/






































































































































































































































































































































































































































































Text
А.М. БОРОДИН, Н.В. УСКОВ
ПРОЕКТИРОВАНИЕ СИСТЕМ
РАДИОПРОТИВОДЕЙСТВИЯ И РАДИОТЕХНИЧЕСКОЙ
РАЗВЕДКИ МЕТОДАМИ МОДЕЛИРОВАНИЯ
Производственно-практическое издание
Тирасполь, 2002
УДК 623.62:519.25
ББК 3.95
Б82
Рецензент - чл. - корр. РАЕН, д-р тех. наук, профессор ПТУ им. Т.Г. Шевченко
Ю.А Долгое
Бородин А.М., Усков Н.В.
Б82 Проектирование систем радиопротиводействия и радиотехнической разведки методами
моделирования: Произв.- практ. изд., - Бендеры, ООО «РВТ», 2002. — 492 с.
Книга посвящена вопросам проектирования систем радиопротиводействия и радиотехнической
разведки методами моделирования.
Рекомендуется для инженеров-разработчиков радиоаппаратуры и инженеров-системщиков
УДК 623.62:519 25
ББК 3 95
© Бородин А М., Усков Н.В., 2002
Памяти Отцов и Матерей посвящаем...
Предлагаемая читателю книга появилась по нескольким главным причинам,
перечисляемым в произвольном порядке:
1 . Как Память о тех людях, специалистах и друзьях, с которыми пережили
многие годы, работая бок о бок, помогая друг другу, взаимно обогащаясь, и
которых нет уже в живых (лауреат Госпремии Целлер Н.И., Шишватов В.Н.,
Гусев А.Т., Молостов Е В., Тозарев О.И. и многие другие).
2 Уходит наше поколение, появляется новое, а материалов исследований и
открытых публикаций по вопросам проектирования и построения систем РПД и
РТР все еще мало; надеемся тем самым стимулировать публикации других
специалистов по данным (и смежным) вопросам для передачи опыта и знаний
молодому поколению, идущему за нами
3 Написание книги оказалось возможным благодаря выходу в свет
монографии профессора Ю.П. Мельникова, на базе которой писались глава 4 и
часть 5 главы, включая совместные работы, а также работам школы лауреата
Госпремии РФ, академика В.П. Тарасенко по системному анализу Всем им
выражаем глубокую благодарность. Особую заботу в написании книги и
представлении некоторых материалов оказал С.В. Попов - наш учитель, которому
выражаем огромную признательность.
4 . Помощи друзей, родных и близких, особенно жен и детей. Выражаем
также признательность за ценные замечания, позволившие улучшить текст книги
редактору и рецензенту - члену-корреспонденту РАЕН, д.т.н , профессору Ю А.
Долгову.
Приднестровскому государственному университету, на кафедре
«Вычислительные машины, комплексы, системы и сети» которого состоялось
обсуждение материалов книги, и организовавшему ее публикацию.
з
ОГЛАВЛЕНИЕ
Предисловие 3
ВВЕДЕНИЕ 7
Глава! .ОБЩАЯ ХАРАКТЕРИСТИКА СРЕДСТВ РПД, РТР 10
И МЕТОДОВ ИССЛЕДОВАНИЯ СИСТЕМ МОДЕЛИРОВАНИЕМ 10
1 1. Общие сведения о средствах РПД и РТР 11
1,1.1. Устройства РПД и РТР. 11
1.1.2. Комплексы (системы) РПД и РТР. 15
1.1.3. Сложные комплексы и глобальные системы РПД, РТР. 17
1.2. Направления научных исследований систем (комплексов) 20
1.2,1. Эксперименты с системами (комплексами) РПД и РТР, 20
1 2 2 Теоретическое исследование систем. 23
1.2.3. Виды моделей систем на этапах проектирования систем РПД (РТР), 24
1.3. Особенности создания (постпоения) моделей систем 28
1.3.1, Назначение и функции различных классов моделей 29
1.3.2. Классификация моделей и их особенности. 31
1.3.3. Краткое описание классов (видов) моделей систем. 33
1.4, Общие методы (принципы) построения моделей 44
1.4.1. Некоторые принципы системологии. 44
1.4.2. Правила построения моделей систем. 47
1.4.3. Автоматизация проектирования систем РПД (РТР) моделированием. 50
Глава 2, АНАЛИТИЧЕСКИЕ МОДЕЛИ ПРОЕКТИРОВАНИЯ РПД 53
2.1 Глобальные аналитические модели. Трудности построения 53
2.1,1. Некоторые подходы к построению Глобальных моделей 54
2.1,2. Вероятность преодоления системы ПВО группой самолетов. 55
2.2 . Вероятности непоражения обороняемого самолета в дуэлях 61
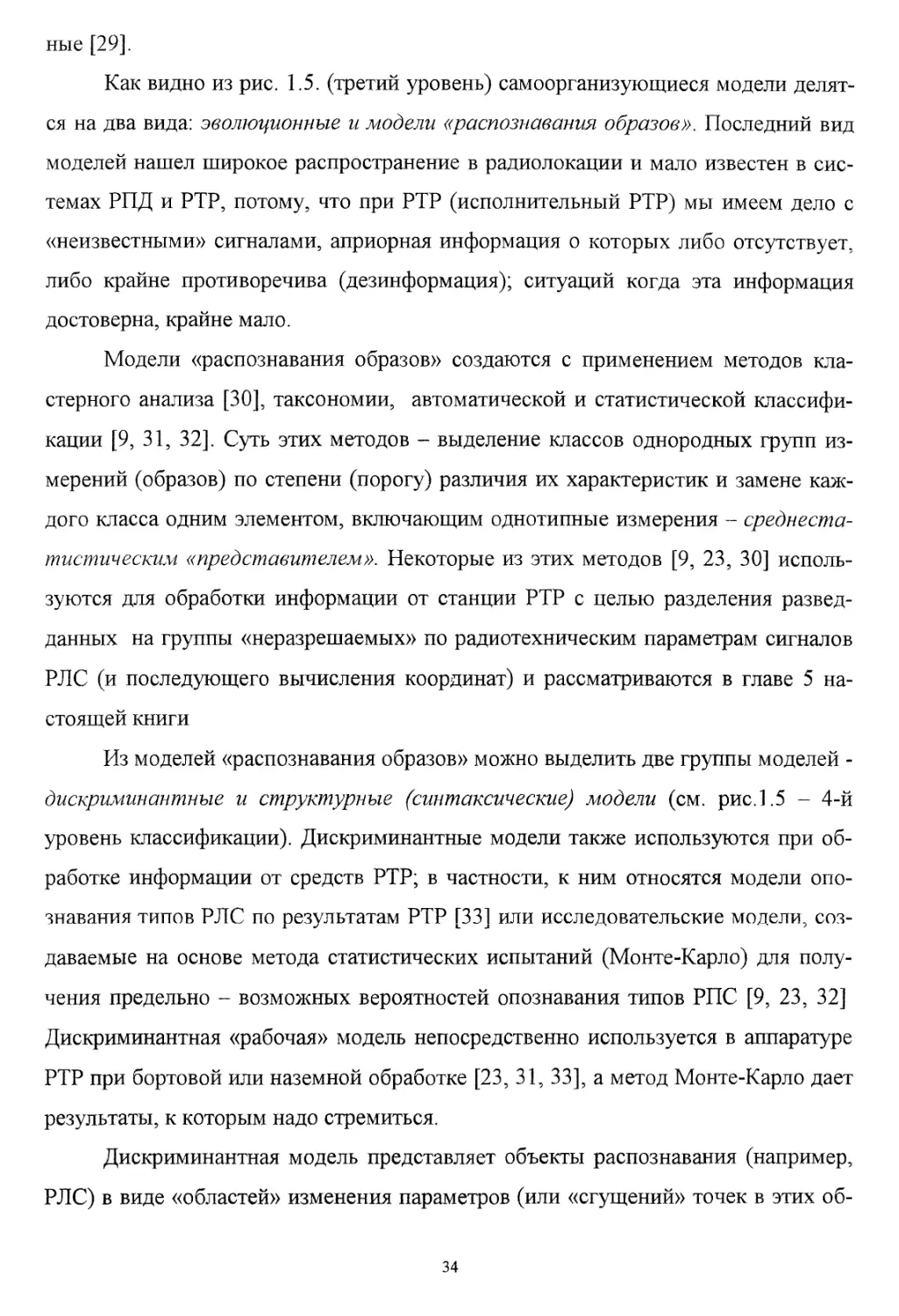
2.3 , Аналитический метод оптимального распределения массы 72
между БКО и средствами ПБЖ 72
Глава 3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И СТЕНДЫ ПРОЕКТРОВАНИЯ
БСО 89
3.1. БСО самолета В-1 В. Требования к ММ и составу ДС 90
3.2. Алгоритм, устройство управления БЦВМ, пульты и индикаторы БСО 97
3.3. Логика работы БСО и управления САП 106
3.4. Динамический стенд. Математические модели ДС 111
3.5. Математическая модель РТО (РЛП) и атакующих средств перехвата 112
3.6 Математическая модель информационной части БСО 123
3.7. Математическая модель исполнительной части БСО 128
3.8. Маскирующие помехи 129
3.9. Имитационные помехи 144
3.10. Помехозащищенность и перспективные РЛС ПВО 182
3.11. Изменение рабочей частоты и многочастотное излучение РЛС 183
5
3 12 Функциональная и пространственно-временная селекция в РЛС 192
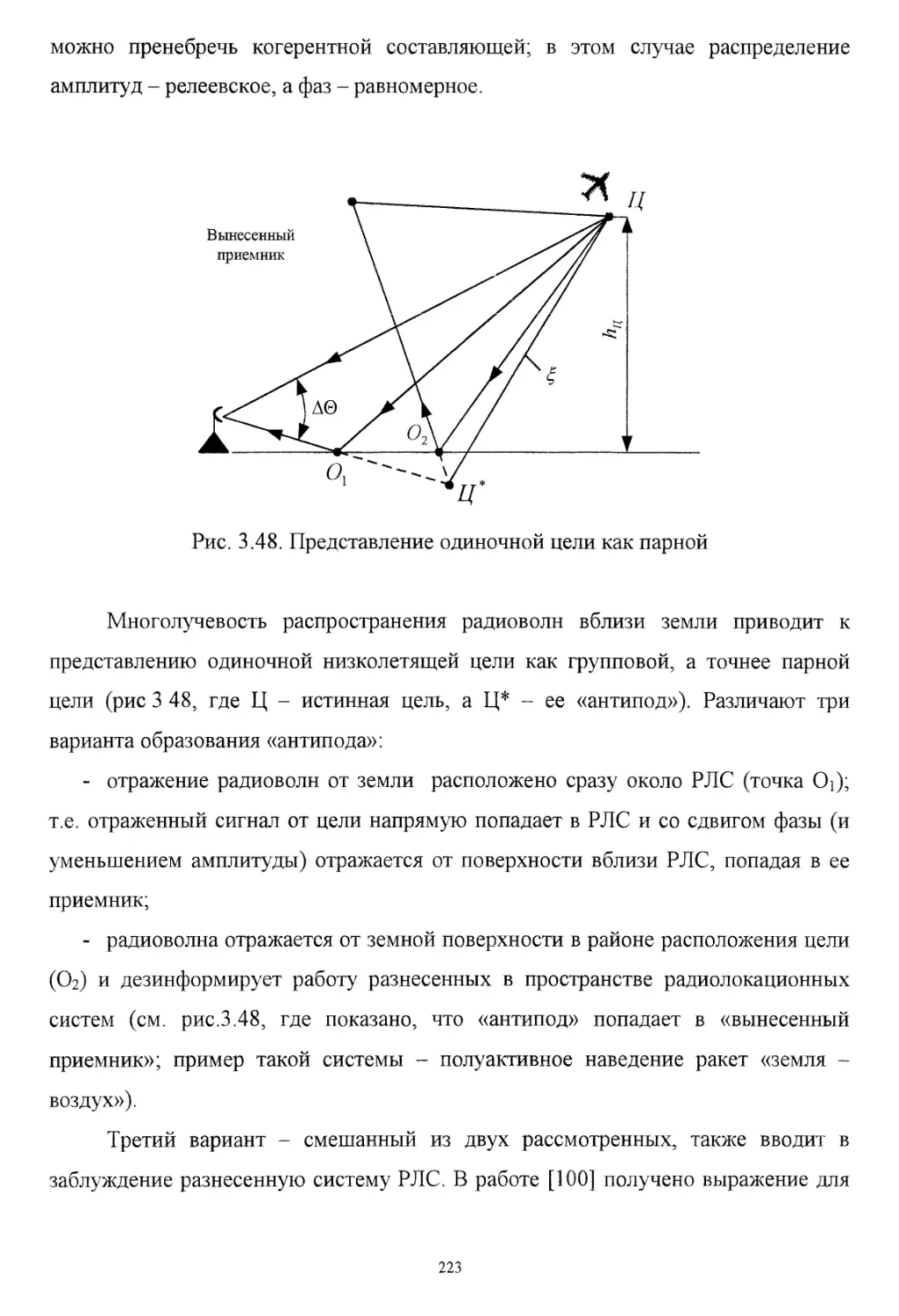
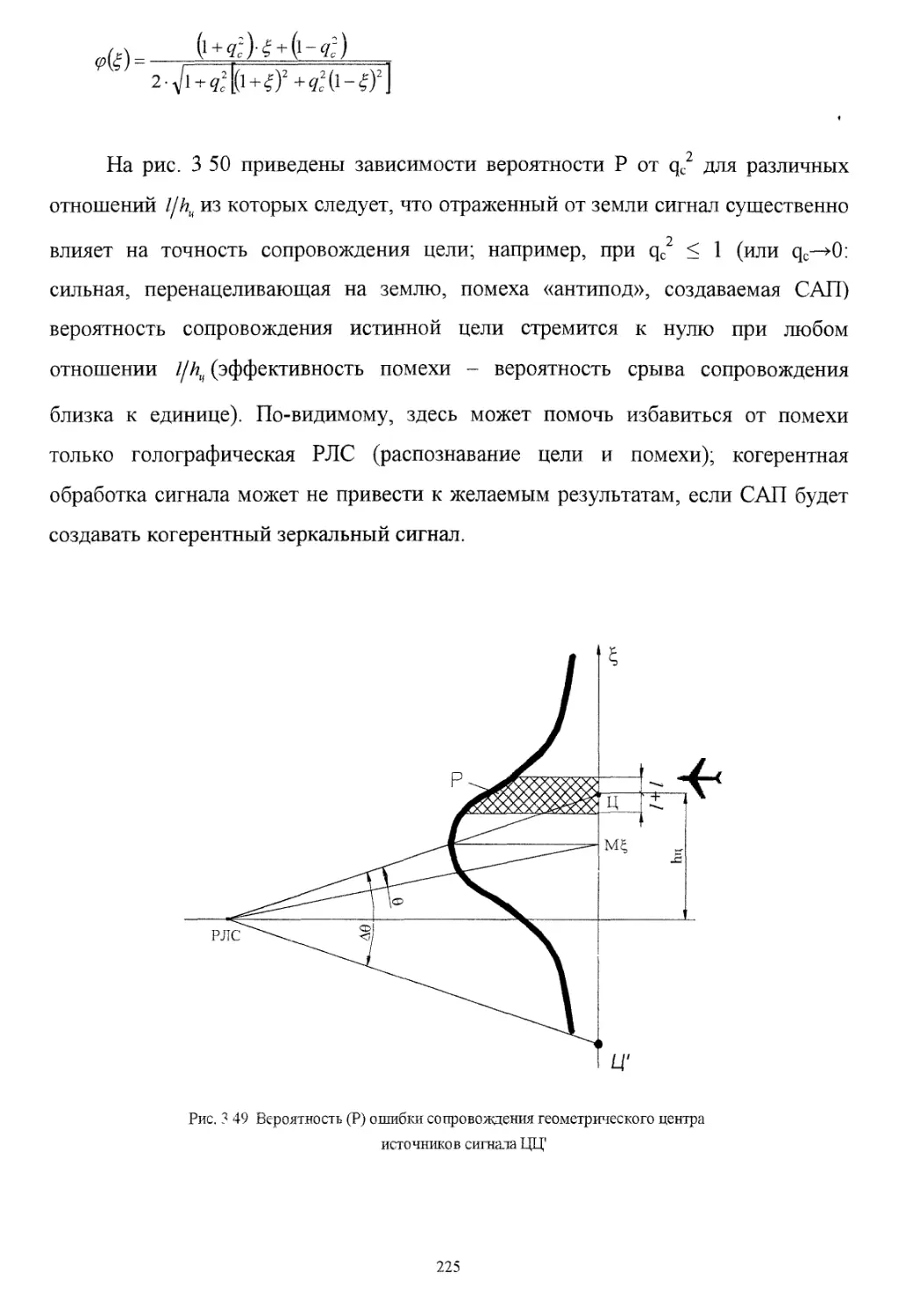
3.13. Моделирование отражения атак на малых высотах цели 218
3.14 Моделирование применения расходуемых средств РПД 231
3 15 Общая математическая модель БСО в составе ДС 271
3 16 Полунатурный стенд и его аналитико-математическая модель
оценки эффективности БСО 280
Глава 4. МОДЕЛИРОВАНИЕ ПРОЕКТРОВАНИЯ КОМПЛЕКСОВ РТР 285
4.1 Аналитические модели оценки эффективности основных этапов
и в целом процесса РТР 286
4 2. Модели расчета эффективности определения координат РЛС при РТР 288
4 3 Оценка вероятностей обнаружения РЛС аналитическими моделями 336
4 4. Аналитические модели процесса РТР в целом 376
4.5. Математическое моделирование в проектировании комплексов
(станций) РТР 379
4.5.1. Состав и характеристики радиолокационного поля 381
4 5.2 Оценка характеристик входного потока сигналов 389
4 5 2.1 Оценка входного потока методом статистических испытаний 391
4.5.2.2. Исходные данные и результаты имитационного математического
моделирования входного потока сигналов при РТР с ЛА 401
4 5 3. Имитационное математическое моделирование станций РТР 407
Глава 5. МОДЕЛИРОВАНИЕ ОБРАБОТКИ ИНФОРМАЦИИ В СИСТЕМАХ
РТР 415
5.1. Общие положения 415
5.2. Сортировка разведданных в системах РТР 417
5.3. Параметрическая селекция сигналов РЛС одного типа при РТР 421
5 4. Эффективность «временной» селекции при проектировании систем
РТР 430
5.5. Варианты аппаратурного построения временных селекторов при РТР
с борта ЛА 432
5.6 Варианты алгоритмического анализа совпадающих временных
последовательностей при РТР 440
5.7. Местоопределение неразрешаемых по параметрам однотипных РЛС 444
5.8. Функция потерь местоопределения группы однотипных РЛС 446
5 9 Поведение функции потерь при обнаружении группы однотипных РЛС 448
5.10. Поведение функции потерь при измерении координат РЛС 450
5.11. Вероятность местоопределения РЛС и ее компоенты 451
5.12 Вероятность ошибки измерения координат РЛС 453
5.13. Вероятность ошибки обнаружения РЛС при местоопределении 456
5.13.1. Локальные алгоритмы 457
5.13.2. Нелокальные алгоритмы 47 0
5.14. Вероятность местоопределения РЛС 474
ЗАКЛЮЧЕНИЕ 478
ЛИТЕРАТУРА 480
6
ВВЕДЕНИЕ
Научно-техническая революция и «холодная война» двух идеологий приве-
ли к тому бурному развитию больших и сложных управляемых систем, которые
мы имеем сейчас; в том числе - принципиально важных разновидностей новой
техники, используемой в военных операциях, - систем противовоздушной и про-
тиворакетной обороны (ПВО и ПРО), а также их «антиподов» - средств информа-
ционной борьбы с ПВО и ПРО - систем радиопротиводействия и радиотехниче-
ской разведки (РПД и РТР) [1, 2, 6 + 11].
Изучением подобных систем, в разных сферах человеческой деятельности,
занимались:
- общенаучные направления - «кибернетика», «системология», «теория
систем», «исследование операций», «теория игр», «информатика», «искусствен-
ный интеллект» и др.;
- прикладные дисциплины - «методы моделирования», «инженерное твор-
чество», «имитационное моделирование» (другие виды моделирования), «мето-
дология эксперимента» и др.;
В 80-х годах двадцатого века стало ясно, что перечисленные исследования
«сливаются в один поток», образуя, по мнению авторов работы [5 с. 5], «систем-
ное движение». Затем возникла наука, служащая «мостом» между абстрактными
теориями системности и живой практикой
В дальнейшем эта наука получила свое название - «системный анализ», а
одним из главных ее «инструментов» исследований стали модели и моделирова-
ние преимущественно на ЭВМ.
Отметим сразу, что сам «системный анализ» не является предметом изуче-
ния в настоящей книге (см для этого работу [5]); здесь применяются только его
основные методы и законы. При этом мы детально не обсуждаем его главных
«постулатов» и понятий: «система», «модель», «большая система», «сложная сис-
7
тема», «большая и сложная система» и т.д (тоже относится и к моделям), а пыта-
емся кратко на них остановиться и сформулировать (по возможности) собствен-
ные, близкие к технике РПД и РТР, подходы и варианты.
Например, в работе [3] собрано более тридцати (!) определений системы
разного уровня и степени формализации (желающий может с ними ознакомиться);
аналогичное разнообразие формулировок «вложено» в понятие «модель», из ко-
торых нам (к технике РПД и РТР) ближе подходит «целевая» интерпретация мо-
дели, когда множество моделей делится по типам целей (задач) [4].
Основное назначение предлагаемой читателю книги - выполнить пожела-
ние авторов монографии [5 с. 6]: «дополнить системный анализ ... сборником ре-
альных его примеров (применений)... - проработанными кем-то ранее ситуация-
ми » Надеемся, что исследование инженерных проблем, в том числе - вопросов
оптимального проектирования средств РПД и РТР методами моделирования бу-
дет одним из таких успешных применений.
Средства РПД и РТР относятся к системам радиотехнического типа, рабо-
тающим в широком диапазоне частот (от оптического до высокочастотного по-
рядка десятков МГц) [2]; их разработка началась форсированными темпами после
Второй мировой войны [11]; однако методы РПД и РТР сегодня еще не оформи-
лись в самостоятельные научные дисциплины. Трудно сказать, с чем связан по-
следний факт (утверждение); возможно, в основном, существенная закрытость
тематики не позволила это сделать. Косвенно это подтверждается тем, что моно-
графий и книг по проектированию и исследованию работы средств РПД и РТР
крайне мало («можно пересчитать по пальцам рук») [1,2, 6 -н 13]. Только в по-
следнее время в отечественной литературе начали появляться аналитические ис-
следования специалистов в данной области (монография [9], вышедшая ограни-
ченным тиражом; диссертация [15]; статьи в Приложении к журналу «Радиотех-
ника» под названием - «Информационный конфликт в спектре электромагнитных
волн»).
Публикации подобного рода по моделированию построения и функциони-
рования средств РПД и РТР практически отсутствуют, если не считать работы [14,
8
16] и др. аналогичной тематики (цифровому и математическому моделированию
радиосистем); имеется ряд примеров моделирования процессов РТР, входного по-
тока сигналов и др. в работе [9].
Итак, основное назначение нашей книги можно конкретизировать следую-
щим образом:
- анализ существующих способов и создание прикладной методологии про-
ектирования и исследования работы средств РПД и РТР моделированием различ-
ного рода (аналитическим, имитационным, динамическим, полунатурным и т.д.);
- использование разработанной методологии применительно к созданию
комплексов РПД и РТР с учетом их основных этапов работы, состава, техниче-
ских параметров входящих в них устройств и комплексов в целом;
- рассмотрение некоторых примеров построения комплексов РПД и РТР и
оценка эффективности их функционирования в различных условиях.
Безусловные требования заключаются в том, что такая методология должна «от-
слеживать»:
- задачи оптимального построения и выбора технических параметров, а
также алгоритмов (логики) работы аппаратуры на всех этапах проектирования
средств РПД и РТР («исследовательских» этапах и стадиях создания опытных
(серийных) образцов);
- более чем 30-и летний опыт конструирования комплексов подобного рода
и результаты оригинальных исследований авторов, насколько это возможно при
публикациях в открытой печати.
Книга состоит из 5 глав, первая из которых касается общих методов проек-
тирования систем моделированием, вторая и третья - создания систем РПД, чет-
вертая и пятая главы - разработки систем РТР.
9
ГЛАВА 1. ОБЩАЯ ХАРАКТЕРИСТИКА СРЕДСТВ РПД, РТР
И МЕТОДОВ ИССЛЕДОВАНИЯ СИСТЕМ МОДЕЛИРОВАНИЕМ
Построение, состав и технические параметры (их набор и точности измере-
ния) средств РПД, РТР зависят от:
- уровня сложности и эффективности выполнения поставленных перед
средствами РПД, РТР задач;
- степени организованности и состава (характеристик) системы ПВО, про-
тивостоящей аппаратуре РПД, РТР.
Известно [6,7], что главная обобщенная задача средств РПД - нарушение
правильного функционирования (и даже срыв работы) системы ПВО путем соз-
дания преднамеренных (специально организованных - «умышленных») помех ра-
диоэлектронными способами. Сформулированная главная задача РПД постоянно
усложнялась по мере совершенствования (развития): радиолокационных станций
(РЛС) ПВО; радиооборудования и вооружения комплексов перехвата - зенитно-
ракетных (ЗРК) и воздушных сил (истребителей-перехватчиков (ИП)); методов
управления и связи в системе ПВО. В результате модернизаций системы ПВО
приходилось усложнять и средства РПД.
Название разведки - «радиотехническая» уже определяет ее задачи [9];
можно выделить два основных класса аппаратуры РТР и направления использо-
вания разведданных:
- контроль за процессами перевооружения системы ПВО специализирован-
ной аппаратурой РТР, установленной на самолетах-разведчиках;
- выполнение мероприятий РТР по обеспечению радиопротиводействия в
строю летательных аппаратов, преодолевающих систему ПВО
Специализированная аппаратура РТР делится на несколько классов, в зави-
симости от сложности решаемых ею задач (станции «детальной», общей, тактиче-
ской, стратегической и др. видов разведки); задачи второго направления выпол-
няются так называемой исполнительной (ИРТР) РТР [15], входящей в состав ком-
10
плексов, станций и других средств РПД. Ясно, что в связи с развитием систем
ПВО, должны совершенствоваться и классы (виды) аппаратуры РТР, ее техниче-
ские параметры.
1.1. Общие сведения о средствах РПД и РТР
Исторически, по мере усложнения систем ПВО, развитие средств РПД и
РТР происходило от [6, 11, 15]: отдельных устройств, решавших «узкие», кон-
кретные задачи; через сложные комплексы (сложные системы) к «глобальным»
комплексам («глобальным» системам РТР [6]).
Указанное развитие, как известно, претерпевает (проходит) любая система,
если ей противостоит развивающаяся подобным образом другая система, какой
является ПВО; причем средства РПД и РТР, по своему развитию, всегда отстают
от модернизаций системы ПВО, если у их разработчиков нет надежных сведений
о путях усовершенствования ПВО.
Перейдем к краткой характеристике составляющих этой иерархической
структуры
1.1.1. Устройства РПД и РТР.
К устройствам РПД относятся [2]:
- станции активных радиоэлектронных помех (РЭП) различного вида и на-
значения;
- автоматы выброса пассивных и активных помех («расходуемых» средств),
таких как - дипольные отражатели сигналов РЛС; патроны с горючими смесями,
имитирующие излучения выхлопных газов двигателей летательных аппаратов;
ракеты - ловушки и ложные цели; передатчики одноразового действия и др ,
- дистанционно пилотируемые и управляемые летательные аппараты
(ДПЛА), оборудованные средствами РПД
Существуют также устройства изменения рассеивающих свойств летатель-
ных аппаратов (ЛА) в спектре электромагнитных волн, в том числе - покрытия,
п
поглощающие сигналы РЛС, падающие на объект (ЛА). К средствам (устройст-
вам) РПД можно отнести: камуфлирующие устройства, создающие дымы и аэро-
золи; ионизаторы окружающего ЛА пространства путем изменения электрических
свойств среды распространения сигналов РЛС (плазменные устройства). Однако
ионизаторы не нашли применения в технике РПД из-за больших энергетических
затрат на создание эффекта поглощения в среде распространения радиоволн, ка-
муфлирующие устройства не входят в состав комплексов РПД, а поглощающие
материалы используются для обеспечения электромагнитной совместимости
(ЭМС)
У стройствами РТР можно назвать [2]:
- станции РТР всевозможного вида и назначения;
- радиопеленгаторы, «опто» и «тепло» инфракрасные (ПК) пеленгаторы,
- радиодальномеры, «опто» и ИК - дальномеры;
- «фото» и «теле» приемники, регистрирующие (документирующие) уст-
ройства всевозможного типа;
- радиолинии (коротковолновой - КВ, ультракоротковолновой - УКВ) свя-
зи и передачи данных.
Наиболее сложными и распространенными из них можно считать станции
РЭП и РТР; они размещались на многих военных самолетах, вертолетах, беспи-
лотных и пилотируемых летательных аппаратах.
Следующими по распространенности применения в боевых операциях, при
взлетах (посадках) с военных аэродромов можно назвать пиротехнические, меха-
нические автоматы выброса расходуемых средств (АПП, АПМ), особенно ди-
польных отражателей и ложных целей. Конкретные типы устройств РПД и РТР
зарубежных стран и их размещение на летательных аппаратах приведены в работе
[2].
Обобщенная типовая блок-схема самолетной станции активных помех
(САП) приведена на рис. 1.1. (станции РЭП для создания некоторых видов помех
(их блок-схемы) описаны в работе [7]). Как правило, в САП существуют два кана-
ла - генераторный и ретрансляторный с собственными «наборами» аппаратуры;
12
на рис. 1.1. это не показано, а будет проиллюстрировано позднее в главе III на-
стоящей книги.
Рис 1 1. Блок-схема самолетной станции РЭП
(станции активных помех - САП)
В состав схемы рис. 1.1. включены:
- приемные - Апр(1) и передающие - Апер(8) антенны;
- приемник (2) для обнаружения, измерения и запоминания «временных»
параметров сигнала (длительности, периода повторения импульсов), несущей час-
тоты, характеристик модуляции сигналов РЛС;
- генераторы шумов (3) различного вида («белый», «нормальный», шумо-
вая модуляция основных параметров сигналов РЛС - амплитуды, частоты и фа-
зы);
- модуляторы (4) шумов различного вида для «маскирования» параметров,
отраженных от летательного аппарата, сигналов РЛС;
- имитаторы (5) отраженных сигналов (создают «имитирующие» помехи,
13
повторяющие и «размножающие» сигналы РЛС);
- матрица (7) выбора (включения) соответствующих видов, последователь-
ности («целевых комбинаций») действующих помех на определенное время
(цикл) РПД.
Подробнее обо всем этом можно найти в работах [7, 8] и в главе III книги
Здесь мы только отметим, что назначение имитаторов (5) - создание «точных»
копий сигналов РЛС с соблюдением всех амплитудно-частотно - фазовых соот-
ношений между параметрами отраженных сигналов для введения в «заблужде-
ние» РЛС, а в матрице выбора (7) каждому типу РЛС с помощью «замыкателей»
можно установить «целевую» комбинацию («набор») наиболее эффективных, с
точки зрения РПД, видов помех и циклы (времена) их противодействия.
Ai(l)
Рис 1.2. Блок-схема самолетной станции РТР.
Блок - схема самолетной станции РТР изображена на рисунке 1.2. В состав
станции РТР входят.
- приемные антенны - АД1) приемника - обнаружителя (3) сигналов и из-
мерителя технических параметров РЛС;
- приемные антенны - Аг(2) приемника - пеленгатора (4) для измерения уг-
14
лов прихода (азимута -а и угла места -Д) сигналов РЛС;
- временной (5) селектор (или/и бортовая цифровая вычислительная машина
- БЦВМ) измеренных параметров по «экземплярам» РЛС (разделение по времени
прихода или «по параметрам» наложившихся во времени облучений РЛС),
- устройства запоминания (6) и обработки (7) разведанной информации с
учетом навигационных данных самолета-разведчика («привязка» координат РЛС
к «карте»).
Вторая задача селектора (кроме разделения последовательностей облучений
РЛС) - «привязка» к одним и тем же моментам времени приема угловых коорди-
нат (а,Д) и технических параметров сигналов РЛС (мощности, несущей частоты,
длительности и периода повторения импульсов и т.д.). Возможен вариант по-
строения станции РТР, когда углы а, р измеряются по отселектированным после-
довательностям сигналов РЛС, из-за необходимости получения «пачки» (несколь-
ких, следующих подряд, импульсов) или определенной длительности (непрерыв-
ное излучение РЛС) сигнала РЛС
Более подробные сведения о станциях и другой аппаратуре РТР можно най-
ти в литературе [7, 11 и др ], а также в гл. 4 настоящей книги.
Заметим, для ясности, что вопросы конкретного построения блоков и стан-
ций РЭП и РПД, методов обнаружения и пеленгования сигналов, анализа влияния
конкретных видов помех на схемы построения РЛС выходят за рамки настоящей
книги («нельзя объять необъятное»); однако в той мере, которая требуется для
моделирования, эти вопросы будут затрагиваться в последующих главах.
Подчеркнем еще раз, что эта книга пишется не просто для моделирования, а
для выбора структуры, состава и основных технических параметров средств
РПД, РТР с помощью различных методов моделирования
1.1.2. Комплексы (системы) РПД и РТР.
Мы будем называть комплексом (системой) РПД (РТР) «устройства оп-
ределенного функционального назначения, объединенные общим устройством
управления (УУ), для решения конкретно поставленных задач». Такое «целевое»
15
назначение комплекса (системы) соответствует практике его построения и нас
вполне устраивает
Само УУ комплекса может быть построено на базе БЦВМ или быть «конеч-
ным автоматом», как это интерпретируется в теоретической логике, когда в УУ
реализуется жесткая («аппаратная») логика работы комплекса. Не исключается
(допускается включение) введение в составы устройств собственных БЦВМ («ми-
ни-ЭВМ»); единственное требование при этом - наличие в «мини - ЭВМ» ин-
терфейсов обмена информацией с центральной БЦВМ (УУ), «не противореча-
щих» логике построения комплекса (в первую очередь - согласованных с общим
темпом обмена и «не тормозящих» его).
Укрупненная блок-схема такой системы (комплекса (РПД, РТР)), построен-
ной по нашему определению, приведена на рис. 1.3.[15], который не требует по-
яснений (РЭО - радиоэлектронное оборудование ЛА)
Рис 1.3 Укрупненная блок-схема системы РПД РТР
Если это (рис. 1.3) система (комплекс) РПД, то в зависимости от ее назначе-
ния, составные части подсистемы могут быть представлены разными составами
устройств.
Типовой состав системы РПД включает:
- информативную часть - станцию И РТР, инфракрасный (оптический, ла-
зерный или все вместе) теплопеленгатор, устройство определения собственных
координат летательного аппарата (если на воздушном носителе нет собственной
навигационной системы);
- исполнительную часть - все устройства РПД, перечисленные в разделе
1.1.1., кроме ДПЛА.
16
УУ системы РПД сопрягается аппаратно (или через интерфейс) с обеими
частями (информационной и исполнительной) и с радиоэлектронным оборудова-
нием летательного аппарата в том числе - для обеспечения совместной работы и
электромагнитной совместимости; в состав УУ могут входить пульты и индика-
торы для управления работой оператором [15], В состав системы РПД может
включаться межаппаратное устройство временной развязки (МАВР) сигналов для
обеспечения ЭМС (на рис. 1.3 не показано)
Типовой состав системы РТР (по схеме рис. 1.3.) состоит из’
информативной части - все устройства РТР, перечисленные в разделе
1.1.1. (кроме радиолинии);
исполнительной части - коротковолновые (ультракоротковолновые)
линии передачи данных (иногда в исполнительную часть входят устройства до-
кументирования разведданных).
УУ системы РТР, кроме управления, выполняет еще и обработку информа-
ции, а также сопряжение (совместную обработку) данных от различных устройств
разведки, которые (данные) в общем случае - неравноточные. Кроме того, при
обработке информация может сжиматься для передачи по линии связи потребите-
лю (передаются на Землю только координаты и типы РЛС, либо выборочно-
технические параметры конкретных РЛС по запросам или предполетной про-
грамме).
1.1.3. Сложные комплексы и глобальные системы РПД, РТР.
Вообще говоря, действуя дальше аналогичным (как на рис. 1.3.) образом
(также как мы определили и «построили» системы РПД и РТР), можно построить
сложные комплексы (сложные системы) любой степени «сложности». Например,
можно объединить различные системы летательного аппарата в единую, более
сложную систему (бортовую РЛС - БРЛС на ЛА увязать с системой РПД и нави-
гационной системой управления летательным аппаратом, как это сделано на са-
молете В-1В (мы будем это рассматривать в главе III книги)).
Можно построить сложную систему РТР, размещенную на трех самолетах -
17
носителях аппаратуры для реализации «мгновенного» (моноимпульсного) способа
местоопределения РЛС, получившего название «разностно-дальномерного», ко-
торый мы будем рассматривать в главе IV книги.
Продолжая таким образом «наращивать» сложность комплексов и систем
разумно задать себе вопрос, а где надо остановиться? Теоретически, как будто,
согласно теории «вложенных множеств», можно сделать все, как говорят «на бу-
маге», а практически - существуют ли какие - либо ограничения?
Для приближенного ответа на эти вопросы обратимся к публикациям.
В системологии термины «простые», «большие», «сложные», «глобальные»
системы (комплексы), по материалам работы [5 с. 115] еще окончательно не уста-
новились. Некоторые авторы вообще не используют эти понятия и просто описы-
вают схемы какой-то степени сложности; другие - объединяют эти понятия, по
возможности, в синонимы, с какими-то оговорками; третьи считают разницу ме-
жду ними чисто качественной (не обязательно двигаться «вширь», можно дви-
гаться «вглубь» явления, процесса, схемы аппаратуры и получить те же пробле-
мы); четвертые связывают сложность с особенностями самих систем.
Все эти подходы к понятию «сложность» подробно рассмотрены в работе
[5, § 4 4] и в цитированной там литературе. Здесь мы только отметим, чтобы ус-
покоить читателя, что кроме качественных мер классификации систем, использо-
ванных нами выше, существуют попытки ввести количественные меры (в разных
науках называемые «концепциями»), но общей такой меры «сложности», пригод-
ной для любых систем (хотя бы технических), построить пока не удалось.
Наиболее известны концепции, где «сложность» выражается некоторым
числом; такие «конструкции» (критерии) введены в следующих, близких к нашей
теме, науках: логике (исчисление высказываний при построении алгоритмов);
статистике (различные «метрики» близости; например, Махаланобиса), теории
самих алгоритмов (длина); теории информации (сложность связана с энтропией; в
работе [7] энтропия используется для оценки качества помех) и др. Подробнее об
этом изложено в работе [16].
Возможно, что в нашем случае, при объединении устройств и систем, в бо-
18
лее сложные «конструкции» через устройства управления, входящие в их соста-
вы, также ввести целесообразно количественную меру - договориться о количе-
стве связей, реализуемых УУ в конкретной системе построения. При превышении
некоторого порога по числу связей в УУ, можно переходить к следующей, по
уровню управления в иерархической структуре, сложной системе Такой критерий
(по числу связей УУ с внешними устройствами (вышестоящими системами).. ) с
учетом реализуемости системы (обеспечения возможности ее функционирования
при выбранной элементной базе) позволит достаточно логично классифицировать
«сложные» системы, а самое главное - строить эти системы так, чтобы они дейст-
вительно работали Таков ответ на поставленные вопросы применительно к сред-
ствам РПД и РТР, как сложным, в большинстве случаев, системам.
Например, относительно системы РПД («простого» комплекса) более слож-
ной можно считать группу таких «простых» систем РПД, размещенных на раз-
ных летательных аппаратах, преодолевающих совместно систему ПВО, и управ-
ляемых вышестоящим «командирским» устройством управления (или нескольки-
ми аналогичными, зарезервированными между собой и размещенными на разных
ЛА). В состав такого более сложного «по управлению» комплекса могут входить
и специализированные самолеты-постановщики помех (ПП) [7], специально
предназначенные для защиты «строя» (группы) ЛА из «вынесенных точек»
К «глобальным» системам (комплексам) можно отнести любые крупные
комбинации из наземных, воздушных и космических систем РПД (РТР), объеди-
ненные общей системой управления. Примером существующей глобальной сис-
темы можно считать систему ПВО Северо-Американского континента, имеющей
несколько линий обороны (в том числе - наземных, воздушных,морских) и
управляемой из центра (штаба), находящегося в США [6].
Некоторые простейшие аспекты построения космических систем РТР, на-
званных «глобальными» из-за масштаба территорий, охваченных разведкой, рас-
смотрены Р. Шлезингером [6]
То, что «размножая» подобным образом понятие «сложность» систем
(комплексов) можно (в конечном итоге) дойти до абсурда, подметил еще И. При-
19
гожин (1986): «Единственной специфической особенностью сложных систем яв-
ляется то, что знания о них ограничены и неопределенность со временем возрас-
тает» [5 с. 116]. Памятуя это мудрое предупреждение, в настоящей книге мы не
будем касаться вопросов проектирования моделированием сложных, а тем более
«глобальных» систем, а остановимся на построении «простых» систем РПД и РТР
(в дальнейшем - комплексов) типа рассмотренных выше.
Прежде всего проанализируем известные способы исследования систем и
особенно - моделированием.
1.2. Направления научных исследований систем (комплексов)
Учитывая, что этот небольшой экскурс - отвлечение в методологию анализа
систем читателю может пригодиться, особенно тогда, когда с чего-то надо начи-
нать при проектировании сложных систем, рассмотрим известные направления
научных исследований.
В настоящее время (так сложилось исторически) существуют три общих на-
правления научных исследований (иногда, и даже часто, банальности помогают)
эксперимент, теория и моделирование. Укрупненно оценим их возможности при-
менительно к проектированию систем, а именно - к построению комплексов РПД
и РТР.
1 2.1. Эксперименты с системами (комплексами) РПД и РТР.
Говоря об экспериментах с системами РПД и РТР, следует, в первую оче-
редь, остановиться на их главном приемо-сдаточном этапе - натурных испытани-
ях. Известно, что все натурные испытания для военно-воздушных сил (ВВС) со-
стоят из наземной и летной частей.
Наиболее трудоемкий и продолжительный вид испытаний - летные, кото-
рые могут проводиться в активном, пассивном и комбинированном вариантах.
В частности, при испытаниях систем РПД и РТР меняется: состав РЛС, ре-
жимы их работы; состав и параметры имитаторов атакующих средств перехвата;
маршруты полета летательных аппаратов и многое другое.
20
Одним из вариантов проведения экспериментов является создание «летаю-
щих лабораторий», действующих «на постоянной основе» (как это принято сего-
дня говорить).
В пассивных способах проведения эксперимента внешние воздействия
нельзя изменить, а можно только наблюдать за изменением обстановки и за пове-
дением исследуемой аппаратуры (например, можно исследовать влияние элек-
тромагнитного излучения атмосферных явлений (разрядов молний) на радиоэлек-
тронное оборудование самолета; изучать поведение смерчей и цунами и др.).
При летных (натурных) испытаниях систем РПД и РТР обычно реализуются
этапы.
подготовка испытаний (составление программы, выбор испытатель-
ного полигона и его средств, расчет и оценка материально-технического обеспе-
чения, обоснования потребного числа полетов);
установка на летательном аппарате бортовых регистраторов экспери-
ментальной информации;
выбор аппаратуры наземных внешне траекторных измерений положе-
ния летательного аппарата в пространстве;
выполнение запланированного числа полетов по варьируемому коли-
честву РЛС и имитаторов радиополигона с записью результатов работы комплек-
сов на различных носителях информации, либо с передачей разведданных по ра-
диолиниям связи;
обработка материалов испытаний (выборочно - на борту летательного
аппарата и окончательно - на наземных ЭВМ в испытательных лабораториях)
Не касаясь сейчас других видов экспериментов с системами РПД и РТР (это
делается в других разделах книги там, где это необходимо) можно заключить, что
натурные испытания - дорогостоящее «мероприятие» и всегда стараются мини-
мизировать количество полетов. Полеты сокращаются по принципу проверки
наиболее важных технических характеристик аппаратуры, новых видов помех и
методов радиопротиводействия (РТР), которые нельзя проконтролировать в на-
земных условиях из-за того, что получатся другие результаты.
21
К сожалению, из-за ограниченности материальных ресурсов на создание и
модернизацию радиополигонов не все на них можно проверить Кроме того, реак-
ция полигона из отечественных образцов РЛС ЗРК и ИП не всегда соответствуют
зарубежным образцам (другое построение и разные способы (аппаратура) защиты
от помех); особенно это каксается атакующих средств перехвата.
Наконец, мы подходим к наиболее важным ограничениям в проведении на-
турных испытаний, а именно:
- воспроизвести на полигоне испытаний аналоги построения систем ПВО
различной сложности просто невозможно без войсковых учений; иногда не помо-
гают и учения;
- некоторые из натурных экспериментов опасны для летных экипажей даже
во время проведения (и принятия) специальных мер защиты (скажем проверка от-
ражения атак ракет в реальных их пусках даже без боезапаса и с «препарирован-
ными» головками самонаведения).
Последние из перечисленных проверок могут быть выполнены только ме-
тодами математического (динамического, полунатурного) моделирования на мо-
делях, аттестованных вместе с заказчиком (согласованных с заказчиком) и в
этом состоит принципиальная «помощь» от моделирования, так как это сущест-
венно дополняет натурные эксперименты (а не только наоборот, когда экспери-
мент «проверяет» модель).
Резюмируя, вкратце, сказанное в настоящем (и других) разделах, можно за-
ключить, что мы ожидаем «двойной пользы» от моделирования: непосредственно
при проектировании (синтезе} аппаратуры систем РПД и РТР и при расширении
«испытательного полигона» в дополнение к возможностям натурного (реального)
радиополигона.
Рассмотрим второе и третье направления исследований комплексов (сис-
тем) - теоретическое (насколько позволяет это сделать общая цель книги) и моде-
лирование.
22
1.2.2. Теоретическое исследование систем.
Нельзя умалять ценности существующих до настоящего времени попыток
теоретического исследования систем РПД и РТР и ряда имеющихся практических
схем построения подобной аппаратуры, базирующихся на достижениях в области
других дисциплин, как об этом уже говорилось ранее. Такие исследования мы бу-
дем, безусловно, использовать, там, где это возможно и целесообразно.
Мы всегда помним, что теория - «... высшая, самая развитая форма органи-
зации научного знания, дающая целостное представление о закономерностях и
существенных связях объекта» [17] Однако мы знаем также, что и теория имеет
дело с абстракцией (моделью) реального объекта, системы, явления и т д. (всем
известно со школьной скамьи математическое представление тела «материальной
точкой»).
Вчерашний, как будто бы проверенный и традиционный путь накопления
теоретических знаний - «от фактов через гипотезы (концепции), математические
модели - к закону» заменяется (все более) сегодня современным и «цивилизован-
ным» (а точнее - компьютеризованным) - «от компьютерного эксперимента, рас-
ширяющего факты, через гипотезы и «думающие» («интеллектуальные») модели
- к закону». Часто «вычислительный эксперимент» используется вместо фактов,
а «Полезная модель» заменяет образец аппаратуры и патентуется (модель) как
изобретение [18], что было не доступно вчера (авторские свидетельства на алго-
ритмы не выдавались).
Нетрадиционный путь накопления теоретических знаний привел, по наше-
му мнению, к самостоятельному направлению научных исследований - математи-
ческому (динамическому, полунатурному и др.) моделированию создания средств
и систем и, в частности, комплексов РПД и РТР.
Естественно, что любая страна гордится авторами новых законов, фунда-
ментальных открытий, Нобелевскими лауреатами и т д.; кроме того, любые моде-
ли также используют аналитические методы при их (моделей) создании; но все-
таки «рутинная практическая работа» при анализе, сравнении и выборе конкрет-
ного варианта (алгоритма) построения систем РПД и РТР, выполняется на мате-
23
матических (и других) моделях; без моделирования нет качественной (нельзя по-
строить) и эффективной системы, свободной от принципиальных ошибок.
В предыдущих разделах отмечалось, что в существующей литературе по
технике РПД и РТР нет публикаций, названных (или использующих) словом
«теория», что, по-видимому, также объясняется относительной «молодостью» на-
званных отраслей знаний и прикладным характером исследований. Немалую роль
в этом играет и тот факт, что получение результатов в удобной аналитической
форме часто оказывается весьма затруднительным. Причина последнего факта -
недостаточная разработанность математического аппарата, огромная размерность
решаемых задач и отсутствие надежных априорных сведений о системах и сред-
ствах ПВО, а также о новых идеях и тенденциях развития радиолокации в откры-
той литературе.
По-видимому, «судьба» РПД и РТР такова, что эти направления научных
исследований будут постепенно «открываться» для широкого круга читателей с
некоторой задержкой относительно истинного положения дел. Не зря даже в
ссылках иностранных авторов [6, 143] читаешь и узнаешь, что «такое-то» иссле-
дование было «опубликовано»... двадцать лет назад «в отчетах» такой-то лабора-
тории.
В создании теории РПД и РТР, а также в «продвижении» подобных иссле-
дований помогут монографии типа работы [9], системный анализ [5], общая тео-
рия систем [3], «системология» [19], «исследование операций» [20], «методы экс-
пертных оценок» [38] и другие исследования, о чем уже говорилось.
В неформализуемых случаях построения и анализа средств РПД и РТР су-
щественную помощь окажет и моделирование во всех его вариантах.
Для уяснения и выработки методологии создания (построения) моделей,
рассмотрим (предложим) их возможные виды на разных этапах проектирования
систем РПД и РТР.
1.2.3 Виды моделей систем на этапах проектирования систем РПД (РТР).
Итак, в отличие от известных методов научного исследования других сис-
24
тем в различных областях знаний (физических и вообще естественных науках,
экологии, ...), когда попеременно используются теоретические и эксперименталь-
ные подходы с контролем результатов на ЭВМ и хранением в моделях различных
знаний об объекте [21] (модель играет в таких исследованиях прикладную роль), в
настоящей книге предлагается использовать модели в качестве «инструмента»
построения систем РПД и РТР.
Об этом «курсиве» мы уже говорили в начале главы и во введении; тоже
самое рекомендует также системный анализ (теория «слаба», а эксперименты до-
роги) [5].
Системный подход к построению средств и систем РПД, РТР превращает
науку о «конструировании» моделей - «заменителей» конкретной аппаратуры в
самостоятельный развивающийся процесс, непрерывно сопровождающий все
стадии проектирования. Это значит, что на каждой стадии проектирования сис-
тем РПД (РТР), мы должны иметь исследовательскую модель, максимально при-
ближенную к условиям разработки (создания) аппаратуры на данной стадии; при-
чем, именно на моделях апробируются (проверяются), в первую очередь, все ре-
шения (идеи, схемы, методы, и т.д.) Главного конструктора [15].
Это означает, что модель становится не только главным, универсальным,
незаменимым «инструментом» построения систем РПД и РТР (о чем уже говори-
лось), но и в большинстве случаев единственным методом научных исследований
(там, где радиополигон и другие методы «бессильны») [22].
Типовая схема (стадии) серьезной (качественной) разработки аппаратуры
назначения состоят из пяти этапов'
1. Проведение научно - исследовательских (НИР) и аванпроектных работ,
результатами которых, как правило, являются предложения (проект) по тактико-
техническим требованиям (ТТТ) на опытно-конструкторскую работу (ОКР).
2. Выполнение технического проекта (l-ro подэтапа ОКР), где проверяются
идеи НИР, макетируются основные каналы (важнейшие блоки) аппаратуры, вы-
полнение техпроекта может заканчиваться действующим макетом аппаратуры
(системы) и обязательно - предложениями по корректировке (изменению, допол-
25
нениям) тактике - технического задания (или ТТТ) на ОКР.
3. Изготовление, настройка, предварительные («заводские») испытания
опытных образцов аппаратуры (системы), проверка их заказчиком на стенде и
передача на конструкторские испытания (2-ой подэтап ОКР).
4. Установка опытных образцов на летательные аппараты (другие объекты)
и проведение конструкторских испытаний (испытаний Главного конструктора) -
лабораторных, наземных и летных (натурных).
5 Государственные натурные испытания (см. раздел 1.2.1.) и начало серий-
ного производства образцов аппаратуры.
Иногда дополнительно (или вместо НИР и аванпроекта) вводится третий
подэтап в ОКР - эскизный проект, который выполняется первым (по порядку ве-
дения ОКР).
Отметим, что важнейшую роль при проведении ОКР выполняет правильно
сформулированное тактике - техническое задание (оптимально, с учетом реально-
существующей элементной базы и достижений техники, заданная работа). Разра-
ботка и согласование ТТТ - прерогатива заказчика и Главного конструктора и
определяется их искусством (как экспертов), знанием проблемы и интеллектом.
Если ТТТ выдается сразу на опытно-конструкторскую работу, то желательно уже
иметь предварительные данные по моделированию комплексов (систем) в пред-
полагаемых условиях функционирования.
На рис. 1.4. приведены варианты моделей, применяемых на соответствую-
щих этапах проектирования систем РПД (РТР), взятые из работ [15, 23]. На этапах
разработки станций и систем РТР используются, в основном, определенные виды
имитационных моделей [23], о которых мы будем говорить позднее в настоящей
и др. главах книги. Общие принципы имитационного моделирования (для озна-
комления) читатель может найти в работах [24, 39].
В основе классификации рис. 1.4. лежит: опыт разработки систем РПД
(РТР) [15, 23]; иерархия моделей (стендов); итерационный характер процессов
проектирования; использование идей и методов искусственного интеллекта, раз-
витых в работах Тарасенко В.П. и его школы (см. работы [153,154] и др.)
26
Рис 1 4 Варианты моделей на различных этапах проектирования
(указаны номерами в прямоугольниках) систем РПД и РТР
В углах прямоугольников схемы рис 1.4. с названием моделей (стендов)
указан номер этапа проектирования системы РПД, на котором эти модели (стен-
ды) должны применяться; стрелки на рис. 1.4. указывают использование резуль-
татов моделирования (либо то - какие модели являются исходными данными).
Заметим, что ввиду ограниченного объема книги не все варианты моделей и
стендов описаны достаточно подробно в последующих главах; например, трена-
27
жер для освоения (изучения) системы РПД летным составом (оператором системы
РПД и другими) не рассматривается совсем из-за его специфики применения. В
самом простом варианте (с минимальным использованием сведений об аппарату-
ре системы РПД) тренажер представляет математическую модель функциониро-
вания комплекса при отражении атаки какого-либо комплекса перехвата; при
этом на мониторе персональной ЭВМ (ПЭВМ) «высвечиваются» маршруты
сближения защищаемого летательного аппарата и комплекса перехвата (ЗРК, ИП
и др.) Не описываются также стенды (и некоторые модели) для системы РТР.
Прежде чем перейти к описанию построения и состава моделей при проек-
тировании систем РПД и РТР (все это мы отложим до следующих глав книги),
рассмотрим общие принципы (способы) их создания.
1.3. Особенности создания (построения) моделей систем
Вернемся снова к литературе по данному вопросу. Ранее нами отмечалось,
что общепринятого определения системы не существует; аналогичная ситуация
имеет место с общепринятым определением «модель».
Так, согласно работе [25] математическая модель представляет «... множе-
ство некоторых элементов с отношениями, заданными на этом множестве» - тео-
ретико-множественная формулировка; в работе [26] модель «... структура для
хранения знаний об объекте» моделирования - слишком конкретное определение,
отражающее одну из функций модели. В работе [27] «... математическая модель
сложного объекта представляет собой некоторую знаковую систему, собственные
свойства которой близки к свойствам исследуемого объекта». Последнее опреде-
ление по мнению авторов работы [27], позволяет с помощью экспериментов с
системой (объекта) на ЭВМ получить интересующую нас информацию о поведе-
нии объекта и его свойствах в заданных условиях. Однако снова не ясно, что та-
кое «знаковая система» (это достаточно абстрактное для практики понятие) и
«собственные свойства объекта».
Мы привели три разные формулировки понятия «модель» не для того, что-
28
бы их критиковать, а потому, чтобы показать, что в разных отраслях знаний тре-
буются разные подходы к моделям. Нас, как разработчиков конкретной аппарату-
ры, удовлетворяющей заданным тактико-техническим требованиям, больше всего
«устраивает» краткое определение: «Цель (алгоритм ее достижения) - модель»;
ближе всего к нему «подходят» рекомендации работы [4]. Это определение уже
позволило нам предварительно (рис. 1.4.) разделить модели (и стенды) по целям
моделирования на каждом из этапов проектирования систем. Из рис. 1.4. мы ви-
дим, что на некоторых этапах проектирования могут быть использованы одинако-
вые модели, о чем мы убедимся в дальнейшем при описании способов и выборе
их построения. Кроме того, определение «цель - модель» утверждает, что нельзя
построить универсальную модель, удовлетворяющую всем задачам проектирова-
ния системы (стадиям - этапам разработки, приведенным в разделе 1.2.3 ).
Чтобы выяснить каким требованиям должна удовлетворять любая модель
(стенд, имеющий в своем составе математическую модель), адекватно отражаю-
щая цели моделирования, структуру, характерные свойства и связи систем РПД
(РТР), рассмотрим особенности и функции разных классов моделей, известные по
литературным данным. Возможно, что проведенный анализ облегчит нам по-
строение моделей систем РПД (РТР), а также будет полезен и для проектирования
других типов систем [71, 105, 155, 156].
1.3.1. Назначение и функции различных классов моделей
Существующие классы моделей предназначены для выполнения следую-
щих функций (в обобщенных вариантах)’
1. Измерение некоторых величин, когда модели используют свойство подо-
бия исследуемому объекту (как в работе [27]); например, географическая карта -
модель местности (штурманская, лоцманская и др. карты), выполненная в требуе-
мом масштабе, может позволить измерять расстояние между населенными (и дру-
гими) пунктами (карта автомобильных дорог - более абстрактная модель, но на
ней сделаны (указаны) все необходимые «отметки» и расстояния для автомобили-
ста);
29
2. Описание свойств объекта в различных сочетаниях (таблицы техниче-
ских характеристик объекта (блока, канала, станции и т.д.) в нормальных клима-
тических условиях и при отрицательных (положительных повышенных) темпера-
турах; другие таблицы; номограммы; графики; временные циклограммы, диа-
граммы и т.д);
3. Накопление информации об объекте, процессе (см. цитированное выше
определение модели из работы [26]; банк данных о системе ПВО - радиолокаци-
онном поле (РЛП); данные об атакующих средствах перехвата (рис. 1.4.), «зало-
женные» в ЭВМ, используемой для математического моделирования);
4. Преобразование информации (данные математического или натурного
эксперимента о системе РПД (процессе РТР) статистически обрабатываются для
получения законов распределения величин (аппроксимации известными закона-
ми), гистограмм и др.; см. работу [9], гл. IV, V и др. настоящей книги);
5. Предсказание будущего поведения объекта и его свойств.
Последняя функция (и назначение) моделей особенно привлекательна для
проектирования систем РПД (РТР), так как позволяет (и об этом уже многократно
говорилось), не проводя аппаратурного (натурного) эксперимента, прогнозиро-
вать поведение любой аппаратуры в различных условиях ее функционирования и
по результатам этого прогнозирования синтезировать, отбирать (корректиро-
вать) схемо - технические решения.
Указанное разделение функций относится к простым (или «специализиро-
ванным») моделям; реальные системы и модели, которые им соответствуют, со-
вмещают несколько, а в пределе - все функции и даже те, которые не перечисле-
ны выше, чтобы не повторяться.
Рассмотрим некоторые подходы к построению моделей систем, примени-
тельно к целям аппаратурного проектирования, и дадим краткую классификацию
моделей в зависимости от: степени корректности (правильности) и наличия апри-
орной информации о внешней среде (внешних условиях работы комплексов); уча-
стия «самой ЭВМ», оператора и пользователя (исследователя) в процессе по-
строения (функционирования) модели; свойств системы и др. факторов.
30
1.3.2. Классификация моделей и их особенности.
В существующих способах построения моделей, как и в математике при до-
казательстве теорем, применяются индуктивные, дедуктивные и комбинирован-
ные подходы, которые приводят к эмпирическим, аполитическим и смешанным
моделям (или направлениям моделирования). Примерная классификация моделей,
не претендующая на полноту, изображена на рис. 1.5. Перечисленные укрупнен-
ные модели (направления моделирования) образуют первый уровень классифика-
ТТГХГХ (ГЛТХГ» 1 S А
АДАААА ^pAAV'. А.-У, у.
Рис 1 5 Классификация («граф») моделей, используемых при построении систем
(двойной линией отмечены модели часто применяемые в технике РПД и РТР)
31
Сами названия моделей «говорят» о том, что первые используют опытную
(эмпирическую) информацию, а вторые - теоретические знания об объекте (сис-
теме) моделирования; третий класс моделей (направления моделирования) не тре-
бует пояснений.
Наибольшее распространение при исследовании систем получили смешан-
ные - эмпирико-аналитические модели и это понятно (в их построении использо-
вано максимальное количество информации об объекте); в разработке алгоритмов
построения подобных моделей существенную помощь оказала новая, быстро раз-
вивающаяся отрасль знаний - «информатика».
Информационные технологии предполагают непосредственное использова-
ние ЭВМ в процессе построения моделей («автоматически» по «моделирующим»
алгоритмам). Иногда ЭВМ «привлекается» для построения моделей «под руковод-
ством» оператора (пользователя), который сам отбрасывает ненужные структуры
(свойства) моделей, т.е. занимается «конструированием» (созданием) моделей с
помощью ЭВМ.
Эмпирико-аналитическое направление моделирования делится на два
больших класса моделей;
- имитационные модели (теоретическое исследование в работе [24]; некото-
рое практическое применение к моделированию процессов РТР в работе [23]),
- семиотические (знаковые) модели, которые нашли применение в других
отраслях знаний.
Отметим, что первый класс моделей использует количественные данные об
объекте моделирования, а второй - качественную информацию.
Второе направление моделирования (второй уровень классификации моде-
лей на рис. 1.5.) включают также два класса; феноменологические модели и моде-
ли потенциальной эффективности, которые (последние) также широко применя-
ются в технике РПД и РТР.
Первое направление моделирования (эмпирическое) мы тоже разделили на
два больших класса; эмпирико-статистические и самоорганизующиеся модели.
Незаметно мы подошли к непосредственной классификации и описанию
32
разного класса (вида) моделей; хотя этот процесс немного утомителен и косвенно
затрагивает тематику книги, без него нам не обойтись потому, что надо опреде-
лить место моделей систем РПД (РТР) и ознакомиться с путями (и особенностя-
ми) моделирования.
1.3.3. Краткое описание классов (видов) моделей систем.
Начнем опять по порядку (рис. 1.5.) с эмпирического направления модели-
ГЧ ГЛ Г2 О Ш% ОТ
ТГ^Г'ЛЛГЧТТЧСТ
Till Л ГЧ ТГ ГЧТ" ,
применения в системах РПД (РТР)
Эмпирические модели
Как мы уже знаем, это направление моделирования состоит из эмпирико-
статистических и самоорганизующихся моделей.
Первые из них (эмпирико-статистические):
- реализуют функции описания и накопления информации о свойствах объ-
екта (раздел 1.З.1.), а также преобразования информации;
- используют огромные объемы статистического материала;
- применяют методы математической статистики (регрессионного, корреля-
ционного и факторного анализов; проверки статистических гипотез о виде зако-
нов распределения параметров измеряемых величин и др );
- «сжимают» экспериментальную информацию, превращая ее в удобные
графики, таблицы, законы.
Хотя эти модели и не выявляют, как говорят - «причинно-следственные
связи» между процессами, устройствами и др. аппаратурой системы, они (модели)
нашли некоторое применение в технике РТР [9] и широко используются в других
отраслях знаний [28, 40]. Самоорганизующиеся модели выполняют предсказа-
тельную функцию и это хорошо, но априорные (и другие) сведения о структуре и
поведении системы учитывают очень обобщенно. Как правило, они синтезиру-
ются «самой ЭВМ» по алгоритмам эволюционного моделирования на основе обу-
чающей выборки, которой служат небольшие по объему экспериментальные дан-
33
ные [29].
Как видно из рис. 1.5. (третий уровень) самоорганизующиеся модели делят-
ся на два вида: эволюционные и модели «распознавания образов». Последний вид
моделей нашел широкое распространение в радиолокации и мало известен в сис-
темах РПД и РТР, потому, что при РТР (исполнительный РТР) мы имеем дело с
«неизвестными» сигналами, априорная информация о которых либо отсутствует,
либо крайне противоречива (дезинформация); ситуаций когда эта информация
достоверна, крайне мало.
Модели «распознавания образов» создаются с применением методов кла-
стерного анализа [30], таксономии, автоматической и статистической классифи-
кации [9, 31, 32]. Суть этих методов - выделение классов однородных групп из-
мерений (образов) по степени (порогу) различия их характеристик и замене каж-
дого класса одним элементом, включающим однотипные измерения - среднеста-
тистическим «представителем». Некоторые из этих методов [9, 23, 30] исполь-
зуются для обработки информации от станции РТР с целью разделения развед-
данных на группы «неразрешаемых» по радиотехническим параметрам сигналов
РЛС (и последующего вычисления координат) и рассматриваются в главе 5 на-
стоящей книги
Из моделей «распознавания образов» можно выделить две группы моделей -
дискриминантные и структурные (синтаксические) модели (см. рис. 1.5 - 4-й
уровень классификации). Дискриминантные модели также используются при об-
работке информации от средств РТР; в частности, к ним относятся модели опо-
знавания типов РЛС по результатам РТР [33] или исследовательские модели, соз-
даваемые на основе метода статистических испытаний (Монте-Карло) для полу-
чения предельно - возможных вероятностей опознавания типов РПС [9, 23, 32]
Дискриминантная «рабочая» модель непосредственно используется в аппаратуре
РТР при бортовой или наземной обработке [23, 31, 33], а метод Монте-Карло дает
результаты, к которым надо стремиться.
Дискриминантная модель представляет объекты распознавания (например,
РЛС) в виде «областей» изменения параметров (или «сгущений» точек в этих об-
34
ластях) в многомерном пространстве признаков; при этом отнесение нового изме-
рения к одному из объектов (имеющихся априори (или измеренных) областей
(или сгущений)...) производится с помощью упомянутых выше детерминирован-
ных или статистических алгоритмов [30/32].
Структурная (синтаксическая) модель представляет «образ» объекта путем
соединения его отличительных (структурных) элементов по правилам «формаль-
ных грамматик» (подобно составлению предложений любого разговорного языка
из набора слов). Примеры структурных моделей - алгоритмы распознавания обра-
зов, полученных радиолокационными, оптическими (фотоснимки), инфракрасны-
ми и др. методами.
Аналитические модели
Вернемся снова на первый уровень второй ветви классификации («графа»)
моделей (рис. 1.5) к аналитическим моделям, состоящим из феноменологических и
моделей потенциальной эффективности [17].
При построении феноменологических моделей отбираются самые сущест-
венные элементы и связи, что делает подобные модели чрезвычайно упрощенны-
ми, пригодными для «грубого» объяснения и описания качественной «картины»
(процесса) поведения объекта. Роль автора в построении моделей такого рода
очень велика потому, что выбрать существенные элементы и связи непросто, соз-
даются они (модели) без «помощи» ЭВМ, которая используется как быстродейст-
вующий вычислитель. В случае сложных уравнений и аналитических зависимо-
стей, когда получение результатов в удобном (явном) виде затруднено, использу-
ется вычислительный эксперимент [9, 37]
Аналитические модели потенциальной эффективности особенно важны
для построения систем РПД (РТР), так как используются для получения задан-
ных значений показателя эффективности систем, выбора их состава, структуры и
технических параметров до изготовления макетов, опытных образцов систем Эти
модели выполняют важную предсказательную функцию и значительно более
сложны, чем феноменологические, но их сложность компенсируется качеством
35
полученных результатов, которые значительно ближе к реальности
Структура аналитической модели «повторяет» декомпозицию показателя
эффективности системы и «выстраивается» по иерархическому принципу [15].
Звенья (элементы) структуры предоставляют ряд взаимосвязанных между собой
формул «от общего к частному». Кроме того, «звеньями» структуры могут быть
специалисты - разработчики конкретных устройств, блоков, функционально-
конструктивных модулей (ФКМ); специалисты выполняют эвристические функ-
ции. К числу этих функций можно отнести’ оценку результатов; дополнительные
расчеты по собственным программам; изменение схемо-технических решений,
если они не удовлетворяют требуемым техническим параметрам и «локальным»
показателям эффективности. Специалисты, в зависимости от уровня собствен-
ной подготовки и ответственности за технические решения, могут подключаться
на любом этапе (уровне) работы аналитической модели. Особенно ценно участие
разработчиков отдельных блоков, узлов и ФМК на конечном этапе функциониро-
вания аналитической модели, когда определяется аппаратурная реализуемость
расчетных результатов в заданных габаритах и весах.
Далее в книге показывается, что аналитическая модель потенциальной эф-
фективности РПД увязывает между собой [15]:
- показатель эффективности системы с обобщенными показателями эффек-
тивности ее устройств;
- эффективность работы каждого устойства с качеством функционирования
его отдельных каналов, блоков и так далее вплоть до ФКМ, а также их техниче-
скими параметрами;
- ограничения, накладываемые на аппаратуру (с точки зрения ее габаритов,
весов, энергопотребления) с техническими параметрами устройств и комплекса в
целом.
При этом специалисты - разработчики аппаратуры разного уровня (от ве-
дущих инженеров по каналам, устройствам и блокам до специалистов по ФКМ)
должны получать (при правильной организации моделирования) частные техни-
ческие задания (ЧТЗ) и по ЧТЗ определять возможность их использования в за-
36
данных габаритах и весах.
Если аппаратура предварительно (эскизно) была спроектирована схемотех-
нически, то аналитическая модель должна «уметь» оценить эффективность по-
строения этого варианта.
Время работы системы РПД в аналитической модели учитывается дис-
кретно числом взаимодействий системы (ее составных частей) с атакующими
средствами перехвата системы ПВО, а именно - количеством циклов «радиопро-
тиводеиствие-разведка» при отражении атак ЗРК, И11 и др. средств перехвата
Так как на все элементы системы накладываются ограничения, то конечным
итогом работы аналитической модели является так называемая оптимизированная
структура состава и технических параметров аппаратуры на начальной стадии
ее проектирования; оптимизация проводится по максимальному (пороговому)
значению показателя эффективности аппаратуры в заданных габаритах, весах и
энергопотребления [15]. В системотехнике такая методология получила название
«оптимальный синтез» или просто «синтез» аппаратуры.
Модели потенциальной эффективности функционирования системы можно
разделить на две группы: для целей моделирования процесса РПД (РТР) конкрет-
ной аппаратурой и концептуальные (на рис 1 4 такая модель применительно к
задачам РПД названа «глобальной»), которые решают более сложные и общие
проблемы.
К концептуальным (глобальным) аналитическим моделям можно отнести
упомянутые выше в разделе 1.2.3. модели потенциальной эффективности преодо-
ления группой самолетов, оборудованных комплексами РПД, системы ПВО; в со-
став этой группы могут входить, как мы знаем, «постановщики помех» - специа-
лизированные самолеты, оборудованные только средствами РПД; постановщики
помех могут сопровождать основную (боевую) группу на некотором расстоянии,
создавая «заградительные» помехи «из зоны» (подробно об этом см. в главе II)
Концептуальные модели (подтверждающие некоторый «строй» летательных
аппаратов с определенным составом средств РПД (РТР) - «концепцию» преодо-
ления системы ПВО) существуют и «живут» отдельной «самостоятельной жиз-
37
нью», перерабатываются (в связи с появлением других концепций, новых средств
РПД (РТР), новых летательных аппаратов и т.д.) или создаются вновь
Концептуальные модели можно проверить (подтвердить или опровергнуть)
только в широкомасштабных войсковых учениях, а в большинстве случаев они
(модели) не проверяются натурными испытаниями (нет возможности создать аде-
кватную обстановку для проверки).
К «обычным» моделям потенциальной эффективности относятся: аналити-
ческие модели расчета вероятности непоражения летательного аппарата, обору-
дованного системой РПД в дуэльных ситуациях - при атаках какого либо средства
перехвата; расчетные модели сравнения эффективности системы РПД с мерами
повышения боевой живучести летательного аппарата или с его полезной (боевой)
нагрузкой (см. главу II настоящей книги).
Имитационные модели
Вернемся к одному из классов эмпирико-аналитических моделей - к ими-
тационным (рис. 1.5); этот класс моделей особенно привлекателен для нашей те-
мы исследования.
Дело в том, что имитационные модели, как правило, строятся в условиях
априорной неполноты описания объекта моделирования и внешней среды и до-
пускают большую «импровизацию» в этом плане. Кроме того, имитационные мо-
дели дают количественные результаты и выполняют предсказательную функ-
цию.
Такими моделями могут быть: математическая модель «известного в общих
чертах» макета системы РПД, взаимодействующей с реальным устройством
управления в составе динамического стенда; модели системы ПВО (радиолокаци-
онного поля - РЛП и отдельных комплексов перехвата), «сконструированные» из
отрывочных сведений, дополненных собственным анализом тенденций развития
радиолокации; модели процесса РТР (системами и станциями) и др. (см. рис. 1.4).
Подробнее такие модели представлены в главах III и IV книги.
38
В будущем, по-видимому, надо ожидать существенное расширение этого
класса моделей по следующим причинам. Во-первых, модели предназначены для
реализации на ЭВМ процесса функционирования объекта моделирования во-
времени путем имитации элементарных событий, явлений (и процессов) с сохра-
нением их логической структуры и временной последовательности. Во-вторых, в
составе имитационных моделей допускается использование любых видов знаний
об объекте, среде (эмпирических, аналитических и т.д.), а также «эвристических
конструкций», формируемых экспертным путем на основе опыта, интуиции ве-
дущих в данной отрасли знаний специалистов.
По существу, имитационные модели представляют некоторую систему мо-
делирования, включающую модели разных классов, представленных набором ал-
горитмов функционирования во времени; основное свойство такой системы мо-
делей - графовая (логическая, иерархическая) структура, «параллельно-
последовательно» функционирующая во времени и решающая определенную за-
дачу (цель).
Из последнего резюме следует, что имитационные модели состоят (делятся)
из эвристических и декомпозиционных конструкций (моделей), согласно рис 1 5.
Эвристическое построение имитационной модели предполагает предвари-
тельное глубокое изучение системы (комплекса) и логики ее работы, а также всех
«элементов» системы - от устройств до ФКМ; если системы нет в наличии (нет
структурных и функциональных схем), то моделирующий алгоритм создается эв-
ристическим путем (на основе) «мысленно» предполагаемых вариантов построе-
ния с учетом анализа всех литературных источников информации.
Фактически моделирующий алгоритм представляет предполагаемую логику
работы системы (комплекса), включающую последовательность операций над
сигналами (с учетом их прохождения в элементах аппаратуры) с сохранением всех
«причинно-следственных» и «пространственно-временных» связей.
Таким путем была построена одна из первых моделей работы станции РТР
[34], в которой имитация разведки - взаимодействия станции РТР с радиолокаци-
онным полем - осуществлялась дискретно во времени (с определенным времен-
39
ным шагом моделирования) с учетом изменений на каждом шаге (проверки изме-
нений) состояния РЛП и процессов, происходящих в устройствах (блоках) стан-
ции. Оценка состояний РЛП и процессов в станции производились детерминиро-
ванными и вероятностными методами (в том числе датчиками случайных чисел)
скачкообразно во времени (более подробно см. главу IV настоящей книги)
Качество эвристического моделирования [34] зависело от степени прибли-
жения моделирующего алгоритма к реальному построению и функционированию
аппаратуры, а также от необходимой и возможной детализации представления
моделируемых процессов на существующих в то время ЭВМ.
Вернемся к еще одному варианту имитационных моделей - декомпозици-
онным (рис. 1.5, третий уровень классификации моделей). Декомпозиционный
путь формирования структуры модели основан на «расчленении» системы на ко-
нечное число частей с сохранением связей, обеспечивающих их взаимодействие
[35] Разделение системы происходит до тех пор, пока не останутся элементы,
удобные для математического и (или) алгоритмического описания. Каким спосо-
бом «завязать» эти элементы обратно в систему (логически и аналитически), при
конкретном ее (системы) построении, остается искусством и зависит от уровня
подготовки разработчика модели.
Заметим, что декомпозиционный путь имитационного моделирования бо-
лее абстрактный и требует общей математической подготовки (ближе математику
- алгоритмисту); эврический способ математического моделирования требует
схемотехнической (инженерной) подготовки в выбранной для моделирования от-
расли знаний Гораздо лучше «дело движется» там, где за моделирование берутся
оба этих специалиста, взаимно дополняя друг друга, а самый оптимальный вари-
ант, когда к ним присоединяется программист, знающий информатику и ЭВМ.
Предсказание свойств и поведения объекта (системы) в принятой идеологии
имитационного моделирования производится путем так называемого «.имитаци-
онного эксперимента», позволяющего «проигрывать» на ЭВМ различные ситуа-
ции при варьировании технических параметров системы, алгоритмов ее работы и
маршрутов полета объекта (самолета - носителя аппаратуры) через систему ПВО
40
(вдоль границ ПВО) либо имитации взаимного сближения защищаемого самолета
с комплексом перехвата.
Для реализации эксперимента на ЭВМ требуется создать программы, полу-
автоматически (с участием оператора) с помощью ЭВМ по моделирующему алго-
ритму или «вручную» с использованием языков программирования, т.е. надо раз-
работать так называемое «математическое обеспечение» (МО) решаемой задачи
или - «программное обеспечение» (ПО) Для удобства внесения изменений, ПО
должно быть построено по модульному принципу (как блоки в аппаратуре), когда
каждый модуль «перерабатывает» (моделирует) определенную часть моделируе-
мого алгоритма и представляет собой частную модель - компоненту исследуемой
системы.
Очень часто имитационные модели получаются громоздкими в зависимости
от состава комплекса (системы) и модульное построение математической модели
в таком случае обязательно для поблочной «отработки и стыковки» модулей;
сложные модели (в зависимости от шага моделирования и имитируемого времени
«протекания» процесса, например - полета летательного аппарата) могут потре-
бовать значительного времени работы ЭВМ при «проигрывании» одной реализа-
ции (варианта).
Реализуемость модели на ЭВМ будет обсуждаться в соответствующих гла-
вах книги; здесь мы только, как пример, отметим, что первые математические мо-
дели процесса РТР продолжительностью (1,5-^2) часа даже при шаге моделирова-
ния в несколько миллисекунд (моделирование облучений РЛС главными лепест-
ками диаграммы направленности их антенны) потребовали 8~Л 0 часов машинно-
го времени ЭВМ М-20 с быстродействием 20 тысяч «коротких» операций (типа
сложения) в секунду [34].
Сегодня положение дел с имитационным моделированием значительно
улучшилось потому, что несравненно возросли мощности и возможности ЭВМ
(память, быстродействие, языки программирования и др.).
Однако, несмотря на успехи в развитии вычислительной техники, шаг мо-
делирования, в некоторых задачах РПД и РТР. также существенно уменьшился
41
(до десятых долей микросекунды и менее) в связи с ростом возможностей РЛС и
других средств системы ПВО, а потребная длительность полетов возросла до
(10-45) часов. Поэтому имитационное моделирование так и осталось искусством
(как предупреждал Р. Шеннон [24]) и одновременно - дорогостоящим экспери-
ментом, особенно в реальном «масштабе времени» концептуальными (глобаль-
ными) математическими моделями
Семиотические модели
Казалось бы, что мы уже рассмотрели и «набрали» полный банк моделей,
которые нам понадобятся при проектировании систем РПД (РТР). Тем не менее, в
рассмотренных выше моделях, остался открытым один крупный вопрос - относи-
тельно математического (алгоритмического) описания (и применения) качествен-
ной информации в моделировании, к которой относятся экспертная, лингвистиче-
ская, логическая и другая информация.
На использование подобной информации «нацелены» семиотические моде-
ли; их основная разновидность - логико-лингвистические модели (рис. 1.5), в ко-
торых информация представляется в «языковой» (лингвистической) форме [36].
Логико-лингвистические модели «опираются» на специальные языки представле-
ния знаний, которые желательно было бы использовать в наших моделях ком-
плексов РПД (РТР); иначе придется создавать свой (собственный) язык примени-
тельно к специфике отношений и терминов в нашей отрасли знаний.
Для получения самой общей информации о языках представления знаний,
адекватно отображающих качественные сведения о структуре, свойствах объекта
моделирования и их изменениях, приведем три группы таких языков:
- логические, использующиеся из логики (ее теории) разделы «исчисление
высказываний и предикатов» и «булеву алгебру»;
- реляционные, учитывающие отношения («реляции») между предметами
реального мира и свойствами предметов (табличные представления, семантиче-
ские сети, модные фреймовые языки, синтагматические цепи);
42
- продукционные, которые описывают условия и действия при наступлении
этих условий (набор операций, которые соответствуют условиям); примером та-
ких условий и действий могут служить алгоритмические «безусловные» и «ус-
ловные» переходы.
Разрабатываются также языки и логики, отражающие закономерности
человеческого мышления при познавании явлений окружающего мира (например,
способы формализации поиска изобретений и открытий [18]). Наибольшее рас-
пространение в логико-лингвистических моделях получили реляционные и про-
дукционные языки [41, 42], причем, последние (продукционные) языки пытаются
формализовать работу экспертов [5, 42].
Как видно из краткого описания, неясно сразу как использовать эти языки
при моделировании проектирования систем РПД (РТР), естественно, что в каж-
дом конкретном случае придется читателю и разработчику математической моде-
ли внимательно их изучать.
Здесь мы только отметим, что сочетание логико-лингвистических и имита-
ционных методов привело к появлению нового класса моделей - имитационно-
лингвистических, которые, безусловно, найдут применение в концептуальном
(глобальном) математическом моделировании, где мнение экспертов может
иметь принципиальное значение (см. рис. 1.5).
Д ля завершения параграфа 1.З., резюмируя сказанное, сделаем некоторые
выводы:
1 На различных этапах проектирования систем РПД (РТР) и в различных
условиях целесообразно применять различные модели (см. рис. 1.4), если цели
моделирования совпадают (в той или иной степени), то можно использовать оди-
наковые модели (например, «глобальную» модель РПД можно использовать на
начальном этапе разработки средств РПД для задания ТТТ и на завершающем
этапе - для оценки эффективности «прорыва» системы ПВО);
2. Какую именно модель (стенд) выбрать из нашей классификации (рис
1.5) определяется целями (задачами) моделирования и возможностями самих мо-
делей', например, для задач распознавания типов РЛС следует применять модели
43
«распознавания образов» (дискриминантные); для оптимизации и синтеза состава
(технических параметров) системы РПД требуется использовать аналитические
модели, имитационные математические модели в составе динамических стендов,
полунатурные стенды и т.д. (см. рис. 1.4);
3. Очень важно при концептуальном моделировании учитывать мнение
экспертов и применять новые имитационно-лингвистические виды моделей, со-
четающие достоинства количественного и качественного анализов.
В классификации моделей не рассмотрено пока, моделирование работы ал-
горитмов управления, для построения которых возможно надо применять эволю-
ционное моделирование, однако, основная отработка алгоритмов управления
производится, на динамическом стенде и о ней речь пойдет в главе III настоящей
книги.
Дальнейшему улучшению (и уточнению) построения моделей, а также фор-
мулировке требований к ним, поможет, как мы надеемся, методологическая осно-
ва создания моделей, к обсуждению которой мы приступаем.
1.4. Общие методы (принципы) построения моделей
Методологической основой построения моделей разного применения (в
разных отраслях знаний) могут быть известные принципы системологии, сфор-
мулированные в работе [19].
1.4.1. Некоторые принципы системологии.
Применительно к задачам аналитического, имитационного, имитационно-
лингвистического и др. методов моделирования целесообразно применять четыре
основных принципа системологии, а именно:
1. Осуществимость, позволяющая различать модели, которые следует при-
менять при разработке (исследовании) конкретной аппаратуры («практические»
модели), от «чисто» математических. Осуществимость определяется по одному
главному свойству практических моделей - наличию реализуемого «моделирую-
44
щего алгоритма», о котором мы уже говорили выше. Поясним подробнее этот
принцип
Известно, что любая система, построенная разумно, может выполнять по-
ставленную задачу с вероятностью близкой к единице, если она (система) распо-
лагает неограниченными ресурсами, способностью к адаптации и длительным
(сколь угодно большим) временем функционирования. Нас же интересуют толь-
ко те системы (и соответствующие им модели), которые с требуемой вероятно-
стью (W > Wo) достигают цель в заданное время —t < to (Wo, to — пороговые веро-
ятность и время реализации цели моделируемой системой).
Требуемые Wo и to задаются в ТТТ (тактико-технических требованиях) или
вышестоящей более сложной системой (концептуальной), а в крайнем случае --
лицом, принимающим решение (Главным конструктором).
Следовательно, моделирование обязано из общей массы структур (и соста-
вов) систем выделить только те системы, которые удовлетворяют сформулиро-
ванному условию реализуемости и позволяют сравнивать их между собой. Таким
образом, мы переходим логически ко второму принципу системности, называе-
мому «множественностью»
2. Множественность моделей предполагает не только существование для
одного и того же объекта моделирования нескольких разных моделей, отобра-
жающих различные аспекты (этапы, стадии) поведения объекта (см. рис 1.4)
Вторым важным «проявлением» множественности является «увязка» моделей
между собой, если они (модели) представляют один многоэтапный процесс и весь
процесс нельзя «уместить» в одну большую модель (как в нашем случае при соз-
дании систем) Чтобы удовлетворить принципу множественности, модели много-
этапного процесса проектирования систем РПД (РТР) должны либо стыковаться
«программно» (алгоритмами работы), либо, как минимум, «стыковаться» вход-
ными "(выходными) данными.
Подобное «расчленение» задачи и одновременно «увязка» моделей позво-
ляет решить достаточно сложные проблемы, которые в математической постанов-
ке трудно решаемы.
45
Например, задачу взаимодействия комплекса перехвата с системой РПД,
размещаемой на летательном аппарате, возможно можно решить теоретически с
использованием модифицированных для этого случая диффузных уравнений
Фоккера-Планка или Винера-Колмогорова [43]. Однако значительно проще и на-
гляднее для разработки системы РПД в такой дуэльной ситуации построить мате-
матическую (аналитическую) модель, состоящую из моделей (оценок):
- описания работы средства перехвата (ЗРК и ИП) с учетом его характери-
стик и способов сближения с атакуемым летательным аппаратом;
- описания алгоритма функционирования системы РПД на этапах обнару-
жения, сопровождения и пуска ракет ЗРК (ИП) с учетом видов помех, создавае-
мых системой на каждом этапе атаки и маневрирования атакуемого самолета;
- управляющего модуля, учитывающего все переходы в алгоритме работы
системы РПД, связи и временные соотношения.
В процессе построения модели остается только выбрать подходящую для
этих целей ЭВМ, шаг моделирования и провести эксперименты раздельно для пе-
редней, где время моделирования минимально, и задней полусфер атак обороняе-
мого самолета.
Еще лучше, если удастся решить такую задачу обоими способами - теоре-
тическим и экспериментальным моделированием на ЭВМ и сравнить эти резуль-
таты.
Следующими принципами системности являются:
3 Омнипотентностпъ - чувствительность модели (системы) к второсте-
пенным факторам, которые в будущем при моделировании могут оказаться опре-
деляющими (всемогущими - омнипотентными). Например, если в предыдущей
задаче (моделирования дуэльных атак комплексов перехвата) не учесть противо-
действие системы РПД на этапе пуска ракет ЗРК (ИП), то задачу сохранения са-
молета при его преодолении ПВО выполнить не удастся, как бы тщательно мы не
моделировали;
4 . Учет несоответствия точности знаний о системе ее сложности
(вспомним предупреждение И. Пригожина, приведенного в разделе 1.1.3, а также
46
принцип неопределенности Гейзенберга в квантовой физике относительно невоз-
можности одновременного точного измерения импульса движения и координат
частицы). Этот принцип системологии гласит, что по мере углубления анализа
сложной системы, суждения исследователя о ней (системе) становятся все менее
точными (возрастает неопределенность знаний). В ряде случаев это несоответст-
вие задается: объективной реальностью - стохастичностью (вероятностным ха-
рактером) сигналов РЛС системы ПВО (особенно при приеме сигналов аппарату-
рой РТР из-за радиогоризонта); априорной неточностью (закрытостью) сведений
о системе ПВО; нечеткостью языка при качественном описании объекта и др.
Поэтому при выборе типа (класса) модели все это надо учитывать и, особенно,
при выборе шага моделирования потому, что шаг непосредственно влияет на вре-
мя реализации модели на ЭВМ (материальные затраты на эксплуатацию ЭВМ)
Неверно выбранный шаг неоправданно увеличивает стоимость моделирования и
вероятность появления сбоев ЭВМ. Обычно ожидаемая точность аналитического
моделирования составляет десятки процентов при удовлетворительных расчетах.
Оказывается (по опыту моделирования), что соблюдение перечисленных
принципов системологии возможно при выполнении определенных правил моде-
лирования, к обсуждению которых мы приступим.
1.4 2. Правила построения моделей систем.
В настоящем разделе правила (требования) к построению моделей разного
класса формулируются с учетом характерных особенностей средств РПД (РТР) и
этапов их создания; однако эти требования могут быть полезны и для проектиро-
вания систем другого типа.
Первое правило - следует четко определять цели и «задачи» проектирова-
ния, а также будущие проблемы или «потенциальные» цели (все это называется
проблемной средой моделирования). Указанное правило мы пытались отслеживать
в тексте книги и будем продолжать выполнять его (требование) далее (как это по-
лучится - судить читателю).
Второе правило - умелое задание границ предметной области моделирова-
47
ния, в которую входят сам объект (система РПД (РТР) и радиоэлектронное обору-
дование летательного аппарата, а иногда (часто) - его (ЛА) маневренные и летно-
технические данные и грузоподъемность) и окружающая объект сре-
да. Фактически, как говорят в системном анализе, надо учитывать системную
«двойственность» объекта: представление объекта как внутренней части систе-
мы является основой системного анализа [5], ориентированного на выявление от-
ношений «целое - часть»; рассмотрением же внешней части системы (среды) за-
нимается классификационный анализ [25], который выявляет «родовидовые» от-
ношения в среде
Опуская специальные термины, скажем просто, что применительно к проек-
тированию систем РПД (РТР) внешнюю часть системы (среду) можно разделить
на три вида сигналов:
- прямые (слабофлюктуирующие) сигналы в пределах радиогоризонта, рас-
пространяющиеся в атмосфере между РЛС (наземной, самолетной; активной го-
ловкой самонаведения ракеты) и нашим самолетом;
- сигналы РЛС (бортовых - самолетных - БРЛС), интерферирующие с от-
раженными от Земли сигналами, как правило, при малых высотах полета самоле-
тов;
- загоризонтные сигналы РЛС из областей «тени», «полутени» с большими
амплитудными замираниями (федингами) и искажениями фазовых фронтов от ат-
мосферных (ионосферных) неоднородностей [44, 98].
Возможны также «особые» условия распространения загоризонтных сигна-
лов»по волновому каналу»; однако рассчитывать на такие временные отклонения
не приходится в РТР.
Третье правило: требуется разумно сочетать количественные и качест-
венные описания проблемной среды и предметной области моделирования. Фак-
тически, на практике особо «мудрствовать» не приходится: там, где имеются ко-
личественные сведения, их надо, безусловно, «закладывать» в модель; остальное
(недостающее) дополняется качественными сведениями. В особом положении на-
ходятся концептуальные (глобальные) модели, которые приходится создавать с
48
большим объемом (до 50%) качественных данных экспертов; иногда на таких мо-
делях приходится «проигрывать» прямо противоположные - «антагонистические»
варианты (или мини -максные условия) экспертов.
Четвертое правило - интеллектуализация организации моделирования. Это
правило непременно повышает качество моделирования и облегчает задачу по-
строения моделей.
К интеллектуализации относятся:
- эффективное использование экспертов не только как источников качест-
венной информации, но, в первую очередь, как «кладезь» мудрой, оригинальной,
непредсказуемой количественно информации (академической);
- создание баз (банков) данных (знаний) в виде «выжимок» (резюме, выво-
дов) из научно-технической документации аналогов систем (функциональных
схем, методов построения, технических параметров, рекламных сведений - «рас-
кладушек» и т.д.);
- банки данных по материалам литературы (библиотечной); патентов, дис-
сертаций, авторских свидетельств, рационализаторских предложений;
- результаты всех видов испытаний аналогов аппаратуры, их сервисного обеспе-
чения, компьютерных экспериментов; сведения о контрольно-проверочной аппа-
ратуре;
- использование оператора с «диалоговым» процессором для отладки, тес-
тирования и работы с моделями;
- автоматизация программирования и в том числе - использование моде-
лирующих алгоритмов как высшей стадии построения моделей с помощью ЭВМ
Еще раз подчеркнем, что, вообще говоря, последнее правило моделирова-
ния особенно показало ту «бездну» проблем, которые приходится решать, если
берешься за дело и в первую очередь за нетрадиционное моделирование проекти-
рования систем РПД (РТР) на всех этапах их разработки.
Сама по себе реализация моделей зависит, в первую очередь, от «финансо-
вых» и интеллектуальных возможностей коллектива (и аппарата Главного конст-
руктора), который этой задачей (проектированием систем) занимается.
49
Однако планировать и выполнять работы по моделированию проектирова-
ния систем, с целью сокращения последующих затрат (в том числе), безусловно
необходимо и убедить заказчика аппаратуры - основная (или одна из главных) за-
дач предлагаемой читателю книги. Подробно с методами моделирования можно
ознакомится в цитируемой выше литературе (см. [35, 37,42, 45, 46 и др ]); сейчас
же мы перейдем к небольшому обоснованию проблем, которые стоят при реали-
зации моделирования на ЭВМ, когда занимаемся «полномасштабным» проекти-
рованием (синтезом) аппаратуры на ЭВМ.
1 4.3. Автоматизация проектирования систем РПД (РТР) моделированием.
Как уже отмечалось, автоматизация проектирования систем (комплексов)
моделированием - самостоятельная, достаточно сложная задача, успешно ре-
шаемая, например, школой В.П. Тарасенко [153, 154 и др.] применительно к соз-
данию эффективных корреляционно-экстремальных навигационных систем лета-
тельных аппаратов.
Уже само название навигационных систем говорит о том, что они синтези-
руются оптимальными (экстремальными) методами на принципах корреляцион-
ного анализа
Примерно такую же целенаправленную автоматизацию и проектирование
(синтез структурный и параметрический) хотелось бы иметь и в нашем случае с
учетом специфики построения средств РПД (РТР)
Например, в работе [15] указывается на разработку системы автоматизиро-
ванного проектирования работы (САПР) бортовых комплексов обороны (БКО)
самолетов, включающую в своем составе пять автоматизированных рабочих мест
(АРМ) разработчика, построенных на базе ЭВМ. В дополнение к этим САПР БКО
были разработаны стенды отработки и сдачи по техническим условиям заказчику
отдельных аппаратурных частей системы РПД (каналов, устройств в целом, бло-
ков и приборов) с использованием персональных ЭВМ IBM/PC.
В наиболее широком варианте в САПР систем РПД (РТР) должны (могут)
входить:
50
- аналитические, математические модели и стенды в соответствии с но-
менклатурой рис. 1.4, реализуемые на ЭВМ с обменом информацией между ними
по волоконным (оптическим) линиям связи;
- АРМ по автоматизированному проектированию схем низкочастотных
устройств аппаратуры с учетом минимизации их состава методами булевой ал-
гебры [155] и автоматической «трассировке» печатных плат (монтажных схем) с
последующим изготовлением электролитической печатью и автоматизированной
пайкой;
- АРМ по автоматизации построения высокочастотных схем малой и боль-
шой степени интеграции, расчетов антенн, диаграмообразующих блоков и др с
выдачей документации по технологическому вакуумному производству и меха-
ническим работам;
- АРМ по разработке конструкторской документации на блоки, ФКМ, при-
боры (типовых низкочастотных конструкций) для запуска их в производство (кар-
касы блоков, ФКМ; монтажные и электрические схемы; деталировка приборов,
узлов; крепежные изделия и др.);
- АРМ по созданию технологической документации (техпроцессы, штампы,
инструменты, материалы и др.);
- АРМ по разработке вторичной (текстовой) документации на отдельные
устройства и их составляющие, а также систему РПД (РТР) (технические описа-
ния, руководства по эксплуатации, технические условия, паспорта и др.) (см.
[15]);
- АРМ по созданию сервисного обеспечения (испытательных лабораторий,
контрольно-записывающей аппаратуры), контрольно-проверочной и эксплуата-
ционной аппаратуры и проработке вопросов ЭМС
В работе [15] показано, что без применения принципов системного проек-
тирования и управления проектами значительно увеличивается расход планируе-
мых на ОКП затрат (на 50-^-500% в зависимости от сложности проектов), а время
разработки до завершенного состояния возрастает, как минимум, вдвое.
Основными причинами перерасхода планируемых финансов ресурсов и уд-
51
линения сроков разработки являются:
- неотработанность на моделях и стендах программно-алгоритмического
обеспечения (по некоторым американским данным на испытаниях системы AN -
ALQ 161 самолета В-1В переработано до 80% «бортового» ПО);
- неприменение (замена) математических расчетов (аналитических моделей)
и моделирования; вместо этого использовалось макетирование (аппаратурный
эксперимент), что заметно сузило «диапазон» исследований ввиду их дороговиз-
ны (не все можно макетировать). Как следствие этого имеет место:
- существенные доработки и неоправданные модернизации аппаратуры для
«доводок» до достижения ею заданных характеристик (по ТТТ):
- появление в входе выполнения ОКР непредвиденных данных и неучтен-
ных факторов, что говорит о плохой предварительной проработке вопроса и от-
сутствии «прогнозирующего»моделирования.
Существенное удорожание САПР БКО может произойти из-за отсутствия
унификациии вычислительных средств, используемых в АРМ, а также аппаратной
и программной несовместимости ЭВМ. Последнее замечание касается также «ра-
зунификации» наземных и бортовых цифровых вычислительных машин (как ми-
нимум, все наземные ЭВМ должны быть одинаковой конфигурации и совместимы
по ПО; это касается и бортовых ЦВМ; как максимум, все бортовые и наземные
ЭВМ должны быть программно и аппаратно совместимы).
Даже из перечисления АРМ, проведенного выше, видно какие сложные за-
дачи встречаются при серьезном подходе к проектированию аппаратуры модели-
рованием.
Перейдем к решению хотя бы части из них, в соответствии с рис 1.4 на-
стоящей главы, и начнем с аналитических моделей систем РПД, а, в частности,
попробуем, в простейшем виде, построить концептуальную (глобальную) анали-
тическую модель.
52
ГЛАВА 2. АНАЛИТИЧЕСКИЕ МОДЕЛИ ПРОЕКТИРОВАНИЯ РПД
2.1. Глобальные аналитические модели. Трудности построения
Необходимость задания уровней эффективности работы различных средств
РПД, участвующих, в одно и то же время, в операциях по преодолению ПВО
противника требует разработки обобщенных аналитических (математической,
смешанной) моделей типа «.авиация против ПВО страны»', такие модели часто
называют «глобальными» (концептуальными).
Еще Р. Шлезингер (1961 г.) предупреждал, что между РПД и эффективно-
стью обороны (ПВО) «... существует чрезвычайно сложная связь с большим чис-
лом неопределенных элементов и что любые методы анализа, в том числе теоре-
тические, могут давать только приближенное решение, которое тем не менее . .
может иметь большое значение для увеличения эффективности РПД» [6 с.274].
Вторая причина целесообразности разработки таких моделей -невозмож-
ность «проигрывания» операций подобной сложности в натурных условиях на
полигонах (не считая дорогостоящих учений с собственной системой ПВО), о чем
уже говорилось в предыдущей главе.
Итак, с одной стороны - существуют трудности построения и приближен-
ность оценок по любой концептуальной модели, а с другой стороны - все-таки
есть необходимость иметь такие модели. Некоторые считают, что построение
глобальной модели задача (и прерогатива) Заказчика военной техники - мини-
стерства обороны (МО) и разработчику средств РПД нет смысла вмешиваться в
этот процесс; однако дело от этого только страдает. Суть вопроса в том, что сис-
тема ПВО и средства РПД непрерывно усложняются и обеспечить заданный уро-
вень эффективности РПД в ограниченных габаритах и весах становится все труд-
нее. Поэтому, как минимум, участвовать в формулировке (разработке) техниче-
ского задания ТЗ глобальных моделей проектировщику средств РПД приходится
почти всегда.
53
2.1.1. Некоторые подходы к построению Глобальных моделей
Период, когда для построения моделей эффективности преодоления ПВО
использовались кумулятивные биномиальные и др. известные аналитические в
явной форме (или табулированные) распределения вероятностей, кажется, давно
прошел [6 с. 272, 20].
Существующий уровень развития вычислительной техники позволяет про-
ектировать сложные и громоздкие математические модели, в том числе - путем
кооперации различных предприятий (фирм) между собой, но стоимости разработ-
ки и машинного времени для набора статистики при применении таких моделей
очень велики, и поэтому они используются редко (один - два раза за цикл разра-
ботки (модернизации) аппаратуры - в начале проведения новых НИР, ОКП и в
конце - для контрольных проверок). Например, во времена существования одной
из мощных российских ЭВМ БЭСМ-6 (быстродействием около одного млн ко-
ротких операций в сек.) время расчета одного простейшего варианта на глобаль-
ной математической модели составляло 8 + 10 часов при стоимости одного ма-
шинного часа порядка 150 руб. (месячная зарплата инженера); при требуемом
числе вариантов расчета около 100 стоимость моделирования составляла 150 тыс.
руб. (около 200 тыс. долларов).
Современные ограничения материальных ресурсов в оборонной промыш-
ленности (в том числе и потребность в «двойных» технологиях) заставляют вер-
нуться к простейшим, но логически объяснимым и понятным аналитическим ис-
следованиям (и оценкам) эффективности с помощью вероятностных моделей (ни-
кого не устраивает, что затратив приличные средства на статистический расчет
одного «пролета» системы ПВО (около 100 вариантов) на математической моде-
ли, вы получаете несколько конечных цифр, не зная насколько можно отклонить-
ся от них в ту или другую стороны).
Методически взаимодействие авиации, оборудованной средствами РПД и
РТР (беспилотной, пилотируемой), с системой ПВО можно оценивать аналитиче-
ски двумя путями - конфликтом (методами теории игр) двух сторон с учетом
обоих ПВО и РПД стратегий поведения или расчетом вероятности преодоления
54
(«туда и обратно») группировкой самолетов системы ПВО. Первый из путей
предпочтителен для штабных (или других) учений; для разработчиков средств
РПД приемлем второй путь потому, что из него сразу получаются вероятности
работы ( пороговые значения) в заданное время конкретных средств РПД (РТР),
также как и вероятности функционирования любой другой аппаратуры, обеспечи-
вающей налет авиации («поддержка радиопротиводействием» из зоны - см. главу
1 и др ). В некоторых случаях удается рассчитать степень предварительного (при-
вентивного) подавления системы ПВО «огневым ударом» («физическим» унич-
тожением наиболее важных элементов системы) в случае, если требуемые вероят-
ности преодоления ПВО недостаточны (потери прорывающей ПВО группировки
авиации недопустимо велики).
2.1.2. Вероятность преодоления системы ПВО группой самолетов.
Как уже отмечалось, глобальная аналитическая модель должна вычислять
вероятность преодоления группировкой самолетов системы ПВО. В отличие от
мощных полигонов некоторых развитых зарубежных стран (свыше 100 ЗРК, ИП и
др. средств на полигоне), имитирующих в тактических учениях работу сложной
системы ПВО [2 с. 160], или дорогостоящих математических моделей, наша ана-
литическая модель должна быть, по возможности, очень простой, но, в то же
время, учитывать'.
- три основных способа применения средств РПД (в строю, позади или впе-
реди ударной авиации, а также комбинацию этих способов, если это необходимо),
- всю имеющуюся номенклатуру средств РПД (см. таблицу 2.1.; главу 1 и
работу [2]);
- наличие в составе группировки самолетов «огневой» поддержки, оборудо-
ванных индивидуальными комплексами РПД; группа поддержки «связывает бо-
ем» большинство атакующих ИП, уничтожает РЛС пунктов наведения (управле-
ния) ЗРК и авиации.
В работе [2] рассмотрено несколько вариантов прорыва ПВО. Одним из
наиболее эффективных способов массового налета авиации, преодолевающей
55
систему ПВО с допустимыми потерями, является [2, 47] •
- первоначальная постановка пассивных или комбинированных (активно-
пассивных) маскирующих помех с дистанционно пилотируемых летательных ап-
паратов (ДПЛА) путем сброса дипольных отражателей (ДО), передатчиков одно-
разового действия (ПОД) и др. средств РПД;
- затем (под прикрытием помех) - нанесение ракетных ударов с самолетов
прикрытия (поддержки) и тяжелых ДПЛА по РЛС, аэродромам атакующих
средств перехвата (ЗРК, ИП и др) в условиях контр - РПД со стороны ПВО;
- наконец, уничтожение заданных целей ударной авиацией, оборудованной
индивидуальными комплексами РПД, поддержанной постановщиками помех
(ПП) в строю, тактическими разведчиками с комплексами индивидуальной РПД
для выявления оставшихся наземных средств ПВО и ИП.
Первые два действия в этом способе применения авиации называются
«обеспечением эшелона прорыва» системы ПВО (согласно терминологии работы
[2]), последнее действие (оперативное построение) - «ударным эшелоном». Про-
межутки времени между указанными действиями должны быть минимально-
возможными, чтобы обеспечить взаимную поддержку и не дать системе ПВО ис-
пользовать резервы; целесообразна также поддержка прорывающейся группиров-
ки из боковых зон ДПЛА со средствами РПД (РТР) и маскирующими (загради-
тельными) помехами большой плотности мощности по несущей частоте сигналов
РЛС со своей территории (до дальностей порядка 170-200 км) с барражирующих
самолетов и вертолетов.
По мнению зарубежных специалистов ДПЛА с аппаратурой активных по-
мех, РТР, расходуемыми средствами РПД (ДО, ПОД и др.), в будущем станут
самым массовым средством поддержки воздушного нападения на современных
ТВД [2 с. 151, 48] ДПЛА десятками запускаются и управляются со специальных
самолетов-носителей и после успешного выполнения задания садятся на землю
или подбираются в воздухе (понятие «успешно» здесь относительное - даже сби-
тый ДПЛА может успешно выполнить задание).
Как правило, постановщики помех - ПП (или средства «групповой» защиты
56
ударных самолетов) предназначены, в отличие от индивидуальных комплексов
РПД, для радиопротиводействия (см. табл. 2.1. и работу [2]):
- РЛС обнаружения, целеуказания и наведения (целераспределения) ЗУР и
ИА(ИП);
- центрам (пунктам) управления и радиосвязи ЗРК (ИА).
ПП могут снизить потери ударной авиации, при правильной организации
РПД, от воздействия истребителей на 70% и от зенитных ракет на 30% [2 с. 151,
49].
Высокая эффективность самолетов поддержки под защитой помех, при сла-
бой организации системы ПВО, продемонстрирована в арабо-израильском кон-
фликте (1982), когда внезапные удары израильских ВВС ракетами уничтожили 17
ЗРК из 19 (коэффициент подавления (уничтожения) системы ПВО в зоне прорыва
~ 0,9), развернутых Сирией в долине Бекаа [2 с. 235].
Опубликованные сведения о многих средствах РПД (РТР) зарубежных
стран, некоторые их характеристики, результаты применения средств РПД (РТР) в
учениях, мировых и локальных войнах (конфликтах) интересующийся читатель
может найти в работах [1,2], а также в библиографии к ним.
Перейдем к построению глобальной аналитической модели, ориентируясь
на возможность простейшего описания наиболее подходящего, с точки зрения
минимума ожидаемых потерь, варианта массового налета авиации.
Сразу скажем, что считать перечисленные в эффективном варианте прорыва
ПВО «три волны» налета авиации независимыми нельзя, так как суть (идеология)
прорыва теряется (для обеспечения независимости процессов эти «волны» надо
разделять достаточно большими временными интервалами, за которые система
ПВО может, в определенной степени, восстановиться, что невозможно учесть).
Следовательно, нельзя разделить задачу преодоления ПВО на три независимых
подэтапа, что сильно усложняет рассмотрение. Вторая трудность заключается в
том, что здесь большой вес имеют тактические вопросы «оперативного построе-
ния» средств прорыва системы ПВО, являющиеся специализацией военных (спе-
циалистов ВВС и летчиков).
57
Таблица 2.1. Номенклатура средств РПД авиации [2].
Средства РПД (носители этих средств) Виды помех 1 1
1. Комплексы групповой защиты - ПП (размещаются на специальных носителях, дополняются БКО). Все виды помех- РЛС управления, це- i леуказания, наведения; линиям связи, центрам (пунктам) управления
2. Индивидуальные комплексы РПД (БСО) (размещаются на всех ви- дах авиации). Все виды помех: РЛС ЗРК, ИП, ИА, ЗА («стрельбовым» средствам ПВО); ГСН ракет (ТСН, РГСН, .. ).
3. Станции активных помех (разме- щаются в составе БСО или авто- номно на всех видах авиации). Шумовые (заградительные, прицель- ные и др.) помехи, дезинформирую- щие (имитационные) помехи.
4. Дистанционно-пилотируемые ле- тательные аппараты (ДПЛА) (тя- желые; средние; легкие; выстре- ливаются со специальных носите- лей или запускаются с Земли) Пассивные и активные виды помех (дипольные отражатели, передатчики одноразового действия, САП-станции активных помех); средства РТР.
5. Ракеты-ловушки, ложные цели (самолеты, вертолеты ВВС и ВМС). Буксируемые ловушки. Имитируют отраженные сигналы воз- душных целей; уводят ракеты от за- щищаемых носителей.
6. Автоматы пиро- и электротехни- ческие, пневматические (на всех видах авиации). Выбрасывают ДО, ПОД, ИК - ловуш- ки (ЛТЦ), ложные цели, опто- электронные ловушки (ОЭЛ).
7. Передатчики одноразового дейст- вия (ПОД) (сбрасываются с по- мощью автоматов с самолетов, вертолетов, ДПЛА; выстрелива- ются). Активные (и пассивные) перенацели- вающие помехи РЛС, линиям связи, центрам управления (по главному лу- чу РЛС и боковым лепесткам)
8. Аппараты подрыва радиовзрыва- телей (размещаются на самолетах, вертолетах ВВС, ВМС). Помехи преждевременного подрыва радиовзрывателей ракет, бомб с це- лью их унижтожения.
9. Дымовые вещества и аэрозоли (выбрасываются авиабомбами, минометами, пушками, специаль- ными пусковыми установками). Помехи -ИК, лазарным, оптоэлек- тронным средствам поражения* фото- разведке и др.
Последняя трудность - правильное «конструирование» (учет) составов обо-
рудования средствами РПД (РТР) самолетов, БПЛА, вертолетов близких к реаль-
ным, которые нельзя реализовать из-за скудных сведений в открытой литературе
по их техническим (и весо-габаритным) характеристикам, способам (схемам) по-
58
строения и параметрам (также недостаточна информация о системе ПВО). Без
преодоления этих трудностей качество расчетов будет весьма приближенным, о
чем и предупреждал цитированный нами автор работы [6].
Выходом из создавшегося положения может быть следующее. Предполо-
жим, что в глобальной аналитической модели не надо учитывать первые «две
волны налета» по обеспечению «эшелона прорыва» системы ПВО, и мы можем
ориентироваться только на конечные результаты этой операции, задаваясь коэф-
фициентом подавления (уничтожения) системы ПВО порядка 0,7^0,8 (это можно
сделать датчиком случайных чисел в ЭВМ, запуская его для «прореживания» РЛС
управления ЗРК, ИП и др). Кроме того, считаем, что выполнение задания на пер-
вых двух этапах налета авиации было настолько успешным, что привело к децен-
трализации системы ПВО, а время для восстановления прерванных связей средств
перехвата (ЗРК, ИП) отсутствует. Тогда атаки оставшихся в системе ПВО средств
перехвата по каждому самолету ударной группировки будут случайными, эпизо-
дическими и независимыми друг от друга. В этих предположениях любой самолет
ударной группировки преодолеет ПВО, если он не будет сбит истребительной
авиацией - ИА, зенитно-ракетным комплексом (ЗРК) и зенитной артиллерией
(ЗА), а так как эти события независимы, то вероятность преодоления системы
ПВО самолетом (Рпво) равна [7]:
РпвоЧ1-РиЛ (1-Рзур) (1-Рз.а), (2.1)
где Рил, Рзур, Р за - вероятности поражения нашего самолета ракетным комплек-
сом ИА, ЗУР и снарядами ЗА.
В свою очередь Риа в формуле (2.1) определяется числом атак истребитель-
ной авиации («ял) и полной вероятностью поражения нашего самолета за одну
атаку (РИА1У-
= (2.2)
Аналогично выражению (2.2) имеем для Рзур и Рза :
59
'Рда=1-(1-Л^1)"’?7
K=t-(i-p30i)”s‘>
Подставив выражения (2.2) и (2.3) в формулу (2.1) получим.
р = (1 - р )"- (1 - р )'" (1 - р )"
Г ПВО V 1 иаУ 1 зркУ V 1 заУ
Формулу (2.4) можно представить в компактном виде-
Рпво = П$-Ы\
2=1
(2.3)
(2.4)
(2-5)
где Рп - полная вероятность поражения нашего самолета z-ым комплексом пере-
хвата в одной атаке, п, - число атак /-ого средства перехвата системы ПВО, 2 -
количество типов средств перехвата.
Мы получили простейшее выражение (2 5) для вероятности преодоления
каждого самолета из группы прорыва системы ПВО. Однако это выражение имеет
большой физический смысл, вероятность сохранения каждого ударного самоле-
та зависит только от количества атак и вероятностей поражения в одной
атаке средствами перехвата ПВО
Если, как мы уже говорили, задаться минимумом потерь самолетов ударной
группировки, то из формул (2.4) и (2.5) следует, что главная задача «эшелона про-
рыва» (первых двух «волн полета» летательных аппаратов) - обеспечить мини-
мальное число атак различных средств перехвата по ударным самолетам (в преде-
ле - не более одной атаки по ударному самолету), т.е. добиться того, чтобы атаки
были редки (Пуассоновский поток атак с достаточно малой интенсивностью). В
то же время бортовой системе обороны (БСО) следует отражать любую атаку
средства перехвата с максимальной эффективностью (надо, чтобы в формуле (2.4)
Ргш1, Рзрк1„ Рза1 6ЫЛИ блИЗКИ К Нулю).
60
По подсчетам зарубежных специалистов применение средств РПД индиви-
дуальной и групповой защиты ударной группировки авиации в 20 раз снижает
уязвимость самолетов в зоне действия противоборствующей стороны (см. [2 с
159, 49]). Этот факт означает, что для отдельного самолета ударной группировки
вероятность его поражения может быть снижена до 0,05 и менее в одной атаке.
В то же время другие исследования [15] показывают, что уменьшить веро-
ятности поражения даже в одиночных атаках до значений, близких к нулю, не так
просто, используя только индивидуальные комплексы РПД (БСО) из-за залпового
применения оружия (управляемых ракет) от одного раза до нескольких раз в од-
ной атаке (поэтому вероятности поражения в формулах (2.2) - (2.5) названы
«полными») истребителем перехватчиком, а также из-за высокой помехозащи-
щенности РЛС ИА, ЗРК.
Для увеличения вероятности непоражения защищаемого ударного самолета
в одной атаке приходится дополнительно (в «помощь» БКО) применять: управ-
ляемые ложные цели, ловушки, оборонительные ракеты; снижать ЭПР самолета с
помощью поглощающих электромагнитное излучение РЛС материалов, наноси-
мых на «блестящие точки» самолета; придумывать специальные конструкции ле-
тательных аппаратов (см. зарубежную программу «Стеле» [2]) и т д.
В следующей главе будут рассмотрены расширенные варианты составов
БКО с применением ряда перечисленных мер на примере стратегического амери-
канского бомбардировщика В-1В (его системы РПД), разработанного по про-
грамме «Стеле».
Сейчас мы перейдем к расчету вероятности непоражения нашего самолета,
оборудованного БКО, с учетом обобщенных характеристик систем РПД (его ос-
новных частей) и ряда мер, снижающих полные вероятности поражения (Ридь
РзурО в одной атаке; атаку зенитной артиллерии мы опускаем, так как серьезных
проблем защиты самолета, по сравнению с ЗУР (ЗРК) и ИА, она не вызывает.
2.2 Вероятности непоражения обороняемого самолета в дуэлях
В соответствии с материалами работ [15, 23] нам надо получить аначгттиче-
61
скую методику расчета вероятности непоражения самолета с БСО, чувствитель-
ную (как говорят в системном анализе) к [15, 23]'
- обобщенным характеристикам исполнительной, информативной частей
РПД и устройства управления (см. схему рис 1.1 и состав системы РПД изобра-
женный на рис. 1.3, и также его описание в главе 1);
- техническим параметрам устройств, входящих в состав БСО, а в пределе
также - к весо-габаритным характеристикам устройств, каналов, блоков и т.д.
В исследованиях [15, 50 и др.] показано, что к обобщенным характеристи-
кам исполнительной части БСО относятся:
- вероятности срыва атаки (и ее этапов - обнаружения, сопровождения и
пуска ракеты) средства перехвата всеми имеющимися ресурсами системы РПД и
БСО в целом;
- число циклов целевых комбинаций помех и расходуемых средств бортово-
го комплекса обороны самолета;
- время действия (с заданным качеством срыва) целевых комбинаций помех
и расходуемых средств.
Из материалов работ [23,9 и др.] следует, что к обобщенным характеристи-
кам информативной части БСО относятся:
- вероятности обнаружения сигналов РЛС в различных диапазонах длин
волн (радиотехническом, инфракрасном, оптическом),
- вероятности опознавания типов РЛС, селекции сигналов;
- вероятности определения координат (местоположения) источников излу-
ченияи др.
Нахождению связей обобщенных характеристик с техническими парамет-
рами посвящены следующие главы.
В работе [50] получено общее выражение для полной вероятности непоражения
(W) защищаемого БСО самолета в дуэльной ситуации при отражении атаки любо-
го средства перехвата системы ПВО;
62
со к / \
W = 1 — РНКП П П (1- )х
<=1т?=1
Л Л Я
s Pi - 2 PiPj + s PjPjPq +
г=1 к] i,j.q
i*j i*J*q
3
+ (-1Г ПР/
7=1
(2.6)
где: Рнкп - вероятность наведения средства перехвата на самолет системой
ПВО (если не было наведения, то Рнкпне учитывается);
- вероятности срыва <|-ого этапа атаки средства перехвата (до пуска ра-
кет и применения пушечного вооружения) г| - ым циклом помех;
со, k, X - число этапов атаки, циклов помех и типов головок самонаведения
(ГСН) атакующих ракет, включая пушечное вооружение;
Pi, Pj, Pq вероятности поражения самолета ракетами i-ым, j-ым, q-ым
.. типами головок самонаведения (ГСН) и пушками.
Формулу (2.6) можно представить более компактно, если «свернуть» мно-
житель, стоящий в ее квадратных скобках
со к / \Г 2
w = i-pHKnn п (i-^Ji-n(i-A) ,
<=1?7=1 ' L 7=1
(2 7)
где Р, - вероятность поражения самолета i-ой ГСН (пушкой).
В выражениях (2.6) и (2.7) и всех последующих в настоящей главе вероят-
ности срыва атаки (ее этапов) обозначаются буквой «S» с индексами, чтобы отли-
чить их от обычных вероятностей, обозначаемых буквой «Р» (с индексами).
Более простое и понятное выражение для полной вероятности непоражения
(W) маневрирующего самолета с БСО можно получить из формулы (2 6), если
учесть три вида ГСН ракет, пушечное вооружение и два этапа атаки (подготови-
тельных этапа) до пуска (применения) ракетно-пушечного вооружения средством
63
перехвата и после пуска [15]:
И' = 1 ~ Р... (1 - )(1 - s„ )П (1 -)П (1 - s;) х [Л+(1 - А+(1 - )/>,.! (2.8)
/=1 1=1
ГДе. А Рргс + (1~Рргс)‘Ртгс >
$СЛ1, SpM - вероятности срыва атаки (ухода от ракеты) противосамолетным и
противоракетным маневрированием под прикрытием помех; S’oRH, Slc - вероятно-
сти срыва этапов: поиска и захвата на сопровождение и самого сопровождения
РЛС (БРЛС) нашего самолета помехами (/ и £- число циклов помех);
Рргс, Ртгс, Рлгс, Рпв - вероятности поражения самолета ракетами с радиоло-
кационной (РГС), тепловой (ТГС), лазерной (ЛГС) головками самонаведения
(ГСН) и пушкой.
Выражение (2.8) в практике построения систем РПД получило название
«боевой» эффективности защищаемого самолета (в отражении атак участвует
боевое маневрирование самолета), а формула (2.6) называется «технической» эф-
фективностью БСО. По сути своей эти эффективности одинаковы, так как без
имитации прежнего движения самолета с помощью помех, никакое маневрирова-
ние самолета не помогло бы в борьбе с ракетами (не те «располагаемые» пере-
грузки при маневре нашего самолета).
Как видно из формул (2.6) и (2.8), на этапах атаки до пуска ракет уже учи-
тываются обобщенные показатели (вероятности срыва) исполнительной части
БСО; если не противодействовать наведению ракет и пушечной атаке, то в эти
формулы вместо Рргс, Р^, Рлгс, Рпв надо подставлять так называемые «полигон-
ные» вероятности поражения. В действительности БСО наиболее активно проти-
водействует (целевыми комбинациями помех и расходуемыми средствами) раке-
там и пушечному вооружению на последнем (основном) этапе атаки (если состоя-
лось применение ракет и пушек средством перехвата). В этих условиях вероятно-
сти поражения ракетами и пушкой оцениваются так [15, 50]:
64
Рргс “1 Р ргс
I
* п 1 ~ Sc Ргс
/ — 1,
Рщгс 1 D Р()тгс ' 0 $ОЗтгс)' Р I 8стгс ,
/=1А /
(2.9)
Рдгс 1 [1 Л)лгс’О ^ОЗлгс)' 1 ScJl2C %,
,=i< л
Pie = 1 ~ [1 ~ Ропе ' 0 ~ $03пв )]1 ,
где: Ро ргс, Ро тгс, Ро тс, Ро пв - полигонные вероятности поражения самолета при
наведении ракет с РГС, ТГС, ЛГС и стрельбой из пушек;
$оз ргс, $оз тгс, $оз тс, $оз пв - вероятности срыва атак управляемых ракет с
РГС, ТГС, ЛГС и пушек системой огневой защиты (03) нашего самолета (напри-
мер, с помощью бортовой РЛС управления оружием и защиты «хвоста» самоле-
та);
v,n,%,ri - число ракет в залпе (пушечных очередей);
Scpze, Scmzc, 8слгс- вероятности срыва сопровождения (наведения) ракет
7-ым циклом помех (расходуемым средством);
т, п,г- количество целевых комбинаций помех (расходуемых средств)
Вообще говоря, при расчетах вероятностей срыва атаки ракет и пушек по
формулам (2 9) дополнительно учитываются так называемые меры «повышения
боевой живучести» (ПБЖ) самолета (бронирование баков с горючим, кабины пи-
лотов и экипажа и др.), но это «отдельная статья», требующая компетенции само-
летостроителей. О сравнении РПД и мер ПБЖ мы будем говорить в следующем
разделе главы.
Заметим также, что сомножитель в фигурных (квадратных) скобках формул
(2.6) (2.8) обращается в единицу при равенстве единице любой из вероятностей
поражения ракетой (с различными ГСН) или пушкой; это проверяется непосред-
ственной подстановкой соответствующих вероятностей поражения в указанные
65
формулы и «говорит» об их (формул) правильности.
Из общих формул технической и боевой эффективностей можно получить
любые многочисленные частные случаи для разных типов (видов) атакующих
средств перехвата, которые подробно рассмотрены в работах [15, 50].
Здесь мы приведем формулы только для двух частных случаев, чтобы пока-
зать «нижние оценки» вероятности непоражения самолета (хуже которых нельзя
допускать); если расчетные вероятности непоражения самолета получаются
меньше таких оценок, необходимо принимать дополнительные меры по обороне
самолета.
В частности, при размещении БСО на «тяжелом», слабо маневрирующем
самолете (стратегический бомбардировщик, постановщик, самолет радиолокаци-
онного дозора и др.) надо считать, что в формуле (2.8) SCM = SpM = 0; кроме того,
для «нижних» оценок применяется минимально-возможное количество циклов
помех при отражении этапов атаки до пуска ракет и применения пушек (/ = к = 1);
тогда из выражения (2.8) имеем:
W = 1 - Р.„ (i-s^Xi - st)x Й < (I + (1 - р, ) М- (2-1°)
При наличии в одной атаке только двух управляемых ракет в залпе (одной с
РГС и одной с ТГС), выпускаемых средством перехвата (для пуска других ракет
не хватило времени), можно в выражении (2.10) положить Рлгс = Рпв = 0 и тогда:
IT — 1 — Рнкп ’ (1— $обн Х1 ~ ) [Рргс + (1 ~ иге ) ?тгс ]• (2.А 1)
В выражениях (2.10) и (2.11) при расчетах вероятностей поражения (сомно-
жителей, стоящих в фигурных и квадратных скобках) также можно брать мини-
мально - возможное количество циклов помех и (или) расходуемых средств (рав-
ное единице) при вычислениях по формулам (2.9); например, для т = n = 1 и двух
управляемых ракет (у = д = 1) с РГС и ТГС из (2.9) имеем:
бб
Рргс ~ Д)ргс ' V “^ОЗргс /' V $сргс /
фтгс ~ Б)тгс ' — $03тгс )' 0 ~ $стгс
(2.12)
которые надо подставлять в формулу (2.11).
Во всех предыдущих формулах, где входит количество циклов помех на
различных этапах атаки (обнаружение, сопровождение и пуск ракет по самолету),
это число пикпов находится следующим образом:
l(k, т, п, г) - ДР/ (t4 усб),
(2-13)
где: ND - интервал дальностей (между самолетом и средством перехвата) на соот-
ветствующем этапе начала и конца атаки,
t4 - длительность одного цикла помех; vc6 - скорость сближения нашего са-
молета с атакующим средством перехвата.
Количество расходуемых средств (PC), используемых при отражении ра-
кетных атак, также вычисляется по формуле (2.13), где вместо t4 используется
темп выброса PC.
Итак, первая часть задания выполнена: во всех предыдущих формулах на-
стоящего параграфа вероятность непоражения самолета связана (зависит) с
обобщенными характеристиками исполнительной части БСО и маневрировани-
ем самолета (для боевой эффективности).
Напомним читателю, что нам осталось включить в предыдущие формулы
для вероятностей непоражения обобщенные характеристики информативной час-
ти БСО.
Сразу заметим, что одна из обобщенных характеристик информативной
части - вероятность местоопределения координат с заданной точностью (стт и
Оу - среднеквадратические точности измерения координат в Декартовой системе)
или дальности до атакующего средства перехвата (при известной высоте лета-
67
тельного аппарата) определяет точности оценки числа циклов помех по формуле
(2 13) на различных этапах атаки. В главе 4 рассматриваются различные методы
местоопределения и приводятся оценки точностей вычисления координат и даль-
ности. К сожалению, имеющиеся «в распоряжении» БСО методы «мгновенного»
нахождения дальности дают больше ошибки и самым подходящим способом зна-
чительного увеличения точностей (на порядок и более) может быть комплексиро-
вание БСО с бортовыми радиолокаторами (БРЛС) самолета в передней и задней
полусферах для получения информации от БРЛС и использования ее в целях (ин-
тересах) защиты самолета. Особенно такое комплексирование важно при отраже-
нии атак истребителей-перехватчиков и ракет ЗРК (на последнем этапе).
В работе [50] показано, что вероятности срыва этапов атаки комплекса пе-
рехвата являются условными, зависящими от вероятностей обнаружения в широ-
ком смысле (с учетом времени анализа, селектирующей способности аппаратуры
и тд. (см. работу [23] или монографию [9])...), вероятности опознавания типа
РЛС и др. Некоторые расчетные зависимости для оценок этих вероятностей при-
ведены в гл. 4.
Условность вероятностей срыва означает, что их надо умножать (при расче-
тах по предыдущим формулам) на произведение вероятностей обнаружения и
опознавания типа РЛС в соответствующем диапазоне длин волн аппаратуры
ИРТР (радиотехническом, инфракрасном, оптическом), т.е. например, в формуле
(2 8) вместо S'o6h и Slc надо подставлять:
С' . р'’(1) ,рЩ) тх сг . р'(2) пг(2) (2 141
доби Гобн Гоп и 10бн Гоп у
где: Р^ и pffl - вероятность обнаружения и опознавания типа РЛС при /-ом
цикле создания помех на первом этапе - обнаружения РЛС нашего самолета (по-
иска и захвата на сопровождение);
и Р^2) - те же вероятности, но уже на втором этапе работы РЛС (при
сопровождении нашего самолета и создании /-ого цикла помех на этом этапе).
68
Формулы (2.14) неприменимы при оценках вероятностей срыва атак систе-
мой «огневой защиты» нашего самолета (физического уничтожения ракет и само-
лета противника) и противосамолетным (противоракетным) маневрированием
(т.е. 5озргс> Зозтгс, ^озтс, Розпв в формулах (2.9) и 8СЛ1>, SpM в формуле (2.8).
Более сложные формулы типа (2.14) при учете противодействия неопознан-
ным типам РЛС и атакующим средствам перехвата приведены в работе [50].
Иногда в информативной части БСО теплопеленгаторы (обнаружители ИК-
излучения двигателей самолетов и ракет) и лазерные дальномеры работают не
только в режиме кругового (секторного) обзора, но и по целеуказанию от радио-
технических устройств обнаружения радиосигналов бортовой аппаратурой (стан-
ций ИРТР). Целеуказание существенно ограничивает зону обзора теплопеленга-
тора (лазерного дальномера) по азимуту и углу места и сокращает время поиска
ИК (оптических) сигналов; тогда вместе с использованием формулы (2.14) расчет
ведется по соотношениям:
С . p'W.p* и S1 -Р'С) pi 62 151
°стгс 1 цу 1 тп ^слгс 1 цу 1 дд’
где: РцР и Ptlnn - вероятности целеуказания от станции РТР теплопеленгатору
(ТП) и обнаружения ТП ПК-излучения на z-ом цикле помех, (в информации о це-
леуказании передается также тип средства перехвата),
Р‘^ и Р1лд - тоже самое для лазерного дальномера.
Формулы (2.15) используются при расчетах Ртгс и Рлгс по выражениям (2 9)
вместо 81слгс и 81стгс.
Такова методология оценок полных вероятностей непоражения нашего
самолета с учетом обобщенных характеристик информативной и исполнительной
частей БСО.
Более подробные и конкретные формулы учета обобщенных показателей
основных частей БСО в расчетах вероятностей непоражения приведены в работах
69
[15,50].
Здесь мы только упомянем некоторые простейшие результаты таких расчетов
Во-первых, для получения достаточно высоких (>0,7) полных вероятностей
непоражения защищаемого самолета (W) обобщенные характеристики станции
ИРТР (информативной части БСО) также должны быть высокими (вероятности
обнаружения, опознавания типа и определения координат с заданной точностью
не хуже 0,8 каждая).
Во-вторых, важно обеспечить эффективное отражение атаки на всех ее
этапах-, если на этапах обнаружения (поиска и захвата) вероятности срыва атаки
могут быть порядка (0,4 - 0,5) для одного цикла помех, то на этапе отражения
атаки ракет вероятности срыва их наведения должны быть порядка (0,8 - 0,9) рас-
ходуемыми средствами (ЛТЦ, ДО и др.). Естественно, что число циклов помех
(запас расходуемых средств) должно быть максимально-возможным.
В-третьих, наибольшую опасность для защищаемого самолета представ-
ляют ЗРК с командной системой наведения ракет и особенно - истребители-
перхватчикщ важно для увеличения вероятности непоражения самолета от таких
ЗРК организовать противодействие линиям передачи команд на ракету для ее на-
ведения.
Приведем формулу из работы [50] для оценки вероятностей целеуказания в
выражениях (2.15) при расчетах W:
(Да-Д/?)/(а0 • Д), при Да- Д/? < ап- Д,
1, при Да • -Д/> > а0 Д
(2-16)
где: Да, А/? - зоны обзора по азимуту и углу места, выданные станцией ИРТР
теплопеленгатору (лазерному дальномеру) для поиска целей;
а0 Д - величина атакоопасной зоны по азимуту и углу места.
В работе [50] найдены выражения для а0 и входящих в выражение
(2.16):
70
а0 - 2(а0 +^у°'а +(Гн +Gn )
А) = 2(Z>o + Ayl а д +tr„ +сг« )
(2-17)
где ао и Ьо - максимальные углы (в 2-х взаимно-перпендикулярных плоско-
стях), под которыми видны с защищаемого самолета расстояния между РЛС и
пусковой установкой наземного ЗРК (для реальных дальностей до ЗРК с учетом
высоты полета самолета а0 и Ьо составляют в большинстве случаев порядка 1°;
для ИП ао=Ьо=О');
А -постоянная величина, определяемая уровнем вероятности, с которым
оцениваются границы атакоопасной зоны;
для нормального распределения ошибок А=2 при вероятности 0,95,
оа, ор - среднеквадратичные погрешности (СКО) измерения а и р в станции
ИРТР;
он - СКО измерения крена (тангажа) нашего самолета, выдаваемые навига-
ционно-пилотажным комплексом (НПК) (обычно он порядка 1,5°);
оп - СКО угловых перемещений самолета за счет полета от момента полу-
чения дро момента «отработки» целеуказания теплопеленгатором (дальномером)
(оп~ 1°).
Расчеты показывают [50], что вероятность целеуказания в формуле (2.16)
близка к единице при оа= ор<2°, измеряемых станцией ИРТР.
В заключение параграфа заметим, что учет ловушек и ложных целей, вклю-
чаемых в состав БСО, может быть произведен использованием вместо полигон-
ных вероятностей (РоРгс, Ротгс, Ропв) в формуле (2.9) зависимостей вида:
[1/(1»,«)]
На+с* «..«)
[i/(i
(2.18)
71
где Рргс •> Ртгс > Рлгс > ~ вероятности «подобия» ложных целей (ловушек) защи-
щаемому самолету в радиотехническом, инфракрасном и оптическом (лазерном)
диапазонах длин волн; пргс, птгс, плгс, плц - число ложных целей (ловушек) для
перенацеливания ракет с РГС, ТГС, ЛГС и пушки.
Формула (2.18) получена в предположении о равновероятном перенацели-
вании атакующих ракет на ловушки (ложные цели); в этом случае несложно «сде-
лать» вероятности «подобия» ловушек, близкие единице (для этого требуются
простые ловушки) Гораздо сложнее сконструировать «интеллектуальные» ло-
вушки, типа SKAD [2], входящие в состав системы РПД самолета В-1В (FB-111),
которые обеспечивают большую, чем на защищаемый самолет, вероятность пере-
нацеливания атакующих ракет В последнем случае необходимо использовать
другие расчетные соотношения для решения задачи зашиты самолета (см главу
III). «Интеллектуальность» ловушек, в первую очередь, определяется сложностью
и возможностями средств РПД, размещаемых на них [2]
Приведенные в настоящем параграфе формулы для расчета вероятностей
непоражения можно применять и для других целей, например - для определения
масс, отводимых на борту летательного аппарата для комплекса РПД, по сравне-
нию с массой оборудования, необходимо для обеспечения боевой живучести са-
молета (средств ПБЖ, о которых говорилось выше в настоящем параграфе). Пе-
рейдем к рассмотрению подобных вопросов
2.3. Аналитический метод оптимального распределения массы
между БКО и средствами ПБЖ
Учитывая, что полезная нагрузка ударных самолетов при выполнении бое-
вой задачи является строго фиксированной величиной, целесообразно предвари-
тельно знать правильное соотношение веса аппаратуры радиопротиводействия по
сравнению с весом другой аппаратуры и бомбовой (ракетной) нагрузки, необхо-
димой для эффективного выполнения боевой задачи.
72
В такой общей постановке решение задачи достаточно сложно и относится
к компетенции самолетостроительных фирм и заказывающих управлений ВВС
В работе [6] сформулирована идея решения задачи и приведен пример оп-
тимального распределения весов между аппаратурой РПД и бомбовой нагрузкой
самолета (бомбардировщика) по критерию’
2 = (1-Л)-П, (2 19)
где' Q - мера эффективности совместного применения аппаратуры РПД данно-
го веса и соответствующей бомбовой нагрузки самолета;
1 - Рк - вероятность сохранения (непоражения) самолета;
D - процент разрушений цели, который «причиняет» (обеспечивает) бом-
бардировщик в зависимости от веса бомбовой нагрузки, доставляемой к цели
Кривая на рис. 2.1 показывает уменьшение вероятности поражения (Рк)
бомбардировщика в зависимости от веса аппаратуры РПД (G), установленной на
его борту, для некоторой гипотетической оборонительной системы оружия ПВО
[6 с 18]. На практике такая кривая может быть построена для любой заданной
Рис. 2 1 Зависимость вероятности поражения бомбардировщика
(эффективности) от веса средств РПД
73
системы управления оружием (например, для ЗРК «Найк-Геркулес») в функции от
различных видов и уровней (потенциалов) создания помех.
Типичное соотношение между процентом разрушений (D) и весом бомбо-
вой нагрузки, сбрасываемой на цель бомбардировщиком, показано на рис. 2 2.
Рис 2 2. Зависимость разрушения цели системы ПВО от сбрасываемой бомбовой нагрузки
Если весовая нагрузка самолета фиксирована, то оптимальное отношение
веса аппаратуры РПД к бомбовой нагрузке будет соответствовать максимальному
значению Q, вычисляемому по выражению (2.19). Такую «оптимизацию» можно
осуществить графически, пользуясь данными рис. 2.1 и рис. 2.2; результаты оп-
тимизации для максимальной полезной нагрузки 4500 кг приведены на рис. 2 3.
Из последнего рисунка следует, что эффективность совместного примене-
ния (Q) средств РПД и бомб максимальна при отношении веса аппаратуры РПД к
бомбовой нагрузке, равной 0,5; это значит, что на средства РПД должно «отво-
диться» 1500 кг, а на бомбовую нагрузку - 3000 кг из общей полезной нагрузки.
Отметим, что оптимизация стала возможной, потому, что один из сомножи-
телей целевой функции (2.19) возрастает, а другой - убывает при перераспределе-
нии весов.
74
Рис 2.3 Зависимость эффективности выполнения боевой задачи от отношения веса средств
РПД (G БСО) к весу бомбовой нагрузки (Gbh)
Этот простейший пример показывает важность математического моделиро-
вания, «как существенного фактора повышения вероятности выполнения боевого
задания» [6, с. 20].
Казалось бы в данном примере сравниваются разнородные задачи: вероят-
ность сохранения самолета и успешное бомбометание по намеченной пели бом-
бардировщиком, однако это различие сразу «исчезает», если вспомнить, что без
применения бортовых средств РПД никакого бомбометания может и не быть.
Более близкая, по конечным целям, задача решена в работе [51], где рас-
сматриваются оптимальные варианты защиты самолета системой РПД и средст-
вами повышения боевой живучести самолета (ПБЖ).
В работе [51] показано, что «целевая функция» для оптимизации массы сис-
темы РПД и средств ПБЖ имеет вид:
Рц - ]-Wj W2, (2.20)
где Рц - вероятность поражения самолета (цели), оборудованного одновременно
БСО и средствами ПБЖ, любым атакующим комплексом перехвата ПВО;
75
W], W2 - вероятности непоражения самолета, оборудованного отдельно-
системой РПД (см. §2.2 настоящей главы) или средствами ПБЖ
Для вычисления Wi целевой функции (2.20) воспользуемся частным случа-
ем выражения (2.7) для 2-х типов ГСН ракет (с РГС и ТГС) с учетом формулы
(2.9) при Зозргс= 5озтгс= 0 (нет «огневой» защиты от атакующих ракет) (можно
также пользоваться и формулой (2.11)
Руки П П )[рргс + (1 Рргс )Рщгс
£=1т?=1
(2.21)
где
т
Р
7 тгс
Рргс ~ 1 [1 Л) ргс " П 1 $с ргс
/=\ )_
/ \"|А
11 I !'
77 1 - Sc тгс
/=1
остальные обозначения - из пояснений к формулам (2.7) и (2.9).
Как видно из формулы (2.21), в целях экономии материала книги, в написа-
нии формулы учитываются только обобщенные характеристики станции актив-
ных помех (САП) БСО (исполнительной части).
В последующих расчетах по выражению (2.21) мы будем учитывать вероят-
ности обнаружения и опознавания типа РЛС комплекса перехвата информативной
частью.
Чтобы определить зависимость Wi целевой функции от массы САП БСО
требуется найти связи вероятностей срыва (S^ $сргс, Згстгс) с массой САП (Gi).
Указанные оценки для типовых атакующих средств перехвата (ЗРК ХОК и Найк-
Геркулес; ИП F-4 («фантом»)) и самолетов, защищаемых системой РПД, с ЭПР
(о), равной 25 м2 и 9 м2 приведены соответственно на рис 2.4. и 2.5.
76
Рис 2 4 Зависимости вероятностей срыва этапа сопровождения РЛС и наведения ракет с РГС и
ТГС от массы аппаратуры РПД БСО (<т=25 м2)
Рис 2 5 Зависимости вероятностей срыва этапа сопровождения РЛС и наведения ракет с
РГС и ТТС от массы аппаратуры РПД БСО (о = 9 м2)
77
На рис. 2.4. и 2.5. обозначены:
Scx > sch-2^Scf- вероятности срыва этапа сопровождения РЛС ЗРК Хок,
Найк-Геркулес и ИП F-4 (противодействие на этапе поиска и захвата РЛС не учи-
тывается;
тогда в формуле (2.21) перед квадратными скобками остается одно произве-
дение, т.к. со -1 и только один этап отражается помехами до пуска ракет - сопро-
вождение РЛС),
Sxpzc, Sp ргс - вероятности срыва наведения ракет с РГС ЗРК Хок и ИП F-4
(при расчетах Рргсу,
Sf тге ~ вероятность срыва наведения ракеты с ТГС ИП F-4 (при расчетах
Р тге)
Экспериментально-расчетные данные, приведенные на рис. 2.4 и 2.5, полу-
чены для следующих условий.
1. Атака средств перехвата ПВО производится с одной полусферы (перед-
ней полусферы);
2. Вероятности срыва усреднялись по циклам помех (все произведения
можно заменить возведением в степень по числу циклов помех),
3. Вероятность обнаружения сигналов РЛС станцией ИРТР БСО ЗРК Хок,
Нейк-Геркулес и ИП F-4 считалась одинаковой и равной 0,9;
4 ЗРК Хок и Найк-Геркулес атакуют ракетами с РГС (на этапе после пуска
ракеты Найк-Геркулес РПД отсутствует, так как ракета наводится по командам,
передаваемым по линиям связи, которым нет радиопротиводействия); ЗРК ата-
куют одиночными ракетами; ИП F-4 атакует двумя ракетами (с РГС и ТГС) в зал-
пе;
5. Вероятности опознавания типа атакующих средств перехвата и целеука-
зания теплопеленгатору варьировались.
Указанные на рис. 2.4 и 2.5 экспериментальные данные аппроксимированы
с точностями (5-20%) следующими зависимостями:
а) для вероятностей срыва этапов сопровождения и наведения ракет с РГС:
78
Sy = l-exp(az? -Gy)
(2.22)
где - коэффициенты, подбираемые методом наименьших квадратов [51] (I -
номер этапа атаки,; - номер средства перехвата);
б) для вероятностей срыва наведения ракет с ТТС:
l-exp^^-Gj) при С5<0,27 (сг=9л/2) и (^(0,43 (сг=25л/);
0,6(6^ >0,27, <т=9л?) или 0,75(^>0,43ст=25д?) (2-23)
Значения коэффициентов dy и aimmz формулы (2.22) и (2 23) сведены в таб-
лицу 2.2.
Таблица 2.2. Коэффициенты в аппроксимирующих кривых выражений
(2.22) и (2.23) - ciy и aimx.
\ Ср-ва \ перехвата ° [м2]\. Найк-Г еркулес Хок (два этапа отражения ата- ки) F-4 («Фантом») (три этапа отражения ата- ки)
$сН-Г scx Sxpzc ScF &Fpzc Spmzc
ап ап ai2 ап агз &3тгс
25 0,9 1,0 1,5 1,1 1,3 Г 3,3
9 1,4 1,7 2,4 1,4 2,0 3,3
Подставляя полученные значения из табл. 2.2 в кривые (2.22) (2.23), можно
рассчитывать (в конечном итоге) вероятности непоражения самолета, атакуемого
различными комплексами перехвата в зависимости от массы САП (G)) и получить
W1} (Wij - вероятность непоражения самолета, рассчитываемая по формуле (2.21)
для /-го средства перехвата).
79
w2
для с-9 м2
Рис 2 6 Зависимость вероятности непоражения самолета от массы средств ПБЖ.
Действуя по изложенной методике, в работе [51] получены эксперимен-
тально-расчетные данные по вероятностям непоражения самолета W2, входящим
в формулу (2.20), в зависимости от массы средств ПБЖ (G2); эти данные изобра-
жены на рис. 2.6 и аппроксимированы зависимостью:
W2j = l-exp(-Cj G2), (2.24)
где: W2j - вероятность непоражения самолета, защищаемого средствами ПБЖ
при атаке /-го средства перехвата в зависимости от массы G2 ;
Cj - постоянные для этого (/-го) комплекса перехвата коэффициенты ап-
проксимации.
В таблице 2.3 приведены численные значения Cj для ЗРК «Хок», «Найк-
Геркулес» и ИП F-4, атаки которых отражают самолеты с ЭПР о = 25 м2 и а=9 м2.
80
Таблица 2.3. Коэффициенты аппроксимации (2.24) для различных атакую-
щих средств перехвата и расчета Wy.
\ Ср-ва перехвата о [м2] Найк- Геркулес (ЗРК) Хок (ЗРК) F-4 (ИП) («Фантом»)
W21 w22 w23
С1 с2 с3
25 0,27 0,46 0,43
9 0,73 1,25
Подстановка данных табл. 2.3 в формулы (2.24) позволяет рассчитать зави-
симость вероятности непоражения от различных средств перехвата в функции от
массы ПБЖ.
Для того, чтобы упростить (сократить) массив расчетных результатов и од-
новременно получить дополнительные, полезные для РПД сведения поставим бо-
лее общую задачу: представим себе, что нам нужно минимизировать потери груп-
пы самолетов (М), преодолевающих систему ПВО, оптимальным распределением
массы между БСО и средствами ПБЖ, а именно оптимизировать целевую функ-
цию [51] вида:
(2.25)
i=i
где: Pj - вероятность поражения самолета в одной атаке z-тым комплексом пере-
хвата,
и, - число атак z-ro комплекса перехвата;
N - количество типов атакующих комплексов перехвата при пролете систе-
мы ПВО на определенную глубину (Z).
В формуле (2.25) Р, вычисляется по выражению (2.20) для каждого ком-
плекса перехвата, атаку которого мы отражаем.
Минимизация потерь самолетов (М) позволяет оценить общий «наряд»
(количество) самолетов, потребных для выполнения, например, задачи бомбоме-
81
тания, рассмотренной в начале настоящего параграфа (часть самолетов будет по-
теряна, остальная группа выполнит задачу бомбометания).
Для трех типов атакующих средств перехвата (Найк-Геркулес, Хок и F-4),
которые мы рассматривали, формула (2.25) примет вид (с учетом (2.20), (2.21) и
аппроксимаций вероятностей срыва этапов атак):
М=Рнкп Ро [Ац(1-В1) п^А21(1-В2) п2+А1з(1-Вз) п3]~^niBi + п2В2 - п3В3 , (2.26)
где: РОрге Ротс = Ро\ (Ро ~ полигонная вероятность поражения самолета раке-
той с РГС или ТГС);
«2, п3 - число атакующих средств перехвата первого (Найк-Геркулес),
второго (Хок) и третьего (F-4) типов;
Bj = exp(-c}G2) = 1-W2j-(см. формулу (2.24);; = 1,2,3);
Aj}= exp(-aj]m0Gj); A2J = [-(ai2^a22)m0GJ;
A3i= exp[-(ai3+a23)mQGl] + (l-SFmzc)mQ exp(-ci13m0Gi)[l-P0 exp(-a23 m0Gi)];
mo = k = m = n (число циклов помех на всех этапах отражения атаки одина-
ково);
5ртгс в выражении А31 определяется по формуле (2.23).
Таким образом, необходимо минимизировать значение М в формуле (2.26)
при ограничении вида: Gj + G2 = d = const.
Подстановка G2 = d - G] в выражение (2.26) и последующее его дифферен-
цирование по Gj для поиска минимального значения (min G; = Gj *) приводит к
трансцендентному уравнению относительно Gi. Поэтому значения Gj* и G2*^--d -
(Д* обеспечивающие минимум числа потерь самолетов (М) и соответствующие
оптимальному распределению масс между самолетными средствами РПД и ПБЖ,
получены расчетным путем на ЭВМ с применением стандартных процедур поиска
экстремума. Результаты расчетов приведены в таблицах 2.4 и 2.5 для следующих
исходных данных: Рнкп = 0,95 (большие и средние высоты полета защищаемого
самолета); Рнкп = 0,5 (малые высоты полета самолета). Полигонная вероятность
82
поражения атакующими средствами перехвата варьировалась от 0,82 до 1,0.
Кроме того, для оценки вклада системы РПД и мер ПБЖ в общую эффек-
тивность обороны самолета при оптимальных массах (Gy* и G2*) были рассчита-
ны и представлены в табл 2.4 и 2.5 значения Wi}, W2}.
Из табл 2 4 и 2.5 видно:
1. Значение Gy* (оптимальные массы систем РПД), обеспечивающие мини-
мальные средние потери (М) самолетов, в несколько раз меньше значений Gy*
масс, тоебуемых для мер ПБЖ (бронирование уязвимых мест самолета, кабины
экипажа и т д ); при этом во всех случаях эффективности защиты самолета ком-
плексом РПД для оптимальных масс больше эффективности защиты самолета
средствами ПБЖ (ИД7 > ИДД.
2. Увеличение числа циклов помех (т0) и, следовательно, эффективности
противодействия атакующим средствам перехвата практически всегда уменьшает
требуемые оптимальные массы системы РПД.
3 Чем большему количеству этапов атаки организовано радиопротиводей-
ствие, тем больше эффективность ее (атаки) отражения и тем меньшие массы для
этого комплекса РПД требуется.
4. Меньшие ЭПР защищаемого самолета (табл. 2.5) требуют меньше массы
средств РЭП при примерно одинаковых вероятностях непоражения летательного
аппарата.
83
Таблица 2.4. Оптимальные массы системы РПД (а = Gj*) и значения Wj}
b при G]*; W2j = с при G?*= d- G]* (данные в таблице представлены дробью:
a/[Z>(c)]); ЭПР ЛА о - 25 м2.
р х НКЦ ЭПР о самолета равна 25 м2
П1 1Ъ П3 Число циклов помех (шр)
m0 = 1 т0 = 2 т0 = 3
б/ ~ G;*- G2* [тонны] = const
1,0 1,5 з,о 1,0 1,5 3,0 1,0 1,5 3,0
0,95 I (боль- шие и 1 средн h) п^0 п2=Пз=0 0,2 0,4 0,95 0,25 0,45 0,8 0,3 0,4 0,7
0,4(0,2) 0,5(0,3) 0,7(0,4) 0,6(0,2) 0,7(0,2) 0,8(0,4) 0,7(0,2) 0,8(0,3) 0,9(0,5)
п2^0 П!=Пз=0 о,з 0,45 0,8 0,25 0,35 0,6 0,25 о,з 0,45
0,7(0,3) 0,8(0,4) 0,9(0,6) 0,8(0,3) 0,9(0,4) 0,96(0,7) 0,9(0,3) о,9(0,4) 0,97(0,7)
Пз#0 п^Пз^О 0,45 0,45 0,85 0,45 0,45 0,55 0,45 0,45 0,45
0,7(0,3) 0,7(0,4) 0,9(0,6) 0,9(0.3) 0,9(0,4) 0,95(0,7) 0,98(0,3) 0,98(0,4) 0,98(0,7)
0,5 (ма- лые h) п2^0 П1=п3=0 0,1 0,25 0.6 0,15 0,25 0,45 0,15 0,2 0,35
0.5(0,3) 0,6(0,4) 0,8(0,7) 0,7(0.3) 0,8(0,4) 0,92(0,7) 0,8(0,3) 0,9(0,4) 0,94(0,4)
Пз#) п^Пз^О 0,1 0,45 0,6 0,2 0,45 0,45 0,2 0,45 0,45
0,95(0,3) 0,9(0,4) 0,9(0,7) 0,7(0,3) 0,96(0,4) 0,96(0,7) 0,8(0,3) 0,99(0,4) 0,99(0,7)
Примечание к таблице 2.4: на малых высотах (Л) полета самолета Найк-Геркулес
(ЗРК) не атакует
Расчет отношений соответствующих оптимальных вероятностей непораже-
ния к массам оборудования системы РПД и средств ПБЖ по данным табл 2.4 и
2 5 показал, что в среднем это отношение для системы РПД в 7 раз выше, т.е. 100
кг аппаратуры комплекса РПД условно обеспечивают такую же эффективность
защиты самолета как 700 кг средств ПБЖ.
Результаты оценок Gj*, выполненных при других величинах числа атак (щ,
Г12, Из), позволяет сделать вывод, что эти оценки примерно равны среднегеометри-
ческим значениям (по количеству атакующих средств перехвата) СД* приведен-
ным в табл. 2.4 и 2 5 [51].
84
Таблица 2.5. Оптимальные массы системы РПД (а = Gj*) и значения Wy = b при
Gi*; W2] = с при G2*~ d- Gi* (данные в таблице представлены дробью: а/[Ь(с)]);
ЭПР ЛА о = 9 м2.
|?нкп ЭПР о самолета равна 9 м2
П1 Число циклов помех (то)
то = 1 т0 = 2 т0 = 3
П2 d = Gj*+ G2* [тонны] = const
Пз 1,0 1,5 з,о 1,0 1,5 з,о 1,0 1,5 з,о
П2#) 0,15 ~ 0,3 0,4 0,15 0,25 0,3 0,1 0,2 0,45
0,95 П1=пз=0 0,4(0,2) 0,6(0,4) 0,7(0,5) 0,5(0,2) 0,7(0,4) 0,9 (0,6) 0,7(0,2) 0,8(0,4) 0,9 (0,6)
Пз#) о,з 0,35 0,55 о,з о,з 0,4 0,2 0,3 0,3
П1=Пз=0 0,6(0,2) 0,6(0,6) 0,7(0,7) 0,8(0,2) 0,8(0,6) 0,9 (0,7) 0,8(0,3) 0,92(0,6) 0,92(0,8)
П2^0 0,05 0,15 о,з 0,05 0,15 0,25 0,1 0,15 0,2
0,5 П1=п3=0 0,7(0,3) 0,8(0,5) 0,9(0,6) 0,7(0,3) 0,9(0,5) 0,93(0,6) 0,9(0,2) 0,9(0,5) 0,94(0,6)
Пз#) 0,01 0,3 0,4 0,1 о,з о,з 0,1 о,з о,з
П1=Пз=0 0,5(0,5) 0,8(0,6) 0,8(0,7) 0,7(0,4) 0,9(0,6) 0,9 (0,8) 0,7(0,4) 0,96(0,6) 0,96(0,8) L__J
Рис. 2.7 - 2.9 иллюстрируют поведение кривых вероятностей поражения
защищаемого системой РПД и мерами ПБЖ (формула (2 20) ..), при атаке ЗРК
Найк-Геркулес, Хок и ИП F-4 от суммарной массы средств обороны самолета. Из
рис. 2.7 - 2.9 видно, что общая эффективность защиты невелика за счет малых ве-
роятностей непоражения самолета, обеспечиваемых средствами ПБЖ и расчетах
по формуле (2.20) (выбранного вида целевой функции). В действительности сред-
ства ПБЖ и система РПД должны дополнять друг друга при отражении атаки, а
не «конкурировать» между собой (вероятность поражения нашего самолета при
«совместной» защите будет значительно ниже - см данные табл. 2.4 и 2.5).
Заметим, что, как и в первом примере (распределение веса между бомбовой
нагрузкой и средствами РПД), оптимизация стала возможной поцелевой функции
(2.20) при возрастании W} и убывании W2 в случае перераспределения масс между
системой РПД и мерами ПБЖ.
85
Рис 2 7 Зависимость вероятности поражения самолета, защищенного системой РЭП и мера-
ми ПБЖ при атаке ЗРК «Найк-Геркулес»'
о = 25 м2, Ро = 0,95; d = 1,5, — -m=l, -------m=2, — -m=3.
Рис. 2 8 Зависимость вероятности поражения самолета, защищенного системой РЭП и
мерами ПБЖ при атаке ЗРК «Хок».
а = 25 м2, Ро = 0,95; d = 1,5, -m=l; -m=2, -m=3
8б
Рис 2 9 Зависимости вероятности поражения самолета, защищенного системой РЭП и
мерами ПБЖ при атаке ИП F-4
о = 25 м2, Ро = 0,95, d - 1,5; -m=l, -пг=2, -т=3
Можно продолжить варианты расчетов попарной оптимизации массы сис-
темы РПД с другим радиоэлектронным оборудованием самолета, имеющим от-
ношение к общей задаче, выполняемой ударными самолетами.
Например, целесообразно оценить соотношение между эффективностью
защиты самолета системой РПД и «оборонительным оружием», управляемым
бортовыми радиолокаторами (БРЛС); для этого, как минимум, надо рассчитать
вероятности срыва атак управляемых ракет с РГС, ТГС, ЛГС и пушек системой
«огневой» защиты самолета 8озргс, 5озтгс, 5озлгс, Зозпв в выражениях (2.9) в зависи-
мости от массы этой системы. В таких расчетах можно также учесть уничтожение
РЛС ЗРК, боевых секций ЗРК и ИП противолокационными и другими ракетами,
размещаемыми на обороняемом самолете (см. работу [2], где указаны такие раке-
ты и летательные аппараты, на которых они размещаются).
Предоставим возможность проведения таких оценок заинтересованному чи-
тателю с использованием методики расчетов, изложенной в настоящем разделе и
другой литературе.
87
Наша дальнейшая задача в следующей главе - связать компоненты вероят-
ности непоражения - обобщенные характеристики информативной и исполни-
тельных частей системы РПД с техническими параметрами аппаратуры
88
ГЛАВА 3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И СТЕНДЫ
ПРОЕКТИРОВАНИЯ БСО.
Прежде чем переходить к описанию математических моделей, используе-
мых самостоятельно, или в составе стендов проектирования и отработки систем
РПД (его составных частей), следует договориться - на каких системах РПД мы
остановимся. Как уже мог заметить читатель, для конкретных подходов к методам
проектирования средств РПД с помощью моделей, упор в книге постепенно скло-
няется в сторону систем РТР и РПД для индивидуальной защиты самолётов (в
первой главе приведены приближённые схемы таких систем; во второй главе в
составе системы РПД появились ложные цели и ловушки). Систем индивидуаль-
ной защиты (обороны) самолётов достаточно много в зависимости от класса (ти-
па) и назначения летательного аппарата (см., например работу [2]). Наиболее ин-
тересны, обязательны к размещению на линейных самолётах, универсальны и
достаточно сложные по составу, уровню организации и решаемым задачам - бор-
товые системы индивидуальной защиты (обороны - БСО) самолётов дальней,
стратегической авиации (ДА) [15]. Сама БСО ДА (и её математическая модель -
ММ) по функциональному составу, характеристикам, весу и габаритам занимает
промежуточное положение между системами РПД (их ММ), постановщиков по-
мех (ПП) и более простыми БСО (их ММ) истребительно-бомбардировочной и
истребительной (ИА) авиации. Как правило, БСО самолёта ДА входит составной
частью в комплекс РПД ПП. Ввиду того, что ПП не несёт бомбовой (ракетной)
нагрузки (кроме ракет со средствами РПД или (и) противолокационных ракет),
аппаратура РПД ПП имеет в 1,5 и более раза большие габариты и вес, обеспечи-
вает значительно (в несколько раз) больший передающий потенциал, диапазон
перекрываемых частот и т. д.
Далее, для определённости, в настоящей главе мы будем ориентироваться
на типовой состав БСО стратегического самолёта В - 1В США. Эта ориентировка
89
не умаляет общности подходов к синтезу систем РПД с помощью различных ме-
тодов моделирования и носит иллюстративный характер. Затем в главе описыва-
ются принципы построения (и составы) динамического и полунатурного стендов,
а также построение математической модели ускоренной оценки эффективности
БСО для самолёта ДА (аналитико-математическая модель, дополненная имитато-
рами в составе полунатурного стенда). Перейдём к описанию БСО бомбардиров-
щика В - 1В.
3.1. БСО самолёта В - 1В. Требования к ММ и составу ДС
Укрупнённая блок-схема БСО самолёта В - 1В изображена на рис. 3.1 От-
метим, что большинство сведений о системе обороны самолёта В - 1В взяты из
работ [52-г59]. Авторам книги пришлось проанализировать более 100 наименова-
ний отечественных литературных источников, составленных по материалам от-
крытой зарубежной печати (ссылки в библиографии к книге имеются на часть из
них)
Как видно из рис. 3.1, в состав БСО самолёта включены: система ALQ -
161, управляемая бортовой цифровой вычислительной машиной (БЦВМ); ложные
цели (ЛЦ) SCAD и противорадиолокационные ракеты (ПРЛР) «Стандарт - ARM»,
наводящиеся по лучу РЛС для её уничтожения [2]; импульсно-допплеровская
РЛС ALQ - 153, работающая по информации ИК-датчиков, для защиты «хвоста»
самолёта от тепловых головок самонаведения (ТГСН) ракет; автоматы выброса
ДО и ЛТЦ, управляемые БЦВМ SKC - 2070. Ввиду специфики преодоления са-
молётом В - 1В системы ПВО на предельно малых высотах (h ~ 60 м) , по мне-
нию разработчиков системы по самолёту не предполагаются атаки ракетами с
ТГСН в переднюю полусферу (ПП) и поэтому организована только защита «хво-
ста» самолёта. С помощью БРЛС ALQ - 164 и двух БЦВМ АР - 101F (на рис. 3.1
не показаны) самолёт «повторяет» при полёте рельеф местности на скорости ~
960 км / час; в этом случае дальность прямой видимости самолёта (Дп) РЛС ПВО
составляет около 30 км (Дп^АЛ^/М-Л )> а максимальное время пребывания В - 1В
90
на экранах РЛС «маловысотного» радиолокационного поля (РЛП) - 4 сек при
ЭПР самолёта с передней полусферы около 10м2.
Контроль от БЦВМ АР - 101 F
V
Рис. 3.1. Укрупненная блок-схема БСО самолёта В - 1В
В дальнейшем при математическом моделировании мы дополним систему:
передатчиками одноразового действия (ПОД) и ложными оптическими целями
(ЛОЦ), выстреливаемыми тем же устройством выброса или дополнительным ав-
томатом; ИК-пеленгаторами, работающими вкруговую. Возможно также допол-
нить БСО ИК-передатчиками модулируемых помех и опто-электронными пере-
датчиками, но мы этого делать не будем, чтобы не усложнять оборонительную
систему и одновременно не «подсвечивать» самолёт.
Будем считать, что откорректированная БСО управляется оператором, так-
же как оборонительная система [54] самолёта В - 1В, где работают два пилота и
91
два оператора (второй оператор управляет ударной системой с помощью БЦВМ
АР - 101 F). Оператор БСО получает информацию на пульты и индикаторы (на
рис 3.1 не показаны) о рабочем состоянии блоков системы и о радиотехнической
(радиолокационной) обстановке на маршруте прорыва ПВО (выдаётся отдельной
БЦВМ АР - 101 F). Считаем также, что в упрощенном виде информация выдаётся
на индикаторы лётчикам, в том числе - рекомендации по оборонительному ма-
неврированию самолёта для уклонения от атак ЗРК, обхода зон поражения, про-
тивоистребительного и противоракетного маневрирования.
По данным работ [53-т58] система ALQ - 161 в составе БСО самолёта В -
1В «является самой сложной из всех индивидуальных систем РПД когда-либо
разработанных в США» Система ALQ - 161 состоит из восьми поддиапазонов с
частотами сначала от 100 (200) МГц до 1,43 ГГц (три приёмных поддиапазона) и
далее - от 1,43 ГГц до 18 (18,5) ГГц (пять приемо-передающих поддиапазонов).
Сведения о составе аппаратуры первых трёх поддиапазонов отсутствуют, и по-
этому считаем, что в них работают три приёмника РТР (по одному на поддиапа-
зон), информация в которые поступает от шести антенн с двух бортов самолёта. В
каждом из последующих поддиапазонов размещается по четыре (поддиапазоны
№4 и № 5) и по три поста (№ 6, № 7 и № 8) Постом в БСО и системе ALQ - 161
называют аппаратуру, обеспечивающую автономную (с управлением от выше-
стоящих БЦВМ) оборону в заданном пространственном секторе (максимальные
сектора - 90° в № 4 и № 5, 120° в № 6 4- № 8 по азимуту (а) и 90° во всех под-
диапазонах по углу места (0); центральные оси секторов могут быть наклонены
вниз относительно строительной оси (горизонтальной плоскости самолёта)). Со-
став оборудования каждого поста примерно одинаков; техническое исполнение по
функциональному построению - одинаково, а по комплектующим изделиям -
разное за счёт специфики разработки блоков в разных поддиапазонах длин волн.
Имеется также общая часть аппаратуры, обслуживающая все посты.
В табл 3 1 приведён количественный состав приёмо-передающей аппарату-
ры системы ALQ - 161 по постам и поддиапазонам №4 + № 8. Заметим, что на
самолёте В - 1В предусмотрены места для установки дополнительной аппаратуры
92
поддиапазонов № 1, №2, № 3 и № 8, проложены кабели (фидеры) и волноводы
для подключения блоков с целью расширения возможностей обороны серийных
самолётов и доукомплектования их в строевых частях авиации (модернизация
системы ALQ - 161, изменение состава аппаратуры до полёта и др ).
Из табл. 3.1 следует, что в поддиапазонах № 6^-№ 8 в каждом из постов
предусмотрены два отдельных канала САП - ретрансляторный и генераторный, а
в № 4, № 5 только генераторные каналы. Ретрансляторный канал имеет свои ан-
тенны (приёмные и передающие) и построен по классической схеме: приёмник —
модулятор принятых сигналов РЛС помехами и передатчик. Важно, что включе-
ние ретрансляторного передатчика возможно только по командам БЦВМ, чтобы
не демаскировать преждевременно самолёт. Генераторный канал более сложный,
с использованием панорамных (матричных, многоканальных) приёмников, боль-
шого количества вычислительной техники (БЦВМ, микропроцессоров, цифровых
логических схем и устройств) и САП с полным набором помех (см схему рис. 1 1
гл. 1; далее будет приведена логика работы системы и САП). Повсеместно в сис-
теме применяются передовые цифровые методы приёма, обработки, запоминания,
преобразования и передачи сигналов Передатчики помех в генераторных каналах
поддиапазонов № 6 + № 8 построены на мощных ЛБВ (500 + 700) Вт и фазиро-
ванных антенных решётках (ФАР), причём на одну 10 - элементную ФАР может
работать до трёх передатчиков помех одновременно (трёхканальное подключе-
ние) с когерентной или некогерентной «запиткой» элементов ФАР (увеличение
мощности излучения в 9 и 3 раза). Аналогичные мощные ЛБВ использованы и в
других каналах (в том числе и ретрансляторных); в поддиапазонах № 4 и № 5
применяются рупорные передающие антенны.
93
Таблица 3.1. Количественный состав приёмо-передающей аппаратуры сис-
темы ALQ - 161 по постам и поддиапазонам.
№ Наименование аппаратуры Число постов в поддиапазо- нах 1— Итого
№4, №5 №6, №7 №8 (ЗП)
1 Приемные антенны (спиральные) ретрансляционных каналов САП - 3 1 7
2 Приемники ретрансляционных каналов САП - 1 3 1 7
3 Передатчики ретрансляционных каналов САП - 3 1 7
4 Передающие антенны САП ретрансляционных кана- лов - 3 1 7
5 Приемно-передающие ФАР (РТР и РПД) генератор- ных каналов - 3 1 7
6 Передатчики САП генераторных каналов На 4 поста 2 передал 3 1 И
7 Передающие антенны САП генераторных каналов 4 (ру- пора) 3 1 15
8 Радиочастотные усилители САП 3 1 7
9 Панорамные приёмники станций РТР 1 1 1 5
10 Приёмные антенны интерферометра Верх Низ - 2
11 Интерферометр На все поддиапазоны 1
Итого антенн - 38;1 приемников и передатчиков -31
1) Примечание: снижение числа антенн до 30 , указанных в работе [2], возможно
использованием ФАР, общих для генераторных и ретрансляционных передающих
каналов, а также исключением ретрансляционного канала в поддиапазоне №8.
Если считать, что перекрытие по частоте сигналов внутри поддиапазонов
ALE-161 примерно одинаковое и равно »1.67, то границы поддиапазонов (интер-
валы перекрываемых частот) будут следующие:
Номера под- диапазонов 4 5 6 7 8
Границы час- тот [ГГц] 1.434-2.4 2.44-4.0 4.04-6.6 6.64-11.0 11.04-18.5
94
Более точные расчеты коэффициента перекрытия (к), если этот коэффици-
ент должен быть одинаков для всех пяти поддиапазонов, дают /<=1.695
[^=(/max/fmm+l)1/n, где п - число поддиапазонов (л=5);с41ЯХ=18 5 ГГц,/тт=1.43 ГГц]
В САП системы ALQ - 161 предусмотрена регулировка выходной мощно-
сти помех в зависимости от уровня сигналов РЛС, отражённых от В - 1В, несу-
щей частоты, вида помехи, уровня диаграммы направленности антенны РЛС
(главный луч, боковые лепестки) и др. факторов. Предусмотрена также регули-
ровка чувствительности приёмников (РТР и САП) для обеспечения электромаг-
нитной совместимости (ЭМС) с передатчиками, в том числе - возможности приё-
ма сигналов РЛС во время работы передатчиков помех. Другие меры обеспечёния
ЭМС рассмотрены в работе [163].
Время реакции системы ALQ - 161 по разным данным колеблется от десят-
ков микросекунд до долей секунды; точность наведения спектра помех на несу-
щую частоту - 1 МГц. Система имеет встроенную сеть контроля работы аппара-
туры; элементы сети управляются БЦВМ АР - 101F Всего же на самолёте В - 1В
в составе радиоэлектронного оборудования (РЭО) самолёта, БСО (ALQ - 161),
бортовых РЛС, сети контроля, схем индикации работает восемь БЦВМ АР - 101F,
одна из которых - резервная
Наработка системы ALQ - 161 на один отказ составляет 45 часов при более
чем двукратном резервировании; общая масса системы не менее 5200 фунтов
(около 2300 кг); масса одного блока лежит в пределах 16=36 кг, объём -
(0,03=0,06) м3, а общее число блоков 97 - 107 (без антенн) На этом в описании
системы ALQ - 161 и БСО самолёта В - 1В мы пока остановимся. В дальнейшем
при построении моделей, как пример, будет использована другая информация о
системе ALQ - 161, поскольку этот вариант БСО (рис. 3.1) выбран базовым для
математического моделирования. В частности, с определёнными доработками, от-
сутствующими в зарубежной печати, мы будем пользоваться структурной (функ-
циональной) схемой ALQ - 161, логикой построения системы, схемами основных
устройств БСО и др. сведениями.
95
Вернемся к математическим моделям в составе динамического стенда (ДС).
Какие же основные требования к моделям и составу ДС мы будем предъявлять?
Во-первых, нельзя забывать рекомендации и классификацию моделей,
сформулированные в главе 1, а также результаты предварительного (структурно-
параметрического) синтеза, полученные в главе 2 на аналитических моделях. В
этом плане мы должны остановиться на базовых имитационных математических
моделях, на показателях эффективности аппаратуры, полученных в разделе 2.2 и
на структурной (функциональной) схемах, построенных по методикам главы 2
(тот вариант БСО самолёта В - 1В, который будет иллюстративным (рис.3.1) с
учётом дополнений, фактически следует из этих методик).
Во-вторых, математическая модель, которая будет «проигрываться» на ис-
следовательской, мощной ЭВМ в составе ДС, должна имитировать в масштабе
времени, близком к реальному, работу устройств БСО при отражении атаки сред-
ства перехвата, поток данных от БСО, который циркулирует на входе устройства
управления (УУ) с центральной БЦВМ (рис. 3.1). Кроме того, модель должна вос-
принимать в реальном темпе выдачи реакцию УУ в виде управляющих команд,
выходной информации устройствам, рекомендаций по целевым комбинациям по-
мех, целеуказаний приёмнику САП и др., а также правильно реагировать на все
эти сигналы.
В третьих, в УУ (в её БЦВМ) должны быть предварительно «зашиты» (в по-
стоянную или репрограммируемую память) программы управления функциони-
рованием БСО, реализованные на базе разработанных ранее (и отработанных на
собственных логико-лингвистических моделях, кратко описанных выше (см. так-
же работу [36] и др.))
В четвёртых, в состав ДС следует включить устройство сопряжения между
ЭВМ, на которой имитируется работа модели, и устройством управления; единст-
венное требование к сопрягающему устройству - не вносить задержек и не иска-
жать поток данных от ЭВМ к УУ и обратно. В составе ДС должна быть и другая
сервисная аппаратура (счётчики временных интервалов - таймеры, буферная па-
мять, схемы реализации старт-стопного режима взаимодействия с БЦВМ и др.)
96
для обеспечения моделирования и оценки его результатов, в дальнейшем «тонко-
сти» сервиса мы не рассматриваем.
В пятых, следует выбрать подходящую ЭВМ для реализации модели, спо-
соб построения математической модели, шаг моделирования, оценить количество
операций на каждом шаге. Скорее всего общая математическая модель будет со-
стоять из моделей отдельных устройств, объединённых совместной логикой (ал-
горитмом) функционирования БСО.
И, наконец, должны быть построены модели атакующих средств перехвата,
включая «мешающее» радиолокационное поле (РЛП), описаны методы сближе-
ния атакующих средств перехвата с защищаемым самолётом с той степенью дета-
лизации, которая требуется.
Из перечисленных требований, в первую очередь, надо начать с алгоритма
работы БСО, создание которого представляет актуальную, самостоятельную и
сложную задачу; с описания УУ и логики функционирования САП Основное
требование к алгоритму - достаточно высокий уровень его организации (универ-
сальный применительно к разным составам и сложности построения БСО) при
максимально-возможном быстродействии (наименьшем числе «длинных» опера-
ций). К сожалению, в реализации этого требования сегодня основную (главную)
роль играют эвристические способности человека, его опыт в построении БСО,
его профессиональные данные в области РПД и РТР, так как общих подходов к
решению задачи не существует. В следующем разделе мы воспользуемся резуль-
татами работы [15].
3.2. Алгоритм, устройство управления БЦВМ, пульты и индикаторы БСО
На современном уровне развития БЦВМ, используемых в устройствах
управления, практически нет ограничений на реализацию сложных (по термино-
логии работы [15] - концептуальных) алгоритмов управления, имеющих иерархи-
ческую (многоуровневую) структуру с большим числом алгоритмических блоков,
97
условных и безусловных переходов, циклов, связей. Такие алгоритмы работают в
реальном масштабе времени, применяют передовые концепции в организации
обороны и противодействия перспективным (моноимпульсным, помехозащищён-
ным) средствам перехвата системы ПВО, оптимальные или близкие к ним методы
обработки информации. Для реализации указанных алгоритмов требуется БЦВМ
в составе УУ с несколькими млн. операций/сек., памятью более 512 Кбайт, раз-
рядностью 24 - 45 двоичных разрядов, большим числом различных входов (выхо-
дов), с быстродействующей мультиплексной связью.
Например, центральная БЦВМ устройства управления БСО самолёта В - 1В
имеет: быстродействие - 1 млн. операций/сек.; внутреннюю память - 128 Кбайт,
внешнюю память большой ёмкости и кассетные запоминающие устройства на
магнитных лентах; 16 двоичных разрядов; мультиплексные шины с темпом обме-
на 1 млн бит/сек.; достаточное число входов/ выходов (только 9 выходов на логи-
ческие устройства формирования помех в одном из 3~ постов поддиапазонов № 6
-№8) [54].
Однако, как отмечается в работе [15], при проектировании устройств управ-
ления первых отечественных БСО бортовые ЭВМ только появлялись, их характе-
ристики были слабы (производительность ~ 10000 операций/сек., память (4 - 8)
Кбайт и др), поэтому приходилось существенно упрощать алгоритмы управле-
ния, прибегать к программированию в кодах БЦВМ для ускорения выполнения
операций и т.д Программисты, знавшие программу управления и быстро нахо-
дившие в ней ошибки по неправильной реакции БСО были на «вес золота» В
этих условиях необходимо было создать алгоритмы управления, обеспечивающие
их «живучесть» во времени при модернизациях (улучшениях характеристик ЭВМ
и др.), универсальность применительно к БСО разного состава, сложности и про-
пускной способности Такие алгоритмы были разработаны, проверены на собст-
венных моделях и стендах, отработаны в натурных условиях [15].
На рис. 3.2. показан укрупненный фрагмент алгоритма управления, который
структурно условно состоит из трёх частей, работающих в трёх фазах атаки сред-
ства перехвата (первая фаза - поиск и захват обороняемого самолёта, вторая - со-
98
провождение, третья - пуск ракет). Переход РЛС от одной фазы атаки к другой
устанавливался по изменению параметров облучающих сигналов РЛС (смена ре-
жима работы РЛС, числа принимаемых импульсных сигналов и др.), включению
новых РЛС «подсвета» самолёта (непрерывные сигналы) и др. Переход к фазе
пуска ракеты фиксировался теплопеленгатором по вспышке стартового двигателя.
В дальнейшем при появлении РЛС с квазинепрерывными сигналами (КИИ - сиг-
налами), сопровождающими самолёт «на проходе», распознавать фазы атаки ста-
ло значительно труднее.
Части алгоритма делятся на блоки, выполняемые в определённой последо-
вательности в зависимости от: возможностей БЦВМ, входящих устройств и ско-
рости обмена информацией; поведения атакующего средства перехвата; распола-
гаемых ресурсов системы на момент отражения атаки; работоспособности систе-
мы (какие отказы в системе появились).
Построение блоков алгоритма управления предусматривает пропуск (упро-
щение) выполнения определённых операций, если они не соответствуют «перера-
батывающим возможностям» БСО и входящих в него устройств; это замечание
относится и к порядку выполнения блоков алгоритма
Например, если станция РТР не измеряет период повторения импульсов
РЛС (7п) или (и) период вращения антенны РЛС (ГВр), то работа фрагмента алго-
ритма (рис.3.2) начинается с «нулевого» блока, т.е. с формирования дескрипторов
в БЦВМ Дескриптор - совокупность параметров, относящихся к одному импуль-
су (облучению) РЛС -Д, ти, момент приёма, амплитуда импульса и т.д., затем, по
совокупности параметров определяется Тп или Твр обработкой дескрипторов
Если станция РТР (информационная часть системы) измеряет Гц ГВр (в её
составе имеется временный селектор - рис. 1.2 гл. 1 или собственный процессор),
то работа алгоритма управления на первой фазе атаки начинается с первого блока
(рис. 3.2), который осуществляет вторичную обработку информации [60] - опо-
знавание типов РЛС, поэкземплярную идентификацию, оценку координат, даль-
ности до РЛС и др.
Далее на первой фазе атаки алгоритм управления:
99
- во втором блоке (рис. 3.2) уточняет данные об РЛС, по мере накопления
информации, и осуществляет третий этап её обработки (иногда называемый «тре-
тичным» [9]), заключающийся в том, что получаются все сведения об объекте
РПД (для ЗРК по типам РЛС и их местоположению определяется класс (наимено-
вание) атакующего комплекса - «Хок» или «Найк - Геркулес» или «Патриот» и
т.д.);
- выбирает (в 3-м блоке) главную (наиболее опасную) цель (ГЦ), принимает
решение о порядке организации РПД и ранжирует остальные атакующие средства
ПВО по степени их опасности (для того, чтобы преждевременно не «вскрыть» се-
бя, так как БСО до определённого момента не будет ставить помехи);
На второй фазе атаки комплекса перехвата алгоритм управления (в 4-м бло-
ке, рис 3.2) снова ранжирует цели, так как появилась сопровождающая цель, вы-
числяет момент перехода в режим РПД ГЦ и другим атакующим средствам (по
степени их опасности), выдаёт сведения о сопровождающих целях оператору БСО
на пульты и индикаторы, отмечая главную цель. Далее в 5-м блоке вырабатыва-
ются рекомендации по маневрированию самолёта (если это более эффективно,
или режим работы РЛС не позволяет ей поставить «качественную» заградитель-
ную помеху - например, РЛС ЗРК «Патриот», которая может перестраивать 7н от
импульса к импульсу в широком диапазоне частот, встретилась на маршруте и её
(РЛС) можно обойти) В 6-м блоке алгоритм выдаёт рекомендации САП по целе-
вым комбинациям помех, распределению ресурсов САП (каким РЛС с какой
мощностью надо противодействовать), определяет приоритетность работы БСО и
БРЛС защищаемого самолёта (опасная атака - БРЛС может «помолчать») Далее
снова уточняются ГЦ, сведения о средствах перехвата (блок № 7); осуществляется
управление чувствительностью приёмника РТР и мощностью САП (по ГЦ, кото-
рым ведётся РПД), проверяется возможность ведения РТР во время излучения
помех (блоки № 8, № 8а, № 86 на рис. 3.2).
Допустим, что в это время ПК- датчик (теплопеленгатор) регистрирует факт
пуска ракеты по нашему самолёту; тогда БСО переходит к работе на третьей фазе
атаки с помощью алгоритма управления, который совмещает информацию от РТР
100
и ИК- пеленгатора по угловым координатам (блок № 9). При подтверждении фак-
та пуска ракеты от станции РТР, (станция измерила в предыдущий момент време-
ни примерно такие же угловые координаты РЛС ЗРК (или БРЛС)), уточняются все
данные об атакующих средствах, определяется время до встречи с ракетой (блоки
№ 10 и № 11), меняется ГЦ и вид РПД, «подключается» собственная (нашего са-
молёта) БРЛС к обнаружению ракеты.
При отражении (срыве) атаки снова уточняются все данные об атакующих
средствах (блок № 12) и принимается решение, на какую часть (фазу) алгоритма
управления переключиться.
В алгоритме управления применены методы обработки информации, близ-
кие к оптимальным, а именно [15]:
- байесовские критерии опознавания типа РЛС (БРЛС) по априорно состав-
ленной библиотеке типов;
- кластер - анализ при идентификации экземпляров РЛС и оптимальное со-
вмещение информации от нескольких независимых источников [30];
- квазиоптимальное правдоподобие при оценке числа однотипных РЛС и уп-
рощенный метод наименьших квадратов при вычислении координат наземных
РЛС (координаты - дальность до БРЛС оцениваются грубо - по уровню прини-
маемых сигналов и уточняются при отслеживании БРЛС) (см [157], глава 4 и 5
книги);
- опознавание типа атакующего средства перехвата (как сложного объекта)
Некоторые из перечисленных методов цитированы в гл 1 со ссылками на
литературу, ряд оригинальных подходов по обработке информации имеется в мо-
нографии [9], эффективность оценки числа однотипных (неразрешаемых по ра-
диотехническим параметрам сигналов) РЛС рассматривается в гл. 5 и имеется в
работах [23, 157, 160 и др.].
Одно из достоинств алгоритмов управления, созданных при проектирова-
нии отечественных БСО, - использование в них принципа первоочередного проти-
водействия наиболее опасным атакующим средствам перехвата и распределе-
ние ресурсов БСО в соответствии с этим принципом управления [15]. Заметим,
101
ещё раз, что алгоритм управления не обязательно выполняется последовательно
по блокам, которые кратко описаны; всё зависит от темпа поступления информа-
ции, возможностей БЦВМ, скоростей обмена данными, поведения атакующих
средств (если ИП появился неожиданно в режиме «молчания» (не работающей
БРЛС), а затем быстро вошёл в атаку, БСО «всё бросит» и будет отражать атаку
именно этого ИП).
Все временные соотношения между блоками алгоритма и последователь-
ность их работы как раз и проверяются (корректируются) на ДС в различных си-
туациях. Это одна из центральных задач динамического стенда.
Сейчас мы немного остановимся на проблемах выбора БЦВМ, описании
облика пультов и индикаторов; пригодность БЦВМ, индикаторов также проверя-
ется на ДС.
Как уже отмечалось, все подходы к сравнительному анализу и формулиров-
ке требований к БЦВМ, УУ в современных условиях и, например, 20 (и более) лет
назад совершенно изменились. В 70-х годах двадцатого века к выбираемым отно-
сились практически все параметры БЦВМ, такие как [60]:
- производительность (время выполнения логических, арифметических и др.
операций), разрядность слова, возможность оперирования двойными словами и
формат представления вещественных чисел;
- объём памяти различного вида (оперативная, постоянная, сверхоперативная,
репрограммируемая; сегодня добавилась - ассоциативная память) и время обра-
щения к ней;
- архитектура построения, возможность объединения в систему и подключе-
ние внешней памяти (магнитных лент, дисков);
- число каналов, виды и помехоустойчивость связей; скорость обмена ин-
формацией; наличие обмена параллельным и последовательным биполярным ко-
дам (сегодня - наличие мультиплексных каналов и выхода на «общую шину»);
- наличие средств автоматизации программирования и сервисного обеспече-
ния (пульты, стенды проверки и отработки, в том числе - математического обес-
печения и сервисных алгоритмов);
102
- эксплуатационные данные (надёжность, спецстойкость, вес, габариты, кон-
тролепригодность, автоконтроль).
Методика выбора параметров БЦВМ основана на расчётах объёма обмен-
ной (перерабатываемой) информации в единицу времени от устройств БСО, РЭО
самолёта и учитывает: количество операций, выполняемых алгоритмом управле-
ния (обработки) информации; логику построения комплекса, длительности пе-
риодов РТР и РПД; распределение времени на отражение атаки по ее фазам; цик-
лограммы работы устройств. В результате применения методики выбраны БЦВМ
«Аргон - 15» и двухпроцессорная БЦВМ «Аргон - 15 - 2» [15] для БСО отечест-
венной разработки и их модернизации.
При построении пультов и индикаторов для БСО учитывались следующие
требования-
выдача оператору БСО информации о наиболее опасных атакующих
средств перехвата в координатах «азимут - дальность», отображение двух фаз
атаки (сопровождение и пуск ракет), условного номера ГЦ и других дополнитель-
ных сведений (технических параметров РЛС и атакующих средств по желанию
оператора БСО);
вывод «подсказок» оператору БСО для правильного принятия решения о
вмешательстве в работу системы, сведений о работоспособности устройств (отка-
зах блоков, каналов), наличие запаса расходуемых средств (ДО, ЛТЦ, ПОД, ЛОЦ,
ловушек и ложных целей); рекомендации о направлении и виде манёвра пилотам
самолёта (на индикаторы лётчиков),
- обеспечение возможности оператору включения с пультов БСО в целом и
отдельных входящих устройств, раздельной подачи электропитания («накал»,
«высокое») на ЛБВ для повышения надёжности ЛБВ и обеспечения режима «мол-
чания» РПД;
- эргономика (регулировка яркости подсвета, выбор цвета освещения, удоб-
ство размещения органов управления, не утомляемость зрительных ощущений и
Др.).
103
Анализ вариантов исполнения пультов и индикаторов показал, что, в условиях
компактного размещения в кабине пилотов самолёта, наиболее полно удовлетво-
ряют перечисленным требованиям знако-цифровые индикаторы, мнемотабло и
кнопочное исполнение пультов, а также электроннолучевые трубки (типа «харак-
тронов»), достоинство которых - универсальность отображаемой информации.
Кроме БЦВМ, пультов и индикаторов в состав устройства управления вхо-
дит блок сопряжения с составляющими частями БСО.
На этом мы завершим краткое описание алгоритмов управления, характери-
стик БЦВМ, облика пультов и индикаторов УУ, так как основная цель динамиче-
ского моделирования - - проверка правильности их работы с учётом реального
функционирования в образце УУ, работающего в составе ДС.
Эффективность применения алгоритмов управления в большой степени свя-
зана с логикой построения и работы БСО, в первую очередь с логикой управления
наиболее важной и ответственной частью - САП. Все эти логики фактически
представляют «жёсткий» (аппаратный) алгоритм управления, а точнее доводят
команды (информацию) до исполнительных устройств. Плохо построенная логика
редко может быть улучшена самой совершенной БЦВМ и идеальным УУ. Поэто-
му алгоритм управления и состав УУ должны не противоречить логике правиль-
ного построения БСО и управления САП, т.е. обязаны дополнять и развивать друг
друга.
104
Начало управления, уменьшение дальности сближения (Дсбл) защищаемого самолета и атакующего средства перехвата (АСП);
Рис 3 2 Фрагмент концептуального алгоритма управления БСО.
3.3. Логика работы БСО и управления САП
Воспользуемся снова известными сведениями о логике построения системы
ALQ - 161 и её исполнительной части, а точнее дополним сведения, которые есть
в литературе, нашими представлениями о том, какая должна быть логика работы
БСО, чтобы реализовать оптимальное управление. На рис. 3.3 приведена укруп-
нённая схема логики построения [53^-55] системы ALQ - 161 (в основном её пере-
дающей части) в каждом из пяти приёмо-передающих поддиапазонов, управляе-
мых БЦВМ АР - 101Д (не путать её с центральной БЦВМ АР - 101F).
Как видно из рис. 3.3 сначала существуют и передаются в исполнительную
часть системы два параллельных потока информации. Поток от БЦВМ АР - 101Д
«несёт» результаты обработки данных, полученных от информативной части сис-
темы (станции РТР), и обеспечивает дальнейшую синхронизацию моментов вре-
мени излучения помех с отраженными от самолёта сигналами РЛС (с упреждени-
ем отражённых сигналов при работе САП в генераторном режиме и некоторым
отставанием помех от сигналов при ретрансляции). Если РЛС не перестраивает
параметры своих сигналов, то этот поток информации меняется медленно (отно-
сительно Тп импульсов) - 1 раз в несколько секунд, а при наличии в составе
станции РТР блока исключения повторной разведки (блок пропускает только «но-
вые» сигналы РЛС) - ещё реже, но не более периода вращения антенны РЛС (Твр).
Именно в потоке от БЦВМ АР-101Д выдаются данные: о режиме работы САП
(генераторный, ретрансляторный или оба вместе); приоритет угроз (в каком из
постов в первую очередь включать САП и на какое время); порядок работы по-
стов в поддиапазоне, направления излучения (а, Р), виды ( целевые комбинации)
помех. Более подробные данные, выдаваемые в САП, заложены в алгоритме
правления, рассмотренном кратко выше. И самое главное, в этом потоке компью-
тер АР-101 Д обеспечивает начальное «слежение» за 7вр и Тп, по которым затем
вырабатываются синхросигналы.
106
Темп изменения данных во втором потоке от «контрольной» БЦВМ АР -
101F принципиального значения не имеет (эти данные ждут своей очереди при
дальнейшей обработке, чтобы не «мешать» РПД)
Далее управление и передача информации САП ведётся через
исполнительно-распределительные логические устройства (ИРЛУ) - одно на
каждый поддиапазон. ИРЛУ через своё ассоциативное следящее устройство
(АСУ) «принимает эстафету» от БЦВМ АР-101 Д и вырабатывает уже два потока
(№ 1 и № 2) синхросигналов, отслеживающих Твр и Тп. ИРЛУ имеет собственный
процессор, который, в частности, уточняет (и дополнительно вычисляет), а затем
передаёт в САП команды, определяющие длительность излучения и начало
передачи помех. Отметим, что если несущая частота (/и) в пачке импульсов,
соответствующей времени облучения главным лучом антенны РЛС, изменяется
по некоторому закону, то эта информация передаётся в САП; если изменение
наблюдается от импульса к импульсу в некотором интервале частот, то и эти
данные поступают в САП для постановки заградительной помехи. Важно, что
компьютеры и синхросигналы точно отслеживают начало и конец пачки
облучения главным лучом ДНА РЛС через Твр.
Далее информация из ИРЛУ через его микропроцессорный коммутатор
распределяется по постам в поддиапазоне с помощью логических устройств
распределения каналов (постов) - ЛУРК. Число ЛУРКов соответствует
количеству постов поддиапазона, и в каждом ЛУРКе информация собирается
(упаковывается) в один поток (из 3~ потоков), с соответствующими метками,
который поступает в управляющий процессор (УП) поста.
Возможно также, что все три потока от ЛУРКов циркулируют параллельно,
но тогда число логических схем утраивается.
Заметим ещё, что УП введены в состав постов каждого из поддиапазонов
системы ALQ - 161 не сразу, а по результатам испытаний из-за возникших
трудностей в отладке на борту системы её математического обеспечения. Наличие
самостоятельного УП в каждом посте поддиапазона обеспечило автономность
отладки аппаратуры поста (параллельно несколькими комплексными бригадами)
107
От центральной БЦВМ АР — 101F (управление)
Антенны
Информативная часть ALQ
-161
сигналы РЛС
данные
РТР
1~ поток (в САП)
Рис 3 3. Логика построения и работы системы ALQ - 161и её передающей части (САП)
Из УП информация передаётся в быстродействующие микрокомпьютеры
((5-40) млн. команд/сек.) логических устройств (ЛУ) постов и далее - в
108
формирователи помех (ФП). Поскольку ФП расположены непосредственно у
передатчиков помех в постах (ФП несколько - по одному на каждый из 3-х
каналов с ЛБВ), то потоки информации передаются со скоростью 1 млн. бит/сек.
на расстояния < 37,5 м из центрального отсека по двухпроводным линиям связи
(туда и обратно), выполненным витой парой. Кадры (файлы) постановки помех со
всей необходимой информацией, передаваемые на ФП, сменяются во времени по
принципу конвейера. Конвейер заполняется файлами по мере их поступления;
если отдельный файл поступает в ФП, когда все ЛБВ заняты, то сигнал об этом по
второй шине (обратно) возвращается в УП, где процессор сравнивает четыре
угрозы (кадра) по степени их опасности и сокращает интервал постановки помех
РЛС, представляющей наименьшую угрозу для самолёта. Тем самым
обеспечивается постановка помех всем четырем РЛС. Отметим, что
синхросигналы передаваемые в ФП бывают двух видов: высокочастотные
синусоидальные с частотой 20 МГц и низкочастотные прямоугольные импульсы,
что связано со спецификой формирования и модуляции различных видов помех.
Итак, мы видим, что в подсистеме исполнения (САП) ALQ 161
существует пятиступенчатое цифровое управление с помощью различных
вычислительных средств, а именно: центральная БЦВМ АР - 101F (рис 3 1 и рис
3 3) выбирает приоритет поддиапазона РПД и какими средствами РПД следует
защищаться; затем БЦВМ системы ALQ - 161 (АР - 101Д) определяет
очерёдность подключения постов с целью РПД в выбранном поддиапазоне; далее
ИРЛУ со своим процессором реализует эту очерёдность, дополняя информацию
управления и формируя три потока данных; и, наконец, «в дело вступает» ЛУРК
со своим процессором, указывая на первоочередной номер поста, где уже
управляет УП. Параллельно в эти потоки данных через ИРЛУ «вклинивается»
центральная контрольная БЦВМ АР - 101F, обеспечивая поиск и устранение
отказов в ALQ - 161, подключая резервные блоки (узлы) и перераспределяя их
функции Такой многоступенчатый, но понятный процесс управления с
использованием могущества цифровых методов реализован в ALQ - 161 (а
возможно, - должен быть так реализован).
109
Следовательно, логика построения системы ALQ - 161, и особенно его
передающей части, соответствует схеме максимальной децентрализации
управления (и автономности его исполнения) во всех поддиапазонах и постах,
при этом, всегда сохраняется единство общего управления за центральной БЦВМ
и оператором БСО.
Чтобы не усложнять логику работы БСО специально не затронуто
управление остальной частью комплекса (рис 3 1), кроме системы ALQ - 161
Все функционирование БСО происходит параллельно (в требуемое время в
надлежащем месте) с помощью центральной БЦВМ АР - 101 F. Например,
параллельно может производиться отражение атак в передней полусфере и
«защита хвоста» самолёта БРЛС ALQ - 153.
Указанная логика (и схема) управления позволяет получить наибольшее
быстродействие в системе «приём-передача» при организации РПД - ответа на
возникшую угрозу самолёту и максимальную пропускную способность
аппаратуры Цена за эти возможности достаточно велика: очень сложное
математическое обеспечение (стоимость разработки и отладки матобеспечения
превосходят стоимость самого радиоэлектронного оборудования в несколько раз);
существует значительная избыточность аппаратуры, которую можно
удовлетворить только при малогабаритных комплектующих изделиях (высоком
уровне интеграции и передовых технологиях); значительные затраты на отработку
аппаратуры. Кроме перечисленных, в системе ALQ - 161 существуют большие
проблемы по обеспечению ЭМС внутри системы и с РЭО самолёта (ударной
системой), потери времени на отработку и анализ большого объёма избыточных
данных. Последние потери разработчики ALQ - 161 надеялись снизить
применением экспертных систем и систем с искусственным интеллектом.
Существенную экономию аппаратуры можно получить в БСО, логика и
схема работы которой строятся по принципу: выделение в общую часть
наибольшего состава аппаратуры (например, размещения в постах только
выходных блоков (ЛБВ) и антенн); организация автономной работы САП с
собственным простейшим приёмником без пеленгатора и «подсказками» от
по
центральной БЦВМ, обрабатывающей информацию от панорамного приемника;
переключением выходной мощности (до выходных блоков) по бортам, в
переднюю или заднюю полусферы и т. д. Можно также упростить схемы
панорамных приёмников, используя транспонирование сигналов из мало
загруженных поддиапазонов в другой; например, поддиапазон № 8 в поддиапазон
№ 6 (если только самолёт не маловысотный) и т д.
Но вернёмся к системе ALQ - 161 и её логике построения. Из-за краткости и
простоты изложения оставлены без рассмотрения вопросы, организация РПД
перестраиваемым по техническим параметрам сигналам РЛС (особенно по Тп,
когда не так просто сформировать поток № 2 с «привязкой» к Тп); РПД
моноимпульсным РЛС, когда надо попытаться «закрыть» первый импульс
перестраиваемой РЛС или организовать «мерцающую» помеху и т. д.; РПД
многочастотным РЛС (приведенная логика позволяет это сделать),
многофункциональными (многорежимными) РЛС и РЛС с КНИ - сигналами
(КНИ - РЛС излучает пачки сигналов с высокой частотой повторения внутри
пачки и средней (низкой) частотой повторения между пачками); РПД
голографическим РЛС и РЛС с синтезированной апертурой и т.д Некоторые из
этих вопросов, с учётом разумных объёмов книги, будут рассмотрены позднее;
отдельные аспекты проблем (способы РПД) читатель может найти в работах [6^8,
10, 15 и др.].
Перейдём к рассмотрению построения ДС и его моделей.
3.4. Динамический стенд. Математические модели ДС
Основой для построения ДС служат: требования к стенду, изложенные в
разделе 3.1, алгоритм работы устройства управления БСО, САП и др материалы
(фактически многие материалы, изложенные в предыдущих и настоящей главах)
Начнём с математической модели БСО.
111
В состав обобщенной математической модели (ОММ) БСО ДС, которая
иногда называется «базовой» входят [15]:
- математическая модель радиотехнической обстановки (ММ РТО), (иногда
именуется моделью радиолокационного поля - РЛП) и атакующих средств
перехвата системы ПВО;
- математическая модель информационной части БСО (ММ РТР и
теплопеленгатора), составленная на базе описанных алгоритмов работы её
устройств;
- математическая модель исполнительной части БСО, построенная по логике
работы САП с включением функционирования других её исполнительных
устройств;
- модель работы устройства временной межаппаратурной развязки (МАВР)
приёмной и передающей части БСО, а также взаимодействия с РЭО самолёта;
МАВР с помощью блокирования и бланкирования обеспечивает возможность
ЭМС бортовых систем самолёта;
- модель РЭО самолёта (БРЛС, навигационных систем и др.), если в составе
ДС нет аппаратурных имитаторов РЭО.
Сложность ОММ БСО зависит от качества построения входящих в неё
математических моделей.
3.5. Математическая модель РТО (РЛП) и атакующих средств перехвата
Применительно к построению ОММ БСО в дуэльных ситуациях нас в
первую очередь будут интересовать построение моделей атакующих средств
перехвата на маршруте полёта самолёта с системой РЭП (БСО) к заданной цели
через систему ПВО. Остальные средства ПВО, в том числе гражданские
аэродромы, оборудованные РЛС, следует отнести к «мешающим», и выделить из
них станцией РТР опасные атаки ЗРК и ИП.
112
В модель конкретного вида атакующих средств перехвата должны входить
(или учитываться):
- типы РЛС, обслуживающие наземные (корабельные) средства перехвата,
их координаты и параметры излучаемых сигналов, режим работы РЛС,
взаимодействие между собой и др.;
- организация стрельбовой части комплекса перехвата (количество секций,
батарей, дивизионов; их координаты на местности (распределение по кораблям);
время передачи информации и принятия решения от обнаружения до стрельбы,
характеристики ракет и метод их наведения и т.д.);
- характеристики БРЛС истребителей-перехватчиков; количество ракет
дальнего, среднего и ближнего действия, используемых в одной атаке; динамика
сближения с перехватчиком, наиболее вероятные атаки и др.;
- способы помехозащиты РЛС (БРЛС) атакующих ЗРК и перехватчиков.
Естественно, что далеко не все эти сведения публикуются в открытой
печати и приходится многое дополнять самому разработчику БСО, ориентируясь
на общие тенденции развития РЛС (БРЛС) и системы ПВО, новые концепции
РПД. Выручают возможности современной вычислительной техники, которые
позволяют моделировать любые предполагаемые (даже гипотетические) ситуации
для выбора способов РПД в наихудших для защищаемого самолёта условиях атак.
С другой стороны, для первоначальной отработки методики моделирования
и тестирования (оценки правильности исходов) результатов моделирования
желательно начинать с простейших (очевидных) вариантов, постепенно усложняя
задачу. При этом важно ориентироваться сразу на блочную структуру модели с
тем, чтобы, включая в модель дополнительные блоки, можно было бы постепенно
получить требуемую конечную модель (как в алгоритмах управления).
Для упрощения задачи моделирования, без потери её сути, можно
первоначально исключить блок описания сближения ИП и нашего самолёта с
произвольных ракурсов атаки (не моделируется решения динамических
уравнений в обобщенном виде с учётом ускорений ИП и манёвров нашего
самолёта). Тогда, предположим, что:
ИЗ
- ИП атакует вдоль строительной оси нашего самолёта со скоростью vc6 = vm ±
vu (усб, Vjm и vu, - скорости сближения, ИП и нашего самолёта);
- ИП атакует известными, аналитически просто описываемыми и технически
легко реализуемыми способами «пропорционального» наведения
(«параллельного» сближения - частный случай), сближения по «кривой погони» и
др. [6, 7 и др.].
Граница радиолокационного
ракеты
Рис. 3.4. Схема атаки цели по кривой погони.
Например, достаточно просто моделируется (и рассчитывается)
равновысотная атака с преследованием по кривой погони; геометрические
соотношения для этого случая приведены на рис. 3.4. С точки зрения ИП такая
атака наиболее выгодна, так как требует наименьшего количества информации от
БРЛС для её успешного осуществления (маневрирование ИП в условиях РПД
крайне сложно).
На рис. 3.4. указаны две граничные кривые, определяющие последнюю
возможность пуска ракеты «воздух - воздух» (кривая - «граница пуска ракеты») и
114
минимально возможное расстояние, на котором защищаемый самолёт должен
быть обнаружен на экране БРЛС («граница радиолокационного обнаружения»).
Рис. 3.5. Зависимость числа отраженных импульсов от скорости сближения.
0,9999
0,999
0,98
0;95
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,05
0,02
0,01
0,005
0,002
0,001
0,0005
обн
—
X j
X ।
/ 1
F 1 1
1
1 1
1
i 1
1
1 . I
I
1 1
1 1
1 1
1 1
1
1 1
1
1 1
6 8 10 12 14 16 18
0 2
JF (дБ)
Рис. 3 6. Зависимость вероятности обнаружения самолета от отношения сигнал/шум.
115
Расстояние между граничными кривыми иллюстрирует время (при заданной
Усб), которое есть у лётчика ИП на выбор, подготовку и прицеливание оружием
для поражения защищаемого самолета. Обычно минимально это время составляет
2^3 сек при атаке с передней полусферы (НИ) и до 15 сек при атаке с задней
полусферы (ЗП), если постановщик помех вышел в точку, изображённую на рис.
3.4, по строительной оси самолёта (около 2400 м на границе РЛ/обнаружения и
900 м на границе пуска ракеты; vC6 с ПП~700м/с, с ЗП~ 100м/с).
Рис. 3.7. Зависимость улучшения отношения сигнал шум от интегрирования
импульсов в функции от N (числа накопленных импульсов).
Представим себе, что ИП до выхода в точку Д = 2400м до цели (нашего
самолёта) обнаружил цель с вероятностью 0.999 и начал её сопровождение (атаку
с ЗП). В процессе захвата цели БРЛС «накопила» около 300 импульсов,
отраженных от нашего самолёта (зависимость числа отраженных импульсов от
скорости сближения представлена на рис. 3.5) и лётчик ИП видит на экране БРЛС
цель и чувствует себя уверенно (на пуск ракеты у него ~ 15 сек времени).
Уверенность лётчика ИП подтверждается графиками рис.3.6, 3.7, 3 8 [6] (из
рис.3.6 следует вероятность обнаружения самолёта 0.999 при отношении
116
сигнал/шум 16дБ, которое получено из графика рис. 3.7 при 300 интегрированных
БРЛС импульсах, тогда как потребное отношение (фактическое отношение)
сигнал/шум для одного отраженного от цели импульса (рис. 3.7) составляло - 2дБ;
этому отношению - 2дБ соответствует дальность обнаружения 2.4 км (рис. 3.8)
при плотности помех 1 Вт/МГц).
Однако в момент времени, соответствующий R = 2,4 км, БСО (неожиданно
для лётчика ИП) включает заградительную помеху, чтобы БРЛС не успела и не
смогла перестроить свою несущую частоту и вновь захватить цель
(информативные устройства БСО давно определили тип РЛС и знают, что она
перестраивает Гц в диапазоне 10СИ-500 МГц относительно fH). Плотность
мощности заградительной помехи на Д = 2,4 км - 4 Вт/МГц и помеха сразу
снижает отношение сигнал/шум на входе приёмника БРЛС до 10 дБ, уменьшает
вероятность обнаружения до 0,25 (см рис.3.6 и др.); сигнал цели с экрана БРЛС
исчезает. Из предыдущих исходных данных и графиков следует, что БСО
достаточно излучать помеху в течение 15 сек (с регулируемой - возрастающей
мощностью по мере приближения ИП к нашему самолёту), чтобы сорвать атаку
ИП. Передатчик САП БСО должен иметь мощность порядка 1+2 кВт (как у
системы ALQ - 161) для прикрытия полосы частот (100 + 500) МГц с плотностью
4 Вт/МГц (КНД антенны передатчика порядка 10 + 12).
Вместо зависимостей на рис. 3.5 + 3.8, взятых из работы [6], можно также
воспользоваться известным критерием Неймана - Пирсона для расчёта (и
моделирования) вероятности обнаружения в условиях помех [7, с 92] в
зависимости от отношения сигнал/шум на выходе приёмника БРЛС.
Продолжая рассмотрение равновысотной атаки по кривой погони (рис. 3 4)
можно предположить, что у лётчика ИП имеется на борту устройство
сопровождения цели по помехе от БСО и ему удалось пустить ракету. В этом
варианте надо рассматривать два случая - «пассивное» сопровождение ракеты
(«полуактивное» наведение), когда ракета получает в свою «головку наведения»
отраженные сигналы от нашего самолёта, «подсвечиваемого» (облучаемого)
сигналами БРЛС, и «активное» сопровождение цели ракетой, на которой
117
установлена собственная радиолокационная головка самонаведения (РГСН) или
аппаратура сопровождения по помехе. Первый случай не отличается
принципиально от рассмотренного выше (БСО надо оценить по факту пуска
ракеты, почему БРЛС удалось это сделать и, возможно, сменить вид помехи).
Единственное условие, которое надо соблюсти в данном случае, необходимо
обеспечить РПД БРЛС и головке наведения ракеты одновременно.
Рис. 3.8. Зависимость минимальной дальности обнаружения от отношения
сигнал/шум одиночного импульса в функции от плотности мощности помех (РД.
Второй случай более серьёзный с точки зрения РПД; во-первых, надо
обнаружить и распознать сигналы РГСН ракеты (это может быть совсем другой
поддиапазон приёмника БСО и понадобится увеличить чувствительность
приёмника до предельно возможной); во-вторых - потребуется сменить РПД.
Не рассматривая далее вопросы расчёта (и моделирования) отражения атаки
в последнем случае, перейдём к дальнейшему описанию характеристик
118
атакующих средств перехвата (при интересе к этому вопросу читатель может
посмотреть работу [7]).
Бортовая аппаратура
ракеты (ист ребителя)
1
Рис.3.9. Укрупненная функциональная схема контура дальнего наведения.
Современную систему ПВО, независимо от того, на каком театре военных
действий (ТВД) она находится, укрупненно можно представить как совокупность
трёх обобщенных последовательных контуров (подсистем) защиты,
целераспределения, дальнего наведения и самонаведения. Целераспределением
занимаются самые «интеллектуальные» (высокоорганизованные) РЛС с высокой
степенью помехозащиты; РЛС обеспечивают трёхкратное перекрытие воздушного
пространства, триангуляционное пеленгование целей в условиях помех,
корреляционную обработку сигналов и др По условиям построения глобальной
математической модели (гл. 1, п. 1.1) мы считаем, что такие РЛС должны быть
(при массированных налётах авиации) уничтожены в первую очередь и их
характеристики в дальнейшем не рассматриваются. Ликвидация таких РЛС
существенно
119
снижает число атак по прорывающейся группировке авиации (система ПВО
становиться децентрализованной).
Контур дальнего наведения, в условиях отсутствия информации от РЛС
целераспределения, превращается в контур автономного наведения и сам должен
обнаруживать цели. В составе такого контура имеются РЛС, обслуживающие
несколько батарей (дивизионов) ЗРК и аэродромов базирования тактической
авиации, с достаточно высокими техническими параметрами и степенями
помехозащиты.
Задача контура состоит в том, чтобы на основании информации о
координатах целей и истребителей (ракет), а также реализуя принятый закон
(имеющийся в распоряжении) наведения, с помощью командной радиолинии
управления (КРУ) истребителя или ракеты вывести их в такую область, из
которой они могли бы осуществить самонаведение (с помощью БРЛС или РГСН)
(рис. 3.9). Иногда РЛС наведения управляет ракетой с помощью КРУ,
размещенной в её «хвосте», по сигналам, отраженным от цели и принятым
головкой наведения ракеты, а затем транслированным ракетой по линии связи на
наземную РЛС (наведение «через ракету») Старые способы полуактивного
наведения ракет (ракета с «пассивной» головкой наведения на цель, упомянутая
выше) уходят в прошлое.
Контур самонаведения на цель ИП (или ракеты) включает БРЛС (активную
РГСН ракеты) и используется для организации самостоятельной атаки ИП на
выбранную предыдущим контуром наведения цель (группу целей), прикрытую
помехами.
В табл. 3.2 приведены основные данные об РЛС контуров наведения и
БРЛС (РГСН) контуров самонаведения, используемые в дальнейшем при
моделировании атакующих средств перехвата (АСП); при этом могут
использоваться простые атаки ЗРК (ИП) - пуск 1-2 ракет и сложные атаки.
Под «сложной» атакой истребителя-перехватчика понимается:
- с передней полусферы - пуск двух ракет большой дальности (150 - 200 км)
и затем еще двух ракет средней дальности (120 - 60 км);
120
- с задней полусферы - пуск двух ракет средней дальности и еще (через
некоторое время) двух ракет малой дальности (40 - 20 км); в дальнейшем
возможен переход в пушечную атаку.
Под простой атакой понимается пуски только одной ракеты ЗРК и двух
(залп) ракет ИП; со стороны ПП ИП атакует ракетами с РГСН, причем на ракетах
большой дальности размещены активные РГСН (см. характеристики в табл. 3.2);
со стороны ЗП и ПП при пуске ракет средней дальности одна ракета может иметь
активную РГСН, вторая - пассивную ИК- головку наведения (ТГСН); со стороны
ЗП обе ракеты малой дальности имеют ТГСН. Скорости всех ракет превышают
более чем в 1,3 раза vC6 ИП при атаке со стороны ЗП и в 1,1 раза со стороны ПП.
Как уже говорилось, под атакой ЗРК понимается пуск одной ракеты; число
атак ЗРК по нашему самолёту определяется помеховой обстановкой и
маршрутами пересечения целью зоны поражения ЗРК. Вероятность поражения
ракетами защищаемого самолета в отсутствие помех лежит в пределах 0,6 0,8
(одной ракетой).
Если в таблице (или тексте) указаны интервальные значения технических
параметров РЛС (характеристик АСП), то их конкретные значения в одной атаке
(пролете системы ПВО) при моделировании задаются датчиками случайных чисел
(ДСЧ) равномерного (равновероятного) распределения. Начальные фазы периода
вращения антенны РЛС (и другие, если таковые существуют) задаются в
интервале {0, 2л}.
Практически всегда подразумевается, что у РЛС наведения ЗРК и БРЛС
самонаведения ИП имеется оптимальная (корреляционная - додетекторная)
обработка сигналов, улучшающая соотношение сигнал/шум на 8 10 дБ [6] и
аппаратура селекции движущих целей (СДЦ).
Во всех «линейных» атаках скорости сближения ИП с нашим самолетом -
700 м/сек со стороны ПП и 100 м/сек со стороны ЗП (как было в рассмотренном
выше примере)
121
Таблица 3.2. Основные данные об РЛС наведения и БРЛС (РГСН).
Основные данные о РЛС, БРЛС и РГСН
1 Наземная РЛС контура наведения (поддиапазон №6 ALQ - 161) ।
1.1 Мощность излучения 100 — 200 кВт (импульсная); КНД антенны = 35 - 40 дБ
1 2 Ширина луча антенны (а°, (Г) равна: а • (3 - —-- — [6], КНД[разах\
1 3 Уровень боковых лепестков - 30 дБ при излучении, 40 дБ - при приеме [9]
1.4 Длительность ЛЧМ- сигнала - 100 - 200 мкс; коэффициент сжатия - (10 - 20)
1 5 Метод наведения - «через ракету», за 10 - 15 сек до поражения цели ракетой - переход в КНИ- режим
1 6 При обнаружении РЛС работает в моноимпульсном режиме
1 7 При сопровождении посылается “п” три-пять импульсов подряд в каждый элемент разрешаемого пространства
1 8 Обзор пространства - телевизионный (построчный)
1 9 Имеется перестройка от импульса к импульсу в AF = 500 МГц
1 10 В КНИ- режиме - пачки импульсов (ти= 1 мкс, Fn = 100 кГц ); период повторения пачек - ЮкГц,
2 РГСН ракеты (дальнего и среднего действия), контур самонаведения ИП
2 1 Поддиапазон работы №8 (Остальные данные - паспортные [9]).
3 БРЛС истребителя-перехватчика (контур самонаведения):
3 1 Импульсная мощность излучения 50 - 70 кВт; поддиапазон №7;
3 2 КНИ- режим (Остальные данные - паспортные [9])
3 3 Время обзора пространства 2-3 сек Длительность пребывания луча антенны ФАР в одном элементе пространства - 10 мсек, число разрешаемых градаций - 30(a) и 10(Д);
3 4 КНД антенны - (30-35) дБ; а,0=25,1О3/КНД; Уровень бокового излучения- ЗЗдБ
3 5 Перестройка fH от одного положения луча антенны - к другому
4 Наземный дальномер контура наведения ракет (поддиапазон №8).
4.1 Импульсная мощность - 50 кВт, ти= 10 мкс, Fn- 2000 Гц
42 КНД антенны - 30 дБ; ширина луча (1-^-3) град, Ткачания- Ю сек
43 Работает совместно с наземной РЛС контура наведения (п 1. настоящей таблицы)
5 Корабельная РЛС ЗРК наведения (поддиапазон №5) ракет
5 1 Размещена на крей серах ЗУРО (защиты, управления ракетным оружием)
6 РЛС подсвета цели непрерывная. (Остальные данные по п 5 и п 6 - паспортные [9])
122
3.6. Математическая модель информационной части БСО
В моделируемую информационную подсистему БСО входят: приемники
анализа и пеленга, теплопеленгатор. Если обратиться снова к системе ALQ - 161,
то структурная схема многоканально-функционального («матричного»)
приемника этой системы приведена на рис. 3.10 и состоит из входных антенн,
фильтров и трех крупных блоков (всего таких приемников от пяти (см. табл. 3.1)
до восьми - по числу поддиапазонов системы ALQ - 161).
Как следует из рис. 3.10, первый блок № 1 - широкополосный приемник,
построенный по принципу многоканального супергетеродина. Этот блок
включает светвитель, схему регулировки чувствительности, преселектор -
разветвитель, прецезионные гетеродины - преобразователи в первую
промежуточную частоту и фильтры. Аналогичным образом построен и второй
блок №2 с преобразованием во вторую промежуточную частоту (нет только
схемы регулировки чувствительности). В обоих блоках имеются отводы на
детекторы и схемы селекции сигналов по максимальной амплитуде с передачей
параметров импульсов в логическое устройство ввода-вывода (УВВ) Кроме того,
параметры импульсов из цифрового УВВ передаются по стандартной
информационной шине для последующей обработки.
В третьем блоке № 3 имеется набор узкополосных фильтров и цифровых
преобразователей «частота-код» для кодирования сигналов с выхода каждого
канала. Отметим, что во второй блок включен дополнительный перестраиваемый
узкополосный приемник повышенной чувствительности и окончательного
устранения неоднозначности сработавших каналов (если сигнал попал «на стык»
соседних фильтров), хотя это бывает очень редко (в, основном с этим
«разбираются» схемы селекции по амплитуде).
Импульсы большой длительности специально “помечаются" и отводятся в
отдельный перестраиваемый приемник Для защиты от непрерывных и
импульсно-допплеровских сигналов используются перестраиваемые ЖИГ-
фильтры (фильтры из железисто-иттриевого граната) Данные о пеленге
123
измерительно - кодирующее устройство принимает от приемника-пеленгатора и
«привязывает» по времени приема, образуя общий дескриптор. Максимальная
скорость формирования дескрипторов импульсов - 3 млн./сек.
Отметим, что в России аналогичный приемник был построен, исследован и
апробирован С. В. Поповым (1961) [61, 62] по авторской заявке Киреева Б. А.
(1957). Упоминание и схема такого приемника в простейшем виде имеется в
работе [6].
Блок-схема приемника-пеленгатора поддиапазонов № 6 ч- № 8 (в 4-м и 5-м
поддиапазонах, по-видимому, другая схема) приведена на рис.3.11. За рубежом
эта схема известна как матричная схема Батлера; точность пеленгования такой
схемой по одному импульсу (путем сравнения амплитуд сигналов каналов)
определяется полуширной диаграммы направленности антенны одного луча
(~ 5° -*• 7°); в пределе (по нескольким импульсам) такая схема может дать
точность измерения пеленга до 2° + 3° специальной обработкой По-видимому,
лучшей точности для (8-40) элементной антенной решетки (ФАР) не требуется.
Антенна № 9 (рис. 3.11) используется для канала анализа (канал анализа и
пеленгатор объединены в один панорамный приемник); кроме того, в состав
приемника-пеленгатора включен интерферометр и две антенны (верх, низ) для
устранения неоднозначности пеленгования.
Кроме перечисленных данных, для моделирования работы приемников и
приемной части БСО требуется знать:
- чувствительности узкополосного и широкополосного приема (определяются
числом подключенных каналов и полосой пропускания конечного канала; в
широкополосном варианте - чувствительностью детекторного приемника с
усилением по видеочастоте);
- время анализа сигналов (один импульс - все параметры; два импульса - Тп;
период обзора (Гвр) за Твр; при калибровке чувствительности приемника
дополнительно нужен один импульс);
124
- разрешающую способность и точность измерения технических параметров
сигналов РЛС (fs с точностью до 1 МГц; временные параметры - ти, Гвр, Гп, момент
приема - 0,1 мксек; амплитуда - с точностью 2-3 дБ);
- точность пеленгования (среднеквадратическая ошибка) (5 - 7)° за один
импульс по а и /3 и (2 - 3)° за 4 - 6 импульсов по а и 0 (амплитудный пеленгатор);
- дополнительно измеряемые параметры - диапазоны и скорости перестройки
fH, Тп, ти; координаты наземных РЛС и время их измерения (за один импульс при
дальностях до (5-7) h, h - высота полета при угломестном методе пеленгования
энергетическим способом [9] и триангуляцией - методом многократной
пеленгации по двум и более пеленгам с последующим уточнением) все эти
данные получаются после вторичной обработки (см. п.3.2);
- вероятности опознавания типа РЛС (БРЛС), АСП, сложного объекта
(комплекс ЗРК); время поиска сигналов РЛС при узкополосном приеме;
- укрупненный алгоритм работы (порядок выполнения операций).
Обтекатель и поляризатор
Интерферо-
метр
Выходные видеосигналы
-----—--------------------------(на анализ)
Информация о пеленге
Рис 3 11. Блок - схема приемника - пеленгатора поддиапазонов № 6, 7, 8
системы ALQ - 161. (антенны 14-8 - пеленгационные).
125
ю
О>
Преселектор-разветвитель
Рис.3.10 Структурная схема приемника системы ALQ-161
IXА - аттенюатор с цифровым управлением от БЦВМ,
LQ - местный гетеродин;
D & COOF - детекторы схемы селектирования по максимальной амплитуде
TR - перестраиваемый приемник
1 - входной блок приемника (с разбивкой по п/д)
2 - блок грубого разделения полосы частот по каналам
3 - блок точного распределения полосы частот на каналы и кодирования
Рис. 3.12. Блок-схема теплопеленгатора.
Блок-схема теплопеленгатора информативной части (в системе ALQ - 161
его нет, а есть только датчик ИК- излучения в задней полусфере для включения
БРЛС, см. рис. 3.1) показана на рис. 3.12. Теплопеленгатор состоит из: оптико-
механического блока (ОМБ) с системой зеркал, вращающихся по кругу,
приемника теплового излучения сверхвысокой чувствительности (охлаждается
жидким азотом) и цифрового блока обработки поступающих ИК- сигналов В
приемнике предусмотрены меры для регулировки пороговой чувствительности и
защиты от солнца, дневного светового фона, бликов, отраженных от конструкций
самолета. В некоторых типах теплопеленгаторов имеется устройство слежения за
траекторией движения наиболее опасной ракеты по тепловому излучению ее
маршевого двигателя. Вероятность ложной тревоги при определении факта пуска
в сложной фоновой обстановке за один обзор (в разных ситуациях) лежит в
пределах 10'2-^ 10‘3, а вероятность обнаружения факта пуска ракеты > 0,9.
Для моделирования работы теплопеленгатора, кроме приведенных данных,
требуется иметь: чувствительность приемника (лучше вероятности обнаружения
факта пуска и сопровождения ракеты на траектории - 0,9 и 0,7 0,8); точность
пеленгования и сопровождения на траектории (0,5° - среднеквадратическая
ошибка по а и 0 при определении факта пуска; Г - ошибка сопровождения по а и
/3 ракеты).
127
Все эти данные необходимы для вычислительного алгоритма
функционирования общей математической модели (ОММ) БСО. Поэтому мы и
пытаемся максимально (насколько это возможно в рамках книги) их описать.
Далее требуется информация от навигационной системы самолета:
- точность измерения собственных географических координат самолета-
носителя БСО, h полета, углов крена и тангажа;
зависимости систематических и случайных ошибок навигационной
информации от времени полета.
И, наконец, для информативной части БСО нужны сведения (если таковые
имеются) от БРЛС самолета («защиты хвоста» как ALQ - 153 в системе ALQ -
161 или (и) от БРЛС управления и навигации самолета в ПП) о характеристиках
атакующих средств перехвата (особенно о ракетах) - дальность, угловые
координаты (ос, /?), скорость сближения, траектория движения. При наличии линии
связи и обмена такой информацией можно предусмотреть приоритетность их
работы (особенно если на борту нашего самолета есть пушечное вооружение для
«защиты хвоста» или ракеты); кроме того, что обычно тоже важно, необходимо
иметь сведения о параметрах схем, блокирования (бланкирования) работы
приемников и передатчиков для обеспечения ЭМС.
3.7. Математическая модель исполнительной части БСО
Мы подошли к важнейшей части общей математической модели (ОММ)
БСО - описанию функционирования работы и технических параметров его
исполнительной части, реализующей возможности комплекса по отражению атак
системы ПВО.
Напомним читателю, что «в активе» у нас уже есть основные
характеристики и логика работы САП БСО на примере организации системы ALQ
- 161 (п. 3.1). Кроме того, мы уже знаем, что работа САП и всех других
составляющих БСО (автоматов выброса расходуемых средств, ложных целей,
128
противорадиолокационных ракет и др.) (рис. 3.1.) максимально “распараллелена”
(как и постов внутри САП, приемников и т.д.). Это обстоятельство делает
нецелесообразным описание построения моделей работы отдельных каналов и
устройств (внимательный читатель заметил, что разделы 3.4.1 и 3.4.2 названы
«математическими моделями...», а схем (алгоритмов) нет) в целях экономии
материалов книги. Поэтому далее мы продолжим изложение всех требуемых
сведений об устройствах (каналах) БСО, которые нужны для создания ОММ.
Одними из самых важных характеристик САП являются вероятности срыва
атаки того или иного средства перехвата в зависимости от вида помех, их
технических параметров и условий применения. Некоторые представления об
условиях применения заградительных помех читатель получил из примера
отражения атаки ИП в разделе 3.4.1
Попытаемся отыскать общие подходы к расчету (оценке) вероятностей
срыва различных фаз атаки средств перехвата, оборудованных типовыми РЛС
(табл. 3.2),при применении оптимальных (наиболее эффективных) видов целевых
комбинаций помех. Сразу скажем, что это - самостоятельная, глобальная задача,
достойная написания отдельной книги (со времени опубликования работ [6^-8] в
этой области прошло 25-МО лет!), поэтому мы попытаемся, в основном,
сформулировать в общем виде задачу, оставив ее для рассмотрения специалистам
в данной области (особенно в части РПД перспективным моноимпульсным
средствам перехвата типа наземной РЛС контура наведения ЗРК под пунктом 1 в
табл. 3.2, с наведением «через ракету» и перестройкой несущей частоты от
импульса к импульсу в широком диапазоне частот).
3.8 Маскирующие помехи
Итак, что же есть в открытой литературе по поставленному вопросу? Еще
Дж Р. Шлезингер [6] пытался найти общее уравнение радиолокации,
справедливое для РЛС различного класса (импульсных, непрерывных и
квазинепрерывных - импульсно-доплеровских) с тем, чтобы сформулировать
129
единые подходы к РПД различными видами помех (маскирующего и
имитационного свойств). Такое уравнение, по его мнению [6, с 146], может быть
записано в форме (оставлены обозначения автора работы [6]):
£
^•4-/ Г Рт.-У
(12)-4я-ЛТ Г < 7
(3.1)
£
N
где - в левой части уравнения стоит
эффективное отношение сигнал/шум
«0)
после когерентного (синфазного до детекторного интегрирования N импульсов),
т.е. сигнал/шум, изображенный на рис. 3.6 (по оси абсцисс);
- в правой части уравнения: сгц - ЭПР цели (защищаемого самолета);
Ае - эффективная площадь приемной антенны РЛС;
у - коэффициент, учитывающий потери в системе (или несовершенство
теории);
Na = kT • NF (Na - плотность мощности собственных шумов приемник (Вт/Гц);
кТ=4,2"10'21 Вт; к - постоянная Больцмана; Т - абсолютная температура);
NF - шумофактор приемника (1/Гц)), который находится из рис. 3.13;
R - дальность действия РЛС;
Pav " Ts A|/s - энергия, сосредоточенная в луче антенны РЛС (Pav - средняя
мощность излучения, Ts - длительность цикла обзора, Vs - телесный угол
обзора).
Для импульсных РЛС. Pav =Римп"'Си/Тп (Римп - импульсная мощность; ти -
длительность; Тп - период повторения; ти/Тп величина обратная скважности РЛС);
Ts/ Vs = ТУ ув , (Ti - время интегрирования, например, время облучения цели
главным лучом ДНА РЛС);
Vb ~ 4tt/G, где Vb - ширина главного лепестка антенны в стерадианах; G -
усиление антенны РЛС, которое в свою очередь определяется из соотношения G =
4л*к"АеА2, к = const; X - длина волны РЛС).
130
Рис. 3.13. Типовые значения шумфактора радиолокационных приемников.
Эффективное отношение сигнал/шум
51
— связано с вероятностью
Jeff (0)
выделения сигнала РЛС при различных уровнях вероятности ложных тревог - Ру
зависимостями, изображенными на рис 3.14. [6, с.72] Подчеркнем, что в уравнение
радиолокации (3.1) не входят конкретные технические параметры РЛС -
рабочая длина волны ( X ) излучения, ти, Тп и др.(хотя к ним легко перейти ), и
используется только эффективная площадь антенны, энергия излучения РЛС и
ЭПР цели (защищаемого самолёта). Слева в выражении (3.1) стоит предельно-
возможное для РЛС отношение сигнал/шум, которое согласно рис. 3.14 сразу даёт
Робн= f(R) при Рр = const.
Конечно, в некоторых РЛС может использоваться некогерентное
(последетекторное) накопление видеоимпульсов, которое даёт худшие результаты
(меньшее отношение сигнал/шум —см. рис. 3.15), но это уже детали конкретного
построения РЛС, на которые не следует рассчитывать; единственный случай,
когда это надо учитывать - отсутствие запаса в передающем потенциале САП. В
последнем случае очень важно знать - имеются ли в распоряжении атакующих
средств перехвата (РЛС, БРЛС, РГСН) характеристики отраженных от
защищаемого самолёта сигналов, а именно:
131
- может ли РЛС обеспечить когерентность фаз (сохранение этой
когерентности) разных частот спектра импульса при его отражении от
«блестящих точек» цели при различных ракурсах атаки, перестройки параметров
сигналов РЛС (особенно fH) от импульса к импульсу;
- выявила ли цель (защищаемый самолёт) сама «блестящие точки» и
ликвидировала ли их, приняв соответствующие меры (типа запланированных по
программе «Стеле»)
Не зря один самолёт В-1В специально выделялся для этих целей, в том
числе - для снятия диаграмм направленности антенн (к сожалению, в
большинстве случаев, основной вклад в ЭПР самолёта могут вносить антенны).
Рис.3.14. Зависимость вероятности обнаружения
от соотношения сигнал/шум (“накопленного” при интегрировании).
132
По значениям Робн (рис. 3.14) мы получаем требуемую, обратную ей
величину - вероятность срыва маскирующими помехами (Рср) определённой фазы
атаки, например, поиска и захвата на сопровождение цели (Рср= 1-РОбн)- Если эта
зависимость (рис. 3 14) едина для РЛС любых классов (импульсных,
непрерывных, импульсно-допплеровских), как показано в работе [6], это
существенно упрощает моделирование.
Если, например, помехи отсутствуют, то из формулы (3.1) может быть
вычислена Rq, обеспечивающая РЛС максимально-потребную вероятность
обнаружения отраженных сигналов (из графика рис. 3.14 для отношения
сигнал/шум 16дБ вероятность обнаружения не меньше 0,999, что совпадает с
данными, которые мы получали раньше, в разделе 3.4.1 из рис 3.6 при PF = 10'6 в
обоих случаях).
Рис. 3.15. Зависимость отношения сигнал/шум от числа интегрированных
видеоимпульсов относительно уровня N = 1.
133
Теперь представим себе, что мы включили на нашем самолёте (или
постановщике помех - ПП) передатчик помех на расстоянии Rj от РЛС (рис. 3 16)
и собираемся помочь «своему соседу» - самолёту пары по боковым лепесткам
диаграммы направленности антенны РЛС, которая смотрит главным лепестком на
нашего партнёра; такая защита известна специалистам по РПД как
«индивидуально-взаимная».
Постановщик помех
Рис.3.16. Схема расположения самолета-цели и постановщика
помех при индивидуально-взаимнои защите.
Тогда суммарная плотность мощности шумов на входе приёмника РЛС
(собственные шумы и помехи от передатчика САП) равна [6 с. 199]:
где Pj - плотность мощности шумов передатчика помех (Вт/гц);
134
G} - усиление (КНД) антенны передатчика помех;
Gr - КНД антенны РЛС в направлении на наш передатчик помех (или ПП) по
боковым лепесткам.
Поясним смысл записи формулы (3.2): первый сомножитель (в круглых
скобках) первого слагаемого - плотность потока мощности на входе антенны РЛС
на расстоянии Rj от передатчика САП - умножается на второй сомножитель (в
круглых скобках), представляющий эффективную площадь антенны РЛС - Ае,
результат перемножения - плотность потока мощности от САП на входе
приёмника РЛС суммируется с плотностью потока мощности собственных шумов
приемника.
С учётом работы нашего передатчика САП (или ПП) отношение
сигнал/шум на входе приёмника станет другое, чем то которое соответствовало Ro
£
(без помех) -
Подставляя вместо Nd в формулу (3.1) выражение (3.2),
получим:
5
• рт • 4 • А- • г
N
<(1)
(1,2)-4я
(3 3)
где Rr- новая дальность обнаружения цели при наличии помех и другого
отношения сигнал/шум -
£
Если для обеспечения одинаковой вероятности обнаружения цели без помех
и в присутствии помех мы хотим сохранить и одинаковое отношение сигнал/шум
(например, РОбН = 0,999 при = 10'6 и сигнал/шум равный 16дБ из рис.3.14), то
должно
быть
относительное уменьшение дальности
обнаружения цели в условиях работы передатчика помех будет:
135
fRry4 _ (M2 -kT-NF-R:
^Ro ) ~ л2 -Pj-G,-G, + (4л-)2 -kT NF- R* ’
(3 4)
где в (3.4) вместо Na подставлено его значение - kT-NF, приведённое в
пояснениях к выражению (3.1)
В большинстве практических случаев, представляющих интерес, мощность
передатчика помех значительно больше мощности собственных шумов
приёмника (с этим надо обходиться осторожно, ведь речь идёт о плотности
мощности шумов, а полоса излучения передатчика помех и приёмника могут быть
существенно различны). Иначе говоря, если в знаменателе формулы (3.4) первое
слагаемое значительно больше второго, то выражение (3.4) представляется.
Г Я? JAtR) kT NF R:
[r^j ^-Pj-Gj-Gr
(3 5)
Если передатчик помех установлен на самолёте-цели (индивидуальная
защита комплексом РПД собственного самолёта), то R=R}=RT и, вводя новую
индексацию (Pj=Pnep; Gj=Gnep; Gr=GA), имеем:
I R„ J
(4ft-)2 -kT-NF-R2
-F^-G^-G, ’
(3-6)
где' РПер - плотность мощности передатчика САП (в* Вт/Гц или Вт/МГц;
размерность Рпер должна совпадать с размерностью Nd=kT• NF );
Gnep - коэффициент усиления антенны передатчика в направлении на РЛС;
Ga - КНД антенны РЛС.
136
Вернёмся к выражению (3.5), левую часть которого в соответствии с
предыдущими выкладками можно заменить на отношения сигнал/шум для
дальностей (Д.)4и (7?О)4, тогда:
$
-Wo)
5‘
(4тг)2 -kT'NF- R]
-Р3.-G;Gr
(3-7)
Для примера рассмотрим маскирующие помехи РЛС, частота которой
ЮГГц (Х=3 см), коэффициент усиления бокового лепестка диаграммы
направленности антенны в направлении на передатчик помех - ЮдБ, шумфактор
приёмника ЮдБ. Передатчик помех находится на расстоянии Rj=36 км, плотность
мощности передатчика помех - 1 Вт/МГц и усиление антенны САП - ЮдБ. В
этих условиях расчеты дают:
£
= 0,1 И 0,56
£ Ro
-/7Je#(0)
(3 8)
Следовательно, помехи САП снижают отношение сигнал/шум на ЮдБ, а
дальность обнаружения цели (если РЛС обнаруживает цель с той же
вероятностью) уменьшается на 56% относительно первоначальной - Ro (самолёт
должен подлететь ближе к РЛС на 0,56Ro, чтобы его обнаружила РЛС)
Предположим, что Ro соответствует отношению сигнал/шум, равному 16 дБ
(вероятность обнаружения 0,999 при вероятности ложной тревоги 10‘6, см. график
рис. 3 14.); тогда снижение отношения сигнал/шум на 10 дБ (до 6дБ) означает, что
вероятность обнаружения упала практически до нуля (Робн = 0,01). Интересно
сравнить эти расчетные результаты с примером раздела 3.4.1 настоящей главы,
137
где плотности помехи 1 Вт/МГц на дальности 2,4 км не хватило для РПД БРЛС и
пришлось увеличивать плотность мощности помехи до 4 Вт/МГц на 6 дБ, чтобы
снизить вероятность обнаружения РЛС до 0,25
Um
а) модулирующее напряжение,
Рис. 3.17. Помеховый высокочастотный сигнал, модулированный
по амплитуде шумами.
138
Из приведенного, достаточно подробного анализа действия маскирующих
помех, читатель мог уяснить, что для моделирования работы САП (особенно для
учета случайных факторов воздействия шумов на РЛС) требуется знать каким
образом можно оценивать вероятности срыва (Рср) атак средств перехвата (РЛС,
БРЛС, РГСН, и др.) в зависимости от дальности (R) другими видами помех или
целевыми комбинациями нескольких видов помех Это - центральная задача,
которая была поставлена в начале настоящего раздела.
Мы, пока, не коснулись способов формирования маскирующих помех -
заградительных, прицельных и сопряженных со спектром сигнала РЛС; эти
способы касаются аппаратурных вопросов построения САП.
Если заградительные помехи создаются путем усиления «прямых» шумов
(«белого», «нормального» или близких к ним), то прицельные помехи
(узкополосные и сопряженные со спектром сигнала) формируются модуляцией
шумов основных параметров сигнала (амплитуды, частоты, фазы или их
комбинаций).
Рассмотрим кратко особенности модулированных сигналов шумовых помех
[7]. На рис. 3.176 представлено высокочастотное колебание, модулированное по
амплитуде шумами. Режим модуляции выбран так, чтобы 100% модуляция
(достижение амплитуды в ряде точек абсциссы до нуля) обеспечивалась
максимальными выбросами напряжения шума, при этом глубина модуляции
получается малой, но качество шума - хорошее (большая изрезанность
шумовыми выбросами). Для увеличения глубины модуляции с целью улучшения
спектральных свойств шума (расширения и создания равномерного спектра)
используется ограничение шума (рис. 3.18а.). Слишком большое ограничение
шума приводит к возникновению перемодуляции (сглаживанию шумовых
выбросов и «прореживанию» шума (рис. 3.17в)). На рис. 3.186 изображен спектр
амплитудно-модулированной помехи (АМП) с двухсторонним ограничением и,
для сравнения, на рис.3.18в - спектр прямошумовых помех Из рис.3.18б видно,
что АМП имеет в два раза больший спектр, чем модулирующее напряжение
139
(рис 3.18а) (также как и прямошумовая) и ярко выраженный пик напряжения на
несущей частоте, который “помогает” распознать АМП.
Сильно ограниченные АМП позволяют выделить сигнал РЛС (рис. 3.19),
если АОп <2п* А/пр (А^р - полоса приемника РЛС). При АПп >2к* АМП,
проходя через приемник РЛС, будет нормализовываться [64] и на выходе
приемного тракта РЛС маскирующие свойства шума восстанавливаются
(нормализация шума возможна при ткор«1/ АД,, где ткор - время корреляции
ограниченной АМП). На практике уровень ограничения (67огр на рис. 3.17.а.)
выбирают путем компромиссного решения при экспериментальных
исследованиях.
Расчеты показали, что и прямошумовая помеха теряет на боковых
составляющих спектра при ограничении (рис. 3 18.в) 19% -*-31% энергии помехи
[7].
При фазовой модуляции шумами (помехами, ФМП) высокочастотного
колебания вида:
иф = «9 sin[ftV + у/0 + й)], (3.9)
где & - амплитуда сигнала;
соо - несущая (круговая) частота (а>0 - 2nfa);
уо - начальная фаза;
- шум, стационарный случайный процесс с нулевым средним и
дисперсией [a^w]2,(Ау/эфф- эффективное значение фазы).
Необходимо различать два случая А^эф#»1 и А^э^<1.
При А^ф»1 спектр ФМП определяется (А£1фМ)[65]:
12л
= эфф ‘ ^«max ' ’ (3.10)
140
где CinTnsx - максимальная частота модулирующего спектра.
При &у/эфф<1 ФМП имеет хороший спектр (с точки зрения РПД) с шириной
как у АМП; по форме спектр ровный и повторяет спектр модулирующего шума.
Такой шум называют «узкополосным», сопряженным со спектром сигнала РЛС
Рис. 3.18а. Спектр модулирующих шумов до ограничения
Рис 3 186. Спектр ограниченных амплитудно-модулированных шумов.
141
Рис. 3.18в. Спектр прямошумовых помех.
Частотно-модулируемый шум (помеха) - ЧМП (частотная модуляция)
имеет вид:
Ur(t) = «9 sin
Ct)ot +
j Aco(t)dt
0
(З.П)
гдеЛю(/)- случайная модулирующая функция.
Форма спектра ЧМП полностью определяется спектром частот
модулирующей функции и глубиной модуляции (индексом модуляции - Шщ). В
случае шчм= 0,1-И),5, ЧМП имеет спектр (О™) [7 с. 122]:
Q = т2 AQ
чм чм
(3.12)
где ДП„- спектр модулирующего шума.
142
Рис. 3.19. Осциллограммы смеси сигнала и шума.
Маскирующие свойства ЧМП получаются в данном случае высокими и этот
вид помехи характеризуется как «прицельные по несущей частоте».
При ж1М>0,5 спектр помехи (ЧМП) - = у[2тг m4V • ЛСД получается
достаточно широким и если принять меры по устранению «перемодуляции»
помехи (надо, чтобы время изменения частоты помехи в пределах всего диапазона
передатчика помех (модулятора помех) было не более 1 /Д/п), то ЧМП может быть
прицельно-заградительной.
На практике в большинстве случаев применяются амплитудно-частотная и
амплитудно-фазовая модуляции шумами, которые обладают лучшими, чем АМП,
ФМП и ЧМП качествами шума, но это предмет отдельного рассмотрения. Для
оценок вероятности обнаружения (срыва) РЛС при модулированных шумах
можно применять приведённые выше формулы (3.H3.7) и графики.
143
3 9. Имитационные помехи.
Перейдем к рассмотрению оценок эффективности действия имитационных
помех, относящихся к «интеллектуальным» видам, в отличие от «силовых» -
маскирующих помех, требующих обеспечения существенного (до 6 10 дБ)
превышения мощности помехи над отраженным от цели (защищаемого самолета)
сигнала для срыва атаки средств перехвата системы ПВО.
Имитационные помехи изменяют количество (и качество) информации в
контурах наведения (самонаведения) ИП, ракет, командных радиолиниях
управления (КРУ) и связи, приводя к промахам (в том числе случайным -
средним, среднеквадратическим) и к уменьшению вероятности наведения,
искажению команд управления и связных данных (информации, передаваемой по
линии связи).
Рис. 3.20. Дифференциальный закон распределения промахов по одной координате.
Вообще говоря, чтобы точно оценить вероятности наведения
(самонаведения), надо знать законы распределения ошибок наведения в условиях
помех и применить специализированные математические модели, для того, чтобы
результаты моделирования использовать в более сложных математических
144
моделях и ОММ. Один из вариантов построения «локальных» аналитических
моделей в радиотехнике (при анализе прохождения сигналов через устройства
РЛС) - метод статистических эквивалентов, использованных в работе [8]. Мы
попробуем пойти другим путем.
Для ориентировочных расчетов и моделирования действия имитационных
помех будем предполагать дифференциальный закон распределения промахов по
одной координате нормальным (рис. 3.20):
р(Л) = —j= exp -
(А-а)
2сг2
(3 13)
где А - промах (случайная величина);
а - математическое ожидание;
о2 - дисперсия промахов;
распределения.
В более общем варианте оценок надо было вместо выражения (3.13) брать
дифференциальную вероятность попадания А в эллипс, взятый в «картинной»
плоскости, пересекающий строительную ось нашего самолета; мы же смотрим
«плоский» вариант задачи - попадание А в интервал, совпадающий с одной из
главных осей этого эллипса ошибок. Начало координат (рис.3.20) совместим с
местоположением нашего самолета и центром эллипса (центром тяжести нашего
самолета), тогда исход наведения будет зависеть от величины промаха,
обеспеченного помехой Ап в момент перехода истребителя (ракеты) на
самонаведение. Когда промах Ап будет меньше максимального промаха Ао,
выбираемого ИП (ракетой) по условиям располагаемых им перегрузок, то
наведение считаем нормальным (состоявшимся), а иначе (АП>АО)
безрезультатным (сорванным помехой).
145
Тогда вероятность наведения (Рн) ИП (ракеты) может быть найдена как
вероятность попадания случайного промаха А в интервал {-До, Ао}, выбираемый
самонаведением:
^0
Рн = (заштрихованная площадь на рис.3 20) (3 14)
Для мощных ракет без самонаведения на последнем этапе вероятность
наведения может быть принята за вероятность поражения - Рпор (ракета после
наведения попала в сферу, радиус которой Ro равен ее радиусу поражения; центр
сферы совпадает с «центром тяжести» самолета), тогда:
(3.15)
~Д0
Если ракета может самонаводиться (после наведения), то.
Ао+Яо
Pmr = Jp(ApA (3.16)
-(A0+7?o)
где Ао, как и раньше, - промах, выбираемый по условиям перегрузки за время
самонаведения (ракеты с РГСН, ТГСН).
Отсутствие самонаведения исключает Ао из пределов интегрирования в
формуле (3.16) и «превращает» ее в выражение (3.15).
В общем случае, когда помехи в том числе (кроме выбираемых промахов
Ао) создают еще систематические (матожидание - а) и случайные ошибки со
среднеквадратическим отклонением ст, вероятность наведения в одной плоскости
для истребителя составляет:
146
Ря =- Ф| -2------- +Ф —----------
1 ( ст ) \ <j j
(3 17)
где Ф(х) = -Д=
х zl2
$е 2 dt - табулированный интеграл вероятности Гаусса.
О
Из формулы (3.17) видно, что на величину вероятности наведения
ЛА'ЯЯКТРЯ^Т КТТЫПТТЫ7=> 1ГЯ1Г МЯТГГЛ-НЛЯИИР (сГ\ ТЯк" И ТТЫГТТАПСЬГСГ ( <Х\ ГГПЛЛЛЯУПК' е^стпя РП П
Л-Г IAV JL J-JLAVJLJ-JLJl IVVtLV 1IA M. 1 V/Д KX Al I W у V-ZV у 2 XVA.AV XX /-А, I 1W IX W VH Л \Х-Л / X x V 1 TA UAA k W AJ W.IXA Л R R /
увеличивает a (o2=const), то вероятность наведения уменьшается (рис 3.21),
такой же результат дает возрастание о2 при нулевом матожидании (рис. 3 22). В
общем случае, когда действие РПД приводит к изменению и матожидания и
дисперсии, увеличение дисперсии может быть нежелательным с точки зрения
помех (рис 3 23).
Следует напомнить, что приведенные выше формулы (3.13^3 17)
справедливы, если выполняются допущения:
- ошибки наведения, созданные с помощью помех (а и ст2) существенно
превышают собственные случайные ошибки системы наведения;
- наведение осуществляется в одной плоскости.
Для использования формул по вероятностям наведения и поражения,
необходимо знать результирующие промахи ИП (и ракет), вызываемые помехами-
- при наведении истребителя (ракеты) результирующий промах (ос) равен: а =
Дп - До, где Дп - промах, вызываемый РПД;
- для случая ЗУР без самонаведения ос = Дп - До >R.
Приступим к нахождению результирующих промахов, при этом желательно
еще найти и <т, чтобы пользоваться формулой (3.17).
147
Рис. 3.21 Зависимость вероятностного наведения от математического ожидания промахов
При наведении ИП методом параллельного сближения (см п. 3 4.1)
управление курсом истребителя осуществляется таким образом, чтобы обеспечить
условие: ё - 0 (£ - угловая скорость линии визирования защищаемого самолета
- линии, соединяющей ИП и цель). Тогда, текущий промах A(t) при действии
помех оценивается как:
. / \ ё • J?2
AW =------- (3.18)
Не
где R(t) - расстояние между ИП и целью в момент времени t;
vC6 - скорость сближения ИП и нашего самолета.
Из формулы (3.18) видно, что помехи системе радиоэлектронного
управления ИП могут влиять либо на изменение угловой скорости визирования
цели (е), либо обеспечивать «прикрытие маневра» нашего самолета (изменение R,
148
усб) в то время, когда контур системы наведения разорван помехами (иначе
система управления ИП маневр отследит).
В реальных условиях под действием помех и маневра величины vc6, R, £ в
выражении (3.18) не будут оставаться постоянными, поэтому надо оценивать
интегральный эффект их действия. Например, при малых начальных промахах (до
действия помех) и tn = tK, в соответствии с данными работы [7 стр.54]’
1 1 тэ2
а 1 . 2 1 • ^0
А„= = 2 и
Vc6
(3-19)
_ 1 . 2 1 . R2
б “* Л J п СН - J п 2
(3.20)
В формулах (3.19) и (3.20):
R и Rq - дальности до цели в момент начала и окончания наведения;
jn - составляющая ускорения ИП (ракеты), перпендикулярная линии визирования
цели (/щах = «max’g, где итах - максимально допустимая перегрузка, g - ускорение
силы тяжести земли);
ta и tcn времена действия помех и наведения (?п = /сн - помехи действуют все
время наведения);
уСб- скорости сближения ИП (ракеты) и цели.
Если в результате действия помех контур наведения разорван на время tn и
наш самолет (в момент разрыва контура) начинает двигаться с ускорением jc
(маневр по скорости) т.е. ^jjsinq, то промах, накапливаемый за время действия
помехи (^ = ?н), оценивается в виде [7 стр.56]:
® ’sin<7,
149
где q - угол между вектором скорости (ускорения) цели и линией ее визирования
(скорее всего - выражение (3.21) есть а = Дп - Ао, так как формула (3.21) получена
в предположении, что R2 • /. • cos<? «г v2
Рис.3.22. Зависимость вероятности наведения от дисперсии промахов
Рис 3 23 Зависимость вероятности наведения от совместного влияния математического
ожидания и дисперсии промахов
150
На практике управляющий сигнал, пропорциональный угловой скорости
линии визирования цели (е), формируется с помощью скоростного гироскопа [67],
тогда метод параллельного сближения (е = 0) модифицируется следующим
образом (рис. 3.24):
С4 = + = 0 (3.22)
где ф' - производная угла рыскания ИП, ракеты (контур самонаведения);
kz и - коэффициенты пропорциональности. На рис. 3.24: СГ - скоростной
гироскоп; СД - устройство съема данных; хсн - равносигнальное направление;
S - сумматор;
Up и СД - напряжения, пропорциональные (с коэффициентами к(р и ке)
производным ё и ф';
UK - суммарное напряжение, которое при методе параллельного сближения
должно равняться нулю. БРЛС (ГСН) устанавливается на платформе (корпусе
ракеты)
Рис.3.24. Упрощенная функциональная схема контура самонаведения
с измерительным скоростным гироскопом.
151
Объектом действия имитационных помех в контуре самонаведения
(наведения) в большинстве случаев является приемник РЛС (РГСН ракеты); при
этом помехи «выбивают» стробы автоматического сопровождения по дальности,
скорости, угловым координатам и др., уменьшая, как уже говорилось,
вероятности наведения или условные вероятности самонаведения и поражения
(условные, потому, что этапу самонаведения и поражения предшествует этап
дальнего наведения, как было рассмотрено выше).
Рис.3.25. Блок-схема станции многократных ответных помех.
Перейдем к обсуждению еще одного немаловажного аспекта действия
имитационных помех - краткому описанию их принципов (механизмов) действия,
которые помогут оценить вероятность срыва этапов наведения (самонаведения)
ИП, РГСН и др.
К активным помехам имитационного вида, «выдаваемым» импульсным
РЛС, работающим в режиме обзора (мощности маскирующих помех
недостаточно) относятся:
- многократные синхронные импульсные помехи;
- уводящие импульсные помехи (уводы стробов);
- хаотические импульсные помехи (ХИП).
152
I
а) на входе станции помех
I
I
I
I
г) на выходе модулятора
д) помеховые импульсы, запаздывающие
е) помеховые импульсы, упреждающие
отметку от цели
Рис 3 26. Осциллограммы напряжений в различных точках станции
многократных ответных помех.
153
Блок-схема станции РПД (САП) многократных ответных помех
представлена на рис. 3.25 (частный случай или один из входов коммутатора САП,
представленный на рис. 1.1. гл. 1) и построена по принципу многократной
ретрансляции радиоимпульсов подавляемой РЛС (ретрансляционный канал САП).
Принятый антенной Аг сигнал поступает на схему запоминания частоты (СЗЧ)
(рис. 3.26 а, 3.26 б) и одновременно на вход разведывательного приемника
(приемника РТР). Из приемника РТР задержанный сигнал (СЗ) поступает в
модулятор, который на каждый принятый сигнал формирует серию (пачку)
импульсов (рис 3.26 в, 3.26 г), которые модулируют усилитель высокой частоты
(У). Серия радиоимпульсов (с высокочастотным заполнением, соответствующим
fH ретранслируются обратно РЛС через оконечный усилитель и антенну - А2
(рис.3.26д, 3.26е). Важнейшим элементом (устройством) САП может быть названа
СЗЧ подавляемой РЛС; при времени запоминания частоты РЛС значительно
больше ти (сравнимым с Гп), имеется возможность создать на экране РЛС отметки
как запаздывающие относительно нашего самолета, так и упреждающие самолет
(для этого в системе ALQ - 161 применяется «слежение» по периоду повторения
импульсов Тп, которые мы отмечали ранее). Отметки ложных целей,
соответствующие указанным случаям на экране индикатора кругового обзора
РЛС, изображены на рис. 3.27 (при мощности САП, достаточной для обнаружения
помеховых сигналов локатором по боковым лепесткам диаграммы
направленности антенны; ложные отметки могут появляться в виде секторов на
ИКО). На самом деле, при наличии «сторожевых стробов», ожидающих
появления отметки цели на определенной дальности, такой картинки на ИКО
может и не быть. (ИКО - индикатор кругового обзора).
Дело в том, что в РЛС существуют системы автоматического
сопровождения цели (защищаемого самолета) по дальности (автодальномер),
блок-схема которой приведена на рис. 3.28а. Схема работает так: на вход
временного различителя (ВР) поступает отраженный импульс (С) вместе с
помехой (П) (рис. 3.28.6), куда через схему задержки (СЗ), управляемую
напряжением задержки (£73), от генератора (ГСП) подаются два селекторных
154
импульса (С] и Сг) - «сторожевые стробы» переднего и заднего фронтов
отраженного импульса
Рис.3.27. многократные ответные помехи на экране индикатора кругового обзора
в случае имитации запаздывающих - а) и упреждающих отметку от цели - б).
Передатчик помех (САП), построенный по схеме рис. 3.25 (только вместо
модулятора - М стоит управляющее устройство - УУ, так как это еще один из
входов коммутатора, изображенного на рис. 1.1 гл. 1), после схемы задержки (СЗ)
выдает не серию импульсов (как было при создании многократных помех), а один
импульс, длительность задержки которого относительно принятого сигнала
может регулироваться в пределах Тп. Если помеха попадает одновременно с
сигналом в стробы дальности (рис. 3.276), то в последующем времени, как
наиболее мощная, помеха уводит «сторожевые стробы» на ложную дальность, а
затем выключается. При пропадании помехи РЛС вынуждена снова искать
стробами отраженный сигнал и процесс повторяется. Кроме многократной и
ответной помех ретрансляторный канал САП может выдавать хаотические
импульсные помехи - ХИП.
155
б)
Рис. 3 28. Функциональная схема радиодальномера - а) и
Сопровождаемый и селекторные импульсы в радиодальномере - б).
Блок-схема САП, формирующей импульсные хаотические помехи,
построена по тому же принципу как и схема рис.3.25, только вместо линии
задержки (ЗС) и модулятора (М) используются после разведывательного
приемника (РП): источник шума, усиливаемый и ограничиваемый в
широкополосном усилителе, затем схемы - формирователи импульсов со
случайной длительностью и периодом повторения, «заполненных шумом»; эти
импульсы модулируют передатчик помех (схема формирования ХИП также один
156
из входов коммутатора, изображенного на рис. 1.1). ХИП по своим свойствам
сходны с амплитудной модуляцией несущей частоты ограниченным шумом,
рассмотренной в настоящем разделе (если средний период следования ХИП <
1/Afnp, то на выходе линейной части подавляемого приемника РЛС будет
нормализованный шум). Заметим, что автодальномер из режима сопровождения
могут «выбить» обычные маскирующие шумы достаточной длительности
(накрывающие пачку импульсов, соответствующую главному лучу РЛС),
поскольку «сторожевым стробам» не за что «зацепиться» и накопить в приемнике
достаточное число импульсов РЛС; не помогает и вобуляция импульсов, так как
шумы есть везде (перекрывают интервал вобуляции - изменения Гп).
Рассмотрим схемы автоматического сопровождения по скорости цели в
радиолокаторах.
Рис 3.29 Блок-схема автоматического сопровождения по скорости
157
Автоматическое сопровождение целей по скорости в РЛС выполняет
функцию селекции движущихся целей (СДЦ) на фоне пассивных помех, земли и
местных предметов; СДЦ реализуется в РЛС с непрерывным и квазинепрерывным
излучением, использующим узкополосные сигналы, возможно также включение
канала СДЦ в импульсную РЛС [6, 7].
В основу схем автоматического сопровождения по скорости положена
информация о радиальной скорости цели, содержащаяся в величине
допплеровского смещения (/ё)частоты отраженного сигнала, равного:
4=-------/н, (3.23)
с
где: vr - радиальная составляющая скорости цели;
Jh - несущая частота РЛС;
с - скорость света.
Метод защиты РЛС от пассивных помех с помощью фильтрации
допплеровских частот (ДЧ) значительно эффективнее способа череспериодной
компенсации помех, отраженных от облака диполей, применяемого в импульсных
РЛС (рассматривается позже).
Блок-схема канала СДЦ ракеты (РЛС с непрерывным и КНЧ излучением)
приведена на рис. 3.29 [68]. В хвостовую антенну Ах РГСН поступает сигнал от
наземной непрерывной РЛС подсвета, который используется как опорный в
ракете и одновременно эта РЛС «подсвечивает цель». Оба сигнала - опорный и
отраженный одновременно (отраженный через носовую антенну Ан) попадают на
смесители CMi и СМ2, куда подается также напряжение от общего гетеродина
(ГетО. На выходе смесителей сигналы промежуточной частоты попадают в
усилители (УПЧ1 и УПЧ2). Отраженный сигнал от УПЧ1 содержит информацию
об угловом положении цели и параметрах ее движения, а опорный сигнал (от
УПЧ2) имеет информацию о параметрах движения ракеты. В третьем смесителе
158
(СМз) оба сигнала смешиваются и поступают в фильтр допплеровских частот
(ФДЧ), где отфильтровывается несущая частота (полоса пропускания ФДЧ
соответствует диапазону изменения допплеровских скоростей ракеты и цели).
Сигнал допплеровской частоты (суммарный или разностный) с выхода ФДЧ
поступает через СМд на схему АСС (автоматического сопровождения по
скорости). Для измерения допплеровской частоты имеется поисковый гетеродин
(Гет2), частота которого меняется по пилообразному закону в диапазоне
ожидаемых допплеровских частот с помощью генератора (ГПН). Если измеренная
допплеровская частота и частота Гет2 совпадают с точностью до полосы
узкополосного фильтра (УФ), называемого «стробом» скорости, то на выходе УФ
появляется сигнал, который попадает в частотный детектор (ЧД) и далее из ЧД
через ГПН в схему остановки поиска Гет2. После этого осуществляется захват
отраженного сигнала и автоматическое сопровождение по скорости цели
(допплеровской частоте) в том числе и за счет изменения ее углового положения
(выход из АСС на пеленгатор).
Каналам селекции по скорости могут быть созданы:
- узкополосные шумовые помехи, спектр которых перекрывает диапазон
изменения возможных допплеровских смещений частот отраженных сигналов;
- уводящие помехи, создаваемые путем имитации ложных допплеровских
частот,
- «заградительные» допплеровские шумовые помехи.
Воздействие аддитивной смеси сигнала и интенсивной узкополосной
помехи типа белого шума можно представить как напряжение вида (3.9)
настоящего раздела, где И7) и - случайные функции времени (амплитудно-
фазовая модуляция); это напряжение попадает на вход частотного детектора (ЧД)
(рис.3.29) и, проходя через него, вместо остановки Гет2 вызывает случайное
изменение его частоты относительно допплеровской (полученной от ФДЧ) на
выходе СМ4. Под воздействием этих шумовых колебаний «строб скорости»
смещается по оси частот и, спустя некоторое время (соизмеримого с постоянной
времени канала автосопровождения), допплеровская частота выходит из полосы
159
удержания частотного детектора (ЧД), в результате - теряется цель -
защищаемый самолет). Если в РГСН ракеты не предусмотрен режим выхода на
источник активных помех по угловым координатам, нарушение
функционирования схемы селекции по скорости приводит к размыканию контура
самонаведения. Создание узкополосных помех возможно при учете собственной
скорости движения самолета, примерной скорости ракеты и ракурса ее атаки; в
противном случае приходится применять широкополосные («заградительные»)
допплеровские шумовые помехи (не путать с заградительными помехами по
несущей частоте, имеющими порядок нескольких сотен МГц; «заградительные»
допплеровские шумовые помехи имеют порядок до 100 КГц (0 + 100 КГц).
Уводящие помехи «строба скорости» действуют также как уводы строба
дальности, смещая точку устойчивого состояния (в пределах линейного участка
дискриминационной характеристики системы СДЦ) в сторону помех и, конечном
итоге, при определеном отношении сигнал/шум - уводя «строб скорости». Затем
помеха выключается и система СДЦ вынуждена снова настраиваться на
допплеровскую частоту цели. Здесь в отличие от шума, САП должна создать
смещение допплеровской частоты, чтобы захватить помехой «строб скорости»,
применяя, например, периодическую модуляцию лампы бегущей волны (ЛБВ) по
фазе [69]. Заметим, что все эти виды помех предусмотрены в матрице выбора
помех, изображенной на рис 1.1 гл. 1. Заметим также, что наиболее эффективны
помехи, сопряженные (между собой) по дальности и скорости цели, которые
принципиально ничем от рассмотренных не отличаются.
Перейдем к краткому рассмотрению схем сопровождения РЛС (БРЛС и др.)
по угловым координатам (a, ft), известных в литературе как схем автоматического
сопровождения по направлению (АСН) [7] или угломерных координаторов.
Принципиально имитационные помехи системам (схемам) АСН можно
разделить на «одноточечные» и «многоточечные», связанные со спецификой их
(АСН) построения. В АСН с последовательным сравнением сигналов
применяются антенны с коническим сканированием пространства, в
моноимпульсных АСН - неподвижные антенны типа «амплитудный (фазовый)
160
крест» для мгновенного измерения угловых координат (а, Р). В АСН устаревшего
типа - с последовательным сканированием - все «одноточечные» помехи (из
одной точки пространства) «выбивают» (раскачивают) антенну РЛС модуляцией
и «попаданием в резонанс» помехи с частотой сканирования антенны. К ним
относятся: прицельные, заградительные (шумовые, «скользящие» помехи),
прерывистые по частоте сканирования антенны помехи, подробно рассмотренные
в [7]. Основной проблемой помех такого типа, снижающей их эффективность
(кроме прерывистых), является наличие в помеховом сигнале несущей частоты,
которая устраняется методом балансной модуляции [7 стр. 154].
Выражение для углового отклонения (О) линии визирования цели (линии,
соединяющей ИП (ракету) с целью (защищаемым самолетом) при параллельном
сближении) под действием помех на систему АСН с последовательной
обработкой сигналов записывается в виде [7 стр. 142]:
__. 05 .
28 0О (1 + Z>
(3.24)
где: ®0 5 - ширина диаграммы направленности РЛС на уровне половинной
мощности (используется аппроксимация диаграммы направленности (главного
лепестка) вида F(©) = exp
©о - отклонение ДНА от равносигнальной зоны при сканировании;
b - отношение сигнал/шум на выходе приемника РЛС (входе детектора
огибающей сигнала);
Гр ~7
= J пвх/р ’ где; вх и вх ~ моп1ности помехового и отраженного от цели
I / 1 свх
сигналов);
тп - коэффициент (индекс) модуляции помехового сигнала.
161
Рис. 3.30 Зависимость угловой ошибки сопровождения цели от отношения
помеха/сигнал при действии прицельной по частоте сканирования помехи.
Помехи, прицельные по частоте сканирования антенны РЛС (низкой
частоте ~ единиц = десятков Гц и более), создаются ретрансляционным каналом
САП (амплитудной модуляцией сигнала частотой сканирования антенны,
априорно известной или измеренной станцией РТР).
На рис. 3.30 приведены зависимости 0/0о5 от величины «Ь» (для 0o/0os =
0.5), которые позволяют оценить минимально-необходимое отношение мощности
помехового к мощности полезного сигналов (коэффициент подавления - кп, как
говорят в РПД [7 стр. 79]). Максимальное отклонение линии визирования цели
при действии «прицельной» по частоте сканирования антенны РЛС помехи
составляет 0.7 0О5 (w=l, b»V) при 0о/0о5 = 0.5.
Помехи, заградительные по частоте сканирования антенны РЛС
(низкочастотный шум) снижают эффективный индекс модуляции (шп в
формуле(3.24)) в д/ДПиД/дЩ раз (AQn - полоса низкочастотных помех; AQK -
полоса пропускания углового координатора). Например, если А0П/ А0К = 100, то
mn снижается в 10 раз (mn =0,1) и О (формула (3.24)) тоже в 10 раз; следовательно,
такая помеха становится в 10 раз ниже по эффективности по сравнению с
прицельной. Для улучшения качества заградительной помехи (если нет
162
информации о частоте сканирования антенны РЛС) применяется «скользящая
помеха» с быстрой или медленной перестройкой низкой частоты управляющего
генератора, создающего модулирующее напряжение шума Результаты,
приближающиеся к эффективности прицельной по частоте сканирования помехи,
дает «скользящая помеха» с медленной перестройкой частоты [7 стр. 153],
Рис 3.31. Функциональная схема АСН с суммарно-разностной “мгновенной”
обработкой сигналов амплитудно-фазового типа.
Такие, на первый взгляд, малые угловые отклонения от линии визирования
нашего самолета, обеспечиваемые прицельной помехой (около 0.5 при mn = 1 и
Ь=5 из рис. 3.30) дают ощутимые промахи ракеты (на дальности 10км при ©о 5= 2°
не выбираемый самонаведением промах ракеты за счет прицельных помех
составит около 200 м).
Действие прерывистых помех САП (мощных помеховых радиоимпульсов
определенной длительности и частоты) подробно изучены в работе [70], где
показано, что воздействуя на схемы автоматической регулировки усиления (АРУ)
приемника, помехи могут вызывать потерю устойчивости и временную потерю
чувствительности некоторого типа систем АСН [8 стр.209].
Перейдем к системам АСН с одновременным сравнением сигналов,
отраженных от цели (моноимпульсных РЛС), которые сегодня применяются в
163
боль шинстве перспективных средств перехвата (ЗРК, ИП и, возможно, в РГСН
ракет) Эти системы имеют высокую помехоустойчивость по отношению к
действию активных помех, создаваемых из одной точки и указанные помехи при
радиопротиводействии таким системам на этапе сопровождения и пуска ракет
практически не применяются. Помехи из одной точки действуют на
моноимпульсные РЛС, имеющие не идентичные амплитудно-фазовые
характеристики.
Рис. 3.32. Наведение управляемой ракеты на парную цель.
Рис. 3.33. Зависимость промаха (Д п) от действия некогерентной помехи и промаха До,
выбираемого за время самонаведения, от базового расстояния (£) между источниками.
164
На рис. 3.31 изображена система АСН с одновременным сравнением
сигналов (суммарно-разностной обработкой), которая может применять фазовый
или амплитудный методы пеленгования. Не приводя выражений для построения
пеленгационных характеристик применительно к обоим методам измерения
пеленгов (при необходимости читатель это может найти в работах [7, 71, 72 и др.],
перейдем к рассмотрению эффективности некогерентной (с любыми фазовыми
соотношениями между сигналами источников помех) - так называемой
«мерцающей» помехи - попеременному включению источников активных помех
с пары самолетов (применяется для индивидуально-взаимной защиты самолетов).
На рис. 3.32 приведена схема самонаведения (наведения) ракеты
(«мерцание» применяется для защиты от ракет) - Р на парную цель (Ц1 и Ц2),
атакуемую под ракурсом q (угол между линией визирования середины расстояния
(L) между целями и направлением (скоростью) их движения). В самом начале
наведения расстояние (Д) значительно превышает L; обе цели находятся в
главном луче РГСН ракеты и угломерный координатор сопровождает
геометрический центр (О) парных источников помех, если мощности САП или
ЭПР целей одинаковы (упрощенное описание процесса). Затем, при сближении с
ракетой, угол между целями (Д 0) будет возрастать и при угле разрешения Д0р=
(0.8^-0.9)00 5 где ©о 5 - ширина ДНА РГСН на уровне половинной мощности,
моноимпульсный угломерный координатор разрешит цели и начнет сопровождать
одну из них. Будем считать, что ракета, после разрешения самолетов, с
максимальной перегрузкой устремится к одному из них, но не сможет выбрать
накопившийся промах (Д1 и Д2 на рис. 3.31) и пройдет мимо цели. Оценим
промахи-
\ = А = А = f -cos4 и согласно формуле (3.20) - До jnm^
2 2 Vc6
где: До - выбираемый ракетой промах;
vc6 - скорость сближения,
165
jn max= nmax’g, nmax - максимальная перегрузка;
g - ускорение силы тяжести Земли;
тогда (при Д » L,
„ Lcosq.
д »-----д) имеем:
Д0„
. _ 1 13 • cos2 q
О л J птах А ,-хп о
2 Д02-гс26
(3-25)
Результирующий промах, входящий в формулу (3.17) для вычисления
вероятности самонаведения, равен:
А . L 1 13 cos2 q z_
a ~ Лп - До = — cos q-(3.26)
° 2 2 п™х ДО2 v\ k }
На рис. 3.33 изображена качественная картина зависимости промахов Ап и
Ао от расстояния между самолетами (L).
Найдем оптимальное расстояние (Lonr) между целями для получения
максимального результирующего промаха ctmax. Дифференцируя (3.26) по L и
приравнивая производную к нулю, получаем:
1
2 Jnmax ’COS?
И
L Д02-т2б Д®2-г2б
= — • cos? = —
4 8-7итах 8-nmax-g
(3.27)
Из формулы (3.27) видно, что максимальный промах определяется Lom и cos
q или углом разрешения парных источников помех (как указывается в работе [7,
с.181], А0Р = (О.8-Ю.9)©о5), скоростью сближения пары самолетов с ракетой и
располагаемыми перегрузками (nmax) ракеты. Это означает, что между самолетами
должна быть телекодовая линия связи для организации режима мерцания и
поддержания оптимального расстояния.
166
Для оценки эффективности помех, создаваемых когерентными источниками
(с учетом фазовых соотношений между сигналами), воспользуемся рис. 3.34, где
представлено сечение ДНА моноимпульсного амплитудного пеленгатора с
суммарно-разностной обработкой по одной из угловых координат
Рис. 3.34. Сечение диаграммы направленности антенны моноимпульсного
амплитудного пеленгатора.
На рис. 3.34 источники помеховых когерентных сигналов Ucl и UCII видны
антенной подавляемого радиопеленгатора под углом Д® (Ц1 и Ц2 как и было
раньше); в данном случае источники когерентных помех размещаются на одном
самолете (хотя и возможно один источник когерентных сигналов разместить на
буксируемой ловушке при отражении атак с боковых ракурсов). Угол между
равносигнальным направлением (РСН) и направлением на середину базы (L)
источников помеховых сигналов обозначим через 3 (рис. 3.34). Нас будет
интересовать случай, когда колебания, создаваемые источниками помех в центре
167
раскрыва пеленгатора находятся в противофазе (у = л), так как именно этот
случай по исследованиям многих авторов (см. библиографию к работе [7]) дает
ориентацию РСН в точку, находящуюся за пределами базы L (максимальную
ошибку пеленгации). Вначале считаем, что сигнал РЛС (БРЛС, РГСН)
отсутствует - «пассивная пеленгация» или пеленгация источника помех (угол ©о
- угол между серединой базы L и максимумом ДНА пеленгатора).
Если амплитуда поля в раскрыве антенны пеленгатора, создаваемая вторым
источником помех (Цг), условно равна 1, а от источника Ц1 равна Р, то
равносигнальное направление (РСН) на выходе разностного канала суммарно-
разностного моноимпульсного пеленгатора РЛС (РГСН, БРЛС и т.д.) может быть
найдено решением трансцендентного уравнения (рис. 3.34):
Uci - Ucn - О,
(3.28)
т, АО Л J ДО п
где. UCI = pF\ 0О + — + .9j + F^0o—— + <9
Ucn
( АО 1 ! АО
= pF 0О+Г1 0О
F(0) - диаграмма направленности антенны РЛС;
угол © отсчитывается от направления максимума ДНА (излучения),
/?(х)=^А (прямоугольный раскрыв антенны со стороной d, х = — sin О) или
х 2
2 j А)
F{x)~ iV 7 (апертура антенны - круг диаметром d), (/Дх) - функция
распределения тока антенны).
Линеаризация F(©) в окрестности равносигнальной зоны в уравнении (3.28)
и вычисление 3 [(разложение в ряд F(©) и использование первых членов
разложения); (Д©/2 и 3 - малые величины по сравнению с 0О)] дает при
противофазных когерентных источниках (у = л; у - разность фаз между
источниками Ц1 и Цг) [7 стр. 192]:
168
л© i+д
(3.29)
где & - отклонение РСН от центра базы противофазных источников помех.
Границы применяемости формулы (3.29) за счет линеаризации F(®):
tg® ~ ®; Р < 0.9 или Р > 1.1; Д® < (0.02^0.04)®0 5 (®о 5 - ширина ДНА РЛС на
уровне половинной мощности).
В работе [7 стр. 192] приведена более общая формула для расчета
отклонения РСН от середины базы (L) при произвольной разности фаз (\|/)>
создаваемых помеховыми сигналами в центре раскрыва антенны
моноимпульсного пеленгатора:
А0 1-Д2
2 /?2 +2/?-cos^ + l ’
(3.30)
которая применима при Д® < (0.05-Ю. 1); р > 1.1, р < 0.9.
Подстановка в выражение (3.30) у = л дает формулу (3.29)
Рис 3.35.Зависимость угловой ошибки сопровождения геометрического
центра парных когерентных источников от разности фаз колебаний.
169
На рис. 3 35 построена зависимость как функция от разности фаз между
помеховыми сигналами в центре антенны пеленгатора при различных значениях
отношения амплитуд источников шумов (у =(165 - 180)°; (0 = 12 = 1.05)) по
формуле (3.30). Из рис 3.35 следует, что наибольшие значения 0 имеют место при
у = л и 0—>1 (амплитуды источников шума почти одинаковы)
Например, при 0 = 1,05 и ф = л, & = 20 Д® (рис 3.35), учитывая, что границы
применимости формулы (3.30) Д® < (0,05=0,1) ®о,5 имеем О = 20Д® > 20(0,05=0,1)
®о.5 = (1=2) ®Од. Это означает, что при ®0,5 =2°, промахи ракет за счет применения
когерентной помехи (противофазной) при пассивном наведении «по помехе»
составят от 17,5 = 35 м на дальности пуска (наведения) 1 км и до 175 = 350 м на
дальностях пуска 10 км, если ракета не пользуется (не выбирает промах) какой
либо другой информацией. Фактические промахи ракет могут быть еще больше,
так как база между источниками помех на самолете может быть порядка десятков
метров (например, при L = 60 м и Д®, соответствующем этой базе, промах равен
0=20Д®=1200 м); однако для подтверждения этого предположения требуется
самый общий анализ воздействия когерентной помехи на моноимпульсный
пеленгатор (без линеаризации ДНА и других допущений).
Рис. 3.36. Положение равносигнального направления
с учетом влияния полезного сигнала.
170
До сих пор мы рассматривали увод РСН при действии только помеховых,
сдвинутых на у по фазе, когерентных сигналов. Теперь представим себе, что
наводимая (самонаводимая) ракета имеет активную РГСН (или получает
отраженный от цели сигнал при ее подсвете наземной РЛС (БРЛС)). В данном
случае, при оценке промахов необходимо учитывать, кроме двух помеховых,
третий, отраженный от цели, собственный сигнал РГСН. Наиболее просто его
учесть, если помеховые сигналы и полезный некогерентны, а следящая система,
подвергающаяся их одновременному воздействию, находится в состоянии
равновесия. Тогда действие двух когерентных сигналов (помеховых), сдвинутых
на п по фазе, можно заменить (рис. 3.36) эквивалентным помеховым сигналом
одного помехового источника (точка О2 за пределами базы) с эквивалентной
мощностью
Р,„=РЮ(1-Р)2 -ЫЕ^-Ес,,)2;
где Е02 Боу - амплитуда поля второго и первого источников помех.
Pq2=Eq2 - мощность второго источника помех;
к\ - коэффициент пропорциональности;
/?= Ет/ Ео2 - отношение амплитуд первого и второго источников помех.
Если полезный сигнал имеет мощность Рс и отражается от середины базы
(L) двух помеховых источников (рис.3.36), то условие равновесия замкнутой
следящей системы для квадратичного детектора (равносигнальная зона (ось
антенны) направлена на энергетический «центр тяжести») и линейной
пеленгационной характеристики во всем интервале рассматриваемых углов
запишется так [7 стр. 203]:
Рс-Л& = Рэп-(&-№) ,
171
где- Рс и РЭп - мощности полезного и эквивалентного помехового сигналов на
выходе антенны подавляемой РГСН.
Из этого выражения можно найти ДЗи подставить в полученный результат
значение 3 из формулы (3.29); тогда имеем:
&& = &
Рэп+Рс
да г р„ ;
2 и»
li-zd
(3.31)
Следует отметить, что, вообще говоря, при получении формулы (3.31) и
границ ее применимости должна использоваться обобщенная пеленгационная
характеристика системы пеленгации, представленная для двух (!) разнесенных
источников когерентных помех (или одного эквивалентного), так как трех
«точечную» задачу мы свели к двух «точечной».
Как видно из выражения (3.31) ДЗ < 3 (ДЗ - 3 при Рс=0) и источник
отраженного от цели (собственного сигнала РГСН) как бы возвращает РСН в
точку, ближе к середине базы ( точка Oi) потому, что отраженный и помеховый
сигналы некогерентны. С точки зрения РПД надо, чтобы ДЕ было как можно
ближе к 3, а это возможно, если мощность эквивалентного помехового сигнала
(Рог) превысит в к раз мощность отраженного сигнала Рс (к= PqP Ре)- Учитывая,
г Р
что Рэп= РОг(1-р) к -^- = к подставим эти значения в формулу (3.31) и после
простых преобразований имеем:
2 (!-«’ + ’
к
(3.32)
Если ДД и к »1, то формула (3.32) переходит в выражение (3.29) и точка
увода когерентными помехами середины базы возвращается в Ог (рис.З 35), о чем
мы уже говорили. Формулы (3.29) и (3.32) могут быть использованы как
172
оптимальные уводы (промахи) ракет при когерентных (сдвинутых по фазе на л)
помеховых сигналах (при сопровождении «по помехе» или в присутствии
сигнала, причем если к »1, то сигнал не влияет на уводы!).
До сих пор мы не обращали внимание на знак угловой ошибки (знак увода
по углу). В первом приближении, на основании изучения тонкой структуры
фазового фронта для случая, изображенного на рис.3.36, анализ показал, что ось
антенны пеленгатора (РСН) при увода направляется за базу в сторону от
источника большей мощности [7 стр. 203].
Большой интерес представляет для будущих исследований в области РПД
теоретическое изучение воздействия «п» помеховых источников когерентных
помех в присутствии «т» отраженных сигналов от нашего самолета (истинных)
сигналов с произвольными (или специально выбираемыми) фазами между
помехами и сигналами, а также с различными базами («протяженная» цель с
несколькими «блестящими» точками). Результаты этой работы можно положить
в основу проектирования эффективной аппаратуры РПД. Вторая задача -
изучение действия на системы наведения (самонаведения) модулируемых по
времени (и амплитуде) уводов, представленных формулами (3.29), (3.32) и др. с
тем, чтобы использовать в целях РПД ошибки по скорости изменения
равносигнального направления (непостоянство вектора скорости ракеты,
«качание» системы наведения за ложными уводами и т.д., (см формулу (3.18), где
измеряется £(0 и обеспечивается £'(0=0)).
Одним из эффективных видов имитационных помех системам АСН, в
определенных условиях, являются помехи на ортогональной поляризации
антенны РЛС (так называемые кросс - поляризационные помехи) [8стр.75]
Вообще-то говоря, существует собственное (паразитное) излучение на
ортогональной поляризации, которое, например, для зеркальных антенн
составляет - (КН-20) дБ относительного главного максимума антенны на
основной поляризации [8 стр.76]; основная поляризация обычно бывает линейной
- по направлению электрического вектора электромагнитной волны в раскрыве
антенны. Подробный анализ действия кросс - поляризационной помехи на
173
системы АСН проводится с помощью семейства нормированных диаграмм
направленности антенн на обоих поляризациях пеленгационных характеристик
системы АСН [164]; анализ использует суммарный сигнал (Я) (полезный и
помеховый) на выходе пеленгатора:
tA. =а,Я(®)+*;„ «-/•„(©)], (з.зз)
где: к\= kUc2Go2 (k=const\ Uc - амплитуда полезного сигнала;
Со - КНД антенны на основной поляризации);
Lc(&) и £п(0) - пеленгационные характеристики для сигнала и помехи;
koc.x=Gn/Go (Gn - КНД антенны на ортогональной (помеховой) поляризации);
(Un - амплитуда помехового сигнала на кросс-поляризации)
Из выражения (3.33) можно заметить (при анализе ошибок 0
сопровождения системой АСН цели (нашего самолета) из уравнения ЕЛг=О) два
качественно различных случая действия поляризационной помехи. При малой
мощности помехового сигнала (&Осл*Чп<<:1) уменьшается лишь крутизна
пеленгационной характеристики основного сигнала (суммарного сигнала). При
Ссл’Чп »1 форма пеленгационной характеристики деформируется (крутизна ее
снижается) и появляются (на ней) две точки устойчивого равновесия в системе
АСН, что говорит об ошибке в сопровождении целей Приближенное решение
уравнения Е/Д0)=:О дает ошибку сопровождения 0~©о,5 (®о,5 - ширина ДНА на
уровне половинной мощности) При угловом рассогласовании плоскостей
поляризации помехового и полезного сигнала (уп) величина 0 (ошибка
сопровождения) будет уменьшаться из-за появления двух ортогональных
составляющих электрического вектора, одна из которых - увеличивает полезный
сигнал (помеха помогает обнаружить сигнал), а вторая дает ортогональную кросс-
поляризационную помеху. Это явление можно использовать, создавая помеху с
вращающейся плоскостью поляризации, которая будет «раскачивать» антенну
(изменять угловую скорость равносигнального направления, обеспечивая
174
промахи). Более подробные сведения о поляризационных и других
характеристиках антенн можно найти в работах [73, 74].
Для завершения настоящего раздела в части имитационных помех, нам
осталось проанализировать материалы по помехам командным радиолиниям
управления и связи (в дальнейшем сокращенно - КРУ). Подавление КРУ
средствами РПД, в ряде случаев, полностью решает задачу отражения атаки,
поскольку обеспечивает разрыв контуров наведения ИП и ЗУР. Наибольшее
распространение в системах РПД КРУ получили прицельные и заградительные по
коду управления (связи) помехи имитационного типа, учитывая высокую
помехозащищенность КРУ и скрытность их работы. Сначала получим
энергетические соотношения при РПД КРУ.
Случай создания помех КРУ наведением ИП (ракет) представлен на рис.
3.37, когда самолет (цель - Ц) и самолет с БСО (П) не совмещены в пространстве
(индивидуально-взаимная защита), а объект РПД - приемное устройство
радиолинии, установленной на борту ИП (ракеты). Существует и более сложный
случай, когда надо (одновременно с вариантом рис. 3.37) противодействовать
РГСН ракеты (БРЛС ИП), чтобы «накрыть» отраженный от цели сигнал, и
наземной РЛС, которая принимает переданные по радиолинии с ракеты
отраженные сигналы РЛС (вместо (или совместно) приемника в хвостовой части
ракеты установлен передатчик радиосигналов, т.е. осуществляется наведение
«через ракету», о котором говорилось выше (см. табл. 3.2)).
Рис. 3.37. Вариант создания помех линиям радиосвязи и радиоуправления.
175
В упрощенном варианте (рис. 3.37) мощность помехи (РПБх) от самолета (П)
на входе приемника ракеты (ИП) определяется соотношением (максимум ДНА
САП направлен на ракету) [7 стр. 239]:
пвх
' 41 р-2 /Q ф\ 44г
I. J > 7’ ’
(3.34)
где: PnGa - энергетический потенциал САП;
Ат - эффективная площадь приемной антенны, установленной на ракете (ИП);
Ди(0;Ф) - ДНА приемника по полю (на ракете или ИП);
уп - коэффициент, учитывающий несовпадение поляризаций передающей
антенны САП и приемной антенны КРУ (Уп=1 при совпадении и уп=0,5 при
несовпадении поляризаций);
А/пр и AFn - полосы пропускания приемника и передатчика излучения помех;
Dn - расстояние между передатчиком САП (нашим самолетом) и приемником
КРУ (ракетой или ИП).
Учитывая, что, как и раньше (формула (3.2)), мощность полезного сигнала
передатчика команд (наземного) на входе приемника (см. первый сомножитель в
круглых скобках в выражении (3.34)), установленного на ракете (ИП), равна:
(3.35)
найдем отношение Рп ВХ/РС вх, пользуясь выражениями (3.34) и (3.35) (так
называемое “уравнение радиопротиводействия”):
Р Р G
___ пвх ____ п п
П р
свх с с
D,
(3.36)
176
Для радиолиний управления и связи обычно принимается Кп = 1
(имитационная помеха), в отличие от маскирующих помех, где Ки существенно
выше (см. формулу (3.7)). Вообще то (как и ранее) под АД понимается минимально
необходимое отношение Рп вх/Д вх в пределах Д/пр, при котором с заданной
(пороговой) вероятностью исключается возможность приема информации
приемником КРУ.
Оценим в простейшей ситуации потребную мощность передатчика помех
для обеспечения Кп^1 при слабонаправленных антеннах САП и приемника КРУ
(Gn~Gcsl, Ап(0,(р) ~1, Уп=1 и A/ip=AFI1), тогда из выражения (3.36) получим:
(3.37)
Чтобы сорвать наведение ИП надо «разомкнуть» радиолинию (пусть для
этого достаточно условий при выводе (3.37) до начала самонаведения ИП
собственной БРЛС), тогда Дг^рлс и из выражений (3.37) имеем минимальную
потребную мощность подавления КРУ (РПтш)’
fD У
р =р (3.38)
и mm с га \ /
\ иС J
Пример: при Dc=500 км, Dpnc=50 км; Рс=10 кВт из (3 38) имеем - Pnmin=100
Вт, т.е. всего 100 Вт против 10 кВт на дальности наведения ИП = 500км (мы же на
расстоянии 50 км от ИП). По мере приближения ИП к РЛС дальность
уменьшается (£)с) и при Вс = /Эрле, чтобы сохранить Кп =1 надо увеличить
мощность САП до 10 кВт (диапазон регулировки мощности передатчика САП -
20 дБ!).
Если же учесть РПД по боковым лепесткам ДНА приемника,
установленного на ИП (ракете) в условиях, когда А*Г1=1Э уп=1 и Д/пр=ДАп из
формулы (3 36) получаем:
177
f D ' 1
Pn-Gn=Pc-Gc ~ ;
(3.39)
Теперь уже на £>п= 50 км (дальность от нашего самолета до ИП) и £>с=500км
(дальнее наведение ИП) при Fn2(©,(p)=10'2 из выражения (3.39) надо обеспечить
передающий потенциал САП сразу равный передающему потенциалу РЛС
радиолинии (в предыдущем примере - 10кВт) и далее его увеличивать по мере
приближения ИП к собственной РЛС наведения до невероятных величин - 1000
кВт (если Dc= Dn), что практически сделать невозможно. Отсюда вывод-
требуемую минимальную энергетику по боковым лепесткам ДНА приемника КРУ
можно обеспечить, если ИП находится в дальней зоне наведения от наземной
РЛС.
наведением
Рис. 3.38. Упрощенная функциональная схема одноканальной КРУ.
Перейдем к имитационным помехам КРУ; на рис. 3.38 приведена
упрощенная схема одноканальной КРУ. В шифраторе (Ш) передающей станции
(наземной) КРУ осуществляется модуляция поднесущих колебаний управляющих
команд (амплитудная, частотная, фазовая, широтно-импульсная, кодово-
импульсная и т.д.); поднесущие колебания, в свою очередь, модулируют несущую
частоту, команды усиливаются и генерируются передатчиком (ПрД). На борту ИП
(ракеты) управляющие команды принимаются (ПрМ), усиливаются и
178
детектируются, а затем дешифрируются (ДШ) и снова преобразуются в команды
управления рулями ракеты или автопилотом истребителя.
В старых радиолиниях зарубежного производства (типа «Такан») для
передачи команд управления использовалась модуляция по фазе импульсных
поднесущих (ФИМ), когда шифратор формирует две кодовые группы импульсов
- первая группа - опорные сигналы, вторая группа - рабочие сигналы. Число
импульсов в каждой группе и временные расстояния между ними вполне
определенные, известные на приемном пункте, фаза колебании внутри каждого
импульса также определена. Различают два вида помех командным радиолиниям
с ФИМ - помехи, заградительные по коду (непрерывные шумовые колебания или
хаотические импульсные помехи (ХИЛ)) и помехи - прицельные по коду. В
работе [68] проанализировано влияние ХИП на ФИМ для Пуассоновского потока
ХИЛ и показано, что основной эффект воздействия помех сводится к
существенному изменению коэффициента передачи КРУ (Ккру), который
вычисляется из соотношения [80]:
КкР,= е‘1т. (3.40)
(р У
где 2Г = — тп-Рк,
и!
Рк - вероятность дополнения (замещения) импульсами ХИП любого
импульса до опорного или исполнительного кода, причем.
ч
Т
п
р.
Р. =ПП
• т
(3-41)
где ти - длительность импульса.
В формулах (3.40) и (3.41):
179
(р у
— - отношение средних мощностей ХИП и сигнала на входе приемника
\р^ех
КРУ;
п - число импульсов в кодовой посылке;
т - количество кодовых посылок за период передачи (Т) одной команды.
В качестве простейшего примера рассмотрим ФИМ с двумя импульсами в
коде (и) и двумя кодовыми посылками - опорной и кодовой (т-2), как сказано
выше; пусть также ти=10'6 сек (1мкс) и 7=1 Оме (частота повторения посылок -
100Гц); тогда из формул (3.40) и (3.41) имеем-
ККРУ
(3 42)
На рис. 3.39 построена зависимость коэффициента передачи (Акру) КРУ от
, рассчитанного
по формуле (3 42). Линию передачи команд считают
разомкнутой, если Акру под действием помех уменьшается до 0,2 - 0,1 (в 5=10)
раз, из рис.3.39 видно, что это уменьшение Акру произойдет при
около 25.
Р
Для того, чтобы в формулах (3 40=3.42) перейти к коэффициенту подавления (Кп
согласно выражению (3.36)), надо вместо средних Рп и Рс использовать
импульсные мощности. Существенным недостатком ХИП (и других
заградительных помех по коду) является значительная величина потребной
средней мощности передатчика помех (в 25 раз больше, чем Рс в нашем примере
рис.3.39), которая должна быть еще больше при увеличении значности кода
(числа кодовых импульсов - и).
180
Рис. 3.39. Зависимость коэффициента передачи (КкрУ) от отношения
помеха/сигнал.
Указанный недостаток можно устранить, используя имитационные помехи,
прицельные по коду, но для этого требуется дорогостоящая дополнительная
информация - код, их параметры, порядок и период следования, т.е. усложнение
информационной части комплекса РПД. Найти компромиссное решение - одна из
основных задач математического моделирования.
Прицельное помехи «конструируются» таким образом' на каждый опорный
код выдается снова опорный (вместо исполнительного), также как за
исполнительным кодом следует опять исполнительный; все это реализуется с
использованием схем запоминания кодовых параметров сигналов КРУ, задержки
и ретрансляции в требуемой помеховой последовательности САП.
Однако не все так просто, как описано; современные радиолинии типа
«Лоран», «Шоран» и их многочисленные модификации имеют большое число
каналов передачи информации, множество “прецизионных” несущих и
поднесущих частот, коды поиска и исправления (обнаружения) ошибок за счет
высокой избыточности передаваемых команд, дублирование передачи
информации через радиолинии космической и спутниковой связи. Поэтому
создание РПД командным радиолиниям управления и связи в современных
условиях представляет самостоятельную, серьезную задачу, достойную
отдельного исследования.
181
В начале настоящей главы мы говорили о необходимости учета в моделях
помехозащищенности РЛС и оставили в стороне относительно новые
«интеллектуальные» (современные) РЛС ПВО (такие РЛС не вошли в таблицу
3.2) Указанные вопросы заслуживают отдельного раздела в главе потому, что
читатель должен сам оценить их сложность и актуальность.
3 10 Помехозащищенность и перспективные РЛС ПВО.
РЛС системы ПВО всегда развивались в двух направлениях:
- построение специализированных РЛС (одно, двух, и трех координатных) с
оптимальным (по определенным критериям) набором параметров для выполнения
«узких» задач ПВО (импульсных, непрерывных, импульсно-допплеровских и др.);
- разработка универсальных (ПВО и ПРО) многофункциональных РЛС,
извлекающих максимальное количество информации из отраженных от целей
зондирующих сигналов
В последнее время (в связи с бурным развитием средств РПД и в целях
экономии ресурсов) второе направление стало преобладающим, особенно в ЗРК,
ИП и др средствах поражения летательных аппаратов; при этом сразу считается
(как само собой разумеющееся), что такие РЛС должны иметь оптимальное
структурное и функциональное построение, а также наибольшую
помехозащищенность от преднамеренных помех (в этих условиях автоматически
обеспечивается защита от естественных помех).
Не рассматривая конкретное схемотехническое построение РЛС (БРЛС,
РГСН) в плане защиты от радиопомех (частично эти вопросы затронуты в
предыдущем разделе; более подробное описание методов помехозащиты каналов
и устройств РЛС читатель может найти в работе [8] и библиографии к ней),
сосредоточим свое внимание на перспективных новшествах в построении РЛС и
обработке сигналов от воздушных целей, появившихся около 30 лет назад и
внедренных в современные средства ПВО. В конечном счете, нас интересует
влияние этих новшеств на защиту РЛС от активных (и других) помех.
182
В обобщенном варианте к таким нововведениям РЛС следует отнести:
параллельно-многоканальное функционирование РЛС с перестройкой несущей
частоты от импульса к импульсу и одновременной работой РЛС на нескольких,
разнесенных по оси частот, зондирующих сигналах (о чем уже неоднократно
упоминалось в тексте книги); внедрение методов функциональной и
пространственно-временной (пространственно-фазово-голографической)
обработки отраженных сигналов.
3.11 Изменение рабочей частоты и многочастотное излучение РЛС.
Быстрое изменение несущей частоты РЛС по случайному закону (от
импульса к импульсу) обеспечивает [75]:
- улучшение характеристик обнаружения и уменьшение ошибок измерения
угловых координат целей;
- увеличение дальности и точности сопровождения самолетов на фоне
мешающих отражений от земной (водной) поверхности;
- повышение помехозащищенности РЛС от искусственно создаваемых и
взаимных помех.
Улучшение основных показателей обнаружения и технических параметров
РЛС связано с усредненнием ЭПР целей (и конкретно каждой из них) при
изменении fH в широких пределах; это улучшение возможно при отсутствии
корреляции между отраженными сигналами (когда разность частот между
соседними скачками fK -Д/н >с//ч [76], где с - скорость света, 1Ц - длина цели).
Учитывая, что при случайных скачках /н от импульса к импульсу в полосе Afpnc
плотность распределения частоты постоянна, а закон распределения интервалов
между скачками симметричен относительно Д/рлс/2, математическое ожидание
двух соседних значений частоты равно [77] тогда корреляции не будет,
если:
183
bfpjK/2^f™ или А/РЧС >2c/lv (3.43).
Если /и=10 м (истребитель), то Afpnc > 60 МГц; при /,=100 м (корабль),
AfpjIC> 6 МГц; при 1=1м (ракета), Afpj[C> 600 МГц; последнее значение диапазона
перестройки несущей частоты не так просто обеспечить.
Расчеты показывают, что быстрое скачкообразное изменение fH позволяет
улучшить энергетическое (формула (3.7)) отношение сигнал/шум (при прочих
равных условиях - одинаковой вероятности ложной тревоги и равном количестве
накапливаемых импульсов) по сравнению с неперестраиваемой РЛС на 7 дБ [76,
79]; однако в случае быстрой перестройки трудно обеспечить когерентность
обработки принимаемых сигналов (в частности СДЦ), т.е. оптимальность
обработки, и мы снова теряем эти же 7 дБ. Поэтому в современных РЛС ЗРК с
перестройкой fH от импульса к импульсу (РЛС ЗРК «Патриот») предусмотрена
вобуляция fH внутри длинного зондирующего импульса (ЛЧМ-модуляция) для
обеспечения СДЦ и последующее сжатие (после приема) в короткий импульс
отраженного сигнала (см. табл. 3.2). Следует также отметить, что эффект
(энергетический выигрыш) усреднения имеет место, если время усреднения
существенно меньше постоянной времени системы АСН (~ в 10 раз). При
постоянной времени системы АСН около 0,1 сек, время усреднения несущих
частот не должно превышать Юме (в табл. 3.2 РЛС ЗРК посылает после
обнаружения цели подряд минимум три импульса с ЛЧМ; поэтому интервал
между ними не должен превышать 50 мкс).
Скачкообразная перестройка от импульса к импульсу по случайному
закону позволяет, в определенной степени, избавить РЛС от узкополосных помех
и может разрушить индивидуально-взаимную защиту самолетов мерцающими
помехами, так как в обоих случаях нельзя предугадать fK следующего импульса и
поэтому, при соответствующем быстродействии САП, можно «закрыть»
пространство за постановщиком помех (самолетом с БСО). Более того, с
помощью стробирования участка по дальности, «не закрытого» помехой до
постановщика, можно его выделить в парной цели, т.к. расстояния каждого
184
самолета пары до РЛС никогда не будут одинаковы (РЛС «стробирует» это
различие в дальностях с точностью 20^30 м). Такие ситуации при моделировании
надо учитывать, создавая целевые (сложные) комбинации помех, которые будут
эффективны в данном случае или, если позволяет энергетический потенциал,
переходить на заградительный (заградительно-прицельный) режим постановки
помех. Заградительно-прицельный режим должен учитывать вероятностные
соотношения, рассчитываемые из теории совпадения импульсных потоков:
одного - зондирующие импульсы РЛС, второго - ответные излучения САП с тем,
чтобы «накрыть» прицельно-заградительной помехой заданное число
зондирующих отраженных сигналов [80, 81]. Появляются также проблемы при
применении имитационных помех против указанных РЛС; эти проблемы
усугубляются при «вобуляции» периода повторения импульсов РЛС (изменении в
определенных пределах Гп), особенно по случайному закону.
Многочастотная РЛС осуществляет передачу, прием и обработку
одновременно нескольких радиосигналов с разными несущими частотами (в
разделе 3.6 говорилось о изменении и разрешении сигналов таких РЛС
приемником системы ALQ - 161, если они различаются по переднему фронту
импульсов на 0,1 мкс). В состав многочастотной РЛС включаются «п»
передатчиков (и>2) с соответствующим антенным устройством и многоканальная
система обработки сигналов, поэтому сдвиг частот повторения и/или фронтов
длительности импульсов от «п» передатчиков вполне возможен, если они не
«запитываются» синхронно и их тракты не откалиброваны.
Многоканальная РЛС позволяет:
- увеличить суммарную мощность излучения и, следовательно, обеспечить
большую дальность обнаружения целей по сравнению с одночастотной РЛС (не
перестраиваемой по
- повысить помехозащищенность и надежность работы станции
Имеется два варианта использования нескольких несущих частот РЛС' с
использованием собственной диаграммы направленности на каждой рабочей
частоте и излучение «п» несущих частот в пределах одной ДНА. Первый вариант
185
- фактическое использование «и» радиолокаторов, работающих на разных fH и
ведущих наблюдение за различными, попарно перекрывающимися областями
пространства вместо одной РЛС. При этом в «п» раз увеличивается общая
мощность излучения РЛС (если передатчики имеют одинаковую мощность) или
передающий потенциал (произведение излучаемой мощности на КНД антенны).
Однако, это не требует пропорционального (в «и» раз) увеличения мощности
передатчика САП потому, что наш самолет на текущей дальности до
многочастотной РЛС может попасть в створ только двух лучей диаграммы
направленности РЛС и поэтому может облучаться максимум двумя
передатчиками РЛС (т.е. требуется увеличение мощности передатчика САП
только в два раза независимо от числа передатчиков РЛС).
Сужение ДНА, например в «л» раз в вертикальной плоскости,
пропорционально уменьшает разрешаемый пространственный объем РЛС на
каждой несущей частоте, что приводит к снижению в «п» раз мощности помехи
на входе РЛС от облака дипольных отражателей, если это облако не подсвечивать
с помощью передатчика помех (САП) для компенсации данного уменьшения (все
указанные «нюансы» надо учитывать при моделировании и расчете мощности
отражения от ДО).
Когда многочастотная станция излучает «и» частот через одну антенну
(второй вариант построения), то каждая цель (наш самолет) облучается «и»
зондирующими рабочими частотами, различия между которыми выбираются
согласно неравенству (3.43) для исключения корреляции между сигналами,
отраженными от цели.
Вероятности правильного обнаружения (РОбН п) и ложной тревоги (Рлт п) п-
канальной РЛС можно представить как вероятности превышения пороговых
уровней хотя бы в одном из каналов:
PO6un-l-(l^Po6Hi)n И Рлтп-1~(1~Рлт1)п (3.44)
186
где Робн i и Рдт 1 - вероятности превышения порогового уровня и ложной тревоги
в i-ом канале (все эти вероятности во всех «п» каналах одинаковы).
При Рлт 1 «1, что всегда имеет место при обнаружении сигналов по
критерию Неймана - Пирсона, Рт п ~ п Рлт ь Если необходимо сравнивать между
собой одночастотную и многочастотную станции, следует соблюдать два условия:
должна быть одинаковой полная энергия излучаемых колебаний в том и другом
случае, а также одинаковыми результирующие вероятности правильного
обнаружения и ложной тревоги[6,82]
Например, при приеме сигналов с неизвестной начальной фазой и медленно
флуктуирующей амплитудой требуемое отношение сигнал/шум для
одноканальной станции (<7i) связано с вероятностями правильного обнаружения
(Р<?бн 1) и ложной тревоги (РЛт1) зависимостью [82]:
1п(1/Лв„) ’ ( 4а)
где Ес - полная энергия принимаемых сигналов, используемая для единичного
обнаружения;
N- спектральная плотность мощности собственного шума приемника.
Заметим, что при выводе однородного уравнения для дальности действия
PJIC импульсного, непрерывного и допплеровско-импульсного излучения
(уравнение (3.1)) автор работы [6 стр. 186] использовал в левой части выражения
(3.44) такое же отношение, отличающееся от (3.44) постоянным коэффициентом:
<71 = —
1,22V
(3-45)
которое получено для оптимального построения первых каскадов приемника РЛС
и дает отношение сигнал/шум на 4 дБ (в 2,4 раза) меньше, чем формула (3.44).
Весьма примечательно, что теоретически возможность обнаружения цели не
187
зависит от видов модуляции сигналов РЛС и остается одинаковой для всех типов
радиолокационных станций (о чем уже говорилось в начале раздела 3.7).
Для многоканальной станции должны быть обеспечены вероятности
правильного обнаружения и ложной тревоги в каждом отдельном z-ом канале в
соответствии с формулой (3.44):
и Ртт=Рлт„1п или, учитывая, что при сравнении одноканальной и
многоканальной станций Робн п= Робн i и Рлт n= Р~л i имеем.
и Р,„=Рт,/». (3.46)
Теперь из выражения (3 44) можно получить Робн ] и РлтЬ подставить их в
формулу (3.46) и вычислить, при заданном п -РОбн1 и P;rri; затем снова по (3.44 а)
получить qi (отношение сигнал/шум для каждого канала) и, наконец, по формуле
(3.44 а) определить требуемое значение энергии сигнала на входе отдельного
канала многоканальной РЛС ЕС1 = qy N/2 (для оптимального приемника, в
соответствии с выражением (3.45), эта энергия должна быть в 2,4 раза меньше!)
Если после указанных выше вычислений энергия пЕсу входных сигналов
многоканальной РЛС оказывается меньше энергии Ес одноканальной станции, то
при прочих равных условиях, отношение'
= tfqjnq, (3.47)
IД )
будет больше единицы (Рп и Ry - дальности действия многочастотной и
одночастотной станций).
188
Рис. 3.40. Зависимость вероятности обнаружения трехчастотной и одночастотной
РЛС от отношения сигнал/шум.
Заметим, что выражение (3.47) является аналогом левой части формул (3.6)
и (3.7). Графики рис. 3.40 иллюстрируют результаты расчетов характеристик
обнаружения трехчастотной и одночастотной (пунктирная линия) РЛС. Из рис
3.40 следует, что для Робн п = Л>бн1 = 0,95 и одинаковой вероятности ложной
тревоги (10‘5), требуемое отношение сигнал/шум для одночастотной станции
-180, а для трехчастотной ~ 60; следовательно, увеличение дальности действия
трехчастотной РЛС составит - 1,32.
Для улучшения помехозащищенности многоканальной РЛС от активных
маскирующих помех применяются различные варианты совместной обработки
выходных сигналов отдельных каналов; например, для трехчастотной РЛС [83]:
Гвых = К1(И1+ И2+ Из) или (и) Ивых = к2 (И И2+ Г2 И3+ И3 И]) или (и) Ивых =
кзК/И2Гз где - выходной сигнал z-го канала, i = 1, 2, 3.
В данных вариантах обработки (в порядке их перечисления) РЛС будет
обладать ухудшающимися характеристиками обнаружения, но улучшающейся
помехозащищенностью!
189
Рис. 3.41. Зависимость вероятности обнаружения трехчастотной РЛС для различных
вариантов обработки сигналов.
В первом варианте обработки Робнз и Рлт3 были найдены; во втором и
третьем вариантах:
ро6н3 = i-(i-Po6Hi2)3; pot3«3pJ
Р =Р 3 Р L- P 3
обнЗ обн 1 ’ х лтЗ ят i
(3-48)
Результаты расчетов характеристик обнаружения трехчастотной РЛС по
полученным формулам и описанной методике для трех вариантов обработки
сигналов (помеченных буквами «а», «б» и «в») приведены на рис. 3.41, из
которого видно, что действительно наилучшими показателями обнаружения
обладает первый вариант, а наихудшими - последний (вариант «в»). Кстати,
первый вариант показан и на рис. 3.40 (сплошная линия).
Помехозащищенность трехчастотной РЛС в первом варианте хуже потому,
что нам достаточно создавать ей помеху на одной, а максимум на двух частотах
(если она наш самолет облучает двумя лучами, о чем было сказано выше), а в
190
последнем варианте лучше всех потому, что САП надо создавать помехи на трех
частотах, а это значительно труднее. Для дополнительного повышения
помехозащищенности и улучшения работы САП можно использовать разную
частоту следования импульсов в каждом канале [83].
Для нормально работающей многочастотной РЛС частоты повторения
сигналов в разных каналах должны выбираться из следующих соображений.
В одном из каналов частота следования (FIlt) должна позволять
селектировать быстро движущиеся цели на фоне неподвижных предметов
(подстилающих поверхностей) или медленно перемещающиеся наземные
(воздушные) цели (Fni > FDmax; где FDmax - максимальная допплеровская частота -
формула (3 23)); в другом канале частота повторения зондирующих сигналов
выбирается из условия однозначного измерения максимальной дальности
воздушной цели - Fmax (F^ < C/2 Fmax, С - скорость электромагнитной волны) и
т.д. К каналу РЛС с минимальным отжатием луча антенны от земной
поверхности, предназначенному для измерения характеристик низколетящих
целей, предъявляются особые требования к ряду технических параметров
зондирующих сигналов, в том числе - к мощности передатчика; некоторые из
требований, с точки зрения РПД, будут рассмотрены в следующем разделе.
Различные частоты повторения зондирующих сигналов в разных каналах
ведут к неодинаковому времени накопления отраженных от цели сигналов (в
случае, если должно быть интегрировано равное число отраженных импульсов во
всех каналах), что может быть выполнено подбором ширины ДНА в главных
лучах; либо при суммировании неодинакового количества отраженных сигналов
(если ширина главных лучей ДНА одна и та же в каждом канале). Все это
изменяет характеристики обнаружения многочастотной РЛС; при этом точный
анализ характеристик обнаружения в различных вариантах построения громоздок
и представляет серьезные трудности уже при п > 3, а при «=(540) пока не
реализован (кроме специальных расчетов в частных случаях на ЭВМ). По
видимому сложности построения таких многочастотных РЛС (в том числе
проблемы формирования требуемых многолучевых ДНА с низким уровнем
191
боковых лепестков) подтолкнули разработчиков станций остановиться на
одноканальных квазинепрерывных (КНИ) сигналах (по крайней мере для БРЛС
ИП и РЛС ЗРК), имеющих разные частоты повторения импульсов (с вобуляцией
или изменением в определенном интервале) между пачками сигналов и с высокой
частотой повторения внутри пачки. РЛС с КНИ-сигналами работают «на
проходе» с телевизионным обзором пространства фазированной антенной
решеткой и могут быстро перестраивать несущую частоту (см. табл. 3.2)
Еще одним преимуществом многочастотных РЛС является их повышенная
аппаратурная (и функциональная) надежность потому, что все каналы станции
зарезервированы и физически ясно, что выход из стоя одного канала из «п»
изменяет только характеристики обнаружения, в то время как в одноканальной
РЛС «парализует» работу станции. Нетрудно подсчитать вероятность безотказной
работы (Рбр) многоканальной РЛС в течение заданного интервала времени; для
этого нужно в первой из формул (3.44) заменить Робн п на Pqp п, а РОбН i на Pqp i -
вероятность работы без выхода из строя z-ro канала станции. Так, при Р6р 1=0,6
(низкая надежность канала в одноканальной РЛС) вероятность безотказной
работы трехканальной РЛС (Рбр3) при Pqp j=0,6 (надежность одного канала)
составляет Рбр3=0,933.
Судя по материалам зарубежных источников [78] разность между частотами
в многочастотной РЛС составляет до сотен МГц.
3.12. Функциональная и пространственно-временная селекция в РЛС.
Методы и средства функциональной обоаботки сигналов в РЛС дают
' ' X X W X
возможность осуществлять одновременное измерение технических параметров
радиосигналов, отраженных от целей (амплитуда, несущая частота, длительность
и период повторения и т.д.) и угловых координат целей, что позволяет сразу
селектировать полезные сигналы (частично объединяются первичная и вторичная
обработки). При этом обычно измеряются комплексные амплитуды поля (э/м
волны) в раскрыве антенны РЛС, либо комплексные автокорреляционные (и/или
взаимокорреляционные) функции сигналов в независимых каналах станции
192
Измеряемые величины связываются через уравнения с функциями от
искомых технических параметров и угловых координат на входах элементов
антенной решетки многоканального радиолокационного измерителя. Антенная
решетка должна иметь «пхт» элементов (п - число целей, m - количество
измеряемых характеристик одной цели). Каждому пространственному положению
целей соответствует свое распределение поля отраженных сигналов, составленное
из суммы элементарных полей, образуемых от отдельных элементов решетки; в
радиолокации это именуется откликом радиолокационного измерителя
(суперпозиция «и» откликов отраженных сигналов) [86].
Анализ и вычислительные процедуры (упрощение и поиск решения
трансцендентных уравнений) довольно громоздкие и в случае интереса читатель
может обратиться к работам [84, 86]. Так, трехантенная РЛС [85], кроме
измерителей разности фаз и амплитуд, имеет спецвычислитель, предназначенный
для решения систем сложных нелинейных уравнений. Достоинства
многочастотных РЛС - перенос обработки сигналов на видеотракт, что снижает
ряд серьезных требований к высокочастотным элементам приемной антенной
решетки (позволяет иметь медленно меняющееся во времени «замороженное»
распределение поля по раскрыву антенны). В этом плане функциональные РЛС
обеспечивают те же преимущества, что и голографические.
Для того чтобы представлять, в каком направлении действовать помехами
против функциональной РЛС, приведем краткий вывод окончательного
выражения для оценки обобщенных угловых координат (Кц и Кц2) двух
источников отраженных сигналов, взятый из работы [8 стр.370]. Это выражение
получено при следующих ограничениях: помехи РЛС отсутствуют, обе цели
находятся на одной дальности; несущая частота отраженных сигналов - известна;
отраженные сигналы некогерентны и интегрируются (начальные фазы сигналов
можно не учитывать).
Нормированный отклик РЛС от одиночного сигнала с координатой тц] (рис.
3.42.) имеет вид
193
F(y) = sin л(у - v41 )/tt(v - v41) ,
где v - обобщенная угловая координата;
v = (D//,)sin© (где D - - апертура антенны;
X - длина волны отраженного сигнала;
© - текущий угол между направлением на цель и осью антенны);
уЦ1 - обобщенный угол первой цели.
Суммарный отклик двух целей - суперпозиция двух одиночных откликов;
дифракционная картина сигналов по апертуре антенны восстанавливается по
теореме отсчетов В. А. Котельникова с шагом квантования Д 3 =1.
В этих условиях обобщенные угловые координаты целей (vHi=(D/X)sin@i,
v]i2=(D/X)sm©2) находятся решением системы двух уравнений вида:
S’-S,(’<„+v,2)+5,”-vs1.v<2=0, (3.49)
где S"' = V"‘ Vui + vzra • Vul + vf • vuk (m =0, 1, 2);
Vui, Vui, vuk - измеренные многоканальным радиолокационным измерителем
[86] в точках i, 1, к значения комплексных амплитуд поля. (рис. 3.42)
Первое уравнение получается из (3.49), если Vj=l, vi=2, vk=3 (см. рис. 3.42;
при отсчетах везде интервал квантования (разница между соседними отсчетами) -
Av=l); второе уравнение также находится из (3.49), когда Vj=2, v\=3, vk=4 (рис.
3.42).
Результат решения этой системы:
=-Ро/2±7а74-^о , (3.50)
194
о О с 2 с О с 2
13 о * О о 13 о ’ О q
где Ро = —т—4—г;
о2 гт1 оС crl
13 13 13 * кЗ 2
О'О о2 о1 о2
а ~ ^2 ^3 ^3 ‘ ^2
h ~ S°-S3-S°-S?
Задача РЭП состоит в том, чтобы создать из точек Ц1 и Ц2 такую помеху в
видеотракте, когда радиолокационный измеритель станции дает систематические
и (или) случайные ошибки оценки обобщенных координат, размножает
(увеличивает число) цели или уменьшает их количество.
(V,) (v;) (vj
Рис.3.42. Зависимость отклика функциональной РЛС измерителя угловых
координат на действие одиночного (____) и двух () сигналов.
Недостатками функциональных РЛС являются сложная вычислительная
аппаратура (специальные вычислители), наличие дорогостоящего
математического обеспечения (алгоритмов и программ обработки) и, самое
главное, - необходимость априорного знания числа истинных целей для
правильной и эффективной работы вычислительных алгоритмов. Это означает,
что такая РЛС подвержена действию имитационных помех, размножающих цели,
и нуждается в предварительном целеуказании. Поэтому радиолокация в системах
195
ПВО пошла по другому пути - использовала методы функциональной обработки
в моноимпульсных РЛС (функциональные РЛС используются в научных целях -
«исследовательских» РЛС, изучающих звезды и галактики (радиотелескопах), с
целеуказанием от оптических телескопов). Так, типичная моноимпульсная РЛС,
имеющая четыре приемных антенны для мгновенного измерения двух угловых
координат воздушных целей, с успехом может решать задачу одновременного
вычисления двух обобщенных угловых координат и измерения уровня мощностей
отраженных сигналов, приходящих от двух целей, за счет усложнения аппаратуры
обработки [85]
Более лучшие результаты по селекции помех в отличие от функциональной
дает пространственно-временная обработка сигналов, причем в процессе
последней обработки участвует только та часть смеси сигналов и помех, которая
попадает в раскрыв антенны.
Рис. 3.43. Пространственно-временная избирательность двух сигналов (1 и 2)
линейной антенной протяженностью L.
В зависимости от того, по какому числу пространственных координат
производится обработка сигналов различают одномерные (линейные), двумерные
(плоские) и трехмерные (объемные) антенны. Использование объемных антенн
196
усложняет приемники РЛС, делает их многоканальными и обуславливает
применение дополнительной обработки сигналов. Наиболее строго
характеристики такой РЛС могут быть найдены на основе анализа
пространственно-временной функции неопределенности или представлением этой
функции в виде произведения пространственной и временной ее части [87].
Более просто получается, если в качестве критерия оценки взять
представление поля в каждой точке антенны скалярной величиной,
функционально зависящей от линейных координат точки раскрыва и времени, с
учетом взаимных поляризаций сигнала и антенны.
Для этого надо взять соответствующим образом обработанную разность
скалярных величин (разность определяет пространственно-временную
избирательность), которую часто удобно представить как интегральную
среднеквадратичную разность (s =Д§) двух сигналов в раскрыве антенны - Si(t, г),
г) (г - вектор или пространственная координата) [88]:
№ = Д|5\(лг)-.52(лг) fdtdr, (3 51)
дтди
где | d ] - модуль величины «<7»;
ДИ и ДГ - пространственный и временный интервалы обработки (раскрыв
антенны).
Решение о наличии одного или двух сигналов принимается при сравнении
критерия (3.51) с некоторым порогом - Д$о («кластер-анализ» использует другие
методы определения различий [5, 23]; некоторые из них, применительно к РТР,
приводятся в работе [30]).
Используя имеющуюся литературу, авторы работы [8 стр. 405] привели
следующее выражение для пространство-временной избирательности двух целей
(сигналов) линейной антенной (рис. 3.43) при одинаковом законе амплитудной
197
модуляции отраженных сигналов (#i(t)= <72(0= <2(t)), узкополосных сигналах (ю0 -
круговая частота меняется незначительно):
AS = £[1 + /?2 -2/?-cosA<z>-j/„(a)0ve)] (3 52)
где k V] -Тэф-кэф Е]* кэф,
Е\ - энергия первого отраженного сигнала;
£Эф - эффективная длина антенны;
i/2
Ьэф = , J(x) - распределение тока по линейному раскрыву антенны;
-1/2
$=NilN] (У2 и V] - амплитуды напряжений отраженных сигналов);
A(p=(pi-(p2=(o)o^c)sma; (Аф - разность фаз сигналов в точках 1 и 2 за счет
разности хода ЭМВ;
фп(сооу^0)=ф(оэоУ©)/2л,Ь,ф (\|/(co0V©) - пространственная автокорреляционная
функция ДНА [87, 88]);
P©=(sin®2 - sin®i)/c; с - скорость света),
ТЭф - эффективное значение интервала обработки сигналов;
СО
Тэф = dt (U©=sin®i/c, х - координата линейного раскрыва
—со
антенны).
При малом значении разности синусов углов, под которыми видны цели из
центра раскрыва антенны (sin®2 ~ shi©i/c—Vq—>0), »/н(й)оИ@)=1 в выражении (3.52);
тогда (3 52) приобретает вид:
AS = k^ + /32 -2^cos[(Z6J0/c)sinoj}. (3.53)
Аф
198
1,2,3 . .
М
Рис. 3.44. Получение радио и оптической голограмм точечной цели.
Из формулы (3 53) видно, что наихудшее разрешение (Д8К—>0) пары
самолетов радиолокационной станцией будет, когда набег фазы между
отраженными сигналами в точке приема будет кратен 2л (cos Дф в выражениях
(3.52), (3.53) равен нулю, синфазные источники; A^=2m*n(m=Q, 1, 2...)) и
отраженные сигналы по амплитуде одинаковы (/М); несколько лучше
199
(минимально лучшее) разрешение будет при /Ми Дф=(2т+1)л (в точке приема -
противофазные сигналы), тогда Д5к=4к (из (3.53)).
Усреднение cos Дф по фазе в выражении (3.53) (некогерентные источники
отраженных сигналов, накопление импульсов) дает:
AS„=k(l+₽2). (3.54)
Выражение (3.54) говорит о том, что некогерентные источники отраженных
сигналов равной амплитуды имеют разрешение еще хуже, чем противофазные
источники когерентных сигналов в тех же условиях (/М) в два раза
Д$к=4/с).
Если в выражении (3.52) положить ^=^н(со0И©) и Д^=2/и*л (синфазные
сигналы) и разделить полученную формулу на выражение (3.52), где Др=2(ти+1)*л
и /?=1, то получим относительный проигрыш в разрешении синфазных (Д5е)
источников отраженных сигналов по сравнению с противофазными (Д5П)
(когерентными):
ГлП [i-y„kre)]
2
(3.55)
Формулой (3.55) надо пользоваться аккуратно, не забывая о том, что она
получена при /М^н(суок®)~1; из (3.55) видно, что проигрыш в разрешении
синфазных источников может быть весьма существенный. Например, при
i//k(ojqVq)=Q,9 проигрыш будет в двадцать раз!.
Единственный способ улучшить разрешение источников отраженных
сигналов это «сделать» их противофазными изменением несущей частоты
зондирующих сигналов следующим образом: Д^=(2/и+1)л; при т=0 имеем:
K=A(p=(/®o/c)sina, тогда о)0=2л1о=л*с//’81п а, следовательно, fc=dll sin а. При a
=30° и I =1000м, требуемое смещение fo составит 300 кГц.
200
Формулы (3 51)-^-(3.55) могут быть использованы как «исходный материал»
при «конструировании» индивидуально-взаимных помех РЛС с пространственно-
временной обработкой сигналов (и математическом моделировании).
Идеи пространственно-временной обработки сигналов наиболее полно
реализованы после изобретения голографии, которая позволила не только
использовать информацию о начальной фазе, но и «увидеть» волновой фронт
(амплитудное и фазовое распределение поля по апертуре антенны РЛС) после его
преобразования из радиодиапазона в диапазон видимого света Восстановление
волнового фронта оказалось возможным, если голографическая РЛС (ГРЛС) -
многоканальная и когерентная.
Обычно в голографических - ГРЛС антенная система выполняется в виде
решетки из MxN элементов (рис 3.44), на которую падает волна, рассеянная
целью, и плоская «опорная» когерентная волна; в результате интерференции
интенсивность суммарного сигнала изменяется по апертуре антенны, затем через
усилители-преобразователи «радиокартинка» преобразуется в световой диапазон,
детектируется и получается оптическая голограмма, которая обрабатывается
Полнота полученной информации зависит от типа пространственного
квантования (удовлетворения условиям теоремы Котельникова). Одно из главных
преимуществ голографических устройств - возможность получения высокой
разрешающей способности по угловым координатам и дальности при
одновременном обзоре значительных областей пространства. Кроме того,
голографирование сигналов позволяет:
- снизить эффективность «угловых» помех из вынесенных точек
пространства (вне цели) сравнением «образов» источников помехи и сигнала
(если используется «антипод» - перенацеливание на подстилающую поверхность,
то «пятно», отражающее сигналы от этой поверхности, отличается от голограммы
самолета);
- осуществить эффективную фильтрацию некоторых видов имитирующих
помех (не «интеллектуальных» ловушек, особенно если есть возможность
получить голограмму ловушки),
201
- ослабить действие активных маскирующих шумовых помех из-за их
некогерентности.
Если шумовая помеха имеет ширину спектра А/п, то «длина» ее
когерентности определяется формулой - /n=c/Afn (это выражение использовалось,
когда рассматривалась перестройка несущей частоты в предыдущем разделе). Для
устойчивой записи голограммы длина когерентности определяется временем
экспонирования - Гэкс и равна /экс=сТэкс; помеха не будет записана в голограмме,
если /п«/экс и, следовательно, Тэкс»1/ Д/^; если все-таки Гэкс < 1/ Д4 (т.е.
наоборот), то можно получить точечное изображение источника помех.
Для оценки области пространства, обозреваемого ГРЛС, в первом
приближении можно использовать формулу
- 0o63=X/(L/N),
где L - апертура;
N - число элементов линейного раскрыва антенны.
В предельном случае N=L/(X /2), тогда АОбз равен двум радианам (~114°).
Потенциальная разрешающая способность ГРЛС определяется критерием
Аббе, эквивалентным критерию Релея [89]. Если цель имеет периодическую
структуру, т.е. состоит из отражающих и не отражающих полос (квадратов), под
пространственной разрешающей способностью понимают наименьший размер
(А/) между полосами, который может быть воспроизведен данной РЛС
Традиционная РЛС как фильтр пространственных частот имеет граничную
частоту
z ч d<p 2п . „ 2д-_ 2я
(Ютах) - Ютах = = -VSln ®А * ~Т®А * ТГ
ах л Ла
где 0А - угол, под которым еще возможен прием сигналов;
202
0A^o,5=Vd;
d- элементарный размер (размер элемента решетки) антенны.
ГРЛС имеет ту же граничную пространственную частоту (сор), если <7=А/,
тогда условие разрешения по критерию Аббе записывается в виде [89]:
<Вр.<а>тах ИЛИ A/>d. (3.56)
Следовательно, ГРЛС имеет разрешение в плоскости антенны гораздо
меньшее общего размера антенны (d«L). Формула (3.56) оценивает
разрешающую способность ГРЛС, работающей в полуактивном режиме; для
ГРЛС имеющих одну и ту же приемо-передающую аппаратуру потенциальная
разрешающая способность будет еще выше - A/=d/2 Не следует думать, что А/
ГРЛС определяет все; угловая разрешающая способность ГРЛС зависит от
апертуры антенны, и, как обычно -
Выражение (3.56) характеризует линейную разрешающую способность
ГРЛС (Al=d или А/=б//2) на дальности R до цели, определяемой условием
фокусирования X/A/<L/2R, откуда:
R<L-M/2A, (3.57)
где R - дальность, на которой реализуется предельное разрешение.
Из M>d и &L=d/2 также следует, что уменьшение размера элементарной
антенны в решетке (d) до предельно возможного приводит к уменьшению
разрешающей способности в пределе до А/=Х/2.
Одним из способов, реализующих предельное разрешение, является,
например, синтезирование апертуры антенны ГРЛС [90]; при этом для получения
заданного разрешения (d=A/) апертура L должна синтезироваться согласно
203
неравенству (3.57), т.е. L >R-2Xl^l, что полностью согласуется с критерием Релея
[89].
При использовании монохроматического зондирующего сигнала ГРЛС
обладают разрешающей способностью по дальности. Так, если зондирующий
сигнал [/(O=Fbexp(-ja>ot), то отраженный сигнал, принятый элементарной
антенной Ua(t) (цель №2 на рис. 3.43):
Uа (0 = Va еХР[- 7®0 - Т )] , /С = (2/с)7х2+Г
(3-58)
где г - наклонная дальность до цели.
При г»х в выражении (3 58) тг (задержку сигналов от цели до антенны)
можно представить:
(3-59)
Тогда, с учетом формулы (3.59) и соо=2л/Х, выражение (3.58) для Ua(t):
Ua (0 = Va еХР(~ 7®0Z)' еХР + J
(3.60)
Пространственное разрешение по фазе (сог) с учетом апертуры будет
определятся дифференциалом d(p(x,r)/dr, который из последней формулы (3.60)
равен:
dq> _ 4тг 2я
dr Я Я-г2
Если размер апертуры антенны равен L, то из последней формулы
204
Ксог =(о,^-(о,mm = (Ът/л^/r2) или Ar =
(3.61)
Из выражения (3.61) видно, что разрешающая способность
пропорциональна квадрату дальности до цели и на больших дальностях она
существенно ухудшается Однако сам факт наличия разрешения по дальности в
монохроматической непрерывной РЛС (в обычной непрерывной РЛС для того
чтобы получить информацию о дальности, надо было изменять несущую частоту
сигналов [6]) говорит о многом, в том числе об улучшении характеристик станции
при действии помех (например, пассивных, в том числе отражений от местных
предметов, подстилающей поверхности и др. стробированием по дальности).
Найдем, например, отношение сигнал/помеха или лучше помеха/сигнал (кп
- коэффициент подавления ГРЛС (РЛС) заданным видом помех, кп - использован
выше в данной главе) для пассивных помех типа облака дипольных отражателей
(ДО). Известно, что удельная ЭПР облака - Syo (это облако ДО можно считать
«белым» пространственно-временным шумом со спектральной плотностью
Оо[Вт2/Гц*м2]) равна [8 стр.420]:
(3.62)
где Si - ЭПР одного диполя;
нср - средняя концентрация ДО в единичном объеме, разрешаемом ГРЛС
(РЛС).
Объем разрешения ГРЛС
AV=Ara •Аг®» Дг, (3.63)
где Ara=X*Ro/X (Ara - разрешающая способность по азимуту (а) на дальности Ro,
205
X - линейный размер антенны по горизонтали);
Ar@=X*Ro/Y (Аг© - разрешающая способность по углу места (®),
Y - линейный размер антенны по углу места (вертикали));
Ar=XR02/L2 (см. формулу (3.61); L = >1хг + У2 ).
Умножая выражение (3.62) на формулу (3 63) получаем Sv - суммарный
элемент объема разрешения облака ДО ГРЛС:
^=0 17^
__
X'Y (X- + Г=)
(3.64)
Мощность помехи на выходе элементарной антенны ГРЛС:
'рс -сбД ( ss ''
(3 65)
где первый сомножитель в круглых скобках - плотность потока мощности
передатчика ГРЛС на дальности Ro у облака ДО (Рс, Gc - мощность и КНД
антенны (передающей) ГРЛС);
второй сомножитель (в скобках) - плотность потока мощности отраженного
от Sv сигнала на входе антенны ГРЛС;
А - эффективная площадь элемента приемной антенны ГРЛС (по типу того
объяснения, которое было для формулы (3.1)).
Мощность полезного сигнала от цели (Su - ЭПР цели) на выходе
элементарной антенны ГРЛС:
л-л. (з.бб)
(‘Wi)
206
С учетом (3.65) и (3.66) получим (напомним, что полезные сигналы на входе
антенны пропорционально числу элементов решетки складываются, а помеховый
сигнал остается неизменным):
(PJPX^S.IQ-S^
(3.67)
где ^=MxJV=4Ax}7X2 (Q - число элементов антенной решетки при расстоянии
между ними Л/2).
Подставляя в выражение (3.67) значение из (3.64) и учитывая число
элементов (Q) антенной решетки, имеем.
' П -7 L I . ' • "V "
4X2F2(X2+F2)
(3.68)
Пусть X=Y=L, тогда, учитывая, что L для оптимальной ГР Л С с
фокусированной (на цели) антенной равно L=XRo/d, имеем:
= (0 1742-^) ^/(В-А-ДДУД
(3-69)
Выражения (3.68) и (3.69) показывают, что отношение помеха/сигнал может
быть существенно уменьшено (зависимость в шестой степени) при увеличении
апертуры антенны (Г) или сокращении элементарных антенн (<Д; рост отношения
помеха/сигнал с уменьшением расстояния до цели (квадратичный) объясняется
выбором L=)JXjld для фокусированных ГРЛС (L функционально зависит от Rd).
Для ГРЛС, у которых апертура антенной решетки постоянна (не зависит от
7?о), получаем из (3.68):
(3.70)
Рис 3 45 Обнаружение сигнала от точечной наземной цели
РЛС бокового обзора
Как видно из (3.70) при L-const отношение помеха/сигнал может быть
существенно снижено на малых дальностях (Яо) до цели. Из этих последних
выражений (3.69) и (3.70) напрашивается вывод о том, что для снижения
зависимости от пассивных помех ГРЛС нужна информация (целеуказание) о
дальности до цели для того, чтобы управлять апертурой антенны оптимальным
образом (тем самым снижая отношение помеха/сигнал на всех дальностях); это
благоприятно создателям средств РПД.
Все перечисленные рассуждения годятся только для стационарного
распределения фазы по апертуре антенны (во время преобразования
радиосигналов в оптический диапазон и экспонирования пленки распределение
яркостей по площади пленки заметно не меняется - также как при снимках
фотоаппаратом)
При относительном перемещении ГРЛС и наблюдаемых объектов фазовое и
яркостное распределения будут меняться из-за эффекта Допплера, искажая
голограмму и ухудшая разрешающую способность. Дело можно исправить, когда
208
априори известен закон изменения (во времени атаки средства ПВО) текущей
разности фаз зондирующего и отраженного сигналов. Примером реализации
такой возможности могут служить ГРЛС с синтезированной засчет движения
цели апертурой антенны (может быть и наоборот - ГРЛС размещена на
воздушном носителе и получает радиолокационные снимки наземных целей -
военной техники, заводов, производящих вооружение, радиолокационных
станций и т.д.). Отличие РЛС с синтезированной апертурой антенны, которые
появились раньше голографических, заключается в том, что ГРЛС формируют
голограмму сразу (мгновенно) по всей апертуре антенны, а РЛС с боковым
обзором (так часто называют станции с синтезированной апертурой) -
последовательно в течение всего времени облучения цели; фактически в
последнем случае, получается линейная голограмма (а не площадная или
объемная как в ГРЛС).
Если, как и раньше в ГРЛС, РЛС бокового обзора использует
монохроматический сигнал, то в раскрыве антенны отраженный сигнал,
рассеянный точечной наземной целью представляется в виде (см рис.3.45)
(зондирующий сигнал такой же как и при выводе выражения (3.58)):
C^)=E^-r3)exp[-jt^-r)l Г = (2/4\/Zo +(х-у)2 , (3 72)
где Vnp(t-T3) - огибающая сигнала, близкая по форме к амплитудной диаграмме
антенны;
т3 - время задержки (запаздывания) сигнала при распространении
электромагнитных волн от РЛС до цели и обратно.
При ширине диаграммы направленности антенны на уровне 0,5 по
мощности (®о.5—Ю°) для дальности до цели можно считать:
г * * Z,„ +1 • , (3.72)
209
как и было раньше (см. формулу (3.59))
где Xi - расстояние между осью OZ и местоположением цели по оси X),
х = v*t (v - скорость самолета с РЛС бокового обзора).
Можно считать, что амплитудное распределение по апертуре антенны по
оси OZ мало меняется (/~Zo*®o5 и соц—2тг/Х)5 тогда с учетом (3.72) и замечаний из
формулы (3.72) имеем:
2тг
ипр({)=vnp ехР v J J - -77-(vZ - л )2 -
(3.73)
где (po=(4n/X)‘Zo - постоянный сдвиг фазы (неизвестная начальная фаза).
Сигналы целей, различающиеся по координате Z (траверз) на величину ±
AZb определяются допплеровским сдвигом частоты:
(3.74)
Быстрые изменения фазы cp(t)=coot в выражении (3.73) не несут информации
(если не требуется сохранять /о для решения задач обработки) и поэтому несущую
частоту можно исключить фазовым детектированием с использованием опорного
сигнала (вычитанием). Чтобы избавиться от неизвестной начальной фазы (ф0)
можно применить два квадратурных фазовых детектора, у которых опорные
колебания сдвинуты по фазе на л/2. Если проделать эти две операции, то после
фазовых детекторов (£7фд), имеем:
0 = кФДVnpV. exp j x. )2 ,
(3.75)
где: /гфд - коэффициент передачи фазового детектора:
210
Fb - амплитуда опорного сигнала.
Заменив в выражении (3.75) t=x/v можно перейти к пространственным
частотам (сох) и дифференцируя фазу по «х», получаем:
d<p(x) 4тг , ।
= (3-76)
ах AZ0
Таким образом, на голограмме точечной цели для каждого элемента
разрешения по координате «х», мы будем иметь серию чередующихся светлых и
темных участков с изменением пространственной частоты в соответствии с
выражением (3.76). Используя ту же процедуру, которую мы сделали для
голографической РЛС (см. формулы (3.62)~Д3.70)), можно найти отношение
помеха/сигнал для РЛС бокового обзора при наличии пассивных помех (только
теперь РЛС бокового обзора должна стоять на земле, а наш самолет - цель
двигаться со скоростью - v; облако ДО может быть между целью и РЛС),
предоставим эти расчеты заинтересованному читателю.
Имеется еще один тип РЛС, в котором, по существу, используются идеи
голографии и который широко применяется в системах ПВО (особенно в ЗРК),
являясь достаточно перспективным Это РЛС, использующие длинные импульсы
с высокочастотным заполнением, модулированным по линейному закону (ЛЧМ -
сигналы) (см табл 3.2).
Вернемся к выражению (3 73) и обратим внимание на то, что частота
колебаний, заполняющих импульс длительностью tx=//v=Zo*©o s/v (импульс
«образуется» за счет движения самолета) меняется в пределах его длительности
по закону:
(3-77)
где to - тх/2 < t < t0 + тх/2;
211
to - момент нахождения цели на «траверсе» к направлению полета.
В поле зрения РЛС с синтезированной апертурой могут находиться цели с
разными координатами X Z; для целей, удаленных от X на АХ, изменение
допплеровской частоты будет происходить со сдвигом во времени A?j=Ax,/v, а
сигналы, отличающиеся по координате Z на величину ±AZb различаются
допплеровским сдвигом частоты на величину, определяемую формулой (3 74).
Более того, как отступление, заметим, что С. В. Попов еще в 1961 г.
высказал идею об измерении траверса на РЛС с борта летательного аппарата по
изменению знака допплеровской частоты (и других временных параметров РЛС)
[61]. Эта идея широко применяется в РТР.
Но вернемся к аналогам РЛС с боковым обзором - РЛС с ЛЧМ - сигналами;
из выражения (3.77) мы видим, что высокочастотное заполнение импульсов РЛС с
синтезированной апертурой (тх) линейно модулировано по f0 Тогда задача
системы обработки в обоих случаях (РЛС с ЛЧМ сигналами - искусственно
создаваемыми и РЛС с боковым обзором, где fo модулируется допплеровской
частотой) состоит в определении «центра тяжести» импульса. Указанная аналогия
позволила распространить идеи обработки (сжатия импульса) в РЛС с ЛЧМ-
сигналами и сжатия при записи отраженного ЛЧМ-сигнала в РЛС с боковым
обзором в (c/v) раз. После сжатия сигнала последней РЛС (с боковым обзором)
получается сразу координата Xi точечной цели на дальности Zo (на пленку с
голограммой накладывается транспарант-лист прозрачного материала с
нанесенным на него темными полосами и совмещается с темными участками
голограммы).
Переходя в выражении (3.75) к пространственным координатам t=x/v и,
учитывая, что на голограмму записывается только действительная часть сигнала,
получим выражение для функции, записываемой на пленку:
/(х, Zo) = 0 5 + — jcos
I v )
(3.78)
212
где 0,5 - некоторый средний уровень записи;
S(x/v) - функция, несущая информацию об амплитуде и меняющаяся от 0
до1/2.
Светлым пятнам на пленке будет соответствовать cos[^(x)]=l, темным -
cos[^(x)]=-l (ф(х) - выражение под знаком cos в формуле (3.78)), т.е. полосы
должны чередоваться, когда «набежит» разность фаз - л; транспарант должен
быть копией голограммы.
Реально процесс обработки голограмм будет значительно сложнее, так как
«превращение» голограмм в панораму местности требует нескольких полетов по
интервалам дальностей (либо многолучевой ФАР с «и» каналами обработки). Еще
30 лет назад было предложено несколько способов автоматизации этого процесса
в РЛС с синтезированной апертурой за счет движения антенны [88, 90, 91].
Мы же более подробно остановились на этих вопросах потому (в том
числе), что во- первых - будущее за когерентной обработкой и когерентными
сигналами, во-вторых настанет время интегрирования всей этой аппаратуры,
установленной на самолете, (БСО, РЛС различного типа, навигационно-
пилотажного комплекса и др.) в радио и оптическом диапазонах в единую
информационно-оборонительную систему более высокого уровня системности,
чем БСО (самолет не может разместить все устройства отдельно на борту). По-
видимому, это главная перспектива (в ответ на развитие системы ПВО) на
ближайшие 1СН20 лет.
При рассмотрении вопросов помехозащищенности (помехоустойчивости)
РЛС подобного класса нет необходимости привязываться к любому из этих
способов построения и получения информации в РЛС. Все они реализуют процесс
когерентного многоканального накопления и эквивалентны с точки зрения
помехозащиты (что очень важно для средств РПД1) Так, оптическим методам
оптимальной обработки сигналов в РЛС с синтезированной апертурой
эквивалентны методы обработки ЛЧМ-импульсов с помощью пассивных
213
«укорачивающих» цепей. Поэтому для оценки выигрыша помехоустойчивости
подобных РЛС воспользуемся известными результатами [92]
Пусть огибающая ЛЧМ-импульса имеет прямоугольную форму
U(/) = Ко cos a>ot +
I 2
(3.79)
где ц - скорость нарастания частоты
Согласованный с сигналом U(t) (сопряженный) фильтр должен иметь
весовую функцию вида:
g(z) = ^cosl I, -Tj2<t<Tj2, (3 80)
где к} = •
При подаче U(t) на вход такого фильтра огибающая выходного импульса
представляется выражением [92]:
(3 81)
где к - коэффициент пропорциональности; с.
Для перехода к сигналам РЛС с синтезированной апертурой надо в
соответствии с формулой (3.73) при у=0 подставить в (3.81) следующие значения
параметров ц и ти:
V2
и. =----- И
2Z0
7 - (4 I
т _ т _ о _
V V
(3.82)
214
Подставив (3.82) в (3.81) и найдя предел этого выражения при t—>0 (пиковое
значение напряжения на выходе фильтра), имеем:
Согласованный фильтр не меняет энергии нормальных (белых) шумов
(~k2Vo2) в пределах своей полосы, поэтому отношение сигнал/шум равно:
^^0 \^ш)еых
(3.83)
Пусть ®о,5=О>2 радиана (11,4°); Zo=3«lO4 м (30 км), Х-3*10’2 м(Зсм), тогда
(Рс/Рш)=8*104 (~50 дБ). Этот выигрыш очень большой и отражает только
предельные возможности РЛС с синтезированной апертурой. Из-за всякого рода
нестабильностей (существенных потерь за счет непрямолинейности траектории,
трудности осуществления 1,5 см (Х/2) элементов антенной решетки и др.
факторов) выигрыш будет значительно скромнее. Следует, однако, помнить, что
при использовании согласованного фильтра отношение энергии выходного
сигнала к спектральной плотности шума не изменяется. Это свидетельствует (и
еще раз подтверждает мысли автора работы [6]) о том, что при одной и той же
энергии излучаемых сигналов (формула (3.1)) характеристики обнаружения РЛС с
синтезированными и обычными апертурами (и РЛС с ЛЧМ-сигналами)
идентичны (РЛС со сжатием импульсов повышает только свою разрешающую
способность по азимуту).
Если РЛС создается синусоидальная помеха на частоте соп, имеющая
расстройку Дю=(Вп - ®о относительно несущей частоты зондирующего сигнала
(со0), то отклик оптимального фильтра будет иметь огибающую вида
215
(3 84)
Сравнивая выражения (3.81) и (3.84) видно, что помеха данного типа
вызывает появление на экране РЛС отметки, смещенной относительно координат
цели на величину Дх = (Л70/4яЕ)-Д<уя. Интенсивность помеховой отметки убывает
с увеличением расстройки Дсо по закону sin(Aco)/Aco; при Дсо> Доэтах (Дюшах -
максимальное значение допплеровской частоты зондирующего сигнала) такая
помеха не будет влиять на работу РЛС. При излучении САП «сетки»
допплеровских частот («п» частот) можно имитировать несколько ложных целей,
что приемлемо с точки зрения РПД данной РЛС (значительно искажает
голограмму). Предыдущие (приведенные выше) формулы позволяют провести
моделирование и исследование действия других видов помех. Однако при анализе
действия помех, необходимо учитывать и пространственную (и другую)
фильтрацию при обработке изображений оптическими когерентными системами
[89, 91, 93-5-96], которая позволяет решать задачи-
- обнаружения сигналов на фоне помех и исправление дефектов изображения
(в том числе восстановление образа объекта по зарегистрированной части его
изображения);
- распознавание образов малоразмерных целей
Практически во всех этих случаях используется замечательное свойство
оптических линз - осуществлять преобразование Фурье. Простейшая линза в
задней фокальной плоскости формирует Фурье-образ изображения предмета,
помещаемого в передней фокальной плоскости Если в задней фокальной
плоскости расположить фильтры с заданным распределением прозрачности
(искусственно выполненным), то можно реализовать давно известные в
радиотехнике методы частотной фильтрации, применительно к преобразованиям
частотных спектров помех в пространственные координаты. Оптический фильтр,
в отличие от радиотехнического, обладает одновременно пространственной и
216
временной селекцией (пространственная селекция выполняется изменением
прозрачности фильтра по координатам, а временная - набором светофильтров (за
счет изменения фазовых набегов разных спектральных составляющих света) в
требуемой последовательности)
Не вдаваясь в известные подробности n-мерных преобразований Фурье,
рассмотрим их практическое приложение - схему простейшего
пространственного оптического фильтра, представленную на рис. 3.46 [96].
Фильтрация изображения происходит по методу двойной дифракции (двойного
преобразования Фурье); вначале изображение SBX(x), облучаясь когерентным
источником света, проходит через линзу Л] (фокусное расстояние - Рф) и
формирует в задней плоскости линзы спектр изображения «пространственных»
частот - 5(сох) (сох=2л/А/, где А/ - разрешающая способность линзы); затем (в
задней фокальной плоскости Л]) изображение пропускается через специальный
фильтр пространственных частот и, проходя через линзу Л2, подвергается еще
одному преобразованию. В задней фокальной плоскости второй линзы получаем
искомое изображение. На таком принципе построены многие устройства
распознавания образов целей (предметов и др.). Фильтр П] с известным
пространственным спектром частот (рис. 3 46) является «стержнем»
преобразования («маской» предмета, цели) и пропускает только «свой» сигнал
Потому из смеси «сигнал + шум» в выходной плоскости линзы Л2 будет
сформировано изображение сигнала
Для изготовления оптимального пространственного фильтра используются
устройства Фурье-голографии, позволяющий получить Фурье-образ полезного
сигнала - голограмма - интерференционная картина взаимодействия плоской
когерентной волны (опорной) с Фурье-образом.
Заметим, что после прохождения «сигнала + шума» через схему рис. 3.46 на
выходе образуется три пучка света, первый пучок (без дифракции)
распространяется вдоль оптической оси линзы Л2; второй, превращаясь в
автокорреляционную функцию сигнала, порождает яркий пучок света,
отклоняющийся вверх (см. на рис.3.45 конструкцию фильтра П1 с тремя
217
отверстиями - пространственными координатами), третий пучок света аналогичен
второму и оставляет яркое пятно на противоположной стороне экрана Второй и
третий яркие пучки окружены слабыми размазанными пятнами, являющимися
результатами взаимной корреляции сигнала и шума (шум имеет случайное
распределение фаз вдоль фронта суммарной волны).
Рис.3.46. Схема простейшего оптического пространственного фильтра.
3.13. Моделирование отражения атак на малых высотах цели
Как мы еще помним (см. начало главы), самолет В - 1В, система БСО
которого выбрана нами за прототип при построении обобщенной математической
модели (ОММ), спроектирована для преодоления ПВО на малых высотах - h (h ~
50 м). Посмотрим, какова специфика отражения атак при маловысотном полете.
Самая главная специфика, облегчающая преодоление системы ПВО, - влияние
Земли (подстилающей поверхности), ухудшающей характеристики РЛС
(дальность обнаружения, разрешающую способность, точность сопровождения
целей и др.) за счет:
- изрезанное™ ДНА при малых углах места, наличия местных предметов
(«засоренность» позиции, где располагается РЛС), значительно сокращающих
дальность обнаружения РЛС;
218
- многолучевости распространения электромагнитной волны, приводящее’ к
размножению целей, увеличивающей ошибки сопровождения истинной цели по
углу места (при полуактивном самонаведении ракет «земля - воздух», работе
разнесенных радиолокационных систем и т.д.);
- интерференции прямого и отраженных от подстилающей поверхности
сигналов, образующей биения принимаемых сигналов, что вызывает появление
значительных угловых ошибок в некоторых типах РЛС (с коническим
сканированием луча антенны и др.);
- изрезанности и шероховатости земной поверхности, которые существенно
искажают спектр отраженного сигнала, что затрудняет работу схем селекции
движущихся целей (СДЦ) и систем автоматического сопровождения по скорости.
БСО, размещаемой на защищаемом самолете надо только воспользоваться
этими трудностями для повышения вероятности преодоления ПВО на малых
высотах. Рассмотрим более подробно перечисленные мешающие факторы при
работе наземных РЛС.
Влияние подстилающей поверхности (земли или водной поверхности в
случае корабельных РЛС) при малых углах места приводит к многолепестковости
диаграммы направленности РЛС; при этом нижний лепесток отжат от земли на
угол Р, значение которого связано с ha (высотой подъема РЛС) и X (длиной волны)
соотношением [97]: p=(X/4)ha. Мощность сигнала, принимаемого РЛС с учетом
влияния Земли, представляется[97]:
р ч2 г
р^= С(Л 4 (З-85)
где Рс, Gc - мощность передатчика и КПД антенны РЛС;
Бц-ЭПРцели;
Ru - дальность до цели;
Фи(р) интерференционный множитель, который для малых р равен:
" высота йели)-
219
Если чувствительность приемника РЛС равна минимально возможной
(Рпршт) и Рсвх= Рпртт, то, подставляя в выражение (3.85) значение Фи(р), имеем’
(3.86)
Принимая во внимание, что дальность РЛС (Rn0) без учета влияния земли
выражается формулой (3.85) при Фи(р)=1 и Рсвх= Рпртт из (3.86) найдем.
Формулы (3.86) и (3.87) получены путем линеаризации функции ФИ(Р) и
справедливы при условии, что R4 max > 10л •йц*Ь.Д (при Ьц =50 м; ha =10 м;
Х=25«10‘2=25см; Лц ^>60 км).
Из формулы (3.87) видно, что дальность обнаружения маловысотных целей
снижается очень существенно (Ьц=50 м, ha=10 м, Х=0,25 м, Rll0=300 км; Ru max~85
км (снижение более чем в три раза!)).
Препятствия, попадающие в зону действия РЛС, также заметно снижают
дальность обнаружения низколетящих целей (холм, деревья, постройки и др.);
уменьшения дальности действия, в некоторых случаях, составляют несколько раз
и могут быть подсчитаны по методике работы [98].
220
Рис 3 47. Зависимость Котр от угла, под которым находится БРЛС
Обычно отражения от земной поверхности представляют две составляющие
- зеркальную (когерентную) и диффузную (некогерентную), имеющие разные
ДН. Доля мощности отраженного сигнала, по сравнению с падающим, зависит от
коэффициента отражения (котр) (вида отражающей поверхности), угла падения
электромагнитной волны и ее поляризации. На рис.3.47 приведены зависимости
Котр от угла (®пр), под которым находится относительно Земли БРЛС, и
поляризации падающего на земную поверхность сигнала, облучаемую САП,
антенна которой смонтирована под защищаемым самолетом (вертикальное
падение электромагнитной волны на земную поверхность). Такая помеха носит
название «антипод» и может создаваться нашим (защищаемым) самолетом, как в
переднюю полусферу, так и в заднюю (одной антенной с регулируемым углом
наклона, либо двумя антеннами в ПП и ЗП). Сплошными линиями на рис 3 47
отмечены кривые для Х=10 см, пунктирными линиями для Х=1 см; земная
поверхность гладкая [73].
Как уже говорилось, отраженный от земной поверхности сигнал может
быть представлен аддитивной смесью когерентной (зеркальной Доставляющей и
узкополосного нормального шума; дифференциальный закон распределения
амплитуды суммарного сигнала (V) подчиняется распределению Райса [99]:
221
, ч V ' V" + A2 I V-A }
»K(H = -r-exp !„ --И
v J \ ш J
где <jmz - дисперсия шумовой составляющей,
Am - амплитуда когерентной составляющей;
10(«) - функция Бесселя нулевого порядка мнимого аргумента.
(3.88)
Если поверхность отражений сильно шероховатая (Ат ~ 0), то остается
узкополосный шум (огибающая распределена по закону Релея):
W(v) =
При гладкой (мало шероховатой) поверхности (Ат »егш) распределение
(3 88) переходит в нормальный закон:
w(v)=
exp
0^-2
Закон распределения фазы у отраженного сигнала зависит также от
отношения Ат/ош когерентной и некогерентной составляющих. В общем случае
плотность вероятности для фазы W(y) выражается формулой [64]:
„г ч 1 (
iriy) = —ехр -
2тг I
А..
ffl
2а,
1 + У27Г——Ф2 ——cosy/ -ехр
к )
А_ 'I
— ——cosy/
2К )
>, -п <цг <п.
(3.89)
где Фг(х) - функция ошибок.
При Ат / ош »1 плотность распределения (3.89) неравномерна и имеет
максимум при с увеличением шероховатости поверхности W(y)
приближается к равномерному распределению В сантиметровом поддиапазоне
222
можно пренебречь когерентной составляющей; в этом случае распределение
амплитуд - релеевское, а фаз - равномерное.
Рис. 3.48. Представление одиночной цели как парной
Многолучевость распространения радиоволн вблизи земли приводит к
представлению одиночной низколетящей цели как групповой, а точнее парной
цели (рис 3 48, где Ц - истинная цель, а Ц* - ее «антипод»). Различают три
варианта образования «антипода»:
- отражение радиоволн от земли расположено сразу около РЛС (точка Oi);
т.е. отраженный сигнал от цели напрямую попадает в РЛС и со сдвигом фазы (и
уменьшением амплитуды) отражается от поверхности вблизи РЛС, попадая в ее
приемник;
- радиоволна отражается от земной поверхности в районе расположения цели
(Ог) и дезинформирует работу разнесенных в пространстве радиолокационных
систем (см. рис.3.48, где показано, что «антипод» попадает в «вынесенный
приемник»; пример такой системы - полуактивное наведение ракет «земля -
воздух»).
Третий вариант - смешанный из двух рассмотренных, также вводит в
заблуждение разнесенную систему РЛС. В работе [100] получено выражение для
223
плотности вероятности W(x) ошибки сопровождения геометрического центра
пары флуктуирующих источников (Ц и Ц*):
(3.90)
71+«Ж1+»2)+(i -+ )]г
где х=фЪц (д - линейная, х - относительная ошибки сопровождения центра
парных источников;
Ьц - высота полета);
- qc2 - отношение мощностей сигналов, переизлученных целью и землей.
Среднее значение относительной ошибки равно:
. М, р , х q2 -1 q2 -1
Мх = —L - xw(x)dx = А—, откуда Ме = h —
Д 9^+1 " 9с+1
Из выражения для математического ожидания линейного отклонения (М^)
равносигнального направления видно, что оно не может быть больше высоты
полета самолета (такова ошибка при сопровождении низколетящей цели).
Если цель имеет линейные размеры 2£ (рис.3.49), то вероятность того, что
линия визирования при сопровождении цели будет находиться в ее пределах (2£)
определяется формулой:
Р = f w(x)dx = (p(g2) 5
где (,=(*,+/)/*,;
224
Л)=
1
На рис. 3 50 приведены зависимости вероятности Р от qc2 для различных
отношений l/hv из которых следует, что отраженный от земли сигнал существенно
влияет на точность сопровождения цели; например, при qc2 < 1 (или qc—*0:
сильная, перенацеливающая на землю, помеха «антипод», создаваемая САП)
вероятность сопровождения истинной цели стремится к нулю при любом
отношении lf\ (эффективность помехи - вероятность срыва сопровождения
близка к единице). По-видимому, здесь может помочь избавиться от помехи
только голографическая РЛС (распознавание цели и помехи); когерентная
обработка сигнала может не привести к желаемым результатам, если САП будет
создавать когерентный зеркальный сигнал.
U'
Рис. 3 49 Вероятность (Р) ошибки сопровождения геометрического центра
источников сигнала ЦЦ'
225
При атаке истребителя-перехватчика на низких высотах кроме описанных в
настоящем разделе эффектов, на входе БРЛС ИП образуются низкочастотные
биения, обусловленные интерференцией сигналов, переизлученных целью
(нашим самолетом) - прямой сигнал и земной поверхностью (отраженный
сигнал). Кроме того, возникают биения сигналов за счет переотражений от
местных предметов при перемещении БРЛС (взаимные биения). Значительное
влияние переотражения будут оказывать, если допплеровское смещение спектров
(допплеровские частоты) близки к частоте сканирования антенны РЛС [101].
Методы измерения дальностей до атакующего средства перехвата по максимумам
интерфенционной кривой на малых высотах полета обороняемого самолета
рассмотрены в главе 4.
Рис. 3.50. Зависимость вероятности сопровождения цели от q2c
для различных отношений Цкц (малые высоты).
При оценке ошибок сопровождения низколетящей цели за счет биений
будем считать, что РЛС работает в пассивном режиме пеленгования с
непрерывным зондирующим сигналом:
£/, - К costt^ и U2 - V2 cos®2z,
226
где Vj и V2 — амплитуды полезного и отраженного иг земли сигналов;
= <®о[1+кя /с)]>
сог = [1+•(vc62 /с)] (со0 - несущая частота;
vC6i и Vc62 - скорости сближения цели и ее антипода).
Суммарный сигнал - U (биения) при v^i = vc62 и V]=V2=V равен:
U = 2Vcos{[(<y, -<у2)/2]-4 •cos
При применении в пеленгаторе РЛС квадратичного детектора на его выходе
образуется напряжение (UJ:
ид = к-
1 + cos(2fi>]£) + cos(2ft>2f) + cos^ + yj+ cqs^ -co2)t] ,
(3.92)
где k=const.
Рассматривая выражение (3.92) замечаем, что в составе
продетектированного напряжения присутствует составляющая частота биений
Q6=(Di - м2. Если скорости сближения vC6i и vc62 таковы, что частота биений станет
близка частоте сканирования антенны пеленгатора БРЛС (QCK ~ Об), то на частоте
сканирования образуется помеха, которая вызовет в контуре слежения
возмущение.
Для определения ошибки (0) сопровождения цели при Об=®1 - ®2= Оск и
наличии отражения от земной поверхности (рис 3.48) в работе [8 стр.33] найдена
обобщенная пеленгационная характеристика для случая пеленгации парных
движущихся источников сканирующей антенной; тогда 0 находится из
уравнения:
227
т, +-"-+- -3^-----5—6- = 0,
Яс 4(1с
(3.93)
где mi=F2(®o - ®) - F2(®o+®);
m2=F2(®0- ®+Д®) - F2(®0+®-A®);
ms=F(©o - ®+Д®);
m4=7F(®o- 0)+F(0o+0);
m5= F(®o+0 - Д®);
ni6=F(®o- ®)+7F(®o+®);
F(p) - диаграмма направленности сканирующей антенны;
®о - смещение максимума ДНА относительно равносигнального
направления;
Д® - угловое расстояние между источниками Ц, и Ц2-
Рис 3.51. Зависимость относительной величины ошибки сопровождения ( 0 / 0 0 5) п
На рис. 3 51 приведены результаты численного решения уравнения (3.93),
выполненного в работе [8] (выражения для использованной при этом
аппроксимации ДНА - F(P) в работе не приводится), для разных qr=l/qc. Анализ
228
графиков показывает, что при сравнимых мощностях полезного и мешающего
сигналов (qn=l/qc~l-4>) эффективный центр сопровождения при Д®/®05
< ( 0,8-4,0) находится выше истинной цели. При увеличении мощности
мешающего сигнала, что возможно только при применении преднамеренных
помех (отражения от земной поверхности не могут превышать сигнал), qn растет,
а ошибка сопровождения цели уменьшается и при малых Д® (Д®/®о,5=О,НО,3)
эффективный центр смещается вниз от цели (якобы «под Землю»). Более сильные
помеховые возмущения наблюдаются всякий раз, как только частота биений Q6
становиться близкой частоте сканирования антенны (или ее гармоникам).
Эффективность этих возмущений может быть ослаблена изменением частоты
сканирования антенны или сужением полосы пропускания (если только САП не
создает помехи, заградительные по частоте сканирования). Последняя мера РЛС
влияет только на продолжительность действия помехи тогда, когда помеховые
возмущения (Qg - Оск) выходят за полосу пропускания контура слежения.
Рис. 3.52. Часть спектра, соответствующая импульсному сигналу РЛС
(БРЛС), примыкающего к зондирующему сигналу с несущей частотой f0.
Результаты этих оценок, приведенные на рис. 3 51, могут быть
использованы при выборе помех и моделировании отражения атак на малых
высотах.
229
Заметим, что при выборе параметров помех САП на малых высотах надо
учитывать спектральные характеристики сигналов, отраженных от разного вида
подстилающих поверхностей (наземных, водной) На рис. 3.52 показана часть
спектра, соответствующая импульсному сигналу РЛС (БРЛС), который (спектр)
«примыкает» к зондирующему сигналу с несущей частотой f0 [102]. Форма
спектра всего сигнала может быть получена, если учесть симметрию его
составляющих f0 ± kFn (k=l, 2, 3 ...), a Fn - частота повторения импульсов[6].
Зондирующий сигнал, приходящий в приемный тракт БРЛС, имеет
дискретную составляющую (1) (рис.3.52), вокруг которой располагаются: выброс
(2) сигнала, поступающего (отражаемого) от земной поверхности, находящейся
под самым истребителем-перехватчиком; составляющая спектра (3) - влево и
вправо от основной частоты f0 объясняется наличием различных допплеровских
частот сигналов, принимаемых боковыми лепестками ДНА с разных направлений;
выброс (4) - наиболее сильный, отраженный от земли сигнал, принимаемый
главным лучом ДНА БРЛС. Полезный сигнал, поступающий от цели,
сближающейся с истребителем-перехватчиком, помечен на рис. 3.52 номером (5)
на фоне внутренних шумов приемника (6).
Отражающая поверхность влияет и на величину систематического
допплеровского сдвига частоты (при водных подстилающих поверхностях из-за
движения волн, зависящего от скорости ветра); систематические смещения
допплеровской частоты могут составлять от долей до нескольких процентов
относительно среднего значения частоты Допплера [99].
Аналитическое описание состояния водной поверхности отсутствует. При
исследовании отражений от воды более подходит модель, которая основана на
суперпозиции двух статистических «шероховатых» поверхностей. Первая из
поверхностей - крупномасштабная и «гладкая» и ее статистические параметры
должны выбираться из условий большого морского волнения. Параметры второй
поверхности задаются так, чтобы их можно было рассматривать как малые
отклонения от средних величин (небольшая рябь на склонах и гребнях волн).
230
Такая модель позволяет получить результаты, согласующиеся с экспериментом в
большинстве диапазонов длин волн.
Отметим, что при любых морских соединениях военных кораблей,
периметр этого соединения всегда охраняют корабли с РЛС, предназначенных для
обнаружения низколетящих воздушных целей и надводных кораблей; это говорит
о важности борьбы с низколетящими целями и, следовательно, важности защиты
низколетящих целей с помощью БСО.
3.14. Моделирование применения расходуемых средств РПД.
Кроме САП в состав гипотетической БСО были включены расходуемые
средства РПД, выбрасываемые пиротехническими автоматами (рис. 3.1), с
самолетных подвесок (подкрыльевых, подфюзеляжных), с барабанов (кассет),
размещенных внутри фюзеляжа самолета. Классификация расходуемых средств
РПД или, как их часто называют, помех из «вынесенных точек» пространства
(имеются в виду точки (области) пространства вне защищаемого самолета),
приведена на рис 3.53 Учитывая, что помехами из вынесенных точек является и
«антипод» - перенацеливание на земную (водную) поверхность при полетах на
малых высотах (хотя существует и «средневысотный антипод», если хватает
мощности САП, и «антипод по боковым лепесткам» ДНА РЛС), и РПД с
соседнего самолета при индивидуально взаимной защите («мерцание», по
боковым лепесткам ДНА) без потери элементов (устройств) БСО, нас больше
устраивает название «расходуемые средства» РПД так как эти средства теряются
самолетом безвозвратно и не восполняются до конца операции по преодолению
системы ПВО.
Наиболее хорошо разработанные из них, применяемые со времен второй
мировой войны дипольные отражатели - ДО [1, 2], запас которых на борту
231
самолета может измеряться миллионами (десятками млн. штук); выбрасываемые в
больших количествах в атмосферу, они образуют облака полуволновых
отражателей для сигналов РЛС, создавая на входе РЛС пассивную узкополосную
шумовую помеху за счет допплеровского сдвига отражаемых от них частот.
Выражение для расчета удельной ЭПР облака (8УД) приводилось в разделе
3.12. (формула (3.62)) и оно справедливо, если приемник и передатчик РЛС
находятся в одном месте; когда они разнесены в пространстве, то 8уд надо
уменьшить, в худшем случае, до 0,65 8УД [7 стр. 267].
Спектральные плотности флуктуаций амплитуд отраженного от облака ДО
сигналов, ширину спектра отраженных сигналов и др. характеристики можно
найти в работах [7, 8, 103, 104]; здесь мы приведем некоторые результаты
указанных работ.
Коэффициент ослабления радиоволн, проходящих через облако ДО:
/? = 0,7322» [дБ/m] (и - среднее число диполей на 1м3) (3 94)
Например, для обеспечения затухания радиоволн в 20 дБ (Р=0,02 дБ/м) в
одну сторону (или 40 дБ в обе стороны, а значит уменьшения действия РЛС в 10
раз) потребуется из выражения (3.94) п~ 30 диполей/м3 (Х=3 см). Это весьма
высокая концентрация, чтобы скрыть цель (облако ДО между РЛС и нашим
самолетом; требуемые размеры облака зависят от дальности (R) и разрешаемого
объема РЛС).
Границы «импульсного» разрешаемого объема (импульсная РЛС)
определяются пространственной шириной луча антенны подавляемой РЛС на
заданной R и длительностью импульса (ти)'
AP«A2-©05-a05-f6'M ,
232
где ®о.5 и ао.5 - ширина ДНА по углу места и азимуту на уровне половинной
мощности.
Если считать, что диполи (ДО) распределены в облаке равномерно с
объемной концентрацией п, то ЭПР ДО (о£), находящихся в ДV равна:
стL - п- l\V =n -R~ -0О5
(3-95)
где О1=(0,86-Д),56)Х2.
Выражение (3.95) показывает, что и, следовательно, величина
отраженного сигнала и эффективность пассивных помех в существенной степени
зависят от разрешающей способности РЛС по углам и дальности (с*ти/2).
После выбросов автоматом (выстрелов) пачек диполей плотность и ЭПР
диполей меняется во времени (размеры облака ДО растут, и плотность диполей в
нем падает); поэтому требуются учет турбулентностей атмосферы по закону
Колмогорова-Обухова [103] (турбулентной диффузии - D= 1 и др. факторов)
2 dt
Исследования показали [103], что при 25 м < с>£< 500м, зависимость D и
примерно пропорциональна времени t существования облака ДО.
В этих условиях решение уравнения турбулентной диффузии приводит к
произведению нормальных плотностей вероятности распределения диполей в
элементарном облаке по его координатам (х, у, z):
P(v) dv = Wx • Wy • Wz dV
(3 96)
где P(v) dv - вероятность нахождения диполей через время t в объеме ДУ;
= ехр
2^(7^- /
(аналогично записываются Wy и Wz);
xo=Cxt; yo=Cyt; zo=C7t (Cx, Cy, Cz - скорости движения воздуха по осям X, Y, Z)
233
оаНе Сх'; osy-k* Су', ovz=k* Cz'; (Сх\ Су', С/ - усредненные скорости ветра
по осям X, Y, Z; к=0,0168).
Зная закон распределения диполей в пространстве p(V), можно найти число
диполей в импульсном объеме:
*)„ '/’(»'>. (3.97)
где пп - число пачек (выброшенных) диполей;
Nn - число диполей в пачке.
Тогда ЭПР диполей в импульсном объеме Одду = Н1Ду‘О1. Еще более точный
расчет ЭПР импульсного объема диполей требует учета формы ДНА в обеих
плоскостях F(®, а) и формы зондирующего импульса xu(t) (т.е. под тройной
интеграл в выражении (3.97) вместо p(V) надо подставлять: p(V)« F(®, а) • iu(t)...).
Цель (наш самолет) не обнаруживается в облаке ДО, если мощность
помеховых сигналов, отраженных от диполей в импульсном объеме суду,
превышает (в определенное число раз) мощность полезного сигнала, отраженного
от цели; это отношение мощностей (kn) на входе приемника РЛС, равно:
( р А 0-
(3-98)
где оеду - ЭПР импульсного объема диполей;
Оц - ЭПР цели (нашего самолета).
Задача выделения полезного сигнала на фоне пассивных помех от облака
ДО имеет много общего с задачей обнаружения отраженного сигнала от цели в
гауссовом шуме. Согласно центральной предельной теоремы теории вероятностей
сигналы, отраженные от облака ДО ( при определенной плотности диполей),
234
могут рассматриваться как гауссов шум, однако в отличие от белого шума его
автокорреляционная функция не будет 5-функцией за счет допплеровских сдвигов
несущей частоты. В этих условиях есть отличия и в методике подсчета (расчета,
оценок) отношения правдоподобия - Ai(U)= pi(U)/po(U), где pi(U) и po(U) -
плотности распределения аддитивной смеси сигнала + шума и шума. Как уже
сказано, kn в формуле (3 98) будет зависеть от автокорреляционной функции
помехи, создаваемой облаком ДО, т.е. от параметров спектральной плоскости
отраженных от облака диполей сигналов, что особенно важно для подавления
РЛС с СДЦ Обычно, как мы считали раньше, kn (формула 3 98) должен
обеспечивать снижение вероятности обнаружения цели до уровня не выше 0,3
На практике определение ЭПР импульсного объема с помощью формулы
(3.97), даже с учетом табулированное™ компонент выражения (3.96), довольно
трудоемкая задача, требующая больших вычислительных затрат (при
моделировании на ЭВМ она решается достаточно просто).
Рассмотрим случай, когда прикрываемый самолет (ПС] или ПС2) летит в
полосе (за полосой)дипольных отражателей, как показано на рис 3.54. Если
постановщик помех (летящий впереди самолет с БСО - ПП] или ПП2) летит с
постоянной скоростью - Vn и сбрасывает пачки диполей с равномерным темпом -
tn = , то число пачек диполей, требуемых для перекрытия участка маршрута
п
протяженностью L, равно [7 стр. 283].
где как и раньше, оп - ЭПР цели;
Gv=0,17»k2,ncp - ЭПР пачки одного диполя (пср - среднее число эффективно
работающих диполей в пачке).
235
Если, например, в результате расчета требуемого кп для обеспечения
заданного снижения вероятности обнаружения: кп= 2, оц= оу = 50 м2; X =10 см (0,1
м); L=100 км (105 м); Vn=200 м/с; тп=1мкс (10’6 с); tn = -^-=0,75 с, то из формулы
2Fn
(3.99) число пачек (ппачек) равно 1333 шт. Заметим, что количество диполей в
пачке в этих условиях около 30 тысяч, а общее число диполей около 40 млн. (если
кп=5,0, то число диполей дойдет до 100 млн. (!)). Такова «плата» за применение
диполей. Зная вес одной пачки, можно определить потребный вес снаряжения
диполей (без учета веса патронов и т.д.).
Однако, это не так уж страшно, как кажется на первый взгляд. По данным
работы [106] (почти 30 лет назад!) ЭПР одного килограмма диполей была
(2-НЗ)* 103 м2, что составляет 1,5 млн. диполей; это значит, что 100 млн. ДО будут
весить около 70 кг (вес одного ДО<1мг, а поперечные размеры измеряются
сотыми долями миллиметра).
Рис. 3.53. Классификация средств РПД из «вынесенных точек».
236
Защита импульсных квазикогерентных РЛС с большой скважностью
зондирующих импульсов (их когерентность обеспечивается в течение
длительности зондирующего импульса, причем каждый раз заново для каждого
зондирующего сигнала) от пассивных помех (облака ДО), в основном,
обеспечивается с помощью череспериодной компенсации отражений от
полуволновых вибраторов [105]. Простейшая схема такой РЛС приведена на
рис.3,55; на схеме: М - модулятор коротких импульсов (ти) для высокочастотного
генератора (Г) (и далее для передачи зондирующих сигналов через антенно-
передающий тракт (АП)) и длинных импульсов (Т - период повторения) для
когерентного гетеродина (КГ); в/ч генератор (Г) синхронизирует по фазе
зондирующие сигналы (ти) с когерентным гетеродином (КГ) (на схеме показана
связь между ними); сигналы КГ (той же несущей частоты, что и в/ч генератора)
смешиваются в смесителе (СД с сигналами местного гетеродина (МГ) и на
промежуточной частоте поступают в приемник (ПРМ) РЛС; в ПРМ поступает
также отраженная от цели и облака ДО смесь сигнала и помехи, которая проходит
через Сг, взаимодействуя с сигналами МГ и на промежуточной частоте приходит
в ПРМ. После приемника (УПЧ, детектора, видео-усилителя) смесь (сигнала и
помехи) и сигнала КГ (на промежуточной частоте попавшая на выход) на
видеочастоте поступает на схему череспериодной компенсации (схему
компенсации), и далее ни ИКО-индикатор кругового обзора. В схеме
компенсации имеется линия задержки (ЛЗ) на время, равное Т и устройство
вычитания сигналов; на ИКО, в идеальном случае, не должно быть сигналов
(только помехи), если цель неподвижна, и появится сигнал (в помехах), если цель
движется
237
Рис. 3.54. Действия на РЛС помех, создаваемых дипольными отражателями:
а) - “продольная” полоса диполей;
б) - “поперечная” полоса диполей.
Для компенсации движения диполей в РЛС имеется устройство
«компенсации ветра», которое изменяет фазу в/ч колебаний (например, по
линейному закону) в зависимости от направления и скорости ветра; случайные же
движения диполей исключаются при корреляционной обработке. Для улучшения
компенсации движения облака ДО от импульса к импульсу применяют
двукратные, трехкратные (и т.д.) схемы компенсации, которые уменьшают
уровень помех, но кардинально решить проблему не могут потому, что трудно
«угадать» процессы диффузии и движения диполей в облаке ДО при неизвестных
метеоусловиях в районе цели (или в облаке ДО).
Наличие нескомпенсированных остатков отражений от диполей позволяет
преодолеть действие компенсаторов и обеспечить маскировку движущейся цели
облаком ДО.
Исследования, проведенные в работах [7, 8, 103, 105 и др.], позволили найти
следующее выражение для отношения мощностей помехового и полезного
сигналов на выходе схемы однократного вычитания (knJ):
238
(3 100)
где o)q - круговая частота Допплера (<у3 = 2л- • /0 = 2л- —- ,
\ J
Vr - радиальная составляющая скорости движения ДО);
г(т) = г(г)/ - нормированная корреляционная функция
помехового сигнала на выходе детектора огибающей, вычисленная при т = Т.
С учетом преобразования Хинчина г^т)^= т можно представить [7 стр.293]:
г(г) = ехр(-1,43-тт2?-2 Fo25)=1^/_ у. = ехр(-1,43-тг2-Т2 Д25), (3 101)
где FOj5 - ширина спектра помех от облака ДО по половинному значению
нормированной спектральной плотности.
При получении формулы (3.101) использовалась следующая аппроксимация
энергетического спектра помехового сигнала [106]. G(F) = exp -0,7
F
F.
Л2
Подставляя (3.101) в выражение (3.100) имеем:
еых(1)
1 - ехр(- )
(3.102)
239
Рис. 3.55. Блок-схема импульсно-когерентной РЛС.
Формула (3.102) определяет величину коэффициента подавления помехами
от ДО в предположении, что СДЦ (однократный компенсатор) работает идеально.
В реальных условиях надо учитывать нестабильности РЛС и компенсаторов
(передатчика, местного и когерентного гетеродинов, операции вычитания,
собственное движение антенны амплитудного пеленгатора (АП) и т д ) Учет этих
нестабильностей приводит к эквивалентному расширению спектра помехи от
облака ДО (примерно в два раза в сантиметровом и в 1,4 раза в дециметровом
поддиапазонах длин волн). Минимально-необходимое значение к-^ на входе
индикаторного устройства с яркостной отметкой для скрытия сигнала цели
составляет 1,5+2 [97].
240
Рис. 3.56. Зависимость коэффициента подавления на выходе системы
(Vr )
СДЦ от параметра —Т .
к Л у
Учитывая сказанное, примем, что имеет место расширение спектра F0.5 в
сантиметровом поддиапазоне в 2 раза (4 раза, так как F0j52 в (3.102), а в
дециметровом и метровом поддиапазонах - в 1,4 раза (2 раза, так как Fo 52)); тогда
выражения для ^п1(СМ) и &ni(WM) представляются (см.(3.102)):
2sin --------7
I 2 J
п 2Г2яК
2 sin2---'
I 2
(3.103)
На рис. 3.56 приведены зависимости (3.103) &ni(CM) от (VrT/X) для
сантиметрового диапазона в предположении, что (Рп/Рс)вх-1, а 0< VrT/X <1 (при
переходе Ц77Х к другим значениям аргумента, кратным л, зависимости
повторяются). Параметром построенного семейства кривых является
произведение Fq^T (Fq.s находится по формулам работы [103] на основании
3 33 /rrf г/
метеорологических данных; в простейшем случае Fo 5 = ——. где гх ~
Л
составляющая скорости ДО в направлении РЛС).
241
Как видно из рис.3.56, величина коэффициента подавления существенно
зависит от ширины спектра помехового сигнала (F0.5), периода следования
импульсов (Т), радиальной скорости сближения (РД РЛС с ДО и длины волны
излучаемых сигналов.
Соответственно отношение мощностей помехового и полезного сигналов на
входе схемы СДЦ с двукратным вычитанием (2-х кратной схемой компенсации)
равно [7 стр 298]:
JILl'] 3-4г(Т)+г(2Т}
UJ <„ ' их « '2лГ t'i
\ сУвых{2) V сУвх I ---
I A J
(3.104)
где г(Г) и г(27) вычисляются по формуле (3.101) для т =Ти т =2Т.
Приведенные приближенные, но достаточно физически понятные формулы
и рассмотрения позволяют выявить новые возможности повышения
эффективности ДО как средства РПД.
В самом деле, до сих пор мы оценивали эффективность помех от облаков
ДО при «пассивном» отражении радиолокационных сигналов. В то же время су-
ществуют широкие возможности для «подсвечивания» облака ДО сигналами САП
для создания помех с заданными (регулируемыми) характеристиками на входе
РЛС. Такие возможности подкрепляются тем, что обороняемый самолет сам
может получить отраженный сигнал от облака ДО, измерить и изучить его
технические параметры и сформировать на этой основе оптимальную помеху на
входе РЛС от «подсвечиваемого» облака ДО. Описание видов таких помех
достаточно закрытая область знаний и выходит за рамки настоящей книги (на рис.
3.53 при классификации такие средства РПД отмечены), но идея их построения
ясна. Отметим, что для грубых (оценочных) расчетов можно существенно
упростить формулу (3.104), если энергетический спектр помехового сигнала нам
известен (или измерен, как указывалось выше).
242
Рис. 3.57. Энергетический спектр помехового сигнала, создаваемо!
На рис.3.57 схематично предоставлен такой спектр и его аппроксимация
эквивалентным ему по мощности прямоугольным спектром; максимальная
частота эквивалентного прямоугольного спектра (ОпР) определяется из условия:
п„, = -Цс(Ж>,
^шах О
где G(Q) - измеренный (известный) спектр помехи от облака ДО.
В первом приближении QITp можно найти графически из рис.3.56, взять
вместо Опр величину Под - ширину измеренного спектра на уровне половинной
спектральной плотности).
Тогда отношение мощностей помехового и полезного сигналов на выходе
схемы СДЦ с m-кратным вычитанием равна [7 стр.300] (Пп»Т «1):
кт-
Р \ Р (2тг -V
X с )вых(т) х с )вх _____г . у1
I 2
(3.105)
Для схемы с однократным вычитанием, имеем:
243
что совпадает с формулой (3.105) при т = 1.
Конечно, расчеты эффективности ДО по приведенным выше формулам
(3 103) + (3.105) и др. носят предварительный характер и их желательно было бы
подтвердить специальным математическим моделированием, экспериментами в
аэродинамических трубах и натурными испытаниями. Однако принципиально это
не меняет сути дела, которая заключается в том, что пассивные помехи от облака
ДО маскируют цели и, в сочетании с подсветом ДО от САП, можно добиться
хороших результатов в части РПД. На рис.3.57 приведены, в качестве примера,
три варианта подсвета облаков ДО активными радиопомехами [2]:
- индивидуальная защита ударного самолета (вариант «а») шумовыми
имитационными помехами САП от автоматических (без оператора) РЛС
обнаружения, сопровождения цели и РГСН ракет с наведением по отраженному
сигналу;
- индивидуально-взаимная (или групповая) защита ударных самолетов
(вариант «б») постановщиком помех или ударными самолетами, подсвечивающих
облако ДО «изнутри» активными помехами с прицельными (заградительными)
спектрами допплеровских частот против импульсно-допплеровских РЛС (или
другими видами помех);
- групповая помеха (защита) с помощью САП, работающих в заднюю
полусферу (вариант «в»), в направлении облака ДО; при этом одновременно
обеспечивается ЭМС в строю и при приеме сигналов РЛС с передней полусферы
для оценки реакции РЛС на создаваемые помехи.
Приведенные варианты подтверждают многообразие способов подсвета
облака ДО (совместное использование пассивных и отраженных от диполей
активных помех), о чем уже говорилось ранее, с целью улучшения качества
помех.
244
ц
Рис. 3.58. Способы подсвета ДО активными радиопомехами:
а) ударным самолетом;
б) постановщиком помех, находящемся в полосе ДО;
в) постановщиком помех, находящимся вне полосы.
245
Из оставшихся видов расходуемых средств РПД без аэродинамического
качества наиболее просто считаются требуемые коэффициенты подавления РЛС с
помощью передатчиков одноразового действия (ПОД); как правило, ПОД
оказывают РПД с помощью маскирующих шумовых помех (прицельных или
заградительных) на малой дальности в том числе по боковым лепесткам ДНА
(ПОД сбрасываются в большом количестве (практически на РЛС) на парашютах),
либо применением имитирующих активных помех (если не хватает мощности).
Формула для расчета коэффициента подавления (вероятности обнаружения РЛС)
для ПОД приведены выше (см., например, выражение (3.36) и др.).
Более сложно оценить эффективность ложных тепловых (ИК) и оптических
целей (ЛТЦ и ЛОЦ); здесь необходимо знать индикатриссы излучения двигателей
и ЛТЦ в ПК-поддиапазоне; ширины их спектров излучений; примерную схему
ТГСН (хотя бы, в каких участках спектра она работает; различают «одноцветную»
(в одном участке спектра) и «двухцветную» головку самонаведения); химический
состав топлива нашего самолета (особенно присадок к топливу, которые
расширяют спектры выхлопных газов); характеристики оптических (лазерных)
средств наведения оружия системы ПВО и др. [107]. Учитывая многообразие этих
факторов, при моделировании мы будем задаваться ориентировочными данными
по вероятности срыва атаки одной ЛТЦ в определенных пределах (на основании
некоторых специальных оценок).
Некоторые сведения, которые могут помочь в моделировании, о станциях
активных помех в - ИК и оптическом поддиапазонах длин волн (из
оптоэлектроники известна только одна зарубежная система - АОСМ), ПОД, ДО и
ЛТЦ приведены в табл. 3.3 [2], которые «говорят» о скудности таких сведений по
материалам зарубежной печати. Интересно отметить достаточно высокую
эффективность использования ДО, ПОД и ЛТЦ в локальных военных конфликтах
по зарубежным данным [49] и сведениям работы [2].
246
Таблица 3.3. Некоторые сведения о станциях активных помех
в ИК-поддиапазоне, системе защиты воздушных аппаратов
в оптическом поддиапазоне, передатчиков одноразового действия (ПОД),
дипольных радиолокационных отражателей (ДРО, ДО)
и ложных тепловых целей (ЛТЦ); сведения получены обработкой приложений
работы [2].
Станции активных помех в ИК-поддиапазоне (Х=1,5-6 мкм)
Имитационные модулированные помехи, ИК-головкам самонаведения ракет «воздух-воздух» и «поверхность-воздух» ЗРК и ИА. Источники излучения - цезиевые, сапфировые лампы (импульсный режим) и камера сгорания авиационного топлива (керосин) Мощность излучения: (10-20) Вт в непрерывном режиме и 200 Вт в импульсном режиме; ту=50 мкс; масса от 10 кг до 170 кг (отношение массы к объему аппаратуры - 1,4 г/см3)
Оптическая система (РТР + САП) - АОСМ (США) (об вспышкам пусков и выстрелов' наружение ЗУР и ЗА по
Назначение: вывод из строя оптических систем; ослепление наводчиков оптического оружия (защита от ракет) Состав: подсистема обнаружения; лазерный дальномер; мощный передающий лазер; подсистема управления. Рабочая Х=-1,06 мкм; энергия лазерного излучения - (3-5) Дж; защищает самолеты ВВС, ВМС и конкретно - стратегический бомбардировщик В - 52.
Передатчики одноразового действия (ПОД) - расходуемые средства РПД.
Помехи: прицельные и заградительные шумовые РЛС системы ПВО и линиям УКВ радиосвязи (метровый поддиапазон). Поддиапазоны работы (8-20) ГГц, (2-4) ГГц, (0,5-1) ГГц, (0,03-0,5) ГГц. Мощность > 10 Вт (плотность мощности - 1 Вт/МГц); время работы (5-30) мин (спуск на парашюте); масса (0,5-1) кг (отношение массы к объему аппаратуры - 2 г/см3)
Дипольные радиолокационные отражатели (ДРО) Ложные тепловые цели (ЛТЦ)
1. Вес пачки ДО (ДРО) - (150-310) г; ЭПР пачки (30-70) 2 М 2. Число типов ДО равно числу поддиапазонов; до 10 режимов выброса ДО (одиночно, сериями, залпами). 3. Количество (запас) пачек на борту от (1000 - 2000) шт. (тяжелые самолеты) до (60-90) шт. БПЛА (соотношение веса автомата к весу ДО равно от (1:1) до (2,5:1) - при разрезке ДО на борту самолета). 1. Мощность излучения от 2 кВт (спектральная мощность 1кВт/мкм); время действия до 40 сек. Запас ЛТЦ ~ в 4 раза (и более) меньше запаса ДО. 2. Отстрел - одиночно, сериями и залпами (определяется ЭВМ)
247
Перейдем к обсуждению расходуемых средств РПД с аэродинамическим
качеством (рис. 3.53), запускаемых с летательного аппарата и буксируемых за
ним. К ним относятся, в первую очередь, ложные цели и ловушки. Уже само
название этих средств РПД говорит о их функциональном назначении: первые -
«размножают» количество истинных целей, приводя к перегрузке системы
обработки РЛС, и дополнительному расходованию ракет для их уничтожения, т.е.
снижают число атак по защищаемому самолету; вторые «ловят» (уводят) ракеты и
истребители-перехватчики (пока их не увидят летчики визуально) от целей. Как
правило, кроме буксируемых, они оснащаются стартовыми и (или) маршевыми
двигателями, которые позволяют осуществлять автономный управляемый
(неуправляемый) полет в течение длительного времени (несколько десятков
минут) Чтобы ракета - ложная цель выполнила свою задачу ее надо сделать
«очень похожей» на защищаемый летательный аппарат (не буквально, а по
характеристикам отраженных сигналов и параметрам движения, близким к
самолету). Ловушка же должна переключать на себя контур автоматического
сопровождения атакующей ракеты (ИП), т.е. вначале ловушка должна быть «во
всех стробах» слежения ГСН (БРЛС), а затем, имея более сильный отраженный
сигнал, увести эти стробы от самолета «за собой».
В простейшем варианте применения ложных целей (ЛЦ) в контурах
целераспределения РЛС, эффективность ЛЦ зависит от- соотношения
численности реальных и ложных целей (в сумме их обозначим - и); количества
пущенных ракет - т (считаем, что m < и) и вероятностей поражения целей и ЛЦ
ракетами (пусть эта вероятность одинакова и равна р); тогда можно оценить
вероятность поражения прикрываемых самолетов и ЛЦ - Рт(и) следующей
формулой (при массовом применении ложных целей):
(3.106)
п
248
Зависимость Рт(п) для одной цели, прикрываемой (и-1) ЛЦ (тогда 1 + п - 1=
и) от числа расходуемых системой ПВО ракет (т) при вероятности поражения
ракетой цели или ЛЦ равной 0,8 (р=0,8) приведена на рис. 3.59, из которого
видно, что снижение вероятности поражения защищаемой цели до приемлемых
величин можно получить применением относительно большого количества
ложных целей (п - 1=10=20).
Рис. 3.59. Зависимость Pm(n) для одной цели, перекры-
ваемой (п-1) ЛЦ
Невидимому, такое количество ЛЦ надо считать (для срыва атаки одной
ракеты по нашему самолету) «дорогим удовольствием» по следующим причинам.
Во-первых, надо затратить немало средств, чтобы сделать ЛЦ похожим на
истинные, иначе РЛС «распознает» и отселектирует ложные цели. Во-вторых, ЛЦ
сама по себе есть ракета, но уже с аппаратурой вместо боевого заряда и ГСН и
запускается ЛЦ с самолета, что может быть значительно «накладнее»
(уменьшение на нашем самолете боевой нагрузки и т.д.). Поэтому, применение
ЛЦ должно быть экономически (и тактически) оправдано и против РЛС
целераспределения использоваться в исключительных случаях (для этого есть ДО,
ПОД и др. более «дешевые» средства РПД).
Воспроизведенние амплитуды отраженного от цели сигнала в ЛЦ можно
обеспечить либо активными усилителями-ретрансляторами в дециметровом и
метровом поддиапазонах длин волн, либо пассивными переизлучателями в
249
сантиметровом поддиапазоне (ЭПР переизлучателя максимальна по сравнению с
его размерами).
Рис. 3.60. Блок-схема усилителя-ретраслятора.
Техническая реализация усилителей-ретрансляторов в ЛЦ (рис 3 60) не
вызывает серьезных затруднений, особенно при современном уровне развития
твердотельной и др. техники. Способы формирования ретранслируемых сигналов
с амплитудной шумовой модуляцией мы уже обсуждали в настоящей главе (см.
также рис. 3.17). Сигналы подавляемых РЛС (рис. 3.60) поступают в приемную
антенну (Ai), усиливаются в предварительном усилителе (ПУ) и поступают в
оконечный усилитель (ОУ), где модулируются по амплитуде шумовым
напряжением и излучаются в направлении на РЛС антенной Аз. Модуляция
необходима для имитации флуктуирующей эффективной площади реальной цели
(нашего самолета). Лучше всего, если имитируются все «блестящие точки»
реальной цели (это уже более сложная аппаратура и ее реализация зависит от
условий и возможностей размещения на ложной цели).
250
Fp(0,d>)
Fc(®,<D)
РЛС
Рис 3 61 Схема применения ракеты-ловушки с ответчиком
Определим коэффициент усиления ретранслятора (/Грет), требуемый для
имитации (реализации) заданной величины «отраженного» от ложной цели
сигнала (ЛЦ должна обеспечивать такой же «отраженный» сигнал на входе РЛС
как и наш самолет на определенных дальностях).
Мощности сигналов на входе «вводимой в заблуждение» РЛС от
ретранслятора (Рпвх), размещаемого на ложной цели, и нашего самолета (Рсвх),
равна (см. рис.3.61):
где: в Рпвх (правой части): первый сомножитель(в круглых скобках) - плотность
потока мощности от РЛС на входе антенны эффективной площадью ArJ ЛЦ на
дальности Dp; второй сомножитель (в круглой скобке) - плотность потока
мощности от ретранслятора ЛЦ на входе антенны РЛС эффективной площадью
АГ2,
251
в Рс вх (правой части) сомножители в скобках имеют тот же смысл, что и для
Рп вх, только это уже плотности потоков мощности от истинной цели с ЭПР стц на
расстоянии Dc;
Рс (1), Рс (2), Рп (о, Рп (2) - нормированные ДНА по полю РЛС и ложной цели,
зависящие от разных углов под которыми видны ЛЦ и наш самолет (поэтому они
имеют разное значение) и соответствующие разным антеннам ложной цели
(приемной и передающей с КНД G2);
PC*GC - передающий потенциал РЛС.
Вообще говоря, мы стараемся везде уравнения радиолокации предоставлять
через плотности потоков мощности (начиная от формулы (3.1)). Беря отношение
Рп vJPc вх и обозначая его, как обычно, Кп (коэффициент подавления (см формулу
(3.36)); но в данном случае это, может быть - коэффициент имитации сигналов
ложной целью), можно найти 76рет:
F^-D*
(3.108)
В частном случае, когда расстояние между ЛЦ и нашим самолетом мало по
сравнению с расстояниями и Dp (Dc ~ Dp и FC(i)~FC(2)), ретранслятор использует
одну антенну для приема и передачи (или Fn(i) = F^)), выражение (3.108)
упрощается:
Kn-o-4-Fc2 Кп-ои Fe2
^G2-Fn4 Gl U2)Fy
(3.109)
где в (3.109) использовано соотношение [6 стр.216]: б2 = 4я • /Л2, которое
применялось неоднократно.
252
Если АГП=1; Х=0,1 м (10 см); Fc=Fn=\\ Сг2=10, сц=50 м2, то 7Срет=630; когда
наш самолет в два раза ближе к РЛС, чем ложная цель (DPIDC =2), а ЛЦ и самолет
находятся на одной линии с РЛС, то /Срет= 16*630-104, что достаточно сложно
сделать в малых габаритах и весах.
Из формулы (3.109) видно, что коэффициент передачи ретранслятора растет
с уменьшением длины волны РЛС квадратично и уже выше Х=10 см (3~
сантиметровый поддиапазон длин волн)реализовать ретрансляцию сигналов
трудно. На помощь приходят пассивные переизлучатели падающей
электромагнитной энергии в соответствии с выражением:
a = ^-G = 5G, (3.110)
где Ррасс и Рпад - рассеянная и падающая на тело произвольной формы
электромагнитная энергия;
G - КНД переизлучателя (тела) в данном направлении;
о - ЭПР тела.
Для тел, близким к плоским, эквивалентная площадь поглощения Аг
некоторой антенны равна [6 стр.216]: =GA2/4zr = 5, тогда из формулы (3.110)
после подстановки G, получим:
= (3.111)
где такое значение ЭПР имеет идеально проводящая пластина площадью S,
ориентированная по перпендикуляру к направлению падающей волны
Исследовано очень много форм простых и сложных отражающих
поверхностей в теории антенн: уголковые отражатели; линзы Люнеберга
253
(диэлектрические и с металлическими вставками); решетки Ван-Атта и т.д.
[108-110].
На рис. 3.62 показаны принцип действия, пространственная диаграмма
рассеяния электромагнитных волн (ЭМВ) трехгранного отражателя (с
треугольными гранями), конструкция одиночных и сложных всенаправленных
уголковых отражателей трех простейших форм, а в табл. 3.4 сведены
сравнительные данные их ЭПР (в порядке убывания) и ширина диаграмм
рассеяния ЭМВ на уровне 0,5 по мощности (©о,5) в зависимости от формы граней.
Таблица 3.4. Сравнительные данные ЭПР (в порядке убывания)
и ширины диаграмм рассеяния ЭМВ (а - длина ребра уголкового отражателя;
X - длина волны, падающей на отражатель).
^\Форма Данные\. Прямоуголь- ная Пластина Секторная (четверть круга) Треугольная Металлический шар (R - радиус)
G ( a Y 12л- • -г= у лМу / \4 . а ] 4л -7= / \4 „ [ а 2л -т= Z \ 4 4тг( а } з /А2
®0.5 35° 60°
В табл. 3.4 приведены максимальные значения о, когда грани уголков
строго взаимно перпендикулярны, а все поверхности - проводящие; отклонения
от прямых углов лишь на 1° уменьшает ЭПР отражателя в пять раз (!). Менее
чувствительны к погрешностям изготовления радиоотражатели с треугольными
гранями, имеющие к тому же самую широкую из простейших форм диаграмму
направленности и большую жесткость граней, хотя о у них самая маленькая; они
и применяются наиболее часто в РПД. Особенно высокая точность должна быть
выдержана при изготовлении оптических отражателей (для ЛОЦ), которые
изготавливаются из специальных материалов с оптическими свойствами и грани
их юстируются оптическими приборами.
Один отражатель с тремя гранями рассеивает ЭМВ только в пределах
одного квадранта; поэтому для расширения ДР (диаграмма рассеяния) отражатели
объединяют в группы (как показано на рис. 3.62ж, 3.62з, 3 62и). Восьмиугловые
254
радиоотражатели (РО), так называемом октаэдрной группы создают
восьмилепестковую диаграмму рассеяния (ДР). Из сложных уголковых
отражателей представляет интерес конструкция из трехгранных РО, размещенных
по сфере (сотовая конструкция из 20 и более РО); например, применяется
правильный двадцатигранник (икосаэдр), имеющий многолепестковую ДР Для
компенсации провалов в ДР (очень глубоких) используется принудительное (или
под действием ветра) вращение сложных отражателей; в результате средняя ЭПР
получается приемлемой, но модулированной по амплитуде. Один из вариантов
сложного вращающего РО (типа «флюгера») показан на рис. 3.63 [110], где группа
из четырех трехгранных отражателей вращается электродвигателем для
получения амплитудной модуляции, а группа типа «флюгер» вращается ветром
для фазовой (допплеровской) модуляции отраженных сигналов.
Рис. 3.63. Модулирующие уголковые радиоотражатели:
а) с амплитудной модуляцией;
б) с фазовой (частотной) модуляцией.
255
Уголковые радиоотражатели: а) треугольный; б) прямоугольный;
в) круглый
Принцип действия уголкового отражателя, г) двугранного; д) трёх-
гранного; е) диаграмма рассеяния энергии радиоволн трёхгранным
Уголковые радиоотражатели: ж) с треугольными гранями;
з) с секторными гранями; и) с квадратными гранями.
Рис. 3.62. Принцип действия радиоотражателей.
256
Система из нескольких РО и отражателей с поляризационными решетками
успешно работает на волнах (ЭМВ), имеющих горизонтальную (вертикальную) и
круговую поляризацию. РО с нечетными гранями меняет направления вращения
вектора электрического поля ЭМВ отраженного сигнала на обратное. Если в
целях РПД это явление нежелательно, то перед одной из граней РО ставят
отражатель из диэлектрика (пластину или стержень) и (или) решетку из
вертикальных металлических проводов (стержней). Отражатель с такой решеткой
успешно работает на линейно поляризованных ЭМВ. Все эти конструкции
отрабатываются экспериментально (на стенде и в других необходимых условиях).
Большие возможности в создании средств РПД заложены при облучении
облаков РО с борта защищаемого самолета различными видами помех.
Отражающая
поверхность
(рефлектор)
Рис. 3.64. Принцип отражения энергии радиоволн в линзе Люнеберга.
Одним из главных недостатков конструкций из уголковых РО является их
дороговизна при получении требуемых характеристик (большая трудоемкость и
высокая инструментальная точность изготовления); поэтому в технике РПД при
создании ложных целей широкое применение получили линзы Люнеберга,
представлявшие в начальном варианте шар (рис. 3.64), внутренняя часть которого
металлизирована, а сам шар заполнен диэлектриком с диэлектрической
проницаемостью, изменяющейся от нуля до некоторого значения,
257
обеспечивающего поворот (разворот) и фокусирование на металле падающей
ЭМВ в обратном направлении (как преломление света в оптической линзе с
изменяющейся проницаемостью). Такой шар может быть составлен из набора
оптических линз для «разворота» падающего на него луча лазера в обратном
направлении для «ослепления» источника излучения. Ширина диаграммы
рассеяния (ДР) линзы зависит от размеров экрана (металлической поверхности) и
может достигать 140°. Максимальная ЭПР линзы Люнеберга радиусом R
составляет 4тг3 • (т?Д/л)4, что примерно соответствует ЭПР конструкции,
составленной из РО уголковых с прямоугольными гранями, но ширина ДР линзы
примерно в четыре раза больше, а это весьма существенно (см. табл. 3.4). Так, по
данным работы [2 стр.83] линза диаметром 60 см и массой 40 кг имеет на ЭМВ
Х=10 см ЭПР превышающую 150 м2, на Х=3 см ЭПР > 1800м2 и на Х=1,5 см -
около 7200 м2.
Из этого примера видно, что линзы Люнеберга, при достаточно большой
массе, имеют, все-таки, ограниченную ДР и их надо ориентировать в направлении
на источник излучения; чтобы избежать этого применяют сферические
конструкции с отражающими металлическими кольцами (меняя положение
кольца или нескольких колец можно сформировать различные ДР [108]).
Максимальное значение ЭПР такой линзы:
л (xR2-2RLf h м л 3( R Y га 1 юх
= --------^--(L = 0) = 4^3 , (3.112)
л J
где R - радиус, a L - ширина металлического кольца линзы.
ДР линзы с металлическим кольцом и диэлектриком в два раза больше, чем
у линзы с рефлектором (линзы имеют металлическую поверхность меньше
половины поверхности шара с диэлектриком); ДР линзы можно смещать
изменением положения кольца около «экватора» шара [108]. Увеличение ширины
258
металлического кольца приводит к расширению ДР (@0,5), н0 одновременно
уменьшается ЭПР линзы в соответствии с выражением (3 112).
а) проволочное
кольцо
ортогональные проволочные
кольца
Рис. 3.65. Гелиосферические линзы Люнеберга.
Указанное противоречие хорошо разрешается, если кольцо в линзе сделать
в виде решетки из параллельных, навитых под углом 45° проволок (сетка
«рабица» по диагонали, рис.3.65); такая линза называется гелисферой. Ее
основной недостаток - поляризационные потери при двукратном прохождении
ЭМВ, достигающее 6дБ. Для получения почти изотропной диаграммы рассеяния
ЭМВ применяют гелисферы с двумя ортогональными проволочными решетками
(рис.3.656).
Принципиально (как в оптике) можно создать идеальную линзу (с
изотропным отражением - переизлучением) без металлических колец, если ее
диэлектрический заполнитель меняет диэлектрическую проницаемость (от слоя к
слою сферы к центру) по закону , (0 < R < /?тах); где Ятах
максимальный радиус линзы.
Диэлектрические гелисферические линзы довольно тяжелые, так как они
требуют ввода в центральную часть линзы (R-+ 0) диэлектрика с большой
проницаемостью (коэффициентом преломления).
259
Полая прозрачная
Металлическое кольцо
б)
Рис. 3.66. Полая гелиосферическая линза: а) - конструкция; б)- ход лучей
Существенно меньший вес имеют полые гелисферические линзы, где
отражающее металлическое кольцо в виде шарового сегмента закреплено в центре
линзы (рис 3.66) и выполняет роль рефлектора для ЭМВ. На рис. 3.67 приведены
зависимости ЭПР различных линз, нормированных относительно ЭПР
металлического шара того же диаметра D (см. табл. 3.4), от D/Х, т.е. по оси
ординат рисунка отложена величина:
а = 101g —,
(3.113)
где ал и сгл - ЭПР линзы и металлического шара.
Гибридом пассивных отражателей и активных ретрансляторов можно
назвать переизлучающие антенные решетки (ответчики Ван-Атта и др.), действие
которых иллюстрируется рис.З 68. Антенны в них выполнены в виде диполей
(или спиралей, рупоров и т.д.) и попарно соединяются (замыкаются) кабелями или
волноводами в пассивном варианте исполнения (ЭМВ, принятая диполем 1
переизлучается диполем 6 и наоборот).
260
Рис.3.67. Зависимости ЭПР различных отражателей от их размеров:
1 - идеальная линза Люнеберга;
2 - гелиосфера с кольцом внутри;
3 - полая гелиосферическая линза (для линейной поляризации);
4 - полая гелиосферическая линза (для круговой поляризации).
Так как сигналы, принятые и переизлученные диполями, проходят
одинаковый путь (длина кабелей одинакова), то направление максимума
диаграммы переизлучения будет совпадать с направлением падающей волны.
Решетки проектируются для отражения волн с любой поляризацией; для этого
диполи располагают на металлическом экране под разными углами (каждая пара
под углом л/2 к соседней паре). ЭПР такой решетки из п полуволновых
вибраторов (диполей), расположенных на расстоянии Х/2 друг от друга и на
расстоянии 1/4 от экрана (рис. 3.68) может быть найдена по формуле [109]
/ \~14
• I л
smi —cos®
<2 J
(3.114)
где 5 - площадь раскрыва решетки;
0 - угол падения ЭМВ.
При 0=0 и S~n*A2/4, получим из (3.114) сгртах «^-(яЛ)2
261
Такие решетки конструктивно выполняют применением вместо диполей
спиралей, нанесенных на диэлектрический лист электролитической печатью (как
печатные платы), что значительно упрощает технологию изготовления,
уменьшает габариты и массу решеток. Для увеличения переизлучаемой мощности
и формирования сигналов помех с заданной модуляцией по основным
техническим параметрам (амплитуде, фазе, частоте) применяются
малогабаритные усилители, модуляторы и др. техника. Основная трудность в
реализации антенных решеток - обеспечение ЭМС приемных и передающих
трактов.
Рис. 3.68. Принцип действия переизлучающей антенной
решетки : а) схема соединения диполей; б) диаграм-
ма рассеяния; I - коаксиальные линии, II - экран.
В табл. 3.5 приведены некоторые скудные сведения о ложных целях
зарубежных стран по материалам работы [2]; из таблицы следует, что за рубежом
давно применяются ложные цели с усилителями-ретрансляторами, линзами
Люнеберга, сложными уголковыми отражателями, передатчиками узкополосных
шумовых помех мощностью до 250 Вт и др. помехами (ЭПР ложных целей, как
правило, повторяет и превышает ЭПР самолета, которые они защищают)
262
Таблица 3.5. Некоторые виды (типы) ложных целей зарубежных стран
и их данные по материалам работы [2].
Название, страна; виды помех Тип ЛЦ, размеры, вес (масса), скорость, дальность Прочие сведения
1. «Файроби»-20, США, усилитель-ретранслятор на ЛБВ, линза Люнеберга. Мини-самолет длиной - 7м, размахом крыльев - 3,9м, массой - 1000 кг и дозвуковой скоростью Создает ЭПР, близкую к бомбардировщику (~70 - 100 м2)
2 SCAD, США, пассивные помехи от уголковых отражателей; активные от передатчика помех Мини-самолет длиной 4,3 м, диаметром фюзеляжа 0,53 м, массой 800 кг с дозвуковой скоростью и дальностью действия 1600 км Создает ЭПР, сравнимую со стратегическим бомбардировщиком, размещается на В-52 (20 шт ), В-1 (до 30 шт ), и на FB-111 (20 шт.) - самолете РЭБ (постановщике помех- ПП)
1 «Макси-Декой» -1,2; США; прицельные узкополосные шумовые помехи в поддиапазоне (4-5-6) ГГц Мини-планер, запускающийся с самолетов тактической авиации (F-4, 15, 16 по 12шт. на одной подвеске) На ЛЦ установлены передатчики помех с мощностью 90 Вт и 250 Вт (на первой - 1 и второй - 2 модификациях ЛЦ)
4. «Ростон ЛЛ», Великобритания; оборудована отражателями ЭМВ в радио, ИК и видимом поддиапазонах. Ракета запускается с самолетов «Буканир» и «Фантом».
5 TALD, США, 1986 Создает активные помехи и применяет ДРО Может наводиться на РЛС с помощью собственной ГСН Размещается на самолетах тактической авиации по 20
6 TEDS, США, 1982 Скорость полета 90 км/час, дальность действия - 500 км Размещается на самолетах тактической авиации
7 АДМ - 20, «Куэйл», США Размещается на пилонах или в бомбоотсеке стратегических бомбардировщиков B-52G, В-52Н.
8. «Мини Поп» Ложная радиолокационная цель массой 23 кг, система наведения - программная Размещается на самолетах тактической авиации.
Перейдем к ловушкам, используемых для срыва атак в контурах наведения
и самонаведения; атака считается несостоявшейся, если ловушка «замкнула на
себя» ракету или ИП (о чем уже говорилось). Время замыкания должно быть
соизмеримо со средним временем наведения (самонаведения) на реальную цель, а
удачное применение ловушки приводит к промаху управляемой ракеты (ИП),
безопасному для нашего самолета (см. раздел 3.4 3 настоящей главы, формула
(3.13) и др.). «Вектор признаков» ловушки должен иметь компоненты,
обеспечивающие ее захват на сопровождение с учетом энергетических
характеристик, спектра, скорости и ускорения ловушки (помеховый сигнал
263
ловушки должен превышать полезный от цели, чтобы переключить следящие
системы ракеты на ловушку).
Конечно, многое зависит от сложности аппаратуры и возможности маневра
ловушки, а также от РГСН ракеты и системы управления ею. В благоприятных
для нас условиях наиболее совершенная ловушка может обеспечить замыкание на
себя контура наведения (самонаведения) в лучшем варианте с вероятностью
примерно равной 0,5 и потребуется несколько ловушек для срыва одной атаки
Как следует из рис.3.53 по способу применения ловушки с аэродинамическим
качеством делятся на буксируемые и сбрасываемые, а по принципу (методу)
управления - управляемые и неуправляемые; последние мы рассматривать не
будем, так как против современной системы ПВО они не применяются
Управляемые ловушки, как и ложные цели, применяемые в контурах
целераспределения, представляют собой ракеты с пассивными и активными
переизлучателями электромагнитной энергии РЛС (БРЛС, активных РГСН). Так
же как и на ЛЦ, на ловушках могут устанавливаться стартовые и маршевые
двигатели, обеспечивающие управляемый полет (принципиально ЛЦ работают на
дальних рубежах атаки, а ловушки - в «ближнем бою»). Направление пуска
ракеты-ловушки определяется направлением атаки и соотношением векторов
скорости нашего самолета, ловушки и атакующего средства перехвата. Как
правило, после пуска ловушки прикрываемый самолет должен осуществить
маневр по направлению и скорости, прикрытый помехами, чтобы противник его
«не разгадал». В первый момент после сброса ловушка должна иметь скорость
удаления от защищаемого самолета, обеспечивающую увод стробов следящих
систем «за собой» (о чем уже неоднократно говорилось, но именно это очень
важно!) по углу, дальности и скорости.
Рассмотрим вариант переключения на ловушку ракеты «поверхность-
воздух», наводимой наземным ЗУР комплексом в режиме «подсвета» цели по
отраженному сигналу (полуактивное наведение; ракета не «подсвечивается» и не
управляется РЛС ЗРК). На рис.3.69 представлен этот случай - усложненный
264
вариант применения ловушки против наземной РЛС целераспределения
(рис.3.61), только там нашему самолету не было реальной угрозы в виде ракеты.
Найдем уравнение радиопротиводействия для ловушки, САП которой
работает в генераторном режиме (без усиления принятого сигнала РЛС и
ретрансляции его, «наделенного помехами», в сторону РГСН ракеты). Действуя
проверенным методом (через плотности потока мощности, отмечаемые круглыми
скобками), найдем:
(3.115)
где ряд обозначений представлен на рис.3.69;
Pn*Gn и Pc’Gc - передающие потенциалы САП ловушки и РЛС;
Fn, Fc, FpQ), FP(2) - нормированные ДНА передающих антенн ловушки
(антенна передающей САП), РЛС и приемной антенны РГСН ракеты по
полю;
уп - коэффициент, учитывающий несовпадение поляризаций антенн ловушки
и РГСН ракеты;
Afnp/Afn - отношение полосы пропускания приемника РГСН и ширины
спектра помехи; Аг - эффективная площадь приемной антенны РГСН;
Рпвх И Рсвх - мощности помехи и сигнала на входе приемника РГСН.
Деля Рп вх на Рс вх, получим исходное уравнение РПД для генераторного
режима работы САП ловушки:
'Р,,..']/^ P.-G,'' (nJ-Др
D1. J
'p‘-p^ (
(3.116)
265
PT ГР(0;Ф)
л /эА(0;Ф)
A
РЛС подсвета
Рис. 3.69. Вариант применения ракет-ловушек в контуре самонаведения ЗУР.
Чтобы воспользоваться уравнением (3.116) надо решить два вопроса: где
«взять» сигнал РЛС и какой должен быть /Сп для вычисления передающего
потенциала передатчика; в реальной жизни при проектировании БСО и способов
защиты от атакующих средств перехвата с помощью ловушек значительно
больше вопросов, а именно: нужна значительно большая информация об РЛС для
организации РПД, которая может быть получена только от информативной
подсистемы БСО и учтена в программе управления ловушкой до ее старта с
защищаемого самолета.
Информация о сигнале РЛС при работе САП ловушки в ретрансляторном
режиме может быть получена простейшим (детекторным) приемником ловушки и
ретранслирована, наделенная помехами, по методу, рассмотренному выше (при
расчете коэффициента усиления ретранслятора по формуле (3.108) ..). Однако, в
данном варианте придется ретранслировать сигнал на РГСН ракеты, а не на РЛС,
как в формуле (3.108); учитывая, что, как правило, расстояние между ловушкой и
атакующей ракетой значительно меньше дальности между РЛС и ловушкой,
появляется «запас» в коэффициенте усиления ретранслятора, (/Срет)
пропорциональный (De/'D;1)2 (если (Dc/Dn)=10, то запас в Арет будет 100 раз, т.е 20
дБ). Этот запас может быть вычислен при подстановке в выражение (3.108)
266
вместо Dp4 (числителе) произведения Dp2*Dn2 (Dn - расстояние между ловушкой и
наводимой ракетой) и использован для обеспечения заданного превышения (Кп)
помехи над сигналом. Поэтому, как правило, ловушка (с достаточно сложной
аппаратурой) может быть использована, как ложная цель и наоборот, что
зафиксировано при описании характеристик зарубежных средств РПД в работе
[2].
Из формулы (3.116) может быть найдено необходимое значение
передающего потенциала (произведения выходной мощности (гп) на КНД
антенны (Gn) активного (или пассивного) переизлучателя ловушки при
воздействии по основному лепестку ДНА РГСН ракеты, если известно требуемое
значение Кп. Для простоты предположим, что Dn=Dp, a Fa= Fc= Fp^~ FP(2)=1;
ДЛр=Д& Y =1 j тогда из выражения (3.116) находим:
Р G а ( Р -G У
G р =^—L^L.K = .а К (3.117)
" ” 4тг-£Р \4яРгс) V 7
т.е. потребный передающий потенциал САП ловушки при Dn=Dp равен
произведению плотности потока мощности РЛС у цели на (ац*Кп) - очень простая
и понятная оценка.
Конечно, если дальность до РЛС существенно уменьшится (плотность
потока мощности сильно возрастет), то потребный потенциал РПД ловушки
значительно увеличится (увод ловушкой атакующего истребителя-перехватчика)
что, осложнит применение ловушки. Дорогостоящее усложнение ловушек навело
на мысли о применении простых отражателей (уголковых, линз Люнеберга и др )
в качестве ловушек, которые были уже оценены с точки зрения ЭПР и диаграмм
рассеяния ЭМВ; такие ловушки могут применяться массово с учетом их простоты
и малой стоимости по сравнению с ловушками - мини-самолетами, ракетами,
планерами (с аэродинамическим качеством, но очень простым, ловушками - со
стартовым двигателем в целях захвата и увода стробов сопровождения нашего
самолета).
267
Если обычное тело (без аэродинамического качества и стартового
двигателя), сброшенное с летательного аппарата падает по баллистической
траектории, то скорость и направление падения определяет так называемое
«характеристическое время» падения - С, которое вычисляется из теории
баллистики [111]; известно, что это время в секундах оценивается так-
А /7 2 А
t = 20,2 + —-—-С -103,
* G Ч
(3.118)
где b - коэффициент формы тела;
d- диаметр;
G - вес тела;
Сх - аэродинамический коэффициент.
Рис. 3.70а. Траектория падения сбрасываемой ловушки без двигателя.
Чем больше tx, тем больше «парашютирует» ловушка и быстрее отстает от
самолета (рис.3.70а); в то время как ее (ловушку) надо как можно дольше
удержать в импульсном объеме разрешения самолета по дальности (для
импульсных РЛС), учитывая инерционность (постоянную времени следящих
систем), или в пределах полосы пропускания следящих систем по скорости (для
непрерывных РЛС) с учетом ширины главного лепестка ДНА.
268
Допустим, что мы сбрасываем линзу Люнеберга диаметром 0,5м (о ~ 190м2
на Х=5 см); для шара b = 8 и Сх=0,2 [111], тогда t*= 21 сек, если G =500 кг и ?х= 26
сек при G =70 кг; следовательно, изменение веса линзы в 7 раз дает уменьшение tx
всего на 5 сек, что отклоняет траекторию свободного падения совершенно
незначительно.
Из примера видно, что для существенного увеличения времени пребывания
ловушки в достаточно малой окрестности самолета, надо (при малом весе) задать
ловушке начальную скорость в направлении движения летательного аппарата
(рис.3.706), т.е. оборудовать ловушку стартовым двигателем. Однако этого еще не
достаточно; режим работы двигателя должен удовлетворять определенной
программе, учитывающей характеристики конкретной РЛС (РГСН) таким
образом, чтобы обеспечить конкретную начальную и среднюю скорости (за
период обзора РЛС), когда выпущенная ловушка за цикл обзора РЛС остается в
заданных пределах около самолета.
со стартовым
двигателем
Рис. 3.706. Траектория движения ловушки, оборудованной стартовым
двигателем.
Существует еще один метод применения ловушек с аэродинамическим
качеством - буксирование ловушек за самолетом-бомбардировщиком (за
маломаневренным летательным аппаратом) на тонком тросе, длина которого
может достигать нескольких километров; в убранном положении ловушка
находится в специальном отсеке, а затем выпускается с помощью стартового
механизма. Буксируемые ловушки используются для срыва атак ракет (ИП) на
269
последнем этапе наведения (самонаведения) и могут оборудоваться усилителями-
ретрансляторами, пассивными переизлучателями или (и) аппаратурой помех. Их
эффективность будет высокой (что мы уже несколько раз подчеркивали), если в
начальный момент наведения ракеты (ИП) прекрываемый самолет и ловушка
представляют одну цель и не разрешаются по углам, дальности и допплеровским
частотам.
Рис. 3 71 Схема наведения ракеты (Р) на цель (Ц) -
буксируемую ловушку
Величина удаления (L) буксируемой ловушки (БЛ) от нашего самолета (Ц)
определяется разрешающей способностью РЛС (БРЛС, РГСН), по допплеровским
частотам - Д/d и углу (Д®р); т.е. расстояние между целью и БЛ (L) не должно
превышать величины L < (A®peD)/sinq (рис.3.71), а
FfD<kFD (AfD=2(ycji-vJ/A)=2Av/A<kFD; AFD - ширина полосы пропускания
«строба скорости»; гсл и гл - радиальные скорости сближения атакующей ракеты с
прикрываемым самолетом и БЛ).
На рис. 3.72 показаны (условно) зоны разрешения буксируемой ловушки
(БЛ) и самолета (Ц) по углу (зона I) и разности радиальных скоростей (зона II), а
также угловая величина затенения самолетом Б Л (зона III). Если атакующая
ракета (или истребитель-перехватчик) с передней полусферы попадает в зону III,
то эффекта перенацеливания на ловушку не будет из-за того, что она не видна
средству перехвата. Самолет будет затенять ловушку, если атак^тощая ракета
находится внутри конуса, угол при вершине которого равен:
270
. k-R
a - arcsin-
L
где R - радиус поражения ракеты;
к - коэффициент запаса;
L - расстояние между самолетом и БЛ.
Рис 3 72 Зоны разрешения буксируемой ловушки (Л) и самолета (Ц)
по углу (I), разности радиальных скоростей (П) и зона зате-
нения (Ш) самолетом ловушки.
3.15. Общая математическая модель БСО в составе ДС
На рис.3.73. представлена блок-схема ОММ и динамического стенда (ДС),
составленная как обобщение материалов предыдущих описаний главы и,
практически, не требующая пояснений. Из вопросов, которые остались
271
нерешенными необходимо отметить, что нет выбора параметров
исследовательской ЭВМ для моделирования и состава модели мешающих средств
ПВО. В настоящем разделе мы не будем оценивать входной поток от средств
системы ПВО, которые не участвуют в атаках, создавая «мешающий фон»,
данный вопрос мы отложим до следующей главы. В целях экономии
производительности ЭВМ, памяти и других ресурсов будем считать на основании
материалов работы [23], что любую атаку средства перехвата (ЗРК или ИП)
«сопровождают» от трех до пяти облучений РЛС радиолокационного поля - РЛП
(в любой момент времени от РЛС РЛП «совпадает» 3-^-5 главных лепестков ДНА
РЛС, создающих «мешающие» потоки сигналов) в любом поддиапазоне длин
волн из восьми (см. описание системы ALQ - 161), Средняя частота повторения
«мешающего» потока может меняться в широких пределах (в зависимости то
параметров участвующих в нем РЛС); но, если не считать непрерывные и
квазинепрерывные РЛС, максимальный мешающий поток импульсов не будет
превышать 50-гЮО кГц.
Средняя плотность потока облучений «мешающих» РЛС (v) более точно
может быть вычислена с использованием так называемой эквивалентной
(среднестатистической) РЛС [9 стр.89]:
v = m3-N /1л, (3.119)
где <у3 = —-- (или просто соэ = — Уа>1);
V „ 9
La
7-1
N - среднее число РЛС;
aj.s - средняя угловаяскорость вращения антенны РЛС;
о,. = 2nlTepi (TBpi - период вращения антенны i-ой РЛС);
q - число типов РЛС;
р. - плотность распределения i-ro типа на местности).
272
Формула (3.119) справедлива при малой высоте полета нашего самолета и
высокой чувствительности приемника РТР; в других случаях используются более
сложные выражения [9], учитывающие вероятность обнаружения РЛС от
дальности в зоне действия РЛС. [146].
Зная среднюю длительность облучения главным лучом эквивалентной РЛС
и среднюю частоту повторения сигналов РЛС по выражению (3.119) можно
оценить средний поток импульсов (усреднение можно произвести аналогичным
способом - по плотности РЛС z-ro типа на местности - pi и числу типов (q) РЛС)
[146].
Исходные
данные для
моделиро-
вания
I--------------------
Модели
атакующих
средств перехвата
Модель
«мешающих»
средств ПВО
Модель
исполнительной
подсистемы (САП,
АПЛ, ловушки,
ложные цели)
Модель
информативной
подсистемы
Модель блока
межаппаратурной
развязки (МАВР)
Модель РЭО
самолета (навигация,
связь с БРЛС)
Рис.3.73 Блок-схема общей математической модели (ОММ)
и динамического стенда (ДС).
Структурные
схемы из
аналитических
моделей
ОММ БСО
273
Даже если максимальные выбросы суммарного потока импульсов (с учетом
РЛС атакующего средства перехвата, работающей в КНИ-режиме) не будут
превышать нескольких сотен кГц, реализовать его моделирование с учетом
обработки и реакции БСО в реальном масштабе времени на ЭВМ достаточно
сложно, а главное - дорого. Поэтому наш опыт моделирования работы БСО на
динамическом стенде показал, что значительно проще моделировать реакции
устройства управления на изменяющейся входной поток сигналов в так
называемом «старт-стопном» варианте функционирования БЦВМ Это означает,
что БЦВМ должна работать «порциями» с остановом на время, пока
математические модели стенда не обработают (промоделируют) очередной
накопленный объем входной информации (с сохранением всех временных
интервалов в поступившей информации); после обработки «порция накопленной
информации» сбрасывается в УУ в реальном (определяемом входным потоком и
работой БСО) темпе и затем процесс повторяется. Моделирование в «старт-
стопном» варианте позволяет использовать исследовательские ЭВМ по
быстродействию не столь мощные (-1,5 млн. операций в сек.), что значительно
удешевляет процесс (по нынешним меркам это возможно даже на персональном
компьютере).
Учитывая логику работы БСО (его аналог - ALQ-161), при математическом
моделировании достаточно отслеживать периоды повторения РЛС (шаг
моделирования от минимального Гп до длительности сигналов РЛС, если это
необходимо), а сам процесс моделирования организовать как оценку изменения
ситуации в «особых точках». Моделирование по «особым точкам», кроме ряда
преимуществ, позволяет сделать шаг моделирования переменным в зависимости
от ситуации.
Такова, вкратце, методика моделирования. Прежде чем приступить к
обсуждению алгоритма обобщенной математической модели БСО заметим, что
нет смысла касаться моделирования - устройства межаппаратурной временной
развязки (МАВР) приемников и передатчиков БСО методом бланкирования и
блокирования («это чисто аппаратурный вопрос», а моделирование развязок -
274
«отдельная статья»; обычно приводятся расчеты комбинационных частот, оценки
расстояний прямой видимости и результаты измерения развязок на натурном
объекте), а также моделирования взаимодействия с РЭО (в ДС можно
использовать имитатор (устройство) работы РЭО, а при моделировании считать,
что эта информация имеется априори).
На рис. 3.74 представлены алгоритм построения обобщенной
математической модели БСО в укрупненном виде (блоки этого алгоритма в
большинстве - повторение материала нашей книги); заметим, что сама схема
алгоритма составлена не в обычном (традиционном) плане (с указанием
результатов выполнения неравенств при оценке величин (в виде «да», «нет»),
циклов, условных и безусловных переходов и т.п.), а с указанием содержательной
части блоков модели.
Как строить блоки ОММ, представленные на рис.3.74, нам ясно из
предыдущего материала, за исключением второго блока
Расчет максимальной (и текущей) дальности обнаружения РЛС
производится по выражению [9, 23]:
'G‘ G» , (3.120)
у Рртр
где PC*GC - передающий потенциал РЛС;
Лртр - чувствительность приемника станции РТР (ИРТР);
Gzq - КНД антенны приемника ИРТР;
уп - коэффициент потерь (на распространение ЭМВ, несогласованность
поляризации и др.);
Fi(0) и /'2(0) - нормированные диаграммы направленности антенн РЛС и
станции РТР по полю.
Максимальная дальность обнаружения РЛС станцией РТР получается при
Fi(®)=F2(0)=1; в дальнейшем, по мере сближения нашего самолета с атакующим
275
средством перехвата, дальности (текущие) уменьшаются и имеется возможность
обнаружить РЛС (БРЛС) не только по главному лучу, но и по боковым лепесткам
ДНА РЛС, что увеличивает длительности облучения (вероятности облучения)
РЛС нашего самолета. При определенных расстояниях РЛС будет приниматься
станцией РТР вкруговую по боковым и задним лепесткам ДНА (с вероятностью,
близкой к единице) и поток облучений в формуле (3.119) перейдет в поток
импульсов (для импульсной РЛС).
Для оценки текущих при моделировании расстояний между РЛС ЗРК (БРЛС
ИП и т.д.) и нашим самолетом необходимо использовать аппроксимацию
бокового излучения РЛС; как показано в работе [9] спад уровня бокового
излучения РЛС по мере удаления (по азимуту - 0, а, в ряде случаев, и углу места
- при «карандашных» лучах РЛС) от главного лепестка ДНА описывается
выражением:
' exp [-2,78(©/®01)2] , при 0<О<©0;
F]2(0) = g(®)= J (3.121)
^01
< О,О625/(0/0я)'-, при 0О] < 0 < /Т
где Fi2(0) - аппроксимация ДНА по полю (С (®)=д/с(©)/С01 );
©01 ~ ширина ДНА РЛС по половине мощности;
ц - показатель степени гиперболы второй ветви аппроксимации, зависящий
от качества позиции РЛС («засоренности» местными предметами);
р=Н2 (ц=2 - «хорошая» позиция, сантиметровая РЛС; (1=1,5 - средняя
позиция, дециметровая РЛС; ц=1 - плохая позиция).
Заметим, что аппроксимация главного луча ДНА вида (3.121) уже
неоднократно использовалась выше (см. пояснения к формуле (3.24) и др.). При
моделировании на среднее значение, определяемое формулой (3.121),
рекомендуется накладывать случайную (фоновую) составляющую,
276
распределенную по нормальному закону со среднеквадратическим отклонением
Оф~3-5 дБ.
1-------------------------------------------------------------------------------
। 1. Задание: траектории сближения и параметров БРЛС ИП или координат ЗРК
| (количества, расположения и параметров РЛС, обслуживающих ЗРК);
I траектории движения нашего самолета с БСО относительно зоны обнаружения
[ ЗРК
I .................................:
I 2. Расчет максимальной дальности обнаружения (Дм0) БРЛС, РЛС ЗРК
(текущей дальности - Дик); сравнение этих дальностей с фактическими и
радиогоризонтом (Дфает и ДрГ); расчет основных характеристик потока (полезного)
। от атакующего ИП, ЗРК
! Т
3 Оценка (формирование) «мешающего» потока облучений РЛС (БРЛС) и
। импульсов («пачек импульсов»); задание «начальных фаз» (моментов начала
I отсчета) мешающего и основного потоков
4. Наложение ошибок измерений технических параметров сигналов на каждом
импульсе (облучении) РЛС, БРЛС; формирование «сбоев» станции РТР при
пеленговании (ложных пеленгов) и выделение полезных сигналов из «мешающих»,
фиксация (проверка наличия) факта пуска ракеты ТП.
5. При наличии собственного приемника в САП
выделение сигналов БРЛС ИП, РЛС ЗРК из общего потока
(без пеленгования); наложение ошибок измерения,
формирование сбоев, отработка целеуказаний от УУ (ЦУ).
ЦУ
Устройство
управления
(с алгоритмом и
программой
управления)
6. Вычисление коэффициентов подавления (Кп),
вероятностей срывов атаки для целевых комбинаций (ЦК)
помех, рекомендованных УУ
ИК помехи
—-------- у
^^Документирование
Рис. 3.74. Укрупненная схема алгоритма обобщенной
математической модели (ОММ) ДС.
277
Выражением (3.121) описывается боковое излучение РЛС, имеющей
cosec?(fl), диаграмму направленности антенны по углу места (0), если луч РЛС
«карандашный», то F](®,/?)=Fi(®)* Fi(/?), где обе составляющие произведения
представлены формулой (3.121). Аналогичным образом (в первом приближении)
могут быть записаны выражения для бокового излучения антенн САП и ДНА
станции РТР (более близкие к реальной аппроксимации ДНА станций РТР
приведены в работе [23]).
Основная задача (идея) моделирования БСО в составе ДС может быть
сформулирована следующим образом. Интуитивно ясно, что оптимальное
радиопротиводействие при индивидуально-взаимной защите с помощью БСО
(максимальная вероятность защиты - непоражения самолета при минимально-
возможном расходовании материальных ресурсов БСО) может быть получено
при применении- маскирующих помех на больших дальностях между нашим
самолетом и ЗРК (ИП); имитирующих помех на средних дальностях (как правило,
для маскирующих помех не хватает передающего потенциала САП); помех из
«вынесенных точек» (расходуемых средств РПД) на малых дальностях То же
самое распределение классов (видов) помех получается по фазам атаки ЗРК (ИП)-
фаза обнаружения и целераспределения (маскирующие помехи); фаза
сопровождения цели (имитирующие) и фаза отражения атак ракет «воздух-
воздух» и «земля-воздух» (расходуемые средства РПД) - в соответствии с
принятым алгоритмом управления БСО. Естественно, что возможны исключения
из этой идеологии, которые зависят (определяются) способами преодоления
системы ПВО группой самолетов (например, возможно первоначально
массированное применение ДО о чем уже говорилось и т.д.)
Задача моделирования (ОММ) - конкретно оценить возможности данного
построения БСО, алгоритмов функционирования и управления (и т.д), выбрать
наилучшие технические параметры устройств БСО (обосновать их), оценить
расчетные вероятности срыва атак (которые вычислялись аналитически по
обоснованным методикам), определить потребные запасы и способы применения
расходуемых средств и пр. (в том числе все временные интервалы применения
278
способов и средств РПД, правильность выбора видов и циклов целевых
комбинаций помех). Все это называется коротким и емким словом -
аппаратурный (структурный, функциональный, параметрический) синтез БСО
(одновременно он будет и алгоритмическим, т.к. проверяются алгоритмы
управления и логика работы БСО, входящих устройств).
Кроме того, при моделировании важно выделить «узкие места» в
построении аппаратуры, реакцию БСО на всевозможные сбои, ложную
информацию, «мешающий поток» при различных чувствительностях приемников
станции РТР.
Интересно также исследовать вопрос об оптимальном моменте включения
средств РПД (активных и других помех) на маршруте преодоления системы ПВО,
чтобы преждевременно не «демаскировать» наш самолет (группу самолетов).
Рис. 3 75. Относительная эффективность ПВО от дальности включения РПД.
В работе [6] показано, что начало (оптимальное) применения помех должно
примерно соответствовать максимальной дальности обнаружения цели ЗРК (ИП)
в отсутствие помех, которая обычно несколько превосходит максимальную
дальность стрельбы ракетами. Если РПД будет применено раньше, оно увеличит
дальность обнаружения РЛС («по помехе») и позволит лучше организовать
279
защиту от РПД; если позже, то система ПВО может производить по группе
самолетов залпы ракет в условиях отсутствия РПД.
На рис. 3.75 приведена, в качестве иллюстрации, зависимость
относительной эффективности системы ПВО (среднее число N сбитых
бомбардировщиков, равное произведению числа залпов ракетами на среднюю
вероятность поражения ракетой цели) от дальности включения средств РПД (в
расчетах принято, что максимальные дальности стрельбы зенитными ракетами и
обнаружения цели в отсутствие помех равны между собой и составляют 290 км;
вероятность поражения цели в отсутствие помех - 0,8, а при наличии помех - 0,4,
скорость зенитной ракеты в два с половиной раза превышает скорость самолета)
В окончательном варианте динамический стенд отработки БСО и УУ
состоял из нескольких ЭВМ СМ-1700, IBM/РС, а модели устройств и ОММ в
целом функционировали в операционной системе собственной разработки в среде
МОС ВП.
3.16. Полунатурный стенд и его аналитико-математическая
модель оценки эффективности БСО
Стенд полунатурного моделирования (ПНМ) оптимально сочетает
физические, имитационно-аппаратные и математические методы моделирования;
причем, для имитации устройств (в объеме протоколов связи с реализацией
динамики функционирования) широко используются мини-ЭВМ, а управление и
математическое моделирование в стенде производится на ПЭВМ. В состав стенда
ПНМ входят (см. рис. 3.76) [15]:
- канал радиотехнической обстановки (РТО) для имитации сигналов РЛС,
БРЛС, РГСН и др средств ПВО, в котором используются генераторы сложных (и
перспективных) сигналов атакующих средств перехвата (ЛЧМ-сигналы; сигналы
с перестройкой несущей частоты; КНИ-сигналы; многочастотные и другие
сигналы); количество генераторов соответствует пропускной способности БСО;
генераторы управляются по специальной программе от ПЭВМ (учитываются
«атакующие» РЛС (БРЛС) и «мешающие» РЛС); подача сигналов на станцию РТР
280
производится по эфиру в безэховой камере через антенны с автоматической
(медленной) регулировкой по амплитуде для создания эффекта перемещения ИП
(или самолета относительно ЗРК) по дальности;
- базовые модули (БМ), построенные на мини-ЭВМ для имитации работы
отсутствующих устройств БСО; входные (выходные) сигналы БМ и темп обмена,
как уже говорилось, соответствуют протоколам связей;
- физические макеты имитаторов РЭО самолета и других устройств (если
таковые имеются) — блоков (устройств) навигации, БРЛС и т.д.;
- контрольно-проверочная аппаратура (КПА) устройств БСО и комплекса в
целом; три ПЭВМ для управления стендом, каналом РТО, каналом отработки
программы УУ; устройство сопряжения;
- аналитико-математическая модель оценки эффективности БСО.
Стенд ПНМ является последним звеном в цепи синтеза БСО и основное его
назначение - окончательная проверка правильности работы комплекса перед
многочисленными испытаниями. Условно стенд ПНМ можно разделить на пять
частей (четыре из них отмечены (на рис. 3.76) жирной линией, одна - штрих
пунктиром):
- стенд отработки и сдачи, опытных образцов БСО по техническим условиям
заказчику (канал радиотехнической обстановки - РТО в минимальном объеме;
имитаторы РЭО, КПА; стеллажи, подставки, соединительные кабели и
волноводы; длина кабелей соответствует фидерной схеме по условиям
размещения аппаратуры на самолете); впоследствии документация на эту часть
стенда передается на серийный завод для изготовления и настройки (сдачи) -
серийных образцов БСО;
- исследовательская, наиболее полная часть стенда (весь стенд ПНМ, кроме
математических моделей), предназначенная для проверки предельных
возможностей БСО по специальной программе (в большем объеме, чем это
заданно по тактико-техническим требованиям на БСО), окончательной отработки
программ (алгоритмов) управления;
281
- переменные части стенда для сопровождения натурных испытаний БСО; в
этих «переменных» частях могут быть использованы математические модели (для
приближенной оценки эффективности по значительно более сложной, по
сравнению с радиополигоном РТО, программе), либо значительная часть
исследовательского стенда для имитации ситуаций, возникающих на
радиополигоне во время испытаний, на серийном заводе при сдаче (для
корректировки аппаратуры, алгоритмов и программ управления) с целью
выработки и проверки правильности изменений, вносимых в аппаратуру;
исследования «не штатных» (и не предвиденных) ситуаций; имитация «сбоев» и
др.; канал отработки алгоритмов и программ управления.
Какие-либо рекомендации (в плане методики построения стенда ПНМ)
трудно придумать; общая рекомендация одна: чем больше стенд учитывает
реальных условий работы БСО, тем эффективнее он будет использоваться; это
возможно при обязательной проверке и информативной части по «эфиру» и
широким применением вычислительной техники. Последовательность
проектирования стенда ПНМ такова: сначала создается канал РТО, имитаторы
устройств (БМ), канал отработки алгоритмов и программ и все «завязывается» в
единую систему; затем имитаторы последовательно заменяются на реальные
устройства. Несколько слов о модели оценки эффективности БСО. Во второй
главе мы создали аналитические модели оценки эффективности; чтобы их
проверить и сравнить с оценками эффективности заказчика (на упрощенных
аналитических моделях) нужен «инструмент» для проверки, которым может быть
стенд ПНМ. В этих условиях были созданы комбинированные аналитико-
математические модели, в том числе с использованием некоторых блоков ОММ,
математических моделей, созданных в кооперации с другими предприятиями;
модели реализованные на ПЭВМ IBM/PC в операционной системе MS-DOS
(ПЭВМ могут устанавливаться в местах испытаний и работать в лабораторных
условиях).
282
г
Имитаторы
РЭО
КПА
Стенд отработки
БСО по ТУ
Имитаторы
связей
I Математические ।
I
I модели I
V_____________
Управляющая
стендом ПЭВМ
ШМ/РС
Исследовательский
стенд ПНМ.
Устройство
сопряжения
..
Рис.3.76. Блок-схема полунатурного моделирования.
283
Заметим (в заключение главы), что аналитические модели (глава вторая),
динамический и полунатурный стенды представляют систему
автоматизированного проектирования (и отработки) БСО, алгоритмов (программ)
управления, оценки эффективности БСО, сопровождения натурных (заводских)
испытаний и др. Эта система не только облегчает создание (современное
проектирование) систем РПД, но и в ряде случаев, является единственным научно
обоснованным «инструментом» разработки аппаратуры подобного класса
(наиболее полная система автоматизации проектирования, в постановочном
плане, приведена в разделе 1.4.3 книги).
Перейдем к рассмотрению проектирования комплексов РТР
моделированием и этапов вторичной обработки информации от них.
284
Глава 4. МОДЕЛИРОВАНИЕ ПРОЕКТИРОВАНИЯ КОМПЛЕКСОВ РТР
Приступая к очередному крупному разделу книги, всегда думаешь о тех
проблемах, которые остались «за ее бортом» по причине «конечности» повество-
вания. Многое, как уже подчеркивалось, из теории и практики проектирования
средств РТР (РПД), даже в настоящее время, относится скорее к области искусст-
ва, чем науки; огромной материал находится «в умах» специалистов («не положен
на бумагу» по причине закрытости этой области знаний). Мы не будем преследо-
вать здесь цель дать формулировку подробных рекомендаций (инструкций) по
проектированию аппаратуры подобного класса моделированием. Скорее наша за-
дача заключается в том, чтобы дать читателю возможность самому осмыслить
общие принципы (методы) создания (синтеза) сложных систем с помощью моде-
лирования на примере решения конкретных проблем РТР и РПД, а также убедить
читателя в необходимости обязательного предварительного моделирования слож-
ных систем.
Радиоразведка раньше чем радиопротиводействие начала использоваться в
военных конфликтах; современные задачи РТР весьма обширны (от локальных до
тактических и стратегических), методы выявления информации разнообразны (от
«мгновенных» до длительных, многократно повторяющихся способов), а средства
РТР размещаются практически на всех классах летательных аппаратов [1,2].
Несмотря на огромное разнообразие задач РТР, ее основными функциями (и
этапами) всегда были: обнаружение, местоопределение и распознавание радио-
сигналов; причем на этапе обнаружения производится измерение радиотехниче-
ских параметров, а на двух остальных этапах - обработка разведанных данных В
предыдущих материалах книги мы рассмотрели один из возможных вариантов
применения (и моделирования) информации от средств РТР - непосредственное
285
ее использование в системах РПД (БСО) в интересах защиты летательного воен-
ного аппарата. В настоящей главе мы займемся моделированием оптимального
проектирования специальных, автономно используемых (или в составе более вы-
сокоорганизованных систем) комплексов РТР [137, 138].
По-видимому, целесообразно пойти проверенным путем и начать с анали-
тических моделей оценки функционирования средств РТР.
4.1 Аналитические модели оценки эффективности
основных этапов и в целом процесса РТР
Прежде всего, надо договориться относительно критериев оценки эффек-
тивности этапов РТР и процесса РТР в целом. Традиционно для этих целей при-
менялись вероятностные критерии, которых мы и будем придерживаться, хотя
некоторые авторы считают, что использованием простейших формул типа (2 1)
«чаще удается сократить количество слов для описания процесса, чем получить
точные количественные результаты» [7, с.38]. Монография Ю.П. Мельникова [9]
прекратила такие разговоры и показала мощь вероятностно-статистических мето-
дов в радиотехнической разведке при получении количественных оценок.
В табл. 4.1, на основании материалов работ [9, 23, 112, 142 и др.], приведе-
ны вероятностные критерии с учетом этапов и процесса ведения РТР. Если веро-
ятность обнаружения целиком зависит от технических параметров аппаратуры
РТР (порога обнаружения, приемного потенциала, времени анализа, селектирую-
щей способности аппаратуры, динамического диапазона, требуемой номенклату-
ры и точности измерения параметров сигналов и др.), то вероятность местоопре-
деления определяется характеристиками (и наличием) пеленгатора, принятым
способом пеленгования и производительностями обнаружителя, пеленгатора и
системы бортовой обработки (наличием БЦВМ) (см. схему комплекса РТР на рис
1.2 и рис. 1.3 гл. 1). Вероятность опознавания сигналов РЛС (типов РЛС) зависит
только от перекрытия областей изменения параметров РЛС, относящихся к раз-
286
ным типам, между собой и количества РЛС каждого типа в радиолокационном
поле (РЛП); как правило, точностей измерения технических параметров, потреб-
ных для поэкземплярной идентификации РЛС, вполне хватает для опознавания
типов РЛС с точностью, определяемой РЛП [23,30]. Как подтвердил опыт разра-
ботки комплексов, станций и др. средств РТР, основным (основополагающим)
требованием при создании комплексов РТР (в тактико-техническом задании) яв-
ляется вероятность местоопределения РЛС с заданной точностью.
Таблица 4.1. Критерии оценки эффективности этапов и комплексов РТР
1 № | Этапы РТР Для отдельных РЛС Для РЛП
1 1 Обнаружение РЛС Вероятность обнаружения (от времени, энергетики РЛС и др ) 1 Средняя вероятность обнаружения РЛС РЛП, 2 Число обнаруженных РЛС.
2 Распознавание типа РЛС Средняя вероятность опознавания типа РЛС. Средняя вероятность опо- знавания типа РЛС РЛП.
3 Определение коорди- нат РЛС 1. Вероятность местоопределе- ния РЛС с заданной точно- стью; 2 Ошибки расчета координат РЛС. 1 Средняя (Роп) вероят- ность местоопределе- ния РЛС РЛП, 2 Средняя условная ве- роятность местоопре- деления (с учетом РОб„ и Ро„ РЛС).
4 Эффективность ком- плексов РТР (Рколот) и средств (станций и др.) РТР (возможен также критерий, сте- пень выполнения тре- бований ТТЗ заказчи- ка) 1 Координаты i-ой РЛС с задан- ной точностью; О ^КОМП/ — Р Р Р /i-ойРЛС оМ °ni OMi (вероятности Рот POJUJ - услов- ные); 3 Вероятность правильного оп- ределения координат РЛС с заданной точностью; 4 Вероятность пропуска РЛС; 5 Вероятность ложного место- определения. 1 - Ркомп^РобнРопРом (ве- роятности Роп и Роы - условные); 2 Средняя условная ве- роятность местоопре- деления с заданной точностью РЛС РЛП, 3 Количество правильно обнаруженных РЛС РЛП (их координаты) 4 Количество ложных отметок РЛС в РЛП, 5 Количество новых ти- пов (экземпляров) РЛС
287
Именно этот показатель эффективности определяет структуру и техниче-
ские параметры средств РТР и, чтобы грамотно спроектировать аппаратуру, надо
знать каким образом его оценить. Все остальные показатели эффективности
должны быть автоматически «обеспечивающими» и предельно-возможными в си-
лу того, что вероятность местоопределения всегда условная (ее можно получить
при условии: правильного (и эффективного) обнаружения сигналов РЛС и опо-
знавания типа РЛС без внесения значительных инструментальных погрешностей
со стороны аппаратуры).
Перейдем непосредственно к аналитическим моделям расчета эффективно-
сти определения координат РЛС при РТР.
4.2. Модели расчета эффективности определения координат РЛС при РТР
Существующие методы местоопределения источников излучения (РЛС,
БРЛС и др) в воздушной радиотехнической разведке [9, 23, 61, 160, 161 и др.]
можно условно расклассифицировать в соответствии с данными табл. 4.2. Прак-
тическое применение в аппаратуре РТР нашли угломерные методы («мгновен-
ные» и угломерно-временные; триангуляционные и «траекторные») там, где име-
ются радиопеленгаторы, и временные (в аппаратуре оценки радиообстановки, не
имеющей в своем составе радиопеленгаторов); последние позволяют получить
район нахождения источников излучения.
Поскольку нас интересует моделирование конкретного построения аппара-
туры РТР и оптимальный выбор ее технических параметров [23, 137], то начнем с
угломерных способов определения координат. Наиболее полная оценка эффек-
тивности местоопределения наземных РЛС методами многократной пеленгации
приведена в монографии [9]. Согласно этой работе интегральной характеристикой
эффективности местоопределения РЛС РЛП является усредненная по дальности
верятность вычисления координат с ошибкой по дальности не более заданной (гД
которая может быть найдена так:
288
(4.1)
где Дз- заданная ширина зоны разведки по одну сторону от линии полета;
Р0А((Д) - вероятность определения координат РЛС с ошибкой не более г0 как
функция от дальности.
В общем случае интегрирование в формуле (4.1) может вестись не от нуля
до Дз, а от минимальной дальности обнаружения РЛС по условиям размещения
приемных антенн средств РТР на воздушном носителе (например - от высоты по-
лета ЛА). Для эллиптического рассеяния попарного пересечения некоррелирован-
ных пеленгов от истинных координат РЛС Р0Л((Д), согласно работе [113], описы-
вается формулой:
Р„,(Д) = Л,(Д) =
где Jo - модифицированная функция Бесселя нулевого порядка;
<5У - среднеквадратические погрешности определения координат, завися-
щие от дальности (ось ОХ эллипса рассеяния погрешностей (пересечений пелен-
гов) параллельна оси полета ЛА).
В частных случаях, когда сгх=О и <зх^<5у интеграл (4.2) представляется в виде
[9 с.247]:
)p,W=®4«/[V2.CT)(/?)]}
р,. (д) = 1 - ехр{- г;/[го-; (д){;
при сух - 0;
При <7х=Оу.
(4 3)
2^(Иногда, ФХ*) носит название интеграла веро-
/ о
ятности).
289
Подставляя в выражение (4.1) формулы (4 2) и (4 3) можно получить ДДг0),
результаты численного интегрирования по формуле (4.1) в функции от параметра
42-ау(д)/гп (по оси ОХ) при различных оДоу) и, когда оу(Д) пропорциональна
дальности, приведены на рис. 4 1. Семейство кривых, представленное на рис. 4.1
и охватывающее различные сочетания и оу, хорошо аппроксимируется функци-
ей [9 с. 248]:
РоМ=1 - ехр[- (3 7 -17<с/ )J (4.4)
Таблица 4.2. Методы местоопределения (измерения дальности -Д, траверза -Дтр)
РЛС (излучающих РТС) с борта летательного аппарата (ЛА) (или нескольких ЛА)
при РТР.
290
Рис. 4.1. Зависимость средней вероятности определения координат РЛС
в функции от 4z<3y/rQ при различных значениях <зу и оу.
Для того, чтобы пользоваться последней формулой, необходимо знать зави-
симость <зх и оу от числа снятых на РЛС пеленгов (считается, что РЛС обнаруже-
ны достоверно). Такая зависимость получена в работах [9, 23] при оптимальной
обработке «т» пар пеленгов. Координаты РЛС можно определить по пересечени-
ям минимум двух пеленгов [6]; т.е. эллипс ошибок образуется от попарного пере-
сечения пеленгов, снятых на РЛС аппаратурой РТР; оптимальная обработка пред-
полагает получение минимально-возможного эллипса ошибок (по методу наи-
меньших квадратов или «весовой» обработкой [114]). Зависимость <зх и оу от «т»
имеет вид (для симметричной относительно траверза на РЛС пеленгации) [23]•
оу = 1 72(7 а Д3/[/т • tg(y/2)]; >
=°\[°57-^б72)1
(4 5)
где у - сектор пеленгования (угол между двумя крайними пеленгами, взятым в
начале и конце базы пролета (L);
а - симметрична относительно траверза на РЛС);
291
т - число пар независимых пеленгов,
оа - погрешность (СКО) пеленгации.
Подстановка формул (4.5) в выражение (4.4) дает самую простую из извест-
ных в литературе формулу для оценки средней по дальности вероятности место-
определения РЛС РЛП с погрешностью не большей го (относительное число раз-
веданных РЛС РЛП с заданной точностью):
7^W = l-exp
[1 52 — 0 4/g(y/2)]- r0 Vw tg(yl2)
Дз'&а
(4 6)
Формула (4.6) получена в предположении некоррелированности пеленгов и
связывает Рои(г0) с требуемой шириной сектора пеленгования (у), числом пар пе-
ленгов (ти); заданной точностью определения координат (гр) и среднеквадратич-
ной ошибкой пеленгования аппаратурой РТР (сга) при фиксированной величине
зоны обзора РТР (по одну сторону от линии полета разведчика). На рис. 4.2 при-
ведены результаты расчета по формуле (4 6) в зависимости от Дз; параметр кри-
вых рис. 4.2 - величина су = гйДт/аа в км; у=60 .
Выражения (4.5) и (4.6) справедливы при л?»1; при малых т (в пределе
т=1, т.е. одна пара пеленгов) <jv = Д3 • cy/sin(y/2) и <ух = <уу-tg(y/2), тогда подстанов-
ка этих оу и су в формулу (4.4) дает:
^1fc>) = l-exp<
[2 62-1.2-Zg(y/2)]-r0 -sin(//2)
Дз'^а
(4-7)
Расчет по формуле (4.7) и выражению (4.6) для т=2 (четыре пеленга) дает
результаты, расходящиеся всего на 10%.
292
Рис. 4.2. Зависимость определения координат РЛС в функции от размеров зоны
разведки.
Для высотных разведывательных ЛА (в том числе спутников Земли) может
быть применен мгновенный (по одному импульсу) угломерный способ определе-
ния координат с измерением угла в вертикальной плоскости 0 (угломестный спо-
соб [7]), если известна высота (h) полета ЛА; тогда, без учета погрешностей изме-
рения h, ол- и оу приближенно равны:
суу=ар-Дг/к И <гх=ау-Н1Д,
(4-8)
где - среднеквадратическая погрешность измерения угла 0 в вертикальной
плоскости;
Д- дальность («мгновенная») до РЛС.
Подставляя выражение (4 8) в формулу (4.3), а затем последнюю в (4.1) и
проводя численное интегрирование, получим зависимости ^(г0), приведенные на
рис. 4.3. Параметрами у этих кривых служат оу и оу, а по оси ОХ отложена вели-
чина Ь:
293
[х/2 оу (Д)]/г0 = 72 • сгл Д2/(г0 • h) = b2
следовательно, b = 1.19Д jД/Д
(4-9)
С ростом дальности, согласно выражению (4.8), ох/ау =Н/Д стремится к ну-
лю, поэтому точки на графике рис. 4.3 для h-const по мере увеличения Д удаля-
ются от кривой, соответствующей стх=о,у, и приближаются к кривой аА-=0. Это об-
стоятельство отражает аппроксимирующая зависимости Д„(г0) кривая:
Раы W = 1 - ехр(- 2/^) = 1 - ехр
1 68 \гД
Д
(4.10)
где b взято из (4 9).
Кривая (4.10) отмечена на рис. 4.3 пунктиром.
Рис. 4.3. Вероятность определения координат РЛС с погрешностью не более г0
в функции от параметра «Ь» при угломестном способе вычисления
местоположения.
294
Сравнивая между собой выражения (4.6) и (4.10) видим, что угломестный
метод местоопределения (мгновенный способ), в отличие от многократной пелен-
гации, естественно, не зависит от числа пеленгов и ширины сектора пеленгования
(ширины зоны обзора - Дз, которая определяется высотой (h) полета самолета), в
меньшей степени (д/о> в отличие от сга) - от точности пеленгования, но сущест-
венно зависит от высоты полета (Д).
Кривые (4.10) в функции от размеров зоны обзора (Дз) показаны на рис. 4.4,
параметр кривых - величина с = (лг0/сг^)р5, выраженная в километрах. Из сравне-
ния графиков на рис. 4.2 и рис. 4.4 для O'J = °6 при Дз=200 км следует, что па-
раметры =г0Дт/о-а «300 км, а с = (/гго/сг^)1' =100 км, следовательно, для получе-
ния одинаковых ошибок местоопределения (г0) в обоих случаях (одинаковых То)
надо, чтобы выполнялись соотношения:
(4.Н)
гп=3-102^ И F =ю4^ ИЛИ -^ = 33^.
° Дп ° h Д h
Рис. 4.4. Вероятность определения координат РЛС с погрешностью не более г0
в функции от размеров зоны обзора и параметра «С» угломестным способом.
295
Из последнего выражения (4.11) следует, что для обеспечения одинаковых
точностей пеленгования азимута и угла места (аа=о/;) надо поднять летательный
аппарат на высоту h = Зз4т ; если т=100, то высота подъема ЛА должна быть 330
км (спутник Земли). Для высоты полета самолета равной 33 км точность измере-
ния с»/? должна быть на порядок выше сг«.Другой пример. Если зона разведки по
одну сторону ЛА - 400 км, а средство РТР имеет радиопеленгатор с са=(1-г2)° (по
условиям размещения на ЛА такая точность пеленгации предельно-возможная) и
координаты РЛС определяются методом многократной пеленгации, то для полу-
чения средней вероятности местоопределения по формуле (4.6) около 0.8 с ошиб-
кой г0 = (5-10) км (у=60°) требуется снять на каждую РЛС около 30 пеленгов. Та-
кова, вкратце, методика пользования кривыми и расчетными зависимостями (ана-
литическими моделями) при выборе технических параметров средств РТР для
двух широко распространенных пеленгационных методов местоопределения
Следует также отметить [23], что угломестный способ вычисления коорди-
нат РЛС с борта ЛА дает удовлетворительные погрешности местоопределения
при дальностях меньших (5-ь7)А, так как при больших, чем (5-г7)Л дальностях до
РЛС сам измеряемый угол места (£) становится малым, сравнимым с точностями
его (р) измерения. Поэтому угломестный способ, как правило, применяется при
разведке РЛС со спутников Земли.
Для оценки пределов применимости приведенных выше аналитических мо-
делей пеленгационных методов и их аппроксимаций в работе [9] был поставлен
статистический эксперимент на ЭВМ, в ходе которого задавались координаты пе-
ленгационных пунктов на траектории полета и РЛС, вычислялись пеленги на РЛС
и на них (пеленги) накладывались ошибки измерения. Обработка результатов та-
ких моделируемых измерений производилась либо по методу наименьших квад-
ратов, либо с учетом «веса» пеленга [114].
296
Л МД^а)
О X • д о '2
• х ° X -3
е х • •
ох 4—22L
m -
1 2 3 4 5 6
Рис. 4.5а. Результаты статистического эксперимента на ЭВМ при а2=0.5 (1 -
сга=0.1; 2 - оа=0.05; 3 - сга=0.025).
Рис. 4.56. Результаты статистического эксперимента на ЭВМ при 0.2=2 (+оа=0 1;
*оа=0.05).
Совокупность пеленгов, снятых за один пролет считалась одной реализаци-
ей эксперимента; количество экспериментов (реализаций) варьировалось от 100
до 1000. Обработка результатов моделирования показала, что оба алгоритма
(наименьших квадратов и «весовой») примерно равноценны; на рис. 4.5 а и 4.5 б
297
приведены данные, усредненные по этим двум методам - зависимости нормиро-
ванных среднеквадратических ошибок координат (<т,/(Д от числа пар пелен-
гов (т) Параметрами у кривых (экспериментальных точек) является отношение
а2 - Д-тр/Ь №тр “ дальность до РЛС по траверзу, L - база между крайними пелен-
гами - рис. 4.6; число реализаций для каждой точки равно 1000; сплошными ли-
ниями показаны результаты, полученные по аналитическим моделям. Из рис. 4.5 а
и 4 5 б следует, что степень совпадения аналитических зависимостей с экспери-
ментальными (моделируемыми) результатами тем лучше, чем меньше значения
Дтр/Ь = а2 и выше точность пеленгования (на полученных с помощью ЭВМ дан-
ных <за указана в радианах). Самое лучшее (в пределах 10 %) совпадение по ре-
зультатам экспериментов теории и практики, если -
а2 • сгс < 0.025 или < 0 025. (4 12)
L
Следовательно, при Д^/L -1 должно быть - ста=О.О25=%0 радиана=1.4°, что
требует уже, как указывалось выше, предельно-возможных, с учетом размещения
на летательном аппарате, точностей пеленгования.
При обработке из всего массива пеленгов надо брать пары, симметричные
относительно траверза на РЛС (пара 1-4 и пара 2-3 как показано на рис. 4.6) пото-
му, что рядом стоящие пеленги (например, 1 -2) дают наибольшие ошибки место-
определения [23, 161].
При отсутствии радиопеченгатора в составе аппаратуры РТР для оценки
района нахождения наземных РЛС используются временные методы вычисления
координат [61]; как правило, такие методы основаны на модуляции (изменении)
технических параметров РЛС при пролете траверза на РЛС (кратчайшего рас-
стояния от траектории полета до РЛС) Такая аппаратура РТР называется станци-
ей разведки радиообстановки и предназначена для обнаружения РЛС в широком
диапазоне длин волн (от 0.1 ГГц до 20 ГГц и более[2]).
298
Рис. 4.6. Определение координат РЛС по четырем (двум парам = п) пеленгов (а/,
ot2, аз, аД, взятых равномерно.
Методика оценки координат РЛС основана на измерении и отслеживании
изменения суммарной длительности облучения главным и боковыми лепестками
ДНА РЛС за время пролета базы L (рис. 4.6); суммарная длительность обучения
РЛС за счет сокращения дальности между РЛС и ЛА увеличивается, достигает
своего максимального значения при Д=Д?р и затем снова уменьшается, достигая
минимального значения «на краю» базы L. Эта зависимость иллюстрируется ка-
чественно графиком рис. 4.7, где показано расширение суммарного за период
вращения антенны угла 0обл в градусах (по оси «У») от сокращения дальности (Д)
между ЛА и РЛС (ось «X») относительно максимальной дальности (Д/Дм), соот-
ветствующей началу (или концу) базы L.
В связи с тем, что в формировании суммарного угла (0°6л) участвует боль-
шое количество случайных выбросов ДНА, флуктуации бокового излучения
сглаживаются и зависимость от дальности (Д/Дм) становится все более плав-
ной без провалов по мере приближения ЛА к РЛС. Однако, при приближении (на-
хождении) ЛА на дальности, соответствующей среднему уровню бокового излу-
чения, число боковых выбросов максимально и при построении временных селек-
299
торов, отслеживающих время облучения конкретной РЛС, этот эффект перерывов
(«изрезанности») в приеме сигналов РЛС надо учитывать [23, 115, 162].
Рис. 4.7. Зависимость суммарного угла облучения от дальности до РЛС (логариф-
мический масштаб).
Рис. 4.8. Измеренная в натурных условиях диаграмма направленности РЛС и ап-
проксимация среднего уровня боковых лепестков, G/G# в дб.
300
На рис. 4.8, для примера, приведена ДНА с учетом боковых лепестков, взя-
тая из работы [115]; на этой ДНА сплошной линией нанесена аппроксимация
ДНА вида зависимости (3.121) из главы 3, аналогичная кривой, изображенной на
рис. 4.7. Материалы по данному вопросу имеются также в работах [9, 117, 162 и
др.].
Рис. 4.9. Перемещение самолета, оснащенного станцией с боковым сектором
разведки, относительно РЛС.
Найдем зависимость суммарного времени облучения (0ОбЛ) от дальности об-
наружения, координат, других параметров РЛС и ширины диаграммы направлен-
ности антенны станции РТР.
Предполагается, как и раньше в пеленгационных методах, что антенны
станции РТР (разведки радиообстановки) расположены вдоль бортов ЛА (рис.
4.9.). Учитывая аппроксимацию (3.121) гл. 3 уровня бокового излучения РЛС, за-
висимость отношения ©обЛ!®01 можно записать в виде [9 с.210]:
301
®обл/® 01 “
X2 + у2
0.22 <------— <1;
Дм_
Jx2 +
0.073 < ---—- < 0.22-
ДМ
(4.13)
УУТу2 /дм < 0.073,
где
при
0<Л<1.04
при 1.04<л<^еь^
А = [arctg(x/y)l®^,
®oi и &02 - ширина ДНА РЛС и станции РТР в горизонтальной плоскости на
уровне 0.5 по мощности;
Дм - максимальная дальность обнаружения РЛС при совпадении главных
лучей антенн РЛС и станций РТР (см. формулу (3 120) гл. 3).
Результаты расчета ©Обл/©07 по последним формулам для ©^=1 радиан
(57.3°) приведены на рис. 4.10 в зависимости от отношения х/Дм (относительная
текущая координата ЛА - см. рис. 4.9). Параметрами у кривых служат утр!Дм (от-
носительная дальность по траверзу РЛС). Из графиков рис. 4.10 следует, что при
отсутствии ошибок и флуктуаций измеряемой величены (времени облучения
РЛС) координаты РЛС могут быть определены по результатам нескольких изме-
рений, а наиболее точно - при прохождении траверза (утр) на РЛС (рис. 4.9) [61].
Заметим, что формула (4.13) получена в предположении, что диаграммы
направленности антенн РЛС и станций РТР аппроксимируются одинаково выра-
жением (3.121) (см. 3 главу). В работе [23] рассмотрены другие аппроксимации
диаграмм направленности антенн станций РТР (отличные от sin х/х) и получены
несколько другие формулы для отношения 0ОбЛ/0о7 по сравнению с (4.13).
302
Рис. 4.10. Зависимость нормированного времени облучения
от координат разведуемой РЛС при прямолинейном полете самолета-разведчика.
Для оценки влияния ошибок на точность измерения координат РЛС необхо-
димо учесть следующее:
- флуктуации бортовой (станции РТР) ДНА, ее несимметричность и из-
резанность;
флуктуации ДНА РЛС из-за отражений от земли, местных предметов
и их зависимость от дальности между РЛС и ЛА;
- изменения уровня мощности РЛС и чувствительности приемника
станции РТР за время разведки (пролета базы);
- прерывистости 0обл («провалы» или перерывы в длительности облу-
чения) и инструментальные ошибки измерителя.
Для простоты исследования прерывистость 0ОбЛ можно не учитывать (счи-
тать, что это «аппаратурный вопрос»), а далее полагать, что суммарно все осталь-
ные причины (в соответствии с центральной предельной теоремой в теории веро-
ятностей) проявляются распределенными по нормальному закону с дисперсией
303
о-"й . Найдем зависимость ошибок измерения координат РЛС сгл и <зу от числа об-
лучений (вернее числа измерений &ОбЛ), аппроксимируя кривые рис. 4.10 тре-
угольниками (рис. 4.11).
Рис. 4.11. Аппроксимация изменений времени облучения при прямолинейном по-
лете самолета-разведчика.
Измерения времени облучения производятся в точках с координатами х/, х2,
.. хг ..., а 2хтах - база пролета, на протяжении которой осуществляются измере-
ния. Результаты отдельных измерений времени облучения (по оси ординат - ось
времени) на рис. 4.11 показаны отрезками прямых; длина этих отрезков случайна
и флуктуирует около средних значений, определяемых сторонами треугольника
следующим образом:
|Х; Хтр\/Хмакс)> ХТР Хмакс < Xi < ХТР Хмакс’
0, X,. > хТР + хыакс или xt < хтр - хмакс
(4.14)
304
В соответствии с неравенством Рао-Крамера [114, 118] существует верхняя
граница дисперсии выборки - а2тр, удовлетворяющая условию
(4-15)
где Е - оператор получения математического ожидания путем двойного диффе-
ренцирования логарифма функции правдоподобия (L„) выборки из «т» измере-
ний.
Для получения функции правдоподобия действуем по методике работы [9 с
212] применительно к нашему случаю (общая методика изложена в [114, 119 и
120]).
Плотность вероятности единичного измерения времени облучения (р) в точ-
ке X/, как уже отмечалось, распределена по нормальному закону с дисперсией оу:
[l/(V2^r - crf^|- ехр[—0.5(?. — ip)2/crf2], (416)
где at среднеквадратическая погрешность единичного измерения времени облу-
чения, принятая независящей от координат xz.
Считая ошибки (измерения) независимыми и используя аппроксимацию
(4.14), имеем функцию правдоподобия выборки (L„) из «т» измерений вида
2’ -o',
ехр< 0 5t2p /оу tt / 1ТР -
|-Ay -A-jp I
X
макс
После логарифмирования Ln имеем’
ln£^S!n[!/(^'c)]+I
|х, - хтр |
X
макс
305
Заметим, что в последней формуле выражение i 1 - ——। после дифферен-
цирования по хур равно:
Y
\макс J
dxTP
ГУХМ«Кс^ nPU Х, > ХТР>
Х,>Хтр
Тогда
(4-17)
Подставляя выражение (4.17) в неравенство Рао-Крамера (4.15) имеем:
или
tTP4m
(4.18)
Из формулы (4.18) видно, что минимальная относительная ошибка в опре-
делении координаты «X» РЛС (сгл мин1Хмак<) прямо пропорциональна суммарной
ошибке времени облучения (оД, и обратно пропорциональна корню квадратному
из числа измерений (7>й), а также среднему (в соответствии с ДНА) времени об-
лучения РЛС на линии траверза (Д,). Действуя аналогичным образом, можно най-
ти минимальную ошибку измерения координаты «у» (Qy,Mt(H) при условии, если хур
известна; так для у>0.25Дмо имеем (ошибка измерения координаты «у» (a,^mm ) за-
висит уже от самой координаты «у»):
ОутгММ = 4/ • /01 • ДЛ1О),
(4-19)
где toi - время облучения ЛА главным лепестком ДНА РЛС;
Дмо - максимальная дальность обнаружения РЛС (использована выше).
306
Анализ имеющихся материалов по тонкой структуре бокового излучения
ДНА РЛС и моделирования функционирования аппаратуры РТР, по данным рабо-
ты [9], дают следующие оценки относительных ошибок в определении координат
РЛС при измерении времени облучения за пролет базы (2Х,МКС на рис 4.11)
^/А(»с = 005^0 1; <7у/у = О2 + ОЗ. (4 20)
Это позволяет получать в станциях разведки радиообстановки информацию
о районе расположения РЛС (особенно по координате «У», где «грубая» точность
измерения).
Другими многочисленными вариантами временных методов местоопреде-
ления неподвижного излучателя с движущегося ЛА (или наоборот) могут быть
названы различные навигационные способы, разностно-дальномерные или доп-
плеровские интегральные [121 §7.5]; разностно-допплеровские [122, разд. 3 3 и
6.3] (подобно тому, как работают дифференциально-фазовые радиопеленгаторы и
допплеровские измерители угловой скорости); ряд примеров аппаратурного по-
строения при использовании временных методов можно найти в зарубежных па-
тентах [123]. Все эти методы основаны на использовании известных сигналов ра-
диомаяков и заданной траектории движения ЛА и измеряют (вычисляют) коорди-
наты либо по изменению моментов модуляции импульсных (непрерывных) сиг-
налов за счет эффекта Допплера (низкочастотная модуляция), либо по обычному
допплеровскому изменению несущей частоты радиосигнала.
В работе [124] и других С.В. Поповым предлагается ряд модификаций этих
методов применительно к специфике РТР с борта летательного аппарата и, в ча-
стности, показана принципиальная возможность применения модифицированных
методов в случаях априорно неизвестных частот модуляции сигналов или несу-
щей частоты. Изложенные в этих работах способы местоопределения не требуют
применения высокостабильных эталонов несущей частоты и узкополосных час-
тотно-избирательных устройств для снижения мешающего влияния близких по
частоте сигналов других источников излучения. Напротив, наличие в полосе при-
307
нимаемых частот сигналов нескольких РЛС с периодической импульсной моду-
ляцией может быть использовано как отличительный признак РЛС путем приме-
нения известных устройств селекции нескольких периодических импульсных по-
следовательностей и параллельной обработкой отселектированных сигналов (о
чем уже говорилось выше при рассмотрении блок-схемы построения комплекса
РТР). Во втором, «высокочастотном варианте» построения аппаратуры РТР, оп-
ределение дальности и курсового угла на РЛС производится по скорости измене-
ния разностной допплеровской частоты (ДЧ) f„ сигнала путем подсчета числа пе-
риодов этой ДЧ в последовательных временных интервалах и изменения отрезков
пути ЛА Разностная ДЧ измеряется фиксацией фазовых «набегов» сигнала, при-
нимаемых разнесенными вдоль борта ЛА антеннами с помощью устройств фазо-
вого сравнения (фазовым детектором, суммарно-разностной мостовой СВЧ-
схемой и т.д.). Если f„ неизвестна (и не измеряется в станции РТР), то вместо двух
временных интервалов (и отрезков пути, пройденного ЛА) требуется три и более
(для решения системы уравнений и исключения неизвестной fw).
Если правильно построить временной селектор и применить интерполяцию
измерений, то на точность вычислений не скажутся перерывы в приеме импуль-
сов РЛС, связанные с приемом по боковому излучению антенны, которые как мы
убедились, имеют место.
Для оценки погрешности и вероятности местоопределения с ошибкой не
более заданной разностно-дальномерных методов вычисления координат, вос-
пользуемся материалами работы [9], где рассмотрен случай ведения РТР с не-
скольких носителей аппаратуры радиоразведки. Однако этот материал имеет об-
щее применение там, где измеряются разности хода сигналов РЛС в точках на-
блюдения (точнее разности прихода сигналов РЛС, зависящие от дальности и
скорости распространения ЭМВ от РЛС до пункта РТР)
308
Рис 4.12. Схема разведки разнесенной системой воздушной РТР
Представим себе случай разведки некоторой площади системы ПВО разме-
рами Lxl (рис. 4.12); ЛА с аппаратурой РТР летят вдоль большой стороны прямо-
угольника на расстоянии уь от нее с интервалами d друг от друга (для мгновенно-
го определения координат РЛС необходимо три ЛА и линия связи между ними).
РЛС находится в точке F с координатами (х/,у,). Разведка с нескольких носителей
предполагает идентификацию отсчетов (на принадлежность их к определенному
экземпляру РЛС); если эта идентификация должна осуществляться на борту в
процессе РТР с целью оперативной обработки и передачи развединформации по
линии связи адресату, то это существенно усложняет построение комплекса РТР
При одинаковых и независимых ошибках измерения разности хода для обе-
их линий положения (AB-BC=J), т.е. из работы [113] находим сле-
дующее выражение для среднеквадратической ошибки (сг) определения коорди-
нат:
- - ad{1/[2sin 0 5(^>4 + <рс)]}• y)/sin2 0 5<рл + 1/sin2 0.5^с
(4 21)
309
где XAFB = (рА = arctg^Xj - xb + d - yb)] ~ arctg^x, - xb );(у^ - yb )];
FBFC = (pC= arctgfai - xb Ум - yb )] - arctg[(xf - xb - d), (y, - yb)],
<PA + (Pc = / = arctg[(xi - xb + d)!^ - yb)]- arctg^x, - xb - d)/(yi - yb )];
x.b - смещение точки В (второго ЛА) относительно начала координат.
Если ошибки измерении линий положения неодинаковы (ст«и*сгас), то в
формуле (421) первый сомножитель (с^) надо исключить, а оба члена суммы под
корнем умножить соответственно на сту. и <?;с. Отношение (с/о^)=Г называют в
навигации геометрическим фактором; на рис. 4.13 аи4.13 б показаны результаты
вычислений по формуле (4.21) - так называемое «поле погрешностей» - F=f(x,y)
при Ах/=400х200 км2; уь= -50 км; <У=100 км для двух различных положений точки
В (рис. 4 12). Кривые на рис. 4.13 приведены для фиксированного значения отно-
шения =const. Как видно из рисунков имеет место существенная неравно-
точность вычисления координат РЛС в зависимости от дальности до РЛС и поло-
жения разведчиков (линий положения) относительно центра района разведки.
Фактически для повышения точности местоопределения необходимо последова-
тельно просматривать заданную площадь разведки областью наибольшей точно-
сти разностно-дальномерной системы.
Полученное двухмерное (по X и У) распределение погрешностей целесооб-
разно заменить одномерным, если мы зададимся распределением вида:
P(5<C) = AS(./(£xZ),z=l,2, (4.22)
где Р(5<Ц.) - вероятность того, что на площади AS’ (рис. 4.13а), значение гео-
метрического фактора не превысит Д;
/=1,2, — интервалы задания (значение) Д.
310
Рис. 4.13а. Поле погрешностей Г=/(х,у) при хь=0.
Цифры у кривых на рис. 13а и рис. 136 соответствуют значениям геомет-
рического фактора Г = с, /&d.
Рис. 4.136. Поле погрешностей Г^/(х,у) при хь=-200 км.
311
Для получения распределения (4.22) зависимости на рис. 4.13а были ап-
проксимированы логарифмически-нормальным распределением с ошибкой не бо-
лее 5 % [9 с. 258]:
Р(1п В < In Г)=0.5 {1+Ф2 [(in В - ^)/(о-гл/2)]},
(4.23)
где Ф2 (х) = (2/Утг) Jexp(-t~ }dt;
о
£ и <5г ~ параметры распределения.
На рис. 4.14 приведены три кривые, соответствующие разным значениям
параметров £ и оу- для трех случаев ведения РТР заданной зоны разведки L-I. Пер-
вая кривая (2) построена для «центрального» положения ЛА относительно зоны
разведки (рис. 4.13а) и здесь £=2.2, а оу-=0.6 в формуле (4.23). Вторая (2) соответ-
ствует случаю (рис. 4.136), когда ЛА находятся на краю зоны; здесь £=3.3, и
<дг=1.5 в формуле (4.23).
Рис. 4.14. Интегральные распределения погрешностей определения координат
для разных параметров ведения разведки (масштаб логарифмический).
312
Из кривых рис. 4.14 (7 и 2) следует, что если ЛА мгновенно определяют ко-
ординаты РЛС и их положение случайно относительно зоны разведки, то все по-
грешности местоопределения заключены между этими кривыми. При наличии
возможности пролететь зону разведки, «просматривая» ее областью наибольшей
точности вычисления координат, ошибки уменьшаются и в оптимальном варианте
соответствуют кривой 3 рис. 4.14, из которой видно, что с вероятностью около 0.9
погрешности местоопределения не превышают Г=сз7сг<^=10 (так, если о/=30 м, то
стг=300 м).
Перейдем к учету реальных ошибок, которые при разностно-дальномерном
способе складываются из двух классов (видов) - погрешностей измерения линий
положения и собственных координат самолетов-разведчиков. Начнем с послед-
них, которые, в свою очередь делятся на погрешности собственной навигацион-
ной системы и ошибки измерения положения крайних ЛА относительно цен-
трального (точка В на рис. 4.12). Если считать, что навигационная система ис-
пользует угломерно-пеленгационный метод измерения собственных координат, то
плотность распределения ошибок (с»^ и оуН) можно найти в работе [113]:
W(r,d)- (г -&ту)/\2л:ахГ1 • сг>йд/1 -р2)]•ехр[-0.5г2/(1 -р2)хл], (4.24)
где А = [(sin2 0)/сАхН -2рsin 0 sin(y -0)/о-^ • ayii + sin2 (у -0)/о2уН];
г, 0 - полярные координаты ошибок навигации;
у - угол между линиями положения,
р - коэффициент корреляции
В работе [9] получено с использованием формулы (4.24) выражение для до-
полнительной ошибки вычисления координат крайних ЛА (точки А и С рис. 4 12)
относительно центрального ЛА (точка В) в следующем виде:
сган /сту11 = 2cosAycos2 Ajk2 + sin2 Л, ,
(4-25)
313
где сан - среднеквадратическая ошибка (CKO) определения крайних ЛА отно-
сительно центрального, у = л/2; р=0;
к = ^ун/^хН
4 = % ; Р - угол на разведуемую РЛС с борта ЛА (угол между перпен-
дикуляром к линии полета и направлением на РЛС).
Результаты расчета относительных ошибок определения координат крайних
ЛА относительно центра системы РТР показаны на рис. 4.15 для разных погреш-
ностей (Зун/^хн^к системы навигации самолетов. Положительные значения угла /3
соответствуют объектам правее точки С (рис. 4.12), отрицательные - левее точки
С Как видно из рис 4.15, ошибки в определении крайних ЛА наиболее сильно
сказываются (при к=1) при /? = (- я/2 о).
Рис. 4.15. Относительные ошибки определения координат крайних ЛА относи-
тельно центрального ЛА в функции от угла на РЛС при угломерно-
пеленгационном методе из измерения.
314
Перейдем к оценке погрешностей в измерении разности хода ЭМВ («вре-
менных» ошибок), которые зависят от внутренних шумов приемника, нестабиль-
ностей уровня (амплитуд) импульсов, их длительности (временного положения) и
крутизны фронтов.
Согласно [64] погрешность в измерении момента прохождения сигнала (сс)
с амплитудой Рс и нарастающей крутизной S на фоне внутренних шумов прием-
ника с СКО шума -<уш и дисперсией ст; равна:
стс«стш/5 при Рс/<т2ш»1. (4.26)
Это выражение для линейно нарастающего фронта может быть приведено к
виду [9 с. 263]:
= (4 27)
где тфрвых - длительность фронта на выходе усилителя (входе измерителя);
Рг„ - пороговая чувствительность приемника относительно шума (®15 дБ);
ко - коэффициент передачи огибающей сигнала высокочастотного тракта с
учетом детектора (далее принято к., = 1/V2).
Величина тфрвых связана с полосой пропускания усилителя (Д£) и длительно-
стью фронта сигнала на его входе тфрвх соотношением [125, 126]:
Т г
фр вых
=7д»+0/дл)2 •
(4-28)
Для измерения разности хода импульсов (ЭМВ) необходимо два независи-
мых измерения на разных (поэтому независимых) ЛА, отстоящих от разведуемой
315
РЛС на расстояниях Ду и Д2; если теперь тфрвх и Д/р в усилителях разных станций
РТР одинаковы, то из формул (4.27) а (4.28) получаем:
(4 29)
где До = Л/Ал -G] •77-С2/Рш - дальность обнаружения РЛС при РС=РШ (порого-
вой чувствительности приемника);
А - длина волны;
PiG] - передающий потенциал РЛС;
G2 - КНД антенны станции РТР;
т|=(0.2-0.5), а чаще 0.5 - коэффициент потерь (или «несовершенства теории»
[6])-
Выражение (4.29) получено в упрощенном виде; можно было бы не считать
, kfy, Рш одинаковыми для разных станций РТР из-за технологических разбро-
сов аппаратуры и условий распространения сигналов и получить из формулы
(4.27) более общее выражение для ошибок. Оставим это для упражнений внима-
тельному и заинтересованному читателю (тем более, что надо было бы еще учи-
тывать и особенности построения аппаратуры РТР).
Погрешности из-за нестабильности уровня сигнала учтем следующим обра-
зом. Мощность сиганала на входе приемника станции (комплекса) РТР с учетом
предыдущей расшифровки формулы (4.29) в части значения До можно предста-
вить так:
Р, Д с,2 г'-/д7] (g./gJ, (4.30)
где Z = (Л/ДяЦ/; СЛ1 - параметр Мельникова Ю.П. [9] (в ранних его работах
этот параметр был обозначен через \|/);
316
Go; - КНД антенны РЛС;
Gj/Goi - нормированная ДНА РЛС, учитывающая ее боковое излучение.
Распределение Z, Д и (Gi/Goi) в соответствии с материалами работы [9 гл. 2]
имеют вид:
^(Z)=(z/a|)-exp[-(o.5Z!)/°iL (4.31)
»Г(Д)=[2-(Д-Д„,)1/'(Д„„-Д„„)2, Д,„_ < (4.32)
Г(С,/См)==|о]/(СТлЛ&-Ся)]-ехр{-(о.5/<7П1п(01/60|)-А]2}, (G,/Gs,)>0. (4.33)
В формулах (4.31) 4- (4.33): <т| - дисперсия энергетического параметра ра-
диолокационного поля (РЛП), зависящая от состава РЛП (для современного РЛП
без маловысотных РЛС az = (0.4 - О.б) км Вт05; для перспективного РЛП
crz = (0.8 -1.2) км Вт0,5; более подробно мы поговорим о РЛП и параметре Z(crz) в
разделе «математическое моделирование комплексов РТР»);
Дмо и Дида - максимальная и минимальная дальности разведки РЛС;
<5д и г|а - параметры логарифмически-нормального распределения уровня
бокового излучения РЛС.
Уровень мощности (Рс) на входе приемника в формуле (4.30), как результат
перемножения нескольких случайных величин, будет тоже распределен по лога-
рифмически-нормальному закону [127]:
’ФЭ= )] ехр[-О.з(1п !' - (4.34)
где Цр (среднее значение)= 2 w(z/Д)+рд;
317
В свою очередь, математическое ожидание /Az/д), дисперсия [a(z/;/)]2 рас-
пределения цэ, а2 распределения WfGi/Goi) находятся известными мето-
дами по приведенным в тексте формулам (4.31) 4- (4.33) и не выводятся, чтобы не
загромождать текст книги.
Рис. 4 16. Определение временного положения фронта импульса РЛС
Для нахождения погрешности измерения временного положения импульсов
РЛС в зависимости от параметров плотности распределения входной мощности Рс
(формула (4.34) и ее параметры - рр и стД рассмотрим рис. 4 16. На нем изображе-
ны два импульса с разной крутизной фронтов и амплитуд, а также отмечен уро-
вень срабатывания -Vo, который определяет разное временное положение (^ и С)
зарегистрированного импульса на оси времени. Время регистрации любого им-
пульса (любой амплитуды) при одинаковой длительности их фронтов (^) зависит
от уровня «отсечки» (измерения) - Ро и амплитуды - например, - Vf.
(4.35)
318
где 1фрвых определяется формулой (4.28).
Так как VclV(j=^PtJPt., то по выражениям (4.34) и (4.35) может быть найдена
плотность распределения нормированного временного отклонения tH
(чтобы в формуле (4.35) в правой части осталось только = V0/Vc =yjP0/Pc ) в ви-
де усеченного логарифмически-нормального распределения:
(4-36)
где F(/#) = = 0.5^ + ф[(1пГ// +0.5//р)/(сг^л/2)]}.
О
Безразмерное СКО временного положения (tH =Д/тфреьа) находится по фор-
муле:
(4-37)
В работе [9 с. 266] приводится следующий пример расчета параметров рас-
пределений и погрешностей из-за нестабильностей уровня сигнала и разного вре-
мени фиксации временного положения фронта импульсов:
1. При сг/=1 км ВтОэ (перспективное РЛП) параметры распределения
ДНА РЛС (формула (4.33)) - 0^=1.612 (7 дБ), -9.21 (-40 дБ ниже главного луча
ДНА). Рассчитанные по формуле (4.34) параметры имеют значения: при высоте
полета самолетов-разведчиков 20 км (Дмо=500 км и ДМЮ1-50 км) параметр р,р=-23.6
(дБ к 1 Вт), что соответствует среднему значению входной мощности 5.5-10'11 Вт
319
(Рс) и параметру &р = 2 7(11 7дЛ); при высоте полета ЛА 6 км (Дмо=300 км и Дтт=ЗО
км) цр=-20 (дб к 1 Вт), что соответствует Рс=2-10'9 Вт и Стр=1 .5 (6 7 дБ).
2. Распределение времени срабатывания (4.36) для случая высоты поле-
та ЛА, равной 20 км, имеет параметры цг=-2, стуЛ .9 и F(7=7)=0.85 при пороге из-
мерения равном 1/50 от средней мощности; тогда СКО согласно (4.37) стл=0.232
Заметим, что величина не может быть больше чем 1/712 = 0 29, что соответст-
вует равномерному распределению z на интервале [о,1]-> 0... 1.
Считая погрешности измерения временного положения из-за внутренних
шумов (формула (4.29)) и различий уровней входного сигнала (4 37) независимы-
ми, а также учитывая удвоение дисперсии ст* (каждая линия положения РЛС из-
меряется разностью моментов прихода двух импульсов в точках С, В и А (рис
4.12)), для искомой ошибки от флуктуаций амплитуд имеем-
+ + (4.38)
При высокой чувствительности приемников станции РТР, когда До»Д1 и
До»Д2 первым членом под знаком корня во втором сомножителе формулы (4.38)
можно пренебречь и все определяется д/ст^-2 =Т2-ст* - СКО расчета (измерения)
линий положения Уменьшение возможно измерением временного положения
специальными методами (на постоянном относительно амплитуды сигнала уров-
не) или схем, сжимающих динамический диапазон входных сигналов [128].
Для того, чтобы закончить оценку погрешностей измерения координат для
разностно-дальномерного метода осталось оценить ошибки из-за нестабильности
длительности фронтов импульсов и суммарные погрешности. Флуктуации дли-
тельности фронта сигналов возможны по разным причинам: отражения от мест-
ных предметов в районе расположения РЛС, неоднородности атмосферы на трас-
сах распространения ЭМВ, нестабильности передатчиков РЛС и др. В табл. 4.3
приведены данные обработки 150 экспериментальных наблюдений излучения
320
РЛС шести типов (в районе расположения РЛС) с помощью приемника с подклю-
ченным на его выходе осциллографом, которые имели полосу пропускания > 20
МГц. Все длительности в табл. 4.3 даны в микросекундах; расшифровка обозна-
чений: т„ - средняя длительность импульса; Тфр вых - средняя длительность фронта
импульса на выходе приемника; - СКО длительности фронта от его среднего
значения; NU3M - число измерений данной длительности. Как видно из данных
табл. 4 3 выбранной полосы пропускания вполне достаточно для того, чтобы при-
емник и осциллограф не вносили инструментальных погрешностей в измерения;
обработка данных табл. 4.3 подтвердила нормальное распределение длительности
фронта с дисперсией <зфр. Из табл. 4 3 также следует, что величина погрешностей,
вызванная нестабильностью фронта (сгкести. фР) импульсов может оказаться сравни-
мой с рассмотренными выше погрешностями из-за внутренних шумов приемника
и различия уровня входных сигналов (аФг»0.23тфр вых). Для уменьшения ошибок
требуется измерять длительности фронтов и амплитуды импульсов, что, вообще
говоря, ставит проблему выявления так называемой «тонкой структуры» прини-
маемых сигналов с помощью широкополосных трактов и, например, быстрых
преобразований Фурье для запоминания спектра сигнала и его фронтов с целью
последующего их восстановления и «поэкземплярного» опознавания каждой РЛС
Таблица 4.3. Результаты обработки экспериментальных измерений длительности
импульсов РЛС.
| № типа РЛС т„, мкс ^фр вых? МКС ®Фр Nизм (Ун^фр еых) ^фр!^фр вых
1 6 0.3 0.1 11 0 05 0.3
2 2.5 0.5 0.07 17 0.2 0 14
3 2.5 0.22 0.05 33 0.088 0.23
1 4 2 0.28 0.05 41 0.14 0 18
5 6 0.55 0.13 15 0.09 0 24
! 6 1.2 0.25 0 07 34 0.21 0.28
321
Таким образом, ошибки из-за нестабильности длительности фронтов двух
импульсов (при измерении линий положения) должны быть учтены в формуле
(4.38) добавлением в подкоренное выражение второго сомножителя слагаемого:
&нест фр
( 2'0.23rif„J = 0.14
а суммарная погрешность измерения разности хода сигналов (в длинах или еди-
ницах длины) определится выражением:
оу = с-
4/4 ' (л,+д1) /Г - 2^.+0.1 г;, ,„
(4.39)
где с - скорость распространения ЭМВ (электромагнитной волны).
Кстати, последняя формула не учитывает погрешность из-за нестабильно-
стей самой величины с (скорость ЭМВ), которые, в определенных условиях, мо-
гут иметь тот же порядок, а могут быть и значительно выше при определении ме-
стоположения РЛС за радиогоризонтом.
Для иллюстрации зависимости суммарной когрепшости от дальности про-
ведены расчеты ст^при исходных данных: Д1&Д2=Д-, с=ЗОО м/мкс, До= 1000 км; ос-
тальные исходные данные сведены в табл.4.4 Результаты расчетов показаны на
рис. 4.17; в табл. 4.4 также указаны номера кривых рис. 4 17.
Из представленных кривых видно, что суммарная погрешность лежит в
пределах от 10 м до 60 м в зависимости от флуктуации сигналов и измеряемой
дальности; добавляя оу к навигационным ошибкам измерения собственных коор-
динат ЛА, которые сравнимы с из кривой 3 рис. 4 14 получаем предельно-
возможную точность измерения 90 % РЛС РЛП (т е. с вероятностью около 0.9)
при Г -ог +<Д = 10, откуда аг = 10 +Д . При изменении сг^ от 10 м до 40 м
322
(Д=200 км) и oj=30 м, оу по последней формуле (РЛП площадью 400x200 км2) из-
меняется в пределах ог=(320-:-500) м (ог - средняя СКО вычисления координат)
Рис 4.17. Зависимость суммарной погрешности измерения разности хода сигнала
от дальности.
Таблица 4.4 Исходные данные для расчетов суммарной погрешности измерения
разности хода сигналов
|| | Номер кривой рис. 417 N Полоса пропуска- ния приемника. МГц 4f Длительность фронта импульса, мкс хфр СКО, мкс £>dt 1
1 10 0.2 0.23
2 20 0.2 0.23
3 10 0.1 0.23
4 20 0.1 0 23
5 20 0.1 1 0.1
323
Рис. 4.18. Интегральные оценки точности разнесенной системы РТР (логарифми-
ческий масштаб).
На рис 4.18 приведены более реальные ошибки и вероятности местоопре-
деления с точностью не менее заданной, соответствующие кривым 1 и 2 рис. 4.14,
но с учетом ojr; кривые 7 и 2 рис. 4.18 получены для «центрального» расположе-
ния ЛА относительно зоны разведки (см. рис. 4.13а), а кривые 3,4- для крайнего
относительно зоны разведки (400x200 км2) положения ЛА (см. рис 4.136) Ос-
тальные данные таковы: До=1000 км; t^=0.1 мкс; Д/^20 МГц, ал=0.23. Для кри-
вых 7, 3 навигационная ошибка 20 м, для кривых с 2, 4 - 60 м. Теперь уже (в от-
личие от кривой 3 рис. 4.14) с учетом (формула (4.39)) для вероятности место-
определения около 0.9 (90 % РЛС РЛП) согласно кривым 1 и 2 рис. 4.18 при
«мгновенной» разведке ошибки вычисления координат будут около 2000 м (2 км
или 1 % от максимальной дальности РЛС в РЛП).
Итак, не ставя преред собой цели более или менее полного описания пред-
ставленных в табл. 4.2 классификации методов местоопределения с точки зрения
эффективности (вероятности) вычисления координат с заданной точностью, мы
уже рассмотрели достаточно широко применяемые из них для разведки наземных
неподвижных источников излучения. Все эти аналитические модели предполага-
324
ют предварительное обнаружение РЛС с вероятностью близкой к единице и ука-
зания их числа на заданной для РТР траектории либо поэкземплярное разделение
принятых пеленгов измерений.
Задача местоопределения подвижных наземных источников излучения вы-
ходит за рамки настоящей книги (ряд задач определения координат надводных
кораблей и оценка погрешностей измерения их местоположения, скорости, курса
читатель может найти в работах [9, 129, 130]). Остальные вопросы будут рассмот-
рены позднее.
Помня все время о практической применимости рассматриваемого материа-
ла книги, завершим настоящий раздел оценкой эффективности энергетических
методов местоопределения (табл. 4 2), используемых для грубого вычисления
дальности до летательного аппарата (истребителя-перехватчика и др.) и способов
измерения дальности до наземных РЛС с маловысотных ЛА.
Из раздела 3.4.5 гл. 3 книги нам известно, что сигнал на входе станции
(комплекса) РТР, установленной на ЛА, летящем на малой высоте (h), представ-
ляется регулярной (когерентной) и диффузной (случайной) составляющими. Доля
каждой составляющей зависит от: структуры и состава подстилающей поверхно-
сти в районе РЛС; угла падения ЭМВ на землю; угла отражения ЭМВ на цель
(ЛА); высоты полета ЛА и длины излучаемой волны (X). Как мы знаем из форму-
лы (3.85) и материала раздела 3.4.5 зависимость регулярной составляющей отра-
жения от земли принято описывать интерференционным множителем или «мно-
жителем Земли» [97, 131] (Ф(*)):
ф(е, , 1 + R2 УАА + 2|Я| cosf4-т h‘'sm в + /l, (4 40)
где R и P - модуль и аргумент коэффициента отражения,
- нормирования ДНА РЛС по полю,
0 - угол отраженного от поверхности земли сигнала на ЛА;
0а - направление максимума передающей антенны РЛС;
ha и X - высота передающей антенны и длина ЭМВ.
325
Для нашего случая (малых высот полета ЛА) 0а = 0, Л}2(0)=1 и формула
(4 40) упрощается:
Ф(<?) = + Я2Д2 (20) + 2|7?| • Д (20) • cos[(4tt • Д,/2) sin (9 + /?]. (4.41)
Остановимся немного подробнее на коэффициенте отражения (Л), который
нам нужен и для целей РПД при организации помехи «антипод». Как известно
модуль коэффициента отражения при малых углах 0 близок к единице. На рис.
4 19 представлены экспериментальные данные коэффициента отражения от ров-
ного открытого поля, поросшего травой с неровностями порядка нескольких сан-
тиметров (X передатчика равна 3 см; где Ин - средняя высота неровно-
стей), данные взяты из работы [131]. Зависимости рис. 4.19 аппроксимируются
следующим образом [9 с. 218]:
R = ехр[- (13 • hH • 0)/Л].
(4.42)
Рис. 4.19. Зависимость коэффициента отражения от угла на цель и длины волны.
326
В работе [132] дана другая аппроксимация нормированного коэффициента
отражения (Rui/Rr, где Rm и Rr - коэффициенты отражения от шероховатой и
гладкой поверхностей), подтверждаемая данными, полученными на морских трас-
сах:
Rm/Rr =ехр[-2(2л--Ля-sm^y/A2]. (4.43)
Можно связать коэффициент отражения регулярной составляющей (R) с от-
ношением сигнала к шуму диффузной составляющей по мощности (Ё^/Ё^), если
учесть, что Е2отрк + Е2ш =Е2отрЪ (сумма квадратов напряженности когерентной (E2„?J
и шумовой (£2) составляющих равна суммарной (f^s) отраженной энергии), т.е.
Л2=£.2„,£/£2.4-£2/£L = l-l/d!, (4.44)
где E2mp^lE2nao = 1 (принято, что падающая энергия в основном отражается в виде
регулярной (когерентной) составляющей);
еЦеЕ - \/d2 (d2 - отношение сигнал/шум по мощности - см. например, ле-
вую часть формулы (3.1) в гл. 3).
Если отражающая поверхность представляет собой периодические углубле-
ния (высокие волны на морской поверхности) с периодом неровностей - 21, то
расстояние (ДУ), проходимое низколетящим ЛА от пропадания до появления сиг-
нала из-за этих неровностей, равно ЁЦ-(И- l)/ha (h и ha - высоты самолета и ан-
тенны РЛС) и частота флуктуации от этих неровностей составит fH = У ha)/(2/h) (У
- скорость ЛА).
Учет подвижных неоднородностей (качающихся деревьев под ветром, мор-
ских волн и т п) приводит к расширению спектра флуктуации. В работе [131] при-
водится выражение для средних частот спектра от качающихся деревьев (У), рав-
ное fk=-2VjA (Уд - скорость перемещения крон, ветвей деревьев (Рэ=1 м/с при
327
скорости ветра 5 м/с)). Таким образом, спектр флуктуаций отражений от земной
(водной) поверхности изменяется от нуля до сотен герц, что надо учитывать в
РПД и РТР при измерении дальностей до РЛС в условиях флуктуаций уровня от-
раженных от земной поверхности сигналов.
Учитывая, что регулярная составляющая входной мощности сигнала от раз-
ведуемой РЛС на малых высотах полета ЛА определяется (в том числе) интерфе-
ренционным множителем (4.40) на измерении параметров интерфериционной
кривой с борта ЛА построен ряд способов измерения дальности до РЛС [9], неко-
торые из которых могут быть использованы и при РТР с борта ЛА самолета-
перехватчика, атакующего наш самолет (в системах РПД защищаемых самоле-
тов).
Регулярная составляющая сигнала разведуемой РЛС (Рс) представляется из-
вестным соотношением [97]:
/>0’ G„, JM/M. (4.45)
где Z = (Л/Дл-^/’С, - параметр Мельникова Ю П., широко известный в РТР;
G02 - КНД антенны приемной антенны станции РТР;
р - коэффициент потерь;
Д- дальность до РЛС;
Ф(») - интерференционный множитель, определяемый по выражениям
(4 40) и (4 41).
Используя аппроксимацию ДНА вида (3.121, гл. 3) для р2(20) и
р(20) = ^р2(20), а также выражение для R вида (4.42), при подстановке в формулу
(4.41) для Ф2(0), имеем:
л Г 26-/г„-бП 2/ \ Г 13-А-01 An-h -h
Ф“ (0) = 1 + ехр----f— • р (20) - ехр - —Д— • р (20) • cos — *
_ л j L z J л • //
(4.46)
328
где sinG в формуле (4.42) заменен на h/Д (малые высоты полета ЛА, /?«Д), а (3
принят равным нулю
На рис. 4.20 а, 4.20 б представлены результаты расчета в формуле (4.45)
множителя в квадратных скобках Ф2/Д’1 от дальности при /^/2 = 1 и разных зна-
чениях произведения h-ha при полетах ЛА в направлении на РЛС (расчеты Ф2(/9)
велись по выражению (4.46) для 6^/1 ° и 2=3 см.).
В работах [132, 133] и др приводятся зависимости уровня входного сигнала
на входе радиолокационного приемника (РЛС) в функции от дальности для раз-
ных характеристик подстилающей поверхности, что подтверждает наличие регу-
лярных максимумов интерференционной кривой и идею измерения дальности до
РЛС по этим данным.
В монографии [9] рассматривается ряд временных способов измерения
дальности по максимумам и другим параметрам интерференционной кривой, ко-
торые следуют через (4л- • ha • sin #)/2 + р = 2п (п - целое число; см. формулу (4.41),
аргумент у косинуса). Примерно такой же способ, но уже при изменении уровня
сигнала при пересечении линии радиогоризонта, положен Ю.П. Мельниковым [9]
в основу регистрации пролета радиогоризонта и измерения Дрг по резкому изме-
нению уровня сигнала в области неглубокой тени (полутени) Б.А. Введенского
[132]:
^ = Д5с-№)]-я(лМ(л>л', (4.47)
где Еф -напряженность поля в области полутени,
PG - передающий потенциал РЛС;
N, H(h), Н(А) - коэффициенты, зависящие в том числе - от высоты поднятия
антенн, и других параметров (А) трассы;
5(Д) - множитель ослабления, определяемый из выражения.
329
Рис. 4.20. Изменение уровня входного сигнала при полете на РЛС:
a) h -ha=^Q^ mz, hn /2 = 1;
6) h -ha=\0000 m2,
5(д) = ехр
(4 48)
где: В - безразмерный коэффициент (меняется слабо); X - длина волны; R$ -
радиус Земли; Д- дальность за РГ (радиогоризонтом).
330
В работе [9] дальность на линии радиогоризонта предлагается определять
по наклону зависимости (18/с1Д в области начала полутени (Дрг - «равна» той даль-
ности, где мощность сигнала снижается в 10 раз по сравнению с мощностью в об-
ласти «прямой» видимости).
Однако, нас больше всего будут интересовать (в завершение раздела) энер-
гетические методы определения дальности в пределах радиогоризонта, там, где
имеется регулярный сигнал.
Вернемся к формулам (4.41) и (4.45); в максимумах интерференционной
кривой cos[(4tt • /га /A)sin 9 + /?] = 1 и Ф(<?) = 1 + R • А (2(9), тогда:
^._ = к1 + ^)2Ьг или Д = + Л (449)
где к - Z' • G02 • г) согласно «расшифровке» формулы (4.45).
При RFj=l (большие высоты полета ЛА, интерференция прямого и отра-
женного от Земли сигналов отсутствует) мы имеем обычную формулу радиосвязи
и все способы «энергетического» определения дальности для малых высот полета
(по уровню Рс макс или по другим уровням) будут годиться и для других высот по-
лета; учитывая, что уровень входного сигнала (входная мощность) определяется
«мгновенно» эти методы можно применять для определения дальности истреби-
телей-перехватчиков (или других ЛА).
Измерение дальности по формуле (4.49) требует знания величины «А», ко-
торая (в том числе) может быть получена априорными данными о РЛС разведуе-
мого типа (либо обработкой данных предыдущих разведывательных полетов) Ес-
ли априорные сведения отсутствуют, то придется пользоваться энергетико-
временным методом (измерения уровня сигнала в двух и более точках маршрута
полета ЛА), что исключает мгновенность измерения, но позволяет все-таки изме-
рить дальность (дело в том, что других способов местоопределения быстро дви-
жущихся ЛА с борта другого ЛА еще не придумано).
331
Из формулы (4.49) можно сразу получить дальность (по ИП, h - большие), а
можно по изменению уровня сигнала с измерением (уменьшением) дальности, ко-
торая находится дифференцированием РСМакс'
^^/ад = -2к(1 + КР,У/д3, откуда д =
2k^(l+ RFJ 72
й-fl)
(4.50)
где ДД - интервал дальностей, который понадобится для получения дальности;
Р2 и Р^ абсолютные отсчеты №2 и №1 уровня сигнала Рсмакс.
При измерениях по интерференционной кривой: 1\Ц - интервал дальности
между двумя максимумами; Р2 и Pi - абсолютные уровни сигналов РЛС в двух
соседних максимумах.
Если энергетический потенциал входящий в «к» формулы (4.49) неизвестен,
то можно пользоваться измерением отношения мощностей сигналов в двух точках
маршрута сближения (погони) летательных аппаратов, либо измерять отношения
мощностей в двух соседних максимумах интерференционной кривой (малые h
ЛА, наземная РЛС). Тогда согласно (4.49):
/( - MI +Л,/,) )2 /),2 ; Р2 =/с(1 + ед2)2/Д22 , откуда
Р2 /Д = [(I+ад 2 )2 • Д[2 j / [(I+ад! )2 • д22 j
или учитывая, что
Д ~ Дг + АТ после преобразования получим:
д2=д=ьд: 1(|+ад i)(у -"Т ) 0+ад2)], (4.51)
где RxFn и R2Fl2 - значения RFi в формуле (4.49), соответствующие дальностям
Д1
332
При малых углах места величина RF/ в соседних интерференционных мак-
симумах меняется незначительно и можно считать RiFh=R2Fi2, тогда, после изме-
рения Д77, Р2 и Pi ( ЛД - v • А/, где у - скорость нашего самолета), по формуле (4.51)
рассчитывается Д2 (наземная РЛС/ При больших углах места (больших высотах
полета) и атаках ИП RF']i=R2Fj2=l и ДД=РсбЛ( (Fs - скорость сближения ИП и
нашего ЛА); учитывая, что скорость ИП нам неизвестна, придется измерять даль-
ность еще раз (Д3) и из системы трех уравнений, типа (4.51) или других, исклю-
чать УСб для определения дальности до ИП.
Таким образом, мы имеем три способа (первый - энергетический, осталь-
ные - смешанные) измерения дальностей до ИП или по интеренференционной
кривой до наземной РЛС при малых высотах нашего ЛА; эти три способа соот-
ветствуют измерениям и расчетам по формулам (4.49), (4.50) и (4.51).
В работе [9] приведены оценки погрешностей измерения дальностей по вы-
ражениям (4.49)ч-(4.5 1) через полные дифференциалы этих уравнений, а также од-
номерные функции (плотности) распределения дальностей, соответствующие
трем указанным соотношениям (4.49)-г(4.51).
В целях экономии материала книги приведем выражения для относительной
ошибки и плотности распределения чисто энергетического метода (4.49):
^/д=+о-25(ст,м+°.25(СТр/р):, (4.52)
№(Д)= + х&^}ехр/(1 + ЯЛ)7Д2 ~р] Ft (4.53)
где Р = k(l + RFl)2/дД
ор - СКО измерения мощности входного сигнала, определяемой по формуле
(4-49);
Д - математическое ожидание дальности;
g(RFi) и а..- СКО измерения RFj и к.
333
Если же считать, что ошибки в определении множителя (1 +RFi), отношения
(1 +ДД,)/(1 +ААз) и ДД малы по сравнению с ошибками измерения входной мощ-
ности и энергетического потенциала (к) разведуемой РЛС, то выражения для вы-
числения ошибок по формулам (4.49)ч-(4.51) существенно упрощаются и прини-
мают вид:
(4-54)
где соответствующие индексы - 1, 2, 3 у скобок в левой части равенств указы-
вают на принадлежность относительных ошибок измерения дальности к форму-
лам (4.49)/, (4.50)2 и (4.51)5, ошибки (<5д/Д)з получены для .
Из последних выражений можно найти значения потребных погрешностей
измерения уровня входного сигнала при заданной (допустимой) ошибке измере-
ния дальности. Допустим, что надо обеспечить относительную погрешность из-
мерения дальности не хуже 10 %, т.е. од/Д<0,1 для каждого из трех способов из-
мерения дальности; тогда потребная точность измерения уровней сигналов соста-
вит:
—>04-(СТ1М,_____________
(<7„/-?), < (1 - Дг/Д )>045-0.5(СТ,М,.
ЕЛ, <0 2(l-/72/X)/Vl + Ж'
(4.55)
Напомним, что при вычислениях дальности до ИП с борта ЛА и отсутствии
сведений по скорости сближения (Е^) надо, как комментировалось относительно
334
пользования формулой (4.51), получать другую формулу измерением еще одной
дальности (Д3) и исключением Vc6 при решении трех уравненийЗ ; поэтому ошиб-
ка (<Зр1Р}з для расчетов этого случая по выражению (4.55) не годится
Из соотношений (4.55) видно, что когда энергетический потенциал РЛС хо-
рошо известен (ajk»0 05) наиболее предпочтительным методом измерения явля-
ется первый во всех случаях (любые высоты ЛА), тем более, что этот метод мгно-
венный и «чисто» энергетический. В этих условиях требуются относительные
точности измерения уровня сигнала не хуже 0.2; второй способ в этих условиях
требует более высоких относительных точностей (сУр/Р) - около 0.16 и двух изме-
рении.
Рис. 4.21. Относительные погрешности измерения дальности.
На рис. 4 21 изображены относительные погрешности измерения дально-
стей указанными методами в зависимости от (су/Р), рассчитанные по формулам
(4.54); нумерация кривых соответствует сравниваемым способам местоопределе-
ния. Параметром кривых являются точности сведений о передающем потенциале
РЛС (БРЛС) - (су^/Р); из рис. 4.21 следует, что третий способ местоопределения
335
существенно зависит от (Ср/Р) и дает значительные погрешности измерения даль-
ности.
Преимущество первого метода показывает также [9 с. 243] сравнение плот-
ностей распределения ошибок. Эксперимент, проведенный на ЭВМ методом ста-
тистических испытаний подтвердил расчетные формулы вплоть до относитель-
ных ошибок измерения мощности сигнала <0 2-гО.З (другие ошибки измерения
дают неприемлемые погрешности вычисления Д).
4.3. Оценка вероятности обнаружения РЛС аналитическими моделями
При расчете вероятностей и точностей местоопределения в предыдущем
разделе предполагалось (и это надо еще раз подчеркнуть), что все РЛС, «подле-
жащие вычислению координат», обнаружены достоверно и измерения, «снятые»
на них, «не перепутаны» между разными РЛС, т.е. «расклассифицированы» также
достоверно.
Отсюда видна актуальность эффективного обнаружения, и «поэкземпляр-
ной идентификации» измерений, относящихся к каждой РЛС, в том числе - пра-
вильного (безошибочного) определения принадлежности каждой РЛС к конкрет-
ному типу. Высокая вероятность опознавания типа является критерием правиль-
ного использования и уточнения априорных сведений о типе, которые, как мы
уже убедились, играют большую роль во многих случаях. Так, на морских театрах
военных действий вообще принято пользоваться «точечной» (поэкземплярной
библиотекой типов с «привязкой» каждой РЛС данного типа к конкретному ко-
раблю), что, иногда, имеет решающее значение при планировании «морских» во-
енных операций.
Оценке вероятности обнаружения РЛС с борта летательного аппарата по-
свящалось достаточно много исследований; однако, системный подход примени-
тельно к РТР, имея ввиду общую цель - достижение наиболее высокой эффектив-
ности станции (комплекса) РТР при разведке заданного РЛП реализован в очень
336
немногих работах, и, прежде всего, в исследованиях [9, 23, 135]. Оказалось, что
для достижения высокой эффективности обнаружения не надо «знать до предела»
все технические параметры аппаратуры, которые можно реализовать при совре-
менном уровне развития элементной базы и вычислительной техники, достаточно
определить «сочетаемые друг с другом» (оптимальные) наборы технических па-
раметров, исходя из задач, условий РТР и требуемой конечной вероятности ме-
стоопределения РЛС с заданной точностью (см. предыдущий раздел)
По аналогии с радиолокацией, где требуется накопить (когерентно или не-
когерентно) «п» сигналов (импульсов) РЛС для уверенного обнаружения сигналов
на фоне шумов, в аппаратуре РТР также необходимо принять ««» сигналов РЛС
для измерения их технических параметров (несущей частоты, длительности и пе-
риода повторения импульсов, угловых координат и др.), отселектировать импуль-
сы, относящиеся к разным РЛС и т.д . На все эти операции, как принято в технике
РТР, надо затратить время анализа (С), существенно зависящие от способа по-
строения станции (комплекса) РТР. Не вдаваясь в подробности описания способов
построения аппаратуры РТР (некоторые варианты построения приемников обна-
ружителя и пеленгатора приведены в гл. 3 на примере построения системы ALQ-
161 самолета В-1В), будем полагать, что в аппаратуре РТР производится прием «к
подряд из п» импульсов (сигналов) РЛС. Это наиболее жесткое условие из всех
существующих («любые к из н» или «некоторая пачка из «ш» подряд импульсов
из п» и т.д.) потому, что требует повышенного приемного потенциала станции
РТР.
Существуют большое количество публикаций по оценке вероятности обна-
ружения (РОбн) «к подряд из п» нефлуктуирующих импульсов на входе разведпри-
емника; так, на основании [133], имеем:
= = (4-56)
([«(1 + 2%)] J
337
где (Z>) = (1/у/2л)Jexp(-r/2)dt;
x\=PcIPul - отношение сигнал/шум по мощности;
г)й = К/ /2РИ( - нормированный порог схемы обнаружения;
п - число импульсов, потребное для анализа («л подряд импульсов») посто-
янной амплитуды.
В работе [9] приведена аппроксимация зависимости (4.56) с ошибкой, не
превышающей 20 % (при вероятности ложных тревог (Рдт=10'6) в логарифмиче-
ском масштабе.
?обн 00 — Ф1Ао \^обн ] ’ Fjit ~ j / _Р\| dt,
(4.57)
где A = 10-lg??;
0-^5-lg
rd}+d2y
d2)
d} =r;0-n + V,
^2 =(2770 -я + 1)05;прии=1, Т1о=-1прлт,а Xq =10-lg(-lnF/Z7’ -1).
На рис. 4.22 приведены зависимости РОбн от 10 1g(Pc/P„,) для п=1 и и=Ю;
применительно к п=1 в формуле для РОбн (4.57) -Ха=\ 1.1 дБ, собн=1.74 дБ; Л=13.81
дБ, для и=10 - Хо=3.6 дБ, (УОбн=^ .42 дБ и Х=32.71 дБ (везде РЛг=].О'6 - и для графи-
ков, и расчетов РОбн)-
Прием сигналов РЛС аппаратурой РТР по боковому и заднему излучению, в
отличие от приема регулярной последовательностью импульсов по главному ле-
пестку ДНА (рис. 4.22), эквивалентен разведке флуктуирующей пачки сигналов за
один цикл поиска РЛС (за период вращения антенны).
338
Рис. 4.22. Зависимость вероятности обнаружения одиночного импульсного
сигнала и пачки из десяти импульсов от отношения сигнал\шум.
Второй цикл приема этой же РЛС в станциях РТР с заданным ta может со-
ставлять единицы секунд, а если учесть поиск по частоте (несущей частоте) с ос-
тановкой на время анализа каждой РЛС РЛП, то возврат на исходную несущую
частоту той же РЛС может произойти через десятки и более секунд В таких усло-
виях второй и последующий циклы приема РЛС может приходиться на другие уг-
лы и дальности визирования РЛС (углы между направлением на ЛА и главным
лучом РЛС). Как следует из экспериментов с обработками бокового излучения
РЛС, интервал корреляции случайной функции, представляющей ДНА РЛС в бо-
ковых (отличных от главного луча) направлениях примерно равен ширине ДНА
на уровне половинной мощности [162]. Поэтому можно считать, что уровни сиг-
нала, отличающиеся более чем на ширину главного лепестка ДНА, независимы и
определяются логарифмически-нормальным распределением со средним значени-
ем, зависящим от угла отклонения главного луча ДНА РЛС в направлении на са-
молет-разведчик (6) в соответствии с выражением (3.121) гл. 3.
В работе [9 с. 81] введена средняя вероятность обнаружения (аналог обна-
ружения) медленно флуктуирующих целей [134] РЛС станцией РТР:
= ]pjx)-w(x)dx, (4.58)
339
где Робн(Х) определяется (4.57);
W(X) - логарифмически-нормальное распределение, описывающее ДНА в
боковом и заднем направлениях
Тогда выражение для Робн представится:
?обн “ I Ф]
\ & обп )
(4-59)
тд$ X - математическое ожидание логарифма отношения сигнал/шум (см по-
яснения к формуле (4.57)), которое вычисляется в соответствии с распределением
коэффициента усиления антенны РЛС и формулой радиосвязи (дальности РТР);
- среднеквадратическое отклонение уровня бокового (и заднего) облуче-
ния относительно среднего значения, определяемого выражением (3 121) гл 3
(са=5 .7) дБ как уже говорилось, в зависимости от качества позиции РЛС (ц в
формуле (3.121); при fi=2; аа=5 дБ, при ц= 1, сг0=7 дБ)
Тогда после интегрирования формулы (4.59) имеем:
?обн ~ Ф1
где стс +<J'a
На рис 4 23, в качестве иллюстраций, приведены результаты расчета для
данных, представленных в табл 4.5. Сравнение графиков, приведенных на рис.
4.22 и рис. 4.23 между собой показывает, что учет бокового (и заднего) излучения
РЛС приводит к значительному растяжению зоны вероятностного приема РЛС.
340
Рис. 4.23. Зависимость вероятности обнаружения сигналов РЛС по боковому и
заднему излучениям ее антенны от отношения сигнал\шум.
Таблица 4.5. Исходные данные к расчетам по формуле (4.60).
- Рлт число импульсов (и) [ДБ] [дБ] ^обн [ДБ] с» [ДБ] № | кривой на рис. 4.23
10’3 I (РЛС с оператором) 1 7.7 6.91 2.6 7 1
10'3 (РЛС с оператором) 10 1.04 22.6 2.05 7 2
10'6 (автоматическая РЛС) 1 11.1 13.8 1.74 7 3
10'6 (автоматическая РЛС) 10 3.6 32.7 1.4 7 4
В работе [9 с. 87] приводится еще одна, уточняющая зависимости (4.60),
формула с учетом качества позиции расположения РЛС (показателя и в выраже-
нии (3.121) гл. 3) и ширины ДНА РЛС (0^):
^обн
20^ДМО/Д)-12 4.3 A(ln ^01 - 1)- А-р
^я+СТа2+(0.4 + 4.3А)2Г
(4.61)
341
где в знаменателе под интегралом вероятности стоит суммарная СКО, вызванная,
кроме всего о чем говорилось, случайным положением направления наблюдения с
нашего самолета сигнала РЛС относительно главного луча ее антенны (в интерва-
ле [ 0, 2я ]); (эта составляющая дисперсии в знаменателе под интегралом вероятно-
сти учтена в виде -(0 4 + 4 Зд)2 в формуле (4 61)), в числителе под Ф(х) величина -
[12-4 Зд(1пя"/|9П1-1)] - математическое ожидание (среднее значение) коэффициента
усиления антенны в интервале [0,л/0т ]; Дмо - максимальная дальность обнаруже-
ния РЛС (при совпадении главных лучей ДНА РЛС и комплекса РТР).
На рис. 4 23 (кривая 5) и рис. 4 24 построены зависимости Робн по формуле
(4 61) для F/77=10’6, //=1.5 и суммарной СКО (о/), равной 13 дБ для двух значений
п и 0О/ (Ао=11.1 дБ при и=1 и Jl0=3.6 дБ при н=10). Заметим, что формулах (4.57) и
(4 60) как и в (4.61) можно использовать вместо отношения сигнал/шум по мощ-
ности (ту) величину т] = (дио/дУ для получения зависимостей вероятностей обна-
ружения от дальностей (по аналогии с формулой (3.4) гл. 3 для отраженного сиг-
нала от ЛА; у нас прямой сигнал в РТР).
Из кривых рис. 4.24 видно, что вероятности обнаружения, близкие к едини-
це, по боковому излучению РЛС могут быть получены (при случайном положе-
нии ДНА РЛС (главного луча) относительно ЛА) при достаточно высоких прием-
ных потенциалах комплекса РТР (надо обеспечить Д/Дмо порядка 10’3 на расстоя-
ниях, близких к радиогоризонту -ДРД Так, например, в работе [9 с. 87] подсчита-
но, что Робн порядка (0.8+0.9) (рис. 4.24 для Д/Дю=10'3) РЛС с энергетическим по-
тенциалом (PG)~ 109 Вт на /+=10 см может быть получена в практически моноим-
пульсной станции РТР (п=1+10 импульсов) с эквивалентной чувствительностью,
(величина, обратная приемному потенциалу) Pj/G^-lU дБ/Вт на дальности (все-
го!) 180 км. Это означает, что практически всегда поисковая станция РТР, не-
смотря на высокое быстродействие (время анализа от 1 до 10 импульсов равно С)
«по анализу» сигналов, «попадает» на боковое излучение РЛС, просматривая оче-
редную полосу пропускания приемника РТР.
342
Рис. 4.24. Зависимость обнаружения сигнала РЛС при ц=1.5
для разной вероятности ложных тревог и разном числе импульсов:
1-и=1, Fjr=10'6; 2-«=10, F/;7-lО'6; 3-н=1, F,77=lО'4; 0(i-2°.
Если же узкополосная станция РТР поискового типа (с полосой пропуска-
ния 10 МГц в полосе поиска от 3 см до 30 см) останавливается для анализа на
длительное время по каждой РЛС (порядка секунды и более), анализируя при
этом «пачки» сигналов с недостаточным числом следующих подряд импульсов за
счет флуктуаций бокового излучения и выдавая «сбои», то общее время поиска
для получения одного измерения на каждую РЛС РЛП составляет сотни секунд
(при наличии достаточно большого числа РЛС в «типовом» РЛП («400 РЛС), а
число таких измерений - единицы за время существования РЛС в зоне обнаруже-
ния станции РТР [23, 135].
Чтобы оценить количественно влияние этих эффектов на вероятность обна-
ружения и число измерений по каждой РЛС в зависимости от технических пара-
метров аппаратуры РТР (приемного потенциала, времени анализа, времени выяв-
ления и количества сбоев при анализе, селектирующей способности, динамиче-
ского диапазона и др.) проведен ряд исследований [9, 23, 135, 136 и др.]. Приве-
дем некоторые из этих результатов
343
В общем случае при воздушной РТР и поиске сигналов приемником стан-
ции (комплекса) РТР следует учитывать такие независимые события [23].
- вид поиска сигнала (многоступенчатый, одноступенчатый; достовер-
ный или вероятностный; с наведением на сигналы, обнаруженные в предыдущей
ступени, или без наведения и т д.);
число и характеристики РЛС в зоне действия аппаратуры (обзорные;
«стрельбовые», сопровождающие самолет главным лучом ДНА; перестройка не-
сущей частоты и других параметров РЛС и т.д.);
перемещение летательного аппарата, в результате чего ряд РЛС «по-
кидает» зону обзора, а некоторое количество РЛС появляется вновь (время суще-
ствования РЛС в зоне обзора и работы «на излучение» определяет число измере-
ний, которое можно получить на РЛС).
Рис 4 25. Сектор обнаружения перемещающегося летательного аппарата.
344
Одновременный учет этих событий приводит к достаточно сложным фор-
мулам [23, 135], получаемым с применением теорий массового обслуживания,
совпадения потоков [80, 81] и др.
Самым первым (грубым) приближением может быть следующая оценка:
пусть ширина зоны обнаружения «принудительно» ограничена сектором пеленго-
вания шириной Q02 (пеленги и измерения технических параметров РЛС, которые
попадают в этот сектор поступают в обработку; пеленги вне сектора отбрасыва-
ются), счи таем, что внутри сектора и зоны обнаружения (рис 4.25) сигналы РЛС
принимаются «вкруговую» достоверно по боковым и задним лепесткам ДНА (вы-
сокая чувствительность приемника станции РТР); поиск ведется одноступенча-
тым приемником, причем на каждой полосе анализа селектор выделяет одну РЛС
и после этого поиск продолжается; РЛС работают на фиксированных частотах (не
перестраиваются). Тогда суммарное время поиска сигналов по заданному диапа-
зону частот примерно равно [135]:
С = к + Na • ta + Neu6p • ta + Nnpon tc6=tn+N-z-ta, (4.62)
где N. =(Na +Nebl6p+Nnpon/2) (Na, Nebl6p, Nnpon - количество проанализированных
РЛС внутри сектора, «выброшенных» РЛС из-за того, что они вне сектора, и
число (TVnpon) пропущенных РЛС из-за сбоев в аппаратуре);
С - время поиска («чистое») при просмотре участков, где РЛС отсутствуют,
С и tce -времена анализа и сбоев (tC6=tal1 при равномерном распределении);
сбои могут происходить из-за: ошибок селектора (нехватки селектирующей спо-
собности), пропуска ряда импульсов в последовательности за счет перерывов бо-
кового излучения и др.;
= p (р плотность РЛС на местности, 8сект - площадь сектора, при
^02 = ^/2, SceKm = (т • Д2РГ)/4 , (Дрг - радиогоризонт)).
345
Максимальное число (т) измерений РЛС iNebl6p=Nnpo„^0) внутри сектора
равно:
W [2 Дтр ’ ^(^02 /^)]/(^„ + Д, ' Р ) J Дтр—Дрг СО5(^0г/2)5
(4-63)
где Дтр - дальность по траверзу к линии полета ЛА.
Теперь представим себе, что каждая РЛС внутри сектора периодически об-
лучает наш самолет с вероятностью 1обл1Твр (t0&l - время облучения РЛС; Твр - пе-
риод вращения антенны РЛС); тогда вероятность обнаружения РЛС за период
вращения ее антенны (если приемник РТР настроился на ее частоту) равна:
0,npu ta>to6„,
робк (ДР)=) (дбл - ta )/Др, при ta < 1.о6л < твр,
1, при to6„ = Твр,
(4 64)
где РобДТвр) совпадает с РОб„(С), если в секторе обзора находится одна РЛС;
Робн^п) - вероятность обнаружения за время поиска.
Соотношения (4.64) очевидны; далее можно было бы поступить так: внача-
ле находится распределение облучающих РЛС сектора в полосе перестраиваемого
гетеродина (Д/г«и) по всему диапазону частот поиска; затем для каждой /\fzem (на-
пример, 10 МГц) по формулам работы [135] вычисляется число совпадающих об-
лучений РЛС для определения селектирующей способности аппаратуры (числа
одновременно анализируемых последовательностей облучений РЛС) и безпропу-
скного приема (анализа) РЛС; наконец, по формуле (4.62) с учетом (4.64) и веро-
ятности совпадений облучений РЛС в полосе Ь£гет определяется ts, а затем тп по
выражению (4.63). Такая методика использовалась в работе [23].
Мы поступим следующим образом Попытаемся оценить число проанали-
зированных РЛС (AQ и пропущенных РЛС за счет непопадания в сектор (АвЫбр) и
346
из-за сбоев (Nnpon) в формуле (4.62). Сначала найдем РОбнДвр) в выражении (4.64),
Сбл в этой формуле согласно работе [9] определяется так (согласно (3.121) гл. 3):
Ч I т^(Д,ДД), I й Д1Д„„ г 0 25.
Д„Мгд. о.25 > д/д„, > (ffl/J/fte),
(4.65)
где to - время облучения главным лепестком ДНА (г0 = 0п/со, где - ширина
ДНА, со - угловая скорость вращения антенны РЛС);
Тер=2к1оу,'Дмо- максимальная дальность РТР.
Подставляя выражение (4.65) в (4.64) получаем (для ветви ta~tn<t06n<Tep в
Робн(Твр) формулы (3.64)).
Р ДТ ) = ^
ООН \ вр /
ехР(~~г) > Д > 0,25;
Дмо
[(6 Д_)/(2Д)-б]/Г.,. 0.25 > Д > WPKV)
(4.66)
Из формулы (4.66) видно, что «двигаясь» от максимальных дальностей (Дио)
можно найти Дм0, при которой еще возможен анализ сигнала одной РЛС, т.е.
to6n=ta+tn-, тогда эта дальность (Дга) равна:
Д,. = (0 5 Д„„ /„) /(/„ +1,), (/. +1„) > (о 5/с).
(4 67)
Кроме того, существует минимальная дальность (Дман), где времени нахож-
дения РЛС в зоне обнаружения (сектор на рис. 4.25) хватает только на проведение
поиска сигналов (без анализа), т.е на этой дальности начинается нулевой отсчет
Роб. Дер)
ДМ1Ш найдем так.
347
Д.и„=(9^ЛА t„)'Ctg((^2l
(4 68)
где &jlA - скорость летательного аппарата (нашего самолета).
И, наконец, на относительно небольших дальностях (Дко) существует зона,
где сигналы достаточно мощных РЛС, расположенных внутри углового секто-
ра(0П2) принимаются приемником станции РТР, настроенным на несущую часто-
ту, «вкруговую» (достоверно) несмотря на положение главного луча ДНА РЛС;
при д -2 в аппроксимации ДНА вида (3.121, гл. III) имеем:
(4.69)
Д*о - (0.5• ДмJ(0O1 /2я) = (0 5Дл(О)/(/01 Твр)
Рис. 4 26 Зависимость вероятности обнаружения РЛС станцией воздушной РТР с
линейным поиском по частоте от дальности.
На рис. 4.26 для ДмиДД^ДДа приведена зависимость РобнДД), которая в
окончательном виде записывает так (от Д):
348
' Д! Д ,
MUH’
м,)=
1,
{(0Д1ДДД/Д-1.]/Т,г,
(4.70)
0<Д<Д....
Дмин “ Д ** Дхо)
Дко<Д<Дмо/4;
[(1.7/,,X/ln(7J.„/2Z)-/,]/7'.,,
Величина «скачка» (нестыковки) второй и третьей ветвей зависимостей
РОбн(Твр) от Д (4.70) равна ta/Tep и стремится к нулю при ->0.
Из предыдущих рассуждений видно, что даже такая простая зависимость
(4.70) требует многочисленных допущений при выводе. Естественно, что формула
(4.70) «работает» не при всех соотношениях между Дмт, Дко ъД1а. Например, для
маломощных РЛС может быть Дмин >ДК0 и на рис 4.26 не будет участка, где
Робн(Твр)=1 (как видно из сплошной («жирной») кривой); может быть и наоборот -
для мощных РЛС и высоких приемных потенциалах (PJGJ) последняя ветвь в
формуле (4.70) (или даже обе - третья и четвертая ветви) может исключаться из
РобДДвр), так как эти ветви «уходят» за радиогоризонт - Дрг. Таким образом, общее
правило пользования зависимостями (ветвями) формулы (4.70): надо сначала вы-
числять Дмин, Дко и Д1а и сравнить их между собой и Дрг, оставив те ветви в (4.70),
которые необходимы.
Вернемся к формуле (4.62). Допустим, что зоны обнаружения всех РЛС ук-
ладываются в сектор рис. 4.25; тогда все РЛС облучают самолет-разведчик с ве-
роятностями, определяемыми формулой (4.70), и при поиске сигналов РЛС рас-
пределяются в соответствии со своими несущими частотами по «каналам» (поло-
сам пропускания или «разрешаемым градациям» приемника) - tynp. Если при этом
селектирующая способность аппаратуры РТР в каналах достаточна для беспропу-
скного приема и анализа сигналов (например, к каналам последовательно под-
ключается селектор на максимально-возможное число ожидаемых наложившихся
последовательностей облучения РЛС), то из формулы (4.62) остаются только пер-
вых два члена (сбоев в аппаратуре нет) и равно:
349
8СЕКТ ) ‘ Робн Дер )(1),
(4.71)
где РоДТерД- средняя по сектору вероятность обнаружения РЛС, получаемая
усреднением по дальности формулы (4.70).
Число «выбрасываемых» (не учитываемых) РЛС при обработке (внесектор-
ных - Nebl6p), и количество пропущенных РЛП из-за недостаточного времени (дли-
тельности) облучения в формуле (4.62) можно оценить из следующих соотноше-
ний’
выбр—S,п • р и Nnpon~ S23O • р, (4 72)
где S\o - площадь зоны обнаружения, выходящая за границы сектора (рис. 4.25),
S2O - часть зоны обнаружения, ограниченная изохронами, соответствующими
^Обл~^ И 1()ОЛ ta.
Выражения для расчетов зон обнаружения можно найти в работе [9] для
различных значений энергетических потенциалов РЛС, уровней бокового излуче-
ния РЛС и параметров аппаратуры РТР (приемного потенциала, ширины сектора
пеленгования, способа обзора пространства и др.); там же введено понятие «изо-
хрон» - кривых, ограничивающих зоны обнаружения при to6n=const и дана мето-
дика их определения.
Заметим, что учет Nebl6P и Nnpon необходим, так как в некоторых случаях за-
траты времени на анализ этих РЛС сравнимы и даже превышают время анализа
«полезных» РЛС, находящихся в секторе пеленгования Например, при некоторых
значениях Дмо зона обнаружения представляет полукруг площадью (^г)/2 в от-
личие от площади сектора (при 0(а =n/2,SCEKT = (лД2г)/4), что в два и более раза
увеличивает число анализируемых РЛС (это лишний раз подтверждает целесооб-
разность оптимизации технических параметров аппаратуры РТР).
350
Действуя аналогично, как при получении формулы (4.71) выражение (4 62)
с учетом (4.72) можно представить [135]:
=>„+><. лж,)(„+sL<'«)!> (4 ?з)
где РобАТвр)(2), РобЛРвр^об.^^) - средние вероятности обнаружения РЛС за Тер с
учетом усреднения по дальности в площадях S2so и S\o
Можно, конечно, более точно оценить с учетом биномиального (или дру-
гого) распределения вероятностей, но мы этого делать не будем из-за экономии
текста книги, так как для этого надо «работать» с каждым экземпляром РЛС, учи-
тывать ее вероятность облучения на дальности, где она находится и т.д (см. [23,
135]).
До сих пор, мы предполагали, что РЛС работают на фиксированных часто-
тах при поиске, однако современное РЛП насыщено достаточным количеством
РЛС, перестраиваемых по параметрам зондирующих сигналов (такие РЛС мы
рассматривали в предыдущей главе с точки зрения возможности РПД). Обнару-
жение поисковым приемником перестраиваемых по параметрам РЛС рассматри-
валось в ряде работ; однако наиболее полный анализ возможностей обнаружения
дан в работе [9] Нас более всего будет интересовать случайная перестройка час-
тоты сигнала, как наиболее эффективное средство защиты от помех; доставляет
«хлопоты» случайная перестройка и РТР с борта ЛА поисковым преемником.
Учитывая вероятностный характер облучения РЛС за период вращения ее антен-
ны, перестройка РЛС еще более уменьшает вероятность ее обнаружения за Твр,
оставляя возможность обнаружить перестраиваемые сигналы либо при сверхбы-
стром поиске (за длительность импульса), либо ожидая на каждой разрешаемой
градации (полосе поиска) длительное время (пока РЛС не возвратится на исход-
ную частоту), либо анализируя РЛС за длительность импульса (период повторе-
ния определяется после обработки сигналов).
351
В последнем случае в работе [9] найдена формула для вероятности обнару-
жения хотя бы одного импульса за Твр при случайной перестройке РЛС от им-
пульса к импульсу:
Л«.(Г.Р) > 1 = 1 -ехрНл -¥.,)/[Ш -F2)]!, (4.74)
где to6jl- время облучения РЛС, вычисляемое по формуле (4.65);
Afnp -полоса пропускания приемника (частотная градация);
Тп -период повторения импульсов РЛС;
С -F2 = AF- полоса поиска приемником РТР (диапазон разведки).
При этом молчаливо предполагается, что за (а вернее за ta) РЛС хотя бы
один раз за время перестройки будет находится в просматриваемой частотной
градации. Выражение (4.74) получено из формулы (4.75) при условии (к»1):
РобГ1(Твр)>1 имп = \-(\-к)ак «ехр(-п), (4.75)
где к - число разрешаемых градаций при частотной перестройке РЛС поиско-
вым приемником {к=(Д - f2)/kfnp), где (f/-f?) - диапазон перестройки РЛС).
При подстановке в формулу (4.74) второй ветви зависимости от дально-
сти из формулы (4.65) ( Д< Дмо/4) имеем (учитывая, что ?0 = (#01 • Гвр)/2я-):
ш<Я = 1-ехр(-(О,5-ео1 -Г,,-Л4,-Д„)/[2^-7,(7- -Г2)-Д]}, (4.76)
где (9,и - ширина ДНА РЛС в радианах на уровне половинной мощности.
На рис. 4.27 показана зависимость имп (4.76) от дальности при:
0О1=1 °(1 /57,3 радиана); Тер= 10 с; Тп= 1 мс (F„= 103 Гц); ДР//Дпр = (FX-F2)!ДГпр = 400
352
(если = то AF = 4-103МГц\ Дш>=5Л^км (кривая 1); Дмо = 2-1(Укм
(кривая 2). Из рис. 4.27 видно существенное снижение вероятности обнаружения
от дальности при приеме даже одного импульса перестраиваемой по случайному
закону РЛС поисковой станцией РТР; отсюда могут быть сформулированы требо-
вания к параметрам перестройки приемника, а также к его энергетическим харак-
теристикам.
100 200 300 400 500
Рис. 4.27. Вероятность обнаружения РЛС,
перестраиваемой по случайному закону, за период вращения антенны.
Для иллюстрации в работе [9 с.99] получены зависимости вероятности об-
наружения одиночной неперестраиваемой РЛС (при пролете зоны обнаружения)
не менее «К из ш» раз поисковым приемником, когда число циклов перестройки
для сектора приема оценивается из выражения т = [2Д tg(602/2)]/(VJI4 -in), (17лл -
скорость ЛА) (сравни с формулой (4.63)):
m m"' k-\
)=Z g p'(i - p) = i - z c: p' (i - Pr.
A.t г П
(4 77)
353
где Р=Робн(Твр), оценивается по формулам (4.70); при пользовании биномиаль-
ным распределением (4.77) считается, что обнаружения РЛС в соседних циклах
перестройки независимы.
На рис. 4.26 приведены расчетные данные (пунктирные кривые, которые не
были объяснены ранее) для случая: РЛС имеет параметры - (PG)=2 109 Вт;
Л = 10 см; Тер=10 с; 0О1 =1°; станция РТР имеет параметры: (РУСД^Ю10 1/Вт; Fr
/•’2=] О4 МГц; /„=100 с (очень медленный поиск; гипотетический случай); 0^ =60°;
ЛА имеет скорость 500 м/с; расчеты дальностей Дмо, Дко иДмин для этого варианта
дали значения 49 1 03км, 68 км и 43 км соответственно. Кривая РОбн(Тв^ (формула
(4.70)) нарисована на графиках сплошной (жирной) линией; а кривые (4.77) для
к > 2 и к > з показаны пунктирной линией; здесь же пунктиром нанесена прямая
т=ДД) без учета части полуокружности, ограничиваемой Дрг («парашютика» на
рис. 4.25). Из рис. 4.26 видно, что Р(>2) и Р(>3) около 0.5 и 0.2 на дальностях,
превышающих 150 км, а в районе Д~ 100 км они вообще равны нулю. Такие низ-
кие значения вероятностей получения (2-3) измерений, в первую очередь, объяс-
няются длительным поиском (100 с) по диапазону РТР, высокой скоростью ЛА
(1800 км/час) и недостаточным сектором пеленгования (0О2)
Для оценки влияния времени поиска (/„) на вероятность обнаружения хотя
бы один раз за tn при различных соотношениях между ta и t„ в зависимости от
дальности были рассчитаны кривые, изображенные на рис. 4.28. Сплошная кривая
соответствует формуле (4.70), когда Твр сравнимо с tn, ступенчатые зависимости
(кривые 0 и 1) соответствуют /„=0 (беспоисковые системы), времени анализа ta=Q
(кривая 0) и /„=0, ta-t0 (кривая 1); кривые 2 4-6 показывают сокращение зоны дос-
товерного обнаружения, а затем и самой вероятности обнаружения при увеличе-
нии tn и Г согласно формуле (4.73) до слишком малых значений. На рис. 4.28 обо-
значены Дмин,ДК0 ъД1а-
По-видимому, читатель догадался, что в расчетах графиков рис. 4.26, дли-
тельный поиск (100 с) объясняется остановками на время анализа (С) сигналов
354
РЛС (см. формулы (4.62) и (4.73)), а не просто «чистым» просмотрам за время t„
заданного диапазона частот. В работах [23, 135] имеется обширный материал по
данным вопросам; там же учтены и просчитаны варианты увеличения суммарного
времени поиска за счет недостаточной селектирующей способности аппаратуры
РТР и узкого динамического диапазон.
Рис. 4.28. Зависимость вероятности обнаружения РЛС
в зависимости от дальности при различных ta и tn.
Сокращение времени поиска может быть достигнуто увеличением полосы
пропускания приемника (АД,), которое одновременно повышает вероятность об-
наружения перестраиваемых по несущей частоте РЛС в соответствии с выраже-
нием (4.76); однако при этом мы теряем в точности измерения частоты сигналов
РЛС и увеличивается поток совпадений облучений РЛС в АД. Компромиссом
при решении этих вопросов может быть переход к многоступенчатому поиску,
подробно исследованному в работе [139]. Как показано в этой работе, существуют
оптимальные соотношения между сокращением времени поиска при переходе к
многоступенчатому поиску и числом ступеней приемника. В идеализированном
случае временной выигрыш при переходе от одноступенчатого к щ-ступенчатому
приему не зависит от числа ступеней и может быть оценен по формуле:
355
т7/Two=<e/(e Inae),
(4.78)
где Т/ и Тпо - времена поиска сигнала одно и По-ступенчатым приемником;
as=(F7-F2)/ Afnj> = №/&fnp;
е - основание натурального логарифма.
Зависимости выигрыша во времени и оптимального (и0)количества ступе-
ней от числа разрешаемых градаций (as), взятые из работы [139], приведены на
рис. 4.29. Из рис. 4.29 следует, что теоретически при as=102 в четырехступенчатом
приемнике возможно достичь сокращение времени поиска, по сравнению с одно-
ступенчатым, не менее чем на порядок. На практике из-за существенного увели-
чения аппаратурных затрат и потерь, сложности построения многоступенчатых
приемников, более чем 3-х ступенчатые разведприемники не применяют (такие
приемники, но беспоискового типа называют еще и «матричными» и о них доста-
точно много говорилось в гл. 3). Примеры построения таких беспоисковых при-
емников имеются в работах [6, 62 и др ]) для as=102-H03 (при /y-F/ЛО4 МГц и
bfnp = \ШГц имеем as=(F7-F2)/A/„p =103).
В случае когда разведка обнаруженной РЛС требует дополнительного вре-
мени (поиск с остановкой на время анализа ^), а также при наличии нескольких
(jV) обрабатываемых целей в диапазоне обзора, выигрыш по времени за счет мно-
гоступенчатого поиска уменьшается, а возможность обнаружения перестраивае-
мых по несущей частоте РЛС с вероятностью, близкой к единице остается, осо-
бенно, если полоса поиска первой ступенью приемника превышает диапазон пе-
рестройки РЛС (после обнаружения таких РЛС первой ступенью можно выделить
в аппаратуре РТР(включить в состав станции)) специальный приемник для дораз-
ведки перестраиваемых РЛС. В этом варианте уменьшение времени многоступен-
чатого поиска (Т„о) по сравнению с одноступенчатым (Т7) равно:
Тпо/Т^[е- ln(x/N)+ta/tд/] / [(аеОнЛД (4.79)
356
где 1д/- время «прохождения» приемником полосы поиска (для всех ступеней
поиска одинаковое, несмотря на разную ширину полос поиска);
е - основание натурального логарифма (формула получена при равномер-
ном распределении РЛС в диапазоне поиска по частоте).
Рис. 4.29. Зависимость выигрыша во времени и оптимального количества ступе-
ней по от числа разрешаемых градаций.
На рис. 4.30 приведены кривые Tn0/Ti в функции от параметры у кри-
вых - отношение ae/m из которых следует, что чем больше насыщенность
РЛП (меньше ге/Ы) и ближе время «прохода» полосы поиска к ta (t#), тем больше
выигрыш в многоступенчатом поиске по времени
Указанные выше соотношения (4 78) и (4.79) получены при достоверном
обнаружении сигналов РЛС при поиске; влияние вероятностного приема сигналов
РЛС (аналогичного рассмотренному нами выше) оценивалось и в работе [139] при
многоступенчатом поиске При этом вероятность обнаружения флуктуирующего
по нормальному закону радиосигнала РЛС представлялось в виде (Роби /, где
1=1,2,3,4 ., щ - номер ступени приемника РТР).
357
РобШ =Лй,д-а-1п(Д//А),
(4.80)
где Робнд- вероятность обнаружения в последней полосе (д)приемника;
А/ - полоса приема градацией z-ой ступени;
а - коэффициент аппроксимации в интервале вероятностей Po6jti (от (0,14-0,15)
до (0.854-0,9)).
Рис. 4.30. Зависимость выигрыша во времени обзора при многоступенчатом поиске
от средней плотности расположения целей и времени анализа.
Представление вида (4.80) отражает изменение чувствительности приемни-
ка при расширении полос пропускания ступеней; значение СКО флуктуаций
уровня сигнала принималось равным 8Д6, а а лежит в пределах (0,0874-0,174).
Оценку временных выигрышей и оптимальный выбор числа ступеней приемника
в этом варианте построения интересующийся читатель может найти в работе
[139]
358
Чтобы завершить с аналитической моделью вероятности обнаружения РЛС
РЛП при РТР с борта одного ЛА, необходимо привести так называемые инте-
гральные (по терминологии работы [9]) или усредненные по дальностям вероят-
ности обнаружения - для различных типов приемников.
Относительно легко «считаемыми» (оцениваемыми) вариантами построения
приемников станций РТР являются беспоисковые по несущей частоте приемники
с моноимпульсным (С=0) обнаружением и определением технических параметров
РЛС («матричные»), либо широкополосные супергетеродинные приемники с
двойным преобразованием несущей частоты, производящие анализ за время об-
лучения главным лепестком (zn) ДНА РЛС 0,5 /0) [6, 61, 62].
Согласно работе [9 с. 103] средняя по дальностям до РЛС (Дн, Д^) РЛП ве-
роятность обнаружения -Робн (или относительное количество обнаруженных) из
общего числа РЛС в РЛП) равна:
____________________
A. =J/ЛЛА/О Аднидлдад,,, (4-81)
о о
где Робн{Д,Длю') - вероятность обнаружения конкретной РЛС;
ЛДД) и ЛДДМО)- плотности распределения дальностей (Д) и максимальных
дальностей обнаружения (Дмо);
Д3- ширина зоны разведки станцией (комплексом) РТР (обычно Д3=Дрг или
1,25 от максимальной (паспортной) дальности самой РЛС).
Усреднение по Дмо в выражении (4 81) произведено для того, чтобы оценить
зависимость Робн от энергетических параметров РЛС и приемника станции РТР.
Учитывая, что плотности распределения Ж(Д) и 1Д(ДМ0) можно представить
в виде:
И'(//) = 2Д/Х (0<Д<Д3) и ИДД,„) = (Д/<.)ехр[-Д)„/(2(т/2„)], (4.82)
359
где Дмо= Z • ;
Z = U/4^-G01 ;
P1G01 и П2 - передающий и приемный потенциалы РЛС и станции РТР;
П2=Р2/С2,
а вероятность Робн(Д, Дмо)»1 моноимпульсным, беспоисковым приемником (при
С <0,5 to и Д<До, где До - дальность обнаружения РЛС с заданной вероятностью),
то выражение (4.81) после интегрирования представляется в виде:
Робн = (а270,5я-Л2)/ Л-ФТЛ /(cxz#^)],
(4.83)
где Ф, = (1 /)j*ехр(-Р / l)dt - интеграл вероятности,
о
На рис. 4.31 изображена кривая Робн к функции от приемного потенциала
аппаратуры РТР(ПД для Дз=500км и C=O,5to при
crz =0,45-zcw Ви?0 5 (crz соответствует типовому РЛП без маломощных РЛС непре-
рывного излучения). Из рис.4.31 для ta=Q,5t0 следует, что 100% вскрытие РЛП с
помощью РТР возможно при приемном потенциале П/=108 1/Вт на дальности
разведки с борта ЛА 500 км (высоте полета ЛА h «14юи ).
360
Рис. 4 31. Зависимости вероятности обнаружения РЛС от приемного потенциала
станции РТР для различных ta и to.
Для того, чтобы получить другие зависимости Робн от П2 и времени анали-
за беспоисковой аппаратурой (при других С>2С) заметим, что дальность, соответ-
ствующая времени анализа (ДС) из аппроксимации ДНА РЛС (см. (3.121) гл. 3) и
выражений (4.65) равна:
Д1.а =
'Дмо-е^[-Ра1(ЗРД\ ta
\(ДДДмо-Д)На, ta
< 2^0 >
>2Z0,’
(4 84)
где при использовании ДДа надо помнить, что /ойч (время облучения РЛС) должно
быть не меньше ta.
Подстановка в №(ДМ0) формулы (4.82)ДС вместо Дмо дает:
№(Д/а) = (Д1а/ехр[-Д; /(2сг;)], (4 85)
где flta определяется выражением (4.84).
361
Интегрирование выражения (4.81) с учетом (4.82) для ЛДД), (4.85) и (4.84)
при ta>2to
= ХЛ'ХТоЖ)] (4.86)
Зависимости (4 86) для: -0.4' кчгВт1: .Л~500к'м: tQ=(1/36) сек (60, =Ги
7вр=10 сек) и двух разных значений ta(ta=5t0 и ta^5Qto) изображены на рис. 4.31. Из
этого рисунка следует, что если Га=50г0=1,4 сек, то для обеспечения 100% развед-
ки (обнаружения) требуется приемный потенциал 10121/Вт.
Заметим, что если в формулу (4.86) подставить V=O,5to, то получается вы-
ражение (4.83), что подтверждает рассуждения.
Анализ РЛП показывает, что имеется корреляционная связь между
Дмo=Zy[n2 и временем облучения главным лучом РЛС, что можно использовать
при аналитическом моделировании.
Как мы уже видели, плотность "\¥(ДС) по формуле (4.85) с учетом выраже-
ния (4 84) уже связана с to и ta; в более общем случае, если обозначить через Zt0
величину Zto= Z • t0, то
W(Zto>k-exp(-AZto), (4.87)
где к- параметр, который надо определить в
Из выражения (4.84) имеем (ta>2t0): Д1а = ^,5Дмо-^^а=^,5^1аУ[п~2')11а и то-
гда вместо (4.85) можно воспользоваться другим распределением - \¥(Д*)типа
(4.87):
W( X )= (2. к. /„ 71Ж) ехр(-2« 717х ). (4.88)
362
Подстановка в формулу (4.81) вместо W(JU) выражения (4.88) для W( Д*а ) и
интегрирование дает более простую по сравнению с соотношением (4.86) зависи-
мость:
№ = [^/(1,12 ТО'2 л)Н-ехр[-Д3/(7л;-1О2 /1,12л)]}> (4.89)
где П2 измеряется в [1/Вт], a ta- в миллисекундах.
Расчеты по более точной (4.86) и приближенной (4.89) формулам отличают-
ся не более чем на 10%; формула(4.89) при разведке по главным лучам ДНА РЛС
беспоисковой аппаратурой определяет Робн всего по двум параметрам станции
РТР - приемному потенциалу и времени анализа аппаратуры и может служить для
первых, предварительных расчетов (далее требуется определить селектирующую
способность, ограничения за счет динамического диапазона и др. [23, 135]).
Расчет средних вероятностей обнаружения поисковым разведприемником в
зоне и за пролет зоны обнаружения может быть выполнен (приводит к простым
формулам) лишь для некоторых частных случаев в связи со сложностью интегри-
рования общих выражений вида (4.73) и других. Учитывая, что при поисковых
методах обнаружения сигналов по несущей частоте в станциях РТР Дмо, как пра-
вило, выходит за радиогоризонт, в формуле (4.81) следует оставить интегрирова-
ние только по текущей дальности до РЛС(Д), тогда:
__________________________
РобЩП) = {р(Д, ДлюЖДШ • (4-90)
о
Для случая, рассмотренного выше, когда Дъша<Дко<Д3<Д1а и Р(ДД^Д опреде-
ляется выражением (4.70) после интегрирования по формуле (4.90) имеем (сред-
нюю вероятность обнаружения по зоне разведки):
Р2бЛТер\п) =(1/д1')-12Дкс,Д3-Д^-1а ДД23 -ДмДТвр-Д^/З]. (4.91)
363
При других соотношениях между Дмин, Дко, Д3, Дга 'выражение для
будет иным (как мы это обсуждали ранее при выводе формулы (4 70) - надо
смотреть, какие ее «ветви» остаются)
На рис. 4.32 показано семейство кривых, рассчитанное по формуле (4 91)
для: Д^0 = сугУрД = 0,45у/тД [км]; Дз =500 км; Гвр=10с, ГО=1/36 с,4^=50^ для раз-
ных ta (пунктиром показана кривая для беспоисковой аппаратуры с ta=lc).
Рис 4 32. Зависимость вероятности обнаружения РЛС за период перестройки
станции воздушной РТР в зависимости от приемного потенциала.
Из рис. 4.32 видно, что изменение ta в существенных пределах (на два по-
рядка) практически не влияет на среднюю вероятность обнаружения РЛС поиско-
вой станцией (по-видимому, Z„=100c и остальные параметры РЛС были такие же
как в исходных данных к рис. 4.26).
Для того, чтобы получить среднюю вероятность обнаружения за пролет зо-
ны обзора с учетом приема РЛС не менее «к» раз (>к) надо воспользоваться фор-
мулами (4.77) и (4 70); тогда имеем [9 с. 108]:
____ Дз1 Дмин к-}
роб»(>кра3) = 1-(д1«т/д3)[к+ X £c^'(l-pr'], (4.92)
т=к j-Q
364
где к- целая часть отношения Д/ДМин (илиД/Дмин) и
fl,
Р [[(О,5/о • Дмо) / Д-QITep,
Дмин
<Д<ДК0-,
ДК0 < Д <0,25-ДМД
(4 93)
если Д/Д-щДДк, то вероятность обнаружения за tn равна нулю.
Отличие формул (4.77) и (4.92) состоит в том, что первая определяет веро-
ятности обнаружения не менее «к» раз за «т» циклов перестройки
[т=(2Д • rg(0O2 /2))/^ • t„)], а вторая - за пролет ЛА зоны обнаружения.
365
Рис. 4.33. Зависимость вероятности обнаружения РЛС станцией РТР
за пролет зоны разведки при а) Д„,и=14 км; б)Дшгй=28 км; в) Д„г„=56 км.
Результаты расчетов по формулам (4.92) и (4.93) приведены на рис. 4.33а,
4.33 б и 4.33 в для Дмин=1А,28 и 56 км; изменение Дмт в соответствии с выражени-
ем (4.68) может быть вызвано либо увеличением скорости полета ЛА (разные
классы ЛА), либо возрастанием времени поиска (£„) при неизменном секторе пе-
ленгования - (<902 ).
Пунктирными прямыми линиями показаны зависимости числа пеленгов от
дальности (0П2 =60°) Из рис. 4.33 следует резкое снижение числа пеленгов (т) и
обнаруженных РЛС (>2 и >3раз) за пролет зоны по мере роста Дмин Сплош-
ными линиями нанесены кривые Робн(Твр) согласно (4.70).
Из приведенных расчетов можно сделать некоторые обобщающие выводы
относительно эффективности обнаружения РЛС РЛП в зависимости от способа
ведения РТР и некоторых параметров станции (комплекса) РТР, а именно:
- беспоисковые системы (способы ведения) РТР обеспечивают относи-
тельно большое количество обнаруженных РЛС РЛП и высокую вероятность об-
наружения при временах анализа, сравнимых с длительностью облучения глав-
ным лучом ДНА РЛС; их основной недостаток - требование высокой селекти-
рующей способности аппаратуры (по данным работы [23] число совпадающих по-
366
следовательностей облучений РЛС во всем диапазоне современного РЛП, при вы-
боре приемного потенциала, соответствующего приему главных лепестков ДНА
РЛС, составляет (1СП12)...; если весь диапазон РЛП делить на 05 приемных уча-
стков, то в каждом из них потребуется селектор на (3*4) последовательности);
оценка вероятностей обнаружения (аналитические модели), как уже говорилось,
с учетом селектирующей способности и динамического диапазона аппаратуры
приведена в работе [135];
- изменение (увеличение) времени анализа в беспоисковых системах в
некоторых случаях (прием по боковому излучению) может значительно влиять на
среднюю вероятность обнаружения РЛС РЛП и потребовать существенного (в (^)
раз согласно формуле (4.89)) увеличения приемного потенциала аппаратуры, что,
в свою очередь, ведет к резкому возрастанию селектирующей способности и не-
возможности анализа облучений РЛС во всем диапазоне длин волн;
- в поисковых системах изменение ta в широких пределах сказывается
мало на Ро3н(Рвр\1и (4-91), как это уже подчеркивалось при анализе рис. 4 32; более
существенное значение имеет большое время поиска с остановкой на анализ (где
влияют уже «сбойные» явления, внесекторные приемы и косвенно - С)М00сек (и
выше), а также выбор скорости ЛА, ширины сектора пеленгования, приемного
потенциала. Все эти технические параметры обязаны быть оптимальными и взаи-
мосвязанными; большое значение для сокращения времени поиска имеет пра-
вильная организация многоступенчатого поиска и его оптимизация в зависимости
от числа разрешаемых градаций(ае).
Для завершения раздела по аналитическим моделям вероятностей обнару-
жения остановимся кратко на особенностях оценки эффективности обнаружения
РЛС разнесенными системами воздушной РТР. Как мы помним из предыдущего
раздела, разнесенные в пространстве ЛА (группа ЛА) имеют возможность мгно-
венного высокоточного определения координат РЛС, что особенно важно при
управлении высокомобильными средствами РЭП, высокоточным оружием в дру-
367
гих условиях («засечка» кратковременно работающих РЛС при радиомаскиров-
ке)[140,141].
Необходимость одновременного приема РЛС сразу в 2-х 3-х разнесенных
на большой дальности пунктах влечет за собой требование разведки по боковому
(и заднему) излучению РЛС и идентификации (привязке к друг другу) сигналов
РЛС. Выше в настоящем разделе была получена аналитическая оценка средней
вероятности приема РЛС по боковому излучению антенны (4.60), относящаяся к
обнаружению медленно флуктуирующих целей (ЛА), которая может быть записа-
на в виде-
Л». = 0,5 + О,5Ф2 р - Х„
(4,94)
где Ф2(х) = (2/л(т) • jexp(-/2)cfr;
о
X— математическое ожидание отношения сигнала/шум по мощности на
входе приемника в логарифмическом масштабе; это отношение вычисляется по
формуле радиосвязи для среднего уровня бокового (и заднего) облучения РЛС и
составляет от -33дБ до - 45 дБ к Ватту от уровня главного луча ДНА РЛС;
Хо и ^обн " параметры кривой обнаружения нефлуктуирующего радиолока-
ционного сигнала;
аа - среднеквадратичное отклонение (СКО) уровня мощности относительно
среднего значения бокового излучения, определяемого аппроксимацией (3.121)
(гл 3)
Как мы помним, параметры Хо и сга зависят от вероятности ложных тревог
(Елт) и потребного числа интегрируемых импульсов (п) РЛС (см. формулу (4.57) и
пояснения к ней); например, для п=1 (моноимпульсное обнаружение) и БлгЛО'6
(автоматическая РЛС) -Ло=11,1 дБ, о-0бн =1,74^ (см. табл. 4.5)
368
Полагая в дальнейших расчетах качество позиции РЛС неизвестным
(сга = '1дБ}, а вероятность ложных тревог F^r=10'6 и учитывая моноимпульсное об-
наружение на каждом из 2Х^3Х ЛА(п=1) из (4.94) получим:
РобнРС = 0,5 + 0,5Ф2[1,96 • lg(0,28 • До / Д)],
(4.95)
где До-потребная (эталонная) дальность обнаружения разведываемой РЛС без
учета ослабления ЭМВ в атмосфере по среднему уровню бокового (и заднего) из-
лучения РЛС, ослабленного по отношению к главному лепестку ДНА РЛС на
40дБ (-40дБ) при отношении сигнал/шум=1 по мощности;
Д- текущая дальность до РЛС.
Рис. 4.34. Зависимость вероятности обнаружения РЛС
по боковому излучению антенны от текущей и эталонной дальностей.
На рис. 4.34 показаны расчеты по формуле (4.95) для пяти разных значений
До; например, До=1000 км соответствует приемному потенциалу станции РТР
102дБ/Вт, Л = 10см и энергетическому потенциалу разведуемой РЛС
(PG=2 1010Bt); это означает, что разведуется десятимегаваттная РЛС с КНД рав-
ным- 2-103 единиц и все равно приемного потенциала мало (рис 4.34). А если
369
учесть, скажем, потребную вероятность обнаружения на уровне 0,9 при дальности
(размере зоны) равной 400 км, то потребуется обеспечить До«4000 км, а значит
приемный потенциал в 16 раз больший (на 18 дБ) и при отношении сигнал/шум на
входе приемника станции РТР (потребного) в 15 дБ общий требуемый приемный
потенциал будет Пу=135 дБ/Вт.Чтобы его (П^) обеспечить (при широкоугольных
антеннах и в широком диапазоне длин волн) разработчик аппаратуры, столкнется
со многими проблемами.
Средняя вероятность одновременного обнаружения сигналов РЛС на трех
разнесенных в пространстве приемных пунктах (рис. 4.6, рис. 4.12) представится
произведением.
Р(обн)7<(Зл4 или приемных пункта)^ Р(ДА )РС Р(ДВ )рс Р(ДС )рс, (4.96)
где Р(Да)рсД(Дв)рс,Р(Дс)рс вычисляются по формуле (4.95) для соответствую-
щих дальностей.
Для отыскания интегральных характеристик эффективностей обнаружения
- относительного числа обнаруженных РЛС на заданной площади (LxT)~ рассмот-
рим два случая:
- разведка путем последовательного просмотра (пролета) заданного
прямоугольника (LxJ) за время Т„р трех ЛА;
- разведка одновременно всей зоны (прямоугольника).
В первом случае разведка ведется с минимально-возможными ошибками
местоопределения (около перпендикуляра к базе летательных аппаратов (см. рис.
4.13 а)) за время 7Д=1Д\ЛА (скорости ЛА одинаковы) к Да,Дв,Дс до РЛС определя-
ются координатой - У, базой (расстоянием между ЛА - d) и удалением траектории
полета от нижней границы прямоугольника (yd) (рис. 4.12):
370
Да = Дс = *Jd2 + {y+yd)2 , Дв = у +yd(xd = 0).
Если РЛС размещены равномерно по глубине зоны, то относительное коли-
чество (среднее число) обнаруженных РЛС по координате Y равно (максимальное
Y=I) согласно интегралу от произведения вераятностей обнаружения:
Робнрс = (1 / Z) J Р. (у + yd, До) • Р22 Ф2 +(у + yd)2 Mdy, (4.97)
О
где у- расстояние по траверзу от РЛС до границы зоны L разведки со стороны
ЛА.
Подставляя в формулу (4.97) РД*) и РД»)согласно выражению (4.95) имеем
Робнрс =(l/8J)f/l + O2[l,96-Ig0^2^])
ol У + yd J
< 1 + Ф2[1,96 • 1g -уЛ28'До ],
yd2 + (y + yd)2
(4 98)
1000 , 2000 3000 4000 5000
Рис. 4.35. Зависимость вероятности обнаружения РЛС от эталонной дальности До.
371
Результаты численного интегрирования Робн7С в функции от До согласно
соотношению (4.98) представлены на рис. 4.35. для: 7=200 км; d=l00 км, уа=-50 км
(кривая 1); 1=50 км, <7=25 км; yd=-12,5 км (полет на h-230 м) - (кривая 2).
Из рис. 4.35 (кривые 7 и 2) следует, что для получения Робнрс = 0,9 надо
обеспечить До=3000км в первом случае (кривая 7) иДо=П50 км, (сокращение «глу-
бины» зоны разведки в 4 раза); т.е. в 4 раза меньше (кривая 2) во втором случае
(это означает, что можно снизить приемный потенциал в 16 раз « на 18 дБ); сле-
довательно, 2?o=12(7+yd) - такова функциональная зависимость.
Второй вариант разведки - РТР одновременно во всей зоне, а не только
вблизи перпендикуляра к базе среднего самолета; в этом варианте (рис.4.12)’
Да = 7(^+^ + х)2+(У + У<7)2 (0 < у < 7),
Дь = д/(х + xd)2 + (у + yd)2 (-0,5 L < х < 0,5L) и
Дс - yl(x + xd- d)2 + (у + у<7)2 (-0,57, < х < 0,57,)
А под знаками логарифмов в знаменателе интегралов вероятности в 7^(«),
Р2(*) и А (•) согласно формуле (4.95) будут стоять эти Да, Де и Дс; тогда по анало-
гии с формулой (4.98) средняя вероятность обнаружения рассчитывается так:
Робнрс = [l/(8/L2)j 'f [[1 + Ф2(Л/ Дл)\[1 + Ф2(4/Д,)]-[1 + Ф2(Л/ ДДУх.ДкД}, (4.99)
0 -L< 2-LI2
где 4 = 1,961g(0,28-Х)-
Результаты численного интегрирования по формуле (4.99) приведены также
на рис. 4.35 для: 7=200; <7=100 км; yd=-50 км; £=400км (кривая 3) и вчетверо
меньшие геометрические размеры исходных данных для кривой 4, которые для
получения Робнрс =0,9, требуют обеспечить несколько большие значения До (4000
км и 103 км).
372
Представляет интерес еще одна группа интегральных характеристик, опре-
деляющих среднюю вероятность обнаружения с учетом распределения энергети-
ческого параметра Z=(A/4n)JpiG^ РЛС радиолокационного поля.
В связи с тем, что у i-oro типа РЛС значение энергетического параметра
свое (z,) для приемного потенциала аппаратуры РТР, фиксированного в данном
пролете системой ЛА РЛП, будет свое относительное число разведанных РЛС ка-
ждого типа. Распределения z - параметра для каждого типового РЛП определяется
своей дисперсией а2г, а плотность - законом Релея [9 с.23]
W(z)=(Z/o-2)exp[-? /(2ст|)], Z>0, (4.100)
где z = (XI 4л-)ДдСП1; До = Zy/ТД (что уже неоднократно указывалось).
Обозначая сгд = o-z^n^ из выражения (4.100)имеем:
^(Д0) = (Д0/а|)-ехр[-Дп2/(2Сг|)], (4.101)
Для простоты в дальнейших расчетах средней вероятности обнаружения
РЛС РЛП принято az =0,4 кмВт°А
Как видно из сгд, ее величина зависит от приемного потенциала (ПД, кото-
рый можно изменять, регулируя чувствительность аппаратуры (как это было для
системы РЭП ALQ-161); однако это усложняет расчеты и далее принято, что
n2=const для данного пролета системой ЛА зоны РТР с временем разведки - Гпр
В случае разведки «главной зоной» (около перпендикуляра к линии полета
центрального из трех ЛА) с наименьшими ошибками определения, имеем (как
было раньше для величин Да, Д?. и ДД
373
Робнк =(l/S)JJ{l + ®2[X/(y + jrf)]} ^ + Ф2[Л/л/с/=V.
оо • (4.102)
х[(Д 7о-|)ехр[-До /(2ст|)]Ж^
Для разведки одновременно во всей зоне величины Дс, Дв и Да будут дру-
гие (как при получении формулы (4.99)) и 7’пр=0.
Тогда средняя вероятность обнаружения РЛС РЛП будет иметь вид
как(4.99) с учетом (4.101):
_ J L/2 L/2
РОбНрс =(ШЛ2^ J /[1 + Ф2(Л/Д,,)][1 + Ф2(Л/Д4)]х
0-L/2-L/2 ’ V4
х [1 + Ф2 (Л / Дс)] • КД2л2д) ехрЬДо2 /(2ст2Д WAadxddXdy
где H=l,961g(0,28-До) (как и в формуле (4.99)).
Результаты численного интегрирования по выражениям (4.102) и (4.103) в
функции от приемного потенциала станции РТР увеличенного на 40дБ (для прие-
ма по боковому излучению РЛС) показаны на рис. 4.36. по исходным данным:
кривые 1 (формула (4.102)) и 3 (формула (4.103)) - £=100км; /=50км; d=25 км,
у^-12,5 км; кривые 2 (4.102) и 4 (4.103)- £=400 км; /=200 км; </=100 км; »д=-50км.
Из рис. 4.36 следует, что с вероятностью 0,9 (90% разведанных РЛС РЛП)
разведка площади размером 400x200 км современного радиолокационного поля
разностно-дальномерной системой РТР из трех ЛА осуществляется аппаратурой
РТР, имеющей приемный потенциал порядок 123 дБ/Вт (с учетом, что сиг-
нал/шум=1).
374
Рис. 4.36. Зависимость вероятности обнаружения РЛС
от приемного потенциала станции РТР.
Для отношения сигнал/шум, равного 15дБ, потребная чувствительность
приемника РТР (G^l) составит 138 дБ/Вт, что достаточно сложно выполнить;
кроме того, при такой чувствительности сильно возрастает поток сигналов на
входе аппаратуры РТР, и, мы еще в этом убедимся позднее, появляются проблемы
в идентификации, измерении и обработке сигналов.
Для разведки высокопотенциального РЛП, имеющего <jz -1 кмВт°Д требу-
ется приемный потенциал на 8 дБ меньше; уменьшение П2 во время пролета зоны
(за Тпр) по сравнению с мгновенным местоопределением за Т„р=0 составляет все-
го 3 дБ, что не принципиально при таких оценках.
Таков, по сути дела, итог настоящего раздела, который представляет анали-
тические модели на этапе оценки вероятности обнаружения - первостепенного
этапа любой РТР.
375
4.4. Аналитические модели процесса РТР в целом
В предыдущих разделах настоящего параграфа мы рассмотрели некоторые
аналитические модели двух основных этапов процесса РТР -обнаружения отдель-
ных РЛС в РЛП, а также их местоопределение. Опознавание типа, как «автомати-
чески» удовлетворяющееся при выборе точностей измерения технических пара-
метров РЛС и угловых координат мы не оценивали; но этот этап также характери-
зуется средней вероятностей опознавания РЛС РЛП - Роп
Если перейти к общей оценке эффективности работы станции (комплекса)
РТР на всех этапах, то формально следует интегрировать совместно вероятности
обнаружения и вычисления координат для всех вариантов построения станций
РТР, которые рассматривались выше, и умножать полученный результат на сред-
нюю вероятность опознавания типов РЛС РЛП (Роп). Это серьезная задача, тем
более, что за сложными интегралами, не выражаемыми явно через известные
функции, и численным интегрированием, мы можем потерять суть задачи, ее фи-
зический смысл.
Предлагается, для наглядности изложения, пойти менее математическим
путем, а именно: если мы раньше получили зависимости средних вероятностей
обнаружения и местоопределения в виде:
— ъ
о
__ ь
о
376
то надо исследовать подынтегральные функции на их монотонность, при этом, в
результате исследований можно получить следующие оценочные зависимости.
\ДРобн (Д) / <] • [dPOM (Д) / <] > 0, то Рртр > Робн Ром
<аробн(Д)/ад]-^ром/ад]<0,то Рррр <Робн-Ром , (4.Ю4)
[аробдддад]-[аром(ддад] = о, то рртр=рО6н -Том
где Рртр - общая средняя вероятность этапов обнаружения и вычисления коор-
динат РЛС.
Домножив Рт на Роп, мы получим интегральную среднюю вероятность
разведки станцией (комплексом) РТР (см. табл. 4.1) [112]:
Рртр интегр — Робн • Ром Роп ,
(4 105)
где выражением (4.105) надо пользоваться с ограничениями, в соответствии с
результатами полного дифференцирования согласно (4.104).
Для получения более точных и интегральных оценок процесса РТР заметим,
что в воздушной РТР: всегда выполняется неравенство бРЛ(О(Д)/0Д<0 (вернее, поч-
ти всегда, если нет «ложных» пеленгов от другого борта ЛА, при плохих аппара-
турных развязках в случае сильных сигналов); в поисковых станциях РТР на уча-
стке 0<Д<Д,„(Н бРОбн(Д)/с1Д>0, а бРОлХД)/(1Д=0; при Д>ДМ1(Н в поисковых станциях
- бРобн(Д)/бД<0 и согласно неравенствам (4 104) и этим рассуждениям можно
записать:
min( Po6//, Ром) < Рртр < Робн Ром,
откуда следует:
377
Рртр = 0,5[Робн • Ром + гшп(Робн, Рол/)].
(4.106)
Выражение (4 106) получено в работе [9 с 255] и выгодно с точки зрения
разработчика аппаратуры РТР (составлено с запасом на неточности и ошибки в
проектировании), так как приближается к истинному значению «сверху», чем
просто произведение средних вероятностей, которое выгоднее заказчику аппара-
туры (приближается к истинному значению «снизу»).
Для получения численного примера на рис. 4.37 показаны результаты рас-
четов по формуле (4.92) для поисковой станции РТР при следующих исходных
данных- Z=0,36 кмВт0’5, Дмг<н=28 км, Д№=50 км; ta=l с; Д/д=500 км (вероятность об-
наружения РЛС от дальности не менее двух раз за пролет - кривая №2 и трех раз
за пролет - кривая №4). Там же кривой №1 нанесена зависимость вероятности ме-
стоопределения от дальности для достоверного обнаружения, рассчитанная по
формуле (4.3) для ах = 0; Го=10 км; &а = 0,02.
Рис. 4.37. Зависимость вероятности обнаружения РЛС поисковой станцией РТР от
дальности.
378
Интегралы от кривых 1 и 2 (усреднение по дальности) дают соответственно
Ром - 0,5 и Робн = 0,16, а их произведение (Рртр )-0,08.
Интегрирование кривых 1 и 2 по формуле:
_ Дз
Рртр(г<гп) = (1/Д3)$Ро6н(Д) Рмо^ДУД, (4.1071
дает Рртр (г <10юи) = 0,1, что отличается от ZW =0,08 на 20%. Расчет по формуле
(4.106) приводит к результату Рртр = 0,12.
Как видно из численного примера, учет вероятности обнаружения поиско-
вой станцией РТР «сводит на нет» (приводит к малым значениям) общую вероят-
ность разведки (Рртр) даже без использования третьего сомножителя - Роп, кото-
рый для типовых РЛП лежит в пределах (0,854-0,9). Отсюда видна еще раз важ-
ность предварительного аналитического и математического проектирования по-
строения аппаратуры и, в конечном итоге - ее синтез с помощью методов моде-
лирования.
Читатель, интересующийся (вопросами опознавания типов РЛС может изу-
чить работу [9] (к сожалению, многие работы других авторов публиковались в за-
крытой литературе; большое значение исследованию вероятностей опознавания
типов РЛС уделяет Е.Г. Логачев).
4.5 Математическое моделирование в проектировании комплексов
(станций) РТР.
Начиная очередной важный раздел, позволим небольшое отступление. Чи-
татель, наверно, обратил внимание, что методология изложения материала на-
стоящей главы немного отличается от таковой при написании гл 3 по РЭП. Если
в третьей (основной) главе по РЭП мы ближе к технике (на примере станции
379
AQL-161 и др.), то здесь наше внимание сосредоточено на выборе (использова-
нии) количественных соотношении, связывающих между собой технические па-
раметры аппаратуры с вероятностью (точностью) получения данных об РЛС РЛП.
При этом мы достаточно часто употребляли слова «оптимальный» во всех его мо-
дификациях и реже - «синтез», фактически не занимаясь напрямую ни тем ни
другим
Дело в том, что радиотехническая разведка имеем более длинную историю,
чем РЭП и ей (РТР) всегда уделялось достаточное внимание, да и сама система
РЭП, как мы убедились, не может функционировать без информации от исполни-
тельной РТР. Поэтому методы аппаратурной реализации идей РТР проработаны
достаточно хорошо и нет особого смысла уделять вопросам построения аппарату-
ры РТР много внимания; если это надо делать, то в отдельной книге, так как РТР
возможна всегда, даже в отсутствие войны и «локальных конфликтов», которыми
называют малые войны (недавно американский самолет-разведчик попал в плен к
китайцам). Сегодня вопросы проектирования РТР основным своим «потоком»
пошли «вглубь» (технику построения) и очень мало внимания уделяется доста-
точно «широким» проблемам в том числе - оптимизации построения стандий
(комплексов) РТР.
Поэтому основной «упор» в настоящей книге делается на рассмотрение то-
го, что может дать современная воздушная РТР в плане реализации основной сво-
ей цели - «вскрытие» системы ПВО, и каких потенциально- возможных вероятно-
стей (и точностей) «вскрытия» от РТР можно ожидать как от главного вида раз-
ведки. Отсюда и много иллюстративного материала (графиков, примеров и др.) в
тексте книги, а не только «сухие» формулы. Задача же оптимизации и сам синтез
построения нельзя решить без этих исследований (все равно их придется делать),
а наша главная цель - как можно больше указать принципиальных проблем в этом
плане и, по возможности, решить часть из них. Кстати, в прикладной теории все,
что мы делаем, называется - «предварительная оптимизация и параметрический
синтез»[153].
380
Исходными данными для моделирования на ЭВМ процесса РТР служат све-
дения об РЛС РЛП, к формированию которого мы и переходим.
4.5.1. Состав и характеристики радиолокационного поля
Имеется два варианта построения РЛП - заимствование существующих
сведений из информационных «открытых» источников и «конструирование» РЛП
самому на основании обработанных сведений (по разным источникам), в том чис-
ле статистического усреднения. Единственно возможным остается второй из ва-
риантов, поскольку готового РЛП, опубликованного в периодической печати, не
существует. Вернемся снова к монографии [9], где имеются некоторые обрабо-
танные сведения о РЛП и идеи его построения.
При формировании РЛП соблюдается принцип обеспечения сплошного пе-
рекрытия (иногда двойного) для обнаружения летательных аппаратов на всех
предполагаемых высотах их полета; понятно, что плотность распределения РЛС
на местности должна быть тем больше, чем ниже к земле по высоте их эшелон от-
ветственности (дальность работы РЛС увеличивается с высотой перехвата ЛА)
Согласно эшелонированному построению РЛС ПВО каждый ряд РЛС должен
иметь свое удаление от линии боевого соприкосновения (ЛЕС) войск, тем боль-
шее, чем выше интервал высот, которые эшелон РЛС должен просматривать для
беспропускного обнаружения ЛА. Характеристики РЛС каждого эшелона должны
обеспечивать обнаружение ЛА на максимальной высоте его ответственности, а
число РЛС выбирается достаточным для перехвата ЛА на минимальной высоте
эшелона. Для иллюстрации сказанного в таблице 4.6 приведен пример построения
РЛП системы ПВО на ЛЕС, реализующий этот принцип.
381
Таблица 4.6. Распределение потенциалов РЛС, числа(л) и удаления (А) от ЛЕС
при эшелонирования РЛП ПВО по высоте (Л).
№ эшел Высота (h) эшелона (км) Нормированный PG Число (условное) РЛС эшелона | Удаление (А )от ЛБС(км)
1 0,1-0,25 1 100 1
2 I 0,25-0,63 6,3 40 2,4
3 0,63-1,6 40 16 6,3
4 | 1,6-4,0 250 6 16
5 4,0-9,9 1600 2 40
6 9,9-25,0 10 000 1 100
Оптимальное количество эшелонов получается как степень основания нату-
рального логарифма, приравненные к отношению максимальной высоты эшело-
нов к минимальной, что известно из теории чисел при выборе «экономного» ос-
нования системы счисления (в аппаратурном плане), а также из работы [139] -
(см. формулу (4.78)) при определении оптимального времени поиска; из работы
[6] при уточнении координат РЛС, разведуемых с ЛА делением полос обзора на
земле, и др.; т.е. -
konm~-ln(hmax/hmiri), {копт- минимальное число эшелонов). (4.108)
Весьма приближенно распределение энергетического потенциала много-
эшелонного РЛП, «сконструированного» подобным образом, аппроксимируется
двухпараметрическим законом Вейбулла [127], функция распределения которого
определяется следующим выражением:
А?(х) = 1-ехр[-(А/Сгв)"],
(4.109)
где применительно к табл. 4.6 - г) = 0,3 и ав = 1,2.
382
Плотность распределения закона (4.109) равна - ’ dx'
1 •ехр[-(*/<тв)'7], ПРИ Х>0.
(4.110)
Из плотности распределения (4 110), как частный случай при ?? = 2, получе-
на другая плотность распределения параметра Z = (2/4^)VPG, представляемая за-
коном Релея (формула (4.100) Величина СКО параметра Z Релеевского распреде-
ления (4.100) зависит от того, какие группы РЛС (по их тактическому назначе-
нию) включены в состав РЛП, что неоднократно подчеркивалось в тексте книги
Например, для РЛП РЛС дальнего обнаружения ЗРК средней (и большой) дально-
сти и диспетчерских аэродромных РЛС оу = 0,3 0,5 кмВт0,3 (рис. 4.38); для РЛП,
включающего маловысотные ЗРК az - 0,05 0,2 кмВт°’5(тот же рис. 4.38) [9, с. 23]
Рис. 4.38. Распределение энергетического параметра для типового поля,
составленного из РЛС дальнего обнаружения (кривая 7)
и РЛС, включающего дополнительно РЛС маловысотных ЗРК (кривая 2).
Итак, у нас есть распределение параметра Z и некоторые сведения о оу. Что
касается ориентировочного значения 2,входящего в параметр Z, то по материалам
открытых источников (в том числе [143]) для зарубежных сухопутного
383
ТВД(СТВД) и морского ТВД (МТВД) в 3-х сантиметровом поддиапазоне длин
волн работают большинство «стрельбовых» РЛС ЗРК и ИП (ИП при РТР мы не
моделируем, но их РЛС могут вносить определенный «вклад» во входной поток
сигналов); в двухсантиметровых поддиапазонах и менее работают дальномеры
некоторых ЗРК и РЛС маловысотного поля (первый эшелон ПВО сразу за линией
ЛВС) в том числе - в оптическом поддиапазоне; в пятисантиметровом поддиапа-
зоне функционируют некоторые мощные РЛС ЗРК (например, корабельные) и
РЛС обнаружения ЛА; в десяти и двадцатипятисантиметровом поддиапазоне -
высотомеры и РЛС обнаружения целей; в семидесятипятисантиметровом поддиа-
пазоне - РЛС воздушных, морских радиолокационных дозоров и РЛС обнаруже-
ния острова Британия (РЛС типа AMES) и, наконец, в стапятидесятисантиметро-
вом поддиапазоне - корабельные РЛС обнаружения ЛА и наведения ИА. Таким
образом, на СТВД РЛС работают в поддиапазонах от 75 см до 2-х и менее см; на
МТВД - в поддиапазонах от 150 см до 5 см (не считая самолетных РЛС). Такова
ориентировочная информация относительно выбора 2 при «конструировании»
РЛП для математического моделирования.
Конкретные параметры РЛС того или иного типа можно определить из об-
щих соображений (основные типы РЛС описаны в предыдущей главе), дейст-
вующих в радиолокации [6,9,133,143]. Например, для импульсных РЛС в зависи-
мости от их дальности действия период повторения сигналов Тп выбирается с уче-
том скорости прохождения ЭМВ до объекта локации и обратно
(Д >0,15 Ддейства длительность сигналов - с учетом найденных Ти и им-
пульсной мощности по скважности (Т„/ г,) и т.д. В работе [9] приведены техниче-
ские параметры 19 типов зарубежных диспетчерских и посадочных аэродромных
РЛС, а в библиографии к работе [9] можно найти данные о технических парамет-
рах других РЛС РЛП.
Кроме таблицы технических параметров РЛС РЛП и примерного количест-
ва РЛС разных эшелонов (табл. 4.6) необходимо при составлении РЛП знать
плотность распределения РЛС на местности. Несмотря на общую неравномер-
ность распределения РЛС на крупных участках площади, что характерно для
384
«объектовой» системы ПВО (ПВО крупных промышленных центров, военных баз
и т.д ). всегда можно выделить районы меньших размеров (или пограничные рай-
оны вдоль ЛВС), где расположение РЛС на местности примерно равномерно
Тогда (при постоянной плотности размещения на выделенных участках -
(р[1/кл?]) можно для оценки числа (к) РЛС использовать закон Пуассона [20]:
P(fc)=[(p(4.111)
где Р(к)~ вероятность размещения ровно «к» РЛС на площади (S) с плотно-
стью^).
Если событие А - появление хотя бы одной (другой) РЛС в круге радиуса
«г» с центром, совпадающим с координатами расположения любой РЛС РЛП, а
случайной величиной X- является расстояние между центром круга (радиуса г) и
ближайшей (соседней РЛС), то:
P(A)=P(r<x)= 1 - ехр[~(ж2) • р], (4.112)
где Р(А) и Р(г<х)- вероятности реализации соответствующих событий,
ж2 - площадь круга радиуса X;
(ж2) р - число РЛС в круге (ж2), хотя бы одна РЛС.
Из выражения (4.112) дифференцированием по X можно найти плотность
распределения (W/) расстояний между двумя РЛС (исходной и первой соседней)’
441= (2лр х) • ехр[-(ж2) • р}. (4.113)
Действуя аналогично можно получить плотность распределения расстояний
между исходной (опорной) и любой другой (i-ой) РЛС РЛП из выражения (z=l,
2, -)
385
W;(x)— [2(яр)' x2'' • ехр(-лрс2)]/(г -1)!.
(4.114)
Известна плотность распределения Эрланга ~И^э(х) [144] для «линейных»
расстояний X между «г» соседними заявками в пуассоновском потоке с интенсив-
ностью Л («расстояний» по времени, если поток заявок - временной):
И7э(х) = рТ • х'1 • exp(-2x)]/(z -1)!.
(4.П5)
Выражение (4.114), полученное в работе [9 с 25], есть аналог распределения
(4.115) на плоскости.
Математическое ожидание (среднее расстояние на плоскости) для плотно-
сти (4.114) с учетом справочника [145] представляется в виде:
Хг=Г(/ЧО,5)Шр)о’5-(/-1)!]
(4.116)
где F(i + 0,5)при i = 1, 2,... - Гамма-функция.
Второй начальный момент a2i и дисперсия (о-2) представляются так:
аъ = И(л:р)’, =(l/^t?){z-r2(z + 0,5)/[(z’-l)!]2}.
(4.117)
Из выражений (4.116) и (4.117) следует, что среднее расстояние (AY) и СКО
(tTj) между ближайшими (соседними, т.е. z-1) РЛС составляют:
Х\ =0,5/у[р и ofj = 0,25.7/? •
(4.118)
Выражения (4.116) и (4.117)могут быть использованы при «конструирова-
нии» конкретного (заданного для моделирования) РЛП - формирования коорди-
386
нат каждой РЛС РЛП при различных плотностях размещения РЛС на местности
(р)-
На рис. 4.39 приведена гистограмма расстояний между соседними РЛС ти-
пового РЛП СТВД, составленного из 377 РЛС (без маловысотных РЛС) [9], и ап-
проксимирующий эту гистограмму закон Пуассона (4.111); средние значение
Хг=11км, СКО ст, = 8,8км (между соседним РЛС).
Применительно к математическому моделированию на МТВД нельзя гово-
рить о равномерном распределении РЛС РЛП на достаточно значительных пло-
щадях. Типовые корабельные соединения, перемещающиеся на морских (океан-
ских) акваториях, строятся по принципу круговой обороны, когда корабли разме-
щаются по окружностям в пределах радиолокационной (или визуальной) видимо-
сти, а в центре такого боевого соединения («ордера») находятся один два авиа-
носца. Соответственно от центра по радиусу к границам ордера падает (уменьша-
ется) передающий потенциал РЛС (или параметр Z=(2/4«-)7PG ), так как «цен-
тральным» РЛС приходится дальше обнаруживать воздушные цели, чем РЛС, на-
ходящимся на периферии морского соединения.
Рис. 4 39. Гистограмма расстояний между соседними РЛС типового РЛП и ап-
проксимирующая ее функция распределения.
387
Вторая особенность моделирования (и разведки) РЛС на МТВД - необхо-
димость обнаружения РЛС морских соединений на максимальных дальностях,
близких к радиогоризонту, когда требуется знание не только линейных (радиаль-
ных), но и «угловых» расстояний между РЛС. В работе [9 с.29] найдены распре-
деления «угловых» расстояний между ближайшими РЛС (при равномерном рас-
пределении самих РЛС в круге радиусом r=O,5d, d- диаметр круга):
(X) = (64 / Зтг2) ехр(-4,9У2Л),
<^(2Г) = 1-ехР(-5,72.%1-58),
О < X < 1;
0<У<1,’
(4 119)
где W](X) и Fi(X) - плотность и функция распределения «угловых» расстояний
между РЛС в круге радиуса г, «видимых» с борта ЛА (X=r-tg(r/ Д), где Д - даль-
ность РТР).
Математическое ожидание (А) и СКО величины х соответственно равны:
А = 027; ах =0.195.
На рис. 4.40 представлены зависимости (4.119), которые могут быть исполь-
зованы для расчета угловых погрешностей вычисления координат РЛС и форми-
рования РЛП МТВД. Поскольку такие распределения целесообразнее применять
для РЛС, расположенных в центре ордера (вблизи «ядра» соединения), то чита-
тель может получить соответствующие распределения угловых расстояний между
РЛС для «колец» морского соединения, находящихся на расстоянии R от его цен-
тра (для РЛС находящихся на кораблях, распределенных по площади кольца в ин-
тервале радиусов круга &R = Д -Д ).
388
Рис. 4.40. Зависимость плотности (JF(x)) и функции распределения (F(x)) угловых
расстояний между РЛС, расположенных в круге радиусом г.
4.5.2. Оценка характеристик входного потока сигналов.
После того как РЛП сформировано (определены координаты и технические
параметры каждой РЛС РЛП), можно моделировать на ЭВМ этап обнаружения
сигналов и измерения их технических параметров. Однако для того, чтобы оце-
нить в каком режиме (при разном приемном потенциале и высоте полета развед-
чика) будет работать аппаратура РТР, следует оценить плотность поступления
входных сигналов во времени; это особенно важно для определения селектирую-
щей способности беспоисковой широко диапазонной аппаратуры РТР.
В связи с этим определение статистических характеристик плотности (в
единицу времени) поступления входных сигналов (или потока входных сигналов),
по-видимому, целесообразно при моделировании.
Как только мы выбрали приемный потенциал и маршрут полета самолета-
разведчика относительно РЛП, то тем самым объективно (независимо от состава и
остальных технических параметров станции РТР) мы задали входной поток сиг-
389
налов РЛС от РЛП в соответствии с ранее употреблявшимся выражением (урав-
нением радиосвязи):
Р«=(^/Д)2 [G(0)/GO]]-GO2-y, (4.120)
где Z = (2/4^)A/P1G01 ;
[G(WG01 ]- нормированная ДНА РЛС;
G02- КНД антенны станции РТР;
у - коэффициент потерь.
Далее, чтобы не зависеть от всех остальных технических параметров разве-
даппаратуры кроме чувствительности приемника, принято G2 у =1.
Вообще-то снова возвращаясь к имитационному математическому модели-
рованию РТР - предмету рассмотрения в настоящем разделе, можно было бы соз-
дать отдельную модель (тематическую) оценки характеристик входного потока
сигналов на ЭВМ. Для этого у нас уже есть РЛП и аппроксимация ДНА во всех
видах (по среднему уровню и с учетом флуктуаций бокового излучения РЛС - см
(3.121) гл. 3 и раздел 4.3. настоящей главы) Остается только промоделировать
полет ЛА над этим РЛП и получить итоговый поток как сумму потоков сигналов
от каждой РЛС, превышающих пороговой уровень, заданный чувствительностью
аппаратуры и отношением сигнал/шум приемника. Этим мы займемся в конце на-
стоящего раздела.
Временной масштаб математического моделирования (как мы уже знаем из
гл 3) зависит от числа РЛС РЛП, детальности описания процессов и шага модели.
390
4.5.2.1. Оценка входного потока методом статистических испытаний.
Но именно определенные трудности построения РЛП по методике преды-
дущего раздела, когда многое надо «додумывать» (искать в литературе) самому
разработчику станции (комплекса) РТР, в связи со скудным материалом в этой
области знаний, делают целесообразным создание другой методики (экспресс-
оценки) входного потока сигналов, использующей способ статистических испы-
таний (Монте-Карло), о котором также уже говорилось [32] Этот способ учиты-
вает распределения параметров Z, Д hG(6»)/G01, входящих в формулу (4.120), кото-
рые уже неоднократно приводились раньше в тексте настоящей книги (см. напри-
мер, формулы (4.31) -(4.33) и другие). Следует заметить, что если имеются непре-
одолимые трудности при «конструировании» РЛП, то можно имитировать на
ЭВМ полученное в настоящем разделе описание входного потока сигналов вместо
РЛП.
Рис. 4.41 Гистограмма уровней мощности сигнала на входе станции РТР от ра-
диолокационного поля.
Указанным способом статистических испытаний в работе [9] были рассчи-
таны гистограммы W(PBX) для: ненаправленной антенны станции РТР (G02 =1); вы-
соты полета ЛА А=10 км; СКО энергетического параметра Z crz = 0,1 кмВт0,5; ши-
391
рины ДНА РЛС <901=2°, коэффициента качества позиции РЛС //=1,5 (формула
(3.121.) гл. 3); СКО флуктуаций уровня бокового излучения (<то- см формулу
(4.60)) равное нулю и числе реализаций (Монте-Карло испытаний)- 104 (см. рис.
4.41). Гистограмма, рассчитанная для тех же исходных данных, но при <уа =ЗдБ
достаточно близка к рис. 4.41 (максимум тот же (-97,5 дБ/Вт), величина максиму-
ма на 10 % меньше, а дисперсия, соответственно, больше). Эти гистограммы
удовлетворительно аппроксимируются логарифмически - нормальным распреде-
лением вида (4.34), где вместо Рс должен быть Рс= (1gРвх-е) при Рвх>е\ ор>^',
-оо</лр<^. Параметры логарифмически-нормального распределения (е,ар,/ир)
могут быть найдены из гистограммы по значениям процентилей lg Рвхо,о5,lg Рвхо,5^
lg Pexot95 для вероятностей превышения заданных уровней входной мощности
(Рвх)-0,05; 0,5 и 0,95 соответственно по следующим соотношениям [127]:
£ = [lg^o,5 -ехр(-у/7)]; ор =(1/7); =+(//7)> (4.121)
где 7/=i,645{ln[(lgРвх0 95 - 1gРет0.5)/(^Р^о.5 -lgPex(lfi5)]}~‘;
У = 71п{[1 - ехр(-1,645 / 7)]/(lg Рехй >5 - 1g Рет0>95)}.
Из приведенного на рис. 4.42 распределения W(lg Рвх):
lg Лход5=-1О,8; lg Рвхо,5=-9,75; lg PexftP5=-8,25; тогда: 7 = 4,61; / = -5,78;
£ = -13,25; ор = (1/4,61);-//р = +1,25.
392
Рис. 4.42. Функция плотности распределения, аппроксимирующая зависимость
рис. 4.41.
Из распределения (4.34) с учетом (4.121) находится вероятность превыше-
ния входным сигналом (Рех=Ре) порогового уровня -РпОр интегрированием:
х пор
Р(Рвх>РПор> \W(Pex)dPex.
о
Для параметров (4.121) интегрирование (4.34) дает:
(4.122)
ln(lgP^ +13,25)-1,25
(4 123)
где \gPmp> -13,25;
Ф, =(2/л/7г)|ехр(-г‘2)^.
о
393
Переход к другим значениям стг и h не меняет вида зависимости 1P(PBX), так
как разности процентилей постоянны (постоянны у и в расшифровках формулы
(4 121)..), меняется только математическое ожидание Ре^,5, а значит и е , следова-
тельно, для любых сочетаний <jz и h имеем:
ЛЛх>Лог) = о,5р-Ф2
I
ln(lgPTO;i-lg(ст)/Л) +10,25)-1,25
0,31
(4.124)
В соотношении (4.124) размерность az - обычная кмВт0’5, айв километрах;
при lgP„o/, <lg(crf/Л) - 10,25 обнаружение достоверно [Р(Рел>Риор)=1]; если сг7=0,1
кмВт0’5 и h=l0 км, то формула (4.124) превращается в (4.123).
Соотношение (4.124) представляет вероятность превышения порогового
уровня «обобщенным» сигналом РЛП, подчиняющегося Релеевскому распределе-
нию вида (4.31) с параметром az.
На рис. 4.43 показаны расчеты по выражению (4.124) для crz=0,3 кмВт0’5 и
разных высот полета самолета-разведчика (Л); из рисунков видно, что для получе-
ния высоких вероятностей РТР РЛП с больших высот полета (Л> 10/ш) необходи-
мо иметь чувствительность приемника порядка - 100дБ/Вт, а на h=200 метров
можно снизить чувствительность приемника на 15-^20 дБ.
Перейдем к оценкам входного потока сигналов от РЛС РЛП; при известных
средней плотности РЛС на местности (р) и средней частоте зонирующих импуль-
сов (Fn), частота поступления сигналов от РЛП & - входной поток сигналов от
РЛС РЛП - приближенно равна:
&-P(Pex>Pnop)-Fn-р(л-1152И),
(4.125)
где (я 1152Л)- площадь размещения РЛС РЛП, от которых поступают сигналы
(Дгд2=1152h, где h измеряется в километрах).
394
Рис. 4.43. Зависимость вероятности превышения входным сигналом порогового
уровня для разных высот полета
(7 - 20 км; 2-10 км, 3-4 км, 4-2 км; 5-1 км; 6 - 0.2 км).
Следовательно, в формуле (4.125) зона приема сигналов РЛС- круговая с
максимальной дальностью обнаружения, равной радиогоризонту. Например, при
11=10км; /?- 10-3(1/к.м2), Аи=10377/, oz =О,ЗкмВт05 и Pw=40'8 Вт(-80дБ/Вт) имеем
входной поток ,9 = 75-103 75/, что примерно соответствует «мешающему» потоку
ЮОкГц, выбранному при моделировании атак комплексов перехвата самолета с
системой РЭП на борту (см. раздел 3.4.7 гл. 3).
Чтобы приблизиться к более реальным оценкам входного потока сигналов в
формуле (4.125), необходим учет различий частот повторения импульсов для раз-
ных типов РЛС и режимов их работы. Для унификации желательно иметь зави-
симость Fw РЛС от их энергетического параметра (z); так как Fn выбирается в РЛС
из условия однозначности отсчета максимальной дальности обнаружения ЛА, то
большим энергетическим потенциалам (для одних и тех же 2) соответствуют
меньшие частоты повторения. Эмпирические данные (из анализа типовых РЛП)
показывают, что приближенно можно представить Fn(z) зависимостью.
Fn (z) - 2250 • exp(-6z) + 250,
(4.126)
395
где Fn измеряется в (1/сек), z- в [кмВт0,5].
Тогда в выражении (4.125) вместо двух первых сомножителей в правой час-
ти равенства -P(Pex>Pnop)-Fn надо использовать F3Ke, находимое по формуле.
(4 127)
С}
В последнем выражении F„(z) и W(z) определяются зависимостями (4 126) и
(4 100), а для нахождения вероятности превышения входным сигналом опреде-
ленного уровня в функции от параметра Z-P(z) были вновь рассчитаны гисто-
граммы W(Pex) при z=const, которые снова были аппроксимированы логарифмиче-
ски-нормальным распределением вида (4.34), а затем по методике работы [127]
были определены параметры этого распределения по формулам (4.121): 77 = 2,37,
/ = -0,8; б = -11,4.
Переход к интегральной функции (4.122) для разных Z и h и интегрирова-
ние дают:
P(z) = 0,5] 1 - Ф2
ln(lgP„op-lg(^2 /А)+ 8,4)-0,34
0,6
(4.128)
где если PWop<(z2/h)-10 84 или z >104'2 • 7’яй/,, то обнаружение входных сигналов
РЛС РЛП достоверно и P(z)=l; z измеряется в кмВт0’5, h в километрах.
Подстановка формул (4.100), (4.126), (4.128) в выражение (4.127) и интегри-
рование от нуля до z = 104,2^A Рпор (дальше не надо так как P(z)=l) позволяет, по-
сле подстановки Рэкев (4.125) вместо P(Pex>PnopyFn получить входной поток сиг-
налов в зависимости от распределений параметра z(crz).
396
На рис. 4.44 показаны результаты оценок входного потока для средней
плотности РЛС РЛП на местности р = 10~3(1/юи2) и СКО энергетических парамет-
ров РЛП сг2 = О,1кл/5«/0,5, <уг - О,ЗкмВт05 (графиками можно пользоваться и для дру-
гих значений az; при этом уменьшение в «к» раз эквивалентно увеличению h
в «7?» раз).
Рис 4.44. Зависимость входного потока импульсов при массовых действия
авиации на входе станции РТР в функции от чувствительности приемника РТР
(2-77=0.2 км, ctz=0. 1 кмВт1/2; 2-Н=0 2 км, Gz=0.3 кмВт1/2; 3-Н=1 км, Oz=0.1 кмВт1/2;
4-Н=10 кмс/—0.1 кмВт1/2; 5-Н=20 км, ст/=0.1 кмВт1/2; 6-Н=20 км, ог?=0.3 кмВт1/2)
Из рис. 4.44 видно, что малые чувствительности станций РТР (порядка
-60... -70 дБ/Вт- приемники прямого усиления) дают потоки сигналов <Л0кГц и
слабую зависимость от h и crz; высокие чувствительности приемников РТР (до
-90... -100 дБ/Вт) дают поток сигналов на входе аппаратуры от 100 кГц до 1000
кГц и более заметной зависимости потока от Л и az,
397
Приведенные расчеты соответствуют максимально-возможному потоку ра-
диосигналов от импульсных РЛС (работают «два борта» аппаратуры и прием ве-
дется вкруговую, как мы рассматривали в гл 3 при построении систем РПД).
При локальных боевых операциях авиации или одиночных полетах самоле-
тов-разведчиков надо учитывать зависимость относительного числа работающих
РЛС ЛП от высота полета ЛА и энергетического параметра z РЛС.
Как мы знаем (см. формулу (3.1)...), дальность обнаружения Добн ЛА с Эпр
о-д РЛС, имеющей приемник с чувствительностью Рпр.мин. определяется так:
Ле.=^Г[(ОС1Сгч)/Л„,..Г'=. (4.129)
Обозначая через котн отношение общего числа РЛС, работающих на излуче-
ние в РЛП к общему количеству РЛС РЛП, распложенному в зоне (круге) с мак-
симальной дальностью Дрг=115 Jh (h измеряется в км) имеем:
котя=(Лобн1 Дрг)2 или komH=(a-z)/h,az<h, (4.130)
где последняя формула (4.130) получена с учетом (4.129); а- коэффициент про-
порциональности .
При возрастании ДОбн, кота увеличивается вплоть до единицы (или лучше
0,95- с запасом); тогда (4.130) аппроксимируется так:
копт =1 - exp[-(az) / h], (4.131)
где а = (1 /1152 )[(G01 ) / Р„рлп,„ ]0’5.
398
Например, если РЛС с Gw=1000 (ЗОдБ) и Р1ф лпш=10’13 Вт (-130дБ/Вт) обна-
руживает ЛА с ЭПР (сгч) 5м2, то а=17 кмВт(о, тогда подстановка значения «<?» в
формулу (4 131) дает:
^=l-expL-(17-z)M]. (4.132)
Подставляя (умножая) (4.132) в подынтегральное выражение (4.127) имеем
следующую зависимость потока на входе станции РТР для одиночного ЛА (ком-
пактной небольшой группы ЛА) от типового РЛП на высоте h:
IQ^^hPnop
Г = 5 = [р(я-1152/1)]. fl’(z)-F„(Z) k^(z!h) W{z)dz, (4.133)
О
где: все функции под знаком интеграла известны;
р - суммарная плотность РЛС на местности в [1/км2];
Рпор- пороговая чувствительность приемника в Вт;
z- энергетический параметр (z=(2/4^)a/p1G01 ) РЛС;
h- высота ЛА.
На рис 4.45 даны результаты интегрирования по (4.133) для исходных дан-
ных: р - 10’3[1/юи2]; crz = 0,ХкмВтп*’5 ,<jz - 0,ЗкмВт°’5 и разных высот полета ЛА.
Сравнение кривых рис. 4.44 и рис 4.45 показывает, что наибольшее разли-
чие (не менее, чем на порядок) во входных потоках наблюдается при высоких
чувствительностях разведприемника (не менее - 90 дБ/Вт) и высотах полета (h)
больших 10 км; естественно, что потоки на входе аппаратуры РТР для одиночных
(локальных) полетов значительно меньше.
399
Рис. 4.45 Зависимость входного потока импульсов при локальных действиях
авиации на входе станции РТР в функции от чувствительности приемника РТР
(остальные расчетные данные таки же как для рис. 4.44).
Как мы уже знаем, аппаратура РТР может иметь как широкий диапазон
длин волн (СТВД, или МТВД, или суммарный), так и отдельные поддиапазоны;
задавая соответствующие этим условиям РТР р и <jz можно получить потоки раз-
ной интенсивности для разного класса станций РТР (на разных носителях аппара-
туры). Кроме того, имея поисковые приемники РТР и зная распределение РЛС по
несущей частоте, можно грубо оценивать потоки сигналов и для конкретной по-
лосы пропускания приемника, в том числе - и для многоступенчатого поиска.
В предыдущих рассуждениях не учитывались квазинепрерывные сигналы
РЛС. сопровождающих «на проходе», имеющие высокие частоты повторения (см.
таблицу 3.2.гл. III), а также непрерывные РЛС «подсвета» ЛА, сопровождающие
самолет (главный луч ДНА постоянно длительное время облучает ЛА).
Такие сигналы учитываются достаточно просто суммированием этих облу-
чений с импульсным потоком сигналов [146], а также при математическом моде-
лировании. В работе [146], с учетом результатов работы [9], производится уточ-
нение входного потока сигналов
400
Математическое моделирование входного потока сигналов обычно решает
две задачи:
- детальный учет процесса формирования потока (боковое излучение
РЛС и всевозможные флуктуации сигналов; реальное размещение РЛС на местно-
сти, их конкретные параметры, типы и режимы работы и т.д.);
- проверка справедливости допущений, сделанных при выводе анали-
тических моделей.
В нашем случае, касаясь оптимального проектирования аппаратуры моде-
лированием, необходимо создать условия для правильной оценки различного со-
четания технических параметров станций РТР, в том числе - в вариантах функ-
ционирования «мешающих» РЛС (метеорологических, имитаторов РЛС и др по-
мехах), которые в последующем затрудняют анализ сигналов и вносят дополни-
тельные (иногда существенные) погрешности.
4.5.2.2 Исходные данные и результаты имитационного математического
моделирования входного потока сигналов при РТР с ЛА.
На основании анализа открытых данных по зарубежным РЛП, в работе [9],
было сформировано радиолокационное поле из 400 РЛС, размещенных на площа-
ди 500x1000 км2, со средней плотностью до 8-10~4(1/юи2); ЛА с аппаратурой
РТР размещался (первоначально) датчиком случайных чисел (ДСЧ) в квадрате со
стороной 200 км, а центр квадрата, в свою очередь, перемещался на площади, за-
нятой РЛП.
Антенны станции РТР шириной по азимуту « 40° (0,7 радиан) и углу места
57,3° (1 радиан) располагались по обоим бортам ЛА с главными направлениями,
перпендикулярными направлению оси полета; чувствительность разведприемника
составляла (Р2=Ю'6Вт), КНД его антенны (Сог=4).
РЛС РЛП имели ширину ДНА в вертикальной плоскости (угол места) -5,7°
(0,1 радиана),а угол отжатия главного лепестка ДНА от горизонта также 0,1 ра-
401
диана; остальные технические параметры РЛС (ширина ДНА в горизонтальной
плоскости - (901, КНД антенны, мощность излучения РЛС - Р/, угловая скорость
сканирования антенны -о, и др. задавались согласно паспортным данным РЛС),
начальный угол отклонения антенны РЛС от направления на ЛА задавался датчи-
ком случайных чисел; РЛС были либо однотипными, либо состояли из 29 разных
типов.
ДНА антенн РЛС аппроксимировались «гладкой» зависимостью вида
(3 121) гл. Ill для д = 1,5; аналогичной зависимостью по обоим углам (азимуту -6>2
и углу места- /?2) представлялась ДНА станции РТР в виде:
G(02,/?2) = G(02)G(/?2), (4.134)
где G(02) и G(/?2) представлялись выражением (3.121) для д = 2;
Д = arctg[hl4(Xm -Х,Г+(^ -4’1;
(Хд4, Улл) и (Хг,Уг) -координаты самолета-разведчика и i-ой РЛС РЛП;
h- высота полета ЛА (варьировалась).
Геометрическая дальность до /-ой РЛС (Дг) определялась по формуле
Д) = ^(ХЛЛ-X,)2+(YJli-Yt)2 +h2, а радиогоризонт как всегда - Дрг=1 \5-у[й[км].
Максимальная дальность обнаружения РЛС, наблюдаемой с ЛА в точке
(Хг,Уг) под углами <92,Д2 при облучении самолета- разведчика главным лучом РЛС
определялась по формуле:
Д,.(„ = (Л/4^)7[Дс,(Д).6(О)-/]/Л . (4.135)
где С,.(Д)- коэффициент усиления антенны i-ой РЛС в вертикальной плоскости
(в направлении Д), рассчитываемый по аппроксимации (3.121);
402
у = 1;
G(02, Д) рассчитывается по формуле (4.134);
угол Р, вычисляется так: Д = ротж-arctglh/ +(УЛА-Г^];
/?0№к - угол отжатия антенны РЛС от горизонта (0,1 радиана).
Математическое моделирование (кратко) производится так: после сравне-
ния геометрической дальности (Дг), радиогоризонта (Дрг) и максимальной дально-
сти (Дмог) для каждой РЛС устанавливается факт обнаружения i-ой РЛС; затем
подсчитывается и запоминается число облучений сигналов, поступивших на вход
приемника станции РТР во всем частотном диапазоне и его участках (поддиапа-
зонах); далее ЛА перемещается в другую точку пространства, отстоящую от пер-
вой на расстояние, равное произведению скорости ЛА на шаг моделирования по
времени и т.д. (процесс повторяется).
Результаты моделирования запоминаются, обрабатываются в виде гисто-
грамм и выводятся на печать.
Рис. 4.46а. Распределение времени облучения от РЛП из однотипных РЛС, полу-
ченное методом математического моделирования
(Л=20 км, Дио^Дрг, 6^=0.043,03=1.05 р/с).
403
Рис. 4.466. Распределение времени облучения от РЛП из разнотипных РЛС,
полученное при высоте полета /?=20 км.
Рис. 4.46в. Распределение времени облучения от РЛП из разнотипных РЛС,
полученное при высоте полета Я=100 м.
404
На рис. 4.46 а), б) и в) приведены:
- распределение времени облучения 375 однотипных РЛС РЛП, пара-
метры которых такие, что максимальная дальность обнаружения РЛС при совпа-
дении главных лучей ДНА РЛС и станции РТР вдвое превышает радиогоризонт
(Дрг) при высоте полета (Ь)- 20 км; (рис. 4 46 а));
- распределение времени облучения от РЛП из 29 типов РЛС
(«375РЛС) при h =20км (рис.4.46 б)); из рисунка видно, что имеется два максиму-
ма в распределении из-за наличия группы РЛС, имеющих малые значения 0О1 /®; в
РЛП дополнительно включались РЛС сопровождения с tog,=4,4 сек;
гистограмма времени облучения от разнотипных РЛС при полете на
малой высоте (Ь=100м); число типов РЛС -30, представлены (включены в РЛП)
три «стрельбовых» РЛС со временм сопровождения 4,4 сек. (рис. 4.46 в)).
Среднее значение ^=72 мс (рис. 4.46 б)), a CKO - at06n =151 мс без со-
провождающих РЛС; с сопровождающими РЛС (три РЛС с tog«=4,4 с) соответст-
вующие величины /обл=90 мс, а^бл =336 мс (дисперсия выросла «в 2 раза); сред-
нее количество облучающих (рис. 4.46 б)) равно 68 (плюс 3 сопровождающих =71
РЛС).
Для эксперимента на рис. 4.46 в): гобл=186 мс,<Уюбл -452 мс, среднее число
одновременно обнаруживаемых РЛС равно 2,6 (совпадающих последовательно-
Рис. 4 47а. Распределение среднего поперечного размера зоны обнаружения
при высоте полета Н=20 км.
405
Рис. 4.476. Зависимости некоторых характеристик РЛС от высоты полета
(1 - средний поперечник зоны обнаружения; 2 - дальность прямой видимости;
3 - среднее время облучения).
На рис. 4.47 а) и 6) показаны:
- распределение среднего поперечного размера зоны (£) обнаружения
РЛС при И=20км ЛА (рис. 4.47 а...); при этом среднее значение поперечника зоны
равно 219км, а максимум гистограммы приходится на Ь=100км; имеется группа
РЛС, где Ь=2Дрг (диаметр круга);
- некоторые значения характеристик типового РЛП разнотипных РЛС,
определяющих входной поток сигналов, в зависимости от высоты полета ЛА (рис.
4.47 б)).
Полученные результаты математического моделирования входного потока
сравнивались с другими данными [147] и примерно (удовлетворительно) совпада-
ли; более детальное сравнение затруднительно из-за отсутствия в публикациях
количественных исходных данных (это же ограничение действует и на наши ре-
зультаты).
В работе [9] обосновывается целесообразность применения среднестатисти-
ческой РЛС для оценки входного потока, которая подтверждается эксперимента-
ми по математическому моделированию с использованием такой РЛС.
406
Данные математического моделирования входного потока сигналов (в том
числе и те, которые могут быть получены дополнительно при других технических
параметрах аппаратуры РТР и условиях моделирования, а не только те, которые
изображены на рис. 4.46, рис. 4.47.), напрямую используются в расчетах вероят-
ности обнаружения, определения координат и других аналитических моделях
процесса РТР (см. раздел 4.1.2 и другие материалы настоящей главы), в том числе
- для корректировки результатов аналитических расчетов. Кроме того, любой
главный конструктор, по нашему опыту, больше доверяет данным математиче-
ского моделирования, чем теоретическим оценкам; аналогично поступает и спе-
циалист - разработчик устройств, каналов и блоков аппаратуры.
I
4.2.3. Имитационное математическое моделирование станций РТР.
Незаметно мы подошли к одному из самых важных этапов в проектирова-
нии аппаратуры - математическому моделированию ее функционирования. Из
предыдущего материала книги мы убедились, что до начала изготовления образ-
цов (опытных, макетных) комплексов (станций) РТР, наряду с предварительными
аналитическими расчетами, физическими и аппаратными экспериментами (маке-
тированием новых узлов, блоков, каналов аппаратуры, наиболее принципиальных
схем), как обязательное условие построения эффективной и оптимальной аппара-
туры должно быть проведено математическое моделирование процесса РТР.
Ввиду отсутствия в технике пассивной РТР «игровых» ситуаций, в отличие
от разработки средств РПД (нет «противостояния» со стороны системы ПВО, если
разведка ведется со своей или нейтральной территории, из космоса в мирное вре-
мя), нет особого смысла разрабатывать глобальные математические модели РТР
как при проектировании комплексов РПД и оценке их эффективности. Поэтому
обычно (и наиболее приемлемо) моделирование процесса РТР с одного летатель-
ного аппарата и мы не будем отступать от общих правил. Математическое моде-
лирование работы пространственно-разнесенной системы РТР с двух или трех ЛА
407
требует принципиально других подходов, так как здесь на первый план выступает
качество имитации процесса взаимодействия ЛА между собой, вопросы иденти-
фикации и привязки измерений, проблемы синхронизации функционирования и
обмена информацией. Все эти трудно моделируемые проблемы переносятся (в
большинстве) на этап натурных испытаний. Недаром при разработке космическо-
го челнока «Буран» изготовлено около 40 его макетов и образцов различной
сложности, из которых четыре образца были пилотируемыми, поднимались в воз-
дух летчиками-испытателями (срабатывает известное русское правило - все «по-
щупать» самому и опробовать на «деле»...).
Совершенно очевидна последовательность применения моделирования' по-
сле выдачи заказчиком тактико-технических требований к аппаратуре на анали-
тических моделях должны быть выбраны (синтезированы) предварительные схе-
мы построения каналов, устройств, блоков и комплекса в целом в нескольких ва-
риантах; затем на математических моделях все это должно уточняться, а именно
- варианты построения, технические параметры, время анализа, пропу-
скная (селектирующая) способность, динамический диапазон (ДД) измеряемых
сигналов;
- оптимальное сочетание технических параметров (каждому приемному
потенциалу должны соответствовать своя селектирующая способность, ta, ДД и
др);
- методы измерений технических параметров, угловых координат, точ-
ности (СКО) и вероятности обеспечения заданных (требуемых) характеристик
эффективности;
алгоритмы обработки информации (идентификация, опознавание ти-
па, поэкземплярная классификация, местоопределение неразрешаемых по радио-
техническим параметрам РЛС);
методы представления информации потребителю, время обработки и
передачи результатов, в том числе по КВ и УКВ - линиям связи.
Перечисленные возможности математических моделей РТР реализованы в
работе [23].
408
Самым трудным в построении любой имитационной математической моде-
ли (в этом ее сложность построения) являются, необходимость алгоритмического
описания (представления) работы ее устройств для всех конкурирующих между
собой вариантов построения аппаратуры на языках и в порядке, понятном про-
граммисту (реализуемого на ЭВМ); представление логики работы комплекса РТР
в целом и отдельных устройств, входящих в его состав; составление протоколов
связи (установление аппаратурных, временных и логических связей внутри ком-
плекса и с радиоэлектронным оборудованием самолета). Исходным материалом
при разработке математической модели могут быть- ряд предыдущих аналитиче-
ских формул настоящей главы; некоторые графики и таблицы; модели «конструи-
рования» РЛП и расчета (оценки) потока входных сигналов.
В связи с ощутимыми временными затратами на реализацию имитационно-
го процесса РТР с помощью ЭВМ, важным является выбор шага моделирования.
Некоторые рекомендации при этом выборе были высказаны в главе III.
Для беспоисковых систем РТР, как правило, за каждый шаг требуется пере-
бирать все (N) РЛС, находящиеся в зоне обнаружения аппаратуры; при этом осу-
ществляется расчет дальности, уровня входного сигнала (при выбранном для кон-
кретного типа приемника отношении сигнал/шум), и вероятности обнаружения
сигнала в течение заданного времени анализа. Если на каждую РЛС затрачивается
«ч»типовых операций, то суммарное количество операций (ws) за пролет ЛА (Т/м)
с учетом шага А? в математической модели равно:
п^-п N Тлл / А/;
тогда время моделирования - Т мод есть-
Тмод=«, /V
409
где V- количество операций ЭВМ в секунду; а отношение времени полета ЛА
(Тлл) к времени работы ЭВМ («прогона» математической модели на ЭВМ) -
Тл/од составит:
ТМ!ТМС6^ (Д/)]/(шМ). (4.136)
Отношение ^ла^мод характеризует степень приближения имитационного
моделирования процесса РТР (и любого другого процесса) к реальному течению
явления; если это отношение равно единице, то говорят, что моделирование про-
исходит «в реальном масштабе времени».
Вообще говоря число операций (п), входящее в формулу (4.136), может со-
стоять (в обычной ЭВМ) из операций сложения (логического сравнения), умно-
жения, деления и др., которые имеют разное время реализации на ЭВМ и это об-
стоятельство надо учитывать при выборе шага моделирования, а также оценке
временных затрат ЭВМ за один пролет.
Из выражения (4.136) видно, что если п и N имеют порядок нескольких со-
тен, а «п» состоит преимущественно из «коротких» операций, то для моделирова-
ния часовых полетов ЛА в течение минут на ЭВМ с быстродействием нескольких
миллионов коротких операций в сек (обычно так указывается производительность
ЭВМ) надо выбрать Д/« 0,1 сек.
Для моделирования процессов наложения импульсов РЛС РЛП такой шаг
моделирования, безусловно, неприемлем и его (шаг) надо уменьшать, как мини-
мум, в 105 раз, а при анализе наложения (совпадения) облучении РЛС РЛП требу-
ется шаг моделирования в 100 раз («1 мс) меньший. Это означает, что потребное
быстродействие ЭВМ, если задачу моделирования решать «в лоб», должно быть
несколько десятков миллиардов операций в секунду в первом случае и несколько
сотен миллионов опер/сек во втором. Такое быстродействие для персональных
ЭВМ (ПЭВМ) не «под силу», и, кажется на первый взгляд, что необходимо ори-
ентироваться только на мощные «исследовательские» (уникальные и дорогие)
ЭВМ.
410
Существенное снижение требований к ЭВМ может быть достигнуто двумя
путями (не считая, что у нас «в запасе» есть значительно завышенный масштаб
моделирования, когда мы потребовали, чтобы часовой полет ЛА «проигрывался «
на ЭВМ за несколько минут (Тдл/Т^/од^бО)).
Первый путь (как уже это использовалось в главе при моделировании сис-
тем РЭП) - рассмотрение только облучающих в данный момент РЛС, а не перебор
всех РЛС РЛП. Для его реализации надо отслеживать (прогнозировать) моменты
облучения ЛА главными лепестками ДНА РЛС РЛП и запомнить (занести в па-
мять ЭВМ) все начальные фазы периодов вращения РЛС РЛП. Тогда в модели мы
будем «иметь дело» только с совпадающими последовательностями облучений
РЛС, которых, как известно, немного (порядка (10-12) при РТР на СТВД и еще
меньше при РТР на МТВД). Если считать, что общее чисел РЛС РЛП порядка
500 4-600 (N), то снижение требований к быстродействию ЭВМ составит около 50
раз.
Второй путь снижения требований к быстродействию- уменьшение количе-
ства выполняемых операций (п) в формуле (4 136) с помощью, например, предва-
рительного табулирования расчетных зависимостей (внесение в память таблиц),
упрощение аналитических выражений с помощью аппроксимаций и др.; Как по-
казал опыт построения подобных моделей, снижением числа операции можно
«ослабить» требование к быстродействие ЭВМ примерно в 10 раз (на порядок).
Следовательно, общее снижение необходимого быстродействия за счет использо-
вания указанных двух путей составит не менее 500 раз, что уже вполне достаточ-
но для реализации, по крайней мере, шага моделирования около 200мкс и иссле-
дований наложения облучающих главными лепестками ДНА РЛС РЛП. Дальней-
шее уменьшение требуемого быстродействия и переход к математическому моде-
лированию процесса РТР беспоисковой аппаратурой на ПЭВМ можно достигнуть
моделированием РТР по поддиапазонам длин волн (примерно в 3 4- 5 раз) и к мас-
штабу моделирования, близкому к единице (Ула^мод » 1), что вполне оправдано и
реально в случае исследования процессов моноимпульсного приема и наложения
импульсов (шаг моделирования- десятые доли микросекунды). Например, на
411
ПЭВМ типа «Pentium» можно моделировать процесс 'РТР приемником системы
РЭП ALQ-161, который был описан в главе 3.
Для поисковой аппаратуры РТР характерна высокая избирательность по не-
сущей частоте (узкая полоса приема - полоса пропускания оконечной ступени
при многоступенчатом поиске), поэтому за каждый временной шаг моделирова-
ния автоматически надо просматривать только те РЛС РЛП, несущая частота fn
которых соответствует частоте настройки (полосе анализа) приемника. Как мы
уже знаем из раздела 4.1.2 настоящей главы, за время полета самолета-разведчика
производится К циклов перестройки с длительностью Тд- каждого цикла; поэтому
Тд4=к-Тд (в Тд входит и время «чистой» перестройки по разведуемому диапазону
длин волн -t„ и остановки на анализ облучений (С) в каждой полосе пропускания
приемника -kfnp где были обнаружены сигналы). Если мы анализируем облуче-
ния РЛС в полосе пропускания приемника с шагом «1мс (совпадающие облуче-
ния, которых порядка 1+2 в kfhp') и (Т^/Тл/од=1), то из формулы (4.136) имеем-
V = (l + 2)»/(l.wc)-(l-2)-103 п [1/с]; при п=103 операций на анализ одного-двух облу-
чений РЛС в Д/н требуемое быстродействие ЭВМ равно (1-2) млн. опер/с, т.е.
вполне достаточно ПЭВМ.
Дальнейшее сокращение требуемой мощности ЭВМ можно достигнуть, ис-
пользуя расположение (в памяти ЭВМ) РЛС в порядке возрастания (уменьшения)
несущей частоты сигналов и неравномерность распределения РЛС по разведуе-
мому диапазону частот, когда «пустые» участки диапазона (без РЛС) можно про-
пускать, «перескакивая» при перестройке по fH на занятые (в дальнейшем время
«просмотра» не занятых РЛС участков прибавляется к Тц). Указанные меры по-
зволяют снизить требование к быстродействию ЭВМ в несколько раз.
Перестройка РЛС РЛП по несущей частоте по случайному закону и матема-
тическое моделирование РТР таких РЛС поисковым приемником вынуждает пе-
реходить к поимпульсному моделированию процесса РТР с шагом порядка еди-
ниц мкс или долей микросекунд. Для использования ПЭВМ в таких случаях с бы-
стродействием (1+2) млн. опер/с целесообразно переходить к моделированию
процесса РТР за один цикл поиска (Т/Д по разведуемому диапазону длин волн, а
412
число измерений (пеленгов) на РЛС за время их существования в зоне разведки
находить расчетным путем (из аналитических моделей). При моделировании за
цикл поиска, если не хватает статистики, можно всегда остановиться, занеся ре-
зультаты в память ПЭВМ, а затем продолжить эксперимент в удобное для иссле-
дователя время.
Существует еще много приемов и ухищрений, известных только специали-
стам в области программирования, применяя которые можно сократить время мо-
делирования процесса РТР при решении конкретной задачи. Заметим только одно
(повторим то, о чем уже говорили в главе III), что сегодняшние возможности вы-
числительной техники позволяют делать практически все, в том числе - разраба-
тывать достаточно сложные математические модели процесса РТР на ПЭВМ, со-
временные ПЭВМ имеют характеристики на несколько порядков превосходящие
ЭВМ 60х70х годов двадцатого века (например, ЭВМ типа М-20, БЭСМ-4, на ко-
торых, в определенной степени, успешно моделировали процессы РТР), при не-
измеримо меньших габаритах и энергопотреблении.
Рис. 4.48 Зависимость относительного числа обнаруженных РЛС типового РЛП
от скорости летательного аппараты, полученные методом имитационного моде-
лирования (1, 3) и расчетом по аналитическим соотношениям (2, 4).
413
В завершение раздела на рис 4.48. приведены результаты расчета на имита-
ционной математической модели процесс РТР одной из характеристик эффектив-
ности обнаружения - относительного числа обнаруженных РЛС РЛП за пролет
зоны разведки, полученные в работе [9 с. 130] для приемного потенциала станции
РТР ЦгЧЗоУРгЛ О10 [Вт], скорости поиска приемником -500 МГц/сек (полоса про-
пускания приемника 10 МГц «проходилась» за 20 мс). Скорость самолета-
разведчика менялась в интервале от 300 м/с до 1600 м/с, а время анализа ta сигна-
лов РЛС в полосе пропускания приемника имело два значения: /в=0,1 с (кривая 1)
и ^=0,7 с (кривая 3). На графиках рис. 4.48 нанесены кривые 2 и 4, полученные
расчетным путем для тех же ta и эквивалентной РЛС со средним (СКО) для ра-
диолокационного поля энергетическим параметром z = 0,45zowBw0,5; период вра-
щения антенны эквивалентной РЛС (Тву=10с), ширина главного луча 0С1 =1°, а
требуемая (заданная) дальность разведки составляла Дз=500 км (11=14 км).
Как видно из сравнения кривых 1 и 2; 3 и 4 расхождение результатов мате-
матического моделирования и аналитических расчетов не превышает 20%.
Одной из задач математического моделирования является имитация присут-
ствия в информации, привозимой ЛА с аппаратурой РТР, так называемых «сбой-
ных» данных, которые «засоряют» полезные сведения, мешают качественной об-
работке разведанных измерений о РЛС РЛП. В связи с этим приходится разраба-
тывать алгоритмы обработки, нечувствительные к ложным и неправильным изме-
рениям. К анализу качества обработки информации и эффективности алгоритмов
мы и приступаем в следующей главе. При этом особо нас будет интересовать ме-
стоопределение неразрешаемых по радиотехническим параметрам РЛС по ре-
зультатам многократного пеленгования.
414
Глава 5. МОДЕЛИРОВАНИЕ ОБРАБОТКИ ИНФОРМАЦИИ В
СИСТЕМАХ РТР
5.1. Общие положения
Проблемам и вопросам обработки информации от систем (станций) РТР
иногда уделяется недостаточное внимание по сравнению с проектированием
аппаратуры. Опыт показывает, что такой подход принципиально не оправдан и
может привести к серьёзным ошибкам, как в проектировании самой аппаратуры,
так и в последующем при её эксплуатации.
Дело в том, что грамотно построенная система обработки разведданных
иногда может «спасти» некачественно сконструированную аппаратуру,
выдающую, наряду с большим объёмом полезной информации, высокий процент
«сбоев» всевозможного происхождения и даже ложных измерений (пеленгов с
другого борта ЛА).
С другой стороны, не всякую ситуацию можно «спасти», отбросив
«сбойную» информацию (иногда нет признаков такой информации), и,
следовательно, нельзя «фетишировать» обработку, считая, что эффективными
алгоритмами можно исправить все недостатки аппаратуры РТР. Иногда
выбранный метод пеленгования принципиально «не свободен» от ложных
измерений и всё зависит только от вероятности их появления (фазовый метод).
Поэтому, как правило, нужен системный подход к построению станций
РТР, когда на аппаратуру накладываются определённые ограничения: по
производительности, (не требуются слишком частые измерения пеленгов,
коррелированные друг с другом и др.); по «засоренности» разведданных
«сбойной» (и ложной) информацией (процент сбоев должен быть в интервале
415
(1%-5%... и т.д ) с учётом возможностей конкретных алгоритмов обработки; по
точности измерения параметров.
Известно [23], что любая обработка развединформации состоит из
нескольких этапов, каждый из которых должен быть выполнен оптимально, в том
числе с минимальными потерями полезной информации, если алгоритмы
«избавляются от сбоев». К этапам обработки (и последовательностям их
исполнения) обычно относятся:
- сортировка разведданных на группы, принадлежащие к различным типам
РЛС (образование массивов «разнотипной» информации) с целью последующего
опознавания типов;
- разделение информации внутри каждой «однотипной» группы по
экземплярам РЛС с задачей последующего определения числа РЛС и вычисления
их координат на местности;
- определение количества и координат «неразрешаемых» по
радиотехническим параметрам сигналов РЛС (иногда называемых
«однотипными»; на самом деле такие РЛС можно назвать «одноэкземплярными»
(похожими как близнецы) и единственным их отличием является местоположение
в РЛП - координаты на плоскости).
Наиболее сложные алгоритмы обработки применяются на её последнем
этапе; вычисление координат, по расклассифицированным по экземплярам РЛС не
вызывает серьёзную проблему, хотя и имеет свою специфику (см. главу 4 и
работу [114]). t
Продолжая тему системного подхода к построению аппаратуры РТР
заметим, что этот подход, пока, ещё утвердился в задании тактико-технических
требований (ТТТ) на систему (станцию) РТР в виде конечных цифр по
эффективности (вероятности местоопределения РЛС РЛП с заданной точностью
или РЛС определённого типа). Однако часто, наряду с системными требованиями,
в ТТТ включаются и аппаратурные (чувствительность, время анализа и измерения
пеленга, точность пеленгования, диапазон разведки и т.д.), которые в ряде
случаев, могут не коррелироваться (а попросту - противоречить) с системными.
416
После завершения разработки и оформления «паспорта» (технических условий)
на поставку аппаратуры РТР возникают «казусы»: аппаратура РТР полностью
удовлетворяет всем «параметрическим» требованиям (заданным по ТТТ
техническим параметрам), но не соответствует только одному системному -
вероятности местоопределения с заданной точностью. Такой (гипотетический)
пример проектирования систем РТР подтверждает необходимость соблюдения
принципов системности в построении аппаратуры Предложение оставить в ТТТ
либо одну цифру по эффективности аппаратуры, либо много «параметрических»
требований часто вызывает недоумение Заказчика и много споров, которые
заканчиваются появлением в ТТТ компромиссных формулировок типа неравенств
(чувствительность аппаратуры должна быть не ниже конкретного значения и т.д.),
но, к чести Заказчиков, можно утверждать, что системный параметр в ТТТ
оставался всегда.
После этого небольшого отступления, перейдём к оценке качества этапов
обработки информации (объединив первые 2 этапа в один - «сортировка
разведданных») методами аналитического и математического моделирования.
5.2. Сортировка разведданных в системах РТР
При рассмотрении и анализе обобщённого этапа обработки информации
следует различать [60]: первичную (в аппаратуре РТР) и вторичную (в бортовой
или наземной ЭВМ) сортировку развединформации. Современные успехи
вычислительной техники позволяют выполнять всю обработку информации на
борту ЛА; ранее обычно информация «набиралась» на борту ЛА, записывалась в
ЗУ и обрабатывалась на земле в специальных пунктах обработки данных (ПОД),
где результаты РТР сравнивались с другими видами разведки (фото-,
телевизионной и т.д.). Обычно ПОД размещался на автомобиле (автоприцепе) и
включал весь необходимый «сервис» для организации обработки.
417
Первичное разделение информации производится с целью последующего
измерения: периодов повторения Тп; периодов вращения антенны РЛС (Твр);
времени облучений (Сбл), а также для «привязки» технических параметров РЛС к
угловым измерениям (а,/?). Наиболее эффективно первичная сортировка
выполняется в моноимпулъсных станциях РТР (см. главу III по приёмникам
системы РПД ALQ-161 самолёта В-1В), когда имеется возможность по одному
импульсу измерять набор параметров в составе - несущей частоты (fH),
длительности импульса - ти (и его фронтов), момент приёма и уровень мощности
сигнала (tnp и Рвх), угловые координаты прихода импульса (а,/Т)
Если все перечисленные параметры измерены (по одному импульсу) и
относятся к одному и тому же сигналу РЛС («привязаны» между собой, так как
углы измеряются пеленгатором, а технические параметры приёмником-
обнаружителем как в системе РПД ALQ-161), то основная задача первичной
обработки (сортировки) сигналов РЛС считается выполненной.
Полученный при этом «набор» параметров РЛС позволяет приступить к
вторичной сортировке, измеряемой более длинными временными интервалами на
входе аппаратуры (сейчас нас эти длительности не интересуют потому, что мы
всё измерили «поимпульсно»); а именно: к разделению импульсных
последовательностей сигналов(облучений), относящихся к разным РЛС с задачей
определения «вторичных» параметров сигналов РЛС - Тп, 7вр, Сбл, числа
селектируемых последовательностей (нс) и др.
Слово «эффективный» применительно к моноимпульсным системам РТР
«привязано» не случайно: как мы уже знаем из предыдущей главы, только
моноимпульсные измерения технических и угловых параметров сигналов
позволяют с максимальной вероятностью (практически достоверно) разведывать
перестраиваемые по fn, Тп и ти сигналы РЛС, характерные для современных
помехозащищённых РЛС радиолокационного поля. Единственное при этом
условие - не допускать на выход аппаратуры коррелированные между собой
измерения, т.е. иметь в своём составе устройство исключения повторной разведки
таких измерений (или систему исключения повторной разведки - СИПР).
418
Не моноимпульсные системы РТР, в том числе работающие по боковому
излучению РЛС и имеющие перестраиваемые приёмники, когда первичные
технические параметры и угловые координаты измеряются по пачке следующих
подряд (или «прореженных») импульсов, требуют сразу предварительного
разделения импульсных последовательностей (временного селектора или мини -
ЭВМ), не говоря уже о вторичной обработке сигналов [23].
К моноимпульсным устройствам пеленгования с борта ЛА относятся
многобазовые фазовые пеленгаторы (с числом баз не менее трёх-четырёх) для
точного измерения пеленга с СКО порядка (1^2 градуса), амплитудные способы
измерения пеленга (СКО около (5-ь7)° как в системе ALQ-161); к не
моноимпульсным устройством - импульсно - допплеровские методы
пеленгования с вращающимися антеннами. Эмпирическая зависимость точности
пеленгования (СКО-сга) от длительности времени облучения РЛС в интервале
(10 4-юо) мс представлена на рис. 5.1 для импульсно - допплеровского
пеленгатора (зависимость СКО угла места от 1обл аналогична, поскольку
вращающаяся антенна принимает сигналы одновременно в двух взаимно-
перпендикулярных плоскостях).
Рис. 5.1. Зависимость точности пеленгования от длительности времени
облучения РЛС для импульсно-допплеровского пеленгатора.
419
Не рассматривая «привязку» технических параметров и угловых координат
в системах РТР, перейдём к оценке эффективности вторичной сортировки
(селекции) по набору технических и угловых параметров либо по периоду
повторения (периоду вращения антенны РЛС); первая селекция обычно
называется «параметрической», вторая - «временной».
Вообще говоря, в обоих случаях эффективность сортировки оценивается
двумя вероятностями - попаданием в строб селекции (интервал, определяемый
ошибками измерения параметров) «выделяемой» (селектируемой) РЛС и
непопаданием в этот же строб сигналов другой («разделяемой») РЛС. Заметим,
что для обоих случаев важно (желательно) знать «априори» с какими РЛС мы
«имеем дело» - с перестраиваемыми по 7н, 2н и ти или с РЛС, имеющими
фиксированные значения технических параметров сигналов (не меняющиеся за
интервал наблюдения); если это заранее неизвестно, то по крайней мере, эту
возможность надо учитывать при разработке процедуры (алгоритмов) селекции.
Часто, для упрощения расчётов, можно считать вероятность попадания
«своего» сигнала в «собственный строб» селекции достоверным событием
(событием, близким к единице) и оценивать только вероятность попадания
«чужого» сигнала в «наш строб»; из качественных соображений ясно, что чем
«уже» строб и больше число параметров, по которым ведётся сортировка, тем
меньше вероятность «ложных тревог» (по аналогии с радиолокацией). Такое
допущение оправдано тем ,что строб(интервал ошибок измерения) формируется
около «центрального положения» (среднего значения) «своего» сигнала
(«собственных» параметров сигнала); ширина строба зависит от плотности
(закона) распределения ошибок измерения параметров РЛС.
420
5.3. Параметрическая селекция (сортировка) сигналов РЛС
одного (произвольного) типа при РТР.
При задании интервальных значений любого параметра РЛС i-ro типа
необходимо знать закон распределения однотипных РЛС по этому параметру.
Обычно технологический и эксплуатационный разброс параметров считается
нормальным (также как и распределение ошибок измерения параметров РЛС
аппаратурой РТР), а положение строба (относительно возможного значения
разведываемого параметра) - случайным, подчинённым тому же нормальному
распределению. Другие возможные законы распределения параметров
однотипных РЛС, относящихся к конкретному типу, внутри интервалов их
значений, рассматриваются отдельно в конце настоящего раздела.
При селекции по одному (любому) параметру РЛС средняя вероятность
попадания «мешающего» («чужого») сигнала в строб величиной ±<5; (/- номер
параметра) равна [9 с. 134]-
со yj + ^j
P, = j \w(x1)W(yl')dX1dyl, (5.1)
— СО yj~S;
где W(xi) и ^(Vj) - плотности распределения j параметра РЛС (Xj) внутри типа и
положения строба (у) относительно измеряемой величины параметра.
Если (W(Xj) и W(yj) - нормальные распределения, то из выражения (5 1)
имеем:
=(0 5/Л). }[Ф=(/, +<у-ФД-й;)]ехр(--(,Х , (5 2)
где Ф. (х) = (2/< -) j ехр(-Л )dt\
О
421
J7=Ay/(T2-a;);
(A, - половина ширины строба);
о-/ - дисперсия, определяющая разброс изменения j-ro параметра РЛС,
5t~ ошибка идентификации, связывающая величину строба с
нестабильностью параметра, по которому производится идентификация.
При малых значениях ^разность интегралов вероятностей в
подынтегральном выражении (5.2) может быть представлена линейной функцией
от величины 8} (£у<0,3). Действительно, разлагая интеграл вероятности в ряд,
имеем [145]:
Ф,_ (х) = (2 / Л) Xк-1)' / я ] [X2-1 !(2i +1)],
/=0
тогда
ф2(7 + 6) - ф2(7 - 4) « (Ы/4я) • ( - 1/С’ /а.
i=0
(5 3)
(5.4)
Учитывая, что ^(-l)1'-(t2i //<) = ехр(—г2) и подставляя эту экспоненту в
7=0
выражение (5.4), а затем интегрируя (5.2) с её учётом, получим простейшее
выражение для средней вероятности попадания «мешающего» («чужого») сигнала
в строб (2Ау) при 8, <0 3 .
Р} =(1/^)0/у)=ОЩ.У1) (5.5)
Формула (5.5) часто используется в технике идентификации, но не было
ясно откуда она получается.
422
Рис. 5.2. Зависимость средней вероятности попадания в строб селекции
мешающего сигнала от параметра для центрального (1) и случайного (2)
положения строба; приближенная зависимость (3).
На рис. 5.2. приведены расчётные графики Р} в функции от <5, для трёх
случаев, когда положение строба попадает на центр нормального распределения
параметра РЛС (кривая 7), случайного (относительного распределения параметра
РЛС) положения строба (кривая 2) и прямая (5) (приближённая зависимость
(5 5)) Из рис 5.2 видно, что прямая зависимость мало отличается от кривых 2 и
1 при Sj < 1 (не более чем на 25%).
Перейдём к многомерному стробу селекции. Если комплекс РТР достоверно
принимает сигнал одной из «к» произвольного типа РЛС, находящихся в зоне
разведки (попытка поэкземплярной идентификации РЛС внутри типа), то
вероятность попадания в строб селекции «ш» сигналов «к-1» оставшихся РЛС
данного типа определяется формулой Бернулли:
Р,иЛ-1 =Cjn -РГ \\-РР)к-'~'\ (5.6)
где Р] определяется выражениями (5.1), (5.2), и (5.5).
423
Считая, что положение строба (у3) определяется первым селектируемым по
указанному распределению сигналом и это положение строба зависит от
распределения FF(yj), найдём среднее значение в виде:
00
f Л" (Лу)-[1-Р,(Л (5.7)
—ОО
Если идентификация производится по «и» параметрам, то надо взять п-
мерный интеграл (по типу выражения (5.7)); полагая измерения и распределения
«и» параметров независимыми, в результате получим:
= CV, .W(y„)dy,...dy^
(5.8)
где а=плод
7=1
ММ плотности распределения от одного О,) до «и» (уи)
параметров РЛС, по которым производится поэкземплярная селекция внутри
типа.
При одинаковых плотностях распределения параметров (и нормальном
распределении) аналогично формуле (5.2) с учётом преобразованного числа
сочетаний биномиального распределения, получим [9 с. 137]:
Рт.к-г,п = У —ММ./7 {[ф(t + б5)-Ф2(1 -exp(-t,2)dt
(5.9)
424
Формула (5.9) позволяет рассчитывать средние вероятности попадания в п-
мерной строб селекции «т» мешающих сигналов при наличии в зоне
обнаружения «£» РЛС, относящихся к одному типу.
Результаты расчёта по формуле (5.9) для СЛО и различных сочетаний
точностей измерения параметров приведены в таблице 5.1. (трёхмерный -
трёхпараметрический строб селекции).
Действуя как и в случае одного параметра для малых значений <0.3 и
(А-1)П^. «2) аналогично формуле (5.5), получено очень простое выражение для
У=1
нахождения требований к точностям измерения параметров при идентификации
сигналов РЛС:
п _
ГР, (5.Ю)
/=1
где п - число параметров, по которым производиться идентификация (селекция)
сигналов РЛС, относящихся к одному типу;
к - количество РЛС одного типа в зоне обнаружения;
Рсел -средняя вероятность селекции.
При к=2 (две РЛС) и п=1 (один параметр) из формулы (5.10) получается
выражение (5.5) (Р]=\-Рш т.к. Р} и Рсел - средние вероятности попадания
чужого и своего сигналов); задавая Рсел (среднюю вероятность селекции «своего»
сигнала) можно автоматически получить из (5.10) требования к количеству и
точностям измерения параметров в функции от числа анализируемых РЛС (в
полосе пропускания или на входе приёмника).
425
Таблица 5.1. Вероятности попадания в 3-х мерный параметрический строб
селекции, вычисленные по формуле (5.9) (/7=3, ти={03}).
очностшзмерения т=0 т=1 т-2 т=3 т=4 т-5
1 02 0.7 07 07 0 238 0 055 0 09 0 001 5-10 5
2 0 35 0.7 0 7 0 55 0 296 0.115 0.013 0.007 0.001
3 07 07 07 0 35 0 30 0.2 0.102 0.04 0 012
4 0 58 07 0 47 0 52 0 30 0 13 0.04 001 0 0017
5 0 58 0.23 0.47 0 97 0 027 5-Ю-4 6 ТО’6 6-10“8 -
6 07 0.61 0.18 0 75 0 205 0038 5-Ю"3 5-10~4 3-105
7 0.14 0.47 0.18 0.96 0.048 2-Ю’3 4-10’5 7 40”7 8-Ю’9
Для одинаковых значений 8} = 32 -.. = 8п -8 из выражения (5.10) имеем-
S < 1 25
(5-П)
Формула (5.11) тоже широко известна в технике параметрической селекции
и её можно представить в более понятном виде, извлекая из-под корня и-ой
степени Р сел .
Рсел -1 - (к -1) /(8 /1 25)” -1 - 1 - 8",
(5-12)
где Д, = {д[^(к-Т)/125]}»<5j (для обычного числа - «к» одновременно
совпадающих последовательностей на входе аппаратуры РТР (и в &fnp) и
количества параметров (и) классификации).
В последней формуле (5.12) «£г» (Рет) имеет смысл вероятности попадания
в одномерный строб селекции «чужого» сигнала, а 8" (Р") -вероятности
426
присутствия «чужого» сигнала в п мерном стробе; тогда Рсел- средняя вероятность
непопадания ни одного постороннего сигнала в п - мерный строб (при 8 < 0 з и
п=3, Рсел >0.97). Кстати, формула (5.5) даёт более точное значение вероятности
попадания «чужого» сигнала в одномерный строб селекции (чем просто «^» в
выражении (5.12)).
В вышеприведённых формулах настоящего раздела величина 8;. (как мы
знаем) связана с половиной ширины строба (Д7) и разбросами параметра
идентификации РЛС (о; -СК(Р> соотношением 8} = Ду/(72-оу) (см. пояснения к
выражению (5.2)...). Чтобы задать требования по этому соотношению к точности
измерения параметра классификации (Д;. <0 3-72-сту , т.к. все приближения к
оценкам вероятности селекции были получены для 8} < 0 3) аппаратурой РТР,
надо знать а2 (дисперсию разброса) для каждого параметра РЛС внутри типа.
Обработка и анализ существующих типов РЛС РЛП, проведённый в работе [9],
позволил получить такие данные для несущей частоты (/„), периода повторения
(Г„), длительности импульса (т„)и периода вращения РЛС (Гв/>) по типам РЛС,
работающих на фиксированных параметрах; средние значения
среднеквадратических отклонений (СКО) (<т7) и требуемые точности измерения
(Д7) представлены в табл. 5.2.
Как видно из табл. 5.2, требуемые точности измерения параметров сигналов
РЛС для получения высоких вероятностей идентификации сигналов при
вторичной обработке, достаточно жёсткие с точки зрения разработчика
аппаратуры РТР, особенно по точностям измерения ти, сравнимым (при
® единиц мкс) с флуктуациями импульсов (их фронтов) при переотражениях от
местных предметов и др. (в системе РЭП ALQ- 161 наложенные друг на друга
импульсы могут различаться, если их фронты сдвинуты на 0.1 мкс). Отметим ещё
раз, что указанные в табл. 5.2 погрешности позволяют применять приближенные
формулы (5 5) и (5.10), если выполнено соотношение (А: — 1)• « 2(к - число
427
совпадающих (анализируемых последовательностей; J~p, - произведение
параметров
Таблица 5.2. Средние значения СКО некоторых параметров РЛС РЛП (о-,)
и потребные точности измерения (Д;) этих параметров
при классификации сигналов с высокой вероятностью (Рср -> 1).
Параметр РЛС Интервал или среднее значение параметра 1 Среднее значение СКО (о-/) Погрешность измерения (Д ) (допустимая) (
Несущая частота [МГц] 10 000 25 10
3 000 15 6
1.200 7 3
Тп [мкс] 500 - 3000 2 1
[мкс] 1 - 100 0.1 0 04
Твр [с] 2-20 0.02 0.01
Последнее условие уже использовалось выше, когда получена формула
(5.10). Табл. 5.2 может быть использована и при «конструировании» РЛП в гл. 4.
Заметим, что неодинаковые требования к точностям измерения технических
параметров позволяют объяснить некоторые парадоксы в расчётных данных табл.
5.1
При получении предыдущих выражений использовались нормальные
распределения параметров РЛС, что для некоторых измеряемых параметров не
всегда может выполняться, например, начальные фазы приходов времени
облучения и первого импульса пачки распределены равномерно в интервалах
{оХИ{ОЛГ
W(<pep) = l/Tef, W(<pTn) = l/Tn.
(5.13)
428
Длительность времени облучения (r0&i) сигналов РЛС даже одного типа
распределяется по более сложному закону, который обычно аппроксимируется
законом Релея:
) = (!обя ехр(-0.5 • /2О& /ст2). (5.14)
Учитывая, что для нормального закона = Д7/(<77л/2) и подставляя в него
вместо сг7 СКО для других законов распределения (5.13) и (5.14), получим:
.г(«,г_) = д.7б/7'„
(5.15)
Количественная оценка величин приведённых в выражении (5.15), по
имеющимся литературным открытым публикациям позволяет определить
ожидаемые их значения. Так, относительная погрешность измерения Тп и Твр в
станциях воздушной РТР не превышает единиц процентов, что позволяет
надеяться на соответствующие (единицы процентов) 8j(8((pTa6},8(<pTn) )
Величина СКО Сбл ожидается в пределах 50-100 мс для РЛС одного типа, а
ошибка измерения Сбл зависит от флуктуаций уровня бокового излучения РЛС и в
пределе может составлять несколько миллисекунд; тогда можно ожидать
Таким образом, дополнительное измерение таких «нетрадиционных» в
технике РТР параметров (начальных фаз 7’вр, 7П и /оСл) позволяют увеличить
«классификационный список», доведя его до 7-8 параметров (fn,Tu,T„,tep, уровень
мощности (Рс) сигнала , две начальные фазы, /обл ...), что может значительно
повысить вероятность «параметрической» селекции сигналов РЛС, доведя её до
достоверной (сравнительно с вероятностью ложных тревог в радиолокации
ложные сбои будут приближаться к приемлемым значениям). Однако всё это
429
относится к неперестраиваемым по параметрам РЛС. Эти факты (замечания)
особенно важны при классификации одинаковых по радиотехническим
параметрам РЛС, когда единственной информацией о их «различимости»
становится местоположение и снятые на них пеленги (угловые измерения).
Классифицируя по начальным фазам «пачек» сигналов, моментов
облучения основным лепестком ДНА РЛС, мы переходим «к временной»
селекции.
5.4. Эффективность «временной» селекции при проектировании систем РТР
Существует достаточное число работ применительно к исследованию
эффективности использования методов временной селекции для разделения по
радиотехническим параметрам РЛС [9, 148, 149 и др.] при обработке
разведданных воздушной РТР. Не вдаваясь в сложные расчёты, приведём
простейшие общеизвестные выражения для предварительной оценки
эффективности временной селекции; расчёт вероятностей временной селекции в
общих случаях целесообразно производить с использованием математического
аппарата теории совпадений импульсных потоков [80, 81], как это сделано в
работе [136], применительно к выводу вероятностей и длительностей совпадений
боковых излучений РЛС РЛП.
Вероятность одновременного присутствия на входе (N) импульсных
последовательностей с длительностью (тД сигнала и (тп) помехи за период их
следования (7Д равна:
Рпри.=[^-(тс+г„)/Т„]^ (5.16)
Формула (5.16) справедлива, если периоды последовательностей близки, а
(А+А)^Г„.
430
Если аппаратура РТР имеет на входе селектор, выделяющий одну из N
последовательностей, то вероятность выделения (селекции) этой
последовательности оценивается приближённо так:
Рсел1 =[1-тах{гс,ти}/7’„]х, (5 17)
где тах{тс,тп} = т- наибольшее значение из гси тп (селектор может иметь только
одну ячейку, выделяя и отслеживая одну последовательность).
Если на входе аппаратуры имеется селектор на «к» последовательностей
(к>1) из N, то вероятность селекции, с использованием распределения (5.6),
можно оценить так:
р„,= £с;.ч. р-- о -рТ- (5.18)
i-O
где р~ г/Тп (г = шах{гс,т„} ).
При p-N<l формула Бернулли (5.6) может быть заменена Пуассоновским
распределением:
= Е([/> (Д' ~ 1)Г «')} exp[-p(7V -1)] (5.19)
Возможна также оценка эффективности селекции методами имитационного
моделирования входного потока сигналов с учётом наложившихся
последовательностей и алгоритма работы временного селектора
(последовательный, параллельный и комбинированный способ выделения
«пачек»).
431
Рассмотрим некоторые аппаратурные и алгоритмические (на ЭВМ) способы
построения временных селекторов и варианты оценок их эффективности, а также
числа операций алгоритмов.
5.5. Варианты аппаратурного построения временных селекторов при РТР
с борта Л.А
Параллельное селектирование по времени прихода импульсов в простейшем
варианте выполняется на линии задержки с большим количеством отводов (ЛЗ). В
последнее время в качестве ЛЗ используются обычные регистры на элементах с
двумя устойчивыми состояниями. Число таких ЛЗ (регистров) определяется
количеством параллельных каналов и сложностью построения селектора (в
основном - числом «ложных тревог» на его выходе). На рис. 5.3 представлен один
из каналов такого селектора; отводы ЛЗ, отстоящие от начала ЛЗ на интервалы
Т\,2Т„ .,37], ,п7] (i- номер или интервал квантования последовательности; п-
число отводов) присоединяются к одним входам «и» логических элементов «г/», а
на вторые входы элементов «и» поступает входной поток импульсов. Для разных
каналов интервалы квантования (разделения во времени) последовательности
могут быть разные; может меняться интервал квантования и внутри одной ЛЗ
(регистра).
При наличии во входном потоке сигналов импульсов, совпадающих по
времени с задержанными в ЛЗ, на выходе соответствующей схемы «и» появится
отселектированный (по времени) сигнал; если таких сигналов (с одинаковыми Тп)
достаточно много, то все они попадут на выход одной и той же схемы совпадения
«и». Порядок «запитки» сигналами каналов селектора может быть разный и
зависит от алгоритма выделения последовательностей; в простейшем варианте
каждый очередной импульс входной последовательности попадает
(последовательно друг за другом) в новый канал селектора так, что если селектор
состоит из «к» каналов, то в них (в каждую ЛЗ) попадут первые «к» импульсов
432
последовательности (смеси последовательностей) на входе. Дальнейшее
распределение входных импульсов по каналам селектора зависит от результатов
«захвата» и сопровождения последовательностей на предыдущих этапах.
Рис 5.3. Блок - схема параллельного временного селектора.
Представленный кратко принцип действия параллельного селектора широко
используется в радиолокации [150], в измерительной технике коротких
временных интервалов [151] и станциях РТР. Если требуемое число каналов на
входе порядка (5-10), то существующие селекторы имеют достаточно большой
объём аппаратуры и сложны в построении, но это компенсируется их
быстродействием и малыми потерями развединформации.
Существенное сокращение объёма и сложности оборудования селектора
можно получить в рециркуляторных вариантах построения схем селекции на
одну, выделяемую из входного потока сигналов последовательность
(последовательное селектирование) [152]. Рециркуляторные схемы селекции по
периоду повторения, как правило, используют одну ЛЗ на выделяемый Та,
принцип их действия основан на запоминании (и циркуляции в ЛЗ запомненного
числа) первых «и» импульсов последовательности с последующей проверкой
синхронности (по Тп) каждого очередного (начиная с «и+1») импульса входной
последовательности с предыдущими, запомненными в ЛЗ. Заметим, что на
принципе рециркуляции информации («динамического» запоминания) построены
433
многие устройства средств РПД и РТР(кратковременное запоминание несущей
частоты сигналов РЛС, динамические триггеры - бистабильные элементы и др.).
Рециркуляторные схемы селекции, при наличии в их составе генератора
синхроимпульсов, позволяют восстановить пропущенные по той или иной
причине импульсы, что характерно при приёме бокового излучения РЛС.
Из рассмотренного следует, что любая временная селекция характеризуется:
числом выделяемых последовательностей за определённый промежуток времени
(/сел), а из предыдущего раздела - вероятностью выделения селектируемой
последовательности либо помехоустойчивотью - количеством ложных измерений
на её выходе в единицу времени. Как мы уже знаем, проще провести
исследование помехоустойчивости, когда на входе (выходе) схемы действует
пуассоновский поток; если относительно входного потока и существуют какие-то
сомнения на сей счёт, то выходной поток можно, безусловно, считать
пуассоновским.
Известно, что средняя частота появления помеховых, совпадающих с
истинным потоком, выбросов длительностью «<5» от «мешающего» (по
отношению к своей выделяемой последовательности весь остальной поток будет
мешающим) потока, с которым мы уже знакомы, находится из выражения [80,81]:
к к 02
А„(<5) = (Па (5.20)
Л'=1 s-1 о
где иеых(8)- средняя частота импульсов длительностью 6 выходного потока
«помеховых» («ложных») сигналов;
- средняя частота импульсов S-ro входного потока;
Л - J(rs -^)aXr)dr,
о
as(r)- плотность распределения длительностей импульсов ts S-vq входного
потока;
к- число каналов селектора(входов схем совпадений);
434
т„ - длительность импульса S'-го потока..
В предположении, что длительности импульсов, поступающих на входы
схем совпадений от отводов ЛЗ (регистров), нормируются по периоду повторения
(чем длиннее период, тем больше обычно бывает длительность импульса у РЛС),
т.е.
= Ст),
где ^(т,)-тактовая частота импульсов участка регистра, от которого выполнен
отвод на вход схемы совпадения «и», и, кроме того, предполагая, что г, » 5 из
со
формулы (5.20) имеем при и jas(r)dr-l :
о
= а/г,), (5.21)
.У-1 5=1
где - рех, а для всех потоков одинаково.
Для простейших регистров с одинаковой тактовой частотой нормировки
длительностей по всей протяжённости регистра (ЛЗ) = ^ = const и тогда
последнее выражение (5.21) значительно упрощается (становится совсем
простым):
(5.22)
где определяет погрешность измерения периода повторения и одновременно
верхнюю границу длительности импульсов «мешающего» («ложного») выходного
потока.
435
Заметим сразу, что при последовательной селекции, когда на входе потока
стоит одна селектирующая ячейка (рециркуляторный вариант селектора),
формула (5.22) также определяет «помеховый» поток сигналов на его выходе
(поток «ложных тревог»), если под <<к» понимать кратность совпадений по
периоду повторения (Гп), на который настроился селектор (А- число раз, когда
схема «выдала» тот же период повторения - Тп). Последний вывод следует из
анализа материалов работ [150,152].
Приведём некоторые примеры расчётов по формуле (5.22). Оценки
результатов работы [152] для шестикратной селекции по периоду повторения
(к=6) одиночной импульсной последовательности (шестикратного выбора одной и
той же последовательности импульсов с периодом Ta=consf) с Гп=1 мс (Fn=1000
Гц) и = 10б с одноканальным селектором из входного потока интенсивностью
/лвх 3S - 50кГц («мешающего» потока) дают частоту «ложных тревог»
к,л- = (2-9)-10'2 [1/с], т.е. один ложный сигнал в (10-50) с. Естественно, что время
шестикратного «выделения» требуемой импульсной последовательности составит
не менее бмс, а точность измерения Тп - около 0.1 %.
Для ещё более приближённых расчётов (оценки «снизу») можно в формуле
(5.22) полагать nex-S!Tncp (S- число импульсных последовательностей, Гпср-
средний период их следования); тогда
(5.23)
При : г, =10 5 с (10 мкс); 7'пбр = 10мс (104 л/кГц S = 10 (10 последовательностей
на входе); к=3 (селектор на три последовательности), получаем - цвх=10/104=1000
Гц, Цвых=0,3 Гц, точность измерения Гп=0.1 %.
Общее число отводов (т) ЛЗ (двоичных разрядов регистра), также как и
количество схем совпадения, в одном канале селектора равно:
« - (ттакс -Тта)/h * ТтсЛс /Т. (5.24)
436
При Гмакс=10 мс и тг <10мкс,т >1000 , что говорит о большом количестве
элементов селектора (одного канала).
Для сокращения объёма аппаратуры можно использовать переменный шаг
задержки по мере увеличения измеряемого периода повторения сигналов
(например, удвоением «шагов» - интервалов измерения Гп); применение
«двоичного» шага интервалов задержки (измерения) Тп уменьшает объём
оборудования в предыдущем примере примерно на два порядка, однако при этом
резко возрастает общее число «ложных» измерений с последних участков
(отводов) ЛЗ (примерно во столько же раз).
В качестве мер, снижающих поток «ложных» измерений по мере
увеличения шага (интервала) измеряемого периода повторения можно
использовать: «Запрет» на «перемещение» импульсной последовательности по
ЛЗ, если эта последовательность «обнаружена» в первых схемах совпадения;
интегрирование на выходах схем совпадения импульсов «истинной»
последовательности по определённому критерию.
Расчётные значения интенсивности выходного потока «ложных» сигналов (
в логарифмическом масштабе) в зависимости от числа совпадающих
последовательностей (S) и добротности (Q) интеграторов - фильтров собственных
(«истинных») сигналов представлена на рис. 5.4 [9] для случая т^Юл/кс;
Тмакс = бмс', Тмин=0.5мс; к=3. Кривые на рис. 5.4 удовлетворительно
аппроксимируются выражением: реых = (4.8• 105 • ^/^[l/c].
Из рис. 5.4 следует, что селектор с фильтрами низкой добротное™ 0=1
может дать (при 5-6 «наложившихся» друг на друга последовательностях)
/уеых <0 т.е. один ложный сигнал в 10 с; увеличение Q до 10 позволяет
увеличить при том же потоке ложных сигналов «нагрузочную способность»
селектора до (8 - 9). На рис. 5.4 пунктиром указана кривая, построенная для (>=5,
но без «запрета на перемещение импульсных последовательностей» (все другие
кривые построены с учётом указанного выше «запрета»); как видно из
пунктирной кривой, «запрет» существенно снижает поток ложных выбросов, так
437
как без него при пороге //вых <0 Ш/нельзя удовлетворительно разделить более 3-х
последовательностей совпадающих импульсных сигналов (добротность Q-5
помогает слабо).
Рис 5.4. Интенсивность выходного потока ложных сигналов
(в логарифмическом масштабе) в зависимости от числа совпадающих
последовательностей S и добротности О интеграторов.
Сравнение схем параллельного и последовательного селектирования
показывает, что если расчёт помехоустойчивости ведётся в примерно одинаковых
условиях (формула (5.22)) и требуется на выходе селектора обеспечить один и тот
же поток «ложных тревог», то это означает, что параллельный селектор должен
иметь 6 каналов, а последовательный селектор обязан реализовать шестикратную
селекцию последовательности (двЫА. <0 1 Гц). Тогда, если во входном потоке
имеется 10 импульсных последовательностей, а каждый из селекторов в новом
цикле анализирует новую последовательность (последовательный селектор 10
наложившихся облучений должен анализировать минимум 10 раз, выделяя
каждый раз одну; параллельный 6-канальный селектор за 2 цикла «выделит» все
10 последовательностей), то одноканальный селектор затратит на всю процедуру
60 мс, а параллельный 6-канальный - 4 мс (при 2-х кратном повторении приёма и
подтверждения последовательности), т.е. в 15 раз меньшее время. Если при
расчётах учесть ещё вероятность настройки селектора на новую
438
последовательность, то разница во времени увеличится ещё, как минимум, в
несколько раз.
Из приведённого сравнения видна существенная разница во времени работы
селекторов, которая достигается «ценой» увеличения оборудования и сложности
построения «параллельного» селектора, о чём1 предварительно мы получили
начальные сведения.
Дальнейший выбор того или иного варианта построения станции РТР и, в
частности, её анализирующей части зависит от обйдей схемы функционирования и
построения приёмной части аппаратуры, и в том числе (как мы знаем из
предыдущей главы книги) - от её приёмного потенциала, способа разведки
заданного диапазона частот (беспоисковый - одно или многоступенчатый) и,
таким образом, в конечном итоге - от количества совпадающих
последовательностей на входе аппаратуры и длительности облучений РЛС РЛП.
При применении беспоисковой аппаратуры, работающей в широком
диапазоне длин волн нужны, безусловно, многоканальные (параллельные)
селекторы; но к выбору разбиения на поддиапазоны (с перекрытием не более 2)
надо относиться очень профессионально и осторожно, чтобы снизить до
минимума количество совпадающих последовательностей (аналогично надо
оптимизировать между собой и другие технические параметры аппаратуры).
В поисковой аппаратуре РТР, когда в полосе пропускания приёмника его
оконечной ступени (Д/пр) будет работать порядка (1-2)х последовательностей
облучений РЛС, допустимо применение одноканальных селектирующих
устройств; например, описанных в работе [152], тем более, что такая аппаратура
имеет высокую чувствительность и принимает сигналы по боковому излучению
РЛС, где часть импульсов может из-за флуктуаций отсутствовать и их
необходимо восстанавливать.
Схемы временных селекторов значительно усложняются, когда РЛС РЛП
имеют кратные частоты повторения, «вобуляцию» периода повторения импульсов
(и длительности) вокруг средних значений и становятся практически
439
непригодными, если в составе РЛП имеются РЛС, перестраиваемые от периода к
периоду повторения в некотором интервале частот повторения импульсов.
Значительные сложности возникают при временном способе выделения
«пачечных» сигналов (типа квазинепрерывных с высокой частотой повторения
«внутри» пачки и низкой между пачками импульсов) на фоне «мешающего
потока»
Признаки большого количества «сбоев» временного селектора и
невозможности длительное время «настроиться» на любую последовательность
(Сор) используются в аппаратуре РТР для «обнаружения» перестраиваемых по
периоду повторения РЛС. В таком случае применяются специальные режимы
поиска и анализа сигналов, специализированные блоки и устройства, работающие
на других принципах, например, на сборе информации, относящейся к
определённому «узкому» интервалу углов приёма.
Именно в таких случаях весьма важно иметь на борту специализированные
вычислители с высоким быстродействием (мини - ЭВМ); скажем, цифровые
преобразователи сигналов в ряд Фурье с последующим сравнением спектров
импульсных сигналов, как в радиолокации, и т.д.
Для завершения раздела рассмотрим некоторые алгоритмы обработки
временных интервалов на ЭВМ.
5.6. Варианты алгоритмического (на ЭВМ) анализа совпадающих ременных
последовательностей при РТР.
Начнём с простейшего алгоритма полного перебора и сравнения всех
временных интервалов между1 собой; если число наложившихся
последовательностей - г, а количество импульсов в каждой из них - т, то полное
число временных интервалов в смеси из гт импульсов равно Сгт «0.5(nw)2, (C2m -
число сочетаний из гт элементов по два).
440
Количество N сравнений периодов повторения, которое надо выполнить,
определяется арифметической прогрессией (от 1 до ап = 0,5(rm)2,a„- последний
член суммы этой прогрессии), т е.
N = ап (а„ +1) / 2 = 0,25(W ) [0,5(гш)2 +1]« 0,125(лти)4.
Учитывая, что каждому сравнению предшествует образование временного
интервала (операция вычитания) общее число операций (N}) по полному перебору
всех временных интервалов составит:
Nx = 2N = 0,25(rm)4. (5.25)
В оценках (5.25) не учитываются времена обращения к памяти,
нормализация чисел и др.
Если аппаратура РТР работает по «главному лучу» РЛС, обнаруживая в
пределах прямой видимости нефлуктурирующие сигналы, то вероятностью
«пропадания» импульсов можно пренебречь, и на входе беспоискового приемника
будут достоверно существовать (приниматься) «г» последовательностей с
одинаковыми периодами повторения (7) у однотипных РЛС; можно также
считать, что предварительно ЭВМ расклассифицировала по радиотехническим
параметрам все измерения на РЛС РЛП и на втором (вторичном) этапе в
анализируемую группу попали сигналы «неразрешаемые» по радиотехническим
параметрам, которые можно отличить только по периоду следования импульсов.
Такую группу «однотипных» сигналов мы и анализируем, причем периоды
повторения всех последовательностей стационарны (const) помня, что периоды
повторения этих последовательностей не вобулируются в определенном
интервале значений.
В таком варианте сортировки разведанных, выявление периодических
последовательностей можно производить путем сравнения всех «смежных»
(«соседних») временных интервалов с «попарно-упорядоченными» временными
441
интервалами в такой последовательности: интервал между первым и вторым
импульсом сравнивается со всеми интервалами между вторым и остальными
импульсами (1 шаг); затем интервал между первым и третьим импульсом также
сравнивается с интервалами между третьим и со всеми остальными импульсами
(2 шаг) и т.д. пока не завершится сравнение первого и (rm-1) интервала с (rm-1) и
(rm) интервалом Далее в алгоритме первый импульс заменяется на второй и вся
(пошаговая) процедура повторяется снова и т.д.
Рис. 5.5. Схема алгоритма сравнения смежных временных интервалов (Nm -
число операций в столбце)
Рис. 5.5. схематично отображает сказанное; число сочетаний операций
сравнения с интервалами, куда входит первый импульс (первая
последовательность шагов на рис. 5.5.), определяется суммой натурального ряда
чисел от 1 до (rm-2), которая равна 0,5(rm-2) (rm-1), а с учетом образования
временных интервалов, число операций алгоритма (на первой серии шагов):
У2(1) ~ (гт - 2) + (rm - 2)(rm -1) = (rm - 2)(mr).
442
Аналогичные рассуждения для подсчета операций сравнения и образования
временных интервалов, куда входит второй импульс (вторая последовательность
шагов на рис. 5.5) дает:
-^2(2) = (г/я ~ 3) + (гт - 3)(гт - 2) = (rm - 3)(тг -1) и Т.Д.
Последняя строка (последовательность шагов) содержит две операции
образования временных интервалов, (гт-2)- (гт-1) и (тти-1) - гт и одну операцию
(одно) сравнение между собой. !
Суммируя все Мц), М(2), №(3), •••, М(гш-2), и используя соотношение
= (1/6)•[«(« +l)(2w + l)], имеем.
N2 ~ (1/6) • [rm(rm - 1)(2г/и -1)] - (гт -1) «[(гт)3 /3]. (5 26)
Число операций по данному алгоритму примерно в (гт) раз меньше, чем по
полному перебору всех временных интервалов (формула (5.25)).
В последний алгоритм в работе [9 с. 153] внесено два усовершенствования,
позволившие еще больше сократить количество операций без ухудшения качества
оценок
Первое усовершенствование заключается в том, что не все «пары»
интервалов, сравниваемых с основным интервалом (например - интервалом 1.2 в
первом столбце переборов, содержащих импульсы 1 и 2 на рис. 5.5), надо
перебирать; если разность (период времени) по времени между вторым и первым
импульсами (1.2. на рис. 5.5) меньше, скажем, интервала 2.4 (первый столбец рис.
5.5), то дальнейшее сравнение можно не делать, так как следующие интервалы в
этом столбце будут только увеличиваться, и мы не найдем (в этом столбце)
интервала, равного (1.2). Это сокращает число переборов для первых столбцов,
где величина «базового» (исходного) интервала (1.2), (1.3), ... ещё небольшая и
ничего не дает для последних столбцов, где «базовый» интервал велик.
443
Второе усовершенствование заключается в том,. что при обнаружении
первого совпадения (например, интервала 1.3. с интервалом 3.5), мы продолжаем
дальше сравнения с того (второго) интервала, который совпал с нашим первым
«базовым» (в данном случае мы «опускаем» - не производим все переборы до
интервала 3.5; все последующие столбцы первой строки; вся вторая строка
опускается полностью и далее перебор начинается с интервала 3.5. третьей строки
(третья строка на рис. 5.5 не показана).
Поиск первого совпадения называется в алгоритме «обнаружением» сигнала
(первого совпавшего периода повторения, т.е. совпадения 1.3 с 3.5 - как в нашем
примере); последующий поиск (с интервала 3.5) называется «сопровождением»
найденного периода повторения (как в радиолокации при работе РЛС).
Полное количество операций с учетом обоих усовершенствований,
оцененное в работе [9 с. 155], составляет в «модернизированном» алгоритме
N3 =[0,5 (г + 1)(г + 2)-3] (2/й)»(приг >5)«(г + 1)2я?. (5-27)
При селекции более 5 наложившихся последовательностей количество
операций, рассчитанные по формуле (5.27), значительно меньше, чем по второму
алгоритму.
Напомним еще раз, что последний «двухэтапный» алгоритм построен на
существовании «т» подряд импульсов каждой из «г» последовательностей,
принятых станцией РТР достоверно (без перерывов и пропаданий сигналов).
5.7. Местоопределение неразрешаемых по параметрам однотипных РЛС
Перейдем к нахождению выражения для оценки вероятности
местоопределения неразрешаемых по параметрам среди однотипных РЛС.
Насыщенность современных РЛП РЛС различного тактического назначения
приводит к тому, что их сигналы не различаются системой (станцией) РТР либо
444
из-за идентичности параметров этих РЛС, либо из-за ограниченной разрешающей
способности приемников-частотомеров и пеленгаторов, анализирующих
устройств, но, особенно, из-за перестройки параметров сигналов РЛС,
многочастотности сигналов и использования других методов помехозащиты (см.
главу 3 настоящей книги).
В работе [23] получены зависимости максимального количества
неразрешаемых по параметрам РЛС (п), в предположении о неизменности
характеристик излучения РЛС во времени, от ширины сектора пеленгования
(0О2), точностей измерения несущей частоты (А/н) и периода повторения
импульсов (АТ;) для станции РТР, ведущей разведку по основным лепесткам
диаграммы направленности РЛС. На рис. 5.6 показаны некоторые из них,
соответствующие более насыщенному участку частотного диапазона сухопутного
твд.
Рис. 5.6. Зависимость количества неразрешаемых по параметрам РЛС
в функции от точности измерения несущей частоты,
ширины сектора пеленгатора и периода повторения импульсов
445
Из рис. 5.6 следует, что при практически реализуемых точностях измерения
&fH « 0,3 4-1,2 % и ДД = 25 мксек, в секторе пеленгования 60° - 90° максимальное
число неразрешаемых по параметрам РЛС составляет 4-8. Аналогичные
результаты дал анализ наиболее насыщенного участка диапазона
радиолокационного поля морского ТВД при точности измерения ти «20 % и тех
же точностях измерения /н и Д. Учет возможной перестройки параметров РЛС
при работе увеличивает число неразрешаемых РЛС в несколько раз. Наличие в
развединформации неразрешаемых по параметрам РЛС заставляет подходить к
местоопределению РЛС как к статистической задаче, особенностью которой
является необходимость одновременного выполнения двух операций:
обнаружения РЛС (т.е. определение числа РЛС и указание районов их
нахождения) и вычисления координат РЛС. Такая разноплановость затрудняет
построение методов оценки эффективности местоопределения в общей
постановке. Описанные в ряде работ способы оценки касаются, как правило, лишь
одной из задач местоопределения.
Далее предлагается один из возможных подходов к оценке качества
местоопределения, основанный на стоимостных предпосылках [157], которые
являются наиболее общими и одновременно подходящими для оценки числа
неразрешаемых по параметрам РЛС.
.5.8. Функция потерь местоопределения группы однотипных РЛС
С точки зрения теории статистических решений местоопределение группы
неразрешаемых по параметрам РЛС (из общего числа однотипных) представляет
процесс принятия решения в условиях неопределенности. Имеет место некоторая
реализация истинного 0 размещения РЛС на исследуемой территории из
множества возможных размещений, а наблюдатель на основе имеющейся в его
446
распоряжении априорной и полученной аппаратурой развединформации делает
вывод о предполагаемом размещении РЛС, т е. выбирает точку © в пространстве
возможных решений. Желательно, чтобы ошибки в обнаружении числа РЛС была
минимальной. Поставив в соответствие каждому истинному © количеству РЛС и
определенному © некоторое число Z, количественно выражающее качество
проведенного местоопределения, мы получаем функцию Z(®,®), заданную на
каждой паре элементов из общего числа возможных вариантов. В теории
статических решений Z принято трактовать как потери, которые несет
наблюдатель при вынесении решений о количестве РЛС и качестве
местоопределения. Поэтому функцию Z(®,0) будем называть функцией потерь
местоопределения. Необходимо, чтобы эта функция потерь удовлетворяла
следующим требованиям;
- функция потерь должна основываться на конкретной тактической
задаче и допускать обобщение на другие тактические задачи;
правильные решения должны давать минимум функции потерь и
естественно положить этот минимум равным нулю.
Исходя из первого требования в [157] построена следующая функция потерь
местоопределения разведанной группы однотипных (неразрешаемых по
параметрам) РЛС:
С-й-Л-л+(Л+Я)^П[1-р.(г#.)]
Z =--------------, (5.28)
пВ
где р(гчу вероятность необнаружения (потери) z-й истиной РЛС и замене еёу-й
предполагаемой РЛС; Эта вероятность может (и должна) зависить от
+(л -у,)2;
п - действительное число неразрешаемых по параметрам РЛС с
координатами хх,у„х2,уг; хп,уп,
447
п - полученное в результате разведки количество РЛС с координатами
А,В,С - стоимости радиолокатора, ущерба, наносимого радиолокатором, и
затрат на разведку РЛС.
В работе [157] вероятность p(ri}) определялась из тактической задачи
нанесения удара (ракетного, бомбового) по обнаруженным РЛС, но этого делать
не обязательно.
Определяющими характеристиками выражения (5.28) являются стоимость
А, В, С и закон оценки р(Гу), которые будем считать произвольными Таким
образом, первая часть требований к функции потерь выполнена. Далее
попытаемся использовать введенную функцию потерь непосредственно для
оценки качества местоопределения, которую можно рассматривать как
самостоятельную тактическую задачу. Проанализируем поведение введенной
функции потерь в двух случаях: при обнаружении РЛС и измерении их
координат.
5.9. Поведение функции потерь при обнаружении группы однотипных
(неразрешаемых по параметрам) РЛС.
Будем считать РЛС расположенными достаточно далеко друг от друга
(плотность однотипных РЛС мала (ниже на порядок и более) по сравнению с
общим числом РЛС разных типов в РЛП.
Предположим далее, что точность оценки вычисления координат намного
больше точности обнаружения РЛС. Тогда вероятность обнаружения равна
пороговой функции:
у ( j О,если РЛС обнаружена неверно',
v ‘ (1, если i-ая РЛС обнаружена правильно',
448
где л; = ^(х, - х, )2 + (yt - у, )2 - ошибки в определении координат данной /-ой РЛС.
Пусть вместо п существующих РЛС обнаружено п, причем т\ из них верно,
а то - неверно («ложные» РЛС). Используя второе требование к функции потерь
местоопределения и произведя несложные преобразования выражения (5.28) (с
учетом введенной пороговой функции), получим (А=С):
п - С т0
и В п
(5.29)
Таким образом, функция потерь при обнаружении неразрешаемых по
параметрам РЛС равна сумме относительного числа пропущенных и неверно
обнаруженных РЛС с весами, указывающими на сравнительную опасность
ошибки пропуска РЛС и неверного обнаружения. Если обе ошибки одинаково
нежелательны (В = С), то
п-тх +т0
(530)
В большинстве методов и алгоритмов местоопределения [23, 148, 149]
эффективность этапа обнаружения принято оценивать вероятностями ошибок при
испытании областей предполагаемого размещения РЛС на занятость. В работе
[23] на основании материалов этих исследований, ошибки обнаружения
оцениваются двумя вероятностями.
- пропуска РЛС Р = -—~ и ложной тревоги Р.т = — , где и т} -
( п ) < п )
среднее число правильно обнаруженных и ложных РЛС Из выражения (5 30)
непосредственно следует, что Zo6k -Рпро„ + Р1п, и, следовательно, при одинаковой
«цене» этих ошибок ((С=В) - в формуле (5 29)) -
449
иш обн
р +Р
проп л т
обь.
2
(5.31)
Как правило, в литературе качество обнаружения группы РЛС
предполагается оценивать также двумя числами - эффективностью - /3 и
достоверностью - у В наших обозначениях в = ~ -\-Р ,у = ^.
п ,яюп Я
Связь между введенной функцией потерь (5.28) и параметрами /3 и у может
быть легко получена из формулы (5.29):
^обн
(5-32)
В случае В = С при правильном обнаружении (п - Я- т} и тп - 0, те /з = у = Г)
потери (5.32), как и следовало ожидать стремятся к нулю; при
п-Я, (3 = у, Рпроп =РЛ1ПИ выражение (5.32) обращается в выражение (5.31).
5.10. Поведение функции потерь при измерении координат РЛС.
Пусть А = В = С, все РЛС считаются обнаруженными верно (п = п = т}, тй = 0)
и расположенными достаточно далеко друг от друга так, что p(ri})~ р(гЗ). Тогда
функция потерь (5.28) принимает вид:
(5.33)
П ,=1
Конкретный вид функции потерь измерения координат определяется
требованиями, которые предъявляются к С(г) = 1- р(г) Например, С(г) может
быть произвольной унимодальной функцией, удовлетворяющей требованиям:
450
С(0) = о
lim c(r) = 1
Г—>СС
(5 34)
Когда нужна точечная оценка, то С(г) может иметь вид, изображенный на
рис. 5.7 а) или 5.7 б).
Если же требуется определить только область, где находится разведуемая
РЛС, то С(г) имеет вид, изображенный на рис. 5.7 в).
Рис. 5.7. Функция потерь измерения координат.
Соответствующим выбором s можно регулировать разрешающую
способность местоопределения до величин, позволяющих идентифицировать
близко расположенные РЛС.
Функция потерь прямоугольного вида очень удобна для практического
использования, так как она, во-первых, достаточно хорошо соответствует
различным тактическим задачам и, во-вторых, позволяет значительно упростить
функцию потерь общего вида (5.28).
Действительно, если С(г) = Д(г), где Дг =
О если | г |< е,
1, если | г [> s,
то выражение (5.28) с
учетом того, что А = В = С, может принять вид:
451
л 9 "
=”-i+-eo, (5.35)
п
где г* =min{^,z;2, ,rifl} - расстояние от z-й истинной РЛС до точки ближайшего
предполагаемого расположения РЛС.
В имеющейся литературе способы определения эффективной интервальной
оценки координат РЛС разработаны достаточна достаточно полно [114] и
должны применяться там, где произведена достоверная поэкземплярная
классификация РЛС по параметрам принимаемых сигналов. При этом точность
определения координат обнаруженных РЛС оценивается либо дисперсией о-2
положения [114], либо вероятностью попадания оценки в е - окрестность
истинных координат РЛС [9]. Первый способ получается из выражения (5.33)
разложением р(г) в ряд с точностью до члена второго порядка малости
включительно [/’(0) = 1,Р/(0) = °]- Второй способ получается из выражения (5.35),
которое для задачи измерения координат (п - п) можно представить в виде:
_ /77
Z,,.=2—= (5.36)
п
где w0 - среднее число РЛС, вычисленные координаты которых не попали в
круговую s - окрестность их истинного положения;
п - число разведанных РЛС;
- вероятность ошибки измерения координат РЛС.
Следует отметить, что стоимостной подход к оценке эффективности
местоопределения применялся и ранее. Например, в работе [20] рассмотрена
задача определения координат одиночной РЛС, имея в виду её последующее
уничтожение. В качестве функции потерь предлагалось использовать среднюю
стоимость средств, необходимых для уничтожения РЛС с заданной вероятностью.
452
5.11. Вероятность местоопределения РЛС и её компоненты
Необходимость выполнения двух независимых операций - обнаружения
РЛС и измерения координат обнаруженной РЛС по сгруппированным пеленгам
при решении задачи местоопределения неразрешаемых по параметрам РЛС,
приводит к следующему представлению для средней вероятности
местоопределения:
= (1 - Р„.)(1 - ) = [ 1 - 1 ~ (5 37)
\ 2 А 2 )
Из выражения (5.37) видно, что средняя вероятность местоопределения
может быть найдена либо через компоненты функции потерь, либо
непосредственно через вероятности ошибок обнаружения и измерения координат
РЛС.
Рассмотрим выражение для компонент Pov применительно к наиболее
распространенному методу местоопределения РЛС с движущегося носителя на
дальностях, превышающих в 5 + 7 раз высоту h полета носителя - многократной
пеленгации.
5.12. Вероятность ошибки измерения координат РЛС
Вообще-то вероятность ошибки измерения координат РЛС для метода
многократного пеленгования подробно рассмотрена в главе 4 по материалам
работы [9] и других источников. Однако мы повторим рассмотрение, основываясь
на материалах работы [23], выполненой ещё в 1975 году, а читатель может
сравнить эти материалы.
453
Для эллиптического рассеяния
вероятности того, что ошибка
местоопределения не превышает заданной величины г0, равна [113]:
где Jo (х) - модифицированная функция Бесселя нулевого порядка;
ст2 о-2 - среднеквадратические ошибки определения координат (ось ОХ эллипса
ошибок параллельно оси полета).
Входящие в формулу (5.38) дисперсии определения координат для метода
многократной пеленгации приведены в работе [23] (ст2 = ст2):
где 0О2 - угол раскрыва антенн пеленгатора;
а> - число пеленгов на одну РЛС;
ст2 - дисперсия ошибок измерения азимута;
D - удаление РЛС от траектории движения носителя.
В выражении (5.38) удаление РЛС от траектории движении носителя
считается фиксированным, поэтому средняя по дальности вероятность ошибок
измерения равна [23]:
Л™ = ]p„(PW(P)dD
454
где W(D) - плотность распределения D в предположении о равномерности
распределения D на интервале [О, А], где
— Dpr
A’D^D₽r ’
В работе [23] найдено следующее выражение для Р0Шизм
к
(5-40)
где
sin ©02
0
^02
F(x) = |е ' • Jo (kl)dt
о
тк е~! JGQd)dt
о
специально введенные и табулированные в [23] с
использованием материалов других работ функции;
К(х) - полный эллиптический интеграл первого порядка.
На рис. 5.8. пунктирными линиями представлены зависимости Рошизы от
г Г •
числа пеленгов для 0О2 = 60°, D3=600 км. при разных значениях .
°а \град )
Из-за сложности выражения (5.40) для анализа и расчетов пользуются его
аппроксимацией, полученной в [23]:
455
ОШ МЗЯ
(5.41)
Рис. 5.8. Зависимость вероятности ошибки измерения координат РЛС от
числа пеленгов.
На рис. 5.8 сплошными линиями изображены аппроксимирующий кривые.
Формула (5.41) в точности совпадает с выражением (4.6) главы 4 книги.
5.13. Вероятность ошибки обнаружения РЛС (потери обнаружения)
при местоопределении.
Вероятность ошибки обнаружения РЛС (потери обнаружения) при
местоопределении группы однотипных (неразрешаемых по параметрам РЛС)
полностью обусловлены принятым методом (алгоритмом) местоопределения.
Согласно приведенной в [23, 161] классификации существующих методов
местоопределения применительно к многократной пеленгации можно выделить
два основных класса алгоритмов, широко используемых в настоящее время при
обработке результатов РТР: локальные алгоритмы и нелокальные алгоритмы.
456
5.13.1. Локальные алгоритмы.
Вероятность ошибки обнаружения РЛС в дальней зоне локальными
алгоритмами от числа (п) неразрешаемых по параметрам РЛС и ошибки
пеленгации сга, найдена эмпирическим путем и приведена в работе [149] в
предположении, что число пеленгов достаточно велико:
Р^п -2,06aJnn. (5.42)
Рис. 5.9. Зависимость вероятности ошибки обнаружения РЛС от числа
неразрешаемых по параметрам РЛС для разных типов ошибок.
На рис. 5.9 сплошными линиями изображены зависимости Рошобн от числа
неразрешаемых по параметрам РЛС для разных ошибок пеленгации аа,
полученные по выражению (5.42).
В работе [159] предложена следующая зависимость средних потерь
обнаружения от плотности неразрешаемых по параметрам РЛС - р и ошибки
пеленгации <та, которая подтверждается некоторыми экспериментальными
данными [23]:
457
р
ОШ обн
I ,
Zo6H ® схр< -
0,11 ]
Р-ста •£>]
(5.43)
На рис. 5.9 пунктирными линиями изображена Рошоби, рассчитанные по
формуле (5.43) для сектора пеленгования 90°, т.к. формула (5.42) получена в
аналогичных условиях. Формулы (5.42) и (5.43) не отражают влияние на
эффективность обнаружения таких характеристик станции РТР как сектор обзора
и число пеленгов на РЛС. Кроме того, требуется количественное выяснение
влияния расположения РЛС относительно базы пеленгования (траектории полета
ЛА) на эффективность обнаружения РЛС. Материалы настоящего раздела
являются развитием результатов, полученных в работе [159] и опубликованы в
[15, 23, 160]. Большинство локальных алгоритмов обработки пеленгов, снятых на
неразрешаемые по параметрам РЛС, строятся по следующей схеме.
Из группы пеленгов, подлежащих обработке, берется первый пеленг и
последовательно сравнивается с другими до тех пор, пока угол пересечения
пеленгов не превзойдет заданный величины, после чего эти два пеленга
считаются опорными и относительно их точки пересечения строится так
называемая «доверительная окружность» радиуса А (в работах [148, 149] эта
область имеет форму овала). Далее подсчитывается число пеленгов, проходящих
через доверительную область. Если это число превышает пороговое, то
принимается решение, что окружность охватывает точку, где находится РЛС, и
все пеленги, проходящие через окружность, сняты на эту РЛС. Сгруппированные
таким образом пеленги обрабатываются по методу наименьших квадратов, в
результате чего определяются координаты РЛС Пеленги, участвовавшие в
определении координат «истинной» РЛС, исключаются из дальнейшего
рассмотрения и вычеркиваются. Как видно из схемы построения локального
алгоритма, эффективность обнаружения РЛС определяется качеством
группировки пеленгов по доверительным областям. На рис 5.10а показано
«горизонтальное» расположение двух разведуемых РЛС (I и II) относительно
линии полета (ось X).
458
Рис 5.10 а. Горизонтальное положение двух разве дуемых РЛС относительно
линии полёта (ОХ) ЛА. (±а(х)- угол, отсчитываемый от линии СА, соединяющей
начало базы пеленгации с координатами (точкой расположения) РЛС II).
Рис. 5.10 6. Горизонтальное расположение двух разведуемых РЛС относительно
линии полета.
459
Найдем вероятность того, что пеленги, снятые на РЛСц, пройдут через
окружность И и не будут до этого вычеркнуты, т.е. не пройдут через окружность
I. Для простоты рассмотрения предположим, что центры «доверительных
окружностей» совпадают с истинными РЛС.
Для выбора радиуса пороговой окружности (Ro) воспользуемся
следующими соображениями (рис. 5.10°). При росте Ro растет вероятность
правильного группирования пеленгов на первую РЛС (Рлл). Вероятность
правильного группирования пеленгов на вторую РЛС (РПГя) ведет себя более
сложно. При малых значениях Ro, 8 < 0 и РПГи с ростом Ro возрастает. При
дальнейшем росте Ro появляется возможность прохождения пеленгов через
окружность I (8 > о) и скорость роста РПГл падает. При дальнейшем увеличении
Ro, РПГц уменьшается. Для последующих расчетов можно принять Rn = 2oaD При
равномерном распределении пеленгов по базе полёта (пеленгования) средняя (по
базе) вероятность правильного группирования пеленгов на вторую РЛС равна:
Рпгп ~ YR) \ (^О6^ ’
2Dtg\
(5-44)
где Ра и определяется следующим образом
Вернемся к рис. 5.10 а и рассмотрим два случая. 7? > 2Rq и R < 2Rq. Введем
обозначения:
а(х) = arcsin
4447
8(х) = arctg-arctg--ь arcsin .- 0 - + arcsin —т
х x-R J&Tx*
Рассмотрим указанные выше случаи отдельно
1. R>2Ro
460
Если
X ч--
R
тогда
РдГд (Х) ~ —
•<2я
(5-45)
тогда
к- R
Если х+—
2
-1,
1
л/2л
«W 2^
/ ----------da =
-cr(x)+<5(x) &а
(5А6)
2
D
(х) —
2. R<2Rq.
В данном случае вероятность правильного группирования пеленгов на ₽ЛСц
определяется формулой (5.46).
горизонтальное
расположение
вертикальное
расположение
Рис. 5.11. Зависимость средней вероятности правильного группирования
пеленгов в функции от (R/D).
461
На рис. 5.11. пунктирными линиями представлена РПГп, рассчитанная по
формуле (5.44) в функции от RID при фиксированных значениях <за и ®02.
Рассмотрим другой случай взаимного расположения двух РЛС на линии,
перпендикулярной направлению полета, так называемое «вертикальное
расположение» (рис. 5.12 а, 5.12 б).
Рис. 5.12 а соответствует большим значениям базы пеленгования, рис. 5.12
б - малым Радиусы доверительных окружностей соответственно равны Rm = 2<заВ
и R^ = 2<ya(D-R) Для этих случаев вероятность правильной идентификации
пеленга по второй РЛС определяется следующим образом. Также, как и при
«горизонтальном» расположении РЛС рассмотрим два случая: R>Rqi+Ro2 и
R<Roi+Ro2. Введем обозначения:
а(х) = arcsin . ^02 - '
V(D-A)2 + х2
е / \ • Д)2 D-R . R01 D
5 Ах}- arcsin , ; + arctg —г-:— + arcsin - r ~ arctg —;
7(Й-Я)’-+Х2 И 7d2+x! и
5Ax} = arcsin . 01 + arctg—+ arcsin .. °2-... -arctg. ;
Vn2 + x2 H y[(D-R)2+x2 И
DRq2
^-(R^-R^y
В первом случае Roi+Ro2<R. При этом могут быть варианты:
1 • |х|>Хо,
тогда
(5-47)
^01 < Д:2
D ~D-R
462
тогда
тогда
a) xi<|x|<xo,
6) |x|<Xi,
^пгп (x) ~
1 , a(x)
-Уф —
2 I L0-»^2
+ Ф
a(x) - (x)
O' V2
(5-48)
Рпг„(х) = -]2Ф
a(x)
a(x) - 8, (x)
<7 V2
« v
a(x) - 32 (x)
(5-49)
Рис. 5.12. Вероятность правильного группирования пеленгов при
«вертикальном» расположении РЛС.
463
Рассмотрим следующий случай:
-^01 Д)2
D D-R’
-х} <| х|< х0, тогда РПГ]] (х) определяется формулой (5.48);
|х|<-х, тогда РПГц (х) = 0.
В случае К^+КогЖ — < и |xj>xi для расчета Рпг (х) используется
D D -* R и
формула (5.48).
При |х)<Х] для расчета РПГв (х) используется формула (5 49).
В случае — > ^°2 , |х|>Х] для расчета РПГд (х) справедлива формула (5.48), а
D D — R 11
для |х|<-х, РПГл (х) = 0 .
Для всех приведенных выше случаев расчетные вероятности правильной
идентификации пеленгов по РЛСп при их «вертикальном» расположении
приведены на рис. 5.11 сплошными линиями. Из рис. 5.11 видно, что вероятность
правильного группирования пеленгов при «горизонтальном» расположении РЛС
существенно выше, чем при «вертикальном» расположении. Это объясняется тем,
что при «вертикальном» расположении большинство пеленгов, принадлежащих
второй РЛС (РЛСц), проходят также через окружность I и «вычеркивается» из
дальнейшего рассмотрения, т.к. по принятому алгоритму пеленги РЛС}
обрабатываются первыми.
В работе [23] приведены выражения для вероятности правильного
группирования пеленгов на РЛСп при произвольном положении областей
группирования I и II, которые из-за громоздкости в тексте не показаны. На рис.
5.13а показаны средние по базе пеленгования (£) и углу определяющему
взаимное положение областей I и II в зависимости от отношения RJD для
различных значений аа и 0О2 при фиксированном расстоянии до центра РЛСц
Z=D-R, а на рис. 5.136 изменение этих вероятностей от Z(J£)=const при
варьировании R.
464
Рис. 5.13 а. Зависимости от R/L^RJД') вероятностей правильного
группирования пеленгов на РЛСц при произвольном положении двух
доверительных областей (I, II) на местности
(варьируется <уа и 0О2 как параметры кривых).
Рис. 5.13 б. Зависимости вероятностей правильного группирования
пеленгов на РЛСц при их (РЛС I и РЛС II) произвольном положении на местности
от а (варьируется расстояние между доверительными областями).
465
Из анализа приведенных кривых на рис 5.13а следует, что средняя по базе
пеленгования (£) и углу вероятность правильного группирования пеленгов
практически не меняется в пределах варьирования ®0, от 60° до 90°. Это
объясняется приведением кривых для вероятностей правильного группирования,
показанных на рис. 5.14а.
Интересен ход кривых на рис. 5.13°: при небольших расстояниях РЛСц от
линии полета число случаев, когда PJICi «отбирает» пеленги РЛСц относительно
небольшое и РПГи - большая. С увеличением L число таких случаев начинает
возрастать до тех пор, пока РЛС} не начинает выходить за радиогоризонт, а РПГ;1
убывает, и, наконец, РПГд быстро увеличивается, когда РЛС] все чаще выходит за
радиогоризонт. Последнее обстоятельство является причиной излома кривых рис.
5.13а при больших R/D (сравните с кривыми рис. 5.11 для «вертикального»
расположения РЛС, полученными в предположении, что РЛС} не выходит за
радиогоризонт).
Выше были найдены вероятности правильного группирования пеленгов для
двух доверительных областей. В реальном радиолокационном поле число
неразрешаемых по параметрам РЛС может быть существенно больше двух.
Поэтому необходимо учесть влияние других доверительных областей, в том числе
и ложных, на вероятность правильного группирования пеленгов. При этом задача
получения удобных для анализа и моделирования аналитических выражений
чрезвычайно усложняется. Однако, как следует из работ [23, 149], если
интересоваться достаточно большими вероятностями группирования пеленгов
(>0,8), то для любых локальных алгоритмов ошибка в определении координат
РЛС при учете только ближайшей соседней РЛС (доверительной области) не
будет превышать 10 %. Учитывая последнее замечание, а также то, что
расстояние между ближайшими соседними РЛС, при условии их равномерного
размещения на местности, распределены по закону Релея [9]:
466
Рис. 5.14 а. Зависимость вероятностей правильного группирования на РЛСп
(Рпгп) от угла между доверительными областями
(<р = 0 соответствует горизонтальному положению; <р = 90° - вертикальному);
параметр кривых - ширина сектора пеленгования ®02.
Рис. 5 14 6 Средняя вероятность правильного группирования пеленгов на
РЛСц при произвольном положении доверительных областей в зависимости от L
(параметры кривых - оу,0О2).
467
W = —- exp<
0,56 тлттг-
где aR = , p - средняя плотность неразрешаемых по параметрам РЛС,
(5.50)
можно определить среднюю вероятность правильного группирования пеленгов
для всего поля неразрешаемых по параметрам РЛС.
(5.51)
где РПГп (7?) - вероятность правильного группирования пеленгов для
произвольного положения двух доверительных областей, усредненная по углу и
базе.
Результаты численного интегрирования по формуле (5.51) показаны на рис.
5.14 б. Расчетные кривые усредненных по дальности вероятностей правильного
группирования пеленгов для всего поля неразрешаемых по параметрам РЛС,
приведены на рис. 5.15.
Рпг =1-ехр<
(5.52)
где а = 2,82 для ©02 = 60° и а = 2,53 для ©02 = 90°; Ь = 1,87 (км/град);
с = 1620 (км2/град).
468
Рис. 5.15. Усреднённая по дальности вероятность правильного
группирования пеленгов для всего «поля» неразрешаемых по параметрам РЛС.
Кривые рис. 5.15 удовлетворительно апроксимируются выражением [23]
Для нахождения зависимости вероятности обнаружения неразрешаемых по
параметрам РЛС локальными алгоритмами от числа пеленгов, вспомним, что
решение об «истинности» очерченной доверительным кругом области
принимается на основании подсчета количества пеленгов, прошедших через круг,
и сравнения его с пороговым значением ty0 Величина с-утак же, как и Ro,
выбирается с учетом требуемых значений вероятностей обнаружения и пропуска
РЛС. Если общее число пеленгов со, снятых на данную РЛС, примерно известно,
то задача выделения занятой области может быть сведена к известной в
радиолокации задаче обнаружения пачки из со импульсов. Этой задаче посвящено
большое количество работ, предложены многочисленные критерии типа «к из со »,
«к подряд из со» и др. Используем критерий «к из со», применительно к которому
в работе [9] приводится соотношение, связывающие оптимальное значение порога
(А?Ойт) с числом импульсов в пачке:
Копт «1,57® .
469
Вероятность ошибки при выделении занятых РЛС областей при
использовании критерия «к из су» определяется выражением:
^-опт i zn| __
to /'(® “О'
(5.53)
где Рпг определяется формулой (5.52).
На рис. 5.16 показана зависимость 1-РОшобн в функции от Рпг при различных
значениях со(к. =копт).
Рис. 5.16. Зависимость \-Рошоби в функции от Рпг при различных значениях
w и kQ.
5.13.2. Нелокальные алгоритмы.
К нелокальным относятся такие алгоритмы, которые «не привязаны» в
каждый момент времени к некоторой малой окрестности исследуемой траектории,
а производят определение местоположения всей группы неразрешаемых по
470
параметрам РЛС. В работах [23, 158] показано, что именно нелокальные
алгоритмы, основанные на методе максимального правдоподобия, оптимальны
для введенной в предыдущем разделе функции потерь. Особенностью этих
алгоритмов является то, что потери обнаружения для них определяются
преимущественно неточным определением числа РЛС, а не ошибками в
классификации пеленгов, так как пеленги по обнаруженным РЛС не
выбрасываются из общей совокупности.
Представляет интерес оценить среднее наименьшие потери из-за ошибки в
нахождении числа неразрешаемых по параметрам РЛС Для этого используем
подстановку тй = п ~ в формулу (5 30). В результате получим выражение:
П + 77 - 2/77]
(5-54)
Очевидно, что в наилучшем случае
777. = <
77, если п < п
п, если и > п
Отсюда наименьшее значение потерь обнаружения
., _\п~п\
га? ~~
П
(5.55)
Эти потери вычислены для одного варианта местоопределения. Для
вычисления средней вероятности наименьших потерь обнаружения формулу
(5.55) нужно усреднить по условному распределению оценки Р\ — :
1 I х I Т)( )
«00
7
^iai
(5.56)
Из-за трудностей разработки аналитических методов исследования
статистических свойств непараметрических способов оценки числа РЛС
471
I -ft I
(распределения P| — ), в работе [158] был использован метод математического
к. и )'
моделирования. В результате (при равномерном распределении РЛС в
прямоугольнике (500х700)км2и секторе пеленгования ©02 = 60°) получены
гистограммы распределения оценки числа РЛС в различных условиях, а именно: в
функции от ошибки пеленгации - , числа неразрешаемых по параметрам РЛС -
п и числа пеленгов на одну РЛС -су . На рис. 5.17 и 5.18 показаны несколько таких
гистограмм, которые удовлетворительно аппроксимируются функцией:
СпЛ 1 —
Р[-] = ~-е^ , (5 57)
J 2сг
где б? = 0,25(и + 0,48ст2 -1,12аа + 5,73) 1п(п + 1) + 0,18®,;
ст = 0,0325су(0.075и + е'2Д9<т“~8 +0,83)1п(и + 1) + 0,045сул,
су, - процент ложных пеленгов.
На графиках рис. 5 17 и рис. 5.18 сплошными линиями указаны
фактические распределения числа РЛС, обнаруженными нелокальными
алгоритмами. Очень важно подчеркнуть, что качество обнаружения определяется
не только характеристиками пеленгатора и условиями разведки, но и
предварительным числом РЛС, которые алгоритм обнаруживает. Последний
вопрос очень специальный и выходит за рамки книги, заслуживая отдельного
рассмотрения.
Аппроксимированные кривые показаны на рис.5.17 и рис. 5.18 пунктиром.
Ещё раз отметим, что получение гистограмм при моделировании и реальная
эффективная работа нелокальных алгоритмов местоопределения существенно
зависели от предварительной оценки числа неразрешаемых по параметрам РЛС.
Для оценки числа РЛС в работах [23, 157, 160] предложены были «базовые» -
непересекающиеся между собой пеленги.
472
Рис. 5.17. Гистограммы распределения оценки числа РЛС в различных
условиях
Рис. 5.18. Гистограммы распределения оценки числа РЛС в различных
условиях
473
5.14. Вероятность местоопределения РЛС
Подстановка формулы (5.57) в (5.56) и выражения (5.52) в формулу (5.53) с
учётом в них этапа измерения координат РЛС (выражения(5.41)) дает в итоге
следующие выражения для вероятности местоопределения РЛС [15, 23, 160].
Для локальных алгоритмов:
(5.58)
Для нелокальных алгоритмов:
2и (и)
(5.59)
где средняя вероятность правильного группирования пеленгов (Рпг)вычисляется
по формуле (5.52), а распределение вероятности Р| - , как уже говорилось,
I F7 )
аппроксимировано выражением (5.57).
Зависимости средней вероятности местоопределения от числа пеленгов при
различных плотностях неразрешаемых по параметрам РЛС,
среднеквадратических погрешностях измерения пеленга, требуемых точностях
местоопределения для 0О2 = 60° и Ds - 600 км приведены на рис. 5.19 и рис. 5.20.
474
Рис. 5.19 а. Зависимости средней вероятности местоопределения
неразрешаемых по параметрам РЛС (Ром) от числа пеленгов для локальных
алгоритмов (параметры кривых - сга, р и р- плотность РЛС).
Рис. 5.19 6 Зависимости средней вероятности
местоопределения неразрешаемых по параметрам РЛС от числа пеленгов
при обработке информации локальными алгоритмами (параметры кривых:
сга,г0 - точность местоопределения и р- плотность РЛС).
475
Рис. 5.20 а. Зависимости средней вероятности местоопределения
неразрешаемых по параметрам РЛС от числа пеленгов для нескольких алгоритмов
(параметры кривых: оа, гп; п и р).
Рис. 5.20 б. Зависимости средней вероятности местоопределения
неразрешаемых по параметрам РЛС от числа пеленгов
при обработке информации нелокальными алгоритмами
(параметры кривых: суа,п- число, р- плотность РЛС; Го- точность
местоопределения).
476
Сравнение кривых, представленных на этих рисунках и проведенное в
работах [15, 23, 160], показывает, что нелокальные алгоритмы имеют следующие
преимущества перед локальными:
- высокую эффективность местоопределения при малом числе пеленгов (в
работах [15, 23] отмечено, что нелокальные алгоритмы специально настроены на
малое число пеленгов), что в 90 % случаев определяется потерями измерений;
- алгоритмы работают при значительных плотностях неразрешаемых по
параметрам РЛС без ухудшения эффективности местоопределения;
- алгоритмы обеспечивают относительно высокую вероятность
местоопределения при оа - 2° 3°.
Недостатками нелокальных алгоритмов являются:
- малая эффективность при большом числе пеленгов и плотностях
неразрешаемых по параметрам РЛС «10~5 1/км2;
- чувствительность к ложным пеленгам;
- большая сложность алгоритма и, как следствие, значительное время
реализации на ЭВМ.
В работе [60] найдено и представлено количество операций различного вида
(по типу материала раздела 5.6), которые необходимо реализовать на ЭВМ при
моделировании и обработке информации о пеленгах, снятых на неразрешаемые
по параметрам РЛС локальными и нелокальными алгоритмами. Там же
произведен выбор характеристик наземной и бортовой ЭВМ, которые
применяются при обработке информации подобного вида с целью определения
координат неразрешаемых по параметрам РЛС.
477
ЗАКЛЮЧЕНИЕ
В заключение считаем целесообразным кратко сформулировать
(перечислить) проблемы и вопросы, которые, по тем или иным причинам, вышли
за рамки книги и оказались не решёнными (часть из них упоминалась в тексте
книги).
Во-первых, современные средства ПВО, которые управляются РЛС
различного типа, непрерывно совершенствуясь, используют повсеместно в
качестве мер защиты от РПД перестройку основных радиотехнических
параметров (/я,Т„,т) в широком диапазоне длин волн, в пределе - от импульса к
импульсу, моноимпульсные цифровые способы приёма и обработки сигналов,
синхронные сигналы и т.д. (подробнее об этом в главе III настоящей книги). Это
означает, что количество неразрешаемых по радиотехническим параметрам
сигналов РЛС непрерывно растёт и, более того, возникает проблема выявления
диапазонов (и алгоритмов) перестройки технических параметров сигналов, где
единственной информацией, за которую можно «зацепиться», являются пеленги
(и углы места) РЛС, а в конечном счёте - их координаты. Однако и сами
координаты РЛС могут меняться в процессе РТР, если они установлены на
движущихся объектах (корабли, самолёты, автомобили и др.) и возникает задача
«мгновенного» определения координат (когда объекты не успели существенно
изменить своё местоположение), либо, в процессе РТР (или обработки её
результатов), надо вычислять параметры движения объектов (курс, скорость,
траекторию и т.д.), что представляет сложную самостоятельную задачу. В таких
условиях этапы обнаружения и измерения координат РЛС нельзя считать
независимыми, как мы предполагали в главе 5, и придётся разрабатывать новые
подходы (и алгоритмы) решения подобных задач. К числу таких подходов можно
отнести функциональное преобразование пеленгов (например, пеленги а,
478
преобразуются в c/g«;); тогда вместо картины попарного пересечения самих
пеленгов для метода многократной пеленгации мы будем иметь «траектории» (см.
табл. 4.2. гл. 4) на которые «ложатся» преобразованные пеленги, а с учётом
ошибок измерения пеленгов эти «траектории» будут «размыты», образуя
«трубки» (читатель, для интереса, может на листе бумаги нарисовать эти картины
и уяснить суть вопроса). Количество «траекторий» («трубок») в точности
соответствует числу неразрешаемых по параметрам РЛС (и эта информация
может использоваться в локальных и нелокальных алгоритмах), а углы, под
которыми они располагаются (пересекают) к маршруту полёта самолёта -
разведчика, зависят от «траверзной» дальности до РЛС («траверзная» дальность -
расстояние по перпендикуляру к линии полёта самолёта - разведчика до РЛС).
Более того, тангенс угла наклона «трубки» к траектории полёта полностью
определяет «траверзную» дальность. «Траекторные» методы местоопределения
неразрешаемых по параметрам РЛС практически не исследованы (авторы знают
только одну работу Усова В.Н. по оценке эффективности этого метода в условиях
прямолинейного движения носителя аппаратуры РТР и фиксированных на
местности координат РЛС).
Во-вторых, в книге не рассмотрены вопросы моделирования разработки
алгоритмов управления системами РПД и РТР, хотя проверке работоспособности
алгоритмов управления на динамическом стенде внимание уделено (в рамках
ограниченного объёма книги).
И, наконец, в книге только упоминаются аналитическая модель расчёта
функциональной надёжности системы РПД, моделирование и исследование
сервисных вопросов (контрольно - проверочной и эксплуатационно - ремонтной
аппаратуры) и проблемы ЭМС. Последним вопросам, в достаточной степени,
уделено внимание в работе [15]. Моделирование и исследование кратко
перечисленных проблем требуют подготовки, написания и издания отдельной
(дополнительной) книги.
479
ЛИТЕРАТУРА
1 Палий А.И. Радиовойна - М.: Воениздат, 1965.
2 Палий А.И. Радиоэлектронная борьба - М.: Воениздат, 1989.
3. Уемов А.И. Системный подход и общая теория систем - М., Мысль, 1978.
4. Растригин Л.А. Кибернетика и познание. - Рига: Знание, 1978.
5. Перегудов Ф.И., Тарасенко Ф.П. Основы системного анализа. - Томск: 1997.
6 Шлезингер Р.Дж. Радиоэлектронная война. - М.: Воениздат, 1963.
7. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической
разведки -М.: Сов. Радио, 1968.
8. Защита от радиопомех (под редакцией Максимова М.В.) - М/ Сов. Радио,
1976.
9. Мельников Ю.П. Методы оценки эффективности воздушной
радиотехнической разведки. - Санкт-Петербург: 1998.
10 Атражев М.П. и др. Борьба с радиоэлектронными средствами. - М.:
Воениздат, 1972.
11. Van Brunt. Applied ECM. Encyclopedia of ECCM Tactics and Techniques EW
Engineering. Inc. USA, 1978 - 1982. Перевод под редакцией Фомичева К.И.,
Юдина Л.М.
12. R.G. Wiley. Electronic Intelligence: The Interception of Radar Signals. Dedham,
MA: Artech House, 1985.
13. D.J. Torrieri. Principles of Military Communication Systems, USA, Dedham, MA:
Artech House Tnc., April, 1985
14. Быков В.В. Цифровое моделирование в статистической радиотехнике. - М.:
Сов. Радио, 1971.
480
15. Бородин А.М Автоматизация выбора оптимальных параметров авиационных
бортовых комплексов обороны, Кандидатская диссертация. - Томск: 1997.
16. Борисов Ю.П. Математическое моделирование радиосистем. - М.: Сов. Радио,
1976.
17. Философский энциклопедический словарь. -М.: Сов энциклопедия, 1983.
18. Альтшулер Г.С. Найти идею. - Новосибирск. Наука, 1986.
19. Флейшман Б.С. Основы системологии. -М.: Радио и связь, 1983.
20. Вентцель Е.С., Овчаров Л.А. Прикладные задачи теории вероятностей. - М.:
Радио и связь, 1973.
21. Велихов Е.П., Выставкин А.Н. Проблемы развития работ по автоматизации
научных исследований. - М.: Наука, 1983.
22. Калашников В.В. Организация моделирования сложных систем. - М.: Знание,
1982.
23. Усков НВ. Оптимизация выбора параметров самолетной аппаратуры РТР,
Кандидатская диссертация. - Томск: 1975.
24. Шеннон Р. Имитационное моделирование. - Искусство и наука. - М.: Мир,
1978
25 Шнейдер Ю.А , Шаров А.А. Системы и модели. - М : Радио и связь, 1982.
26. Пешель М.М. Моделирование сигналов и систем. - М.: Мир, 1981.
27. Флейшман Б.С. и др. О методах математического моделирования сложных
систем (системные исследования). - М/ Наука, 1982.
28. Матушевский В.В. Применение САС для обработки экспериментальных
данных в системе САФРА. - Томск: ТГУ, 1977.
29. Букатова И.Л. Эволюционное моделирование (идеи, основы теории,
приложения) -М.: Знание, 1981.
30. Гладких Б.А., Усков Н.В. Задача классификации РТС на группы,
неразрешаемых по радиотехническим параметрам, ВСРЭ, сер. XVI (ТИПР),
вып. 2, 1973.
31. Горелик А.Л. Методы распознавания - М.: Высшая школа, 1989.
32. Бусленко Н.П. Метод статистических испытаний. - М.: ГИФМЛ, 1962.
481
33. Усков Н.В., Кудлай В.И. Исследование вероятности опознавания типов РЛС
перспективного РЛП методом статистических испытаний на ЭВМ М-20 (М-
220). Доклад и материалы конференции НИИ АП, октябрь, 1971.
34 Усков И.В., Аверьянова Л.П., Гусев А.Т. Моделирование на ЭВМ
взаимодействия быстродействующей аппаратуры РТР с перспективным РЛП
на этале обнаружения и пеленгования Доклад и материалы конференции
НИИАП, октябрь, 1971.
35 Бусленко Н.П. Моделирование сложных систем. - М.: Наука, 1978.
36. Поспелов Д.А. Логико-лингвистические модели в системах управления. - М.:
Энергоиздат, 1984.
37. Попов Н.П., Самарский А.А. Вычислительный эксперимент. - М.: Знание,
1983.
38. Бешелев С Д., Гурвич Ф.Г. Математико-статистические методы экспертных
оценок. -М.: Статистика, 1980.
39. Максимей И.В. Имитационное моделирование на ЭВМ. - М.: Радио и связь,
1988.
40. Пакет прикладных программ ОТЕКС (для анализа данных) - Н.Г. Загоруйко и
др. - М.: Финансы и статистика, 1986.
41 Кузин Л. Т. Основы кибернетических моделей. - М.: Энергия, 1979
42 Элти Дж., Кулбс М Экспертные системы (концепции и прмеры). - М.:
Финансы и статистика, 1987.
43. Большаков И.А. и др. Математические основы современной
радиоэлектроники. - М.: Сов. Радио, том 2, вып.2, 1968.
44. Шарыгин Г.С. и др. Экспериментальное исследование структуры ЭМ поля при
распространении СМВ над землей. - Томск: ТГУ, 1970.
45. Мартин Д. Организация баз данных в вычислительных системах. - М.: Мир,
1978.
46 Шемакин Ю.И. Введение в информатику. - М/ Финансы и статистика, 1985
47. The strategy of Electromagnetic Conflict, Peninsula Publishing PO BOX 867, Loc.
Altos, California, 94022, 1980
482
48, Flight Entemational, February, 19, p 444, 1983.
49. Aviation Week and Space Technology, vol. 102, №4, p. 40 130,1975.
50. Усков H.B., Бородин A.M. Влияние эффективности работы информационных
устройств системы РЭП на вероятность непоражения самолета ВСРЭ, сер
ТИПР, вып.2, 1978.
51._Усков Н.В., Бородин А.М Аналитический метод оптимизации распределения
массы между самолетными средствами РПД и мерами повышения боевой
___.____ПГ'П'Л____ТТЛ I 11__— Z" 1 non
ЖИКуЧСиШ. UCp 1Г11ГГ, bblll.J, lyov.
52. Дроджин Э. «Система РПД ALQ - 161 с разделением излучения помехи во
времени» (из журнала «Microwave System News», р.55, 58, 61 - 64, ПО,
October, 1978).
53. Экспресс-информация (ЭИ) «Радиотехника за рубежом» («РЭ ЗР»): № 1,
стр.25 - 28,1983 и № 5, стр. 10- 12, 1984 (два наименования).
54. «Новости Зарубежной Науки и Техники» («НЗ НиТ»), САВ: № 16, стр.З - 14,
1976; № 21 (ИБ НИЦ), 1983; № 8 стр.1 и 8, 1984; № 16 стр.1 и 7, 1984, № 17,
1984; № 1, 1986; № 3 (ИБ НИЦ), 1986; № 9, 1986; № 3, 1987; № 17, 1987; № 7,
1988 (одиннадцать наименований).
55. Экспресс-информация (ЭИ «ЗС АВ» или «ЗС АВ»): № 5 (ОИ) от 3.02.1983, №
8 (ОИ) от 24.02.1983; № 39 (ОИ) от 29.09 1983; № 46 (ОИ) от 17.11 1983, № 7
(НИЦ) от 12.02.1987; № 40 от 1.10.1987; № 51 от 17.12.1987; № 17 от
28.04.1988 (восемь наименований).
56. Обзоры НИИЭИР: «Бортовое Электронное Оборудование бомбардировщика В
- 1В», № РО4 8055, 1983 и «Радиоэлектроника (состояние и тенденции
развития)» тетрадь III, 1897.
57. Прочие обзоры: «Состояние и тенденции развития бортовых средств РЭБ в
США», НИЦ, 1980 и «Современные программы разработок бортовых средств
РЭБ» (источник «JDR», v 18, № 2 р.р. 169 - 177, 1985) в ЭИ Авиастроение №
32, 1985.
58. Schefter «New planes that radar can’t see» (из «ЕА», v 45, №5, p.p. 12, 13, 15, 17,
1983).
483
59. «Awand ST» v 26, № 13, march, 1984 (стенды моделирования).
60. Усков H.B., Суханов С.М., Бородин А.М. Оптимизация выбора варианта
построения и состава аппаратуры вторичной обработки информации от
самолетных станций РТР. ВСРЭ, сер. ТИПР, вып.З, 1976.
61. Попов С.В. Пояснительная записка по НИР «Грань» НИИАП, 1961.
62. Попов С.В. К использованию многоканально-функционального
(«матричного») приемника в широкодиапазонной аппаратуре РТР ВСРЭ,
сер.XVI, вып. 2, 1967.
63. Попов С.В. Пути построения перспективной аппаратуры РТР. ВСРЭ, сер.XVI,
вып. 2, 1967.
64. Тихонов В.И. Статическая радиотехника - М : Сов. радио, 1966
65 Левин Б.Р. Теория случайных процессов и её применение в радиотехнике. -
М.: Сов. радио, 1960.
66. Добровольский Ю.П. и др. Автоматика управляемых снарядов. - М •
Оборонгиз, 1963.
67 Типугин В.Н., Вейцель В.А. Радиоуправление. - М.: Сов радио,1962.
68 Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио,
1964.
69. Wadie К.Н., Stockford М.Т., Hutchinson М. Phase Modulation of T.W.Tubes.
Electronic tehnology, № 12,1960.
70 Кривицкий Б.Х. Автоматические системы радиотехнических средств,
Госэнергоиздат, 1962.
71. Бородин А.М. Принятие решений в условиях неопределённости. Издательство
ПТУ им. Т.Г. Шевченко, Тирасполь, 2001.
72 Хеллгрен Г Вопросы теории моноимпульсной радиолокации “Зарубежная
радиотехника” № 12, 1962 и № 1,1963.
73. Канарейкин Д.Б. и др. Поляризация радиолокационных сигналов. - М.: Сов.
радио, 1966.
74. Сканирующие антенные системы СВЧ (пер. с анг. под ред. Г.Т. Маркова). -
М.: Сов. радио, т. I- 1966, т. II - 1969, т. III - 1971.
484
75. Хансен Г Логика последовательной обработки обзорной РЛС с поимпульсной
перестройкой частоты. “Зарубежная радиоэлектроника” № 4, с. 80-98, 1969.
76. РЛС со скачкообразным изменением частоты. Экспресс- информация, сер.
“Радиолокация, телевидение и связь” РТС № 5, 1968.
77. Примеры и задачи по статической радиотехнике (под ред. В.И. Тихонова). -
М.: Сов. радио, 1970.
78. РЛС с изменяющейся несущей частотой. Экспресс - информация, сер. РТС, №
6, с. 1-13, 1970.
79. Густафсон X. Характеристики РЛС с изменяющейся от импульса к импульсу
несущей частотой - “Зарубежная радиотехника” № 4, с. 30-37,1965.
80. Лившиц А.Р. О вероятности n-совпадения Радиотехника и электроника, № 8,
1957.
81. Седякин Н.М. Элементы теории импульсных потоков. - М.: Сов. радио, 1965.
82. Гуткин Л С. Теория оптимальных методов радиоприёма при флуктуационных
помехах - М., Сов. радио, 1972.
83. Грассо Ж., Гуаргуаглини П. Характеристики обнаружения многочастотной
РЛС “Зарубежная радиоэлектроника” № 8, с. 45-55, 1968.
84. Технические основы радиолокации (под ред. Я.Д. Ширмана). - М.: Сов. радио,
1970.
85. Hausz W. Angular location monopulse and resalution, Microwave J.,V.7, p. 60-65,
Feb. 1964.
86. Царьков Н.М. Многоканальные радиолокационные измерители. - M.: Сов.
радио, 1965.
87. Вакман Д.Е. Сложные сигналы и принцип неопределённости в радиолокации.
- М.: Сов. радио, 1965.
88. Радиолокационные устройства (под ред. В.В. Григорина-Рябова). - М.: Сов.
радио, 1970.
89. Скроук Д. Введение в когерентную оптику и голографию. - М.: Мир, 1967.
90. Радиолокационные станции бокового обзора (под ред. А.П. Реутова). - М.:
Сов. радио, 1970.
485
91. Кондратенков Г.С. Обработка информации когерентными оптическими
системами. - М.: Сов радио, 1972
92. Кук Ч., Бернфельд М. Радиолокационные сигналы. - М.: Мир, 1973.
93. Сороко Л.М. Основы голографии и когерентной оптики. -М.: Наука, 1971
94. Франсон М. Голография. - М.: Мир, 1972.
95 Гудмен Д. Применение голографии -
96 Свет В.Д. Оптические методы обработки сигналов. - М.: Энергия, 1971.
97 Теоретические основы радиолокации (под ред. В.Е. Дулувича). - М.: Сов.
радио, 1964.
98. Долуханов М.П. Распространение радиоволн. -М.: Сов. радио, 1972.
99 Зубкович С.Г. Статические характеристики радиосигналов, отражённых от
земной поверхности. - М.: Сов. радио, 1968.
ЮО.Островетянов Р В. К вопросу об угловом шуме. - Радиотехника и
электроника, т. XI, № 4, с.592-601,1966.
ЮЕЗоркин Ч.С., Штейберг Б.Д. Сопровождение цели на фоне помех
радиолокатором с конической развёрткой луча. “Зарубежная
радиоэлектроника” № 10, с. 22-29,1959.
Ю2.Сколник М. Введение в технику радиолокационных систем. - М.: Мир, 1965.
103. Загородников А.А Некоторые результаты измерения турбулентности в
свободной чистой атмосфере радиолокационным способом, Доклады АН
СССР, т.156, №6, 1964.
104. Палермо С. Баур Л. Двухпозиционное сечение рассеяния ДО применительно
к задачам радиосвязи. Труды института инженеров по радиоэлектронике и
радиотехнике (ТИИЭРЭ) № 8, 1965.
105. Бородин А.М. Роль измерений в создании моделей систем. ИздательствоПГУ
им. Т.Г. Шевченко.- Тирасполь, 2001.
Юб.Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь,
1972.
107. Сигналы и помехи лазерной локации (под ред. В.Е. Зуева). - М.: Радио и
Связь, 1985.
486
108. Шранк X. Всенаправленные сферические радиолокационные отражатели с
высокой эффективностью, ТИИЭРЭ, № 8, 1968.
109. Антенные решётки (под ред. Л.С.Бененсона). - М.: Сов. радио, 1968.
ПО.КобакВ.О. Радиолокационные отражатели. -М.: Сов. радио, 1975.
111 Метод Гольдфарба в теории регулирования. - М.: Госэнергоиздат, 1962
112 .Усков Н.В., Скобелев ЮА. Обобщенные показатели оценки эффективности
аппаратуры РТР. ВСРЭ, сер. XVI вып. 4, 1969.
НЗ.Сайбель А.Г. Основы теории точности радиотехнических методов место-
определения. -М.: Оборонгиз, 1958.
114 .Линник Ю.В. Метод наименьших квадратов и основы матиматико-
статистической теории обработки наблюдений. - М.: Физматгиз, 1962.
115 . Усков Н.В., Суслов С.А. К расчету вероятности обнаружения ’’прореженной”
пачки импульсов. Информационно-справочный листок № 015495,1967.
116 Электромагнитная совместимость радиоэлектронных средств и
непреднамеренные помехи (составители - Дональд Р., Ж.Уайт, вып. 1) (пер. с
анг. под ред. А.И. Сапгира). - М.: Сов. радио, 1977.
П7.Сапгир А.И. К вопросу о вероятностной оценке уровня бокового излучения
антенны. Радиотехника, т. 26, № 3, 1971.
118. Крамер Г. Математические методы статистики. -М.: Мир, 1975.
П9.Бернстейн Р. Исследования угловой точности обзорного радиолокатора, (сб.
под ред. Гуткина Л.С.). - М.: Издательство иностранной литературы, 1960.
12О. Сверлинг П. Максимальная точность определения угловых координат
импульсной РЛС - Вопросы радиолокационной техники, № 2, 1957.
121. Шебашевич В.С. Введение в теорию космической навигации - М., Сов.
радио, 1971.
122. Беляваский Л.С. и др. Основы радионавигации - М., Транспорт, 1982.
123. Патенты США: №3789410 (1974), №4350984 (1982), №4422076 (1989),
№4626860 (1976).
487
124. Мельников Ю.П., Попов С.В. Дифференциально-допплеровский временной
метод местоопределения источника излучения с движущегося носителя,
Новости навигации, № 1, 2001.
125. Бартон Д., Вард Г. Справочник по радиолокационным измерениям - М., Сов.
радио, 1976.
126. Ицхоки Я.С. Импульсные устройства - М : Сов. радио, 1959.
127. Хан Г., Шапиро С. Статистические модели в инженерных задачах. - М.: Мир,
1969.
128. Митяшев Б.Н. и др. Временная фиксация импульсов с большим
динамическим диапазоном амплитуд. Радиотехника, № 1, 1975.
129. Мельников Ю.П., Попов СВ. Методы оценки погрешностей определения
параметров движения объекта при его активной и пассивной локации в
условиях РЭП. Радиотехника, № 3, 1998.
130. Попов С.В. и др. Оценка текущих координат движущегося объекта по
данным его пеленгования. Вопросы радиоэлектроники, серия АСУПР, № 2,
1992.
131. Аренберг А.Г. Распространение дециметровых и сантиметровых волн. - М.:
Сов. радио, 1957.
132. Черный Ф.Б. Распространение радиоволн. -М.: Сов. радио, 1962.
133. Голев К.В. Расчет дальности действия радиолокационных станций - М. Сов.
радио, 1962.
134. Андреев А.В. и др. Обнаружение и анализ сигналов сложной структуры.
Учебник МО РФ, 1996.
135. Усков. Н.В. О вероятности обнаружения РЛС. ВСРЭ, сер. XVI вып. 5, 1968.
136. Усков. Н.В., Суханов С.М. Вероятность регистрации ряда
последовательностей пачек импульсов. ВСРЭ, сер. ТИПР, вып. 2, 1973.
137. Усков. НВ. Оптимизация выбора основных параметров аппаратуры РТР.
ВСРЭ, сер. XVI вып. 4, 1966.
488
138. Усков. Н.В., Попов С.В. Пути и способы построения перспективной
аппаратуры РТР, выбор ее технических параметров. Доклад на 15 секции
НТС по радиоэлектронике МО (в/ч 25980), май, 1966.
139. Попов С.В. К оценке сокращения времени обзора при многоступенчатой
процедуре поиска с последовательным уточнением. Вопросы
радиоэлектроники, серия ОТ, вып. 19,1969.
140. Аверьянов В.Я. Разнесённые радиолокационные станции и системы. - Мн.:
Наука и техника, 1978.
141. Кондратьев В.С. и др. Многопозиционные радиотехнические системы. - М.:
Радио и Связь, 1986.
142. Усков Н.В. Тактическая эффективность аппаратуры РТР. Информационно-
справочный листок № 015491, 1967.
143. Справочник по радиолокации (под ред. М.С. Колника) т. I. - М.: Сов. радио,
1976.
144. Кофман А., Крюон 3. Массовое обслуживание. Теория и приложения. - М.:
Мир, 1965
145. Градштейн И.С, Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. -М.: Физматгиз, 1962.
146. Бородин А.М., Усков Н.В. Аналитическая оценка и математическое
моделирование входного потока сигналов в авиационных бортовых
комплексах обороны. Радиоэлектроника. Информатика. Управление. Выпуск
6, 2001.
147. Партала и др. Методы обработки сигналов в пассивных радиолокационных
системах. “Зарубежная радиоэлектроника”, № 6,1996.
148. Медведев Г.А. НИР “Статистик”. - Томск: СФТИ, 1963.
149. Медведев Г.А. Докторская диссертация, - Томск: 1966.
150. Кузьмин С.З. Основы теории обработки радиолокационной информации в
автоматизированных системах ПВО, APT А, 1964.
151. Пределин Б.А. Прибор для измерения микросекундных интервалов времени
- Приборы и техника эксперимента, № 2, 1958.
489
152 Попов С.В Некоторые варианты схем многократной селекции импульсов по
периоду с использованием одной линии задержки Вопросы
кораблестроения, сер. Радиолокация, вып. 17, 1976.
153. Тарасенко В.П. и др. Интеллектуализация корреляционно-экстремальных
навигационных систем и автоматизация процесса их проектирования.
Сборник: «Методы и алгоритмы автоматизации технологических процессов»
- Томск: Издательство ТГУ, 1995.
154. Полищук Ю.М. и др. Региональные экологические информационно-
моделирующие системы,- Новосибирск: ВО “Наука”, 1993.
155. Бородин А.М., Усков Н.В. Классификация моделей для целей
проектирования систем РПД и РТР. - Тирасполь: Издательство ПТУ им. Т.Г.
Шевченко, 2002.
156. Бородин А.М., Усков Н.В. Вопросы автоматизации проектирования систем
РПД и РТР,- Тирасполь: Издательство ПТУ им. Т.Г. Шевченко, 2002.
157. Гладких Б.А., Усков Н.В. Критерий эффективности методов
местоопределения группы однотипных РЛС. ВСРЭ, сер. XVI, вып. 7,1968.
158. Гладких Б.А. Кандидатская диссертация - СФТИ, Томск, 1968.
159. Мельников Ю.П., Попов С.В., Усков Н.В. Методы обоснования необходимых
технических характеристик аппаратуры воздушной РТР. Труды ЦНИИ-30
МО, вып. 216 (286), 1969.
160. Бородин А.М., Усков Н.В. Эффективность работы алгоритмов определения
координат однотипных РЭС. Радиоэлектроника. Информатика. Управление.
Выпуск 6. 2001.
161. Попов С.В., Усков Н.В., Суханов С.М Алгоритмы местоопределения по
данным многократного пеленгования при наличии систематических и
случайных погрешностей. ВСРЭ, серия ОТ, вып. 22, 1972.
162. Попов С.В. О вероятности разведки РЛС по их боковому излучению. ВСРЭ,
сер XVI, вып. 5,1968.
490
163. Бородин А.М. и др. Опыт решения вопросов ЭМС внутри самолётных
комплексов РЭП индивидуальной защиты. ВСРЭ, серия “Общие вопросы
радиоэлектроники”, вып. 6, 1991.
491
Производственно-практическое издание
Бородин А.М., Усков Н.В.
Проектирование систем радиопротиводействия и радиотехнической разведки
методами моделирования
В авторской редакции
Подписано в печать 9.01.2002 г.
Формат 61 х 86/8. Ризография тир. 500, зак. 124
Отпечатано с готовых диапозитивов в ООО «РВТ», г Бендеры, ул Московская, 30
Тел (232)2-55-70