/

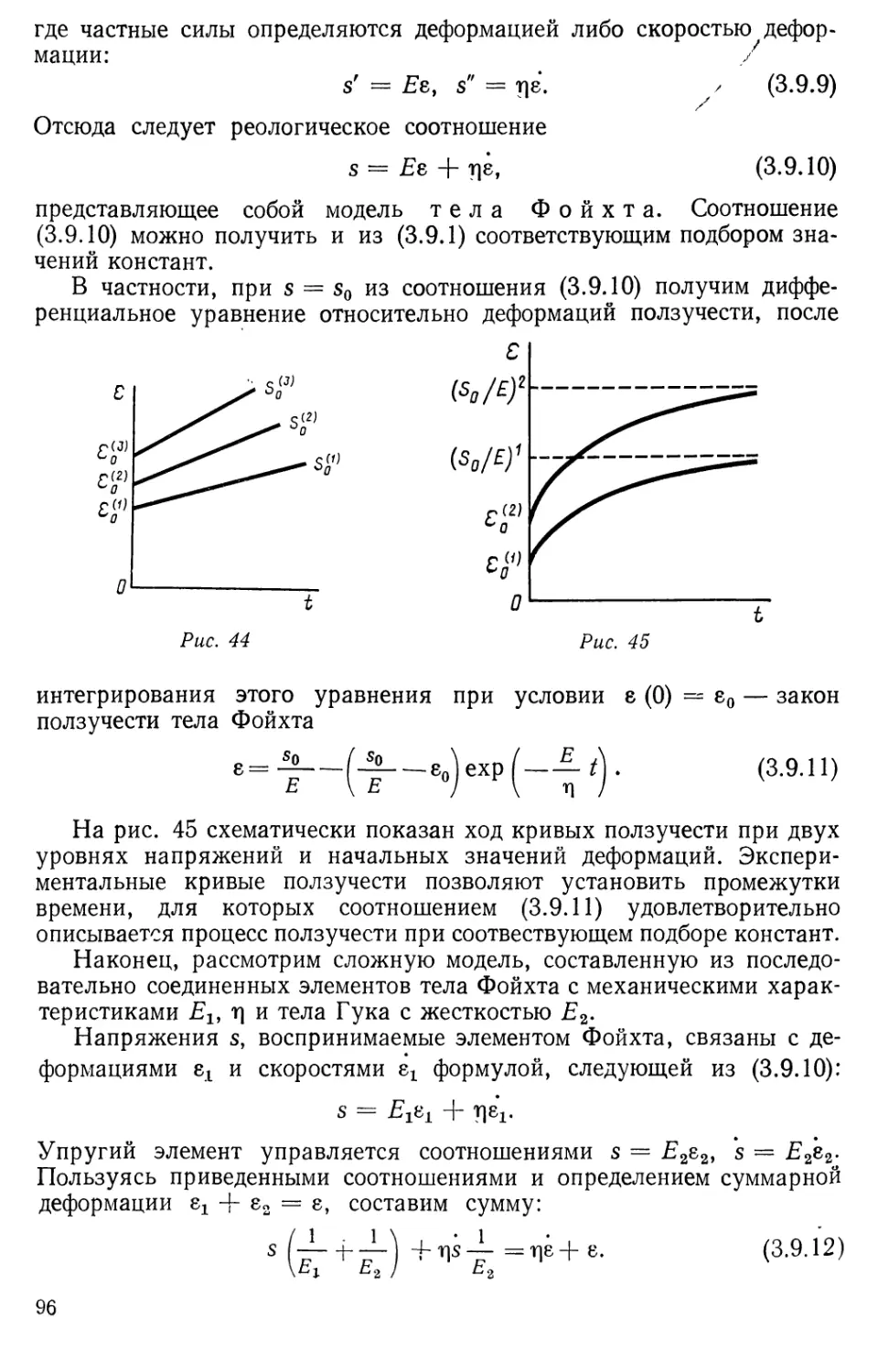






Author: Толоконников Л.А.
Tags: механика деформируемых тел упругость деформация общетехнические дисциплины механика
Year: 1979




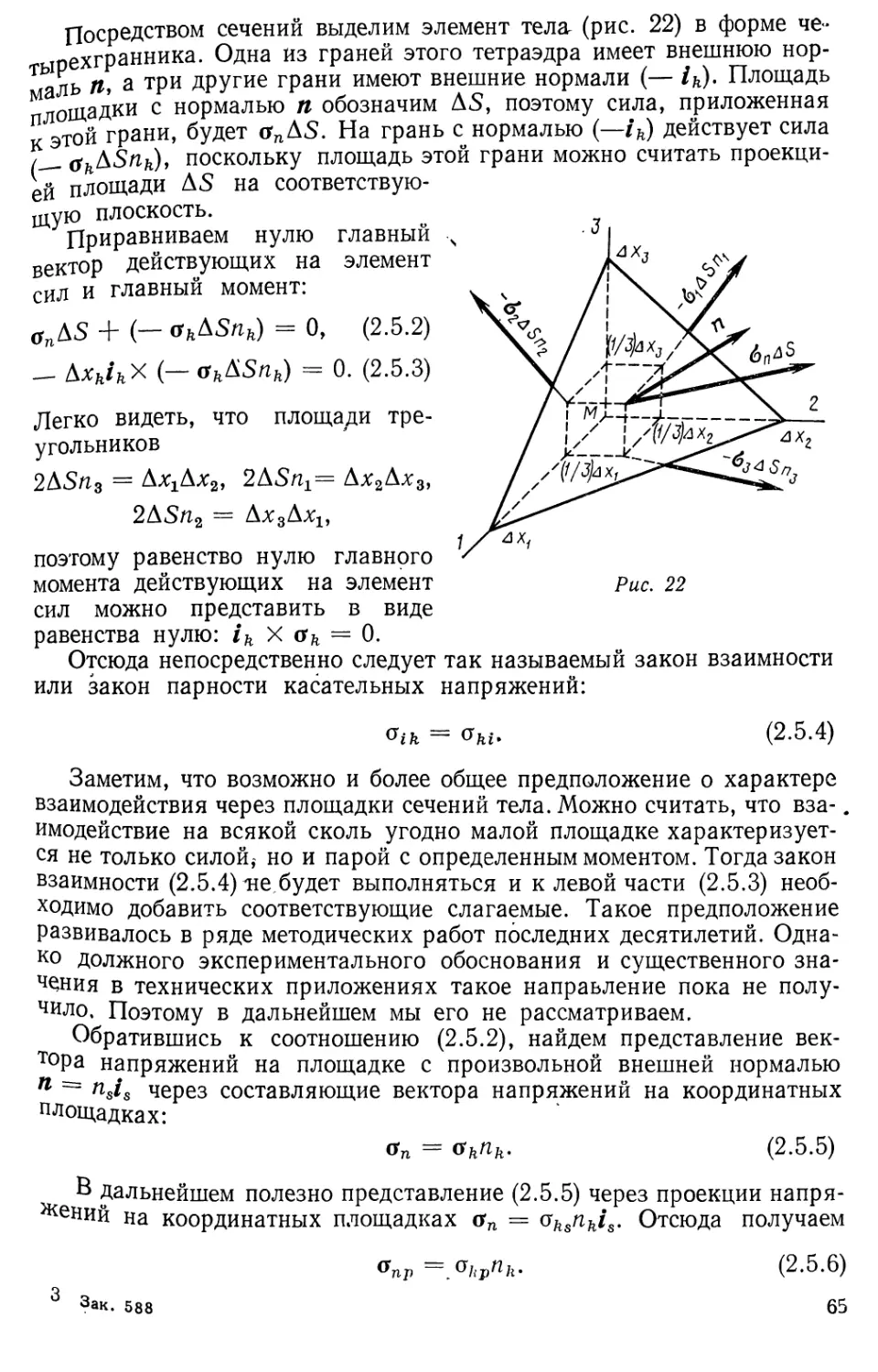
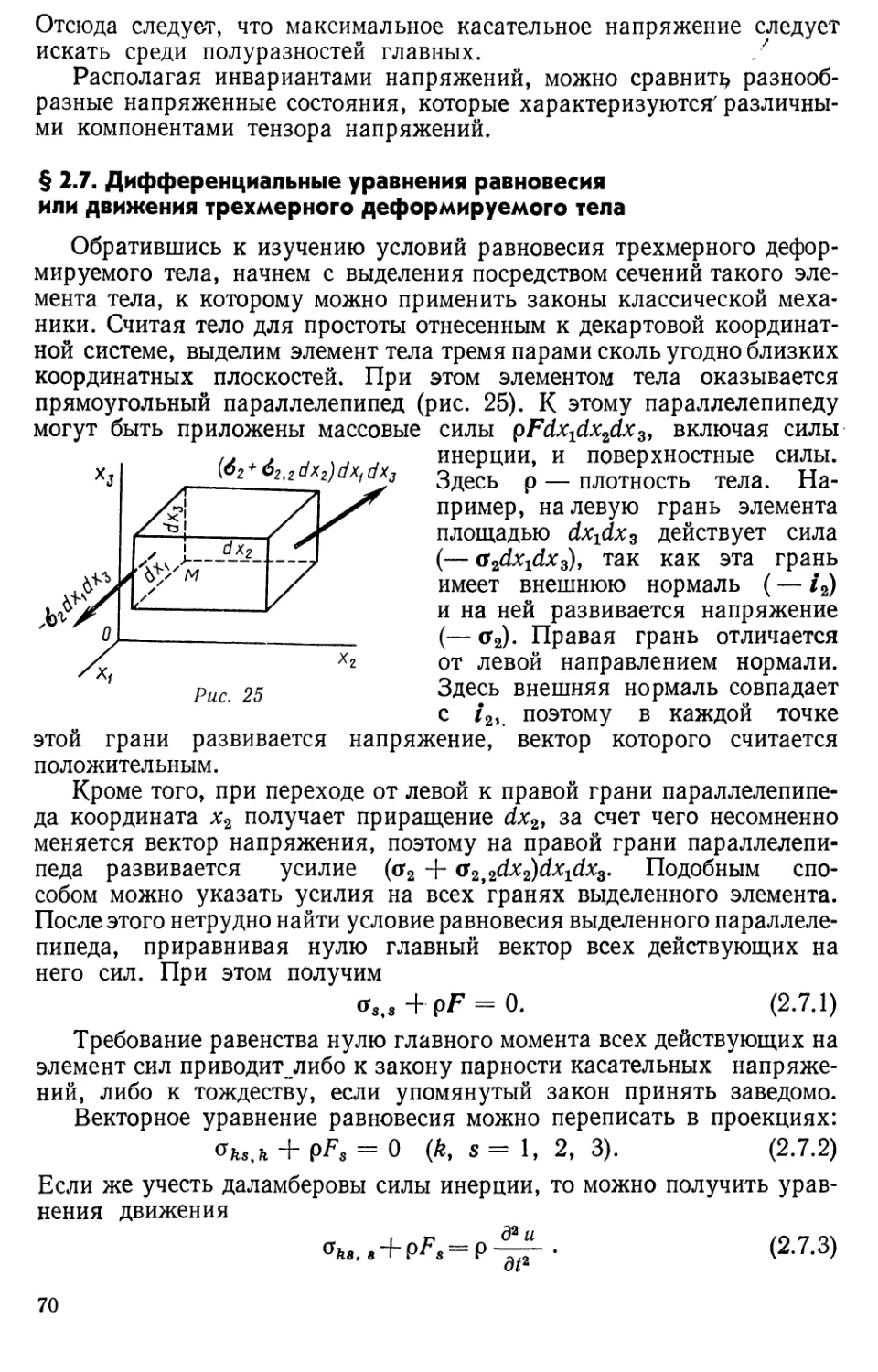
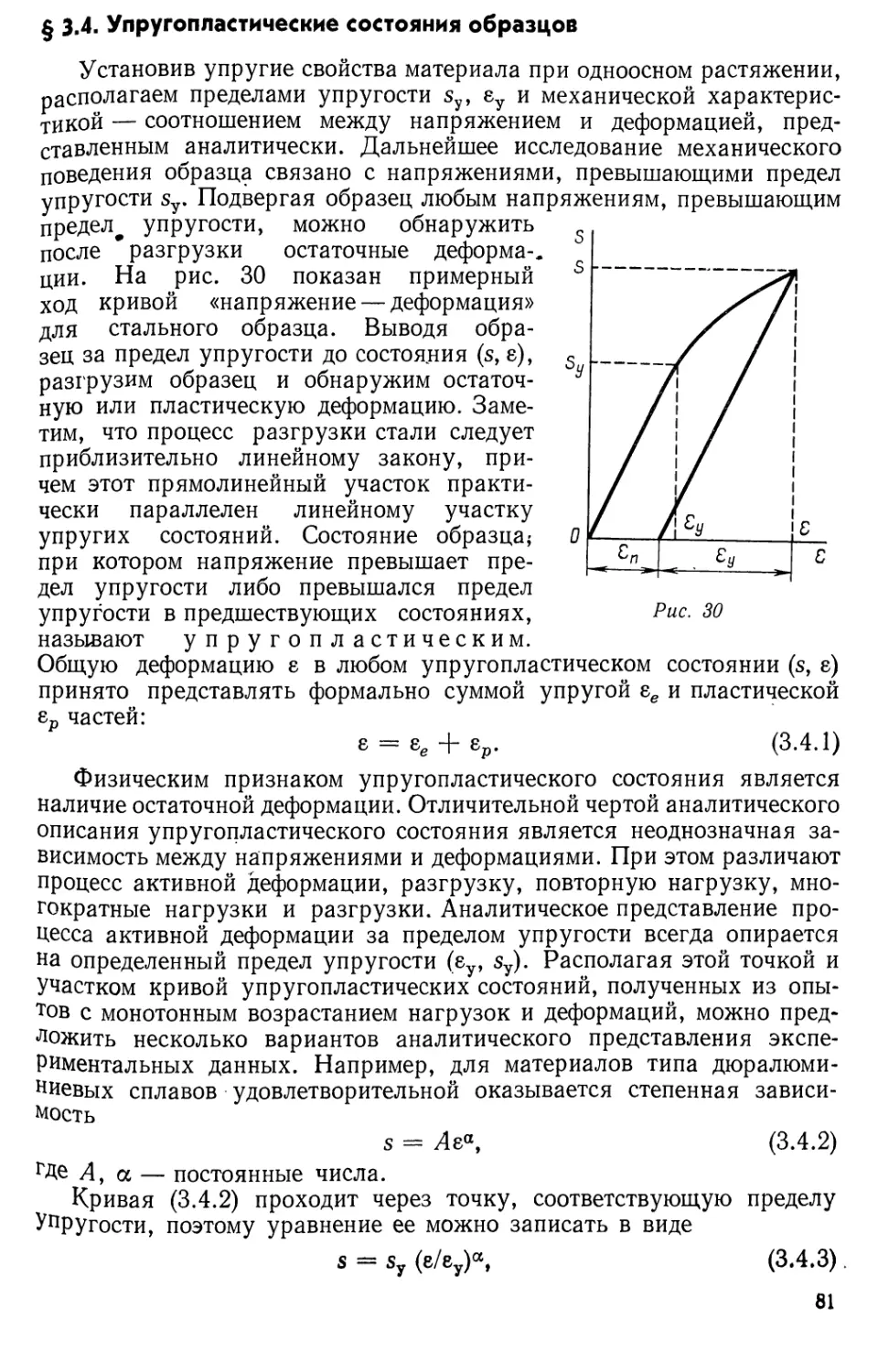
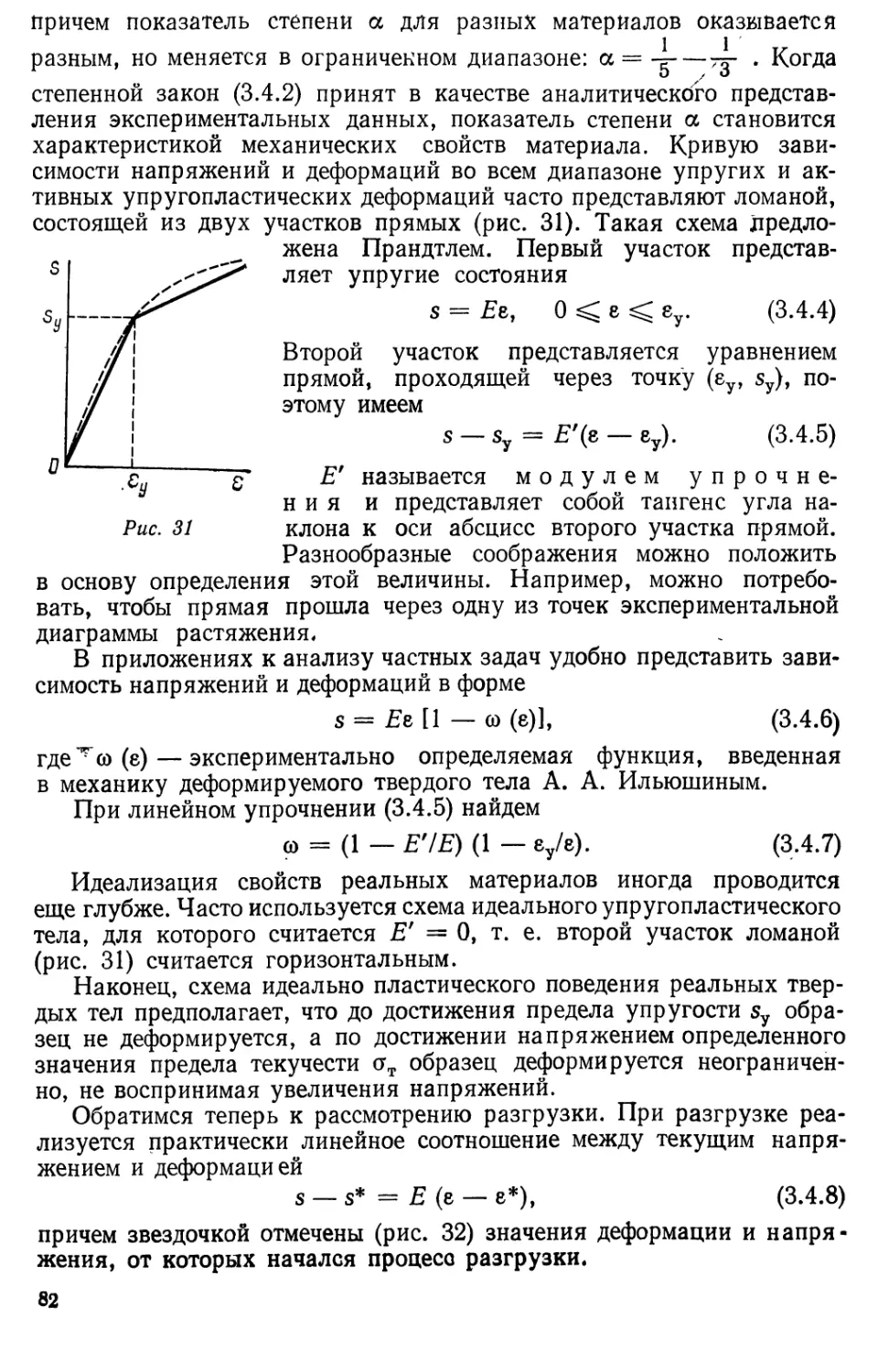
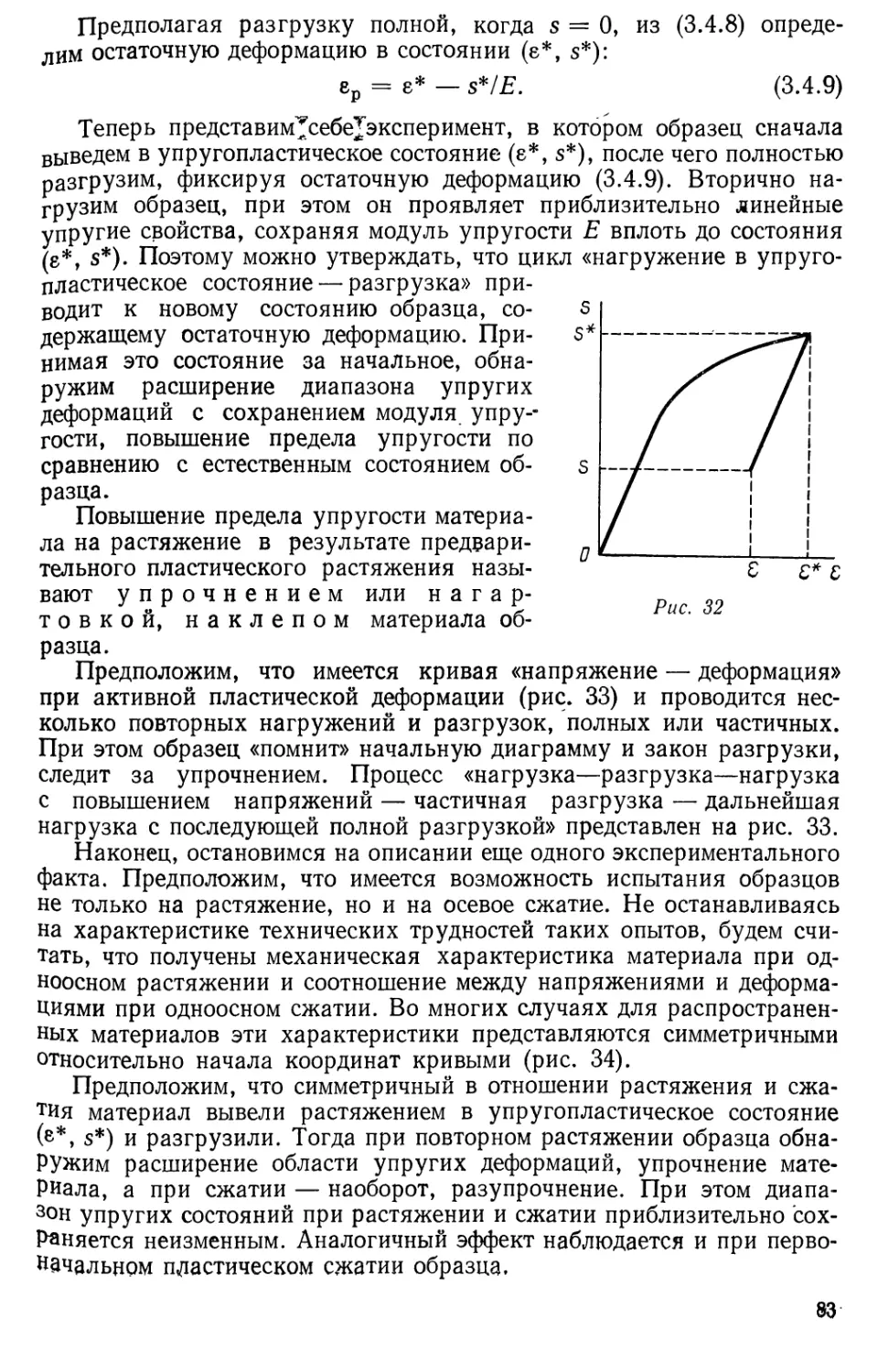
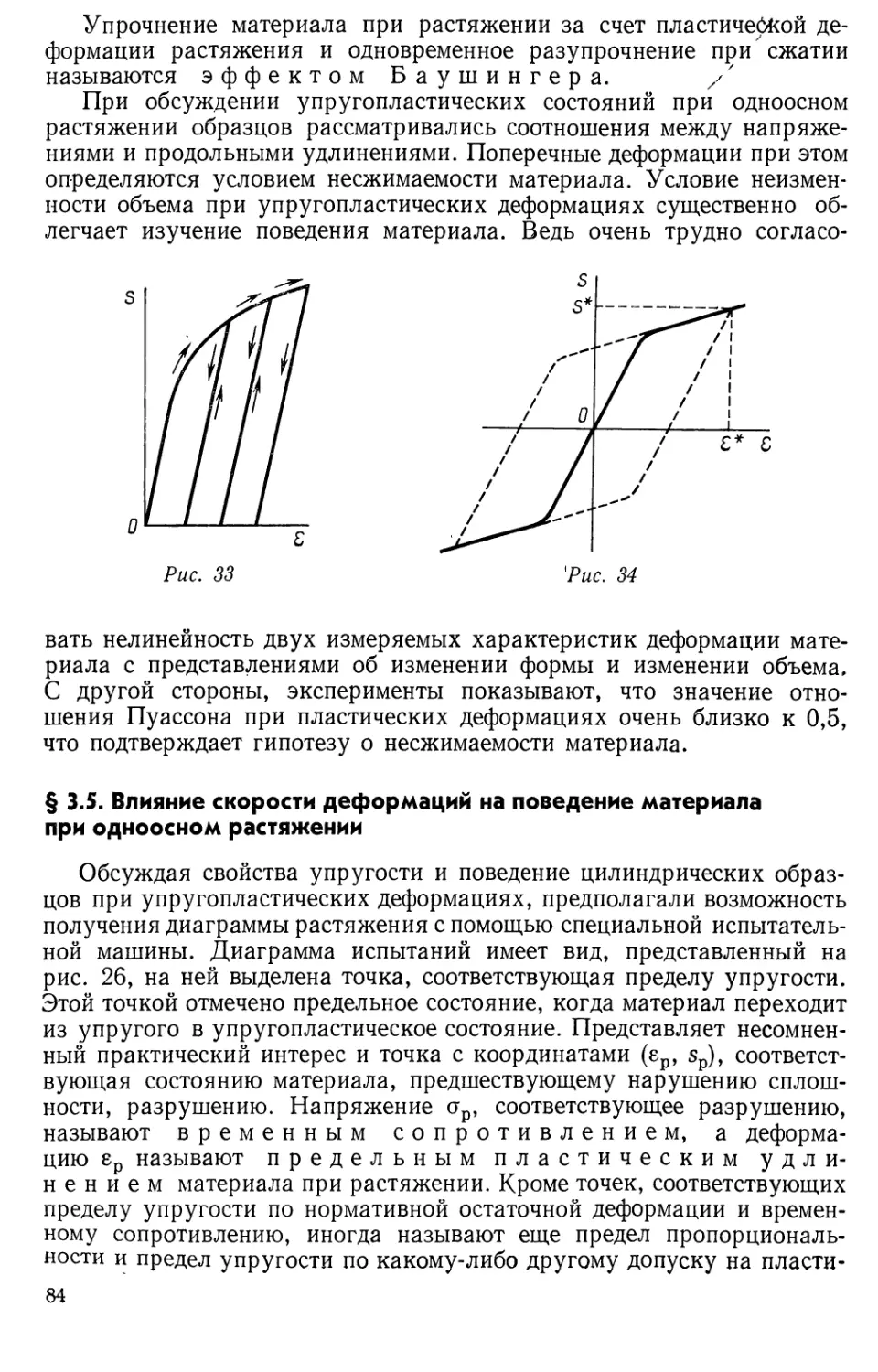
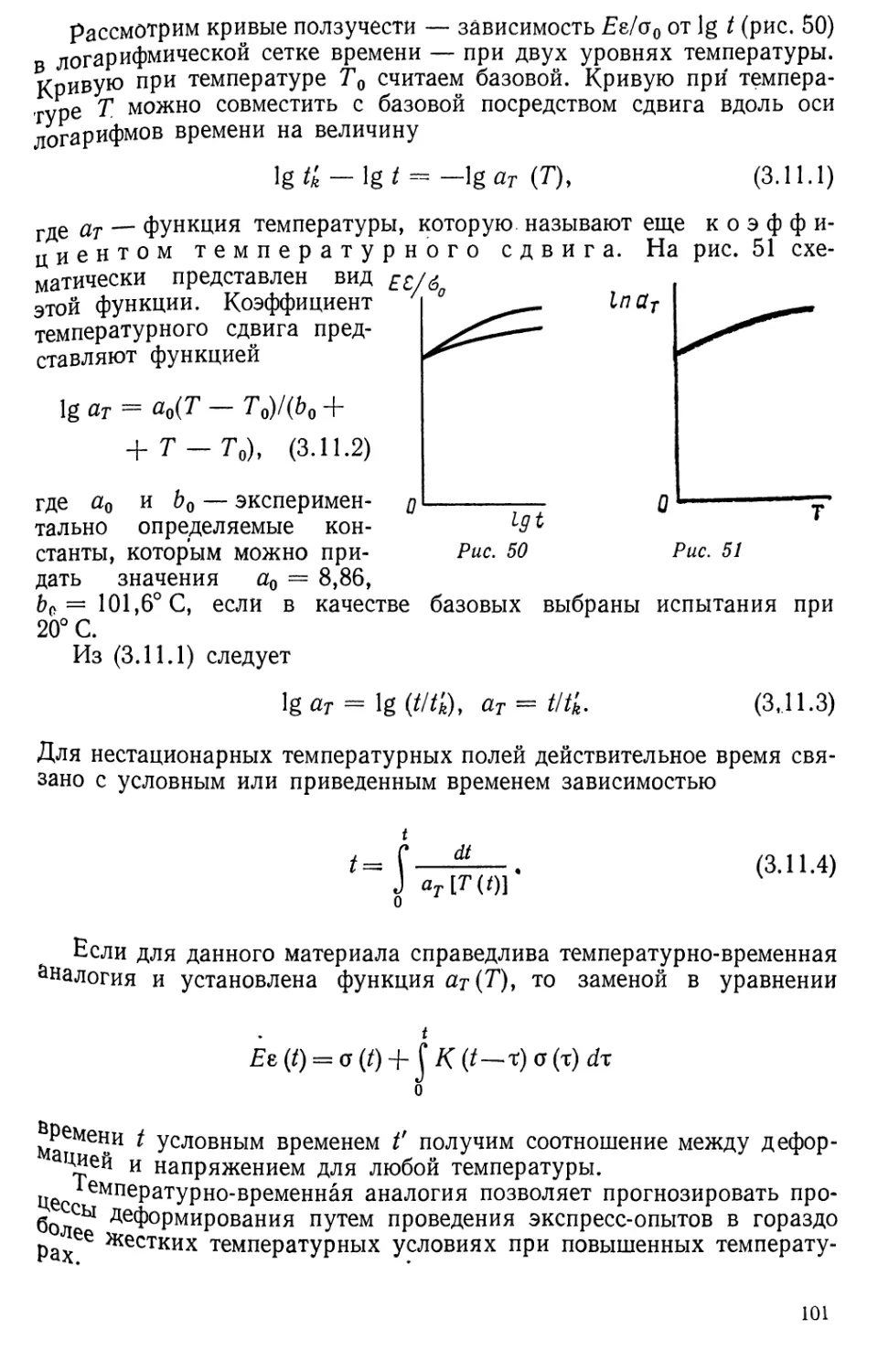
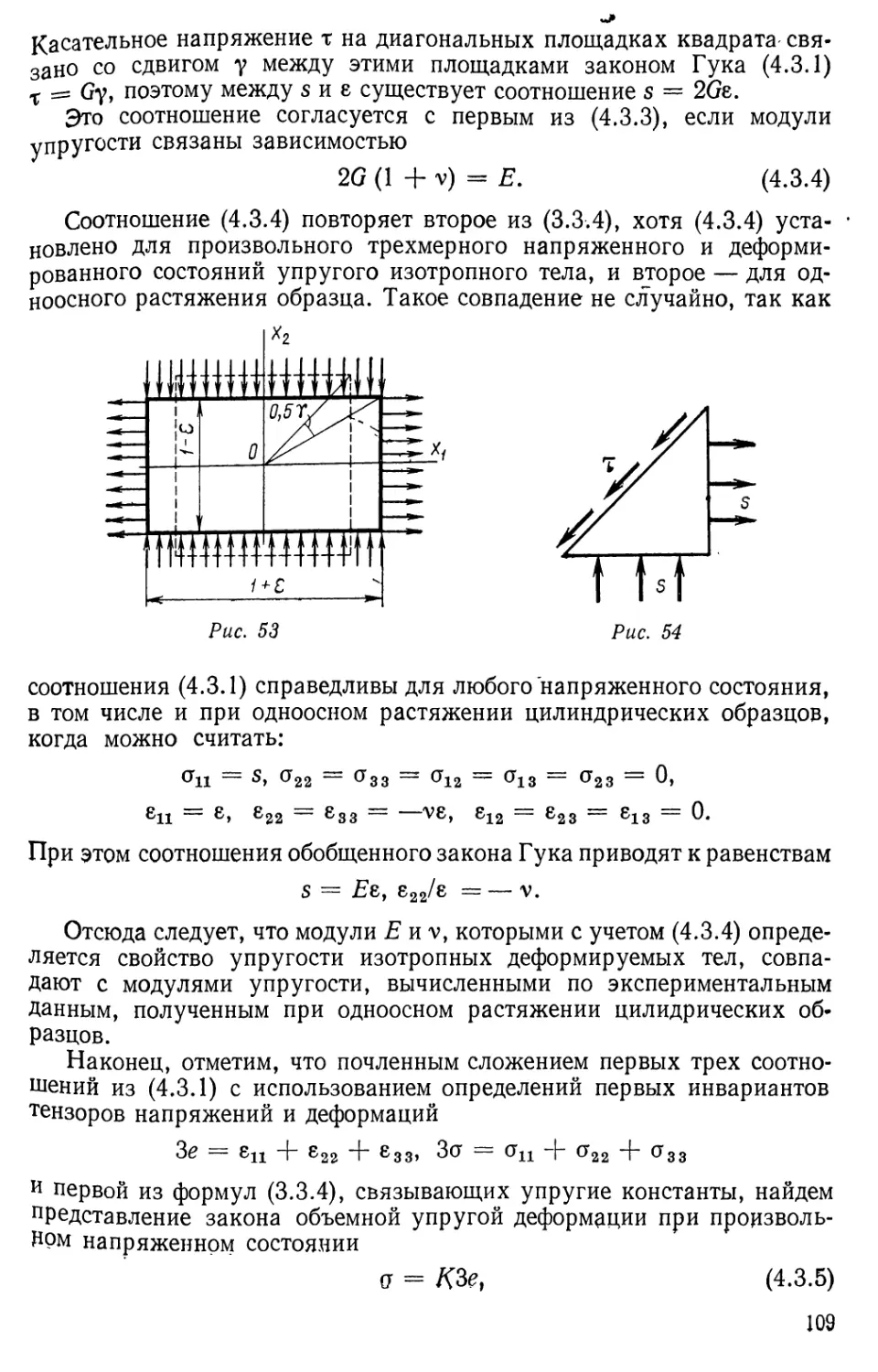
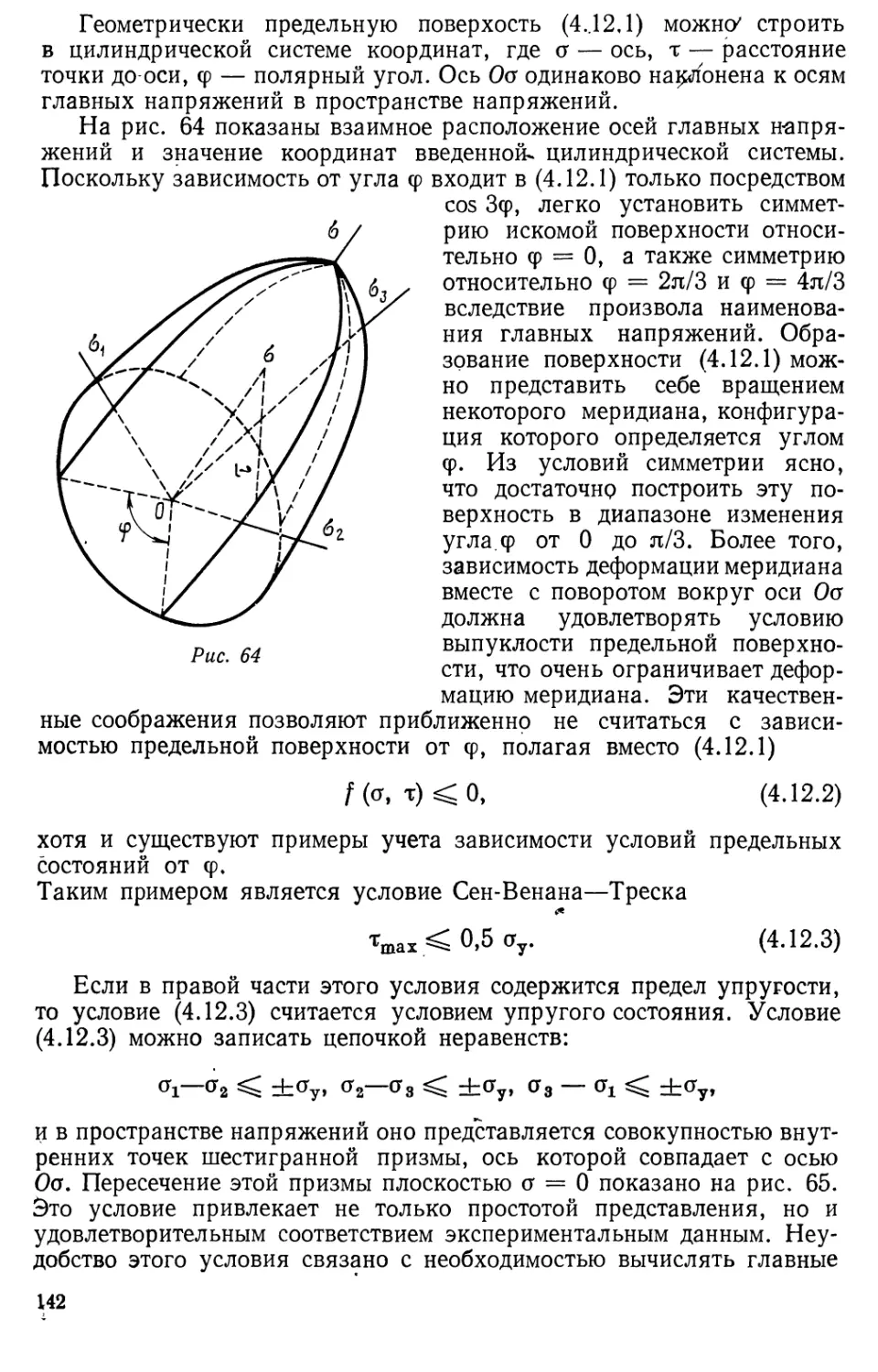
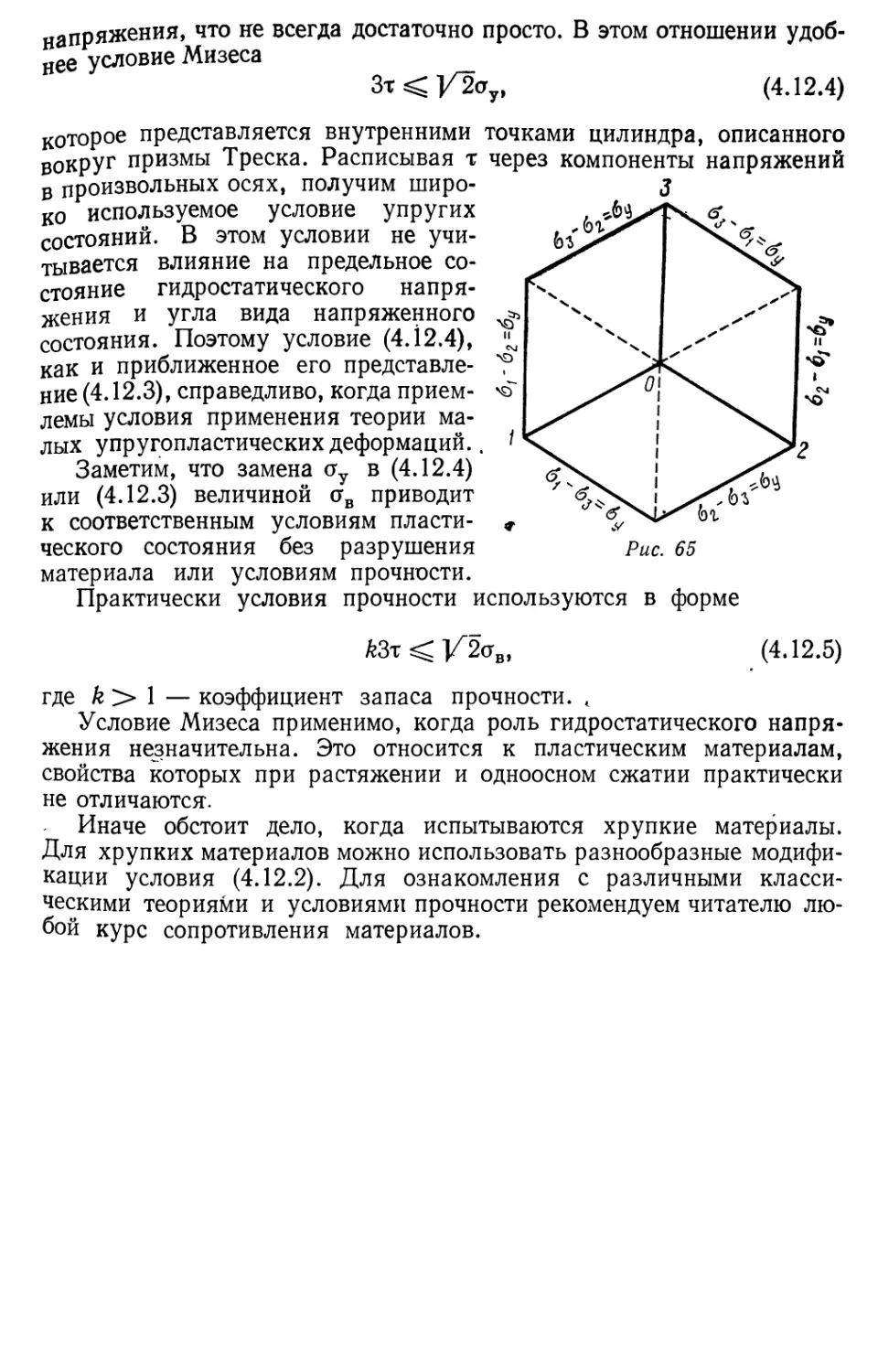
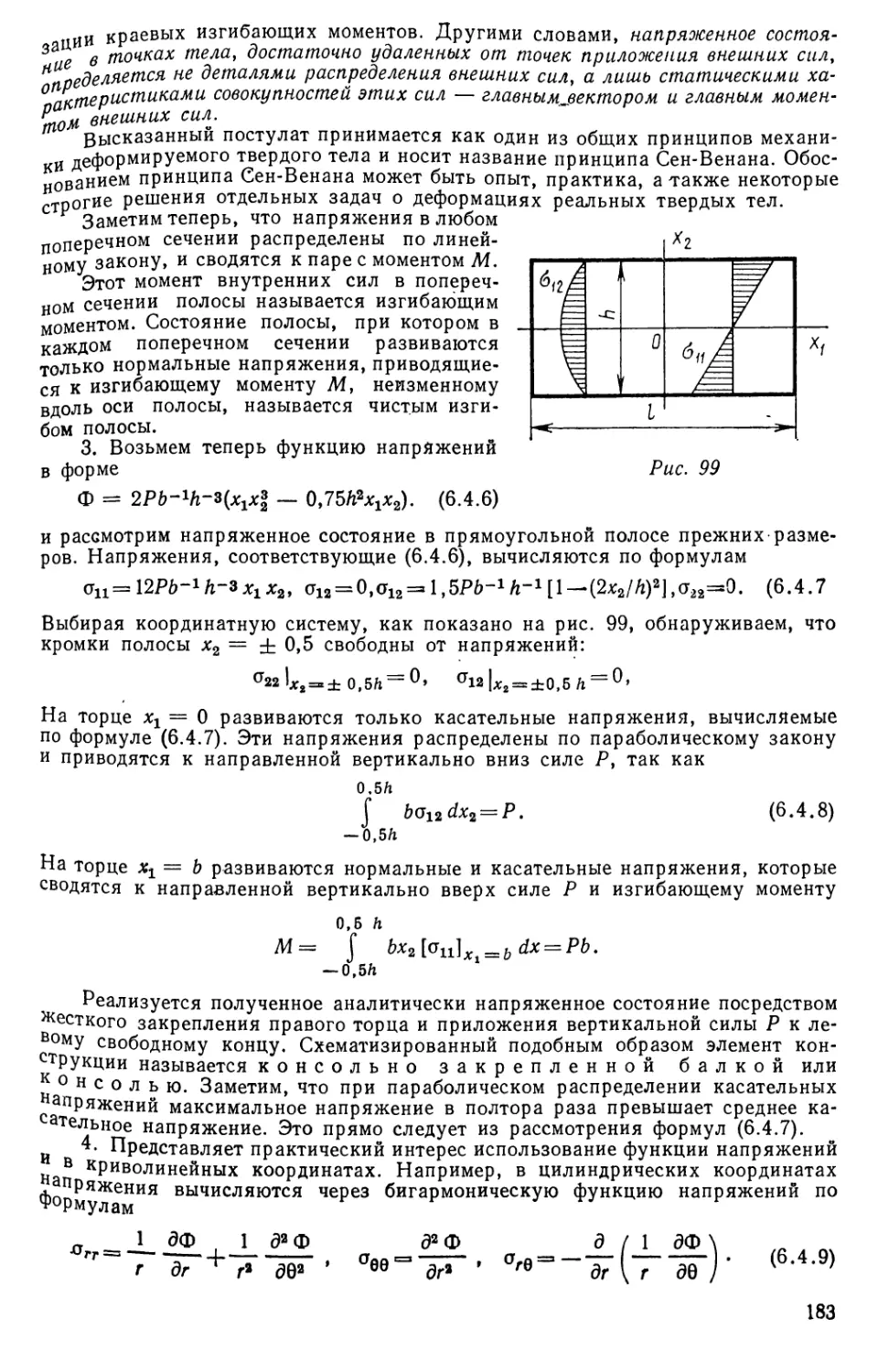
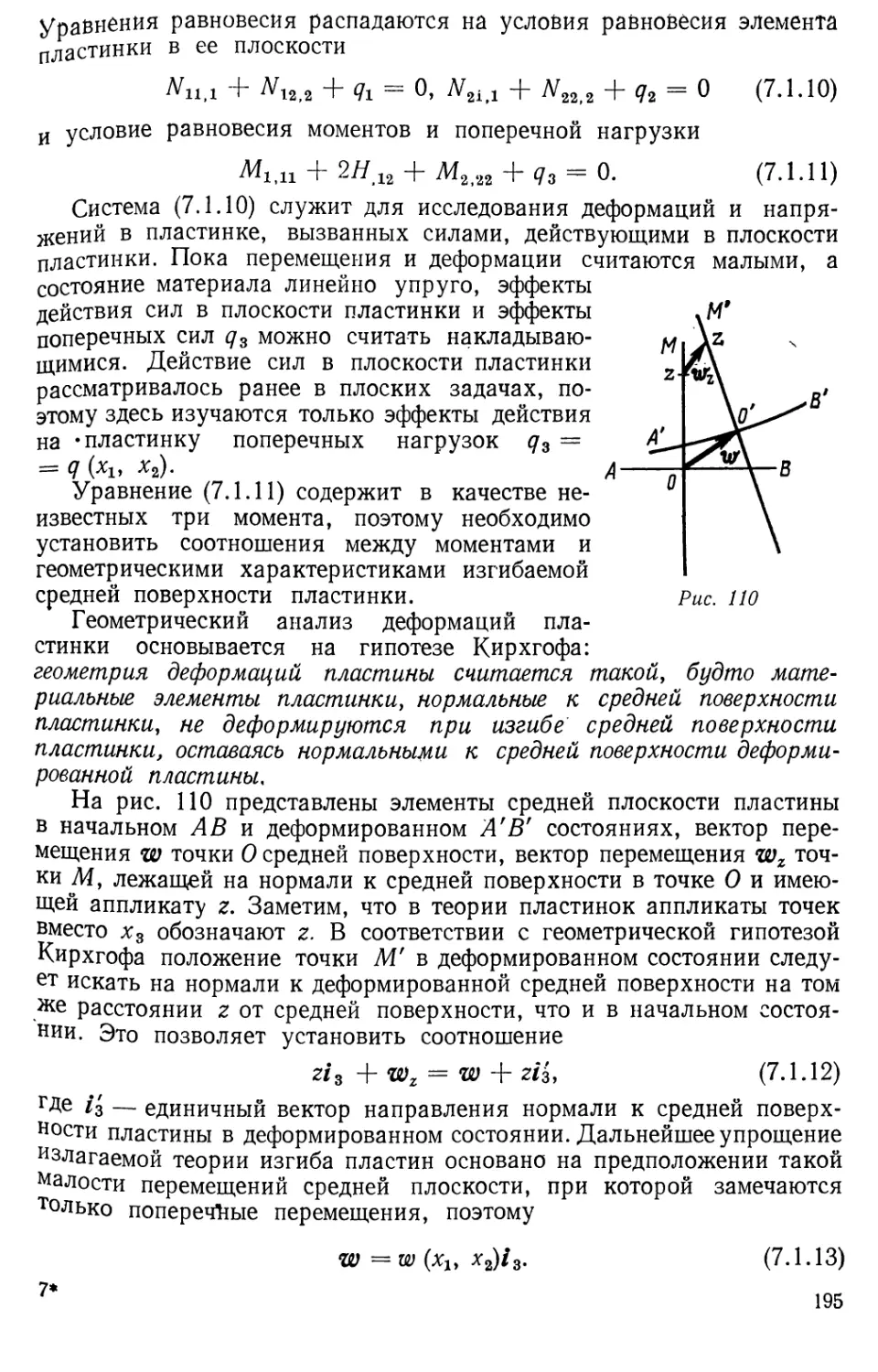
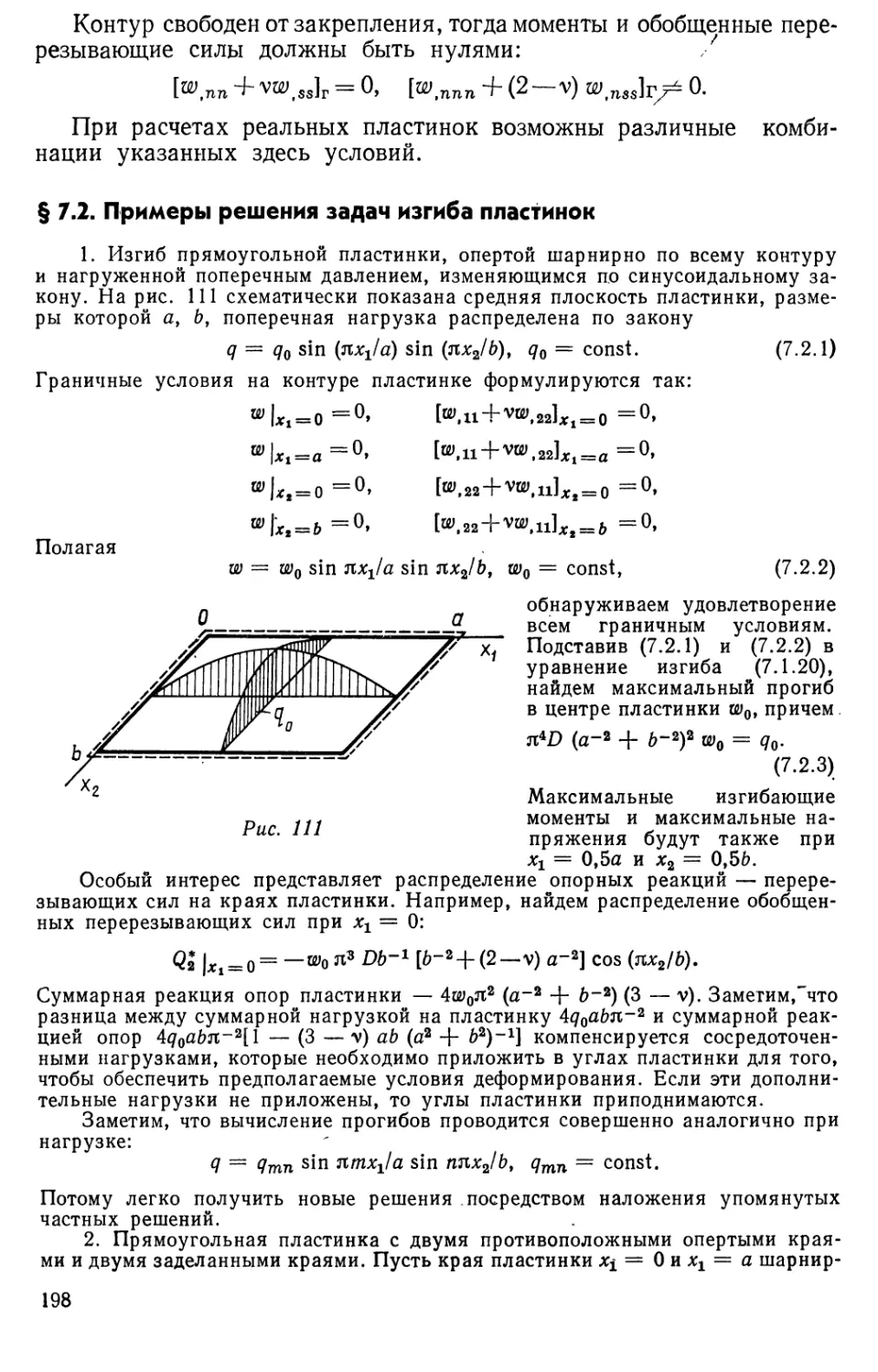
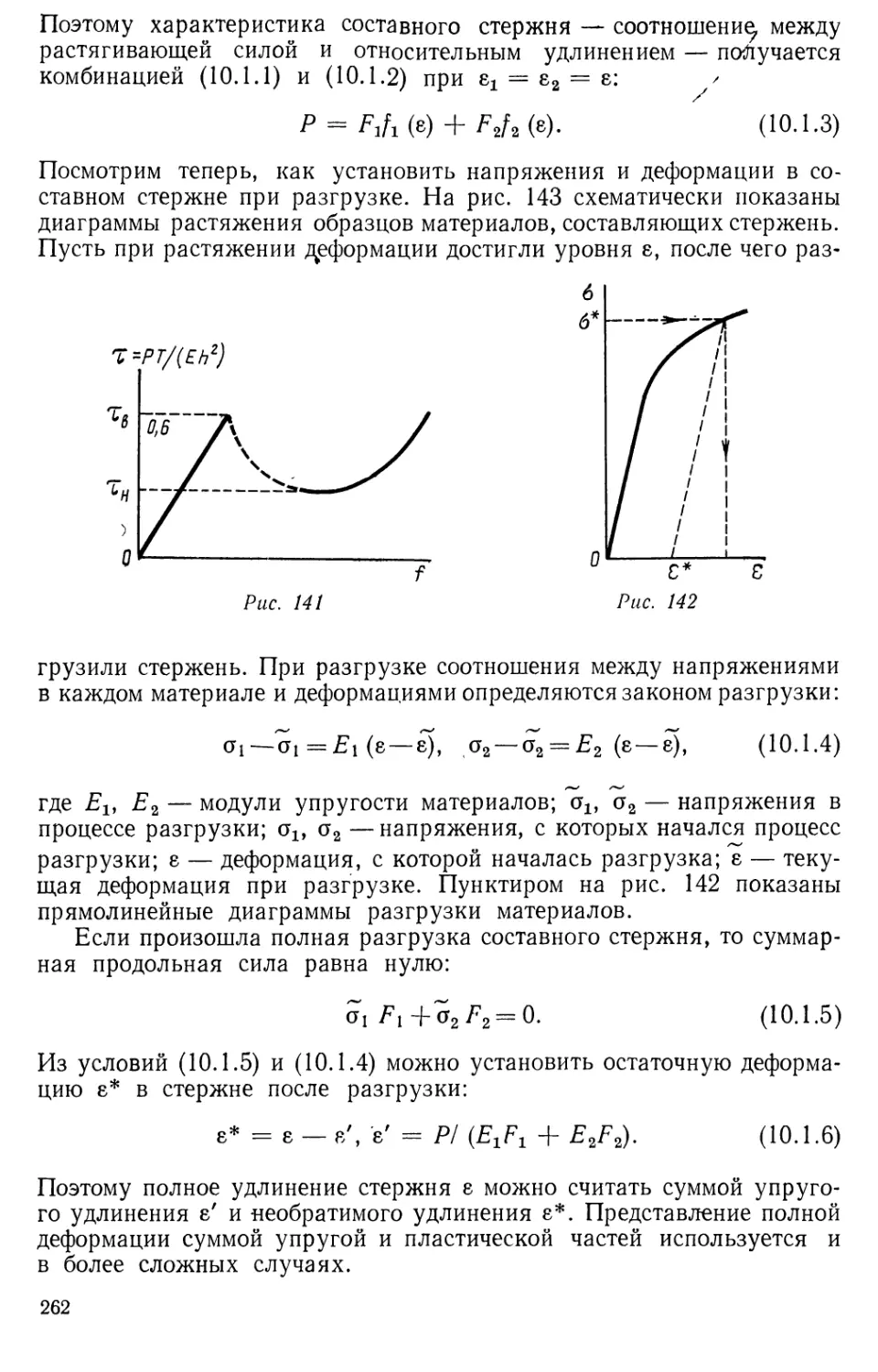
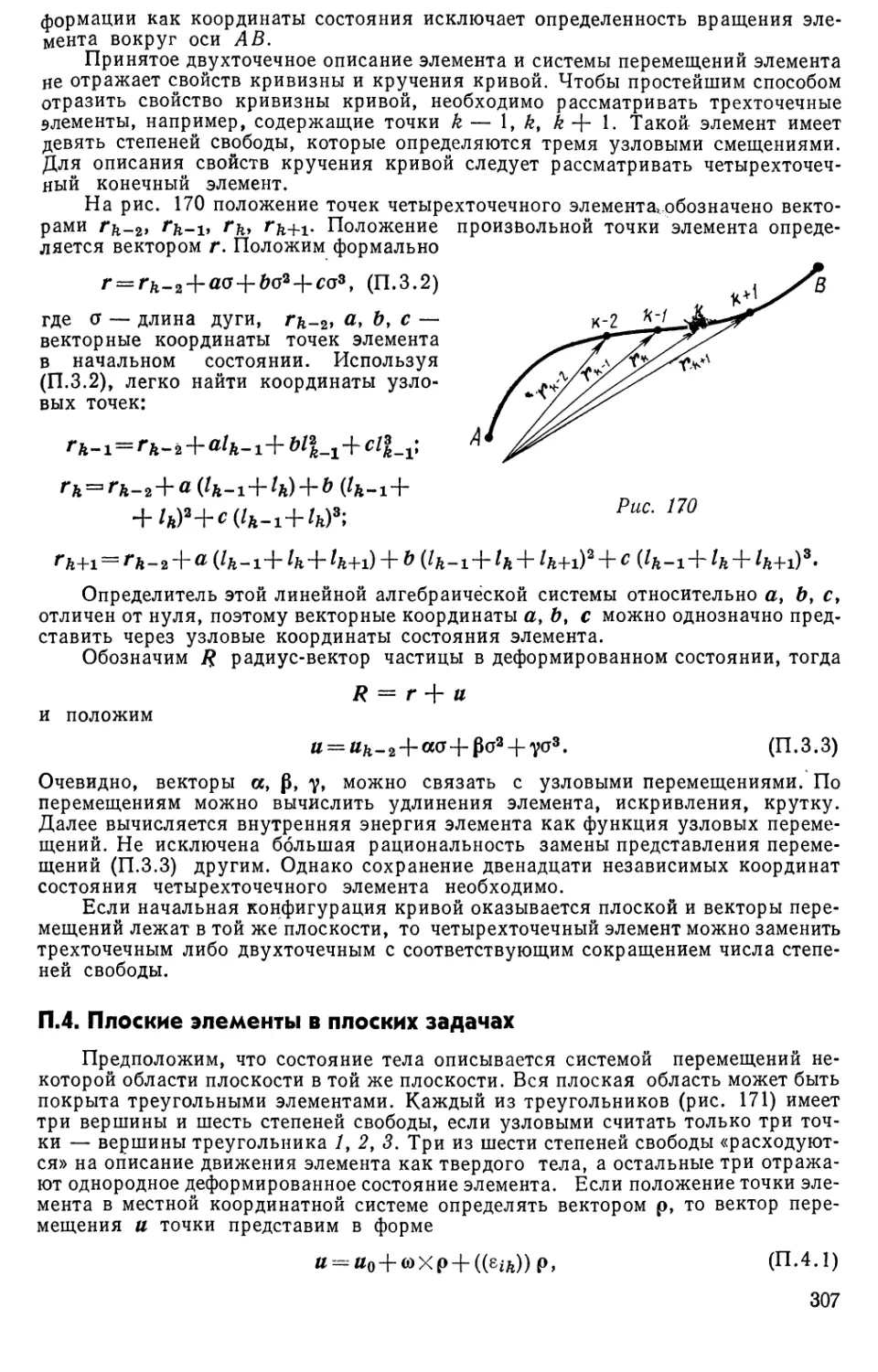
Text
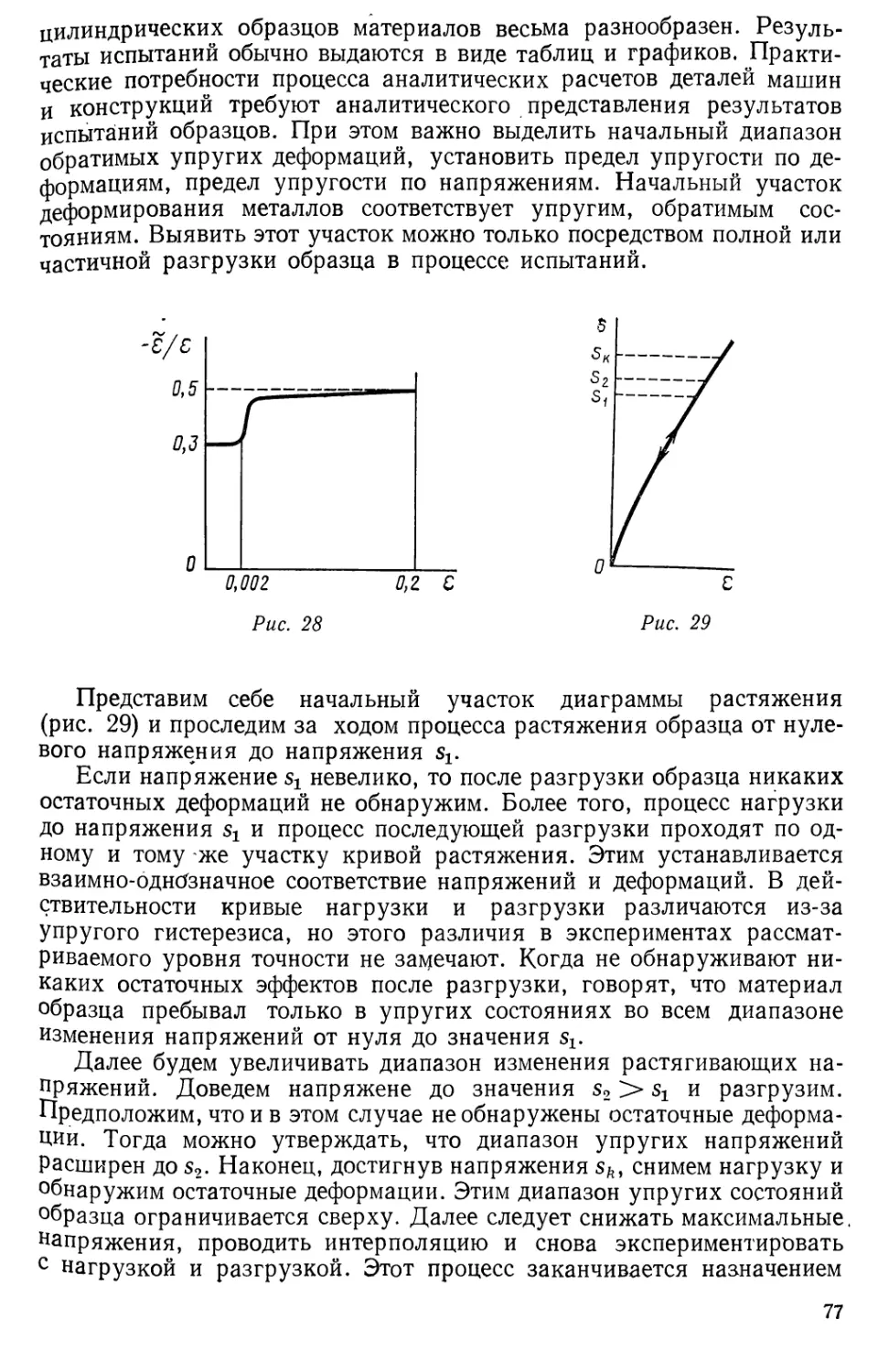
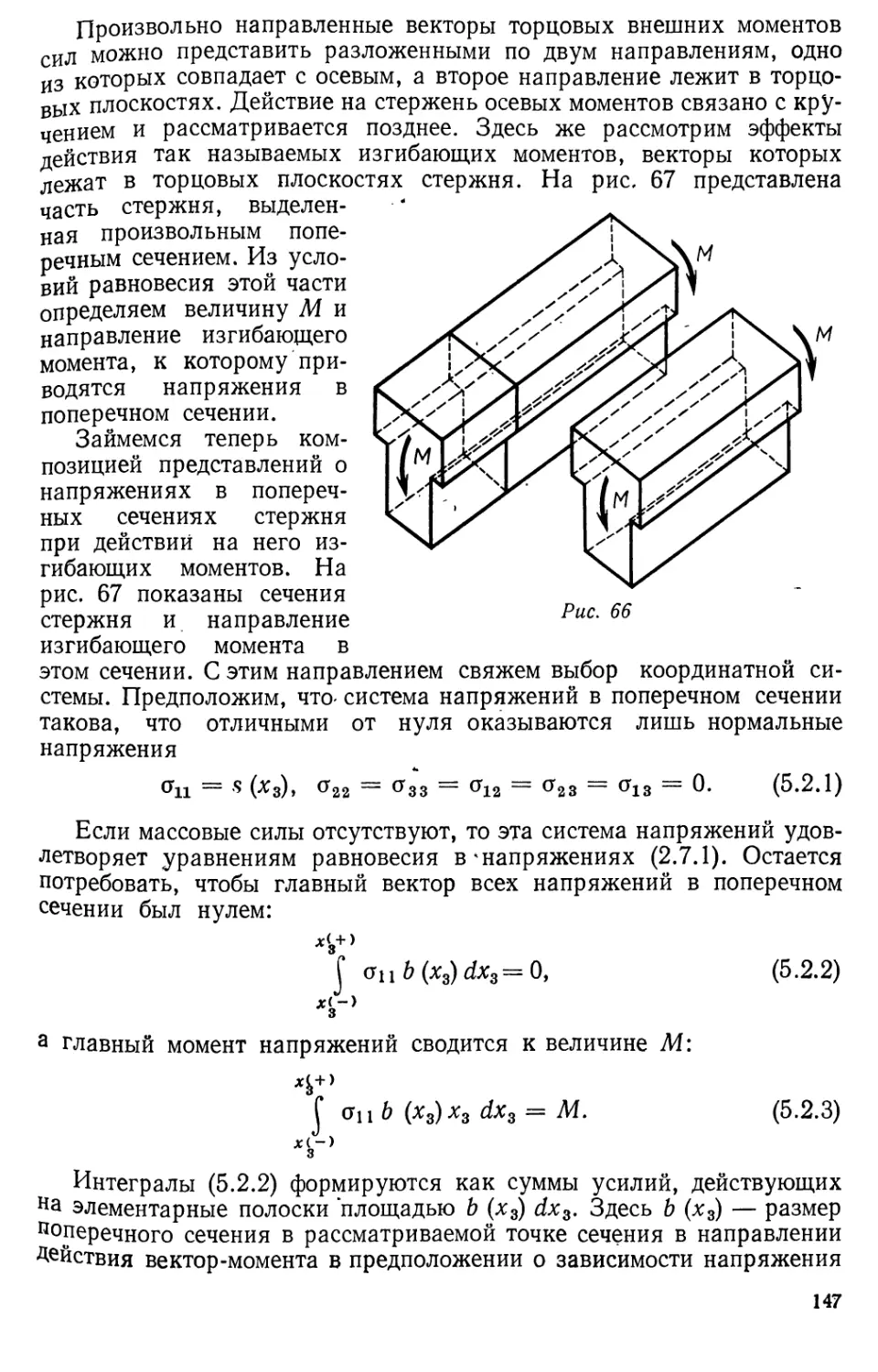
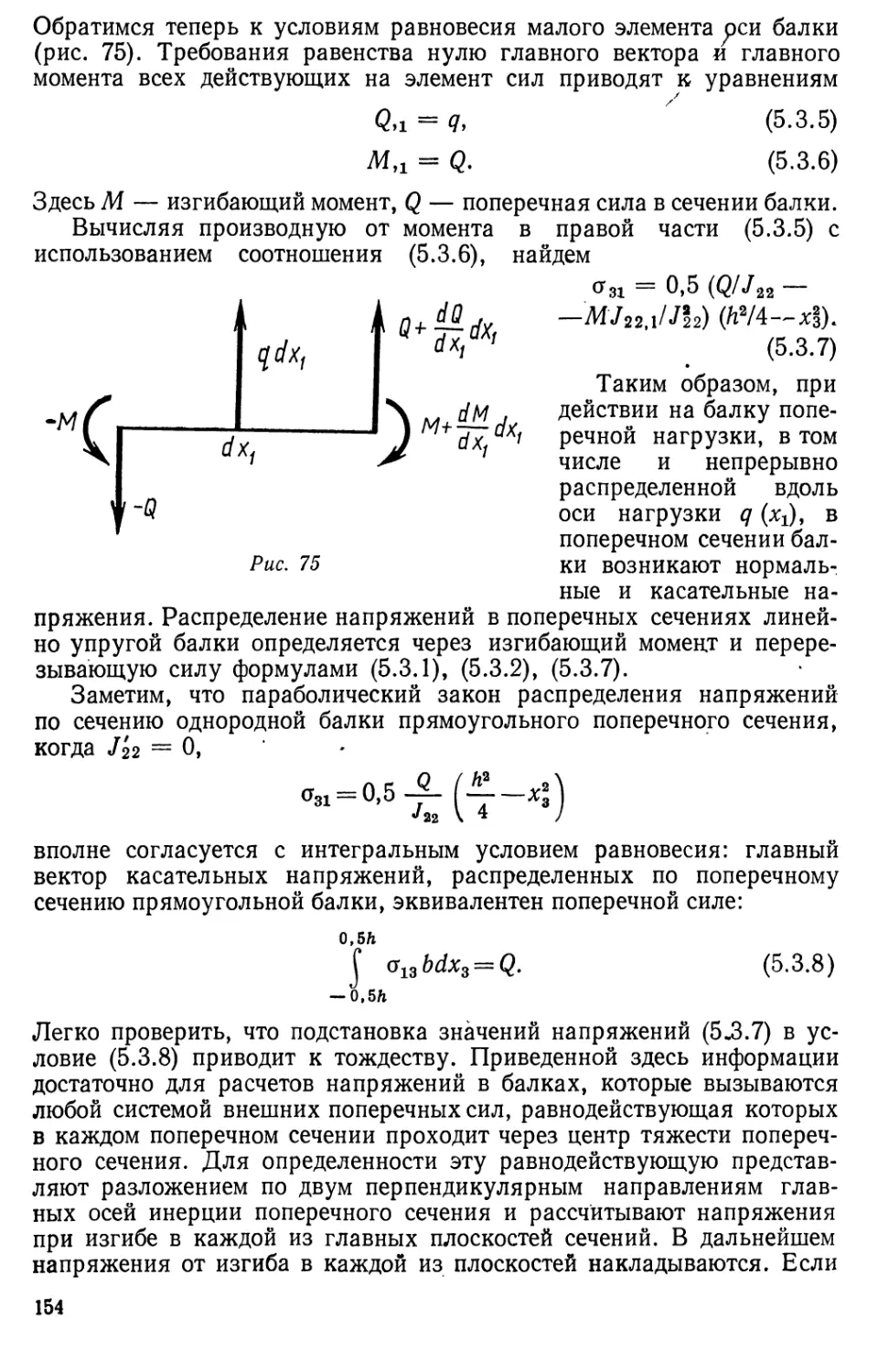
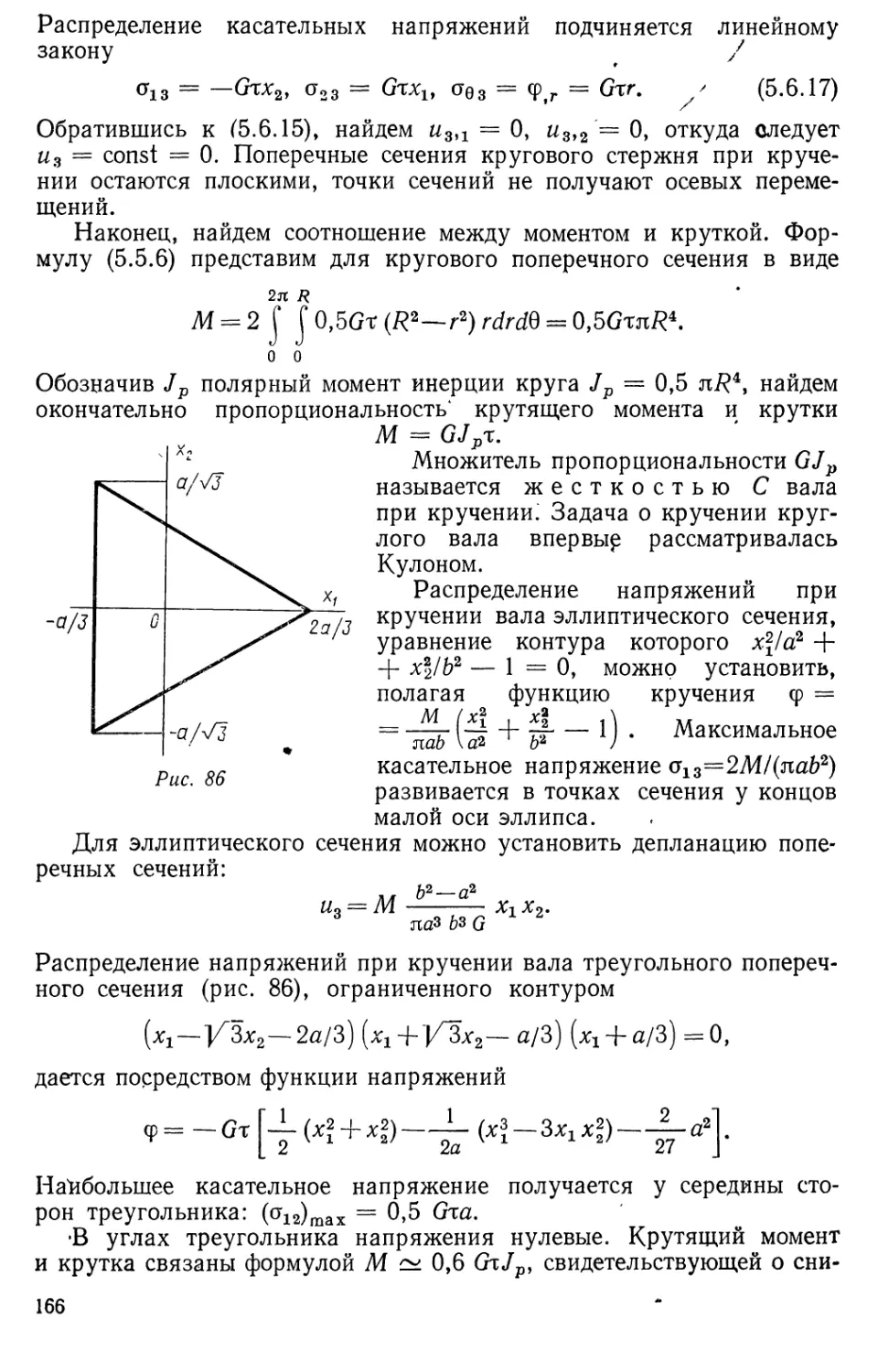
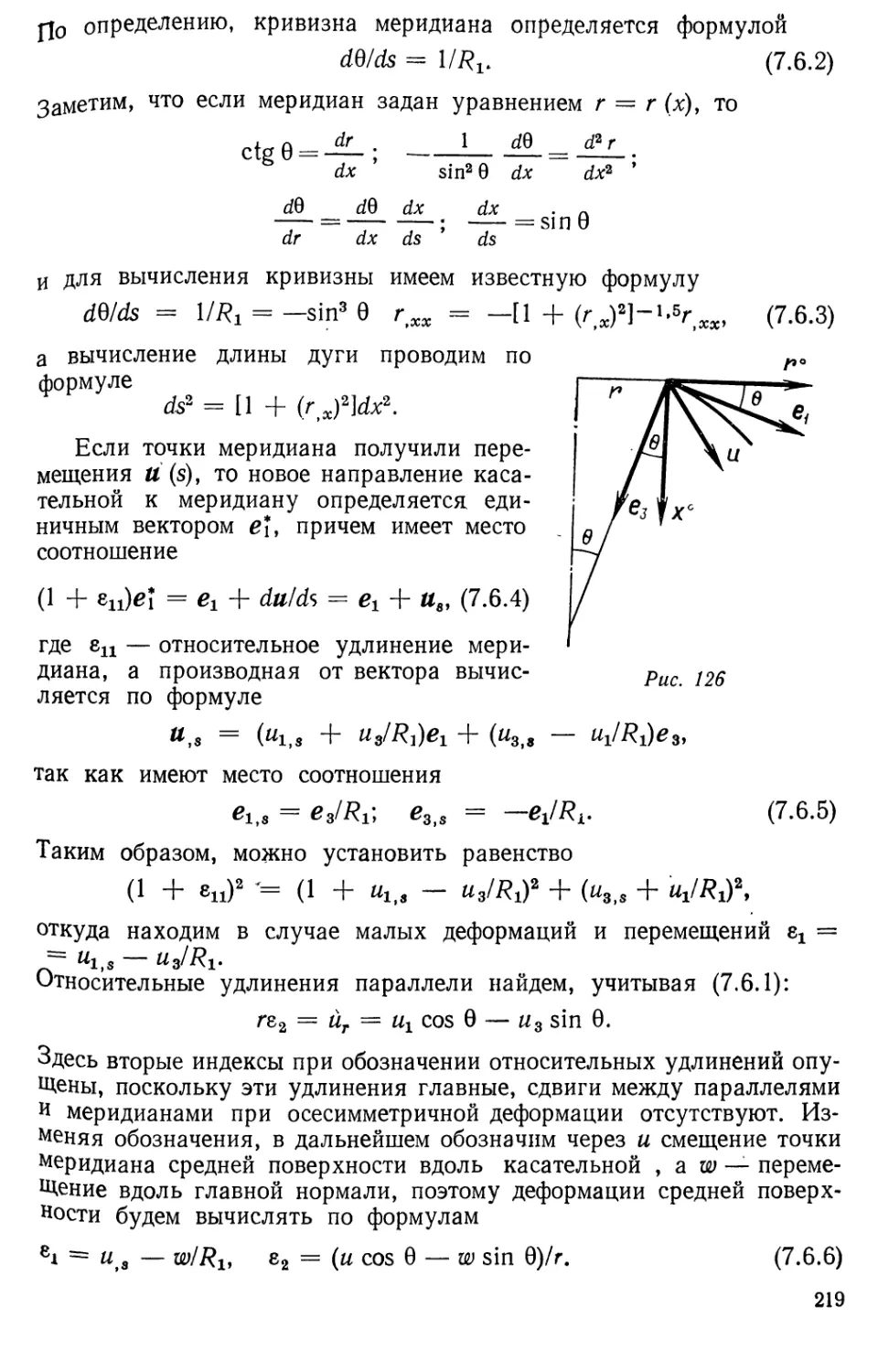
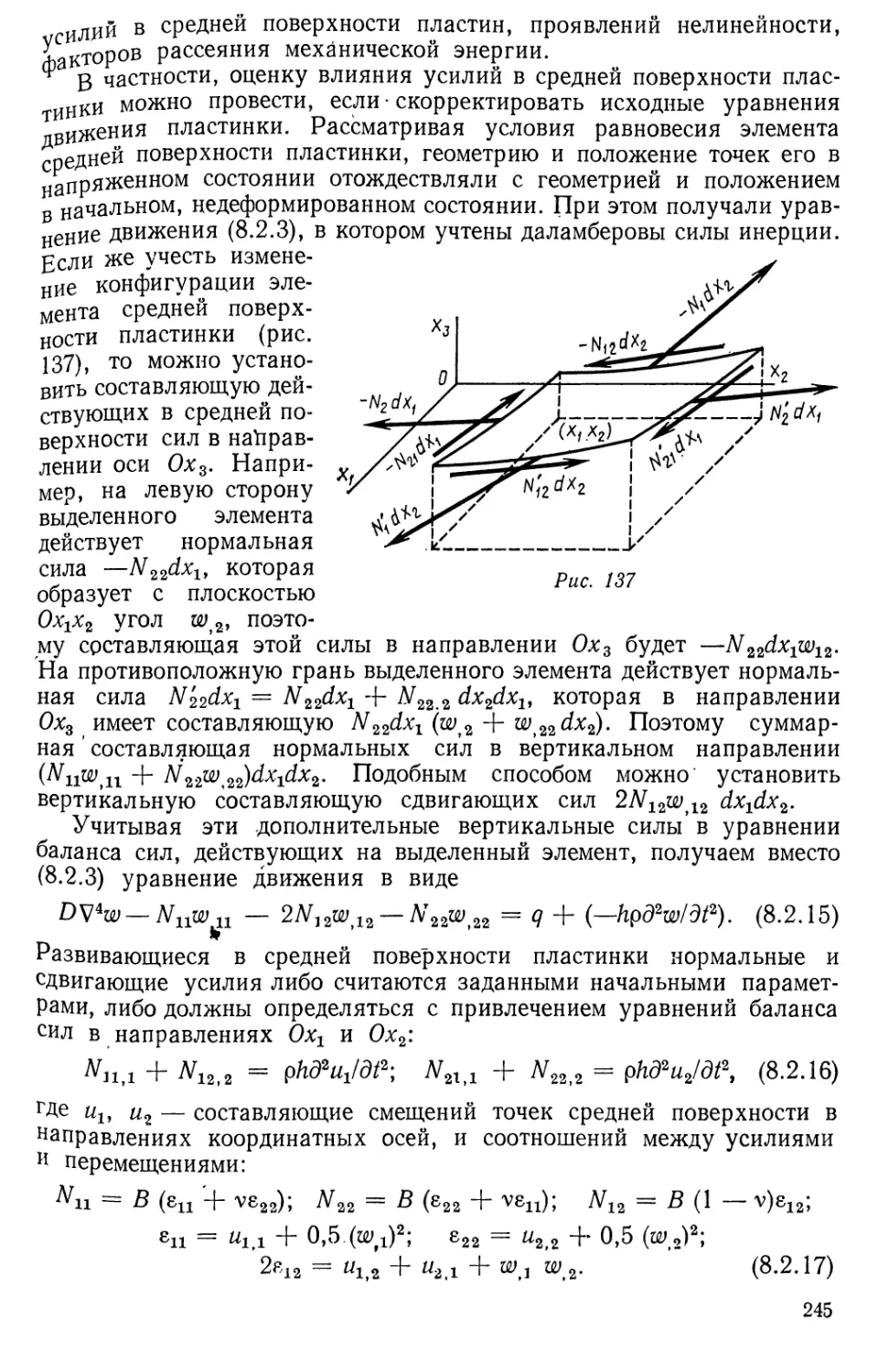
д. толоконников
МЕХАНИКА
ЦЕФОРМИРУЕМОГО
ГВЕРДОГО ТЕЛА
Цопущено Министерством высшего и среднего
специального образования СССР в качестве
учебного пособия для студентов высших
технических учебных заведений
М0СКВА ВЫСШАЯ ШКОЛА 1979
ББК 30.12
Т52
УДК 539.3(075)
Рецензенты:
кафедра «Сопротивление материалов» Московского станкоинструм1
тального института (зав. кафедрой — проф. Тарабасов Н. Д*
Лужин О. В. — докт. техн. наук, профессор Московского инженеру
строительного института.
Толоконников Л. А.
Т52 Механика деформируемого твердого тела: Учеб. поеоби^
для втузов. — М.: Высш. школа, 1979.— 318 с, ил.
В пер.: 1 р.
В книге дано систематическое изложение основ механики деформируемого твер
дого тела в упругих, упругопластических и упруговязких состояниях. Построень
основные соотношения, даны методы их экспериментального обоснования, метода
решения задач теории упругости, пластичности и вязкоупругости и приведены при
меры решения практически важных научных и инженерных задач.
m 20304-260 605
Т „+, ,ч 88—79 1703040000 ,
001(01)—79 ББК 30.12
© Издательство «Высшая школа», 1979
РЕДИСЛОВИЁ
В книге изложены основы построения механики деформируемого
*ердого тела, методы и примеры решения задач, связанных с
отработай технических условий и норм проектирования объектов
строительна, машиностроения, приборостроения и др., где приходится иссле-
звать механическое поведение реальных твердых тел. С достаточной
эщностью представлены теория деформаций одномерных, двухмерных,
эехмерных объектов, разнообразные системы инвариантов, позволя-
щие обсуждать свойства реальных материалов не только при малых,
о и конечных деформациях.
Приводятся основные результаты общей теории напряжений, физи-
еское значение инвариантов напряжений, формулируются уравнения
авновесия в декартовых и криволинейных координатах. Определены
войства реальных деталей машин и конструкции: упругость, пластич-
ость, вязкоупругость. Приведенные гипотезы и экспериментальные
»акты позволяют строить основные соотношения различных разделов
механики деформируемого твердого тела, формулировать математиче-
кую постановку задач теории упругости, теории пластичности, тео-
»ии вязкоупругости.
Во второй части изложены некоторые частные задачи и методы ре-
нения задач сопротивления материалов, теории упругости, пластич-
юсти, вязкоупругости.
Содержание книги предлагается как альтернатива традиционного
учебного курса сопротивления материалов, расширяющая
возможности начала самостоятельных исследований студентов, углубляющая
леханико-математическую подготовку и открывающая широкие воз-
ложности применения современной вычислительной техники.
Хочется надеяться, что и инженеры, исследователи прочности,
«есткости, устойчивости элементов конструкций и машин найдут
в книге полезные разделы.
Автор
ВВЕДЕНИЕ
Механика деформируемого твердого тела — наука о равновес
и движении реальных тел с учетом изменений расстояний между ч;
тицами в процессе движения. Предполагается, что материальные э;
менты тела сплошным образом 'заполняют некоторый объем простраш
ва, ограниченный одной или несколькими непрерывными поверхноп
ми. Считаются определенными некоторое начальное состояние тел
условия внешней среды, температура начального состояния. Задан:
ся внешние силы, изменения температуры и других условий внешй
среды. Требуется установить эффекты действия внешних сил, изменен]
температуры. В механике деформируемого твердого тела изучают
только эффекты, проявляющиеся в деформациях тела — изменение
формы, объема тела, вызванных изменениями расстояний между м;
териальными частицами тела, изменениями углов между материал
ными частицами тела, изменениями площадей. Выявляющиеся в д
формациях эффекты действия внешних сил называют механ]
ческими.
Механика деформируемого тела —' одна из фундаментальных ecu
ственных наук — служит основой многочисленных рекомендаций и кс
личественных соотношений, которые используются при расчетах и прс
ектировании технических объектов — разнообразных сооружени
и машин, технологических процессов обработки материалов давл(
нием, резанием, добычи полезных ископаемых, прогнозирования горо
образования или поведения мышц спортсмена. Как и во всякой нау
ке, в механике деформируемого твердого тела имеются предме
изучения, метод и история развития. Для описания упомянуты:
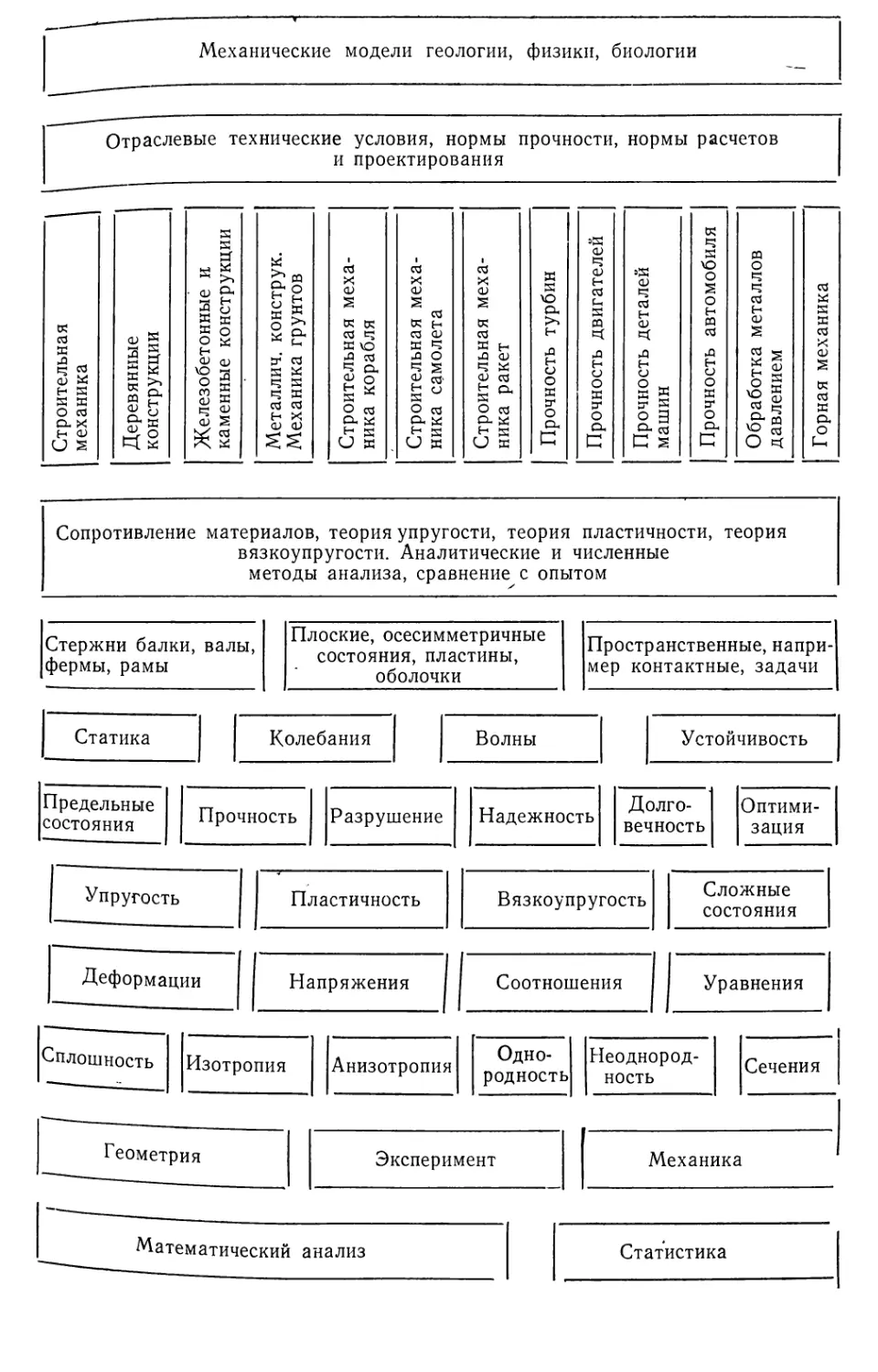
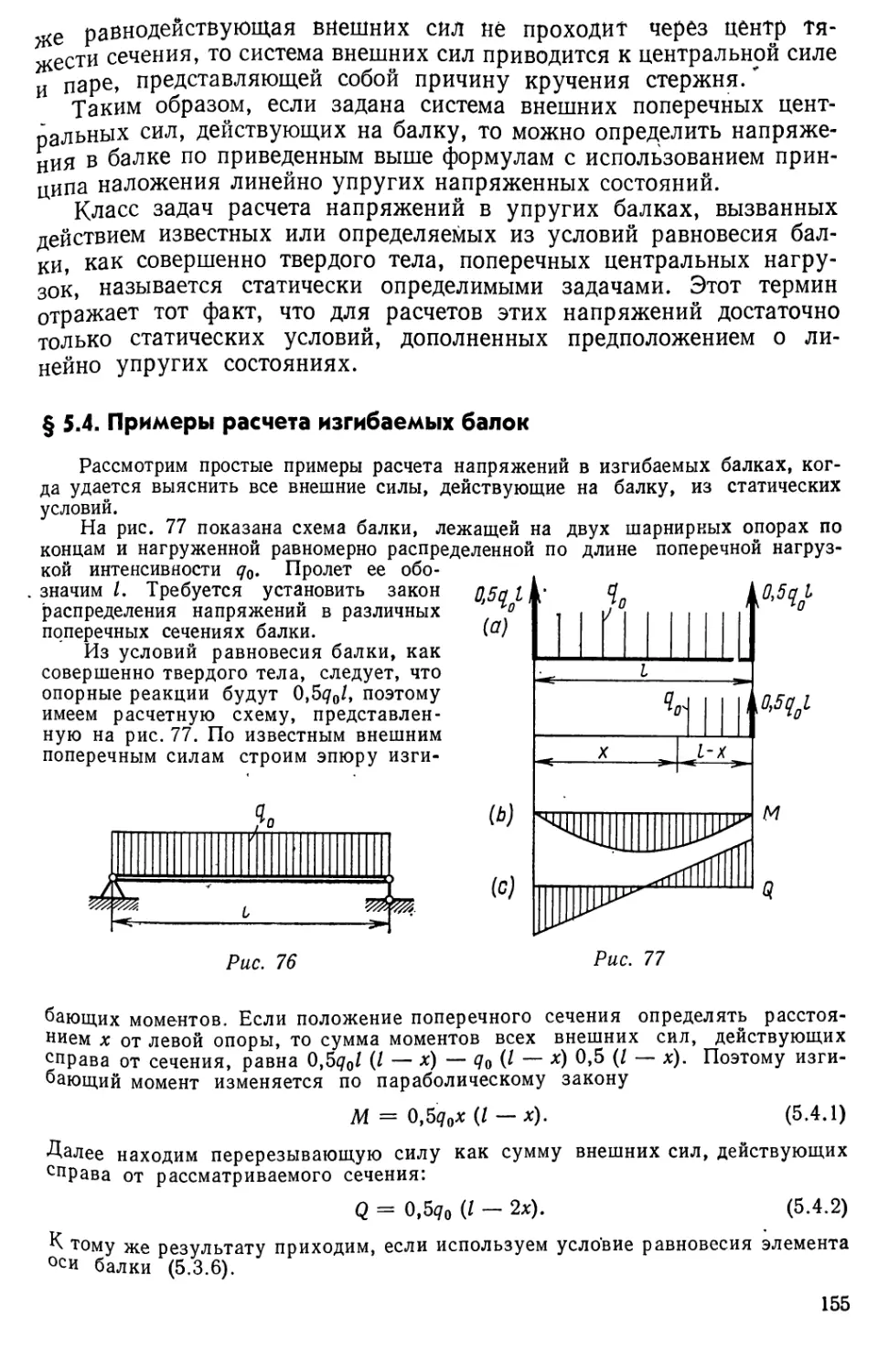
черт науки полезна приведенная ниже схема механики деформиру
емого твердого тела, которую начнем обсуждать с нижнего уровня.
Различают детерминированную и статистическую механику в за
висимости от способа описания, отражения количественных соотноше
лий. Мы будем использовать аппарат математического анализа i
описывать детерминированную механику, как наиболее распростра
некную, хотя и вероятностная статистическая точка зрения получил*
в последнее время развитие и применение в механике.
В основе построения механики деформируемого твердого теля
лежат геометрия, законы классической механики и данные опытов,
отмеченные на втором уровне схемы. Геометрические соотношения
необходимы при оценке параметров деформации, вызванной
некоторой системой перемещений. Законы механики используются при
формулировке уравнений движения или условий равновесия элемецта,
объекта, для которого допустимо применение законов Ньютона.
Формированию такого объекта помогают гипотеза сплошности и метод
4
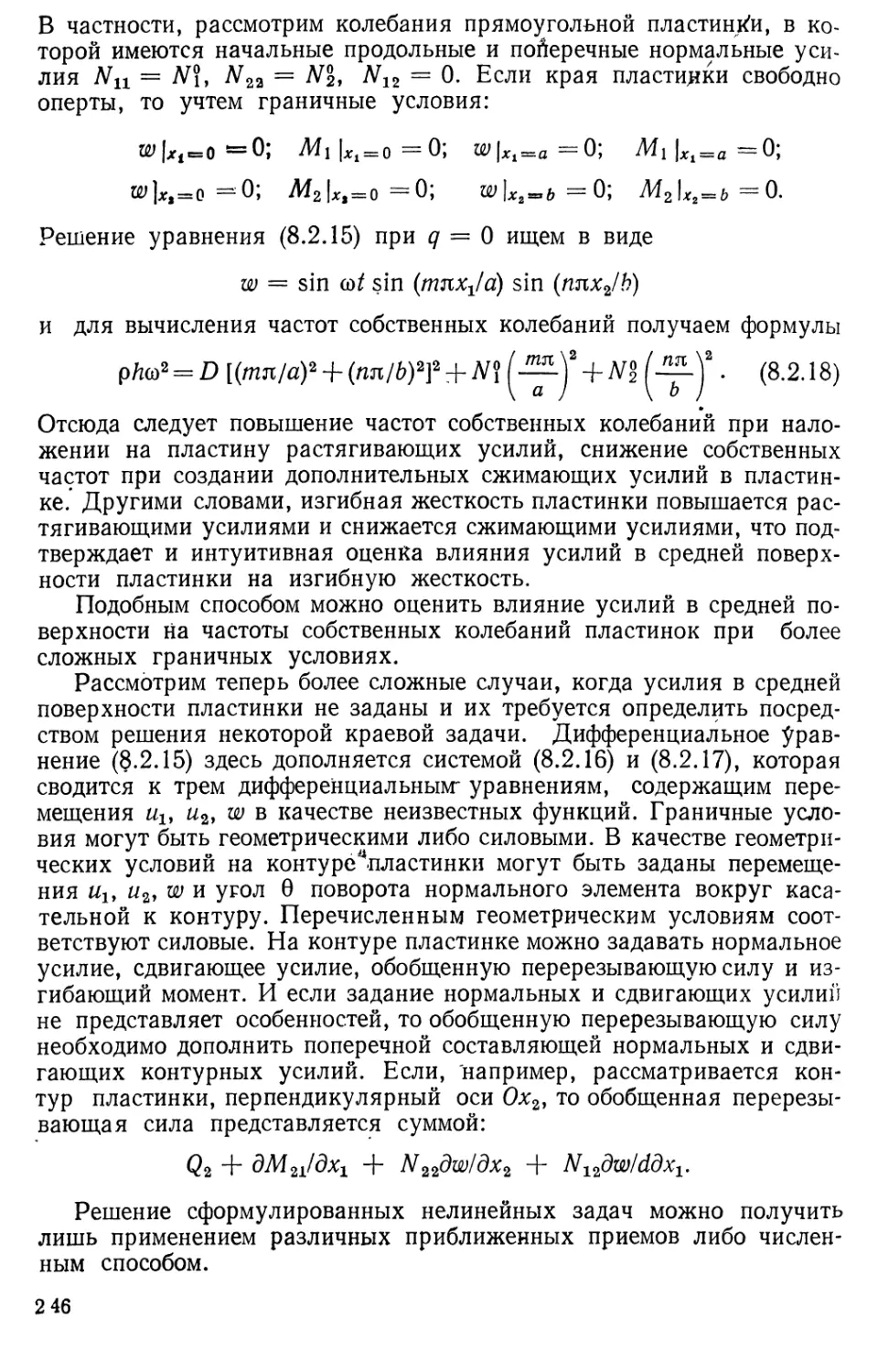
Механические модели геологии, физики, биологии
Отраслевые технические условия, нормы
и проектирования
прочности, нормы расчетов
сё
X
CD
к к
се ч
Я VO
►Д се
Ч Он
Ф о
§3*
О ев
ЛМ
О я
се
X
<v
S
«я
се CD
к ч
Л о
й *
Я °
О се
£-*
н к
се
О)
S
к
се
я н
Л О)
с; *
cd се
н о.
я
о се
£**
Я
Он
>>
н
►д
я
°
Он
с
«
О)
1=3
<v
н
се
U
s
и
«=Х
л
н
о
о
к
IT1
о
о-
с
>я
О)
с?
се
н
О)
н
о
а- я
Й э
к
«=з
я
\о
о
о
н
PQ
се
н
о
о
я
сг
о
Он
м
о
1=3
ч
се
н
О)
се с?
О t<
се
' «
я
я
се
X
CD
к
се
я
о.
о
U
Сопротивление материалов, теория упругости, теория пластичности, теория
вязкоу'пругости. Аналитические и численные
методы анализа, сравнение с опытом
Стержни балки, валы,
фермы, рамы
Плоские, осесимметричные
состояния, пластины,
оболочки
Пространственные,
например контактные, задачи
Статика
Колебания
Устойчивость
Предельные
состояния
Прочность
Разрушение
Надежность
Долговечность
Оптимизация
Упругость
Пластичность
Вязкоупругость
Сложные
состояния
Деформации
Напряжения
Соотношения
Уравнения
Сплошность
Изотропия
Анизотропия
Однородность!
Неоднородность
Сечения
Геометрия
Эксперимент
Механика
Математический анализ
Статистика
сечений, играющие существенную роль при построении механики
деформируемого твердого тела.
Гипотеза сплошности уже упоминалась. В механике не
рассматривают подробностей кристаллической, молекулярной,' атомной
структуры реальных твердых тел, полагая материал сплошь заполняющим
некоторый объем пространства.
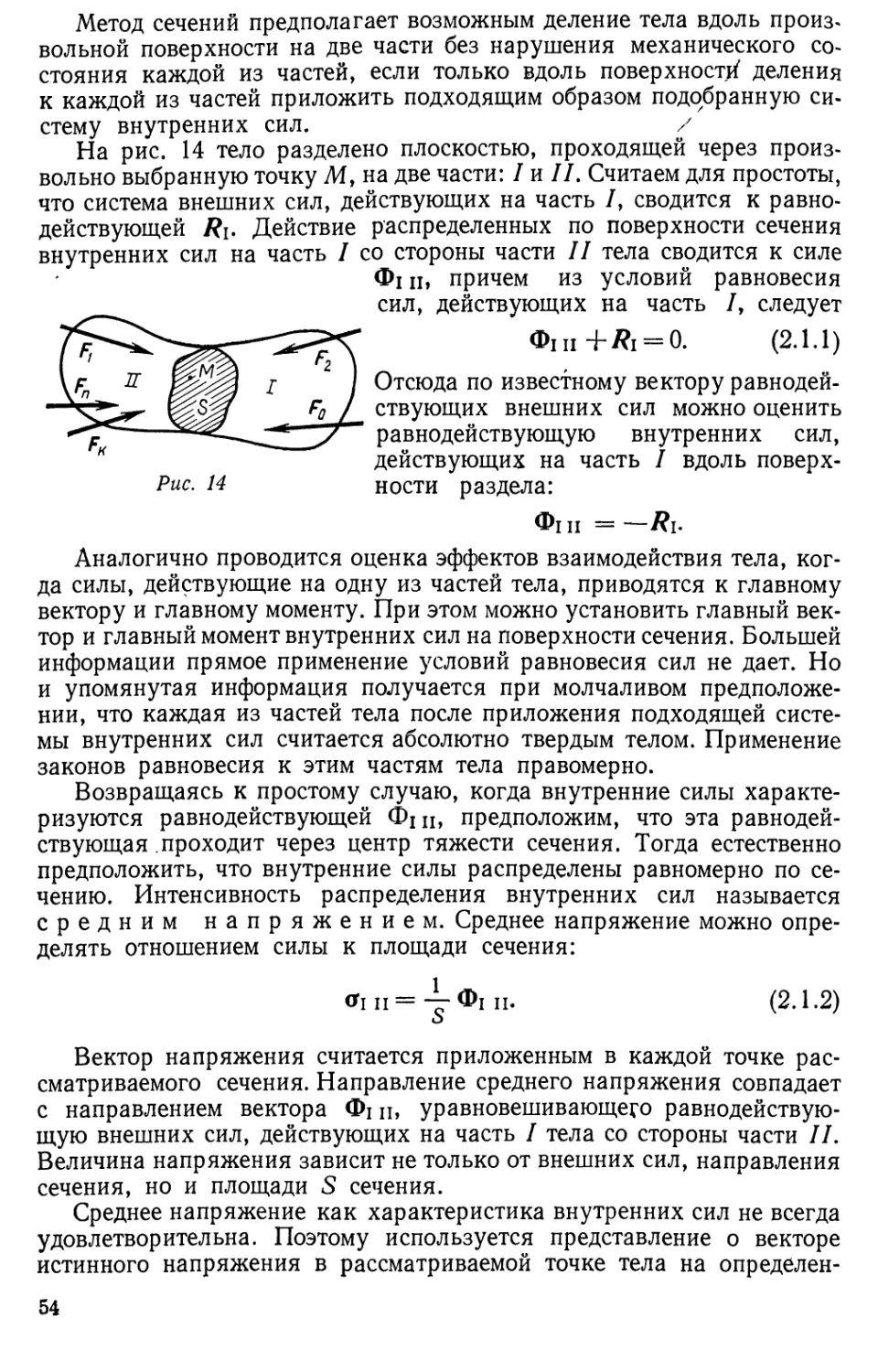
Метод сечений предполагает возможность разделения тела
некоторым сечением на две части без изменения состояния каждой из
частей, если эффекты взаимодействия частей заменить непрерывно
распределенными по сечению внутренними силами — напряжениями.
Введению представления о напряжениях механика обязана
методу сечений. Выделяя сечениями соответствующий элемент, можно
сформулировать уравнения движения или условия равновесия, в
которых неизвестными оказываются не только перемещения, но и
напряжения. Связать характеристики напряжений и деформаций можно
только посредством эксперимента. Такие соотношения называют
определяющими или конституционными. В этих соотношениях
отражаются механические свойства реальных твердых тел в
рассматриваемых условиях внешней среды. Программу экспериментов, объекты
и условия испытаний образцов материала устанавливают посредством
использования достаточно общих термодинамических и механических
соображений. Важным оказывается учение об инвариантных
характеристиках напряжений и деформаций, не изменяющихся при
преобразованиях выбранной координатной системы. Обработка опытных
данных, планирование экспериментальных работ посредством анализа
инвариантов позволяют обнаружить в разнообразных опытах
отражение объективных физических закономерностей.
Математическая постановка задач механики деформируемого
твердого тела исчерпывается установлением трех групп соотношений:
геометрических соотношений между перемещениями и деформациями,
соотношений между напряжениями в точке на различно ориентированных
площадках, определяющих соотношений. Первые две группы
соотношений основываются на законах геометрии и количественных
соотношениях механики Ньютона, поэтому обладают глубокой общностью,
применимы к анализу самых разнообразных состояний реальных
твердых тел.
В третьей группе соотношений, отражающих физические свойства
реальных тел, не удается сохранить подобную общность. Слишком
велико разнообразие свойств, состояний реальных твердых тел,
которые должны получить количественное описание в определяющих
соотношениях. Поэтому приходится выделять наиболее важные
свойства реальных твердых тел, которые чаще других проявляются в
процессе работы деталей машин и элементов конструкций. В механике
деформируемого твердого тела изучают свойства упругости,
пластичности, вязкоупругости, которые отмечены на пятом уровне схемы
построения механики деформируемого твердого тела.
' Общим для всех упомянутых свойств является деформируемость
реальных твердых тел. И упругость, и пластичность, и вязкоупругость
проявляются в деформируемости, изменениях расстояний между час--
6
амй тела, изменениях формы и размеров тела. Разница свойств
ТИоугости и пластичности заключена в обратимости свойства упруго-
^ и и необратимости свойства пластичности. Упругими называют обра-
Симые деформации, которые пропадают по прекращении действия внеш-
т сил> температуры или других факторов, вызвавших деформацию.
Пластические деформации остаются, сохраняются и по прекращении
действия вызвавших деформацию сил. Проявление свойств
упругости и пластичности обнаруживается при достаточно медленном, так
называемом статическом приложении внешних сил, когда проявление
свойств деформируемости практически не зависит от времени, скорости
возрастания нагрузки, продолжительности действия внешних сил.
Если же деформированное состояние существенно зависит от
предшествующих состояний (наследственность), скоростей изменения
напряжений и деформаций, когда заметно изменение деформаций со временем
при неизменных внешних силах, когда можно наблюдать изменения
напряжений со временем при неизменных деформациях, говорят
о вязкоупругих свойствах, вязкопластических свойствах реальных
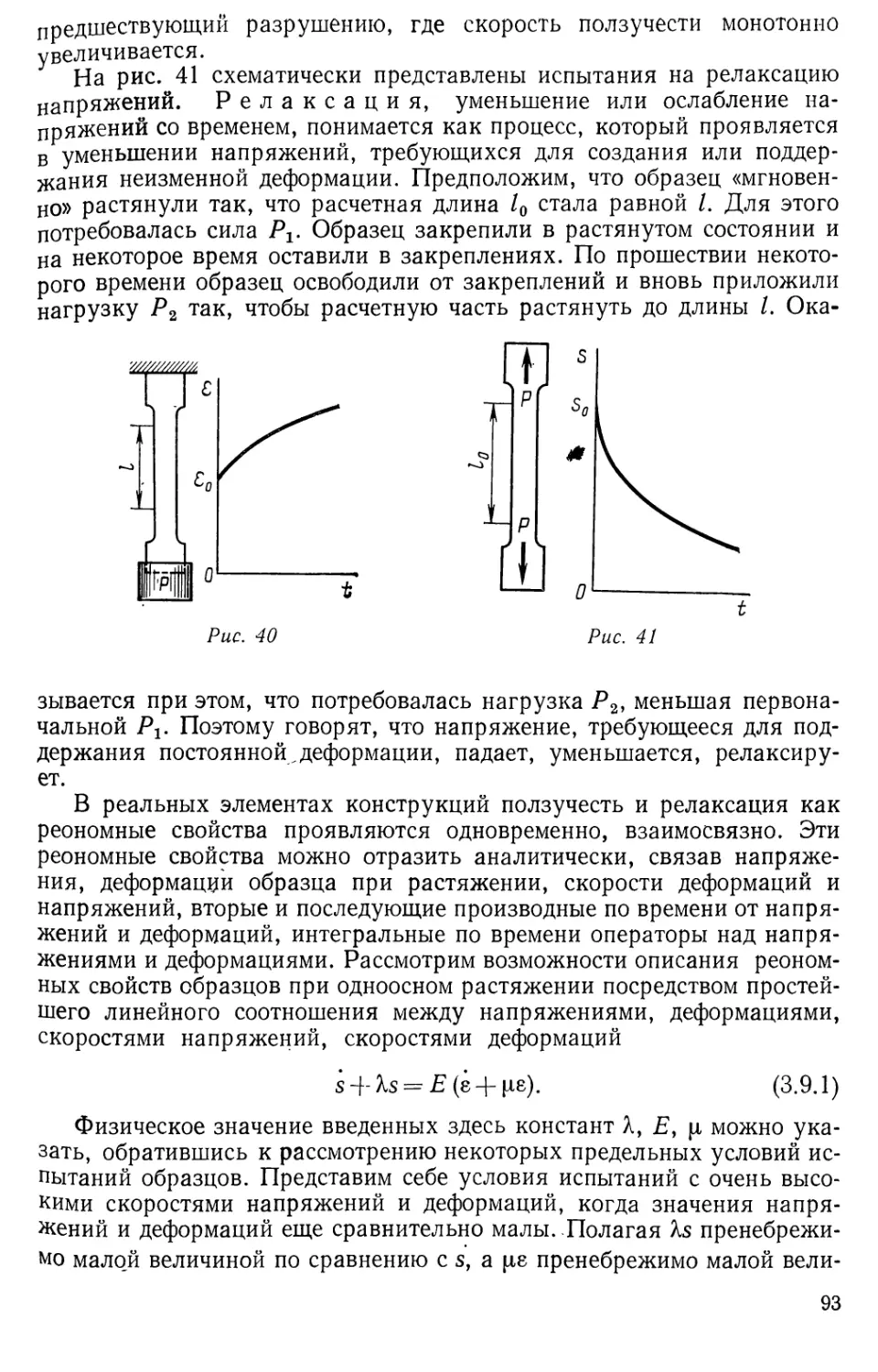
твердых тел, о ползучести, релаксации напряжений.
Одной, из основных задач механики деформируемого твердого тела
является прогнозирование упругих, пластических,, вязкоупругих
состояний деталей машин и конструкций либо их частей. Такое
предсказание посредством расчетов становится возможным только после
систематических экспериментальных исследований свойств материалов.
Лабораторные исследования позволяют установить количественные
соотношения между напряжениями и деформациями, их скоростями,
а также интегральными характеристиками в упругом, упругопласти-
ческом, вязкоупругих состояниях и др. Кроме того, посредством
опытов с образцами материала устанавливаются общие условия,
обеспечивающие упругие, упругопластические состояния и др. Опытным
путем устанавливаются и предельные условия — условия упругого
состояния, условия пластичности, условия разрушения, условия
прочности и т. д. Опытные данные позволяют судить о прочности,
надежности, долговечности материала при известных условиях внешнейсреды,
получить условия оптимизации состояния по тем или иным параметрам.
На седьмом уровне схемы отмечены возможности статической
постановки задач, задач устойчивости и динамических задач в
зависимости от характера внешних сил. При статической постановке
выписывают уравнения равновесия элемента тела и устанавливают
систему перемещений, деформаций тела, вызванных действием заданной
самоуравновешенной системы внешних сил либо перемещениями
точек границы тела. В задачах устойчивости устанавливают условия,
при которых малые изменения внешних воздействий не вызывают
значительных изменений перемещений. Постановка динамических задач
ожет быть разной в зависимости от протяженности тела и характера
нешних воздействий. Выделяют задачи о колебаниях твердых реаль-
ix тел и задачи о распространении волн,
pve следУющ.ем уровне схемы различают задачи механики
деформируемого твердого тела по мерности, числу пространственных коорди-
» определяющих не только состояние тела, но и степень аналитиче-
7
ских трудностей, которые необходимо преодолеть при решении
частных задач. Различают одномерные, двухмерные и трехмерные задачи.
Очень важными классами являются задачи, сводящиеся к
одномерным или двухмерным. К одномерным задачам относятся проблемы
расчета гибкой нити, стержней, балок, валов, элементов фермерам.
Заметим, что именно одномерные объекты являются предметом
исследования одного из разделов механики деформируемого твердого
тела — сопротивления материалов. К двухмерным объектам
относятся так называемые плоские задачи, осесимметричные задачи, в
которых состояние зависит от двух из трех пространственных координат.
Очень важными в приложениях являются задачи о прочности,
устойчивости, колебаниях пластинок и оболочек—объектов,
приводящихся к двухмерным посредством использования дополнительных
упрощающих предположений. Основные соотношения механики
деформируемого твердого тела строятся применительно к трехмерным
телам с учетом изменений состояния по трем независимым
пространственным координатам. Когда установлена полная система уравнений,
поставлена математическая задача механики деформируемого
твердого тела, можно говорить о таких разделах механики, как теория
упругости, теория пластичности, теория вязкоупругости, в зависимости
от используемых определяющих соотношений. Каждый из этих
разделов имеет свои особенности и достижения в развитии.
4 Располагая математической постановкой задачи механики
деформируемого твердого тела, выбирают аналитические или численные
методы анализа частных классов задач. Здесь используют все
математические методы, а в последнее десятилетие получили широкое
распространение методы, связанные с применением современной
вычислительной техники — аналоговых и цифровых машин.
Полученные количественные результаты расчетов иногда удается
сопоставить с данными опытов, что является самым надежным
критерием оценки степени точности описания действительности. Этим
исчерпывается схема построения механики деформируемого твердого
тела. Последующие уровни надстройки относятся к сфере
практического использования результатов науки.
Специализация геометрических форм, механических свойств и
внешних воздействий связана с рядом технических наук, основанных на
выводах, рекомендациях, методах механики деформируемого
твердого тела, например развитие методов расчетов упругих состояний
стержней, балок — со строительной механикой, специальными
рекомендациями применительно к деревянным, металлическим,
железобетонным и каменным конструкциям/ строительным конструкциям из
пластмасс. Потребности расчетов деталей машин и приборов связаны
со специальными разделами, такими, как прочность турбин, прочность
двигателей и других объектов. Эти разделы технических наук служат
основой отработки отраслевых технических условий и норм прочности,
правил расчетов и проектирования.
Результаты, методы механики деформируемого твердого тела
широко используются не только в технических науках, но и в ряде
естественных наук: геологии, физике, биологии.
8
В заключение приведем некоторые краткие сведения из истории
еханики деформируемого твердого тела.
В развитии механики деформируемого твердого тела можно
наметь три периода. Первый из них начинается с обсуждения Галилеем
П638) ДВУХ новых наУк и продолжается около двухсот лет. Второй
еоиод продолжительностью около века начинается с работ Коши
П820). Третий период — механика двадцатого века.
работы первого периода относятся главным образом к тому
разделу механики деформируемого твердого тела, который именуется
сопротивлением материалов. Построена теория изгиба балок (Я. Бер-
нулли-старший, Л. Эйлер), установлены экспериментальные основы
сопротивления материалов (Р. Гук, Т. Юнг), появились учение об
устойчивости стержней (Л. Эйлер, Ж. Лагранж) и теория кручения
круглых валов (Кулон). Многие из первых публикаций по
сопротивлению материалов выходили в научных сообщениях Российской
Академии наук, где почти всю свою долгую жизнь работал Л. Эйлер.
Более того, по-видимому, звон колоколов в Петербурге навеял Я. Бер-
нулли-младшему и Эйлеру мысли о создании теории'колебаний
тонкостенных оболочек.
В двадцатых годах прошлого столетия появилась в сообщениях
Парижской Академии серия работ Коши, Навье, Пуассона, в которых
установлены основные уравнения современной теории упругости,
развиты приложения общих уравнений к некоторым задачам о колебаниях
и равновесии упругих сред. Энергетический подход к обоснованию
уравнений теории упругости предложен Грином, а термодинамическое
обоснование этого способа дал Кельвин. Последовательное изложение
обоснованных уравнений теории упругости впервые дано Ламе в
лекциях, которые были опубликованы в 1852 г.
Во второй половине прошлого века в связи с потребностями
развивающейся промышленности, транспорта, строительства получены
решения ряда технических задач механики деформируемого твердого
тела. Ламе решил задачи о напряжениях в толстостенном цилиндре
и полом шаре под действием внутреннего или внешнего давления.
Генерал от артиллерии Гадолин исследовал напряжения в
многослойных цилиндрах, построив тем самым основы проектирования стволов
артиллерийских орудий; изложил современную теорию изгиба балок
Д. И. Журавский, который широко применял методы сопротивления
материалов при проектировании многочисленных мостов железных
Дорог.
Именно в этот период Сен-Венаном.предложен полуобратный метод
решения задач теории упругости, на основе которого построена теория
кручения и изгиба призматических стержней произвольного
поперечного сечения. Принцип Сен-Венана, устанавливающий зависимость
наряженного состояния в частях тела, достаточно удаленных от обла-
и приложения внешних сил, не от подробностей распределе-
заЯ ЭТ11Х сил> а лишь от главного вектора и главного момента
^Данной системы, открывает широкие возможности практического
тел 0ЛЬ30В^НИЯ рекомендаций ме ханики деформируемого твердого
9
Проблема распространения вбЛн в упругом теле изучалась Пуасч
соном и М. В. Остроградским, однако исчерпывающее решение дано
Рэлеем, который установил существование не только волн расширен
ния и искажения, но и поверхностных волн, распространяющихся
с меньшей скоростью и с затухающей от поверхности я^ела амплитудой.
Задача о продольном ударе о стержень массивным телом рассмотрена
Гюгонио.
Во второй половине прошлого столетия Г, Кирхгоф сформулировал
основные уравнения теории тонких стержней, положив начало
развитию методов расчетов упругих пружин. Кроме того, им разработана
последовательная теория тонких пластинок. Первые попытки в этом
направлении были сделаны Лагранжем и Софи Жермен в 1814 г.,
а после них Коши и Пуассоном, но они не сумели правильно
сформулировать граничные условия задачи.
В конце прошлого века Г. Ароном и А. Лявом даны первые варианты
уравнений современной теории оболочек, основанные на применении
гипотезы недеформируемости нормального прямолинейного элемента.
Наконец, Ж. Буссинеском изучалось распределение напряжений
в упругом теле под действием сосредоточенной силы. Это открыло
возможности Г. Герцу поставить задачу о взаимодействии при контакте
двух упругих тел.
Последний период развития механики деформируемого твердого
тела отмечен не только интенсификацией исследований упругих
состояний реальных твердых тел, но и рождением теории пластичности,
теории вязкоупругости и других практически важных разделов
науки.
Достижения исследований упругих состояний связаны с
развитием математических методов. Здесь в первую очередь необходимо
указать на работы Г. В. Колосова и Н. И. Мусхелишвили, в которых
применяется метод аналитических функций для решения плоских задач
теории упругости и задач кручения, изгиба стержней. Важную роль
в решении прикладных задач играют приближенные методы Ф. Рит-
ца, Б. Г. Галеркина и И. Г. Бубнова..
В тридцатые и сороковые годы много внимания уделялось анализу
фундаментальных уравнений теории стержней (В. 3. Власов) и
тонкостенных оболочек (В. В. Новожилов, В. 3. Власов, Ю. Н. Работнов).
В это же время возобновился интерес к анализу физических
соотношений и формулированию различных вариантов нелинейной теории
упругости (Ф. Д. Мурнаган, Р. Ривлин, Н. В. Зволинский).
Многочисленны работы по устойчивости стержней, стержневых
систем, пластин, оболочек и других элементов конструкций.
Экспериментальные работы Ф. Шлейхера и П. Бриджмена о
влиянии всестороннего давления на пластическое деформирование, опыты
А. Надаи и В. Лоде, М. Роша и А. Эйхингера с тонкостенными трубами
по выяснению условий пластичности вместе с потребностями практики
расчетов приводят к разнообразным построениям теорий пластичности.
Б. Сен-Венан, Р. Мизес, Г. Генки, В. Прагер, А. Надаи и другие вфаз-
ное время предлагали разные построения соотношений между
напряжениями и деформациями при пластических состояниях. А. А. Илью-
Ю
/j 943) систематизировал опытные данные, обосновал условия при-
Ш^имс>сти деформационной теории пластичности, сформулировал тео-
ме ы а простом нагружении и о разгрузке.
Ре g дальнейшем А. А. Ильюшин (1957) указал пути построения и эк-
периментального обоснования теорий пластичности при сложном на-
Спужении. В это же время развивалось и второе направление теории
пластичности — теория течения. Трудами Б. Сен-Венана, Р. Мизеса,
Д Драккера, Р. Хилла и других теория течения получила
завершенную формулировку и обоснование условий применимости. Многие
задачи теории идеальной пластичности решены Д. Д. Ивлевым,
приложения к исследованиям технологических процессов разрабатывались
A. Д. Томленовым.
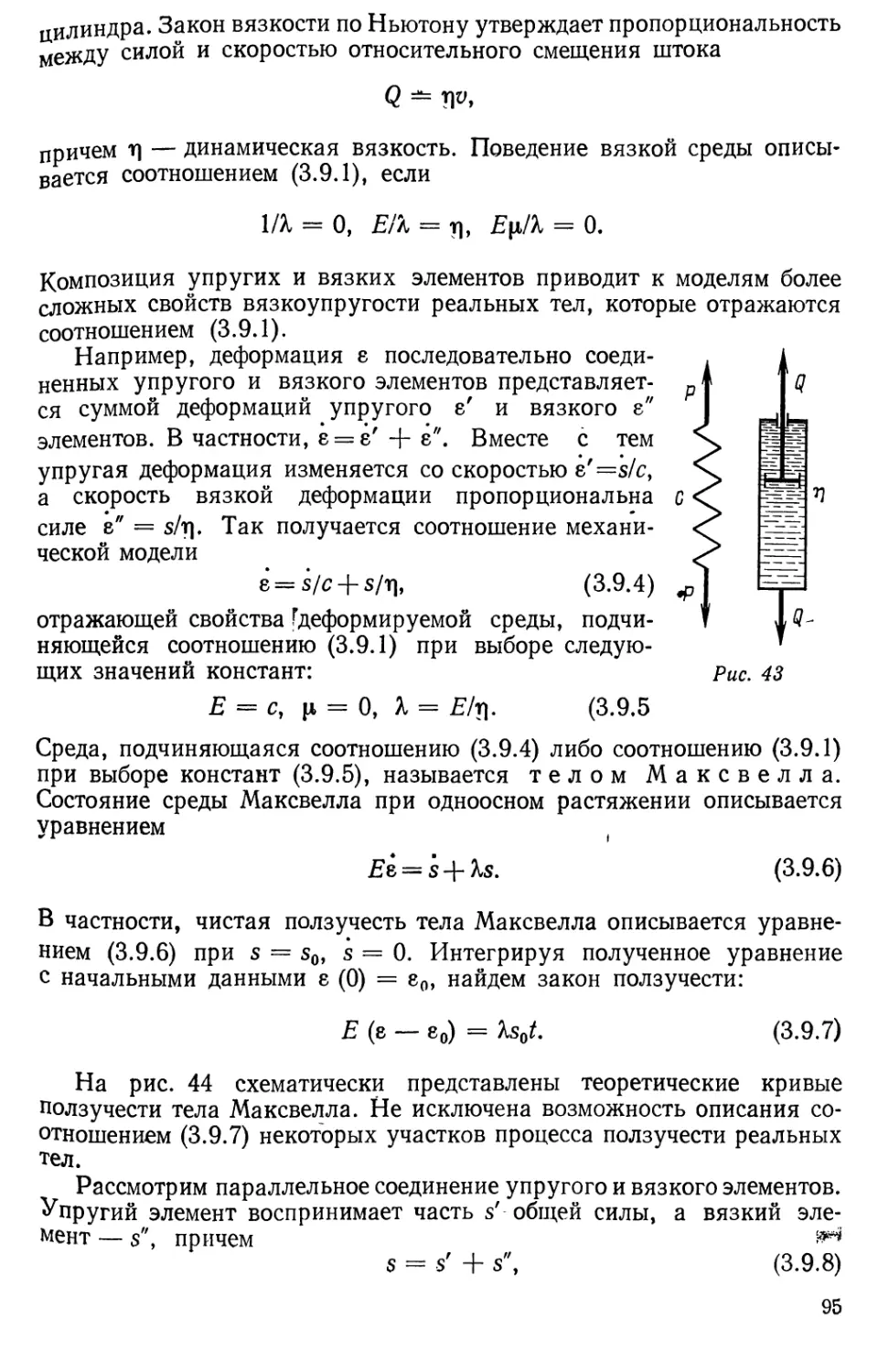
Первоначальное развитие современной теории вязкоупругости
связано с именами Л. Больцмана, Дж, Максвелла, В. Кельвина,
B. Фойхта. Весьма важным является принцип В. Вольтерра,
позволяющий результаты решения cfaTH4ecKnx задач упругости
пересчитывать на состояния наследственной вязкоупругости.
Многие достижения современной теории вязкоупругости состояний
сплошных сред связаны с работами А. А. Ильюшина, А. Ю. Ишлин-
ского, Ю. Н. Работнова и других советских ученых. В частности,
А. А. Ильюшиным подробно разработана не только общая
наследственная теория термовязкоупругости, но и предложен эффективный метод
решения частных задач — метод аппроксимаций.
Более подробный обзор современных достижений опубликован в
сборнике «Механика в СССР за 50 лет».
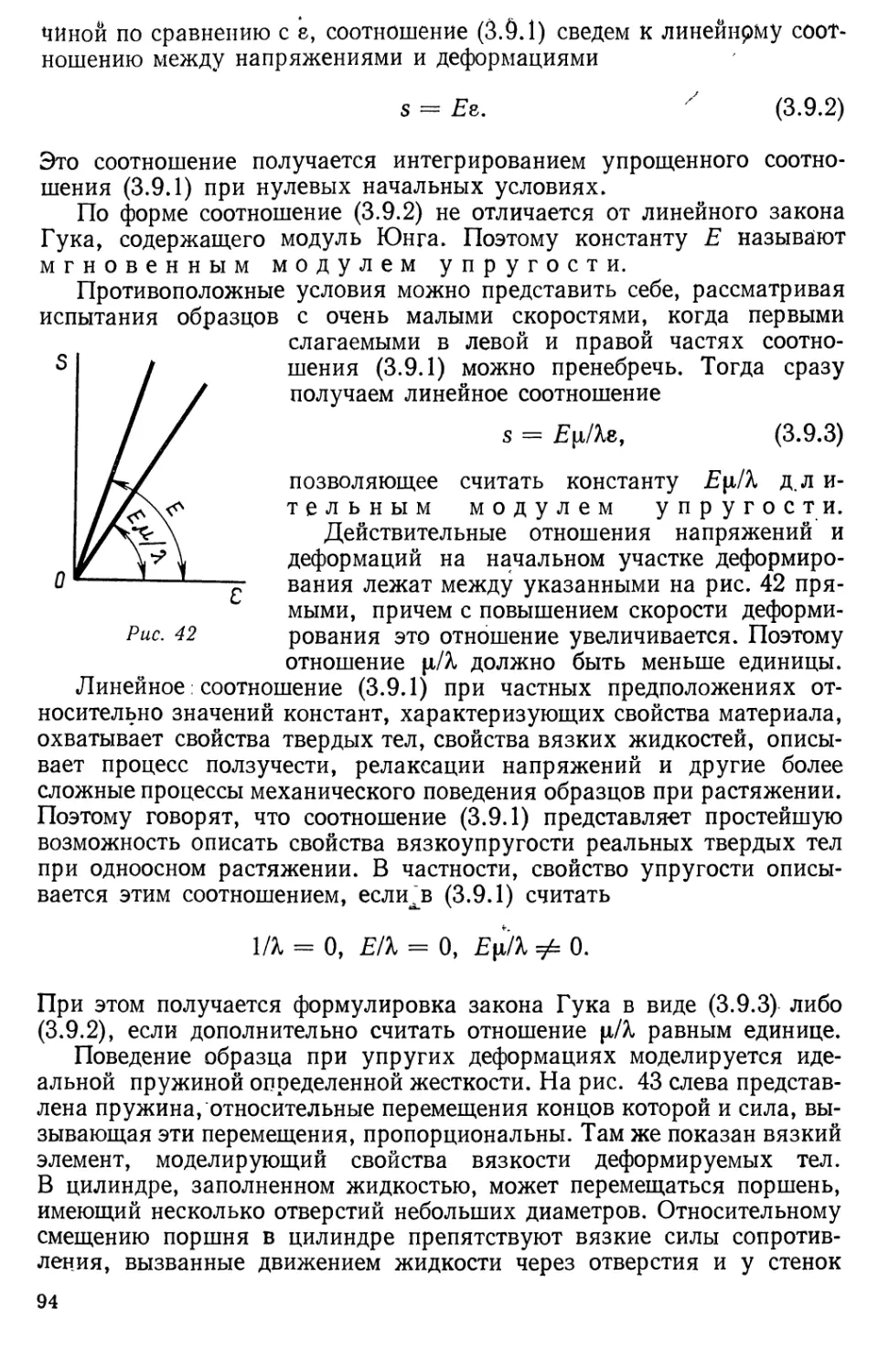
Часть первая
ОБЩИЙ МЕТОД МЕХАНИКИ
ДЕФОРМИРУЕМОГО ТВЕРДОГО ТЕЛА
Глава I
КИНЕМАТИКА ДЕФОРМАЦИЙ СПЛОШНОГО ТЕЛА
§ 1.1. Перемещения и деформации одномерных объектов
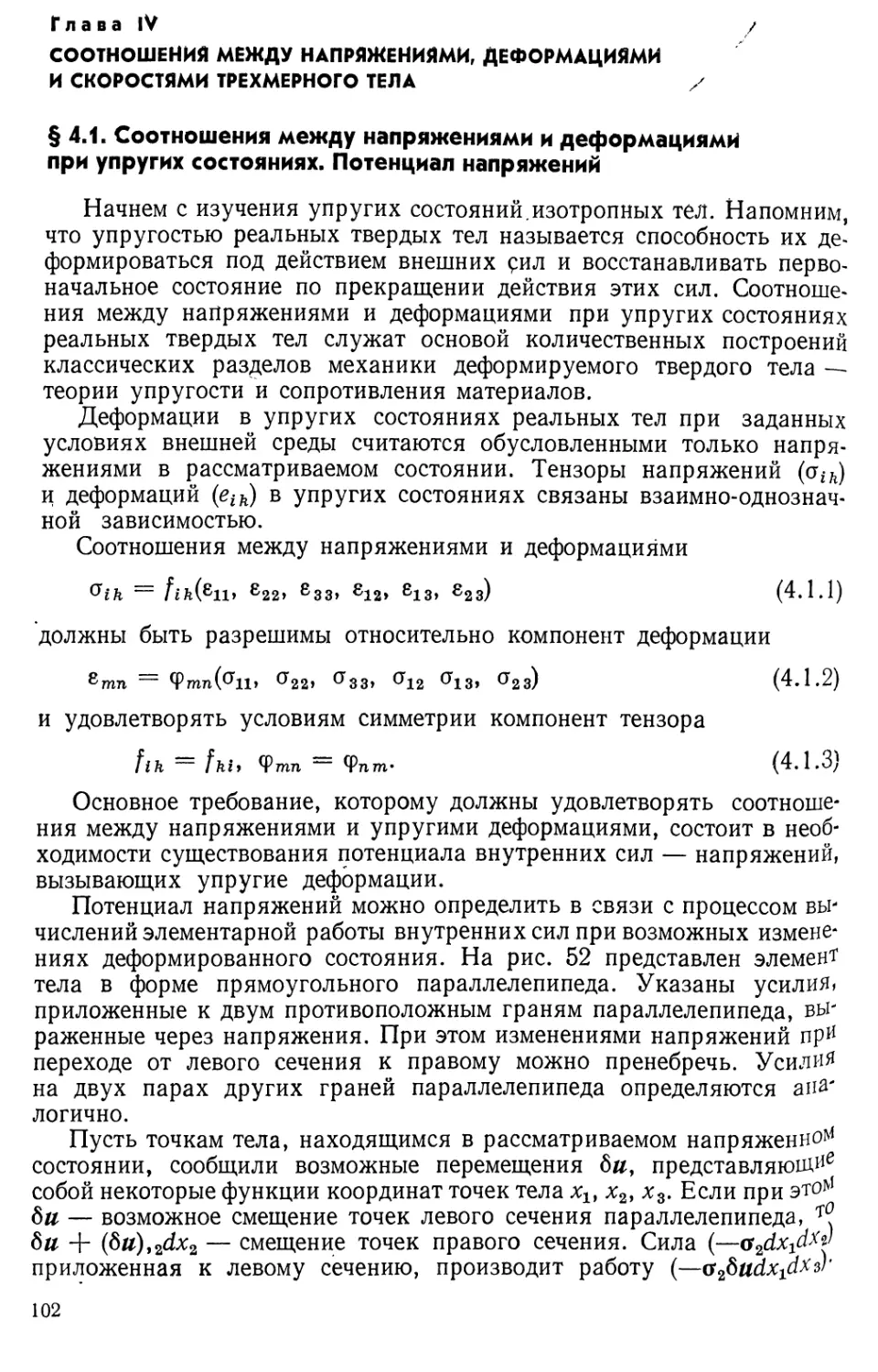
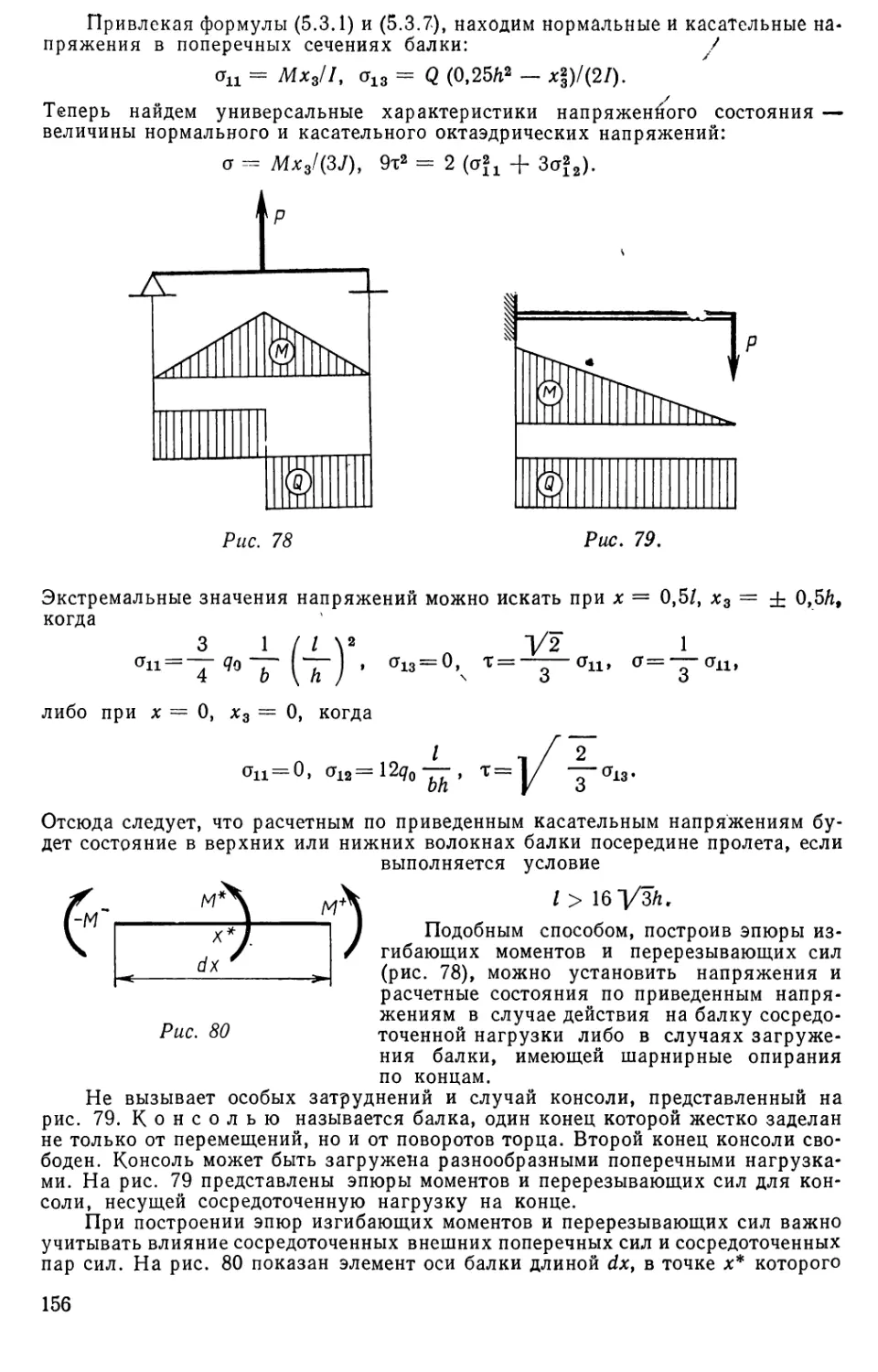
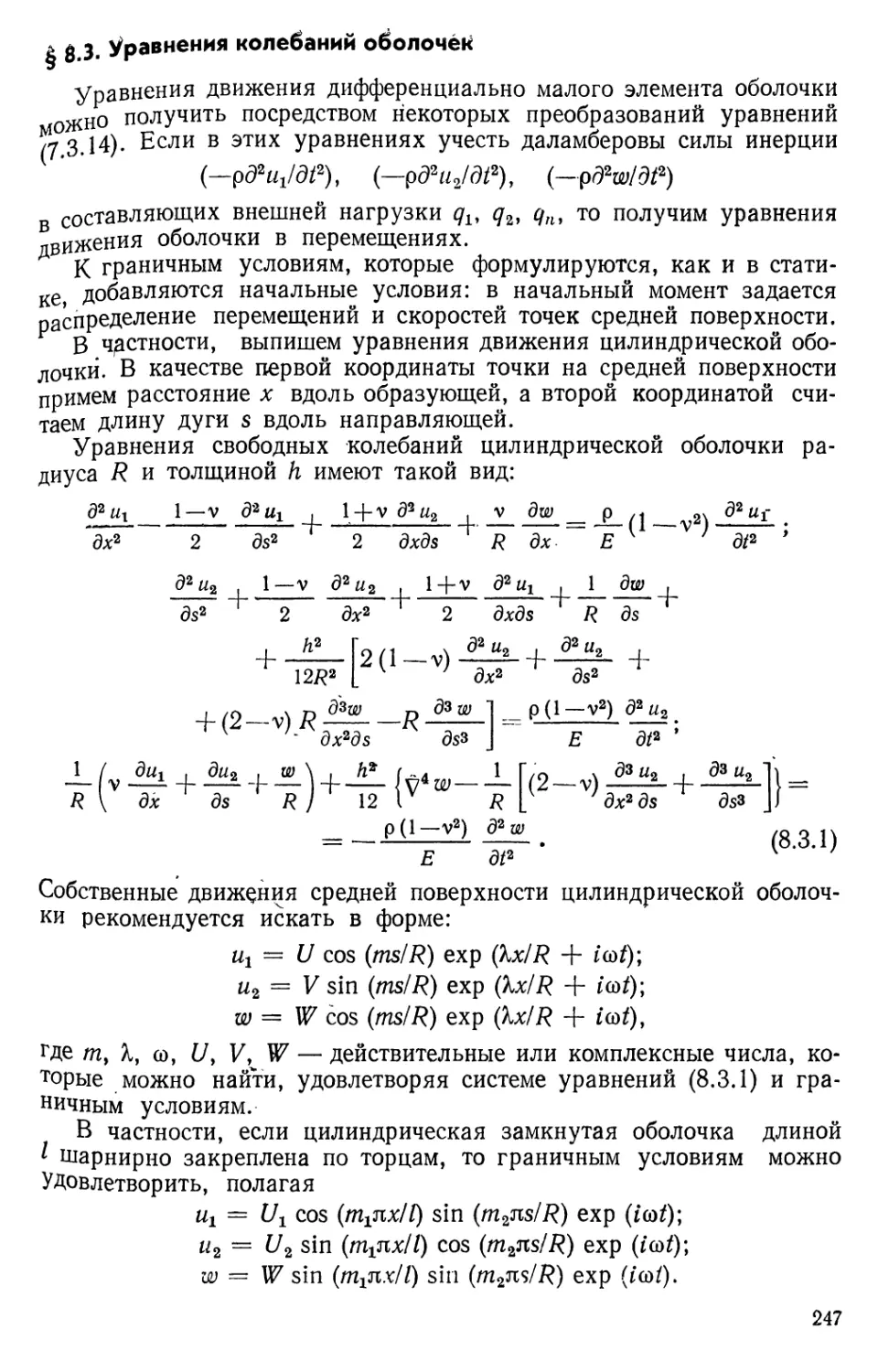
Рассмотрим материальные тела, положение точек которых можно
определить одной координатой, так называемые одномерные объекты.
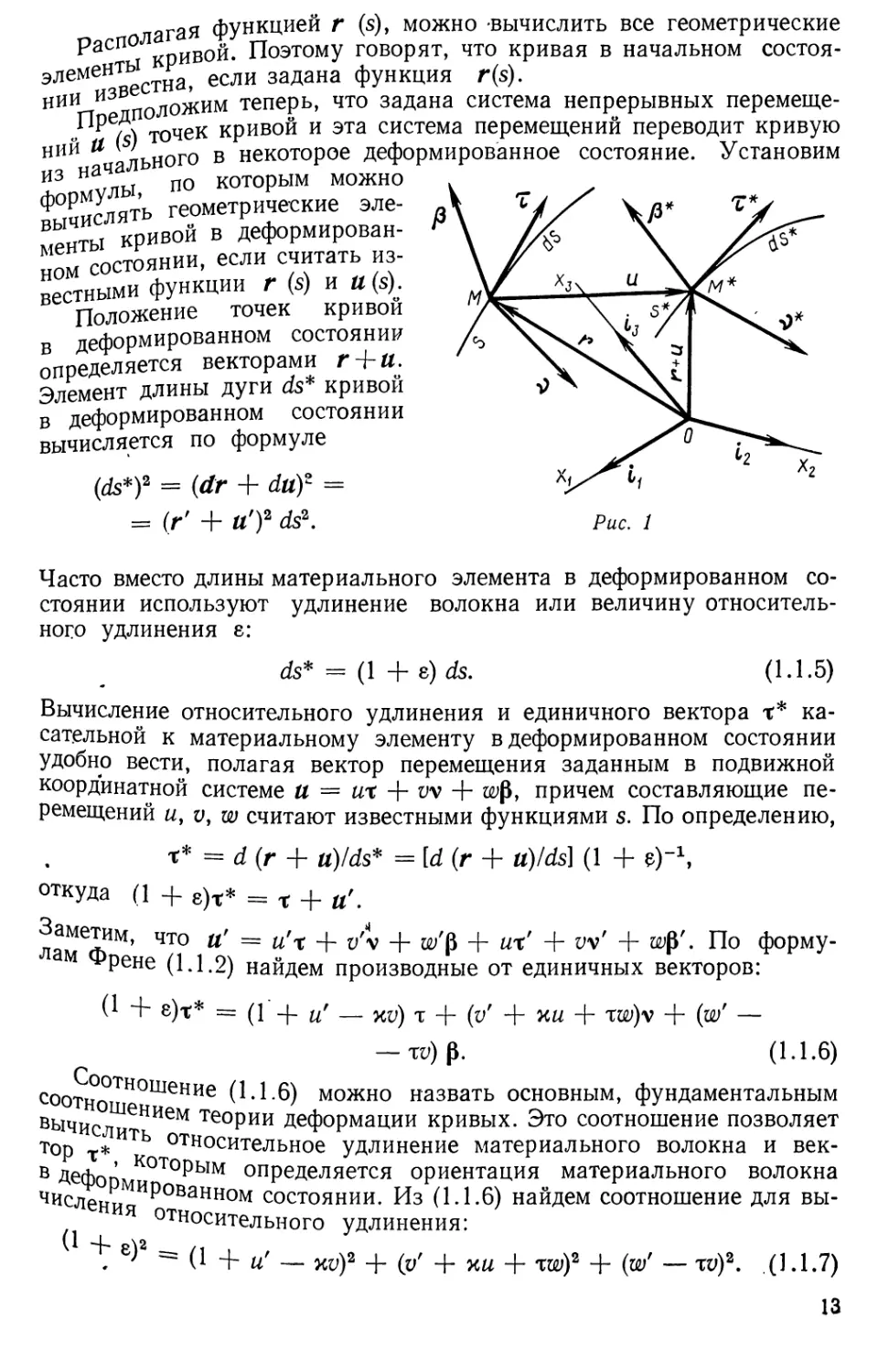
Моделируются такие тела материальной линией. Представим себе
два состояния материальной линии: начальное и деформированное
(рис. 1). Положение точек кривой в начальном состоянии можно
определить координатами хр (р = 1, 2, 3) относительно декартовой
координатной системы с единичными векторами iv. Аналитически кривая
в начальном состоянии считается заданной функциями xp(s), где s —
длина дуги кривой, либо вектор-функцией г (s), где г — радиус-
вектор точки в декартовой координатной системе.
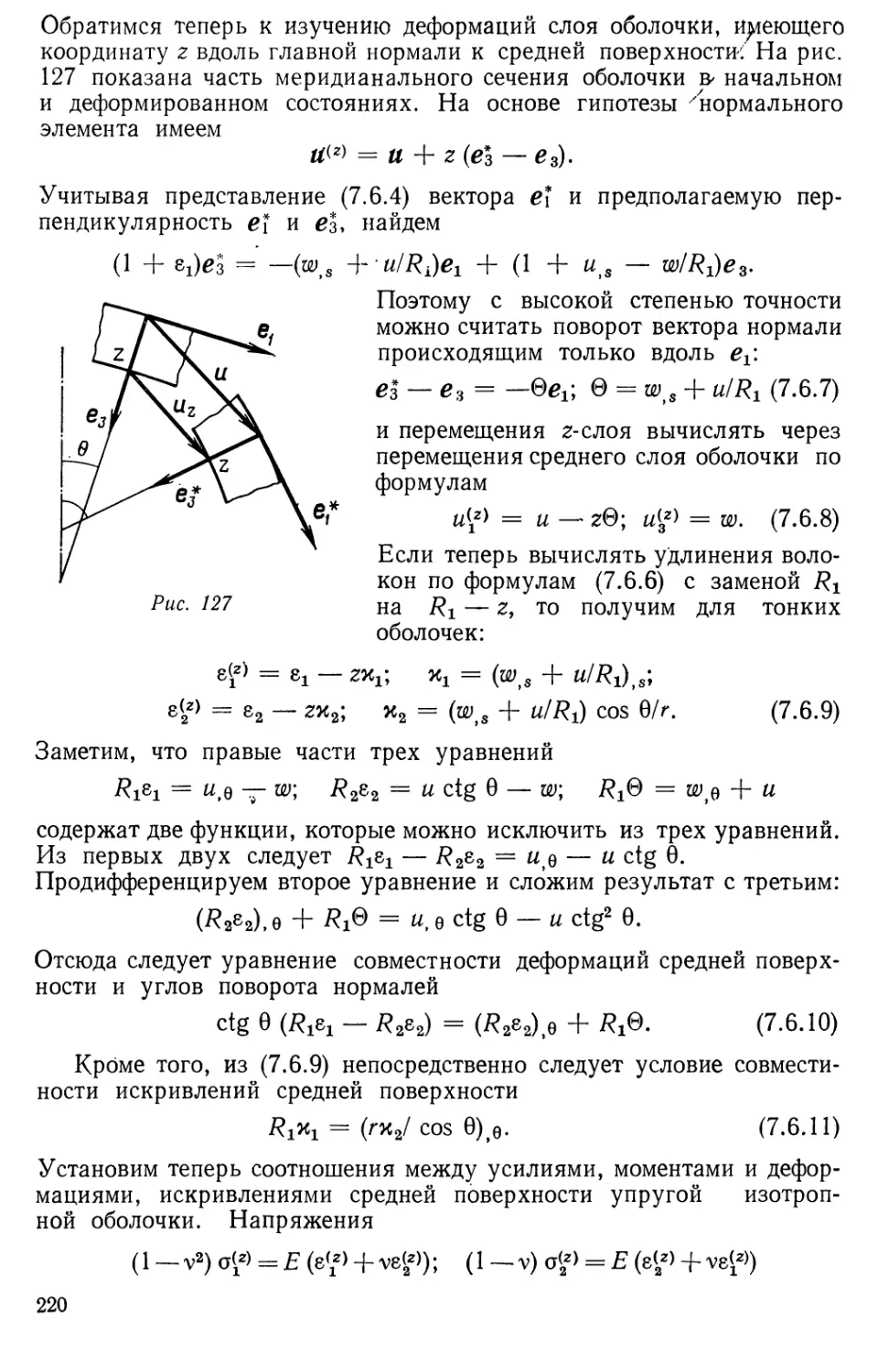
Направление материального волокна кривой в рассматриваемой
точке определяется единичным вектором касательной т к кривой в
рассматриваемой точке. Единичные векторы главной нормали v,
бинормали р, величины кривизны х и крутки т кривой вычисляются через
заданную функцию г (s). При этом используются определения
единичных векторов подвижного трехгранника:
t = r', xv = t' = r\ р = х х v. (1.1.1)
Штрихом обозначены производные по дуге s.
Изменения ориентации единичных векторов трехгранника при
движении по кривой определяются формулами Френе:
т' = xv, v' = — хт — тр, р' = tv. (1.1.2)
Кривизну кривой х можно установить, вычислив квадраты длин
векторов в левой и правой частях второго из равенств (1.1.1):
x2=(*i')2-M4)2 + W)2. (1.1.3)
Для вычисления крутки т кривой продифференцируем третью из
формул (1.1.1); заменив производную dfi/ds по формуле (1.1.2) и
умножив полученное равенство скалярно на v, найдем
т- (т X v')v. (1.1.4)
12
РасП кривой. Поэтому говорят, что кривая в
элементь Р^ если задана функция r(s).
начальном состоя-
известна
пагая функцией г (s), можно вычислить все геометрические
распой —з/ Плотпми ™талпа
ем
нии ^"~оЛожим теперь, что задана система непрерывных перемеще-
^Р6/^\ rmttp.K коивой и эта система перемещений переводит кривую
ний
из
формулы
-11F7s) точек кривой и эта система перемещении переводит кривую
и а льного в некоторое деформированное состояние. Установим
нача — которым можно
по
Счислять геометрические эле-
,ряты кривой в
деформированном состоянии, если считать
известными функции r(s) и a(s).
Положение точек кривой
в деформированном состоянии
определяется векторами г + и.
Элемент длины дуги ds* кривой
в деформированном состоянии
вычисляется по формуле
(ds*)2 = (dr + duf =
= (г' + и')2 ds\
Рис. 1
Часто вместо длины материального элемента в деформированном
состоянии используют удлинение волокна или величину
относительного удлинения е:
ds* = (1 +&)ds. (1.1.5)
Вычисление относительного удлинения и единичного вектора т*
касательной к материальному элементу в деформированном состоянии
удобно вести, полагая вектор перемещения заданным в подвижной
координатной системе а = их + w + сф, причем составляющие
перемещений иу v, w считают известными функциями s. По определению,
т* - d (г + a)/ds* = И (г + u)/ds] (1 + е)-\
откуда (1 + е)т* = т + я'.
ламефИМ> ЧТ° U = и'х + v'*x + w'$ + их' + vv' + w$'- По Ф°РМУ"
Рене (1Л.2) найдем производные от единичных векторов:
(1 + 8)т* = (1- + ц, _уя))х + р + кц + ш^у + (W> _
— то) р. (1.1.6)
Со°тношНОШеНИе ('• 1-6) можно назвать основным, фундаментальным
вычислиеНИеМ теоРии Деформации кривых. Это соотношение позволяет
тор т* Ть ОТносительное удлинение материального волокна и век-
в Дефопми°Т°'ЗЫМ опРеДеляется ориентация материального волокна
числения ^ОВанном состоянии. Из (1.1.6) найдем соотношение для вы-
относителы-юго удлинения:
^ + е)2 ^
(1 + и' — kv)2 + (у' + ки + %wf + {w' — xv)2. (1.1.7)
13
Очевидны упрощения этой формулы, когда рассматривается
деформация плоской кривой (т = 0). Еще большие упрощения обнаружим при
изучении деформаций начально прямого волокна (т = 0, х = 0).
Кроме того, формула (1.1.7) упрощается посредством линеаризации
ее в случаях, когда производные от перемещений и!, v\ w' и величины
ху, ки, xw, xv оказываются малыми по сравнению с единицей.
Если, кроме того, и относительные удлинения е малы по-
сравнению с единицей, то из (1.1.7) получим представление е линейной
функцией относительно перемещений и их производных:
е = и' — т. (1.1.8)
Эту упрощенную формулу можно получить и посредством
элементарных геометрических соображений, особенно применительно к
удлинениям плоской кривой.
Последующим дифференцированием фундаментального
соотношения (1.1.6) можно получить формулу для вычисления вектора главной
нормали в деформированном состоянии, кривизны и кручения
деформированной кривой. Приведем без вывода формулу для вычисления
кривизны деформированной кривой:
•(l + e)VxT=[(1+i"'-wy-xp,+iXB + TB,l,+
+
Ув'+ии + тоЛ' , 1+и'—Y.V . w'—XV ~|2
л ч^ ) Т+1 i+8 J
, Г/ ^—it) У v' +KU + XW
+ [(-т— 1-*
1+е ; 1+е ■ ;
Пренебрегая квадратами относительных удлинений по сравнению с
первыми степенями, считая производные от перемещений и величины
типа nv пренебрежимо малыми по сравнению с единицей, найдем
посредством формальной линеаризации (1.1.9) приближенную
формулу для вычисления искривлений, изменений кривизны:
и* _ х = (i/ + ки + xw)' + х (wr — XV). (1.1.10)
Таким образом, по заданной системе перемещений точек
материальной кривой можно вычислить все геометрические характеристики
деформированного состояния: относительные удлинения волокон,
.искривления,-изменения ориентации в пространстве.
Приведем несколько примеров вычислений деформаций.
Пример 1. Однородная деформация растяжения прямого стержня.
Рассмотрим прямолинейный стержень длиной / в начальном состоянии. Оси
декартовой и подвижной координатных систем можно считать в этом случае
совпадающими, причем % = 0, х = 0. Зададим систему перемещений и = ех1у
v = w = Q, где е — некоторая константа.
В рассматриваемом случае s = хъ поэтому и' = e,V = w' = 0 и формула
(1.1.7) приводит к относительным удлинениям, постоянным по длине стержня:
8 = е. Такое деформированное состояние называется однородным. К
однородному деформированному состоянию приводит и приближенная формула (1.1.8).
Стержень, оставаясь прямым, однородно удлиняется при е > 0 или однородно
укорачивается при е < 0.
14
Пример 2. Поперечные перемещения точек прямого стержня.
Пусть тот же прямолинейный в начальном состоянии стержень расположен
доЛь оси 0х± и получает перемещения и = О, v = 0,5£*f, w = О, которые
переводят отрезок прямой в кусок параболы. По-прежнему s = х1у и по (1.1.7)
находим (1 + е)2 = 1 + (кхг)2. Если величина относительного удлинения 8 мала
по сравнению с единицей, то в левой части этого равенства, опустив слагаемое,
с0держащее е2, найдем 8 = 0,5 (kx-^2. Если же использовать заранее упрощенную
формулу (1.1.8), то получим 8=0. Поэтому линеаризация соотношений теории
деформаций, вообще говоря, допустима, но иногда требует дополнительного
тонкого анализа полученных результатов. Вычисляя искривления стержня по
формуле (1.1.9), найдем х* (1 + е)3 = k. При малых относительных деформациях
получим х* = kt что согласуется и с упрощенной формулой (1.1.10).
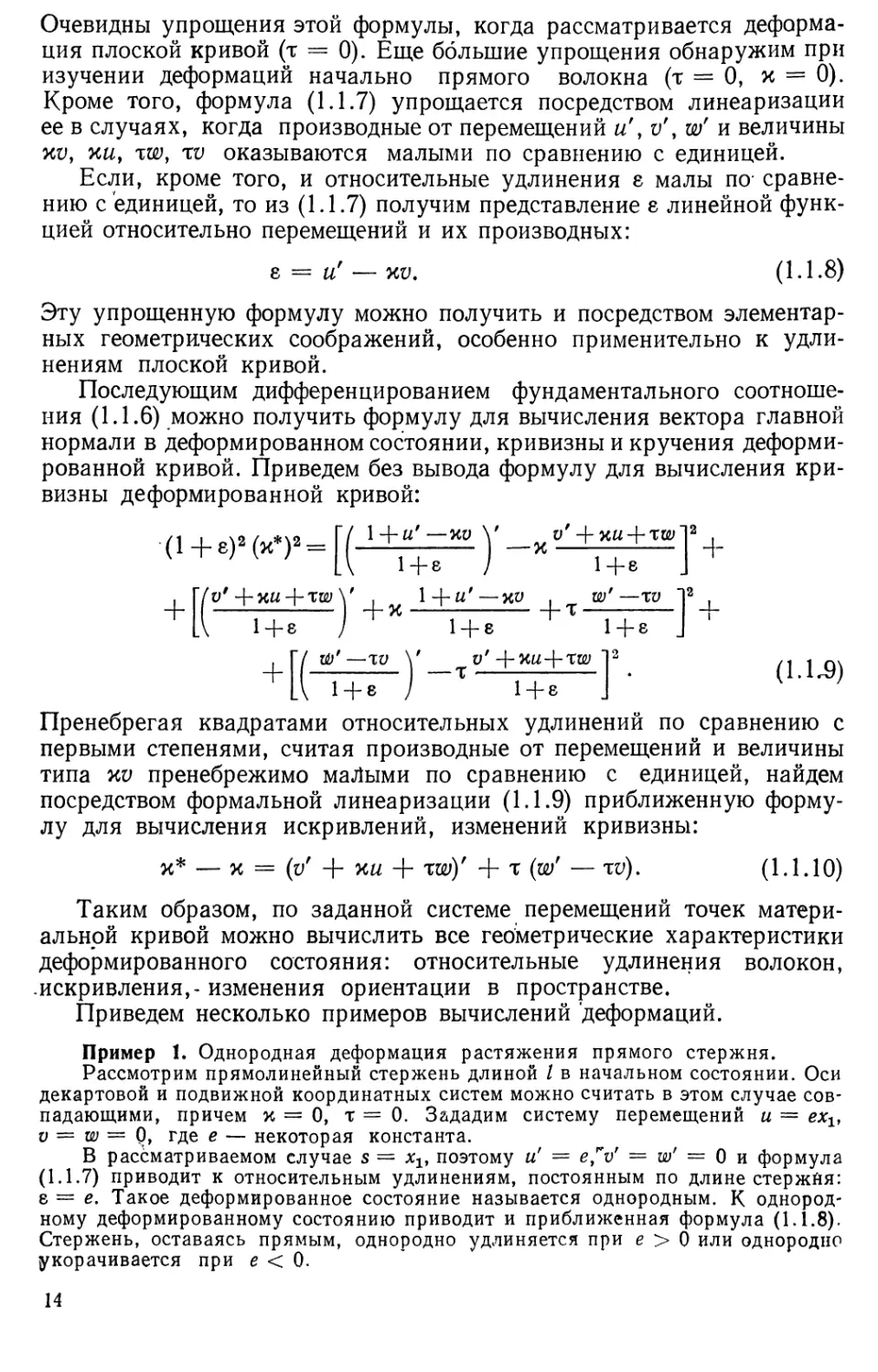
Пример 3. Деформации дуги окружности при радиальных перемещениях.
Представим себе материальную дугу окружности радиуса а, точки которой
получают радиальные
перемещения а. Найдем
относительные деформации дуги
окружности и искривления.
Единичный вектор
касательной и единичный
вектор нормали, имеющий
радиальное направление . к
центру окружности,
образуют подвижную
координатную систему. При этом
основные параметры не
зависят от координаты точки:
х = 1/а, т = 0, и = 0,
v = — a, w = 0,
поэтому производные от "ис*
перемещений равны нулю.
По формуле (1.1.7) определим относительную деформацию: 8 = а/а. К тому
же результату приводит вычисление и по упрощенной формуле (1.1.8), однако
область применения этой формулы ограничена малыми значениями а/а. Тот
же результат получается и прямым сравнением длин окружностей в
деформированном и начальном состояниях. По формуле (1.1.9) можно определить кривизну
в деформированном состоянии х* = (а + а)-1, что подтверждается прямыми
геометрическими соображениями: радиус окружности изменился, в
деформированном состоянии стал а + а. Заметим, что упрощенная формула (1.1.10) не
отражает фактических изменений кривизны, что свидетельствует о грубости
упрощений в рассматриваемом случае.
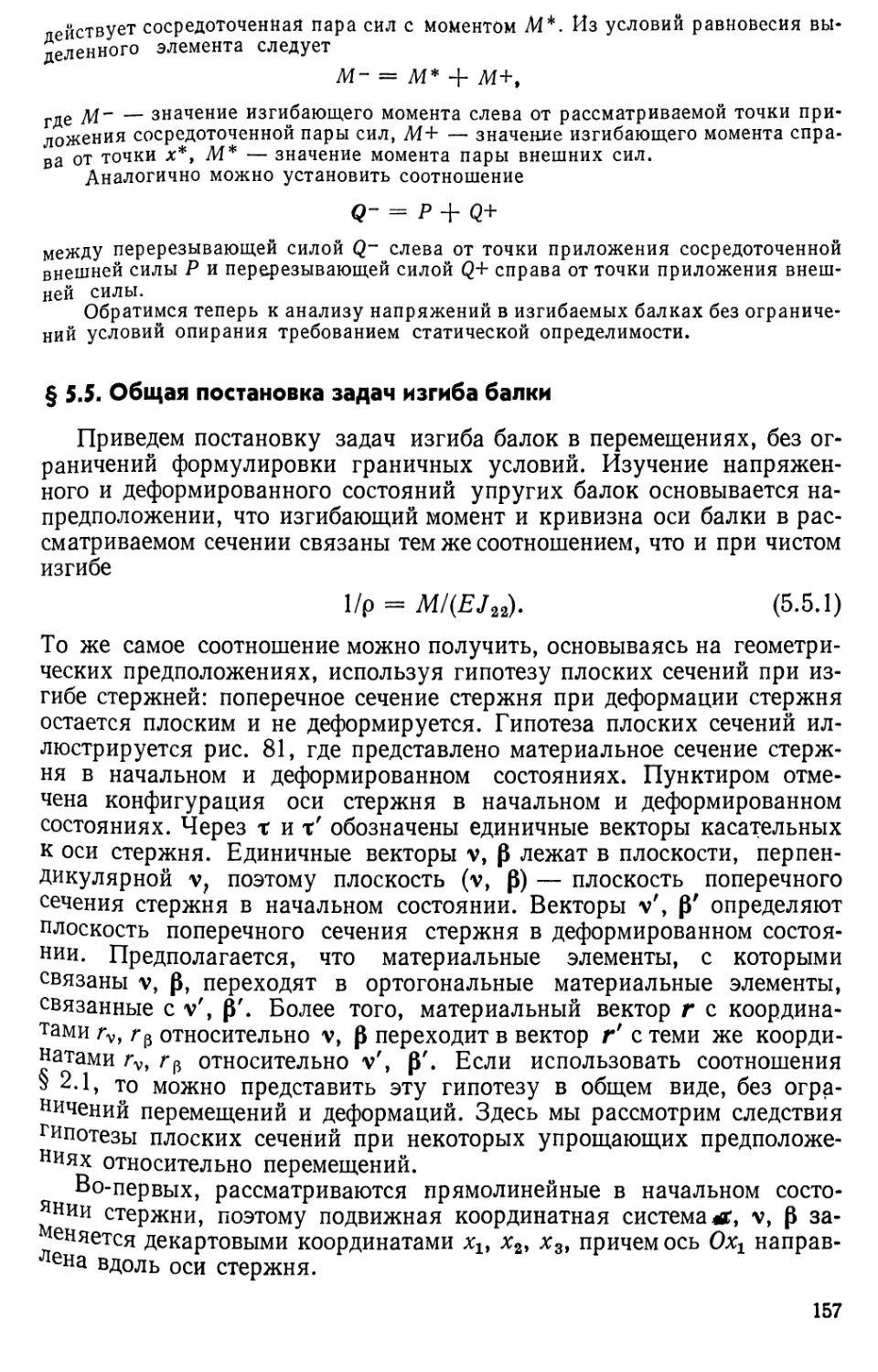
Пример 4. Деформации системы нитей и стержней.
Представим себе систему прямолинейных волокон-нитей (рис. 2),
параллельных между собой в начальном состоянии и скрепленных в поперечном направле-
ии достаточно часто расположенными жесткими стержнями. Выделим одну из
итей и предположим, что положение точек ее в начальном состоянии
определяйся вектор-функцией г (*х) и задана система непрерывных перемещений и (х^).
Рассматриваемом случае можно считать s= xv Для простоты ограничимся
лучением перемещений в плоскости рисунка. Декартова система координат
выдается так» что нити в начальном состоянии параллельны оси Oxf. Нити скреп-
д ?Тся со стержнями так, что сохраняется их перпендикулярность в процессе
формирования нитей. Планки в процессе деформирования системы остаются
Рямыми, неизменной длины,
д . Заданной системой перемещений и (s) одной из нитей системы определяются
формации не только этой нити, но и любой другой нити, имеющей относитель-
ую ординату г.
ра Рассмотрим (рис. 2) произвольную нить, имеющую точки с радиус-векто-
ми fgt перемещения этих точен обозначим uz, ординаты точек в начальном со-
15
стоянии x2z, причем x2z = х2 + z. Из рассмотрения векторного
четырехугольника MM*N*N следует равенство
z/2 + uz= и + ZV*. (1.1.11)
По формуле (1.1.6) после ее линеаризации можно определить направление
единичного вектора касательной к волокну в деформированном состоянии: т* =
= т + t/v = /1 + v'i2. Отсюда следует и выражение перпендикулярного т*
вектора нормали к волокну в деформированном состоянии: v* = — fl'/i + h-
Теперь соотношение (1.1.11) можно представить в виде
uz= и — v'ziv (1.1.12)
Перемещения точек произвольной нити системы можно представить через
перемещения точек фиксированной нити и их производные.
По перемещениям (1.1.12) можно вычислить деформации соответствующей
нити.^Заметим, что иг = и — v'z, vz = v\ по упрощенной формуле (1.1.8)
найдем для прямолинейной в начальном состоянии нити ег = и' — v"z.
Легко установить, что эту формулу можно представить в виде ez = е — v"z.
Обратившись к формуле (1.1.10), заметим, что х* —изменение кривизны
начальной нити—совпадает с v"', поэтому предыдущая формула преобразуется так
ez = 8 — x*z. (1.1.13)
Таким образом, относительное удлинение произвольного волокна
формируется как сумма относительного удлинения некоторого базового волокна и
величины, пропорциональной искривлению базового волокна. Это значит, что
процесс деформирования системы нитей и стержней можно трактовать как
одномерный. Такие системы можно называть квазиодномерными или приводящимися
к одномерным. Подобным способом можно установить деформации системы, если
базовая нить не прямолинейна, а представляет собой произвольную
пространственную кривую. Систему перемещений также можно не ограничивать плоской.
Использование упрощенных линеаризованных соотношений не обязательно.
Конечно, при отказе от каждого из упомянутых упрощений увеличивается
громоздкость всех соотношений, усложняется их геометрическая трактовка.
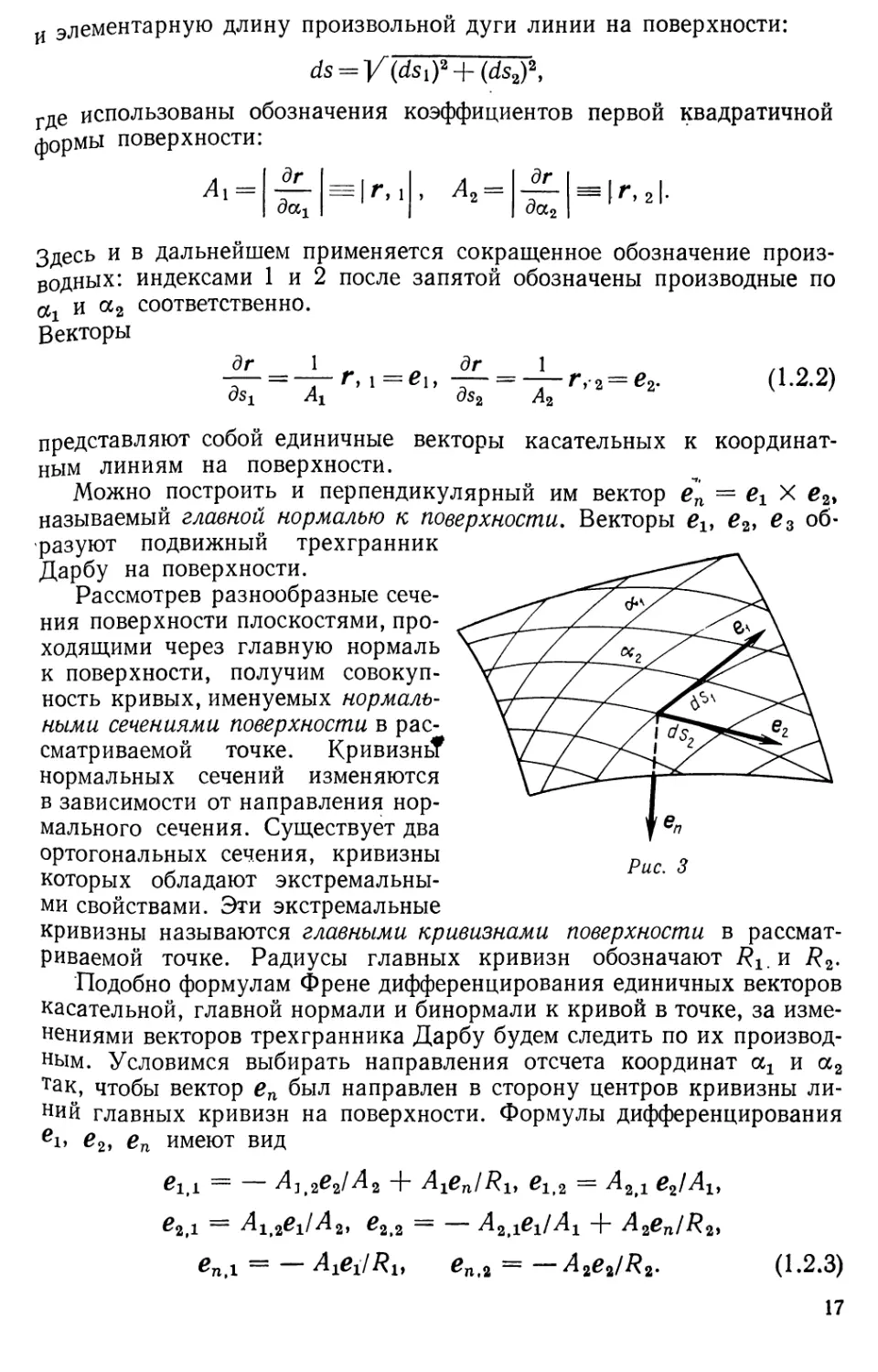
§ 1.2. Перемещения точек материальной поверхности
Рассмотрим материальную поверхность; ее можно разбить на
конечные части, каждая из которых описывается аналитически вектор-
функцией двух аргументов
г = г (alf a2). (1-2.1)
Каждая пара чисел а1? а2 определяет положение точки на
поверхности. Поэтому ах и а2 играют роль криволинейных координат на
рассматриваемой части поверхности. Линии на поверхности a2 = const
и ax = const представляют собой линии изменения ах и линии
изменения а2 и образуют сетку гауссовых координатных линий на
поверхности (рис. 3). Например, на поверхности шара сетка меридианов и
параллелей образует сетку координатных линий.
С криволинейными координатами на поверхности можно связать
подвижной координатный трехгранник Дарбу. Будем предполагать
координатную сетку на поверхности ортогональной, ортогональные
координатные линии — совпадающими с линиями кривизны на
поверхности.
По заданной вектор-функции (1.2.1) можно найти элементарные
длины дуг координатных линий:
dsx = Axdau ds2 = A2d<x2
16
и элементарную длину произвольной дуги линии на поверхности:
ds = V(dslr + (ds2)\
где использованы обозначения коэффициентов первой квадратичной
формы поверхности:
дг
= |г,,
1 А 2 —
дг
да2
Здесь и в дальнейшем применяется сокращенное обозначение
производных: индексами 1 и 2 после запятой обозначены производные по
а± и а2 соответственно.
Векторы
^=Хг'1=е1'^ = 17г'а=е2- (L2-2)
представляют собой единичные векторы касательных к
координатным линиям на поверхности.
Можно построить и перпендикулярный им вектор еп = ех X е2>
называемый главной нормалью к поверхности. Векторы еъ е2, #з
образуют подвижный трехгранник
Дарбу на поверхности.
Рассмотрев разнообразные
сечения поверхности плоскостями,
проходящими через главную нормаль
к поверхности, получим
совокупность кривых, именуемых
нормальными сечениями поверхности в
рассматриваемой точке. КривизньТ
нормальных сечений изменяются
в зависимости от направления
нормального сечения. Существует два
ортогональных сечения, кривизны
которых обладают
экстремальными свойствами. Эти экстремальные
кривизны называются главными кривизнами поверхности в
рассматриваемой точке. Радиусы главных кривизн обозначают /?ьи R2.
Подобно формулам Френе дифференцирования единичных векторов
касательной, главной нормали и бинормали к кривой в точке, за
изменениями векторов трехгранника Дарбу будем следить по их
производным. Условимся выбирать направления отсчета координат аг и а2
так, чтобы вектор еп был направлен в сторону центров кривизны
линий главных кривизн на поверхности. Формулы дифференцирования
еь е2, еп имеют вид
ем = — Alt2e2/A2 + A^n/Ri, elt2 = А2Л е21Аъ
^2,1 = Alt2ejA2y e2t2 = — A2>1e1lA1 + A2en/R2,
en,i = — A&IRu епл = —A2e2/R2. (1.2.3)
17
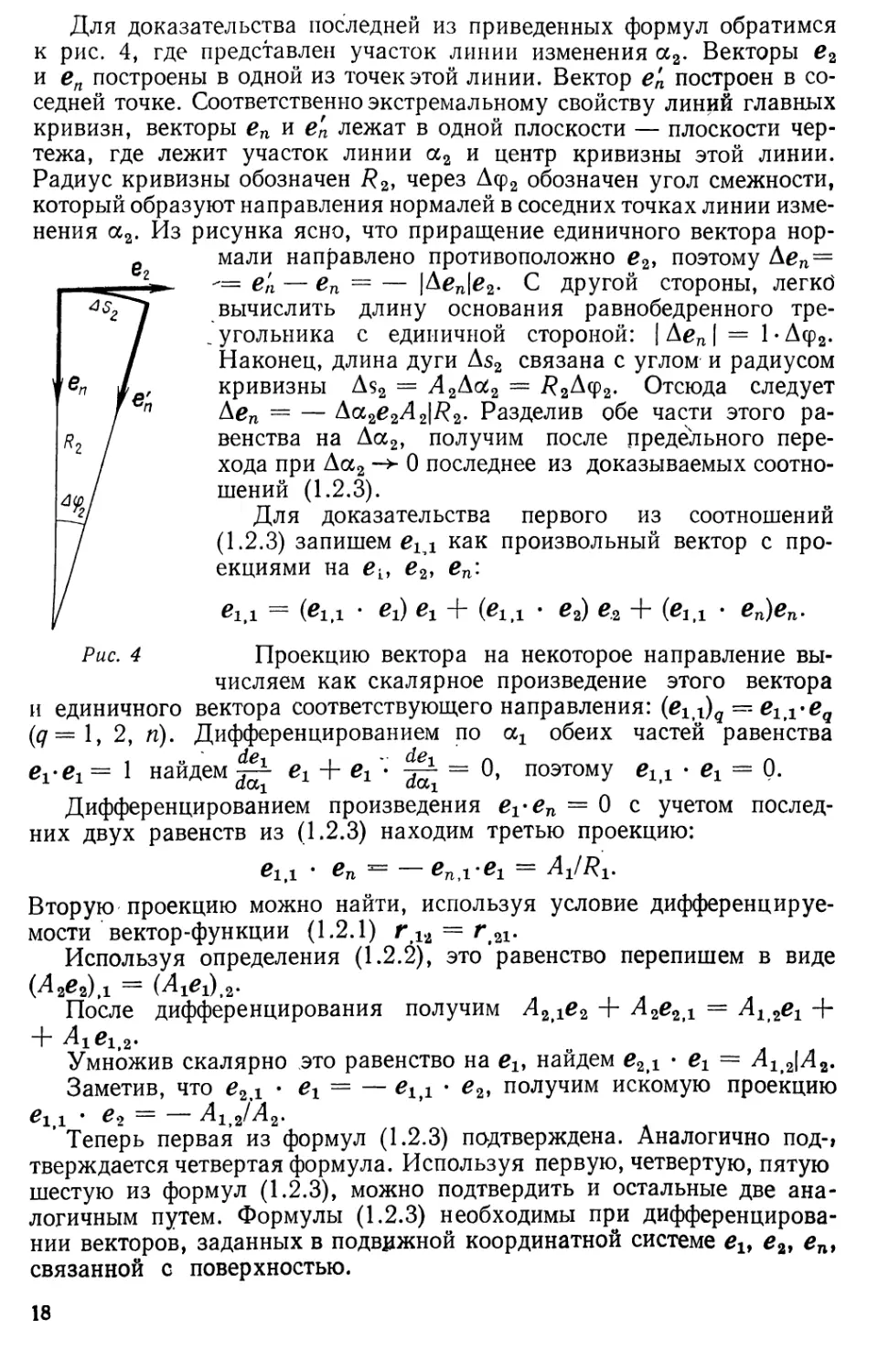
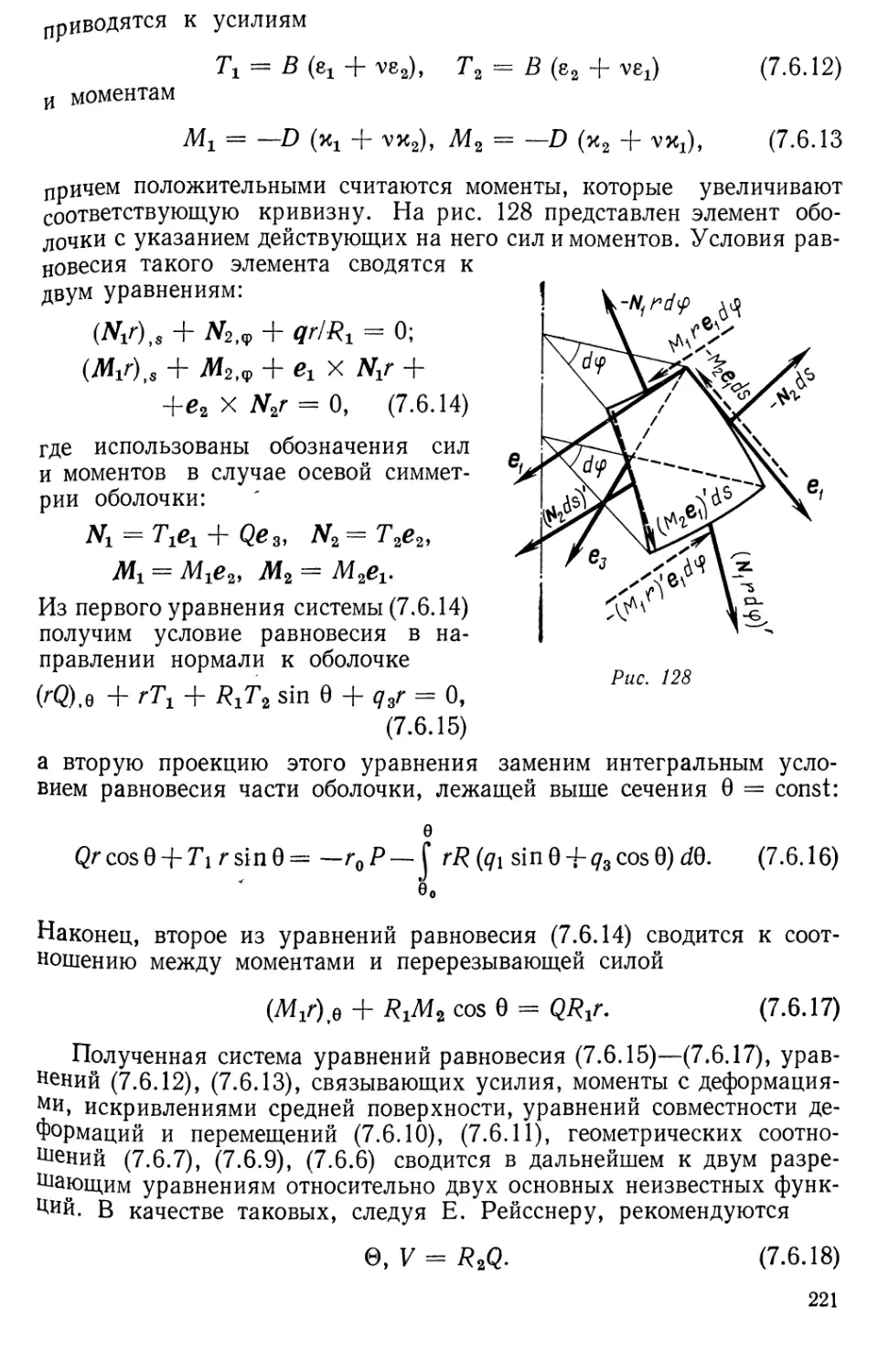
Для доказательства последней из приведенных формул обратимся
к рис. 4, где представлен участок линии изменения а2. Векторы е2
и еп построены в одной из точек этой линии. Вектор е'п построен в
соседней точке. Соответственно экстремальному свойству линий главных
кривизн, векторы еп и е'п лежат в одной плоскости — плоскости
чертежа, где лежит участок линии а2 и центр кривизны этой линии.
Радиус кривизны обозначен R2y через Лср2 обозначен угол смежности,
который образуют направления нормалей в соседних точках линии
изменения а2. Из рисунка ясно, что приращение единичного вектора
нормали направлено противоположно е2, поэтому Аеп =
-= е'п — еп = — \Аеп\е2- С другой стороны, легкб
вычислить длину основания равнобедренного
трехугольника с единичной стороной: |Дел| = ЬДф2.
Наконец, длина дуги As2 связана с углом и радиусом
кривизны As2 — А2Аос2 = #2Дф2. Отсюда следует
Аеп = — Aa2e2A2\R2. Разделив обе части этого
равенства на Аа2, получим после предельного
перехода при Аа2 -»■ 0 последнее из доказываемых
соотношений (1.2.3).
Для доказательства первого из соотношений
(1.2.3) запишем еи1 как произвольный вектор с
проекциями на £L, е2, еп:
0i,i = (eltl • ег) ех + (е1л • е2) е2 + (е1л • еп)еп.
Рис. 4 Проекцию вектора на некоторое направление
вычисляем как скалярное произведение этого вектора
и единичного вектора соответствующего направления: (eltl)q = eltl-eq
(<7=1, 2, п). Дифференцированием по ах обеих частей равенства
е^вх = 1 найдем ^- ех + е± "• -~ = О, поэтому е±1 • ег = 0.
Дифференцированием произведения е^еп = 0 с учетом
последних двух равенств из (1.2.3) находим третью проекцию:
ем * ^тг = — 0п,1*01 = AJRt.
Вторую проекцию можно найти, используя условие
дифференцируемое™ вектор-функции (1.2.1) г 12 = г 21.
Используя определения (1.2.2), это'равенство перепишем в виде
(Л2е2)д == (Аге^л.
После дифференцирования получим А21е2 + А2е2Л = А12ег +
+ Аге1л.
Умножив скалярно это равенство на е1У найдем е2Л • ег = А12\А2.
Заметив, что е2Л • ег = — е1Л • е2> получим искомую проекцию
01,1 • 02 = — А1Л1А2.
' Теперь первая из формул (1.2.3) подтверждена. Аналогично под-i
тверждается четвертая формула. Используя первую, четвертую, пятую
шестую из формул (1.2.3), можно подтвердить и остальные две
аналогичным путем. Формулы (1.2.3) необходимы при
дифференцировании векторов, заданных в подвижной координатной системе elf е2, еп9
связанной с поверхностью.
18
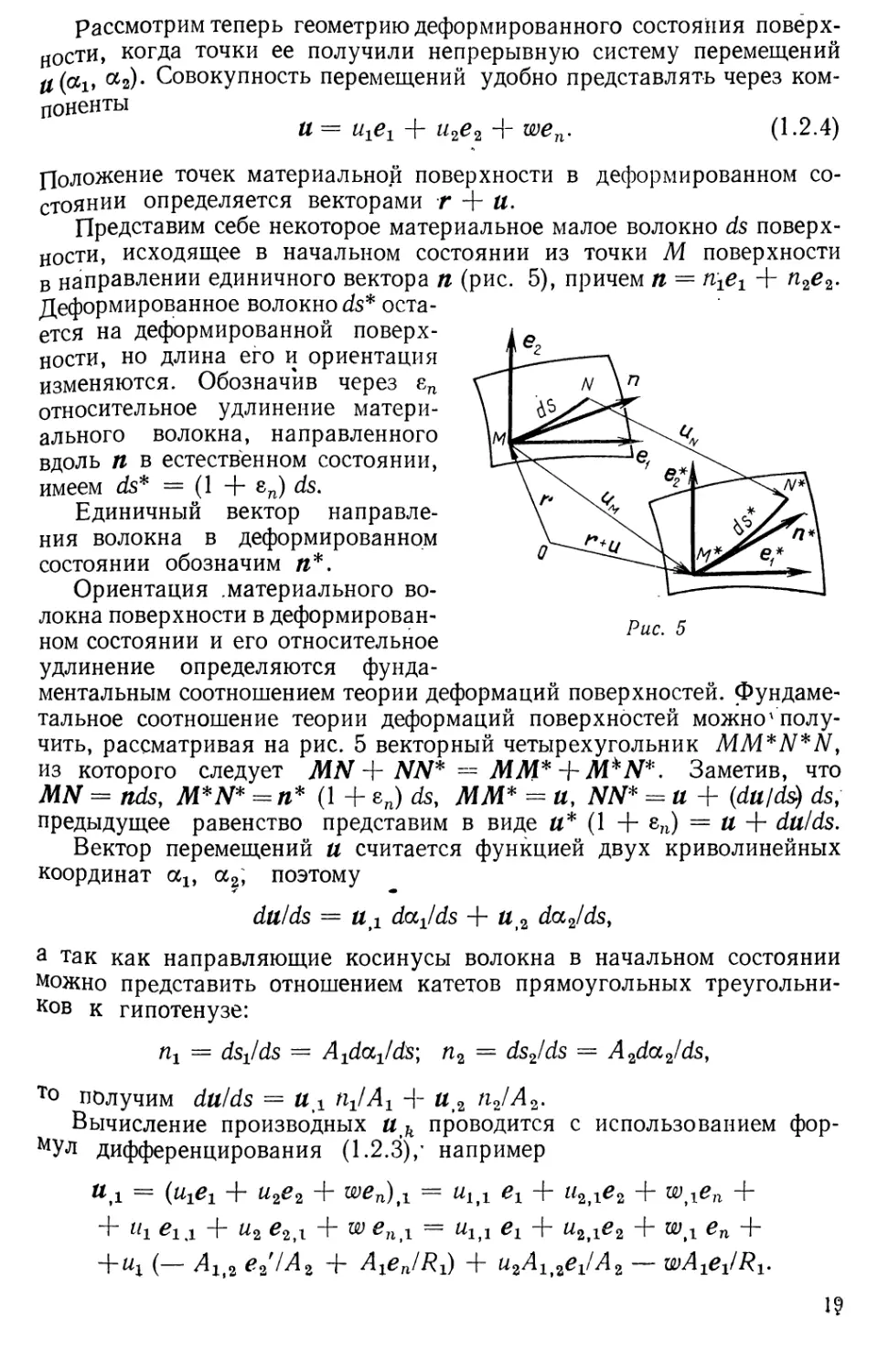
рассмотрим теперь геометрию деформированного состояния
поверхности, когда Точки ее получили непрерывную систему перемещений
#(<%i, а2)- Совокупность перемещений удобно представлять через
компоненты
и = ихех + и2е2 + wen. (1.2.4)
Положение точек материальной поверхности в деформированном
состоянии определяется векторами г + и.
Представим себе некоторое материальное малое волокно ds
поверхности, исходящее в начальном состоянии из точки М поверхности
в направлении единичного вектора п (рис. 5), причем п = пхех + п2е2.
Деформированное волокно ds*
остается на деформированной
поверхности, но длина его и ориентация
изменяются. Обозначив через гп
относительное удлинение
материального волокна, направленного
вдоль п в естественном состоянии,
имеем ds* = (1 + гп) ds.
Единичный вектор
направления волокна в деформированном
состоянии обозначим п*.
Ориентация .материального
волокна поверхности в
деформированном состоянии и его относительное
удлинение определяются
фундаментальным соотношением теории деформаций поверхностей. Фундаме-
тальное соотношение теории деформаций поверхностей можно*
получить, рассматривая на рис. 5 векторный четырехугольник MM*N*N,
из которого следует MN + NN* = MM* + M*N*. Заметив, что
MN = nds, M*N* = п* (1 + гп) ds, ММ* = я, NN* = и + (da/ds) ds,
предыдущее равенство представим в виде а* (1 + гп) = а + da/ds.
Вектор перемещений а считается функцией двух криволинейных
координат ах, а2, поэтому
da/ds = ал dajds + а2 da2ldsy
а так как направляющие косинусы волокна в начальном состоянии
можно представить отношением катетов прямоугольных
треугольников к гипотенузе:
пх = dsjds = Axdaxlds\ п2 = ds2/ds = A2da2/ds,
т° получим dulds = ал п11А1 + ал п2/А2.
Вычисление производных tttk проводится с использованием фор-
мУл дифференцирования (1.2.3),' например
ил = (ихех + и2е2 + wen)tl = uXfX ех + и2Ле2 + хюлеп +
+ «1 е1Х + и2 е2Л + w епХ = ultl ех + и2%хе2 + wtX еп +
+ их (— Ai,2 е21А% + AxeJRx) + и2Ахлех1А2 — wAxex/Rx.
1?
Теперь фундаментальное соотношение теории деформаций пдверх-
ностей можно представить в виде
(1 + еп)п* = [(1 + еп) п± + Ф2^21 ег + [ф^ + (1 + е22) п2]е2 +
+ (ФЛ + №*) еп, (1.2.5)
где
6ц = и1Л1А1 + Mi,2/0M2) — w/Ri,
622 = U2>2IA2 + M2.1/OM2) — w/R2; (1.2.6)
Ф1 = «2.1^1 — М1УОМ2); ф2 = tilt2/A2 — М2.1/ИИ2); (1-2.7)
яр! - Юд/Лх + Mi//?!, -ф|2 = wJA2 + u2IR2. (1.2.8)
Вектор п* единичный, поэтому из (1.2.5) можно получить формулу
для вычисления относительного удлинения произвольно
расположенного материального волокна поверхности
(1 + гпу = [(1 + eu) nL + <pa/ia]« + [ФЛ + (1 + еаа) п2? +
+ [грЛ + гр2п2]2. (1.2.9)
Объединяя слагаемые при квадратах и при произведениях
направляющих косинусов, перепишем эту формулу в виде
(1 +еп)* = 1 + 2епп] (1.2.10)
еПп = е1гп\ + е22п\ + 2е12п±п2у (1.2.11)
где обозначено:
^ii = e11 + 0>5(e!1 +Ф?+я|)?);
^22 = е22 + 0,5 (г222 + ф! + г|)1);
2е12 = (1+ 822) ф1 + (1 + еп) ф2 + ед>2. (1.2.12)
Установим геометрические значения введенных обозначений
комбинаций перемещений и их производных. Рассмотрим сначала
материальное волокно, направление которого совпадает с направлением
первой координатной линии на поверхности, когда пг = 1, п2 = 0.
В этом случае относительное удлинение материального волокна
поверхности 8Х вычисляется по формуле
(1 +г,У= 1 + 2е1Ъ / (1.2.13)
где еп вычисляется по формуле (1.2.12). Поэтому еп и в22 связаны
с удлинениями координатных волокон поверхности соотношениями
вида (1.2.13).
Чтобы выяснить геометрическое значение £12, вычислим
уменьшение угла 7i2 между направлениями «материальных координатных
волокон. Волокно ds^i превращается в ds1 (1 + г)е*. Полагая в (1.2.5)
п = 1, п2 = 0, найдем направление первого из координатных волокон
в деформированном состоянии:
(1 + ех) е\ = (1 + еи) ех + ф^2 + Ф^п-
gHo этому, по фундаментальному соотношению (1.2.5) можно
йтй единичный вектор el направления второго координатного во-
на на в деформированном состоянии:
(1 + еа) el - Ф2^1 + (1 + е22) е2 + ц2еп.
g начальном состоянии координатные волокна ортогональны. При
еформации прямой угол уменьшается на у12. Именно уменьшение
^оямого угла между материальными волокнами при деформации назы-
ают углом сдвига и считают, положительной величиной. Синус угла
сдвига назовем сдвигом Е12 между ортогональными волокнами и
вычислим через скалярное произведение векторов el, el- По определению,
е\-е\ = cos (я/2 — у12) = sin у12 = Е12.
Используя представления е\ и е%, найденные через их проекции,
находим
(1 + ei) (1 + е2) Е12 = (1 + еи)ф2 + (1 + 822)ф! +яМ)2 = 2е12. (1.2.14)
Величина 2е12 непосредственно связана со сдвигами материальных
координатных волокон при деформации. Таким образом, определив
относительные удлинения координатных волокон и сдвиги между
координатными волокнами в некоторой точке поверхности, можно по
формуле (1.2.11) вычислить величину епп, связанную формулой (1.2.10)
с относительным удлинением произвольно ориентированного
волокна,, исходящего из рассматриваемой точки поверхности.
Сдвиги Е\ и между произвольно направленными ортогональными
волокнами, исходящими из рассматриваемой точки поверхности в
направлениях ti\ и /|ц, вычисляются через скалярные произведения
единичных векторов л!\ Ли, вычисленных с помощью
фундаментального соотношения (1.2.5). Можно показать, что*
(1 + 8ni) (1 + еп ц) Ei п = 2 [еиЛцЛ1 и + e22n2i n2U + e12 X
X (пцп2n + n2lnlU)].
Отсюда следует, что величинами е1Ъ е22У е12 определяются не только
Удлинения исходящих из точки поверхности материальных волокон,
Но и сдвиги между волокнами. Другими словами, упомянутыми
величинами определяется деформированное состояние поверхности в
точке- Поэтому е1Ъ е22, е12 можно назвать координатами деформированно-
Го состояния поверхности в точке.
Координаты деформированного состояния поверхности в точке
^?°Жно вычислить через перемещения и производные от перемещений.
Утверждение тому — соотношения (1.2.12) и (1.2.6), (1.2.7), (1.2.8).
Другой стороны, если координаты деформации поверхности заданы,
° (1.2.12) можно рассматривать как дифференциальные уравнения для
Числения перемещений.
с Приведенные общие соотношения теории деформаций поверхностей
Умственно упрощаются, когда начальное состояние поверхности
ляется плоскостью. В этом случае любая сетка ортогональных ко-
21
*1
Cz
ех
h
-к
%
Bl
h
h
ординат на плоскости будет системой линий кривизны и во всех
соотношениях следует считать \IRX = О, 1AR2 = 0.
Особый интерес представляет возможность прямого пересчета
координат деформации плоскости в одной системе координат через
координаты деформаций в другой координатной системе, повернутой
относительно первой на некоторый угол.
Пусть в системе еъ е2 координаты деформации будут е1Ъ е22, ^12,
а в системе еъ е2 координаты деформированного состояния
поверхности обозначим еи, е22, е12.
Таблица 1 Допустим, что система
координат #!, е2 получается
поворотом elf е2 на угол а, причем
взаимная ориентация
координатных осей задается табл. 1
направляющих косинусов, где
lx = cos а, 12 = sm а-
Полагая в (1.2.11) /г1 = /1, п2 = /2, находим
е11 = е 111\ + е22 II + 2е 12 h 12.
Подобно этому, полагая в (1.2.11) пг = — /2, п2 = 1Ъ находим
^22 = ^11 ^2 + ^22 ^1 —2^12 /l /2-
Сдвиг между волокнами, направленными вдоль ех и е2, вычислим с
использованием фундаментального соотношения (1.2.5). Найдем
сначала ej и 4 затем их скалярное произведение:
2?i2 = 1(1 + вц) k + (р2/2)] [- (1 + еп) /2 + Фа/J + [фх/i +
+ (1 + е22) /а]{— фА + (1 + е22) /J + [^ +лр8/а] [-W2 +
\ + WJ-
Собирая в правых частях слагаемые, содержащие квадраты и
произведения направляющих косинусов, найдем
%2 = (— еп + е22) lj2 + е12 (1\ — 1\).
где использованы обозначения (1.2.12).
Таким образом, координаты eik деформации в точке поверхности,
связанные с выбором координатной системы еъ e2i преобразуются
при повороте основной координатной системы в координаты
деформации!?^ по однородным квадратичным формулам относительно
направляющих косинусов взаимной ориентации координатных систем:
е]\ = еп l\ + e22l22 + 2e\2l\ /2; е22 = еп l2 + e22l\ — 2eX2l\ /2;
^12 = (-еп+е22)1112 + е12(П-122). (1.2.15)
Совокупность величин (eik)y связанная с координатной системой
и преобразующаяся по формулам (1.2.15) при поворотах
координатной системы, называется тензором дефо р м а ц и и.
22
Напомним, что составляющие вектора связаны с выбором коорди-
тной системы и преобразуются по линейным однородным формулам
ианОСительно направляющих косинусов при поворотах координатной
°истемы. Компоненты тейзора второго ранга. преобразуются по одно-
соДНЬ1М квадратичным формулам вида (1.2.15).
Р Компоненты тензора (eih) часто называют компонентами деформа-
шй. Заметим, что компонентами деформаций поверхности часто
называют и величины 8И, е22, е12, определенные формулами (1.2.6) и (1.2.7).
Когда перемещения, их производные и относительные удлинения
считаются малыми, справедливы приближенные равенства:
еп — 8ц, £22 = &22» ^12 == 812« (1.2.1b)
При этом всюду величинами порядка удлинений пренебрегают по-
сравнению с единицей.
§ 1.3. Тензорные свойства деформаций поверхности
В предыдущем параграфе установлено, что деформированное
состояние в точке плоскости определяется компонентами тензора
деформаций (eih), которые изменяются при поворотах основной
координатной системы по формулам (1.2.15). Как и компоненты векторов,
компоненты тензоров изменяются при поворотах координатной системы.
Вместе с тем, например, длина вектора или сумма квадратов
ортогональных проекций вектора не изменяется при поворотах осей
координат. Подобно этому, существуют некоторые комбинации компонент
тензора, которые не изменяются при поворотах координатной
системы. Такого типа комбинации называются инвариантами тензора.
Представление об инвариантах тензора можно получить,
определяя экстремальные свойства относительных удлинений. Относительное
удлинение гп волокна, имеющего направление я, можно определить
по формуле (1.2.10) через еппу вычисляемое через компоненты тензора
Деформаций и проекции единичного вектора п:
еПп = епп\ + е22п\ + 2е12п1п2, (1.3.1)
причем пг и п2 связаны соотношением
/if + л1 — 1 = 0. (1.3.2)
Среди множества направлений материальных волокон, исходящих
Из Рассматриваемой точки поверхности, найдем такие направления,
в которых располагаются материальные волокна, имеющие
экстремальные удлинения. Эти направления находим по требованию экстре-
мУма величины епп по переменным пъ п2 при условии (1.3.2). Задача
°пРеделения условного экстремума функции (1.3.1) при условии
"•3.2) эквивалентна задаче безусловного экстремума функции
F a ennf + е22п*2 + 2е12пгп2 — %(n\ + nl — \)
23
по переменным пг, п2, где X — пока неопределенное число. Условия
экстремума этой функции dFldnx = О, dFldn2 = 0 запишем в виде
системы однородных линейных уравнений
(*ii — ^) ni + е12п2 = 0;
^i2^i + (^22 — Х)п2 = 0 (1.3.3)
относительно направляющих косинусов искомого экстремального
направления.
Условие существования ненулевых решений этой системы —
равенство нулю определителя — сводится к уравнению относительно
неизвестного множителя X:
.= 0. (1.3.4)
Корни этого квадратного уравнения можно записать в виде
Ч 2 = 0,5 [(еп+е22) ±Y(en-e22f + \e\2\ (1.3.5)
Подстановка А, = Хх в систему (1.3.3) приводит к двум
повторяющим друг друга уравнениям, из них выберем, например, первое,
которое представим в виде (еи — Хх) пг + е12п2 = 0. Это уравнение
совместно с (1.3.2) позволяет найти единственное экстремальное
направление, соответствующее значению X = Xv Действительно,
решения упомянутой системы уравнений
п\ = —ei2/(en—h\)n29
Vi + [ei2/(en-Xl)]2'n2 = ±l
представляют собой некоторое направление единичного вектора п и
ему противоположное. Другими словами, значению X = Ях,
соответствует вполне определенное единственное направление материального
волокна поверхности, проходящего через рассматриваемую точку.
Волокно, удлинение которого экстремально, называется главным
волокном. Направление главного волокна называется главным
направлением тензора деформаций поверхности.
Значению X = Х2 соответствует свое главное направление,
поэтому существуют два главных направления тензора деформаций
поверхности. Относительные удлинения главных волокон называются
главными относительными удлинениями и обозначаются Еъ Е2> а
соответствующие главные значения тензора деформаций обозначаются
еъ е2.
Чтобы установить главные удлинения, предположим, что основная
координатная система еъ е2 на поверхностиt оказалась выбранной
так, что первое главное направление совпадает с первым
координатным. Это значит, что при X = Хг решениями системы (1.3.3)
оказываются /гх = 1, п2 = 0. Такое решение реализуется только при еп = Xv
е12 = 0, когда сдвиги между выбранными координатными волокнами
отсутствуют. Отсюда следует, что главные значения тензора еъ е$
совпадают с соответствующими значениями множителя X: ег = Ях>
е\\—Х в\2
е\2 е22—Х
24
^ Я2- Нетрудно показать, что главные волокна образуют ортогональ-
е* е направления на поверхности.
г^Штак, в каждой точке деформируемой поверхности существуют два
ортогональных главных волокна, которые и после деформации
остаются ортогональными. Главные удлинения этих волокон Е1у Е2
связаны с главными компонентами тензора деформаций поверхности фор-
МУЛаМИ (1 + Ekf = (1 + 2eh), k= 1, 2.
Главные значения тензора вычисляются через компоненты тензора
по формулам
. 2eit2 = en+e22±V(en— е22)2 + 4е?2. (1.3.6)
Относительные удлинения некоторых фиксированных материальных
волокон поверхности не зависят от выбора координатной системы на
поверхности. Поэтому удлинения главных
волокон и, следовательно, главные
значения тензора деформаций еъ е2 будут
инвариантными величинами.
С другой стороны, эти величины
совпадают с корнями алгебраического
уравнения (1.3.4), которые однозначно
выражаются через коэффициенты этого уравнения.
Следовательно, комбинации компонент
тензора, представляющие коэффициенты
уравнения (1.3.4), будут инвариантами.
Можно выписать любую комбинацию инвариантов, которая также
будет инвариантной. Отметим, в частности, две комбинации
инвариантов:
ег + е2 = еп + е22, (е1 — e2f = (еп — e22f + 4е?2, (1.3.7)
им можно придать особую геометрическую трактовку.
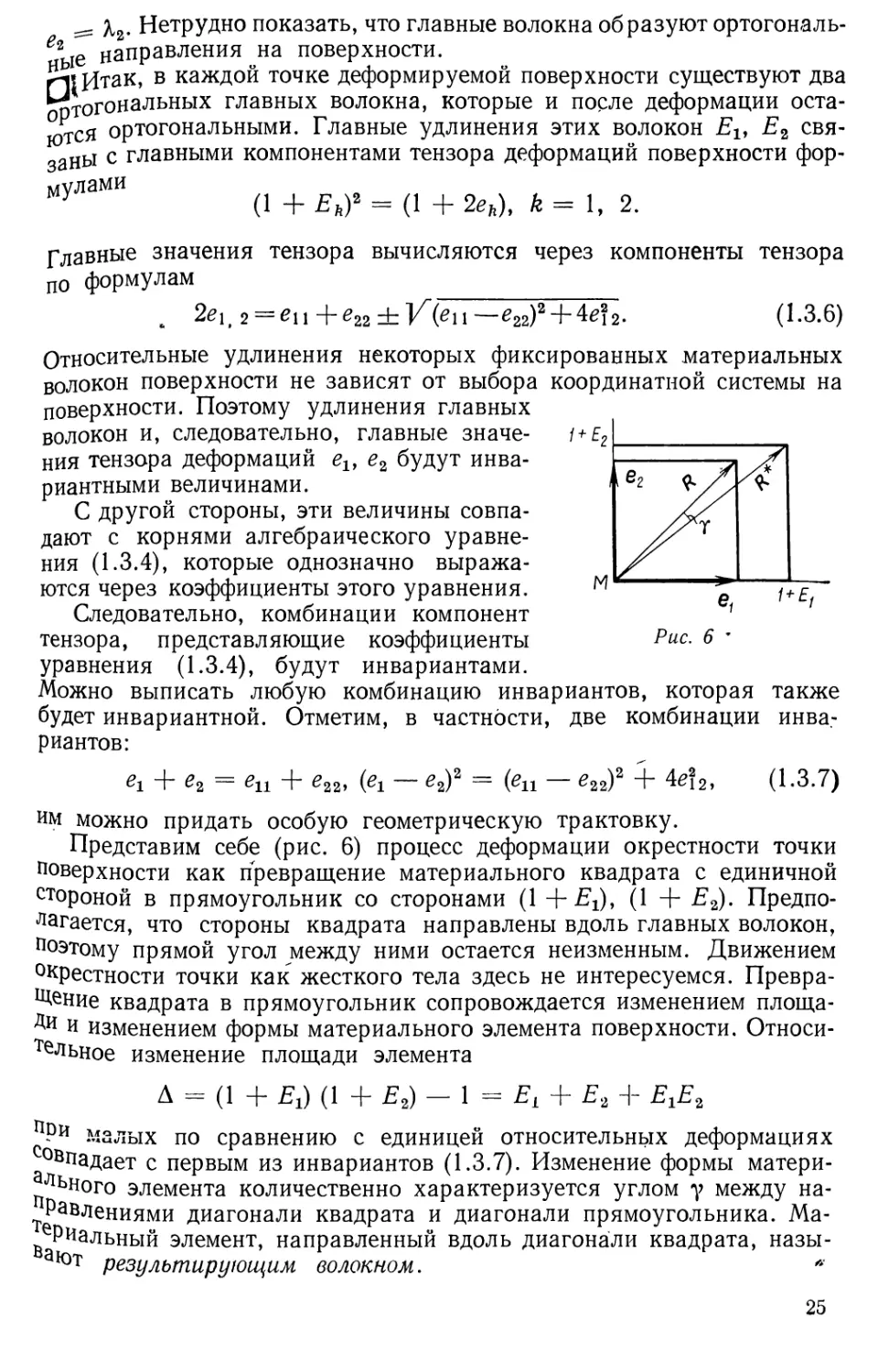
Представим себе (рис. 6) процесс деформации окрестности точки
поверхности как превращение материального квадрата с единичной
стороной в прямоугольник со сторонами (1 + Ег), (1 + Е2).
Предполагается, что стороны квадрата направлены вдоль главных волокон,
поэтому прямой угол между ними остается неизменным. Движением
окрестности точки как жесткого тела здесь не интересуемся.
Превращение квадрата в прямоугольник сопровождается изменением
площади и изменением формы материального элемента поверхности.
Относительное изменение площади элемента
А - (1 + Ег) (l+E2)-l=EL + Е2 + ЕХЕ2
ПРИ малых по сравнению с единицей относительных деформациях
°впадает с первым из инвариантов (1.3.7). Изменение формы матери-
льного элемента количественно характеризуется углом у между на-
Равлениями диагонали квадрата и диагонали прямоугольника. Ма-
^еРиальный элемент, направленный вдоль диагонали квадрата, назы-
а*°т результирующим волокном. *
Рис. 6 '
25
Угол поворота материального результирующего волокна
относительно главных волокон называют углом результирующего сдвига,
а синус этого угла — просто результирующим сдвигом.
При вычислении результирующего сдвига заметим, что
MR'= ег + е2, MR* = (1 + Ег) ех + (1 + Е2) е2.
Скалярное произведение этих векторов
V2 V(i+El)2 + (l+E2ycosy= 1+Ег + 1 +Е2.
Отсюда можно найти
2 [(1 + Егу + (1 + E2f] sin2Y = (Е± - Е2)\
При малых относительных удлинениях главных волокон квадрат
результирующего сдвига пропорционален второму из инвариантов
(1.3.7).
Таким образом, первый из инвариантов тензора деформаций
характеризует изменение площади материального элемента при
деформациях, а второй инвариант характеризует изменение формы
материального элемента при деформациях.
Тензор деформаций в произвольной координатной системе
записывается посредством таблицы
е\2 е22 ) '
симметричной относительно главной диагонали. Если же
координатные оси совпадают с главными направлениями, то тензор деформаций
в главных осях принимает вид
(о J*
Происхождение термина «tensio» (тянуть) связано с деформацией.
Деформацию можно рассматривать как некоторое линейное
преобразование материального пространства посредством тензора деформаций.
Когда тензор записан в главных осях, это преобразование сводится
к растяжениям или сжатиям в двух перпендикулярных главных
направлениях. Главными значениями тензора определяются
интенсивности упомянутых растяжений — сжатий.
§ 1.4. Примеры деформаций плоскости
Представим себе некоторую область плоскости, положение точек
которой определяется декартовыми координатами хъ х2, тогда радиус-
вектор точки в начальном состоянии
Г = X^l-y ~\- x2i2.
26
Предположим, что точки плоскости получают перемещения в своей
плоскости и проекции перемещений представляются линейными функг
айЯми координат
иг == апхг + а12х2 + аь
и2 = а2Ххг + а22х2 + а2. (1.4.1).
Вычислим компоненты деформации плоскости. Обратимся к общим
рекомендациям (§ 1.2) и обнаружим, что роль криволинейных
координат в этом случае играют декартовы координаты ах = хъ а2 = -х2.
Коэффициенты первой квадратичной формы постоянны: Ах = А2 =1,
а единичные векторы подвижной системы совпадают с единичными
векторами декартовой координатной системы ёг = il9 е2 = /2, поэтому
формулы дифференцирования (1.2.3) теряют в этом случае свое
значение. Поскольку рассматриваются перемещения точек плоскости
в своей плоскости, полагаем w = 0.
По формулам (1.2.6), (1.2.7), (1.2.8) и (1.2.Л6) вычисляем:
8ц == &1Ъ ^22 == ^22» ^®12 = ^21 + #12>
Ф1 = а2ъ ф2 = fl^. ^1 = 0, яр2 = 0. (1.4.2)
Поэтому фундаментальное соотношение теории деформаций плоскости
принимает вид
(1 + 8П) #* = [(1 + аи) п± + а12п2] /х + 1а21пг + (1 + я22) X
X л2] /2. (1.4.3)
Вычислим по формулам (1.2.12) компоненты тензора деформаций:
^п = <hi + °>5 (а\ 1 + all), е22 = а22 + 0,5 (а\2 + а\2)>
2е12 = (1 + яп) д12 + (1 + я22) «21- (1.4.4)
Компоненты тензора деформаций не зависят от координат
рассматриваемой точки плоскости. Поэтому деформированное состояние плоскости,
вызванное перемещениями (1.4.1), оказывается однородным,
одинаковым во всех точках плоскости. Используя соотношения (1.2.10)
и (1.4.4), найдем относительные удлинения координатных волокон:
(1 + £1)2 = (1 +any + ah,
(1 +E2f = a\2 + {\ +а22у. (1.4.5)
Сдвиги между координатными волокнами вычисляются по формулам
(1.2.14) с использованием последней из (1.4.4) и (1.4.5):
sin У! » = £»»= (1+0п) "12+(1+а22)з21 . (1А6)
V[<l+flll)1 + flil][fll2 + (l+fl22)al"
По формулам (1.3.7) можно вычислить инварианты деформации
Плоскости, а по формулам (1.3.6) — найти главные значения тензора
Деформаций и главные относительные удлинения. Этим исчерпывает-
я Характеристика деформированного состояния плоскости, вызван-
Ного перемещениями (1.4.1).
27
Заметим, что постоянные ах и а2 не участвуют в описаниц
рассматриваемого деформированного состояния. Это объясняется тем, что
постоянными аг и а2 определяется только перенос плоскости как
совершенно жесткого тела.
Рассмотрим некоторые частные значения постоянных aih>
участвующих в формировании перемещений плоскости (1.4.1). Случай
ап ф О а12 = а21 = а22 = О соответствует однородному растяжению
(ап > 0) или сжатию (ап < 0) плоскости в направлении оси Охх,
Случай ап Ф 0, а22 Ф 0, а12 = а21 = 0 соответствует однородному
растяжению или сжатию плоскости в
двух направлениях координатных осей.
Здесь особый интерес представляет
случай чистого сдвига, когда а22 = — Яц=
= а. При этом в соответствии с (1.4.5)
найдем Ег — — я, Е2 = а, что отражает
превращение некоторого материального
квадрата в ромб при чистом сдвиге.
Стороны квадрата образуют одинаковые
углы с осями координат. Легко
установить, что единичная сторона
квадрата превращается в сторону ромба
длиной (1 + а2), поэтому стороны квадрата
удлиняются при чистом сдвиге.
Угол сдвига- у между
материальными волокнами рассматриваемого
квадрата можно вычислить, используя
геометрически очевидное соотношение
tg (45° — 0,5?) = (1 — a)/(I + а). В отличие от чистого
сдвига деформация простого сдвига плоскости задается перемещениями
"i = Y*2> ti2 = 0. В этом случае ап = а21 = а22 = 0, а12 = у.
Первое координатное волокно не удлиняется, а второе координатное
волокно получает относительное удлинение Е22 = Vl + у — 1. Сдвиг
между координатными волокнами находим по формуле (1.4.6) Е12 =
= yfVl -f Y2- Заметим, что эти параметры чистого сдвига или
простого сдвига можно установить и на основе прямых геометрических
соображений.
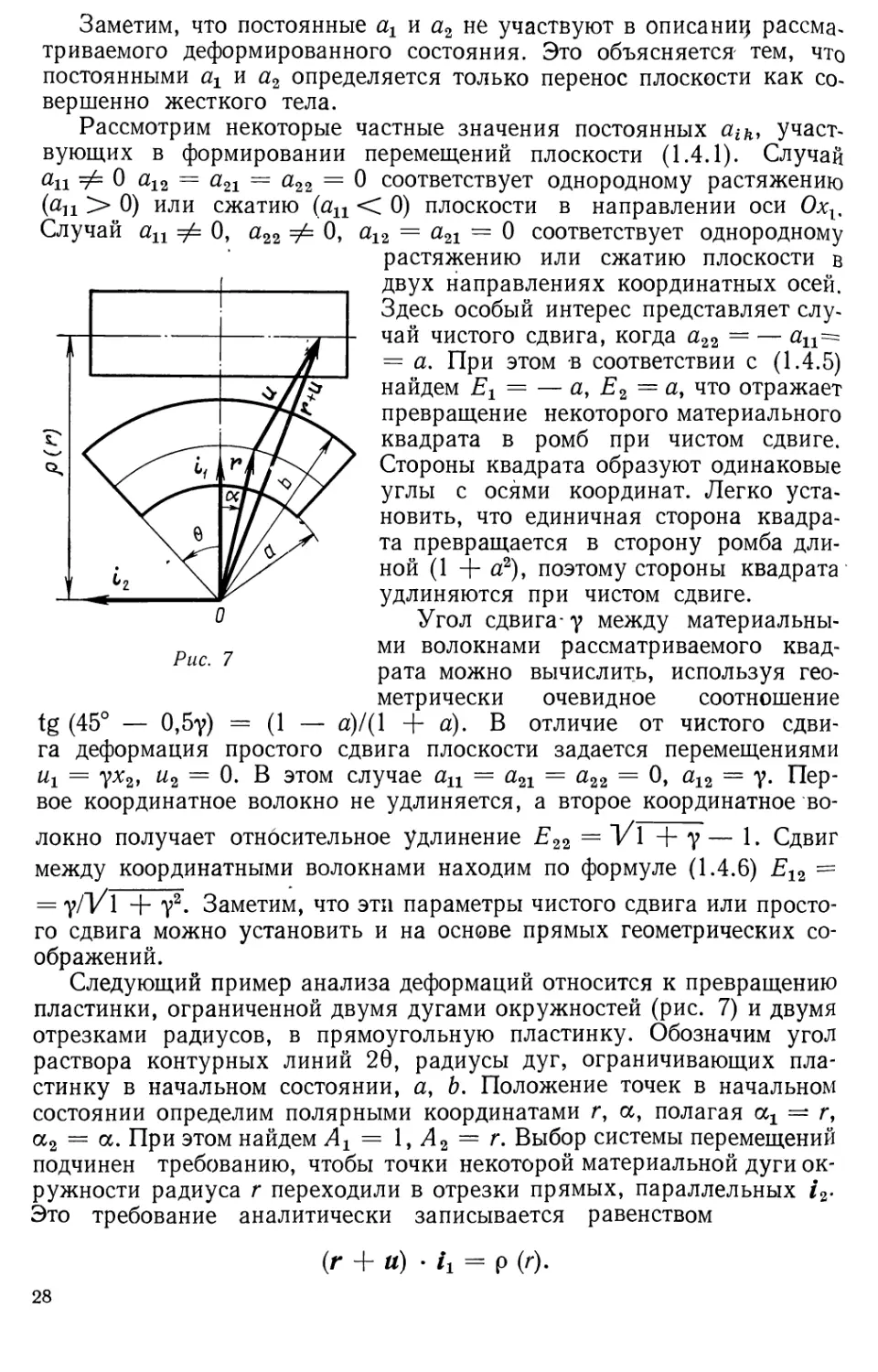
Следующий пример анализа деформаций относится к превращению
пластинки, ограниченной двумя дугами окружностей (рис. 7) и двумя
отрезками радиусов, в прямоугольную пластинку. Обозначим угол
раствора контурных линий 20, радиусы дуг, ограничивающих
пластинку в начальном состоянии, а, Ь. Положение точек в начальном
состоянии определим полярными координатами г, а, полагая <хх — г,
а2 = а. При этом найдем Аг = 1, А2 = г. Выбор системы перемещений
подчинен требованию, чтобы точки некоторой материальной дуги
окружности радиуса г переходили в отрезки прямых, параллельных /2.
Это требование аналитически записывается равенством
(г + я) • h = Р (г).
Рис. 7
28
Вторая координата точки деформированной полосы считается
зависящей только от а, поэтому (г + и) • /2 = т (а). Отсюда следует, что
радиус-вектор точки в деформированном состоянии можно
представит* в виде
r+« = p(r)/1 + m(a)/a. (1.4.7)
Для определения компонент смещения на оси подвижной
координатной системы найдем сначала единичные векторы:
ег = r° = cos ai1 + sin а /2, е2 = «° = — sin а/х + cos а/2,
a потом обратные соотношения:
/2 = sin авх + cos ae2, /х = cos аег — sin ct£2.
Подставляя эти векторы в (1.4.7), найдем проекции перемещений
на оси подвижной координатной системы:
иТ = р cos а + m sin а — г, на = — р sin а + m cos а. (1.4.8)
По перемещениям (1.4.8) можно вычислить величины e,-ft, фг-, г|?Л,
затем найти компоненты тензора деформаций eik.
Ограничимся изучением малых деформаций и перемещений, когда
компоненты тензора деформаций eik можно отождествлять с
соответствующими компонентами &ik. Формулы (1.2.6), (1.2.7) и (1.2.14)
в полярных координатах сводятся к следующим:
при перемещениях (1.4.8) получим:
err = p'cosa—l,eaa= -^-cosa—1, 2ei2 =— л'-l —-sin a. (1.4.9)
r r r r
Здесь штрихами обозначены производные от функций р (г) или m (а)
по соответствующим аргументам.
Дальнейшие вычисления вызывают необходимость установления
функции р (г) и m (а) по каким-либо дополнительным требованиям
или условиям. Потребуем, например, чтобы при деформации пластин-
- ки всюду отсутствовали сдвиги. Тогда для определения неизвестных
функций имеем уравнение w! (a) — rp' (г) = О, которое сводится
к двум уравнениям:
/р' (г) = С, m' (а) = С, (1.4.10)
гДе С — произвольная постоянная величина.
Для вычисления составляющих деформаций по формулам (1.4.9)
не требуется интегрирования (1.4.10), поэтому имеем
еГг = eaa = — cos a — 1.
г
Таким образом, при выпрямлении кривой полоски в прямоуголь-
нУю пластинку, когда отсутствуют сдвиги, окрестность каждой точки
пластинки оказывается в состоянии двустороннего растяжения или
с*атия.
29
Обозначив га деформацию пластинки в точке с координатами г"=* я,
а = О, найдем С = а (1 + еа) и относительные деформации
Представим так:
бгг^^аа^ — (l+ejcosa—1.
Наконец, потребуем, чтобы деформация отсутствовала в углах
пластинки при г = я, а = 0, тогда
a cos a < /1 I \ а 1
Err = Zaa=7^Q— 1, (l+8a)cOS0=l.
Полученных данных достаточно, чтобы построить графики (эпюры)
распределения деформаций по высоте пластинки при различных
значениях а. При этом можно ограничить параметры а> Ьу 9 так, чтобы
величины 8ГГ и eaa оставались малыми по сравнению с единицей^
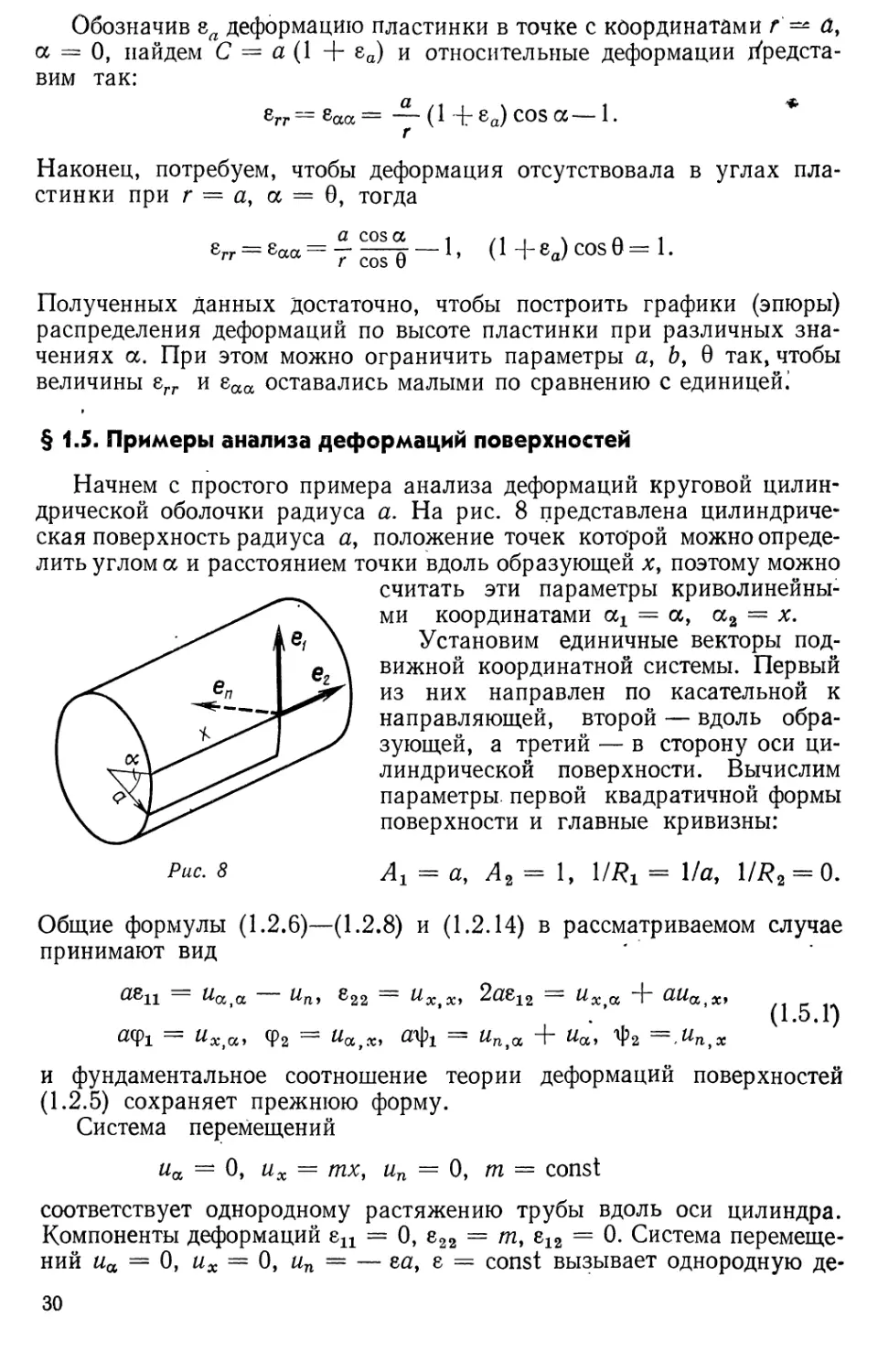
§ 1.5. Примеры анализа деформаций поверхностей
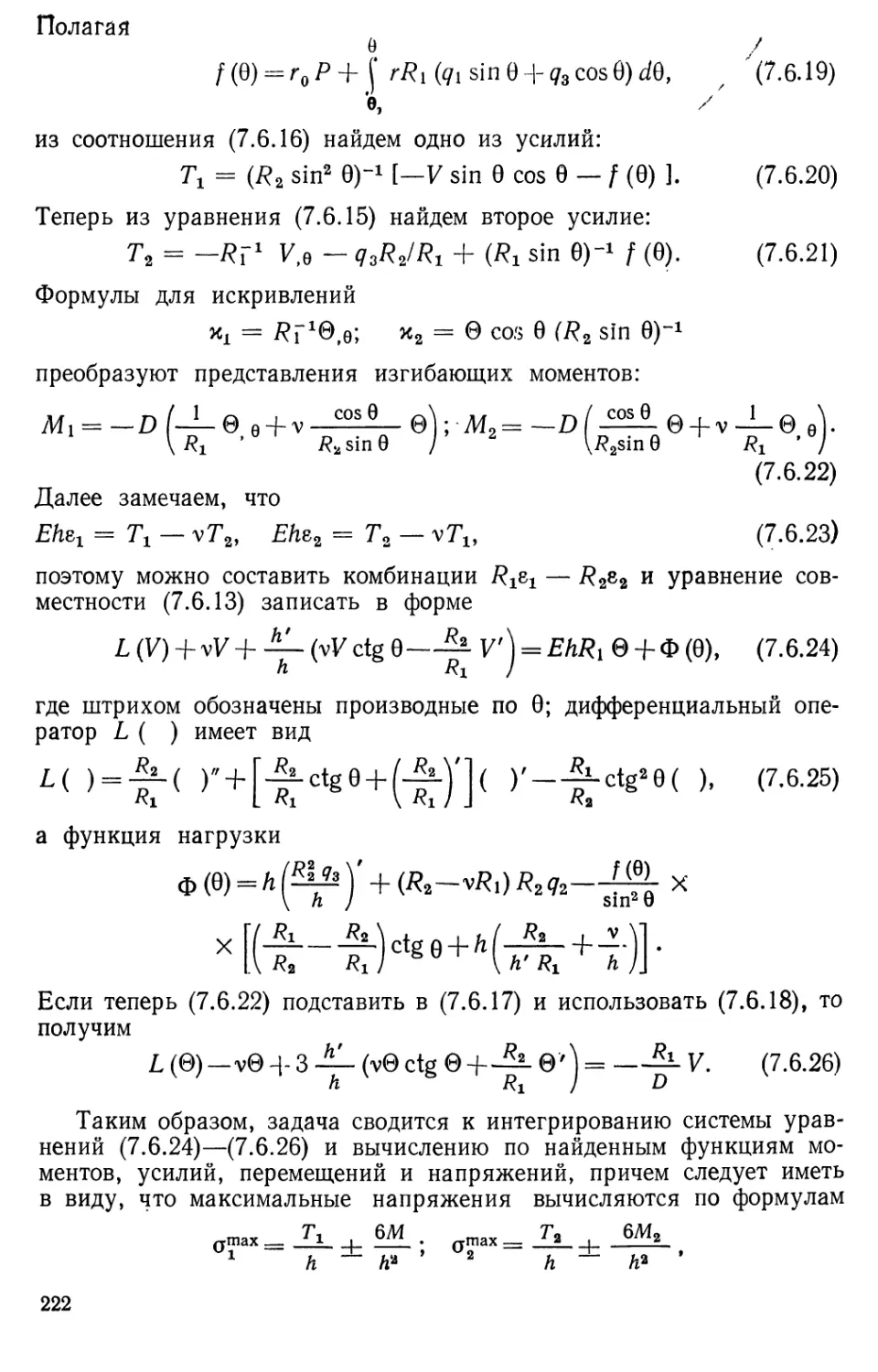
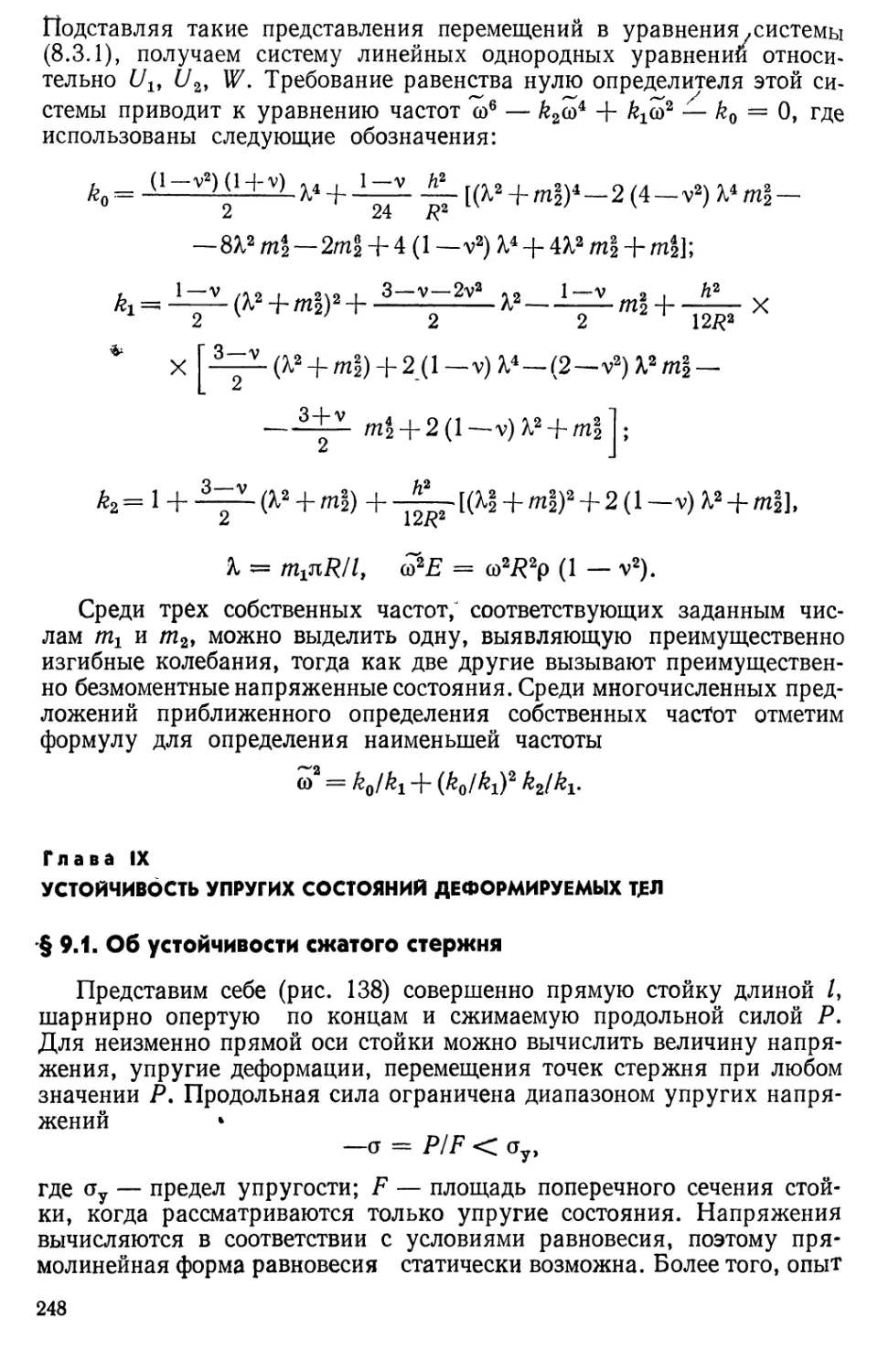
Начнем с простого примера анализа деформаций круговой
цилиндрической оболочки радиуса а. На рис. 8 представлена
цилиндрическая поверхность радиуса я, положение точек которой можно
определить углом а и расстоянием точки вдоль образующей л;, поэтому можно
считать эти параметры
криволинейными координатами ах = а, а2 = х.
Установим единичные векторы
подвижной координатной системы. Первый
из них направлен по касательной к
направляющей, второй — вдоль
образующей, а третий — в сторону оси
цилиндрической поверхности. Вычислим
параметры, первой квадратичной формы
поверхности и главные кривизны:
Рис. 8 А± = а, Л2 = 1, 1//?! = 1/а, 1/#2 = 0.
Общие формулы (1.2.6)—(1.2.8) и (1.2.14) в рассматриваемом случае
принимают вид
агп = иаа ип, е22 = uXtX> 2ae12 = их(Х + auatX,
и фундаментальное соотношение теории деформаций поверхностей
(1.2.5) сохраняет прежнюю форму.
Система перемещений
иа — 0, их = тх, ип = 0, m = const
соответствует однородному растяжению трубы вдоль оси цилиндра.
Компоненты деформаций еп = 0, е22 = /п, е12 = 0. Система
перемещений иа = 0, их = 0, ип = — е#, е = const вызывает однородную де-
30
формацию расширения цилиндра, которая характеризуется
компонентами еп ^ 8» 822 = 0» ei2 = 0. Наконец, система перемещений иа =
= ух,
их = 0, ип = 0, 7 = const вызывает деформацию простого
Рис. 9
сдвига цилиндра с компонентами
8ii = 0, е22 - 0, 2е12 - у
В рассматриваемых условиях линейных деформированных
состояний справедлив принцип наложения: наложение элементарных
перемещений вызывает наложение и. компонент малых деформаций.
Примером неоднородной деформации
трубы может служить процесс сплющивания
трубы.
Система перемещений иа = 0, их = 0,
Un = h sin 2а, h = const приводит к
неоднородным по переменной а деформациям
авп = — A sin 2а, е22 = 0, е12 = 0,
следящим за перемещениями.
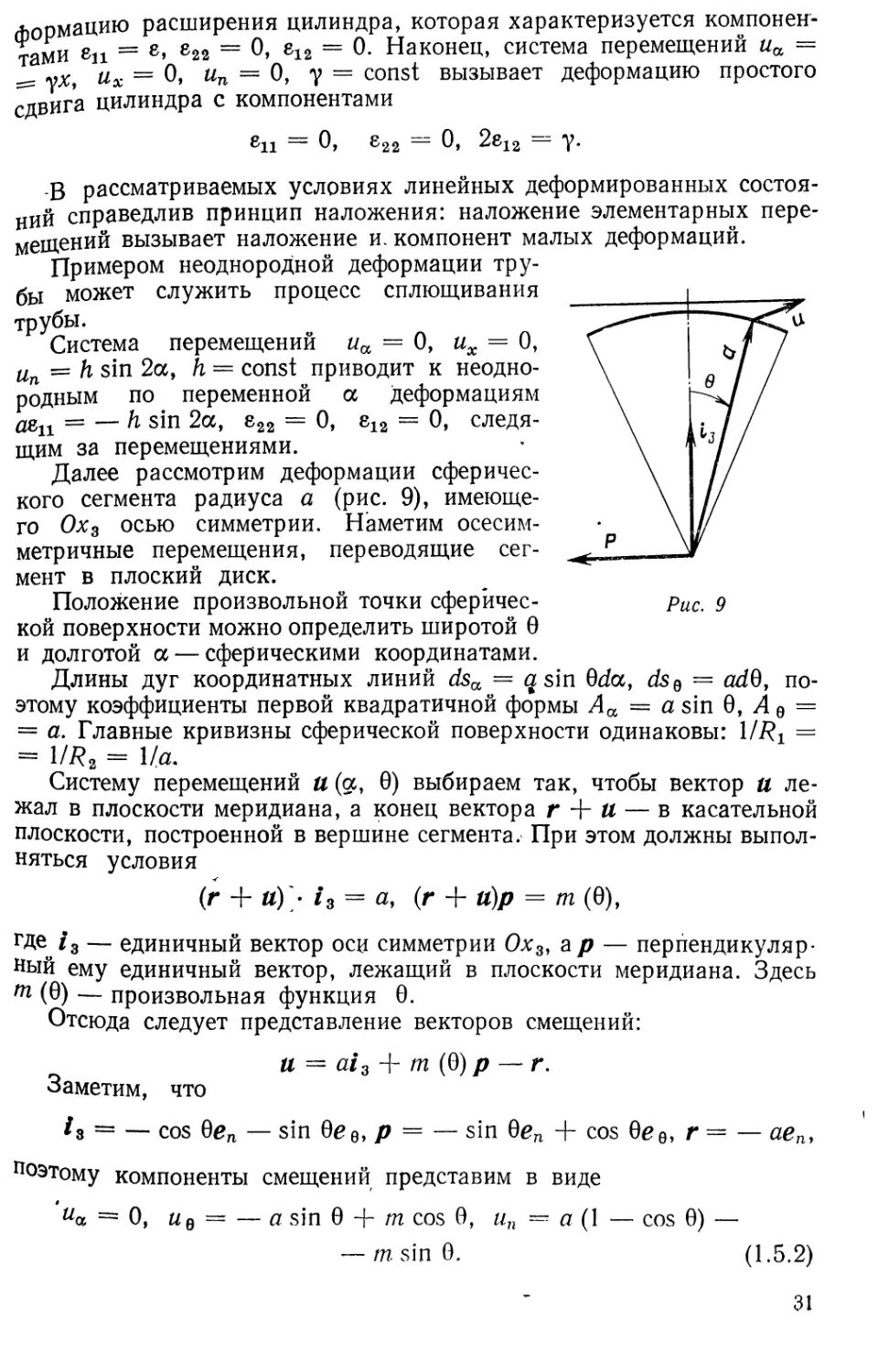
Далее рассмотрим деформации
сферического сегмента радиуса а (рис. 9),
имеющего Ох3 осью симметрии. Наметим осесим-
метричные перемещения, переводящие
сегмент в плоский диск.
Положение произвольной точки
сферической поверхности можно определить широтой 9
и долготой а — сферическими координатами.
Длины дуг координатных линий dsa = qs'm Qda, dsQ = adQ,
поэтому коэффициенты первой квадратичной формы Аа = a sin 0, А 0 =
= а. Главные кривизны сферической поверхности одинаковы: l/R1 =
= 1/яя = На.
Систему перемещений а (а, Э) выбираем так, чтобы вектор и
лежал в плоскости меридиана, а конец вектора г + и — в касательной
плоскости, построенной в вершине сегмента. При этом должны
выполняться условия
(г -f и)- /8 = а, (г + и)р = /п (6),
где^/д — единичный вектор оси симметрии Ох3у ар —
перпендикулярный ему единичный вектор, лежащий в плоскости меридиана. Здесь
т (9) — произвольная функция 0.
Отсюда следует представление векторов смещений:
и = ш3 + т {0)р — г.
Заметим, что
'з = — cos Qen — sin 0ее, р = — sin Qen + cos 0ee, r = — ae7l,
поэтому компоненты смещений представим в виде
иа = 0, ие = — a sin 0 + т cos 0, г/72 = а (1 — cos 0) —
— /nsin 0. (1.5.2)
3.1
По перемещениям (1.5.2) и формулам (1.5.1) находим компоненты
малых деформаций:
еаа = т/(я sin0); eee = m'cos8/a—1; еае — 0.
Неизвестную функцию т (0) удобно представить в виде
т = a sin 9 [1 + е-(9)].
Тогда предыдущие формулы дают соотношения
8аа = 8 (0), 600 = 8 COS2 0 — Sin2 0 + б' sin 0 COS 0.
Задавая, например, закон расширения параллелей е = k sin 0,
k = const, найдем закон распределения деформаций меридиана:
еее = (2k cos2 0 — sin 0) sin 0.
Здесь может представить особый интерес определение точек перемеш
знака деформации меридиана.
§ 1.6. Системы координат при описании деформаций
трехмерного тела
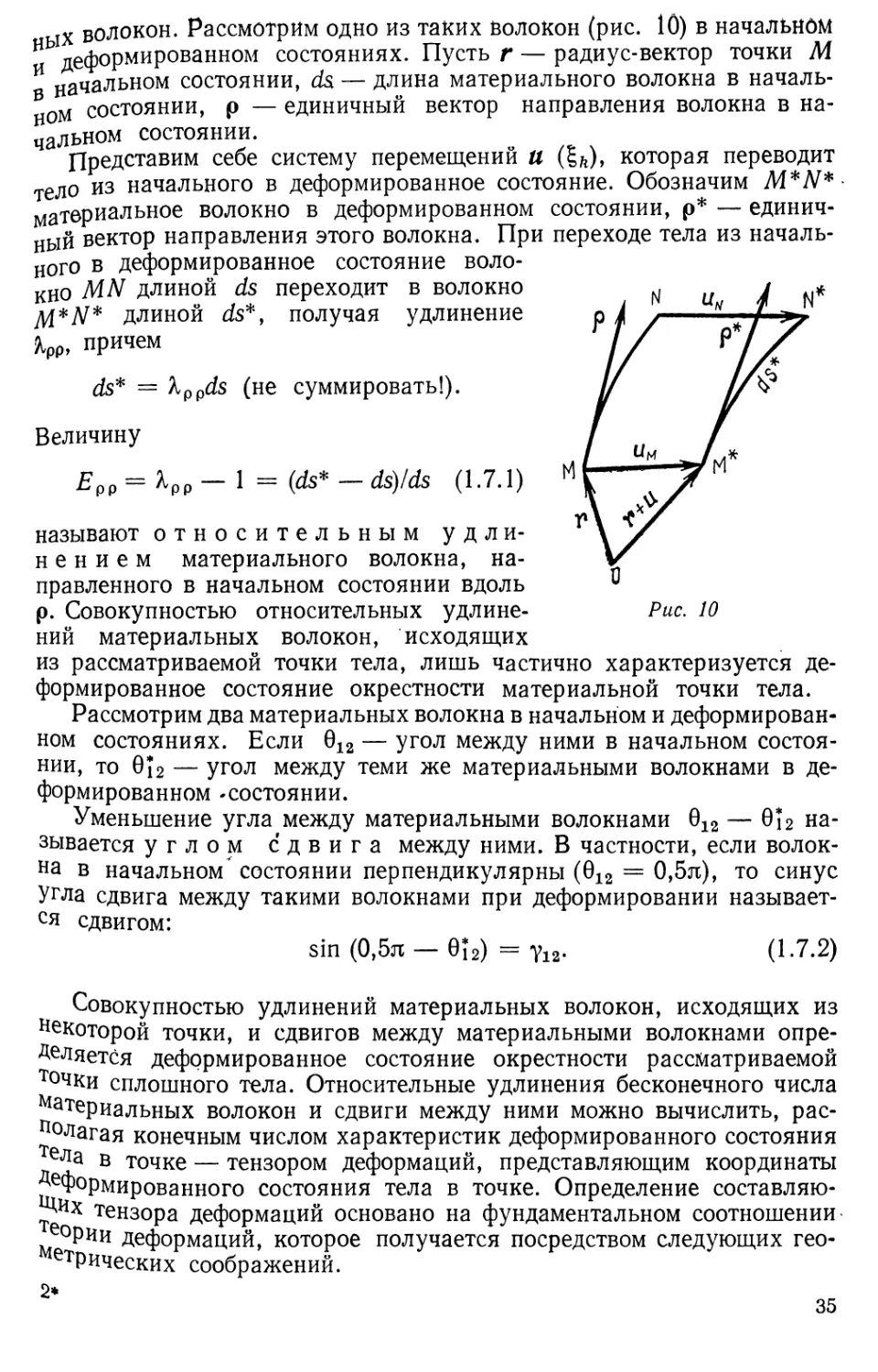
Ниже рассматривается результат деформации трехмерных
материальных тел. При этом предполагается существование некоторого
начального состояния тела и деформированного состояния,
отличающегося от начального непрерывной системой перемещений.
Положение материальных частиц тела, занимающего в начальном
состоянии объем V, ограниченный поверхностью 5, можно определить
разнообразными координатами. В первую очередь можно ввести
декартовы координаты.
Обозначим ik (k = 1, 2, 3) ортогональные единичные векторы
декартовой системы координат, a xk — декартовы, координаты частицы
в начальном состоянии. Тогда радиус-вектор частицы представим
суммой:
Здесь и в дальнейшем удобно применять правило сокращенного
обозначения суммирования. Наличие повторяющихся индексов
эквивалентно знаку суммирования по этому индексу от единицы до трех.
Положение точки в пространстве можно определить и
криволинейными координатами £s (s = 1, 2, 3), когда задается вектор-функция
г = г &ъ Ъ2У у.
Семейства поверхностей lh = const образуют семейства
координатных поверхностей, а пересечения разнообразных поверхностей
образуют семейства координатных линий. Вдоль каждой из координатных
линий изменяется только одна из трех криволинейных координат.
Через каждую точку пространства проходят три координатных линии
разных семейств. Можно ввести единичные векторы ek касательных
к координатным линиям в рассматриваемой точке. По определению,
дг1д1г = На, dr'ldl2 = Н2е2, drldU = Н8е3, (1-6.1)
32
Hj, H2, H3 — коэффициенты Ламе,
соответствующие выбранной криволинейной координатной системе. Мы будем поль-
оваться ортогональными координатами, полагая еи в2, в3
удовлетворившими условиям ортогональности.
Из определения (1.6.1) следует способ вычисления коэффициентов
ЛаМб: Uh = \dr/dUl (1-6.2)
Здесь же напомним представление элемента длины дуги кривой в
криволинейных ортогональных координатах:
&2 = |^Г|2 = щаЦ (1 63)
Если положение точки в пространстве
определяется-криволинейными координатами, то в каждой точке можно вычислить тройку
единичных векторов еъ, которые образуют подвижной координатный
трехгранник. Изменения векторов подвижного трехгранника
характеризуются производными от еи по криволинейным координатам. Для
представления этих производных используются специальные обозначения
их компонент:
deMh = eSth^T?kem. (1.6.4)
Величины Tfk называют символами Кристоффеля
и вычисляют по правилам, которые устанавливаются ниже. Во-первых,
из определения (1.6.4) при ортогональных векторах получаем
соотношение
е89н-ет= ТТи, (1.6.5^
которым можно пользоваться для вычисления всех символов
Кристоффеля. Процесс вычисления этих символов упрощается, если заметить,
что дифференцированием равенств е1-е1 = 1, е2-е2 = 1, е3-е9 = 1 по
любой из переменных £* находим для любого значения k:
ГЬ = 0, 1Ъ = 0, 1Ъ = 0. (1.6.6)
Дифференцированием условий ортогональности ер-ещ — О при
Р Ф т находим соотношения между символами Кристоффеля:
Гт — ГР Гт _ Г1 f Гт — Г2« Гт— ГЗ о (1.6.7)
1 ps— —1 ms> A ii — —A mb * 22— —* т2> * 3з— —х шЗ- \*'^-Ч
Наконец, условия дифференцируемости вектор-функции r(li,.£a» £з)
д2г а2 г , ^ ч
dim dls д%8 dlr,
можно записать в виде
(Hses),m ■= (H.mem)s (не суммировать!).
Скалярным умножением этих равенств на es находим при тфэ
r^s —— - (не суммировать!). (1.6.8)
2 Зак. 588 33
Если же предыдущие равенства умножить на ер (р Ф k Ф т), то
получим
Hftr£m==Hmr£fc (не суммировать!). (1.6.9)
Этим исчерпывается вычисление символов Кристоффеля. После
введения криволинейных координат, единичных векторов подвижной
координатной системы и правил дифференцирования этих векторов
напомним основные формулы для вычисления длин, площадей и объемов
материальных элементов.
Длина элементарного волокна, исходящего из рассматриваемой
точки вычисляется по формуле
ds* = Щ, dl2m = dx\ + dx\ + dx\. (1.6.10)
Площадь элемента поверхности, который опирается на векторные
элементы dnx и dn2, совпадает с модулем векторного произведения
dS = \dnx X dn2\. (1.6.11)
Угол между направлениями волокон вычисляется через скалярное
произведение:
dnx-dn2 = |<teiMdn2[ cos (fih* &пг)- (1.6.12)
Наконец, объем параллелепипеда, построенного на векторах dnly dn2>
dn3, вычисляется как модуль смешанного произведения:
dV = \{dnx X dn2) dn3. (1.6.13)
Вычисления скалярного и векторного произведений векторов,
заданных в ортогональных криволинейных координатах, не отличаются
от соответствующих вычислений в декартовых ортогональных
координатах.
Если положение материальной частицы тела в начальном
состоянии задается вектор-функцией г (11у 12, 13), то положение той же
частицы в деформированном состоянии определяется вектором г + #, где
й(£г, gg, £3) — вектор-функция, которой задается система перемещений
при переходе тела из начального в деформированное состояние.
Если перемещения и заданы как непрерывные функции координат,
то можно вычислить разнообразные геометрические характеристики
деформированного состояния: удлинения материальных волокон,
изменения углов, площадей, объемов материальных элементов при
деформации. Все эти вычисления можно провести, располагая
фундаментальным соотношением теории деформаций произвольного
трехмерного тела.
§ 1.7. Фундаментальное соотношение теории деформаций,
координаты деформации
Установим геометрические соотношения между материальными
элементами сплошного тела в начальном и деформированном состояниях.
Каждый объемный материальный элемент тела будем представлять
материальной частицей и совокупностью исходящих из нее материаль-
34
ых волокон. Рассмотрим одно из таких ёолокон (рис. 10) в начальном
й деформированном состояниях. Пусть г — радиус-вектор точки М
начальном состоянии, ds — длина материального волокна в
начальном состоянии, р — единичный вектор направления волокна в
начальном состоянии.
Представим себе систему перемещений и (£&), которая переводит
тело из начального в деформированное состояние. Обозначим M*N*>
материальное волокно в деформированном состоянии, р* —
единичный вектор направления этого волокна. При переходе тела из
начального в деформированное состояние
волокно MN длиной ds переходит в волокно
M*N* длиной ds*, получая удлинение р
ЯРР, причем
ds* = ^ppds (не суммировать!).
Величину
Epp=XPQ—l = (ds* —ds)/ds (1.7.1)
называют относительным
удлинением материального волокна,
направленного в начальном состоянии вдоль
р. Совокупностью относительных удлине- Рис. 10
ний материальных волокон, исходящих
из рассматриваемой точки тела, лишь частично характеризуется
деформированное состояние окрестности материальной точки тела.
Рассмотрим два материальных волокна в начальном и
деформированном состояниях. Если 612 — угол между ними в начальном
состоянии, то 6J2 — угол между теми же материальными волокнами в
деформированном -состоянии.
Уменьшение угла между материальными волокнами 012 — ЭЬ
называется углом сдвига между ними. В частности, если
волокна в начальном' состоянии перпендикулярны (Э12 = 0,5я), то синус
Угла сдвига между такими волокнами при деформировании
называется сдвигом:
sin (0,5л — вЬ) = Yi2. (1-7.2)
Совокупностью удлинений материальных волокон, исходящих из
некоторой точки, и сдвигов между материальными волокнами
определяется деформированное состояние окрестности рассматриваемой
точки сплошного тела. Относительные удлинения бесконечного числа
Материальных волокон и сдвиги между ними можно вычислить,
располагая конечным числом характеристик деформированного состояния
ела в точке — тензором деформаций, представляющим координаты
Деформированного состояния тела в точке. Определение
составляющих тензора деформаций основано на фундаментальном соотношении
е°рии деформаций, которое получается посредством следующих гео-
етРических соображений.
2*
35
На рйс. 10 можно обнаружить векторный четырехугольник
MNN*M*, рассмотрение которого приводит к равенству
MN+ aN = uM + M*N*.
Изменяя обозначения отдельных слагаемых, заметим, что
MN=pds, М* N* = p*ds*, UM = u{xk) = u(lh),
uN = U + — ds.
ds
Учитывая еще и определение (1.7.1), предыдущее векторное равенство
перепишем в форме
р*(1 +£рр) - p + du/ds. (L7.3)
Остановимся теперь на вычислениях производной вектор-функции а
по направлению дуги s.
Если перемещения считать заданными в декартовых ортогональных
координатах, то
dulds = (da/dxk) dxh/ds = (du/dxh) phy
где использованы, известные соотношения между отношениями
приращений дуг, приращений координат и направляющими косинусами дуг:
dxk = phds, р = phih.
Используем представление перемещений в декартовых координатах:
а = ustS9 (1.7.4)
производные по координатам xs обозначим индексом после запятой,
тогда соотношение (1.7.3) перепишем в форме
р* (1 + £рр) = р + us>hphis. (1.7.5)
Соотношение (1.7.5) можно назвать фундаментальным. Отсюда
следует, что девятью градиентами перемещений — производными uSth
определяются направление р* любого волокна, исходящего из
рассматриваемой точки тела, и относительное удлинение волокна. Поэтому
упомянутые градиенты можно назвать координатами
деформированного состояния тела в точке. Число независимых координат
деформированного состояния тела в точке можно сократить до шести.
Величины
2eih = uiih + ukti + uSiiuStk (1.7.6)
можно считать координатами деформации, так как задания их
достаточно для определения относительных удлинений и сдвигов
материальных волокон, исходящих из рассматриваемой точки тела.
Действительно, для вычисления относительных -удлинений
обратимся к фундаментальному соотношению (1.7.5), откуда найдем
квадрат длины векторов левой и правой частей:
(1 + £рр)2 = (pft + uhtipi) (pk + uktSps) (по p не суммировать!)
Раскрывая скобки и используя обозначения (1.7. 6), получим
(1+£рр)2 = 1 + 2*<ftp,pk. (1.7.7)
36
rt и этом использовано соотношение
Р " " Р? + Pi + Pi = 1.
о дальнейшем относительные удлинения Ерр материальных волокон.
0 . —пттпо-pl г. величинами ерр:
(1 +Ерру= 1 +2ерр, (1.7.8)
удобно связывать с величинами ерр
уд
которые вычисляются через eik посредством квадратичных формул
относительно направляющих косинусов:
еРР =* eihpiph. (1.7.9)
Отсюда следует, что величины eih можно считать координатами
удлинений материальных волокон. Обратимся теперь к вычислениям
сдвигов между материальными волокнами. С этой целью рассмотрим
волокна, направленные вдоль р<х> и р<2> в начальном состоянии.
Применив к каждому из этих волокон фундаментальное соотношение(1.7.5)
найдем:
р^*(1+£Р1Р1) = (р^ + ^,дР^)4,
P(2,*(l+fp2pJ = (pi2) + ^.pP^2))4.
Скалярным перемножением этих равенств получим
Для ортогональных в начальном состоянии волокон, учитывая
обозначения сдвигов (1.7,2), найдем
yi2(l+EPlPl)(l+EP2Qi) = 2epqP^p^\ (1.7.10)
Поэтому шесть величин eiki определенных формулами (1.7.6), можно
считать независимыми координатами деформированного состояния тела
в точке.
Заметим, что все рассуждения и вычисления существенно не
изменятся, если положение точек тела в начальном состоянии
определяйся криволинейными координатами. В этом случае фундаментальные
соотношения теории деформаций (1.7.3) перепишем в форме
р* (1 + Ерр) = р + Hi"1 «fcpfc,
спользуем разложение вектора перемещений по осям подвижного
Р^хгранника и = uses и формулы дифференцирования единичных век-
°Р°в (1.6.4).
При этом найдем фундаментальное соотношение:
р* (1 + Ерр) = р + Hj^Pft (ttPift + мвГ5к) ер. (1.7.11)
Но°с^Но проверить; что формулы (1.7.8), (1.7.9) для вычисления
отдельных удлинений произвольно ориентированных волокон и
37
формула (1.7.10) для вычисления сдвигов сохраняются, если только
величины eik определить общими формулами
2еп = 2еи + е*п + (е12 + со3)2 + (е18 — со2)2,
*12 = ei2 + бц («и — со3) + е22 (е12 + со3) + (е13 — со2) (ё23 + <ог)
(1, 2, 3), (1.7.12)
где использованы обозначения
ei^Hr^ui+^iH^H^s^ + ^H,)-1^^^,
2ei2 = HaHr1(a2H2-1)fl+H1H2-1(«iHr1)i2 (1,2,3), (1.7.13)
2©1 = (Н2Н8)-Ч(Н8И8),2-(Н,^|8 1 (1, 2, 3). (1.7.14)
Символы (1, 2, 3) означают возможность получения других
соотношений путем круговой перестановки индексов.
Выясним геометрические значения координат деформированного
состояния тела в точке. С этой целью рассмотрим совокупность
координатных волокон. Так называют материальные волокна,
направления которых в начальном состоянии совпадают с векторами подвижной
координатной системы. Возьмем, например, волокно, совпадающее
с первым координатным, полагая рх = 1, р2 = р3 = 0. Из (1.7.9)
и (1.7.8) следует при этом, что относительное удлинение первого
координатного волокна Еп связано с компонентой деформации еп
формулой
(1 +£ц)2= 1 + 2еп. (1.7.15)
Аналогичное геометрическое значение имеют е22, е33.
Если относительные удлинения координатных волокон малы по
сравнению с единицей, то е1Ъ е22У е33 можно считать совпадающими с
относительными удлинениями координатных волокон.
Найдем теперь сдвиги между координатными волокнами. Считая
рС1) =± еъ р(2) = е2у найдем сдвиг между первым и вторым
координатными волокнами:
Ti2 (1 + Еи) (1 + Е22) = 2е1%. (1.7.16)
Если относительные удлинения координатных волокон малы по
сравнению с единицей, то сдвиги координатных волокон можно
считать совпадающими с удвоенными значениями величин eik с разными
индексами.
Таким образом, удлинениями координатных волокон и сдвигами
между координатными волокнами вполне определяется
деформированное состояние тела в точке.
Координаты деформации eik, записанные в форме таблицы,
симметричной относительно главной диагонали:
/еп е12 е13\
(E) = (elfc)« Ui е22 е231 (1.7.17)
Vsl *32 ^3/
38
боазуют тензор второго ранга, именуемый тензором деформаций.
Тензорные свойства проявляют не только характеристики деформи-
ванного СОСТояния, поэтому остановимся на некоторых общих
свойствах тензоров.
§ 1.8. О скалярах, векторах, тензорах
В технических науках, естествознании количественными
характеристиками процессов и состояний могут служить скаляры, векторы,
тензоры. Скалярами, или отдельными числами,
характеризуется расстояние, время, температура, энергия и другие величины.
Векторные и тензорные характеристики представляют собой
определенные совокупности чисел, связанные с выбором координатной
системы. Вектор — это не только направленный отрезок. Если
имеется система с единичными векторами /ft, то вектор можно определить
совокупностью трех чисел, таких, что
r = xhth. (1.8.1)
Рассмотрим новую координатную систему с единичными векторами
i'ky которые получаются из прежней посредством некоторого
поворота. Единичные векторы старой и новой координатных систем связаны
линейным преобразованием поворота:
ik = Phmim> h = Pmhl'm- (1.8.2)
Это преобразование можно задать и табл. 2 направляющих косинусов
взаимной ориентации координатных осей.
Направляющие косинусы связаны извест- Таблица 2
ными соотношениями
Pml +Pm2+ РтЗ = 1 (/И = 1,2,3)
PmsPfts.= 0 (тфк.
В координатной системе /£ вектор г
определяется тройкой чисел x'k так, что
г = х'М. (1.8.3)
используя формулы (1.8.1)—(1.8.3), можно установить формулы
перелета координат xh и х'н вектора в разных координатных системах:
*h = Xspsh* Х'т = XhPhm. (1.8.4)
сеперь вектором будем называть совокупность чисел xh9 связанных
Сбором координатной системы ik, которая при линейных преобра-
в Ваниях (1.8.2) координатной системы в систему ik преобразуется
НапИСЛа х'к по лине™ым однородным формулам (1.8.4) относительно
Равляющих косинусов взаимной ориентации осей.
i'i
«
а
*i
pii
Р21
Рз1
'l
Pl2
Р22
Р32'
<3
Pl3
Р23
Рзз
39
Заметим, что длина вектора при преобразованиях координат не
изменяется, поэтому
1 = х{ + х1 + х1 = х'шш + х?+х? (1.8.5)
называется инвариантом вектора {xh}.
Вектор можно определить не только тройкой чисел {xk}, но и
через его инвариант / и две независимые величины, которые изменяются
с изменением координатной системы, — некоторые вариантные
характеристики. Роль вариантных характеристик могут играть, например,
широта и долгота места — географические координаты.
Наконец, отметим дуализм не только в определении векторов, но
и в терминологии. Векторы как упорядоченные тройки чисел,
связанные с крординатной системой, называют еще итензорами
первого ранга, так как эти тройки чисел преобразуются по
однородным формулам первой степени относительно psm.
Прямым обобщением представления о векторе как совокупности
упорядоченной тройки чисел, связанных с выбором координатной
системы, является определение тензора второго ранга. Тензором
второго ранга называют упорядоченную таблицу шести чисел
Ml «12 «1 з\
(A) = la21 а22 а23 ) = (a,ft), (1.8.6)
\#31 #32 «33/
симметричную относительно главной диагонали (aih = ahi). Числа aik
связаны с выбором координатной системы /в и преобразуются с
преобразованием (1.8.2) координатной системы по однородным
квадратичным формулам относительно направляющих косинусов:
0// = akmpihpmj. (1.8.7)
Числа akm называют компонентами тензора.
Геометрическое толкование тензора можно воспроизвести, если тензор считать
носителем некоторого линейного однородного преобразования
совокупности векторов Ъ в совокупность векторов с. Если проекции
упомянутых множеств связаны соотношениями
ch = ahmbm, (1.8.8)
то преобразование векторов Ь в векторы с называют аффинным
линейным, а коэффициенты akm этого преобразования образуют таблицу,
именуемую аффинором. Симметричная таблица (aih = ahi) называется
тензором второго ранга.
В пространстве векторов Ь можно построить поверхность второго
порядка
F ев 0,5ahmbhbm = const, (1.8.9)
обладающую следующим свойством: вектор-градиент к этой
поверхности, перпендикудярный ей, построенный в конце вектора &,
совпадает с вектором с, поэтому
ch ■* dF/dbh.
40
Поверхность (1.8.9) — центральная поверхность второго порядка,
члипеоид или гиперболоид, имеющая не менее трех главных осей.
Известна роль главных направлений линейных преобразований:
векторы, направленные вдоль главных осей, при линейном
преобразовании не изменяют своих направлений, изменяют только длины.
Линейное преобразование сводится к растяжениям — сжатиям пространства
по трем ортогональным направлениям.
Отметим некоторые важные свойства тензоров.
Произведением тензора (А) и числа X называется тензор,
компоненты которого получаются умножением компонент aik на число Я:
% (A) = (Xaih). (1.8.10)
Суммой тензоров (aik) и (bik) называется тензор (cik)y компоненты
которого представляются суммами компонент aik и bih:
(Cik)= (aih) + (bik), cik = aik + bik.
Отсюда следует, что всякий тензор можно представить линейной
комбинацией специально подобранных тензоров. В частности, часто
используется единичный тензор, по главной диагонали которого
располагаются единицы, а побочные элементы — нули:
/1.0 04
(/)= 0 1 0 (1.8.11)
\0 0 \)
Важной количественной характеристикой тензора является
сумма его диагональных элементов
За = ап + а22 + а339 (1.8.12)
которая называется следом тензора.
Вычислив след тензора (Л), можно составить тензор-девиатор (£>),
соответствующий тензору (А):
/dn d12 d13\ /а1г — а а12 а13 \
(D) = jd21 d22 Й2з) = (я21 агг—а d23 J. (1.8.13)
\d31 d32 d33J \d31 a32 a33—a J
По определению, след девиатора равен нулю:
<% — а + а22 — а + а33 — а — 0.
располагая единичным тензором и девиатором, легко. произвольный
ензор представить их комбинацией:
(A) =a(I) + (D). (1.8.14)
Особый интерес представляют главные направления, главные
знали***^ и Другие инварианты тензора. Полагая тензор (А) носителем
н [|ейного преобразования (1.8.8) векторов Ь в векторы с, среди
единое Н*1Х векторов Ь° будем искать главные, которые при указанном
Есл °Вании изменяют только длину, не изменяя направления.
и Результатом преобразования единичного вектора оказывается
41
$kn =
det(akn — dhnX) =
Лишь изменение его длины, то это преобразование удовлетворяет
условию "' /
(А)Ь° = ХЬ°, (1.8.15)
где X — пока неопределенное число, а вектор Ь° можно^представить
через проекции
*° = Мт, Pf + Р! + Р1= I- (1.8.16)
Условие (1.8.15) можно представить системой линейных однородных
уравнений относительно рА:
(ahn ~ вЛлЯ) Р„ = 0 (k = 1, 2, 3), (1.8.17)
где использованы обозначения символов Кронекера
1 при k — riy
О при кфп.
Система (1.8.17) имеет ненулевые решения,
равен нулю:
|ац—X а12
#21 #22 """"^
| #31 #32
Так получается алгебраическое уравнение третьей степени
относительно неопределенных множителей X с коэффициентами, зависящими от
компонент тензора (aik):
— Xs + 1гХ* — 12Х + /3 = 0.
Здесь использованы обозначения коэффициентов
h = #11 + #22 + #зз = За,
^2 ~ #11#22 ~Ь #22#33 ~Ь #33#11 #12 ~~ #23 #ЗЬ
если определитель ее
"13
#23
азз—^
= 0. (1.8.18)
(1.8.19)
(1.8.20)
(1.8.21)
I3 = det(aik).
#11 #12 #13
#21 #22
#31 #32
#2
(1.8.22)
Уравнение (1.8.19) называется характеристическим,
соответствующим тензору (А).
Три корня уравнения (1.8.19) всегда действительны вследствие
симметричной структуры тензора aih = aki и структуры
коэффициентов (1.8.20), (1.8.21) и (1.8.22). Три действительных корня обозначим
#i, #2» #з и будем называть их собственным и
значениями, а в дальнейшем — главными значениями тензора
(#*ь).
Рассмотрим одно из собственных значений, например а1у и
подставим его вместо X в систему (1.8.17), тогда получим систему уравнений
с нулевым определителем
(ahn - 6*n#i) Р* = 0 (k = 1, 2, 3). (1.8.23)
Это значит, что одно из этих уравнений оказывается следствием двух
других. Оставшиеся два уравнения будут независимы, если среди а&
42
нет совпадающих с av Предполагая это, можно выделить разрешаю-
аз ю систему уравнений относительно двух неизвестных отношений
m vx направляющих косинусов к третьему. Указанная система вме-
е с условием (1.8.16) приводит к единственной (с точностью до знака)
СТойке направляющих косинусов, определяющих главное н а-
Давление, соответствующее собственному значению av
П Единичный вектор главного направления, соответствующего а1у
бозначим Pi- Подобно этому, полагая аъ а2, а3 различными,
определим единичные векторы р2, р3 второго и третьего собственных
направлений.
Легко проверить ортогональность рь р2, р3, когда среди
собственных значений тензора нет совпадающих.
Таким образом, тензор (aik) имеет три различных собственных
значения и три ортогональных собственных направления. Если все
координатные оси совпадают с главными направлениями, то тензор (А)
принимает диагональную форму:
/ах 0 О \
(Л) = 0 а2 О . (1.8.24)
\0 0 aj
Числа #i, а2, а3 называются главными значениями тензора и
представляют собой инварианты тензора, они не меняются при
преобразованиях (1.8.2) координатной системы. Инвариантами упомянутого
преобразования будут, любые комбинации аъ а2, а3. В частности,
инвариантами будут коэффициенты 11у /2, 13 алгебраического уравнения
(1.8.19), через которые однозначно, с точностью до нумерации,
представляются корни уравнения аъ а2, а3. Можно указать и другие
системы независимых инвариантов.
Во-первых, заметим, что инварианты 1Ъ /2, /3 можно представить
через главные значения тензора формулами
За = аг + а2 + а3, /2 = ага2 + а2а3 + а3аъ
/3 = аха2а3, (1.8.25)
непосредственно следующими из (1.8.24) и (1.8.20) — (1.8.22). Кроме
того, полезно выписать представления инвариантов девиатора (1.8.13)
в произвольных и главных осях:
£>i = 0,
D2 = (ап — а) (а22~а) + (а22—а) (а33—а) + (а33—а) (ап — а) —
—al2 — ah — a2l3 = (a1—a)(a2 — d) + (a2—d)(a3 — a) +
+ («8~a)(fll-a) = ~^[(a1-a^ + (a2-a3f + (a3-a1^]= -\&\
&з = (#i — а) (а2 — а) (аз — я). (1.8.26)
р а т°Ь введено специальное обозначение модуля девиат о-
То " ^ак называется положительная величина d, квадрат которой с
°стью до множителя совпадает со вторым инвариантом девиатора:
3d2= — 2D2. (1.8.27)
43
Наконец, введем в рассмотрение направляющий
тензор. Так называется тензор, компоненты которого получаются
делением на d соответствующих составляющих девиатора:
d(D) = (D). (1.8.28)
Из определения направляющего тензора следует, что первые два
инварианта его — заведомо известные числа, поэтому можно задавать
направляющий тензор тремя параметрами, определяющими главные
направления тензора, и еще одним инвариантом. В качестве такого
инварианта введем направляющий угол ф тензора, полагая
ak = а + yud cos ф&,
<Pi = Ф» Фг = Ф + 2я/3, Ф3 = ф — 2я/3. (1.8.29)
Складывая эти формулы, обнаруживаем, что они не противоречат
определению первого инварианта (1.8.20) тензора (Л), так как cos фх +
+ cos ф2 + cos ф3 = 0. Формулы (1.8.29) не противоречат
определению второго инварианта девиатора (1.8.26), так как
cos2 ф2 + cos2 ф2 + cos2 ф3 = 1,5, cos фх cos ф2 + cos ф2 cos ф3 +
+ cos ф3 cos ф2 = — 0,75.
Наконец, составляя третий инвариант направляющего тензора
либо девиатора с использованием (1.8.29), найдем способ вычисления
параметра ф через компоненты тензора в главных либо произвольных
осях:
Т/2
со5 3ф= •?— (аг—а)(а2—а) (а3 — а) =
лЛ
а\\—а а12 а13
#21 #22—а #23
#31 #32 #33"
(1.8.30)
Отсюда следует, что тензор второго ранга определяется не только
шестью компонентами в произвольных ортогональных координатах.
Тензор можно определить тройкой главных направлений и тремя
независимыми инвариантами. В качестве независимых инвариантов можно
выбрать главные значения тензора либо некоторые комбинации
инвариантов, например след тензора или величину а, модуль тензора d
и фазу тензора ф, определенные формулами (1.8.26) и (1.8.30).
§ 1.9. Тензор деформации, геометрическое значение
его инвариантов
Ранее показано, что фундаментальным соотношением (1.7.6) в
декартовых координатах либо соотношением (1.7.11) в криволинейных
ортогональных координатах вполне определяется деформированное
состояние тела в точке: относительные удлинения, сдвиги
материальных волокон, их ориентация в деформированном состоянии. Исполь-
44
Зуя 1;оотношения (1-7.13) и (1.7.14) между компонентами малых
деформаций Sik, величинами (os и градиентами перемещений,
фундаментальное сбртношение теории деформаций можно переписать в единой форме
\ р* (1 + £рр) = р + о х р + ((8,,)) р, (1.9.1)
где символом © X р обозначено векторное произведение
© X р = ех (со2р3 — со3р2) + е2 (co3Pi — ^iPa) + е3 (со^ —
-<oaPi), (1.9.2)
а символом ((&ik)) Р обозначено линейное преобразование
совокупности векторов р посредством тензора ((е^)):
((Sift)) Р = (вцр1 + е12р2 + 813р3) е1 + (е21р1 + е22р2 + е23р3) е2+
+ (esiPi + е32р2 + е33р3) е3. (1.9.3)
Геометрически результат деформации окрестности материальной
точки можно представить как наложение поступательного движения
окрестности точки, поворота окрестности точки как твердого тела и
эффектов чистой деформации. Тождественное преобразование
представлено первым слагаемым правой части равенства (1.9.1), малый поворот
окрестности точки — вторым слагаемым, причем вектором о пред*
ставлен вектор поворота. Третье слагаемое правой части (1.9.1)
представляет эффекты чистой деформации. Представление о чистой
деформации легко получить, полагая оси еъ е2, е3 совпадающими с главными
направлениями деформации в рассматриваемой точке. В'этом случае
следует считать тензор (eik) отнесенным к главным осям и имеющим вид
Гг± О (Г
О е2
к0 О
При малых вращениях и деформациях эти оси можно считать
главными и для тензора (eik)t поэтому можно отождествлять еЛ, ек
и Ek. Тогда процесс деформации можно трактовать как растяжение—
сжатие окрестности точки в трех ортогональных главных направлениях.
Относительное удлинение в каждом из главных направлений
задается величиной Ек, либо главным значением тензора деформаций ек.
Тензор деформаций без ограничений величин деформаций можно
определить не только компонентами eih, но и тройкой главных
направлений вместе с главными значениями ek либо тройкой инвариантов е> /,
■ф» которые связаны со следом тензора деформаций, модулем девиатора
Деформаций и фазой деформаций. Повторяя общие определения (1.8.20),
(1.8.26), представим соотношения между компонентами и инварианта-
Ми тензора деформаций в виде
Зе = ег + е2 + ^з ~ еп + ^22 + е
38>
45
3/2 = (ei - e2f + (е2 - е3)* + (е3 - exf = (еп - e22f + (е22 <-
е33)2 + (е33 - епу + 6 (е\2 + eh + eh),
/3 cos 3^ = 1/2
ец—е е12
e2i
e3i
^22 &
^13
-23
^32
^яа &
= V2(ei~e)(ez
Полезны и обратные представления типа (1.8.29):
eh = е + Vtf cos \pk,
% = 'Ф. Фг = 'Ф + 2я/3, фз = яр — 2я/3.
Располагая главными направлениями тензора деформаций и
главными значениями тензора ek, можно найти главные относительные
удлинения Ek и главные удлинения Xk, используя соотношения
-e){et-e).
(1.9.4)
(1.9.5)
(1+£Л)а = Я? = 1+2е„
(1.9.6)
Кроме того, по заданным главным удлинениям можно установить
конфигурацию малого элемента тела в деформированном состоянии-
Подчеркнем, что по удлинениям можно установить именно конфигу.
Л рацию: форму, размеры деформированного
элемента, но не положение в пространстве. Для
определения положения элемента в пространстве
необходимо задать параметры смещения его как
совершенно твердого тела*
Если исключить из рассмотрения движение
элемента среды как твердого тела, то процесс
деформирования окрестности точки можно
считать однородным и происходящим с сохранением
направлений главных волокон. Деформация
характеризуется удлинениями по трем
перпендикулярным направлениям. При этом
материальный куб с единичными ребрами вдоль главных
направлений превращается в прямоугольный
параллелепипед (рис. 11). Если ребро куба в
начальном состоянии условно считать
единичным, то ребра параллелепипеда будут К1у Я2, Я3. Конечно,
упомянутый единичный размер устанавливается по степени неоднородности
деформации в рассматриваемом объеме тела. Отсюда следует
возможность вычисления относительного изменения объема
материального элемента:
Рис. 11
А — AjAgA^ — 1.
(1.9.7)
В качестве характеристик формоизменения введем главные
удлинения формоизменения материальных элементов /ft, которые
вычисляются по формулам
Xh = (l +АУ'Чк. (1.9.8)
46
На удлинениях h, определенных формулами (1.9.8), не отражается
налож&ие на некоторое деформированное состояние чисто объемной
дефорЩВДИ-
Действительно, если некоторое деформированное состояние
достигается посредством двух этапов, то превращение материального
волокна длиной ds в волокне длиной ds можно представить себе как
превращение ds в ds* с удлинением Я* и превращение ds* в ds** с
удлинением
I**
причем
ds*~k*ds, ds=h**ds*, ds—Ms.
Таким образом, суммарное удлинение к представляется
произведением частных удлинений Я =* к*К**. Основываясь на этом
замечании, можно утверждать, что ik пред- д?
ставляют собой удлинения
формоизменения. Результат формоизменения молено
представить себе как превращение куба
в прямоугольный параллелепипед с
ребрами ihj причем
^1л2^3 — ^ •
(1.9.9)
Чтобы установить две независимых
характеристики формоизменения, обратим- AJ-
ся к рис. 11 и вычислим угол между Рис. 12
диагональю куба и диагональю
параллелепипеда, в который превращается единичный куб. Диагональ
куба направлена вдоль единичного вектора /?°, причем
1/ЗЯ0 = /1 + /„ + /з,
где Ik — единичные векторы главных направлений.
Диагональ параллелепипеда направлена вдоль единичного
вектора /?:
Вычисляя скалярное произведение векторов R°A и /?, найдем угол Э
между ними из соотношения
V^Vn + ll + lUosQ = lx + l2 + l3.
(1.9.10)
По определению, материальное волокно, одинаково наклоненное к
главным направлениям, называется результирующим волокном.
Угол 8 (рис. 12) поворота результирующего волокна
относительно главных волокон называется углом
результирующего сдвига, а синус этого угла называется результирую-
*Ц и м с д в и г о м. Из (1.9.10) легко получить представление
результирующего сдвига
(/i-/2)2 + (/2-/3)2 + (Wi)2
и2
sin2 9 =
з(/?+ *! + '§)
(1.9.11)
47
В этой формуле можно все th заменить на Xk без изменения существа
формулы. У /
Интенсивность формоизменения определяется результирующим
сдвигом, а второй параметр формоизменения служат установлению
направления формоизменения. Чтобы установить направлец/йе
формоизменения при фиксированных главных направлениях, рассмотрим
движение апекса — точки пересечения направлением результирующего
волокна сферы единичного радиуса. '
На рис. 12 показаны часть сферы и два положения апекса, совпадаю-
ющие с концами векторов /?° и /?, соответствующими начальному и
конечному положениям апекса. Точки R0 и R соединим дугами больших
кругов между собой и точками пересечения главных направлений со
сферой единичного радиуса — точками Аъ Л2, Л3. Обозначим ak угол
между дугами больших кругов R°Ak и R°R.
Известные соотношения между углами и дугами больших кругов
сферических треугольников R°RAh приводят к равенствам
lh = l(VT^y2 + V2ycosah)t
а± = а, а2 = а + 2я/3, а3 = а — 2я/3,
У31 = УП + 1Ъ + 1з. (1.9.12)
Углом а определяется направление дуги большого круга, вдоль
которой перемещается апекс, когда окрестность точки переводится из
начального в деформированное состояние. Поэтому параметр а
называется направляющим углом формоизменения.
Направляющий угол формоизменения и результирующий сдвиг можно
считать двумя независимыми параметрами, которыми задается
формоизменение. Третий параметр I можно определить по а и у из
соотношения
/3[(l + 2,572)Kb=Y + 0,5"|/2v3cos3a]=l, (1.9.13)
получающегося с использованием свойства (1.9.8) главных
удлинений формоизменения, определения (1.9.12) и соотношений
cos аг + cos a2 + cos a3 = О,
cos2 аг + cos2 a2 + cos2 a3 = 1,5,
cos ax cos a2 + cos a2 cos a3 + cosa3 cos a± = — 0,75,
cos G^cosajjcos a3 = 0,25 cos 3a. (1.9.14)
Параметры a и у — не единственная система независимых координат
формоизменения. Можно указать немало других, представляющих
практический интерес. Например, широко используются при анализе
больших пластических деформаций логарифмические удлинения.
Величины
In 1Ъ In /2, In /3 (1.9.15)
назовем логарифмическими удлинениями
формоизменения.
48
Введем тензор логарифмических удлинений
моИЗменения. Так называется тензор, главные направления кото-
го совпадают с главными направлениями тензора деформаций, а
Равные значения совпадают с логарифмическими удлинениями формо-
гзменения\(1.9.15). Более того, тензор логарифмических удлинений
формоизменения является девиатором, так как первый инвариант этого
теНЗ°ра In /1 + ln/2 + ln/3 = 0.
Полагая,
ln/A = yl2*cospA, (1.9.16)
Pi = Р, Р2 = Р + 2я/3, р3 = Р - 2я/3,
установим еще одну серию инвариантов формоизменения:
• Зз2 = In21г + In2 /2 + In2 /3,
э3 cos ЗР = 1/2Ъ к In /2 In /3. (1.9.17)
Используя аналогию представления главных значений девиатора
формоизменения и девиатора деформаций, назовем э
интенсивностью формоизменения, а р — фазой формоизменения.
Наличие большого числа систем независимых инвариантов
формоизменения объясняется только отдельными привлекательными
качествами каждой из систем. Например, результирующий сдвиг у и
направляющий угол формоизменения а имеют совершенно отчетливое геоме*
трическое значение, но мало пригодны при обработке опытных данных
и сложно представление их через компоненты тензора деформаций и
градиенты перемещений. Система э> р удобна при обработке опытных
данных, но сложны соответствующие представления этих инвариантов
через производные от перемещений в произвольной системе координат.
Система /, г|> не имеет простого геометрического значения при
произвольных по величине деформациях, но очень просты соответствующие
представления тензоров в произвольных координатных осях.
§ 1-10. Упрощения соотношений теории деформаций
в случае малых деформаций и малых перемещений
Большинство металлов и других конструктивных материалов
деформируются в реальных условиях работы деталей машин и элементов
конструкций настолько мало, что величина относительного изменения
°бъема и результирующий сдвиг оказываются пренебрежимо малыми
п° сравнению с единицей величинами. Вместе с тем будем считать
малыми по сравнению с единицей величину Ъе и величины 7 cos ak. Тогда
^Рмулы (1.9.12) с учетом (1.9.9), (1.7.5) можно упростить и привести
К виду eh = е + 1/2~7 соя ак. Сравнивая их с (1.9.5), заключаем: что
, Ри малых деформациях инварианты f и яр, определенные формулами
^ -4), можно отождествлять соответственно с интенсивностью формо-
Менения и направляющим углом формоизменения.
49
(j другой стороны, из формул (1.7.15) и (1.7.16) следует, что при
малых относительных удлинениях и сдвигах относительнее удлинения
координатных волокон можно отождествлять с соответствующими
диагональными элементами тензора деформаций. Сдвирй, углы сдвига
и удвоенные побочные элементы тензора деформаций можно не
различать. Поэтому говорят, что компоненты eik тензора малых деформаций
представляют собой относительные, удлинения координатных волокон
либо половины сдвигов между координатными волокнами. При малых
деформациях относительное изменение объема можно отождествлять
с первым инвариантом тензора деформаций
А = ег + е2 + е3 = еп + е22 + е33 = Зе. (1.10.1)
Формоизменение характеризуется девиатором деформаций.
Интенсивность формоизменения характеризуется величиной /, квадрат
которой пропорционален второму инварианту девиатора. деформаций.
Направляющий тензор, соответствующий девиатору деформаций,
называется направляющим тензором формоизменения. Компоненты
тензора деформаций связаны с перемещениями и их производными по
координатам нелинейными соотношениями (1.7.12). Эти соотношения
можно упростить, если градиенты перемещений оказываются малыми
по сравнению с единицей величинами. В таком случае квадратами
eik и со^ их произведениями можно пренебречь по сравнению с первыми
степенями. В теории малых деформаций и перемещений считают
eih = sih. (1.10.2)
Так получают достаточно простые линейные соотношения между
компонентами тензора деформаций и перемещениями. Приведем их для
простоты в декартовых, координатах:
2eik = 2eik = щ%к + #м. (1.10.3)
. В заключение приведем условия совместности малых деформаций.
Ограничиваясь рассмотрением компонент малых деформаций и малых
поворотов в декартовых координатах, заметим,'что формулы
2e*ft = ui%h + #м, 2% = м8|2. — "2,3, ... (1.10,4)
можно переписать в форме, решенной относительно девяти градиентов
перемещений по координатам:
#1§1 — 8n, #lf2 = е12 — со3, #1,3 ~ 81з ~Ь ^г»
#2,1 ~ 812 ~Ь ^З» #2,2 == 822> #2,3 === 832 <°1>
#3,1 = 81з — о)2, #з,2 — ез2 + ©1» "з,з = е33. (1.10.5)
Условия непрерывности функции uh от трех аргументов позволяют
вычислять вторые производные от этой функции в любом порядке,
поэтому' имеем три уравнения:
(#М),1 ^ ("М),2. (Uk,s),2 = ("А,2),3, (#A,l)f3 = (#Л,з),1
50
каждого из номеров k = 1, 2, 3. Эти девять соотношений. после
ДлЯ таНОнки в них выражений производных (1.10.5) можно решить
П°носителЬро производных com>s:
фх г = eJy3,2 612,3i Щ,2 == 823,2 822,3> ®1,Ь = 833,2 С23,3
(1, 2, 3). (1.10.6)
Теперь запишем условия непрерывности малых поворотов —
функций (Oh — п0 аргументам х1у х2у х3:
(coft,2),i = (®kti)tz> (^а.О.з = (®к,з),ъ (^мЬ = (°Чз),2-
*
Используя здесь выражения (1.10.6), получаем шесть разных
соотношений совместности деформаций
д2е33 , дае22 о д2е23 = q
дх% дх\ дх2 дх3
J_(d4* ^i3_ + _^i2_\ ^822_ = 0 (1?2,3). (1.10.7)
дх2 \ дхг дх2 дх3 ) дх±дх3
При этом вторая группа соотношений получается дважды. Заметим,
что если в (1.10.7) подставим (1.10.3), то получим тождества. Поэтому
соотношения (1.10.7) называют часто тождествами Сен-Венана.
Если же компоненты деформации удается представить через
некоторые неизвестные функции координат точек тела, то соотношения
(1.10.7) приводят к уравнению для определения этих функций.
§ 1.11. Скорости частиц тела и скорости деформаций
Распределение скоростей в деформируемом твердом теле можно
задавать по-разному — в зависимости от выбора координат
материальных частиц. Положение частицы деформируемого твердого тела можно
определять ее координатами хк в начальном состоянии и непрерывной
системой перемещений uky которые считаются заданными функциями
координат начального состояния частицы и времени. Поэтому
положение частицы в некотором текущем состоянии определяется вектором г*,
который можно представить суммой г + и. Вектор скорости частицы v
определяется производной вектора г* по времени
тсобый интерес представляет распределение скоростей окрестности
очки деформируемого тела. На рис. 13 схематически представлены
чки М и N в начальном состоянии. Указаны положения этих точек
У ТекУЩем состоянии, когда точки тела получают перемещения а,
азаны векторы скоростей рассматриваемых частиц сплошного тела.
ал Определение скоростей точек окрестности произвольной матери-
Ной частицы тела можно установить, считая скорости частиц не-
51
прерывными функциями координат начального состояния и времени,
Используем правила дифференцирования непрерывных функций;
Vn — vM + (dv/ds)M ds. (1.11,2)
Производную поля векторов v по направлению Хуги s вычисли^
подобно производнрй поля векторов смещений:
dvlds = vthdxh/ds = Vtkph,
где ph — направляющие косинусы рассматриваемого материального
волокна в начальном состоянии. Аналогично вычисляются производ.
ные и в криволинейной координатной
системе.
Продолжая преобразования форму.
^ лы (1.11.2) в прямоугольных декарто*
м вых координатах, введем, следуя Гельм-
гольцу, обозначения комбинаций
производных:
2eifc = vith + vKi, (1.11.3)
2^ = ^.2—^2.3» 2co2=t;lf3—v3$1,
2®8 = ^2.i — fli,2- (1.11.4)
Эти соотношения можно решить относительно производных, тогда
^з.2 = е2з + с°1» fl2i8 = е28—а>! 0>2,3)
и формулу (1.11.2) представим в виде
vN = vM + u>Xt>ds + (eik)()ds. (1.11.5)
Таким образом, скорость произвольной частицы окрестности
деформируемого твердого тела складывается из скорости
поступательного движения и вращения с угловой скоростью со окрестности точки,
как совершенно твердого тела, и скорости, вызванной деформацией
окрестности точки. Совокупность величин (eik) называется
тензором скоростей деформаций.
Кинематическое значение компонент тензора скоростей
деформации установим применительно к некоторым частным случаям
распределения скоростей частиц сплошного тела.
Например, рассмотрим растяжение тела в трех перпендикулярных
направлениях, полагая
vx = а (хг — хш), v2 = Ъ (х2 — х2м), v3 = с (хв — хш).
В этом случае легко вычислить тензор скоростей деформаций, который
принимает диагональную форму:
fa О О
Ы = [о ь о
\0 0 с
52
Рис. 13
яяесь a, by с — скорости растяжений или сжатий материальных воло-
он исходящих из точки М в направлениях соответствующих осей
координат.
В случае распределения скоростей вида
vx = а (х2 — х2м), v2 = а (хг — хш), v3 = 0.
тензор скоростей деформаций сводится к отличной от нуля
единственной компоненте е12 = 0,5а, удвоенное значение которой представляет
собой скорость сдвигов между первыми двумя координатными
волокнами.
Нетрудно определить, пользуясь общими свойствами тензоров,
скорость изменения объема, интенсивность скоростей формоизменения,
фазу скоростей деформаций, главные направления скоростей
деформаций.
Глава II
ТЕОРИЯ НАПРЯЖЕНИЙ, УРАВНЕНИЯ ДВИЖЕНИЯ
§ 2.1. Вектор напряжения
Напряжение — это мера внутренних сил взаимодействия
различных частей сплошного тела. Рассматриваемые внутренние силы
возникают только за счет действия некоторой системы внешних сил,
изменения температуры и других условий внешней среды.
Представление о напряжении строится в связи с применением метода сечений..
Рассмотрим два состояния деформируемого твердого тела: начальное,
когда рассматриваемая система внешних сил не действует, и
напряженное и деформированное состояния. Начальное, или
естественное, состояние тела понимается как материал, из которого
состоит тело. Из этого же материала можно реализовать другие тела,
в частности образцы для испытаний механических свойств материала.
Предполагается возможным начальное состояние воспроизвести
(повторить в модели) при натурных испытаниях, когда выдерживается
определенная технология производства рассматриваемого тела.
Начальное состояние тела предполагается равновесным. Поэтому
допускается деление, по крайней мере мысленное, тела на произвольные
части без нарушения равновесного состояния тела в целом и каждой
из его частей. Начальное состояние тела — это деталь конструкции
До начала расчетного загружения, элемент машины до начала
расчетного режима эксплуатации ее.
В отличие от начального состояния напряженное состояние тела,
вызванное действием заданной системы внешних сил, не допускает
произвольного деления на части без изменения состояния, если не
ввести дополнительных внутренних сил взаимодействия различных
частей тела. На рис. 14 схематически представлены тело и система
внешних сил, приложенных к телу. Предполагается, что тело под
действием этой системы сил пребывает в равновесии.
63
Метод сечений предполагает возможным деление тела вдоль
произвольной поверхности на две части без нарушения механического
состояния каждой из частей, если только вдоль поверхности деления
к каждой из частей приложить подходящим образом подобранную
систему внутренних сил. /
На рис. 14 тело разделено плоскостью, проходящей через
произвольно выбранную точку М, на две части: / и //. Считаем для простоты,
что система внешних сил, действующих на часть /, сводится к
равнодействующей /?i. Действие распределенных по поверхности сечения
внутренних сил на часть / со стороны части // тела сводится к силе
Oi и, причем из условий равновесия
сил, действующих на часть /, следует
Фш+/?1 = 0. (2.1.1)
Отсюда по известному вектору
равнодействующих внешних сил можно оценить
равнодействующую внутренних сил,
действующих на часть / вдоль
поверхности раздела:
Фш =— Rh
Аналогично проводится оценка эффектов взаимодействия тела,
когда силы, действующие на одну из частей тела, приводятся к главному
вектору и главному моменту. При этом можно установить главный
вектор и главный момент внутренних сил на поверхности сечения. Большей
информации прямое применение условий равновесия сил не дает. Но
и упомянутая информация получается при молчаливом
предположении, что каждая из частей тела после приложения подходящей
системы внутренних сил считается абсолютно твердым телом. Применение
законов равновесия к этим частям тела правомерно.
Возвращаясь к простому случаю, когда внутренние силы
характеризуются равнодействующей Ф1П, предположим, что эта
равнодействующая проходит через центр тяжести сечения. Тогда естественно
предположить, что внутренние силы распределены равномерно по
сечению. Интенсивность распределения внутренних сил называется
средним напряжением. Среднее напряжение можно
определять отношением силы к площади сечения:
<Ги1 = уФць (2.1.2)
Вектор напряжения считается приложенным в каждой точке
рассматриваемого сечения. Направление среднего напряжения совпадает
с направлением вектора Ф1 и, уравновешивающего
равнодействующую внешних сил, действующих на часть / тела со стороны части //.
Величина напряжения зависит не только от внешних сил, направления
сечения, но и площади S сечения.
Среднее напряжение как характеристика внутренних сил не всегда
удовлетворительна. Поэтому используется представление о векторе
истинного напряжения в рассматриваемой точке тела на определен-
54
тм образом ориентированной материальной площадке. На рис. 15
^зображена часть деформируемого твердого тела, и в сечении выделе-
й площадка AS — окрестность точки М сечения. Предположим, что
Ждалось какими-то средствами установить вектор АФ внутренних сил,
которые передаются через площадку AS на рассматриваемую часть
тела. Тогда средним напряжением на этой площадке будет вектор
<rCD = АФ.
ср AS
Полагая площадку AS стягивающейся к точке М по произвольному
закону и сохраняя предположение о возможности установления
вектора АФ, назовем истинным
напряжением в точке предел
среднего напряжения при уменьшении
площадки:
ст= lim -*± . (2.1.3)
AS-* О До
По определению, вектор напряжения т
зависит от положения точки, в которой
рассматриваются напряжение и
ориентации площадки. Совокупностью век- Рис- 15
торов напряжений на всевозможных
площадках, проходящих через заданную точку тела,
представляется напряженное состояние тела в точке.
Говоря о напряженном состоянии тела в точке, условимся
определять ориентацию материальной площадки, на которой рассматривается
напряжение, внешней нормалью п. Вектор напряжения, действующего
на площадке с нормалью п> обозначим вп. Отсюда следует, что
площадки с нормалями п и (—п) относятся к разным частям мысленно
рассекаемого тела, поэтому векторы напряжений ап и <т_п представляют
собой силы взаимодействия и в соответствии с третьим законом
Ньютона выполняется равенство
вп = —в_п. (2 Л.4)
Вектор напряжения ап на площадке с внешней нормащью п удобно
представлять разложением на две составляющие: нормальное напря*
Жение опп-п и касательное напряжение хп:
<*п =* <W* + тп. (2Л .5)
Положительное значение апп представляет растягивающее напряжение,
отрицательное — сжимающее.
§ 2.2. Примеры вычислений напряжений
Напряжения можно определить только через внешние воздействия как про»
^вление внутренних взаимодействий частей тела. Напряжение можно вычислить
^посредственно по внешним силам, когда напряженное состояние однородно,
ДИнаково в разных точках тела.
55
Пример 1. Рассмотрим круглый цилиндрический однородней стержень,
который подвергается действию продольных внешних сил Р. /
Состояние стержня считается однородным, одинаковым во всех точках. В
частности, однородным будет и состояние в точках поперечного речения площадью
F. Поэтому нормальные опп и касательные%п напряжения распределены равно^
мерно по всему сечению. По этим напряжениям легко вычислить равнодействую-
щую нормальных напряжений onnF и равнодействующую касательных напря-
жений tnF.
Потребовав, чтобы главный вектор всех действующих на одну из частей
стержня сил равнялся нулю, получим уравнения равновесия:
-P+onnF= О, xnF=0.
Отсюда следует, что касательные напряжения во всех точках поперечного
сечения отсутствуют, а нормальные — вычисляются по формуле
- onn=P/F. (2.2.1)
Рассмотрим теперь
произвольное сечение стержня, нормаль к
которому v образует угол а с осью
стержня, и составим условия
равновесия, например, левой части
стержня (рис. 16).
В каждой точке сечения
стержня действуют нормальное
напряжение а и касательное напряжение,
р i~ Касательное напряжение представим
с' разложением на составляющую т
, вдоль большой оси эллипса сечения
и составляющую т* вдоль малой оси эллипса сечения. Приравнивая нулю
составляющие главного вектора всех действующих на выделенную часть
стержня сил в направлении нормали к сечению, направлении большой и малой
осей эллиптического сечения, найдем:
— Р cos а + oF/cos а = О,
Р sin а + xF/cos а = О, ,x*F/cos а = 0.
Отсюда следует, что нормальные напряжения в точках косого сечения стержня
вычисляются по формуле
а = Р cos2a/F. ■- (2.2.2)
Касательные напряжения вдоль большой о.си эллипса сечения вычисляются
по формуле
т = — Р sin a cos a, (2.2.3)
что свидетельствует о действительном направлении касательных напряжений,
противоположном указанному на рисунке. Касательные напряжения вдоль
малой оси эллипса т* = 0.
Пример 2. Рассмотрим напряженное состояние тонкостенной
цилиндрической трубы, которая подвергается действию крутящих моментов М, приложенных
по торцам трубы. Векторы этих моментов направлены по оси трубы в
противоположные, стороны. Радиус средней поверхности цилиндра обозначим R,
толщину — h. Толщина трубы предполагается настолько малой, что отношение hIR
не превышает 0,1. Поэтому напряженное состояние трубы считается однородным.
Некоторым поперечным сечением выделим две части трубы и рассмотрим
равновесие, например, левой части. По поверхности сечения могут развиваться
нормальные напряжения а, касательные напряжения %п направленные вдоль
радиуса, и касательные напряжениях, направленные перпендикулярно
соответствующему радиусу. Требование равенства нулю главного вектора всех
действующих на одну часть трубы сил приводит к необходимости отсутствия нормальных
56
яжений cr = 0. Требование равенства нулю главного момента всех действую-
наП на левую часть трубы сил приводит к равенству
тйХ М = т2яД#2. (2.2.4)
касается радиально направленных касательных напряжений тг, то по-
гтством рассматриваемого выделения элемента тела их определить невозможно.
°п шь другим способом выделяя элемент трубы, можно показать отсутствие ра-
альных касательных напряжений.
Пример 3. Рассмотрим эффекты действия внутреннего давления на тонко-
ную цилиндрическую трубу. Труба считается либо сколь угодно длинной,
С\бо способ приложения давления реализованным так, что внутреннее давление
вызывает никаких эффектов в продольном направлении. Например, торцы
Йпубы можно закрыть поршнями без трения. На технических возможностях
реализации такого состояния не останавливаемся.
Представим себе тонкостенную трубу, на которую действует только
внутреннее давление интенсивности р. В поперечных сечениях такой трубы напряжения
не развиваются. Для исследования напряжений в радиальных сечениях
рекомендуется рассмотреть равновесие половины трубы, выделенной произвольным
диаметральным сечением, откуда имеем
2oQh = 2Rp. (2.2.5)
Это условие позволяет определить напряжение сг0 по измеряемому давлению,
радиусу трубы и ее толщине.
Пример 4. Если трубчатый образец подвергать растяжению силой Р, то
возникают напряжения в поперечных сечениях
az = P/(2nRh). (2.2.6)
Таким образом, воздействием крутящих моментов, внутреннего давления
и продольных растягивающих сил на трубчатый образец можно создать в образце
касательные напряжения, нормальные напряжения в меридиональном
направлении и нормальные напряжения в поперечных сечениях образцов. При этом
возможно создать произвольную комбинацию этих напряжений, реализуя
разнообразные напряжения на различных материальных площадках трубы, что
используется при постановке экспериментов.
§ 2.3. Уравнения равновесия призматических стержней
Представим себе (рис. 17) призматическое или цилиндрическое тело
с прямой осью в начальном состоянии и произвольной конфигурацией
поперечного сечения. Осевой размер тела L считается значительно
(не менее чем в 5—10 раз) превосходящим характерный размер h
поперечного сечения. Такого типа тела в зависимости от
функционирования называют стержнями, стойками, балками, валами.
Формирование тела стержня может быть однородным и неоднородным.
Стержень может быть композитным, созданным из разных материалов.
Можно указать ряд других особенностей, отражающих разнообразные
механические свойства стержней как элементов машин и конструкций.
Обсуждая уравнения равновесия стержней, непременно
рассматривают деформируемую ось стержня — гладкую кри-
вУ*о линию, с каждой точкой которой можно связать некоторое
поперечное сечение. Считается, что при переходе стержня из начального в
деформированное состояние точки его получают перемещения я, всю-
ДУ в стержне возникают напряжения. Отличительной чертой стержня
ак объекта исследования механики деформируемого твердого тела
Шлется преимущественное значение напряжений на площадках
57
поперечных сечений. Предполагается, что основную роль в
формировании напряженного состояния играют напряжения именнб на этих
площадках. Поэтому метод сечений применяется здесь
специализированно: рассматриваются условия равновесия частей тел&, выделенных
из неголпоперечными сечениями. Система напряжений ст,
развивающихся в каждом поперечном сечении стержня, приводится к главному
вектору и главному моменту.
На рис. 18 представлена часть стержня в деформированном
состоянии и одно из поперечных сечений. Предполагается возможным
указать подвижный координатный трехгранник единичных векторов t, v,
р, связанных с осью стержня.
Рис. 17 Рис. 18
Плоскость (v, Р) совпадает с плоскостью поперечного сечения
стержня. Направление отсчета длины дуги s считается заданным,
поэтому направление т определено. Положительным направлением
вектора т определяется совокупность материальных площадок
поперечного сечения. Рассмотрим в точке с координатами (v, Р) элементарную
площадку поперечного сечения площадью dvdp. Обозначим а —
вектор напряжения, edvdfi — силу, приложенную к этой площадке.
Такого типа внутренние силы, действующие на разнообразные
элементарные площадки рассматриваемого -поперечного сечения, можно
привести к центру—точке поперечного сечения, совпадающей с осью
стержня.
Обозначив Р — главный вектор, .а М — главный момент всех
действующих в поперечном сечении внутренних сил, найдем:
P = ^advd$, (2.3.1)
(2)
Л1=ГГ^ + рр)х<кЫр, (2.3.2)
где интегрирование распространено на всю площадь поперечного
сечения стержня. Заметим, что вектор напряжения в поперечном
сечении стержня можно представить через нормальное ох и касательные
aY, dp напряжения:
a » Of т -f- av v + аз p.
58
Подобно этому введем нормальное усилие Рт, касательные
сдвигающие или перерезывающие поперечные силы Pv, Яр, крутящий момент
д| и изгибающие моменты Mv, Мр, полагая
M = MTx + Mvv + Мрр.
Приведем расчетные формулы, связывающие усилия и моменты в
поперечных сечениях с напряжениями и формой сечения:
Рх = jjaTdvdp, Pv= jjavdvdp, Р$ = f f cr6 dvdp,
(2)
(2)
(2)
PttC. /0
Aft = jj(vap —pav)dvdp, Afv = jjpatdvdp, M$ = — jj vortdvdp.
(2) (2) (2)
(2.3.3)
Если компоненты напряжений aT, av, ap считать известными
функциями координат точек поперечного сечения, то приведенные
формулы позволяют вычислить усилия и моменты, развивающиеся в
каждом поперечном сечении стержня.
Не меньшее значение в приложениях имеет противоположное
толкование соотношений (2.3.3). Располагая компонентами сил и моментов,
на основании (2.3.3) .с учетом
известного характера
распределения напряжений в%
поперечном сечении стержня
можно установить закон
распределения напряжений по
сечению и, в частности, найти
максимальные напряжения в
сечении стержня. .,
Таким образом, с математической точки зрения стержень
представляет собой объект, в котором задача отыскания напряжений сводится
к определению усилий и моментов, связанных с точками оси стержня.
Усилия и моменты зависят от положения точки на оси стержня —
одной пространственной координаты. Поэтому процедура приведения
напряжений к усилиям и моментам существенно упростила
математическую задачу, сократив число пространственных координат с трех
До одной.
G механической точки зрения так моделированный стержень
(одномерный объект) —линия, в каждой точке которой развиваются
внутренние усилия и моменты. Более того, будем предполагать, что все
внешние силы, действующие на реальный стержень, приведены к точкам
°си стержня, поэтому считаем заданными внешние силы д и моменты
я*» отнесенные к единице длины оси стержня.
Теперь уравнения равновесия стержня получаем посредством
формулировки условий равновесия элемента оси стержня. На рис. 19 пред-
Ставлен элемент оси стержня с указанием всех действующих на него
СИл и моментов.
59
Полагая этот элемент в рассматриваемом состоянии абсолютно
твердым телом, напишем условия равновесия его: потребуем равенства
нулю главного вектора и главного момента всех действующих на него
сил. При этом получим уравнения:
dP/ds + q = О,
dM/ds — xxP + m = 0. (2.3.4)
Чтобы получить соответствующие уравнения в скалярной форме,
необходим кинематический анализ состояния стержня, так как
упомянутый переход связан с необходимостью дифференцирования векторов
подвижной координатной системы с применением формул Френе
(1.1.2). Кроме того, вообще говоря, следует различать геометрию
начального и деформированного состояний оси и поперечного сечения
стержня. Если же перемещения и деформации стержня невелики, то
можно условия равновесия тела формулировать, опираясь на
геометрию начального состояния. В этом случае найдем, например,
Поэтому уравнения равновесия стержня сводятся к системе
dPJds — kPv + qx = 0;
dPv/ds — кРх + тР3 + $ = 0»
dPz/ds — tPv + <7p = 0,
dMJds — xMv + mT = 0,
dMv/ds — M хк + rMj3 + Pp + mv = 0,
dittos — iMv — Pv + mp = 0. (2.3.5)
Заметим, что в этих шести дифференциальных уравнениях
содержатся в качестве неизвестных функций компоненты усилий,
компоненты моментов, кривизна и кручение оси стержня. Кроме того,
компоненты внешних сил могут содержать даламберовы силы инерции, а с
ними дополнительные кинематические неизвестные.
В частности, при формулировке условий равновесия стержня с
прямой осью трехгранник Френе совмещается с трехгранником
декартовой ортогональной системы координат хг, х2, х3, кривизна и кручение
оси считаются отсутствующими, поэтому уравнения равновесия
принимают вид:
Лд + ^i = 0, P2tl + q2 = 0, P3,i + <7з = 0, (2.3.6)
Mi/i + mx = 0, Мм + Р3 + т2 = 0, Мзд — Р2 + т3 = 0.
60
Поя этом усилия и моменты вычисляются по формулам
^-ДОацЕ, P2=^G2dXt P3=Wo3d2,
(2) (2) (2)
д^1-== f f (*а аз — 4 <**) d2, M2 = ^ x3 ax d2, M3 = J j ( — xa) <Ji dS,
(S) (2) (2)
(2.3.7)
где 2 — известная площадь поперечного сечения стержня в
начальном состоянии.
Если шесть неизвестных сил и моментов удается определить из
шести уравнений (2.3.6) с учетом условий на границах оси стержня,
то говорят о статически определимых задачах.
Например, если на левом конце стержня действует только внешний
крутящий момент (— тк), а на правом конце — только крутящий
момент тк, то уравнениям (2.3.6) можно удовлетворить при дп = О,
тп = 0, полагая Мг = тк, Рц = О, М2 = М3 = 0. Такое состояние
стержня называется чистым кручением.
Рассмотрим чистый изгиб стержней.
Уравнениям равновесия (2.3.6) можно удовлетворить, полагая
распределенные вдоль оси внешние силы и моменты отсутствующими,
а из внутренних сил и моментов отличными от нуля лишь М2 и М3.
Тогда уравнения (2.3.6) удовлетворяются при постоянных вдоль оси
изгибающих моментах М2 и М3.
В этих и других примерах, когда силы и моменты внутренних
напряжений оказываются известными, остается проблема распределения
напряжений по сечению стержня. Эта задача — предмет дальнейших
рассмотрений после анализа характеристик напряженного состояния
тела в точке, связей напряжений и деформаций.
§ 2.4. Уравнения равновесия пластинок
Представление о пластине как элементе конструкции или машины
можно получить посредством такой последовательности построений.
Рассмотрим некоторую плоскость и представим себе в каждой точке
плоскости нормаль. Отложим по нормали по обе стороны плоскости
одинаковые отрезки. Концы этих отрезков образуют поверхности.
*1усть пространство между так построенными поверхностями
заполнено материалом. Если длина упомянутых отрезков мала по сравнению
с Размерами в плане, то получим тело, именуемое пластиной. В
частности, когда длины материальных нормалей одинаковы, получаем
пластинку постоянной толщины.
Базовая плоскость, с которой начинается геометрическое
построена тела пластинки, называется средней плоскостью.
Пластинка как объект механики деформируемого твердого тела
^Ракт^ризуется тем, что напряжения в сечениях, перпендикулярных
^Р^Дней плоскости, приводятся к усилиям и моментам, отнесенным
еДинице длины контура, лежащего в средней плоскости^ Представим
61
себе (рис. 20) пластинку, положение точек которой связано/с дёкарто-
вой координатной системой. Рассматривая напряжения э разных
точках пластинки, будем считать, как это принято в линейнбй теории,
геометрию пластинки неизменной.
I *3 В сечении пластинки плоскостью,
перпендикулярной оси Ох2У
развиваются напряжения а21, а22, cj23.
Распределенные по толщине
пластинки напряжения приведем к си-
х ле и моменту. С этой целью выде-
^^ лим полоску, для простоты единич-
11 J ной ширины, параллельную оси
Охъ а на этой полоске отметим
элемент площадью 1 • dx3 с аппликатой
х3. Тогда силы и моменты,
отнесенные к контуру средней плоскости,
параллельному оси Охг и
лежащему в средней плоскости и
рассматриваемом сечении, будут
Рис. 20
0,5ft
N21= J СГ21 dx3, N22 = j* o22dx3,N23 = f o23dx3, (2.4.1)
— 0,5ft —0,5ft —0,5ft
0,5ft 0,5ft
M2\=— j x3G22dx3y M22= j x3o2idx3, (2.4.2)
— 0,5ft
— 0,5ft
где h — толщина пластины.
Подобно этому можно ввести усилия и моменты, к которым
приводятся напряжения, действующие в сечении пластинки с нормалью i{.
0,5ft 0,5ft 0,5ft
#11 = j 0Tndv3, #12= [ ai2^3, #13= j o{3dx3, (2.4.3)
— 0,5ft
— 0,5ft
-0,5ft
0,5ft
0,5ft
Mn = — [ 02ix3dx39 Mi2= j onx3dx3.
(2.4.4)
-0,5ft
— 0,5ft
Рассмотрим произвольный контур на средней поверхности
пластинки и некоторую точку этого контура, в которой определены единичные
векторы касательной т и нормали v так, чтобы ориентация осей t, v, /3
совпадала с ориентацией /ь /2, /3- Тогда усилия и моменты
определяются формулами
0,5Л
0,5ft
0,5ft
#w= f ovvdx3, #VT = Г Ovxdx3, #V3= f Qvzdx39 (2.4.5)
— 0,5ft —0,5ft —0,5ft
0,5ft 0,5ft
AfVT=— f x3avvdx3y Mw = Г x3ovx dx3. (2.4.6)
— 0,5ft
— 0,5ft
62
V илия типа #ц, #22, #vv называются нормальными рас-
ягивающими или сжимающими усилиями. Усилия
т да дг12, #2i, #VT — сдвигающие усилия. Знаки этих усилий
В сечениях средней плоскости определяются подобно знакам напряже-
в g в сечениях тела с определенной координацией в пространстве.
Н Усилия #23» Л^1з> #v3 называются перерезывающими или
поперечными усилиями. Знаки этих усилий на контуре
средней поверхности с положительной нормалью положительны, если они
направлены вдоль оси Ох3. Моменты М12У М21у М^у вызванные
действием нормальных напряжений, называются изгибающими,
а моменты М22у М11у Mvx называются крутящими моментами.
Знаки моментов считаются положительными, если направления
соответствующих векторов совпадают с направлениями координатных осей.
Таким образом, со статической точки зрения рассмотрение
элемента пластинки, построенного на элементе средней плоскости
посредством нормальных к средней плоскости сечений по всей толщине
пластинки, эквивалентно рассмотрению элемента средней плоскости, к контуру
которого приложены соответствующие, усилия и моменты. Трехмерные
напряжения приводятся к двухмерным силам и моментам.
На рис. 21 представлен элемент средней поверхности пластины
Размерами dxly dx2 с указанием действующих на него внутренних уси-
Лий и моментов и вектора внешних сил qdx±dx2. При этом указали
силы и моменты, действующие лишь на двух противоположных кром-
Ках элемента. На двух других кромках силы и моменты аналогичны.
Силы и моменты, действующие на левой кромке элемента, имеющей
нещнюю нормаль (— /2), отрицательны, а интенсивность их
пропорциональна длине контура dxx. Силы и моменты на противоположной
Ромке положительны, направлены вдоль осей декартовой
координатой системы, интенсивность их пропорциональна длине контура эле-
63
мента dxv Кроме того, рассчитанные на единицу длины контура силы
и моменты N22, •••» ^2i изменяются за счет изменения на dtf2 коорди.
нат точек по сравнению с точками левой кромки.
Полагая приложенными к элементу все внутренние силы и моменты,
получим условия равновесия его в виде уравнений:
ЛГцд + #21,2 + ft = 0, (2.4.7)
#12,1 + #22,2 + <72 = 0, (2.4.8)
#23,2 + #13,1 + <7з = 0, (2.4.9)
Мцд + М1М + Л^23 = 0, (2.4.10)
^22,2 + Л12М + #13 = 0. (2.4.11)
Эти уравнения следуют из требования равенства нулю главного
вектора и главного момента всех действующих на элемент сил. Уравнение
(2.4.7) — следствие требования равенства нулю суммы всех сил в
направлении оси Охъ уравнение (2.4.8) — в направлении оси Ох2.
Уравнение (2.4.9) — требование равенства нулю суммы всех сил в
направлении оси Ох3. Уравнение (2.4.10) получается в результате
приравнивания нулю суммы моментов всех сил относительно оси,
параллельной оси Охх и проходящей через правую кромку элемента.
Аналогично получено уравнение (2.4.11), а требование равенства нулю
суммы моментов всех сил относительно оси Ох3 приводит к
тождеству либо закону взаимности касательных усилий
#i2 = #2i. ' (2.4.12)
Уравнения (2.4.7)—(2.4.12) играют в теории пластинки ту же роль,
что уравнения (2.3.5) в теории стержней.
§ 2.5. Тензор напряжений
Векторы напряжений на разнообразных площадках, проходящих
через одну и ту же точку тела, можно вычислить через конечное число
параметров, образующих тензор напряжений. С этой целью
рассмотрим малую окрестность точки, где напряженное состояние можно
считать однородным — одинаковым в разных точках окрестности.
Предположим, что нас интересует вектор напряжения ап на площадке
с внешней нормалью п. Введем конечное число параметров, через
которые можно вычислить напряжение на любой площадке. Здесь особую
роль играют векторы напряжений на координатных площадках.
Координатными называются площадки, внешние нормали к которым
совпадают с единичными векторами координатной системы /ft. Обозначим
ak вектор напряжения на площадке с нормалью /А. Эти векторы
можно представить разложениями
<7Л = oh8t8. (2.5.1)
При этом ап, а22, а33 — нормальные напряжения на координатных
площадках, a aks при k Ф s — составляющие касательных
напряжений.
64
Посредством сечений выделим элемент тела (рис. 22) в форме че*
ырехгранника. Одна из граней этого тетраэдра имеет внешнюю нор-
Тяль п, а три другие грани имеют внешние нормали (— /&). Площадь
площадки с нормалью п обозначим AS, поэтому сила, приложенная
к этой грани, будет crnAS. На грань с нормалью (—ik) действует сила
/_ 0h/±Snk), поскольку площадь этой грани можно считать
проекцией площади AS на
соответствующую плоскость.
Приравниваем нулю главный
вектор действующих на элемент
сил и главный момент:
a^S + (-ohASnh) = 0, (2.5.2)
- bxkihX (- ak/HSnh) = 0. (2.5.3)
Легко видеть, что площади
треугольников
2ASn3 = А^Длга, 2ASn1= Ах2Ах3,
2ASn2 = Ах3кхъ
поэтому равенство нулю главного
момента действующих на элемент
сил можно представить в виде
равенства нулю: ik X ak = 0.
Отсюда непосредственно следует так называемый закон взаимности
или закон парности касательных напряжений:
Рис. 22
<*ik = Gki
(2.5.4)
Заметим, что возможно и более общее предположение о характере
взаимодействия через площадки сечений тела. Можно считать, что вза-.
имодействие на всякой сколь угодно малой площадке
характеризуется не только силой; но и парой с определенным моментом. Тогда закон
взаимности (2.5.4) не будет выполняться и к левой части (2.5.3)
необходимо добавить соответствующие слагаемые. Такое предположение
развивалось в ряде методических работ последних десятилетий.
Однако должного экспериментального обоснования и существенного
значения в технических приложениях такое напраьление пока не
получило. Поэтому в дальнейшем мы его не рассматриваем.
Обратившись к соотношению (2.5.2), найдем представление
вектора напряжений на площадке с произвольной внешней нормалью
п ^ nsis через составляющие вектора напряжений на координатных
площадках:
<*п = oknk. (2.5.5)
В дальнейшем полезно представление (2.5.5) через проекции напря-
ений на координатных площадках ап = Ghsnkis. Отсюда получаем
Gnp —^°hpnh'
Зак. 588
(2.5.6)
65
Располагая проекциями апр вектора напряжения на площадке
с нормалью пу можно найти нормальное напряжение на этой
площадке: /
Япп = <*пП = опрпр = okpnknp / (2.5.7)
и квадрат величины касательного напряжения:
т£ = Ki/2ft)2 + (ОкъПк)2 + ЫгПп)2 — ЫрПкПр)2. (2.5.8)
Итак, по компонентам aih напряжений на координатных
площадках можно вычислить вектор напряжения, его проекции на
координатные оси огпр, нормальное и касательное напряжения на любой
площадке с заданной внешней нормалью #. Поэтому совокупность величин
aih можно считать координатами напряженного состояния в
точке тела. Величины aik связаны с выбором направлений координатных
осей и изменяются с изменением координатной системы. Величины
aih образуют тензор — они изменяются по однородным квадратичным
формулам относительно направляющих косинусов, определяющих
взаимную ориентацию повернутых друг относительно^друга осей
координатных систем.-В этом легко убедиться без"подробных вычислений,
обратившись к формуле (2.5.7). Действительно, если п — одна из осей
координатной системы, то соответствующая этому направлению
компонента тензора вычисляется по однородной квадратичной формуле
относительно nk.
Шесть компонент тензора напряжений вполне характеризуют
напряженное состояние в точке тела. Эти характеристики не всегда
удовлетворительны, поскольку зависят от выбор'а координатной системы.
Поэтому ниже выделяются инвариантные характеристики
напряженного состояния.
§ 2.6. Главные направления и напряжения,
инварианты напряжений
В дальнейшем тензор напряжений записывается в виде
симметричной относительно глаавнй диагонали таблицы:
(<7ц 0\2 <У1з\
(2.6.1)
. Проблема отыскания главных направлений тензора напряжений
имеет непосредственное физическое значение. Будем искать такие
направления нормалей Пи к площадкам или такие материальные
площадки, на которых развиваются только нормальные напряжения. Это
требование представляется векторным равенством
ап = Nn, (2.6.2)
где N, пл, п2, п9 —'неопределенные числа,
66
Равенство (2.6.2) с учетом (2.5.6) сводится к системь
(аи — N) п1 + о12п2 + а13п3 = О,
<*ыЩ. + (<*22 — N) п* + <*23п3 = О,
сУзЛ + о32п2 + (а33 — N) п3 = 0. (2.6.3)
Характеристическое уравнение этой системы
det(Gik-8ikN) = 0
имеет инвариантные коэффициенты
2i = oru + а22 + а33 = За,
2ц = аиа22 + о22о33 + о33оп — а?2 — Q23 — а3?,
2ш = det (oih). (2.6.4)
и три действительных корня, которые обозначим а1у а2, а3.
Отсюда следует, что при несовпадающих главных напряжениях
в каждой точке тела существуют три ортогональных главных
направления, соответствующие им три главных площадки, на которых
отсутствуют касательные напряжения. Тензор напряжений в главных осях
имеет вид
'<Т! 0 0\
0 а2 0 , (2.6.5)
\0 0 а3//
а инварианты этого тензора
2i = ах + а2 + а3 = За,
2 и = о1о2 + о2о3 + о3о1у
2 ш = о^о^ (2.6.6)
Важное значение для приложений имеют инварианты девиатора
напряжений: октаэдрическое касательное напряжение т и направляю*
^Щий угол ф, которые вычисляются подформулам:
9т2 = {аг - а2у + (а2 - а3)2 + (а, - ах)2 = (аи - а22)2 +
+ (°22 — ^зз)2 + (<Ьз — ОпУ + 6 (а?2 + а|3 + a|i);
т3 cos Зф = ]/2"(аг — а) (а2 — а) (а3 — а) = У2 det (oik —
- 6/fta). (2.6.7)
Можно показать, что так определяемые инварианты напряжений
имеют интересное физическое значение: а, т, ф полностью
характеризуют напряженное состояние на октаэдрических площадках.
Представим себе совокупность площадок, нормали к которым образуют
°Динаковые углы с главными направлениями, и определим
напряжения на них. Наглядное представление о таких площадках можно
полупить посредством построения октаэдра (рис. 23), грайи которого парал-
ельны рассматриваемым площадкам. На гранях октаэдра удобно
3*
67
вести и построения векторов напряжений. Отсюда и следует
происхождение терминов «октаэдрическая площадка», «октаэдрическое/йапряже-
ние». Октаэдрическая площадка, проходящая через точку М,
параллельна одной из граней октаэдра. у
Считая тензор напряжений заданным в главных осях (2.6.5),
найдем напряжения на октаэдрических площадках с направляющими
косинусами, квадраты которых равны V3.
Рис. 23
Обозначив вектор напряжения на октаэдрической площадке сг0,
найдем по (2.5.7) проекции его на главные направления:
°ор = аопр (не суммировать!).
Отсюда следует, что нормальные напряжения на октаэдрической
площадке
<V ■= врп2р = (аг + а2 + а3)/3 = а (2.6.8)
не зависят от ориентации площадки, одинаковы по величине на всех
восьми октаэдрических площадках и совпадают со средним
нормальным напряжением а.
Величину касательного напряжения вычисляем по формулам (2.5.9):
г20 = (а? + °1 + а|)/3 - (аг + а2 + а3)2/9 = [3 (а? + а\ +
+ el) — (о\ + о\ + о\) — 2 (аха2 + а2о3 + авах)]/9 = 1(аг —
- <у2)2 + (а2 - а3)2 + (а3 - oJ*]/9.
Отсюда следует, что величина октаэдрического касательного
напряжения одинакова на всех октаэдрических площадках и совпадает
с определенной формулой (2.6.7).
Для выяснения направления октаэдрического касательного
напряжения рассмотрим октаэдр ическую площадку и некоторые направления
на ней. На первой октаэдрической площадке (рис. 24) возьмем
единичный вектор аъ направленный из центра тяжести площадки в сторону
первого главного направления: ]/б аг = 2/х — /2 — /3, и ему
68
Рис. 24
перпендикулярный единичный вектор ]/2 а\ = /2 — h- Кроме
того, построим единичный вектор х°, образующий с направлением а?
угол Ф, и ему перпендикулярный вектор t*:
т° = cos фах + sin <paf, t* = — sin фах + cos фа*.
Подберем угол cp так, чтобы октаэдрическое касательное
напряжение имело направление т°. Другими словами, потребуем, чтобы
вектор октаэдрического напряжения а0 и вектор т* были
перпендикулярны <r0t* = 0.
Это условие запишем подробнее:
—2<risiiKp + (sin<p + ]/~3 cos(p)a2 + (sin Ф—V% cos(p)a8 = 0. (2.6.9)
Удовлетворим тождественно этому условию, полагая
ok = g + V2r cos <pft,
Ф1 = Ф> Ф2 = Ф + 2я/3, ф3 = Ф — 2я/3. (2.6.10)
Тогда для определения <р получим второе из соотношений (2.6.7).
Отсюда следует, что углом ф, вычисленным по (2.6.7), определяется
направление октаэдрического касательного напряжения.
Наконец, отметим, что векторы октаэдрических касательных
напряжений на разных октаэдрических площадках обладают свойством
симметрии относительно ребер октаэдра. Таким свойством обладают и
векторы полных напряжений на октаэдрических площадках.
Среди инвариантов напряженного состояния значительную роль
в приложениях играют максимальные касательные напряжения. К
представлению о максимальных касательных напряжениях приходят
посредством анализа касательных напряжений на разнообразных
площадках.
Квадрат касательного напряжения на произвольной площадке
вычисляют по формуле (2.5.8). Если координатные направления
совпадают с главными, то
т£ = оЫ — {ahn\f.
Можно показать, что максимальные касательные напряжения
развиваются на площадках, которые проходят через одно из главных
направлений напряжений и делят пополам углы между двумя другими
главными направлениями. Полагая в предыдущей формуле, например,
пв = 0, п\ = Я, п\ = 1 — X, найдем
г2п = о\% + о\ (1 — X) — [агХ — ст2 (1 — Я)]2,
а из условия экстремума касательного напряжения по % установим
^ = п\ = 0,5. Отсюда следует, что площадка с экстремальным
касательным напряжением делит пополам угол между первым и вторым
главными направлениями, а значение экстремального напряжения
вычисляется по формуле
г= ± 0,5 (с?! — (т2). (2.6.11)
69
Отсюда следует, что максимальное касательное напряжение следует
искать среди полуразностей главных. /
Располагая инвариантами напряжений, можно сравнит^
разнообразные напряженные состояния, которые характеризуются7
различными компонентами тензора напряжений.
§ 2.7. Дифференциальные уравнения равновесия
или движения трехмерного деформируемого тела
Обратившись к изучению условий равновесия трехмерного
деформируемого тела, начнем с выделения посредством сечений такого
элемента тела, к которому можно применить законы классической
механики. Считая тело для простоты отнесенным к декартовой
координатной системе, выделим элемент тела тремя парами сколь угодно близких
координатных плоскостей. При этом элементом тела оказывается
прямоугольный параллелепипед (рис. 25). К этому параллелепипеду
могут быть приложены массовые силы pFdx^x^x^ включая силы
инерции, и поверхностные силы.
Здесь р — плотность тела.
Например, на левую грань элемента
площадью dxtdxs действует сила
(— 02djt1dx3)> так как эта грань
имеет внешнюю нормаль (— /2)
и на ней развивается напряжение
(— <*2)- Правая грань отличается
z от левой направлением нормали.
Здесь внешняя нормаль совпадает
с /2, поэтому в каждой точке
напряжение, вектор которого считается
{62 + 62,zdxz)dx1dx3
ТУ
Рис. 25
этой грани развивается
положительным.
Кроме того, при переходе от левой к правой грани
параллелепипеда координата х2 получает приращение dx2y за счет чего несомненно
меняется вектор напряжения, поэтому на правой грани
параллелепипеда развивается усилие (or2 + a2t2dx2)dx1dx3. Подобным
способом можно указать усилия на всех 'гранях выделенного элемента.
После этого нетрудно найти условие равновесия выделенного
параллелепипеда, приравнивая нулю главный вектор всех действующих на
него сил. При этом получим
or.,.+.pF = 0. (2.7.1)
Требование равенства нулю главного момента всех действующих на
элемент сил приводит либо к закону парности касательных
напряжений, либо к тождеству, если упомянутый закон принять заведомо.
Векторное уравнение равновесия можно переписать в проекциях:
°K8,h + pF8 = 0 (k, s= 1, 2, 3). (2.7.2)
Если же учесть даламберовы силы инерции, то можно получить
уравнения движения
°h8.s + pFs = P^-- (2.7.3)
dt2
70
Три дифференциальных уравнения с частными производными
содержат в качестве неизвестных шесть компонент напряжений и три
составляющих перемещения каждой точки тела. Эти уравнения
решаются при граничных условиях: в каждой точке поверхности тела
задаются три величины, по одной из-трех пар. Пару величин составляют
проекции перемещений и8 граничных точек и проекции внешних
поверхностных сил fSi которые связаны с компонентами тензора напряжений
и проекциями единичного вектора внешней нормали формулами,
вытекающими из (2.5.6):
f8 = eh$nk. "(2.7.4)
Если задается перемещение, то условие называется
геометрическим, если задается сила — статическим. Иногда может быть
задано определенное соотношение между силой и перемещением, как
в случае упругих опор.
Заметим, что дифференциальные уравнения равновесия или
движения можно получить и в криволинейных координатах £ft. Выделим
соседними координатными поверхностями]бесконечно малый элемент
тела. На одну из:граней его действует сила (—a1H2H3dl2dl3)9 на
противоположную — сила [ агН2Н3 +l(o1H2Hz)A dgj d\2d%3- На
двух^других противоположных гранях принято аналогичное
обозначение сил. Поэтому уравнение равновесия в криволинейных координатах
принимает вид
(DahH~\)9h + pDF = Ot D = Н.Н.Н,. (2.7.5)
Представление напряжений <rA = aksee с использованием формул
дифференцирования единичных векторов (1.6.4) приведет к
скалярной форме уравнений движения в криволинейных координатах.
Например, используем цилиндрические координаты г, q>, z так, чтобы
выполнялись соотношения
г cos ф = %, г sin ф = х2, z = *8, %г = г, %2 = ф, £3 = г-
Тогда формулы (1.6.1) приводят к выражениям
— = cos ф/i + sin ф/2 = в\, -^— = г (—sin ф/! + cos ф/2) = ге27
дг .... дг
-— = COS ф*1 + Sin ф!2 = в\,
or дф
дг
— —13 — е3.
дг
Отсюда находим и коэффициенты:
#!= U Н2 = г, Н3= 1, D = г.
Кроме того, легко установить формулы дифференцирования:
е*,1 = вЛ|3г= е*,2 = 0, eli2 = е2У е2)2 = — ег.
71
Этих соотношений достаточно, чтобы подробно расписать уравнение
(2.7.5) и получить уравнения равновесия в цилиндрических
координатах: /'
Г(Уц,1 + сг12,2 + гсг13,з + (<% — ст22) + prF± = 0;
^12,1 + ^22,2 + ^2з,з + 2а12 + prF2 = 0;
^13,1 + <*23,2 + ^33,3 + ^13 + prF3 = 0. (2.7.6)
Уравнения (2.7.2), (2.7.5) либо (2.7.6) представляют собой систему
трех дифференциальных уравнений, содержащих шесть неизвестных
составляющих тензора напряжений и три неизвестные составляющие
вектора перемещений точек тела в случае движения.
Обнаружив явную недостаточность соотношений между
неизвестными, необходимо выяснить возможности установления
дополнительных соотношений между напряжениями и деформациями вместе с их
производными.
Такие соотношения можно получить только с привлечением опытных
данных, постулируя то или иное механическое состояние
деформируемого тела.
Глава III
МЕХАНИЧЕСКИЕ СВОЙСТВА ДЕФОРМИРУЕМЫХ ТВЕРДЫХ ТЕЛ
§3.1. Задачи экспериментов
При внешних воздействиях на реальные твердые тела наблюдается
их деформируемость. Деформируемость отдельных частей тела,
окрестностей разнообразных точек проявляется в первую очередь на
поверхности тела, где можно непосредственно измерять расстояния между
фиксированными точками.
Если реализовать такие деформированные состояния некоторых
тел-образцов, при которых поверхностные элементы оказываются
в одинаковых деформированных состояниях, то можно прямыми
измерениями расстояний и углов между поверхностными элементами
устанавливать и регулировать деформированное состояние поверхностных
элементов. Когда удается реализовать одинаковые деформированные
состояния во всех точках некоторой конечной части тела, говорят об
о д н oj)'o дном состоянии. По измерениям на поверхности судят
о деформированном состоянии всего тела, точнее части тела, где
состояние" тела заведомо однородно, так называемой расчетной части образца.
При внешних воздействиях на реальные твердые тела в каждой
точке развиваются напряжения. Напряжения можно оценить только
в'связи с внешними силами. В случае однородной деформации части
тела напряжения сравнительно просто вычисляются по внешним
силам и геометрическим параметрам тела, которые контролируются в
процессе экспериментов. Поэтому однородное напряженное состояние
части образца становится контролируемым.
72
В механике деформируемого твердого тела предполагается, чтб
характеристики деформированного состояния в каждой точке тела
и характеристики напряженного состояния взаимно обусловлены.
При этом характеристиками деформированного состояния считаются
тензор деформаций, тензор скоростей деформаций, другие
производные во времени от тензора деформаций, учитывающие тенденцию
изменений со временем деформированного состояния в рассматриваемый
момент времени. Кроме того, на деформированное состояние в
рассматриваемый момент времени может оказывать влияние история
деформирования, т. е. процесс накопления деформаций. Поэтому в число
характеристик деформированного состояния могут входить и интегралы
по времени от составляющих тензора деформаций, повторные интегралы.
Приблизительно то же относится и к характеристикам
напряженного состояния. Во всяком случае полагают, что напряжения в
рассматриваемой точке представляются определенными функциями либо
функционалами деформаций в этой же точке. Справедливо и обратное:
деформированное состояние в точке тела определяется некоторым
функционалом над тензором напряжений. Вид упомянутых
функционалов или функций зависит от температуры, давления и других
параметров условий окружающей среды.
Установление соотношений между характеристиками напряжений
и деформаций, так называемых конституционных соотношений,
представляет собой основную задачу процесса построения механики
деформируемого твердого тела. Выявить соотношения между тензорами
напряжений и деформаций, их производными по времени различных
порядков, интегралами по времени от напряжений и деформаций
можно лишь на основе глубоко обоснованных экспериментов. Широкую
программу экспериментов опишем позднее. Здесь же остановимся
на простейших опытах, в которых можно проследить за
механическими состояниями материала, изменениями и соответствием отдельных
составляющих тензоров напряжений и деформаций, их
дифференциальных и интегральных операторов.
В опытах по растяжению и сжатию специально приготовленных
образцов материала можно обнаружить свойства упругости материала,
свойства пластичности, свойства вязкоупругости, проследить за
влиянием скоростей деформирования, температуры и других условий
окружающей среды на проявление механических свойств материала.
§ 3.2. Напряжения и деформации
при осевом растяжении образцов
Выявление механических свойств материалов при одноосном
растяжении и одноосном сжатии проводится с помощью специальных
испытательных машин, имеющих захваты для закрепления концов
образца и механический либо электромеханический привод для
создания растягивающей нагрузки. Образцы для испытаний механических
свойств материалов изготовляются с цилиндрической или плоской
Расчетной частью и утолщениями по концам под захваты испытательной
машины. Длина расчетной части образца обозначается /0, диаметр d0.
73
Они выбираются в соответствии с ГОСТ 1497—73. Различают д^инйые
и короткие образцы. Для цилиндрических образцов установлены
соотношения:
/0 = 10d0 — для длинных образцов,
/0 = 5d0 — для коротких образцов.
Длину плоских образцов связывают с площадью F0 поперечного
сечения:
l0 = II^I^Fq — для длинных образцов,
/0 = б/бб]/"/^ — для коротких образцов.
Образец закрепляют в захватах испытательной машины и
подвергают действию продольной силы Р, которая регистрируется
непрерывно либо дискретно. Разнообразные механические или
электромеханические приспособления и приборы позволяют следить за изменениями
длины расчетной части образца и размеров поперечного сечения. Измеряя
текущую длину в расчетной части образца, площадь F поперечного
сечения и силу Р, можно вычислить продольное относительное
удлинение: е = (/ — 10)/10, относительную деформацию поперечных волокон:
е = (d — d0)/d0, нормальное напряжение в поперечном сечении
образца: s = PIF,
Дальнейшую обработку экспериментальных данных будем вести
в связи с выбором координатной системы. Полагая ось Охг
направленной вдоль оси образца, а оси 0х2У 0х3 декартовой координатной
системы направленными в плоскости поперечного сечения образца, можно
вычислить компоненты тензора напряжений:
an = s, а22 = а33 = 0, а12 = а23 = a3i = 0.
По компонентам тензора напряжений можно найти инварианты
напряжений, используя формулы (2.6.6) и (2.6.7) (напряжение s
считается растягивающим):
а = s/З, т = V2s/3, ф = 0. (3.2.1)
При осевом растяжении образцов продольные волокна удлиняются,
а поперечные волокна образца сжимаются, поэтому в
рассматриваемом случае г положительна, а е отрицательна. По компонентам
тензора деформаций
можно вычислить инварианты деформации:
Зе = е + 2«Г, Зэ=У2(е—%), Р=0. (3.2.2)
Заметим, что вместо поперечной деформации г в дальнейшем
удобнее оперировать с коэффициентом Пуассона v — взятым с обратным
знаком> отношением поперечной и продольной относительных
деформаций образца:
v » —Г/в. (3.2.3)
74
Используя коэффициент Пуассона, инварианты деформации (3.2.2)
представим формулами
Зе = (1 — 2v) 8, Зэ = У2 (1 + v) е, р = 0. (3.2.4)
По определению, коэффициент Пуассона не может быть
отрицательным, пока продольная растягивающая сила не вызывает поперечного
расширения цилиндрического образца.
С другой стороны, при осевом растяжении образца объем
материала не может уменьшаться, поэтому относительное изменение
объема положительно. По формуле (3.2.4) при этом должно быть
положительным число 1 — 2v. Отсюда следуют пределы изменения
коэффициента Пуассона:
0,5 > v > 0. (3.2.5)
Учитывая простые соотношения между экспериментальными
данными, представленными через компоненты напряжений и деформаций
либо через инварианты, в дальнейшем будем предполагать
возможным представление опытных данных не только через s, е, v, но и через
инварианты а, т, еу э. Представление опытных данных через
упомянутые симметричные инварианты облегчает сопоставление
механических свойств, которые проявляются при разных напряженных и
деформированных состояниях.
§ 3.3. Упругие состояния образцов
Упругостью называется свойство реальных тел
деформироваться под действием внешних сил или при изменениях температуры
и восстанавливать первоначальное состояние по Прекращении
действия рассматриваемых сил или при восстановлении температуры.
Проявляется свойство упругости по-разному в зависимости от скоростей
приложения внешних сил, температуры, влажности и других условий
внешней среды. Существенное влияние на свойства упругости деталей
машин и конструкций может оказать технологический процесс их
производства.
Качественные проявления свойств упругости наблюдаются всюду
в окружающей нас действительности. Количественную оценку свойств
упругости можно реализовать только с помощью специальных машин,
приспособлений, измерительных устройств. Наиболее просто
реализуются испытания свойств упругости при одноосном растяжении или
сжатии цилиндрических или плоских образцов материала.
Специальные машины испытаний механических свойств материала имеют
устройства для закрепления образца материала и приложения продольной
силы. Растягивающая сила регистрируется непрерывно либо
дискретно в отдельные моменты процесса испытаний. Кроме того, непременно
отмечаются температура и другие условия окружающей среды,
скорость изменения нагрузки.
С помощью механических, оптических или электрических датчиков
Деформаций в процессе испытаний цилиндрических образцов
регистрируются деформации продольных материальных волокон и деформа-
75
ции поперечных волокон цилиндрического образца. Регистрация
деформаций может проводиться непрерывно либо дискретцо в
зависимости от задач эксперимента и степени его материальной
оснащенности. В процессе испытаний цилиндрического образца
устанавливаются соответствующие значения напряжения s в поперечных сечениях
образца, продольной относительной деформации е и отношения
поперечной и продольной деформации.
На рис. 26 представлена характерная зависимость истинного
напряжения и относительной деформации при растяжении
металлических образцов. На этой кривой можно выделить по меньшей мере
два участка: первый, почти прямолинейный, соответствует диапазону
o,ooz о, г
Рис. 26
Рис. 27
очень малых деформаций, не превышающих долей процента. При
этом напряжение изменяется от нуля до нескольких сотен ньютонов
на квадратный миллиметр. Второй участок диаграммы соответствует
гораздо большему диапазону изменения деформации при
сравнительно небольшом, 20—30%-ном увеличении напряжений.
На рис. 27 приведена еще одна кривая, связывающая напряжения
и деформации при осевом растяжении цилиндрических образцов.
Здесь показана характерная диаграмма растяжения мягкой резины.
Диапазон деформаций резины до разрушения превышает диапазон
деформаций металлов в десятки, сотни раз, тогда как диапазон
изменения напряжений, наоборот, для резины значительно снижается по
сравнению с металлами.
На рис. 28 представлена зависимость отношения поперечной и
продольной деформации от продольной деформации металлов. На
первом участке это отношение практически постоянно, но для разных
металлов меняется от 0,25 до 0,35. На втором участке деформаций это
отношение резко меняется, приближаясь к значению 0,50,
соответствующему условию неизменности объема при деформировании. Многие
сорта резины во всем диапазоне деформаций практически не изменяют
объема.
Отсюда следует, что характер соотношений между напряжениями,
деформациями и отношениями Пуассона при одноосном растяжении
76
цилиндрических образцов материалов весьма разнообразен.
Результаты испытаний обычно выдаются в виде таблиц и графиков.
Практические потребности процесса аналитических расчетов деталей машин
и конструкций требуют аналитического представления результатов
испытаний образцов. При этом важно выделить начальный диапазон
обратимых упругих деформаций, установить предел упругости по
деформациям, предел упругости по напряжениям. Начальный участок
деформирования металлов соответствует упругим, обратимым
состояниям. Выявить этот участок можно только посредством полной или
частичной разгрузки образца в процессе испытаний.
-£/с
0,5
0,3
0\ I
0,002 О,
Рис. 28
Представим себе начальный участок диаграммы растяжения
(рис. 29) и проследим за ходом процесса растяжения образца от
нулевого напряжения до напряжения s±.
Если напряжение s2 невелико, то после разгрузки образца никаких
остаточных деформаций не обнаружим. Более того, процесс нагрузки
до напряжения s± и процесс последующей разгрузки проходят по
одному и тому же участку кривой растяжения. Этим устанавливается
взаимно-однбзначное соответствие напряжений и деформаций. В
действительности кривые нагрузки и разгрузки различаются из-за
упругого гистерезиса, но этого различия в экспериментах
рассматриваемого уровня точности не замечают. Когда не обнаруживают
никаких остаточных эффектов после разгрузки, говорят, что материал
образца пребывал только в упругих состояниях во всем диапазоне
изменения напряжений от нуля до значения sx.
Далее будем увеличивать диапазон изменения растягивающих
напряжений. Доведем напряжене до значения s2 > Si и разгрузим.
Предположим, что и в этом случае не обнаружены остаточные
деформации. Тогда можно утверждать, что диапазон упругих напряжений
Расширен до s2. Наконец, достигнув напряжения ski снимем нагрузку и
обнаружим остаточные деформации. Этим диапазон упругих состояний
образца ограничивается сверху. Далее следует снижать максимальные.
напряжения, проводить интерполяцию и снова экспериментировать
с нагрузкой и разгрузкой. Этот процесс заканчивается назначением
! С
Рис. 29
77
предельного значения растягивающего напряжения ауу который
называется пределом упругости по напряжениям. Вместе с тем можно найти
и предельное значение относительного удлинения гу. Точка с
координатами (ву, гу) на диаграмме растяжения образца называется \и р е-
делом упругости. Все состояния, соответствующие
"промежуточным точкам между (0, 0) и (оуу еу), будут упругими, обратимыми.
Конечно, предел упругости, как любую другую точку на диаграмме
результатов испытаний, можно установить только с определенным
допуском. Более того, часто пределы упругости нормируются.
Например, для конструкционных сталей установлено, что гу = 0,002, а по
деформации можно найти и соответствующий предел упругости по
напряжениям, если имеются протоколы испытаний образцов.
Данные испытаний образцов представляются либо кривыми связи
напряжений и деформаций, либо в табличной ф'орме. А практика расчетов
деталей машин и конструкций часто требует аналитического
представления данных испытаний образцов. Поэтому вслед за установлением
пределов упругости встает проблема аналитического представления
данных испытаний образцов материала на одноосное растяжение.
Аналитическое представление экспериментальных данных по растяжению
образцов в области упругих деформаций должно удовлетворять условию
взаимной однозначности: по заданному напряжению можно найти
единственное значение деформации, по заданной деформации определяется
единственное напряжение. Наиболее распространенным и достаточно
точно отражающим свойства многих реальных материалов оказывается
линейное соотношение между напряжениями и деформациями
s = Ее. (3.3.1)
После определения числа Е на основании обработки эксперименталь"
ных данных соотношение (3.3.1) получает значение физического закона
и называется законом Гука по имени Роберта Гука, который
сформулировал триста лет назад закон пропорциональности силы и удлинения.
Коэффициент пропорциональности Е в (3.3.1) называется модулем
Юнга и представляет собой важнейшую характеристику
упругости материала. Второй механической характеристикой поведения
растягиваемого образца в упругом состоянии является коэффициент
Пуассона. Опыт показывает, что отношение поперечной деформации и
продольной при упругих состояниях растягиваемого образца остается
практически постоянным. Это постоянное число и называют к о э*ф-
фициентом Пуассона. Таким образом, числа £, v
представляют собой механические характеристики поведения образца при
упругих деформациях.
В табл. 3 приведены значения этих величин для некоторых
материалов.
Константы состояний линейной упругости Е и v определяются
посредством непосредственной обработки опытных данных по одноосному
растяжению цилиндрических образцов. Вместе с ними "получили
распространение другие константы упругости, которые вводятся в сэязи
с другой интерпретацией закона Гука.
78
Таблица 3
Наименование материала
Чугун
Алюминиевый сплав . . .* ...
£.10-», Н/м»
2Л
1,2
0,7
0,4
1,1
V
0,30
0,25
0,31
0,34
0,30
Напряжение при осевом растяжении образца можно выразить
либо через гидростатическое напряжение а, либо через октаэдрическое
касательное напряжение т формулами
s = 3<т, YJs = Зт.
Подобно этому осевое относительное удлинение связано с
относительным изменением объема Зе и результирующим сдвигом э:
е (1 — 2v) = Зе, УЦ\ + v) е = Зэ.
Поэтому закон Гука (3.3.1) можно представить либо в форме
закона изменения объема:
а = КЗе,
либо в форме закона формоизменения:
т = 2G9.
(3.3.2)
(3.3.3)
Здесь введены специальные обозначения для модуля К объемной
деформации и модуля сдвига G. Эти модули связаны с константами Е и v
формулами
3 (1 — 2v) К = Е% 2 (1 + v) G = Е. (3.3.4)
Приведенные соотношения между модулями линейной упругости
можно переписать в разрешенной относительно v и Е форме:
v = 0,5 (1 - g)l{\ +g), Е = G [1 + 2 (1 + g)]t g = G/3K. (3.3.5)
Отсюда следует, что две константы упругости определяются
экспериментально, остальные вычисляются по приведенным формулам.
Представление закона Гука как закона изменения объема (3.3.2)
либо закона формоизменения (3.3.3) при одноосном растяжении
цилиндрических образцов позволит в дальнейшем установить широкие
обобщения, считая константы Е, v механическими
характеристиками произвольного упругого напряженного состояния изотропного
материала. я
Обращаясь к другим возможностям представлений соотношений
между напряжениями и упругими деформациями при одноосном ра-
79
стяжении образцов, заметим, что нелинейные свойства упругрсти
проявляются некоторыми материалами не только при большие
деформациях. Такие материалы, как стекло, полистирол, медь/ чугун,
некоторые стали, проявляют заметную нелинейность даже 1г(эи малых
деформациях. Аналитическое представление свойств таких материалов
должно проводиться так, чтобы уточнение представления
механических свойств не привело к непреодолимым вычислительным
трудностям в процессе применения этих соотношений. Указанному условию
можно удовлетворить, полагая напряжения представимыми
многочленами по степеням деформаций. Такой способ представления можно
применять и для больших упругих деформаций резиновых образцов.
На рис. 27 схематически представлена кривая растяжения
резиновых образцов в диапазоне упругих деформаций. Отмечены
характерные точки этой кривой: начальная (0, 0), предел упругости (&у, sy)-
и точка перегиба кривой с координатами (еп, sn). Ограничиваясь
представлением кривой многочленами, допустим, что напряжение
выражено многочленом пятой степени по нечетным степеням
деформации:
s = ЛХ8 + Л383 + Л5е5. (3.3.6)
При этом кривая (3.3.6) проходит через начало координат, точка
(0, 0) лежит на этой кривой. Потребуем, чтобы кривая (3.3.6)
проходила через точку перегиба и точку, соответствующую пределу
упругости. Тогда получим два условия:
sn = А±гп + Л3еп + Л5еп,
Sy — ^i8y ~Т~ А з^у ~Г Афу.
Поскольку в точке перегиба кривизна кривой равна нулю, между
коэффициентами Л3 и Л5 должно выполняться соотношение
ЗЛ3 + 10Л5е* = 0.
Полученная система уравнений относительно Аъ Л3, Аъ разрешима
и найденные значения коэффициентов будут удовлетворительные,
если окажется
(гпгу — гу&и)/(7г2п — Зеу) > 0.
Для аналитического представления кривой, изображенной на
рис. 27, можно выдвинуть другие требования. Тогда и в формуле
(3.3.6) получим другие значения коэффициентов Ль Л3, Л5. Поэтому
можно лишь условно говорить об этих коэфффициентах как
константах, характеризующих механическое поведение материала, при
растяжении. Более того, в случае нелинейной характеристики испытаний
на одноосное растяжение типа (3.3.6) неясно, как получить кривую
изменения объема и кривую формоизменения. Ведь в случае конечных
деформаций параметры изменения объема и параметры формоизменения
связаны с компонентами деформации гораздо более сложными
соотношениями. Но это — предмет специальных обсуждений.
80
§ 3.4. Упругопластические состояния образцов
Рис. 30
Установив упругие свойства материала при одноосном растяжении,
располагаем пределами упругости sy, еу и механической
характеристикой — соотношением между напряжением и деформацией,
представленным аналитически. Дальнейшее исследование механического
поведения образца связано с напряжениями, превышающими предел
упругости sy. Подвергая образец любым напряжениям, превышающим
предел^ упругости, можно обнаружить
после # разгрузки остаточные деформа-,
ции. На рис. 30 показан примерный
ход кривой «напряжение — деформация»
для стального образца. Выводя
образец за предел упругости до состояния (s, е),
разгрузим образец и обнаружим
остаточную или пластическую деформацию.
Заметим, что процесс разгрузки стали следует
приблизительно линейному закону,
причем этот прямолинейный участок
практически параллелен линейному участку
упругих состояний. Состояние образца,-
при котором напряжение превышает
предел упругости либо превышался предел
упругости в предшествующих состояниях,
называют упругопластическим.
Общую деформацию е в любом упругопластическом состоянии (s, е)
принято представлять формально суммой упругой ге и пластической
ер частей:
e = ee + sp. (3.4.1)
Физическим признаком упругопластического состояния является
наличие остаточной деформации. Отличительной чертой аналитического
описания упругопластического состояния является неоднозначная
зависимость между напряжениями и деформациями. При этом различают
процесс активной деформации, разгрузку, повторную нагрузку,
многократные нагрузки и разгрузки. Аналитическое представление
процесса активной деформации за пределом упругости всегда опирается
на определенный предел упругости (еу, sy). Располагая этой точкой и
участком кривой упругопластических состояний, полученных из
опытов с монотонным возрастанием нагрузок и деформаций, можно
предложить несколько вариантов аналитического представления
экспериментальных данных. Например, для материалов типа
дюралюминиевых сплавов удовлетворительной оказывается степенная
зависимость
s = Ле«, (3.4.2)
гДе Л, а — постоянные числа.
Кривая (3.4.2) проходит через точку, соответствующую пределу
Упругости, поэтому уравнение ее можно записать в виде
s = Sy (е/еу)", (3.4.3).
81
причем показатель степени а для разных материалов оказывается
разным, но меняется в ограниченном диапазоне: а = -=—тд- • Когда
степенной закон (3.4.2) принят в качестве аналитического
представления экспериментальных данных, показатель степени а становится
характеристикой механических свойств материала. Кривую
зависимости напряжений и деформаций во всем диапазоне упругих и
активных упругопластических деформаций часто представляют ломаной,
состоящей из двух участков прямых (рис. 31). Такая схема лредло-
жена Прандтлем. Первый участок
представляет упругие состояния
s = £е, 0 < е < 8у. (3.4.4)
Второй участок представляется уравнением
прямой, проходящей через точку (еу, sy),
поэтому имеем
s — sy = £'(в — еу). (3.4.5)
^ёу £" Е' называется модулем
упрочнения и представляет собой тангенс угла на-
Рис. 31 клона к оси абсцисс второго участка прямой.
Разнообразные соображения можно положить
в основу определения этой величины. Например, можно
потребовать, чтобы прямая прошла через одну из точек экспериментальной
диаграммы растяжения.
В приложениях к анализу частных задач удобно представить
зависимость напряжений и деформаций в форме
s = Ег [1 — со (в)], (3.4.6)
где^со (е) —экспериментально определяемая функция, введенная
в механику деформируемого твердого тела А. А. Ильюшиным.
При линейном упрочнении (3.4.5) найдем
со = (1 — Е'1Е) (1 — 8у/е). (3.4.7)
Идеализация свойств реальных материалов иногда проводится
еще глубже. Часто используется схема идеального упругопластического
тела, для которого считается Е' = 0, т. е. второй участок ломаной
(рис. 31) считается горизонтальным.
Наконец, схема идеально пластического поведения реальных
твердых тел предполагает, что до достижения предела упругости sy
образец не деформируется, а по достижении напряжением определенного
значения предела текучести <тт образец деформируется
неограниченно, не воспринимая увеличения напряжений.
Обратимся теперь к рассмотрению разгрузки. При разгрузке
реализуется практически линейное соотношение между текущим
напряжением и деформацией
s — s* = Е (г — 8*), (3.4.8)
причем звездочкой отмечены (рис. 32) значения деформации и
напряжения, от которых начался процесс* разгрузки.
82
Рис. 32
Предполагая разгрузку полной, когда s = О, из (3.4.8)
определим остаточную деформацию в состоянии (е*, s*):
8р = е* — s*IE. (3.4.9)
Теперь представим^себеТэксперимент, в котором образец сначала
выведем в упругопластическое состояние (е*, s*), после чего полностью
разгрузим, фиксируя остаточную деформацию (3.4.9). Вторично
нагрузим образец, при этом он проявляет приблизительно линейные
упругие свойства, сохраняя модуль упругости Е вплоть до состояния
(е*, s*). Поэтому можно утверждать, что цикл «нагружение в
упругопластическое состояние — разгрузка»
приводит к новому состоянию образца,
содержащему остаточную деформацию.
Принимая это состояние за начальное,
обнаружим расширение диапазона упругих
деформаций с сохранением модуля упру--
гости, повышение предела упругости по
сравнению с естественным состоянием
образца.
Повышение предела упругости
материала на растяжение в результате
предварительного пластического растяжения
называют упрочнением или нагар-
товкой, наклепом материала
образца.
Предположим, что имеется кривая «напряжение — деформация»
при активной пластической деформации (рис. 33) и проводится
несколько повторных нагружений и разгрузок, полных или частичных.
При этом образец «помнит» начальную диаграмму и закон разгрузки,
следит за упрочнением. Процесс «нагрузка—разгрузка—нагрузка
с повышением напряжений — частичная разгрузка — дальнейшая
нагрузка с последующей полной разгрузкой» представлен на рис. 33.
Наконец, остановимся на описании еще одного экспериментального
факта. Предположим, что имеется возможность испытания образцов
не только на растяжение, но и на осевое сжатие. Не останавливаясь
на характеристике технических трудностей таких опытов, будем
считать, что получены механическая характеристика материала при
одноосном растяжении и соотношение между напряжениями и
деформациями при одноосном сжатии. Во многих случаях для
распространенных материалов эти характеристики представляются симметричными
относительно начала координат кривыми (рис. 34).
Предположим, что симметричный в отношении растяжения и
сжатия материал вывели растяжением в упругопластическое состояние
(е*, s*) и разгрузили. Тогда при повторном растяжении образца
обнаружим расширение области упругих деформаций, упрочнение
материала, а при сжатии — наоборот, разупрочнение. При этом
диапазон упругих состояний при растяжении и сжатии приблизительно
'сохраняется неизменным. Аналогичный эффект наблюдается и при
первоначальном пластическом сжатии образца.
S3
Упрочнение материала при растяжении за счет пластической
деформации растяжения и одновременное разупрочнение при" сжатии
называются эффектом Баушингера. /
При обсуждении упругопластических состояний при одноосном
растяжении образцов рассматривались соотношения между
напряжениями и продольными удлинениями. Поперечные деформации при этом
определяются условием несжимаемости материала. Условие
неизменности объема при упругопластических деформациях существенно
облегчает изучение поведения материала. Ведь очень трудно согласо-
Рис. 33 'Рис. 34
вать нелинейность двух измеряемых характеристик деформации
материала с представлениями об изменении формы и изменении объема,
С другой стороны, эксперименты показывают, что значение
отношения Пуассона при пластических деформациях очень близко к 0,5,
что подтверждает гипотезу о несжимаемости материала.
§ 3.5. Влияние скорости деформаций на поведение материала
при одноосном растяжении
Обсуждая свойства упругости и поведение цилиндрических
образцов при упругопластических деформациях, предполагали возможность
получения диаграммы растяжения с помощью специальной
испытательной машины. Диаграмма испытаний имеет вид, представленный на
рис. 26, на ней выделена точка, соответствующая пределу упругости.
Этой точкой отмечено предельное состояние, когда материал переходит
из упругого в упругопластическое состояние. Представляет
несомненный практический интерес и точка с координатами (ер, sp),
соответствующая состоянию материала, предшествующему нарушению
сплошности, разрушению. Напряжение ар, соответствующее разрушению,
называют временным сопротивлением, а
деформацию 8р называют предельным пластическим
удлинением материала при растяжении. Кроме точек, соответствующих
пределу упругости по нормативной остаточной деформации и
временному сопротивлению, иногда называют еще предел
пропорциональности и предел упругости по какому-либо другому допуску на пласти-
84
и ш
/ J
-wV
-0,5с1
-10 ~w
ческие деформации. Будем считать эти точки совпадающими с пределом
упругости (еу, sy).
Представленная на рис. 35 диаграмма получена при некоторой
фиксированной температуре и определенной скорости возрастания
нагрузки или скорости деформаций. В обычных испытательных
машинах скорость деформаций образцов изменяется в широком
диапазоне сравнительно малых скоростей деформаций е = 10~5—10~2 с-1.
Такой режим деформирования называется статическим.
Диаграмма статических испытаний не зависит от скорости
деформации, хотя скорость может изменяться в несколько раз, оставляя
режим испытаний статическим. Зависимость
механических свойств материала от скоростей
деформации заметно проявляется, начиная со
скоростей порядка Ю-1 с-1. На рис. 35 показаны
схематически диаграммы испытаний
малоуглеродистой стали, полученные при трех разных
уровнях скоростей деформации. Сравнение
приведенных диаграмм показывает, что модуль упругости
при одноосном растяжении практически не
изменяется при существенном повышении скорости
деформаций. Пределы упругости по напряжениям
и по деформациям увеличиваются с увеличением
скоростей растяжений. Это расширение диапазона Рис' 35
упругих деформаций связано, по-видимому, с
инерцией механизма пластических деформаций. Представляет
интерес аналитическое представление предела упругости в зависимости
от скорости деформаций. Одно из возможных представлений —
линейная зависимость
sy = syT + №> (3.5.1)
где \i — экспериментально определяемая константа.
При увеличении скорости деформирования заметно повышается
временное сопротивление и снижается предельное удлинение,
приводящее к разрушению материала. Диапазон пластических деформаций,
предшествующих разрыву, сокращается. Это явление называется о х-
Рупчиванием м*а т е р и а л а. Ведь хрупкий материал
разрушается без заметных пластических деформаций, предшествующих
разрыву.
Для высокопрочных сталей диапазон пластических деформаций,
предшествующих разрушению, вообще невелик и сокращается очень
Резко при динамическом нагружении. Охрупчивание углеродистой
стали SAE1020, резкое сокращение предельного пластического удлинения
начинается со скорости деформаций 2 • 102 с-1. При возрастании
скорости до 3 • 102 с-1 предельная деформация сокращается почти вдвое.
Совершенно отчетливо проявляют зависимость от скорости
деформаций, начиная с Ю-1 с-1, высокопрочные титановые сплавы.
Наблюдается снижение предельных пластических удлинений и повышение
вРеменного сопротивления или предела прочности с увеличением
скорости деформаций.
35
Ограничимся приведенными качественными замечаниями'о влиянии
скоростей деформаций на механические характеристику материалов,
так как до сих пор нет надежных систематических исследований этого
влияния для многих классов материалов. Эти исследования проводятся
для очень ограниченных марок материалов в связи со специальным
назначением их. Ведь скорости нагружения, скорости деформаций,
при которых проявляются изменения механических характеристик
материала, не имеют широкого распространения в технике. Поэтому
в подавляющем большинстве случаев статической диаграммы
испытаний материала на растяжение оказывается достаточно для
характеристики его механических свойств при растяжении.
Рис. 36
Рис. 37
Несравненно заметнее проявляете» зависимость свойств
материала от скоростей испытаний металлов в условиях повышенной
температуры, когда существенно меняются не только значения
предельных деформаций,но и значения временного сопротивления, угол
наклона кривой испытаний на начальном участке. При- температуре
около 400° С сплавы цветных металлов, а стали — при температуре
около 600° С проявляют свойства ползучести и релаксации, поэтому
Зависимость между напряжениями и деформациями без учета
скоростей изменения напряжений и деформаций теряет смысл.
Ползучестью называют процесс изменения деформаций при
неизменном напряжении. Релаксацией напряжений называют
процесс падения напряжений при неизменной деформации.
На рис. 36 показаны кривые ползучести образца при растяжении,
нагруженного ступенчато. Эти кривые меняются с изменением уровня
напряжений s4 > ss>.s2> su которые поддерживаются
постоянными в каждом из испытаний. По мере увеличения уровня напряжений
скорость ползучести увеличивается.
На рис. 37 приведены схематически кривые релаксации. Здесь
заметно увеличение скоростей с увеличением уровня начальной
деформации. Более подробно обсудим процессы ползучести и релаксации
при рассмотрении свойств вязкоупругости. Здесь же отметим, что
86
влияние временных эффектов при нормальных температурах заметно
сказывается при испытаниях полимерных'материалов. О
разнообразии проявления зависимости от времени свойств материала свидетель-
и-С-Не1
I-C = Wc1
Рис. 38
Рис. 39
ствуют приведенные на рис. 38 данные испытаний полиэтилена, а
на рис. 39 — данные испытаний полистирина при двух значениях
скоростей деформирования.
§ 3.6. Влияние температуры на механические свойства
Ссылаясь на кривую растяжения, представленную на рис. 26,
предполагают, что она получена не только посредством статических
испытаний, но и при нормальной температуре около 20° С. Характерные
параметры механических свойств материала выявляются в
большинстве случаев также при нормальной температуре. Вместе с тем
модуль упругости, предел текучести, временное сопротивление,
предельное пластическое удлинение изменяются с изменением температу-*
ры. С повышением температуры модуль упругости, предел упругости,
временное сопротивление, как правило, монотонно уменьшаются.
Например, сопротивление разрыву малоуглеродистой стали или
титанового сплава снижается в два раза при повышении температуры
от 20 до 500° С.
Алюминиевые сплавы снижают временное сопротивление в два раза
при повышении температуры от 20 до 220° С. А специальные
жаропрочные сплавы снижают временное сопротивление в два раза, когда
температура повышается от 20 до 900° С. Поэтому снижение
прочности с повышением температуры существенно разное у разных
материалов. Гораздо менее интенсивно снижается модуль упругости с
повышением температуры. Например, модуль упругости малоуглеродистой
стали снижается на 12—15% при повышении температуры до 500° С.
Предельное пластическое удлинение повышается с повышением
температуры.
Однако наблюдаются аномалии, отклонения от монотонного
изменения механических характеристик материала. Например, при повыше-
87
нии температуры мягкой стали от 20 до 300° С наблюдается некоторое
повышение временного сопротивления растяжению и резкое'снижение
в два-три раза предельного пластического растяжения .у^Это явление
называют охрупчиванием материала. При дальнейшем увеличении
температуры восстанавливаются пластические свойства стали. Охруп-
чивание материала наблюдается и при отрицательных температурах.
Понижение температуры приводит к повышеню предела упругости,
временного сопротивления и снижению предельного пластического
удлинения. Снижение температуры стали до—200° С приводит к
повышению предельных напряжений на 20—30%, а диапазон предельных
пластических удлинений снижается в десятки раз. Охрупчивание
большинства материалов в условиях низких температур ограничивает
возможность их применения. Устанавливается температура,
ниже которой не рекомендуется применение того или иного
материала.
При исследовании влияния температуры на механические свойства
материала важно установить диапазон изменения температуры, в
котором свойства материала, проявляемые при испытаниях .на растяжение
образцов, можно считать неизменными.
Вместе с тем указывается диапазон температур, в котором
механические свойства меняются очень резко. Например, при изменении
температуры от ?0 до 30° С сопротивление разрыву стали снижается
на 10%, а при дальнейшем повышении температуры на 300° С
прочность снижается в десять раз.
§ 3.7. Допускаемые напряжения, запас прочности
Располагая диаграммой растяжения образцов материала, по
крайней мере пределами упругости и значениями временного
сопротивления и предельной пластической деформации, можно решить
некоторые проблемы предсказания поведения частного класса деталей машин
и конструкций под нагрузкой. Речь идет о таких деталях машин,
в каждой точке которых развиваются только растягивающие или
сжимающие одноосные напряжения. Осевое растяжение стержней, изгиб
стержней, сжатие и изгиб некоторых пластинок и оболочек, процессы
вытяжки деталей — далеко не полный перечень расчетных задач,
которые можно решать, используя диаграмму растяжения.
Предполагается, что установлена расчетная система внешних
сил, действующих на рассматриваемую деталь. Кроме того, считается
известным способ установления зависимости напряжения в каждой
точке детали от параметров внешних сил. Это позволяет выделить
расчетное состояние, например точку тела, где растягивающее
напряжение оказывается не меньше, чем в других точках тела.
Обычно требуют, чтобы расчетное напряжение не превосходило
допускаемого напряжения. В свою очередь, допускаемое напряжение
[sff] назначается в связи с условиями эксплуатации детали машины или
условиями обработки материала в технологическом процессе.
Например, расчет большинства элементов конструкций и деталей машин
ведется в предположении, что рассматриваемое тело деформируется,
88
оставаясь в упругом состоянии. Поэтому требуется, чтобы
допускаемое напряжение не превышало предела упругости:
lsj^sr (3.7.1)
Условие (3.7.1) обеспечит пребывание всего рассматриваемого тела
в упругом состоянии, если выполняются по крайней мере три
условия:
а) свойства материала образца, представленные диаграммой
растяжения, точно повторяют ^свойства материала, из которого
выполняется деталь машины или элемент конструкции;
б) расчетная схема внешних воздействий строго отражает
наиболее тяжелый режим работы реального тела;
в) схематизация работы частей тела достаточно точно отражает
действительное взаимодействие частей детали машины или элемента
конструкции;
, г) механическое поведение каждого элемента рассматриваемой
детали повторяет поведение образца материала при
одноосном'растяжении.
Конечно, строго гарантировать соблюдение всех перечисленных
условий невозможно. Поэтому надежность расчетных и
экспериментальных рекомендаций увеличивают заменой неравенства (3.7.1)
таким:
k [5Д] < sy, (3.7.2)
где коэффициент запаса k выбирается заведомо больше единицы.
Коэффициентом запаса снижаются действительные возможности
материала, например снижается предел упругости. Коэффициент запаса
выбирается эмпирически в зависимости от множества условий. В
настоящее время имеются расчеты, в которых считают k = 1,10. Такое
низкое значение «коэффициента незнания» оказывается приемлемым
только при особо строгом анализе условий работы детали и свойств
материала. Иногда принятым значением коэффициента k
характеризуют уровень развития отрасли техники, степень совершенства
технологии и условий эксплуатации машин.
Когда речь идет о прочности детали, упругопластическое состояние
считается допустимым, условия неразрушения, условия прочности,
условия отсутствия разрывов, трещин, неоднородностеи записывают
неравенством
[5Д] < sP. (3.7.3)
Соображения, высказанные по отношению к условию (3.7.1), в
неменьшей, а гораздо большей степени относятся к неравенству (3.7.3).
Разброс свойств при упругопластических состояниях гораздо
больше, чем при упругих состояниях материала. Расчетные схемы,
применяемые при анализе упругопластических состояний, гораздо менее
совершенны, чем при расчетах упругих состояний. Более того,
практически нет надежных средств анализа поведения деталей машин в сос-
89
тояниях, предшествующих моменту разрушения. Поэтому несомненна
замена неравенства (3.7.3) условием прочности в форме у
k Ьд] < 5Я. / (3.7.4)
Коэффициент запаса прочности &> 1, Значения коэффициента
запаса прочности меняются в пределах от 1,20 до 6 в зависимости от свойств
материала и условий работы рассматриваемой детали.
§ 3.8. Технологические пробы свойств металлов
Выше отмечалось, что кривая одноосного растяжения образца
металла дает значительную информацию о механических свойствах.
Модуль упругости, коэффициент Пуассона, пределы упругости по
напряжениям и деформациям, предел прочности по напряжениям,
предельное пластическое удлинение, аналитическое представление
кривой растяжения непосредственно используются при анализе
напряженных состояний, повторяющих состояния образца при
одноосном растяжении. С такими состояниями связан достаточно широкий
класс распространенных в технике деталей конструкций и машин.
В дальнейшем будет показано, что кривая растяжения образцов
имеет гораздо более широкое значение: она отражает механические
свойства материала при сложных состояниях, которые реализуются
в большинстве деталей машин, конструкций и технологических
процессах обработки материалов. Поэтому кривая растяжения
представляет собой паспорт механических свойств материала.
Такой распространенный материал, как сталь, проявляет
приблизительно одинаковые свойства при одндосном растяжении и сжатии,
поэтому растяжение достаточно полно характеризует свойства стали.
Чугун, камень, бетон, керамика по-разному ведут себя при
одноосном растяжении и одноосном сжатии. Диапазон пластических
деформаций при одноосном растяжении таких материалов в десятки раз
меньше, чем при одноосном сжатии. Такие материалы называют
хрупкими и говорят, что они по-разному сопротивляются
растяжению и сжатию. Для таких материалов информации, которую
можно получить из анализа кривой растяжения, недостаточно.
-Требуются испытания на сжатие, а иногда и более сложные испытания
трубчатых образцов.
Наряду с детализацией механических свойств, усложнением
испытаний часто применяют экспресс-методы для сравнительной оценки
свойств разных металлов, оценки влияния термообработки и других
технологических процессов на свойства металлов.
Среди упомянутых методов широкое распространение получили
испытания твердости материала/ Твердостью называют
способность материала сопротивляться внедрению в его поверхность
некоторого стандартного достаточно жесткого тела. По пластическим
деформациям на поверхности испытуемого тела судят о его механическом
поведении. Различают статические методы испытаний металлов по Бри-
неллю, Виккерсу, Роквеллу.
90
Твердость по Бринеллю (НВ) представляется отношением силы
ру Н (кгс), к площади F, мм2, отпечатка, который остается после
вдавливания этой силой стального закаленного шарика диаметром
Ю мм. Проба Бринелля применима, когда глубина отпечатка меньше
0,1 толщины детали в рассматриваемом месте. Расстояние центра
отпечатка от края детали или образца должно быть не менее диаметра
шарика, а расстояние между центрами двух соседних отпечатков
должно быть не менее двух диаметров шарика. Эти требования часто
приводят к использованию шариков меньших размеров.
Твердость по Виккерсу (HV) представляется отношением силы Р,
Н, к площади F, мм2, отпечатка при вдавливании в тело алмазной
квадратной пирамиды с углом между противоположными гранями около
136°. Рекомендуется применение силы 50, 100, 200, 300, 500, 1000 Н.
Измерив среднее значение d диагоналей отпечатка, можно считать
HV= 1,85 P/d2.
Применение алмазной пирамиды обеспечивает постоянство угла
вдавливания при любой величине отпечатка. Рекомендуют силу Р
прикладывать так, чтобы глубина отпечатка была в семь раз меньше
средней длины диагоналей. Угол 136° между гранями пирамиды
подбирается так, что твердость HV мало отличается от числа твердости
по Бринеллю. Более того, в пределах изменения силы Р от 50 до 1200 Н
число твердости по Виккерсу не зависит от величины силы.
Приблизительное совпадение твердостей НВ и HV наблюдается до значений
порядка 4000 Н/мм2. Твердость по Виккерсу рекомендуют применять,
когда испытаниям подвергаются изделия из тонких листов толщиной
до 0,3 мм.
Твердость по Роквеллу (HR) представляется разностью глубин
проникновения наконечника под действием основной и
предварительной нагрузок. В качестве наконечника применяется шарик либо
алмазный конус. Алмазный конус с углом 120° и радиусом закругления
0,2 мм применяют для измерений твердости закаленной стали. Для
более мягких материалов применяется шарик диаметром 1/16".
Предварительная нагрузка выбирается 100 Н, а основную доводят до
1200 Н. Отчет разностей глубин проникновения проводят после
сбрасывания основной нагрузки.
Для определения твердости применяют и метод царапания.
Нанесение царапин на поверхности проводится алмазным конусом с прямым
углом при вершине посредством перемещений предметного столика
с закрепленным на нем образцом для испытаний. Нагрузку подбирают
До 5 Н. Мерой твердости служит либо нагрузка, обеспечивающая
Царапину шириной 0,01, либо величина, обратная ширине царапины,
полученной при заданной нагрузке.
Наконец, микротвердость измеряют вдавливанием алмазной
пирамиды,, с квадратным основанием в тщательно отшлифованную
поверхность. Обработку результатов измерений ведут, как и в случае пробы
твердости по Виккерсу.
Наряду со статическими применяют разнообразные динамические
способы оценки качества металлов. Издавна известны способы опреде-
91
ления качества стальных изделий по гамме звуков, издаваемых при
ударах. Количественную оценку динамической жесткости материала
можно получить ударными испытаниями. При ударе шарикрм о
поверхность металлического изделия образуется вмятина. Отношение работы
ударной нагрузки к объему остаточного сегмента называется
ударной твердостью. Ударная твердость определяется с помощью
специальных приспособлений типа прибора Николаева или по методу
упругого отскока бойка. Значения ударной твердости сопоставимы
с пробой Бринелля.
§ 3.9. Наблюдение и описание вязкоупругих свойств
материалов при одноосном растяжении
До сих пор обсуждались свойства упругости и пластичности
реальных твердых тел, которые проявляются в процессе статических
испытаний цилиндрических образцов на растяжение или сжатие
посредством технологических дроб материала вдавливанием шарика,
конуса, изменения свойств при очень больших скоростях деформаций.
Предполагалось, что существует значительный диапазон ч изменения
сравнительно малых скоростей испытаний, в которых скорости
испытаний, не оказывают заметного влияния на результаты
испытаний.
Большинство металлов при нормальных температурах и другие
конструкционные материалы проявляют устойчиво свойства упругости,
свойства пластичности при статических * режимах эксплуатации.
Вместе с тем металлы при высоких температурах, а некоторые
полимерные материалы, бетон и при нормальных температурах
отчетливо проявляют реономные свойства. Так называются
механические свойства материалов, существенно зависящие от времени.
Остановимся на примерах наблюдения реономных свойств в опытах
с цилиндрическими образцами. Начнем с опытов, где проявляется
ползучесть.
Ползучестью или крипом называют процесс изменения
деформаций со временем при неизменном напряжении. Существуют
специальные машины и установки, которые позволяют
продолжительное время поддерживать образец при постоянной температуре под
действием неизменного растягивающего напряжения. При этом наблюдают
деформации со временем. На рис. 40 схематически показаны условия
испытаний и кривая ползучести. Верхний конец образца
закрепляется, к нижнему прикладывается нагрузка. Ведется наблюдение
изменения длины в расчетной части образца. Строится кривая
зависимости относительной деформации от времени. Деформация изменяется
от начального значения е0, которое соответствует «мгновенно»
приложенной нагрузке Р. Далее можно выделить три характерных участка
кривой ползучести. На первом из них скорость ползучести монотонно
уменьшается, начиная с некоторого большого значения. Это участок
неустановившейся ползучести. Второй участок кривой — почти
прямолинейный участок установившейся ползучести. Здесь скорость
ползучести практически постоянна. Наконец, можно наблюдать участок,
92
предшествующий разрушению, где скорость ползучести монотонно
увеличивается.
На рис. 41 схематически представлены испытания на релаксацию
напряжений. Релаксация, уменьшение или ослабление
напряжений со временем, понимается как процесс, который проявляется
в уменьшении напряжений, требующихся для создания или
поддержания неизменной деформации. Предположим, что образец
«мгновенно» растянули так, что расчетная длина 10 стала равной /. Для этого
потребовалась сила Рг. Образец закрепили в растянутом состоянии и
на некоторое время оставили в закреплениях. По прошествии
некоторого времени образец освободили от закреплений и вновь приложили
нагрузку Р2 так, чтобы расчетную часть растянуть до длины /. Ока-
'Щ/ЖШ
у
Н
Рис. 40
Рис. 41
зывается при этом, что потребовалась нагрузка Р2> меньшая
первоначальной Рг. Поэтому говорят, что напряжение, требующееся для
поддержания постоянной^деформации, падает, уменьшается, релаксиру-
ет.
В реальных элементах конструкций ползучесть и релаксация как
реономные свойства проявляются одновременно, взаимосвязно. Эти
реономные свойства можно отразить аналитически, связав
напряжения, деформации образца при растяжении, скорости деформаций и
напряжений, вторые и последующие производные по времени от
напряжений и деформаций, интегральные по времени операторы над
напряжениями и деформациями. Рассмотрим возможности описания реоном-
ных свойств образцов при одноосном растяжении посредством
простейшего линейного соотношения между напряжениями, деформациями,
скоростями напряжений, скоростями деформаций
s + Xs = E(e + \ie). (3.9.1)
Физическое значение введенных здесь констант Я, £, \i можно
указать, обратившись к рассмотрению некоторых предельных условий
испытаний образцов. Представим себе условия испытаний с очень
высокими скоростями напряжений и деформаций, когда значения
напряжений и деформаций еще сравнительно малы.-Полагая Ks
пренебрежимо малой величиной по сравнению с s, а \хг пренебрежимо малой вели-
93
чиной по сравнению с 8, соотношение (3.&.1) сведем к линейнрму
соотношению между напряжениями и деформациями
s = Ев. У (3.9.2)
Это соотношение получается интегрированием упрощенного
соотношения (3.9.1) при нулевых начальных условиях.
По форме соотношение (3.9.2) не отличается от линейного закона
Гука, содержащего модуль Юнга. Поэтому константу Е называют
мгновенным модулем упругости.
Противоположные условия можно представить себе, рассматривая
испытания образцов с очень малыми скоростями, когда первыми
слагаемыми в левой и правой частях
соотношения (3.9.1) можно пренебречь. Тогда сразу
получаем линейное соотношение
s = E\i/Xb, (3.9.3)
позволяющее считать константу E\l/X д. л и-
тельным модулем упругости.
Действительные отношения напряжений и
деформаций на начальном участке
деформирования лежат между указанными на рис. 42
прямыми, причем с повышением скорости
деформирования это отношение увеличивается. Поэтому
отношение |лА должно быть меньше единицы.
Линейное: соотношение (3.9.1) при частных предположениях
относительно значений констант, характеризующих свойства материала,
охватывает свойства твердых тел, свойства вязких жидкостей,
описывает процесс ползучести, релаксации напряжений и другие более
сложные процессы механического поведения образцов при растяжении.
Поэтому говорят, что соотношение (3.9.1) представляет простейшую
возможность описать свойства вязкоупругости реальных твердых тел
при одноосном растяжении. В частности, свойство упругости
описывается этим соотношением, если^в (3.9.1) считать
1А = О, Е/Х = 0, Ер/Ь ф 0.
При этом получается формулировка закона Гука в виде (3.9.3) либо
(3.9.2), если дополнительно считать отношение |лЛ равным единице.
Поведение образца при упругих деформациях моделируется
идеальной пружиной определенной жесткости. На рис. 43 слева
представлена пружина, относительные перемещения концов которой и сила,
вызывающая эти перемещения, пропорциональны. Там же показан вязкий
элемент, моделирующий свойства вязкости деформируемых тел.
В цилиндре, заполненном жидкостью, может перемещаться поршень,
имеющий несколько отверстий небольших диаметров. Относительному
смещению поршня в цилиндре препятствуют вязкие силы
сопротивления, вызванные движением жидкости через отверстия и у стенок
Рис. 42
94
цилиндра. Закон вязкости по Ньютону утверждает пропорциональность
между силой и скоростью относительного смещения штока
Q - IF,
причем ч) — динамическая вязкость. Поведение вязкой среды
описывается соотношением (3.9.1), если
1/Я = О, Е1% = я, E\i/X = 0.
Композиция упругих и вязких элементов приводит к моделям более
сложных свойств вязкоупругости реальных тел, которые отражаются
соотношением (3.9.1).
Например, деформация е последовательно
соединенных упругого и вязкого элементов
представляется суммой деформаций упругого е' и вязкого е"
элементов. В частности, е = е' + е". Вместе с тем
упругая деформация изменяется со скоростью e'=s/c,
а скорость вязкой деформации пропорциональна
силе е" = s/т). Так получается соотношение
механической модели
i=s/c + s/i\, (3.9.4)
отражающей свойства [деформируемой среды,
подчиняющейся соотношению (3.9.1) при выборе
следующих значений констант:
$Ш
,Q-
Рис. 43
Е = с, (а = 0, Я = Е/г\.
(3.9.5
Среда, подчиняющаяся соотношению (3.9.4) либо соотношению (3.9.1)
при выборе констант (3.9.5), называется телом Максвелла.
Состояние среды Максвелла при одноосном растяжении описывается
уравнением
Ее = s + Xs.
(3.9.6)
В частности, чистая ползучесть тела Максвелла описывается
уравнением (3.9.6) при s = s0j s = 0. Интегрируя полученное уравнение
с начальными данными 8 (0) = е0, найдем закон ползучести:
Е (е — е0) = %s0t.
(3.9.7)
На рис. 44 схематически представлены теоретические кривые
ползучести тела Максвелла. Не исключена возможность описания
соотношением (3.9.7) некоторых участков процесса ползучести реальных
тел.
Рассмотрим параллельное соединение упругого и вязкого элементов.
Упругий элемент воспринимает часть s' общей силы, а вязкий
элемент — s", причем &*
$ = s' + s", (3.9.8)
95
где частные силы определяются деформацией либо скоростью
деформации:
s' = Ее, $" = т]8.
Отсюда следует реологическое соотношение
s = Ее + т)б,
(3.9.9)
(3.9.10)
представляющее собой модель тела Фойхта. Соотношение
(3.9.10) можно получить и из (3.9.1) соответствующим подбором
значений констант.
В частности, при s = s0 из соотношения (3.9.10) получим
дифференциальное уравнение относительно деформаций ползучести, после
С
Рис. 44
Рис. 45
интегрирования этого уравнения
ползучести тела Фойхта
при условии 8 (0) = е0 — закон
(3.9.11)
На рис. 45 схематически показан ход кривых ползучести при двух
уровнях напряжений и начальных значений деформаций.
Экспериментальные кривые ползучести позволяют установить промежутки
времени, для которых соотношением (3.9.11) удовлетворительно
описывается процесс ползучести при соотвествующем подборе констант.
Наконец, рассмотрим сложную модель, составленную из
последовательно соединенных элементов тела Фойхта с механическими
характеристиками Еъ т] и тела Гука с жесткостью £2.
Напряжения s, воспринимаемые элементом Фойхта, связаны с
деформациями et и скоростями ех формулой, следующей из (3.9.10):
s = £,181 + П8*1-
Упругий элемент управляется соотношениями s = Е2г29 s = Е2г2.
Пользуясь приведенными соотношениями и определением суммарной
деформации ех + е« = е, составим сумму:
_l_ . j_
El Е2
4~ Tjs — = г|е + е.
&9.
(3.9.12)
96
Полученное соотношение представляет собой закон, управляющий
поведением этой комбинированной модели. Вместе с тем соотношение
(3.9.12) отличается от общего линейного соотношения (3.9.1) только
обозначениями коэффициентов.
Значения констант, входящих в определяющее линейное
соотношение (3.9.1), можно установить на основе опытов, выполненных
по строго установленной программе. В этих опытах можно задавать
режим нагружения, режим изменения напряжений s и следить за
экспериментальными значениями деформаций е. С другой стороны,
располагая функцией s (0, интегрированием уравнения (3.9.1) при
определенных граничных условиях можно найти функцию е (/), за-
t* t
Рис. 46
Рис. 47
висящую от трех параметров. Эти параметры можно подбирать,
требуя той или иной точности представления функциями е (/)
экспериментальных данных.
Представим себе реализуемым (рис. 46) режим нагружения
образца, при котором напряжение «мгновенно» достигнет значения s* и
в течение промежутка времени t* поддерживается постоянным, а
в момент t* «мгновенно» снижается до нуля. Реологическое
соотношение (3.9.1) позволяет предсказать режим изменения деформации
во времени, соответствующий указанному режиму изменения
напряжений.
В течение промежутка времени от 0 до t* происходит процесс
ползучести. Для описания ползучести имеем после интегрирования (3.9.1)
при s = s* соотношение
е =
_
Е
t
1 +(*-,!) J
eii(x-t)'dx
E
1 +
(l_e-n*)l.
(3.9.13)
Здесь s*/E — начальная мгновенная деформация, которая считается
Упругой. Измерив эту деформацию при фиксированном напряжении,
можно вычислить £. В момент времени t*, когда мгновенно снимается
напряжение, уровень деформации снижается на величину упругой
Зак. 588
97
деформации s*/E и образец продолжает деформироваться в
соответствии с (3.9.1), имея начальную деформацию
е* = (Х/|г —1)(1— е-***)
и постоянное нулевое напряжение. Обращаясь к (3.9.1), находим
8 = е*ехр [—(х (t — £*)]. По кривым действительных изменений
напряжений и деформаций при испытаниях образца на одноосное
растяжение (намеченных пунктиром на рис. 46, 47) можно назначить
разнообразные условия для определения всего лишь двух констант:
\х и К. Например, измерений деформации при / = /* и в одной из
промежуточных точек достаточно для вычисления констант.
§ 3.10. Наследственные свойства вязкоупругости
Предложенный Больцманом способ описания наследственных
свойств реальных твердых тел основан на предположении о
наложении, суперпозиции влияний напряжений в предшествующее время
на деформации в момент наблюдений. Деформации Дв, наблюдаемые
в момент времени /, вызванные приращением Да (т) напряжения
а (т), действующего в момент времени т, предшествующий /, считаются
пропорциональными приращению напряжения:
Де(0 = U(t — т) Да(т). (3.10.1)
Из закона Гука о пропорциональности напряжений и деформаций
следует пропорциональность приращений Де = Е"1 Да, причем
величина, обратная модулю Юнга, называется податливостью
одномерной упругой системы. Поэтому множитель П в (3.10.1)
называют функцией податливости, зависящей от времени, прошедшего
с момента проявления приращения напряжения. Соотношение (3.10.1)
отражает свойство, похожее на упругость, но с податливостью,
зависящей от предшествующего промежутка времени, поэтому говорят
о вязкоупругости. Суммированием величин (3.10.1) после обычного
предельного перехода получим
t
е(0= flip—т) da (т). (3.10.2)
о
Интегрированием по частям найдем
t
е (0 = П (0) a (t) — П (/) а (0) + j IT (t—x) а (x)dx.
о
Обозначим
Щ0) = —, Il'(t — T)= —K(t—x)9 (3,10,3)
в я
9§
тогда основное соотношение наследственной теорий вязкоу пру гости
представим в форме
t
Ее (t) ^a(t) + \K(t~T)a (т) dx. (3.10.4)
о
Если реализовать процесс деформации при постоянном напряжений
а ф = (т0, то описание этого процесса зависит только от К (t — т).
Поэтому функцию К (t — т) называют ядром ползучести.
Соотношение (3.10.4) можно рассматривать как интегральное
уравнение Вольтерра II рода относительно а (/). Решение его можно
записать в форме
t
Е-1 o(t) = e (0— f Г (/—т) е (т) d%> (3.10.5)
о
Функция V (t — т) называется ядром интегрального уравнения, а
функция К (t — т) — его резольвентой. Ядром Г характеризуется
процесс релаксации напряжений.
Заменив обозначения, процесс изменения напряжений можно
записать в форме
t
а(/)= Jfl(/—x)de(x), (3.10.6)
о
причем функции релаксации свойственно
R (0) = Е, R' (0 = -ЕТ (*). (3.10.7)
Из теории интегральных уравнений известно соотношение между
ядром и резольвентой
t
Г (/) —/С (0 = j К (/—т) Г (т) dx, (3.10.8)
о
а функции ползучести и релаксации связаны соотношением
преобразований по Лапласу
П* R* = 1, (3.10.9)
где звездочка означает интегральное преобразование
f*(P)=]f®e-#dt.
о
В частности, если реализовать процесс ползучести при постоянном
Спряжении, т. е. а (/) = а0, то из (3.10.4) получим Ее = а0 [1 +
+ I К (т) dx], а после дифференцирования найдем представление
яДра ползучести через наблюдаемую скорость ползучести:
Ее = e0K(t). (3.10.10)
Подобным способом из (3.10.5) можно установить соотношение /между
ядром релаксации и наблюдаемой скоростью релаксации
напряжений, а именно: /'
or = —Ee0T(t). (3.10.11)
Кроме того, при мгновенном достижении уровня напряжений о0
можно получить функцию податливости:
а0П (0 - е (/),
(3.10.12)
а при мгновенном деформировании до уровня е0 найдем функцию
релаксации:
е0£ (/) == G(t). (3.10.13)
> Реализация чистой ползучести или чистой релаксации (рис. 48)
затруднительна, так как достижение заданного уровня напряжений
t<i) иг) 4(3) г
Рис. 48
Рис. 49
или заданного уровня деформаций требует некоторого времени.
Зависимость деформаций от времени иллюстрируется приведенными на
рис. 49 кривыми для полиэфирной смолы, полученными при трех
уровнях скоростей напряжений. Экспериментальные факты
свидетельствуют о том, что кривые ползучести, полученные при
достижении одного и того же уровня напряжений с разными скоростями,,
на диаграмме е ~ t можно получить смещением одной из них. Этот
факт положен в основу специальной методики получения
механических характеристик материалов, отраженной в руководствах по вязко-
упругости.
§3.11. Температурно-временная аналогия
Опыты с полимерными материалами свидетельствуют, что при
постоянной температуре диаграмма зависимости напряжения от
деформации располагается тем выше, чем больше скорость нагружения.
Опыты с постоянной скоростью нагружения, проведенные при разных
температурах, свидетельствуют, что диаграммы а ~ е тем выше, чем;
ниже температура. Эти экспериментальные факты отражаются тем-
пературцо-временной аналогией.
100
рассмотрим кривые ползучести
в логарифмической сетке времени
зависимость Е&/о0 от lg / (рис. 50)
при двух уровнях температуры.
Кривую при температуре Т0 считаем базовой. Кривую при
температуре Т можно совместить с базовой посредством сдвига вдоль оси
логарифмов времени на величину
lg tk - lg * = -lg ат (7),
(3.11.1)
lnaT
где ат — функция температуры, которую, называют еще
коэффициентом температурного сдвига. На рис. 51
схематически представлен вид Ег/6
этой функции. Коэффициент '■ °
температурного сдвига
представляют функцией
\gaT = a0(T-T0)/(b0 +
+ Т-Т0)У (3.11.2)
где а0 и Ь0 — эксперимен- q
тально определяемые
константы, которым можно
придать значения а0 = 8,86,
&0 = 101,6° С, если в качестве базовых выбраны испытания при
20° С.
Из (3.11.1) следует
Igt
Рис. 50
Рис. 51
lg ат = lg (t/t'k)9 ат = Шк.
(3,11.3)
Для нестационарных температурных полей действительное время
связано с условным или приведенным временем зависимостью
J ат[Т
(01
(3.11.4)
Если для данного материала справедлива температурно-временная
Аналогия и установлена функция ат(Т)у то заменой в уравнении
Ег (0 = а (/) + f К (t—x) о (т) dx
Ремени t условным временем f получим соотношение между дефор-
Дией и напряжением для любой температуры.
це емпературно-временная аналогия позволяет прогнозировать про-
болСЫ ДеФ°РмиРования путем проведения экспресс-опытов в гораздо
рахее Жестких температурных условиях при повышенных температу-
101
Г л а в а IV /
СООТНОШЕНИЯ МЕЖДУ НАПРЯЖЕНИЯМИ, ДЕФОРМАЦИЯМИ
И СКОРОСТЯМИ ТРЕХМЕРНОГО ТЕЛА
§ 4.1. Соотношения между напряжениями и деформациями
при упругих состояниях. Потенциал напряжений
Начнем с изучения упругих состояний.изотропных тел. Напомним,
что упругостью реальных твердых тел называется способность их
деформироваться под действием внешних <рил и восстанавливать
первоначальное состояние по прекращении действия этих сил.
Соотношения между напряжениями и деформациями при упругих состояниях
реальных твердых тел служат основой количественных построений
классических разделов механики деформируемого твердого тела —
теории упругости и сопротивления материалов.
Деформации в упругих состояниях реальных тел при заданных
условиях внешней среды считаются обусловленными только
напряжениями в рассматриваемом состоянии. Тензоры напряжений (aik)
и деформаций (eik) в упругих состояниях связаны
взаимно-однозначной зависимостью.
Соотношения между напряжениями и деформациями
Gik == /ift(8ll> 822» 833> е12> 813» 82з) (4.1.1)
должны быть разрешимы относительно компонент деформации
Zmn = Фтп^п, <*22> ^33» Ci2 а13, ^гз) (4.1.2)
и удовлетворять условиям симметрии компонент тензора
fik = fhh Фтп = Фпт- (4.1.3)
Основное требование, которому должны удовлетворять
соотношения между напряжениями и упругими деформациями, состоит в
необходимости существования потенциала внутренних сил — напряжений,
вызывающих упругие деформации.
Потенциал напряжений можно определить в связи с процессом
вычислений элементарной работы внутренних сил при возможных
изменениях деформированного состояния. На рис. 52 представлен элемент
тела в форме прямоугольного параллелепипеда. Указаны усилия,
приложенные к двум противоположным граням параллелепипеда,
выраженные через напряжения. При этом изменениями напряжений при
переходе от левого сечения к правому можно пренебречь. Усилия
на двух парах других граней параллелепипеда определяются
аналогично.
Пусть точкам тела, находящимся в рассматриваемом напряженно^
состоянии, сообщили возможные перемещения 6#, представляют*^
собой некоторые функции координат точек тела xlt x2f х3. Если при это*1
8и — возможное смещение точек левого сечения параллелепипеда, т(?
8и + (8u),2dx2 — смещение точек правого сечения. Сила (—a2dx1d^
приложенная к левому сечению, производит работу (—афийх^Хз)'
102
Сила, приложенная к правой грани параллелепипеда, производит
работу а^х^х3Ш + (8u)y2dx2].
Поэтому суммарная работа сил, приложенных к двум
противоположным граням параллелепипеда, на возможных перемещениях
представляется скалярным произведением ог26 (#,2) dx^dx^dx^. Здесь мы
воспользовались возможностью переставлять порядок варьирования и
дифференцирования вектор-функции перемещений: (6а),2 = S (я,а).
Подобным способом можно вычислить работу внутренних сил,
действующих на две пары
других граней паралле- ^+^г^Ч)^\^\
лепипеда. Теперь можно
определить суммарную
работу всех сил,
действующих на грани
выделенного' элемента при
возможных
перемещениях, или плотность
работы внутренних сил:
8'A=ak8a}h. (4.1.4)
Вычисляя скалярные
произведения каждого
из слагаемых формулы
(4.1.4), используем
представления ak = Gksis,
и = usis и формулы
Коши: uk9 s + usy k = 2efts. Тогда формулу (4.1.4) перепишем в виде
суммы произведений компонент напряжений на вариации компонент
ензора малых деформаций:
•6zzdx1dx3
^621)2dxz)dx1dx3
Рис. 52
б'Л = ohs8shs.
(4.1.5)
Здесь апостроф над символом вариации означает, что элементарная
работа внутренних сил; является бесконечно малой величиной, но не
всегда существует функция W координат деформации гк8У
дифференциал которой совпадает с работой 8 А внутренних сил в единице
объема тела.
Отличительным свойством упругих состояний Jдеформируемого
ВеРДого тела является зависимость напряжений только от
деформации. Это значит, что упругие напряжения относятся к классу позици-
нных внутренних сил механической системы. А такие силы представ-
циЮтся через силовую функцию или потенциал. В частности, потен-
е алом напряжений ahs называют функцию W координат деформации
ъп* обладающую свойством
3W
Ояя =
д (2е13)
dW
де*
Оп =
<Г12 =
dW
ten
dW
д2г^
dW
J22'
J23"
de22
dW
д2е2Я
(4.1.6)
103
При упругих состояниях существует потенциал напряжений W,
поэтому
8>A = 6W= — 6elft. (4.1.7)
Предположение о существовании функции плотности внутренней
энергии W, вариация которой совпадает с элементарной работой
внутренних сил, приводит к представлению напряжений через
потенциал — формулами (4.1.6).
Таким образом, задача отыскания соотношений между
напряжениями и упругими деформациями эквивалентна задаче установления
потенциала напряжений при упругих деформированных состояниях.
Заметим, что иногда представляет интерес рассмотрение функции
дополнительной работы — потенциала деформаций W> который
определяется формулами
6il — "Т » 822 — -~Z , 833 — '
д<Хм да22 da.
зз
2e12 = — , 2e13 = —— , 2e23 = —— . (4.1.8)
aol2 do13 oa23
Формулы (4.1.8) важны, когда речь идет о представлении
деформаций через напряжения в упругом состоянии.
Переходим к рассмотрению частных форм соотношений между
напряжениями и деформациями — экспериментального обоснования
упомянутых соотношений.
§ 4.2. Обобщенный закон Гуна анизотропного тела
Около полутора столетий назад Коши предложил соотношения
(4.1.1) между напряжениями и упругими деформациями представлять
степенными рядами по всем шести аргументам:
^-/«(0) + (-^-)ввМ11 + (-^-)ввМЛвр. + ... • (4.2.D
\ ™тп I \ ОЬтп 0Вр8 ]
Слагаемые /^(0), не содержащие множителями компоненты
деформации, должны быть нулями, так как при отсутствии деформаций, когда
компоненты деформации нулевые, напряжения, по предположению,
отсутствуют.
Далее предполагается, что постоянные коэффициенты
df
дгп
( &f у
\ д&тпдгра }
имеют одинаковый порядок величины. Во всяком случае, значения
производных высшего порядка при нулевых значениях аргументов
не должны существенно превосходить значения производных первого
порядка.
104
Наконец, напомним предположение о малости компонент
деформации Bik> Считая компоненты деформации настолько малыми, что
можно пренебрегать их квадратами и произведениями по сравнению
с первыми степенями, сведем представления (4.2.1) к линейным
соотношениям между напряжениями и деформациями:
*th = Aikmnemn. (4.2.2)
Здесь через Aikmn обозначены постоянные неизвестные значения
первых производных при нулевых значениях аргументов:
Athmn = (dfik/demn)°.
Условия симметрии компонент тензоров напряжений и деформаций
сокращают число неизвестых коэффициентов, если учесть необходимые
условия существования потенциала напряжений. Таким образом,
соотношения (4.2.2) можно записать в форме обобщенного закона Гука:
#11 == ^1111811 "Т ^1122822 ~t~ ^1133е33 4" ^11122812 + Л112з2в2з +
"Ь А11132е1В,
^22 == ^2211811 ~Г -™2222822 4~ ^2233833 "Г ^2212^812 4"
4" ^2223^823 I ^2213^813>
<*33 — <4з311811 + ^3322622
+ А
3333833 ~Г ^3312^812 "Г
4~ ^332з2823 4" ^331з2813»
^12 = <™1211811 "Г ^1222822 4" ^12 3 3833 4~ <™12122812 4"
•4~ ^122з282 3 "Г ^121з2813»
(Tg3 = ^2 311811 "Т ^2 322822 4~ ^2 33З833 ~Г ^2 312^812 "Г
"Г -^2 32 3^82 3 "Г ^2 313^813i
^13 = ^1311811 "Г ^1322822 4" ^1333833 4" <™13122812 4"
4~ ^1323^823 4~ ^1313^813« (4.2.о)
Условия симметрии Aikmn = Amnik позволяют утверждать, что
обобщенный закон Гука (4.2.3) содержит не более 21 константы для
экспериментального определения. Коэффициенты Aikmn называются
Жесткостями упругого состояния тела или
МоАулями упругости деформируемого тела
с произвольной анизотропией механических
свойств. В дальнейшем будут указаны некоторые свойства сим-
Метрии реальных твердых тел, позволяющие сократить число
независимых модулей упругости.
Соотношения обобщенного закона Гука (4.2.3) можно
рассматривать как уравнения относительно компонент деформации еи, е22, ...,
is. При этом определитель системы имеет симметричную структуру
105
й отличен от нуля. Поэтому можно систему (4.2.3) решить
относительно компонент деформации. Это решение запишем в тд^ой форме:
£llell = ^11 — V 21^22 — V 31^33 + Т)23»1<?23 + Г1 ЗЫ^Ы*'4" T]l2» 3°12»
^22822 == vi2°ii 4~ 022 Л?з2(7зз 4~ ?]23»2СГ2Я 4~
31 » 2^13 + 3112,2^12,
^33833 = ^3^11 V23a22 ~Г ^33 4" 1)2 3» 3^23 4" fl 31» 3^31 4" Hi2»1°12»
2G23823 = I)l>2 3°Il ~Г Т12»23а22 4~ Лз^З^ЗЗ 4" а23 4" [^3123^13 +
+ Hi22 з0^»
2G13813 = Hi»31^11 "г Tl2»3icr22 4" Из»31^33 4" Шзз^гз 4" сг13 +
4" И'12.31ОГ12
2Ge12 = Tli,i2ail 4" Jl2»12(T22 4~ Цз»12°Г33 4" М'2312°Г23 4"
4- ^1312^13 4- <т1я. (4.2.4)
Коэффициенты £, G, j), [х с разными номерами однозначно
выражаются через жесткости Aikmn, так же как и жесткости через эти
коэффициенты. Разнообразием в обозначениях коэффициентов (4.2.4)
подчеркивается различное физическое значение их. Величины Е11у £"22, £зз
представляют собой модули упругости образцов при одноосном
растяжении или сжатии. Действительно, пусть растягивается образец
с осью, направленной вдоль /2. Тогда из компонент напряжений
отличной от нуля будет лишь одна:
an = s, а22 = а33 = <т12 = а18 = ст23 = О.
По первой из формул (4.2.4) найдем
Еп = s/e.
Последующие две формулы, записанные в виде
(£22е22)/(£ие) = —v12, (Е33г33)/(ЕпЕ) = —v13,
позволяют по данным одноосных испытаний на растяжение образцов
установить приведенные коэффициенты поперечной деформации.
Величины vmn называют коэффициентами Пуассона.
Величинами G12, G23, G13 в формулах (4.2.4) представлены модули
сдвигов в соответствующих координатных плоскостях. Для
определения их необходимо реализовать напряженные состояния, в которых
отличными от нуля были бы только ог12, либо только а23, либо только
а13. Этого'можно достигнуть при чистом или простом сдвиге в
соответствующих плоскостях либо при кручении образцов.
Константы \iksmn называются коэффициентами
Чепцов а и характеризуют соответствующие сдвиги — сдвиги в
плоскостях, параллельных Охтхп, вызванные напряжениями oks.
Величины yimn» h и r\my nk называются к о э ф ф ициентамИ
взаимного влияния нормальных "и
касательных н апряжений. Например, коэффициентом Х[тп, k
характеризуется удлинение в направлении th9 вызванное наличием касатель
106
х напряжений amn. Коэффициентами T)m, nk характеризуется сдвиг
плоскости, параллельной Oxnxh, вызванный нормальным
напряжением &тп*
Заметим, что коэффициенты в соотношениях (4.2.3) называются
есТкостями анизотропного тела, тогда как
коэффициенты в (4.2.4) называются коэффициентами податливости
анизотропного тела. По классификации П. Н. Бехтерева, выделяют шесть
групп коэффициентов податливости
анизотропного тела.
Группа I: #ц = ^Ti1» #22 = ^гг1» #зз = ^зз1.
Группа II: —а12 = — #2i = ^21/£п = ViJE22, #1з> #гз-
Группа III: аи = G^1, #5б = Gil1, a66 = G121.
Группа IV: #5в = я65 = Pusi/Gis = Изпг^лг» •••
Группа V: а13 = а31 = y\23JG13 = Лъгз/^гз* •••
Группа VI: #24 — Ягз»2/^22 = У12>2з/02з> #34 = Ткз»з/£зз =
— Т1з»2з/^23.
Как правило, реальные материалы проявляют некоторые свойства
симметрии, позволяющие сократить число независимых констант
упругости.
Предположим, что одна из координатных плоскостей, например
плоскость Охгх2, оказывается плоскостью симметрии упругих свойств.
Это значит, что соотношения (4.2.4) или (4.2.3) не изменяются при
замене направления оси 0х3 на противоположное. Но при упомянутом
изменении направления отсчета следует заменить (Т23 и а13 на (—а23)
и (—а13) соответственно, а компоненты деформации е23 и е13 — на
(—е2з) и (—е13).
Проводя такую замену и требуя неизменности соотношений (4.2.4),
приходим к необходимости считать некоторые из коэффициентов
податливости нулями:
йы = й1ъ = #24 = #25 = #34 = #35 = #46 = а5в = О-
Так, число упругих констант при наличии только одной плоскости
симметрии сокращается до 13. Особенно интересен с практической
точки зрения случай, когда тело в каждой точке имеет три
ортогональных плоскости симметрии упругих свойств. Такое тело называется
0 Р т о т р о п н ы м. Для ортотропного тела остается девять
независимых констант упругости и обобщенный закон Гука принимает такой
вид:
811 = °ll/-£l 0*22^21/-^2 ^ЗЗ^ЗГ-^З)
822 = —GFiiVi2/£i +0'22/^2 ^3 3^32'-£з>
£зз = — o11v13/E1 — o22v23/E2 + в33/Е3, (4.2.5)
^е2з ~ ^2з/^23, 2е13 = сг13/013,
2е21 = о>21/С/21.
по определения констант упругости достаточно данных опытов
одноосному растяжению образцов в направлениях главных осей
107
анизотропии и опытов со сдвигами в соответствующих плоскостях.
При этом используются и условия симметрии коэффициентов
упругости:
v21/£2 = v12/£lf v31/£3 = v18/£i, v23/£,2 = v^lE/.
Дерево, фанера, железобетон, армированные пластики, прокат
черных металлов представляют собой многочисленные примеры орто-
тропных материалов.
Например, для сосны найдены значения констант:
Ег = 1 • 1010 Н/м2; Е2 = 0,042; G12 = 0,75 . 10» Н/м2; v21 = 0,01.
Для березовой фанеры, материала с конструктивной анизотропией,
найдено:
Е1 = 1,2 • 1010 Н/м2; Е2 = 0,5 £х; Gla = 0,7 . 109 Н/м2;
vla = 0,071; v18 = 0,036.
§ 4.3. Обобщенный закон Гука изотропного тела
Тело, свойства которого одинаковы во всех направлениях,
называется изотропным. Соотношения обобщенного закона Гука для
изотропного тела можно получить из соотношений (4.2.5), опустив
индексы у всех коэффициентов податливости:
еи = Е-Чог1 — v (огаа + (т33)], 2е12 = G-lo129
82S = £-4(722 — v (а33 + ап)], 2е23 = G-lo2S,
833 = Е~Чо33 — v (огц + or22)], 2е13 = G~lo13. (4.3.1)
В частности, представим себе напряженное и деформированное
состояния чистого сдвига (рис. 53). Состояние чистого сдвига
создается системой напряжений
°ii = s, а22 = —s, сг33 = о12 = ог23 = а31 = 0, (4.3.2)
которая превращает изотропный брус или изотропную квадратную
пластинку при упругих состояниях в прямоугольную. По
напряжениям (4.3.2) и соотношениям закона Гука (4.3.1) можно установить
компоненты деформации:
8П = E~ls (1 + v) = е, е22 = —8, 833 = е12 = е23 = е31 = 0. (4.3.3)
По удлинениям главных волокон, пользуясь рис. 53, где
представлено превращение квадрата с единичной стороной в прямоугольник
со сторонами 1 + е и 1 — е, найдем соотношение для определения
половины угла сдвига у:
tg(45°-0,5Y)=4r:i(1-tg0^V)/(l+tgO,5Y).
Отсюда следует tg 0,5 у = 8, а при малых деформациях сдвиг между
диагональными волокнами квадрата у = 2е,
Рассматривая условия равновесия треугольника (рис, 54) с
единичными катетами, найдем:
т/2 = sYI/2 + SV2J2, т = 5.
108
Касательное напряжение т на диагональных площадках квадрата
связано со сдвигом у между этими площадками законом Гука (4.3.1)
t = Gy, поэтому между s и е существует соотношение s = 2Ge.
Это соотношение согласуется с первым из (4.3.3), если модули
упругости связаны зависимостью
2G (1 + v) = Е. (4.3.4)
Соотношение (4.3.4) повторяет второе из (3.3.4), хотя (4.3.4)
установлено для произвольного трехмерного напряженного и
деформированного состояний упругого изотропного тела, и второе — для
одноосного растяжения образца. Такое совпадение не случайно, так как
1
J
■ЦП WW
1
|о
j-
1 '
I
0
'
х2
0}5ГУ1^
/^
!
1 + С
** ■ *-
\
—^
r^L^i
*
1
1
Рис. 53
Рис. 54
соотношения (4.3.1) справедливы для любого "напряженного состояния,
в том числе и при одноосном растяжении цилиндрических образцов,
когда можно считать:
<ТП = S, СГ22 = 0*3 3 — #12 = °13 = а2 3 = О,
&и — е, е2
>зз
—V8,
D12
= е
23
°13
= 0.
При этом соотношения обобщенного закона Гука приводят к равенствам
s = £е, е22/е = — v.
Отсюда следует, что модули £hv, которыми с учетом (4.3.4)
определяется свойство упругости изотропных деформируемых тел,
совпадают с модулями упругости, вычисленными по экспериментальным
Данным, полученным при одноосном растяжении цилидрических
образцов.
Наконец, отметим, что почленным сложением первых трех
соотношений из (4.3.1) с использованием определений первых инвариантов
тензоров напряжений и деформаций
Зе = би + е22 + 633, За = ап + ог22 + а33
и первой из формул (3.3.4), связывающих упругие константы, найдем
представление закона объемной упругой деформации при
произвольном напряженном состоянии
о = КЪе, (4.3.5)
109
который повторяет закон объемной деформации (3.3.2),
установленный при одноосном растяжении образца. /
Итак, константы упругости Е, v либо К, G представляют собой
характеристики механических свойств изотропного упругого тела при
произвольных напряженных состояниях, хотя установлены они при
одноосном растяжении образцов. Конечно, эти константы можно
установить обработкой любых других экспериментальных данных,
пока соотношения (4.3.1) сохраняют значение физического закона,
представляющего упругие свойства деформации изотропного тела.
В процессе формирования деформаций сплошного тела особое
значение имеет изменение температуры.
Обозначив Т — изменение температуры, а — коэффициент
линейного расширения, определим компоненты деформации, вызванные
изменением температуры изотропного тела, произведением аТ, причем
*Ь=*Ь = *1* = *Т9 8^=82", = 8^=0. (4.3.6)
Полагаем коэффициенты упругости не изменяющимися с изменением
температуры; применим принцип суперпозиции, наложения
деформаций (4.3.1) и (4.3.6)г найдем суммарные термоупругие деформации:
8И = Е-Чвп — v (cr22 + ass)! + «7\ 2е12 = G~lo12l
е22 = Е~Чо22 — v (а33 + ап)] + аГ, 2е23 = G~le23y
е33 = Е-Чо8В — v (аи + а22)] + аГ, 2е13 = G-*o13. (4.3.7)
Разрешив эти соотношения относительно напряжений, можно получить
представление термоупругих напряжений.
Отметим еще некоторые возможные подходы к формулировке
соотношений обобщенного закона Гука применительно к изотропному
телу. Энергетическая формулировка закона Гука основана на
композиции потенциала напряжений. Потенциал упругих напряжений
считается зависящим только от компонент тензора деформаций. Вместо
компонент тензора деформаций в произвольных координатах можно ввести
три параметра, определяющие направления главных осей тензора
деформации, и три инварианта деформации. Если же рассматривать
потенциал напряжений изотропного тела-, свойства которого не
зависят от каких-либо избранных направлений, то функцию W без
ограничений общности можно считать зависящей только от трех
независимых инвариантов деформации. Например , потенциал упругих
напряжений можно полагать зависящим от главных значений тензора
деформаций изотропного тела:
W = W (е1э 82, 83) (4.3.8)
и представить степенным рядом по выбранным аргументам
W = а0 + ах (ех + е2 + е3) + а2(е? + г22 + el) + Ь2(г1г2 + е2е3 +
+ egej) + ...
Вследствие равноправия каждого из трех главных направлений
возможны только приведенные комбинации главных удлинений. Коэф-
110
фихиент а0 можно опустить, как не играющий роли при определений
напряжений. Коэффициент ах = О, так как при отсутствии деформаций
напряжения должны быть нулевыми. Наконец, опуская слагаемые,
содержащие третьи степени деформаций и более высокие, найдем
по потенциалу
W e w2 = a2(ef + е| + 823) + Ь2(г±г2 + 82е3 + гьгД
главные напряжения
Gl = dW/dtx = 2а2гг + Ь2(е2 + е3), а2 = dW/de2, о3 = dW/de3.
Введенные здесь константы а2 и Ь2 определяются экспериментально.
Используя, например, опыты по одноосному растяжению образцов,
находим:
2а2 + 262 = Е1{\ — 2v); 2а2 — Ъ2 = E/(l + v).
Отсюда следует, что потенциал напряжений
E(l-v) (8t+8| + 8|)+ ^
2(l + v)(l —2v) (1 + v) (l-2v)
X (ex 8a+ 6283 + 838!)
порождает представление обобщенного закона Гука для изотропного
тела в главных осях
а = Х9 + 2pteft (k = 1, 2, 3), (4.3.9)
где использованы обозначения для относительного изменения объема
Р = Зе = ех + е2 + е3 и для комбинаций модулей упругости:
Я= — , jx = G = . (4.3.10)
(1+v) (1—2v) ' 2 (1+v) v ;
Комбинации модулей X и \i называются константами
упругости изотропного материала по Ламе, а соотношения в форме
(4.3.9) — обобщенным законом Гука в форме Ламе, форме,
разрешенной относительно напряжений.
Заметим, что более общие соотношения между напряжениями и
деформациями— соотношения квадратичной теории упругости — можно
получить, если в представлении потенциала напряжений сохранить
слагаемые третьей степени. При этом получаются соотношения
квадратичной теории упругости в форме Мурнагана.
Возвращаясь к другим способам построения потенциала упругих
напряжений, предположим, что аргументами потенциала напряжений
служат естественные инварианты 8, у и а, связанные с главными
относительными удлинениями формулами
8ь = е + V2y cos dftl
аг = а, а2 = а + 2я/3, а3 = а — 2я/3. (4.3.11)
ill
Справедливы и обратные соотношения:
бе = S1 + 82• + 83 = 8n -+- 822 I ^ЗЗ»
Зт2 = (е2 - ef + (в, - е)2 + (е3 - е)2 -
= (1/3) [(е„ — е22)2 + (е22 — е33)2 + (е33 — ец)г +
+ 6 (е?2 + е|3 + в!,)],
Y3 cos За = V2
е12
813
812 813 1
е22 ^ е23
е23 е33 ^ |
(4.3.12)
Среди инвариантов деформации выделяются количественные
характеристики изменения объема Зе и изменения формы у.
Направляющий угол формоизменения а служит качественной
характеристикой формоизменения.
Полагая потенциал представимым степенным рядом по
количественным инвариантам деформации с коэффициентами, зависящими от
а, положим
W = b±y2 + b2e2 + b3ye + cxf + c2y2e + csye2 + ..,
Первые слагаемые этого ряда опущены на основании гипотезы
начального состояния: при нулевых деформациях должны быть нулевыми
и напряжения. Слагаемые, содержащие степени у и е выше второй,
опускаются вследствие предполагаемой малости их. Кроме того,
можно привести несколько формальных доводов, позволяющих опустить
слагаемое, содержащее произведение еу. Например, только слагаемые,
содержащие е2 и у2, приводят к однородным квадратичным формам
относительно компонент тензора деформаций в произвольных осях.
Учет произведения еу приводит к противоречивым выводам о возмож*
ности создания сдвигов посредством гидростатического давления.
Таким образом, можно взять потенциал напряжений в форме
W = ае2 + by2,
где a, b — экспериментально определяемые константы.
Изменив обозначения констант, представим потенциал напряжений
упруго деформированного изотропного тела в форме
W = 0,5 К (еи + е22+е33)2 + С/3 [(eu - 822)2 +
+ (е22 - е33)2 + (е33 - Hi? + 6 (е?2 + eb + eh)l (4.3.13)
Используя определение (4.1.6) потенциальной функции, найдем
соотношения обобщенного закона Гука:
°п = (/С—f- G\3e + 2Gellf... ,a12 = 2Gela. (4.3.14)
112
Отсюда можно установить, что К — модуль объемной деформации, а
г — модуль сдвига. Складывая первые три сотношения из (4.3.14),
найдем закон объемной деформации:
о = К • Зе. (4.3.15)
Принимая (4.3.15) в качестве физического закона объемной
упругой деформации, обобщенный закон Гука (4.3.14) можно записать
в общей форме:
от = 8iho + 2G (eik - 6ihe), (4.3.16)
что эквивалентно пропорциональности девиаторов напряжений и
деформаций:
ФН (DS) = 2G(DR). (4.3.17)
Составляя из левых частей (4.3.16) второй инвариант девиатора
напряжений, обнаружим, как следствие (4.3.16), количественный закон
формоизменения, утверждающий пропорциональность октаэдрическо-
го касательного напряжения и результирующего сдвига,
% = 2Gy. (4.3.18)
Если теперь левые части равенства (4.3.16) поделить на т, а правые
части — на 2Gy, то получим систему равенств компонент
направляющих тензоров напряжений и деформаций, сводящуюся к равенству
направляющих тензоров напряжений и деформаций
(Ds) = (De). (4.3.19)
Итак, обобщенный закон Гука для изотропного тела можно
формулировать в виде трех постулатов:
1. Объемная деформация упруга и связана с гидростатическим
напряжением формулой (4.3.15), где К — экспериментально
определяемая константа — модуль объемной деформации.
2. Направляющие тензоры напряжений и деформаций совпадают —
выполняется равенство (4.3.19).
3. Октаэдрическое касательное напряжение и результирующий
сдвиг пропорциональны, выполняется равенство (4.3.18), где модуль
формоизменения G определяется экспериментально.
Преимущества такой формулировки закона Гука обнаруживаются
при отработке программы экспериментальной проверки закона Гука
и выяснении области его применения.
Как отмечалось ранее, независимые константы упругости Е и v
Можно определить из простейших опытов по одноосному растяжению
Цилиндрических образцов. Но это еще не значит, что соотношения
(4.3.14) готовы для применения. Требуется их экспериментальное
обоснование: необходимо показать их справедливость не только при
одноосном растяжении, но и при одноосном сжатии, при чистом
сдвигу при всевозможных других реализуемых в экспериментах сложных
Напряженных состояниях. Необходимо, кроме того, установить
диапазон деформаций, где обобщенный закон подтверждается
экспериментом*
из
Проверка закона Гука в форме (4.3.14) не открывает возможности
прямо сопоставить, например, экспериментальные данные/при
растяжении и кручении образцов. А формулировка закона /Гука в виде
(4.3.15) и (4.3.18) позволяет представить экспериментальные данные
по растяжению, сжатию, сдвигу образцов, эксперименты при
сложных напряженных состояниях в одних и тех же переменных, в одном и
том же масштабе. Поэтому сопоставимость такого способа
представления экспериментальных данных несомненна. Данные опытов с
реализацией различных напряженных состояний в переменных а и е, а также
в переменных тиу должны в области упругих деформаций
повторяться независимо от реализуемого напряженного состояния. Конечно,
известный разброс экспериментальных данных допустим.
Обработка опытных данных через количественные характеристики
напряжений и деформаций не вызывает особых трудностей, ибо
необходимая для этого информация добывается с должной точностью
достаточно просто. Сложнее обстоит дело с проверкой постулата,
утверждающего равенство направляющих тензоров. Как правило, в опытах
реализуется совершенна строгое совпадение главных направлений
тензоров напряжений и деформаций изотропного упругого тела.
Остается проверить постулат совпадения фаз тензоров напряжений и
деформаций. С этой целью необходимо реализовать кроме крайних
значений по крайней мере три промежуточных значения фазы
деформаций. Это возможно только в опытах с тонкостенными
цилиндрическими образцами. Подготовка и реализация таких опытов
требуют специальной машинной оснастки и измерительной аппаратуры.
Кроме того, проверка гипотезы совпадения фаз напряжений и
деформаций требует несравненно большей точности проведения
опытов, так как вычисление фазы деформаций связано с необходимостью
перемножения трех малых величин, поэтому ошибка измерений может
привести к существенным отклонениям результатов обработки
экспериментальных данных. Однако представление опытных данных в
фазовых координатах создает определенность программы испытаний и
позволяет количественно оценить степень отклонений свойств
материала от постулируемых законом Гука.
§ 4.4. Опыты с трубчатыми образцами
Задачей опытов с трубчатыми образцами в упругом состоянии
является прямая проверка закона Гука и установление области
деформации, где соотношения закона Гука достаточно точно отражают
механическое поведение материала. Трубчатые образцы (рис. 55)
изготовляются так, чтобы концы их можно было жестко закрепить в
специальных захватах испытательной машины. Приспособления машины
обеспечивают регулируемое воздействие на образец продольной силы
Р, внутреннего давления р, крутящих моментов М. Длину расчетной
трубчатой части образца следует брать не менее пяти диаметров
средней поверхности цилиндрической оболочки. Толщина назначается
наименьшей в зависимости от возможностей технологического
процесса изготовления образцов.
114
Полагая распределение напряжений по толщине расчетной части
равномерным, располагая значениями внешних воздействий, можно
^числить напряжения. Если ось Охг направить вдоль образующей
цилиндра, ось Ох2 — по касательной и направляющей, а ось Ох3 —
толщине цилиндрической оболочки, то компоненты напряжений
по
Б расчетной части образца можно вычислить по формулам
011 = PI(nhd0),
012 = 2М/(Ш1),
средней
<y22 = d0p/(2h0),
<*23 = О»
поверхности
#зз = °»
о18 = 0, (4.4.1)
оболочки, - h0 — начальная
определяемое в расчетной части образца
контролируемым. Регули-
У////У//А
Р
дГ
W//HMH(f«(«M(/ZZZu
Шг
Ш11
р
7?
Рис. 55
где d0 — диаметр
толщина образца.
Напряженное состояние
по формулам (4.4.1), называется
рованием внешних
воздействий можно
достигнуть заранее
заданного значения
любой из
составляющих напряжений.
Конечно, здесь
подразумеваются
отличные от нуля
напряжения.
. В тонкостенных
цилиндрических
образцах достигается наиболее общее из реализуемых
однородных напряженных состояний. В этом случае можно произвольно
изменить три из шести компонент напряжений. Отметим, что
изменением соотношений между внешними воздействиями можно пройти
весь диапазон возможных значений фаз напряжений.
По напряжениям, вычисленным по формулам (4.4.1) через
замеряемые внешние воздействия, можно вычислить симметричные инварианты
напряжений:
За = ап + а22,
4,5 г2 = а21Х - апа22 + а2% + За*2,
t3cos Зф = — ]/2а ((TU — а) (а22 — а). (4.4.2)
Как только начнем вычислять истинные напряжения по
замеренным силам и деформированным размерам, состояние перестает
контролироваться непосредственно силами. В частности, можно наметить
Упрощенные программы Р-опытов, Р ~ /7-опытов.
В случае Р-опытов отлична от нуля только продольная сила.
Поэтому находим сначала напряжения:
^п = P/(nh0d0) = s, а22 = 0, сг1а = О,
а затем инварианты:
а = s/З, т"= ]/2|s|/3, cos Зф = sign s.
(4.4.3)
115
В случае Р ~ р-опытов находим:
оп = P/(nhQd0) = s, а22 = pd0/(2h0) = t, а12 = О
и по формулам (4.4.2) — инварианты: /
За = s + U
4,5т2 = s* — st + t\
(Зт)3 cos Зф = — V2 (s + t) (2s — t) (2t — s). (4.4.4)
В частности, при J = 0 и s > 0 получим ф = 0. При t > 0 можно
считать s = mt. Когда т = —1, получим а = 0, т =|/2/3 /, ф = я/6,
что соответствует деформации чистого сдвига. При т = 1 получим
о = 2t/3, т = У~2НЗ, cos Зф = —1, Поэтому даже в Р~р-опытах
можно пройти весь диапазон возможных значений фазы напряжений.
Правда, реализация однородного состояния образца при осевом
сжатии затрудняется возможным выпучиванием стенки трубки при
достаточно больших сжимающих силах, что нарушает нормальный
ход эксперимента. Поэтому приходится прибегать к помощи
Р ~ М ~ р-опытов, где реализуются все возможные изменения
фазы напряженного состояния с помощью наложения касательных
напряжений, вызванных моментами М. Более того, можно указать
различные напряженные состояния, соответствующие одним и тем же
значениям фазы. Например, одноосному сжатию соответствует фаза
Ф = я/3. Вместе с тем фаза ф = я/3 соответствует двухосному
растяжению. Два названных напряженных состояния отличаются только
гидростатическим давлением — первым инвариантом тензора
напряжений.
Обсудим теперь возможности измерений, позволяющих вычислить
компоненты тензора деформаций и его инварианты. Деформации
считаются однородными по толщине. Не вызывают особых трудностей
измерения продольных деформаций, поперечных и сдвиговых деформаций
образцов. Существуют разнообраные электрические, механические и
оптико-механические датчики деформаций, позволяющие по
непосредственным измерениям вычислить относительные деформации еи,
е22 и 812. Пусть 10 — начальное значение базы измеряемого
продольного волокна, I — текущая длина волокна, тогда
еи = (/ — /0)//0.
Относительное удлинение поперечных волокон можно вычислить
по изменениям диаметра е22 = (d — d0)/d0.
Измерив углы поворотов г^ и гр2 двух поперечных сечений образца,
отстоящих на расстоянии L друг от друга, найдем поперечные
смещения 0,5 Л|)х и 0,5 Л|)2 (рис. 56) и по разности окружных смещений
найдем угол сдвига: 2е12 = (-фа — ifo) d/(2L).
Не удается лишь надежно измерить относительное изменение
толщины образца 8зз- Из-за малой базы точность всяких измерений
толщины в ходе деформирования существенно снижается, поэтому, как
116
правило, во всех известных экспериментальных работах
ограничиваются вычислениями е33 по заранее установленному закону
объемной деформации. Приняв линейный закон объемной деформации,
найдем
е3з = — (еп + е22) + fan + о22)/(ЗК), (4.4.5)
где К считается известным, например, из опытов на одноосное
растяжение образцов.
Рис. 56
Я/3 Я
По опытным значениям ги, е22, е12 и вычисленным по формуле
(4.4.5) значениям е33, приняв е13 = е23 = 0, найдем по (4.3.10)
результирующий сдвиг и фазу формоизменения:
9Y2 = (eii — е22)2 + (е22 — езз)2 + (е33 — £ц)2 + 6е*2,
гп—е 8i2 0
,2~~
о
•у8 cos За = 1/2
812
0
е22 — е 0
£яя • ^
Зе =
(4.4.6)
Проверка обобщенного закона Гука сводится к сопоставлению
зависимости т от у и зависимости ф от а при разнообразных
напряженных и деформированных состояниях образцов.
На рис. 57 приводятся-данные опытов со стальными трубчатыми
образцами. В опытах не обнаружено заметной зависимости ф от
интенсивности напряжений. Поэтому ограничиваются установлением
зависимости между а и ф. В крайних точках при одноосном
растяжении и одноосном сжатии наблюдается строгое совпадение фаз
напряжений и деформаций. В промежуточных точках наблюдаются
небольшие отклонения от гипотезы равенства фаз напряжений и
деформаций. Однако гипотеза совпадения направляющих углов
подтверждается удовлетворительно. Отклонения от равенства фаз
напряжений и деформаций могут связываться не только с проявлением
механических свойств материала, но и с ошибками измерений и вычис-
117
лений фаз напряжений и деформаций, особенно вблизи их нулевых
значений. /
Заметим, что гипотеза совпадения фаз напряжений и деформаций
оказывается очень сильной по вытекающим из нее следств,ийм. Можно
показать, что следствием закона объемной упругой деформации (4.3.13)
и гипотезы совпадения фаз напряжений и деформаций, сводящейся
при совпадении главных направлений к равенству направляющих
тензоров (4.3.17), является универсальность при разнообразных фазах
зависимости октаэдрического касательного напряжения от
результирующего сдвига при упругих состояниях. Действительно, работу
внутренних сил (4.1.6) при совпадении главных направлений
тензоров напряжений и деформаций можно представить суммой
произведений главных напряжений и вариаций главных компонент
деформации^
б'Л = bW = ок8гк. (4.4.7)
Используя формулы (2.6.10) и (4.3.9) для представления главных
напряжений и деформаций, находим
8W = (а + ]/2т cos <pft) б (е + V2 у cos ak).
После перемножений и простых преобразований получаем
8W = а . 38е + Зт [cos (<р — а) бу + sin (<р — а) у8а]. (4.4.8)
Принимая равенство фаз напряжений и деформаций, представляем
работу внутренних сил в виде 8W = Зо8е + Зтб-у.
Из условия существования потенциала напряжений теперь? следует
до/ду = дг/де. Поэтому закон упругой объемной деформации а = ЗКе
приводит к необходимости считать т зависящим только от у:
t = t(v). (4.4.9)
Формулировка законов линейной упругости завершаете^
представлением зависимости (4.4.9) линейной функцией
т = 2Gy. (4.4.10)
Для этого надо подобрать значение модуля сдвига и установить
диапазон изменения у> где деформации упруги, обратимы, а
напряжения представимы" линейным законом (4.4.10).
Предельные значения ту и у7 можно связать с пределами
упругости sy и еу при одноосном растяжении:
Зту ш=У2 ау, 3Yy =К2 (1 + v) еу. (4.4.11)
Первая из этих формул получается прямым вычислением при
одноосном растяжении. Вторую можно получить аналогично либо
применением закона Гука при одноосном растяжении и формулы (4.4.10)
к предельному состоянию.
118
§ 4.5. О соотношениях теории нелинейной упругости
Свойства упругости некоторых материалов типа резины,
полимерных материалов, а также металлов — чугуна, меди и др. — не
описываются с достаточной' точностью линейным законом.
Наблюдаемые существенные отклонения свойств упругости от описываемых
обобщенным законом Гука разнообразны, поэтому известно несколько
вариантов формулировки законов теории нелинейной упругости.
Приведем некоторые из них.
Квадратичные теории или теории упругости второго порядка
можно построить, основываясь на представлении потенциала напряжений
многочленами по компонентам деформации. Если потенциал
линейной теории. представляется многочленом второй степени, то
потенциал квадратичных теорий упругости содержит дополнительно
слагаемые третьей степени относительно компонент деформации.
Проблема сводится к тому, как выбрать и обосновать выбор слагаемых
третьей степени в представлении потенциала.
Квадратичную теорию упругости изотропного тела, следуя Мур-
нагану, можно получить, если потенциал напряжений представить
многочленом по инвариантам тензора деформаций (1.9.4):
W = а2(3е)2 + 623/2 + a3{3ef +
+ Ь3(3е) (З/2) + с3(/3 cos Щ. (4.5.1)
Слагаемые третьей степени, как и слагаемые второй степени, здесь
отобраны так, чтобы потенциал всегда представлялся рациональной
функцией — многочленом по компонентам деформации в
произвольных координатах. Ведь можно дополнить (4.5.1) слагаемыми,
содержащими, например, произведение в2/, но это слагаемое приведет кТирра-
циональностям в представлении потенциала и соответствующих
напряжений.
Подобно (4.4.8), вариацию потенциала напряжений можно
представить формулой
Ш = Зобе + Зт [cos (ф — ф) б/ + sin (q> — ip) /6ф]. (4.5.2)
С другой стороны, дифференцированием (4.5.1) найдем
Ш = (18 а2е + 81 а3е2 + 9Ь3р) 8е +
+ (6b2f + 18 b3ef + 3c3cos Зя|)/2) б/ -
— Зс3/3 sin Зфвф. (4.5.3)
Сравнение (4.5.2) и (4.5.3) приводит к соотношениям между
инвариантами напряжений и деформаций:
а = 6а2е + 27а3е2 + 3b3f2\ (4.5.4)
xcos (ф — г|з) = 2b2f + 6b3ef + с3 cos Зя|)/2; (4.5.5)
tg (q>—Ф) ^зШЗф . (4.5.6)
2b2 + 6b3 е+3с3£ cos Зг|> V '
119
Отсюда следует, fco-первых, что константу с3 следует определить,
обрабатывая фазовую характеристику механических свойств
материала — кривую, подобную приведенной на рис. 57. Пру этом
можно установить отношение cs/b2.
Далее можно обратиться, например, к опытам на одноосное
растяжение образцов. По напряжениям оп = s, а22 = о33 = а12 =
= а23 = а31 = 0 вычисляем а = s/З, т = ]/"2s/3, ф = 0. По
деформациям ех — 8, е2 = —ve, е3 = — ve вычисляем Зе = (1 — 2v) е,
3/ = УЪ (1 + v) е, ф = 0.
Закон изменения объема (4.5.4) при одноосном растяжении
сводим к соотношению
s = 6а2(1 - 2v) е + [9а8(1 - 2v)2 + 268(1 + v)2] е2, (4.5.7)
а закон формоизменения (4.5.5) запишем в форме
s = 2&2(1 + v) е + [2&3(1 + v) (1 - 2v) + УЪ^Х + v)2/3]e2.
(4.5.8)
Предполагается, что опыты с трубчатыми образцами проведены и
установлена фазовая характеристика, позволяющая определить число
т так, что
с3 = щ • 2Ь2. (4.5.9)
Кроме того, опыты по одноосному растяжению обработаны так, что
получены механические характеристики материала
s = Ee + Exs*, (4.5.10)
v = v0 + vxe, (4.5.11)
где £, Ely v0, vx — экспериментально определяемые константы.
Если считать
2а2 = E/IS (1 — 2v0)], b2 = Е/12 (1 + v0)l;
2Ь»(1 + v0) (1 - 2v0) = £х - 2&2К + ml/2(l + v0)2/3]; (4.5.12)
9а8(1 - 2v0)2 = £х + 12aavi — 2Ь8(1 + v0)2,
то соотношения (4.5.6) и (4.5.7), представляющие количественные
законы изменения объема и формоизменения, оказываются
совместными: одно из них следует из другого при одноосном растяжении.
Кроме того, экспериментальные данные (4.5.10) и (4.5.11) при одноосном
растяжении образцов, обработанные с точностью, соответствующей
квадратичной теории, будут отражены потенциалом (4,5.1) с
соответствующей степенью точности. К сожалению, не располагаем надежными
экспериментальными данными и соответствующими значениями
констант пятиконстантной квадратичной теории упругости.
Заметим, что гипотеза совпадения направляющих тензоров
напряжений и деформаций приводит к необходимости считать ф = i|),
с3 = 0, тогда опытов по одноосному растяжению образцов
оказывается достаточно, чтобы найти все четыре константы. упругости:
120
по заданным значениям Е0, vo> Еъ vx и формулам (4.5.12) можно найти
постоянные a2,.b2l b3> а3.
В случае совпадения фаз напряжений и деформаций не менее
обоснованным может быть и другой подход к построению потенциала
напряжений. Пусть гидростатическое напряжение связано только
с изменением объема, а октаэдрическое касательное напряжение —
только с результирующим сдвигом, тогда
о = Ave + Bve\ т = Лф/ + £Ф/2. (4.5.13)
При этом можно с принятой в квадратичной теории степенью
точности определить модули изменения объема и модули формоизменения.
Однако в таком случае теряется рациональность представления
потенциала напряжений многочленом по компонентам деформации
в произвольной координатной системе.
Для сохранения рациональности представления потенциала Кау-
дерер рекомендует представление закона формоизменения в (4.5.13)
заменить таким:
т = Aof (1 + aj* + aj* + ...). (4.5.14)
Однако в этом случае теряется единство степени точности
представления закона изменения объема и закона формоизменения.
Потенциалы упругих напряжений высокоэластических материалов
строят, следуя Муни и Ривлину, в виде многочленов по инвариантам,
представляющим собой комбинации главных удлинений:
«Л = Я? + А,1 + ^3>
Ъ = КЦ + ЦЧ + ЦЦ, (4.5,15)
J3 = Х\ %2 Яз.
Материал при высокоэластических деформациях считается не
изменяющим своего объема, поэтому полагают
J3 = 1 (4.5.16)
и потенциал напряжений считается функцией только двух
инвариантов. В расчетной практике применяют потенциал в форме Муни
w = с (XI + я; + х; — з) (4.5.17)
или более совершенный потенциал в форме Ривлина
W=CJ± + <V2. (4.5.18)
Экспериментальные данные, необходимые для обоснования как
гипотезы (4.5.17), так и предположения (4.5.18), очень ограничены.
Они приводятся в специальных руководствах по нелинейной теории
упругости,
121
§ 4.6. Соотношения теории малых упругопластических /
деформаций для изотропного тела
Процесс деформаций в точке тела при упругих состояниях для
большинства конструкционных материалов управляется обобщенным
законом Гука. Если обобщенный закон Гука считать физическим
законом для всевозможных упругих состояний тела, а линейный закон
изменения объема
о = ЗКе ^ (4.6.1)
считать справедливым во всем диапазоне рассматриваемых
деформаций, то условие достижения предельного упругого состояния в
данной точке тела запишется так
т = ту. (4.6.2)
Условие (4.6.2) можно считать в этом случае условием
пластичности по напряжениям, а условие пластичности по деформациям имеет
вид
V =??,. (4.6.3)
Условие пластичности можно представить геометрически
поверхностью в пространстве напряжений. Для простоты
представим~себе'пространство напряжений как трехмерное пространство главных
напряжений (рис. 58) и уравнение поверхности (4.6.2) с учетом формул (2.6.7)
запишем в виде
(cri - <т2)2 + (а. - стз)2 + (ог8 - (ТО2 = 9т*. (4.6.4)
Заметим, что прямая, одинаково наклоненная к главным осям
°1 = <?2 = °ъ>
не пересекает поверхности (4.6.4) и является осью цилиндра (4.6.4).
Если изображающая напряженное состояние точка лежит внутри
цилиндра (4.6.4), то соответствующее состояние упруго. Если
изображающая точка лежит на поверхности"цилиндра, то состояние
будет предельным, а если изображающая точка оказывается
вне поверхности цилиндра, то состояние тела будет упруго-
пластическим.
Итак, если упругие состояния тела описываются законом Гука,
а закон (4.6.1) объемной деформации справедлив во всем диапазоне
деформаций, то предельной поверхностью упругих состояний
является цилиндр в пространстве напряжений.
Когда изображающая напряженное состояние точка выходит за
пределы предельной поверхности, состояние тела в точке называется
упругопластическим. При этом изображающая деформированное
состояние точка выходит за пределы поверхности (4.4.6) в пространстве
деформаций. Возникает вопрос о соотношениях между напряжениями
и деформациями в упругопластическом состоянии тела. Названная
проблема успешно решается при определенных ограничениях
процесса деформирования, указанных Д. А. Ильюшиным.
122
Во-первых, строго различают процессы актИЁных деформаций й
разгрузки. Процесс деформирования называется активным,
если интенсивность деформации, измеряемая результирующим
сдвигом, возрастает. В случае убывания интенсивности деформаций
процесс называется разгрузкой.
Во-вторых, деформация окрестности точки называется простой,
если направляющий тензор деформаций не изменяется в процессе
деформирования.
Процесс нагружения называется простым, если при изменениях
напряженного состояния интенсивность напряжений изменяется, а
направляющий тензор напряжений
остается неизменным. Показано, что
при некоторых дополнительных
условиях- процесс деформации и
нагружения будет простым, если внешние
силы, действующие на тело,
изменяются пропорционально одному
параметру.
Наконец, будем рассматривать
малые упругопластические
деформации, не очень удаляясь от
поверхности предельных упругих
напряжений. Вместе с тем диапазон
пластических деформаций может в несколько десятков раз превысить
упругие деформации. Теория малых упругопластических
деформаций при простом нагружении строится как прямое обобщение
соотношений классической теории упругости изотропного тела.
Сохраняется закон объемной упругой деформации
о = ЗКе (4.6.5)
либо принимается условие несжимаемости — условие неизменности
объема при деформациях е = 0.
Сохраняется постулат совпадения направляющих тензоров
напряжений и деформаций
(Ds) = {De). (4.6.6)
Наконец, плотность работы внутренних сил, вычисленная для всего
процесса активной деформации от начального до текущего состояния
монотонно возрастающей интенсивности деформаций, играет роль
потенциала напряжений в рассматриваемом состоянии.
Постулат (4.6.6) совпадения направляющих тензоров напряжений
и деформаций накладывает очень жесткое ограничение векторных
характеристик изменений напряженного и деформированного
состояний: предполагается неизменность главных материальных волокон
в процессе деформирования. Предполагается неизменным и после
Упругих состояний совпадение главных направлений напряжений и
Деформаций. Кроме того, из девиаторного равенства (4.6.6) следует
неизменность и равенство фаз напряжений и деформаций. Это значит,
123
Что результирующее волокно неизменно скользит вдоль дуги
большого круга на сфере единичного радиуса, а ориентация октаэдри-
ческих касательных напряжений не изменяется в процессе изменений
напряжений.
На следствиях последнего из формулированных законов малых
активных упругопластических деформаций остановимся подробнее.
Этот постулат устанавливает, во-первых, существование потенциала
напряжений. Во-вторых, устанавливается определенный способ
вычислений этого потенциала.
По определению, элементарная работа внутренних сил
вычисляется как сумма произведений составляющих тензора напряжений
и тензора действительных приращений деформаций: dW = oihdeik.
Полагая направляющие тензоры неизменными в процессе
деформации, можно это произведение представить в главных осях: dW =
= okd&k. Переходя к естественным инвариантам напряжений и
деформаций, с учетом равенства фаз напряжений и деформаций получим
dW = (а + ]/2тcos ф/г) (de + "J/2 cos ф^ dy)
и после простых преобразований находим
dW = 3ode + 3%dy. (4.6.7)
По предположению, правая часть должна представлять
интегрируемую комбинацию, причем первое слагаемое правой части зависит
только от е. Поэтому т может зависеть только от у. Тогда с учетом
(4.6.5)
W = 0,5 К (3e)2 + 3^'(yjdy.
о
Здесь явно выделены работа внутренних сил при изменении объема
и работа формоизменения.
Зависимость т от у можно выяснить только экспериментально,
реализуя активные упругопластические состояния образца при
любой неизменной в процессе опыта фазе напряжений и деформаций.
В частности, можно использовать и опыты по одноосному растяжению
цилиндрических образцов.
При одноосном растяжении цилиндрических образцов
реализуются напряжения, которые характеризуются инвариантами
аг = s, ог2 = а3 = 0, ф = 0, За = s, Зт = ]/2s. (4.6.8)
Деформации определяются так: гг = е + У~2у = е, е2 = е3 = е —
— 0,51/27 = — ve,
откуда следует:
Зе = (1 _ 2v) е, Зу = }/Т(1 + v) е. (4.6.9)
При одноосном растяжении цилиндрических образцов можно
экспериментально установить зависимость напряжения от продольной
124
деформаций и зависимость отношения поперечной и продольной
деформаций от продольной деформации
s = s(e), v = v (в). (4.6Л0)
Второе из соотношений (4.6.9) с учетом второго из (4.6.10) можно
разрешить относительно е и получить экспериментальную
зависимость
е = г (у). (4.6.11)
Подставляя последнее из (4.6.8) и соотношение (4.6.11) в первое из
(4.6.10), получим зависимость
т = т(Т), (4.6.12)
представляющую механические свойства материала при простом наг-
ружении.
Заметим, что в пределах упругости коэффициент Пуассона v —
постоянная характеристика свойств упругости изотропного материала.
При деформациях за пределом упругости отношение (— ^J&i) зависит
от е и изменяется, приближаясь к значению 0,5. Поэтому для простоты
часто полагают материал за пределом упругости несжимаемым.
Считают, что активные пластические деформации реализуются без
изменения объема материала, только за счет формоизменения.
Если считать v = 0,5 за пределом упругости, то пересчет
экспериментальной зависимости s от 8 на зависимость т от 'у сводится к
изменению масштабов экспериментально полученной диаграммы
растяжения. Поэтому аналитическое представление зависимости (4.6Л2)
можно считать подобным зависимости s от е. Здесь можно
использовать схему линейного упрочнения:
т = 2Gy при у < Yy,
т = 2Gyy + 2G'(y — Yy) при у > уу, (4.6.13)
где уу — предел упругости, G' — модуль упрочнения при
формоизменении.
Можно также применять кусочно-линейное представление
функции (4.6.12), либо степенную зависимость, либо дискретное, точечное
представление экспериментальной зависимости т от у с учетом
действительных изменений отношения поперечной и продольной
деформаций образца при испытаниях.
При всем этом многообразии формальных возможностей
представления экспериментальных фактов следует не забывать, что строго
Доказанные достаточные условия выполнения законов малых упруго-
пластических деформаций требуют принимать условия
несжимаемости и только степенную аппроксимацию зависимости т от у.
Опытов по одноосному растяжению образцов достаточно для
определения всех констант и функций, недостающих в соотношениях
v*.6.5), (4.6.6), (4.6.12). Но этих опытов совершенно недостаточно для
кспериментального обоснования гипотезы о совпадении направ-
125
Ляющих тензоров напряжений и деформаций, а также
предположения о возможности представления упругопластической деформации
при простом нагружении как процесса нелинейно упруги
деформации, когда существует потенциал внутренних сил.
Для обоснования приемлемости гипотез и схем, определения
диапазона деформаций, где гипотезы и соотношения справедливы,
рекомендуется использовать опыты с тонкостенными трубчатыми
образцами.
Серии испытаний трубчатых образцов рекомендуют либо при
фиксированной фазе напряжений, либо при постоянной фазе деформаций.
Каждое из таких испытаний следует обрабатывать вплоть до построен
ния зависимости (4.6.12) по экспериментальным * данным. Если
разброс этих зависимостей при разных фазах оказывается в допустимых
пределах разброса экспериментальных данных, то постулированные
соотношения теории малых упругопластических деформаций при
простом нагружении верны. Можно указать ряд тонких
экспериментальных исследований, подтверждающих деформационную теорию
пластичности.
Итак, формулировка законов деформационной теории
пластичности сводится к соотношениям (4.6.5), (4.6.6) и (4.6.12), причем
константа /С и зависимость (4.6.12) считаются экспериментально
определенными.
Для применения этих соотношений в процессе математической
постановки задачи теории пластичности полезно переписать эти
соотношения в форме, разрешенной относительно напряжений, и форме,
разрешенной относительно компонент деформации. Ограничимся
первой из упомянутых форм, представляя (4.6.6) в виде
(D.) = х (DB)/y.
Распишем это тензорное равенство через компоненты тензоров:
oik — bihO = т (&ik — 8ike)/y.
Наконец, с учетом (4.6.5) и (4.6.12) получим
oik = Ьгк -ЗКе + х (у) (eih - 8ike)/y. (4.6.14)
Напомним, что эти соотношения справедливы при активной
пластической деформации и простом нагружении. В отличие от активной
пластической деформации соотношения между напряжениями и
деформациями при разгрузке устанавливаются с учетом напряжений
ом, деформаций е&, соответствующих началу процесса разгрузки.
Разности напряжений oihj деформаций eik в текущем состоянии
разгрузки и состоянии начала разгрузки удовлетворяют
соотношениям (4.6.5), (4.6.6) и линейному закону разгрузки, подобному
начальному упругому участку диаграммы (4.6.12), поэтому соотношения
между напряжениями и деформациями при разгрузке имеют вид
oik - oh = 8ik3K (е — е*) + 2G [eik — efc —6<fc(e - e*)]. (4.6.15)
Линейность закона разгрузки также подтверждается
экспериментальными данными.
126
$ 4.7. Основные соотношения теории течения
Ограниченность области применения соотношений теории малых
упругопластических деформаций приводит к необходимости поисков
других реологических соотношений. В частности, необходимо
построить такие соотношения, которые работали бы в области больших
пластических деформаций при технологических процессах обработки
металлов давлением, расчетах предельных состояний оснований
сооружений, расчетах режимов резания. Вариант упомянутых
соотношений представляет теория пластического течения.
В теории течения предполагается, что состояние медленных
пластических течений сплошной среды определяется совокупностью
компонент тензора напряжений aik и другими
параметрами типа температуры или
характеристик предшествующих пластических
состояний. Шесть компонент тензора
напряжений можно геометрически представить-
вектором напряжений в шестимерном
пространстве напряжений. Если следить за
движением конца этого вектора в процессе из- О
менения напряжений от нулевых значений, то
получится траектория напряжений (рис. 59). '
При монотонном изменении нагрузки
состояния тела сначала будут упругими. Совсем не обязательно упругие
состояния описываются обобщенным законом Гука. Но при любом
способе описания диапазон упругих деформаций ограничен.
Ограничен и диапазон изменений напряжений, соответствующих упругим
деформациям. Эти ограничения можно представить себе как
непрерывную поверхность в пространстве напряжений (рис. 59), которая
делит пространство на две части. Если изображающая напряженное
состояние точка лежит по одну сторону этой поверхности, то
состояние упруго, если же изображающая точка оказалась по другую
сторону поверхности, то состояние будет упругопластическим.
Поэтому при монотонном увеличении внешних сил траектория
напряжений достигает некоторой точки в*, лежащей на предельной
поверхности.
В частности, если справедлив линейный закон Гука во всей
области упругих состояний изотропного тела, то предельной
поверхностью упругих состояний будет цилиндр Мизеса
К - <т22)2 + (а22 - <Тзз)2 + (азз - стц)2 + 6 (а?а + о*3 +
+ *2i) = 9т£. (4.7.1)
Эт° уравнение поверхности в- пространстве напряжений получается
Как подробная запись предельного условия упругих состояний гуков-
Ского материала т = хуу где ху — предел упругости по октаэдриче-
с*ому касательному напряжению.
Если отказаться от достаточно жесткого предположения о спра-
еАливости линейного закона Гука во всем диапазоне упругих сос-
127
тояний, то условия предельного состояния можно представить в об-
щем виде:
/(<%> ^22» <*зз, ^12» о'гз, <bi) = 0- / (4.7.2)
Уравнением (4.7.2) характеризуют предельное условие упругих
состояний или условие появления пластических деформаций — условие
пластичности. Выход изображающей напряженное состояние точки
на поверхность (4.7.2) означает появление возможностей
пластического деформирования окрестности рассматриваемой точки. В теории
пластического течения предполагается, что упругие и пластические
деформации аддитивны. Другими словами, соответствующие
компоненты деформаций складываются. Более того, часто упругие деформа-
ции опускают по сравнению с пластическими.
Пластические деформации в теории течения определяются
ассоциированным с условием пластичности законом. Вводится гипотеза
градиента л ьности, вектор приращений деформаций полагают
направленным перпендикулярно поверхности текучести (4.7.2), что
эквивалентно предположению о пропорциональности компонент
приращений деформаций и компонент вектора-градиента — частных
производных от левой части уравнений (4.7.2) по соответствующим
компонентам напряжений:
den = dXdf/dall9 ..., 2de13 = dldf/dols. (4.7.3)
Соотношения (4.7.3) называют ассоциированным законом
пластического течения, соответствующим условию пластичности (4.7.2).
Здесь dk — дифференциально малый множитель, механическое
значение которого устанавливается в связи с рассмотрением
элементарной работы внутренних сил на пластических деформациях. По
определению плотности работы напряжений имеем
dU = aikdeik.
Используя соотношения (4.7.3), получим
dU = pKaik -^- = die grad Д (4.7.4)
doik
На рис. 60 схематически показаны кусок поверхности текучести
и векторы, составляющие скалярное произведение в формуле (4.7.4).
Из этой формулы следует, что множитель dX пропорционален
плотности работы напряжений на пластических деформациях, причем
коэффициент пропорциональности отличен от нуля.
Определение приращений пластических деформаций через
производные функции f по соответствующим аргументам (4.7.3) служит
основой наименования f пластическим потенциалом.
Рассматривая функцию f как пластический потенциал, не
обязательно ограничиваться определением приращений пластических
деформаций в предельном упругопластическом состоянии. Можно иметь
в виду произвольное текущее упругопластическое состояние с
развитыми пластическими деформациями. Тогда поверхность (4.7.2)
именуется поверхностью пластичности либр поверхностью текучести
12S
Поверхность текучести или пластический потенциал определяется
экспериментально, согласуясь с некоторыми общими физическими
соображениями. Одним из общих требований к построению
пластического потенциала является критерий упрочнения,
сформулированный Друккером и состоящий в следующем.
Представим себе (рис. 61) некоторое напряженное состояние а*,
которому соответствует поверхность текучести S*. Поверхность
текучести делит пространство напряжений на две области: переход из
точки су* в область ее положительных значений сопровождается активной
пластической деформацией, приращением вектора пластической
деформации. Переход из конца вектора <х* в область отрицательных
значений соответствует разгрузке, следующей упругим законам;
Рис. 60
Рис. 61
пластическая деформация при этом неизменна. Рассмотрим теперь
состояние, определенное вектором о*, конец которого лежит в
положительной области; этому состоянию соответствует поверхность
текучести S. Постулатом Друккера утверждается неотрицательность
работы приращений напряжений на действительных приращениях
деформаций за цикл, когда состояние из точки <х* переходит по
некоторому пути в а, затем возвращается в <т*:
§(<*th — <ytk)deik >0.
(4.7.5)
Важное следствие'из этого постулата можно получить, полагая
замкнутый путь интегрирования состоящим из трех участков. На
участках А*А' и АА* деформация только упруга, а на участке А'А —
Упругопластическая: dsik = de($ +de(/?.
Вследствие обратимости упругих деформаций соответствующая
им часть в сумме (4.7.5) обращается в нуль и остается
(Л)
А очку А' можно считать в пределе совпадающей с Л, а состояния
° и or бесконечно близкими, поэтому левая часть предыдущего
неравенства сводится к скалярному произведению
daih . de{J) ^ 0.
Зак. 588
(4.7.6)
129
А это значит, что вектор приращения напряжений и ректор
приращения пластических деформаций образуют острый угол. Другими
словами, поверхность, представляющая пластический цотенциал, должна
^ быть выпукла в сторону активных пластических
деформаций, как показано на рис. 60 и 61.
Условие (4.7.6) называют иногда условием
устойчивости процесса пластических деформаций и
демонстрируют его в простейшем случае одноосного
растяжения образца. На рис. 62 показана диаграмма
растяжения образца. Переход от точки Л* в
состояние А сопровождается работой приращения
напряжения 0,5 dads.
С Работа положительна, когда напряжение
возрасте. 62 тает с ростом деформации. Этот процесс не
наблюдается после образования шейки на растягиваемом
образце, когда образующиеся дефекты материала приводят к
интенсивному росту деформации даже при понижении напряжений. Такой
процесс деформирования неустойчив.
§ 4.8. Примеры предельных поверхностей
и пластических потенциалов
Начнем с описания пластического течения изотропного тела. Если
упругие состояния во всем диапазоне деформаций описываются
обобщенным законом Гука, то предельной поверхностью, от которой
начинаются упругопластические деформации, будет цилиндр Мизеса,
уравнение которого совпадает с (4.7.1). Левая часть этого уравнения
может выполнять роль пластического потенциала не только в точках
предельной поверхности, но и в нетолстом слое пространства
напряжений, который примыкает с внешней стороны к предельной
поверхности. По мере удаления 6т предельной поверхности поверхность
равного потенциала может искажаться, отличаясь от цилиндра
посредством зависимости потециала не только от октаэдрического касательного
напряжения, но и от других инвариантов напряжений.
Кроме того, если обобщенный закон Гука справедлив лишь в
ограниченном диапазоне упругих деформаций, когда существует область
нелинейной упругости, предельная поверхность упругих состояний
будет отличаться' от цилиндра (4.7.1). Поэтому пластический
потенциал изотропного тела можно представить непрерывной однозначной
функцией трех инвариантов напряжений
f(ay т, Ф)-0. (4.8.1)
Выбор аргументов пластического потенциала иллюстрируется рис. 63.
Положение точки N в пространстве главных напряжений можно
определить числами а19 а2, а3, представляющими главные напряжения.
Вместе с тем введем направление OR, образующее одинаковые углы
с координатными осями. Отложим отрезок а вдоль OR. Из точки R
проведем луч, перпендикулярный OR в плоскости ROA^ Этот луч
следует повернуть на угол ср и вдоль получившегося направления
130
отложи'гь отрезок т, тогда попадем в точку N. Другими словами, tf,
х и ф представляют собой цилиндрические координаты точек в
пространстве напряжений. Ось этой цилиндрической системы совпадает
с направлением, образующим одинаковые углы с главными
направлениями напряжений. Начальная меридиональная плоскость совпадает
с одной из плоскостей, где лежат главные направления.
Поскольку зависимость от «р левой части уравнения (4.8.1) можно
реализовать только через инвариант cos Зср, поверхность (4.8.1),
должна быть симметричной относительно трех плоскостей меридианов,
содержащих глащше
направления. Свойства симметрии
предельной поверхности позволяют
сократить диапазон обследования
напряженных состояний. Достаточно
реализовать состояния в диапазоне
изменения ф от 0 до я/3, чтобы
затем восстановить остальные части
предельной поверхности по
свойствам симметрии. В опытах надо
реализовать крайние состояния по
фазе ф и одно — при промежуточ- Рис. 63
ных значениях.
Предельную поверхность (4.8.1) можно представить себе
посредством совмещения вращения некоторого меридиана и небольших
изменений конфигурации меридиана. Уравнение меридиана при
фиксированной фазе получается из (4.8.1):
/ (о, т, ф*) = 0. (4.8.2)
Наиболее простыми примерами предельных поверхностей являются
цилиндрические поверхности с образующими, параллельными оси
OR. Одним из таких примеров является поверхность цилиндра Мизеса,
уравнение которой (4.7.1) приводилось ранее.
Цилиндр Мизеса — выпуклая поверхность. Если левую часть (4.7.1)
принять за пластический потенциал, то по формулам (4.7.3)енайдем
соответствующие соотношения теории течения:
deih = Mk'(aih — 6iho). (4.8.3)
Так определенные приращения пластических деформаций не
сопровождаются изменением объема; сложением первых трех из равенств
(4.8.3) найдем
den + d&22 + de33 = d (Зе) = 0. (4.8.4)
Учитывая условие пластической несжимаемости, составим выражение
Работы формоизменения:
(otk — 8ih<*) d (elh—8ike) = Шу.
Здесь принято, кроме того, условие совпадения фаз напряжений и
Деформаций, поэтому формула (4.5.2) существенно упростилась.
5*
131
Если же левую часть последнего равенства вычислять по формуле
(4.8.3), то найдем /
fou = (dy)/xt (4.8.5)
где т — октаэдрическое касательное напряжение.
Отсюда следует, что системой равенств (4.8.4) утверждается
только равенство направляющих тензоров напряжений и приращений
деформаций. Для замыкания определяющих соотношений необходимо
добавить экспериментально определенную зависимость т от у.
Наряду с цилиндром Мизеса широкое распространение в
расчетной практике получило условие предельных значений экстремальных
касательных напряжений. Как показано в теории напряжений,
экстремальные значения касательных напряжений совпадают с
полуразностями главных напряжений, поэтому условия предельных состояний
принимают вид
0,5 (ак - ав) = ±ттах (ft, s = 1, 2, 3). (4.8.6)
Геометрически это условие, именуемое условием Треска—Сен-Вена-
на, представляется шестигранной призмой, вписанной или описанной
около цилиндра Мизеса. Значения констант ттах и ту в уравнениях
поверхностей (4.8.6) и (4.7.1) можно подобрать так, что эти
поверхности будут близкими.
Особый интерес представляет использование предельного условия
Треска—Сен-Венана, когда изображающая напряженное состояние
точка выходит на ребро призмы. В этом случае определенность
напряженного состояния повышается, а вектор приращения деформации
лежит внутри угла, который образуется двумя нормалями и гранями
призмы, примыкающими к ребру. Если предельным условием
пластичности Мизеса учитывается только влияние октаэдрического
касательного напряжения на формирование состояния, то условием
максимальных касательных напряжений учтено влияние фазового
инварианта — нарушена осевая симметрия предельной поверхности.
Приведем теперь и некоторые условия предельных состояний, в
которых сохраняется осевая симметрия, но учитывается зависимость
предельного состояния от гидростатического напряжения. Условие
Мизеса—Шлейхера представляется линейным соотношением между
величинами нормального и касательного октаэдр ического напряжений
ат+ ра = 1, (4.8.7)
где а, р — экспериментально определяемые константы. В
пространстве напряжений это уравнение представляется прямым круговым
конусом — двухполостной поверхностью.
По-видимому, не менее рационально представление предельной
поверхности параболоидом вращения
г2 + k2G = %2f (4 8#8)
где подчеркивается возможность предельных пластических состояний
при положительном гидростатическом напряжении — всестороннем
растяжении.
132
Константы k2 и xf, фигурирующие в этом условии, можно
определить из простейших экспериментов. Например, если при одноосном
растяжении образцов установлено предельное напряжение s+, то
по главным значениям тензора напряжений gx = s+, а2 = а3 = О
находим За = s+, Зт = ]^2s+ и подстановка в (4.8.8) приводит к одному
Из уравнений для определения констант k2 и ts
2 (s+)2 -f 3k2s+ = 9т!.
Напряжения при одноосном сжатии ог = а3 = 0, а2 = —s~ приводят
к значениям За = —s", Зт = l/"2s~, которые по подстановке в (4.8.7)
приводят ко второму уравнению
2(s~)2 — З/Аг = 9т".
Решение полученной системы 3k2 = 2 (s~ — s+), 9т| = 2s+s~
подчеркивает, что условие (4.8.7) реализуется, если предельное напряжение
сжатия по величине превышает предельное напряжение растяжения.
Если условие (4.8.8) принять в качестве поверхности текучести, а
функцию (4.8.8) — в качестве потенциала приращений деформаций, то
3deis = dX [2 (ai8 - 8iso) + 8isk2l (4.8.9)
На других вариантах соотношений теории течения здесь мы не
останавливаемся, хотя известны разнообразные предложения
построений предельных поверхностей, учитывающих упрочнение материала
с развитием пластических деформаций, изменения потенциальных
функций в процессе деформирования.
Имеются определенные предложения, учитывающие начальную
анизотропию материала, его неоднородность, влияние температуры на
поверхность текучести.
§ 4.9. Соотношения линейной теории вязкоупругости
Рассмотрим возможности построения соотношений между
напряжениями и деформациями, когда существенным становится учет
времени, отражение реономных свойств деформируемого тела.
Компоненты тензора деформаций (eik) в рассматриваемый момент времени t
накапливаются в результате действия внешних сил на тело в течение
Конечного промежутка времени от 0 до t Будем считать деформации
обусловленными только напряжениями am7l, изменяющимися в течение
этого времени от нулевых значений до заданных в рассматриваемой
точке тела. Предположим, что компоненты напряжений отп заданы
как функции времени
<Утп = отп(т;) (4.9.1)
в промежутке 0 ^ т ^ L
Требуется установить значения компонент деформации в момент
времени t. Процесс накопления деформаций вследствие меняющихся
Со временем напряжений будем считать линейным. Линейность
позволяет осуществить следующий подход к описанию процесса накопления
133
деформаций со временем. Разделим промежуток времени (0, t) точками
to = 0» ть т2> •••> т/1 == ^ на части тДт3 = ts — тв-1. В каждом из
частных промежутков времени будем считать компоненты тензора
напряжений постоянными oPq(xs). Реализация напряжений o^3(ts) в течение
промежутка времени Ats вызывает деформирование окрестности точки
Де^, которое проявляется в момент времени /. Компоненты
деформации Asik(t)t вызванные действием напряжений в предшествующий
промежуток времени Ats, считаются линейными функциями
напряжений opq(xs)y пропорциональными времени Axs:
teikV) = Kikpq{ty xs) apq(xs) Ats. (4.9.2)
Коэффициенты податливости считаются зависящими как от времени
t% так и от времени xs действия напряжений. Эту зависимость следует
определить экспериментально. Однако экспериментам должен
предшествовать тщательный теоретический анализ возможных форм
зависимостей Kihpq от их аргументов.
Как демонстрировалось ранее, при формулировке законов
линейной упругости изотропного тела, предположение о линейной
зависимости компонент тензоров напряжений и деформаций" эквивалентно
предположению о линейной зависимости первых инвариантов этих
тензоров и пропорциональности девиаторов. Поэтому соотношения
(4.9.2) для изотропного тела можно записать в эквивалентной форме:
&es(t) = K0(t, т,).а(та) Ats,
Дел — 6jftAes = /Сф(/, тв) laik(xa) — 8ikG (xs)] Axs.
Здесь K0 — податливость при изменении объема, а /Сф —
податливость при формоизменении.
Таким образом, вместо 36 функций податливости остается для
экспериментального определения лишь две, когда речь идет о линейной
деформируемости изотропного тела.
Линейность процесса накопления деформаций позволяет
суммировать частичные деформации, полагая
е (0 = 2 Aes, Eih -8ike=% (Де?л-6,л Де«).
s=l s=l
Увеличение числа разбиений промежутка времени с равномерным
уменьшением интервалов разбиения приводит к интегральным
представлениям деформаций
t
e(t)=[K0(t,x)o(x)dx, (4.9.3)
t
Zih-bik е = $Кф (t, x) [oih (x)- 8ik о (т)] dx, (4.9.4)
где K0(t, x) и /Сф(/, т) — функции податливости изотропного
материала при изменении объема и формоизменении. Эти функции
определяются экспериментально.
134
Податливости можно истолковать еще и как функции влияния:
этими функциями определяется вклад напряжений, реализованных
в момент времени т, в процессе формирования деформаций,
наблюдаемых в момент времени /.
Соотношениями (4.9.3) и (4.9.4) деформации в рассматриваемый
момент времени представлены функционалами, они содержат
интегральные операторы, в которых существенную роль играют функции двух
аргументов К0(х, t) и /Сф(т, f), именуемые ядрами. Таким образом,
проблема выяснения соотношений между напряжениями и
деформациями изотропного тела, обладающего «памятью», сводится к
установлению вида ядра объемной деформации К0(х> О и яДРа
формоизменения Кф(ъ, t); Заметим, что К0(х> 0 называется еще ядром
объемной ползучести, а /Сф(т, /) —ядром сдвиговой
ползучести.
Если во всех предыдущих рассуждениях поменять ролями тензоры
напряжений и деформаций, то можно составить выражения
напряжений через функции влияния:
t
a(t)=\T0(ttx)e(x)dxJ (4.9.5)
oik (t)-8ik о (t) = j Гф(t, т) (eik~6ih e) dx, (4.9.6)
о
При этом Г0 называется ядром объемной
релаксации, аГф — ядром сдвиговой релаксации.
По-видимому, ядра ползучести и релаксации связаны друг с другом..
Эту связь можно получить, подставляя, например, представление
напряжений (4.9.5) в правую часть (4.9.3). Изменяя обозначение
некоторых из переменных, найдем
e(0 = j ^о(^) §T0(x,u)e(u)du \dx.
Изменив порядок интегрирования по формуле Дирихле, найдем
*"(/) = J П ЯоС *)Г0(т, u)dx\e(u)du.
О |_и J
С другой стороны, используем свойства б-функции Дирака:
t
* (0 = \ 8 (*~и) е (и) du- (4.9.7)
о
Сравнив последние две формулы, получим искомое соотношение между
ядрами ползучести и релаксации:
t
j К0 (/, т) Г0(т, u)dx=S(t — и). (4.9.8)
и
135
Напомним определение 6-функции Дирака:
(оо ПрИ f = 0, '
в
причем Г 6 (0 <#= 1 при е > О,
— 8
и свойства функции Дирака для любой непрерывной функции / (/):
f/Wep-^Xh-l'f ПР"^'>; (4.9.10»
J I 0 при *>&, t<a,
откуда следует соотношение (4.9.7).
Соотношение (4.9.8) между ядрами ползучести и релаксации
свидетельствует о необходимости сингулярной особенности каждого
из ядер. Наличие б-особенностей ядер отражает свойство мгновенной
реакции материала на воздействия с очень большими скоростями. Это
свойство отражает упругость материала. Свойство упругости
содержится в соотношениях (4.9.3), (4.9.4) либо (4.9.5), (4.9.6) и
получается, если выбрать ядра в виде
Г0=.3/Сб(*-т),
Гф = 20б(г-т), (4.9.11)
где К — модуль объемной упругости, G — модуль сдвига изотропного
тела.
Подставляя (4.9.10) в (4.9.5), (4.9.6), а также используя свойство
(4.9.7), получаем законы упругости:
а = ЗКе, aik — 8ika = 2G (eik — 8ike). (4.9.12)
Чтобы выделить в ядрах сингулярные особенности, следует
положить для вязкоупругих состояний
Г0(*. т) = 3*6(*-г)-Т(*. т);
K0(t, т) = (З/О^б (t - т) +~К (t, т); (4.9.13)
Гф(*. т) = 2(й(*-т)-Г(<, т);
*ф(*. т) = (2G)-*e (t - т) + К (t, т), (4.9.14)
где Г, 7(, Г, К — регулярные части ядер, удовлетворяющие
следующим из (4.9.8) условиям:
t
[К (t, т)Г(т, u)dx+ —T(t,u) = 2GK(t,u); (4.9.15)
J 2G
и
t
J
K(t, т) Г (т, u) dT + J-T(t, и) = 3KK (t, u). (4.9.16)
Зд
136
Теперь конституционные соотношения вязкоупругого состояния тела
можно представить в форме, разрешенной относительно напряжений:
t
а = ЗКе— f f (t,T)e(%)d%;
о
t
oik - 6ift е = 2G (eih~6ih е) J -Т (/,т) (е;й-бгй в) Л, (4.9.17)
О
либо в форме, разрешенной относительно деформаций:
t
e = j^G+^K(t9 т)а(т)Л,
о
t
Zih-6ike = ^(oik~8iko)+^K(t,T)(oik^6iko)dT. (4.9.18)
о
Остается установить экспериментально вид ядер релаксации или. ядер
ползучести, связанных уравнением (4.9.16).
Ограничиваясь рассмотрением ядер разностного типа,
инвариантных по отношению к началу отсчета времени, положим:
^(/,т) = Щ(<—тг), T(t,%)=—Rl(t—T)\
К (*, т) = П' (f-т), Г (/, т) = —R' (t—т). (4.9.19)
Проводя опыты на кручение тонкостенной трубы, можно
экспериментально установить зависимость отличных от нуля составляющих
напряжении а12 и деформаций е12 от времени.
С другой стороны, из второго соотношения (4.9.18) с учетом
обозначений (4.9.19) находим
t
612 = — 042 + Г П' (t — Т) аХ2 W dX
о
и после интегрирования по частям имеем
t
e12 = jn(^-T)da12(T), (4.9.20)
о
если'П. (0) = 1/2 G, а12(0) = 0.
Можно осуществить режим ползучести образца, прикладывая к нему
постоянное напряжение о\2- Аналитически такое напряжение можно
записать в форме
ст12 = o°l2h (0, (4.9.21)
гДе h (t) — единичная функция Хависайда:
МО- f «<*>*- (JT£n (4'9-22)
Л, 10 при *<0,
137
производная которой равна б-функции Дирака, причем ;
t
§f(t,x)6(T)d%=f(t9Q)h(t).
о
Используя представление (4.9.21) в (4.9.20), находим
t i
е12 = oh f П (t—т) h! (т) dx = o°l2 Г П (t—x) 6 (т) Л? *=аЬ П (t) h{t).
о о
Таким образом, для t > 0 можно считать
вц(0/а?2- = П (t). (4.9.23)
Другими словами, если построить экспериментальную кривую
ползучести 812(t) и отнести ординаты ее к заданному напряжению а?2,
при котором наблюдается ползучесть, то получим кривую, не
зависящую от напряжения. Проводя опыты на ползучесть при разных
уровнях напряжений, можно установить диапазон изменения времени,
в котором реализуется такая универсальная зависимость
приведенной деформации ползучести от времени. В этом диапазоне
изменения времени свойства материала можно считать линейными.
Если реализованы опыты на релаксацию напряжений при
заданном режиме изменения деформаций
е12 = е?2 й(0
то можно найти по измеряемым напряжениям ст12(/):
R (t) = a12(0/e?2. (4.9.24)
Аналогично строятся программы опытов по изучению ядер объемной
деформации. При этом следует учесть отмеченные ранее особенности
обработки опытных данных, связанные с различными скоростями
достижения заданных уровней напряжений при ползучести и
деформаций при релаксации.
Располагая ядрами ползучести и релаксации, включая и модули
упругости, соотношения (4.9.17) или (4.9.18) можно считать
конституционными соотношениями линейной теории вязкоупругости и
использовать их при математической постановке задач.
§ 4.10. Ассоциированный закон ползучести
Процесс установившейся ползучести, происходящий при
неизменных скоростях, если компоненты напряжений неизменны, можно
описать достаточно простыми соотношениями ассоциированного закона
ползучести, подобного ассоциированному закону пластического
течения. Вводится в рассмотрение мощность рассеяния энергии
L = OifiUf (4.10.1)
138
которая считается экспериментально определяемой функцией
компонент тензора напряжений.
Гипотеза градиентальности состоит в определении скоростей
ползучести через вектор-градиент поверхности одинакового рассеяния
энергии:
*u = b(Omn)dL/dou. (4.10.2)
Если оказываются справедливыми равенства
& (OmnW/doj, = дФ/дои,
то говорят о существовании потенциала скоростей ползучести
ви = дФ/дои. (4.10.3)
При существовании потенциала скоростей ползучести можно
определить дополнительное рассеяние U = а^-е^ — Ф, которое
представляется функцией компонент скоростей ползучести и служит потенциалом
напряжений
ои='ди/дёи. (4.10.4)
Потенциал скоростей ползучести Ф изотропного тела следует
считать функцией инвариантов напряжений. Эта функция должна
удовлетворять некоторым общим физическим условиям. Требуют,
например, чтобы при переходе точки тела из одного состояния а* в соседнее
а, с большим значением мощности рассеяния энергии, дополнительная
работа была положительной:
(oi, — Oi))BU>0,
что приводит к необходимой выпуклости поверхностей U = const
в каждой сточке.
Часто игнорируют зависимость Ф от третьего инварианта девиа-
тора напряжений, что упрощает представление потенциала: дело
сводится к поверхности вращения с осью, образующей одинаковые углы
с главными направлениями напряжений.
Наиболее простой вариант теории установившейся ползучести
получается, если Ф пропорционален второму инварианту девиатора
напряжений.
Вообще построение потенциальных поверхностей в теории
установившейся ползучести, использующей ассоциированный закон (4.10.3)
можно проводить подобно построению потенциала в теории
пластического течения. Здесь практически целесообразным оказывается
использование квадратичных форм и инвариантов групп
преобразований симметрии рассматриваемой анизотропной среды.
Подробности экспериментальных и теоретических исследований
этого направления содержатся в специальной литературе.
139
§ 4.11. Влияние изменений температуры ,
на деформируемое тело
Предположим, что в теле происходят изменения' температуры по
по сравнению с начальным состоянием так, что эти изменения
характеризуются функцией Т координат точек тела и времени.
Простейший вариант учета влияния температуры основан на предположении
о независимости действия внешних сил и температуры. Эффекты
влияния температуры сводятся к всестороннему растяжению или сжатию
окрестности каждой точки изотропного тела. Относительная объемная
температурная деформация считается обратимой и
пропорциональной температуре:
ei = ei = ei = orf, (4.11.1)
где а — коэффициент линейного температурного расширения.
Температурное изменение объема добавляется к силовому
изменению объема, а на изменение формы температура в таком представлении
не влияет. Поэтому конституционные соотношения линейно упругого
тела с учетом влияния заданного распределения температуры
принимают форму
еи = £-%!! — v (<г22 + <г38)] + аТ> •••>
е12 = £"1(1 +v)or12. (4.11.2)
Соотношения термоупругости (4.11.2) можно разрешить
относительно напряжений:
а11 = 20Гб11 + ^^^(е11 + 822 + е3з)1~^-^аГ,...,
olu = 2Gel2. (4.11.3)
До сих пор мы считали упругие характеристики материала
постоянными, не изменяющимися с температурой. Это предположение
справедливо, пока не обнаруживается значительных перепадов температуры
в теле. При наличии таковых необходимо учитывать зависимость
Е, G, v, а от температуры.
В деформационной теории пластичности принимается закон упругой
объемной деформации, который с учетом влияния температуры можно
получить из (4.11.2):
е = £-i(l — 2v) а + аТ, (4.11.4)
а соотношения подобия девиаторов напряжений и деформаций
сохраняются:
<** —6*сг = —т(*)(е<Л— bihe). (4.11.5)
9
Из (4.11.5) с учетом (4.11.4) можно получить соотношения
термопластичности как в форме, разрешенной относительно напряжений,
так и в форме разрешенной относительно компонент деформации.
Уравнения теории пластического течения с учетом влияния
температуры можно построить либо использованием соотношения (4.11.4)
140
в дифференциальной форме, либо введением температурной
зависимости непосредственно в потенциал скоростей пластических
деформаций. При этом необходимо выяснить экспериментально зависимость
поверхности предельных состояний от температуры.
Построение конституционных соотношений термовязкоупругости
проводится как с использовнием закона (4.11.4), так и прямым
введением температурной зависимости в ядро релаксации и ползучести.
Здесь первостепенное значение имеет температурно-временная
аналогия, позволяющая изменением масштаба времени добиться учета
изменений температуры.
§ 4.12. Условия предельных состояний
при статических нагрузках
Обсуждая разнообразные соотношения между напряжениями и
деформациями в упругом, упругопластическом, упруговязкопластическом
и др. состояниях тела, мы собираемся дать математическую постановку
задач механики деформируемого твердого тела, указать некоторые
способы решения этих задач.« Результатом решения таких задач
оказывается определенная зависимость перемещений, деформаций,
напряжений от параметров внешних воздействий и координат точек
рассматриваемого" тела.
С другой стороны, располагаем экспериментальными данными
механических свойств материалов, полученными, как правило, в опытах
по одноосному растяжению образцов. В этих испытаниях
устанавливаются предел упругости ау по напряжениям, предел
пропорциональности сгпц, предел текучести сгт или а02, предел прочности ав,
предельное относительное удлинение еп при пластической деформации,
предельное сужение ty и получаются стандартные кривые ползучести и
релаксации.
Возникает вопрос: как по полученным расчетным путем
напряжениям и деформациям судить о расчетных состояниях в разных точках
тела при сложном напряженном состоянии, опираясь на
экспериментальные данные при одноосном растяжении образцов или другие
реализуемые экспериментальные данные. Ответ на этот вопрос дают
условия предельных состояний, представляющие собой количественную
формулировку условий перехода материала из одного состояния
в Другое. Об условиях перехода из упругого состояния в пластические
упоминалось ранее. Здесь еще раз остановимся на этих условиях и
сформулируем условия прочности, укажем условия конструктивной
эффективности материала при статических нагрузках. Динамические
воздействия и циклически меняющиеся нагрузки требуют особого
рассмотрения.
Для изотропного тела условия предельных состояний в
напряжениях должны в качестве аргументов содержать только инвариантные
характеристики напряжений. Поэтому такие условия можно представить
неравенствами вида
f (ст, т, <р)<0. (4.12.1)
141
Геометрически предельную поверхость (4.12,1) можнсУ строить
в цилиндрической системе координат, где а — ось, т — расстояние
точки до оси, ф — полярный угол. Ось Оо одинаково наклонена к осям
главных напряжений в пространстве напряжений.
На рис. 64 показаны взаимное расположение осей главных
напряжений и значение координат введенной^ цилиндрической системы.
Поскольку зависимость от угла ф входит в (4.12.1) только посредством
cos Зф, легко установить
симметрию искомой поверхности
относительно ф = 0, а также симметрию
относительно ф = 2я/3 и ф = 4я/3
вследствие произвола
наименования главных напряжений.
Образование поверхности (4.12.1)
можно представить себе вращением
некоторого меридиана,
конфигурация которого определяется углом
ф. Из условий симметрии ясно,
что достаточнее построить эту
поверхность в диапазоне изменения
угла.ф от 0 до я/3. Более того,
зависимость деформации меридиана
вместе с поворотом вокруг оси Оо
должна удовлетворять условию
выпуклости предельной
поверхности, что очень ограничивает
деформацию меридиана. Эти
качественные соображения позволяют приближенно не считаться с
зависимостью предельной поверхности от ф, полагая вместо (4.12.1)
Рис. 64
f (or, т) < О,
(4.12.2)
хотя и существуют примеры учета зависимости условии предельных
состояний от ф.
Таким примером является условие Сен-Венана—Треска
*тах<0,5 <7у.
(4.12.3)
Если в правой части этого условия содержится предел упругости,
то условие (4.12.3) считается условием упругого состояния. Условие
(4.12.3) можно записать цепочкой неравенств:
ох—о2 < ±(ту, о2—о3 < ±огу, о3 — о± < ±ау,
и в пространстве напряжений оно представляется совокупностью
внутренних точек шестигранной призмы, ось которой совпадает с осью
Оо. Пересечение этой призмы плоскостью о = 0 показано на рис. 65.
Это условие привлекает не только простотой представления, но и
удовлетворительным соответствием экспериментальным данным.
Неудобство этого условия связано с необходимостью вычислять главные
142
напряжения, что не всегда достаточно просто. В этом отношении
удобнее условие Мизеса
Зт< }/2(7у, (4.12.4)
которое представляется внутренними точками цилиндра, описанного
вокруг призмы Треска. Расписывая т через компоненты напряжений
в произвольных осях, получим
широко используемое условие упругих
состояний. В этом условии не
учитывается влияние на предельное
состояние гидростатического
напряжения и угла вида напряженного
состояния. Поэтому условие (4.i2.4), *
как и приближенное его представле- ?
ние (4.12.3), справедливо, когда прием- ^Г
лемы условия применения теории
малых упругопластических деформаций..
Заметим, что замена ау в (4.12.4)
или (4.12.3) величиной сгв приводит
к соответственным условиям
пластического состояния без разрушения Рис. 65
материала или условиям прочности.
Практически условия прочности используются в форме
£3т < 1/2ав, (4.12.5)
где k > 1 — коэффициент запаса прочности. t
Условие Мизеса применимо, когда роль гидростатического
напряжения незначительна. Это относится к пластическим материалам,
свойства которых при растяжении и одноосном сжатии практически
не отличаются.
Иначе обстоит дело, когда испытываются хрупкие материалы.
Для хрупких материалов можно использовать разнообразные
модификации условия (4.12.2). Для ознакомления с различными
классическими теориями и условиями прочности рекомендуем читателю
любой курс сопротивления материалов.
Часть вторая
ПОСТАНОВКА ЗАДАЧ
И МЕТОДЫ РЕШЕНИЯ
Глава V
УПРУГИЕ СОСТОЯНИЯ СТЕРЖНЕЙ
§5.1. Растяжение стержней и стержневых систем
Начнем с простейшего случая. Представим себе достаточно
длинный однородный стержень, который подвергается действию
растягивающих сил. Стержень считается однородным и настолько длинным,
что состояния в разных поперечных сечениях стержня можно считать
одинаковыми. Поэтому можно взять любое сечение стержня и условия
равновесия каждой из выделенных частей стержня привести к
равенству внутренних S и внешних Р сил.
Внутреннюю силу S можно связать с нормальными напряжениями
а и площадью F поперечного сечения. Предполагая напряжения
равномерно распределенными по площади поперечного сечения, найдем
S = oF.
Наконец, напряжения а связаны с относительными удлинениями
8 экспериментально определенным законом о = о (&). Если материал*
считать линейно упругим и принять закон Гука
а = £е, (5.1.1)
то механическая характеристика стержня — соотношение между
силой и относительным удлинением —Р = EF&. Если использовать
определение деформации
е = А///,
где / — начальная длина стержня; А/ — удлинение при действии силы
Р, то легко установить соотношение между силой и удлинением
линейно деформируемого стержня
Pl = EFJ. (5.1.2)
Конфигурация поперечного сечения произвольна.
Механическую характеристику стержня (5.1.2) как элемента
конструкции можно получить, заменив характеристику линейных свойств
(5.1.1) любой нелинейной характеристикой. Соответственно изменится
и характеристика, конструкций.
Рассмотрим теперь неоднородный стержень. Пусть поперечное
сечение стержня составлено из двух частей с различными механическими
свойствами. Например, в стальную трубу вставлен медный стержень,
144
по торцам стержень и труба жестко скреплены. Нетрудно видеть,
что при линейных механических свойствах каждого из материалов
получается характеристика механических свойств элемента
конструкции вида
Vy P = (E1F1 + E2F2)et (5.1.3)
где Еъ Е* ~ м°ДУли продольной упругости материала, a Fl9 F2 —
площади поперечных сечений каждого из элементов составного
стержня.
Если характеристики составляющих материалов нелинейны:
то и характеристика элемента конструкции нелинейна: Р = FJ^s) +
+ FJ2(b).
В составных элементах конструкций часто управляют напряжениями,
создавая предварительно напряженные элементы конструкций.
Например, представим себе, что составленный из трубы и сердечника
стержень деформируется в два этапа. На первом этапе сердечник
получает относительную деформацию растяжения е* посредством
приложения растягивающей силы
Р = ВДв*,
где E1nF1 — модуль Юнга и площадь поперечного сечения сердечника.
После этого торцы трубы и сердечника скрепляют, поддерживающая
сердечник б растянутом состоянии сила снимается. Сердечник и
труба сжимаются, получая деформацию (—е**). Сжимающая трубу
сила E2F2(—е**) и оставшаяся в сердечнике растягивающая сила
Р + £i/7i(—s**) компенсируются, уравновешивают одна другую,
поэтому имеем равенство Р + ЕгРг(—е**) + E2F2(—е**) = 0.
Отсюда получается соотношение между суммарной деформацией сердечника
ei ~ ej — 8** и деформацией трубы е2 = —е*
ВДвх + E2F2&2 = 0. (5.1.4)
Предположим, что на предварительно напряженную составную
конструкцию сердечника трубы действует сила Q, которая воспринимается
стержнем в упругом состоянии, поэтому дополнительная деформация
связана с силой формулой
в(ВД + ВД) = Q. (5.1.5)
Предположим, что требуется подобрать силу Р так, чтобы труба при
Действии силы Q была в недеформированном состоянии, если,
например, ElF± = 0,5 E2F2 = EF.
^3 (5.1.5) найдем дополнительную деформацию е = Q/(3EF), которая
Должна компенсировать начальную деформацию трубы (—е**),
поэтому е = е**.
Обратившись к (5.1.4), находим Р = 3EFe = Q, что
подтверждается интуитивными соображениями: если труба не напряжена, то сила
V воспринимается только сердечником," который надо предварительно
145
растянуть, чтобы компенсировать деформации, вызванные действием
силы Q. /
Расчет механической характеристики составного стержня,
воспринимающего растягивающую силу Р> не усложняется существенно,
если поперечное сечение формируется из п различных однородных
стержней. В этом случае можно показать, что при упругом состоянии
всех элементов сила связана с относительным удлинением формулой
(ВД + E2F2 + ... + EnFn) в - P. (5.1.6)
В случае кусочной неоднородности стержня по длине каждый из
участков стержня можно рассматривать в первом приближении как
отдельный стержень. В этом случае приведенные выше формулы отражают
действительность только в сечениях, удаленных от мест сопряжений
отдельных участков стержня. Около мест сопряжений распределение
напряжений и деформаций не будет одномерным, в каждом конкретном
случае сопряжения оно должно исследоваться особо. В первом
приближении деформация на каждом участке стержня вычисляется
по формуле EkFhsk = Р.
Наконец, если стержень имеет монотонно меняющееся вдоль оси
сечение F = F (х)у то напряжения в каждом сечении а = PIF (х)
непрерывно изменяются с изменением координаты х.
Если продольная сила, действующая вдоль оси стержня, оказывается
сжимающей, то к расчетам по приведенным выше формулам следует
относиться с большей осторожностью. Найденные напряжения могут
не гарантировать надежной работы элемента конструкций
вследствие выпучивания оси стержня. Состояние стержня при сжатии может
оказаться неустойчивым: ось стержня получает самопроизвольно
поперечные перемещения, существенно изменяется распределение
напряжений по сечению, напряженное состояние становится существенно
неоднородным. Анализ устойчивости сжатых упругих стержней будем
рассматривать особо.
Наконец, если линия действия растягивающей или сжимающей
силы отличается от линии центров тяжести поперечного сечения, то
приведенные выше расчетные рекомендации теряют свое значение:
необходимо учитывать дополнительно эффекты изгиба оси стержня.
§ 5.2. Чистый изгиб стержня с прямой осью
Представим себе (рис. 66) стержень с прямой осью произвольного
поперечного сечения, на торцах которого действуют системы сил,
приводящиеся к парам с моментами М. Геометрическое место центров
тяжести поперечных сечений стержня называется осью стержня.
Из условий равновесия любой части стержня, ограниченной торцом
стержня и поперечным сечением, следует, что в поперечных сечениях
развиваются напряжения, сводящиеся к парам с моментами Л4.
Направления вектор-моментов внутренних сил в поперечных сечениях
нетрудно установить, обратившись к условиям равновесия части
стержня, ограниченной торцом стержня и рассматриваемым сечением.
146
Произвольно направленные векторы торцовых внешних моментов
сил можно представить разложенными по двум направлениям, одно
из которых совпадает с осевым, а второе направление лежит в
торцовых плоскостях. Действие на стержень осевых моментов связано с
кручением и рассматривается позднее. Здесь же рассмотрим эффекты
действия так называемых изгибающих моментов, векторы которых
лежат в торцовых плоскостях стержня. На рис, 67 представлена
часть стержня,
выделенная произвольным
поперечным сечением. Из
условий равновесия этой части
определяем величину М и
направление изгибающего
момента, к которому
приводятся напряжения в
поперечном сечении.
Займемся теперь
композицией представлений о
напряжениях в
поперечных сечениях стержня
при действий на него
изгибающих моментов. На
рис. 67 показаны сечения
стержня и направление
изгибающего момента в
этом сечении. С этим направлением свяжем выбор координатной
системы. Предположим, что- система напряжений в поперечном сечении
такова, что отличными от нуля оказываются лишь нормальные
напряжения
Он = s (л:3), о22 = с>зз = о12 = а23 = <т13 = 0. (5.2.1)
Если массовые силы отсутствуют, то эта система напряжений
удовлетворяет уравнениям равновесия в ^напряжениях (2.7.1). Остается
потребовать, чтобы главный вектор всех напряжений в поперечном
сечении был нулем:
Рис. 66
Л+)
j onb(x3)dx3=0,
(5.2.2)
*<->
а главный момент напряжений сводится к величине М:
Г 011 b (х3)х3 dx3 = М.
(5.2.3)
Х\Г>
Интегралы (5.2.2) формируются как суммы усилий, действующих
На элементарные полоски площадью Ь (х3) dx3. Здесь Ь (х3) — размер
поперечного сечения в рассматриваемой точке сечения в направлении
Действия вектор-момента в предположении о зависимости напряжения
147
только от координаты х3. Интегралы (5.2.3) формируются как суммы
моментов усилий, действующих на выделенные полоски. Через х(ь~)
и хЬ+у обозначены координаты «самой нижней» и «самой верхней» точек
поперечного сечения.
Дальнейшую информацию о распределении напряжений можно
получить, рассматривая деформации стержня при изгибе парами и
соотношения между напряжениями и деформациями.
На рис. 68 представлена часть продольного сеченця стержня
плоскостью, параллельной ОххХЗУ протяженностью dxx в начальном и
деформированном состояниях.
Верхние продольные волокна стержня растягиваются, нижние
сжимаются. Волокно, не изменяющее длины при изгибе стержня,
Рис. 67 Рис. 68
называется нейтральным. Радиус кривизны нейтрального
волокна обозначим р. Координатную систему Охгх%хъ можно выбрать так,
чтобы ордината нейтрального слоя — совокупности нейтральных
волокон — была нулевой. Относительные удлинения продольных
волокон можно теперь определить непосредственным сравнением длин
материальных волокон в деформированном и начальном состояниях:
8и = t(P + *з) ^Ф — dXiVdXi.
Заметим, что вследствие недеформируемости нейтрального волокна
&хх = pdcp, поэтому относительные удлинения волокон вычисляются
по формуле
еи = Хз/р. (5.2.4)
Вывод этой формулы опирался на предположение о сохранении
материальных поперечных сечений стержня плоскими. Правда, это
предположение не вызывает сомнений из-за неизменности, однородности
состояний стержня при чистом изгибе: состояние стержня не изменяется
при переходе от одного поперечного сечения к другому вдоль оси Охг.
Обратимся теперь к соотношениям между напряжениями и дефор-
148
мадиями. Принимая закон линейной упругости, находим
распределение напряжений по сечению:
огц =£ец = Е — х3. (5.2.5)
Р
Условие (5.2.2) с использованием (5.2.5) приводит к необходимости
считать координату х% центра тяжести поперечного сечения стержня
нулевой:
4+)
J 'x3b(x3)dx3 = Fx<i = 0.
Другими словами, ось Ох2 координатной системы должна быть
центральной осью поперечного сечения — проходить через центр тяжести
сечения. Условие равновесия (5.2.3) приводит вместе с (5.2.5) к
соотношению между изгибающим моментом М, кривизной 1/р и изгибной
жесткостью стержня EJ22:
М = EJ22Vp. (5.2.6)
Здесь J22 представляет собой момент инерции площади поперечного
сечения относительно центральной оси, параллельной направлению
вектора изгибающего момента,
*з+)
J22- { b{x3)xldx3. * (5.2.7)
Наличие момента только в плоскости Ох±х3 приводит к равенству
[ onx2dF = 0 или \x3x2dF = J23 = 0. Центральный момент инер-
(F) (F)
ции J23 = 0 в том случае, когда Ох2, Ох3 — главные оси инерции
сечения, а плоскости Охгх3у Оххх2 — главные плоскости стержня.
Произведение модуля упругости Е и момента инерции
поперечного сечения стержня называется изгибной жесткостью
стержня
Сизг = £/„. (5.2.8)
Вычисляя кривизну оси стержня при изгибе с помощью формул
(5.2.6) и (5.2.8) через изгибающий момент и жесткость стержня, с
помощью формулы (5.2.5) можно установить распределение напряжений
по сечению:
ап = (M/J22) х3. (5.2.9)
В частности, по формуле (5.2.9) можно найти максимальное
напряжение в сечении. Нормальное напряжение достигает максимального по
абсолютной величине значения в наиболее удаленных от нейтральной
оси точках:
а"» = М \x3\m4J22.
Заметим, что величина
W = /22/U3lraax (5.2.10)
149
называется моментом сопротивления речения при
изгибе. Поэтому максимальное напряжение при изгибе стержня с прямой
осью торцовыми парами сил вычисляется как отнршение^изгибающего
момента к моменту сопротивления, если только стержень однороден и
деформируется в согласии с линейным законом упругости.
Наконец, отметим возможность
представления свойств упругости изгибаемых стержней
посредством соотношения между изгибающим
моментом и углом ф взаимного поворота
торцовых сечений стержня длиной /,
поскольку в этом случае рф = / и из формулы (5.2.6)
следует
Ml = £/22ф. (5.2.11)
Формирование распределения
напряжений при чистом изгибе составного стержня,
Рис 69 (рис. 69), имеющего неоднородное поперечное
сечение, проводится также на основе
интегральных условий равновесия (5.2.2) и (5.2.3).
Располагая направлением вектора изгибающего момента (рис. 69),
совместим ось Ох2 с этим направлением, ось Охг направляем
перпендикулярно сечению. Положение оси 0х2 в сечении определяется
соотношением
Гаи (х2, x3)dx2dx3 = 0t
(F)
г
)"■■
Рис. 70
где интегрирование распространяется на всю площадь поперечного
сечения. После этого можно найти изгибающий момент
М
= Jan (*2, x3)x3dx2dx3,
(F)
интегрирование при этом проводится по всей площади сечения. Пусть,
например, балка прямоугольного поперечного сечения высотой h и
шириной Ь (рис. 70) из материала с модулем упругости Е усилена слоем
материала с модулем упругости Еа и площадью поперечного сечения
Fa. Тогда для вычисления ординаты нейтрального слоя имеем условие
0,5Л
oaFa + bE— J (x8-*S)dx8 = 0,
-0,5Л
150
где х°з — ордината нейтрального слой, а напряжения в арматуре
вычисляются по формуле
аа - Ea(0,5h — 4)/р.
Поэтому ординату нейтрального слоя вычисляем по формуле
4 = 0y5hEaFa/(bhE + EaFa).
Независимо от ординаты нейтрального слоя находим изгибающий
момент:
Отсюда видно увеличение изгибной жесткости балки за счет
армирования:
3FaEa
C*£ = ±bh*E[l +
bhE + FaEa
Если, в частности, жесткость арматуры на растяжение составляет
половину жесткости на растяжение основного стержня, то изгибная
жесткость стержня увеличивается в два раза.
§ 5.3. Изгиб стержней поперечными нагрузками
Поперечные нагрузки, которые могут быть приложены к стержню,
весьма разнообразны. Вместе с тем система поперечных нагрузок
не может сводиться к одной силе, так как упомянутая система
предполагается самоуравновешенной. Самоуравновешённая система двух
поперечных сил, показанная на рис. 71, предполагает наличие одной
линии действия и изгиба оси стержня не
производит. Эффекты действия такого типа со- а
средоточенных сил будут обсуждаться
позднее. Здесь же рассмотрим только такие
уравновешенные системы сил, которые вызывают
изгиб оси стержня. Заметим, что стержни,
оси которых могут изгибаться под действием
поперечных нагрузок, называют балками.
Поэтому считаем допустимой путаницу
терминов «изгибаемый стержень» и «балка». IP
На рис. 72 представлена другая простая
система поперечных сил Р1у Р2, Рз> которую рис. 71
можно считать самоуравновешенной и
вызывающей изгиб' оси балки.
Система внешних сил, представленная на рис. 72, отличается
°т системы сил на рис. 71 тем, что в случае рис. 72 имеются участки
оси балки, где отличны от нуля изгибающие моменты, изгибаемые
Участки оси балки. Изгибающий момент в некотором сечении балки
или в точке оси балки вычисляется как сумма моментов относительно
Рассматриваемой точки оси всех внешних сил, действующих на балку
слева либо справа от рассматриваемого сечения балки. Из условий
151
равновесия любой части балки, слева или справа от рассматриваемого
сечения, следует, что изгибающий момент в сечении балки-
вычисляется и как сумма моментов всех внутренних сил в рассматриваемом
сечении. Точнее говоря, изгибающий момент в сечении балки
представляет собой некоторую характеристику распределения
нормальных напряжений в сечении балки, так как касательные напряжения
в поперечном сечении балки не участвуют в формировании
изгибающего момента.
Суммарной характеристикой распределения касательных
напряжений в поперечном сечении балки является перерезывающая сила —
главный вектор всех поперечных сил слева или справа от
рассматриваемого сечения.
Ь
итт^тглЫ
м
Рис. 72
Рис. 73
Задача расчета напряжений в поперечных сечениях изгибаемых
поперечными нагрузками балок состоит в установлении распределения
нормальных и касательных напряжений в поперечных сечениях,
выявлении максимальных значений напряжений в зависимости от
параметров внешних нагрузок и характеристик балки. Эта задача
решается в несколько этапов. Первым из них является установление
графиков изменения изгибающих моментов и перерезывающих сил вдоль
оси балки. Такие графики принято называть эпюрами изгибающих
моментов и перерезывающих сил. На рис. 73 представлена ось балки,
изображены действующие на балку силы Р19 Р2> Р3у причем из
условий равновесия сил находим
р± + р2 — р3 = о, 1грг = yv
Ниже приводятся эпюра изгибающих моментов М и эпюра
перерезывающих сил. График изгибающих моментов построен на растянутом
волокне «балки»: значения изгибающего момента откладываются
со стороны растянутых продольных волокон балки.
Перерезывающая сила считается положительной на участке
возрастания изгибающих моментов и отрицательной на участке убывания
изгибающих моментов.
Перечисленных правил или условностей достаточно, чтобы по
заданным поперечным нагрузкам на балку найти изгибающие моменты и
152
перерезывающие силы. Отметим, что наличие непрерывно
распределенной поперечной нагрузки q не должно вызывать существенных
затруднений в расчетах, так как в этом случае к операции
суммирования дискретных элементов лишь добавляется интегрирование.
Нормальные напряжения в поперечных сечениях балки при
действии на нее произвольных поперечных нагрузок определяются по
изгибающему моменту. При этом полагают, что нормальные напряжения
распределены при изгибе балки поперечными силами, вызывающими
момент М в рассматриваемом сечении, точно так же, как и
нормальные напряжения при чистом изгибе
такой же балки моментами М. Поэтому
сразу можно использовать формулу
(5.2.9) для вычисления нормальных
напряжений
а„ = MxJJ*
(5.3.1)
и условия (5.2.2) для определения
положения нейтральной оси. В
формуле (5.3.1) изгибающий момент М и
момент инерции J22 могут зависеть от Рис. 74
хх — продольной координаты сечения.
Определение касательных напряжений проведем для простоты
применительно к балке прямоугольного сечения (рис. 74), однородной и
изотропной. Ширина балки Ь> высота Л. Определив изгибающий
момент и перерезывающую силу, считаем все четыре боковые
поверхности балки свободными от напряжений. Кроме того, если Охгх3 —
плоскость изгиба, то все компоненты напряжений с индексом 2
считаются нулевыми:
^21 = а22 = °V.3 = 0. (5.3.2)
Для установления распределения напряжений по высоте сечения
балки обратимся к дифференциальным уравнениям равновесия (2.7.1).
Второе из этих уравнений в данном случае удовлетворяется
тождественно. При этом массовые силы считаются отсутствующими. Третье
из уравнений равновесия будет удовлетворено, если а33 считать
нулем не только на поверхностях, но и всюду в сечениях балки,
параллельных нейтральному слою.
Наконец, первое из уравнений (2.7.1) приводится к уравнению
относительно сдвигающего напряжения
'пд
+ а1з.з = 0»
(5.3.3)
поскольку из (5.3.1) следует <т11Д = Xz(M/J22),i' Подстановка этого
значения в уравнение (5.3.3) с последующим интегрированием при
условии, что касательные напряжения на площадках х3 = ±0,5 h
отсутствуют, приводит к закону распределения касательных
напряжений
<*31 =* 0,5 (М//22)д (Л2/4 - xl).
(5.3.4)
153
Обратимся теперь к условиям равновесия малого элемента оси балки
(рис. 75). Требования равенства нулю главного вектора и главного
момента всех действующих на элемент сил приводят в уравнениям
Q.i = Я,
Мл = Q.
(5.3.5)
(5.3.6)
Вычисляя производную от момента
использованием соотношения (5.3.6),
-М
(|
\
1
1 d
\-Q
\ 4d*t
*/
А
«♦&*
!>^
rfxf
Здесь М — изгибающий момент, Q — поперечная сила в сечении балки.
в правой части (5.3.5) с
найдем
<bi = 0,5 (Q/J22 —
—MJ22ti/Jh) (fts/4--x|).
(5.3.7)
Таким образом, при
действии на балку
поперечной нагрузки, в том
числе и непрерывно
распределенной вдоль
оси нагрузки q (л^), в
поперечном сечении
балки возникают
нормальные и касательные
напряжения. Распределение напряжений в поперечных сечениях
линейно упругой балки определяется через изгибающий момент и
перерезывающую силу формулами (5.3.1), (5.3.2), (5.3.7).
Заметим, что параболический закон распределения напряжений
по сечению однородной балки прямоугольного поперечного сечения,
когда /22 = 0,
Рис. 75
*-**■££-*)
вполне согласуется с интегральным условием равновесия: главный
вектор касательных напряжений, распределенных по поперечному
сечению прямоугольной балки, эквивалентен поперечной силе:
0,5Л
j o13bdx3 = Q.
(5.3.8)
— О.бЛ
Легко проверить, что подстановка значений напряжений (5.3.7) в
условие (5.3.8) приводит к тождеству. Приведенной здесь информации
достаточно для расчетов напряжений в балках, которые вызываются
любой системой внешних поперечных сил, равнодействующая которых
в каждом поперечном сечении проходит через центр тяжести
поперечного сечения. Для определенности эту равнодействующую
представляют разложением по двум перпендикулярным направлениям
главных осей инерции поперечного сечения и рассчитывают напряжения
при изгибе в каждой из главных плоскостей сечений. В дальнейшем
напряжения от изгиба в каждой из плоскостей накладываются. Если
154
же равнодействующая внешних сил не проходит через центр
тяжести сечения, то система внешних сил приводится к центральной силе
паре, представляющей собой причину кручения стержня. *
Таким образом, если задана система внешних поперечных
центральных сил, действующих на балку, то можно определить
напряжения в балке по приведенным выше формулам с использованием
принципа наложения линейно упругих напряженных состояний.
Класс задач расчета напряжений в упругих балках, вызванных
действием известных или определяемых из условий равновесия
балки, как совершенно твердого тела, поперечных центральных
нагрузок, называется статически определимыми задачами. Этот термин
отражает тот факт, что для расчетов этих напряжений достаточно
только статических условий, дополненных предположением о
линейно упругих состояниях.
§ 5.4. Примеры расчета изгибаемых балок
Рассмотрим простые примеры расчета напряжений в изгибаемых балках,
когда удается выяснить все внешние силы, действующие на балку, из статических
условий.
На рис. 77 показана схема балки, лежащей на двух шарнирных опорах по
концам и нагруженной равномерно распределенной по длине поперечной
нагрузкой интенсивности q0. Пролет ее обо-
значим/. Требуется установить закон 0,5й1\ Я0 k°>5clnl
распределения напряжений в различных ° ■ ■' т
поперечных сечениях балки.
Из условий равновесия балки, как
совершенно твердого тела, следует, что
опорные реакции будут 0,5qQl, поэтому I q , . , \L05q i
имеем расчетную схему, представлен- I ° 1 I I 11 ' "о
ную на рис. 77. По известным внешним
поперечным силам строим эпюру
изгнав
jlllllllllllllllllfl
h- ь
Щ1\
(а)
1к\
(ч
[ }° \
1
?1 1 1 |{
^ х ,|«*"Х;Л
рр^
Рис. 76
Рис. 77
бающих моментов. Если положение поперечного сечения определять
расстоянием х от левой опоры, то сумма моментов всех внешних сил, действующих
справа от сечения, равна 0,5?0/ (1-х)— q0 (I — *) °>5 V — *)■ Поэтому
изгибающий момент изменяется по параболическому закону
М = 0,5q0x (1-х).
(5.4.1)
Далее находим перерезывающую силу как сумму внешних сил, действующих
справа от рассматриваемого сечения:
Q = 0,5<7о (/ - 2^). (5.4.2)
К тому же результату приходим, если используем условие равновесия элемента
°си балки (5.3.6).
155
Привлекая формулы (5.3.1) и (5.3.7), находим нормальные и касательные
напряжения в поперечных сечениях балки: /
о*п = Mx3/It о13 = Q (0,25/i2 — *§)/(2/).
Теперь найдем универсальные характеристики напряженйого состояния —
величины нормального и касательного октаэдрических напряжений:
а = Mx3l(3J), 9т2 = 2 (а2х + За22).
JT
4
Рис. 78
Рис. 79.
Экстремальные значения напряжений можно искать при х = 0,5/, х3 = ± 0,5Л,
когда
3 1 / / V V2 1
ail=T'°T(Tj ' ai3==0\ Х=Т°^ °=Т°11'
либо при х = 0, #з=0, когда
011 = 0, ог12=12<7,
^ т=1/ fa»-
(M"i—^—i)
Рис. 80
Отсюда следует, что расчетным по приведенным касательным напряжениям
будет состояние в верхних или нижних волокнах балки посередине пролета, если
выполняется условие
/> 16УЗЛ,
Подобным способом, построив эпюры
изгибающих моментов и перерезывающих сил
(рис. 78), можно установить напряжения и
расчетные состояния по приведенным
напряжениям в случае действия на балку
сосредоточенной нагрузки либо в случаях загруже-
ния балки, имеющей шарнирные опирания
по концам.
Не вызывает особых затруднений и случай консоли, представленный на
рис. 79. Консолью называется балка, один конец которой жестко заделан
не только от перемещений, но и от поворотов торца. Второй конец консоли
свободен. Консоль может быть загружена разнообразными поперечными
нагрузками. На рис. 79 представлены эпюры моментов и перерезывающих сил для
консоли, несущей сосредоточенную нагрузку на конце.
При построении эпюр изгибающих моментов и перерезывающих сил важно
учитывать влияние сосредоточенных внешних поперечных сил и сосредоточенных
пар сил. На рис. 80 показан элемент оси балки длиной dx, в точке х* которого
156
действует сосредоточенная пара сил с моментом М*. Из условий равновесия
выделенного элемента следует
М- = М* + М+9
где М" — значение изгибающего момента слева от рассматриваемой точки
приложения сосредоточенной пары сил, М+ — значение изгибающего момента
справа от точки **, М* — значение момента пары внешних сил.
Аналогично можно установить соотношение
<?- = Р + Q+
между перерезывающей силой Q- слева от точки приложения сосредоточенной
внешней силы Р и перерезывающей силой Q+ справа от точки приложения
внешней силы.
Обратимся теперь к анализу напряжений в изгибаемых балках без
ограничений условий опирания требованием статической определимости.
§ 5.5. Общая постановка задач изгиба балки
Приведем постановку задач изгиба балок в перемещениях, без
ограничений формулировки граничных условий. Изучение
напряженного и деформированного состояний упругих балок основывается на-
предположении, что изгибающий момент и кривизна оси балки в
рассматриваемом сечении связаны тем же соотношением, что и при чистом
изгибе
1/р = M/(EJ22). (5.5.1)
То же самое соотношение можно получить, основываясь на
геометрических предположениях, используя гипотезу плоских сечений при
изгибе стержней: поперечное сечение стержня при деформации стержня
остается плоским и не деформируется. Гипотеза плоских сечений
иллюстрируется рис. 81, где представлено материальное сечение
стержня в начальном и деформированном состояниях. Пунктиром
отмечена конфигурация оси стержня в начальном и деформированном
состояниях. Через гит' обозначены единичные векторы касательных
к оси стержня. Единичные векторы v, р лежат в плоскости,
перпендикулярной V, поэтому плоскость (v, Р) — плоскость поперечного
сечения стержня в начальном состоянии. Векторы v', р' определяют
плоскость поперечного сечения стержня в деформированном
состоянии. Предполагается, что материальные элементы, с которыми
связаны v, р, переходят в ортогональные материальные элементы,
связанные с v', р\ Более того, материальный вектор г с
координатами rv, Гр относительно v, р переходит в вектор г' с теми же
координатами rv, г3 относительно v', р'. Если использовать соотношения
§2.1, то можно представить эту гипотезу в общем виде, без
ограничений перемещений и деформаций. Здесь мы рассмотрим следствия
гипотезы плоских сечений при некоторых упрощающих
предположениях относительно перемещений.
Во-первых, рассматриваются прямолинейные в начальном
состоянии стержни, поэтому подвижная координатная системам, v, р
заменяется декартовыми координатами хг, х2, х3, причем ось Охг направ-
Лена вдоль оси стержня.
157
Во-вторых, всё перемещения точек стержня предполагаются
параллельными плоскости Ох±х2У поэтому рассмотрение перемещений
точек поперечного сечения сводится к рассмотрению перемещений
точек волокна поперечного сечения, лежащего в плоскости Оххх2
(рис. 82).
Перемещения точек этого элемента — плоские, элемент не
деформируется, поэтому перемещения w произвольной точки этого элемента
с ординатой х2 связаны с перемещением и центра тяжести сечения
формулой
x2i2 + w = и + x2i*2. (5.5,2)
Здесь i\ обозначен единичный вектор направления материального
волокна в деформированном состоянии, это направление перпендику-
Рис. 81 Рис. 82
лярно касательной t к линии центров тяжести поперечных сечений
в деформированном состоянии — так называемой упругой линии
стержня.
Третье упрощающее предположение состоит в том, что
рассматриваются лишь поперечные перемещения точек упругой линии стержня,
исключаются продольные осевые составляющие перемещений, поэтому
и = wi2.
Более того, перемещения w считаются малыми, а их производные
также малыми величинами, поэтому можно считать
т = /х + w'i2y
•* / • i •
i2 = —w %1 + i29
где w' = w9l = 0 — угол наклона касательной к упругой линии
Теперь соотношение (5.5.2) приводит к представлению перемещений
w1 = —x2w\ w2 = w. (5.5.3
По перемещениям (5.5.3) и формулам Коши можно вычислить компс
ненты деформации:
8ц = X2W , 822 = взз■ == в>.е12 ~ е23 =s е32 ~ ".
158
Вычисляя отличные от нуля напряжения по закону Гука, найдем
оп = —Ex2wn (5.5.4)
и изгибающий момент
2
М = — Г &ai 1 л:2 dx2 = EJ33 w". (5.5.5)
Х2
При сделанных предположениях о малости перемещений и деформаций
можно считать кривизну совпадающей со второй производной от
прогибов по продольной координате:
1/р = аЛ
Поэтому соотношение (5.5.5) повторяет формулу (5.5.1).
Если теперь использовать формулу (5.5.5) в уравнении
равновесия (2.3.6), получим дифференциальное урвнение упругой линии
(EJwy + q = 0. (5.5.6)
Интегрирование этого уравнения четвертого порядка относительно
поперечных перемещений точек оси балки требует формулировки
условий на концах балки — краевых условий и условий сопряжения
участков балки.
Вывод уравнения упругой линии (5.5.6) предполагает отсутствие
на рассматриваемом участке балки разнообразных сосредоточенных
силовых факторов. Поэтому при расчетах эффектов действия
сосредоточенных сил и моментов балка разбивается на участки точками,
соответствующими расположению опор или приложению
сосредоточенных сил и моментов. На краю балки задается прогиб w либо
перерезывающая сила. Одновременно и независимо друг от друга эти
величины задаваться не могут. Задание прогиба w представляет собой
геометрические граничные условия, а задание перерезывающей силы —
статические условия. Возможно, кроме того, задание соотношения
между краевым прогибом и перерезывающей силой, например при
наличии упругой опоры эти величины пропорциональны Q — kw.
На краю балки может быть задан угол поворота либо изгибающий
момент. В исключительных случаях задается соотношение между
прогибом w, его производными, изгибающим моментом,
перерезывающей силой и можно утверждать, что на краю балки задаются две
величины, по одной из двух пар: {w, EJw'"}y {w', EJw").
Условия сопряжения участков балки формулируются как требо-
Вания непрерывности прогибов w> непрерывности поворотов сечений,
^прерывности изгибающих моментов и перерезывающих сил. Упо-
янутых условий достаточно для определения всех постоянных
интегрирования, которые появляются при решении задачи изгиба балки
°Аной из плоскостей симметрии.
159
Например, рассмотрим балку, нагруженную по схеме,
представленной на рис. 83. Решение уравнения изгиба представим" в форме
w=—&- + С[» + СЬ»х + &их? + СЬ" х3, <)<*< — /,
24EJ г ' ' ^ ' Л ' * 2
w = Ci2) + СЬ,} х + С^2' *2 + С;2) л;3,
ш=с\зу+сь»> х+азух*+cv х*,
2 ^ ^ 4
4
1/2
У*
i/«
-*■ ^-
соответственно трем участкам балки: на первом участке нагрузка q
распределена равномерно, на двух других участках нагрузка
отсутствует, изгиб вызывается краевы-
ми воздействиями.
\\Л I р, Требование равенства нулю
ЗЛ*, прогиба w и изгибающего момента
М или второй производной от
прогиба приводит к двум уравнениям,
связывающим постоянные
интегрирования:
Рис. 83 СП) = 0, С^) = о.
Удовлетворяя условиям равенства нулю прогибов и углов поворота
при х = /, получаем:
с(13)+с(23)/+^3)/чс13)/з=о,
C^3) + 2C^3)/+3Cf/2 = 0.
Условия непрерывности прогибов, углов поворота, изгибающих
моментов и перерезывающих сил в точке сопряжения первых двух
участков балки при х = 0,5 / приводят к уравнениям
~ -- (1)3+^1)+2С(з1)|+3^1)(1)2=
6 EJ
~Tir(i)2+2C'1)+6C*1)-2" =2Ci2)+6C(i!)7'
? /
£/ 2
+6q» = 6Ci2>
160
Условия непрерывности прогибов, углов поворота, изгибающих
моментов при х = 0,75 / и условие разрыва перерезывающей силы,
вызванного наличием сосредоточенной нагрузки Р, приводят к системе
= с(3)+с(2з) (JL /) + с(33)(-^ /)2 + с13)(т/)3^
С(2) + 2С32>^/ + ЗС<2>(^
2С<32> + 6С<2) — / = 2С<33> + 6С<43> — /,
6С<2> = — + 6С<3>.
4 EJ 4
Решив полученную систему двенадцати уравнений, найдем
прогибы балки и все другие интересующие расчетчика величины,
характеризующие изгиб балки.
Заметим, что существуют различные способы рационального
составления решений уравнений изгиба на каждом участке и записи условий
сопряжения. Эти способы сокращают процедуру записи условий для
определения констант и процесса решения составленных уравнений.
Упомянутые способы обычно излагаются в курсах сопротивления
материалов.
Если внешние силы, изгибающие упругую балку, не лежат в одной
из главных плоскостей, рекомендуется провести разбиение балки
на участки так, чтобы изгибающий момент для каждого из участков
был определенным. Этот изгибающий момент М раскладывается
на составляющие в главных плоскостях:
- М2 = М cos а, М3 = М sin а,
а нормальные напряжения в сечении линейно упругой балки
суммируются:
_ М2 х3 М3х2 %д ( х3 cos а , х2 sin а \
^22 ^33 \ ^22 •'ЗЗ /
Отсюда можно найти уравнение нейтральной линии, где напряжение
нулевое:
х3 cos а х2 sin а
о,
^22 ^33
и наиболее напряженные точки — наиболее удаленные от нейтральной
6 Зак.
588 161
§ 5.6. Расчет упругих напряжений при кручении валов
/
/
Стержень как расчетный элемент конструкции называется в а-
л о м, если изучаются эффекты действия крутящих ^моментов.
Представим себе стержень с прямой осью, который подвергается действию
сосредоточенных или распределенных внешних сил, приводящихся
к парам, векторы моментов которых направлены вдоль оси стержня.
%В этом случае стержень подвергается кручению, скручивается.
Выделим участок стержня, который можно считать призматическим
или цилиндрическим телом, которое подвергается действию крутящих
моментов интенсивности М по
торцам (рис. 84).
Для описания напряжений и
деформаций стержня введем
систему координат, связанную с валом.
Ось Ох3 направлена вдоль оси
вала, а плоскость Охлхг совпадает
с одним из поперечных сечений
вала.
Определение напряжений,
деформаций и перемещений точек
вала основано на применении
полуобратного метода Сен-Венана.
Полуобратный метод решения задач механики деформируемого твердого
тела состоит в том, что часть неизвестных компонент напряжений,
деформаций и перемещений задают в соответствии с геометрической
или физической ситуацией. Оставшиеся неизвестные определяют в со-,
ответствии с дифференциальными уравнениями равновесия или
движения, граничными или начальными условиями, геометрическими
условиями непрерывности.
Рассматривая цилиндрическое тело, которое подвергается
кручению внешними торцовыми моментами, следует учесть, что боковая
поверхность скручиваемого вала свободна от напряжений.
Применяя полуобратный метод к решению задач кручения валов,
будем считать, что нормальные напряжения на координатных
площадках не развиваются, а из касательных составляющих напряжений
отличны от нуля лишь напряжения ог31, а32, развивающиеся в
поперечных сечениях стержня. Более того, если говорить об участках валов,
боковые поверхности которых свободны от напряжений, то
распределения напряжений в разных поперечных сечениях вала одинаковы.
Другими словами, отличные от нуля компоненты напряжений а31,
а32 при кручении валов не зависят от осевой координаты:
<% = а22 = а33 = ^12 = О» <*31 = aSl(Xly Xz)> а32 == ^ЗгС*!»' #г)- (5.6.1)
Учтем отсутствие массовых сил при кручении и дифференциальные
уравнения равновесия (2.7.2) сведем к одному:
^13»! + ^23*2 = 0- (5.6.2)
162
Это уравнение свидетельствует о существовании такой функции
cp-(Xi, *2)» чеРез частные производные которой можно представить
напряжения:
^13 = Ф»2» ^гз = — Фа- (5.6.3)
функция ф называется функцией напряжений при
кручении. Условия для определения напряжений при
кручении следует искать в оставшихся пока неиспользованными двух
группах соотношений механики деформируемого твердого тела:
обобщенном законе Гука и геометрических условиях совместности
деформаций.
Учитывая предположения (5.6.1), соотношения обобщенного закона
Гука для изотропного тела представим формулами
811 ^ 822 ^ 833 csc 812 = О,
2Ge13 = а13, 2Ge23 = а23. (5.6.4)
Первая группа уравнений совместности деформаций (1.10.8) при
условии (5.6.4) удовлетворяется тождественно. Одно из уравнений
совместности второй группы из (1.10.8) также тождественно
удовлетворяется, остальные два приводятся к виду
(8зъ2 — e32»i)ii = 0, (е2з»1 — 8i.3is)i2 = 0. (5.6.5)
Учитывая соотношения закона упругости (5.6.4) и представления
(5.6.3) напряжений через функцию напряжений, найдем
вил-вид-^+^-^ф. (5.6.6)
Здесь принимается специальное обозначение V2cp для
дифференциального оператора второго порядка над функцией ср — оператора
Лапласа. Подставляя (5.6.6) в уравнения совместности (5.6.5), приходим
к выводу, что У2фне зависит от координат хъ х2 и сводится к
константе. Поэтому следствием условий совместности деформаций является
Уравнение
V2cp = const. (5.6.7)
Вошедшую в это.уравнение константу оставим пока неопределенной,
обратившись к формулировке граничных условий.
Сначала рассмотрим точки граничной-цилиндрической или
призматической поверхности стержня. Для всех этих точек внешняя
нормаль образует прямой угол с осью Ох3у поэтому п3 = 0 и
граничите условия в напряжениях, полученные с помощью формул (2.5.6),
сводятся к одному:
[а13П! + а23/г2]г = 0. '(5.6.8)
^Десь символом [ ]г обозначены значения некоторой функции в
точках контура Г.
0 163
На рис. 85 представлены поперечное сечение стержня, граничный
контур Г, направление элемента дуги ds контура и направление
внешней нормали п к контуру. Из рассмотрения рисунка следует, что
/
пх — cos а — —dx2/ds, п2 = sin а = dxjds.
Поэтому с учетом представлений напряжений (5.4.3) граничное условие
(5.4.8) можно переписать так:
ds ds Jr L ds Jr
Отсюда следует, что на контуре поперечного сечения скручиваемого
стержня функция ф напряжений при кручении должна принимать
постоянные значения:
х2
х2
п
Г
г^ см
\
h'J
I
| dx1
dx.
sds
dxz\
n
ос
Mi
(5.6.9)
Если сечение односвязно, то
постоянное значение функции
напряжений на контуре можно принять
нулевым, так как -добавление константы
к функции напряжений не влияет
на напряжение. Если же контур
сечения многосвязен, то на каждом
из контуров функция напряжений
принимает свое постоянное значение.
Установим теперь связь
крутящего момента с функцией
напряжений. Глядя на рис. 85, легко установить способ вычисления
суммарного крутящего момента через напряжения:
Рис. 85
М = j j (— <r81 х2 + а32 хг) dx2 dx2.
(F)
Используя формулы (5.4.3), получаем
М= — ^(9,2*2+Ф,1*1)^*1^2-
(F)
Заметим, что, например, (ф^),! = ф,^! + ф,
поэтому предыдущее равенство запишем так:
М= — ^ [(Ф*1),1 + (ф*2Ы dxt dxz + 2 j j <pd*i dx2.
(F) (F)
Первое слагаемое правой части можно представить контурным
интегралом, поэтому
М=— <£ ф (х± пх + хг п2) ds + 2 (^dx1dx2. (5.6.10)
(Г) (F)
164
Для односвязного контура ср|г = 0, поэтому крутящий момент
представляется удвоенным объемом, заключенным между сечением и
построенной на нем функцией напряжений:
М-2 f Г фЛсхЛся. (5.6.11)
(F)
Теперь обратимся к изучению деформаций скручиваемого стержня.
По напряжениям (5.6.1) и (5.6.3) можно найти выраженные через
перемещения компоненты деформаций:
и1Л = О, и22 = 0, u3t3 = 0, и1>2 + и21 = 0, (5.6.12)
G (н1|3 + и3>2) = ф2, G (и2}3+ изл) = — срд. (5.6.13)
Положим
и1 = —хх2х3, и2 = гх1х3, и3 = и3(х1у х2), (5.6.14)
где т — постоянная крутка вала — угол относительного поворота
двух сечений вала, расположенных на единичном расстоянии друг
от друга. Система уравнений (5.6.12) превращается в тождества.
Система перемещений (5.6.14) выбрана так, что деформации стержня
при кручении можно представить себе как наложение совершенно
одинаковых депланаций различных поперечных сечений (выход точек
поперечных сечений из их плоскостей) и поворотов этих сечений, как
совершенно жестких элементов, вокруг оси стержня.
Система (5.6.13) с учетом (5.6.14) сводится к системе уравнений
относительно и3 и ф:
G (—хх2 + и3>1) = ф,2, (5.6.15)
G (т*! + и3>2) = —фд.
Исключив из этой системы ф, получим уравнение для определения
осевых смещений — депланаций
V2u3 = 0.
Исключение из системы (5.6.15) функции и3 приводит к уравнению
для определения функции напряжений
у2ф = _2Gt, (5.6.16).
*
повторяющему полученное из условий совместности деформаций
уравнение (5.6.7), поэтому константа в (5.6.7) совпадает с (—2Gr).
В частности, если скручивается вал кругового сечения, то
уравнение контура можно записать в виде
х\ + х\ - R* = 0,
где ^ — радиус вала.
Полагая
Ф = А {—х\ —х22 + Я2), А = const,
Удовлетворяем граничным условиям (5.6.9), а подставляя это
представление ф в уравнение (5.6.16), получаем:
Ф = 0,5С т(Я2-г2), г2 = x* + xl
165
Распределение касательных напряжений подчиняется линейному
закону
-Gxxo
Grxly ае3 = ф г = Gxr.
/
(5.6.17)
Обратившись к (5.6.15), найдем u3il = О, и3у2 = О, откуда следует
и3 = const = 0. Поперечные сечения кругового стержня при
кручении остаются плоскими, точки сечений не получают осевых
перемещений.
Наконец, найдем соотношение между моментом и круткой.
Формулу (5.5.6) представим для кругового поперечного сечения в виде
2п R
М = 2 j j 0,5G? (R2—r2) rdrdQ = 0,5GmR*.
о 0
Обозначив Jp полярный момент инерции круга Jv = 0,5 я/?4, найдем
окончательно пропорциональность крутящего момента и крутки
М = GJpx.
Множитель пропорциональности GJP
называется жесткостью С вала
при кручении: Задача о кручении
круглого вала впервыр рассматривалась
Кулоном.
Распределение напряжений при
кручении вала эллиптического сечения,
уравнение контура которого х\1а2 +
-а/з
Рис. 86
+ х\1Ь2 — 1=0, можно установить,
полагая функцию кручения ф =
= -Ш ё + W ~ 0 • Максимальное
касательное напряжение о13=2М/(лаЬ2)
развивается в точках сечения у концов
малой оси эллипса.
Для эллиптического сечения можно установить депланацию
поперечных сечений:
£2 а2
Uo = M Xi х2.
Распределение напряжений при кручении вала треугольного
поперечного сечения (рис. 86), ограниченного контуром
{х1—УЗх2—2а/3) (*1+]/Зх2— а/3) [хг + а/3)=0,
дается посредством функции напряжений
Ф=-От [-!-(*?+ *,*)—^(%3-З^Аф-^-а2].
Наибольшее касательное напряжение получается у середины
сторон треугольника: (сг12)тах = 0,5 Gia.
•В углах треугольника напряжения нулевые. Крутящий момент
и крутка связаны формулой М ~ 0,6 G%JP, свидетельствующей о сни-
166
жении жесткости при кручении вала треугольного сечения по
сравнению с круглым валом, при одном и том же полярном моменте инерции.
Рассматривая разнообразные поперечные односвязные сечения
валов при кручении, Сен-Венан обнаружил возможность
приближенного вычисления жесткости С валов по общей формуле
4д2 Jp
где р =* площадь, Jp — полярный момент инерции односвязанного
поперечного сечения.
Наибольшее касательное напряжение при кручении
обнаруживается в наиболее приближенных точках контура к центру тяжести
сечения.
Наконец, в случае поперечного
сечения, ограниченного контуром в
полярных координатах (рис. 87) (г2 —Ь2) X
X (l — -2а cos 9J = 0, функция
напряжений снова берется
пропорциональной левой части уравнения
контура. При этом можно обнаружить
максимальное напряжение (o>e)max — Gx х
X (2а — Ь) в левой точке контура при
6 = 0.
В задаче изучения напряжений при
кручении стержня прямоугольного
сечения размерами а и Ь рекомендуется применение метода гразде-
ления переменных, который приводит к функции напряжений
Рис. 87
Ф =
32Ста2
лз
4d пз 2 V ch Nb j 2a
n= 1,3,5,..
Полагая b > а, можно установить максимальное касательное
напряжение у середины длинных сторон прямоугольника:
(<*1з)гаах = k ' 2Gra,
где k — число, зависящее от отношения Ыа\
fe=l
я3 А
1
п2 ch Nb
/1=1,3,5,...
Крутящий момент и крутка связаны формулой
М = kxG% (2а)\2Ъ).
167
Значения k и kx для некоторых значений отношения Ь/а: /
Ь/а
к
*i
1,0
0,675
0,141
1,2
0,759
0,166
1,5
0,848
0,196
2,0
0,930
0,229
2,5 3,0
0,968 0,985
0,249 0,263
4,0 ;/5,0
0,997 0,999
0,281 0,291
10,0
1,000
0,312
Рас.
Для определения k± можно использовать приближенную формулу
3^ = 1 — 0,63Р + 0,052р5, р = Ь/а.
Наконец, обратимся к общему анализу кручения стержней
многосвязных поперечных сечений (рис. 88). Функция напряжений при
кручении ф принимает на контуре постоянные
значения. И если Г0 — внешний контур,
а 1\, Г2, ..., Тп — внутренние контуры
поперечного сечения, то значение ф на
внешнем контуре обозначим С0, а значения на
внутренних контурах Съ С2, ..., Сп. При
расчетах контурных интегралов в формуле (5.5.6)
для крутящего момента следует учитывать
направление обхода внешнего и внутренних
контуров. Положительные направления
указаны на рисунке.
При этом
J к = (6 (*i Щ + х2 п2) <pds = Ck $ (х\ rt\ + х2 п2) ds.
Преобразовав интеграл в правой части по формуле Грина
(J) (Pdxi +Qdx2) = ^ (Qti-Pt2)dx1 dx2,
(Г) (F)
найдем
Jk = Сьф (*i dx2~x2dxi) = Ck2 ^ dxx dxz = Ck 2Fh,,
4 (Fk)
где Fk — площадь сечения, ограниченная контуром Tk.
Отсюда следует, что формулу (5.6.10) для крутящего момента можно
представить теперь так:
M=-2F0C0 + 2 ^ FkCh + 2)) ydxxdx2.
k=\ (F)
■SI
(5.6.18)
Значения констант C& определяются на основании соотношений,
вытекающих из теоремы Бредта: для любого контура, целиком лежащего
в пределах поперечного сечения стержня, циркуляция касательного
напряжения / равна площади, ограниченной этим контуром, умно*
168
женной на 2Gx. Циркуляцией касательного напряжения при
кручении называется криволинейный интеграл
1 = j> <*3s ds,
где (Узз — составляющая касательного напряжения в направлении
касательной к контуру; эта составляющая может быть вычислена через
функцию напряжений по формуле
' 3s
-дср/(д/г),
где п отсчитывается вдоль направления нормали к контуру, поэтому
ф дц/(дп) ds^*—2FG%. (5.6.19)
Применяя эту формулу для всех внутренних контуров, найдем
систему алгебраических уравнений для вычисления всех констант
в формуле (5.6.18).
§ 5.7. Мембранная аналогия кручения,
кручение тонкостенных стержней
Продолжая обсуждение задач крученц^ стержней, напомним, что
по формулам (5.6.3) напряжения вычисляются посредством функции
напряжений, которая удовлетворяет уравнению (5.6.16), принимая
постоянные значения на контуре области поперечного сечения
стержня. Можно показать, что тому же
уравнению (5.6.16) с точностью
до обозначений функций и
констант, тем же граничным условиям
удовлетворяет функция
поперечных перемещений равномерно
натянутой на контур мембраны под
действием равномерно распределен-
ного давления. Чтобы подтвердить *'
это, рассмотрим (рис. 89) элемент Tcjx
мембраны размерами dxl9 dx2, на
который действует поперечная сила
pdxxdx2y а также усилия натяжения
Tdxly Tdx2i направления которых
образуют углы с плоскостью Охгх2, указанные на рис. 89. Поперечные
перемещения считаются малыми, поэтому углы наклона
поверхности натянутой на контур мембраны считаются малыми, тангенсы,
синусы этих углов считаются совпадающими с самими углами.
Приравнивая нулю сумму проекций на ось Ох3 всех действующих на
выделенный элемент сил, получаем
ж2г dxz
Щ{^Щис1х1
Рис. 89
TV2w = —р.
(5.7.1)
169
Граничные условия равномерно натянутой на контур мембраны для
поперечных перемещений w формулируются для односвязного
контура Г так:
о;|г = 0. / (5.7.2)
Если же мембрана образует многосвязную область, ограниченную
внешним контуром Г0 и несколькими внутренними контурами 1\,
Г2, ..., Г71, то граничные условия для определения поперечных
перемещений точек мбмбран формулируются следующим образом.
Поперечные перемещения точек внешнего контура можно считать
нулевыми, а поперечные перемещения точек внутренних контуров —
постоянными, различными для разных контуров:
w\ =0, w\ =Clt*w\ =с;,..., а;I =С (5.7.3)
ГО \ll Г 2 \LTl
Сравнивая математическую задачу для определения функции
напряжений и математическую постановку задачи определения поперечных
перемещений равномерно натянутой мембраны, обнаруживаем их
тождественность при выполнении условия
q>/(2Gr) = wT/p (5.7.4*
и соотношений между константами
<V(2Gt) = CtTlp. (5.7.5)
Этим исчерпывается подтверждение аналогии задачи определения
функции кручения и задачи о поперечных перемещениях равномерно
натянутой на контур поперечного сечения мембраны — мембранной
аналогии задачи кручения.
Из формул (5.6.3) и (5.7.4) следует, что величины составляющих
вектора касательного напряжения пропорциональны компонентам
вектор-градиента к поверхности деформированной мембраны или
максимального угла ската поверхности.
Мембранная аналогия позволяет, в частности, оценить касательные
напряжения при кручении стержня, поперечное сечение которого
представляется* вытянутым прямоугольником. Если Ъ > а, то
поверхность мембраны, натянутой на прямоугольник, можно представить
в виде w = w0(l — x\lcF), w0 = 0,5а2р/Т и касательные напряжения,
согласно (5.6.3) и (5.6.4), будут
о13 = 0, а23 = —2Ст77р, wtl = 2Gtx1.
Вычисляя момент этих напряжений, найдем
а
М* = Г xi о23 2bdxv = — Gx2b (2а)3,
—а
что примерно вдвое меньше действительного крутящего момента.
Вторая половина крутящего момента формируется за счет больших
значений а19 вблизи удаленных от центра тяжести сечения коротких
сторон прямоугольника.
170
Крутящий момент можно определить по формуле (5.6.11), тогда
нужно вычислить объем, ограниченный мембраной
М = 2 ( I q>dx\ dx2 = 2 • 2Gt —> I I wdx\ dx2,
(F) (F)
соотношение между моментом и круткой
M = —Gx(2a)s2bf
3 '
(5.7.6)
J
что удовлетворительно согласуется с точным решением, начиная
с bla с*. 10 (см. § 5.6). Если это представление крутки использовать
при вычислении максимальных
касательных напряжений сг2з
при хг — ау то получаем
а™х = ЗМ/1(2а)*2Ы (5.7.7)
Формулы (5.7.6) и (5.7.7) для
расчетов- крутки и
максимального касательного напряжения
Рис. 90
Рис. 91
можно применять и для оценки соответствующих величин при
кручении тонкостенных валов открытого профиля, для которых
поверхность мембраны слабо отличается от цилиндрической.
На рис. 90 показаны некоторые из такого типа поперечных
сечений. Каждое-из этих поперечных сечений может быть развернуто на
прямоугольник без заметной деформации поверхностей мембраны.
Поэтому в формулах (5.7.6) и (5.7.7) 2а — толщина профиля, а 26 —
длина средней линии профиля сечения.
Мембранная аналогия позволяет наглядно оценить сравнительное
значение напряжений в валах сложного поперечного сечения (рис. 91),
содержащего входные (Л) и выходные (В, С, D) углы. В окрестности
точки А углы наклона нормали к поверхности мембраны
максимальны, тогда как у выходных — углы наклона нормали близки к нулю.
Поэтому распределение напряжений в местах их концентрации у
входных углов требует более тонкого анализа.
Если тонкостенный профиль нельзя развернуть в прямоугольник,
а сечение можно представить себе состоящим из нескольких удлинен^
НЬ1х прямоугольников (рис. 92), применяют следующую расчетную
процедуру. Крутящий момент, воспринимаемый каждым элементом
номера ky вычисляется по формуле (5.5.6) 3Mk = Ghx(2ah)3(2bk),
171
а общий крутящий момент М воспринимается всеми элементами и
п
поэтому вычисляется суммированием: М — ^Мк.
k=\ /
Отсюда можно найти крутку. Максимальные или расчетные
напряжения следует определять перебором напряжений в каждом из элементов.
Наконец, остановимся на оценке жесткости и касательных
напряжений в тонкостенных стержнях замкнутого профиля. На рис. 93
представлены поперечные сечения двух трубок, одна из которых
имеет продольный разрез. Разница в распределении напряжений по
сечениям этих трубок
при кручении
иллюстрируется рисунком, где
Рис. 92 Рис. 93
представлено распределение перемещений точек мембраны и
распределение касательных напряжений по толщине открытого (О) и
закрытого (3) профилей.
Касательные напряжения при кручении стержня закрытого
профиля поперечного сечения распределены почти равномерно по толщине,
поэтому крутящий момент вычисляется по формуле М = os32F2a,
где F — площадь,- ограниченная контуром поперечного сечения.
Вычислив напряжения по закону Гука oS3 = Gy = Gxr = Gx\/~F!n,
найдем, например, для кругового сечения М = Gx]/rF/n2F • 2а. Теперь
можно найти отношение жесткостей на кручение открытого и
закрытого профилей Со/Сз = я (2a)2/(6f), откуда следует, что жесткость
закрытого профиля значительно превышает жесткость открытого
профиля.
Глава VI
СТАТИКА УПРУГИХ СОСТОЯНИЙ ТРЕХМЕРНЫХ ТЕЛ
§ 6.1. Постановка задач статики упругого тела в общем виде
Рассмотрим математическую постановку статических задач об
упругих состояниях изотропного сплошного однородного трехмерного
тела. Эти задачи сводятся к решению замкнутой системы
дифференциальных уравнений с необходимым числом граничных условий,
позволяющих установить формулы или другие способы вычислений пере-
172
метений, деформаций, напряжений в любой точке тела по заданным
внешним силам или перемещениям граничных точек либо изменениям
температуры. В зависимости от особенностей формулировки
граничных условий упомянутую общую задачу можно свести к определению
перемещений, а по перемещениям в дальнейшем вычислить
деформации, напряжения. В таком случае говорят о постановке задач теории
упругости в перемещениях. Иногда удается формулировать задачу
в напряжениях, когда основные искомые функции представляют
собой напряжения. Оценка упругих деформаций, перемещений и
напряжений позволяет прогнозировать поведение деталей машин и
конструкций в соответствующих условиях. Кроме того, анализ поведения
реальных тел при упругих состояниях используется как-исходная
позиция при исследовании пластических состояний либо состояний,
предшествующих разрушению, условий прочности элементов машин и
конструкций. Поэтому остановимся на общих и разнообразных
постановках задач об упругих состояниях деформируемых твердых тел.
Начнем с постановки задач теории линейной упругости в
перемещениях. В этом случае имеем цепочку из трех групп определенны^
соотношений. Первая группа соотношений — дифференциальные
уравнения равновесия в напряжениях. Эти уравнения представляют
собой условия равновесия произвольного дифференциально малого
элемента тела. Если этот элемент выделен соседними координатными
поверхностями декартовой прямоугольной координатной системы,
то уравнения равновесия представляются в форме
стАв>в + pFK = 0 (ft, s = 1, 2, 3). (6.1.1)
Здесь массовая плотность р и составляющие массовых сил Fk —
известные функции координат, а шесть составляющих тензора
напряжений oks — искомые функции. Уравнения равновесия можно написать
и в криволинейных координатах.
Вторая группа соотношений представляется экспериментально
установленным законом, выражающим напряжения через деформации
в частности обобщенный закол Гука для изотропного тела — в форме
<*п = (К — 2G/3) Зе + 2Gen, ..., <т12 = 2Ge12. (6.1.2)
Он представляет собой выражения составляющих напряжений через
компоненты деформации. Если (6.1.2) подставить в уравнения (6.1Л),
то вновь получим систему трех уравнений с шестью неизвестными
Функциями, но этими неизвестными будут компоненты деформации.
Третья группа соотношений представляется шестью
геометрически установленными выражениями компонент деформаций через
перемещения. В теории линейной упругости перемещения и
деформации считаются малыми и связанными формулами Коши
2e<ft = uhk + мл,,. (6.1.3)
173
Подставляя (6.1.3) в (6.1.2), а результаты этой подстановки в (5,4.1),-
получим систему линейных дифференциальных уравнений
относительно перемещений /
(К + G/3) (div u),h + GV*uk + pFk = О,
div и = иЪ1 + u2l2 + и3,3у V2uh = uk, u + Hft, 22 + "ьзз-
(6.1.4)
Таким образом, три группы соотношений теории линейной
упругости изотропного тела сводятся к трем уравнениям (6.1.4)
относительно неизвестных функций uk(xl9 х2, х3). В каждой точке границы тела
задаются составляющие вектора перемещений граничной точки либо
компоненты внешней поверхностной силы F%, причем эти силы
вызывают поверхностные напряжения, связанные с компонентами
тензора напряжений формулами, ^вытекающими из (2.5.7):
lokprikls = ГР. (6.1.5)
Используя соотношения (6.1.2), получаем в левой части линейную
комбинацию производных от искомых перемещений по координатам.
Объединяя формулировки, можно утверждать, что в каждой точке
границы тела задаются три величины, по одной из трех пар:
{lupls, 1<УкРпк]}. (6.1.6)
Заметим, что кроме упомянутых могут встретиться граничные
условия, когда задается некоторое конечное соотношение между
граничными значениями напряжений и перемещений. Например, в случае
упругой опоры с жесткостью С получим
[<Ър.л*Ь = Clup]s. (6.1.7)
При любых из перечисленных типов граничных условий доказаны
существование и единственность решения уравнений системы (6.1.4).
Установив перемещения, удовлетворяющие системе (6.1.4) и
граничным условиям, можно вычислить деформации и напряжения для
суждений о состояниях изотропного тела.
В связи с конфигурацией границ тела иногда удобно использовать
вместо декартовых криволинейные координаты. Поэтому возникает
необходимость представления системы (6.1.4) в ортогональных
криволинейных координатах, Продемонстрируем еще один способ перехода
от декартовых к криволинейным координатам. Перепишем систему
(6.1.4) в векторной форме:
(К + G/3) grad div и + GV2u + pF = 0, (6.1.8)
с дифференциальными операторами в декартовых координатах:
div а = usisi grad / = i8fi8.
В криволинейных ортогональных координатах Ев, имеющих
коэффициенты Ламе #в и единичные векторы е8 подвижного координат-
174
ого трехгранника, фигурирующие в (6.1.8) дифференциальные
операторы представляются так:
u^ahekd\4U^--^—-^(H1H,Hz^-)i (6.1.9)
mdf = -^-^Leh = -^ftkeky (6.1.10)
Hh oik nh
V2a = grad div a —rot rot u, (6.1.11)
Tot U= —^77- |№«зЬ —(tf 2 И2),3 ^1 + "П^" [(Я1 "lb" (#8 И8)д] ^2+
+ 1Г1Г-[Я2м2)11~(Я1«1)12]в8. (6.1.12)
Этой информации достаточно, чтобы выписать уравнения
равновесия сил в любой ортогональной криволинейной координатной системе.
Например, рассмотрим .цилиндрические координаты г, 0, г при
-Si = г, Ъ2 = е> 1в = г.
Найдем, вычислив длины дуг координатных линий, Нг = 1, Я2 = г,
#3 = 1. Обозначим £х = г°, £2 = 6°, е3 = г°9 их = иг, и2 = и0.
и3 = az и по формулам (1.7.13) найдем, отождествляя eih и e,-ft,
компоненты деформации в цилиндрических координатах:
егг = иГ|Г1 rEQQ = uete + ttrt ez = uZtZ,
2rsrQ=—tiQ + rue,r + Urte, 2re2Q = ruQ, z + uz,q, (6.1.13)
^rz ==Urz-f- Uz:r,
Используем геометрическое значение расхождения как
относительного изменения объема. Найдем сумШфованием первых трех формул
из (6.1.13):
div-» = uTtT + ие,е/г + иг/г + uZtZ
а затем по (6.1.10), получим
grad div и = r°(div я), г + 0°(div »),0/г + ^°(div »)>z.
Используя дважды (6.1.12), получаем
Tot rot U = [UQ,o/r2 + Uq, rQ/r — Ur, дв/Г2 — иг$ zz + UZf rz] Г° +
+ ["*, zd/r—UQ, zz + Ue/r2 — llQt г/Г — Uq, rr — Ur, Q/r2 + UQt 02/r[G°-f
+ [{uTtZ—uZtT)lr + urtT4t — uZtTT — u2tQQ/r2-\-ue,ez/r]z°.
Теперь no (6.1.11) находим
Va« = r° (V4 — 2uQtQ/r2 — ur/r2) + 0°(V4 + 2urtQ/r2 —
— uQ/r2) + z°V2uz,
гДе оператор Лапласа в цилиндрических координатах:
r*V*u = r2utTt + ru9f + г2и, Zl + ut ее.
175
Наконец, выпишем уравнения равновесия в цилиндрически^
координатах:
(К + G/3) (div u)ir + G (V\ - uQtQ/r* - urlr2) +jpFr = 0,
(K + G/3) (div uUIr + G(V2uQ + 2urtQ/r2-uQ/r2) + pFQ = 0,
(K + G/3) (div e)l2 + GV2u2 + pFz =5 0. (6.1.14)
Подобным способом можно выписать уравнения равновесия в
сферических, эллиптических и других криволинейных координатах.
Три дифференциальных уравнения относительно трех неизвестных
перемещений и три условия в каждой точке границ тела позволяют
считать математическую задачу поставленной исчерпывающе. На
общих методах решения этих задач остановимся специально, здесь же
приведем два примера решения частных задач.
§ 6.2. Примеры решения пространственных задач
теории линейной упругости
1. Задача Ламе. Представим себе толстостенную длинную цилиндрическую
трубу длиной /, ограниченную цилиндрическими поверхностями радиусов а и Ъ
и плоскостями по торцам. Пусть труба подвергается действию равномерного
внутреннего давления ра и внешнего давления /?&. Кроме того, по торцам трубы
могут действовать продольные напряжения, обеспечивающие равномерную
осевую относительную деформацию ez. Изучение перемещений, деформаций и
напряжений в толстостенной упругой изотропной трубе под действием
внутреннего и внешнего давления представляет собой задачу Ламе.
Для математической постановки этой задачи удобна цилиндрическая
координатная система, в которой весьма просто записываются граничные условия:
0>rlr = a=— Ра> OrrU^b^—Pb* (6.2.1)
Систему перемещений назначаем в форме
ur = u(r), i/0 = O, uz = zez, (6.2.2)
где гг — постоянное осевое удлинение, & и (г) — единственная искомая
функция.
Полагая массовые силы отсутствующими, систему уравнений равновесия
в форме (6.1.4) приводим к единственному уравнению (ut1. + u/r)tT = 0, общее
решение которого приобретает вид
и = 0,ЬС±г + С2/г. (6.2.3)
Постоянные интегрирования Сг и С2 следует определять из граничных условий
(6.2.1). Чтобы написать эти условия в явной форме через перемещения,
определим по закону Гука радиальные напряжения в трубе:
аГГ = (К — 2G/3) Зе + 2Gerr.
В рассматриваемом случае
ггг = игГ, &вв — и/г, e2z = 82, 3e==utr + u/r-jrEz — C1-\-eZt
поэтому по закону Гука найдем:
orr = A-B/r*9 аее = Л + В/г2,
Л = (К — 2G/3) (Сх + е2) + GClt В = 2GC2 (6.2.4)
и граничные условия (6.2.1). приводят к уравнениям относительно констант
Л и В:
А - В/а2 = - Pa, А — Bib2 = — рь.
176
Отсюда получаем:
A = (paa*-pbb*)/(b*-a*), B = a4*(pa-pb)/(b2-a*).
(6.2.5)
Особый интерес представляет вычисление тангенциальных напряжений а0е,
вызывающих разрывы трубы. Выпишем формулу для вычисления этих
напряжений при рь = 0:
[(bIa)*-\]oQQ = pa(b/r)K (6.2.6)
Таким образом, напряжения в толстостенной трубе, при выполнении
условий задачи Ламе, не зависят от констант упругости, а при действии только
внутреннего давления закон распределения напряжений о0е по толщине —
гиперболической (рис. 94).
2. Действие сосредоточенной силы на упругое полупространство — задача
Буссинеска. Представим себе изотропное тело значительных размеров,
ограниченное плоскостью. Такое полубесконечное тело принято называть полу-
/ r/b
Рис. 95
пространством. Для определенности полупространство полагаем
ориентированным так, что ограничивающая его плоскость оказывается
горизонтальной, а тело полупространства располагается ниже граничной плоскости.
Ориентация полупространства определяется декартовой координатной системой,
причем ось Ох3 направлена вертикально вниз. Предположим, что на границе
полупространства приложена сосредоточенная сила Р, направленная вдоль оси Ох3
(рис. 95). Эта сила вызывает перемещения, деформации, напряжения в
полупространстве. По-'видимому, окрестность точки приложения силы Р,
протяженность которой определяется радиусом г полусферы с центром в точке О,
перемещения, деформации и напряжения, вызванные действием силы Р, будут большими
и неупругими. Во всех других точках полупространства можно предполагать
наличие упругих состояний, малых перемещений и деформаций, выполнения
всех условий теории линейной упругости. Выяснение перемещений, деформаций
и напряжений в упругом изотропном полупространстве, вызванных действием
сосредоточенной силы на границе полупространства, составляет задачу Бусс-
неска. Требуется найти систему перемещений и&, удовлетворяющих уравнениям
Равновесия (6.1.4) при отсутствии массовых сил и граничным условиям.
Формулировка граничных условий составляет особенность постановки
задачи Буссинеска. На границе полупространства всюду, за исключением
окрестности точки О, напряжения отсутствуют:
*3~о=0. (6.2.7)
В
o"i31^3 = 0 = 0; о~2з|яз = о=0;азз |ж3
окрестности начала координат напряжения очень велики и для учета их
рекомендуется рассматривать условия равновесия конечной части полупространства
виде половины шара с центром в начале координат. Четверть этого полушария
надставлена на рис. 95. Кроме внешней силы Р на сферическую поверхность
177
полушария действуют напряжения. В точке с радиус-вектором г действует
напряжение о>. Положение этой точки на сфер*£
удобно/определить/географическими координатами —долготой 9, меняющейся от 0 до*2л;, и широтой ф,
меняющейся от 0 до л/2. При этом элемент площади поверхности полусферы можно
представить в виде dS = г2 sin cpdcpdQ. Поэтому условия равновесия
выделенного полушария сводятся к одному равенству
2я 0, 5л
P+J J Or^r*sin <р%Ю = 0. (6.2.8)
о о
Заметим, что проекции вектора о> на координатные оси можно представить
через компоненты тензора напряжений в системе /^ формулами (2.4.7). В
частности, аг*/3 = о>3 = °"i3vi + cr23v2 + a33v3» где направляющие косинусы
нормали к сфере vft связаны с координатами формулами
Vh = Xh/r, r2=xl + x22+xl
Поэтому для удовлетворения интегральному условию равновесия (6.2.8)
необходимо вычислять лишь три компоненты напряжений на горизонтальных
площадках. Буссинеск показал, что всем перечисленным условиям задачи можно
удовлетворить, полагая
Р ( хг;
3G
*i
и* = -
хгх3
3K—G г + х3
3G
3K—G г + х3
х\ } 3K+4G] ~
-т +
3/C+G /,
p=p/(4nG).
(6.2.9)
Это решение получено с использованием общих свойств уравнений теории
упругости и свойств гармонических потенциалов посредством наложения
элементарных решений уравнений теории упругости первого и второго типа.
Проверим, удовлетворяются ли уравнения равновесия в перемещениях
(6.1.4) при Fh= 0.
Прямая подстановка (6.2.9) в (5.1.14) приводит к тождествам.
Действительно, по перемещениям (6.2.9) и формулам Коши можно вычислить компоненты
деформации:
+ *з) гЦг+хд*.
(г+*3) г»(г+*,)»
-'{-Н-?-)-^}'-
2ец=?{-
oXi х2 х3
г5
_хкх1_п + _L_jl
r(r + x3) [г* (г + *з)2 J J
ei3- — 3P*x xl/r*, e23- — 3Px2 хЦгЬ,
g-3G/(3K + G). (6.2.10)
В частности, суммированием первых трех строк (6.2.10) найдем
Зе = — Рд . 2V*. (6.2.11)
178
ле этсго проверяем подстановкой удовлетворение уравнениям равновесия,
гт деформациям (6.2.10), (6.2.11) и закону Гука (6.1.2) вычисляем напряжения,
Удовлетворяющие условиям (6.2.7):
°^~2лг* г [г ) ' °32~ 2лг* г [г ' °33~~ 2пг*
(6.2.12)
Подстановка (6.2.12) в (6.2.8) приводит к тождествам, поэтому можно
утверждать, что сосредоточенная сила Р на границе полупространства вызывает
в изотропном упругом полупространстве перемещения (6.2.9) и напряжения на
горизонтальных площадках (6.2.12).
§ 6.3. Постановка задач теории упругости в напряжениях.
Плоские задачи теории упругости
В практике расчетов характеристик упругих состояний реальных
тел встречаются ситуации, когда в качестве основных искомых
функций выбираются напряжения. Это особенно рационально, когда
граничные условия заданы в напряжениях. Такая постановка задач
предусматривает сначала 'определение напряжений, а по напряжениям
можно в дальнейшем вычислить деформации и посредством
интегрирования системы дифференциальных уравнений — перемещения.
При постановке задач в напряжениях необходимо удовлетворить
уравнениям равновесия в напряжениях и граничным условиям.
Кроме того, по напряжениям можно, используя соотношения обобщенного
закона Гука, вычислить компоненты деформации. И эти компоненты
должны удовлетворять условиям совместности деформаций —
уравнениям (1.10.8), в которых компоненты деформации предполагаются
представленными через напряжения.
Постановку задач теории упругости в напряжениях
продемонстрируем для класса плоских задач. Различают плоское напряженное
состояние и плоскую деформацию. В случае п л о с ко й
деформации тело предполагается цилиндрическим или призматическим,
причем размер его в направлении оси значительно больше поперечных
размеров. Действующие на тело, силы предполагаются однородно рас-
пределенцыми вдоль оси. Если ось тела совместить с осью Ох3> а оси
0*ъ Ох2 оставить произвольными ортогональными, то в случае
плоской деформации предполагаются отличными от нуля только
перемещения, перпендикулярные оси тела, не зависящие от х3:
их = и(хг,х2), щ = v(xl9x2\ ц3 = 0 (6.3.1)
ири этом компоненты деформаций будут
Б11 ^ UijIj 822 = ^2*2> ^е12 == ^1»2 ~Г ^2»1> е13 == е23 == е33 = 0-
(6.3.2)
Чтобы обеспечить отсутствие осевого удлинения материальных
ЗДокон, необходимо соответственно обобщенному закону Гука
прибить осевые напряжения
<т8з = v (сги + а22). (6.3.3)
179
Поэтому остальные соотношения закона Гука для изотрогшого тела
можно представить так:
1—V2 / V \ 1—V2 / V \
1+V 1—V2 Л , V \ ,с о л\
Если массовые силы отсутствуют, то напряжения при плоской
деформации должны удовлетворять уравнениям равновесия
а1Ъ1 + ^12^2 = 0> <721>1 + а22»2 = 0» (6.3.5)
получающимся из общих дифференциальных уравнений равновесия
в прямоугольных декартовых координатах. Первое из уравнений
(6.3.5) свидетельствует о существовании такой функции A (xlf х2),
что ап = Л,2, сг1а = — Ла.
Второе уравнение (6.3.5) показывает, что
#22 = ^>i> °12 == ^i == ^»2*
Сравнивая два представления для сг12, получим Atl = £,2, поэтому
существует функция напряжений Ф, удовлетворяющая условиям
Л = Ф,2, 5 = Ofl.
Таким образом, вводя функцию напряжений или функцию Эри Ф,
представляем напряжения формулами
оп=д*Ф\дх1 о22 = д*Ф\дх1 а12 = - /® (6.3.6)
и безусловно удовлетворяем уравнениям равновесия. Совокупность
формул (6.3.4) и (6.3.6) приводит к представлениям деформаций
через функцию напряжений:
£*ец = Ф§22—v*a>fii, £*в2а = Ф,ц—v*0>,22,
£*е12=-(1-л>*)Ф,12, £* = _* v*=-^-. (6,3'7)
1—V2 1—V
Обратившись к первой группе уравнений совместности (1.10.8),
получим дифференциальное уравнение
&22>11
"г eii»22 — 2e12,i2 — О,
которое при подстановке в него (6.3.7) приводит к уравнению для
функции напряжений — бигармоническому уравнению
д*Ф +2 34Ф +^«U0, (6.3.8)
дх} дх\ дх\ дх\
дть повторным прим
У2(У2Ф) = У4Ф=0. (6.3.9)
которое можно представить повторным применением оператора Лап
ласа
180
Таким образом, функция напряжений должна быть бигармониче-
g удовлетворяющей определенным граничным условиям.
Предстаем себе контур Г области поперечного сечения рассматриваемого те-
Б0 /ойс. 96) и предположим, что в точке контура с внешней нормалью
згданы нормальная avv и касательная avt составляющие вектора
внешних сил. Эти внешние силы связаны с компонентами
напряжений следующими из (6.1.5) формулами:
[ai 1 п\ + 2а12 п{п2 + а22 п22]г = a?v, (6 3 10)
[(<?22—стц)/г./г2+ о12(п1—п22)]г = о^
Поэтому, представив напряжения через функцию напряжений, можно
получить два граничных условия для определения бигармонической
функции
Замечание 1. К той же
математической проблеме определения
бигармонической функции напряжений
по граничным значениям некоторых
комбинаций производных искомой
функции сводится задача о плоском
напряженном состоянии.
Плоское напряженное состояние
реализуется в тонкой пластинке, которая
подвергается действию внешних сил,
лежащих в срединной плоскости
пластинки. Совмещая срединную плоскость с координатной плоскостью
Охгх2, можно утверждать, что в случае плоского напряженного
состояния
Рис. 96
<*31 = <*32 = a
33
- 0
(6.3.11)
не только на граничных плоскостях пластинки х3 = ±0,5 h (h —
толщина пластинки), свободных от внешних воздействий, но и всюду
в пластинке. Остальные компоненты напряжений подчиняются
уравнениям равновесия вида (6.3.5), которые удовлетворяются введением
функции напряжений (6.3.6). В отличие от (6.3.7) компоненты
деформации связаны с функцией напряжений формулами
Ееп =* Ф,22
v(p,n, £е22 =Ф,и — v(D,2
(6.3.1-2)
£е12 = -(1 + v) Ф,
12'
Поэтому функция напряжений, определенная для некоторых
состояний плоской деформации, служит и функцией напряжений для
пластинки соответствующей конфигурации и нагрузки.
Замечание 2. Известны представления бигармонических
Функций через две аналитические функции комплексного переменного,
пРедставимые сходящимися степенными рядами. Поэтому при решении
Плоских задач теории упругости широко используются методы теории
Функций комплексного переменного, предложенные Г. В. Колосовым,
Развитые Н. И. Мусхелишвили^и его многочисленными последовате-
181
§ 6.4. Примеры построения функций напряжений /
1. Однородное напряженное состояние прямоугольной пластинки.
Рассмотрим напряжения, порождаемые функцией /
Ф = 0,5 (qx\ + рх\) — sxxx2. (6.4.1)
Нетрудно проверить, что эта функция бигармоническая — при подстановке
в уравнение (5.6.8) получим тождество. Вычисляя по формулам (6.3.6) и (6.4.1)
составляющие напряжений, находим:
°П = Р> °*22 = Ч> °*12 = °*21 = S«
(6.4.2)
Напряженное состояние, представленное формулами (6.4.2), реализуется
системой внешних сил, показанных на рис. 97.
я
5й
ЦЩ#Ш
fffl ftrl 1TM
Рис. 97
Рис. 98
Равномерно распределенные нормальные напряжения в направлении оси
Ох± и оси 0х2 и равномерно распределенные касательные напряжения s вызывают
напряженное состояние (6.4.2) в пластинке либо длинном брусе показанного
сечения.
2. Функции напряжений
Ф = а*2/(ЗА), (6.4.3)
где а, h — постоянные, соответствует напряженное состояние прямоугольной
пластинки (рис. 98) с размерами Л, /, Ь, где Ь — толщина, h — высота, / —
длина полосы. Напряжения вычислим по формулам
°*ii = 2ox2/ht с22 = <т1а = 0. (6.4.4)
На рис. 98 показан график линейного по высоте пластинки распределения
напряжений, причем максимальное значение напряжения обнаруживается
в крайних волокнах при х2 = ОуЫг.
Напряженное состояние (6.4.4) в пластинке высотой h реализуется
внешними воздействиями, представляющими собой линейно
распределенные,нормальные напряжения по торцам. Эти напряжения приводятся к статически
эквивалентному изгибающему моменту
М =
0,5ft
х2опЬс1х2=>2 ~YGb"^
(6.4.5)
Заметим, что реализация краевых изгибающих моментов может быть
технически разнообразной. При этом распределение напряжений по торцам балки также
разнообразно. Важно лишь обеспечить статическую эквивалентность этих
напряжений паре с моментом М.
Если длина / пластинки достаточно велика, то напряженное состояние в
средней части пластинки описывается соотношениями (6.4.4) при любой реали-
182
ояции краевых изгибающих моментов. Другими словами, напряженное
состояние в точках тела, достаточно удаленных от точек приложения внешних сил,
Определяется не деталями распределения внешних сил, а лишь статическими ха-
оактеристиками совокупностей этих сил — главным^вектором и главным
моментом внешних сил.
Высказанный постулат принимается как один из общих принципов
механики деформируемого твердого тела и носит название принципа Сен-Венана.
Обоснованием принципа Сен-Венана может быть опыт, практика, а также некоторые
строгие решения отдельных задач о деформациях реальных твердых тел.
Заметим теперь, что напряжения в любом
поперечном сечении распределены по
линейному закону, и сводятся к паре с моментом М.
Этот момент внутренних сил в
поперечном сечении полосы называется изгибающим
моментом. Состояние полосы, при котором в
каждом поперечном сечении развиваются
только нормальные напряжения,
приводящиеся к изгибающему моменту Му неизменному
вдоль оси полосы, называется чистым
изгибом полосы.
3. Возьмем теперь функцию напряжений
в форме
Ф = 2Pb-1h-*(x1x* — 0,75/i%^2). (6.4.6)
и рассмотрим напряженное состояние в прямоугольной полосе прежних
размеров. Напряжения, соответствующие (6.4.6), вычисляются по формулам
o11^\2Pb-1h-^x1x2y o12 = 0,o12^\,5Pb-1h-1[l--(2x2/h)2]>e22==0. (6.4.7
Выбирая координатную систему, как показано на рис. 99, обнаруживаем, что
кромки полосы х2 = ± 0,5 свободны от напряжений:
а22 Ijc2 = ± O.Sft^0» a12U2 = ±0,5/i = 0'
На торце xt = 0 развиваются только касательные напряжения, вычисляемые
по формуле (6.4.7). Эти напряжения распределены по параболическому закону
и приводятся к направленной вертикально вниз силе Р, так как
0,5/1
J bo12dx2 = P. (6.4.8)
-0,5/1
На торце х± = b развиваются нормальные и касательные напряжения, которые
сводятся к направленной вертикально вверх силе Р и изгибающему моменту
Рис. 99
0,5 h
М= Г Ьх2[ап] bdx--
— 0,5/i
--РЬ.
Реализуется полученное аналитически напряженное состояние посредством
есткого закрепления правого торца и приложения вертикальной силы Р к ле-
му свободному концу. Схематизированный подобным образом элемент кон-
к РУкции называется консольно закрепленной балкой или
н н с ° л ь ю. Заметим, что при параболическом распределении касательных
са Ряжений максимальное напряжение в полтора раза превышает среднее ка-
4Нпе напРяжение- Это прямо следует из рассмотрения формул (6.4.7).
ив пРеДставляет практический интерес использование функции напряжений
НаппКрИВ°ЛИНейных К00РДинатах. Например, в цилиндрических координатах
Ф°РмуЖеНИЯ вычисляются через бигармоническую функцию напряжений по
<*гг =
J_ дф
г дг "*"
1 даФ
г2 аеа
JeeE
а2о
дг2
"гв~
д I 1 дФ\
дг[ г ае)
(6.4.9)
183
Класс бигармонических функций, зависящих только от г, имеет в^Д
Ф = A In г + Br2 In г + Cr2 + D, (6.4.10)
где А, В, С, D — константы. /'
В частности, легко показать, что функцией напряжений
Ф = A In г + Сг2
A = (pa-Pb)a2b2j(b2-a2), 2С = (а2ра -b2pb)I(b2-a2)
определяется распределение напряжений в кольце, которое подвергается
внутреннему и внешнему давлению (задачи Ламе).
Рис. 100
Рис. 101
Функцией напряжений (6.4.10) при
NA = — 4Ma2b2 In (b/a)t
NB = — 2М (b2 — а2),
NC = М [b2 — а2 + 2b2 In b — 2a2 In a,
N=(b2 — a2) — Aa2b2 (in —)
определяется распределение напряжений при чистом изгибе кривого бруса
(рис. 100) — решается задача X. Головина. По формулам (4.4.9) находим:
Norr=— 4M[a2b2r-2\n(b/a) + b2\n(r/b) + a2\n(r/a)]y
Noqq = —4М [ — a2 b2 r-2 In {b/a) + b2 In (r/b) + a2 In (r/a) + b2—a2],
Jr6
= 0.
Задача об изгибе кривого бруса поперечной силой (рис. 101) решается функцией
напряжений
Ф = (Аг3 + Br-s + Cr In г),
где
2НА = Р, 2НВ = — РаЧ2у НС = — Р (а2 + б2),
Я = а2 — Ь2 + (а2 + Ь2) In (bid).
Здесь особый интерес представляет распределение нормальных напряжений
а89 У закрепленного конца бруса при 6 = 0,5я, которое дается формулой
Na{
ее-
--Р [Зг—а2 Ь2 г-з — (а2 + Ь2) г-1].
Для решения задачи о действии на кривой брус нормальной к свободному
сечению силы привлекают функцию напряжений вида Ф = / (г) cos 6.
Разнообразные случаи нагружения кривых брусьев с применением комбинации упомянутых
функций напряжений были рассмотрены X. Головиным.
184
Использование функции напряжений вида Ф = / (г) cos 20 позволило
Киошу решить задачи о распределении напряжений в полосе, имеющей не-
£' ьшое круговое отверстие (рис. 102). Функция напряжений
ф = (Лг2 + Вг4 + Сг-2 + D) cos 29
ЙВодит в этом случае к представлению напряжений:
о>г==0,5<7(1 — а2) + 0,5д(1 + 3а4—4а2) cos 20,
(j0e=O,5g(l— а2) — O,5g(l + 3a4)cos20,
ar6=— 0,5^(1 — 3a4 + 2a2)sin.20. (6-4.11)
Заметим, что размер b в это решение не входит, поскольку предполагается
а1Ь - 0.
\
я
У
,
СМ
1
Т
X
\ '■■— ■■■"
\
N
\
\
\
\
\
\
«
J
\
i
1
I
Я
'
\
шяя^
Рис. 102
Рис. 103
'На рис. 102 схематически показано распределение нормальных напряжении
а0е в наиболее слабом сечении пластинки при 0 = 0,5я. По формулам (6.4.11)
находим, что
*ее|е = о.5я = <7 (l + 0,5a»+l,5a«).
Отсюда следует, что максимальное напряжение в ослабленном круговым
отверстием сечении будет при г = а и в три рааа превышать- среднее напряжение:
max.
аее -
■-kqy * = 3.
(6.4.12)
Возрастание максимальных напряжений за счет отверстий или иных
изменений конфигурации тела называется концентрацией
напряжений, а коэффициент k в формуле (6.4.12) — коэффициентом
концентрации напряжений.
В частности, коэффициент концентрации напряжений около кругового
отверстия при одноосном растяжении пластинки оказывается равным трем. С
таким значительным повышением средних напряжений несомненно стоит считаться.
5. Заканчивая обсуждение применения функции напряжений, остановимся
подробнее на решении задачи о действии сосредоточенной силы на границе
полуплоскости (рис. 103) —. задачи Фламана — Буссинеска.
Для выяснения вида функции напряжений привлечем соображения теории
размерности. Напряжение представлено через функцию напряжений формулой
аве ^ д2ф/дг2. Поэтому единица измерения функции напряжений совпадает
с единицей измерения произведения oQQr2 = Н.
С другой стороны, сила Р измеряется в Н/см, поскольку она отнесена к
единице длины вдоль оси, перпендикулярной рассматриваемой плоскости. Поэтому
J 85
можно утверждать, что единицы измерения Фи произведения Pg совпадают,
что служит основанием для представления функции напряжении в форме
Ф = Prf (9),
где / (6) — безразмерная функция координатного угла 6. Потребуем теперь,
чтобы Ф была бигармонической. Сначала находим У2Ф, а затем
У«Ф = Рг-8[(^+/)-+й-+/)].
Требование бигармоничности функции напряжений приводит к уравнению для
определения /: /IV + 2/" + / = 0.
Характеристическое уравнение, соответствующее этому линейному
однородному дифференциальному уравнению, имеет кратные корни k = ± t, поэтому
общее решение его представим в виде
/ - схе sin е + с2е cos е +
+С3 sin 9 + С4 cos 9,
где Съ С2, С3, Сл — постоянные
интегрирования. Прямые вычисления напряжений
по функциям напряжений Ф=С3Рг5т9,
Ф = C^Pr cos 0. приводят к нулевым
напряжениям, поэтому без ограничений
общности можно считать С3 = С4=.0. Далее
заметим, что нормальные напряжения агг
вычисляются через четные производные
по Э от функции напряжений. Поэтому
при действии силы Р, перпендикулярной границе полуплоскости, функция
напряжений должна быть четной по 9 и следует считать
Ф = CjP9r sin 9. (6.4.13)
Если рассматривать эффекты действия силы <?, параллельной границе
полуплоскости, то рекомендуется функция напряжений
Ф = C2Q9rcos 9. (6.4.14)
По функции напряжений (6.4.13) находим, используя4 формулы (6.4.9):
огг = С1Рг-12 cos 9, (тее = 0, о>е = 0. (6.4.15)
Напряженное состояние, определяемое формулами (6.4.15), называется
простым радиальным. В каждой точке тела лишь радиальное напряжение
отлично от нуля.
Для определения константы Сг рекомендуется рассмотреть условие
равновесия полукруга радиуса г с центром в О, выделенного из полуплоскости.
Толщина диска считается единичной.
Условие равновесия полудиска
0,5л
f o>rcos9rd0 + P = O
— "0,5я
приводит к числу Сх = — я-1
и распределению радиальных напряжений в полуплоскости
orr=—2PcosQ(m)-1. (6.4.16)
Заметим, что окружности диаметра d (г = d cos 9), касающиеся границы полу-
плокости в начале координат, представляют собой геометрическое место точек
равных напряжений. Эти геометрические места наблюдаются экспериментально
при действии сосредоточенных сил на пластинки из оптически активных
материалов.
186
располагая решением задачи о действии сосредоточенной силы на границу
луПЛоскости, можно, используя принцип наложения решений линейных задач,
поЛучить распределение напряжений в полуплоскости от действия двух сил, пары
п л распределенной нагрузки по границе полуплоскости.
с 'Применение функции напряжений (6.4.15) продемонстрируем на задаче о
действии сосредоточенной силы Q на бесконечный клин раствора 2а. На рис. 104
показаны клин, действующая сила Q и система полярных координат.
Распределение нормальных напряжений антисимметрично по углу 9, поэтому, применяя
функции напряжений (6.4.15) и формулы (6.4.9), находим:
о>г=— 2C2Q/*-1sin0, аее = 0, arQ = Q.
Условия равновесия части клина, ограниченной дугой произвольного радиуса г,
сводятся к уравнению
а
Q— f arrsin0rdG = O,
— а
откуда находим
С2 = — (2a — sin 2а)-1
и формулу распределения напряжений
агг = 2Q sin 9 [г (2a — sin 2а)]-1, (6.4.17)
которая действует лишь при некотором удалении от точки приложения силы
§ 6.5. Изгиб консоли
В целях совершенствования представлений о распределении
напряжений в призматических стержнях при изгибе рассмотрим задачу
изгиба консоли с позиций общих уравнений теории упругости.
На рис. 105 представлена схема консоли с произвольным
поперечным сечением. Формулами (6.4.7) устанавливается распределение
нормальных и касательных напряжений
в балке прямоугольного поперечного
сечения, когда ширина балки невелика,
а напряженное состояние можно
считать плоским.
Пусть сила Р приложена с
эксцентриситетом б относительно начала
координат. Для определенности считаем,
что ось Охг совпадает с линией центров
тяжести поперечных сечений. Длину
консоли обозначим /, а сила считается Рис. 105
параллельной Ох2. Требуется
установить распределение напряжений- в консоли, считая деформации
Упругими, а материал консоли однородным, изотропным.
Решение этой задачи ищем полуобратным методом. Установим
эмпирически значения некоторых из компонент напряжений, а осталь-
Нь*е компоненты попытаемся определить посредством удовлетворения
Уравнениям равновесия, условиям совместности деформаций,
граничным условиям.
Распределение нормальных напряжений ап в поперечных сечениях
алки принимают пропорциональным ординате продольного волокна
187
ffxl = kx2t причем коэффициент пропорциональности k выбирае^я
таким, как при чистом изгибе балки того же поперечное сечения
парами сил с моментом, совпадающим с изгибающим моментом в
рассматриваемом сечении М = Рхх. /
На основании формул (5.2.9) либо (5.3.6) положим Gn — Pxxx2/J'33,
где Узз— момент инерции поперечного сечения относительно оси Ох3%
Касательные напряжения в поперечных сечених а12, а13 оставляем
пока неопределенными, а остальные компоненты тензора напряжений
считаем нулями. Таким образом, следуя полуобратному методу, задаем
систему напряжений в консольной балке формулами
(Ти = Px±x2/J3Sj а22 = а33 = <72з = 0- (6.5.1)
Дифференциальные уравнения равновесия (6.1.1) при отсутствии
массовых сил Fk = 0 будут удовлетворены, если компоненты
напряжений сг12, о13 считать зависящими только от координат х2, х3 и
вычислять через некоторую функцию я|э (х21 х3) по формулам
°i2 = *>8 — Pxl/(2JS9) + f {х3)у о13 = -я|>,2, (6.5.2)
где г|) — пока произвольная функция. .
Неизвестную функцию г|э (х2, х3) можно называть потенциалом
касательных напряжений при изгибе консоли. Поскольку в
рассматриваемой задаче основными неизвестными выбраны компоненты
напряжений, необходимо проследить за выполнением условий совместности
деформаций.
По напряжениям (6.5.1) и (6.5.2) можно вычислить, используя
обобщенный закон Гука применительно к изотропному телу,
компоненты деформации:
D&H — JrX^X2y J3&22 ~ ^^3 3 == VrXiXfy
Вг12 = (1 + v) [У88%8 - 0,ЬРх1+ J33f (х3)]
Вг13 = —(I + v) /33г|)12, е23 = О, В = £/33. (6.5.3)
Компоненты деформации eih связаны условиями совместности
деформации (1.10.8). Если представления (6.5.3) подставим в первую
группу уравнений совместности (1.10.8), то получим тождества.
Подстановка (6.5.3) во вторую группу уравнений совместности
приводит к двум дифференциальным уравнениям:
(813»2 812>з)>2 == 0, (6l3)2 е12»з)»3 = ^РВ .
Отсюда после интегрирования и подстановки (6.5.3) найдем
дифференциальное уравнение, которому должен удовлетворить потенциал
напряжений,
щ = v/(1 + v) pX3/j33 _ /1(Хз) + с, (6.5.4)
где С — постоянное число.
Наконец, обратимся к граничным условиям. На боковой
поверхности цилиндрического или призматического тела внешняя нормаль-
перпендикулярна Охъ поэтому vx = 0. Боковая поверхность консоли
188
свободна of напряжений,* поэтому граничные усЛоЁйй на поверх*
ности сводятся к условию на контуре поперечного сечения Г:
f(J12v2 + a13v3]r =* 0.
На рис. 106 показан контур Г поперечного сечения консоли,
внешняя нормаль v к контуру в произвольной точке и элемент ds дуги
контура,
Очевидно,
что
v2 = cos а — dx3/dsy v3 = sin а = —dx2/ds.
Используя эти соотношения и формулы (6.5.2), можно показать,
tfi2v2 + Oi3v3 = dty/ds + If (x3) — 0,5 P/(J33xl)] dxJds.
Рис. 106
Поэтому условие отсутствия
напряжений на боковой поверхности сводится
к условию определения потенциала
касательных напряжений при изгибе
консоли по условию на границе
{^ + Г/(*з)-0,5Р/(/зз*§)]^4 =0.
I ds ds J г
(6.5.5)
Итак, проблема определения
напряжений при изгибе консоли свелась к
нахождению потенциала я|),
удовлетворяющего уравнению (6.5.4) и
граничному ус'ловию (6.5.5). За счет произвольного выбора / (х3) и
константы С можно эту краевую задачу свести к одной из стандартных форм.
Например, полагая на границе поперечного сечения
[/ (jc8) - 0,5Р/(У33х|)]г = 0, (6.5.6)
за счет специализации выбора / (х3) из (6.5.5) получаем
И-фШг = 0.
Отсюда следует: потенциал напряжений принимает постоянное-
значение на контуре поперечного сечения. Без ограничений общности в
случае односвязного контура можно считать
tylr = 0. (6.5.7)
Можно, конечно, поступить и иначе: выбор f\x3) подчинить
упрощению правой части уравнения (6.5.4). На обсуждении этого пути
упрощений краевой задачи не останавливаемся.
Рассмотрим некоторые примеры расчетов напряжений при изгибе
к°нсоли. Начнем с поперечного сечения в виде круга радиусом R.
^Равнение контура круга х\ + х\ = R2. Поэтому контурные
значения х\ будут связаны с х3\ х\ = R2 — х\, а для удовлетворения
условию (6.5.6) достаточно считать
f(x3) = 0,5 PIJ33{R2-x%). (6.5.8)
189
Условию (6.5.7) удовлетворим, если в представление потенциала
введем множитель (—R2 + А + х\). /
Выбирая координатную систему, как показано ija рис. 107,
обнаружим симметрию напряжений а13 относительно/оси Ох2. Поэтому
а13 меняет знак с изменением знака х3 на обратный. Это значит, что
д\р/дх2 должна быть нечетной функцией по переменной х3.
Сказанное служит основанием попытки
искать функцию напряжений в форме
многочлена
я|) = Ax3(-R2 + х\ + х\), (6.5.9)
удовлетворяющего граничным условиям.
Подстановка этой функции в уравнение (6.5.4)
с учетом представления / (х3) в виде (6.5.8)
приводит к тождеству, если считать
A=±LtllJL. (6.5.10)
8 1+V /88
По найденному потенциалу вычисляем напряжения:
<х1а = (0,5Р//Зз — A) (R2 — xl — хЪ)+2АхЪ <т18 = —2Ах3х2.
Максимальное касательное напряжение обнаружим при х2 = R, х3 =
= 0, причем
gmax_ 1 3 + 2v PR*
12 8 1 + v J33
Если использовать рекомендации расчета максимальных
касательных напряжений по формуле (5.3.7), то получим завышенное
значение максимального напряжения а™х = 0,5PR2/J33.
Подобным способом можно найти функцию напряжений и
распределения напряжений при изгибе консоли эллиптического
поперечного сечения. В этом случае множитель в скобках правой части
выражения (6.5.9) заменяется левой частью уравнения контура эллипса.
Возвратимся теперь к изучению напряжений в консоли
прямоугольного сечения высотой ft, шириной Ь. Заметим, что граничное
условие (6.5.6) на частях контура х3 = ±0,5Ь удовлетворяется за счет
второго из множителей, ибо на этих частях контура х3 — const.
Граничному условию (6.5.6) на частях контура х2 = +0,5/1
удовлетворим за счет выбора произвольной функции
f(x3) = Ph2/(8J33). (6.5.11)
Кроме того, константу С считаем равной нулю. Теперь проблема
сводится к определению функции я|), удовлетворяющей
дифференциальному уравнению
у2^ = ^_1__£ъ ^ (6.5.12)
1 + v J33
Рис. 107
190
следующему из (6.5.4), и граничному условию
^ = 0| при *3 = ±0,5&, (65ЛЗ)
[ при х2= ± 0,5Я.
Заметим, что основные части напряжений при изгибе определяются
формулами (6.5.1), (6.5.2) и (6.5.11) при -ф = 0, тогда как if> (*2, х3)
несет поправки к основным частям напряжений. Однако средства
вычисления этих поправок оказываются гораздо более громоздкими.
Краевую задачу (6.5.12) с условиями (6.5.13) будем решать
разложением в ряд:
^=2'2A^^cos{2m+H)nX2sin^r1- (а5Л4)
При этом удовлетворяются первые из условий (6.5.13) и вторая
группа условий на контуре.
Подстановкой ряда (6.5.14) в уравнение (6.5.12) получим
сю оо
2 2 ^2m+i.nCos(2m-f l)jt-|L sin2nn^-x
/72=0 П=1
X
(2m+l)2jt2 / я VI v Px,
+
(2^yu^_
\ b)\ (l+y
) Js
Умножив обе части этого уравнения с неизвестными А2т+1п на
произведение косинуса и синуса, после интегрирования по всей области
поперечного сечения найдем формулы для вычисления
коэффициентов:
Л2т+\ ч = * " • (6.5.15)
,71 1 + v J33 n*(2m+\)n[(2m+\)*lh* + {2n/b)2] К
Совокупностью формул (6.5.14), (6.5.15) определяется искомая
функция корректирующих частей напряжений при изгибе консоли. В
частности, если учесть, что S = bh, J 33 = Wi3/12, касательное
напряжение в центре прямоугольника при х3 = 0 можно представить в виде
а12(0, 0) =* 1,5(1 —k)P/S.
Коэффициент k зависит от отношения h/b и значения коэффициента
Пуассона. Для тонких балок значение k имеет порядок величины 0,02,
к°гда h/b > 2. По мере снижения высоты, когда h/b <С 0,25, число к
имеет порядок 0,2.
191
Особый интерес представляет изучение изгиба 6ajjoK, имеющих
несимметричное относительно плоскости х3 = 0 поперечное сечение.
На рис. 108 представлено поперечное сечение консоли в виде
полукруга. /
Распределения напряжений, соответствующие потенциалу (6.5.9),
можно представить формулами
а12 = 0,5-^- [l ——^±^1 (^2__Jc|_xi) + о,25 ^t^- f-x§,
•Л*з L 4(l+v) J 1 + v J33
n 7r l + 2v P
1+v /33
On
' %\ %2*
(6.5.16)
При этом дифференциальные уравнения
равновесия и условия совместности деформации
удовлетворены. .
На полуокружности, где v2R = x2J v3R = х3у
составляющая касательного напряжения
°i2v2 + o13v3 = (о12х2 + o13x3)/R = 0.
На оставшейся части контура при х3 = 0
напряжение а13 согласно (6.5.16) нулевое. Отсюда
следует, что напряженное состояние (6.5.16)
оказывается таким, что напряжения на боковой
поверхности полукруглого стержня отсутствуют.
Рис. 108 Далее потребуем, чтобы линия действия
поперечной силы проходила через топку К (рис. 108).
Точка К подбирается так, чтобы момент касательных напряжений
в поперечном сечении уравновешивался моментом внешней силы:
j (—x2Oi3 + x3ai2)dx2dxs = PxK.
(6.5.17)
(S)
Здесь интегрирование распространяется на всю площадь
поперечного сечения полукруга.
Вычисления по формулам (6.5.17) и (6.5Л6) приводят к
определению координаты хк точки /С:
8 3 + 4v п
(6.5.18)
5я 3(l+v)
Заметим, что координата центра тяжести полукруга хс = 4/?/ (Зя)
4 п /2 3+4v Л
и разность хк — хс = — R !— — 1 положительна.
Точка /С, в которой следует приложить поперечную силу, не
вызывающую кручения, называется центром изгиба.
192
Глава VII
УПРУГИЕ СОСТОЯНИЯ ПЛАСТИН И ОБОЛОЧЕК
§ 7.1- Основные соотношения теории изгиба пластинок
Теория изгиба пластинок строится как приведение общей
трехмерной задачи механики деформируемого твердого тела к двухмерной
посредством двух гипотез Кирхгофа. Пластинка как объект
исследования представляется конфигурацией ее средней плоскости. В
средней плоскости положение точек можно определить декартовыми
координатами х1у х2 либо криволинейными
координатами. Здесь же вводятся элемент линии
средней поверхности, касательная t и
нормаль v к контуру этой линии, причем t, v, /3
образуют правую координатную систему.
На рис. 109 представлена часть
поперечного сечения пластинки, соответствующая
контуру ds средней плоскости пластинки с
касательной т и внешней нормалью v. Там
же показаны нормальные ovvdx3ds и
касательные ovxdx3ds внутренние усилия,
действующие на элементарную площадку
сечения площадью dx3ds с аппликатами х3. Здесь
не представлена касательная составляющая
усилия в направлении нормали к средней
плоскости, так как компоненты напряжений
-0,5h
'23> и33>
имеющие индекс 3, считаются
Рис. 109
в ^теории пластинок пренебрежимо малыми
по сравнению с тремя другими. В этом состоит одна из гипотез
Кирхгофа. Сведением распределенных по высоте сечения напряжений к
усилиям и моментам относительно точки контура средней
поверхности найдем составляющие главного вектора и главного момента:
0,5 h
dsN,
- s
•vv — \ Oyy ax3 as у dsi\ \
— 0,5 h
0,5/i
=- 5
Gvxdx3ds, (7.1.1)
-0,5 h
0,5/1
0,5 h
dsMvx = — \ хз °vv dx3 ds, dsMvv = j
X3 0\?T (XX3 (XX
-0,5/1
— 0.5 A
(7.1.2.)
Формулами (7.1.1) определены отнесенные к единице длины контура
произвольной линии средней поверхности нормальное Nvv и
касательное NVx усилия, изгибающий Mvx и крутящий Mvv моменты. Кроме
того, полагаем отличной от нуля перерезывающую поперечную силу
Qv, поэтому векторы сил и моментов, отнесенных к "единице длины
контура средней плоскости, определяем по формулам
Nv = Nvx t — Л/vv v + Qv /3, Mv = Mvxx + Mvv v.
Зак. 588
(7.1.3)
193
В частности, рассматривая площадку с внешней нормалью ily
следует в формулах (7.1.3) считать х = —/2, v = tly заменить индекс т на
индекс —1, а индекс v на +1. При этом получим^/
Ni = N12i2 + Nui, + QJ3y Mx = M12i2 + Mnil9
если учтем соотношения N1(_2) = — N12, Mt(_2) = — М12. Усилия
и моменты на координатной площадке с внешней нормалью /х
вычисляются по формулам
0,5 ft 0,5 ft
#п = \ ondx3i Nl2= § o12dx3y
— 0,5ft — 0,5ft
0,5/i 0,5ft
Mia= jj x3ondx3, Afu= jj x3a12dx3. (7.1.4)
— 0,5ft -0,5ft
Подобно этому, при t = /lf v = /2 найдем силы и моменты на второй
координатной площадке:
лга=
л*«
-Nu
Nn-
L= —
h+Nni,
0,5ft
- s •
-0,5ft
0,5ft
! 1 0,2 *3»
22 ^*^3>
(722 6^3»
#«
Д,
1
Л*и
= Мг111+Мы
0,5ft
-0,5ft
0,5ft
Л
d#;
— 0,5ft -0,5ft
(7.1.5)
Теперь рассмотрим условия равновесия бесконечно малого
элемента средней поверхности пластинки размерами dxly dx2. На элемент
действует распределенная внешняя нагрузка qdxxdx2. К одной
кромке элемента длиной dx2 приложены сила —Nxdx2 и момент —JAxdx2.
К противоположной кромке — сила (N± + N1 д dxx)dx2 и момент
(Mi + Мг>1 dx±)dx2. К двум другим противоположным кромкам —
аналогичные силы и моменты. Поэтому условия равновесия элемента
средней плоскости, как совершенно твердого тела, сводятся к
уравнениям
Nx.i + N2t2 + q = 0, (7.1.6)
Q2 = -М11Л — M21i2, Q± = M22>2 + М12Л. (7.1.7)
Заметим, что из (7.1.7), (7.1.4) и (7.1.5) следует симметричное
представление перерезывающих сил
Q = (H + Л^д, Q2 = (H + М2),2, (7.1.8)
где использованы специальные обозначения изгибающих Ми М2 и
крутящих Я моментов
Мх = М2, Мп = -Мгъ U = -Мп = М%г. (7.1.9)
№
Рас. 110
Уравнения равновесия распадаются на условия равновесия элемента
пластинки в ее плоскости
Лид + #г„ + дг = О, ЛГ21Д + N22t2 + q2 = 0 (7.1.10)
й условие равновесия моментов и поперечной нагрузки
Mi.u + 2//1а + ЛГа,аа + ?3 = 0. (7.1.11)
Система (7.1.10) служит для исследования деформаций и
напряжений в пластинке, вызванных силами, действующими в плоскости
пластинки. Пока перемещения и деформации считаются малыми, а
состояние материала линейно упруго, эффекты
действия сил в плоскости пластинки и эффекты
поперечных сил q3 можно считать
накладывающимися. Действие сил в плоскости пластинки
рассматривалось ранее в плоских задачах,
поэтому здесь изучаются только эффекты действия
на *пластинку поперечных нагрузок q3 =
= q (*i, *2).
Уравнение (7.1.11) содержит в качестве
неизвестных три момента, поэтому необходимо
установить соотношения между моментами и
геометрическими характеристиками изгибаемой
средней поверхности пластинки.
Геометрический анализ деформаций
пластинки основывается на гипотезе Кирхгофа:
геометрия деформаций пластины считается такой, будто
материальные элементы пластинки, нормальные к средней поверхности
пластинки, не деформируются при изгибе средней поверхности
пластинки, оставаясь нормальными к средней поверхности
деформированной пластины.
На рис. ПО представлены элементы средней плоскости пластины
в начальном АВ и деформированном А'В' состояниях, вектор
перемещения w точки О средней поверхности, вектор перемещения wz
точки М, лежащей на нормали к средней поверхности в точке О и
имеющей аппликату z. Заметим, что в теории пластинок аппликаты точек
вместо х3 обозначают г. В соответствии с геометрической гипотезой
Кирхгофа положение точки М' в деформированном состоянии
следует искать на нормали к деформированной средней поверхности на том
же расстоянии z от средней поверхности, что и в начальном
состоянии. Это позволяет установить соотношение
zi з + wz = w + zi£, (7.1.12)
гДе /з — единичный вектор направления нормали к средней
поверхности пластины в деформированном состоянии. Дальнейшее упрощение
излагаемой теории изгиба пластин основано на предположении такой
малости перемещений средней плоскости, при которой замечаются
только поперечные перемещения, поэтому
w =w (xly x2)i3.
7*
(7.1.13)
195
Направления координатных волокон в деформированном
состоянии определяются векторами /{ = 1г + дод /3, /£ = /2 + W^2 *з> еДи"
ничным вектором нормали к средней поверхности будет/их
векторное произведение /з = (/3—Wtl) X (/х — wt2 /2). Используй такое
представление вектора /з, находим' из (7.1.12)" и (7.1.13) проекции
перемещений произвольной точки пластинки:
wzl = —шд г, wza = — оу>2 г, ш23 = w. (7.1.14)
По формулам Коши можно вычислить компоненты деформации:
6ц '— Z^Hi ^22 = 2%22» ^12 = ^^12» (/.1.1э)
где введены обозначения для искривлений и кручения средней
поверхности пластинки
И11 = ^ц, ^22 = Я>,22> *12 = ^,12- (7.1.16)
Обратимся теперь к соотношениям между напряжениями и
деформациями, их упрощениям, основанным на гипотезах Кирхгофа. В
случае изотропного упругого тела малые деформации можно вычислить
через напряжения по закону Гука (4.3.1). Если при этом учесть
первую, статическую гипотезу Кирхгофа, пренебречь компонентами
напряжений, содержащими индекс 3, по сравнению с другими
компонентами, то получим:
Ееп = а11—vg22,
Е ^22 = ^22 ^Н >
Ee12 = (l+v)an.
Решая эти соотношения относительно напряжений, найдем с учетом
формул (7.1.15):
(1 — v2)oru = — Ez (ии + vxa2), —(1 — v2)a12 = Е (1 — v)zx12,
(7.1.17)
(1 — v2)a22 = — Ez (x22 + vxn).
Используем эти формулы при вычислении моментов по формулам
(7.1,9), (7.1.4), (7.1.5) и введем специальное обозначение для
цилиндрической жесткости пластинки
D = Ehs/[12(1 —v2)]. (7.1.18)
Тогда получим:
М±=— D (ип + vx22); М2 = —D (х22 + vxn);
Н=— D(\— v)x12. (7.1.19)
Наконец, подстановка моментов (7.1.9) и искривлений (7.1.16)
в уравнение равновесия (7.1.11) приводит к разрешающему задачу
уравнению в частных производных четвертого порядка
DV% = q, (7.1.20)
196
где использовано обозначение бигармонического оператора.
Интегрирование уравнения (7.1.20) проводится при определенных
граничных условиях. Контур средней поверхности пластинки обозначим Г.
Тогда в каждой точке контура Г, где можно построить единственную
касательную, могут быть заданы поперечные перемещения w или углы
поворота dw/dn нормальных к средней поверхности элементов
пластины. Такие условия относятся к категории геометрических
и записываются так:
w\r = f(s), dw/dn \v = f*(s), (7.1.21)'
где / и /* — заданные функции длины дуги s контура пластины. На
контуре пластинки могут задаваться и статические условия.
Например, вместо поворота dw/dn контурного элемента может
задаваться изгибающий момент Mvx. По определению (7.1,2) с
использованием закона Гука в форме (7.1.17) найдем
Mvx = D(wtnn + vwtSS). (7.1.22)
Поэтому можно считать, что на контуре пластинки задается
нормальная производная dw/dn либо комбинация вторых нормальной и
касательной производных (7.1.22).
Несколько сложнее формируется статическое граничное условие,
связанное с заданием перерезывающих сил на контуре. Дело в том,
что перерезывающая сила, задаваемая на контуре, складывается из
части вида (7.1.8), связанной с перемещениями:
#в8 = —D [ (1 — v)w9ns + wtSS + vwi7in]in,
и силы, к которой сводятся эффекты изменения крутящего момента
Mvv вдоль дуги контура. Можно показать, что эти эффекты
эквивалентны распределению добавочной перерезывающей силы
интенсивности dMvv/ds. Если же учесть связь крутящего момента с круткой
(7.1.19), то получим выражение обобщенной, суммарной
перерезывающей силы
Q* = -D [wtnnn + (2 - v)wtnu]. (7.1.23)
Итак, в каждой точке граничного контура средней поверхности
пластинки задаются две величины, по одной из двух пар:
(Иг; [wtnnn + (2~v)winss]r}{dw/dn\r\ (w,nn + (vwiSS)T}. (7.1.24)
При таких условиях уравнение (7.1.20) имеет единственное решение.
Отметим некоторые частные формулировки граничных условий.
Контур пластинки считается шарнирно опертым, когда прогибы и
изгибающие моменты оказываются нулями: w\r = 0, [w пп +
+ vw,ssh = 0.
Контур пластинки жестко заделан, когда условиями закрепления
запрещены не только прогибы, но и углы поворота контурных
элементов вокруг касательной к контуру: w\? = 0, [dw/dn]r = 0.
197
Контур свободен от закрепления, тогда моменты и обобщенные
перерезывающие силы должны быть нулями:
[w>nn + vwiSS]r = 0, [wtUnn + (2—v) w,nss]r^ 0.
При расчетах реальных пластинок возможны различные
комбинации указанных здесь условий.
§ 7.2. Примеры решения задач изгиба пластинок
1. Изгиб прямоугольной пластинки, опертой шарнирно по всему контуру
и нагруженной поперечным давлением, изменяющимся по синусоидальному
закону. На рис. 111 схематически показана средняя плоскость пластинки,
размеры которой а, Ь, поперечная нагрузка распределена по закону
q = q0 sin (nxja) sin (nx2lb), q0 = const. (7.2.1)
Граничные условия на контуре пластинке формулируются так:
w \Xt==0 =0, Ku + voyf22]Xi==0 =0,
W\Xl = a =°> №.n + ™,22\Xi==a = °>
Полагая
[wt22 + vwtll]Xt = 0 = 0,
[wt22 + vwtll]Xa==b =0,
w = w0 sin nxja sin nx2/b, w0 = const,
(7.2.2)
Рис. Ill
обнаруживаем удовлетворение
всем граничным условиям.
Подставив (7.2.1) и (7.2.2) в
уравнение изгиба (7.1.20),
найдем максимальный прогиб
в центре пластинки wQ, причем.
пЮ (а-2 + б-2)2 w0 = q0.
(7.2.3)
Максимальные изгибающие
моменты и максимальные
напряжения будут также при
Xi = 0,5а и х2 = 0,56.
Особый интерес представляет распределение опорных реакций —
перерезывающих сил на краях пластинки. Например, найдем распределение
обобщенных перерезывающих сил при % = 0:
QZ \Xl==0=—worfi Db~x №~2 + (2—v) a-2] cos (пх21Ь).
Суммарная реакция опор пластинки — 4ш0я2 (а-2 + Ь~2) (3 — v). Заметим,"что
разница между суммарной нагрузкой на пластинку 4q0abn~2 и суммарной
реакцией опор 4qQabn~2[l — (3 —v) ab (а2 + b2)-1] компенсируется
сосредоточенными нагрузками, которые необходимо приложить в углах пластинки для того,
чтобы обеспечить предполагаемые условия деформирования. Если эти
дополнительные нагрузки не приложены, то углы пластинки приподнимаются.
Заметим, что вычисление прогибов проводится совершенно аналогично при
нагрузке:
Я = Ятп sin nmxja sin nnx2/bt qmn = const.
Потому легко получить новые решения посредством наложения упомянутых
частных решений.
2. Прямоугольная пластинка с двумя противоположными опертыми
краями и двумя заделанными краями. Пусть края пластинки х± = 0 и Xf = а шарнир-
198
но оперты, а края пластинки х2 = 0 и х2 = Ь жестко заделаны. Нагрузка
пластинки считается равномерно распределенной по всей срединной плоскости.
оо
Прогибы пластинки представим рядом w = 2 Ym (х2) sin (mnxja). Подставим
/л= 1,3, б, ...
выражение для прогибов в уравнение изгиба (7.1.10) при q = q0, умножим
полученное соотношение на sin (mnxja) и проинтегрируем по длине пластинки
от 0 до а, получим уравнение для определения Ym:
d*Ym ( тк у d*Ym , / тл \* 4q0
-»(?-№+№■
dx\ \ а ] dx\ ' \ а ) т mnD #
Введем новую переменную т| = тя*2/а, и предыдущее уравнение запишем в виде
d'Ym _2 d*Ym 4д0а*
Общее решение его
Если выбрать начало координат в середине короткой стороны пластины, то
прогибы будут симметричными относительно оси Охъ а функция Ym — четный
по переменной т]. Поэтому считаем С^ = С^ = 0. Остальные константы
определим из условий на жестко заделанной части контура w I х = 05& = 0»
Удовлетворение этим уравнениям приводит к следующим значениям
констант:
С3т) = — С[т) (1 + m* cth т*), т* = 0,5тя6/а,
С[т) [1 +т* (cth т*—sh т*)] = 4<70 a4 D-1 т-5 л~5.
Далее можно вычислить максимальные прогибы, максимальные напряжения
и другие характеристики упругого состояния пластинки.
3. При изучении осесимметричных прогибов круглых и кольцевых пластин
выписывают оператор Лапласа в полярных координатах:
v2( ) = ( ).гг+г-Ч ),г+г-Ч ),ее
и упрощают за счет симметрии:
Va() = (),rr + r-i(),r=r-4r()tr],r.
Потому уравнение изгиба пластин (7.1.10) можно записать в форме
Dr-1{rb-1(rw>r),r}>r},r = g(r)^
Последовательным интегрированием находим общее решение этого уравнения:
и/= Схга + С2+С3г2 Inr+Ct Inг+
ЛШ^Н-)^
(7.2.4)
Постоянные С1э С2, С3, С4 находим из граничных условий. Например,
рассмотрим изгиб сплошной круглой пластины постоянной жесткости при действии
постоянного давления q\ С3 и С4 принимаем равными нулю, чтобы обеспечить
конечность прогибов и изгибающих моментов в центре пластин при г = 0.
Константы Сг и С2 определяем из условий на контуре пластины. Например, в
случае жесткой заделки при постоянной нагрузке находим сначала
199
а затем выписываем граничные условия при г — R:
CXR2 + C2 +
2СхД + -
1
64
1
16
DR^°->
DR3 = °>
/
откуда имеем
Сх=-
1
32
-§■«■;
c-=ii«'-
Рассмотрим теперь кольцевую пластинку, внутренний радиус которой а,
внешний радиус Ь. Пусть пластинка жестко закреплена на внешнем контуре и
нагружена равномерно распределенной по внутреннему контуру поперечной
силой Р (рис. 112). Принимая общее решение
в виде
w = схг2 + С2+ С3гЧпг + С4 In г,
i
la
1
lb
1
Рыс. 112
выписываем граничные условия:
CJ2 + С2 + С3&2 In b + С4 In & = О,
Ci + С3 (2 In b + 1) + С46-2 = О,
2СХ(1 + v) + С3 [2 (1 + v) In а + 3 + v] -
— C4(l — v)a-»= О,
4DC3 = aP,
причем последнее условие представляет собой определение перерезывающих сил
Q = D [/— 1(гш>г)>г]эГ при г = а.
Если круглая пластинка имеет ступенчато меняющуюся жесткость либо
нагрузку, то при расчете поперечных перемещений пластинка, делится на области,
в каждой из которых можно написать решение уравнения изгиба вида (7.2.4)
Для определения констант используют граничные условия и условия
сопряжения: требуется непрерывность прогибов на границе областей, непрерывность
углов наклона касательных к меридиану получающейся поверхности вращения,
непрерывности или выполнения условий конечных разрывов изгибающих
моментов и перерезывающих сил. Например, для сплошной круглой пластинки
радиуса я, нагруженной силой Р, распределенной по окружности радиуса Ь,
можно найти для наружной части пластинки
8я£>
г a2-\-b2 г 1
\(a2-r2)~-^- + (b2 + r2)\n — \ (b<r<a)
и для внутренней части
Р Г b
• (a2 + г2) In —
-b2
8kD
2a
>]
(a2 + r2) (0<r< b).
Наружный край здесь предполагается жестко заделанным. Другие
многочисленные примеры расчетов упругих деформаций и напряжений в пластинках можно
найти в специальной литературе.
§ 7.3. Общие уравнения теории упругих оболочек
•Оболочки — это разнообразные элементы современных
сооружений, детали кораблей, самолетов, ракет, автомобилей, вагонов, части
машин, приборов, установок. Трудно охватить все разнообразие
технических применений оболочек. Оболочка — деформируемое
твердое тело, ограниченное криволинейными поверхностями.
Представление о форме оболочки можно получить через форму некоторой
200
опорной поверхности, именуемой средней или срединной
поверхностью, и толщину оболочки, измеряемую вдоль нормалей
# опорной поверхности.
Поверхность может быть задана в криволинейных ортогональных
координатах, как в § 1.2; в этом случае определен радиус-вектор
произвольной точки поверхности г(аъ а2). Протяженность поверхности
в направлениях каждой из координатных линий предполагается
одного порядка величины. В каждой точке этой поверхности можно
построить единичные векторы касательных к координатным линиям и
вектор нормали, образующие трехгранник е1у еъ е3. От каждой точки
этой поверхности, отложим отрезки длиной 0,5/i в направлении
нормали е3 и противоположном ей направлении (—е 3). Совокупность
концов этих отрезков образуют две поверхности, «одинаково отстоящие»
от средней поверхности. Эти поверхности называют иногда
лицевыми поверхностями. Очевидно, при заданной средней
поверхности и заданной толщине h (alf a2) лицевые поверхности
вполне определены векторами г ± 0,5/ie3. Предположим теперь, что все
пространство между лицевыми поверхностями занято непрерывно
распределенным материалом. Если при этом положительная величина
h оказывается существенно меньше любого из размеров средней
поверхности, то получим материальный объект, именуемый оболочкой.
Заметим, что размеры оболочки определяются протяженностью Ьъ
L2 вдоль координатных линий, а также величинами Rlf R2 радиусов
главных кривизн средней поверхности оболочки. Предполагается,
что h не менее чем в 5—10 раз меньше наименьшего из размеров Ll9
■Ь2, Ai, А2.
Оболочка представляет собой трехмерный материальный объект,
положение любой точки которого определяется координатами аъ <х2
соответствующей точки средней поверхности и координатной z вдоль
направления е3, определенного для точки средней поверхности.
Теория расчета упругих деформируемых оболочек основана не
некоторых гипотезах, приводящих трехмерную задачу теории упругости к
двухмерной.
Геометрия деформаций оболочек строится на основе гипотезы
нормального элемента: материальный элемент оболочки длиной h,
нормальный к средней поверхности оболочки до деформации, не
деформируется, оставаясь нормальным к деформированной средней
поверхности оболочки. В этом состоит одна из основных гипотез теории
оболочек — гипотеза Кирхгофа—Лява.
В § 1.2 установлены формулы для вычисления векторов еъ е2, #з
координатного трехгранника на поверхности,- Там же установлены
формулы (1.2.10), (1.2.16) и (1.2.11) для вычисления составляющих
тензора деформаций в точке поверхности по заданным компонентам
вектора перемещения точек поверхности:
е 1 даг , и2 дЛг и3 . 1 ди2 , иг дА2 щ
Ах дах АХА2 да2 Rx ' А2 да2 АгА2 дах R2
2е — * ди* _l 1 dui ui dAi и* дЛ2 (731)
Ах dot! А2 да2 ЛХА2 да2 AtA2 дах
201
Рассмотрим теперь слой оболочки, имеющей третью координату
г фиксированную, и определим компоненты деформации этбго слоя,
вызванные системой перемещений и^ точек такого слоя.уНа рис. ИЗ
представлены точка N слоя и соответствующая ей точка М средней
поверхности. Точки М и N лежат на одной нормали к средней
поверхности. Здесь же указано положение этих точек после деформации,
е вызванной перемещениями и и #(z),
V/ u(z) ^*/gj соответствующими гипотезе Кирх-
NX *iz гофа—Лява.
\ / Из рассмотрения рис. 113 сле-
м\ _^—- и ^^/м* дует векторное равенство
^л S^000000000^ ^Ч>44 ze* "*" и(г) = и ~^~ ze*3y
l^^0**^ так как считается действующей
^ гипотеза нормального .элемента;
Рис. 113 точка N* лежит на нормали к
деформированной средней
поверхности ^сохранением аппликаты z. Для вычисления разности el— е3
обратимся к фундаментальному соотношению (1.2.13), откуда найдем
единичный вектор е\ направления касательной к первой
материальной координатной линии на средней поверхности:
е\ (1 + еи) = (1 + гп)ег + фа + <h«s-
Подобно этому находим
е*2 (1 + е22) = (1 + «22^2 + Ф2^1 + ^З-
Вектор el направлен вдоль векторного произведения elxel-
Вычислять компоненты этого вектора будем, придерживаясь точности
построения линейной теории малых перемещений и деформаций,
пренебрегая квадратами и произведениями перемещений и их
производных по сравнению с первыми степенями. С указанной степенью
точности найдем el = —гр^ —*ф2в3 + ег- Теперь можно представить
перемещение точки произвольного слоя оболочки а^г) через
перемещение и соответствующей точки средней поверхности и
производные от этих перемещений:
#(*) = и — г^гег — гф2е2. (7.3.2)
Для удобства перепишем формулы (1.2Л2):
*'-1г^г+х' ^-1г^г+^г* (7-3-3)
Напомним еще раз, что формулами (7.3.2) представлен основной
вывод, к которому приводит гипотеза о недеформируемости
нормального элемента и сохранении его ортогональности к деформированной
средней поверхности. Здесь полезно сопоставить формулу (7.3.2) с
формулой (7.1.12) и последующими соотношениями теории изгиба
пластин.
202
Соотношение (7.3.2) можно переписать в проекциях на оси
подвижного координатного трехгранника:
u{z) = in— г-фь и^ = и2 — г$2, иф = и3. (7.3.4)
Применение формул (7.3.1) приводит к вычислению компонент
тензора деформаций в слое, который «отстоит» на расстоянии z от
среднего слоя. Надо только в этих формулах А1$ Л2, Rly R2 заменить на
Аг (1 — 2/^i), А2 (1 — z/R2), /?! (1 — zARi) и R2 (1 — *//?,)
соответственно. Однако, рассматривая тонкие оболочки, величинами
порядка h/R можно пренебречь по сравнению с единицей и упростить
формулы для вычисления деформаций в произвольном слое оболочки.
Деформации произвольного слоя оболочки вычисляются по формулам
еЙ = ei 1—2X1, еЙ = е22—2х2, г[г) = е12— ZX12. (7.3.5)
Здесь введены специальные обозначения для искривлений и кручения
средней поверхности:
Лх Зах i42 да2 i4!i42 да2 ^i>42 дах
Отсюда следует, что перемещения и деформации произвольного слоя
оболочки можно установить по заданным перемещениям точек
средней поверхности. Формулы (7.3.5), как и (7,3.4), являются следствием
гипотезы нормального элемента и некоторых упрощений, связанных
с небольшой толщиной оболочки.
Вторая основная гипотеза теории оболочек относится к
установлению сравнительной величины компонент тензора напряжений.
Предполагается, подобно теории пластинок, что слои оболочки,
параллельные средней поверхности, не взаимодействуют. Другими словами,
компоненты тензора напряжений, имеющие индекс 3 в подвижной
координатной системе ег, е2, es пренебрежимо малы по сравнению с
остальными. г
В частности, применительно к упругому состоянию изотропного
тела статическая гипотеза позволяет представить соотношения
между напряжениями и деформациями слоя оболочки, имеющего
аппликату г, в виде
Щг2 = Си —va22; £е<222> = а22—v<rn; Еъ™ = (1 + v) в{2,
что следует из соотношений (4.1.10).
Решая эти уравнения относительно напряжений, получаем:
аи== ГЦ?" №+**№> ^ = j^2)(^ + vs[% a12 = T-^r(l-v)8(->.
(7.3.7)
Обратимся теперь к формулировке уравнений равновесия малого
элемента оболочки. В первую очередь необходимо заняться решением
203
А «
yjf
b^Tej
«О" A
4ccJ
i J
ем—1
dp
задачи приведения напряжений в поперечных сечениях оболочки к
усилиям и моментам, отнесенным к контурам на средней поверхности
оболочки. На рис. 114 схематически представлена часть/окрестности
точки М средней поверхности оболочки. Указаны направления е1у е2,
е3у причем отсчет направлений изменения параметров аъ а2
выбирается так, чтобы вектор е3, представленный векторным произведением
первых двух, был направлен в сторону центров главных кривизн —
кривизн координатных линий на средней поверхности. В сечениях с
внешними нормалями е± и
е2 выделяем полоски точек,
имеющих координаты г,
соответствующие длинам дуг
dsu ds2 координатных
линий на средней
поверхности. Рассмотрим сечение
с внешней, нормалью е2.
Пусть ds1—длина линии аг
на средней поверхности,
тогда соответствующая
площадь выделенной
полоски будет dzds1 (1 —z/RJ.
Поэтому на полоску
действуют силы, указанные
на рис. 114: нормальная
сила о2 (1 —z/tf^dsdz,
сдвигающая сила в
направлении е1: а21 (1 — zIR-^'dsydz,
сдвигающая сила в
поперечном направлении сг23Х
X (1 — z/RJds^z.
Аналогично указываются силы, действующие на полоску,
выделенную на площадке с внешней нормалью ех. Нормальная и
сдвигающая силы, действующие в сечении оболочки с внешней нормалью е2,
вычисляются с использованием формул
0,5/1
#22 = j o22(l—z/Ri)dz,
— 0,5/1
#21 =
0,5ft
f o2i(l—z/Ri)dz,
-0,5/i
а.усилия, отнесенные к единице длины координатной линии средней
поверхности, на площадке с внешней нормалью ех вычисляются по
аналогичным формулам:
0,5/1
0,5/г
#п = ) an(l—z/R2)dz #12= j o22(l—z/Ri)dz.
-0,5/i
-0,5/i
Поперечные составляющие сил или перерезывающие силы #23, N13
вычисляются, как и в теории пластинок, из уравнений равновесия
дифференциально малого элемента средней поверхности оболочки.
204
рторые элементы приведения напряжений, развивающихся в
поперечных сечениях, представляют изгибающими и крутящими
моментами.
Изгибающие моменты на площадках с нормалями е± и е2
0,5ft 0,5ft
М\2 = — [ zorii (1— z/R2)dz, М2\ = — Г zG22(l—z/Ri)dz
~-0, 5Л
— 0,5ft
определяются так, что положительные моменты увеличивают
соответствующие кривизны оболочки.
Крутящие моменты
0,5ft 0,5ft
M2z= j zo2i(l—z/Ri)dz, —ЛГц= j zdi2(l — z/R2)dz
-0,5ft
-0.5ft
выбираются так, чтобы их векторы были направлены вдоль осей е2,
ег координатного трехгранника.
Выбор положительных направлений усилий и моментов,
развивающихся на координатных линиях средней поверхности оболочки,
показан на рис. 115.
Векторы изгибающих и
крутящих моментов изображены
пунктирными линиями в
отличие от сплошных
линий, изображающих
усилия.
Используя формулы
приведения напряжений к
усилиям и моментам, а
также соотношения (7.3.7)
и (7.3.5), представляющие
закон Гука для
изотропного тела и деформации
произвольного сдоя оболочки, можно получить представления усилий
и моментов через деформации и искривления средней поверхности
оболочки:
Nn = В (eu + ve22), ЛГ22 = В (е22 + ven),
Рис. 115
N12 = N21 = B(l-v)s
12»
Мп = D (*! + vxa), М22 = D (х2 + v^),
М
12
-М9
D (1 - v)xla
(7.3.8)
Здесь введены обозначения для мембранной В и цилиндрической D
жесткостей оболочки: В
Eh
D = ъ
1 Eh*
Ь^у2' *" 12 1—v2#
Векторы усилий и моментов, действующих в сечениях,
перпендикулярных координатным линиям, определим формулами
ЛГХ = Nutx + N12e2 + N13e3; N2 = ^21^1 + N22e2 + N23e3\
Mx = M12ex — Mne2, M2 = M2le2 + M22ev (7.3.9)
205
Можно определить векторы усилий и моментов, отнесенные к единице
длины контура средней поверхности в точке, где внешйяя нормаль
к сечению образует углы с осями еи е2, косинусы котррых обозначим
П{ и /г2, причем п = п^ + п2е2. Обозначим Nn и Мп векторы
упомянутых усилий и моментов. Для представления этих векторов через
векторы, определенные формулами (7.3.9), установим условия
равновесия треугольного бесконечно малого элемента средней поверхности
(рис. 116). Здесь не представлены
эффекты действия распределенной
нагрузки на оболочку, так как
Рис. 116
Рис. 117
соответствующие силы пропорциональны произведению ds1ds2—малой
величине второго порядка. Условия равновесия сил и моментов
—Nnds + N±ds2 + N2ds± = 0, — Mnds + М^2 + M2ds± = О
не содержат слагаемых второго порядка малости. Учитывая
соотношения пх = ds2/ds, п2 = dsJdSj предыдущие равенства представим в
виде
Nn = IVi/ix + N2n2, Мп = Жа + М2п2. (7.3.10)
Отсюда можно найти соотношения между силами—моментами на
произвольном контуре средней поверхности и силами—моментами на
координатных контурах средней поверхности оболочки.
Наконец, переходим к формулировке условий равновесия
элемента оболочки. На рис. 117 представлен элемент средней поверхности
оболочки, выделенный двумя парами соседних|координатных линий.
* Векторами (—N2ds^t (—M2ds^) обозначены усилия и'моменты,
приложенные к части контура "элемента, имеющего внешнюю нормаль
(—е2). На противоположной стороне элемента, имеющей внешнюю
нормаль, почти совпадающую с е2у усилия и моменты отмечены
штрихами. Эти штрихи подчеркивают необходимость учесть изменения
совокупности сил и моментов, связанные с изменениями координат точек
при переходе от одного контура к соседнему, когда координаты
а2 получают приращение da2 : (N^sJ' =» (N2ds^) + (N^ds^^ da2,
(M^ds^' = M2ds1 + {M2ds^)2 da2. Здесь и в дальнейшем символами
( )i2 обозначены производные по а2, а ( )д — производные по ах.
206
Подобно этому, векторы (—Nids2), (—Mxds2), вычисляемые по
координатам «!, а2 точки М, представляют силу и моменты,
развивающиеся на площадке с внешней нормалью (—вх), а величины сил и
моментов на противоположной стороне элемента вычисляются по
формулам
(Nids2Y = N.ds, + (АГхЛ,),! dav
\Mxds2)f = Mxds2 + (MLds2)tl dax.
На рис. 117 указан также вектор qds1ds2, представляющий
внешнюю нагрузку, распределенную по рассматриваемому элементу.
Требования равенства нулю сил и моментов, приложенных к
элементу средней поверхности как твердому телу, приводят к уравнениям
равновесия:
(Л2ЛГХ)Д + (АгЩ%ъ + дАгА2 = 0;
(МгА2)л + (М^^Л- АгА2 (e1xN1 + е2 X ЛГ2) = 0. (7.3.11)
Заметим, что если вектор q содержит даламберовы силы инерции
—РлТГ» то уравнения (7.3.11) играют роль дифференциальных
уравнений движения.
Из уравнений (7.3.11) получается система уравнений равновесия
в скалярной форме:
{AXN22)§2 + (A1N1^9l + N21A2il - NnAlt2 - A^NJ^ +
+ q2A1A2 = 0;
(A2N13)tl + (АгЫ23)12 + АгА2 (ЫпШг + N22IR2 + q3) = 0;
(А2М12)Л +{АгМ22),2 — MnAlt2— М21А2Л + A±A2N23 = 0;
(AiM2l)i2 — (A2Mn)tl + M22A2A—M12Alt2~A1A2N13 = 0;
М12тг + M21/R2 + N12 — N21 = 0. (7.3.12)
Вывод этих уравнений опирался на данные формул (1.2.3)
дифференцирования единичных векторов подвижного координатного
трехгранника. Если использовать определения крутящих моментов и
сдвигающих сил через интегралы по толщине как элементы приведения
напряжений по толщине оболочки, то обнаружим, что шестое уравнение
из (7.3.12) превращается в тождество вследствие закона взаимности
касательных напряжений.
Четвертое и пятое уравнения системы (7.3.12) представляют собой
статический способ определения перерезывающих сил N23 и N13
через изгибающие и крутящие моменты. Учитывая формулы (7.3.6) и
(7.3.8), можно получить выражения перерезывающих сил через
перемещения. Если эти представления перерезывающих сил
использовать в первых трех уравнениях (7.3.12) и все усилия и моменты с
помощью (7.3.8), (7.3.6), и (7.3.1) выразить через перемещения, то
получим систему трех дифференциальных уравнений в перемещениях.
207
В этих уравнениях неизвестными оказываются ult и2У и3 —
компоненты вектора перемещения точки средней поверхности как функции аъ
а2.
В теории оболочек формулируются граничные условия. Различают
геометрические и статические граничные условия на контуре Г
средней поверхности оболочки. В каждой точке контура средней
поверхности оболочки можно определить направление касательной т к
контуру и направление внешней нормали v к сечению оболочки в точке
контура. В этой точке контура можно определить векторы еъ е2, е3
(рис. 118) координатного трехгранника. Если край оболочки
свободен, то можно произвольно задавать вектор перемещения любой точ-
Рис. 118 Рис. 119
ки контура средней поверхности a* (s) и угол поворота 8* (s)
вокруг касательной элемента границы, примыкающегб к
рассматриваемой точке.
Таким образом, в каждой точке контура средней поверхности
можно задавать четыре функции дликы дуги контура:
ип\г = и*п, их\т = и\у щ\т = и1, В|г = 0*, (7.3.13)
причем все левые части можно выразить через смещения края и их
производные. С другой стороны, если не ограничивать смещения краевых
элементов, то можно задавать краевое значение усилия Nn и момента
Ml
Проекции силы Nnn и Nnx соответствуют нормальным и
касательным смещениям и*п и их. Изгибающий момент М*пх соответствует углу
поворота 6*. В отличие от этих простых соответствий поперечному
смещению и\ соответствует комбинация перерезывающей силы Nn3 и
производной от крутящего момента,Мпп. Нетрудно видеть, что
распределение по краю оболочки крутящих моментов Мпп эквивалентно
распределению перерезывающей силы интенсивностью (—dMnn/ds).
Действительно, на рис. 119 показаны элемент края оболочки и несколько
элементарных площадок этого края, соответствующих дугам As. Так
же показаны пары сил, эквивалентные моментам MnnAs, действующим
на каждую из элементарных площадок. Предполагается, что крутящий
208
момент Мпп по мере увеличения s растет, поэтому векторы каждой
йз сил, образующих пару, растут с ростом s, поэтому dMnn/ds > 0.
После указания всех сил пар сместим на 0,5As прямые нормали
разбиения края на элементарные площадки. Тогда обнаружим, что на
каЖДУю из новых площадок действует перерезывающая сила
dMnJdshs, направленная противоположно es. Отсюда следует, что
поперечному смещению и\ соответствует комбинация силы и
момента Nns — dMnn/ds.
Таким образом, в каждой точке контура средней поверхности
оболочки задаются четыре независимых комбинации перемещений и их
производных, по одной из четырех пар. Первые из элементов этих пар
приведены формулами (7.3.13), а соответствующие им статические
элементы, выраженные через силы и моменты, представим в виде
поел едовател ьности
дм*
N*nn, N*nx, N;3 JUL, М*пх, (7.3.14)
ds
причем для представления этих величин через краевые перемещения
и их производные рекомендуется использовать соотношения (7.3.10).
Любое из упомянутых граничных условий можно заменить конечным
соотношением между соответствующими статическими и
геометрическими величинами.
§ 7.4. Упрощенные варианты теории упругих оболочек
Громоздкость общей математической постановки задачи расчета
упругих оболочек, изложенной в предыдущем параграфе,
возможности интуитивного предсказания некоторых общих свойств
деформаций и напряжений в оболочках, формальные математические
оценки порядка величин отдельных групп слагаемых в уравнениях теории
оболочек привели к разнообразным упрощенным вариантам теории
оболочек. Остановимся на краткой характеристике двух вариантов:
безмоментной теории оболочек и теории пологих оболочек. Можно
представить себе три типа распределения напряжений по толщине
оболочки, которые оцениваются по усилиям и моментам. Напряжения
алг, вызванные усилиями, и напряжения ом, вызванные моментами,
при линейном распределении суммарных напряжений вычисляются
по формулам oN=N/h, ом = 6ЛШ2, когда интересуются
максимальными значениями.
В первом случае напряжения распределяются почти равномерно
по толщине. Поэтому вклад усилий в формирование напряжений
оказывается преимущественным по сравнению с моментами. В этом
случае говорят о безмоментном напряженном состоянии, пренебрегая
Сиянием изгибающих и крутящих моментов на напряжения в
оболочке. Заметим, что безмоментная оболочка как несущий элемент
конструкции является наиболее рационально спроектированной, так как
в этой оболочке наиболее полно используются прочйостные
возможности материала.
209
Второй тип распределения напряжений по толщине
противоположен первому: распределение резко неоднородное по толщине, с
переменной знака напряжений в районе средней поверхности. В
формировании такого типа напряжений первостепенную/ роль играют
изгибающие и крутящие моменты. В этом случае говорят о чисто
изгибном состоянии и пренебрегают влиянием усилий по сравнению
с моментами. Такого типа состояния реализуются очень редко и
практически могут иметь значение только при оценке некоторых
технологических процессов гибки листовых заготовок.
Наконец, третий тип напряженного состояния, когда напряжения,
вызванные наличием усилий, и напряжения, обусловленные
моментами, имеют одинаковые порядки величин. Такое изгибно-мембран-
ное состояние оболочек реализуется обычно вблизи мест приложения
внешних сосредоточенных сил, около краевых областей
закрепленного контура оболочки. В этом случае говорят об областях и
уравнениях краевого эффекта.
Уравнения теории безмоментных оболочек получаются из общих
уравнений предыдущего раздела, если в них изгибные факторы
считать отсутствующими. В частности, если в уравнениях (7.4.14)
считать равными нулю изгибающие и крутящие моменты Mihl то пятое
и четвертое уравнения этой системы приводят к необходимости
считать отсутствующими и перерезывающие силы N23 и N13. Поэтому
система уравнений равновесия безмоментного состояния
произвольной оболочки принимает вид
(Л2#и),1 + {А^22)л + N12Ali2—N22A2il + qxAxA2 = 0;
(4iW22),2 + (^2^u),i + N2lA2A — N11Alt2 + q2A1A2 = 0;
Мц/R! + NJR2 + q3 = 0; N12 = N21. (7.4.1)
Определив из этих уравнений усилия по (7.3.8), можно установить
уравнения для определения перемещений:
5(l-v2)8n = (yV1]L-viV22),
5(1- v)e12 = N1%9
5(1- v2)e22 = (ЛГ22 - vNn), (7.4.2)
где sik вычисляются по (7.3.1)
Таким образом, безмоментное напряженное состояние
описывается системой (7.4.1), а система перемещений описывается
дифференциальными уравнениями (7.4.2), которые решаются после установления
усилий. Отмеченное разделение общей задачи на последовательность
двух вызывает некоторые особенности в формулировке граничных
условий. Пренебрежение моментами и перерезывающими силами в
общих уравнениях равновесия оболочек не позволит задавать
произвольно поперечные смещения и3 и угол поворота Э на краях оболочки,
что сокращает количество граничных условий до двух. Необходимо
также задание в каждой точке границы по крайней мере одного из
усилий — нормального или сдвигающего. Только при этом условии
появляется надежда решить систему (7.4.1). G другой стороны, одно
210
йз граничных условий в каждой точке непременно должно быть
геометрическим. Только с помощью закрепления границ оболочки от
перемещений можно закрепить оболочку от дополнительных
возможных перемещений, связанных с чисто изгибными деформациями.
Таким образом, в безмоментных оболочках на границе поверхности
следует задавать одну составляющую усилия и одну составляющую
смещения.
Когда при заданной конфигурации и заданных внешних
воздействиях обнаружено безмоментное состояние оболочек,
рекомендуется принять все меры для реализации его: осуществить безмоментность
краевых условий, избегать приложения сосредоточенных силовых
воздействий, устранить перемещения, связанные с чистым изгибом
средней поверхности оболочки. Более того, когда конфигурация
оболочки меняется плавно, нагрузка меняется столь же плавно и
оболочка не очень пологая, не приближается к пластине, безмоментное
решение рекомендуется использовать как основное частное решение,
которое корректируется моментным и состояниями краевого эффекта.
Остановимся теперь на варианте упрощений общих уравнений
теории оболочек, принятых в теории пологих оболочек. Если считать
искривления оболочки зависящими только от поперечных
перемещений, то формулы (7.3.8) приводятся к соотношениям
*! = k$o\ к2 = k2w\ х12 = k12w9
где kl9 k2y k12 — дифференциальные операторы:
\ дах ], 1 да2
\ да2 /, 2 дах
А, Аг k12 = т-^ + АТ1 Л,. „--*- + А;1 А2.х-2-,
а через w обозначено поперечное смещение и8 — w (аи а2)
Эти формулы для искривлений и крутки достаточно точны, когда
оболочка полога, если характерный радиус кривизны оболочки
значительно превосходит размеры оболочки в плане. Иногда пологой
называют оболочку , геометрия которой (дуги и углы на средней
поверхности) практически не отличается от геометрии проекции оболочки
на плоскость ее плана.
Если теперь определить-усилия посредством функции усилий Ф:
Nll = k10; N22 = k2<b, N12 = N21 = £12Ф, (7.4.5)
To уравнения равновесия и уравнения совместимости деформаций
и искривлений средней поверхности сводятся при наличии только
поперечной нагрузки к системе
ААФ + Eh6w = 0; DAAw — 6Ф = q3. (7.4.6)
(7.4.3)
(7.4.4)
211
Здесь введены специальные дифференциальные оператору:
а1а2а = (а^а2^~) + (ахА*1 д
д<*1 Л 1 ' V""1 " да2 J/2 '
л,л,б=Г(л1/?2)-м2-?-1 +[(л2^,)-м1-/-1 .
L »«i J, 1 L д«2 J, 2
(7.4.7)
Этот вариант теории оболочек предложен и обоснован В. 3. Власовым
и иногда называется технической теорией оболочек.
§ 7.5. Безмоментное напряженное состояние
оболочки вращения
Оболочки, средняя поверхность которых представляет собой
поверхность вращения, называют оболочками вращения.
Конфигурация такой оболочки задается уравнением меридиана
средней поверхности и законом изменения толщины. На рис. 120
представлена часть меридиана оболочки вращения, имеющего радиус
кривизны R±. Нормаль к меридиану образует
угол 0 с осью вращения. Расстояние
точки от оси обозначено г. Уравнение
меридиана можно задать в форме г = г (0) и
определить вектор касательной к
меридиану т = еъ единичный вектор касательной
к параллели е2, единичный вектор
нормали v = е3. Вектор ег направляется так,
чтобы с возрастанием дуги sx угол 0
возрастал, причем элемент дуги первой
координатной линии ds1 = RxdQ, поэтому
Ах = Rx. Кроме того, R2 — г/ sin 0,
А2 = г.
Вектор е3 направлен к центру
кривизны меридиана. Векторы еъ е2, е3
образуют правую координатную систему. Угол
0, представляющий широту места на
поверхности вращения, принимается в
качестве одной из координат точки. Второй координатой считается долгота
ф. Направление ср определяется направлением оси х либо
направлением еъ е3. Наконец, заметим, что меридиан можно задавать в виде
г = г (х), где г, х — декартовы координаты меридиана в его
плоскости. Толщина h оболочки задается как функция координат h = h (0, ф).
Компоненты деформации средней поверхности оболочки вращения
вычислим по общим формулам (1.2.6), полагая а± = 0, а2 = ф, Ах =
= Rly А2 = R2 sin 0. При этом найдем:
#i8ii = duJdQ — иг;
гг22 = ди2/ду + их cos 0 — и3 sin 0;
2rel2 = dujdy + и2 + rRi1 du2/dQ. (7.5.1)
212
Заметим, что эти формулы возможно получить и прямым
составлением фундаментального соотношения теории деформаций в принятой
координатной системе:
(1 + г88)е*3 = es + Ri1 п±да/дв + г1 п2ди/дц>,
где пг, п2 — направляющие косинусы волокна относительно е±, е2 с
использованием формул дифференцирования
дег/дд = е3, де2/дв = 0; де3/дд = —ег\
дех/дц> = е2 cos 0,
де2/ду = —ех cos 8 + е3 sin 0,
де3/дц = —е2 sin 0.
Уравнения равновесия элемента
оболочки, выделенного двумя парами
соседних координатных линий (рис. 121),
можно получить из общих уравнений
теории оболочек (7.3.12), полагая в них
отсутствующими моменты и
перерезывающие силы. Получим их
непосредственно из рассмотрения условий равновесия
сил на рис. 121:
(ЛГ^Хе + (ЛГа^.ф + qR±r = 0.
^N2>(pdcf)Rfd9
qrRdfde /^
Рис. 121
Используя разложение усилий на нормальные и касательные
Ni = #i0i + Se2i N2 = Se± + N2e2
и формулы дифференцирования единичных векторов, получаем
дифференциальные уравнения равновесия:
№,е + (#iS).<p - ^i#2 cos 0 + qjiyr = 0;
(rS)/+ (/?1#а),Ф + ^i5cos0 + q2Rxr = 0\
rNx +R2N2 sin 0 + R1rq3 = 0. (7.5.2)
Геометрические соотношения (7.5.1) и уравнения (7.5.2)
дополняются соотношениями между напряжениями и деформациями
оболочек. В частности, для изотропной упругой оболочки получаем:
N±-vN2 = fi(l-v2)en,
S = В (1 — v)e12
N2-vNt = B(l-v*)e22l
(7.5.3)
Пусть оболочка вращения нагружена по торцам крутящими
моментами М. При этом система усилий
Ы{ = 0, Л^3 = 0, S = Ml (2пг2)
(7.5.4)
213
при q1 = q2 = q3 = 0 удовлетворяет уравнениям ра^ловесия,
превращает (7.5.2) в тождество, если учесть, что дг!д*г = RT1, дг/дв =
= i^cos 6. Система уравнений (7.5.3) при использовании в ней (7.5.1)
и найденных усилий (7.5.4) будет удовлетворена, если считать иг =
= и3 = 0, и2 = и2 (6) = и и определять смещение и из уравнения
ЯГ1 ди№ + u/r = M(l+ v)/ (nr*Eh).
Интегрирование этого уравнения проведем для конической
оболочки постоянной толщины и раствором 2а. В этом случае R±dQ =
= drl sin а и общее решение имеет вид
a=i[cfiY,/',ne-I)4~i—1.
г [_ \ г J 1—sin а J
где введено обозначение а2 = Ml (2nhG) = М (I + v)/ (nEh).
Физическое значение этого параметра можно выяснить, рассматривая
нормальные сечения конической оболочки — полоску Ьторой
конической поверхности радиуса /?, которая воспринимает момент М.
Обозначив т касательное напряжение на такой площадке, найдем из
общих условий равновесия М = 2nhRH. Отсюда следует а2 = Rh/G.
Если рассматриваемое сечение закрепить от перемещений, то
1 т
1—sin a G
позволяющее вычислять перемещения в любом сечении при заданном
уровне напряжений в закрепленном сечении.
Рассмотрим еще один пример применения уравнений равновесия
безмоментной оболочки вращения. Применительно к сферической
оболочке радиуса а, нагруженной так называемой ветровой нагрузкой:
Яг = Й2 = О, Чз = р cos ф sin 0, систему усилий представим
формулами
3Nt sin3 0 = — pa cos q> cos 0 (2 — 3 cos 0 + cos3 0);
3N2 sin3 0 = pa cos ф (2 cos 0 — 3 sin2 0 — 2 cos4 0);
3S sin3 0 = —pa sin q> (2 — 3 cos 0 + cos3 0). (7.5.5)
В этом случае г = a sin 0, Rt = а и прямая подстановка. (7.5.5) в
(7.5.2) приводит к тождествам. Отметим, что нормальные усилия на
краю полусферы 0 = 0,5я оказываются нулевыми и ветровая
нагрузка на полусферу целиком воспринимается сдвигающими силами,
которые принимают максимальные значения при ф = +0,5я. На рис.
122 схематически показаны распределение внешней нагрузки на
полусферическую оболочку и распределение сдвигающих усилий.
Особый интерес представляют оболочки вращения, нагруженные
без нарушения осевой симметрии. В этом случае все функции,
характеризующие напряжения, деформации, перемещения, не зависят
от координаты ф. Кроме того, исключая случай осесимметричного
кручения оболочки, вызванного нагрузкой q2 или сосредоточенными
R2
и = —
г
, J? \(l/sing-l)
моментами, можно считать q2 = О, 5 = 0, и2 — 0 и уравнения
равновесия упрощаются:
(^i).e — RiN* cos 6 + qiRxr = 0;
rN± + /?! sin 6 7V2 + ^^3 = 0. (7.5.6)
Напомним, что первое из уравнений (7.5.6) представляет собой
условие равновесия сил, действующих на бесконечно малый элемент
оболочки в направлении касательной к меридиану. Второе
представляет условия равновесия сил, действующих в направлении нормали
к элементу. Оставляя неизменным второе уравнение, заменим первое
Из (7.5.6) интегральным условием равновесия части оболочки,
ограниченной обрезом по конической поверхности 0 = const (рис. 123). По-
Рис. 122 Рис. 123
требуем равенства нулю суммы всех сил, действующих на верхнюю
часть оболочки, ограниченной обрезом 0 = const. По верхнему
обрезу оболочки предполагается приложенной сосредоточенная
продольная нагрузка, величина которой равна длине окружности
обреза, умноженной на интенсивность нагрузки 2пг0Р. Далее находим
осевую составляющую распределенной нагрузки q3 cos 0 + <7i sin 0,
умножаем ее на элемент площади поверхности rRxdQd<p и
интегрируем по всей площади верхней части оболочки:
е
2я Г (^3cose + ^i sin в) /?i rd9.
Наконец, находим равнодействующую внутренних сил по нижнему
°брезу 2nrNx sin 0. Суммируем все эти силы. Из условия равновесия
найдем формулу для вычисления одного из усилий
в
г sin BNi = — r0 Р — f Ri r (flf, cos 0 + qx sin 0) d8. (7.5.7)
216
После этого не составит особого труда найти М2 из второго уравнения
равновесия системы (7.5.6).
Пусть, например, оболочка в виде полусферы (рис. ,,124) радиуса
а испытывает внутреннее давление интенсивности р. В э^ом случае
легко установить:
г = a sin 6; R± = а\ Р = 0; q1 = 0; q3 = —р\ 60 = 0.
Поэтому формула (7.5.7) приводит к распределению меридиональных
усилий:
е
г sin QN{= —{ a2 sin 9 (—р) cos QdQ = 0,5ра2 sin2 Q.
Отсюда и из второго уравнения (7.5.6) находим: N± = 0,5/?а, N2 =
= 0у5ра.
Заметим, что в этом простом случае усилия можно вычислить и
посредством некоторых элементарных соображений. Обратившись к
формулам (7.5.3), (7.5.1), можно
вычислить по усилиям деформации
и перемещения
и3 = —ра2 (1 — v)/ (2ЕИ).
Поэтому для реализации безмо-
ментного состояния
полусферической оболочки под действием
внутреннего давления необходимо
обеспечить равномерные радиальные
смещения края оболочки. Если
же край закреплен неподвижно, то возникают у края
дополнительные силы, не учтенные в безмоментном решении. Возникает краевой
эффект — моментное состояние, очень заметное у края оболочки и
быстро затухающее по мере удаления от края.
Расчет оболочки вращения можно провести не только при осесим-
метричной нагрузке, но и при периодически изменяющейся нагрузке
вида
Ц\ = Яш cos шр, q2 = 0, <7з = Яш cos шр.
В этом случае усилия определяются в форме
Рис. 124
Nx = Nln cos шр,
W2 = N2n cos шр,
S = &
n Sin Шр
и для вычисления Nln, N2ny Sn после подстановки в уравнения
равновесия (7.5.2) получается система обыкновенных дифференциальных
уравнений, которую можно проинтегрировать.
Остановимся подробнее на возможностях расчетов круговых
цилиндрических оболочек. На рис. 125 демонстрируется координатная
система х> ср, в которой можно определить положение любой точки
средней поверхности цилиндрической оболочки радиуса а. В этом
случае уравнения равновесия (7.5.2) преобразуются к виду
flNJjx + 5,ф + Чха — °; (aS)x + #2,Ф + q^a = 0; ЛГа + aq3 = 0-
216
Отсюда находим последовательно:
N2 = —aq3\ aS = — J (ЛГ2,Ф + q2a)dx + s (q>);
aN1 = —$(S,v+ qxd)dx + /i (ф), (7.5.8)
где s (<p) и л (ф) — произвольные функции.
Для определения перемещений имеем систему уравнений
EhuliX=N1—vN2\
Ehu (и2>ч> — и8) =(#2 — vA/Ja;
G/г (ш/2|* + ttif(p) = aS. (7.5.9)
В случае периодической нагрузки по координате ф можно нагрузку
представить рядом Фурье по этой переменной. Поэтому в случае
линейной задачи рекомендуется
рассмотреть типичные слагаемые нагрузки
Яг = Ят cos шр; q2 = q2n sin шр;
q3 = q3n ,cos шр
и для такой нагрузки усилия искать
в форме
#i=#in (х) cos шр; N2=N2n (х) cosn ф;
S = Sn (х) sin шр.
Результаты таких решений в
дальнейшем накладываются.
Из уравнений равновесия найдем:
N2n = —(Щзп (*); 5Д = — { (nq3n + ?2n)^ + sn;
Nln = — j (nS/a 4- <7т)фс + ^n,
где $пи сп — постоянные, определяемые из граничных условий.
Рассмотрим, например, равновесие горизонтальной
цилиндрической трубы, наполненной тяжелой жидкостью с объемным
весом у. Нагрузка на трубу имеет составляющие qx = 0; q2 = 0;
9з = —уа (1 — cos ф). Первая из формул (7.5.8) приводит к
растягивающему тангенциальному усилию N2 = уа2 (1 — cos ср). Вторая
из формул (7.5.8) преобразуется: S = —уа(х+ сг) sin <р + с2.
Наконец, третья формула из (5.7.8) приводит к усилию
#i = У (0,5л:2 + сгх + с3) cos ср + сА.
Вследствие симметрии с2 = 0, так как S (ф = 0) = 0. Кроме того,
по предположению, суммарная продольная сила на трубу не действу-
ет: [ Nxad(p = 0, откуда следует с4 = 0.
о
Если опорные устройства по концам трубы одинаковы, то при х =
== 0,5/ сдвигающая сила должна быть нулевой, откуда следует сг =
"= —0,5/. Наконец, требование равенства нулю не только продольной
силы, но и изгибающего момента по торцам трубы приводит к с3 = 0.
217
Рис. 125
Итак, безмоментные усилия в цилиндрической горизонтальной
трубе, наполненной тяжелой жидкостью, вычисляются по формулам
N± = 0,67л: (х — I) cos ф; N2 = уа2 (1 — cos ср);//
-S = —уа (х — 0,5/) sin <р.
По этим усилиям и уравнениям (5.7.9) можно найти перемещения.
Например, при симметричном закреплении торцовых сечений после
интегрирования первого из уравнений (5.7.9) имеем
1Eh
т(дс,-т)-т/(ж'-т)]С08Ч,+2^х
X Ц *J(1—СОБф)}
Два других уравнения этой системы приводят после исключения и2
к уравнению
из,* = — а-1 И1,фф — a (Eh)-1 (Л/2 — vNJ^ + (Gh У1 S.„.
После интегрирования этого уравнения найдем
2AEhaus = 7 I (я8 — 2/я2 + I3 — 0,75va2x)x cos ф + сх cos ф + с2].
Положив с2 = 0, потребуем также, чтобы и3 (х = I) = 0, тогда
24Ehaus = ух cos <р [г* — 21х2 + I3 — 0,75va2 (х — I) ].
В частности, найдем прогиб оси трубы:
, i 5y/4 /1,3 a2 \
*1'-.Ц«-°~ 6-8.8^ (l+JV^)-
Этот прогиб удобно представить через суммарный вес жидкости Р:
3 48я Eh? \ 2а ) \ /2 /
§ 7.6. Осесимметричные деформации оболочек
На рис. 126 показан кусок меридиана поверхности вращения и
обозначены единичные векторы различных координатных систем.
Вектор и перемещения произвольной точки меридиана можна
представить любым из разложений
и = и^х + и3е3 = игг° + ихх°.
Векторы используемых здесь координатных систем связаны
соотношениями
х° = cos 6е3 + sin 6^1, r° = —sin Qe3 + cos Qev
Поэтому, например,"" радиальную составляющую перемещения
вычисляем по формуле
ит = иг0 = иг cos G — и3 sin 0. (7.6.1)
218
flo определению, кривизна меридиана определяется формулой
dQ/ds = 1/#х. (7.6.2)
Заметим, что если меридиан задан уравнением г = г (х), то
ctg9 = -f ;
dx
1
dQ
d2r
dx2
uv ил ил • r\
= — ; =Sin0
sin2 9 dx
_d9__ ji6_ dx_^ Jx
dr dx ds ' ds
и для вычисления кривизны имеем известную формулу
dQ/ds = 1/7?! = —sin3 0 riXX = —[1 + Ы2]-1»5/*,
а вычисление длины дуги проводим по
формуле
ds2 = [1 + (riX)2]dx2.
Если точки меридиана получили
перемещения a (s), то новое направление
касательной к меридиану определяется
единичным вектором е*и причем имеет место
соотношение
(1 + en)e*i = е± + da/ds = ег + #8, (7.6.4)
где 8П — относительное удлинение
меридиана, а производная от вектора
вычисляется по формуле
я s = К* + Ha/#i)*i + К*
так как имеют место соотношения
5М
e3/#i;
^3,s
= -вХ//?х.
(7.6.5)
Таким образом, можно установить равенство
(1 + еп)2 *= (1 + th%% - Us/Rtf + Ks + Ui/Ri)2*
откуда находим в случае малых деформаций и перемещений &х =
Относительные удлинения параллели найдем, учитывая (7.6.1):
ге2 = йг = их cos 0 — и3 sin 0.
Здесь вторые индексы при обозначении относительных удлинений
опущены, поскольку эти удлинения главные, сдвиги между параллелями
и меридианами при осесимметричной деформации отсутствуют.
Изменяя обозначения, в дальнейшем обозначим через и смещение точки
меридиана средней поверхности вдоль касательной , a w —
перемещение вдоль главной нормали, поэтому деформации средней
поверхности будем вычислять по формулам
w sin 0)/г. (7.6.6)
и3 — w/Rl9 82 = (и cos 0
219
Обратимся теперь к изучению деформаций слоя оболочки, имеющего
координату z вдоль главной нормали к средней поверхности^ На рис.
127 показана часть меридианального сечения оболочки ъ> начальном
и деформированном состояниях. На основе гипотезы 'нормального
элемента имеем
и^ = и + г(е*з — е3).
Учитывая представление (7.6.4) вектора е* и предполагаемую
перпендикулярность е\ и вз, найдем
(1 + гг)ез = —(wi8 + u/Ri)e1 + (1 + ut8 — wIR^e^.
Поэтому с высокой степенью точности
можно считать поворот вектора нормали
происходящим только вдоль ег:
el — е, ="—ввх; @ = wtS + u/R1 (7.6.7)
и перемещения г-слоя вычислять через
перемещения среднего слоя оболочки по
формулам
и(г) = и — гв; и\?) = w. (7.6.8)
Если теперь вычислять удлинения
волокон по формулам (7.6.6) с заменой Rt
на R± — z, то получим для тонких
оболочек:
Рис. 127
в?>
г± — гк±; щ = (w>s + u/RJi8;
e(2z) = е2 — гк2; х2 = (wt8 + и/RJ cos 0/r, (7.6.9)
Заметим, что правые части трех уравнений
#i8i = w,e — w\ R2e2 = и ctg 6 — w\ R±Q = wtQ + и
содержат две функции, которые можно исключить из трех уравнений.
Из первых двух следует R& — R2s2 = и$ — и ctg 9.
Продифференцируем второе уравнение и сложим результат с третьим:
(#2e2),e + R& = и, е ctg 6 - и ctg2 9.
Отсюда следует уравнение совместности деформаций средней
поверхности и углов поворота нормалей
ctg 9 (#A - #2е2) = (R2e2)tQ + R±Q. (7.6.10)
Кроме того, из (7.6.9) непосредственно следует условие совмести-
ности искривлений средней поверхности
#!*! = (rx2/cos 9)>0. (7.6.11)
Установим теперь соотношения между усилиями, моментами и
деформациями, искривлениями средней поверхности упругой
изотропной оболочки. Напряжения
(1 — v2) о<*> = Е (е<*> + ve<f)); (1 — v) a<f > = Е (е</> + угф)
220
приводятся к усилиям
Тг = В (гг + ve2), Т2 - В (е2 + vex) (7.6.12)
и моментам
Мг = —D (х± + vx2), М2 = —D (х2 + vx2), (7.6.13
причем положительными считаются моменты, которые увеличивают
соответствующую кривизну. На рис. 128 представлен элемент
оболочки с указанием действующих на него сил и моментов. Условия
равновесия такого элемента сводятся к
двум уравнениям: J V-/^ ^
(Л/i'b + ЛГ2>Ф + qrlRx = 0;
(М±г)18 + Ж2,Ф + егх Nxr +
+е2 X N2r = 0, (7.6.14)
где использованы обозначения сил
и моментов в случае осевой
симметрии оболочки:
N1 = T1e1 + Qe3, N2=T2e2y
Мг = Мге2У М2 = M2ev
Из первого уравнения системы (7.6.14)
получим условие равновесия в
направлении нормали к оболочке
(rQ),e + гТг + R±T2 sin 0 + qsr = О,
(7.6.15)
а вторую проекцию этого уравнения заменим интегральным
условием равновесия части оболочки, лежащей выше сечения Э = const:
е
Qr cos в+ 7*1 г sm9= —r0P—[ rR(qx sin Q-±-q3 cos Q)dQ. (7.6.16)
e0
Наконец, второе из уравнений равновесия (7.6.14) сводится к
соотношению между моментами и перерезывающей силой
Рис. 128
(Mxr)fi + RxMt cos 0 = QRj.
(7.6.17)
Полученная система уравнений равновесия (7.6.15)—(7.6.17),
уравнений (7.6.12), (7.6.13), связывающих усилия, моменты с
деформациями, искривлениями средней поверхности, уравнений совместности
деформаций и перемещений (7.6.10), (7.6.11), геометрических
соотношений (7.6.7), (7.6.9), (7.6.6) сводится в дальнейшем к двум
разрешающим уравнениям относительно двух основных неизвестных
функций. В качестве таковых, следуя Е. Рейсснеру, рекомендуются
e,v = R2Q.
(7.6.18)
221
Полагая
о /
/(9) = r0P+f rRi(qisinQ + q3cosQ)dQ, / ""(7.6.19)
о,
из соотношения (7.6.16) найдем одно из усилий:
7\ = (R2 sin2 б)"1 [—V sin 0 cos 9 — / (9) ]. (7.6.20)
Теперь из уравнения (7.6.15) найдем второе усилие:
Т2 = -RT1 V.e - qsRJRi + (Ri sin 0)"1 f (9). (7.6.21)
Формулы для искривлений
их = Яг1©,^ к2 = в cos 9 (#2 sin 9)"1
преобразуют представления изгибающих моментов:
\/?i ' Л* sin 6 j 2 U2sin9 ^ /гх '^
(7.6.22)
Далее замечаем, что
ЕЫХ = Тг — vT2, Ehe2 = Т2 — v7\, (7.6.23)
поэтому можно составить комбинации /?1е1 — #282 и уравнение
совместности (7.6.13) записать в форме
L(V) + vV+ — (vVctgQ—^V') = EhRxe + 0(Q)9 (7.6.24)
h R\ 1
где штрихом обозначены производные по 9; дифференциальный
оператор L ( ) имеет вид
И ) = -|ч )"+[xctg0+("t")']( )'~l~ctg2e( )( (7'6'25)
а функция нагрузки
0(e) = A^»)' + (*,-vKi)*afc--^&- х
Если теперь (7.6.22) подставить в (7.6.17) и использовать (7.6.18), то
получим
L (0)_v0 + 3 — (v0ctg 0 + ^- 0'W £*- V. (7.6.26)
/г R± J D
Таким образом, задача сводится к интегрированию системы
уравнений (7.6.24)—(7.6.26) и вычислению по найденным функциям
моментов, усилий, перемещений и напряжений, причем следует иметь
в виду, что максимальные напряжения вычисляются по формулам
1 h — Л* 2 /г — Л2
222
перемещения определяются интегрированием уравнений
w* = Ri (ei cos 0 — в sin в); и' = R± (вг sin Э + в cos 6). (7.6.27)
Для системы уравнений (7.6.24)—(7.6.26) необходимо задать четыре
условия, по два на каждом краю оболочки. Если же добавить еще
второе из уравнений (7.6.27), то после интегрирования его добавится еще
одна константа интегрирования, а с нею и новое условие на краю.
Отметим некоторые частные формы граничных условий и условий
сопряжения участков оболочки. Если край оболочки жестко заделан,
то для этого края имеем условия е2 = г*2 = О, @ = в* = 0. Таким
условиям соответствуют статические граничные условия, когда
задаются перерезывающая сила и момент Q = Q*; М = М*9 например
для свободного края Q* = М* = 0. Наконец, отметим, что при
сопряжении краев двух участков оболочки необходимо обеспечить
непрерывность перемещений или деформаций е2, непрерывность углов
поворота и непрерывность либо определенную разрывность
перерезывающих сил и изгибающих моментов.
Общее решение системы уравнений (7.6.24)—(7.6.26) легко
получается применительно к цилиндрической оболочке постоянной
толщины. Из других форм оболочек, поддающихся строгому анализу,
отметим класс оболочек, имеющих постоянную кривизну меридиана:
коническую, сферическую, тороидальную.
В случае конической оболочки задача сводится к интегрированию
уравнения Бесселя и решение его представляется через комплексные
функции комплексного аргумента — функции Ханкеля первого и
второго рода.
В случае сферической оболочки решение выражается посредством
функций Лежандра. В случае тороидальной оболочки решение
основных уравнений представляется гипергеометрическими рядами.
Однако эти уникальные случаи оказываются достаточно
сложными для изложения и практического использования. Поэтому в
дальнейшем излагается способ упрощенного анализа напряжений и
перемещений в осесимметричных оболочках.
§ 7.7. Осесимметричные деформации
Цилиндрической оболочки
Рассмотрим деформации частного класса осесимметричных
оболочек — цилиндрических оболочек. Положение точки средней
поверхности такой оболочки определяется продольной координатой х
и угломТф. Все общие рассуждения предыдущего параграфа
сохраняют значение, хотя применительно к цилиндрической оболочке
легко повторить основные выводы. Деформации и искривления
средней поверхности оболочки вычисляются по формулам
ех = иж> е2 = —w/a, Xi = w>xx, щ = w/a2y (7.7.1)
гДе а — радиус средней поверхности оболочки.
Уравнения равновесия цилиндрической оболочки можно получить
Из общих с заменой RxdQ на dx, 0 на я/2 и l/Rx нулем. Проще это сде-
223
лать непосредственно, рассматривая равновесие элемента/оболочки.
При этом получим
QtX + Тг1а + q = 0, MltX = Q, / (7.7.2)
причем
Мг = —DwiXX, Т2 = —Ehwla. (7.7.3)
Заметим, что приведенное представление усилия Т2 получается из
общих формул (7.6.12) с учетом отсутствия продольных сил.
Система (7.7.2), (7.7.3) сводится к одному уравнению
до1У + 12 (1 — v2)h-*a~2w = q/Dy (7.7.4)
которое можно назвать разрешающим уравнением теории расчета
цилиндрической оболочки. Если найдена функция до, то можно
вычислить усилия, моменты, напряжения, деформации оболочки. При
интегрировании уравнения (7.7.4) задаются краевые значения двух
величин, по одной из двух пар: {до, а}у {wiX, Мг).
Четырех краевых условий, по два на каждом краю оболочки,
достаточно для определения всех констант интегрирования,
появляющихся при решении уравнения (7.7.4). Заметим, что при анализе
перемещений оболочку часто разбивают на участки соответственно
изменениям нагрузки или размеров оболочки. В этих случаях условия
на краях оболочки дополняются условиями сопряжения —
условиями непрерывности моментов, перерезывающих сил, перемещений,
углов поворота.
Общее решение неоднородного уравнения (7.7.4) складывается из
частного решения до* этого уравнения и общего решения
соответствующего однородного уравнения:
wlv+ 12 (1 —v2) h-2a~2w = 0. (7.7.5)
Таким образом, имеем
до = до* + до. (7.7.6)
., *~
Общее решение линейного однородного уравнения (7.7.5) можно
представить в виде любой линейной комбинации независимых частных
решений ехр (±1 ± i)kx, где положительное число k вычисляется по
формуле k*h2a2 = 3 (1 — v2).
В частности, если рассматривается длинная цилиндрическая
оболочка под действием сил и моментов, приложенных к одному из краев
оболочки, то решение удобно представить в виде
w = e-kx (Сг cos kx + С2 sin kx) + ekx (С* cos kx + C4 sin kx). (7.7.7)
Если начало координат выбрано на загруженном торце оболочки,
то можно утверждать, что прогибы, деформации, напряжения,
вызванные действием сил и моментов на упомянутом торце, должны
затухать по мере удаления от этого торца. Такому условию
удовлетворяет лишь первая группа слагаемых правой части (7.7.7). Поэтому
полагаем Сг = С± = О, пренебрегая условиями на другом конце
трубы. Постоянные Сх и С2 в этом случае легко определить по заданным
224
перерезывающей силе и моменту, действующими на загруженном
терце, либо по заданным перемещениям и поворотам торцовых сечений.
' Если в частности, заданы w \ х=0 = w0f w^x = в | х=0 = в0, то
легко найти прогибы цилиндрической трубы, на которую не
действует поперечное давление, но заданы перемещения и углы поворота
торцового сечения:
w — e~kx [w0 cos kx + (w0 + &-10o) sin kx].
Такого типа перемещения используются только в окрестности
нагруженного края для анализа только краевых эффектов.
В случае достаточно короткой трубы удобнее представлять общее
решение однородного уравнения (7.7.5) в форме
w — Сх sh kx sin kx + C2 sh kx cos kx + C3 ch kx sin kx +
+ C4 ch kx cos kx.
Например, в случае, когда на одном конце трубы, не несущей
распределенной нагрузки, заданы перемещения w0, в0 = 0, а на другом
конце при х = I перемещения отсутствуют: w \ х=1 = 0, 6 = до х \ х=1 =
= 0, легко получить систему уравнений для определения констант
с4 = до0; С2 + С3 = 0;
Сг sh kl sin kl + C2 sh kl cos kl + C3 ch kl sin kl +
+ C4 ch kl cos kl = 0;
Сг (sh kl cos kl + ch kl sin kl) + C2 (—sh kl sin kl + ch kl cos kl) +
+C3 ( sh kl sin &/+ch И cos kl) + C4 (— ch kl sin &/+sh &/ cos kl) = 0.
Несомненно, такую систему решить нетрудно, однако при
исследовании оболочек, представленных несколькими участками, составление
условий сопряжений оказывается громоздким. Поэтому усилия
многих исследователей были направлены на поиски таких форм
представления общего решения уравнения (7.7.5), которые предельно
облегчили бы как процесс составления условий сопряжений разных
участков оболочки, так и процедуру решения получающейся таким
способом системы уравнений для определения констант.
Одна из упомянутых возможностей представляется применением
функций А. Н. Крылова, производные которых весьма просто
выражаются через сами функций. Функции Крылова можно определить
равенствами
wx = ch I cos g; w2 = 0,5 (ch £ sin £ + sh g cos g);
w3 = 0,5 sh I sin £; wA = 0,25 ( ch £ sin I — sh £ cos £),
непосредственным дифференцированием которых легко найти
w\,t = —4до4; w2,i = о^; Доз,& = w2) wa,i = ^з» а после этого и
производные любого порядка от функций Крылова можно выразить
через одну из этих функций. Эффективность применения функций
Крылова проявляется, например, при расчете перемещений точек
Зак. 588
225
цилиндрической оболочки радиуса а и длиной 2/, глухо закрытой по
торцам и подверженной действию распределенной непрерывнее по
окружности силы Р. Выделяем два участка оболочки: от—/до 0 и от О
до /. На каждом из них представляем перемещения в фефме
w(m) = С(т) W{ 4. С(т) щ + С(т) щ + С(т) щ (т = 1, 2).
Требования непрерывности перемещений, углов поворота,
изгибающих моментов сводятся к непрерывности прогибов вместе с первыми
двумя производными при х = 0:
ю<п |, = 0 = wW U=o, w^l |, = 0 = w\2)x |,=о,
w{,1x)x\x=o = w%\x==0.
Условие разрыва перерезывающих сил: — Dw{>xlx = Р — Dw\llK.
Свойства функций Крылова позволяют очень легко
выписать'первые три из условий сопряжения и установить равенства
Четвертое условие дает соотношение С4а) = С{х) + PD_1ft~3.
Поэтому прогибы оболочки представим так:
«ДП = C1w1 + C2w2 + CBw3 + (С4 — 0,5PD-^-3) при х < 0;
ау(2) = clw1 + C2w2 + Csw3 + (С4 + O^PD^fr*) при х > 0.
Соображения четности перемещений по переменной х приводят к
значениям С2 = 0, С4 = 0.
Краевые условия при х = ±/, отражающие отсутствие
перемещений и углов поворота на краях оболочки, приводят к уравнениям
C^ikl) + C3Wt(kl) = — O^PD^ft"3;
—4С>4 (ft/) + C3Wo (ft/) = 0,
из которых можно найти
г _. ch &/sin£/ + sh fc/cos &/ Р
3 sh£/ch kl + s\nklcoskl 2D£3 '
Г — 9 c^ klsinkl—shklcoskl P
l^~ shklchkl + smklcoskl 2DA* "
Нетрудно проследить зависимость приведенного прогиба
* 2£>&з sh 6/ ch ^/ + sin kl cos /г/
P ch fc/ cos kl
от продольной координаты
w* = ( tg ft/ -t th ft/) ch ft* cos ft* + (tg ft/ — th ft/) sh kx sin ft*
при задании различных значений параметра ft/. Прогиб будет
затухать по мере удаления от мест приложения внешней нагрузки.
2?S
fnaea VIII
ДВИЖЕНИЕ УПРУГИХ СТЕРЖНЕЙ, ПЛАСТИН И ОБОЛОЧЕК
§ 8.1- Движение стержня с прямой осью
Исследование движений деформируемых стержней с прямой осью
основано на применении закона Ньютона к элементу стержня и
некоторых дополнительных условий: соотношений между напряжениями
и деформациями, отражающих экспериментальные данные, условий
на концах стержня, начальных условий движения и условий
непрерывности либо конечных разрывов параметров движения. В
зависимости от внешних воздействий либо начальных условий различают
продольные движения стержней, изгибные поперечные движения,
состояние кручения стержня. Возможны и разнообразные наложения
упомянутых состояний. Начнем с постановки задач о продольных
упругих движениях стержня с прямой осью.
Представим себе элемент стержня, ось которого совпадает с осью
х\ этот элемент выделен двумя соседними поперечными сечениями,
имеющими координаты х и х + dx. На левое сечение действует сила
—gF, на правое oF + (oF)tX dx, где а — напряжение в поперечном
сечении, F — площадь сечения. На элемент может действовать
внешняя продольная сила q (х, t)dxy интенсивность которой считается
заданной функцией координат и времени. Масса выделенного элемента
pFdx, умноженная на ускорение d2u/dt2 в продольном направлении,
равна сумме всех действующих на элемент сил:
pFdxd2u/dt2 = —oF + oF + (oF)x dx + qdx,
где p — плотность стержня.
Отсюда получаем уравнение продольных движений стержня
pFd2u/dt2 = (oF)^x + q(x% t).
Это уравнение дополняется законом Гука при изучении упругих
состояний а = Ег = EutXy поэтому исследование продольных
движений стержня основано на уравнении
pFd2u/dt2 = (EFutX)tX + q (*, t). (8.1.1)
* Уравнение движения (8.1.1) в качестве неизвестной содержит
функцию двух переменных и (х, t), представляющую смещение любой
точки стержня в любой момент времени. Располагая этой функцией,
можно вычислить скорость duldt любой точки в произвольное время,
Деформацию ди/дх окрестности произвольной точки, напряжения.
Коэффициенты уравнения (8.1.1) зависят от распределения плотности,
площади поперечного сечения и модуля упругости по координате и
времени. Эти коэффициенты считаются заданными функциями, а в
простейшем случае — постоянными числами. Плотность
распределения внешних продольных сил q (х, t) также считается заданной. При
этом выделяют два существенно различных класса движений:
свободные или собственные движения и вынужденные движения. Когда
8*
227
речь идет о свободных или собственных движениях, возмущающие
внешние силы q (х, t) считают отсутствующими, а уравнение
движения сводится к однородному: /
pFd2u/dt2 = (EFutX\x. У (8.1.2)
Движения стержня при наличии возмущающих сил q (х, t)
описываются неоднородным уравнением (8.1.1) и существенно зависят
от характера этих сил.
Уравнение (8.1.1), представляющее собой следствие закона
Ньютона применительно к любому элементу стержня и закона упругости,
дополняется граничными условиями, как и при статической
постановке задач. На границах конечного стержня могут быть заданы
либо перемещения и (a;0, f), где х°—абсцисса какого-либо конца стержня,
либо напряжения о (х°, t)y что при законе Гука эквивалентно заданию
деформации или utX (х, t). В отличие от задач статики деформируемого
тела в задачах о движении деформируемой среды граничные условия
представлены не обязательно константами, а некоторыми функциями
времени. Можно задать движения конца стержня либо можно задать
напряжение на конце стержня как функцию времени.
Постановка задач о продольных движениях стержня
предусматривает задание начальных условий. Как и в динамике материальной
точки или системы материальных точек, здесь необходимо задать
начальное распределение смещений и начальное распределение
скоростей точек стержня:
и (х, 0) = </ (*), ди (х, 0)/dt = ф (*). (8.1.3)
Начальные смещения, начальные скорости точек стержня называют
часто начальными возмущениями. В зависимости от
характера начальных возмущений различают задачи о колебаниях
стержней и задачи о распространении продольных волн в стержнях.
Если тело ограничено конечными размерами и начальные
возмущения отличны от нуля во всей области пространства, занятого телом,
то будем говорить о динамической постановке задачи, о колебаниях
сплошного деформируемого тела.
Если же начальные возмущения носят заведомо локальный
характер либо имеются начальные возмущения конечной области в
безгранично протяженном теле, то говорят о постановке волновых
задач, об изменениях и распространении начальных возмущений
посредством волн.
Представление о волнах можно получить при изучении
продольных движений бесконечно протяженного стержня, вызванных
начальными локальными возмущениями. Начальные возмущения
бесконечно протяженного стержня, ось которого совпадает с осью Ох,
назначим в форме (8.1.3), где
| 0 при —оо<л;<1—/,
I W- б(1— xll) при 0<х</, (8Л-4)
I 0 при 1^х<. оо.
228
j-ja рис. 129 представлены графики начальных смещений, а также
графики начальных продольных деформаций. Заметим, что функция
^ отлична от нуля лишь на небольшом интервале изменения х,
поэтому начальные возмущения локальны. Кроме того, функция и
непрерывна, в то время как ее производная utX существенно разрывна.
Такого типа разрывы сохраняются со временем, поэтому иногда
термины «волна» и «разрыв» по отношению к перемещениям и их
производным отождествляют.
Распространение начального возмущения управляется
уравнением (8.1.2), которое при постоянных значениях плотности, модуля
Рис. 129
Рис. 130
упругости и площади поперечного сечения стержня сводится к
наиболее простому виду — волновому уравнению
д*и
дР
д*и
(8.1.5)
где использовано обозначение комбинации констант
а2 = Е/р. (8.1.6)
В дальнейшем будет показано, что а совпадает со скоростью
распространения волн.
Общее решение волнового уравнения (8.1.4) возьмем в форме,
предложенной Даламбером в результате перехода к характеристикам
х — at = Н, х + at = г]. Упомянутое решение имеет вид и =
= F (х — at) + ф (х + at).
Всякую функцию, аргумент которой имеет вид х — at либо х + at,
называют волновой по отношению к
перемещению и.
При отсутствии начальных скоростей [и (х> 0) = 0] производные
неизвестных функций равны F' (х) = ф' (х), поэтому сами функции
могут отличаться лишь несущественной константой. Таким образом,
имеем и = ф (х — at) + ф (х + at). Потребуем теперь, чтобы
начальные значения такого представления смещений совпадали с задан-
229
ным начальным возмущением стержня 2ф = /, где / определена фор-,
мулой.. (8.1.4). /
Перемещения точек стержня, удовлетворяющие уравнению
движения при отсутствии возмущающих сил, при заданны^' начальных
возмущениях в перемещениях определяются формулой
и = 0,5/ (х — at) + 0,5/ (х + at). (8.1,7)
Рис. 130 иллюстрирует эту формулу. На этом рисунке плоскость
Oxt покрыта сеткой характеристик — прямых, вдоль которых
аргумент одного из слагаемых в (8.1.7) сохраняет неизменное значение,
поэтому сохраняет неизменное значение и соответствующее слагаемое.
На рис. 130 проведено построение профиля смещений в любой момент
времени t. Это построение можно реализовать по крайней мере двумя
способами. Во-первых, построим профиль половины начального
возмущения и будем продвигать этот полупрофиль сначала вдоль
одного семейства характеристик, затем вдоль второго семейства вплоть
до заданного уровня времени. При этом, над плоскостью (xt t) получим
две призматические или цилиндрические поверхности,
представляющие решение поставленной задачи. Сечение этих поверхностей
плоскостью дает профиль возмущения в данный момент времени.
Во-вторых, можно строить профиль смещений непосредственно на оси Ох.
С этой целью будем следить за проекциями полупрофилей смещений
в любой момент времени на плоскость (х, и). Обнаружим, что эти
проекции можно получить движением полупрофилей начальных
смещений со скоростью а: одного вдоль Ох, второго в противоположном
направлении. Начальное возмущение как бы распадается на два
равных полувозмущения, и каждое из них продвигается в своем
направлении с постоянной скоростью.
В рассматриваемом примере один треугольник с основанием 21 и
высотой 0,56 продвигается направо со скоростью а, второй такой же
треугольник продвигается налево со скоростью а. Описанный
процесс распространения возмущений называется бегущей или
распространяющейся волной. т
Заметим, что подобным способом можно провести анализ^распро-
странения волн в случае, когда в начальный момент возмущены
скорости при нулевых перемещениях:
и (ху 0) = 0, и (х, 0) = оф' (х).
Решение волнового уравнения, удовлетворяющее первому из этих
начальных условий, имеет вид и-= —F (х — at) '+ F (х + at).
Второе начальное условие приводит к равенству 2F' = я|/, 2F = яр + С,
поэтому решение поставленной задачи дается функцией
и = —0,&ф (х — at) + 0,5я|) (х + at).
Отсюда следует, что отрицательное полувозмущение движется со
скоростью а направо, а положительное полувозмущение движется
налево от начала координат со скоростью а.
Анализ распространения более сложных по структуре
возмущений получается посредством наложения специально подобранных.
230
Например, сравнительно просто получается решение задачи о
распространении возмущений в полубесконечном Стержне посредством
введения дополнительных фиктивных начальных возмущений.
Предположим теперь, что начальные возмущения
распространяются на весь стержень, т. е. оказываются нелокальными. Например,
имеется стержень ограниченной длины / и имеются начальные
отклонения, определяемые заданной функцией / (я), и начальные скорости,
заданные функцией <р (х):
и (х, 0) = f (х), и (а:, 0) =■ ф (х).
Концы стержня для определенности неподвижны — внешние силы
не действуют. Тогда уравнение движения (8.1.3) по-прежнему
справедливо, но частное решение его рекомендуется искать в форме
и (х, t) = sin К х (С sin Я at + С* cos hat),
где С, С*, Я — пока неопределенные константы. Можно показать,
что эта форма решения представляет собой частный случай решения
Даламбера.
Нулевые краевые условия этим решением будут удовлетворены,
если
К = Хп = null (п = 1, 2, ...).
Уравнению движения и граничным условиям удовлетворяет и сумма
таких решений:
u(x,t)= 23 sin%nx(Cnsin%n at + CnCos%nat). (8.1.8)
n = 0
Обратившись к начальным условиям, найдем
оо оо
/(*)= 2j CJsin^A;, ф(*) = 2 Cn%nasmKnx.
n = 0 /г = 0
Таким образом, если начальные возмущения можно представить
рядами Фурье ъо всей области, занятой телом, то движение
представляется формулой (8.1.8). Такое движение является суперпозицией,
наложением бесконечного числа перемещений вида
ип = Ап sin (Xnat + Qn) sin %nx. (8.1.9)
Это периодически изменяющиеся по координате отклонения,
амплитуда которых периодически меняется со временем. Ап и вп —
константы — амплитуда и начальная фаза каждого из отклонений ип.
Перемещения ип называют стоячими волнами, а движение,
представленное каждым из смещений ип, -гармони кой. Кроме
того, движение ип называется гармоническим
колебанием.
Движение стержня при отсутствии внешних сил и произвольных
начальных отклонений, представимых рядами Фурье, состоит из
наложения гармонических колебаний. При этом число гармоник, участ*
вующих в наложении, бесконечно, что соответствует бесконечному
231
Ъ1
числу степеней свободы сплошного стержня, бесконечному чиелу
собственных значений Яп и бесконечному числу собственных функций
ип. Такие движения стержня именуются собствен-н ъ^М и
колебаниями.
На простых примерах продольных движений прямолинейного
стержня проявляется разница волновых и колебательных движений
стержня. Характер движения зависит от начальных возмущений.
Если начальные возмущения локальны, движение будет волновым.
Если начальные возмущения не локальны, то обнаружим с о б с т-
венные колебания
N упругого стержня.
Обратимся к задаче о
поперечных колебаниях струны
или стержня, у которого из-
гибная жесткость мала.
Поперечные движения такого
стержня происходят так, что
на любой элемент струны
(рис. 131) действуют
натяжения N и распределенная
поперечная нагрузка q (х, t)dx. Составляющие натяжения в
поперечном направлении — NwtX, Nw.x + (NwtX)iX dx, поэтому уравнение
движения выделенного элемента нити приводится к
дифференциальному уравнению
(NwtX)>x + q = pd2w/dt\
•ur,x+iir,xxdx
b/+w,xdx
Рис. 131
где p — плотность распределения масс нити.
Полагая
Ь2 - Nip
(8.1.10)
и считая натяжение неизменным, получим уравнение поперечных
колебаний струны
b2wtXX = d2w/dt2 — q (ху f)IN.
(8.1.11)
Концы струны могут быть закреплены, тогда в качестве граничных
условий задаются перемещения w. На конце нити можно задавать
натяжение* Л/". Для совершенно упругой нити при учете только
поперечных движений имеем N = 0,5EF (wx)2y поэтому задание натяжения
N эквивалентно заданию производной от прогиба WiX. Таким
образом, формулировка граничных условий в задаче о поперечных
движениях нити совпадает с формулировкой граничных условий в
задаче о продольных колебаниях стержня.
Начальные условия упомянутых задач также аналогичны. В
начальный момент можно задавать начальные отклонения нити и
начальные скорости w (ху 0) = ф (а:), тл (ху 0) = \р (х).
Если струне длиной / сообщить натяжение N и закрепить
неподвижно концы, то свободные поперечные движения струны будут
описываться уравнением (8.1.11) при q = 0, общее решение которого
известно: w = F (х — bt) + F* (х + Ы). Считая начальные скорости
232
нулевыми, найдем w = F (х — bt) + F (x + bt). Наконец, удой-
летворив первому из начальных условий, получим
2w = f(x — bt) + f(x + bt).
Если f (х) — локальное отклонение, получаем волны,
распространяющиеся в двух направлениях по струне, с одинаковыми
скоростями Ъ\ формы волн совпадают с полувозмущениями. Мы
описали лишь начальный промежуток движения, когда можно не
считаться с условиями закрепления концов струны. В противном случае
надо рассматривать условия отражения и распространения
отраженных волн.
При непрерывных начальных отклонениях по всей длине /
закрепленной по концам струны решение уравнения (8.1.11) ищем в форме
оо
w= 2 sin ля— (ап sirinnb \-bn cos nnb — j,
n= 1
диктуемой методом разделения переменных. Здесь ап, Ьп —
постоянные, которые определяем из начальных условий. Если начальные
скорости отсутствуют, то ап = 0, а постоянные Ьп представляют собой
коэффициенты Фурье функции f (х)> т. е. начальные отклонения.
Например, если начальные отклонения представляются треугольником
0,5 6*// при 0<*<0,5/,
(0,56(1—*//) при 0,5/<*</,
то можно найти
fW = ^-[sin(n-f)-TSin(3,tf)+iSin(5,t"f")"
и соответствующие отклонения, которые можно представить себе как наложение
на главный тон —обертон
86 х Ъ
Шл — —Г- Sin Я ^-~ COS Я — /
л2 / /
колебаний высших тонов w2i w6y ..., амплитуды которых быстро затухают вместе
с номером.
Рассмотрим теперь задачу о крутильных колебаниях валов. На
элемент вала, соответствующий длине dx оси вала, действует
крутящий момент (—М) с одной стороны диска и крутящий момент
М + М х dx — с другой. Обозначив момент, инерции диска Jpdx,
получим уравнение свободных крутильных колебаний вала:
pJda/dt = М х.
Здесь угловая скорость со связана с углом поворота ф, а крутящий
Момент — с круткой т, которая вычисляется через угол поворота:
233
to = ду/dt, M = GJx, г = cp>x. Поэтому уравнение крутильных
колебаний имеет вид
дьфр =« с2ф ХХУ с2 = G/p. (8.1.12)
..
Распространение локальных возмущений, анализ собственных
частот и форм крутильных колебаний проводятся по универсальной
схеме, которая применялась для изучения продольных движений
стержня и поперечных колебаний струны. Рассмотрим эту схему
применительно к жестко заделанному на одном конце стержню,
несущему сосредоточенную массу (тонкий диск) — на другом. Рис. 132 схе-
Рис. 132 Рис. 133
матично иллюстрирует эту схему закрепления концов вала.
Уравнение свободных крутильных колебаний тонкого вала (8.1.12)
дополняется условием закрепления верхнего конца ср (0, t) = 0 и уравнением
движения диска рЛЗ = —М (/, t), причем угловая скорость ^ диска
совпадает с угловой скоростью концевого сечения вала £2 = ср (/, /).
Поэтому условие на скрепленном с диском конце таково:
[Э-ф/ЛЪ-1 = -с>± №. j,_,, * = -jb~| -^ ,
где рв, рд — плотности материала вала и диска; Jxx, Ja —
геометрические моменты инерции сечений вала и диска; h — толщина диска.
Метод Фурье, дополненный условием периодического движения
по времени, приводит к представлению угла закручивания
Ф = sin [Хх (a sin Xct + 0 cos Xct) ], (8.1.13)
где а и Р — пока неопределенные постоянные, если учесть условие
закрепления верхнего конца вала.
Условие скрепления вала с диском приводит к трансцендентному
уравнению — уравнению собственных частот g sin I = k cos i, § —
= XL
^ Левая и правая части этого уравнения схематически
представлены на рис. 133, откуда с очевидностью следует наличие бесконечного
234
числа собственных частот, соответствующих абсциссам точек
пересечения двух кривых.
Приведем значения первых корней частотного уравнения для
нескольких значений k:
k | <я 100 10 5 2 1 0,9 0,7 0,3 0,1 0,01
^~jl757~ 1,56 1^42 П32 Г708 0^86 0^82 0/75 0^52 0^32 0Л0
Наконец, рассмотрим изгибные колебаний стержня..На рис. 134
показан элемент оси стержня в состоянии движения с указанием
действующих на него сил и моментов.
Уравнение движения элемента pd2w/dt2 = Q х + q дополняем
уравнением баланса моментов Q = —MtX и соотношением между
изгибающим моментом и кривизной М = EJwtXX. Поэтому уравнение из-
гибных колебаний имеет вид
pd2w/dt2 +, EJd*w/dx* = q. (8.1.14)
Положим х = /£, |ы4 =' рЯ2/4/ (EJ) и решение однородного
уравнения изгибных колебаний представим в периодической по времени
форме w = sin (М + 8)Х (|). Уравнение XIV — [х4Х = 0 имеет четыре
линейно независимых решения sh \i%, ch jig, cos \il, sin [xg,
которые удобно скомбинировать в функции Крылова:
S (g|i) = 0,5 ( ch jig + cos ill), T (g|i) = 0,5 ( sh |ig + sin fig),
U (l\i) = 0,5 ( ch fxg — cos \i%)y V (l\i) = 0,5 ( sh ц£ — sin |i|).
Функции Крылова обладают свойствами S' = V, V = 5, V1 = Г,
V = U.
Общее решение однородного уравнения колебаний балки представ-
вим в виде
w = sin (М + б) [CsS + СТТ + Си U + CVV]. (8.1.15)
Сформулируем граничные условия применительно к
разнообразным способам закрепления концов стержня либо другим условиям
на концах.
Если стержень шарнирно оперт, то прогиб и изгибающий момент
на краю должны быть нулями: X (£°) = 0, X" (£°) = 0.
При жесткой заделке конца стержня прогиб и угол поворота
сечения должны быть нулями: X (1°) = 0, X' (£°) = 0.
Если конец стержня свободен, изгибающий момент и
перерезывающая сила имеют нулевые значения: X" (£°) = 0, X'" (£°) = 0.
Если левый конец стержня скреплен с точечной массой т, то
следует взять сечение, как показано на рис. 135, и написать уравнение
Движения md2w/dt2 = Q, откуда можно найти граничное условие:
М8"[Х]Жя0 пг = EJ [Х"%=0 1*"]*=о = 0.
Составим, например, уравнение частот для стержня длиной /,
представляющего собой элемент камертона — консольно закрепленной
235
<§э
з-
балки. Граничные условия X (0) = 0; X' (0) = 0; X" (1У = 0;
X"' (1) = 0 приводят к однородной системе алгебраических
линейных уравнений, определитель которой должен быть нулем. Отсюда
находим уравнение частот ch \i cos \i = —1.
Корням этого уравнения
(Xi = 1,875, \i2 = 4,694, |л3 ='7,854 ..., \ik « 0,5я (2k — 1) при
k > 3 соответствуют собственные значения Xk и собственные формы
колебаний, набор которых бесконечен.
Особый интерес представляет оценка влияния продольных сил N
на частоты колебаний стержней. Рассматривая силы, действующие
на малый элемент оси стержня
ъг\ In (рис. 136), обнаружим, что наличие
продольных сил эквивалентно
действию в поперечном направлении
К силы NwiXX dx. И уравнение
движения стержня оказывается таким:
EJd*w/dx* — Nd2w/dx2 +
Рис 1М + pd*w/dt2 = q. (8.1.16)
Собственные колебания балки при постоянной сжимающей силе ищем
в форме
w = A sin (Xt + Q)X (х),
где Л, Я, 0 — константы, а для определения X (х) —имеем уравнение
EJX™ — NX" — рХ2Х = 0.
Соответствующее характеристическое уравнение
р4 _ 2пр2 — s4 = 0, 2п = NIEJ, s4 = pXVEJ
имеет два действительных и два мнимых корня:
Pl,2=±^ P8.4=±*V, \l=VVs* + n2+tl, V = VVs* + n2-tl.
Формы колебаний можно представить функцией
X = С1 sh \ix + С2 ch \ix + С3 sin v* + С4 cos v*.
Например, в случае шарнирно опертого по концам стержня длиной
/ получаем уравнение частот
О2 + v2) sh \il sin v/ = 0, v/ = fere.
Отсюда следует, что pX3/ (EJ) = (Ы/)4 (1 + 2nl2k'2 w2).
Растягивающая сила (ft > 0) повышает частоты колебаний, сжимающая
сила (п < 0) снижает их по сравнению со случаем отсутствия
продольной'силы (ft = 0). Изучая эффекты постоянно действующих
возмущающих сил, ограничимся случаем изгибных колебаний.
236
Вынужденные колебания стержней описываются уравнением
/8 1.16), в котором нагрузка q считается заданной функцией
координат и времени.
Рассмотрим сначала случай периодической по времени нагрузки
q = q (х) sin со/. Перемещения изгибаемого стержня при отсутствии
продольных сил ищем в форме w = v (х) sin со/. Тогда формы
вынужденных колебаний можем определять из уравнения
EJv™ — рсЛ = q (х).
Общее решение этого уравнения складывается из частного и
общего решения соответствующего однородного уравнения. Например,
при постоянной по длине
стержня нагрузке имеем
v = q0/ (—Р^2) + Сг sh ах+
+ С2 ch ах + С3 sin ах +
+ С4 cos ах,
где использовано
обозначение а4 = рсо2 / (EJ).
В частности, при
шарнирном опирании концов
стержня
Сх = q0 (1 — ch at)/ (2рсо2 sh at), C3 = q0 (1 — cos al)l (2pco2 sin at),
С 2 = Q = ^/(2pco2).
Отсюда следует возможность значительного возрастания прогибов,
когда а/ приближается к величине for, ч*го возможно при стремлении
частоты возмущающей нагрузки к одной из собственных частот
колебаний балки. Это случай резонансных частот возмущающих сил.
Таким образом, рассмотрена простейшая форма возмущающей
силы. В общем случае зависимости амплитуды возмущающей нагрузки
от х рекомендуется разложение этой амплитуды по. функциям,
представляющим собственные формы колебаний балки.
§ 8.2. Колебания пластин
Предсказание расчетным путем поведения упругих пластин и
оболочек основывается на дифференциальных уравнениях движения
рассматриваемого объекта в перемещениях, граничных условиях и
начальных условиях. Дифференциальные уравнения движения
выписывают как уравнения движения бесконечно малого элемента средней
поверхности пластинки или оболочки с учетом действия на него
усилий и моментов, распределенных по контуру бесконечно малого
элемента, а также даламберовых сил инерции. Считая бесконечно малый
элемент оболочки совершенно твердым телом, следует выделить
силы инерции поступательного движения элемента и силы инерции
вращения. Даламберовы силы инерции поступательного движения вы-
237
Рис. 136
числяют как произведение массы элемента на его ускоренно; взятое
с обратным знаком:
—phdsxds2d2uldt2, / (8.2.1)
здесь р — плотность материала оболочки, h — толщина в
рассматриваемом месте, ds}ds2 — площадь соответствующего элемента средней
поверхности, d2a/dt2 — вектор ускорения.
Обозначив й — вектор угловой скорости малого элемента
оболочки, dJ — момент инерции, р — плотность, можно написать
выражение даламберовой силы инерции вращения
—pdJdQ/dt, (8.2.2)
как взятое с обратным знаком изменение со временем момента
количества движения рассматриваемого элемента оболочки. Вектор
угловой скорости можно определить либо через производные от вектора
перемещений #, либо самостоятельными компонентами. Однако в
классической теории изгиба пластин и оболочек принято пренебрегать
инерцией вращения. Считается, что, пока не рассматриваются
коротковолновые перемещения с очень высокой частотой, инерцией
вращения можно пренебречь.
Другими словами, в уравнении баланса моментов, действующих
на выделенный бесконечно малый элемент оболочки, инерционными
слагаемыми можно пренебречь. Поэтому соотношения между
перерезывающими силами и изгибающими, крутящими моментами в
динамической теории оболочек считаются повторяющими соответствующие
статические соотношения. В динамической теории пластинок
принимаются соотношения (7.1.2), а в динамической теории оболочек
имеют место последние три соотношения из (7.3.14). Наличие этих
представлений перерезывающих сил через изгибающие и крутящие
моменты, а вслед за этим и через перемещения позволяет формулировать
уравнения движения элемента оболочки как уравнения движения
материальной точки или как условия равновесия всех действующих
на элемент сил, включая и силы инерции (8.2.1). Например, основное
уравнение малых поперечных движений пластинки с учетом (7.1.10)
получаем в виде
£>V% = q — phd2w/dt2f (8.2.3)
где V4 — бигармонический" дифференциальный оператор.
Уравнения движения пологих оболочек получим из (7.1.6), добавив
даламберовы силы инерции, связанные только с поперечными
движениями:
ДАФ + ЕЫЬщ = 0,
DAAw — 6Ф = q3 - phd2w/dt2. (8.2.4)
Обозначения операторов Д и б приведены при формулировке условий
равновесия соотношениями (7.4.7). Добавлением даламберовых сил
инерции в трех направлениях можно получить динамические
уравнения в перемещениях общей теории оболочек. Их не выписываем из-
за громоздкости. Заметим далее, что формулировка граничных усло-
238
йй в динамике оболочек или пластин не отличается от формулирОЁ-
и граничных условий в статике оболочек; в каждой точке края обо-
почки задаются геометрические условия: нормальные, касательные
мещения, поперечные, смещения и угол поворота краевого элемента
вокруг касательной к контуру средней поверхности. Каждое из
геометрических условий может быть заменено заданием
соответствующих статических условий: нормальной или сдвигающей силы,
обобщенной перерезывающей силы и изгибающего момента. В каждой
точке граничного контура средней поверхности пластинки или оболочки
задаются четыре величины, по одной из четырех пар, указанных в
в статике пластинок или в статике оболочек.
Существенное отличие постановки динамических задач от задач
статических вносится наличием начальных условий в динамических
задачах. В начальный момент движения пластинки или оболочки
необходимо задать перемещения точек средней поверхности и их
скорости. Например, при изучении поперечных малых динамических
^перемещений пластинки задают
w\i==0 = w0 К, а2), dw/dt\t=0 = v0 (al9 а2), (8.2.5)
где аг, а2 — криволинейные координаты точек средней поверхности
пластинки. Далее будем говорить главным образом о задачах малых
поперечных изгибов пластинок, хотя методы исследования и
основные выводы будут относиться и к оболочкам либо к пластинкам при
значительных прогибах, которые управляются, например,
уравнениями (8.2.4).
Изучение малых динамических перемещений пластинок основано
на уравнении (8.2.3) при определенных граничных и начальных
условиях. В уравнении (8.2.3) жесткость D и нагрузка q считаются
известными. Как и в общей теории колебаний механических систем,
можно выделить собственные движения пластинки и вынужденные
движения. Вынужденные движения существенно зависят от характера
изменения со временем внешней нагрузки q. Собственные движения
пластинки определяются граничными и начальными условиями. Очень
важна при этом'роль начальных условий. Если пластинка
оказывается достаточно протяженной хотя бы в одном направлении, а
начальные отклонения или скорости локальны, можно обнаружить
распространение по пластинке волн. Если область начальных возмущений,
область задания отличных от нуля начальных перемещений и
начальных скоростей распространяется на всю пластинку, то говорят о
колебаниях пластинки. Свободные колебания пластинки изучаются с
привлечением дифференциального уравнения (§.2.3) при q = О,
граничных условий и начальных условий.
Рассмотрим сначала колебания прямоугольных пластин,
положение точек средней поверхности пластины будем определять
координатами хъ х2, размеры пластины обозначим а, Ь. Поперечная нагрузка
Я считается известной функцией координат х1у х2 и времени t.
Жесткость пластинки D считается постоянной, хотя можно учесть и
переменную жесткость. Граничные условия задаются при хг = 0,. хг = а,
a также при хг = О, х2 = Ь.
239
Начнем с изучения свободных или собственных
колебаний пластинки при самых простых для исследования
граничных условиях: края пластинки считаются шарнирно опертыми.
Это значит, что прогибы и изгибающие моменты на краях должны быть
нулями:
W\Xt = a =0, (Wf ц+VW 22)Xl==a = 0,
a*),,=0=0, (wt n+vwt22)xt = o =0,
w\X2=o = 0, (wt 22 + vwt h)jc2=0 =0,
т\ХгжЪ =0, (wt22 + vwt и)х2 = ь =0.
Начальные условия (8.2.5) считаются колебательными. Решения
уравнения (8.2.3), удовлетворяющие граничным и начальным
условиям, при отсутствии нагрузки находим методом Фурье, полагая
w = W (хъ х2)Т (/). (8.2.6)
Подстановка (8.2.6) в уравнение (8.2.3) при q = 0 приводит к
дифференциальному уравнению для определения "форм колебаний
DV*W = X2W (8.2.7)
и уравнению, определяющему зависимость от времени,
—phT" = Х2Т, (8.2.8)
где штрихом обозначена производная от времени, а через X2 —
некоторая положительная, пока произвольная константа. Знак этой
константы выбирается так, чтобы решение уравнения (8.2.8)
представлялось периодической функцией времени:
Т = A sin (со*+ 6), ./
где А — константа, p/ico2 = Я2, причем со — частота колебаний, fi —
начальная фаза колебаний. Поскольку Я2 — произвольная константа,
частота колебаний остается пока произвольной.
Формы колебаний W определяются граничными условиями и
уравнением (8.2.7), из которого следует возможность представления
решения в виде ряда
W = Ji Д Wmn, Wmn=amnsin(mn-a)sin(«Kf).
Здесь можно разделить переменные, однако проще непосредственно
проверить, что это решение удовлетворяет граничным условием
шарнирно опертой прямоугольной пластинки и уравнению (8.2.7), если
только выполняется соотношение
Оя4 (mVa2 + n2lb2)2 =* p/ico2, (8.2.9)
которое называется уравнением частот.
Частоты, вычисленные по (8.2.9) при фиксированных значениях
/п и пу называются собственными частотами колебаний прямоуголь-
240
0Й пластинки, шарнирно опертой по контуру. Обозначаются они
Н0 . Каждой собственной частоте соответствует форма wmn
колебания и частное колебание или частная гармоника
и>тп = атп s'm^(omnt + 6тп),
причем атп и 8Ш остаются пока произвольными постоянными. Эти
постоянные в дальнейшем можно определить посредством
удовлетворения начальным условиям.
Таким образом, полное перемещение w произвольной точки
средней поверхности пластинки представляется суперпозицией,
наложением, суммированием частных колебаний, гармоник:
00 со
йу= 2 2 атп sin хш sin х2п sin (coronf+Smn);
m=l п= 1
*im = mnxja; х2п = mtxjb. (8.2.10)
Вычислив по этой формуле начальные отклонения и начальные
скорости:
со оо
w\t=o= 2 2 amnSinA:iwsinA:2msin6m7l;
оо оо
[dw/dt]t=o= 2 2 am„^mnsin*iwsin*2ncos6m7l,
обнаружим, что амплитуды атп и фазы бтл начальных отклонений
можно выразить через коэффициенты Фурье начальных отклонений
и начальных скоростей пластинки:
а ь
0,25abamn sin дтп = j j w0 sin хш sin *27l dx2dxx\
о о
ЪА§йЪштп amn cos 6mn = j j* v0 sin *im sin 2n dx2 dx{.
о 6
Дополнив этими вычислениями формулу (8.2.10), получим
исчерпывающее представление о поведении упругой прямоугольной
шарнирно опертой пластинки при свободных колебаниях, вызванных
начальными возмущениями w0 и v0.
Более сложными математическими средствами получают
собственно частоты и собственные формы колебаний прямоугольных
пластинок при других граничных условиях. Для примера рассмотрим
случай, когда два противоположных края пластинки шарнирно опер-
Ть1, а два других края могут быть жестко заделаны, свободны, либо
°дин из них свободен, а другой жестко заделан или шарнирно оперт.
Пусть края х± = 0 и хх = а пластинки шарнирно оперты.* Тогда
перемещения при свободных колебаниях рекомендуется искать в виде
w =* Y (х2) sin nnxja sin (со* + б).
241
При этом условия шарнирного бпираййя кромок пластиной х = б и
х = а будут удовлетворены, а для определения функции Y (х2)
получим из (8.2.3) уравнение
yiv _ 2{imldfY" + (nnlaYY = p/ico2/DF.
Характеристическое уравнение, соответствующее этому линейному
дифференциальному уравнению, имеет корни
±«»-/(^)*+/¥; ±/(^)'-/¥ -**■
два из которых действительны всегда, а два другие могут быть и
мнимыми. В таком случае форма перемещений определяется функцией
Yn = q«> sh аЛ*я + С<"> ch anxa + С™ sin pn*a + С<"> cos p^8l
которая иногда именуется балочной.
Удовлетворяя однородным краевым условиям на кромках х2 = О
и х2 = ft, получим систему однородных линейных алгебраических
уравнений относительно постоянных Ckn). Коэффициенты этой
системы будут зависеть от со. Приравняв нулю определитель этой системы,
получим уравнение частот — трансцендентное уравнение для
определения собственных частот колебаний со. Например, если один край
пластинки жестко заделан, а второй край свободно оперт, то
уравнение частот имеет вид
pn th (anb) = ап tg (рдЬ) и наименьшая собственная частота для
квадратной в плане пластинки будет comln = |/5,74я4£>а~4 (p/i)"1.
Для расчета минимальной частоты опертой по всему контуру
пластинки число 5,74 следует заменить на 2,ОС. Защемление контура
приводит к повышению собственной частоты колебаний. К дальнейшему
повышению собственных частот колебаний приводит защемление
других участков контура пластины. Наибольшую частоту колебаний
имеет плйстинка, жестко заделанная по всему контуру. Задача о
собственных колебаниях прямоугольной пластинки с жестким
закреплением по всему контуру не имеет строгого аналитического решения,
поэтому имеются различные варианты приближенных решений.
Большинство из приближенных решений основано на применении
метода Бубнова—Галеркина. Рекомендуется выбрать систему
функций /х (х1у х2)9 /2 (хъ х2), ..., fn {хъ х2)у ..., каждая из которых
удовлетворяет по крайней мере геометрическим граничным условиям
задачи. Лучше, если каждая из функций удовлетворяет всем граничным
условиям. Система функций fk (хъ х2) должна быть бесконечной,
удовлетворять условиям полноты. Предполагается, что эта система
ортогональна и нормирована во всей области, занятой пластинкой.
При изучении прогибов прямоугольных пластинок функции fk
можно составлять из произведений балочных функций, причем
множители подбираются так, чтобы граничные условия заведомо удовлетво-
242
оялись. Далее выбирается форма перемещений при колебаниях
пластинки в^ виде конечной суммы — линейной комбинации
W= 2 Ckfh. (8.2.11)
Если эту функцию подставить в однородное уравнение (8.2.7), то, как
правило, тождества не получим, в левой части результата
подстановки получится некоторая функция хъ х2, содержащая в качестве
параметров неизвестные числа Ck. Обозначим левую часть L (хъ х2) и
потребуем, чтобы эта функция была ортогональна каждому из
учтенных слагаемых flt f2, ..., fp. Условия ортогональности
j JL(a:1, x2)fhdxl dx2=0 (k= 1, 2,..., p)
(S)
приводят к системе однородных алгебраических уравнений
относительно Сг, С2, ..., Ср.
Если решаемое дифференциальное уравнение оказывается
линейным, как (8.2.3), то соответствующая алгебраическая система также
линейна. Поэтому условие нетривиальности решения — равенство
нулю определителя линейной системы — приводит к уравнению
частот. Здесь же заметим, что к аналогичным результатам приводит и
другой приближенный метод, предложенный Ритцем и основанный
на принципе минимума полной механической энергии.
Значения корней уравнения частот, очевидно, зависят от выбора
функций /> полной системы, который нельзя подразумевать
единственным. Значения корней зависят и от числа функций
последовательности, участвующих в формировании суммы (8.2.11). С увеличением
числа р суммируемых функций точность вычисления частот
увеличивается. О сходимости этого процесса судят обычно по результатам двух
последовательных значений первых корней уравнения частот.
Применение системы балочных функций в качестве
аппроксимирующей системы приводит к простой формуле для вычисления
собственных частот колебаний жестко заделанной по контуру
прямоугольной пластинки
0>m/t = -
ph
а4 б4 а2Ь2 )'
причем коэффициенты ат и |Зт зависят от т и определяются
равенствами
1,506 при т=1у
т + 0,5 при т>2,
1,248 при /п=1,
оЦ^т—у) при т>2.
243
Применяя эту формулу для расчета низшей частоты квадратной
пластинки с жесткой заделкой всего контура, находим коэффициент
13,4 вместо 2,00 для шарнирного опирания или 5,76 для/заделанной
по одной из сторон квадрата пластинки. Первая частота заделанной
пластинки выше в 2,6 раза первой частоты шарнирно опертой
квадратной пластинки.
В справочной литературе можно найти результаты вычислений
частот собственных колебаний прямоугольных пластинок с
разнообразными значениями отношений сторон прямоугольника, при
разнообразных условиях опирания контурных точек, с учетом опирания
в отдельных точках пластинки, с учетом влияния сосредоточенных
масс, которые может нести пластинка. Изучены и колебания
пластинок переменной толщины. Все это оказывается очень полезным и
важным при исследованиях вынужденных колебаний пластинок при
заданной нагрузке.
Вынужденные колебания пластинок возбуждаются
периодически изменяющейся нагрузкой. Пусть на пластинку
действует поперечная нагрузка q = q° (хъ х2) sin Ш. При этом
рекомендуется прогибы искать в виде w = w° (хъ х2) sin Ш. Подстановка
таких прогибов в уравнение движения (8.2.3) приводит к уравнению
для определения форм вынужденных колебаний
DVW — phQ2w° = </°. (8.2.12)
Предположим, что частоты соп и формы wn (х1у х2) собственных
колебаний пластинки установлены, причем функции wn (х1у х2)
удовлетворяют уравнениям
£>VX — ph<o%wn = 0. (8.2.13)
Тогда решение уравнения (8.2.12) рекомендуется искать в виде
разложения по собственным функциям:
оо
^°= 2 Cnwn(xu х2).
/г=1
Форма поперечной нагрузки на среднюю поверхность
предполагается также разложенной по собственным функциям:
оо
9°= 2 knwn(xux2).
Подстановка этих рядов в (8.2.12) с использованием (8.2.13) приводит
к определению коэффициентов разложения форм прогибов:
Сп = kn/Iph ((*% - Q*y]. (8.2.14)
Отсюда следует, что приближение частоты внешней нагрузки к одной
из частот собственных колебаний пластинки приводит к
неограниченному возрастанию амплитуды соответствующей гармоники
вынужденных колебаний — проявлению резонанса. В действительности
амплитуда вынужденных колебаний всегда ограничена вследствие наличия
244
силяй в средней поверхности пластин, проявлений нелинейности,
Факторов рассеяния механической энергии.
* В частности, оценку влияния усилий в средней поверхности
пластинки можно провести, если • скорректировать исходные уравнения
движения пластинки. Рассматривая условия равновесия элемента
средней поверхности пластинки, геометрию и положение точек его в
напряженном состоянии отождествляли с геометрией и положением
в начальном, недеформированном состоянии. При этом получали
уравнение движения (8.2.3), в котором учтены даламберовы силы инерции.
Если же учесть
изменение конфигурации
элемента средней
поверхности пластинки (рис.
137), то можно
установить составляющую
действующих в средней
поверхности сил в
направлении оси Oxs.
Например, на левую сторону
выделенного элемента
действует нормальная
сила —N22dxlf которая
образует с плоскостью
Оххх2 угол до2,
поэтому составляющая этой силы в направлении Ох3 будет —N22dxxw12.
На противоположную грань выделенного элемента действует
нормальная сила N,22dx1 = N22dxx + N222 dx2dxly которая в направлении
0х3 имеет составляющую N22dxx (тл + wt22dx2). Поэтому
суммарная ' составляющая нормальных сил в вертикальном направлении
(NnWfll + N22wл22^х-$х2. Подобным способом можно' установить
вертикальную составляющую сдвигающих сил 2N12wfl2 dxxdx2.
Учитывая эти дополнительные вертикальные силы' в уравнении
баланса сил, действующих на выделенный элемент, получаем вместо
(8.2.3) уравнение движения в виде
Рас. 137
DV*w — N-
11W11
2N12w)12 — N22w^22 = q + (—hpd2w/dt2). (8.2.15)
Развивающиеся в средней поверхности пластинки нормальные и
сдвигающие усилия либо считаются заданными начальными
параметрами, либо должны определяться с привлечением уравнений баланса
сил в направлениях Охг и Ох2:
#и.1 + ^12,г = phd^/dt2; N2XA + N22}2 = phd2u2/dt2, (8.2.16)
гДе иъ и2 — составляющие смещений точек средней поверхности в
направлениях координатных осей, и соотношений между усилиями
и перемещениями:
#ц = В (en + ve22); N22 = В (е22 + ven); N12 = В (1 — v)e12;
en = й1Д + 0,5. (ауд)2; е22 = и22 + 0,5 (ш2)2;
2е12 = «1,2 + «2.1 + w,i w,2- (8.2.17)
245
В частности, рассмотрим колебания прямоугольной пластинки, в
которой имеются начальные продольные и пойеречные нормальные
усилия Nn = N\, N22 = №2, N12 = 0. Если края пластинки свободно
оперты, то учтем граничные условия:
wta-o *=0; Mi\Xl = 0 =0; w\XlBsa =0] Mi\XlSsa =0;
w]xu=o =0; М2\Хя=о =0; w\x^b =0; M2\X2=b =0,
Решение уравнения (8.2.15) при q = 0 ищем в виде
w = sin (at sin (mnxjd) sin (tmx2lb)
и для вычисления частот собственных колебаний получаем формулы
рЛсо2 = D [{mnlaf + (пп/Ь)*]* + Щ (^-J + №2 (^J . (8.2.18)
Отсюда следует повышение частот собственных колебаний при
наложении на пластину растягивающих усилий, снижение собственных
частот при создании дополнительных сжимающих усилий в
пластинке. Другими словами, изгибная жесткость пластинки повышается
растягивающими усилиями и снижается сжимающими усилиями, что
подтверждает и интуитивная оценка влияния усилий в средней
поверхности пластинки на изгибную жесткость.
Подобным способом можно оценить влияние усилий в средней
поверхности на частоты собственных колебаний пластинок при более
сложных граничных условиях.
Рассмотрим теперь более сложные случаи, когда усилия в средней
поверхности пластинки не заданы и их требуется определить
посредством решения некоторой краевой задачи. Дифференциальное 5фав-
нение (§.2.15) здесь дополняется системой (8.2.16) и (8.2.17), которая
сводится к трем дифференциальным- уравнениям, содержащим
перемещения иъ и2, w в качестве неизвестных функций. Граничные
условия могут быть геометрическими либо силовыми. В качестве
геометрических условий на контуре^пластинки могут быть заданы
перемещения иъ и2У w и угол 0 поворота нормального элемента вокруг
касательной к контуру. Перечисленным геометрическим условиям
соответствуют силовые. На контуре пластинке можно задавать нормальное
усилие, сдвигающее усилие, обобщенную перерезывающую силу и
изгибающий момент. И если задание нормальных и сдвигающих усилий
не представляет особенностей, то обобщенную перерезывающую силу
необходимо дополнить поперечной составляющей нормальных и
сдвигающих контурных усилий. Если, например, рассматривается
контур пластинки, перпендикулярный оси Ох2У то обобщенная
перерезывающая сила представляется суммой:
Q2 + dM2i/dx1 + N22dw/dx2 + N12dw/ddx±.
Решение сформулированных нелинейных задач можно получить
лишь применением различных приближенных приемов либо
численным способом.
2 46
к 6 3. Уравнения колебаний оболочек
Уравнения движения дифференциально малого элемента оболочки
ожно получить посредством некоторых преобразований уравнений
/у 3.14). Если в этих уравнениях учесть даламберовы силы инерции
(-р<Э2 ujdt2), (-pdhujdt2), (- pd2w/dt2)
в составляющих внешней нагрузки qly q2, qnf то получим уравнения
движения оболочки в перемещениях.
К граничным условиям, которые формулируются, как и в стати-
ке добавляются начальные условия: в начальный момент задается
распределение перемещений и скоростей точек средней поверхности.
В частности, выпишем уравнения движения цилиндрической
оболочки. В качестве первой координаты точки на средней поверхности
примем расстояние х вдоль образующей, а второй координатой
считаем длину дуги s вдоль направляющей.
Уравнения свободных колебаний цилиндрической оболочки
радиуса R и толщиной h имеют такой вид:
д2 иг __ 1—v д2их . 1 + v д2и2 , _v_ dw _ j>_ ,< 2ч д2 и? ^
"дх2 2 ds2 2 dxds + ~R дх ■ ~~ 1Ё ^ ~V ' dt2 '
д2и2 1—v д2и2 . 1+у д2иг , 1 dw .
ds2 2 а*2 2 a^as r ds
h2
2(l-v)-^ + -^ +
v } dx2 ds2
\2R2
d*w D азщ "I _ p(l— v2) d2u2
E dt2 ;
J_/v J^ -J- .^2 -I-iM _1_ Л* (Л4гл, LT/o_ »л аз"2
/? v ал: as
v '- a*2as ass J
И v ^ (2—v) --[ 1 =
/?/ 12 r /? [ ;a^as aS3 J/
p(i—v2) а2ш
(8.3.1)
E dt2 v
Собственные движения средней поверхности цилиндрической
оболочки рекомендуется искать в форме:
иг = U cos (ms/R) ехр (Ял;/# + Ш);
и2 = V sin (ms/R) ехр (WjR + ш/);
до = № cos (ms/R) ехр (tac/# + ш£),
где m, Я,- со, [/, Vy W — действительные или комплексные числа,
которые можно найти, удовлетворяя системе уравнений (8.3.1) и
граничным условиям.
В частности, если цилиндрическая замкнутая оболочка длиной
I шарнирно закреплена по торцам, то граничным условиям можно
Удовлетворить, полагая
их = их cos (тхпх11) sin (m2ns/R) ехр (Ш)\
и2 = U2 sin (тгпх/1) cos (m2ns/R) ехр (icot)\
w = W sin (m^x/l) sin (m2ns/R) ехр (i'a>/).
247
Подставляя такие представления перемещений в уравнения,системы
(8.3.1), получаем систему линейных однородных уравнений
относительно Ul9 U2, W. Требование равенства нулю определителя этой
системы приводит к уравнению частот а>6 — &2со4 + ^со2 — k0 == О, где
использованы следующие обозначения:
k0= (1~V2H1+V) ^ + _LpL^.[(P+m|)4_2(4_v2)X4m|_
2 24 R*
—812тЬ—2ml+ 4(1— м*)№ + 4К2 ml + tnt];
1 2 v ' 2 2 ^ 12tf2
-^- (^2 + ml) + 2(1 —v) №—(2—v2) Я," ml —
__i±L m42 + 2(l~v)X2 + mI
^2=l + ±?L(^ + ml)+-^-[(^ + mI)3 + 2(l-v)^ + mi](
2 12R2
к = т^Я//, оГ2£ = со2Я2р (1 — v2).
Среди трех собственных частот; соответствующих заданным
числам тг и /722, можно выделить одну, выявляющую преимущественно
изгибные колебания, тогда как две другие вызывают
преимущественно безмоментные напряженные состояния. Среди многочисленных
предложений приближенного определения собственных частот отметим
формулу для определения наименьшей частоты
со2 = kQlkx + (£0/&i)2 ЫК
Глава IX
УСТОЙЧИВОСТЬ УПРУГИХ СОСТОЯНИЙ ДЕФОРМИРУЕМЫХ ТЕЛ
§9.1. Об устойчивости сжатого стержня
Представим себе (рис. 138) совершенно прямую стойку длиной /,
шарнирно опертую по концам и сжимаемую продольной силой Р.
Для неизменно прямой оси стойки можно вычислить величину
напряжения, упругие деформации, перемещения точек стержня при любом
значении Р. Продольная сила ограничена диапазоном упругих
напряжений
—а = P/F < ау,
где ау — предел упругости; F — площадь поперечного сечения
стойки, когда рассматриваются только упругие состояния. Напряжения
вычисляются в соответствии с условиями равновесия, поэтому
прямолинейная форма равновесия статически возможна. Более того, опыт
248
оказывает, что в ограниченном диапазоне изменения продольной си-
0<Р<Ркр, (9.1.1)
лы
■Я
де Л<р — так называемая критическая сила, дополнительные
воздействия на стойку малой поперечной силой Q приводят к столь же
малым поперечным перемещениям. По прекращении действия
поперечной силы поперечные перемещения точек стержня исчезают.
Состояние равновесия упругого тела, вызванное действием
заданной совокупности внешних сил, называется устойчивым,
если под действием малых дополнительных возмущающих
сил тело получает малые возмущения в перемещениях,
исчезающие по прекращении действия возмущающих
сил. С этой точки зрения, прямолинейное упругое
состояние сжатой стойки в диапазоне изменения сил (9.1.1)
будет устойчивым. С этой же точки зрения
устойчивость, например, сжимаемой реальной двухметровой
стойки из двутавра № 14 можно экспериментально
обнаружить, если попытаться действием руки
подвергнуть изгибу сжатую в испытательной машине стойку..
Экспериментатор «вручную» обнаружит значительную
изгибную жесткость стержня и единственность
прямолинейного равновесного состояния оси стойки. По мере
увеличения сжимающей силы можно установить
критическое значение сжимающей силы, превышение
которого приводит к качественно новым результатам
испытаний действием поперечной возмущающей нагрузки.
По превышении сжимающей силой критического
значения действие поперечной возмущающей силы приводит к
необратимому изогнутому равновесному состоянию стержня. Стержень
оказывается в равновесном изогнутом состоянии под действием
только сжимающей силы, линия действия которой проходит по-
прежнему через шарниры.
Когда продольная сила не превышает критического значения,
поперечные возмущающие силы приводят к обратимым поперечным
перемещениям оси стержня, прямолинейное состояние равновесия
стержня* будет устойчивым, стержень остается прямолинейным при
действии продольных сил. Докритические продольные силы не могут
поддержать никаких, кроме прямолинейной, равновесных состояний
оси стержня.
Если сжимающая сила превышает критическое значение, то
прямолинейное состояние стержня статически возможно, но неустойчиво:
при действии поперечных возмущений ось стержня получает
необратимые поперечные перемещения, изогнутое состояние оси стержня
оказывается устойчивым, а реализуются только устойчивые состояния.
Поэтому при монотонном увеличении продольной сжимающей
стержень силы можно чнаблюдать прямолинейное состояние оси"стерж-
ня^ пока сила не достигла критического значения. По достижении си-
яой критического значения и превышении этого значения ось стерж-
Рис. 138
249
ня изогнется самопроизвольно благодаря наличию
малых/возмущений и неустойчивости прямолинейной формы оси стержни.
Возвращаясь к эксперименту со стойкой, сжимаемо^ продольной
силой, по достижении продольной силой критического значения
можно обнаружить появление удивительной податливости стержня в
отношении поперечного изгиба, стойка как бы теряет изгибную
жесткость по достижении продольной силой критического значения. Это
объясняется наличием двух близких статически возможных форм
равновесия стержня.
Теоретически поведение стержня, сжатого, продольной силой,
можно описать посредством вычисления потенциальной энергии упруго
деформированной стойки. На рис. 139
схематически представлена зависимость по-
У тенциальной энергии от продольной силы
*У^ в докритиче'ском и закритическом
состояниях. В до критическом состоянии
каждому значению силы соответствует
единственное состояние равновесия, соответ-
^ ствующее прямолинейной, оси. В закрити-
% р ческом состоянии заданному значению
Рис 1зд силы соответствуют по крайней мере два
состояния равновесия, соответствующих
прямолинейной и изогнутой оси,
причем изогнутое состояние оси имеет меньшую потенциальную энергию
по сравнению с прямолинейным состоянием. Конечно, реализуется
лишь одно из возможных состояний, соответствующее меньшей
потенциальной энергии. При монотонном увеличении сжимающей силы
стержень остается прямолинейным при Р < Ркр и самопроизвольно
искривляется с последующим интенсивным ростом поперечных
перемещений при Р > Ркр. При этом говорят о потере устойчивости
прямолинейной формы равновесия, о выпучивании стержня, переходе
стержня или другой упругой системы из одного равновесного состояния
в качественно новое состояние.
§ 9.2. Устойчивость стержней и пластинок
В случае сжимаемой продольной силой стойки (рис. 139) переход
из основного состояния в возможное изображается отрезком АВ,
представляющим потерю устойчивости прямолинейной формы равновесия.
Уравнения равновесия возможного состояния, выписанные
относительно перемещений, деформаций и напряжений, связанных с
потерей устойчивости, можно заменить упрощенной линейной системой
уравнений относительно связанных с потерей устойчивости
напряжений, деформаций, перемещений. Эта система оказывается однородной
с однородными нулевыми граничными условиями. Поэтому такая
система может иметь отличные от нулевых решения лишь при некоторых
дискретных значениях коэффициентов дифференциальных уравнений.
А эти коэффициенты зависят от параметров внешних сил. Отсюда
получаются критические зцачения параметров внешних сил, обеспечи-
250
ю1Цих возможность потери устойчивости основного состояния
равновесия.
g частности, рассмотрим сжатую продольными силами стоику.
Надавив ось Ох1 вдоль оси стержня, можно считать в основном
состоянии tfii ^ —^^, а остальные компоненты тензора напряжений и
перемещения— нулями. Можно, конечно, учесть влияние изменения
геометрии стержня на критические нагрузки, но это влияние мало
для обычных конструкционных материалов, имеет порядок
относительных удлинений по сравнению с единицей. Найдем условия
существования возможного равновесного состояния стержня, при
котором ось стержня оказывается изогнутой в плоскости Охххг. Жесткость
стержня и условия закрепления концов предполагаются
исключающими изгибно-крутильные формы оси стержня, поэтому их мы не
рассматриваем.
Учет деформации оси стержня при составлении условий
равновесия возможного состояния сводится к рассмотрению только
поперечных перемещений и связанных с ними искривлений оси стержня.
Удлинений элементов оси стержня не учитываем. Обозначив v (хг)
поперечные перемещения точек оси стержня, найдем условия равновесия
элемента:
dNn = О, dQ + N11v%lxdx1 = 0, dM + Qdxx = 0.
Первое из этих уравнений свидетельствует о неизменности вдоль оси
продольной силы Nn = —Я, а два других уравнения сводятся к
одному:
-М,ц + Nnvtll = 0. (9.2.1)
Кроме условий равновесия располагаем соотношением между
изгибающим моментом и искривлением оси стержня в упругом состоянии:
М = EJvtll. (9.2.2)
Соотношения (9.2.1), (9.2.2) сводятся к одному дифференциальному
уравнению относительно перемещений изогнутого состояния оси
стержня:
EJv™ + pv* = 0. (9.2.3)
Обозначив
EJk2 = Р, (9.2.4)
найдем общее решение уравнения:
v = Сг sin kx + С2 cos kx + Съх + С4. (9.2.5)
Требование равенства нулю прогибов и изгибающих моментов при
х = 0 и х = /, где / — длина шарнирно закрепленного по концам
стержня, приводит к системе однородных линейных уравнений для
определения постоянных Съ С2, С3, С4 и значения fe2. Из этой
системы находим
С2 = С3 = С4 = 0, Ы = пп (п= 1, 2, ...), (9.2.6)
з Сг остается произвольной.
Последнее из равенств (9.2.5.) вместе с (9.2.4) позволяют
установить бесконечную совокупность критических значений сжимаю-
251
щей силы
PKV = n*n*EJ/P, (п= 1,2, ...). /
Минимальная из них называется критической силой ло Эйлеру:
РЕи = n*EJ/P. (9.2.7)
Каждой из возможных критических нагрузок соответствует своя
форма возможных поперечных смещений. Первой критической
соответствует возможная равновесная форма оси с образованием одной
полуволны синусоиды, второй — с двумя полуволнами и т. д.
Практический интерес представляет лишь минимальная критическая нагрузка
(9.2.7) и соответствующая ей изогнутая форма оси стержня с
образованием одной полуволны. Можно показать, что только эта форма будет
устойчивой, когда сжимающая сила превышает
~\ \ значение (9.2.7).
\ Метод Эйлера определения критических на-
\ грузок широко применяется для изучения устой-
\ чивости стержней при разнообразных способах
\ закрепления концов сжимаемого стержня. Рас-
!\. смотрены критические нагрузки на стержни со
| >s^ ступенчато изм<еняющейся жесткостью, моно-
fll I г__ тонно изменяющейся изгибной жесткостью, при
80 Ь наличии нагрузок в промежуточных точках про-
р 14Q лета балки. Изучены критические нагрузки на
стержневые системы: фермы, рамы. Имеется
разнообразная справочная литература по этим
вопросам. Метод Эйлера применяется и при исследовании
устойчивости пластинок, оболочек разнообразных очертаний. Как правило,
рассматриваются возможности перехода сжатых пластинок, оболочек
из безмоментного основного напряженного состояния в близкие мо-
ментные состояния.
Чтобы обобщить формулу (9.2.7) применительно к другим
способам закрепления концов сжимаемого стержня, вводят так называемую
гибкость стержня
к = тЛ/р, (9.2.8)
где радиус инерции поперечного сечения р вычисляется по известной
формуле J = Fp2y am — некоторый коэффициент.
Формула (9.2.7) перепишется в виде
РЕи = n2EF/X\ (9.2.9)
где к вычисляется по (9.2.8) при т = 1.
Зависимость величины критического напряжения, отнесенного к
модулю упругости, от гибкости представлена на рис. 140. Опыт
свидетельствует о достаточно точном отражении действительности формулой
(9.2.9) при гибкости Я порядка 100 и более. При меньших гибкостях
стержень не теряет устойчивости прямолинейной формы либо
выпучивается при напряжениях, превышающих предел упругости.
Заметим, что критические напряжения для стержня, имеющего
жесткую заделку по двум концам, можно вычислять по формуле (9.2.9), если
252
олько гибкость вычислять по (9.2.8) при т = 0,5. Иными словами,
амена шарниров жесткой заделкой по концам стержня критическую
гибкость стержня уменьшает в два раза.
Для одного заделанного конца, второго шарнирно опертого
следует считать т = 0,7.
Если же сжимается консоль, то т = 2. Во всех этих случаях
сохраняется формула (9.2.9) для вычисления критических напряжений
в упругом состоянии стержней.
Можно показать, что формула (9.2.9) сохраняет значения для
стержней, нагруженных в промежуточных точках пролета сжимающими
нагрузками как сосредоточенными, так и распределенными непрерывно
по оси стержня. Соответствующие значения коэффициента
табулированы. Например, в случае шарнирно опертого по концам стержня
и равномерно распределенной осевой нагрузки на полупролете одного
направления, на другом полупролете — противоположного для
критического значения 0,5ql получается формула (9.2.9) при т = 0,56.
Для консольной стойки с линейно меняющейся нагрузкой т = 1,388
при максимальной нагрузке на свободном конце и т = 0,782 при
максимальной нагрузке на заделанном конце стойки.
Практически интересны задачи устойчивости стержней
переменного по длине поперечного сечения. В этих случаях общая постановка
задач остается прежней: составляются условия равновесия
возможных состояний стержня с изогнутой осью. Математические трудности
решения дифференциального уравнения с переменными
коэффициентами преодолеваются либо применением метода Бубнова—Галеркина,
либо применением энергетического метода Ритца. Оба эти метода дают
приближенную верхнюю оценку сжимающих сил, оценка
уточняется по мере увеличения числа функций, участвующих в приближенном
представлении прогибов. Метод Ритца состоит в использовании
теоремы о минимуме полной потенциальной энергии внутренних и
внешних сил упругой системы. Выбирается полная система функций,
удовлетворяющих геометрическим граничным условиям, а перемещения,
связанные с потерей устойчивости, представляются линейной
комбинацией конечного числа функций такой системы с неизвестными
коэффициентами.
Минимизация потенциальной энергии проводится по упомянутым
коэффициентам, что приводит к уравнению для определения
критических нагрузок. Например, в случае сжимаемого силой Р стержня
полная потенциальная энергия вычисляется по формуле
/ i
Э = 0,5 f EJ {v"f dx — 0,5P f (v')2 dx. (9.2.10)
о 0
Если {vk} — полная система функций, то искомые поперечные
перемещения представляем в виде суммы:
v = СЛ + C2v2 + ... + Cpvpy (9.2.11)
гАе Сь ..., Ср — неизвестные коэффициенты.
253
Подстановка (9.2.11) в (9.2.16) и условия минимизаций функции-
нала Э по С1} С2, ..., Ср приводят к системе линейных алгебраических
уравнений
дЭ1дСк = 0 (£=1,2, ..., р).
Равенство нулю определителя этой системы представляет собой
искомое характеристическое уравнение для Ркр. Например,
решенную ранее задачу об устойчивости консольно закрепленного стержня,
сжимаемого силой Р на свободном конце, можно решить еще методом
Ритца, полагая vk — x2k. Очевидно, vk (0) = 0, v'k (0) = 0, что
соответствует консольному закреплению конца в начале координат.
При k = 1 подстановка в (9.2.10) прогибов v = Схх2 приводит к
значению Р<$> = 3EJ/12.
Напомним, что строгое решение этой задачи дает
Ркр = 0,25я2£///2. (9.2.12)
Уточнение представления перемещений v = С±х2 + С2л;4 приводит к
критической нагрузке Р£р} = 2,5£7//2, превышающей значение (9.2.12)
на 1,2%. Наконец, если взять три слагаемых в представлении прогибов,
то получим критическую силу, превышающую строгое расчетное
значение на 0,4%. Приведенный пример свидетельствует о быстрой
сходимости и надежности метода Ритца.
Метод Ритца применительно к исследованию устойчивости
пластинок был развит С. П. Тимошенко. Уравнение устойчивости пластинок
Dу% - Nnwtll — 2N12wA2 — N22Wt22 = 0 (9.2.13)
получается преобразованием уравнения изгиба пластинок, если в
качестве поперечной нагрузки учесть проекцию на ось Ох3 сжимающих
Nlly N22 и сдвигающих N12 сил, действующих на элемент пластинки в
изогнутом состоянии.
Граничные условия в задачах устойчивости пластинок —
однородные: на контуре средней поверхности пластинки задаются нулевые
перемещения, углы поворота либо обобщенные перерезывающие силы,
изгибающие моменты. Требуется найти значения усилий Nn, Af22, Af12,
при которых уравнение (9.2.13) при нулевых граничных условиях
имеет ненулевые решения.
Эта задача имеет эквивалентную энергетическую формулировку:
требуется обеспечить минимум полной потенциальной энергии
пластинки:
3 = 0,5Z) j J [sj2w —2(1— v)(wt и wt 22~wU^]dx\ dx2—
-0,5 j \[Nn(wil)2 + Nu(wt2)2i+2Nl2w>{wi2]dxldx2. (9.2.14)
(5)
Например, рассмотрим прямоугольную пластинку с размерами о», Ъ
в плане, которая сжимается в направлении оси Ох1у усилиями N.
254
Полагая пластинку шарнирно опертой по всему контуру,
положим _
w a* w sin (nnx^djsm (mnx2/b)f
где w — постоянное число, п, т — целые числа.
Подставив в уравнение (9.2.13) это выражение прогибов и
значения усилий Nn = —N\ N22- = N12 = О, найдем выражение
критического напряжения, если минимизируем N = (a/n)2Dn[n2/a2+m2/b2]2
по параметрам т, п.
Если пластинка выпучивается с образованием одной полуволны в
поперечном по отношению к сжатию направлении, то
Nb2/(nD) = (1/Х + Я)2, \ = а/(пЬ).
Минимальное значение этой величины равно четырем. Поэтому
шарнирно опертая по контуру прямоугольная пластинка не потеряет
устойчивость, если N <AfKP = 4я2£)/Ь2. Легко проверить, что при
наименьшей сжимающей нагрузке AfKP теряют устойчивость квадратные
пластинки или прямоугольные пластинки, по длине которых
укладывается целое число квадратов (к = 1). При выпучивании
прямоугольная пластинка с шарнирным закреплением контура имеет тенденцию
к разбиению на квадраты либо наиболее близкие к квадратам области,
каждая из которых выпучивается как квадратная пластинка.
Критические нагрузки продольно сжатых прямоугольных
пластинок при разнообразных граничных условиях удобно вычислять по
единой формуле
N = kn2D/b2y (9.2.15)
где коэффициент k определяется в зависимости от граничных
условий.
Методом Эйлера на основании уравнения (9.2.13) либо
минимизацией (9.2.14) проведены исследования критических нагрузок
прямоугольных пластинок при разнообразных сочетаниях сжимающих и
сдвигающих усилий в средней поверхности. Рассмотрены случаи
однородных напряженных состояний, когда усилия не зависят от координат.
Кроме того, изучены случаи линейного распределения усилий, что
соответствует случаю изгиба прямоугольных пластинок в их плоскости.
Особый интерес представляет боковое выпучивание изгибаемых
балок. Имеются справочные данные о критических нагрузках на
анизотропные прямоугольные пластинки на пластинки, подкрепленные
ребрами. Подробно изучены формы неустойчивости круглых
пластинок, кольцевых пластинок и некоторых пластинок более сложной
формы.
§ 9.3. Неустойчивость цилиндрической оболочки
^Приведем частное решение задачи об устойчивости продольно
сжатой цилиндрической оболочки, предполагая осесимметричную форму
потери устойчивости. Рассмотрим круговую цилиндрическую оболочку,
Которая подвергается сжатию продольными силами интенсивности
255
Tf равномерно распределенными по торцам оболочки. Радиус
оболочки R, длина /, торцы считаем шарнирно закрепленными./Обозначим
w радиальные перемещения оболочки, связанные с потерей
устойчивости. Предполагаем, что форма потери устойчивости^ осесимметрич-
ная, поэтому считаем w = w (х) и условия равновесия элемента
изогнутой оболочки можно трактовать как условия равновесия элемента
балки, на который действуют в поперечном направлении сила TwtXX dxy
вызванная искривлением образующей средней поверхности оболочки,
и сила Ehw/R2dx, вызванная наличием поперечных усилий в
меридиональных сечениях оболочки. Учет этих сил приводит к
дифференциальному уравнению равновесия возможного осесимметричного
состояния оболочки
wiv + TiDw» + Eh/(DR2)w = О,
которое надо решать при граничных условиях w\x=*o = 0;
о)" Ue0 = 0; 0*1*., =0; о/'|*=/=0.
Полагая w = с sin (пх/l), удовлетворяем граничным условиям и
дифференциальному уравнению неустойчивости, если I—^— 1 — W-r-1 +
Отсюда находим возможную зависимость Т от п:
Т = D/X2 + Eh№R\ X2 = U/(nn)]2.
Легко найти значение параметра Я2 = Rh/[2]^3(l — v2)],
обеспечивающего минимальную критическую нагрузку на цилиндрическую
оболочку
Т*т> = 13 (1 - v2)]-o.s Eh (h/R). (9.3.1)
Приведенная постановка задачи устойчивости цилиндрической
оболочки и результат (9.3.1) определения критических сжимающих сил
вызвали оживленное обсуждение в технической литературе
последнего полустолетия. Большинство из упомянутых обсуждений было
направлено на усовершенствование, уточнение приведенной
постановки задачи. Эти уточнения обосновывались явными отклонениями
рекомендаций (9.3.1) и экспериментальных данных*
Сжимаемые цилиндрические оболочки часто теряют устойчивость
при гораздо меньших нагрузках, чем вычисляемые по (9.3.1). Этот факт
можно объяснить как несовершенством теории расчета критических
нагрузок на оболочку, так и несовершенствами экспериментальных
образцов оболочки: отклонениями формы, размеров, свойств
материала, реализации граничных условий. Критическую нагрузку на
оболочку, вычисленную по простейшей схеме, приводящей к формуле (9.3.1),
называют верхней критической нагрузкой. Разумеется, имеется и
нижняя критическая нагрузка, установить которую можно только с
позиций нелинейной теории оболочек. Решение уравнений нелинейной
теории оболочек проводится с привлечением одного из приближенных
методов и позволяет установить соотношение между нагрузкой и мак-
256
мальным ПрОГИбом средней поверхности оболочки. Это соотношение
имеет вид, представленный на рис. 141. По мере увеличения
сжимающих усилий сначала растут поперечные смещения f приблизительно по
линейному закону. Затем на поверхности оболочки образуются
регулярно расположенные вмятины, ромбовидные по очертанию внешних
границ. При этом обнаруживается рост прогибов даже при снижении
сжимающей нагрузки. Оболочка теряет устойчивость прощелкиванием.
При монотонном увеличении сжимающей нагрузки достигается
верхнее критическое значение тв ~ 0,6, а затем после прохождения ряда
неустойчивых состояний обнаруживается равновесное устойчивое
состояние, соответствующее нижнему критическому значению нагрузки
% ~ 0,18. Конечно, закритические состояния равновесия
теоретически можно предсказать лишь на основе достаточно корректной
нелинейной теории, изложение которой представляет предмет специальных
курсов, ^id
§ 9.4. Общая постановка задач о неустойчивости
Предположим, что известна некоторая система перемещений,
деформаций, напряжений деформируемого твердого тела, вызванная
заданной системой внешних воздействий. Назовем рассматриваемое
состояние тела основным, обозначив
ul е?ш, о!т (9.4.1)
систему перемещений, деформаций, напряжений этого состояния.
Перемещения, деформации, напряжения (9.4.1) считаются известными
функциями координат точек тела, содержащими определенную
зависимость от механических характеристик материала тела и зависимость
от параметров внешних сил. Система (9.4.1) удовлетворяет
дифференциальным уравнениям равновесия в перемещениях либо
уравнениям равновесия в напряжениях и условиям совместности
деформаций. Система (9.4.1) удовлетворяет и заданным граничным условиям.
Для суждений об устойчивости основного состояния равновесия
предполагают, что существует не только основное состояние
равновесия, но и близкое к нему возможное состояние. Возможное
состояние условимся определять перемещениями, деформациями и на*
пряжениями, которые представим суммами:
ul + uk, г?т + еы, Oim + <yim. (9.4.2)
Величины uk, eim, <rfm, характеризующие отклонения перемещений,
Деформаций, напряжений при переходе от основного к возможному
состоянию, называют возмущениями, если эти величины
достаточно малы. Перемещения, деформации и напряжения возможного
состояния должны удовлетворять дифференциальным уравнениям
движения или равновесия, дифференциальным уравнениям совместности
Деформаций, граничным условиям. Ограничимся рассмотрением
условий равновесия.
9 Ззк. 558
257
Дифференциальные уравнения равновесия можно записать
применительно к основному состоянию в виде
Dt (ul е„%, <хА*) + р° Ft = б, / (9.4.3)
где через Dt обозначены некоторые дифференциальные операторы.
Вообще говоря, эти операторы нелинейны. Через Ft обозначены
компоненты массовых сил, которые считаются определенными
функциями параметров внешних сил. Через р° обозначена плотность
материала в основном состоянии.
Величины (9.4.1) должны удовлетворять условиям на границе тела.
В каждой точке границы должно удовлетворяться одно из двух
условий:
ul\r = uh9 SfeKs|r, ua) = Sk, (9.4.4)
где uk — заданные смещения, a Sk — заданные напряжения. Через
Sk обозначены алгебраические операторы над напряжениями и
дифференциальные относительно перемещений.
kL Совокупностью уравнений (9.4.3) и условий на границе тела (9.4.4)
представлены все разнообразные геометрические, статические,
физические условия, которым должны удовлетворять характеризующие
состояние равновесия перемещения, деформации, напряжения. Ш
Полагая реализуемым не только основное, но и возможное
состояние, требуем, чтобы функции (9.4.2) удовлетворяли дифференциальным
уравнениям равновесия и граничным условиям. При этом получим
систему дифференциальных уравнений равновесия
Dt (u°k + uky г*тк + emk, a^ + omk) + (p° + p) Ft = 0 (9.4.5)
и граничные условия
[Uk + uk]T = uhy Sk(G^s + omSf u°s + us) = Sh. (9.4.6)
Отметим еще раз, что внешние массовые силы Fiy поверхностные
силы Sk и смещения точек на поверхности ик полагаем зависящими
от некоторых параметров, а основное и возможное состояния
реализуются, по предположению, при одних и тех же значениях параметров
внешних сил. Поэтому в уравнениях (9.4.3) и (9.4.5) компоненты
массовых сил не различаются, а в условиях (9.4.4) и (9.4.6) не различаются
заданные правые части равенств. И J
Остается выяснить условия, точнее — значения параметров^внеш-
них сил, при которых одновременно удовлетворяются уравнения
(9.4.3) и (9.4.5) при соответствующих условиях на границе. Величины
(9.4.1) считаются известными, а условия (9.4.3) и (9.4.4) —
несомненно удовлетворяющимися. Поэтому вопрос сводится к определению
параметров внешних сил, при которых существует решение uk системы
(9.4.5), удовлетворяющее граничным условиям (9.4.6). Среди этих
значений параметров внешних сил находятся критические, достижение
которых обеспечивает существование не только основной формы
равновесия, но и возможной, и подтверждается следующими
соображениями.
268
Левые части уравнении (9.4.5) и граничных условии (9.4.6)
рекомендуется преобразовать, используя предположения о малости
возмущений. Разложив левые части (9.4.5) и (9.4.6) в ряды по степеням
возмутений и ограничиваясь первыми степенями возмущений, вместо
/д 4.5) найдем
' ^,+<,<.>+(fi)4+(|yv,+(^)°x
а вместо (9.4.6) имеем
[ul + uh]v = 0; Sh(o°mk, u%) + (^^-Jamh + ^^-Jus = Sh.
Если же учесть уравнения равновесия основного состояния (9.4.3)
и граничные условия (9.4.4), то получим систему дифференциальных
уравнений равновесия возможного состояния в виде
и условия на границе
№ = 0, [^)о*т + (^)иа = 0. (9.4.8)
\ дотп J \ ди8 J
В этих соотношениях
\дик I \ детп ] \ дотп ) \ дотз ] \ ди8 ]
представляют собой известные1 функции координат точек тела,
параметров внешних сил и механических свойств материала. Располагая
левыми частями уравнений равновесия в общей форме и функциями
(9.4.1), можно найти эти коэффициенты. Кроме того, изменение
плотности р можно считать линейной функцией перемещений ик и их
производных.
Поэтому система уравнений (9.4.7) представляет собой систему
линейных однородных уравнений относительно возмущений. Здесь же
заметим, ^то в систему (9.4.7) подразумеваются включенными и
линейные соотношения между возмущениями напряжений и
деформаций. Далее очевидно, что граничные условия (9.4.8) однородные,
нулевые. Поэтому возможное равновесное состояние существует, если
существует ненулевое решение однородной системы уравнений (9.4.7)
с однородными граничными условиями (9.4.8).
Из математической физики известно, что если система уравнений
(9.4.7) относится к эллиптическому типу, то ненулевое решение такой
системы с однородными граничными условиями существует только
при некоторых дискретных значениях коэффициентов, зависящих от
параметров внешних сил. Этими соображениями и обосновываются
надежды на существование параметров внешних сил,
обеспечивающих возможность потери устойчивости основного равновесного состоя-
9*
259
ния. Остается указать некоторые методы отыскания эти# параметров.
Математически проблема сводится к отысканию собственных чисел
и соответствующих им собственных решений систем^дифференциаль-
ных уравнений с переменными коэффициентами. Более того,
практически важно найти первое собственное число, ограничивающее
диапазон единственности основного состояния.
Получить общее решение системы уравнений устойчивости (9.4.7)
удается в ограниченном числе частных случаев, когда задача
оказывается одномерной либо легко сводящейся к одномерной. Поэтому
многие решения задач устойчивости получены разнообразными
приближенными способами. Укажем некоторые из них.
Методом Фурье решения системы линейных уравнений (9.4.7)
ищутся в форме рядов по одной или нескольким переменным. Тогда
совокупность уравнений устойчивости и граничных условий
приводит к алгебраической системе относительно неизвестных констант.
Отсюда получается характеристическое уравнение, корни которого
связываются с критическими нагрузками. Специальным выбором
некоторых из коэффициентов рядов Фурье удается упростить процесс
решения частных задач.
Метод Бубнова—Галеркина состоит в представлении искомых
перемещений ик, связанных с потерей устойчивости, линейными
комбинациями известных функций fks:
Uk = Cftl/fci + Ch2fh2 + ... + Скр/кр. (9.4.9)
Функции fhs выбираются так, чтобы заведомо удовлетворялись
геометрические граничные условия. Требуется, чтобы аппроксимирующие
функции удовлетворяли условиям полноты. Желательно, чтобы эти
функции были и ортогональными. .
Результат подстановки перемещений в форме (9.4.9) в каждое из
трех уравнений в перемещениях (9.4.7) обозначим Ls (хту Скр) (s =
= 1, 2, 3).
Если удалось угадать решение какого-либо из уравнений (9.4.7), то
соответствующая ему функция Ls будет тождественным нулем.
Однако вероятность удачи мала. Поэтому следует выбрать константы
Скр так, чтобы как можно лучше приблизить Ls к нулю. В
соответствии с рекомендацией И. Г. Бубнова применяют способ ортогонализа-
ции функций Ls по отношению к каждой из функций /sm,
участвующих в приближении соответствующего перемещения. Другими
словами, требуется равенство нулю интегралов:
$Ls(xmCKV)fstdv = 0 (9.4.10)
(V)
(s=l, 2,3; t=ly 2, ...,/n),
где интегрирование проводится по всему объему, занятому телом. При
этом получается система 3/п однородных линейных алгебраических
уравнений, содержащая 3/п неизвестных констант Csp. Приравняв
260
нуЛЮ определитель этой системы, получим характеристическое
уравнение, откуда и определим критические соотношения параметров
внешних сил.
Не менее распространенным оказывается энергетический способ
определения констант Cks в приближенном представлении смещений
(9.4.9). Составляется полная потенциальная энергия системы,
получающей возмущающие отклонения от основного состояния, с учетом
работы внутренних сил основного состояния, связанной с
нелинейными частями деформаций при потере устойчивости. Заметим, что
энергетический метод и метод Бубнова приводят к одним и тем же
результатам. Разница их проявляется только в способах составления
разрешающих задачу систем уравнений.
Для решения задач устойчивости применяют метод конечных
разностей, метод коллокаций, разнообразные полуобратные методы,
способы последовательных приближений.
Однако в первую очередь следует обратить внимание не на выбор
метода решения системы (9.4.9), а на метод составления этой системы
уравнений устойчивости деформируемого твердого тела. В
зависимости от системы предположений, принятых при упрощениях уравнений
равновесия, разными оказываются и системы (9.4.9), а также
граничные условия. Этим часто объясняется численная разница в решениях
одних и тех же технических задач.
Глава X
ЗАДАЧИ ТЕОРИЙ МАЛЫХ УПРУГОПЛАСТИЧЕСКИХ ДЕФОРМАЦИЙ
§ 10.1. Одноосное растяжение стержня
Представим себе однородный стержень, который подвергается
осевому растяжению. По заданной силе Р и площади F поперечного
сечения можно вычислить напряжение PIF и по диаграмме, полученной
в опытах с образцами (рис. 142), предсказать относительное
удлинение А///. Хак получается соотношение между осевой силой и
удлинением стержня, которым предсказывается механическое поведение
стержня как элемента конструкции. В частности, по заданному
уровню достигнутых напряжений а* можно определить остаточную
деформацию б*.
Предположим теперь, что стержень составлен из двух материалов
так, что напряжения а1? а2, развивающиеся в каждом материале,
уравновешивают силу
P = c1F1 + o2F2, (10.1.1)
а продольные удлинения ех и е2 каждого из материалов оказываются
одинаковыми. Здесь Fly F2 — площади поперечных сечений каждого
из материалов стержня. Однозначная зависимость напряжения от
деформации считается заданной для каждого из материалов,
составляющих стержень:
<?i = /i(ei), <та = Ме2). (Ю-1-2)
261
Поэтому характеристика составного стержня — соотношение, между
растягивающей силой и относительным удлинением — получается
комбинацией (10.1.1) и (10.1.2) при ех = е2 = е: /
Р = Fifi (в) + F2f2 (е).
(10.1.3)
Посмотрим теперь, как установить напряжения и деформации в
составном стержне при разгрузке. На рис. 143 схематически показаны
диаграммы растяжения образцов материалов, составляющих стержень.
Пусть при растяжении деформации достигли уровня е, после чего раз-
T=PT/(Eh2)
Рис. 141
грузили стержень. При разгрузке соотношения между напряжениями
в каждом материале и деформациями определяются законом разгрузки:
(У\— ох =Е\ (е — е), о2 — о2 = Е2 (е — е),
(10.1.4)
где Ег, Е2 — модули упругости материалов; а1у о2 — напряжения в
процессе разгрузки; а1} в2 —напряжения, с которых начался процесс
разгрузки; 8 — деформация, с которой началась разгрузка; 8 —
текущая деформация при разгрузке. Пунктиром на рис. 142 показаны
прямолинейные диаграммы разгрузки материалов.
Если произошла полная разгрузка составного стержня, то
суммарная продольная сила равна нулю:
ai Fi+a2F2 = 0.
(10.1.5)
Из условий (10.1.5) и (10.1.4) можно установить остаточную
деформацию е* в стержне после разгрузки:
8* = е _ р/, -8' = р/ (E1F1 + E2F2). (10.1.6)
Поэтому полное удлинение стержня 8 можно считать суммой
упругого удлинения е' и необратимого удлинения 8*. Представление полной
деформации суммой упругой и пластической частей используется и
в более сложных случаях.
262
6<
S 10.2- Упругопластические состояния
изгибаемых балок
Изложим пути анализа упругопластических состояний
изгибаемых балок на основе применения теории малых упругопластических
деформаций и некоторых дополнительных предположений.
Начнем с рассмотрения чистого изгиба брусьев, имеющих
плоскость симметрии, в плоскости симметрии (рис. 144). Систему
координат Ox1x<2tx3 выберем так, чтобы ось Охх
совпадала с линией центров тяжести поперечных
сечений, ось Ох3 направим в плоскости
симметрии. Начало координат выбирается в центре
тяжести одного из поперечных сечений балки.
Предполагается, что к торцам балки приложена
система внешних сил, приводящаяся к парам с
моментами М. Ширина балки Ь (х3) меняется
с изменением х3. При действии на балку
изгибающих моментов точки оси получают
перемещения w (#i) вдоль оси Ол:3, а в поперечных
сечениях возникает система нормальных
напряжений сги. ^
Если состояние балки по всему поперечному
сечению упруго и материал балки подчиняется
закону Гука, то, как установлено ранее,
напряжения распределены по линейному закону
о11 = Ах3. (10.2.1)
При этом выполняются условия равновесия любой части балки,
выделенной рассматриваемым поперечным сечением:
ИГ
с*! |е с,
l 1
1 .1!
С* С
Рис. 143
l'o\\(x3)b(x3)dx8=.09
(П
§x3on(x3)b(x3)dx3 = M.
(10.2.2)
(10.2.3)
(F)
Интегрирование распространяется на всю площадь сечения. При
.линейном законе распределения напряжений (10.2.1) условие (10.2.2)
выполняется тождественно, если ось Ох1 совпадает с линией центров
тяжести сечения. Второе условие равновесия (10.2.3) приводит к
соотношению между изгибающим моментом, моментом инерции сечения
^22 и константой А:
AJ22 = М. (10.2.4)
Переходя к анализу деформаций балки, рассмотрим элемент
сечения балки плоскостью симметрии (рис.- 145) в начальном и
деформированном состояниях. Полагаем, что материальное волокно dxlf
принадлежащее оси балки, не удлиняется. Вследствие симметрии
условий деформирования различных поперечных сечений эти сечения
остаются плоскими, поэтому волокно &хх в деформированном состоянии
263
имеет конфигурацию дуги окружности радиуса р, причем dx± = pdq>.
Материальное волокно, точки которого имеют координаты
х3у/превращается в дугу окружности радиуса (р + х3), поэтому его длина будет
dx* = (р + x3)dy. Отсюда следует формула для вычисления
относительных удлинений
8n = (dxl — dx1)/dx1 = х3/р. (10.2.5)
Здесь же заметим, что кривизну оси балки можно вычислять при
малых поперечных перемещениях по формуле
1/р = х = —d2w/dxl (10.2.6)
Рис. 144 ' Рис. 145
Закон Гука оп = Евп и формулы (10.2.1), (10.2.4), (10.2.5) приводят
к соотношению между изгибающим моментом и кривизной
1/р = Ml (EJ22). (10.2.7)
Предположим теперь, что по достижении изгибающим моментом
значения Му наиболее удаленное от центра тяжести вдоль оси Ох3
волокно оказывается в предельном состоянии: напряжение достигает
предела упругости. Этим значением изгибающего момента
ограничивается область упругих состояний изгибаемой балки. Дальнейшее
увеличение изгибающего момента приводит к упругопластическим
состояниям поперечных сечений балки.
Распределение напряжений по высоте поперечного сечения
балки можно представлять, как схематически показано на рис. 146. Здесь
точка О соответствует центру тяжести сечения, точка с ординатой х0
соответствует положению нейтрального слоя, где продольные
волокна не удлиняются. Точки с ординатами Ху и Ху соответствуют
положению волокон, которые работают на пределе упругости. Точка х~~
обозначает крайнее нижнее, а точка х+ — крайнее верхнее волокна
балки.
264
Предполагается для простоты, что пределы упругости при
растяжении и сжатии одинаковы, поэтому соотношения
poY = E(x$— х0)9 —pov = E(Xy—x0) (10.2.8)
служат для определения Ху, х$.
Условие равновесия (10.2.2) служит определению положения
нейтрального волокна и записывается в виде
*у 4
Г Gubdxi-i Г (x{—x0)bdxi+ Г oubdxi = 0. (10.2.9)
Напряжения в нижней и верхней зонах пластического состояния
определяются в соответствии с выбранным законом пластичности.
Наконец, соотношение между изгибающим моментом и кривизной
получается из условия равновесия (10.2.3):
Ху
Г ап (хх — х0) bdxx+— Г (Xi —х0)2 bdxx -f
Х~ Ху
х+
+ [ on(xi—x0)bdxi*=M. (10.2.10)
4
Заметим, что здесь момент напряжений берется относительно точки
О, хотя его можно вычислять относительно любой точки, так как
главный вектор напряжений вследствие (10.2.9) равен нулю. Если
для областей упругопластических состояний принять условие
несжимаемости и полагать е22 + е33 = —0,5еп; е12 = е2 3 = е13 = 0, то
интенсивность деформаций или результирующий сдвиг следует
вычислять по формуле З7 = 1/2*1 вц|.- Совокупность закона подобия де-
виаторов напряжений и деформаций и закона формоизменения
приводит к единственному соотношению
au = Е [1 — со (v) ]еш (10.2.11)
где со (у) — функция А. А. Ильюшина, экспериментально
определяемая из опытов на растяжение образца. Располагая такой функцией,
подстановкой (10.2.11) в соотношение (10.2.10) с учетом (10.2.9) и
(Ю.2.8) получим выражение изгибающего момента через кривизну,
геометрические характеристики поперечного сечения и механические
характеристики упругопластических свойств материала.
В частности, проведем расчеты для однородной балки
прямоугольного поперечного сечения. Ширина балки Ь, высота h. Предположим,
что материал линейно упрочняющийся, поэтому функция А. А. Илью-
ншна имеет вид
со = (1 - Е'1Е) (1 - ь/у)9
265
где Ё — модуль Юнга; Ё' — тангенс угла наклона к оси деформаций
прямолинейного участка диаграммы растяжения образца з1а
пределом упругости; Yy — предел упругости по^деформациям.^В
дальнейшем удобно использовать предел упругости по деформациям еу при
одноосном растяжении образца и полагать
ю=(1— Е'/Е) (1-еу/еп). (10.2.12)
Антисимметрия распределения напряжений относительно оси Ох% в
любом поперечном сечении балки приводит к заключению, что х0 = 0
при тождественном удовлетворении условия (10.2.9). Условие
равновесия (10.2.10) приводим к виду
0,5 h
M = EJ — — 2b f (1— Е'/Е) (^ — e^xxdxi
zi
и после вычисления интеграла получаем соотношение между
моментом и кривизной
M = EJ — (l—Q).
9 (10.2.13)
Снижение фактической изгибной жесткости балки по сравнению с
жесткостью упругой балки характеризуется функцией
H'-fX' + T1'-!-1)' |=2^=Т^"- <10'2Л4>
Особый интерес представляет случай, когда упрочнение материала
отсутствует. При этом следует считать Е' = 0 и соотношение между
изгибающим моментом и кривизной становится таким:
M=—bh*oJl l-tA. (10.2.15)
В предельном случае, когда пластическая зона распространяется на
всю высоту балки, при £-^0 получаем из (10.2.15)
М = 0,25ЫАгу. (10.2.16)
Предельное значение внешней силы, при которой одно из несущих
сечений балки оказывается полностью в пластическом состоянии при
идеально пластических свойствах материала, называется несущей
способностью балки. Поэтому формулой (10.2.16)
определена несущая способность балки при чистом изгибе.
Наконец, отметим, что после упругопластического
деформирования балки ее можно разгрузить, снять изгибающие моменты. После
разгрузки в сечениях балки обнаруживаются остаточные напряжения,
266
хематически показанные на рис. 147. Вследствие линейности
зависимости напряжений от деформаций на каждом участке кривой
деформирования сохраняется линейность распределения остаточных
напряжений. Обозначив а* величину остаточного напряжения при
х =-= Ху и через а** — величину остаточного напряжения при х =
U 0,5/i, найдем ординату волокна, где остаточное напряжение равно
нулю:
х = (0,5g*/i + с**ху)/ (а* + а**).
(10.2.17)
Требование равенства нулю суммарного момента остаточных
напряжений по всему поперечному сечению приводит к соотношению
между экстремальными остаточными напряжениями
3o*!cxy = (h + x)(0,5h—х)о**. (10.2.18)
Наконец, отметим, что напряжение в точке х при
нагрузке парами с моментом М вычисляется по
формуле а = Е (1 — со)- 'х и снимается при
разгрузке по закону о ='Ех . Отсюда можно
определить остаточную кривизну:
1
Рпл
:(0(Х)
1
X |
х +
0
ft
1
IX"
(10.2.19)
Рис. 146
где функция со вычисляется при х=х. Заметим,что из (10.2.18)
определяется отношение экстремальных остаточных напряжений, после
чего (10.2.17) сводится к уравнению относительное.
Рассматривая задачу о чистом изгибе бруса при разнообразных
механических свойствах материала, устанавливают соотношения
между изгибающим моментом и кривизной оси бруса. Эти соотношения
играют роль физических законов при постановке задач изгиба балок
поперечными силами.
Механическое соотношение М = М (1/р),
геометрическое соотношение 1/р = —d2w/dx2 и уравнения
равновесия элемента оси балки
dQ + qdx = 0;
dM + Qdx = 0
(10.2.20
сводятся к одному нелинейному дифференциальному уравнению
с.определенными краевыми условиями. Краевые условия задаются как
и в задачах изгиба упругих балок под действием непрерывно^
распределенной поперечной нагрузки q (х). Условия"на*краях балки
формулируются так: в каждой крайней точке задаются'две величины, по
одной из двух пар величин. Первую пару составляют прогиб и
поперечная, или перерезывающая, сила. Может быть задано и соотношение
между ними, как в случае упругой опоры. Вторую пару составляет
Угол поворота крайнего^сечения и изгибающий момент. Можно зада-
267
вать и соотношение между ними. Подразумевается при этом, чдю угол
поворота сечения вычисляется через производную поперечнбго
смещения, изгибающий момент — через вторую производную/
перерезывающая сила — через третью производную поперечного перемещения.
§ 10.3. Расчет изгибаемых балок
Рассмотрим однородную балку прямоугольного поперечного
сечения пролетом /, нагруженную сосредоточенной силой Р (рис. 148).
На том же рисунке показана расчетная схема части балки,
выделенной поперечным сечением с абсциссой х1у с заменой действия опор
силами, заменой системы напряжений в сечении
балки изгибающим моментом и поперечной силой Q.
Из условий равновесия части балки,
схематически представленной на рис. 148, следует
возможность вычисления изгибающего момента
М = 0,5Р (0,5/ — х).
(10.3.1)
Рис. 147
Максимального значения изгибающий момент
достигает в середине пролета. И если
обнаруживается пластическое состояние балки, то зона
пластических состояний примыкает к середине
балки. Сначала пластическое состояние
обнаружится в точках с координатами хг = 0, х3 =
= +0,5/i. В этом предельном случае напряжения
по высоте сечения распределены по закону сгп =
= 2x3ay/h1 где ау — предел упругости материала
по напряжениям при одноосном растяжении образца. Напряжения
сводятся к изгибающему моменту cryWi2/6, который совпадает с
вычисленным по формуле (10.3.1) при х = 0 и равным 0,25Р*/. Отсюда
находим предельное значение силы, до которой балка остается в
упругом состоянии:
Р* - 2bh2oy/ (31). (10.3.2)
Если сила Р превышает значение Р*, вычисленное по формуле
(10.3.2), то в балке появляются зоны пластических состояний,
показанные на рис. 149, и распределение напряжений по сечению балки
оказывается приблизительно таким, как показано справа на этом
рисунке.
Условия приведения напряжений в сечении с абсциссой хг к
моменту, вычисленному по формуле (10.3.1):
0.5Л
2 Г bonx3dx3 = 0y5P (O^l—Xi),
приводят к определению ординаты х0 границы зон упругости и
пластического состояния материала:
0,75/i2 = х\ + ЗР (0,5/ — хг)/(2ауЬ)щ
268
Итак, граница зон представляется параболой, ось которой
совпадает с осью Охх\ вершина имеет ординату
х = —0,5 (aYbh2/P — /).
Особый интерес представляет случай, когда вершина параболы
продвинется до начала координат (£=0). Это произойдет, когда сила
достигнет значения
Р** = oYbh2/l. (10.3.3)
В отличие от первого предельного значения поперечной силы
(10.3.2) второе предельное значение (10.3.3) соответствует случаю,
когда одно из поперечных сечений балки оказывается полностью в
пластическом состоянии. Распределение Т зон пластических состояний в
0,51
\0,5Р
ИФ
М
Рис. 148
Рис. 149
этом случае показано на рис. 149. Значение параметра внешних сил,
при котором одно из несущих сечений балки из упругопластического
материала без упрочнения оказывается полностью в пластическом
состоянии, называется несущей способностью балки.
Поэтому значение, силы, определяемое формулой (10.3.3), называется
несущей способностью шарнирно опертой по концам балки
прямоугольного- поперечного сечения, нагруженной посередине пролета.
Определение, несущей способности изгибаемых элементов
конструкций удобно проводить по схеме, предложенной А. А. Гвоздевым.
Основу этой схемы составляет замена элемента конструкции
некоторым механизмом посредством введения в него пластических шарниров.
Пластический шарнир — элемент, обеспечивающий
мгновенную подвижность системы, в котором развивается определенный
момент сопротивления. Если пластический шарнир относится к
балке прямоугольного сечения, то соответствующий, момент
вычисляется по формуле
ЛГН
0,25cryWi2,
(10.3,4)
вывод которой основан на предположении, что все сечение балки
перешло в пластическое состояние, распределение напряжений под-
269
чиняется схеме, представленной на рис. 150. В случае сечения, от-
личного от прямоугольного, либо неоднородного сечения пр^дпола^
гается, что все несущие элементы перешли в пластическое .состояние
так, что внутренние силы сводятся к паре с моментом, представляю*
щим собой несущую способность поперечного сечения. Превратив эле*
мент конструкции посредством введения пластических шарниров в
механизм, имеющий мгновенную подвижность, можно получить
значение несущей способности применением принципа возможных
перемещений. Например, в случае рассмотренного выше примера балки,
нагруженной в середине пролета сосредоточенной силой Р, схема
механизма, имеющего мгновенную подвижность, представлена на рис. 151.
Рис. 150
Рис. 151
Пунктиром отмечено положение точек оси при возможных
перемещениях точек оси механизма. Обозначив 8w возможное
перемещение точки приложения силы Я, легко найти угол бф взаимного
поворота звеньев механизма:
бф = 48w/l. (10.3.5)
Согласно принципу возможных перемещений, условием равновесия
системы является равенство суммы работ внешних сил на возможных
перемещениях и суммы работ внутренних сил на возможных
перемещениях: P8w = Мн>сбф. Учитывая соотношение (10.3.5) и
представление (10.3.4) момента несущей способности, найдем прежнее
значение несущей способности балки: Рн#с = />** = oybh2/l.
Здесь же рассмотрим пример расчета несущей способности жестко
заделанной по концам балки пролетом /, нагруженной силой Р
посередине пролета. Для превращения балки в механизм введем
посередине и по' концам три пластических шарнира. Уравнение баланса
возможных работ внешних и внутренних сил в этом случае имеет вид
P8w = М н.с0,5бФ + Мн.сбф + Мн.с 0,5бф
и несущая способность жестко заделанной по концам балки Рп с =
= 2oybh2/l оказывается в два раза больше несущей способности шар-
нирно опертой!"балки.
Ф В более сложных случаях для оценки несущей способности
приходится проверять несколько схем достижения системой предельного
состояния — превращения системы в механизм. Минимальное из по-
270
лученных при этом значений внешних сил считается несущей
способностью.
Наконец, остановимся на возможностях решения задач изгиба
стержней с учетом упрочнения материала за пределом упругости.
Например, в случае линейного упрочнения изгибающий момент и
кривизна связаны соотношением (10.2.13). Кривизна и поперечные
перемещения точек оси балки связаны геометрическим соотношением (10.2.6).
Изгибающий момент и нагрузка на балку связаны соотношением
(10.2.20). Перечисленные уравнения системы можно свести к
одному дифференциальному уравнению относительно поперечных
перемещений
[£/шп(1 -Q)],n =q(x), (10.3.6)
где использованы обозначения
6EJQ = (Е—Е') (0,5/i—х0) b(h2—hx0 — 2x20)t ]/2доЛ1 х0 = Ззу. (10.3.7)
На краях балки могут быть заданы либо геометрические условия —
угол поворота до§1 крайнего сечения и прогиб до, либо
соответствующие им статические условия — изгибающий момент
М = EJwtl (1 — Q) (10.3.8)
и перерезывающая сила
Q = —Мл. (10.3.9)
Дифференциальное уравнение (10.3.6) четвертого порядка с четырьмя
краевыми условиями представляет собой известную краевую задачу с
единственным решением.
Возможно применение разнообразных численных методов для
решения этого нелинейного дифференциального уравнения либо
приближенных способов типа метода Бубнова—Галеркина. Остановимся
на очень распространенном в инженерных расчетах методе А. А.
Ильюшина, который именуется также методом упругих решений. Метод
упругих решений представляет собой одну из разновидностей способа
■последовательных приближений. Первое приближение для
поперечных перемещений W\ получается как решение краевой задачи при
Я = 0 и совпадает с решением задачи об упругих состояниях балки под
действием заданной нагрузки. По упругому решению w\ (xt) можно
вычислить деформации, напряжения, зоны балки, где интенсивность
Деформаций превосходит предел упругости. В соответствующих
областях изменения переменной хх найдем функцию Я (х±) по
известной функции W\ (хх) и формулам (10.3.7). Подставляя так
вычисленную функцию Я = Qi в дифференциальное уравнение (10.3.6) и
граничные условия (10.3.8) и (10.3.9), получаем новую линейную
краевую задачу, решение которой обозначим доц. По вычисленному
значению доц вновь находим функцию Я = Яп и подставляем так
вычисленную функцию в уравнение (10.3.6) и краевые условия,
подготовив тем самым возможность вычисления третьего приближения. Этот
процесс заканчивается по достижении максимальной разностью двух
последовательных приближений заданного уровня.
271
Рассмотрим, например, шарнирно опертую по концам балку пря^
моугольного поперечного сечения при равномерно распределенное
нагрузке (рис. 152). ,
Решение задачи удобно вести в безразмерных переменных, пола-
гая
w = 0,5/ш, х = 0,511, 2bEh*q* = З?/4, х0 = 0,5ftg.
Тогда уравнение изгиба балки (10.3.6) принимает вид
[o.K(l-G)].tt = f*. (10.3.10)
где следует считать:
О = (1 - ЕЧЕ) (1 - С) (1 - 0,5£ - 0,5£2), (10.3.11)
V"2h2\v,te\£ = 3l29T (10.3112)
Полагая £2 = 0, находим общее решение уравнения (10.3.10) в форме
Поскольку прогибы симметричны относительно начала координат,
считаем Сг = С3 = 0. Удовлетворяя условиям равенства нулю
прогибов и моментов на краях балки при £ = 1, имеем:
<7*/24 + С2 + Сь = 0, q*/2 + 2С2 = 0,
откуда С2 = —(l/4)q*9 С4 = (5/24)?*
и упругое решение имеет вид
vI = -^q*(t*-ft2 + 5). (10.3.13)
В частности, (fli)(& = 0,5?* (I2 — 1).
Вычисляя по формуле (10.3.12) относительную ординату границы
упругой зоны, обнаруживаем £, = г\/ (1 — £2), где введено
обозначение q*h2r\ = д]/212э7. Очевидно, если т] > 1, то £ > 1 даже в
середине пролета, поэтому пластических зон не будет.
Если л = 1, то пластическое состояние обнаружится лишь в двух
крайних полосках среднего сечения при 5 = 0.
Условием существования заметных пластических зон является
неравенство
Я<1, (10.3.14)
которое обеспечивается при увеличении параметра нагрузки, когда
h2q>3V2l29T
Зададим для определенности г) = 0,8, ЕЧЕ = 0,2. Тогда имеем £ =
= 0,8/ (1 — I2); Q = 0,2 (1 — £) (1 — 0,5£ — 0,5£2) и пластическая зона
простирается до абсциссы £s = "^0,20.
^fHa рис. 153 показано приблизительное распределение зон упру-
гопластических состояний по первому приближению. Зоны пластичес-
272
ких состояний заштрихованы. Теперь в области изменения £ от нуля
до Is вычисляем прогибы по уравнению
[o.K(l-Q/)I.K = 9*
(10.3.15)
и в области между ls и единицей — по формуле (10.3.13).
решение уравнения (10.3.15) будем сопрягать при £ = Es с
прогибами, углами поворота, моментами и перерезывающими силами,
вычисленными по (10.3.13).
Из (10.3.15), следует
(fn)..K(i-Qi) = o>69*6»+c;E+c;,
причем С{ = 0 вследствие симметрии перемещений относительно
начала координат.
\^тш^^Л
\^тя^\
Рис. 152
Рис. 153
Кроме того, на границе зон при £ = %s получим из условия
непрерывности вторых производных С[ = —0,5<7*, поэтому
(»ц).« (1 — Qi) -= 0f59* (б1 —1).
После первого интегрирования этого уравнения найдем
Ы,£ = 0,5?* (J + Q,
где введено обозначение квадратуры J = j" l(l2 — 1)/(1 — Qi) Щ.
Далее находим
vn = 0,fy4j7d£ + C£g + CJ].
Вследствие четности перемещений по переменной g имеем Сз = 0,
поэтому получаем формулу
■»,i = 0f59*(J/dE + C;).
Окончательное представление перемещений связано с трудностями
вычисления квадратур. Здесь можно использовать разнообразные
приемы, в том числе и приближенное представление
подынтегральной функции
£а—1 _ —1 + 1,04486»
1—Qj
1 — 0,0112
273
удовлетворяющее требованию совпадения строгого и приближенного
представления в двух точках, при £ = 0 и |2 = 0,20. Используя это
приближенное представление подынтегральной функции, получаем
v^J-ff1-™*-* +С'\ ' (10.3.16)
11 24 Ч \ 1-0,0112 V V ;
Требование непрерывности перемещений при £ = £s позволяет
установить значение константы С'4. Вычисляя перемещения по (10.3.13)
при I2 = 0,20 и по только что полученной формуле, находим
^(о,2^б>о,2 + 5) = ^^^0448-°-22-6,0-2 + с;У
24 V ' ' "Г ' 24 Ч \ 1—0,0112 ^ V
Отсюда следует С'А = 5 (1 + \ 1_,00]12)-
Для вычислений перемещений по второму приближению полученная
формула (10.3.16) дает значение максимальных прогибов при £ = 0,
превышающее вычисленные по (10.3.14), где предполагаются упругие
состояния.
§ 10.4. Кручение валов при упругопластических
состояниях
Проблема кручения валов при упругих состояниях обсуждалась
ранее, и в § 5.8 введена функция кручения ср так, что уравнения
равновесия элемента вала будут удовлетворены, если напряжения
вычислять по формулам
°11 = ^22 = ^33 = ^12 = 0» °13 = Ф,2» а23 = ~ф,1- (Ю.4.1)
Координатные оси выбираются так, что ось Ох3 совпадает с осью
вала, а плоскость Охгхг совпадает с плоскостью одного из
поперечных сечений вала.
Если состояние поперечного сечения вала всюду упруго, то
функции напряжений при кручении удовлетворяют уравнению (5.6.16).
Функция упругого кручения моделируется поверхностью гибкой
пленки, равномерно натянутой на соответствующий контур и
подвергнутой равномерному поперечному давлению. Имеется в виду
мембранная аналогия задачи кручения валов при упругих состояниях.
При неупругом кручении функция напряжений ср (х2, хг)
определяется другими уравнениями. Использование функции кручения при
вычислении напряжений по формулам (10.4.1) позволяет
удовлетворить уравнениям равновесия. Рассмотрим перемещения и
деформации при кручении вала, сохранив представления (5.6.14)
перемещений
Й! = —0*2*3» и2 = 6*1*3» и3 = w (х1у х2) (10.4.2)
и изменив обозначение крутки на 0.
274
Тогда по закону подобия девиаторов напряжений и деформаций
приходим к соотношениям
— =-^-(-в*» + аЫ ^L=-±-{Qx1 + wt2). (10.4.3)
Здесь v считается экспериментально определенной функцией октаэд-
рического касательного напряжения т, причем в случае кручения
находим
Зт2 = 2 (ah + ah). (ЮЛА)
Исключив функции w из системы (10.4.3), получим. уравнение для
определения функции кручения
(2у<У2Я/т)д - (2уст13/т),2 = 29, (10.4.5)
если учтем представления (10.4.1), (10.4.4) и зависимость у от т.
Например, в случае линейного упрочнения на участке, где
напряжения и деформации превышают предел упругости, имеем Y = Ту +
+ (т — Ty)/2G' и уравнение (10.4.5) приводим к следующей форме:
— [ту + ^-1 [^з т, i — ^i3 т,2] + Т7(а23л--а1з12) = 29т2-
На границе контура функция ср принимает постоянные значения, а на
границе областей упругих и упругопластических состояний
выполняются условия непрерывности.
Особо остановимся на постановке задачи кручения валов из
идеально пластического материала. Когда соотношение между интенсивно-
стями напряжений и деформаций заменяется условием текучести
т = ту, для определения функции напряжений имеем
(ф.2)2 + (ф.1)г = 1,5т£. (10.4.6)
Это уравнение поверхности постоянного угла ската. Действительно,
ведь частные производные срд, ф|2 представляют собой проекции
вектор-градиента, направленного по'нормали к поверхности. Уравнением
(10.4.6) подчеркивается, что функция напряжений представляется
поверхностью, для которой вектор-градиент постоянен. Поверхность
постоянного угла ската можно представлять как крышу постоянного
угла ската, покрывающую контур поперечного сечения
скручиваемого стержня.
Аналогия функций напряжений с поверхностью крыши
постоянного угла ската при идеально пластическом состоянии и поверхностью
мембраны при"упругом состоянии позволяет оценить распределение
областей упругих и пластических состояний скручиваемого стержня.
Применительно к валу квадратного поперечного сечения возьмем
квадратный контур, который покрыт крышей постоянного угла
ската. На контур сечения натягивается мембрана, которая подвергается
поперечному давлению. Угол ската крыши, а также начальное
натяжение и поперечное давление на мембрану подбираются
соответственно пределу текучести ту и модулю упругости G, а также крутке 9.
275
Монотонно увеличивая поперечное давление, сначала не обнаружим
зон контакта мембраны и крыши. По мере увеличения давления /ббна-
ружим зоны соприкосновения мембраны и крыши. Эти зоны
соответствуют зонам пластических состояний скручиваемого стерЗкня. Так
построенная модель может служить прямому вычислению крутящего
момента М по поверхности, представляющей функцию кручения
М = 2 ||ф^5, (10.4.7)
(5)
где интегрирование распространено на все поперечное сечение.
Измеряя объем, ограниченный мембраной и крышей, по формуле (10.4.7)
определяем крутящий момент.
§ 10.5. Упругопластические состояния пластин
и оболочек
Постановка задач о перемещениях, деформациях, напряжениях
при упругопластических состояниях пластин и оболочек лишь в
отдельных деталях отличается от соответствующих задач
применительно к упругим состояниям пластин и оболочек. Форма уравнений
равновесия сохраняется, сохраняются и геометрические соотношения,
основанные на геометрической гипотезе Кирхгофа. Изменяются
только соотношения между
напряжениями и деформациями,
а вслед за ними — соотношения
между усилиями — моментами
и деформациями —
искривлениями средней поверхности.
На рис; 154 схематически
показано распределение зон
упругих и упругопластических
состояний в некотором сечении
оболочки. Зона пластических
состояний] заштрихована.
Наличие двух зон различных
состояний в теле оболочки может привести к необходимости
рассматривать четыре области на средней поверхности пластинки или оболочки.
В первой области состояние упруго по всей толщине оболочки. Во
второй области обнаруживаются две зоны, зона пластических состояний
примыкает к одной из лицевых поверхностей. В третьей области зоны
пластических состояний примыкают к первой и второй лицевым
поверхностям оболочки, а средняя зона оказывается в упругом
состоянии. Четвертая область соответствует упругопластическому
состоянию по всей толщине оболочки.
Соотношения между силовыми и геометрическими параметрами
деформирования оболочек и пластинок можно построить, вычислив
потенциалы усилий и моментов в каждой из областей средней
поверхности оболочки.
276
используем общее представление плотности работы внутренних сил
изотропного тела при совпадении фаз напряжений и деформаций
6В7 = о8(Зе) + 3т6у, (10.5.1)
закон упругого изменения объема о = З/Св, закон формоизменения в
упругом состоянии т = 2Gy и закон формоизменения в
упругопластическом состоянии т = 2Gy [1 — со (у)].
Использование в (10.5.1) законов упругости приводит к
представлению потенциала напряжений
Wy = 0,5К (Зе)2 + 3G?2, (10.5.2)
а использование закона упругого изменения объема и закона
формоизменения в упругопластическом состоянии приводит к потенциалу
в зоне упругопластических состояний
Wyn = 0,5К (Зе)2 + 3G (у2) (1 - Q), (10.5.3)
где использовано обозначение квадратуры
v
72й = 2 Ы{у)ус1уу Y>Yy5 (10.5.4)
Ь
а через уу обозначен предел упругости по интенсивности деформаций,
связанный с пределом упругости по напряжениям ту формулой ту =
= 2Gvr
В частности, если принять степенной закон упрочнения
х = ту|0'5 л, I = (?/7у)2, то из (10.5.4) получим Q£ = I — 1 —
_2[|o.5(i+»)_ 1] (1 + п)-1.
Таким образом, потенциалы напряжений как "в зоне упругих
состояний, так и в зоне упругопластических состояний можно считать
известными функциями изменения объема (Зе) и квадрата интенсивности
формоизменения y2- Если теперь выяснить зависимость этих
инвариантов от г-координаты точки по толщине оболочки, то можно найти
потенциалы сил и моментов в областях I, II, III, IV соответственно:
0,5/i z* 0,5ft
П1= j Wydz\ Пп= f Wydz + J Wyndz\
— 0,5/i —6,5ft z*
z* z* 0,5ft 0,5ft
Пш= j WJudz + § W7dz+ j WVBdz\ niV= j WYadz.
-0,5ft z* 22 -0,5ft
(10.5.5)
Компоненты деформации произвольного слоя пластинки или
оболочки вычисляются на основе гипотезы нормального элемента по
формулам
e(ii} = 8п — *кц; 4V = 622 — ^22; е<|> - е12 — *к18. (10.5.6)
277
Сдвиги &[%) и е223} считаются отсутствующими вместе с касательными
напряжениями на площадках, параллельных средней поверхности,
а удлинение е^|> вычисляется из условия отсутствия нормального взаи'
модействия упомянутых площадок /
стзз = 0. (10.5.7)
При этом в зоне упругих состояний найдем
(1 - v)eft> = -v (eft> + в<«>); (1 - v)3e = (1 - 2v) (efc> + e<*>);.
9f (l _ v2) = 2 (1 — v + v2) (е<*> + е<*>)2 +
+ 6 (1 - v2) (е(|)8(|) - etfeft). (Ю.5.8)
В зоне упругопластических состояний из (10.5.7) получим
= 3v + co(l-2v)
33 3(l-v)-2co(l-2v) V X1 22/
По мере стремления коэффициента Пуассона к значению 0,5 влияние
функции со на результат вычисления е^ пропадает, поэтому в
упрощенном варианте вычислений можно считать формулы (10.5.8)
справедливыми и при вычислениях инвариантов деформации оболочек за
пределом упругости. Такое предположение приводит к формуле
Wyn =Wy + 3Gy2Q (у). (10.5.9)
Теперь используем формулы (10.5.6) и представим упругий
потенциал тремя слагаемыми:
Wy = о/ 24(se-2?8e„ + z2e„), (10.5.10)
2(1 — v2)
где введены обозначения квадратичных форм относительно
деформаций и искривлений средней поверхности:
е8 = (в! + е2)2 + 2 (1 — v) (822 — 8!82),
е£х = tei + 8г) (*i + и2) + (1 — v) (2ei2^i2 — %^2 —е2ха),
8Х = (хх + х2)2 + 2 (1 - v) (к22 - ххх2). (10.5.11)
Если состояние пластинки упруго по всей толщине, то по формуле
(10.5.5) потенциал упругих усилий и моментов
1^ = 0,5Вее + 0,5Dex, (10.5.12)
где использованы введенные ранее обозначения мембранной и
цилиндрической жесткостей упругой оболочки или пластинки.
Можно определить элементарную работу внутренних сил и
моментов на деформациях и искривлениях средней поверхности:
6П = TfiSi + Г26е2 + 2Тхфгп — М1бх1 — М26х2 — 2М12бх12
278
по выражению потенциала (10.5.12) найти известные соотношений
иеЖду силовыми и кинематическими характеристиками деформаций
оболочек:
Тг = дП/дгх = В (гг + ve2), ...9—М1 = дШдщ = D fa + vx2),
(10.5.13)
которые повторяют соотношения (7.6.12), (7.6.13), полученные
другим путем. Переходя к анализу упругопластических состояний
оболочек, замечаем, что формулу для квадрата результирующего сдвига
удобно переписать в виде
y2 = yl-2zyEX + z2yl (10.5.14)
где введены обозначения:
1,5?S = Vr,V+Jll (gi + £2)2 + s?2-Si «2,
1,5?ен =
1—v + v2
3(1 —v)s
3(l-v)2
(ex + e2) (*i +хг) + в12 x12 — 0^ x2 — 0,5e2 xx,
i,6Ya=
1—v + v2
К+х^+и;,
-x;x2
(10.5.151
3(l-v)2
На рис. 155, а, б представлены различные варианты зависимости
от z квадрата результирующего сдвига. В первом случае, когда
минимум 72 оказывается в пределах тела оболочки, возможно
образование двух границ упругих и упругопластических состояний. Во
втором случае, когда ордината1г=Уех/7х
выходит из пределов тела оболочки,
возможно образование лишь одной
границы, где Y = Ту
Соотношение (10.5.14) можно
рассматривать как замену переменной
интегрирования в формулах (10.5.5).
Переходя от переменной z ку2,
можно установить пределы
интегрирования. Когда точка z лежит на
границе зон, имеем v = Ту» а когда точка
выходит на поверхность оболочки,
соответствующее значение у2
непосредственно вычисляется по
формуле (10.5.14) при z = ± 0,5М Таким путем в принципе возможно
составить функционал П в разнообразных областях среднейj
поверхности, соответствующих упругопластическим состояниям оболочки.
Этот функционал будет содержать в качестве искомых функций
проекции перемещений точек средней поверхности оболочек.
Можно, используя такой функционал, получить соотношения
между напряжениями и деформациями. Можно применять и прямые
методы решения задач расчета оболочек. Весьма надежным для этой
цели является метод упругих решений либо иной метод
последовательных приближений.
-0,5/7
Рис. 155
279
§ 10.6. Расчет несущей способности пластин и оболочек
/
2
0,5h
6у Zq
-0t5h
Рис. 156
Расчет несущей способности пластин и оболочек рекомендуется
проводить посредством применения кинематического метода. Несу,
щей способностью пластины или оболочки на-
зывается наименьшее значение параметра внешних сил, при котором
одно или одновременно несколько несущих сечений пластинки или
оболочки ^полностью переходят в
пластическое состояние, когда материал элемента
конструкции наделяется свойствами идеального
жесткопластического материала»!
Кинематический метод предполагает возможным
сосредоточить свойства деформируемости
элемента конструкции вдоль отдельных линий
средней поверхности, располагая вдоль этих
линий пластические шарниры. После
превращения пластинки или оболочки посредством
введения системы пластических шарниров в
мгновенно подвижную систему-механизм
выписывают условие предельного равновесия,
требуют равенства элементарной работы
внешних сил на возможных перемещениях
и работы внутренних сил, сосредоточенных
в шарнирах.
Предельное состояние в пластическом
шарнире однородной пластинки или
оболочки представляют распределением напряжений
в поперечном сечении, как показано на
рис. 156, где показаны нормальные
растягивающие напряжения в зоне z0 ^ z ^ 0,5/i,
совпадающие ^пределом упругости материала ау, и сжимающие
напряжения (—(7у) в зоне —0,5/i ^ z ^ Zq. Показанные напряжения
сводятся к усилию и моменту
Т = —2z0ay, М = (0,25ft2 — zl)ov. (10.6.1)
Средняя поверхность пластинки или оболочки разбивается на
жесткие элементы, связанные пластическими шарнирами (рис. 157).
Пластические шарниры способны обеспечить взаимное смещение 6А вдоль
действующей внутренней силы Т и взаимное угловое смещение бср
элементов. При этом на каждой единице длины пластического шарнира
развивается работа внутрених сил
76Д + МбФ = —2г0аубА + (0,25/i2 — г20)аубФ. (10.6.2)
Суммарная работа внутренних сил, содержащая параметрическую
функцию Zq от длины дуги пластического шарнира, приравнивается
возможной работе внешних сил. При этом г0 подбирается из условий
минимума параметра внешних сил.
Щ В частности, рассмотрим прямоугольную однородную пластинку,
имеющую шарнирное опирание по всему контуру (рис. 158). Предпо-
Рис. 157
280
яожим, что пластина несет равномерно распределенную нагрузку q.
гтлЯ оценки несущей способности qHC пластинки толщиной h и
пределом текучести ои применим кинематический метод. В первую очередь
рекомендуется наметить схему разрушения пластинки,
конфигурацию пластических шарниров,
вдоль которых ожидаются
трещины пластины.
На рис. 159 показана одна
из возможных схем расположе-
|4v Я
\'У ш
KSw 1
/У
X
х
xJ
С
-*: *-
Рис. 158
Рис. 159
ния пластических шарниров, обеспечивающих мгновенную
подвижность системы четырех жестких блоков, скрепленных между собой
пластическими шарнирами, развивающими только
моменты^внутренних сил, поэтому будем считать
в^этом случае z0 = 0.
Для определения углов
поворотов жестких блоков
относительно друг друга обратимся
к рис. 160, где представлена
мгновенно подвижная система
в деформированном состоянии.
Обозначим ily /2, /3 единичные
векторы координатной системы,
в которой *!, /2 лежат в
плоскости пластинки, а /3
перпендикулярно плоскости.
Обозначим пи П\и йш, #iv
единичные векторы нормалей ч
к соответствующим плоским блокам в деформированном состоянии.
Очевидно, пи Пщ лежат в плоскостях, параллельных 0/ь /3, а Пц>
#iv лежат в плоскостях, параллельных 0/2, /3. Обозначив аг угол
между /3, пх и а2 угол между /3, П\и получим
П\ = cos aj3 + sin ajlt tt\\ = cos а2 /3 + sin а2 /2.
Подобным способом можно найти
Рис. 160
#ш = cos аг13 — sin ajly П\м = cos a2i3
Теперь легко найти скалярное произведение:
sin ct2/2.
Щ\ #iv = cos 2а2 = cos2a2 — sin2 a2 = 1 — 2 sin2 a2.
281
Из рассмотрения треугольника в сечении блока II плоскостью Qi2i.
вследствие малости 6w найдем у
sin а2 ~ а2 = 6^/(0,5£>), cos а2 ~ 1. у
Цепочка вычислений
sin 2а2 = |/"1 — cos2 2а2 = 2 sin а2 ]/"l + sin2 а2
приводит к окончательному выводу: малый угол взаимного поворота
граней II и IV вычисляется так: 2а2 = 48w/b. Заметим далее, что
аг с^ 8w/c, cos а± ~ 1, и вычислим
П\ П\\ = cos (п\Пи) = cos ах cos а2.
Отсюда следует, что угол между гранями I и II
(Яь Пц) = У1—cos2 ах cos2 a2 = ]/sin2 ax + sin2 а2 =
= )Л/<;2 + 4/626йУ.
Теперь находим работу внутренних сил в предельном состоянии,
учитывая длины всех пластических шарниров:
4 у
iMt,+Yf+,/i+i
При вычислении работы равномерно распределенной нагрузки q на
заданной системе возможных перемещений заметим, что эту работу
можно вычислять как интенсивность нагрузки, умноженной на объем,
«заметенный» пластинкой при возможных смещениях. Упомянутый
объем складывается из объема призмы и объемов двух пирамид:
я\±Ь{а-2с)+±Ьс}
8w,
Приравнивая работу внутренних сил и работу внешних сил, находим
выражение нагрузки, содержащее неопределенный параметр с:
(За -2с) б2 L V 4с
где используются безразмерные величины
а = а/b, с = с/Ь.
В частности, полагая 2с = 1, при умеренных длинах пластинки
получим
?н.с = б(а+1)/(За-1).
Подробным исследованием экстремальных значений q в
зависимости от размеров пластинки- заниматься не будем. Развитие и
применение кинематического метода оценки несущей способности можно
найти в специальной литературе, особенно касающейся расчетов
железобетонных пластин и оболочек,
282
Глава XI
зДдАЧИ ТЕОРИИ ПЛАСТИЧЕСКОГО ТЕЧЕНИЯ
§ 11.1. Растяжение и кручение тонкостенной трубы
Изучение возможных приложений законов пластического течения
начнем с очень простого случая. Представим себе тонкостенную
круглую трубу, радиус средней поверхности которой R, а толщина стенки
^# Пусть труба подвергается действию растягивающих сил Р и
крутящих моментов М. Нормальные напряжения S и касательные
напряжения Т в поперечных сечениях трубы можно вычислить
непосредственно по заданным внешним воздействиям, поскольку 2nRhS = Р;
2nR2hT = М.
Кинематический анализ состояний трубы проводим, применяя рдин
из простых вариантов теории течения. Приращения деформаций
изотропного тела представляют суммами упругих и пластических частей.
Приращения упругих компонент деформации вычисляют по закону
Гука, а приращения пластических частей деформаций — в
соответствии с ассоциированным законом. Предельным условием считается
уравнение цилиндра Мизеса в пространстве напряжений
т = ту. (11.1.1)
Закон изменения объема представим в форме
Ed (еп + е2а + е33) = 0 — 2v)d (ап + а22 + а33).
Закон формоизменения в теории течения считается ассоциированным
с уловием пластичности (11.1.1) и сводится к соотношениям между
приращениями detj девиатора деформаций, компонентами otj девиа-
тора напряжений и приращениями девиатора напряжений
c&u=SiJdb + (2G)-1dbu.
Здесь тильдами помечены компоненты девиаторов. Применение
ассоциированного закона текучести предполагает, что никаких движений
по предельной поверхности не допускается. Если же допустить
движение по предельной поверхности, то можно получить различные
деформации, соответствующие одним и тем же напряжениям.
Для иллюстрации такого различия* обратимся к анализу
состояний, соответствующих значениям напряжений
S = S* = 1,5т,,, Т = Т* = 0,5]/3~ту, (11.1.2)
которые удовлетворяют условию предельного состояния (11.1.1). В
рассматриваемом случае условие предельного состояния записываем
применительно к растяжению — кручению трубы в виде
[V2S/3y + {V2/3Ty = T2y. (11.1.3)
Если относительное осевое удлинение обозначить е, а угол сдвига при
кручении обозначить у, то при условии несжимаемости ассоцииро-
283
ванный закон пластического течения сводится к дифференциальным
соотношениям /
Ыг - 2Sdk + G'1 dS; dy - 2Tdk + G~4T. y(l 1.1.4)
Предположим теперь, что напряженное состояние (11.1.2)
достигается посредством растяжения трубы до напряжений S == ]/~2S*y
Т = 0 с последующим закручиванием трубы, когда условие
пластичности (11.1.3) неизменно выполняется. При этом нормальные
напряжения в поперечных сечениях непременно уменьшаются, а
касательные напряжения увеличиваются. В процессе закручивания трубы
выполняются условия пластичности (11.1.3) и ассоциированный закон
текучести (11.1.4).
Достигнутое предельное удлинение трубы условимся считать
неизменным в процессе закручивания трубы. Поскольку начальное
удлинение можно вычислить по закону упругости 3Gsy = S и считать
неизменным, то d& = 0, поэтому первое из соотношений (1-1.1.4)
приводит к уравнению между приращениями: 2GSdX = —dS.
Второе из (11.1.4) можно записать в виде
Шу + TdS = SdT. , (11.1.5)
Продифференцируем условие пластичности (11.1.3): SdS= — 3TdT.
Поэтому следствие (11.1.5) ассоциированного закона текучести
можно свести к дифференциальному уравнению
dT = (1 — t2)-1 dt, (11.1.6)
где использованы обозначения
ЗГ2т* - 2GY, 3/2т£ = 2Г2.
Заметим, что в начале процесса закручивания трубы имеем
условие Г ='0 при t = 0. Поэтому интегрированием (11.1.6) находим
Г = 0,5 In (1 + 0 —0,5 In (1 —/).
В частности, напряжение (11.1.2) достигает интересующей величины
при Р = 0,5 и предельному значению угла сдвига соответствует
значение Г* - Г [ (0,5)0'5] = In (1 + УТ) ~ 0,88.
Если же непосредственно вычислять предельные значения углов
сдвигов по упругим деформациям трубы, то моменту, вычисленному
по (11.1.2), будет соответствовать значение Г = t = 1/]/~2 ~ о,71.
Отсюда следует недопустимость движения по предельной'
поверхности текучести.
§ 11.2. Плоское пластическое течение
Рассмотрим возможности количественного определения
распределения напряжений и скоростей пластического течения в
цилиндрическом или призматическом теле (рис. 161), имеющем" значительную
протяженность в направлении оси Ох3, когда условия контакта с
другими телами и внешние силы, вызывающие пластическое течение, од-
284
нородны вдоль оси Ох3. Предполагается, что условиями
закрепления поверхностей тела запрещены перемещения точек вдоль оси Ох3.
Остальные компоненты перемещений и скоростей точек тела
считается не зависящими от х3.
Если реализуется система перемещений и скоростей:
fi (*i, х2)9 v2 = v2 (xl9 х2)9 v3 = О,
(11.2.1)
т0 состояние деформируемого
тела называется плоским
деформированным
состоянием. Когда речь идет
о пластическом течении, то
системой скоростей (11.2.1)
определяется плоское
пластическое течение.
Очевидно, достаточно определить
распределение напряжений и
скоростей в одной из плоскостей,
параллельных Охгх2, чтобы
перенести суждение о
напряжениях tf скоростях в любую точку
тела при плоской деформации.
Поэтому в дальнейшем будем
рассматривать только
распределение напряжений и скоростей в точках плоскости Оххх2.
По составляющим скоростей (11.2.1) и формулам Коши легко
установить компоненты тензора скоростей деформаций:
Рис. 161
О
"2,2
(11.2.2)
'01,1
0,5 (02,1 + 01,2)-
ч0 0 Оу
В теории плоского пластического течения принимается гипотеза
неизменности объема материала при пластическом течении, поэтому
первый инвариант тензора (11.1.2) считается нулем:
01.1 + 02,2 = 0 (11.2.3)
и тензор скоростей деформаций определяется двумя независимыми
компонентами. Можно найти главные направления этого тензора и
главные значения. Обозначим 6 угол между первым главным
направлением тензора скоростей деформаций и осью Охг и пусть v — первое
главное значение тензора скоростей деформаций, тогда (—v) —
второе значение. Поэтому плоская деформация несжимаемого
материала представляет собой деформацию чистого сдвига. Фаза девиатора
скоростей деформации чистого сдвига я/6.
Располагая фазой девиатора скоростей деформаций и
ассоциированным законом течения, можно утверждать, что главные
направления напряжений при плоской деформации изотропного материала
совпадают с главными направлениями тензора скоростей деформаций.
Фазы упомянутых тензоров также совпадают. Поэтому можно/
представить главные напряжения формулами
di = — р+уТ$х\ол= — р—Vh5v, о3=—р/ (11.2.4)
через (—р) обозначено для удобства гидростатическое напряжение,
а т — октаэдрическое касательное напряжение.
Напряженное состояние при плоской деформации
характеризуется тремя независимыми величинами: составляющими тензора
напряжений в произвольных осях (ти, сг22, сг12, а33 = <*з> связанными
соотношением
<?зз = <?з = — Р = 0,5 (огп + а22), (11.2.5)
либо углом .6 и двумя величинами
2р = —(ai + аа); V~6x = о{—о2. (11.2.6)
Заметим, что октаэдрическое касательное напряжение в
произвольных осях представляется в этом случае так:
т ув = K(an-a22)2 + 4af2. (11.2.7)
Формулы (11.2.7), (11.2.5) и (11.2.4) позволяют представить главные
напряжения через компоненты напряжений в произвольных осях.
Остановимся теперь на средствах, которыми можно
воспользоваться для определения перечисленных здесь неизвестных: угла 0,
которым определяются главные направления, величины v главной
скорости деформаций, параметров /?, т либо напряжений aik в
произвольных осях.
Выпишем дифференциальные уравнения медленных движений
пластической среды в условиях плоской деформации, когда
массовыми силами пренебрегают:
стц,1 + ог12)2 = 0; alM + a22j2 = 0. (11.2.8)
Кроме того, следует использовать условие пластичности и
ассоциированный закон течения. Заметим, что самое общее условие пластичности
для изотропного тела / (а, т, ср) = 0 при фиксированной фазе
напряжений сводится к кривой в плоскости а, т : / (а, т, я/6) = 0.
Требование равенства нулю скорости изменения объема
изотропного тела при пластическом течении df/da = 0 приводит к
необходимости ограничиться применением условия Мизеса
т = Ху = const. (11.2.9)
Три уравнения (11.2.8), (11.2.9) содержат три неизвестных
компоненты напряжений. Поэтому этих уравнений достаточно для
определения напряжений, если только граничные условия задаются в
напряжениях.
Для определения кинематики течения следует использовать
условие совпадения направляющих тензоров напряжений и скоростей
деформаций
2ст12/ (au — <т22) = (i>i,2 + i>2|1)/ (vn — v22) (11.2.10)
и условие несжимаемости (11.2.3).
286
с 'j 1.3. Линии скольжения, методы решения задач
о плоских пластических течениях
формулами (11.2.4) установлено представление главных
напряжений через гидростатическое давление р и октаэдрические касательные
напряжения т при плоских деформированных состояниях, когда
фаза напряжений равна я/6. Если материал идеально пластический, то
в области пластического течения удовлетворяется условие
пластичности (11.2.9) и главные напряжения^вычисляем по формулам
cri = —р4-]Л,5ту; а2= — р—уХ5ту; о3=~р. (11.3.1)
Первое главное направление образует угол 0 с осью 0хъ поэтому при
заданном значении ху напряженное состояние в точке вполне
определяется величинами р, 0,
(которые считаются искомыми
функциями координат. Например,
компоненты напряжений в осях
Охгх2 вычисляются по общим
формулам преобразования
компонент тензора:
ап = ог cos2 0 + g2 sin2 0;
о'гг = °i sin2 9 + G2 c°s2 6;
°i2 = (Gi — a2) sm 6 cos 0.
(11.3.2)
Особый интерес
представляют напряжения на площад- Рис. 162
ках, которыми делятся
пополам углы между главными площадками. Напряжения на таких
площадках обозначим о\и oh> erf2 и вычислим по формулам типа (11.3.2):
<T22 = orn=0>5(oi + aa)=—р, а]2= У^Ь- (п-3-3)
Заметим, что касательные напряжения на площадках, которые делят
пополам углы между главными направлениями, обладают
экстремальными свойствами: они максимальны по сравнению с касательными
напряжениями на соседних площадках, проходящих через ту же точку.
Вдоль площадок максимальных касательных напряжений
реализуется скольжение малых блоков материала "в процессе пластического
течения. Поэтому упомянутые площадки называются
площадками скольжения. Очевидно, площадки скольжения в каждой
точке ортогональны.
Линиями скольжения называют два ортогональных
семейства линий, касательные в каждой точке которых совпадают по
направлению с площадками скольжения. Касательные к линиям
скольжения образуют углы 0 + л/4 и 0 + Зл/4 с осью Охг (рис. 162). На
этом рисунке показано несколько линий скольжения двух семейств.
В каждой точке области плоскости, занятой пластическим течением,
287
можно построить единичные векторы еъ е2 касательных к линиям
скольжения. /
Рассмотрим элемент ds1 дуги линии скольжения первого
семейства. Эта дуга с внешней нормалью е2 несет на себе вектор" усилия
a2dsx = (022^2 + G*2e1)ds1.
Подобно этому, дуга ds2 с внешней нормалью ег несет усилие
0^2 = (оивх + o*2e2)ds2.
Поэтому условие равновесия элемента плоскости пластического
течения, выделенного двумя парами соседних линий скольжения,
сводится к уравнению
-?- (сг2 ds{) ds2 + /- (0i ds2) dsx = 0. (11.3.4)
OS2 OSx
Упрощениям этого уравнения способствуют легко проверяемые
формулы дифференцирования
_L(dSl)=^__£_(41d|1) = -Li^dE1=-L-**LdSl;
ds2 А2 д%2 Л2 д%2 Ах ds2
где £lf l2.— криволинейные координаты точки плоскости; Аъ А2 —
соответствующие им параметры Ламе.
Напомним правило дифференцирования единичных векторов:
dsx
Pi дв Pl 2'
ds2 р2 ds2
dSl рх
P2
где кривизны линий скольжения определяются как пределы
отношений углов смежности к соответствующим дугам: 1/рх = dQ/dslf
i/p2 = ae/as2.
Приведенные формулы позволяют уравнение (11.3.4) свести к двум
скалярным уравнениям:
д
1 у ds2 А2 dsx J AL ds2
ds2
(11.3.6)
Заметим, что если положение точки определяется радиус-вектором
г (£i> £2)» то единичные векторы определяются равенствами
1 дг \ дг
в\ — ; е2=
Ах д£х А2 д%2
286
й условия совместности
записывается в форме
дАх __ - ае ал2 _ А ао
os2 dsi ds1 ds2
Поэтому уравнения (11.3.6) принимают простую форму:
-^-(р*+6) = 0, -А-(р*-9) = 0, (11.3.7)
uSi os2
где введено обозначение безразмерного давления
р= 2УТ5тур*. (11.3.8)
Интегралы уравнений равновесия идеально пластического тела
P* + 0 = /(s2), ■р*-в = ф(в1) (М.3.9)
были получены Генки и носят его имя.
Выписывая интегралы (11.3.9) для двух пар линий скольжения,
легко получить четыре соотношения:
Р*в + вв = рс+вс, Pm + Qm = Pa + Qa\ Pm—Qm = Pb—Qb\
Pa-Ba^Pc-Qc, (11.3.10)
где индексы, например р£, 0s, означают, что относительное давление
и угол наклона линии скольжения первого семейства относятся к
точке Б. Почленным вычитанием второго и третьего из соотношений
(11.3.10), а также первого и четвертого из них получим:
P*a — P*b = 2Qm—Ba—Qb; Рл-рЬ=—29с + 0л+ Эл. (И.3.11)
Комбинируем выражения первое с третьим, второе с четвертым из
(11.3.10):
р£—рЗ| = 2вв—вс—вд,; Рс-Рл* = -20л + Ос + 0л*. (11.3.12)
Соотношения (11.3.11) и (11.3.12), как следствия интегралов
(11.3.9), позволяют установить разности давлений в противоположных
углах четырехугольника, образованного двумя парами соседних
линий скольжения. Кроме того, из этих соотношений прямо следует
равенство
Вы + 0С= Ва + 0б. (11.3.13)
Это равенство можно трактовать по-разному. Во-первых, равенство
(11.3.13) означает, что суммы углов наклона линий скольжения
первого семейства, вычисленные в противоположных точках
упомянутого выше четырехугольника, совпадают. Во-вторых, из (11.3.13)
следует первая теорема Генки, устанавливающая свойства линий
скольжения,
0в-0л* = Ос-0л. (11.3.14)
10
Зак. 588
Углы между касательными к двум линиям скольжения первого
семейства, построенные в точках пересечения этих линий линией второго
семейства, не изменяются при переходе вдоль линии первого семейства от
одной линии второго семейства к любой другой линии этого семейства.
Теорема Генки сохраняет свое значение и по отношение к любой
паре линий скольжения второго семейства.
На рис. 163 представлен элемент
плоскости пластического состояния тела,
ограниченный двумя соседними элементами
линий скольжения. Из построения следует
ds\ = dsx — ds2dQ\ ds*2 = ds2 + dsxdQ,
Пользуясь определением радиуса
кривизны, находим:
>i — Pi
dsl-dSl ^_^;
сЮ
Р2—Р2 ='
dQ
■ = dsu
(11.3.1.5)
Рис. 163
что подтверждает вторую теорему Генки.
Остановимся на некоторых приемах
построения линий скольжения. Заметим
предварительно, что следствием системы (11.3.7) является
дифференциальное уравнение линий скольжения
dsjL ds2
*=0.
(11.3.16)
Отсюда прямо следует, что прямые линии 0 = const могут служить
первым семейством линий скольжения. Например, сетка
ортогональных декартовых координат на плоскости может представлять линии
скольжения. Такие линии можно наблюдать на поверхности плоских
образцов при их осевом растяжении. Наблюдаемые линии
называются линиями Людерса. Другим примером возможных семейств линий
скольжения служит сетка полярных координат.
§ 11.4. Плоские пластические установившиеся течения
При обсуждении свойств плоских пластических установившихся
течений предполагается, что рассматриваемое состояние не зависит
от времени и не зависит от способов и путей, какими оно достигается.
Область плоскости, где рассматривается деформируемое тело,
разбивается на две части. В одной из них, заполненной линиями
скольжения, предполагается реализуемым пластическое течение, а
остальная область считается недеформируемой. Устанавливаются условия
равновесия тела в целом, условия сопряжения жестких и
пластических частей тела.
290
При анализе жесткопластических состояний очень помогает
инженерная интуиция, которая позволяет сразу установить часть границы
тела, откуда^ можно начать построение линий скольжения,
определение давлении и напряжений, вплоть до кривой, где заметно
нарушаются статические или кинематические условия течения. После
определения линии скольжения можно установить скорости, начиная этот
процесс с частей, где имеется достаточное число условий.
Рассмотрим, например, начальное состояние пластического
течения полубесконечного тела, воспринимающего силу Р через жесткий
штамп (рис. 164). Как следует из решения соответствующей задачи
теории упругости, значительные напряжения под углами штампа воз-
Ш~0
Рис. 164
Рис. 165
никают даже при небольшой силе Р. По мере увеличения силы
пластические области расширяются, а когда пластическое состояние
материала полупространства распространяется на всю область под
штампом, начинается движение штампа. Будем изучать именно начальную
фазу пластического течения, когда процесс пластического скольжения
распространяется на всю областьлюд штампом и прилегающие к
штампу части границы. Вместе с тем пластическое течение еще не развилось
настолько, чтобы оказалось заметным изменение формы границы,
на рис. 165 показано поле линий скольжения. Поле симметрично
относительно линий действия силы Р и состоит из четырех
треугольных областей, покрытых прямолинейной сеткой, и двух треугольных
областей, где сетка линий скольжения описывается полярными
координатами. * ^
Рассмотрим одну из линий скольжения, например ABCD, и
примем ее за линию первого семейства. По известным параметрам сетки
линии скольжения сразу находим значения углов-
0Л = 8В = —я/4, 0С = в/
я/4.
В точке D, принадлежащей свободной от нагрузки границе, одно из
главных напряжений равно нулю. Обратившись к формулам (11.3.1),
обнаруживаем, что в точке D следует считать рЬ = VT7bxv, ph = 0 5
Исходя из соотношений (11.3.9), находим р*с = рЬ = 0,5. Переходя
к участку первой линии скольжения ВС, имеем pi + 6S = v*r + Qr
откуда находим Р*в = 0,5 (1 + я). Наконец, интеграл (11.3.9) вдоль
10*
291
А В приведет к значению р*А = 0,5 (1 + л), позволяющему найти4\лав-
ные напряжения в точке А: / '
ая=2К1^5ту(0>5-р^;
оу= 2VT5iry(—0,5—pjj).
Теперь установим распределение напряжений под штампом:
Gy=-V]JxY(2 + zi). (ПАЛ)
При ширине штампа Ь найдем силу, обеспечивающую пластическое
состояние под штампом,
р=]Л^5ту(2 + л)&. (11.4.2)
Если равномерно распределенное давление приложено к усеченному
конусу (рис. 166), то аналогичным способом, намечая указанную на
рисунке систему линий
скольжения, можно показать, что
предельное напряжение,
вызывающее пластическое состояние
по всей поверхности
приложения нагрузки, вычисляется по
формуле
оу=* -2]/Т5ту(1 + Ф), (11.4.3)
где 2ф—угол раствора клина.
Задача волочения листа
через жесткую коническую
матрицу (рис. 167) решена Хиллом
следующим путем: лист
толщиной Я силой Р протягивается
через жесткую матрицу и в результате пластического
деформирования превращается в лист толщиной h. Интенсивное
пластическое течение происходит в областях, примыкающих к матрице, и
пронизывает лист по всей толщине. Обжатие листа или относительное
уменьшение толщины г = (Я — h)IH определяется углом раствора
матрицы 2а. Упругим отпором пренебрегаем.
Построение поля линий скольжения начинается с блока ABC.
Матрица считается совершенно гладкой, поэтому линии скольжения
подходят к ней, образуя углы я/4. Точки А и В считают особыми,
около них образуются вееры линий скольжения, ограниченные
дугами окружностей, проходящих через точку С. Располагая двумя
линиями скольжения CD и СЕ, можно продолжить построение поля
линий скольжения вплоть до точки F, лежащей на оси симметрии листа.
Заметим, что упомянутое построение поля линий скольжения
реализуется, когда угол а достаточно мал. Если V — скорость
волочения, то скорость подхода левой жесткой области к матрице по условию
несжимаемости будет Vh/H. Это позволяют установить нормальные
компоненты скоростей течения на контурах EF и DF.
292
Давление на стенки матрицы вдоль АВ распределяется
равномерно. Предполагая гидростатическое напряжение в точке F равным
(—Ро)у можно, пользуясь интегралом Генки, вычислить напряжения
вдоль всего контура BEF и потребовать, чтобы суммарная
продольная сила, действующая на этот контур, была равна нулю.
Сила Р/2, необходимая для реализации волочения листа,
совпадает с продольной составляющей суммарных напряжений вдоль ADF.
Напряжение t волочения вычисляется по формуле
t = 4VYJrY (1+a)sina . (Ц.4.4)
у 1 + 2 sin а
Если на состояние, представленное на рис. 168, наложить
всестороннее давление так, чтобы компенсировать растягивающие напряжения
Рис. 167 Рис. 168
t, то сетка линий скольжения сохранится, однако внешние
воздействия и процесс пластической деформации изменятся. В этом случае
получится процесс, подобный процессу прямого выдавливания через
клинообразную матрицу (рис. 168). Подобным способом решены
задачи обратного выдавливания материала, задачи прокатки полосы
между валками.
Глава XII
ЗАДАЧИ ТЕОРИИ ВЯЗКОУПРУГОСТИ
§ 12.1. Принцип соответствия
Математическая задача теории наследственной вязкоупругости в
изображениях соответствует некоторой задаче классической теории
упругости. Поэтому наличие набора аналитических решений задач
классической теории упругости позволяет выписать соответствующие
соотношения для изображений искомых напряжений, перемещений
вязкоупругого состояния. В этом и состоит принцип соответствия,
сформулированный Вольтерра.
Подтвердить справедливость высказанного можно, рассматривая
достаточно общую постановку задач теории наследственной термо-
вязкоупругости. Пусть задано тело, занимающее в начальном состоя-
293
нии объем V, ограниченный поверхностью S. Заданы внешние массовые
и поверхностные силы как функции времени либо перемещения
дочек поверхности. Заданы механические свойства вязкоупругого/гела
функциями ползучести, релаксации, термоупругости. Требуется
определить перемещения, деформации, напряжения в разных точках
тела, соответствующие заданному моменту времени, предсказать
расчетом поведение тела со временем.
Рассмотрим, например, постановку задач в перемещениях.
Кроме того, ограничимся квазистатическими задачами, когда силами
инерции в уравнениях медленных движений можно пренебречь. Тогда
можно использовать дифференциальные уравнения равновесия. В
декартовых координатах xk выписываем уравнения равновесия:
Otk,k + pFi = 0. (12.1.1)
Ограничимся малыми перемещениями и деформациями, компоненты
деформаций представим формулами Коши:
2еи= ui9j+uJti. (12.1.2)
Дальнейшие рассуждения можно провести и применительно к
нелинейным компонентам деформации, произвольным криволинейным
координатам. Однако ограничимся простейшим вариантом построения
основных соотношений теории вязкоупругости. Напряжения и
деформации полагаем связанными соотношениями подобия- девиаторов
t
<*и-ви.° = М(еи-6ие) -$Ту~х)(еи-6ие)(1% (12.1.3)
о
и законом изменения объема
t
o = 3Ke — §f(t—x)3ed%. (12,1.4)
о
В каждой точке граничной поверхности задаются три функции
времени либо константы. Здесь имеются в виду компоненты перемещений
uh граничных точек либо проекции напряжений
fk(t) = [ohsvsh. (12.1.5)
Предполагается, что в правых частях (12.1.5) сначала проводится
подстановка (12.1.3) и (12.1.4), где используются выражения (12.1.2)
деформаций через перемещения. Поэтому в правых частях (12.1.5)
фигурируют некоторые операторы над производными от
перемещений по координатам. Не исключено задание соотношения между
смещением uk и проекцией напряжения fk на то же направление в
случае упругих или упруговязких опорных устройств. Если теперь
подставить напряжения oik, вычисленные по формулам (12.1.3), (12.1.4),
в уравнения движения (12.1.1) и принять во внимание геометрические
соотношения (12.1.2), то получим систему интегродифференциальных
уравнений относительно трех составляющих перемещений как
функций координат и времени. Эта достаточно сложная математическая
294
задача решается в два этапа. На первом из них задача приводится
посредством интегральных преобразований к соответствующей задаче
классической теории упругости. На втором этапе приходится искать
методы установления оригиналов по заданным изображениям.
Остановимся на определении основных операций системы
интегральных преобразований Лапласа—Карсона—Мелина.
Преобразованием Лапласа—Карсона
r(P) = p]e~*f(f)dt (12.1.6)
о
устанавливается соответствие заданной на полубесконечном
интервале функции / (t) и функции /* (р) действительной или комплексной
переменной р. Функция f (t) называется оригиналом, а
функция /* (р) — изображением. Формулой (12.1.6) оригиналу
ставится в соответствие изображение, по оригиналу можно
вычислить изображение. Наоборот, по изображению можно установить
оригинал, если использовать преобразование Мелина
G+ioo
^) = Т~ f ±^r(P)dp. (12.1.7)
Zzii J p
Здесь интегрирование проводится вдоль прямой, лежащей правее всех
полюсов функции /*. Отметим, что преобразование
Лапласа—Карсона применительно к константе не изменяет этой константы.
Далее заметим, что применение интегрального преобразования
Лапласа—Карсона к интегральному представлению функции
V(f) = $<p(t-x)dq{%) (12.1.8)
о
можно (после перемены порядка интегрирования по формуле Дирихле)
записать так:
ОО t ОО 00
.ф* (р) = р Г е-?* Г ф (t— т) dq (т) dt = Г pdq {%) Г ср (/—х) е-* dt.
0 0 ОТ
Если ввести под знак интеграла множители е^е- рх, заменить t —т
новой переменной и, то получим
W ОО
ф* (р) = Г е~Р* dq (г) f е~Ри <р [и) du.
Проинтегрировав первый из множителей по частям с учетом начального
условия q (0) = 0, придем к формуле умножения изображений
,ф* = ф*^*4 (12.1.9)
С помощью преобразования Лапласа—Карсона во всех соотношениях
(12.1.1)—(12.1.5) можно заменить все участвующие там функции-ори-
295
гиналы соответствующими изображениями. Например, уравнения
равновесия принимают вид /
Oik.k + pFt = 0, ,02.1.10)
/
а соотношения между напряжениями и деформациями, согласно
(12.1.8) и (12.1.9), получаются такими:
of/ — 6иа* = R* (ejj — btje*); а* -= R13e*. (12.1.11)
Здесь R* и Rl для однородного тела и заданного уровня
одинаковой температуры не^зависят от координат точек тела. Поэтому при
подстановке соотношенийА(12.1.11) в уравнения (12.1.10) будем
оперировать R* и Rl как константами. Форма соотношений (12.1.11) не
отличается от обобщенного закона Гука для изотропного тела.
Присоединив]^ (12.1.10), (12.1.11) соотношения Коши в изображениях,
получим для изображений математическую задачу, не отличающуюся
от задачи классической теории упругости. Заметим только, что если
граничные условия не содержат прямой зависимости от времени
(постоянные внешние воздействия, стационарные закрепления), то
соответствие будет полным. Когда условия на границе зависят от
времени, граничные условия задачи вязкоупругости и соответствующей
задачи классической теории упругости различаются. Полагая
трудности решения задачи классической теории упругости исчерпанными,
можно представить изображения искомых перемещений, напряжений,
деформаций известными функциями координат и параметра р.
Остается решить вторую часть общей проблемы — установить оригиналы
по изображениям.
§ 12.2. Примеры использования готовых решений
Среди задач вязкоупругости, решения которых сравнительно просто
представляются через готовые решения задач классической теории
упругости, отметим те, в которых изменение объема можно считать
упругим, поэтому константа К остается таковой и в решении задачи
вязкоупругости. Кроме того, нет необходимости применять
преобразование Лапласа—Карсона, а затем проводить переход от
изображений к оригиналам. Для получения решения упруговязкой задачи
достаточно провести замену комбинаций констант упругости на
соответствующие комбинации функции релаксации R (t) и функции
ползучести П (t), которые считаются известными из опытов. А. А. Ильюшин
заметил, что многие решения задач теории упругости содержат
константу К и комбинации коэффициента Пуассона
© = (1 — 2v)/ (1 + v), 1/со *= (1 + v)/ (1 — 2v), (12.2.1)
причем установлено соответствие о и RI (3/С), а также 1/со и 3/СП (/).
Поэтому решения задач вязкоупругости можно получить заменой
комбинаций (12.2.1) на функции релаксации и ползучести.
Например, можно показать, что прогиб консоли прямоугольного
поперечного сечения представляется формулой
б = PI3/ (3EJ),
296
где Р — сила, действующая на конце консоли; / — длина; J — момент
инерции поперечного сечения; Е — модуль Юнга. Используя
соотношения между константами упругости 2 (1 + v)G = Е> 3(1 —
— 2v)K = £, легко показать, что НЕ = (1 + 2/со)/ (9/С).
Поэтому прогиб упруговязкой консоли представим в виде
8(*) = -^"^-[1 + 6КП(/)1.
При изучении кручения упругих стержней установлено соотношение
между круткой т и крутящим моментом М : М ~ 0,6G/pt. Это
соотношение можно перенести на вязкоудругие состояния, полагая G =
= 0,5/?(0.
Вообще перенос результатов классической теории упругости на
анализ вязкоупругих состояний облегчается с использованием табл. 4
соответствия комбинаций других констант и комбинаций функций
релаксации и ползучести. \
Таблица 4
Константы упругости
СО
I/O)
1/S
2G
W
(m + nv)/G
2G(m+nv)/(\—2v)
Ev
(l+v)(l-2v)
\ Упруговязкие функции
\
\ R (Q/(3K)
\ [1 + 6/СП(/)]/(9/С)
\ 2П (t)
[(m—ny-|-(2m+n) ЗВП {t)]/(9K)
K[2mbi + (m-n)R (Q/(3K)]
i «Чт * w
Однако далеко не все практически интересные^комбинации
констант упругости исчерпываются приведенными в таблице. Поэтому
А. А. Ильюшин предложил метод аппроксимаций — простого
приближенного представления решений задач теории упругости и
соответствующих задач вязкоупругости.
§ 12.3. Метод аппроксимаций Л. А. Ильюшина
Структура решения задачи линейной теории упругости
представляется линейной комбинацией характерного силового воздействия на
тело, характерного значения перемещения и граничных точек,
изменения температуры 7\ Поэтому искомые напряжения 2 или
перемещения U можно записать в виде
Z = Pfx+Kuf2 + aKTf3, и = ^-к{ + ик2+аТк3. (12.2.1)
2с,7
Коэффициенты этих линейных комбинаций /lf /2, /3> ^i» ^2» Щ
зависят от координат рассматриваемой точки, зависят от формы,
размеров тела, а также от коэффициента Пуассона как второе Упругой
константы. Зависимостью этих коэффициентов от v определяются
трудности представления решений задачи вязкоупругости. А. А. Ильюшин
заметил, во-первых, что гораздо удобнее считать упомянутые
коэффициенты зависящими от второй константы упругости через со-параметр,
определенный формулой (12.2.1). Более того, он предложил
простейшую аппроксимацию зависимости коэффициентов от со:
fh^fko + fhia + fki-l)*-1, (12.3.2)
так как диапазон изменения коэффициента Пуассона ограничен
0,5 > v > 0, то ограничен и диапазон цзмецения со: 1 > со > 0.
Аппроксимацию (12.3.2) можно реализовать любым способом,
например методом наименьших квадратов., Когда аппроксимация
проведена, то легко установить структуру/решения задачи
вязкоупругости. Соответственно трехчленным формулам (12.3.2), а также
таблице соответствия решение задачи вязкоупругости будет содержать
слагаемое упругое, слагаемое, соответствующее влиянию релаксации,
и слагаемое, отражающее влияние ползучести.
Д. Л. Быков предложил обобщение приближения по Ильюшину,
полагая вместо (12.3.2)
fh = /ft(-l)C0_1 + fj+ /ft!» + fhz®2 +
В этом случае расшифровка степеней и произведений операторов
проводится с использованием /известных рекуррентных формул
операционного анализа.
§ 12.4. Эксперименталько-теоретический
метод А. А. Ильюшиь
А. А. Ильюшин сформулировал теорему, по которой структура
решения любой задачи классической теории упругости записывается в
форме (12.3.1), а/коэффициенты представляются такими рядами, что
структура решения имеет вид
2 = / + <o<p + arl$+fj хА(1+рл©)-1,
/ /е=0
где pft —ушела, не содержащие зависимости от со; коэффициенты /,
ф, "Ф> и*' СУТЬ линейные комбинации внешних воздействий. Полагая
«ь-тпег- • (12-4Л)
представим решение задачи теории вязкоупругости в изображениях:
2* = /* + ©*Ф* + я*'ф* + 12] gg к*, я*=1/ю*. (12.4.2)
k=0
298
Если все внешние воздействия реализуются мгновенно, достигая
конечных значений, а затем остаются неизменными, то решение
задачи упругости получается в виде
2 = / (х) + со (0 ср (х) + я (0 ф (*) + fj gp, (0 иЛ (*). (12.4.3)
fc=0
Здесь предполагается, что оригинал изображения (12.4.1) найден. В
общем случае произвольного изменения внешних воздействий
соотношение (12.4.2) обращается и оригинал решения вязкоупругой
задачи получается вьфаженным через свертки:
2 = /{х, t) + j U(t-x) JS^L + п (t-r) -**£3-+
О \
+ 2V~T)i!a»r4*- (12А4)
Эта формула получается с использованием теоремы о свертках:
оригинал изображения представленного произведением изображений
двух функций \
/* (р) = N*Xp)Q* (р),
\/
вычисляется по любой из формул \
t
f(t) = N (0) Q (t) + J Q (t-x) dN (т) =\|V (0 Q (0) + J W (f-т) dQ (x),
\
\ 1
В частности, применяя эту формулу к изображению со* = -о-/?*П*,
найдем
Зсо (0 = 7? (0) П1 (0 + J П4 (*-т) dfl (т) = /? (0 П1^9) + J Л (*-т) dlli (т),
о \ о
а применение ^обратной функции я* = 1/со* =^П*7?* приводит к
формулам
t
-L п (0 = П (0) R{ (t) + J/?! (*-т) Л1 (т) = 7?i (0)W)
+
о
t
+ ^Il(t—x)dRi(x).
Здесь i?! и U1 — функции объемной релаксации и ползучести.
Остается указать способ обращения (12.4.1). Функция g$(t)', изображение
которой дается формулой (12.4.1), называется функцией
связной ползучести. Определение функции связной ползучести
рекомендуется проводить экспериментально посредством проведения
испытаний на релаксацию или ползучесть образца, соединенного по-
299
следовательно или параллельно с идеальной упругой пружиной. Этот
опыт можно заменить испытанием трубки на кручение. /
Пусть образец имеет длину 1Ъ поперечное сечение F, механические
характеристики R (f), П (/), поэтому продольная сила Р вызывает
относительное удлинение е1у абсолютное удлинение 1хгг. К образцу
последовательно присоединяется упругая пружина длиной /2
жесткостью k, причем Р = kl2e2. Суммарное удлинение системы и = 1ггг +
+ /2е2 = 1ггх + Plk задается произвольно. Соотношения между
напряжениями и деформациями типа (12.1.11) при одноосном
растяжении приводят к связи
t
О
Подставив выражение г± в предыдущее соотношение, найдем
P = f—X^U(t^T)dP9 (12.4.5)
о /
где приняты обозначения: /
_9KFku_ j х= 6k Kk (12 4 6)
Изображение (12.4.5) имеет вид
Р* = f> _ Ш*Р*,
откуда находим: /
P*=/3lf*y Gl = ! . (12.4.7)
Из (12.4.7) следует, чтб решение интегрального уравнения (12.4.5)
можно представить сверткой:
P = \Gb{t-x)df{T). (12.4.8)
о
В опыте на релаксацию задается мгновенно достигаемое смещение и0,
поэтому считаем
и = u0h (t)\ f = f0h (t)y
где h (t) —/функция Хависайда.
Из (1^:4.8) находим
Gx(t) = ^L= *&+* Q0(f). (12.4.9)
Измеряя "релаксирующую силу Q0j(f), можно по (12.4.9) построить
при различных k функции G^ (t). '
Воззращаясь к (12.4.7), найдем/
GI = 1 — Ш*/ (1 + Ш*) =/1 — 3/Ш* (3/С/Л + 3/СП*)-1.
£00
С другой стороны, изображение оператора gp (12.4.1) представим в
форме
gp 3K+&R* р + ЗКП*
Отсюда следует, что, обеспечивая равенство
р = 3/С/Я (12.4.10)
подбором Я и К у можно получить GJ = 1 — gp, а затем и искомую
функцию ft (0 = 1— G* (О-
Условию (12.4.10) можно удовлетворить при 2(3 > 1, поэтому
опыты с реализацией растягивающей образец силы пригодны только при
Р > 0,5. В предельном случае, при |3 = 0,5, можно показать, что
функция связной ползучести связана с кривой релаксации Rr (t)
формулой
I УД
В заключение приведем еще табл. 5 соответствия комбинаций констант
упругости и функций, связанных с g0b (t).
Таблица 5
Постоянные упругости
Характеристики вязкоупругости
Е
m + nv
v(l+v)
Е
■(l+v)(l-2v)
V
G(l+v)
1
l + G
D
5 + v
D(l+v)
1 3+v
D 1+v
D 1—v
9Kfl-fifo.e(0]
m + n+\ybng0tb(t)
0,5tt (t) —0,25/C-1 go>5(0
П (0-^-^0,5(0 ,
4,5/C.[l-fo,e(0]
~j7 go,б(0
[/Cn(0 + 0,5g0,5(0]
/(/i2
.ЗКД3
4
3/СЛ8
б
/СЛ:
[16 + ЗЗКП (0+*4,5^o,5 (01
[4 + 24/Ш(0—4,5g0.в (01
- [3Kn(0-0,5g0,5W]
?ос
§ 12.5. Примеры решений задач линейной
вязкоупругости /
1. Рассмотрим длинный круговой цилиндр, который в условиях плоской
деформации нагружен давлением р на внутренней поверхности радиуса а/а
внешняя поверхность радиуса Ь считается свободной от напряжений. Используя
решение задачи Ламе, можно установить изменение толщины стенки трубы:
АЯ= — ~ 6а(Л+г), (12.5.1)
Е
где Е — модуль Юнга, v — коэффициент Пуассона,
а = alb, А = (1 — а)/(1 + а). (12.5.2)
Считая (12.5.1) изображением вязкоупругого решения по Лапласу—Карсону,
найдем его оригинал, воспользовавшись таблицей, приведенной в конце
предыдущего параграфа:
A+v* I1
—^—= ад-М-1 + (М+1)я*].
Тогда оригинал решения А# = (А — 1) ф (t) + (2Л + 1) f я (1 — т) dy (т),
о
Д#9/(
где приняты обозначения АН = — —— —, р = /?0ф (/), причем я (/) = ЗКя (/)
а р0
безразмерное ядро сдвиговой ползучести.
2. Если тот же длинный круговой цилиндр жестко закреплен по наружной
поверхности, то действие внутреннего давления приведет к изменению толщины
стенки цилиндра:
р 1—va
АЯ- -~- Ьа - , (12.5.3)
Е р—v
где кроме (12.5.2) используется обозначение
Б== (1 + сс2)/(1 —а2). (12.5.4)
Для сравнения строгого и приближенного решения по методу Ильюшина
рекомендуется переход к упругим константам К и со по формулам
, .2 JKl+M-. „ v 2В-1+(В+1)со
l~v = (2 + со)2 ' B-V=Z 2+S '
, л Зсо
1 —2v = -^ .
2 + со
откуда следует
1—у2 1 1+2со 1_ fl
E(B-v) = 2Б-1 ЗКсо(1 + рсо) "" ЗК(2В
где принято
-1) L* 1 + PcoJ'
Р = (В + 1)/(2Я — 1) = 2/(1 + За2).
Строгое решение вязкоупругой задачи имеет следующий вид:
г < *
АЯ =
2В—1
L0
гДе £« W — функция связной ползучести.
302
|"я (/-т) Жр (т) + (2-Р) f ^ (*-т) <fcp (т)
(12.5.5).
Приближенное решение получим, проводя аппроксимацию зависимости
упругого решения от коэффициента Пуассона по методу наименьших квадратов.
Возьмем сумму
АЯа = С0 + С1©* + Ся —+ У. , °fe , ,
(О* t+d 1 + Вь CD*
(12.5.6)
где Pft — известные константы. Модуль объемной деформации К считается
постоянным. Константы Рь выбирают по известному ядру. Здесь очень
эффективным оказывается метод М. А. Колтунова, именуемый методом совмещений. Для
определения ядра ползучести из опытов на одноосное растяжение используем
представление ядра в виде
П(/) = П(0)
1+ \ k(A, а,%, i)dx I ,
L о J
(12.5.7)
1
где 2Я(0) = ,qv , g (0) — мгновенный модуль сдвига; Л, Я, а — константы,
а функция k лредставима через гамма-функции Эйлера:
k{A,ay М) =
е
г, [ЛГ (a)]n *Q
if
n=l
Г («a)
(12.5.8)
Функция связной ползучести определяется формулой
^(0 = ^(0)
1+j*(i4pfafXfT)dT ,
где обозначено:
Р 1 + 1/(P<D0)
l-2v0
1+Vo '
v0 — мгновенный коэффициент Пуассона, а постоянные а и Я те же, что и у
ядра ползучести. По этой формуле находим
Р =
1
(А/Ло - 1) '
Выбирая из таблиц монографии М. А. Колтунова кривые с различными
параметрами Л^ Ф Л, по этой формуле находим соответствующие им величины р&.
Оригинал приближенного решения имеет вид
АНа (9 = С0 ф (0 + С2 j © (/-1) dq (т) + С2j я (*-т) <*ф (т) +
+ 2 C8ft^ft(*-T)dq>(x).
(12.5.9)
£ = 1
Если давление,, мгновенно достигает заданного уровня р0) то ф (/) = h (t)
и из формулы (12.5.9) получим
AHa(t) = C0 + Cl(*(t) + C2n(t) + 2 _Сз**Ы0. (12.5.10)
303
£ = 1
Приведем результаты расчетов для цилиндра с характеристиками /
* alb = 0,5, v0 = 0,3789, А = 0,078, а = 0,1, X = 0,05. /
Расчеты проведены на ЭВМ «Наири-2». Упругое решение считалось для
различных коэффициентов Пуассона в диапазоне от 0 до 0,495 с шагом 0,05, при
различном числе слагаемых суммы (12.5.6). В табл. 6 приводятся значения
точного и приближенного решений для момента времени t = 1 мин.
Таблица 6
Количество
слагаемых
3
4
5
6
Строгое
решение
30,626
30,626
30,626
30,626
Приближенное
решение
30,724
30,697
30,642
30,633
Погрешность
0,302
0,070
0,053
0,027
Отсюда следует, что применение метода аппроксимаций позволяет
сравнительно просто получить решением удовлетворительной степенью точности.
ПРИЛОЖЕНИЕ. ВЫБОР ПЕРЕМЕЩЕНИЙ
ТОЧЕК КОНЕЧНОГО ЭЛЕМЕНТА
П.1. Общая характеристика МКЭ
Метод конечного элемента получил в последние полтора-два десятилетия
очень широкое распространение в расчетной практике. Как и другие
приближенные способы математического анализа, МКЭ основан на дискретизации задач
механики непрерывной среды. Проблема отыскания непрерывных функций
координат и, быть может, времени сводится к задаче определения конечного числа
неизвестных чисел, дискретных неизвестных. Метод Ритца, метод Галеркина
и другие приближенные методы предполагают аппроксимацию искомых функций
посредством конечного числа известных функций полной системы,
удовлетворяющих некоторым граничным условиям. Выбирая искомые функции в виде линейных
комбинаций известных функций с неизвестными коэффициентами,
рассматриваемую механическую систему с бесконечным числом степеней свободы сводят к
системе с конечным числом степеней свободы. Свобода перемещений определяется
числом независимых коэффициентов в представлениях перемещений. Применение
методов Ритца, Галеркина предусматривает необходимость выбора
аппроксимирующих функций для всей области определения искомых функций, что очень
ограничивает применение этих методов. Вместе с тем небольшое число искомых
коэффициентов аппроксимации позволяет простыми средствами решить
получающиеся алгебраические уравнения. Поэтому упомянутые методы применяются
и без использования современной вычислительной техники.
МКЭ предусматривает возможность разбиения области определения
искомых функций на конечные элементы — частичные области. Конечные элементы
в каждом конкретном случае должны быть стандартными, а способ построения
их должен предусматривать возможности произвольного увеличения числа
элементов, удобства нумерации элементов. На границе каждого элемента либо внутри
области, занятой элементом, намечаются отдельные точки — узлы. Значения
искомых функций- в узлах называют узловыми и в дальнейшем считают
основными искомыми величинами. Для каждого элемента вводится местная координатная
система и искомые функции аппроксимируются полиномами либо другими
элементарными функциями. При этом вводится некоторое число произвольных
коэффициентов, которые можно однозначно связать с узловыми значениями
искомых функций. Другими словами, в МКЭ принимается аппроксимация искомых
функций для каждого элемента посредством узловых значений искомых функций.
Узловыми значениями искомых функций определяются число степеней
свободы и обобщенные координаты состояния механической системы, в частности
число степеней свободы моделируемой механической системы. Адекватность
отражения свойств реальной системы увеличивается вместе с ростом числа узлов,
поэтому применение МКЭ возможно только вместе с современной вычислительной
техникой. Условия для определения узловых неизвестных можно
формулировать как требования равенства нулю обобщенных сил, соответствующих
узловым смещениям, либо с использованием принципа возможных перемещений
сплошных сред. Поскольку чаще всего употребляются для этой цели
интегральные вариационные принципы, МКЭ относят к классу вариационных
приближенных методов. Ниже рассмотрены детали построения конечных элементов
применительно к статическим задачам механики деформируемого твердого тела
различной мерности.
305
П.2. Одномерный элемент в одномерном пространстве /
№ Представим себе одномерный объект (рис. 169), положение точек которого
определяется одной координатой х. Предположим, что допускаются только
перемещения и точек тела вдоль оси Ох. Перемещениями и (х) определяется состояние
тела. Функция и (х) считается искомой.
Искомую функцию и (х) предлагается строить по участкам, элементам
объекта. Разделим тело точками A, ...,k — 2, k — 1, &, k + 1, & + 2, ..., Б на
элементы. Здесь А — начальная точка, В — конечная точка тела. Элемент номера k
имеет протяженность /^ от точки k — 1
АО В X до точки k. Введем местную коорди-
«-*— * 1 • J ■ * натную систему для этого элемента.
/ К -2 К~т К к+1 Например, положение точки будем
р 1f;Q определять координатой |, отсчиты-
Уис- lt>y ваемой от точки k — 1 вправо. В
соответствии с МКЭ назначим систему
перемещений и (£) точек элемента так, чтобы и (0) = и^-1у и (/^) = «&. Для
интерполяции и (£) можно использовать, например, многочлены.
Ограничиваясь линейным двучленом, найдем
H = ttfc-i+(Hfc—Mft-i)£//ft. (П.2.1)
Очевидно, в (П.2.1) вместо первой степени относительной координаты точки
можно использовать любую степень, но в остальном структура представления
перемещений останется прежней: располагая^узловыми перемещениями «й-i» uh*
по формуле (П.2.1) можно вычислить перемещение любой точки конечного
элемента номера k. Далее можно найти относительные деформации элемента:
8 = du/dl = (uk—uh- i)//ft,
а затем и энергию деформации элемента. Например, энергия деформации в
упругом состоянии
Лй = 0,5С82 = 0,5С(^-^_1)2//1,
где С — жесткость тела.
Для определения энергий всего тела остается просуммировать энергию
элементов:
А= 2 Аъ>
Внутренняя энергия линейно упругого тела оказывается квадратичной
формой по узловым перемещениям. Поэтому равенство вариации внутренней
энергии и возможной работы внешних сил приводит к системе линейных
алгебраических уравнений относительно^ узловых смещений — задача подготовлена к
использованию ЭВМ.
П.З. Одномерный элемент в трехмерном пространстве
Представим себе материальный "объект, состояние которого определяется
системой перемещений и (s) точек пространственной кривой г = г (s), заданной
параметрически. Выделением точек кривой можно разделить ее на конечные
элементы (рис. 170). Узловые перемещения обозначим и&. Перемещения элемента
номера k определяются перемещениями узлов Яь-х, и&. И если через g
обозначить местную дуговую координату точки элемента k длиной /^, то перемещения
точек элемента k можно представить формулой
» = »fc-i + («fc—»A-i)o//ft (П.3.1)
линейной аппроксимации перемещений. Шесть степеней свободы элемента,
содержащиеся в узловых смещениях и^-ъ uh> отражают движение элемента
как твердого тела и однородную деформацию элемента. Наличие параметра де-
306
Рис. 170
формации как координаты состояния исключает определенность вращения
элемента вокруг оси АВ.
Принятое двухточечное описание элемента и системы перемещений элемента
не отражает свойств кривизны и кручения кривой. Чтобы простейшим способом
отразить свойство кривизны кривой, необходимо рассматривать трехточечные
элементы, например, содержащие точки k — 1, k, k + 1. Такой элемент имеет
девять степеней свободы, которые определяются тремя узловыми смещениями.
Для описания свойств кручения кривой следует рассматривать
четырехточечный конечный элемент.
На рис. 170 положение точек четырехточечного элемента>,обозначено
векторами г^_2, гъ-ъ fh> rk+i- Положение произвольной точки элемента
определяется вектором г. Положим формально
r = rk-2 + ao+bo* + co*t (П.3.2)
где а — длина дуги, гь-2, а, Ь, с —
векторные координаты точек элемента
в начальном состоянии. Используя
(П.3.2), легко найти координаты
узловых точек:
rh-i = rk-2 + ath-i+bl%-i+clLr
rk=>rh-2 + a(tk-1 + tk) + b(lk-1+
rk+1 = rk-2 + a(lk^1+lk + lk+1) + b(tk-1+th+lk+1)^ +
Определитель этой линейной алгебраической системы относительно a, bt с,
отличен от нуля, поэтому векторные координаты а, Ь, с можно однозначно
представить через узловые координаты состояния элемента.
Обозначим /? радиус-вектор частицы в деформированном состоянии, тогда
R = г + и
и положим
« = «fe-2 + «cr + pa2 + va3. (П.3.3)
Очевидно, векторы а, р, у, можно связать с узловыми перемещениями. По
перемещениям можно вычислить удлинения элемента, искривления, крутку.
Далее вычисляется внутренняя энергия элемента как функция узловых
перемещений. Не исключена большая рациональность замены представления
перемещений (П.3.3) другим. Однако сохранение двенадцати независимых координат
состояния четырехточечного элемента необходимо.
Если начальная конфигурация кривой оказывается плоской и векторы
перемещений лежат в той же плоскости, то четырехточечный элемент можно заменить
трехточечным либо двухточечным с соответствующим сокращением числа
степеней свободы.
П.4. Плоские элементы в плоских задачах
Предположим, что состояние тела описывается системой перемещений
некоторой области плоскости в той же плоскости. Вся плоская область может быть
покрыта треугольными элементами. Каждый из треугольников (рис. 171) имеет
три вершины и шесть степеней свободы, если узловыми считать только три
точки — вершины треугольника 7, 2, 3. Три из шести степеней свободы
«расходуются» на описание движения элемента как твердого тела, а остальные три
отражают однородное деформированное состояние элемента. Если положение точки
элемента в местной координатной системе определять вектором р, то вектор
перемещения и точки представим в форме
Я = И0 + <оХр + ((е;А))р, (П.4.1)
307
где вектором и0 определяется поступательное движение, вектором (о = со/3
определяется малый поворот, а двухмерным тензором — однородная
деформация. Вычисляя по формулам (П.4.1) узловые смещения /
и* = Яа+юХрл + ((еу)) Pk>
/
(П.4.2)
можно установить выражения координат деформированного состояния элемента
#о> со, &ij через узловые перемещения. Например,
«01 =
Aqi
А
Д =
Ао1 =
"11
"21
«31
и
1!
1?
и
II
£>*
(П. 4.3)
По перемещениям (П.4.2), (П.4.3) можно найти градиенты перемещений,
а по ним—любые характеристики деформаций как функции узловых смещений.
Остается сформулировать, например, энергетические условия равновесия всех
элементов.
Рис. 171
Рис. 172
Число степеней свободы треугольного элемента можно увеличить
посредством введения промежуточных узлов 4, 5, 6 на сторонах треугольника. При этом
можно учесть неоднородность деформаций элемента. Например, добавляя к
составляющим uk перемещений слагаемые второй степени по координатам точки,
можно ввести шесть новых степеней свободы элементов. Затем введенные
коэффициенты можно выразить через узловые смещения. Число промежуточных
точек вместе со степенью аппроксимирующих многочленов и числом степеней
свободы треугольного элемента можно увеличивать. При этом возникает
дилемма: увеличить число простых треугольных элементов или увеличить число узлов
в каждом элементе? Ответ на поставленный вопрос можно обосновать либо
практикой расчетов, либо выяснением геометрического значения уточнения
перемещений.
На последнем пути полезно применение четырехугольных элементов,
связанных с координатными линиями на плоскости. Например, на рис. 172
представлен четырехугольный элемент, связанный с декартовой координатной
системой на'плоскости. Местные координаты предполагаются также декартовыми.
Такой элемент имеет восемь степеней свободы, определяемых узловыми
смещениями.
Представлением в форме (П.4.1) отражается движение и однородная
деформация элемента. Неоднородность деформации можно учесть на основе
разнообразных геометрических соображений. Например, пусть прямоугольный элемент
изгибается в своей плоскости так, что волокно %г = 0 превращается в дугу
окружности радиуса R3i, центр которой лежит на оси 0£х (рис. 172). При этом
волокна, параллельные оси Ogj, остаются прямолинейными. Перемещение и
произвольной точки (О, £2) нейтрального волокна найдем, составляя равенство сумм
векторов:
£а /а + и* = Я31 h + Яз1 (— cos 93i Ь + sin 9з1 ^'
308
Перемещение и\ за счет рассматриваемого изгиба точки с координатами (£±, £2)
найдем, рассматривая второй векторный четырехугольник на рис. 172, откуда
следует
Ei *i + «; = »* +Ei (cos 931 /i-sin 931 /2).
Складывая последние два равенства, найдем
«?= -Еа /« + (/?3i-Ei) [(1-cos 631) /i + sin 031 У •
При малых искривлениях можно считать
sine3i=e3i=E2/«8i. cosвз1=1—(1/2) е§х, е31/?з1=Е2
и пренебрегать слагаемыми порядка \lR по сравнению с единицей, поэтому
предыдущее выражение перемещений принимает вид
£ А31 A3i
Аналогично найдем перемещения и2 за счет изгиба элемента вокруг центра
кривизны на оси 0£2 с радиусом R32 нейтрального волокна:
* А32 ^32
Учитывая (П.4.1), суммарные перемещения точек элемента представим формулой
« = «o + «»Xp + ((8ift)) P + (-J— -W'i + Уг— ■¥*■)**- (П-4-4)
\ -6А31 /<32 / \ ZK32 ^31 /
Кинематические координаты состояния и01, и02, со, ец, е22, е12, #3i, #32 связаны
с узловыми перемещениями ип> u12t ..., иА2 следующими формулами:
h2
4"01 + "Т^—= "ll+«2l + "31 + "4i;
^<31
2Mn = «ii —и21—«3i + «4i;
2/г2 (ей —ю) = "11 + ^21—"si—Иль
1
Я;
-hxh2=> ~ "li +«21+ «3i —«41;
32
Л!
4"02 + -ТГ = «12 + «22 + «32 + «42 \
^^32
2^1 (612 + О)) = «12 — «22 — «32 + «42 J
2Л2 е22 = «12 + «22 — W32 — «42»
— /^V^ — «12 + «22 + «32 — «42- (П.4.5)
А 81
По перемещениям (П.4.4)и (П.4.5) можно вычислить градиенты перемещений,
компоненты деформации, работу внутренних сил в элементе и другие
характеристики состояния. Так получается основание для составления алгебраических
уравнений относительно узловых перемещений.
Возможен переход к криволинейным координатам при построении
четырехугольного плоского элемента. Известны варианты усложненного
прямоугольного элемента с узловыми точками на сторонах прямоугольника.
309
П.5. Двухмерный элемент в трехмерном пространстве
Произвольную поверхность можно разделить на треугольные элементы
с прямолинейными или криволинейными сторонами. Представим себе один из
таких элементов, положение которого вполне определяется положением трех
вершин. В местной координатной системе, связанной с плоскостью трех вершин
элемента, положение любой точки элемента можно определить вектором р,
зависящим от двух координат §х, £2- Системой перемещений
tf = Ho+<«>Xp+((eift))P> (П.5.1)
где и0> <*> — трехмерные векторы, а ((е^)) — двухмерный тензор, отражается
произвольное движение элемента как твердого тела и однородная деформация
в плоскости элемента. Так, введенные координаты деформированного состояния
элемента соответствуют его девяти степеням
свободы: каждая из трех узловых точек может
иметь три независимых перемещения.
Соотношения
ии = «о+<*> X 9h + (tefc))pfc (П.5.2)
Рис. 173
можно разрешить относительно й0, <*>i eik и
таким способом выразить перемещения
произвольной точки элемента через узловые перемещения,
если рассматривать совокупность равенств (П.5.1)
и (П.5.2).
Произвольную поверхность можно разделить
на четырехугольные элементы. На рис. 173
представлен элемент, выделенный двумя парами
соседних линий кривизны, и установлена местная координация, при которой
положение любой точки определяется дуговыми координатами Sj, s2, причем
угловые точки имеют координаты ± 0,5/i±, ± 0,5Л2.
Для углубления представлений о деформированном состоянии элемента
введем восемь узловых точек, показанных на рис. 173. В трехмерном
пространстве такой элемент имеет 24 степени свободы. Систему перемещений точек элемента
можно представить через восемь векторов я0, иъ ..., щ22 в форме
и = щ+иг s±+ u2s2+ип si + a12sis2 + и22 s\ + sx s2 («n2 s±+я122 s2).
(П.5.3)
Обозначив Vi, ..., V8 массив узловых перемещений, где
^1 = я(0>5Л1, 0); К2 = я(0,5/гь 0,5/z2);...; К8 = я(+0,5 Ль —0,5ЛЯ),
найдем по формуле (П.5.3) систему:
V1 = a0 + 095h1u1 + 0,25hl яп;
V2 = Uo+Of5h1tt1+0,2bhltt11+095h2tt2+Ot25hlttn+0925h1hiu12 +
+ 0,125 hx h2 (вшЛх + яш/г2)
Решение этой системы:
400 = 2(^+^3+K6+F7)-(K2+K4+Ke + tf8)5
0iShlun=Vl+V6-2u0;
0,5/г|и22= Кз+К7~2йо;
/zi/z2tt12=K2-K4+Ke-K8;
0,Ьhxhl и122= V2-Vt-Ve+ Vs^V^Vbl
0,5/г2Л2и112=Ка+К4-Кв-К8-2К3 + 2К7; (П.5.4)
310
вместе с формулой (П.5.3) позволяет перемещения точек элемента представить
через узловые перемещения.
Используя такое представление перемещений, найдем компоненты
деформации поверхности:
диг ( и3 ^ л ди2 ( и3 п ди2 диг
е22 — ъ + ~7~" *» 2е12 = -
X1 двг ' Rx " ds2 ' R2 ' 12 dSl г ds2
искривление и кручение поверхности:
х1= —
д (
dSl \
х12 =
' ди3 их
к dsx R±
_ д2и3
д [ ди3 и2
ds2 \ ds2 R2
1 дил 1 ди9
uz>i va2 Ri OS2 R2 OS1
и внутреннюю энергию элемента изотропной оболочки в упругом состоянии:
U= 2(l-v2) j dsi j [(^n-l-^22)2 -2 (1-v) (ene22-e?2)] ds2 +
^0,5/ii —0,5fta
0,5/ii 0,5ft2
E№ С С
+ 24(1_v2) J rfsi J [(*i + >*)a-2(l-v)<W«2--*b)]<k.-
— 0,5^! — 0,5/ia
Суммированием энергии элементов и дальнейшим применением
вариационного принципа можно получить алгебраическую систему уравнений
относительно узловых перемещений. Конечно, эта процедура усложняется, когда
учитываются упругопластические состояния элементов оболочки либо другие
нелинейные свойства.
Представление (П.5.3) перемещений элемента поверхности в пространстве,
позволяющее учесть деформации и искривления средней поверхности оболочки,
не единственно. Можно указать и другие представления, основанные как на
формальных, так и на геометрических соображениях.
П.6. Трехмерный конечный элемент
Любую область трехмерного пространства можно заполнить тетраэдрами —
четырехгранниками, положение точек которых определяется четырьмя
точками — узлами (рис. 174). Такой элемент имеет 12 степеней свободы, если
состояние его определяется только перемещениями узлов. Элемент сплошного
деформируемого тела сводится к системе с 12 степенями свободы, если перемещения
задать в форме
й = йо+»Хр + Ыр, (П.6.1)
где u0t a), вщ-* пока произвольные параметры, р — вектор точки в местной
координатной системе. Формулой (П.6.1) учитывается движение элемента как
твердого тела и однородная деформация, которая определяется градиентами
перемещений.
Чтобы более подробно отразить свойства перемещений элемента сплошного
тела, правую часть (П.6.1) дополняют нелинейными слагаемыми. При этом
необходимо ввести промежуточные узловые точки на каждом из ребер тетраэдра.
Так получаются элементы с 30, 48 степенями свободы и т. д. Соответствующие
интерполяционные многочлены будут иметь вторую, третью степени и т. д.
относительно местных координат точек.
311
Не менее рациональным может оказаться применение конечногоуэлемента
в виде прямоугольного параллелепипеда (рис. 175) с ребрами Л1э h2i h3.
Узловые перемещения элемента /, m, п обозначим так: /
/, т, п
/ — 1, т, п
1 — 1, т—\, п-\
"ft
= «4-i-i-i
Следуя общим рекомендациям метода конечного элемента, введем местную
координатную систему £j, |2, £3 с началом в центре тяжести элемента и
представим перемещения произвольной точки элемента многочленом "
ик = 4 + а\ Ei + aJb + ajE8 + ai4! + ai»6i+ar й+^Чх£2 +
+ aJ4.68 + aj[1-E8£i + ailia + .-. + Ei(at"K + ai83a) + ...
... + aif4ib5:
(П.6.2)
Набор отличных от нуля коэффициентов интерполяционных многочленов
связан с числом узловых точек элемента. Например, ограничиваясь узлами
в вершинах параллелепипеда, получим элемент с 24 степенями свободы. Полови-
Рис. 174
1-1,т-1,п
1-1, т,п
l,m-f,n
6.7 •
4
___j£-/,/77,/7-/
l,m-f,n-/
£,/77, П-1
LZ
Рис. 175
на из этих степеней свободы расходуется на описание движения окрестности
элемента как твердого тела и однородной деформации. Остальными 12
координатами состояния элемента описываются разнообразные неоднородности деформации.
Если ограничиться в (П.6.2) учетом слагаемых вида
(П.6.3)
то коэффициенты таких интерполяционных полиномов каждой из составляющих
tik оказываются связанными только с массивом узловых перемещений в том же
направлении:
, = и111+и11-1+и1-11 + иг111 + иг1-11+аг11"1 +
+ iii-i-i + «i-i-i-b
ик
4^aJ-fijt»+Mj[i-i+ei-».
-iii_ttri-ii-
■ +
4А2 а% = щ
i"
+«i1~1-«i-
+ «J-I-l_„^l-l-l;
,1-1-1.
4A3a| = «iix_„ii-i + ui-ii+aft-iii+H-i-ii_„-ii-i_tti-i-i_tt-i-i-i;
2A1A2ai2=„in+ui1-i_Mi-ii_u-iii+„-i-ii_B-ii-i_
-«I
-«i-i-i + Bj
312
2M8aV =411-41"1-4-11+^-111=^-1-11-^11-1 +
+ ^-1-1 + ^1-1-1;
2A3^a^^aiii^ttii-i + tti-ii_.w-iii_.w-i-ii + w-ii-i_
-4-i-i + a,-i-i-i;
+ wi-i-i_tt-i-i-i (П.6.4)
Подробное описание дальнейшей процедуры МКЭ не обязательно.
Вычисляются градиенты перемещений, деформации, внутренняя энергия как функции
узловых перемещений; применением вариационного принципа получается
разрешающая система алгебраических уравнений относительно узловых перемещений.
Представляется интересным и другой способ выбора коэффициентов
интерполяционных многочленов, основанный на геометрических соображениях.
Систему перемещений и точек элемента можно представить себе как наложение
общего аффинного преобразования совокупности векторов р = |^/д и отображений
пространства, отражающих нелинейности. Нелинейности ограничим
преобразованиями кручения пространства, преобразованиями изгиба и изгибно-крутиль-
ными преобразованиями. Аффинные движения точек элемента представим в
прежнем виде:
яа = «о + ©хр + ((е«л))р. (П.6.5)
Крутка элемента считается наложением кручений пространства вокруг
центральных осей С£&. Например, крутка \1Т± вокруг C|j вызывает поворот
материальной плоскости gj = const на угол \JT^. За счет такого поворота точка с
координатами |i, £2, £3 получает перемещения:
Ч = О, и2 = - Eige/Ti, Щ = 6i52/^i-
Подобным способом вычисляются перемещения за счет кручения
пространства вокруг двух других осей. Суммарные перемещения от кручений
пространства имеют вид
«5 = (1/гя — 1/Гв) EtEs О. 2, 3). (п.б.б)
Для оценки перемещений точек конечного элемента за счет изгибаний
пространства проведем цепочку рассуждений, подобных реализованным в П.4
(см. рис. 172). При этом получим
u" = ll/2(il/Rn+tyR2i)-t2ti/R32-hli!R23]ii+..- (П.6.7)
Наконец, введем так называемые изгибно-крутильные смещения
яик = (<*1М1+а»М2+а8М8) ^Ы" • (п.6.8)
"1 "2 "3
Суммируя перемещения (П.6.5)—(П.6.8), составляющие смещений
произвольной точки элемента представим формулами
ei = «J + euEi+(eu-»»)|t+(eu + «>,)E, + (l/2)(a//?ii + U/^8i)-
-!ib*M-Sib/*«+(i/r,-i/r,)S1b+^bSii»/(AiA») (!• 2> 3>- (п-6-9>
Вычисляя узловые смещения вида
н}11=«г + 0,5е11 ^ + 0,5(6x2—й)з)/г2 + 0,5(е13 + со2)Лз+
+ (l/T, — \JT,)htht/4 + dlhl/8,
313
получим систему уравнений для определения «J,1..., d3. Решение этой системы
имеет вид * ,
+ ИГ1-11 + ИГ11-1+*!-1-1+иг1-1-1; /
^xen-win + wii-i + wl-^-^r111 —иг1"11—"Г11"^"!"1"1—"Г1"1"1;
4/г2(812-соз) = а1111 + «111-1-^-11+"Г111-^Г1-11 +
+ «Г11-1—«1-1-1 —«Г1-1-1;
4Л8(е18 + соя) = и1"-|/11-1+и1-" + иг111 + иГ1"11-
_ИГ11-1_-И1-1-1__ИГ1-1-1;
2А1Ла//?8а=-и}"-и11-1 + и1-11+иГ111-иГ1"11 +
+ «i-ii-i+«i-i-i-«i-i-i-i;
2/z1/Z3/JR23=-aiii + «ii-i-«i-ii+«1-iii + «1-i-n-
—«i-n-i +«i-i-i —«fi-i-i;
2Л2/7з(1/Г2-1/Гз) = «111-«11-1-«1-11 + «1-111-«1-1-11-
— «i-ii-i+ «1-1-1+ «i-i-i-i;
d1A1 = «iii—«ii-i—«i-ii —«£-iii+ «£-1-11+ «£-ii-i +
+«l-i-i-«r1"1-1; (1,2,3). (П.6.10)
Поэтому формулами (П.6.9), (П.6.10) перемещения произвольной точки элемента
определены через узловые перемещения.
ЛИТЕРАТУРА
1. Безухое Н. Я. Теория упругости и пластичности. М., 1953.
2. Блох В. Г. Теория упругости. Харьковский университет, 1964.
3. Б. Боли, Дж. Уэйнер. Теория температурных напряжений: Пер. с англ.
М., 1964.
4. Ван Цзи-de. Прикладная теория упругости: Пер. с англ. М., 1969.
5. Вольмир А. С. Устойчивость упругих систем. М., 1963.
6. Ильюшин А. А. Пластичность. М., 1948.
7. Ильюшин А. А. Пластичность. М., 1963.
8. Ильюшин А. А.у Победря Б. Е. Основы математической теории термовяз-
коупругости. М., 1970.
9. Колтунов М. А. Ползучесть и релаксация. М., 1976.
10. Лейбензон Л. С. Курс теории упругости. М., 1947.
И. Лурье А. И. Теория упругости. М., 1970.
12. Ляв А. Математическая теория упругости: Пер. с англ. М., 1935.
13. Механика в СССР за 50 лет. М., 1968, т. III.
14. Москвитин В. В. Сопротивление упруговязких материалов. М., 1972.
15. Мусхелишвили Н. И. Некоторые основные задачи математической теории
упругости. М., 1966.
16. Новожилов В. В. Теория упругости. Л., 1958.
17. Новожилов В. В. Теория тонких оболочек. Л., 1962.
18. Прагер В. Введение в механику сплошных сред. М., 1963.
19. Прочность. Устойчивость. Колебания: Справочник. М., 1968, т. 1,2, 3.
20. Работное Ю. Н. Сопротивление материалов. М., 1962.
21. Работное Ю. Н. Ползучесть элементов конструкции. М., 1966.
22. Расчеты на прочность в машиностроении. Пономарев С. Д., Бидерман В.
Л., Лихарев К. К. и др. М., 1958, т. I, II, III.
23. Рекач В. Г. Руководство к решению задач теории упругости. М., 1975.
24. Седов Л. Я. Механика сплошной среды. Московский университет, 1968,
ч. IV.
25. Сокольников И. С. Тензорный анализ. Теория и применение в геометрии
и механике сплошных сред. М., 1971.
26. Тимошенко С. П. Теория упругости. М., 1934.
27. Тимошенко С. П. Пластинки и оболочки. М., 1948.
28. Тимошенко С. П. Сопротивление материалов. М., 1960.
29. Феодосьев В. И. Сопротивление материалов. М., 1960.
30. Филин А. П. Прикладная механика твердого деформируемого тела. М.,
1975, т. 1.
31. Филоненко-Бородин М. М. Теория упругости. М., 1947.
32. Филоненко-Бородин М. М. Сопротивление материалов. М., 1949.
33. Хилл Р. Математическая теория пластичности.: Пер. с англ. М., 1956.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение . . 4
Часть первая
Общий метод механики деформируемого твердого тела
Глава I. Кинематика деформаций сплошного тела . 12
§ 1.1. Перемещения и деформации одномерных объектов . . 12
§ 1.2. Перемещения точек материальной поверхности .... 16
§ 1.3. Тензорные свойства деформаций поверхности . / 23
§ 1.4. Примеры деформаций плоскости 26
§ 1.5. Примеры анализа деформаций поверхностей 30
§ 1.6. Системы координат при описании деформаций трехмерного тела 32
§ 1.7. Фундаментальное соотношение теории деформаций, координаты
деформации . . 34
§ 1.8. О скалярах, векторах, тензорах 39
§ 1.9. Тензор деформации, геометрическое значение его инвариантов 44
§ 1.10. Упрощенния соотношений теории деформаций в случае малых
деформации и малых перемещений . . 49
§ 1.11. Скорости частиц тела и скорости деформаций ... 51
Глава II. Теория напряжений, уравнения движения 53
§2.1. Вектор напряжения 53
§ 2.2. Примеры вычислений напряжений 55
§ 2.3. Уравнения равновесия призматических стержней . 57
§ 2.4. Уравнения равновесия пластинок .... . 61
§ 2.5. Тензор напряжений 64
§ 2.6. Главные направления и напряжения, инварианты напряжений 66
§ 2.7. Дифференциальные уравнения равновесия или движения
трехмерного деформируемого тела . .. . ^ . . . . 70
Глава III. Механические свойства деформируемых твердых тел 72
§ 3.1. Задачи экспериментов 72
§ 3.2. Напряжения и деформации при осевом растяжении образцов 73
§ 3.3. Упругие состояния образцов . .75
§ 3.4. Упругопластические состояния образцов 81
§ 3.5. Влияние скорости деформаций на поведение материала при
одноосном растяжении. ..." . 84
§ 3.6. Влияние температуры на механические свойства 87
§ 3.7. Допускаемые напряжения, запас прочности . . 88
§.3.8. Технологические пробы свойств . металлов . . .: 90
§ 3.9. Наблюдение и описание вязкоупругих свойств материала при
одноосном растяжении 92
§ 3.10. Наследственные свойства вязкоупругости 98
§ 3.11. Температурно-временная аналогия ... 100
Глава IV. Соотношения между напряжениями, деформациями и
скоростями трехмерного тела .102
§ 4.1. Соотношения между напряжениями и деформациями при
упругих состояниях. Потенциал напряжений ... . ... 102
316
§ 4.2. Обобщенный закон Гука анизотропного тела 104
§ 4.3. Обобщенный закон Гука изотропного тела . 108
§ 4.4. Опыты с трубчатыми образцами 114
§ 4.5. О соотношениях теории нелинейной упругости 119
§ 4.6. Соотношения теории малых упругопластических деформаций
для изотропного тела 122
§ 4.7. Основные соотношения теории течения 127
§ 4.8. Примеры предельных поверхностей и пластических потенциалов 130
§ 4.9. Соотношения линейной теории вязкоупругости . . 133
. § 4.10. Ассоциированный закон ползучести . 138
§ 4.11. Влияние изменений температуры на деформируемое тело . . 140
§ 4.12. Условия предельных состояний при статических нагрузках . 141
Часть вторая
Постановка задач и методы решения
Глава V. Упругие состояния стержней .144
§ 5.1. Растяжение стержней и стержневых систем . . 144
§ 5.2. Чистый изгиб стержня с прямой осью .... . 146
§ 5.3. Изгиб стержней поперечными нагрузками . 151
§ 5.4. Примеры расчета изгибаемых балок . . . 155
§ 5.5. Общая постановка задач -изгиба балки .... . 157
§ 5.6. Расчет упругих напряжений при кручении валов 162
§ 5.7. Мембранная аналогия кручения, кручение тонкостенных стержней 169
Глава VI. Статика упругих состояний трехмерных тел 172
§ 6.1. Постановка задач статики упругого тела в общем виде . . . . . 172
§ 6.2. Примеры решения пространственных задач теории линейной
упругости
§ 6.3. Постановка задач теории упругости в напряжениях. Плоские
задачи теории упругости
§ 6.4. Примеры построения функций напряжений ... .182
§ 6.5. Изгиб консоли ..... . . . 1$7
Глава VII. Упругие состояния пластин и оболочек . .193
§ 7.1. Основные соотношения теории изгиба пластинок . . 193
§ 7.2. Примеры решения задач изгиба пластинок . 198
§ 7.3. Общие уравнения теории упругих оболочек ... . . 200
§ 7.4. Упрощенные варианты теории упругих оболочек ... . . 209
§ 7.5. Безмоментное напряженное состояние оболочки вращения . 212
§ 7.6. Осесимметричные деформации оболочек • 218
§ 7.7. Осесимметричные деформации цилиндрической оболочки . 223
Глава VIII. Движение упругих стержней, пластин и оболочек: . 227
§ 8.1. Движение стержня с прямой осью ... • 227
§ 8.2. Колебания пластин • 237
§ 8.3. Уравнения колебаний оболочек . • 247
Глава IX. Устойчивость упругих состояний деформируемых тел 248
§9.1. Об устойчивости сжатого стержня ... • 248
§ 9'.2. Устойчивость стержней и пластинок ... • 250
§ 9.3. Неустойчивость цилиндрической оболочки • 255
§ 9.4. Общая постановка задач о неустойчивости • 257
Глава X. Задачи теории малых упругопластических деформаций 261
§ 10.1. Одноосное растяжение стержня • 261
§ 10.2. Упругопластические состояния изгибаемых балок • 263
§ 10.3. Расчет изгибаемых балок • 268
§ 10.4. Кручение валов при упругопластических состояниях . 274
176
. 179
317
§ 10.5. Упругопластйческие состояния пластин и оболочек . . . ./ . 276
§ 10.6. Расчет несущей способности пластин и оболочек . . . у. . 280
Глава XI. Задачи теории пластического течения . . . • /'• • • 283
§ 11.1. Растяжение и кручение тонкостенной трубы 283
§ 11.2. Плоское, пластическое течение 284
§ 11.3. Линии скольжения, методы решения задач о плоских
пластических течениях 287
§ 11.4. Плоские пластические установившиеся течения 290
Глава XII. Задачи теории вязкоупругости .... . • 293
§ 12.1. Принцип соответствия 293
§ 12.2. Примеры использования готовых решений ., 296
§ 12.3. Метод аппроксимаций А. А. Ильюшина 297
§ 12.4. Экспериментально-теоретический метод А. А. Ильюшина . . . 298
§ 12,5. Примеры решений задач линейной вязкоупругости 302
Приложение. Выбор перемещений точек конечного элемента 305
П.1. Общая характеристика МКЭ 305
П.2. Одномерный элемент в одномерном пространстве 306
П.З. Одномерный элемент в трехмерном пространстве 306
П.4. Плоские элементы в плоских задачах - 307
П.5. Двухмерный элемент в трехмерном пространстве . . .... 310
П.6. Трехмерный конечный элемент 311
Литература 315
Леонид Александрович
Толоконников
МЕХАНИКА ДЕФОРМИРУЕМОГО
ТВЕРДОГО ТЕЛА
Редактор Г. Н. Самошкина
Художник В. 3. Казакевич
Художественный редактор Н. К. Гуторов
Технический редактор Н. А. Битюкова
Корректор Г. И. Кострикова
ИБ Кя 1634
Изд. № ОТ-284. Сдано в набор 14.09.78. '"" Подп.
в печать 03.04.79. Формат 60X90Vi6. Бум тип. № 2.
Гарнитура литературная. Печать высокая.
Объем 20 усл. печ. л. 19,45 уч.-изд. л.
Тираж 10 000 экз. Зак. № 588. Цена 1 руб.
Издательство «Высшая школа»,
Москва, К-51, Неглинная ул., д. 29/14
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли
Москва, 129041, Б. Переяславская ул., д. 46