/


















































































































































































































































Author: Никитин Н.Н.
Tags: теория машин и механизмов общие вопросы технической механики механика теоретическая механика
ISBN: 5-06-000695-6
Year: 1990




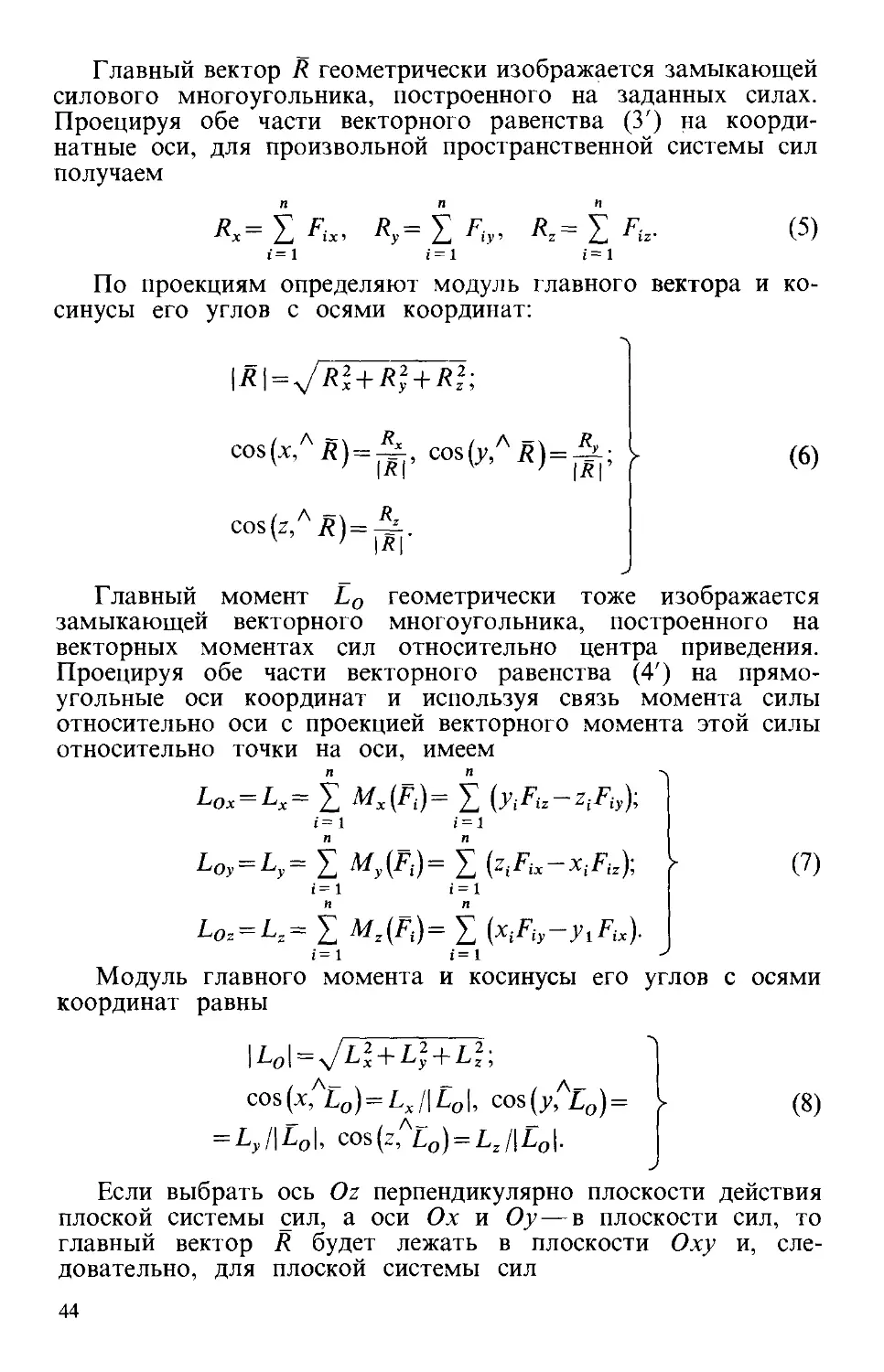
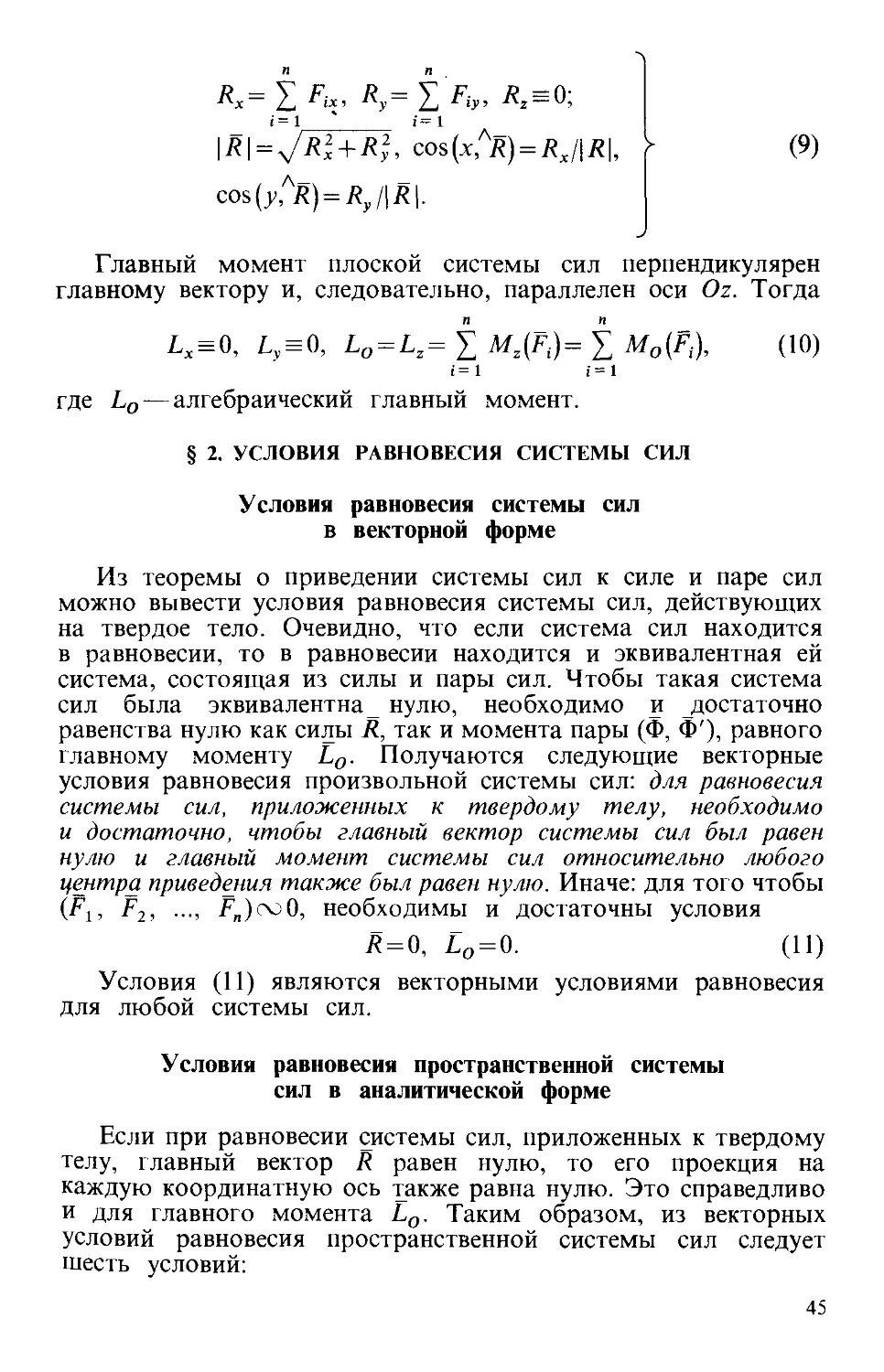
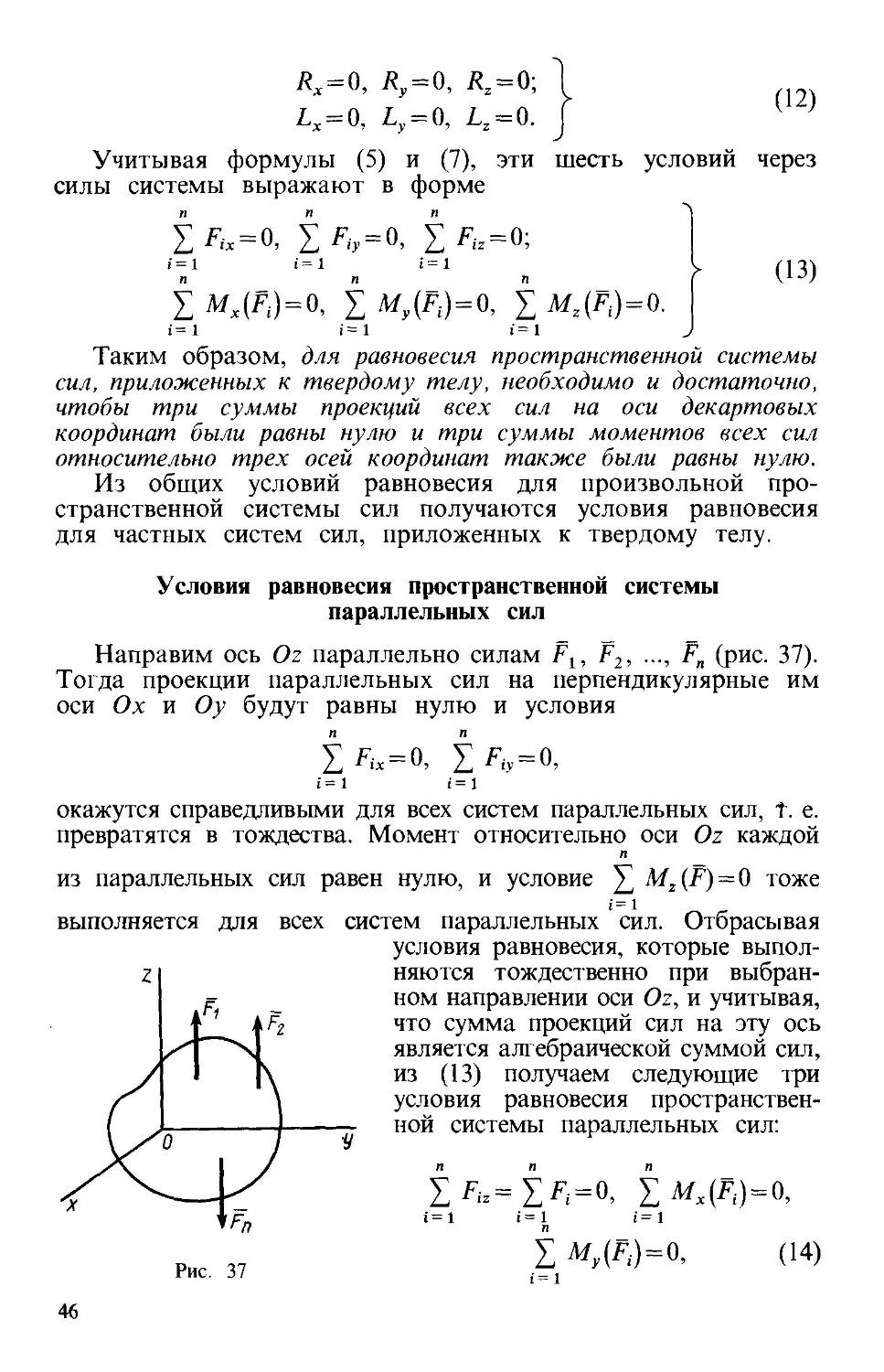
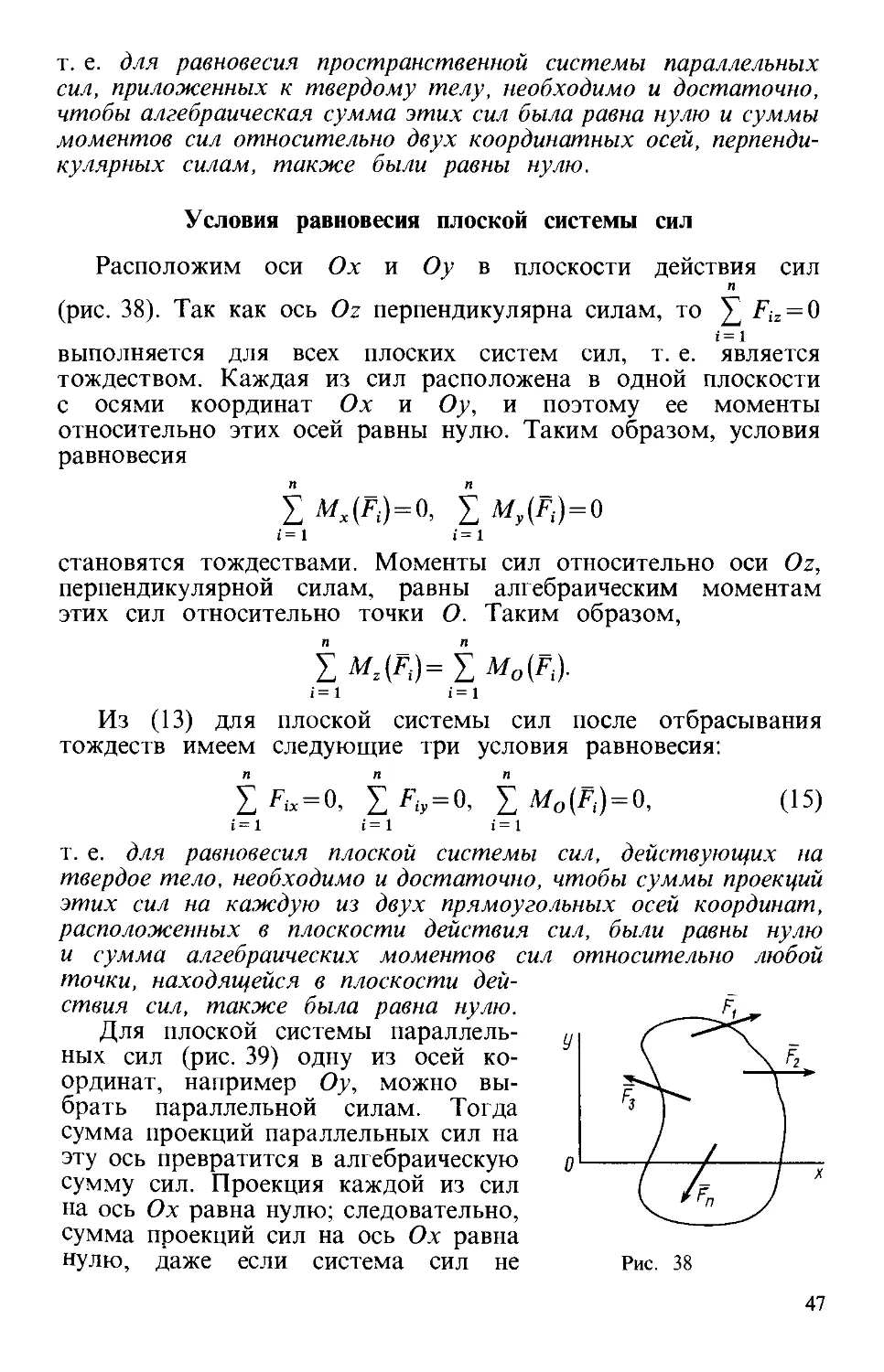
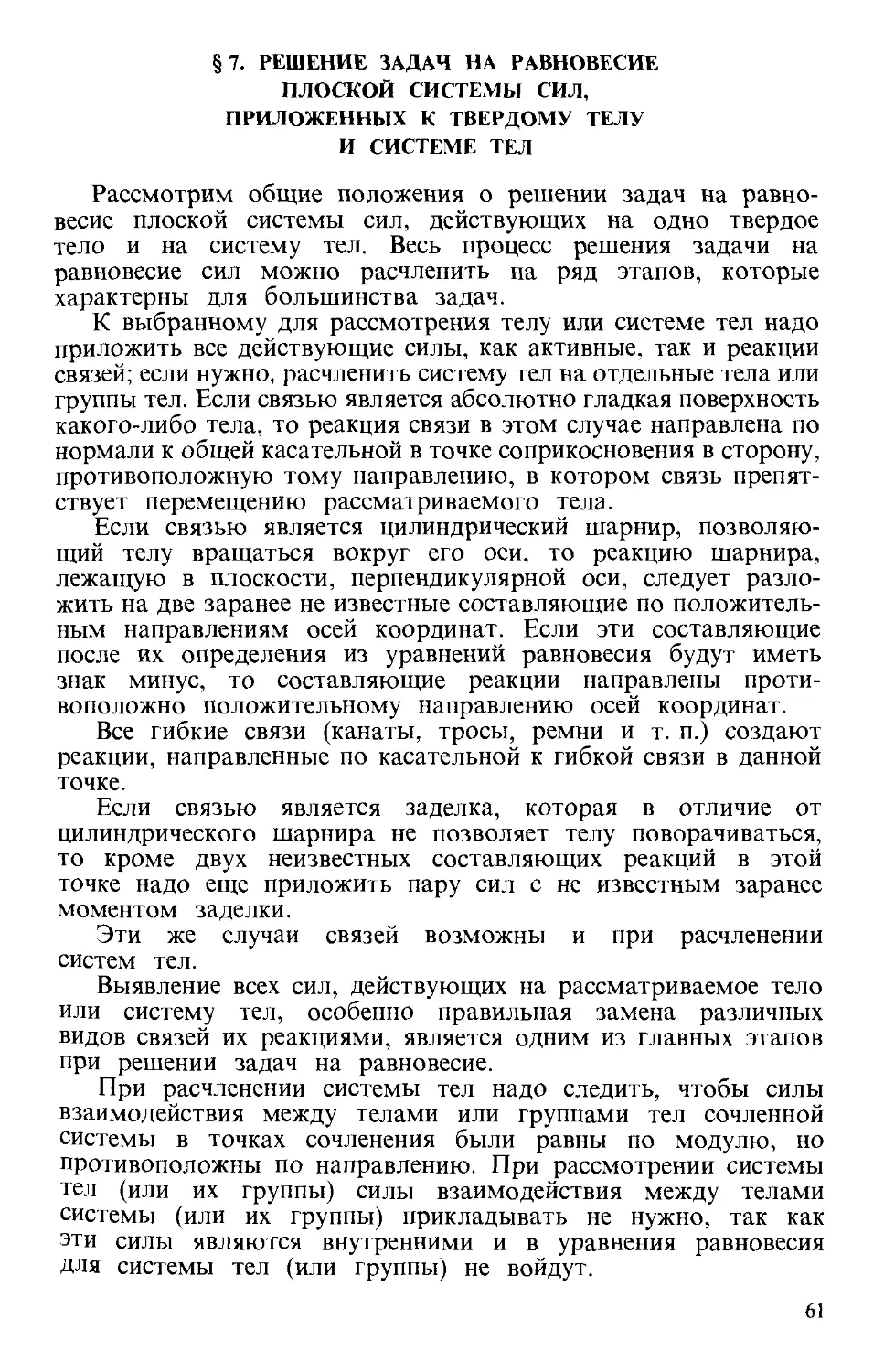
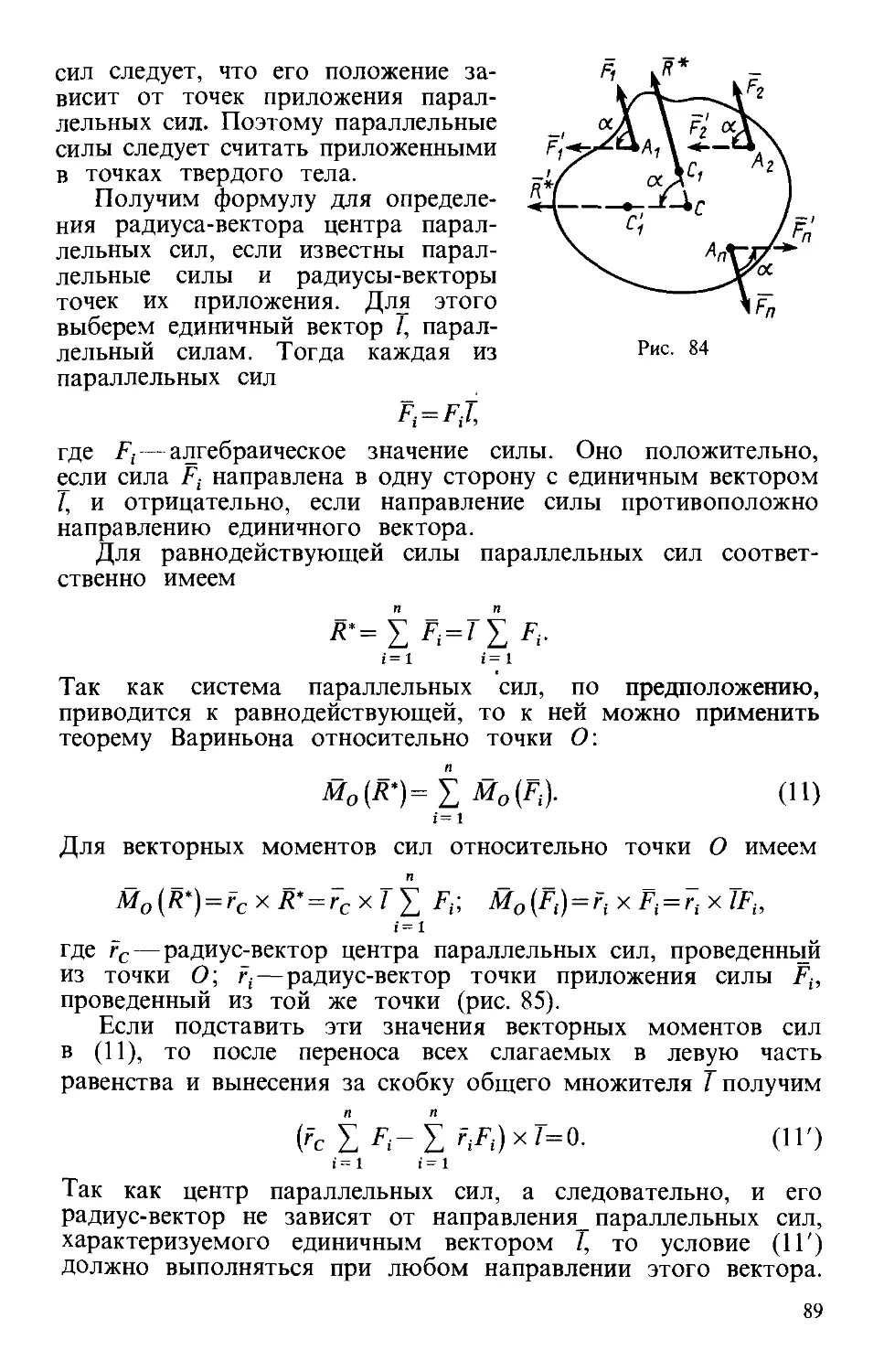
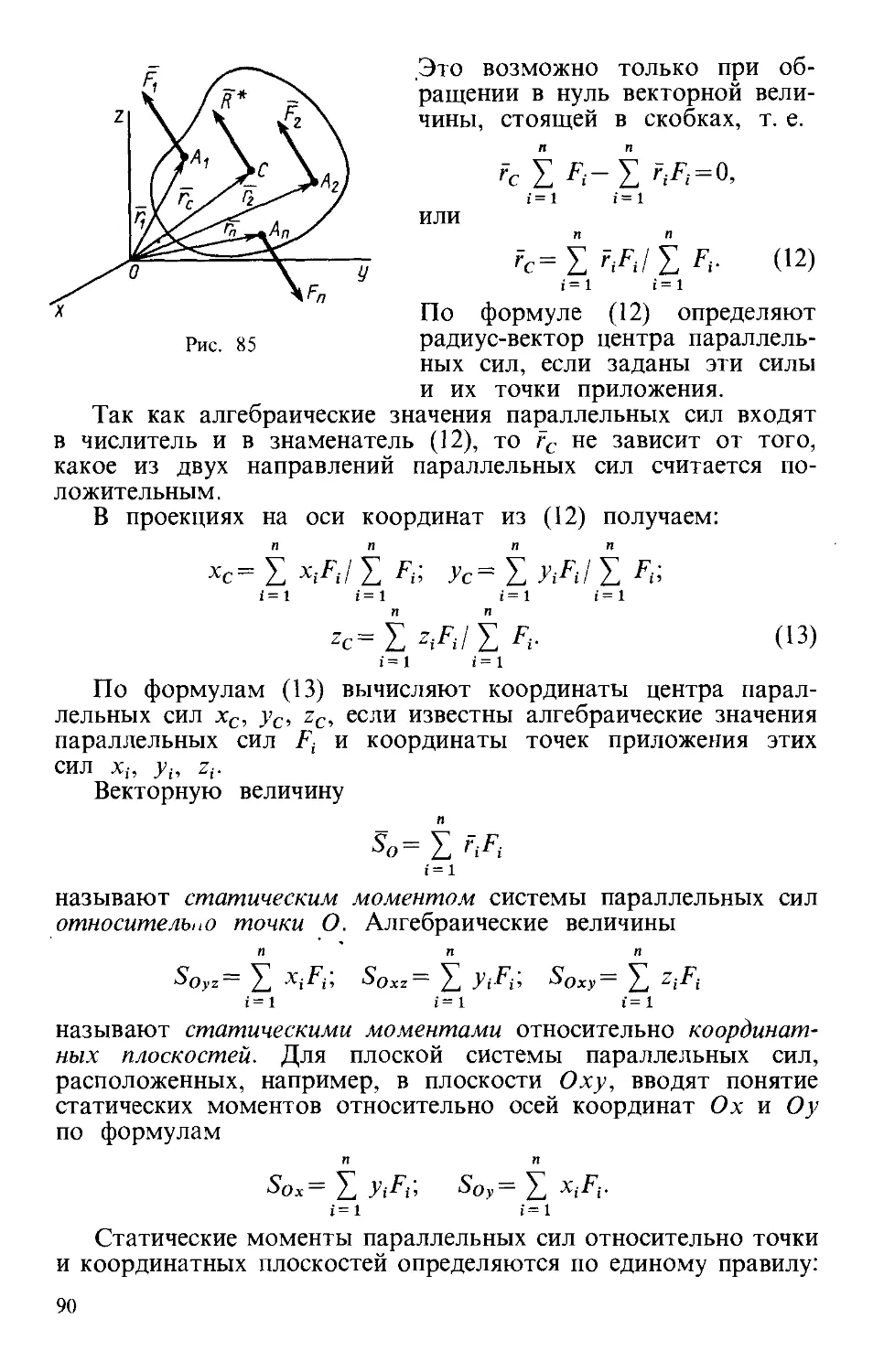
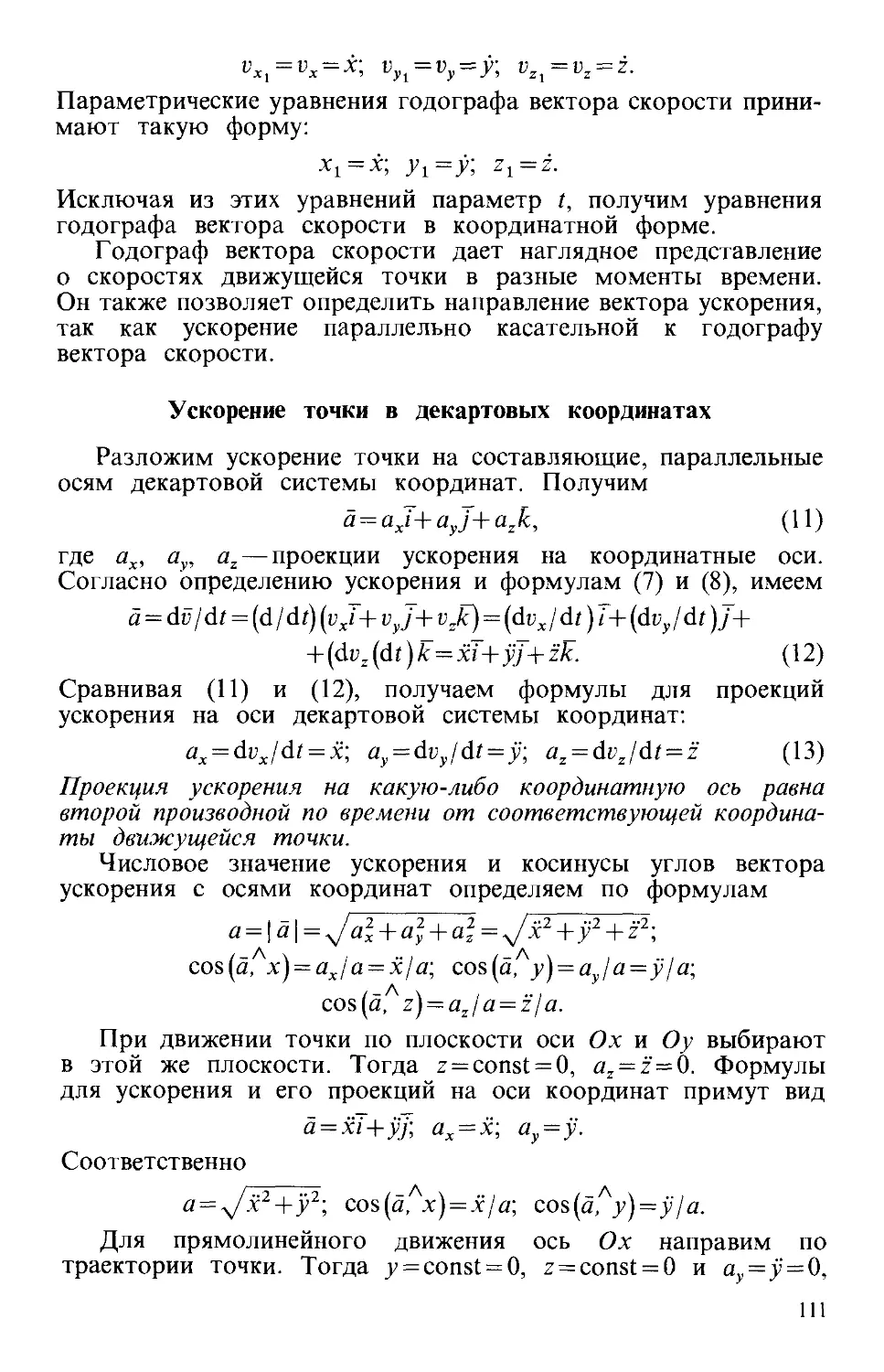
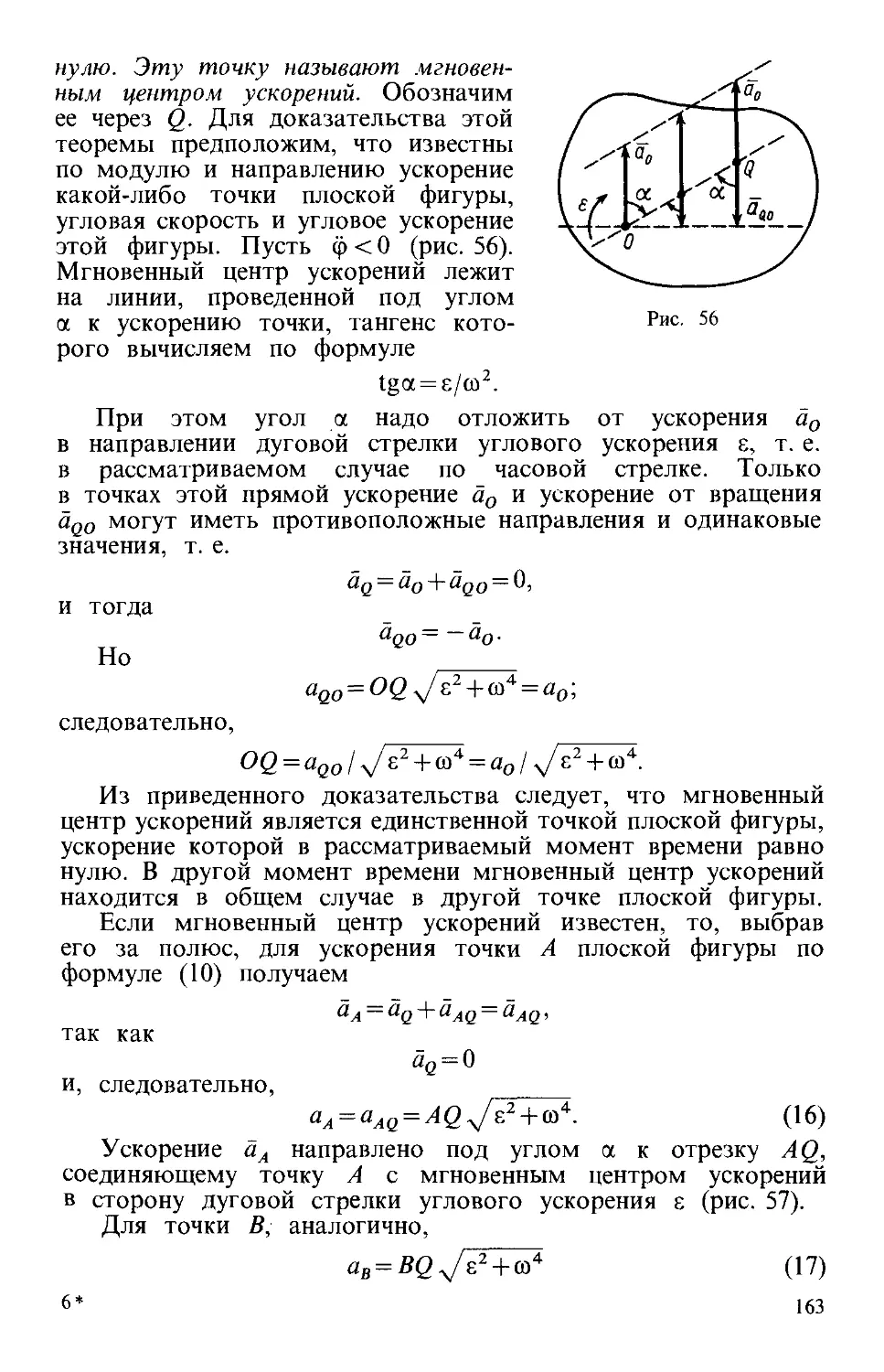
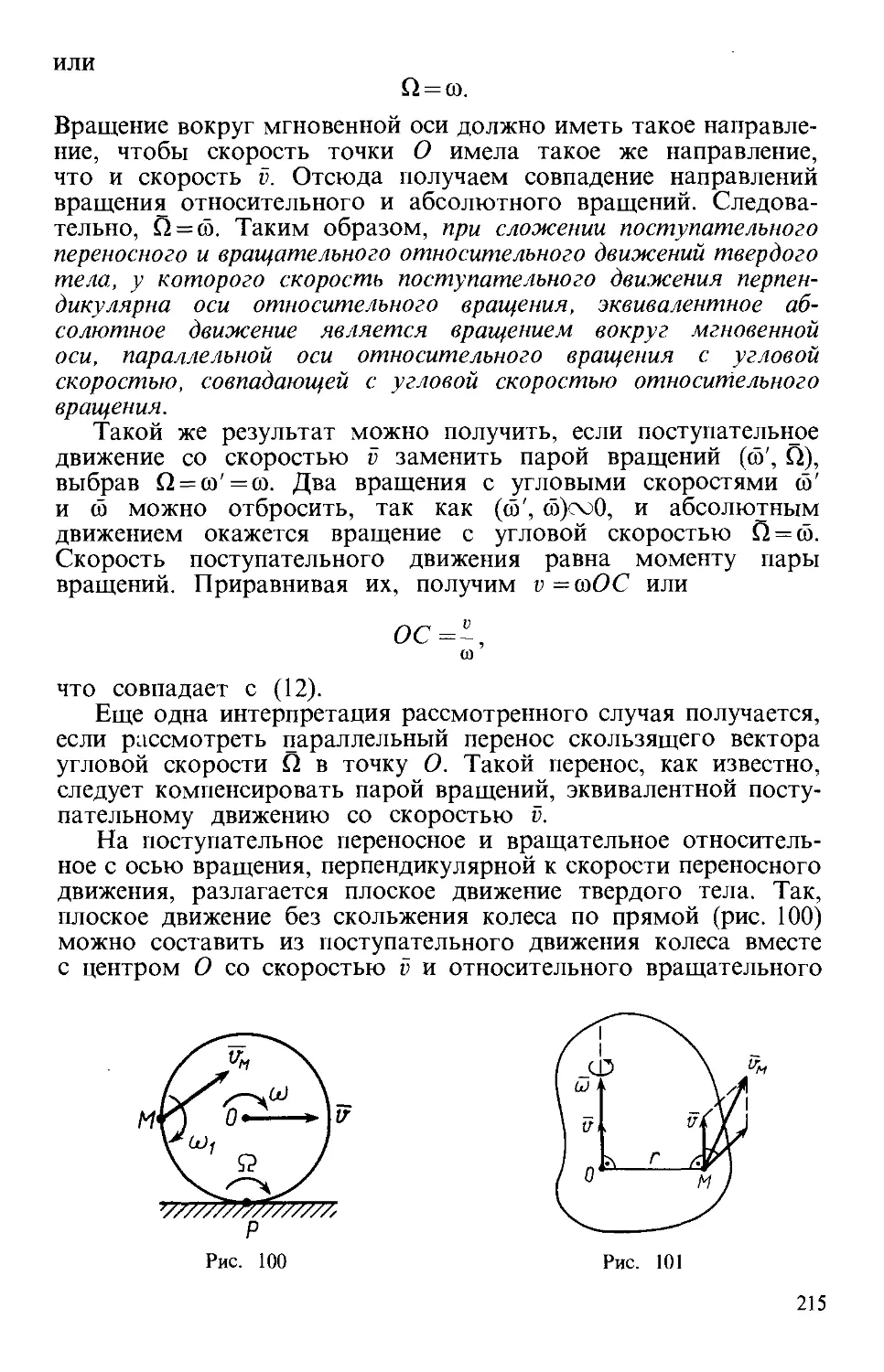
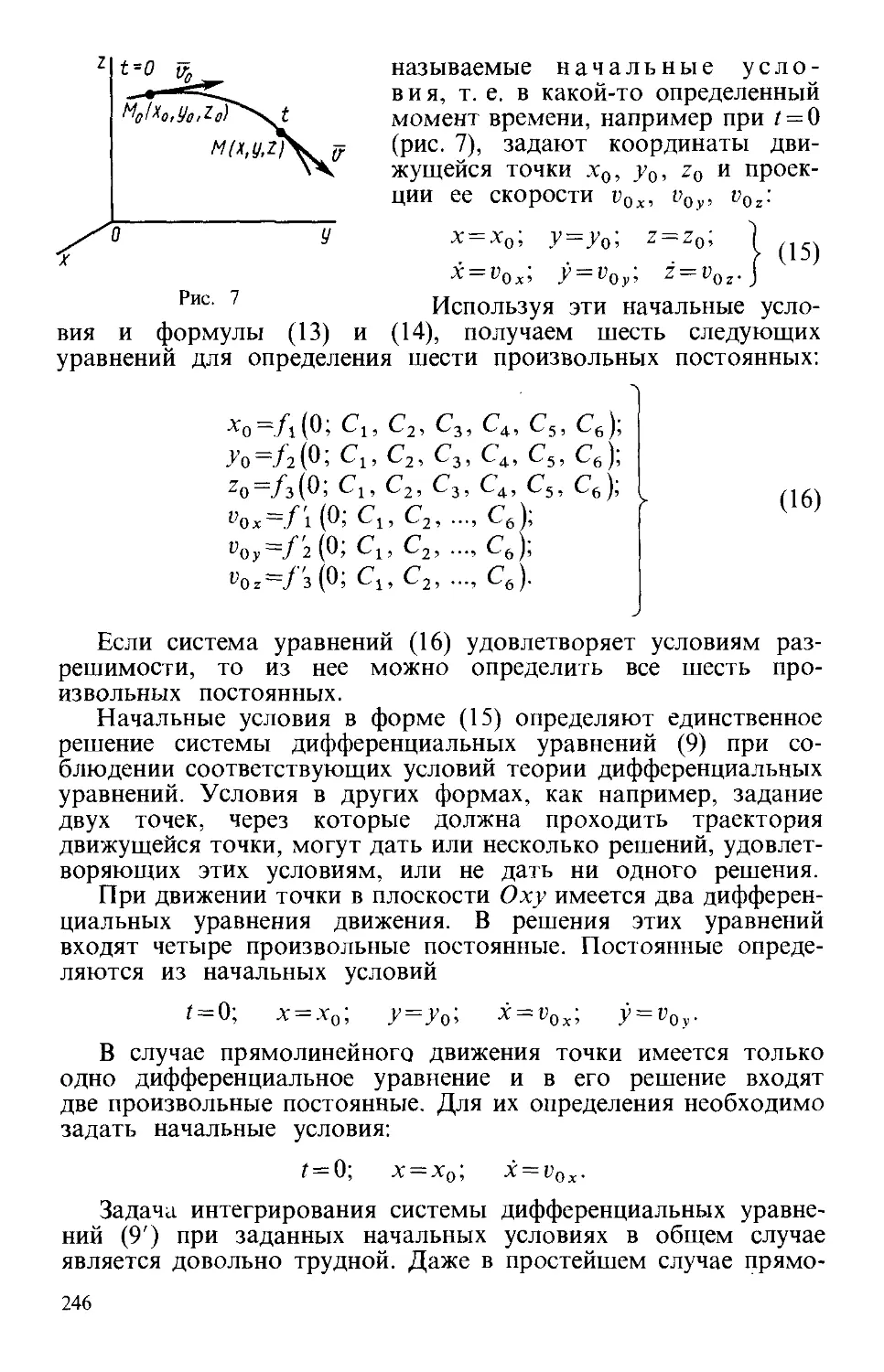
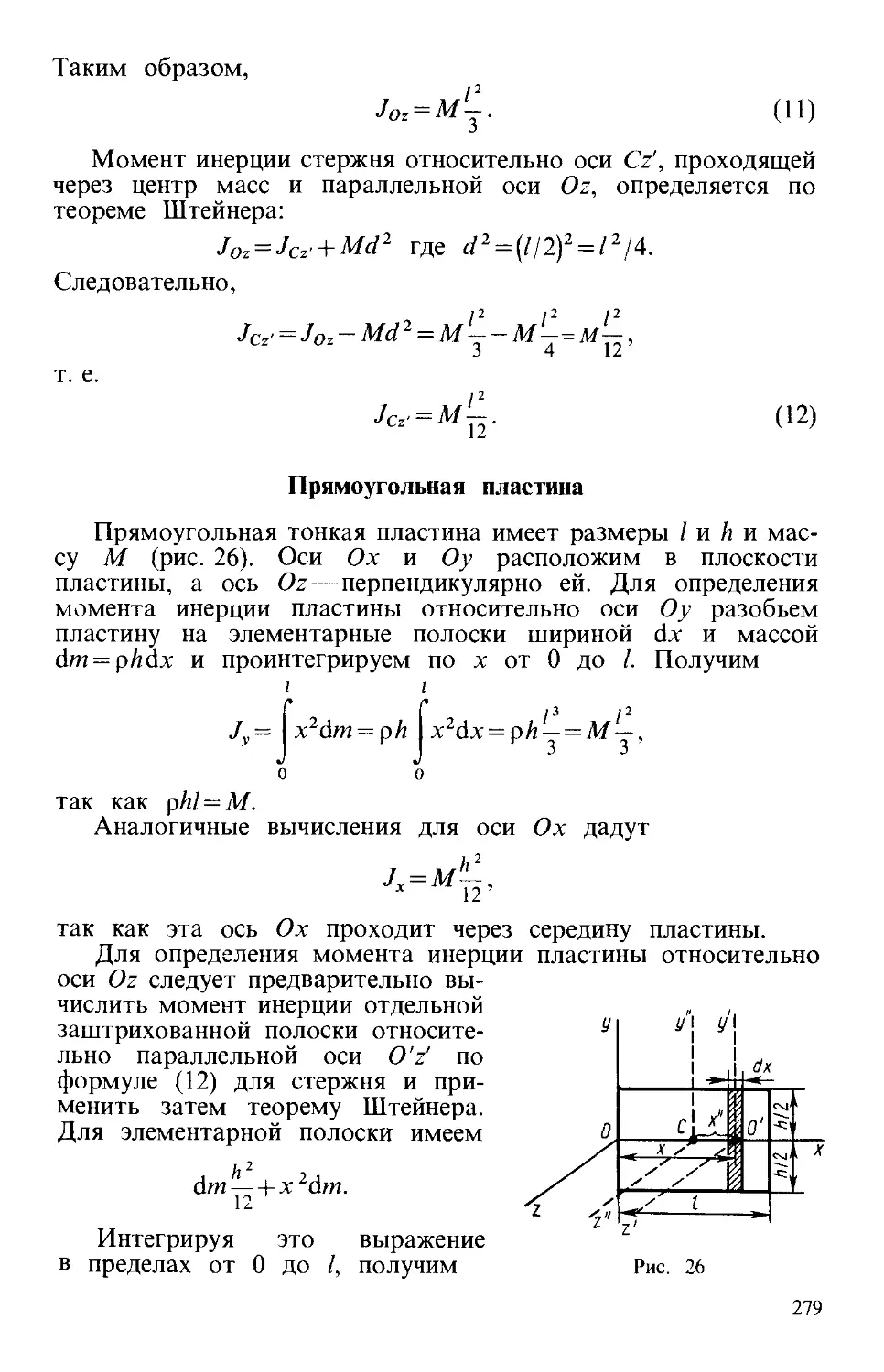
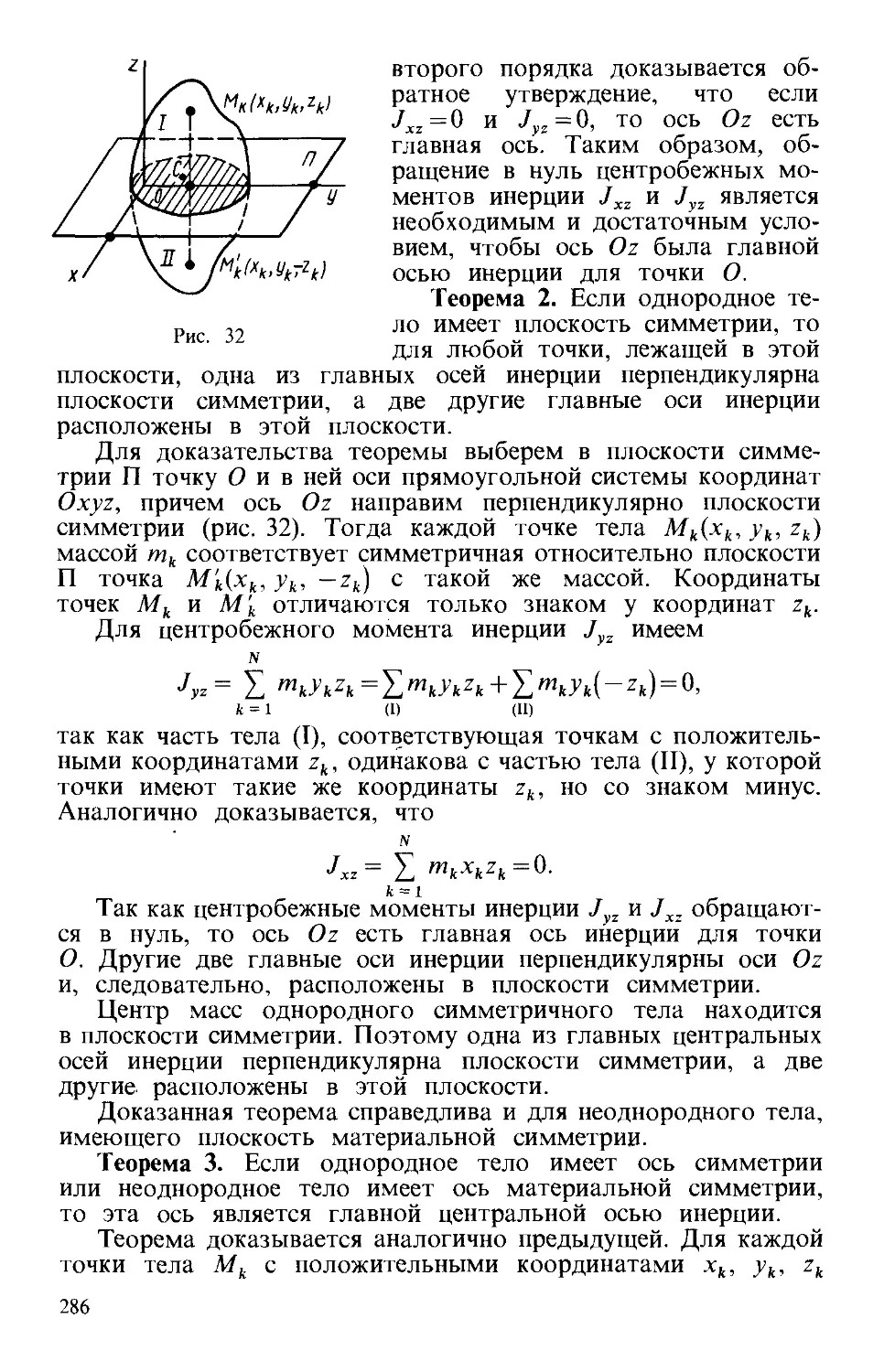
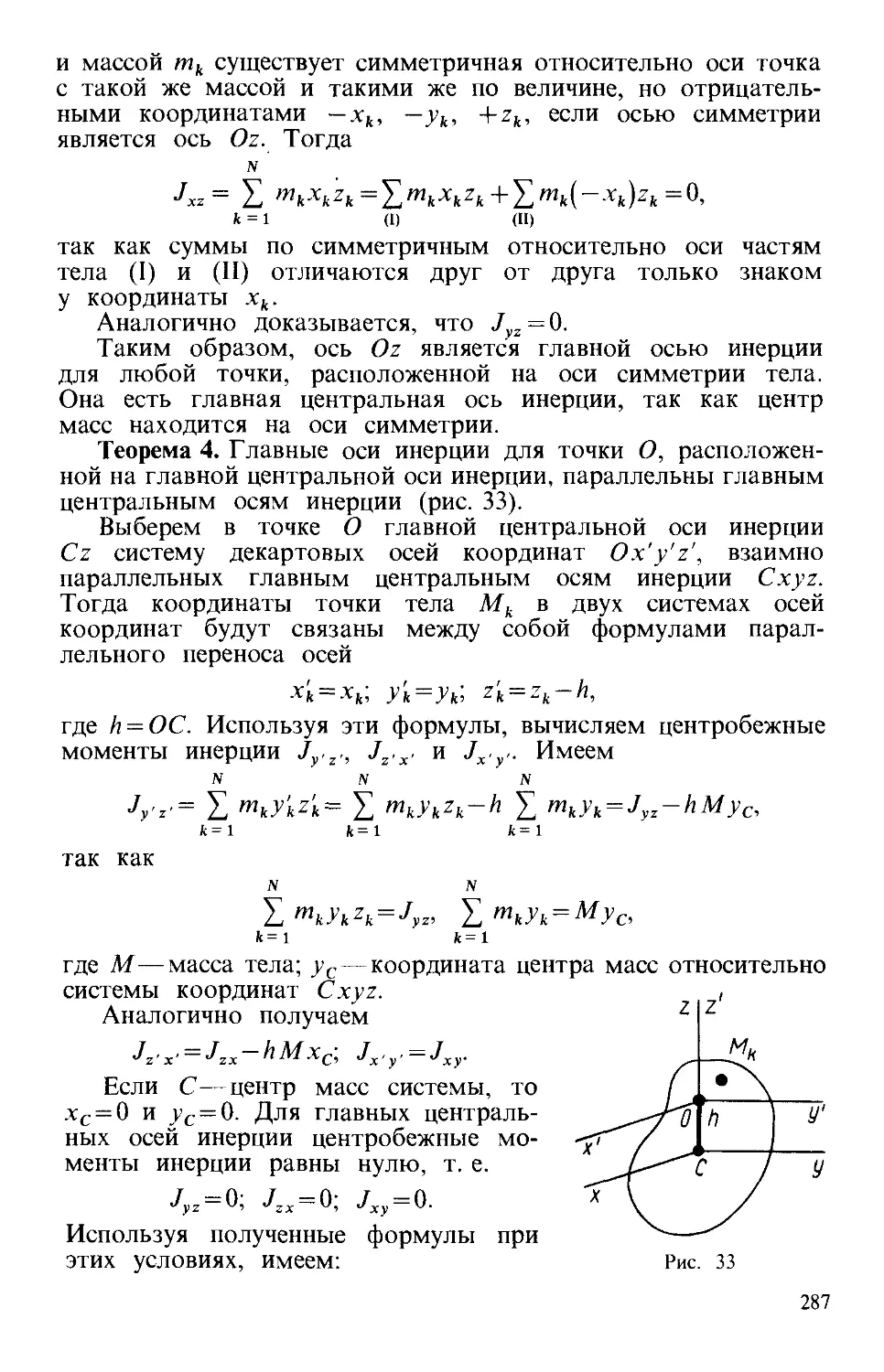
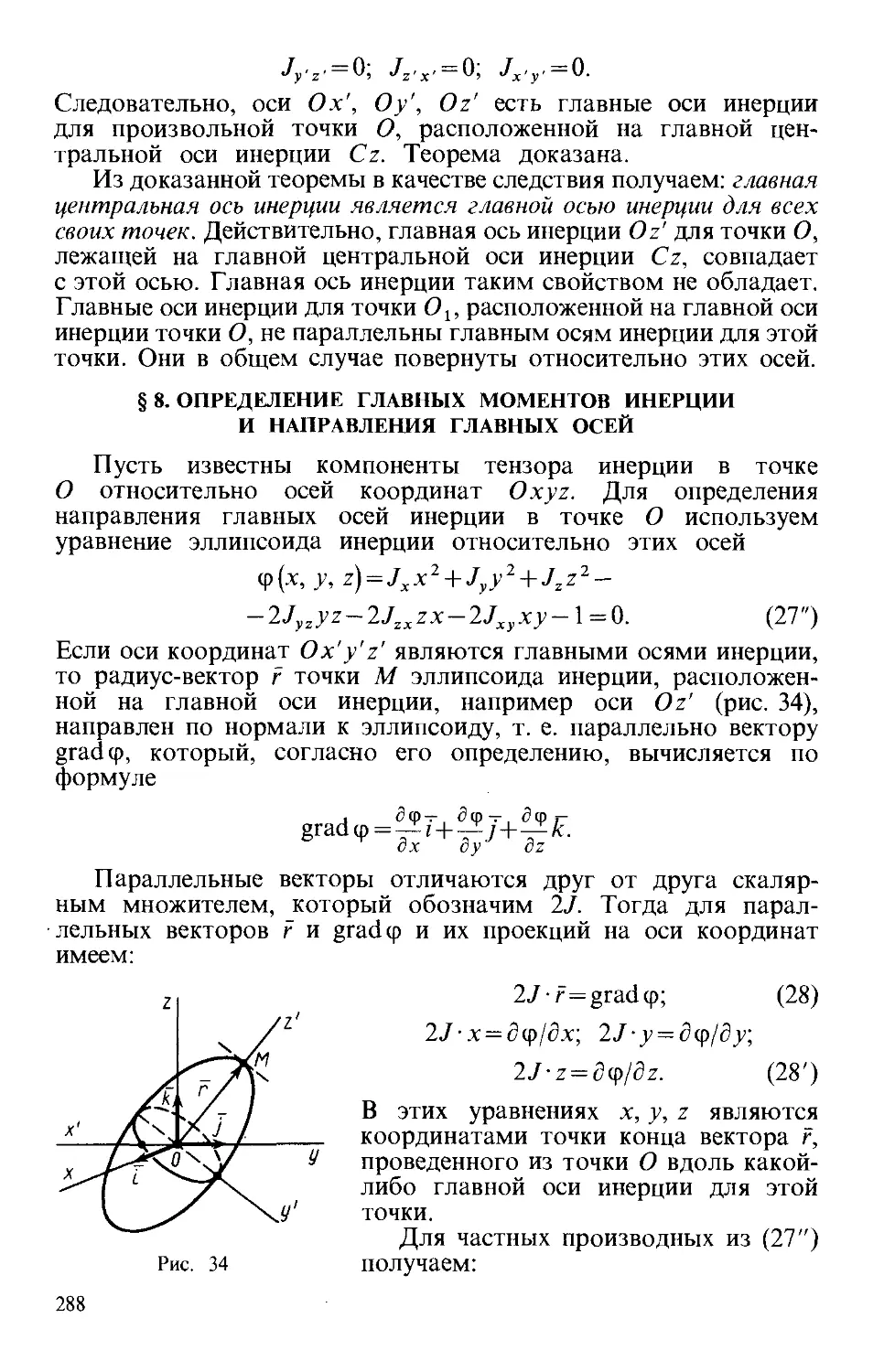
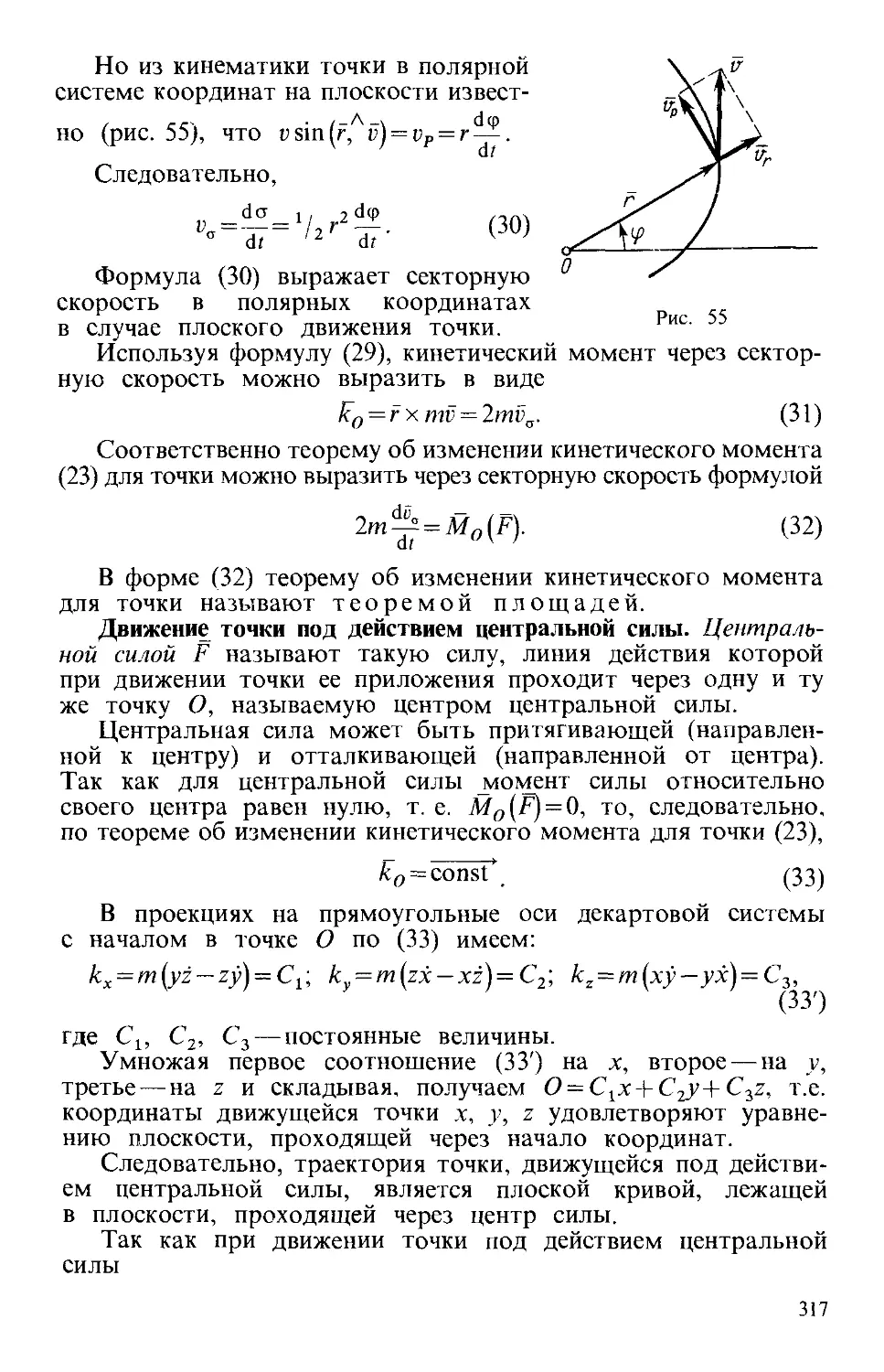
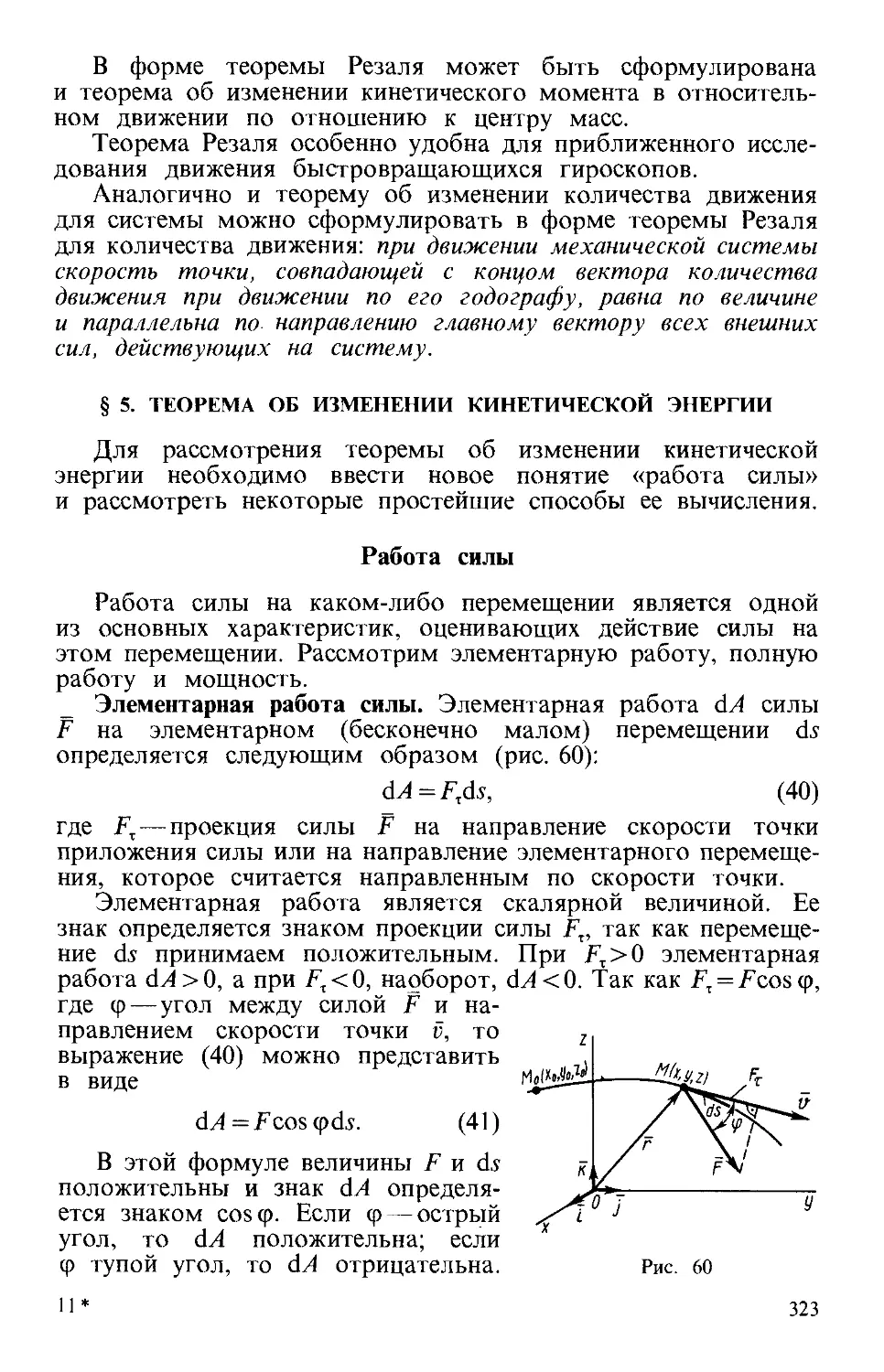
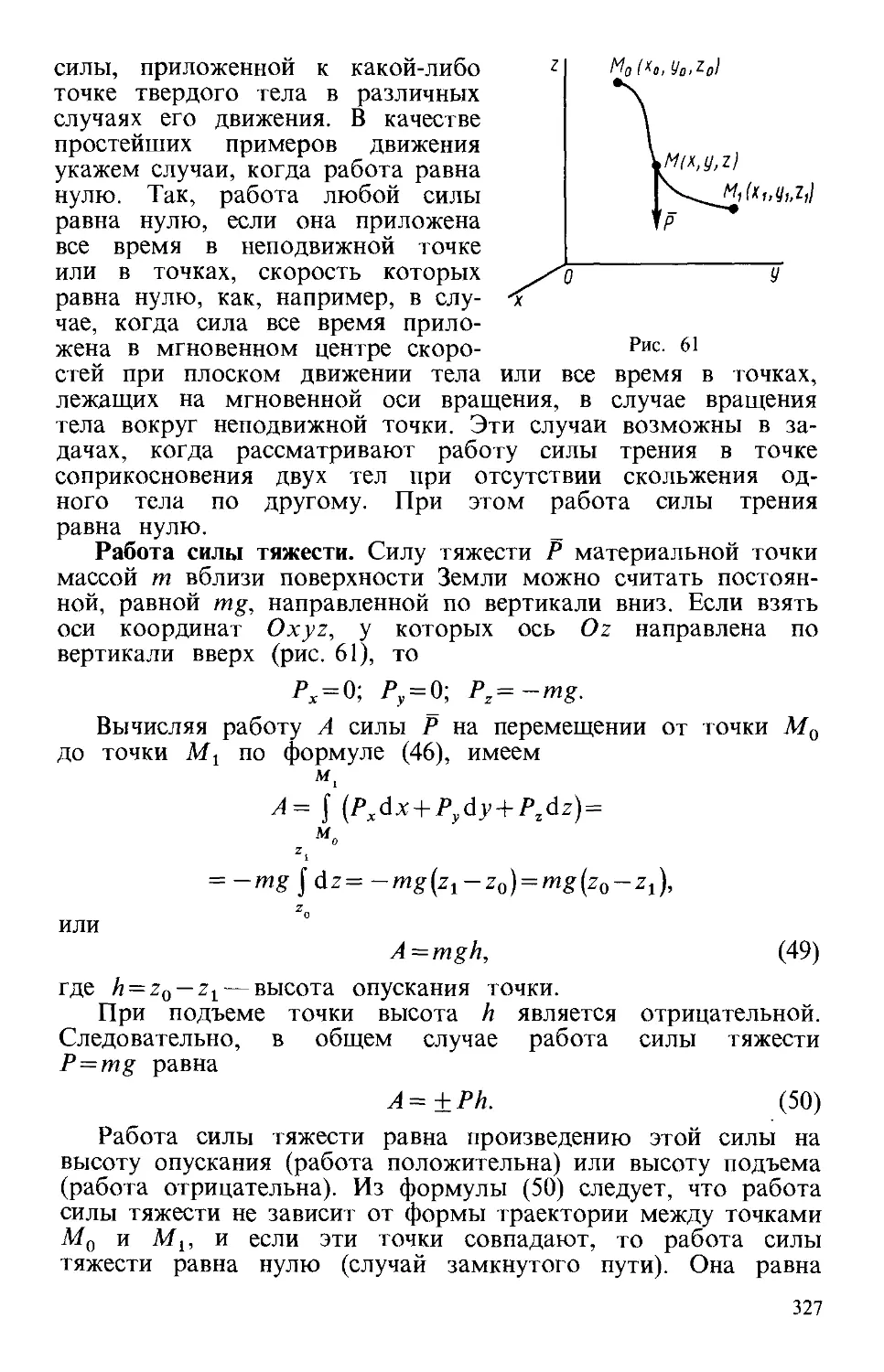
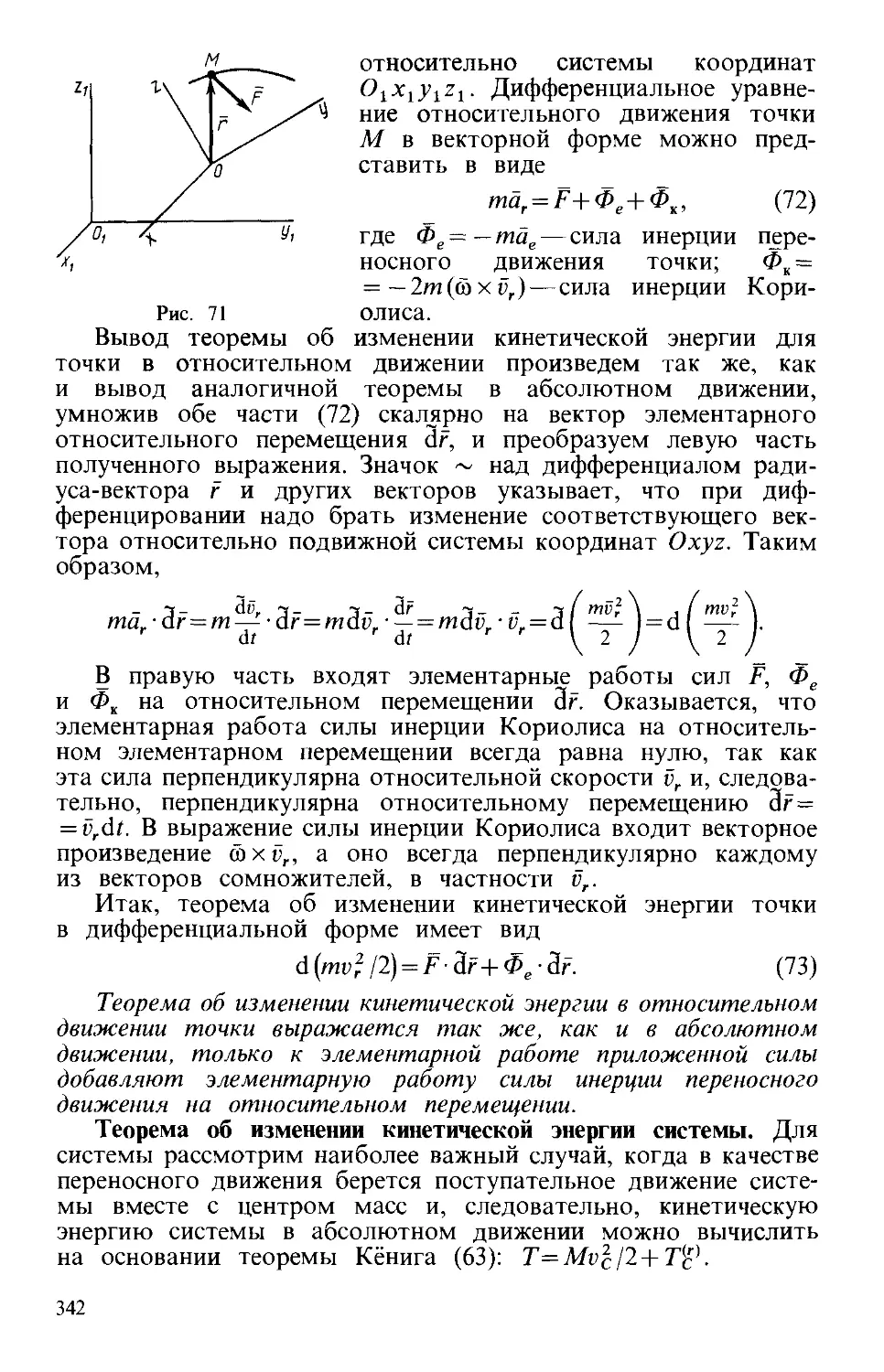
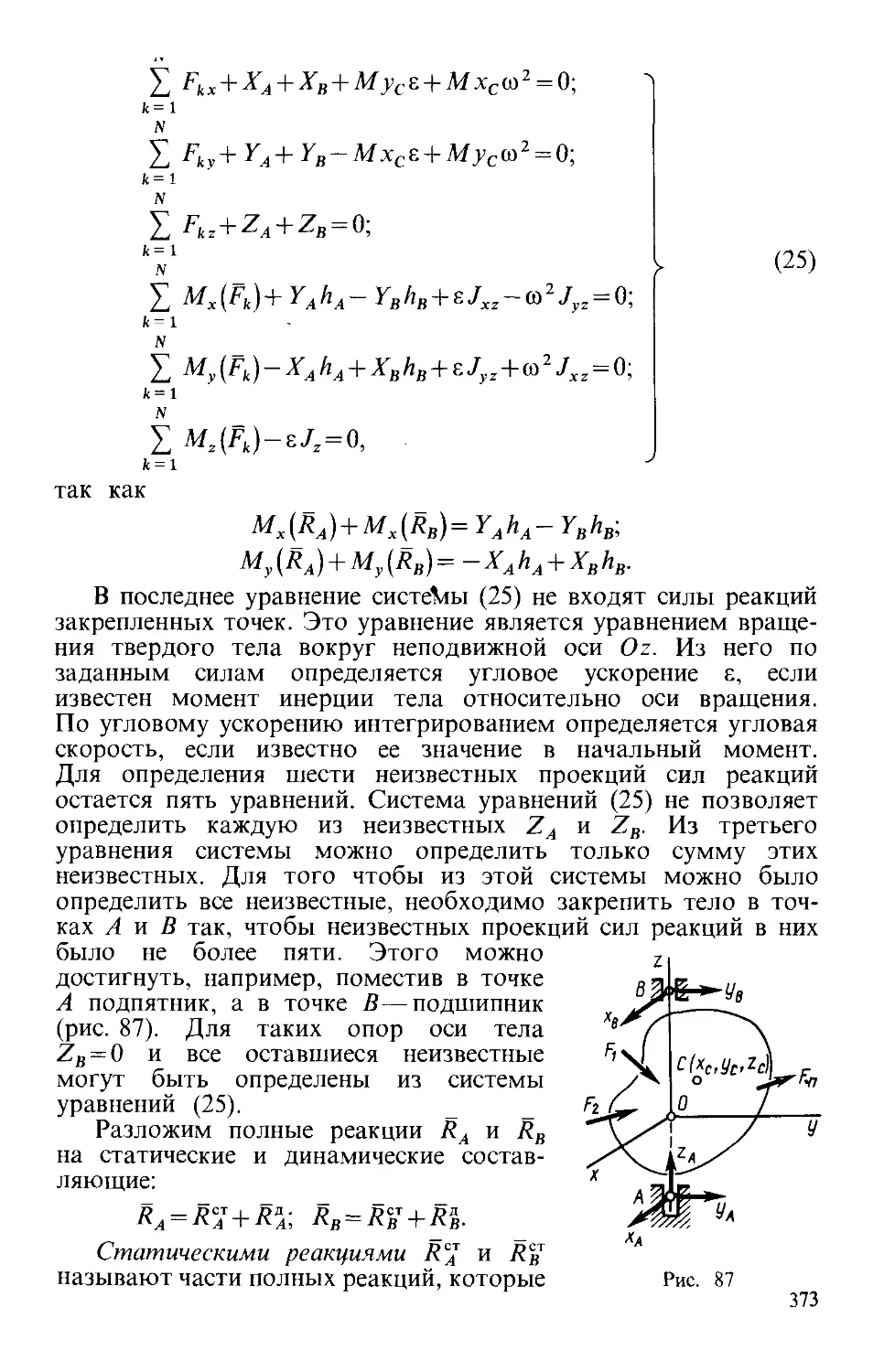
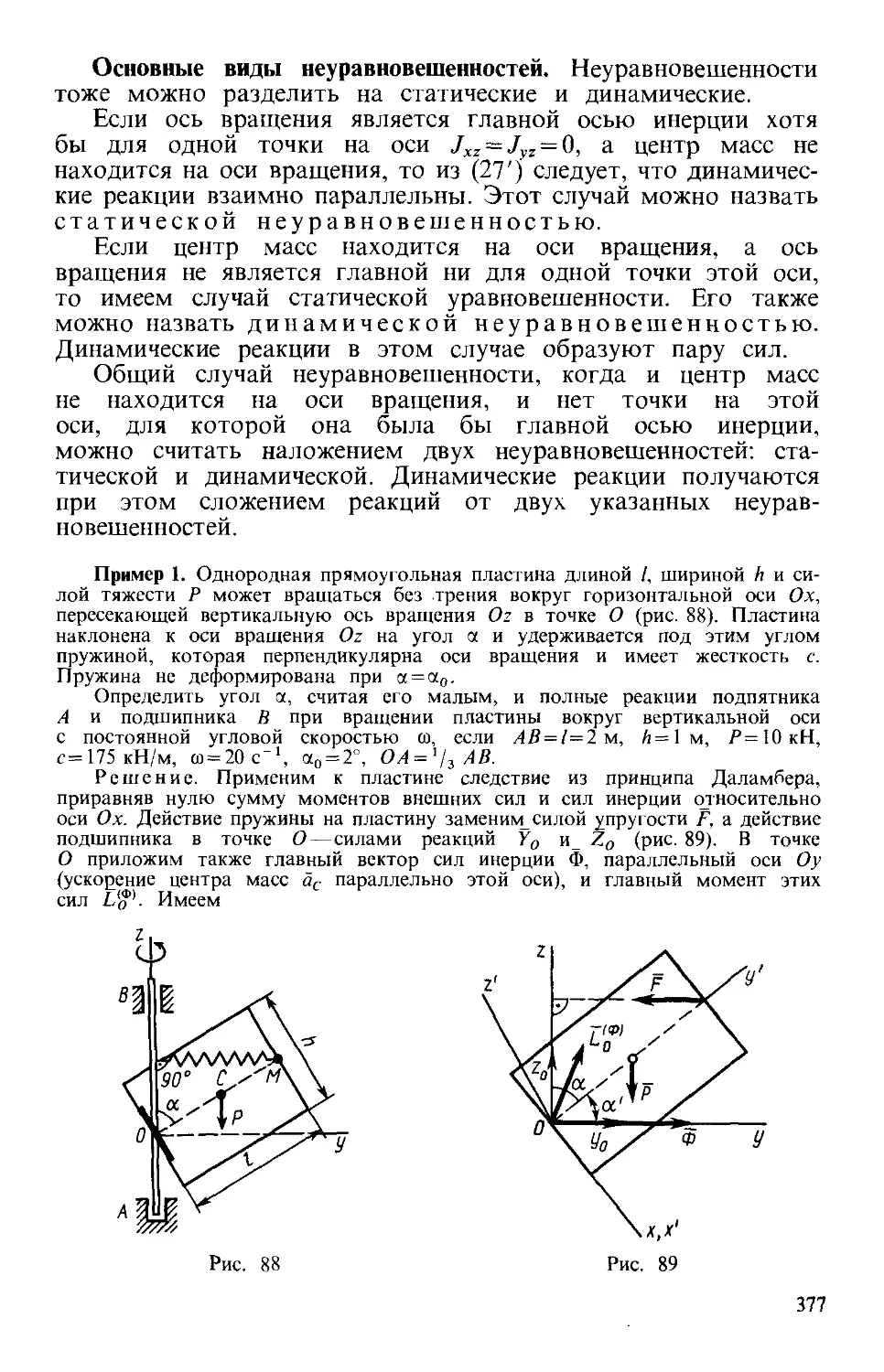
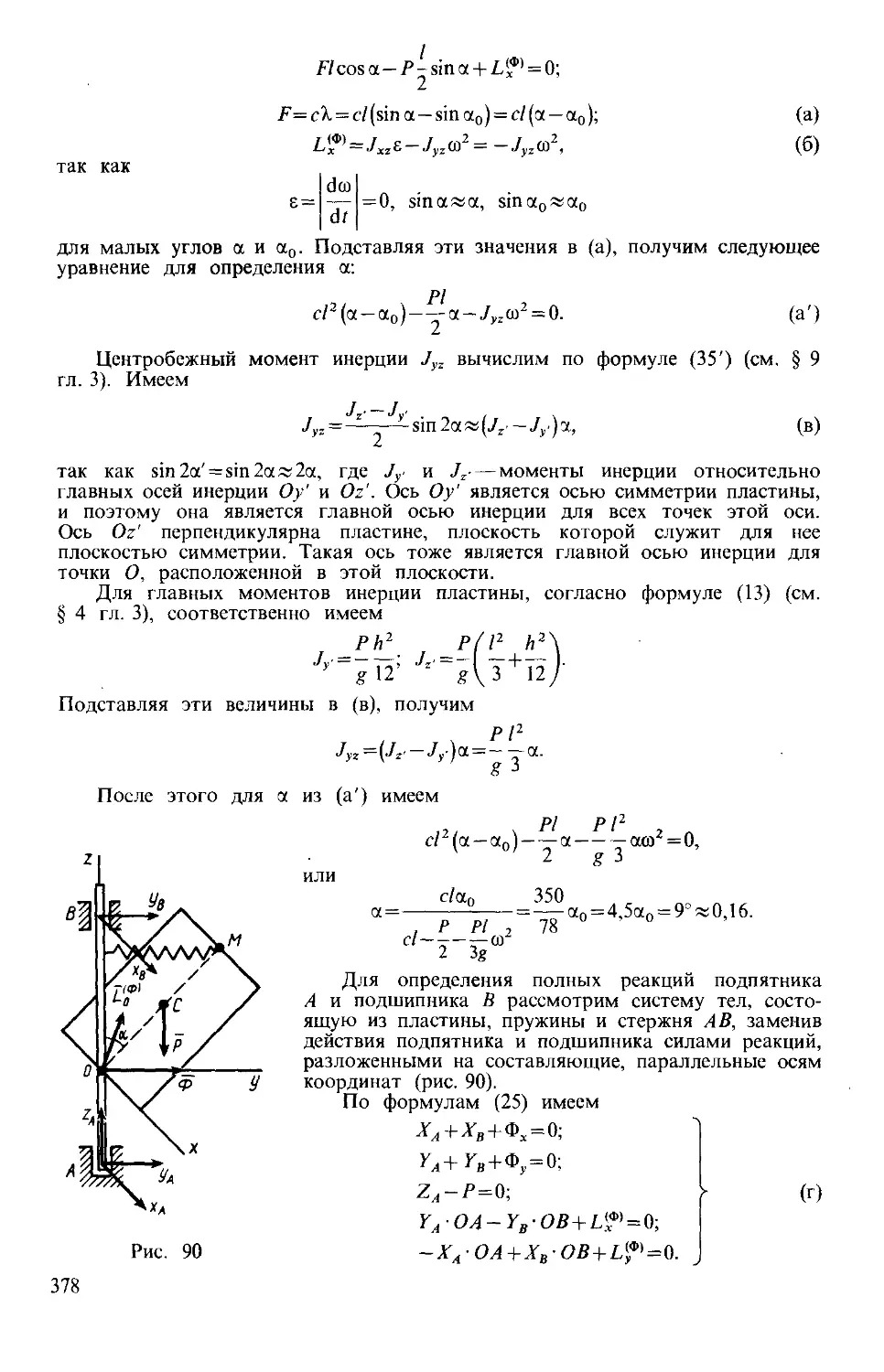
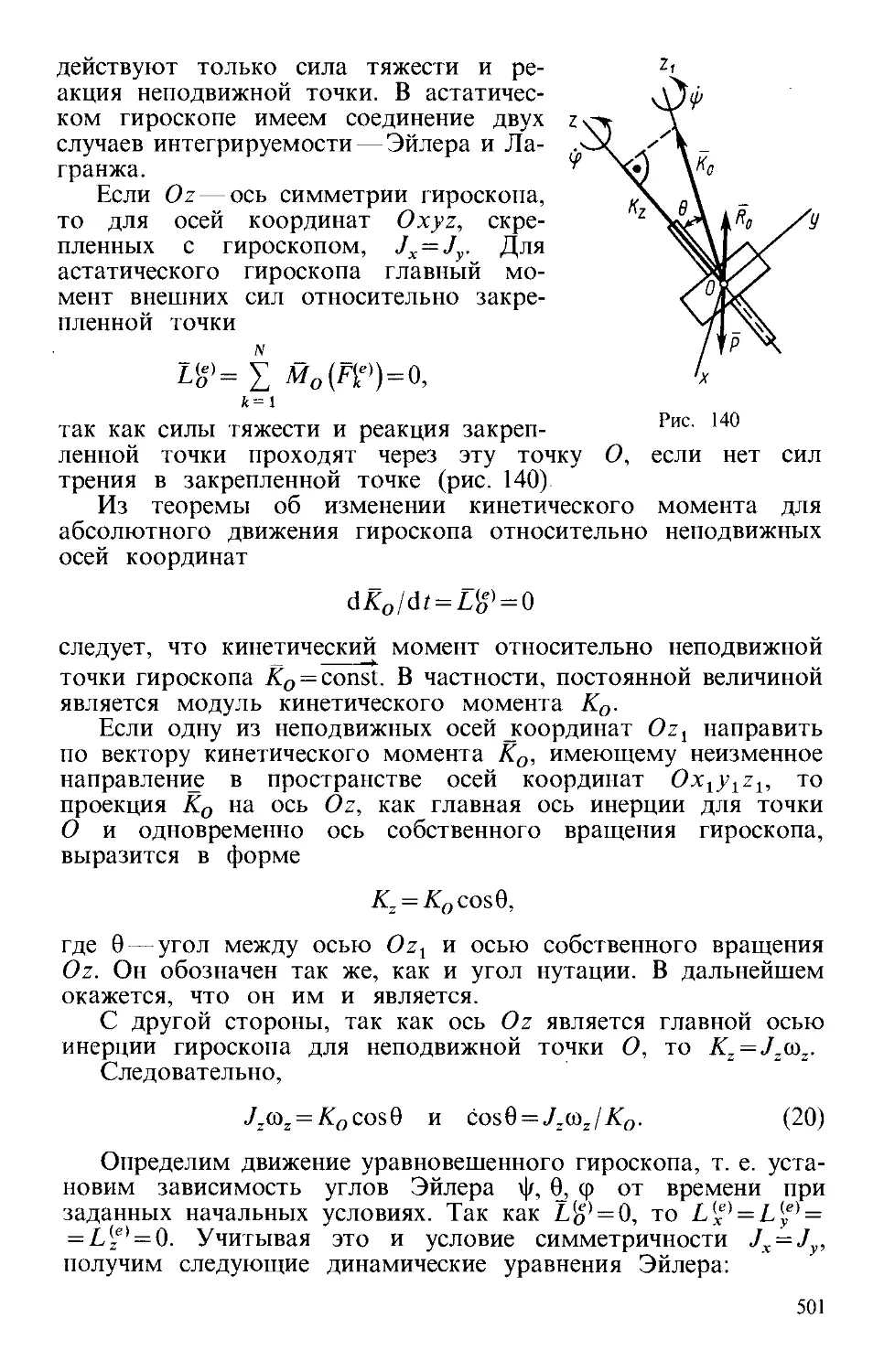
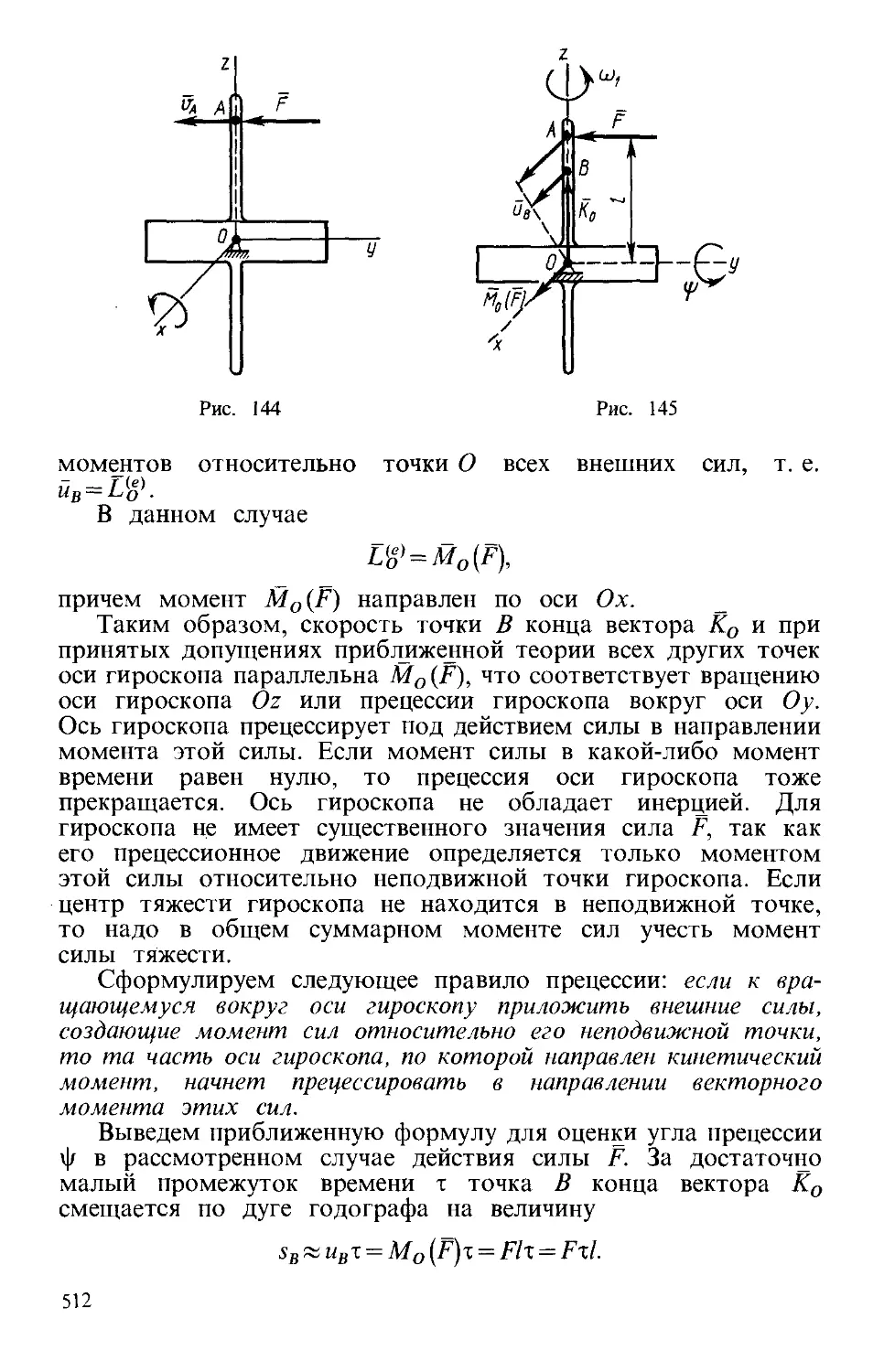
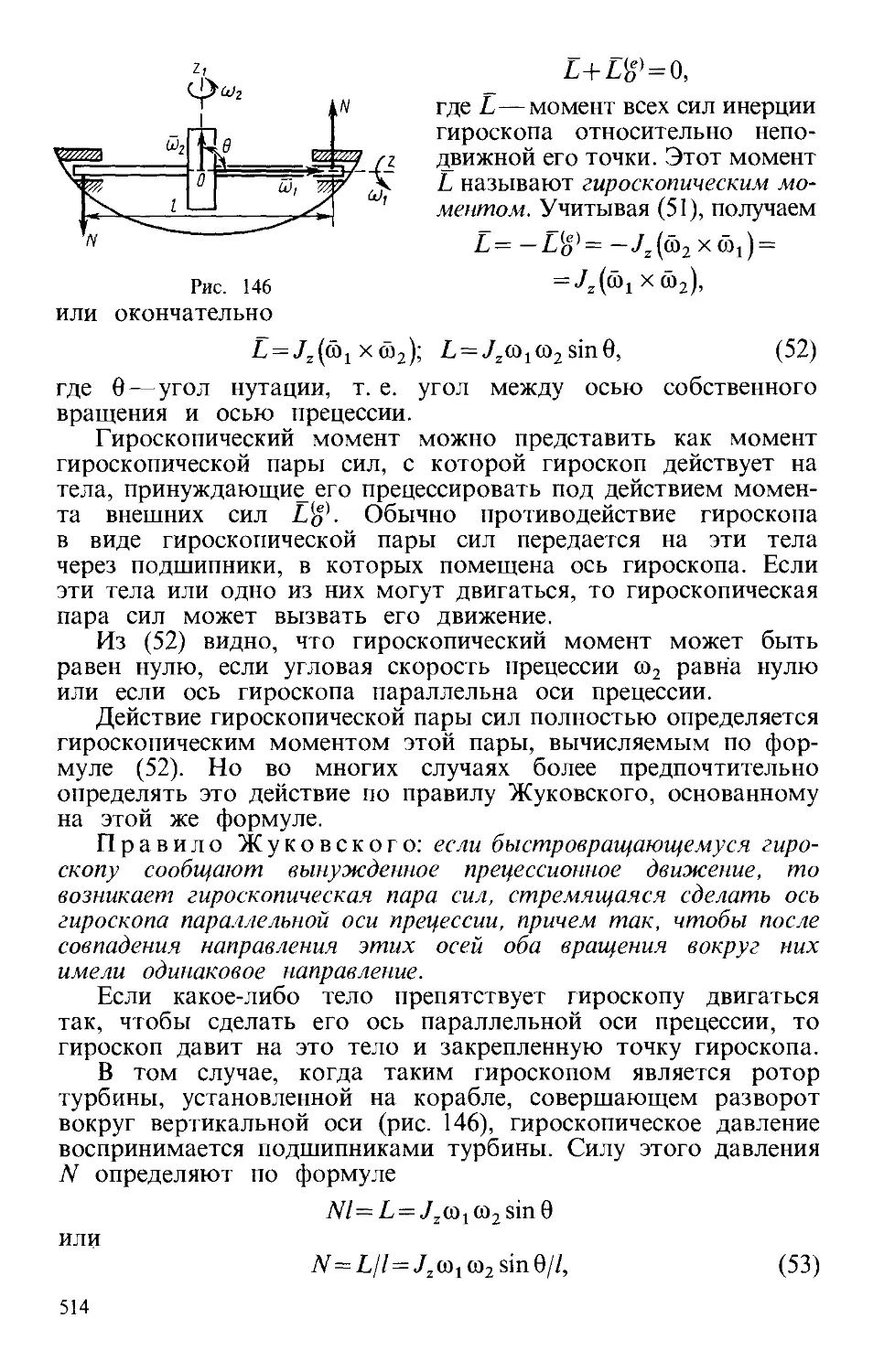
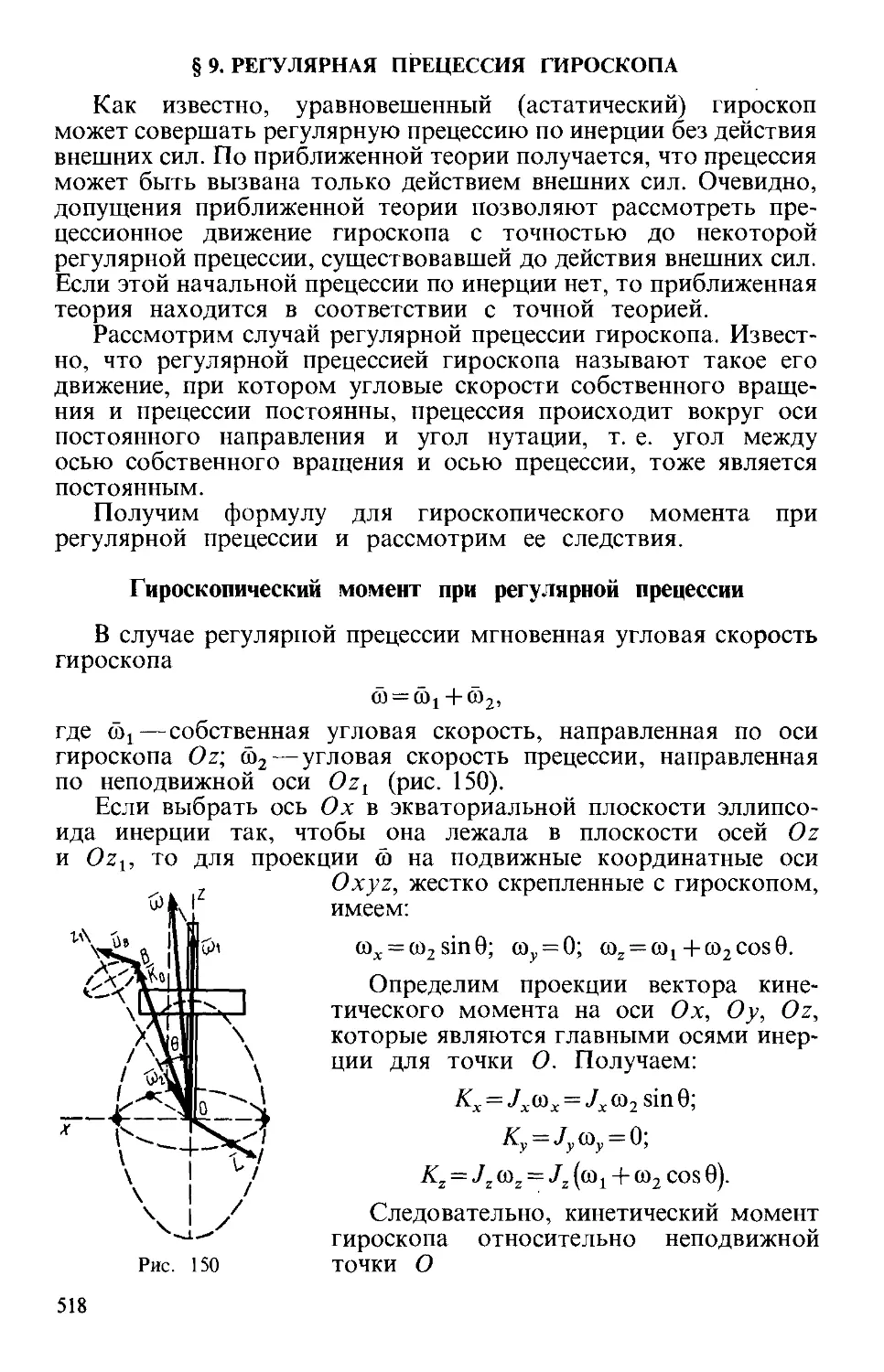
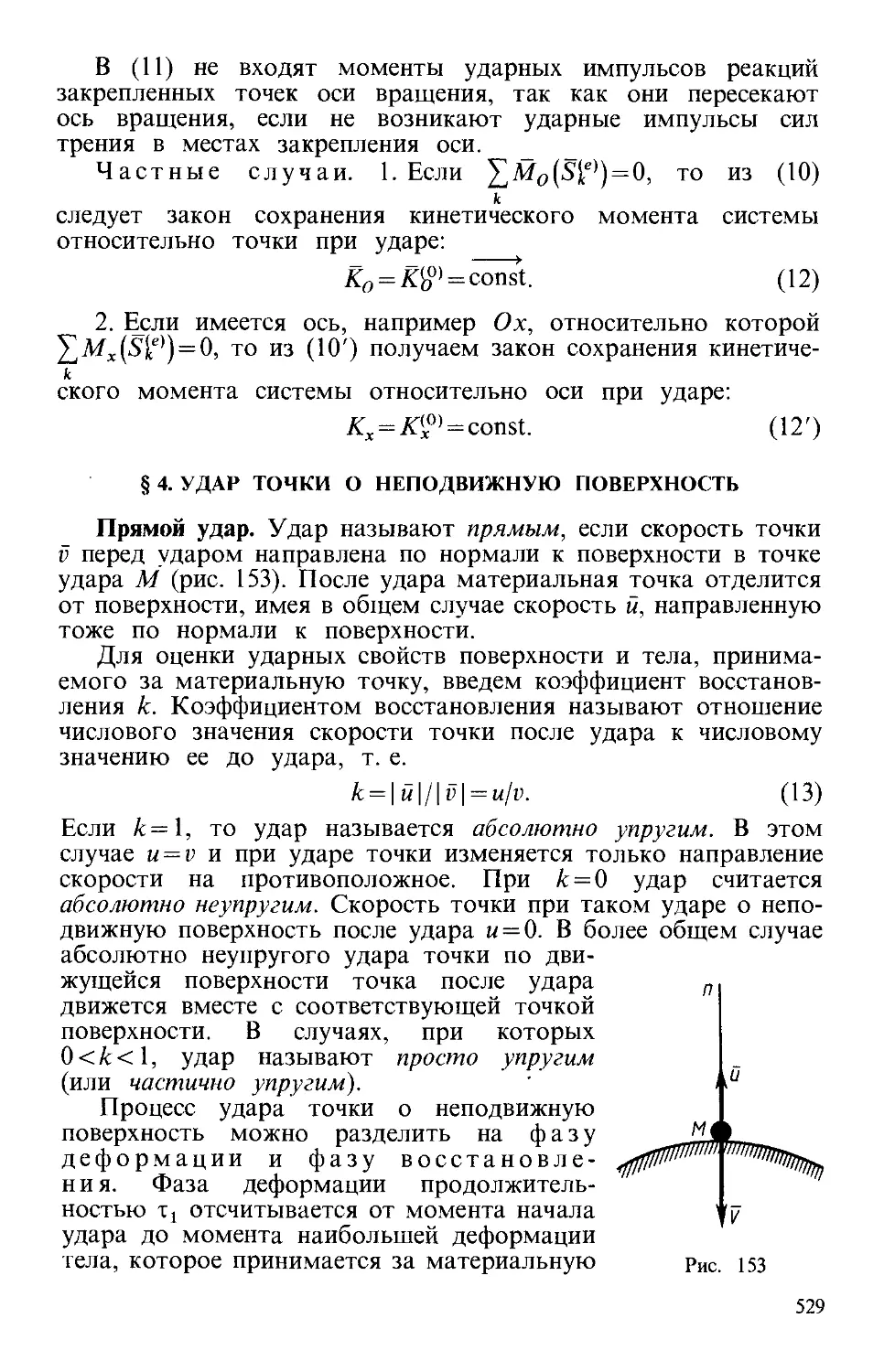
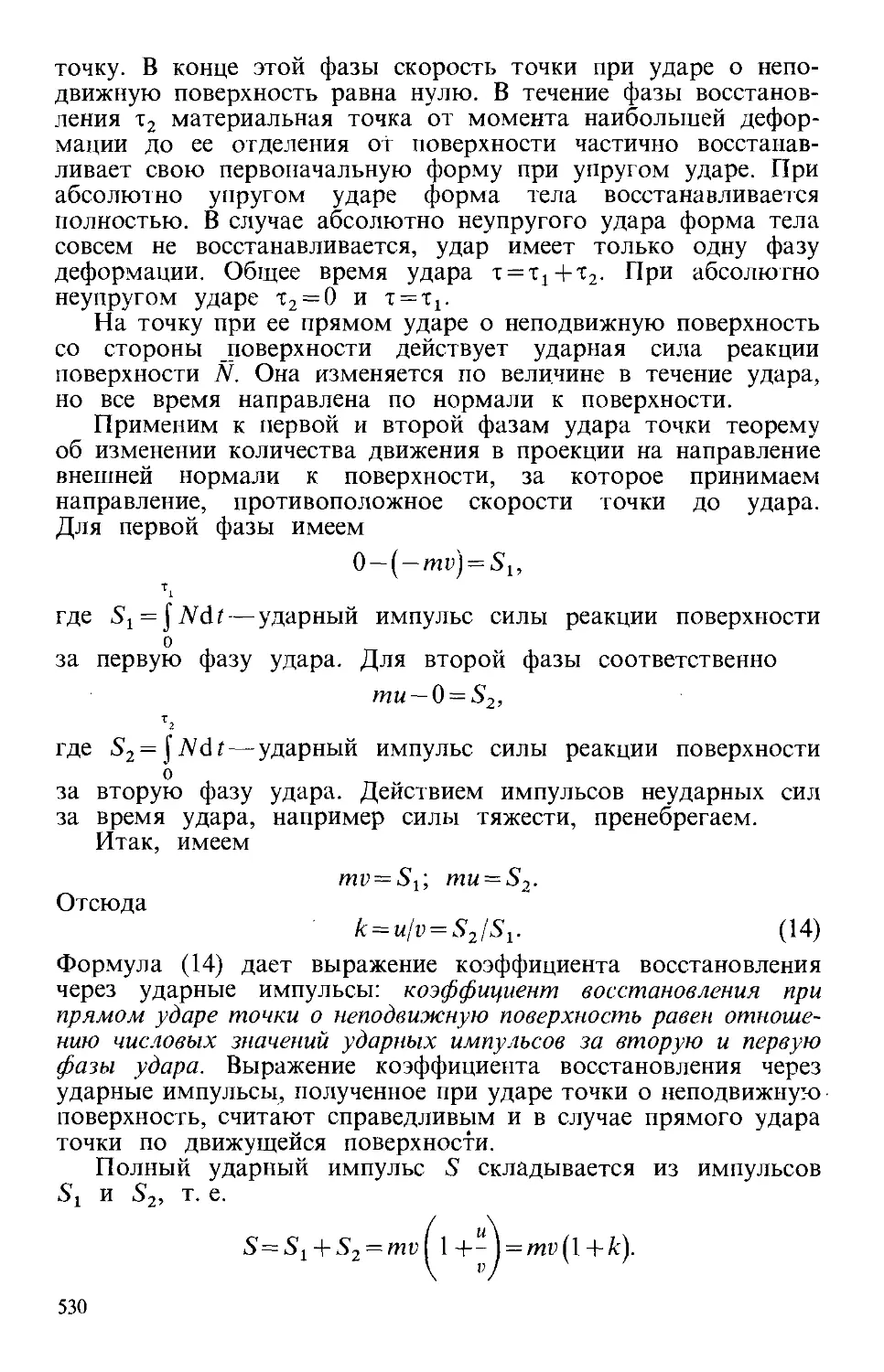
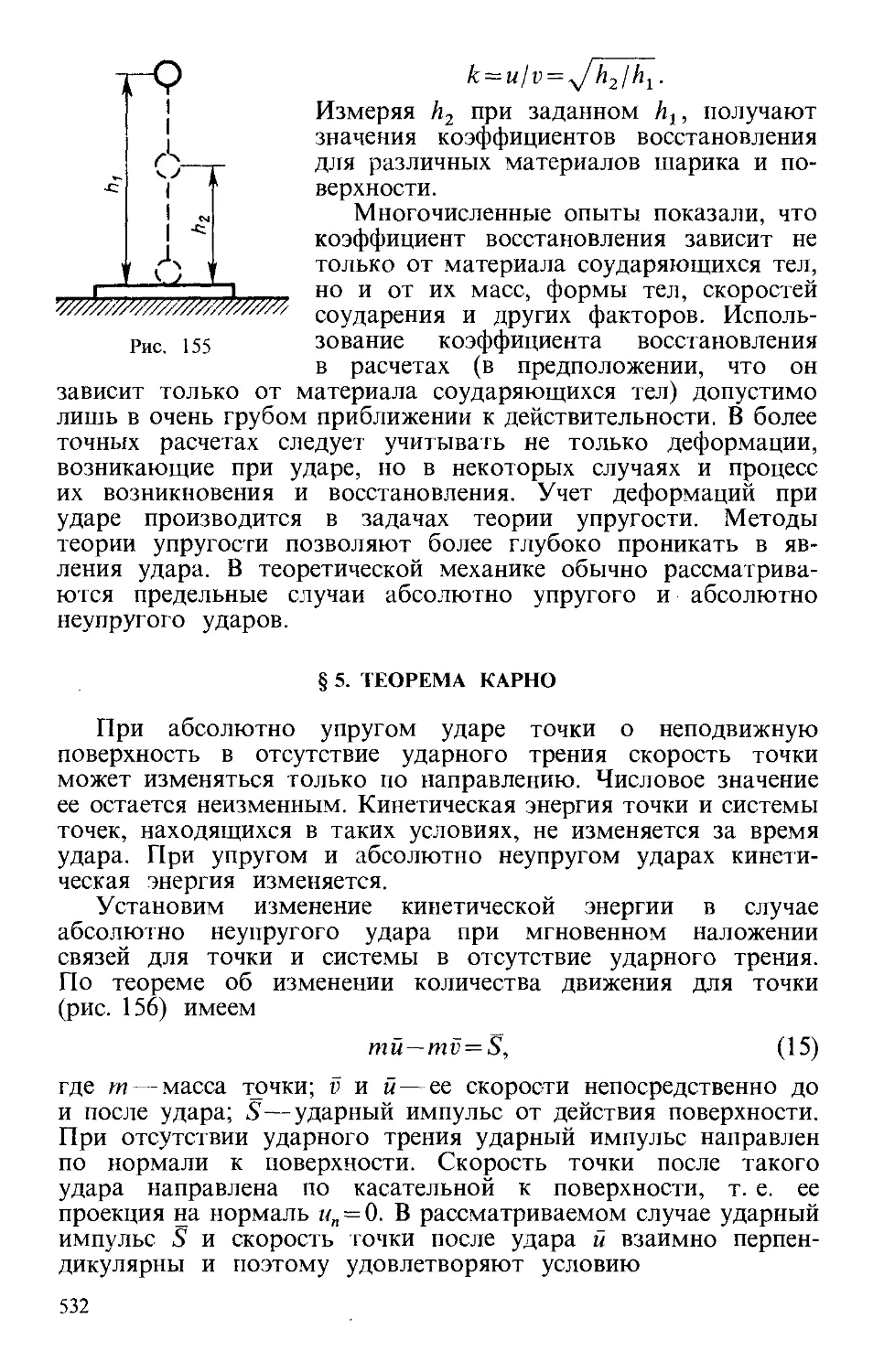
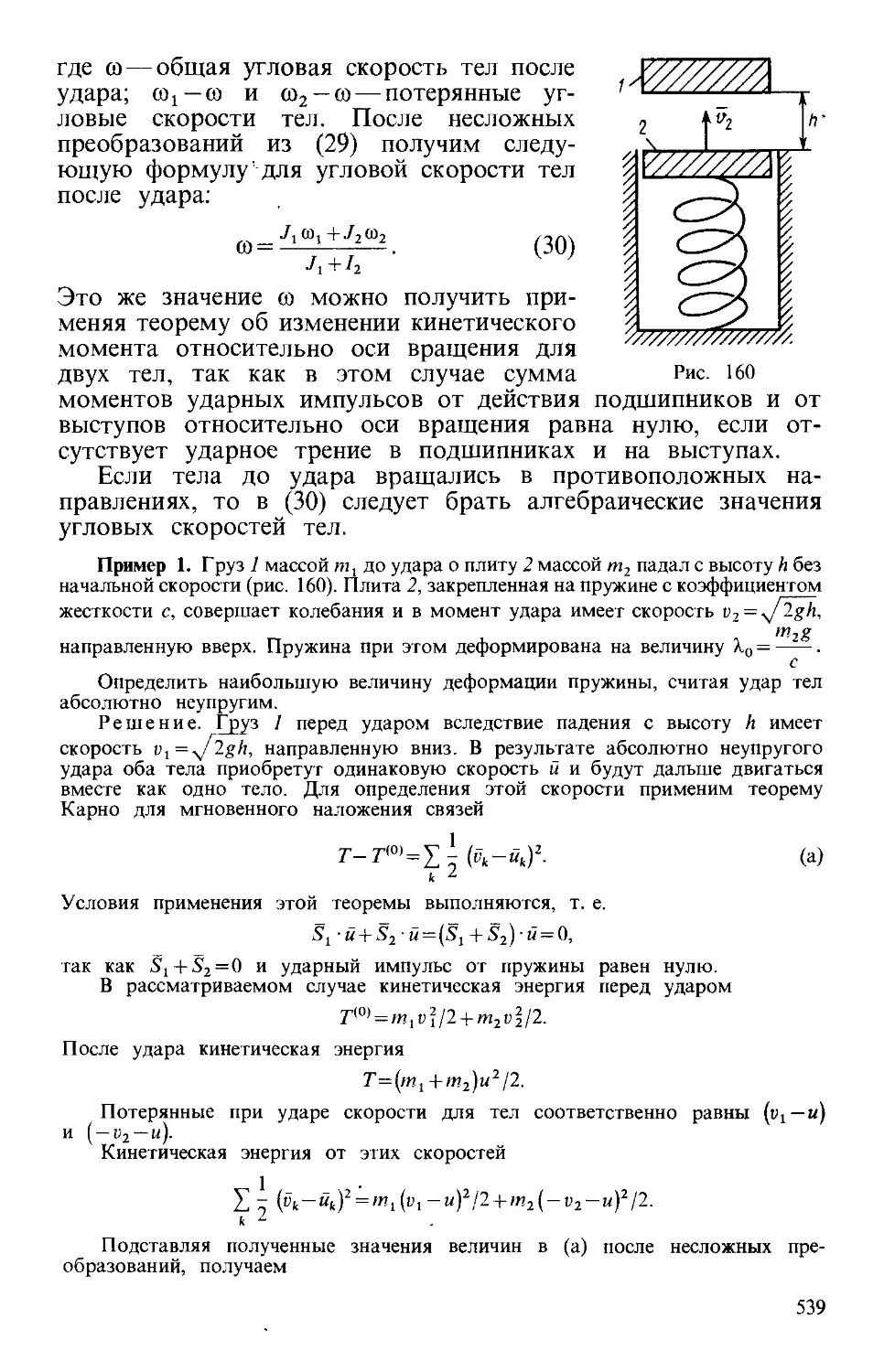
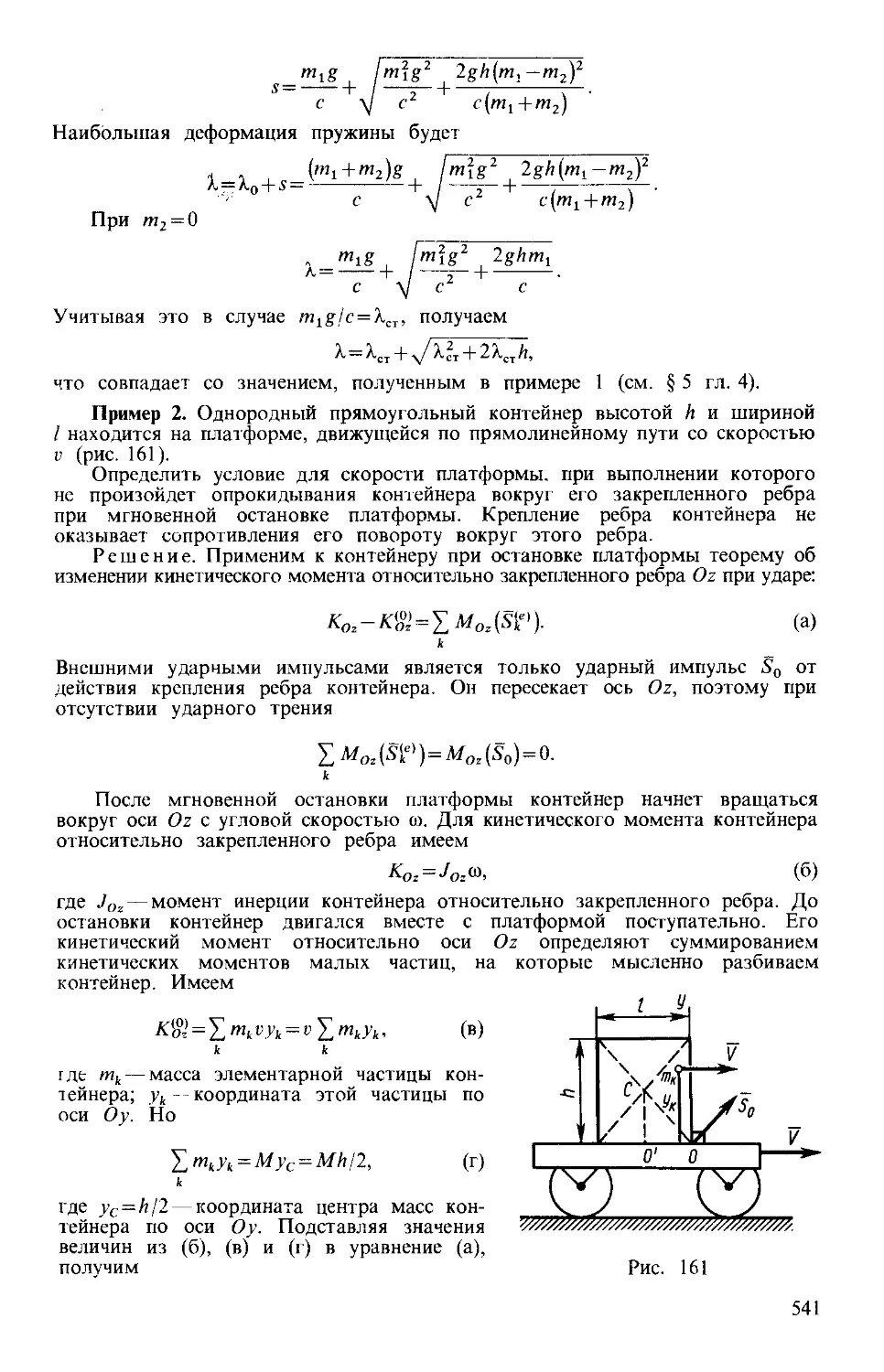
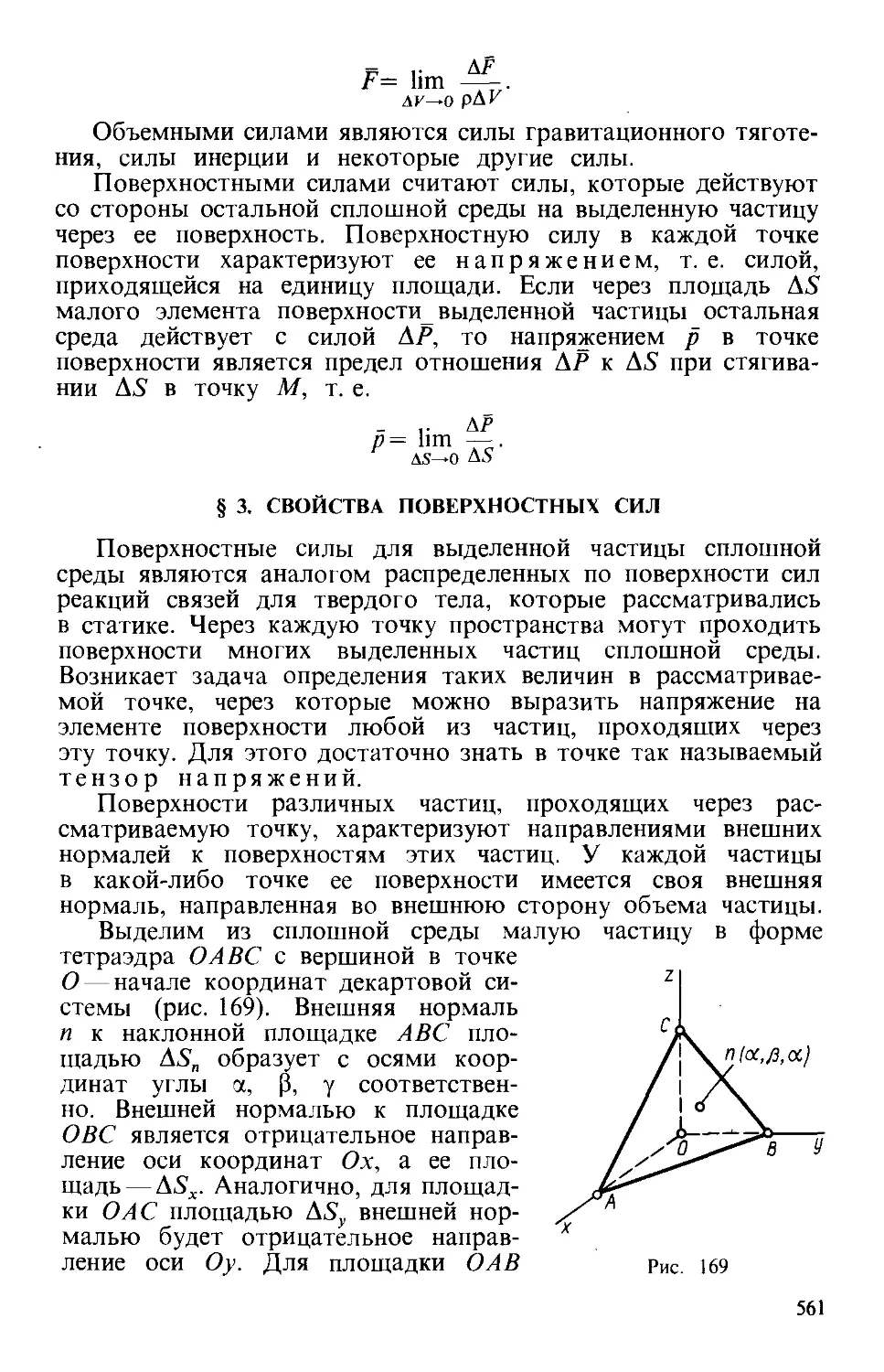
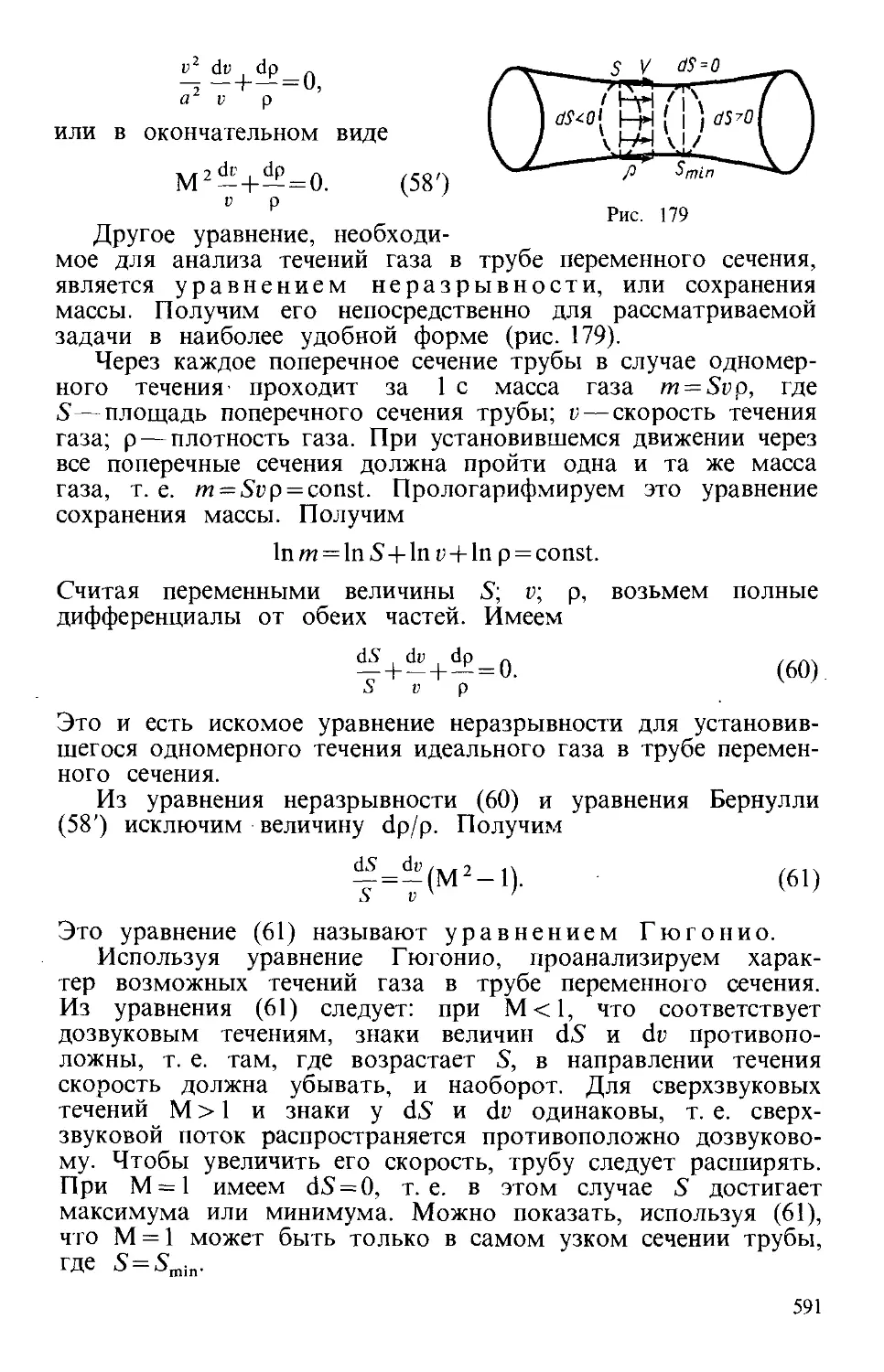
Text
Н.Н.Никитин
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ИЗДАНИЕ ПЯТОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Государственным комитетом СССР
по народному образованию
в качестве учебника для студентов
машиностроительных и приборостроительных
специальностей вузов
Москва
«Высшая школа» 1990
ББК 22.21
Н 62
УДК 531.8
Рецензент — кафедра теоретической механики Ленинградского по-
политехнического института им. М. И. Калинина (зав. кафедрой — д-р физ.-
мат. наук, проф. В. К. Прокопов)
Никитин Н. Н.
Н 62 Курс теоретической механики: Учеб. для машино-
строит. и приборостроит. спец. вузов.— 5-е изд., перераб.
и доп.— М.: Высш. шк., 1990.— 607 с: ил.
ISBN 5-06-000695-6
В пят^ издании D-е—1983 г.) переработаны главы о центре тяжести
(«Статика»), й сложении движений тела («Кинематика»), параграфы о канонических
уравнениях и задаче Ньютона («Динамика»). Ряд примеров статики и динамики
заменен новыми. Внесены уточнения и добавления, относящиеся к совершенствова-
совершенствованию структуры учебника.
1603020000 D309000000)—522
Н V^ '- 98—90 ББК 22.21
001 @1)—90 531
ISBN 5-06-000695-6 © Н. Н. Никитин, 1990
ПРЕДИСЛОВИЕ
Настоящий курс теоретической механики предназначен для
студентов высших технических учебных заведений, готовящих
инженеров-конструкторов и исследователей различных техничес-
технических специальностей. Он может использоваться также студента-
студентами других специальностей.
В основу курса положен многолетний опыт преподавания
теоретической механики в МГТУ им. Н. Э. Баумана.
Относительная краткость курса требовала тщательного
отбора теоретического материала 'и примеров, поясняющих
основные разделы курса, и наиболее рационального способа
их изложения. Так, в статике приведение сил к силе и паре
рассматривается для общей пространственной системы сил.
В кинематике сразу за простейшими движениями твердого
тела излагается часть сложного движения точки с рассмотре-
рассмотрением сложения ускорений при переносном поступательном
движении. Это позволяет более естественно рассматривать
случаи плоского и свободного движений твердого тела.
В динамике общие теоремы для точки и системы рассматри-
рассматриваются совместно, как это принято в МГТУ. Теория малых коле-
колебаний излагается для систем с одной и двумя степенями свободы
без отдельного рассмотрения прямолинейных колебаний точки.
В курс включен ряд дополнительных разделов, которые
при преобразовании МГТУ в технический университет должны
стать основными. В динамике достаточно полно изложена
теория малых колебаний систем с двумя степенями свободы.
Наряду с приближенной теорией дополнительно изложена
теория регулярной прецессии и движения быстровращающегося
гироскопа под действием силы тяжести, позволяющая обосно-
обосновать допущения приближенной теории.
Расширена глава о моментах инерции. Это позволяет на
примере тензора инерции описать некоторые общие свойства
тензора скоростей деформации и тензора напряжений в механи-
механике сплошной среды.
В аналитической механике даны уравнения Гамильтона.
Основы кинематики сплошной среды содержатся в разделе
«Кинематика» (гл. 7); введение в динамику сплошной среды — в
разделе «Динамика» (гл. 12). Они изложены без использования
операций тензорного исчисления.
В специальную главу «Элементы космических движений»
внесены вопросы движения точки под действием силы тяготения
Земли и точки переменной массы.
Основная переработка курса была осуществлена при подго-
подготовке четвертого издания. Для пятого издания заново написаны
главы о центре тяжести в статике; сложении движений твердого
тела в кинематике; параграфы о скорости и ускорении
в криволинейных координатах, а также скорости и ускорения
в сферических координатах, уравнениях Гамильтона и задаче
Ньютона. Часть примеров в статике, кинематике и динамике
заменена новыми.
В пятое издание внесены некоторые другие дополнения
и изменения, обусловленные эволюцией курса теоретической
механики в МГТУ в последние годы, где курс принят
в качестве основного учебника.
После переработки в пятом издании курса материала
В. В. Добронравова не осталось.
Все замечания и пожелания по улучшению книги следует
направлять по адресу: 101430, Москва, ГСП-4, ул. Неглинная,
д. 29/14, издательство «Высшая школа».
Автор
ВВЕДЕНИЕ
Все явления природы представляют собой движение различ-
различных форм материи. В теоретической механике рассматриваются
механические движения материальных объектов только вещест-
вещественных форм, таких, как различные материальные тела
или в более общем случае сплошные среды, и не рас-
рассматриваются такие физические объекты, как электромагнитное
поле, их источники и др. Материальность тел и сплошных
сред в теоретической механике характеризуется массой и дру-
другими величинами, связанными с ней, понятия которых вводятся
в динамике.
Всякое изменение материи называют движением. Одним
из простейших является механическое движение — пере-
перемещение материальных объектов в пространстве с течением
времени без рассмотрения физических свойств движущихся
материальных объектов и их изменения в процессе движения.
Механическое движение обычно входит составной частью
в более сложные виды движения материи.
В теоретической механике изучаются механические
движения вещественных форм материальных объектов в прост-
пространстве с течением времени.
Пространство, время, как и материя, являются сложными
понятиями. В теоретической механике используются их упро-
упрощенные понятия или модели. Пространство считается не
зависящим от времени и движущейся в нем материи. Прини-
Принимают, что оно обладает всеми геометрическими свойствами
эвклидовой геометрии. Время считают универсальным, не
связанным с пространством и движущейся материей. Его
характеризуют каким-либо периодическим процессом, например
периодом вращения Земли.
Наиболее общим методом изучения всех явлений природы
и общества является диалектический метод, который, признавая
опыт источником всех наших знаний, придает большое значе-
значение абстрактному мышлению, использующему модели явле-
явлений.
В теоретической механике широко используются математи-
математические методы, абстрактные понятия, модели явлений и зако-
законы логики, являющиеся составной частью диалектического
метода.
Каждый раздел теоретической механики имеет в своей
основе ряд понятий и аксиом, имеющих опытное происхожде-
происхождение. Вводя новые понятия и используя законы логики,
получают следствия или теоремы в форме, удобной для
практического применения.
Теоретическая механика все время развивается. По мере
углубления наших знаний выявляются границы применимости
теоретической механики, относительность ее понятий. Выясни-
Выяснилось, что аксиомы или законы классической механики Ньютона
не абсолютны.
Для материальных тел, скорости которых близки к скорости
света, вместо классической механики следует применять меха-
механику специальной теории относительности. Классическая те-
теоретическая механика ограниченно применима для изучения
движения элементарных частиц атома, таких, как электрон,
протон и др., для изучения движения которых следует при-
применять квантовую механику.
Теоретическая механика широко применяется в технике
(авиации, космонавтике, машиностроении, кибернетике и т. д.).
На базе теоретической механики возникли и успешно развива-
развиваются многие науки, такие, как сопротивление материалов,
теория упругости, гидродинамика, газовая динамика и др.
В этих науках обычно к законам механики добавляются
другие законы, характеризующие дополнительные свойства
материальных тел. В сопротивлении материалов и теории
упругости учитывается деформация тел и добавляется закон
Гука о связи деформаций с силами.
В гидродинамике учитывается скорость деформации и ис-
используется дополнительный закон о связи скоростей дефор-
деформации и сил. В газовой динамике, кроме того, учитывается
сжимаемость газа.
Теоретическая механика имеет свою историю становления
законов и понятий. Она создавалась вместе с развитием
техники под непосредственным влиянием развития произ-
производительных сил общества и всей человеческой культуры.
Теоретическая механика берет свое начало в глубокой древ-
древности, задолго до нашей эры.
Наибольший вклад в основу современной теоретической
механики внесли великие ученые Галилей A564—1642) и Нью-
Ньютон A643—1727). Дальнейшее развитие теоретической механики
связано с именами многих ученых, наиболее выдающиеся из
которых Гюйгенс A629—1695), Даламбер A717—1783), Эйлер
A707—1783), Лагранж A736—1813) и многие другие.
Большой вклад в развитие современной механики внесли
русские ученые, такие, как М. В. Остроградский A801 —1862),
Н. Е. Жуковский A847—1921), С. В. Ковалевская A850—1891),
А. М. Ляпунов A851 — 1918), К. Э. Циолковский A857—1935)
и др. Своими исследованиями и открытиями они в значитель-
ной мере содействовали развитию механики и ее приложений
в технике и естествознании. Плодотворно работают советские
ученые и сейчас, продолжая славные традиции корифеев
отечественной науки.
Теоретическая механика делится на три части: статику,
кинематику и динамику. Статика — раздел теоретической
механики, в котором рассматривают свойства сил, приложен-
приложенных к точкам твердого тела, и условия их равновесия.
В кинематике изучают чисто геометрические формы механи-
механических движений материальных объектов без учета условий
и причин, вызывающих и изменяющих эти движения. В дина-
динамике изучаются механические движения материальных объек-
объектов в зависимости от сил, т. е. от действия на рассматриваемые
объекты других материальных объектов.
РАЗДЕЛ I
СТАТИКА
ГЛАВА 1
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ.
СХОДЯЩИЕСЯ СИЛЫ
В статике твердого тела рассматриваются свойства сил,
приложенных к твердому телу. В частности, изучается приведе-
приведение сложных систем сил к более простому виду и устанавли-
устанавливаются условия равновесия различных систем сил, действующих
на твердое тело или материальную точку.
Теоретическая механика, как и всякая другая наука, имеет свои
понятия и определения, которые используются для формулирова-
формулирования ее аксиом и теорем. Статика базируется на аксиомах, из
которых по законам логики, вводя новые понятия, получают все
необходимые следствия в удобной для применения форме.
§ 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Материальной точкой называют простейшую модель мате-
материального тела любой формы, размеры которого достаточно
малы и которое можно принять за геометрическую точку,
имеющую определенную массу.
Механической системой называется любая совокупность
материальных точек.
Абсолютно твердым телом (или неизменяемой механической
системой) называют механическую систему, расстояния между
точками которой не изменяются при любых взаимодействиях.
Все тела в природе в той или иной мере деформируемы, но
в некоторых задачах деформациями тел можно пренебречь,
считая тела твердыми. При рассмотрении движения Земли
вокруг Солнца ее можно считать абсолютно твердым телом
и даже материальной точкой, хотя в действительности она
не твердая, так как на ней есть океаны, воздушная оболочка
и т. д. В дальнейшем абсолютно твердое тело будем называть
просто твердым телом.
Понятие силы в теоретической механике является основ-
основным, первичным понятием. Силой называют одну из вектор-
векторных мер действия одного материального объекта на другой
рассматриваемый объект. Имеются разные меры действия:
скалярные и векторные. Обычно за эталон числового значения
силы принимают значение линейной силы упругости,
например пружинного динамометра, которая пропорциональна его
деформации. Числовые значения сил различной природы определя-
определяют путем сравнения со значением линейной силы упругости.
Сила кроме числового значения характеризуется точкой
приложения и направлением действия. Она является вектор-
векторной величиной. Механическое действие материальных тел
друг на друга осуществляется при их соприкосновении (давле-
(давление стула на пол в местах соприкосновения его ножек с полом)
или как действие на расстоянии при посредстве силовых полей
(притяжение Луны Землей и т. п.).
Силу как величину векторную обозначают какой-либо буквой
со знаком вектора, например F или Р. Для выражения числового
значения силы или ее модуля используется знак модуля от вектора,
т. е. \F\, \Р\, или те же буквы, но без знака вектора, т. е. F, Р.
Системой сил называют совокупность сил, действующих
на рассматриваемое тело или в более общем случае на точки
механической системы. Можно рассматривать систему сил,
приложенных к одной материальной точке.
Системой сил, эквивалентной нулю (или равновесной систе-
системой сил), называют такую систему сил, действие которой на
твердое тело или материальную точку, находящиеся в покое
или движущиеся по инерции, не приводит к изменению
состояния покоя или движения по инерции этого тела или
материальной точки.
Две системы сил называются эквивалентными, если их
действие по отдельности на одно и то же твердое тело или
материальную точку одинаково при прочих равных условиях,
т. е. если одна система сил приводит твердое тело или
материальную точку в какое-то движение, например из состоя-
состояния покоя, то другая система сил, эквивалентная первой,
сообщит такое же движение. Движения, вызванные действием
эквивалентных систем сил, имеют одинаковые характеристики
для каждогомомента времени. Условие_эквивалентности двух
систем сил (Fx, F2, ..., Fn) и (F'i, F'2, ..., F'k) выражают в форме
(Fu F2, ..., Fn)cv(F'i, F2, ..., F'k),
где п и к—число сил в системах.
Равнодействующей силой рассматриваемой системы сил
называют силу, действие которой на твердое тело или
материальную точку эквивалентно действию этой системы
сил. Равнодействующая сила обозначается R*, и условие ее
эквивалентности рассматриваемой системе сил (Fl5 F2, ..., Fn)
выражается в виде
^, F2, ..., Fn).
Равновесная система сил имеет равнодействующую, равную
нулю.
Уравновешивающей силой заданной системы сил считается
такая сила, добавление которой к заданной дает новую
систему, эквивалентную нулю. Если_/?*' является уравнове-
уравновешивающей силой системы сил (Ft, F2, ..., Fn), то, согласно
определению, она удовлетворяет условию
{Fu F2, ..., Fm /г*')счэО.
В дальнейшем убедимся, что не всякая система сил имеет
равнодействующую и уравновешивающую силы. Есть системы
сил, которые не находятся в равновесии и не эквивалентны
одной силе.
§ 2. АКСИОМЫ СТАТИКИ
Справедливость аксиом механики проверяется на опыте
как непосредственно, так и по тем следствиям, которые из
них получают.
При формулировке аксиом предполагаем, что на твердое
тело или материальную точку действуют силы, которые
указаны в соответствующей аксиоме. Твердое тело или мате-
материальную точку в общем случае следует считать свободны-
свободными, имеющими возможность совершать в рассматриваемый
момент любые перемещения в пространстве.
I. Аксиома о равновесии системы двух сил. Для равновесия
системы двух сил, приложенных к точкам твердого тела,
необходимо и достаточно, чтобы эти силы были равны по»
модулю и действовали вдоль одной прямой, проходящей через
точки их приложения, в противоположных направлениях (рис. 1).
Этой аксиомой устанавливается простейшая система сил,
эквивалентная нулю. Если силы F1 и F2 находятся в равновесии,
то, естественно, они образуют систему сил, эквивалентную
нулю. Действие такой системы сил на покоящееся твердое
тело не изменяет состояния покоя этого тела. Аксиома
справедлива и для сил, приложенных к одной точке тела
или одной материальной точке.
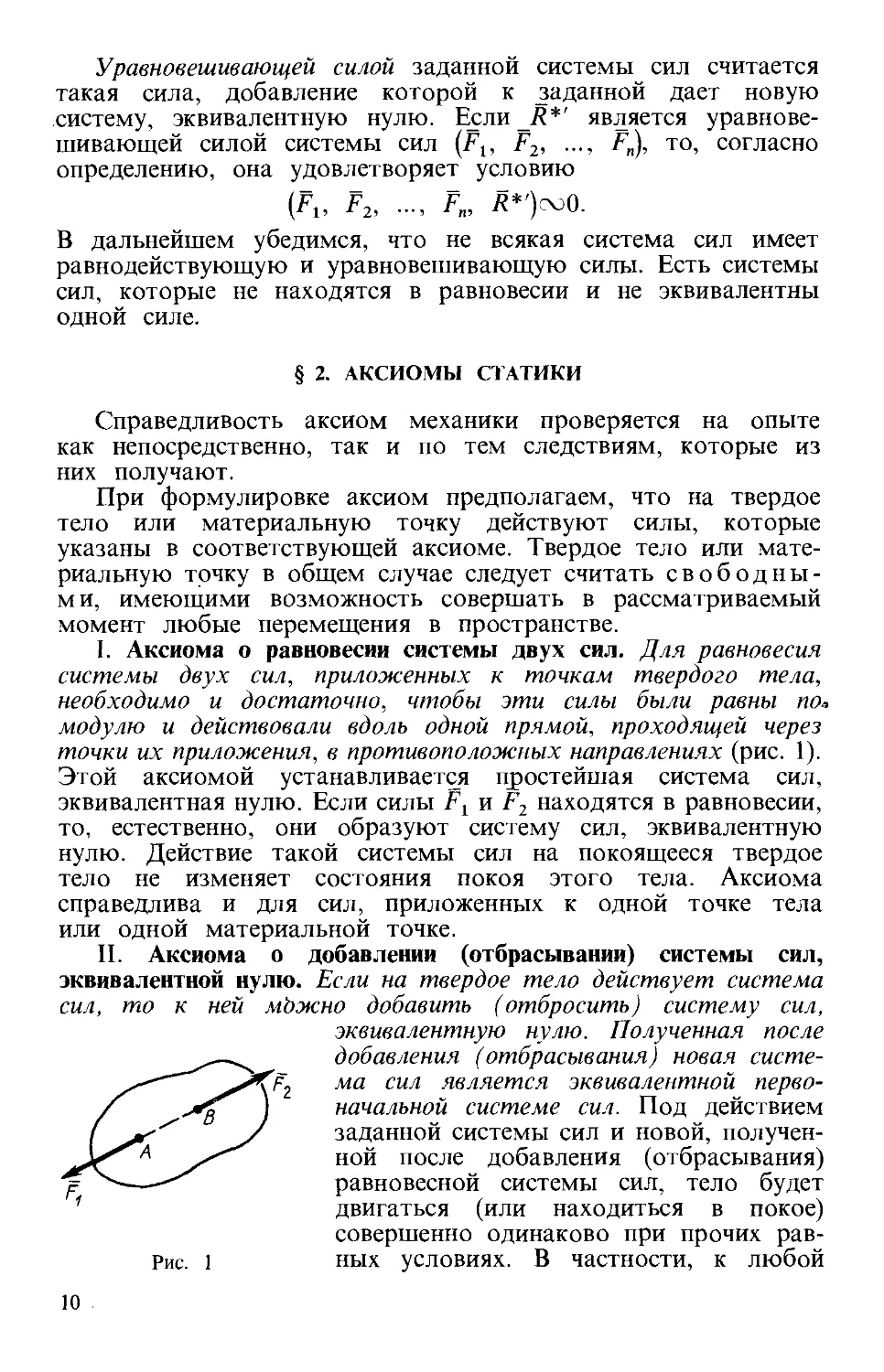
II. Аксиома о добавлении (отбрасывании) системы сил,
эквивалентной нулю. Если на твердое тело действует система
сил, то к ней мЬжно добавить (отбросить) систему сил,
эквивалентную нулю. Полученная после
добавления (отбрасывания) новая систе-
система сил является эквивалентной перво-
первоначальной системе сил. Под действием
заданной системы сил и новой, получен-
полученной после добавления (отбрасывания)
равновесной системы сил, тело будет
двигаться (или находиться в покое)
совершенно одинаково при прочих рав-
Рис. 1 ных условиях. В частности, к любой
10
системе сил можно добавить (отбросить)
простейшую равновесную систему сил, со-
состоящую из двух равных по модулю сил,
действующих вдоль одной прямой в про-
противоположных направлениях и приложен-
приложенных в одной или разных точках твердого
тела в соответствии с первой аксиомой.
III. Аксиома параллелограмма сил. Две
силы, действующие в одной точке твердого Рис- 2
тела или на одну материальную точку, можно заменить
одной равнодействующей силой, равной по модулю и направлению
диагонали параллелограмма, построенного на заданных силах
(рис. 2). Очевидно, справедливо и обратное. Одну силу,
приняв за равнодействующую, можно разложить по правилу
параллелограмма на две составляющие силы.
Эту аксиому долгое время в истории развития механики
пытались доказать и, следовательно, считали теоремой. Тща-
Тщательный анализ таких доказательств, часто очень остроумных,
показал, что для этого дополнительно используются положе-
положения, которые следует принимать за аксиомы.
Замену двух сил одной равнодействующей силой по
правилу параллелограмма называют векто_рным сложе-
сложением этих сил. Векторное сложение сил F1 и F2 математически
выражают так:
R* = Fl+F2.
Если силы Fl и F2 направлены по одной прямой в одну
или противоположные стороны, то векторное сложение пере-
переходит в алгебраическое.
Модуль равнодействующей силы R* как векторную сумму
сил вычисляют по формуле диагонали параллелограмма
R * = yjF\ + F22 + 2FXF2 cos (F^F2).
Применяя теорему синусов к одному из треугольников парал-
параллелограмма, определяют синусы углов, которые образует
равнодействующая R* с составляющими ее силами Fx и F2:
sin (Л*, F,)= ^' 2>; sin (Л*, F2) = -i—JL
Более предпочтительным способом определения числового
значения и направления равнодействующей силы по отношению
к каким-либо прямоугольным осям координат является метод
проекций, который особенно удобен в случае векторного
сложения более чем двух сил. Этот метод рассматривается
дальше, при изучении систем сходящихся сил.
IV. Аксиома о равенстве сил действия и противодействия —
один из основных законов классической механики, сформулиро-
сформулированных Ньютоном: всякой силе действия есть равная, но
11
Vb)
противоположная сила противодействия. По отношению к двум
материальным точкам эта аксиома утверждает, что силы
взаимодействия двух материальных точек равны по модулю,
противоположны по направлению и действуют вдоль одной
прямой, проходящей через взаимодействующие точки. Матери-
Материальные точки при этом могут взаимодействовать как через
посредство силовых полей, т. е. на расстоянии, так и путем
соприкосновения друг с другом, если их считать твердыми
телами очень малых размеров.
В статике эту аксиому применяют для твердых тел. Силы
взаимодействия двух твердых тел (при взаимодействии путем
соприкосновения или на расстоянии при посредстве силовых
полей) равны по модулю и противоположны по направлению.
Силы действия и противодействия всегда приложены к разным
телам или к различным взаимодействующим точкам одного
и того же тела.
Таким образом, в природе силы встречаются всегда по
две: силы действия и противодействия.
V. Аксиома связей. Связью для твердого тела или материаль-
материальной точки называют материальные объекты (тела и точки),
которые ограничивают свободу перемещения рассматриваемого
твердого тела или материальной точки. Аксиома связей
утверждает, что всякую связь можно отбросить и заменить
силой, реакцией связей (в простейшем случае) или системой
сил (в общем случае). Эта аксиома фактически уже содержится
в определении силы, но в истории развития механики это
не было осознано сразу. Длительное время после формулировки
Ньютона основных законов классической механики их примене-
применение к несвободным твердым телам и механическим системам
встречалось с трудностями, пока не была дополнительно
сформулирована аксиома связей. Учитывая большое значение
аксиомы связей для дальнейшего изложения теоретической
механики, оставим эту аксиому как самостоятельную.
Почти все теоремы и окончательные результаты теоретичес-
теоретической механики формулируются для материальной точки или
твердого тела, освобожденных от связей, т. е. когда связи
заменены силами реакций связей. Поэтому очень важно уметь
п\
12
правильно заменять отброшенные связи силами реакций связей.
Это одна из главных задач при изучении статики, которой
следует уделить наибольшее внимание.
Силы реакций связей для рассматриваемого тела или точки
зависят прежде всего от приложенных сил и от вида связей.
При движении силы реакций связей зависят еще и от
характеристик движения. Так, при движении тела в воздухе
сила реакции воздуха на движущееся тело зависит от скорости
движения тела относительно воздуха.
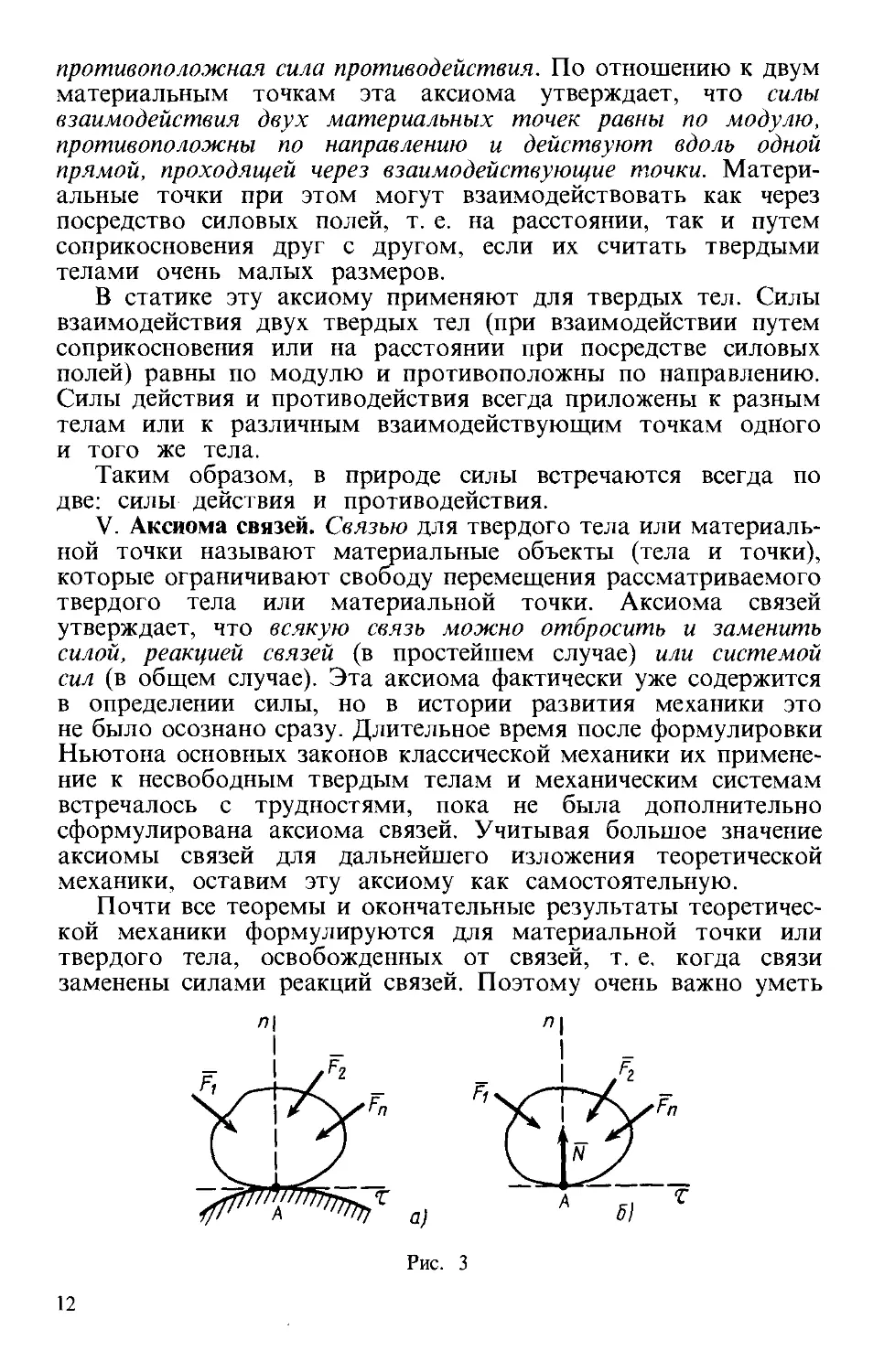
Приведем примеры связей и их замены силами реакций
связей. Если связью для твердого тела (рис. Ъ,а) является
абсолютно гладкая поверхность другого тела, то сила реакции
такой поверхности, если соприкосновение происходит в одной
точке, направлена по нормали к общей касательной соприка-
соприкасающихся поверхностей тел независимо от сил, приложенных
к_ рассматриваемому телу (рис. 3, б). Сила реакции связи
./V направлена в сторону, противоположную направлению,
в котором связь препятствует перемещению рассматриваемого
тела. Числовое значение силы реакции при равновесии опреде-
определяется приложенными к телу силами, которые в отличие от
сил реакций связей часто называют активными силами.
Если соприкосновение происходит не в одной точке, а по
некоторой площади поверхности, то реакция такой связи
сводится к системе распределенных по поверхности сил,
которые в некоторых случаях удается заменить одной равно-
равнодействующей силой реакции связи. В общем случае система
распределенных сил может не иметь равнодействующей.
В тех случаях, когда сила реакции связей не только по
модулю, но и по направлению зависит от приложенных сил,
ее обычно раскладывают по правилу параллелограмма на
составляющие параллельно осям координат. Через состав-
составляющие легко определяется как модуль силы реакции, так
и ее направление.
Неизвестную по модулю и направлению силу реакции
создают цилиндрический (плоский) и шаровой шарниры.
Пусть имеем балку АВ, находящуюся в равновесии под
действием силы F и закрепленную на одном конце с помощью
цилиндрического шарнира А, а. на другом — катковой опоры
В (рис. 4. а). Цилиндрическим шарниром называют устройство,
4 *; V!
Г л 4 П
~а а » ~д—j
U Ь п л ь и О
А
pv
ЯШ ЗЕЗЕ А X,
Рис. 4
13
'/////л
al 5}
Рис. 5
позволяющее балке поворачиваться в плоскости вокруг оси,
перпендикулярной этой плоскости. Устройство катковой опоры
ясно из рисунка. На рис. 4,6 показана та же балка после
освобождения от связей. Сила реакции катковой опоры направ-
направлена по нормали к общей касательной, если поверхности
соприкосновения гладкие. Неизвестная по модулю и направле-
направлению реакция цилиндрического шарнира разложена на две
составляющие ХА и YA, предположительно направленные
в положительном направлении осей координат.
В случае шарового шарнира силу реакции раскладывают
на три составляющие, параллельные осям координат.
Гибкие связи (канаты, тросы, нити) дают силы реакции
связей (силы натяжения), направленные по касательной к гибкой
связи. На рис. 5, а, б сила натяжения нити S заменяет действие
нити на груз. На рис. 6, а, б показаны силы натяжения провода
в сечениях А я В, действующих на часть провода АВ.
На рис. 1,а, б показаны силы реакции цилиндрического
шарнира А и стержня ВС на балку АВ. Стержень ВС, имеющий
на концах шарниры В и С, создает силу реакции на балку АВ
только в направлении самого стержня ВС (шарнирный стер-
стержень), если на этот стержень не действуют другие силы между
его шарнирами В и С. Действительно, если рассмотреть
находящийся в равновесии стержень ВС, то на него действуют
только две силы в точках В и С. Согласно первой аксиоме, эти
силы должны быть направлены по одной прямой, проходящей
через точки В и С. Следовательно, сила реакции стержня YB на
балку А В направлена по ВС, так как действие балки на
стержень дает силу, направленную по стержню.
14
Силы реакций других наиболее часто встречающихся связей
рассматриваются в примерах.
VI. Аксиома затвердевания. Если деформируемое тело нахо-
находится в равновесии, то равновесие его без изменения системы
приложенных сил не нарушится от наложения на точки тела
дополнительных связей, включая превращение деформируемого
тела в абсолютно твердое. С помощью этой аксиомы устанав-
устанавливается, в частности, связь между условиями равновесия сил,
приложенных к твердому и деформируемому телам. Из
аксиомы следует, что условия равновесия сил, приложенных
к твердому телу, необходимы и для равновесия деформируе-
деформируемого тела. Но условия равновесия сил, приложенных к тве-
твердому телу, не являются достаточными для равновесия
деформируемого тела.
Сформулированные аксиомы и являются той основой,
на которой строится вся статика сил, приложенных
к твердому телу.
Аксиомы статики характеризуют свойства сил, приложенных
к абсолютно твердому телу или одной точке. Но они не
учитывают материальных свойств тела или точки, характеризуе-
характеризуемых их массой, а для тела — еще распределением массы
в теле, влияние которых существенно при их движении.
Совместный учет действия сил и материальных свойств
тел или точки содержится в аксиомах динамики. Такие
аксиомы статики, как аксиома о параллелограмме сил, о равен-
равенстве сил действия и противодействия, аксиома связей, справед-
справедливы и в динамике. Так как в статике рассматриваются
свойства и неравновесных систем сил, под действием которых
твердое тело или точка не могут находиться в покое
относительно инерциальной системы отсчета, то для оправда-
оправдания этого в статике можно считать, что эти системы сил
являются частями более укрупненных равновесных систем сил,
под действием которых тело или материальная точка находится
в покое или совершает движение по инерции.
§ 3. ПРОСТЕЙШИЕ ТЕОРЕМЫ СТАТИКИ
Теорема о переносе силы вдоль линии действия. Действие
силы на твердое тело не изменится от переноса силы вдоль
своей линии действия. _
Пусть в точке А твердого тела приложена сила F (рис. 8).
К этой силе на ее линии действия в точке/? в соответствии
с аксиомой II добавим систему сил (F', F"),_ эквивалентную
нулю, для которой F"——F'. Выберем силу_Г', равную силе
F. Полученная система трех сил (F, F\ F"J эквивалентна,
согласно аксиоме о добавлении равновесной системы сил,
силе F, т. е.
{F)<s>(F, F, F").
15
ГУ
Рис. 8
Система сил (F, F"), согласно аксиоме
I, эквивалентна нулю и, согласно аксиоме
II, ее можно отбросить. Получится одна
cjuiaF, приложенная в точке В, т. е. (F,
F, F") ^>\F'). Окончательно получаем
(F)^(P).
Сила F приложена в точке А. Она эк-
эквивалентна такой же по модулю и направ-
направлению силе F', приложенной в точке В,
где точка В—любая точка линии действия
силы F. Теорема доказана. Таким образом,
точка приложения силы в абсолютно тве-
твердом теле несущественна. Силу для твердого тела можно
считать приложенной в любой точке линии действия. Векторные
величины, которые можно прикладывать в любой точке линии
действия, называют скользящими. Сила, приложенная к твердо-
твердому телу, есть вектор скользящий. В деформируемом теле
силу нельзя переносить вдоль линии действия. Сила в этом
случае не является скользящим вектором.
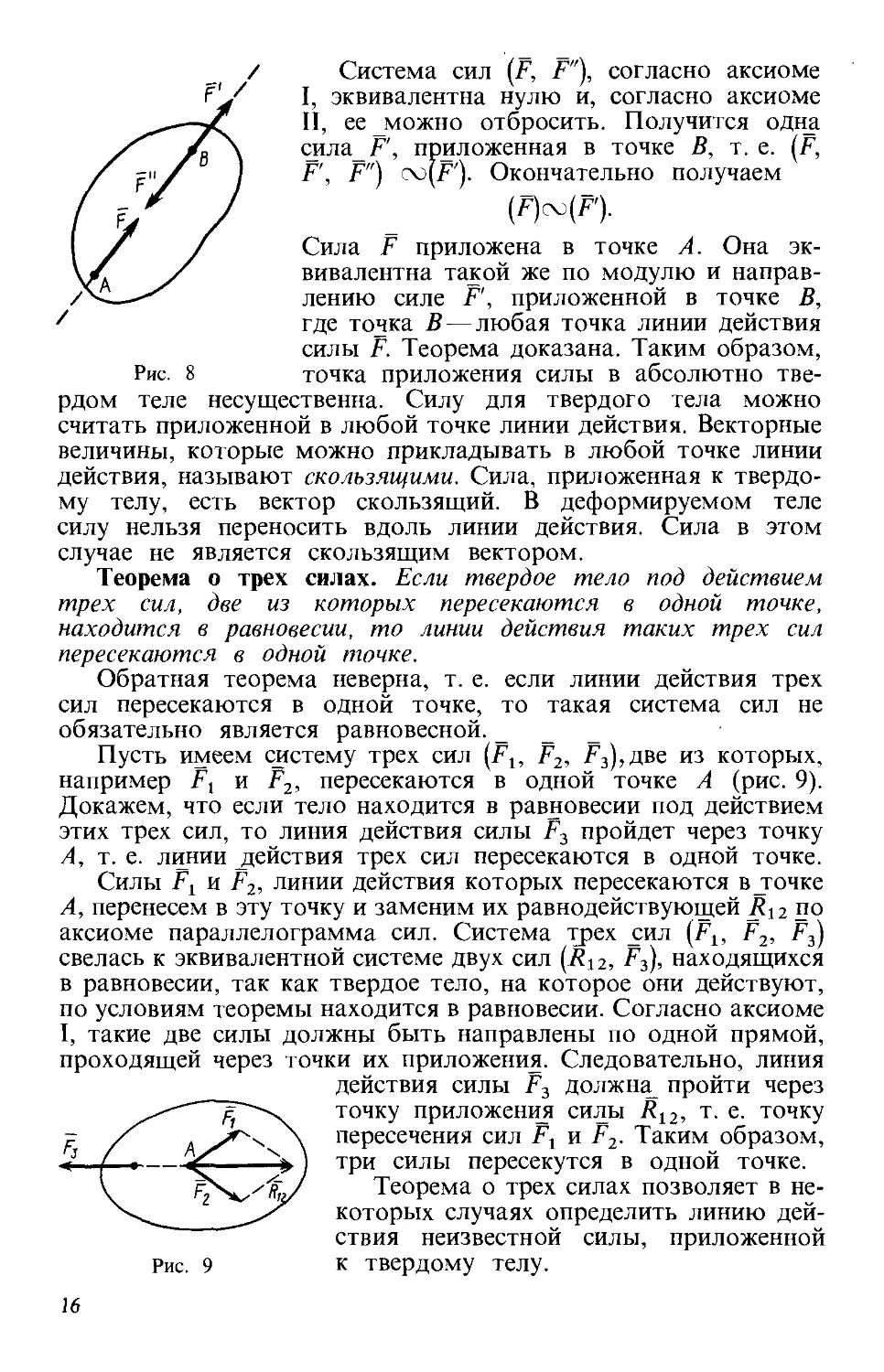
Теорема о трех силах. Если твердое тело под действием
трех сил, две из которых пересекаются в одной точке,
находится в равновесии, то линии действия таких трех сил
пересекаются в одной точке.
Обратная теорема неверна, т. е. если линии действия трех
сил пересекаются в одной точке, то такая система сил не
обязательно является равновесной. _ _ _
Пусть имеем систему трех сил [F1, F2, -Г3),две из которых,
например Fl и F2, пересекаются в одной точке А (рис. 9).
Докажем, что если тело находится в равновесии под действием
этих трех сил, то линия действия силы F3 пройдет через точку
А, т. е. линии действия трех сил пересекаются в одной точке.
Силы Fl и F2, линии действия которых пересекаются в_точке
А, перенесем в эту точку и заменим их равнодействующей Rl2 по
аксиоме параллелограмма сил. Система трех ^ил (Fb F2, F3)
свелась к эквивалентной системе двух сил (Ri2, F3), находящихся
в равновесии, так как твердое тело, на которое они действуют,
по условиям теоремы находится в равновесии. Согласно аксиоме
I, такие две силы должны быть направлены по одной прямой,
проходящей через точки их приложения. Следовательно, линия
действия силы F3 должна_ пройти через
точку приложения силы Rl2, т. е. точку
пересечения сил F1 и F2. Таким образом,
три силы пересекутся в одной точке.
Теорема о трех силах позволяет в не-
некоторых случаях определить линию дей-
ствия неизвестной силы, приложенной
Рис. 9 к твердому телу.
16
A I, \C l2 ^{а_
V/3 j ~^В
Рис. И
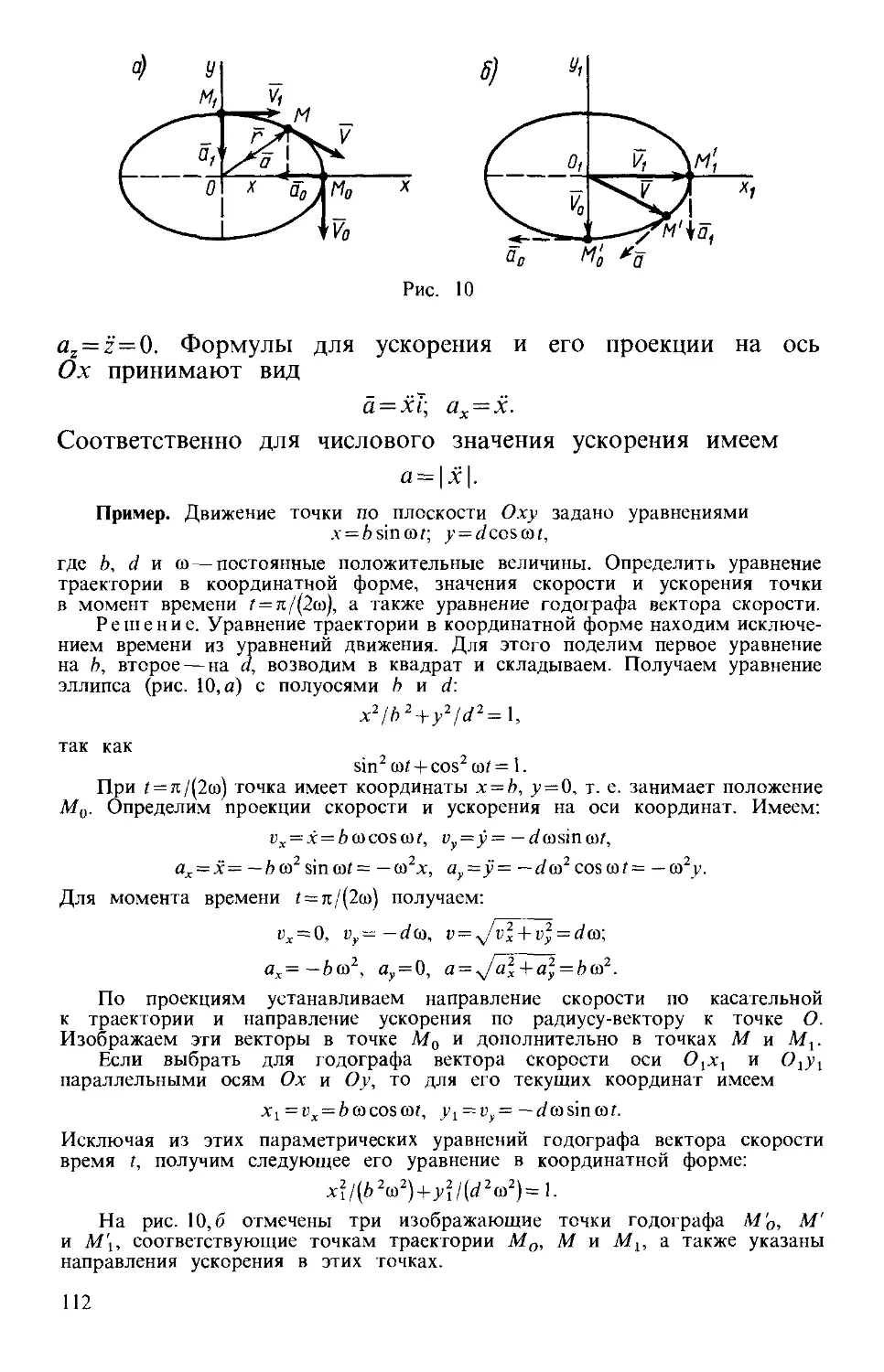
Пример. Дана балка АВ, закрепленная, как указано на рис. 10. На балку
действует активная сила F, направление которой задано углом а. Определить
линию действия силы реакции цилиндрического шарнира RA.
Решение. Освободим балку от связей, заменив их силами реакций
связей (рис. 11). Сила реакции стержня DC на балку АВ направлена по
стержню DC. Ее jihhhh действия пересекается с линией действия заданной
силы F в точке Е. Согласно теореме о трех силах при равновесии _балки,
через точку Е должна пройти и линия действия силы реакции RA. Ее
направление определится углом Р, который зависит от угла а и положения
точки С:
СЕ /2.
^АС-^*-
Если АС=ВС, то C = а.
§ 4. СИСТЕМА СХОДЯЩИХСЯ СИЛ
Рассмотрим одну из важных систем сил — систему сходя-
сходящихся сил. Для этой системы сил следует рассмотреть
приведение ее к простейшему виду и установить условия
равновесия.
Системой сходящихся сил (или пучком сил) называют
такую систему сил, линии действия которых пересекаются
в одной точке — центре пучка. Сходящиеся системы сил могут
быть пространственными и плоскими, т. е. расположенными
в одной плоскости.
Приведение к равнодействующей силе
Рассмотрим общий случай пространственной системы сходя-
сходящихся сил. Так как сила, действующая на твердое ■ тело, есть
вектор скользящий, то можно считать, что силы системы (Fl,
F2, ..., Fn) приложены в одной точке — центре пучка (рис. 12).
Применяя к первым двум силам пучка Fl и F2 аксиому
параллелограмма, заменим их одной равнодействующей силой
R12 (рис. 13), причем
Rl2 = Fl + F2.
Затем по правилу параллелограмма складываем силы Rl2
и F3 и получаем их равнодействующую:
17
Рис. 12
Рис. 13
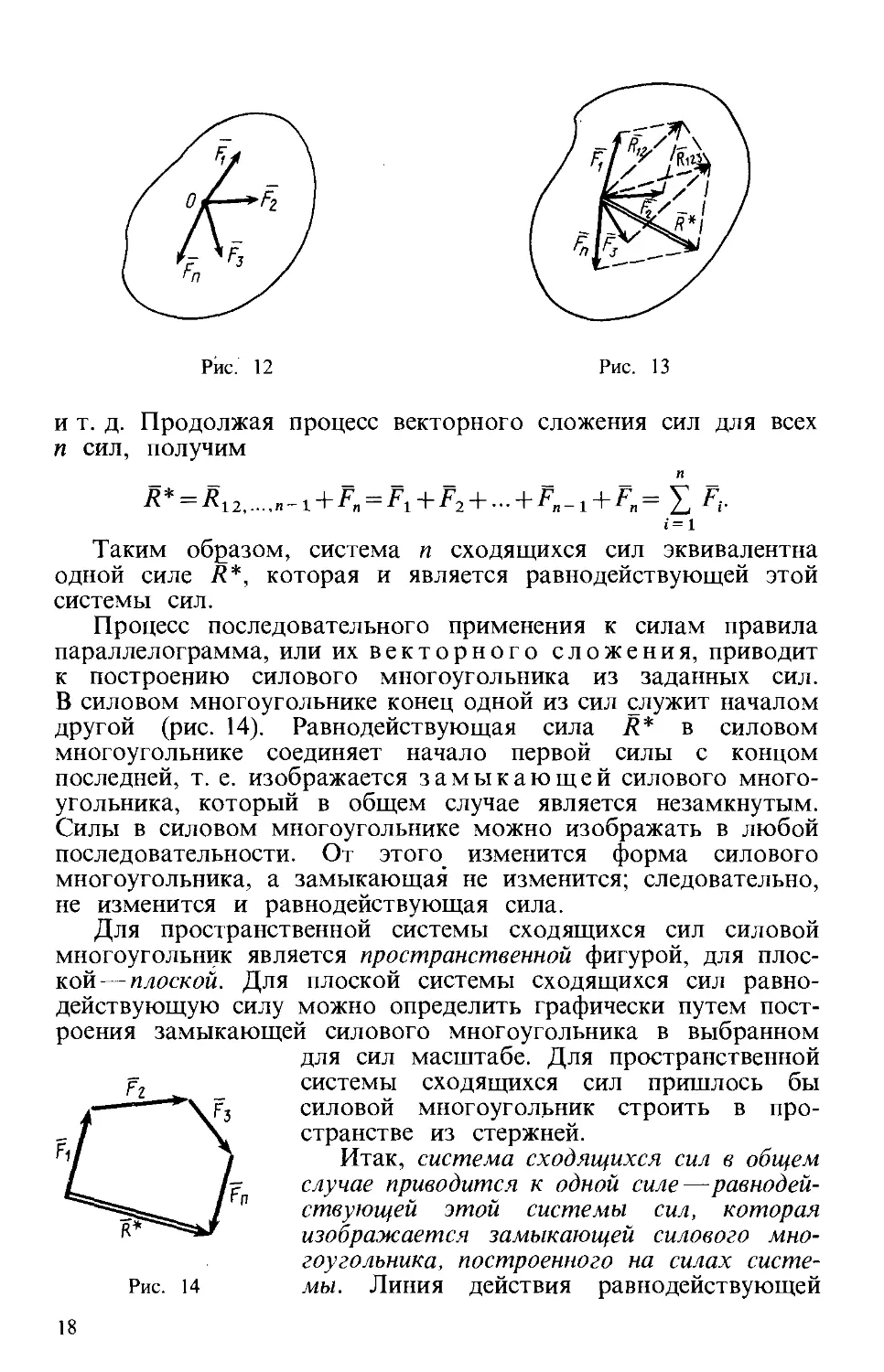
и т. д. Продолжая процесс векторного сложения сил для всех
п сил, получим
R* = R12,...,n-i + Fn = F1 + F2 + ... + Fn_l + Fn= £ Ft.
t = i
Таким образом, система п сходящихся сил эквивалентна
одной силе R*, которая и является равнодействующей этой
системы сил.
Процесс последовательного применения к силам правила
параллелограмма, или их векторного сложения, приводит
к построению силового многоугольника из заданных сил.
В силовом многоугольнике конец одной из сил служит началом
другой (рис. 14). Равнодействующая сила R* в силовом
многоугольнике соединяет начало первой силы с концом
последней, т. е. изображается замыкающей силового много-
многоугольника, который в общем случае является незамкнутым.
Силы в силовом многоугольнике можно изображать в любой
последовательности. От этого изменится форма силового
многоугольника, а замыкающая не изменится; следовательно,
не изменится и равнодействующая сила.
Для пространственной системы сходящихся сил силовой
многоугольник является пространственной фигурой, для плос-
плоской— плоской. Для плоской системы сходящихся сил равно-
равнодействующую силу можно определить графически путем пост-
построения замыкающей силового многоугольника в выбранном
для сил масштабе. Для пространственной
системы сходящихся сил пришлось бы
силовой многоугольник строить в про-
пространстве из стержней.
Итак, система сходящихся сил в общем
случае приводится к одной силе—равнодей-
силе—равнодействующей этой системы сил, которая
изображается замыкающей силового мно-
многоугольника, построенного на силах систе-
Рис. 14 мы. Линия действия равнодействующей
18
силы проходит через центр пучка параллельно замыкающей
силового многоугольника.
Для аналитического определения равнодействующей силы
следует выбрать систему прямоугольных осей координат
и воспользоваться известной из геометрии теоремой о том,
что проекция замыкающей любого многоугольника на какую-
либо ось равна алгебраической сумме проекций составляющих
его сторон на ту же ось. _
Так как равнодействующая сила R* является замыкающей
силового многоугольника, или векторной суммой сил, то
R*=tpi- (!)
1 = 1
Проецируя векторы векторного равенства на прямоугольные оси
координат, согласно теореме о проекции замыкающей получим
Rx = £ Fix; R;=t Fiy; R'z= £ Fiz. B)
i = 1 i=l i = 1
По проекциям определяем модуль равнодействующей силы
и косинусы углов ее с осями координат по формулам
' 2
R*^(Rlf+(R;f+(R^ = ^[liFuJ +[1Ъу) +(l/"j ;C)
cos(R*x!Kx)^R*x/R*; cos(£*,%) = л;/7?*; cos(R^z) = Rl/R*.D)
В формуле C) перед квадратным корнем всегда берут знак
плюс, так как оределяется модуль равнодействующей силы.
В случае плоской системы сходящихся сил одну из коорди-
координатных осей, обычно Oz, выбирают перпендикулярной силам,
тогда каждая из сил пучка даст проекцию на эту ось, равную
нулю, а следовательно, будет равна нулю и проекция равно-
равнодействующей силы на эту ось, т. е.
R*z= £ Fiz = 0.
i= 1
Условия равновесия системы сходящихся сил
Для равновесия системы сходящихся сил, приложенных
к твердому телу, замыкающая силового многоугольника,
изображающая равнодействующую силу, должна обратиться
в точку, т. е. конец последней силы в многоугольнике
должен совпасть с началом первой силы. Такой силовой
многоугольник называют замкнутым (рис. 15). Получено
условие равновесия сходящихся сил в геометрической
форме: для равновесия системы сходящихся сил, приложенных
к твердому телу, необходимо и достаточно, чтобы силовой
19
многоугольник, построенный из этих сил, был
замкнутым. Для случая трех сходящихся сил
при равновесии должен быть замкнутым
силовой треугольник, построенный из трех сил.
Для определения неизвестных сил при
равновесии более предпочтительным является
использование условий равновесия системы
сходящихся сил в аналитической форме. Так
как при равновесии системы сходящихся сил
равнодействующая сила должна быть равна нулю (силовой
многоугольник замкнут), то из этого следует, что равно нулю
подкоренное выражение в C), состоящее из суммы положитель-
положительных величин. Таким образом, равны нулю квадраты каждой
из величин подкоренного выражения, а следовательно, равны
нулю и сами величины. Получаем условия равновесия простран-
пространственной системы сходящихся сил в аналитической форме:
£ Fix = 0; £fi, = 0; £ Fiz = 0, E)
i=l i=l i=l
т. е. для равновесия пространственной системы сходящихся
сил, приложенных к твердому телу, необходимо и достаточно,
чтобы суммы проекций сил на каждую из трех прямоугольных
осей координат были равны нулю.
В случае плоской системы сходящихся сил одну из осей
координат, обычно Oz, выбирают перпендикулярной силам, а две
другие оси—соответственно в ялоскости сил. Тогда третье условие
л
из E) превратится в тождество £ Fiz = 0. Отбрасывая его, получаем
;= 1
£ib = 0; £f,, = 0, F)
i = 1 i=l
т. е. для равновесия плоской системы сходящихся сил, действую-
действующих на твердое тело, необходимо и достаточно, чтобы суммы
проекций этих сил на каждую из двух прямоугольных коорди-
координатных осей, лежащих в плоскости сил, были равны нулю.
Проецирование силы на оси координат
Если дана сила F, то ее проекции на прямоугольные оси
координат вычисляются по формулам
FX = F-T= Fcos(F,Ax); Fy = F•]= Fcos(F*y);
Fz = F-k = Fcos{F?z),
где /, j, k—единичные векторы, направленные по осям
координат. Косинусы углов силы с осями координат удовлетво-
удовлетворяют условию
cos2 (F,Ax)+cos2 (F,Ay) + cos2 (F,A z) = 1.
20
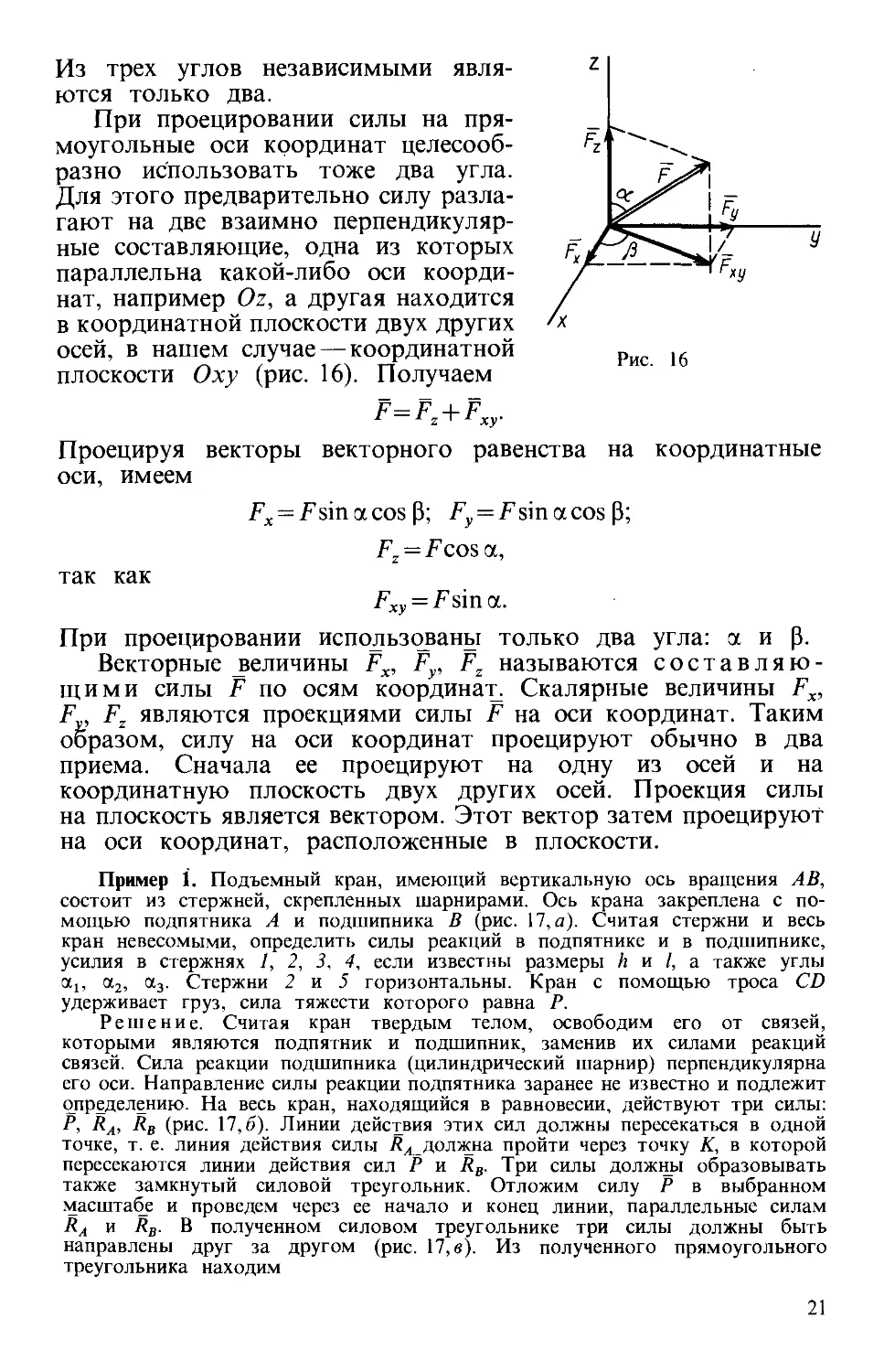
Из трех углов независимыми явля-
являются только два.
При проецировании силы на пря-
прямоугольные оси координат целесооб-
целесообразно использовать тоже два угла.
Для этого предварительно силу разла-
разлагают на две взаимно перпендикуляр-
перпендикулярные составляющие, одна из которых
параллельна какой-либо оси коорди-
координат, например Oz, а другая находится
в координатной плоскости двух других
осей, в нашем случае — координатной
плоскости Оху (рис. 16). Получаем
Рис. 16
F=Ft + R
ху
Проецируя векторы векторного равенства на координатные
оси, имеем
Fx = Fsinacos P; 7^ = ^ sin a cos Р;
Fz = Fcos a,
так как
Fxy = F sin a.
При проецировании использованы только два угла: аир.
Векторные _величины Fx, Fy, Fz называются составляю-
составляющими силы F по осям координат^ Скалярные величины Fx,
F Fz являются проекциями силы F на оси координат. Таким
образом, силу на оси координат проецируют обычно в два
приема. Сначала ее проецируют на одну из осей и на
координатную плоскость двух других осей. Проекция силы
на плоскость является вектором. Этот вектор затем проецируют
на оси координат, расположенные в плоскости.
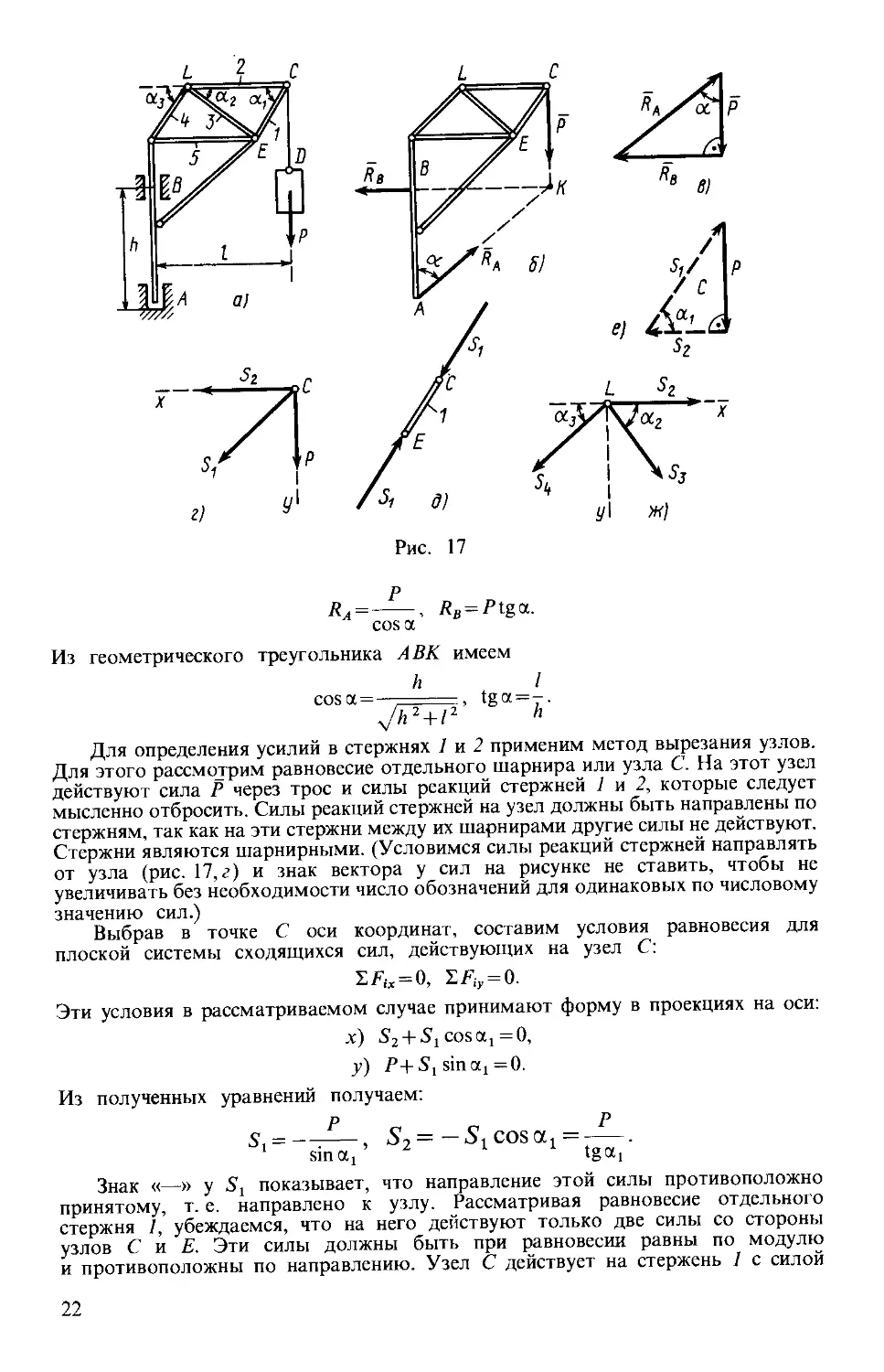
Пример 1. Подъемный кран, имеющий вертикальную ось вращения АВ,
состоит из стержней, скрепленных шарнирами. Ось крана закреплена с по-
помощью подпятника А и подшипника В (рис. 17, а). Считая стержни и весь
кран невесомыми, определить силы реакций в подпятнике и в подшипнике,
усилия в стержнях /, 2, 3, 4, если известны размеры h и /, а также углы
а1, а2, а3. Стержни 2 к 5 горизонтальны. Кран с помощью троса CD
удерживает груз, сила тяжести которого равна Р.
Решение. Считая кран твердым телом, освободим его от связей,
которыми являются подпятник и подшипник, заменив их силами реакций
связей. Сила реакции подшипника (цилиндрический шарнир) перпендикулярна
его оси. Направление силы реакции подпятника заранее не известно и подлежит
определению. На весь кран, находящийся в равновесии, действуют три силы:
Р, RA, RB (рис. 17,6). Линии действия этих сил должны пересекаться в одной
точке, т. е. линия действия силы /^должна пройти через точку К, в которой
пересекаются линии действия сил Р и RB. Три силы должны образовывать
также замкнутый силовой треугольник. Отложим силу Р в выбранном
масштабе и проведем через ее начало и конец линии, параллельные силам
RA и RB. В полученном силовом треугольнике три силы должны быть
направлены друг за другом (рис. 17, в). Из полученного прямоугольного
треугольника находим
21
L '? С
M «/
sz
Л
Re
S,
V
/ с
е] ££i~a
h
L Sz
У
/E
/
Рис
^1
0}
. 17
/
if
Sl
h
A
i
i
i
i
y\
/«2
\
ж;
cos a
Из геометрического треугольника АВК имеем
h I
cnsc», = —- , tga = -.
Для определения усилий в стержнях 1 и 2 применим метод вырезания узлов.
Для этого paccMojpHM равновесие отдельного шарнира или узла С. На этот узел
действуют сила Р через трос и силы реакций стержней 1 и 2, которые следует
мысленно отбросить. Силы реакций стержней на узел должны быть направлены по
стержням, так как на эти стержни между их шарнирами другие силы не действуют.
Стержни являются шарнирными. (Условимся силы реакций стержней направлять
от узла (рис. 17, г) и знак вектора у сил на рисунке не ставить, чтобы не
увеличивать без необходимости число обозначений для одинаковых по числовому
значению сил.)
Выбрав в точке С оси координат, составим условия равновесия для
плоской системы сходящихся сил, действующих на узел С:
Эти условия в рассматриваемом случае принимают форму в проекциях на оси:
х) S2 + S1 cose*! =0,
у) P+S1sina1=0.
Из полученных уравнений получаем:
Р Р
S, = , S2= — 5'1cosa1 = .
1 sin a,' 2 * * tga.
Знак «—» у Sj показывает, что направление этой силы противоположно
принятому, т. е. направлено к узлу. Рассматривая равновесие отдельного
стержня /, убеждаемся, что на него действуют только две силы со стороны
узлов С и Е. Эти силы должны быть при равновесии равны по модулю
и противоположны по направлению. Узел С действует на стержень / с силой
22
Sj, противоположной по направлению силе действия стержня на узел
Е (рис. \1,д). Таким образом, получаем, что при рассмотрении равновесия
узла С, когда St имеет отрицательное значение, стержень / будет сжат; S2
получили с плюсом. Следовательно, стержень 2 будет испытывать растяжение.
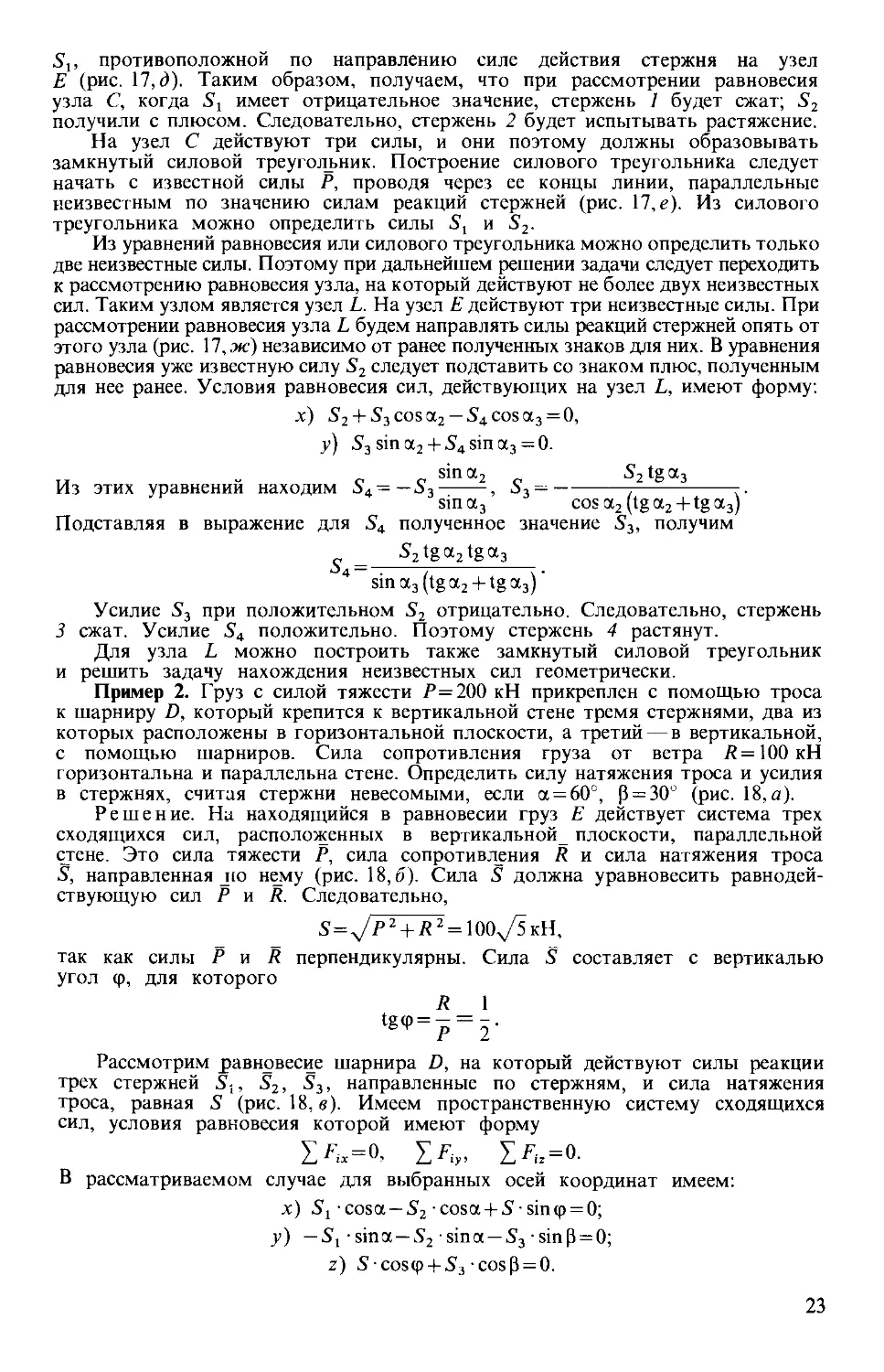
На узел С действуют три силы, и они поэтому должны образовывать
замкнутый силовой треугольник. Построение силового треугольника следует
начать с известной силы Р, проводя через ее концы линии, параллельные
неизвестным по значению силам реакций стержней (рис. 17, е). Из силового
треугольника можно определить силы 5t и S2.
Из уравнений равновесия или силового треугольника можно определить только
две неизвестные силы. Поэтому при дальнейшем решении задачи следует переходить
к рассмотрению равновесия узла, на который действуют не более двух неизвестных
сил. Таким узлом является узел L. На узел Е действуют три неизвестные силы. При
рассмотрении равновесия узла L будем направлять силы реакций стержней опять от
этого узла (рис. 17, ж) независимо от ранее полученных знаков для них. В уравнения
равновесия уже известную силу S2 следует подставить со знаком плюс, полученным
для нее ранее. Условия равновесия сил, действующих на узел L, имеют форму.
х) S2 + S3cosa2 — S4cosa3 = 0,
у) S3 sin a2 + S4 sin a3 = 0.
„ - с с sina2 с S2tga3
Из этих уравнении находим S4= — S3- , S3 — -
sina3' cosa2(tga2 + tga3)'
Подставляя в выражение для S4 полученное значение S3, получим
s S2tga2tga3
sina3(tga2 + tga3)'
Усилие S3 при положительном S2 отрицательно. Следовательно, стержень
3 сжат. Усилие 54 положительно. Поэтому стержень 4 растянут.
Для узла L можно построить также замкнутый силовой треугольник
и решить задачу нахождения неизвестных сил геометрически.
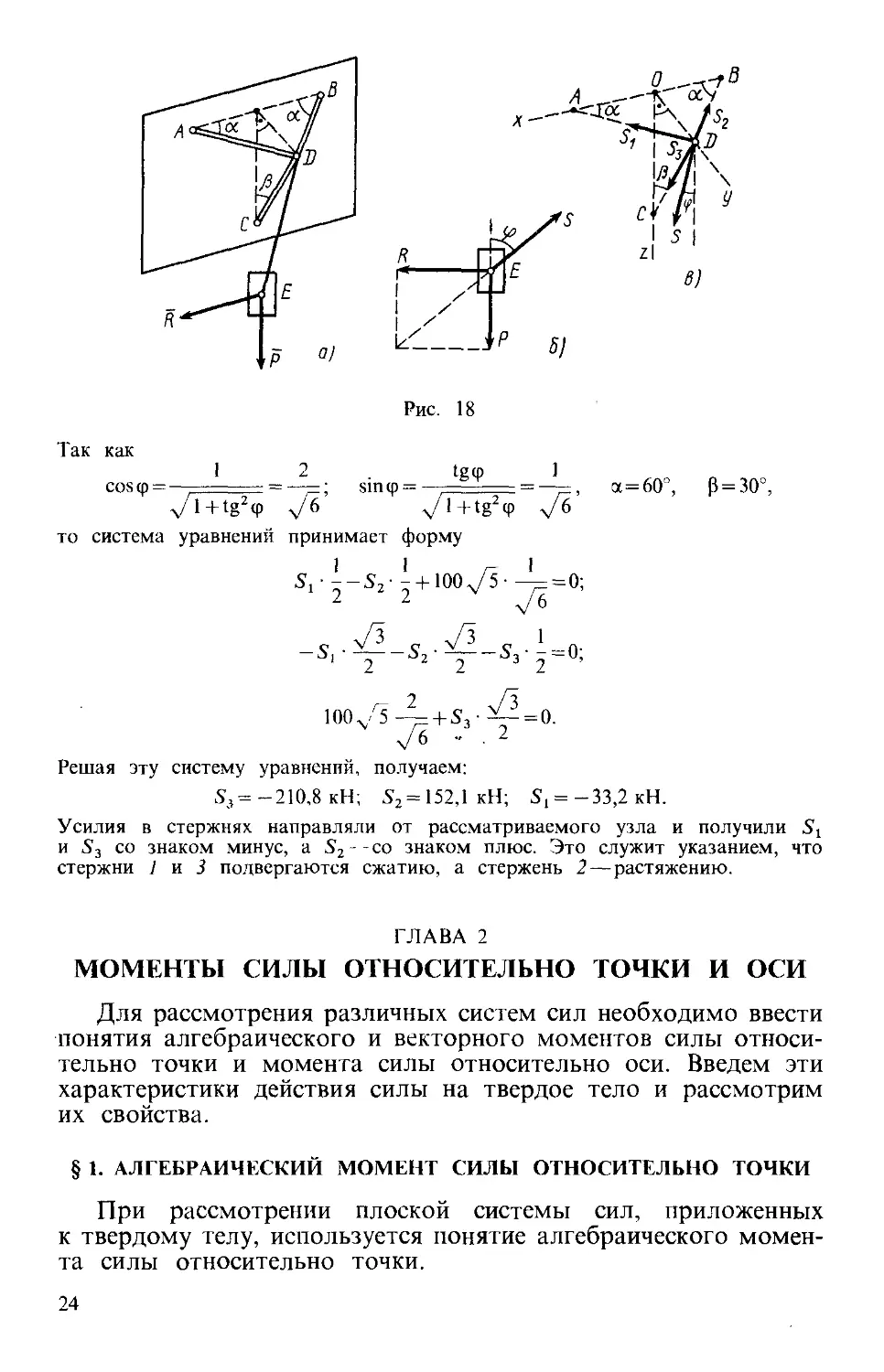
Пример 2. Груз с силой тяжести Р=200 кН прикреплен с помощью троса
к шарниру D, который крепится к вертикальной стене тремя стержнями, два из
которых расположены в горизонтальной плоскости, а третий — в вертикальной,
с помощью шарниров. Сила сопротивления груза от ветра Л=100кН
горизонтальна и параллельна стене. Определить силу натяжения троса и усилия
в стержнях, считая стержни невесомыми, если a = 60°, р = 30° (рис. 18, а).
Решение. На находящийся в равновесии груз Е действует система трех
сходящихся сил, расположенных в вертикальной_ плоскости, параллельной
стене. Это сила тяжести Р, сила сопротивления R и сила натяжения троса
S, направленная _но нему (рис. 18, б). Сила S должна уравновесить равнодей-
равнодействующую сил Р и R. Следовательно,
5=7-Р2 + Л2 = Ю0У5кН,
так как силы Р и R перпендикулярны. Сила S составляет с вертикалью
угол ф, для которого
R 1
Рассмотрим равновесие шарнира D, на который действуют силы реакции
трех стержней 5,, S2, S3, направленные по стержням, и сила натяжения
троса, равная S (рис. 18, в). Имеем пространственную систему сходящихся
сил, условия равновесия которой имеют форму
lFix = 0, ^Fiy, £ *•„ = <>.
В рассматриваемом случае для выбранных осей координат имеем:
х) Sl cosa — S2 -cosa + S-sin(p = 0;
у) — Sl -sina—S2 sina — S3 sinp = 0;
z) S-cosip + S3 -cosp = 0.
23
01
л
1
ш
/ 1
1 /
1 /
к-1 }Р
5!
s7m?
т\
с* /1
1 5 |
в)
Рис. 18
Так как
coscp =
sinip =
tg9
l+tg> V6 x/'+tg'ip л/б'
то система уравнений принимает форму
1 1 г 1
2 2^./^
= —=, а=60°, Р = ЗО°,
-vf-s,-
f^,.l=.;
100 VA5—= + 53-
V6 "
'3
= 0.
Решая эту систему уравнений, получаем:
Sj=-210,8 кН; S2 = 152,1 кН; 51 = -33,2кН.
Усилия в стержнях направляли от рассматриваемого узла и получили Sx
и S3 со знаком минус, a S2--co знаком плюс. Это служит указанием, что
стержни 1 и 3 подвергаются сжатию, а стержень 2—растяжению.
ГЛАВА 2
МОМЕНТЫ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ
Для рассмотрения различных систем сил необходимо ввести
понятия алгебраического и векторного моментов силы относи-
относительно точки и момента силы относительно оси. Введем эти
характеристики действия силы на твердое тело и рассмотрим
их свойства.
§ 1. АЛГЕБРАИЧЕСКИЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
При рассмотрении плоской системы сил, приложенных
к твердому телу, используется понятие алгебраического момен-
момента силы относительно точки.
24
Алгебраическим моментом силы
относительно точки называют произ-
произведение модуля силы на плечо силы
относительно этой точки (рис. 19),
взятое со знаком плюс или минус.
Плечом h силы F относительно
точки называют кратчайшее расстоя-
расстояние между этой точкой и линией
действия силы, т. е. длину отрезка
перпендикуляра, опущенного из^ точки
О на линию действия силы F. Рис'
_ Обозначим M0[F) или Мо алгебраический момент силы
F относительно точки О. Тогда
M0(F)=±Fh. A)
Если сила стремится вращать тело вокруг моментной точки
(точки, относительно которой вычисляют алгебраический мо-
момент силы) против часовой стрелки, то берем знак плюс,
если по часовой стрелке—знак минус.
Алгебраический момент силы представляет собой произведе-
произведение силы на длину (в СИ — Н-м).
Из определения алгебраического момента силы относи-
относительно точки следует, что он не зависит от переноса силы
вдоль ее линии действия. Алгебраический момент силы от-
относительно точки равен нулю, если линия действия силы
проходит через моментную точку. Сумма алгебраических
моментов относительно точки двух равных по модулю, но
противоположных по направлению сил, действующих вдоль
одной прямой, равна нулю. Численно алгебраический момент
относительно точки равен удвоенной площади треугольника,
построенного на силе АВ и моментной точке:
M0{F)= ±2 пл. А ОАВ. B)
§ 2. ВЕКТОРНЫЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
При рассмотрении пространственной системы сил, прило-
приложенных к твердому телу, применяется понятие векторного
момента силы относительно точки.
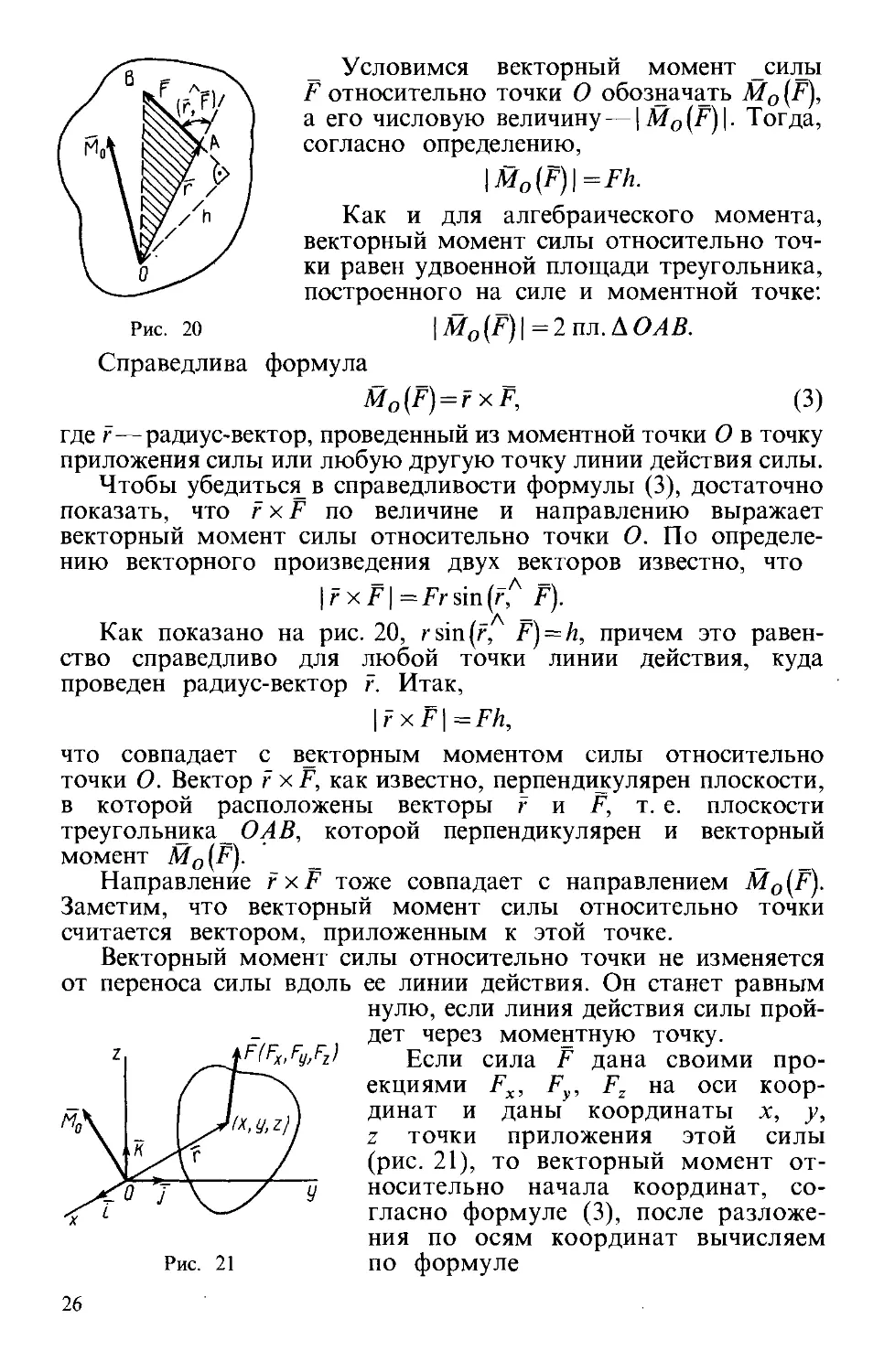
Векторным моментом силы относительно точки называют
вектор, приложенный в этой точке и равный по модулю
произведению силы на плечо силы относительно этой точки.
Векторный момент силы направлен перпендикулярно плоскости,
в которой лежат сила и моментная точка, таким образом,
что с его конца можно видеть стремление силы вращать
тело против движения часовой стрелки (рис. 20).
Плечом h силы относительно точки О называют кратчайшее
расстояние от этой точки до линии действия силы.
25
Рис. 20
Условимся векторный момент _силы
F относительно точки О обозначать Мо (F),
а его числовую величину — | Мо (F) \. Тогда,
согласно определению,
\M0{F)\=Fh.
Как и для алгебраического момента,
векторный момент силы относительно точ-
точки равен удвоенной площади треугольника,
построенного на силе и моментной точке:
\Мо(Р)\=2пл.АОАВ.
Справедлива формула
M0{F) = rxF, C)
где г—радиус-вектор, проведенный из моментной точки О в точку
приложения силы или любую другую точку линии действия силы.
Чтобы убедиться^ в справедливости формулы C), достаточно
показать, что FxF по величине и направлению выражает
векторный момент силы относительно точки О. По определе-
определению векторного произведения двух векторов известно, что
\FxF]=Frsm(r!y F).
Как показано на рис. 20, г sin (f, F) = h, причем это равен-
равенство справедливо для любой точки линии действия, куда
проведен радиус-вектор г. Итак,
\rxF\=Fh,
что совпадает с векторным моментом силы относительно
точки О. Вектор г х F, как известно, перпендикулярен плоскости,
в которой расположены векторы г и F, т. е. плоскости
треугольника_ ОАВ, которой перпендикулярен и векторный
момент M0(F). _ _
Направление FxF тоже совпадает с направлением M0(F).
Заметим, что векторный момент силы относительно точки
считается вектором, приложенным к этой точке.
Векторный момент силы относительно точки не изменяется
от переноса силы вдоль ее линии действия. Он станет равным
нулю, если линия действия силы прой-
пройдет через моментную точку.
Если сила F дана своими про-
проекциями Fx, Fy, Fz на оси коор-
координат и даны координаты х, у,
z точки приложения этой силы
(рис. 21), то векторный момент от-
относительно начала координат, со-
согласно формуле C), после разложе-
разложения по осям координат вычисляем
по формуле
26
F(Fx,Fy,Fz)
Рис. 21
M0(F) = rxF=
~i j к
x у z
F F F
= {yFz-zFy)i+
+ {zFx-xFz)j+(xFy-yFx)k, D)
где i, j, к — единичные векторы, направленные по осям
координат.
Используя формулу D), можно выделить проекции Мо (F) на
оси координат:
M0x{F)=yF2-zFy^
MOy(F) = zFx-xFz- \ E)
MOz(F) = xFy-yFx.)
Модуль векторного момента M0[F) и косинусы углов его
с осями координат определяем по формулам
\M0(F)\=J(yFz~zFyy + {zFx-xFzy + (xFy-yFxJ;
/,-> Л ч MO.(F)
F)
В формулах F) числовую величину \M0{F)\ берем со
знаком плюс.
§ 3. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
Моментом силы относительно оси называют алгебраический
момент проекции этой силы на плоскость, перпендикулярную
оси, относительно точки пересечения оси с этой плоско-
плоскостью (рис. 22). Момент силы от-
относительно оси считается положи-
положительным, если проекция силы на
плоскость, перпендикулярную оси
(проекция силы на плоскость явля-
является вектором), стремится вра-
вращать тело вокруг положительного
направления оси против часовой
стрелки, и отрицательным, если
она стремится вращать тело по
часовой стрелке. Момент силы,
например, относительно оси Oz
обозначим MZ(F). По опреде-
определению, рис 22
27
Mz(F) = M0(Fn)=±hFn, G)
где Fn — вектор проекции силы F на плоскость П, перпенди-
перпендикулярную оси Oz, а точка О — точка пересечения оси Oz
с плоскостью П.
Из определения момента силы относительно оси следует,
что введенный выше алгебраический момент силы относительно
точки можно считать моментом силы относительно оси,
проходящей через эту точку, перпендикулярно плоскости,
в которой лежат сила и моментная точка. Момент силы
относительно оси можно выразить_ через площадь треугольника,
построенного на проекции силы Fn и точке пересечения О оси
с плоскостью:
Mz(F)=±hFn=±2nn.AOA1B1. (8)
Из формулы (8) можно получить следующие важные свойства
момента силы относительно оси:
1. Момент силы относительно оси равен нулю, если сила
параллельна оси. В этом случае равна нулю проекция силы
на плоскость, перпендикулярную оси.
2. Момент силы относительно оси равен нулю, если
линия действия силы пересекает эту ось. В этом случае
линия действия проекции силы на плоскость, перпендикулярную
оси, проходит через точку пересечения оси_ с плоскостью
и, следовательно, равно нулю плечо силы Fn относительно
точки О.
В обоих этих случаях ось и сила лежат в одной плоскости.
Объединяя их, можно сказать, что момент силы относительно
оси равен нулю, если сила и ось лежат в одной плоскости.
§ 4. СВЯЗЬ МОМЕНТА СИЛЫ ОТНОСИТЕЛЬНО ОСИ
С ВЕКТОРНЫМ МОМЕНТОМ СИЛЫ
ОТНОСИТЕЛЬНО ТОЧКИ НА ОСИ
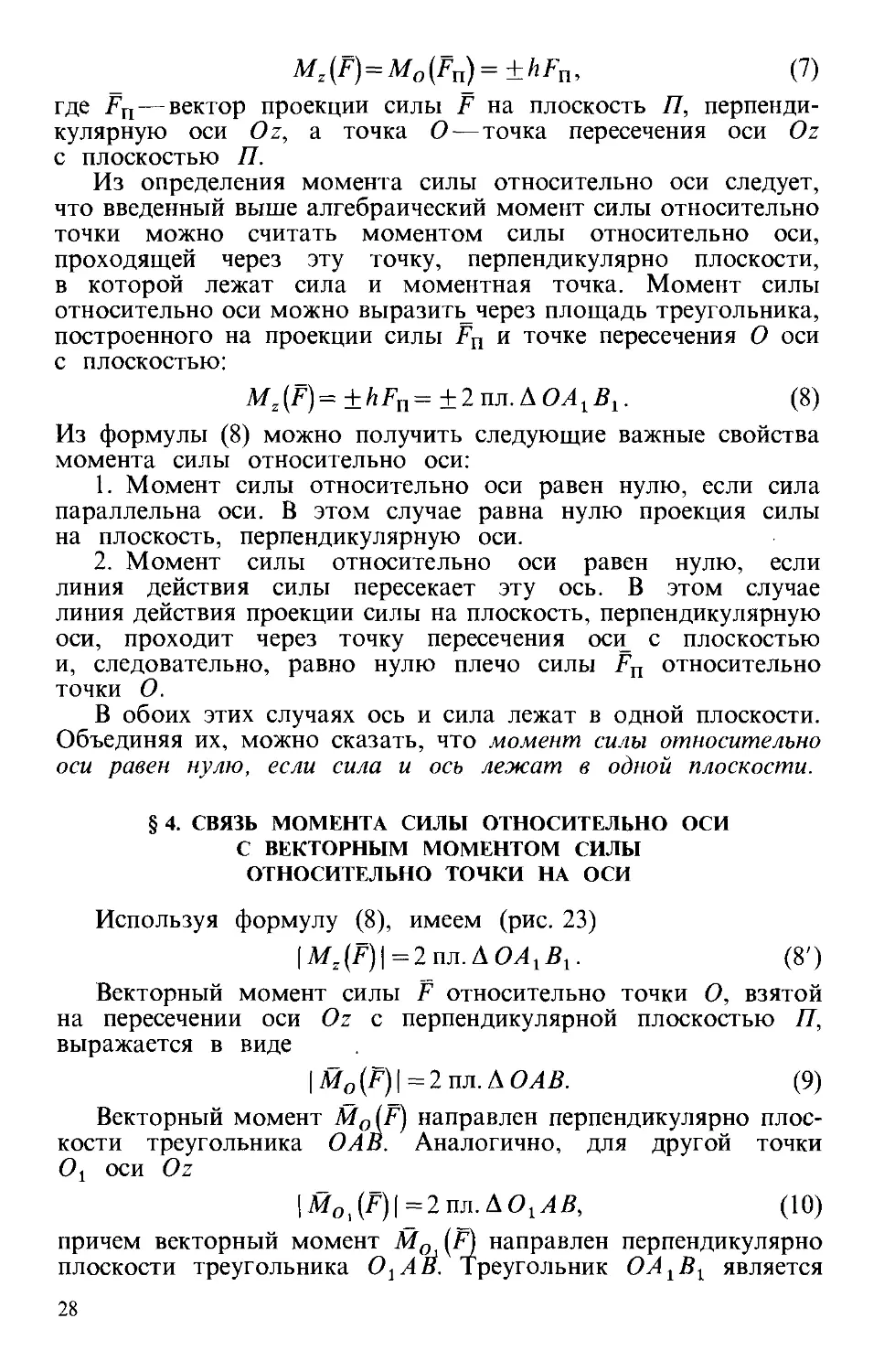
Используя формулу (8), имеем (рис. 23)
\Mz(F)\=2nn.AOAlBl. (8')
Векторный момент силы F относительно точки О, взятой
на пересечении оси Oz с перпендикулярной плоскостью П,
выражается в виде
|М0(^)|=2пл.ЛО4Я. (9)
Векторный момент M0(F) направлен перпендикулярно плос-
плоскости треугольника ОАВ. Аналогично, для другой точки
0! оси Oz
\MOi{F)\=2Tin.t±O,AB, A0)
причем векторный момент Мо (F) направлен перпендикулярно
плоскости треугольника ОхАё. Треугольник OAlBi является
28
м,
Рис. 23
проекцией треугольников ОАВ
и ОХАВ на плоскость П. Из геомет-
геометрии известно, что площадь проек-
проекции плоской фигуры равна площа-
площади проецируемой фигуры, умножен-
умноженной на косинус угла между плос-
плоскостями, в которых расположены
эти фигуры. Угол между плоско-
плоскостями измеряется углом между пер-
перпендикулярами к этим плоскостям.
Перпендикуляром к плоскости тре-
треугольника ОА1В1 является ось Oz,
а перпендикулярами к плоскостям
треугольников ОАВ и ОХАВ—со-
ОХАВ—соответственно векторные моменты
M0(F) и MOi[F). Таким образом^ пл.АОА1В1 = пл.AOABcosa,
где а—угол между вектором M0(F) и осью Oz. Отсюда по
формулам (8') и (9) имеем
Mz(F)=|Mo(F)|cosa = MOz(F), A1)
причем знак MZ(F) полностью определяется знаком cos а.
Аналогично,
nn.kOAlBl=mi./S.O1ABcosv,x,
т. е.
Mz(F)=|Mo,(F)|cosai = MOiZ(F), A2)
где Ot—любая точка на оси Oz.
Формулы A1) и A2) отражают искомую связь между
моментом силы относительно оси и векторными моментами
силы относительно точек, лежащих на этой оси: момент силы
относительно оси равен проекции на эту ось векторного
момента силы относительно любой точки на оси.
Эту зависимость между моментом силы относительно оси
и векторным моментом силы относительно точки на оси
можно принять за определение момента силы относительно оси.
§ 5. ФОРМУЛЫ ДЛЯ МОМЕНТОВ СИЛЫ ОТНОСИТЕЛЬНО
ОСЕЙ КООРДИНАТ
Используя связь момента силы относительно оси с вектор-
векторным моментом силы относительно точки на оси, можно
получить формулы для вычисления моментов относительно
осей координат, если даны проекции силы на оси координат
и координаты точки приложения силы.
Для оси Ох имеем
Согласно E),
Mx(F) = MOx(F).
29
следовательно,
Mx(F)=yFz-zFy.
Аналогично, для осей Оу и Oz
My(F) = zFx-xFz; Mz{F) = xFy~yFx.
Окончательно
M%{F)=yFz-zFy; My{F) = zFx~xF2; Mz{F) = xFy-yFx. A3)
По формулам A3) можно вычислить моменты силы относи-
относительно прямоугольных осей координат.
По этим_ формулам получаются необходимые знаки для
MX(F), My(F), MZ{F), если проекции силы Fx, Fy, Fz на оси
координат и координаты х, у, z точки приложения силы
подставлять в них со знаками этих величин.
При решении задач момент силы относительно какой-либо
оси часто получают, используя его определение, т. е. проецируя
силу на плоскость, перпендикулярную оси, и вычисляя затем
алгебраический момент этой проекции относительно точки
пересечения оси с этой плоскостью.
ГЛАВА 3
ТЕОРИЯ ПАР СИЛ
§ 1. ПАРА СИЛ И АЛГЕБРАИЧЕСКИЙ
МОМЕНТ ПАРЫ СИЛ
Пару сил в механике рассматривают как одно из основных
понятий наряду, с понятием силы.
Парой сил называют систему двух равных по модулю
параллельных сил, направленных в противоположные стороны
(рис. 24).
Пара сил не составляет системы сил, эквивалентной нулю.
Рис. 24 Рис. 25
30
F,
•**
r
-
<
-
-
;Ms
г
Известно, что под действием па-
пары сил свободное твердое тело вы-
выходит из равновесия. Обычно пару
сил [F^, F2) прилагают к телу,
которое должно вращаться, напри-
например к маховику вентиля при его
закрывании и открывании (рис. 25).
Поэтому пару сил нельзя заменить
одной силой и, следовательно, она
не имеет равнодействующей, а яв-
является такой системой сил, упро- Рис 26
стить которую нельзя. Каждая из сил, входящих в состав
пары сил, имеет свойства обычных сил.
Пара сил, действующая на твердое тело, характеризуется
прежде всего плоскостью действия, аналогично тому, как сила
характеризуется линией действия. Плоскостью действия пиры
сил называют плоскость, в которой расположены силы пары.
Для количественной характеристики действия пары сил на
твердое тело и указания направления, в котором пара сил
стремится вращать тело в плоскости действия, введем понятие
алгебраического момента пары сил.
Алгебраическим моментом пары сил называют взятое со
знаком плюс или минус произведение одной из сил пары на
плечо пары сил.
Плечом пары сил d называют кратчайшее расстояние между
линиями действия сил пары (рис. 26). _ _
Алгебраический момент пары обозначим М или M(Fi, F2).
Согласно определению,
M=M(Fl,F2)=±Fd. A)
Алгебраический момент пары сил выражается в тех же
единицах, что и алгебраический момент силы относительно
точки.
Алгебраический момент пары сил имеет знак плюс, если
пара сил стремится вращать тело против часовой стрелки,
и знак минус, если пара сил стремится вращать тело по
часовой стрелке.
Алгебраический момент пары сил не зависит от переноса
сил пары вдоль своих линий действия и может быть равен
нулю, если линии действия сил пары совпадают, т. е. в случае
двух равных по модулю, но противоположных по направлению
сил, действующих вдоль одной прямой. Такая система двух
сил, как известно, эквивалентна нулю. Алгебраический момент
пары сил численно равен площади параллелограмма, постро-
построенной на силах пары:
M=M(F1, F2)= ±пл. □ ABCD = ±2 пл. Л ABC =
= +2 пл. A ABD.
31
§ 2. ТЕОРЕМА ОБ ЭКВИВАЛЕНТНОСТИ ДВУХ ПАР СИЛ,
РАСПОЛОЖЕННЫХ В ОДНОЙ ПЛОСКОСТИ
Докажем, что пары сил, расположенные в одной плоскости,
по своему действию на тело отличаются одна от другой
только алгебраическими моментами.
Две пары сил называют эквивалентными, если их действие
на твердое тело одинаково при прочих равных условиях.
Докажем теперь следующую теорему об эквивалентности
двух пар сил: пару сил, действующую на твердое тело, можно
заменить другой парой сил, расположенной в той же плоскости
действия и имеющей одинаковый с первой парой алгебраический
момент. Иначе: две пары сил, расположенные в одной
плоскости, эквивалентны, если они имеют одинаковые алгеб-
алгебраические моменты. _ _
Пусть на твердое тело действует пара сил (Fx, Fj) с алге-
алгебраическим моментом М (рис. 27). Перенесем силу Ft в точку
015 а силу F2 — в точку О2, проведем через точки О± и О2
две любые параллельные прямые, пересекающие линии дей-
действия сил пары и лежащие, следовательно, в плоскости
действия заданной парь^ сил. Соединив прямой точки Ох
и О2, разложим силы Ft в точке О1 и F2 в точке О2
правилу параллелограмма, как указано на рис. 27. Тогда
F^F\+F'[; F2=F'2+F'2.
Так как силы Ft и F2 образуют пару сил, то
F,= -F2 ,
и, следовательно,
F\=-F'2; F'[=-F'2.
по
Итак,
F,
(Fu F2)cv)(Fi, F'{, F'2, F'^(F[, F'2),
так как
(F'i, FS)cvO;
Рис. 27
следовательно, эту систему двух сил
можно отбросить.
Таким _ образом, заданную пару
сил (Fb F2) заменим другой парой
сил (F\, F'2). Докажем, что алгебра-
алгебраические моменты у этих пар сил
одинаковы. Направление вращения
у них одно и то же. Имеем
M=M(Fi, F2) = 2nn. A OlO2A;
M' = M(F'uF'2) = 2nn. А ОХО2В.
Но пл. А ОХО2А =пл. А ОХО2В,
так как эти треугольники имеют об-
32
щее основание 0х02 и равные высоты (их вершины рас-
расположены на общей прямой, параллельной основанию).
Таким образом, теорема доказана и можно сделать сле-
следующие выводы:
а) пару сил как жесткую фигуру можно как угодно
поворачивать и переносить в ее плоскости действия;
б) у пары сил можно изменять плечо и силы, сохраняя
при этом алгебраический момент пары и плоскость действия.
Эти операции над парами сил не изменяют их действия
на твердое тело.
§ 3. ТЕОРЕМА О ПЕРЕНОСЕ ПАРЫ СИЛ
В ПАРАЛЛЕЛЬНУЮ ПЛОСКОСТЬ
Действие пары сил на твердое тело не изменяется от
переноса этой пары сил в параллельную плоскость (рис^ 28).
Для доказательства этой теоремы к паре сил (Fl5 F2)
в точках А1 и Вх, где перпендикуляры, опущенные из точек
А и В плоскости П1, пересекаются параллельно^ ей плоскостью
П2, приложим две системы сил (F'i, F'[) и (F'2, F2), каждая
из которых эквивалентна нулю, т. е.
F\=-Fl; F2=-F.
Выберем силы F\ и F'2 так, чтобы они удовлетворяли
условиям
F\=F,; F'2=F2.
Сложим две равные и параллельные силы Fx и F"%. Их
равнодействующая R параллельна этим силам, равна их сумме
и приложена посередине отрезка АВХ в точке О, так как
складываются равные параллельные силы. Равнодействующая
R' двух равных параллельных сил F2 и F'[ тоже равна их
сумме, параллельна им и приложена на середине отрезка В А15
т. е. в точке О, где пересекаются диагонали прямоугольника
Рис. 28
2 Заказ 192
33
АВА1В1. Так как R = —R', то система сил (R, R') эквивалентна
нулю и ее можно отбросить^ _
Таким образом, пара сил (Fl, F2) эквивалентна такой же па-
паре сил (F\, F'2), но лежащей в другой, параллельной плоскости.
Пару сил, не изменяя ее действия на твердое тело, можно
перенести из одной плоскости в другую, параллельную ей.
§ 4. ВЕКТОРНЫЙ МОМЕНТ ПАРЫ СИЛ
Пару сил, приложенную к твердому телу, можно охаракте-
охарактеризовать плоскостью действия, моментом пары сил и направле-
направлением вращения пары. Все эти элементы пары сил в простран-
пространстве можно выразить одной величиной — векторным мо-
моментом пары сил.
Векторным моментом пары сил назовем вектор, числовое
значение которого равно произведению силы пары на ее плечо.
Векторный момент пары сил направлен перпендикулярно плоскости
действия пары сил так, чтобы с его направления молено было
видеть стремление пары сил вращать тело против часовой стрелки.
Векторный момент пары сил условимся временно прикладывать
посередине отрезка, соединяющего точки приложения сил пары
(рис. 29). Его можно прикладывать также, как будет доказано
ниже, в любой точке тела, _на которое действует пара сил.
Векторный момент пары сил (Fl, F2) обозначим М или M(FX, F2).
Согласно определению, числовое значение векторного мо-
момента пары сил | М | совпадает с модулем алгебраического
момента пары сил и, следовательно,
\M\ = hF,=hF2,
где h — плечо пары сил.
Векторный момент пары сил численно выражается пло-
площадью параллелограмма, построенного на силах пары:
\M\ = M=hF1=nn. □ ABCD.
Отметим простейшие свойства векторного момента пары
сил: его числовое значение не зависит от переноса сил
пары вдоль своих линий действия, и он может быть
равен нулю, если одна из сторон параллелограмма А В CD
превратится в точку, т. е. плечо пары или сила пары
становится равной нулю.
Векторный момент пары сил можно выразить в виде
векторного произведения двух векторов:
М=АВ xF2 = BA xFj. B)
Действительно, __> >
\ABxF2\ = F2ABsin(AB, F2),
но __>
ABsin(AB, AF2) = h
34
и, следовательно,
\АВ xF2\ = F2h,
что совпадает с модулем вектор-
векторного момента пары сил.
Направления векторных произ-
произведений А В х F2 и В А х Fx пер-
перпендикулярны плоскости, где лежат Рис- 29
сомножители векторных произведений, а следовательно, и плос-
плоскости действия пары сил. Они совпадают с направлением
векторного момента пары сил М.
§ 5. ЭКВИВАЛЕНТНОСТЬ ПАР СИЛ
Сформулируем условия эквивалентности двух пар сил,
используя наиболее общую характеристику пары сил — ее
векторный момент.
Известно, что пару сил можно как угодно поворачивать
и переносить в плоскости ее действия; действие пары сил на
твердое тело не изменяется, если алгебраический момент пары
сил остается таким же. Следовательно, векторный момент
пары сил можно переносить параллельно самому себе в любую
точку твердого тела, лежащую в плоскости действия пары
сил. Так как к тому же пару сил можно переносить
в параллельную плоскость, то векторный момент пары сил
можно переносить параллельно самому себе в любую точку
тела, не изменяя действия пары сил на твердое тело. Поэтому
векторный момент пары сил, действующей на твердое тело,
есть свободный вектор, т. е. он характеризуется только модулем
и направлением, а точкой приложения у него может быть
любая точка тела; следовательно, векторный момент пары
сил не обязательно прикладывать посередине отрезка, соеди-
соединяющего точки приложения сил пары.
Итак, две пары сил, действующие на одно и то же твердое
тело, эквивалентны, если они имеют одинаковые по модулю
и направлению векторные моменты.
§ 6. ТЕОРЕМА О СУММЕ МОМЕНТОВ СИЛ ПАРЫ
Сумма векторных моментов сил, входящих в состав пары,
относительно любой точки не зависит от выбора точки
и равна векторному моменту этой пары сил, т. е. для пары
сил (FUF2)
M0(F1) + M0{F2) = M(Fi,F2), C)
где О — любая точка (рис. 30).
Эту теорему докажем, вычисляя левую часть равенства C):
M0(Fi) + M0(F2) = rl х F, +r2 х F2 ={r2-rx) х F2,
2* 35
так как для пары сил
F1=-F2.
Но _>
г2-г1=АВ
и не зависит от выбора точки О;
следовательно,
M0(Fl) + M0(F2) = ABxF2,
что на основании формулы B) совпадает
с векторным моментом пары сил М. Таким образом,
MO{FX) + MO{F2) = M.
Взяв за точку О последовательно точки А и В, по формуле
C) имеем
МЛ(Р2) = ЛЭД) = М, D)
т. е. векторный момент пары сил равен векторному моменту одной
из сил пары относительно точки приложения другой силы пары.
Эта теорема имеет важное значение при решении задач,
когда надо вычислять сумму моментов сил пары относительно
какой-либо точки. Для этого достаточно взять момент пары
сил, что справедливо для любой точки.
Если моментная точка О выбирается в плоскости действия
сил пары как частный случай, справедлива теорема о сумме
алгебраических моментов сил пары: сумма алгебраических
моментов сил, входящих в состав пары сил, относительно'
точки, лежащей в плоскости действия пары сил, равна алге-
алгебраическому моменту пары сил и, следовательно, не зависит
от выбора моментной точки, т. е.
MO{F1) + MO(F2) = M(F1,F2). E)
Выбирая А и В за моментные точки, лежащие на линиях
действия сил пары, получаем
MA(F2) = MB{Fl) = M(Fi,F2), F)
т. е. алгебраический момент пары сил равен алгебраическому
моменту одной из сил пары относительно точки, лежащей
на линии действия другой силы этой пары.
§ 7. СЛОЖЕНИЕ ПАР СИЛ
Рассмотрим случай, когда пары сил не лежат в одной
или параллельных плоскостях, а расположены в пересека-
пересекающихся плоскостях. Докажем, что две пары сил, действующие
на одно и то же тело и лежащие в пересекающихся плоскостях,
можно заменить одной эквивалентной парой сил, векторный
Момент которой равен сумме векторных моментов заданных
пар сил.
36
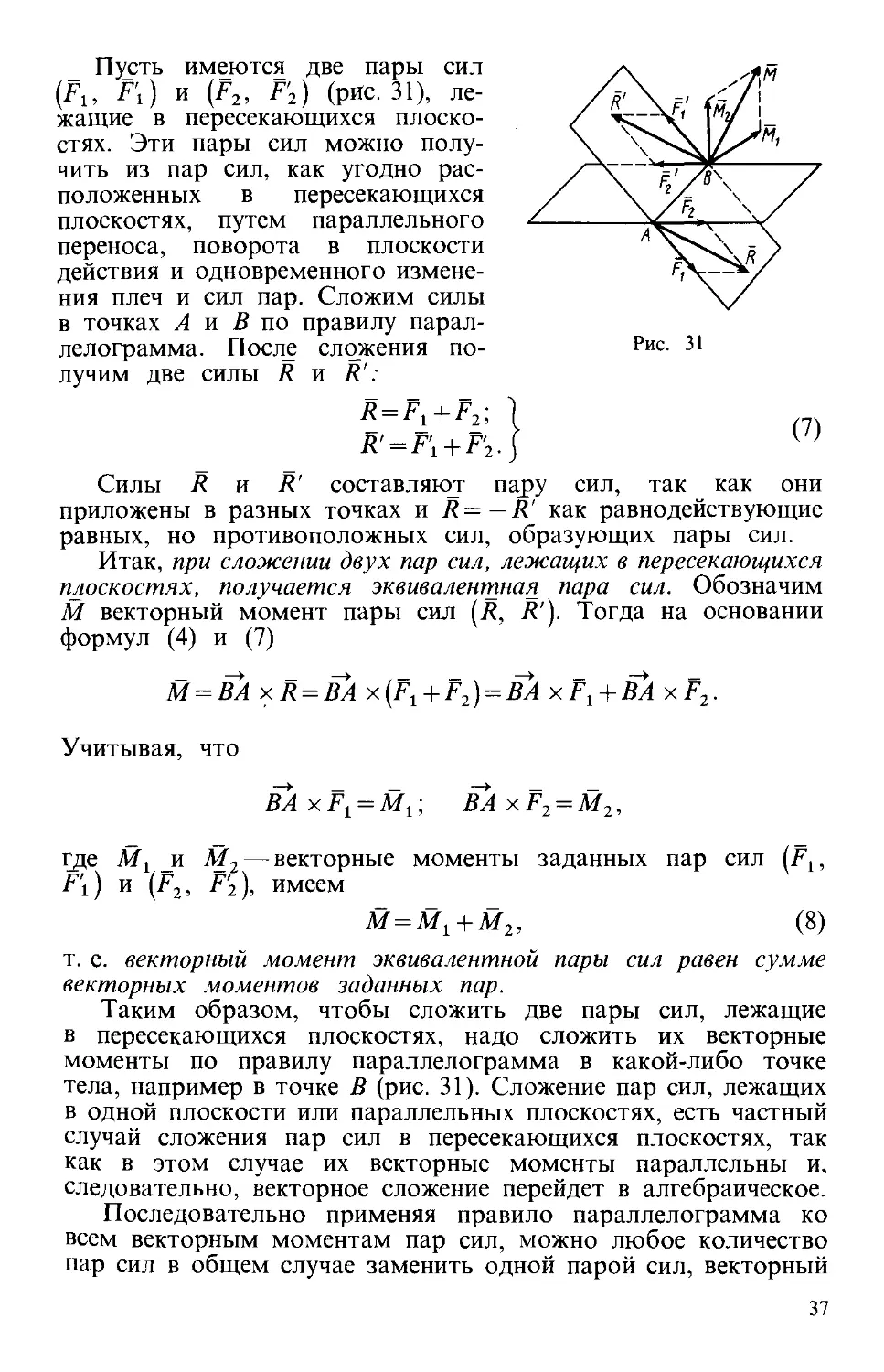
Пусть имеются две пары сил
(F,, F\) и (F2, F'2) (рис.31), ле-
лежащие в пересекающихся плоско-
плоскостях. Эти пары сил можно полу-
получить из пар сил, как угодно рас-
расположенных в пересекающихся
плоскостях, путем параллельного
переноса, поворота в плоскости
действия и одновременного измене-
изменения плеч и сил пар. Сложим силы
в точках А и В по правилу парал-
параллелограмма. После сложения по-
получим две силы R и R':
R' = F\ + F'2.
Рис. 31
G)
Силы R и R' составляют naj>y сил, так как они
приложены в разных точках и R=—R' как равнодействующие
равных, но противоположных сил, образующих пары сил.
Итак, при сложении двух пар сил, лежащих в пересекающихся
плоскостях, получается эквивалентная пара сил. Обозначим
М векторный момент пары сил [R, R'). Тогда на основании
формул D) и G)
М = ВА xR = BA x(Fl + F2) = BA xF^ + BA xF2.
Учитывая, что
BAxF1 = M1; BAxF2 = M2,
где Mj _и М2 — векторные моменты заданных пар сил (Fx,
F\) и (F2, F'2), имеем
М = М, + М2, (8)
т. е. векторный момент эквивалентной пары сил равен сумме
векторных моментов заданных пар.
Таким образом, чтобы сложить две пары сил, лежащие
в пересекающихся плоскостях, надо сложить их векторные
моменты по правилу параллелограмма в какой-либо точке
тела, например в точке В (рис. 31). Сложение пар сил, лежащих
в одной плоскости или параллельных плоскостях, есть частный
случай сложения пар сил в пересекающихся плоскостях, так
как в этом случае их векторные моменты параллельны и,
следовательно, векторное сложение перейдет в алгебраическое.
Последовательно применяя правило параллелограмма ко
всем векторным моментам пар сил, можно любое количество
пар сил в общем случае заменить одной парой сил, векторный
37
Рис. 32
момент которой М равен сумме век-
векторных моментов заданных пар сил:
М= £ Мг. (9)
i=i
Если это сложение выполнять гра-
графически, особенно когда векторные мо-
моменты пар сил находятся в одной плос-
плоскости, то векторный момент эквивалент-
эквивалентной пары сил изобразится замыкающей
векторного многоугольника, построенного из векторных момен-
моментов заданных пар сил.
Для пар сил, расположенных в одной плоскости, теорема об
их сложении формулируется так: пары сил, действующие на
твердое тело и расположенные в одной плоскости, можно
привести к одной паре сил, алгебраический момент которой равен
сумме алгебраических моментов составляющих пар сил, т. е.
М= £ М...
(9')
г=1
Так же складываются пары сил, расположенные в парал-
параллельных плоскостях, так как их предварительно можно пере-
перенести в одну плоскость.
Пример 1. Определить векторный момент пары сил, которая получается
при сложении двух пар сил с моментами М^^Н-м и М2 = 30Нм,
действующих на одно и то же твердое тело. Пары сил расположены
в пересекающихся плоскостях, двугранный угол между которыми равен 60°.
Решение. Складываем по правилу параллелограмма векторные моменты
заданных пар сил. Для модуля векторного момента эквивалентной пары сил
М имеем
M = s/M21+Ml^2MlM2cos(M* M2) =
= ,/1600 + 900 + 2-1~200-0,5 = У3700*61 Н м,
так как угол между Mt и М2 равен двугранному углу между плоскостями
действия пар сил.
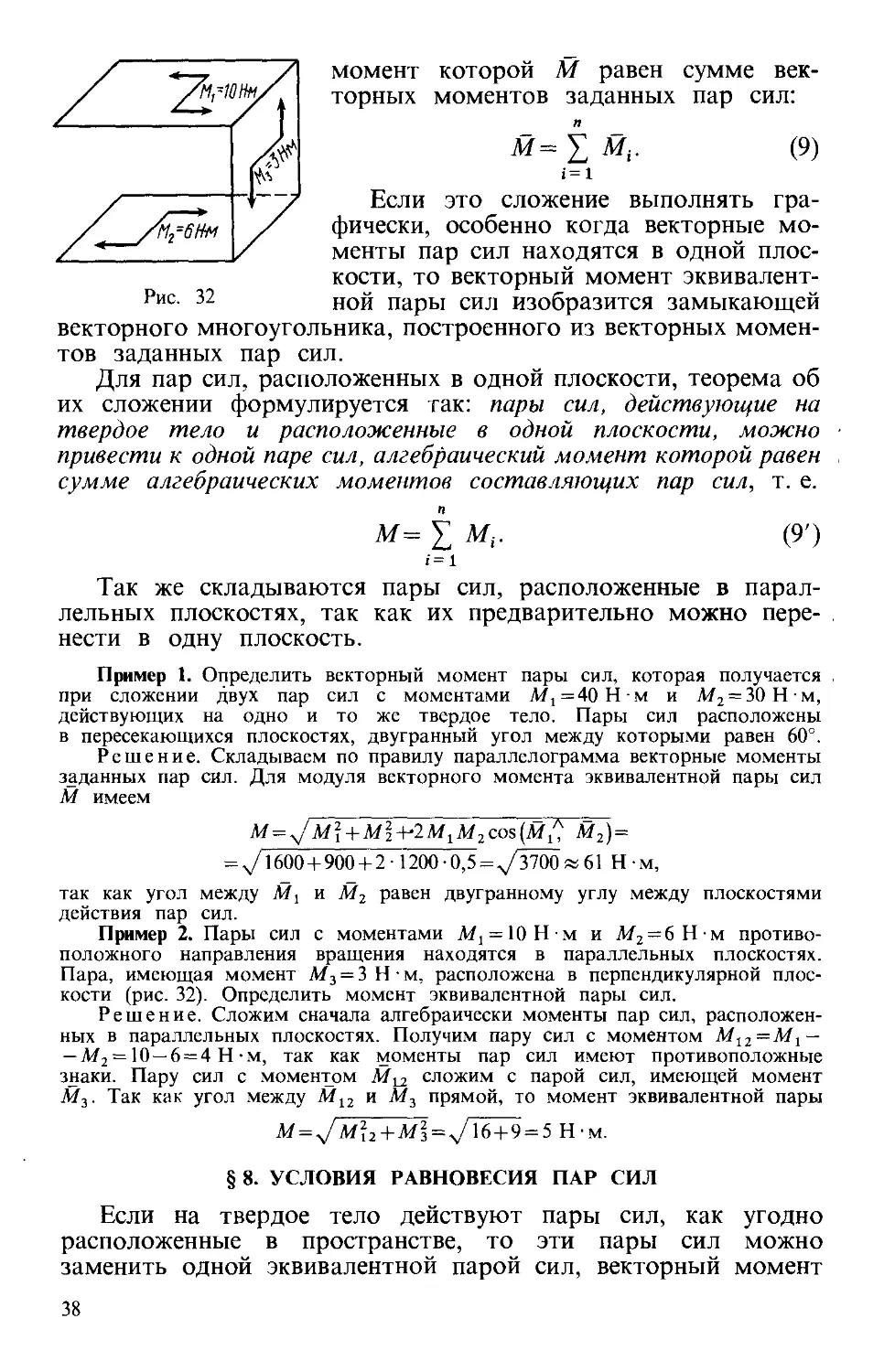
Пример 2. Пары сил с моментами Af, = 10H-M и Л/2 = 6Нм противо-
противоположного направления вращения находятся в параллельных плоскостях.
Пара, имеющая момент Мъ = 3 Н • м, расположена в перпендикулярной плос-
плоскости (рис. 32). Определить момент эквивалентной пары сил.
Решение. Сложим сначала алгебраически моменты пар сил, расположен-
расположенных в параллельных плоскостях. Получим пару сил с моментом М12=М1 —
— М2 = 10 — 6 = 4 Н -м, так как моменты пар сил имеют противоположные
знаки. Пару сил с моментом М^ сложим с парой сил, имеющей момент
Мъ. Так как угол между М12 и Мъ прямой, то момент эквивалентной пары
M = JM\2 + M\ = j\6 + 9 = 5 Н-м.
§ 8. УСЛОВИЯ РАВНОВЕСИЯ ПАР СИЛ
Если на твердое тело действуют пары сил, как угодно
расположенные в пространстве, то эти пары сил можно
заменить одной эквивалентной парой сил, векторный момент
38
которой равен сумме векторных моментов заданных пар
сил, т. е.
М= t Mt.
i=l
Векторный момент М геометрически изображается замыка-
замыкающей векторного многоугольника, построенного на векторных
моментах заданных пар сил.
Для равновесия пар сил, действующих на твердое тело,
необходимо и достаточно, чтобы модуль векторного момента
эквивалентной пары сил был равен нулю или чтобы векторный
многоугольник, построенный на векторных моментах заданных
пар сил, был замкнут.
Итак, М=0. Отсюда
Mz=t Miz = 0.
i=l
A0)
Таким образом, для равновесия пар сил, приложенных
к твердому телу, необходимо и достаточно, чтобы алгебраичес-
алгебраическая сумма проекций векторных моментов пар сил на каждую
из трех координатных осей была равна нулю.
В общем случае пары сил можно уравновесить только
парой сил и нельзя уравновесить одной силой или какой-либо
другой системой сил, отличной от пары сил.
В том случае, когда пары сил действуют на твердое тело,
находясь в одной плоскости, их можно заменить одной
эквивалентной парой сил, алгебраический момент которой
равен сумме алгебраических моментов составляющих пар сил:
М= t Мс.
i=i
Для равновесия таких пар сил необходимо и достаточно,
чтобы алгебраический момент эквивалентной им пары сил
был равен нулю, т. е. для равновесия пар сил, действующих
на твердое тело в одной плоскости, необходимо и достаточно,
чтобы сумма алгебраических моментов этих пар сил была
равна нулю.
Если на твердое тело действуют только пары сил, лежащие
в одной плоскости, то реакции опор, уравновешивающие
заданные пары сил, составляют пару сил. Например, если
39
1 &
^r
одной из двух опор тела в его
точке В является катковая опора
(рис. 33), а другой — неподвиж-
неподвижный шарнир в точке А, то на-
направление реакции в шарнире
А противоположно направлению
реакции в точке В, так как эти
реакции составляют пару сил.
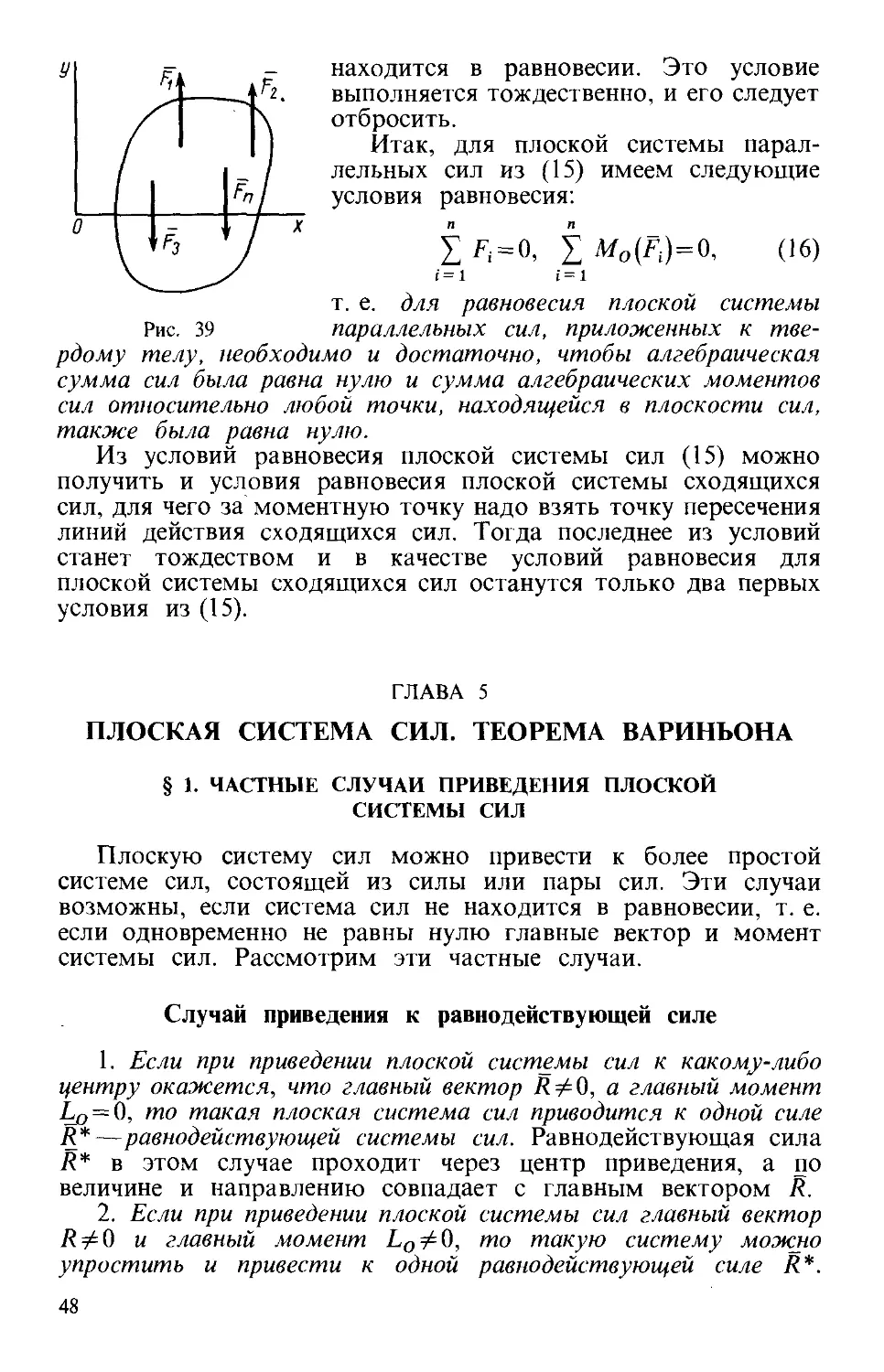
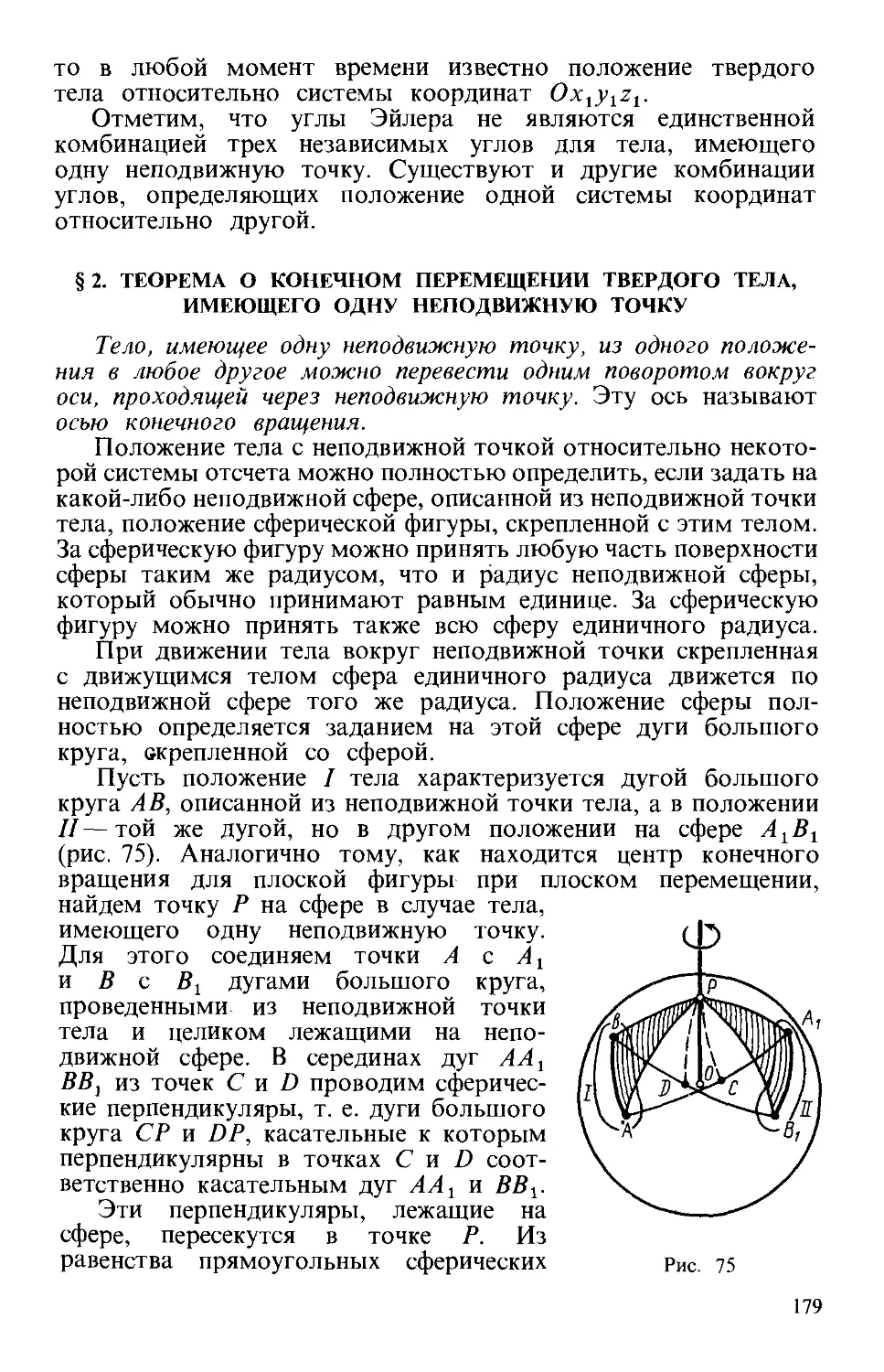
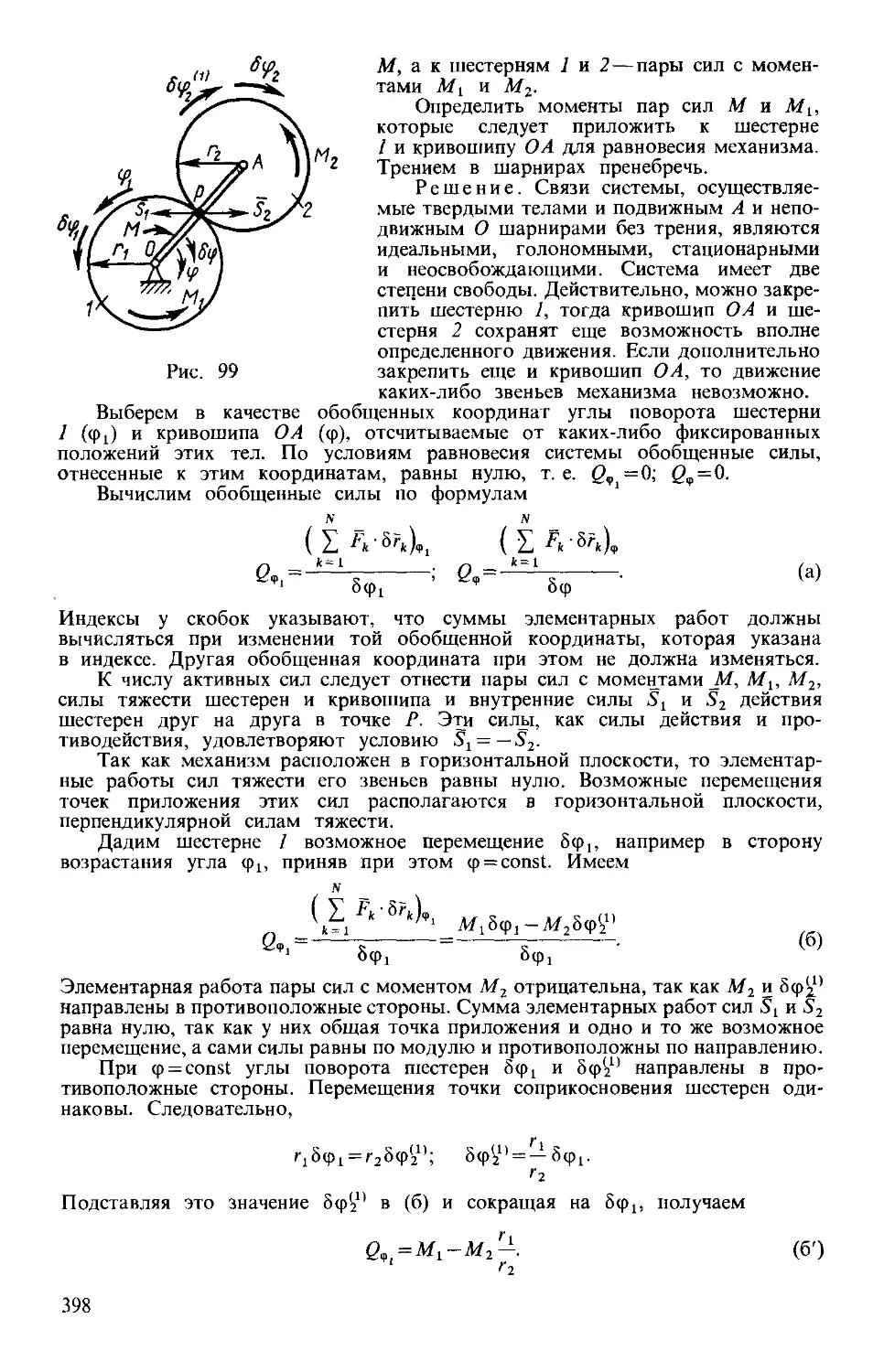
Реакция катковой опоры RB пер-
перпендикулярна плоскости опоры катков и направлена вверх;
следовательно, RA направлена параллельно RB вниз.
Величины этих реакций равны. Их можно найти приравняв
момент пары сил опорных реакций сумме алгебраических
моментов пар сил, действующих на тело. Таким образом,
Рис. 33
RA~
RB и RBl= £ Mt;
i= 1
1 ;=i
ГЛАВА 4
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ
К ПРОСТЕЙШЕЙ СИСТЕМЕ.
УСЛОВИЯ РАВНОВЕСИЯ
§ 1. ПРИВЕДЕНИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
К СИЛЕ И ПАРЕ СИЛ
Приведение силы к заданному центру
Силу можно переносить параллельно самой себе в любую точку
твердого тела, добавляя при этом пару сил, векторный момент
которой равен векторному моменту переносимой сиш относительно
новой точки приложения силы. Пусть имеем силу F, приложенную
к твердому телу в точке А (рис. 34). Известно,
что силу, приложенную к твердому телу, можно
переносить вдоль ее линии действия, от чего
действие силы на твердое тело не изменяется.
Теперь докажем, что силу можно пере-
переносить на другую, параллельную линию дей-
действия. Но этот перенос следует компенсиро-
компенсировать добавлением соответствующей пары сил.
Приложим в точке тела В, выбранной за
центр приведения, систему двух равных по
Рис. 34 модулю, но противоположных по направле-
40
ник^ сил F и F", параллельных заданной силе F. Силы F
и F" составляют систему сил, эквивалентную нулю, и ее
можно добавить к любой заданной системе сил.
Пусть по модулю
F' = F" = F.
Тогда
(F)cv(F,F,F")^{F,{F,F")}.
Система двух равных по модулю_ и противоположных по
направлению параллельных сил (F, F") составляет пару сил,
которую называют присоединенной парой сил. _
Итак, вместо силы F, приложенной в точке А, получены сила F,
равная ей по модулю и направлению, но приложенная в точке В,
и присоединенная пара сил (F, F"), векторный момент которой
M{F, F") = MB(F). _ A)
Процесс замены силы F силой F' и парой сил (F, F")
называют приведением силы F к заданному центру В. По теореме
об эквивалентности пар сил пару (F, F") можно заменить любой
другой парой сил с таким же векторным моментом.
Приведение произвольной системы сил к силе и паре сил
Докажем основную теорему статики (теорему Пуансо):
любую произвольную систему сил, действующих на твердое
тело, можно в общем случае привести к силе и паре сил.
Такой процесс замены системы сил одной силой и парой
сил называют приведением системы сил к заданному центру.
Пусть дана произвольная система сил (F\, F2, ..., Fn),
приложенных к твердому телу. Выберем произвольную точку
О тела за центр приведения и каждую силу заданной системы
сил приведем к точке О (рис. 35). Получим
cx){F'l5 F'2, ..., F'n; {F^F'l), (F2, F), ..., (Fn, F"n)}.
Таким образом, система из п сил
заменена системой из Ъп сил, т. е.
в точке О приложена_ система сходя-
сходящихся сил (F\, F'2, ..., F'n) и на твердое
тело действует также система п присо-
присоединенных пар сил
{(Fl,F'[),{F2,F'i),...,(Fn,F:)}.
Векторные моменты присоединен-
присоединенных пар сил, согласно формуле A),
можно выразить через векторные мо-
моменты заданных сил:
Mi = M(Fi,F-) = M0(Fi);i= 1,2,...,«. B) Рис. 35
41
Систему сходящихся сил (F\, F'2, ..., F'n) заменим их
равнодействующей R, которая равна векторной сумме сил
F\, F'2, ..., F'n и геометрически изображается замыкающим
вектором силового многоугольника, построенного на этих
силах (рис. 35).
Итак,
{F\, F'2, ..., F'n)cx>(R),
где
R = Fl+F2+...+Pn = Fl+F2+...+Fll=fd Ft.
Для системы сходящихся сил {F\, F'2, ..., F'n) сила R является
равнодействующей силой, а для заданной системы сил
(Fb F2, .., Fn) сила R является лишь только ее векторной
суммой, или главным вектором.
Главным вектором системы сил называют вектор, рав-
равный векторной сумме этих сил. Он изображается векто-
вектором, замыкающим силовой многоугольник, построенный на
силах, т. е.
R= t Ft, C)
i=l
Систему присоединенных пар сил {(F^FI), (F2, F2),*..,
(Fn, F'^)} по теореме_ о сложении пар сил можно_ заменить
одной парой сил (Ф, Ф') с векторным моментом М(Ф, Ф') = Ь0,
который называют главным моментом. Главный момент Lo
равен сумме векторных моментов присоединенных пар. Учиты-
Учитывая формулу B), для Lo имеем
L0 = M0(Fl)+M0{F2)+...+M0{Fn)= t M0(Ft). D)
;=i
Индекс О означает, что за центр приведения взята точка О.
Итак, главным моментом системы сил относительно точки
О тела называют сумму векторных моментов всех сил системы
относительно этой точки.
Главный момент системы сил является вектором, замыка-
замыкающим векторный многоугольник, образованный при сложении
векторных моментов сил системы относительно выбранного
центра.
Таким образом, доказана основная теорема статики: лю-
любую систему сил, действующих на твердое тело, можно
привести к силе, равной главному вектору системы сил, и
паре сил, векторный момент которой равен главному мо-
моменту системы сил относительно точки, выбранной за центр
приведения.
В краткой форме эту теорему можно выразить так:
(л^2,...,^)(^(л,/:0),
42
т. е. каждую систему сил можно привести
к главному вектору и главному моменту
относительно произвольного центра. Следу-
Следует учитывать, что это условная форму-
формулировка основной теоремы. Главный мо-
момент характеризует действие на тело пары
сил (Ф, Ф') (рис. 36), лежащей в плоскости,
перпендикулярной главному моменту.
Приведение плоской системы сил Рис 36
Плоской системой сил, приложенных к твердому телу,
называют такую систему сил, линии действия которых лежат
в одной плоскости. Основная теорема статики справедлива
для любой системы сил. Она справедлива и для плоской
системы сил, действующих на твердое тело: любую плоскую
систему сил можно в общем случае привести к^иле и паре сил.
Для плоской системы сил главный вектор R лежит в плос-
плоскости действия сил, если за центр приведения выбрать точку
в плоскости действия сил. Все присоединенные пары сил тоже
лежат в этой плоскости, а следовательно, векторные моменты
этих пар перпендикулярны ей и взаимно параллельны. Главный
момент Lo, характеризующий векторный момент пары сил,
эквивалентный присоединенным парам, перпендикулярен глав-
главному вектору. Он является векторной суммой параллельных
векторов.
В этом случае главный момент равен сумме алгебраических
моментов присоединенных пар и, следовательно, сумме алге-
алгебраических моментов сил относительно центра приведения.
Для плоской системы сил вместо векторного главного
момента используют понятие алгебраического главного мо-
момента. Алгебраическим главным моментом Lo плоской системы
сил относительно центра приведения, лежащего в плоскости
действия сил, называют сумму алгебраических моментов этих
сил относительно центра приведения.
Формулы для вычисления главного вектора и главного момента
Для любой системы сил (F^, F2, ..., Fn) главный вектор
R является векторной суммой этих сил:
R=tFn C')
а главный момент Lo — суммой векторных моментов сил
относительно центра приведения:
L0=tM0(Fi). D')
i= I
43
Главный вектор R геометрически изображается замыкающей
силового многоугольника, построенного на заданных силах.
Проецируя обе части векторного равенства C') на коорди-
координатные оси, для произвольной пространственной системы сил
получаем
Rx=t Flx, R>=t Fly, Rz=t Fiz. E)
1=1 ! = 1 [=1
По проекциям определяют модуль главного вектора и ко-
косинусы его углов с осями координат:
\R\ = ^R2X + R2 + R2;
cos(x,AR) = ^,Cos(y,AR) = b.-,
F)
cos(Z,^)=-.
Главный момент Lo геометрически тоже изображается
замыкающей векторного многоугольника, построенного на
векторных моментах сил относительно центра приведения.
Проецируя обе части векторного равенства D') на прямо-
прямоугольные оси координат и используя связь момента силы
относительно оси с проекцией векторного момента этой силы
относительно точки на оси, имеем
LOX = LX= £ Mx{Ft) = £ {yiFb-z&y);
i=i
; = i
LOy = Ly = £ ад)= I (ztFu-XtFb);
i=l
и
i=l
G)
LOz = Lz= £ Mz(Ft)= £ {XiFiy-yiFix).
i=l i=l
Модуль главного момента и косинусы его углов с осями
координат равны
\L0\ = jL2x + L2y + L2;
cos(*,ALo) = Lx/|Lo|, cos(/NLo) =
Л-
Л-
= Ly/\L0\, cosB, L0) = LJ\L0\.
(8)
Если выбрать ось Oz перпендикулярно плоскости действия
плоской системы сил, а оси Ох и Оу — в плоскости сил, то
главный вектор R будет лежать в плоскости Оху и, сле-
следовательно, для плоской системы сил
44
i=i * 1=1
\R\ = ^R2X + R2y, cos(x,AR) = Rx/\R\,
л=-
cos(^/?)=/?,/|/?|.
(9)
Главный момент плоской системы сил перпендикулярен
главному вектору и, следовательно, параллелен оси Oz. Тогда
Lx = 0, Ly = 0, LO = LZ= t Mz{Ft)= t M0(F,), A0)
;=i i=i
где Lo — алгебраический главный момент.
§ 2. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ
Условия равновесия системы сил
в векторной форме
Из теоремы о приведении системы сил к силе и паре сил
можно вывести условия равновесия системы сил, действующих
на твердое тело. Очевидно, что если система сил находится
в равновесии, то в равновесии находится и эквивалентная ей
система, состоящая из силы и пары сил. Чтобы такая система
сил была эквивалентна_ нулю, необходимо и достаточно
равенства нулю как силы R, так и момента пары (Ф, Ф'), равного
главному моменту Lo. Получаются следующие векторные
условия равновесия произвольной системы сил: для равновесия
системы сил, приложенных к твердому телу, необходимо
и достаточно, чтобы главный вектор системы сил был равен
нулю и главный момент системы сил относительно любого
центра приведения также был равен нулю. Иначе: для того чтобы
(Fl5 F2, ..., Fn)cvH, необходимы и достаточны условия
tf = 0, Lo = 0. A1)
Условия A1) являются векторными условиями равновесия
для любой системы сил.
Условия равновесия пространственной системы
сил в аналитической форме
Если при равновесии системы сил, приложенных к твердому
телу, главный вектор R равен нулю, то его проекция на
каждую координатную ось также равна нулю. Это справедливо
и для главного момента Lo. Таким образом, из векторных
условий равновесия пространственной системы сил следует
шесть условий:
45
Lx = 0, Ly = 0, Lz = 0.
A2)
Учитывая формулы E) и G), эти шесть условий через
силы системы выражают в форме
=1 i=l i=l
A3)
;=i >=i i=i
Таким образом, для равновесия пространственной системы
сил, приложенных к твердому телу, необходимо и достаточно,
чтобы три суммы проекций всех сил на оси декартовых
координат были равны нулю и три суммы моментов всех сил
относительно трех осей координат также были равны нулю.
Из общих условий равновесия для произвольной про-
пространственной системы сил получаются условия равновесия
для частных систем сил, приложенных к твердому телу.
Условия равновесия пространственной системы
параллельных сил
Направим ось Oz параллельно силам Fl5 F2, ..., Fn (рис. 37).
Тогда проекции параллельных сил на перпендикулярные им
оси Ох и Оу будут равны нулю и условия
л л
V р. -о у р. —п
;=i i=i
окажутся справедливыми для всех систем параллельных сил, т. е.
превратятся в тождества. Момент относительно оси Oz каждой
л
из параллельных сил равен нулю, и условие £ A/2(.F) = 0 тоже
выполняется для всех систем параллельных сил. Отбрасывая
условия равновесия, которые выпол-
выполняются тождественно при выбран-
выбранном направлении оси Oz, и учитывая,
что сумма проекций сил на эту ось
является алгебраической суммой сил,
из A3) получаем следующие три
условия равновесия пространствен-
пространственной системы параллельных сил:
i=i i=i i= 1
I M,(Ft) = 0,
A4)
;= 1
46
т. е. для равновесия пространственной системы параллельных
сил, приложенных к твердому телу, необходимо и достаточно,
чтобы алгебраическая сумма этих сил была равна нулю и суммы
моментов сил относительно двух координатных осей, перпенди-
перпендикулярных силам, также были равны нулю.
Условия равновесия плоской системы сил
Расположим оси Ох и Оу в плоскости действия сил
л
(рис. 38). Так как ось Oz перпендикулярна силам, то £ Fiz = 0
i=l
выполняется для всех плоских систем сил, т. е. является
тождеством. Каждая из сил расположена в одной плоскости
с осями координат Ох и Оу, и поэтому ее моменты
относительно этих осей равны нулю. Таким образом, условия
равновесия
£мх{Р{)=о, £м,C)=о
1=1 1 = 1
становятся тождествами. Моменты сил относительно оси Oz,
перпендикулярной силам, равны алгебраическим моментам
этих сил относительно точки О. Таким образом,
t M,(Ft) = t M0(Ft).
i=l i = 1
Из A3) для плоской системы сил после отбрасывания
тождеств имеем следующие три условия равновесия:
£Fix = 0, £f,, = 0, £mo(F() = 0, A5)
;=i ;=i i=i
т. е. для равновесия плоской системы сил, действующих на
твердое тело, необходимо и достаточно, чтобы суммы проекций
этих сил на каждую из двух прямоугольных осей координат,
расположенных в плоскости действия сил, были равны нулю
и сумма алгебраических моментов сил относительно любой
точки, находящейся в плоскости дей-
действия сил, также была равна нулю.
Для плоской системы параллель-
параллельных сил (рис. 39) одну из осей ко-
координат, например Оу, можно вы-
выбрать параллельной силам. Тогда
сумма проекций параллельных сил на
эту ось превратится в алгебраическую
сумму сил. Проекция каждой из сил
на ось Ох равна нулю; следовательно,
сумма проекций сил на ось Ох равна
нулю, даже если система сил не Рис. 38
О
47
находится в равновесии. Это условие
выполняется тождественно, и его следует
отбросить.
Итак, для плоской системы парал-
параллельных сил из A5) имеем следующие
условия равновесия:
Ё^=о, £м0(^)=о, (i6)
т. е. для равновесия плоской системы
Рис. 39 параллельных сил, приложенных к тве-
твердому телу, необходимо и достаточно, чтобы алгебраическая
сумма сил была равна нулю и сумма алгебраических моментов
сил относительно любой точки, находящейся в плоскости сил,
также была равна нулю.
Из условий равновесия плоской системы сил A5) можно
получить и условия равновесия плоской системы сходящихся
сил, для чего за моментную точку надо взять точку пересечения
линий действия сходящихся сил. Тогда последнее из условий
станет тождеством и в качестве условий равновесия для
плоской системы сходящихся сил останутся только два первых
условия из A5).
ГЛАВА 5
ПЛОСКАЯ СИСТЕМА СИЛ. ТЕОРЕМА ВАРИНЬОНА
§ 1. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПЛОСКОЙ
СИСТЕМЫ СИЛ
Плоскую систему сил можно привести к более простой
системе сил, состоящей из силы или пары сил. Эти случаи
возможны, если система сил не находится в равновесии, т. е.
если одновременно не равны нулю главные вектор и момент
системы сил. Рассмотрим эти частные случаи.
Случай приведения к равнодействующей силе
1. Если при приведении плоской системы сил к какому-либо
центру окажется, что главный вектор ЯфО, а главный момент
4о = 0> то такая плоская система сил приводится к одной силе
R*—равнодействующей системы сил. Равнодействующая сила
R* в этом случае проходит через центр приведения, а по
величине и направлению совпадает с главным вектором R.
2. Если при приведении плоской системы сил главный вектор
ЯфО и главный момент Lo^0, то такую систему можно
упростить и привести к одной равнодействующей силе R*.
48
Эта сила по величине и направлению
совпадает с главным вектором R, но
ее линия действия отстоит от перво-
первоначального центра приведения на рас-
расстоянии d (рис. 40), которое определя-
определяют из соотношения
d=LojR.
Действительно, пусть при приведе-
приведении к точке О получаются главный
вектор и пара сил, алгебраический
момент которой равен главному мо- Рис- 40
менту Ьо. По теореме об эквивалентности пар сил, рас-
расположенных в одной плоскости, пару сил можно поворачивать,
передвигать в плоскости ее действия и изменять плечо и силы
пары, сохраняя ее алгебраический момент. Выберем силы R',
R*, входящие в пару сил, равными по величине главному
вектору. Тогда плечо пары сил d определим по формуле
d=LojR; R' = R* = R. A)
Повернем пару_ сил, чтобы ее силы были параллельны
главному вектору R, а точку приложения силы пары, противо-
противоположной по направлению главному вектору, совместим с цен-
центром приведения О. Тогда
(R, R', R*)cv(R*).
Так как (R, R*)oo0, то такую систему сил можно отбросить.
Итак, систему сил, приведенную к силе с парой сил,
в том случае, когда R^O и Ь0Ф§, можно упростить и привести
к одной силе R*—равнодействующей заданной системы сил,
отстоящей от центра приведения на расстоянии
OOl=d=LoIR.
Равнодействующую силу R*, приложенную к твердому
телу, можно перенести в любую точку линии ее действия.
Случай, когда Lo = 0, возможен, если за центр приведения
О взять точку, лежащую на линии действия равнодействующей
силы R*.
Случай приведения к паре сил
Если при приведении плоской системы сил к какому-либо
центру окажется, что главный вектор R = 0, а главный момент
£о^0, то такую плоскую систему сил можно привести к одной
паре сил, алгебраический момент которой равен главному
моменту системы сил относительно центра приведения,
и в этом случае главный момент не зависит от выбора
Центра приведения.
49
Если главный вектор равен нулю при приведении к одному
какому-либо центру, то он равен нулю и при приведении
к любому другому центру, так как главный вектор, являясь
векторной суммой сил системы, не зависит от выбора центра
приведения. Главный момент не зависит от центра приведения
только в том случае, когда R = 0. В других случаях главный
момент системы зависит от выбора центра приведения. Если
бы при R = 0 главный момент зависел от центра приведения,
то одна и та же плоская система сил была бы эквивалентна
парам сил, имеющим разные алгебраические моменты, что
невозможно, так как эквивалентные пары сил, лежащие в одной
плоскости, имеют одинаковые алгебраические моменты.
Таким образом, рассмотрены случаи, которые возможны
при приведении плоской системы сил к какому-либо центру.
Если R = 0 и Lo = 0, то система сил находится в равновесии;
если RФО, a Lo = 0, или R^0, ЬоФ0, то сиаема сил приводится
к одной равнодействующей силе; если R = 0, Lo=£0, то система
приводится к одной паре сил.
§ 2. ТЕОРЕМА О МОМЕНТЕ РАВНОДЕЙСТВУЮЩЕЙ СИЛЫ
(ТЕОРЕМА ВАРИНЬОНА)
Для случая, когда любая система сил, приложенных к твердому
телу, плоская или пространственная, приводится к равнодейству-
равнодействующей силе, часто применяют так называемую теорему Вариньона:
векторный момент равнодействующей рассматриваемой системы
сил относительно любой точки равен сумме векторных моментов
всех сил этой системы относительно той же точки. _
_ Пусть_ на твердое тело действует любая системасил (Ft,
F2, ..., Fn) (рис. 41), имеющая равнодействующую R*, т. е.
{F,, F2, ..., Fn)^(R*). B)
Добавим к заданной системе сил ее уравновешивающую
силу R*', которая равна по модулю, но противоположна по
направлению равнодействующей силе R* и имеет с ней общую
линию действия. Тогда
(F,, F2, ..., РЙ, R*')cv(R*, R*')cx>0, C)
т. е. при добавлении к системе сил урав-
уравновешивающей силы, согласно определе-
определению уравновешивающей силы, образуется
новая система сил, эквивалентная нулю и,
следовательно, удовлетворяющая условиям
равновесия системы сил, приложенных
к твердому телу. В частности, сумма
векторных моментов сил этой новой си-
системы сил относительно любой точки О ра-
Рис. 41 вна нулю:
50
() (R*') = 0, D)
i= 1
HO
M0(R*')=-M0(R*), E)
так как R*' и Л*—две равные и противоположно направленные
силы, действующие вдоль одной прямой. Подставляя E) в D),
получаем
£ Mo{Ft)-Mo{R*) = 0,
откуда следует теорема Вариньона
М0(К*)=£м0(Р1). F)
1=1
Если правую и левую части векторного равенства F)
спроецировать на произвольную ось Oz, проходящую через
точку О, то, учитывая связь момента силы относительно оси
с проекцией векторного момента относительно точки на оси,
получим теорему Вариньона относительно оси Oz:
MZ{R*)= £ Mz{Ft), G)
;= l
т. е. момент равнодействующей силы относительно произвольной
оси равен сумме моментов сил системы относительно той же оси.
Для случая плоской системы сил, если точку О выбрать
в плоскости действия сил, из F) получаем
Мо(К*)=£мо{Р1). (8)
;= 1
Это теорема Вариньона для плоской системы сил: алге-
алгебраический момент равнодействующей плоской системы сил
относительно любой точки, лежащей в плоскости действия
сил, равен сумме алгебраических моментов всех сил этой
системы относительно той же точки.
§ 3. РАЗЛИЧНЫЕ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ
ПЛОСКОЙ СИСТЕМЫ СИЛ
В § 2 гл. 4 получены общие условия равновесия плоской
системы сил, действующих на твердое тело, в следующей
форме:
£f1x = 0; £^ = 0; £ Мо{Р{) = 0. (9)
; = 1 ; = 1 i = 1
Условия равновесия (9) назовем условиями равновесия пло-
плоской системы сил в первой форме.
51
Условия равновесия плоской системы сил, приложенных
к твердому телу, можно сформулировать в других эквивалент-
эквивалентных формах. Существуют еще две эквивалентные формы
необходимых и достаточных условий равновесия.
Рассмотрим эти условия равновесия в виде теоремы о трех
моментах и третьей формы условий равновесия.
Теорема о трех моментах
(вторая форма условий равновесия)
Для равновесия плоской системы сил, приложенных к тве-
твердому телу, необходимо и достаточно, чтобы суммы алгеб-
алгебраических моментов сил системы относительно трех любых
точек, расположенных в плоскости действия сил и не лежащих
на одной прямой, были равны нулю, т. е.
£ Мл(^) = 0; £ MB(Ft) = 0; £ Mc(Ft) = 0. A0)
i = 1 i=l i=l
Необходимость этих условий равновесия плоской системы
сил обусловлена тем, что если плоская система сил находится
в равновесии, то силы этой системы удовлетворяют условиям
равновесия в первой основной форме (9). А тогда из последнего
условия (9) следует, что сумма алгебраических моментов сил
относительно любой точки (следовательно, и точек А, В, С)
равна нулю (рис. 42).
Для доказательства достаточности условий A0) для равно-
равновесия плоской системы сил, действующих на твердое тело,
можно привести следующие рассуждения. Так как главные
моменты относительно трех точек А, В и С равны нулю,
то для любой из этих точек, взятых за центр приведения,
система приводится или к равнодействующей, если главный
вектор системы отличен от нуля, или система сил оказывается
в равновесии, если главный вектор системы равен нулю.
Предположим, что она приводится к равнодействующей силе
R*. Тогда если выбрать за центр приведения точку А, то,
используя теорему Вариньона (8), согласно A0), получим
£ мА(Р()=мА{к*)=о.
1 = 1
Выбрав за центр приведения точку
В, аналогично имеем
1=1
Рис. 42
Эти условия для равнодейству-
равнодействующей силы R*, отличной от нуля,
могут выполняться в том случае, если
52
линия действия равнодействующей силы R* проходит через
точки А и В.
Из последнего условия A0) после применения теоремы
Вариньона получаем
£ Mc(Fi) = Mc(R*)=±hR* = 0.
Но h Ф 0, так как точка С не находится на прямой,
проходящей через точки А и В. Следовательно, равнодейст-
равнодействующая сила равна нулю, что и является достаточным
условием равновесия плоской системы сил, приложенных
к твердому телу.
Третья форма условий равновесия
Условия равновесия плоской системы сил можно сформу-
сформулировать и так: для равновесия плоской системы сил, при-
приложенных к твердому телу, необходимо и достаточно, чтобы
суммы алгебраических моментов сил относительно двух любых
точек, лежащих в плоскости действия сил, были равны нулю
и алгебраическая сумма проекций этих сил на какую-либо ось
плоскости, не перпендикулярную прямой, проходящей через две
моментные точки, также была равна нулю, т. е.
£ £ 0; £ Fix = 0, A1)
i=i
где за ось Ох принята любая прямая, не перпендикулярная
АВ. Необходимость условий A1) для равновесия плоской
системы сил следует из первой формы условий равновесия
(9). Первая часть теоремы о достаточности условий A1) для
равновесия (линия действия равнодействующей силы R* про-
проходит через точки А и В) доказывается так же, как и в теореме
о трех моментах.
Из последнего условия A1) (рис. 43) следует, что
i i
Но
cos (*,/?*)# 0,
так как ось Ох не перпендикулярна прямой, проходящей
через точки А и В. Следовательно, равнодействующая сила
R* равна нулю, что и доказывает достаточность условий
A1) для равновесия плоской системы сил, приложенных
к твердому телу.
В частном случае плоской системы параллельных сил
можно сформулировать другую форму условий равновесия
этой системы сил: для равновесия плоской системы параллельных
53
сил, приложенных к твердому телу,
необходимо и достаточно, чтобы сум-
суммы алгебраических моментов сил отно-
относительно двух любых точек, лежащих
в плоскости сил, были равны нулю, т. е.
£ MA(Ft) = O; £ Мя(^) = 0. A2)
Я* х >=i i=i
Точки А и В нельзя брать на
Риг 43 « «
прямой линии, параллельной силам.
При применении условий равновесия A2) удобно за момент-
ные точки А и В брать точки, через которые проходят
искомые силы, например реакции связей. В этом случае
получаются такие уравнения для определения искомых сил,
в каждое из которых входит только по одной неизвестной
силе; эти уравнения, как правило, решаются проще, чем
уравнения, в каждое из которых входят обе неизвестные силы.
§ 4. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ И СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ
Для любой плоской системы сил, действующих на твердое тело,
имеется только три независимых условия равновесия, каждое из
которых не является следствием двух других. Независимые условия
равновесия можно брать в трех различных формах.
Следовательно, для любой плоской системы сил из условий
равновесия можно найти не более трех неизвестных, а для
плоских систем параллельных и сходящихся сил — не более
двух неизвестных. Если в какой-либо задаче число неизвестных
окажется больше числа независимых условий равновесия, то
такую задачу нельзя решить методами статики без рас-
рассмотрения прежде всего деформаций тела, т. е. без отказа
от основной гипотезы статики об абсолютно твердом теле.
Задачи, в которых число неизвестных не больше числа
независимых условий равновесия для данной системы сил,
приложенных к твердому телу, называют статически опре-
определимыми. Для любой плоской системы сил, приложенных
к твердому телу, в статически определимой задаче число
неизвестных должно быть не больше трех, а для плоских
систем параллельных и сходящихся сил — не больше двух.
Пример простейшей статически неопределимой задачи приведен
на рис. 44, где представлена балка заданной длины, закрепленная на
концах с помощью двух неподвижных цилиндрических шарниров
An В. На балку действуют активные силы Ft и F2. Известны также
и точки приложения этих сил. Так как для цилиндрического
шарнира имеются две неизвестные, например составляющие силы
реакции по осям координат, то число неизвестных будет четыре,
а независимых условий равновесия можно составить только три.
54
Чтобы сделать задачу статичес-
статически определимой, надо балку на
одном конце закрепить, например
с помощью так называемой катко-
вой опоры. Тогда одна неизвестная
будет равна нулю; если катковая
опора находится в точке В и плос-
плоскость опоры катков параллельна
оси Ох, то сила Хв равна нулю.
§ 5. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
У7/ V7,
ш
Y7/ V7.
Рис. 44
Рассмотрим равновесие сил, приложенных к системе не-
нескольких взаимодействующих между собой тел. Тела могут
быть соединены между собой с помощью шарниров, соприка-
соприкасаться друг с другом и взаимодействовать одно с другим,
вызывая силы взаимодействия. Такую систему взаимодей-
взаимодействующих тел иногда называют сочлененной системой тел.
Силы, действующие на рассматриваемую систему тел,
можно разделить на внешние и внутренние.
Внешними называют силы, с которыми на тела рас-
рассматриваемой системы действуют тела, не входящие в эту систему.
Внутренними называют силы взаимодействия между телами
рассматриваемой системы.
Если, например, рассматриваемой системой тел является
железнодорожный поезд, то внешними силами являются силы
веса вагонов и тепловоза, действие рельсов на колеса вагонов
и тепловоза, силы сопротивления воздуха. Внутренними силами
являются натяжения в стяжках, сила давления газа и т. п.
Силы веса для любой системы тел, в которую не входит
Земля, всегда являются внешними.
При рассмотрении равновесия сил, приложенных к системе
тел, можно мысленно расчленить систему тел на отдельные
твердые тела и к силам,
действующим на эти тела,
применить условия равно-
равновесия, полученные для од-
одного тела. В эти условия
равновесия войдут как
внешние, так и внутренние
силы системы тел. Внутрен-
Внутренние силы на основании ак-
аксиомы о равенстве сил дей-
действия и противодействия
в каждой точке сочленения
двух тел образуют равно-
равновесную^ систему сил (силы
R'a и R"a, рис. 45). Поэтому Рис 45
55
внешние силы, действующие на систему тел отдельно, без
внутренних сил, удовлетворяют условиям равновесия сил, при-
приложенных к твердому телу, за которое следует принять эту
систему тел.
Покажем это на примере системы двух тел и плоской
системы сил (рис. 45). Если составить условия равновесия
для каждого твердого тела системы тел, то для тела /
£ t{) (R'A) = 0; (В)
= i i=i
для тела II
£ £ R'A) = 0. A4)
Кроме того, из аксиомы о равенстве сил действия и про-
противодействия для двух взаимодействующих тел имеем
R'a=-R"a A5)
M0(R'A)=-M0(RA). A6)
Если сложить A3) и A4), учитывая A5 и A6), то
i=i 1=1 ; = i ;=i
Представленные равенства и есть условия равновесия внеш-
внешних сил, действующих на систему двух тел.
Для системы N тел в том случае, когда на каждое тело
действует любая плоская система сил, можно составить 3N
условий равновесия и, следовательно, определить 3N неизвест-
неизвестных. Если число неизвестных больше 3N, то задача является
статически неопределимой. В случае статически определимой
задачи 3N условий равновесия можно получить, если составлять
их для каждого тела отдельно, учитывая и силы взаимодействия
тел, или составлять условия равновесия для любых комбинаций
групп тел, в том числе и для всей рассматриваемой системы
тел. При этом внутренние силы для отдельных групп тел
учитывать не надо.
§ 6. РАСПРЕДЕЛЕННЫЕ СИЛЫ
В статике рассматривают силы, приложенные к твердому
телу в какой-либо его точке, и поэтому такие силы называют
сосредоточенными. В действительности обычно силы бывают
приложены к какой-либо части объема тела или его поверх-
поверхности, а иногда к некоторой части линии. Так как все
аксиомы и теоремы статики формулируются для сосредоточен-
сосредоточенных сил, приложенных к твердому телу, то необходимо
56
рассмотреть способы перехода от распределенных сил
к сосредоточенным в простейших, наиболее часто воз-
возникающих случаях.
Распределенные силы прежде всего характеризуются ин-
интенсивностью распределенной силы, т.е. силой, приходя-
приходящейся на единицу объема, поверхности или длины линии.
В основном встречаются параллельные и сходящиеся распреде-
распределенные силы. К параллельным силам, распределенным по
объему тела, относится вес частиц этого тела. Сила давления
воды на плотину относится к распределенным параллельным
силам по поверхности плотины. Сила тяжести частиц тонкой
проволоки характеризует распределенные силы по длине линии.
Рассмотрим замену сосредоточенными силами только рас-
распределенных сил по длине линии, т. е. линейных распределенных
сил. Для простоты возьмем случаи, когда отрезок линии, по
которому распределены силы, является отрезком прямой,
а интенсивность этих сил или постоянна (силы распределены по
прямоугольнику), или распределена по линейному закону,
в простейшем случае — по треугольнику. Комбинируя эти два
случая, можно получить линейное распределение интенсивности
распределенной силы в более общем случае.
Параллельные силы постоянной интенсивности,
распределенные по отрезку прямой линии
Пусть на участке А В прямой линии длиной / распределены
параллельные силы, интенсивность которых q постоянна (рис.
46, а). Заменим эти распределенные силы сосредоточенными.
Для этого отрезок АВ разобьем на отрезки достаточно малых
размеров по сравнению с его длиной. На каждый такой
малый отрезок действует сила qAl{, которую при достаточной
малости длины отрезка Д/, можно считать сосредоточенной
силой. Заменяя полученную таким образом систему сосредо-
сосредоточенных параллельных сил </Д/, одной равнодействующей
силой, получим
1/2
R=ql
В "Л
51
Рис. 46
57
Равнодействующая R параллельна распределенным силам
и приложена вследствие симметрии распределения сил в сере-
середине отрезка АВ.
Если параллельные силы постоянной интенсивности q
распределены по отрезку прямой, наклоненному к распре-
распределенным силам, то модуль равнодействующей R таких
сил равен ql. Линия действия ее, параллельная распреде-
распределенным силам, проходит через середину отрезка (рис. 46, б).
Модуль равнодействующей в этом случае не равен площади
параллелограмма, образованного прямой АВ и распределен-
распределенными силами.
Параллельные силы, распределенные по отрезку прямой
с интенсивностью, изменяющейся по линейному закону
Рассмотрим распределенные параллельные силы, изменя-
изменяющиеся по линейному закону (рис. 47, а). Обычно считают,
что такие силы распределены по треугольнику. Параллельные
распределенные_ по треугольнику силы приводятся к равно-
равнодействующей R, по модулю равной
где qmax — наибольшая интенсивность силы. Это легко можно
проверить путем сложения параллельных сосредоточенных сил
qAx, приложенных к каждому элементарному отрезку длиной
Ах. Наиболее просто это можно сделать путем интегрирования.
Действительно,
п I
R = \im Yj q&x = j qdx.
Дх-^О
2131
a)
6)
Рис. 47
58
Если х отсчитывать от точки А, то из подобия тре-
треугольников имеем
После этого, вставляя под интеграл вместо q его значение,
получаем
R =
/
/ 2
Точка приложения С равнодействующей силы смещается
в сторону, где интенсивность силы больше, и совпадает
с центром тяжести площади треугольника, который нахо-
находится в точке пересечения медиан, расположенной на рассто-
расстоянии '/з от основания треугольника и 2/3 от его вершины
А, т. е. АС = 2/3 I. Точку приложения равнодействующей силы
можно также определить вычислив момент элементарных
сосредоточенных сил qAx, например относительно точки А,
и применив затем теорему Вариньона о моменте равнодейст-
равнодействующей силы.
Имеем
п I
= j qxdx.
Заменяя q его значением q = ^^x, получаем
Учитывая, что R = ^-, найдем
3R ~3L
Если параллельные силы с интенсивностью, изменяющейся
по линейному закону, распределены по отрезку прямой,
наклоненному к направлению сил (рис. 47, б), то их равнодейст-
равнодействующая R=~- и делит отрезок А В так же, как и в том
случае, когда распределенные силы перпендикулярны отрезку
АВ. Величина равнодействующей в этом случае не равна
площади треугольника, образованного отрезком прямой А В
и распределенными силами.
59
В более сложных случаях распределенных сил равнодейст-
равнодействующую силу и ее точку приложения обычно определяют
путем интегрирования и применения теоремы Вариньона.
Величину равнодействующей в случае непараллельных рас-
распределенных сил находят так же, как и для параллельных,
только суммируют (и, следовательно, интегрируют) не элемен-
элементарные сосредоточенные силы д;Д/;, а их проекции на оси
координат. По проекциям уже вычисляют равнодействующую
силу и косинусы ее углов с осями координат.
Реакция заделки
Пусть имеем тело, например балку А В, один конец которой
А А' заделан в стену (рис. 48, а). Такое крепление конца балки
А А' называют заделк_ой_в точке А. Пусть на балку действует
плоская система сил (Fl, F2, ..., Fn). Определим силы, которые
надо приложить в точке (сечении) А балки, если часть балки
А А' отбросить.
К части балки А А' при освобождении ее от заделки в стене
приложены распределенные силы. Если эти силы заменить
элементарными сосредоточенными силами и затем привести их
к точке Л, то в точке А получим силу RA (главный вектор
элементарных сосредоточенных сил д;Д/;) и пару сил с момен-
моментом МА (главный момент относительно точки А элементарных
сил <7;А/() Момент МА называют моментом заделки.
Таким образом, заделка в отличие от шарнира создает
не только не известную по величине и направлению реакцию
RA, но еще и пару сил с не известным заранее моментом
в заделке МА (рис. 48, б).
Очевидно, если рассмотреть любую часть балки, расчленив
ее мысленно по сечению тп, то в месте расчленения надо
приложить неизвестные силу и пару сил, заменяющие действие
отброшенной части балки на рассматриваемую ее часть,
причем сила и момент пары сил, действующие на различные
части балки, будут иметь противоположные направления
действия и вращения соответственно, как всякое действие
и противодействие.
/' г 1
Fn
а)
Рис. 48
60
§7. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ
ПЛОСКОЙ СИСТЕМЫ СИЛ,
ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ
И СИСТЕМЕ ТЕЛ
Рассмотрим общие положения о решении задач на равно-
равновесие плоской системы сил, действующих на одно твердое
тело и на систему тел. Весь процесс решения задачи на
равновесие сил можно расчленить на ряд этапов, которые
характерны для большинства задач.
К выбранному для рассмотрения телу или системе тел надо
приложить все действующие силы, как активные, так и реакции
связей; если нужно, расчленить систему тел на отдельные тела или
группы тел. Если связью является абсолютно гладкая поверхность
какого-либо тела, то реакция связи в этом случае направлена по
нормали к общей касательной в точке соприкосновения в сторону,
противоположную тому направлению, в котором связь препят-
препятствует перемещению рассматриваемого тела.
Если связью является цилиндрический шарнир, позволяю-
позволяющий телу вращаться вокруг его оси, то реакцию шарнира,
лежащую в плоскости, перпендикулярной оси, следует разло-
разложить на две заранее не известные составляющие по положитель-
положительным направлениям осей координат. Если эти составляющие
после их определения из уравнений равновесия будут иметь
знак минус, то составляющие реакции направлены проти-
противоположно положительному направлению осей координат.
Все гибкие связи (канаты, тросы, ремни и т. п.) создают
реакции, направленные по касательной к гибкой связи в данной
точке.
Если связью является заделка, которая в отличие от
цилиндрического шарнира не позволяет телу поворачиваться,
то кроме двух неизвестных составляющих реакций в этой
точке надо еще приложить пару сил с не известным заранее
моментом заделки.
Эти же случаи связей возможны и при расчленении
систем тел.
Выявление всех сил, действующих на рассматриваемое тело
или систему тел, особенно правильная замена различных
видов связей их реакциями, является одним из главных этапов
при решении задач на равновесие.
При расчленении системы тел надо следить, чтобы силы
взаимодействия между телами или группами тел сочленной
системы в точках сочленения были равны по модулю, но
противоположны по направлению. При рассмотрении системы
тел (или их группы) силы взаимодействия между телами
системы (или их группы) прикладывать не нужно, так как
эти силы являются внутренними и в уравнения равновесия
для системы тел (или группы) не войдут.
61
. М~ЮОкН-м
q=20kH/m
Рис. 49
После выявления всех сил надо выбрать оси координат
и моментные точки, а затем, составив условия равновесия
сил в одной из форм, решить полученные уравнения от-
относительно неизвестных.
Решение уравнений будет более простым, если при их
составлении в каждое из уравнений добавляется по одной
новой неизвестной. Этого удается достичь, если за моментную
точку брать такую, в которой пересекаются две искомые
силы. Такой точкой обычно является цилиндрический шарнир.
Оси координат надо брать так, чтобы одна или две неизвестные
силы были перпендикулярны одной из осей координат и,
следовательно, параллельны другой оси. В этом случае в соот-
соответствующее условие равновесия для одного тела войдет
только одна неизвестная сила.
Приведем примеры решения задачи на плоскую систему сил.
Пример 1. Дана система двух твердых тел, соединенных с помощью
шарнира С (рис. 49). Балка АС, изогнутая под прямым углом, имеет заделку
в точке А. Круговая арка С В закреплена в точке В с помощью стержня,
имеющего на донцах шарниры. Размеры тел и приложенные силы указаны
на рисунке. Дуговая стрелка условно обозначает пару сил. Силами тяжести
тел пренебречь. Определить силы реакций в точках А к В.
Решение. Заменим распределенные силы сосредоточенными. Величина
равнодействующей силы Ri (рис. 50) распределенных по треугольнику сил
на участке АЕ определяется по формуле
я1 = 1-АЕ-дви1Х = 1--Ъ-АО = б10 кН.
Точка приложения силы R1 отстоит от точки Е на 1/3 АЕ, т. е. на
1 м. Значение равнодействующей R2 распределенных по арке радиальных сил
определяем как произведение длины хорды BD, стягивающей дугу BD, на
интенсивность распределенных сил q, т. е.
62
Линия действия равнодействующей силы R2 вследствие симметрии распре-
распределения сил проходит через центр арки О, деля угол, стягивающий арку,
на равные части.
Рассмотрим сначала равновесие системы двух тел, состоящих из балки
АС и арки ВС. На эту группу тел действуют силы F, Rlt R2, пара сил
с моментом М, силы реакций в заделке А и в опоре В.
Реакции заделки в точке А в общем случае дают три неизвестные: две
составляющие силы по осям координат и момент пары сил; одна неизвестная
сила имеется в точке В. Ее дает шарнирный стержень. Таким образом,
имеем четыре неизвестные, а независимых уравнений для их определения —
только три. Систему тел следует расчленить на отдельные тела (рис. 51),
приложив к каждому из них в точке С силы действия одного тела на
другое, которые равны по величине, но противоположны по направлению.
В дальнейшем целесообразно на рисунках у стрелок, изображающих
силы, ставить только буквы, обозначающие значения сил, без знака вектора
над ними (рис. 51). Это уменьшит число неизвестных и, следовательно,
количество уравнений для их определения.
Всего имеется шесть неизвестных, считая составляющие силы реакции
в шарнире С. Составляя по три уравнения равновесия сил для каждого тела,
можно получить шесть уравнений для нахождения из них всех неизвестных.
Требуется определить только четыре неизвестные реакции в точках А и В.
Поэтому составим уравнения гак, чтобы в них не входили реакции в точке С и по
возможности в каждое уравнение входило не более одной новой неизвестной.
Рис. 51
63
Составим для арки СВ одно условие равновесия сил в форме суммы
моментов сил относительно точки С. Имеем
- М- R2rcosW + YBr= - \00-m-4
откуда получаем YB»94 кН.
После этого для всей системы тел применим условие равновесия в форме
суммы проекций сил на оси Ох и Оу. Получим
ХА + R i - F cos 53° - R2 cos 30° = 0,
YA - F sin 53° - R2 sin 30° + YB = 0,
откуда *4 = 99кН, Ул = 66кН.
Для определения момента пары сил МА в заделке достаточно применить
для тела АС условие равновесия в форме суммы моментов сил относительно
точки С. Имеем
откуда М^ = 370 кН-м.
Если дополнительно требуется определить силы Хс и Yc, то следует
применить условия равновесия для тела СВ в форме проекций сил на оси
Ох и Оу.
Тогда
-Xc-^2cos30° = 0; - Kc-/?2sin30°+ YB = 0.
Из этих уравнений получаем
Хс = 69кН; Ус = 54кН.
Для контроля правильности определения реакций в точках А и В следует
составить условие равновесия, например, в форме суммы моментов сил
относительно точки С для всей системы. Полученные ранее значения
неизвестных должны обратить его в тождество.
Задача считается решенной, если известны проекции искомых сил на оси
координат, так как по проекциям легко определяются модули этих сил
и косинусы углов сил с осями координат.
Пример 2. Для системы тел, находящихся в равновесии, определить
реакцию шарнира В (рис. 52). Необходимые данные указаны на рисунке.
Стержни АЕ и ВС, блоки и нить считать невесомыми. Трением в шарнирах
пренебречь. Дуговой стрелкой обозначена пара сил, \М\ — модуль алгебра-
алгебраического момента.
Решение. Рассмотрим всю систему тел, освободив ее от связей, т. е.
от цилиндрических шарниров в А и В. Неизвестные по величине и направлению
силы реакций этих шарниров разложим на составляющие Хл, Yл, Хв, Ув,
yL jM .!- Зм J_ 3" J
1
ю
■L-S
02л? j j
Рис. 52
64
предположив, что они направлены по положи-
положительному направлению осей координат. Неиз-
Неизвестных четыре, а условий равновесия сил для
всей системы тел можно составить только три.
Поэтому рассмотрим другие комбинации тел
или отдельные тела.
Для определения Хв удобно составить условие
равновесия для всей системы тел в форме суммы
моментов сил относительно точки А. Имеем
или
Рис. 53
5-2-4-5-10-10 = 0,
откуда ХВ = Ъ1,1 кН. Из приведенного уравнения Хв получилось со знаком
плюс; следовательно, предположение о первоначальном направлении Хв
в положительную сторону оси Ох оказалось правильным.
Другие условия равновесия сил для всей системы тел не позволяют
определить неизвестную YB, так как в уравнения войдет неизвестная сила У'л.
Рассмотрим отдельно равновесие стержня ВС (рис. 53), освободив его
от связей. В шарнире С неизвестную силу реакции заменим составляющими,
направленными параллельно осям координат в положительную сторону.
В точке К приложим силу натяжения отброшенной нити, которая по величине
равна силе тяжести груза Р и направлена по нити.
Для определения YB составим условие равновесия для сил, приложенных
к стрежню ВС, в форме суммы моментов сил относительно точки С. В это
условие не войдут неизвестные силы Хс и Yc, которые определять не
требуется. Имеем
113
YB-6+ 3-10-4 + 2-2=0.
Отсюда находим Ув=12,8кН. Знак плюс у этой силы указывает на
правильность предположения о направленности YB.
Для приобретения опыта силового анализа в системах тел рассмотрим
дополнительно еще несколько вариантов частей ситемы тел и отдельных
тел с приложенными к ним силами (рис. 54... 57).
При замене отбрасываемых тел силами учтено, что оси блоков D и Е яв-
являются цилиндрическими шарнирами и реакции от них следует разлагать
на составляющие, параллельные осям координат. Рассматривая силы, с ко-
которыми тела действуют друг на друга, следует учитывать, что, согласно
аксиоме статики, силы действия и противодействия равны по величине, но
противоположны по направлению. Так, если стержень действует на блок
Рис. 54
Рис. 55
3 Заказ 192
65
Ye
Рис. 57
в точке D с силами Хв и YD, направленными в положительные стороны
осей координат (рис. 56), то блок будет действовать на стержень АЕ (рис. 57)
с силами, равными по модулю, но направленными в противоположные
стороны.
При отбрасывании нити следует учитывать, что ее натяжение во всех
точках при отсутствии трения в осях блоков одинаково по величине
и направлено по касательной к нити. Нить при этом должна испытывать
только' растяжение. При рассмотрении отдельного блока силы натяжения
нитей следует приложить в двух точках, в которых отбрасываются части нити.
ГЛАВА 6
ТРЕНИЕ
При движении или стремлении двигать одно тело по
поверхности другого в касательной плоскости поверхностей
соприкосновения возникает сила трения скольжения.
Если одно тело, например цилиндрический каток, катить
или стремиться катить по поверхности другого тела, то кроме
силы трения скольжения из-за деформации поверхностей тел
дополнительно возникает пара сил, препятствующая качению
катка. Возникновение силы трения, препятствующей скольже-
скольжению, иногда называют трением первого рода, а возникновение
пары сил, препятствующей качению,— трением второго рода.
§ 1. ТРЕНИЕ СКОЛЬЖЕНИЯ
Пусть на тело действует плоская система активных сил
и тело находится в равновесии, соприкасаясь с поверхностью
другого тела, являющегося связью для рассматриваемого тела.
Если поверхности соприкасающихся тел абсолютно гладкие
и тела абсолютно твердые, то реакция поверхности связи
направлена по нормали к общей касательной в точке со-
соприкосновения и направление реакции в этом случае не зависит
от действующих на тело активных сил. От активных сил
зависит только числовое значение силы реакции. В дейст-
действительности абсолютно гладких поверхностей и абсолютно
твердых тел не бывает. Все поверхности тел в той или иной
степени шероховаты и все тела деформируемы. В связи с этим
и сила реакции R шероховатой поверхности при равновесии
66
Рис. 58
тела зависит от активных сил не
только по модулю, но и по направ-
направлению (рис. 58).
Если силу реакции R шероховатой
поверхности разложить на_ составля-
составляющие, одна из которых (N) направ-
направлена по общей нормали к поверхности
соприкосновения, а другая (F) нахо-
находится в касательной плоскости к этим
поверхностям, то составляющая F си-
силы реакции является силой трения
скольжения, а составляющая N—нормальной реакцией.
В теоретической механике обычно рассматривается только
сухое трение между поверхностями тел, т. е. такое трение,
когда между ними нет смазывающего вещества. Для сухого
трения надо различать трение скольжения при покое или
равновесии тела и трение скольжения при движении
одного тела по поверхности другого с некоторой относительной
скоростью.
При покое сила трения зависит только от активных сил.
При выбранном направлении касательной в точке соприкос-
соприкосновения поверхностей тел сила трения вычисляется по формуле
F= £ FJt.
1 = 1
Аналогично, при выбранном направлении нормали нормаль-
нормальная реакция выражается через заданные силы
В 1781 г. Кулон установил основные приближенные законы
для сухого трения скольжения. В дальнейшем законы Кулона
многократно проверялись другими исследователями. Но эти
законы подтверждались в случае, когда поверхности тел не
вдавливались друг в друга и шероховатость была не очень
велика.
Законы Кулона можно установить на приборе, схема
которого дана рис. 59. На этом приборе^ изменяя вес гири,
можно изменять нормальное давление Р (или равную ему
нормальную реакцию N) между трущимися поверхностями.
Изменяя же вес гирь Q, можно изменять силу Q, которая
стремится двигать тело вдоль поверхности другого тела,
являющегося связью. Очевидно, что если сила 2 = 0, то тело
находится в равновесии и сила трения F равна нулю.
Если силу Q увеличить (при этом тело не скользит по
поверхности, а находится в равновесии), то по условию
равновесия возникает сила трения F, которая равна, но
3*
67
У/////7////Л
/////////////////
Рис. 59
противоположна активной силе Q.
Нормальная реакция N равна нор-
нормальному давлению Р. Увеличивая
силу Q при одном_ и том же нор-
нормальном давлении Р, можно достичь
и такого положения, когда ничтожно
, малое дальнейшее увеличение силы
1Q Q выведет тело из равновесия, застав-
' ляя его скользить по поверхности
связи. Очевидно, будет достигнуто
предельное положение, при котором
сила ^трения станет наибольшей и не
сможет уравновешивать силу Q при ее дальнейшем увеличении.
Изменяя силу нормального давления Р, можно исследовать,
как изменяется при этом предельная сила трения Fmax. Можно
также исследовать влияние на предельную силу трения площади
соприкосновения тел, сохраняя при этом нормальное давление,
а также влияние материала тел, характер обработки поверх-
поверхностей и другие факторы. Такие опыты позволяют проверить
законы Кулона для сухого трения скольжения.
Законы Кулона
1. Сила трения скольжения находится в общей касательной
плоскости соприкасающихся поверхностей тел и направлена
в сторону, противоположную направлению возможного или
реального скольжения тела под действием приложенных
сил. Сила трения при покое зависит от активных сил
и ее модуль заключен между нулем и максимальным
значением, которое достигается в момент выхода тела
из положения равновесия, т. е.
2. Максимальная сила трения скольжения при прочих
равных условиях не зависит от площади соприкосновения
трущихся поверхностей. Из этого закона следует, что для
того, чтобы сдвинуть, например, кирпич, надо приложить
одну и ту же силу независимо от того, какой гранью он
положен на поверхность, широкой или узкой.
3. Максимальная сила трения скольжения пропорциональна
нормальному давлению (нормальной реакции), т. е.
Faul = fN, A)
где безразмерный коэффициент / называют коэффициентом
трения скольжения; он не зависит от нормального давления.
4. Коэффициент трения скольжения зависит от материала
и физического состояния трущихся поверхностей, т. е. от
величины и характера шероховатости, влажности, температуры
68
и других условий. Коэффициент трения скольжения в зависимо-
зависимости от различных условий устанавливается экспериментально.
Так, коэффициент трения для кирпича по бетону равен 0,76; для
стали по стали — 0,15; для дуба по дубу поперек волокон — 0,54,
а для дуба по дубу вдоль волокон — 0,62.
Опыты показывают, что при скольжении одного тела по
поверхности другого с некоторой относительной скоростью
возникает сила трения скольжения, равная максимальной,
только при этом коэффициент трения скольжения незначитель-
незначительно изменяется в зависимости от скорости скольжения. Для
большинства материалов он уменьшается с увеличением скорос-
скорости скольжения, но для некоторых материалов, наоборот,
увеличивается (трение кожи о металл).
В приближенных технических расчетах обычно считают,
что коэффициент трения скольжения не зависит от относитель-
относительной скорости скольжения.
В отличие от сухого трения трение при наличии смазываю-
смазывающего слоя между поверхностями определяется распределением
относительной скорости скольжения в этом слое. В этом
случае трение происходит не между поверхностями тел, а между
слоями смазывающего вещества. Теория трения в смазываю-
смазывающем слое жидкости рассматривается в гидродинамике.
Угол и конус трения
Многие задачи на равновесие тела на шероховатой поверх-
поверхности, т. е. при наличии силы трения, удобно решать геометри-
геометрически. Для этой цели введем понятия угла и конуса трения.
Пусть твердое тело под действием активных сил находится
на шероховатой поверхности в предельном состоянии равнове-
равновесия, т. е. таком состоянии, когда сила трения достигает своего
наибольшего значения при данном значении нормальной реак-
реакции (рис. 60). В этом случае полная реакция шероховатой
поверхности R отклонена от нормали общей касательной
плоскости трущихся поверхностей на наибольший угол.
Этот наибольший угол ф между полной реакцией, построен-
построенной на наибольшей силе трения при данной нормальной реакции,
и направлением нормальной реакции называют углом трения.
Угол трения ф зависит от коэффициента трения, т. е.
tg<P = Fmax/N.
Но по третьему закону Кулона,
следовательно,
tg ф = /, B)
т. е. тангенс угла трения равен коэф-
коэффициенту трения.
Рис. 60
69
Конусом трения называют конус, описанный полной реакцией,
построенной на максимальной силе трения, вокруг направления
нормальной реакции. Его можно получить изменяя активные
силы так, чтобы тело на шероховатой поверхности находилось
в предельных положениях равновесия, стремясь выйти из
равновесия по всем возможным направлениям, лежащим в общей
касательной плоскости соприкасающихся поверхностей.
Если коэффициент трения во всех направлениях одинаков,
то конус трения круговой. Если не одинаков, то конус трения
не круговой, например в случае, когда свойства соприкаса-
соприкасающихся поверхностей различны (вследствие определенного
направления волокон или в зависимости от направления
обработки поверхности тел, если обработка происходит на
строгальном станке и т. п.).
Равновесие тела на шероховатой поверхности
При равновесии сил, действующих на твердое тело, находя-
находящееся в равновесии на шероховатой поверхности, возникает
дополнительно неизвестная сила реакции шероховатой поверх-
поверхности—сила трения. В случае предельного равновесия сила
трения достигает своего максимального значения и по формуле
A) выражается через нормальную реакцию. В общем случае
равновесия сила трения находится между нулем и ее максималь-
максимальным значением. Поэтому соответствующие условия равновесия,
в которые входит сила трения после замены ее максимальным
значением, становятся неравенствами. После этого неизвестные
находят путем совместного решения уравнений и неравенств.
Для всех неизвестных или для их части получают решения
в виде неравенств.
Некоторые задачи на равновесие с учетом сил трения
удобно решать геометрически с помощью конуса трения.
Можно сформулировать условия равновесия тела на
шероховатой поверхности используя конус трения. Если
активные силы, действующие на тело, приводятся к рав-
равнодействующей силе R(a\ то при равновесии тела на
шероховатой поверхности равнодействующая активных сил
R(a' по аксиоме о равновесии двух сил, приложенных
к твердому телу, уравновешивается полной реакцией R ше-
шероховатой поверхности (рис. 61). Полная реакция проходит
через вершину конуса, а следовательно, через вершину
конуса проходит и равнодействующая активных сил.
Очевидно, при изменении равнодействующей активных сил
тело находится в равновесии до тех пор, пока составляющая
Q равнодействующей активных сил, лежащая в общей касатель-
касательной плоскости соприкасающихся поверхностей^ не будет пре-
превышать наибольшего значения силы трения Fmax.
70
Рис. 61
Рис. 62
Предельным положением равновесия тела является случай,
когда сила Q равна силе Fmax. В этом случае равнодействующая
активных сил R(a) направлена по образующей конуса трения, так как
Р—составляющая равнодействующей активных сил по нормали —
уравновешена нормальной реакцией N, если только активные силы
не отделяют тела от шероховатой поверхности. Поэтому условие
равновесия тела на шероховатой поверхности можно сформулиро-
сформулировать так: для равновесия тела на шероховатой поверхности
необходимо и достаточно, чтобы линия действия равнодействующей
активных сил, действующих на тело, проходила внутри конуса
трения или по его образующей через его вершину (рис. 62).
Тело нельзя вывести из равновесия любой по модулю
активной силой, если ее линия действия проходит внутри
конуса трения.
Если линия действия равнодействующей активных сил не
проходит внутри конуса трения или по его образующей, то
тело на шероховатой поверхности не может находиться
в равновесии (рис. 63).
Пример 1. Тело, сила тяжести которого Р= 100 Н, удерживается в рав-
равновесии силой Т на шероховатой наклонной плоскости, имеющей угол
Рис. 63
У////////////////////////.
Рис. 64
71
наклона ос=45° (рис. 64). Коэффициент трения скольжения между телом
и плоскостью / = 0,6. Сила Т действует на тело _под углом р= 15° к линии
наибольшего ската. Определить значение силы Т при равновесии тела на
шероховатой наклонной плоскости.
Решение. К телу приложены силы N, Р, Т и сила трения F. Возможны
два случая предельного равновесия тела и соответственно два предельных
значения силы Т при двух направлениях силы трения по наклонной плоскости
вниз и вверх в зависимости от направления возможного скольжения вверх
по наклонной плоскости и вниз. Для составления уравнений равновесия
целесообразно ввести ft=kf, где к= + \.
Составляем условия равновесия в виде суммы проекций сил на координат-
координатные оси для обоих предельных случаев. Имеем
rcosp"-f-.Psinoc = 0;
По закону Кулона,
Решая эти уравнения относительно Т, получаем
T=P{sma+kfcosa)/{cosP+kfsmfi).
Отсюда при к = + 1
1(/)/(p /p)«102 H;
при к= — 1
r2 = -P(sinoc-/cosoc)/(cosp'-/sinP)«35 H.
Таким образом, сила Т при равновесии тела должна удовлетворять
условию 35=£Г=£102 Н.
Пример 2. Однородный тяжелый стержень А В длиной / опирается концом
А на гладкую вертикальную стену, а другим В—на шероховатую вертикальную
стену (рис. 65). Расстояние между стенами h<l. Определить коэффициент
трения стены /, при котором возможно равновесие стержня.
Решение. Рассмотрим случай, когда точка А расположена выше точки
В стержня. Равновесие стержня невозможно, если точка А расположена ниже
точки В. На стержень действуют сила тяжести _Р, приложенная посередине
стержня^ нормальная реакция гладкой стены NA и реакция шероховатой
стены RB, которую разложим на нормальную реакцию NB и силу трения FB.
Составим условия равновесия плоской системы сил:
£ Fix = 0; NA-NB = 0;
Рис. 65
h
fB(f.) = O; P — j\
2
К этим условиям следует добавить неравенство
для силы трения
Из уравнений равновесия находим
NA = NB = N; FB = P; N=NA = Ph /B/sina).
Из геометрических условий задачи имеем
smoe=-
Итак, для силы трения FB имеем следующие
уравнение и неравенство:
72
Исключая из них силу трения FB, после сокращения на Р получаем
Искомое условие для коэффициента трения / при равновесии стержня принимает влд
§2. ТРЕНИЕ КАЧЕНИЯ
Если рассматриваемое тело имеет форму катка и под
действием приложенных активных сил может катиться по
поверхности другого тела, то из-за деформации поверхностей
этих тел в месте соприкосновения могут возникнуть силы
реакции, препятствующие не только скольжению, но и качению.
Примерами таких катков являются различные колеса, как,
например, у электровозов, вагонов, автомашин, шарики и роли-
ролики в шариковых и роликовых подшипниках и т. п.
Пусть цилиндрический каток находится на горизонтальной
плоскости под действием активных сил. Соприкосновение катка
с плоскостью из-за деформации фактически происходит не
вдоль одной образующей, как в случае абсолютно твердых
тел, а по некоторой площадке. Если активные силы приложены
симметрично относительно среднего сечения катка, т. е. вызыва-
вызывают одинаковые деформации вдоль всей его образующей, то
можно изучать только одно среднее сечение катка. Этот
случай рассмотрен ниже.
Активные силы, действующие на катки в виде колес
(рис. 66), кроме силы тяжести Р обычно состоят из силы Q,
приложенной к центру колеса параллельно общей касательной
в точке А, и пары сил с моментом L, стремящейся катить
колесо, называемое в этом случае ведомо-ведущим. Если L = 0,
а 2#0, то колесо называют ведомым; если L^O, a Q = 0,
то ведущим. Ведомо-ведущими являются колеса локомотива,
идущего вторым в составе поезда.
Если активные силы, действующие на колесо, привести
к точке А соприкосновения катка с плоскостью, у которых
нет деформации, то в общем случае получим
силу и пару сил, стремящиеся заставить
каток скользить и катиться. Следует раз-
различать чистое качение, когда точка со-
соприкосновения А катка не скользит по непо-
неподвижной плоскости, и качение со сколь-
скольжением, когда наряду с вращением катка
есть и скольжение, т. е. точка А катка
движется по плоскости. При чистом сколь- у///////7777//7//////.
жении, наоборот, каток движется по плос-
плоскости, не имея вращения. Рис. 66
73
Ю)
Соприкосновение среднего сечения колеса с неподвижной
плоскостью из-за деформации колеса и плоскости происходит
по некоторой линии BD. По этой линии на колесо действуют
распределенные силы реакции (рис. 67). Если привести распреде-
распределенные силы к точке А, то в этой точке получим главный
вектор R этих распределенных сил с составляющими N (нор-
(нормальная реакция) и F (сила трения скольжения), а также
пару сил с моментом М. При симметричном распределении
сил по линии BD относительно точки А момент М пары
сил равен нулю. В этом случае нет активных сил, стремящихся
катить каток в каком-либо направлении._
Приведем активные силы (Ff\ F%\ ..., F^]) в общем случае
к^ точке А. В этой точке получим главный вектор этих сил
/?<а) и пару сил, момент которой равен главному моменту
L (рис. 68).
При равновесии катка, т. е. когда каток не катится и не
скользит по плоскости, активные силы уравновешиваюся сила-
силами реакций связи и, следовательно,
-Л = Л(в)= X F\a); -M = L= X MA(F\a)).
Изменив активные силы, приложенные к катку так, чтобы
увеличивался момент L пары активных сил, стремящейся
катить каток. Пока каток находится в равновесии, увеличива-
увеличивается и равный ему по числовой величине, но противоположный
по направлению момент М пары сил, препятствующий качению
катка и возникающий от действия на каток неподвижной
плоскости. Наибольшее значение М достигается в момент
начала качения катка по плоскости.
Установлены следующие приближенные законы для наи-
наибольшего момента пары сил, препятствующей качению:
1. Наибольший момент пары сил, препятствующей ка-
качению, в довольно широких пределах не зависит от радиуса
катка.
74
2. Предельное значение момента Мтлх пропорционально
нормальному давлению, а следовательно, и равной ему
нормальной реакции N:
Л/тах = §ЛГ. C)
Коэффициент пропорциональности 8 называют коэффициен-
коэффициентом трения качения при покое или коэффициентом трения второ-
второго рода. Из формулы C) следует, что 8 имеет размерность длины.
3. Коэффициент трения качения 8 зависит от материала
катка, плоскости и физического состояния их поверхностей.
Коэффициент трения качения при качении в первом приближе-
приближении можно считать не зависящим от угловой скорости качения
катка и его скорости скольжения по плоскости. Для случая
качения вагонного колеса по стальному рельсу коэффициент
трения качения 8 «0,5 мм.
Законы трения качения, как и законы трения скольжения,
справедливы для не очень больших нормальных давлений и не
слишком легко деформирующихся материалов катка и плоскости.
Эти законы позволяют не рассматривать деформации катка
и плоскости, считая их абсолютно твердыми телами, касающи-
касающимися в одной точке. В этой точке соприкосновения в среднем
сечении катка кроме нормальной реакции и силы трения надо
приложить еще и пару сил, препятствующую качению.
Коэффициент трения качения равен длине d, которую
вычислим следующим образом. Сложим нормальную реакцию
N с парой сил, препятствующей качению в момент, когда
М=Мтах. Получим ту же силу N, но сдвинутую параллельно
самой себе на расстояние
d=MmaJN=8N/N=b.
В предельном случае равновесия катка d=b. Эту величину
следует отложить в направлении, в котором активные силы
стремятся катить каток (рис. 69).
Для того чтобы каток не скользил, необходимо выполнение
условия
\F\<Fmilx = fN. D)
Для заданных активных сил соответственно
i= I
Для того чтобы каток не катился, должно выполняться
условие
|M|<Mmax = 8iV. E)
Для активных сил оно имеет вид
\-м\ = \ £ мл{Р\а))\<мтлх.
1=1
75
Рис. 70
Для примера рассмотрим случай ведомого колеса, к ко-
которому кроме силы тяжести Р приложена еще горизонтальная
активная сила Q (рис. 70).
Если каток находится в равновесии, то из условий равнове-
равновесия плоской системы сил, приложенных к катку, получаем
F = Q; N = P; rQ=M,
где за моментную точку взята точка А.
В случае отсутствия скольжения по формуле D) с учетом
условий равновесия
Q=F**fP.
Аналогично, при отсутствии качения по формуле E) имеем
Таким образом, при отсутствии скольжения сила Q должна
удовлетворять условию Q </Р, а при отсутствии качения эта
же сила Q — удовлетворять другому условию:
Q<P
Если д/г </, то, пока Q <-Л каток находится в равновесии.
Если fP >Q~Z-P, то каток катится без скольжения (чистое
качение). При Q ^fP кроме качения появляется еще и скольжение.
При 5/г >/ каток находится в равновесии, пока Q </Р. Если
с»
-Р >Q >fP, он скользит не вращаясь (поступательное движе-
движение). При Q^-P наряду со скольжением возникает качение.
В том случае, если -=/, каток находится в равновесии,
пока Q ^P =fP. Если же Q^-P =fP, то он катится со
скольжением.
76
Обычно S/r <§cf и, следовательно, для начала качения катка
требуется значительно меньшая сила Q, чем для начала его
скольжения. Поэтому по мере увеличения силы Q каток
сначала начинает катиться, а при дальнейшем ее росте
к качению добавляется еще и скольжение.
С точки зрения затраты энергии выгодно заменять скольже-
скольжение качением. Этим объясняется преимущество шариковых
и роликовых подшипников по сравнению с подшипниками
скольжения, если даже в них трение и не уменьшается
введением смазывающего вещества.
Аналогично трению качения можно рассмотреть и явление
возникновения так называемого трения верчения, т. е.
случая, когда активные силы стремятся вращать тело, например
в форме шара, вокруг нормали к общей касательной поверх-
поверхности соприкосновения.
В этом случае возникает пара сил, препятствующая верче-
верчению, причем наибольший ее момент, возникающий в момент
начала верчения, также прямо пропорционален нормальной
реакции. Коэффициент пропорциональности, т. е. коэффициент
трения верчения, обычно значительно меньше коэффициента
трения качения.
ГЛАВА 7
ЧАСТНЫЕ СЛУЧАИ ПРОСТРАНСТВЕННЫХ СИСТЕМ
СИЛ.
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
§ 1. ИЗМЕНЕНИЕ ГЛАВНОГО МОМЕНТА
ПРИ ПЕРЕМЕНЕ ЦЕНТРА ПРИВЕДЕНИЯ
При перемене центра приведения векторные моменты сил
изменяются, так как изменяются радиусы-векторы их точек
приложения. Вследствие этого изменяется главный_ момент.
Оценим изменение главного момента системы сил (jpl5 F2, F3,
..., Fn). Пусть система сил приведена к центру О и получены
в этой точке главный вектор R и главный момент Lo (рис. 71).
Выберем в качестве центра приведения другую точку Ох
и вычислим главный момент Lo рассматриваемой системы
сил. Так как
{Flt F2, ..., Fn)^(R,L0),
то для получения главного момента Lo достаточно привести
к новому центру систему (R, Ео). Силу R из точки О перенесем
в точку О у. Получим в этой точке силу RX=R и, согласно
теореме о параллельном переносе силы, присоединенную пару
сил с векторным моментом Мо (R). Векторный момент пары
77
сил Lo, вычисленный относительно
точки О как вектор свободный,
можно приложить в любой точке
тела. Новый главный момент от-
относительно точки О у по правилу
сложения пар сил является вектор-
ной_ суммой моментов Lo
и MOi(R), т.е.
Рис 71 LOi-Lo=M0i{R). A)
По формуле для векторного момента силы имеем
MOi =ОХ6 х R = -ООХ х R.
С учетом этого формула A) примет вид
LOl=L0-Od[xR. B)
Итак, главный момент системы сил при перемене центра
приведения изменяется на векторный момент главного вектора
R, приложенного в старом центре приведения, относительно
нового центра приведения Оу.
§ 2. ИНВАРИАНТЫ СИСТЕМЫ СИЛ
Инвариантами в статике называются такие величины для
рассматриваемой системы сил, которые не изменяются при
изменении центра приведения. Одним из инвариантов является
главный вектор, так как в любом центре приведения он
выражается векторной суммой системы_ сил. Если в одном
центре приведения О главный вектор R, а в другом Ох он
Ri, то
*=*!• C)
Таким образом, главный вектор системы сил является вектор-
векторным инвариантом. Для одной и той же системы сил он не
зависит от выбора центра приведения.
Из векторного равенства C) следует, что равны модули
и проекции главных векторов на любые оси координат, т. е.
R=Ai> Rx — ^ix> ^у = ^1у> ^z — ^iz- C)
Для получения второго, скалярного, инварианта используем
формулу B):
LOi=Lo-0d[xR.
Умножая обе части этого равенства скалярно на jR1; причем
в правой части при умножении вместо Rlf согласно C),
возьмем R, получим
LOiR^LoR-{6o xR)R,
78
или
LOiR^LoR, D)
так как смешанное произведение век-
векторов, содержащих два одинаковых мно-
множителя R, равно нулю, т. е.
(Од[ xR) R=0.
Соотношение D) является вторым ска-
скалярным инвариантом: скалярное произве- Рис- 72
дение главного момента на главный вектор не зависит от центра
приведения. Второй скалярный инвариант можно выразить
в двух других эквивалентных формах, если раскрытьскалярное
произведение векторов в D). Обозначая проекции Ьо на оси
координат через Llx, Lv , Llz, а проекции Lo — соответственно
через Lx, Ly, Lz, второй инвариант можно выразить в форме
y + L2Rz. D')
Кроме гого, формуле D) можно придать вид
j = Loi? cosa,
где_ах— угол между векторами Lo и /?l5 а a — между Lo
и R (рис.72). После сокращения на Rl=R получим
Lo coso^ =Locosa. D")
В этой форме второй инвариант утверждает, что проекция
главного момента на направление главного вектора не зависит
от центра приведения.
Если главный момент в каждом центре приведения разло-
разложить на две взаимно перпендикулярные составляющие, одна
из которых направлена по главному вектору, то, учитывая,
что главные векторы в различных центрах приведения парал-
параллельны, согласно D"), получим
L'ox=L'o, _ E)
где L'o —составляющая главного момента Lo по направле-
направлению главного вектора /?ь а Е'о—составляющая главного
момента Lo по направлению главного вектора R. Соотношение
E) является следствием первого и второго инвариантов.
Рассмотренные инварианты C) и D) являются независимыми,
т. е. из одного не следует другой. Комбинируя эти инварианты,
можно получить другие, зависящие от них инварианты.
§ 3. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПРОСТРАНСТВЕННОЙ
СИСТЕМЫ СИЛ
Произвольная система сил приводится к силе, равной
главному вектору R, и паре сил, векторный момент которой
равен главному моменту Ьо. В зависимости от их модулей
79-
и взаимного направления, т. е. угла а между
ними, можно произвести дальнейшие упро-
упрощения. _
_ Приведение к паре сил. Если Я=0,
Lo Ф 0, то система сил приводится к одной
паре сил, причем главный момент в этом
случае, согласно B), не зависит от выбора
центра приведения. В рассматриваемом слу-
случае оба инварианта системы сил равны
нулю, т. е.
Рис. 73 £=0; LoR=0.
Приведение к равнодействующей. Возможны два
случая.
_ 1^Если /?#0, LOi = 0 (первый инвариант Я#0, второй —
Lo- R = 0), то система приводится к равнодействующей силе
/?*, равной по модулю и направлению главному вектору R, т. е.
R' = R.
Линия действия равнодействующей силы в этом случае прохо-
проходит через центр приведения. _ _
2. Если Д#0, ЬофЪ, но а = 90°, т.е. L0LR (первый
инвариант Я#0, второй — LoR = 0), то система сил тоже
приводится к равнодействующей, причем опять
R* = R.
Но линия действия равнодействующей силы R* отстоит от
центра приведения на расстоянии d—L0\R. Действительно,
в_ этом случае имеем силу и пару сил с векторным моментом
Lo, причем силы пары можно считать расположенными в одной
плоскости с силой R^ так как векторный момент пары
перпендикулярен силе R (рис. 73). Поворачивая и перемещая
пару сил в ее плоскости, а также изменяя силы пары и ее
плечо, при сохранении векторного момента можно получить
одну из сил пары R', равной по модулю, но противоположной
по направлению главному вектору R. Другая сила пары R*
и будет равнодействующей силой. Действительно,
(Л, L0)c\d{R, R', R*)csd(R*), {R*) = R,
так как система двух равных по модулю, но противоположных
по направлению сил [R, R')coO и может быть отброшена.
Таким образом, рассматриваемая система сил оказалась эквива-
эквивалентной одной равнодействующей силе R*, которая по модулю
и направлению совпадает с главным вектором R. Плечо пары
сил (R', R*) определяется из условия
d=L0/R,
так как R = R' = R*. Отрезок d определяет кратчайшее расстоя-
расстояние от центра приведения О до линии действия равнодейству-
80
Рис. 74 Рис. 75
ющей силы R*. Первый случай является частным случаем
второго, когда за центр приведения О взята точка, расположен-
расположенная на линии действия равнодействующей силы.
Приведение к дин^ме. Динамой_в _механике называют
такую совокупность силы F и пары сил [F1, F\), действующих на
твердое тело, у которой сила перпендикулярна плоскости действия
пары сил (рис. 74). Используя векторный момент М пары сил (Fl5
F\\ можно также определить динаму как совокупность силы
и пары, у которых сила параллельна векторному моменту пары сил
(рис. 75). Сила F и векторный момент пары сил М могут быть
направлены как в одну, так и в противоположные стороны.
_ Рассмотрим теперь случай, в котором В.Ф0, Ьоф0 и векторы
Lo и R не перпендикулярны. В этом случае оба инварианта
не равны нулю, т. е.
КфО, Е
Покажем, что система сил в этом случае приводится к динаме,
причем элементами динамы являются сила R1 = R имомент
пары Lj=Locosa, где a — угол между векторами Lo и R.
Действительно, после приведения системы сил_ к центру
О получим главный вектор R и главный момент Lo. Косинус
угла а между ними можно определить выражая скалярное
произведение векторов Lo и R в двух формах:
LoRocosa. = LxRx + LyRy + LzRz;
cosa = -
y Ry
x Rx -\- L,v Rv -\- L R
LnR
Разложим главный момент^ Lo на две взаимно перпендикуляр-
перпендикулярные составляющие Lt и L2, одна из которых L1 направлена
по главному вектору R (рис. 76). Имеем
F)
R
Векторный момент пары сил L2 перпендикулярен главному
вектору R. Такая система силы R и пары с моментом L2
приведется к одной силе R1 = R, линия действия которой
находится от точки О на расстоянии
81
,_L2 _Losin<x
f - #
p D
G)
Рассматриваемая система сил за-
заменилась эквивалентной системой сил,
состоящей из силы Rx и пары сил
с векторным моментом Lx, который
как свободный вектор можно пере-
перенести из точки О в любую точку,
в том числе и точку Ох на линии
действия силы R1. Кратко результат
можно выразить в форме
(R, LO)^(RU ГД
причем система сил (j?b Lt) является динамой. Сила Лх
и векторный момент пары Ll есть элементы динамы:
^. (8)
Рис. 76
R
Линия, по которой направлена сила динамы, Ru называется
центральной винтовой осью. Во всех точках винтовой
оси, принятых за центры приведения, система сил приводится
к одной и той же динаме. Расстояние от центра приведения
О до центральной винтовой оси
d=LosinajR.
Если брать за центры приведения точки на поверхности
цилиндра, осью которого является центральная винтовая ось,
то главные моменты относительно таких центров будут
одинаковы по модулю и составляют одинаковый угол с об-
образующими цилиндра. Эти главные моменты состоят из
одного и того же момента Lx, входящего в состав динамы,
и моментов L2, перпендикулярных Lx и по числовой величине
пропорциональных расстоянию центра приведения от централь-
центральной винтовой оси.
Совокупность сил, образующих динаму, можно заменить
двумя скрещивающимися силами. Для этого следует одну из
сил пары R" совместить с точкой
приложения силы Rt и сложить
с этой силой (рис. 77).
Рассмотрены все возможные слу-
случаи, кроме_ случая равновесия систе-
системы сил (R = 0, Lo = 0), рассмотрен-
рассмотренного ранее. Таким образом убеди-
убедились, что только при обращении
в нуль главного вектора и главного
момента система может находиться
Рис. 77 в равновесии, т. е. обращение в нуль
82
главного вектора и главного момента не только необходимо
для равновесия системы сил, но и достаточно.
Из рассмотрения частных случаев приведения систем сил
следует., что при приведении системы сил к равнодействующей
силе R эта сила равна и параллельна главному вектору R.
Но линия действия равнодействующей может не проходить
через центр приведения, в котором приложен главный вектор.
Если главный вектор не равен нулю, то равнодействующей
может и не быть, если система приводится к динаме.
§ 4. УРАВНЕНИЕ ЦЕНТРАЛЬНОЙ ВИНТОВОЙ ОСИ
Предположим, что в центре приведения,_ принятом за
начало координат, получены главный вектор R с проекциями
на оси координат Rx, Ry, Rz и главный момент Lo с проекциями
Lx, Ly, Lz. При приведении системы сил к центру приведения
Ох (рис.78) получается динама с главным вектором R1 = R
и главным моментом LOi. Векторы LOi и /?,, как образующие
динаму, параллельны и поэтому могут отличаться только
скалярным множителем к0. Имеем
Lo=k0R, _
так как Rx = R. Главные моменты L
удовлетворяют соотношению
_ (9)
Oi и Lo, согласно B),
. B')
Подставляя LOi из B') в (9), получим
Lo-OOlxR = k0R. (9')
Координаты точки Ot, в которой получена динама, обозначим
х, у, z. Тогда проекции вектора 001 на оси координат равны
координатам х, у, z. Учитывая это, (9') можно выразить в форме
к
(Lxi+Lyj+LZE)-
Rx
J
У
R»
R.
= ko(Rxi+Ryj+R,k~),
(9")
где i, j, к — единичные векторы
осей координат^ а векторное произ-
произведение OOt xR представлено опре-
определителем. Векторное уравнение
(9") эквивалентно трем скалярным,
которые после отбрасывания к0
можно представить в виде
Lx-{yRz-zRy)_Ly-(zRx-xRz)_
_Lz-{xRy-yRx)
A0)
Рис. 78
83
Линейные уравнения A0) для координат
х, у, z являются уравнениями прямой
линии — центральной винтовой оси. Сле-
Следовательно, существует прямая, в точках
которой система сил приводится к ди-
наме.
Пример 1. По ребрам куба с длиной стороны
/=3 м действуют силы Fx =FZ=2_H, _F3 = 1 Н
(рис. 79). Привести систему сил F1; F2, F3 к про-
простейшему виду.
Решение. Выберем точку О — начало коор-
координат— за центр _ приведения сил и вычислим
главный вектор R и главный момент Lo. Для
проекций этих векторов на оси координат имеем:
Величины главного вектора и главного момента имеют значения
Определим угол а между векторами Ео и R. Для этого образуем их
скалярное произведение, которое выразим в двух следующих формах:
или
Отсюда получаем cos ос = 0, т. е. векторы Lo и R перпендикулярны. Система
сил в этом случае приводится к равнодействующей, которая по величине
и направлению равна главному вектору, т.е. R* = R, й'=Л=ЗН.
Кратчайшее расстояние от точки О (рис. 80) до линии действия равнодейст-
равнодействующей вычислим по формуле
d=L0/R = 6,8/3 «2,3 м.„
Пример 2. К балке А В, один конец которой
заделан в сечении _А, в точке В приложена
вертикальная сила Р (рис. 81, а). К балке АВ
в сечении С под прямым углом жестко прикреп-
прикреплена балка CD. В концевом сечении балки
CD в плоскости, параллельной координатной
плоскости Ауг, действует пара сил с моментом
М = Ра. Размеры тел и направление вращения
пары сил указаны на рисунке. Определить силу
и момент пары сил в заделке.
Решение. Рассматриваемые вместе балки
АВ и CD освобождаем от связей. Заделка для
пространственной системы сил создает неиз-
неизвестную силу RA с проекциями на оси коор-
координат ХА, YA, ZA и пару сил с векторным
моментом МА, проекции которого на коор-
Рис. 80
динатные оси — МА
М
Ау>
МАг (рис. 81,6).
84
м
Рис. 81
В общем случае имеем шесть неизвестных. Для их определения составляем
шесть условий равновесия пространственной системы сил. При проецировании
сил на оси координат пары сил учитывать не надо, так как сумма проекций
пары сил на любую ось равна нулю. В уравнения равновесия для моментов сил
относительно осей координат следует включать проекции векторных моментов
пар сил на эти оси. Для удобства проецирования пару сил в концевом сечении
балки CD представим ее векторным моментом М, который в рассматриваемом
случае направлен по балке CD параллельно оси Ах.
Составляем условия равновесия:
=0; ХА=0-
Fi) = 0; MAx-P-2a + M=Q;
Учитывая, что М=Ра, имеем:
Задача считается решенной, если
определены проекции неизвестных си-
силы RA и момента пары сил МА на
какие-либо прямоугольные оси коор-
координат.
Пример 3. Изогнутый под прямым
углом стержень ABDC находится
в горизонтальной плоскости. Стер-
Стержень закреплен с помощью подпят-
подпятника А и подшипника В (рис. 82).
На стержень под прямым углом жест-
жестко насажен диск радиуса Л = 0,5 м.
В плоскости диска по касательной
действует сила S под углом у = 30°
к вертикали. В точке С стержня
приложена сила Р = 20 кН под углом
а = 60" к вертикали и углом E = 60°
к линии СК, которая находится
в плоскости Axz.
Рис. 82
85
Определить силы реакций подпятника и подшипника, а также значение
силы S, необходимой для равновесия, если /, = 1 м, 12 = \ м, /3 = 0,5 м, /4=1>5 м.
Решение. Рассмотрим равновесие стержня А В DC вместе с диском. На
эту систему тел действуют силы Р, S; реакция в подпятнике_с составляющими
ХА, YA, ZA; реакция в подшипнике с составляющими Хв и YB, которые
предполагаем направленными в положительные стороны осей координат.
Составим шесть условий равновесия для сил. Для проекций сил на оси
координат имеем:
SFU = O; Хл + Хв- Psinasmfi- Ss'my = 0;
IF,-,=O; YA+YB+Pcosa-Scosy = 0; J> (а)
EFi2 = 0; Z/4-PsinacosC = 0.
При определении проекций силы Р на оси координат предварительно
раскладываем ее на две перпендикулярные составляющие, одна из которых
параллельна оси О у и имеет проекцию на эту ось Ру = Pcos a. Перпендикулярная
составляющая расположится в плоскости Axz и будет иметь величину
проекции на эту плоскость
Силу Рхг как вектор проецируем на оси координат Ах и Az. Имеем
Рх= -Pxzsin$= -Psinasin C;
Л, = PX2cos p = Psin acos p.
Для моментов сил относительно осей координат получаем:
-Psinacosp/4-Psinasinp(/1+/2 + /) = 0; '
T.M2(F,) = 0; -
При вычислении момента силы относительно оси координат, согласно
определению, проецируем силу на плоскость, перпендикулярную оси, и затем
вычисляем момент проекции силы относительно точки пересечения оси
с плоскостью. Силы, параллельные оси или ее пересекающие, дают моменты
относительно этой оси, равные нулю. При определении момента силы
S относительно осей координат раскладываем ее на составляющие, параллель-
параллельные осям координат, вычисляем на основании теоремы Вариньона моменты
каждой из составляющих относительно соответствующих осей координат
и складываем их алгебраически. Значения составляющих сил равны проекциям
этих сил на оси координат и щ. можно взять из уравнений (а). Аналогично
вычисляются моменты силы Р.
Решая систему линейных уравнений (а) и (б) относительно проекций
неизвестных сил, можно определить все неизвестные силы.
Подставляя в уравнения (а) и (б) заданные значения сил, расстояний
и углов, получим:
86
-S-0,5 + 20---l,5 = 0.
Решая эту систему уравнений, имеем:
5=30 кН; Хв = 32,6кН; Хл = 2,ЬкН;
YB = 0,5 кН; Гл = 15,4кН.
§5. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПРОСТРАНСТВЕННОЙ
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
В отличие от произвольной системы сил пространственная
система параллельных сил не приводится к динаме, так как
для нее главный вектор и главный момент в общем случае
взаимно перпендикулярны. Для доказательства этого рассмот-
рассмотрим пространственную систему параллельных сил, для которой
главный вектор и главный момент не равны нулю. Выберем
за центр приведения точку О — начало декартовой системы
координат, ось Oz которой направим параллельно силам
(рис. 83). Тогда проекции главного вектора на оси координат
так как параллельные силы перпендикулярны этим осям. Только
проекция главного вектора на ось Oz в общем случае не равна
нулю. Она равна алгебраической сумме параллельных сил, т. е.
i = 1
i=l
Следовательно, главный вектор R параллелен оси Oz.
Для проекций главного момента на оси координат имеем:
L =
Ly=
Проекция главного момента на ось
Oz равна нулю, так как каждая сила
параллельна этой оси.
Таким образом, главный момент
расположен в плоскости Оху, перпен-
перпендикулярной главному вектору, направ-
направленному по оси Oz. В этом случае
система сил приводится к равнодейст-
равнодействующей.
Для системы параллельных сил воз-
возможны следующие частные случаи при-
приведения:
LZ=
i = i
Рис. 83
87
— система приводится к паре сил;
R^O, Го = 0
или
КфО, Е0ФО
— система приводится к равнодействующей силе;
— имеем равновесную систему сил.
Если главный вектор не равен нулю, то система параллель-
параллельных сил приводится только к равнодействующей силе, парал-
параллельной главному вектору и равной ему по величине.
§6. ЦЕНТР СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
Для систем параллельных сил, приводящихся к равнодейст-
равнодействующей, введем понятие центра параллельных сил. Для
этого предположим,_ что на твердое тело действует система
параллельных сил (Ft, F2, ..., Fn), приводящаяся к равнодейст-
равнодействующей, силы которой приложены в точках Аг, А2, ..., Ап.
При введении понятия центра параллельных сил считаем силы
приложенными в точках твердого тела. При переносе сил
вдоль линий действия положение центра параллельных сил
изменяется. _
Определим линию действия равнодействующей R* парал-
параллельных сил для заданного направления этих сил. Затем через
точки приложения параллельных сил проведем взаимно парал-
параллельные оси, перпендикулярные силам. Повернем параллельные
силы вокруг этих осей на общий угол в одном и том же
направлении (рис. 84). Получим новую систему параллельных
сил (F\, F'2, ...,_F'n). Равнодействующая 3fofi системы парал-
параллельных сил R*' равна по модулю равнодействующей силе
R*, так как при повороте числовые значения параллельных
сил не изменялись. _ _
Линии действия двух равнодействующих сил R" и R*'
пересекутся в точке С, которая и называется центром параллель-
параллельных сил. Если равнодействующую силу R* приложить в точке
С вместо С\, то при повороте заданных параллельных сил
(Fi, F2, .... Fn) на угол а она повернется на тот же угол
а вокруг оси, проходящей через точку С и параллельной
осям, вокруг которых поворачиваются заданные параллельные
силы. Оси поворота параллельных сил должны быть перпен-
перпендикулярны параллельным силам.
Центр параллельных сил не зависит от угла поворота
и направления параллельных осей, вокруг которых поворачива-
поворачиваются параллельные силы. Из определения центра параллельных
сил следует, что его положение за-
зависит от точек приложения парал-
параллельных сил. Поэтому параллельные
силы следует считать приложенными
в точках твердого тела.
Получим формулу для определе-
ния радиуса-вектора центра парал-
параллельных сил, если известны парал-
параллельные силы и радиусы-векторы
точек их приложения. Для этого
выберем единичный вектор /, парал-
параллельный силам. Тогда каждая из
параллельных сил
где Ft— алгебраическое значение силы. Оно положительно,
если сила Ft направлена в одну сторону с единичным вектором
Т, и отрицательно, если направление силы противоположно
направлению единичного вектора.
Для равнодействующей силы параллельных сил соответ-
соответственно имеем
Рис. 84
Так как система параллельных сил, по предположению,
приводится к равнодействующей, то к ней можно применить
теорему Вариньона относительно точки О:
п
(И)
Для векторных моментов сил относительно точки О имеем
M0{R*) = rcxR* = FcxTt F-, M0{Fl) = fixFi = 7ixlFi,
где гс — радиус-вектор центра параллельных сил, проведенный
из точки О; гг — радиус-вектор точки приложения силы Ft,
проведенный из той же точки (рис. 85).
Если подставить эти значения векторных моментов сил
в A1), то после переноса всех слагаемых в левую часть
равенства и вынесения за скобку общего множителя / получим
i = i i = i
Так как центр параллельных сил, а следовательно, и его
радиус-вектор не зависят от направления_ параллельных сил,
характеризуемого единичным вектором /, то условие AГ)
должно выполняться при любом направлении этого вектора.
89
Это возможно только при об-
обращении в нуль векторной вели-
величины, стоящей в скобках, т. е.
1 = 1
;= 1
или
'c=Z ^
По формуле A2) определяют
рис 85 радиус-вектор центра параллель-
параллельных сил, если заданы эти силы
и их точки приложения.
Так как алгебраические значения параллельных сил входят
в числитель и в знаменатель A2), то гс не зависит от того,
какое из двух направлений параллельных сил считается по-
положительным.
В проекциях на оси координат из A2) получаем:
= Z X
п
iFil Z
Z Ft'>
zc=Y,ziFilY,Fi- A3)
i=i i=i
По формулам A3) вычисляют координаты центра парал-
параллельных сил хс, ус, zc, если известны алгебраические значения
параллельных сил Ft и координаты точек приложения этих
СИЛ X;, yh Z;.
Векторную величину
называют статическим моментом системы параллельных сил
относительно точки О. Алгебраические величины
называют статическими моментами относительно координат-
координатных плоскостей. Для плоской системы параллельных сил,
расположенных, например, в плоскости Оху, вводят понятие
статических моментов относительно осей координат Ох и Оу
по формулам
и и
Статические моменты параллельных сил относительно точки
и координатных плоскостей определяются по единому правилу:
90
алгебраические значения сил умножают на расстояния от
точек приложения сил до точки или плоскости и результаты
суммируют. Расстояния от точек приложения сил до координат-
координатных плоскостей есть величины скалярные; это соответствующие
координаты этих точек. Расстояния от точки О до точек
приложения параллельных сил берутся векторные. Ими являют-
являются радиусы-векторы точек приложения параллельных сил,
проведенные из точки О.
§7. ЧАСТНЫЕ СЛУЧАИ РАВНОВЕСИЯ
ТВЕРДОГО ТЕЛА
Равновесие твердого тела с двумя
закрепленными точками
Твердое тело с двумя закрепленными точками А и В имеет
неподвижную ось вращения, проходящую через эти точки.
Пусть тело находится в равновесии под действием приложенных
сил (Ft, F2, ..., Fn). Освободим тело от связей, приложив
в закрепленных точках А и В, рассматриваемых как шаровые
шарниры без трения,_не известные по модулю и направлению
силы реакций RA и RB. Эти силы разложим на составляющие,
параллельные осям координат ХА, YA, ZA и Хв, YB, ZB, и для
освобожденного от связей тела составим шесть условий
равновесия сил. Обозначив А В через h (рис. 86), получим:
Fiy+YA+YB =
= 0; X М
i=l i = 1
Пять первых уравнений содержат
неизвестные реакции закрепленных то-
точек, поэтому их называют уравнениями
равновесия. В последнее (шестое) ура-
уравнение входят только заданные силы
и не входят неизвестные силы реакций.
Такие соотношения, которым должны
удовлетворять при равновесии тела
только одни заданные силы, называют
условиями равновесия. Тело в рас-
рассматриваемом' случае имеет одну степень
свободы, оно может только вращаться
вокруг оси Oz (ось АВ). Приложенные
силы удовлетворяют тоже одному
Рис. 86
91
условию равновесия. Сумма моментов заданных сил относительно
оси Oz обращается в ноль. В остальном приложенные силы могут
быть любыми. Изменяя систему приложенных сил так, чтобы они
удовлетворяли при этом условию равновесия, получим в соответ-
соответствии с уравнениями равновесия каждый раз свои силы реакций.
Неизвестных реакций шесть, а уравнений для их определения
только пять и, следовательно, только пять неизвестных можно
определить. Из рассмотрения уравнений равновесия убеждаем-
убеждаемся, что нельзя по отдельности определить ZA и ZB, можно
определить только их сумму ZA + ZB. Задача нахождения сил
реакций является статически неопределимой. Для того чтобы
ее сделать статически определимой, в одной из точек вместо
шарового следует установить цилиндрический шарнир. Если
цилиндрический шарнир поместить в точке А, то ZA = 0, так
как реакция цилиндрического шарнира перпендикулярна его
оси; в рассматриваемом случае перпендикулярна оси Oz. После
этого неизвестных реакций останется только пять. Столько
же уравнений имеется для их определения.
Твердое тело с одной закрепленной точкой
Тело с одной закрепленной точкой имеет три степени
свободы. Оно, например, может вращаться вокруг каждой из
трех осей координат, проходящих через закрепленную точку.
Если твердое тело с одной закрепленной точкой А, принимае-
принимаемой за шарнир, освободитьот этой связи, то для составляющих
силы ^реакций связи Хл, YA, ZA и приложенных к телу сил
(Fx, F2, ..., Fn) можно составить следующие шесть условий
(рис. 87):
В этом случае имеем три уравнения равновесия с тремя
неизвестными. Задача статически определима. Приложенные
силы удовлетворяют тоже трем условиям равновесия, т. е.
равны нулю суммы моментов приложенных сил относительно
каждой из трех осей координат. В эти условия не входят
неизвестные силы реакций. Существует много разных систем
сил, удовлетворяющих этим трем условиям. Для каждой из
таких систем приложенных сил получим свои реакции связи.
В рассмотренных двух случаях число условий равновесия,
которым должны удовлетворять заданные силы при равновесии
92
твердого тела, совпало с числом степе-
степеней свободы этого тела. Это справед-
справедливо и для свободного твердого тела,
у которого шесть степеней свободы
и соответственно шесть условий равно-
равновесия для сил. При изучении аналитичес-
аналитической статики, которая излагается вместе
с аналитической динамикой (в одной
главе), увидим, что число степеней сво-
свободы не только для твердого тела, но
и для механических систем совпадает
с числом условий равновесия для задан- рис 87
ных сил, если связи, наложенные на систему, удовлетворяют
некоторым специальным условиям.
ГЛАВА 8
ЦЕНТР ТЯЖЕСТИ
При рассмотрении движения тел, особенно таких, как
самолеты, ракеты, космические корабли, важное значение имеет
понятие центра тяжести.
§ 1. ОПРЕДЕЛЕНИЯ И ФОРМУЛЫ ДЛЯ ВЫЧИСЛЕНИЯ
ЦЕНТРОВ ТЯЖЕСТИ
Для введения понятия центра тяжести разобьем мысленно
рассматриваемое тело на достаточно большое число малых
по сравнению с телом или элементарных его частей произ-
произвольной формы. Силу тяжести элементарной частицы тела
с индексом i от действия на нее Земли обозначим через ДР;,
а силу тяжести всего тела — через Р. Силы тяжести элемен-
элементарных частиц тела направлены приближенно к центру Земли,
т. е. образуют систему сходящихся сил. Если размеры рас-
рассматриваемого тела малы по сравнению с размерами земного
шара, то силы тяжести элементарных частиц тела можно
считать системой параллельных сил, направленных в одну
сторону. Центром тяжести тела называют центр системы
параллельных сил, которую приближенно образуют силы тя-
тяжести его элементарных частиц.
Радиус-вектор центра тяжести тела гс вычисляем как
радиус-вектор центра параллельных сил (рис. 88) по формуле
£ г-.др,. £ г-др,.
г —' = 1 —i=1 A)
£ АР,. Р
1=1
93
Рис.
где гi—радиус-вектор точки при-
приложения силы тяжести элементар-
элементарной части тела, принятой за точку;
APt—сила тяжести элементарной
п
частицы; Р= £ APt—сила тяжести
;= 1
всего тела; п — число частей, на
которое мысленно разбито все те-
тело. Центр тяжести является точкой
приложения равнодействующей си-
силы тяжести, если силы тяжести
отдельных его частей считать системой параллельных сил.
Если в A) перейти к пределу, увеличивая число элементар-
элементарных частей п до бесконечности, то после замены АР{
дифференциалом dP, а суммы — интегралом получим
'-^, <п
где г — радиус-вектор элементарной части тела, принятой за
точку. В проекциях на оси координат из A) и (Г) получаем:
и
I
1=1
р '
Ус
[zdP
Р '
где xc, yc, zc — координаты центра тяжести; xt, уь z{ — коорди-
координаты точки приложения силы тяжести APt.
Используя понятие центра тяжести тела, введем понятие
его центра масс. Силы тяжести элементарных частей тела
и всего тела можно выразить через их массы Лт; и М и ускоре-
ускорение силы тяжести g с помощью формул
, P=Mg.
Подставляя эти значения сил тяжести в A) и (Г) после сокращения
на g, которое принимаем одинаковым для всех частей тела, имеем
I'V
и соответственно
и м
Гс м~
B)
B')
По формулам B) и B') определяют радиус-вектор центра
масс тела. Центр масс обычно определяют независимо от
центра тяжести как геометрическую точку, радиус-вектор
94
которой вычисляется по формулам B) или B'). В проекциях
на оси координат из B) и B') получаем:
м ' -^ м ' и м
и
\хАт \уАт \zArn
где хс, ^с, zc—координаты центра масс тела.
Для однородного тела силу тяжести элементарной частицы
тела и ее массу можно вычислить по формулам
где Аи,- — объем элементарной частицы тела; yv и р^ — соответ-
соответственно удельный вес и плотность тела. Сила тяжести и масса
всего тела
P=yvv, M=pvv,
где v — объем тела. Подставляя эти значения в B) и B'),
после сокращения на yv и pv соответственно получим формулы
_
Гс~
по которым определяют центр тяжести объема тела.
Если тело имеет форму поверхности, т. е. один из размеров
мал по сравнению с двумя другими, как, например, у тонкого
листа железа, то имеем
AP; = YSAS,., P = ysS,
где ys — удельный вес; А5; — площадь элементарной частицы
поверхности; S—площадь всей поверхности. После сокращения
на ys для однородной поверхности получим следующие
формулы для определения центра тяжести ее площади:
Для однородных тел типа проволоки, у которых два
размера малы по сравнению с третьим, можно определить
радиус-вектор центра тяжести длины линии по формулам
гс. 'с,
где А/. — длина элемента линии; /—общая длина линии, центр
тяжести которой определяется.
95
§2. МЕТОДЫ ОПРЕДЕЛЕНИЯ ЦЕНТРОВ ТЯЖЕСТИ
(ЦЕНТРОВ МАСС)
1. Метод симметрии. При определении центров тяжести
широко используется симметрия тел. Докажем, что для
однородного тела, имеющего плоскость симметрии, центр
тяжести находится в плоскости симметрии. Для доказатель-
доказательства выберем начало координат в плоскости симметрии тела
и одну из осей координат, ось Oz направим перпендикулярно
плоскости симметрии, а две других оси расположатся в плос-
плоскости симметрии (рис. 89). Каждая частица массой Дт;,
находясь по одну сторону плоскости симметрии, имеет сим-
симметричную частицу такой же массы по другую сторону этой
плоскости. Координаты хь yi у симметричных частиц одинако-
одинаковы при сделанном выборе осей координат, а координаты по
оси Oz отличаются только знаком. Для координаты центра
масс zc имеем следующее выражение:
я
Разбивая сумму в числителе на две по симметричным частям
тела, получаем, что
= 0,
м
так как симметричные части тела 1 и 2 одинаковы.
Таким образом, центр масс расположен в плоскости
симметрии и для его определения достаточно вычислить
только две его координаты хс и ус в этой плоскости.
Аналогично доказывается, что для однородного тела, имею-
имеющего ось или центр симметрии, центр масс находится соответ-
соответственно на оси симметрии или в центре симметрии.
2. Метод разбиения на части (метод
группировки). Некоторые тела сложной
формы можно разбить на части, цен-
центры тяжести которых известны или
предварительно могут быть определе-
определены. В таких случаях центры тяжести
сложных тел вычисляются по общим
формулам, определяющим центр тя-
тяжести, только вместо элементарных
частиц тела берутся его конечные ча-
части, на которые оно разбито. Покажем
это на частном примере плоской фи-
фигуры, изображенной на рис. 90. Плос-
Рис. 89 кую фигуру можно разбить на три
96
части, центры тяжести которых
Си С2 и С3 известны. Они находят-
находятся на пересечении диагоналей пря-
прямоугольников. Их радиусы-векторы
обозначим г у, г 2, гъ и площади
Sy, S2, Si,. Общая площадь сложной
фигуры будет S = Sy + S2 + S3.
Используя определение центра ,/
тяжести и производя группировку
слагаемых под знаком суммы по Рис- 90
частям фигуры, на которые она разбита, получим
r,AS,
B)
C)
Радиусы-векторы центров тяжести частей тела выразятся
в такой форме:
ИЛИ
A) B) C)
Используя эти формулы для радиуса-вектора всей фигуры,
имеем
имеем
г г —
^ '
Полученная формула имеет ту же структуру, что и формула,
определяющая радиус-вектор центра тяжести тела при разбие-
разбиении его на элементарные частицы, только в нее входят
величины для конечных частей тела.
3. Метод отрицательных масс. Видоизменением метода раз-
разбиения на части является метод отрицательных масс. Проил-
Проиллюстрируем его тоже на примере плоской фигуры (рис. 91).
Для определения центра тяжести этой
фигуры ее можно разбить на три
части. Можно поступить по-другому.
Для этого дополним нашу фигуру до
прямоугольника и примем, что этот
прямоугольник с площадью St и цен-
центром масс Су полностью заполнен
массой (имеет положительную пло-
площадь). На той части фигуры, которую ^
добавили, следует распределить от-
отрицательную массу (отрицательную Рис. 91
4 Заказ 192
97
площадь) той же плотности. Площадь этой фигуры с от-
отрицательной массой обозначим S2, а ее центр масс — С2.
Применяя метод разбиения на части, радиус-вектор заданной
фигуры определим по формуле
с
...
1 '
В отличие от обычного метода разбиения на части в формуле
D) массы и, следовательно, площади входят со знаком минус.
Метод отрицательных масс особенно удобен при вычислении
положения центров тяжести тел, имеющих отверстия.
§ 3. ЦЕНТРЫ ТЯЖЕСТИ ПРОСТЕЙШИХ ТЕЛ
Для определения центров тяжести тел сложной формы
методом разбиения на части или методом отрицательных масс
необходимо уметь вычислять центры тяжести простейших тел, на
которые разбивается тело сложной формы. Рассмотрим некото-
некоторые из тел, для определения центров тяжести которых известны
простые способы их нахождения или вычисления по формулам.
1. Прямолинейный отрезок. Центр тяжести прямолинейного
однородного отрезка располагается на его середине, а неодно-
неоднородного— на самом отрезке и не может находиться вне отрезка.
2. Площадь треугольника. Для определения центра тяжести
площади треугольника разобьем его прямыми линиями, парал-
параллельными одной из его сторон AD, на полоски, которые
в пределе можно принять за прямолинейные отрезки (рис. 92).
Центры тяжести отрезков и, следовательно, полосок находятся
посередине полоски. Все они расположатся на медиане CtB.
В пределе центры тяжести полосок непрерывно покроют
медиану, но не равномерно, так как площади полосок разные.
В каждом центре масс полоски следует считать сосредоточенной
массу или площадь этой полоски, пропорциональную длине
полоски, если ширину полосок выбирать одинаковой.
Затем разобьем треугольник на по-
полоски прямыми линиями, параллельны-
параллельными другой стороне А В треугольника.
Центры их тяжести в пределе покроют
неравномерно медиану C2D. Центры
тяжести неоднородных прямолинейных
отрезков СХВ и C2D должны распола-
располагаться на этих отрезках, а следователь-
следовательно, в точке их пересечения С, явля-
являющейся точкой пересечения медиан тре-
треугольника. Эта точка делит медианы
в отношении 1 к 2, т. е. если длина
медианы СХВ равна /, то С1С=1/31,
Рис. 92 СВ=2/31.
3. Дуга окружности. Дуга окру-
окружности А В определяется радиусом
R и стягиваемым ею центральным
углом 2 а (рис. 93). Она имеет ось
симметрии, делящую угол пополам.
Центр тяжести находится на оси
симметрии дуги, которую примем
за ось координат Ох. Координату
центра тяжести дуги А В вычисляем
по формуле
ОС
ОС=хс,
f jcd/
Рис. 93
В рассматриваемом случае
l=R-2a, x = Rcosq>, d/=/?d(p.
Подставляя эти значения в формулу для хс, получим
_ R .
— I j\ vwo u/u\u — —— Sill CD
Л-2а Y Y 2а Y
Таким образом,
= — Fsina — sin( — a)l = 7?^^.
2a L \ /j a
OC = R
sina
E)
Для полуокружности a = -. Приняв п = —, получим:
я/2
4. Площадь кругового сектора. Центр тяжести площади
кругового сектора с радиусом R и центральным углом 2 а находится
на оси симметрии, принимаемой за ось Ох (рис. 94). Разобьем
сектор на элементарные треугольники
одинаковой величины. Центры тяжести
треугольников в пределе при увеличении
их числа до бесконечности равномерно
покроют дугу окружности радиусом
r = ~R. Используя формулу для центра
тяжести дуги окружности, получим
Рис. 94
4*
99
или
3 a
к
F)
22
Для площади полукруга а = -, sina=l. При тс = — получим
7l/z 371 ii
5. Объем пирамиды и конуса. Определим положение центра
тяжести объема конуса (рис. 95). Для простоты рассмотрим
прямой конус, у которого высота является осью симметрии.
Высотой конуса является отрезок, соединяющий его вершину
О с центром тяжести площади основания Q. Выберем начало
координат в вершине конуса, а ось Oz направим по оси
симметрии конуса. Тогда центр тяжести объема конуса располо-
расположится на оси Oz.
Разобьем конус плоскостями, перпендикулярными оси Oz,
на элементарные тонкие диски толщиной dz и площадью Sz.
Все полученные сечения (диски) конуса подобны его основанию.
Координату zc центра тяжести объема конуса вычислим по
формуле
_\zdv
zc —.
Отношения линейных размеров сечений к соответствующим
размерам основания конуса пропорциональны их расстояниям
до вершины конуса. Отношения площадей пропорциональны
квадратам расстояний. Приняв OC^-h, получим
Рис. 95
3Uh. G)
Таким образом, центр тяжести пря-
прямого конуса находится на расстоянии
3/4/г от вершины или 1/4А от основания.
100
Это справедливо для объема любого конуса и любой пира-
пирамиды, как прямых, так и наклонных, т. е. центр тяжести
объема пирамиды или конуса находится на расстоянии 1/4
расстояния от центра тяжести площади основания до вершины.
6. Объем полушара. Полушар имеет ось симметрии, которую
примем за координатную ось Ох (рис. 96). Разобьем объем
полушара на элементарные диски толщиной dx и радиусом
у, который является координатой точки окружности, которая
получилась от пересечения полушара с координатной плос-
плоскостью Оху. Уравнение этой окружности
где R — радиус полушара. Для координаты центра тяжести
объема полушара имеем
пг-х х -
где х — координата центра тяжести элементарного диска. Объем
полушара
Объем элементарного диска
dv = nr2dx = ny2d x = n(R2 — х2) dx,
так как радиус диска г—у. Выполняя интегрирование в пределах
от х = 0 до x = R, получим
]n{R2-x2)xdx
Таким образом, центр тяжести объема полушара находится
от его центра на расстоянии
U- (8)
Это расстояние меньше половины радиуса
полушара.
Пример. Определить координаты центра тяжести
площади плоской фигуры, имеющей размеры, указан-
указанные на рис. 97.
Решение. Присоединим к заданной фигуре до-
дополнительно полукруг 3 и разобьем полученную
фигуру на прямоугольник / и треугольник 2. По-
Получили три фигуры, две из которых имеют поло-
положительные площади (прямоугольник / и треугольник
2) и одна—отрицательную (полукруг 3). В выбранной
системе координат для координат центра тяжести
заданной фигуры имеем
Рис. 96
101
l,=20
\ V
"Ч,
г.
-чс
i
i
) У
N.
^\
/ 1\ \
Рис. 97
Рис. 98
i "T »^2"^2
Ус — '
(a)
где xu >>,; x2, y2; x3, уъ—координаты центров тяжести отдельных фигур;
St, S2, S3 — площади этих фигур.
Вычислим площади и координаты центров тяжести отдельных фигур,
учитывая рис. 98. Имеем:
S, =40 -60 = 2400 см2;
= --40-30 =
см2; S3 = -Kr2 = ~ «353,2 см2;
1 1 40
; yi=20 см; д;2 = 60+--30=70 см; >>2 = --40=— см; хъ =20+ 15 = 35 см;
/ 2 sina\ 60
>'з= h — г =40 «33,6 см,
\ 3 a ) Ътг
так как а=—.
Подставляя полученные значения в (а), получим:
72000 + 42000-12 362
2646,8
48 000+12000-11857,5
= 2646,8
= 38,4 см;
= 18,2 см.
РАЗДЕЛ II
КИНЕМАТИКА
ВВЕДЕНИЕ
В кинематике изучается движение материальных объектов
(точки, твердого тела, сплошной среды) без рассмотрения причин,
вызывающих или изменяющих это движение. Такое изучение
движения материальных объектов не требует учета материальных
характеристик этих объектов — массы, моментов инерции и др.
В кинематике рассматривают такие характеристики движе-
движения, как скорость и ускорение точки, угловые скорость
и ускорение твердого тела и др.
Движение материальных объектов, в частности материаль-
материальной точки, совершается в пространстве при изменении времени.
Пространство в классической механике считается эвклидовым,
не зависящим от времени и движущихся в нем материальных
объектов. Время принимается универсальным, не связанным
с пространством и не зависящим как от движения наблюдателя,
с точки зрения которого рассматривается движение материаль-
материального объекта, так и от движения самого материального объекта.
Движение материального объекта всегда следует рассматри-
рассматривать относительно какого-либо твердого тела — тела отсче-
отсчета, т. е. движение является относительным. С телом
отсчета скрепляют систему осей координат, например декарто-
декартовых, принимая ее за систему отсчета, относительно
которой рассматривается движение материального объекта.
Системой отсчета для трехмерного эвклидова пространства
не может служить одна точка, линия или плоскость, а должны
быть три оси, не обязательно прямолинейные, но не лежащие
в одной плоскости.
Независимость времени от движения означает, что во всех
системах отсчета, произвольно движущихся друг относительно
друга, оно одно и то же, если за начало отсчета выбрано
общее для них событие.
В кинематике сплошной среды телами отсчета, относительно
которых рассматривается движение, могут быть также дефор-
деформируемые тела.
В курсе теоретической механики обычно изучаются движение
точки и твердого тела. Соответственно кинематика делится
на кинематику точки и кинематику твердого тела. В настоящем
курсе дополнительно излагаются также основы кинематики
сплошной среды.
103
ГЛАВА 1
КИНЕМАТИКА ТОЧКИ
В кинематике точки рассматриваются характеристики движе-
движения точки, такие, как скорость, ускорение, и методы их
определения при различных способах задания движения. Важ-
Важным в кинематике точки является понятие траектории. Траек-
Траекторией точки называется геометрическое место ее последова-
последовательных положений в пространстве с течением времени относи-
относительно рассматриваемой системы отсчета.
По виду траекторий движения точки делятся на прямо-
прямолинейные и криволинейные. Форма траектории зависит от
выбранной системы отсчета. Одно и то же движение точки
может быть прямолинейным относительно одной системы
отсчета и криволинейным относительно другой. Например,
если с летящего горизонтально Земле с постоянной скоростью
самолета отцеплен груз, то, пренебрегая сопротивлением
воздуха и учитывая только действие силы тяжести, получим
в качестве траектории движения центра масс груза от-
относительно самолета прямую линию, а относительно Земли —
параболу.
§ 1. СКОРОСТЬ ТОЧКИ
Одной из основных характеристик движения точки является
ее скорость относительно выбранной системы отсчета, которая
изображена в виде декартовой прямоугольной системы коорди-
координат (рис. 1).
Положение движущейся точки М относительно рассматри-
рассматриваемой системы отсчета определяется в момент времени
t радиусом-вектором г, который соединяет неподвижную точку
О с этой точкой. В другой момент времени t1 = t + At
движущаяся точка займет положение М1 и ее радиусом-
вектором будет гг. За время At радиус-вектор движущейся
точки изменится на Ar = ri — г.
Средней скоростью tJcp точки за
время At называют отношение Ar/At,
т. е.
vcp = Ar/At.
Средняя скорость параллельна век-
вектору Аг. В общем случае она зависит
от времени осреднения At. У нее нет
конкретной точки приложения на тра-
траектории.
Введем скорость точки
г; в момент t, которая определяется
104
М
Рис. 1
как предел средней скорости, если промежуток времени, за
который определяется средняя скорость, стремится к нулю, т. е.
v= lim vcp= lim
ЛГ—0 ЛГ^О
Скорость точки направлена в сторону ее движения по
предельному направлению вектора Аг при А?, стремящемся
к нулю, т. е. по предельному направлению секущей ММХ,
которая совпадает с касательной к траектории в точке М.
Таким образом, скорость точки равна первой производной по
времени от ее радиуса-вектора. Она направлена по касательной
к траектории в сторону движения точки.
Начало радиуса-вектора движущейся точки можно выбрать
в любой неподвижной точке. На рис. 1 представлен случай,
в котором радиусом-вектором является также р с началом
в точке О'. Радиусы-векторы г и р имеют одинаковые
изменения Аг и Ар за время At и поэтому
v = dr/dT=dp/dt. A)
Размерность скорости в СИ получаем из A):
[v ] = длина/время = м/с.
Часто скорость выражают в км/ч; км/ч = 3,6 v м/с.
Для характеристики переменного вектора используют поня-
понятие его годографа. Годографом вектора называют геометричес-
геометрическое место его концов, если переменный вектор в различные
моменты времени откладывать от одной и той же общей точки.
Траектория точки, очевидно, является годографом ради-
радиуса-вектора г или р (рис. 1). Последовательные положения
вектора г в различные моменты времени откладываются
в этом случае от точки О, а вектора р — от точки О'.
Первая производная по времени от радиуса-вектора есть
скорость точки, направленная по касательной к траектории.
Следовательно, параллельно касательной к годографу направле-
направлена первая производная по скалярному аргументу от любого
переменного вектора.
Годографом вектора скорости является линия, на которой
располагаются концы этого вектора в различные моменты
времени, если их начала совместить в одной общей точке.
Для построения годографа вектора скорости выбираем точку,
например О1 (рис. 2,6), и начала векторов скорости для
различных моментов времени переносим в эту точку, не
изменяя их величин и направлений. Каждой точке траектории
М (рис. 2, а) будет соответствовать своя изображающая точка
М' на годографе вектора скорости (рис. 2,6). Масштаб для
скоростей при построении годографа вектора скорости может
быть выбран отличным от масштаба для скоростей, изображае-
изображаемых в точках траектории. При движении точки по траектории
соответствующая ей изображающая точка движется по годогра-
годографу вектора скорости.
105
Рис. 2
При равномерном движении точки по прямой годографом
вектора скорости является одна точка; при неравномерном
движении — отрезок прямой, параллельный траектории.
§ 2. УСКОРЕНИЕ ТОЧКИ
Пусть движущаяся точка М в момент времени t имеет
скорость v. В момент времени tl = t + At эта точка занимает
положение Мх, имея скорость v1 (рис. 3,а). Чтобы изобразить
приращение скорости At; за время At, перенесем вектор
скорости vt параллельно самому себе в точку М.
Средним ускорением точки аср за время At называют
отношение Av/At, т. е. acp = Av/At. Среднее ускорение точки
параллельно приращению скорости AtJ. Как и средняя скорость,
среднее ускорение не имеет на траектории конкретной течки
приложения и изображено в точке М условно. В общем
случае среднее ускорение зависит от времени At.
Ускорением точки а в момент времени t называют
предел, к которому стремится среднее ускорение при At,
стремящемся к нулю, т. е.
а= lim #CD = lim At;/A/ = dt;/d/. B)
ЛГ-^О
М
ср
51
Рис. 3
106
Таким образом, ускорение точки равно первой производной по
времени от скорости точки.
Приращение скорости Av и, следовательно, среднее ускоре-
ускорение направлены внутрь вогнутости траектории. Так же направ-
направлены и их предельные значения при At, стремящемся к нулю.
Поэтому ускорение точки направлено тоже внутрь вогнутости
траектории. Кроме того, ускорение как первая производная
по времени от скорости, по свойству годографа вектора,
параллельна касательной к годографу вектора скорости
(рис. 3,6).
Размерность ускорения в СИ получаем из B):
[а ] = [v ]/ [t ] = скорость/время = м/с2 = м • с~2.
§ 3. ВЕКТОРНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Движение точки относительно рассматриваемой си-
системы отсчета при векторном способе изучения движе-
движения задается радиусом-вектором F этой точки (рис. 4).
Движение точки считается заданным, если известен
радиус-вектор движущейся точки как функция време-
времени, т. е.
r = f(t). C)
Задание векторного уравнения движения C) пол-
полностью определяет движение точки.
Траекторией точки является годограф радиуса-вектора.
Скорость точки направлена по касательной к траекто-
траектории и вычисляется, согласно ее определению, по фор-
формуле
v = dr/dt = r. D)
Для ускорения точки соответственно имеем
= r. E)
Таким образом, если движение точки за-
задано векторным способом, то скорость
и ускорение вычисляются по формулам
D) и E).
Определение скорости и ускорения точ-
точки сводится к чисто математической задаче
вычисления первой и второй производных
по времени от радиуса-вектора этой точки.
Для практического вычисления скорости
и ускорения обычно используют коорди-
координатный и естественный способы изучения
движения. Векторный способ ввиду его
краткости и компактности удобен для тео-
теоретического изложения кинематики точки.
М
Рис. 4
107
§ 4. КООРДИНАТНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Задание движения и траектория
Движение точки можно изучать используя любую систему
координат. Рассмотрим случай декартовых прямоугольных
осей координат, которые являются также системой отсчета,
относительно которой рассматривается движение точки. Движе-
Движение точки в декартовых координатах считается заданным,
если известны координаты точки как непрерывные, дважды
дифференцируемые функции времени (рис. 5), т. е. заданы
уравнения движения точки в декартовых коор-
координатах:
x=fM y=fi{t), z=f3{t). F)
Уравнения движения точки в декартовых координатах пол-
полностью определяют движение точки. Они позволяют найти
положение точки, ее скорость и ускорение в любой момент
времени. Уравнения движения F) есть также уравнения
траектории точки в параметрической форме. Пара-
Параметром является время t. Уравнения траектории в ко-
координатной форме из F) получают исключением парамет-
параметра t. Исключая время, например, из первых двух уравнений
и затем из второго и третьего, получим уравнения двух
поверхностей:
Это и есть уравнения траектории в координатной форме.
Траекторией является линия пересечения двух поверхностей.
Эти поверхности являются цилиндрическими, так как их
уравнения не содержат одной из координат: первое — координа-
координаты z, второе — координаты х. Ось первой цилиндрической
поверхности параллельна оси Oz, второй — оси Ох.
Исключая время из уравнений движения в другом порядке,
получим траекторию точки как линию пересечения двух других
цилиндрических поверхностей, например
F1(x,y) = 0, F3(x, z) = 0.
При исключении параметра t из
уравнений движения могут быть
получены отрезки линий или точки,
которые не содержатся в уравне-
уравнениях F). Эти дополнительные точ-
точки не следует считать точками
7-тг траектории.
JL
Пример. Даны уравнения движения точ-
точпо плоскости
Рис. 5
= bsmzkt, y = ccos2kt,
(a)
108
где />, с, к — положительные постоянные вели-
величины. Определить уравнение траектории в ко-
координатной форме.
Решение. Уравнения движения (а) есть
уравнения траектории точки в параметрической
форме с параметром (. Исключим его из
уравнений движения. Для этого достаточно
сложить правые и левые части уравнений,
разделив предварительно первое уравнение на
Ь, а второе -- на с. Получим
x/b+y/c=\, (б)
так как
sin2 kt+cos2 kt=\.
Рис. 6
Уравнение (б) есть уравнение прямой, отсекающей на осях координат
отрезки Ь и с (рис. 6).
Из уравнений (а) следует, что координаты точки х и у все время
положительны и удовлетворяют условиям х^Ь, у^с, т. е. они могут изменяться
только в пределах 0<.*</>, О^у^с. Точки прямой, для которых х>Ь и у>с,
не содержатся в уравнениях движения (а). Они дополнительно появились
при исключении из уравнений параметра /. Их не следует включать
в траекторию.
Траектория точки М0М в координатной форме выражается уравнением
и двумя неравенствами:
xjb+y/c=l,
Скорость в декартовых координатах
Разложим радиус-вектор и скорость точки на составляющие,
параллельные осям координат (рис. 7). Получим
F=xT+yJ+zJc; v = vj+vj+vzk, G)
где х, у, z—координаты точки М; i, j, к — единичные век-
векторы осей координат; vx, vy, vz — проекции скорости на оси
координат.
Учитывая G), согласно определению скорости, имеем
v = dr/dt = (d/dt) (xT+ yj+ zk) = хТ+ yj+ zk, (8)
так как /, j, к не изменяются при движении точки М. Точки
над х, у, z означают их производные по времени. Сравнивая
G) и (8), получаем для проекций скорости на декартовы оси
координат следующие формулы:
vx = dx/dt = x; vy-dy/dt=y; v2 = dz/dt = z. (9)
Проекция скорости точки на какую-либо координатную ось
равна первой производной по времени от соответствующей
координаты этой точки. По проекциям определяют числовое
значение (модуль) скорости и косинусы углов вектора скорости
с осями координат:
= \v
^ = у/'х2 +у2 + z2; cos(t;, x) = vjv = x/v^
_л
= vy/v=y/v; cos(t;, z) = vz/v = z/v.
A0)
109
0
X
Рис.
t
М
1
V
* X
Рис. 8
Если точка движется в плоскости,
то, выбрав оси координат Ох и Оу
в этой плоскости, получим:
z=const = 0, vz = z = 0, vx = x, vy=y;
v^xT+yj.
Соответственно
v = sfx2+y2; cos(iJ, x) = x/v;
cos(iJ, y)=y/v.
Для прямолинейного движения
точки координатную ось, например
Ох, направляют по траектории (рис.
8). Тогда j = const = 0 и z=const = 0,
у = 0, i = 0. Проекция скорости и ее
модуль определяются по формулам
v =х v — \x\
Уравнение годографа вектора скорости
Известны уравнения движения точки в декартовых координа-
координатах. Получим уравнения годографа вектора скорости. На
рис. 9, а изображены траектория точки и несколько векторов
скорости в выбранном масштабе для различных моментов
времени, а на рис. 9,6 представлен годограф вектора скорости
этого движения. Точке М(х, у, z) на траектории соответствует
точка Ml(x1,y1,zl) на годографе вектора скорости.
Координаты точки Ми согласно определению годографа,
выражаются через проекции вектора скорости на оси координат
0\х\У\2\ по формулам
Если оси координат для годографа вектора скорости парал-
параллельны соответствующим осям координат, относительно кото-
которых заданы уравнения движения точки, то
61
Рис. 9
ПО
Параметрические уравнения годографа вектора скорости прини-
принимают такую форму:
Исключая из этих уравнений параметр t, получим уравнения
годографа вектора скорости в координатной форме.
Годограф вектора скорости дает наглядное представление
о скоростях движущейся точки в разные моменты времени.
Он также позволяет определить направление вектора ускорения,
так как ускорение параллельно касательной к годографу
вектора скорости.
Ускорение точки в декартовых координатах
Разложим ускорение точки на составляющие, параллельные
осям декартовой системы координат. Получим
a = axi+ayj+azk, A1)
где ах, ау, az— проекции ускорения на координатные оси.
Согласно определению ускорения и формулам G) и (8), имеем
a = dv/dt = (d/dt)(vxT+vJ+vJc) = (dvx/dt)T+(dvy/dt)J+
+ (dvz(dt)k = x7+yj+zJc. A2)
Сравнивая A1) и A2), получаем формулы для проекций
ускорения на оси декартовой системы координат:
ax = dvxjdt = x; ay = dvy/dt = y; az = dvjdt = z A3)
Проекция ускорения на какую-либо координатную ось равна
второй производной по времени от соответствующей координа-
координаты движущейся точки.
Числовое значение ускорения и косинусы углов вектора
ускорения с осями координат определяем по формулам
a = \a\ = j a2x + a2y+a2z=J х2 +у2 + z2;
cos (a, х) = ах/а = х/а; cos (а, у) = ау/а=у/а;
cos (а, z) = az/a = z/a.
При движении точки по плоскости оси Ох и Оу выбирают
в этой же плоскости. Тогда z = const = 0, az = z = 0. Формулы
для ускорения и его проекций на оси координат примут вид
а = хТ+у/, ах = х; ау=у.
Соответственно
y2; cos(a, x) = x/a; cos(a*y)=y/a.
Для прямолинейного движения ось Ох направим по
траектории точки. Тогда j = const = 0, z = const = 0 и ау = у = О,
111
Рис. 10
az = z = 0. Формулы для ускорения и его проекции на ось
Ох принимают вид
а = хТ; ах — х.
Соответственно для числового значения ускорения имеем
а = \х\.
Пример. Движение точки по плоскости Оху задано уравнениями
y = dcosmt,
где b, d и ш — постоянные положительные величины. Определить уравнение
траектории в координатной форме, значения скорости и ускорения точки
в момент времени г=к/Bш), а также уравнение годографа вектора скорости.
Решение. Уравнение траектории в координатной форме находим исключе-
исключением времени из уравнений движения. Для этого поделим первое уравнение
на Ь, второе — на d, возводим в квадрат и складываем. Получаем уравнение
эллипса (рис. 10, а) с полуосями Ь и d:
x2/b2+y2/d2=l,
так как
sin2w( + cos2(o(= 1.
При ( = л/B(о) точка имеет координаты х = Ь, у = 0, т. е. занимает положение
Мо. Определим проекции скорости и ускорения на оси координат. Имеем:
, vy=y= —dmsinoit,
= — а2у.
ах = х= — ba2$тШ= —а>2х, ау=у= —
Для момента времени ( = тг/B(о) получаем:
!), = 0, !),,= — rfco, v =
ax=—b<x>2, ay = 0, a = Ja2x
По проекциям устанавливаем направление скорости по касательной
к траектории и направление ускорения по радиусу-вектору к точке О.
Изображаем эти векторы в точке Мо и дополнительно в точках М и М1.
Если выбрать для годографа вектора скорости оси Oix1 и О1ух
параллельными осям Ох и Оу, то для его текущих координат имеем
Исключая из этих параметрических уравнений годографа вектора скорости
время t, получим следующее его уравнение в координатной форме:
На рис. 10,6 отмечены три изображающие точки годографа М'о, М'
и М\, соответствующие точкам траектории Мо, М и Л/,, а также указаны
направления ускорения в этих точках.
112
§ 5. ЕСТЕСТВЕННЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Естественный способ задания движения
При естественном способе задания движения задаются
траектория и закон движения точки по траектории. Движение
точки рассматривается относительно фиксированной системы
отсчета. Задание траектории относительно выбранной системы
отсчета осуществляется различными способами: уравнениями
(возможно, вместе с неравенствами), словесно или в виде
графика (в каком-либо масштабе). Например, можно сказать,
что траекторией автомобиля, принимаемого за точку, является
дуга окружности радиусом 10 км и т. д.
Для задания закона движения точки по траектории необхо-
необходимо выбрать на траектории точку О, принимаемую за
начало отсчета расстояний (рис. 11). Расстояния в одну
сторону от точки О по траектории считаются положительными
(например, вправо), в другую — отрицательными. Кроме того,
следует задать начало отсчета времени. Обычно за / = 0
принимают момент времени, в который движущаяся точка
проходит через точку О, или момент начала движения.
Время до этого события считается отрицательным, а после
него — положительным.
Если в момент времени t движущаяся точка занимает
положение М, то закон движения точки по траектории задается
зависимостью от времени расстояния s, отсчитываемого от
точки О до точки М, т. е. s=f(t). Эта функция должна быть
непрерывной и дважды дифференцируемой. Расстояние s берет-
берется по траектории, какой бы сложной ни была форма
траектории. Это расстояние не имеет прямого отношения
к пройденному точкой пути за время t, так как за начало
отсчета расстояний может быть выбрана, в частности, и конеч-
конечная точка пути. К тому же движение точки может быть
колебательным вокруг начальной точки О.
От задания движения в декартовых координатах можно
перейти к его заданию естественным способом. Закон движения
точки по траектории в дифференциальной форме через декарто-
декартовы координаты выражается в виде
и после интегрирования — в конечной
форме
t'JL.
о
о
если
x=fM У=Ш, z=f3(t).
За начало отсчета расстояний принята точка траектории,
в которой находится движущаяся точка в начальный момент
времени. Знак у квадратного корня определяется выбором
направления положительных и отрицательных расстояний.
Скорость точки при естественном способе
задания движения
Пусть движение точки задано естественным способом, т. е.
заданы траектория точки и закон ее движения по траектории
s=f(t). Вычислим скорость точки. Для этого используем
радиус-вектор г движущейся точки, начало которого находится
в неподвижной точке О1 (рис. 12). При движении точки ее
радиус-вектор изменяется с течением времени, а следовательно,
он изменяется в зависимости от расстояния. Используя опреде-
определение скорости, имеем
dr dr ds df .
d( ds dt ds '
или v = st, где t = dr/ds. Вектор x направлен по касательной
к траектории как производная от вектора по скалярному
аргументу и является единичным вектором. Модуль этого
вектора равен единице, как предел отношения длины хорды
| Аг | к длине стягивающей ее дуги | As | при стремлении ее
к нулю.
Единичный вектор х всегда направлен по касательной
к траектории в сторону возрастающих (положительных) рас-
расстояний независимо от направления движения точки. При
ds>0 направления векторов х и dr совпадают. Вектор dr
в этом случае направлен в сторону возрастающих расстояний.
Если точка движется в сторону убывающих расстояний, то
ds<0 и направления векторов х и dr противоположны. Но
вектор df направлетт в сторону убывающих расстояний, а сле-
следовательно, вектор х опять направлен
в сторону возрастающих расстояний.
При s>0 вектор скорости направлен
по х, т. е. в сторону возрастающих рас-
расстояний; при s<0 он имеет направление,
противоположное х, т. е. в сторону убыва-
ющих расстояний.
Величина vz = s называется алгебраичес-
алгебраической скоростью точки. Ее можно считать
проекцией скорости на положительное на-
направление касательной к траектории, со-
совпадающее с направлением единичного век-
Рис. 12 тора х.
114
Естественное задание движения точки полностью определяет
скорость точки по величине и направлению. Алгебраическую
скорость находят дифференцированием по времени закона
изменения расстояний. Единичный вектор т определяют по
заданной траектории.
Геометрические понятия. Дифференцирование
единичного вектора
Радиус кривизны и соприкасающаяся плоскость. В точке
М кривой линии проведем касательную Мх (рис. 13). В другой
близкой точке кривой М15 отстоящей от точки М на расстоянии
As, построим касательную М1х1. В общем случае пространст-
пространственной кривой касательные А/т и М1х1 будут скрещиваться.
Проведем в точке М прямую линию А/т'ь параллельную
A/jTj. Угол Аф между линиями Мх и Мх'{ называется углом
смежности. Кривизной кривой к в точке М называют предел,
к которому стремится угол смежности, приходящийся на
единицу расстояния As, причем As стремится к нулю, т. е.
к= lim A(p/As = d(p/d?.
Радиусом кривизны кривой р в точке М называют величину,
обратную кривизне кривой в этой точке, т. е.
р= \/k = ds/dq>.
Вычислим радиус кривизны дуги окружности радиусом
R (рис. 14). Дуга окружности длиной s, опирающаяся на
центральный угол ср, выражается зависимостью s — R<p. Для
радиуса кривизны имеем
т. е. для окружности радиус кривизны в каждой ее точке
один и тот же и совпадает с радиусом окружности.
Участок кривой из малой окрестности какой-либо ее точки
лучше всего аппроксимирует по сравнению с дугами других
окружностей элемент дуги окружности, радиус которой равен
радиусу кривизны кривой в рассматриваемой точке.
м
Рис. 13
Рис. 14
115
Спр. пл.
Норм, пл.
р. пл.
Для определения понятия сопри-
соприкасающейся плоскости прово-
проводим вспомогательную плоскость через
две пересекающиеся прямые Мх
и A/x'i (см. рис. 13). Предельное по-
положение этой плоскости при совпаде-
совпадении в пределе точки Мх с точкой
М называется соприкасающейся плос-
плоскостью кривой в точке М.
В случае плоской кривой сопри-
соприкасающейся плоскостью для всех то-
1 чек кривой является сама плоскость,
в которой расположена эта кривая.
Рис 15 Естественный трехгранник. Постро-
Построим в точке М кривой линии естественные оси этой
кривой (рис. 15). Первой естественной осью является касатель-
касательная Мх. Ее положительное направление совпадает с направ-
направлением единичного вектора касательной х, направленного
в сторону возрастающих расстояний.
Перпендикулярно касательной Мх располагается нор-
нормальная плоскость кривой. Нормаль, расположенная в со-
соприкасающейся плоскости, называется главной нормалью Мп.
Она является линией пересечения нормальной плоскости с со-
соприкасающейся плоскостью. По главной нормали внутрь
вогнутости кривой направим единичный вектор п. Он определя-
определяет положительное направление второй естественной оси.
Нормаль, перпендикулярная главной нормали, называется
бинормалью. Единичный вектор_Ь, направленный по бинормали
так, чтобы три вектора х, п и b образовывали правую систему
осей координат, определит положительное направление третьей
естественной оси.
Три взаимно перпендикулярные оси Мх, Мп и Mb, положи-
положительные направления которых совпадают с направлениями
единичных векторов х, п, Ь, называются естественными осями
кривой. Эти оси образуют в точке М естественный
трехгранник. При движении точки по кривой естественный
трехгранник движется вместе с точкой как твердое тело,
поворачиваясь вокруг вершины, совпадающей с движущейся
точкой.
Дифференцирование единичного вектора. Вычислим производ-
производную от единичного вектора по скалярному аргументу. В ки-
кинематике точки скалярными аргументами обычно являются
время и расстояние по траектории. В качестве единичного
вектора выберем х, направленный по касательной к траектории,
и вычислим его производную по времени.
Производная df/dt перпендикулярна самому единично-
единичному вектору х. Для доказательства этого используем тож-
тождество
116
т-х=1.
Дифференцируя по времени обе части
этого тождества, получим
2х 0.
At
Каждый из сомножителей этого выраже-
выражения не равен нулю, поэтому векторы
dxjdt и х перпендикулярны друг другу.
Это справедливо для любого другого
вектора, числовая величина (модуль) которого постоянна.
Направим по вектору dx/dt единичный вектор п. Тогда
dx/dt = \dx'dt\n. A4)
Годографом вектора х является кривая, расположенная на
сфере единичного радиуса, так как единичный вектор изменя-
изменяется только по направлению (рис. 16).
По определению модуля производной от вектора имеем
Рис. 16
,. S Ax |
= hm -—-.
дг—>o I A( |
Длина малой хорды | Ах | с точностью до малых величин
более высокого порядка равна длине дуги, которую стягивает
хорда, т. е.
|Ах| = 1-|АФ|,
где Аф — угол, опирающийся на эту дугу. Используя это
выражение, получим
■ • I Ах [
= hm -—-
Af—О I А(
= lim
|Аф| |dq>|
Подставляя это значение в A4) и используя выражение для
радиуса кривизны и переменную s, получим
dx
dT
dcp
"dT
п =
dcp
- Ml
n = —
p
A5)
Радиус кривизны р считаем положительным.
Вектор dx/d? и совпадающий с ним по направлению
единичный вектор п направлены параллельно предельному
положению вектора Ах при At, стремящемся к нулю, т. е.
они расположены в соприкасающейся плоскости кривой. Еди-
Единичный вектор п перпендикулярен вектору т, направленному
по касательной к кривой. Следовательно, вектор п направлен
по главной нормали кривой в сторону ее вогнутости, так
как в эту сторону направлено предельное положение вектора Ах.
Если имеем любой другой вектор b с постоянным модулем,
то для него остается справедливым все, что было получено
117
для единичного вектора, только радиус годографа следует
заменить его модулем Ь. Получим
дБ
dcp
~d7
п, A5')
где п — теперь единичный вектор, перпендикулярный вектору
b и направленный параллельно dbjdt.
Формулу A5') можно выразить векторным произведением:
где ю — вектор угловой скорости поворота вектора Ь, модуль
которого |co| = |d(p/cU |. Вектор угловой скорости ш следует
направитьперпендикулярно плоскости, в которой расположены
векторы bun, причем так, чтобы с его стрелки увидеть
поворот вектора b к п в этой плоскости на угол 90° против
часовой стрелки. Подробнее понятие вектора угловой скорости
дается при рассмотрении вращения твердого тела вокруг
неподвижной оси и в других случаях его движений.
Ускорение точки при естественном способе
задания движения
Учитывая, что для скорости точки имеем
v = sx = vzx, A6)
в соответствии с определением ускорения и A5) получаем
_ dv d/._\ .._ , .df .._ v2 -
так как s2 — v2 и df/dt направлен внутрь вогнутости траектории
параллельно единичному вектору главной нормали п.
Получено разложение ускорения точки по осям естественно-
естественного трехгранника. Часть ускорения
называется касательной составляющей ускорения. Другая часть
ускорения
an = {v2lp)n = (s2/p)n
называется нормальной составляющей ускорения. Она направле-
направлена внутрь вогнутости траектории, т. е. в сторону положительно-
положительного направления единичного вектора главной нормали п, так
как внутрь вогнутости траектории направлено полное ускоре-
ускорение. Таким образом, ускорение точки
а = ах + ап. A8)
Из A7) получим формулы для проекций ускорения на
естественные оси. Имеем:
118
Рис. 17
ax = s = dvz/dx, an = v2/p, ab = 0. A9)
Проекция ускорения на положительное на-
направление касательной, совпадающее с на-
направлением единичного вектора т, называ-
называется касательным ускорением, а на главную
нормаль, направленную по единичному
вектору п,— нормальным ускорением. Про-
Проекция ускорения на бинормаль, направ-
направленную по единичному вектору Ь, равна
нулю; следовательно, ускорение точки рас-
расположено в соприкасающейся плоскости
траектории. В этой плоскости находятся единичные векторы
касательной и главной нормали.
Учитывая ортогональность аТ и а„ (рис. 17), в соответствии
с уравнением A8) имеем
B0)
Нормальная составляющая ускорения ап всегда направлена
внутрь вогнутости траектории. Касательная составляющая ах
при s>0 направлена в положительную сторону касательной,
т. е. по направлению единичного вектора т, а при s<0 — в
отрицательную, противоположно т.
При 5>0 и s>0 векторы скорости и касательной составляю-
составляющей ускорения направлены в одну сторону — по т. Движение
точки является ускоренным в положительном направлении
касательной к траектории. При s<0 и s<0 опять векторы
скорости и касательной составляющей ускорения имеют одина-
одинаковые направления и, следовательно, движение точки является
ускоренным, но в отрицательном направлении касательной
к траектории.
Если i>0 и s<0, то вектор скорости направлен по т,
а вектор касательной составляющей ускорения противоположен
ему по направлению. Движение точки является замедленным
в положительном направлении касательной к траектории. При
а<0 и s>0 имеем замедленное движение точки в отрицатель-
отрицательную сторону касательной к траектории точки.
Случаи обращения в нуль касательного ускорения получают
из условия
Это условие выполняется все время, пока v = | v% \ = const, т.е.
при равномерном движении точки по траектории любой
формы. Касательное ускорение обращается в нуль также в те
моменты времени, в которые алгебраическая скорость vz
достигает экстремума, например максимума или минимума.
Для изображенного на рис. 18 изменения алгебраической ско-
скорости в зависимости от времени касательное ускорение равно
119
Рис. 18
Рис. 19
нулю в моменты времени tl и t2- При колебаниях маятника
(рис. 19) эти моменты соответствуют его прохождению через
точку А. При движении маятника в одну
сторону алгебраическая скорость в точке
А достигает максимума, при движении
в обратном направлении — минимума.
Рис- 20 Случаи обращения в нуль нормального
ускорения следуют из условия
Это условие выполняется при р = оо, т.е. при прямолинейном
движении точки. При движении точки по криволинейной
траектории р = оо в точках перегиба, в которых происходит
изменение выпуклости траектории на вогнутость, и наоборот
(рис. 20). Нормальное ускорение обращается также в нуль
в моменты времени, в которые v = 0, т. е. в моменты
изменения направления движения точки по траектории. Для
маятника такими моментами являются моменты отклонения
маятника на наибольший угол как в одну сторону, так
и в другую. Эти моменты соответствуют мгновенным оста-
остановкам маятника.
Случаи обращения в нуль касательного и нормального
ускорений, а также общие формулы
для них показывают, что касательное
ускорение характеризует изменение ве-
вектора скорости по величине, а нор-
нормальное— по направлению.
Пример. Точка М движется по дуге окру-
окружности радиусом R по закону s=R$mat, где
ш = const. Начало отсчета расстояний и времени,
а также направление положительных расстоя-
расстояний указаны на рис. 21. Определить скорость
и ускорение точки в момент времени (, а также
их значения в точке О и в точке траектории
М1, в которой скорость обращается в нуль.
Решение. Скорость и проекции ускорения
на естественные оси определяем по формулам
A6) и A9). Имеем:
Рис. 21
120
; ax=s= —Да2 sinat; an = v 2/p = R2u>2 cos2at/R = Ra2cos2at.
Скорость обращается в нуль, если cosco? = 0, т. е. в момент времени
tl=njB(i>) и другие моменты времени, которые в этом примере не рас-
рассматриваются. При t1=n/Ba), т. е. в момент изменения направления движения
точки, имеем
д,= -йш2, д„ = 0.
Подставляя в формулы для от, а, и а„ значение 1 = 0, получаем
vx=Ra, дт = 0, д„ = Лй2.
Касательное ускорение в этот момент времени обращается в нуль, так как
алгебраическая скорость достигает своего максимума.
Частные случаи движения точки
Равномерное движение. При равномерном движении точки
по траектории любой формы v = const; следовательно, посто-
постоянна и алгебраическая скорость vx, которая может отличаться
от v только знаком. Так как
то
ds = vxdt, s = vx\dt = vj,
о
если принять при t = 0 s = 0.
Равнопеременное движение. Равнопеременным движением
называют такое движение по траектории любой формы,
при котором касательное ускорение ат = const. Движение
является равноускоренным, если алгебраическая скорость
vx и касательное ускорение ах имеют одинаковые знаки.
Если vx и ат имеют разные знаки, то движение является
равнозамедленным.
Получим формулы для алгебраической скорости и рассто-
расстояния при равнопеременном движении. Имеем:
следовательно,
v, = vo + a^t, B1)
если принять при t = 0 v^ = v0.
Так как vz = ds/dt, то с учетом B1)
0 0
0 0 0
если при t = 0 s = 0. Выполняя интегрирование, получим
aj~. B2)
121
Из B1) и B2) можно определить любые две неизвестные
величины, если известны остальные три величины, входящие
в эти формулы.
§ 6. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В ПОЛЯРНЫХ КООРДИНАТАХ
Рассмотрим движение точки по плоскости. В этом случае
движение можно задать в полярных координатах. Для этого
примем какую-либо точку О плоскости за полюс и проведем
из нее полярную ось, например ось Ох (рис. 22). Положение
движущейся точки М на плоскости известно, если заданы
радиус-вектор г и полярный угол <р как функции времени, т. е.
r=fM ф=/2(/). B3)
Полярный угол считается положительным, если он откла-
откладывается от полярной оси до радиуса-вектора против часовой
стрелки. Радиус-вектор как расстояние от точки О до точки
М принимает только положительные значения.
Уравнения B3) называются уравнениями движения точки
в полярных координатах. Они являются также уравнениями
траектории точки в параметрической форме. Если из B3)
исключить параметр — время t, то получим уравнение траек-
траектории в полярных координатах:
F(r, <p) = 0.
Введем единичный вектор г°, направленный по радиусу-век-
радиусу-вектору от полюса О к точке М. Тогда
dr°
Для скорости v получаем
d
~df~dr ' dt dt '
Согласно A5), для производной по времени от единичного
вектора имеем
dr°_d<p _0_ . -о
dt dt '
где вместо единичного вектора
п введен единичный вектор р°,
направление которого получается
поворотом вектора г° на 90° в по-
положительном направлении угла ф,
т. е. против часовой стрелки
(рис. 22). После этого для скорости
точки получаем
Рис. 22
122
B4)
Это разложение скорости точки на радиальную vr и транс-
версальную (поперечную) vp составляющие, т. е.
v = vr + vp, B5)
где
vr = fr°, vp = r<pp°.
Для проекций скорости на оси, положительные направления
которых совпадают с направлениями единичных векторов г°
и р из B4), получаем
vr = r\ vp = rq>. B6)
Они соответственно называются радиальной и трансверсалъной
скоростями. В зависимости от знаков производных гиф ради-
радиальная и трансверсальная скорости могут быть как положитель-
положительными, так и отрицательными.
Используя B4), определяем ускорение точки в полярных
координатах. Имеем
a = dvjdt = {djdt){n0 + r<s?p°).
Выполняя дифференцирование, получим
dr° do0
a = fr° + f Ьгф/?0 + гф/?° + гф —.
Для производной по времени от единичного вектора р° имеем
d/>°/df = <j>(-f°),
так как вектор р° поворачивается с той же угловой скоростью
ф, что и вектор г°, а единичным вектором, по которому
направлен вектор dp°/dt, является вектор ( — г°).
После подстановки в выражение для ускорения производных
от единичных векторов и объединения слагаемых имеем
а = (г-гц>2)г° + (гф + 2гц>)р°. B7)
Получили разложение ускорения точки на радиальную аг
и трансверсальную ар составляющие, т. е.
a = ar + ap, ar = (r-rq>2)r°, ар = (гф + 2гц>)р°.
Для проекций ускорения на оси Or и Ор получаем
аг = г-гф2, ар = г'ц> + 2г'ц>. B8)
Ускорение аг называется радиальным, а ар — трансверсальным.
Трансверсальное ускорение можно выразить также в форме
Это выражение для трансверсального ускорения широко
используется при рассмотрении движения планет и искусствен-
искусственных спутников Земли.
123
Радиальная и трансверсальная со-
составляющие ускорения взаимно пер-
перпендикулярны, поэтому
a = Jtf + tf. B9)
Отметим, что для неподвижных
осей координат Ох, Оу и Oz справед-
справедливы формулы
ax = dvx/dt, ay = dvy/dt, az = dvz/dt.
Рис. 23 Для подвижных осей Or и Ор, как
следует из B6) и B8), аг и ар не
равны производным по времени от vr и vp.
Частные случаи. 1. Если ф = const, то имеем прямо-
прямолинейное движение по прямой Or. В этом случае ф = 0, ф = 0
и из B6) и B8) получаем:
Эти величины совпадают с ранее полученными выражениями
для них при изучении движения точки в декартовых коорди-
координатах. Только расстояние г следует заменить на координату х.
2. При г = const (рис. 23) получаем движение точки по
окружности. В этом случае г' = 0, г=0. Из B6) и B8) имеем:
В этих формулах ф является угловой скоростью вращения
радиуса-вектора, а ф — его угловым ускорением.
Пример 1. Движение точки задано в полярных координатах уравнениями
где / и ш—постоянные величины. Определить уравнение траектории, скорость
и ускорение точки в полярных координатах для момента времени t и момента
времени ( = 0.
Решение. Исключая из уравнений движения параметр /, получим
следующее уравнение траектории в полярных координатах:
r = /(l+coscp).
Это уравнение кардиоиды (рис. 24).
Проекции скорости и ускорения на полярные оси определяем по формулам
B6) и B8). Имеем:
I +COSCO/),
) = 2/cocos(co//2);
ar — f—r(f2= —/ш2A +2cosco(), ар = г(р + 2гц>= —21w2sinwt,
з2=/ш2.
a = Ja2 + al = /ш2 уД\+ 2 cos шJ + 4 sin2 Ш = /и2 у/5 + 4 cos иг.
Для момента времени /=0 из этих формул получаем:
124
Рис. 24
Рис. 25
аг=-31ш2, ар = 0, a=\ar\ = 3lm2.
Векторы скорости и ускорения для моментов времени /и 1 = 0 изображаем
на рисунке.
Пример 2. Движение точки задано в прямоугольной системе координат
уравнениями
x = 4sint, у = 3cos2/,
где х и у— в метрах, / — в секундах.
Определить уравнение траектории в координатной форме, а также скорость,
ускорение, касательное и нормальное ускорения, радиальную и трансверсальную
составляющие скорости и радиус кривизны траектории в момент времени
г=п/6 с. Изобразить на рисунке траекторию, скорости и ускорения в указанный
момент времени.
Решение. Уравнения движения представляют собой уравнение траектории
в параметрической форме. Для определения уравнения траектории в ко-
координатной форме следует из уравнений движения исключить время /. Имеем:
sint=x/4;
следовательно,
= 3A-х2/8).
Это уравнение параболы. Не все точки параболы являются точками траектории.
Так как при любых значениях t |sin/|^l и |cos2f|^l, то из уравнений
движения получаем дополнительные ограничения для координат точек тра-
траектории |jc|^4, |>>|^3.
Таким образом, точки траектории удовлетворяют условиям
.у = 3A-х2/8); |x|sc4; \y\^3.
Часть точек параболы, не являющихся точками траектории, дополнительно
появилась при исключении из уравнений движения параметра /.
На рис. 25 приведена траектория точки. Траекторией является только
часть параболы ABC.
Определяем проекции скорости на оси и скорость в любой момент времени:
=y= — 6sin2?;
При t = n/6 с
«3,5 м/с; vy= -6sin2?= -
-5,2 м/с; f =
v
= ч/39«6,2м/с.
Проекции ускорения в любой момент времени определяем по формулам
я =х=— 4sinr; a =v'= — 12cos2/.
125
ax= — 2 м/с2; ау——6 м/с2;
При / = я/6 с
»6,3 м/с2.
Для модуля касательного ускорения при t = n/6 с имеем
- 16 ■ 2 cos / sin г+36 • 2 sin 2/ cos 2? • 2
dv
d' 2^/16 cos2 / + 36 sin2 2/
Нормальное ускорение при / = я/6 с
1<Ц/3
: = "/6 ,/39
:3,9 м/с2.
-а\= 40--~=5 м/с'.
Для вычисления радиальной скорости предварительно определяем ра-
радиус-вектор:
Тогда при t = n/6 с получаем
16-2sin?cos?-9-2-2cos2/-sin2;
, = - V^/5 « - 0,3 м/с.
2N/16sin2/ + 9cos22/
Трансверсальную скорость при /=п/6 с определяем по формуле
Координаты движущейся точки при t = n/6 с
x = 4sin/|, = lt/6 = 2 м; >- = 3cos2f|г = „/6= 1,5 м.
По координатам отмечаем положение движущейся точки на траектории и,
выбрав масштабы, изображаем векторы скорости и ускорения по их проекциям
на оси. Для радиальной составляющей скорости юг учитываем ее направление,
противоположное единичному вектору г°, так как v, получилось со знаком минус.
Для трансверсальной составляющей скорости определено только числовое
значение. Из рис. 25 следует, что направление вектора vp противоположно
направлению единичного вектора р° (направление р° получается поворотом
на 90° вектора г° против часовой стрелки). Следовательно, в рассматриваемом
случае vp надо взять со знаком минус, т.е. vp=— 6,2м/с.
Для проверки правильности определения vp можно использовать формулы
у
v=r(f>, cp = arctg-.
х
Нормальное ускорение а„ всегда направлено внутрь вогнутости траектории.
Направление касательного ускорения ах определяем по а и »,; оно оказалось
направленным по вектору скорости. Следовательно, точка в рассматриваемый
момент времени движется ускоренно.
Определим радиус кривизны траектории в момент времени t = n/6 с. Все
необходимые величины для этого уже имеются. Получим
v
=—=39/5
7,8 м.
§ 7. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В ЦИЛИНДРИЧЕСКИХ КООРДИНАТАХ
При движении точки в пространстве иногда используются
цилиндрические оси координат. Они получаются добавлением
к полярным координатам на плоскости координаты z, отсчи-
126
тываемой вдоль неподвижной оси
Oz, перпендикулярной плоскости,
в которой расположены полярные
оси координат (рис. 26).
Положение точки М определяют
заданием трех ее цилиндрических
координат как функций времени:
r=h[t)> ф=@; 7=/з@-
Разложение векторов скорости
и ускорения на составляющие, па-
параллельные осям цилиндрической
системы координат Or, Op, Oz,
выразится в следующей форме:
Рис. 26
a = arr° + app° + azk,
C0)
C1)
где
г°,
р°, к — единичные векторы, направленные по осям
О O О
цилиндрической системы координат. Оси Or и Ор расположены
в одной плоскости с осями Ох и Оу.
Представим радиус-вектор р точки М как сумму двух
векторов, т. е.
р = ОМ' + ММ = rr° + zk.
Скорость точки получим дифференцированием радиуса-вектора
р по времени:
-_dP_ d / -о\ i d / гл
dt dt^ ' dr ''
Первое слагаемое в этом выражении вычислялось при выводе
формулы B4) для скорости точки в полярных координатах.
Было получено
Во втором слагаемом постоянный по модулю и направлению
единичный вектор к можно вынести за знак производной. Для
скорости получается следующее разложение на составляющие,
параллельные осям цилиндрической системы координат:
v = rr° + rq>p° + zlc. C2)
Сравнивая C2) с C0), получаем формулы для проекций
скорости на цилиндрические оси координат:
vr = f; vp = r<p; vz = z. C3)
Так как составляющие скорости vr, vp и vz, параллельные
осям цилиндрической системы координат, взаимно перпенди-
перпендикулярны, то для модуля скорости имеем
127
Ускорение точки получим дифференцированием по времени
вектора скорости:
dv d/._n • -о\ d / .|—i
a = — = -(rr° + r<pp°) + -(z]c).
dt dty ' dr '
Первое слагаемое в этом выражении вычислялось при выводе
ускорения в полярных координатах:
Во втором слагаемом при дифференцировании выносим вектор
к за знак производной. Объединяя результаты дифференци-
дифференцирования, получим следующее разложение ускорения на состав-
составляющие, параллельные осям цилиндрической системы коор-
координат:
а = (г-гф2)г° + (гф + 2гф)р° + £/с. C4)
Сравнивая его с C1), получаем формулы для проекций
ускорения на цилиндрические оси координат
ar = f-rq>2; ар = гф + 2гц>; az = z. C5)
Составляющие ускорения ar, ар, az взаимно перпендику-
перпендикулярны, поэтому для модуля ускорения имеем
§ 8. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Положение точки в пространстве в декартовой системе
координат определяется тремя координатами: х, у, z. Можно
выбрать другие три параметра qx, q2, q3 и назвать их
криволинейными или обобщенными координатами то-
точки. Декартовы координаты будут зависеть от криволинейных:
x = x(q1, q2, <?з); y = y(qx, Яг, Чг)\ z = z{qx, q2, Яз)-
Движение точки в криволинейных координатах задается
уравнениями
Радиус-вектор г движущейся точки, начало которого находится
в неподвижной точке выбранной системы отсчета для рас-
рассматриваемого движения, является функцией как декартовых,
так и криволинейных координат, т. е.
r = r(qi, q2, Чз) = г{х, у, г).
Выберем точку О, в которой криволинейные координаты
равны нулю, и рассмотрим зависимость r = F(ql, 0, 0). Получим
128
уравнение в векторной форме координатной линии для
qx, проходящей через точку О. Аналогично получаются
уравнения координатных линий r = f(O, q2, 0) и r = r@, 0, q3),
проходящих через точку О для координат q2 и q3.
Через каждую точку пространства можно провести три
координатные линии, пересекающиеся в этой точке. Вдоль
каждой из координатных линий изменяется только одна
криволинейная координата, а две другие сохраняют постоянные
значения, соответствующие рассматриваемой точке.
Рассмотрим частные производные -^. Они как производные
от вектора по скалярному аргументу направлены по каса-
касательным к координатным линиям, являющимся годографами
радиуса-век'тора. Введем единичные векторы, направленные по
дг „ _ _ _
векторам —. Эти три единичных вектора ех, е2, е3 называются
базисными векторами. Базисные векторы, как и —, на-
правлены в каждой точке по касательным к координатным
линиям в сторону возрастания криволинейных координат.
Направления возрастания и начало отсчета криволинейных
координат выбираются при задании движения.
В общем случае базисные векторы могут быть неорто-
неортогональными. Используя базисные векторы, получаем
дг
ИЛИ
~ = Кё, A=1, 2, 3). C6)
oqt
Скалярные величины ht =
дг
называются коэффициентами
Ламэ.
Для вычисления /г; учтем, что радиус-вектор через декартовы
координаты можно выразить в форме
r = xf+yf+zk, C7)
где г, j, к— единичные векторы, направленные по осям
декартовой системы координат. Из C7) имеем
дг дх — ду — dz .-
— = — l + j-J + T~k
и, следовательно,
др
я А №
Hi)
5 Заказ 192 129
Скорость точки в криволинейных координатах. При движении
точки ее радиус-вектор через обобщенные координаты зависит
от времени, т. е.
F=r[q1(t), q2{t), q3(t)].
По определению скорости и правилу дифференцирования
сложных функций имеем
+^ + ^' C9)
где О; = — называется обобщенной скоростью точки.
At
Используя C6), из C9) получаем
3
Получено разложение скорости по осям, направление которых
совпадает с направлением базисных векторов.
Для величин составляющих скорости по базисным векторам
из D0) имеем
Vi = hiqi (i=l, 2, 3). D0')
В случае ортогональности базисных векторов по формуле
D0') вычисляются проекции вектора скорости на оси, направ-
направленные по базисным векторам. В этом случае для квадрата
скорости получаем
1 = 1
Ускорение в ортогональных криволинейных координатах.
Криволинейные координаты считаются ортогональными, если
ортогональны их базисные векторы. В приложениях обычно
встречается этот случай. Для ортогональных базисных векторов
проекции ускорения точки на их направления вычисляем по
формулам
а^а-^-'ё, (i=l, 2, 3). D1)
Выражая базисные векторы по C6), из D1) получим
■' d/A, dq, h\dl dq
Для дальнейших преобразований D2) следует воспользо-
воспользоваться тождествами
\ dv df , _ d / дг\ ....
4^rdj-^+i?"sw D3)
130
or df дг dv ,,..
— = — или — =—; D4)
o<ii dq, dq, dq{
= — ИЛИ —I — ) = —.
Тождество D3) представляет собой известное правило
дифференцирования скалярного произведения двух векторов.
Докажем справедливость тождеств Лагранжа D4) и D5).
Тождество D4) получим из C9) дифференцированием v,
л —
например, по <ji- Учитывая, что производные -^ не могут
зависеть от qt, имеем
dv _ df
Аналогично,
dv df dv df
dq2 dq2 dq3 dq3
т. e.
dv 8f ,. . „. O4
—=— 0=1, 2, 3).
Справедливость тождества D4) установлена.
Для доказательства тождества D5) продифференцируем v из
C9) по qt. Получим
" d2f • ' d2F ■ ' 8Z? -,. D6)
дг
Учитывая, что — не может зависеть от обобщенных
dq,
скоростей, и дифференцируя ее по времени как сложную
функцию времени, имеем
d ( df\ d2f . d2f . d2f .
Правые части D6) и D7) совпадают, так как они отличаются
только порядком частного дифференцирования, от которого
частные производные не зависят. Следовательно, тождество
D5) доказано. Используя тождества, преобразуем выражение
в скобках из D2). Получим '
dv df _ d f - Bf\ - _ d / df\ d /_ dv
dt Bq~ dl\ dqj di^J^
- dv d
Учитывая, что v2 = v2, и вводя функцию Г= —, из D2)
с учетом D8) имеем
131
По формулам D9) можно вычислить проекции ускорения точки
на оси, направленные по базисным ортогональным векторам.
§ 9. СКОРОСТЬ И УСКОРЕНИЕ В СФЕРИЧЕСКИХ
КООРДИНАТАХ
В качестве примера использования полученных формул
вычислим скорость и ускорение точки в сферических коорди-
координатах. Сферическими координатами точки М являются вели-
величины г, ф, 0 (рис. 27). Координатной линией для г является
прямая (г) с базисным вектором ёг. Координатной линией
для ф служит параллель сферы с базисным вектором
ev и координатной линией 9 — меридиан сферы с базисным
вектором ёв.
Базисные векторы оказались ортогональными. Декартовы
координаты х, у, z точки М через сферические выражаются
следующими зависимостями:
х = гсо89со8ф; ^ = rcos9sn^; z = rsin9. E0)
По формулам C8) вычисляем коэффициенты Ламэ. Имеем:
+ (r cosQJ = г.
Проекции скорости на оси, направленные по базисным
векторам, определяем согласно
D0'). Получаем
Лп
E1)
После этого
Рис. 27
"Л+Ve-
132
Для квадрата скорости и функции Т имеем
v + v,
Прокции ускорения на оси, направленные по базисным векто-
векторам, вычисляем по формулам D9). Имеем
d I ёТ\ дТ г .. . 2 2п Л2
г / З '
а«=т„
Зср
d/дТ\ дТ
d/
зё
fcos0
г dl
E2)
Для вектора ускорения получаем
Модуль ускорения будет иметь следующее выражение:
Аналогично можно вычислить ранее полученные скорость
и ускорение точки в цилиндрических координатах.
ГЛАВА 2
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 1. СТЕПЕНИ СВОБОДЫ И ТЕОРЕМА
О ПРОЕКЦИЯХ СКОРОСТЕЙ
Числом степеней свободы твердого тела называют число
независимых параметров, определяющих положение тела отно-
относительно рассматриваемой системы отсчета.
Движение твердого тела во многом зависит от числа его
степеней свободы; тело с одним и тем же числом степеней
свободы может совершать различные движения, не похожие
друг на друга. Свободное твердое тело в общем случае имеет
шесть степеней свободы. Действительно, положение тела в про-
пространстве относительно какой-либо системы координат, на-
например декартовой, определяется заданием трех его точек,
не лежащих на одной прямой. Расстояния между точками
в твердом теле должны оставаться неизменными при любых
133
его движениях. Это накладывает на
координаты фиксированных точек три
условия. Девять координат должны
удовлетворять трем уравнениям. По-
Получаем только шесть независимых
координат, которые можно задать
произвольно. Оставшиеся три коор-
координаты определятся из уравнений для
расстояний между точками.
В качестве независимых парамет-
Рис' ров можно взять любые шесть ко-
координат точек или шесть других независимых параметров,
которые являются функциями координат трех или большего
количества точек тела. У свободной точки три степени свободы
и соответственно три независимых параметра, например ее
координаты х, у, г. Точка, которая движется по неподвижной
поверхности, имеет две степени свободы. При движении точки
по неподвижной кривой точка имеет одну степень свободы.
Справедлива теорема: при любом движении твердого тела
проекции скоростей точек на прямую, соединяющую эти точки,
равны (рис. 28).
Для доказательства теоремы используем зависимость ра-
радиусов-векторов точек А и В:
гв-гА = АВ {АВ = Т).
Возведем обе части в скалярный квадрат. Имеем
но /=const для твердого тела. Дифференцируя по времени
это выражение, справедливое для любого момента времени,
получим
Заменив в этом равенстве
drA/dt = vA, drB/dt = vB, rB-rA = T,
получим
2/ -(vB — vA) = 0 или T-vB = hvA.
Раскрывая скалярные произведения векторов и сокращая на
/, имеем
Теорема доказана. Очевидно, все точки тела, расположенные
на прямой АВ, имеют одинаковые проекции скоростей на
эту прямую.
134
Имеется два простейших вида движения твердого тела,
комбинированием которых можно получать другие, более слож-
сложные его движения. Такими движениями твердого тела являются
поступательное движение и вращение вокруг неподвижной оси.
§ 2. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным движением твердого тела называют такое
его движение, при котором любая прямая, жестко скрепленная
с телом, остается параллельной своему первоначальному
положению в каждый момент времени. Очевидно, достаточно,
чтобы это выполнялось только для двух непараллельных
прямых, скрепленных с телом.
Поступательно движутся педали у велосипеда относительно
его рамы во время движения, поршни в цилиндрах двигателя
внутреннего сгорания относительно цилиндров, кабины колеса
обозрения относительно* Земли в парках.
Траектории точек у поступательно движущегося твердого
тела могут быть не только прямыми, но и любыми кривыми,
в том числе окружностями.
Свойства поступательного движения характеризует следу-
следующая теорема: при поступательном движении твердого тела
траектории, скорости и ускорения всех точек тела одинаковы.
Если выбрать две точки А и В твердого тела, то радиусы-
векторы этих точек удовлетворяют условию (рис. 29)
Для любого твердого тела вектор А В является постоянным
по модулю, а при поступательном движении он не изменяется
и по направлению.
Уравнение A) показывает, что годограф радиуса-вектора
точки В, являющийся траекторией этой точки, сдвинут по
сравнению с годографом радиуса-вектора точки А (траектория
—»
точки А) на постоянный вектор АВ. Если этот сдвиг
осуществить, то обе траектории
совпадут всеми своими точками.
Такие траектории считаются
одинаковыми.
Если продифференцировать
по времени A), справедливое для
любого момента времени, то
получим
d/
Рис. 29
135
В этом соотношении drB/dt = vB, drA/dt = vA. Кроме того, для
АВ, постоянного по модулю и направлению вектора, — (АВ) =
= 0. Таким образом, для любого момента времени имеем
пв = пл- B)
Дифференцируя по времени B) и учитывая, что
dvB/dt = aB, dvA/dt = aA,
получим
ав = аА. C)
Теорема о поступательном движении твердого тела полностью
доказана.
Движение твердого тела, для которого векторы скоростей
точек равны только в один момент времени, а не все время,
называется мгновенным поступательным движением. Для мгно-
мгновенного поступательного движения ускорения точек в общем
случае не являются одинаковыми.
Поступательное движение твердого тела полностью характе-
характеризуется движением одной точки тела. Для задания этого
движения достаточно знать координаты какой-либо точки тела
как функции времени, т. е.
x=A{t); y=f2(t); z=/3{t). D)
На движение отдельной точки тела при поступательном
движении никаких ограничений в общем случае не накла-
накладывается. Следовательно, твердое тело, совершающее поступа-
поступательное движение, имеет три степени свободы и уравнения
D) считаются уравнениями поступательного движения твердого
тела. Для изучения поступательного движения твердого тела
достаточно использовать кинематику одной точки.
§ 3. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ОСИ
Угол поворота, угловая скорость и угловое ускорение
Вращением твердого тела вокруг неподвижной оси называ-
называется такое его движение, при котором две точки тела остаются
неподвижными в течение всего времени движения. При этом
также остаются неподвижными все точки тела, расположенные
на прямой, проходящей через его неподвижные точки. Эта
прямая называется осью вращения тела.
Если А и В—неподвижные точки тела (рис. 30), то осью
вращения является ось Oz, которая может иметь в пространстве
любое направление, не обязательно вертикальное. Одно на-
направление оси Oz принимается за положительное.
136
Через ось вращения проведем неподвижную
плоскость Яо и подвижную Я, скрепленную
с вращающимся телом. Пусть в начальный момент '{////у\
времени обе плоскости совпадают. Тогда в момент
времени t положение подвижной плоскости и само-
самого вращающегося тела можно определить двугран-
двугранным углом между плоскостями и соответствующим
линейным углом ф между прямыми, расположен-
расположенными в этих плоскостях и перпендикулярными оси
вращения. Угол ф называется углом поворота тела.
Положение тела относительно выбранной си-
системы отсчета полностью определяется в любой
момент времени, если задано уравнение Рис- 30
Ф =/('). E)
где f(t)—любая, дважды дифференцируемая функция времени.
Это уравнение называют уравнением вращения твердого тела
вокруг неподвижной оси.
У тела, совершающего вращение вокруг неподвижной оси,
одна степень свободы, так как его положение определяется
заданием только одного параметра — угла ф.
Угол ф считается положительным, если он откладывается
против часовой стрелки, и отрицательным — в противополож-
противоположном направлении, если смотреть с положительного направления
оси Oz. Траектории точек тела при его вращении вокруг
неподвижной оси являются окружностями, расположенными
в плоскостях, перпендикулярных оси вращения.
Для характеристики вращательного движения твердого тела
вокруг неподвижной оси введем понятия угловой скорости
и углового ускорения. Алгебраической угловой скоростью тела
в какой-либо момент времени называют первую производную
по времени от угла поворота в этот момент, т. е. ёф/ёг = ф.
Она является величиной положительной при вращении тела
против часовой стрелки, так как угол поворота возрастает
с течением времени, и отрицательной — при вращении тела
по часовой стрелке, потому что угол поворота при этом
убывает.
Модуль угловой скорости обозначают ю. Тогда
oo = |d<p/df| = |q>|. F)
Размерность угловой скорости устанавливаем в соответствии
с F):
[ю] = угол/время = рад/с = с ~1.
В технике угловая скорость — это частота вращения, выражен-
выраженная в оборотах в минуту. За 1 мин тело повернется на угол
2пп, если п — число оборотов в минуту. Разделив этот угол
на число секунд в минуте, получим
137
. G)
Алгебраическим угловым ускорением тела называют первую
производную по времени от алгебраической скорости, т. е.
вторую производную от угла поворота d2ф/df2 = ф. Модуль
углового ускорения обозначим е, тогда
Е = |ф|. (8)
Размерность углового ускорения получаем из (8):
[е] = угловая скорость/время = рад/с2 = с~2.
Если ф > 0 при ф > О, то алгебраическая угловая скорость
возрастает с течением времени и, следовательно, тело враща-
вращается ускоренно в рассматриваемый момент времени в положи-
положительную сторону (против часовой стрелки). При ф < О и ф < О
тело вращается ускоренно в отрицательную сторону. Если
ф < 0 при ф > 0, то имеем замедленное вращение в положитель-
положительную сторону. При ф > 0 ф < 0, т.е. замедленное вращение
совершается в отрицательную сторону.
Угловую скорость и угловое ускорение на рисунках изобра-
изображают дуговыми стрелками вокруг оси вращения. Дуговая стрелка
для угловой скорости указывает направление вращения тела.
Для ускоренного вращения дуговые стрелки для угловой
скорости и углового ускорения имеют одинаковые направления,
для замедленного—их направления протипоположны.
Частные случаи вращения твердого тела
Вращение называется равномерным, если ю = const. Алгебраи-
Алгебраическая угловая скорость отличается от модуля угловой скорости
только знаком. Поэтому она тоже постоянна и при интегри-
интегрировании ее можно вынести за знак интеграла. Имеем
если принять ф = 0 при t = 0.
Вращение будет равнопеременным, если е = const. Алгебраи-
Алгебраическое угловое ускорение при этом тоже постоянно. Его при
интегрировании можно вынести за знак интеграла. Имеем
d * '
~(q>) = q>; dq> = ipdt; j ёф = ф Jch;
Фо °
138
если ф = Ф0 при ? = 0.
Так как
то
ф t t
|ёф = фо|с1г + ф|/
о оо
если ф = 0 при t = 0.
В общем случае, если ф не постоянно,
ф = Jфdf; ф = |фё/.
Скорости и ускорения точек тела
Известно уравнение вращения твердого тела вокруг непо-
неподвижной оси ф = /(г) (рис. 31). Расстояние s точки М в по-
подвижной плоскости /7 по дуге окружности (траектории точки),
отсчитываемое от точки Мо, расположенной в неподвижной
пдоскости, выражается через угол ф зависимостью s = h(p, где
h — радиус окружности, по которой перемещается точка. Он
является кратчайшим расстоянием от точки М до оси враще-
вращения. Его иногда называют радиусом вращения точки. У каждой
точки тела радиус вращения остается неизменным при враще-
вращении тела вокруг неподвижной оси.
Алгебраическую скорость точки М определяем по формуле
Модуль скорости точки
v = hco. (9)
Скорости точек тела при вращении
вокруг неподвижной оси пропорциональ-
пропорциональны их кратчайшим расстояниям до
этой оси. Коэффициентом пропорци-
пропорциональности является угловая ско-
скорость. Скорости точек направлены по
касательным к траекториям и, сле-
следовательно, перпендикулярны радиу-
радиусам вращения. Рис. 31
139
Рис. 32
Скорости точек тела, расположен-
расположенных на отрезке прямой ОМ, в соот-
соответствии с (9) распределены по линей-
линейному закону. Они взаимно параллель-
параллельны, и их концы располагаются на
одной прямой, проходящей через ось
вращения.
Ускорение точки разлагаем на ка-
касательную и нормальную составля-
составляющие, т. е.
Касательное и нормальное ускорения вычисляются по
формулам
так как для окружности радиус кривизны р = /г (рис. 32). Таким
образом,
|ат| = /гг, ап = /гю2; a = y/a? + aZ = hv/e2 + co4. A0)
Касательные, нормальные и полные ускорения точек, как
и скорости, распределены тоже по линейному закону. Они
линейно зависят от расстояний точек до оси вращения.
Нормальное ускорение направлено по радиусу окружности
к оси вращения. Направление касательного ускорения зависит
от знака алгебраического углового ускорения. При ф>0 и ф>0
или ф<0 и ф<0 имеем ускоренное вращение тела и направле-
направления векторов аг и v совпадают. Если фиф имеют разные
знаки (замедленное вращение), то а, и с направлены проти-
противоположно друг другу.
Обозначив ос угол между полным ускорением точки и ее
радиусом вращения, имеем
tga = K|/an = e/co2, A1)
так как нормальное ускорение а„ всегда положительно. Угол
ос для всех точек тела один и тот же. Откладывать его
следует от ускорения к радиусу вращения в направлении
дуговой стрелки углового ускорения независимо от направления
вращения твердого тела.
Пример. Диск / вращается вокруг неподвижной оси, проходящей через
его центр О, перпендикулярно плоскости диска, по закону ф = (/— t2) (рис. 33)
и приводит во вращение диски 2 и 3, имеющие общую неподвижную ось
вращения и жестко скрепленные друг с другом.
140
Определить угловые скорости дисков, а так-
также скорости и ускорения точек их соприкос-
соприкосновения А в момент времени t = 5 с, если
радиусы дисков /•[ =20 см, г2 = 30 см, г3 = 20 см;
скольжение между дисками отсутствует.
Решение. Определяем алгебраические уг-
угловую скорость и угловое ускорение диска 1.
Имеем
ф=1— 2г; ф=—2.
В момент времени t=5 с соответственно
Ф=—9; С0[ = | ф| = 9 с;
ф=—2; б! = |ф| = 2с~2.
В этот момент времени дуговые стрелки для
угловой скорости и углового ускорения следует
направить в сторону, противоположную положительному направлению угла
Ф, так как алгебраические угловая скорость и угловое ускорение оказались
отрицательными.
Скорости и касательные ускорения точек соприкосновения дисков 1 и 2 при
отсутствии скольжения между ними одинаковы. Поэтому
v = г1со1 =г2со2; t) = r1co1 = 180 см/с;
ar\ = r1el=r2£2; |ят| = г161=40 см/с2.
Кроме того,
= 6 с
; s2 = r
Дуговые стрелки для со2 и s2 следует направить в стороны, противопо-
противоположные дуговым стрелкам для со t и е1 соответственно.
Диски 2 и 3 жестко скреплены друг с другом, поэтому их угловые
скорости и угловые ускорения одинаковы, т. е.
со3=со2 = 6 с; 63 =62«1,3 с.
Определяем нормальные ускорения точек А дисков 1 и 2. Для диска
/ получаем
a"Ai =r1coi =20-81 = 1620 см/с2 = 16,2 м/с2.
Для диска 2 соответственно
а^2 = г2со2 = 30-36=1080 см/с2 = 10,8 м/с2.
Полные ускорения точек соприкосновения дисков
aA,~\(at) +{aA,J~ 16,2 м/с ;
Векторы скоростей и ускорений точек А дисков 1 и 2 и составляющие
ускорений этих точек изображены на рис. 33.
Векторы угловой скорости и углового ускорения
Введем понятия векторов угловой скорости и углового
ускорения тела. Если к—единичный вектор оси вращения,
направленный в ее положительную сторону, то векторы угловой
скорости со и углового ускорения £ определяют выражениями
141
Рис. 34
Так как к — постоянный по мо-
модулю и направлению вектор, то
из A2) следует, что
£=da>/dt. A3)
При ф>0 и ф>0 направления
векторов со и г совпадают. Они
оба направлены в положительную
сторону оси вращения Oz
(рис. 34,а). Если ср>0 и ф<0, то
они направлены в противополож-
противоположные стороны (рис. 34,6). Вектор
углового ускорения совпадает по направлению с вектором
угловой скорости при ускоренном вращении и противоположен
ему при замедленном.
Векторы со и г можно изображать в любых точках оси
вращения. Они являются векторами скользящими. Это их
свойство следует из векторных формул для скоростей и ускоре-
ускорений точек тела.
Векторные формулы для скоростей и ускорений
точек тела
Выразим скорость, касательное, нормальное и полное
ускорения точки тела в векторной форме. Скорость точки
по модулю и направлению можно представить векторным
произведением
п=сохг, A4)
где г — радиус-вектор точки М, проведенный из произвольной
точки оси вращения Oz, например точки О (рис. 35). Выражение
A4) называется векторной формулой Эйлера. Убедимся в спра-
справедливости этой формулы проверкой. Действительно, вектор
со х г перпендикулярен плоскости, в которой расположены
векторы, входящие в векторное произведе-
произведение. По направлению он параллелен ско-
скорости v, направленной по касательной
к окружности. Модуль векторного произ-
произведения
(
Рис. 35
o,r) = co/z =v,
так как rsin(co, ~r) = h. Таким образом, век-
векторное произведение со х г по модулю и на-
направлению определяет скорость точки. Сле-
Следует только считать этот вектор приложен-
приложенным в точке М; он не зависит от точки
приложения вектора со на оси вращения,
а также точки оси, в которой помещено
142
начало вектора г. В частности, в качестве
радиуса-вектора г можно использовать Век-
Вектор h, направив его из точки О1 в точку М.
Из определения ускорения и векторной
формулы Эйлера имеем
dv d , _
а = -г=т-(а)
dr dr
dd) _ _ Af
) = —хг+юх —.
' dt dt
Рис-
т. е.
Учитывая, что
dco/cU=s; dr/dt=v,
получаем
а =г хг +сб х v. A5)
Первое слагаемое в A5) является ка-
касательным ускорением, а второе — нормальным,
В справедливости A6) убеждаемся вычислением их правых
частей. Имеем
I - -I • /-Л _ч
|е х r| = srsin(s, r) = zh,
что совпадает с касательным ускорением. Направление вектора
г х f параллельно вектору касательного ускорения (рис. 36).
Для векторного произведения со х v имеем
| со х v\ = cousin (со, v) = cav =/гсо2 =а„,
так как векторы со и v взаимно перпендикулярны. Направление
вектора со х v параллельно вектору нормального ускорения
и направлено от точки М к оси вращения, поэтому
а„= -7zco2,
если условиться вектор h направлять от оси вращения.
Справедливость формул A6) установлена.
Из определения скорости точки известно, что
v =dr/dt,
где г — радиус-вектор точки, проведенный из любой неподвиж-
неподвижной точки, в частности из любой точки на оси вращения
тела, вращающегося вокруг неподвижной оси. Но скорость
точки при вращательном движении тела определяется по
векторной формуле Эйлера
v = со х г.
Сопоставление двух формул для скорости точки дает формулу
для вычисления производной по времени от вектора г:
dr/cU=c6xr. A7)
В этой формуле вектор г имеет постоянный модуль, так
как соединяет все время две точки твердого тела. Вектор со,
143
являясь угловой скоростью вращения твердого тела вокруг
неподвижной оси, выполняет также роль угловой скорости
вращения вектора г, жестко скрепленного с телом.
Формула A7) остается справедливой также для вектора г,
начало которого находится в любой точке тела, а не только
на оси вращения. По этой формуле вычисляется производная
по времени от любого вектора, величина которого постоянна.
§ 4. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Основные понятия
Для изучения некоторых, более сложных видов движений
твердого тела целесообразно рассмотреть простейшее сложное
движение точки. Во многих задачах движение точки приходится
рассматривать относительно двух (и более) систем отсчета,
движущихся друг относительно друга. Так, движение космичес-
космического корабля, движущегося к Луне, требуется рассматривать
одновременно и относительно Земли и относительно Луны,
которая движется относительно Земли. Любое движение точки
можно считать сложным, состоящим из нескольких движений.
Например, движение корабля по реке относительно Земли
можно считать сложным, состоящим из движения по воде
и вместе с текущей водой.
В простейшем случае сложное движение точки состоит из
относительного и переносного движений. Определим эти дви-
движения. Пусть имеем две системы отсчета, движущиеся друг
относительно друга. Если одну из этих систем O1x1>'1z1
(рис. 37) принять за основную или неподвижную (ее движение
относительно других систем отсчета не рассматривается), то
вторая система отсчета Oxyz будет двигаться относительно
первой. Движение точки относительно подвижной системы
отсчета Oxyz называется относительным. Характеристики этого
движения, такие, как траектория, скорость и ускорение, назы-
называются относительными. Их обозначают индексом г; для
скорости и ускорения vr, аг.
Движение точки относительно
~~{г) о с н о в н ой, или неподвиж-
неподвижной, системы отсчета O1xlylz1
называется абсолютным (или
сложным). Его также иногда
называют составным движением.
Траектория, скорость и ускоре-
„ ние этого движения называются
' абсолютными. Скорость и
ускорение абсолютного движения
обозначают буквами v, а без
Рис. 37 индексов. Переносным движени-
144
ем точки называют движение, которое она совершает вместе
с подвижной системой отсчета, как точка, жестко скрепленная
с этой системой в рассматриваемый момент времени. Вслед-
Вследствие относительного движения движущаяся точка в различные
моменты времени совпадает с различными точками тела S,
с которым скреплена подвижная система отсчета. Переносной
скоростью и переносным ускорением являются скорость и уско-
ускорение той точки тела S, с которой в данный момент совпадает
движущаяся точка. Переносные скорость и ускорение обознача-
обозначают ve, ae.
Если траектории всех точек тела S, скрепленного с подвиж-
подвижной системой отсчета, изобразить на рисунке (рис. 37), то
получим семейство линий — семейство траекторий переносного
движения точки М. Вследствие относительного движения точки
М в каждый момент времени она находится на одной из
траекторий переносного движения. Точка М может совпадать
только с одной точкой каждой из траекторий этого семейства
переносных траекторий. В связи с этим иногда считают, что
траекторий переносного движения нет, так как приходится
считать траекториями переносного движения линии, у которых
только одна точка фактически является точкой траектории.
В кинематике точки изучалось движение точки относительно
какой-либо системы отсчета независимо от того, движется
эта система отсчета относительно других систем или нет.
Дополним это изучение рассмотрением сложного движения,
в простейшем случае состоящего из относительного и перенос-
переносного. Одно и то же абсолютное движение, выбирая различные
подвижные системы отсчета, можно считать состоящим из
разных переносных и соответственно относительных движений.
Сложение скоростей
Определим скорость абсолютного движения точки, если
известны скорости относительного и переносного движений
этой точки. Пусть точка со-
совершает только одно относи-
относительное движение по отношению
к подвижной системе отсчета
Oxyz и в момент времени t за-
занимает на траектории относи-
относительного движения положение
М (рис. 38). В момент времени
t+At вследствие относительного
движения точка окажется в по-
положении М\, совершив пере-
перемещение ММ у по траектории
относительного движения. Пред-
Предположим, что точка участвует
Рис. 38
145
только в одном переносном движении. Тогда за время
А? вследствие этого движения вместе с системой координат
Oxyz и относительной траекторией она переместится по
некоторой кривой на ММ2. Если точка участвует одновременно
и в относительном и в переносном движениях, то за
время At она переместится на ММ' по траектории абсолютного
движения и в момент времени t + At займет положение
М'. Если время At мало и в дальнейшем переходят
к пределу при At, стремящемся к нулю, то малые перемещения
по кривым можно заменить отрезками хорд и принять
их за векторы перемещений. Складывая векторные пе-
перемещения, получаем
В этом отношении отброшены малые величины более высокого
порядка, стремящиеся к нулю при At, стремящемся к нулю.
Переходя к пределу, имеем
lim MK= Jim MM±+ iim *LML. A8)
Пределы величин, входящих в это соотношение, являются
соответственно скоростями абсолютного, переносного и относи-
относительного движений точки, т. е.
v= lim ^L; ve = \\m^; vr= lim "a^-.
Следовательно, A8) примет форму
v = ve + vr. A9)
Получена так называемая теорема сложения скоростей:
скорость абсолютного движения точки равна векторной сумме
скоростей переносного и относительного движений этой точки.
Так как в общем случае скорости переносного и относительного
движений не перпендикулярны, то •
/ 2 | 2 | *Л /~Л~*\ /1 q?\
\J в > Г 1 С Т \ С ' Г/* V /
Пример. Капля дождя падает вертикально вниз со скоростью v относитель-
относительно Земли (рис. 39). Определить траекторию и скорость относительно движения
капли по отношению к автомобилю, движу-
движущемуся прямолинейно по горизонтальной до-
дороге со скоростью п относительно Земли.
Решение. Движение капли считаем слож-
сложным, состоящим из переносного движения
вместе с автомобилем и относительного по
отношению к автомобилю. По теореме сложе-
сложения скоростей,
Рис. 39 v = ve + vr.
146
В рассматриваемом случае ve = u и v перпендикулярна и. Следовательно,
Траектории падения капель дождя относительно автомобиля наклонены
к вертикали на угол ос. На рисунке пунктиром показаны следы капель дождя
на вертикальном стекле автомобиля.
При очень большой скорости автомобиля по сравнению со скоростью
падения капли дождя
tga = u/v
стремится к бесконечности, а угол ос— к предельному значению, равному
90°. Относительная предельная скорость капли дождя равна по величине
и противоположна по направлению скорости автомобиля, т.е. (vr)up= — п.
Сложение ускорений при поступательном
.переносном движении
Определим ускорение абсолютного движения в частном
случае поступательного переносного движения. Общий случай
сложения ускорений при произвольном переносном движении
рассматривается в гл. 5. Для любого переносного движения
справедлива теорема сложения скоростей
Если подвижная система отсчета Oxyz движется поступательно
относительно неподвижной Olx1ylz1, то по свойству поступа-
поступательного движения все точки тела, скрепленного с этой
системой, имеют одинаковые скорости и ускорения, равные
скорости и ускорению начала координат подвижной системы
координат точки О. Следовательно, для скорости и ускорения
переносного движения имеем
Выразим относительную скорость в декартовых координатах.
Получим
где i, j, к—единичные векторы, направленные по подвижным
осям координат; х, у, z—координаты движущейся точки
относительно этих осей (рис. 40). уо = уе
Подставляя в теорему сложения 7 /\
скоростей значения переносной
и относительной скоростей, име-
имеем
v = vo + xi+yj+zk.
По определению абсолютное
ускорение выражается производ-
производной по времени от абсолютной
скорости, т. е.
Рис. 40
147
a = d v/d t = (d/d t)(vo + xi+yj+'z k),
причем изменение абсолютной скорости v и других векторов v0, i,
j, к следует учитывать по отношению к неподвижной системе осей
координат O1xlylzl. Выполняя дифференцирование, получим
a = dvojdt + xi+yj+zk; dvo/dt = ao = de, B0)
так как производные по времени от единичных векторов
равны нулю. При поступательном движении подвижной си-
системы отсчета они не изменяются ни по модулю, ни по
направлению. Используя B0) и выражение для относительного
ускорения в декартовых координатах
получим следующее выражение для теоремы сложения ускоре-
ускорений точки при поступательном переносном движении:
а = ае + аг, B1)
т. е. абсолютное ускорение точки при поступательном перенос-
переносном движении равно векторной сумме ускорений переносного
и относительного движений.
В общем случае переносное ускорение ае и относительное
аг не перпендикулярны, поэтому
а = у/а1 + а? + 2аеагсо$(ае,А аг). B1')
ГЛАВА з
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Плоским движением твердого тела называют такое его
движение, при котором каждая его точка все время движется
в одной и той же плоскости. Плоскости, в которых движутся
отдельные точки, параллельны между собой и параллельны
одной и той же неподвижной плоскости. Поэтому плоское
движение твердого тела часто называют плоскопараллельным
движением. Траектории точек тела при плоском движении
являются плоскими кривыми.
Плоское движение твердого тела имеет большое значение
в технике, так как звенья большинства механизмов и машин,
применяемых в технике, совершают плоское движение. Враща-
Вращательное движение твердого тела вокруг неподвижной оси
можно считать частным случаем плоского движения.
При изучении плоского движения, как и любого другого,
необходимо рассмотреть способы задания этого движения,
а также приемы вычисления скоростей и ускорений точек тела.
148
Пусть твердое тело совершает
плоское движение, параллельное непо-
неподвижной плоскости По (рис. 41). Тогда
любая прямая, перпендикулярная этой
плоскости и жестко скрепленная сво-
своими точками с движущимся телом,
будет двигаться поступательно, т. е.
все точки этой прямой движутся оди-
одинаково.
Следовательно, для изучения дви-
движения точек, лежащих на рассмат-
рассматриваемой прямой, достаточно изучить
движение одной точки этой прямой,
М Р
Рис-
р
например точки М. Рассуждая аналогично для любой другой
прямой, перпендикулярной плоскости По и скрепленной с дви-
движущимся твердым телом, можно сделать вывод, что для
изучения плоского движения твердого тела достаточно изучить
движение точек этою тела, лежащих в какой-либо плоскости
П, параллельной неподвижной плоскости По, т. е. точек тела,
лежащих в сечении рассматриваемого тела плоскостью П и об-
образующих плоскую фигуру.
Таким образом, для изучения плоского движения твердого
тела достаточно изучить движение плоской фигуры в ее
плоскости, параллельной неподвижной плоскости По. Положе-
Положение фигуры на ее плоскости полностью определяется положени-
положением отрезка прямой линии, жестко скрепленной с этой плоской
фигурой. Различные по форме твердые тела, совершающие
плоское движение, имеют в сечениях разные плоские фигуры.
В общем случае за плоскую фигуру примем всю плоскость
и, следовательно, рассмотрим движение этой подвижной плос-
плоскости по другой, неподвижной плоскости.
§ 1. УРАВНЕНИЯ ПЛОСКОГО ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
Для задания положения плоской фигуры на плоскости
относительно системы координат OYxxyY, лежащей в плоскости
фигуры, достаточно задать на этой плоскости положение
отрезка ОМ (рис. 42), скрепленного с фигурой. Положение
отрезка ОМ относительно системы координат Olxlyl опреде-
определится заданием координат какой-либо точки этого отрезка
и его направления. Например, для точки О нужно задать
координаты х0, у0, а направление задать углом \|/, который
образует отрезок ОМ с какой-либо осью, например OYxY,
или ей параллельной осью Ох\. Вместо угла vj/ можно взять
угол между любой другой осью или отрезком, скрепленными
с плоской фигурой, и осью Оххх, например угол ср. Тогда
v|/ = cp + a, где а не зависит от времени. Таким образом,
149
уравнения движения плоской фигу-
фигуры в ее плоскости, а следовательно,
и плоского движения твердого тела
относительно системы координат
О1х1у1 имеют вид
*o=/i@; yo=f2{t); ф=/з@-
Положение любой точки
М плоской фигуры относительно
подвижной системы координат
Оху, скрепленной с этой движущей-
движущейся фигурой и лежащей в ее плос-
Рис- 42 кости, полностью определяется за-
заданием координат х и у точки М, которые при движении
плоской фигуры в ее плоскости не изменяются с изменением
времени. Между координатами точки М в двух системах
координат О1х1у1 и Оху существует следующая зависимость
(рис. 42):
х\ =*0 + rcos(a + (p); yl=yo + rsin(oi + q)),
где г — длина отрезка ОМ; ос— постоянный угол между отрез-
отрезком ОМ и осью Ох.
Раскрывая косинус и синус суммы двух углов и учитывая,
что rcosa = x; r sin ос=у, получаем окончательные формулы
в следующем виде:
x1=x0 + xcos(p—ysm(p; y\ =y0+ycosy + xsimp. A)
Формулы A) являются уравнениями движения точки плоской
фигуры относительно системы координат О1х1у1.
Эти формулы позволяют определить координаты любой
точки плоской фигуры по заданным уравнениям движения
этой фигуры и координатам ее точки относительно подвижной
системы координат, скрепленной с движущейся фигурой.
Используя векторно-матричную символику, A) можно выра-
выразить в форме
Р! = ро + Аг, (Г)
где А — матрица поворота на плоскости:
/cos ф
ув
sin ф \
J
§ 2. РАЗЛОЖЕНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
НА ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ
Любое движение твердого тела, в том числе и движение
плоской фигуры в ее плоскости, бесчисленным множеством
способов можно разложить на два движения, одно из которых
переносное, а другое — относительное. В частности, движение
150
плоской фигуры в ее плоскости
относительно системы координат
Olxlyl, расположенной в той же
плоскости (рис. 42), можно раз-
разложить на переносное и отно-
относительное движения следующим
образом. Примем за переносное
движение фигуры ее движение
вместе с поступательно движу- Рис 43
щейся системой координат
Ох\у\, начало которой скреплено с точкой О фигуры, принятой
за полюс. Тогда относительное движение фигуры будет по
отношению к подвижной системе координат Ох\у\ вращением
вокруг подвижной оси, перпендикулярной плоской фигуре
и проходящей через выбранный полюс О.
Для доказательства этого достаточно показать, что плоскую
фигуру в ее плоскости из одного положения в любое другое, в том
числе и бесконечно близкое первому, можно перевести двумя
перемещениями—поступательным перемещением в плоскости
фигуры вместе с каким-либо полюсом и поворотом в той же
плоскости вокруг этого полюса. Рассмотрим два любых положения
плоской фигуры I и II в ее плоскости, определяемые двумя
положениями отрезка А В, скрепленного с этой фигурой (рис. 43).
В общем случае, когда отрезок А В в одном положении
не параллелен тому же отрезку в другом положении, из
рис. 43 следует, что плоскую фигуру действительно сначала
можно переместить поступательно, например вместе с точкой
А этой фигуры, причем скрепленный с фигурой отрезок А В
займет положение А1В\, а затем повернуть фигуру вокруг
точки AY на угол ф до совпадения AlB'l с А1В1.
В частном случае, когда отрезок А В параллелен отрезку
AxBt, угол ф равен нулю и, следовательно, вращательного
перемещения в этом случае не будет. Очевидно, что в общем
случае, когда ф не равно нулю, сначала плоскую фигуру можно
повернуть на угол ф вокруг точки А, а затем переместить
поступательно. И наконец, совершая плоское поступательное
перемещение вместе с точкой А, фигуру можно поворачивать
вокруг этой точки так, чтобы в момент совпадения точки
А с точкой At эта фигура повернулась на угол ф.
Действительное плоское перемещение фигуры из положения
/ в положение // может быть любым, но его всегда можно
заменить двумя простыми плоскими перемещениями — поступа-
поступательным и вращательным — так, чтобы конечное положение
плоской фигуры в обоих случаях было одним и тем же.
Действительное перемещение фигуры в ее плоскости из одного
положения в другое, бесконечно близкое к первому, в пределе
можно точно заменить двумя элементарными простыми плоски-
плоскими перемещениями — поступательным и вращательным. При
151
этом поступательное перемещение фигуры вместе с какой-либо ее
точкой является переносным движением плоской фигуры,
а вращение фигуры вокруг подвижной оси, перпендикулярной
плоскости фигуры и проходящей через выбранную точку,—
относительным движением.
Поступательное перемещение зависит от выбора точки
фигуры, вместе с которой совершается это поступательное
перемещение, в то время как угол поворота вокруг полюса
не зависит от выбора полюса.
На рис. 43 показаны случаи, когда за полюсы выбираются
сначала точка А, а затем точка В. Штриховой линией указаны
положения плоской фигуры после поступательных перемещений
вместе с точками А и В.
§3. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ ТЕЛА
ПРИ ПЛОСКОМ ДВИЖЕНИИ
Для характеристики вращательной части плоского движения
твердого тела вокруг подвижной оси, проходящей через
выбранный полюс, аналогично случаю вращения твердого
тела вокруг неподвижной оси можно ввести понятия
угловой скорости со и углового ускорения в. Если угол
поворота вокруг подвижной оси, проходящей через полюс,
обозначить ф, то
CD = |d<p/d*|; s = |aco/d?| = |d29/d?2|.
Так как вращательная часть движения не зависит от выбора
полюса, то и характеристики этой части движения — угловая
скорость и угловое ускорение — также не зависят от выбора
полюса. Следовательно, для заданного плоского движения
фигуры в данный момент они одинаковы относительно подвиж-
подвижной оси, проходящей через любую точку фигуры.
При плоском движении тела угловую скорость и угловое
ускорение можно считать векторами, направленными по по-
подвижной оси, перпендикулярной плоскости фигуры и проходя-
проходящей через выбранный полюс. Вектор угловой скорости со при
плоском движении фигуры направлен по подвижной оси так,
чтобы с конца его стрелки можно было видеть вращение
фигуры против часовой стрелки. Вектор углового ускорения
в при ускоренном вращении фигуры совпадает с направлением
вектора угловой скорости со, а при замедленном вращении
эти векторы имеют противоположные направления. Так как
со и s не зависят от выбора полюса на плоской фигуре,
то, следовательно, их можно приложить в любой точке фигуры,
не изменяя модулей и направлений этих векторов, т. е.
со и s являются свободными векторами. Вектор углового
ускорения является первой производной по времени от вектора
угловой скорости, т. е. s = dco/d?.
152
§4. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Применяя к плоскому движению теорему о сложении
скоростей для какой-либо точки В фигуры, получаем
Ч = Че + »Вг, B)
где vB— абсолютная скорость точки В плоской фигуры относи-
относительно системы координат, по отношению к которой рассмат-
рассматривается движение фигуры; vBe—скорость точки В от перенос-
переносного поступательного движения фигуры вместе, например,
с точкой А этой фигуры (рис. 44, a); vBr — скорость точки
В в относительном движении, которым является вращение
плоской фигуры вокруг точки А с угловой скоростью со.
Так как за переносное движение выбрано поступательное
движение вместе с точкой А, то все точки плоской фигуры
имеют одинаковые переносные скорости, совпадающие с абсо-
абсолютной скоростью точки А, т.е.
Скорость относительного движения, в случае когда оно
является вращательным движением, равна
Скорость vBr расположена в плоскости движущейся фигуры
и направлена перпендикулярно отрезку АВ, соединяющему
точку В с полюсом А. Эту относительную скорость можно
выразить в виде векторного произведения:
vBr = (bxAB,
где угловая скорость со считается направленной по подвижной
оси вращения, проходящей через точку А и перпендикулярной
плоскости фигуры. Относительную скорость vBr обозначим
vBA. Это обозначение показывает, что скорость относительного
движения точки В получается от вращения плоской фигуры
S)
153
вокруг подвижной оси, проходящей че-
через точку А, или просто вокруг точки
А. Формулу B) можно выразить в виде
«в = «л + «1м> C)
где
vBA = &AB, D)
а вектор vBA перпендикулярен отрезку
А В и направлен в сторону вращения
плоской фигуры (рис. 44, а). Используя
Рис. 45 C), можно построить в выбранном мас-
масштабе треугольник скоростей для точки В (рис. 44, б).
Таким образом, скорость какой-либо точки фигуры при ее
плоском движении равна векторной сумме скорости полюса
и относительной скорости этой точки от вращения фигуры вокруг
полюса. Формула C) выражает зависимость между скоростями двух
любых точек тела при плоском движении в любой момент времени.
Пример. Колесо радиусом R (рис. 45) катится со скольжением по прямой
линии, имея в рассматриваемый момент времени скорость центра t;0 и угловую
скорость со. Определить в этот момент времени скорости точек обода колеса
М, Р и N, расположенных на концах вертикального и горизонтального
диаметров.
Решение. Для точки М скорости полюса v0 и от вращения вокруг
полюса vM0 направлены по одной прямой в одну и ту же сторону.
Следовательно, по формуле C),
где
Для точки Р скорости v0 и vP0 противоположны по направлению, поэтому
причем
При качении колеса по прямой линии без скольжения скорость точки Р равна
нулю и, следовательно, в этом случае скорость центра v0 и угловая скорость
со связаны соотношением
Отсюда угловую скорость можно выразить через скорость центра колеса v0
и его радиус:
В точке N скорости v0 и vN0 перпендикулярны. Следовательно,
„2
где
Отметим, что при качении колеса по прямой без скольжения скорости
точек обода колеса не направлены по касательной к ободу, за исключением
самой верхней его точки М.
Формулу C), устанавливающую зависимость скоростей двух
точек плоской фигуры, можно получить непосредственным
дифференцированием по времени векторного равенства
154
справедливого для любого момента времени (см. рис. 44, а).
При дифференцировании векторов учитываем их изменения
относительно основной, неподвижной, системы координат
О1х1у1, т. е. вычисляем полные производные от этих
векторов. Имеем
drB dr. d
dt dt
Очевидно, drB/dt = vB, drAjdt = rA— скорости точек В и А.
Вектор А В соединяет две точки плоской фигуры и, следователь-
следовательно, не изменяется по модулю при движении плоской фигуры.
Производную по времени от такого вектора как вектора
постоянного модуля по скалярному аргументу можно выразить
в форме
Т
где ю — вектор угловой скорости вращения АВ, а следовательно,
и плоской фигуры, с которой скреплен вектор АВ.
Окончательно имеем
vB = vA+ax АВ.
Если ввести обозначение vBA=(bx А В, то
vb = va+vBa,
т. е. получаем формулу C).
§ 5. МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
В каждый момент времени при плоском движении фигуры
в ее плоскости, если со^О, имеется единственная точка этой
фигуры, скорость которой равна нулю. Эту точку называют
мгновенным центром скоростей. Обозначим ее Р.
Для доказательства этой теоремы достаточно указать способ
нахождения мгновенного центра скоростей, если известны по
модулю и направлению скорость какой-либо точки О плоской
фигуры и угловая скорость этой
фигуры в рассматриваемый момент
времени. Пусть вращение проис-
происходит по часовой стрелке (ф<0
и со = |ф|) (рис. 46). Скорость точки
Р плоской фигуры равна нулю,
если скорость полюса О и скорость
от вращения вокруг полюса
О в этой точке равны по модулю, Рис. 46
155
но противоположны по направлению. Эти точки лежат на
перпендикуляре к скорости v0 в точке О. В других точках
векторная сумма двух векторов не может быть равна нулю.
Итак, если vP = v0 + vP0 = О, то vP0=—v0; vPO = vo.
Но
vPO=(i)OP;
следовательно,
OP =vPOj(S) = voj(S).
Таким образом, мгновенный центр скоростей находится
на перпендикуляре к скорости v0, проведенном из точки О,
на расстоянии OP =voj(S).
Мгновенный центр скоростей является единственной точкой
плоской фигуры для данного момента времени. В другой
момент времени мгновенным центром является уже другая
точка плоской фигуры.
Если мгновенный центр известен, то, приняв его за полюс
и учитывая, что скорость его в этом случае равна нулю,
согласно C) и D), для точки А фигуры имеем
пл=»лр; vA=vAP = (i)AP, E)
где АР—расстояние от точки А до мгновенного центра скоростей.
По направлению скорость vA в этом случае перпендикулярна
отрезку АР. Для точки В, аналогично,
vB = d)BP, F)
причем скорость vB перпендикулярна отрезку ВР.
Из E) и F) имеем
(u = vA/AP=vB/BP G)
vA/vB = AP/BP. (8)
Следовательно, если мгновенный центр скоростей известен, то
скорости точек плоской фигуры при ее движении в своей
плоскости вычисляют так же, как и в случае вращения фигуры
в рассматриваемый момент вокруг своего мгновенного центра
скоростей с угловой скоростью со.
Для нахождения скоростей точек тела при его плоском
движении обычно предварительно находят мгновенный центр
скоростей. Но можно применить формулу, выражающую
зависимость между скоростями двух точек тела.
Рассмотрим способы нахождения мгновенного центра ско-
скоростей. Существует два основных способа его нахождения: из
механических условий задачи и по скоростям точек плоской фигуры.
В некоторых случаях удается сразу указать точку плоской
фигуры, скорость которой в рассматриваемый момент равна
нулю. Эти точки в таких задачах и являются мгновенными
центрами скоростей. Так, в случае качения без скольжения
одного тела по поверхности другого неподвижного тела точка
156
Рис. 47
Рис. 48
соприкосновения поверхностей тел и является мгновенным
центром скоростей.
Например, при качении без скольжения колеса по неподвижной
прямой линии (см. рис. 52) и одного колеса по неподвижному
другому колесу (см. рис. 61) мгновенный центр скоростей
находится в точках соприкосновения колеса с прямой и соответст-
соответственно колеса с колесом. В общем случае, если известны скорости
двух точек плоской фигуры (рис. 47), мгновенный центр скоростей
находится на пересечении перпендикуляров к скоростям этих точек.
В том случае, когда точки лежат на общем перпендикуляре
к скоростям этих точек, скорости точек параллельны и концы
их лежат на одной прямой, проведенной через мгновенный
центр скоростей (рис. 48 и 49), так как скорости точек
пропорциональны расстояниям от этих точек до мгновенного
центра скоростей. Если скорости двух точек, расположенных
на общем перпендикуляре к этим скоростям, еще и равны
(рис. 50), то имеем мгновенное поступательное движение плос-
плоской фигуры, при котором скорости всех точек фигуры
одинаковы по модулю и направлению. Угловая скорость
плоской фигуры при мгновенном поступательном движении
равна нулю, и в этом случае, согласно формуле G), мгновенный
центр скоростей находится в бесконечности.
157
«д/
Рис. 51
///////////////77777
Р
Рис. 52
Заметим, что при мгновенном поступательном движении
только скорости точек одинаковы, а их ускорения в общем
случае различны. Невозможен случай, когда скорости двух
точек, не лежащих на общем перпендикуляре к скоростям,
не равны друг другу по модулю, но параллельны (рис. 51),
так как для него не выполняется теорема о проекциях
скоростей двух точек тела на прямую, соединяющую эти точки.
Пример. Колесо радиусом R (рис. 52) катится без скольжения по неподвиж-
неподвижной прямой, имея скорость центра v0. Определить скорости точек М,
N и L обода колеса в данный момент времени.
Решение. Мгновенный центр скоростей в этом случае находится в точке
Р соприкосновения колеса с прямой. Угловая скорость колеса определяется
по формуле G):
_ vo _vo
По формуле E) для скоростей указанных точек имеем
vm =vL=a>MP=v0S/2; vN =<oNP =2v0,
так как
Скорости точек колеса направлены по перпендикулярам к отрезкам прямых,
соединяющих мгновенный центр скоростей с рассматриваемыми точками.
§ 6. ВЫЧИСЛЕНИЕ УГЛОВОЙ СКОРОСТИ
ПРИ ПЛОСКОМ ДВИЖЕНИИ
Угловую скорость плоской фигуры при плоском движении
можно вычислить, согласно ее определению, как
(D = |d<p/df|.
Затем ее можно определить по формуле G):
(a = vA/AP=vB/BP.
Чтобы определить угловую скорость, надо скорость ка-
какой-либо точки плоской фигуры разделить на расстояние от
этой точки до мгновенного центра скоростей. Направление
вращения определяем по направлению скорости какой-либо
158
точки, считая, что плоская фигура
в данный момент вращается вокруг
мгновенного центра скоростей с уг-
угловой скоростью со.
Угловую скорость при плоском
движении можно вычислить путем
предварительного нахождения скоро- *-* -^
сти какой-либо точки плоской фигуры ""ъ"
от вращения фигуры вокруг другой
ее точки, принятой за полюс, напри- Рис- 53
мер vBA или vCA. Тогда угловая скорость, согласно формуле D),
Знак угловой скорости определяют по направлению относи-
относительной скорости какой-либо точки фигуры от вращения
фигуры вокруг другой ее точки, выбранной за полюс.
Применяют и другие способы определения угловой скорости.
Так, если предварительно установить зависимость угла поворо-
поворота плоской фигуры от линейных и угловых величин других
плоских фигур тождественным соотношением, то, дифференци-
дифференцируя его по времени, получаем соотношение, из которого иногда
удается определить искомую угловую скорость. Этот способ
используют часто для нахождения зависимости угловых скоро-
скоростей отдельных звеньев плоских механизмов.
Пример. В кривошипно-шатунном механизме (рис. 53) даны длины криво-
кривошипа г, шатуна / и расстояние h от оси вращения кривошипа до направляющей
ползуна В. Установить зависимость между угловыми скоростями кривошипа
со и шатуна а>! при любом положении механизма.
Решение. Положение кривошипа О А определяется углом ср, а шатуна
А В—углом v|/. До тех пор пока ср<-, справедливо тождество
rsincp + A =/sinv|/.
Дифференцируя это тождество по времени, получим
Но |ф|=со, |\J/1^со!; следовательно,
г со cos ср = /co1cos\j/.
Полученное соотношение и является искомой зависимостью между угловы-
угловыми скоростями кривошипа и шатуна. При А = 0 имеем частный случай
кривошипно-шатунного механизма. Если дополнительно /=г, то v|> = cp и со^со.
Направления вращений кривошипа и шатуна противоположны. При вращении
кривошипа против часовой стрелки шатун вращается по часовой стрелке.
§ 7. УСКОРЕНИЯ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Рассматривая плоское движение плоской фигуры как слож-
сложное, состоящее из переносного поступательного вместе с по-
полюсом А и относительного вращательного вокруг А, по
теореме о сложении ускорений для точки В имеем
ав = аВе + аВг. (9)
159
si
Так как переносное движение является поступательным
вместе с точкой А фигуры, то переносное ускорение
Относительное ускорение аВг точки В от вращения
вокруг полюса А обозначим аВА. После этого формула
(9) принимает вид
ав = аА + аВА, A0)
т. е. ускорение какой-либо точки плоской фигуры при плоском
движении равно векторной сумме ускорения полюса и ускорения
этой точки от вращательного движения плоской фигуры вокруг
полюса.
Ускорение от относительного вращательного движения
вокруг полюса, как и в случае вращения тела вокруг непо-
неподвижной оси, состоит из касательной и нормальной состав-
составляющих аВА и аВА:
(И)
ВА
причем
аВА = гАВ;
и
A2)
A3)
A4)
Касательное относительное ускорение аВА направлено по
перпендикуляру к отрезку А В в сторону дуговой стрелки
углового ускорения г (рис. 54, а). Нормальное относительное
ускорение а"ВА соответственно направлено по линии А В от
точки В к полюсу А. Наконец, полное относительное ускорение
аВА составляет с отрезком А В угол а, тангенс которого
можно определить по формуле
A5)
160
Из формулы A5) следует, что угол а для всех точек плоской
фигуры одинаков. При ф > О угол а от ускорения аВА к отрезку
В А надо откладывать против часовой стрелки. При ф < О его
надо откладывать по часовой стрелке, т. е. во всех случаях,
независимо от направления вращения фигуры, угол а всегда надо
откладывать в направлении дуговой стрелки углового ускорения.
В соответствии с A0) и A1) можно построить в выбранном
масштабе многоугольник ускорений для точки В (рис. 54, б).
Формулу A0), определяющую зависимость ускорений двух
точек плоской фигуры, можно получить непосредственным
дифференцированием векторного равенства для скоростей,
справедливого в любой момент времени. Имеем
AB.
Продифференцируем по времени обе части этого равенства,
учитывая изменения векторных величин относительно непод-
неподвижной системы координат (полные производные). Получаем
dvB dvA d(b т"Й , - d
—1 = —± + —-хАВ + <£>х—
dt dt dt dt
Здесь dvB/dt — as, dvA/dt = aA— ускорения точек В и А отно-
относительно неподвижной системы координат; dco/dz = 8 — угловое
ускорение плоской фигуры. У вектора АВ постоянный модуль;
следовательно, его производная по времени выражается в форме
~(AB) = (hxAB.
dtx '
Объединяя полученные результаты, получаем
ав = аЛ + гхАВ+(йх(& хАВ*).
Рассуждения, аналогичные тем, которые проведены для
скорости vBA, позволяют сделать вывод о том, что
zxAB=aBA; шх(шх AB) = (hxvBA = aBA,
т. е. гхАВ и шх(шх1с) являются соответственно касательным
и нормальным ускорениями от вращения плоской фигуры
вокруг точки А. Следовательно,
Пример. Колесо радиусом R катится со
скольжением по неподвижной прямой, совершая
плоское движение (рис. 55). Ускорение центра
колеса в рассматриваемый момент времени а0, i I i* J40. \N ?o
а угловая скорость и угловое ускорение колеса
ш и е. Дуговые стрелки для шиз направлены по
часовой стрелке, т. е. ф < 0 и ф < 0. Определить
в этот момент времени ускорения точек М,
N и Р, расположенных на концах вертикального
и горизонтального диаметров обода колеса.
Решение. Ускорение точки М, приняв за
полюс точку О, определим по формуле Рис. 55
6 Заказ 192 161
и аналогичным формул'ам для точек N и Р. Для касательного и нормального
ускорений точки М от вращения колеса вокруг точки О имеем
Ускорение а\ю перпендикулярно отрезку ОМ и направлено в сторону,
указываемую дуговой стрелкой е, а ускорение а"мо направлено от
точки М к точке О, принятой за полюс. Аналогично направлены
ускорения для точек Л" и Р.
Так как для точки М ускорения а0 и а\ю направлены по одной прямой,
то, предварительно их сложив, получим две перпендикулярные составляющие
ускорения и, следовательно,
Для точки N
так как
ON=OM=R.
Окончательно для точки N имеем
Для точки Р соответственно
В том случае, когда колесо катится без скольжения, точка Р является
мгновенным центром скоростей и скорость точки Р в любой момент времени
равна нулю. Скорость точки О в этом случае можно определить по формуле
Дифференцируя по времени обе части этого тождества и приравнивая результат
дифференцирования, получим
dvoldt=Rd(o/dt,
так как точка О движется прямолинейно, и
s=|dco/df|;. аЬ= |dt;0/dr|.
Учитывая, что
azPO = £OP=sR = ao,
имеем
ао-арО = 0.
Следовательно, при качении колеса по прямой без скольжения
т. е. ускорение мгновенного центра скоростей, скорость которого равна нулю,
не равно нулю.
Если угловое ускорение не задано, то при отсутствии скольжения колеса
по прямой его можно определить по формуле
§ 8. МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
В каждый момент, движения плоской фигуры в своей
плоскости, если ю и г не равны нулю одновременно, имеется
единственная точка этой фигуры, ускорение которой равно
162
нулю. Эту точку называют мгновен-
мгновенным центром ускорений. Обозначим
ее через Q. Для доказательства этой
теоремы предположим, что известны
по модулю и направлению ускорение
какой-либо точки плоской фигуры,
угловая скорость и угловое ускорение
этой фигуры. Пусть ф< О (рис. 56).
Мгновенный центр ускорений лежит
на линии, проведенной под углом
а к ускорению точки, тангенс кото-
которого вычисляем по формуле
= e/co2.
Рис. 56
При этом угол а надо отложить от ускорения а0
в направлении дуговой стрелки углового ускорения г, т. е.
в рассматриваемом случае по часовой стрелке. Только
в точках этой прямой ускорение а0 и ускорение от вращения
aQ0 могут иметь противоположные направления и одинаковые
значения, т. е.
и тогда
Но
следовательно,
Из приведенного доказательства следует, что мгновенный
центр ускорений является единственной точкой плоской фигуры,
ускорение которой в рассматриваемый момент времени равно
нулю. В другой момент времени мгновенный центр ускорений
находится в общем случае в другой точке плоской фигуры.
Если мгновенный центр ускорений известен, то, выбрав
его за полюс, для ускорения точки А плоской фигуры по
формуле A0) получаем
так как
и, следовательно,
aA = aAQ = AQ%/e2 + (o4'. A6)
Ускорение аА направлено под углом а к отрезку AQ,
соединяющему точку А с мгновенным центром ускорений
в сторону дуговой стрелки углового ускорения г (рис. 57).
Для точки В, аналогично,
' A7)
163
и ускорение ав также направлено под углом
а к отрезку BQ.
Из формул A6) и A7) имеем
aJaB = AQlBQ, A8)
т. е. ускорения точек плоской фигуры при
плоском движении пропорциональны рас-
расстояниям от этих точек до мгновенного
центра ускорений.
Итак, суммируя результаты, получаем,
что ускорения точек плоской фигуры при
рис 57 плоском движении можно определить так
же, как и при вращательном движении
плоской фигуры вокруг мгновенного центра ускорений с угловой
скоростью ю и угловым ускорением г.
Для вычисления скоростей точек плоской фигуры при
плоском движении принимают, что плоская фигура вращается
вокруг мгновенного центра скоростей, а для вычисления
ускорения следует считать, что она вращается вокруг мгновен-
мгновенного центра ускорений.
При качении без скольжения колеса по прямой (см. пример
в § 7) получается, что ускорение мгновенного центра скоростей
не равно нулю; следовательно, в общем случае мгновенные
центры скоростей и ускорений являются различными точками
плоской фигуры.
Ускорения точек плоской фигуры при плоском движении,
подобно скоростям точек, можно определять двумя способами:
по формуле A0), выражающей зависимость ускорений двух
точек плоской фигуры, и по формуле A6), используя мгновен-
мгновенный центр ускорений. Обычно мгновенный центр ускорений,
кроме частных случаев, когда угловая скорость или угловое
ускорение равны нулю, располагается на плоской фигуре так,
что трудно определить расстояние от него до рассматриваемых
точек фигуры. Поэтому определение ускорения точек рекомен-
рекомендуется вычислять по формуле A0).
Рассмотрим способы нахождения мгновенного центра уско-
ускорений как в частных, так и в общем случаях.
1. Пусть известно, что угловое ускорение г = 0, а угловая
скорость ю^О. Очевидно, это возможно в случае, когда
плоская фигура вращается в своей плоскости с постоянной
угловой скоростью или когда угловая скорость достигает
относительно наибольшего или наименьшего значения. В этом
случае для угла а
и, следовательно, угол ос = О.
Мгновенный центр ускорений лежит на прямой линии, по
которой направлено ускорение какой-либо точки плоской
164
фигуры (рис. 58). Так как это справедливо
для любой точки фигуры, то, следователь-
следовательно, мгновенный центр ускорений лежит
в точке пересечения прямых линий, по
которым направлены ускорения точек
плоской фигуры. Ускорения точек плоской
фигуры в этом случае направлены к мгно-
мгновенному центру ускорений, так как они
состоят только из одной относительной
нормальной составляющей от вращения
вокруг мгновенного центра ускорений.
Если известно ускорение, например точки А, то мгновенный
центр ускорений можно найти по расстоянию AQ:
Рис. 58
Эта формула получается из A6) в том случае, когда
угловое ускорение равно нулю.
2. Пусть угловая скорость ю = 0, а угловое ускорение г^О.
Это возможно при мгновенном поступательном движении.
Тогда
и, следовательно, угол ос — прямой. Его надо откладывать
от ускорения точки в направлении дуговой стрелки углового
ускорения. Мгновенный центр ускорений лежит на пересечении
перпендикуляров к ускорениям точек плоской фигуры, про-
проведенных из этих точек (рис. 59). Если известно числовое
значение ускорения какой-либо точки А, то расстояние от
А до мгновенного центра ускорений можно вычислить по
формуле AQ = aA/s, которая получается из формулы A6)
при ю = 0.
3. В общем случае, когда угловая скорость ю и угловое
ускорение г известны и не равны нулю, для угла а имеем
tga = e/oo2#0.
Мгновенный центр ускорений лежит на пересечении прямых
линий, проведенных к ускорениям точек фигуры под одним
и тем же углом ос, причем угол а нужно
откладывать от ускорений точек в на-
направлении дуговой стрелки углового
ускорения независимо от направления
угловой скорости плоской фигуры (см.
рис. 57). Если известно ускорение, на-
например точки А, то расстояние от точки
А до мгновенного центра ускорений
можно найти по формуле A6), т. е.
Рис. 59
165
4. Пусть в данный момент времени
/* известны ускорения двух точек плоской
фигуры: А и В (рис. 60). Укажем
<h способ нахождения мгновенного центра
ускорений в этом случае. По формулам
A0)... A3), приняв за полюс точку
А, имеем
A9)
где
~П A Dr,^.2 ,.1 A Do
U. ft а — Si. D LU , (*■ ВА — Si-DC*.
Проецируя левую и правую части
векторной формулы A9) на две взаимно
перпендикулярные оси Вх и By, по-
получаем
ав cos C = аА cosy + АВа>2; ав sin C = аА siny + ABe,
где Р и у — известные углы соответственно между ускорениями
ав и аА и положительным направлением оси Вх.
При принятом направлении оси Вх проекцию а"ВА на эту
ось надо взять со знаком плюс, так как аВА направлена
всегда от точки В к полюсу А. Проекцию ускорения а\А на
ось By предположительно возьмем с плюсом, считая дуговую
стрелку s в рассматриваемом случае направленной против
часовой стрелки. Определяя ю2 и е, легко находим
ю
2 =
= (авcos& — aAcosy)/АВ; e = (aBsinP — aAsiny)/АВ.
Естественно, что в реальных случаях величина со2, найденная
из полученной формулы, должна оказаться положительной.
Знак же углового ускорения 8 определяется знаком правой
части формулы для 8.
После того как найдены е и ю2, задача нахождения
мгновенного центра ускорений сводится к уже рассмотренному
случаю 3.
§ 9. ОСНОВНЫЕ СПОСОБЫ ВЫЧИСЛЕНИЯ УГЛОВОГО
УСКОРЕНИЯ ПРИ ПЛОСКОМ ДВИЖЕНИИ
При вычислении ускорений точек фигуры при плоском
движении необходимо знать угловое ускорение. Рассмотрим
некоторые приемы его определения.
1. Если известен угол поворота или угловая скорость
в зависимости от времени, то угловое ускорение 8 определяем
путем дифференцирования их по времени, т. е.
2. Обычно требуется определить угловое ускорение в ка-
какой-либо момент времени по другим величинам, известным
166
в этот же момент времени. В этом случае угловое ускорение тоже
можно получить путем дифференцирования угловой скорости по
времени, считая ее для вывода формулы известной функцией
времени. Угловую скорость можно найти по формуле G):
где А — точка плоской фигуры; Р—мгновенный центр скоростей.
Дифференцируя ю по времени, получаем
dco
—
dt
I du,
-
АР dt
dt
1
В тех случаях, когда АР постоянно,
е = аА/АР, B0)
так как
e=|dm/df|; a\=\dvjdt\,
где а\ — касательное ускорение точки А.
Так, например, при качении колеса без скольжения по
неподвижной прямой линии (см. рис. 55), если за точку А взять
центр колеса О, то, учитывая, что он движется прямолинейно,
получим
£ = ao/R,
так как в этом случае
= R = const и аЬ = а0,
где R— радиус колеса.
При качении без скольжения одного колеса по неподвиж-
неподвижному другому колесу сначала установим зависимость между
угловой скоростью а>1 подвижного колеса и угловой скоростью
ю кривошипа О А (рис. 61). Учитывая, что мгновенный центр
скоростей подвижного колеса лежит в точке соприкосновения
колес, получаем
vA vA R + r
где R—радиус неподвижного колеса;
г—радиус подвижного колеса.
Дифференцируя по времени B1),
имеем
R + r
B2)
так
как
E1 = |dro1/d/|; e=|doo/d*|.
Из сравнения B1) и B2) видно, что
связь между угловыми скоростями и уг-
угловыми ускорениями колес полностью
Рис. 61
167
аналогична. Это справедливо и для
углов поворота колес, если нулевые
их значения выбрать в один и тот
же момент времени.
При внешнем зацеплении дуго-
дуговые стрелки угловой скорости и уг-
углового ускорения подвижного ко-
колеса совпадают с дуговыми стрел-
стрелками соответственно угловой ско-
скорости и углового ускорения кри-
Рис 62 вошипа О А.
При внутреннем зацеплении ко-
колес дуговые стрелки ю и г колеса и кривошипа имеют
противоположные направления.
3. Иногда угловое ускорение г можно найти путем про-
проецирования на оси координат известного по направлению
ускорения, например точки В, если ускорение какой-либо
другой точки А и угловая скорость фигуры со известны или
их можно вычислить предварительно.
Так, если ускорение точки В
ав = аА + аВА + а"ВА, B3)
то, проецируя обе части B3) на ось Ох, перпендикулярную
ускорению ав, получаем соотношение, из которого можно
определить угловое ускорение, если другие величины, входящие
в это соотношение, известны.
Определим этим способом угловое ускорение линейки
эллипсографа А В (рис. 62). Эллипсографом называют меха-
механизм, в котором одна точка А его линейки движется только
по оси Ох, а другая В—по оси Оу. Линейка эллипсографа
обычно приводится в движение вращением кривошипа ОС
вокруг оси О, причем точка С лежит на середине линейки
и описывает окружность с центром в точке О, а точки части
линейки ВС описывают всевозможные эллипсы, заключенные
между окружностью и прямой Оу. Точки части линейки АС
соответственно могут описать набор эллипсов, заключенных
между окружностью и прямой Ох.
В эллипсографе, когда ускорения точек А и В направлены
соответственно по осям Ох и Оу, проецируя B3) на Ох,
получаем
0 = aA + AB(d2cosq> — ABssinq>, B4)
так как
апВА = АВы2; аВА = АВг.
Соотношение B4) и служит для определения углового
ускорения линейки эллипсографа АВ, если все другие величины
в этом соотношении известны или их можно предварительно
определить.
168
Описанным выше приемом удобно определять угловое
ускорение шатунов в различных кривошипно-шатунных меха-
механизмах, когда у шатуна есть точка, движущаяся прямолинейно.
Если известны ускорения двух точек А и В плоской фигуры
по модулю и направлению в какой-либо момент времени,
то путем проецирования соотношения B3) на два взаимно
перпендикулярных направления, одно из которых удобно
направить по А В, получим два уравнения для определения
угловой скорости и углового ускорения (см. п. 4 § 8).
Наоборот, по угловой скорости и угловому ускорению из
этих уравнений можно найти числовые значения ускорений
точек А и В, если известны направления ускорений этих точек.
4. В задачах (см. § 6, рис. 53), где зависимость между
угловыми скоростями различных тел можно установить путем
дифференцирования по времени тождественных соотношений
между углами поворота, зависимость между угловыми ускоре-
ускорениями часто можно получить путем двукратного дифференци-
дифференцирования по времени этих тождеств. Так, после первого
дифференцирования в рассматриваемом случае
г cosф ф = /cosi|/\j/.
Дифференцируя вторично, имеем
— rsin(p(p + rcos(pcf>= —/sin\(/\]/ + /cos\J/v[/.
Так как e1 = |v|/| — угловое ускорение шатуна А В и е = |ф| —
угловое ускорение кривошипа О А, то
— r(£>2Sm(p + r£COS(f>= —/ГО? SinV(/+ /8^0811/.
Если дополнительно известно, что угловая скорость ю криво-
кривошипа О А постоянна, т. е. г = 0, то
Отсюда можно определить угловое ускорение шатуна в за-
зависимости от углов ф и vj/ и угловых скоростей ю и (й1.
Пример. Диск радиусом г=0,25 м приводится в движение от кривошипа
О А и вертикальной рейки (рис. 63). От кривошипа движение диску передается
при помощи шатуна АС. Рейка движется
поступательно по закону s = 2t2 м; криво-
кривошип вращается согласно уравнению
ТС 71
<f>=-sm-t. Угол ф отсчитывается от го-
горизонтального направления.
Определить угловые скорость и уско-
ускорение диска и шатуна, а также скорости
и ускорения точек В, С, D, мгновенные 0,
центры скоростей и ускорений диска
в момент времени t = 1 с, если
ОА = АС=\ м и точки D диска и О кри-
кривошипа расположены на одной гори-
горизонтальной прямой. п г-,
v Рис. 63
169
ж
Рис. 64
Рис. 65
Решение. Положение кривошипа в момент времени t=\ с определяется
я тс тс
углом ш = —sin—= - рад. Кривошип в этот момент занимает вертикальное
2 2 2
положение, параллельное рейке.
Для алгебраических угловой скорости и углового ускорения кривошипа имеем
2 3
ТС ТС Я ТС
Ф = — cos-г; ф= sin-?.
4 2 8 2
Tf
При ?=1с, ф = 0, ф=-—=-3,87 с.
Таким образом угловые скорость
и ускорение кривошипа ш = |ф| = 0, е = | ф |= +3,87 с~2. Дуговую стрелку для
е следует направить против положительного направления угла ф, так как ф<0.
Для скорости и ускорения точки А кривошипа, вращающегося вокруг
неподвижной оси, имеем:
vA = OAa> = 0; аА = аА + а"А, a"A = OA(a2 = 0; aA = OAs = 3,87 м/с2.
Ускорение аА — а'А изображено на рис. 64 с учетом дуговой стрелки для е.
У точки А шатуна такие же скорость и ускорение, как и у точки
А кривошипа. Приняв точку А за полюс (рис. 65), определяем скорость
точки С шатуна по формуле
vc = vA + vCA. (a)
Но vA = 0; следовательно, vc = SCA, причем vCA перпендикулярна АС. В проекциях
на выбранные оси координат из (а) получаем
Траекторией точки С
vc = \vCy\. С учетом этого (
скорость шатуна toAC = vCA[AC =
В
является вертикальная прямая. Поэтому иСх = 0,
из (а') имеем, что vCA-0, vc = \vCy\ = 0 и угловая
AC 0
щ
Вычисляем скорость и ускорение точки В рейки по формулам vB = s = 4t,
aB='s = A. При г=1с 58=4 м/с,
ав=А м/с2. Производные s и s положи-
положительны, поэтому vB и ав следует напра-
направить в сторону возрастания s.
При отсутствии скольжения у точки В
диска будут такие же скорость и состав-
составляющая ускорения в вертикальном направ-
направлении аВу, как и у точки В рейки (рис. 66).
Приняв за полюс точку В диска, определя-
У\ ем скорость его точки С по формуле
Рис. 66 vc = vB + vCB. (б)
170
Предположив, что диск вращается
против часовой стрелки, строим тре-
треугольник скоростей для точки
С в соответствии с (б). Он выродил-
выродился в отрезок прямой (рис. 66).
В проекциях на оси координат
из (б) имеем vCx = 0, vCy = vB—vCB. "о
Но vCy = 0; следовательно, vB—vCB — 0
и во=в,=4м/с. Скорость vCB по- Рис- 67
лучилась положительной; следовательно, предположение о направлении враще-
вращения диска подтвердилось. Угловую скорость диска определяем по формуле
a1=vCB/CB=vCB/r=l6c-i.
Мгновенным центром скоростей диска является его точка С, так как
ис = 0. Используя эту точку как МЦС, для точки D имеем
vD=CD(n1 = г-о>1=4 м/с.
Перейдем к определению ускорений точек и углового ускорения диска
8!. Приняв за полюс точку А шатуна, ускорение его точки С определим
по формуле
Яс = пл~'гЯ'сА^~^СА' (В)
где апСА = АСшАС = 0, axCA~ACzAC и а1СА перпендикулярно АС. На основании
(в) строим многоугольник ускорений для точки С (рис. 67, а), предполагая,
что еас направлено против часовой стрелки.
В проекциях на оси координат из (в) (см. рис. 65 и 67, а) имеем
Ускорение точки С направлено параллельно оси Оху вследствие ее прямоли-
прямолинейного движения в этом направлении. Следовательно, ас =0, <fCA —
= -аА\ sin|3= -3,87/0,75= -5,16 м/с2; aCy = axCAcos$ = -2,55 м/с*, так как
sin|3 = (CM-r)//4C=O,75; cosp = J\ -sin213 = 0,66.
Так как azCA получили со знаком минус, то направление для дуговой
стрелки гАС противоположно предположенному (см. рис. 65).
Угловое ускорение шатуна sAC = aTCA/АС =3,87 с~2. Ускорение ас направле-
направлено вверх, т.е. аСу отрицательно, и ас = \ аСу | = 2,55 м/с2. Для определения
углового ускорения диска е1 вычислим ускорение точки С, приняв за полюс
точку В. Имеем
где
В соответствии с (г) строим многоугольник ускорений для точки С, приняв
Ej направленным против часовой стрелки (рис. 67, б).
В проекциях на выбранные оси координат из (г) с учетом рис. 67, б
получаем
НО ЯСх = в«х-ЯС.
a£B = CS-co2 = r-Cu2 = 64M/c2; aBy = s = A м/с2; aQ=-2,55 м/с2.
С учетом полученных значений из (г') имеем:
и " "_
Ускорение атсв получилось положительным, что подтверждает правильность
выбора направления для е1. Угловое ускорение диска
171
D
Рис. 68 Рис. 69
Приняв за полюс точку С, для ускорения точки D получим
где
(д)
aJ,c = .DCco2=rco2 = 64 м/с; a'DC = flC-E,=rt1 =6,55 м/с2.
На рис. 68 приведен многоугольник ускорений для точки D. В проекциях
на оси координат из (д) имеем
aDx = alc = 6,55 м/с2; aDy= -ac-a"DC= -2,55-64= -66,55 м/с2.
Определим ускорение точки D:
Для определения мгновенного центра ускорений Q диска вычисляем
0,10; а, «6е.
Угол 0ц откладываем от ускорения ас в направлении дуговой стрелки б^
На линии, проходящей через точку С под углом ось находится точка Q.
Расстояние до нее от точки С определяем по формуле
Точка Q находится вблизи точки С. На рис. 69 указаны в примерном масштабе
значения ускорений точек диска и положение Q. Ускорения ав и ав тоже образуют
такие же углы ос, с отрезками прямых, соединяющих эти точки с точкой Q.
Мгновенный центр ускорений шатуна АС находится в точке QAC (см.
рис. 65), так как для шатуна
tga = Exc/co^c = oo и ос = 9Ос.
§ 10. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ
ПЛОСКОЙ ФИГУРЫ
Понятие мгновенного центра скоростей плоской фигуры
при плоском движении можно ввести используя теорему
о конечном перемещении плоской фигуры. Фигуру в ее
плоскости из заданного положения I в любое другое положение
II (рис. 70) можно перевести одним поворотом в этой плоскости
вокруг точки Р, называемой центром конечного вращения.
Пусть в положении / плоская фигура характеризуется
отрезком АВ, скрепленным с фигурой, а в положении // этот
отрезок займет положение А1В1.
172
Рассмотрим случай, когда АВ
и А\В\ не параллельны. Можно
доказать, что центр конечного вра-
вращения Р находится на пересечении
перпендикуляров СР и DP, вос-
восставленных из середин отрезков
ААХ и ВВХ. Для этого докажем,
что заштрихованные треугольники Рис. 70
АВР и А1В1Р равны по трем сторонам; АР = АХР как
гипотенузы в равных прямоугольных треугольниках АСР
и АХСР, так как по построению точка С есть середина
отрезка ААХ, а СР—общий катет треугольников. Аналогично,
рассматривая равные треугольники BDP и B1DP, получаем
ВР = ВХР; АВ = А1В1—по условию.
Для перевода плоской фигуры из положения / в положение
// достаточно совместить между собой равные треугольники
АВР и А1В1Р. Это можно осуществить одним поворотом
треугольника АВР в его плоскости вокруг вершины Р. При
этом если сторону АР до совмещения со стороной АХР
повернуть на угол ф, то сторону ВР до совмещения со
стороной ВХР следует повернуть на угол \(/, равный углу <р,
так как углы ф и vj/ состоят из общего для них угла
C и одинаковых углов ос, лежащих в равных заштрихованных
треугольниках против равных сторон.
Итак, если отрезок АР повернуть вокруг Р на угол ф,
то отрезок ВР при этом повернется на тот же угол и в том
же направлении, что и отрезок АР, и, следовательно, точка
А совпадает с точкой Ах, а точка В—с точкой Ви т. е.
отрезок АВ совпадет всеми своими точками с отрезком А1В1.
В том случае, когда отрезок А В параллелен отрезку АхВ1г
перпендикуляры СР к ААХ и DP к ВВХ параллельны и,
следовательно, пересекаются в бесконечности. В этом случае
Р следует считать находящимся в бесконечности и плоскую
фигуру из положения / в положение // можно перевести
поступательным перемещением, что соответствует повороту
фигуры вокруг бесконечно удаленной точки.
§ 11. МГНОВЕННЫЙ ЦЕНТР ВРАЩЕНИЯ. ЦЕНТРОИДЫ
Для двух бесконечно близких положений плоской фигуры
вместо центра конечного вращения получим так называемый
мгновенный центр вращения. Любое плоское перемещение
фигуры можно приближенно заменить последовательностью
вращательных перемещений вокруг своих центров конечного
вращения. В пределе плоское перемещение фигуры можно
заменить бесконечной последовательностью элементарных мг-
мгновенных поворотов вокруг мгновенных центров вращений,
расположенных в определенной последовательности.
173
У\
Рис. 71
Отсюда следует, что любое плоское
движение фигуры можно заменить по-
последовательностью мгновенных враще-
вращений, совершаемых за тот же промежуток
времени, что и рассматриваемое плоское
движение. Можно ввести угловую ско-
скорость вращения вокруг мгновенного цен-
центра вращения или, точнее, вокруг мгно-
мгновенной оси, проходящей через мгновен-
мгновенный центр вращения и перпендикулярной
плоскости движения.
При плоском движении фигуры мгно-
мгновенный центр вращения перемещается как в неподвижной, так
и в подвижной плоскости, скрепленной с движущейся плоской
фигурой. Геометрическое место мгновенных центров вращения
на неподвижной плоскости называют неподвижной центроидой,
а геометрическое место этих же мгновенных центров вращения
на подвижной плоскости, скрепленной с движущейся фигурой,—
подвижной центроидой. Для каждого плоского движения фигуры
существуют свои две центроиды: подвижная и неподвижная.
Очевидно, что точка плоской фигуры, с которой в рассмат-
рассматриваемый момент совпадает мгновенный центр вращения,
имеет скорость, равную нулю; следовательно, она является
в то же время мгновенным центром скоростей.
При плоском движении фигуры подвижная центроида катит-
катится без скольжения по неподвижной центроиде. Эта теорема
позволяет плоское движение твердого тела рассматривать как
качение без скольжения одной плоской кривой по другой.
Центроиды нашли применение в некоторых вопросах ки-
кинематики механизмов. Рассмотрим пример нахождения
центроид.
Пример. Стержень А В, имеющий длину /, концами скользит по двум
взаимно перпендикулярным прямым (рис. 71). Найти центроиды стержня А В
при этом движении.
Решение. Скорость точки А может быть направлена только по ОХА,
а точки В—только по О^В, так как траекториями этих точек являются
указанные прямые. Восстанавливая перпендикуляры в точках А и В к этим
направлениям, получаем положение точки Р, которая и будет мгновенным
центром скоростей на подвижной плоскости, скрепленной со стрежнем,
и мгновенным центром вращения на неподвижной плоскости. Из рисунка
видно, что O1/'=/=const во все время движения, как диагональ прямоуголь-
прямоугольника. Следовательно, неподвижная центроида является окружностью радиусом
/ с центром в точке О1.
На подвижной плоскости Аху, скрепленной со стрежнем А В, точка
Р обладает аналогичным геометрическим свойством, так как
ОР=ОХР/2 = 1 /2=const, поэтому подвижной центроидой является окружность
радиуса 1/2 с центром в точке О.
При качении подвижной окружности по неподвижной концы А и В диамет-
диаметра окружности движутся прямолинейно соответственно по прямым О1А
и ОХВ. Повернув на произвольный угол вокруг точки О1 в плоскости
чертежа оси координат О1х1у1 и рассмотрев этот случай после закрепления
174
осей координат в новом положении, можно
убедиться, что центроидами являю.тся те
же окружности. Следовательно, другие две
точки подвижной окружности движутся пря-
прямолинейно.
Таким образом убеждаемся, что все точки
подвижной окружности движутся по прямым
линиям, проходящим через центр неподвижной
окружности О1. Это свойство точек подвижной
окружности можно использовать для преоб-
преобразования вращательного движения в прямо-
прямолинейное поступательное движение.
В общем случае движения плоской
фигуры мгновенный центр скоро-
скоростей— точка Р—и мгновенный центр
ускорений—точка Q—являются раз-
различными точками этой фигуры (рис. 72). Эти точки совпадают,
если плоское движение вырождается во вращательное движение
вокруг неподвижной оси.
Выберем точку А плоской фигуры и отметим точки Р и Q.
Поставим задачу — указать формулы, по которым можно
вычислить проекции ускорения точки А на оси Ах и Ау,
Ах' и Ау'. Ось Ах перпендикулярна оси Ау и Ax'LAy'.
Точка Q является мгновенным центром ускорений. Следова-
Следовательно, ускорение
Рис. 72
и аАу направлено всегда к точке Q; проекция ускорения на
перпендикулярное направление Ах'
aAx=aAQ = AQe.
Точка Р является мгновенным центром скоростей. Скорость
точки А перпендикулярна АР, а скорость всегда направлена
по касательной к траектории. Следовательно, ось Ах есть
касательная к траектории и проекция ускорения на нее является
касательным ускорением и вычисляется по формуле для
касательного ускорения
Ось Ау перпендикулярна касательной; следовательно, это
главная нормаль траектории. Проекция ускорения на это
направление вычисляется по формуле для нормального
ускорения
Если аАу>0, то траектория точки обращена выпуклостью
к точке Р; если аАу<0, то вогнутостью.
Кажется, что у точки А два различных нормальных
и касательных ускорения. Но а\ и а"А — касательное и нор-
нормальное ускорения абсолютного движения точки А по
175
отношению к неподвижной системе координат (на рис. 72
не показана), a a\Q и a"AQ — соответственно касательное
и нормальное ускорения относительного движения точки
А по отношению к подвижной системе координат, движущейся
поступательно относительно неподвижной вместе с точкой
Q. Переносное ускорение точки А совпадает с абсолютным
ускорением точки Q, а оно равно нулю, так как эта
точка фигуры является мгновенным центром ускорений.
ГЛАВА 4
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТЕЛА
Вращением твердого тела вокруг неподвижной точки называ-
называют такое движение, при котором одна точка тела остается
все время неподвижной. Это вращение часто называют сфе-
сферическим движением твердого тела в связи с тем, что
траектории всех точек тела при таком движении располагаются
на поверхностях сфер, описанных из неподвижной точки.
Тело, совершающее вращение вокруг неподвижной точки,
имеет три степени свободы, так как закрепление одной
точки тела уменьшает число степеней свободы на три
единицы, а свободное тело имеет шесть степеней свободы.
Одной из главных задач при изучении вращения тела
вокруг неподвижной точки является установление величин,
характеризующих это движение, т. е. углов Эйлера, угловой
скорости, углового ускорения, и вывод формул для вычисления
скоростей и ускорений точек тела.
§ 1. УГЛЫ ЭЙЛЕРА. УРАВНЕНИЯ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Три степени свободы, которые имеет тело при вращении
вокруг неподвижной точки, требуют для задания положения
тела относительно какой-либо системы координат трех незави-
независимых величин. Эти три величины, или параметра, можно
задать различными способами. В теоретической механике
наибольшее применение получили так называемые углы Эйлера,
рассмотренные ниже.
Через неподвижную точку О твердого тела проведем
неподвижную систему координат Ox1y1z1, относительно кото-
которой будем рассматривать движение тела (рис. 73). Другую
систему координат Oxyz скрепим с телом, вращающимся
вокруг неподвижной точки О. Для определения положения
движущегося тела относительно системы координат Oxly1zl
следует задать относительно этой системы координат положе-
176
ние другой, подвижной, системы
координат Oxyz, скрепленной
с движущимся телом. Для этой
цели Эйлер предложил три
независимых параметра — углы
Эйлера.
Первый из этих углов—угол
прецессии vj/ — определяет поло-
положение линии узлов ОК, которая
является линией пересечения ко-
координатных плоскостей Ох1у1
и Оху относительно неподвиж-
неподвижной координатной оси Oxv Для
изменения этого угла тело должно вращаться вокруг коор-
координатной оси Ozu которую называют осью прецессии. Положе-
Положение линии узлов при движении тела изменяется как от-
относительно неподвижной системы координат Ox1j1z1, так
и относительно движущегося тела, т. е. подвижной системы
координат Oxyz. Угол i|/ от положительной части оси Ох1
до положительного направления линии узлов ОК считается
положительным, когда он отсчитывается против часовой
стрелки, если смотреть с положительного направления оси
Ozx. За положительное направление на линии узлов ОК
выбираем то ее направление, с которого поворот оси Oz1
к оси Oz на наименьший угол виден происходящим против
часовой стрелки.
Вторым углом Эйлера является угол между координатными
плоскостями Ох^у^ и Оху. Его измеряют углом 9 между
перпендикулярами к этим координатным плоскостям, которыми
являются оси Ozj и Oz. Угол 9 отсчитывают от оси Ozx
до оси Oz в положительном направлении, если направление
поворота оси Oz с положительного направления линии узлов
ОК происходит против часовой стрелки.
Угол 9 называют углом нутации, а ось ОК, вокруг которой
вращается тело при изменении угла 9, соответственно называют
осью нутации или линией узлов.
Для полного определения положения рассматриваемого
тела относительно системы координат Ox1y1z1 нужно задать
угол между подвижной осью координат Ох и положительным
направлением линии узлов О К—угол собственного вращения
ф. Угол ф от линии узлов ОК до оси Ох считается
положительным, если вокруг оси Oz поворот оси Ох от
линии ОК виден происходящим против часовой стрелки.
При изменении угла ф тело вращается вокруг так называе-
называемой оси собственного вращения Oz, перпендикулярной плоскос-
плоскости, в которой лежат прямые ОК и Ох, образующие этот
угол. Таким образом, угол ф определяет положение подвижной
координатной оси Ох относительно линии узлов ОК.
177
Углы Эйлера широко применяются
в теории гироскопов. Движение ги-
гироскопа, т. е. симметричного тела,
имеющего неподвижную точку на оси
симметрии и быстро вращающегося
вокруг этой оси, в общем случае
можно представить состоящим из
трех движений (рис. 74): вращения
с большой угловой скоростью вокруг
оси симметрии, или оси собственного
вращения, при котором изменяется
угол собственного вращения ср; враще-
вращения гироскопа вместе со своей осью
симметрии вокруг неподвижной оси
Рис- 74 Ozx, при котором изменяется угол
прецессии vj/. Третье движение совершает ось симметрии,
которая, участвуя в прецессионном движении, описывает ко-
коническую поверхность с вершиной в неподвижной точке,
а вследствие изменения угла нутации 8 описывает в общем
случае волнистую поверхность.
Если угол 8 не изменяется, то коническая поверхность
является круговым конусом. Если коническую поверхность
пересечь плоскостью, перпендикулярной оси прецессии, то
получится кривая линия, на которой возможны узловые точки,
или точки возврата. Известно, например, что земной шар
кроме собственного вращения вокруг своей оси еще прецес-
сирует и совершает нутационное движение.
В технике особенно важное значение имеет так называемая
регулярная прецессия, когда угловые скорости вращения вокруг
оси собственного вращения и вокруг неподвижной оси прецес-
прецессии постоянны и угол между этими осями (угол нутации)
остается тоже постоянным.
При вращении тела вокруг неподвижной точки в общем
случае изменяются все три угла Эйлера: \|/, 6 и ср. Углы
Эйлера являются независимыми параметрами, или
обобщенными координатами, характеризующими положение
тела с одной неподвижной точкой относительно неподвижной
системы координат. Задание трех углов Эйлера для тела,
вращающегося вокруг неподвижной точки, как функций времени
является необходимым и достаточным для полного описания
такого движения тела.
Итак, для определения положения тела с одной неподвижной
точкой в любой момент времени надо задать углы Эйлера
как однозначные функции времени, т. е.
Уравнения A) являются уравнениями вращения твердого
тела вокруг неподвижной точки. Если эти уравнения заданы,
!78
то в любой момент времени известно положение твердого
тела относительно системы координат Ox1y1z1.
Отметим, что углы Эйлера не являются единственной
комбинацией трех независимых углов для тела, имеющего
одну неподвижную точку. Существуют и другие комбинации
углов, определяющих положение одной системы координат
относительно другой.
§2. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ ТВЕРДОГО ТЕЛА,
ИМЕЮЩЕГО ОДНУ НЕПОДВИЖНУЮ ТОЧКУ
Тело, имеющее одну неподвижную точку, из одного положе-
положения в любое другое можно перевести одним поворотом вокруг
оси, проходящей через неподвижную точку. Эту ось называют
осью конечного вращения.
Положение тела с неподвижной точкой относительно некото-
некоторой системы отсчета можно полностью определить, если задать на
какой-либо неподвижной сфере, описанной из неподвижной точки
тела, положение сферической фигуры, скрепленной с этим телом.
За сферическую фигуру можно принять любую часть поверхности
сферы таким же радиусом, что и радиус неподвижной сферы,
который обычно принимают равным единице. За сферическую
фигуру можно принять также всю сферу единичного радиуса.
При движении тела вокруг неподвижной точки скрепленная
с движущимся телом сфера единичного радиуса движется по
неподвижной сфере того же радиуса. Положение сферы пол-
полностью определяется заданием на этой сфере дуги большого
круга, вкрепленной со сферой.
Пусть положение / тела характеризуется дугой большого
круга А В, описанной из неподвижной точки тела, а в положении
//—той же дугой, но в другом положении на сфере А1В1
(рис. 75). Аналогично тому, как находится центр конечного
вращения для плоской фигуры при плоском перемещении,
найдем точку Р на сфере в случае тела,
имеющего одну неподвижную точку.
Для этого соединяем точки А с Ах
и В с Bt дугами большого круга,
проведенными из неподвижной точки
тела и целиком лежащими на непо-
неподвижной сфере. В серединах дуг ААХ
BBt из точек С и D проводим сферичес-
сферические перпендикуляры, т. е. дуги большого
круга СР и DP, касательные к которым
перпендикулярны в точках С и D соот-
соответственно касательным дуг АА1 и ВВУ.
Эти перпендикуляры, лежащие на
сфере, пересекутся в точке Р. Из
равенства прямоугольных сферических Рис. 75
О
179
треугольников BDP и DB^, имеющих общий катет DP
и равные катеты BD и DB±, следует, что гипотенузы
этих сферических треугольников тоже равны, т. е. точки
В и Вх равноудалены от точки Р.
Аналогично доказывается, что точки А и А1 тоже одинаково
удалены от точки Р. Если повернуть заштрихованный сферический
треугольник АВР вокруг оси, проходящей через точку Р и непо-
неподвижную точку О, то этот треугольник, перемещаясь по сфере,
совпадет всеми своими точками с равным ему по трем сторонам
сферическим треугольником AtBtP, так как сферический угол на
сфере, на который надо повернуть вокруг ОР дугу АР до
совпадения с дугой A t P, равен сферическому углу на той же сфере,
на который надо повернуть дугу ВР до совпадения с дугой SjP.
Итак, путем поворота вокруг оси, перпендикулярной поверх-
поверхности сферы и проходящей через точку Р и, следовательно,
проходящей также и через центр сферы, где расположена
неподвижная точка, тело можно переместить из одного положе-
положения в любое другое. Для каждых двух положений тела
получаются соответствующая точка Р последовательно, соот-
соответствующая ось конечного вращения, проходящая через эту
точку и неподвижную точку тела.
§3. МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ. АКСОИДЫ
Ось, вокруг которой следует вращать тело, имеющее одну
неподвижную точку, для перевода его из одного положения
в другое, бесконечно близкое первому, называют мгновенной осью
вращения (или мгновенной осью) для данного момента времени.
Любое движение тела вокруг неподвижной точки можно
заменить последовательностью вращений вокруг совокупности
мгновенных осей. Геометрическое место мгновенных осей
относительно неподвижных осей координат, по отношению
к которым рассматривается движение тела, называется непо-
неподвижным аксоидом. Неподвижный аксоид является конической
поверхностью с вершиной в неподвижной точке тела, так как
все мгновенные оси проходят через неподвижную точку.
Геометрическое место мгновенных осей в движущемся теле
представляет подвижный аксоид, являющийся также конической
поверхностью. Для каждого движения твердого тела вокруг
неподвижной точки имеется пара аксоидов. При этом, когда
тело совершает вращение вокруг неподвижной точки, подвиж-
подвижный аксоид катится по неподвижному без скольжения, так
как общая образующая этих аксоидов в каждый момент
времени служит мгновенной осью, вокруг которой вращается
тело, и, следовательно, все точки оси в рассматриваемый
момент времени неподвижны. Если подвижный аксоид катится
без скольжения по неподвижному аксоиду, то осуществляется
движение тела вокруг неподвижной точки.
180
Очевидно, что при плоском движении твердого тела коничес-
конические аксоиды являются цилиндрическими поверхностями, кото-
которые в пересечении с плоскостью движения плоской фигуры
образуют центроиды для этой фигуры.
Практически понятие аксоидов используется для классифика-
классификации видов прецессионных движений гироскопов.
§4. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
ПРИ ВРАЩЕНИИ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Так как движение тела, имеющего одну неподвижную
точку, в каждый момент времени можно считать вращением
вокруг мгновенной оси, то в качестве величин, характеризу-
характеризующих это движение, можно ввести мгновенную угловую
скорость и мгновенное угловое ускорение вращения твер-
твердого тела вокруг неподвижной точки. Очевидно, вводимая
угловая скорость является векторной величиной, направ-
направленной в каждый момент времени по соответствующей
мгновенной оси, и при использовании правой системы ко-
координат вектор угловой скорости ю направлен по мгно-
мгновенной оси так, что с направления этого вектора видно
вращение тела вокруг мгновенной оси против часовой стрелки.
Модуль вектора угловой скорости можно выразить через
элементарный угол поворота Дер вокруг мгновенной оси за
время At:
ю= lim
At->0 A?
Элементарный угол повотора Дер, аналогично случаю
вращения тела вокруг неподвижной оси, следует рассматривать
как угол между двумя положениями в моменты t и г + Д/
подвижной плоскости, скрепленной с телом и проходящей
через мгновенную ось в момент времени I.
Введенный таким образом вектор угловой скорости ю харак-
характеризует угловую скорость вращения вокруг мгновенной оси,
направление мгновенной оси и направление вращения тела
вокруг этой оси. Вектор угловой скорости ю можно приклады-
прикладывать в любой точке мгновенной оси (рис. 76).
За вектор углового ускорения s при враще-
вращении тела вокруг неподвижной точки принима-
принимают вектор, который характеризует изменение
угловой скорости ю в данный момент как
по числовой величине, так и по направлению.
Известно, что такой характеристикой явля-
является производная по времени от вектора
угловой скорости ю. Таким образом, угловое
ускорение
d/k Рис. 76
181
Так как угловая скорость может изменяться по модулю
и направлению, то в общем случае угловое ускорение не
направлено по мгновенной оси, а имеет направление как
производная по времени от вектора со, параллельное касатель-
касательной к годографу этого вектора. Условимся угловое ускорение
ё изображать в любой точке прямой, параллельной этой
касательной годографа со, но проходящей через неподвижную
точку тела.
§5. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
При рассмотрении вращательного движения тела вокруг
неподвижной оси получена векторная формула Эйлера,
по которой скорости точек тела полностью характеризу-
характеризуются общей для всех точек тела угловой скоростью вра-
вращения и расположением точек тела относительно оси вра-
вращения.
Формула Эйлера справедлива и для случая вращения
твердого тела вокруг неподвижной точки.
В этом случае в каждый момент времени тело вращается
вокруг мгновенной оси, проходящей через неподвижную точку,
с угловой скоростью со, направленной по мгновенной оси.
Точки тела, лежащие на мгновенной оси, имеют скорости,
равные нулю, как и в случае неподвижной оси вращения.
Следовательно, линейные скорости точек тела при вращении
вокруг неподвижной точки можно вычислять также по вектор-
векторной формуле Эйлера, как и в случае вращения вокруг
неподвижной оси, только радиус-вектор каждой точки удобно
проводить из неподвижной точки тела.
Итак, скорость v какой-либо точки М тела (рис. 77), по
векторной формуле Эйлера,
iJ=co х г. B)
Модуль скорости
t; = corsin(co,A^ = @/J) C)
где h — кратчайшее расстояние от рассматриваемой точки до
мгновенной оси.
Таким образом, скорости точек тела пропорциональны
расстояниям от этих точек до мгновенной оси. Направление
скорости какой-либо точки тела перпендикулярно плоскости,
182
в которой находятся векторы ю и г, а сле-
следовательно, перпендикулярно отрезку h.
Если требуется найти модуль угловой
скорости тела в определенный момент вре-
времени, то для этого, согласно C), достаточно
разделить скорость какой-либо точки в этот
же момент времени на кратчайшее рассто-
расстояние от этой точки до мгновенной оси.
Мгновенную ось в конкретных задачах
часто находят из механических условий
задачи, т. е. в рассматриваемый момент
времени она всегда проходит через две Рис. 77
неподвижные точки тела. Так, если движущееся тело касается
в какой-либо точке неподвижной поверхности другого тела
и при этом нет скольжения, то мгновенная ось проходит
через эту неподвижную в данный момент времени точку.
В случае качения без скольжения одного конуса по другому,
неподвижному, конусу (рис. 78) мгновенной осью является та
общая образующая этих конусов О А, вдоль которой в данный
момент времени они касаются друг друга. Если, например, скорость
vo точки Oj известна, то угловая скорость подвижного конуса
(d = vo /h — Vn /(//sin a),
i' uii\ p
где Н=ОО1 и а. — угол полураствора подвижного конуса.
Проекции угловой скорости тела ю как на подвижные,
так и неподвижные оси координат можно определить также
через углы Эйлера как функции времени, характеризующие
положение тела относительно неподвижной системы координат.
Если спроецировать правую и левую части B) на координат-
координатные оси, то получим формулы Эйлера для проекций скоростей
vx, vy и vz:
(А \
где х, у, z — координаты точек тела, скорости которых опре-
определяются.
Если взять точки тела, лежащие
на мгновенной оси в рассматрива-
рассматриваемый момент времени, то для них
скорости равны нулю, а следователь-
следовательно, приняв равными нулю vx, vy, vz,
из D) получим следующие уравнения
для координат этих точек:
Эти уравнения можно представить
в виде
х/юх=у/со =z/roz. E) Рис. 78
183
Для определенного момента времени формула E) является
уравнением мгновенной оси. Если же величины, входящие
в E), рассматривать как функции времени, то она будет
представлять собой уравнения подвижного или неподвижного
аксоида (в параметрической форме) в зависимости от того,
в какой системе координат она составлена.
Если х, у, z являются текущими координатами тонки
мгновенной оси относительно подвижных осей, скрепленных
с движущимся телом, а юх, ю^,, го2 — проекции угловой скорости
тела на эти оси, то формула E) является уравнением
подвижного аксоида.
Если вместо подвижных осей координат взять неподвижные
оси, относительно которых рассматривается движение тела,
и проекции угловой скорости тоже взять на эти оси, то
тогда формула E) будет уравнением неподвижного аксоида.
Скорость какой-либо точки можно вычислить как первую
производную по времени от радиуса-вектора г этой точки,
проведенного из неподвижной точки. С другой стороны,
скорость точки тела, вращающегося вокруг неподвижной точки,
можно вычислить по векторной формуле Эйлера B). Сле-
Следовательно, производная по времени от радиуса-вектора любой
точки твердого тела, вращающегося вокруг неподвижной точки,
определится по формуле
dr/dt = (hxr. F)
Длина радиуса-вектора г как расстояние между двумя точками
твердого тела является постоянной величиной при движении
этого тела. Следовательно, равенство F) можно рассматривать
как формулу для вычисления производной по времени от
вектора, модуль которого постоянен, и изменение этого вектора
происходит только вследствие вращения его с угловой скоростью
ш вместе с телом вокруг неподвижной точки.
Если взять подвижную систему координат Oxyz, скреплен-
скрепленную с телом, которое вращается вокруг неподвижной_ точки
с угловой скоростью ю, то для единичных векторов /, j, к,
направленных по этим осям координат, как для векторов,
модули которых постоянны, на основании F) имеем:
d//dt = юх/; d//dt = (bxj; dk/dt = йх£ G)
Формулы G) называют формулами Пуассона.
§ 6. УСКОРЕНИЯ ТОЧЕК ТЕЛА ПРИ ВРАЩЕНИИ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Формулу для ускорения какой-либо точки М тела, вра-
вращающегося вокруг неподвижной точки, нельзя получить не-
непосредственно используя формулу для ускорения при враща-
вращательном движении вокруг неподвижной оси, так как в рас-
184
сматриваемом случае угловое ускорение е в общем случае
не направлено по оси вращения, а следовательно, и по ю.
Во всем остальном формулы для ускорения в этих случаях
полностью аналогичны.
Формулу для ускорения какой-либо точки тела М можно
получить путем дифференцирования по времени вектора скоро-
скорости, учитывая, что скорость вычисляют по формуле B).
Выполняя это дифференцирование, получаем
a = diJ/d? = d(o/d?x f+(bxdr/dt.
Так как
dco/d? = e; drjdt = v = (bxr,
то
а = ё х г+ю х v. (8)
Формулу (8) часто называют формулой Ривальса.
Часть общего ускорения точки
flBp = 8Xr (9)
называют вращательным ускорением, а другую часть
аос = юхг; A0)
— осестремительным ускорением. Следовательно, формула (8)
примет вид
а = авр + аос, A1)
т. е. ускорение точки тела, вращающегося вокруг неподвижной
точки, равно векторной сумме вращательного и осестремитель-
ного ускорений.
В общем случае вращательное и осестремительное ускорения
не перпендикулярны; следовательно, модуль ускорения а вычис-
вычисляют как диагональ параллелограмма по формуле
Bp, аж). A2)
Рассмотрим вращательное и осестремительное ускорения
по отдельности. Вращательное ускорение вычисляют по фор-
формуле (9), аналогичной формуле B) для скорости точки. Только
здесь вместо угловой скорости ш входит угловое ускорение
ё. Поэтому вращательное ускорение авр направлено аналогично
скорости v, если тело вращается в рассматриваемый момент
времени с угловой скоростью, равной угловому ускорению ё.
Модуль вращательного ускорения авр определяют аналогич-
аналогично модулю скорости v [см. формулу C)]:
aBp = h1E, A3)
где hl — кратчайшее расстояние от точки тела до линии, по
которой направлено угловое ускорение ё (рис. 79).
Формула A3) для авр получается из (9):
(e )
где rsin(e, f) = hl.
185
Из A3) следует, что вектор углового
ускорения ё расположен на прямой линии,
проходящей через неподвижную точку. В про-
противном случае эта точка имела бы не равное
нулю вращательное ускорение.
Модуль осестремительного ускорения
аос можно получить из формулы A0):
A4)
aoc = |coxi>| = cousin (го, и) = гог; = /
Рис.
так как угловая скорость со перпендикулярна
скорости v.
Осестремительное ускорение направлено
ло перпендикуляру к мгновенной оси, опущен-
опущенному из точки, для которой оно вычисляется, т. е. по отрезку
h, так как, являясь векторным произведением со и v, оно
перпендикулярно плоскости, где находятся эти векторы, и имеет
направление вектора этого векторного произведения. Если
ввести вектор h, направленный по перпендикуляру от мгновен-
мгновенной оси к рассматриваемой точке, то
аос=—йсо2. A5)
В случае вращения твердого тела вокруг неподвижной оси
угловое ускорение и угловая скорость направлены по этой
оси; тогда расстояния h и /гх равны. Следовательно, вращатель-
вращательное ускорение превращается в касательное ускорение, а осестре-
осестремительное— в нормальное или центростремительное ускорение.
Таким образом, вращение тела вокруг неподвижной точки
можно рассматривать как более общее движение, чем вращение
тела вокруг неподвижной оси.
§ 7. ВЫЧИСЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ
Для вычисления ускорения точек тела необходимо знать
угловое ускорение ё. Рассмотрим два основных способа его
вычисления.
1. Если известны проекции угловой скорости на подвижные
или неподвижные оси координат сох, го^, coz, то проекции
углового ускорения на те же оси определяют по формулам
Ex = d(nx/dt; Ey = d(dy/dt; e2 = droz/d?. A6)
По проекциям легко найти модуль углового ускорения
и косинусы его углов с осями координат.
2. Другой способ определения углового ускорения s основан
на его разложении на две взаимно перпендикулярные состав-
составляющие. Если ввести единичный вектор со0, направленный
по со, то
со = госо0;
г = dco/ck = (dco/d?)ro° + ю (dm°/df).
A7)
186
Составляющая el полного углового ускорения е1=—со0
направлена по вектору ю, когда dro/d?>0, и противоположно
ему при dro/d?<0.
„ A<В°
Составляющая е2 полного углового ускорения е2 = ю —
всегда перпендикулярна ш, так как производная по времени
от единичного вектора ю° есть вектор, перпендикулярный
дифференцируемому единичному вектору и, следовательно,
перпендикулярный вектору ш.
Составляющая углового ускорения ej является полным
угловым ускорением при вращении тела вокруг неподвижной
оси, так как составляющая г2 в этом случае равна нулю.
Вычислим составляющую углового ускорения ё2. Часто угловая
скорость постоянна по модулю и изменяется только по
направлению. В этом случае составляющая ё1 = 0 и полное
угловое ускорение совпадает с ё2.
Если же угловое ускорение ё\ не равно нулю, то его
можно вычислить отдельно и затем, сложив с составляющей
ё2, определить полное угловое ускорение ё. Итак, если угловая
скорость постоянна, то
В этом случае воспользуемся определением углового уско-
ускорения через угловую скорость непосредственно:
s = dco/d?.
Учитывая, что ю = const, и применяя формулу, анало-
аналогичную производной по времени от радиуса-вектора [см.
формулу F)], когда радиус-вектор постоянен по длине,
будем иметь
e = do)/d? = (oex(o, A8)
где (Ье — угловая скорость вращения дифференцируемого по
времени вектора ю, т. е. угловая скорость вращения мгновенной
оси, по которой направлен вектор ю. Модуль углового
ускорения можно найти аналогично скорости точки, т. е.
s = ro1roe, A9)
где расстоянием h является а>1 — кратчайшее расстояние от
конца вектора ю до оси, по которой направлена угловая
скорость юе (рис. 80).
Вектор углового ускорения ё пройдет через неподвижную
точку и будет параллелен касательной к годографу вектора
ю. Окончательно направление ё берут в соответствии с форму-
формулой A8), т. е. по направлению вращения мгновенной оси
в зависимости от угловой скорости (Ье.
187
Рис. 80
Рассмотрим теперь пример
«а вычисление угловой скоро-
скорости, углового ускорения и ли-
линейных скоростей и ускорений
точек тела, вращающегося во- Рис. 81
круг неподвижной точки.
Пример. Круговой конус / с углом раствора 2а катится без скольжения
по внутренней стороне неподвижного конуса // с углом раствора 2C (рис. 81).
Скорость точки О, подвижного конуса постоянна и равна w; OOi=H.
Определить угловую скорость и угловое ускорение подвижного конуса,
а также скорости и ускорения точек А и В этого конуса.
Решение. Мгновенной осью конуса / является образующая О А. Если
скорость точки О, направлена от плоскости OAOt во внешнюю сторону,
то угловая скорость конуса ю направлена по мгновенной оси от точки
О к точке А. Числовое значение угловой скорости
<o=v/Q1 M=!;/(#sin a) = const.
Скорость точки А равна нулю, так как эта точка находится на мгновенной
оси. Скорость точки В вычисляем по формуле
Я sin a
Скорость vB перпендикулярна плоскости OLB и направлена от нее во
внешнюю сторону.
Угловое ускорение е вычисляем по формуле A9):
Годографом вектора ю является окружность радиуса
a>i =cosinfS = «sin fi/(#sina).
Если рассмотреть плоскость, в которой находятся мгновенная ось ОА, ось
подвижного конуса 00, и ось неподвижного конуса 002 (плоскость рисунка),
то при движении конуса / эта плоскость вращается вокруг оси неподвижного
конуса 00j, расположенной в указанной плоскости, а следовательно, вокруг
этой оси вращается и мгновенная ось О А, находящаяся в этой плоскости.
Угловую скорость этого вращения юг можно определить, если скорость
какой-либо точки этой плоскости, участвующей только во вращении вокруг
ОО2 и не имеющей другого движения, разделить на кратчайшее расстояние
от этой точки до оси ОО2. Отмеченными выше свойствами обладают все
точки, расположенные на оси подвижного конуса 00х. Выбрав на этой оси
точку О,, имеем
188
где OtC—кратчайшее расстояние от точки О, до ОО2- Так как
01C=#sin(f3-a),
то
Me = !;/[Fsin(C-a)].
Таким образом,
t)sinC v u2sinfS
//sin (C-a) ~ Я2 sin a sin (C-a)'
Так как скорость точки О1 направлена во внешнюю сторону от рисунка,
то мгновенная ось ОА вращается вокруг ОО2 по часовой стрелке и,
следовательно, угловое ускорение ё направлено перпендикулярно плоскости
О АС во внешнюю сторону.
Ускорение какой-либо точки подвижного конуса можно определить по
формуле
а = авр + а0<:.
Для точки А расстояние /г = 0 и поэтому аос = /гш2 = 0. Для вращательного
ускорения имеем
v2 sin C Я v2 sin C
Я sin a sin (C—a) cosa Явит a cos a sin (p — a)
Ускорение aBp, а следовательно, и полное ускорение a^ этой точки направлены
перпендикулярно О А и находятся в плоскости ОАО1. С положительного
направления вектора ё направление аА должно быть направлено как скорость
при вращении против часовой стрелки вокруг ё.
Для точки В
v2 2v2
Я2 sin2 а Я sin a'
i;2sinp-ff i;2sinp
Я2 sin a sin (p — a) cos а Я sin a cos a sin (P — a)
Ускорение a0Q направлено по BL от точки В к точке L, а ускорение
яВр—перпендикулярно О В и расположено в плоскости OBL.
Полное ускорение точки В вычисляется как диагональ параллелограмма,
построенного на ускорениях a0Q и авр, т. е.
„2
ав = \Aoc + ЯвР - 2aoc aBp cos 2a = -—— /4 +
v2 / sin P 4sinPcos2a
Я sin a \j cos2 a sin2 (P—a) cos a sin (P—a)
Отметим, что шс можно получить, если угловую скорость <в, направленную
по мгновенной оси, разложить по правилу параллелограмма по осям
подвижного и неподвижного конусов. Тогда составляющая по оси непод-
неподвижного конуса и будет угловой скоростью <де.
§ 8. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ СВОБОДНОГО
ТВЕРДОГО ТЕЛА
Разложение движения свободного твердого тела
на поступательное и вращательное
Рассмотрим общий случай движения свободного твердого
тела, т. е. тела, имеющего шесть степеней свободы. Покажем,
что самое общее движение свободного твердого тела можно
189
Рис. 82
представить состоящим из поступательного движения вместе
с какой-либо точкой тела и вращательного движения вокруг
этой точки.
Положение тела относительно какой-либо системы коорди-
координат O1x1y1zl полностью определяется заданием трех точек
тела, не лежащих на одной прямой, или заданием треугольника,
скрепленного с телом (рис. 82). Треугольник ABC, а следова-
следовательно, и тело, скрепленное с ним, из одного положения /
в любое другое положение // можно переместить одним
поступательным перемещением вместе с какой-либо точкой
тела (например, точкой А, когда подвижная система координат
Ax\'y'iz'i перемещается поступательно) и поворотом относи-
относительно подвижной системы координат Ax\y\z\, т. е. вокруг
оси, проходящей через эту точку.
Поступательная часть перемещения тела зависит от выбора
точки, вместе с которой перемещается тело, а вращательная
часть перемещения вокруг оси или вокруг точки не зависит
от выбора точки. Поступательную часть перемещения можно
поменять местами с вращательной частью, и, наконец, их
можно выполнять одновременно, т. е. пока тело совершает
поступательное перемещение из одного положения в другое,
за это же время можно осуществить и поворот тела вокруг
точки на требующийся угол.
Если два положения тела бесконечно близки, то истинное
элементарное перемещение свободного твердого тела можно
заменить элементарным поступательным перемещением вместе
с какой-либо точкой тела и элементарным поворотом вокруг
мгновенной оси, проходящей через эту точку, осуществляемыми
за то же время, что и истинное перемещение; тела.
Любое движение свободного твердого тела, таким образом,
можно заменить совокупностью поступательных движений
вместе с какой-либо точкой тела и вращений вокруг этой
точки, совершаемых за то же время, что и истинное движение.
Поступательное движение вместе с точкой тела и подвижной
190
системой координат Ax\y\z\ является переносным движением,
а движение тела относительно этой подвижной системы
координат, являющееся в каждый момент времени вращением
вокруг своей мгновенной оси, проходящей через эту подвижную
точку. тела, есть относительное движение.
Итак, любое движение свободного твердого тела можно
составить из поступательного движения вместе с подвижной
системой координат и сферического движения относительно
этой системы координат. Для относительного сферического
движения можно ввести угловую скорость ш и угловое
ускорение ё, которое является первой производной по времени
от ю, как в случае вращения тела вокруг неподвижной точки.
Угловую скорость и угловое ускорение относительного
вращательного движения вокруг какой-либо точки тела на-
называют в общем случае угловой скоростью и угловым
ускорением свободного твердого тела. Эти величины не зависят
от выбора точки тела. От выбора точки тела зависит только
переносное поступательное движение тела.
Уравнения движения свободного твердого тела
В общем случае для определения положения свободного
твердого тела относительно системы координат Oixlylzl
достаточно задать относительно этой системы координат
положение другой системы координат Ox\y\z\, движущейся
поступательно относительно первой системы вместе с ка-
какой-либо точкой О рассматриваемого тела, и углы Эйлера,
определяющие положение системы координат Oxyz, скреплен-
скрепленной с движущимся телом, относительно системы координат
Ox\y\z\ (рис. 83).
191
Для простоты предположим, что оси Ох\, Оу\, Oz\
соответственно параллельны осям Olx1, O1yi, O1zl. Таким
образом, положение свободного твердого тела относительно
системы координат Olxlyiz1 полностью определяется, если
относительно этой системы задать координаты точки О тела
как однозначные функции времени и углы Эйлера подвижной
системы координат Oxyz, скрепленной с движущимся телом,
относительно системы координат Ox\y\z\, поступательно
движущейся вместе с точкой О тела:
*о=Л('); yo=f2{t); zo=f3{t); \|f=/4(r); e=/5(f); ф=Л@-
Уравнения B0) являются кинематическими уравнениями
движения свободного твердого тела в общем случае его
движения. Этих уравнений шесть, т. е. столько, сколько
степеней свободы у свободного твердого тела. Первые три
уравнения B0) определяют переносное движение тела вместе
с точкой О, вторые три уравнения определяют вращательное
движение вокруг этой точки.
Первые три уравнения для рассматриваемого движения
свободного твердого тела зависят от выбора точки О тела;
последние три уравнения (углы Эйлера) не зависят от выбора
точки О, вокруг которой рассматривается вращение тела.
Скорости и ускорения точек свободного
твердого тела в общем случае
Так как движение свободного твердого тела в общем
случае можно представить как сложное движение, то и ско-
скорость, и ускорение какой-либо точки М этого тела можно
вычислить соответственно по теоремам сложения скоростей
и ускорений (рис. 84). Так, для скорости v точки М
Переносным движением является поступательное движение
тела вместе с точкой О этого тела. Следовательно, скорости
поступательного переносного дви-
движения одинаковы у всех точек тела
и равны скорости v0 точки О.
Относительное движение есть вра-
вращение вокруг точки О, и, следо-
следовательно, скорость относительного
движения можно вычислить по век-
векторной формуле Эйлера:
где г — радиус-вектор точки М,
Рис. 84 проведенный из точки О; ю — уг-
192
ловая скорость вращения тела во-
вокруг точки О или подвижной '
мгновенной оси, проходящей через
точку О.
Окончательно для скорости точ-
точки М получим следующую фор-
формулу:
B1)
Формулу B1) можно получить /^ У1
непосредственным дифференцирова- *'
нием векторного равенства
Рис- 85
справедливого для любого момента времени. Возьмем
полные щроизводные по времени от обеих частей равенства,
учитывая изменения векторов относительно неподвижной
системы координат O1x1ylzl. Имеем
dp/dr = dp0 jdt + drjdt.
Здесь dp/dt = v, dpo/dt = vo — скорости точек тела М и О со-
соответственно. Модуль вектора г как отрезка, соединяющего
две точки тела, не изменяется при движении этого тела.
Следовательно, по формуле производной по времени от
вектора постоянного модуля получаем
Объединяя результаты, получаем формулу B1):
Так же как и при плоском движении твердого тела, часть
скорости го х г можно истолковать как скорость от вращения
тела вокруг точки О.
Ускорение а точки М (рис. 85) в частном случае, когда
переносное движение является поступательным, определяем по
формуле
а = ае + аг.
Ускорения переносного движения всех точек тела равны
ускорению а0 точки О, так как за поступательное переносное
движение принимается движение вместе с точкой О.
Ускорение относительного движения, как и при вращении
тела вокруг неподвижной точки, состоит из вращательной
и осестремительной составляющих, т. е.
аг = ё х г + ш х г;г = 8 х г + сох (сох г), B2)
где г — угловое ускорение тела.
Окончательная формула для ускорения точки М свободного
тела в общем случае его движения имеет вид
7 Заказ 192 193
или на основании формулы Ривальса
где
B3)
B4)
Формулу B3) можно получить непосредственным диф-
дифференцированием векторного равенства для скоростей B1),
справедливого в любой момент времени. Вычисляя полные
производные по времени, при определении которых учитывают-
учитываются изменения векторов относительно неподвижной системы
координат, получаем
dv dvn dm dr
dt dt dt dt
Здесь dv/dt = a, dvojdt = ao— ускорения точек Ми О;
/k = e — угловое ускорение.
Учитывая, что вектор г является вектором постоянного
модуля, имеем
Окончательный результат выразится в форме
й = ао + £хг+шх(шхг).
Заметим, что если в кинематике свободного твердого тела
в качестве точки О можно брать любую точку тела, то
в динамике в качестве такой точки оказывается выгодным
выбирать центр масс тела.
При выборе различных точек тела в качестве полюса
изменяются скорость и ускорение полюса. Угловая скорость
и угловое ускорение при этом не изменяются. Докажем это
для угловой скорости, используя B1).
Пусть А и В—две точки свободного твердого тела (рис. 86).
Приняв за полюс точку А, для скорости точки В имеем
B5)
где юл — угловая скорость вращения те-
тела вокруг точки А. Аналогично, приняв
за полюс точку В, для скорости точки
А получим
= vB — ювх АВ, B6)
где юв — угловая скорость вращения тела
вокруг точки В. Из B5) и B6) имеем
Рис. 86
со.
; (сол — щ)хАВ =
194
для любых двух точек свободного твердого тела. Эти точки
можно выбрать так, чтобы АВ не было параллельно вектору
(юА — (Ьв). Тогда получаем
п>А — юв = 0; (ЬЛ = (ЬВ = (Ь, B7)
т. е. угловая скорость свободного твердого тела не зависит от
выбора полюса. Она инвариантна по отношению к выбору полюса.
Так как равенство B7) справедливо для любого момента
времени, то, дифференцируя его по времени, получим
d(bA/dt = d(bB/dt; га = гв = г,
т. е. вектор углового ускорения свободного твердого тела тоже
не зависит от выбора полюса.
ГЛАВА 5
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ
§ 1. АБСОЛЮТНАЯ И ОТНОСИТЕЛЬНАЯ ПРОИЗВОДНЫЕ
ОТ ВЕКТОРА. ФОРМУЛА БУРА
При рассмотрении сложного движения точки в общем
случае переносного движения приходится рассматривать из-
изменение векторных величин с течением времени по отношению
к системам отсчета, движущимся друг относительно друга.
Одно изменение имеет векторная величина относительно по-
подвижной системы отсчета, движущейся относительно другой,
неподвижной, и другое — относительно неподвижной системы
отсчета. Неподвижной системой отсчета считается система,
движение которой относительно других систем отсчета не
рассматривается.
Введем обозначения производных от векторных величин
при рассмотрении их изменения относительно различных систем
отсчета, движущихся друг относительно друга. Для любого
вектора b(t) его производную по времени по отношению
к неподвижной системе отсчета называют полной (или абсолют-
абсолютной) производной и обозначают db\dt. Производную по времени
при учете изменения вектора Ъ относительно подвижной
системы отсчета называют относительной (или локальной)
производной и обозначают Зб/d? или {dbjdt)r.
Установим зависимость между полной и относительной
производными по времени вектора Ь и величинами, характе-
характеризующими движение подвижной системы отсчета относитель-
относительно неподвижной. Для этого разложим вектор Б на со-
составляющие, параллельные осям подвижной системы коор-
координат. Имеем
7* 195
b = bxi+byj+bzk. A)
Изменение вектора Б относительно
неподвижной системы координат
O^xxyxzx в зависимости от времени
состоит из изменения его проекций
bx, by, bz на подвижные оси координат
и _изменения единичных векторов /,
j, к подвижных осей вследствие движе-
Ри 87 ния подвижной системы координат
относительно неподвижной. Вычислим
полную производную по времени от вектора Ь, используя
формулу A). Получим
db dbx^ dbv^ dbzr , di , dj , dk ,-4
— = —^H y-j-\ -k + bx — + bv~ + b. —. B)
dt dt dt dt dt y dt dt
Первые три слагаемых учитывают изменение вектора b при
неизменных /, j, к и поэтому составляют относительную
производную, т. е.
Производные по времени единичных векторов определим по
формулам Пуассона
так как эти векторы не изменяются от поступательного
движения со скоростью % вместе с подвижной системой
отсчета (рис. 87). Вектор ю есть угловая скорость враща-
вращательной части движения вокруг точки О подвижной системы
координат относительно неподвижной. Подставляя эти зна-
значения производных единичных векторов в B) и вынося ю за
скобки, получим
dbjdt = db/dt + G)X (bj+byj+bzk),
или, учитывая A),
dE/dt = SFjdt + (bxE. D)
_ Получена формула зависимости производных векторов
b в двух системах отсчета, движущихся друг относительно
друга. Формула D) называется формулой Бура.
Известно, что произвольное движение системы координат
как свободного твердого тела можно представить как поступа-
поступательное движение вместе с полюсом, например с точкой О,
и вращение вокруг этой точки. Из формулы Бура следует,
что поступательная часть движения вместе с полюсом не
влияет на зависимость между производными, а влияет только
вращательная часть движения.
Рассмотрим частные случаи.
196
1. Если вектор Ъ не изменяется относительно подвижной
системы координат, то его относительная производная db/ck = O
и по формуле D) получаем
= cox Ъ.
Это формула для производной от вектора постоянного модуля,
доказанная ранее для радиуса-вектора при вращении вокруг
неподвижной оси. Она справедлива для любого вектора при
произвольном движении подвижной системы осей координат.
В рассматриваемом случае ю не только угловая скорость
вращения подвижнойсистемы координат, но и угловая скорость
вращения вектора Ъ, так как вектор Ъ можно при этом
считать скрепленным_ с подвижной системой координат.
2. Если вектор Ъ не изменяется относительно основной
системы координат, то полная производная dF/d/ = 0 и, со-
согласно D), его относительная производная
db/dt— -шхй.
3. Если Ь = к(Ь, т. е. вектор^ все время параллелен вектору
угловой скорости ю, то ю х Ъ = О и
db/dt = db/dt.
В частности, если Ь = п>, то
Полная и локальная производные также равны друг другу
в те моменты времени, в которые вектор b параллелен
вектору угловой скорости ю.
§ 2. СЛОЖЕНИЕ СКОРОСТЕЙ
Если O1x1y1z1—неподвижная система осей координат,
a Oxyz — подвижная (рис. 88), то, как известно, абсолютным
движением точки называют ее движение относительно непод-
неподвижной системы осей координат, а относительным — ее
движение относительно подвижной. Переносным движением
точки называют ее движение в рассматриваемый момент
времени вместе с подвижной системой осей относительно
неподвижных. Относительные скорость и ускорение обозначают
vr и аг, переносные — ve и ае, а абсолютные — v и а.
Другие характеристики этих движений снабжаются соот-
соответствующими значками.
Движение подвижной системы осей координат относительно
неподвижной можно охарактеризовать скоростью ее поступа-
поступательного движения v0, например вместе с точкой О и вектором
угловой скорости ю ее вращения вокруг О. Пусть точка
М движется относительно подвижной системы координат.
Получим теорему сложения скоростей. Для этого проведем
197
векторы риг, Характеризующие по-
_ \ ложение точки М относительно непо-
lrl\V движной и подвижной систем осей
координат, и вектор р0 точки О. Для
любого момента времени
Продифференцируем по времени это
векторное тождество, учитывая изме-
изменения векторов относительно непо-
неподвижных осей координат, т. е. вычис-
Рис- 88 лим полные производные. Получим
dp/cU = dpo/cU-f dr/ck. E)
По определению, dp/d/ = iJ является абсолютной скоростью
точки М, dpo/dt = vo — абсолютной скоростью точки О. Для
вычисления dr/dt применим формулу Бура. Имеем
Относительная производная 3f/dt = vr является относительной
скоростью точки М по отношению к подвижной системе
отсчета, а ю—угловая скорость вращения подвижной системы
отсчета и, следовательно, радиуса-вектора г, если бы он
в рассматриваемый момент времени был скреплен с подвижной
системой осей координат. Таким образом, из E) получаем
v = vo + (bxr + vr. F)
Скорость
Ve = п0 + ГО X Г
является скоростью точки свободного твердого тела, скреплен-
скрепленного с подвижной системой координат, с которой в данный
момент совпадает точка М в движении тела относительно
неподвижной системы осей координат. Это есть переносная
скорость точки М. Из F) получаем следующую теорему
сложения скоростей для точки:
v = ve + vr, G)
т. е. скорость абсолютного движения точки равна векторной
сумме переносной и относительной скоростей.
§ 3. СЛОЖЕНИЕ УСКОРЕНИЙ ТОЧКИ В ОБЩЕМ СЛУЧАЕ
ПЕРЕНОСНОГО ДВИЖЕНИЯ
Абсолютное ускорение точки определим вычислением
полной производной по времени от абсолютной скорости
F). Имеем
а-~ = — iH + (Bxr + c,=-^+Txr+(oxT-+-A
At dr ' dt dt dt dt
198
Для полных производных от векторов г и vr применим
формулу Бура. Получим
Учитывая, что
dvo/dt = ao; d(b/dt = l; $r/dt = vr; dvr/dt = ar,
получим для абсолютного ускорения
a = ao + lxr + (bx((bxr) + ar + 2((bxvr). (8)
В этой формуле первые три слагаемых составляют ускорение
точки свободного твердого тела в« общем случае его движения
вместе с подвижной системой осей координат относительно
неподвижной. Первое слагаемое а0 — ускорение точки О, ехг
и йх(шхг) — соответственно вращательное и осестремительное
ускорения точки М, если бы она двигалась только вместе
с подвижной системой осей координат, не имея в рассматривае-
рассматриваемый момент времени относительного движения. После этого
(8) примет вид
а = ае + аг + ак, (9)
где
йж = 2(йх«г). A0)
Ускорение ак называется ускорением Кориолиса. Иногда его
также называют добавочным (или поворотным) ускорением.
Формула (9) выражает теорему сложения ускорений точки,
или кинематическую теорему Кориолиса: абсолютное ускорение
точки является векторной суммой трех ускорений — переносно-
переносного, относительного и Кориолиса.
Переносное ускорение рассматривалось при изучении движе-
движения свободного твердого тела. Относительное ускорение изуча-
изучалось в кинематике точки. Его можно выразить в двух формах
в зависимости от способа задания относительного движения.
При координатном способе задания в декартовых координатах
ar = xi+yj+zk,
где х, у, z — координаты движущейся_ точки относительно
подвижной системы осей координат; i,j, k — единичные векторы
этих осей. При естественном способе задания движения
причем
a\ = dvrjdt = sr; a"r=v?/pr,
где sr — расстояние от начала отсчета до точки по траектории
относительного движения; рг — радиус кривизны этой траекто-
траектории. В частном случае, когда переносное движение есть
вращение вокруг неподвижной оси, переносное ускорение
199
где касательное переносное ускорение
причем h есть кратчайшее расстояние от движущейся точки
до оси вращения. Нормальное переносное ускорение
Абсолютное ускорение в этом случае
A1)
§ 4. УСКОРЕНИЕ КОРИОЛИСА
Рассмотрим ускорение Кориолиса и его свойства. Оно
определяется формулой A0)
aK = 2((bexvr).
Угловую скорость вращательной части движения подвижной
системы отсчета, т. е. угловую скорость переносного движения,
заменили на юе.
Ускорение Кориолиса является результатом взаимного влия-
влияния двух движений: переносного и относительного. Часть его
(юе х vr) получается вследствие изменения переносной скорости
точки из-за относительного движения. Другая его часть, тоже
(юе х vr), есть результат изменения относительной скорости
вследствие переносного движения. Это следует из анализа
формул при выводе абсолютного ускорения.
Модуль ускорения Кориолиса в соответствии с A0) опреде-
определяется выражением
aK = 2(oet;rsin((oe, vr). A2)
Для определения ускорения Кориолиса очень удобно правило
Н. Е. Жуковского. Оно основано на формуле A0). Пусть имеем
точку М, движущуюся с относительной скоростью vr (рис. 89).
Построим плоскость П, перпендикулярную угловой скорости
переносного вращения юе, и спроецируем
vr на эту плоскость. Проекцию обозначим
v*. Она является вектором; ее модуль
* (u )
Ускорение Кориолиса выразится в форме
aK = 2G)ev*. A2')
Учитывая A0) и A2'), получаем пра-
правило Жуковского: модуль ускорения
Кориолиса равен удвоенному произведению
угловой скорости переносного вращения на
модуль проекции относительной скорости
на плоскость, перпендикулярную оси пе-
Рис. 89
200
реносного вращения; чтобы получить направление ускорения
Кориолиса, следует вектор проекции относительной скорости
v*r повернуть на 90° вокруг оси, параллельной оси переносного
вращения, в направлении этого вращения.
Рассмотрим случаи обращения в нуль ускорения Кориолиса.
Из A2) следует, что ак = 0, если:
1) юе = 0, т. е. переносное движение является поступатель-
поступательным;
2) vr = 0, т. е. в те моменты времени, в которые происходит
изменение направления относительного движения;
3) sin(coe, vr) = 0, т. е. когда скорость относительного движе-
движения vr параллельна угловой скорости переносного вращения юе.
Следует отметить, что при различном разложении одного
и того же абсолютного движения точки на переносное
и относительное получим разные ускорения Кориолиса.
Пример 1. Шар радиусом R=\ м вращается вокруг вертикальной оси
Oz' по закону ф = 2/ — 1Ъ рад. По меридиану шара движется точка М по
закону s = nt2/4 (рис. 90,а). Расстояние j отсчитывается от точки Мо меридиана.
Определить абсолютные скорость и ускорение точки М в момент
времени t = 1 с.
Решение. За переносное движение точки примем вращение ее вместе
с шаром вокруг оси Oz (рис. 90,6). Тогда относительным движением точки
будет ее движение по меридиану шара.
Определим положение точки М на меридиане в момент времени (=1 с.
Имеем s,=1=ii/4m. Так как Я=1 м, то положение точки определяется углом
ШИрОТЫ 0t=7t/4.
Вычислим угловые скорость и ускорение переносного движения. Получаем
ф = 2 —Зг2; при t=\ с <р= —1 с"*1. Угловая скорость ш = |ф| = 1 с. Знак минус
у ф показывает, что вращение шара происходит в отрицательную сторону
угла ф, т. е. по часовой стрелке.
Так как ф=— 6/ и при /=1 с ф = —6с, то угловое ускорение переносного
движения £ = |ф| = 6с~2. Знак минус у ф указывает, что оно направлено по
часовой стрелке, против положительного направления угла ф. Так как знаки
у ф и ф одинаковы, то вращение шара в рассматриваемый момент времени
является ускоренным.
Рис. 90
201
Абсолютную скорость точки определяем по формуле
v = ve + vr.
Скорость переносного движения при t = 1 с
f(! = /-a> = .Ra>cosoc = ^/2/2«0,7 м/с.
Скорость относительного движения точки vr = \s\, где s = nt/2. При t = \ с
s=я/2 = 1,6 м/с. Следовательно, 1)г=1,6м/с. Знак плюс у i указывает, что vr
направлено в сторону возрастания s.
В рассматриваемом случае ve направлена по касательной к параллели
шара и перпендикулярна vr, которая направлена по касательной к меридиану.
Следовательно,
Так как переносное движение является вращением шара вокруг неподвиж-
неподвижной оси, то абсолютное ускорение точки определяем по формуле
„. (а)
Переносное нормальное ускорение
//2«0,7 м/с2.
Ускорение а" направлено по кратчайшему расстоянию от точки до оси, т. е.
по МОХ. Переносное касательное ускорение а\ перпендикулярно а" и направлено
в соответствии с направлением углового ускорения по скорости ve. Числовое
значение этого ускорения
3y/2x4,2 м/с2.
Относительное нормальное ускорение
oP = i;r2/p = i;2/« = 2,6 м/с2.
Ускорение Щ направлено к центру кривизны траектории относительного
движения, т. е. к центру шара О. Относительное касательное ускорение
al — \s\, где i'= я/2 = const % 1,6 м/с2. Следовательно, а;=1,6м/с2. Так как
s положительно, то а\ направлено в сторону возрастающих значений s по
касательной к траектории относительного движения. Относительное движение
оказалось ускоренным в рассматриваемый момент времени.
Ускорение Кориолиса определяем по правилу Жуковского. Его модуль
at = 2u)v'r, где v", — проекция vr на плоскость, перпендикулярную оси переносного
вращения Oz'. Имеем
«l,l м/с.
После этого находим ок = 2 ■ 1 ■ 1,1 =2,2 м/с2. Чтобы определить направление
ах, следует v*r повернуть вокруг оси Mz, параллельной Oz', на 90° в сторону
переносного вращения, т. е. в рассматриваемом случае по часовой стрелке.
Получаем, что ускорение ах направлено по ускорению aj.
Для определения абсолютного ускорения выбираем прямоугольные оси
координат Mxyz и проецируем обе части векторного равенства (а) на эти
оси, учитывая направление составляющих ускорений (рис. 90,6). Получаем:
ax = a" +a?cosoc-a;sin ос=О,7 + 2,6-0,7-1,6-0,7«1,4 м/с2;
ау = ате + ак = 4,2+ 2,2 = 6,4 м/с2;
aI=-a;sina-a;cosa=-2,6-0,7-l,6-0,7=-2,9 м/с2.
Числовое значение абсолютного значения
7,2 м/с2.
Пример 2. Колечко М (рис. 91), надетое на стержень, движется в плоскости
Оху согласно уравнениям
202
x=3(l+cosnt); >>=4-8sihrt?,
где х, у—в см; t — в с. Стержень может вращаться
вокруг оси Oz.
Определить в момент г = 0,5 с угловую скорость
и угловое ускорение стержня, а также скорость
и ускорение движения колечка по стержню.
Решение. Положение колечка в момент времени
г = 0,5 с определяется координатами
Xj =3A + cos я/2) = 3 см; У\—4—8 sin я/2 = —4 см.
Примем движение колечка вместе с вращающимся
стержнем за переносное. Тогда его движение по гж. 91
стержню будет относительным движением.
Вычислим проекции на оси координат абсолютных скорости и ускорения
колечка для произвольного момента времени. Имеем:
vx—x = — 3nsinnt; vy=y= —Sncosnt;
а.=х= —3n2cosnt: а =у = 8я28тяг.
х ' у s
Для момента времени / = 0,5 с получаем:
vx=—3nx— 9,4 см/с; vy = 0; v = y
vj = 9,4 см/с;
ах = 0; ау = Ы2«78,9 см/с2; а=х/а2+а2 = 78,9 см/с2.
По проекциям изображаем векторы абсолютных скорости и ускорения
в рассматриваемый момент времени (рис. 92).
По теореме сложения скоростей для колечка,
Скорость переносного движения ve перпендикулярна стержню О А, а скорость
относительного движения vr направлена по стержню. Разлагая абсолютную
скорость v по этим двум направлениям, получаем
Но
поэтому
ve=v sin(p; t>r=i>cos(p.
sin<p = |
ve=7,5 см/с; vr= 5,6 см/с.
Угловая скорость вращения стержня определяется по формуле
ю = г;е/ОЛ/=7,5/5=1,5с-1.
В соответствии с направлением ve изображаем на рисунке дуговую стрелку
для угловой скорости.
В частном случае переносного вращательного движения по теореме сложения
ускорений для абсолютного ускорения имеем
Вычисляем отдельные составляющие абсолютного
ускорения а и изображаем их на рис. 93. Для
модуля нормального переносного ускорения а"е по-
получаем
а"е = ОМ ш2= 11,3 см/с2.
Ускорение а" направлено к оси переносного враще-
вращения, т. е. к точке О. Составляющая переносного
ускорения а\ направлена перпендикулярно а" и по
величине неизвестна. Предполагая, что дуговая
стрелка для б направлена против часовой стрелки,
изображаем на рисунке ускорения а\.
Рис. 92
203
Нормальная составляющая относительного
ускорения а? = 0, так как относительное движе-
движение колечка по стержню является прямолиней-
прямолинейным. Касательная составляющая относитель-
относительного ускорения в этом случае равна полному
относительному ускорению, т. е. dTr = ar. Пред-
Предположим, что аг направлено от точки М к А.
Ускорение Кориолиса ак определяем по
правилу Жуковского. Для его модуля имеем
aK = 2a>iv, где х>\—проекция относительной ско-
скорости vr на плоскость, перпендикулярную оси
переносного вращения Oz. В рассматриваемом
случае v*r = vr, поэтому ак = 2(аг;г= 16,8 см/с2. На-
Направление ускорения ак получаем поворотом
р д., на 90" вектора v*r по направлению дуговой
стрелки ш вокруг оси, проходящей через точку
М параллельно оси вращения стержня Oz.
Выбираем оси координат Мх'у' и проецируем векторы, входящие в урав-
уравнение (а) на эти оси. Имеем:
для Мх' — asin(p = ar — a";
для My' acos9 = Oe + a«-
Из этих уравнений определяем неизвестные ускорения:
а,= — a sin ф + aJ« — 51,8 см/с2;
a* = acos(p — aK«3O,5 см/с2.
Ускорение аг получилось отрицательным. Следовательно, предположение
о направлении его оказалось неверным. В действительности а, направлено
против ранее принятого направления. Ускорение а\ оказалось положительным.
Предположение о направлении дуговой стрелки для £ подтвердилось.
Угловое ускорение стержня определяем по формуле
=6,1 с.
ГЛАВА 6
СЛОЖЕНИЕ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
В простейшем случае рассматривают сложение двух движе-
движений твердого тела, одно из которых является переносным,
другое — относительным. Относительным движением
твердого тела считают его движение, в простейшем случае
поступательное или вращательное, относительно подвижной
системы осей координат, движущейся относительно другой,
основной или неподвижной, системы координат, т. е. системы
координат, движение которой относительно других систем
координат не рассматривается. Переносным движением
твердого тела называют его движение, тоже в простейшем
случае поступательное или вращательное, вместе с подвижной
системой координат в рассматриваемый момент времени
относительно неподвижной. Сложным движением твердо-
твердого тела называется его движение относительно основной или
неподвижной системы координат. Составление сложного движе-
движения из переносного и относительного в простейшем случае
или нескольких переносных и относительных движений в общем
204
случае, называют сложением движений твердого тела.
Обратный процесс называется разложением движения
твердого тела на составляющие движения. Этот процесс всегда
возможен и для него справедливы формулы, полученные для
сложения движений твердого тела.
Плоское и движение свободного твердого тела считают уже
сложными. В общем случае переносное и относительное движения
твердого тела могут быть любыми сложными движениями тела.
При рассмотрении сложного движения твердого тела,
состоящего из нескольких движений, рассматривают сложение
его движений не за конечный промежуток времени, а в рас-
рассматриваемый момент времени, т. е. в действительности рас-
рассматривается сложение скоростей линейных и угловых. Для
вычисления ускорений точек тела следует использовать форму-
формулу для сложного движения точки или формулы для ускорений
точек того движения твердого тела, которое получается
в результате сложения движений.
§ 1. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНЫХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
Имеем твердое тело, участвующее одновременно в двух
поступательных движениях, одно из которых является перенос-
переносным со скоростью vu а другое — относительным со скоростью
v2- Таким образом, твердое тело движется относительно
подвижной системы координат Oxyz поступательно со ско-
скоростью v2, а подвижная система координат движется относи-
относительно неподвижной O1x1y1z1 тоже поступательно со скоростью
v{ (рис. 94). Движение тела относительно основной системы
координат является сложным.
Установим вид сложного движения. Для этого вычислим
скорость какой-либо точки М тела относительно неподвижной
системы координат Охххухгх. По теореме сложения скоростей
для точки имеем
так как переносное и относительное
движения тела являются поступа-
поступательными. Это справедливо для лю-
любой точки рассматриваемого тела,
а потому сложное движение тела
является поступательным со скоро-
скоростью v. Таким образом, от сложения
двух поступательных движений твер-
твердого тела получается поступатель-
поступательное движение со скоростью, рав-
равной векторной сумме скоростей
составляющих поступательных дви-
движений.
'х,
Рис. 94
205
Если имеется последовательность поступательных движений
тела, первое из которых является относительным по отношению
к переносному второму, а это второе — относительным к пе-
переносному третьему и т. д. (скорости таких последовательных
движений соответственно vu v2, ..., vn), то от сложения этих
движений путем последовательного применения A) получим
поступательное движение тела со скоростью
«= V vk.
v =
B)
§ 2. СЛОЖЕНИЕ ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
1. Сложение вращений вокруг пересекающихся осей. Пусть
твердое тело участвует одновременно в двух вращениях:
переносном с угловой скоростью а1 и относительном с угловой
скоростью ю2. Оси вращений пересекаются в точке
О (рис. 95, а). Векторы угловых скоростей как скользящие
векторы можно считать перенесенными в точку О осей
вращения.
Примером тела, участвующего в двух вращениях вокруг
пересекающихся осей, является диск А, свободно насаженный
на ось 00' и вращающийся вокруг нее с угловой скоростью
ю2- Вместе с осью 00' диск еще вращается вокруг другой
оси ОгОг (рис. 95, б) с угловой скоростью (hv
Определим вид движения твердого тела, участвующего
в двух вращениях вокруг пересекающихся осей. Точка О тела,
расположенная на пересечении осей вращения, является непод-
неподвижной, и ее абсолютная скорость vo = 0. Докажем, что любая
другая точка М тела, находящаяся на диагонали парал-
параллелограмма, построенного на векторах угловых скоростей
(»! и ю2, тоже имеет в рассматриваемый момент скорость,
равную нулю.
По теореме о сложении скоростей для точки М имеем
а)
ше1 б)
206
Так как переносное и относительное движения являются
вращениями вокруг осей, то
v м е = hica1 = 2пл. АО AM; юмг = п2а2 = 2плЛ0ВМ,
где h{ и h2 — кратчайшие расстояния от точки М до соответст-
соответствующих осей вращения. Площади треугольников в параллело-
параллелограмме равны, поэтому VMe = vMr. Векторы скоростей ше и шг име-
имеют противоположные направления. Таким образом, vMe = 0. Это
справедливо для любой точки М, расположенной на диагонали
параллелограмма, так как масштаб векторов можно изменять.
Точки оси ОМ имеют скорости, равные нулю. Следовательно, ОМ
является мгновенной осью вращения тела в рассматриваемый
момент, т. е. при сложении двух вращений вокруг пересекающихся
осей, одно из которых переносное, а другое — относительное,
получается вращение тела вокруг мгновенной оси.
Для определения абсолютной угловой скорости вращения
вокруг мгновенной оси выберем на теле точку N и вычислим
ее скорость один раз как скорость сложного движения,
а другой — как вращения вокруг мгновенной оси. По
формуле Эйлера для вращательных движений при сложном
движении имеем
VN = VNe + VNr = COj X f+ Ю2 X Г = ((Oj + Й>2) X Г.
Для абсолютного вращения вокруг мгновенной оси
vN = ю х г.
Приравнивая скорости, получаем
ю = ю1+ю2, C)
т. е. угловая скорость абсолютного вращения равна векторной
сумме угловых скоростей составляющих вращений.
Последовательное применение этого правила сложения вра-
вращений вокруг пересекающихся осей позволяет заменить любое
количество вращений вокруг пересекающихся осей одним
вращением, угловая скорость которого ю равна векторной
сумме угловых скоростей составляющих вращений, т. е.
Тело, участвующее в двух вращениях вокруг пересекающихся
осей, имеет неподвижную точку, расположенную на пересечении
осей. Оно вращается вокруг неподвижной точки, т. е. совершает
сферическое движение. Таким образом, сферическое движение
твердого тела можно считать состоящим из двух вращений
вокруг пересекающихся осей: переносного и относительного.
Сферическое движение совершает конус 2 при качении без
скольжения по неподвижному конусу / (рис. 95, б). Его движе-
движение можно считать двумя вращениями вокруг пересекающихся
207
Рис. 96
осей. Относительное вращение происходит вокруг оси подвиж-
подвижного конуса Oz с угловой скоростью юг, а переносное — вокруг
оси неподвижного конуса Ozt с угловой скоростью юе.
Абсолютным движением является вращение вокруг мгновенной
оси ОС с угловой скоростью
Мгновенная ось ОС, как и ось подвижного конуса Oz, вращается
вокруг оси неподвижного конуса Ozl с угловой скоростью юе.
От движения подвижного конуса по неподвижному без
скольжения легко перейти к движению подвижной конической
шестерни по неподвижной шестерне, если у конусов отрезать
их части плоскостями, перпендикулярными осям Ozx и Oz.
2. Сложение вращений вокруг параллельных осей. Следует
рассмотреть три случая.
1) Вращения имеют одинаковые направления. Тело участвует
в двух вращениях: переносном с угловой скоростью (Oj и от-
относительном с угловой скоростью ю2 (Рис- 96, а). Таким телом
является диск, представленный на рис. 96, б. Пересечем оси
вращения перпендикулярной прямой. Получим точки пересечения
А я В, в которые можно перенести векторы угловых скоростей
©! и ю2- На отрезке А В тела в рассматриваемый момент
имеется точка С, скорость которой равна нулю. Действительно,
по теореме сложения скоростей для точки С имеем
Точки тела, для которых переносная и относительная скорости
параллельны и противоположны, могут находиться только на
отрезке А В между точками А я В. Скорость точки С равна
нулю, если vCe = vCr. Но vCe = (ol AC, vCr = a>2BC. Следовательно,
@1АС=щВС,
или
со, ВС
ш2
ас'
208
Прямую, перпендикулярную осям вращения, можно прове-
провести на любом расстоянии. Следовательно, существует ось,
скрепленная с телом и параллельная осям вращения, скорости
точек которой равны нулю в данный момент. Она является
мгновенной осью вращения в рассматриваемый момент
времени.
Для определения угловой скорости ю вращения тела вокруг
мгновенной оси вычислим скорость точки В, считая ее движение
сложным. Получим
vB = vBe + vBr,
но
vBe = @1AB, vBr = (o2BB=0.
Следовательно,
Для скорости точки В при вращении тела вокруг мгновенной
оси имеем
vB = (oBC.
Приравнивая скорости точки В, полученные двумя способами,
имеем
оВС=@1АВ, АВ = ВС+АС.
Согласно D),
АС _ш2
В~С~"щ'
Поэтому
ВС+АС АС
О) = Ю1 _____ = Ю1 + Ю1 __ = 0)! + Ю2,
т. е.
ю = ю1+ю2. E)
Формулу D) можно представить в следующем виде:
а>! _ а>2
¥с~а~с'
Образуя производную пропорцию и используя формулу E),
получим
~ВС~~АС~ ВС+АС'
или
__.=-______ F1
ВС АС А В { '
Таким образом, при сложении двух вращений тела вокруг
параллельных осей в одинаковых направлениях получается враще-
вращение вокруг параллельной оси в том же направлении с угловой
скоростью, равной сумме угловых скоростей составляющих
вращений. Мгновенная ось полученного вращения делит отрезок
209
между осями составляющих вращений на части, обратно
пропорциональные угловым скоростям этих вращений, внутрен-
внутренним образом. Точка С при таком делении располагается между
точками А я В.
Естественно, справедливо и обратное. Вращение вокруг оси
с угловой скоростью ю можно разложить на два вращения
вокруг двух параллельных осей с угловыми скоростями a^ и й>2.
Тело, участвующее в двух вращениях вокруг параллельных
осей, совершает плоское движение. Плоское движение твердого
тела можно представить как два вращения, переносное и от-
относительное, вокруг параллельных осей. Плоское движение
колеса сателлита 2 по неподвижному колесу 1 (рис. 96, в) явля-
является примером движения, которое можно заменить двумя
вращениями вокруг параллельных осей в одном и том же
направлении, например против движения часовой стрелки.
Колесо сателлита совершает переносное вращение вместе
с кривошипом А В вокруг оси, проходящей через точку
А с угловой скоростью ю1; и относительное вращение вокруг
оси, проходящей через точку В с угловой скоростью ю2. Оба
вращения имеют одинаковые направления. Абсолютное враще-
вращение происходит вокруг оси, проходящей через точку Р, которая
является в данный момент МЦС. Она находится в месте
соприкосновения колес, если подвижное колесо катится без
скольжения по неподвижному. Угловая скорость абсолютного
вращения
Абсолютное вращение с этой угловой скоростью происходит
в том же направлении, что и составляющие движения.
2) Вращения имеют противоположные направления. Рассмот-
Рассмотрим случай, когда OjXOj (рис. 97, а). Получим следующие
формулы:
ю = ю1-(й2, G)
BC
i— а>2
АС ВС-АС
а)
210
или
ВС АС А В' { '
Для вывода этих формул разложим вращение с угловой
скоростью cuj на два вращения в том же направлении вокруг
двух параллельных осей с угловыми скоростями ю и ю'2. Ось
одного из вращений с угловой скоростью ю2 возьмем проходя-
проходящей через точку В и выберем ю'2 = ю2. Другое вращение
с угловой скоростью ю пройдет через точку С (рис. 97, б).
На основании E) и F) имеем
, ш а>'2 а>1
1 2 ' АВ АС ВС'
ИЛИ
, ш, ш2 со
1 2 * 2' ВС АС АВ
Справедливость формул G) и (8) доказана. Таким образом,
при сложении двух вращений твердого тела вокруг параллельных
осей в противоположных направлениях получается вращение
вокруг параллельной оси с угловой скоростью, равной разности
угловых скоростей составляющих вращений в сторону вращения
с большей угловой скоростью. Ось абсолютного вращения делит
отрезок между осями составляющих вращений на части,
обратно пропорциональные угловым скоростям этих вращений
внутренним образом. Точка С при таком делении находится
на отрезке А В за точкой А, через которую проходит ось
вращения с большей угловой скоростью.
Можно также одно вращение разложить на два вокруг
параллельных осей с противоположными направлениями враще-
вращения. Примером плоского движения твердого тела, которое
может быть представлено двумя вращениями вокруг параллель-
параллельных осей в противоположных направлениях, является движение
колеса сателлита, катящегося внутри неподвижного колеса без
скольжения (рис. 97, в). Переносным в этом случае является
вращение колеса 2 вместе с кривошипом АВ с угловой ско-
скоростью (о1 вокруг оси, проходящей через точку А. Относитель-
Относительным будет вращение колеса 2 вокруг оси, проходящей через
точку В с угловой скоростью ю2, и абсолютным — вращение
этого колеса вокруг оси, проходящей через МЦС, точку Р,
с угловой скоростью ю. В этом случае (u2>g)j и потому
угловая скорость абсолютного вращения ю = ю2—ю^ Это
вращение по направлению совпадает с направлением вращения,
имеющим большую угловую скорость. Ось абсолютного
вращения расположена вне отрезка А В за осью вращения
с большей угловой скоростью.
3. Пара вращений. Парой вращений называется совокуп-
совокупность двух вращений твердого тела, переносного и относительного,
211
Рис. 98
Эйлера для них получим
вокруг параллельных осей с одина-
одинаковыми угловыми скоростями
в противоположных направлениях
(рис. 98, а). В этом случае
(Ь1 = — ю2. Рассматривая движение
тела как сложное, по теореме
сложения скоростей для точки
М имеем
vM^vUe + vMr. (9)
Составляющие движения явля-
являются вращениями с угловыми
скоростями G)l и ю2. По формуле
После этого для абсолютной скорости имеем
так как ю2— —d>i- Учитывая, что fl—f2 = AB, получаем
(9')
—>
Так как векторное произведение В А х Wj можно назвать
моментом угловой скорости a^ относительно точки В, то
Заменяя в формуле (9') a^ на — ю2, соответственно получим
Объединяя результаты, имеем
~* - ~* — —
^ = 0»! хАВ=(д2 х В А = Мв (oh)- МА((д2),
или _ _ _
пм = Мв(т1) = Мл(ш2) = М(т1, ю2), A0)
где М((Ьг, ю2) является векторным моментом пары вращений
(«1» «г)-
Таким образом, если твердое тело участвует в паре
вращений, то скорости всех точек тела, согласно A0), одинако-
одинаковы, т. е. тело совершает при этом мгновенное поступательное
движение. При длительном участии тела в паре вращений
будет длительным и поступательное движение.
Скорость поступательного движения тела
v =М(ю1; (Ь2) = МА((ЬА) = МВ{(Ь1).
212
Она равна векторному моменту пары вращений, который
может быть также выражен векторным моментом одной из
угловых скоростей относительно какой-либо точки, расположен-
расположенной на оси вращения тела с другой угловой скоростью,
входящей в пару вращений. Скорость поступательного дви-
движения тела, участвующего в паре вращений, зависит
только от характеристик пары вращений. Она перпендику-
перпендикулярна осям пары вращений. Числовое ее значение можно
выразить как
v =a>ld = @2d, A1)
где d—кратчайшее расстояние между осями пары или
плечо пары.
Пара вращений аналогична паре сил, действующей на
твердое тело. Угловые скорости вращения тела, аналогично
силам, являются векторами скользящими. Векторный момент
пары сил является вектором свободным. Аналогичным свой-
свойством обладает и векторный момент пары вращений.
Пару вращений и ее эквивалентность поступательному
движению можно наглядно продемонстрировать на приборе
(рис. 98,6), состоящем из неподвижной 1 и подвижной 2 ше-
шестеренок, соединенных цепью. При вращении кривошипа А В
вокруг оси, проходящей через точку А, шестеренка 2 будет
участвовать в двух вращениях вокруг параллельных осей:
переносном вместе с кривошипом и относительном вокруг
оси, проходящей через точку В. Вращения противоположны.
Их угловые скорости одинаковы. Скорости всех точек шестерен-
шестеренки 2 равны скорости точки В, причем vB = l(o1 все время
при движении этой шестеренки.
Если с шестеренкой 2 скрепить прямолинейный отрезок
MN, то он при движении механизма будет оставаться парал-
параллельным своему первоначальному положению. Если этот
горизонтальный отрезок совместить с дном стаканчика с водой,
прикрепив стаканчик к подвижной шестеренке, то вода не
выльется из стаканчика при движении механизма в вертикаль-
вертикальной плоскости.
При поступательном движении траектории всех точек тела
одинаковы. Точка В описывает окружность радиуса /. Траекто-
Траектории всех других точек подвижной шестеренки будут тоже
окружностями такого же радиуса. Тело, участвующее в паре
вращений, совершает плоское поступательное движение.
§ 3. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО
ДВИЖЕНИЙ
Если тело одновременно участвует в переносном поступа-
поступательном движении со скоростью v и относительном вращатель-
вращательном с угловой скоростью го, то в зависимости от их
213
взаимного расположения целесообразно
рассмотреть три отдельных случая.
1. Скорость поступательного движе-
движения перпендикулярна оси относительного
вращения. В этом случае векторы
v и со перпендикулярны (рис. 99). На
линии ОС, перпендикулярной плоскости,
в которой расположены v и со, имеется
Рис дд точка С, скорость которой равна нулю.
Определим ее расстояние от точки О.
По теореме сложения скоростей для точки С имеем
vc = ve + vr = v + ю х ОС,
так как при вращении вокруг оси
»г=шх ОС.
Учитывая, что скорости v и vr противоположны по направле-
направлению, получим
vc = v —(oOC.
Так как vc=0, то v — (oOC =0 и, следовательно, точки
С я О находятся на расстоянии
ОС=-. A2)
ш
Другие точки, имеющие скорости, равные нулю, располагаются
на линии, проходящей через точку С, параллельно оси
вращения тела с угловой скоростью со. Таким образом,
имеется мгновенная ось вращения, параллельная оси от-
относительного вращения и проходящая через точку С. Для
определения угловой скорости абсолютного вращения U вы-
вычислим скорость, например,- точки О двумя способами.
Считая движение сложным, имеем
Точка О находится на оси относительного вращения, и поэтому
fOr = 0. Скорость переносного движения vOe в рассматриваемом
случае переносного поступательного движения равна г;. Следо-
Следовательно, vo=v, vo = v. С другой стороны, эквивалентное
абсолютное движение тела является вращением вокруг мгновен-
мгновенной оси, проходящей через точку С с угловой скоростью Q.
Поэтому для скорости точки О имеем
vo=QOC.
Приравнивая скорости точки О, вычисленные двумя способами
и используя A2), получаем
v=UOC, или v=Q~,
ш
214
или
Вращение вокруг мгновенной оси должно иметь такое направле-
направление, чтобы скорость точки О имела такое же направление,
что и скорость v. Отсюда получаем совпадение направлений
вращения относительного и абсолютного вращений. Следова-
Следовательно, й = а>. Таким образом, при сложении поступательного
переносного и вращательного относительного движений твердого
тела, у которого скорость поступательного движения перпен-
перпендикулярна оси относительного вращения, эквивалентное аб-
абсолютное движение является вращением вокруг мгновенной
оси, параллельной оси относительного вращения с угловой
скоростью, совпадающей с угловой скоростью относительного
вращения.
Такой же результат можно получить, если поступательное
движение со скоростью v заменить парой вращений (со', Q),
выбрав Q = co' = co. Два вращения с угловыми скоростями со'
и со можно отбросить, так как (со', co)cv>0, и абсолютным
движением окажется вращение с угловой скоростью fj = co.
Скорость поступательного движения равна моменту пары
вращений. Приравнивая их, получим v =со(9С или
что совпадает с A2).
Еще одна интерпретация рассмотренного случая получается,
если рассмотреть параллельный перенос скользящего вектора
угловой скорости Q в точку О. Такой перенос, как известно,
следует компенсировать парой вращений, эквивалентной посту-
поступательному движению со скоростью v.
На поступательное переносное и вращательное относитель-
относительное с осью вращения, перпендикулярной к скорости переносного
движения, разлагается плоское движение твердого тела. Так,
плоское движение без скольжения колеса по прямой (рис. 100)
можно составить из поступательного движения колеса вместе
с центром О со скоростью v и относительного вращательного
V///////7/////////
Р
Рис. 100
Рис. 101
215
вокруг оси, проходящей через точку О с угловой скоростью
ю. Это же движение можно рассматривать как вращение
вокруг мгновенной оси, проходящей через МЦС, который
совпадает с точкой Р. Угловая скорость этого абсолютного
вращения Q = ro, и оно имеет то же направление вращения,
что и относительное вокруг оси, проходящей через точку О.
Если в качестве точки О используется другая точка колеса,
например точка М, то изменится только скорость переносного
поступательного движения. Она будет равна скорости vM
точки М. Угловая скорость юх вращения тела вокруг оси,
проходящей через точку М, по величине и направлению будет
той же самой, что и вокруг осей, проходящих через
точки О и Р.
2. Винтовое движение. Движение, при котором скорость
переносного поступательного движения тела параллельна оси
относительного вращения, называется винтовым движени-
движением твердого тела (рис. 101). Ось вращения тела в этом случае
называется винтовой осью. При винтовом движении тело
движется поступательно параллельно оси винтового движения
и вращается вокруг этой оси. Винтовое движение не приводится
к какому-либо другому одному простому эквивалентному
движению.
При винтовом движении векторы v и ю могут иметь как
одинаковые, так и противоположные направления. Винтовое
движение тела характеризуется параметром винтового
движения, которым считают величину р = -. Если v и ю из-
изменяются с течением времени, то и параметры винтового
движения являются переменными. В общем случае и =-—,
ш
dm ds dm ds ■.
ю = — и р ——:—=—, т. е. р есть перемещение тела вдоль оси
dt dt dt dm
винтового движения при повороте тела на один радиан.
Для скорости точки М тела, совершающего винтовое
движение, по теореме сложения скоростей имеем
vM=vMe + vMr.
Но vMe = v, vMr = (ur, где г — расстояние точки до винтовой
оси. Скорости v и vMr перпендикулярны. Следовательно,
Учитывая, что v =юр, получаем
v =@^/р2 + г2. A3)
Если тело вращается с постоянной угловой скоростью
и имеет постоянную скорость поступательного движения, то
такое движение тела называется постоянным винтовым
216
Рис. 103
движением. В этом случае точка тела при движении все
время находится на поверхности кругового цилиндра с радиу-
радиусом г. Траекторией точки является винтовая линия. Кроме
параметра в рассматриваемом случае вводят шаг винта, т. е.
расстояние, на которое переместится какая-либо точка тела
при одном обороте тела вокруг оси винтового движения.
Угол поворота тела ф при ю = const вычисляется по формуле
Ф = юг. Для одного оборота тела ср = 2я. Необходимое для
этого время
За время Т точка переместится в направлении, параллельном
винтовой оси, на шаг винта
h =vT = v — = 2пр.
ш
Отсюда получается зависимость шага винта от параметра
винтового движения h =2np.
Уравнения движения точки М тела по винтовой линии
(рис. 102) в декартовых координатах выражаются в следующей
форме:
х =
у =
z=vt.
В этих уравнениях величины ю, г и v являются постоянными.
3. Общий случай. Пусть скорость переносного поступатель-
поступательного движения v и угловая скорость относительного вращения
ю образуют угол а. Случаи, когда а = 0, 90 и 180°, уже
рассмотрены.
Разложим скорость v (рис. 103) на две перпендикулярные
составляющие
ю. Тогда
и v2, причем v1 направим параллельно
u1=ucosa, v2=
217
Переносное движение со скоростью v2 и относительное враще-
вращение с угловой скоростью ю эквивалентны вращению вокруг
оси, проходящей через точку С с угловой скоростью Q = ro
/ ч /~,^-. v2 fsinot
(согласно случаю первому), причем OL =—= .
ш ш
Скорость поступательного движения vl имеют все точки
тела. Таким образом, получено винтовое движение с винтовой
осью, отстоящей от первоначальной оси вращения на величину
ш
Параметр полученного винтового движения
vi ycosoc
(О Ш
Общий случай переносного поступательного и относительного
вращательного движений твердого тела оказался эквивалент-
эквивалентным мгновенному винтовому движению.
§ 4. СТАТИЧЕСКИЕ АНАЛОГИИ В КИНЕМАТИКЕ
Рассмотренные случаи движений твердого тела показывают,
что вектор угловой скорости тела й является вектором
скользящим. В статике вектором скользящим является сила
F, действующая на абсолютно твердое тело. Паре сил в статике
соответствует пара вращений в кинематике, векторным мо-
моментом которой является скорость поступательного движения
тела. Эти аналогии позволяют без подробного рассмотрения
сформулировать некоторые результаты сложения движений
твердого тела, используя соответствующие теоремы, дока-
доказанные в статике.
Если тело участвует в п вращениях с угловыми скоростями
fflj и / поступательных движениях со скоростями vk, то по
аналогии с приведением сил, приложенных к твердому телу,
можно выбрать за центр приведения точку О тела и получить
в качестве главного вектора угловых скоростей составляющих
вращений угловую скорость
;= 1
проходящую через точку О. Главный момент при этом
образуют все присоединенные пары вращений и скорости
поступательных движений. Эквивалентная главному моменту
скорость поступательного движения
1=1 к=1
218
Полученное сложное движение тела можно дальше упрос-
упростить, рно в общем случае приведется к винтовому движению,
если О. и v не равны нулю и не перпендикулярны. В частных
случаях, если iJ=0 или v перпендикулярно Q, может получиться
одно вращение. При Q = 0 получим одно эквивалентное поступа-
поступательное движение со скоростью v.
Аналогично статическим инвариантам имеют место и ки-
кинематические инварианты. Так, инвариантности главного век-
вектора сил в статике в кинематике соответствует инвариантность
угловой скорости Q, т. е. ее независимость от выбора центра
приведения, вместе с которым тело совершает поступательное
движение.
ГЛАВА 7
ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Сплошной средой считают деформируемые тела, различные
жидкости, не очень разреженные газы. Понятия скорости
и ускорения точки сплошной среды такие же, как и в кинемати-
кинематике одной точки. В кинематике сплошной среды роль точки
отводится малой частице этой среды. Рассмотрим задания
движения сплошной среды и получим формулы, по которым
вычисляются скорости и ускорения точек сплошной среды.
Движение сплошной среды может быть изучено двумя
методами, один из которых — метод Лагранжа — является обоб-
обобщением метода, применявшегося в кинематике одной точки.
Движение в методе Лагранжа задается в переменных Лагранжа.
Другой метод — метод Эйлера — широко использует концепцию
теории поля. При этом движение задается и изучается
в переменных Эйлера. При рассмотрении движения сплошной
среды преимущественно используется полевой подход, базиру-
базирующийся на методе Эйлера и соответственно использующий
переменные Эйлера.
§ 1. ПЕРЕМЕННЫЕ ЛАГРАНЖА И ЭЙЛЕРА
Переменные Лагранжа. В выделенном объеме сплошной
среды каждая его точка (малая частица) в фиксированный
момент времени, например / = 0, имеет координаты х0, у0,
z0 или другие параметры а, Ь, с, которые являются функциями
этих координат
a = q>i(*o» Уо, г0); Ь = ц>2(х0, у0, z0); с = ц>3(х0, у0, z0),
допускающими вторые производные по всем переменным.
Параметры а, Ь, с, так же как и х0, у0, z0, дают возможность
отличать одну точку сплошной среды от другой. В разные
219
моменты времени / различные точки сплошной среды характе-
характеризуются четырьмя независимыми переменными а, Ь, с, t,
которые называются переменными Лагранжа.
Для задания движения сплошной среды в переменных
Лагранжа, как и в случае одной точки, достаточно задать
декартовы координаты х, у, z всех точек сплошной среды
или их радиусы-векторы г, но уже как функции четырех
переменных Лагранжа:
x = j\(a, b, с, t); y = f2(a, b, c, t); z = f3(a, b, c, t),
или
r = r(a, b, c, t).
В кинематике одной точки, которая рассматривалась ранее,
использовались переменные Лагранжа для этой точки. Парамет-
Параметры а, Ь, с не применялись, так как не было других точек, от
которых следовало отличать рассматриваемую точку. Остава-
Оставалась зависимость координат точки или ее радиуса-вектора только
от времени. Для сплошной среды задание параметров а, Ъ,
с позволяет выделить конкретную точку. Разным значениям этих
параметров соответствуют различные точки сплошной среды.
Если движение сплошной среды задано в переменных
Лагранжа, то скорости и ускорения в этих переменных
определяются по обычным формулам кинематики точки:
v = dr/dt,
или
vx = dx/dt; vy = dy/dt; vz = dz/dt:
или
ax = d2x/dt2; ay = d2y/dt2; az = d2zjdt2.
Производные по времени t частные, так как вычисляются
при фиксированных значениях переменных а, Ь, с. Величины
х, у, z или г можно также дифференцировать по каждому
из переменных а, Ь, с.
В методе Лагранжа объектом изучения являются сами
точки движущейся сплошной среды.
Переменные Эйлера. В механике сплошной среды, особенно
для жидкостей и газов, а также в теории поля преимущественно
используются метод Эйлера и соответственно переменные
Эйлера. В методе Эйлера рассматриваются не фиксированные
точки сплошной среды, а точки пространства, занятые движу-
движущейся сплошной средой. За независимые переменные принима-
принимают время / и декартовы координаты точки М пространства
х, у, z или другие параметры, характеризующие различные
точки пространства. Четыре независимые переменные величины
х, у, z, t называют переменными Эйлера.
Различные векторные и скалярные величины, характеризу-
характеризующие сплошную среду, такие, как, например, скорость, ускоре-
220
ние, плотность и т. п., рассматривают как функции этих
переменных. В случае сплошной среды изучаются поля скаляр-
скалярных и векторных величин, характеризующих движущуюся
сплошную среду и ее свойства. Изучаются распределение этих
величин по точкам пространства, занятого сплошной средой,
и их изменение с течением времени.
По известному векторному полю скоростей сплошной среды,
заданному в' переменных Эйлера v = v(x, у, z, t), можно
определить векторное поле ускорений а в этих переменных.
Получим соответствующую формулу. Движение сплошной
среды в переменных Эйлера считается известным, если задано
поле скоростей в этих переменных. Согласно определению
ускорения точки сплошной среды, находящейся в какой-либо
точке пространства М(х, у, z) в момент времени t, следует
рассмотреть положение этой точки сплошной среды в момент
времени t + At. Она в этот момент вследствие движения
сплошной среды окажется в другой точке пространства Мх
с координатами х + Ах, у + Ау, z+Az и будет иметь скорость
Vi, зависящую от координат этой новой точки пространства
М1 и времени t + At. Изменение координат рассматриваемой
точки сплошной среды на Ах, Ay, Az произошло вследствие
изменения времени на At, поэтому
,. Ах ,. Ду ,. Дг ,1Ч
hm -r- = vx\ hm ~r~ = vy; lim T = vz. (I)
Разложим скорость vx в ряд по степеням величин Ах, Ау,
Az, At:
v1=v(x + Ax, y + Ay, z+Az, t + At) = v(x, y, z, t) +
Индексы М и t у производных указывают на то, что
они берутся в точке М[х, у, z) пространства в момент
времени t. Согласно определению ускорения а точки сплошной
среды, находящейся в точке пространства М в момент
времени t, имеем
dv\ Ay fdv\ Az
— hm-i+ — hm —
+ \iy)MtXmft + \Jz)u,Xim Д? B)
Остальные слагаемые ряда в пределе обращаются в ноль.
Подставляя A) в B) и опуская для краткости индексы
М и t у производных, получаем
a = (dv/dt) + vx(dv/dx} + v {dvjdy^ + vAdvjdz}. C)
В проекциях на координатные оси имеем
221
C')
z = d vz /d t+vx (d vz jd x) + vy
По векторной формуле C) вычисляют поле ускорений
в переменных Эйлера, если известно поле скоростей. В эту
формулу входят dv/dt— локальная производная от век-
вектора скорости — и группа слагаемых vx(dv/dx) + vy(dv/dy) +
+ vz(dvjdz), представляющая собой конвективную произ-
производную от этого вектора. Полное изменение вектора скорости
с течением времени, т. е. ускорение, обозначим DvjDt.
Локальная производная dv/dt характеризует изменение век-
вектора скорости v в точке М(х, у, z) пространства вследствие
изменения только одного времени при неизменных х, у, z.
Полная производная DvjDt равна локальной производной dv/dt
в тех точках пространства, в которых скорость в рассматрива-
рассматриваемый момент времени равна нулю.
Группа слагаемых, представляющая конвективную произ-
производную, учитывает изменение вектора скорости, вызванное
переносом рассматриваемой точки сплошной среды самой
движущейся средой.
Рассмотрим частные случаи.
1. Если v = v(x, у, z), т. е. поле скоростей стационарно,
то dv/dt = O и a = Dv/Dt = vx(dv/dx) + vy(dv/dy) + vJdv/dz).
2. При v = v(t) dv/dx = dv[dy = dv/dz = O и a = d
3. Если r = const, то dv/dt = O,
и a = Dv/Dt = 0.
По формуле C) вычисляют полные, или субстанциальные,
производные по времени в переменных Эйлера от любых
векторных или скалярных величин, характеризующих сплошную
среду. Пусть, например, известно скалярное поле плотностей
р(х, у, z, t) сплошной среды. Рассуждения, аналогичные
приведенным при выводе формулы для ускорения, приведут
к полной производной от р по времени /
Dp/Dt = dp/dt + vx (d p/dx) + vy (d p/dy)+ vz (d pjdz).
Если сплошная среда неподвижна, т. е. vx = vy = vz = 0, то полная
производная по времени от любой векторной или скалярной
функции, характеризующей сплошную среду, согласно C),
равна локальной производной.
Преобразованием конвективной производной из C) можно
получить другое выражение для ускорения (формула Лэмба —
Громеко):
a = dv/dt + 4(v2/2)-vxrotv, D)
222
где rotv — вихрь вектора скорости, а V—символический
оператор Гамильтона:
8х 8у
i, j, E—единичные векторы, направленные по осям декартовой
системы осей координат. Вихрь вектора скорости определяется
выражением
xv =
i j к
A A JL
8x ду dz
8vz
Jy"
В дальнейшем используется также вектор ю, определяемый
как половина вихря вектора скорости:
(b=1/2votv. F)
В проекциях на оси координат
Для выяснения физического смысла rotu рассмотрим не-
несколько примеров вычисления его по заданному полю ско-
скоростей.
Пример 1. Сплошная среда совершает плоское движение, параллельное
оси Ох, с постоянной скоростью v (рис. 104). Имеем vx = v = const; vy=0; vz=0.
По формуле E) для вектора вихря fl = rotu имеем:
о 8v^ti0- о dv* 8v*a.
' дх ду
|
о
Рис. 104
Рис. 105
223
Рис. 106
Рис. 107
Следовательно, fl = rotu=0 во всех точках пространства, занятого движущейся
сплошной средой.
Пример 2. Сплошная среда совершает плоское движение, параллельное
оси Ох, со скоростью, распределенной по линейному закону (рис. 105).
Траектории точек сплошной среды являются прямыми линиями, параллель-
параллельными оси Ох. В этом случае
vx=ny; vf—0; vz=0,
где п =tga = const. Имеем:
dv, dvv evx dv,
П^ 0 п^
8x By
Таким образом, во всех точках потока сплошной среды
n = rotfi =QJ+Qj+Qzk = -пк,
где к — единичный вектор, направленный по оси Oz.
Пример 3. Точки сплошной среды движутся по круговым траекториям
с центрами на оси Oz и скоростями, обратно пропорциональными радиусам
окружностей (рис. 106), т.е. v—njr, где и = const. Имеем:
vx = — «sincp= — nyjr2; vy=vcosq> = nx/r2; fz=0,
так как
sin(p=>>/r; cos(p = x/r,
где х, у — координаты точки. По формуле E) имеем
-о- а -о- a ~d-^J-^-(~-lnxx
так как х2+у2 =г2.
Следовательно, f2 = roti;=0 во всех точках потока, кроме точки г=0,
для которой вычисления непригодны, так как в этой точке скорость обращается
в бесконечность.
Пример 4. Сплошная среда вращается как твердое тело вокруг неподвиж-
неподвижной оси Oz с угловой скоростью ш0. Скорости точек сплошной среды в этом
случае распределены по линейному закону (рис. 107), т. е. v =wor. В этом случае
(o0jc; vz=0.
vx = — usincp= —
По формулам для вихря скорости имеем
ёх ёу
Следовательно,
224
fl = rot v = 2too k,
где Е—единичный вектор, направленный по оси Oz. Во всех точках потока
rotu имеет постоянную величину и постоянное направление, параллельное
оси Oz, в том числе и в точке О, где г = 0 и и = 0.
Угловая скорость
юо=-П = ю,
т. е. равна половине вихря вектора скорости. Таким образом, половина вихря
вектора скорости является вектором угловой скорости вращения твердого
тела вокруг неподвижной оси.
§ 2. РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ В МАЛОЙ ОКРЕСТНОСТИ
ТОЧКИ ПРОСТРАНСТВА
Пусть известны скорость в точке О в момент t и произ-
производные от нее по координатам в этот же момент времени
(рис. 108). Получим формулу для вычисления скорости в этот
же момент времени в любой другой точке М из малой
окрестности точки О. Так как скорости в точках Ми О рас-
рассматриваются в один и тот же момент времени, то удобно
выбрать начало осей координат, относительно которых изуча-
изучается движение сплошной среды, в точке О.
Точки М пространства из малой окрестности точки О от-
отличаются друг от друга только координатами х, у, z или
радиусом-вектором г. Скорость в какой-либо точке М для
фиксированного момента времени является функцией координат
этой точки х, у, z. Разложим v(x, у, z) в степенной ряд по
координатам х, у, z, ограничиваясь слагаемыми первой степени
по этим переменным и пренебрегая слагаемыми второй и более
высоких степеней, предполагая, что ими можно пренебречь
по сравнению с сохраняемыми слагаемыми для достаточно
малых х, у, z. Получим
v(x, у, z) = v@, 0, 0) + (dv/dx)ox + {dv/dy)oy + (dv/dz)oz, G)
где v@, 0, 0) = vo—скорость в точке О. Индекс О у производных
служит указанием на то, что они вычисляются в точке
О пространства. В дальнейшем его будем опускать. В проекциях
на координатные оси из G) имеем
dvx
dvx
0Vy
TxX
dvz
~дхХ
ov
+ ТуУ
, dv,
+ ЪУ
Tz
dv:
M(x,y,z)
Введем компоненты тензора скоро-
скоростей деформации S в точке О вы-
выражениями
Рис. 108
8 Заказ 192
225
dv,
2\ ду ' Tx
dvx dv
1 / 3d,
=:_| ^
l
5uz
= p • p = 5
czv' ezz -, •
(8)
Тензор скоростей деформаций удобно представить в форме
таблицы или матрицы:
Iexx exy exz\
(9)
Компоненты тензора скоростей деформаций, характеризующие
движение сплошной среды, зависят от точки пространства
и направления осей координат. Тензор «S является симмет-
симметричным тензором, так как согласно формулам, определяющим
его компоненты,
Для таких симметричных тензоров в линейной алгебре до-
доказывается, что в каждой точке существуют такие прямоуголь-
прямоугольные оси координат, называемые главными осями, для которых
тензор принимает диагональную форму:
(е, О О
S = \ 0 е2 О
\0 0 е3
где el5 е2, ег—компоненты тензора скоростей деформаций
для главных осей. Известно также, что сумма диагональных
компонентов является инвариантом. Она не изменяется
при повороте осей координат в рассматриваемой точке, т. е.
ехх~\-еуу-\-ezz — (i\ ~^е2~{-е3.
Скалярная величина
ехх + еуу + ezz = dvx /дх + dvy /ду + dvz jdz
называется дивергенцией (расхождением) вектора скорости
и обозначается divr. Таким образом, по определению,
div v = dvx /дх + dvy /ду\ dvz /dz.
Величины ех, е2, е3 определяются из уравнения собственных
значений тензора S как его корни, т. е. как корни кубического
уравнения для е:
226
exx-
eyx
ezx
e
exy
eyy-
ezy
exz
e eyz
ZZ
= 0.
Известно, что числу соответствует геометрический образ,
которым является точка на числовой оси. Вектору соответст-
соответствует прямолинейный отрезок. Тензору S, компоненты которого
имеют два индекса, можно поставить в соответствие поверх-
поверхность второго порядка, которую называют эллипсоидом ско-
скоростей деформаций. Такие тензорные поверхности дальше
будут рассмотрены для тензоров инерции и напряжений
поверхностных сил.
Применим для производных по координатам от проекций
вектора скорости на оси координат тождественные преобра-
преобразования Коши, прибавляя и вычитая одинаковые величины
и используя F') и (8). Имеем
I \ I
~dy~~2\dy~ Jx~) 2\dx~~dy~
= exy-G)z;
dvx_\ ( dvx dvz \ 1 / dvx _ dvz \ _
dz 2 у dz dx J 2 \_ dz дх J
Яг 7 \ п г Яг/ ?. l Л v f)v I
z _ 1 / Зиг отх \ _ 1 / dvx dvz \ _
~dx~2\Jx ~dz J 2\Tz dx
= ezx-(£>y;
dv.
2\ dv
dvy \ , 1 / dvv dv.
A0)
Из G') с учетом этих преобразований получаем
В векторной форме A1) примет вид
A1)
где йд называется скоростью деформации. Проекции скорости
деформации на оси координат определяют по формулам
A2)
8*
227
До формуле A1') вычисляется скорость в момент времени
t в любой точке М пространства из малой окрестности точки
О, если в этот же момент известны скорость, вихрь скорости
и тензор скоростей деформаций S в точке О. Формула A1')
является обобщением на случай сплошной среды формулы
B1) (см. § 8 гл. 4) для скорости точки свободного твердого
тела в общем случае его движения. Для твердого тела va = 0.
Кроме того, для сплошной среды роль угловой скорости
выполняет половина вихря вектора скорости в точке О.
Рассмотрим скорость деформации va. Для простоты
пусть мы выбрали такую точку О, в которой в рас-
рассматриваемый момент времени vo = 0 и ю = 0. Тогда для
скорости в какой-либо точке М из малой окрестности
этой точки, согласно AГ), имеем
v = va, A3)
или в проекциях на оси координат
A3')
Если в точке О еххф0, а все остальные компоненты тен-
тензора скоростей деформаций равны нулю, то из A3') по-
получаем:
vx = exxx; vf = 0; vz = 0. A4)
Из A4) следует, что точки сплошной среды из малой
окрестности точки О, находящейся в плоскости Oyz, имеют
скорости, равные нулю, так как для них х = 0. Точки,
расположенные в плоскости, параллельной этой координатной
плоскости на расстоянии х в положительном направлении
оси Ох, имеют одинаковые скорости, пропорциональные х и на-
направленные параллельно Ох, если ехх>0, и в обратную
сторону, если ехх<0. Для точек плоскости, параллельной Oyz,
но отстоящей от нее на — х, скорости имеют противоположное
направление. Таким образом, exx — vx\x в малой окрестности
точки О характеризует скорость расширения (ехх>0) или
сжатия (ехх<0) частицы сплошной среды, приходящуюся на
единицу расстояния в направлении, параллельном оси Ох
(рис. 109). Аналогично, еуу и ег2 характеризуют относительные
скорости растяжения или сжатия, приходящиеся на единицу
расстояния в малой окрестности точки О, в направлениях,
параллельных осям координат Оу и Oz,
Допустим, что ехуф0, а все остальные компоненты тензора
скоростей деформации равны нулю. Тогда из A3') следует:
vx = exyy; vy = exyx; vz = 0.
228
Рис 109
Рис. ПО
Это показывает, что точки сплошной среды из малой окрест-
окрестности точки О, расположенные в плоскости Oyz, в частности на
оси Оу, для которых х = 0, имеют скорости, параллельные оси
Ох. Эти скорости распределены по линейному закону (рис. 110)
и направлены в положительном направлении этой оси, если
еху>0, и в обратную сторону, если еху<0. Аналогично, точки,
находящиеся в плоскости Oxz, в частности на оси Ох, имеют
скорости, распределенные по линейному закону и параллельные
оси Оу. Если еху>0, то точки части сплошной среды из малой
окрестности точки О, находящиеся в момент времени t на осях
координат Ох и Оу и образующих прямой угол, в следующий
момент времени расположатся на прямых линиях, образующих
острый угол. Если еху<0, то прямой угол превратится в тупой.
Таким образом, величина еху = vx /у = vy /x характеризует отно-
относительную скорость скоса углов в плоскости Оху. Соответст-
Соответственно exz и еу2 характеризуют относительные скорости скоса
углов в плоскостях Oxz и Oyz, приходящиеся на единицу длины.
В общем случае, если все компоненты тензора скоростей
деформации отличны от нуля, рассмотренные эффекты в окре-
окрестности точки О наложатся друг на друга. Так как точка
О является произвольной точкой пространства, в котором
движется сплошная среда, то все изложенное применимо для
малой окрестности любой точки.
§ 3. ЛИНИИ И ТРУБКИ ТОКА
При рассмотрении движения сплошной среды и применении
переменных Эйлера используется понятие линий тока, т. е.
линий, в каждой точке которых в рассматриваемый момент
времени векторы скоростей параллельны касательным этих
линий. Если вектор в какой-либо точке линии тока направлен
по касательной к этой линии, то, по определению линии
тока, он должен быть параллельным вектору скорости v в этой
точке. Два параллельных вектора отличаются друг от друга
только скалярным множителем к (положительным или от-
отрицательным). Следовательно,
229
dr = kv. A5)
Если проекции вектора dr на оси
координат есть dx, dy, dz, то в про-
проекциях на эти оси выражение A5)
примет форму
dx = kvx; dy = kvy; dz=kvz.
Отбрасывая произвольный множи-
множитель к, эти уравнения можно пред-
Рис 1П ставить в следующем виде:
dx dy dz ,л , ,ч
vx(x, у, z, t) vy(x, у, z, t) vz(x, у, z, t)
Два уравнения A5') относительно координат х, у, z для
фиксированного момента времени t являются дифференциаль-
дифференциальными уравнениями семейства линий тока. После интегрирова-
интегрирования этих уравнений появятся произвольные постоянные, раз-
различным значениям которых соответствуют разные линии тока.
На фиксированной линии тока в рассматриваемый момент
времени находятся разные точки сплошной среды в отличие
от траекторий.. Для стационарного движения, при котором
вектор скорости не зависит от времени, семейство линий тока
совпадает с семейством траекторий. Для нестационарного
движения это разные семейства линий.
Линии тока являются векторными линиями для векторного
поля скоростей точек сплошной среды. Аналогичные векторные
линии можно получить для любого другого векторного поля,
например векторного поля вихря вектора скорости и т. п.
Если выбрать в пространстве, в котором движется сплошная
среда, какой-либо замкнутый контур L (рис. 111) и через
каждую его точку провести свою линию тока, то получим
трубку тока. Сплошная среда не может выходить из трубки
тока через боковую ее поверхность, так как в ее точках,
состоящих из линий тока, скорости точек сплошной среды
направлены по касательным к поверхности трубки тока.
Сплошная среда может входить и выходить из трубки тока
только через ее торцовые сечения. Трубки тока используются
для формулировки некоторых интегральных форм теорем
о движении сплошной среды.
§ 4. ПОТОК И ЦИРКУЛЯЦИЯ ВЕКТОРА СКОРОСТИ
Поток вектора скорости. Выберем в пространстве, в котором
движется сплошная среда, неподвижную поверхность отно-
относительно рассматриваемой системы отсчета. Разобьем ее на
малые элементарные площадки с площадью dS (рис. 112).
Потоком вектора скорости v через элементарную площадку
dS, определяемую внешней нормалью Мп, называется скаляр-
230
ная величина vndS, где г;„ = г; cos (п, п) —
проекция скорости на внешнюю нормаль
к площадке.
Для замкнутой поверхности вне-
внешней нормалью в каждой ее точке
называют нормаль, которая направлена
во внешнюю часть объема, ограниченного
поверхностью. Для незамкнутых поверхно-
поверхностей дополнительно уславливаются, какое
направление нормали считать внешним. Рис. Ш
Потоком Q вектора скорости v через воображаемую
поверхность S называют скалярную величину
Q = \\vndS. A6)
(S)
Для вычисления потока можно получить другие выражения,
если учесть, что
vn = v-n = vl-cos(v,An) = vxnx+vyny + vznz,
где п — единичный вектор, направленный по внешней нормали;
пх, пу, nz — его проекции на оси координат. Для них имеем:
пх= 1 -cos(Я, х); пу = 1 • cos(п, у); nz=l-cos(n, z).
Кроме того,
dScos(n, x) = dydz; dScosyn, y) = dzdx; d5cos(«, z) = dxdy.
После этого для потока получаем
Q =)) vndS = \\\yxcos[n, x) + vycos[n, j) + i;zcos(n, z)Jdi =
(S) (S)
A6')
(S)
Наиболее часто используемое выражение для потока полу-
получают применением формулы Гаусса—Остроградского для пре-
преобразования интеграла по замкнутой поверхности S в интеграл
по объему V, ограниченному этой поверхностью:
Л Л Д
jj [/?cos(n, x) + qcos(n, j) + rcos(n, z
(S)
8x dy dz
(V)
где p, q, r—любые функции переменных Эйлера, имеющие
частные производные. Замкнутая поверхность должна быть
при этом достаточно гладкой.
Если принять p = vx, q = vy, r = vz, то, применяя A7) для
потока через замкнутую поверхность, имеем
231
Q = )\\\yxcos{n, x) + vycos{n, y) + vzcos[n, z
(S)
Bx By o
A6")
Ho
(V)
dx By Bz
поэтому
Q = ^ vndS=§§ v-ndS = §^divvdV. A8)
(S) (S) (V)
Для вектора вихря скорости поток через замкнутую по-
поверхность равен нулю, так как с учетом формул для проекций
вектора вихря на координатные оси имеем
ох оу oz
дх у By By J By у Bz Bx J 8z\ ox By J
Из A8) для потока AQ через элементарную замкнутую
поверхность, ограничивающую объем AV, приближенно имеем
Отсюда получаем для дивергенции вектора скорости
л- - г де
divt)= hm —,
т. е. дивергенцию вектора скорости в какой-либо точке можно
рассматривать как предел потока вектора скорости через
замкнутую поверхность, приходящуюся на единицу объема,
ограниченного поверхностью, при стягивании объема в эту
точку.
Циркуляция вектора скорости. Для
введения понятия циркуляции вектора
скорости по какому-либо контуру сле-
следует выбрать контур /, разбить его
на элементарные участки длиной d/.
Тогда циркуляцией вектора скорости
v по элементарному контуру d/ назы-
называют величину vrdl, где vx — проекция
вектора скорости на положительное
направление касательной к контуру
в рассматриваемой точке (рис. 113). За
положительное направление касатель-
рис. из ной к контуру, если контур замкнутый,
232
выбирают то направление, при обходе контура в котором
ограниченная им поверхность остается слева. Для незамкнутого
контура о положительном направлении касательной услав-
уславливаются дополнительно.
Циркуляция вектора скорости по всему контуру
r=f»td/. A9)
(!)
Для вычисления циркуляции можно получить другие форму-
формулы, если учесть, что
v% = vx = v\ -cos(t;, x) = vxxx + vyxy + vzxz,
где т — единичный вектор в положительном направлении
касательной к контуру; хх, ху, xz— его проекции на декартовы
оси координат. Учитывая, что
тж=1 -cos(t, x); Tj,= 1-cos(t, у); xz = I -cos(x,Az);
d/cos(x, x) = dx; d/cos(x, y) — dy; d/cos(x, z) = dz,
получим
Г= J rtd/= J [rxcos(x, х) + 1)усо8(т, у) + vzcos(x, z)]d/=
A) (D
l( y dz). A9')
Ho
vx dx + vy dу + vz dz = v dr,
где f—радиус-вектор, проведенный из начала координат в точ-
точку М контура. Поэтому имеем
r=xi+yj+zk; dr = dx-i+dyj+dz -Jc.
Таким образом,
Г= J vxdl= J vxdx + vydy+vzdz= J vdr. A9")
(!) С) (О
Для замкнутого контура можно применить формулу Стокса,
преобразующую интеграл по контуру в интеграл по поверх-
поверхности, натянутой на этот контур:
J [pcos(x, x) + <?cos(i, j) + rcos(x, z)]d/=
(i)
---Jcos(n,
_Л , (dp dr\ ,_Л ч
) + ^J(n, y)
(S)
(|)^)]^ B0)
233
Если принять p = vx, q = vy, r = vz, то, применяя B0) для
замкнутого контура, имеем
Г= j [uxcos(f, х) + 1)усоз(т, y) + vzcos(x, z)]dl=
- Л ч / <5d_ Зи, \ / - Л
Учитывая, что
_c4_cV _5^_a^. _<4_c^
x~<5>' 8z' U>~ dz dx' z~3x 3>-
являются проекциями вихря скорости, для циркуляции по
замкнутому контуру получим
Г= \v-fdl=\$Totv-ndS. B1)
(О (S)
Если rot v = 0, т. е. движение сплошной среды является
потенциальным, то циркуляция при таком движении по
замкнутому контуру равна нулю, если контур не охватывает
точек, в которых вихрь скорости отличен от нуля.
Для вектора силы F циркуляция по какому-либо контуру
является работой силы на этом контуре.
РАЗДЕЛ III
ДИНАМИКА
ГЛАВА 1
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ И УРАВНЕНИЯ
ДВИЖЕНИЯ ТОЧКИ
§ 1. ВВЕДЕНИЕ
В динамике изучаются механические движения материаль-
материальных объектов под действием сил. Простейшим материальным
объектом является материальная точка. Это модель матери-
материального тела любой формы, размерами которого в рассма-
рассматриваемых задачах можно пренебречь и принять за геометри-
геометрическую точку, имеющую определенную массу. Более сложные
материальные объекты — механические системы и сплошные
тела — считают состоящими из материальных точек. Сплошное
материальное тело представляют состоящим из малых по
сравнению с размерами самого тела частиц, на которые
мысленно разбивается тело. Каждую такую частицу считают
материальной точкой.
Сила считается в механике основным, первичным понятием.
Она является векторной мерой действия одного материального
объекта на другой. В качестве эталона силы обычно принимают
линейную силу упругости, т. е. такую меру, модуль которой
при действии, например, на пружину динамометра пропорци-
пропорционален деформации пружины в пределах ее упругости. Свойства
сил, приложенных к твердому телу и одной точке, рассмат-
рассматривались в статике. В динамике силы оцениваются по их
динамическому действию, т. е. по изменению ими харак-
характеристик движения материальных объектов.
Движение материальных объектов всегда следует рассматри-
рассматривать относительно определенной системы отсчета. Оно совер-
совершается в пространстве с течением времени. В классической
механике, в основу которой положены аксиомы Ньютона,
пространство считается трехмерным эвклидовым простран-
пространством, свойства которого не зависят от движущихся в нем
материальных объектов. Положение точки в таком простран-
пространстве относительно какой-либо системы отсчета определяется
тремя независимыми параметрами или координатами точки.
В общей теории относительности свойства пространства зависят
от находящихся в нем материальных объектов и их движения.
235
Время в классической механике универсально. Оно не
связано с пространством и движением материальных объектов.
Во всех системах отсчета, движущихся друг относительно друга,
оно протекает одинаково. В теории относительности про-
пространство и время связаны друг с другом. Они рассматриваются
как единое четырехмерное пространство — время. Время при
этом зависит от того, в какой системе отсчета оно рассматрива-
рассматривается. В классической механике время определяется по какому-
либо периодическому процессу, как, например, вращение Земли
вокруг своей оси, колебания маятника часов и т. д.
Все положения динамики получают из ее аксиом, используя
законы логики и вводя удобные для применения понятия.
В основу классической механики положены аксиомы Ньютона,
которые были даны в его труде «Математические начала
натуральной философии», опубликованные впервые в 1687 г.
Классическую механику часто называют механикой Ньютона
в отличие, например, от механики теории относительности.
Для формулировки аксиом Ньютона необходимо дать
определение инерциальных систем отсчета, для ко-
которых справедливы аксиомы Ньютона. Достаточно предва-
предварительно определить одну исходную или основную инер-
инерциальную систему отсчета. В дальнейшем будет показано,
что инерциальных систем отсчета бесконечно много. Ньютон
считал, что существует абсолютное неподвижное пространство,
с которым и следует скрепить исходную инерциальную систему
отсчета. Ньютоновское определение абсолютного пространства
породило споры и возражения. В настоящее время целе-
целесообразно определить исходную инерциальную систему отсчета
как систему осей координат, начало которой находится в центре
Солнца, а оси все время направлены на одни и те же
удаленные звезды. Такую систему координат называют ге-
гелиоцентрической. Ее использование в качестве инерциальной
системы отсчета, как показывает опыт, не приводит к заметным
погрешностям.
§ 2. ОСНОВНЫЕ АКСИОМЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
Всякая система аксиом должна быть полной и независимой,
т. е. отдельные аксиомы не должны, например, быть частным
случаем или следовать из других аксиом. Аксиомы классической
механики (или ее законы) не являются независимыми. Они
не образуют и замкнутой системы, удовлетворяющей условию
полноты и другим требованиям, предъявляемым к системам
аксиом. Предпринималось немало попыток заменить систему
аксиом Ньютона более совершенной системой, но эти попытки
не были успешными. Поэтому примем за основу аксиомы
Ньютона в современной их форме применительно к простейшей
модели тела — материальной точке.
236
m
Первой аксиомой, или законом
классической механики, является
закон инерции, который был открыт
еще Галилеем: материальная точка, на
которую не действуют силы или действу-
действует равновесная система сил, обладает
способностью сохранять свое состояние
покоя или равномерного и прямолинейного
движения относительно инерциальнои си-
системы отсчета. Материальная точка, на Рис- >
которую не действуют силы или действует равновесная система
сил, называется изолированной материальной точкой.
Равномерное и прямолинейное движение точки называют
движением по инерции. Частным случаем движения по
инерции является покой точки, при котором скорость ее равна
нулю. Первая аксиома содержит в себе утверждение, что
простейшее материальное тело, а следовательно, и любые
другие материальные тела обладают свойством инерции, т. е.
свойством сохранять свое прямолинейное и равномерное дви-
движение относительно инерциальнои системы отсчета. Согласно
Ньютону, все материальные тела обладают врожденной способ-
способностью сопротивляться изменению своего движения по инер-
инерции. Это внутреннее свойство всех материальных тел, зависящее
только от самих тел и не зависящее от присутствия в простран-
пространстве других тел. При движении материальной точки по инерции
ее ускорение равно нулю. Ускорение точки, таким образом,
является мерой отклонения ее движения от движения по
инерции.
Вторая аксиома, или основной закон динамики,
принадлежащий Ньютону, устанавливает зависимость ускоре-
ускорения точки относительно инерциальнои системы отсчета от
действующей на нее силы и массы точки: ускорение матери-
материальной точки относительно инерциальнои системы отсчета
пропорционально приложенной к точке силе и направлено по
этой силе (рис. 1). Если F есть приложенная к точке сила
на — ее ускорение относительно инерциальнои системы отсчета
Oxyz, то основной закон можно выразить в форме
ma = F. A)
Положительный коэффициент пропорциональности т, характе-
характеризующий инертные свойства материальной точки, называется
инертной массой точки. Инертная масса в классической
механике считается величиной постоянной, зависящей только
от самой материальной точки и не зависящей от характеристик
ее движения, т. е. скорости и ускорения. Масса также не
зависит от природы силы, приложенной к точке. Она одна
и та же для сил тяготения, сил упругости, электромагнитных
сил, сил трения и других сил.
237
В отличие от инертной массы масса, входящая в закон
тяготения Ньютона
„ „ тМ
FG
называется гравитационной массой. В этом законе G—постоян-
G—постоянная тяготения; т, М—гравитационные массы притягивающихся
точек; г—расстояние между ними. Гравитационные массы
т и М в этом законе выполняют роль своеобразных зарядов,
если сравнивать закон тяготения с законом Кулона для
взаимодействия покоящихся электрических зарядов. С большой
степенью точности экспериментально установлена эквивалент-
эквивалентность инертной и гравитационной масс.
Массу обычно определяют по силе тяготения Р и ускорению
свободного падения g у поверхности Земли. Согласно A),
в этом случае имеем
mg = P; m = P/g. B)
Это определение массы широко используется в механике Ньютона.
Основной закон механики является также критерием, который
позволяет устанавливать, какую силу следует считать п р и л о -
же иной к материальной точке. Сила, приложенная к материаль-
материальной точке, всегда имеет материальный источник в виде других
материальных тел, которые действуют на точку путем контакта
при непосредственном соприкосновении с ней или на расстоянии
через посредство силовых полей. Приложенная к точке сила
должна создавать у нее ускорение относительно инерциальной
системы отсчета в соответствии с основным законом динамики.
Только приложенная сила является причиной ускорения точки
в классической механике. Это определяет наблюдателя, с точки
зрения которого следует судить в механике Ньютона о взаимо-
взаимодействии тел, определяющих силы. Таким является наблюдатель,
находящийся в инерциальной системе отсчета.
Из A), если сила F=0, следует, что ускорение а = 0, т. е.
материальная точка имеет постоянную по модулю и направле-
направлению скорость относительно инерциальной системы отсчета.
В основном законе содержится часть утверждения аксиомы
инерции. Другая часть этой аксиомы о свойстве инерции
материальной точки и всех других материальных тел в ос-
основном законе динамики не содержится.
Третья аксиома, или закон о равенстве сил
действия и противодействия, определяет свойство сил
взаимодействия между двумя материальными точками с точки
зрения инерциального наблюдателя: силы взаимодействия двух
материальных точек равны по величине и противоположны по
направлению (рис. 2), т. е.
Fi = -F2 C)
238
независимо от удаления точек друг от друга.
Эти силы в классической механике считаются
действующими вдоль одной прямой. Если не
требовать этого, то и силу Лоренца, воз-
возникающую при действии одного электрического т1
заряда на другой, движущийся, заряд, можно
считать тоже силой взаимодействия. Рис- 2
Если сила действия, например Fx, изменяется, то синхронно
с ней должна, согласно C), изменяться и сила противодействия.
Это возможно для любых расстояний между взаимодейст-
взаимодействующими точками только при условии, что силовое взаимо-
взаимодействие распространяется мгновенно, т. е. с бесконечно боль-
большой скоростью. В действительности же все известные взаимо-
взаимодействия имеют конечные скорости распространения. Для
устранения этой трудности взаимодействие на расстоянии
целесообразно считать близкодействием, используя концепцию
поля. При рассмотрении взаимодействия выделенной матери-
материальной точки с каким-либо материальным объектом на
расстоянии можно считать, что точка контактно взаимо-
взаимодействует с полем объекта, не рассматривая в механике вопрос
о передаче противодействия к источнику поля и его запаздыва-
запаздывание из-за конечности скорости передачи.
При рассмотрении взаимодействия материальных точечных
объектов с полями часто используются пробные точечные
объекты, которые испытывают действие поля, но сами на
поле не влияют.
Четвертая аксиома, или закон независимого
действия сил (закон суперпозиции сил), не является самосто-
самостоятельной аксиомой, если принять, что силы, действующие на
материальную точку, складываются по правилу параллело-
параллелограмма. Эта аксиома следует из аксиомы сложения сил. Закон
независимого действия сил утверждает: при одновременном
действии на материальную точку нескольких сил ускорение
точки относительно инерциальной системы отсчета от дейст-
действия каждой отдельной силы не зависит от наличия других
приложенных к точке сил и полное ускорение равно векторной
сумме ускорений от действия отдельных сил. Между силами
нет взаимного влияния друг на друга в создании ускорения
точки^ Если к материальной точке приложена система сил
Flt F2, ..., Fn, то, согласно этой аксиоме, ускорение от
действия каждой из этих сил определяется по A):
ma^F^ ma2 = F2; ...; man = Fn. D)
Ускорение при одновременном действии всех сил является
векторной суммой ускорений, созданных отдельными силами,
т. е.
а= t ak. E)
k=l
239
Суммируя D) и используя E), получаем основное уравне-
уравнение динамики точки:
та= £ Fk. F)
4=1
Закон независимого действия сил следует понимать как
закон суперпозиции сил, т. е. как закон сложения ускорений
от действия отдельных сил. Это не означает, что приложенные
к точке силы являются независимыми, особенно если среди
приложенных сил есть силы реакций связей, которые всегда
зависят от активных сил.
Основное уравнение динамики точки остается справедливым
и для несвободной материальной точки, на которую наложены
связи. Следует только в число приложенных сил включить
и силы реакций связей.
Аксиомы классической механики и их следствия хорошо
согласуются с результатами опытов для не очень больших
скоростей движения по сравнению со скоростью света в пу-
пустоте. Для скоростей движения, сравнимых со скоростью
света, следует применять механику специальной теории относи-
относительности, для которой классическая механика является ее
первым приближением при малых скоростях.
§ 3. СИСТЕМЫ ЕДИНИЦ
Основной закон динамики A) показывает, что единицы
ускорения, массы и силы связаны между собой, а потому
нельзя выбрать их независимо друг от друга. Размерность
ускорения, в свою очередь, выражается через размерности
длины и времени. Таким образом, единицы длины, времени,
массы и силы должны определяться с учетом основного
закона динамики. Независимыми из них являются только три
величины. В общепринятой СИ в качестве единицы времени
принята секунда (с), длины — метр (м), массы — килограмм
(кг). Для них существуют эталоны. Единица силы — ньютон
(Н) — является производной от указанных независимых единиц.
Сила в 1 Н равна силе, сообщающей телу массой в 1 кг
ускорение, равное 1 м/с2.
Существуют и другие системы единиц, как, например,
абсолютная, или CGS, и техническая. Абсолютная система
единиц отличается от СИ тем, что в ней используются более
мелкие единицы. За единицу длины принят 1 см, за единицу
массы—1г. Тогда сила выразится в динах: 1дина =
= 1 г-1 см/с2; 1 Н=105 дин.
В технической системе единиц в качестве независимых
принимаются: для времени — секунда, длины — метр, для си-
силы— килограмм-сила (кгс). Единица массы является производ-
240
ной от этих единиц. Масса выражается в технических единицах
массы (т. е. м.). Одну техническую единицу массы имеет тело,
которое под действием силы в 1 кгс получает ускорение
в 1 м/с2. Из B) получаем, что массу в 1 т. е. м. имеет тело,
сила тяжести которого равна 9,8 кгс.
§ 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
Используя основной закон динамики, можно вывести диф-
дифференциальные уравнения движения материальной точки в раз-
различных системах координат. По аксиоме о связях и силах
реакций связей можно получить дифференциальные уравнения
движения и несвободной точки так же, как и для свободной,
только ко всем приложенным к точке силам надо добавить
силы реакций связей.
Силы реакций связей при движении точки могут зависеть
в общем случае не только от вида наложенных на точку
связей и приложенных к ней сил, но и от характера ее
движения, например от ее скорости при движении в воздухе
или в какой-либо другой сопротивляющейся среде. В даль-
дальнейшем не будем делать различия между свободной и несвобод-
несвободной материальными точками. Обозначая равнодействующую
всех заданных сил и сил реакций связей F, а массу точки
т, получаем
ma = F. G)
Из кинематики точки известно, что ускорение а выражается
через радиус-вектор г (рис. 3):
Дифференциальное уравнение движения материальной точки
в векторной форме имеет вид
m% = F. (8)
Если спроецировать обе части уравнений G) или (8) на
координатные оси, то можно получить дифференциальные
уравнения движения точки в про-
проекциях на эти оси.
В декартовой системе координат
в общем случае
max = Fx; may = Fy; maz = Fz.
Проекции ускорения на координат-
координатные оси можно выразить через вторые ^^Р У
производные по времени от коор- х
динат движущейся точки: Рис. 3
241
d2z
Дифференциальные уравнения движения материальной точки
в прямоугольной декартовой системе координат имеют вид
d2x „ d2y „ A2z „ ,„.
mJ? = Fx' md?=^ mdT2=Fz- (9)
Частные случаи. Если известно, что материальная точка
движется в одной и той же плоскости, то, принимая ее за
координатную плоскость Оху, имеем
Так как z = 0, то, следовательно, Fz = 0.
В случае движения точки по прямой линии, направив по
ней координатную ось Ох, получим одно дифференциальное
уравнение прямолинейного движения точки
т^г=РХ- (И)
Так как при движении y = z = 0, то, следовательно, Fy = Fz = O.
Для естественных подвижных осей координат (рис. 4),
проецируя обе части G) на эти оси, получаем:
где ах, ап, аь и Fz, Fn, Fb — соответственно проекции ускорения
и равнодействующей силы на касательную, главную нормаль
и бинормаль к траектории в рассматриваемом положении
движущейся точки. Учитывая, что
a, = d2s/dt2; an = v2/p; ab = 0,
где р — радиус кривизны траектории, дифференциальные уравне-
уравнения движения точки в проекциях на естественные оси имеют вид
m 771=
= Fb.
A2)
Второе уравнение из A2) можно преобразовать:
ds v2 v ds 1 dm
p = — • —=t)~ = t> = f—-,
d(p p p d/ds/dcp dt
где с!ф/с1/ — угловая скорость вращения касательной к траек-
траектории движущейся точки и, следовательно, dcp — угол смеж-
242
ности между касательными в двух
бесконечно близких точках.
Дифференциальные уравнения
A2) можно представить в виде
dt> „ dcp
m— = Fx; mv— =
= Fb. A2)
Рис. 4
.Эта форма дифференциальных
уравнений движения точки удобна
при исследовании некоторых случа-
случаев полета снарядов и ракет, особенно по траектории, лежащей
в плоскости. Тогда ф будет углом между касательной к тра-
траектории и любой осью, лежащей в плоскости траектории.
Дифференциальные уравнения движения точки можно пред-
представить в любой другой системе координат. Для этого надо
знать выражения проекций ускорения на эти оси координат.
§ 5. ДВЕ ОСНОВНЫЕ ЗАДАЧИ ДИНАМИКИ ТОЧКИ
Используя дифференциальные уравнения движения матери-
материальной точки в той или другой системе координат, можно
решать две основные задачи динамики точки.
Первая задача. Зная массу точки и ее закон движения,
можно найти действующую на точку силу. Действительно,
если, например, заданы уравнения движения точки в декартовой
системе координат
то проекции силы на оси координат определяются из диф-
дифференциальных уравнений движения точки (9), т. е.
^ 2/i F _ А2у _ A2f2 „ _ сРг _ d2/3
*т 7Im'7r mm
_ ^ _
~т ~А?~
z~md?~
Зная проекции силы на координатные оси, легко определить
модуль силы и косинусы углов силы с осями координат.
Пример 1. Точка М, имеющая массу т (рис. 5), движется в плоскости
Оху так, что уравнениями ее движения являются
x=acoskt; y=bsinkt,
где а, Ь, к — постоянные положительные ве-
величины; t—время.
Определить силу, под действием которой ^» 1 ^ -*^М
точка совершает это движение.
Решение. Найдем уравнение траектории
точки в координатной форме, исключая время
из уравнений движения:
Рис. 5
Траекторией точки является эллипс с полуосями
а и Ъ.
243
Рис. 6
На основании дифференциальных уравнений дви-
движения точки A0)
d2x А2у
Fx=m —j-= —mk2acoskt; Fy = m -r-j = ~~mk2bsinkt
или, если ввести координаты движущейся точки,
Fx=-mk2x; Fy=-mk2y;
F=^F2 + F2 = mk2yfx2+y2 = mk2r,
где г—радиус-вектор движущейся точки. Косинусы
углов силы F с осями координат
cos(F, .
) = Fx/F=-x/r; cos(F, y) = Fy/ F= -y/r.
Отсюда можно заключить, что сила F имеет направление; противоположное
радиусу-вектору г.
Окончательно
F=-mk2r.
Пример 2. Точка М, имеющая массу т (рис. 6), движется из состояния
покоя по окружности радиусом R с постоянным касательным ускорением
ах. Определить действующую на точку силу в момент, соответствующий
пройденному точкой по траектории расстоянию s = R^/2.
Решение. Применяя дифференциальные уравнения движения точки в про-
проекциях на естественные оси, имеем:
F-m*l.
Так как движение происходит с постоянным касательным ускорением а,
без начальной скорости, то
г = о,/; s = aj2l2.
Тогда
1 т' " R '
В момент, когда s=Rsf2 = aJ2j2, axt21R = 2S[2 и, следовательно, а?/4/Л2 = 8,
Тангенс угла а между радиусом окружности и силой F
Fx та, R R
Из рассмотрения первой задачи динамики точки видно,
что по заданной массе точки и уравнениям ее движения
сила полностью определяется как по величине, так и по
направлению.
Вторая задача. По заданной массе и действующей на точку
силе необходимо определить движение этой точки. Рассмотрим
решение этой задачи в прямоугольной декартовой системе
координат. В общем случае сила F, а следовательно, и ее
проекции на координатные оси могут зависеть от времени,
координат движущейся точки, ее скорости, ускорения и т. д.
Для простоты ограничимся случаем зависимости силы и ее
244
проекций на оси координат от времени, координат и скорости.
Дифференциальные уравнения движения точки (9) имеют вид
т -^ = Fx(t; х, у, z; х, у, i); m -^ = Fy(t; x, у, z; х, у, i);
m-^ = Fx(t;x,y,z;x,y,z). (9')
Для нахождения уравнений движения точки в декартовых
координатах необходимо проинтегрировать систему трех обы-
обыкновенных дифференциальных уравнений второго порядка. Из
теории обыкновенных дифференциальных уравнений известно,
что решение одного дифференциального уравнения второго
порядка содержит две произвольные постоянные. Для случая
системы трех обыкновенных дифференциальных уравнений
второго порядка имеется шесть произвольных постоянных:
Ci, С2, С3, С4, С5, С6.
Каждая из координат х, у, z движущейся точки после
интегрирования системы уравнений (9) зависит от времени
/ и всех шести произвольных постоянных, т. е.
x=f1{t;C1,C2,C3,CA,C5,C6)q
>>=/2(/;Q,C2, C3,C4, C5,C6); У A3)
z=/3(/;C1,C2,C3,C4, C5,C6). J
Если продифференцировать уравнения A3) по времени, то
определяются проекции скорости точки на координатные оси:
vx = x=f'1(t; Си С2, С3, С4, С5, С6);)
Vy=y=ff2{r, С,, С2, С3, С4, С5, С6); \ A4)
v2 = z=f'3(t; С,, С2, Съ, С4, С5, С6). J
Таким образом, задание силы не определяет конкретного
движения материальной точки, а выделяет целый класс движе-
движений, характеризующийся шестью произвольными постоянными.
Действующая сила определяет только ускорение движущейся
точки, а скорость и положение точки на траектории могут
зависеть еще от скорости, которая сообщена точке в начальный
момент, и от начального положения точки. Так, например,
материальная точка, двигаясь вблизи поверхности Земли под
действием силы тяжести, имеет ускорение g, если не учитывать
сопротивление воздуха. Но точка будет иметь различные
скорости и положение в пространстве в один и тот же
момент времени и различную форму траектории в зависимости
от того, из какой точки пространства началось движение
и с какой по величине и направлению начальной скоростью.
Для выделения конкретного вида движения материальной
точки надо дополнительно задать условия, позволяющие
определить произвольные постоянные, которых в общем случае
будет шесть. В качестве таких условий обычно задают так
245
Рис. 7
называемые начальные усло-
условия, т. е. в какой-то определенный
момент времени, например при / = О
(рис. 7), задают координаты дви-
движущейся точки х0, у0, z0 и проек-
проекции ее скорости vOx, vOy, vOz:
-*- = -^0' У~Уо' z — Zq,
X = V0x-> y = V0y^ Z = "or
A5)
Используя эти начальные усло-
условия и формулы A3) и A4), получаем шесть следующих
уравнений для определения шести произвольных постоянных:
xo~fi{v> Ci, С2, С3, С4, С5, С6);
УО=Г2{Ъ;С„С2,СЪ,СА, С5,С6);
го=М0->С1,С2,С3,СА,С5,С6);
vOx=f\@;C,,C2,...,C6);
voy—f'2\Q', Cl5 С2, ..., С6);
A6)
Если система уравнений A6) удовлетворяет условиям раз-
разрешимости, то из нее можно определить все шесть про-
произвольных постоянных.
Начальные условия в форме A5) определяют единственное
решение системы дифференциальных уравнений (9) при со-
соблюдении соответствующих условий теории дифференциальных
уравнений. Условия в других формах, как например, задание
двух точек, через которые должна проходить траектория
движущейся точки, могут дать или несколько решений, удовлет-
удовлетворяющих этих условиям, или не дать ни одного решения.
При движении точки в плоскости Оху имеется два дифферен-
дифференциальных уравнения движения. В решения этих уравнений
входят четыре произвольные постоянные. Постоянные опреде-
определяются из начальных условий
V=V(i
x>
В случае прямолинейного движения точки имеется только
одно дифференциальное уравнение и в его решение входят
две произвольные постоянные. Для их определения необходимо
задать начальные условия:
J0x-
Задача интегрирования системы дифференциальных уравне-
уравнений (9') при заданных начальных условиях в общем случае
является довольно трудной. Даже в простейшем случае прямо-
246
линейного движения, когда имеется только одно дифферен-
дифференциальное уравнение, его решение удается выразить точно
в квадратурах лишь при определенной зависимости силы от
времени' ?, координаты х и скорости v. Поэтому важно
определение таких соотношений из системы уравнений (9'),
которые являются следствиями этой системы и в которые входят
производные от координат точки только первого порядка. Такие
соотношения, например, в виде/(/; х, у, z; х, у, z) = C называют
первыми интегралами системы дифференциальных уравнений (9').
Если из системы (9') удается найти три независимых
первых интеграла, то задача интегрирования упрощается, так
как вместо интегрирования системы дифференциальных урав-
уравнений второго порядка достаточно проинтегрировать систему
трех дифференциальных уравнений первого порядка, которую
представляют эти первые интегралы.
В дальнейшем будет рассмотрен способ получения первых
интегралов дифференциальных уравнений движения точки из
так называемых общих теорем динамики в некоторых частных
случаях движения точки.
Для выяснения особенностей решения второй основной
задачи динамики, имеющей прикладное значение, рассмотрим
ее решение для случая как прямолинейного, так и криво-
криволинейного движения материальной точки.
§ 6. ОСНОВНЫЕ ВИДЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТОЧКИ
Дифференциальное уравнение прямолинейного движения
точки вдоль оси Ох, согласно A1), имеет вид
rn-^ = Fx{t\x,v), A1')
если рассматривается случай зависимости силы только от
времени, координаты и скорости.
Начальные условия можно задать в форме / = 0, х = х0,
vx = v0.
Наиболее важные случаи прямолинейного движения мате-
материальной точки получаются тогда, когда сила Fx постоянна
или она зависит только от времени, или от координаты х,
или от скорости v. Если сила постоянна, имеем случай
равнопеременного движения, т. е. движения с постоянным
ускорением. От времени сила зависит обычно, когда ее
изменяют путем регулирования, например регулируют силу
тяги самолета изменением режима работы его двигателей.
Силу, зависящую от координаты х, могут создать сжатая
или растянутая пружина и другие упругие тела при их
деформации. Силы, зависящие от скорости движения,— это
прежде всего силы сопротивления, когда материальная точка
движется в какой-либо среде, например в воздухе, в воде и т. д.
247
Отметим, что в перечисленных случаях интегрирование
дифференциального уравнения AГ) выполняется наиболее про-
просто и его можно довести до конца в квадратурах. В более общем
случае, если сила одновременно зависит от времени t, координа-
координаты х и скорости v, в большинстве случаев дифференциальное
уравнение можно проинтегрировать лишь приближенно.
Рассмотрим примеры на составление и интегрирование
дифференциального уравнения прямолинейного движения точки.
Эти примеры позволяют выявить некоторые особенности
решения таких задач. Ниже приведены примеры, когда сила
зависит только от времени, или от скорости, или от коор-
координаты.
Пример 1. Точка массой т (рис. 8) падает вертикально вниз без начальной
скорости под действием силы тяжести, испытывая силу сопротивления воздуха
R, значение которой пропорционально квадрату скорости и массе точки,
т. е. R = kmv2, где к — постоянная положительная величина.
Найти уравнение движения точки.
Решение. Направим ось Ох по вертикали вниз, выбрав за начало
координат положение точки в момент начала движения. В этот же момент
примем ( = 0. В произвольный момент времени прикладываем к точке
действующие на нее силы Р и R и составляем дифференциальное уравнение
ее движения. Имеем
At2
Скорость в этом случае можно определить в зависимости от времени
или от координаты, используя подстановки
А2х do do
Последняя подстановка позволяет исключить из дифференциального уравнения
время при определении скорости. Эта подстановка получается из первой
умножением и одновременным делением на Ах:
do do Ax do
At Ax At Ax
0 Используя первую подстановку, получаем дифферен-
" -0 циальное уравнение движения точки в следующем виде:
1 do/d/=%/A:-o2).
Разделяя переменные и беря интегралы от обеих
частей, имеем
g/k-v2
о о
Для того чтобы не искать дополнительно про-
произвольную постоянную интегрирования, интегралы
возьмем определенные, сохраняя верхний предел пе-
V//////////////////S////, ременным для последующего интегрирования, а для
нижних пределов используем также условие: при t — 0
о = О. Выполняя интегрирование и подставляя пределы,
Рис. 8 получаем
248
или
т. е.
Потенцируя и решая относительно ю, имеем
1-е-
(а)
Переходя в (а) к пределу при t, стремящемся к бесконечности, получаем
lim
Для достижения предельной скорости требуется бесконечно большое
время. Более подробные расчеты показывают, что скорость, близкая к пре-
предельной, устанавливается довольно быстро.
Отметим, что для свободного падения в воздухе парашютиста вблизи
Земли без раскрытия парашюта предельная скорость равна 50...60 м/с; для
авиационной бомбы она составляет 200...300 м/с.
Для нахождения закона движения точки подставляем в (а) вместо скорости
и ее значение dx/dt. Тогда
Интегрируя это уравнение после разделения переменных, имеем
Пример 2. Материальная точка массой т (рис. 9), брошенная вертикально
вверх с поверхности Земли со скоростью ю0, движется под действием силы
тяжести по закону тяготения Ньютона.
Определить зависимость скорости точки от ее расстояния до центра
Земли, пренебрегая сопротивлением воздуха.
Решение. Направив ось Ох по прямолинейной траектории точки,
выберем начало координат в центре Земли. Тогда по закону Ньютона для
силы тяготения имеем
F=k/x2.
Постоянный коэффициент к можно выразить через другие величины, в ча-
частности k = GMm, где М—масса Земли; G—универсальная постоянная тяготе-
тяготения. Для рассматриваемого случая удобнее к выразить из условия, что на
поверхности Земли сила тяготения F равна силе тяжести P=mg. Приравнивая
F и Р при х = Я, получим
mg = k/R2; k = mgR2,
где g — ускорение силы тяжести у поверхности Земли; R—радиус Земли.
Подставляя полученное значение к в выражение для силы тяготения, имеем
249
F=mgR2/x2.
Составляем дифференциальное уравнение движения точки.
Получаем
А2х d2x_ mgR2
At2 " At2 x2
Знак минус в правой части этого уравнения определяется
знаком проекции силы F на ось Ох. Проекция силы
отрицательна для положительных значений х, рассматрива-
рассматриваемых в этом примере.
Исключая время из дифференциального уравнения под-
подстановкой
А2х Av
Рис. 9
получаем
Av j
D-—= —-
Разделяя переменные и беря от обеих частей интегралы с учетом, что
при x = R tf=t>0, имеем
, fdx
vAv=~gR2 -=-,
Jx
или
Отсюда находим
Для определения наибольшего расстояния хтш в зависимости от скорости
v0 следует положить d = 0. Из последней формулы получим
xmax = 2gR2/BgR-v20).
Видно, что хтах увеличивается с ростом скорости v0 и при v'0 = ^/2gR
расстояние хтлх становится равным бесконечности. Это можно истолковать
так, что точка, брошенная с Земли со скоростью v"a = s/2gR, не возвратится
на Землю. Приняв g»9,8 м/с2, Л = 6,4-10 м, получим
v'0 = y/2gR» 11,2 км/с.
Скорость Do называют второй космической скоростью. Это наименьшая
скорость, которую должен иметь космический корабль для полета к другим
планетам Солнечной системы.
Наименьшую скорость космического корабля, при которой он становится
спутником Земли, называют первой космической скоростью. Она приблизительно
равна 8 км/с (см. ниже § 2 гл. 10).
Пример 3. Материальная точка массой т (рис. 10) движется под действием
силы притяжения F к неподвижной точке
f ^ О. Эта сила пропорциональна массе точки
О f «t fm и обратно пропорциональна кубу расстояния
m Л между точками. Коэффициент пропорцио-
пропорциональности равен единице. В начальный мо-
момент г = 0 начальное расстояние точки
Рис. 10 хо = 2м и начальная скорость do = 0,5 м/с.
250
Определить уравнение движения точки.
Решение. Выбирая за начало координат точку О для силы F при
положительном х, имеем
F=m/x3.
Учитывая направление силы F, составляем дифференциальное уравнение
движения точки:
m-^j-tx, x- -т/х .
После преобразования левой части оно примет форму
dv_ 1
Разделяя переменные и интегрируя это уравнение, имеем
V2 V%_ 1 1
~2~~J~2x1~2x~l'
После подстановки числовых значений для х0 и v0 получаем:
v=l/x; v = dx/dt; dx/dt=l/x.
Интегрируя полученное уравнение, имеем
t
Г х2
xdx=\dt; y~2 = f.
J
0
Закон движения точки можно выразить в форме
§ 7. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
В случае криволинейного движения по плоскости имеется
два дифференциальных уравнения движения точки в декартовой
системе координат, а в общем случае движения в пространст-
пространстве— система трех дифференциальных уравнений. Дифференци-
Дифференциальные уравнения криволинейного движения точки интегриру-
интегрируются сравнительно просто, если каждое из этих уравнений
интегрируется независимо от других уравнений и при этом
возможен один из трех рассмотренных случаев зависимости
проекции равнодействующей силы от времени, координаты
и скорости.
Рассмотрим примеры криволинейного движения точки
в плоскости и в пространстве.
Пример 1. Материальная точка массой т (рис. 11) движется по плоскости
под действием силы притяжения F к неподвижной точке О. Сила притяжения
(сила упругости) изменяется по закону F= —mk2f, где г — радиус-вектор
251
Рис.
движущейся точки, проведенный из точки О;
к — постоянный коэффициент. В начальный мо-
момент ? = 0 х=/, _у = 0, vx=0, vy = v0, если начало
координат выбрано в неподвижной точке О.
Определить уравнения движения точки
и уравнение ее траектории в координатной
форме.
Решение. Пусть в момент t движущаяся
точка имеет координаты х и у. Прикладываем
к точке силу F и составляем дифференциальные
уравнения ее движения в проекциях на оси
координат. Имеем:
At2 x' At2 "'
Fx= — mk2rcos<p; F— — mk2rsinip.
Учитывая, что
дифференциальные 'уравнения принимают форму
A2x/At2=-k2x; A2y/dt2=-k2y.
Для интегрирования этих уравнений можно применить подстановки
d2x dvx d2y dvy
или интегрировать их как линейные дифференциальные уравнения с постоянны-
постоянными коэффициентами. Выполним интегрирование уравнений, используя подста-ч
новки. Имеем
V X
| vxdvx= —k2\ xdx,
Аналогично для vy получаем
v* vl_ к2
J~J~Yy
Учитывая, что
имеем
Эти дифференциальные уравнения интегрируем путем разделения переменных.
Получаем
Ах
- = k\dt;
dy =k U.
/.. 2 /г.2 Г2
JV0/K —у J
I 0 0 О
Выполняя интегрирование и подставляя пределы, имеем
arcsin — arcsin I = к t; arcsin arcsin 0 = к t,
/ vo/k
или
- = sin\ kt-i—| = cosA:f;
/ \ 2) vo/k
= sinkt
252
и уравнения движения точки при-
принимают вид
x = lcoskt; y = (vo/k)sinkt.
Возводя в квадрат cos А: г и sinkt,
получаем уравнение траектории точки
в координатной форме:
x2/l2 + k2y2/v20=\. *
Траекторией точки оказался эллипс Рис- '2
с полуосями / и vo/k.
Пример 2. Материальная точка массой т (рис. 12) брошена с поверхности
Земли в вертикальной плоскости со скоростью v0 под углом а к горизонту.
Определить уравнения движения точки, если сила сопротивления воздуха,
направленная против скорости, пропорциональна скорости и массе, т. е.
R = kmv, где к — постоянный коэффициент пропорциональности.
Решение. Задачу удобно решать в прямоугольной декартовой системе
координат, начало которой находится в точке бросания, а ось Oz направлена
по вертикали вверх. Оси Ох и Оу при этом расположатся в горизонтальной
плоскости. Для определенности предположим, что начальная скорость »о
располагается в плоскости Oyz. Для составления дифференциальных уравнений
движения точки возьмем такое ее положение в момент t, когда координаты
точки х, у, z и их первые производные по времени положительны. На точку
действуют две силы: сила тяжести Р, направленная по вертикали вниз,
и сила сопротивления R, направление которой противоположно направлению
скорости д. Равнодействующая сила
F=P+R,
причем R=—kmv.
Для проекций равнодействующей силы F на оси координат, считая, что
в выбранном положении точки и положительных значениях vx, vy, vz, имеем
Fx= —kmvx= — kmx;
Fy= —kmvy= — kmy;
Fz= —mg — kmvz= — mg — kmz.
Знак минус у проекций силы сопротивления указывает на то, что их знаки
противоположны знакам проекций скорости, принятым положительными.
Дифференциальные уравнения движения точки имеют вид
d2x d2y d2z
т—j= — kmx; m—^= —тку; т—j= — mg—mkz. (a)
При сделанном выборе осей координат имеем следующие начальные
условия:
t = 0, x = 0, y = 0, »x = 0, Dj, = D0cosa, tiz = o0sina. (б)
Каждое дифференциальное уравнение системы в рассматриваемом случае
можно интегрировать отдельно, независимо от других уравнений. После
сокращения на т дифференциальные уравнения примут вид
dvx/dt=-kvx; A\yjdl=-kvy; dvz/dt= -g-kvz. (в)
Разделяя переменные и интегрируя каждое из уравнений системы, получаем:
\nvx=-kt + \nCi; lne,= -fcf+lnC2; ln(vz+g/k)=-kt+lnC3.
После потенцирования имеем:
юх=С,е'ы; vy = C2e-kt; vz= -g/k+ Съе~и. (г)
Подставляя в (г) начальные значения для vx, vy, vz, получаем уравнения
Для определения произвольных постоянных Сь С2, С3:
253
0 = C1; t>0cosa = C2; vosma— —g/k+C3.
Постоянные интегрирования имеют следующие значения:
Ci=0; C2 = u0cosa; C3=g/k + Dosina.
После подстановки постоянных интегрирования в (г) и замены про-
проекций скорости на оси координат производными от координат по времени
получаем
dx/dt = 0; , ,
Разделяя в (г') переменные и интегрируя каждое дифференциальное
уравнение первого порядка, имеем
j k'-gt/k + C6.
К
Подставляя в (д) начальные условия, получаем уравнения для определения
постоянных интегрирования С4, С5, С6:
0=С4; 0=-^^+С5; 0= --
Отсюда находим
С4 = 0; C5=(iHcosa)/fc; C6=(\/k)(gjk + v0sm
Подставляя значения постоянных в (д), получаем искомые уравнения
движения точки:
(е)
к'
Проведем некоторые исследования движения точки. Из уравнений движения
(е) путем предельного перехода при к, стремящемся к нулю, можно получить
уравнения движения точки под действием только одной силы тяжести.
Обозначая координаты точки в этом случае хи yit zlt раскрываем неопределен-
неопределенности в уравнениях (е) по правилу Лопиталя. Для ух получаем
.. 1-е"*' ,. (d/dk)(l-e~")
у\ =u0cosa lim =o0cosa hm — - =
k^o к /t_o dk/dk
t-e'kl
= i!0cosa hm =D0fcosa.
Прежде чем переходить к пределу в г, преобразуем его к виду
_g(\-e-k'-kt)
После этого
,. (d2jdk2)(l-e-k'-kt) ,. (d/
(d2/dk2)k2
/dk2)k2 k^o dk/dk
-t2e'kl . te-kl gt2
ifSina hm
,. te . te gt
=g lim i-foSina hm = —-—|-i>ofsina.
*^0 2 Ar-,0 1 2
254
Получаем следующие уравнения движения точки под действием одной
силы тяжести:
Если из этих уравнений исключить время (, то получим уравнения
траектории точки в координатной форме (рис. 12):
gy\
х =0; zj^tga--^ —. (ж)
2i)cosza
Траекторией точки является парабола, расположенная в плоскости xl=Q.
Если в (ж) принять zv=0, то j^ при этом окажется горизонтальной
дальностью /, которая определяется по формуле
/=2t>ocosasina/g=[)osm2a/g. (з)
Из (з) следует, что наибольшая горизонтальная дальность получается
при угле бросания a=45°:
При других углах бросания а одну и ту же дальность /, как это следует
из (з), можно получить бросая точку под углом а к горизонту или под
тем же углом а к вертикали с той же самой скоростью t>0.
§8. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
Как уже известно, основной закон динамики для несвобод-
несвободной материальной точки, а следовательно, и ее дифференциаль-
дифференциальные уравнения движения имеют такой же вид, как и для
свободной точки, только к действующим на точку силам
добавляют все силы реакций связей. Естественно, что в этом
случае движения точки могут возникнуть соответствующие
особенности при решениях первой и второй основных задач
динамики, так как силы реакций связей заранее не известны
и их необходимо дополнительно определить по заданным
связям, наложенным на движущуюся материальную точку.
При решении первой основной задачи динамики действую-
действующая на точку равнодействующая сила определяется по заданно-
заданному движению точки из дифференциальных уравнений ее
движения. Затем из этой равнодействующей силы по заданным
связям выделяют силу реакции связей. Таким образом получа-
получается задача о разложении известной силы на ее составляющие.
Полную силу реакции точки при ее движении обычно
разлагают на две составляющие. Составляющая силы реакции
связей, уравновешивающая заданные силы, приложенные к точ-
точке, называется статической реакцией. Другая составляющая
полной силы реакции, зависящая только от движения точки
под действием заданных сил, называется динамической реакцией.
Она уравновешивает силу инерции движущейся точки.
При решении второй основной задачи динамики, когда
по заданным силам и начальным условиям требуется опре-
определить движение несвободной точки, часть сил, действующих
на точку, а именно все силы реакций связей, заранее не
известны и их необходимо определить по заданным связям
255
в процессе решения задачи. Таким образом, вторую основную
задачу динамики для несвободной материальной точки можно
сформулировать так: по заданным силам, начальным условиям
и связям, наложенным на точку, определить движение этой
точки и силы реакции связей.
Рассмотрим решение этой задачи для движения точки по
поверхности и кривой линии. Дифференциальные уравнения
при этом выражают в той системе координат, которая наиболее
соответствует конкретной задаче. Разберем постановку и реше-
решение задачи в прямоугольной декартовой системе координат.
Движение точки по поверхности
Пусть гладкая неподвижная поверхность, по кото_рой дви-
движется точка массой т под действием данной силы F, задана
уравнением f(x, у, z) = 0, где х, у, z— координаты движущейся
точки. Так как рассматриваемая поверхность является гладкой,
то сила трения отсутствует. Обозначив N неизвестную нормаль-
нормальную силу реакции поверхности, получим следующие дифферен-
дифференциальные уравнения движения точки по поверхности:
Из дифференциальной геометрии известно, что косинусы
углов внешней нормали к поверхности с осями координат,
а следовательно, и силы N, параллельной главной нормали,
можно вычислить по формулам
где
Таким образом,
A8)
Обозначив X = N/Af и подставив значения Nx, Ny, Nz из
A8) в A7), получим:
256
Эти дифференциальные уравнения называют дифференциаль-
дифференциальными уравнениями Лагранжа первого рода для движения
несвободной материальной точки. Из этих трех дифференциальных
уравнений и одного конечного уравнения—уравнения поверхности
f(x, у, z) = 0 — можно найти четыре неизвестных—координаты
точки х, у, z и неопределенный множитель Лагранжа X как
функции времени и произвольных постоянных интегрирования.
Произвольные постоянные определяют из начальных условий.
По найденному неопределенному множителю Лагранжа
X, легко определить силу реакции поверхности N=~kAf, которая
в общем случае зависит от времени.
ОЕсли поверхность не гладкая, то кроме нормальной силы
реакции возникает предельная сила трения .Fmax, проекции
которой надо добавить в правые части дифференциальных
уравнений движения точки. Это добавление усложнит решение
задачи, но задача и в этом случае принципиально разрешима,
так как наряду с добавлением неизвестной силы добавляется
и конечное уравнение, связывающее эту силу с нормальной
реакцией:
где к — коэффициент трения.
Так как сила трения скольжения всегда направлена против
скорости, то проекции этой силы на оси координат можно
представить в виде
Г тах= Г max COS \V, Xl= ~/*тах = -^тах , ==i
v ^2+2 2
аналогично,
Fy — — F У Fz — — F
1 max ■* max ,—= ^> L max * max
j2 2 2
Учет силы трения значительно усложняет задачу интегриро-
интегрирования дифференциальных уравнений движения несвободной
материальной точки.
Движение точки по гладкой кривой линии
Кривую неподвижную линию в пространстве можно рас-
рассматривать как линию пересечения двух поверхностей: fx (x,
у, z) = 0 и /2 (х, у, z) = 0. Эти поверхностисоздадут для движу-
движущейся точки две нормальные реакции Nt и N2, и поэтому
полная реакция кривой линии N=N1 + N2-
Дифференциальные уравнения Лагранжа первого рода дви-
движения точки по кривой линии имеют вид
9 Заказ 192 257
At2
ex
ду
5v'
A9)
где соответственно
Присоединяя к дифференциальным уравнениям Лагранжа
первого рода A9) два конечных уравнения поверхностей
fi\x, у, z) = 0 и f2(x, у, z) = 0, получаем пять уравнений для
определения пяти величин х, у, z, Я,1} Х2 как функций времени.
Таким образом, и в этом случае поставленная задача может
быть разрешена. Она принципиально разрешима и при учете
силы трения.
Если при рассмотрении этой задачи за оси координат
взять естественные оси, то дифференциальные уравнения движе-
движения точки по гладкой кривой примут вид
где Fz — проекция силы F на касательную; Fn и Nn — проекции
сил на главную нормаль; Fb и Nb — проекции сил на бинормаль;
р — радиус кривизны кривой линии.
Из первого дифференциального
уравнения системы B0) независимо
от двух других уравнений можно
найти закон движения точки и, сле-
следовательно, скорость точки v. После
этого из двух оставшихся уравнений
B0) можно определить проекции неиз-
неизвестной нормальной реакции N соот-
соответственно на главную нормаль и би-
бинормаль.
Пример. Материальная точка массой
т (рис. 13) движется под действием силы
тяжести по внутренней части поверхности сфе-
сферы радиуса R вблизи устойчивого положения
равновесия. В начальный момент г=0 х=х0,
Рис. 13 у = 0, vx=0, v =v0. Ось Oz направлена по
258
вертикали вниз, а Ох и Оу расположены в горизонтальной плоскости.
Начало координат находится в центре сферы.
Определить движение точки и силу реакции абсолютно гладкой сферы
на точку. Эта задача известна как задача о сферическом маятнике.
Решение. Дифференциальные уравнения движения точки по поверхности
сферы имеют вид
8f df df
тх = Х—; ту = Х—; mz = mg+X—, (а)
дх ду dz
где
X = N/Af.
К дифференциальным уравнениям (а) следует добавить уравнение связи,
т. е. уравнение поверхности сферы
f(x,y, z) = R2-(x2+y2 + z2) = 0.
Тогда
df , df df
^-=-2x; —=-2y; — =-2z;
ox oy dz
так как
Подставляя в уравнения (а) значения производных d fjdx, df/dy и dfjdz,
имеем:
тх= — 2Хх; ту= —2~Ку\ mz = — mg — 2Xz. (a')
Эту систему и надо проинтегрировать. Для этого обычно из этих уравнений прежде
всего исключают неизвестную X, учитывая, что производные от нее не входят
в уравнения (а'). Система уравнений сложна для интегрирования. Проинтегрируем ее
приближенно. Для получения первого приближения сохраним в уравнениях только
первые степени величин x/R,y/Rn пренебрежем их квадратами в выражении для z:
Разлагая это выражение по формуле для бинома, получаем
Полагая в третьем уравнении системы (a') z=R и z = 0, имеем
mg-2XR = 0; X=mg/BR),
т. е.
Подставляя значение X в первые два уравнения системы (а'), получаем:
S 8 Kg
х= х; у= у или х + — х = 0; у-\—у = 0.
R R R R
Решения этих дифференциальных уравнений (см. выше § 7, пример 1), зависящие
каждое от двух постоянных интегрирования, имеют вид
(б)
Дифференцируя их по времени, получаем
x = Ciy/gjRcos(s/g~[Rt+C2); y = C^JJlRcos(JgTRt+C4). (в)
Используя начальные условия из (б) и (в), имеем следующие уравнения
Для определения постоянных интегрирования С,, С2, С3, С4:
9* 259
Из второго и третьего уравнений системы (г) находим С4 = 0, С2=я/2.
Подставляя эти значения в первое и четвертое уравнения, имеем
Искомые уравнения движения точки при принятом допущении принимают
вид
x = xosm(yfgjRt); y = ^JR/gv0 cos (y/gjRt); z=R.
Если исключить из уравнений движения время t, то получим уравнение
траектории точки в координатной форме:
2l
x
lxl+gy2l(Rvl)=\; z = R,
т. е. траекторией точки в принятом приближении является эллипс, расположен-
расположенный в плоскости z = R с центром на оси Oz.
Не следует думать, что система уравнений (а') проинтегрирована с точ-
точностью до членов первого порядка x/R, y/R, так как дополнительно принято
г=0. Если интегрирование уравнений выполнить с точностью до указанных
слагаемых, приняв за первое приближение полученное решение, то вместо
эллипса получится незамкнутая кривая, близкая на первом витке к эллипсу.
Движение по такой незамкнутой кривой можно воспроизвести, если полученный
эллипс поворачивать равномерно с определенной скоростью в сторону
1
ГЛАВА 2
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ОТНОСИТЕЛЬНОГО
ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Во многих задачах динамики рассматривается движение
материальной точки относительно системы отсчета, движущей-
движущейся относительно инерциальной системы. Дифференциальные
уравнения движения материальной точки относительно таких
подвижных, в общем случае неинерциальных, систем отсчета
получают из уравнений движения точки относительно инерци-
инерциальной системы отсчета и кинематической теоремы Кориолиса
о сложении ускорений.
Имеем инерциальную систему отсчета Olxlylzl и материаль-
материальную точку массой т, на Kojopyio действуют приложенные
силы F и N (рис. 14), где F—равнодействующая заданных
активных сил; N—равнодействующая сил реакций связей. Если
а — ускорение точки относительно инерциальной системы от-
отсчета (абсолютное ускорение), то согласно уравнению движения
точки в векторной форме имеем
1 Собрание трудов академика А. Н. Крылова, вып. III. Математика. Изд.
АН СССР, 1949. Ч. I. С. 333.
260
A)
Если ввести другую, неинерциаль-
ную, систему отсчета Oxyz, которая
в общем случае может двигаться
относительно инерциальной как
свободное твердое тело, то по
теореме сложения ускорений имеем /Ot / У1
B) / /
где ае, аг, ак — соответственно пе-
переносное, относительное и кори-
олисово ускорения. Рис- 14
Подставляя значение абсолютного ускорения а из B) в A)
после переноса слагаемых, кроме таг, из левой части в правую,
получим
таг = Р+М+Фе + Фк, C)
где Фе = — тае; Фк = — так называются соответственно пере-
переносной и кориолисовой силами инерции. Получена
динамическая теорема Кориолиса, или уравнение
относительного движения точки в векторной форме:
материальная точка движется относительно неинерциалъной
системы отсчета так же, как и относительно инерциальной,
только к приложенным активным силам и реакциям связей
следует добавить переносную и кориолисову силы инерции.
Силы инерции Фе и Фк являются поправками на
неинерциальность системы отсчета. Для инерциальной
системы отсчета они равны нулю, так как в этом случае
абсолютное и относительное движения точки совпадают.
Переносная и кориолисова силы инерции участвуют в создании
относительного ускорения совершенно так же, как и приложен-
приложенные силы со стороны материальных тел. Но эти силы инерции,
по определению приложенных сил классической механики, не
приложены к материальной точке, так как не участвуют
в создании ее ускорения относительно инерциальной системы
отсчета.
Если координаты движущейся точки относительно подвиж-
подвижной системы координат Oxyz в момент времени t есть
х, у, z, то в проекциях на подвижные оси координат
C) примет форму
(У)
Это дифференциальные уравнения движения точки относительно
подвижной системы координат в проекциях на декартовы
подвижные оси координат. Они отличаются от дифференциальных
261
уравнений абсолютного движения относительно инерциальной
системы отсчета только наличием поправок на неинерциальность
системы отсчета.
§ 2. ЧАСТНЫЕ СЛУЧАИ
Относительное движение по инерции. Если материальная точка
движется относительно подвижной системы отсчета прямоли-
прямолинейно и равномерно, то такое движение называют относитель-
относительным движением по инерции. В этом случае относительная
скорость vr постоянна по модулю и направлению, а потому
относительное ускорение аг = 0. Из C) следует в этом случае
Р+М+Фе + Фк = 0. D)
Это условие для сил при относительном движении точки по
инерции.
Относительное равновесие. При покое материальной точки
относительно подвижной системы отсчета ее относительные
скорость и ускорение равны нулю, т. е. vr = 0 я аг = 0. Ускорение
Кориолиса тоже равно нулю, так как
ож = 2(шхпг).
Из C) получаем условие относительного равновесия
для сил:
F+N+Фе = 0. E)
При абсолютном движении по инерции или абсолютном
равновесии относительно инерциальной системы отсчета имеем
для сил одно и то же условие F+N—0. Условие относительного
равновесия для сил отличается от условия относительного
движения по инерции.
Инерциальные системы отсчета. Переносное ускорение в об-
общем случае вычисляется по формуле
где а0 — ускорение точки, принятой за полюс, например начало
координат подвижной системы координат; ю — угловая ско-
скорость вращения подвижной системы координат вокруг выбран-
выбранного полюса; s. = d(b/dt—угловое ускорение этого вращения;
г—радиус-вектор движущейся точки относительно выбранного
полюса.
Пусть подвижная система отсчета все время движется
относительно основной инерциальной системы поступательно,
равномерно и прямолинейно. В этом случае переносная
и кориолисова силы инерции равны нулю, т. е.
Фг=-тае = 0; Фк=-так = О,
так как при поступательном движении ю = 0 и J~ = dcb/d? = O.
При равномерном и прямолинейном движении ао = 0. Таким
262
образом, в этом случае из C) получаем уравнение относитель-
относительного движения
mar = F+N, F)
которое совпадает с уравнением движения относительно инер-
циальной системы отсчета A).
Все подвижные системы отсчета, которые движутся поступа-
поступательно, равномерно и прямолинейно относительно основной
инерциальной системы отсчета, называются тоже инерциальны-
ми. Относительно всех инерциальных систем отсчета получают-
получаются одинаковые уравнения движения материальной точки. Уско-
Ускорения материальной точки относительно всех инерциальных
систем отсчета одинаковы.
Отсутствие принципиальной возможности каким-либо меха-
механическим опытом, основанным на наблюдении за движением
материальных тел, отличить одну инерциальную систему
отсчета от другой находится в основе принципа относи-
относительности классической механики — принципа Галилея —
Ньютона, который утверждает: все механические явления в раз-
различных инерциалъных системах отсчета протекают одинаково,
или никаким механическим опытом нельзя обнаружить инер-
циальное движение системы отсчета, участвуя вместе с ней
в этом движении. Наоборот, неинерциальную систему отсчета
можно обнаружить и отличить одну от другой по поправкам
на неинерциальность.
Скорости материальной точки относительно различных
инерциальных систем отсчета разные, но нет возможности из
наблюдений за движением материальной точки в различных
системах отсчета сделать утверждение, какая из инерциальных
систем отсчета является основной, неподвижной, а какая — под-
подвижной.
В специальной теории относительности имеет место прин-
принцип относительности Эйнштейна, который утверждает:
все физические явления во всех инерциалъных системах отсчета
протекают одинаково. Физические явления кроме механических
включают также электромагнитные процессы.
Возьмем две инерциальные системы отсчета: O1x1y1z и Oxyz
(рис. 15). Примем, что система от-
отсчета Oxyz движется относительно
Olxly1z1 с постоянной по модулю
и направлению скоростью v парал-
параллельно оси Огх^, причем в началь-
начальный момент времени при t = 0 начала
координат и соответствующие оси
координат совпадают. В соответст-
соответствии с концепцией классической меха-
механики время для обеих систем ко-
координат одно и то же. Нетрудно РИС 15
263
видеть, что координаты какой-либо точки М в двух
инерциальных системах отсчета связаны соотношениями па-
параллельного переноса. Имеем:
x = x1-vt; у=у{, z = z{, t = tv G)
Эти соотношения называются преобразованиями Галилея в ча-
частном случае движения двух инерциальных систем отсчета
друг относительно друга.
Преобразования Галилея не изменяют формы уравнения
движения точки A), т. е. оно инвариантно по отношению
к преобразованиям Галилея.
§ 3. ДВИЖЕНИЕ ТОЧКИ ОТНОСИТЕЛЬНО ЗЕМЛИ
Для неинерциальной системы отсчета уравнение движения
материальной точки под действием силы отличается от
уравнения движения относительно инерциальных систем
отсчета. Согласно C), оно имеет форму
лг _ _ _
m~ = F+<be + <bK. (8)
Наличие поправок на неинерциальность систем отсчета в виде
сил инерции Фе и Фк позволяет установить неинерциальность
системы отсчета и отличить эти системы отсчета одну от
другой.
Система отсчета, скрепленная с земным шаром, не является
инерциальной. Земной шар движется относительно гелиоцентри-
гелиоцентрической инерциальной системы отсчета. При рассмотрении
движения материальных тел относительно Земли должны
проявлять себя эффекты, связанные с неинерциальностью
системы отсчета. Земной шар движется относительно гелио-
гелиоцентрической системы отсчета как свободное твердое тело.
Его центр перемещается по эллиптической орбите, близкой
к окружности. Кроме того, он вращается вокруг оси, про-
проходящей через его центр, с почти постоянной по модулю
и направлению угловой скоростью, совершая один оборот за
сутки. Угловая скорость вращения Земли
co = 2ti/B4- 60 -60)^0,00007 с,
т. е. величина малая по сравнению с единицей.
В общем случае переносная сила инерции
Фе= —тае= —т[ао + ё
где а0 — ускорение центра земного шара относительно гелио-
гелиоцентрической системы отсчета; г—радиус-вектор движущейся
точки, проведенный из центра Земли. Ускорение а0 с очень
большой степенью точности можно считать равным нулю,
так как центр Земли движется по эллиптической орбите очень
264
больших размеров. Угловое ускорение 8 можно тоже считать
равным нулю, так как ю считаем постоянным вектором.
Оставшаяся часть переносного ускорения йх(йхг) пропорцио-
пропорциональна ю2, т. е. величина малая по сравнению с величинами
порядка ю для не очень больших расстояний г. Величиной
порядка ю является сила инерции Кориолиса
Фк = — так = — т • 2 (ю х vr),
где vr — скорость материальной точки относительно Земли.
Таким образом, неинерциальность системы отсчета, скреплен-
скрепленной с Землей, проявляется главным образом через влияние
силы инерции Кориолиса, если рассматривается движение
материальной точки вблизи Земли, при котором г не очень
велико. Рассмотрим несколько примеров этого влияния кори-
олисовой силы инерции.
Маятник Фуко. Если подвесить на длинной нити груз
достаточно малых размеров, то действующая на него сила
F будет состоять из силы притяжения Р к Земле, направленной
к центру Земли, и силы натяжения нити S (рис. 16, а). Эти
силы расположены в одной вертикальной плоскости
п (рис. 16,6). Если начальные отклонения и скорость груза
тоже находятся в плоскости к, то маятник при колебаниях
должен все время находиться в плоскости п, неподвижной
относительно гелиоцентрической системы отсчета. Земной шар
поворачивается относительно этой системы отсчета с угловой
скоростью ю. Следовательно, плоскость п по отношению
к Земле должна поворачиваться в сторону, противоположную
Земле, с угловой скоростью ю, если маятник подвесить на
северном полюсе. Для маятника на широте ф угловая скорость
вращения плоскости колебаний маятника равна wsintp. На
экваторе эта скорость равна нулю.
Если тело маятника имеет выступ, который при колебаниях
может оставлять след, например на песке, то этот след при
Рис. 16
265
£> движении маятника в одну сторону
" будет отличаться от следа при движе-
движении в противоположную сторону из-за
вращения Земли. Это отличие тем
больше, чем длиннее нить маятника.
Фуко в 1857 г. использовал маятник
длиной /=67 м. В СССР маятник Фуко
имеется в Исаакиевском соборе в Ле-
Ленинграде. Маятник Фуко наглядно де-
демонстрирует вращение Земли относи-
относительно инерциальной системы отсчета.
Отклонение движущихся тел вправо
Рис 17 в Северном полушарии. В Северном
полушарии из-за дополнительного действия силы инерции
Кориолиса, вызванной вращением Земли, все движущиеся тела
должны смещаться в правую сторону, если смотреть в направлении
движения. Пусть материальная точка движется со скоростью vr
относительно Земли по касательной к меридиану с севера на юг
(рис. 17). Определим проекцию v*r этой скорости на плоскость,
перпендикулярную оси вращения Земли. Повернув вектор v* вокруг
оси, параллельной оси вращения земного шара, на 90°
в направлении его вращения, получим, согласно правилу
Жуковского, направление ускорения Кориолиса ак по касательной
к параллели с запада на восток. Сила инерции Кориолиса
Фк = — так соответственно направлена с востока на запад, т. е.
вправо от направления движения. Действие такой силы вызовет
у движущейся точки дополнительное ускорение относительно
Земли в направлении этой силы, а следовательно, и ее перемещение,
если точка движется в течение некоторого времени. Движение точки
может иметь направление, отличное от касательной к меридиану.
Важно, чтобы оно имело отличную от нуля проекцию скорости
v*r на плоскость, перпендикулярную оси вращения земного шара.
Если рассмотреть поступательное движение железнодорож-
железнодорожного вагона, то для него сила инерции Кориолиса пройдет
через центр его тяжести слева направо, если смотреть по
движению вагона. Это приведет к увеличению давления на
правый рельс и к его уменьшению на левый. На двухколейных
железных дорогах правый рельс изнашивается быстрее левого.
Для частички воды в реке действие силы Кориолиса слева
направо, если смотреть по течению реки, приведет к прижима-
прижиманию этой частички к правому берегу, способствуя большему
его подмыванию. Правый берег рек в Северном полушарии
более подмыт, чем левый на прямолинейных участках реки.
Этот эффект известен в географии как закон Бэра. На
закруглениях реки вследствие центробежных сил инерции может
оказаться подмытым и левый берег.
Действие силы инерции Кориолиса на летящие самолеты,
ракеты, снаряды, движущийся воздух, морские течения приво-
266
Рис. 18
дит к их отклонению в правую сторону в Северном полушарии.
В Южном полушарии отклонение будет в левую сторону.
Сила инерции Кориолиса способствует образованию циклонов,
антициклонов, вихрей, смерчей и т. д. Если в каком-то месте
образовалось пониженное давление, например вследствие мест-
местного нагревания воздуха, то к этому месту начнет двигаться
воздух из мест с повышенным давлением. Сила инерции
Кориолиса отклонит движущиеся частички воздуха вправо,
создав местный вихрь (рис. 18), а для больших масс возду-
воздуха -циклон. Аналогично, в местах с повышенным давлением
образуются антициклоны.
Отклонение падающих тел к востоку. Рассмотрим в Север-
Северном полушарии тело, падающее вертикально вниз под действи-
действием силы тяжести без начальной скорости. Действие силы
инерции Кориолиса в этом случае в первом приближении
сведется к отклонению падающего тела к востоку. Действитель-
Действительно, если скорость тела vr направлена по вертикали к центру
Земли, то ее проекция на плоскость параллельного круга
направлена к центру этого круга (рис. 19). Ускорение Кориолиса
ак соответственно направлено по касательной к параллели на
запад, а сила инерции Кориолиса Фк — по касательной к парал-
параллели на восток. Она вызовет отклонение падающего тела
к востоку. Как показывают расчеты, это отклонение при
падении с высоты 160 м составляет приблизительно 2,8 см
при ф = 50°, что хорошо согласуется с результатами опытов.
Пример. Внутри трубки, имеющей гладкую поверхность, находится шарик
массой т = 1 кг (рис. 20). Шарик притягивается к неподвижной точке О трубки
силой, пропорциональной расстоянию шарика до этой точки. Коэффициент
пропорциональности с = 4,9 Н/м. Трубка наклонена к вертикальной оси Ozx
на угол а = 60° и вращается вокруг этой оси с постоянной угловой скоростью
(о=1 с. В начальный момент шарик находился в точке Мо на расстоянии
М0О=2,4 м и имел скорость относительно трубки ио=10м/с.
Определить закон движения шарика по трубке, принимая его за точку;
силу давления шарика на стенку трубки и силу притяжения в момент
времени t = n/2 с.
267
Решение. Выберем систему подвижных
осей координат Oxyz, вращающихся вместе
с трубкой. Ось Ох направим по трубке.
Векторное уравнение движения шарика
относительно подвижной системы координат
имеет вид
mar= P+ N+Р+Фе + Фк.
В проекциях на подвижные оси координат
тх = — F— Pcosa + ct^
О = Ny — Р sin a — Фе cos a;
Здесь P = mg — сила тяжести шарика; N—
сила_реакции трубки; F—сила притяжения;
Фе, Фк — переносная сила инерции и сила
инерции Кориолиса. Так как _y = const = 0,
z=const = 0, то y — z = O. Ось Oz направлена
параллельно силе Фк, а ось Оу вместе
с другими осями образует правую систему осей координат.
В рассматриваемом случае
Рис. 20
Nz= — 2mcoisina.
sina=——х; Фк =
F=cx = 4,9x; £=9,8 м/с2.
Подставляя эти значения сначала в общем виде в уравнения движения, после
простых преобразований получаем:
х + (с/т —со2sin2a)x= —gcosa; Af(, = msina(^+xco2cosa)
После подстановки числовых значений величин имеем
л;+4,1х=-4,9; Ny = ^
Дифференциальное уравнение является линейным неоднородным; следова-
следовательно, его решение
Х=Х1+Х2,
где х1—общее решение однородного уравнения; х2 — частное решение неодно-
неоднородного уравнения, правая часть которого постоянна. В качестве частного
решения можно взять постоянную х2= —4,9/4= — 1,2. При подстановке значения
х2 в дифференциальное уравнение убеждаемся, что оно обращает уравнение
в тождество, т. е. является его частным решением.
Общее решение однородного уравнения х1 является решением однородного
уравнения
Его характеристическое уравнение
=0.
Корни характеристического уравнения Xly2x ±2i чисто мнимые. Следовательно,
решение однородного уравнения, зависящее от двух постоянных интегрирования
Q и С2, можно выразить в форме
x1 = Cl cos2t + C2 sin2t.
После этого
268
Начальные условия задачи
t = nj2c; x = xo=— 2,4 м; x — vo = 10 м/с.
Подставляя их в выражения для х и х, получаем следующие уравнения для
определения постоянных интегрирования:
— 2,4= —Cj —1,2; 10=-2С2.
Их решения С[ = 1,2; С2=—5.
Уравнения движения шарика с учетом значений постоянных принимает вид
*=l,2(cos2f-l)-5sin2f; x= -2,4 sin It- 10 cos It.
В момент времени t = n/2 с
х= l,2(cosn— 1) —5sinn= —2,4 м; jc= —2,4sin7t— 10costi= 10 м/с.
Подставляя эти значения х и х в выражения для JVy и 7VZ, имеем
^ = (^/3/2) (9,8- 1,2) = 7,3 Н; 7VZ= -^/з • 10= - 17,3 Н.
Давление шарика ЛГ на трубку равно по величине силе реакции трубки
на шарик. Поэтому
N' = N = jNl + N* = l8$ H.
Сила притяжения F при t = n/2 с
F=c-|jc| = 4,9-2,4=11,8 H.
§ 4. НЕВЕСОМОСТЬ
Динамическая теорема Кориолиса позволяет рассмотреть
состояние невесомости, которое, в частности, возникает при
движении космических кораблей как искусственных спутников
Земли. При рассмотрении невесомости материальной точки
целесообразно ее представлять как твердое тело, имеющее
поверхность, которой оно может соприкасаться с другими
телами. Будем предполагать, что скорости и ускорения всех
точек тела одинаковы, а реакции соприкасающихся тел приво-
приводятся к равнодействующей.
Под невесомостью такой материальной точки понимают
отсутствие давления этой точки на каждое из тел, с которым
она может соприкасаться. В частности, невесомая материальная
точка не давит на площадку весов (не имеет веса), находящихся
в покое по отношению к той системе отсчета, относительно
которой покоится материальная точка.
Систему отсчета, относительно которой материальная точка
находится в покое и, следовательно, имеет относительно нее
скорость и ускорение, равные нулю, назовем собственной
системой отсчета материальной точки. Все величины относи-
относительно этой системы отсчета условимся обозначать специаль-
специальным индексом *. Тогда имеем v*r, a*r, а*е, и т. д. Естественно,
что vt и а*г равны нулю.
Невесомая материальная точка (тело), прикрепленная на
пружине к любому телу, покоящемуся относительно ее собст-
собственной системы отсчета, не деформирует эту пружину. Учиты-
Учитывая, что давление точки на какое-либо тело по модулю
269
совпадает с силой реакции тела на эту точку, невесомость
наблюдается при равенстве нулю силы реакции от любого
тела, соприкасающегося с рассматриваемой невесомой мате-
материальной точкой.
Если в общем случае рассматривать невесомость материаль-
материального тела, а не точки, то реакции окружающих его тел
сведутся к распределенным силам по поверхности его со-
соприкосновения с этими телами. Сила реакции, отнесенная
к единице площади поверхности соприкосновения (напряжение
силы реакции), должна при невесомости тела быть равна
нулю в каждой точке его поверхности. Это является условием
невесомости для любого тела, не обязательно твердого.
Для абсолютно твердого тела при его невесомости вместо
равенства нулю напряжения поверхностной силы в каждой
точке его поверхности соприкосновения достаточно равенства
нулю главного вектора и главного момента этих сил относи-
относительно любого центра приведения.
Ограничимся рассмотрением невесомости материальной точ-
точки, т. е. абсолютно твердого тела, для которого все поверхност-
поверхностные силы приводятся только к одной равнодействующей силе —
реакции тел, соприкасающихся с ним. Невесомость материаль-
материальной точки не связана с системой отсчета или с наблюдателем,
находящимся в той или иной системе отсчета. Но для
выявления сил, действие которых испытывает материальная
точка, выберем ее собственную систему отсчета, по отношению
к которой ее относительные скорость и ускорение равны
нулю, т. е. v*r = 0 и а*г = 0. В этом случае сила инерции
Кориолиса тоже равна нулю и для сил выполняется условие
относительного равновесия
F+N+Ф*е = 0,
где F—равнодействующая активных или заданных сил от тел,
не соприкасающихся с точкой; ./V—равнодействующая реакция
от всех соприкасающихся в точкой тел; Ф£= — та\— переносная
сила инерции в собственной системе отсчета рассматриваемой
точки.
Из условия относительного равновесия сил имеем
Согласно определению невесомости, N=0 и, следовательно,
Рф* 0
Таким образом, условие невесомости через силы можно
выразить как N=0 или как F+Oe = 0, т. е. для невесомости
материальной точки необходимо и достаточно, чтобы равно-
равнодействующая активных сил от материальных объектов, не
соприкасающихся с точкой, вместе с переносной силой инерции
в собственной системе отсчета рассматриваемой точки об-
образовывала равновесную систему сил.
270
Согласно теореме о сложении ускорений, абсолютное уско-
ускорение в общем случае определяется по формуле
Если абсолютное ускорение рассматривать относительно
инерциальной системы отсчета, а в качестве подвижной системы
отсчета выбрать собственную систему отсчета, то v*r = 0, a*r = 0,
at = 0 и, следовательно, а = а%. Сила инерции в инерциальной
системе отсчета Ф=— та, таким образом, совпадает^ перенос-
переносной силой инерции в_ собственной системе отсчета Ф%= —та%.
Учитывав, что Фе = Ф, условие невесомости можно выразить
как F+<5 = 0, т. е. как уравновешивание силой инерции в инер-
инерциальной системе отсчета равнодействующей сил от действия
тел, не соприкасающихся с невесомой материальной точкой.
Проверим выполнение условия невесомости для материальной
точки, находящейся в космическом корабле, который движется
поступательно относительно Земли в качестве ее искусственного
спутника за пределами атмосферы. За инерциальную систему
отсчета можно принять систему отсчета, скрепленную с Землей.
Пусть материальная точка неподвижна относительно косми-
космического корабля. Тогда собственной системой отсчета будет
система отсчета, скрепленная с кораблем. Силой от действия
тел, не соприкасающихся с точкой, является сила тяготения
Земли F=mg, где т — масса точки, a g—ее ускорение,
создаваемое силой тяготения^ Сила инерции точки в ее
движении относительно Земли Ф= —та совпадает с переносной
силой инерции Ф*е= — та*е, где al — переносное ускорение точки
от поступательного движения вместе с собственной системой
отсчета, скрепленной с космическим кораблем.
Если корабль не испытывает действия других сил, кроме силы
тяготения Земли, то его ускорение от этого тяготения тоже равно
g, так как ускорения от силы тяготения не зависят от масс тел,
а зависят только от расстояния этих тел до центра Земли. Таким
образом, ai = a = g и, следовательно, условие невесомости точки
•Р+Ф = 0 выполняется. Материальная точка будет находиться
в невесомости и, следовательно, не должна оказывать давления
на любое тело, движущееся вместе с космическим кораблем.
В космическом корабле, который кроме поступательного
движения имеет также и вращение, каждая из материальных
частиц корабля не находится в состоянии невесомости, хотя
весь корабль как целое находится в состоянии невесомости.
Для него главный вектор и главный момент поверхностных
сил равны нулю, так как нет тел, с которыми корабль
соприкасается своей поверхностью.
Материальная точка внутри кабины корабля находится
в состоянии невесомости, пока она не соприкасается со
стенками корабля и с другими телами, скрепленными с ко-
кораблем.
271
Кажется, что для невесомости тела необходима невесомость
каждой его точки. Это приводит к требованию отсутствия
взаимных давлений между точками тела или к отсутствию
внутренних напряжений в теле. Но такие напряжения всегда
имеются при невесомости вследствие естественной связи точек
тела друг с другом, на которую можно влиять, например,
термообработкой, изменением температуры и т. д. При невесо-
невесомости тела как целого не обязательно отсутствие даже
дополнительных напряжений, создаваемых движением тела.
Достаточно равенства нулю напряжений в точках поверхности
тела, создаваемых другими, соприкасающимися телами (свя-
(связями), а для абсолютно твердого тела — равенства нулю
главного вектора и главного момента поверхностных сил.
В невесомости находятся земной шар и другие планеты
Солнечной системы, их спутники, если пренебречь действием
на них метеоритов, космического излучения и т. д.
В состоянии невесомости находилось бы свободно падающее
тело вблизи Земли, если бы не было действия воздуха.
Невесомость можно создать искусственно вблизи Земли в гер-
герметизированной кабине летательного аппарата, заставив его
с помощью двигателей совершать поступательное движение
с ускорением g, равным ускорению от силы притяжения Земли.
ГЛАВА 3
ГЕОМЕТРИЯ МАСС
§ Т. ЦЕНТР МАСС
При рассмотрении движения твердых тел и других механи-
механических систем важное значение имеет точка, называемая
центром масс. Если механическая система состоит из
конечного числа материальных точек ./V с массами т:, т2,
..., mN, радиусы-векторы которых, проведенные из одной и той
же точки О, —г:, г2, ..., rN (рис. 21), то центром масс
называется геометрическая точка С, радиус-вектор которой
гс определяется выражением
N
гс= X mkrJM, A)
k= I
N
где М— X тк — масса системы. Обозначая декартовы коорди-
к — 1
наты материальных точек (xt, yu zt), ..., (xN, yN, zN), из A)
проецированием на декартовы оси координат получим следую-
следующие формулы для координат центра масс:
N N N
272
Е тЛ/Л/; Ус= S ткУк1М; zc= £ mkzJM: (Г)
к — 1 к — 1 к — 1
Центр масс является не материаль-
материальной точкой, а геометрической.
Он может не совпадать ни с одной
материальной точкой системы, как,
например, в случае кольца. Центр
масс системы характеризует распре-
распределение масс в системе.
N
Векторная величина So = У^ ткгк
называется статическим моментом
массы относительно точки О. Скаляр- •
N
ная величина Soyz = У^ Щхк называется статическим моментом
массы относительно координатной плоскости Oyz. Величины
N N
Soxz= У МкУк и Soxy= У mkzk являются соответственно ста-
к=1 к=1
тическими моментами массы относительно координатных плос-
плоскостей Oxz и Оху.
Радиус-вектор и координаты центра масс через статические
моменты массы выражаются формулами
rc = SojM; xc = Soyz/M; yc = Soxz/M; zc = SoxyjM.
Если механическая система представляет собой сплошное
тело, то его разбивают на элементарные частицы с бесконечно
малыми массами dm и с изменяющимися от частицы к частице
радиусом-вектором г.
Суммы в пределе переходят в интегралы. Формулы A)
и (Г) принимают форму
гс=$гдт/М, B)
xc = \xdm/M; yc — \ydmlM; zc = §zdm/M, B')
где М = J dm — масса тел а.
Для однородных сплошных тел dm = pdK; M=pV, где
р — плотность тела, общая для всех элементарных частиц;
dV—объем элементарной частицы; V—объем тела.
Для тел типа тонкого листа, которые можно принять за
однородные материальные поверхности, dm = psdS; M=psS,
где ps — поверхностная плотность; dS—площадь поверхности
элементарной частицы; S—площадь поверхности.
Для тонкой проволоки, которую можно принять за отрезок
линии, dm = p,d/, М = р,/, где р,—линейная плотность; d/—дли-
d/—длина элемента линии; /—длина отрезка линии.
В этих случаях определение центра масс тел сводится
к вычислению центра масс объемов, площадей и длин линий
соответственно.
273
§ 2. МОМЕНТЫ ИНЕРЦИИ
Для характеристики распределения масс в телах при
рассмотрении вращательных движений требуется ввести поня-
понятия моментов инерции.
Моменты инерции относительно точки и оси
Моментом инерции механической системы, состоящей из
N материальных точек, относительно точки О называется
сумма произведений масс этих точек на квадраты их расстояний
до точки О (рис. 22), т. е.
Момент инерции относительно точки часто называют полярным
моментом инерции. В случае сплошного тела сумма переходит
в интеграл и для полярного момента инерции имеем
Jo = \d2dm, C')
где dm— масса элементарной частицы тела, принимаемой
в пределе за точку; d—ее расстояние до точки О.
Моментом инерции Js системы материальных точек относи-
относительно оси 01 называется сумма произведений масс этих
точек на квадраты их расстояний rk до оси 01 (рис. 22), т. е.
N
Ji = %mwrl. D)
В частном случае сплошного тела сумму следует заменить
интегралом:
/, = fr2dm. D')
Моменты инерции одинаковых по форме однородных тел,
изготовленных из разных материалов, отличаются друг от
друга. Характеристикой, не зависящей от массы материала,
является радиус инерции. Радиус инерции р, относительно оси
01 определяется по формуле'
Pi — y/Ji/M, E)
где М—масса тела.
Момент инерции относительно оси через
радиус инерции относительно этой оси опре-
определяется выражением
/, = Мр2. E')
В справочниках по моментам инерции при-
приводят таблицы значений радиусов инерции
различных тел.
Формула E') позволяет считать радиус
Рис. 22 инерции тела относительно оси расстоянием
274
от этой оси до такой точки, в которой следует поместить
массу тела, чтобы ее момент инерции оказался равным
моменту инерции тела относительно рассматриваемой оси.
Моменты инерции относительно оси и точки имеют одина-
одинаковую размерность — произведение массы на квадрат длины
(кг-м2).
Кроме моментов инерции относительно точки и оси исполь-
используются также моменты инерции относительно плоскостей
и центробежные моменты инерции. Эти моменты инерции
удобно рассмотреть относительно координатных плоскостей
и осей декартовой системы координат.
Моменты инерции относительно осей координат
Моменты инерции относительно декартовых осей координат
Ох, Оу и Oz и их начала — точки О (рис. 23) — определяются
выражениями
N N N
J = У mt(vl + zk\, У„= У mt(z2 + xk); J = У ml(xk+vk): F)
k=\ fc=l k=l
N
Г — V т (y-2 -Lii2 J- 72\ П\
JO~ la 'пк\лк ~ТУк Т ^к)-> \1)
где хк, ук, zk — координаты материальных точек системы. Для
сплошных тел эти формулы примут вид
Из приведенных формул следует зависимость
2JO = JX+Jy+Jz. (8)
Если через точку О провести другую систему декартовых
осей координат Ox'y'z', то для них по формуле (8) получим
2JO = J ,-\-J , + J ,. (8')
Из сравнения (8) и (8') следует, что
Сумма моментов инерции относи-
относительно декартовых осей координат не
зависит от ориентации этих осей
в рассматриваемой точке, т. е. явля-
является величиной, инвариантной по от-
отношению к направлению осей коор-
координат.
Для осей координат Oxyz можно
определить следующие три цент-
центробежных момента инерции:
Рис. 23
275
Jxy = Z ткХкУк>
Jxy
(9)
Центробежные моменты инерции часто называют произведения-
произведениями инерции.
Моменты инерции относительно осей и точек—величины
положительные, так как в них входят квадраты координат.
Центробежные моменты инерции содержат произведения коор-
координат и могут быть как положительными, так и отрицательными.
Центробежные моменты инерции имеют важное значение
при рассмотрении давлений на подшипники при вращении
твердого тела вокруг неподвижной оси и в других случаях.
Кроме рассмотренных моментов инерции иногда исполь-
используются моменты инерции относительно координатных плоскос-
плоскостей JOxy, Joyz, Jozx, которые определяются выражениями
N N N
Joxy= X mkZk\ Joyz= X ткХк\ Jozx= X ткУ к-
§ 3. ТЕОРЕМА О МОМЕНТАХ ИНЕРЦИИ ОТНОСИТЕЛЬНО
ПАРАЛЛЕЛЬНЫХ ОСЕЙ (ТЕОРЕМА ШТЕЙНЕРА)
Установим зависимость между моментами инерции системы
относительно параллельных осей, одна из которых проходит через
центр масс. Пусть имеем две системы прямоугольных, взаимно
параллельных осей координат Oxyz и Cx'y'z'. Начало системы
координат Cx'y'z' находится в" центре масс системы (рис. 24).
По определению момента инерции относительно оси имеем
N
к=1
N
Jcz,= X тк(х'к2+Ук2),
к=1
где тк — масса точки Мк, а хк, ук, zk и х'к, у'к, z'k—координаты
этой точки относительно систем координат Oxyz и Cx'y'z'
соответственно. Если обозначить хс, ус, zc координаты центра
масс относительно системы координат
Oxyz, то для взаимно параллельных
осей координаты одной и той же точки
Мк связаны соотношениями параллель-
параллельного переноса
хк = х'к + хс; ук=у'к+ус; zk = z'k + zc,
Подставим эти значения координат
в выражение момента инерции, Joz-
Рис. 24 После преобразований получим
276
N N N
Joz= E тк(х'к2+у'2к) + 2хс £ mkx'k + 2yc £
N N
В этом соотношении £ тк = М—масса системы, £
;V t = l к=1
= Мх'с = 0 и Е w^fc^k = Л/Ус = 0, так как х'с = 0 и у'с = 0 вследствие
того, что по условию центр масс находится в начале координат
этой системы координат.
Величина x2z+yc = d2, где d—расстояние между осями Oz
и Cz'. Окончательно
Связь моментов инерции относительно двух параллельных
осей, одна из которых проходит через центр масс, составляет
содержание так называемой теоремы Штейнера или Гюйген-
Гюйгенса— Штейнера: момент инерции системы относительно ка-
какой-либо оси равен моменту инерции относительно параллельной
оси, проходящей через центр масс, плюс произведение массы
системы на квадрат расстояния между этими осями.
Из теоремы Штейнера следует, что для совокупности
параллельных осей момент инерции является наименьшим
относительно оси, проходящей через центр масс.
Если взять ось Охгх параллельной Oz, то для нее получим
где d1—расстояние между параллельными осями Oxzx и Cz'.
Исключая момент инерции JCz, из двух последних формул,
получим зависимость моментов инерции относительно двух
параллельных осей, не проходящих через центр масс:
Установим изменение центробежных моментов инерции при
параллельном переносе осей координат. Имеем
N N N N N
Jyz= X »»fcykzk= £ mjj'tz'k+ус £ mkz'k + zc £ т^+у^с £ mk.
k=l fc=l k=l k=l k=l
N N N
Учитывая, что £ m^fczk = 7rz., £ mkzk~Mz'c; X! ткУ'к = Му'с,
У k=l fc=l fc.= l
X mk = M, получаем
k = \
Jyz = Л v + Му&'с + Mzcy'c + Myczc,
где y'c, z'c — координаты центра масс относительно системы
координат Cx'y'z''. Аналогичные формулы получаются для двух
других центробежных моментов инерции:
Jzx = JZ'x' + Mzcx'c + Mxcz'c + Mzcxc;
Jxy = JX'y + Mxcy'c + Mycx'c + Mxcyc.
277
Так как начало системы координат Cx'y'z' находится
в центре масс, то х'с = 0, у'с = ®, z'c = 0 и тогда
Jyz = Jyz' + Myczc, JZx = Jzx+Mzcxc; Jxy = JX'y + Mxcyc, A0)
т. е. центробежные моменты инерции при параллельном перено-
переносе осей координат из любой точки в центре масс изменяются
в соответствии с A0).
Если производится параллельный перенос осей Olx1y1z1
из точки Ох в центр масс, то, согласно A0), имеем:
y
A0')
Исключая из A0) и A0') центробежные моменты инерции
Jy'z', Jzx', JX'y; получим формулы для изменения центробежных
моментов инерции при параллельном переносе осей координат
из точки Ох в точку О:
где (х1С, У\с, zic) и {хс, ус, zc) — координаты центра масс
в двух системах взаимно параллельных осей координат.
§ 4. МОМЕНТЫ ИНЕРЦИИ ПРОСТЕЙШИХ ОДНОРОДНЫХ ТЕЛ
Моменты инерции тел сложной формы часто удается
вычислить, если их предварительно разбить на тела простой
формы. Моменты инерции сложных тел получают суммируя
моменты инерции частей этих тел. Получим формулы для
вычисления моментов инерции некоторых однородных простей-
простейших тел.
Однородный стержень
Имеем однородный стержень длиной / и массой М (рис. 25).
Направим по стержню ось Ох. Вычислим момент инерции
стержня относительно оси Oz, проходящей перпендикулярно
стержню через его конец. Согласно определению момента
инерции сплошного тела относительно оси, имеем
Joz — \ x2dm = р | х2 Ах,
(О о
так как Ат = рах, где р = М//—плот-
М//—плотность стержня.
Вычисляя интеграл, получаем
М 2 , Ml3
U2d
Таким образом,
(И)
Момент инерции стержня относительно оси Cz', проходящей
через центр масс и параллельной оси Oz, определяется по
теореме Штейнера:
где </2 =
Следовательно,
т. е.
12'
A2)
Прямоугольная пластина
Прямоугольная тонкая пластина имеет размеры / и h и мас-
массу М (рис. 26). Оси Ох и Оу расположим в плоскости
пластины, а ось Oz — перпендикулярно ей. Для определения
момента инерции пластины относительно оси Оу разобьем
пластину на элементарные полоски шириной <it и массой
dm = phdx и проинтегрируем по х от 0 до /. Получим
i i
Jy- \x2dm = ph \x2dx = ph — = M,
j j
о о
так как phl = M.
Аналогичные вычисления для оси Ох дадут
так как эта ось Ох проходит через середину пластины.
Для определения момента инерции пластины относительно
оси Oz следует предварительно вы-
вычислить момент инерции отдельной
заштрихованной полоски относите-
относительно параллельной оси O'z' по
формуле A2) для стержня и при-
применить затем теорему Штейнера.
Для элементарной полоски имеем
dm—\-x2dm.
Интегрируя это выражение
в пределах от 0 до /, получим
Рис. 26
279
M
о о о
Итак, для моментов инерции пластины относительно
осей координат получены следующие формулы:
A3)
Круглый диск
Имеем тонкий однородный диск радиусом R и массой
М (пис. 27). Вычислим момент его инерции Jo относительно
точки О. Этот момент инерции для тонкого диска совпадает
с моментом инерции Jz относительно координатной оси Oz,
перпендикулярной плоскости диска. Разобьем диск на концен-
концентрические полоски шириной Аг, принимаемые в пределе за
материальные окружности. Масса полоски равна ее площади
2nrdr, умноженной на плотность p = Mj{nR2), т.е. dm =
= p-2nrdr. Момент одной полоски относительно точки О равен
г Am. Для всего диска
м r
Г Г R4 R2
Jo= r2 Am =р-2п r3dr =р-2п — — М—.
Таким образом,
Рис. 27
112
Иг
т
Рис. 28
2. A4)
Для осей координат Ох и Оу, расположен-
расположенных в плоскости диска, в силу симметрии
Jx=Jy. Используя (8), имеем 2J0 =
= JX+Jy+Jz, но JZ = JO, поэтому
Jx=Jy = ll2Jo=MR2l4. A5)
В случае тонкого проволочного кольца
или круглого колеса, у которых масса
распределена не по площади, а по его
ободу, имеем
JZ=JO = MR2; Jx=Jy = lj2MR2. A6)
Круглый цилиндр
Для круглого однородного цили-
цилиндра, масса которого М, радиус
R и длина / (рис. 28), вычислим
прежде всего его момент инерции
относительно продольной оси сим-
симметрии Oz. Для этого разобьем
280
цилиндр плоскостями, перпендикулярными оси Oz, на тонкие
диски массой dm и толщиной dz. Для такого диска момент
R2
инерции относительного оси Oz равен — dm. Для всего цилиндра
м м
Jz= -у dm— \dm=M-j,
о о
Jz=MR2/2. A7)
Вычислим момент инерции цилиндра относительно его
поперечной оси симметрии Су. Для этого разобьем цилиндр
поперечными сечениями, перпендикулярными его продольной
оси, на элементарные диски толщиной dz. Момент инерции
элементарного диска массой dm =nR2pdz относительно оси
R2
Су, по теореме Штейнера, dm \-dmz2.
Чтобы получить момент инерции всего цилиндра относи-
относительно оси Су, следует проинтегрировать полученное выраже-
выражение по z в пределах от 0 до //2 и результат удвоить. Получим
М 1/2
о. о
Но nR /p = M—масса цилиндра. Следовательно,
JCy = M{R2/4+l2/\2).
Таким образом, момент инерции цилиндра относительно
его поперечной оси симметрии получается как сумма моментов
инерции относительно этой оси диска и стержня, массы
которых равны по отдельности массе цилиндра. Диск получа-
получается из цилиндра симметричным сжатием его с торцов до
срединной плоскости при сохранении радиуса, а стержень —
сжатием цилиндра в однородный стержень, расположенный
по оси цилиндра, при сохранении длины.
Шар
Пусть масса шара М, радиус R (рис. 29). Разобьем шар
на концентрические сферические слои радиусом г и толщиной
dr. Масса такого слоя dm=pdV, где р =—=3 j» dK—объем
слоя, равный произведению площади поверхности сферы ра-
радиусом г на толщину слоя dr, т.е. dV=4nr2dr. Таким
образом, масса элементарного слоя dm =pdV = p4m2dr.
Для момента инерции шара относительно его центра
О имеем
281
M
Jo= \r2dm=(An
гис-
JO = 3/5MR2. A8)
Для осей координат, проходящих че-
через центр шара, в силу симметрии
Jx=Jy=Jz. Но 2Jo = Jx+Jy+Jz=3Jx =
=3Jy=3Jz. Следовательно,
A9)
§ 5. МОМЕНТЫ ИНЕРЦИИ ОТНОСИТЕЛЬНО ОСЕЙ,
ПРОХОДЯЩИХ ЧЕРЕЗ ЗАДАННУЮ ТОЧКУ
В заданной точке О выберем декартову систему осей координат
Oxyz. Ось 01 образует с осями координат углы а, р, у (рис. 30). По
определению момента инерции относительно оси 01 имеем
B0)
(с =1
или для сплошных тел
Jl=\d4m.
В дальнейшем используется определение B0). Сплошные
тела считаются разбитыми на N малых частей, принимаемых
за точки.
Из прямоугольного треугольника ОАкМк получаем
dl=rl-{OAkf, B1)
где rl=xl+yl+zl, хк, ук, гк—координаты точки Мк. Отрезок
ОАк является проекцией радиуса-вектора fk=xki +yj +zkk на
ось 01. Для получения проекции вектора гк на ось 01 его
следует умножить скалярно на единичный вектор этой оси
/° = /cosa+ycosC + A;cosY. Имеем
OAk = Fk-T° ={xki +yj +zkk)(icosa.+jcosfi + kcosy) =
= xfccosa+j'fccosC+zfccosY. B2)
Умножая в B1) гк, выраженный через координаты точки Мк,
на единицу в виде cos2 a + cos2 C +cos y= 1 и используя значение
B2) для О А к, получим
d2={x2+yk +z2)(cos2a + cos2p + cos2y) —
— (xfccosa+^tcosP + ztcosYJ = (>;2 +z2)cos2a + (z2 +jc2)cos2P +
+ {x2 +^2)cos2y — 2jfc zfc cos P cosy — 2zfcxfccosycosa —
— 2jcfc^fccosacosp. B3)
Подставляя B3) в B0) и вынося косинусы углов за знаки
сумм, имеем
282
/(=cos2oc
/c =1
fc =1
+ cos2y
fcl fc l
N iV
2 cosy cos a E mkzkxk— 2 cosa cos C £
к = 1
fc = 1
Учитывая, что
£ ) ^
k=l k=l Jc = l
— моменты инерции относительно осей координат, а
Е
Е
/с =
— центробежные моменты инерции относительно тех же осей,
получим
/, =Jxcos2<x + Jycos2^ + Jzcos2y — 2Jyzcos Ccosy —
— 2/^cosycosa — 2/^cos acos C. B4)
Для определения момента инерции /, кроме углов а, C, у,
определяющих направление оси, необходимо знать в точке
О шесть моментов инерции: /,,, Jy, Jz, Jyz, Jzx, Jxy. Их удобно
расположить как элементы единой таблицы или матрицы:
B5)
-J
zy
Матрица, или таблица B5), составленная из осевых и це-
центробежных моментов инерции относительно декартовых осей
координат, называется тензором инерции в точке О.
В тензоре инерции условились центробежные моменты инерции
брать со знаком минус. Компоненты тензора инерции (отдель-
(отдельные осевые или центробежные моменты инерции) зависят не
только от выбора точки, но и от ориентации осей координат
в этой точке.
Для определения момента
инерции относительно какой-ли-
какой-либо оси, проходящей через задан-
заданную точку, для рассматриваемо-
рассматриваемого тела необходимо иметь тензор
инерции в этой точке и углы,
определяющие направление оси
с осями координат.
Рис. 30
283
§ 6. ЭЛЛИПСОИД ИНЕРЦИИ
Для характеристики распределения моментов инерции тела
относительно различных осей, проходящих через заданную
точку, используется поверхность второго порядка — эллипсо-
эллипсоид инерции. Для построения этой поверхности на каждой
оси 01 (см. рис. 31), проходящей через точку О, откладывают
от этой точки отрезок
B6)
Геометрическое место концов отрезков ОК расположится
на поверхности, которая называется эллипсоидом инерции.
Получим уравнение эллипсоида инерции. Для этого выразим
косинусы углов а, р, у через координаты х, у, z точки К. Имеем:
^ cos C = ^ = ^
Подставляя эти значения косинусов углов в B4) и сокращая
на /,, получим уравнение поверхности второго порядка:
Jxx 2+Jyy2 + Jzz2- 2Jyzyz - 2Jzxzx - 2Jxyxy = 1. B7)
Это действительно уравнение эллипсоида, так как отрезок
ОК имеет конечную длину для всех осей, для которых моменты
инерции не обращаются в нуль. Другие поверхности второго
порядка, например гиперболоиды и параболоиды, имеют
бесконечно удаленные точки. Эллипсоид инерции вырождается
в цилиндр для тела в виде прямолинейного отрезка, если точка
О расположена на самом отрезке. Для оси, направленной по
этой прямой линии, момент инерции обращается в нуль
и соответственно отрезок О К равен бесконечности.
Для каждой точки О имеется свой эллипсоид инерции.
Эллипсоид инерции для центра масс тела называют централь-
центральным эллипсоидом инерции. Оси эллипсоида инерции (его сопря-
сопряженные диаметры) называются главными осями инерции.
В общем случае эллипсоид инерции имеет три взаимно
перпендикулярные главные оси инерции. Они являются его
осями симметрии.
В случае эллипсоида вращения все прямые, расположенные
в экваториальной плоскости эллипсоида, перпендикулярной
оси вращения, будут главными осями инерции. Для шара
любая прямая, проходящая через его центр, есть главная* ось
инерции.
Моменты инерции относительно главных осей инерции
называются главными моментами инерции, а относительно
главных центральных осей инерции — главными центральными
моментами инерции.
Если уравнение эллипсоида инерции отнести к его главным
осям Ox', Oy', Oz', то оно примет вид
284
■x'2 + Jy,y'2+Jz,z'2 = l,
B7')
где x', у', z'—текущие координаты точки, расположенной на
эллипсоиде инерции, относительно главных осей инерции; /,,,,
Jy,, Jz,— главные моменты инерции. Уравнение эллипсоида
инерции B7') не содержит слагаемых с произведениями коорди-
координат точек. Поэтому центробежные моменты инерции относи-
относительно главных осей инерции равны нулю, т. е.
Jy.z.=0; Jz.x.=0; JxY=0.
Справедливо и обратное утверждение: если центробежные
моменты инерции относительно трех взаимно перпендику-
перпендикулярных осей равны нулю, то эти оси являются главными
осями инерции. Обращение в нуль трех центробежных момен-
моментов инерции является необходимым и достаточным условием
того, что соответствующие прямоугольные оси координат есть
главные оси инерции.
Главные моменты инерции часто обозначают /1; /2, У3
вместо Jx,, Jy,, Jz,. Для главных осей инерции формула B4)
принимает форму
. B4')
§ 7. СВОЙСТВА ГЛАВНЫХ ОСЕЙ ИНЕРЦИИ
Теорема 1. Если одна из декартовых осей координат,
например Oz (рис. 31), является главной осью инерции для
точки О, а две другие оси Ох и Оу — любые, то два
центробежных момента инерции, содержащих индекс главной
оси инерции Oz, обращаются в нуль, т.е. Jxz=0 и Jyz=0.
Главная ось инерции Oz является осью симметрии эллип-
эллипсоида инерции. Поэтому каждой точке эллипсоида, например
М(О, у, z), соответствует симметричная относительно этой
оси точка М'(О, —у, z). Подставляя в уравнение эллипсоида
инерции B7) последовательно координаты этих точек, получим
Jyy2 + Jzz2-2Jyzyz = l; Jy(-yJ + Jzz2-2Jyz(-y)z = \.
Вычитая из первого уравнения второе,
имеем
N'1-х,0,1)
Так как всегда можно выбрать точки, м'@,-у,2
для которых у и z отличны от нуля, N(x,o,zji
то Jyz=0.
Аналогичные рассуждения для
двух симметричных относительно оси
Oz точек N(x, О, z) и N'( — x, О, z)
приводят к заключению, что Jxz=0.
В аналитической геометрии при ис-
исследовании уравнений поверхностей
■<--\M@,y,z)
Рис. 31
285
Рис. 32
второго порядка доказывается об-
обратное утверждение, что если
Jxz = 0 и Jyz = 0, то ось Oz есть
главная ось. Таким образом, об-
обращение в нуль центробежных мо-
моментов инерции Jxz и Jyz является
необходимым и достаточным усло-
условием, чтобы ось Oz была главной
осью инерции для точки О.
Теорема 2. Если однородное те-
тело имеет плоскость симметрии, то
для любой точки, лежащей в этой
плоскости, одна из главных осей инерции перпендикулярна
плоскости симметрии, а две другие главные оси инерции
расположены в этой плоскости.
Для доказательства теоремы выберем в плоскости симме-
симметрии П точку О и в ней оси прямоугольной системы координат
Oxyz, причем ось Oz направим перпендикулярно плоскости
симметрии (рис. 32). Тогда каждой точке тела Мк(хк, ук, zk)
массой тк соответствует симметричная относительно плоскости
П точка М'к(хк, ук, —zk) с такой же массой. Координаты
точек Мк и М'к отличаются только знаком у координат zk.
Для центробежного момента инерции Jyz имеем
N
к = 1 (I) (II)
так как часть тела (I), соответствующая точкам с положитель-
положительными координатами zk, одинакова с частью тела (II), у которой
точки имеют такие же координаты zk, но со знаком минус.
Аналогично доказывается, что
N
J = У т х z = 0
к ~ 1
Так как центробежные моменты инерции Jyz и Jxz обращают-
обращаются в нуль, то ось Oz есть главная ось инерции для точки
О. Другие две главные оси инерции перпендикулярны оси Oz
и, следовательно, расположены в плоскости симметрии.
Центр масс однородного симметричного тела находится
в плоскости симметрии. Поэтому одна из главных центральных
осей инерции перпендикулярна плоскости симметрии, а две
другие расположены в этой плоскости.
Доказанная теорема справедлива и для неоднородного тела,
имеющего плоскость материальной симметрии.
Теорема 3. Если однородное тело имеет ось симметрии
или неоднородное тело имеет ось материальной симметрии,
то эта ось является главной центральной осью инерции.
Теорема доказывается аналогично предыдущей. Для каждой
точки тела Мк с положительными координатами х,
к, Ук'
286
и массой тк существует симметричная относительно оси точка
с такой же массой и такими же по величине, но отрицатель-
отрицательными координатами — хк, —ук, +zk, если осью симметрии
является ось Oz. Тогда
N
к = 1 (I) (II)
так как суммы по симметричным относительно оси частям
тела (I) и (II) отличаются друг от друга только знаком
у координаты хк.
Аналогично доказывается, что Jyz = 0.
Таким образом, ось Oz является главной осью инерции
для любой точки, расположенной на оси симметрии тела.
Она есть главная центральная ось инерции, так как центр
масс находится на оси симметрии.
Теорема 4. Главные оси инерции для точки О, расположен-
расположенной на главной центральной оси инерции, параллельны главным
центральным осям инерции (рис. 33).
Выберем в точке О главной центральной оси инерции
Cz систему декартовых осей координат Ox'y'z', взаимно
параллельных главным центральным осям инерции Cxyz.
Тогда координаты точки тела Мк в двух системах осей
координат будут связаны между собой формулами парал-
параллельного переноса осей
х'к = хк; у'к=ук; z'k = zk-h,
где h = OC. Используя эти формулы, вычисляем центробежные
моменты инерции Jy,z,, Jz,x, и Jxy.. Имеем
yz = Е
к=\
'к2к= Е
к=1
-Ь Е
к=\
так как
Е ткУк гк = Jyz, ЪткУк
к=1 к=1
где М—масса тела; ус — координата центра масс относительно
системы координат Cxyz.
Аналогично получаем
Jfx- = Jzx-hMxc\ Jx,y, = Jxy.
Если С—центр масс системы, то
jcc = O и ^с = 0. Для главных централь-
центральных осей инерции центробежные мо-
моменты инерции равны нулю, т. е.
/j,z = 0; Jzx = 0; Jxy = 0.
Используя полученные формулы при
этих условиях, имеем: Рис. 33
287
' V, Jz'x'
„=o.
Следовательно, оси Ox', О у', Oz' есть главные оси инерции
для произвольной точки О, расположенной на главной цен-
центральной оси инерции Cz. Теорема доказана.
Из доказанной теоремы в качестве следствия получаем: главная
центральная ось инерции является главной осью инерции для всех
своих точек. Действительно, главная ось инерции Oz' для точки О,
лежащей на главной центральной оси инерции Cz, совпадает
с этой осью. Главная ось инерции таким свойством не обладает.
Главные оси инерции для точки Ои расположенной на главной оси
инерции точки О, не параллельны главным осям инерции для этой
точки. Они в общем случае повернуты относительно этих осей.
§ 8. ОПРЕДЕЛЕНИЕ ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ
И НАПРАВЛЕНИЯ ГЛАВНЫХ ОСЕЙ
Пусть известны компоненты тензора инерции в точке
О относительно осей координат Oxyz. Для определения
направления главных осей инерции в точке О используем
уравнение эллипсоида инерции относительно этих осей
ф(дс, у, z) = Jxx2 + Jyy2 + Jzz2-
-2Jyzyz-2Jzxzx-2Jxyxy-l = 0. B7")
Если оси координат Ox'y'z' являются главными осями инерции,
то радиус-вектор г точки М эллипсоида инерции, расположен-
расположенной на главной оси инерции, например оси Oz' (рис. 34),
направлен по нормали к эллипсоиду, т. е. параллельно вектору
gradcp, который, согласно его определению, вычисляется по
формуле
дх ду dz
Параллельные векторы отличаются друг от друга скаляр-
скалярным множителем, который обозначим 2J. Тогда для парал-
параллельных векторов г и grad ф и их проекций на оси координат
имеем:
г'
2/-f=gradq>;
2J-х = дц>/дх; 2J-y =
B8)
У'
Рис. 34
B8')
В этих уравнениях х, у, z являются
координатами точки конца вектора г,
проведенного из точки О вдоль какой-
либо главной оси инерции для этой
точки.
Для частных производных из B7")
получаем:
288
= 2JX ■ х—2Jxy • у — 2JXZ ■ z;
= - 2 Jxy ■ x + 2Jy- у - Uyz: z;
= — 2Jzxx — 2Jyz -y + 2Jz-z.
Подставляя их значения в B8') и перенося все слагаемые в левую
часть, после объединения и сокращения на общий множитель
получим следующую систему уравнений для определения
координат х, у, z точки М, находящейся на главной оси инерции:
(Jx-J)x-Jxy -y-Jxz-z = 0;
B9)
Так как B9) является однородной системой линейных
уравнений; то отличные от нуля решения для координат
х, у, z получаются только при условии, что определитель этой
системы равен нулю, т. е.
Jx-J -/,„ -Jxz\
-J Jy-yJ -/J = 0. C0)
Jzx —JZy JZ J\
Это кубическое уравнение для определения / называется
уравнением собственных значений тензора инерции.
В общем случае имеется три различных действительных
корня кубического уравнения Ju J2, J3, которые являются
главными моментами инерции. Действительно, если ось Ох
совпадает с главной осью инерции, то для точки М эллипсоида
инерции, расположенной на этой оси, ^ = 0 и z = 0. Первое
уравнение B9) принимает вид
{Jx-J)-x = 0.
Так как хФО, то Jx — /=0 и JX = J, которое следует обозначить
Jv Аналогично можно получить Jy = J=J2, JZ = J=J3, если
оси Оу и Oz — главные оси инерции.
Подставляя в B9) J =JX, получим только два независимых
уравнения для определения координат точки х, у, z эллипсоида
инерции, соответствующих главной оси инерции, для которой
главный момент инерции есть J1. Третье уравнение системы
будет следствием двух других уравнений, так как определитель
этой системы равен нулю. Из B9) можно найти только две
величины, например x/z и у/z. Они определят направление
вектора гх вдоль главной оси инерции, момент инерции
относительно которой есть /х. Модуль радиуса-вектора гх
остается неопределенным. Аналогично определяются направле-
направления векторов г2 и г3 вдоль двух других главных осей инерции,
для которых главные моменты инерции равны /2 и J3.
Можно доказать, что векторы г1? г2, гъ, направленные вдоль
главных осей инерции, взаимно перпендикулярны.
10 Заказ 192 289
Таким образом, если известен тензор инерции для осей
Oxyz, то можно определить как направление главных осей
инерции, так и главные моменты инерции. Для главных осей
инерции тензор инерции B5) принимает форму
1 Jx О О
(/)= | 0 /2 О
,0 0 /3,
B5')
§ 9. ВЫРАЖЕНИЕ КОМПОНЕНТОВ ТЕНЗОРА ИНЕРЦИИ
ЧЕРЕЗ ГЛАВНЫЕ МОМЕНТЫ ИНЕРЦИИ
Определим компоненты тензора инерции в точке О относи-
относительно осей координат Oxyz, если в этой точке известны
главные моменты инерции относительно главных осей инерции
Ox'y'z', т. е. Jl=Jx., J2=Jy', J3 = JZ,. Предположим, что ориен-
ориентация осей координат Oxyz относительно главных осей инерции
Ox'y'z' задана таблицей углов:
Ox; i
Oy; J
Oz; к
Ox'; V
«i
a2
«3
Oy';j"
Pi
P2
Рз
Oz'; k'
Yi
Y2
Y3
Осевые моменты инерции относительно осей Ox, Oy, Oz
через главные моменты инерции определяются по формуле
B4'). Принимая последовательно за ось 01 оси координат
Ox, Oy, Oz, получим
a1 +/),,cos2C1 +/z.cos2y1;
Jy =
Jz = Jx, cos2 а з + Jy, cos2 C з + Jz, cos2 у 3.
C1)
Для выражения центробежных моментов инерции через главные
моменты инерции используем формулы преобразования коорди-
координат точек тела при повороте осей координат вокруг точки
О (рис. 35). Эти формулы получим проецированием на оси
Oxyz радиуса-вектора гк точки Мк, разложенного предваритель-
предварительно на составляющие, параллельные осям двух систем осей
координат в точке О. Имеем
fk=xki+yj+zkk=x'ki'+y'kj'+z'kk',
C2)
290
где хк, ук, zk — координаты точки Мк
относительно системы осей координат
Oxyz, а х'к, у'к, z'k — относительно
Ox'y'z'. Проецирование вектора на ка-
какую-либо ось прямоугольной системы
координат эквивалентно скалярному
умножению этого вектора на единич-
единичный вектор оси. Умножая обе части
C2) последовательно на единичные век-
векторы осей координат i, j, к и учитывая
таблицу углов для осей, получим
xk = rk-T=(x'J'+y'J'+z'kIZ'O=
= xjccosoc1 +y'kcos$l+z'kcosyl;
л
= xJccosa2+jfcCosC2 + ZftCOSY2;
zk=rk-k =(x'J' +y'J' + z'kk')k =
= XfcCosa3+^fcCosC3+ZfcCOSY3;
Используя C3) для центробежного момента инерции
имеем
N , N
ХУ= Е ткЧУк=\ Е
к=1 \к=\
Е
E mkz'k
C4)
так как центробежные моменты инерции относительно главных
осей инерции равны нулю, т. е.
N N
J = V mix'ky'k=0\ /„...= У тьукг'к=0: J7r* =
/c=l fc = l
= E mkz'kXk=o.
Оси координат Ол: и 6ty взаимно перпендикулярны, поэтому
косинусы их углов удовлетворяют условию
или
cosy!COSy2 = — (cosoijcosaj +cosC1cosC2).
Используя это соотношение для исключения величины
cosy!Cosy2 и добавляя в первом слагаемом C4) под знаком
суммы (у'к2 — у'к2) = 0, а во втором (хк2 — хк2) = 0, после объеди-
объединения слагаемых с одинаковыми произведениями косинусов
получим
10*
291
г- N N -i
Jxy=\ E тк{х'к2+у'к2)- X mk{y'k2+z'k2) cosal
+ Г Z mk{x'k2+y'k2)- E ^(jc^+zi
U = l /c = l
где Zmk{x'k2+y'k2) = Jt.; ^ mk{y'k2+z'k2) = Jx,- Y,
k=i
—главные моменты инерции. Аналогично получаются вы-
выражения для Jyz и Jzx. Итак имеем
Формулы C1) и C5) дают выражения всех компонентов
тензора инерции для осей координат Oxyz через главные
моменты инерции, если известны углы этих осей с главными
осями инерции. В приложениях встречаются частные случаи,
когда одна из осей координат Oxyz совпадает с главной
осью инерции.
Если ось Ох сопадает с главной осью инерции Ох' (рис. 36),
то Jxy=Jx,y=0; JZX=JZX,=O. Это же можно получить из C5).
Необходимые для вычисления углы соответственно равны:
а2=90°, а3=90°, р2 = а, р3 = 90°-а.
Из C5) имеем
/ ч 1—1
2
В формуле C5') с полюсом следует брать главный момент
инерции с индексом той оси, на положительное направление
которой указывает дуговая стрелка поворота осей Oyz на
угол а<90° до совпадения с осями
Oy'z'. В рассматриваемом случае по-
поворот осей Oyz вокруг Ох до со-
совпадения с главными осями произ-
производится от оси Оу к оси Oz; сле-
следовательно, с плюсом следует взять
главный момент инерции J'z и с ми-
минусом— Ту.
Если оси расположены, как пока-
показано на рис. 37, то дуговая стрелка
Рис. 36 поворота осей Oyz до совпадения с
292
главными осями инерции Oy'z' на угол
а<90° направлена к отрицательному на-
направлению оси Oz. Поэтому в C5') Jz,
следует взять со знаком минус, a Jy,—со
знаком плюс, в чем нетрудно убедиться,
используя C5) и таблицу углов. Имеем:
а2 = 90°; а3 = 90°; р2 = а; C3 = 9
x,x
-z
Рис 37
Аналогично при совпадении осей Оу с Оу' и повороте
осей Oxz вокруг Оу до совпадения с осями Ox'z' на угол
C<9О° от Oz к Ох в направлении против часовой стрелки
имеем:
При совпадении осей Oz и Oz' и повороте осей вокруг
Oz на угол у<90° от Ох к Оу против часовой стрелки получим:
^р
ГЛАВА 4
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ И СИСТЕМЫ
§ 1. ПРОСТЕЙШИЕ СВОЙСТВА ВНУТРЕННИХ СИЛ СИСТЕМЫ
Механической системой называется любая совокупность
материальных точек.
Внешними силами механической системы называются силы,
с которыми действуют на точки системы тела и точки, не
входящие в рассматриваемую систему.
Внутренними силами механической системы называют силы
взаимодействия между точками рассматриваемой системы.
Внешнюю силу, приложенную _к какой-либо точке системы,
обозначим F[e), а внутреннюю—F%\ Заметим, что внутренние
и внешние силы могут включать в себя как активные силы,
так и силы реакций связей.
Рассмотрим некоторые простейшие свойства внутренних
сил, действующих на всю механическую систему в любом ее
состоянии. Докажем, что главный вектор всех внутренних сил
системы и главный момент этих сил относительно произвольной
точки равны нулю при любом состоянии системы, т. е. при
293
Рис. 38
ее равновесии и при произвольном дви-
движении.
Пусть система состоит из N точек,
где N—любое конечное число (рис. 38).
Условимся пределы у суммы не ставить,
когда суммирование производится по
всем N точкам системы. Если рассмот-
рассмотреть какие-либо две произвольные точки
системы, например М1 и М2, то для
так как силы действия и противодействия
всегда равны друг другу по модулю, противоположны по
направлению и действуют вдоль одной прямой линии, со-
соединяющей взаимодействующие точки. Главный вектор внут-
внутренних сил R(>) состоит из векторной суммы таких сил
действия и противодействия, так как вся система состоит из
пар взаимодействующих точек. Следовательно,
£<■■>=Е ЯР=о. (О
В проекциях на координатные оси
них
Внешние силы тоже являются силами взаимодействия, но
для них силы действия приложены к точкам рассматриваемой
системы, а силы противодействия приложены к телам и точкам,
не входящим в эту систему. _ _
Рассмотрим теперь сумму моментов сил F(il) и Fty относи-
относительно точки О. Легко видеть, что
так как обе силы имеют одинаковые плечи и противоположные
направления векторных моментов. Главный момент внутренних
сил L&1 относительно точки О состоит из векторной суммы
таких выражений, равных нулю. Следовательно,
и соответственно в проекциях на координатные оси
£<!' = ЕМх(Л°) = 0. B')
§ 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
Пусть даны внешние и внутренние силы, действующие на
систему, состоящую из N точек (рис. 39). Если к каждой точке
системы приложить равнодействующую силу внешних сил Ле>и
равнодействующую силу всех внутренних сил F^], то для любой
к-й точки системы можно составить дифференциальное уравне-
уравнение движения, например, в векторной форме, т. е.
=1, 2,
C)
294
Систему N дифференциальных
уравнений C) называют дифферен-
дифференциальными уравнениями движения
механической системы в векторной
форме. Если спроецировать век-
векторные дифференциальные уравне-
уравнения C) на прямоугольные дека-
декартовы оси координат, то получим
систему 3N дифференциальных ура- .,
внений, описывающих движение то- "*
чек механической системы.
Для нахождения движения ме- Рис- 39
ханической системы по заданным силам и начальным условиям
для каждой точки системы нужно проинтегрировать, следо-
следовательно, систему 3./V дифференциальных уравнений. Эту задачу
не удается точно решить в общем случае даже для одной
точки. Она исключительно трудна в случае двух материальных
точек, которые движутся только под действием сил взаимодей-
взаимодействия по закону всемирного притяжения (задача о двух телах)
и совершенно неразрешима в случае трех взаимодействующих
точек (задача о трех телах).
Задача интегрирования дифференциальных уравнений меха-
механической системы еще сложнее, если на механическую систему
наложены связи, силы реакций которых заранее не известны
и должны быть дополнительно определены по заданным
силам и связям аналогично случаю движения несвободной
материальной точки по поверхности и кривой линии.
В некоторых случаях из дифференциальных уравнений
движения системы можно получить первые интегралы, т. е.
соотношения, в которые не входят производные второго
порядка от координат по времени.
Если известны первые интегралы, то задача интегрирования
системы дифференциальных уравнений облегчается. Хотя от-
отдельные первые интегралы и не могут полностью описать
движения всех точек системы, однако они иногда характеризуют
важные стороны движения системы в целом.
Первые интегралы системы дифференциальных уравнений
удобно получать из так называемых общих теорем ди-
динамики, когда выполняются некоторые дополнительные ус-
условия для действующих сил. Кроме того, общие теоремы
динамики, даже когда по ним нельзя определить первые
интегралы, дают ценную информацию о движении точки или
системы. В некоторых задачах, где не требуется полного
знания движения системы, эти сведения могут оказаться
достаточными.
Общие теоремы динамики являются следствиями системы
дифференциальных уравнений движения точки или соответст-
соответственно системы точек.
295
§ 3. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС
Количество движения точки и системы
Одной из мер движения точки или системы является
количество их движения.
Количеством движения материальной точки q называют
вектор, равный произведению массы точки т на ее скорость
v, т. е.
q = mv. D)
Количество движения точки в физике часто называют
импульсом материальной точки.
Проекции количества движения точки на прямоугольные
декартовы оси координат:
qx = mvx = mx; qy = mvy = my; qz = mvz = mz. D')
Размерность количества движений в_СИ—кг м/с или Не.
Количеством движения системы Q называют векторную
сумму количеств движений отдельных точек систем, т. е.
<2 = 1™Л, E)
и, следовательно, проекции количества движения системы на
прямоугольные декартовы оси координат
б*=£»»*«>**; б,=£»»*«>*,; Qz=Y,™kvkz. E')
Вектор количества движения системы Q в отличие от
вектора количества движения точки q не имеет точки приложе-
приложения. Вектор количества движения точки считается приложенным
в самой движущейся материальной точке, а вектор Q является
свободным вектором.
Вычисление количества движения системы
Количество движения системы можно выразить через массу
системы М и скорость центра масс vc:
Q = Mvc. F)
В проекциях на прямоугольные декартовы оси соответ-
соответственно
Qx = MvCx = Mxc; Qy = MvCy = Myc; Qz = MvCz = Mzc, F')
где хс, ус, zc—координаты центра масс системы.
Выведем формулу F):
где Fk — радиус-вектор /ой точки системы (рис. 40).
296
По формуле для радиуса-вектора
центра масс,
'%ткгк = Мгс. (8)
Подставляя значение статического
момента массы (8) в G), имеем
так как масса системы М не изменя- sf
ется при движении системы. Рис 40
Элементарный и полный импульсы силы
Действие силы F на материальную точку в течение времени
At можно охарактеризовать так называемым элементарным
импульсом силы FdL Полный импульс силы F за время t,
или импульс силы S, определяют по формуле
S=\pdt. (9)
о
Проекции импульса силы на прямоугольные оси координат
выражаются формулами
y
0 0
Единица импульса силы — Н • с.
= \ Fzdt.
0
(9')
Теорема об изменении количества движения точки
Дифференциальное уравнение движения материальной точки
под действием силы F можно представить в следующей
векторной форме:
dv ?
т — = Ь.
df
Так как масса точки т принята постоянной, то ее можно
внести под знак производной. Тогда
-{mv) = F.
df
A0)
Формула A0) выражает теорему об изменении количества
движения точки в дифференциальной форме: первая производная
по времени от количества движения точки равна действующей
на точку силе.
В проекциях на координатные оси A0) можно представить
в виде
df
df
A0')
297
Если обе части A0) умножить
на dt, то получим другую форму
t=0 и° этой же теоремы — теорему им-
импульсов в дифференциальной
форме:
d(mv) = Fdt, A1)
■п т. е. дифференциал от количества
-jf движения точки равен элементар-
элементарному импульсу силы, действующей
Рис. 41 на точку.
Проецируя обе части A1) на координатные оси, получаем
d{mvXy) = FXydt,[ A1')
d(mvz) = Fzdt. J
Интегрируя обе части A1) в пределах от нуля до
t (рис. 41), имеем
mv-mvo = S, A2)
где v — скорость точки в момент t; v0 — скорость при ? = 0;
S—импульс силы за время /.
Выражение в форме A2) часто называют теоремой импуль-
импульсов в конечной (или интегральной) форме: изменение количества
движения точки за какой-либо промежуток времени равно
импульсу силы за тот же промежуток времени. В проекциях
на координатные оси эту теорему можно представить в сле-
следующем виде:
mvx — mvOx = Sx; mvy — mvOy = Sy; mvz — mvOz = Sz. A2')
Для материальной точки теорема об изменении количества
движения в любой из форм, по существу, не отличается от
дифференциальных уравнений движения точки.
Теорема об изменении количества движения системы
Аналогично тому, как для одной материальной точки,
выведем теорему об изменении количества движения для
системы в различных формах. Пусть к точкам системы
приложены внешняя и внутренняя силы. Тогда для каждой
точки можно применить теорему об изменении количества
движения, например в форме A0) (см. рис. 40):
d — —
~{mkvk) = Fk^ + Fkl\ k=l, 2, ..., N.
Суммируя по всем точкам системы правые и левые части
этих соотношений и учитывая, что сумма производных равна
производной от суммы, получаем
298
Так как, по свойству внутренних сил и определению
количества движения системы,
то приведенное соотношение можно представить в виде
dg/ch=xne). A3)
Выражение A3) является теоремой об изменении количества
движения системы в дифференциальной форме: производная
по времени от количества движения системы равна векторной
сумме всех внешних сил, действующих на систему. В проекциях
на прямоугольные декартовы оси координат
dQJdt^FlV; dG,/<h = £n?; dQJdt^Fft, A3')
т. е. производная по времени от проекции количества движения
системы на какую-либо координатную ось равна сумме проекций
всех внешних сил системы на ту же ось.
Умножая обе части A3) на dt, получаем теорему импульсов
для системы в дифференциальной форме:
d<2=IF№ A4)
т. е. дифференциал количества движения системы равен вектор-
векторной сумме элементарных импульсов всех внешних сил, действу-
действующих на систему. В проекциях на координатные оси эта
теорема примет вид
dG, = L*1№ dQ^Fftdt; d<22 = £F£>dr. A4')
Вычисляя интегралы от обеих частей A4) по времени от
нуля до /, получаем теорему импульсов для системы в конечной
или интегральной форме:
<2-<2о=1^е), _ A5)
гДе бо — количество движения системы в момент ? = 0; Q — ко-
количество движения в момент t; Sjf' — импульс внешней силы,
действующей на k-ю точку за время Г; 5!е) = j F[e)dt.
о
Теорема импульсов для системы в конечной форме форму-
формулируется так: изменение количества движения системы за
какое-либо время равно векторной сумме всех импульсов внешних
сил, действующих на систему за то же время.
В проекциях на прямоугольные оси согласно A5) имеем:
Qx-QOx = lSg; Qy-Qoy^Stf; Gx-Go, = E'Sfe). A5')
Внутренние силы системы не входят явно в теорему об
изменении количества движения системы в любой из форм
и, следовательно, не влияют непосредственно на изменение
299
количества движения системы. Они могут влиять на изменение
количества движения только неявно через внешние силы.
Из теоремы об изменении количества движения для точки
и системы при некоторых условиях для внешних сил можно
получить так называемые первые интегралы системы дифферен-
дифференциальных уравнений точки и системы. Эти первые интегралы
называют законами сохранения количества движения или проекции
количества движения на ось. Рассмотрим эти законы сохранения
для точки и системы одновременно, считая материальную точку
механической системой, состоящей из одной точки.
Законы сохранения количества движения
Законы сохранения количества движения системы получаются
как частные случаи теоремы об изменении количества движения
для системы в зависимости от особенностей системы внешних
сил, приложенных к рассматриваемой механической системе,
а для одной точки — от особенностей сил, действующих на точку.
Внутренние силы при этом могут быть любыми, так как они
явно не влияют на изменение количества движения системы.
Возможны два частных случая.
1. Если векторная сумма всех внешних сил, приложенных
к системе, равна нулю, т. е. £ FJie) = O, то из теоремы об изменении
количества движения системы, например в форме A3), следует, что
Q = const. A6)
Этот закон (точнее, частный случай теоремы) формулируется
так: если главный вектор внешних сил системы равен нулю,
то количество движения системы постоянно по величине
и направлению. В проекциях на координатные оси, по этому
закону,
Q^C,, Qy = C2; QZ = C3, A6')
где Ct, С2, С3 — постоянные величины.
В соотношения A6) и A6') входят производные от координат
точек по времени не выше первого порядка и не входят
вторые производные от этих координат. Следовательно, эти
соотношения являются первыми интегралами дифференциаль-
дифференциальных уравнений системы C).
2. Если равна нулю проекция главного вектора внешних
сил на какую-либо координатную ось Ох, т.е. 2^F^J = 0, то
из A3') имеем
Qx = const. A7)
Выражение A7) является законом сохранения проекции
количества движения системы: если проекция главного вектора
всех внешних сил системы на какую-либо ось равна нулю, то
300
проекция количества движения на ту же ось является
постоянной величиной.
Применим закон сохранения количества движения системы
для объяснения принципа реактивного движения. Пусть,
например, система состоит из двух сочлененных твердых тел,
находящихся в покое и свободных от действия внешних сил.
Тогда для рассматриваемой системы количество движения все
время постоянно и равно нулю. Допустим, что при взрыве
пиропатрона (действие внутренних сил) первому телу массой
М1 сообщена скорость vx. Тогда скорость второго тела массой
М2 определится из закона сохранения количества движения:
Q = М1 v1 + М2 v2 = const = О
Следовательно,
м, _
v = V
т. е. второе тело движется в сторону, противоположную первому
телу. Если его движению препятствует какая-либо связь, то
рассматриваемое тело давит на эту связь с некоторой силой по
направлению скорости v2. Эту силу называют реактивной.
В реактивных двигателях она создается за счет истечения газа
с большой скоростью (около 2...2,5 км/с) из сопла двигателя.
Теорему об изменении количества движения в той или
другой форме удобно применять для решения задач именно
в рассмотренных частных случаях, хотя в некоторых случаях
ее применяют и в общем случае. Отметим, что внутренние
силы не влияют на изменение количества движения в изо-
изолированных системах, т. е. в системах, которые не соприкаса-
соприкасаются с другими телами, не принадлежащими к рассматрива-
рассматриваемой системе, или окружающей систему материальной средой.
В неизолированных механических системах внутренние силы,
вызывая движение отдельных частей системы вследствие вза-
взаимодействия с внешними телами или окружающей материаль-
материальной средой, могут вызвать внешние силы в виде сил реакций
связей или изменения активных сил, которые могут изменить
количество движения системы.
Количество движения системы мо-
может зависеть от внутренних сил только
неявно, через внешние силы. j
Пример. Через изогнутую под прямым углом -rrtv
трубу постоянного сечения за 1 с протекает
жидкость массой т (рис. 42). Скорость течения /'
жидкости v постоянна, т. е. одна и та же у всех
частиц жидкости. Определить силу, с которой /
жидкость давит на участок трубы вследствие
поворота потока на прямой угол.
Решение. Применим к объему жидкости, рис 42
заключенному между стенками трубы и попереч-
301
ными сечениями 1 и 2, теорему об
изменении количества движения в форме
теоремы импульсов за промежуток времени,
равный 1 с. За секунду точки жидкости
из сечения 1 сместятся на расстояние
v\ и займут положение Г, а точки
жидкости из сечения 2 займут положение
р „ 2'. По теореме импульсов для выделенного
' объема жидкости имеем
Q-Qu = \Mt; \Fdt = Fl, (a)
о о
Ше Qo — количество движения жидкости, заключенной между сечениями 1 и 2;
Q — количество движения жидкости, заключенной между сечениями /' и 2';
F—главный вектор распределенных сил, с которыми стенки трубы действуют
на выделенный объем жидкости.
Так как в общей части объема жидкости количества движения, входящие
в 2 и бо> взаимно уничтожаются при их вычитании, то из (а) получаем
F=Q — QQ; F=mv—mvQ.
Сила давления жидкости F на стенки трубы по закону о равенстве
действия и противодействия выразится в виде
F'=—F=mvo — mv. (б)
Проецируя (б) на оси координат, получаем
F'x= — mv; F'y = mv0 = mv,
так как v = v0. После этого
Направление силы давления жидкости F указано на рисунке.
Если бы через сечение 1 жидкость не поступала, а образовывалась внутри трубы,
как в реактивном двигателе образуются газы после сгорания топлива, а через сечение
2 она выходилаХрис. 43), то сила F', согласно (б), имела бы значение F'= — mv.
Эта сила F' является частью реактивной силы двигателя вследствие
выброса продуктов сгорания из двигателя, являющегося источником газа.
Другая часть реактивной силы двигателя, равная (p—pa)S, получается за
счет разности давлений р, в струе выходящего из сопла газа и давления
в среде ра, куда выходит из двигателя газ. Здесь S—площадь выходного
сечения сопла.
Полная реактивная сила двигателя
R = mv + (p-pa)S.
По направлению реактивная сила R всегда противоположна скорости
v выходящего из двигателя газа. Для получения большой скорости выходящего
газа сопло двигателя следует расширять по направлению к выходному его
сечению при сверхзвуковых скоростях истечения газа.
Теорема о движении центра масс системы
Следствием теоремы об изменении количества движения
системы является теорема о движении центра масс системы.
По теореме об изменении количества движения системы A3),
Но количество движения системы можно вычислить по
формуле F):
Q = Mvc,
302
где vc — скорость центра масс;
М—масса системы.
Подставляя F) в A3) и учиты-
учитывая, что масса системы постоян-
постоянна, получаем теорему о движении
центра масс в векторной форме:
или
A8)
У
где ас—ускорение центра масс. Рис- ^
Теорема о движении центра масс формулируется так: центр
масс системы движется так же, как и материальная точка,
масса которой равна массе всей системы, если на точку
действуют все внешние силы, приложенные к рассматриваемой
механической системе.
Проецируя A8) на прямоугольные декартовы оси координат
(рис. 44), получаем дифференциальные уравнения движения
центра масс:
М —~
A8')
At1
где xc, yc, zc — координаты центра масс.
Из теоремы о движении центра масс можно получить
следствия, аналогичные законам сохранения количества движе-
движения и проекции количества движения на ось.
1. Если главный вектор внешних сил, действующих на
систему, равен нулю, т. е. F^e| = 0, то из A8) следует, что
ускорение центра масс ас равно нулю, а следовательно, скорость
центра масс vc является постоянной по модулю и направлению,
т. е. центр масс движется прямолинейно и равномерно по
инерции или находится в покое. Если, в частности, в начальный
момент он находится в покое, то он покоится в течение всего
времени, пока главный вектор внешних сил равен нулю.
2. Если проекция, например на ось Ох, главного вектора
внешних сил, действующих на систему, равна нулю, т. е.
то из A8') следует, что проекция ускорения хс центра масс
на эту ось равна нулю, а следовательно, проекция скорости
центра масс является постоянной величиной, т. е.
vCx = xc = const.
303
Если дополнительно в началь-
начальный момент vCx = 0, то тогда
хс = const, т. е. координата хс цен-
центра масс не изменяется при движе-
нии системы.
Внутренние силы не влияют
явно на движение центра масс.
Рис. 45 Они могут влиять только неявно,
через внешние силы. Следовательно, одними внутренними
силами, без внешних, нельзя вывести из равновесия или
изменить движение центра масс системы. Но внутренними
силами для неизолированной механической системы можно
создать движение отдельных частей системы и, следовательно,
взаимодействие с внешними телами, вызывая этим внешние
силы реакций связей или изменяя активные силы. Это может
изменить движение центра масс или вывести его из равновесия.
Пусть человек стоит на абсолютно гладкой горизонтальной
плоскости вблизи скрепленного с этой плоскостью тела. Так
как на человека не действуют внешние силы в горизонтальном
направлении, то внутренними силами он не может вывести
из равновесия в этом направлении свой центр масс. Но
человек может оттолкнуться рукой от препятствия, т. е.
внутренними силами вызвать внешнюю силу реакций препят-
препятствия и таким образом вызвать движение своего центра масс
в горизонтальном направлении. Все, что движется по Земле,
летает в воздухе, плавает по воде, совершает это с помощью
внутренних сил, создавая внешние силы трения на твердых
поверхностях внешних тел, отталкиваясь от воздуха или воды.
Пример 1. Два груза с силами тяжести Рх и Р2, соединенные нерастяжимой
нитью, переброшенной через блок, скользят по боковым граням равно-
равнобедренного клина (рис. 45). Клин стороной ВС опирается на гладкую
горизонтальную плоскость. В начальный момент система находится в покое.
Найти перемещение клина по плоскости при опускании груза Р1 на высоту
h. Сила тяжести клина Р=2Р1 и Р1 = 2Р2. Массой блока и нити пренебречь.
Решение. Внешними силами, действующими на клин вместе с грузами,
являются силы тяжести Р1; Р2, Р и нормальная реакция горизонтальной
гладкой поверхности N. Следовательно,
Учитывая, что в начальный момент система находится в покое, на
основании второго следствия из теоремы о движении центра масс имеем
хс = const.
Вычислим хс при г = 0 и х'с в момент, когда груз опустится на высоту h.
Для момента t = 0
- , .... - PlXl+P2X2-
xc~'
Pjg+Pllg+Plg P,+P2+P
где Xj, x2 и л: — соответственно координаты центра масс по оси Ох грузов
/\, Р2 и клина.
Пусть вся система вместе с клином переместилась в положительном
направлении оси Ох на величину / при опускании груза /\ на h. Тогда
304
так как грузы вместе с клином передвинутся
на / вправо и по клину вдоль отрицательного
направления оси Ох на h при заданном угле
клина, равном 45°.
Так как х*с—хс = 0, то после вычитания
получим
Pl(l-h) + P2{l-h)+Pl=0.
Отсюда
{Pl + P2)k_ BP2 + P2)h _3
Р Р + Р 2Р Р 4Р 7 '
Рис- 46
Так как величина / оказалась положитель-
положительной, то клин действительно перемещается
вправо в положительном направлении оси Ох.
Пример 2. В электромоторе корпус (статор) имеет силу тяжести Р1=700 Н,
а ротор Р2 = 300Н. Ротор вращается по часовой стрелке с частотой
и = 980 об/мин (рис. 46). Центр масс ротора вследствие его несимметричности
отстоит от оси вращения на расстоянии /=5см
Определить горизонтальную силу, с которой действует мотор на болты,
крепящие его к фундаменту, и вертикальное давление на пол.
Решение. Предположим, что при г = 0 центр масс ротора находится на оси
Оу. Тогда в момент времени t координаты центра масс ротора можно выразить как
х2 = / sin ф = / sincof; у2 = / соБф = / coscof,
где со = 7си/30 = 7с-980/30 = 98тс/3 с'1.
Для определения давления мотора на болты и пол рассмотрим в качестве
механической системы весь мотор, для которого внешней силой в горизон-
горизонтальном направлении является только сила действия болтов F, а в^ верти-
вертикальном направлении—силы тяжести и нормальная реакция пола N.
Для координат центра масс всего мотора
тххх+т2х2
>п1у1+т2у2
где т, и т2 — массы корпуса мотора и ротора соответственно; х1г ух и х2,
у2 — координаты их центров масс.
Центр масс корпуса закрепленного мотора является неподвижной точкой
и находится в начале координат. Следовательно, х1=0, У\=0, и поэтому
координаты центра масс всего мотора
хс =
т2х2
Р2х2
Ус =
т2у2
Р2У2
mi+m2 Px+P2
Используя дифференциальные уравнения движения центра масс всего
мотора в проекциях на координатные оси, получим
yc = N-Pl-P2,
(а)
где F—сила действия болтов на корпус мотора в горизонтальном направлении
по оси Ох; N—нормальная сила реакции пола.'
Так как
хг=--
la>2sma>t; yc =
Л+Л
/@2COS@f,
то из (а) следует
305
p p
F= -/co2sincof; N= la>2+ (Pi+P2).
g _ S
Сила действия мотора на болты F' и давление N' на пол равны
F'=-F; N'=-N.
Наибольшие числовые значения этих сил
g
Если болтов нет, то корпус мотора может подпрыгивать в направлении оси Оу.
Динамическое условие подпрыгивания в рассматриваемом случае выразится
как yV<0, кинематическое условие подпрыгивания мотора есть у\>0.
Дифференциальные уравнения поступательного движения
твердого тела
Из теоремы о движении центра масс системы получаются
дифференциальные уравнения поступательного движения твер-
твердого тела. Имеем
Но при поступательном движении твердого тела ускорения всех
точек тела одинаковы по модулю и направлению, т. е. ас = а, где
а—ускорение произвольной точки тела. Учитывая это, из теоремы
о движении центра масс получаем следующее дифференциальное
уравнение поступательного движения тела в векторной форме:
Проецируя на оси координат, имеем:
Это и есть дифференциальные уравнения поступательного
движения твердого тела в проекциях на прямоугольные оси
координат. В этих уравнениях х, у, z являются координатами
произвольной точки тела, в частности могут быть координата-
координатами его центра масс. Тело, совершающее поступательное
движение, имеет три степени свободы, и поэтому можно
составить три дифференциальных уравнения его движения.
Дифференциальные уравнения поступательного движения
твердого тела аналогичны дифференциальным уравнениям
движения одной материальной точки. С помощью этих уравне-
уравнений можно решать такие же задачи, как и для одной точки.
§ 4. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
Кинетический момент точки и системы
Наряду с количеством движения в качестве векторной
меры движения можно использовать кинетический момент,
или момент количества движения. Для материальной точки
306
M(x,y,zl v
Рис. 47
О У
Рис. 48
массой т, движущейся со скоростью v, кинетическим моментом
к~0 относительно какого-либо центра О называют момент
количества движения точки относительно этого центра
О (рис. 47), т. е.
ko = Mo{mv) = fxmv. A9)
Кинетический момент к0 приложен к точке О, относительно
которой он вычисляется.
Проецируя обе части A9) на прямоугольные декартовы
оси, получаем кинетические моменты точки относительно этих
осей координат, если точка О является началом осей координат:
кх = Mx(mv) = m (yvz - zvy) = m(yz- zy);
ky = My (mv) = m (zvx — xvz) = m {zx — xz).
kz = M z (mv) = m (xvy—yvx) = m (xy—yx).
A9')
В физике кинетический момент точки иногда называют
моментом импульса точки.
Единица кинетического момента в СИ — кгм2/с,
или
Н-м-с.
Для механической системы кинетическим моментом Ко
(или главным моментом количества движения системы от-
относительно какой-либо точки О) называют векторную сумму
кинетических моментов точек этой системы, взятых относитель-
относительно точки О (рис. 48), т. е.
B0)
Кинетический момент системы Ко приложен к точке О,
относительно которой он вычисляется.
Если спроецировать B0) на прямоугольные декартовы оси
координат, то получим проекции кинетического момента на
эти оси, или кинетические моменты относительно осей коор-
координат:
o = ZMo (mkvk) = Е rk x mkvk.
307
= 'Lmk(ykzk~zkyk);
{mkvk) = Zmk{zkxk-xkzk);
Z (mkvk) = Imt {Xkyk - ykxk).
B0')
Кинетический момент относительно оси вращения
при вращательном движении твердого тела
Вычислим кинетический момент твердого тела относительно
оси вращения, когда тело вращается вокруг этой неподвижной
оси с угловой скоростью со (рис. 49). По определению кинети-
кинетического момента относительно оси [(см. формулы B0')] имеем
Kz = T.Mz(mkvk).
Но при вращении тела вокруг оси vk = hka>, причем количест-
количество движения точки mkvk перпендикулярно отрезку hk и лежит
в плоскости, перпендикулярной оси вращения Oz. Следователь-
Следовательно, момент количества движения относительно оси Oz для
одной точки
Mz {mkvk) = hkmkvk = mkh l со.
Для всего тела
Kz = Е mkh i со = со Е mkh i = &Jz,
т. е.
KZ = JZ&. B1)
Таким образом, кинетический момент тела относительно
оси вращения при вращательном движении равен произведению
угловой скорости тела на его момент инерции относительно
оси вращения. Знак кинетического момен-
момента относительно оеи совпадает со зна-
знаком угловой скорости вращения вокруг
этой оси: при вращении против часовой
стрелки кинетический момент положи-
положительный; при вращении но часовой
стрелке — отрицательный.
Дополнительно без вывода приведем
формулы для кинетических моментов
относительно двух других осей коор-
координат Ох и Оу, перпендикулярных оси
вращения Oz. Имеем
со
K=-JXz&; K=-J,
где
= 'Lmkxkz
kxkzk
.у- -yzCO,
цен-
ценРис. 49
kkk ky
тробежные моменты инерции.
Эти формулы можно получить как
частный случай более общих формул
для случая вращения твердого тела
308
вокруг неподвижной точки. Они могут быть получены
и непосредственно.
Если ось вращения Oz является главной осью инерции для
точки О, то Jxz = Jyz = 0 и, следовательно^ Кх = Ку — О для этой
точки. В этом случае кинетический момент Ко относительно точки
О направлен по оси вращения. В общем случае Ко не направлен по
оси вращения, так как имеет не равные нулю проекции Кх и Ку на
оси координат, перпендикулярные оси вращения Oz.
Теорема об изменении кинетического момента точки
Для материальной точки основной закон динамики можно
представить в виде
dv =
т — = г.
At
Умножая обе части этого соотношения слева векторно на
радиус-вектор г (см. рис. 48), получаем
fxm — = fxF. B2)
В правой части этой формулы имеем момент силы
относительно неподвижной точки О. Преобразуем левую часть,
применив формулу производной от векторного произведения:
Ho
dc d/_ _ч dr
rx m —=— \rx mv)——xmv.
dt dty ' dt
df _ _ _
— xmv = vxmv =
dt
как векторное произведение параллельных векторов.
После этого из B2) получаем
или
d /_ _ч _ -
— [г xmv) = rx F,
B3)
Таким образом, первая производная по времени от кинетичес-
кинетического момента точки относительно какого-либо центра равна
моменту силы относительно того же центра.
Это и есть теорема об изменении кинетического момента
для точки.
Проецируя B3) на прямоугольные декартовы оси координат,
получаем теоремы об изменении кинетического момента точки
относительно этих осей координат:
dkx/dt = Mx(F); dky/dt = My(F); dkJdt = Mz(F). B3')
309
Теорема об изменении кинетического момента системы
Если к точкам системы приложить все внешние и внутренние
силы (рис. 48), то для каждой точки системы можно выразить
теорему об изменении кинетического момента в форме B3), т. е.
~{rkxmkvk) = FkxFP + FkxF<£\ k=l, 2, ..., N.
Суммируя правые и левые части этих соотношений по
всем точкам системы и заменяя суммы производных произ-
производной от суммы, получаем
Так как, по свойству внутренних сил,
а по определению кинетического момента системы,
Zrkxmkvk = K0,
то
dK0/dt = -LrkxFke\
Если обозначить главный момент всех внешних сил L{S\ т. е.
то теорему об изменении кинетического момента системы
можно представить в виде
dKoldt = L<S\ B4)
Следовательно, первая производная по времени от кинетического
момента системы относительно какой-либо точки равна вектор-
векторной сумме моментов внешних сил, действующих на систему,
относительно топ же точки.
В эту теорему входит кинетический момент системы Ко
в ее движении относительно инерциальной системы отсчета,
причем кинетический момент и моменты внешних сил вычис-
вычисляются относительно неподвижной в этой системе отсчета
точки О. Получим теорему об изменении кинетического
момента системы такого же движе-
движения, но выберем в качестве точки
при вычислении кинетического мо-
момента и моментов внешних сил
точку А, движущуюся относительно
инерциальной системы отсчета со
скоростью vA.
По определению кинетического
" момента системы относительно точ-
точки А имеем (рис. 50)
Рис. 50 К, = Е гъ х тль.
310
Вычислим производную по времени от кинетического момента
КА по правилу дифференцирования векторных произведений.
Получим
dK, „ /Ark - , _ dv
rk {F[e) + Я0)] =-vAxl. mkvk + E Fk x F[e\
так как rk = pk — pA: — = -
к Ук кл> d[
mb — = s
Учитывая, что Q = 'Lmkvk = Mvc, получим
dKJdt =-vAx Mvc + ZFkx F\e\
или
Рассмотрим частные случаи этой теоремы.
1. Если точка А совпадает с центром масс С, то MtJcx£5c = 0
и теорема принимает форму
dKcjdt = D£\
2. Если в случае плоского движения твердого тела выбрать
в качестве точки А мгновенный центр скоростей Р, то
€А = 1Рф0, так как в рассматриваемом случае vP есть скорость
движения мгновенного центра скоростей по неподвижной
центроиде, а она не равна нулю в отличие от скорости точки
тела, совпадающей с точкой Р, которая равна нулю. Очевидно,
vPxMvc = 0, если vP параллельна vc, т.е. если касательные
к центроидам и траектории центра масс параллельны или,
что то же самое, центр масс находится на нормали к цен-
центроидам в точке Р. Тогда
dKPldt = Lpe).
Эти частные случаи показывают, что для подвижных
точек центра масс для любой системы и мгновенного
центра скоростей при плоском движении твердого тела
в рассмотренном случае теорема об изменении кинетического
момента для абсолютного движения имеет ту же форму,
что и для неподвижной точки О.
Внутренние силы непосредственно не влияют на изменение
кинетического момента системы. Они могут влиять на него
только через внешние силы, т. е. неявно.
Проецируя B4) на прямоугольные декартовы оси координат,
получаем теоремы об изменении кинетического момента систе-
системы относительно этих осей координат, т. е.
dKJdt = L^; dKy/dt = L^; dKjdt = L<?\ B4')
311
Теорема об изменении кинетического момента позволяет
изучать вращательное движение твердого тела вокруг оси
и точки или вращательную часть движения тела в общем
случае движения свободного твердого тела.
Законы сохранения кинетических моментов
Выведем законы сохранения кинетических моментов для
системы, рассматривая материальную точку как механическую
систему, у которой число точек равно единице. Естественно,
что для одной материальной точки все действующие на нее
силы являются внешними. Возможны следующие частные
случаи теоремы об изменении кинетического момента системы.
1. Если главный моментвнешних сил системы относительно
точки О равен нулю, т. е. L^ = 0, то, согласно B4), кинетичес-
кинетический момент системы Ко относительно той же точки постоянен
по модулю и направлению, т. е.
Ко = const'. B5)
Этот частный случай теоремы об изменении кинетического
момента системы называют законом сохранения кине-
кинетического момента. В проекциях на прямоугольные декар-
декартовы оси координат по этому закону
кх — с15 ку — с2, л2 —с3, (/:>)
где С15 С2, С3 — постоянные величины.
Соотношения B5') являются первыми интегралами диффе-
дифференциальных уравнений движения системы C). Закон сохране-
сохранения кинетического момента системы показывает, что одни
внутренние силы не могут изменить кинетический момент
системы, так же как они не изменяют ее количество движения.
2. Если сумма моментов всех внешних сил_ системы
относительно оси Ох равна нулю, т. е. L(X) = 'LMX{F^)) = O, то
из B4') следует, что
Кх = const. B6)
Следовательно, кинетический момент системы относительно
какой-либо координатной оси постоянен, если сумма моментов
внешних сил относительно этой оси равна нулю, что, в частности,
наблюдается, когда внешние силы параллельны оси или пересекают
ее. В частном случае для тела или системы тел, которые все вместе
могут вращаться вокруг неподвижной оси, и если при этом
то
Кг = JZ со = const
или
/zco = yzocoo, B7)
312
где Jz и со — момент инерции системы
тел и их угловая скорость относительно
оси вращения в произвольный момент
времени t; Jz0 и соо — момент инерции
тел и их угловая скорость в момент
времени, выбранный за начальный, на-
например при ( = 0.
Закон сохранения кинетического мо-
момента в форме B7) используют в своей
деятельности акробаты, прыгуны, танцо-
танцоры и т. д. Наглядно его можно продемон-
продемонстрировать в опыте на скамье Жуковского
(рис. 51). Если человек с гирями в руках
встанет на горизонтальную платформу
скамьи Жуковского, которая может вра-
вращаться вокруг вертикальной оси почти
без трения, и затем ему сообщить уг-
угловую скорость вокруг этой оси, то
Лосоо = Л<:0' Рис. 51
так как внешние силы или параллельны
оси вращения (силы веса человека, гирь и платформы), или
пересекают ось (реакции подшипника, если пренебречь силами
трения).
Следовательно, если человек увеличит момент инерции,
например разведением рук с гирями в сторону, то угловая
скорость вращения уменьшится, и наоборот. В действительнос-
действительности угловая скорость хотя и медленно, но все время уменьшается
вследствие наличия сопротивления воздуха и трения в подшип-
подшипнике скамьи.
Пример. Однородный горизонтальный диск радиусом R и силой тяжести
Р может вращаться без трения вокруг вертикальной оси. Как изменится
угловая скорость диска, если первоначально стоящий
на диске на расстоянии г от его оси человек с силой
тяжести Р1 пойдет по окружности радиусом г по
диску с относительной скоростью v (рис. 52)?
Решение. Пусть угловая скорость диска вначале
была ш0, а потом вследствие движения человека по
диску стала (о. Так как внешние силы для системы,
состоящей из человека и диска, параллельны оси
Oz (силы тяжести Р к Рх) или ее пересекают (реакции
RA и RB), то
и, следовательно,
Кг = const.
Составим Kz для двух моментов времени и при-
приравняем друг другу. В начальный момент, когда
человек стоит, кинетический момент системы опре-
определяется как
313
1 ,2,.
После того как человек пойдет по диску, его кинетический момент станет равным
кинетическому моменту от вращения вместе с диском плюс кинетический момент от
относительного движения по диску, если человек идет в сторону вращения диска, т. е.
Р Р
Кг = У2шН—-г2а-\—- п.
g g
Приравнивая полученные выражения кинетических моментов, получаем
т „ , Р> ,.2„ , ''"l ... г Р<
Отсюда
Л 2
—-гш0.
g
(Jzg + P^Uo-Psv
Для однородного диска
Р R2
Поэтому угловая скорость
Угловая скорость диска от движения по нему человека уменьшилась на
2P1n,t/(JDR2 + 2/>i>-2). Если вместо диска рассматривать земной шар, то движение
по нему материальных объектов (воздуха, течения воды и т. д.), которые
имеют не равную нулю проекцию скорости на касательную к параллелям,
вызовет изменение угловой скорости вращения Земли. Она уменьшится, если
проекции скорости положительны для направления по вращению земного
шара, и увеличится, если против вращения.
Дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси
Из теоремы об изменении кинетического момента B4')
получим дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси Oz (рис. 53). Имеем
Для случая вращения твердого тела вок-
вокруг неподвижной оси, согласно B1), имеем
где Jz — постоянный для твердого тела мо-
момент инерции относительно неподвижной
оси вращения; со — угловая скорость. Учи-
Учитывая это, получаем
Рис. 53
Если ввести угол поворота тела ф, то,
учитывая, что dco/d? = cp, имеем
314
Это и есть дифференциальное уравнение вращения твердого
тела вокруг неподвижной оси. Оно полностью аналогично
дифференциальному уравнению поступательного движения тве-
твердого тела в проекции на какую-либо ось, например на ось Ох.
В дифференциальное уравнение вращения тела вокруг
неподвижной оси вместо координаты х входит угол поворота
Ф, вместо массы тела М—момент инерции относительно оси
вращения Jz, вместо суммы проекций внешних сил на ось
Ох — сумма моментов внешних сил относительно оси вращения
Oz или так называемый вращательный момент внешних сил.
Реакции подшипников RA и RB оси вращения являются
внешними силами, но их моменты относительно оси вращения
равны нулю, так как они пересекают ось, если пренебречь
силами трения.
В частном случае, когда
IjWz(F[s)) = L<£| = const, то e = ip = L{f/Jz = const,
т. е. вращение тела происходит с постоянным угловым
ускорением.
Если
)
то
ф = dco/d/ = 0 и co = const.
Это случай равномерного вращения тела по инерции без
действия вращательного момента внешних сил.
Дифференциальное уравнение вращательного движения твер-
твердого тела в общем случае позволяет решать две основные
задачи: по заданному вращению тела определять вращающий
момент внешних сил и по заданному вращательному моменту
и начальным условиям находить вращение тела. При решении
второй задачи для нахождения угла поворота как функции
времени приходится интегрировать дифференциальное уравне-
уравнение вращательного движения. Методы его интегрирования
полностью аналогичны рассмотренным выше методам интегри-
интегрирования дифференциального уравнения прямолинейного движе-
движения точки.
Движение точки под действием центральной силы.
Теорема площадей
Секторная скорость. Теорема площадей. Наряду с введенны-
введенными в кинематике точки скоростью v и ускорением а можно
ввести другие характеристики движения точки, например сек-
секторные скорость и ускорение. Секторной скоростью точки va
или da/dt относительно точки О (рис. 54) называют векторную
величину, определяемую по формуле
315
/->o\
B8)
Рис. 54
,. Аи da
где Act — вектор, численно рав-
равный заштрихованной на рисунке
площади, ометаемой радиусом-
вектором г движущейся точки за
время At; направление вектора
Лет берется по перпендикуляру
к заштрихованной площади так,
чтобы с конца этого вектора
при ометании заштрихованной площади видеть поворот ради-
радиуса-вектора г против часовой стрелки.
Для случая движения точки по плоскости секторная скорость
перпендикулярна этой плоскости, если точка О выбрана в той
же плоскости, в которой движется точка. Секторная скорость
всегда приложена в той точке, относительно которой она
вычисляется.
Секторное ускорение аа можно ввести как производную
по времени от вектора секторной скорости, т. е.
Секторную скорость можно выразить через момент линей-
линейной скорости v относительно точки О:
va='l2(rxv). B9)
Векторное произведение rxv, согласно определению, имеет
такое же направление, как и vo. Следовательно, для доказа-
доказательства формулы B9) достаточно показать, что величины
левой и правой частей одинаковы. Вычислим левую часть
формулы B9):
|u0|=lim!
Д1—О
но
-Л,
= 1/2rh=l/2r\AF\sm{r,Ar).
Следовательно,
r, V),
что совпадает с модулем векторного произведения, стоящим
справа в формуле B9).
Если движение точки происходит в плоскости, то секторную
скорость можно считать алгебраической величиной. В этом
случае секторную скорость точки часто выражают в полярных
координатах. Из формулы B9) секторная скорость
vo = do/dt=1/2rvs\n(r, v).
316
Но из кинематики точки в полярной
системе координат на плоскости извест-
известно (рис.55), что vsin(r, v) = vP = r—.
Следовательно,
v _dCT_l/ r2dtP Пал
Формула C0) выражает секторную °
скорость в полярных координатах
в случае плоского движения точки. Рис'
Используя формулу B9), кинетический момент через сектор-
секторную скорость можно выразить в виде
k~0 = rxmv = 2mvu. C1)
Соответственно теорему об изменении кинетического момента
B3) для точки можно выразить через секторную скорость формулой
2m^ = M0(F). C2)
В форме C2) теорему об изменении кинетического момента
для точки называют теоремой площадей.
Движение точки под действием центральной силы. Централь-
Центральной силой F называют такую силу, линия действия которой
при движении точки ее приложения проходит через одну и ту
же точку О, называемую центром центральной силы.
Центральная сила может быть притягивающей (направлен-
(направленной к центру) и отталкивающей (направленной от центра).
Так как для центральной силы ^юмент силы относительно
своего центра равен нулю, т. е. Mo(F) = 0, то, следовательно,
по теореме об изменении кинетического момента для точки B3),
ко = const'. C3)
В проекциях на прямоугольные оси декартовой системы
с началом в точке О по C3) имеем:
kx = m(yz — zy) = Cl; ky = m(zx — xz) = C2; kz = m(xy—yx) = C3,
(yj )
где C1, C2, C3 — постоянные величины.
Умножая первое соотношение C3') на х, второе — на v,
третье — на z и складывая, получаем O = Cix + C2y+Cj>z, т.е.
координаты движущейся точки х, у, z удовлетворяют уравне-
уравнению плоскости, проходящей через начало координат.
Следовательно, траектория точки, движущейся под действи-
действием центральной силы, является плоской кривой, лежащей
в плоскости, проходящей через центр силы.
Так как при движении точки под действием центральной
силы
317
k0 = const,
то, учитывая формулу C1), имеем
uo = da/d/ = const
и, следовательно,
va = d ojdt = const = C,
или
C4)
Формула C4) выражает так называемый интеграл пло-
площадей: при движении точки под действием центральной силы
секторная скорость является постоянной величиной и, следова-
следовательно, ометаемая радиусом-вектором площадь пропорциональна
времени.
Учитывая формулу C0), интеграл площадей C4) в полярных
координатах можно представить в виде
г1 —- = const.
At
C5)
В этой форме интеграл площадей широко используется при
рассмотрении движения планет вокруг Солнца и вообще
различных спутников, в частности искусственных спутников Земли.
Теорема об изменении кинетического момента системы
в относительном движении по отношению к центру масс
Рассмотрим относительное движение системы только отно-
относительно системы координат, движущейся поступательно вместе
с центром масс системы.
Прежде чем рассмотреть теорему, выведем формулу для
вычисления кинетического момента системы.
Формула для кинетического момента системы. Пусть механи-
механическая система совершает движение относительно основной
системы координат Oxly1zl. Возьмем подвижную систему
координат Cxyz с началом в центре масс системы С,
движущуюся поступательно относите-
относительно основной системы координат.
Из рис. 56 следует, что для любого
момента времени p^Pc + 'V
Дифференцируя это тождество по
времени, получаем
dPt__dPc . drt
At At At
ИЛИ
Рис. 56
318
где vk— абсолютная скорость точки Мк\ vc — абсолютная
скорость центра масс; vkr = drk/dt— относительная скорость
точки Мк относительно подвижной системы координат Cxyz.
При поступательном движении подвижной системы координат
ее угловая скорость ю равна нулю и по формуле Бура полная
производная по времени от радиуса-вектора г совпадает
с локальной производной, равной относительной скорости.
Согласно определению кинетического момента Ко относи-
относительно неподвижной точки О, для абсолютного движения системы
относительно системы координат Ox1y1z1 по формуле B0) имеем
Подставляя в эту формулу значения рк и vk, после небольших
преобразований получаем
о = Рс х vc^mk + ^ fk x mkvkr+ рс x Emk-^ + (EmkFk) х vc. C6)
В этой формуле Ътк = М — масса системы. Кроме того,
последние два слагаемых равны нулю. Действительно, по
определению радиуса-вектора центра масс относительно этого
центра масс имеем
О = rc = Е mkrk IM.
Следовательно, Emkfk = 0 и последнее слагаемое в C6) тоже
равно нулю.
Другое слагаемое можно предварительно преобразовать:
Pcx'Lmk-^ = pcx-(T,mkFk).
Это слагаемое также равно нулю, так как все время Emkrk = 0.
Формула C6) принимает следующий окончательный вид:
Ко = рс xMvc + RP, C7)
где K(c) = T.rkxmkvkr.
Величина К(р является кинетическим моментом системы
относительно центра масс для относительного движения отно-
относительно системы координат, движущейся поступательно вместе
с центром масс, т. е. системы координат Cxyz.
Формула C7) показывает, что кинетический момент абсо-
абсолютного движения системы относительно неподвижной точки
О равен векторной сумме кинетического момента центра масс
относительно той же точки, если бы в центре масс была
сосредоточена вся масса системы, и кинетического момента
системы относительно центра масс для относительного движе-
движения системы по отношению к подвижной системе координат,
движущейся поступательно вместе с центром масс.
Теорема об изменении кинетического момента системы в от-
относительном движении по отношению к центру масс. Для
319
абсолютного движения системы и неподвижной точки О те-
теорема об изменении кинетического момента имеет вид
Подставляя сюда значения рк и Ко по формуле C7)
и производя дифференцирование и группировку членов, по-
получаем
Перенося из правой части в левую первое слагаемое
и учитывая, что
— х Mvc = vcx Mvc = О
как векторное произведение параллельных векторов, после
объединения слагаемых имеем
В этой формуле выражение в квадратных скобках равно
нулю на основании теоремы о движении центра масс системы
A8) и, следовательно, формула примет вид
или
dK$ldt = L№, C8)
где Lic) = 'LrkxF^) является главным моментом всех внешних
сил относительно центра масс.
Формула C8) и выражает рассматриваемую теорему об
изменении кинетического момента системы относительно цент-
центра масс для относительного движения системы по отношению
к системе координат, движущейся поступательно с центром
масс; она формулируется так же, как если бы центр масс
был неподвижной точкой.
Эту теорему применяют для изучения вращательной части
плоского движения и движения свободного твердого тела
вокруг центра масс.
Дифференциальные уравнения плоского движения
твердого тела
Используя теоремы о движении центра масс и изменении
кинетического момента системы относительно центра масс
для относительного движения системы по отношению к системе
320
координат, движущейся поступатель- У, _,„, У
но с центром масс, получим диф-
дифференциальные уравнения плоского
движения твердого тела.
В плоскости движения центра масс
тела, совершающего плоское движе-
движение, выберем неподвижную систему
координат Ох1у1, относительно кото- О
рой рассматривается движение, и дви- хс
жущуюся поступательно вместе с це-
центром масс систему Сху (рис. 57). Рис- 57
Пусть хс и ус — координаты центра масс тела относительно
неподвижной системы координат. Тогда по теореме о движении
центра масс получим два следующих дифференциальных урав-
уравнения плоского движения твердого тела:
где М—масса тела.
Третье дифференциальное уравнение плоского движения
твердого тела получим из теоремы об изменении кинетического
момента в относительном движении по отношению к центру
масс C8) в проекции на подвижную ось Cz:
Плоское движение твердого тела можно считать состоящим
из поступательного движения вместе с центром масс С и враще-
вращения вокруг подвижной оси Cz. Для случая вращения вокруг
оси кинетический момент относительно этой оси вычисляется
по формуле
где со — угловая скорость; JCz — момент инерции тела относи-
относительно оси Cz.
Так как JCz является величиной постоянной, то после
подстановки К(£1 в теорему об изменении' кинетического
момента в относительном движении получим
Если ввести угол поворота ф вокруг подвижной оси Cz,
то получим следующее дифференциальное уравнение:
Таким образом, для твердого тела, совершающего плоское
движение и, следовательно, имеющего три степени свободы,
соответственно получим следующие три дифференциальных
уравнения:
[t % {F[e\ C9)
11 Заказ 192 321
С помощью этих уравнений можно решать две основные
задачи: по заданному плоскому движению твердого тела находить
действующие на тело внешние силы и по заданным внешним силам
и начальным условиям определять его движение. При решении этих
задач должны быть заданы масса тела М и его момент инерции.
Теорема Резаля
Теореме об изменении кинетического момента системы
можно дать следующее кинематическое истолкование. Из
кинематики точки известно, что скорость точки можно рассмат-
рассматривать как скорость конца радиуса-вектора, следящего за
движущейся точкой, или как скорость изменения самого
радиуса-вектора, если он проведен в движущуюся точку из
какой-либо неподвижной точки (рис. 58). Траектория движущей-
движущейся точки при этом является годографом радиуса-вектора г,
а скорость точки направлена по касательной к этому годографу
и равна первой производной по времени от радиуса-вектора.
Аналогично этому, и производную по времени от кинетического
момента можно рассматривать как своеобразную скорость
конца этого вектора при движении по годографу кинетического
момента (рис. 59). Эта скорость не является обычной скоростью
точки, так как кинетический момент имеет иную размерность,
чем радиус-вектор. Это есть скорость изменения вектора
кинетического момента.
Таким образом, если обозначить через п скорость конца
кинетического момента, т. е. u = dK0/dt, то теорему об измене-
изменении кинетического момента системы B4) можно представить
в новой форме — в виде так называемой теоремы Резаля:
Теорему Резаля можно сформулировать так: при движении
механический системы скорость точки, совпадающей с концом
вектора кинетического момента при движении по годографу
этого вектора, равна по величине и параллельна по направлению
главному моменту всех внешних сил си-
системы. Точка, относительно которой вы-
вычисляются кинетический момент системы
и главный момент внешних сил, одна - У \ _ dK0
и та же. */ \и
Рис. 58
322
В форме теоремы Резаля может быть сформулирована
и теорема об изменении кинетического момента в относитель-
относительном движении по отношению к центру масс.
Теорема Резаля особенно удобна для приближенного иссле-
исследования движения быстровращающихся гироскопов.
Аналогично и теорему об изменении количества движения
для системы можно сформулировать в форме теоремы Резаля
для количества движения: при движении механической системы
скорость точки, совпадающей с концом вектора количества
движения при движении по его годографу, равна по величине
и параллельна по направлению главному вектору всех внешних
сил, действующих на систему.
§ 5. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Для рассмотрения теоремы об изменении кинетической
энергии необходимо ввести новое понятие «работа силы»
и рассмотреть некоторые простейшие способы ее вычисления.
Работа силы
Работа силы на каком-либо перемещении является одной
из основных характеристик, оценивающих действие силы на
этом перемещении. Рассмотрим элементарную работу, полную
работу и мощность.
_ Элементарная работа силы. Элементарная работа dA силы
F на элементарном (бесконечно малом) перемещении ds
определяется следующим образом (рис. 60):
dA = Fxds, D0)
где FT — проекция силы F на направление скорости точки
приложения силы или на направление элементарного перемеще-
перемещения, которое считается направленным по скорости точки.
Элементарная работа является скалярной величиной. Ее
знак определяется знаком проекции силы Fx, так как перемеще-
перемещение ds принимаем положительным. При FT>0 элементарная
работа dy*>0, а при Ft<0, наоборот, dA<0. Так как Ft = Fcosф,
где ф — угол между силой F и на-
направлением скорости точки v, то
выражение D0) можно представить
в виде
dЛ=Fcosфd.y. D1)
В этой формуле величины F и ds
положительны и знак dA определя-
определяется знаком совф. Если ф — острый
угол, то dA положительна; если
Ф тупой угол, то dA отрицательна. Рис. 60
11 * 323
Итак, элементарная работа силы равна произведению элемен-
элементарного перемещения на проекцию силы на это перемещение.
Отметим частные случаи, которые можно получить из D1):
ср = О°, dA=Fds;
ср = 90°, сЫ=0;
ср = 18О°, dA = -Fds.
Таким образом, если сила перпендикулярна элементарному
перемещению, то ее элементарная работа равна нулю. В ча-
частности, работа нормальной составляющей к скорости силы
Fn всегда равна нулю.
Приведем другие формулы для вычисления элементарной
работы силы. Из кинематики точки известно, что v = dr/dt;
i; = |iJ| = dy/d/. Следовательно, ds = \dr\ = vdt.
После этого, согласно D1), элементарная работа
d/l = .F|dr|coscp = .F-dr. D2)
Элементарная работа силы равна скалярному произведению
силы на дифференциал радиуса-вектора точки приложения силы.
Так как dr = vdt, то, согласно D2),
dA = F-dr = F-vdt = Fdt-v. D3)
Элементарная работа равна скалярному произведению элемен-
элементарного импульса силы на скорость точки.
Если силу F и радиус-вектор f разложить по осям
координат, то
F=Fxi+Fyj+Fzk; r = xi+yj+zk.
Из последней формулы имеем
dr = dxi + dyj+dzk.
Подставляя в D2) значения F и dr, получаем
dA = Fxdx+Fydy + F7dz. D4)
Формулу D4) называют обычно аналитическим выра-
выражением элементарной работы. Хотя выражение для
элементарной работы D4) по форме и напоминает полный
дифференциал функции координат точки, в действительности
в общем случае элементарная работа не является полным
дифференциалом. Элементарная работа является полным диф-
дифференциалом функции координат точки только для специально-
специального класса сил — так называемых стационарных потенциальных
сил, которые рассмотрены ниже.
Полная работа силы. Для определения полной работы силы
F на перемещении от точки Мо до точки М разобьем это
перемещение на п перемещений, каждое из которых в пределе
переходит в элементарное. Тогда работу А можно выразить
формулой
324
A= lim Y, d^t,
n—>■ со k~ 1
где ёД — работа на к-м элементарном перемещении, на
которые разбито полное перемещение.
Так как сумма в определении работы является интегральной
суммой определения криволинейного интеграла на участке
кривой М0М, то, используя для элементарной работы формулу
D0), получаем
м
А = j FTds. D5)
Используя другие выражения для элементарной работы,
полную работу силы можно представить также в виде
м м
А= \ F-dr= \ (Fxdx + Fydy + F,dz), D6)
или
t
A=\F-vdt, D7)
о
где момент времени ? = 0 соответствует точке Мо, а момент
времени t — точке М.
Формула D7) особенно удобная для вычисления работы
силы, когда сила известна как функция времени. Отметим,
что из определения элементарной и полной работы следует:
1) работа равнодействующей силы на каком-либо перемеще-
перемещении равна алгебраической сумме работ составляющих сил на
том же перемещении;
2) работа силы на полном перемещении равна сумме работ
этой же силы на составляющих перемещениях, на которые
любым образом разбито все перемещение.
Первое свойство, очевидно, достаточно доказать только
для элементарной работы равнодействующей силы.
Если сила R является равнодействующей силой системы
сил (Fl5 ..., Fk), приложенных к рассматриваемой точке, то
она выражается геометрической суммой этих сил. Тогда по
определению элементарной работы силы имеем
R-dr = (Fi+F2+ ... +Fk)-dr = F1-dr + F2-dr+ ... +Fk-dF.
Первое свойство доказано.
Второе из отмеченных свойств непосредственно следует из
возможности разбиения любым образом полного промежутка
интегрирования на составляющие, причем определенный инте-
интеграл по полному промежутку интегрирования равен сумме
интегралов по составляющим. Единицей полной работы, так
же как и элементарной, в СИ является джоуль: 1 Дж=1 Н-м.
Если проекция силы на направление скорости Fx является
величиной постоянной, то из D5) получим
325
где s — путь, пройденный точкой.
Так как Fz = Fcosq>, то последнюю формулу можно предста-
представить в виде
A=Fscosq>.
Следует отметить, что в этой формуле как F, так и ср могут
быть переменными, но .Fcoscp является постоянной величиной.
Это выполняется, если F и ср постоянны. Если дополнительно
угол ср = О или 180°, то тогда
причем эта формула применима как для прямолинейного, так
и длякриволинейного движения. Для этого необходимо, чтобы
сила F была постоянной по модулю и все время направленной
по касательной к траектории точки. В случае прямолинейной
траектории сила F, следовательно, должна быть все время
направлена по траектории в одну и ту же сторону.
Мощность. Мощность силы или работоспособность какого-
либо источника силы часто оценивают той работой, которую
он может совершить за единицу времени.
Итак, по определению, мощность
W=dA/dt.
Учитывая D3) для элементарной работы, мощность W мож-
можно представить в виде
W=F-v = Fvcosq). D8)
Таким образом, мощность равна скалярному произведению
силы на скорость точки. Из формулы D8) получаем, что чем
больше скорость, тем меньше сила при одной и той же
мощности. Следовательно, если от источника силы с заданной
мощностью нужно получить большую силу, то ее можно
получить только при малой скорости. Так, например, когда
железнодорожному локомотиву надо увеличить силу тяги, то
для этого надо уменьшить скорость поезда.
В СИ единицей мощности является ватт: 1 Вт = 1 Дж/с.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения
точки приложения силы. Следовательно, для вычисления рабо-
работы надо знать движение этой точки. Но в природе имеются
силы и примеры движения, для которых работу можно
вычислить сравнительно просто, зная начальное и конечное
положение точки.
Рассмотрим работу силы тяжести и линейной силы упругос-
упругости, изменяющейся по закону Гука, и вычисление работы
326
силы, приложенной к какой-либо
точке твердого тела в различных
случаях его движения. В качестве
простейших примеров движения
укажем случаи, когда работа равна
нулю. Так, работа любой силы
равна нулю, если она приложена
все время в неподвижной точке
или в точках, скорость которых ^/0 У
равна нулю, как, например, в слу- -х
чае, когда сила все время прило-
приложена в мгновенном центре скоро- Рис- 61
стей при плоском движении тела или все время в точках,
лежащих на мгновенной оси вращения, в случае вращения
тела вокруг неподвижной точки. Эти случаи возможны в за-
задачах, когда рассматривают работу силы трения в точке
соприкосновения двух тел при отсутствии скольжения од-
одного тела по другому. При этом работа силы трения
равна нулю.
Работа силы тяжести. Силу тяжести Р материальной точки
массой т вблизи поверхности Земли можно считать постоян-
постоянной, равной mg, направленной по вертикали вниз. Если взять
оси координат Oxyz, у которых ось Oz направлена по
вертикали вверх (рис. 61), то
Рх = 0; Ру = 0; Pz=-mg.
Вычисляя работу А силы Р на перемещении от точки Мо
до точки М1 по формуле D6), имеем
А= \ {
z M°
= -mg j dz = -mg(zl-z0) = mg(z0-z1),
или
A = mgh, D9)
где h = zo — Zy — высота опускания точки.
При подъеме точки высота h является отрицательной.
Следовательно, в общем случае работа силы тяжести
P=mg равна
A=±Ph. E0)
Работа силы тяжести равна произведению этой силы на
высоту опускания (работа положительна) или высоту подъема
(работа отрицательна). Из формулы E0) следует, что работа
силы тяжести не зависит от формы траектории между точками
Мо и Ми и если эти точки совпадают, то работа силы
тяжести равна нулю (случай замкнутого пути). Она равна
327
MoLx0ly0,io}
_>,M(x,y,zl
нулю, если точки Мо и Мг лежат
в одной и той же горизонтальной
плоскости.
Если имеем систему N матери-
материальных точек, то для каждой точки
с массой тк будем иметь работу
ее силы тяжести
Ak = mkg(zOk-zlk),
где zOk и zlk — начальная и конеч-
Рис. 62 ная координаты точки.
Работа всех сил тяжести системы материальных точек
N / N N \
l mkzOk- £ mkzlk) = Mg(z0C-zlc),
/t=i
fc=
так как
fc= 1 fc= 1
где M—масса системы точек; zoc и zlc — начальная и конечная
координаты центра масс системы точек. Вводя обозначение
для изменения высоты центра масс zoc — zlc= +hc, имеем
A=±Mghc. E0')
Из E0') следует, что для перемещений точек системы, при
которых hc = 0, работа сил тяжести Л=0.
Работа линейной силы упругости. Линейной силой упругости
(или линейной восстанавливающей силой) называют силу,
действующую по закону Гука (рис. 62):
F= — сг,
где г—расстояние от точки равновесия, где сила равна нулю,
до рассматриваемой точки М; с—постоянный коэффициент
жесткости.
Выберем начало координат в точке равновесия О, тогда
Fx=-cx; Fy=-cy; Fz=~cz.
После этого работу на перемещении от точки Мо до
точки Mt определим по формуле
А=
=-c$ (xdx +
так как
+ydy + zdz)=-c jrdr,
xdx+ydy + zdz = )
где r2 = x2+y2+z2.
328
Выполняя интегрирование, получаем
A=-C-(r\-rl). E1)
По этой формуле вычисляют работу линейной силы упругос-
упругости пружины при перемещении по любому пути из точки Мо,
в которой ее удлинение (начальная деформация) равно Х.0 = г0,
в точку Мь где деформация соответственно равна X = rv
В новых обозначениях E1) принимает вид
A=-~(V-V0) E1')
При перемещении из положения равновесия (пружина не
деформирована), где А,о = 0, в любое положение с деформацией
X. работа линейной силы упругости
Работа линейной силы упругости на перемещении из
состояния равновесия всегда отрицательна и равна половине
произведения коэффициента жесткости на квадрат деформации.
Из формулы E1) или E2) следует, что работа линейной силы
упругости не зависит от формы перемещения и работа по
любому замкнутому перемещению равна нулю. Она также
равна нулю, если точки Мо и М1 лежат на одной сфере,
описанной из точки равновесия.
Работа силы, приложенной к твердому телу. Получим
формулы для вычисления элементарной и полной работы
силы, приложенной в какой-либо точке твердого тела, которое
совершает то или иное движение. Сначала рассмотрим поступа-
поступательное и вращательное движения тела, а затем общий случай
движения твердого тела.
При поступательном движении твердого тела все
точки тела имеют одинаковые по модулю и отправлению
скорости (рис. 63). Следовательно, если сила F приложена
к точке Мк, то, так как vk = v,
dA=F-vkdt = F-vdt = F-dr, E3)
где г— радиус-вектор произвольной точки твердого тела.
На каком-либо перемещении полная работа
м
A=\F-dr, E4)
При вращении твердого тела вокруг неподвиж-
неподвижной оси скорость точки М можно вычислить по векторной
формуле Эйлера (рис. 64):
329
Рис. 63
тогда элементарную работу силы F определим по формуле
dA = F-vdt = F-((bxr)dt.
В смешанном векторном произведении, которое выражается
в виде определителя, можно переставлять сомножители в кру-
круговом порядке:
сЫ = ю-(г
так как _ _ _ _
rxF=M0{F) = M0
является моментом силы относительно точки О.
Учитывая, что M0cosa = Mz — момент силы относительно
оси вращения Oz и cod/ = dcp, окончательно получаем
dA = Mzdq>. E5)
Таким образом, элементарная работа силы, приложенной
к какой-либо точке тела, вращающегося вокруг неподвижной
оси, равна произведению момента силы относительно оси
вращения на дифференциал угла поворота тела.
Полная работа
A = \Mzd<s>. E6)
о
В частном случае, если момент силы относительно оси
вращения является постоянным, т. е. MZ(F) = const, работу
определяют по формуле
Л = МгФ, E7)
где ф — угол поворота тела, на котором вычисляют
работу силы.
330
Так как dЛ = со• M0(F)dt, то мощ- мо1П Аш
ность в случае вращения твердого *"" ^~ ~~~
тела вокруг неподвижной оси
W=d Ajd t = to ■ Mo (F) = со Mz (F). E8)
Мощность силы, приложенной
к вращающемуся вокруг неподвижной
оси твердому телу, равна произведе-
произведению угловой скорости тела на момент
силы относительно оси вращения ^У и'
тела. К1
Для свободного тела в об- рис 65
щем случае движения скорость _
точки М, в которой приложена сила F (рис. 65),
следовательно,
t = F-vodt+F-(<bxF)dt.
Учитывая, что
vodt = dro и F-(tox r) = to-(rxF) = to-
имеем _ _ _ _
dA = Fdro + u>- M0(F)dt = F-dr0 + (j}dtM
Но так как Mocos<x = Mm — момент силы относительно
мгновенной оси относительного вращения вокруг точки О,
tod? =dcp — элементарный угол поворота вокруг этой оси, то
окончательно получаем
dA=F-dro + Mm{F)dq>. E9)
Таким образом, элементарная работа силы, приложенной
в какой-либо точке твердого тела, в общем случае движения
складывается из элементарной работы на элементарном посту-
поступательном перемещении вместе с какой-либо точкой тела и на
элементарном вращательном перемещении вокруг этой точки.
В случае вращения твердого тела вокруг неподвижной
точки, выбрав эту точку за полюс О, по E9) для элементарной
работы имеем
dA =Mm(F)d4>. F0)
Поворот на угол dcp следует рассматривать в каждый
момент времени вокруг своей мгновенной оси вращения.
Формулу E9) применяют и для плоского движения твердого
тела, только в этом случае мгновенная ось относительного
вращения перпендикулярна плоскости движения и проходит
через произвольную точку тела. _ _ _
При действии на твердое тело системы сил (Fl5 F2, ..., FN)
для элементарной работы силы Fk, согласно полученным
формулам, имеем
331
Элементарная работа системы сил
i M0{Fk)]<adt=R-dr+L0'Mt =
= 1 J
к = 1
fc = 1
где
o= £
соответственно являются главным вектором и главными мо-
моментами системы сил относительно точки О и мгновенной
оси относительного вращения, проходящей через точку полюс.
Таким образом,
АА =R-dro + Lll>dq> = R-dFo + Lo<Mt, E9')
т. е. элементарная работа системы сил, приложенных к свобод-
свободному твердому телу в общем случае его движения, складывается
из элементарной работы главного вектора системы сил на
элементарном поступательном перемещении вместе с какой-ли-
какой-либо точкой тела и элементарной работы главного момента
этих сил относительно выбранной точки на элементарном
вращательном перемещении вокруг этой точки.
Работа внутренних сил твердого тела. Докажем, что для
твердого тела сумма работ внутренних сил равна нулю при
любом его перемещении. Очевидно, достаточно доказать, что
сумма элементарных работ всех внутренних сил равна нулю.
Рассмотрим две любые точки твердого тела: М1 и М2
(рис. 66). Так как внутренние силы есть силы взаимодействия
точек тела, то для этих двух точек
_ Введем единичный вектор Г°, направленный по силе
Я/>. Тогда
Сумма элементарных работ сил
FV и FV
dA </> +dA V = Ff ■ v^t +Ff ■ v2dt =
= F^dt{v1-T°-v2-T°).
Раскрывая скалярные произведе-
произведения векторов в скобках, получаем
Рис. 66
так как в кинематике твердого тела
доказано, что проекции скоростей
332
любых двух точек твердого тела на направление прямой
линии, соединяющей эти точки, равны друг другу при любом
движении твердого тела. В полученном выражении в скобках
стоит разность этих проекций скоростей двух точек, т. е.
величина, равная нулю.
Твердое тело можно считать состоящим из пар взаимодей-
взаимодействующих точек, для каждой из которых сумма элементарных
работ внутренних сил равна нулю.
Суммируя элементарные работы для всех пар точек,
получаем ^dA^ =0.
Как уже известно, главный вектор и главный момент всех
внутренних сил для любой механической системы равны нулю.
Сумма работ внутренних сил равна нулю только в случае
твердого тела, а для любой механической системы в общем
случае она не равна нулю.
В задачах в качестве механической системы часто рассматри-
рассматривают систему сочлененных твердых тел. При вычислении
работы всех сил, приложенных к такой системе тел, очевидно,
достаточно учесть работу внутренних сил в местах сочленения
твердых тел. Если твердые тела сочленяются с помощью
шарниров без трения, сумма работ таких двух внутренних
сил равна нулю, так как внутренние силы в точке сочленения,
как действие и противодействие, равны по модулю, но
противоположны по направлению, а перемещение у точек
приложения сил общее.
Таким образом, сочленение твердых тел с помощью
шарниров без трения при вычислении работы внутренних сил
не нарушает жесткости системы тел, так как сумма работ
внутренних сил в этих шарнирах равна нулю при любых
перемещениях системы сочлененных твердых тел. Систему
сочлененных с помощью таких шарниров твердых тел при
вычислении работы всех внутренних сил можно считать одним
твердым телом. Это характерно и для случая сочленения
системы твердых тел с помощью нерастяжимых нитей, канатов
и т. п. В этом случае работа внутренних сил натяжений также
равна нулю.
Кинетическая энергия
Кинетическая энергия точки и системы. Кинетической энерги-
энергией материальной точки называют половину произведения массы
точки на квадрат ее скорости, т. е. mv 2/2 или mv 2/2, так
как скалярный квадрат любого вектора равен квадрату модуля
этого вектора. Кинетическая энергия является скалярной поло-
положительной величиной. В СИ единицей кинетической энергии
является джоуль: 1 Дж=1 Н-м.
Кинетической энергией системы Т называют сумму кинети-
кинетических энергий всех точек механической системы, т. е.
333
Кинетическая энергия как точки, так и системы не зависит
от направления скоростей точек. Кинетическая энергия может
быть равна нулю для системы только при условии, если все
точки системы находятся в покое.
Вычисление кинетической энергии системы (теорема Кёнига).
Разложим движение механической системы на переносное
поступательное вместе с центром масс системы и относительное
по отношению к системе координат, движущейся поступательно
вместе с центром масс. Аналогично тому, как это производи-
производилось при выводе формулы для кинетического момента при
таком разложении абсолютного движения, для каждой точки
системы Мк (см. рис. 57) имеем
и соответственно
где vkr =dr/dt является относительной скоростью точки, так как
подвижная система координат движется поступательно (сб = О) и,
следовательно, полная производная по времени от гк совпадает
с локальной производной, равной относительной скорости точки.
Подставляя значение скорости vk в выражение кинетической
энергии абсолютного движения системы, т. е. ее движения
относительно системы координат Ox1y1z1, после очевидных
преобразований получаем
^^^»-cI»vv F2)
Но
так как
YamkXk =const = 0.
Учитывая, что Y<mk = M—масса системы, и обозначая
ТР второе слагаемое в F2), имеем
т^+ПК F3)
где
L ^2
Величина Т(р является кинетической энергией относительно-
относительного движения системы относительно системы координат, движу-
движущейся поступательно вместе с ее центром масс, или кинети-
кинетической энергией системы относительно центра масс.
334
Формула F3) выражает так называемую теорему Кёнига:
кинетическая энергия системы в абсолютном движении скла-
складывается из кинетической энергии центра масс, если в нем
сосредоточить всю массу системы, и кинетической энергии
системы относительно центра масс.
Кинетическая энергия твердого тела. При поступатель-
поступательном движении твердого тела кинетическая энер-
энергия
1^ уЕ»ик = Л/£ F4)
так как при поступательном движении твердого тела скорости
всех точек тела одинаковы, т. е. vk = v, где v— общая скорость
для всех точек тела.
Таким образом, кинетическая энергия твердого тела при
поступательном движении вычисляется так же, как и для
одной точки, у которой масса равна массе всего тела.
При вращении тела вокруг неподвижной оси
кинетическую энергию можно вычислить, если учесть, что
скорость какой-либо точки тела Мк можно выразить (см.
рис. 50) как
где hk — кратчайшее расстояние от точки Мк до оси вращения;
со — угловая скорость тела.
Тогда
или
Г=Лу, F5)
где Jz — момент инерции тела относительно оси вращения От..
Следовательно, кинетическая энергия тела при вращатель-
вращательном движении вокруг неподвижной оси равна половине произведе-
произведения момента инерции тела относительно оси вращения на
квадрат угловой скорости тела.
Из сравнения F4) и F5) следует, что эти формулы подобны,
только при вращательном движении аналогом массы является
момент инерции тела относительно оси вращения, а ско-
скорости— угловая скорость тела. Такая аналогия между по-
поступательным и вращательным движениями твердого тела
может наблюдаться во многих формулах, относящихся к этим
двум движениям.
При плоском движении твердого тела кинетиче-
кинетическую энергию можно вычислить по теореме Кёнига. Так как
в этом случае относительное движение относительно центра
масс (точнее, относительно системы координат, движущейся
335
поступательно вместе с центром масс) является вращением
вокруг центра масс с угловой скоростью со, то
Т(г)__г «2
где JCz — момент инерции тела относительно оси Cz, про-
проходящей через центр масс тела перпендикулярно плоскости
движения. Следовательно, на основании F3) для плоского
движения тела имеем
Таким образом, при плоском движении тела кинетическая
энергия складывается из кинетической энергии поступательного
движения тела вместе с центром масс и кинетической энергии
от вращения вокруг оси, проходящей через центр масс и пер-
перпендикулярной плоскости движения.
Учитывая, что vc = wCP (Р— мгновенный центр скоростей),
из F6), используя теорему Штейнера, получаем еще одну
формулу для кинетической энергии твердого тела при плоском
движении:
T=Mv-l + JCz^ = ^[JCz + M(CPy] = JP^, F6')
где JPz — момент инерции тела относительно оси Pz, прохо-
проходящей через мгновенный центр скоростей перпендикулярно
плоскости движения,
Если механическая система состоит из нескольких твердых
тел, то следует вычислить кинетическую энергию каждого
тела, а затем полученные кинетические энергии сложить. Так
определяется кинетическая энергия системы тел.
Теорема об изменении кинетической энергии точки
Для материальной точки массой т, движущейся под
действием силы F, основной закон динамики можно предста-
представить в виде
m-— = F.
d/
Умножая обе части этого соотношения скалярно на диффе-
дифференциал радиуса-вектора точки dr, имеем
mdv • — — F-dr
dr
или _
mvdv = F-dr,
где v = df/dt — скорость точки.
336
Учитывая, что dA = F-dr — элементарная работа, получаем
mv • dv = dA.
Так как
mv ■ dt; = d (mv2/2) = d (mv 2/2),
то окончательно
d(mv2!2) = dA. . F7)
Формула F7) выражает теорему об изменении кинетической
энергии для точки в дифференциальной форме: дифференциал
кинетической энергии точки равен элементарной работе силы,
действующей на точку.
Если обе части F7) разделить на dt и учесть, что
dA/dt= W—мощность, то теорему можно также выразить
в виде
At
F7')
Производная по времени от кинетической энергии точки
равна мощности, подводимой к этой точке.
Интегрируя обе части F7) от точки Мо до точки М (см.
рис. 60), получаем теорему об изменении кинетической энергии
точки в конечной форме:
"" -А, F8)
т. е. изменение кинетической энергии точки на каком-либо
перемещении равно работе силы, действующей на точку на
том же перемещении.
Пример 1. Тело, имеющее силу тяжести Р, падает без начальной скорости
на пружину с высоты h. Определить наибольшее обжатие пружины X, если
статическое сжатие ее под действием силы тяжести этого тела равно Х,ст.
Массой пружины пренебречь (рис. 67).
Решение. Применим к движению тела теорему об изменении кинетической
энергии точки
mv2j2 — mvQ 12 = А,
приняв за начальное положение тела начало его
падения с высоты h, а за конечное — момент мак-
максимального обжатия пружины. Изменение кинетичес-
кинетической энергии за этот промежуток времени равно
нулю, так как vo = 0 и при наибольшем сжатии
пружины и = 0. Следовательно, работа А=0. На тело
после его соприкосновения с пружиной действуют
две силы: сила тяжести тела Р и сила упругости
пружины. Сила Р совершает работу на перемещении
(h + X), сила упругости — на перемещении X. Следо-
Следовательно,
с
' 2 ~ Рис. 67
337
Но так как в положении статического
равновесия Р=сХ„, то с=Р/Хст. Поэтому
h + X—— Х2 = 0, или
2лст
Х2-2ХстХ-2Хст1г = 0.
Решая это квадратное уравнение, имеем
V
Знак плюс перед корнем выбран потому, что
Х>^ст. При й = 0 наибольшее обжатие пру-
пружины Х = 2Х„, т. е. при динамическом дейст-
действии груза на пружину ее наибольшее обжа-
обжатие в два раза больше статического обжатия.
Пример 2. Грузу с силой тяжести Р,
подвешенному в точке О, на пружине,
статическое удлинение которой под дейст-
действием силы тяжести Р равно ^ст, сообщена
начальная скорость п0 из положения Мо вертикально вниз (рис. 68).
Определить скорость груза в положении М, если груз, принимаемый за
точку, скользит по кольцу радиусом R без трения, OOi = R и естественная
длина пружины равна R.
Решение. Применим к движению груза теорему об изменении кинетической
энергии, приняв за начальное положение груза Мо и конечное — М. Получим
М
Рис. 68
A
g 2 g 2~ ■
Работу совершают сила тяжести груза и сила упругости пружины.
Нормальная реакция кольца N все время перпендикулярна перемещению,
и ее работа равна нулю. Следовательно,
В рассматриваемом случае
поэтому
~
По теореме об изменении кинетической энергии имеем
V =
Теорема об изменении кинетической энергии системы
Приложив к точкам системы все внешние и внутренние
силы, для каждой точки системы можно выразить теорему
об изменении кинетической энергии F7) в форме
{i) ) pdrk, k=\, 2, ..., N.
338
Суммируя правые и левые части этих соотношений по
всем точкам системы и вынося знак дифференциала за знак
суммы, получаем
или
dr=x<L4ie)+X<u£0, F9)
где кинетическая энергия системы
элементарная работа внешних и внутренних сил соответственно
будет
Формула F9) и выражает теорему об изменении кинетической
энергии системы в дифференциальной форме: дифференциал от
кинетической энергии системы равен сумме элементарных работ
всех внешних и внутренних сил, действующих на систему.
Если обе части F9) проинтегрировать между двумя поло-
положениями системы — начальным и конечным, в которых соот-
соответственно кинетическая энергия То и Т, то, изменяя порядок
суммирования и интегрирования, имеем
или
м,
где А[е) = [ dAke)— работа внешней силы для точки системы Мк
при ее перемещении из начального положения Мк0 в конечное
положение Мк; A[l)= [ dA[l)—соответственно работа внутрен-
к0
ней силы, действующей на точку Мк.
Формула G0) выражает теорему об изменении кинетической
энергии системы в конечной или интегральной форме: изменение
кинетической энергии системы при ее перемещении из одного
положения в другое равно сумме работ всех внешних и внутрен-
внутренних сил, действующих на систему, на соответствующих
перемещениях точек системы при том же перемещении системы.
Частный случай. Для абсолютно твердого тела сумма
работ всех внутренних сил системы равна нулю:
=о.
Следовательно, теорему об изменении кинетической энергии,
например, в конечной форме можно представить в виде
339
G1)
Изменение кинетической энергии твердого тела
при каком-либо перемещении равно сумме работ
всех внешних сил, действующих на тело, на
соответствующих перемещениях точек тела при
том же перемещении твердого тела.
Таким образом, в отличие от рассмотренных
других общих теорем динамики системы в те-
теорему об изменении кинетической энергии могут
входить внутренние силы. Они не входят в эту
теорему в случае абсолютно твердого тела.
Пример 1. В маятнике Максвелла однородный цилиндр
силой тяжести Р и радиусом R падает вниз без начальной скорости,
разматывая нить, намотанную на цилиндр в его среднем сечении.
Определить скорость оси цилиндра в зависимости от высоты ее опускания
h (рис. 69).
Решение. По теореме об изменении кинетической энергии цилиндра
как твердого тела имеем
Рис. 69
Так как в начальный момент времени цилиндр покоится, то Го = 0.
Цилиндр совершает плоское движение. Его кинетическая энергия в момент
достижения высоты h
_Pvl со2 PR1
g 2 Cz 2 ' Сг g 2 '
Поэтому
Pvl PR2 vl ЪР .
Внешними силами являются сила тяжести Р и сила натяжения нити
S. Сила S все время приложена в мгновенном центре скоростей цилиндра,
имеющем скорость равную нулю. Работа силы тоже равна нулю. Сле-
Следовательно,
Подставляя вычисленные величины в теорему об изменении кинетической
энергии, получаем
Рис. 70
Пример 2. Груз М, имеющий силу
тяжести Q, с помощью нити, перебро-
переброшенной через блок А, приводит в движе-
движение каток В, катящийся без скольжения
по горизонтальной плоскости (рис. 70).
Блок А и каток В—однородные диски
радиусом R. Их силы тяжести равны Р.
Коэффициент трения качения катка к.
Трением в осях катка и блока, а также
массой нити пренебречь.
Определить скорость груза М в за-
зависимости от его высоты опускания.
В начальный момент система покоится.
340
Решение. По теореме об изменении кинетической энергии системы,
состоящей из груза, нити, блока и катка, имеем
где 7 = 0, так как вначале система покоилась. Обозначив 7\, Т2 и Т3
кинетические энергии груза, блока и катка соответственно после опускания
груза на высоту Л, получаем
Qv2 (л2л Pvl <л1
1 g 2 , 2 о, 2 , з g 2 + Cl 2 *
Но
PR2 v _vc_v
Следовательно,
11 ■= ' J 4gv ' 2^
Так как работа внутренних сил натяжений нити равна нулю, то вообще
_ ' = 0 для всей системы твердых тел, соединенных нитью. Работа сил
тяжести блока и реакции оси Ro равны нулю, так как эти силы приложены
в неподвижно^ точке О. Сила тяжести катка Р перпендикулярна перемещению,
а силы Л' и FTp приложены в мгновенном центре скоростей и, следовательно,
работа их равна нулю. Работу производят сила Q и пара сил с моментом
Мк, препятствующим качению катка по плоскости. Имеем
где ф — угол поворота катка при опусканий груза М на h и Мк = const.
Так как
Mk = kN=kP = const, tp = h/R,
то
Подставляя значения полученных величин в теорему об изменении
кинетической энергии, получаем
R ) V Q+2P '
Заметим, что груз имеет не только силу тяжести Q, совершающую
работу, но он еще обладает массой Qjg и, следовательно, имеет кинетическую
энергию. И работа силы тяжести, и кинетическая энергия груза входят
в теорему об изменении кинетической энергии.
Теорема об изменении кинетической энергии
в относительном движении
Теорема об изменении кинетической энергии материальной
точки. Пусть точка М совершает переносное движение вместе
с подвижной системой координат Oxyz относительно основной
системы координат O1x1yiz1 и относительное движение
по отношению к системе координат Oxyz (рис. 71). Аб-
Абсолютным движением точки М является ее сложное движение
341
относительно системы координат
O1x1y1zl. Дифференциальное уравне-
уравнение относительного движения точки
М в векторной форме можно пред-
представить в виде
'0i 4. у> где Фе — — тае — сила инерции пере-
'/, носного движения точки; Фк =
= — 2т (и х vr)—сила инерции Кори-
Рис. 71 олиса.
Вывод теоремы об изменении кинетической энергии для
точки в относительном движении произведем так же, как
и вывод аналогичной теоремы в абсолютном движении,
умножив обе части G2) скалярно на вектор элементарного
относительного перемещения Зг, и преобразуем левую часть
полученного выражения. Значок ~ над дифференциалом ради-
радиуса-вектора г и других векторов указывает, что при диф-
дифференцировании надо брать изменение соответствующего век-
вектора относительно подвижной системы координат Oxyz. Таким
образом,
marar = mar = mavr— = mdvrvr =
В правую часть входят элементарные работы сил F, Фе
и Фк на относительном перемещении Зг. Оказывается, что
элементарная работа силы инерции Кориолиса на относитель-
относительном элементарном перемещении всегда равна нулю, так как
эта сила перпендикулярна относительной скорости vr и, следова-
следовательно, перпендикулярна относительному перемещению Зг =
= vrdt. В выражение силы инерции Кориолиса входит векторное
произведение шхр„ а оно всегда перпендикулярно каждому
из векторов сомножителей, в частности vr.
Итак, теорема об изменении кинетической энергии точки
в дифференциальной форме имеет вид
й(ть?/2) = Р-&+Фе-й'г. G3)
Теорема об изменении кинетической энергии в относительном
движении точки выражается так же, как и в абсолютном
движении, только к элементарной работе приложенной силы
добавляют элементарную работу силы инерции переносного
движения на относительном перемещении.
Теорема об изменении кинетической энергии системы. Для
системы рассмотрим наиболее важный случай, когда в качестве
переносного движения берется поступательное движение систе-
системы вместе с центром масс и, следовательно, кинетическую
энергию системы в абсолютном движении можно вычислить
на основании теоремы Кёнига F3): T=Mvcj2+T(c)■
342
Теорему об изменении кинетической энергии системы для
абсолютного движения (см. рис. 56) можно представить в виде
•dr=X^e)-dplk + XFi')-dpk. G4)
Так как
и, следовательно,
dpt = d
то, заменяя в G4) dpt и Г их значениями, получаем
;dpc. G5)
По свойству внутренних сил, £^1') = 0-
Если теорему об изменении кинетической энергии для
центра масс выразить так же, как и для точки, у которой
масса равна массе всей системы, и эта точка находится под
действием всех внешних сил, действующих на систему, то
Отбросив в G5) эти члены, получим следующую теорему
об изменении кинетической энергии системы в относительном
движении по отношению к системе координат, движущейся
поступательно вместе с центром масс:
dn° = Zne)-dr, + Xn0-drt. G6)
Сравнивая G6) с G4), видим, что теорема об изменении
кинетической энергии в относительном движении системы по
отношению к системе координат, движущейся поступательно
вместе с центром масс системы, формулируется так же,
как и для абсолютного движения системы.
§ 6. ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ
Для вычисления работы силы на каком-либо перемещении
в общем случае необходимо знать закон движения точки на этом
перемещении. Есть класс сил, для которых работа не зависит от
характера движения точки на рассматриваемом перемещении.
Эти силы называют потенциальными, и они имеют важное
значение в различных областях механики и физики.
Потенциальное силовое поле и силовая функция
Силовым полем называют часть пространства, в каждой
точке которого на материальную точку действует определенная
сила, зависящая от координат точки и времени. Силовое поле
343
М(х,у,г)
считают стационарным, если дей-
действующие силы не зависят от
времени. Если же силы зависят
от времени, то силовое поле яв-
является нестационарным.
Силовое поле называют потен-
потенциальным, если имеется силовая
функция U, зависящая от коор-
координат точки и времени для не-
Рис- 72 стационарного силового поля. Че-
Через силовую функцию U проекции силы на координатные
оси в каждой точке поля (рис. 72) определяются по формулам
Fx = dU/dx; Fy = dU/dy; Fz = dU/dz. G7)
Функцию U(x, у, z, t) называют силовой функцией.
Рассмотрим основные свойства силовой функции стационар-
стационарного силового поля. Из G7) следует, что силовая функция
определяется с точностью до постоянной, так как для проекций
силы на координатные оси требуются только частные про-
производные по координатам от этой функции и добавление
постоянной к функции U не влияет на значения Fx, F , Fz,
Элементарная работа
— dy + d-^dz
ду dz
т. е.
= dU.
G8)
Таким образом, элементарная работа силы в потенциальном
силовом поле равна полному дифференциалу от силовой функции.
Иногда это свойство силовой функции принимают за ее
определение; тогда G7) _получают из G8).
Полная работа силы F на участке от точки Мо до точки М
=U{x, у, z)-U(x0, y0, zo)=U-Uo,
G9)
A = U-U0,
где U0=U(x0, у0, z0), U=U(x, у, z)
Следовательно, полная работа силы на каком-либо переме-
перемещении точки равна разности значений силовой функции в конеч-
конечной и начальной точках перемещения и не зависит от формы
траектории, по которой оно совершается, если силовая функция
является однозначной.
Из G9) следует, что работа силы в потенциальном силовом
поле по любому замкнутому пути равна нулю, так как
значение силовой функции в начальной и конечной точках
перемещения одинаково, если силовая функция не принимает
других значений после возвращения в первоначальную точку.
344
Силовая функция может принимать другие значения после
возвращения в первоначальную точку в зависимости от
количества обходов, если область, ограниченная замкнутым
путем обхода, содержит в себе специальные особые точки
силовой функции.
Если применить понятие вектор-градиента от скалярной
функции U
1 ^dU , -dU , rdU
= i — +jT-+kir,
дх ду dz
где i, j, к—единичные векторы, направленные по осям
координат, то_ силу F можно выразить как градиент силовой
функции U: F= grad U
Определим условия, которые позволяют по силам силового
поля устанавливать, будет ли силовое поле потенциальным.
Если силовая функция U существует, то
dFx /ду = д2 U/(dy дх); dFy /дх = д2 U/(dx ду).
Так как
д2и1{дудх) = д2и/{дхду),
то
dFJdy = dFy/dx или BFxJdy-dFyfdx = O.
Аналогично,
dFz /ду - dFy /dz = 0; dFx /dz - dFz /дх = 0.
Таким образом, полученные условия имеют вид
SF,_dFy_0. dFx 3FZ_ 8Fy dFx_
oy dz dz ox ox cy
В векторном исчислении доказывается, что условия (80)
не только необходимы, но и достаточны для существования
силовой функции. Если использовать вектор вихря rotF от
вектора силы F
то условия (80) можно выразить более кратко:
rotF=0. (80')
Таким образом, для того чтобы силовое поле было
потенциальным, необходимо и достаточно, чтобы оно было
безвихревым.
Непотенциальными силами являются силы сопротивления,
зависящие от скорости, и силы трения. Силы сухого трения
не будут потенциальными, так как хотя сила трения постоянна
и не зависит от скорости, но направление силы трения от
скорости зависит.
345
Поверхности уровня. Силовые линии
Если рассматривать точки потенциального силового поля,
в которых силовая функция имеет одно и то же значение, например
U=C, то все эти точки располагаются на поверхности, которую
называют поверхностью равного уровня или поверхностью уровня.
Уравнение поверхности уровня имеет вид
U(x, у, z) = C.
Отметим некоторые свойства поверхностей уровня.
1. Работа силы равна нулю, если начальная и конечная точки
перемещения лежат на одной поверхности уровня. Действительно,
A = U~U0.
Если начальная и конечная точки лежат на одной поверх-
поверхности уровня, то U=U0 и, следовательно, А=0. Работа силы
на перемещении между точками Мо и М не зависит от
положения этих точек на своих поверхностях уровня. На
любом перемещении между двумя точками рассматриваемых
поверхностей уровня она одинакова (рис. 73).
2. Сила в потенциальном силовом поле всегда перпенди-
перпендикулярна поверхности уровня или, точнее, касательной плоскости
поверхности уровня. Действительно, пусть имеем поверхность
уровня U=C. Возьмем на ней две бесконечно близкие точки
М и Mt и вычислим элементарную работу на перемещении
dsi между этими точками:
dA=Fdslcos(F, ШД
С другой стороны,
dA = UiM^- и(М) = С-С=0.
_ А
Так как F и dsx не равны нулю, то cos(F, ММХ) = О и,
следовательно, угол между силой F и перемещением ММХ,
лежащим в касательной плоскости к поверхности уровня,
является прямым.
3. Сила в потенциальном силовом поле всегда направлена
в сторону возрастающих значений силовой функции. Для
доказательства этого свойства силы
возьмем точку М2 на перпендику-
перпендикуляре к поверхности уровня, восстав-
восставленном в точку М в направлении
возрастающих значений силовой фун-
/ Ч кции. Тогда элементарная работа на
/с/=с/О'Со " / элементарном перемещении ММ2,
равном ds2, вычисляется по формуле
Л
Fds2cos(F, MM2) = C2-C>0,
Рис. 73 так как С2>С.
346
M(x,y,z]
Рис. 74
д
Следовательно, cos(F, MM2)>0;
поэтому угол, равный 180°, _исключа-
ется и получается, что сила F направ-
направлена по ММ2 в сторону возраста-
возрастающих значений силовой функции.
4. Если все силовое поле разбить
поверхностями уровня на п равных
значений так, что для первой повер-
поверхности уровня С1 = С/п, для второй
C2 = 2Cjn и последней Cn = nCjn = C,
то там, где соседние поверхности _
уровня ближе друг к другу, модуль силы F больше, чем
в местах, где поверхности уровня дальше отстоят друг от
друга. Это свойство можно проверить, если заметить, что
работа между точками любых двух соседних поверхностей
в этом случае одна и та же. Следовательно, там, где
расстояние между поверхностями меньше, сила по числовому
значению больше, и наоборот.
Наряду с поверхностями уровня в силовом поле вводят
понятие силовой линии, т. е. такой линии, в каждой точке
которой сила направлена по касательной к этой линии (рис. 74).
Так как вектор dr с проекциями на оси dx, dy, dz всегда
направлен покасательной к кривой, то из условия параллель-
параллельности dr и F следует, что
dx/Fx = dy/Fy = dz/Fz. (81)
Эти дифференциальные уравнения относительно координат х,
у, z являются дифференциальными уравнениями силовой линии.
Потенциальная энергия
В случае потенциального силового поля наряду с силовой
функцией можно ввести другую функцию, характеризующую
запас энергии в данной точке поля,— потенциальную энергию
в этой точке (рис. 75), или потенциальную энергию материаль-
материальной точки в рассматриваемой точке
силового поля.
Потенциальной энергией П мате-
материальной точки в рассматриваемой
точке силового поля М называют
работу, которую совершают силы по-
поля, действующие на материальную
точку при перемещении ее из точки
М в начальную точку Мо, т. е.
Mix, и,г)
ияп
или
n=AMMa=U0-U=C0-U. (82)
Рис. 75
347
Постоянная Со одна и та же для всех точек поля,
зависящая от того, какая точка поля выбрана за начальную.
Очевидно, что потенциальную энергию можно ввести только
для потенциального силового поля, в котором работа не
зависит от формы перемещения между точками М и Мо.
Непотенциальное силовое поле не имеет потенциальной эне-
энергии, для него не существует и силовой функции.
На основании G7) и (82) имеем:
„_ди__дП_ F_dU__dn_ dU_ _дП
х~~дх~ ~дх' у~~ду~ ~ду' z~~dz~ ~dz'
Из G8), G9) и (82) соответственно получаем
dA=dU=-dIT; A = U-U0 = no-II.
Из приведенных формул следует, что П определяется
с точностью до произвольной постоянной, которая зависит от
выбора начальной точки, но эта произвольная постоянная не
влияет на вычисляемые через потенциальную энергию силы
и работу этих сил. Учитывая это, формулу (82) можно
выразить так:
П=-и+const, (82')
или
17=-U.
Потенциальную энергию в какой-либо точке поля с
точностью до произвольной постоянной можно определить
как значение силовой функции в этой же точке, взятое
со знаком минус. По существу, достаточно одной из функций
П или U.
Понятие потенциальной энергии было введено раньше, чем
силовая функция. Силовая функция более удобна, так как
некоторые формулы, содеражщие эту функцию, не имеют
знака минус.
Примеры вычисления силовых функций
Если вычислить силовую функцию, то на основании (82')
будет известна и потенциальная энергия. Вычислим силовые
функции однородного поля силы тяжести, силового поля
линейной силы упругости и силового поля силы притяжения,
действующей по закону Ньютона.
Силовая функция однородного поля силы тяжести. Если
ось Oz (рис. 76) направить вертикально вверх, то проекции
силы тяжести на координатные оси будут равны
Рх = 0; Ру = 0; Pz=-mg.
Вычисляя элементарную работу силы Р, получаем
348
Mix,у,I) l-C/
Так как элементарная работа явля-
является полным дифференциалом, то си-
силовое поле силы тяжести является потен-
потенциальным и силовая функция этого поля
определяется по формуле
U= -mgz + const (83)
По формуле (83) определяют сило- «j
вую функцию однородного поля силы
тяжести, т. е. поля, в котором сила Рис. 76
тяжести постоянна по модулю и направлению. Уравнение
поверхности уровня U=C или z = const, т.е. поверхностями
уровня являются горизонтальные плоскости.
Силовая функция линейной силы упругости. Для линейной
силы упругости (см. рис. 62) имеем:
F=-cf; Fx-—cx; Fy=—cy; Fz=-cz.
Следовательно
dA =Fxdx + Fydy + Fzdz= — c(xdx+ydy + zdz) =
= — crdr = d( — cr2j2),
так как xdx+ydy + zdz = rdr; r2 = x2+y2 + z2.
Силовую функцию линейной силы упругости определяют
по формуле
U= — — + const= —-(x2+>'2+z2) + const. (84)
Поверхностями уровня U = C являются сферы г = const.
Силовая функция силы притяжения по закону Ньютона.
Вычислим силовую функцию поля земного притяжения. Если
выбрать начало координат в центре Земли (рис. 77), то сила
притяжения точки земным шаром F=kjr2.
Сила F направлена к центру Земли; следовательно, вводя
единичный вектор г° по радиусу-вектору от этого центра
в рассматриваемую точку М, имеем
к г к -
= -; ь=--гг"=—--=—-г.
г г г1 г г
Проецируя силу F на координатные оси, получаем:
н ^ — Y' г ^ V г ^ 7
X ГЪ ' У ъУ> Z 3
Тогда
так как xdx+ydy + zdz = rdr; r2 = x2+y2+z2.
349
M(X,y,z)
Таким образом, силовая функция си-
силы притяжения, по закону Ньютона,
: +const. (85)
U—- + const = —-==
Постоянную к для, случая Земли
можно выразить так:
k = GmM=mgR2,
где М—масса Земли; R—радиус Земли;
Рие 77 g—ускорение силы тяжести на поверх-
поверхности Земли; т — масса точки; G—постоянная тяготения.
Если вместо Земли рассматривается другое небесное тело,
изменяется только постоянная к.
Силовая функция и потенциальная энергия системы
Для механической системы в потенциальном силовом поле
можно ввести силовую функцию как функцию, зависящую от
координат всех точек системы, т. е. от положения системы
в силовом поле. Если система состоит из N точек, то силовая
функция U(xu уY, z{, x2, у2, z2; ...; xN, yN, zN) зависит
в общем случае от координат всех точек. Проекции силы,
действующей на каждую точку системы,
dU
;
;
dU
oz
Сумма элементарных работ всех сил, действующих на
точки системы, определяется по формуле
ИЛИ
Y,dAk = dU. (87)
Таким образом, сумма элементарных работ сил поля,
действующих на механическую систему, равна полному диффе-
дифференциалу от силовой функции. Если вычислить сумму работ,
которую совершат силы поля, действующие на механическую
систему при перемещении системы из положения (Мо), в ко-
котором имеется силовая функция Uo, в положение (М), в ко-
котором есть силовая функция U, то
(М) (М)
ХЛ = 1 1 dAk= J dU=U-U0,
(Мо) (М„)
или
У А — U— U C881
350
Следовательно, сумма работ сил поля, действующих на
систему при перемещении системы из одного начального
положения в другое, равна разности значений силовой функции
в конечном и начальном положениях системы.
Потенциальной энергией системы П в рассматриваемом
положении (М) потенциального силового поля называют сумму
работ сил поля, действующих на систему, которую эти силы
совершают при перемещении системы из рассматриваемого
положения в начальное положение (Мг), т. е.
n=YJAk=U1-U= -£/+const, (89)
где U—значение силовой функции для системы сил в положении
(М)\ U1—значение силовой функции в начальном положении.
Из (86) —(89) следует:
_dU_ дП_ __dU_ дПш _dU_ дП.
Следовательно,
§7. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Закон сохранения механической энергии точки
Для материальной точки теорему об изменении кинетичес-
кинетической энергии можно выразить в следующем виде:
mv2 /2 — mvo/2 = A.
Если материальная точка движется в стационарном потен-
потенциальном силовом поле, то
А=П0-П.
-n, или mv2/2 + n=mv%/2 + no = h,
где h — постоянная величина.
Обозначая через Е полную механическую энергию точки,
состоящую из ее кинетической и потенциальной энергий, получаем
E=mv2/2 + n=h.
Таким образом, при движении точки в стационарном
потенциальном силовом поле ее полная механическая энергия
остается постоянной величиной, что является законом сохране-
сохранения механической энергии для точки, который и есть первый
интеграл дифференциальных уравнений движения точки.
Закон сохранения механической энергии системы
Теорему об изменении кинетической энергии для системы
можно представить в виде
351
Если система движется в стационарном потенциальном
силовом поле, то
где Я—потенциальная энергия внутренних и внешних сил,
действующих на систему. Следовательно,
Т-Тп = Пп-П или Г+Я=Г0 + Я0 = /г,
где h — постоянная величина.
Обозначая через Е полную механическую энергию
системы, имеем
Е=Т+П=к. (91)
Формула (91) выражает закон сохранения механической
энергии для системы: полная механическая энергия при движении
системы в стационарном потенциальном силовом поле внешних
и внутренних сил является постоянной величиной.
В случае абсолютно твердого тела работа всех внутренних
сил равна нулю и, следовательно, потенциальная энергия
внутренних сил является постоянной величиной, которую можно
считать равной нулю. Тогда в (91) за потенциальную энергию
следует принять только потенциальную энергию внешних сил,
которая вместе с кинетической энергией является постоянной
величиной. При движении изменяемой механической системы
сумма кинетической энергии системы и потенциальной энергии
внешних сил не является постоянной. Она становится постоян-
постоянной только вместе с потенциальной энергией внутренних сил.
Механические системы, для которых выполняется закон сохра-
сохранения механической энергии, называют консервативными.
При движении точки или системы в непотенциальном силовом
поле, встречающемся в действительности, когда непотенциаль-
непотенциальность связана с действием сил сопротивления, механическая
энергия изменяется, причем она всегда уменьшается на работу сил
сопротивления. Потерянная системой часть механической энергии
обычно переходит в тепловую энергию. Полная энергия всех видов
(механическая, тепловая, химическая и т. д.) не изменяется при
движении точки или системы в любом силовом поле. При этом
происходит только преобразование одного вида энергии в другой.
Рассмотрим теперь комплексный пример на основные виды
движения твердого тела: поступательное, вращение вокруг
неподвижной оси и плоское движение,
а также вычисление количества движе-
движения, кинетического момента и кинети-
кинетической энергии системы.
Пример. Груз А силой тяжести Р1 = 150Н
опускается вниз, приводя в движение с помощью
невесомой и нерастяжимой нити однородный
диск D силой тяжести Р = 900 Н (рис. 78). Нить
намотана на диск D и переброшена через блок
Рис. 78 В силой тяжести Р2=140Н. Нить по блоку не
352
скользит. Диск D имеет радиус R = 30 см. Он
движется по горизонтальному рельсу. Коэффици-
Коэффициент трения скольжения между диском и рельсом
/=0,4; коэффициент трения качения 8 = 0,15 см.
Блок считать однородным диском с радиусом г.
Трением на оси блока пренебречь. Система начина-
начинает движение из состояния покоя.
Определить уравнения движения диска Z),
давления блока В на ось, количество движения
и кинетическую энергию системы и кинетический
момент катка D относительно его точки соприкос-
соприкосновения с рельсом через 1 с после начала движения.
Решение. Составим уравнения движения отдельных тел под действием
приложенных к ним сил.
Като_к D совершает плоское движение. К нему приложены внешние для него сила
тяжести Р, натяжение нити S и реакция рельса, состоящая из нормальной реакции N,
силы трения Fn пары сил, препятствующей качению с моментом L (рис. 79). Силу
трения предполагаем направленной в положительную сторону оси Ох.
При составлении уравнений моменты сил и угловые характеристики тел
считаем положительными, если они направлены против часовой стрелки.
Для катка D имеем следующие уравнения движения:
Рис. 79
(a)
где Jc,—момент инерции катка относительно оси Cz, проходящей через
центр масс перпендикулярно плоскости диска. При сделанном выборе осей
координат yc = R = consi и, следовательно, ус=ус = 0.
Блок В вращается вокруг неподвижной оси Ctz, проходящей через его
центр масс С, (рис. 80). На блок действуют внешние силы тяжести Р2,
реакция оси с составляющими X,, К, и силы натяжения нитей, числовые
значения которых S и SP Дифференциальное уравнение вращения блока
вокруг неподвижной оси
где 7C|Z — момент инерции блока относительно оси вращения C^z.
Груз А совершает прямолинейное движение по оси Oxz (рис. 81). К нему
приложены внешние силы тяжести Р, и натяжения нити, числовое значение
которой 5\. Уравнение движения груза
is,
Рис. 80
Pi
i
i
zi
Рис. 81
12 Заказ 192
353
Pl-Sl. (в)
Имеем систему пяти уравнений (а), (б), (в), в которую входят девять
неизвестных: хс, ф, ф,, z, N, F, L, S, £,. Так как ус = 0, то его считаем
известным.
К системе пяти уравнений движения следует добавить уравнения связи
движений тел вследствие нерастяжимости нити и отсутствия ее скольжения
по катку D и блоку В.
Если переменные величины отсчитывать от начальных положений тел,
то для момента времени t для блока и груза (рис. 80, 81) получаем z=— rcpj
и после дифференцирований по времени
i=-r<j>j и z=-rqjj. (г)
Знак минус здесь и дальше ставится для того, чтобы при отрицательном
значении срг (вращение блока происходит по часовой стрелке) получить
положительное значение z (груз движется вниз в положительную сторону
оси Oxz).
Так как нить не скользит по катку D и блоку В, то скорости и касательные
ускорения точек Е катка и К блока (рис. 80, 81) одинаковы, т. е. хЕ = хк
и хЕ = хк. Но для точки К блока хк=— г<рг и хк=~гф,. Для точки Е катка,
приняв за полюс точку С, по формуле связи скоростей двух точек тела
при плоском движении для произвольного момента времени с учетом знаков
величин, имеем
xE = xc-Rq.
После дифференцирования по времени
Хе~хс~ Лф.
Таким образом, получаем дополнительное уравнение связи движений
л:с-Лф=-/-ф1. (д)
Кроме того, считаем, что при движении груза А вниз каток D катится по
рельсу. Условие его качения для момента пары, препятствующей качению,
выразится в форме
L = Lmax = 5tf.
В тех случаях, когда направление качения катка заранее не известно,
следует задаться направлением L и решить задачу. Если вращение катка
получится при этом против принятого направления для L, то предположение
о направлении L правильно. Если вращение катка получится по направлению
L, то следует изменить направление для L на обратное и заново решать
систему уравнений.
Качение катка может быть как со скольжением, так и без скольжения.
Поэтому сила трения остается неизвестной и по модулю, и по направлению.
Добавились два уравнения (г) и (д) и одно неизвестное L выразилось
через другое N. Для полной определенности задачи необходимо иметь еще
одно уравнение и, кроме того, следует еще установить характер движения
катка, т. е. будет ли он катиться со скольжением или без скольжения.
Предположим, что каток катится без скольжения, т. е. его мгновенный
центр скоростей находится в точке соприкосновения катка с рельсом. Тогда
скорость хс точки С, предполагаемой положительной, выражается через
угловую скорость ф зависимостью хс= —Лф, так как ф при этом отрицательно.
Эта зависимость справедлива для любого момента времени. Путем диф-
дифференцирования ее по времени получим дополнительное условие
хс=-Лф. (е)
После этого уравнение (д) примет вид
2Лф = гф,. (д')
354
Уравнение (е) справедливо только при отсутствии скольжения катка
в отличие от других уравнений, которые не зависят от характера движения катка.
Итак, имеем систему семи линейных уравнений с семью неизвестными,
считая, что L .исключено из уравнений благодаря зависимости L = 8jV.
Характер движения катка можно установить, если из полученной системы
уравнений определить силу трения F и сравнить ее числовое значение
с предельной силой трения Fai%=fN. Если окажется \F\<Fnav то система
уравнений не приводит к противоречию с динамическим условием отсутствия
скольжения. Предположение об отсутствии скольжения катка правильно. Если
же |F|>Fmax, то предположение об отсутствии скольжения неверно, так как
требует такой силы трения, которая возникнуть не может. В этом случае
каток катится со скольжением и условие (е) не выполняется. Но при качении
со скольжением | F \ = FmaK =fN, т. е. имеем дополнительное уравнение для
одной из неизвестных вместо отбрасываемого уравнения (е). Число неизвестных
оказывается равным числу неизвестных и задачу можно решить. Силу трения
Fmax следует подставить в уравнения вместо F с тем же знаком, с которым
получилась из уравнений сила трения F, не соответствующая по модулю.
Для определения силы трения F с учетом условия (е) целесообразно
свести систему семи линейных уравнений последовательным исключением
неизвестных к двум линейным уравнениям для F и, например, ф, чтобы
затем использовать правило Крамера.
Так как >>с = 0, то из второго уравнения системы (а) следует N=P
и потому Fm^=fP = 0,36 кН, L=bN=oP. Определим предварительно силы
натяжения S и £,, в общем случае не используя (е). Из уравнения (в)
с учетом (г) и (д) имеем
S1 = Pl-P±z = Pl+P±rq>l = P1-P±(Xc-Rq>). (ж)
При отсутствии скольжения, т. е. при выполнении условия (е), из (ж)
получаем
IP
5Х=РХ+—Щ- (ж')
g
Р г2
Из уравнения (б) с учетом (ж) и значения момента инерции Jc z=— —
1 g 2
определяем силу натяжения:
^^j (з)
Таким образом, при выполнении условия (е), имеем
S=Pl+^BP1 + P2). (з')
о
Определим силу трения, предположив отсутствие скольжения, т. е. когда
для сил натяжения выполняются условия (ж') и (з'). Подставляя эти значения
5, и S в оставшиеся два уравнения системы (а) с учетом (е), после несложных
преобразований получаем следующую систему двух линейных уравнений:
FP
Р R2
так как момент инерции катка JCz = . Эту систему уравнений кратко
g 2
можно выразить в форме
12* 355
,R 1340 0,3 (P \R 890 0,8
"где ei=(/.+2/.1+pJr-1_ = 4U; e2 = ^ + 2Pi+/.2j7=^- = 27,3;
5
Из системы уравнений (и) определяем силу трения:
Г1
а2
1
-1
-(а,+а2)
= 27,5 Н. (к)
Сила трения из уравнений получается со знаком плюс; следовательно,
предположение о ее направлении в положительную сторону оси Ох оказалось
правильным.
Сравнивая числовое значение полученной силы трения F с предельной
силой трения Fmax =fP = 0,36 кН = 360 Н, имеем \F\<FtMx. Предположение об
отсутствии скольжения не привело к противоречию. Каток действительно
катится без скольжения и хс и ф удовлетворяют уравнению (е).
Подставляя значение полученной силы трения из (к) в первое уравнение
(и), получаем
-(pi+F) S 177,5-9,8 ,
ф = —= = —4,34 с
P + 2Pt + P2 R 1340-0,3
t2
Так как ф = сопз1, то ф = ф—ьС,? + С2. В начальный момент /=0, ф = 0
и ф = 0. Поэтому С, = С2 = 0.
Итак,
Ф = ф — = — 2,17f2 рад.
Из (е) находим
xc=-R<i>= 1,30 м/с2.
t2
Так как хс = const, то хс = хс—ЬС3? + С4. Из начальных условий f = 0,
хс = 0, хс = 0 получаем С3 = С4 = 0. Следовательно,
xc = xc — = 0,65t2 м.
Получены следующие уравнения движения катка D:
xc = 0,65t2 м; ус = Л = 0,Зм; ф=-2,17?2 рад. (л)
По известным значениям хс и ф, используя (д'), (г) и условие (е), получаем
z= —гф] = —2Лф = 2хс; z = 2xc = 2xct. (м)
Реакцию оси блока определяем из условия, что центр масс блока
С, неподвижен, и потому на основании теоремы о движении центра
масс суммы проекций внешних для блока сил на. оси координат Ctx
и С1у равны нулю. Имеем
у с O-V Р С О
ИЛИ
Определяем силы натяжения нитей S и 5, из (ж') и (з'):
356
2P, 2P.+P,
5, = Р,+—!-Лф=111 Н; S=P,+ l 2Лф = 93Н.
S g
После этого для силы реакции оси блока имеем
JTj=93H; У,=251Н; Л, = Jx\ + У2 = 145 Н.
Давление блока на ось по числовой величине равно реакции оси блока Rt.
Количество движения, кинетическую энергию и кинетический момент
определим из общих теорем динамики.
По теореме об изменении количества движения системы,
Система не движется в направлении оси Oz, поэтому Qz=0-
Внешними силами системы являются силы тяжести Р, Р1, Р2, составляющие
реакции оси блока Хх, Yl и силы реакции рельса N, F, и пара сил
с моментом L. Все силы натяжения нити для всей системы являются
внутренними силами. Для проекций внешних сил на оси координат имеем
i =27,5 + 93 = 120,5 Н;
? 11Р2 = 9004 251 — 1190= —39 Н.
Таким образом,
^=120,5;^=-39,
d? d?
или
dgx=120,5df; dg,,= -39df.
Интегрируя эти выражения в пределах от ?=0 до С= 1 с и учитывая, что
при ? = 0, Qx = Qy = d, получаем
Qx= 120,5 Не; е,= -39Нс; Q= jQl + Q} + Ql= 126,5 Н с.
По теореме об изменении кинетической энергии системы для промежутка
времени от f=0 до t=\ с имеем
Здесь Го = 0. Кроме того, £л[0 = 0, так как силы натяжения нитей дают
работу, равную нулю.
Работа внешних сил системы за рассматриваемый промежуток времени
YJAie) = Pxz + F(xc + Ris?) + Lfp= 150 -1,3-1,35-2,2* 192 Н-м,
так как
z = xcf2=l,3; ф=-2,2; L = 5P = 0,0015 -900= 1,35 Н м
и путь точки соприкосновения катка D с рельсом хс + Лср = 0 при качении
катка без скольжения. Другие внешние силы Р, N, P2, Xx, Y1 не совершают
работы, так как перпендикулярны перемещениям или приложены в неподвиж-
неподвижных точках.
Таким образом,
По теореме об изменении кинетического момента относительно неподвиж-
неподвижной оси Oz для катка Z),
Внешними силами катка D являются силы Р, S, N, F и пара сил
с моментом L. Имеем
X MOz (FР) = - S ■ 2R- Рхс + Nxc + L = -93 ■ 0,6 + 1,35 = - 54,4 Н ■ м.
357
Так как N=P, то
После этого
-Рхс-
d*Oz =
\-Nxc = Q,
■ — 54,4dr.
Интегрируя это соотношение от начального момента времени до момента,
соответствующего /=1с, получаем
£Oz=-54,4Hmc.
Проверим полученные значения количества движения, кинетической энергии
и кинетического момента, вычислив^ их по формулам.
Количество движения системы Q состоит из векторной суммы количеств
движения отдельных тел:
Q = Qa + Qb + Qd- _ (н)
Так как центр масс блока В неподвижен, то QB = 0. Для катка D
- Р. Р
Qd=-vc; Gdx=-*c; Gd>.=0-
g s
Груз А движется в положительную сторону оси Olz (вниз); следовательно,
g
Проецируя (н) на оси координат, причем Ох направлена по горизонтали
вправо, а Оу — по вертикали вверх и используя (м), получаем
Qx = QDX = -xc = ~xct; Qy=-QAz= l-z= l-2xct.
g g g g
При t=\ с
gx = 900-1,3/9,8 = 119; Qy= - 150 -2,6/9,8= -40;
Кинетическая энергия системы Т состоит из кинетических энергий отдель-
отдельных тел:
T=7D+TB+TA.
Каток совершает плоское движение. Его кинетическая энергия при ? = 1 с
Р , ф2 3 Р . 3 Р ., 3-900 КЗ2
TD = -xl + JCz\ = ~ -*c = - ~(xctJ= «117 Н-м.
g 2 4 g 4 gv 4-9,8
Блок вращается вокруг неподвижной оси; следовательно, при г=1с
JCl!T^ (piy(xcf) ~24Н м.
Груз движется поступательно, а потому при г = 1 с
Л t=P± PM!=2^( J = 300^ж
* 2 ^ 2 g l с ' 9,8
Кинетическая энергия системы через 1 с после начала движения системы
T=TD+TB+TA= 117 + 24 + 52^193 Н-м.
Кинетический момент катка D относительно неподвижной точки О рельса
вычисляем по формуле
К0 = рсхМ
где
358
Для проекции Ко на ось Oz, учитывая, что кинетический момент в направлении
часовой стрелки следует считать отрицательным, имеем
Так как плечо вектора Mvc, приложенного в точке С относительно точки
О, не зависит от ее выбора на рельсе, то и KOz не зависит от положения
точки О. Точкой О может быть точка соприкосновения катка с рельсом.
В рассматриваемом случае КОх = КОу = 0, поэтому при t=l с
Р R2
o = \KOz\ =
ф
PR PR
= — |-2хс+Лф| = — |-3*с| =
2g 2g
2g
3PR .. 3-900 0,3 1.3
-^-Х^= 2-9,8 ~
Полученные двумя способами величины Q, Т и Ко почти совпадают.
Небольшие расхождения связаны с округлениями величин при вычислениях.
ГЛАВА 5
ПРИНЦИП ДАЛАМБЕРА. ДИНАМИЧЕСКИЕ РЕАКЦИИ
ПРИ ВРАЩЕНИИ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
§ 1. ПРИНЦИП ДАЛАМБЕРА
Принцип Даламбера для материальной точки
Законы Ньютона содержат в себе все необходимое для
рассмотрения движения любых механических систем. Но перво-
первоначально они применялись только для рассмотрения движения
свободной материальной точки и свободного твердого тела
до тех пор, пока не была дополнительно сформулирована
аксиома связей. Для рассмотрения движения несвободных
систем Даламбер предложил специальный принцип, получи-
получивший название принципа Даламбера. Этот принцип был
сформулирован в терминах «потерянных» движений.
В настоящее время, когда считается справедливой аксиома
связей, уравнения движения несвободной материальной точки
являются такими же, как и для свободной, только к действую-
действующим на точку активным или заданным силам добавляют
силы реакций связей.
Современное выражение принципа Даламбера не отличается
по содержанию от уравнений движения материальной точки,
но для многих задач оно более удобно. Принцип Даламбера
для свободной материальной точки эквивалентен основному
закону динамики. Для несвободной точки он эквивалентен
основному закону вместе с аксиомой связей.
Уравнение движения материальной точки массой m относи-
относительно инерциальной системы отсчета под действием приложен-
приложенных активных сил и реакций связей имеет вид
359
Тело
-R
Рис. 82
ma = F+R. A)
усбязь Сила F является _ равнодейству-
равнодействующей активных сил, R — равнодейст-
F вующей реакций связей, а — ускоре-
ускорением точки относительно инерциаль-
ной системы отсчета. Назовем силой
инерции материальной точки произ-
произведение массы точки на вектор уско-
ускорения^ взятое с обратным знаком,
т.е. Ф=—та. Если использовать по-
понятие силы инерции точки и перенести
все слагаемые A) в правую часть
уравнения, то получим
F-{-R + Ф = 0. B)
Так как силы F, R и Ф (рис. 82) образуют систему
сходящихся сил и удовлетворяют условию B), то они являются
системой сил, эквивалентной нулю, т. е.
{F, R, Ф}ооО. C)
Уравнение B) или эквивалентное ему условие C) выражает
принцип Даламбера для точки: при движении материальной
точки активные силы и реакции связей вместе с силой инерции
точки образуют равновесную систему сил.
Из B) в проекциях на координатные оси получаем три
условия равновесия сил:
Fx + Rx + <bx = 0; Fy + Ry + <t>y = 0; Fz + Rz+<!>Z = O. D)
Ускорение точки относительно инерциальной системы от-
отсчета можно разложить на составляющие по осям декартовой
системы координат, а также на касательное и нормальное
ускорения и на переносное, относительное ускорения и ускоре-
ускорение Кориолиса, если движение точки считать сложным, состоя-
состоящим из переносного и относительного. Соответственно силу
инерции Ф можно разложить на такие же составляющие:
Ф = Ф/+Ф/+Ф2£=Ф1 + Ф„ = Фе+Ф1 + Фк. E)
Касательная сила инерции
ФТ=-таг,
где ах—касательное ускорение; нормальная, или центробежная,
сила инерции
Ф„=-та„,
где ап — нормальное ускорение. Переносная и относительная
силы инерции, а также сила инерции Кориолиса через ускорения
выражаются соответственно так:
$е = — тае; Фг = — та/, Фк = — так.
360
Аналогично выражаются через проекции ускорения на
прямоугольные оси координат проекции силы инерции Фх,
Фу, Ф2. На силы инерции существует несколько точек зрения.
Согласно первой точке зрения, сила инерции условно приклады-
прикладывается к точке, чтобы уравнению движения A) придать более
удобную форму условия равновесия B). Поэтому силу инерции
Ф называют фиктивной, даламберовой, условной
и т. д. С этой точки зрения силы инерции в принципе
Даламбера не являются настоящими, реальными силами и от-
отличаются не только от обычных сил, создаваемых действием
тел, но даже и от сил инерции в относительном движении.
Согласно другой, наиболее распространенной точке зрения,
сила инерции считается приложенной по частям к «ускоряю-
«ускоряющим» телам. Для обоснования приводят следующие рассужде-
рассуждения. Материальная точка движется с ускорением а потому,
что на нее действуют какие-то тела с силой, равной (F+R)
(см. рис. 83). По закону о равенстве сил действия и проти-
противодействия материальная точка должна оказывать противодей-
противодействие этим телам с такой же по модулю, но противоположной
по направлению силой _— (F+R), которая, согласно B), равна
силе инерции Ф, т.е. Ф=— (F+R).
Это соотношение дает основание считать, что сила инерции
приложена к «ускоряющим» телам, т. е. телам, которые
сообщают точке ускорение.
Действительно, сила инерции Ф является векторной суммой
сил действия точки на «ускоряющие» ее тела. Она служит
суммарной оценкой этого действия. Однако при рассмотрении
относительного движения^точки вводятся переносная Фе и кори-
олисова силы инерции Фк. Для подвижного наблюдателя их
следует считать приложенными к движущейся материальной
точке, но для них невозможно указать материальные тела,
действием которых на точку можно объяснить эти силы.
Переносная и кориолисова силы инерции являются частью
полной силы инерции Ф. Если для части силы невозможно
указать тела, которые ее создают, то это же справедливо
и для всей силы инерции Ф. Однако в рассматриваемом
случае указывается материальный объект, который действует
с силой инерции Ф на ускоряющие тела. Этим объектом
является движущаяся с ускорением материальная точка.
Согласно третьей точке зрения, силу инерции считают
приложенной к движущейся материальной точке, по крайней
мере это справедливо для наблюдателя, который находится
в собственной системе отсчета этой точки. Собственной
системой отсчета материальной точки называют такую си-
систему отсчета, относительно которой точка находится в покое,
т. е. относительно которой ее относительные скорость и ускоре-
ускорение равны нулю. В этой системе отсчета справедливо условие
относительного равновесия для сил
361
где Ф*е= —та*е— переносная сила инерции в собственной систе-
системе отсчета. Но в собственной системе отсчета v*r = Q, а*г = 0
и когяюлисово ускорение a* = 0, а тогда а = <?е и, следовательно,
Ф = Ф*е.
Таким образом, принцип Даламбера есть условие относи-
относительного равновесия для сил в собственной системе отсчета.
Относительно собственного наблюдателя сила инерции Ф* при-
приложена к движущейся точке, а следовательно, к ней приложена
и совпадающая с_ перенорной силой инерции в собственной
системе отсчета Ф*е сила инерции абсолютного движения Ф.
Силу Ф в этом случае считают дополнительным действием
на точку поля Вселенной. Такая точка зрения на силы инерции
требует изменения понятия приложенной силы и изменения
некоторых основных аксиом динамики (см. Приложение).
Принцип Даламбера для системы материальных точек
Рассмотрим систему N материальных точек. К каждой
точке системы в общем случае приложены равнодействующая
активных сил и равнодействующая реакций связей. Применяя
принцип Даламбера к каждой точке системы, получим
Рк + Кк + Фк = 0, k=\,2,...,N, F)
где Фк=—ткак— сила инерции для к-й точки (рис.83).
Условия F) можно представить в эквивалентной форме:
{Fk, Rk, Фк}^>0, k=l,2,...,N; G)
N векторных условий F) или G) выражают принцип
Даламбера для системы: при движении механической системы
активная сила и реакция связей вместе с силой инерции
составляют равновесную систему сил для каждой точки системы.
Принцип Даламбера для системы по своему содержанию
не отличается от уравнений движения точек системы.
Представим равнодействующую силу, приложенную к каж-
каждой точке системы, разложенной не на активную силу и ре-
реакцию связей, а на внутреннюю и внешнюю силы по
отношению ко всей системе:
Тогда принцип Даламбера для
системы можно представить в дру-
другой форме:
к = 0, к=\, 2, ..., #.(8)
Из принципа Даламбера для
системы в форме F) или (8) можно
Рис. 83 получить следствия в виде шести
362
условии равновесия для сил, действующих на точки системы,
и сил инерции.
Если просуммировать левые части F) по всем точкам
системы, то
JV JV JV
Е F*+Е **+Е ф*=°- (9)
Умножая векторно каждое из соотношений F) слева на
радиус-вектор точки гк и опять суммируя по точкам системы,
получаем
JV JV JV
У (FkxFk)+ E fox^*)+ У (гкхФк) = 0
к = 1 Л == 1
ИЛИ
I M0(Fk)+ £ Мо(^)+ Е Мо
k = l k=l Л =1
A0)
Следствие из принципа Даламбера A0) справедливо как
для неподвижной в рассматриваемой инерциальной системе
отсчета точки, так и движущейся, так как начало радиусов-
векторов гк можно выбирать в любой точке.
Условия (9) и A0), если выразить их через проекции на
координатные оси, дадут шесть условий равновесия, аналогич-
аналогичных условиям равновесия сил, приложенных к твердому телу,
в статике.
Если использовать принцип Даламбера в форме (8), то
получим следствия в форме
Е Пе)+ £ Ф* = 0; A1)
k=l k=l
X M0(FP)+ £ Мо(Фк) = 0, A2)
k=l k=l
так как внутренние силы системы по свойству этих сил
удовлетворяют условиям
£ £о()
к=\ к=1
Если спроецировать A1) и A2) на координатные оси, то
опять получим шесть условий равновесия для сил. Особен-
Особенностью условий равновесия сил в форме A1) и A2) является
отсутствие в них внутренних сил, что делает их особенно
удобными при решении многих задач динамики системы.
В действительности условие A1) представляет собой теорему
об изменении количества движения, а A2) — теорему об
363
изменении кинетического момента для системы, если их
представить в форме
Z Де)-§ = 0; A1')
I Mo(Fie))-d-£ = 0. A2')
Сравнивая A1) с AГ) и A2) с A2'), получаем формулы
для вычисления главных вектора и момента сил инерции
системы через количество движения и кинетический момент:
1с=1
В A2') точка О неподвижна в выбранной инерциальной
системе отсчета. Следовательно, по формуле A4) можно
вычислить главный момент сил инерции только для неподвиж-
неподвижной точки О. Для движущейся точки вместо A2') следует
использовать ранее доказанную теорему об изменении кинети-
кинетического момента для движущейся точки А:
N м
u^xvA = 0. A2")
После замены в A2) точки О на Л и сравнения с A2")
получим формулу для вычисления главного момента сил
инерции относительно движущейся точки А:
y A4')
В формуле A4') vA и vc — соответственно скорости точки
А и центра масс С относительно рассматриваемой инерци-
инерциальной системы отсчета; М—масса системы.
Так как Q = Mvc, то для главного вектора сил инерции
получаем формулу
ф= I Ф*=-§=-Мйс. A5)
Здесь М — масса системы, vc и ас—скорость и ускорение
центра масс соответственно.
В тех случаях движения твердого тела, когда силы инерции
приводятся к равнодействующей, последняя совпадает по модулю
и направлению с главным вектором этих сил. Но равнодейству-
равнодействующая сил инерции необязательно проходит через центр масс тела,
хотя ее модуль и направление всегда определяются по формуле A5).
364
Проецируя векторы из A4) на ось Oz, получаем
£м2(Фк)=-^. A4")
к=1 а!
Аналогичные формулы можно получить и для других
координатных осей. В случае вращения твердого тела вокруг
неподвижной оси Oz, как известно,
Kz = Jza.
Подставляя это значение Kz в A4"), имеем
^Mz(<s>k)=--=-jz-=-jzz,
или
Lf>= £ М2(Ф,)=-Ле- A6)
По формуле A6) вычисляют момент сил инерции относительно
оси вращения при вращательном движении твердого тела вокруг
неподвижной оси. Этот момент создают касательные силы
инерции, так как нормальные силы инерции для каждой точки тела
пересекают ось вращения и, следовательно, момента не создают.
Из принципа Даламбера для системы можно получить
еще одно следствие — теорему об изменении кинетической
энергии. Для этого умножаем (8) скалярно на drk и суммируем
полученные соотношения по всем точкам. Получаем
£ Fie)-drk+ £ F[<>-dr-k+ £ Фк-йгк = 0,
k=l k=l k=l
или в других обозначениях
JV JV JV
Сравнивая A7) с теоремой об изменении кинетической
энергии системы в дифференциальной форме
£ cUFM+ X dA -dT=0,
получаем выражение для суммы элементарных работ сил
инерции через кинетическую энергию системы Т.
£Фк-с1гк= £ dA^ = -dT. A8)
Интегрируя A8), получаем
1\=-(Т-Т0). A9)
1с=1
■ 365
Таким образом, сумма работ сил инерции на каком-либо
перемещении системы равна изменению кинетической энергии
на этом перемещении, взятому с обратным знаком.
Методы решения задач динамики с использованием сил
инерции называют кинетостатическими.
Силы инерции твердого тела в частных случаях его движения
При поступательном движении. Если твердое тело движется
поступательно, то ускорения его точек одинаковы. Силы инерции
этих точек составляют систему параллельных сил, направленных
в одну сторону. Такая система сил приводится к равнодейству-
равнодействующей силе Ф", которая равна главному вектору, т. е.
ф* = ф = - Мас.
Линия действия равнодействующей силы инерции в этом
случае проходит через центр масс, так как главный момент
сил инерции точек тела относительно центра масс
Г<СФ)= £ Мс(Фк) = 0.
Действительно, согласно следствию из принципа Даламбера
A2) для центра масс, имеем
При поступательном движении тело не совершает вращения
вокруг центра масс и поэтому £ Mc(Fjf >) = (). Следовательно,
и Дф> = 0. " = 1
При вращении вокруг неподвижной оси. Если выбрать за
центр приведения сил инерции точку О на оси вращения Oz,
то в этой точке получим главный вектор и главный момент
сил инерции:
Ф=-Мас; D^=-dKojdt.
Если центр масс находится на оси вращения, то Ф = 0.
Проекции главного момента сил инерции на неподвижные
оси координат в общем случае можно вычислить по формулам
Дф) = - dKJdt*0; Lf> = - dKjdt ф0; Lf> = - dKJdt = - Jze.
Моменты сил инерции V^ и Lf} вычисляются в следующем
параграфе. Они равны нулю, если ось Oz является главной
осью инерции для точки О.
При плоском движении. Выбрав за центр приведения сил
инерции центр масс, получим в этой точке главный вектор
и главный момент сил инерции. Для главного вектора сил
инерции имеем
366
Ф = - Мас.
Для главного момента сил инерции относительно центра
масс С, который является движущейся точкой при плоском
движении тела, получим формулы, аналогичные формуле A4),
выведенной для неподвижной точки О.
Согласно следствию из принципа Даламбера A2), главный
момент сил инерции относительно центра масс удовлетворяет
условию
С другой стороны, из теорем об изменении кинетического
момента относительно центра масс для абсолютного и относи-
относительного движений имеем
dKc/dt = X Mc(F[e>); dKP/dt= X MC{F¥).
k=l k= 1
Из этих соотношений следует
Lp = -dKJdt = - dK^/dt.
Проекции L^, L(cy на оси координат с началом в центре
масс и движущиеся поступательно вместе с центром масс
соответственно
где ось Cz перпендикулярна плоскости, параллельно которой
совершают движение точки тела.
Моменты сил инерции Ь$* и Lj^ вычисляются так же,
как и при вращении тела вокруг неподвижной оси. Они равны
нулю, если ось Cz является главной осью инерции для точки
С. Это, в частности выполняется, если тело имеет плоскость
симметрии, проходящую через центр масс и параллельную
плоскости движения тела.
Пример 1. Груз А силой тяжести Pt опускается вниз по грани призмы
с силой тяжести Р, приводя в движение груз В, имеющий силу тяжести
Р2, с помощью нити, перекинутой через невесомый блок С.
Считая пол, грани призмы и грузов гладкими, определить давление
призмы на пол и выступ, препятствующий перемещению призмы, а также
силу натяжения нити. Углы наклона боковых граней призмы аи Р (рис. 84, а, б).
Решение. Применим к системе, состоящей из призмы, грузов, нити
и блока, следствия из принципа Даламбера, составив условия равновесия
внешних сил и сил инерции системы.
Предположим, что ускорение груза А направлено вниз и равно а. Для
абсолютных значений сил инерции грузов А к В соответственно имеем
Р Р
ф =_Lfl; ф ,= —а.
g g
Направления сил инерции Ф[ и Ф2 указаны на рисунке.
367
*Xfc*f
Рис. 84
Составляя условия_ равновесия внешних сил системы Pt, P2, P, N,
F и сил инерции Ф, и Ф2 в проекциях на координатные оси Ох, Оу получим:
для Ох
для Оу
Р Р
F a cos a -acosP = 0;
g g
N-P,~P2-P+~ a sin а -asinp^O.
g g
Из этих уравнений имеем
(a)
Для определения силы натяжения нити S и ускорения грузов применим
принцип Даламбера к каждому грузу в отдельности, составив условия
равновесия внешних сил грузов и сил инерции на направление нити. Получим:
для груза А (рис. 84,а)
р
для груза В (рис. 85, б)
(б)
(б')
g
так как S' = S для случая невесомого блока.
Из (б) и (б'), исключая S, определяем а:
Р, sin a — P2 sin 6
^ Pl+P2 ' (В)
Для того чтобы груз двигался вниз, должно выполняться условие а >0 или
P!Sina-P2sinC>0.
Подставляя полученное значение а в (а), получаем
368
1 ' Pi+Рг
Давление призмы на выступ, согласно закону о равенстве сил действия
и противодействия, будет F'——F; давление призмы на пол N'=—N.
Для определения натяжения нити S следует подставить значение ускорения
а в одно из уравнений (б) или (б'). Тогда
S +P2
Пример 2. Однородный тонкий стержень А В силой тяжести Р и длиной
/ жестко скреплен с вертикальным валом 001 под углом а (рис. 85,а). Вал
00! вместе со стержнем А В вращается с постоянной угловой скоростью со.
Определить реакции стержня в заделке А.
Решение. Применим к внешним силам и силам инерции стержня АВ
следствия _из принципа Даламбера в форме условий равновесия сил. Неизвестные
реакцию RA и векторный момент в заделке Мл разложим по осям координат.
Если разбить весь стержень на элементарные участки одинаковой длины,
то ускорения середин этих участов распределятся в*доль стержня по линейному
закону (рис. 85,6), так как ускорение каждой точки стержня ак = гкч>2, где гк —
расстояние к-й точки до оси вращения. Силы инерции элементарных участков
стержня, принимаемых за точки, распределятся тоже по линейному закону,
образуя треугольник. Распределенные так параллельные силы имеют равнодей-
равнодействующую силу, линия действия которой отстоит от основания треугольника
на расстоянии /j_/ по стержню и 2/3/ от вершины треугольника. Равнодей-
Равнодействующая сила Ф* всегда равна главному вектору Ф распределенных по
треугольнику сил. Для главного вектора сил инерции имеем
Ф= —Мас,
где ас—ускорение центра масс стержня, т. е. его средней точки. Таким образом,
Р РА
ф* =ф=—дс = — со -sina.
8 8 2
Составим шесть условий равновесия сил, приняв, что стержень в рассматри-
рассматриваемый момент времени находится в координатной плоскости Ayz. Тогда
для проекций сил и моментов их относительно осей координат Ах, Ay, Az
имеем:
Рис. 85
369
ХА=0; У/(+Ф*=О; ZA-P=Q;
M Лх — P-sina-Ф* - /cosa = 0;
М^,=0; MAz=0.
Подставляя в эти уравнения значение Ф*- и решая их относительно
неизвестных, получаем:
Х,=0; YA=—co2-sina; ZA=P;
g 2
PI. . /со2 .
Af Дх = — (sin a H sin 2a);
Для силы реакции и момента в заделке имеем
-sin2 a;
Ay+M\z=—(sma.+—sin2a).
§ 2. ДИНАМИЧЕСКИЕ РЕАКЦИИ ПРИ ВРАЩЕНИИ
ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Формулы для реакций
Твердое тело, имеющее две закрепленные точки А я В,
вращается вокруг неподвижной оси Oz, проходящей через эти
точки, под действием внешних приложенных сил f\, F2, ..., FN
(рис. 86). Освободив тело от связей вточках А и В, приложим
к телу силы реакций связей RA и RB, проекции которых на
оси координат обозначим соответственно ХА, YA, ZA и Хв,
YB, ZB. Эти силы тоже являются внешними силами для тела.
Приложив к точкам тела силы инерции, применим к телу
следствия из принципа Даламбера для системы, считая, что
тело разбито на N частиц (малых), принимаемых за точки.
Для этого следует приравнять нулю главный вектор и главный
момент всех внешних сил и сил инерции точек тела. Имеем
к =1
JV
к =1
B0)
Для определения из B0) сил реакций RA и RB необходимо
выразить главный вектор сил инерции Ф и главный момент этих сил
Ljf' через величины, характеризующие само тело и его вращение.
Для главного вектора сил инерции используем выражение
Ф=1Ф*=£(-'М*)=-Мйс, B1)
Jt=l k=\
370
где М — масса тела; ас — ускорение
центра масс.
При вращении тела вокруг непо-
неподвижной оси ускорение любой точки
тела вычисляется по формуле
ак = гх гк + (а х(со х гк), B2)
где гк — радиус-вектор рассматривае-
рассматриваемой точки; г и со—соответственно
векторы углового ускорения и угловой
скорости тела, направленные по оси Рис- 86
вращения. Для центра масс в B2) вектор гк следует заменить
радиусом-вектором центра масс гс.
Векторное произведение двух векторов выражается опреде-
определителем, в первой строке которого расположены единичные
векторы I, j, к, направленные вдоль осей координат, а в двух
других строках — проекции на оси координат векторов сомно-
сомножителей. Определитель можно разложить по элементам первой
строки. Получим
i j к
со x rc = О 0 со
: Ус zc
так как coJ, = cov = 0 и со =со. Здесь
хс> Ус 2с— координаты
центра масс. Используя полученные величины для ускорения
центра масс ас, имеем
ас = s х гс + со х (со х гс) —
;
О
Ус
г 7 к
0 0 со
— (о у с сохс О
= i{-Eyc-(t>2xc)+j(Exc-(f>2yc)+kO,
B2')
так как гх = еу = 0, zz = &.
Из B1) с учетом B2') для проекций главного вектора сил
инерции на оси координат получаем выражения
Фх=
Фу= —МаСу= —
Ф2=-МаСг = 0.
B3)
Формулы B3) можно применять не только для главного
вектора сил инерции, но и для силы инерции отдельной
точки тела. Для этого следует массу тела М в них заменить
массой точки тк, а координаты хс, ус, zc центра масс —
координатами хк, ук, zk точки. Так, для силы инерции к-й
точки Фк, согласно B3), имеем
371
Фкг=-ткак2 =
Проекции главного момента сил инерции относительно
точки на оси вращения L^f* на оси координат вычисляем по
формулам для моментов сил относительно этих осей. Исполь-
Используя B3') и вынося ю и г за знаки сумм, получаем:
к=1
JV
к= 1
JV
к=1
JV
+ю2
)= -s Z «кИ+^к2)= -eJz,
JV JV JV
где У„= Е wk^zk; ^z= Z wkAzk; Л = 'Х wk(x^+jk2) —центро-
к=1 к=1 к=1
бежные и осевой моменты инерции. Получены формульг для
вычисления проекций главного момента сил инерции Lffi на
координатные оси:
Lf> = e/JCZ-(o2/yz; L^ = sJyz + cu2Jxz; L™=-zJz. B4)
При выводе формул B3) и B4) для проекций главного
вектора и главного момента сил инерции на оси координат
не делалось никаких предположений относительно этих осей.
Они могут быть как неподвижными осями, относительно
которых рассматривается вращение тела, так и подвижными
осями, скрепленными с вращающимся телом. Поэтому эти
формулы можно применять как для неподвижных осей ко-
координат, так и для осей координат, вращающихся вместе
с телом.
Из B0) в проекциях на координатные оси с учетом B3)
и B4) получаем следующую систему уравнений для определения
проекций полных реакций ХА, YA, ZA и Хв, YB, ZB:
372
JV
k=l
JV
B5)
так как
- Y
BhB;
) = -XA
vA"A + XBhB.
В последнее уравнение системы B5) не входят силы реакций
закрепленных точек. Это уравнение является уравнением враще-
вращения твердого тела вокруг неподвижной оси Oz. Из него по
заданным силам определяется угловое ускорение г, если
известен момент инерции тела относительно оси вращения.
По угловому ускорению интегрированием определяется угловая
скорость, если известно ее значение в начальный момент.
Для определения шести неизвестных проекций сил реакций
остается пять уравнений. Система уравнений B5) не позволяет
определить каждую из неизвестных ZA и ZB. Из третьего
уравнения системы можно определить только сумму этих
неизвестных. Для того чтобы из этой системы можно было
определить все неизвестные, необходимо закрепить тело в точ-
точках А и В так, чтобы неизвестных проекций сил реакций в них
было не более пяти. Этого можно
достигнуть, например, поместив в точке
А подпятник, а в точке В—подшипник
(рис. 87). Для таких опор оси тела
ZB = 0 и все оставшиеся неизвестные
могут быть определены из системы
уравнений B5).
Разложим полные реакции RA и RB
на статические и динамические состав-
составляющие:
Ул
RA = RCAT+RA; RB = R
Статическими реакциями R" и RCB
называют части полных реакций, которые
Рис. 87
373
статически уравновешивают приложенные внешние силы. Урав-
Уравнение для их определения получим из первых пяти уравнений
системы B5), положив в них s = 0 и ю = 0. Имеем
к= 1
к= 1
B6)
В векторной форме B6) принимают вид
'R%T) = 0. B6')
Это известные из статики уравнения равновесия для сил,
приложенных к твердому телу, имеющему неподвижную ось
вращения. Но под действием приложенных внешних сил тело
может вращаться вокруг неподвижной оси Oz. От вращения
у_ точек^ тела возникнут силы инерции. Части полных реакций
RA и RB, которые уравновешивают силы инерции точек тела,
называют динамическими реакциями.
Уравнения для определения динамических реакций получим
из первых пяти уравнений системы B5), если учтем, что
приложенные внешние силы уравновешены статическими реак-
реакциями. Получим
g - Мх
= 0;
АпА-ГЛ gnBT t.JyZ + (H /Хг = 0. _,
В векторной форме B7) принимают вид
B7)
) 0. B7')
Составляющих динамических реакций опор в направлении оси
вращения Oz не возникает, так как у точек тела нет
составляющих сил инерции в этом направлении. В неподвижных
точках тела имеются только поперечные по отношению к оси
374
вращения составляющие динамических реакций. Это справедли-
справедливо при любом закреплении точек А и В, позволяющем телу
вращаться вокруг оси, проходящей через эти точки. Из
системы уравнений B7) определяются все проекции динамичес-
динамических реакций на оси координат.
Статическая уравновешенность
Тело, имеющее неподвижную ось вращения, называют
статически уравновешенным, если центр масс этого тела
находится на оси вращения. Для статически уравновешенного
тела с осью вращения Oz координаты центра масс тела
хс=ус = 0. Из первых двух уравнений системы B7) в этом
случае следует:
X% + X$ = 0; Y\ + Yl = 0 B8)
или _
R\=-R%. B8')
Динамические реакции для статически уравновешенного тела
образуют пару сил. Пара сил может уравновешиваться только
парой сил. Следовательно, силы инерции точек тела, уравно-
уравновешивающие динамические реакции, в этом случае тоже
приводятся к одной паре сил.
Используя B8), из двух последних уравнений системы B7)
получим:
\гд т^-д £"> yz г CD Jxz t -уд -уд £Jxz CO JyZ
h + h
hA + hB
V), B9)
где
Из B9) следует, что динамические реакции зависят не
только от углового ускорения, но и от угловой скорости,
т. е. они возникают даже при вращении тела по инерции
с постоянной угловой скоростью. Динамические реакции про-
пропорциональны квадрату угловой скорости как в частном случае
статической уравновешенности, так и в общем случае и при
вращении тела с большой угловой скоростью могут достигать
довольно значительных величин.
Формулы B3) и B4) справедливы как для неподвижных,
так и подвижных осей координат. Этим же свойством обладают
и формулы B7). Поэтому динамические реакции как в частном
случае статически уравновешенного тела, так и в общем
случае, когда центр масс не находится на оси вращения,
можно считать вращающимися вместе с подвижными осями
375
координат, если угловая скорость постоянна. Опоры оси
вращения тела будут испытывать действие циклически изменя-
изменяющихся динамических давлений, что может привести к их
усталостному разрушению или разрушению от вибраций, если
собственная круговая частота мест их закрепления совпадает
или близка к угловой скорости вращения тела.
Динамическая уравновешенность
Динамической уравновешенностью называется случай обраще-
обращения в нуль динамических реакций. Динамические реакции
обратятся в нуль, как следует из B9), если равны нулю
центробежные моменты инерции Jxz и Jyz, т. е. дополнительно
к статической уравновешенности ось вращения Oz должна быть
главной осью инерции для любой точки О этой оси. Так как
центр масс в этом случае расположен на этой оси, то ось вращения
при динамической уравновешенности является главной центральной
осью инерции. При вращении тела вокруг главной центральной оси
инерции динамические реакции обращаются в нуль. Следователь-
Следовательно, силы инерции точек тела, создающие динамические реакции,
в этом случае образуют равновесную систему сил. Главный
ктор и момент сил инерции L^O) и L^ равны нулю. М
у ру ру у
вектор и момент сил инерции L^O) и L^ равны нулю. Момент сил
инерции .Цф) при этом может быть отличным от нуля.
Главную центральную ось инерции называют свободной
осью вращения—свободной от динамических реакций опор.
При вращении тела вокруг свободной оси вращения могут
возникнуть только статические реакции. Если тяжелое тело
вращается по инерции с постоянной угловой скоростью вокруг
свободной оси вращения, то статические реакции должны
уравновесить только силу тяготения тела. При специальном
дополнительном движении тела кроме вращения его вокруг
оси с постоянной угловой скоростью может возникнуть
положение, при котором силы инерции точек тела приведутся
к равнодействующей силе, уравновешивающей силу тяготения.
В этом случае статические реакции тоже обратятся в нуль
и подшипник и подпятник для крепления оси вращения
окажутся ненужными. Такое положение имеет место при
вращении земного шара вокруг оси и его дополнительном
движении по орбите вокруг Солнца. То же имеет место для
других планет Солнечной системы, а также при движении
Луны вокруг Земли и при движении естественных и искус-
искусственных спутников планет.
Для того чтобы сделать ось вращения тела свободной
осью вращения, в технике осуществляют его балансировку
на специальных балансировочных установках. При этом прибе-
прибегают иногда к высверливанию в теле отверстий и при
необходимости заполняют их более тяжелым металлом, на-
например свинцом.
376
Основные виды неуравновешенностей. Неуравновешенности
тоже можно разделить на статические и динамические.
Если ось вращения является главной осью инерции хотя
бы для одной точки на оси Jxz = Jyz = 0, а центр масс не
находится на оси вращения, то из B7') следует, что динамичес-
динамические реакции взаимно параллельны. Этот случай можно назвать
статической неуравновешенностью.
Если центр масс находится на оси вращения, а ось
вращения не является главной ни для одной точки этой оси,
то имеем случай статической уравновешенности. Его также
можно назвать динамической неуравновешенностью.
Динамические реакции в этом случае образуют пару сил.
Общий случай неуравновешенности, когда и центр масс
не находится на оси вращения, и нет точки на этой
оси, для которой она была бы главной осью инерции,
можно считать наложением двух неуравновешенностей: ста-
статической и динамической. Динамические реакции получаются
при этом сложением реакций от двух указанных неурав-
неуравновешенностей.
Пример 1. Однородная прямоугольная пластина длиной /, шириной h и си-
силой тяжести Р может вращаться без трения вокруг горизонтальной оси Ох,
пересекающей вертикальную ось вращения Oz в точке О (рис. 88). Пластина
наклонена к оси вращения Oz на угол а и удерживается под этим углом
пружиной, которая перпендикулярна оси вращения и имеет жесткость с.
Пружина не деформирована при а = а0-
Определить угол а, считая его малым, и полные реакции подпятника
А и подшипника В при вращении пластины вокруг вертикальной оси
с постоянной угловой скоростью со, если АВ = 1—2м, А=1 м, Р=10кН,
с=175кН/м, со = 20с-\ ао = 2°, ОА = '/3АВ.
Решение. Применим к пластине следствие из принципа Даламбера,
приравняв нулю сумму моментов внешних сил и сил инерции относительно
оси Ох. Действие пружины на пластину заменим_ силой упругости F, а действие
подшипника в точке О—силами реакций Yo и_ Zo (рис. 89). В точке
О приложим также главный вектор сил инерции Ф, параллельный оси Оу
(ускорение центра масс ас параллельно этой оси), и главный момент этих
сил L(o]- Имеем
Рис.
377
F/cosa-P-sinot
F= cX = cl (sin a—sin a0) = cl (a — a0);
L^ = JX2s — Jyz<iJ = —Jyz(u2,
(a)
F)
так как
e=
= 0, sin a «a, sinao«ao
для малых углов a и a0. Подставляя эти значения в (а), получим следующее
уравнение для определения а:
Pi
с/2 (а — а0) а —Уугсо2 =
(а')
Центробежный момент инерции Jn вычислим по формуле C5') (см. § 9
гл. 3). Имеем
_Jz—J? ■
2
так как sin 2а' = sin 2а «2а, где У,, и Jz—моменты инерции относительно
главных осей инерции Оу' и Oz'. Ось Оу' является осью симметрии пластины,
и поэтому она является главной осью инерции для всех точек этой оси.
Ось Oz' перпендикулярна пластине, плоскость которой служит для нее
плоскостью симметрии. Такая ось тоже является главной осью инерции для
точки О, расположенной в этой плоскости.
Для главных моментов инерции пластины, согласно формуле A3) (см.
§ 4 гл. 3), соответственно имеем
Ph2 P(i2 h2S
Подставляя эти величины в (в), получим
Pi1
После этого для а из (а') имеем
Р/ РI2
Р/ РI
c/2(a-a0)-Ta Taco2 = 0,
2 £ 3
или
a=-
c/a0
с/--- —со2
2 3g
350
Для определения полных реакций подпятника
А и подшипника В рассмотрим систему тел, состо-
состоящую из пластины, пружины и стержня А В, заменив
действия подпятника и подшипника силами реакций,
разложенными на составляющие, параллельные осям
координат (рис. 90).
По формулам B5) имеем
(г)
378
Проекции главного вектора и главного момента сил инерции вычисляем
по формулам B3) и B4); учитывая, что е = 0, получаем
Р
Фх =—
8
Р
Ф„ =
8
Р
—
8
(д)
Ось Ох перпендикулярна плоскости симметрии пластины, проходящей
через ОМ перпендикулярно пластине. Следовательно, она является главной
осью инерции для точки О, поэтому Jxz = 0. Кроме того, в рассматриваемом
случае
*с=0; yc=-sma*-a.
С учетом этого из (г) получаем следующую систему уравнений;
ZA-P=0;
YAOA-YB- OB-Jyzu>2=0;
-XAOA+XBOB=Q.
Из первого и последнего уравнений этой системы следует
(г')
X л— Хп — 0.
Третье уравнение дает
Из второго и четвертого уравнений (г) получаем
1 / Р1
YA=— У„2со2 асо2ОВ
АВ\ yz Is
АВ
PI . \
— аа>2ОА Ь
2g /
Пример 2. Однородный круглый цилиндр силой тяжести Р=200 Н, радиу-
радиусом Л = 20 см, длиной /=80 см с помощью вала АВ вращается вокруг
вертикальной оси с постоянной угловой скоростью со = 20 с (рис.91). Ось
вращения касается поверхности цилиндра посередине образующей в точке
О так, что отрезок ОС, соединяющий точку касания с центром масс цилиндра,
перпендикулярен оси вращения. Продольная ось цилиндра наклонена к вер-
вертикали на угол a=45°.
Определить динамические реакции подшипника А и подпятника В, если
АВ—100 см, ОЛ=60см. Массой вала АВ пренебречь.
Решение. Выберем правую систему осей координат Oxyz, скрепленных
с движущимся цилиндром и началом координат в точке О. Ось Oz направим
по оси вращения; ось Ох—по линии, соединяющей точку О с центром масс
С, ось Оу направим перпендикулярно Ох и Oz.
Динамические реакции вместе с силами инерции системы образуют
равновесную систему сил, т. е. удовлетворяют условиям равновесия для сил
0, (а")
379
г'
У'
где Ф- главный вектор сил инерции; L{o] — главный
момент сил инерции относительно точки О, выбран-
выбранной за центр приведения сил инерции. Главный
вектор сил инерции при вращении цилиндра вокруг
неподвижной оси вычисляется по формулам
Фх= — МаСх = Mycz+ Мхса>2;
Фу=- МаСу = - Mxcz + Муст2;
У Для главного момента сил инерции относитель-
относительно точки на оси вращения справедливы формулы
х dt xz ,z
. 4Ф>=-^ = У,28 + Л2С02
At At
Рис. 91
здесь М—масса цилиндра; хс, ус, zc—координаты центра масс. При
сделанном выборе осей координат xc=—R, yc = 0, zc = 0. Кроме того, так
как со = const, то угловое ускорение 8 = 0. Еще одно упрощение связано с тем,
что ось Ох является главной осью инерции для точки О, так как эта точка
находится на главной центральной оси инерции Сх'. Поэтому Jxz = 0.
С учетом упрощений спроецируем векторные уравнения (а) на оси
координат. Получим следующие пять уравнений для определения динамических
реакций:
Р 2
~YAOA+YB- OB-Jyza2 = 0; ХАОА-ХВ- ОВ=0.
Из второго и четвертого уравнений этой системы определяем проекции
динамических реакций YA и YB. Имеем
Из первого и пятого уравнений соответственно получаем
PRa2OB
«653 Н; ХИ =
PR(u2OA
gAB
;980 Н.
Для полного решения задачи необходимо вычислить центробежный момент
инерции Jyz.
Центробежные моменты инерции обычно вычисляются через главные
центральные осевые моменты инерции. Получим необходимую формулу.
Выберем в точке С систему координат Сх^у^гх, оси которой параллельны
осям системы координат Oxyz. Координаты любой точки цилиндра относитель-
относительно этих двух систем осей координат связаны между собой формулами
параллельного переноса в направлении оси Схх на величину CO = R; поэтому
Так как
то
Z •'y
Для вычисления центробежного момента инерции Jy^Zi в качестве вспомо-
вспомогательных осей координат возьмем главные центральные оси инерции цилиндра
Сх'у'z' (оси его симметрии). Систему осей координат Cx'y'z' можно получить
380
из системы Cxlylzl, поворачивая ее на угол
а вокруг оси Сх'. Формулы преобразования ко-
ординат любой точки тела при повороте осей
(рис. 92) можно выразить в форме
= rk cos фк cos а—rk sin <pk sin а=у'к cos а—z'k sin а;
так как
rkcos(pk=y'k; rksin<pk = z'k.
Используя эти формулы, имеем
a.-sin2
Рис. 92
v'k—zк2)cos a sin а.
В рассматриваемом случае
как центробежный момент инерции относительно главных осей инерции
Су', Cz'.
Прибавляя в выражении для JyiZi величину
§jnk x'k — Yjnkx'k ) cos a sin а = О,
получаем
Л z = ) тк(хк +Ук) — / тк\Хк +zk)\ = ^su^a,
где Jz' и Jy—моменты инерции относительно главных центральных осей
инерции Cz' и Су' соответственно. Они для цилиндра определяются по
формулам
PR2
Итак, для искомого центробежного момента инерции имеем
, , Л-Л- . . P(R2 12\ . . PR2( I2 .
Лг=Л z = -sm2a = — Ism2a= —=—t
1 2 2g\ 4 12/ 24g\R
200
•400/
6400
После этого
24 • 980 \ 400
Jvzco2 44,2-400
' л— — 1ц-
_3 1 = -44,2кг см2.
= 177 Н.
АВ 100
Таким образом определены проекции динамических реакций на оси
координат, т. е. поставленная задача решена.
ГЛАВА 6
АНАЛИТИЧЕСКАЯ МЕХАНИКА
В аналитической механике изучаются равновесие и движение
механических систем. При этом широко используется понятие
возможного перемещения точки и системы. Наиболее
381
удобная для применения форма условий равновесия и урав-
уравнений движения системы получается при применении обоб-
обобщенных координат и обобщенных сил.
§ 1. СВЯЗИ И ИХ КЛАССИФИКАЦИЯ
В аналитической механике необходимо более подробно
рассмотреть связи, налагаемые на точки механической системы.
Механической системой, как известно, называют любую сово-
совокупность материальных точек. Условия, ограничивающие свободу
перемещения точек механической системы, называются связями.
Математически связи могут быть выражены уравнениями или
неравенствами, в которые входят время, координаты всех или
части точек системы и их производные по времени различных
порядков. Для одной точки уравнение связи в общем случае
можно выразить в форме
f(x, у, z; х, у, z; х, у, z; ...; г) = 0. A)
В дальнейшем ограничимся рассмотрением связей, в уравнения
которых могут входить производные по времени от координат
не выше первого порядка.
Для механической системы, состоящей из N точек, / урав-
уравнений связей представятся системой уравнений
Js\xk> Ук' Zk> Хк> Ук-> Zk'i t) = \), S=l, 2, ...,'/. B)
Считается, что индекс к принимает все или часть значений
от 1 до iV как для координат, так и для их производных.
Если в уравнения связей B) входят только координаты
точек и не входят производные от координат, то связи
называются геометрическими. Уравнение геометрической связи
для системы имеет форму
Если в уравнения связей кроме координат входят еще и их
производные по времени (проекции скоростей точек на оси
координат) или только одни производные, кроме времени, то
связи называются кинематическими. В этом случае уравнения
связей являются дифференциальными уравнениями для коорди-
координат точек. Из геометрических связей дифференцированием
можно получить связи кинематические. Из кинематических
связей геометрические получаются не всегда, так как дифферен-
дифференциальные уравнения не всегда могут быть проинтегрированы.
Иногда дифференциальное уравнение связи можно представить
как производную по времени от некоторой функции координат
и, возможно, времени:
-ф(хк, yk, zk, t) = 0.
382
После интегрирования такая кинематичес-
кинематическая связь становится геометрической.
Все геометрические и интегрируемые
кинематические связи называются голоном- -у
ними. Неинтегрируемые кинематические
связи, которые нельзя свести к геометри-
геометрическим, являются неголономными. Важный
класс механических систем с неголономны- Рис 93
ми связями (неголономных систем) интен-
интенсивно исследуется в настоящее время, и эти исследования еще
далеки от завершения. В дальнейшем изложении систематически
системы с такими связями не рассматриваются.
При движении механической системы координаты точек
и их производные по времени, входящие в уравнения связей,
могут зависеть от времени. Кроме того, в уравнения связей
время может входить явно, помимо координат и их произ-
производных. Связи, в уравнения которых время явно не входит,
называются стационарными или склерономными. Если время
входит явно в уравнение связи, то связь называется нестаци-
нестационарной и реономной. Нестационарные связи обычно реализу-
реализуются посредством движущихся или деформирующихся тел.
В простейшем случае одной точки нестационарная геомет-
геометрическая связь в форме движущейся или деформируемой
поверхности имеет уравнение
f(x, у, z, 0 = 0.
Связи называют неосвобождающими или двусторонними,
если они выражаются математически уравнениями, и освобо-
освобождающими или односторонними, если они выражаются неравен-
неравенствами. Для одной точки М, скрепленной с концом жесткого
стержня, другой конец • которого закреплен в неподвижной
точке О, связь (жесткий стержень) является геометрической,
неосвобождающей (рис. 93). Ее уравнение
где /—длина стержня. Если стержень заменить нитью такой
же длины, то связь (нить) будет освобождающей. Она
математически выражается неравенством х2+у2 + z2 — /2^0.
Если при движении точка М окажется от точки О на
расстоянии, меньшем длины нити, то нить уже не стесняет
свободу перемещения точки. Связь освобождает точку от
своего действия (пунктир на рис. 93). В дальнейшем освобож-
освобождающие связи рассматривать не будем.
Все связи можно разделить на реальные и идеальные.
К идеальным связям относятся все связи без трения. Некоторые
связи с трением тоже относятся к идеальным. Понятие
идеальных связей дается после введения понятия возможного
перемещения системы.
383
§ 2. ВОЗМОЖНЫЕ ПЕРЕМЕЩЕНИЯ
Для формулирования принципа возможных перемещений,
определяющего условия равновесия механической системы,
требуется ввести понятие возможного, или виртуаль-
виртуального, перемещения. Для одной точки возможным переме-
перемещением называется такое бесконечно малое (элементарное)
мысленное перемещение, которое допускается в рассматривае-
рассматриваемый момент времени наложенными на точку связями. Для
возможного перемещения не требуется времени на его совер-
совершение. Это мысленное перемещение, которое могла бы со-
совершить точка при наложенных на нее связях в рассматри-
рассматриваемый момент времени. В отличие от элементарного (бес-
(бесконечно малого) действительного перемещения точки dr, ко-
которое совершает точка за время dt под действием приложенных
сил при заданных начальных условиях и наложенных связях,
возможное перемещение 5г определяется только связями в дан-
данный момент. Проекции возможного перемещения Ъг на оси
координат, или вариации координат, обозначают Ъх, Ъу, 5z,
а проекции элементарного действительного перемещения на
оси координат, или дифференциалы координат при изменении
времени на dt, обозначают dx, dy, dz.
Если связью для точки является, например, движущаяся
поверхность, уравнение которой /(х, у, z, t) = 0, то действи-
действительное перемещение точки dr за время dt является в общем
случае векторной суммой перемещений по поверхности и вместе
с поверхностью. Все возможные перемещения точки 5г в данный
момент времени t расположатся на поверхности в положении,
которое она занимает в рассматриваемый момент времени.
Действительное перемещение при заданных начальных условиях
и силах, которое точка может совершить от момента времени
t до момента t+dt, только одно. Возможных перемещений
у точки в момент времени t бесконечно много. Все они
допускаются связью (поверхностью) и как отрезки бесконечно
малой длины расположатся в касательной плоскости к по-
поверхности в точке, в которой находится рассматриваемая
точка в данный момент времени.
Возможное перемещение 5г, как и действительное dr,
является вектором и потому всегда изображается направленным
прямолинейным отрезком. Очевидно, что элементарное дей-
действительное перемещение точки принадлежит к числу воз-
возможных, если связь стационарна, т. е. действительное перемеще-
перемещение не содержит перемещения вместе со связью.
Возможное перемещение точки 5г считают изохронной
вариацией радиуса-вектора, т. е. его полным дифференциалом,
но при фиксированном времени, когда изменяются (варьи-
(варьируются) только координаты точки. Соответственно 5х, 5^,
5z— изохронные вариации координат точки, допускаемые свя-
384
зями. Действительное перемещение dr является полным диф-
дифференциалом радиуса-вектора, который определяется по измене-
изменению координат точки в зависимости от изменения времени;
dx, dy, dz — полные дифференциалы координат точки при
изменении независимого переменного / на величину dt.
Возможным перемещением системы называют любую со-
совокупность возможных перемещений точек системы. В общем
случае система может иметь несколько и даже бесконечно
много возможных перемещений. Вследствие уравнений связей,
наложенных на систему, не все возможные перемещения
являются независимыми. Число независимых возможных пере-
перемещений называют числом степеней свободы системы.
Свободная точка имеет три степени свободы. В этом
случае возможные перемещения (вариации) Ъх, Ъу, 5z (или
выраженные через вариации каких-либо других координат)
являются независимыми. Если точка движется по поверхности
f(x, у, z, t) = 0, то Бх, Бу, 5z связаны соотношением
f5x+^+f5z = 0, C)
дх ду dz
которое получают разложением в степенной ряд функции
f{x + bx, у + Ъу, z + 5z, 0 = 0 ПРИ пренебрежении слагаемыми
второго и более высокого порядка по отношению к Ъх, by,
5z. Независимых вариаций координат, а следовательно, и степе-
степеней свободы будет две. Время при этом не варьируется, оно
фиксировано. Связь между вариациями координат не зависит
от того, входит время явно в уравнения связей или нет.
Проекции на оси координат действительного перемещения
точки dx, dy, dz, если связь выражается уравнением f(x, у,
z, /) = 0, в отличие от возможных определяется зависимостью
^dx + dy+dz + ^dt = O, D)
дх ду dz dt
которая тоже получается разложением в степенной ряд функции
f(x + dx, y + dy, z + dz, /+d/) = 0 и отбрасыванием слагаемых
второй и более высоких степеней величин dx, dy, dz, dt.
Если точка движется по кривой линии, то степеней свободы
у нее будет только одна, так как кривую линию можно
представить как пересечение двух поверхностей.
§ 3. ЭЛЕМЕНТАРНАЯ РАБОТА СИЛЫ
НА ВОЗМОЖНОМ ПЕРЕМЕЩЕНИИ.
ИДЕАЛЬНЫЕ СВЯЗИ
Элементарную работу силы на возможном перемещении ее
точки приложения вычисляют по обычным формулам для
элементарной работы, например 5A = F-Sr = Fx5x + Fy5y + Fz5z,
и другим формулам для элементарной работы. Для механической
13 Заказ 192 385
системы, состоящей из N точек, к которым приложены силы,
элементарная работа этих сил на каком-либо возможном
перемещении системы соответственно выразится так:
5А=^Рк-Бгк. E)
к=1
Элементарная работа сил при этом зависит от выбора
возможного перемещения системы. _
Обозначим силы реакций связей для точек системы Rk.
Тогда связи системы называются идеальными, если для любого
возможного перемещения системы выполняется условие
Evsr^o. F)
Условие F) является определением идеальных связей. Важно
отметить, что это условие должно выполняться для всех
возможных перемещений системы. При этом вся совокупность
связей является идеальной. Может быть идеальной каждая
из связей в отдельности. Приведем примеры идеальных связей.
1. В абсолютно твердом теле точки связаны идеаль-
идеальными связями. Силами реакций связей в этом случае являются
внутренние силы, для которых было доказано, что сумма
элементарных работ этих сил на любых элементарных пере-
перемещениях точек тела равна нулю.
2. Абсолютно гладкая поверхность, или абсо-
абсолютно гладкая линия, является идеальной связью для
точки. Возможные перемещения точки с такими связями
направлены по касательным к поверхности или линии. Силы
реакции в этих случаях направлены по нормалям к ним, т. е.
перпендикулярны силам. Так, например, все шарниры (поверх-
(поверхности) без трения, подвижные и неподвижные, являются
связями, идеальными для тел, соединенных такими связями.
Шарниры без трения, как связи идеальные, эквивалентны
связям между точками в твердом теле.
3. Гибкие нерастяжимые связи типа нитей, канатов,
тросов и т. п., соединяющих точки системы, являются связями
идеальными. В каждом сечении такой связи силы реакций
(силы натяжения) равны по модулю и противоположны по
направлению, а возможные перемещения у их точек приложения
одни и те же. Сумма элементарных работ сил натяжений
для всех мыслимых сечений таких связей равна нулю.
4. Закрепленные точки системы по отдельности явля-
являются связями идеальными, так как их возможные перемещения
равны нулю.
5. Шероховатая поверхность для катков, катящихся
по ней без скольжения, при отсутствии трения качения и,
следовательно, соприкосновения в одной точке или по одной
386
линии, скорости точек которых равны нулю, является связью
идеальной. Возможные перемещения в точке или в точках
линии соприкосновения равны нулю в каждый момент времени,
так как равны нулю скорости в точках соприкосновения, как
и для закрепленных точек.
§ 4. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Принцип возможных перемещений, или принцип Лагранжа,
содержит необходимые и достаточные условия равновесия
некоторых механических систем. Он формулируется следующим
образом: для равновесия механической системы, подчиненной
идеальным, стационарным и неосвобождающим связям, необхо-
необходимо и достаточно, чтобы сумма элементарных работ всех
активных сил, приложенных к точкам системы, была равна
нулю на любом возможном перемещении системы, если скорости
точек системы в рассматриваемый момент времени равны
нулю, т. е.
£^■5^ = 0, G)
где Fk— активная сила, приложенная к k-я точке системы;
гк— радиус-вектор этой точки (рис. 94).
Докажем необходимость условия G) для равновесия
системы, т. е. докажем, что если система находится в рав-
равновесии, то активные силы удовлетворяют условию G). Дей-
Действительно, если механическая система находится в рановесии,
то для _каждой ее точки активная сила Fk и сила реакции
связей Rk удовлетворяют условию равновесия статики для
сил, приложенных к точке:
Fk + Rk = 0, k=\, 2, ..., N.
Умножая обе части этого равенства скалярно на возможное
перемещение точки Бгк и суммируя по всем точкам системы,
получим
к=\
По
N
условию идеальности
связей,
Е Rk'brk = 0 и для активных сил получаем
к=1
условие G).
Докажем достаточность условия G)
для равновесия системы, т. е. что если
это условие выполняется для активных
сил, действующих на точки системы,
то система находится в равновесии при
13*
387
выполнении других условий принципа возможных перемещений.
Теорема о достаточности условия G) для равновесия системы
доказывается методом от противного. Предполагается, что
условие G) и все остальные условия теоремы выполняются,
а система вышла из равновесия. Если теорема о достаточности
справедлива, то должно возникнуть противоречие с условиями
теоремы. Итак, пусть все условия теоремы выполняются,
а система вышла из равновесия. При этом, по крайней
мере для одной точки системы, не будет выполняться
условие равновесия для сил, т. е.
Рк + Якф0. (8)
Дадим системе возможное перемещение. Так как связи стацио-
стационарные, то элементарное действительное перемещение для
каждой точки системы под действием не равной нулю
равнодействующей силы принадлежит к числу возможных
перемещений и их совокупность можно выбрать в качестве
возможного перемещения системы. Скорости точек системы
в рассматриваемый момент времени по условию равны нулю;
следовательно, элементарные действительные перемещения бу-
будут направлены по ускорениям точек, т. е. по равнодейству-
равнодействующим силам. Умножая (8) скалярно на Бгк = йгк, получим
(Fk + Rk)-brk>0 ' (9)
по крайней мере для одной точки системы, вышедшей из
равновесия. Суммируя (9) по всем точкам системы, будем иметь
YFk-brk+YRk-brk>0. (9')
к=\ к = 1
Для идеальных связей
1^-5^ = 0.
к = 1
Поэтому из (9') получаем
Z
k=l
что находится в противоречии с условием G). Следовательно,
система не может выйти из равновесия при выполнении
условий принципа возможных перемещений. Принцип полно-
полностью доказан.
Без дополнительного условия о равенстве нулю скоростей
точек системы в рассматриваемый момент принцип возможных
перемещений утверждает только то, что равны нулю ускорения
точек системы. Вместе с равенством нулю скоростей точек
это дает равновесие системы в тот момент, в который
выполняется для активных сил условие G). При длительном
388
выполнении этого условия система соответственно будет на-
находиться в равновесии тоже длительно, т. е. скорости и ускоре-
ускорения точек равны нулю, если скорости точек системы равны
нулю в начале интервала длительности.
В принцип возможных перемещений не входят силы реакций
связей. Но его можно применять также и для определения
неизвестных сил реакций связей. Для этого связь, силы реакции
которой необходимо определить, отбрасывают (освобождают
систему от этой связи), заменяя ее силами реакции. Эти силы
добавляют к активным силам. Оставшиеся связи системы
должны быть идеальными. Иногда неидеальиую связь заменя-
заменяют идеальной, компенсируя неидеальность соответствующими
силами. Так, если связью для тела является шероховатая
поверхность, то ее можно заменить гладкой поверхностью,
добавляя к активным силам силу трения скольжения и в более
общем случае — еще и пару сил, препятствующую качению.
Связь в виде заделки для твердого тела можно заменить
неподвижным шарниром, плоским или шаровым соответствен-
соответственно, добавляя момент заделки, векторный или алгебраический.
Таким образом, в принцип возможных перемещений входят
в действительности не активные силы, а все приложенные
к точкам системы силы, кроме сил реакций идеальных связей,
которые по условиям задач не требуется определять.
Пример 1. В механизме (рис. 95) допускается поворот кривошипа О А
вокруг горизонтальной оси, проходящей через точку О. По стержню ОА
может перемещаться ползун В, шарнирно соединенный со стержнем ВС,
который может скользить вдоль вертикальных направляющих. К кривошипу
О А приложена пара сил с моментом М; OD = l.
Определить вертикальную силу F, приложенную к стержню ВС в зави-
зависимости от угла <р, при равновесии механизма. Силами тяжести звеньев
механизма и силами трения пренебречь.
Решение. Связи в механизме неосвобождающие и стационарные.
Они не создают сил трения, а потому идеальные. Применим к механизму
принцип возможных перемещений:
Активными силами являются F и пара сил
с моментом М.
Дадим системе возможное перемещение,
допускаемое наложенными связями, повернув
мысленно стержень О А на элементарный угол
5ф в сторону возрастания угла <р. Тогда,
согласно принципу возможных перемещений,
-M5<p + F5>-c = 0, (a)
где 5ус -возможное перемещение точки С.
Стержень ВС твердый, поэтому перемещения
его концов В и С при наложенных связях
равны, т. е. §>>с = 5>>в.
У механизма только одна степень свобо-
свободы, поэтому 5ф и Ьув зависят друг от друга.
Установим предварительно зависимость ув от
М
Рис. 95
389
ф. Имеем yB=/tg<p. Путем варьи-
варьирования этого уравнения связи, ана-
аналогичного вычислению полных диф-
дифференциалов от обеих частей равен-
равенства, получим
-5ф.
СО52ф
Рис. 96
8ув в (а) и вынося 5ф за скобки, имеем
FI
8Ф -
Подставляя полученное значение
= 0.
Величину 8ф можно выбрать отличной от нуля, а потому равно нулю
выражение в скобках, т. е.
FI
~М+ г-=0; F=Mcos2<p/l.
cos ф
Дополнительно установим зависимость 5ф и Ьув непосредственно, не
используя процесс варьирования уравнения связи. При повороте стержня О А
на угол 8ср точка В переместится вместе с соответствующей точкой стержня
перпендикулярно стержню на 8х1 = ОВ5ф и, кроме того, ползун В передвинется
вдоль стержня на 8s2, для того чтобы точка В переместилась только
параллельно направляющим на Ьув, так как другие направления перемещения
точки В не разрешаются направляющими стержня ВС. Вектор возможного
перемещения точки В изобразится диагональю прямоугольника, построенного
на составляющих перемещениях. Из прямоугольника для его диагонали имеем
, или 8ув= 8(р =
coscp
—8ф,
COS ф
так как
0B=//cos<p.
Пример 2. Стержневая система (рис. 96), расположенная в вертикальной
плоскости, находится в равновесии под действием двух пар сил с моментами Mv
и М2- Стержни АС и BD параллельны. Стержень ВС составляет-с ними угол а.
Пренебрегая силами тяжести стержней и трением в шарнирах, определить
реакции в заделке и усилие в стержне BD.
Решение. Освободим систему стержней от заделки, приложив силы ХА,
YA и момент в заделке МА (рис. 97, а). Оставшиеся связи являются идеальными,
если в них не возникает сил трения.
SS,
Рис. 97
390
Дадим стержню АС возможное перемещение 5.s, допускаемое оставшимися
связями, в направлении оси Ах. Точка В может иметь перемещение 5лв,
перпендикулярное только BD.
Для возможных перемещений точек твердого тела, аналогично мгновенному
центру скоростей при плоском движении, можно построить мгновенный центр
перемещений. Для установления связи между возможными перемещениями
точек твердого тела можно использовать и другие положения о связи скоростей
точек твердого тела при плоском движении и в других случаях движения.
Мгновенный центр перемещений стержня ВС находится на перпендикулярах
к возможным перемещениям точек В и С. Вокруг Р стержень ВС повернется
на угол 5<р, который определяется отношением перемещения bs к расстоянию
СР, т. е.
оф=—= . (а)
v СР /2sina
Из принципа возможных перемещений имеем
XAbs+M18q> = 0. (б)
Моменты пары сил М2 и угол 5<р имеют одинаковые направления—по
часовой стрелке, поэтому элементарная работа пары сил является по-
положительной.
Подставляя (а) и (б), получаем
М2
ХА= —.
/2sina
Для определения Мл дадим системе возможное перемещение, повернув
стержень АС вокруг точки А на угол ?кр1 (рис. 97, б). Из принципа возможных
перемещений в этом случае имеем
<р1 =0.
Следовательно, Мл = — М,.
Чтобы определить YА (рис. 97, в), дадим стержню АС возможное перемеще-
перемещение, повернув его на угол 5ф2 вокруг точки С. Получим
М\5ф2 + Млбф2— 7/,/,5ф2 = 0;
Для определения усилия в стрежне BD отбросим этот стрежень, заменив
его действие силой S, направленной по стержню, сохранив заделку (рис. 97, г).
В этом случае связи допускают поворот стрежня ВС на угол 5ф3. Точка
В при_ этом переместится на &sB. Проекция перемещения на направление
силы S при этом равна 5.$'взта = /25ф35та. Составляя сумму элементарных
работ на этом возможном перемещении и приравнивая ее нулю, согласно
принципу возможных перемещений, имеем
Л/25ф3 + S5iBsin a = 0,
откуда получаем
5
/2 sin a
Освобождать от связей систему можно не полностью. Так, например,
заделка эквивалентна шарниру вместе с моментом заделки.
§5. ОБОБЩЕННЫЕ КООРДИНАТЫ СИСТЕМЫ
Пусть система состоит из N точек и, следовательно, ее
положение в пространстве в каждый момент времени определя-
определяется 3N координатами точек системы, например декартовыми
391
xk, yk, zk. Предположим, что на систему наложены голономные
связи, уравнения которых в общем случае могут содержать
и производные от координат точек, но после их интегрирования
они свелись к геометрическим и имеют форму
f.(xk,yk, zk, f) = 0, s=\,2,...,l. A0)
Освобождающие связи, выражающиеся неравенствами, не рас-
рассматриваются. Таким образом, 3N координат связаны / урав-
уравнениями и независимых координат будет n = 3N—l.
Любые п декартовых координат можно задать независимо
друг от друга. Остальные координаты определятся из уравнений
связей. Вместо п независимых декартовых координат можно
выбрать любые другие независимые параметры qy, q2, ..., qn,
зависящие от всех или части декартовых координат точек
системы. Эти независимые параметры, определяющие положение
системы в пространстве, называются обобщенными координата-
координатами системы. В общем случае они могут зависеть от всех
декартовых координат точек системы, т. е.
4i = 4i{xk,yk,zk), A1)
где к изменяется от 1 до N. Задание обобщенных координат
полностью определяет положение точек системы относительно
выбранной системы отсчета, например декартовых осей коор-
координат.
У свободной точки три обобщенные координаты. Если
точка должна двигаться по заданной поверхности, то обобщен-
обобщенных координат только две и т. д. Используя уравнения связей
A0) и выражения обобщенных координат через декартовы
A1), можно при выполнении условий разрешимости этой
системы уравнений выразить декартовы координаты через
обобщенные, т. е. получить
xk = xk{qi, q2, -, qK, t); yk = yk{qi, q2, -, Ч„, t);
Ч = ч(Яи Яг, -, Чп, t).
Соответственно для радиуса-вектора каждой точки системы
Гк = хк1 + Уи + 2кк~ ПОЛуЧИМ
гк = Гк(Я1> Яг>-•■> ЯИ, t). A2)
В случае стационарных связей время явно не входит в урав-
уравнения связей. Поэтому и в A2) оно войдет только неявно,
через обобщенные координаты, если система движется. Для
голономных систем вектор возможного перемещения точки
Бгк в соответствии с A2) можно выразить в форме
Система, имеющая п независимых обобщенных координат,
характеризуется также п независимыми возможными переме-
392
щениями или вариациями
5#1; bq2, ■■■,&Яп' если связи го-
лономны. Для голономных
систем число независимых ' 'sf I "^^^ v///////////r
возможных перемещений со-
совпадает с числом независи-
независимых обобщенных координат.
Следовательно, число степе-
степеней свободы голономной си-
системы равно числу независи- Рис- 98
мых обобщенных координат этой системы, т. е. n=3N—L
Для неголономных систем в уравнения связей A0) могут
входить производные от декартовых координат точек и даже
могут быть такие уравнения связей, в которые входят только
одни производные. Такие уравнения связей наложат ограниче-
ограничения на вариации 5g1; bq2, ...,8#„ и, следовательно, уменьшат
число независимых вариаций, не связывая функциональной
зависимостью сами обобщенные координаты qy, q2, ...,qn. Для
неголономных систем в общем случае число независимых
вариаций (возможных перемещений) меньше числа обобщенных
координат. Число степеней свободы неголономной системы,
равное числу независимых возможных перемещений, тоже
меньше числа обобщенных координат системы.
В дальнейшем рассматриваются только голономные систе-
системы, т. е. системы с голономными связями. Рассмотрим вопрос
обобщенных координат на примере простого механизма.
Пусть имеем кривошипно-шатунный механизм (рис. 98).
Его положение на плоскости вполне определяется заданием
положения трех его точек О, А и В с координатами соответ-
соответ@ 0) ( ) ( 0) К
положения трех его точек О, А и В с координатами соответ-
соответственно @, 0), (хА, уА), (хв, 0). Координат, не равных нулю,
только 3, т. е. 3iV= 3. Можно составить два уравнения связей,
ОА = г и АВ = 1. Имеем
{хв-хАJ+у2А = 12. (а)
Число степеней свободы
« = 3-2=1.
Из трех не равных нулю координат только одну можно
задать независимо. Две другие выразятся через нее как решения
уравнений связей. В качестве независимой координаты можно
выбрать любую из трех координат хА, уА, хв или любую
комбинацию этих координат. Нужно только, чтобы она
однозначно определяла положение механизма относительно
осей координат Оху. Координаты хА и хв следует исключить.
Они неоднозначно определяют положение механизма. Удобно
в качестве независимой обобщенной координаты q выбрать
угол ф, т. е.
393
= arctg—. (б)
х
хл
Из уравнений (а) и (б) координаты хА, уА, хв можно выразить
через угол ср. Для этого следует решить эту систему уравнений
относительно координат. Удобно, не решая системы уравнений,
выразить координаты через угол ф, используя рис. 97. Получим
x^ = rcos(p, yA = rsinq>, xB = rcoscp + /cosv|/.
Но
sim|/ = -sincp;
^^/l — sin2\j/ = - s/l^— r2sin2cp.
С учетом этого искомые выражения для координат
принимают форму
x^ = rcos(p; ^ = rsinq>; x^ = rcos(p + ,y/2 —r2sin2cp.
Нетрудно проверить, что эти значения декартовых координат
удовлетворяют системе уравнений (а) и (б).
§6. ОБОБЩЕННЫЕ СИЛЫ
Определение обобщенных сил. Имеем сумму элементарных
работ сил, действующих на точки системы, на возможном
перемещении системы:
5А=^Рк-Бгк. A4)
к=1
Пусть голономная система имеет п степеней свободы и,
следовательно, ее положение в пространстве определяется
п обобщенными координатами qx, q2, ..., qn. Тогда для Ьгк,
согласно A3), имеем
Подставляя A3') в A4) и изменяя порядок суммирования по
индексам к и i, получим
где скалярная величина
называется обобщенной силой, отнесенной к обобщенной коорди-
координате qt. Используя известное выражение для скалярного
394
произведения двух векторов, обобщенную силу можно также
представить в виде
е,=
I Л* I
где Fkx, Fky, Fkz — проекции силы на оси координат; хк, ук,
zk—координаты точки приложения силы Fk.
Размерность обобщенных сил. Размерность обобщенной силы
в соответствии с A4') следующим образом зависит от
размерности dqh совпадающей с размерностью q(:
т. е. размерность обобщенной силы равна размерности работы
силы (энергии) или момента силы, деленной на размерность
обобщенной координаты, к которой отнесена обобщенная сила.
Если [д,] — длина, то
г „ -л работа сила длина
[2.-]=- = = сила,
u J длина длина
т. е. обобщенная сила имеет размерность силы. В том случае,
когда [9г] = 1, как это имеет место, если в качестве обобщенной
координаты выбран угол, [0,-]— момент силы.
Этот случай часто встречается при решении практических задач.
Вычисление обобщенных сил. 1. Обобщенную силу можно
вычислить по формуле A5), ее определяющей, т. е.
2. Обобщенные силы можно вычислять как коэффициенты
при соответствующих вариациях обобщенных координат в вы-
выражении для элементарной работы A4'), т. е.
3. Наиболее целесообразен способ вычисления обобщенных
сил, который получается из A5'), если системе сообщить
такое возможное перемещение, при котором изменяется только
одна обобщенная координата, а другие при этом не изменя-
изменяются. Так, если Sg^O, а остальные 5q2 = bq3 = ... = bqn = 0, то
из A5') имеем
Индекс qx указывает, что сумма элементарных работ вычисля-
вычисляется на возможном перемещении, при котором изменяется
395
(варьируется) только координата q1. Если изменяющейся
координатой является qt, то
4. Для потенциальных сил по их определению имеем:
Fkx = dUjdxk- Fky = dU/dyk; Fkz = dU/dzk, A8)
где U—силовая функция, зависящая от координат точек
системы и, следовательно, через них — от обобщенных коорди-
координат, т. е.
U=U{xk,yk, zk)=U(qi, q2, ..., qn). A9)
В случае нестационарных силовых полей, которые дальше не
рассматриваются, силовая функция может еще явно зависеть
от времени.
Для обобщенной силы, согласно ее определению, с учетом
A8) и A9) имеем
N /
О = У I Fb —i-
к=i V dqi
dxk dUdyk dUBzk\_dU
* dfc 3ykSg; 8zkdqLJ dq-
Таким образом, в случае существования силовой функции
Q-dU/dq^-dn/dq» B0)
так как потенциальная энергия системы П связана с силовой
функцией U соотношением
#=-£/+const.
Итак, обобщенная сила равна частной производной от силовой
функции по соответствующей обобщенной координате.
§7. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ
Условия равновесия системы выводятся из принципа воз-
возможных перемещений. Они применимы к системам, для
которых этот принцип справедлив. Согласно принципу возмож-
возможных перемещений, условие
является необходимым и достаточным для равновесия системы.
Но в соответствии с A5')
396
Следовательно, необходимым и достаточным условием равно-
равновесия является равенство
Qlbqi + Q2dq2 + ... + QMn = 0. B1)
Так как обобщенные координаты независимы, то их вариации
Бдх, bq2, ..., Бдп являются тоже независимыми, произвольными,
бесконечно малыми величинами. Можно принять Sg^O, а все
остальные 8q2 = dq3 = ... — dqn = 0. Тогда из B1) получим Qx = 0.
Аналогично, приняв 5#2#0, a dql = bq3 = ... = 5#„ = 0, будем
иметь 22 = 0 и т-Д- Таким образом, из B1) получаем
следующие условия равновесия системы:
Qi = 0, Q2 = 0, ..., е„ = 0, B2)
т. е. для равновесия механической системы, подчиненной голоном-
ным, стационарным, идеальным и неосвобождающим связям,
в момент, когда скорости всех точек системы равны нулю,
необходимо и достаточно, чтобы все обобщенные силы были
равны нулю.
О голономности связей условились при введении обобщен-
обобщенных координат и обобщенных сил, а также при определении
числа степеней свободы. Другие условия для связей входят
в формулировку самого принципа возможных перемещений.
В статике для равновесия свободного твердого тела,
имеющего шесть степеней свободы, было получено шесть
условий равновесия для приложенных к телу сил. Эти условия
можно получить также приравняв нулю каждую из шести
обобщенных сил. Для этого следует выбрать в качестве
обобщенных координат декартовы координаты х, у, z какой-ли-
какой-либо точки тела и углы поворота тела вокруг осей координат,
проходящих через эту точку. Обобщенные силы, отнесенные
к координатам х, у, z, превратятся соответственно в суммы
проекций приложенных сил на эти оси, а обобщенные силы,
отнесенные к углам поворота вокруг осей координат,— в
суммы моментов сил относительно этих осей.
Условия равновесия B2) для системы, находящейся под
действием потенциальных сил, вместе с B0) дадут следующие
условия для силовой функции:
Q1 = dU/dqi=0, Q2 = 8Uldq2 = 0, ..., Qn = dU/dqn = 0, B2')
т. е. все частные производные от силовой функции по обобщен-
обобщенным координатам равны нулю. Это является необходимым
условием существования экстремума силовой функции. Таким
образом, при равновесии механической системы, находящейся
под действием потенциальных сил, силовая функция и потенци-
потенциальная энергия могут достигать экстремума.
Пример. Дифференциальный планетарный механизм, расположенный в го-
горизонтальной плоскости, состоит из двух шестерен радиусами гх и г2
и кривошипа О А (рис. 99). К кривошипу приложена пара сил с моментом
397
М, а к шестерням 1 и 2—пары сил с момен-
моментами Му и М2.
Определить моменты пар сил М и Ми
которые следует приложить к шестерне
/ и кривошипу ОА для равновесия механизма.
Трением в шарнирах пренебречь.
Решение. Связи системы, осуществляе-
осуществляемые твердыми телами и подвижным А и непо-
неподвижным О шарнирами без трения, являются
идеальными, голономными, стационарными
и неосвобождающими. Система имеет две
степени свободы. Действительно, можно закре-
закрепить шестерню 1, тогда кривошип ОА и ше-
шестерня 2 сохранят еще возможность вполне
определенного движения. Если дополнительно
закрепить еще и кривошип ОА, то движение
каких-либо звеньев механизма невозможно.
Выберем в качестве обобщенных координат углы поворота шестерни
1 (<р!) и кривошипа ОА (ф), отсчитываемые от каких-либо фиксированных
положений этих тел. По условиям равновесия системы обобщенные силы,
отнесенные к этим координатам, равны нулю, т.е. бФ]=0; бф = 0.
Вычислим обобщенные силы по формулам
Рис. 99
еФ=-
8ср
(а)
Индексы у скобок указывают, что суммы элементарных работ должны
вычисляться при изменении той обобщенной координаты, которая указана
в индексе. Другая обобщенная координата при этом не должна изменяться.
К числу активных сил следует отнести пары сил с моментами _М, Mv, М2,
силы тяжести шестерен и кривошипа и внутренние силы SL и S2 действия
шестерен друг на друга в точке Р. Эти силы, как силы действия и про-
противодействия, удовлетворяют условию S1 = —S2.
Так как механизм расположен в горизонтальной плоскости, то элементар-
элементарные работы сил тяжести его звеньев равны нулю. Возможные перемещения
точек приложения этих сил располагаются в горизонтальной плоскости,
перпендикулярной силам тяжести.
Дадим шестерне / возможное перемещение 5(р,, например в сторону
возрастания угла <рь приняв при этом ф = const. Имеем
(б)
Элементарная работа пары сил с моментом Мг отрицательна, так как М2 и §
направлены в противоположные стороны. Сумма элементарных работ сил ^ и S2
равна нулю, так как у них общая точка приложения и одно и то же возможное
перемещение, а сами силы равны по модулю и противоположны по направлению.
При ф = сопв1 углы поворота шестерен ?кр1 и Ь(р21) направлены в про-
противоположные стороны. Перемещения точки соприкосновения шестерен оди-
одинаковы. Следовательно,
Подставляя это значение
в (б) и сокращая на 5фи получаем
A
(б')
398
Сообщим теперь кривошипу ОА возможное перемещение 5<р, например
в направлении момента пары сил М, считая при этом угол <pt
постоянным. Тогда
В этом случае угол 5ф2 и момент М2 опять противоположны. Точка
соприкосновения шестерен Р является теперь мгновенным центром скоростей
для шестерни 2. Элементарная работа сил SL и S2 в этом случае равна
нулю для каждой силы.
Вычислим возможное перемещение точки А как точки кривошипа ОА
и шестерни 2, имеющей мгновенный центр скоростей в точке Р. Имеем
соответственно
Отсюда получаем
Подставляя эти значения в (в) и сокращая на 6ф, получаем
§Ф2 = 5ф.
бф 2
По условиям равновесия,
G,1=0; S,=0.
Учитывая (б') и (в'), получаем
М1-М2- = 0; М-М2Г-
г2
или
(в')
х2\ 2
Г 2 Г2
§8. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
В соответствии с принципом Даламбера для любой механи-
механической системы активные силы, силы реакций связей вместе
с силами инерции удовлетворяют условию равновесия сил
для каждой точки системы, т. е.
Fk + Як + Фк = 0, k=l,2,...,N, B3)
где Fk — активная сила; Rk—сила реакции связей; Фк — сила
инерции точки. Умножая скалярно каждое из этих соотношений
на возможное перемещение точки Бгк и суммируя по всем
точкам системы, получим
£ Fk-b?k+ £ Rk-bfk+ t <V5rk = 0. B4)
k= 1 k= 1 ■ k~ 1
Это и есть общее уравнение динамики для системы
с любыми связями. Обычно его применяют для систем
с идеальными связями, для которых выполняется условие
399
В этом случае B4) принимает одну из форм
^{Fk~m;?k)-b-rk=0, B5)
так как сила инерции через ускорение ак относительно
инерциальной системы отсчета выражается в форме
Фк=-ткак=-ткгк,
где гк — радиус-вектор точки.
Таким образом, согласно общему уравнению динамики,
в любой момент движения системы с идеальными связями
сумма элементарных работ всех активных сил и сил инерции
точек системы равна нулю на любом возможном перемещении
системы, допускаемом связями. Общее уравнение динамики
B4) часто называют объединенным принципом Д а -
ламбера—Лагранжа. Его можно назвать также общим
уравнением механики. Оно в случае равновесия системы
при обращении в нуль всех сил инерции точек системы
переходит в принцип возможных перемещений статики, только
пока без доказательства его достаточности для равновесия
системы.
Общему уравнению динамики можно придать другие,
эквивалентные формы. Раскрывая скалярное произведение век-
векторов, его можно выразить в виде
где xk, yk, zk — координаты к-й точки системы. Учитывая,
что проекции сил инерции на оси координат через проекции
ускорений на эти оси выражаются соотношениями
фкх= -ткакх= -ткхк; Фку= -ткаку= ~тку\;
%2=-mkakz=-mkzk,
общему уравнению динамики можно придать форму
N
Е [(FkX-mkxk)bxk + (Fky~mkyk)byk + (Fkz-mkzk)bzk] = O. B5')
Jc=l
В этом виде его называют общим уравнением дина-
динамики в аналитической форме.
Общее уравнение динамики для систем, подчиненных голо-
номным, идеальным, неосвобождающим связям, дает полную
информацию о движении таких систем, т. е. из него аналогично
400
тому, как из принципа возможных перемещений получались
условия равновесия системы, можно получить полную систему
дифференциальных уравнений. Для вывода этих уравнений
следует использовать понятия обобщенных координат и обоб-
обобщенных сил.
Пусть имеется система, подчиненная голономным, идеаль-
идеальным, неосвобождающим связям. Предположим, что она имеет
п степеней свободы и, следовательно, ее положение в про-
пространстве определяется обобщенными координатами qx, q2,
..., qn. Радиус-вектор каждой точки системы в общем случае
нестационарных связей зависит от обобщенных координат
и времени, т. е. rk = rk(ql, q2, ..., qn, t). Для возможного
перемещения Ьгк имеем
так как время при этом считается неизменным. Подставляя
B6) в общее уравнение динамики B5), после перемены порядка
суммирования по А: и г получим
£ (£^g+i*^W=o. B7)
(=1 \k=l °Ч* /c=l iJ
Используя обобщенные силы активных сил 0; и сил инерции
61Ф\ т.е.
iy& |л& B8)
из B7) получим общее уравнение динамики в следующей форме:
£ (е,-+е1ф)M9г=о. B9)
Обобщенные координаты системы независимы, вариации этих
координат не только независимы, но и произвольны. Последо-
Последовательно принимая только одну из вариаций обобщенных
координат не равной нулю, а все остальные — равными нулю,
из B9) получаем следующую систему условий:
е,-+е<ф)=о, i=i, 2, ..., п. (зо)
Условия C0) можно назвать принципом Даламбера
для системы, выраженным через обобщенные си-
силы. Из C0) следуют условия равновесия системы 6. = 0, *'=1,
2, ..., и, если силы инерции точек системы, а следовательно,
и обобщенные силы инерции равны нулю.
При использовании общего уравнения динамики необходимо
уметь вычислять элементарную работу сил инерции системы
на возможных перемещениях. Для этого применяются соответ-
соответствующие формулы для элементарной работы, полученные
401
для обычных сил. Рассмотрим их применение для сил инерции
твердого тела в частных случаях его движения.
При поступательном движении. В этом случае тело имеет
три степени свободы и вследствие наложенных связей может
совершать только поступательное движение. Возможные пере-
перемещения тела, которые допускают связи, тоже являются
поступательными.
Силы инерции при поступательном движении приводятся
к равнодействующей Ф*= —Мас= —Ма. Для суммы элементар-
элементарных работ сил инерции на поступательном возможном пере-
перемещении тела получим
N
где Ьгс = Ьг — возможное перемещение центра масс и любой
точки тела, так как поступательное возможное перемещение
у всех точек тела одинаково; одинаковы и ускорения, т. е. ас — а.
При вращении твердого тела вокруг неподвижной оси.
Тело в этом случае имеет одну степень свободы. Оно
может вращаться вокруг неподвижной оси Oz. Возможное
перемещение, которое допускается наложенными связями,
является тоже поворотом тела на элементарный угол 8ф
вокруг неподвижной оси.
Силы инерции, приведенные к точке О на оси вращения,
сводятся к главному вектору Ф и главному моменту L^\
Главный вектор сил инерции приложен к неподвижной точке,
и его элементарная работа на возможном перемещении равна
нулю. У главного момента сил инерции не равную нулю
элементарную работу совершит только его проекция на ось
вращения Ь[ф)=— Jzz. Таким образом, для суммы работ сил
инерции на рассматриваемом возможном перемещении имеем
если угол 8ф сообщить в направлении дуговой стрелки
углового ускорения е.
При плоском движении. Связи, наложенные на твердое
тело, допускают в этом случае только плоское возможное
перемещение. В общем случае оно состоит из поступательного
возможного перемещения вместе с полюсом, за который
выберем центр масс, и поворота на элементарный угол 5ф
вокруг оси Cz, проходящей через центр масс и перпенди-
перпендикулярной плоскости, параллельно которой может совершать
тело плоское движение.
Так как силы инерции при плоском движении твердого
тела можг1О привести к главному вектору Ф и главному
моменту L^* (если за центр приведения выбрать центр масс),
402
то сумма элементарных работ сил инерции на плоском
возможном перемещении сведется_ к элементарной работе
главного вектора сил инерции ф=— Мас на возможном
перемещении центра масс и элементарной работе главного
момента сил инерции на элементарном поворотном пе-
перемещении вокруг оси Cz, проходящей через центр масс.
При этом не равную нулю элементарную работу может
совершить только проекция главного момента сил инерции
на ось Cz, т.е. L$)=— JCze. Таким образом, в рассма-
рассматриваемом случае имеем
N
если поворот на элементарный угол 5ф направить по дуговой
стрелке для е.
Пример 1. Центробежный регулятор вращается вокруг неподвижной верти-
вертикальной оси О1О2 с постоянной узловой скоростью со (рис. 100, а). Силы
тяжести точечных грузов М1 и М2 равны Р, ползуна D — соответственно
Q; длины стержней AlMl=A2M2 = M1Bl — M2B2 = l, OAl = OA2 = ll. Попереч-
Поперечными размерами ползуна D, массами пружин, ползуна Е и всех стержней
пренебречь. Коэффициенты жесткости пружин одинаковы и равны с. Длины
пружин в недеформированном состоянии равны 1Х.
Определить зависимость между угловой скоростью вращения регулятора
ю и углом ф.
Решение. Применим к регулятору общее уравнение динамики в форме
так как проекции активных сил Fk и сил инерции Фк наось Оу равны нулю.
Активными_ силами являются силы тяжести Р и Q и силы натяжения
пружин F и F'. Силы инерции следует учесть только центробежные для
шаров Mi и М2 (рис. 100, б), так как касательные при вращении с постоянной
угловой скоростью равны нулю.
0,
Рис. 100
403
Если пренебречь силами трения, то связи в рассматриваемой задаче
можно считать идеальными. Они неосвобождающие и стационарные.
Декартовы координаты точки Мх: xi, zx; ползуна D: О, z2. Применение
общего уравнения динамики к регулятору дает
Qbz^Q. (a)
При составлении этого уравнения отдельно вычислена элементарная работа
сил на возможных перемещениях для шара Мх. Чтобы учесть элементарную
работу таких же сил для шара М2, результат надо удвоить. Работа силы
упругости пружин F, приложенных к ползуну Е, равна нулю.
Для модулей сил инерции Ф и упругости F имеем
р
Ф=- (l{ +/sin(p)w2; F=cl = cl ыгмр, (б)
g
где X—удлинение пружины.
Для установления зависимости между вариациями координат точек
получим предварительно зависимость самих координат от угла ф:
xi =/i + /sin<p; Z! = /cos(p; z2 = 2/coscp.
Варьируя эти зависимости, имеем:
S*! =/coscp§cp; Szj = —/51Пф8ф; 8z2= —2/Б1Пф8ф. (в)
Все вариации координат выразились через вариацию одного угла <р;
следовательно, система имеет одну степень свободы.
Подставляя значения величин из (б) и (в) в (а), после сокращения на
2/5ф получаем
р
— (l{ +Ism<p)m2l соыр — Р sm(p — cl sin<pcosip — Q sirup —0. (a')
Разделив обе части этого соотношения на cos(p, получаем искомую зависнмость
между со и ф:
Р
— A{ + / sin ф)/а>3 — Р tgф — cl йшф — Q tgф = О,
g
P/^+Zsincp) S'
Пример 2. Призма А, сила тяжести которой Р{, расположена на гладкой
горизонтальной плоскости (рис. 10)). По грани призмы, наклоненной к горизон-
горизонту на угол а, может двигаться груз В, имеющий силу тяжести Р2. Груз
В прикреплен к призме с помощью пружины, имеющей жесткость с.
Определить движение призмы А и груза В по призме, если в начальный
момент система находилась в покое и пружина была не деформирована.
Силами трения груза В о призму А пренебречь.
Решение. Система имеет две степени свободы. В качестве обобщенных
координат выберем х и s. Связи системы неосвобождающие, стационарные
и идеальные, так как поверхности тел гладкие.
Активными силами являются силы тяжести Р{, Р2 и силы упругости
пружины Т (рис. 102).
Общее уравнение динамики в обобщенных координатах для случая двух
степеней свободы можно выразить в форме
б, + еГ = 0; Q2 + Qf] = Q. (a)
Здесь 2i и Q2 — обобщенные силы, отнесенные к обобщенным координатам
х и s; Q(®} и £>2Ф|—обобщенные силы инерции, отнесенные к тем же
координатам.
404
Рис. 101
Рис. 102
Обобщенные силы для координаты х вычисляем по формулам
N
I Fk-brk
Ьх ' - 8, '_ (б)
где Fk — активная сила, приложенная к к-й точке системы; Фк—сила инерции
для той же точки. Индекс х в числителе указывает, что сумму элементарных
работ на возможных перемещениях точек Вгк следует вычислять при изменении
только координаты х, считая координату s при этом постоянной.
Дав возможное перемещение Ьх в направлении возрастания координаты
х, имеем по формуле (б) <2i = 0, так как силы тяжести Pit P2 перпендикулярны
возможному перемещению, а силы упругости (одна приложена к грузу;
другая, равная первой, но противоположная по направлению,— к призме
в точке закрепления пружины) в сумме дают элементарную работу, равную
нулю при постоянном s.
Для обобщенной силы инерции соответственно имеем
■ = -(Ф1+Ф2х)=-'
так как проекции сил инерции призмы и груза на ось Ох
Р Р
Ф1х = —х; Ф2х = — (scosa + x).
Обобщенные силы Q2 и Q20) на возможном перемещении S.s, направленном
в сторону возрастания координаты s, при неизменном значении координаты
х вычисляем по формулам
0.2 = -
(в)
Имеем
P2sma5s — Fbs
= />2sina—F=P2sina — c(kcr + s)=— cs,
так как сила упругости F=c\ = c(kCI + s), если ^ отсчитывать от положения
статического равновесия груза В; Хст—статическое удлинение пружины под
действием силы тяжести груза В в положении равновесия. В положении
статического равновесия действующие на груз силы удовлетворяют условиям
равновесия. Проецируя их на ось O's, получаем из условий равновесия
405
Для обобщенной силы инерции имеем
где Ф25—проекция силы инерции груза В на ось O's.
Подставляя полученные значения обобщенных сил в (а), получим сле-
следующую систему дифференциальных уравнений:
р
(P1 + P2)x + P2cosas = 0; — cs (i4-Jccosa) = 0. (а')
Исключая из второго уравнения (а') с помощью первого х, имеем
следующее уравнение для s:
или
s+k2s = 0, (г)
где
|2_ {P! + Pi)cg
Р2[Р,+Р2(\~соэ2а)]'
Интегрируя (г), получим
s=C1coskt + C2smkt. (г')
Постоянные С{ и С2 определяем по начальным условиям
Р2 sin a
; = 0; s=-XCI= ; i = 0.
с
Дифференцируя (г'), имеем
i= — Ciksinkt + C^coskt. (г")
Из (г') и (г") при ( = 0 получаем
-Кт = С1; С2=0.
После этого имеем
P2sina
s=-\CTcoskt= cos
cos /)r.n(.
с \J P2(P1+P2sui2a)
Подставляя значения s из (г) в первое из уравнений (а'), получаем
следующее дифференциальное уравнение для х:
j^ (д)
Интегрируя его, имеем
P2k"kCTcosu.
*=~Vt^— sinkt+C,. (д')
Интегрируя второй раз, получим
PoX^cosa
х= 2——-coskt+C3t+C4. (д")
/i + r2
Постоянные С3 и С4 определяем, используя начальные условия
г=0, х = 0, л = 0.
Из (д'), (д") и начальных условий имеем
406
После этого
§9. УРАВНЕНИЯ ЛАГРАНЖА
Из C0) получим уравнения Лагранжа второго рода, или
просто уравнения Лагранжа. Уравнения Лагранжа первого
рода — уравнения с неопределенными множителями Лагран-
Лагранжа— получены для одной точки в § 8 гл. 1. Уравнения
Лагранжа первого рода можно получить и для системы.
Тождества Лагранжа. Для получения уравнений Лагранжа
потребуется использовать три тождества. Одно из них — хоро-
хорошо известная формула дифференцирования скалярного произве-
произведения двух любых векторов а и Ь, т. е.
d ,_ ,-л da г , _ db
dty > dt At
ИЛИ
da r d /_ ,-a _ db
-i-'b = -r{a-b)-a-—.
dt dty ' dt
Если принять за а вектор скорости vk = rk, а за Ъ — вектор
j~> то в соответствии с этим тождеством получим
Другое тождество (тождество Лагранжа) выражается в виде
C2)
где точки над величинами означают их производные по
времени. Величина q^dqjdt называется обобщенной скоростью.
Тождество C2) утверждает, что «точки» (дифференцирование
по времени) можно поставить одновременно в числителе
и знаменателе или их «сократить». Справедливость C2)
доказывается вычислением входящих в него величин и их
сравнением. Действительно, в общем случае
При движении системы обобщенные координаты тоже есть
функции времени. Дифференцируя rk по времени как его
сложную функцию, имеем
407
Частные производные дгк/дд( и drk/dt не могут зависеть
от обобщенных скоростей <?,-; следовательно, дифференци-
дифференцирование частным образом по qt с фиксированным номером
обеих частей C3) дает только коэффициент при этой пе-
переменной. Все остальные слагаемые при дифференцировании
дадут нули, так как они не зависят от qt с этим фиксированным
номером. Имеем
Тождество C2) доказано.
Другое тождество Лагранжа заключается в перестановке
порядка дифференцирования по времени и обобщенной коорди-
координате вектора гк, т. е.
= f • C4)
Для доказательства этого тождества вычислим drk/dqi, исполь-
используя C3) и учитывая, что обобщенные скорости не зависят
от обобщенных координат. Получим
С другой стороны, drk/dqt есть сложная функция времени,
которая зависит от него не только явно, но и через
обобщенные координаты. По правилу дифференцирования
сложных функций имеем
iW-il, +J^a + +^d +^± C6)
Порядок частного дифференцирования в смешанных производ-
производных можно изменять. С учетом этого C5) и C6) совпадают.
Таким образом, второе тождество Лагранжа доказано.
Вывод уравнений Лагранжа. Для получения из C0) уравнений
Лагранжа для обобщенной силы инерции необходимо доказать
справедливость следующей формулы:
где
408
N _2 N
- L —5 ^
к=1 l /c=l
— кинетическая энергия системы при ее движении относительно
инерциональной системы отсчета.
Для доказательства C7) вычислим Q(^\ используя ее
определение через силу инерции Фк= — ткак= — ткгк. Имеем
N ,_ Л'
t=i k d4i k=i k k гъ'
Преобразуем выражение
Л - " д'к
В соответствии с тождеством C1)
Применим тождества Лагранжа:
8гк_дгк_ 8v _ d I drk\__drk_dvk
dqt dqt dq? с
d / _ . 5»Л__ _dvk
После этого
Подставляя это значение А в C8) и внося постоянную массу
под знак производных, а производные вынося за знак сумм,
получим
Формула C7) доказана.
Подставляя выражение C7) для 2|ф) в C0), получим
следующую систему уравнений Лагранжа:
£г-!г = е«. '=1.2,..., я. C9)
dtdqi dqt
Число уравнений Лагранжа равно числу степеней свободы
системы.
Структура уравнений Лагранжа и их составление. Уравнения
Лагранжа для обобщенных координат являются обыкновенны-
обыкновенными дифференциальными уравнениями второго порядка, как
и дифференциальные уравнения движения точки в декартовых
координатах. Число уравнений Лагранжа совпадает с числом
обобщенных координат. Действительно, для кинетической энер-
энергии системы, используя ее определение и формулу C3) для
rk = vk, имеем
409
где введены обозначения
л х~* огк дгк п r-i дгк дгк л-1 v
Величины Aij, Bt, С могут зависеть от обобщенных координат
и времени, но не зависят от обобщенных скоростей.
С учетом этого
Это выражение содержит cjj, т. е. производную от обобщенной
координаты только второго порядка. Другие слагаемые уравне-
уравнений Лагранжа содержат производные от обобщенных коорди-
координат не выше первого порядка. Активные силы Fk, если они
не зависят от ускорений точек, не могут дать зависимости
Qi от обобщенных ускорений.
Интегрируя уравнения Лагранжа для случая заданных
активных сил, получим все обобщенные координаты как
функции времени и 2и постоянных интегрирования. Для
определения этих постоянных следует дополнительно задать
начальные условия, т. е., например, при ? = 0 задать
где qf и qf — начальные значения обобщенных координат
и обобщенных скоростей.
При составлении уравнений Лагранжа можно рекомендовать
следующий порядок операций.
1. Вычислить кинетическую энергию системы в ее движении
относительно инерциальной системы отсчета.
2. Выбрав обобщенные координаты, число которых равно
числу степеней свободы системы, преобразовать кинетическую
энергию к обобщенным координатам.
3. Выполнить операции дифференцирования кинетической
энергии, предусмотренные уравнениями Лагранжа.
4. Вычислить одним из способов, указанных в § 7, обобщен-
обобщенные силы системы.
5. Приравнять величины левой и правой частей, входящих
в уравнения Лагранжа.
410
Уравнения Лагранжа для потенциальных сил. Если силы,
действующие на точки системы, являются потенциальными, то
для обобщенных сил справедлива формула Q( = dU/dqt. Силовая
функция U не зависит от обобщенных скоростей, поэтому
производную от нее по обобщенной скорости dU/dqt = O можно
добавить к дТ/dc/i. С учетом этого после переноса всех слагаемых
в левую часть получим следующую систему уравнений Лагранжа:
0, ,•= 1,2, ...,«.
Если ввести функцию Лагранжа, или лагранжиан, по формуле
L=T+U=T-II, D0)
то уравнения Лагранжа для случая потенциальных сил
примут форму
ТЦ-~1Г = 0> i=\,2, ..., п. D1)
dtdqt dqt
Функция Лагранжа отличается от полной механической энергии
системы
Е=Т+П=Т-и.
Из уравнений Лагранжа для стационарных потенциальных
сил и случая стационарности связей системы можно получить
ранее установленный закон сохранения полной механической
энергии
Е=Т+П=И,
где h — постоянная величина.
Уравнения Лагранжа D1) можно получить как уравнения Эйлера из
вариационного исчисления для экстремума функционала
S=f Ldt,
tt
где L=T+U—функция Лагранжа. Функционал S, зависящий от функций
qt(t) и qt(t), называется действием по' Гамильтону. Для того чтобы
действие по Гамильтону имело экстремум, должна быть равна нулю его
вариация, т. е.
SS=0. D1')
Условие D Г) выражает так называемый принцип Гамильтона.
Принцип Гамильтона утверждает, что для действительного движения системы
из одного положения в другое действие по Гамильтону имеет экстремум
по сравнению с другими возможными движениями системы при фиксированных
значениях qi на границах, т. е. при tt и t2-
Принцип Гамильтона позволяет получить уравнения Лагранжа без исполь-
использования основных аксиом динамики. Следовательно, он заменяет эти аксиомы
при выводе уравнений Лагранжа для случая потенциальных сил.
Циклические координаты и циклические интегралы. Функция
Лагранжа L=T+U в общем случае зависит от обобщенных
411
скоростей, обобщенных координат и времени. Если какая-либо
обобщенная координата, например </,-, не входит в выражение
функции Лагранжа, то для нее
dL/dqj = O. D2)
Обобщенная координата, которая удовлетворяет условию D2),
называется циклической. Для циклической обобщенной коорди-
координаты <jj уравнение Лагранжа примет форму
Из него получаем циклический интеграл уравнений
Лагранжа:
Cj, D3)
где Cj — постоянная величина.
В циклический интеграл могут входить производные по
времени от обобщенных координат, в том числе и производная
по времени от циклической координаты не выше первого
порядка. Следовательно, D3) в отличие от уравнений Лагранжа
в общем случае является обыкновенным дифференциальным
уравнением не выше первого порядка. Если все обобщенные
координаты являются циклическими, то система уравнений
Лагранжа, имеющих второй порядок, заменится циклическими
интегралами, имеющими только первый порядок. Интегриро-
Интегрировать систему уравнений первого порядка значительно проще,
чем систему второго порядка. Отыскание обобщенных коорди-
координат, которые являются циклическими, имеет важное значение.
Используя циклические интегралы, можно так называемым
методом игнорирования координат уменьшить число урав-
уравнений Лагранжа на количество циклических координат, не
повышая при этом порядка получаемых дифференциальных
уравнений.
Другое направление в аналитической динамике состоит
в отыскании самих интегралов уравнений Лагранжа или другой
системы уравнений, им эквивалентной.
Аналитическая механика после Лагранжа получила большое
развитие и применение в различных областях науки и техники.
Ее методы особенно широко применяются в теории колебаний
систем и в квантовой механике.
Пример. Однородный диск А силой тяжести Р=\00 Н обмотан нерастяжи-
нерастяжимой нитью, которая перекинута через блок В и прикреплена к грузу D,
имеющему силу тяжести />2 = 200 Н (рис. 103). Груз D может скользить по
неподвижной наклонной плоскости с углом наклона а = 30°. Коэффициент
трения скольжения между грузом и плоскостью /=0,3. Блок В, имеющий
силу тяжести Р, =400 Н, принять за однородный диск.
Определить ускорение груза D и оси диска А, а также натяжение нити
и давление на ось блока, если нить не скользит по блоку. Трением на оси
блока и массой нити пренебречь. Движение начинается из состояния покоя.
412
Решение. Система движущихся тел
имеет две степени свободы. За обобщенные
координаты системы примем перемещение
s груза по наклонной плоскости и угол
ф поворота диска А. Угол ф считаем
положительным против часовой стрелки,
а перемещение s — вниз по наклонной плос-
плоскости.
Связями системы являются нить, ось
блока и негладкая наклонная плоскость.
Если наклонную плоскость заменить силами
реакций связей, то оставшиеся связи окажут-
окажутся идеальными, но появится дополнительная
степень свободы у груза D. Можно сделать
Рис. 103
связи идеальными, считая наклонную плоскость гладкой, а шероховатость
ее поверхности и поверхности груза D компенсировать силой трения. В этом
случае дополнительной степени свободы не появится. Связи окажутся иде-
идеальными и для движения системы можно составить уравнения Лагранжа:
d дТ дТ_ а дТ ВТ
at as os at дф оф
Кинетическая энергия системы состоит из кинетических энергий отдельных тел:
Т=ТЛ+Т,+ Т„.
Диск А совершает плоское движение. Его кинетическая энергия вычисляется
по формуле
g 2
pr2
где vc—скорость центра масс диска; Jcz = момент инерции диска
g 2
относительно оси, проходящей через центр масс перпендикулярно плоскости
диска; г—радиус диска.
Блок В вращается вокруг неподвижной оси. Его кинетическая энергия
где 0!—угловая скорость блока; Jc z =— момент инерции относительно
g 2
оси вращения; г{—радиус блока.
Груз D движется поступательно, н его кинетическая энергия
Так как нить нерастяжима и не скользит по блоку, то угловая скорость
блока связана со скоростью груза соотношением s'=—rl<j>l. Скорость груза
предполагаем направленной в положительную сторону, т. е. вниз по наклонной
плоскости, а следовательно, в начале движения груза из состояния покоя
вниз направлено и ускорение груза. Все точки нити имеют одинаковое
числовое значение скорости |i|. Следовательно, такую же скорость имеет
и точка М диска. Приняв ее за полюс, определяем скорость точки С по
формуле, связывающей скорости двух точек тела при плоском движении:
где исм \ф\
При вращении диска против часовой стрелки скорость vCM направлена
вертикально вниз, a vM—вертикально вверх при движении груза D вниз по
413
наклонной плоскости. Следовательно, vc = s — гф, где направление вверх счита-
считается положительным для точки С.
Выражаем кинетическую энергию системы через обобщенные скорости
и координаты. Имеем
Pjs-гфJ Рг^ф^ I\s2 P2s2_
фf
Ч S
Вычисляем производные, входящие в левые части уравнений
Лангранжа:
8ТдТ 0Ts( Pi \ Рг
0 АРР
d дТ s( - Р, _ \ Рг ..
)—ф;
дТ^ЗРг2 . Рг .
d дТ ЗРг2 Рг
гтт=^—Ф ■«■
dtdy 2g g
При вычислении обобщенных сил следует учитывать силы тяжести Р, Р^, Р2
и силу трения F наклонной плоскости. Реакции идеальных связей (нить, ось
блока, гладкая наклонная плоскость) учитывать не нужно. Важно выбрать
правильное направление для силы трения F, которая всегда направлена
против скорости движения i груза D, заранее не известной. Предположим,
что движение груза направлено вниз по наклонной плоскости. Тогда сила
трения будет иметь противоположное направление. Решаем задачу при этом
предположении. Если получим s (в данном случае и s, так как движение
начинается из состояния покоя) со знаком плюс, то принятое предположение
правильно. Если же ускорение s (а следовательно, и скорость s) получится
отрицательным, то следует изменить направление силы на обратное н снова
решать задачу, так как предполагаемое направление силы трения оказалось
направленным по движению груза, т. е. неправильно. При s=0 движение
груза из состояния покоя начаться не может.
Установив предполагаемое направление силы трения вверх по наклонной
плоскости, вычисляем обобщенную силу Qs. При этом сообщаем системе
такое возможное перемещение, допускаемое связями, при котором угол ф не
изменяется, а изменяется только s на положительную величину bs, т. е.
сообщаем возможное перемещение грузу вниз по наклонной плоскости. По
формуле для обобщенной силы имеем
Q ^A^JP2^/N)BSPJs
OS OS
так как при ф = const перемещение точки С диска такое же, как и у точки
М, a F=Fm:ix = fN. Сила Р{ приложена в неподвижной точке, и ее элементарная
работа на возможном перемещении равна нулю, так как возможное перемеще-
перемещение неподвижной точки равно нулю.
Нормальную реакцию наклонной плоскости определяем из условия рав-
равновесия сил для груза D в направлении нормали к наклонной плоско-
плоскости. Имеем
x = 0; N=P2cosa.
С учетом этого
Qs — P2 (sina — /cosot)—P.
414
При вычислении обобщенной силы Q9 сообщаем системе возможное
перемещение, при котором изменяется только угол ф на положительную
величину бф, а обобщенная координата s не изменяется. Получаем
Jl.bAk)v = Pbsc
* бф 5ф
В этом случае точка М диска является его мгновенным центром скоростей, поэтому
5% = /'5фи5^с при положительном 5ф направлено вниз по силе Р. Элементарная
работа других сил на этом возможном перемещении равна нулю, так как точки их
приложения остаются неподвижными при этом перемещении. Таким образом,
Pbsc
2 ^ />
ф бф
Подставляя вычисленные значения величин в уравнения Лагранжа, получим
систему уравнений
(/+— + Р2)-- Pr = P2(sma- fcosa)- P;
g\ 2 J g
Из последнего уравнения выражаем ф через s. Имеем r<p=-(g+s).
Подставляя это значение в первое уравнение, получаем
s (Р Р \ Р
-( j+y + ^2J = -P2(sina-/cosa)--,
или
-1300 = 600-0,24-100; j = 0,034g«0,33 м/с2.
g
Знак плюс у s (в данном случае и у s) указывает, что движение груза
D действительно направлено вниз по наклонной плоскости, как и пред-
предполагалось.
Ускорение точки С можно получить дифференцированием по времени
выражения для скорости vc = s — rq>, справедливого для любого момента
времени. Имеем
dvc
Таким образом,
2 s 2
ac = ac = i'-r9 = j:"--(g + j:") = ---g=-0,656g=-6L3 м/с2.
Знак минус у ас указывает, что ускорение ас направлено вниз, так как
за положительное направление было принято направление вверх.
Для определения сил натяжения нитей применим к грузу и диску принцип
Даламбера. Для груза D (рис. 104), проецируя силы на ось Ох, получаем
S2 + O2-
Но
Следовательно,
р
Ф2 = — s; N=P2cosa.
S2 = P2{ sma-fcosa--1 = 41,2 Н.
V 8/
415
Для диска А (рис. 105), проецируя силы
на ось Су, имеем
Б1+Ф-Р=0,
но Ф = — ас.
S
Поэтому
—" = 100A - 0,656) « 34,4 H.
Так как центр масс блока неподвижен, то по теореме о движении центра
масс (рис. 106) получаем равновесие сил
0 = X! + S2cosa; 0= Y1-S1-P2-S2sina.
Из этих уравнений определяем проекции реакций оси Xt и Y^.
455,l H.
Числовое значение силы реакции оси блока, а следовательно, и давление
блока на ось
§ 10. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
Уравнения Лагранжа D1) представляют собой п обыкновенных дифферен-
дифференциальных уравнений второго порядка для обобщенных координат qt. Эти
уравнения многими способами можно свести к системе 2 и уравнений первого
порядка путем введения новых переменных. Канонические уравнения
или уравнения Гамильтона дают такую систему дифференциальных
уравнений первого порядка, эквивалентную уравнениям Лагранжа, в наиболее
удобной симметричной форме.
Получим уравнения Гамильтона. Для этого введем в качестве дополнитель-
дополнительных к Qi независимых переменных систему обобщенных импульсов:
дЬ
D4)
где L=T+U=T—II—функция Лагранжа, представляющая собой избыток
кинетической энергии над потенциальной. Определим новую функцию, которая
называется функцией Гамильтона:
H=tpi<ii-L. D5)
416
Можно показать, что функция Гамильтона для случаев, когда кинетическая
энергия является однородной квадратичной формой обобщенных скоростей, т. е.
1 Л П
и силовая функция не зависит от обобщенных скоростей и явно от t,
совпадает с полной механической энергией:
Е=Т+П.
Для других случаев функция Гамильтона является лишь неким аналогом
полной механической энергии.
Для ■ вывода уравнений Гамильтона вычислим вариацию функции Я,
используя ее определение D5) и учитывая, что время при этом не варьируется.
Так как L = L{qb qb t), то получаем
§^=I^H+I^H=I>H+I>.4- D6)
При этом учтено, что, согласно определению pt и уравнениям Лагранжа, имеем
dL_ dLd dL_dpt
dqi " dqt At dqt dt
С учетом значения SL выражение для 8# принимает форму
8#=£лН + Ей8л-1>Н-1>,Н=1>8;>;-£>;Н-, D7)
так как первое и третье слагаемые в сумме дают нуль.
С другой стороны, Я есть функция новых переменных qb pt и, возможно,
времени t, т. е.
H=H(qh Pi, t).
Поэтому для ее вариации, выраженной через эти переменные, имеем
5Я=1^8А+5;!%, D8)
Приравнивая значения 8 Я из D7) и D8) и учитывая, что qh pt независимы
и, следовательно, их вариации независимы и произвольны, получаем следующие
уравнения Гамильтона:
дН дН
4i=-r-; &=—!-, '=i. 2, ..., я. D9)
о Pi dq{
Уравнения Гамильтона служат для определения qt(t) и Pi(t), если для
них дополнительно заданы начальные условия, по которым можно определить
постоянные интегрирования.
Уравнения Гамильтона по сравнению с уравнениями Лагранжа имеют ряд
преимуществ. Для них разработаны методы нахождения интегралов. Форма-
Формализм Гамильтона широко применяется в квантовой и статистической механике.
Пример. Составить уравнения Гамильтона и проинтегрировать их для
системы с одной степенью свободы, для которой кинетическая и потенциальная
энергия выражаются в форме
Т=аЧ~, П=сЧ~, (а)
где а и с —постоянные положительные величины.
Решение. Вычисляем функцию Лагранжа. Имеем
14 Заказ 192 417
Определяем обобщенный импульс р. Получаем
дЬ дТ
Р = тт = \— = аЯ, (б)
dq oq
так как П не зависит от обобщенной скорости.
Для функции Гамильтона, согласно ее определению, используя (б), имеем
Я = 1Л&-*-=/>9-«у + Су = ^+^=7ЧЛ = £, (в)
т. е. в рассматриваемом случае функция Гамильтона Я равна полной
механической энергии Е.
Для составления уравнений Гамильтона выразим функцию Н через
переменные q и р, используя (б). Получим
Из (г) путем дифференцирования имеем
дН р дН
dp a oq
Подставляя эти значения производных в уравнения Гамильтона
дН дН
i = WP=-J~q' (Д)
получим следующую систему уравнений:
q'=~, p=-cq. (д')
Из системы уравнений Гамильтона (д') путем дифференцирования первого
уравнения по времени и подстановки р в полученное выражение из второго
уравнения получим дифференциальное уравнение для определения ц:
q + k2q = 0, (e)
где к2 = -.
а
Решение (е) можно представить в двух эквивалентных формах:
q = Clcoskt+C2sinkt, (ж)
(ж')
где С{, С2> Л, а—постоянные величины, определяемые по начальным
значениям для q.
Вычисляя q и подставляя его значение в первое уравнение (д'), имеем
p = aq' = ak( — C1 sinkt+C2coskt)=akAcos(kt + a). (з)
Получены решения уравнений Гамильтона (д').
ГЛАВА 7
ТЕОРИЯ КОЛЕБАНИЙ
Теория колебаний механических систем — один из самых
обширных и развитых разделов теоретической механики, име-
имеющий большое прикладное значение.
418
Колебательные движения встречаются во многих отраслях
современной науки и техники и требуют для рассмотрения
широкого использования различных математических методов.
Рассмотрим основные свойства малых колебаний меха-
механических систем с одной и двумя степенями свободы на
основе применения уравнений Лагранжа; некоторые результаты
для системы с любым конечным числом степеней свободы
приведем без вывода. Механическая система может совершать
малые колебания только вблизи устойчивого положения
равновесия. Обобщенные координаты системы в положении
равновесия принимают равными нулю, т. е. отсчитывают их
от положения равновесия. Тогда колебательным движением
механической системы в общем случае считают всякое ее
движение, при котором все обобщенные координаты или часть
из них изменяются не монотонно, а имеют колебательный
характер, т. е. принимают нулевые значения по крайней мере
несколько раз.
Ниже рассмотрены только периодические и псевдопериоди-
псевдопериодические колебания.
Для рассмотрения малых колебаний следует дать определе-
определение устойчивости положения равновесия системы и установить
условия, при выполнении которых положение равновесия
является устойчивым.
§ 1. УСТОЙЧИВОСТЬ ПОЛОЖЕНИЯ РАВНОВЕСИЯ
Определение устойчивости положения равновесия
Для наглядности рассмотрим положение равновесия на
примере одного твердого тела. Пусть таким телом является
стержень (рис. 107,а,б,в) с горизонтальной осью вращения,
проходящей через точку О. Стержень имеет два положения
равновесия при ф = 0° и ф = 180°. В положении равновесия
силы, приложенные к стержню, составляют уравновешенную
систему сил.
Чтобы установить, будет ли
рассматриваемое положение рав-
равновесия стержня устойчивым, сле-
следует дать стержню достаточно
малое начальное отклонение от
положения равновесия, а в общем
случае сообщить ему еще до-
достаточно малую начальную уг-
угловую скорость и рассмотреть
его последующее движение. Для
простоты ограничимся только од-
одним малым начальным отклоне-
отклонением от положения равновесия.
В отклоненном положении силы, Рис. 107
6)
14*
419
действующие на стержень (сила тяжести и реакция в точке
О), уже не являются уравновешенными.
Если существует такое достаточно малое начальное отклоне-
отклонение стержня от положения равновесия, при котором силы
стремятся вернуть стержень в положение равновесия, то такое
положение равновесия считается устойчивым.
Положение равновесия стержня при ф = 0° (рис. 107, а)
является устойчивым, так как при начальном его отклонении
на малый угол силы, действующие на стержень, стремятся
вернуть его в положение равновесия.
В том случае, когда силы еще дальше отклоняют стержень
от положения равновесия, положение равновесия является
неустойчивым.
Положение равновесия стержня при ф = 180° может служить
примером неустойчивого положения равновесия (рис. 107,6). Силы,
действующие на стержень, в этом случае стремятся отклонить его
еще дальше от положения равновесия при любом как угодно
малом начальном его отклонении от положения равновесия.
Если стержень, получив любое малое начальное отклонение
от положения равновесия, остается в равновесии в новом
отклоненном положении, то такое положение равновесия
называется безразличным.
Примером безразличного положения равновесия может служить
равновесие стержня, у которого закрепленная точка О совпадает
с центром масс С. В этом случае силы, приложенные к стержню,
образуют равновесную систему сил при любом начальном его
отклонении от первоначального положения равновесия (рис. 107, в).
В общем случае кроме начального отклонения стержню
следует сообщить также еще и некоторую достаточно малую
начальную угловую скорость. Естественно, что тогда случай
безразличного положения равновесия стержня следует отнести
к неустойчивому положению равновесия, так как, получив
любую малую начальную угловую скорость, стержень дальше
будет удаляться с этой угловой скоростью по инерции от
своего первоначального положения равновесия.
Все изложенное о положении равновесия стержня характерно не
только для любого твердого тела, но и для любой механической
системы. Наибольший интерес представляет устойчивое положение
равновесия тела или механической системы, так как в таком
положении равновесия тело или система могут находиться
длительно, если им не сообщается какое-либо возмущение.
При устойчивом положении равновесия система, выведенная
из положения равновесия достаточно малыми возмущениями
в виде начальных отклонений и скоростей, которые сообщаются
всем точкам системы или их части, совершает колебания около
положения равновесия или приближается к нему без колебаний.
При неустойчивом положении равновесия случайные возму-
возмущения приводят к тому, что система при дальнейшем движении
420
все дальше отклоняется от положения равновесия. Таким
образом, прежде всего необходимо установить характер поло-
положения равновесия системы. Для этого требуется ввести точное
понятие устойчивости положения равновесия системы.
Строгое определение понятия устойчивости положения рав-
равновесия было дано в конце прошлого века в работах русского
ученого А. М. Ляпунова. Приведем это определение для систе-
системы с любым конечным числом степеней свободы п.
Условимся обобщенные координаты,qu qz,..., qn отсчитывать от
положения равновесия системы, т. е. принимать их равными нулю
в положении равновесия. Начальное возмущение системы состоит
в общем случае из начальных значений обобщенных координат q,,
q2, ..., qn и начальных обобщенных скоростей q\, q\, ..., qn.
По Ляпунову, равновесие системы называется устойчивым,
если для любого достаточно малого е>0 можно выбрать два
других таких малых числа г^ >0 и ГJ>0, что при удовлетворе-
удовлетворении начальными значениями обобщенных координат и скоростей
неравенств \qf\<r\x, I # ? I < Л 2 в любой момент времени все
обобщенные координаты подчиняются условиям | </,-(* )|<е.
Таким образом, по Ляпунову, положение равновесия счита-
считается устойчивым, если можно задать достаточно малую
область изменения начальных значений обобщенных координат
в окрестности положения равновесия и область начальных
обобщенных скоростей, для которых величины обобщенных
координат при последующем движении системы ограничены
заданной s окрестностью вблизи положения равновесия. Ясно,
что области начальных значений qf и qf, определяемые
положительными числами г\1 и г]2, зависят от выбранной
s-окрестности, т. е. самого числа s. Эти области начальных
значений qf и qf не должны соответствовать т|1=0 и г|2 = О,
т. е. только самому положению равновесия, для которого
qf=O и qf=O.
В положении равновесия механической системы каждая
обобщенная сила g; равна нулю. Для случая потенциального
силового поля обобщенные силы через потенциальную энергию
вычисляются по формулам
Qt= -dn/dqt, / = ], 2, ..., п.
Следовательно, в положении любого равновесия дП/dqt=O,
поэтому потенциальная энергия при этом может достигать
своего экстремального значения.
Теорема Лагранжа—Дирихле
Малые колебания системы могут длительно совершаться
только в окрестности устойчивого положения равновесия
системы. Поэтому важное значение имеет теорема Лагран-
Лагранжа— Дирихле, устанавливающая достаточные условия
421
П(ц) устойчивости положения равно-
равновесия системы. Теорема утве-
утверждает: для устойчивости по-
положения равновесия системы,
подчиненной голономным, идеаль-
идеальным, стационарным и неосво-
бождающим связям и находя-
находящейся в стационарном потен-
потенциальном силовом поле, доста-
Рис- 108 точно, чтобы потенциальная эне-
энергия в положении равновесия имела изолированный от-
относительный минимум.
Докажем сначала теорему для системы с одной сте-
степенью свободы, допускающую наглядную геометрическую
интерпретацию. Потенциальная энергия системы с одной
степенью свободы для стационарного силового поля за-
зависит только от одной обобщенной координаты q, равной
нулю в положении равновесия. Примем потенциальную энер-
энергию в этом положении равной нулю, т. е. /7@) = 0. По
условию теоремы в положении равновесия потенциальная
энергия имеет изолированный относительный минимум, т. е.
/7min = /7@) = 0, и функция n = Il(q) в малой окрестности
q — 0, принимая только положительные значения, является
возрастающей функцией q, т. е. имеет вид, представленный
на рис. 108.
Доказательство теоремы состоит из двух частей. Первая
часть доказательства содержит выбор значения потенциальной
энергии П*. Во второй части доказывается существование
положительных чисел гц и ц2, отличных от нуля, обеспечи-
обеспечивающих выполнение условий устойчивости.
Для определения значений П* зададим положительное
число s настолько малым, чтобы окрестность его не содержала
соседних экстремумов функции # = #(</). Рассмотрим значения
функции n=n(q) при q =е и q = — е, т.е. П(г) и П( — е).
Из двух положительных величин выберем наименьшую, на-
например П(г), и примем ее за П*. Если при движении системы
оказалось, что потенциальная энергия IJ(q)<IJ*, то из выбора
значений П* следует, что q'<q <s, т. е. q обязательно должно
удовлетворять условию \q\<z.
Для доказательства второй части теоремы учтем, что при
движении консервативной системы и выполнении других усло-
условий теоремы о связях справедлив закон сохранения полной
механической энергии
где То и По — значения кинетической и потенциальной энергий
в начальный момент. Они зависят от начальных значений
422
и
т.е. П0=П(д°), T0 = T(q°,
Кинетическая энергия системы может быть только положи-
положительной. Поэтому из закона сохранения механической энергии
получаем следующее неравенство для потенциальной энергии:
П<Т0 + П0.
Это неравенство позволяет установить соответствующие поло-
положительные числа rjj и г]2. Неравенство допускает бесчисленное
количество значений для q° и q°, удовлетворяющих ему.
Действительно, неравенства Яо < Я */2 и Т0<П */2 обеспечи-
обеспечивают выполнение рассматриваемого неравенства для потен-
потенциальной энергии. Из неравенства 770<77*/2 получаем
|q°|<г]j Ф0, а из двух неравенств Т0<П*/2, \q°\<r\1 следует
|</°|<Л2^0- Подставляя значения Г0<Я*/2 и Я0<Я*/2
в основное неравенство, получим следующее условие для
потенциальной энергии:
П<Т0 + П0<П*,
что в соответствии с выбором числовой величины 77* обеспечи-
обеспечивает для обобщенной координаты выполнение условия \q\<e.
Доказано, что для любого достаточно малого числа s<0
существуют положительные числа rjt и гJ, и если |<70|<rii
и |#°|<Г|2> то 1?1<£> т-е- положение равновесия устойчиво.
Для системы с двумя степенями свободы доказа-
доказательство второй части теоремы почти не изменяется, за
исключением того, что ЯО = 77(^1, q°) и TQ = T(q1, q\, q\, q°),
но это не вносит существенных изменений в последующие
рассуждения. Некоторые особенности возникают при выборе
величины 77*.
Для системы с двумя степенями свободы n=IJ(q1,q2).
В положении равновесия системы qi=q2=Q принимаем
Я @,0)= =0. Следовательно, ПтЫ = Я@, 0) = 0.
Потенциальная энергия Я =II(q1, q2) в малой окрестности
изолированного минимума положительна, и ее зависимость
от обобщенных координат имеет форму поверхности, изоб-
изображенной на рис. 109, а.
а)
Рис. 109
423
Выберем е>0 и рассмотрим значения потенциальной
энергии П=П(г,д2), и П = #( — £, q2), где д2— любое, удо-
удовлетворяющее условию |д21^е- Зависимость П=П(г,д2) яв-
является уравнением линии пересечения плоскости дх=е (плос-
(плоскость )) с поверхностью П = II{qx, q2)- Аналогично,
П=П( — е,д2) есть линия пересечения плоскости q\—— е
с той же поверхностью. Из множества значений /7(е, q2)
и П{ — г,д2) (рис. 109, б) при изменении д2 в интервале
|д2|г%е выбираем наименьшее П1. Затем рассматриваем
П =П(д1, е) и П = П(дх, — е). Опять получим в плоскостях
дг = г и Яг—~е по кривой, аналогичной изображенной
на рис. 109,6. Из множества этих значений потенциальной
энергии выбираем наименьшее П2. Из двух положительных
величин П1 и #2 наименьшее принимаем за П*.
Из способа выбора значения П* следует, что если в какой-то
момент движения системы П{дх, д2)<П*, то обобщенные
координаты удовлетворяют условиям \д1\<г и \д2\<г.
Рассмотрим доказательство теоремы Лагранжа — Дирихле
для системы с п степенями свободы и, следовательно,
с </j, g2, ..., дп обобщенными координатами.
Примем в положении равновесия все <7, = 0 и /7@, 0, ...,
0) = 0. Тогда nmin = I7@, 0, ..., 0) = 0. Выберем достаточно
малое положительное число е>0, такое, чтобы в е-окрестности
не содержалось других экстремумов функции П=П(д1, д2> ...,
дп). Дадим обобщенной координате дх значения qx = z и дх = — е,
т.е. \д1\ = е, а другие обобщенные координаты при этом
удовлетворяют условию |^|^е. Из всех значений потенциаль-
потенциальной энергии в этом случае выбираем наименьшее П1. Затем
даем д2 значение \д2\ = г, а другие при изменении удовлетво-
удовлетворяют условию |<7;|<е. Наименьшее значение потенциальной
энергии при этих условиях обозначим П2. Продолжая этот
процесс со всеми обобщенными координатами, получим после-
последовательность положительных чисел Пх, П2, ..., П„, наименьшее
из которых принимаем за П*.
Пока при движении системы П<П\ выполняется условие
|<7,-|<е для всех обобщенных координат.
Пусть системе сообщили соответствующие начальные обоб-
обобщенные координаты и скорости и она движется. При движении
консервативной системы, удовлетворяющей связям, указанным
в условии теоремы, справедлив закон сохранения механической
энергии
Т+П=Т0 + П0,
где П0 = П(дЪ д°2, ..., д°„) и Т0=Т{д°и д°2, ..., g°n; ql ql ...,
д„), т. е. величины, зависящие от начальных значений обобщен-
обобщенных координат и скоростей. Так как при движении системы Т=
2
——>0, то из закона сохранения энергии следует
2
424
п<то+по.
Это неравенство выполняется, если справедливы, например,
два неравенства: П0^П*/2 и Т0^П*/2. Из условий
Яа^Я*/2 получим ряд значений q°, удовлетворяющих условию
q \<г\1:Ф0, а из условия Т0^П*/2 и неравенства |^,-|<т|1 —
ряд значений qf, удовлетворяющих условию |^°|<г]2^0. Для
потенциальной энергии после этого имеем
Следовательно, в соответствии с выбором 77* все обобщенные
координаты удовлетворяют условию | </, | < е.
Итак, существуют такие положительные числа г^ и г]2,
определяющие область начальных значений qf и qf, для
которых все обобщенные координаты удовлетворяют условию
|<7;|<е, т. е. положение равновесия устойчиво. Теорема Лагран-
жа — Дирихле полностью доказана.
В некоторых случаях установить неустойчивость равновесия
можно на основании теорем Ляпунова.
Приводим эти теоремы без доказательства.
1. Равновесие консервативной системы неустойчиво, если
потенциальная энергия системы в положении равновесия не
имеет минимума и отсутствие минимума определяется слага-
слагаемыми второго порядка малости в разложении потенциальной
энергии в ряд по степеням обобщенных координат.
2. Равновесие консервативной системы неустойчиво, если
потенциальная энергия системы в положении равновесия имеет
максимум и наличие максимума определяется членами наимень-
наименьшего порядка малости в разложении потенциальной энергии
в ряд по степеням обобщенных координат.
§ 2. КОЛЕБАНИЯ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Механическая система с одной степенью свободы имеет
одну обобщенную координату q, и ее движение описывается
одним уравнением Лагранжа
dt dq dq ^ V '
Обобщенную силу Q можно считать состоящей из трех
частей: Q-Qn + Q"' + QB. Здесь Qn — обобщенная сила потен-
потенциальных сил. Она выражается через потенциальную энергию
П по формуле Qn = —дП/dq. Потенциальная энергия в общем
случае зависит от координат точек системы и, следовательно,
от обобщенной координаты q и не зависит от обобщенной
скорости q. Для нестационарного силового поля, а также
нестационарных связей потенциальная энергия может зависеть
явно еще и от времени.
425
В Q0 включим ту часть обобщенной силы, которая
получается от действия сил сопротивления, зависящих как от
числовых значений, так и направлений скоростей точек системы.
В дальнейшем рассматривается случай линейного сопро-
сопротивления, когда силы сопротивления точек системы пропор-
пропорциональны скоростям этих точек и направлены в стороны,
противоположные скоростям.
Часть обобщенной силы QB получается от так
называемых вынуждающих, или возмущающих, сил,
зависящих прежде всего от времени. Ниже рассмотрен случай
гармонической возмущающей силы, когда QB изменяется
с течением времени по синусоидальному закону. В общем
случае зависимости QB от времени ее можно разложить в ряд
Фурье и рассматривать дифференциальные уравнения движения
для каждого из синусоидальных слагаемых.
Собственные линейные колебания системы
Рассмотрим малые колебания системы с одной степенью
свободы под действием одних потенциальных сил, т. е. когда
Q = Qn = —дП/dq. Считаем, что сил сопротивления и возмуща-
возмущающих сил нет. Такие колебания называются собственными
или свободными. Колебания считаются малыми, если при
движении системы обобщенные координата, скорость и ускоре-
ускорение достаточно малы и в уравнении Лагранжа A) можно
пренебречь всеми слагаемыми второго и более высокого
порядков относительно q, q и q, т. е. слагаемыми, в которые
входят квадраты этих величин, произведения и т. д. В случае
малых колебаний системы получается линейное дифференци-
дифференциальное уравнение для обобщенной координаты q. Колебания,
для которых дифференциальное уравнение является линейным,
называются линейными. Малые колебания принадлежат к числу
линейных. Но линейными могут быть не обязательно малые
колебания.
Обычно ограничения, которые следует наложить на величи-
величины, характеризующие движение, чтобы колебания были малы-
малыми, удается установить только после полного решения задачи
в предположении, что колебания малые. Ниже рассматриваются
только малые или, если не малые, линейные колебания.
Дифференциальное уравнение собственных линейных колеба-
колебаний системы. Для вывода из уравнения Лагранжа A) линейного
уравнения малых собственных колебаний следует кинетическую
и потенциальную энергии разложить в ряды в окрестности
положения равновесия системы, где <7 = 0.
Пусть система, на которую наложены голономные, идеаль-
идеальные, неосвобождающие и стационарные связи, состоит из N то-
точек и движется вблизи положения равновесия. Ее кинетическая
энергия
426
«2 —:
■k=X
При сделанных допущениях о стационарности связей радиус-
вектор гк каждой точки системы зависит от времени только
через обобщенную координату q; следовательно, rk = — q.
_. dq
Подставляя это гк в выражение кинетической энергии, получаем
Т— х /2Aq2,
где
Величина А, как и гк, может зависеть только от q и не
может зависеть от д. Разлагая Л(</) в окрестности q = 0
в степенной ряд, имеем
Здесь и дальше индекс 0 означает, что соответствующие
величины следует вычислять при q = 0.
Для получения в разложении кинетической энергии слага-
слагаемых не выше второго порядка по отношению к q и q достаточ-
достаточно из разложения A [q] взять только постоянное значение Ао,
которое обозначим а. При учете других слагаемых из разложе-
разложения А (</) появляются члены третьего и более высокого порядков.
Итак, выражение кинематической энергии с отбрасыванием
слагаемых третьего и более высокого порядков можно предста-
представить в виде
T='l2aq2. B)
Положительная постоянная а называется коэффициентом
инерции. Обычно по размерности коэффициент инерции является
или массой, или моментом инерции.
Потенциальная энергия системы П для стационарного
силового поля и стационарных связей является функцией
только обобщенной координаты д. Разлагая ее в степенной
ряд в окрестности д = 0, получаем
Потенциальную энергию По в положении равновесия при q — О
примем равной нулю. Величина (dll/dq)o есть значение обобщен-
обобщенной силы Q в положении равновесия системы, равное нулю.
Будем считать, что в положении равновесия потенциальная
энергия имеет минимум. Это является достаточным условием
устойчивости положения равновесия системы. В этом случае
427
OF м величина (d2I7/dq2H положительна.
Т х Т л Обозначим ее с. Постоянную с Hashi-
Hashing »■) вают коэффициентом жесткости
или просто жесткостью.
Рис. ПО Таким образом, отбрасывая сла-
слагаемые третьего и более высокого порядков, имеем
n(q) = 1/2cq2. C)
Системы, для которых кинетическая и потенциальная энер-
энергии выражаются точно по формулам B) и C) без отбрасывания
слагаемых более высокого порядка, называются линейными.
Для них вся математическая теория является такой же, как
и для систем, совершающих малые колебания, хотя колебания
для линейных систем могут быть любыми, не обязательно
малыми. В дальнейшем рассматриваются линейные колебания,
в число которых входят и малые колебания.
На основании B) и C) получаем:
dT A dT . d dT .. dn
— = 0; — = aq; = aq; — = cq.
dq dq at dq dq
Подставляя эти значения производных в уравнение Лагран-
жа A), получим следующее дифференциальное уравнение малых
собственных колебаний системы с одной степенью свободы:
0. D)
При учете слагаемых третьего и более высокого порядка
в разложениях кинетической и потенциальной энергий в уравне-
уравнении D) появляются члены второго и более высокого порядка
и дифференциальное уравнение становится нелинейным.
Получим дифференциальное уравнение прямолинейных коле-
колебаний материальной точки, не обязательно малых. Пусть
материальная точка М массойт движется прямолинейно по
оси Ох под действием силы F, которая линейно зависит от
расстояния точки от положения равновесия О и стремится
возвратить точку в положение равновесия (рис.110).
Поместим начало отсчета _ расстояний х в положение
равновесия—точку О. Сила F будет направлена к началу
отсчета расстояний — точке О. В этой точке она равна нулю.
Ее проекция на ось Ох
где постоянная величина с0 — жесткость.
Силу F в этом случае называют линейной восстанавливающей
силой. Силы упругости, подчиняющиеся закону Гука, являются
линейными восстанавливающими силами.
Подставляя в дифференциальное уравнение прямолинейного
движения точки значение линейной восстанавливающей силы
и перенося все члены в одну часть уравнения, получаем
428
х = 0. E)
Уравнение E) является дифференциальным линейным уравне-
уравнением собственных прямолинейных колебаний материальной точки.
Сравнивая D) и E), видим, что эти уравнения полиостью
аналогичны. Только в уравнение для системы вместо координа-
координаты х входит обобщенная координата q, вместо массы — коэффи-
коэффициент инерции а, а вместо жесткости с0 следует взять
коэффициент жесткости с.
Интегрирование дифференциального уравнения собственных
колебаний. Если разделить обе части уравнения D) на а и обо-
обозначить положительную величину с/а = к2, то получим диф-
дифференциальное уравнение собственных линейных колебаний
системы с одной степенью свободы в окончательной форме:
q + k2q = 0. F)
Постоянная величина k = yjcja называется круговой (или
циклической) частотой колебаний.
Для прямолинейных колебаний материальной точки соот-
соответственно имеем
где к2 = с0/т.
Размерность круговой частоты к можно установить из
уравнения F). Так как
то
1 J Ы О2] М [г2]' L J W ~с
Ш-Ы _!_=!• Г*1=—--с-1
Ы О2] М [г2]' L J W
если время / выражать в секундах. Ее размерность не зависит
от размерности обобщенной координаты.
Круговая частота выражается в тех же единицах, что
и угловая скорость, в частности единица круговой частоты
колебаний точки к тоже с.
Дифференциальное уравнение F) является однородным
линейным уравнением второго порядка с постоянными коэффи-
коэффициентами. Его решение можно искать в виде q — elt. После
подстановки этого выражения в F) получаем характеристиче-
характеристическое уравнение для уравнения F)
Это квадратное уравнение имеет два чисто мнимых корня:
XU2=±ki.
На основе теории дифференциальных уравнений решение
уравнения F) можно представить в виде
2sin^? G)
429
и для обобщенной скорости
q = — C1ks
Произвольные постоянные Сх и С2 определяются из
начальных условий Г = 0, q = q0, 4 = 4о> гДе Я о и 4о — начальные
значения обобщенной координаты и обобщенной скорости.
Используя выражения для q и q при t = О, получаем C1 = q0;
C2 = q0/k.
Подставляя их значения в G), имеем
q = q0coskt+^~smkt. (8)
/С
Уравнение (8) — одна из двух основных форм выражения
собственных колебаний.
Для колебаний материальной точки соответственно
х = х0 cos kt -i—- sin kt,
где х0 и t;0 — начальное отклонение точки от положения
равновесия и начальная скорость.
Представим выражение для q в другой, так называемой
амплитудной, форме:
Из сравнения этого выражения с G) для новых постоянных
получим формулы
Отсюда
" " С2 /Л. (9)
Иногда вычисляют tgос = С1/С2-
Подставляя в (9) вместо Сх и С2 их выражения через
начальные значения, получаем:
Л = Чо+л.'* sma = 2j; cosa = ^-; tga = ^-. A0)
\j к A Ak q0
Величину А считают положительной и называют ампли-
амплитудой колебаний. Она определяет наибольшее отклонение
обобщенной координаты от положения равновесия, соответ-
соответствующего значению </ = 0. Обобщенная координата q из-
изменяется в пределах от Л-А до —А.
Безразмерная постоянная ос называется начальной фазой
колебаний. Она является значением фазы колебаний (kt + a)
при / = 0. Начальная фаза может изменяться в пределах от
0 до 2л. Для определения начальной фазы ос по начальным
условиям можно использовать любую комбинацию двух ее
тригонометрических функций из A0), например sin a и cos a.
430
По одной тригонометрической функции, например tg ос, получит-
получится два различных значения для а.
Собственные линейные колебания в амплитудной форме
с учетом начальных условий можно представить в окончатель-
окончательной форме:
«= /?§-H^sin fa + arctg™^ . A1)
V к2 V «o /
Для прямолинейных колебаний точки соответственно
/ 2 4 . ( хок
Л, I ЛП \~ т Д111 I fVl ~Т~ £11 L/ Itl
Движение системы, определяемое (8) или эквивалентной
ему амплитудной формой A1), называется гармоническим
колебанием. Гармоническими называются такие колебания, при
которых обобщенная координата изменяется с течением време-
времени по закону синуса или косинуса. Изменением фазы на л/2
от синуса можно перейти к косинусу.
Собственные линейные колебания системы с одной степенью
свободы являются гармоническими. Материальная точка под
действием линейной восстанавливающей силы тоже совершает
гармонические колебания.
Обобщенная координата q изменяется по закону синуса,
который является периодической функцией аргумента с наи-
наименьшим периодом 2л; следовательно, и q является периоди-
периодической функцией. Значение периода колебаний х для
переменной t получим из условия, по которому добавление
периода к этой переменной должно изменить фазу колебаний
на наименьший период синуса 2л. Имеем
k(t + х) + a = &7 + a + 2л; х = 2л//с = 2тц/аД\ A2)
Для прямолинейных колебаний точки период х = 2nyJт/с0.
Период колебаний выражается в единицах времени,
например в секундах. Величина, обратная периоду v=l/x,
называется частотой колебаний. Частота колебаний обыч-
обычно определяется числом колебаний в секунду или в герцах
(Гц). Частота, равная 1 Гц, соответствует одному колебанию
в секунду.
Круговая частота к выражается через период колебаний
и частоту в форме
k = 2n/x = 2nv. A3)
Из A3) следует, что круговая частота к есть число
колебаний за время, равное 2л с.
На рис. 111 представлен график собственных гармонических
колебаний системы с одной степенью свободы. Он представляет
собой синусоиду.
431
Рис. Ill
ческими. Амплитуда этих
Гармонические колебания
полностью определяются ампли-
амплитудой колебаний, периодом и на-
начальной фазой. Отметим основ-
основные свойства собственных линей-
линейных колебаний.
Собственные линейные колеба-
колебания системы являются гармони-
колебании— величина постоянная
и определяется начальными условиями. Период колебаний тоже
величина постоянная, не зависящая от амплитуды и, сле-
следовательно, от начальных условий.
Величина периода определяется только свойствами колеблю-
колеблющейся системы, т. е. коэффициентом инерции а и жесткостью
с. Независимость периода колебаний от амплитуды называется
изохронностью колебаний. Собственные линейные колебания,
если нет возмущающих сил, могут возникнуть только при
начальных условиях, не равных нулю, т. е. когда в начальный
момент система имеет не равные нулю начальную обобщенную
координату <70 или начальную обобщенную скорость qQ.
Гармонические колебания точки при наличии линейной
восстанавливающей силы возникают вследствие начального
отклонения точки х0, или начальной скорости v0, или и того
и другого вместе. Гармонические колебания обладают той
особенностью, что, возникнув однажды в какой-то момент
времени, они продолжаются сколь угодно долго без изменения
параметров колебаний, если нет других воздействий. Но
обычно колебания всегда сопровождаются возникновением сил
сопротивления, которые изменяют характер собственных ко-
колебаний.
Собственные колебательные движения, кроме графика ко-
колебаний, можно изобразить на фазовой плоскости — плоскости
переменных q и q, которые называются фазовыми переменными.
Для случая колебаний точки фазовыми переменными являются
х и v = x. Построим фазовый портрет гармонических колебаний
точки. Имеем
Исключая из этих уравнений время
t, получаем на фазовой плоскости (х,
v) семейство эллипсов:
Рис. 112
А1 ' А2к2
Эти кривые (рис. 112), зависящие
от параметра А, называют фазовыми
траекториями. Семейство фазовых
траекторий зависит от амплитуды ко-
432
лебаний, которая, в свою очередь, определяется начальными
условиями. Каждой фазовой траектории соответствует пара
начальных значений х0 и v0.
Положению равновесия точки на фазовой плоскости соответ-
соответствует начало координат х = 0, v = 0. Когда материальная точка
совершает гармонические колебания, то с течением времени
изменяются ее координата х и скорость v. Следовательно, каждому
моменту времени на фазовой плоскости соответствует определен-
определенное положение изображающей точки с координатами хи v.
За время одного полного гармонического колебания (за период)
изображающая точка описывает на фазовой плоскости эллипс.
Отметим, что периодическим колебаниям на фазовой плос-
плоскости соответствуют замкнутые фазовые траектории, и на-
наоборот. Вид фазовых траекторий характеризует устойчивость
или неустойчивость положения равновесия, достаточную ма-
малость колебаний и т. д.
Фазовые траектории для консервативной системы можно
построить используя интеграл энергии. Каждой фазовой траек-
траектории соответствует определенное значение полной механиче-
механической энергии.
В тех случаях, когда дифференциальное уравнение колеба-
колебательного движения является нелинейным, исследование дви-
движения с помощью фазовых траекторий—один из часто
применяемых методов.
Пример. Груз, имеющий силу тяжести Р=20 Н, подвешен на пружине
(рис. 113). Статическое удлинение пружины под действием силы тяжести груза
1СТ = 5 см.
Определить движение груза, если в начальный момент удлинение пружины
Х.о = 8 см и начальная скорость груза !>0=10см/с и направлена вниз.
Решение. Груз будет двигаться прямолинейно. За начало отсчета
расстояний х выберем положение статического равновесия груза, при котором
сила тяжести Р уравновешивает силу упругости пружины F, направив ось
Ох вниз по траектории движения груза. Силу упругости пружины считаем
пропорциональной ее удлинению из недеформированного состояния.
Пусть груз в момент времени t находится на расстоянии
х от начала_ отсчета. На него действуют сила тяжести Р и сила
упругости F, причем
F=cX=c(XCT+x),
где (Х^+х)— удлинение пружины; с—коэффициент жесткости.
В положении статического равновесия груза х = 0, F=cXc., = P.
Следовательно, с = P/XQT.
Дифференциальное уравнение прямолинейного движения гру-
груза в общем случае имеет вид
тх= X Fkx.
В рассматриваемом случае
N
£ Fkl = P-F=P-c(
к=\
Следовательно,
433
mx=— ex; x + k д: = 0; k
Если за начало отсчета выбрать не положение статического равновесия,
то уравнение будет иметь постоянную правую часть, т. е. будет неоднородным.
Решение дифференциального уравнения можно выразить в следующей форме:
= x= — Схкsmkt+С2кcoskt.
ся по начальны
Постоянные Сх и С2 определяются по начальным условиям: время г=0;
начальная скорость x=vo = 10 см/с;
к = Jcjn = JiJKT = ^^80/5 = 14 с "'.
Постоянные С, и С2, согласно формулам для х и х при г=0, имеют значения
С1=.хо = 3см; C2 = f0/^ = 0,71 см.
Уравнение движения груза принимает вид
x = 3cosl4f+0,71sinl4? см.
Приведем его к амплитудной форме. Амплитуда
Л = ч/с] + С? = ,/9 + О,5О«3,О8 см.
Для начальной фазы а
sina = C1M=0,97>0; cos а = С2//1 = 0,71/Л >0.
Следовательно, угол а находится в первой четверти и по значению, например,
sin а получаем а= 1,34 = 0,43к. Уравнение движения груза в амплитудной
форме имеет вид
x = 3,08sin(l4r+0,437t)cM.
Период собственных гармонических колебаний груза
с.
Влияние линейного сопротивления на малые
собственные колебания системы
с одной степенью свободы
Линейное сопротивление и диссипативная функция. Если на
точки системы с одной степенью свободы кроме потенциальных
сил действуют еще силы сопротивления, то дифференциальное
уравнение Лагранжа выразится в форме
где Qn = — дП/dq — обобщенная сила потенциальных сил; Q® —
обобщенная сила сил сопротивления.
Рассмотрим улучай линейного сопротивления, когда силы
сопротивления Rk точек системы линейно зависят от скоростей
этих точек, т. е.
где цк — постоянный коэффициент сопротивления.
Вычислим обобщенную силу сопротивления. Согласно опре-
определению обобщенной силы, имеем
434
еф Y n "rtt V1
Для дальнейшего преобразования используем тождество
Лагранжа, полученное при выводе уравнений Лагранжа [см.
формулу C2) § 9 гл. 6]:
дгк jdq = drk jdq.
Получим
N / л- \ , N -2
Оф— — У II I г ■ к I— — V ^Ii П5"»
Введем обозначение:
N -г N _2 N 2
Ф= у Mi= у Mi= у t^i. A6)
Функцию Ф называют диссипативной функцией или функцией
Рэлея. Эта функция по своей структуре аналогична кинети-
кинетической энергии системы, только в нее вместо массы точек
входят коэффициенты сопротивления.
Из A5') для обобщенной силы сопротивления имеем
фдФд
Выразим функцию Ф через q и q. Учитывая, что
_ / х _= дгк .
имеем
где *-*<«)-£ *.(£)
Ф В
£ ()
Функция В зависит только от q и не зависит от q, так
как от q не зависит величина drk/dq.
Для выяснения физического смысла диссипативной функции
получим энергетическое соотношение, которому она удовлетво-
удовлетворяет. Для этого умножим на q уравнение Лагранжа A4)
. d дТ .ВТ дП . дФ .
4tT«-qTq=-Tqq-Tqq
и выполним ряд преобразований.
Учитывая, что
имеем
д{.=Чч)ч; qf.=A{q)e = 2T. A8)
Аналогично,
2
435
следовательно,
df.=B(qL; 4д^-вШ2 = 2Ф. A9)
Потенциальная энергия для случая стационарного потен-
потенциального поля зависит от времени только через координату q.
Следовательно,
4f=d« B0)
oq at
Преобразуем первое слагаемое в A7), учитывая A8). Имеем
. d дТ df.8T\ ..ЗТ с!/,„, ..ВТ
4tTrAq^)qT^t{)~q^'
Подставляя A8)—B1) в A7), получим
Учитывая, что Т—функция только q и q, зависящих от
t, имеем
дТ . дТ ..ЛТ
q + q
После переноса — d#/d/ в левую часть B1') и объединения
слагаемых получаем
-BТ~Т+П)=-2Ф или -{Т+П)= -2Ф.
dr ' dr '
Если ввести полную механическую энергию Е=Т+П, то
окончательно имеем энергетическое соотношение
dE/dt= -2Ф. B2)
Это соотношение показывает, что диссипативная функция
Ф характеризует скорость убывания полной механической
энергии системы вследствие действия сил линейного сопротив-
сопротивления. На убывание полной механической энергии указывает
знак минус в B2). Диссипативная функция Ф, согласно A6),
является величиной положительной.
Разложим диссипативную функцию в ряд в окрестности
положения равновесия системы. Для этого в соответствии
с A6') следует разложить в ряд по степеням q функцию
B{q) в окрестности <7 = 0. Имеем
Подставляя это разложение в A6') и оставляя в нем
только В@), получаем
1(J = 1/2ц42, B3)
436
где введено обозначение ц = £@). Положительная постоянная
величина и называется обобщенным коэффициентом сопротив-
сопротивления.
Дифференциальное уравнение малых собственных движений
при действии линейного сопротивления. Вблизи положения
равновесия системы имеем следующие выражения для ки-
кинетической и потенциальной энергий и диссипативной функции:
T=aq2/2; I7=cq2/2; <Ь = щ1\1.
Подставляя их в уравнение Лагранжа
d^5T_f)T= п ф
dtdq oq ^ ^
и учитывая, что
дТ _ d дТ .. „„ дП „ф дФ
— = 0; - — = aq; Q"=- — =-cq; Q<D=-—=-iiq,
oq dt oq oq oq
получаем следующее дифференциальное уравнение:
aq=-cq-\\q.
Это приближенное уравнение. При его получении отбро-
отброшены все слагаемые второго и более высокого порядков.
Если разделить обе части уравнения на а и ввести
обозначения к2 = с/а, 2п = ц/а, то после переноса всех членов
уравнения в левую часть получим дифференциальное уравнение
движения системы в окончательной форме:
q + 2nq + k2q = 0. B4)
Постоянная к = у/с/а является круговой частотой собствен-
собственных колебаний системы без учета сопротивления. Величина
и = ц/Bя) называется коэффициентом затухания. Ее размер-
размерность такая же, как и у круговой частоты. Вместо п иногда
употребляют величину то=1/и, которая называется посто-
постоянной времени затухания и имеет размерность времени.
Интегрирование дифференциального уравнения движения. Диф-
Дифференциальное уравнение B4) является однородным линейным
уравнением второго порядка с постоянными коэффициентами.
Его решение следует искать в форме q — ex\ где постоянная
X определяется из характеристического уравнения \2 + 2п\ +
+ /с2 = 0, которое получается после подстановки решения в диф-
дифференциальное уравнение.
Характеристическое уравнение имеет два корня:
^x,2=-n±Jn2-k2. B5)
Могут представиться три случая: 1) п<к — это случай
малого сопротивления; 2) п>к — случай большого сопротив-
сопротивления; 3) п = к — случай критического сопротивления. Рассмот-
Рассмотрим эти случаи по отдельности.
437
Затухающие колебания. Если п<к, то величина под знаком
квадратного корня в B5) отрицательна. Обозначим к\ по-
положительную величину (к2 — п2). Тогда k1 = s/k2 — n2 и из B5)
получим следующие значения для корней характеристического
уравнения:
Хи 2= —n±k1i.
Соответственно общее решение дифференциального уравнения
зависящее от двух произвольных постоянных, выразится в виде
где Cf, С% и Сх, С2 — произвольные постоянные.
Решение B6) можно также представить в другой, ампли-
амплитудной, форме:
q = Ae~ntsin(k1t + <x), B7)
где А и ос — тоже произвольные постоянные.
Раскрывая синус суммы, имеем
q = Ае ~nt sin (kx t + ос) = е ^nt (A sin a cos k^t + A cos ос sin kxt). .
Сравнивая это уравнение с B6), получаем формулы связи
постоянных:
Сх = A sin ос; С2 = A cos a
или
Постоянные Сх, С2 и соответственно А, ос определяются
из начальных условий t = 0, q = q0, q = q0-
Дифференцируя B6) по времени, имеем
q= ~ne"'{C )
+ e~"t(-Cxk1sink1t + C2k1cosklt). B9)
Используя выражение B6) для q, а B9)—для q при / = 0,
получаем уравнения для определения Сг и С2:
qo = C; qo=~nCx+klC2.
Из них
Q = <7о; С2 = (<7о + nq0 )/к 1 = (<?о + пЯо I^к2-п2.
Соответственно постоянные А и ос через начальные условия
выразятся в следующей форме:
t
% + nqo
438
Величина А положительна. Она
не является амплитудой. Начальная
фаза ос может иметь значения в пре-
пределах от 0 до 2л.
Для выяснения изменения функ-
ции q(t) построим ее график, ис-
используя уравнение B7). Вид гра-
графика функции q = Ae~ntsm(k1t + <x)
(рис. 114) можно выяснить с помо-
помощью построения графиков вспомо-
вспомогательных функций ql = Ae~nt (кри-
(кривая 7) и q2=—Ae-"' (кривая 2).
2
Рис. 114
/-foe),
) q2(р )
Кривые 7 и 2 являются ограничивающими для sin
который изменяется между 1 и — 1.
Таким образом, изобразив синусоиду между ограничиваю-
ограничивающими кривыми / и 2, можно составить представление о виде
графика функции q(t). На рис. 114 в действительности пред-
представлены графики отдельных функций q{t), + Ае~т и — Ае~т.
Из графика функции q(t) следует, что величины по-
последовательных наибольших отклонений q от положения равно-
равновесия уменьшаются с увеличением времени, стремясь к нулю
при неограниченном возрастании времени. В соответствии
с этим движение, определяемое уравнением B7) или B6),
называют затухающими колебаниями.
Условным периодом затухающих колебаний (или периодом)
называют период sin{kxt-fa). Он является периодом прохо-
прохождения системы через положения равновесия, так как функции
q{t) и sin (fcj^-f a) равны нулю одновременно. Круговой часто-
частотой sm(kxt + <x) является величина кх = ^/к2 — п2. Следовательно,
период затухающих колебаний
C1)
Период затухающих колебаний — величина постоянная, не
зависящая от начальных условий. Он больше периода собст-
собственных колебаний при отсутствии сопротивления х = 2п/к.
Из C1), разлагая х^ в ряд по степеням п/к с использованием
бинома Ньютона, имеем
-1/2
C1')
Для очень малых п/к по сравнению с единицей можно
считать х^&х, т. е. малое сопротивление не изменяет периода
собственных колебаний системы. В более общем случае можно
использовать приближенную формулу
C1")
439
В действительности функция q{t) не является периодической,
так как не существует величины т15 удовлетворяющей условию
периодичности q{t + xx) = q(t) для любого момента времени.
Определим моменты времени, в которые функция q{t)
достигает максимальных и минимальных значений. В эти
моменты времени q(t) = O.
Дифференцируя выражение q(t) из B7) и приравнивая нулю
производную, получим следующее уравнение:
Так как е~т равно нулю только при г=оо, то соответ-
соответствующие моменты времени определяются из условия равенства
нулю выражения в квадратных скобках:
— п sin (kl / + a) -\-k1 cos [kx t + а) = О,
или
Если tx — одно из искомых значений /, удовлетворяющих
этому тригонометрическому уравнению, то, учитывая, что
период тангенса равен п, все остальные искомые значения
времени будут удовлетворять соотношению
или
где т — любое натуральное число.
Таким образом, моменты времени, в которые функция
q(t) достигает максимумов и минимумов, образуют бесконеч-
бесконечную последовательность значений
Из графика функции q(t) (см. рис. 114) следует, что между
каждыми ее двумя максимумами расположен один минимум,
и наоборот. Следовательно, два соседних максимальных значе-
значения функции q(t) наступают через промежуток времени, равный
2п/кх, который совпадает с периодом затухающих колебаний
х1. Два последовательных минимума тоже разделяет промежу-
промежуток времени, равный хх.
Переменную величину Ае ~т называют условной амплитудой
затухающих колебаний. Она не является максимальным зна-
значением функции q(t). Установим закон изменения условной
амплитуды Ae~nt при изменении времени на период xt. Если
в момент времени tx условная амплитуда Ax=Ae~nt\ то через
промежуток времени, равный периоду затухающих колебаний
т1( в момент t2 = t1 + xl
440
Это справедливо для любых двух моментов времени,
отличающихся на период т^ Действительно, если при
где т — любое натуральное число, большее единицы, то при
( \)
лт+1—ЛР 'с лте •
Таким образом, последовательные значения условных ам-
амплитуд в моменты времени, отличающиеся на условный
период, образуют убывающую геометрическую прогрессию А1,
А1е~пхч Ale~2nz*; ...; А1е~т"^ч ... со знаменателем е~"\
Можно показать, что по такому же закону убывающей
геометрической прогрессии изменяются любые последователь-
последовательные значения функции
q = Ae~ntsin(k1t + Oi)
для моментов времени, отличающихся друг от друга на
условный период. Так, если в момент времени ?t
то для момента времени г2 =
q2 = Ae~"t>e~"*' s'm
так как sm[k1(t1+Tl) + a] = sm(k1t1+a), вследствие того что
т1 является периодом.
Аналогично, если для tm = t1
то для
Поэтому последовательные значения qy,q2, ..., qm, ... образуют
убывающую геометрическую прогрессию со знаменателем е~пт'.
Так как любые два значения функции q(t), соответствующие
моментам времени, отличающимся на период т15 связаны
соотношением
то этому соотношению удовлетворяют и два последовательных
значения максимума:
~max /1max/1-nt
<1т+1=<1т е
Величину отношения двух последовательных максимумов
называют декрементом колебания.
Натуральный логарифм декремента колебания называется
логарифмическим декрементом колебания. Для логарифмическо-
логарифмического декремента колебания г\ имеем
441
C2)
Кроме декремента и логарифмического декремента колеба-
колебания часто используется другая характеристика затухания — доб-
добротность системы Q, которая определяется приближенным
соотношением
Q = k/Bn), C3)
где £• —частота собственных колебаний без учета сопротивле-
сопротивления; п — коэффициент затухания.
Логарифмический декремент колебания можно выразить
через добротность. Действительно, из C2) и C3) с учетом C1)
C4)
Таким образом, из проведенного исследования можно
заключить, что малое линейное сопротивление незначительно
увеличивает период колебаний по сравнению со случаем от-
отсутствия сопротивления, но сильно уменьшает последовательные
значения условных амплитуд, которые уменьшаются с течением
времени по экспоненциальному закону.
Затухающие движения. Рассмотрим случай, когда п>к
(случай большого сопротивления). Корни характеристического
уравнения в этом случае имеют значения
А,12=—и + ^уи —к =—п + к2,
где введено новое обозначение для положительной величины
2
Оба корня характеристического уравнения действительны
и отрицательны, так как к2<п. Следовательно, общее решение
дифференциального уравнения q + 2nq + k2q = 0 имеет вид
q = C1ex>t + C2el>t = e-nt(Clek>t + C2e-k>t), C5)
где С*! и С2 — произвольные постоянные, которые можно
определить по начальным условиям
t = 0; q = q0; q = q0.
Не выполняя этих вычислений, можно оценить поведение
функции q(t), используя уравнение C5). Для qo>0 могут
представиться три случая в зависи-
зависимости от знака и значения qQ
(рис. 115).
При <7о>0 функция q(t) некоторое
время возрастает до определенного
максимума, а затем убывает, асимп-
асимптотически приближаясь к нулю, так
'* как limg(?) = 0 вследствие того, что
1—со
показатели степеней \ и Х2 отрица-
Рис. us тельны (кривая 1).
442
При не очень больших по абсолютной величине отри-
отрицательных значениях q0 может сразу начаться убывание q(t)
(кривая 2). При больших по модулю отрицательных значениях
q0 функция q(t), убывая, может достичь нулевого значения,
соответствующего положению равновесия системы, стать отри-
отрицательной и, оставаясь отрицательной, асимптотически прибли-
приближаться к нулю (кривая 3). Во всех этих случаях движение
является затухающим, неколебательным, которое иногда на-
называют также апериодическим.
При п =к (случай критического сопротивления)
характеристическое уравнение имеет кратный отрицательный
корень
Х1 = А.2= —и.
Соответственно этому решение дифференциального уравне-
уравнения q + 2nq +k2q = 0 имеет вид
q=e-M{C,t + C2). C6)
Произвольные постоянные Ct и С2 определяются по
начальным условиям. В этом случае при t, стремящемся
к бесконечности, q(t) стремится к нулю при любых конечных
значениях постоянных Ct и С2, так как
что проверяется раскрытием неопределенности по правилу
Лопиталя.
Таким образом, случай критического сопротивления тоже
дает затухающее движение.
При п^-k движение не является колебательным и с не-
некоторого момента времени начинается так называемое лими-
тационное движение, при котором система асимптотически
стремится вернуться к положению равновесия.
Анализ влияния линейного сопротивления на собственные
малые колебания показывает, что линейное сопротивление не
может сделать устойчивое положение равновесия неустойчивым.
Если в окрестности устойчивого положения равновесия система
совершает незатухающие малые колебания, то линейное сопро-
сопротивление превратит их в затухающие или сделает даже
затухающими движениями.
Пример. Система состоит из точечного груза М с силой тяжести Р = 200 Н,
прикрепленного к концу невесомого стержня длиной /=90 см, другой конец
которого закреплен с помощью цилиндрического шарнира О (рис. 116).
К стержню в точке В прикреплены две одинаковые пружины, коэффициенты
жесткости которых с =20 Н/см, а в точке А—демпфер, создающий линейную
силу сопротивления; коэффициент сопротивления демпфера ц=15Н-с/см.
Система расположена в вертикальной плоскости. Статическому положению
равновесия системы соответствует вертикальное положение стержня, при
котором пружины не деформированы. В начальный момент времени стержень
443
О,
Рис. 116
отклонен от вертикали против часовой стрелки
на угол <ро=6° и отпущен без начальной скорости.
Определить движение системы, считая его
малым, и усилие в шарнире О в начальный
момент движения, если ^=40 см, /2 = 30см. Мас-
Массой пружины и подвижных частей демпфера,
а также трением в шарнирах пренебречь.
Решение. Система имеет одну степень сво-
свободы. За обобщенную координату примем угол
Ф, отсчитывая его от положения равновесия стерж-
стержня против часовой стрелки.
Связи системы, состоящие из шарниров без
трения, следует считать идеальными. Для движе-
движения системы имеем одно уравнение Лагранжа
d дТ дТ
'7 Ф
dt 8ф дф
Кинетическая энергия системы
g 2
так как массу имеет только груз М.
дП
Обобщенная сила состоит из двух сил: потенциальной Q "= и дис-
дФ
дц>
сипативной Qm = .
Оф
Потенциальная энергия равна работе потенциальных сил при перемещении
системы из рассматриваемого положения в положение равновесия. Вычислим
потенциальную энергию сил Р и упругости F. Имеем
Работа силы тяжести положительна, так как точка ее приложения опускается
вниз в направлении силы при рассматриваемом перемещении. Если угол
считать малым, то удлинение каждой из пружин будет Х. = (/г + /2)ф. Удлинение
следует при этом учитывать только в горизонтальном направлении. Обе
силы упругости пружин направлены в одну сторону (одна пружина растянута,
другая — сжата), и их работа положительна; ^0 = 0, так как в положении
равновесия пружина не деформирована.
Для малых углов ф, отбрасывая малые третьего и более высоких
порядков, следует считать со5ф=1—ф2/2. Поэтому
Ф2
/+/J]
Сила сопротивления демпфера
R = -\ivA,
где vA=li\(p\ для малых ф и ф. Диссипативная функция Ф вычисляется,
как и кинетическая энергия, только вместо массы следует взять коэффициент
сопротивления ц. Следовательно,
Вычисляем производные, входящие в уравнения Лагранжа. Имеем
444
дТ дТ PI2 d дТ PI2
-— = 0; — = ф; = ф;
сц> дф g dt о ф g
8Ф
еф=-—=-ц/?ф.
Оф
Имея эти данные, составляем уравнение малых движений системы:
Р11
[J]2
где
Pl+2c(l1+l2J 200-90 + 2-20-702
к 2 = -g = 980= 129,45;
PI2 200-902
\il2g 15-402-980
А; =11,4 с; п =*-^- = = 7,25 с.
2Р12 2-200-902
Приближенное дифференциальное уравнение для малых движений системы
можно получить также применяя уравнение вращательного движения твердого
тела (стержень с грузом) вокруг горизонтальной оси, проходящей через
точку О:
В рассматриваемом примере п <к. Следовательно, имеем случай зату-
затухающих малых собственных колебаний. Решение дифференциального уравнения
в этом случае имеет вид
Ф = е '"'(C^osk^ +C2sinklt) = Ae ""'sin^/ +<x),
где
/ У
«8,7 с"
Дифференцируя ф по времени, получим
ф= — пе ~"'(C1cosklt +C2smkit) + e '"'( — C1kismk1t +C2k1cosk1t).
n
При t—0 Ф = фо= 6 = я/30, ф = 0. Подставляя эти значения в выражения
180
для ф и ф, имеем
п/30 = С1; 0= -пС1 + С2к1,
или
d =71/30 = 0,105; C2=nCJk1 =7,25-0,105/8,7*0,09;
^=v/c2 + C2 = 0,13; tga = C,/C2 =0,105/0,09= 1,2
Так как sma. = C1/A>0, то угол а расположен в первой четверти. По
значению тангенса этого угла находим а = 0,28 тс.
Таким образом,
Для определения реакции шарнира О применим для стержня с грузом
следствие из принципа Даламбера, составив условия равновесия приложенных
к ним внешних сил вместе с силой инерции груза в проекциях на оси координат.
К стержню и грузу приложены сила тяжести Р, сила упругости
пружин F, сила сопротивления R, составляющие реакций шарнира Хо,
445
Yo и составляющие силы инерции груза Ф„ и Ф, (рис. 117),
изображенные на рисунке для случая положительных ф, ф и ф.
р
Сила инерции Ф„ = — /ф2 = 0, так как величинами второго
g
порядка пренебрегли еще при составлении дифференциального
уравнения малых колебаний? "Если при вычислениях такие
величины, как Фл, получаются недостаточно малыми по
сравнению, например, с силой тяжести и упругости, то
допущение, что колебание малое, недостаточно точное.
Р
Сила инерции Ф,=— /ф, причем ф следует сюда подста-
подставить с полученным знаком для этой величины.
Сила сопротивления R = \ivA = \il1<p.
ср Сила упругости F=2c(l1 + l2)fp.
17 Составляя уравнения равновесия для сил, имеем
Согласно начальным условиям, при /=0 ф = фо = я:/30,
ф = 0. Угловое ускорение определяем из дифференциального уравнения движения:
ф= — к2ц> — 2иф.
При ф = ф0 и ф = 0,
ф = -&>„ = -129,45 -0,105=- 13,6 с~2.
Кроме того, при ф = ф0
71
0 30
Учитывая это, при ф = ф0 уравнения для Хо и Yo примут вид
0--/фо = 0; Yo-P = 0.
Следовательно,
200-90
(
980
(-13,6) = 44 Н; 7o = F =
H.
Реакция шарнира, а следовательно, и числовое значение давления на
шарнир
Вынужденные колебания системы без учета сопротивления
Для возбуждения вынужденных колебаний необходимо
действие на точки механической системы возмущения в той
или иной форме. Наиболее часто встречаются случаи сило-
силового и кинематического возбуждений. Рассмотрим эти
случаи на примере прямолинейных колебаний груза массой
т по горизонтальной гладкой плоскости (рис. 118,а) под
действием пружины, жесткость которой с.
Пусть на груз дополнительно действует зависящая от
времени сила Ф(г). У груза одна степень свободы. Связи
(гладкая поверхность) являются идеальными. Составим для
движения груза уравнение Лагранжа, приняв х за обобщенную
446
m
Шшшшшшшшмжш
Рис. 118
координату, отсчитываемую от положения груза, при котором
пружина не деформирована. Имеем
At дх дх ^
Силы сопротивления отсутствуют, т. е. Q° = 0. Кинетическая
энергия груза
х2
Потенциальная энергия и обобщенная сила
П=сх2/2; Qn=-dn/dx=-cx.
Для обобщенной силы QB получаем
где Ьх — возможное перемещение груза в направлении
возрастания х.
Вычислим производные от кинетической энергии. Имеем
дТ _ дТ . А дТ
= 0; — = тх; — —=тх.
дх дх At дх
Подставляя полученные величины в уравнение Лагранжа,
получаем
тх—— сх + Ф(?) или тх + сх = Ф(г).
В случае гармонической возмущающей силы
где Н, р и 8—постоянные величины. Уравнение движения
груза принимает форму
тх + сх = Н sin(pt + ?>).
Предположим в той же задаче о движении груза, что
сила Ф = 0, а следовательно, и QB = 0, но вместо этого задано
движение конца пружины — точки А в направлении оси Ох — в
форме z = z{t) (рис. 118,6). Составим уравнение Лагранжа для
груза относительно подвижной системы отсчета Оху, начало
которой движется вместе с точкой А так, что ОА остается
все время постоянным. В этом случае по-прежнему
447
<2п=-дП/дх=-сх.
Кинетическая энергия груза
так как движение груза можно рассматривать как сложное,
состоящее из переносного поступательного вместе с точкой
А и относительного по отношению к теперь уже подвижной
системе координат Оху. По теореме о сложении скоростей
скорость абсолютного движения v равна сумме скоростей
переносного и относительного движений, т. е. v^z + х. Для
производных от кинетической энергии имеем:
дТ . дТ , . , Л d дТ ... ...
— = 0; — = m(x + z); — — = m(x+z).
дх дх у ' dt дх к '
Подставляя полученные величины в уравнение Лагранжа,
получим
m(x+z)=—cx; mx + cx = —mz.
Роль обобщенной силы в этом уравнении выполняет величи-
величины— mz. Если точка А совершает гармонические колебания, то
z = zQ sin (pt + 8),
где z0, p, 8—постоянные величины. В этом случае
sin
(pt + 8)
и дифференциальное уравнение движения груза примет форму
mx+cx = mzop2 sin{pt+Ь),
т. е. то же, что и в первом случае, но H=mzQp2.
Если вместо z(t) задать скорость точки А, изменяющуюся
по гармоническому закону
vA = z = z0 sin (pt + 5),
то уравнение движения груза примет вид
mx + cx = mzop sin I pt + Ь—- I
и в этом случае H=mzop.
Существенное различие этих случаев состоит в том, что
при силовом возбуждении Н не зависит от круговой частоты
р. При кинематическом возбуждении заданием движения
z = zosin(pt + 8) точки А оно пропорционально р2, а при
возбуждении заданием скорости z = zosin(/??+8) точки А —
пропорционально р. Силовое возбуждение эквивалентно воз-
возбуждению путем задания ускорения точки А.
При дальнейшем рассмотрении вынужденных колебаний
ограничимся случаем силового возбуждения.
448
Пусть обобщенная сила состоит из двух сил: потенциальной
Qn= —дП/да= — cq и гармонической возмущающей QB =
= Hsin(pt+S).
Часть обобщенной силы BФ, зависящую от сил сопротивле-
сопротивления, считаем равной нулю. Постоянные Я, р и 8, характеризу-
характеризующие гармоническую возмущающую силу, соответственно
являются амплитудой, круговой частотой и начальной фазой
этой силы. В этом случае, как и в случае собственных
линейных колебаний, из уравнения Лагранжа в предположении,
что для кинетической и потенциальной энергий справедливы
формулы B) и C), получаем дифференциальное уравнение
aq + cq = Hsm(pt + b). C7)
Разделим обе части C7) на а и введем обозначения к2 = с/а,
h = Hja.
Здесь к— круговая частота собственных колебаний, h — от-
относительная амплитуда возмущающей силы.
Дифференциальное уравнение вынужденных колебаний без
сопротивления в окончательной форме имеет вид
2 C8)
Получено неоднородное линейное дифференциальное уравне-
уравнение второго порядка с постоянными коэффициентами. Его
решение, согласно теории дифференциальных уравнений, со-
состоит из общего решения однородного уравнения qx и частного
решения неоднородного уравнения q2. Общее решение уравне-
уравнения C8) есть сумма этих двух решений, т.е. q = q\+qi-
Однородное уравнение для определения qx, т. е. уравнение
q\+k2ql=0, совпадает с дифференциальным уравнением собст-
собственных колебаний. Поэтому его решение ql называют собствен-
собственным колебанием системы. Оно может быть выражено в двух
эквивалентных формах:
q1 = Clcoskt + C2sinkt = Al sin(kt + ai). C9)
Часть движения системы, характеризуемая функцией q2,
является частным решением уравнения C8). Эту часть движения
называют вынужденным колебанием системы. Функция q2
определяется по-разному в зависимости от соотношения частот
собственных колебаний и возмущающей силы.
Возможны два случая: отсутствие резонанса рФк и резонанс
при р = к. Рассмотрим их.
1. Случай отсутствия резонанса. В случае отсутствия
резонанса рфк и частное решение q2 следует искать в той
же форме, что и правая часть уравнения C8):
D0)
Постоянная В подлежит определению из условий, что
функция q2 является частным решением уравнения C8) и,
15 Заказ 192 449
следовательно, подстановка q2 в это уравнение должна обра-
обратить его в тождество. Определим необходимые производные
по времени от q2.
q2 = Bpcos{pt + 5); q'2 = — Вр2 sin {pt + Ъ).
Подставляя q2 и ее производные в уравнение C8) и перенося
все члены в одну часть, получаем следующее тождество,
справедливое в любой момент времени:
(-Вр2 + Вк2-h) sin {pt +8) = 0.
Так как синус переменного аргумента равен нулю не для
всех значений t, то полученное тождество выполняется, если
постоянный коэффициент в скобках при синусе равен нулю:
B(k2-p2)-h = 0.
Отсюда
B = h/(k2-p2)
Подставляя значение В в q2, получаем вынужденные
колебания в форме
<?2 = rA2sin(^ + S)- D1)
к —р
Таким образом, движение системы характеризуется обоб-
обобщенной координатой q, состоящей из двух колебаний с раз-
различными частотами — собственных qx с круговой частотой
к и вынужденных q2 с круговой частотой р:
i(? + 5) D2)
2^sin(
к —р
В амплитудной форме
q = Alsin(kt+a1)+T^~2sin(pt + ?,). D2')
к —р
Постоянные Сх и С2 или А1 и а1 определяются из
начальных условий ? = 0, q — qQ, q = q0-
Подставляя эти значения в выражения D2) для q и q при
г = 0, получаем
Отсюда
Амплитуда собственных колебаний А1 и начальная фаза
через Сх и С2 выражаются формулами
tgat =
Следовательно, амплитуда и начальная фаза собственных
колебаний при действии возмущающей силы зависят не только
450
от начальных условий, но и от параметров этой силы, т. е.
собственные колебания в этом случае могут возникнуть не
только из-за начальных условий, но и благодаря действию
возмущающих сил даже при нулевых начальных условиях.
Введем амплитуду вынужденных колебаний A2 = h/(\к2 — р21).
Тогда в зависимости от соотношения между частотами вынуж-
вынужденные колебания можно выразить в двух формах:
при р<к
при р>к
q2 = — A2sm[pt + Ь) = A2sm(pt + b — п).
Следовательно, при р<к фаза вынужденных колебаний
совпадает с фазой возмущающей силы. В этом случае сдвиг
фаз 8 между ними равен нулю, т. е. вынужденные колебания
и возмущающая сила, в частности, достигают одновременно
максимальных и минимальных значений.
При р>к сдвиг фаз е = л. Действительно, сдвиг фаз как
разность фаз между возмущающей силой и вынужденными
колебаниями
В этом случае вынужденные колебания находятся в противо-
противоположной фазе по отношению к возмущающей силе, т. е.,
в частности, если возмущающая сила достигает максимума,
то функция q2 (г) достигает минимума, и наоборот.
Итак, вынужденные колебания системы без сопротивления
при рфк, возбуждаемые гармонической возмущающей силой,
являются гармоническими колебаниями с постоянной амплиту-
амплитудой. Их частота совпадает с частотой возмущающей силы.
Они совершенно не зависят от начальных условий.
2. Случай резонанса. Резонансом называется случай
совпадения частот собственных колебаний и возмущающей
силы, т. е. когда р = к. При совпадении частот частное решение
уравнения C8) следует искать в форме q2 = Bt cos (pt + Ъ).
Постоянная В определяется из условия, что q2 есть част-
частное решение уравнения C8), обращающее его в тождество.
Аналогично рассмотренному случаю, подставив q2 и ее произ-
производные в C8) и приравняв нулю постоянный коэффициент
при sin(рг+ 5) [члены с Вгcos(рг + 8) взаимно уничтожаются],
получаем В= —h/Bp). Тогда вынужденные колебания выразятся
в форме
^ ^( \ D3)
Главной особенностью вынужденных колебаний при
резонансе является зависимость их амплитуды от времени:
15* 451
0 «S
Рис. 119
A2 = ht/Bp). Амплитуда вынужден-
вынужденных колебаний в этом случае уве-
увеличивается пропорционально време-
времени. Сдвиг фаз при резо-
резонансе, как это следует из D3),
равен л/2. Круговая частота вы-
вынужденных колебаний при резо-
резонансе совпадает с круговой частотой возмущающей силы.
Заметим для построения графика вынужденных колебаний
при резонансе, что q2 изменяется в пределах от q2 = A2 = ht/Bp)
до q2= —A2 = —ht/Bp). Следовательно, согласно D3), графиком
вынужденных колебаний является синусоида, заключенная меж-
между двумя прямыми q21) = ht/Bp) и q2 = — ht/Bp), проходящими
через точки q2 = 0 и ? = 0 (рис. 119).
Рассмотренный случай колебаний при резонансе без сопро-
сопротивления практически не встречается, так как при движении
системы всегда есть силы сопротивления движению. Установ-
Установленный теоретически рост амплитуды с течением времени по
линейному закону в действительности тоже не наблюдается,
хотя амплитуды при резонансе достигают довольно больших
значений по сравнению со случаем отсутствия резонанса. Эта
особенность вынужденных колебаний при резонансе приводит
к тому, что случайно возникший резонанс в машинах, установ-
установках и сооружениях (мосты, роторы турбин, полы зданий
и т. д.) может привести к их разрушению.
Построим для вынужденных колебаний графики амплитуды
и сдвига фаз в зависимости от круговой частоты возмущающей
силы. Имеем
при
ил"
где введено обозначение A20 = h/k2 (рис. 120).
При р->к величина А2~>сс, но при р = к эту формулу для
амплитуды вынужденных колебаний применять нельзя. Спра-
Справедлива другая формула: A2 = ht/Bp).
ei
Рис. 120
р=К
Рис. 121
P>K Pi К
452
График зависимости е от р (рис. 121) состоит из
двух отрезков горизонтальных прямых и одной точки,
так как при р < к 8 = 0; при р = к е = л/2; при р > к е = л.
Пример 1. Груз, имеющий силу тяжести Р=20 Н, подвешен
на пружине (рис. 122), статическое удлинение которой под дей-
действием груза ^ст = 5 см. На груз действует возмущающая сила
S= 20 sin 14? Н. В начальный момент пружина растянута на
Х0 = Ьсм и грузу сообщена скорость ио = 10см/с, направленная
вниз.
Определить движение груза.
Решение. Направим ось Ох вертикально вниз, выбрав
за начало отсчета расстояний х положение статического
равновесия О.
Пусть в момент времени ? возмущающая сила S направлена
в положительную сторону оси Ох. _Ее следует добавить к силам
тяжести Р и упругости пружины F.
Дифференциальное уравнение прямолинейного движения груза
имеет вид
Рис. 122
В этом случае
так как
x = P-F+S; P-F=P-
)=-cx; mx=-cx+S,
P = cXCT; k2 = cg/P=l96c-2; к=Нс'К
Разделив обе части уравнения на т, получим
х+196л: = 980 sin 14?.
Частота возмущающей силы р=14с совпадает с частотой собственных
колебаний к. Имеем случай резонанса.
Собственные колебания
*! = C1cosl4?+C2sinl4f.
Вынужденные колебания при резонансе
lit 980?
х2= cosl4?= cosl4?= —35?cosl4?.
Общее движение груза
х-хх +x2 = C1cosl4? + C2sinl4?—35? cos 14?.
Скорость движения
v = x= -14C1sinl4?+ 14C2cosl4?-35cosl4?+35- 14?sinl4?.
Подставляя в х и х начальные значения ? = 0, х=хо = Хо — ХС1=\ см,
х = и0 = 10 см/с, получаем следующие уравнения для определения постоянных:
l = d; 10= 14С2 —35.
Их решения:
С1=1 см; С2 = 3,2 см.
Уравнение движения груза принимает вид
jc = cosl4? + 3,2sinl4?— 35?cosl4? см.
Приведем уравнение собственных колебаний к амплитудной форме. Имеем:
А\= 4/ci + c'2 = 3,35 cm; sina = C!/^,=0,30>0; cosotj = C2/^!>0.
453
Угол а, находится в первой четверти. По
значению, например, синуса этого угла находим
а, =0,305 рад. Уравнение движения груза при-
принимает форму
х= 3,35 sin A4?+O,3O5) + 35? sin M4/--Y
Пример 2. Система, состоящая из точечного
груза М силой тяжести Р^вОН, невесомых
стержней и пружины жесткостью с=5Н/см,
расположена в вертикальной плоскости
(рис. 123). Штанга ОА движется в вертикальных
направляющих по закону yo = lsmpt, где
/=1,6 см, р = 8 с. Горизонтальное положение
стержня ВМ соответствует положению стати-
статического равновесия системы при уо = 0. В на-
р J23 чальный момент система находится в положе-
положении статического равновесия. Угловая скорость
стержня ВМ равна нулю и уо = 0. Трением пренебречь.
Определить малое движение груза М в вертикальном направлении, если
/,=90 см, /2 = 60см.
Решение. Система имеет одну степень свободы. Выберем за обобщенную
координату угол <р, отсчитываемый от горизонтального направления против
часовой стрелки.
Связями системы являются направляющие и шарниры, трением в которых
пренебрегаем. Такие связи следует считать идеальными.
Уравнение Лагранжа для системы имеет форму
d дТ дТ_
dt с?ф дц>
Кинетическую энергию системы, в которой массу имеет только груз,
вычисляем по формуле
4(yoh4),
,? 2 g
так как движение груза можно считать сложным, состоящим из переносного
поступательного движения вместе с точкой О со скоростью j>0 = lpcospt
и относительного вращательного движения с угловой скоростью ф вокруг
горизонтальной оси Oz, проходящей через точку О перпендикулярно стержню
и плоскости Оху. Так как угол <р и угловая скорость ф считаются малыми,
то скорость от вращения вокруг оси равна /,ф и направлена вертикально
вверх. По теореме сложения скоростей, и=>'0 + /1ф.
Для определения обобщенной силы сообщим системе в момент t возможное
перемещение 5<р против часовой стрелки (в положительную сторону угла <р)
и вычислим элементарную работу активных сил на этом возможном
перемещении в предположении, что угол <р — малая величина. Имеем
е=-
5<р
5<р
где F=cX — сила упругости пружины; \ = \„ + (уо — 12у)—ее удлинение. Следова-
Следовательно,
Q=-Pll1 + cXJ2 + cl2(у0-/2<р) = cl2 (у0-/2<р),
так как в положении статического равновесия момент силы тяжести и момент
силы упругости относительно точки О равны друг другу, т.е. Pil1 = c\cJ2.
Вычислим величины, входящие в левую часть уравнения Лагранжа:
454
ВТ дТ iVj, , d дТ P.I,,
о<р cq> g ■ at д<р g
После подстановки этих значений в уравнение Лагранжа получим
Р I
или
.. , dig cl2g y0
*+*у
Но у0 = — lp2 sinpt, поэтому
Дифференциальное уравнение движения системы можно составить не
пользуясь уравнением Лагранжа, а применяя уравнение относительного
вращательного движения твердого тела (стержень с грузом), с учетом момента
силы инерции от переносного движения.
Вводя обозначения
ki=^±= " =27,22; fc = 5,2c-1;
P,l\ 80-902
h = (^+?-\ /=@,45 + 0,71) 1,6« 1,86 c,
получим следующее дифференциальное уравнение малых колебаний:
Его решение <p = <Pi + <p2, где
Ф! = С! cos/cf + С2 sinkt
—общее решение однородного уравнения (собственные колебания);
— частное решение неоднородного уравнения (вынужденные колебания), так
как рфк.
Таким образом,
Ф = С[ coskt + С2 sinkt+—^ 2 sinpt;
hp
ф= — С .ksmkt + C2kcoskt -\—= ^coso?.
кг-рг
Начальные условия задачи: ?=0, ф = 0, ф = 0. Подставляя эти значения
в выражения для ф и ф, получаем
После этого решение дифференциального уравнения примет вид
Ф = 0,0785 sin5,2?-O,O5O5sin8r.
455
Для координат груза М имеем
*=/1 = 90 см; j?=yo + /jcp= l,6sin8r + 90@,0785sin5,2r—0,0505sin8r) =
= 7,1 sin5,2?-2,9sin8r см.
Влияние линейного сопротивления на вынужденные колебания
Дифференциальное уравнение вынужденных колебаний и его
интегрирование. Для выяснения влияния линейного сопротивле-
сопротивления на вынужденные колебания рассмотрим наиболее общий
случай, когда обобщенная сила Q состоит из трех сил:
потенциальной Qn = — dIJ/dq = — cq, линейного сопротивления
2(ф>= —дФ/да= —\iq и гармонической возмущающей QB =
= Я sin (pt + 8).
Подставляя это значение обобщенной силы Q — Qn + Q<s> + QB
в уравнение Лагранжа A), получаем
Разделим обе части уравнения на а и введем обозначения
к2 —с/a, 2n = \ija, h = H/a. Здесь к — круговая частота собствен-
собственных колебаний; и — коэффициент затухания и h — относительная
амплитуда возмущающей силы.
Дифференциальное уравнение в окончательной форме
q + 2nq+k2q = hsm(pt+?>). D4)
Получено линейное дифференциальное уравнение с постоян-
постоянными коэффициентами вынужденных колебаний с учетом
линейного сопротивления.
Так как оно является неоднородным уравнением, то его
решение состоит из двух частей: q±—общего решения однород-
однородного уравнения, q2 — частного решения неоднородного уравне-
уравнения. Общее решение однородного уравнения удовлетворяет
уравнению собственных колебаний при линейном сопротивле-
сопротивлении, поэтому его называют собственным движением или даже
собственными колебаниями, хотя это движение может и не
быть колебательным.
Частное решение неоднородного уравнения q2 называют
вынужденным колебанием. Общее движение системы характери-
характеризуется обобщенной координатой q, которая равна сумме qt
и q2, т. е. q = qi + q2- Величину q называют общим вынужденным
движением (или вынужденным колебанием).
Общее решение q± однородного дифференциального уравне-
уравнения q'1 + 2nql+k2q1 = 0 в зависимости от соотношения между
величинами пик выражается в одной из трех форм:
п<к, q1=
n>k,q1=e
456
Известно, что в любом из этих случаев из-за наличия
множителя e~nt q± стремится к нулю с возрастанием времени,
т. е. затухает. При малых значениях коэффициента затухания
(п<к) затухающее движение qx носит колебательный характер,
а при больших (п^к) затухание так велико, что движение
не является колебательным. Следовательно, при наличии
линейного сопротивления по истечении достаточного времени
общее вынужденное движение q несущественно отличается от
вынужденных колебаний и можно считать, что q = q2-
Частное решение q2 уравнения D4) следует искать в форме
q2 = A s\n {pt + b — ej.
Постоянные Лиг определяются из следующего условия:
если подставить q2 в уравнение D4), то оно превратится
в тождество. Вычислим для этого производные от q2:
q2 = Apcos{pt + b — е); q'2 = — Ар2 sin (pt + b —z).
Преобразуем правую часть уравнения D4) так, чтобы в нее
входили косинус и синус такого же аргумента, что и у функции
q2. Для этого следует к фазе правой части прибавить и вычесть
величину е и раскрыть синус суммы:
hsin(pt + 8) = hsin [(p? + S-e) + e] =
= h sine cos (pt+8 — e) + h cose sin (pt + 5 — e).
Учитывая это, подставим значение q2 и его производных
в уравнение D4) и соберем члены при sin(/?? + 8 —е) и
cos(/j/+8 —е). Получим тождество
[А (к2— р2) — hcose] sin(/?? + 8 — e) +
+ [2Апр — /гsine] cos(pt+b — e) = 0.
Так как синус и косинус переменного аргумента не равны
нулю одновременно, то тождество может выполняться только
тогда, когда каждая из постоянных в квадратных скобках
равна нулю, т. е.
А [к2— /?2) = /?cose; 2Anp = hsin£.
Из этих уравнений определяем амплитуду вынужденных
колебаний А и сдвиг фаз е:
. h . 2Апр А(к2-р2) t 2np
Л= ; sine = —-!-; cose= , ; tge= 2 2.
J{k2_p2y + An2p2' h h к2-р2
Из формулы для sine следует, что sins является положи-
положительной величиной. Следовательно, значения е заключены
между 0 и л. Поэтому для определения е достаточно
использовать формулу только для одной тригонометрической
функции, например для tge.
Окончательная форма выражения вынужденных колебаний
z), D5)
457
где
А=—~ h ; tge = -^-2; 0<е<л. D6)
V(k2-P2J + *P2 k -P
Основные свойства вынужденных колебаний. Из D5) и D6)
следуют основные свойства вынужденных колебаний при наличии
линейного сопротивления. Вынужденные колебания не затухают.
Их частота совпадает с частотой возмущающей силы. Вынуж-
Вынужденные колебания и при линейном сопротивлении не зависят от
начальных условий. Следовательно, их нельзя возбудить с помо-
помощью ненулевых начальных условий. Для возникновения вынуж-
вынужденных колебаний на систему должно действовать возмущение.
Амплитуда и сдвиг фаз вынужденных колебаний зависят
от частот собственных и вынужденных колебаний и коэф-
коэффициента затухания. Чем больше коэффициент затухания при
прочих равных условиях, тем меньше амплитуда вынужденных
колебаний. Незатухающий характер вынужденных колебаний
при линейном сопротивлении — главное отличие их от собствен-
собственных колебаний, которые при действии линейного сопротивления
всегда затухают, сохраняя колебательный характер (и<к), или
затухают почти монотонно (п^к).
Другая важная особенность влияния линейного сопротивле-
сопротивления на вынужденные колебания связана с явлением резонанса.
В случае резонанса при линейном сопротивлении амплитуда
вынужденных колебаний не возрастает пропорционально вре-
времени, как при отсутствии сопротивления, а остается постоянной
величиной. Достаточно как угодно малого сопротивления,
чтобы амплитуда вынужденных колебаний при резонансе была
постоянной, хотя, возможно, и достаточно большой, но не
переменной, возрастающей с течением времени. Это свойство
вынужденных колебаний хорошо подтверждается опытными
данными.
Исследование вынужденных колебаний. Амплитуда и сдвиг
фаз вынужденных колебаний Лиев соответствии с D6) не
зависят от начальной фазы 8 возмущающей силы. При их
вычислении можно считать, например, 8 = л/2+ 8. Если бы
возмущающая сила была постоянной, равной амплитуде Н,
то правая часть уравнения D4) была бы тоже постоянной
и в качестве частного решения неоднородного уравнения q2
можно взять постоянную величину статического смеще-
смещения q2 = h/k2. Проверка убеждает, что это значение q2
удовлетворяет уравнению D4).
Если вычислять q2 из D5), учитывая D6) как частный слу-
случай, соответствующий р — 0 и 8 = - + s, то получим q2 = [A)p^Pa =
= A0 = h/k2, что совпадает со статическим смещением. Следова-
Следовательно, A0 — h\k2 можно считать «амплитудой» вынужденных
колебаний при действии постоянной возмущающей силы,
458
совпадающей по модулю с наибольшим значением гармони-
гармонической возмущающей силы. Величину А/Ао называют коэффи-
коэффициентом динамичности.
Коэффициент динамичности характеризует относительную
величину амплитуды вынужденных колебаний, т. е. показывает,
во сколько раз амплитуда вынужденных колебаний при
действии гармонической возмущающей силы отличается от
статического смещения, которое вызывает постоянная возму-
возмущающая сила, равная по модулю наибольшему значению
гармонической силы.
Исследование показывает, что для достаточно малого
сопротивления коэффициент динамичности может быть значи-
значительно больше единицы. Проведем исследование коэффициента
динамичности. Найдем, когда он принимает максимальное
и минимальное значения, когда стремится к нулю и т. д.
Учитывая значения А и Ао, после преобразования получаем
А = - 1 - ' Г47~>
А /ГЛ. 2\2—л г г Ulb-1 /Г, 2^ тг^г^' У '
ло J\k — р ) +4nipi п/К v(l—z
Здесь введены обозначения: z=p/k — коэффициент расстрой-
расстройки, или относительная частота возмущающей силы; b = njk —
относительный коэффициент затухания. Коэффициент дина-
динамичности зависит от параметров z и Ь. Исследуем его
изменение в зависимости от изменения z при фиксированных
значениях Ъ.
Из D7) следует, что коэффициент динамичности стремится
к нулю при z->oo и любом относительном коэффициенте
затухания Ь.
Следовательно, и амплитуда вынужденных колебаний
А стремится к нулю, когда коэффициент к очень мал по
сравнению с р (z=p/k->co). В этом случае действие возмущений
с большой частотой не воспринимается колеблющейся системой
и не нарушает режима собственных колебаний, которые под
влиянием сопротивления для линейных систем затухают.
Это свойство вынужденных колебаний широко используется
на практике при перевозке грузов, не переносящих толчков.
Грузы подвешивают на таких пружинах к перевозящему их
транспорту, для которых частота собственных колебаний
оказалась бы малой по сравнению с частотой возмущающих
сил (толчки от стыков рельсов для вагонов, толчки от
неровностей дороги для автотранспорта, вибрации корпуса
самолета от работающих двигателей и т. д.). На этом же
свойстве вынужденных колебаний основано применение рессор
у различных видов транспорта.
Для дальнейшего исследования коэффициента динамичности
введем функцию /(z) = (l—z2J + 462z2, зависящую от z и па-
параметра Ъ. Тогда
459
D7')
Очевидно, что когда /(z) достигает максимума, то А/Ао
имеем минимум, и наоборот. Для определения экстремальных
значений /(z) вычисляем ее производные по z:
Функция f(z) достигает экстремума при тех значениях z, для
которых/' (z) = 0. Из этого условия для z получаем два значения:
Так как относительная частота может быть только положи-
положительной и равна нулю для постоянной возмущающей силы,
то 1— 2Ь2>0; следовательно, 6<ч//2/2 = 0,7. Для таких b f" (z)
<0 при z = zv, а поэтому функция/(z) в этом случае достигает
максимума и коэффициент динамичности — минимума. Для
z = z2= y/l —2b2, наоборот, /"(z)>0 и, следовательно, /(z)
имеет минимум, а коэффициент динамичности — максимум.
Для значений Ь, при которых 1—2Ь2 = 0 (Ь — >/2/2), имеем
z1 = z2 = 0 и /"(z) = 0. Дополнительные исследования третьей
и четвертой производных показывают, что в этом случае /(z)
при z = 0 достигает минимума, а коэффициент динамичности
имеет максимум. Других экстремальных значений/(z) не имеет.
Если 1 — 2Ь2<0, то z2 становится чисто мнимым. Это
можно интерпретировать как отсутствие других значений z,
кроме z = 0, при которых /(z) достигает экстремума. При
z = 0/(z) достигает минимума, а коэффициент динамичности —
максимума. С увеличением z коэффициент динамичности при
1— 2Ь2^0 монотонно убывает от своего максимума при z = 0
до нуля при z->oo.
Результаты исследования коэффициента динамичности изоб-
изображены графически в виде так называемых резонансных
кривых, или амплитудно-частотной характеристики
системы (рис. 124, а), зависимости А/Ао от z для различных
значений относительного коэффициента затухания Ь. При этом
использованы результаты исследования, полученные при отсут-
отсутствии сопротивления, когда Ь = 0.
Проведенное исследование позволяет сделать дополнитель-
дополнительные выводы о влиянии линейного сопротивления на вынужден-
вынужденные колебания. Так, максимум коэффициента динамичности,
а следовательно, и амплитуды вынужденных колебаний на-
наступает не при резонансе, когда z=\(p — k), а при значении
z = z2= yj\ —2b2, меньшем единицы. Чтобы получить величину
максимальной амплитуды Атлх, следует в ее выражение D7)
вместо z подставить z2 = *J\ —2b2, что соответствует критичес-
критическому значению круговой частоты возмущающей силы
460
k/Ao
V
Л
i
A
Ь = 0
Поэтому
z=P/K
\ 2n^P-n2 2bJ\-b2
Для малых b по сравнению с единицей приближенно
Амплитуда вынужденных колебаний при резонансе
получается из D7) при z = 1:
т. е. амплитуда вынужденных колебаний при резонансе меньше
максимальной амплитуды, которая достигается при ркр =
= ^/к2 — 2п2. Критическая круговая частота, при которой
амплитуда вынужденных колебаний достигает' максимума,
уменьшается с увеличением коэффициента затухания. Величины
/4тах и Арез тоже при этом уменьшаются.
В случае кинематического возбуждения путем задания
движения точек системы по гармоническому закону, как было
показано, Н=Н0р2 и
I " "О 1
где ho — Ho/a — постоянная, не зависимая от круговой частоты
возмущения р.
В этом случае по формуле D6) для амплитуды вынужденных
колебаний получаем
461
и для безразмерной (относительной) амплитуды, аналога
коэффициента динамичности,
Построение графиков для A/h0 облегчается, если ввести
вспомогательную переменную zl=-. Зависимость A/h0 от zx
совпадает с зависимостью А/Ао от z, графики для которой уже
построены (рис. 124, а). Для перехода от zl к z в A/h0 следует
учесть, что гх = оо переходит в z = 0, z1 = 0bz=qo и zt = 1 в z= 1.
На рис. 124,6 приведена амплитудно-частотная характерис-
характеристика системы для этого случая. Величина h0 теперь не является
статическим смещением Ао.
Исследуем влияние линейного сопротивления на сдвиг фаз.
В соответствии с D6)
tgE = 2np/(k2~p2) = 2bz/(\-z2), О^е^тг. D6')
Тангенс сдвига фаз 8 выражается простой зависимостью от
z. Пользуясь монотонностью изменения тангенса в зависимости
от изменения аргумента, легко построить график зависимости
8 от z при различных фиксированных значениях Ъ. Подготовим
необходимые данные, учитывая, что при отсутствии сопротив-
сопротивления 8 = 0 для z<\, г = п/2 при z= 1 и е = тг при z>\.
Из D6') следует, что при z = 0 tge = O. Учитывая значение 8 при
отсутствии сопротивления (е монотонно и непрерывно изменяется
в зависимости от Ь), получаем 8 = 0. При z=l tge = oo и,
следовательно, 8 = я/2, как и при отсутствии сопротивления. Когда
z->oo, то tge->0, что соответствует е->тс. Если учесть дополнитель-
дополнительно монотонность тангенса, то для 8 имеем результаты:
z = 0, 8 = 0;
0<z<l, 0<8<7г/2;
z= I, e = it/2;
Z—>OO, 8—>7t.
Эти данные позволяют построить график изменения сдвига фаз
(фазочастотную характеристику системы) в зависимо-
зависимости от относительной частоты возмущающей силы для фиксирован-
фиксированных значений относительного коэффициента затухания (рис. 125).
Тангенс сдвига фаз 8 не зависит от h, и потому фазочастот-
ная характеристика системы не зависит от способа гармоничес-
гармонического возбуждения. Она одна и та же как для динамического,
так и для кинематического возбуждений.
Проведенное исследование сдвига фаз показывает, что сдвиг
фаз при резонансе не зависит от линейного сопротивления.
Он равен л/2.
462
Если при частотах, близких к ре-
резонансным (z = 1), при отсутствии
сопротивления сдвиг фаз изменяет-
изменяется скачкообразно, то под влиянием
линейного сопротивления это изме-
изменение является непрерывным и тем
более плавным, чем больше относи-
относительный коэффициент затухания.
Общие свойства вынужденных
колебаний. Отметим основные свой-
свойства вынужденных колебаний при
действии линейного сопротивления. Рис- I25
1. Вынужденные колебания при линейном сопротивлении
являются незатухающими, т. е. амплитуда их постоянна как
при отсутствии резонанса, так и при резонансе.
2. Линейное сопротивление не влияет на частоту вынужденных
колебаний, которая совпадает с частотой возмущающей силы.
3. Вынужденные колебания при линейном сопротивлении
не зависят от начальных условий, так же как они не зависят
от них при отсутствии сопротивления.
4. Амплитуда вынужденных колебаний стремится к нулю
быстрее при линейном сопротивлении с увеличением относительной
частоты возмущающей силы, чем при отсутствии сопротивления.
Основы виброзащиты. Во многих случаях от работы машин,
механизмов и других устройств, представляющих собой колеблю-
колеблющиеся системы, передаются вредные вибрации на фундаменты. За-
Защищать фундаменты и иные крепления колеблющихся систем сле-
следует прежде всего от вынужденных колебаний, так как собствен-
собственные колебания при наличии сопротивления быстро затухают.
Для уменьшения переменных сил, передающихся от колеб-
колеблющихся систем на фундаменты, представляющие собой упру-
упругие основания, применяются различные способы. Силы от
колеблющихся систем с одной степенью свободы, пропорцио-
пропорциональные ускорениям, пропорциональны амплитудам колебаний.
Существует два основных способа уменьшения амплитуды
вынужденных колебаний. Один из них состоит в значительном
разносе частот вынужденных и собственных колебаний системы,
что имеет место при больших значениях z=p/k. Другой способ
связан с увеличением коэффициента сопротивления, что дос-
достигается с помощью специальных устройств, называемых
демпферами. Процесс уменьшения амплитуды колебаний
за счет увеличения коэффициента сопротивления называют
демпфированием колебаний.
Для выяснения особенностей, связанных с демпфированием
вынужденных колебаний, рассмотрим пример.
Пример. Имеем колеблющуюся систему с одной степенью свободы,
совершающую колебания в вертикальном направлении под действием возму-
возмущающей силы QB = Hsin(pt + S), действующей в том же направлении (рис. 126).
463
Колеблющаяся
система
Корпус колеблющейся системы укреплен на фунда-
фундаменте с помощью пружин с суммарной жесткостью
с и демпфера с коэффициентом сопротивления ц.
Определить наибольшую силу, передающуюся
на фундамент вследствие вынужденных колебаний
системы.
Решение. Выберем за обобщенную координату
q перемещение корпуса колеблющейся системы по
вертикали вниз, отсчитываемое от положения стати-
статического равновесия. На фундамент через пружины
и демпфер будет передаваться сила
где
Рис. 126
,Г=Лс sin(p( + 8 — е)н cos (pt + 8
— вынужденные колебания системы, возникающие
под действием возмущающей силы.
Так как q2 = Ар cos (pt + b — z), то
= Ас
COS \pt +0 — Z) I =AC /1+ S
C J V Ui
где у — дополнительная начальная фаза. Таким образом,
р =Ас
max '1С
Величину отношения
н
называют коэффициентом передачи силы. Преобразуем его выражение, исполь-
используя формулы
A
Тогда Ас = —Аос;
А
Д ,
a a
h H с
с = —=с = — -rj=H.
к2- а к
kl
Для максимальной силы имеем
А
А~г
4п2а'р
2„2
где z=p/k, b = njk.
Для коэффициента передачи силы FmaJH, используя выражение для
коэффициента динамичности AjA0 D7), получаем
(а)
Из (а) следует, что -Fmax/#=1 при
z = 0 и 2= у/2. С учетом этого на рис. 127
приведены графики коэффициента передачи
силы в зависимости от z и Ь. Из графиков
следует, что Fma%/H убывает с ростом
Ь при изменении z в интервале 0<z<%/2.
Здесь демпфирование эффективно. Коэф-
Коэффициент передачи силы растет при из-
изменении z в пределах %/2<z<co. В этом
интервале изменения z демпфирование не
Z-PfK эффективно, так как оно приводит не
к уменьшению, а к увеличению коэффи-
коэффициента передачи силы.
1 ^2
Рис. 127
464
§3. МАТЕМАТИЧЕСКИЙ И ФИЗИЧЕСКИЙ МАЯТНИКИ
Математическим круговым маятником называется матери-
материальная точка, движущаяся в одной и той же вертикальной
плоскости по окружности под действием силы тяжести. Матема-
Математическим маятником является груз достаточно малых размеров,
подвешенный к неподвижной точке О с помощью невесомого
стержня или невесомой нерастяжимой нити (рис. 128). Расстоя-
Расстояние ОМ = 1 называют длиной математического маятника.
Положение материальной точки М можно охарактеризовать
углом ф, отсчитываемым от вертикали — положения равновесия
маятника.
Математический маятник можно рассматривать как систему
с одной степенью свободы. Связь в виде нити или стержня
является идеальной. Выберем за обобщенную координату угол
ф. Составим для маятника уравнение Лагранжа:
d дТ
At Зф
дТ
Кинетическая энергия Т математического маятника
т/2ф2
Р1"_ ф2
так как
Активная сила — сила тяжести Р—является потенциальной
силой; следовательно, обобщенная сила Q через потенциальную
энергию выразится в виде
Для того чтобы вычислить потенциальную энергию в от-
отклоненном положении маятника, следует подсчитать работу
силы тяжести при перемещении точки М из этого положения
в положение равновесия Мо, где ф = 0. Работа равна произведе-
произведению силы тяжести на высоту опускания точки М и является
положительной величной, т. е.
Q=-dn/dq>=-Plsmq>.
Вычисляем производные, входящие в урав-
уравнение Лагранжа:
дТ _ дТ PI2 . d дТ Р12 ..
— = 1); — = — ф; = — ф.
5ф Зф g dt д<р g
Уравнение Лагранжа для математического
маятника после переноса всех членов в левую
часть выразится в форме
Рис. 128
465
cp+-sincp = O. D8)
Получено нелинейное дифференциальное уравнение. Оно не
интегрируется в элементарных функциях.
В случае малых колебаний, когда ср достаточно мало, можно
считать sincpsscp. Уравнение малых собственных колебаний
математического маятника примет форму
ф + 5ф = о, D9)
или ф + А:2ф, где круговая частота колебаний к= yfgfl. Его
решение имеет вид
q> = A sin [kt +а).
Постоянные величины А и а являются амплитудой и на-
начальной фазой. Период малых колебаний математического
маятника
E0)
Малые колебания математического маятника являются
гармоническими. Период их колебания зависит только от
длины математического маятника и ускорения силы тяжести
и не зависит от амплитуды колебаний. Так как ускорение
силы тяжести g зависит от широты места, то, следовательно,
период малых колебаний математического маятника тоже
зависит от широты.
Отмеченными свойствами, очевидно, не обладают колебания
математического маятника, которые не являются малыми.
Эти колебания уже не являются гармоническими, и их период
колебаний зависит от амплитуды А.
Как показывает более подробное исследование, эту зависи-
зависимость периода колебаний от амплитуды можно выразить
в виде ряда:
т = 2тг
Если принять sin A\1kA\1 и удержать первые два члена
ряда, то получим приближенную формулу для периода колеба-
колебаний в зависимости от амплитуды:
Физическим маятником называется твердое тело, враща-
вращающееся под действием силы тяжести вокруг неподвижной
горизонтальной оси, не проходящей через центр масс (рис. 129).
Ось вращения физического маятника называется осью привеса,
466
а точка ее пересечения О с перпендикулярной
оси привеса вертикальной плоскостью, в ко-
которой находится центр масс, называется точ-
точкой привеса.
Физический маятник можно считать си-
системой с одной степенью свободы. За обо-
обобщенную координату примем угол ср между
вертикалью и отрезком ОС, соединяющим
точку привеса О с центром масс С. Считаем,
что трения в подшипниках оси привеса нет
и, следовательно, связи, наложенные на ма-
маятник, являются идеальными. Составим для
физического маятника уравнение Лагранжа:
Рис. 129
d dT ёТ
At д ф д ф
■дП
Кинетическая энергия маятника как твердого тела, вра-
вращающегося вокруг неподвижной горизонтальной оси привеса
Oz, определяется по формуле
T=J *!
Oz 2 '
где JOz — момент инерции маятника относительно его оси
привеса.
Потенциальная энергия вычисляется так же, как и для
математического маятника:
П ~Ph{\ —
— coscp),
где Р—сила тяжести; М—масса физического маятника
и h=OC.
Производные, входящие в уравнение Лагранжа,
дТ
дТ
d дТ
дП ,, , .
— = Mgh sincp.
Уравнение Лагранжа после деления обеих частей на JOz
и переноса всех членов в одну часть принимает вид
Mgh
^7
E1)
Его можно получить применив к физическому маятнику
дифференциальное уравнение вращения твердого тела вокруг
неподвижной оси:
467
•/ОгФ= £ MOI
k = l
где
£ MOx{Fi'>)=-Phsinq>.
k = l
В случае малых колебаний sincp^cp и дифференциальное
уравнение примет форму
Mgh n
-^-ф = 0
JOz
ИЛИ
2ц> = 0, E2)
где k1 g\Oz \Oz
Если для физического маятника ввести условную длину
I =JOzj(Mh), то период его малых колебаний через эту длину
выразится так же, как и период математического маятника.
Действительно,
E3)
Эту условную длину / = /02/(М/г)называют приведенной
длиной физического маятника.
Малые собственные колебания физического маятника, так
же как и математического, являются гармоническими с пери-
периодом, не зависящим от амплитуды.
Если от точки привеса О отложить по линии ОС приведенную
длину физического маятника /, то получим точку О17 которая
называется центром качаний. Для приведенной длины физическо-
физического маятника справедливы следующие теоремы Гюйгенса.
1. Приведенная длина физического маятника больше рас-
расстояния от точки привеса до центра масс, т.е. l>h. Для
доказательства теоремы применим к физическому маятнику
теорему Штейнера о связи моментов инерции относительно
параллельных осей, одна из которых проходит через центр
масс. Получим
{ + h>h
Mh Mh Mh+ "'
так как отрезок OXC =JCzj{Mh) = l —h >0. Здесь JCz — момент
инерции относительно горизонтальной оси, параллельной оси
привеса и проходящей через центр масс.
2. Центр качаний и точка привеса физического маятника
взаимны, т. е. если то же твердое тело подвесить за горизон-
горизонтальную ось, проходящую через центр качаний, параллельно
первоначальной оси, проходящей через точку привеса, то
получим новый физический маятник, приведенная длина кото-
которого равна приведенной длине прежнего маятника, т.е. /х = /.
468
Вычислим приведенную длину /t физического маятника,
у которого ось привеса проходит через точку Ot—центр
качаний прежнего маятника. Согласно определению приведен-
приведенной длины, применяя теорему Штейнера, имеем
JCz
M(l-hy '
так как из E4) следует, что JCz=Mh(l —h).
Если от точки Ох отложить отрезок /х =/, то получим точку
О, т. е. центр качаний и точка привеса взаимны. Периоды малых
колебаний физических маятников вокруг горизонтальных осей,
проходящих через точку привеса и центр качаний, одинаковы.
Важное прикладное значение теории малых колебаний
физического маятника состоит в том, что ее можно положить
в основу экспериментального определения моментов инерции
тел. Для опытного определения момента инерции тела силой
тяжести Р относительно какой-либо оси достаточно сделать
эту ось горизонтальной осью привеса, определить период
малых колебаний тела вокруг этой оси и расстояние от точки
привеса до центра масс. Тогда, согласно E3), момент инерции
относительно горизонтальной оси привеса определится по
формуле
Jo,=^Ph. E5)
§ 4. МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ
СВОБОДЫ (РЕЗУЛЬТАТЫ ДЛЯ ОБЩЕГО СЛУЧАЯ)
Дифференциальные уравнения малых колебаний системы
с двумя степенями свободы получим из уравнений Лагранжа:
d_8T дТ^_п . d_8T ar_
Каждая из обобщенных сил в общем случае состоит из
трех сил: обобщенной силы от потенциальных сил Qf, сил
сопротивления Qf, возмущающих сил Qf.
Для рассмотрения малых колебаний системы в окрестности
устойчивого положения равновесия необходимо получить раз-
разложения в ряды кинетической и потенциальной энергий и дисси-
пативной функции.
Кинетическая энергия
Кинетическая энергия системы вычисляется по формуле
т_ у mkvj_ у mkrj
1 - L -i ~ L 2 '
469
Для системы с двумя степенями свободы, на которую
наложены стационарные, идеальные, голономные, неосвобожда-
ющие связи, радиус-вектор каждой точки гк является функцией
только обобщенных координат qx, q2. При движении системы
обобщенные координаты <?! и </г зависят от времени. Следо-
Следовательно, производная по времени от радиуса-вектора
Подставляя ее в выражение кинетической энергии, получаем
JV / „_ \2 JV
;2 Г ™
где введены обозначения
JV / ,_ \2 N л- я- N / ,_
A., = > mh\ —- ; A,, = > mh —- • —-; A,, = > mu\ —-
11 ^ kW)' 12 Д кдЯ1дд2' 21 & k\Sq2
Величины Alx, A12, A22 зависят только от qx и q2, как и гк,
и не зависят от qx и q2. Разложим каждую из этих функций
в ряд по степеням qt и q2 в окрестности положения равновесия,
приняв в положении равновесия </i=</2 = 0- Имеем для АХ1
Индекс 0 здесь и далее указывает, что эти величины
следует вычислять при qi = q2 = O. Аналогичные разложения
получаются для А12 и А22. Введем обозначения:
aii=UiiH; й12 = (^12H; а22 = (А22H.
Постоянные величины all5 a12, a22 называются коэффици-
коэффициентами инерции системы. Отбрасывая члены третьего и более
высокого порядков по отношению к q1, q2, qy, q2, получаем
следующее выражение для кинетической энергии
T=1l2{aliqi + 2al2qlq2 + a22q22). E7)
Однородной квадратичной формой двух переменных хх
и х2 называют выражение вида
где ВХ1, Вх2, В22 — постоянные величины, не все равные нулю.
Квадратичная форма, которая принимает только положи-
положительные значения в области изменения переменных хх и х2
и равна нулю только при нулевых значениях переменных,
называется определенно-положительной.
470
Если пренебречь слагаемыми третьего и более высокого
порядков, кинетическая энергия системы в окрестности положе-
положения равновесия будет однородной квадратичной формой обоб-
обобщенных скоростей qx, q2. Так как кинетическая энергия всегда
положительна и равна нулю только при нулевых значениях
обобщенных скоростей, то она выражается вблизи положения
равновесия системы определенно-положительной квадратичной
формой обобщенных скоростей.
Для того чтобы квадратичная форма F была опреде-
определенно-положительной, необходимо и достаточно, чтобы ее
коэффициенты удовлетворяли условиям
Я22>0; ВиВ22-В\2 =
вп в12
в12 в2
>0. E8)
'12 2
Получим эти условия. Пусть F—определенно-положитель-
F—определенно-положительная квадратичная форма. Тогда, если F>0 при х2 = 0, хгф0,
то В1, > 0. Аналогично из условия, что F > 0 при х2 ф 0,
хх=0, следует, что В22>0. Это необходимые условия опре-
определенной положительности квадратичной формы, но они
недостаточны, так как F может стать отрицательной вследствие
того, что В12 имеет достаточное по величине отрицательное
значение.
Преобразуем квадратичную форму, введя переменную
х = х1/х2, если в рассматриваемой области х2 не равна нулю.
В противном случае можно поменять местами хх и х2.
Квадратичная форма F примет вид
Г=Л1 ВцЛ +/£>,-; X -\- 13-)-) I.
Для того чтобы F была всюду положительной в области
рассматриваемых значений х, необходимо и достаточно, чтобы
квадратное уравнение
не имело действительных корней, т. е. парабола
для которой 5п>0 и В22 > 0, целиком располагалась над
осью абсцисс.
Для этого дискриминант квадратного уравнения должен
быть отрицательным, т е.
В12-В11В22 <0 или В11В22-В22>0.
Условия E8) доказаны.
Так как кинетическая энергия в окрестности положения
равновесия представляется определенно-положительной квадра-
квадратичной формой, то ее коэффициенты должны удовлетворять
условиям E8); поэтому для я115 а12, а22 имеем
471
an>0;
«11
«17
12
E9)
Для системы с любым конечным числом степеней свободы
п кинетическая энергия в окрестности положения равновесия
выражается однородной квадратичной формой
Условия ее определенной положительности таковы:
«и >0;
и
а
12
а
13
п п п
«21 «22 «23
a
a
11
21
«12
«22
«11
«21
««1
>
a22
Яп2
0;
... aln
... a2n
... ann
^ А
Потенциальная энергия
Потенциальная энергия системы с двумя степенями свободы
зависит только от обобщенных координат q1 и q2, если
силовое поле и связи стационарны. Разлагая потенциальную
энергию Я в окрестности положения равновесия <7i = <72 = 0
в ряд по степеням q1 и q2, имеем
Потенциальную энергию в положении равновесия (П)о
принимаем равной нулю; величины (ЗЯ/3^1)о = 0, (ЗЯ/3<72)о = 0
как значения обобщенных сил в положении равновесия системы.
Окончательно, удерживая члены второго порядка и пренебрегая
слагаемыми третьего и более высокого порядков, потенциаль-
потенциальную энергию выразим в форме
n=1l2{cllqi + 2cl2qlq2 + c22qz2). F0)
Постоянные величины
Cll=(d2nidqlH; с12 = (д2П1(дЧ1дЧ2)]0; с22 = (д2П/дЧ22H
называются коэффициентами жесткости.
Потенциальная энергия с принятой точностью является
однородной квадратичной формой обобщенных координат q1
и q2. В том случае, когда потенциальная энергия в положении
равновесия имеет минимум, т. е. положение равновесия явля-
является устойчивым, коэффициенты разложения сп, с12, с22 как
вторые производные от Я по переменным qx и q2 при
минимуме должны удовлетворять условиям
сп>0; с22>0; с11с22-с22>0.
F1)
472
Эти условия совпадают с условиями E8) определенной
положительности квадратичной формы для П. Следовательно,
потенциальная энергия с принятой точностью выражается
определенно-положительной квадратичной формой в окрест-
окрестности своего минимума при qi—q2 — 0, т.е. в окрестности
устойчивого положения равновесия системы.
Потенциальная энергия в случае п степеней свободы выража-
выражается в форме
Условия определенной положительности сведутся к усло-
условиям для коэффициентов жесткости, полностью аналогичным
условиям для коэффициентов инерции.
Диссипативная функция
Пусть на точки системы действуют линейные силы сопротив-
сопротивления Rk, пропорциональные скорости точек tJk, т. е.
где \ik — постоянные коэффициенты сопротивления.
Обобщенная сила Qi от сил сопротивления, согласно
определению обобщенной силы, если использовать выведенное
в гл. 6 тождество Лагранжа
может быть выражена в форме
/)Ф_ V R ■ дГк - У и г • " - - V ц*"* -
N _2 JV -2
Здесь Ф= Yj ^^-= X ~^—диссипативная функция. Ана-
k=l ^ 4=1
логично, Q2 через диссипативную функцию выразится как
Так же как и в случае системы с одной степенью
свободы, для системы с двумя и любым конечным числом
степеней свободы можно получить энергетическое соотно-
соотношение
d£/d?=-2<P,
где Е=Т+П — полная механическая энергия системы.
Таким образом, диссипативная функция в общем случае
характеризует скорость убывания полной механической энергии
вследствие действия линейных сил сопротивления.
Диссипативная функция по своей структуре аналогична
кинетической энергии, только в нее вместо масс тк входят
коэффициенты сопротивления \ik
473
Выполнив для Ф разложение в ряд окрестности положения
равновесия и отбросив члены третьего и более высокого
порядков, так же как и для кинетической энергии, получим
Ф=1/2(Ии<7? + 2ц12<г1<72 + Ш2<72). F2)
Постоянные величины цп, ц12, Д22 называются приведен-
приведенными коэффициентами сопротивления.
Квадратичная форма для Ф, так же как и для кинетической
энергии, по своей физической сущности является опреде-
определенно-положительной; следовательно, ее коэффициенты удов-
удовлетворяют условиям
Ци>0; Ц22>0; ЦцЦ22-Цп>0.
Для системы с п степенями свободы диссипативная функция
выразится в форме
ф=7
2
Приведенные коэффициенты сопротивления удовлетворяют
условиям, которые полностью аналогичны условиям для коэф-
коэффициентов инерции.
Дифференциальные уравнения собственных колебаний
Если система, имеющая две степени свободы, движется
только под действием потенциальных сил, то, учитывая
формулы для кинетической и потенциальной энергий E7)
и F0), имеем:
Q Q"
дТ дТ „ дТ . дТ
0 +
Подставляя эти значения в уравнения Лагранжа E6),
получаем линейные дифференциальные уравнения малых собст-
собственных колебаний системы с двумя степенями свободы без
сопротивления:
cj + cq) + (aq + cq) = O;] 63
Механические системы, для которых квадратичные выраже-
выражения для кинетической и потенциальной энергий E7) и F0)
являются точными без отбрасывания членов более высокого
порядка, называются линейными. Для линейных систем диф-
дифференциальные уравнения F3) являются точными, а не прибли-
приближенными, как в случае малых колебаний. Математическая
474
теория малых колебаний не отличается от теории линейных
колебаний. Но линейные колебания могут быть не обязательно
малыми.
Для системы с любым конечным числом степеней свободы
дифференциальные уравнения собственных колебаний выразятся
в следующей форме:
Интегрирование дифференциальных уравнений.
Уравнение частот
Решение системы уравнений F3) следует искать в форме
q1 = C1elt, q2 = C2elt. Но в случае малых колебаний в окре-
окрестности устойчивого положения равновесия все значения X.,
в чем нетрудно убедиться, чисто мнимые и, следовательно,
решение можно искать в виде
q1=A1sm(kt + a); q2 — A2sm(kt + a), F4)
где постоянная к— круговая частота колебаний. Как доказано
ниже, оня является действительной величиной. Постоянные Ах,
А2, к и а подлежат определению. Величины А1 и А2 называются
амплитудами, а а — начальной фазой. Вычислим производные:
q\ = — Alk2sm(kt+a); q2— —A2k2sm{kt + a).
Подставим их и значения q1 и q2 из F4) в систему
уравнений F3). Получим тождества, в которых постоянные
коэффициенты при sin(fc? + a) должны быть равны нулю. Это
дает систему двух однородных линейных уравнений для
определения амплитуд At и А2:
{c-ak1) = 0;~)
Однородная линейная система уравнений имеет решения,
отличные от нуля, если определитель системы равен нулю:
11
~а11к сх2 а12к
= 0.
i2~ai2^ c22 — a22k
Раскрывая определитель, получаем уравнение частот:
Только для значений к, удовлетворяющих уравнению частот,
существуют отличные от нуля значения Аи Аг и, следовательно,
qu q2.
475
Уравнение частот как биквадратное уравнение в общем
случае имеет два значения для квадрата частоты к2. Для
системы с двумя степенями свободы, если квадратичные формы
для кинетической и потенциальной энергий удовлетворяют
условиям определенной положительности E9) и F1), эти
условия необходимы и достаточны для того, чтобы оба решения
для к2 были действительными и положительными. Только для
действительных и положительных значений к2 обобщенные
координаты </j и q2 выражаются синусоидальной зависимостью
от времени. Для значений к2, не удовлетворяющих этим
условиям, движение системы не является колебательным.
Отбрасывая отрицательные значения частот, как не дающие
новых решений и не имеющие физического значения, получаем
две частоты. Меньшую из частот обозначают ки большую — к2.
Частоты кг и к2 являются частотами собственных колебаний
системы. Они не зависят от начальных условий и полностью
определяются значениями коэффициентов инерции и жесткости.
Исследуем уравнение частот. Рассмотрим функцию
y = {cll-allx)(c22-a22x)-(cl2~al2xJ, F7)
где х = к2. Уравнение F7) является уравнением параболы.
Корням уравнения частот к\ и к \ соответствуют точки
пересечения параболой оси абсцисс хх и х2.
Так как квадратичные формы для кинетической и потен-
потенциальной энергий определенно-положительны, то коэффициенты
инерции и жесткости удовлетворяют условиям E9) и F1), т. е.
аи>0, а22>0, а22-а12>0; E9')
сп>0, с22>0, с11с22-с?2>0. F1')
Предположим для определенности, что с11/й11<с22/а22.
Для построения параболы зададим ряд значений х и определим
из F7) соответствующие значения у, учитывая условия E9')
и FГ). Имеем:
х = хо = 0, у=уо = с11с21-с212>0;
уу
«22
Расположив в F7) слагаемые по убывающим степеням х,
получим
222
F7)
Так как коэффициент а^аг2 — а\2 при х2 положителен, то
у->+оэ, когда jc-юо. По полученным данным строим график
476
параболы (рис. 130). Из графика пара-
параболы следует, что корни уравнения ча-
частот хх и х2 располагаются в интервале
0<хх <c11jali <c22ja22<x2<ao,
т. е. парабола пересекает ось абсцисс
в двух различных точках х1=к\1
и х2 = к2, так как значения у' и у"
отрицательны в точках х' = с1Х/а1Х
и х" = с22/а22, что и требовалось до-
доказать. рис. 130
Колебание системы с частотой, квад-
квадрат которой х' = к'12 = с11/а11 и обобщенная координата q\,
получается в том случае, если другая обобщенная координата
q'2 = const, т.е. при дополнительном наложении связи на
систему. Аналогично, колебание с квадратом частоты
х" = к'2 —c22ja22 и обобщенной координатой q'2 получается при
q\= const, что тоже связано с дополнительным наложением
связи. Частоты к\ =-v/cn/an и к'2 — ^/с221а22 называются
парциальными частотами системы. Из проведенного анализа
следует, что они заключены между главными частотами,
причем наименьшая из них больше первой главной частоты.
Так влияет на частоты дополнительное наложение связей, при
котором не изменяются коэффициенты инерции и жесткости
системы.
Случай, когда хх=х2, возможен при
при этом у'=у" = 0. Парабола касается оси Ох.
В случае равных частот каждое из уравнений системы F5)
является тождеством, справедливым при любых значениях Ах,
А2. Система дифференциальных уравнений F3) распадается
на два независимых уравнения: одно — для q1, другое—для
q2. Их решения имеют вид
qx = АХ sin{kt + al); q2 = A2 sin(A:? + a2).
Постоянные Ах, А2, оц, а2 определяются из начальных
условий
Система в этом случае совершает гармонические колебания.
Каждая из обобщенных координат qx и q2 изменяется по
синусоидальному закону независимо друг от друга с одинако-
одинаковыми частотами.
В случае разных частот каждой из них соответствуют
определенные значения Аи А2, a: ^i1', A{2\ оц—для частоты
кх; А(х\ А22\ а2 — для частоты к2. В соответствии с этим
получим по два значения обобщенных координат qx и q2:
All
K }
\ q{2] составляют главное колебание для частоты kx, a qB),
q'для частоты k2. Каждое из главных колебаний является
гармоническим для обеих обобщенных координат.
Система однородных линейных уравнений F5) дает возмож-
возможность определить только отношение амплитуд. Для первого
и второго главных колебаний соответственно получаем
c12-a12ki с22-а22кх
ci2-a12k2 c22-a21kl
F9)
Отношения амплитуд в главных колебаниях Pt и C2
называют коэффициентами формы. Из F8) следует, что
коэффициенты формы равны отношениям обобщенных коорди-
координат в главных колебаниях:
h-AP/AV^qPlqP; h = A22^IA[2^q2^/q[2K G0)
Коэффициенты формы Pj и C2 характеризуют формы
главных колебаний. Они могут быть положительными и от-
отрицательными. Если, например, Pi>0, то q^] и q2V) имеют
одинаковые фазы; если рх<0, то их фазы отличаются на к.
Общее решение системы уравнений F3), учитывая G0),
можно выразить в форме
G1)
Четыре произвольные постоянные A{i\ A{2), ос1? а2 определя-
определяются из начальных условий.
Итак, собственные линейные колебания системы с двумя
степенями свободы состоят из суммы двух главных гармоничес-
гармонических колебаний с частотами к1 и к2.
Главные координаты
Если за новые обобщенные координаты системы выбрать
q(x] и qB\ то главное колебание с частотой кх будет
характеризоваться только обобщенной координатой q^\ а глав-
главное колебание с частотой к2 — координатой qB).
478
Обобщенные координаты, каждая из которых представляет
только одно главное колебание, называются главными координа-
координатами системы. Произвольные обобщенные координаты через
главные в соответствии с G1) должны выражаться их линейны-
линейными комбинациями:
G2)
В случаях равных частот любые обобщенные координаты
являются главными. Для главных координат система уравнений
должна распадаться на два отдельных, независимых уравнения,
как в случае равных частот.
Определив обобщенные координаты q^] и q{2\ найдем
главные координаты системы. Главные координаты можно
также определить основываясь на рассмотрении преобразования
кинетической и потенциальной энергий системы.
Для того чтобы система уравнений распалась на отдель-
отдельные независимые уравнения, выражения потенциальной и ки-
кинетической энергий не должны содержать членов с произведе-
произведениями переменных. Это можно положить в основу для
отыскания главных координат. Действительно, пусть </х и q2 —
произвольные обобщенные координаты, a q\ и q\ — главные
координаты.
Попытаемся получить равенства нулю членов с произведе-
произведениями в разложениях кинетической и потенциальной энергий,
приняв линейную зависимость между qu q2 и q\, q\, т. е.
q,=a,q\+a2q\; q1 = ^q\+^>1q*i- G2')
Постоянные ах и а2 включим в q\ и q\, т. е. примем
а1 = а2 = 1. Тогда неизвестные постоянные (Зх и р2 можно
определить из условий, что для главных координат
^=1/2(«*n9i2+«*22g*22); n=1l2(c\lq\2 + ct222q?), G3)
т.е. ai2 = c*i2 = 0- Сохраним для неизвестных постоянных (Зх,
р2 обозначения коэффициентов формы, так как в действитель-
действительности они ими и являются.
Подставляя G2') в выражения кинетической и потенциальной
энергий E7) и F0), получаем
G4)
Из сравнения G3) и G4), используя условия а\2
с 12 = 0, имеем
479
а также формулы связи новых и старых коэффициентов
инерции и жесткости
+c22pic22 = c11 + 2c12p2 + c22pi j
Из G5) получаем
асас acac
Эти соотношения позволяют построить квадратное уравне-
уравнение, корнями которого являются рг и р2:
(al2c22 -a22cl2) C2-(c22cu -апс22) P+(anc 12-a12Cii) = 0.
G8)
Можно доказать, что корни этого уравнения вещественны.
Таким образом, коэффициенты §г и Р2 можно определить
двумя путями: как коэффициенты формы по формулам F9)
или как корни квадратного уравнения G8).
Система уравнений малых колебаний F3) для главных
координат q\, q\ с учетом того, что а\2 = с\2 = 0, распадается
на два независимых уравнения:
a'llft + Ci 101=0; al22922+ C*22?*2 = 0. G9)
Их решения имеют вид
q\ = A^Hm{k\t + ax); q2 = A22hrn(k\t + a2), (80)
где к\ и к\ — частоты главных колебаний. Они вычисляются
по формулам
к'^у/сп/ап; к\ = ^2~\^22. (81)
Используя G2') и (80) для произвольных обобщенных
координат q1 и q2, можно получить выражения G1).
Частоты изменения главных координат совпадают с частота-
частотами главных колебаний, т. е.
k\=ki, k\ = k2, (82)
так как частоты не зависят от выбора тех или иных
обобщенных координат. Они определяются свойствами системы
и потенциальным силовым полем, в котором движется система.
В случае системы с двумя степенями свободы в справедливости
(82) можно убедиться прямыми вычислениями с использова-
использованием формулы G6).
Кажется, что по (81) вычислять частоты проще, чем из
уравнения частот F6), но предварительное отыскание главных
координат представляет собой задачу, равноценную по труднос-
трудности решению уравнения частот. Главные координаты удобны
для теоретических исследований, особенно для исследования
вынужденных колебаний без учета сопротивления.
480
Итак, каждая из главных координат системы изменяется
по гармоническому закону, имея определенную частоту, ам-
амплитуду и начальную фазу, так же как и в случае системы
с одной степенью свободы. Этот результат остается справед-
справедливым и для собственных колебаний системы с любым
конечным числом степеней свободы. Некоторые частоты могут
оказаться одинаковыми, но это не приводит к резонансным
явлениям.
Влияние линейного сопротивления на собственные колебания
Пусть #1 и Чг — главные координаты системы. Тогда
квадратичные формы для кинетической и потенциальной энер-
энергий содержат только квадраты своих переменных:
2 1 (83)
Диссипативная функция в общем случае сохраняет член
с произведением даже для случая главных координат:
Ф = 1/2(И11?1 + 2ц12?1?2 + Ц22# (84)
Подставляя эти значения Т, П и Ф в уравнения Лагранжа
E6), получаем следующую систему уравнений собственных
колебаний с учетом линейного сопротивления:
) = 0. j
Коэффициенты системы уравнений удовлетворяют условиям
ап>0, а22>0, сп>0, с22>0; |!и>0, |!22>0,
(86)
Использование главных координат не приводит к распаде-
распадению системы уравнений на независимые уравнения, но система
уравнений становится несколько проще. Решение системы (85)
можно искать в форме
?i = <V'; q2 = C2eXt. (87)
Подставляя (87) в систему уравнений (85) и сокращая на
ех\ получаем
Для того чтобы эта система однородных линейных урав-
уравнений относительно неизвестных Cl5 C2 имела ненуле-
ненулевые решения, должен быть равен нулю определитель этой
системы:
= 0.
16 Заказ 192 481
Получено характеристическое уравнение для X, являющееся
уравнением четвертой степени. В развернутом виде характерис-
характеристическое уравнение имеет форму
=0. (89)
Каждому из четырех его корней Хг, Х2, Хъ, Х± соответствуют
определенные значения постоянных Сх и С2.
Из уравнений (88) определяются не величины Ci и С2
для каждого корня Хь а только их отношения:
'~ ь А -л ч- \yKJ)
Индекс / указывает, для какого корня Xt берутся постоянные
С1 и С2.
Не проводя подробного исследования, отметим, что при
выполнении условий (86) возможны следующие варианты
корней характеристического уравнения (89) и соответственно
решений системы дифференциальных уравнений (85).
1. Корни комплексные. Они попарно сопряженные,
так как коэффициенты уравнения вещественны и имеют
отрицательные вещественные части:
^i,2= — nl±k1i; Х2,з= —n2±k2i.
Этот случай получается при малом сопротивлении. Подставляя
эти значения X в (87), после несложных преобразований получаем
> [ВB2) cos k2
Здесь все В, D, A, a—постоянные величины.
Каждая главная координата является суммой двух затухаю-
затухающих колебаний. Четыре из восьми постоянных А^', АB\ А^\
Ali\ ос1/', аB), ос'г1', <г22) определяются из начальных условий;
другие четыре — через величины С({\ С2'\
2. Корни действительные. Их можно представить
в форме
причем kl<nl, кг<п2. Для главных координат q1 и q2 в этом
случае
q2 = e-"i< (С^е^1 + С^е-^ + е-
Движение непериодическое, затухающее. Оно получается
при большом сопротивлении.
482
3. Два корня действительные, а два — комплекс-
комплексно-сопряженные:
K,2=-ni±k1; 'k3A=-n2±k2i.
Для #1 и Яг получаем
В этом случае имеем наложение затухающих колебаний
на затухающее движение. Неглавные обобщенные координаты
линейно выражаются через главное в соответствии с G2).
Следовательно, для них каждая из обобщенных координат
является линейной комбинацией рассмотренных трех видов
движений. Аналогичное положение будет в случае любого
конечного числа степеней свободы.
Вынужденные колебания без учета сопротивления
Рассмотрим вынужденные колебания системы с двумя
степенями свободы без учета сопротивления под действием
гармонических возмущающих обобщенных сил, отнесенных
к главным координатам. Гармонические возмущающие силы
для других координат можно привести к гармоническим
возмущающим силам для главных координат, если частоты
первоначальных возмущающих сил одинаковы. Действие воз-
возмущающих сил, имеющих разные частоты, следует рассмат-
рассматривать по отдельности, используя свойство суперпозиции
решений линейных дифференциальных уравнений.
Итак, для главных координат ql и q2 из уравнений Лагранжа E6)
получим следующую систему уравнений вынужденных колебаний:
«1 i<7i + ci i<7i = Hi sin {pt + 5); a22q2 + c22q2 = H2 sin (pt + 8),
или после деления первого уравнения на а1Ь второго — на а22
q\ + k2iq1 = hlsin(pt + b); q2 + kj.q2 = h2sm(pt + $). (91)
Здесь введены обозначения для постоянных: k2 = cli/all,
k\ = c22ja22 — квадраты собственных частот; h1=Hi/all, h2 =
= H2ja22 — относительные амплитуды возмущающих сил.
Каждое из уравнений системы (91) можно интегрировать
независимо от другого уравнения. Общие решения этих
уравнений, согласно теории дифференциальных уравнений,
являются суммой общих решений уравнений без правых частей
(собственные колебания) и частных решений уравнений с пра-
правыми частями (вынужденные колебания):
Свойства собственных колебаний qic и q2e уже рассмотрены.
Они являются гармоническими колебаниями с частотами kt
16* 483
и к2- Рассмотрим вынужденные колебания qiB и q2s. Возможны
следующие характерные случаи.
1. Частота возмущающей силы р не совпадает ни с одной
из частот собственных колебаний кх и к2. Тогда частные
решения можно искать в форме
Подставляя это в (91) и приравнивая нулю коэффициенты
при синусах в полученных тождествах, имеем следующие
уравнения для определения постоянных С\ и С2:
Отсюда
C^hJikl-p2); C2 = h2/{k22-p2). (92)
Вынужденные колебания через главные координаты выра-
выражаются в форме
?i. = p^4sin(/« + 5); gi, = J!±-lSm(pt + 5). (93)
Ki~p к2—р
Если обобщенные координаты не являются главными, то
вынужденные колебания, согласно формулам перехода G2),
будут линейной комбинацией (93).
2. Частота возмущающей силы совпадает с одной из
частот собственных колебаний, например p = kv Это случай
резонанса на этой частоте. Решение для вынужденных
колебаний можно искать в виде
qlB = Cltcos(pt + b); q2B = C2sin(pt + ?>). (94)
Подставляя (94) в систему уравнений (91), получаем уравне-
уравнения для определения постоянных Ct и С2. Из этих уравнений
находим
C^-KKlk,); C2 = h2/{k22-p2). (95)
Вынужденные колебания для главных координат выражают-
выражаются в форме
h,t , о\ h,t ■
sin (рг +8). (96)
По одной главной координате получается резонанс.
Переход к другим, не главным, обобщенным координатам
по формулам перехода G2) приводит к резонансу по обеим
координатам.
При p = kx=k2 получается резонанс по обеим главным
координатам. Для системы с двумя степенями свободы резо-
резонанс наступает при совпадении частоты возмущающей силы
с одной из двух частот собственных колебаний.
484
Для системы с п степенями свободы для появления
резонанса достаточно совпадения частоты возмущающей силы
с одной из п частот собственных колебаний.
Влияние линейного сопротивления на вынужденные колебания
Так как использование главных координат при учете
линейного сопротивления не ведет к существенным упрощениям
системы дифференциальных уравнений, но в то же время
нарушает симметрию, то целесообразно использовать произ-
произвольные обобщенные координаты ql и q2. В этом случае
кинетическая и потенциальная энергии выражаются формулами
E7) и F0), а диссипативная функция — F2).
Обобщенные возмущающие силы считаем гармоническими:
Подставляя эти значения указанных величин в уравнения
Лагранжа E6), получаем следующую систему линейных диффе-
дифференциальных уравнений вынужденных колебаний с учетом
линейного сопротивления:
l2q2 + \ii2q2 + cl2q2) = H1sm(pt + ?>);
(97)
Z2q1 + ]i21q1 + c22q2) = H2sm(pt + 5).
Решение системы уравнений (97) для каждой координаты
является суммой собственных движений qic, q2c и вынужденных
колебаний qlB, q2B:
В зависимости от корней характеристического уравнения
для однородной системы уравнений, которая получается из
(97) путем отбрасывания правых частей, они могут быть
линейной комбинацией затухающих колебаний с затухающими
непериодическими движениями или этими движениями по
отдельности.
Рассмотрим вынужденные колебания qlB, q2B. Они являются
частными решениями системы уравнений (97). В этом случае
их следует искать в форме
lB = Blsm(pt + b) + Dlcos(pt + ?>) = Alsh^t,. , „ „i;n
Постоянные Bx, Dt, B2, D2 связаны с постоянными Аи
А2, 8l5 е2 соотношениями
= — /42sins2,J
и соответственно амплитуды А1, А2 и сдвиги фаз et, e2
485
-D2\i22p =
А, =
Подставим (98) в систему уравнений (97). Получим тождества,
справедливые для любого момента времени. Если в каждом
тождестве собрать отдельно члены с синусами и косинусами, то
коэффициенты при них должны быть равны нулю. Это дает систему
четырех уравнений для определения неизвестных Blt B2, Dl5 D2.
Bl(cll-allp2)-D1\illp + B2{c12-al2p2)-
A01)
Можно доказать, что это система неоднородных линейных
уравнений, т. е. ее определитель не равен нулю ни при каких
значениях р. Решая систему уравнений A01), полностью определим
постоянные Ви В2, Du D2, а следовательно, Аг, А2, е15 г2.
Не выполняя решения системы уравнений A01), можно
сделать выводы о влиянии линейного сопротивления на
вынужденные колебания системы с двумя степенями свободы.
Как и для случая системы с одной степенью свободы,
вынужденные колебания являются незатухающими гармоничес-
гармоническими колебаниями и происходят с частотой возмущающей
силы. Они не зависят от начальных условий. При резонансе
амплитуды вынужденных колебаний остаются постоянными
в отличие от случая отсутствия сопротивления.
В случае системы с п степенями свободы выводы о влиянии
линейного сопротивления на вынужденные колебания остаются
прежними.
Более сложные колебания совершают системы с бесконечным
числом степеней свободы, как, например, различные типы сплош-
сплошных сред. В некоторых случаях их можно с достаточной точно-
точностью заменить системой с конечным числом степеней свободы.
Для сплошных сред дифференциальные уравнения движения
будут уравнениями в частных производных в отличие от
систем с конечным числом степеней свободы, для которых
дифференциальные уравнения являются обыкновенными.
Пример 1. Два груза массами тх и т2 прикреплены к пружинам
с коэффициентами жесткости с1 и с2 (рис. 131, а). Исследовать колебания системы.
Решение. Если рассматривать движения грузов только по вертикали,
то видно, что система имеет две степени свободы. Примем за обобщенные
координаты системы смещения грузов х, и х2, отсчитываемые от положений
статического равновесия грузов вниз. Это позволяет исключить силы тяжести
грузов из уравнений, так как они в положении статического равновесия
уравновешиваются силами упругости пружин.
486
Вычисляем кинетическую энергию си-
системы относительно инерциальной систе-
системы отсчета. Имеем
Перке тШе Imopoe маИнос
колебание колебание
« S!
Рис. 131
Сравнивая ее с разложением кинетичес-
кинетической энергии E7), получаем значения
коэффициентов инерции:
Для определения потенциальной энер-
энергии системы следует вычислить работу,
которую совершают разности сил уп-
упругости и сил тяжести грузов при пе-
перемещении системы из рассматриваемого
положения в положение равновесия. Эти
разности сил изменяются в зависимости
от смещения грузов из статических по-
положений равновесия по линейному закону, аналогично тому, как изменяется
сила упругости пружины при деформации из недеформированного состояния.
При определении потенциальной энергии можно вычислять работу разности
сил последовательно. Сначала вычисляем ее при перемещении груза массой
т1 в состояние его статического равновесия на величину xv Соответствующая
работа равна —х\. Затем переместим груз массой т2 в положение его
статического равновесия. Для этого потребуется переместить его на величину
(х2— ху), так как на расстояние хг он переместился вместе с грузом массой
т1. Этому перемещению соответствует работа —{Хг—Х\J-
Таким образом, для потенциальной энергии системы имеем
Вычисляем коэффициенты жесткости с1Ь с\2, с12:
дП_ _(д2п\
cbq
дП
8x2J0
\dxydxjo
Система дифференциальных уравнений малых собственных колебаний F3)
примет форму
mjii + fc'i +c2)x1—c2X2—0; ~с2
Уравнение частот, согласно F6), имеет вид
Для упрощения вычислений предположим, что пружины одинаковы, т. е.
cl=c2 = c. Тогда уравнение частот примет форму
{2с-т1к2)(с-т2к2)-с2 = 0,
или
Bт2 + т1)с . с2
к к -\ = 0.
тхт2
487
Его решения:
f 1.2— Z +
2mim2 \j \m\m\
Оба решения, как и следовало ожидать, оказались действительными
и положительными.
Если масса тх очень велика по сравнению с массой т2, то, приняв
т2/т1=0, получаем
т. е. груз массой га, не колеблется, а груз массой т2 колеблется так, как
если бы он был прикреплен с помощью одной пружины к неподвижному телу.
Полагая массу т2 бесконечно большой по сравнению с ти имеем kl=0,
k2 = J2c\mv В этом случае груз, имеющий бесконечно большую массу, не
колеблется, а груз массой т1 колеблется, как если бы он был прикреплен
к неподвижному телу на двух пружинах.
Рассмотрим случай, при котором mi=m2=m. Система уравнений собствен-
собственных колебаний примет вид
тхх+2сх1 — «2=0; тх2 — cxl + cx2=0.
Уравнение частот соответственно выразится в форме
Bс-тк2)(с-тк2)-с2 = 0,
или
Из уравнения частот определяем квадраты частот главных колебаний:
Коэффициенты формы в этом случае, согласно F9), имеют значения
k2 '/ /7 ,
^= ~? v5"'
к2 2
2
Первое главное колебание с частотой к1 состоит из х[1) и x$) = $ix<f>. Так
как Р,>0, то знаки смещений х[1] и i}1 в первом главном колебании одинаковы
и колебания грузов совпадают по фазе. Второе главное колебание с частотой к2
включает в себя смещения х'?] и х\2) = $2х'2'. Так как Р2<О, то знаки смещений
хB) и х22) противоположны. Колебания грузов отличаются по фазе на к.
Формы главных колебаний изобразим графически. Для этого отложим
смещения грузов в главных колебаниях вправо по горизонтали положительные,
влево — отрицательные. По вертикали отложим расстояния грузов от верхнего
конца первой пружины. Для первого главного колебания смещение первого
груза изобразится горизонтальным отрезком х\1); смещение второго груза — го-
горизонтальным отрезком x2i) (рис. 131,6). Оба отрезка направлены вправо,
так как у них одинаковые знаки, например, положительные.
Для второго главного колебания отрезок хB) следует отложить вправо,
предположив, что смещение х^ положительно, тогда х22) надо отложить
влево, так как х{2] будет отрицательным (рис. 131,в).
Тогда D пружины при втором главном колебании остается все время
неподвижной. Такие точки называются узлами. Второе главное колебание
имеет один узел. Первое главное колебание узлов не имеет.
Пример 2. Используем условия примера 1 для иллюстрации эффекта
гашения вынужденных колебаний первого груза с массой т^. Для этого
дополнительно предположим, что к первому грузу приложена гармоническая
возмущающая сила F(t) — Hsin(pt+8), направленная по вертикали вниз. При
этом Я, р и 5 являются постоянными.
488
Определим условия, при выполнении которых первый груз не будет
совершать вынужденных колебаний.
Решение. Левые части дифференциальных уравнений малых колебаний
системы останутся такими же, как и в первом примере. В правой части
первого уравнения следует вместо нуля подставить обобщенную силу
Ко второму грузу возмущающих сил не приложено. Поэтому в правой части
второго уравнения так и останется нуль. Получим следующую систему
дифференциальных уравнений:
0. J
Решения для вынужденных колебаний (частные решения) следует искать
в форме
xlt = Ai sin(pt+b); xln = A2sm(pt + 5). (б)
Отсюда
xlB= — Aip2sin(pt+8); Х2а= —A2p2sin(pt + b). (б')
Подставляя значения (б) и (б') в (а), после сокращения на sin (/?/+5)
получим следующую систему уравнений для амплитуд А1 и А2:
А, [-
Из системы (в) определяем Л, по правилу Крамера. Имеем
Н -с2
О -т2р2
= Н
с2~т2р
2
д
где определитель системы
Ш\Р r\Ci-\-C2\ С2 г/ , 2П / 2\ 2
2 =l(Cl+C2)-mlP \\Cl->nlP )-Cl-
— с2 с2 — т2р
Амплитуда вынужденных колебаний первого груза Ai=0, если с2 — т2р2 = 0.
В этом случае А= —с2ф0.
Таким образом, Ai=0, а следовательно, и xla = 0, если жесткость пружины
с2 и массу груза т2 подобрать так, чтобы выполнялось условие с2—т2р2 = 0.
При этом масса тх и жесткость су могут быть любыми. Вынужденные
колебания первого груза будут полностью погашены. Для этого только
требуется, чтобы круговая частота возмущающей силы р= —.
ГЛАВА 8
ДИНАМИКА ТВЕРДОГО ТЕЛА С ОДНОЙ
ЗАКРЕПЛЕННОЙ ТОЧКОЙ
Изучение движения тела с одной закрепленной точкой имеет
важное значение. Во-первых, телом с одной закрепленной точкой,
имеющим широкое практическое применение, является гиро-
гироскоп— тело осесимметричное. Во-вторых, движение свободного
489
твердого тела можно представить состоящим из двух движений:
поступательного вместе с какой-либо точкой тела и вращения его
вокруг этой точки. В качестве точки, вместе с которой
рассматривается поступательное движение, выбирают центр масс
тела, так как для него имеется теорема о движении центра масс.
К изучению движения тела вокруг, например, центра масс можно
применить общие положения о движении тела вокруг неподвиж-
неподвижной точки.
§ 1. КИНЕТИЧЕСКИЙ МОМЕНТ ТЕЛА,
ВРАЩАЮЩЕГОСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Имеем твердое тело, одна из точек которого закреплена.
Движение тела рассматривается относительно некоторой систе-
системы координат Oxyz (рис. 132), начало которой находится
в закрепленной точке тела. Вращение тела вокруг неподвижной
точки в каждый момент времени есть вращение вокруг
мгновенной оси с угловой скоростью_ ю, направленной по
этой оси. Для кинетического момента Ко относительно непо-
неподвижной точки, согласно его определению, имеем
ко =
k- I
A)
где rk— радиус-вектор какой-либо точки тела; тк— масса точки;
vk — скорость этой точки относительно выбранной системы
отсчета. Для сплошного тела роль точек выполняют малые
элементарные частицы тела, на N которых оно разбито.
Из кинематики известно, что скорости точек тела при его
вращении вокруг неподвижной точки вычисляются по вектор-
векторной формуле Эйлера
, = ЮХГ1 =
г
(йх
ч
j
®у
Ук
к
®z
Zk
*) + к
B)
Рис. 132
которую в проекциях на оси координат,
учитывая, что векторное произведение
можно представить в виде определите-
определителя, выразим в форме
Vkz = (£>xyk-K>yXk, B')
где хк, ук, zk — координаты точки тела
с массой тк.
Для проекции кинетического момен-
момента на ось Ох с учетом B') имеем
490
k = l
N
= Z
k=l
A')
Проекции угловой скорости юх, oor coz вынесены за знаки сумм,
так как они не зависят от точек тела, по которым ведется
суммирование. Суммы в (Г) представляют собой соответствен-
соответственно осевой Jx и центробежные Jxy, Jxz моменты инерции.
С учетом этого для Кх и по аналогии для Ку и Kz получаем
C)
Kz= -
По формулам (З) вычисляются проекции на оси координат
кинетического момента тела относительно его закрепленной
точки. Эти проекции являются линейными функциями проекций
угловой скорости вращения тела на те же оси координат.
Кинетический момент Ко по проекциям определяется формулой
K0 = KxJ+Kj+Kzk. A")
Проекции на оси координат кинетического момента по
формулам C) можно вычислить как для осей, относительно
которых рассматривается вращение тела (неподвижные оси),
так и любых других подвижных осей, например скрепленных
с вращающимся телом. Для неподвижных осей осевые
и центробежные моменты инерции изменяются при вращении
тела и, следовательно, зависят от времени вследствие изменения
положения тела относительно этих осей. Для подвижных
осей, скрепленных с телом, моменты инерции являются
постоянными, не зависящими от времени, так как положение
тела относительно этих осей не изменяется при его вращении.
В случае проецирования кинетического момента на подвижные
оси координат следует иметь в виду, что кинетический
момент вычисляется для движения тела относительно не-
неподвижных осей.
Если применить тензор инерции
J x J xy Jxz
Jy Jyz
-Л
yx
и учесть правило умножения тензора на вектор-столбец ю,
то C) можно кратко выразить формулой
491
Формулы C) упрощаются для проекций
кинетического момента на главные оси
инерции для неподвижной точки О. Для
таких осей координат Jxy = Jyz = Jzx = 0 и из
C) получаем:
Kx = Jxax; Ky = Jyasy; KZ = JZ&Z. D)
В этом случае проекции кинетического
момента вычисляются так же, как и в слу-
чае> если бы каждая из главных осей
инерции была неподвижной осью вращения
Рис 133 Тела.
Главные оси инерции для неподвижной точки О обычно
подвижные оси, скрепленные с самим вращающимся телом.
Только такие оси могут быть главными в течение всего
времени вращения тела. Другие подвижные или неподвижные
оси могут быть главными только в отдельные моменты
времени.
Частный случай. Если имеем тело, которое вращается
вокруг неподвижной оси Oz (рис. 133), то в этом случае
вектор угловой скорости ю направлен по оси вращения и его
проекции на две другие оси, перпендикулярные оси вращения,
равны нулю, т. е. (ах = сау = 0. Так как вращение вокруг
неподвижной оси есть частный случай вращения тела вокруг
неподвижной точки, то по формулам C) в этом случае имеем:
Kx=-Jxya>z; Ky=-Jyz(£>z; KZ = JZ«>Z. E)
Если ось вращения Oz является главной осью инерции для
ее точки О, то Jxz = Jyz=--0 и из E) получаем:
Кх = 0; Ку = 0; Kz = Jzaz. E')
Кинетический момент для случая главной оси направлен по
оси вращения. В других случаях он не направлен по оси
вращения. Ось вращения является главной осью инерции для
всех своих точек, если она является главной центральной
осью инерции.
§2. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТЕЛА С ОДНОЙ
ЗАКРЕПЛЕННОЙ ТОЧКОЙ
В соответствии с определением кинетической энергии имеем
N
h- (б)
Если заменить один из векторов скорости vk его значением
из B), то получим
492
1 V" / — — \ — 1 ^~i
mkvk-(mxfk). F')
В смешанном произведении трех векторов можно переставлять
сомножители в круговом порядке, т. е.
vFxrk) = v(»kx<o) = <MrfcXtJk).
С учетом этого после вынесения вектора ю за знак суммы
получим
^'^•Е^хад^/гй^, G)
так как
N
Z rkxmkvk = Ko.
/t=i
Итак, кинетическая энергия тела, вращающегося вокруг
неподвижной точки, равна половине скалярного произведения
угловой скорости вращения тела и кинетического момента
относительно закрепленной точки.
Скалярное произведение можно представить в двух формах:
ri), Ko) =
( ^ ^). (V)
Так как кинетическая энергия может иметь только положитель-
положительные значения, то из G') следует cos (со, Ко) > О, т.е. угол
между мгновенной осью, по которой направлен вектор угловой
скорости, и кинетическим моментом относительно закрепленной
точки всегда острый.
Если в G') величины Кх, Ку1 Kz заменить их значениями
из C), то получим
{ yl-2JyZ<uy<i>z-Jzx(bz<ux-2Jxy(ux(uy), (8)
т. е. кинетическая энергия тела с одной закрепленной точкой
является квадратичной формой проекций угловой скорости на
оси координат.
В матричной форме, учитывая (Г), кинетическую энергию
можно представить формулой
г=1/2й(/4
Если оси координат Oxyz являются главными осями
инерции для закрепленной точки О, то Jxy = Jyz = Jzx = O и (8)
примет вид
T=\/2(Jx^ + Jy^2y+JMy (9)
Эта формула является обобщением выражения кинетической
энергии, полученного при рассмотрении вращения твердого
тела вокруг неподвижной оси. Согласно (9), кинетическая
энергия при вращении тела вокруг неподвижной точки
493
j
Z X
Рис. 134
получается так же, как при одновременном вращении вокруг трех
неподвижных главных осей инерции, проходящих через эту точку.
Проверкой можно убедиться, что как в общем случае, так
и в случае главных осей инерции справедливы формулы
Для случая вращения тела вокруг неподвижной оси
Пример. Диск /, имея закрепленную точку О (рис. 134, а), катится без
скольжения по плоскости.
Вычислить кинетическую энергию диска.
Решение. Выберем за подвижные оси координат главные оси инерции
для точки О, скрепленные с диском. Имеем
Мгновенная ось для диска 1, по которой направлена угловая скорость
ш, проходит через неподвижную точку О и точку соприкосновения диска
с неподвижной плоскостью. Главными осями инерции диска являются ось
симметрии Oz и две любые оси Ох и Оу, перпендикулярные ей в силу
симметрии диска. Для этих осей имеем:
г R
шх = 0; co), = a)cosa = a) , =; шг = атпа = ш-
Момент инерции
Моменты инерции относительно осей Ох и Оу вычисляем с использованием
теоремы Штейнера. Имеем
= JCjl+mR2.
Для диска (рис. 134, б)
Используя эти значения моментов инерции, получаем
Jx = m(r2/4 + R2); Jy = m(r214+R2).
Для кинетической энергии с учетом шх = 0 имеем
-2 Ъ
т=-
'4(г2-
^ +
lr2 R1 1
4 rz + R2]
(rz + 6R2).
494
§3. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Динамические уравнения Эйлера вращения тела вокруг
неподвижной точки под действием сил получают из теоремы
об изменении кинетического момента. Согласно этой теореме,
dK0/dt = L<S\ A0)
где Ко — кинетический момент тела относительно его закре-
закрепленной точки от вращения тела относительно инерциальной
JV
системы отсчета; Dq)= ]Г M0(Fie)) — векторная сумма момен-
тов внешних сил, действующих на тело (рис. 135). К числу
внешних сил относится также сила реакции закрепленной точки.
Бхли выразить A0) в проекциях на инерциальные (неподвиж-
(неподвижные) оси координат, то через Кх, Ку, Kz в полученные уравнения,
согласно C) в общем и D) в частном случаях/главных осей, войдут
изменяющиеся с течением времени моменты инерции, для
вычисления которых следует уже знать движение тела, которое
само подлежит определению по заданным силам. Чтобы избежать
этого, Эйлер предложил проецировать векторы, входящие в A0),
на подвижные оси координат, скрепленные с вращающимся
телом. Для таких осей моменты инерции не зависят от времени.
Подготовим векторное уравнение A0) для проецирования
на подвижные оси координат, скрепленные с движущимся
телом. Для этого абсолютную производную по времени от
кинетического момента необходимо выразить через относитель-
относительную производную, используя формулу Бура, т. е.
dK0_3K0 , -~
___ + (DxKo,
(И)
так как подвижная система осей координат имеет ту же
угловую скорость, что и само тело, с которым скреплены
эти оси.
Для удобства проецирования представим векторное произве-
произведение векторов в виде определителя с последующим разложе-
разложением его по элементам первой строки, т. е.
00 X Лп =
+j{to,Kx - (OXKZ) +1 (<ахК, - <o,Kx), A2)
где i,j,k — единичные векторы, направ-
направленные по осям координат подвижной
системы осей координат. Используя
формулу A1), теорему об изменении
кинетического момента A0) представим
в форме
i
«х
Кх
j
(Иу
к
к
ю.
К
Рис. 135
495
ЗКо
At
A0')
В проекциях на подвижные оси координат, скрепленные
с вращающимся телом, из A0') с учетом A2) получим
A3)
Эти уравнения после подстановки в них значений Кх, Ку, Kz
из C) приведут к обобщенным динамическим урав-
уравнениям Эйлера. Это еще довольно сложные уравнения.
Дальнейшее их упрощение получается, если использовать
второе предложение Эйлера — выбрать в качестве подвижных
осей координат, скрепленных с телом, главные оси инерции
для точки О. В этом случае Кх, Ку, Kz определяются по
формулам D). Моменты инерции по-прежнему не будут
зависеть от времени и их можно выносить за знак производных
по времени. Таким образом, из A3), используя D), получим
следующие динамические уравнения Эйлера:
A4)
К этим динамическим уравнениям Эйлера следует присоеди-
присоединить кинематические уравнения Эйлера
= \|/sin 0 sin ф + 0 cos ф;
A5)
которые выражают проекции вектора угловой скорости враще-
вращения тела на подвижные оси координат, скрепленные с телом,
через углы Эйлера, \|/, 0, ф и их производные по времени.
§4. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Установим зависимость проекций вектора угловой скорости
на оси координат, скрепленные с телом, от углов Эйлера
\|/, 0, ф и их производных по времени.
496
Рис. 136
Тело, имеющее неподвижную
точку О, движется относитель-
относительно осей координат Ox1ylzl
(рис. 136). С движущимся телом
скреплена система подвижных
осей координат Oxyz, движение
которой и характеризует движе-
движение рассматриваемого твердого
тела относительно осей Oxlylzl.
Положение подвижной системы
координат относительно непо-
неподвижной, а следовательно, и по-
положение самого движущегося тела определяются тремя углами
Эйлера: v|/, 0, ф.
Изменение угла прецессии \|/, образованного координатной
осью Oxt и линией узлов ОК, которая является линией
пересечения координатных плоскостей Охгуг и Оху, соответ-
соответствует вращению тела вокруг оси прецессии Ozx, перпендику-
перпендикулярной линиям, образующим угол, с угловой скоростью vj/A7!,
направленной по этой оси. Здесь kx — единичный вектор оси Ozi.
При изменении угла нутации 0, заключенного между осями
координат Oz1 и Oz, тело вращается вокруг перпендикулярной этим
осям линии узлов ОКс угловой скоростью 0«, где п — единичный
вектор, направленный в положительную сторону линии узлов.
Изменение угла собственного вращения ф, образованного
координатной осью Ох и линией узлов ОК, приводит к враще-
вращению тела вокруг оси собственного вращения Oz, перпен-
перпендикулярной этим линиям, с угловой скоростью фк, где
к~—единичный вектор оси Oz.
При изменении углов Эйлера \|/, 0 и ф движение тела
можно рассматривать как сложное, состоящее из трех вращений
вокруг пересекающихся ^рсей Ozr, OK и Oz с угловыми
скоростями \]//cl5 6« и ц>к соответственно. Совокупность этих
трех вращений эквивалентна вращению тела вокруг мгновенной
оси с угловой скоростью со, направленной по этой оси.
По теореме о сложении вращений вокруг пересекающихся
осей имеем
G> = tyk1 + Qn + (pK. A6)
Определим проекции вектора угловой скорости ю на
подвижные оси координат Oxyz, скрепленные с телом. Движе-
Движение тела при этом рассматривается относительно неподвижной
системы отсчета Oxlylzl. При проецировании на оси координат
Oxyz векторной суммы правой части A6) следует проецировать
на эти оси каждый из слагаемых векторов.
Вектор угловой скорости ц>к направлен по оси Oz и дает
проекцию на эту ось, равную ф, так как он перпендикулярен
двум другим осям: Ох и Оу.
497
Угловая скорость 0й, направленная
по линии узлов, располагается в плос-
плоскости подвижных осей Ох и Оу, и ее
проекция на ось Ох равна 8cos(p, а на
ось Оу— ( — Bsincp). Знак'минус у проек-
проекции на ось Оу поставлен потому, что
при изображенном на рисунке располо-
Рис. 137 жении осей вектор 9« при разложении
по осям Ох и О у имеет составляющую, в отрицательном
направлении оси Оу. Проецируемый вектор 9« перпендикулярен
оси Oz, и его проекция на эту ось равна нулю.
Для того чтобы спроецировать на оси координат Oxyz
вектор ^iku его следует предварительно разложить на две
перпендикулярные составляющие, одна из которых направлена
по оси Oz, а другая перпендикулярная составляющая располо-
расположится в плоскости осей координат Ох и Оу. Имеем
\|/fc1 = 9cos0-£+\|/sin0-7J A7)
где Т—единичный вектору направленный по линии OL. При
проецировании вектора ц/к1 на оси координат следует проеци-
проецировать на эти_ оси каждый вектор из правой части A7).
Вектор \|/ cos 9 • Л: дает проекцию v|/cqs0 только на ось Oz.
Остается спроецировать вектор \|/sin07, расположенный в плос-
плоскости осей координат Ох и Оу, на эти оси. В плоскости
этих осей расположится также линия узлов О К (рис. 1 37]l
Линия OL, по которой направлен проецируемый вектор \jzsin8-/,
и линия узлов взаимно перпендикулярны, так как линия узлов
перпендикулярна осям координат Oz и Ozx, а следовательно,
она перпендикулярна и линии OL, расположенной в плоскости
этих осей. Угол ф между осями Ох и О К является также
углом между перпендикулярными к ним осями О у и OL.
Таким образом, проекция вектора \[/sin8-/ на ось О у равна
\|/sin0cos(p, а на ось Ох—\j/sin0sin(p.
Собирая вместе проекции на оси координат векторов, входя-
входящих в правую часть A6), с учетом полученных проекций векторов
из правой части A7) получим кинематические уравнения Эйлера.
Выразим дополнительно косинусы углов оси прецессии Oz1
с осями координат Oxyz, скрепленными с движущимся телом,
через углы Эйлера. Jlo оси прецессии Ozl направлен вектор
угловой скорости ^/■к1. Поэтому множители при \j/ в формулах
для оу,., 0)у, ooz и есть искомые косинусы указанных выше
углов. Обозначая их для краткости yl5 y2, уъ, получаем
Y1=cos(z1, x) = sin0sin(p;
Y2 = cos(z1, y) = si
Y3 = cos(z1, z) = cos0.
A8)
498
§5. ЗАДАЧА О ВРАЩЕНИИ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ.
СЛУЧАИ ИНТЕГРИРУЕМОСТИ
Даны приложенные к телу внешние силы F({\ Щ\ ..., F^\
к которым следует присоединить и силу реакции закрепленной
точки (см. рис. 135). Ограничимся рассмотрением случая сил, для
которых проекции главного момента L^\ Lye), L[e) на подвижные
оси координат, скрепленные с телом, зависят от времени, углов
Эйлера ф, v|/, 9 и их первых производных по времени ф, iff, 9 и не
зависят от производных более высоких порядков от этих величин.
Если тело задано, то известны его моменты инерции относительно
главных осей инерции для закрепленной точки тела. Требуется
определить движение тела, т. е. определить углы Эйлера
в зависимости от времени. Для этого следует проинтегрировать
систему шести динамических A4) и кинематических A5) уравнений
Эйлера. При этом появятся шесть произвольных постоянных
интегрирования, для определения которых дополнительно следует
задать начальные условия, т. е. при t = 0 задать числовые величины
углов Эйлера и их первых производных. Итак, следует задать:
г = 0; Ф = ф0; v|/ = v|/0; 9 = 9O;
ф=ф0; \|>=40; 0=0о- A9)
Интегрирование системы нелинейных дифференциальных
уравнений A4) и A5) при общих начальных условиях A9) — за-
задача чрезвычайно трудная. Она в общем случае начальных
условий не решена даже тогда, когда внешними силами
являются только сила тяжести самого тела и реакция закре-
закрепленной точки. Для тяжелого твердого тела, вращающегося
вокруг неподвижной точки, в трех случаях была указана
система первых интегралов дифференциальных уравнений, из
которых неизвестные углы Эйлера в зависимости от времени
определяются в квадратурах, т. е. путем вычисления интегра-
интегралов. Эти частные случаи называют случаями интегрируемости
уравнений Эйлера.
Случай Эйлера. Тело имеет любую форму, но закрепле-
закреплено в его центре масс, т. е. L^ = L^ = L(ze) = 0.. В этом случае
углы Эйлера выражаются через специальные эллиптические
функции.
Случай Лагранжа (случай симметричного гироскопа).
Тело имеет ось симметрии, например Oz. В силу симметрии
Jx = Jy и эллипсоид инерции для закрепленной точки будет
эллипсоидом вращения. Закрепленная точка О и центр масс
С расположены на оси симметрии. В этом случае могут быть
указаны шесть независимых первых интегралов, из которых
углы Эйлера вычисляются в квадратурах.
Случай Ковалевской. Долгое время не удавалось
указать других случаев интегрируемости, пока русский
499
математик С. Ковалевская, участвуя в конкурсе, объявленном
Французской академией наук, не открыла еще один, получивший
название случая Ковалевской. В случае Ковалевской Jx = Jy = 2Jz.
Закрепленная точка располагается на оси симметрии Oz, а центр
масс находится в экваториальной плоскости эллипсоида инерции
(плоскости Оху) для неподвижной точки тела.
Во многих важных случаях, особенно симметричных тел,
являющихся гироскопами, уравнения Эйлера интегрируются
приближенно. Известен также ряд частных случаев начальных
условий, для которых уравнения Эйлера при движении гироско-
гироскопа под действием силы тяжести могут быть проинтегрированы
точно.
§6. АСТАТИЧЕСКИЙ ГИРОСКОП
Гироскопом обычно называют симметричное твердое тело,
совершающее движение вокруг неподвижной точки О, располо-
расположенной на оси симметрии Oz (рис. 138). Эллипсоид инерции
гироскопа относительно его неподвижной точки является
эллипсоидом вращения (на рисунке он изображен штриховой
линией), а любая его ось в экваториальной плоскости,
перпендикулярной оси гироскопа (например, Ох и О у),— глав-
главной осью инерции. Все эти оси имеют одинаковые моменты
инерции. Ось гироскопа Oz является главной центральной
осью инерции.
Крепление оси гироскопа в одной точке обычно осуществля-
осуществляется с помощью рамок той или иной формы (рис. 139).
Волчок, у которого точка О движется по плоскости, совершает
более сложное движение, чем гироскоп, имеющий одну закреп-
закрепленную точку на оси.
Астатическим (или уравновешенным) гироскопом называют
гироскоп с неподвижной точкой в центре масс, если на него
Рис. 138
500
действуют только сила тяжести и ре-
реакция неподвижной точки. В астатичес-
астатическом гироскопе имеем соединение двух
случаев интегрируемости — Эйлера и Ла-
гранжа.
Если Oz — ось симметрии гироскопа,
то для осей координат Oxyz, скре-
скрепленных с гироскопом, Jx = Jy. Для
астатического гироскопа главный мо-
момент внешних сил относительно закре-
закрепленной точки
Т(е)_ V М (Р<,еЛ — О
^О — /_, мО\Гк ) — U,
Рис 140
так как силы тяжести и реакция закреп-
ленной точки проходят через эту точку О, если нет сил
трения в закрепленной точке (рис. 140)
Из теоремы об изменении кинетического момента для
абсолютного движения гироскопа относительно неподвижных
осей координат
следует, что кинетический момент относительно неподвижной
точки гироскопа Ко = const. В частности, постоянной величиной
является модуль кинетического момента Ко.
Если одну из неподвижных осей координат Ozx направить
по вектору кинетического момента Ко, имеющему неизменное
направление в пространстве осей координат Ox1y1z1, то
проекция Ко на ось Oz, как главная ось инерции для точки
О и одновременно ось собственного вращения гироскопа,
выразится в форме
Kz = KocosQ,
где 0 — угол между осью Oz1 и осью собственного вращения
Oz. Он обозначен так же, как и угол нутации. В дальнейшем
окажется, что он им и является.
С другой стороны, так как ось Oz является главной осью
инерции гироскопа для неподвижной точки О, то Kz = Jza>z.
Следовательно,
■/zcoz = Ко cos 0 и
= ,/ztt>z/Aro.
B0)
Определим движение уравновешенного гироскопа, т. е. уста-
установим зависимость углов Эйлера \|/, 0, (р от времени при
заданных начальных условиях. Так как L^' = 0, то L^) = L{y) =
= Lze) = 0. Учитывая это и условие симметричности Jx = Jy,
получим следующие динамические уравнения Эйлера:
501
B1)
К ним следует присоединить кинематические уравнения Эйлера
сОд. = \J/ sin 0 sin ф + Й cos (p;
(£>у = v|/ sin 0 cos ф — Й sin ф;
coz = v[/cos0 + (p.
B2)
Вместо системы уравнений B1) удобнее использовать первые
интегралы этой системы, один из которых получается умно-
умножением B1) соответственно на а>х, а>у, coz и суммированием.
После преобразований получаем
, г , 2
а . |ш; + со
■ Л/ J
Это соотношение [первый интеграл системы B1)], в котором
постоянная обозначена 2/г, выражает закон сохранения меха-
механической энергии T+IJ=h, где П—потенциальная энергия —
постоянная, принятая равной нулю.
Если уравнения системы B1) соответственно умножить на
Jxa>x, Jyu>y, Jza>z и сложить, то после интегрирования получается
другой первый интеграл:
Соотношение B4) является законом сохранения кинети-
кинетического момента относительно закрепленной точки.
Из третьего уравнения системы B1) следует еще один
первый интеграл:
coz = const = со z0), B5)
где cozO) — значение coz при t = 0.
Первые интегралы B3)—B5) системы уравнений B1) можно
использовать вместо самой системы уравнений. Заменяя coz
на co(z0) и учитывая, что Ко = const, из B0) получаем, что
угол нутации — постоянная величина. Действительно,
cos 0 = Jz(£>z0)/Ko = const = cos 0O,
где 0О — значение 0 при Г = 0. Так как 0 = const, то угловая
скорость нутации 6 = 0. С учетом этого система уравнений
B2) примет вид
502
со = v[/sin 0O cos ф; co^O) lo 9
B2')
Возведем первые два уравнения этой системы в квадраты
и сложим. Получим
со2 + со2 = \|/2 sin2 0O (sin2 ф + cos2 (p) = v]/2 sin2 0O. B6)
Определяя величину со2 + со2 из B3), убеждаемся, что она
является постоянной, так как
ro2 + aJ = B//-t/zco!0J)//c = const. B7)
Учитывая B7), из B6) получаем
\|/2 = (со2 + со 2)/sin2 0O = const,
т. е. угловая скорость прецессии \|/ = const = v]/0 и, следовательно,
v|/ = vlV + v|/0, B8)
где v]/0, \j/0 — значения угловой скорости прецессии и угла
прецессии в начальный момент времени.
Из B2') с учетом B5) и B8) получаем, что угловая
скорость собственного вращения тоже постоянная величина,
так как
ф = colO) — v]/0 cos 0O = const = фо B9)
и, следовательно,
Ф = фо? + фо, B9')
где ф0, \|/0— постоянные величины.
Движение гироскопа с постоянной скоростью собственного
вращения ф, постоянной скоростью прецессии v]/ и постоянным
углом нутации 0 называется регулярной прецессией. Уравнове-
Уравновешенный гироскоп, следовательно, в общем случае совершает
регулярную прецессию по инерции вокруг направления кинети-
кинетического момента Ко.
Для того чтобы уравновешенный гироскоп совершал регу-
регулярную прецессию по инерции, т. е. без действия момента
внешних сил относительно его неподвижной точки, необходимо
выполнение условия
Л Ф = (Л-ЛИ cos9. C0)
Условие C0) получено в § 3 этой главы. Оно следует
также из B9).
Если ф, \j/ и 0 не удовлетворяют этому условию, то для
поддержания регулярной прецессии требуется действие на
гироскоп момента внешних сил.
Если уравновешенному гироскопу сообщить начальную
угловую скорость соо вокруг оси собственного вращения, то
кинетический момент гироскопа Ко, сохраняющий свое на-
направление неизменным, будет все время направлен по этой
оси. В этом случае угол нутации равен нулю и ось собственного
503
вращения совпадает с осью прецессии, по которой направлен
кинетический момент, сохраняющий постоянное направление
в неподвижном пространстве. Ось такого гироскопа тоже
будет сохранять неизменным свое направление в этом про-
пространстве. Это свойство уравновешенного гироскопа сохранять
неизменным свое направление, например на какую-либо
удаленную звезду, широко используется в различных ги-
гироскопических устройствах, таких, как гироскопические ком-
компасы, автопилоты и т. д.
Действие кратковременных возмущений, действующих на
гироскоп, например вследствие движения объекта, на котором
он установлен, с ускорением в течение короткого промежутка
времени, рассматривается в приближенной теории гироскопа.
§ 7. ДВИЖЕНИЕ ГИРОСКОПА ПОД ДЕЙСТВИЕМ
СИЛЫ ТЯЖЕСТИ
Если пренебречь силами сопротивления среды, в кото-
которой движется гироскоп, и силами трения в закрепленной
точке или соответственно в подшипниках рамок, то кроме
силы реакции в закрепленной точке на гироскоп всегда
действует сила его тяжести. Пусть в этом случае гироскоп,
с которым скреплена система координат Oxyz (ось Oz является
осью симметрии гироскопа), движется относительно системы
координат Ox1y1z1, у которой ось Oz1 с единичным вектором
]с1 направлена вертикально вверх (рис. 141).
Для силы тяжести Р, направленной вертикально вниз, т.е.
против положительного направления оси 0z1; имеем Р=—Рк1.
Ее проекции на подвижные оси координат, скрепленные
с гироскопом, выразятся в виде
Px=-Pcos(Zl, x)=-Py1;
A
C1)
где Yi> 72> Уз — косинусы углов оси Ozl с осями координат
подвижной системы Oxyz.
Главный момент внешних сил Lty относительно закреп-
закрепленной точки сведется только к векторному моменту силы
тяжести относительно этой точки. Поэтому, учитывая, что
хс = 0, yc = Q, zc = l, и используя C1), получим
C2)
504
Динамические уравнения Эйлера для симметричного гиро-
гироскопа (Jx = Jy), движущегося под действием силы тяжести,
примут вид
C3)
К динамическим уравнениям следует присоединить кинема-
кинематические уравнения Эйлера
юх = vj/ sin 8 sin ф + Й cos (p;
соу = \J/ cos 0 cos ф — 9 sin ф;
C4)
К системе уравнений C3) и C4) надо добавить формулы
A8), выражающие косинусы углов у1, у2, Уз через углы Эйлера:
Y^sinGsincp; у2 = зт0со8ф; y3 = cos8. C5)
Систему уравнений C3) и C4) с учетом C5) проинтегрируем
в наиболее важном частном случае начальных условий:
Г = 0; юя = шу = 0; coz = co0; Ф = \|/ = 0; е = 6о. C6)
Вместо динамических уравнений Эйлера C3) целесообразно
использовать первые интегралы этих уравнений, которые можно
получить из самих уравнений или из общих теорем динамики,
примененных к гироскопу. Один из этих интегралов следует
из последнего уравнения системы C3):
coz = const = Ct.
Два других первых интег-
интеграла получим применением
общих теорем динамики.
Связи, наложенные на ги-
гироскоп, при отсутствии трения
в закрепленной точке являют-
являются идеальными и стационар-
стационарными. Сила тяжести, дейст-
действующая на него, является по-
потенциальной. При этих усло-
условиях справедлив закон сохра-
сохранения механической энергии
(интеграл энергии) Рис. 141
505
Г+Я= const = C2.
Кинетическая энергия гироскопа при Jx = Jy вычисляется по
формуле
Потенциальная энергия П, если принять ее равной нулю,
когда центр масс находится в горизонтальной плоскости
Ох1у1, определяется через координату центра масс zlc в непо-
неподвижной системе координат выражением:
n=Pzlc.
Значение zic получим проецированием радиуса-вектора центра
масс fc = lk, направленного по подвижной оси Oz, на непод-
неподвижную ось Oz^. Имеем
Таким образом,
Подставляя значения кинетической и потенциальной энергий
в интеграл энергии, получим
Jx(oix + &2y) + Jz&2z +2P/y3 = С2.
Из теоремы об изменении кинетического момента в абсо-
абсолютном движении гироскопа относительно неподвижной оси
Oz1 имеем
dKzJdt = Lze) = 0,
так как сила тяжести Р параллельна этой оси. Отсюда
получаем следующий интеграл сохранения кинетического мо-
момента относительно оси Ozx:
Kz = const = C3.
Выразим Kz через кинетические моменты относительно под-
подвижных главных осей инерции Oxyz для точки О:
Так как кинетический момент Ко можно разложить
на составляющие по осям подвижной системы координат
Ko = Kx-i+Ky-j+Kz-k, то Kz можно получить проецированием
векторной суммы на ось Ozx. Имеем
Интеграл сохранения кинетического момента относительно оси
Ozl принимает форму
506
Получены следующие три первых интеграла динамических
уравнений Эйлера:
coz=Ci;
Jx (со2 + со,2) + /zco2 + 2Ply3 = С2;
Л (Y1 W* + Y2 «„) + •'z Уз «z = С3 ■
Согласно начальным условиям сог = соо, &х = (ау = § при ? = 0,
из этих первых интегралов получаем следующие уравнения
для определения постоянных С1, С2, Съ'■
Подставляя эти значения постоянных в выражения для первых
интегралов, имеем
coz = co0; C7)
-cos% C8)
так как, согласно C5) и начальным условиям, Узо — Y3 = cos9o~
— cosG.
Из кинематических уравнений Эйлера C4) с учетом C5)
получаем соотношения
l 6 D0)
y D1)
С учетом D0) и D1) формулы C8) и C9) примут вид
0); D2)
0 — cosO). D3)
Из последнего уравнения системы C4), приняв coz = coo, имеем
№0 = vl/cose + (p. D4)
Получена система нелинейных обыкновенных дифферен-
дифференциальных уравнений D2), D3) и D4), интегрированием которых
можно определить углы Эйлера \|/, 9, (р в зависимости от
времени при заданных начальных условиях. Это сложная для
интегрирования система уравнений. Подготовим ее для при-
приближенного интегрирования.
В D2) левая часть положительна; следовательно, должна
быть положительна и правая часть, т. е. cos0o — cosO>0.
С учетом этого из D3) для v[/ имеем
^ D5)
т. е. прецессионное движение гироскопа с угловой скоростью
прецессии v[/ происходит все время в одном и том же направлении,
так как при v]/>0 угол \|/ возрастает с течением времени.
507
Определяя угловую скорость нутации 9 из D2) с исполь-
использованием D5), получим
(
92 =—(cos 90 + cos 9) - -4^z (cos Эо - cos 6J =
. D6)
Так как левая часть D6) положительна, то и правая часть
должна быть положительна. Учитывая, что cos0o — cos 9 > 0,
получаем, что выражение в квадратных скобках должно быть
тоже положительным, т. е.
^Усо89о-со50)<1. ^
Для создания предпосылок последующих допущений при-
приближенной теории гироскопа выполним приближенное интегри-
интегрирование полученных уравнений для углов Эйлера в случае
быстровращающегося гироскопа, для которого собствен-
собственный кинетический момент Jza>0— величина достаточно большая
по сравнению с наибольшей величиной знаменателя 2РМХ
в D7). Этот случай представляет наибольший практиче-
практический интерес. Для таких гироскопов разность cos0o — cos0,
как это следует из D7), будет величиной малой. При
этом будет малой и разность углов 0 —0о = м, где и — из-
изменение угла нутации гироскопа. В этом случае приближенно
можно принять, отбрасывая малые второго и более высоких
порядков,
cosm=1; sin и = и;
cos 0 = cos @О + и) = cos 90 — и sin 0О; sin 9 = sin 90.
Учитывая, что Й = dQjdt = du/dt, из D6) получим следующее
дифференциальное уравнение для определения и:
(du/dtJ = a.2u(fi-u), D6')
где введены обозначения для постоянных
а2 = ЛыЦЛ; р = 2PUXsin0O/(У2cog).
Из D6') после извлечения квадратного корня и разделения
переменных получим
Пределы в интегралах поставлены с использованием начальных
условий. Интеграл левой части вычисляется с помощью
508
подстановки и = р sin2 Ь,. Выполняя интегрирование, окончатель-
окончательно имеем
D8)
Подставляя значение 0 из D8) в D5) с учетом принятых
допущений, получим
Jx sin Go
и.
D5')
Отсюда интегрированием находится угол прецессии \|/.
Для угловой скорости собственного вращения из D4)
с учетом D5') и принятых допущений имеем
^^ -
Jr sin 9n
и.
D4')
Из этого соотношения квадратурой получается угол (р в за-
зависимости от времени.
Не производя вычисления интегралов, уже можно сделать
следующие основные выводы о движении быстровращающегося
гироскопа.
1. Модули угловых скоростей прецессии |v]/| и нутации |Й|
малы по сравнению с модулем угловой скорости собственного
вращения
2. Если прецессионное движение происходит все время
в одном и том же направлении (v]/>0), то нутационное
движение носит колебательный характер.
Отсюда следует, что если взять на оси гироскопа какую-либо
точку А, то ее траектория на поверхности сферы, согласно
D8), будет иметь вид, указанный на рис. 142. При м = 0, как
следует из D5'), \1/ = 0, т. е. прецессия на мгновение прекраща-
прекращается. В случае очень больших значе-
значений /zcoo наибольшее изменение
угла нутации мтах будет очень ма-
малым и тогда можно принять
0 = const = 90. Если ввести постоян-
постоянную среднюю угловую скорость
прецессии за рассматриваемый про-
промежуток времени, то движение ги-
гироскопа будет очень близким к ре-
регулярной прецессии, для которой
угловые скорости прецессии и со-
собственного вращения постоянны
и прецессия происходит вокруг не-
неподвижной оси при постоянном Рис. 142
509
угле нутации. В действительности движение гироскопа немного
отличается от регулярной прецессии. Движение гироскопа,
близкое к регулярной прецессии, называют псевдорегулярной
прецессией.
§ 8. ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПА
В технике применяются гироскопы с угловой скоростью
собственного вращения порядка 2000...5000 с B0 000...50 000
об/мин). В современной технике гироскопы нашли очень широкое
применение. Гироскопические явления проявляются при всех видах
движения тела, когда это тело совершает сложное движение,
содержащее в своих частях вращательное движение. Рассмотрим
основные гироскопические явления быстровращающихся гироско-
гироскопов приближенно, приняв, что гироскопу сообщена вокруг оси
симметрии или оси гироскопа Oz собственная угловая скорость cot.
Основные допущения приближенной теории
При применении гироскопов в различных устройствах
важно знать движение его оси. Собственное вращение вокруг
оси обычно задано, и угловая скорость собственного вращения
при этом поддерживается постоянной. Движение оси быстро-
вращающегося гироскопа можно установить по кинетическому
моменту гироскопа, вычисленному относительно неподвижной
точки, так как кинетический момент можно считать прибли-
приближенно направленным по оси гироскопа. Для быстровращаю-
щегося гироскопа угловая скорость прецессии мала по
сравнению с угловой скоростью собственного вращения и также
мало изменение угла нутации, т. е. угла между осью собст-
собственного вращения и осью прецессии.
Мгновенную угловую скорость гироскопа ш = ш1 + ш2 + <йз
от вращения вокруг неподвижной точки
Zf в первом приближении (рис. 143) можно
принять
где Ш! — угловая скорость собственного
вращения; со2 и со3— соответственно уг-
угловые скорости прецессии и нутации.
Учитывая, что оси Ox, Оу, Oz— глав-
главные оси инерции, a Jx = Jy, для проекций
кинетического момента на эти оси имеем:
Kx = Jx(ax; Ky = Jyoiy; Kz=Jz(az.
Так как ш направлена приближенно по
оси собственного вращения Oz, то оск^О,
со х 0 и, следовательно,
Рис. 143
510
Таким образом, для быстровращающегося гироскопа с боль-
большим собственным кинетическим моментом /zco! можно считать
кинетический момент Ко равным по модулю собственному
кинетическому моменту гироскопа Jzd)l и направленным по
оси гироскопа, т. е.
*о«Ло>1- D9)
Это приближенное выражение для кинетического момента
гироскопа будет точным, если ось гироскопа является его
неподвижной осью вращения.
Для решения вопроса о поведении осей таких гироскопов
можно пользоваться теоремой Резаля, позволяющей характери-
характеризовать движение конца вектора кинетического момента по
известному главному моменту внешних сил.
Для сохранения существенных свойств гироскопа угловую
скорость прецессии ю2 следует учитывать, пренебрегая только
угловой скоростью нутации, но при вычислении кинетического
момента гироскопа используем формулу D9).
Особенности движения оси гироскопа
Рассмотрим особенности движения оси гироскопа по сравне-
сравнению с движением оси такого же тела, не имеющего собст-
собственного вращения вокруг оси симметрии Oz. Пусть центр
тяжести в обоих случаях расположен в неподвижной точке О
и трением в этой точке пренебрежем. Если к^ покоящемуся
телу перпендикулярно оси Oz приложена сила F в какой-либо
точке А его оси симметрии (рис. 144), то тело начинает
вращаться вокруг оси Ох, перпендикулярной плоскости рас-
расположения силы и оси симметрии, а точка А тела начнет
двигаться в направлении действия силы. Если действие силы
прекращается, то тело дальше вращается вокруг оси Ох по
инерции с постоянной угловой скоростью, если позволяет
крепление тела в точке О.
Совершенно иначе ведет себя быстровращающийся гироскоп
под действием такой же силы F (рис. 145), приложенной
в точке А. Точка А, согласно приближенной теории, начнет
двигаться не в направлении действия силы F, а, как это
следует из теоремы Резаля, в направлении векторного момента
этой силы относительно неподвижной точки О — параллельно
оси Ох. При этом ось гироскопа вращается вокруг оси Оу.
Действительно, гир_оскоп еще до действия силы имел кине-
кинетический момент Ko = Jzd1, направленный по оси гироскопа,
так как гироскоп вращался только вокруг собственной оси
Oz с угловой скоростью coj. По теореме_ Резаля скорость пв
конца вектора Ко равна и параллельна L^' векторной сумме
511
55
У
ш,
Рис. 144 Рис. 145
моментов относительно точки О всех внешних сил, т. е.
В данном случае
причем момент MO(F) направлен по оси Ох.
Таким образом, скорость точки В конца вектора Ко и при
принятых допущениях приближенной теории всех других точек
оси гироскопа параллельна MO(F), что соответствует вращению
оси гироскопа Oz или прецессии гироскопа вокруг оси Оу.
Ось гироскопа прецессирует под действием силы в направлении
момента этой силы. Если момент силы в какой-либо момент
времени равен нулю, то прецессия оси гироскопа тоже
прекращается. Ось гироскопа не обладает инерцией. Для
гироскопа не имеет существенного значения сила F, так как
его прецессионное движение определяется только моментом
этой силы относительно неподвижной точки гироскопа. Если
центр тяжести гироскопа не находится в неподвижной точке,
то надо в общем суммарном моменте сил учесть момент
силы тяжести.
Сформулируем следующее правило прецессии: если к вра-
вращающемуся вокруг оси гироскопу приложить внешние силы,
создающие момент сил относительно его неподвижной точки,
то та часть оси гироскопа, по которой направлен кинетический
момент, начнет прецессировать в направлении векторного
момента этих сил.
Выведем приближенную формулу для оценки угла прецессии
\|/ в рассмотренном случае действия силы F. За достаточно
малый промежуток времени т точка В конца вектора Ко
смещается по дуге годографа на величину
sbkubx = Mo (F)x = Fix = Fxl.
512
Угол поворота вокруг оси Оу
■ sB _M0(F)z_ Fxl
У~ов~ к0 -J^l'
так как
0B = Ko = Jz0i1.
Из E0) следует, что угол \|/ тем меньше, чем больше
собственный кинетический момент гироскопа У2ю1; угол \|/ пря-
прямо пропорционален моменту импульса силы относительно
неподвижной точки гироскопа. Формулу E0) применяют для
оценки действия на гироскоп кратковременных сил возмущений,
когда величина т очень мала. Если собственный кинетический
момент ^со! достаточно велик по сравнению с моментом
импульса силы, то ось гироскопа почти не отклоняется, т. е.
на нее не влияют кратковременные импульсы сил или удары.
Ось гироскопа устойчива к таким импульсам сил. Удары по
оси гироскопа не приводят к заметному ее отклонению от
первоначального направления.
Гироскопический момент
Как уже известно, если на гироскоп действуют внешние
силы, создающие момент относительно неподвижной его точки,
то гироскоп прецессирует с некоторой угловой скоростью.
Если момент внешних сил становится равным нулю, то
и прецессия гироскопа прекращается. Таким образом, для
создания прецессии гироскопа по приближенной теории требу-
требуется момент внешних сил, и наоборот.
Пусть гироскоп прецессирует с угловой скоростью ш2.
Вычислим момент внешних сил, вызывающих эту прецессию.
По теореме Резаля, момент внешних сил относительно непод-
неподвижной точки гироскопа
Так как вектор Ко, направленный по оси гироскопа, вращается
вокруг неподвижной точки с угловой скоростью прецессии бз2,jro
скорость точки В, совпадающей с концом вектора Ко,
вычисляется по формуле, аналогичной векторной формуле Эйлера
для скорости точки тела при сферическом движении, т. е.
мв = га2 х ОВ = (Ь2 х Ко,
так как OB = KO — Jz(h1. _
Для момента внешних сил Lffi имеем
L<8) = ib2xKo = Jz(a>2xa>l). E1)
Если к гироскопу применить одно из следствий принципа
Даламбера, что сумма векторных моментов внешних сил
вместе с моментом сил инерции точек гироскопа равна нулю, то
17 Заказ 192 513
где L—момент всех сил инерции
гироскопа относительно непо-
неподвижной его точки. Этот момент
L называют гироскопическим мо-
моментом. Учитывая E1), получаем
L= — Ь{о]= —Jz(ro2 хш^
Рис. 146
или окончательно
L = Jz((al xco2); L = t/Zco1co2sin9, E2)
где 9 — угол нутации, т. е. угол между осью собственного
вращения и осью прецессии.
Гироскопический момент можно представить как момент
гироскопической пары сил, с которой гироскоп действует на
тела, принуждающие^ его прецессировать под действием момен-
момента внешних сил Lff- Обычно противодействие гироскопа
в виде гироскопической пары сил передается на эти тела
через подшипники, в которых помещена ось гироскопа. Если
эти тела или одно из них могут двигаться, то гироскопическая
пара сил может вызвать его движение.
Из E2) видно, что гироскопический момент может быть
равен нулю, если угловая скорость прецессии со2 равна нулю
или если ось гироскопа параллельна оси прецессии.
Действие гироскопической пары сил полностью определяется
гироскопическим моментом этой пары, вычисляемым по фор-
формуле E2). Но во многих случаях более предпочтительно
определять это действие по правилу Жуковского, основанному
на этой же формуле.
Правило Жуковского: если быстр обращающему с я гиро-
гироскопу сообщают вынужденное прецессионное движение, то
возникает гироскопическая пара сил, стремящаяся сделать ось
гироскопа параллельной оси прецессии, причем так, чтобы после
совпадения направления этих осей оба вращения вокруг них
имели одинаковое направление.
Если какое-либо тело препятствует гироскопу двигаться
так, чтобы сделать его ось параллельной оси прецессии, то
гироскоп давит на это тело и закрепленную точку гироскопа.
В том случае, когда таким гироскопом является ротор
турбины, установленной на корабле, совершающем разворот
вокруг вертикальной оси (рис. 146), гироскопическое давление
воспринимается подшипниками турбины. Силу этого давления
N определяют по формуле
N1= L = Jz(a1 co2 sin 0
или
jV=L//=/2co1aJsine//, E3)
514
где /—расстояние между подшипниками турбины; оо2—угловая
скорость поворота корабля (угловая скорость прецессии);
0 — угол нутации (в рассматриваемом случае 9 = 90°).
Техническое применение гироскопа
Из многочисленных применений прецессирующего гиро-
гироскопа, движение которого легко оценить на основании правила
Жуковского, рассмотрим для примера измерение угловых
скоростей. Пусть гироскоп, ось которого помещена в подшип-
подшипниках, расположенных на каком-либо летательном аппарате,
совершает быстрое вращение вокруг своей оси. Если летатель-
летательный аппарат поворачивается вокруг какой-либо мгновенной
оси с угловой скоростью ю2, то для гироскопа эта угловая
скорость является угловой скоростью прецессии и ее можно
оценить по силе гироскопического давления N. Эту силу,
в свою очередь, можно измерить, например, по деформации
пружины, на которой укреплен один из подшипников гироскопа
(рис. 147). Для со2 по формуле E3) имеем
@2 = Nll(Jz@1smQ). E4)
В практике измерения угловых скоростей обычно использу-
используют случай, когда 0 = 90°. Если на летательном -аппарате
осуществить регулирующее устройство, которое бы с помощью,
например, рулей стремилось создать для него угловую скорость
ш2 равной нулю, то летательный аппарат можно стабилизиро-
стабилизировать по угловой скорости относительно соответствующей оси.
Создавая с помощью привода соответствующее давление N на
пружинную опору, которое эквивалентно угловой скорости
прецессии, этим регулирующим устройством с рулями можно
управлять летательным аппаратом. Очевидно, для полной
стабилизации и управления летательным аппаратом достаточ-
достаточно трех таких гироскопов со взаим-
взаимно перпендикулярным расположением
осей.
Кроме рассмотренной стабилизации
с помощью регулирующих устройств,
когда гироскоп применяют в качестве
чувствительного элемента, его можно
применять и для непосредственной ста-
стабилизации артиллерийских и иных уста-
установок на кораблях, для успокоения
качки, стабилизации вагонов однорель-
однорельсовой железной дороги и т. п.
Другое важное свойство гироскопа,
которое нашло широкое применение,—
это способность сохранять направление
своей оси, если нет приложенного Рис. 147
17* 515
к гироскопу момента внешних сил. Тогда ось гироскопа не
прецессирует и сохраняет неизменным свое направление в про-
пространстве. Это свойство уравновешенного гироскопа использу-
используют в гирокомпасах, указателях поворота, стабилизирующих
устройствах и т. п. Для этой цели применяют гироскопы
с тремя степенями свободы, или свободные гироскопы.
Прецессия тяжелого гироскопа по приближенной теории
Рассмотрим прецессию тяжелого гироскопа (рис. 148) под
действием силы тяжести. Согласно правилу прецессии, под
действием момента силы тяжести Р относительно точки
О гироскоп прецессирует вокруг вертикальной оси Oz1 в на-
направлении, указанном на рисунке дуговой стрелкой. Так как
в каждый момент времени
Г— _ Г(е). Г _ Т (е)
L, — 1^о ■> L' — J-^O i
то, следовательно,
Jz со 1 со 1 sin 0 = PI sin 0,
где l=OC — расстояние от неподвижной точки до центра
тяжести гироскопа.
Угловая скорость прецессии
(O2 = Pl/(Jz(Ol). E5)
Из E5) следует, что угловая скорость прецессии тяжелого
гироскопа не зависит от угла наклона оси гироскопа: она
обратно пропорциональна собственному кинетическому момен-
моменту гироскопа Jza1, прямо пропорциональна его силе тяжести
и расстоянию от центра тяжести гироскопа до неподвижной
точки.
Пример. Бегуны вращаются вокруг вертикальной оси Oz с постоянной
угловой скоростью ш0 (рис. 149). Сила тяжести каждого бегуна — Р; радиус — R;
радиус инерции относительно оси собственного враще-
вращения Oz —р.
Определить силу давления бегуна на дно чаши
и давление бегунов на шарнир О используя при-
ближенную теорию гироскопа.
Решение. Бегун считаем прецессирующим ги-
гироскопом с осью собственного вращения Oz и осью
прецессии Ozx. Сила давления Q бегуна на дно
чаши складывается из силы тяжести бег^наи силы
гироскопического давления N, т. с. Q = P+N.
Предполагая, что средняя точка А бегуна непо-
неподвижна, т. е. находится на мгновенной оси бегуна,
заключаем, что О А является мгновенной осью бегуна,
по которой направлена его угловая скорость, состо-
состоящая из скорости прецессии ioo, направленной по
оси Ozu и собственной угловой скорости бегуна а>,,
направленной по оси бегуна Oz.
Из подобия треугольников для угловых скоростей
Рис 148 и линейных величин получаем
516
Рис. 149
Ш1/то = //Л.
Отсюда
al=m01/R.
Рассматривая бегун как прецессирующий гироскоп с угловой скоростью
прецессии соо и угловой скоростью собственного вращения со,, по правилу
Жуковского получаем, что бегун давит вниз на дно чаши с силой N, а на
шарнир О—с такой же по числовому значению силой, но вверх. Так как
0 = 90°, то по формуле E3) имеем
Угсо,соо Р\
N=-
/
glR
gR
поскольку
Сила давления
gR
Давление на шарнир О от двух бегунов направлено вверх, и его числовое
значение
Ql=2Nl=2N=2P
Р2<йо
gR '
Если бегун является однородным диском, то р = Д/ч/2 и
Rwl\
h~2g
Для получения больших давлений на дно чаши применяют бегуны
большего радиуса, так как сила гироскопического давления пропорциональна
радиусу бегуна.
517
§ 9. РЕГУЛЯРНАЯ ПРЕЦЕССИЯ ГИРОСКОПА
Как известно, уравновешенный (астатический) гироскоп
может совершать регулярную прецессию по инерции без действия
внешних сил. По приближенной теории получается, что прецессия
может быть вызвана только действием внешних сил. Очевидно,
допущения приближенной теории позволяют рассмотреть пре-
прецессионное движение гироскопа с точностью до некоторой
регулярной прецессии, существовавшей до действия внешних сил.
Если этой начальной прецессии по инерции нет, то приближенная
теория находится в соответствии с точной теорией.
Рассмотрим случай регулярной прецессии гироскопа. Извест-
Известно, что регулярной прецессией гироскопа называют такое его
движение, при котором угловые скорости собственного враще-
вращения и прецессии постоянны, прецессия происходит вокруг оси
постоянного направления и угол нутации, т. е. угол между
осью собственного вращения и осью прецессии, тоже является
постоянным.
Получим формулу для гироскопического момента при
регулярной прецессии и рассмотрим ее следствия.
Гироскопический момент при регулярной прецессии
В случае регулярной прецессии мгновенная угловая скорость
гироскопа
где (% — собственная угловая скорость, направленная по оси
гироскопа Oz; ю2 — угловая скорость прецессии, направленная
по неподвижной оси Ozt (рис. 150).
Если выбрать ось Ох в экваториальной плоскости эллипсо-
эллипсоида инерции так, чтобы она лежала в плоскости осей Oz
и Oz1, то для проекции ю на подвижные координатные оси
Oxyz, жестко скрепленные с гироскопом,
имеем:
Рис. 150
СО;,. = №2 sin 0; соу = 0; coz = c
Определим проекции вектора кине-
кинетического момента на оси Ox, Oy, Oz,
которые являются главными осями инер-
инерции для точки О. Получаем:
Кх = Jxo)x = Jx со2 sin 0;
Kz = Jz ooz = Jz (ю1 + oo2 cos 0).
Следовательно, кинетический момент
гироскопа относительно неподвижной
точки О
518
Ko = Kxi+Kyj+KZE = Jx co2 sin 9 i+Jz (со t + co2 cos Q)k. E6)
Гироскопический момент L как момент сил инерции
гироскопа можно вычислить по формуле
L=-dKojdt=-uB.
При регулярной прецессии а>1 = const, 9 = const, C02 = const;
следовательно, Кх = const, Ky = 0, Kz = const, т. е. вектор кинети-
кинетического момента Ко постоянен по модулю и изменяется
только по направлению. Для того чтобы найти скорость
конца этого вектора — точки В, надо знать угловую скорость
вращения этого вектора вокруг неподвижной точки О.
Если рассмотреть плоскость, в которой лежат ось гироскопа
Oz и ось прецессии Oz1 (плоскость Oxz), то в случае
регулярной прецессии ось прецессии Ozx является неподвижной.
Лежащий в этой плоскости вектор Ко вращается вместе с этой
плоскостью вокруг оси Oz1 с угловой скоростью со2, направ-
направленной по этой оси. Таким образом, по формуле, аналогичной
формуле Эйлера для скорости точки тела при его сферическом
движении,
пв = &2хКо.
Тогда _ _ _
L= — пв= — ид,х Ко = Кох{Ь2- E7)
Из формулы E7) следует, что момент L перпендикулярен
плоскости Oxz, в которой лежат векторы со2 и Ко, и,
следовательно, параллелен оси Оу, совпадающей с линией
узлов. _
Если в E7) вместо Ко подставить его значение из E6), то
L = Jxco2 sin9(i x co2) + ./z(co1 + co2cos9)(/c xco2).
Гироскопический момент
L= — J;cco
так как _ _
|/xco2| = co2cos9; |ATxco2| = c
и векторы (/хсо2) и (^хсо2) параллельны, но противоположны
по направлению. _
Приняв направление вектора (&хсо2)_за положительное,
после введения единичного вектора (h1 = k имеем
L = [y2aI+(yz-yx)co2cos9](co?xco2). E9)
Формула E9) является выражением для вектора гироскопи-
гироскопического момента при регулярной прецессии. Гироскопический
момент, как это следует из E9), можно разложить на две
составляющие L' и L", где
L' = Jzco1(co? xco2) = /zco1 xco2; F0)
519
L" = (Jz-/x)co2cose(ro?x©2). F1)
Гироскопический момент L' совпадает с гироскопическим
моментом, полученным по приближенной теории. Гироскопиче-
Гироскопический момент L" является поправкой к гироскопическому
моменту L' в случае точного вычисления_ кинетического
момента при регулярной прецессии. Момент L" равен нулю,
если JZ = JX (эллипсоид инерции является шаром), и при 0 = 90°,
т. е. когда ось гир_оскопа перпендикулярна оси прецессии.
Отметим, что L' и L" направлена в одну сторону, если
(Jz — /x)cos9>0, и в противоположные стороны при (Jz —
-Jx)cosQ<0.
Регулярная прецессия по инерции
В случае регулярной прецессии без действия внешних сил,
т. е. регулярной прецессии по инерции, имеем
L = LiS) = Q.
Отсюда, учитывая E8), получаем
L — \JZ coj + (Jz — Jx) co2 cos 0] oo2 sin 0 = 0
и, следовательно,
^fc F2)
Таким образом, возможна регулярная прецессия по инерции
с угловой скоростью, определяемой по формуле F2), если
гироскоп не обладает шаровой симметрией \JZ¥^JX) и ось
прецессии не перпендикулярна оси гироскопа.
Известно, что по инерции без действия сил может двигаться
материальная точка с постоянной скоростью по прямой линии
и вращаться твердое тело вокруг неподвижной оси с постоянной
угловой скоростью. К этим случаям следует добавить случай
регулярной прецессии гироскопа по инерции.
Итак, регулярная прецессия может происходить по инерции
и быть вынужденной, т. е. происходящей под действием внеш-
внешних сил. В приближенной теории рассматривается только
вынужденная прецессия. В точной теории регулярной прецессии
рассматривают обе эти прецессии.
Регулярная прецессия тяжелого гироскопа
Для тяжелого гироскопа
L = L{f> = .P/sin в
и, учитывая значение L, из E8) получаем
[/zco! +(JZ — /x)co2cos0]co2sin0 =
Отсюда угловая скорость прецессии
520
-J.m, +
®2 ~ 2G,-
Таким образом, регулярная прецессия тяжелого гироскопа
возможна, если
72q?+4Gz-/x)P/cos0>O. F4)
Условие F4) выполняется, если величина Jz@1 достаточно
велика. В этом случае, вычислив приближенное значение
квадратного корня из F3) по биному Ньютона, ограничиваясь
первыми степенями малых величин, получаем
Подставляя значение этого выражения в F3) и беря верхний
и нижний знаки перед корнем, имеем два приближенных
значения угловой скорости прецессии:
^ ЩF5)
2 7гш, G^-7,) cos 9
Прецессия с угловой скоростью ю^1' — медленная прецессия.
Такая угловая скорость прецессии получается и по прибли-
приближенной теории. Прецессия с угловой скоростью соB2) — быстрая
прецессия. Ее получают, как и прецессию по инерции. Тяжелый
гироскоп при выполнении условия F4) может совершать две
прецессии — медленную и быструю, близкие к рассмотренным
двум прецессиям с угловыми скоростями ю^1' и со^2).
§ 10. УСТОЙЧИВОСТЬ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА
С ОДНОЙ ЗАКРЕПЛЕННОЙ ТОЧКОЙ ВОКРУГ
ГЛАВНЫХ ОСЕЙ ИНЕРЦИИ
Представление об устойчивости вращения тела вокруг
главных осей инерции можно составить на примере движения
твердого тела, закрепленного в центре масс и находящегося
под действием только силы тяжести и реакции закрепленной
точки. Главный момент внешних сил относительно закреплен-
закрепленной точки в этом случае равен нулю.
Пусть оси координат Ox, Oy, Oz, скрепленные с движущимся
телом, являются главными осями инерции для его неподвижной
точки О. Динамические уравнения Эйлера для такого тела
имеют вид
521
Jx(bx+(Jz-Jy)(ox(oy=0;
y F6)
JxWz+(Jy-Jx)(Q,(Ox=0.
Величины (ox = (Oj,=0, coz= const = co0 удовлетворяют уравне-
уравнениям F6), т. е. эти значения сох, соу, сог являются решениями
этих уравнений.
Пусть теперь телу сообщены малые возмущения в виде
малых начальных угловых скоростей соОх. и соО), вокруг осей
Ох и Оу. Если величины со., и со^ остаются малыми
с изменением времени, то вращение вокруг главной оси
инерции — оси вращения Oz— считают устойчивым. Если эти
величины неограниченно возрастают, то вращение вокруг
главной оси инерции неустойчиво. Предположив, что вращение
вокруг оси Oz устойчиво, установим условия, которые определя-
определяют эту устойчивость. Если вращение вокруг оси Oz устойчиво,
т. е. cox и Юу малы, то в уравнениях F6) можно пренебречь
слагаемыми с шхсог Положив cozsscoo, из F6) после от-
отбрасывания малых второго порядка получаем
с6х+^сооа)у=0; d>,+^000@, =0. F7)
Дифференциальные уравнения F7) путем дифференцирова-
дифференцирования и небольших преобразований приводим к виду
юх + оссох=0; iby + occOj, = 0, F8)
где
(Лу)(Лу)шз F9)
•'х-'у
При ос<О решения уравнений F8) имеют вид
шх =С,е^и + С2е ~ VR-'; coy = C3eV'R-' + C4e
При ос>О они выразятся в форме
+ C'2sinv/a-/; co^ =
где Cj, С2, C3, C4, C'i, С2, C3, С\ — произвольные постоянные
интегрирования. Следовательно, при ос>О имеем устойчивость
вращения вокруг главной оси инерции Oz. Условие ос>О
может выполняться в двух следующих случаях:
Jz>Jy; JZ>JX и Jz<Jy; JZ<JX.
Из этих .условий следует, что вращение вокруг главной
оси инерции Oz является устойчивым, если момент инерции
относительно этой оси наибольший или наименьший. В случае
ос<О имеем неустойчивость. В этом случае Jz является средним
по сравнению с Jx и Jy.
522
В гироскопических устройствах обычно применяют гироско-
гироскопы, у которых момент инерции вокруг собственной оси
вращения является наибольшим, т. е. гироскопы берутся в виде
диска, а не цилиндра. Это, во-первых, при прочих равных
условиях дает больший собственный кинетический момент,
а во-вторых, как показывают исследования, ось вращения
с наибольшим моментом инерции оказывается более устой-
устойчивой к действию сил сопротивления, зависящих линейно от
угловой скорости вращения гироскопа.
ГЛАВА 9
ТЕОРИЯ УДАРА
§ 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ И ПОНЯТИЯ ТЕОРИИ УДАРА
Ударом называют явление, при котором за малый проме-
промежуток времени, т. е. почти мгновенно, скорости части или
всех точек системы изменяются на конечные величины по
сравнению с их значениями непосредственно перед ударом или
после него. Длительность удара составляет обычно десятые
и меньшие части долей секунды.
Встречаются различные по характеру случаи ударных явле-
явлений. В простейших случаях удар проявляется как почти
мгновенное наложение или снятие связей. Примером удара,
связанного с мгновенным наложением связей, может служить
столкновение поступательно движущегося тела с другим,
например неподвижным, телом. Удар, обусловленный мгно-
мгновенным снятием связей или их разрушением, можно предста-
представить как отрыв части тела при его быстром вращении вокруг
оси и т. п. Могут быть ударные явления более сложного
характера, связанные, например, с периодическим наложением
и снятием связей (ковка, штамповка
и др.).
Изменение скоростей точек при уда-
ударе на конечные величины связано с бо-
большими ударными ускорениями этих
точек, возникновение которых требует
больших ударных сил. Если F—
ударная сила, т — длительность, или
время удара, то характерый график
изменения ударной силы за время уда-
удара от момента /х до момента t2
имеет вид, показанный на рис. 151.
Ударная сила быстро возрастает от °\
нуля в момент начала удара до ма-
максимального значения, затем так же Рис. 151
523
быстро уменьшается обычно по другому закону до нуля
в конце удара. Во многих случаях не требуется детального
знания закона изменения ударной силы. Достаточно знать
только суммарный импульс этой быстро меняющейся силы
за время удара или ударный импульс. Ударным импульсом
называют векторную величину
S=]Fdt. A)
о
Ударный импульс графически изображается на рисунке заштри-
заштрихованной площадью, ограниченной кривой линией изменения
ударной силы, и осью абсцисс, по которой откладывается
время.
Иногда рассматривают среднюю ударную силу —
постоянную в течение удара силу, которая за время удара
дает такой же ударный импульс, как и переменная ударная
сила. Средняя ударная сила определяется из соотношения
F^ = S. B)
Большие ударные силы дают конечные ударные импульсы за
малое время удара. Средняя ударная сила, согласно ее
определению, имеет величину порядка 1/т, т. е. при малом
т является величиной большой.
Импульс неударной силы, например силы тяжести тела,
за время удара имеет порядок величины т, т. е. является
величиной малой по сравнению с ударными импульсами.
Поэтому импульсами неударных сил можно пренебрегать по
сравнению с ударными импульсами.
При ударе двух тел в месте их соприкосновения возникают
деформации и, следовательно, перемещения точек тел, обусло-
обусловленные деформациями. Вследствие малости деформаций по
сравнению с перемещениями точек тел за конечный промежуток
времени перемещения точек тел за время удара являются
величинами малыми. В обшем случае, если vcp — средняя
скорость за время удара какой-либо точки системы, испыты-
испытывающей удар, то перемещение этой точки имеет порядок
величины т, так как средняя скорость есть величина конечная.
Поэтому перемещениями точек за время удара можно пренебре-
пренебрегать. Считают, что за время удара точки системы не успевают
изменить свое положение, а следовательно, не изменяются
радиусы-векторы точек и их координаты. Если, например,
тело падает на спиральную пружину, то за время удара
величина перемещения тела равна сжатию пружины за это
время. Этим перемещением можно пренебречь по сравнению,
например, с перемещением тела от начала удара тела до
момента наибольшей деформации пружины. При ударе пружину
можно считать твердым телом в приближенных расчетах при
рассмотрении перемещения тела за время удара.
524
Явление удара широко используется в технике при ковке,
штамповке, забивке свай и т. д. Это же явление часто является
нежелательным, особенно при ударе деталей в машинах друг
о друга вследствие люфтов, при ударе колес транспорта
о неровности дороги, стыки рельсов и т. п.
Многие величины, характеризующие удар, с достаточной
точностью могут быть получены из общих теорем динамики.
Рассмотрим особенности применения этих теорем к явлению
удара.
§ 2. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС ДЛЯ УДАРА.
ТЕОРЕМА КЕЛЬВИНА
Пусть до удара точка М массой т двигалась по участку
траектории AM, имея непосредственно перед_ ударом скорость
v (рис. 152). Под действием ударной силы F и неударной F*
точка изменила скорость, которая сразу после удара стала
п. После удара точка продолжает двигаться по участку
траектории MB. Удар точки М характеризуется почти мгновен-
мгновенным изменением ее скорости от v до п по модулю и направ-
направлению и, следовательно, в общем случае резким изломом ее
траектории в момент удара. По теореме об изменении
количества движения для точки в интегральной форме имеем
т т
тп — mv = \ Fd t + J F* d t,
о о
где т — время удара. Обозначая импульс ударной силы S и пре-
пренебрегая импульсом неударной силы за время удара по
сравнению с ударным импульсом, получаем следующую тео-
теорему об изменении количества движения точки
при ударе:
mu — mv = S, C)
т. е. изменение количества движения точки за время удара
равно ударному импульсу, приложенному к точке. В проекциях
на оси координат имеем:
mux — mvx = Sx; muy — mvy = Sy; muz — mvz = Sz. C')
Изменение скорости точки при ударе
u — v = Sjm, т. е. оно параллельно удар-
ударному импульсу
Для любой механической системы,
состоящей из N точек, разделим удар-
ударные- силы на внешние и внутренние.
Применяя теорему об изменении ко-
количества движения для удара к каждой
точке системы, получаем Рис. 152
525
где Ske) и Ski]— ударные импульсы внешних и внутренних
сил. Импульсами неударных сил за время удара пренебрегаем.
Суммируя по всем точкам системы, имеем
к к к к
Обозначая количества движения системы после и до удара
соответственно
Q = Y,mkuk; бо = ЕтЛ
к к
и учитывая, что по свойству внутренних сил, в том числе
и ударных, ^5[° = 0, имеем
Q-Qo=T,Si'\ D)
к
Соотношение D) выражает теорему об изменении коли-
количества движения системы при ударе: изменение коли-
количества движения системы за время удара равно векторной
сумме внешних ударных импульсов, приложенных к точкам
системы. В проекциях на координатные оси получаем:
Qx-Qo^sit 6,-60,=!^; Qz-Qo*=T,siV. D')
k k k
Применяя формулу для вычисления количества движения
системы через массу системы и скорость центра масс, имеем
Q = Muc; Q0 = Mvc,
где М—масса системы; vc и пс — скорости центра масс до
и после удара. С учетом этого из D) получаем следующую
теорему о движении центра масс системы:
M{uc-vc) = Y,S{e). E)
к
В проекциях на координатные оси она примет форму
к
E')
к
Частные случаи. 1. Если ^S[e) = 0, то из D) и E) следует
к
Q = Qo, uc = vc, F)
т. е. количество движения системы и скорость центра масс
не изменяются, если векторная сумма внешних ударных им-
526
пульсов, приложенных к точкам системы, равна нулю. Это
законы сохранения количества движения и движения центра
масс системы при ударе.
2. Если имеется координатная ось, например Ох, для которой
S[el = 0, то из D') и E') получаем следующие законы сохранения
к
проекции количества движения и движения центра масс:
Qx = Qox'' tiCx = VCx. F')
Из C) можно получить теорему Кельвина для работы
ударной силы за время удара. Непосредственно вычислить
работу ударной силы за время удара трудно, так как ударные
силы очень большие, а перемещения точек системы за время
удара малы и ими пренебрегают. Теорема Кельвина позволяет
выразить работу силы через импульс силы и среднее значение
скоростей точки, т. е. величины конечные при ударе. Умножив
C) последовательно на п и v скалярно, получим
mu2 — mu-v = S-u\ тп• v — mv2 = S-v.
После сложения этих равенств и деления на 2 имеем
mu2/2-mv2/2 = -S-(v + u).
По теореме об изменении кинетической энергии для точки
левая часть этого равенства равна работе А, приложенной
к точке силы F. Поэтому
A = l-S-(u+v). G)
Это и есть теорема Кельвина: работа силы, приложенной
к точке, за какой-либо промежуток времени равна скалярному
произведению импульса силы за тот же промежуток времени
на полусумму начальной и конечной скоростей точки.
Теорема Кельвина применима ко всем случаям движения
точки, в том числе и к явлению удара.
Для механической системы теорема Кельвина получается
из G) путем суммирования по всем точкам системы, т. е.
\ (8)
к <- к
где Sk = Ske) + Ske)— импульс внешней и внутренней сил, дейст-
действующих на к-ю точку.
§ 3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ПРИ УДАРЕ
Пусть материальная точка под действием ударного импуль-
импульса испытывает удар. По теореме об изменении количества
движения для точки имеем
527
тп—mv = S,
где v и п — скорости точки до и после удара. Умножим это
векторное равенство слева векторно на радиус-вектор точки
г, который один и тот же непосредственно перед ударом
и после него. Получаем
Fxmu — rxmv = fxS. (9)
Это соотношение выражает теорему об изменении кине-
кинетического момента для точки при ударе. Применяя
ее для каждой из N точек системы, имеем
гкхткпк-гкхткИк = гкх5ке)+гкх8к*\ к=\, 2, ..., N, (9')
где S[e) и Si1' — внешний и внутренний ударные импульсы,
действующие на /с-ю точку системы. Суммируя (9') по всем
точкам системы и вводя обозначения кинетических моментов
системы до и после удара и векторной суммы моментов внешних
ударных импульсов относительно точки О, получим следующую
теорему об изменении кинетического момента системы при ударе:
fo-40» = poEr)), A0)
к
так как
к к к к
по свойству внутренних сил. Таким образом, изменение кинети-
кинетического момента системы относительно точки за время удара
равно векторной сумме моментов относительно той же точки
внешних ударных импульсов, приложенных к точкам системы.
В проекциях на оси координат векторное равенство A0) прини-
принимает следующую форму:
k
Если удар испытывает твердое тело, вращающееся вокруг
неподвижной оси Oz, и со0 и со — угловые скорости до и после
удара, то, учитывая, что
где Jz—момент инерции тела относительно оси вращения,
из A0) получаем следующее изменение угловой скорости тела:
ИЛИ
со-соо = £М2(<>[е>)/./г. A1)
к
528
В A1) не входят моменты ударных импульсов реакций
закрепленных точек оси вращения, так как они пересекают
ось вращения, если не возникают ударные импульсы сил
трения в местах закрепления оси.
Частные случаи. 1. Если £моE[е)) = 0, то из A0)
к
следует закон сохранения кинетического момента системы
относительно точки при ударе:
К0 = К$) = const. A2)
2. Если имеется ось, например Ох, относительно которой
(Sie)) = 0, то из A0') получаем закон сохранения кинетиче-
k
ского момента системы относительно оси при ударе:
Кх = К^ = const. A2')
§ 4. УДАР ТОЧКИ О НЕПОДВИЖНУЮ ПОВЕРХНОСТЬ
Прямой удар. Удар называют прямым, если скорость точки
v перед ударом направлена по нормали к поверхности в точке
удара М (рис. 153). После удара материальная точка отделится
от поверхности, имея в общем случае скорость п, направленную
тоже по нормали к поверхности.
Для оценки ударных свойств поверхности и тела, принима-
принимаемого за материальную точку, введем коэффициент восстанов-
восстановления к. Коэффициентом восстановления называют отношение
числового значения скорости точки после удара к числовому
значению ее до удара, т. е.
k = \u\l\v\ = ujv. A3)
Если к=\, то удар называется абсолютно упругим. В этом
случае u = v и при ударе точки изменяется только направление
скорости на противоположное. При к = 0 удар считается
абсолютно неупругим. Скорость точки при таком ударе о непо-
неподвижную поверхность после удара м = 0. В более общем случае
абсолютно неупругого удара точки по дви-
движущейся поверхности точка после удара
движется вместе с соответствующей точкой
поверхности. В случаях, при которых
0 < к < 1, удар называют просто упругим
(или частично упругим).
Процесс удара точки о неподвижную
поверхность можно разделить на фазу
деформации и фазу восстановле-
ни я. Фаза деформации продолжитель-
ностью Tj отсчитывается от момента начала
удара до момента наибольшей деформации
тела, которое принимается за материальную рис. 153
529
точку. В конце этой фазы скорость точки при ударе о непо-
неподвижную поверхность равна нулю. В течение фазы восстанов-
восстановления т2 материальная точка от момента наибольшей дефор-
деформации до ее отделения от поверхности частично восстанав-
восстанавливает свою первоначальную форму при упругом ударе. При
абсолютно упругом ударе форма тела восстанавливается
полностью. В случае абсолютно неупругого удара форма тела
совсем не восстанавливается, удар имеет только одну фазу
деформации. Общее время удара х = х1+х2. При абсолютно
неупругом ударе т2 = 0 и т = т1.
На точку при ее прямом ударе о неподвижную поверхность
со стороны ^юверхности действует ударная сила реакции
поверхности N. Она изменяется по величине в течение удара,
но все время направлена по нормали к поверхности.
Применим к первой и второй фазам удара точки теорему
об изменении количества движения в проекции на направление
внешней нормали к поверхности, за которое принимаем
направление, противоположное скорости точки до удара.
Для первой фазы имеем
0-(-mv) = Su
где S1 = J JVd t — ударный импульс силы реакции поверхности
за первую фазу удара. Для второй фазы соответственно
ти- 0 = S2,
где S2 = \Ndt — ударный импульс силы реакции поверхности
о
за вторую фазу удара. Действием импульсов неударных сил
за время удара, например силы тяжести, пренебрегаем.
Итак, имеем
mv = S±, mu = S2.
Отсюда
k = u(v = S2/Sl. A4)
Формула A4) дает выражение коэффициента восстановления
через ударные импульсы: коэффициент восстановления при
прямом ударе точки о неподвижную поверхность равен отноше-
отношению числовых значений ударных импульсов за вторую и первую
фазы удара. Выражение коэффициента восстановления через
ударные импульсы, полученное при ударе точки о неподвижную
поверхность, считают справедливым и в случае прямого удара
точки по движущейся поверхности.
Полный ударный импульс S1 складывается из импульсов
Sx и S2, т. е.
530
При к=\ S = 2mv; при к = 0 S=mv.
Ударный импульс при абсолютно
неупругом ударе в два раза меньше
ударного импульса при абсолютно
упругом ударе.
Косой удар. Удар называется
непрямым или косым, если скорость
точки перед ударом направлена под
углом ос к нормали поверхности.
При ос = О имеем прямой удар. Угол
ос (рис. 154) называют углом паде-
падения. В общем случае скорость точки
п после удара составит с нормалью
к поверхности угол р\ который называют углом
Разложим скорости до и после удара на
и касательные составляющие:
v = vH + vx; п = п„ + пх.
Коэффициентом восстановления при косом ударе называют
величину k = \un\/\vn\ = un/vn. Применение теоремы об изменении
количества движения в проекции на нормаль к поверхности
приводит к выражению коэффициента восстановления через
ударные импульсы
Рис. 154
отражения.
нормальные
где S2n и Sln — проекции ударных импульсов на нормаль
к поверхности за вторую и первую фазы удара.
В случае не идеально гладкой поверхности ux<vx. В дальней-
дальнейшем принимаем, что поверхность не обладает ударным трением
и поэтому ux = vx. В этом случае
Эта формула выражает зависимость между углом падения
и углом отражения при различных коэффициентах восстанов-
восстановления и отсутствии ударного трения.
Экспериментальное определение коэффициента восстановления.
Коэффициент восстановления можно определить эксперимен-
экспериментально, измеряя высоту, на которую поднимется тело, обычно
в форме небольшого шара, после прямого удара о поверхность
(рис. 155) при падении с заданной высоты. Если шарик падает
на неподвижную поверхность с высоты /i,, то его скорость
непосредственно перед ударом v = y/2gh1. Сразу после удара
скорость и шарика через высоту подъема его над поверхностью
выражается зависимостью u = ^/2gh2. Для коэффициента вос-
восстановления имеем
531
■с"
\
ту
1
л
чУ
1
1
1
J
<;
\
Измеряя h2 при заданном hx, получают
значения коэффициентов восстановления
для различных материалов шарика и по-
поверхности.
Многочисленные опыты показали, что
коэффициент восстановления зависит не
только от материала соударяющихся тел,
но и от их масс, формы тел, скоростей
^//%?/У/Ш>7/У//У/////////// соударения и других факторов. Исполь-
рис 155 зование коэффициента восстановления
в расчетах (в предположении, что он
зависит только от материала соударяющихся тел) допустимо
лишь в очень грубом приближении к действительности. В более
точных расчетах следует учитывать не только деформации,
возникающие при ударе, но в некоторых случаях и процесс
их возникновения и восстановления. Учет деформаций при
ударе производится в задачах теории упругости. Методы
теории упругости позволяют более глубоко проникать в яв-
явления удара. В теоретической механике обычно рассматрива-
рассматриваются предельные случаи абсолютно упругого и абсолютно
неупругого ударов.
§ 5. ТЕОРЕМА КАРНО
При абсолютно упругом ударе точки о неподвижную
поверхность в отсутствие ударного трения скорость точки
может изменяться только по направлению. Числовое значение
ее остается неизменным. Кинетическая энергия точки и системы
точек, находящихся в таких условиях, не изменяется за время
удара. При упругом и абсолютно неупругом ударах кинети-
кинетическая энергия изменяется.
Установим изменение кинетической энергии в случае
абсолютно неуиругого удара при мгновенном наложении
связей для точки и системы в отсутствие ударного трения.
По теореме об изменении количества движения для точки
(рис. 156) имеем
mv = S, A5)
где т — масса точки; v и п—ее скорости непосредственно до
и после удара; S—ударный импульс от действия поверхности.
При отсутствии ударного трения ударный импульс направлен
по нормали к поверхности. Скорость точки после такого
удара направлена по касательной к поверхности, т. е. ее
проекция на нормаль г/„ = 0. В рассматриваемом случае ударный
импульс S и скорость точки после удара п взаимно перпен-
перпендикулярны и поэтому удовлетворяют условию
532
Учитывая это, умножим обе части A5)
скалярно на п. Получим вспомогательное
соотношение
— mv -п + тп2 = 0.
A6)
При абсолютно неупругом ударе кине-
кинетическая энергия точки уменьшится на
mv2j2 — mu2/2. Добавляя в это выражение
величину, равную нулю в форме A6),
получим
mv
тил
7
- - т ,-
(v
Получена теорема Карно для точки о потере кинетической
энергии при абсолютно неупругом ударе и отсутствии ударного
трения:
mv
т I- -\
mv ти т /_ _
= — [V — U
A7)
Векторную величину v — u называют потерянной скоростью.
Теорему Карно для точки можно сформулировать в следующей
форме: потеря кинетической энергии точки при абсолютно
неупругом ударе и отсутствии ударного трения в случае
мгновенного наложения связей равна кинетической энергии от
потерянной скорости.
Имея A7) для точки, получим теорему Карно для системы
в случае абсолютно неупругого удара и отсутствия ударного
трения. Необходимо при этом, чтобы связи для точек системы,
испытывающих удар, создавали ударные импульсы Sk, перпен-
перпендикулярные скоростям точек послеjдара пк, т.е. чтобы для
каждой точки выполнялось условие ~Sk-uk = 0. Тогда для каждой
точки справедлива теорема A7)
тки2
A7')
где vk — ик — потерянная скорость к-й точки системы. Суммируя
A7') по всем точкам системы и обозначая кинетическую
энергию системы до удара То, а после удара — Т, получим
A8)
533
Для справедливости теоремы Карно для системы при
мгновенном наложении связей вместо условия Sk • пк = 0 для
каждой точки достаточно выполнения менее ограничительного
условия
Получена теорема Карно для системы: потеря кинетической
энергии при абсолютно неупругом ударе в случае мгновенного
наложения связей и отсутствия ударного трения равна кинети-
кинетической энергии от потерянных скоростей точек системы.
Теорему Карно для точки и системы можно получить
также для удара, который возникает при мгновенном снятии
связей. При этом кинетическая энергия после удара больше
кинетической энергии до удара. Потеря кинетической энергии
становится отрицательной. Ударный импульс Sk при снятии
связи должен быть перпендикулярен скорости точки vk до
удара, так как точка двигалась согласно со связью до удара
при абсолютно неупругом ударе. Вспомогательное соотношение
для точки при снятии связей принимает форму
— mv2 = 0, A6')
а теорема Карно в этом случае имеет вид
Для системы она выразится в форме
Т-Т0=1-^тк(дк-пкJ. A8')
z к
При этом для каждой точки системы, испытывающей удар,
должно выполняться условие Sk-vk = 0, или ^S^-i^O.
к
§ 6. УДАР ДВУХ ТЕЛ
В прикладных задачах обычно встречается удар двух тел,
движущихся поступательно или вращающихся вокруг парал-
параллельных или совпадающих осей. Рассмотрим некоторые особен-
особенности применения общих теорем и теоремы Карно в этих
случаях.
Пусть два тела 7 и 2 массами тх и т2 непосредственно
до и после удара движутся поступательно (рис. 157). Их
скорости перед ударом v1 и v2; после удара — соответственно
п1 и п2. У соударяющихся тел отсутствует ударное трение.
Ударные импульсы в этом случае направлены по общей
534
нормали в месте соприкосновения,
т. е. _ по так называемой линии
удара. В случае центрального
удара линия удара проходит через
центры масс тел. Применим теорему
об изменении количества движения
при ударе к каждому телу в от-
отдельности. Имеем
m1u1—m1v1 = S1; m2u2 — m2v2 = S2.{}9)
При ударе двух тел Sl = — S2
по закону о равенстве действия и противодействия, поэтому
из A9) получаем
mlu1 + m2u2 = mlv1 + m2v2, B0)
т. е. количество движения при ударе двух тел не изменяется.
Если удар абсолютно неупругий, то скорости тел после удара
одинаковы и равны п. Из B0) тогда имеем
Рис. 157
mlv1+m2v2
B1)
При прямом ударе двух тел скорости их v1 и v2 до
удара направлены по линии удара и тогда из B1), проецируя
на линию удара, получаем
и )
mt+m2
Здесь и, vl, v2 — алгебраические значения скоростей. Для того
чтобы удар произошел, скорости тел v1 и v2 должны быть
направлены в одну и ту же сторону, а их числовые значе-
значения— удовлетворять условию v1 >v2.
Для прямого центрального удара двух тел к каждому
телу для первой и второй фаз применим теорему об изменении
количества движения в проекции на ось Ох, направленную
по линии удара (рис. 158). Получим
т1и1 —т1и= —S'{;
m2u — m2v2=—S'2\
т2и2 — т2и = S\
1 — 1>2> J1-J2,
B2)
где и — общая скорость тел в конце первой фазы; S"i,
S'2 и S'i, S2 — ударные импульсы соответственно за первую
и вторую фазы удара. К уравнениям B2) следует присоединить
выражение для коэффициента восстановления через ударные
импульсы. Имеем
535
Рис. 158
B2')
Получили семь алгебраических уравнений
B2) и B2'), из которых можно определить
и, иг, и2, S\, S'2, S'i, S, если известны
скорости до удара v1, v2 и коэффициент
восстановления к. Из уравнений B2) и B2'),
в частности, можно получить формулы
k= —
B3)
B4)
Используя B2) и B2') и следствия из них, можно вычислить
потерю кинетической энергии тел То—Т при ударе:
m2v22\ (mxu\
mxm2
2(mi+m2)
B5)
При абсолютно упругом ударе двух тел к=\ и То—Т, т.е.
потери кинетической энергии не происходит. При абсолютно
неупругом ударе к = 0 и
Если использовать потерянные телами за время удара
скорости v1 — u и v2 — и, то потерю кинетической энергии
можно также получить в форме теоремы Карно для удара
двух тел:
Т —T—^-iv —uJ + —(v —иJ B5")
При абсолютно неупругом ударе двух поступательно движу-
движущихся тел для каждого тела налагаемая связь не является
стационарной и условия Sl-u=0 и S2-u=0 по отдельности
не выполняются. Они использовались при выводе теоремы
Карно для системы. Но выполняется условие для двух тел
так как
поэтому теорема Карно B5") остается справедливой. Ее можно
получить непосредственно преобразованием потерянной энер-
536
гии, применяя следствия из B2) и B2') без использования
условия B6). Условие B6) для удара двух поступательно
движущихся тел расширяет область применения теоремы
Карно.
Из теоремы Карно B5") для двух тел можно получить
общую скорость тел после удара при прямом центральном
ударе этих тел:
_ mxvx +m2v2
m-i + m2
Частные случаи. 1. Пусть т1, т2 и vlt v2—соответственно
массы и скорости первого и второго тела до удара,
причем v2 = 0.
Кинетическая энергия тел до удара в этом случае
Общая скорость после абсолютно неупругого прямого удара
u = m1v1/(m1+m2).
Кинетическая энергия тел после удара
T=(ml + m2) " =_^^ = _!J_ T B7)
v '2 ml+m2 2 ml+m2
Потеря кинетической энергии, затраченная на деформацию тел,
То = ^^-То. B8)
u тх+т2 и
Если пг2^>т1, то, полагая m2/(m1+m2)xl, согласно
B8), имеем
0~ 1 ~ 1 0)
т. е. почти вся энергия тел, которую они имели до удара,
затрачивается на деформацию тел. Такой случай имеет место
при ковке и в других аналогичных случаях. В этом случае
пг2 — масса наковальни вместе с поковкой (они покоятся перед
ударом), a ml и vl — соответственно масса и скорость молота
до удара по поковке. Энергия тел при ковке, которая
затрачивается на преодоление различных сопротивлений при
последующем движении,
Т— т' Т ~П
1 1 0 ~ U,
mx+m2
т. е. на преодоление сопротивлений энергия не тратится.
Очевидно, чем больше т2 по сравнению с ml5 тем эффективнее
работа молота. ^
2. Если ml^>m2, то для потери кинетической энергии на
сам удар, считая т2/(т1 + т2)кО, имеем
537
1
I
v Z/
i
!
Рис. 159
В этом случае потери энергии на
удар почти нет и вся первоначаль-
первоначальная энергия затрачивается на пре-
преодоление сопротивления движению
тел после удара, так как
По-
Послучай имеет место при забивке свай, костылей, гвоздей
и т. п. Для наибольшей эффективности этих процессов должно
выполняться условие т1^>т2. В этом случае т1—масса
бабы или кувалды (молотка), v1 — их скорость до удара, а т2
и v2 = 0 — соответственно масса сваи или костыля (гвоздя)
и скорость до удара. Их масса, чтобы рационально использо-
использовалась энергия, должна быть много меньше массы бабы или
кувалды. Вся кинетическая энергия бабы или кувалды при
таком ударе не тратится на деформации при ударе, а передается
свае или костылю, которые движутся вместе с забивающими
их бабой и кувалдой. Эта энергия расходуется на преодоление
сопротивления движению сваи или костыля при последующем
движении в среде, в которую они забиваются.
При рассмотрении удара двух тел, вращающихся вокруг
одной оси или параллельных осей, следует применять теорему
об изменении кинетического момента к каждому телу или
теорему Карно. При применении теоремы об изменении
кинетического момента к двум телам вместе при вращении
тел вокруг параллельных осей войдут моменты неизвестных
ударных импульсов в местах закрепления по крайней мере
одной из осей вращения. Эти моменты сами являются
неизвестными. Применение общих теорем при ударе к одному
телу, вращающемуся вокруг неподвижной оси, рассмотрено
в следующем параграфе. Здесь отметим только некоторые
особенности применения теоремы Карно к системе двух
вращающихся тел.
При вращении двух тел вокруг одной оси (рис. 159) О1О1
с угловыми скоростями до удара cOj и со2 в одном и том
же направлении и моментами инерции относительно этой оси
J1 и J2 можно применить теорему Карно, если удар тел
выступами при сближении абсолютно неупругий. Здесь выпол-
выполняется условие применимости этой теоремы для двух тел
S-u = 0, так как S = SA + S2 = 0, хотя для каждого тела в от-
отдельности S, • п Ф 0 и S2 • п ф 0. Согласно теореме Карно, имеем
538
где ш—общая угловая скорость тел после
удара; к»! —со и со2 — со — потерянные уг-
угловые скорости тел. После несложных
преобразований из B9) получим следу-
следующую формулу'для угловой скорости тел
после удара:
со=^ш'+^Ш2. C0)
Это же значение со можно получить при-
применяя теорему об изменении кинетического
момента относительно оси вращения для
двух тел, так как в этом случае сумма
у//////////////////.
Рис. 160
моментов ударных импульсов от действия подшипников и от
выступов относительно оси вращения равна нулю, если от-
отсутствует ударное трение в подшипниках и на выступах.
Если тела до удара вращались в противоположных на-
направлениях, то в C0) следует брать алгебраические значения
угловых скоростей тел.
Пример 1. Груз 1 массой т1 до удара о плиту 2 массой т2 падал с высоту h без
начальной скорости (рис. 160). Плита 2, закрепленная на пружине с коэффициентом
жесткости с, совершает колебания и в момент удара имеет скорость v2=s/2gh,
m2g
направленную вверх. Пружина при этом деформирована на величину Хо = .
Определить наибольшую величину деформации пружины, считая удар тел
абсолютно неупругим.
Решение. Груз / перед ударом вследствие падения с высоту h имеет
скорость vi=s/2gh, направленную вниз. В результате абсолютно неупругого
удара оба тела приобретут одинаковую скорость п и будут дальше двигаться
вместе как одно тело. Для определения этой скорости применим теорему
Карно для мгновенного наложения связей
(а)
Условия применения этой теоремы выполняются, т. е.
St ■п+52-п=E1+52)-п=0,
так как S1+S2=0 и ударный импульс от пружины равен нулю.
В рассматриваемом случае кинетическая энергия перед ударом
После удара кинетическая энергия
Г=(т!+т2)м2/2.
Потерянные при ударе скорости для тел соответственно равны (t^ — и)
и (-у2-и).
Кинетическая энергия от этих скоростей
I (J (
Подставляя полученные значения величин в (а) после несложных пре-
преобразований, получаем
539
m1+m2 m1+m2
Если масса плиты m2=0, то u = t)j и изменения скорости груза при ударе
по пружине не происходит.
Скорость и можно вычислить также применяя к удару теорему об
изменении количества движения для груза и плиты в проекции на ось Ох,
направленную вниз. Имеем
e,-mO)=S«. (в)
Количества движения перед ударом и после удара соответственно равны
Q(?) = mlv1+m2(-v2); Qx = {mx + m2)u.
Внешний ударный импульс, действующий на соударяющиеся тела, может
создать только пружина. Импульсами неударных сил за время удара следует
пренебречь. Пружина создает силу упругости, а следовательно импульс,
вследствие деформации, которая за время удара произойти не успевает.
Таким образом, ^5^ = 0 и из (в) получаем опять
тл+т2
Имея скорость и, тела, двигаясь, будут деформировать пружину. На-
Наибольшая деформация ее произойдет при скорости тел и = 0. По теореме
об изменении кинетической энергии от момента после удара до остановки
тел при изменении направления движения имеем
Т— 7о = £/Це). (г)
к
В момент наибольшей деформации Г=0, а после удара
Т -I + ) 2l2-( m \("h~m2Y2ghAmi~miJSh
0 2(m1+m2J m1+m2
Работу внешних сил тяжести и упругости на перемещении s вычисляем
по формуле
к
где X = lo + s, Xa
Подставляя вычисленные значения величин в (г), получим
ml+m2 v-i'-z,»- 2
Так как c\0=m2g, то после сокращений имеем
-(ml-m2fgh_ cs2
или
2mlg 2gh(m1-m2f
с c(m1+m2)
Решая квадратное уравнение и отбрасывая знак минус перед квадратным
корнем, дающий отрицательное значение .?, получаем
540
Наибольшая деформация
При т:
Учитывая ;
>то в случае
с ' л/ с
пружины
(ml + m2)g
с
с \
m1g/c='ker,
g2 2gh(m
2 + c(mi
будет
+ V с2 +
\rn\g1 2g
/ с2 '
получаем
s-m2J
+ w2)
2gh(ml-m2f
c[ml + m1)
hml
с
что совпадает со значением, полученным в примере 1 (см. § 5 гл. 4).
Пример 2. Однородный прямоугольный контейнер высотой h и шириной
/ находится на платформе, движущейся по прямолинейному пути со скоростью
v (рис. 161).
Определить условие для скорости платформы, при выполнении которого
не произойдет опрокидывания контейнера вокруг его закрепленного ребра
при мгновенной остановке платформы. Крепление ребра контейнера не
оказывает сопротивления его повороту вокруг этого ребра.
Решение. Применим к контейнеру при остановке платформы теорему об
изменении кинетического момента относительно закрепленного ребра Oz при ударе:
KOz-KWz^MOz{SV). (a)
к
Внешними ударными импульсами является только ударный импульс So от
действия крепления ребра контейнера. Он пересекает ось Oz, поэтому при
отсутствии ударного трения
После мгновенной остановки платформы контейнер начнет вращаться
вокруг оси Oz с угловой скоростью ю. Для кинетического момента контейнера
относительно закрепленного ребра имеем
KOz = Joz^, (б)
где JOz — момент инерции контейнера относительно закрепленного ребра. До
остановки контейнер двигался вместе с платформой поступательно. Его
кинетический момент относительно оси Oz определяют суммированием
кинетических моментов малых частиц, на которые мысленно разбиваем
контейнер. Имеем
(в)
где тк — масса элементарной частицы кон-
контейнера; ук -координата этой частицы по
оси Оу. Но
(г)
где yc = h\2 — координата центра масс кон-
контейнера по оси Оу. Подставляя значения
величин из (б), (в) и (г) в уравнение (а),
получим
I
/ I
/ |
У
/
V»
I/
о1 о
1LJZ
Рис. 161
541
УОг@-М-о = 0. (а')
Для угловой скорости контейнера в момент, остановки платформы имеем
Mhv
0)=—. (Д)
lJOz
Применим к контейнеру после получения им угловой скорости со теорему
об изменении кинетической энергии
(е)
к
За начальное положение примем положение контейнера сразу после остановки
платформы по окончании удара. В этом положении кинетическая энергия
выразится как
Г0 = 7О2т2/2.
В качестве конечного примем положение контейнера при наивысшем положении
его центра масс, т. е. положение после поворота контейнера на 45°. Чтобы
контейнер не опрокинулся, необходимо, чтобы угловая скорость его в этом
положении была равна нулю, т. е. Г=0.
Внешними силами для контейнера являются сила его тяжести P=Mg
и реакция N ребра Oz. Поэтому работа внешних сил сведется только
к работе силы тяжести при подъеме центра масс на высоту (OC—h/2). Работа
силы реакции N равна нулю. Имеем
где ОС=ч//2 + /г /2. Подставляя все вычисленные величины в (е), получим
или
Отсюда получаем для скорости платформы следующее условие, при котором
не произойдет опрокидывания контейнера:
Для момента инерции JOz по теореме о моментах инерции относи-
относительно двух параллельных осей, одна из которых проходит через центр
масс, имеем
j0z=jCz+M{ocy.
Аналогично для оси O'z, параллельной Oz,
Jo,z = JCz + M@'CJ.
Исключая из этих двух выражений JCz, получим
JOz-Jo.z = M[@CJ-@'Cf]; JOz = Jo.z + M[@Cy-@CJ]. (з)
Момент инерции 7Ог определяем по формуле A3) (см. §4 гл. 3) для
однородной прямоугольной пластины. Эта формула справедлива в рассмат-
рассматриваемом случае, только в ней надо поменять местами h и /. Имеем
Л,.2 = М(/г2/3 + /2/12); (ОСJ = (А2 + /2)/4; (О'С) = /г2/4.
После этого
542
l2)l3. (и)
Подставляя выражение (и) в (ж), получаем
Для случая l=h v ^ ^/ljg/г. Если h = 2 м, то
f ^ 4,6 м/с « 16,6 км/ч.
§ 7. ЦЕНТР УДАРА
Если по твердому телу, которое может вращаться вокруг
неподвижной оси, произвести удар, приложив ударный импульс
S, то при выполнении некоторых условий не возникнет ударных
реакций в подшипниках оси вращения. Получим эти условия.
Пусть твердое тело с неподвижной осью А В, по которой
направлена координатная ось Oz, имеет до удара угловую
скорость соо (рис. 162). К телу приложен ударный импульс
S; угловая скорость изменяется и становится равной со.
Освободив тело от связей и заменив их импульсами реакций
SA и SB, применим к явлению удара теоремы об изменении
количества движения и кинетического момента. Имеем
/r-ir0=XMo(-?Le))=M0(_?)+M0(_?i4)+M0(_?B),.
_ _ к ■
где Q и К$ — количество движения и кинетический момент после
удара, a Qo и Ко—соответственно те же величины перед ударом.
Скорости точек при вращении тела вычисляем по формуле
Эйлера:
Следовательно, количество движения
Q = Mvc = М(со х гс),
где М—масса тела; гс — радиус-вектор центра масс. Так как
со и соо направлены по оси вращения, то
Т j к
О 0 со —соо
*с Ус zc
= {^[-^с(«-«о)]+7[^с(«-«о)] + ^-°}м- C2)
Проекции кинетического момента на оси координат можно
определить по формулам для тела, имеющего одну закреплен-
закрепленную точку, но при условии, что (йх = а)у = 0 и coz = co. Имеем:
Kz= -Jzxax-Jzyay zz z
543
Используя эти формулы, получим:
Ку- КОу= ~
C3)
Проецируя C1) на оси координат и учитывая C2) и C3),
получаем
- Myс (ю - соо) = Sx + SAx + SBx;
Мхс (со - соо) =
C4)
_ Из системы уравнений C4) определяем импульсы реакций
SA и SB и изменение угловой скорости при ударе_ ю —соо для
заданного тела и внешнего ударного импульса S.
Определим условия, при которых удар по телу не вызывает
ударных реакций в подшипниках, т. е. когда SA = SB = 0. Из
системы уравнений C4) в этом случае получаем:
C5)
(
Из соотношений C5) следует:^ так
как Sz = 0, то ударный импульс S на-
находится в плоскости, параллельной Оху.
Выберем начало координат О на оси
вращения так, чтобы импульс £ лежал
в плоскости Оху, а координатную ось
Ох направим параллельно S. Тогда
С(Хс,Ус2с1 ударный импульс S пересечет ось О у
в точке К. При таком выборе начала
координат_и осей 5^ = 0, S^S, MX(S) =
= 0, Mj,E) = 0, так как £ параллелен
Ох и пересекает Оу.
Учитывая это, из условий C5) по-
получаем из второго уравнения хс = 0, из
Рис. 162 четвертого Jxz = 0, из пятого Jyz = 0, т. е.
544
центр масс находится в плоскости Oyz и ось вращения Oz
является главной осью инерции для точки О. Так как ударный
импульс £ параллелен оси Ох, то, следовательно, он перпенди-
перпендикулярен плоскости Oyz, проходящей через ось вращения
и центр масс.
Если ввести длину 1=0К, то MZ(S)=— IS при направлении
£ в положительную сторону оси Ох. С учетом этого, исключая
£ из первого и шестого уравнений C5), получаем
l=OK=JJMyc. C6)
При сделанном выборе осей координат ус — расстояние от
оси вращения Oz до центра масс. Если его обозначить И,
то l=JJ{Mh).
Получена формула, по которой вычисляется приведенная
длина физического маятника.
Точка пересечения К линии действия ударного импульса
с плоскостью, проходящей через ось вращения и центр масс
при отсутствии ударных реакций в подшипниках, называется
центром удара. Любой по числовой величине ударный импульс
S, линия действия которого проходит через точку К перпендику-
перпендикулярно плоскости, содержащей ось вращения и центр масс,
не вызывает ударных реакций в подшипниках; если ось
вращения является главной осью инерции для точки О — точки
пересечения оси вращения с перпендикулярной плоскостью,
содержащей ударный импульс S; если расстояние от оси
вращения до линии действия ударного импульса / равно
приведенной длине физического маятника; если центр удара
К и центр масс С лежит по одну сторону от оси вращения.
Если центр масс находится на оси вращения, то h=yc = 0
и расстояние / от оси вращения до центра удара К равно
бесконечности. В этом случае центра удара не существует.
Так как для_ центра масс, находящегося на оси вращения,
uc = vc = 0, то Q — Qo = M(uc — vc)-0 и из первого уравнения
C1) получаем
откуда
+ SB=-S,
т. е. ударный импульс, приложенный к те-
телу, целиком передается на подшипники.
Пример. Дверь, имеющая форму прямоугольной
пластины (рис. 163), закреплена в точке А с помощью
подпятника, а в точке В—подшипника. Ширина
двери h. Определить положение центра удара двери,
если она открывается приложением ударного им-
импульса.
Решение. Ударный импульс S должен быть
перпендикулярен плоскости, проходящей через ось
вращения и центр масс двери, т. е. плоскости самой
Рис. 163
18 Заказ 192
545
двери. Плоскость, перпендикулярная оси вращения, в которой расположен
ударный импульс, должна дать точку пересечения О на оси вращения, для
которой эта ось является главной осью инерции. Таким свойством обладает
точка, расположенная на оси Oz, в которой пересекаются плоскость двери
с плоскостью ее симметрии для однородной двери.
Расстояние ОК=1 до центра удара К определяем по формуле для
приведенной длины физического маятника
Мус
В рассматриваемом случае
yc = h/2; Jz = Mh2j3.
Следовательно,
, Mh2l\ 2h
Mhj2 3
Любой по числовой величине ударный импульс, линия действия которого
перпендикулярна плоскости двери и проходит через центр удара К на
расстоянии от оси l--h, не передается на подпятник А и подшипник В.
ГЛАВА 10
ЭЛЕМЕНТЫ ТЕОРИИ КОСМИЧЕСКИХ ДВИЖЕНИЙ
§ 1. ВВЕДЕНИЕ
Космические корабли различного назначения выводятся на
орбиту (траекторию) с помощью ракет-носителей. Каждая
ступень ракеты-носителя имеет двигатели, баки с топливом
и другие устройства. Остатки использованной ступени обычно
отделяют от остальной части ракеты. Последней ступенью
служит космический корабль или эквивалентное ему устройство,
которые в конце работы двигателей предпоследней ступени
получают скорость г;0 под углом ос к горизонту вследствие
запрограммированного отклонения ракеты-носителя с помощью
рулевого устройства.
Движение космического корабля после его отделения от
остатков ракеты-носителя совершается под действием силы
тяготения Земли при старте с ее поверхности. Высота над
Землей, где космический корабль начинает свое автономное
движение после работы двигателей, достаточно велика и силой
сопротивления воздуха можно пренебречь. Можно пренебречь
также силами тяготения Солнца и других планет, если движение
космического корабля происходит вблизи Земли.
Для рассмотрения движения центра масс космического
корабля в рассматриваемом случае хорошей моделью является
движение материальной точки под действием силы тяготения
земного шара. Эта задача известна как задача Ньютона.
546
Движение точки в задаче Ньютона рассматривается относитель-
относительно системы отсчета, скрепленной с Землей, принимаемой за
инерциальную вследствие малости поправок на неинерциаль-
ность по сравнению с силой тяготения. Земной шар в задаче
Ньютона считается однородной сферой. В этом случае он
притягивает материальную точку как одна точка, центр шара,
имеющая массу всего земного шара. В более точных расчетах
учитывают несферичность Земли и ее неоднородность.
Об особенностях движения космического корабля вместе
с ракетой-носителем при работе двигателей одной из ступеней
можно составить приближенное представление рассмотрев
движение точки переменной массы, являющейся упрощенной
моделью движения центра масс тела, на движение которого
существенное влияние оказывает процесс изменения массы.
§2. ЗАДАЧА НЬЮТОНА
Имеем материальную точку массой т, движущуюся под
действием силы тяготения земного шара, массой М и радиусом
R. Земной шар считаем однородной сферой. Силу тяготения,
действующую на материальную точку, согласно закону тяготе-
тяготения Ньютона, можно выразить в форме
F=-y2f\ 0)
где г — расстояние точки до центра земного шара; к — постоян-
постоянный коэффициент; г° — единичный вектор, направленный от
центра Земли к рассматриваемой точке.
Коэффициент к из закона Ньютона равен
k = GMm,
где G — универсальная постоянная тяготения. Другое выражение
для к получается, если применить формулу A) к материальной
точке, находящейся на поверхности земного шара, где сила
F переходит в силу тяжести P = mg. Приравнивая эти две
силы при r = R получаем
—2 = mg; k = mgR2
где g—ускорение земного тяготения.
При рассмотрении движения точки под действием централь-
центральной силы доказано, что траектория точки является плоской
кривой, т. е. в этом случае у точки только две степени
свободы. Сила тяготения однородного шара относится к числу
центральных сил. Задачу о движении точки под действием
таких сил удобно решать в полярных координатах.
Ограничим решение задачи Ньютона нахождением уравне-
уравнения траектории движения точки в полярных координатах
18* 547
ф — полярный угол
г = /(ф), где
(рис. 164).
Для решения поставленной задачи
следовало бы использовать уравнения
движения точки в проекциях на поляр-
полярные оси координат. Удобнее применять
х следствия из этих уравнений в форме
теорем об изменении кинетической
энергии и кинетического момента точки.
По теореме об изменении кинети-
кинетической энергии точки,
ftlV ttlVn л ,^\
— — = * B)
где работа силы в потенциальном силовом поле тяготения
Земли равна
° г г0'
Рис. 164
C)
так как U=- (см. § 6 гл. 4); г0 — расстояние материальной
точки до центра земного шара в момент, когда точка имеет
скорость v0.
Для квадрата скорости в полярных координатах имеем
v2 = v2 + v2, = f2+ г2ф2, D)
где vr и vp—радиальная и трансверсальная скорости. Используя
C) и D), из B) получаем
2А: /1
—\
т
B')
По теореме об изменении кинетического момента относи-
относительно оси_ Oz, перпендикулярной плоскости траектории и про-
проходящей через центр земного шара, имеем
так как сила тяготения F пересекает ось Oz. Следовательно,
Kz = const. E)
Но
, = mrvp =
так как vp = r<$.
В начальный момент движения по орбите
где
548
Kz = mrovo cosoc = Cm,
С — const = r0 v0 cos a.
Таким образом, из E) получаем
r'2-C. E')
Исключим из B') и E') dt. Из E') имеем
Подставляя значение dt в B'), получаем:
dr\2C2c2 (drVc'C1 2i2k(i
dcp I r* r1 \d(p I r rz m \r r
Уравнение F) является дифференциальным уравнением траекто-
траектории точки в полярных координатах. Интегрируя его, найдем
уравнение траектории в конечной форме. Введем новые обозна-
обозначения для постоянных величин
H — Vo— Vo— , [I gK .
mr0 r0 m
Тогда из F) имеем
или
7
/ 2ц С2
г г*
F')
Преобразуя подкоренное выражение в F') и выполняя интегри-
интегрирование, получаем
где
F")
4-Й , -.
: = arccos-;
_(С_\Л2 .)Ja2-x2
1\"-С*) \г С)
2' Х г С
Фо — постоянная интегрирования. Таким образом, из F"),
учитывая, что косинус — четная функция, имеем
549
-L== = cos((p-(p0).
Отсюда
Г
или окончательно
r
l+ecos(cp —cp0)'
где постоянные величины имеют следующие значения:
Г {vlro-2gR2)rlv20cos2a 2 2 d ( 2 gR2
= 1+к- f-^ = /l+u6cos2a^—j Do-2
Приняв приближенно ro&R, получим
^^^ (8)
Формула G) является уравнением конического сечения
в полярных координатах с параметрами р и е. При различных
значениях параметров получаются разные конические сечения,
являющиеся траекториями движущейся точки под действием
силы тяготения Земли. В зависимости от значения параметра
е возможны следующие три типа траекторий:
1) е< 1, что получается, согласно (8), при vl<2gR или
vo<^/2gR; траекториями точки являются различные эллипсы
в зависимости от параметра р;
2) е=1, или vo = yj2gR= 11,2 км/с; траекториями будут
параболы;
3) е>\, или v0 > yJlgR = 11,2 км/с; траектории имеют форму
гипербол;
4) е = 0; траекториями являются окружности, радиус кото-
которых согласно (8) г=р. При ос = О° в этом случае, приравнивая
е нулю, получаем
или
/~ = 7,9 км/с.
Можно показать, что при vo<^fgR траекториями точки
являются дуги эллипса, которые начинаются на некоторой
высоте над Землей и обязательно оканчиваются на земном
550
Гипердола
v0 711,2 км/с
\
^Парабола
\tr" =77,2 км/с
Рис. 165
шаре, т. е. точка, брошенная
с Земли, в этом случае обяза-
обязательно упадет на Землю. На-
Наименьшая скорость точки, для
того чтобы ее траектория не
пересекала земной шар, если
движение ее начинается на
некоторой высоте над поверх-
поверхностью Земли, получается
в том случае, если траекторией
точки является окружность,
т. е. при v(Q) = yJ~gR = l,9 км/с
при ос = О°. Эту скорость назы-
называют первой космической скоростью. По мере увеличения
v0 сверх первой космической скорости окружность деформируется
в эллипсы и при ti@2) = 4/2g/?=ll,2 км/с получается траектория
в форме параболы. Эту скорость, при которой эллипс переходит
в параболу, называют второй космической скоростью.
Парабола является незамкнутой кривой. Двигаясь по ней, точка
покинет окрестности Земли. Для скоростей vo>^/2gR= 11,2 км/с
парабола превращается в гиперболы различной формы. На
рис. 165 показаны траектории точки в зависимости от ее
начальной скорости, если точка начинает движение на некоторой
высоте h над поверхностью Земли при ос = О°.
Формула G) для траектории материальной точки, движущей-
движущейся под действием тяготения однородного шара, справедлива
не только для земного шара, но и любого другого однородного
шара, например Луны, Солнца и т. п., только для них
параметры g и R будут иметь свои значения.
Материальная точка, имея начальную скорость v\)) =
= 11,2 км/с, может покинуть окрестности Земли. Молекулы
газов, входящих в состав земной атмосферы, приобретая от
взаимных столкновений скорости, равные или большие второй
космической скорости, покидают пределы Земли. Такие ско-
скорости могут приобрести прежде всего молекулы самого легкого
газа, т. е. водорода. Земная атмосфера постоянно теряет
преимущественно водород.
Минимальная скорость, которую необходимо иметь точке,
начинающей движение с Земли, чтобы преодолеть силу притя-
притяжения Солнца и покинуть Солнечную систему, составляет
16,7км/с. Эту скорость называют третьей космической
скоростью.
Законы движения центров масс искусственных и естествен-
естественных спутников Земли не отличаются от законов движения
спутников других планет, например Юпитера, и движения
планет вокруг Солнца или какой-либо другой звезды. Полное
решение задачи Ньютона дает все данные о движении центров
551
масс искусственных и естественных спутников. Из этих данных,
в частности, можно вывести законы Кеплера A571—1630),
которые им впервые были получены, используя астрономичес-
астрономические наблюдения Тихо Браге A546—1601). Приведем законы
Кеплера в современной формулировке без вывода:
1) все планеты описывают вокруг Солнца плоские орбиты,
следуя закону площадей;
2) орбиты планет являются эллипсами, в одном из фокусов
которых находится Солнце;
3) квадраты звездных времен обращения планет вокруг
Солнца пропорциональны кубам больших полуосей их орбит.
§ 3. ДВИЖЕНИЕ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
В современной технике возникают случаи, когда масса точки
и системы не остается постоянной в процессе движения,
а изменяется. Так, при полете космических ракет вследствие
выбрасывания продуктов сгорания и отделения ненужных частей
ракет изменения массы достигают 90...95% общей начальной
величины. Довольно значительно изменяется масса при полете
современных реактивных самолетов вследствие расхода топлива
при работе двигателей и в ряде других случаев. Даже в такой
области техники, как текстильное производство, происходят
значительные изменения массы различных веретен, шпуль
и рулонов при современных скоростях работы станков и машин.
Рассмотрим главные особенности, связанные с изменением
массы, на примере движения одной точки переменной массы.
Точку переменной массы примем за геометрическую точку
с конечной массой, непрерывно изменяющейся в процессе
движения. Вместо точки можно рассматривать также тело
переменной массы, если оно совершает поступательное дви-
движение.
Дифференциальные уравнения движения точки
переменной массы
К точке переменной массы нельзя непосредственно приме-
применить основной закон динамики точки постоянной массы.
Дифференциальные уравнения движения точки переменной
массы получим, применяя закон независимого действия сил
и теорему об изменении количества движения системы. Извест-
Известно, что действующая на точку сила сообщает ей такое
ускорение, которое не зависит от действия других сил. В случае
точки переменной массы кроме приложенной к точке силы
F действуют силы, вызванные отделением от точки частицы
массой А'М.
Считаем, что изменения скорости -v точки, переменной
массы от действия силы F и от изменения массы точки не
зависят друг от друга, или общее изменение скорости dv
552
в течение времени dt_ складывается из изменения скорости
dv1 от действия силы F при постоянной массе точки и измене-
изменения скорости dv2, вызванного изменением массы точки в от-
отсутствие силы F.
_ Имеем точку переменной массы М. От действия силы
F скорость точки постоянной массы изменяется за время dt
в соответствии с основным законом динамики точки постоян-
постоянной массы на
dvl=~ dt. (9)
Изменение скорости точки dv2 за время dt, вызванное
изменением ее массы в отсутствие действия силы F, определяют
по теореме об изменении количества движения системы
постоянной массы. Так как механическая система, состоящая
из точки переменной массы и отделившихся от нее частиц,
свободна от действия внешних сил, то ее количество движения
является постоянной величиной. Внутренние силы взаимо-
взаимодействия точки с отделяющимися частицами не изменяют
количества движения рассматриваемой системы. Применяя
закон сохранения количества движения за промежуток времени
от t до t + dt, имеем
Учитываем только взаимодействие точки переменной массы
с отделившейся от нее частицей массы d'M за время dt
и пренебрегаем действием на точку и эту частицу ранее
отделившихся частиц (рис. 166). Получаем Qt = Mv, так как
в момент t имеется одна точка массой M(t), движущаяся
со скоростью v относительно системы координат Oxyz.
В момент t + dt имеются точка массой M—d'M, скорость
которой v + dv2, и отделившаяся частица массой — d'M, ско-
скорость которой п относительно той же системы координат
Oxyz. Количество движения их в момент t + dt
Приравнивая, согласно A0), количества движения после
сокращения и отбрасывания малого
слагаемого второго порядка z
dM'dv2 по сравнению со слага-
слагаемыми первого порядка, получаем
при d'A/>0 или, включая знак
минус в dM (тогда dM<0), имеем
М
A1)
Рис. 166
553
Общее изменение скорости
6lV = Av1 +dv2,
или, учитывая A) и C),
dv = — dt-\ (u — v).
М м х >
После умножения обеих частей этого уравнения на массу
точки М и деления на dt получаем следующее дифференциальное
уравнение движения точки переменной массы в векторной форме:
Выражение A2) называют дифференциальным уравнением
Мещерского. Оно было получено им впервые в 1897 г.
Если с точкой переменной массы связать подвижную
систему координат, поступательно движущуюся относительно
системы координат Oxyz, то абсолютную скорость п отделив-
отделившейся частицы массой dM по теореме о сложении скоростей
можно выразить как u = ve + vr.
Так как в данном случае ve = v, то относительная скорость
отделившейся частицы
vr = п — v.
Подставляя значение п — v в D), имеем
Если ввести обозначение Фг = —Dr, то D') примет вид
М~ = Р+ФГ. A2")
Величину Фг называют реактивной силой, a dMjdt является
скоростью изменения массы. Она характеризует изменение
массы точки за единицу времени, например за 1 с. Поэтому
реактивная сила равна произведению секундного изменения
массы точки на относительную скорость отделения частиц
массы от точки переменной массы.
В случае уменьшения массы точки с изменением времени
величина dMjdt является отрицательной, а при возрастании
ее массы — положительной. При уменьшении массы точки
вследствие отделения от нее частиц реактивная сила Фг
направлена в сторону, противоположную относительной ско-
скорости отделяющихся частиц vr, а при увеличениимассы точки
величина dMjdt больше нуля и реактивная сила Фг направлена
в сторону относительной скорости частиц vr. Для реактивного
двигателя скорость изменения массы dM/dt является от-
554
рицательной, равной секундному расходу массы, a vr — скорость
вылета газа из сопла двигателя.
Реактивная сила является тягой двигателя, обусловленной
выбросом газа через сопло. Она направлена противоположно
скорости вылета газа из сопла двигателя.
Проецируя обе части A2") на прямоугольные декартовы
оси координат, получаем дифференциальные уравнения движе-
движения точки переменной массы в проекциях на эти оси:
М~ = РХ + ФГХ; Mg = F, + Ory; м£| = ^ + Ф„. A3)
Из A2") или A3) следует, что дифференциальные уравнения
движения точки переменной массы имеют такой же вид, как
и для точки постоянной массы, только кроме приложенных
к точке сил действует дополнительно реактивная сила, обуслов-
обусловленная изменением массы точки.
Дифференциальные уравнения движения точки переменной
массы превращаются в аналогичные уравнения для точки
постоянной массы, если величина dM/dt равна нулю. Из
дифференциальных уравнений движения точки переменной
массы, аналогично тому, как и в случае точки и системы
постоянной массы, можно вывести общие теоремы для точки
и системы переменной массы.
§4. ЗАДАЧИ ЦИОЛКОВСКОГО
Рассмотрим две задачи Циолковского: прямолинейное дви-
движение точки переменной массы под действием только одной
реактивной силы и вертикальное движение точки вблизи Земли
в однородном поле силы тяжести. Эти задачи впервые
рассматривались К. Э. Циолковским.
Первая задача Циолковского
Пусть точка переменной массы или ракета движется
прямолинейно в таком называемом, по терминологии Циолков-
Циолковского, свободном пространстве под действием только одной
реактивной силы. Считаем, что относительная скорость vr
отделения частиц постоянна и направлена в сторону, противо-
противоположную скорости v движения точки переменной массы
(рис. 167). Тогда, проецируя A2") на ось Ох, направленную по
скорости движения точки, дифференциальное уравнение прямо-
прямолинейного движения точки переменной массы принимает вид
,.dii AM
M—=-—-vr.
At At
Разделяя переменные и беря интегралы от обеих
частей, имеем
555
M
t=0
Рис. 167
где v0 — начальная скорость, направленная по
реактивной силе; Мо — начальная масса точки.
Выполняя интегрирование, получаем
v = v0 + vr\n—-. A4)
Если в формулу A4) подставить значения
величин, характеризующих конец горения, когда
масса точки (ракеты) состоит только из массы
несгоревшей части (массы приборов и корпуса
ракеты) Мр, то, обозначая через т массу топлива,
для скорости движения vt в конце горения имеем
Вводя число Циолковского
дующую формулу Циолковского:
= m/Mp, получаем сле-
сле= wo + yrln(l+Z).
A5)
Из формулы Циолковского следует, что скорость в конце
горения не зависит от закона горения, т. е. закона изменения
массы. Скорость в конце горения можно увеличить двумя
путями. Одним из этих путей является увеличение относитель-
относительной скорости отделения частиц vr или для ракеты увеличения
скорости истечения газа из сопла реактивного двигателя.
Современные химические топлива позволяют получать ско-
скорости истечения газа из сопла реактивного двигателя порядка
2... 2,3 км/с. Создание ионного и фотонного двигателей позво-
позволит значительно увеличить эту скорость. Другой путь увеличе-
увеличения скорости ракеты в конце горения связан с увеличением
так называемой массовой, или весовой, отдачи ракеты, т. е.
с увеличением числа Z, что достигается рациональной конструк-
конструкцией ракеты. Можно значительно увеличить массовую отдачу
ракеты М0/Мр путем применения многоступенчатой раке-
ракеты, у которой после израсходования топлива первой ступени
отбрасываются баки и двигатели от оставшейся части ракеты.
Так происходит со всеми баками и двигателями уже отработав-
отработавших ступеней ракеты. Это значительно повышает число
Циолковского для каждой последующей ступени, так как
уменьшается Мр за счет отброшенных масс баков и двигателей.
Для определения уравнения движения точки переменной
массы из A4) имеем
556
dx . Mo
или, выполняя интегрирование после разделения переменных
и считая х = 0 при / = 0, получаем
\n^dt. A6)
о
В теоретических работах по ракетодинамике обычно рас-
рассматривают два закона изменения массы: линейный и по-
показательный. При линейном законе масса точки с течением
времени изменяется так:
М=М0 A-оа), A7)
где а = const (а — удельный расход), а Мо — масса точки
в начальный момент времени.
При показательном законе изменение массы
М=Мое~*'. A8)
Выполняя интегрирование в A6) при линейном законе
изменения массы A7), получаем следующее уравнение движения:
jc = i>0/ + ^[(l-a/)ln(l-a/) + a/]. A9)
При показательном законе изменения массы A8) соответ-
соответственно
x = vot + ^f. B0)
Отметим, что при линейном законе изменения массы A7),
если vr = const, секундный расход массы
(-dM/d?) = aM0 = const
и реактивная сила
Фг = (- AM /dt) vr = aMovr = const.
При показательном законе секундный расход массы и ре-
реактивная сила являются переменными, но ускорение точки
переменной массы а,., вызванное действием на точку одной
реактивной силы Фг, является постоянным, т. е.
иг = Фг / М = <xvr = const.
Вторая задача Циолковского
Если точка переменной массы (ракета) движется по вертика-
вертикали вверх вблизи Земли (см. рис. 167), то, считая поле
земного притяжения однородным (g = const) и пренебрегая
557
сопротивлением воздуха, а также учитывая все предположения
первой задачи Циолковского, получаем следующее диффе-
дифференциальное уравнение движения точки:
,,dt> ,, AM
После выполнения интегрирования имеем
Для х в зависимости от времени, если, как и в первой
задаче Циолковского, отсчитывать х от начального положения
точки, получаем следующую формулу:
ln%dt. B1)
о
Из B1) при линейном законе изменения массы A7) получаем
=v-^+-[0-
При показательном законе изменения массы A8) соответ-
соответственно
ГЛАВА 11
ВВЕДЕНИЕ В ДИНАМИКУ СПЛОШНОЙ СРЕДЫ
§ 1. УРАВНЕНИЕ НЕРАЗРЫВНОСТИ
Для сплошной среды важное значение имеет уравнение
сохранения массы, или уравнение неразрывности.
Для его вывода введем понятие плотности сплошной среды.
Плотностью р в точке М пространства называют предел
отношения массы Am в элементарном объеме AF к этому
объему, охватывающему точку М, при стягивании его в эту
точку, т. е.
,. Am
р= hm —.
дг-oAF
Получим уравнение неразрывности. Выберем в пространстве
неподвижную замкнутую поверхность, ограничивающую объем
V (рис. 168). Сплошная среда при своем движении относительно
рассматриваемой системы отсчета частично входит в объем,
558
Рис
ограниченный поверхностью, частично из
него выходит. Считается, что сама выбран-
выбранная поверхность не влияет на движение
сплошной среды. Через элемент площади
поверхности dS за единицу времени входит
или выходит количество массы сплошной
среды pvndS (определяется знаком потока),
где п—направление внешней по отноше-
отношению к объему нормали. Через всю повер-
хность войдет или выйдет количество мас-
массы JJ" pvndS. Если это величина положительная, то получим
(S)
уменьшение плотности в точках объема в единицу времени
на — dpldt. В малом объеме AV это уменьшение составит
ггг
dV. Во всем объеме оно равно — —dF. Если масса
J J J
сплошной среды сохраняется, то поток ее через поверхность
должен компенсироваться изменением плотности в рассмат-
рассматриваемом объеме, т. е.
pvndS+(((^dV=0. A)
(S) (V)
Это и есть уравнение неразрывности, или сохранения
массы, в интегральной форме.
От интегральной формы уравнения неразрывности для
объема можно перейти к уравнению неразрывности в каждой
точке пространства. Для этого следует интеграл по поверхности
в A) преобразовать в интеграл по объему, ограниченному
замкнутой поверхностью, по формуле Гаусса—Остроградского:
Я [(рcos(n^x) + qcos(n, y)+rcos(n, z)~]dS=
(S)
дх ду dz
(V)
В рассматриваемом случае
vn = v■ n = vxnx + vyny + vz
(n, x) + vycos(ii, y) +
xx yy z x
+ fzcos(«, z).
Полагая в формуле Гаусса — Остроградского p = pvx, q = pvy,
r — pvz, получим
Я Рvn&S = Я {РЩ' "dS = Я [(Рvx)cos (n,\)+(рvy) cos («,Лу) +
(S) (S) (S)
JJJ[«^«] B)

559
(V)
Подставляя B) в A) и объединяя интегралы в один, имеем
dt dx dy dz \ ' У '
(V)
Так как (Г) выполняется для произвольного объема, то это
может быть только в том случае, если подынтегральное
выражение равно нулю в каждой точке, т. е.
dp 3(pi>J dtpvJ) d(pvz) „ ...
1 ~\ ~\ U. \3)
dt дх ду dz
Это и есть уравнение неразрывности сплошной
среды в дифференциальной форме.
Для несжимаемой сплошной среды, для которой плотность
р = const, из C) получим
^ + ^+^ = 0, D)
дх су dz
ИЛИ
„ dvx dv dv, ,
Величина —H—-+—-, как известно, называется дивергенцией
дх dy dz
вектора скорости v. Уравнение неразрывности для несжимаемой
сплошной среды кратко можно выразить в форме
div y = 0. D')
В более общем случае оно имеет вид
^ 0. C')
§ 2. СИЛЫ ОБЪЕМНЫЕ И ПОВЕРХНОСТНЫЕ
Силы, действующие на рассматриваемую частицу сплошной
среды, разделяют на силы объемные, или массовые,
и поверхностные. Объемными силами называют силы,
которые действуют на точки объема сплошной среды со
стороны других материальных объектов, в том числе и со
стороны точек самой выделенной частицы сплошной среды.
Объемную силу обычно характеризуют ее интенсивностью.
В окрестности точки М пространства рассмотрим малую
частицу сплошной среды объемом AF. Тогда масса этой
частицы приближенно имеет значение pAF, где р — плотность
в точке М. Если на все точки выделенной удалой частицы
сплошной среды действует объемная сила AF, то интенсив-
интенсивностью этой силы в точке пространства М является предел
отношения AF к массе частицы при стягивании ее объема
в точку М, т. е.
560
F= lim
AF
V^O pAV
Объемными силами являются силы гравитационного тяготе-
тяготения, силы инерции и некоторые другие силы.
Поверхностными силами считают силы, которые действуют
со стороны остальной сплошной среды на выделенную частицу
через ее поверхность. Поверхностную силу в каждой точке
поверхности характеризуют ее напряжением, т. е. силой,
приходящейся на единицу площади. Если через площадь AS
малого элемента поверхности_ выделенной частицы остальная
среда действует с силой АР, то напряжением р в точке
поверхности является предел отношения АР к AS при стягива-
стягивании AS в точку М, т. е.
_ .. АР
у as^o AS
§ 3. СВОЙСТВА ПОВЕРХНОСТНЫХ СИЛ
Поверхностные силы для выделенной частицы сплошной
среды являются аналогом распределенных по поверхности сил
реакций связей для твердого тела, которые рассматривались
в статике. Через каждую точку пространства могут проходить
поверхности многих выделенных частиц сплошной среды.
Возникает задача определения таких величин в рассматривае-
рассматриваемой точке, через которые можно выразить напряжение на
элементе поверхности любой из частиц, проходящих через
эту точку. Для этого достаточно знать в точке так называемый
тензор напряжений.
Поверхности различных частиц, проходящих через рас-
рассматриваемую точку, характеризуют направлениями внешних
нормалей к поверхностям этих частиц. У каждой частицы
в какой-либо точке ее поверхности имеется своя внешняя
нормаль, направленная во внешнюю сторону объема частицы.
Выделим из сплошной среды малую частицу в форме
тетраэдра О А ВС с вершиной в точке
О — начале координат декартовой си-
системы (рис. 169). Внешняя нормаль
п к наклонной площадке ABC пло-
площадью ASn образует с осями коор-
координат углы а, C, у соответствен-
соответственно. Внешней нормалью к площадке
ОВС является отрицательное направ-
направление оси координат Ох, а ее пло-
площадь— ASX. Аналогично, для площад-
площадки О АС площадью ASy внешней нор-
нормалью будет отрицательное направ-
направление оси Оу. Для площадки ОАВ рис. м,9
п1ос,д,ос)
561
внешняя нормаль — отрицательное направление оси Oz, пло-
площадь ASZ.
Применим к выделенному малому тетраэдру следствие из
принципа Даламбера для системы, согласно которому век-
векторная сумма всех сил, действующих на точки сплошной
среды в выделенном тетраэдре, вместе с силами инерции этих
точек относительно инерциальной системы отсчета равна нулю.
На точки сплошной среды в выделенном тетраэдре действуют
объемные силы. Их векторная сумма FcppCpAK, где Fcp — сред-
средняя интенсивность объемной силы; рср — средняя плотность;
AV—объем тетраэдра. Для поверхностных сил, действующих
на выделенный тетраэдр через поверхность грани ОВС, действу-
действует сила p-xASx, где р~х—среднее напряжение на этой повер-
поверхности. Аналогично, для грани О АС поверхностная сила равна
p-yASy, для грани ОАВ—p~zASz и для ABC—pnASn. Силы
инерции для всех точек сплошной среды в тетраэдре равны
( — рСрйСрАК), где аср— среднее ускорение. Векторная сумма сил
должна быть равна нулю, т. е.
Fcp рср А V- рсраср А V+рп ASn +р _ х ASX + р _, ASy +р _ z ASZ = О.
Площади ASX, ASy, AS: на основании теоремы о связи
площадей проекции и проецируемой фигуры выражаются через
площадь наклонной площади ASn соотношениями
ASx = ASncosa; ASy = ASncosP; A5z = ASFncosy.
Объем AV=1/3hASn, где h — высота тетраэдра, опущенная
из его вершины О на наклонную грань ABC. Поделим обе
части E) на ASn и перейдем к пределу, устремив высоту
тетраэдра h к нулю. Получим
jOn+Jo_;ccosa+^_),cosp+jO_zcosY = 0, E')
так как
и слагаемые с объемными силами обращаются в нуль, если
другие величины, входящие в их выражение, остаются конечны-
конечными во всех точках тетраэдра. В E') входят напряжения (после
перехода к пределу) уже не средние, а те, которые действуют
в точке О. Условие E') для поверхностных сил показывает,
что главный вектор поверхностных сил для элементарного
тетраэдра в пределе (при стягивании тетраэдра в точку) равен
нулю. Это справедливо для частицы любой формы, так как
отношение ее объема к площади поверхности в пределе
стремится к нулю.
На основании закона о равенстве сил действия и противо-
противодействия для напряжений имеем:
P-x=-Pxl P-y=-Pr P~z=-Pz- F)
562
Например, р_х есть напряжение от действия отброшенной
части сплошной среды на выделенный тетраэдр через повер-
поверхность грани ОВС. Напряжение рх следует считать действием
тетраэдра через ту же грань на остальную сплошную среду,
так как для нее внешней нормалью является положительное
направление оси Ох. Аналогично обосновываются два других
соотношения из F).
С учетом F) после переноса слагаемых со знаком минус
в правую часть E') примет форму
^„=jpxcosa+^cosP+j0zcosY. ' G)
Формула G) выражает напряжение на наклонной площадке
в точке О через напряжения по трем взаимно перпендикуляр-
перпендикулярным площадкам, проходящим через ту же точку.
Если сплошной средой является идеальная жидкость,
в которой напряжениями являются только давления, парал-
параллельные нормалям к площадкам, то, проецируя G) последо-
последовательно на оси координат Ox, Oy, Oz и считая напряжения
направленными в отрицательные стороны внешних нормалей,
получим:
-|/?Jcosa=-|/?Jcosa; — | ^„ j cos p = -\py\cos$;
-\pn\cosy=-\pz\cosy.
Таким образом,
т. е. давление р в какой-либо точке идеальной жидкости не
зависит от ориентации площадки в этой точке. Это хорошо
известный закон Паскаля.
§ 4. ТЕНЗОР НАПРЯЖЕНИЙ
Напряжение на наклонной площадке с нормалью п через
напряжения по трем взаимно перпендикулярным площадкам,
нормалями к которым являются оси координат, определяется
по формуле G). В общем случае любой сплошной среды рх,
ру, pz не направлены по нормалям к площадкам, т. е. по
осям координат Ox, Oy, Oz, так же как рп не направлено
по нормали к наклонной площадке. В проекциях на оси
координат из G) получаем
G)
Отметим, что первый индекс у проекции напряжений обозначает
нормаль к площадке, на которой рассматривается напряжение.
563
р„у =рху cos a+Pyy cos p+pzy cos у;
Pnz =Pxz COS <X+pyz COS P + jOzz COS J.
Рис. 170
Второй индекс указывает коор-
координатную ось, на которую про-
проецируется это напряжение.
Чтобы иметь возможность
определить рп, необходимо кроме
углов а, р\ у, определяющих
направление нормали к площад-
площадке, знать девять компонентов
тензора напряжений рхх, рху, ...,
pzz в рассматриваемой точке.
Тензор напряжений П удобно
выразить в виде таблицы или
матрицы:
/Рхх Pyx Pzx*
П=\рху Руу Pzy
\Pxz Pyz Pzz/
(8)
Значение компонентов тензора напряжений для случая,
когда они все положительны, видно из рис. 170, на котором
точки Ои О2, О3, расположенные в плоскостях /, 2,
3, следует совместить в одной точке О. Например, рхх —
проекция напряжения на площадке, нормалью к которой
является ось Ох, на эту же ось; рху — проекция на ось
Оу напряжения рх и т. д.
Компоненты тензора напряжений, характеризующие напря-
напряжения по различным площадкам, проходящим через рассмат-
рассматриваемую точку, в общем случае зависят от выбора точки
и направления осей координат.
§ 5. УРАВНЕНИЯ ДВИЖЕНИЯ СПЛОШНОЙ СРЕДЫ
В НАПРЯЖЕНИЯХ
Выберем в пространстве, в котором движется сплошная
среда, неподвижную относительно инерциальной системы отсче-
отсчета, замкнутую поверхность площадью S, ограничивающую
объем V. Эта воображаемая поверхность не препятствует
движению сплошной среды. Применим к сплошной среде,
которая находится в выделенном объеме в момент времени
t, первое следствие из принципа Даламбера для системы.
Согласно этому следствию, векторная сумма всех действующих
на точки сплошной среды объемных и поверхностных сил
вместе с силами инерции точек относительно инерциальной
системы отсчета равна нулю. На элементарный объем сплош-
сплошной среды действует объемная сила FpdV_и сила инерции
для него соответственно ( — dpdV), где F—интенсивность
объемной силы; а — ускорение относительно инерциальной
системы отсчета; р — плотность. Для всего выделенного объема
564
n(cn,fi,y)
векторная сумма этих сил вы-
выразится интегралом по объему
JJJ(F-a) pdF (рис. 171).
(V)
На элемент dS поверхности
выделенной части сплошной
среды действует поверхностная
сила pndS, где р„ — напряжение
поверхностной силы в точке
поверхности с внешней норма-
нормалью, имеющей углы а, р, Л
у с осями координат Ох, Оу, Рис. 171
Oz. Векторная сумма всех поверхностных сил выразится
интегралом по поверхности §\pndS.
(S)
Согласно первому следствию из принципа Даламбера, для
выделенной части сплошной среды в объеме V имеем
S=0. (9)
IV)
(S)
Преобразуем интеграл по поверхности в интеграл по объему.
По формуле Гаусса — Остроградского, заменив р„ его значением
из G), получим
{{ pndS={{(рх cos а+ру cos p+pz cos у) dS=
(S) (S)
(У)
Подставляя A0) в (9) и объединяя два интеграла в один, имеем
(9')
(V)
Условие (9') выполняется для произвольного объема, поэто-
поэтому подынтегральное выражение обращается в нуль в каждой
точке этого объема. Приравнивая его нулю, получаем уравне-
уравнение движения сплошной среды в напряжениях
в векторной форме, если слагаемое ( — ар) перенести в другую
часть уравнения:
В проекциях на оси координат имеем
565
A1')
При равновесии сплошной среды ускорение а = 0 и из A1)
получим следующее условие равновесия для сил:
% = 0. A2)
f+f+fO.
дх ду dz
В проекциях на оси координат из A2) имеем
^ др^ + д^
дх ду
| ^ дР
дх ду dz
F ! 8Рху | дРуу^ дРгу _Q.
у дх ду dz '
дх ду
A2')
§ 6. СИММЕТРИЧНОСТЬ ТЕНЗОРА НАПРЯЖЕНИЙ
Применим к выделенной части сплошной среды (см.
рис. 171) второе следствие из принципа Даламбера, согласно
которому векторная сумма моментов относительно неподвиж-
неподвижной точки О всех объемных и поверхностных сил вместе
с силами инерции равна нулю. Моменты объемной силы
и силы инерции для элементарного объема dV равны
rx[pF—pa)dV,
где г — радиус-вектор, проведенный из точки О в какую-либо
точку элементарного объема. Для всей сплошной среды
в выделенном объеме это дает
(.V)
Аналогично для поверхностных сил получим \\(Fxpn)dS.
Согласно второму следствию из принципа Даламбера, имеем
W[r-x(pF-pfl)]dr+jj(r-x/g]ds=o. A3)
(V) (S)
Преобразовав поверхностный интеграл в объемный по формуле
Гаусса — Остроградского и используя G), получим
{{(г х рп) dS = {{ [(г х рх) cos а + (г х ру) cos р + (г х ру) cos р +
566
Ж—1
д(?хРх) , d(rxpv) dlrxp) ,
v. Ух'-\—^—^+ v . ; dF.
—I
(V)
Выполняя дифференцирование векторных произведений под
знаком интеграла по объему, получим
| ! B(rxpz
дх dz dz
(У)
ик —
(У)
Подставляя значение интеграла A4) в A3), после объединения
слагаемых имеем
(У)
'л- - - \п
К=0. A3')
Согласно уравнению движения в напряжениях pa + pF+
+^+^ = 0, из A3') получим
су Oz
(У)
Условие A3") выполняется для произвольного объема, поэтому
подынтегральное выражение равно нулю в каждой точке, т. е.
дг _ дг _ дг - „
Так как r = xi+yj+zk, то
dr/dx = i; dr/dy=j;
где i, j, к — единичные векторы декартовой системы осей
координат.
Разлагая напряжения рх, ру, pz на составляющие по осям
координат, имеем:
Px=Pxxi + Pxyj + Pxzk; Py = PyxT+PyyJ+PyJc; Pz=PzJ+Pzy7+PzJ<~
A6)
Подставляя A6) в A5) и выражая векторные произведения
в виде определителей, получим
567
i
1
Pxx
j
0
Pxy
0
Pxz
+
i
0
Pyx
j
1
Pyy
k~
0
Руг
+
T J k~
о о l
= 0.
A5')
После разложения определителей по элементам первых строк
и компоновки слагаемых с множителями i, j, к имеем
(Pyz-Pzy)T+(pzx-pxz)j+(pxy-pyx)k = O. A5")
Если вектор равен нулю, то равны нулю его составляющие
по осям координат, т. е.
Pyz=Pzy; Pzx=Pxz,' Pxy=Pyx- A7)
Соотношения A7) являются условиями симметрии тензора
напряжений сплошной среды. Оно получено в предположении,
что среди поверхностных сил нет пар сил, моменты которых
следует дополнительно учитывать в A3).
Проведем в какой-либо точке две площадки с единичными
векторами п и т по нормалям к ним и напряжениями рп
и рт. Проецируя напряжение рп на направление т, получим
рпт, а проецируя рт на направление п, получим ртп. Используя
условия симметрии тензора напряжений, можно получить
условие взаимности напряжений по двум любым площадкам,
проходящим через общую точку:
Р»т=Ртп- A8)
В частности, приняв последовательно за нормаль т оси
координат Ox, Oy, Oz, из A8) получим:
Рпх=Рхт Pny=Pyni Pnz=Pzn-
§ 7. ЭЛЛИПСОИД НАПРЯЖЕНИЙ
Тензору напряжений, как и любому другому тензору
с двумя индексами (тензору второго ранга), можно поставить
в соответствие геометрический образ — поверхность второго
порядка, так же как тензору с одним индексом (тензору
первого ранга, или вектору) можно поставить в соответствие
прямолинейный отрезок, а числу
(тензору нулевого ранга) — точку на
числовой оси.
Пусть имеем в точке О площадку
с нормалью On, углы которой с ося-
осями координат есть а, р, у (рис. 172).
Разложим напряжение рп, действу-
действующее на выбранной площадке, на
составляющие, параллельные осям
координат. Получим
nia-АУ!
У,
Рис. 172
A9)
568
где рпх, рпу, pnz— проекции напряжения р„ на оси координат.
Спроецируем напряжение р„ на направление нормали On,
используя A9). Имеем
Рп„ =рпх cos a +pny cos р +pnz cos у. B0)
Подставляя в B0) значения р„х, р„у, pnz из G'), получим
рпп=Рхх cos2 ос +jOy),cos2 р +pzzcos2 у + 2pyz cos р cos у +
+ 2/?2Д. cosy cos а+/?;„, cos а cos C. B1)
Отложим на нормали On отрезок ОК, величина которого
обратно пропорциональна корню квадратному из модуля
рпп, т. е.
ОК=\1уД^\. B2)
Если х, у, 2 — координаты точки К, то
cos у = ^=J
B3)
Подставляя B3) в B1) и сокращая на |/?„„|, получим
Рххх2 +РуУуг +pzzz2 + 2pyzyz + 2pzxzx + 2рхуХу = +1. B4)
Это и есть уравнение эллипсоида напряжений. Полу-
Получаем действительно эллипсоид, если ни по одному из направле-
направлений, проходящему через точку О, рпп не обращается в нуль.
В этом случае расстояние от точки О до точек эллипсоида
не равно бесконечности. В правой части B4) следует взять
знак плюс в случае растяжения (р„„>0) и знак минус — при
сжатии (/?„„< 0).
Эллипсоид имеет три взаимно перпендикулярные главные
оси. Компоненты касательных напряжений для площадок,
перпендикулярных главным осям, равны нулю. Для главных
осей Ох±, Оух, Ozx уравнение эллипсоида напряжений прини-
принимает вид
Pix\+p2y\+p3z\=±\, B4')
где р1, р2, р3 — нормальные напряжения для главных осей,
или главные напряжения. Тензор напряжений при пере-
переходе к главным осям принимает диагональную форму:
/Pi 0 0 \
П=[ О р2 0 .
\0 0 pj
Для различных осей координат, проходящих через рассматрива-
рассматриваемую точку, сохраняет свою величину сумма диагональных
компонентов, т. е.
PXX+Pyy+Pzz=Pl+p2+P3- B5)
569
Она является инвариантом, не зависящим от выбора осей
координат в рассматриваемой точке.
Если известны компоненты тензора напряжений для любых
координатных осей, то главные напряжения рх, р2, р3 определя-
определяются как корни уравнения собственных значений тензора
напряжений:
= 0. B6)
Рхх-Р Рху Pxz
Pyx Pyy-P Pyz
Pzx Pzy Pzz'
Это кубическое уравнение для р имеет корни рх, р2, р3. Оно
аналогично уравнениям собственных значений тензоров инерции
и скоростей деформаций. Все эти тензоры второго ранга.
Можно получить также формулы, по которым вычисляются
компоненты тензора напряжений для любых прямоугольных
осей координат, если известны их направления относительно
главных осей и главные напряжения ри р2, р3. Приведем их
без вывода:
Рхх =Р\ COS2 «! +р2 COS2 0С2 +р3 COS2 <Х3;"|
py=pl cos2 fil+p2cos2 p2+/?3cos2 p3; > B7)
Pzz=P\ cos2 Yi +Pi cos2 y2 +p3 cos2 y3; J
p =pyx =pi cos otj cos Pj +p2 cos oc2 cos P2 +
Pyz=Pzy=Pl COS Pi COSY! +^2 COS P2 COS Y2 +
+/>3cosP3cosy3;
Pzx =Pxz =Pi cos Yi cos at +p2 cos y2 cos a2 +
B8)
В этих формулах ось Ох имеет с главными осями Охх, Оу1:
Ozt углы at, a2, a3; ось Оу — соответственно углы р\, Р2,
Р3; ось Oz—утлы уг, у2, у3. Формулы B7) полностью
аналогичны формулам C1) для моментов инерции относительно
осей координат, а B8) — формулам для центробежных момен-
моментов инерции C5) § 9 гл. 3. Это и естественно, так как
компоненты тензоров второго ранга преобразуются по единым
формулам при переходе от главных осей к другим осям
координат, повернутым относительно главных.
§ 8. РЕОЛОГИЧЕСКОЕ УРАВНЕНИЕ
Для различных сплошных сред зависимости тензора напря-
напряжений от тензора скоростей деформаций отличаются друг от
друга. Для упругих сплошных сред тензор напряжений зависит
от тензора деформаций. Зависимость между тензорами
напряжений и скоростей деформаций часто называют реологи-
реологическим уравнением. Сформулируем реологическое уравнение
570
в тензорной форме для сплошных сред, называемых жид-
жидкостями, для которых тензор напряжений не зависит от
тензора деформаций. К жидкостям относятся обычные капель-
капельные жидкости, например вода и газы. Примером газа является
воздух при нормальных атмосферных условиях.
В каждой точке пространства, занятого движущейся жидкостью,
имеем тензор напряжений П и тензор скоростей деформаций S.
Первоначально были сформулированы и экспериментально
проверены простейшие частные случаи зависимости компонентов
этих двух тензоров, как, например, закон Ньютона для касательных
напряжений. Эти зависимости оказались линейными. Это
привело к предположению, что линейная зависимость соблюдается
и в общем случае. Для жидкостей эта линейная зависимость
тензора напряжений от тензора скоростей деформаций носит
название обобщенного закона Ньютона или закона Навье-Стокса.
Линейная зависимость между тензорами П и S в общем
случае изотропной жидкости выражается в форме
n=aS+bI, B9)
где /—единичный тензор; а и Ь — скалярные коэффициенты.
Так как зависимость между компонентами тензоров П и S пред-
предполагается линейной, то скалярный коэффициент а не должен
зависеть от компонентов этих тензоров. Он должен харак-
характеризовать жидкость. Обозначим этот коэффициент 2ц. Ко-
Коэффициент \у называют коэффициентом динамической вязкости.
В общем случае он может иметь различные значения в разных
точках и изменяться с течением времени.
Скалярный коэффициент Ь может линейно зависеть от
компонентов тензоров П и S, но только от таких комбинаций,
которые не зависят от направления осей координат в рассмат-
рассматриваемой точке, т. е. он может зависеть от линейных
инвариантов тензоров П и S. Эту зависимость можно
получить из B9), приравняв линейные инварианты обеих
частей. Получим
Pxx+Pyy+Pzz = 2]i{exx + eyy + ezz) + b-3, C0)
так как линейный инвариант единичного тензора
/1 0 0\
/=010
\0 0 1/
равен 3. Линейный инвариант тензора S для сокращения
записи обозначим 0, т. е.
п , , dvx , dvv Sv,
^exx + eyy + ezz = ~+^ + ^
Коэффициент 0 называют также относительной скоростью
объемного расширения. Для b имеем
571
b=\{pxx+Pyy+Pzz)-\^- C1)
Дальнейшее преобразование связано с определением стати-
статического давления в жидкости или просто давления. Для
идеальной жидкости (жидкость без сил трения) было до-
доказано, что pxx=pyy=pzz- Абсолютную величину р этого
общего отрицательного напряжения и называют давлением
в рассматриваемой' точке. В вязкой жидкости нормальные
напряжения рхх, руу, pzz не равны друг другу. Естествен-
Естественно определить давление р в этом случае как среднее ариф-
арифметическое нормальных напряжений, взятое с обратным зна-
знаком, т. е.
Р=-\{р*х+Р„+Р**)- C2)
Подставляя C2) в C1), получаем
Ь=-р-2/3цв. C3)
При таком определении давления вязкие свойства жидкости
характеризуются одним коэффициентом ц. Для некоторых
жидкостей этого недостаточно. Тогда предполагают, что давле-
давление зависит еще линейно и от относительной скорости
объемного расширения 9, т. е.
P=-{frxx+Pyy+Pn) + M, C4)
где X' — второй коэффициент вязкости. В этом случае
b=-p + lQ, C3')
где Х = Х'—-ц. Если Х' = 0, то Х= — -ц. В дальнейшем для
b используем величину из C3'), как более общую. Из C3')
значение Ь, определяемое соотношением C3), получается как
частный случай при Х,= —-ц.
Давление р нельзя определить произвольно, так как оно
должно соответствовать определению давления в термодинами-
термодинамике через кинетическую энергию движения молекул.
Подставляя b из C3') в B9), получаем следующее реологи-
реологическое уравнение для жидкостей в тензорной форме:
n=2iiS+(-p + lQ)l B9')
или
/РхХ Р„ Pxz\ /1 0 0\ /ехх еху exz\
Pyx Руу Pyz ) = {-Р + Щ[ ° l ° +2Ч еу* еп еу* • B9")
\Pzx Pzy Pzz) \0 0 1/ \ezx ezy ezz)
572
Тензорные равенства, справедливые в одной системе координат,
выполняются в любой другой системе координат, не только
в декартовой, но и в криволинейной, так как все тензоры
при переходе от одной системы координат к другой преоб-
преобразуются по одним и тем же общим правилам.
Тензорное уравнение B9") эквивалентно шести уравнениям
для компонентов. Имеем
Рхх = —jO + X.0 + 2 ue^; рху =рух = 2 \уеху; ~)
pyy=-p + № + 2iieyy;pyZ=pzy = 2neyz; > C5)
Pzz = -р + № + 2 uezz; pzx=pxz = 3
где
Svx
xx dx
exy = eyx
p — p
, ey
-K
1/
2'
у
(dv,
Kdy
(dv,
\ dx
t-vz — t-zv -
dvy
dv,
C6)
- . , - = divi>.
ox o>" oz
Шесть скалярных уравнений C5) выражают обобщенный закон
Ньютона или Навье — Стокса для жидкостей.
В частном случае движение несжимаемой жидкости @ =
= divtJ=O) параллельно оси Ох, при котором vy = vz = 0
и vx = v(y) (рис. 173), для касательных компонентов тензора
напряжений из C5) с учетом C6) имеем
dvx dv
ду dy'
Обозначим рху через т. Тогда закон для касательных напряже-
напряжений выразится в форме
dv
т = ц —.
dy
Это и есть закон Ньютона для касатель-
касательных напряжений в жидкости. Для некото-
некоторых жидкостей линейной зависимости
между тензорами напряжений и скоростей
деформаций недостаточно. Такие жидкости
называют неньютоновскими жидкостями.
Обобщенный Закон Гука для упругих
сплошных сред тоже получают как ли-
линейную зависимость между тензором
напряжений П и тензором деформаций
5", компоненты которого выражаются Рис. 173
573
по формулам C6), только вместо вектора скорости v использу-
используется вектор смещения п, характеризующий деформацию сплош-
сплошной среды. Тензор деформаций и обобщенный закон Гука для
упругих сплошных сред подробно рассматриваются в теории
упругости и курсах сопротивления материалов с элементами
теории упругости. Здесь ограничимся только краткими сведени-
сведениями, относящимися к обобщенному закону Гука.
Для упругих сплошных сред линейная зависимость между
тензором напряжений П и тензором деформаций 5", который тоже
является симметричным, аналогична B9) и выражается в форме
Il=2\iS' + bI, C7)
где
Ь=113(рхх +РУУ +Р„)-2/зЦв'; 6' = divп.
Величина 0' называется относительным объемным расширением.
Дополнительно принимают, что среднее арифметическое значе-
значение осевых напряжений линейно зависит от относительного
объемного расширения, т. е.
С учетом C8) тензорная зависимость C7) принимает вид
n=WI+2\iS'. C9)
Если C9) выразить в компонентах, то получим обобщенный
закон Гука в следующей форме:
/1 0 0\ /е'хх е'„ е'хЛ
у уу y ) W @ 1 0 +2ц е'ух е'уу e'yz , C9')
\PzX РгУ PzzJ \0 0 1/ \e'zx e'zy e'zJ
или
+ 2це'хх; рху=рух у
+ 2\1е'уу:, pyz=pzy = 2v.e'yz; > D0)
' + 2[ie'zz; pzx=pxz = 2[ie'zx. )
Коэффициенты Х и ц, характеризующие упругую сплошную
среду, называются параметрами Ламэ. Они связаны с модулем
упругости Юнга Е и коэффициентом Пуассона а соотношениями
В том случае, если деформации не малы, используется
нелинейная зависимость между компонентами тензоров напря-
напряжений и деформаций.
§9. МОДЕЛИ ЖИДКОСТЕЙ И УРАВНЕНИЯ ДВИЖЕНИЯ
В механике ньютоновских жидкостей рассматривают различ-
различные их модели. Наиболее простой моделью жидкости является
несжимаемая идеальная жидкость, для которой плот-
574
ность р = const (несжимаемая) и коэффициент динамической
вязкости ц = 0 (идеальная). Другой моделью является вязкая
несжимаемая жидкость. Для нее р = const и ц = const.
Самой простой моделью сжимаемой жидкости является иде-
идеальная сжимаемая жидкость, или идеальный газ.
Для него ц = 0, а плотность уже не является постоянной. Она
для совершенного газа связана с давлением р и температурой
Т уравнением состояния (уравнением Клапейрона)
где R — газовая постоянная, зависящая от рода газа. Это
уравнение, справедливое для обратимых процессов, считается
справедливым и при движении газа. Более сложной моделью
сжимаемой жидкости является вязкий газ, или вязкая
сжимаемая жидкость. В этом случае от давления и темпера-
температуры зависит не только плотность, но и коэффициент динамичес-
динамической вязкости (величина переменная). Коэффициент динамической
вязкости зависит главным образом от температуры.
Если в рассмотренных моделях жидкостей учесть электро-
электромагнитные силы, действующие на точки сплошной среды, то
получим модели жидкостей магнитной гидродинамики.
В случае вязкого газа полная система уравнений, характери-
характеризующая его движение и различные процессы в нем, слишком
сложна и содержит много уравнений. В качестве примеров
получим полную систему уравнений движения вязкой несжимае-
несжимаемой жидкости, а также уравнения движения идеальной несжи-
несжимаемой жидкости и идеального газа.
Уравнения движения вязкой несжимаемой жидкости. Если
жидкость вязкая и несжимаемая, то ц = const, 0 = diviJ = O
и слагаемые с параметром X из C5) выпадают. Подставляя
в них значения величин из C6), получим
pxx=-p + Ai-;pxy=pyx = ^dy,dx
Pyy=-
Ргг=-Р + Ц\-^\
D1)
Используя D1), получаем
; г^; г— -z-
дх ду
dp (82vx d2vy д2иг\ д I dvx dvy dvz^
дх у дх2 ду1 8z2 J дх у дх ду dz
575
где введено обозначение
д\
и использовано условие несжимаемости
dx dy dz
С помощью аналогичных преобразований получим
дх ду dz dy "
dVy,
~dt
8vz
~дЧ +
dvy
Vx~dx~
i) z 4-
dx
dv
l) y 4-
v ~з '
дг;
»l z 4-
z dz
dvz j
^Tz'1
7 1
У Р
r 1
z P
5p
dz
dx dy dz t
С учетом этого уравнения движения сплошной среды в напряже-
напряжениях для вязкой несжимаемой жидкости вместе с уравнением
неразрывности дают следующую систему уравнений:
dvx dvx dvx dvx „ \ dp p.
dt x dx y dy z dz x p dx p
D2)
dx dy dz
Имеем четыре уравнения для определения четырех неизвестных
vx; vy; vz; p в зависимости от х; у; z; t. Для интегрирования этой
системы уравнений следует дополнительно задать начальные
и граничные условия. Начальные условия считаются заданными,
если, например, при t = 0 известны во всем пространстве функции
vx = vx{x, У, z, 0); vy = vy(x, у, z, 0);
D3)
vz = vz(x, у, z, 0); р=р{х, у, z, 0).
Для установившихся движений задавать начальные условия не
требуется, так как в этом случае неизвестные от времени не зависят.
В качестве граничных условий для вязкой жидкости исполь-
используются условия прилипания жидкости к поверхности тел,
находящихся в потоке. Если эти тела неподвижны, то скорости
жидкости на их поверхности равны нулю, а следовательно,
равны нулю касательные и нормальные по отношению к повер-
поверхности тел составляющие скоростей.
Уравнения движения идеальной несжимаемой жидкости. Для
того чтобы получить уравнения движения идеальной несжимае-
несжимаемой жидкости, следует в D2) принять ц. = 0. Получим
576
Svx
dt
dvy
~dl
dv,
dvx
dx
dx
dvx dvx r, 1 dp-
v dy z dz x p dx'
dvy dvy j-, 1 dp _
dy z dz y p 5_y'
5dz 5dz _ „ 1 S/>.
'"гу zs7 z~p si;
D4)
Sx 3y 5z
Первые три уравнения D4) называются уравнениями движе-
движения идеальной несжимаемой жидкости или уравнениями Эйлера.
Начальные условия в этом случае задаются так же, как
и в случае вязкой жидкости. Существенно изменяются гранич-
граничные условия. Вместо условий прилипания вязкой жидкости
используется условие отсутствия проникания жидкости через
поверхность твердого тела, при котором обращаются в нуль
нормальные составляющие скоростей в точках поверхности
неподвижного тела, т. е. принимается, что вектор скорости
направлен по касательной к поверхности обтекаемого тела.
Уравнения движения идеального газа. Первые три уравнения
движения идеального газа (или просто газа) совпадают с ана-
аналогичными уравнениями несжимаемой идеальной жидкости.
При их выводе не использовалось условие несжимаемости.
Таким образом,
dt
~dt
dvx
•~дх
dvz
■Их"
dvx
dv,
dz
'■ dz
dv,
•■Tz
1 dp,
p dx
P dy
p dz'
D5)
Слагаемые с Х выпадают из уравнений, так как принимается,
что Х= — 2ц/3, а ц = 0 для идеального газа. В уравнениях
D5) плотность р является для газа переменной. К этим
уравнениям следует присоединить уравнение неразрывности
для газа в форме
dp | 3(pvx) ^ d(pvy) ^ 0
dt dx dy dz
Четыре уравнения связывают пять величин vx; vy; vz;
р; р, зависящих от переменных х; у; z; t. Для замыкания
системы уравнений следует добавить еще одно уравнение,
19 Заказ 192
577
характеризующее процесс, связанный с движением газа. Наибо-
Наиболее часто встречающимся процессом является баротропный
процесс, при котором давление есть только функция плотно-
плотности, т. е. /»=/'(р). Типичным баротропным процессом является
адиабатический процесс, при котором р = ср*, где с —
константа; к = ср/су — показатель адиабаты, зависящий от теп-
лоемкостей газа при постоянном давлении (ср) и объеме (cv).
В более общем случае давление и плотность считаются
связанными уравнением состояния Клапейрона. Появится новая
неизвестная — температура Г, требующая для своего определе-
определения дополнительного уравнения. Этим уравнением является
уравнение баланса энергии.
В магнитной гидродинамике (при учете электромагнитных
сил) к рассмотренным выше уравнениям для различных
моделей жидкостей следует добавить уравнения Максвелла
для электромагнитных полей, а также дополнить начальные
и граничные условия для жидкости условиями для электромаг-
электромагнитных величин.
§ 10. КРИТЕРИИ ПОДОБИЯ ПРИ ОБТЕКАНИИ ТВЕРДЫХ ТЕЛ
ПОТОКОМ ВЯЗКОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
Из уравнений движения жидкости как в общем, так
и в частных случаях можно получить критерии подобия,
которые позволяют устанавливать зависимости между величи-
величинами, характеризующими поток и обтекаемое тело, в наиболее
целесообразной, критериальной форме.
Два явления называются подобными, если величины
одного могут быть получены из соответствующих величин
другого умножением на одинаковые коэффициенты подобия
для всех сходственных точек и моментов времени, т. е.
подобные явления отличаются только масштабами величин,
их характеризующих.
Для подобия плавного обтекания двух тел вязкой несжимае-
несжимаемой жидкостью должны быть геометрически подобны сами
тела и одинаковы безразмерные уравнения движения жидкости
и безразмерные начальные и граничные условия.
Преобразуем уравнения движения вязкой несжимаемой жид-
жидкости к безразмерному виду введением в уравнения безразмер-
безразмерных величин как независимых переменных, так и искомых.
Для независимых переменных, имеющих размерность длины,
выберем характерную длину /, или масштаб длин. Для тела
в форме шара в качестве масштаба длин можно взять радиус
шара. Для крыла самолета за характерную длину обычно
выбирают среднюю хорду крыла, являющуюся его характерной
шириной. В качестве масштаба времени возьмем Т, для
скоростей—V, давления — Р. Постоянные величины сами яв-
являются для себя масштабами.
578
Для безразмерных величин имеем:
x' = x/l; y'=yll; z' = z/l; t' = t/T, р'=р/Р; Vx = vJV; v'y = vy/V;
Vx = vJV, v' = v/V.
Дополнительно примем, что объемными силами являются
только силы тяжести, и ось Oz с единичным вектором
к направлена вертикально вверх, т. е. F= —gk.
Переходя в уравнениях движения вязкой несжимаемой
жидкости D2) к безразмерным величинам и выразив для
краткости первые три уравнения в векторной форме, имеем
v ее'
, ее1 , ее1 , ее'
+v + v
ду
8z
D2')
где
dx 8y dz
— градиент давления. Разделив первое векторное уравнение
D2) на V2/l, а второе скалярное — на V/1, получим
Bv' i dv' i dv' i ее'
dt' x dx' y dy1 z dz'
Fr
dv'x dv'y 8v'z п
8x' dy' dz'
v' 82v' , 84'
D2")
Здесь введены следующие обозначения для чисел подобия:
Sh =
/
—
Р VI
число Струхаля; Еи = —^ — число Эйлера; Re =——
V2
число Рейнольдса; Fr = число Фруда.
gl
Получены уравнения движения вязкой несжимаемой жид-
жидкости в безразмерной форме. Для подобия течений такой
жидкости должны быть одинаковы полученные уравнения
в безразмерной форме, а для этого необходимо выполнение
критериев подобия, т. е. чтобы были одинаковы для
подобных течений числа Струхаля, Эйлера, Рейнольдса, Фруда.
19s
579
Критерии подобия имеют важное значение не только при
теоретических, но и при экспериментальных исследованиях
течений вязкой несжимаемой жидкости. Если, например, необ-
необходимо определить силу сопротивления R, действующую на
тела одинаковой формы при обтекании их потоком несжимае-
несжимаемой вязкой жидкости, то целесообразно ввести безразмерный
коэффициент этой силы (безразмерную силу сопротивления)
С - R
R pV2S/2'
где S—характерная площадь тела, например площадь попереч-
поперечного сечения (наибольшая) в направлении, перпендикулярном
потоку жидкости.
Для всех тел одинаковой формы имеется общая критериаль-
критериальная зависимость безразмерной силы сопротивления от чисел
подобия:
Cj,=/(Sh, Eu, Re, Fr). D6)
Вид функции / полностью определяется формой рассматривае-
рассматриваемых тел. Аналогичные критериальные зависимости получаются
для других безразмерных величин.
Критериальная зависимость D6) может быть получена
путем использования результатов интегрирования уравнений
D2) при заданных начальных и граничных условиях или из
экспериментальных данных, получаемых обычно на модели
тела, уменьшенной по сравнению с его натуральной величиной.
Если движение жидкости установившееся, то число Струхаля
не войдет в число критериев подобия, так как в этом случае
dv'/dt = O. При пренебрежении силами тяжести выпадает из
критериев подобия число Фруда. Критериальная зависимость
D6) тогда примет вид
CR=/(Eu, Re). D6')
Во многих случаях число Эйлера несущественно. Оно может
оказаться зависящим от числа Рейнольдса. В таких случаях
D6")
т. е. безразмерная сила сопротивления зависит только от
числа Рейнольдса.
При установлении критериальной зависимости D6") по
результатам эксперимента на модели обтекаемого тела в диа-
диапазоне чисел Рейнольдса, имеющих место для натуры, харак-
характерный размер которой может быть в десятки раз больше
соответствующего размера модели, большие числа Re прихо-
приходится получать за счет увеличения скорости или уменьшения
коэффициента кинематической вязкости v или, наконец, и того
и другого вместе. Для критериальной зависимости несущест-
580
венно, за счет чего на модели будут достигнуты числа Re,
характерные для натуры. Кинематическую вязкость для не-
некоторых жидкостей у = ц/р можно уменьшить путем увеличения
плотности, если коэффициент динамической вязкости от плот-
плотности не зависит или зависит от нее слабо.
При учете сжимаемости жидкости появится новое число
подобия: число Маха M=V/a, где а — скорость звука в жид-
жидкости. Это число подобия тоже войдет в критериальную
зависимость типа D6).
Критериальные зависимости можно также получать исполь-
используя теорию размерностей физических величин. Теория размер-
размерностей позволяет установить параметры, от которых зависит
искомая безразмерная величина. Вид функции / и с помощью
теории размерностей удается установить лишь в редких
случаях.
§ 11. УСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ВЯЗКОЙ НЕСЖИМАЕМОЙ
ЖИДКОСТИ В КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ТРУБЕ
Рассмотрим ламинарное (слоистое) течение вязкой несжи-
несжимаемой жидкости в гладкой цилиндрической трубе. Примем,
что движение установившееся. На этом примере покажем, как
устанавливается критериальная зависимость сопротивления тру-
трубы от числа Рейнольдса. Решение поставленной задачи важно
и само по себе как случай точного интегрирования уравнений
движения вязкой несжимаемой жидкости.
Для установившегося движения жидкости, пренебрегая си-
силами тяжести, имеем из D2) следующую систему уравнений:
dvx dvx dvx 1 dp
' dx y dy z dz p dx
8P ГУНУ
D7)
'-=-Lvl + vAvz;
dv dv dv,_
dx By dz
где
К этим уравнениям следует добавить граничное условие
прилипания вязкой жидкости к стенкам трубы, т. е. обращение
в нуль скорости жидкости на стенках трубы.
Направим координатную ось Oz по оси трубы, тогда оси
Ох и Оу расположатся в поперечном сечении трубы, имеющем
форму круга, радиусом R (рис. 174).
581
Ищем решение уравнений
D7), удовлетворяющее условиям
vx = vy = 0. Тогда дальнейшему
определению подлежит только
vz = vz (x, у, z), если решение та-
такого вида удовлетворяет уравне-
уравнениям движения жидкости. Из
первых двух уравнений D7) по-
получим др/дх = 0; др/ду = О, т. е.
Рис- 174 p=p(z), или что давление в каж-
каждом поперечном сечении одно и то же во всех точках
и изменяется только вдоль трубы. Из уравнения неразрывности
при принятом допущении получаем, что dvz/dz = 0, т. e. vz =
= v (x, у). После этого третье уравнение системы D7)
примет вид
о у
Левая часть этого уравнения может зависеть только от
z, а правая — только от х и у. Это возможно только
в том случае, если и правая и левая части этого уравнения
постоянны, т. е.
dp dp fd2v , d2v\
-f = / = const; ц-^+-^= const.
dz dz \ox oy I
Так как dp/dz = const, то давление, приходящееся на единицу
расстояния вдоль трубы, можно выразить в виде
up рп — р Ар
— = —^L-L= — -i- = const,
dz / /
где pQ—p = Ap — перепад давлений на длине / между двумя
сечениями трубы вдоль ее оси. Знак минус поставлен потому,
что движение жидкости происходит только в направлении
убывания давления.
Для определения v имеем следующее уравнение:
pL+eJl=-^l. D8)
Будем искать решение уравнения D8) в форме
D9)
Это значение удовлетворяет граничному условию прилипания
на стенках трубы, так как v = 0 при x2+y = R2. Остается
дополнительно определить только константу А путем подста-
подстановки выражения D9) в D8).
Так как
582
dv__A-2xm dv_A-2y_ d2v _ __2A. S2v
Tx~ Tr2"' Ту W' ~dx>~~~R' I/''
то уравнение D8) примет вид
AA _ Ар
2A
Отсюда
A=
ApR2
4ц/
Используя это значение А и вводя переменную г =
= у/х2+у2 — расстояние до рассматриваемой точки от оси
трубы, решение D9) можно выразить в форме
ApR2
v = -
4ц/
'-F1-
D9')
где vmax = Ap-R2/D\il) — значение скорости при г = 0, т.е. на
оси трубы.
Полученное выражение для v является решением поставлен-
поставленной задачи.
Определим секундный объем жидкости, протекающей через
поперечное сечение трубы (рис. 175). Он для всех сечений
одинаков, так как скорость v не изменяется вдоль трубы.
Секундный объем жидкости, проходящей через заштрихованную
площадь тонкого кольца, равен площади этого кольца, умно-
умноженной на скорость движения жидкости, т. е. 2nrvdr. Через
все поперечное сечение трубы за 1 с пройдет объем жидкости
R
Q = j Inrvdr.
о
Используя для v выражение D9'), после вычисления интеграла
получим
R
^ 4ц/Л2 v ' v ' R2 2
2 '
так как
— r2)=—2rdr, т.е.
п _ ташах/?2 _ пАр ■ R*
E0)
2 8ц/
Это известный закон Гагена — Пуазейля.
Секундный объем жидкости, протекающей че-
через поперечное сечение трубы, оказался про-
пропорциональным величине RA, что неожидан-
неожиданно. Кажется, что он должен был быть про-
пропорционален площади поперечного сечения,
т. е. R2.
Рис. 175
583
Введем среднюю скорость течения жидкости vcp как посто-
постоянную по сечению трубы скорость, при которой получается
тот же секундный объемный расход жидкости Q, что и при
переменной скорости. Используя уравнение E0), имеем
Сопротивление трубы можно охарактеризовать перепадом
давления, приходящегося на единицу длины вдоль трубы, т. е.
отношением Ар/1. Чем больше эта величина, тем больше
сопротивление трубы, обусловленное силами трения между
слоями жидкости. Введем безразмерный коэффициент сопротив-
сопротивления трубы % как безразмерную величину перепада давления
на единицу длины Apjl. Получим
где pt>cP/2 — скоростной напор; 2R—диаметр трубы. Из E1)
для Ар/1 имеем
Приравнивая значения Ар/1 из E1) и E2), получаем
2R 2 R2
Отсюда имеем
1 = - =—, E3)
2RvQV p Re
так как 2Rvep/v = Re— число Рейнольдса, отнесенное к диаметру
трубы.
Получена критериальная зависимость коэффициента сопро-
сопротивления трубы от числа Рейнольдса, которая была предсказана
теорией подобия течений вязкой несжимаемой жидкости.
Логарифмируя уравнение E3), получим
lgX lg^ = lg64-lgRe. E3')
В логарифмическом масштабе за-
зависимость E3) выражается графи-
графически отрезком прямой линии
/ (рис. 176). Эта линейная зависи-
зависимость подтверждена многочислен-
многочисленными экспериментами. Но она вы-
выполняется примерно до чисел
Re=$2 103. Затем после некоторого
переходного участка эксперимен-
экспериментальные точки соответствуют пря-
Рис. 176 мой 2. Прямая 1 дает закон со-
584
противления при ламинарном режиме течения жидкости
в трубе, а прямая 2—при турбулентном, характеризующем-
характеризующемся интенсивным перемешиванием жидкости в поперечном
к течению направлении.
До чисел Re^2 103 устойчивой формой течения в трубе
является ламинарная форма, а для Re>2-103 — турбулентная.
Коэффициент сопротивления при турбулентном режиме течения
во много раз больше, чем при ламинарном, для одних и тех
же чисел Рейнольдса.
§ 12. РАСПРОСТРАНЕНИЕ МАЛЫХ ВОЗМУЩЕНИЙ
В ИДЕАЛЬНОМ ГАЗЕ. СКОРОСТЬ ЗВУКА
Рассмотрим движение газа (сжимаемой жидкости) парал-
параллельно оси Ох. Такое движение газа называют одномерным.
В случае одномерного движения vy = vz = 0; vx — v(x, t) и
уравнения D5) в случае баротропного процесса принимают
форму
dv dv I dp
_|_j; = £_■
dt dx р дх'
P=f(p).
E4)
Предположим, что имеем покоящийся газ с параметрами
v = vo = 0; р=ро', Р = Ро> гДе Ро и ро — постоянные величины.
В начальный момент в газе создано такое малое возмущение,
при котором дальнейшее движение газа происходит парал-
параллельно оси Ох и все величины, характеризующие движущийся
газ, зависят только от координаты х и времени t. В произ-
произвольный момент времени для скорости, давления и плотности
имеем:
v = v'(x,t); p=po+p'(x,t); р = ро + р'(х, t),
где v'; p'; р' — малые возмущения скорости, давления и
плотности. Допуская, что производные от малых возмущений
тоже величины малые, линеаризируем систему уравнений
E4), отбрасывая в них малые слагаемые второго и более
высокого порядка. Для производных в рассматриваемом случае
имеем:
dv_dv\ dv __dv\ 5p_5p'_ dp dp'
dt~ dt' ~dx~ dx' ~dt It' ~dx~!bc'
Кроме того,
585
P Po + P Po \ Po/ Po \ Po
dp dp dp dp dp'
dx dp их dp dx
Разлагая в степенной ряд производную dp/dp по р', получим
dP
Введем обозначение I — I =a%. Эта постоянная величина
действительно положительна, так как с возрастанием давления
плотность возрастает, а при убывании давления — убывает
для баротропных процессов.
После этого, отбрасывая в E4) малые величины второго
и более высокого порядка, имеем
dv'_ а% др\ dp' 6v'_
dt~ р0 дх' dt+Podx~u-
Получена система уравнений (линейных) для малых возмущений
скорости и плотности (v' и р')-
Линеаризация уравнения /?=/(р) приведет к выражению
для возмущения давления р' = а\р'.
Дифференцируя первое уравнение системы E5) по t, а вто-
второе— по х и вычитая после этого из первого второе, которое
умножено на аЦр0 имеем
-^-«^ = 0. E6)
Аналогичным способом для р' получим такое же по виду
уравнение
Возмущение давления р' удовлетворяет аналогичному урав-
уравнению.
Уравнение E6) называется волновым уравнением. Если
бы движение газа не было параллельным оси Ох, то
после линеаризации уравнений D5) получили бы для р'
уравнение вида
д р' 2 I д р' д р' д р' \ А
~ПГ~аО I ТТ+ТТ + ТТ ) ~°'
VI \ ОХ су 0Z I
ИЛИ
~ai~W~ \lbri~ + l)y2+l>zT) =0'
586
При д0->оо и конечных значениях
производных оно перейдет в урав-
уравнение Лапласа:
бх2
dz2
t=o
t>0
dot
vi
Волновое уравнение и уравнение
Лапласа являются двумя из трех
типов основных уравнений мате- Рис- 177
матической физики. Они дают математическое описание многих
физических процессов.
Волновое уравнение E6) решают или методом разделения
переменных (метод Фурье), или используют решение Далам-
бера, которое для v' выражается в форме
где новые переменные £,х и £,2 связаны с х и t следующими
зависимостями: ^1—х — дог; ^2 = х + д0г, a/t и/2 — произвольные
функции, которые следует определять по начальным и гранич-
граничным условиям. Непосредственной проверкой можно убедиться,
что решение E7) обращает уравнение E6) в тождество, т. е.
оно является решением этого уравнения.
Рассмотрим функции fx (£,,) и /2 (£,2) по отдельности, т. е.
примем сначала, что v'=fl(c>1). Если в начальный момент
времени / = 0 (рис. 177) отметить начальное возмущение v'o,
соответствующее х = х0 и, следовательно, £,10 = х0, то будет
v' = v'o, если при изменении х и / не изменится ^х, т. е. при
этом tll = x — aot = xo и остается постоянной. Отсюда получаем,
что x = xo + aot, т. е. что возмущение v'o сместится за время
t в положительном направлении оси Ох на расстояние aot.
Скорость этого смещения постоянна и равна д0. Таким
образом, д0 является скоростью распространения в покоящемся
газе малых возмущений скорости и соответственно всех других
малых возмущений. Начальное возмущение скорости на отрезке
0^х^хо за время t без изменения формы сместится на
расстояние aot в положительном направлении оси Ох.
Таким образом, v'=fl{^ll) является волной, распространяю-
распространяющейся по газу со скоростью д0 в положительном направлении
оси Ох. Соответственно f'=/2(|2) есть волна, которая распрост-
распространяется с той же скоростью д0, но в отрицательном
направлении оси Ох, так как в этом случае £,2 = х + д0/.
Скорость д0 распространения малых возмущений называется
скоростью звука в покоящемся газе. В движущемся газе
скоростью звука называют величину д= ^/dp/dp, являющуюся
в общем случае величиной переменной, которая зависит от
координат точки пространства и времени. Как показывают
более детальные исследования, со скоростью звука распростра-
распространяются любые малые возмущения. Конечные возмущения
587
распространяются со скоростями, большими скорости звука,
в зависимости от величины возмущения. Такие возмущения
обычно называют ударными волнами.
Если жидкость, в которой распространяется звук, несжи-
несжимаема, т.е. р = const, то dp = O и д = оо.
И. Ньютон в 1687 г. считал, что распространение звука
есть процесс изотермический, т.е. при распространении
звука абсолютная температура Т= const. Тогда из уравнений
состояния Клапейрона имеем
где константа c = RT. В этом случае
«из = dp/dp = с =р/р; диз = у/р/р.
Опыты показали, что наблюдаемая скорость звука больше,
чем она получается по формуле Ньютона. Это расхождение
Ньютон объяснял наличием в воздухе водяных паров.
П. Лаплас в 1810 г. предположил, что распространение
звука в газе есть процесс адиабатический, т.е. что
давление и плотность связаны уравнением адиабаты:
р = с1р*; Cj= const; % = cp/cv.
В этом случае
dp у, _, рх в
— = с,хр =хс,—= х-
dp р р
и для скорости звука имеем
Формула Лапласа для скорости звука дает значения, хорошо
согласующиеся с опытными данными. Таким образом, распро-
распространение звука и любых других малых возмущений есть
процесс адиабатический.
Из уравнения Клапейрона p/p = RT; следовательно,
а=
т. е. скорость звука зависит только от абсолютной температуры
и рода газа. Для воздуха скорость звука — в м/с:
При Г=273К (f = O°C) д = 332м/с.
Скорость звука тесно связана со средней скоростью свобод-
свободного пробега молекул vs, где a«0,7us.
Движение газа со скоростями v<a называется дозвуковым.
В этом случае число Маха М = v/a < 1. Движение газа
при М = 1 называют звуковым. При сверхзвуковом движении
газа М > 1.
588
■t=o
Рис. 178
Интересна особенность распро-
распространения малых возмущений
в газе, движущемся со сверхзву-
ковой скоростью. Если при этом
в какой-либо точке произведено
малое возмущение газа в момент
г = 0, то в любой другой момент
времени t точка газа, в которой
произведено возмущение, сместит-
сместится вместе с движущимся газом на расстояние vt, а возмущение
по газу распространится на сферу радиусом at. Все возмущения,
таким образом, локализуются в конусе с вершиной в той
точке, где произведено начальное возмущение. Угол полураст-
полураствора конуса а (рис. 178) определяется из выражения
at a 1 1
sinoc = — = - =—=—.
vt v v/a M
При М = 1 величина sinot=l и а = п/2. При М->оо угол <х->0,
т. е. все возмущение локализуется в области, стягивающейся
в отрезок прямой линии.
§ 13. ОДНОМЕРНОЕ УСТАНОВИВШЕЕСЯ ТЕЧЕНИЕ ГАЗА
ВДОЛЬ ТРУБЫ ПЕРЕМЕННОГО СЕЧЕНИЯ
Одномерное установившееся течение газа вдоль трубы
переменного сечения является некоторым приближением к дей-
действительности, так как в основу его положено предположение,
что параметры потока газа, такие, как скорость потока,
давление и плотность, одинаковы во всех точках каждого из
поперечных сечений, перпендикулярного оси трубы. Это предпо-
предположение довольно хорошо соответствует действительности для
элементарной трубки тока, но его применяют и для труб
конечных размеров, используя средние величины по сечениям
трубы.
Предварительно получим из уравнений движения газа D5)
в частном случае установившегося безвихревого движения
следствие в форме уравнения Бернулли. Для этого выразим
левые части трех этих уравнений D5) в форме Лэмба —
Громеки. Пренебрегая объемными силами, имеем
1 др_
р дх'
1 5/>.
Р 5/
1 др
р dz
589
„ I8vx dv, dv, A
Предполагая, что движение стационарное —- = —2 = — = 0
\dtdtdt
и безвихревое (QJC = Q), = Qz = 0), получим из этих уравнений:'
8 (v2\_ \ 8р. д (v2\_ \ dp siv2\__\6p
дх \ 2 / р дх' ду\2 I Р ду dz\2J p dz
Умножая первое из этих уравнений на dx, второе — на
dy, третье — на dz и складывая, получим
или
„dt; + ^ = O. E8)
р
Это и есть уравнение Бернулли в дифференциальной форме.
Если E8) проинтегрировать от состояния газа, в котором
v = vQ; р=р0; р = ро> Д° состояния с параметрами соответственно v;
р; р, то будем иметь уравнение Бернулли в интегральной форме:
= o. E9)
а
Интеграл в уравнении E9) зависит от уравнения, характери-
характеризующего баротропный процесс, т. е. от вида зависимости
P=f(p)-
Для несжимаемой жидкости р = const и уравнение Бернулли
принимает форму
ИЛИ
i p i p
Уравнение Бернулли для несжимаемой жидкости широко
используется при рассмотрении многих технических задач,
связанных с движением жидкости. Его обычно в этом случае
обобщают, учитывая действие потенциальных объемных сил,
прежде всего сил тяжести жидкости.
Для газа уравнение Бернулли E9) широко используется
для адиабатических процессов, для которых ^//?о = (р/Ро)и-
Преобразуем уравнение Бернулли в дифференциальной фор-
форме для газа так, чтобы можно было ввести число М. Имеем
JO; vdv + a 0,
dp p p
так как dp/dp = а2. Поделив обе части на а2, получим
590
v^dv dP_ r^-——*_£ dS=L
a2 v + p~ '
или в окончательном виде
M2dr + dp = Q_
» р
Другое уравнение, необходи-
необходимое для анализа течений газа в трубе переменного сечения,
является уравнением неразрывности, или сохранения
массы. Получим его непосредственно для рассматриваемой
задачи в наиболее удобной форме (рис. 179).
Через каждое поперечное сечение трубы в случае одномер-
одномерного течения- проходит за 1с масса газа m = Svp, где
S—площадь поперечного сечения трубы; v — скорость течения
газа; р — плотность газа. При установившемся движении через
все поперечные сечения должна пройти одна и та же масса
газа, т. е. m — Svp = const. Прологарифмируем это уравнение
сохранения массы. Получим
lnm = lnS+lnt; + ln p = const.
Считая переменными величины S; v; p, возьмем полные
дифференциалы от обеих частей. Имеем
^ + ^ + Ё£ = 0. F0)
5 v p
Это и есть искомое уравнение неразрывности для установив-
установившегося одномерного течения идеального газа в трубе перемен-
переменного сечения.
Из уравнения неразрывности F0) и уравнения Бернулли
E8') исключим величину dp/p. Получим
^ = ^(М2-1). F1)
Это уравнение F1) называют уравнением Гюгонио.
Используя уравнение Гюгонио, проанализируем харак-
характер возможных течений газа в трубе переменного сечения.
Из уравнения F1) следует: при М<1, что соответствует
дозвуковым течениям, знаки величин d5 и dv противопо-
противоположны, т. е. там, где возрастает S, в направлении течения
скорость должна убывать, и наоборот. Для сверхзвуковых
течений М > 1 и знаки у dS и dv одинаковы, т. е. сверх-
сверхзвуковой поток распространяется противоположно дозвуково-
дозвуковому. Чтобы увеличить его скорость, трубу следует расширять.
При М = 1 имеем dS = 0, т.е. в этом случае S достигает
максимума или минимума. Можно показать, используя F1),
что М = 1 может быть только в самом узком сечении трубы,
5 5
где 5 = 5min.
591
Выводы о характере течений газа
в трубах переменного сечения нашли
_ ,,,,,,, применение в конструкциях сопел
\L-LS)^ —*\ современных реактивных двигателей
_^^S ^-J—»J и аэродинамических труб больших
скоростей. Для получения больших
сверхзвуковых скоростей выходящего
Рис- 18° из сопла газа следует сначала сопло
сужать, чтобы получить звуковую скорость газа в узком
сечении сопла, а затем сопло надо расширять для дальнейшего
увеличения скорости выходящего из него газа (рис. 180).
Наибольшая скорость, которая может быть получена на
выходе из сопла, зависит от площади выходного сечения
и должна обеспечиваться необходимым для каждой скорости
давлением на входе в сопло.
ПРИЛОЖЕНИЕ
1. НОВАЯ ФОРМА ОСНОВНЫХ АКСИОМ
По Ньютону, свойство инерции материальных объектов
зависит от самих объектов, т. е. оно является внутренним
свойством этих объектов. Возможна другая точка зрения, что
инерция является сопротивлением физического пространства,
в котором движутся материальные объекты.
Физическое пространство заполнено электромагнитным
и гравитационным излучением. В нем находятся различные
элементарные и неэлементарные частицы. Возможно, что не
все частицы нам еще известны. Свойства пространства, со-
согласно общей теории относительности, зависят от материаль-
материальных объектов, находящихся в нем, и от других факторов.
Предлагаемая концепция инерции требует новой формы
основных аксиом классической механики. Для их формулировки
требуется ввести новые понятия и уточнить ранее применявшиеся.
Аксиомы формулируются для материальной точки, понятие
которой остается прежним. Прежними остаются также понятия
пространства и времени, только пространство для принятой
концепции инерции должно обладать свойством оказывать
сопротивление движущимся в нем материальным объектам.
Используемое в классической механике понятие силы тоже
сохраняется, только силу, действующую на материальную
точку, должен устанавливать не инерциальный наблюдатель,
находящийся в инерциальной системе отсчета, а собствен-
собственный, т. е. наблюдатель, находящийся в собственной системе
отсчета той материальной точки, на которую действует сила.
Собственная система отсчета ранее была определена как
система покоя точки.
Сила является величиной векторной, а векторы складыва-
складываются по правилу векторного сложения. Поэтому сложение
сил, приложенных к одной материальной точке по правилу
параллелограмма, можно считать содержащимся в определении
силы как вектора.
Нет необходимости вводить определение приложенной силы.
На рассматриваемую точку действуют все материальные
объекты, в том числе и само физическое пространство. Силы
этого действия следует определять по законам физики для
различных взаимодействий.
Потребуется понятие инерциальной системы отсчета,
связанной с физическим пространством и, следовательно,
593
с материальными объектами Вселенной, определяющими
свойство пространства оказывать сопротивление движущимся
материальным объектам. Для наших целей в качестве
такой инерциальнои системы отсчета достаточно использовать
гелиоцентрическую систему отсчета.
В общем случае сила сопротивления пространства может
зависеть от времени, так как пространство расширяется, от места
нахождения материальной точки в пространстве, ее скорости,
ускорения и т. д. Установление зависимости силы сопротивления
пространства от указанных факторов должно производиться
путем эксперимента или путем создания теории взаимодействия
пространства с движущимися материальными объектами.
Первая аксиома, которую можно назвать аксиомой Ньюто-
Ньютона, лишь приближенно отражает реальную закономерность.
Она утверждает: сила сопротивления пространства пропорци-
пропорциональна ускорению точки относительно инерциальнои системы
отсчета и направлена против этого ускорения, т. е.
ф=—та, A)
где Ф — сила сопротивления пространства или сила инерции
точки; а — ускорение точки относительно инерциальнои системы
отсчета.
Коэффициент пропорциональности т выражает значение
силы сопротивления пространства, приходящуюся на единицу
ускорения и называется инертной массой точки. Таким
образом, инертная масса точки является своеобразным коэффи-
коэффициентом сопротивления пространства. Для малых скоростей
движения точки по сравнению со скоростью света масса не
зависит от скорости и является величиной постоянной. Физи-
Физическое пространство ведет себя как идеальная жидкость,
которая тоже не оказывает сопротивления движению тел
с постоянной скоростью. При больших скоростях масса зависит
от скорости.
Вторая аксиома, или аксиома Даламбера, постулирует одно
из основных свойств всех сил, действующих на материальную
точку при любом ее состоянии со стороны других материаль-
материальных объектов, в том числе и со стороны пространства
Вселенной. Согласно этой аксиоме, все силы, действующие на
материальную точку, образуют равновесную систему сил, т. е.
F+$ = 0, B)
где F—равнодействующая сила от действия на точку всех
других материальных объектов, кроме пространства.
Из уравнений A) и B) получаем следствие
та = F, C)
которое является основной аксиомой Ньютона в его системе
аксиом. Из C) по известной силе F и массе можно определить
594
ускорение точки, и наоборот. Из B) следует, что силы от
действия материальных объектов и сила сопротивления прост-
пространства полностью равноправны.
Получено условие для сил, действующих на материальную
точку не только при покое, но и при любом ее движении.
Такого условия нет в механике, основанной на аксиомах
Ньютона. Таким образом, на любой материальный объект
в природе действуют только равновесные системы сил.
Третья аксиома, или закон о равенстве сил действия
и противодействия, определяет зависимость между силами
взаимодействия двух материальных точек: силы взаимодействия
двух материальных точек равны по величине или модулю
и противоположны по направлению, т. е.
Fi = -F2, D)
где Fx — сила действия второй материальной точки на первую;
Р2 — сила действия первой точки на вторую.
Для механических взаимодействий в теоретической механике
дополнительно предполагается, что силы взаимодействия точек
направлены по одной прямой, проходящей через точки. Если
это не предполагать, то электромагнитные силы тоже будут
удовлетворять D).
При взаимодействии двух точек, находящихся на расстоянии
друг от друга, целесообразно считать, что каждая из точек
взаимодействует контактно с полем другой точки.
Предлагаемые основные аксиомы в новой форме незави-
независимы. Их число минимально. Они не противоречивы. Введение
их в основы классической механики вместо аксиом Ньютона
устраняет все трудности, присущие механике, основанной на
аксиомах Ньютона, в том числе снимается вопрос о гравита-
гравитационном парадоксе. Отпадает необходимость вводить в теоре-
теоретическую механику всякого рода неполноценные силы.
2. СИСТЕМЫ ОТСЧЕТА
При рассмотрении движения материальной точки и всех
других материальных объектов вблизи Земли учитывается сила
притяжения Земли и не учитываются силы тяготения всех
остальных материальных объектов Вселенной, хотя эти силы
очень велики по сравнению с силой притяжения Земли.
В учебной литературе объяснение этого или отсутствует, или
дается неверно, путем ссылки на удаленность этих объектов
Вселенной.
Для выяснения истинных причин, по которым не учитыва-
учитываются силы тяготения некоторых объектов Вселенной, проведем
анализ различных систем отсчета. Анализ удобно провести,
595
используя основную аксиому механики в новой форме:
F+O = 0, B')
где F—равнодействующая сила от действия на точку всех
материальных объектов; Ф=— та — сила сопротивления про-
пространства (сила инерции точки), зависящая от ускорения точки
а относительно выделенной инерциальнои системы отсчета,
определяющей сопротивление пространства.
Условие B') для сил справедливо для наблюдателя, на-
находящегося в собственной системе отсчета точки. Только
в этих системах отсчета определяется действие сил. Простейшей
собственной системой отсчета точки является ее система покоя,
относительно которой скорость и ускорение точки равны
нулю. Рассмотрим некоторые особенности, связанные с вы-
выбором различных систем отсчета, движущихся относительно
выделенной инерциальнои системы отсчета. Разложим движение
точки на переносное и относительное. Тогда сила сопротив-
сопротивления пространства выразится в форме
Ф = Фе + Фг + Фк, E)
где Фе=— тае — сила сопротивления пространства от перенос-
переносного движения; Фг=—таг — сила_ сопротивления пространства
от относительного движения и Фк = — так сила сопротивления
Кориолиса.
Выбирая в ^качестве подвижных систем отсчета системы,
для которых Фе = 0, тогда Фк тоже равна нулю, получим
класс других инерциальных систем отсчета. Этот класс можно
расширить, если принять Фе + Фк = 0. Движение таких обо-
бщенно-инерциальных систем отсчета должно зависеть
от параметров относительного движения точки, но принципи-
принципиально возможно введение таких систем отсчета. Для всех
инерциальных систем отсчета B_') принимает форму F+Ф^О
и для таких систем отсчета Ф = Ф,. В учебной литературе
обобщенно-инерциальные системы отсчета не рассматриваются.
Из совокупности подвижных систем отсчета можно выде-
выделить класс ^юкально-инерциальных систем отсчета. Для этого
разложим F на составляющие:
F=FS + FT, F)
где Fs — сила от действия на точку тел и сред, соприкасающихся
с ней (поверхностная сила); FT — сила действия на точку
материальных объектов посредством силовых полей. В рас-
рассматриваемом случае это силы гравитационного тяготения.
Силу тяготения тоже разложим на составляющие
FT = FV + F{Te), G)
где F(re)—сила тяготения от материальных объектов, не
включенных в тела подвижной системы отсчета; F^]—сила
596
тяготения от объектов, входящих в подвижную систему отсчета.
С учетом этих разложений B') примет такую форму:
^ + ^<г) + Пе) + Фг + Фе + Фк = 0. B")
Системы отсчета, движущиеся относительно выделенной
инерциальной, для которых выполняются условия F(Te) + <t>e = O
и Фк = 0, или ю = 0; называются локально-инерциаль-
ными системами отсчета. Эти системы отсчета не вращаются
относительно инерциальных и их движение не зависит от
относительного движения точки. Именно этот класс локально-
инерциальных систем отсчета фактически используется в за-
задачах механики, хотя это и не осознается.
Для движения локально-инерциальных систем отсчета и дви-
движения точки относительно любой из них выполняются условия:
; (8)
0. (9)
Используя эти условия, проведем анализ различных локально-
инерциальных систем отсчета и движения точки относительно
таких систем.
Из B') с учетом F) получаем
Из этого условия при Fs = 0 получается условие, которое
выполняется при невесомости точки по отношению к выделен-
выделенной инерциальной системе отсчета, а следовательно, и всех
других инерциальных систем отсчета. Если Fs = 0, то из (9)
получаем условие невесомости точки относительно локально-
инерциальной системы отсчета в форме
Можно рассматривать различные локально-инерциальные
системы отсчета. Они отличаются от семейства инерциальных
систем отсчета. Все они не вращаются относительно инерци-
инерциальных систем, т. е. движутся относительно их поступательно,
но с ускорением.
Условие (8) выполняется при невесомости материальной
точки, движущейся вместе с выбранной локально-инерциальной
системой отсчета относительно любой из инерциальных систем
отсчета. В качестве точки, вместе с которой движется локально-
инерциальная система отсчета, можно выбрать любую точку,
находящуюся в невесомости относительно инерци-альной си-
системы отсчета под действием силы тяготения F[e). В качестве
таких систем отсчета обычно в практике используются системы,
движущиеся поступательно вместе с центрами масс матери-
материальных объектов, находящихся приближенно в невесомости
относительно инерциальных систем отсчета. Это центры масс
597
скоплений галактик, нашей галактики, солнечной системы,
самого Солнца, земного шара, естественных и искусственных
спутников Земли и других планет; свободно падающего у Земли
лифта в пустоте и т. п. Приближенность невесомости рас-
рассматриваемых материальных систем обусловлена тем, что
различные системы материальных объектов не свободны от
сил сопротивлений сред, в которых они движутся. Для
пояснения этого разложим силу Fs на составляющие, т. е.
Fs = Fie) + F?\ A0)
где F(se) — часть силы, в основном сопротивления среды, для
точки и векторная сумма этих сил для системы материальных
объектов при движении вместе с подвижной системой отсчета;
i^r) — часть силы сопротивления для точки и векторная сумма
сил сопротивления системы материальных объектов при от-
относительном движении.
Для движения центра масс реальной системы материальных
объектов относительно инерциальной системы отсчета, как
и для материальной точки, имеем
Ле) + Пе) + Фе = 0, (П)
где F[e) — сила тяготения, действующая на всю совокупность
материальной системы; Фе = Фс = — Мас — Мае — сила сопротив-
сопротивления пространства для всей системы; М—масса системы;
ас—ускорение центра масс, которое равно переносному ускоре-
ускорению материальной точки, совпадающей с центром масс, но
имеющей добавочное движение относительно системы отсчета,
движущейся поступательно вместе с центром масс.
Для того чтобы для центра масс выполнялось условие
невесомости и, следовательно, система материальных объектов
как единая совокупность тоже находилась в невесомости по
отношению к инерциальной системе отсчета, должно выпол-
выполняться условие F\e) = 0. Тогда для центра масс справедливо
условие
Р<е) + Фе = 0 A2)
и система отсчета, движущаяся вместе с центром масс
относительно инерциальной системы, окажется локально-инер-
циальной.
Все реальные системы материальных объектов не свободны
от сил сопротивления различных сред. Материальным объектам
нашей галактики оказывает сопротивление межгалактическая
среда, являясь для нее внешней. Для Солнца к этому добавится
сопротивление внутренней среды нашей галактики, а для
искусственного спутника Земли — еще и сопротивление атмос-
атмосферы. Кажется, что при переходе от небольших систем
материальных объектов к более крупным системам, например
от искусственного спутника Земли, к самой Земле, Солнцу,
598
галактике, сопротивление среды будет уменьшаться. Для каж-
каждого материального объекта, очевидно, это справедливо. Но
по мере продвижения к более крупным скоплениям возрастает
число объектов, испытывающих сопротивление среды. При
движении центра масс следует учитывать силы сопротивления
от всех объектов. Без специального исследования трудно
оценить, какая из систем, отсчета, движущаяся вместе с цен-
центром масс какой-либо системы материальных объектов более
близка к идеальной локально-инерциальной системе отсчета.
Для движения точки относительно локально-инерциальной
системы отсчета из B') и определения такой системы получаем
условие:
FP + FP + <br = 0, (9')
если пренебречь силой F{se). Это условие аналогично B') при
движении точки относительно инерциальной системы отсчета.
В (9') входят только силы действия на точку со стороны
материальных объектов, вместе с центром масс которых
движется выбранная локально-инерциальная система отсчета.
Сила сопротивления пространства зависит тоже только от
движения точки относительно выбранной системы отсчета.
При использовании любой локально-инерциальной системы
отсчета часть сил тяготения F^ не входит в (9') и, следователь-
следовательно, ею не требуется пренебрегать. Пренебрегать приходится
только силой F[e) для системы отсчета, движущейся вместе
с центром масс реальной материальной системы.
Для невесомости материальной точки относительно локаль-
локально-инерциальной системы отсчета должно выполняться условие
которое получается из (9'), если для точки ^'г) = 0, где
F(P — сила от соприкосновения точки с телами и средой,
входящими в локально-инерциальную систему отсчета при
движении точки относительно этой системы отсчета. Сила
тяготения F^ создается тоже только материальными объекта-
объектами, включенными в локально-инерциальную систему отсчета.
Условие невесомости точки относительно локально-инерциаль-
локально-инерциальной системы отсчета аналогично условию невесомости от-
относительно инерциальной системы отсчета.
Для невесомости точки относительно инерциальной системы
отсчета должны выполняться условия ее невесомости от-
относительно локально-инерциальной системы отсчета и условие
невесомости от движения вместе с локально-инерциальной
системой отсчета относительно инерциальной системы. Неве-
Невесомость точки из-за неоднородности полей тяготения от
различных материальных объектов строго осуществляется толь-
только в одной точке и приближенно в области, содержащей
эту точку. Область невесомости точки зависит от размеров
599
материальных объектов, участвующих в создании полей тя-
тяготения и их удаленности.
Для определения семейства локально-инерциальных сис-
систем отсчета необходимо знать хотя бы одну инерциальную
систему отсчета. Для введения всей совокупности инерциальных
систем отсчета требуется иметь выделенную или основную
инерциальную систему отсчета. С основной системой отсчета
связан вопрос о механизме возникновения сил сопротивления
пространства при движении в нем различных материальных
объектов. Сила сопротивления пространства для материальной
точки Ф=—та аналогична силе сопротивления идеальной
жидкости (жидкость без трения), действующей на движущиеся
в ней тела. Эта аналогия приводит к мысли, что основная
инерциальная система отсчета должна быть связана с той
жидкостью без трения, которую содержит пространство. В каче-
качестве одного из кандидатов на такую жидкость называлось
реликтовое излучение. Возможно, что силы сопротивления
пространства носят обменный характер. Тогда основную
инерциальную систему отсчета следует выбирать по-другому.
В общей теории относительности при движении материальных
объектов в пространстве происходит изменение кривизны
пространства. Силу сопротивления пространства можно считать
зависящей от изменения этой кривизны.
Из сказанного ясно, что вопрос о выборе основной
инерциальной системы отсчета еще не решен. В учебной
литературе в настоящее время в качестве основной инерци-
инерциальной системы отсчета выбирают обычно гелиоцентрическую
систему, которая одновременно является одной из приближенно
локально-инерциальных систем отсчета.
В некоторых учебниках по теоретической механике и физике
для выбора инерциальных систем отсчета используют аксиому
инерции. В одном из учебников аксиома инерции сформулиро-
сформулирована так: «Системы отсчета, в которых справедлив принцип
инерции, называются инерциальными системами отсчета». Прин-
Принцип инерции, как известно, состоит в том, что материальная
точка движется прямолинейно и равномерно по инерции
относительно инерциальной системы отсчета, если на точку не
действуют силы или действует равновесная система сил.
Использование принципа инерции для выбора инерциальных
систем отсчета предполагает его расширение на другие системы
отсчета, из которых выбираются инерциальные системы от-
отсчета.
Из проведенного анализа систем отсчета следует, что
принцип инерции справедлив в локально-инерциальных систе-
системах отсчета, но локально-инерциальные системы отсчета не
могут все принадлежать к инерциальным системам отсчета,
так как они движутся относительно инерциальных хотя и по-
поступательно, но с ускорением.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 5
Раздел I. Статика 8
Глава 1. Основные понятия и аксиомы. Сходящиеся силы 8
§ 1. Основные понятия и определения 8
§ 2. Аксиомы статики 10
§ 3. Простейшие теоремы статики 15
§ 4. Система сходящихся сил 17
Приведение к равнодействующей силе 17
Условия равновесия системы сходящихся сил 19
Проецирование силы на оси координат 20
Глава 2. Моменты силы относительно точки и оси 24
§ 1. Алгебраический момент силы относительно точки 24
§ 2. Векторный момент силы относительно точки 25
§ 3. Момент силы относительно оси 27
§ 4. Связь момента силы относительно оси с векторным моментом
силы относительно точки на оси 28
§ 5. Формулы для моментов силы относительно осей координат 29
Глава 3. Теория пар сил 30
§ 1. Пара сил и алгебраический момент пары сил 30
§ 2. Теорема об эквивалентности двух пар сил, расположенных в
одной плоскости 32
§ 3. Теорема о переносе пары сил в параллельную плоскость 33
§ 4. Векторный момент пары сил 34
§ 5. Эквивалентность пар сил : 35
§ 6. Теорема о сумме моментов сил пары , 35
§ 7. Сложение пар сил 36
§ 8. Условия равновесия пар сил 38
Глава 4. Приведение системы сил к простейшей системе. Условия
равновесия 40
§ 1. Приведение произвольной системы сил к силе и паре сил 40
Приведение силы к заданному центру 40
Приведение произвольной системы сил к силе и паре сил 41
Приведение плоской системы сил 43
Формулы для вычисления главного вектора и главного мо-
момента 43
§ 2. Условия равновесия системы сил 45
Условия равновесия системы сил в векторной форме 45
Условия равновесия пространственной системы сил в аналити-
аналитической форме 45
Условия равновесия пространственной системы параллельных
сил 46
Условия равновесия плоской системы сил 47
Глава 5. Плоская система сил. Теорема Вариньона 48
§ 1. Частные случаи приведения плоской системы сил 48
Случай приведения к равнодействующей силе 48
601
Случай приведения к паре сил 49
§ 2. Теорема о моменте равнодействующей силы (теорема Ва-
риньона) 50
§ 3. Различные формы условий равновесия плоской системы сил 51
Теорема о трех моментах (вторая форма условий равновесия) .... 52
Третья форма условий равновесия 53
§ 4. Статически определимые и статически неопределимые задачи 54
§ 5. Равновесие системы сил 55
§ 6. Распределенные силы 56
Параллельные силы постоянной интенсивности, распределенные
по отрезку прямой линии 57
Параллельные силы, распределенные по отрезку прямой с
интенсивностью, изменяющейся по линейному закону 58
Реакция заделки 60
§ 7. Решение задач на равновесие плоской системы сил, приложен-
приложенных к твердому телу и системе тел 61
Глава б. Трение 66
§ 1. Трение скольжения 66
Законы Кулона 68
Угол и конус трения 69
Равновесие тела на шероховатой поверхности 70
§ 2. Трение качения 73
Глава 7. Частные случаи пространственных систем сил. Центр параллель-
параллельных сил 77
§ 1. Изменение главного момента при перемене центра приведения ... 77
§ 2. Инварианты системы сил 78
§ 3. Частные случаи приведения пространственной системы сил 79
§ 4. Уравнение центральной винтовой оси 83
§ 5. Частные случаи приведения пространственной системы парал-
параллельных сил 87
.§ 6. Центр системы параллельных сил 88
§ 7. Частные случаи равновесия твердого тела 91
Равновесие твердого тела с двумя закрепленными точками 91
Твердое тело с одной закрепленной точкой 92
Глава 8. Центр тяжести 93
§ 1. Определения и формулы для вычисления центров тяжести 93
§ 2. Методы определения центров тяжести (центров масс) 96
§ 3. Центры тяжести простейших тел 98
Раздел II. Кинематика 103
Введение 103
Глава 1. Кинематика точки 104
§ 1. Скорость точки 104
§ 2. Ускорение точки 106
§ 3. Векторный способ изучения движения 107
§ 4. Координатный способ изучения движения 108
Задание движения и траектория 108
Скорость в декартовых координатах 109
Уравнение годографа вектора скорости 110
Ускорение точки в декартовых координатах 111
§ 5. Естественный способ изучения движения 113
Естественный способ задания движения 113
Скорость точки при естественном способе задания движения 114
Геометрические понятия. Дифференцирование единичного век-
вектора 115
Ускорение точки при естественном способе задания движения .... 118
Частные случаи движения точки 121
602
§ 6. Скорость и ускорение точки в полярных координатах 122
§ 7. Скорость и ускорение точки в цилиндрических координатах 126
§ 8. Скорость и ускорение точки в криволинейных координатах 128
§ 9. Скорость и ускорение в сферических координатах 132
Глава 2. Простейшие движения твердого тела. Сложное движение точки ... 133
§ 1. Степени свободы и теорема о проекциях скоростей 133
§ 2. Поступательное движение твердого тела 135
§ 3. Вращение твердого тела вокруг неподвижной оси 136
Угол поворота, угловая скорость и угловое ускорение 136
Частные случаи вращения твердого тела 138
Скорости и ускорения точек тела 139
Векторы угловой скорости и углового ускорения 141
Векторные формулы для скоростей и ускорений точек тела 142
§ 4. Сложное движение точки 144
Основные понятия 144
Сложение скоростей 145
Сложение ускорений при поступательном переносном движе-
движении 147
Глава 3. Плоское движение твердого тела 148
§ 1. Уравнения плоского движения твердого тела 149
§ 2. Разложение плоского движения твердого гсла на поступательное
и вращательное 150
§ 3. Угловая скорость и угловое ускорение тела при плоском
движении 152
§ 4. Скорости точек тела при плоском движении 153
§ 5. Мгновенный центр скоростей 155
§ 6. Вычисление угловой скорости при плоском движении 158
§ 7. Ускорения точек тела при плоском движении 159
§ 8. Мгновенный центр ускорений 162
§ 9. Основные способы вычисления углового ускорения при плоском
движении 166
§ 10. Теорема о конечном перемещении плоской фигуры 172
§ П. Мгновенный центр вращения. Центроиды 173
Глава 4. Вращение твердого тела вокруг неподвижной точки. Общий
случай движения тела 176
§ 1. Углы Эйлера. Уравнения вращения твердого тела вокруг
неподвижной точки 176
§ 2. Теорема о конечном перемещении твердого тела, имеющего
одну неподвижную точку 179
§ 3. Мгновенная ось вращения. Аксоиды 180
§ 4. Угловая скорость и угловое ускорение при вращении тела
вокруг неподвижной точки 181
§ 5. Скорости точек тела при вращательном движении вокруг
неподвижной точки 182
§ 6. Ускорения точек тела при вращении вокруг неподвижной
точки 184
§ 7. Вычисление углового ускорения 186
§ 8. Общий случай движения свободного твердого тела 189
Разложение движения свободного твердого тела на поступатель-
поступательное и вращательное 189
Уравнения движения свободного твердого тела 191
Скорости и ускорения точек свободного твердого тела в общем
случае 192
Глава 5. Сложное движение точки в общем случае 195
§ 1. Абсолютная и относительная производные от вектора. Формула
Бура 195
603
§ 2. Сложение скоростей 197
§ 3. Сложение ускорений точки в общем случае переносного дви-
движения 198
§ 4. Ускорение Кориолиса 200
Глава 6. Сложение движений твердого тела 204
§ 1. Сложение поступательных движений твердого тела 205
§ 2. Сложение вращательных движений твердого тела 206
§ 3. Сложение поступательного и вращательного движений 213
§ 4. Статические аналогии в кинематике 218
Глава 7. Основы кинематики сплошной среды 219
§ 1. Переменные Лагранжа и Эйлера 219
§ 2. Распределение скоростей в малой окрестности точки прост-
пространства 225
§ 3. Линии и трубки тока 229
§ 4. Поток и циркуляция вектора скорости 230
Раздел III. Динамика 235
Глава 1. Основные положения динамики и уравнения движения точки ■ 235
§ 1. Введение 235
§ 2. Основные аксиомы классической механики 236
§ 3. Системы единиц 240
§ 4. Дифференциальные уравнения движения материальной точки 241
§ 5. Две основные задачи динамики точки 243
§ 6. Основные виды прямолинейного движения точки 247
§ 7. Криволинейное движение материальной точки 251
§ 8. Движение несвободной материальной точки 255
Движение точки по поверхности 256
Движение точки по гладкой кривой линии 257
Глава 2. Относительное движение материальной точки 260
§ 1. Дифференциальные уравнения относительного движения мате-
материальной точки 260
§ 2. Частные случаи 262
§ 3. Движение точки относительно Земли 264
§ 4. Невесомость 269
Глава 3. Геометрия масс 272
§ 1. Центр масс 272
§ 2. Моменты инерции 274
Моменты инерции относительно точки и оси 274
Моменты инерции относительно осей координат 275
§ 3. Теорема о моментах инерции относительно параллельных осей
(теорема Штейнера) 276
§ 4. Моменты инерции простейших однородных тел 278
Однородный стержень 278
Прямоугольная пластина 279
Круглый диск 280
Круглый цилиндр 280
Шар 281
§ 5. Моменты инерции относительно осей, проходящих через задан-
заданную точку 282
§ 6. Эллипсоид инерции 284
§ 7. Свойства главных осей инерции 285
§ 8. Определение главных моментов инерции и направления главных
осей 288
§ 9. Выражение компонентов тензора инерции через главные мо-
моменты инерции 290
604
Глава 4. Общие теоремы динамики точки и системы 293
§ I. Простейшие свойства внутренних сил системы 293
§ 2. Дифференциальные уравнения движения системы 294
§ 3. Теоремы об изменении количества движения и о движении
центра масс 296
Количество движения точки и системы 296
Вычисление количества движения системы 296
Элементарный и полный импульсы силы 297
Теорема об изменении количества движения точки 297
Теорема об изменении количества движения системы 298
Законы сохранения количества движения 300
Теорема о движении центра масс системы 302
Дифференциальные уравнения поступательного движения твер-
твердого тела 306
§ 4. Теорема об изменении кинетического момента 306
Кинетический момент точки и системы 306
Кинетический момент относительно оси вращения при враща-
вращательном движении твердого тела 308
Теорема об изменении кинетического момента точки 309
Теорема об изменении кинетического момента системы 310
Законы сохранения кинетических моментов 312
Дифференциальное уравнение вращения твердого тела вокруг
неподвижной оси 314
Движение точки под действием центральной силы. Теорема
площадей 315
Теорема об изменении кинетического момента системы в
относительном движении по отношению к центру масс 318
Дифференциальные уравнения плоского движения твердого
тела 320
Теорема Резаля 322
§ 5. Теорема об изменении кинетической энергии 323
Работа силы 323
Примеры вычисления работы силы 326
Кинетическая энергия 333
Теорема об изменении кинетической энергии точки 336
Теорема об изменении кинетической энергии системы 338
Теорема об изменении кинетической энергии в относительном
движении 341
§ 6. Потенциальное силовое поле 343
Потенциальное силовое поле и силовая функция 343
Поверхности уровня. Силовые линии 346
Потенциальная энергия 347
Примеры вычисления силовых функций 348
Силовая функция и потенциальная энергия системы 350
§ 7. Закон сохранения механической энергии 351
Закон сохранения механической энергии точки 351
Закон сохранения механической энергии системы 351
Глава 5. Принцип Даламбера. Динамические реакции при вращении тела
вокруг неподвижной оси 359
§ 1. Принцип Даламбера 359
Принцип Даламбера для материальной точки 359
Принцип Даламбера для системы материальных точек 362
Силы инерции твердого тела в частных случаях его движения .... 366
§ 2. Динамические реакции при вращении твердого тела вокруг
неподвижной оси 370
Формулы для реакций 370
Статическая уравновешенность 375
Динамическая уравновешенность , 376
605
Глава 6. Аналитическая механика 381
§ 1. Связи и их классификация 382
§ 2. Возможные перемещения 384
§ 3. Элементарная работа силы на возможном перемещении. Иде-
Идеальные связи 385
§ 4. Принцип возможных перемещений 387
§ 5. Обобщенные координаты системы 391
§ 6. Обобщенные силы 394
§ 7. Условия равновесия системы 396
§ 8. Общее уравнение динамики 399
§ 9. Уравнения Лагранжа 407
§ 10. Канонические уравнения 416
Глава 7. Теория колебаний 418
§ 1. Устойчивость положения равновения 419
Определение устойчивости положения равновесия 419
Теорема Лагранжа — Дирихле 421
§ 2. Колебания системы с одной степенью свободы 425
Собственные линейные колебания системы 426
Влияние линейного сопротивления на малые собственные
колебания системы с одной степенью свободы 434
Вынужденные колебания системы без учета сопротивления 446
Влияние линейного сопротивления на вынужденные колебания ... 456
§ 3. Математический и физический маятники 465
§ 4. Малые колебания системы с двумя степенями свободы (резуль-
(результаты для общего случая) 469
Кинетическая энергия 469
Потенциальная энергия 472
Диссипативная функция 473
Дифференциальные уравнения собственных колебаний 474
Интегрирование дифференциальных уравнений. Уравнение
частот 475
Главные координаты 478
Влияние линейного сопротивления на собственные колебания 481
Вынужденные колебания без учета сопротивления 483
Влияние линейного сопротивления на вынужденные колебания ... 485
Глава 8. Динамика твердого тела с одной закрепленной точкой 489
§ 1. Кинетический момент тела, вращающегося вокруг неподвижной
точки 490
§ 2. Кинетическая энергия тела с одной закрепленной точкой 492
§ 3. Динамические уравнения Эйлера 495
§ 4. Кинематические уравнения Эйлера 496
§ 5. Задача о вращении твердого тела вокруг неподвижной точки.
Случаи интегрируемости 499
§ 6. Астатический гироскоп 500
§ 7. Движение гироскопа под действием силы тяжести 504
§ 8. Приближенная теория гироскопа 510
Основные допущения приближенной теории 510
Особенности движения оси гироскопа 511
Гироскопический момент 513
Техническое применение гироскопа 515
Прецессия тяжелого гироскопа по приближенной теории 516
§ 9. Регулярная прецессия гироскопа 518
Гироскопический момент при регулярной прецессии 518
Регулярная прецессия по инерции 520
Регулярная прецессия тяжелого гироскопа 520
§ 10. Устойчивость вращения твердого тела с одной закрепленной
точкой вокруг главных осей инерции 521
606
Глава 9. Теория удара 523
§ 1. Основные положения и понятия теории удара 523
§ 2. Теоремы об изменении, количества движения и о движении
центра масс для удара. Теорема Кельвина 525
§ 3. Теорема об изменении кинетического момента при ударе 527
§ 4. Удар точки о неподвижную поверхность 529
§ 5. Теорема Карно 532
§ 6. Удар двух тел 534
§ 7. Центр удара 543
Глава 10. Элементы теории космических движений 546
§ 1. Введение 546
§ 2. Задача Ньютона 547
§ 3. Движение точки переменной массы 552
Дифференциальные уравнения движения точки переменной
массы 552
§ 4. Задачи Циолковского 555
Первая задача Циолковского 555
Вторая задача Циолковского 557
Глава П. Введение в динамику сплошной среды 558
§ ]. Уравнение неразрывности 558
§ 2. Силы объемные и поверхностные 560
§ 3. Свойства поверхностных сил 561
§ 4. Тензор напряжений 563
§ 5. Уравнения движения сплошной среды в напряжениях 564
§ 6. Симметричность тензора напряжений 566
§ 7. Эллипсоид напряжений 568
§ 8. Реологическое уравнение 570
§ 9. Модели жидкостей и уравнения движения 574
§ 10. Критерии подобия при обтекании твердых тел потоком вязкой
несжимаемой жидкости 578
§11. Установившееся движение вязкой несжимаемой жидкости в
круглой цилиндрической трубе 581
§ 12. Распространение малых возмущений в идеальном газе. Скорость
звука 585
§ 13. Одномерное установившееся течение газа вдоль трубы перемен-
переменного сечения 589
Приложение 593
1. Новая форма основных аксиом 593
2. Системы отсчета 595
Учебное издание
Никитин Николай Никитич
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Зав. редакцией А. В. Дубровский. Редактор Н. М. Щепина. Младшие редакторы Т. Ф. Артю-
Артюхина, Н. М. Иванова. Художественный редактор Л. К. Громова. Технический редактор
Е. И. Герасимова. Корректор Г. И. Кострикова
ИБ № 8230
Изд. № От-704. Сдано в набор 21.03.90 Подп. в печать 26.09.90. Формат
60x90'/i6- Бум. офсет. № 2. Гарнитура «Тайме» Печать офсетная. Объем
38,00 усл. печ. л. 38,00 усл. кр.-отт. 36,88 уч.- изд. л. Тираж 100 000 экз.
Зак. № 192. Цена 1р. 50 к.
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглинная ул., д. 29/14.
Ордена Октябрьской Революции и ордена Трудового Красного Знамени МПО
«Первая Образцовая типография» Государственного комитета СССР по печати.
113054, Москва, Валовая, 28.