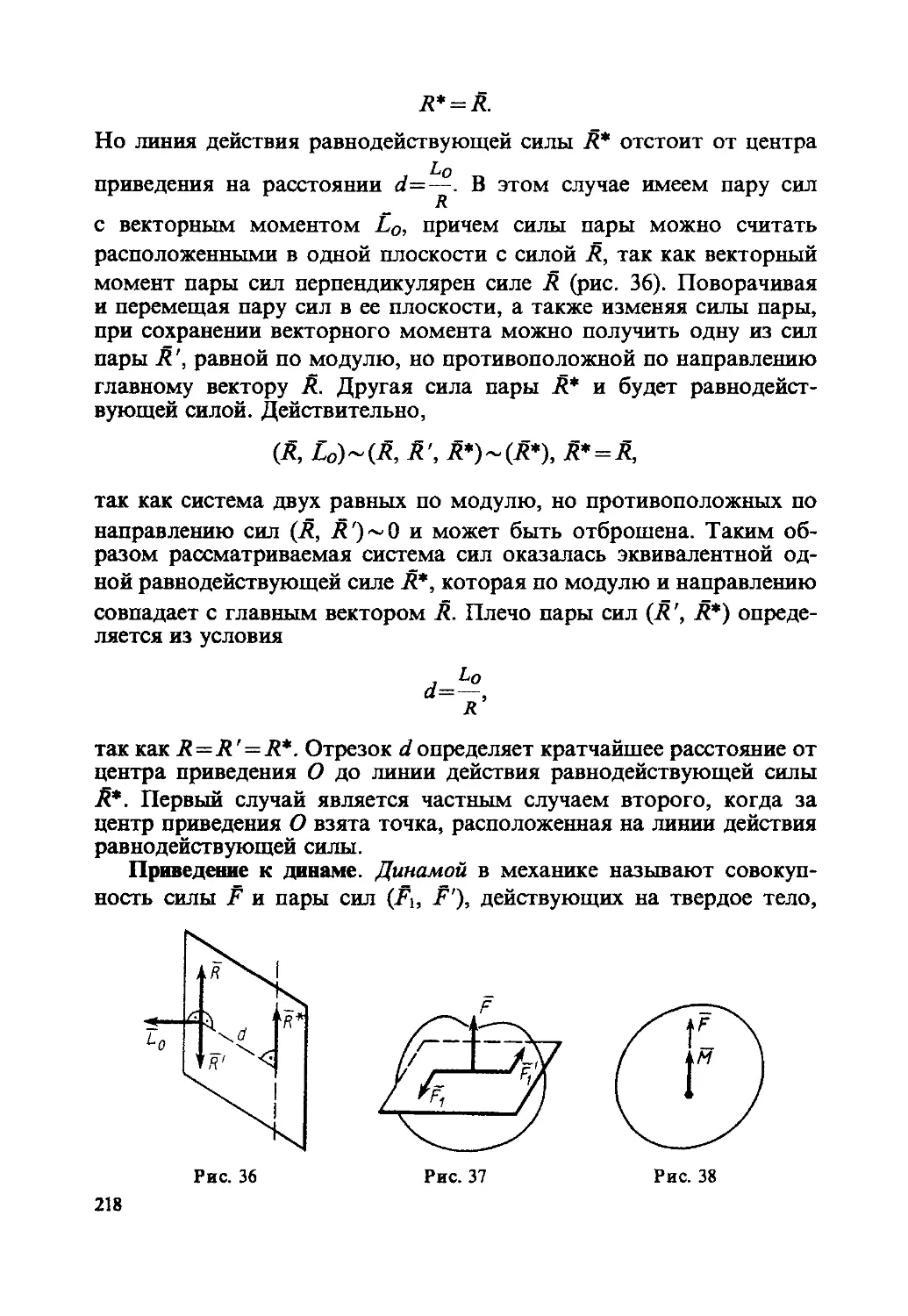
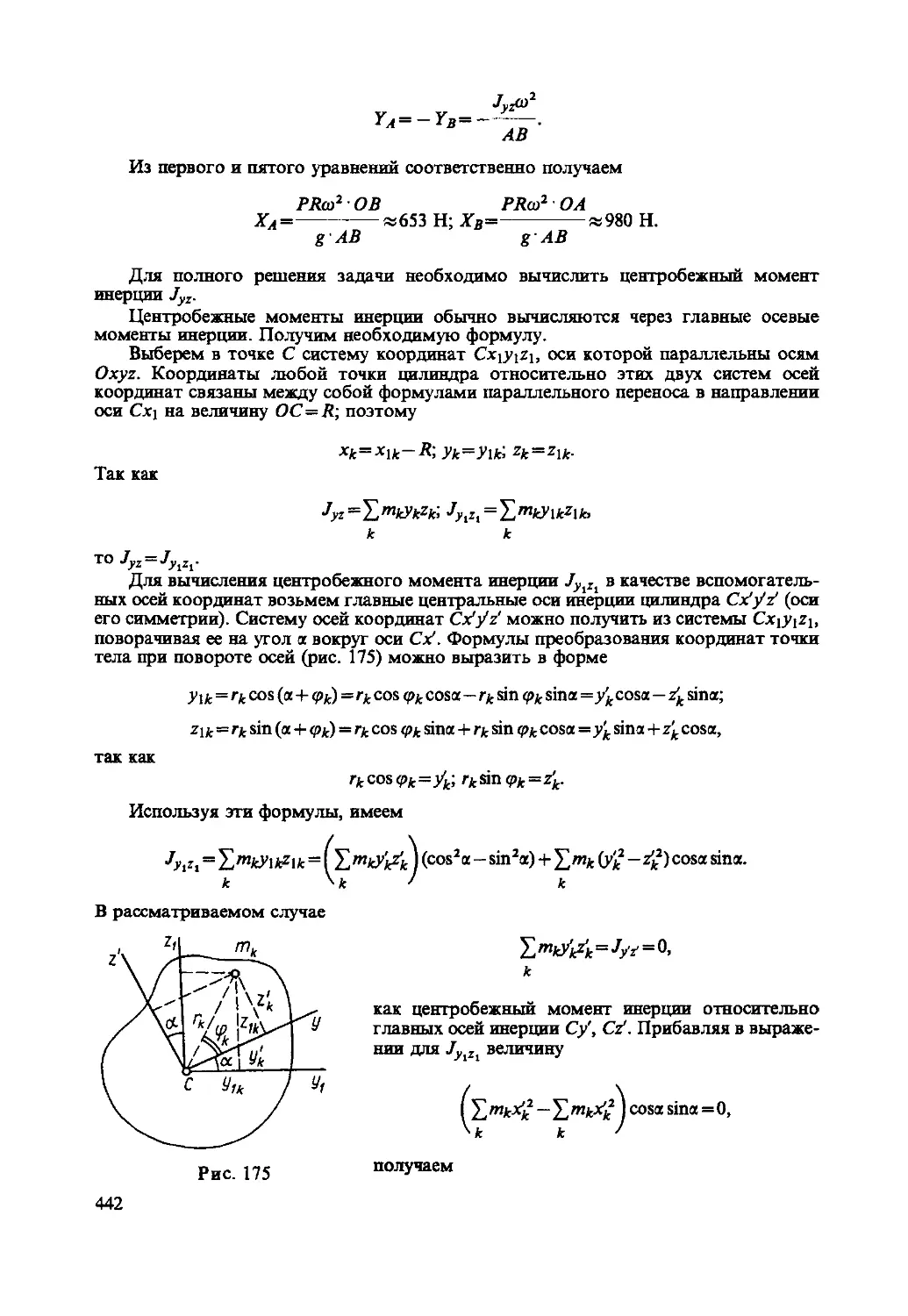
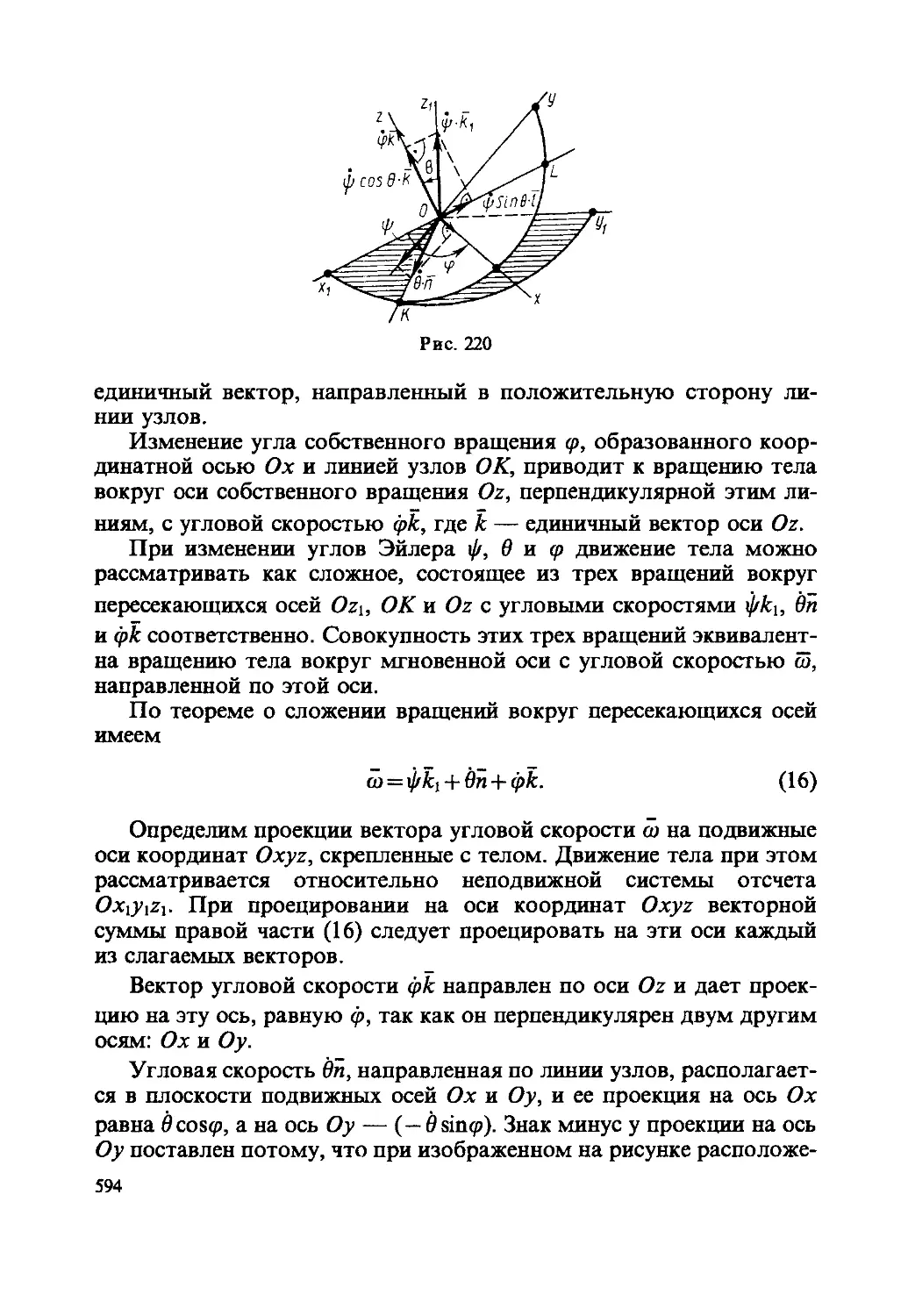
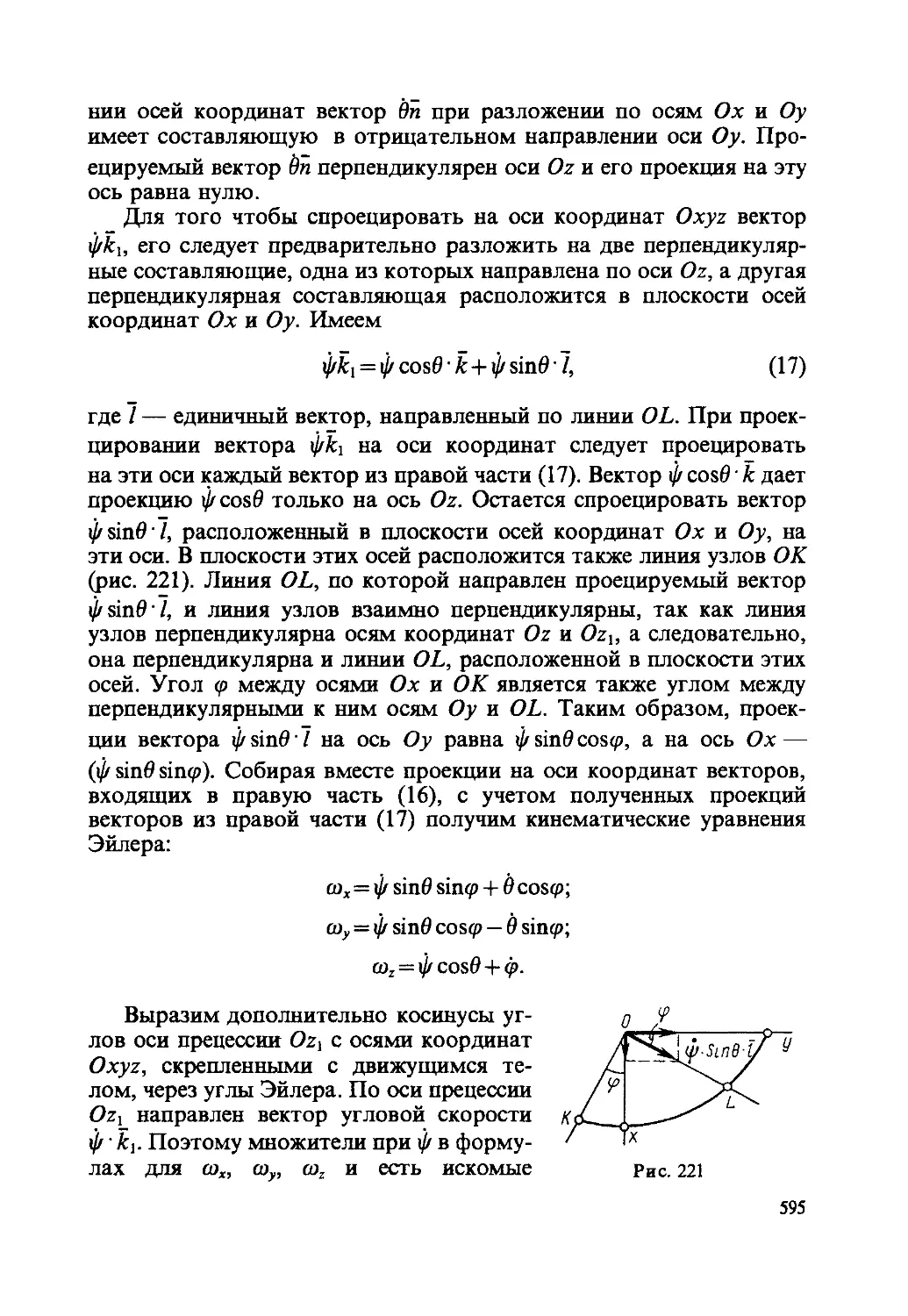
/


































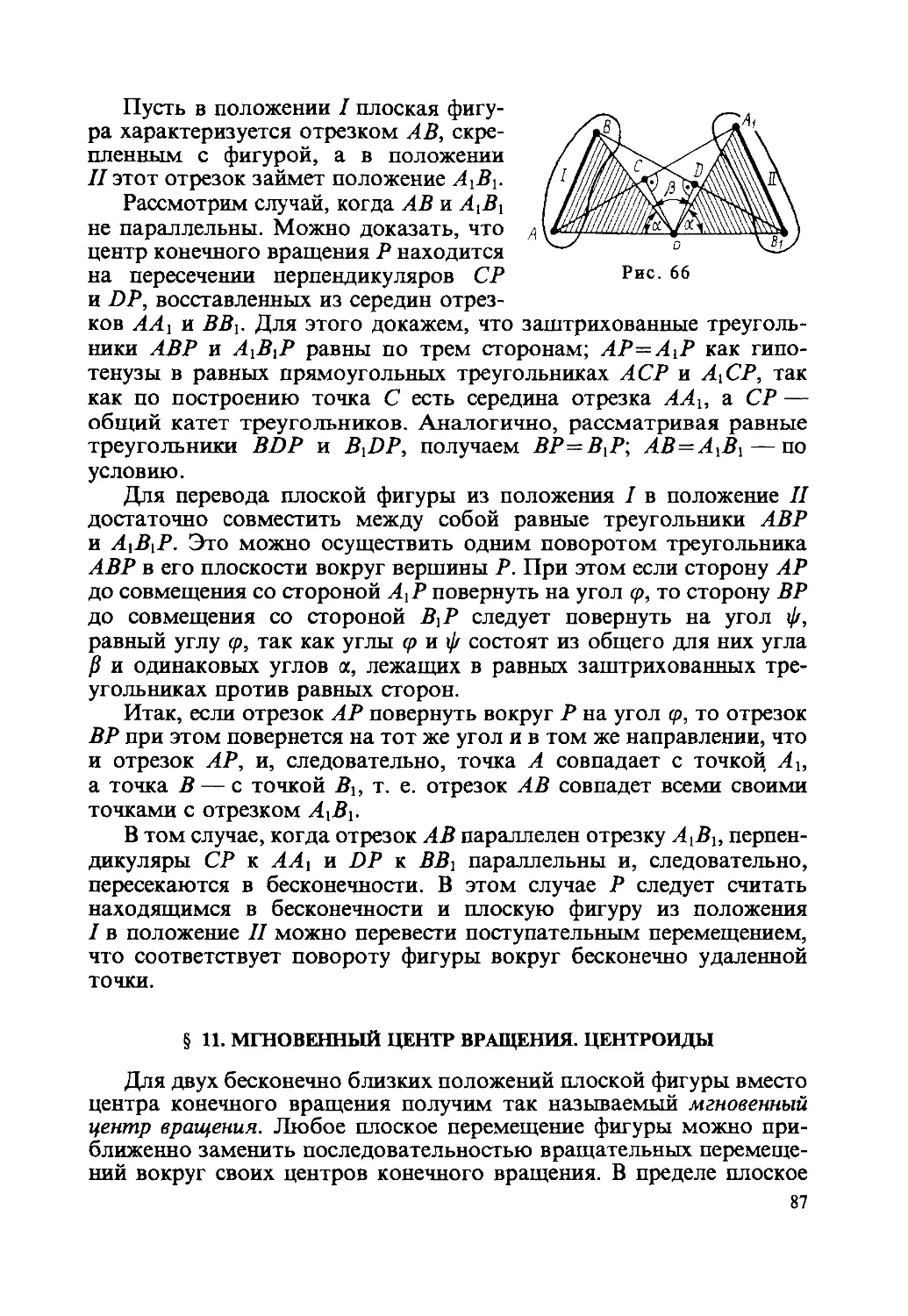

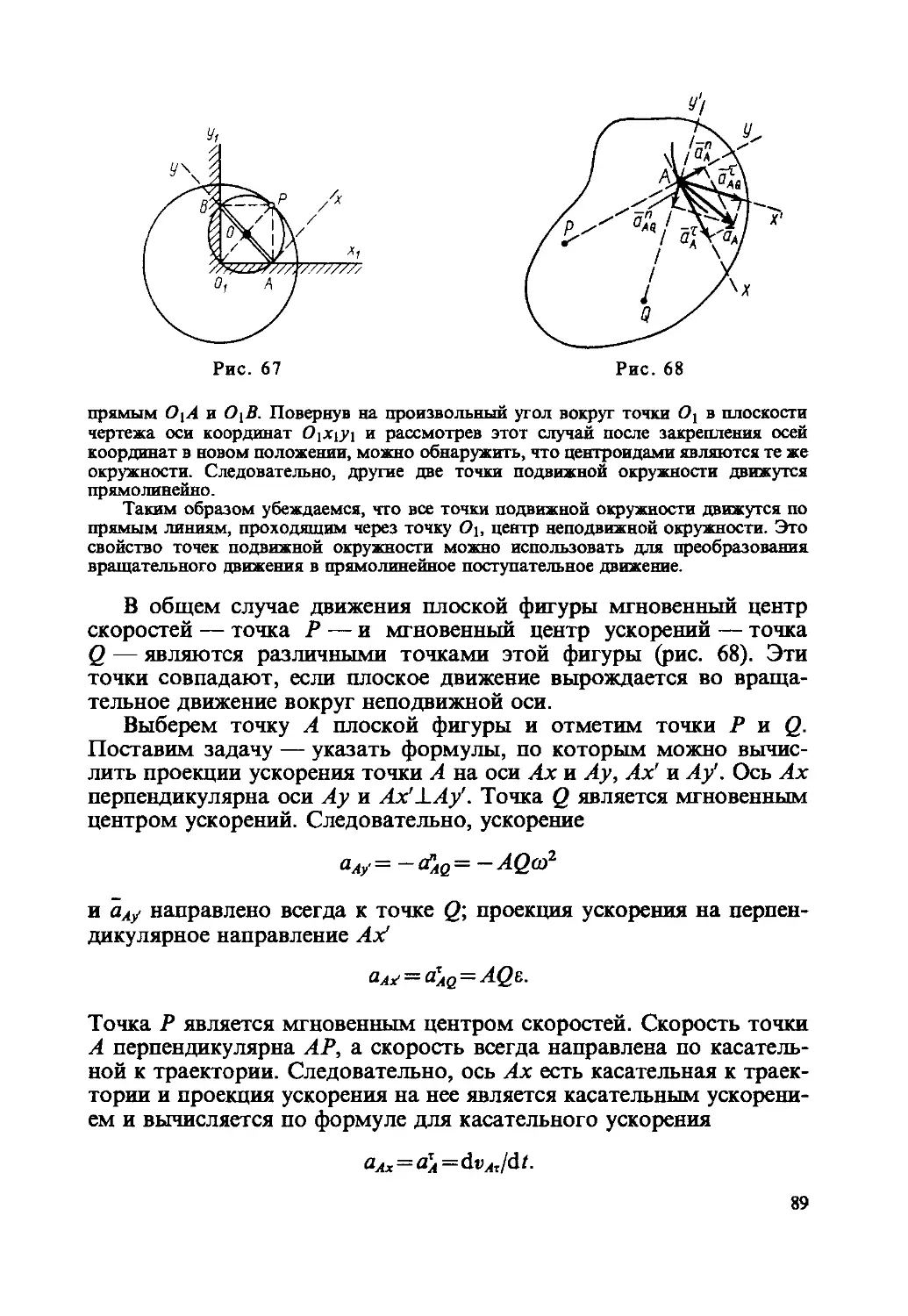


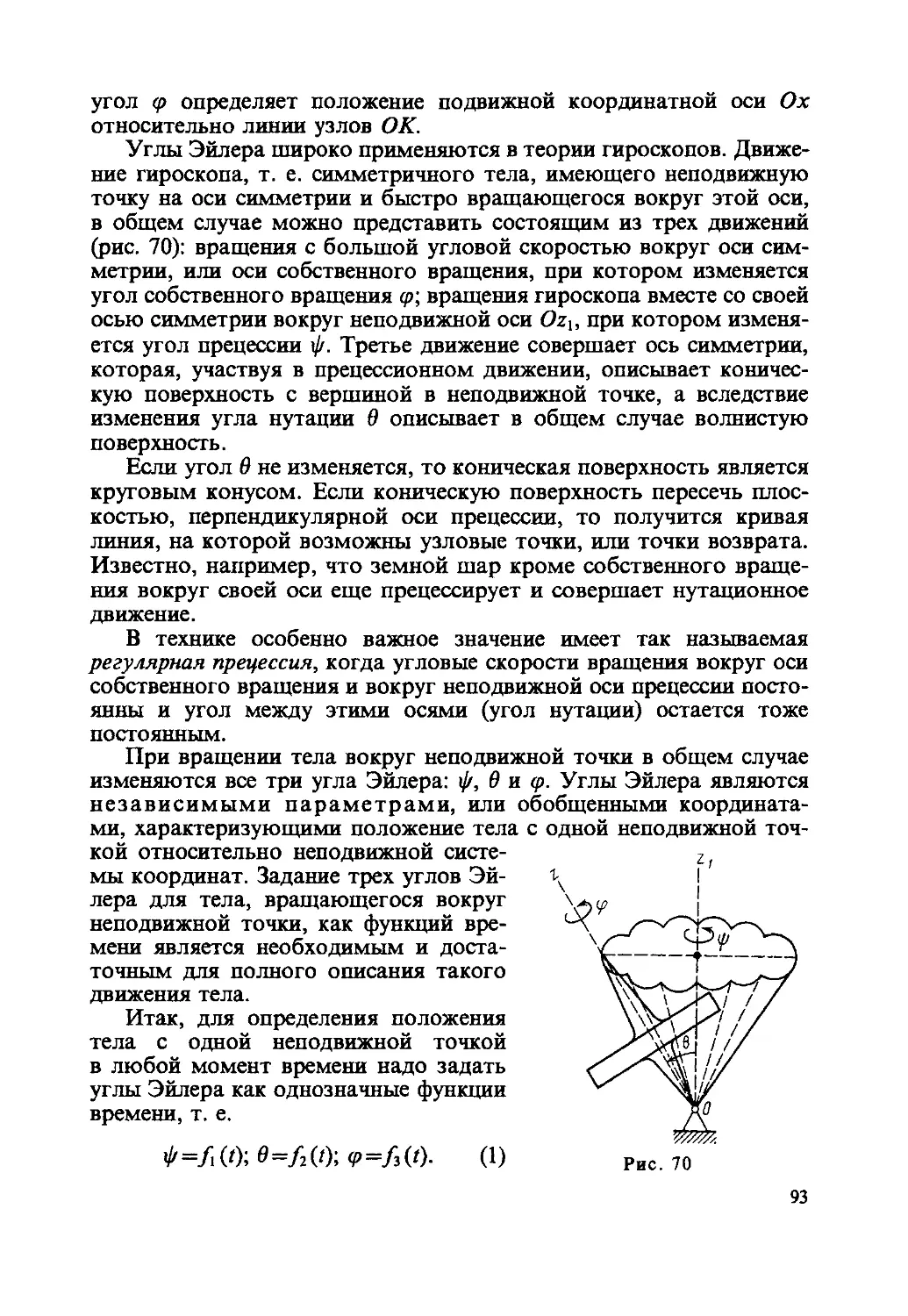














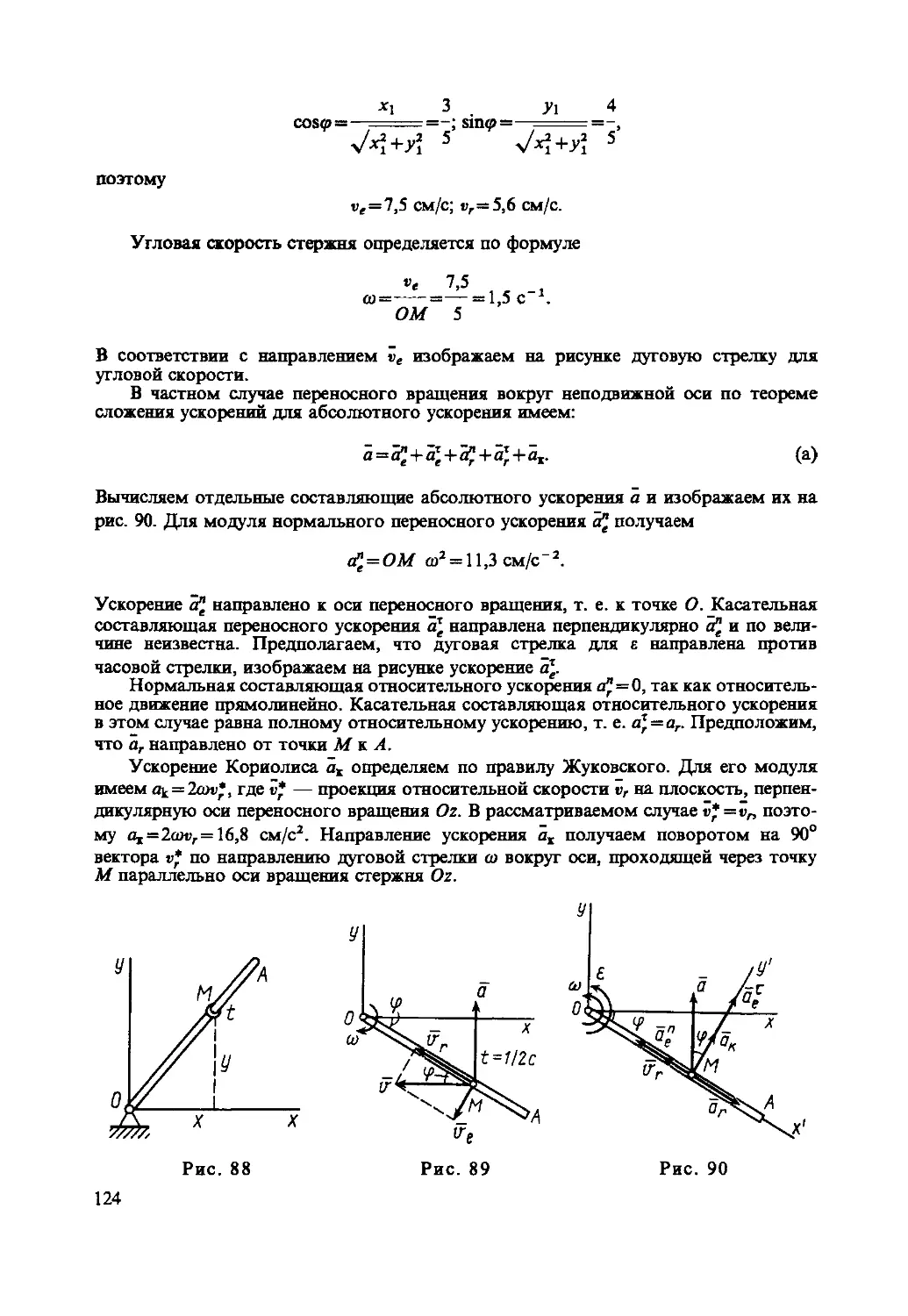

























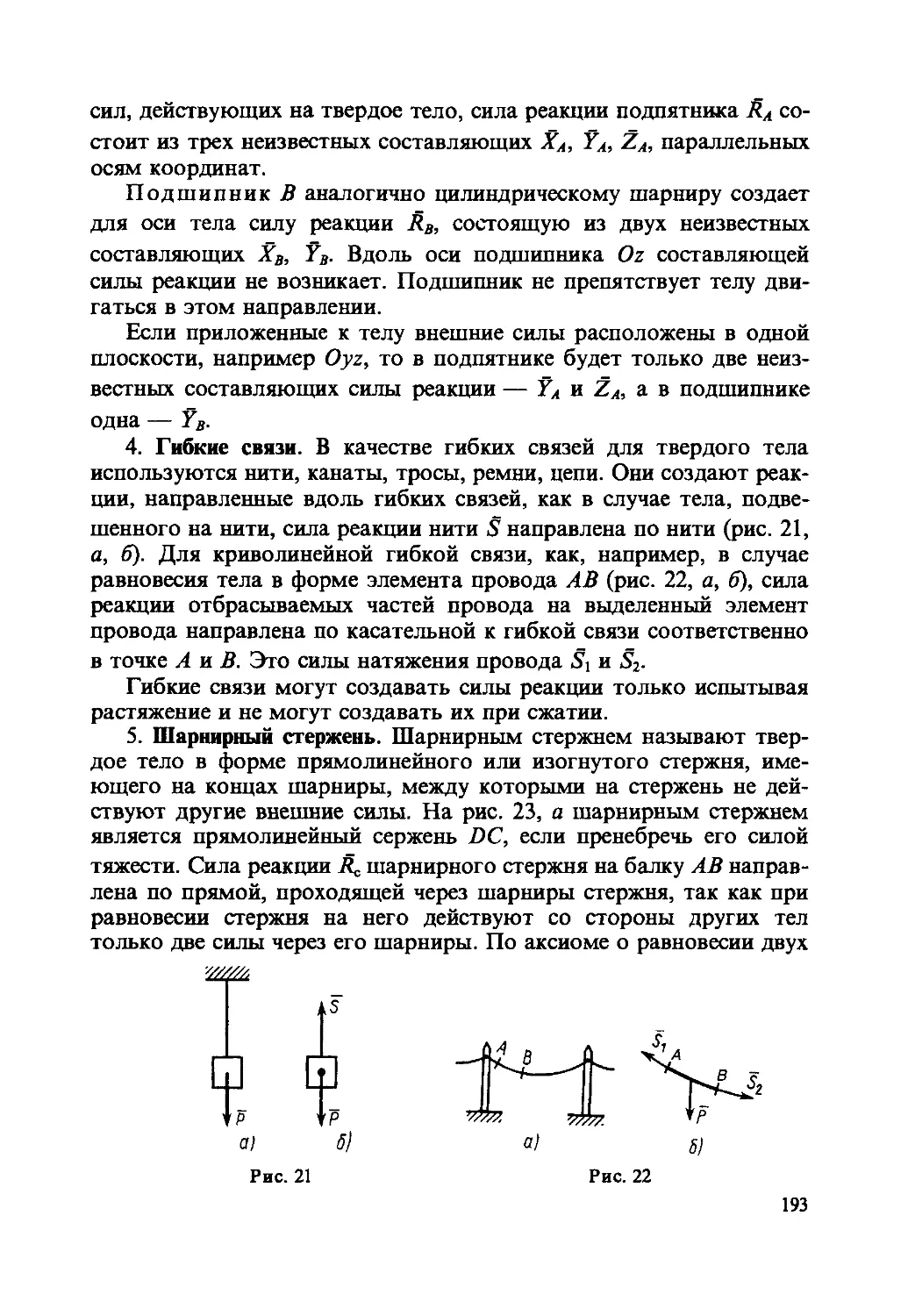



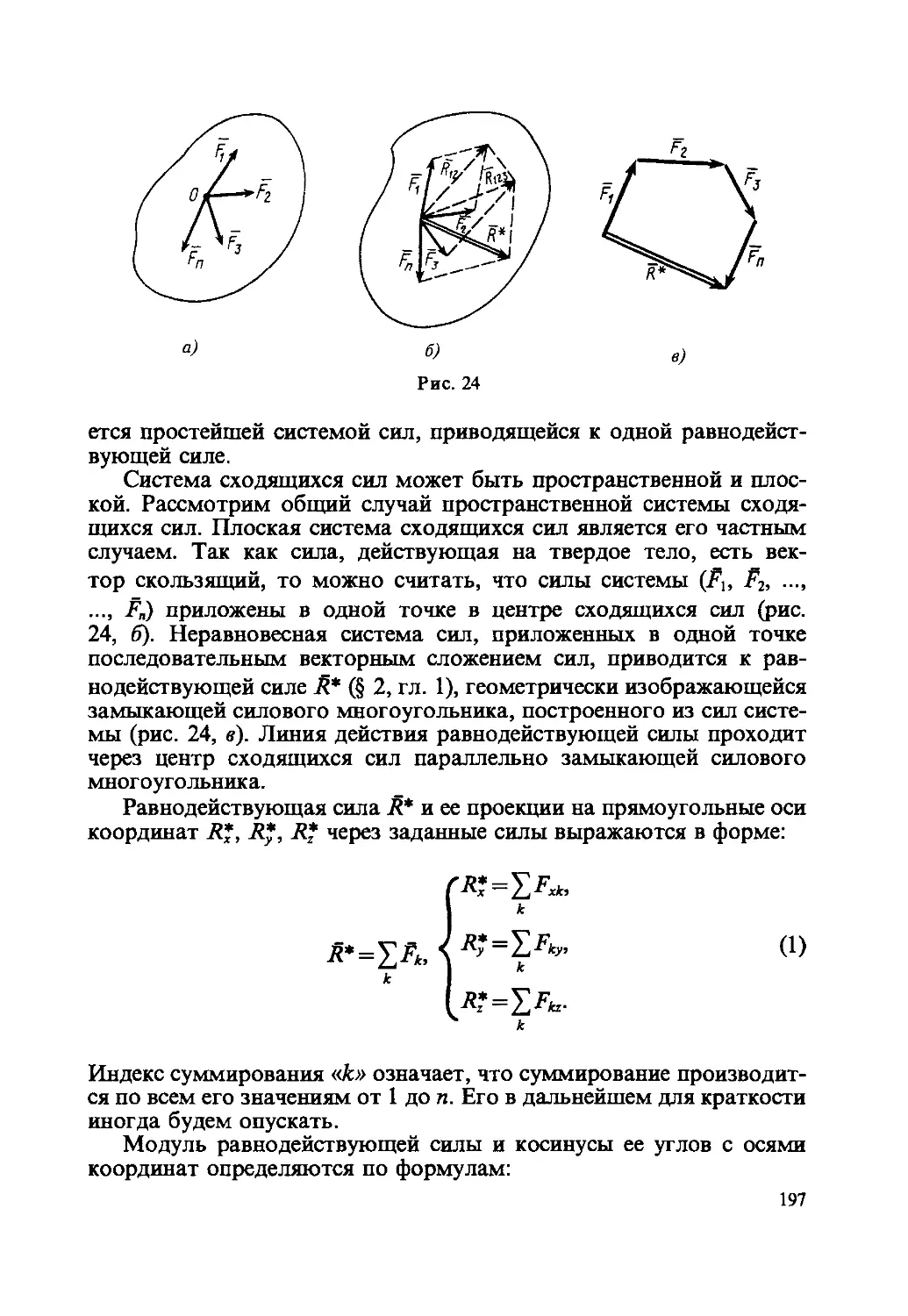

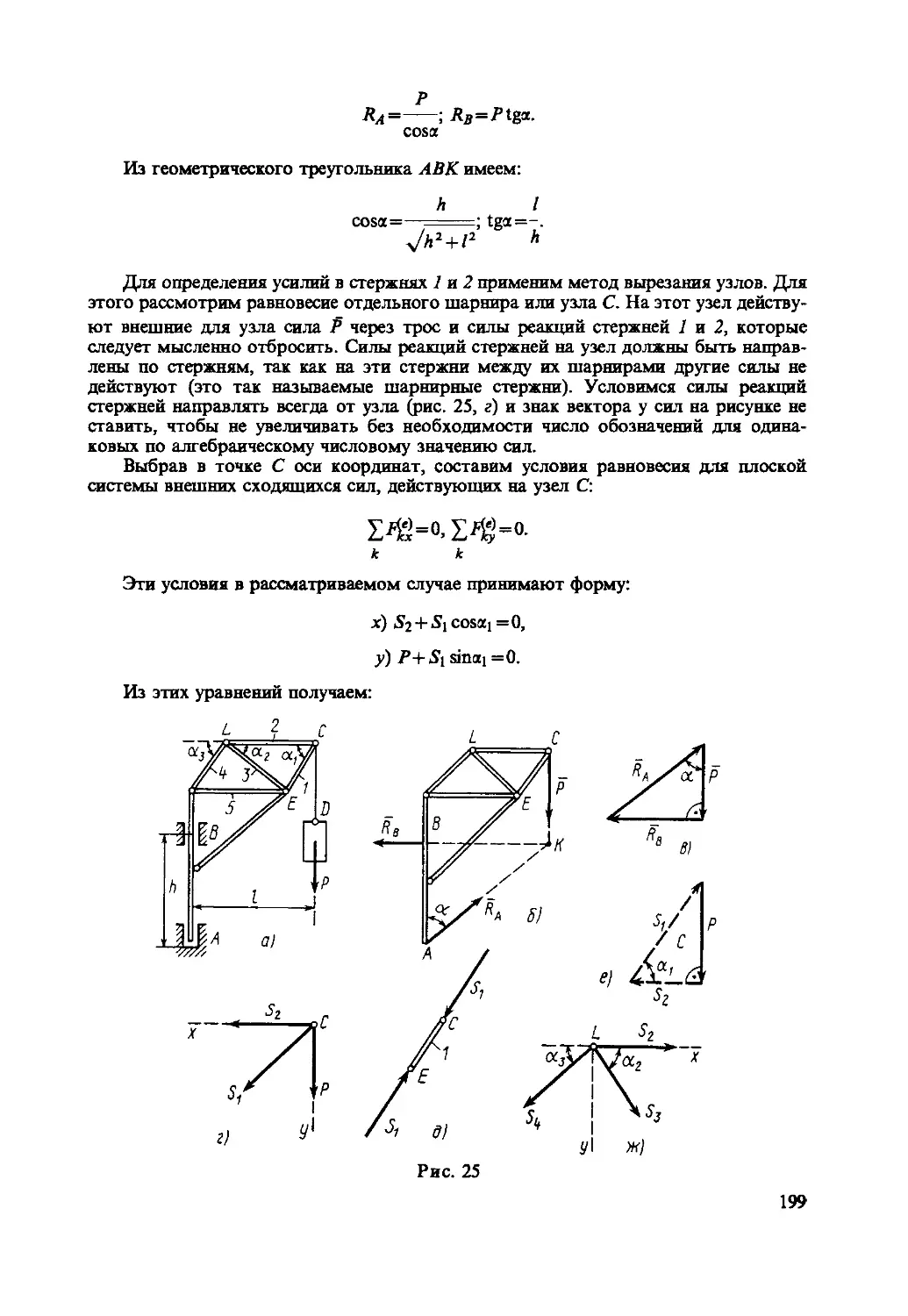


















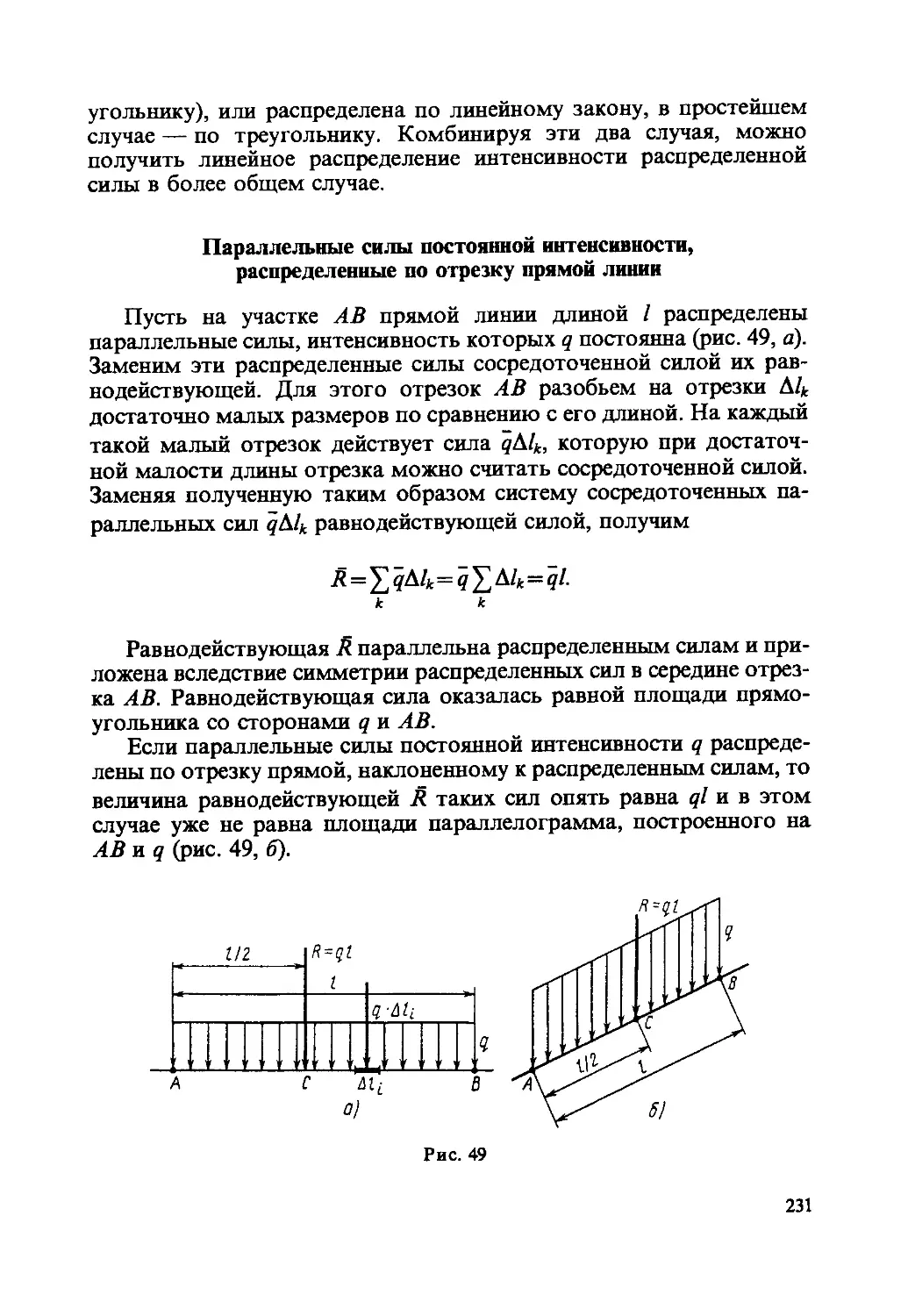
































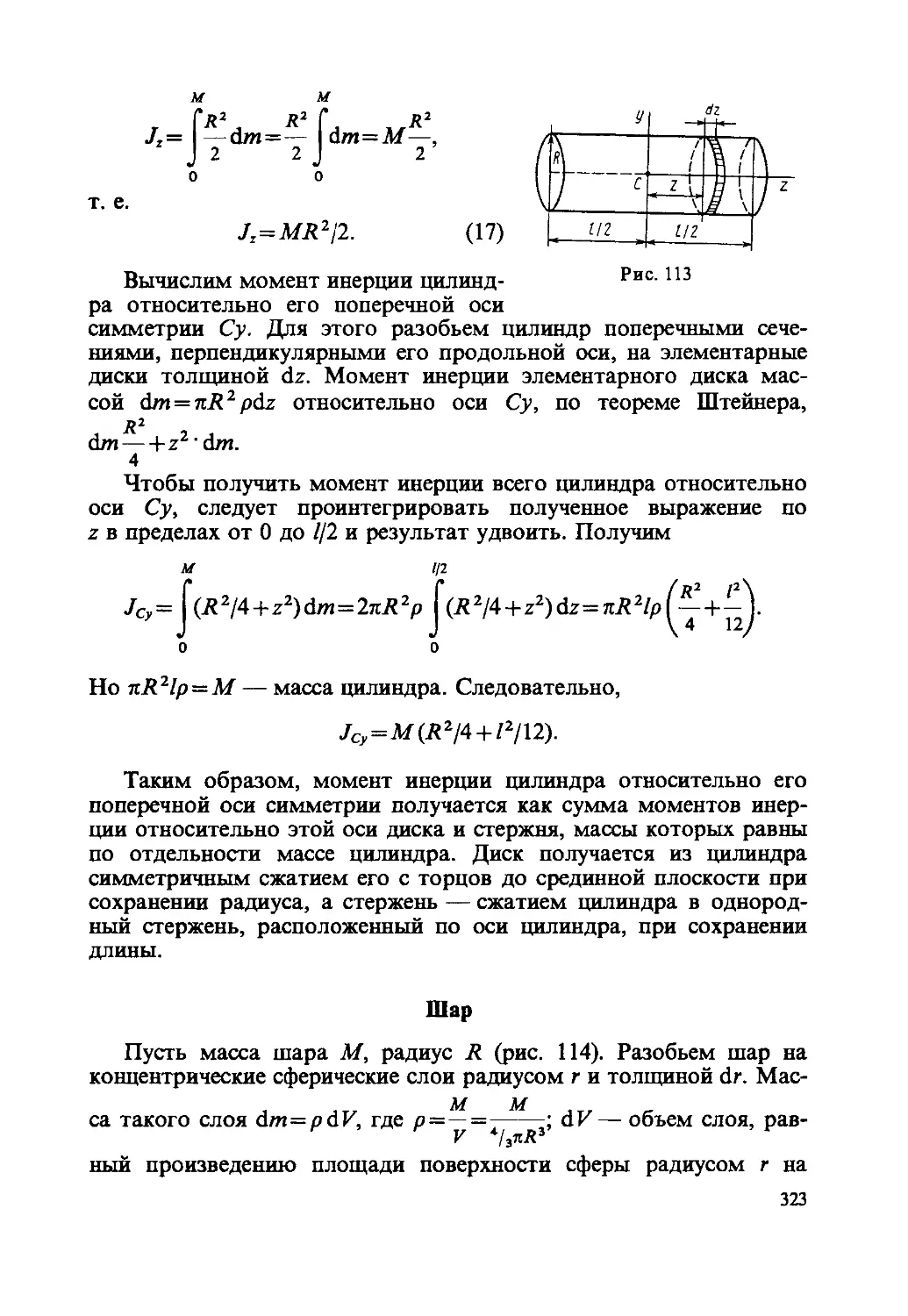
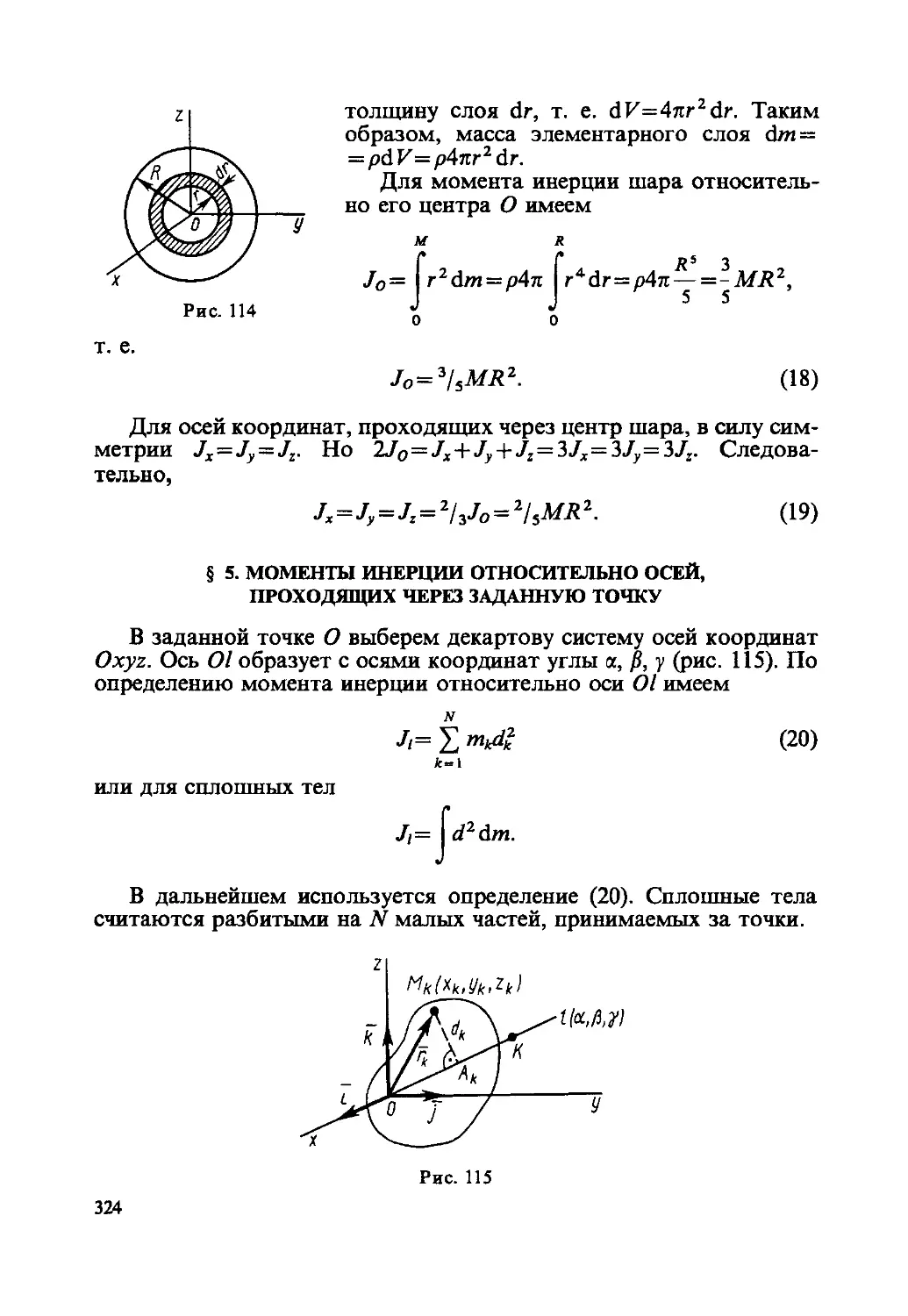

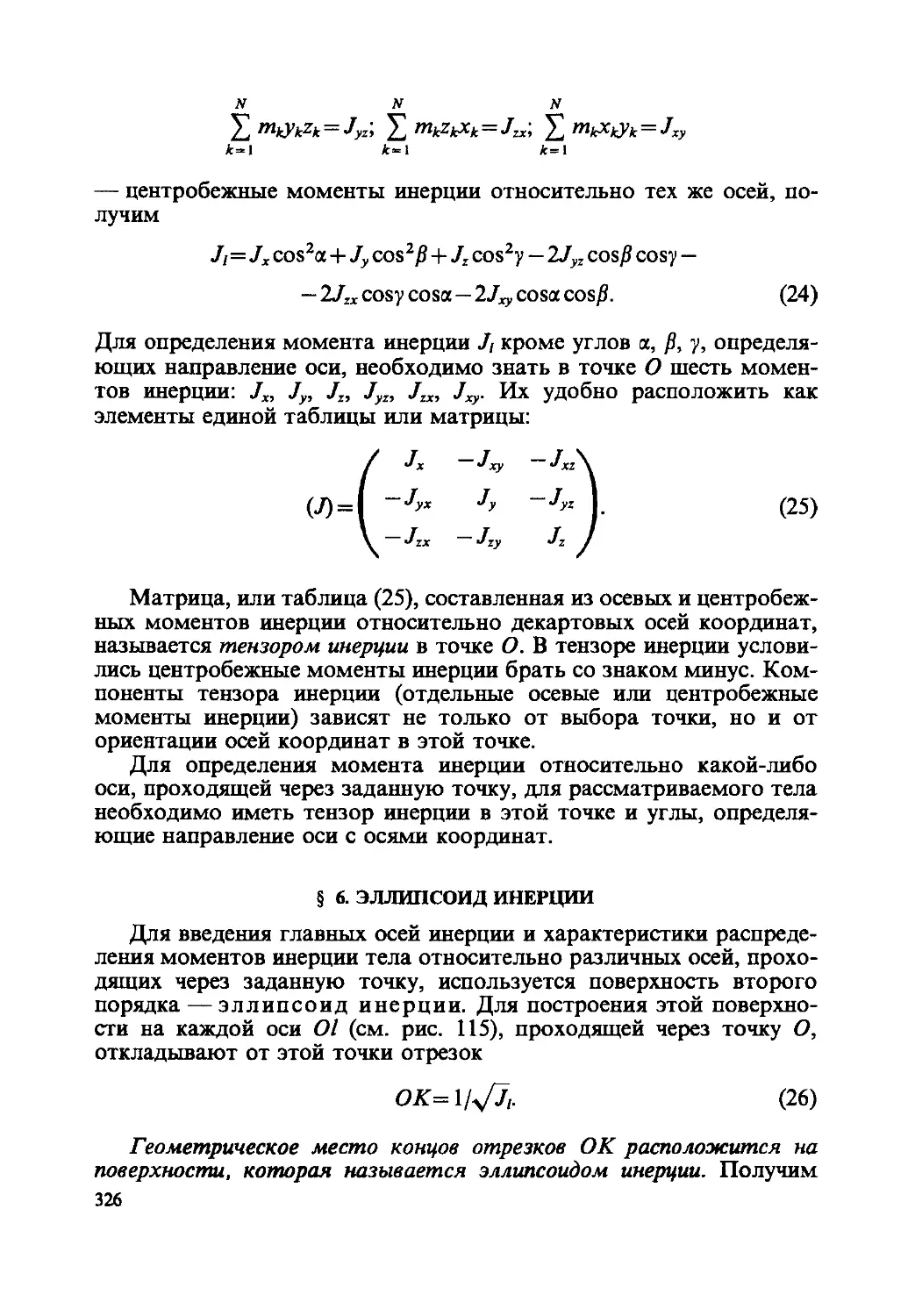
























































































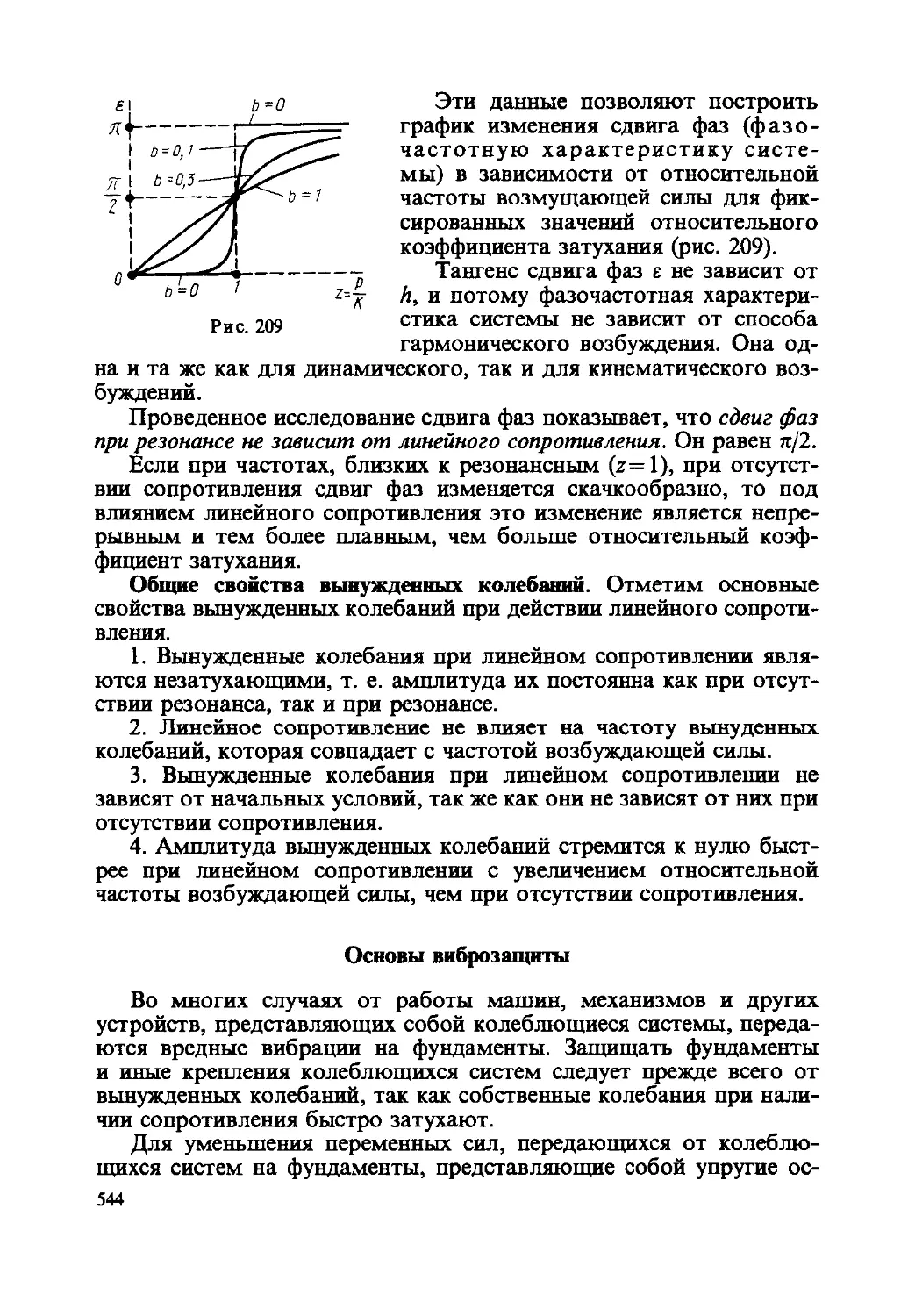























































































Text
Н. Н. НИКИТИН
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
УЧЕБНИК
Издание восьмое,
стереотипное
♦ САНКТ-ПЕТЕРБУРГ ♦
♦ МОСКВА ♦
♦ КРАСНОДАР ♦
2011
ББК22.21я73
Н 62
Никитин Н. Н.
Н 62 Курс теоретической механики: Учебник. 8-е изд., стер. —
СПб.: Издательство «Лань», 2011. — 720 с.: ил. — (Учебни-
ки для вузов. Специальная литература).
ISBN 978-5-8114-1039-2
В основу курса положен многолетний опыт преподавания теоретиче-
ской механики в МГТУ им. Н. Э. Баумана. Тщательный подбор теорети-
ческого материала и примеров позволяет использовать учебник для са-
мостоятельного изучения без дополнительного применения руководств
по решению задач. Начиная с 6-го издания, статика и динамика излага-
ются совместно в разделе «Динамика» на основе новой формы основных
аксиом динамики.
Учебник предназначен для студентов вузов, обучающихся по техни-
ческим направлениям подготовки и специальностям.
ББК22.21я73
Обложка
А. Ю. ЛАПШИН
Охраняется законом РФ об авторском праве.
Воспроизведение всей книги или любой ее части
запрещается без письменного разрешения издателя.
Любые попытки нарушения закона
будут преследоваться в судебном порядке.
© Издательство «Лань», 2011
© Н. Н. Никитин, наследники, 2011
© Издательство «Лань»,
художественное оформление, 2011
ПРЕДИСЛОВИЕ К ШЕСТОМУ ИЗДАНИЮ
Настоящий курс теоретической механики предназначен для сту-
дентов высших технических учебных заведений, готовящих инжене-
ров-конструкторов и исследователей различных технических специ-
альностей. Он может использоваться также студентами других спе-
циальностей.
В основу курса положен многолетний опыт преподавания те-
оретической механики в МГТУ им. Н. Э. Баумана.
Относительная краткость курса требовала тщательного отбора
теоретического материала и примеров, поясняющих основные раз-
делы курса, и наиболее рационального способа их изложения. В ки-
нематике, в шестом издании курса, при выводе формул для скоро-
стей и ускорений точек при плоском движении и движении свобод-
ного твердого тела используется только дифференцирование век-
торов без применения сложного движения точки. Это позволяет
несколько сократить объем этих разделов и изложить сложное
движение точки более компактно и в одном месте.
Наиболее существенное и давно назревшее изменение претер-
пела статика. Она излагается теперь в общем разделе с динамикой,
почти сразу после основных аксиом динамики, изложенных в новой
форме. Такое изложение позволяет получить уравнения равновесия
сил, приложенных к твердому телу, в форме следствий основных
аксиом динамики без постулирования их очевидности. При этом
естественно устанавливается, что условия равновесия сил получены
для твердого тела, находящегося в равновесии или движении по
инерции только относительно инерциальной системы отсчета. При
раздельном изложении статики и динамики выяснить это весьма
затруднительно.
Раздельное изложение статики и динамики сложилось историчес-
ки. Все, что открывалось о свойствах сил, относилось к статике,
насчитывающей тысячелетия своего развития. Основы современной
динамики имеют срок развития всего немногим более 300 лет.
Предпринимавшиеся попытки получить уравнения равновесия сил
из общих теорем динамики не приемлемы, так как эти уравнения
требуются значительно раньше для практических занятий.
Вывод уравнений равновесия сил, приложенных к твердому телу,
сразу после основных аксиом динамики позволил логически более
3
стройно изложить раздел о свойствах сил, приложенных к твер-
дому телу.
Новая форма основных аксиом динамики используется ограни-
ченно. Вместо нее в дальнейшем изложении применяется следствие
из новых первых двух аксиом в форме основного уравнения движе-
ния точки. Принцип Даламбера при этом естественно переходит
в новую основную аксиому Даламбера.
В динамике точки добавлен раздел о первых интегралах при
прямолинейном движении точки под действием силы, зависящей от
времени, координаты и скорости по отдельности.
В теории колебаний системы дополнительно рассмотрены вылу-
женные движения системы под действием периодического и произ-
вольного возбуждения.
Произведены и другие добавления и редакционные изменения
в различных разделах, обусловленные эволюцией курса теоретичес-
кой механики.
В шестом издании курса добавлены новые примеры, взамен
старых, с целью проиллюстрировать на примерах более полно все
основные методы решения задач в теоретической механике. На-
стоящий курс при таком подборе примеров может быть исполь-
зован для самостоятельного изучения теоретической механики без
дополнительного применения руководств по решению задач.
В шестом издании сохранены главы по механике сплошной
среды в кинематике и динамике.
Автор
ВВЕДЕНИЕ
Все явления природы представляют собой движения различных
форм материи. В теоретической механике рассматриваются только
механические движения материальных объектов, состоящих из ве-
щественных форм материи, таких, как различные твердые матери-
альные тела, их системы и в более общем случае сплошные среды
с непрерывным распределением вещества в части пространства.
Материальность тел в теоретической механике характеризуется
массой и другими величинами, связанными с ней, понятия которых
вводятся в динамике.
Одним из простейших движений материи является механичес-
кое движение — перемещение материальных объектов в простра-
нстве с течением времени без изменения их физических свойств
в процессе движения. Механическое движение обычно входит со-
ставной частью в более сложные виды движения материи.
Пространство, время, как и материя, являются сложными поня-
тиями. В теоретической механике используются упрощенные моде-
ли пространства и времени. Пространство считается трехмерным
евклидовым пространством, обладающим всеми геометрическими
свойствами евклидовой геометрии.
Время считают универсальным, не связанным с пространством
и движением системы отсчета, в которой оно используется для
оценки движения материальных объектов. Его характеризуют про-
должительностью какого-либо периодического процесса, например,
периодом вращения Земли или хода часов.
В теоретической механике широко используются упрощенные
модели реальных механических движений материальных объектов,
абстрактные понятия, связанные с построенными моделями.
Изучение механических движений в теоретической механике про-
изводится путем использования положений математики и ее мето-
дов, основанных на применении законов логики.
Теоретическая механика имеет в своей основе небольшое число
аксиом или законов, имеющих опытное происхождение. Из этих
аксиом путем построения моделей, введением новых понятий и ис-
пользованием законов логики получают следствия в виде теорем
и уравнений движения материальных объектов в удобной для прак-
тического применения в науке и технике форме.
5
Теоретическая механика не является наукой, закончившей свое
развитие. Она все время развивается. По мере накопления и углу-
бления наших знаний выявляются границы применимости даже
основных положений теоретической механики, относительность ее
понятий. Выяснилось, что аксиомы классической механики, впервые
предложенные Ньютоном, не абсолютны, а имеют свои границы
применимости и даже в границах применимости требуют изменения
и уточнения как по форме, так и по содержанию для прида-
ния теоретической механике логической стройности и непротиворе-
чивости.
Для материальных объектов, скорости движения которых близ-
ки к скорости распространения света, вместо классической механики
следует применять механику специальной теории относительности.
Классическая теоретическая механика ограниченно применима для
изучения движения таких материальных объектов малых размеров,
как электрон, протон и другие, для изучения движения которых
требуется применять квантовую механику.
Сама форма аксиом Ньютона обладает рядом недостатков.
Аксиомы должны быть независимы. Первая аксиома инерции Нью-
тона получается как частный случай второй, основной аксиомы.
Особенно много споров вызвало утверждение Ньютона, что инер-
ция материальных тел является внутренним свойством самих мате-
риальных тел. При оценке этого свойства инерции силой инерции
возникает ряд противоречий и даже парадоксов, как, например,
гравитационный парадокс. Положение, что сила инерции возникает
из-за свойства пространства оказывать сопротивление движущимся
телам, снимает все противоречия. Еще Э. Мах, критикуя аксиомы
Ньютона, считал, что инерция материальных тел связана с действи-
ем на эти тела материальных объектов Вселенной, т. е. зависит от
звезд.
Теоретическая механика широко применяется в технике (авиа-
ции, космонавтике, машиностроении, кибернетике и т. д.). На базе
теоретической механики возникли и успешно развиваются многие
науки, такие, как сопротивление материалов, теория упругости,
гидродинамика, газовая динамика и др. В этих науках обычно
к законам механики добавляются другие законы, характеризующие
дополнительные свойства материальных тел. В сопротивлении ма-
териалов и теории упругости учитывается деформация тел и добав-
ляется закон Гука о связи деформаций с силами.
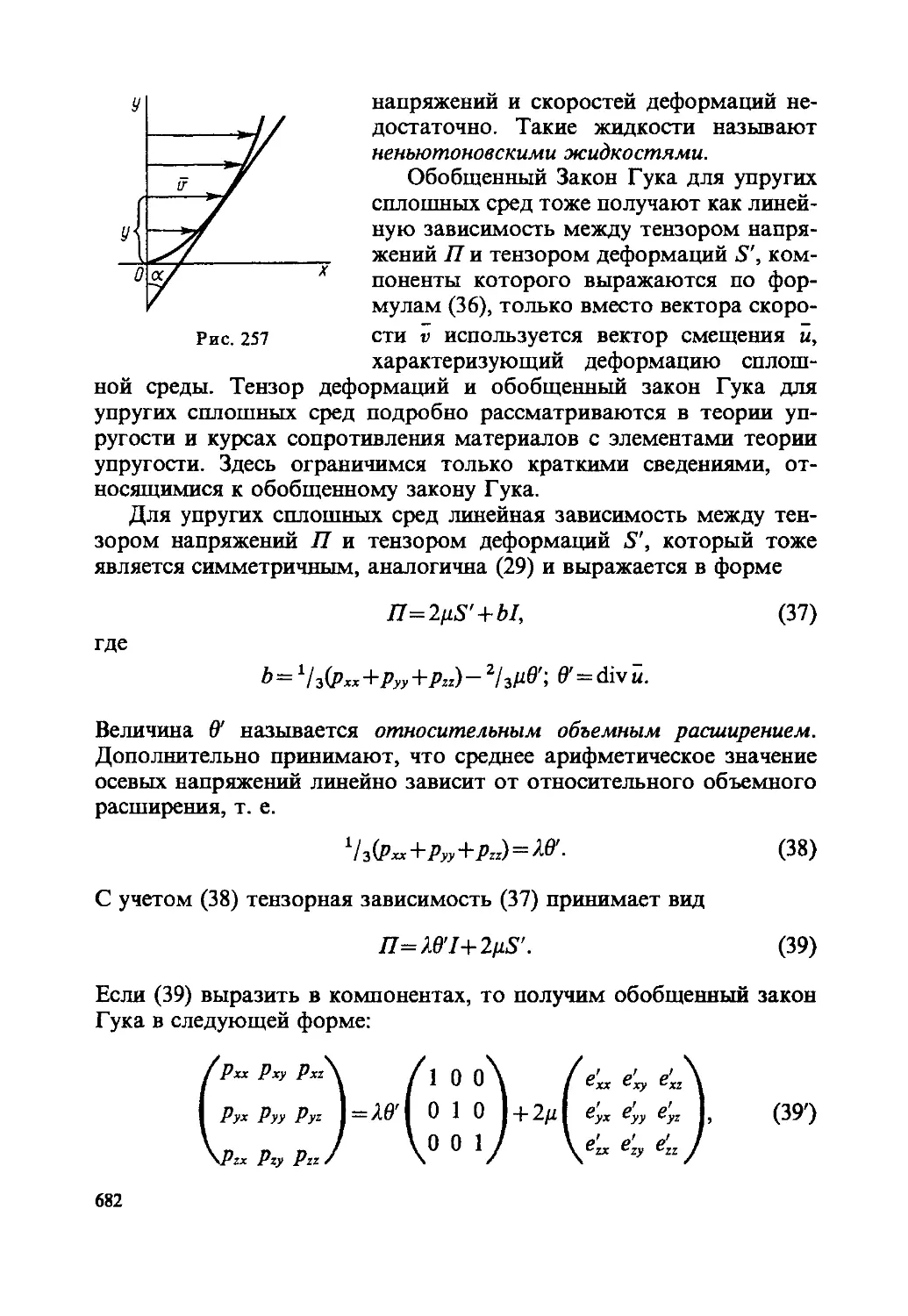
В гидродинамике учитывается скорость деформации и использу-
ется дополнительный закон о связи скоростей деформации и сил.
В газовой динамике, кроме того, учитывается сжимаемость газа.
Теоретическая механика имеет свою историю становления зако-
нов и понятий. Она создавалась вместе с развитием техники под
непосредственным влиянием развития производительных сил обще-
6
ства и всей человеческой культуры. Теоретическая механике берет
свое начало в глубокой древности, задолго до нашей эры.
Наибольший вклад в основу современной теоретической меха-
ники внесли великие ученые Галилей (1564 — 1642) и Ньютон
(1643 — 1727). Дальнейшее развитие теоретической механики связа-
но с именами многих ученых, наиболее выдающиеся из которых
Гюйгенс (1629 — 1695), Даламбер (1717 — 1783), Эйлер (1707 —
1783), Лагранж (1736 — 1813) и многие другие.
Большой вклад в развитие современной механики внесли русские
ученые, такие, как М. В. Остроградский (1801 — 1862), Н. Е. Жу-
ковский (1847 — 1921), С. В. Ковалевская (1850 — 1891), А. М. Ля-
пунов (1851 — 1918), К. Э. Циолковский (1857 — 1935) и другие.
Своими исследованиями и открытиями они в значительной мере
содействовали развитию механики и ее приложений в технике
и естествознании.
Теоретическая механика делится на три части: кинематику, ста-
тику и динамику. В кинематике изучают чисто геометрические
формы механических движений материальных объектов без учета
условий и причин, вызывающих и изменяющих эти движения, т. е.
без учета взаимодействия движущихся материальных объектов
с другими материальными объектами, которые в теоретической
механике выражаются в форме сил. Материальные объекты, движе-
ние которых рассматривается в кинематике, это материальная точ-
ка, абсолютно твердое тело и сплошная среда.
Материальной точкой в теоретической механике называют мате-
риальное тело любой формы, размерами которого в рассматрива-
емой задаче можно пренебречь и принять его за геометрическую
точку.
Абсолютно твердым телом, или просто твердым телом называ-
ют любую совокупность материальных точек, расстояние между
которыми не изменяется при любых взаимодействиях.
В сплошной среде материальные точки распределены непрерыв-
но. Типичными сплошными средами являются сплошные твердые
тела, деформируемые и недеформируемые, жидкости и не очень
разреженные газы.
В статике при раздельном ее изложении рассматривались усло-
вия равновесия сил, приложенных к покоящимся материальной
точке и абсолютно твердому телу, а также свойства сил, действу-
ющих на точки абсолютно твердых тел, и некоторые другие воп-
росы, не имеющие прямого отношения к статике, но включенные
в нее вследствие истории развития теоретической механики, насчи-
тывающей тысячелетия.
Пока не было динамики, все вновь открытое в механике от-
носилось к статике.
В динамике изучаются механические движения материальных
объектов при их взаимодействиях, т. е. под действием сил. Основ-
7
ные положения динамики насчитывают немногим более трехсот лет
своего развития.
Материальные объекты движутся по-разному относительно раз-
личных тел отсчета или систем отсчета. Они могут двигаться от-
носительно одних систем отсчета и покоиться относительно других.
Целесообразно равновесие материальных объектов рассматривать
как частный случай их движения и включить часть статики, рассмат-
ривающую равновесие, в динамику. Остальную часть вопросов,
ранее включавшихся в статику, можно также отнести к динамике.
Они не имеют прямого отношения к статике. В настоящем издании
статика и динамика объединены в один общий раздел «Динамика»
и все, что рассматривалось в статике, включено в динамику. Таким
образом теоретическая механика стала делиться только на две
части: кинематику и динамику.
РАЗДЕЛ I
КИНЕМАТИКА
ВВЕДЕНИЕ
В кинематике изучается механическое движение материальных
объектов (точки, твердого тела, сплошной среды) без рассмотрения
причин, вызывающих или изменяющих это движение. Такое изучение
движения материальных объектов не требует учета материальных
характеристик этих объектов — массы, моментов инерции и др.
В кинематике рассматривают такие характеристики движения,
как скорость и ускорение точки, угловые скорость и ускорение
твердого тела и др.
Движение материальных объектов, в частности материальной
точки, совершается в пространстве при изменении времени. Про-
странство в классической механике считается эвклидовым, не зави-
сящим от времени и движущихся в нем материальных объектов.
Время принимается универсальным, не связанным с пространством
и не зависящим как от движения наблюдателя, с точки зрения
которого рассматривается движение материального объекта, так
и от движения самого материального объекта.
Движение материального объекта всегда следует рассматривать
относительно какого-либо твердого тела — тела отсчета, т. е.
движение является относительным. С телом отсчета скрепляют
систему осей координат, например декартовых, принимая ее за
систему отсчета, относительно которой рассматривается движе-
ние материального объекта. Системой отсчета для трехмерного
эвклидова пространства не может служить одна точка, линия или
плоскость, а должны быть три оси, не обязательно прямолинейные,
но не лежащие в одной плоскости.
Независимость времени от движения означает, что во всех систе-
мах отсчета, произвольно движущихся друг относительно друга,
оно одно и то же, если за начало отсчета выбрано общее для них
событие.
В кинематике сплошной среды телами отсчета, относительно
которых рассматривается движение, могут быть также деформиру-
емые тела.
В курсе теоретической механики обычно изучаются движение
точки и твердого тела. Соответственно кинематика делится на
кинематику точки и кинематику твердого тела. В настоящем курсе
дополнительно излагаются также основы кинематики сплошной
среды.
9
ГЛАВА 1
КИНЕМАТИКА ТОЧКИ
В кинематике точки рассматриваются характеристики движения
точки, такие, как скорость, ускорение, и методы их определения при
различных способах задания движения. Важным в кинематике точки
является понятие траектории. Траекторией точки называется
геометрическое место ее последовательных положений
в пространстве с течением времени относительно рас-
сматриваемой системы отсчета.
По виду траекторий движения точки делятся на прямолинейные
и криволинейные. Форма траектории зависит от выбранной систе-
мы отсчета. Одно и то же движение точки может быть прямоли-
нейным относительно одной системы отсчета и криволинейным
относительно другой. Например, если с летящего горизонтально
Земли с постоянной скоростью самолета отцеплен груз, то, прене-
брегая сопротивлением воздуха и учитывая только действие силы
тяжести, получим в качестве траектории движения центра масс
груза относительно самолета прямую линию, а относительно Зем-
ли -— параболу.
§ 1. СКОРОСТЬ точки
Одной из основных характеристик движения точки является ее
скорость относительно выбранной системы отсчета, которая изоб-
ражена в виде декартовой прямоугольной системы координат
(рис. 1).
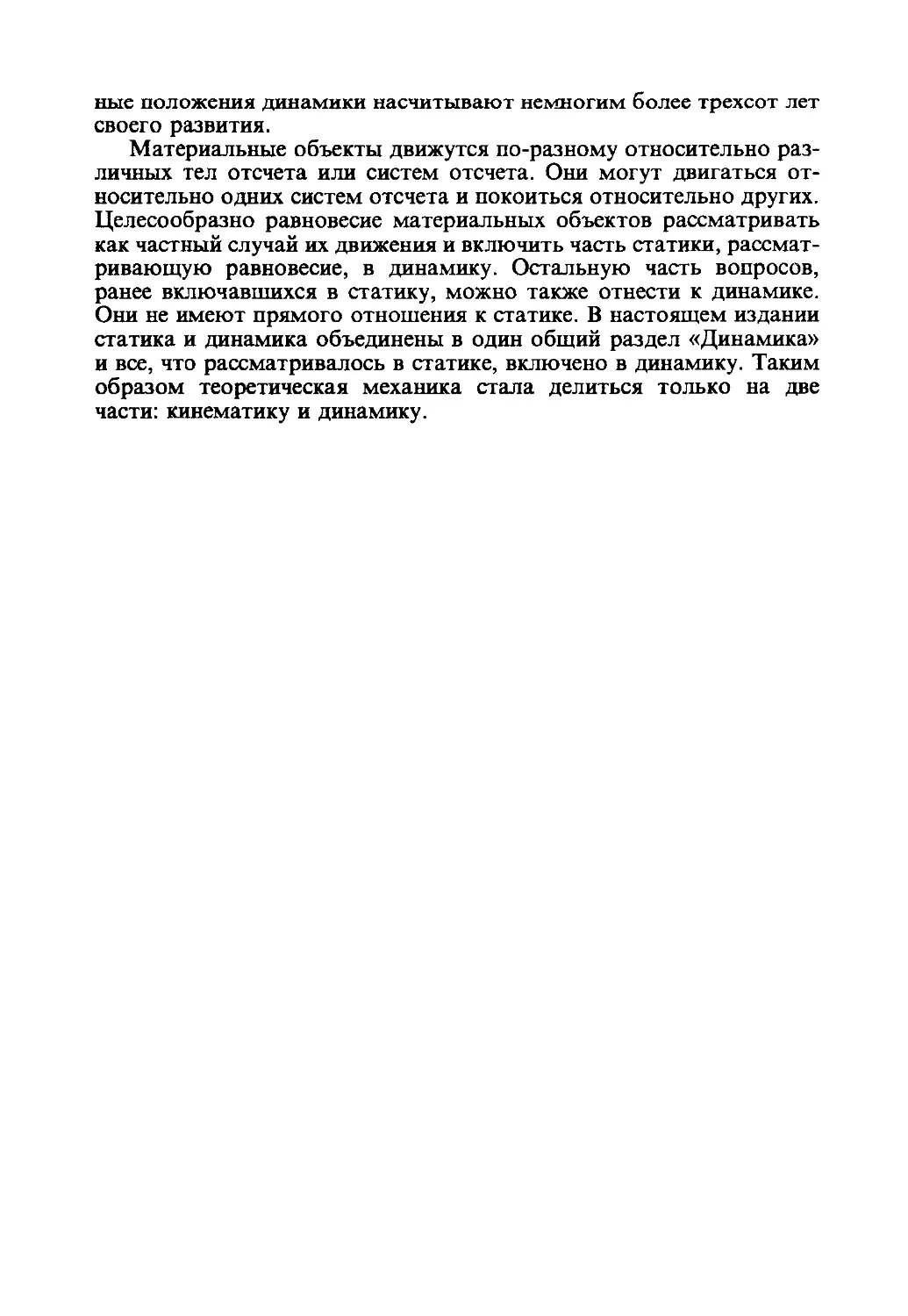
Положение движущейся точки М относительно рассматривае-
мой системы отсчета определяется в момент времени t радиусом-
вектором г, который соединяет неподвижную точку О с этой точкой.
В другой момент времени Ц = t+At движущаяся точка займет поло-
жение М\ и ее радиусом-вектором будет й- За время At радиус-
вектор движущейся точки изменится на Ar—ri — r.
Средней скоростью йр точки за время At называют отношение
Аг/At, т. е.
«ср = Аг/Дл
Средняя скорость параллельна вектору Аг. В общем случае она
зависит от времени осреднения At. У нее нет конкретной точки
приложения на траектории.
10
Введем скорость точки v в мо-
мент t, которая определяется как предел
средней скорости, если промежуток вре-
мени, за который определяется средняя
скорость, стремится к нулю, т. е.
v = lim «ср = lim Аг/At=dr/dt,
Л/—О Д/-»0
или
Рис. 1
т. е. скоростью точки называется первая производная от
радиуса-вектора точки по времени. Радиус-вектор точки
М должен быть проведен из любой неподвижной точки системы
отсчета.
Скорость точки направлена в сторону ее движения по предель-
ному направлению вектора Аг при At, стремящемся к нулю, т. е. по
предельному направлению секущей ММХ, которая совпадает с каса-
тельной к траектории в точке М, т. е. скорость точки направ-
лена по касательной к траектории в сторону движения
точки.
На рис. 1 представлен случай, в котором радиусом-вектором
является также р с началом в точке О'. Радиусы-векторы г и р име-
ют одинаковые изменения Аг и Ар за время At и поэтому
v = dr/dl=dp/dt.
Размерность скорости и СИ получаем из (1):
[и] = длина/время=м/с.
Часто скорость выражают в км/ч; км/ч=3,6 v м/с.
Для характеристики переменного вектора используют понятие
его годографа. Годографом вектора называют геометрическое ме-
сто его концов, если переменный вектор в различные моменты време-
ни откладывать от одной и той же общей точки.
Траектория точки, очевидно, является годографом радиуса-век-
тора г или р (см. рис. 1). Последовательные положения вектора г в
различные моменты времени откладываются в этом случае от точки
О, а вектора р — от точки О'.
Первая производная по времени от радиуса-вектора есть ско-
рость точки, направленная по касательной к траектории, т. е. парал-
лельно касательной к годографу радиуса-вектора.
И
Параллельно касательной к годографу направлена пе-
рвая производная по скалярному аргументу от любого
переменного вектора.
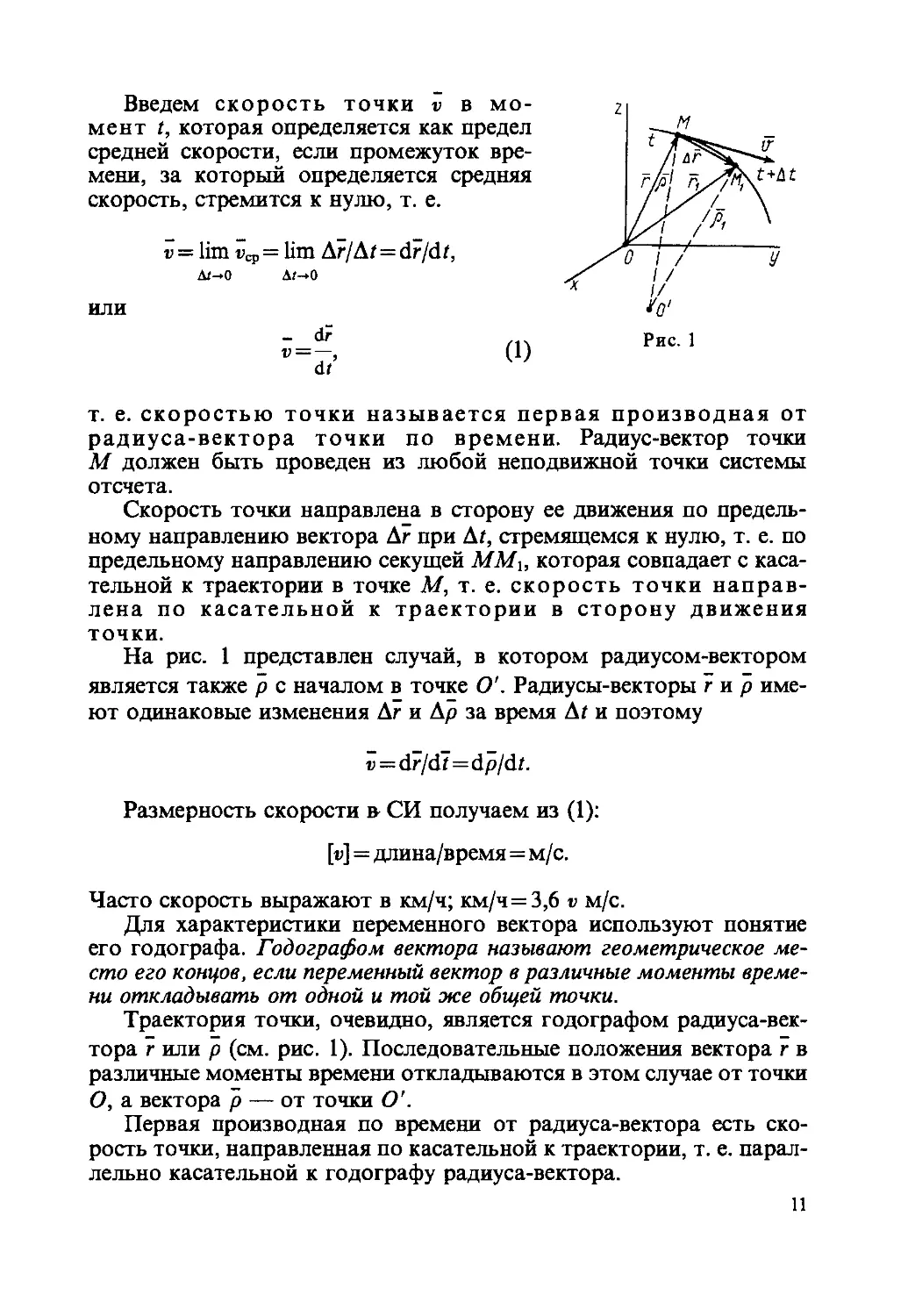
Годографом вектора скорости является линия, на которой рас-
полагаются концы этого вектора в различные моменты времени,
если их начала совместить в одной общей точке. Для построения
годографа вектора скорости выбираем точку, например Ot (рис. 2,
б), и начала векторов скорости для различных моментов времени
переносим в эту точку, не изменяя их величин и направлений.
Каждой точке траектории М (рис. 2, а) будет соответствовать своя
изображающая точка М' на годографе вектора скорости (см. рис. 2,
б). Масштаб для скоростей при построении годографа вектора
скорости может быть выбран отличным от масштаба для скоро-
стей, изображаемых в точках траектории. При движении точки по
траектории соответствующая ей изображающая точка движется по
годографу вектора скорости.
При равномерном движении точки по прямой годографом век-
тора скорости является одна точка; при неравномерном движе-
нии — отрезок прямой, параллельный траектории.
§ 2. УСКОРЕНИЕ ТОЧКИ
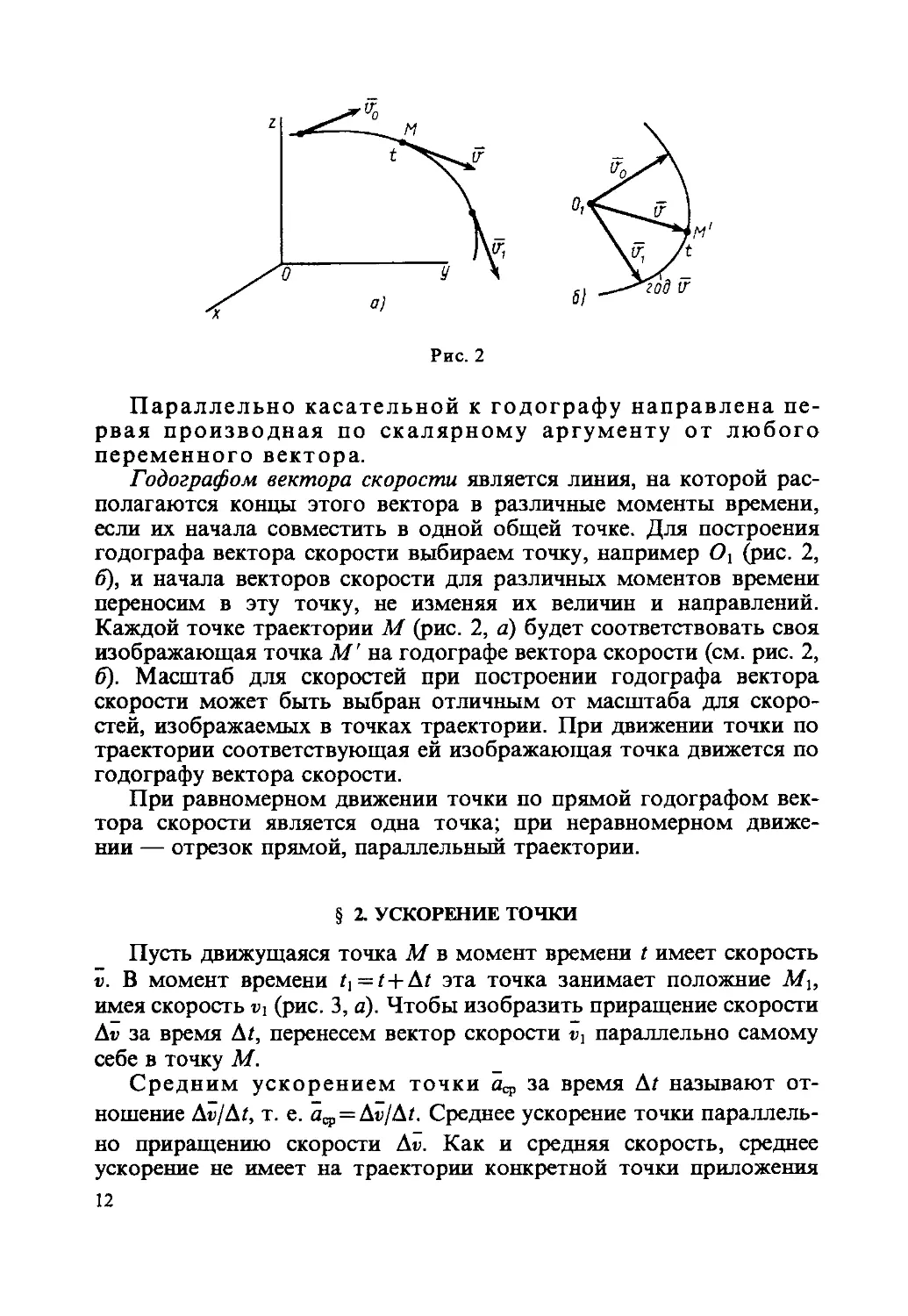
Пусть движущаяся точка М в момент времени t имеет скорость
V. В момент времени /] = /+А/ эта точка занимает положние
имея скорость (рис. 3, а). Чтобы изобразить приращение скорости
Ди за время Д/, перенесем вектор скорости v} параллельно самому
себе в точку М.
Средним ускорением точки а^ за время Д/ называют от-
ношение Дг/Д1, т. е. аф = Дй/Д/. Среднее ускорение точки параллель-
но приращению скорости Д«. Как и средняя скорость, среднее
ускорение не имеет на траектории конкретной точки приложения
12
и изображено в точке М условно. В общем случае среднее ускорение
зависит от времени Ас
Ускорением точки а в момент времени t называют предел,
к которому стремится среднее ускорение при Az, стремящемся к ну-
лю, т. е.
а = lim Од, = lim Av/Az=dv/dz,
Дг->0 Дг->0
или
_ de
а=—.
dt
(2)
Таким образом, ускорение точки равно первой производной по време-
ни от скорости точки.
Приращение скорости Av и, следовательно, среднее ускорение
направлено внутрь вогнутости траектории. Так же направлены и их
предельные значения при А/, стремящемся к нулю. Поэтому ускоре-
ние точки направлено тоже внутрь вогнутости траектории. Кроме
того, ускорение как первая производная по времени от скорости, по
свойству годографа вектора, параллельна касательной к годографу
вектора скорости (рис. 3, б).
Размерность ускорения в СИ получаем из (2):
[а] =[v]/[z] =скорость/время=м/с2 = м' с “ 2.
§ 3. ВЕКТОРНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Движение точки относительно рассматриваемой системы отсче-
та при векторном способе изучения движения задается радиусом-
вектором г этой точки (рис. 4). Движение точки считается заданным,
если известен радиус-вектор движущейся точки как функция време-
ни, т. е.
13
r^r(t).
(3)
Задание векторного уравнения движе-
ния (3) полностью определяет движение
точки.
Траекторией точки является годограф ра-
диуса-вектора. Скорость точки направлена
по касательной к траектории и вычисляется,
согласно ее определению, по формуле
v = dr/dt = г. (4)
Для ускорения точки соответственно имеем
а = dv/dt = d2r/dt 2 = r.
(5)
Таким образом, если движение точки задано векторным способом,
то скорость и ускорение вычисляются по формулам (4) и (5).
Определение скорости и ускорения точки сводится к чисто мате-
матической задаче вычисления первой и второй производных по
времени от радиуса-вектора этой точки. Для практического вычис-
ления скорости и ускорения обычно используют координатный
и естественный способы изучения движения. Векторный способ вви-
ду его краткости и компактности удобен для теоретического изло-
жения кинематики точки.
§ 4. КООРДИНАТНЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Задание движения и траектория
Движение точки можно изучать используя любую систему коор-
динат. Рассмотрим случай декартовых прямоугольных осей коор-
динат, которые являются также системой отсчета, относительно
которой рассматривается движение точки. Движение точки в декар-
товых координатах считается заданным, если известны координаты
точки как непрерывные, дважды дифференцируемые функции време-
ни (рис. 5), т. е. заданы уравнения движения точки в декар-
товых координатах:
(6)
Уравнения движения точки в декартовых координатах полностью
определяют движение точки. Они позволяют найти положение точ-
ки, ее скорость и ускорение в любой момент времени. Уравнения
движения (6) есть также уравнения траектории точки в пара-
метрической форме. Параметром является время t. Уравнения
14
траектории в координатной форме из (6) получают исключе-
нием параметра t. Исключая время, например, из первых двух
уравнений и затем из второго и третьего, получим уравнения двух
поверхностей:
Ft(x, у) = 0, Ft (у, z)=0.
Это и есть уравнения траектории в координатной форме. Траек-
торией является линия пересечения двух поверхностей. Эти поверх-
ности являются цилиндрическими, так как их уравнения не содер-
жат одной из координат: первое — координаты z, второе — коор-
динаты х. Ось первой цилиндрической поверхности параллельна оси
Oz, второй — оси Ох.
Исключая время из уравнений движения в другом порядке,
получим траекторию точки как линию пересечения двух других
цилиндрических поверхностей, например
Ft (х, у)—0, Fs (х, z)=0.
При исключении параметра t из уравнений движения могут быть
получены отрезки линий или точки, которые не содержатся в урав-
нениях (6). Эти дополнительные точки не следует считать точками
траектории.
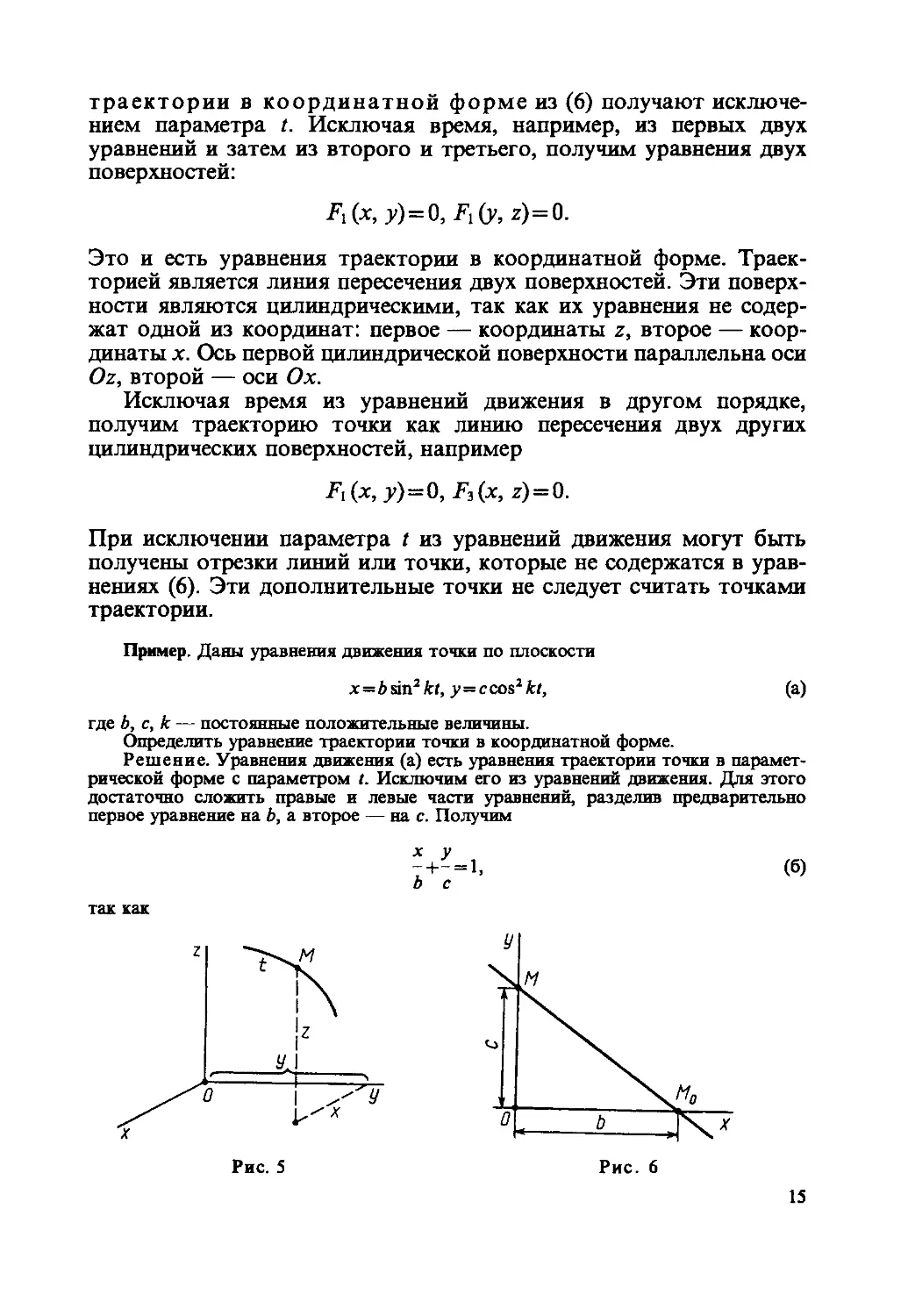
Пример. Даны уравнения движения точки по плоскости
x=bwi2kt, y=cccs2kt, (а)
где Ь, с, к — постоянные положительные величины.
Определить уравнение траектории точки в координатной форме.
Решение. Уравнения движения (а) есть уравнения траектории точки в парамет-
рической форме с параметром t. Исключим его из уравнений движения. Для этого
достаточно сложить правые и левые части уравнений, разделив предварительно
первое уравнение на Ь, а второе — на с. Получим
X у
-+-=1. (6)
b с
так как
15
sin2 кг + cos2 к/= 1.
Уравнение (б) есть уравнение прямой, отсекающей на осях координат отрезки
b и с (рис. 6). Из уравнений (а) следует, что координаты точки х и у все время
положительны и удовлетворяют условиям 0<х^Л, О^у^с. Точки прямой, для
которой х>Ь, у>с, не содержатся в уравнениях движения (а). Они дополнительно
появились при исключении из уравнений параметра I. Их не следует включать
в траекторию.
Траектория точки в координатной форме выражается уравнением и двумя
неравенствами
х у
-+- = 1 0<х</>, 0<у<с.
b с
Геометрически она изображается отрезком М^М-
Скорость в декартовых координатах
Разложим радиус-вектор и скорость точки на составляющие,
параллельные осям координат (рис. 7). Получим
r=xi+yj+zk; v=vxi+vJtj+vik, (7)
где х, у, z — координаты точки Л/; г, j, к — единичные векторы осей
координат; vx, vy, vz — проекции скорости на оси координат.
Учитывая (7), согласно определению скорости, имеем
v — dr/dt = (d/df) (xi+yj+zk) = xi+yj+zk, (8)
так как i, j, к не изменяются при движении точки М. Точки над х, у,
z означают их производные по времени. Сравнивая (7) и (8), получа-
ем для проекций скорости на декартовы оси координат следующие
формулы:
vx=dx/dt=x', vy=dy/dt=y', vz=dz/dt=z. (9)
Проекция скорости точки на какую-либо координатную ось равна
первой производной по времени от соответствующей координаты
этой точки. По проекциям определяют числовое значение (модуль)
скорости и косинусы углов вектора скорости с осями координат:
v = |V| = ^jv2 + v2 + v2 = ^X2+y2 + z2-, COS (у, Л х) = vx/v = x/v,)
COS (г ^y) = Vy/v=y/v, COs(uA z) = vzlv = zjv. J (10)
Если точка движется в плоскости, то, выбрав оси координат Ох
и Оу в этой плоскости, получим:
16
z=const=0, vz = z=O, vx=x, vy=y;
v = xi+yj.
Соответственно
v = \/x2+y2; cos (у,л x)=x/v;
cos(«,л у)=у jv.
Для прямолинейного движения точ-
ки координатную ось, например Ох,
направляют по траектории (рис. 8). То-
гда у=const = 0 и z=const = 0, у = 0,
z=0. Проекция скорости и ее модуль
определяются по формулам
vx = x, v= |х|.
Рис. 8
Уравнение годографа вектора скорости
Известны уравнения движения точки в декартовых координатах.
Получим уравнения годографа вектора скорости. На рис. 9, а изоб-
ражены траектория точки и несколько векторов скорости в выбран-
ном масштабе для различных моментов времени, а на рис. 9,
б представлен годограф вектора скорости этого движения. Точке
М(х, у, z) на траектории соответствует точка Af1(x1, Zj) на
годографе вектора скорости.
Координаты точки согласно определению годографа, выра-
жаются через проекции вектора скорости на оси координат О^у^
по формуле
xi=vXi; yi z,=vZi.
Если оси координат для годографа вектора скорости параллельны
соответствующим осям координат, относительно которых заданы
уравнения движения точки, то
vx,=vx=x; Vyt=vy—y; vXi=vz=z.
Параметрические уравнения годографа вектора скорости принима-
ют такую форму:
xt = x; yi=y; Z[=z.
Исключая из этих уравнений параметр t, получим уравнения годог-
рафа вектора скорости в координатной форме.
17
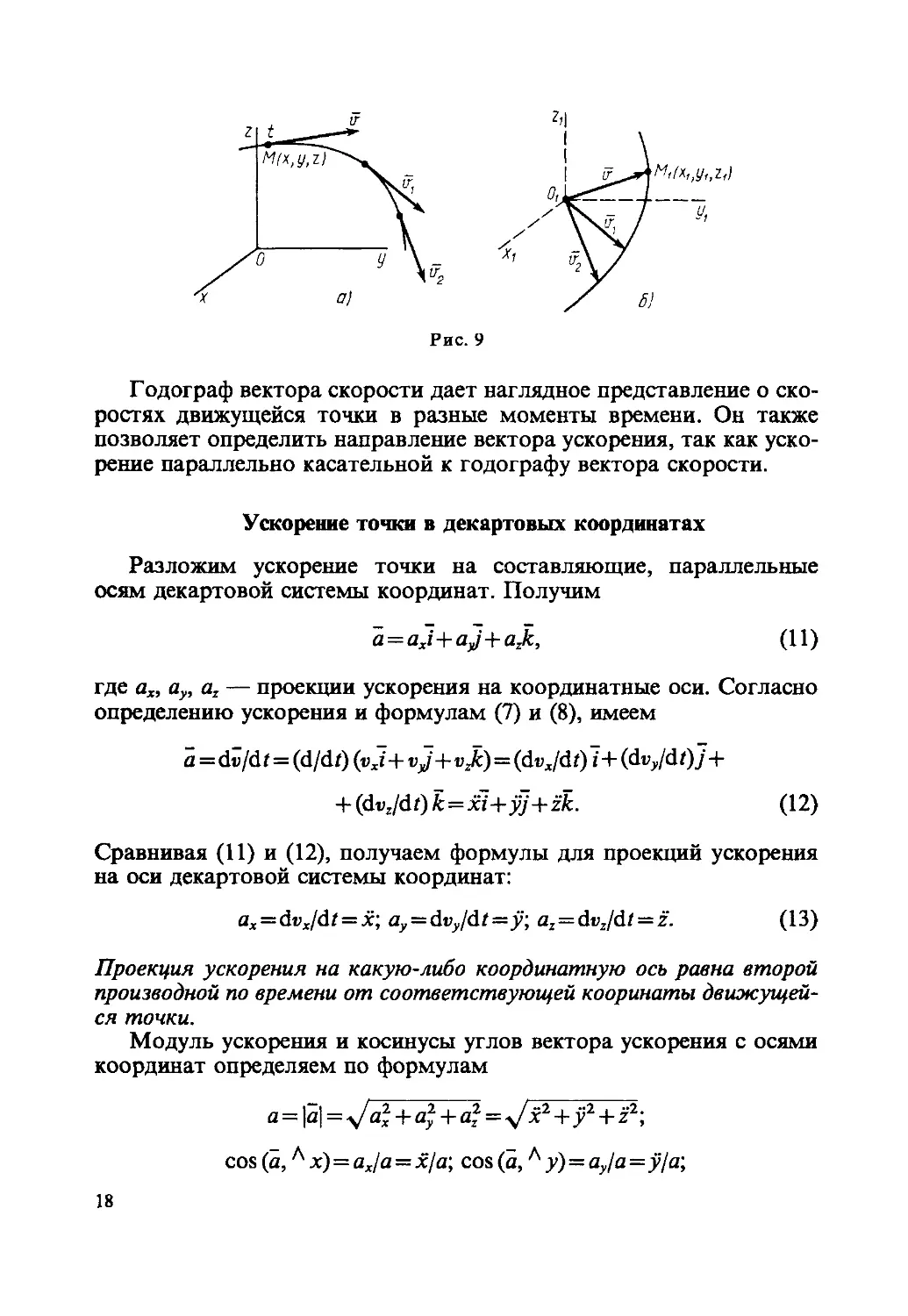
Г одограф вектора скорости дает наглядное представление о ско-
ростях движущейся точки в разные моменты времени. Он также
позволяет определить направление вектора ускорения, так как уско-
рение параллельно касательной к годографу вектора скорости.
Ускорение точки в декартовых координатах
Разложим ускорение точки на составляющие, параллельные
осям декартовой системы координат. Получим
а = axi+aj+ajc, (11)
где ах, ау, az — проекции ускорения на координатные оси. Согласно
определению ускорения и формулам (7) и (8), имеем
а=dv/dt=(d/df) (yxi+vj+vjc)=(dvx/df) i+(dvy/dt)j+
+ (dvz/dt)k=xi+yj+zk. (12)
Сравнивая (11) и (12), получаем формулы для проекций ускорения
на оси декартовой системы координат:
ax=dvx/dt=x; ay = dvy/dt=y; az=dvz/dt = z. (13)
Проекция ускорения на какую-либо координатную ось равна второй
производной по времени от соответствующей кооринаты движущей-
ся точки.
Модуль ускорения и косинусы углов вектора ускорения с осями
координат определяем по формулам
а = |а| = у/ах+ау +az = ^/x2+y2 + z2;
cos (а,Л х)=ах/а = х/а; cos (а,Л у)=ау/а=у/а;
18
cos (а, л z) = az/a = z/a.
При движении точки по плоскости оси Ох и Оу выбирают в этой
же плоскости. Тогда z = const=0, az=z=0. Формулы для ускорения
и его проекций на оси координат примут вид
a = xi+yj; ах=х; ау=у.
Соответственно
а=^/х2+у2; cos (а,Л х) = x/a; cos (а,л у)=у/а.
Для прямолинейного движения ось Ох направим по траектории
точки. Тогда у=const = 0, z=const = 0 и ay=y=0, az-z = Q. Формулы
для ускорения и его проекции на ось Ох принимают вид
a=xi; ах=х.
Соответственно для модуля ускорения имеем
а=|х|.
Пример. Движение точки по плоскости Оху задано уравнениями
x=/>sinaH; у=dcos cot,
где b, d, со — постоянные положительные величины. Определить уравнение траек-
тории в координатной форме, значения скорости и ускорения точки в момент
л
времени /=—, а также уравнение годографа вектора скорости.
2<о
Решение. Уравнение траектории в координатной форме находим исключением
времени из уравнений движения. Для этого поделим первое уравнение на Ь, второе —
на d, возводим в квадрат и складываем. Получим уравнение эллипса (рис. 10, а)
с полуосями b и d:
х2 у1
Г2^ = 1>
так как
sin2 cot -I- cos2 шГ=1.
л
При t=— точка имеет координаты х=А, у=0, т. е. занимает положение
2со
Мо. Определим проекции скорости и ускорения на оси координат. Имеем:
vx=x=ba> cos cot, vy=y= —dco sin cot,
ax=x= —bco2 sin cot = — co2x, ay = у = — dco2 cos cot = — co2y.
19
Для момента времени t=— получаем:
2ш
i>x = 0, Vy=—daj, v = -s/v2+v2=da>;
ax=—ba>2, ау = 0, a = y/a2+a2=b<o2.
По проекциям устанавливаем направление скорости по касательной к траек-
тории и направление ускорения по радиусу-вектору к точке О. Изображаем эти
векторы в точке Mq и дополнительно в точках М и М\.
Если выбрать для годографа вектора скорости оси и Oiyi параллельными
осям Ох и Оу, то для его текущих координат имеем
*1 =vx=b<ocos(ot, yi =1^= — (/cosinax.
Исключим из этих параметрических уравнений годографа вектора скорости
время I. Получим следующее уравнение годографа в координатной форме:
X2 V2
b2a>2 d2co2
На рис. 10, б отмечены три изображающие точки на годографе M’q, М' и М\,
соответствующие точкам траектории М§, М и М\, а также указаны направления
ускорения в этих точках.
§ 5. ЕСТЕСТВЕННЫЙ СПОСОБ ИЗУЧЕНИЯ ДВИЖЕНИЯ
Естественный способ задания движения
При естественном способе изучения движения задаются траек-
тория и закон движения точки по траектории. Движение точки
рассматривается относительно фиксированной системы отсчета. За-
дание траектории относительно выбранной системы отсчета осуще-
ствляется различными способами: уравнениями (возможно, вместе
с неравенствами), словесно или в виде графика (в каком-либо масш-
табе). Например, можно сказать, что траекторией автомобиля,
20
принимаемого за точку, является дуга окружности радиусом 10 км
и т. д.
Для задания закона движения точки по траектории необходимо
выбрать на траектории точку О, принимаемую за начало отсчета
расстояний (рис. 11). Расстояния в одну сторону от точки О по
траектории считаются положительными (например, вправо), в дру-
гую — отрицательными. Кроме того, следует задать начало от-
счета времени. Обычно за t = 0 принимают момент времени, в кото-
рый движущаяся точка проходит через точку О, или момент начала
движения. Время до этого события считается отрицательным, а по-
сле него — положительным.
Если в момент времени t движущаяся точка занимает положение
М, то закон движения точки по траектории задается зависимостью
от времени расстояния s, отсчитываемого от точки О до точки М,
т. е. s=f(f). Эта функция должна быть непрерывной и дважды
дифференцируемой. Расстояние s берется по траектории, какой бы
сложной ни была форма траектории. Это расстояние не имеет
прямого отношения к пройденному точкой пути за время t, так как
за начало отсчета расстояний может быть выбрана, в частности,
и конечная точка пути. К тому же движение точки может быть
колебательным вокруг начальной точки О.
От задания движения в декартовых координатах можно перейти
к его заданию естественным способом. Закон движения точки по
траектории в дифференциальной форме через декартовы координа-
ты выражается в виде
ds = ^/dx2+dy2+dz2
и после интегрирования — в конечной форме
t t
s=J y/dx2 + dy2 + d^ = y/\f{ (z)]2 + (/)]2 + [Л (Z)]2 dz,
0 0
если заданы
x=/,(z),j=/2(z),^=/3(z).
За начало отсчета расстояний принята t-----------4^
точка траектории, в которой находится 0
движущаяся точка в начальный момент
времени. Знак у квадратного корня опре- \
деляется выбором направления положи- х +
тельных и отрицательных расстояний. Рис. И
21
Скорость точки при естественном способе
задания движения
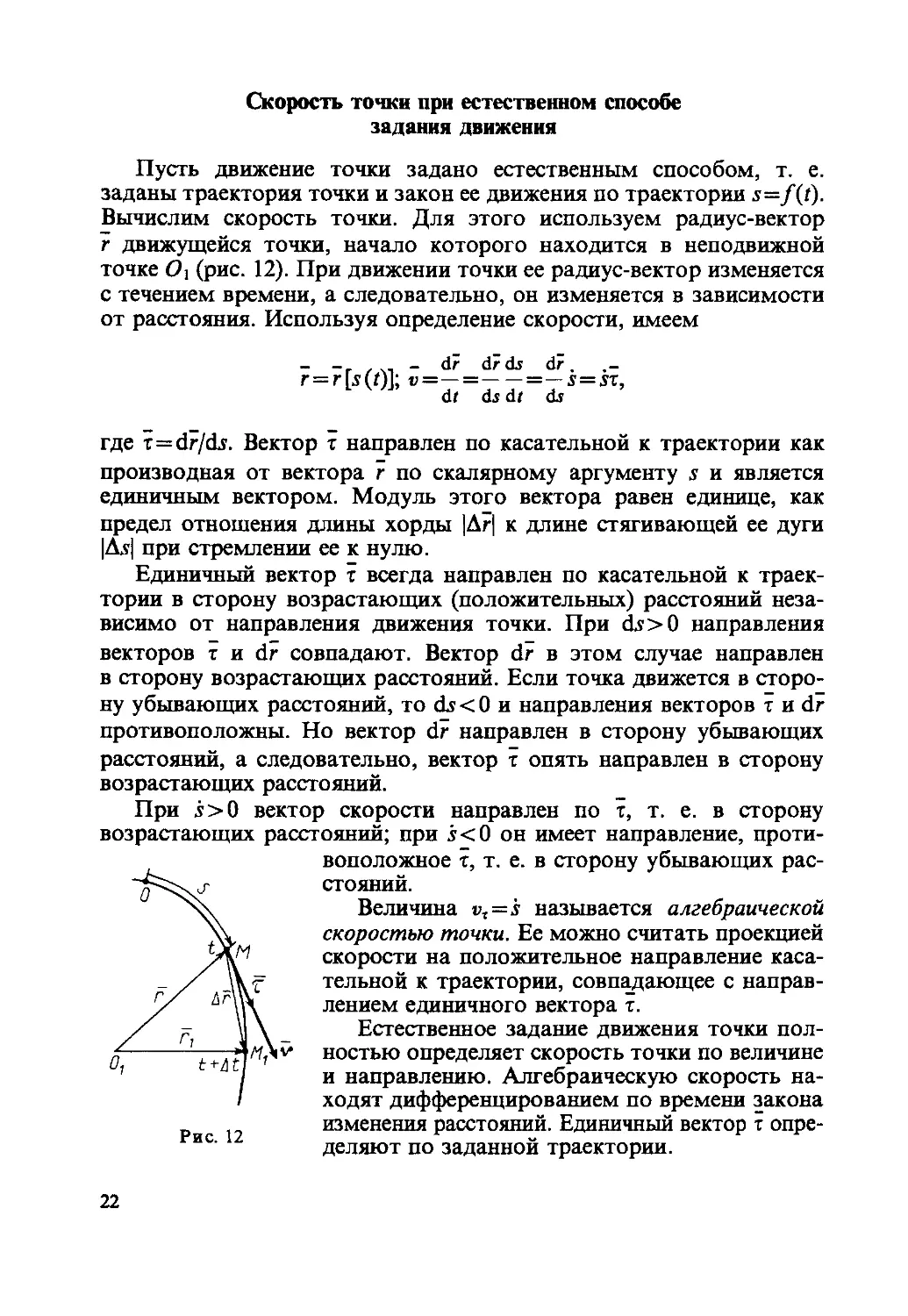
Пусть движение точки задано естественным способом, т. е.
заданы траектория точки и закон ее движения по траектории
Вычислим скорость точки. Для этого используем радиус-вектор
г движущейся точки, начало которого находится в неподвижной
точке О} (рис. 12). При движении точки ее радиус-вектор изменяется
с течением времени, а следовательно, он изменяется в зависимости
от расстояния. Используя определение скорости, имеем
- -г / - dr drds dr.
г—г[su)J; v=—=-------=—s=sx.
dt ds dt ds
где x=dr/ds. Вектор т направлен по касательной к траектории как
производная от вектора г по скалярному аргументу s и является
единичным вектором. Модуль этого вектора равен единице, как
предел отношения длины хорды |Дг| к длине стягивающей ее дуги
|Д.?| при стремлении ее к нулю.
Единичный вектор т всегда направлен по касательной к траек-
тории в сторону возрастающих (положительных) расстояний неза-
висимо от направления движения точки. При <is>0 направления
векторов т и dr совпадают. Вектор dr в этом случае направлен
в сторону возрастающих расстояний. Если точка движется в сторо-
ну убывающих расстояний, то ds < 0 и направления векторов т и dr
противоположны. Но вектор dr направлен в сторону убывающих
расстояний, а следовательно, вектор т опять направлен в сторону
возрастающих расстояний.
При i>0 вектор скорости направлен по т, т. е. в сторону
возрастающих расстояний; при s<0 он имеет направление, проти-
воположное т, т. е. в сторону убывающих рас-
стояний.
Величина vx=s называется алгебраической
скоростью точки. Ее можно считать проекцией
скорости на положительное направление каса-
_ // f тельной к траектории, совпадающее с направ-
\\\ лением единичного вектора т.
./ а \ _ Естественное задание движения точки пол-
ностью определяет скорость точки по величине
’ / и направлению. Алгебраическую скорость на-
/ ходят дифференцированием по времени закона
изменения расстояний. Единичный вектор т опре-
ис’ деляют по заданной траектории.
22
Геометрические понятия. Дифференцирование
единичного вектора
Радиус кривизны и соприкасающаяся плоскость. В точке М кри-
вой линии проведем касательную Мт (рис. 13). В другой близкой
точке кривой Мх, отстоящей от точки М на расстоянии Да, построим
касательную Л/iTj. В общем случае пространственной кривой ка-
сательные Мт и MiTi будут скрещиваться. Проведем в точке
М прямую линию параллельную JWjtj. Угол Д<р между ли-
ниями Мт и Мт\ называется углом смежности. Кривизной кривой
к в точке М называют предел, к которому стремится угол сме-
жности, приходящийся на единицу расстояния Да, при Да стре-
мящемся к нулю, т. е.
к= lim Дд?/ДА=б^/с1А.
Лг-»0
Радиусом кривизны кривой р в точке М называют величину,
обратную кривизне кривой в этой точке, т. е.
р — l/k=ds/dq>.
Вычислим радиус кривизны дуги окружности радиусом R (рис.
14). Дуга окружнсти длиной s, опирающаяся на центральный угол
ср, выражается зависимостью s=Rq>. Для радиуса кривизны имеем
p=ds/dcp = R,
т. е. для окружности радиус кривизны в каждой ее точке один и тот
же и совпадает с радиусом окружности.
Участок кривой из малой окрестности какой-либо ее точки луч-
ше всего аппроксимирует по сравнению с дугами других окружно-
стей элемент дуги окружности, радиус которой равен радиусу кри-
визны кривой в рассматриваемой точке.
Для определения понятия соприкасающейся плоскости
проводим вспомогательную плоскость через две пересекающиеся
23
прямые Мт и Мт\ (см. рис. 13). Предельное положение этой плоско-
сти при совпадении в пределе точки Mt с точкой М называется
соприкасающейся плоскостью кривой в точке М.
В случае плоской кривой соприкасающейся плоскостью для всех
точек кривой является сама плоскость, в которой расположена эта
кривая.
Естественный трехгранник. Построим в точке М кривой линии
естественные оси этой кривой (рис. 15). Первой естественной
осью является касательная Мт. Ее положительное направление
совпадает с направлением единичного вектора касательной т, напра-
вленного в сторону возрастающих расстояний.
Перпендикулярно касательной Мт располагается нормальная
плоскость кривой. Нормаль, расположенная в соприкасающейся
плоскости, называется главной нормалью Мп. Она является линией
пересечения нормальной плоскости с соприкасающейся плоскостью.
По главной нормали внутрь вогнутости кривой направим единич-
ный вектор п. Он определяет положительное направление второй
естественной оси.
Нормаль, перпендикулярная главной нормали, называется би-
нормалью. Единичный вектор Ь, направленный по бинормали так,
чтобы три вектора т, п и Ь образовывали правую систему осей
координат, определит положительное направление третьей естест-
венной оси.
Три взаимно перпендикулярные оси Мт, Мп и Mb, положитель-
ные направления которых совпадают с направлениями единичных
векторов т, п, Ь, называются естественными осями кривой. Эти оси
образуют в точке М естественный трехгранник. При движении
точки по кривой естественный трехгранник движется вместе с точ-
кой как твердое тело, поворачиваясь вокруг вершины, совпадающей
с движущейся точкой.
Дифференцирование единичного вектора. Вычислим производную
от единичного вектора по скалярному аргументу. В кинематике
точки скалярными аргументами обычно являются время и расстоя-
ние по траектории. В качестве единичного вектора выберем т,
направленный по касательной к траектории, и вычислим его произ-
водную по времени.
Производная dr/df перпендикулярна самому единичному век-
тору т. Для доказательства этого используем тождество
Т‘Т=1.
Дифференцируя по времени обе части этого тождества, получим
24
Рис. 15
Рис. 16
Каждый из сомножителей этого выражения не равен нулю, поэтому
векторы dr/d / и г перпендикулярны друг другу. Это справедливо для
любого другого вектора, числовая величина (модуль) которого
постоянна.
Направим по вектору dr/dt единичный вектор п. Тогда
dx/dt= Jd-r/df | п.
(14)
Годографом вектора т является кривая, расположенная на сфере
единичного радиуса, так как единичный вектор изменяется только
по направлению (рис. 16).
По определению модуля производной от вектора имеем
йт .. |Дт|
— =1пп—.
Й* Д;-»01^1
Длина малой хорды |Дт| с точностью до малых величин более
высокого порядка равна длине дуги, которую стягивает хорда, т. е.
]Ат]=1|ДФ|,
где Д<р — угол смежности, опирающийся на эту дугу. Используя это
выражение, получим
Йт |Д?| |Дф|
— = lim — = Inn —
Й' Дг-»о IДИ Д/-.0 |Д,|
|Й<?|
|й<
Подставляя это значение в (14) и используя выражение для радиуса
кривизны и переменную s, получим
25
dt dtp _ dtp
— = — «= —
dt dt dj
ds _ |j| _
— n=—n.
dt p
(15)
Радиус кривизны p считаем положительным.
Вектор dr/d/ и совпадающий с ним по направлению единичный
вектор п направлены параллельно предельному положению вектора
Дт при Д<, стремящемся к нулю, т. е. они расположены в соприкаса-
ющейся плоскости кривой. Единичный вектор п перпендикулярен
вектору т, направленному по касательной к кривой. Следовательно,
вектор п направлен по главной нормали кривой в сторону ее вог-
нутости, так как в эту сторону направлено предельное положение
вектора Ат.
Формулу (15) можно выразить в другой более часто употребля-
емой форме, если ввести угловую скорость ш вращения вектора т.
Угловая скорость вводится для твердого тела и считается общей
для любой его части, например в форме прямолинейного отрезка,
как вектор т. Этот вектор жестко скреплен с твердым телом, кото-
рым является естественный трехгранник кривой линии.
Угловая скорость трехгранника и, следовательно, вектора т при
изменении угла Д<р за время Д/ по модулю есть предел модуля
отношения угла поворота Д<р ко времени Д/, при Д/-»0, т. е.
Дф dtp
со = со = Inn — = — .
д^о Д' d'
Угол Дф между т(с + Дс) и r(t) является углом смежности между
двумя касательными к кривой. Для его изменения следует повора-
чивать трехгранник вокруг оси, перпендикулярной касательным,
образующим угол Д<р. Касательные в пределе при Дс->0 окажутся
в соприкасающейся плоскости кривой в рассматриваемой точке,
а перпендикулярная к касательным ось вращения совпадает с би-
нормалью в этой точке.
Вектор угловой скорости со в рассматриваемый момент времени
направляют по оси вращения так, чтобы с его конца видеть поворот
тела против часовой стрелки, что для трехгранника соответствует
направлению со в положительную сторону бинормали. Таким об-
разом вращение естественного трехгранника и, следовательно, век-
тора т при изменении угла смежности в каждый момент времени
происходит вокруг соответствующего направления бинормали.
ТЛ - - dt
Имея вектор угловой скорости со для — получаем:
26
— = йхт. (15')
dr
Векторное произведение со х т в правой системе осей направлено по
dr
главной нормали кривой и, следовательно, совпадает с —. Совпада-
dt
ют и модули этих векторных величин, так как
, - , d<p dr
|са х т| = со 1 = — =
при перпендикулярности векторов со и т.
Если имеется переменный вектор b с постоянным модулем Ь, то
для его производной по времени остается справедливым все, что
получено для единичного вектора т, только радиус годографа вме-
сто единицы следует заменить модулем Ь. Получим:
db dtp
— — b —
dt dt
n = coxb,
(15")
где co — вектор угловой скорости поворота вектора b.
Понятие вектора угловой скорости в дальнейшем более деталь-
но рассматривается при изучении различных случаев вращательных
движений твердого тела.
Ускорение точки при естественном способе
задания движения
Учитывая, что для скорости точки имеем
V = jT = VzT, (16)
в соответствии с определением ускорения и (15) получаем
_ dJ d _ .dr v2 -
а=—=—(хт)=5т+5—=5тН—п, (17)
dr dr dr р
так как s2 = v2 и dr/dz направлен внутрь вогнутости траектории
параллельно единичному вектору главной нормали п.
Получено разложение ускорения точки по осям естественного
трехгранника. Часть ускорения
aI=ST = (dvz/dt)T
21
называется касательной составляющей ускорения. Другая часть
ускорения
йл = (г2/р)й = (52/р)й
называется нормальной составляющей ускорения. Она направлена
внутрь вогнутости траектории, т. е. в сторону положительного
направления единичного вектора главной нормали п, так как внутрь
вогнутости траектории направлено полное ускорение. Таким об-
разом, ускорение точки
а = ах+ал. (18)
Из (17) получим формулы для проекций ускорения на естествен-
ные оси. Имеем:
ax=s—dvx/dT, a„=v2lp, ab — Q. (19)
Проекция ускорения на положительное направление касательной,
совпадающее с направлением единичного вектора т, называется
касательным ускорением, а на главную нормаль, направленную по
единичному вектору п,— нормальным ускорением. Проекция ускоре-
ния на бинормаль, направленную по единичному вектору Ь, равна
нулю; следовательно, ускорение точки расположено в сопри-
касающейся плоскости траектории. В этой плоскости находятся
единичные векторы касательной и главной нормали.
Учитывая ортогональность ах и а„ (рис. 17), в соответствии
с уравнением (18) имеем
а = л/а2 + a2, tga=|at|/a„- (20)
Нормальная составляющая ускорения а„ всегда направлена внутрь
вогнутости траектории. Касательная составляющая ах при s>0
направлена в положительную сторону касательной, т. е. по направ-
лению единичного вектора т, а при s<0 — в отрицательную, проти-
воположно т.
При j > 0 и s> 0 векторы скорости и касательной составляющей
ускорения направлены в одну сторону — по т. Движение точки
является ускоренным в положительном направлении касательной
к траектории. При 5<0 и 5<0 опять векторы скорости и касатель-
ной составляющей ускорения имеют одинаковые направления и,
следовательно, движение точки является ускоренным, но в отрица-
тельном направлении касательной к траектории.
Если j>0 и s<0, то вектор скорости направлен по т, а вектор
касательной составляющей ускорения противоположен ему по на-
28
правлению. Движение точки является замедленным в положитель-
ном направлении касательной к траектории. При j < 0 и s > 0 имеем
замедленное движение точки в отрицательную сторону касательной
к траектории точки.
Случаи обращения в нуль касательного ускорения получают из
условия
at=dvT/dt = 0.
Это условие выполняется все время, пока v = |vt| = const, т. е. при
равномерном движении точки по траектории любой формы.
Касательное ускорение обращается в нулю также в те моменты
времени, в которые алгебраическая скорость достигает экстрему-
ма, например максимума или минимума. Для изображенного на
рис. 18 изменения алгебраической скорости в зависимости от време-
ни касательное ускорение равно нулю в моменты времени и t2.
При колебаниях маятника (рис. 19) эти моменты соответствуют его
прохождению через точку А. При движении маятника в одну сторо-
ну алгебраическая скорость в точке А достигает максимума, при
движении в обратном направлении — минимума.
Случаи обращения в нуль нормального ускорения следуют из
условия
an=v2/p = 0.
Это условие выполняется при р = оо, т. е. при прямолинейном
движении точки. При движении точки по криволинейной траек-
тории р = сс в точках перегиба, в которых происходит изменение
выпуклости траектории на вогнутость, и наоборот (рис. 20). Нор-
мальное ускорение обращается также в нулю в моменты времени,
в которые v = 0, т. е. в моменты изменения направления движения
точки по траектории. Для маятника такими моментами являются
моменты отклонения маятника на наибольший угол как в одну
сторону, так и в другую. Эти моменты соответствуют мгновенным
остановкам маятника.
29
Рис. 19
Рис. 20
Случаи обращения в нуль касательного и нормального ускоре-
ний, а также общие формулы для них показывают, что касательное
ускорение характеризует изменение вектора скорости по величине,
а нормальное — по направлению.
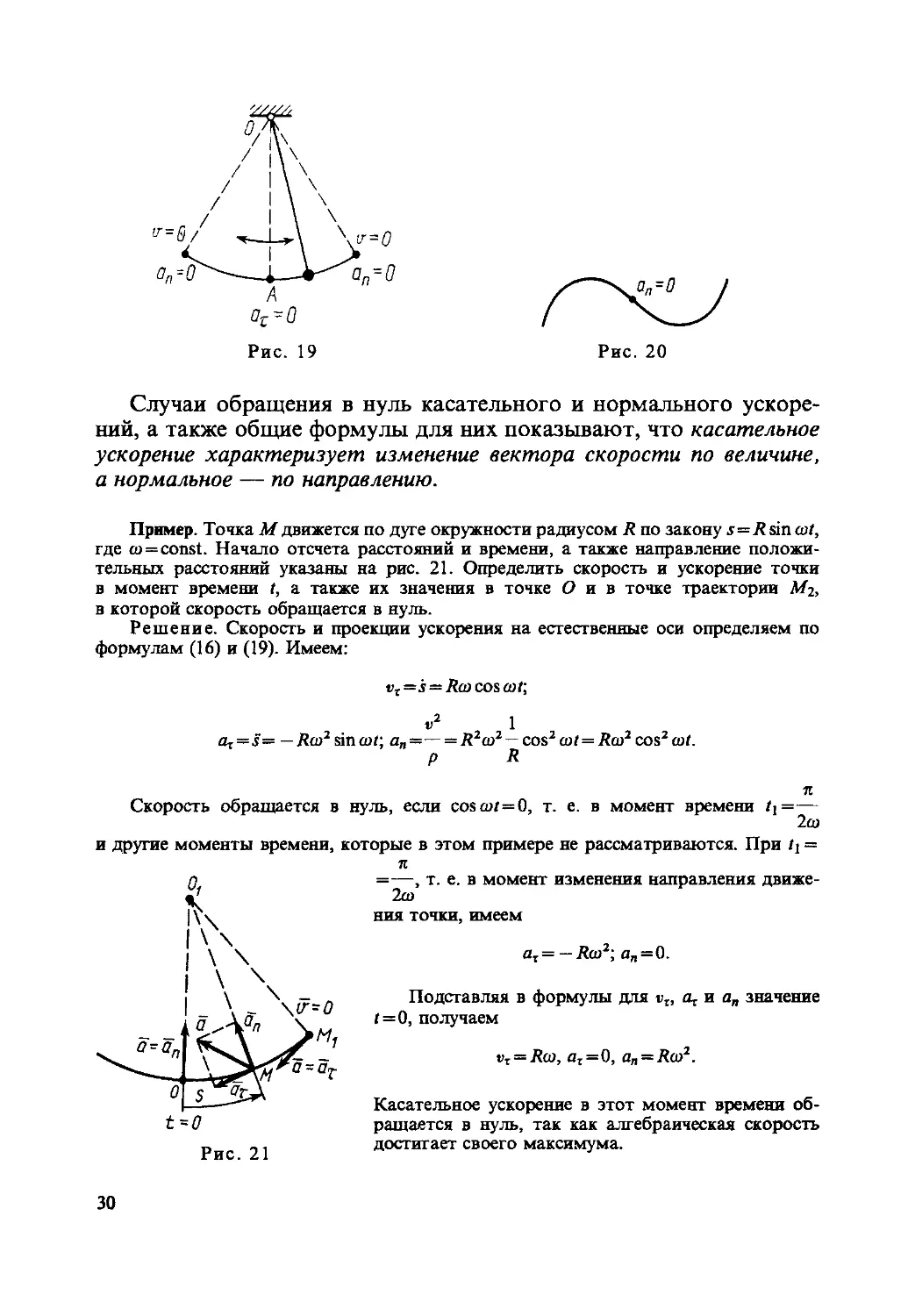
Пример. Точка М движется по дуге окружности радиусом R по закону 5=7? sin cot,
где <о=const. Начало отсчета расстояний и времени, а также направление положи-
тельных расстояний указаны на рис. 21. Определить скорость и ускорение точки
в момент времени t, а также их значения в точке О и в точке траектории Mi,
в которой скорость обращается в нуль.
Решение. Скорость и проекции ускорения на естественные оси определяем по
формулам (16) и (19). Имеем:
vr=j = 7?<u cosco Z;
«2 1
<^=5= — Rco2 sin cot; an = = R2co2 — cos2 cot= Rco2 cos2 cot.
P R
n
Скорость обращается в нуль, если cos cot=0, т. е. в момент времени tt =—
2со
и другие моменты времени, которые в этом примере не рассматриваются. При /] =
Рис.21
л
=—, т. е. в момент изменения направления движе-
2со
ния точки, имеем
ах= — Rco2; а„=0.
Подставляя в формулы для vt, и а„ значение
t=0, получаем
vT = /?co, ат = 0, a„ = Rco2.
Касательное ускорение в этот момент времени об-
ращается в нуль, так как алгебраическая скорость
достигает своего максимума.
30
Частные случаи движения точки
Равномерное движение. При равномерном движении точки по
траектории любой формы v = const; следовательно, постоянна и ал-
гебраическая скорость которая может отличаться от v только
знаком. Так как
ds/dt=vz,
то
t
dj=Vjdt, s=vz Jd/=vt/,
о
если принять при 1=0 s=0.
Равнопеременное движение. Равнопеременным движением на-
зывают такое движение по траектории любой формы, при котором
касательное ускорение az=const. Движение является равноуско-
ренным, если алгебраическая скорсть vz и касательное ускорение
ат имеют одинаковые знаки. Если »т и az имеют разные знаки, то
движение является равнозамедленным.
Получим формулы для алгебраической скорости и расстояния
при равнопеременном движении. Имеем:
«т 1
dvz/dt = az, dvz = ajdt, Jd«r = at Jdt;
•о °
следовательно,
vz=v0 + azt, (21)
если принять при / = 0 vz=v0.
Так как vz=ds/dt, то с учетом (21)
<т t t
ds=vodt+aztdt, ds=i>0 dt+Дг tdt,
ООО
если при /=0 5=0. Выполняя интегрирование, получим
е
s=vat+az-. (22)
2
Из (21) и (22) можно определить любые две неизвестные вели-
чины, если известны остальные три величины, входящие в эти
формулы.
31
§ 6. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В ПОЛЯРНЫХ КООРДИНАТАХ
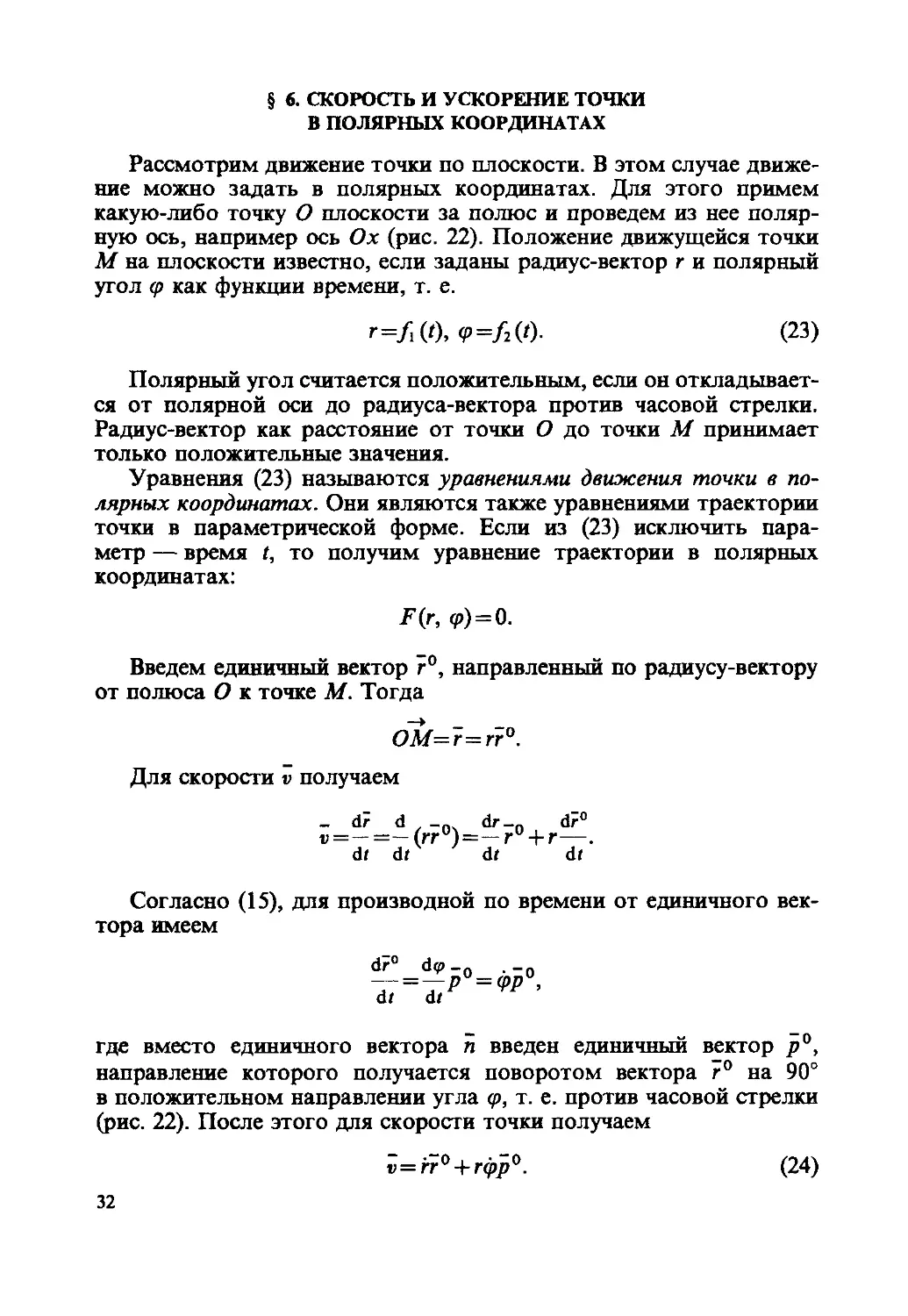
Рассмотрим движение точки по плоскости. В этом случае движе-
ние можно задать в полярных координатах. Для этого примем
какую-либо точку О плоскости за полюс и проведем из нее поляр-
ную ось, например ось Ох (рис. 22). Положение движущейся точки
М на плоскости известно, если заданы радиус-вектор г и полярный
угол ср как функции времени, т. е.
r=fdt), <P=f2(t).
(23)
Полярный угол считается положительным, если он откладывает-
ся от полярной оси до радиуса-вектора против часовой стрелки.
Радиус-вектор как расстояние от точки О до точки М принимает
только положительные значения.
Уравнения (23) называются уравнениями движения точки в по-
лярных координатах. Они являются также уравнениями траектории
точки в параметрической форме. Если из (23) исключить пара-
метр — время t, то получим уравнение траектории в полярных
координатах:
F(r, <р) = 0.
Введем единичный вектор г°, направленный по радиусу-вектору
от полюса О к точке М. Тогда
ОМ—г=гг°.
Для скорости v получаем
Согласно (15), для производной по времени от единичного век-
тора имеем
где вместо единичного вектора п введен единичный вектор р°,
направление которого получается поворотом вектора г ° на 90°
в положительном направлении угла <р, т. е. против часовой стрелки
(рис. 22). После этого для скорости точки получаем
v=rr° + гфр°.
(24)
32
О х
Рис. 22
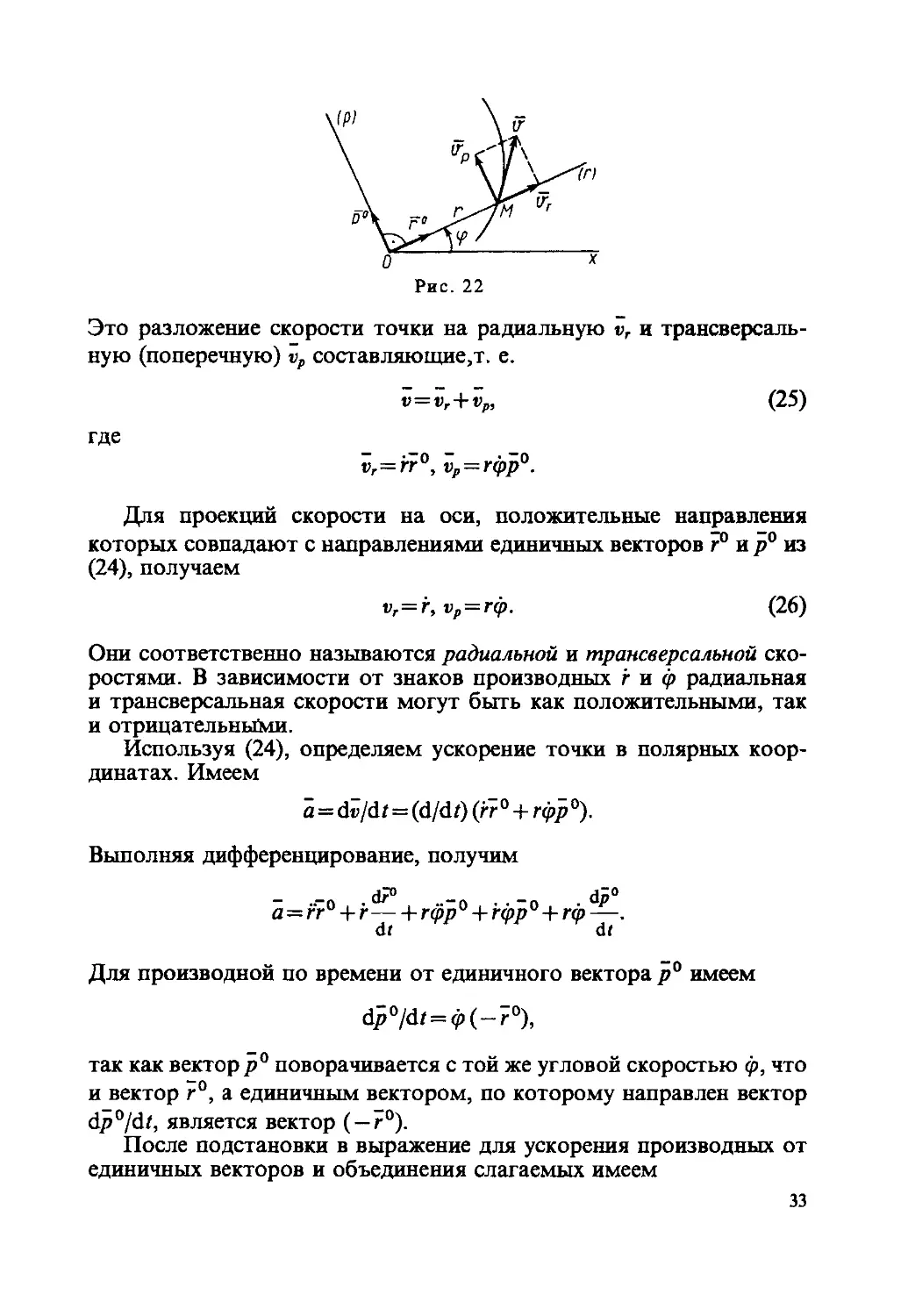
Это разложение скорости точки на радиальную vr и трансверсаль-
ную (поперечную) vp составляющие,т. е.
v=vr+vp, (25)
где
vr=rr°, Vp — гфр0.
Для проекций скорости на оси, положительные направления
которых совпадают с направлениями единичных векторов г° и р° из
(24), получаем
тг=г,ур=гф. (26)
Они соответственно называются радиальной и трансверсальной ско-
ростями. В зависимости от знаков производных г и ф радиальная
и трансверсальная скорости могут быть как положительными, так
и отрицательньГми.
Используя (24), определяем ускорение точки в полярных коор-
динатах. Имеем
а=dv/dt = (d/dt) (rr 0 + гфр °).
Выполняя дифференцирование, получим
- ..-О • d''0 --0 • -О • dp °
a = rr +г---\-гфр +гфр +гф—.
dt dt
Для производной по времени от единичного вектора р° имеем
dp0/dt = ф (—г°),
так как векторр° поворачивается с той же угловой скоростью ф, что
и вектор г °, а единичным вектором, по которому направлен вектор
dp°/dt, является вектор (—г °).
После подстановки в выражение для ускорения производных от
единичных векторов и объединения слагаемых имеем
зз
а=(г-гф2)г° + (гф + 2гф)р°. (27)
Получили разложение ускорения точки на радиальную аг и транс-
версальную ар составляющие, т. е.
а = аг+ар, аг=(г — гф2)г°, ар—(гф + 2гф)р°.
Для проекций ускорения на оси Or и Ор получаем
ar=f— гф2, ар=гф + 2гф. (28)
Ускорение аг называется радиальным, а ар — трансверсальным.
Трансверсальное ускорение можно выразить также в форме
ldz 2-Ч
rat
Это выражение для трансверсального ускорения широко исполь-
зуется при рассмотрении движения планет и искусственных спут-
ников Земли.
Радиальная и трансверсальная составляющие ускорения взаимно
перпендикулярны, поэтому
a = yja2 + a}. (29)
Отметим, что для неподвижных осей координат Ох, Оу и Oz
справедливы формулы
ax=dvx/dz, a>=dr>/dt, az=dvz/dt.
Для подвижных осей Or и Ор, как следует из (26) и (28), аг и ар не
равны производным по времени от vr и vp.
Частные случаи. 1. Если <p=const, то имеем прямолинейное
движение по прямой Or. В этом случае ф = 0, ф = 0 и из (26) и (28)
получаем:
vr=r, Vp = 0, v = |r|,
ar=f, ap=0, a = ]r1.
Эти величины совпадают с ранее полученными выражениями для
них при изучении движения точки в декартовых координатах. Толь-
ко расстояние г следует заменить на координату х.
2. При г=const (рис. 23) получаем движение точки по окружно-
сти. В этом случае г=0, г=0. Из (26) и (28) имеем:
34
vr=0; гр = гф; v = г |ф|;
ar = — гф2; ар=гф; а=^/а^ + а2 — г^ф2 + ф*.
В этих формулах ф является угловой скоростью вращения радиуса-
вектора, а ф — его угловым ускорением.
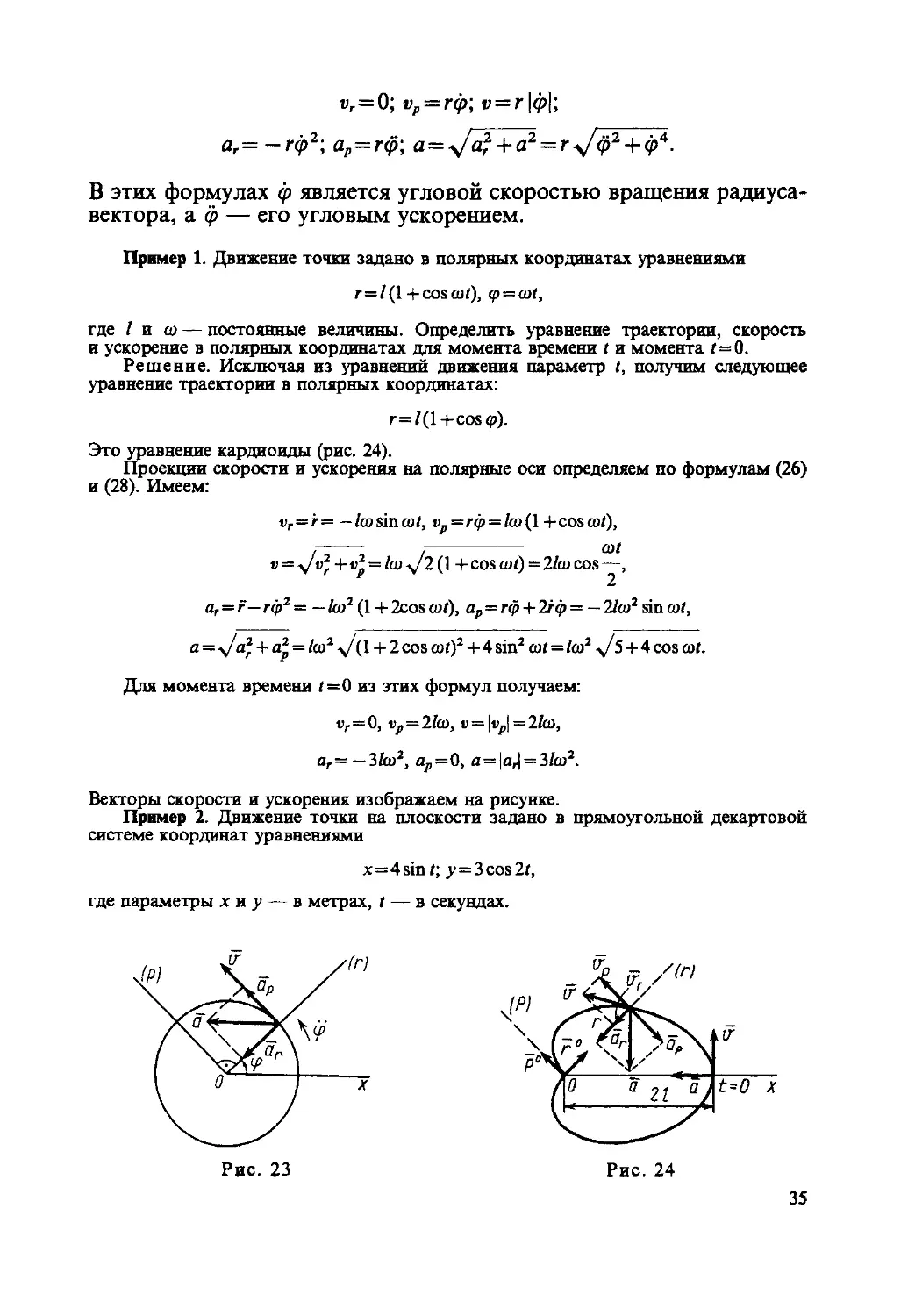
Пример 1. Движение точки задано в полярных координатах уравнениями
r=/(l +costu/), (p=(ot,
где I и со — постоянные величины. Определить уравнение траектории, скорость
и ускорение в полярных координатах для момента времени t и момента t=0.
Решение. Исключая из уравнений движения параметр t, получим следующее
уравнение траектории в полярных координатах:
r=Z(l+cos<p).
Это уравнение кардиоиды (рис. 24).
Проекции скорости и ускорения на полярные оси определяем по формулам (26)
и (28). Имеем:
vr=r= — kosincot, ор=гф = ко(1 4-cos cot),
v = ^/v2 + v2 =/со y/2(l +cos cot) =2ko cos—,
p 2
a,=f — гф2 = — ко2 (1 + 2cos cor), ар=гф+2гф = — 2ko2 sin cot,
a=y/a2 + a2 = ko2 ,/(1 + 2 cos cor)2+4 sin2 cot=l(o2 -/5+4 cos cor.
Для момента времени r=0 из этих формул получаем:
vr=0, vp = 2lco, о = |»р| = 21со,
ar= — Зко2, ар=0, a = \arf = 3l(o2.
Векторы скорости и ускорения изображаем на рисунке.
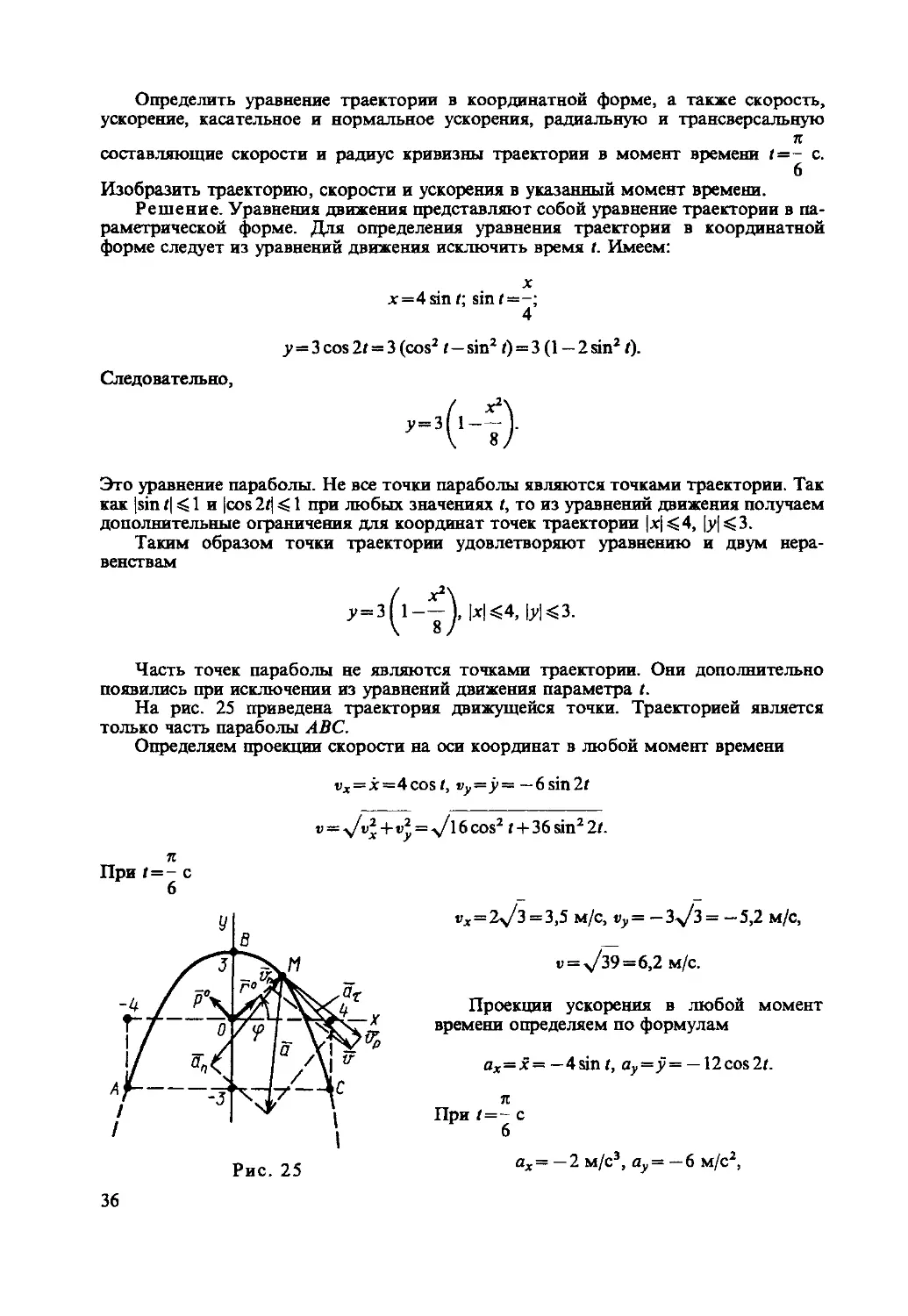
Пример 2. Движение точки на плоскости задано в прямоугольной декартовой
системе координат уравнениями
x=4sinr; y=3cos2r,
где параметры х и у — в метрах, г — в секундах.
35
Определить уравнение траектории в координатной форме, а также скорость,
ускорение, касательное и нормальное ускорения, радиальную и трансверсальную
л
составляющие скорости и радиус кривизны траектории в момент времени t=- с.
6
Изобразить траекторию, скорости и ускорения в указанный момент времени.
Решение. Уравнения движения представляют собой уравнение траектории в па-
раметрической форме. Для определения уравнения траектории в координатной
форме следует из уравнений движения исключить время t. Имеем:
х
x=4sinz: sinr=-;
4
у = 3 cos 2/= 3 (cos2 t — sin2 r) = 3 (1 — 2 sin21).
Следовательно,
Это уравнение параболы. Не все точки параболы являются точками траектории. Так
как |sin /| < 1 и |cos 2r| 1 при любых значениях t, то из уравнений движения получаем
дополнительные ограничения для координат точек траектории |х| <4, |у| S5 3.
Таким образом точки траектории удовлетворяют уравнению и двум нера-
венствам
/ х2\
у=3 1-- , |х|<4,М<3.
\ О /
Часть точек параболы не являются точками траектории. Они дополнительно
появились при исключении из уравнений движения параметра t.
На рис. 25 приведена траектория движущейся точки. Траекторией является
только часть параболы АВС.
Определяем проекции скорости на оси координат в любой момент времени
vx = x=4cost, vy=y= — 6sin2г
v=%/v2+v2 = ^/16cos2 f+36sin22t
vx=2y/3=3,5 м/с, vy= —3y/3= —5,2 м/с,
v = ,/39 = 6,2 м/с.
Проекции ускорения в любой момент
времени определяем по формулам
ах=х=— 4 sin f, ау=у = — 12cos2z.
я
При t=с
6
ах=—2 м/с3, ау= —6 м/с2,
36
а = 5/а2 + а2 =-^/40 = 6,3 м/с2.
я
Для модуля касательного ускорения при t=- с имеем
— 16'2cos t sin t+36 2sin 2t' cos It 2
16' cos21 4- 36 • sin2 2t
Нормальное ускорение при t=- с
Для вычисления радиальной скорости предварительно определяем радиус-
вектор:
r=yjx2 -by2 = у/\ 6sin21+9 cos2 2t.
я
Тогда при t= с получаем
16'2sin t • cos t—9'2 • 2cos 2t sin 2t
v.=r=
2у/16sin21+9cos2 2t
‘=6
я
Модуль трансверсальной скорости при t=- с определяем по формуле
я
Для координат движущейся точки при t= c имеем
x=4sinf=2 м, y=3cos2t=l,5 м.
По координатам отмечаем положение движущейся точки на траектории и,
выбрав масштабы, изображаем векторы скорости и ускорения по их проекциям на
оси координат. Величина радиальной скорости получилась отрицательной. Следо-
вательно, вектор vr следует направить против направления единичного вектора г°.
Для трансверсальной составляющей vp определен только модуль. Из рис. 25
получаем, что трансверсальная составляющая скорости йр направлена против
единичного вектора трансверсали р°, получаемого поворотом на 90° вектора г°
против часовой стрелки. В рассматриваемом случае vp надо взять со знаком минус,
т. е. vp = — 6,2 м/с. Для проверки правильности определения vp можно использовать
формулы
37
У
Vp=r<p, <p = arctg~.
x
Нормальное ускорение а„ всегда направлено внутрь вогнутости траектории.
Направление касательного ускорения а-, определяем по направлениям ускорений
а и о,. Оно оказалось направленным по вектору скорости. Следовательно, точка
в рассматриваемый момент движется ускоренно.
п
Для радиуса кривизны траектории в рассматриваемый момент времени t= - с
6
получаем
V1 39
р=—=— = 7,8 м.
а„ 5
§ 7. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
Положение точки в пространстве в декартовой системе коор-
динат определяется тремя координатами: х, у, z. Можно выбрать
другие три параметра q3, q2, q3 и назвать их криволинейными или
обобщенными координатами точки. Декартовы координаты бу-
дут зависеть от криволинейных:
x=x(qi} q2, q3); y=y(qi, q2, qi); z=z(qx, q2, q3).
Движение точки в криволинейных координатах задается уравне-
ниями
9i = ^i (0; ?2 = ?2(0; ?з = ?з(О-
Радиус-вектор г движущейся точки, начало которого находится
в неподвижной точке выбранной системы отсчета для рассматрива-
емого движения, является функцией как декартовых, так и криволи-
нейных координат, т. е.
r=r(?i, q2, Чз) = г(х, у, z).
Выберем точку О, в которой криволинейные координаты равны
нулю, и рассмотрим зависимость г = г(^ь 0, 0). Получим уравнение
в векторной форме координатной линии для q3, проходящей
через точку О. Аналогично получаются уравнения координатных
линий r=r(0, q2, 0) и г=г(0, 0, qi), проходящих через точку О для
координат q2 и q3.
Через каждую точку пространства можно провести три коор-
динатные линии, пересекающиеся в этой точке. Вдоль каждой из
координатных линий изменяется только одна криволинейная коор-
38
дината, а две другие сохраняют постоянные значения, соответст-
вующие рассматриваемой точке.
8г
Рассмотрим частные производные —. Они как производные от
а?,
вектора по скалярному аргументу направлены по касательным
к координатным линиям, являющимся годографами радиуса-век-
тора. Введем единичные векторы, направленные по векторам
8г _ _ _
—. Эти три единичных вектора е2, е3 называются базисными
а?,-
векторами. Базисные векторы, как и —, направлены в каждой
За-
точке по касательным к координатным линиям в сторону возраста-
ния криволинейных координат. Направления возрастания и начало
отсчета криволинейных координат выбираются при задании движе-
ния.
В общем случае базисные векторы могут быть неортогональ-
ными. Используя базисные векторы, получаем
или
8г 8г -
— = — е,-,
a?,- 8q,
dr —
- = ^0=1,2, 3).
а?,
(30)
Скалярные величины Л,=
называются коэффициентами Ламэ.
Для вычисления Л, учтем, что радиус-вектор через декартовы
координаты можно выразить в форме
(31)
где i, j, к — единичные векторы, направленные по осям декартовой
системы координат. Из (31) имеем
8г дх- 8у- 8z т
— = — к
8q, 8qt 8q, 8qt
и, следовательно,
39
Скорость точки в криволинейных координатах. При движении
точки ее радиус-вектор через обобщенные координаты зависит от
времени, т. е.
r=r[qi(t), q2(t), ?3(г)].
По определению скорости и правилу дифференцирования сложных
функций имеем
-dr ёг . Sr , Sr .
v = — = — q i -I-q2 H--
dr Sqj Sq2 Sq3
(33)
. d<?i c, g.
где qt —— называется обобщенной скоростью точки,
dr
Используя (30), из (33) получаем
з
v = hxqiev + h2q2e2+h2q2e2 = £ h^. (34)
r=i
Получено разложение скорости по осям, направление которых со-
впадает с направлением базисных векторов.
Для величин составляющих скорости по базисным векторам из
(34) имеем
«,=Л^(г=1, 2, 3). (34')
В случае ортогональности базисных векторов по формуле (34')
вычисляются проекции вектора скорости на оси, направленные по
базисным векторам. В этом случае для квадрата скорости получаем
з
= (Mi)2 + (М2)2 + (Мз)2 = Е (Mr)2-
i=i
Ускорение в ортогональных криволинейных координатах. Криво-
линейные координаты считаются ортогональными, если ортого-
нальны их базисные векторы. В приложениях обычно встречается
этот случай. Для ортогональных базисных векторов проекции уско-
рения точки на их направления вычисляем по формулам
а; = а ё,=- ё, (г=1, 2, 3). (35)
dr
Выражая базисные векторы по (30), из (35) получим
di> 1 Sr 1 /dv Sr \
в(=--—(36)
dr Л,- Sqi hi\dt Sqj
40
Для дальнейших преобразований (36) следует воспользоваться
тождествами
d (- dr\ dv dr _ d f dr\
— IV'— ]=— —Fv'—I — I;
d/у 8q,J d/ dq, dty^qj
dr dr dr dv
—=— или —=—;
dq, dq, dq, dq,
d (br\ dr d /3r\ dv
— — =— или — — =—.
dl\cqj dq, dtydqij dq,
(37)
(38)
(39)
Тождество (37) представляет собой известное правило дифферен-
цирования скалярного произведения двух векторов. Докажем спра-
ведливость тождеств Лагранжа (38) и (39).
Тождество (38) получим из (33) дифференцированием v, напри-
мер, по 41- Учитывая, что производные — не могут зависеть от qh
dq,
имеем
dv dr
Sq\ 3qi
Аналогично,
dv dr 8v dr
т. е.
—=— (f=l, 2, 3).
34,- dq,
Справедливость тождества (38) установлена.
Для доказательства тождества (39) продифференцируем v из (33)
по q,. Получим
dv 82r d2r . 82r .
—=---------4i "I---н—-— 4з-
dq, dqfiq, dqfiq2 dq,8q-$
(40)
Учитывая, что — не может зависеть от обобщенных скоростей,
а?(
и дифференцируя ее по времени как сложную функцию времени,
имеем
41
(41)
Правые части (40) и (41) совпадают, так как они отличаются только
порядком частного дифференцирования, от которого частные про-
изводные не зависят. Следовательно, тождество (39) доказано. Ис-
пользуя тождества, преобразуем выражение в скобках из (36). По-
лучим
dv 8r d /_ 8г\ — & f dry d (- 8v
— ' — =1 v ' — I — г | — 1= I v ' —
dt 8q, dt\ 8qJ dt\8qij dt\ dq.
_ 8v d
Учитывая, что v2 = v2, и вводя функцию Т=, из (36) с учетом (42)
имеем
d (8Т\ 8Т
0 =1,2, 3).
(43)
Л,- dixSifij 8qt
По формулам (43) можно вычислить проекции ускорения точки на
оси, направленные по базисным ортогональным векторам.
§ 8. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В ЦИЛИНДРИЧЕСКИХ КООРДИНАТАХ
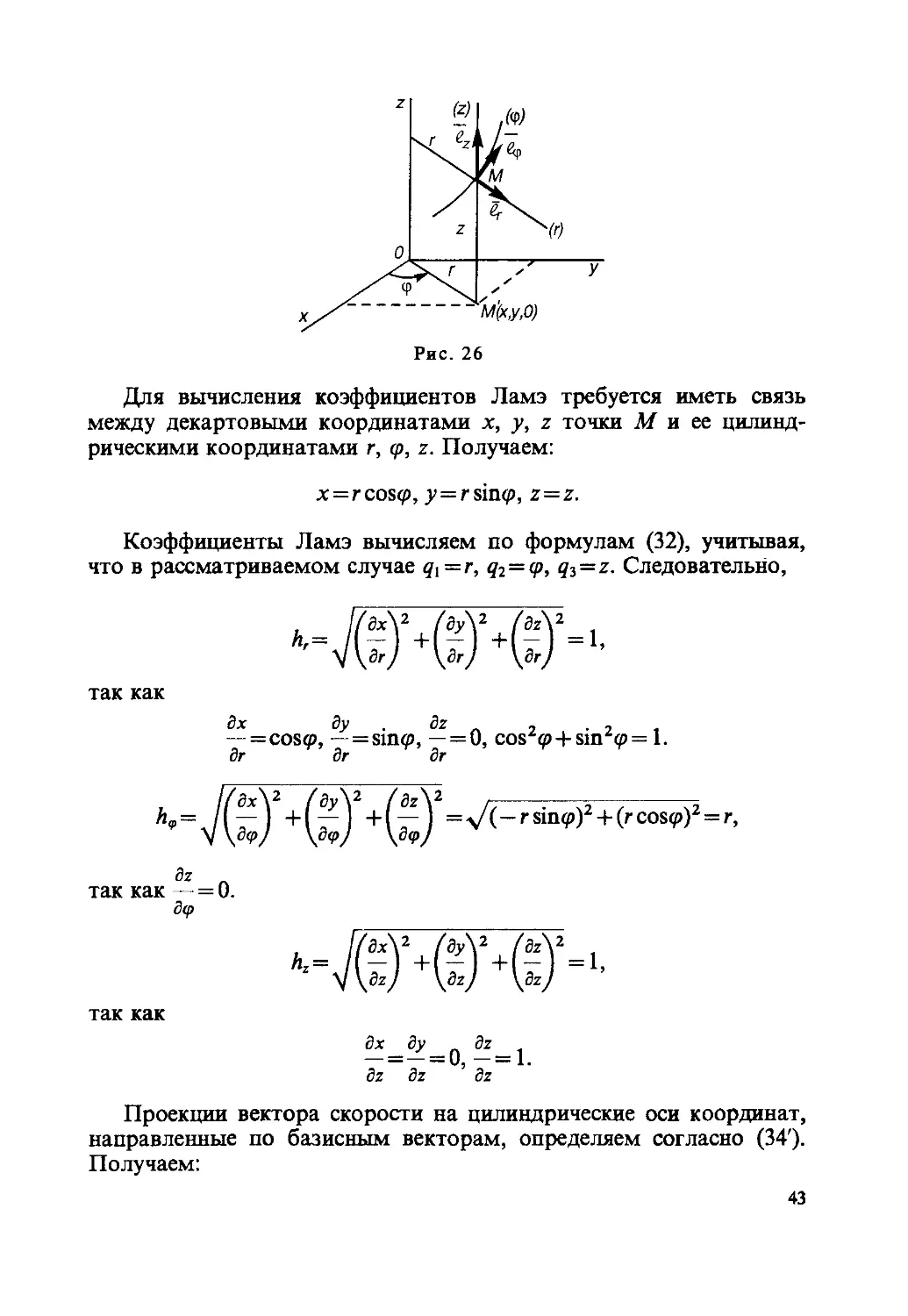
Цилиндрическими координатами точки М являются величины г,
<р, z (рис. 26). Цилиндрическая координата г=ОМ', где М' — проек-
ция точки М на координатную плоскость Оху, координата (р —
угол между осью Ох и отрезком ОМ'\ координата z=M'M, т. е. это
координата z декартовой системы координат Oxyz.
Координатной линией для г, вдоль которой изменяется только
эта координата, служит отрезок прямой (г) с базисным вектором е„
направленным в сторону возрастания г. Координатная линия (<р),
вдоль которой изменяется <р, является дугой окружности радиуса г.
Базисный вектор направляют по касательной к этой дуге в сто-
рону возрастания угла ср. Координатная линия (z) — прямая, парал-
лельная оси Oz с базисным вектором е,.
Система цилиндрических координат оказалась ортогональной,
так как базисные векторы ее взаимно ортогональны.
Рис. 26
Для вычисления коэффициентов Ламэ требуется иметь связь
между декартовыми координатами х, у, z точки М и ее цилинд-
рическими координатами г, ср, z. Получаем:
x=rcoscp, y=rsin(p, z=z.
Коэффициенты Ламэ вычисляем по формулам (32), учитывая,
что в рассматриваемом случае qt=r, qi = (?, qj=z. Следовательно,
так как
—=cos<p, — = sin<p, — = 0, cosz<p + snr<p= 1.
Sr Sr Sr
— r simp)2 4- (r cos<p)2
= r,
так как — = 0.
8(p
6x Sy „ Sz
—=—= 0, -
Sz Sz Sz
так как
Проекции вектора скорости на цилиндрические оси координат,
направленные по базисным векторам, определяем согласно (34').
Получаем:
43
vr=hrr=r, v9 = h9(p — rip, vr=hzz=z.
Для вектора скорости имеем разложение
v=v^r+
Для квадрата скорости и функции Т получаем:
v2 = v?+v2+v2 =r2 + r2<p2 + z2,
T=-v2=-(r2 + r2cp2 + z2).
2 2
Проекции ускорения на оси цилиндрической системы вычисляем
по формулам (43). Имеем:
1
а.= -
hr
а /аг
dr \ 8г,
аг’
8г
Г— гф ,
так как
8Т . d 8Т 8Т
— = г,-------= г, — = гф ,
8r dr 8г 8г
1
dm
h,
d18Т\ 8T
'ч> L-d*
= гф + 2гф,
так как
аг ,. d аг „ .. , . зт п
— = г ф,------= 2ггф + г‘ф, — = 0,
8ф dtdq> 8<р
8Т
8z
так как
аг d аг аг
—=z,-----=z, — = 0.
8z dr 8z 8z
Для вектора ускорения имеем разложение
a = arer+avev + azez.
Для модуля ускорения получаем выражение
а = у/а2 + а2 + а2.
44
Для вычисления проекций ускорения на цилиндрические оси получе-
ны формулы:
ar—f— гф2, а9 = гф+2гф, at=z.
§ 9. СКОРОСТЬ И УСКОРЕНИЕ В СФЕРИЧЕСКИХ
КООРДИНАТАХ
Сферическими координатами точки М являются величины г, ср,
в (рис. 27). Координата г=ОМ, ср — угол между осью Ох и отрез-
ком прямой ОМ', где М' — проекция точки М на плоскость Оху
и 9 — угол между отрезками прямых ОМ' и ОМ.
Координатной линией для г является прямая (г) с базисным
вектором ег. Координатной линией для ср служит параллель сферы
с базисным вектором и координатной линией 0 — меридиан
сферы с базисным вектором es.
Базисные векторы оказались ортогональными. Декартовы коор-
динаты х, у, z точки М через сферические выражаются следующими
зависимостями:
x = rcos9coscp; y=rcos9sincp; z=rsin0. (44)
По формулам (32) вычисляем коэффициенты Ламэ. Имеем:
= >/(—г cos0 sintp)2 4- (г cos0 cos<p)2 + О2 = г cos0;
= ^( — r sin0 costp)2 + (—г sin0 sin<jo)2 + (г cos0)2 = г.
Проекции скорости на оси, направленные по базисным векто-
рам, определяем согласно (34'). Получаем
vr=hrr = r, 'J
vv=— гф cos 0, > (45)
ve=hs9=r9. J
45
После этого
v = v,er++vgeg.
Для квадрата скорости и функции Т имеем
v* 2 = v2+v29+v2 = r2 + г2ф2со$20 + г2в2;
Т=\2 (г2 + г2ф2со$2в+г2в2).
Проекции ускорения на оси, направленные по базисным векторам,
вычисляем по формулам (43). Имеем
1
а,=
d/8T\ 8T
dt\8r/ 8r
= г — гф2 cos20 — rd2,
d /8T\ 8T
rcosOdf
—— — (г2 ф COS20),
(46)
1
1
ag=
d(8T\ 8T
hg dt\89j 89
=-—(г2в) + гф2 cos0 sin0.
rdr
Для вектора ускорения получаем
a = + йдвд.
Модуль ускорения будет иметь следующее выражение:
а = у/а2 + а2 + а2.
ГЛАВА 2
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 1. СТЕПЕНИ СВОБОДЫ И ТЕОРЕМА
О ПРОЕКЦИЯХ СКОРОСТЕЙ
Числом степеней свободы твердого тела называют число незави-
симых параметров, определяющих положение тела относительно
рассматриваемой системы отсчета.
Движение твердого тела во многом зависит от числа его степе-
ней свободы; тело с одним и тем же числом степеней свободы
может совершать различные движения, не похожие друг на друга.
Свободное твердое тело в общем случае имеет шесть
степеней свободы. Действительно, положение тела в пространст-
ве относительно какой-либо системы координат, например декар-
товой, определяется заданием трех его точек, не лежащих на одной
прямой. Расстояния между точками в твердом теле должны оста-
ваться неизменными при любых его движениях. Это накладывает на
координаты фиксированных точек три условия. Девять координат
должны удовлетворять трем уравнениям. Получаем только шесть
независимых координат, которые можно задать произвольно. Оста-
вшиеся три координаты определятся из уравнения для расстояний
между точками.
В качестве независимых параметров можно взять любые шесть
координат точек или шесть других независимых параметров, кото-
рые являются функциями координат трех или большего количества
точек тела. У свободной точки три степени свободы и соответствен-
но три независимых параметра, например ее координаты х, у, z.
Точка, которая движется по неподвижной поверхности, имеет две
степени свободы. При движении точки по неподвижной кривой
точка имеет одну степень свободы.
Справедлива теорема: при любом движении твердого тела проек-
ции скоростей точек на прямую, соединяющую эти точки, равны
(рис. 28).
Для доказательства теоремы используем зависимость радиусов-
векторов точек А и В:
гв—гЛ = АВ (АВ =7).
Возведем обе части в скалярный квадрат. Имеем
(гв-гА)' (гв-7а)=12 (I2=I2),
47
Рис. 28
но /=const для твердого тела. Дифференцируя по времени это
выражение, справедливое для любого момента времени, получим
_ _ (dr» drA
2(гй-гя)М-~ 1=0.
\ dr dry
Заменив в этом равенстве
dr^/dt=«^, drB/d/=itB, rB—rA^l,
получим
2/(vB — l)j) = 0 или TvB = l'vA.
Раскрывая скалярные произведения векторов и сокращая на I,
имеем
vB cos/? = vA cosa.
Теорема доказана. Очевидно, все точки тела, расположенные на
прямой АВ, имеют одинаковые проекции скоростей на эту прямую.
Имеется два простейших вида движения твердого тела, ком-
бинированием которых можно получать другие, более сложные
его движения. Такими движениями твердого тела являются по-
ступательное движение и вращение вокруг неподвиж-
ной оси.
§ 2. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным движением твердого тела называют такое его
движение, при котором любая прямая, жестко скрепленная с телом,
остается параллельной своему первоначальному положению в каж-
дый момент времени. Очевидно достаточно, чтобы это выпол-
нялось только для двух непараллельных прямых, скрепленных с те-
лом.
Поступательно движутся педали у велосипеда относительно его
рамы во время движения, поршни в цилиндрах двигателя внутрен-
48
него сгорания относительно цилиндров, кабины колеса обозрения
относительно Земли в парках.
Траектории точек у поступательно движущегося твердого тела
могут быть не только прямыми, но и любыми кривыми, в том числе
окружностями.
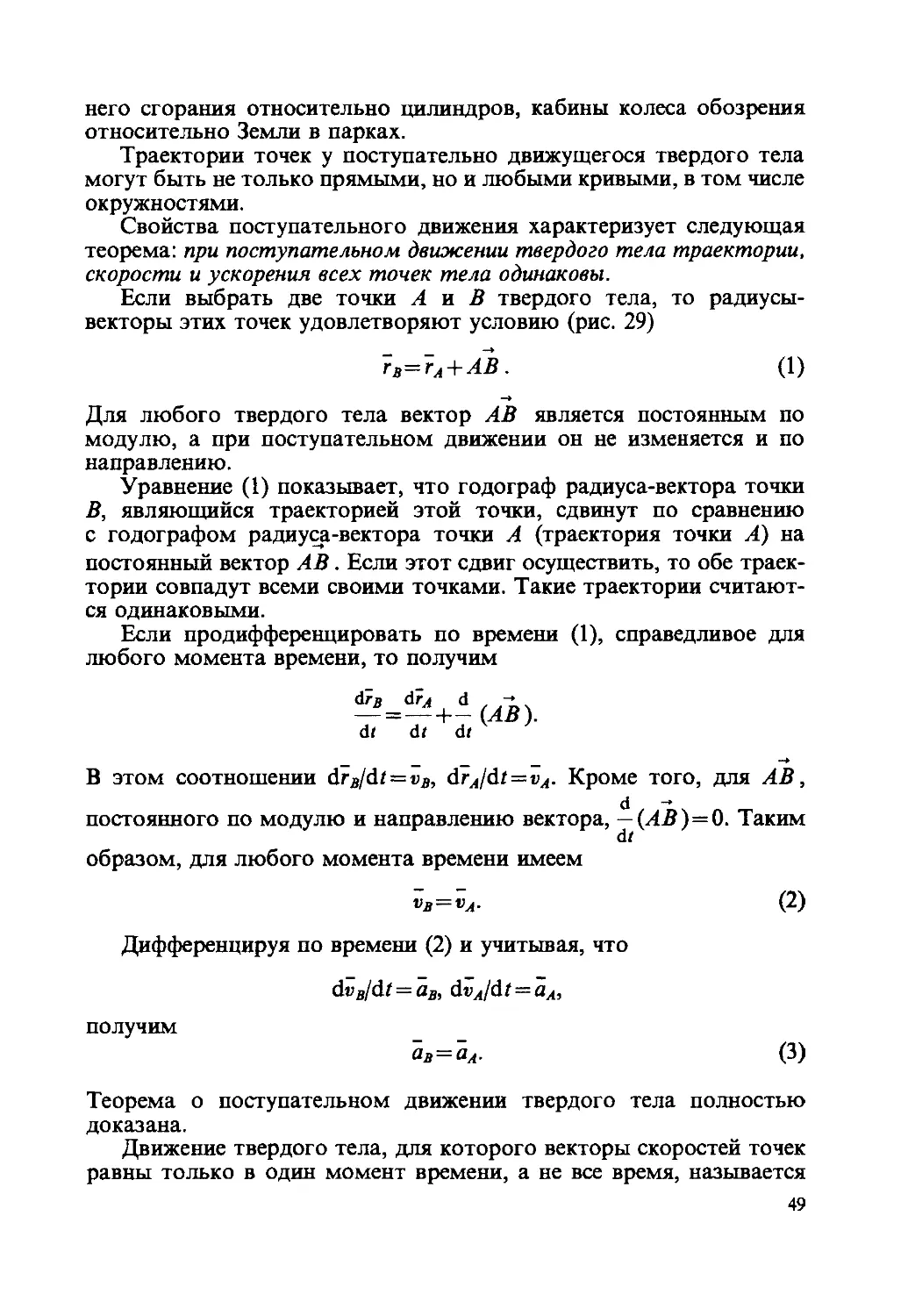
Свойства поступательного движения характеризует следующая
теорема: при поступательном движении твердого тела траектории,
скорости и ускорения всех точек тела одинаковы.
Если выбрать две точки А и В твердого тела, то радиусы-
векторы этих точек удовлетворяют условию (рис. 29)
гл=гл + ЛБ. (1)
Для любого твердого тела вектор АВ является постоянным по
модулю, а при поступательном движении он не изменяется и по
направлению.
Уравнение (1) показывает, что годограф радиуса-вектора точки
В, являющийся траекторией этой точки, сдвинут по сравнению
с годографом радиуса-вектора точки А (траектория точки А) на
постоянный вектор АВ. Если этот сдвиг осуществить, то обе траек-
тории совпадут всеми своими точками. Такие траектории считают-
ся одинаковыми.
Если продифференцировать по времени (1), справедливое для
любого момента времени, то получим
dr dr dr
В этом соотношении drB/dt = vB, drA/dt=vA. Кроме того, для АВ,
постоянного по модулю и направлению вектора, — (АВ)=0. Таким
dr
образом, для любого момента времени имеем
(2)
Дифференцируя по времени (2) и учитывая, что
dvB/dt = aB, dvA/dt — aA,
получим
ав=аА. (3)
Теорема о поступательном движении твердого тела полностью
доказана.
Движение твердого тела, для которого векторы скоростей точек
равны только в один момент времени, а не все время, называется
49
мгновенным поступательным движением. Для мгновенного посту-
пательного движения ускорения точек в общем случае не являются
одинаковыми.
Поступательное движение твердого тела полностью характери-
зуется движением одной точки тела. Для задания этого движения
достаточно знать координаты какой-либо точки тела как функции
времени, т. е.
(4)
На движение отдельной точки тела при поступательном движении
никаких ограничений в общем случае не накладывается. Следовате-
льно, твердое тело, совершающее поступательное движение, имеет
три степени свободы и уравнения (4) считаются уравнениями посту-
пательного движения твердого тела. Для изучения поступательного
движения твердого тела достаточно использовать кинематику од-
ной точки.
§ 3. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ОСИ
Угол поворота, угловая скорость и угловое ускорение
Вращением твердого тела вокруг неподвижной оси называется
такое его движение, при котором две точки тела остаются непо-
движными в течение всего времени движения. При этом также
остаются неподвижными все точки тела, расположенные на прямой,
проходящей через его неподвижные точки. Эта прямая называется
осью вращения тела.
Если А и В — неподвижные точки тела (рис. 30), то осью враще-
ния является ось Oz, которая может иметь в пространстве любое
направление, не обязательно вертикальное. Одно направление оси
Oz принимается за положительное.
50
Через ось вращения проведем неподвижную
плоскость По и подвижную П, скрепленную с вра-
щающимся телом. Пусть в начальный момент
времени обе плоскости совпадают. Тогда в мо-
мент времени t положение подвижной плоскости
и самого вращающегося тела можно определить
двугранным углом между плоскостями и соответ-
ствующим линейным углом ср между прямыми,
расположенными в этих плоскостях и перпенди-
кулярными оси вращения. Угол ср называется уг-
лом поворота тела.
Положение тела относительно выбранной си-
стемы отсчета полностью определяется в любой
момент времени, если задано уравнение
z
Рис. 30
(5)
где f (z) — любая, дважды дифференцируемая функция времени. Это
уравнение называют уравнением вращения твердого тела вокруг
неподвижной оси.
У тела, совершающего вращение вокруг неподвижной оси, одна
степень свободы, так как его положение определяется заданием
только одного параметра — угла ср.
Угол ср считается положительным, если он откладывается про-
тив часовой стрелки, и отрицательным — в противоположном на-
правлении, если смотреть с положительного направления оси Oz.
Траектории точек тела при его вращении вокруг неподвижной оси
являются окружностями, расположенными в плоскостях, перпен-
дикулярных оси вращения.
Для характеристики вращательного движения твердого тела во-
круг неподвижной оси введем понятия угловой скорости и углового
ускорения. Алгебраической угловой скоростью тела в какой-либо
момент времени называют первую производную по времени от угла
поворота в этот момент, т. е. d<p/df = <p. Она является величиной
положительной при вращении тела против часовой стрелки, так как
угол поворота возрастает с течением времени, и отрицательной —
при вращении тела по часовой стрелке, потому что угол поворота
при этом убывает.
Модуль угловой скорости обозначают со. Тогда
to=|d<p/d/| = |<p|. (6)
Размерность угловой скорости устанавливаем в соответствии с (6):
[ш] = уго л/время = рад/с=с "1.
В технике угловая скорость — это частота вращения, выраженная
в оборотах в минуту. За 1 мин тело повернется на угол 2пп, если
51
п — число оборотов в минуту. Разделив этот угол на число секунд
в минуте, получим
1 ^ЯИоб/мии/бО 7^об/мия/30 «0,1 Нцб/миЯ*
(7)
Алгебраическим угловым ускорением тела называют первую про-
изводную по времени от алгебраической скорости, т. е. вторую
производную от угла поворота d2<p/dt2 = <p. Модуль углового уско-
рения обозначим е, тогда
Е = |ф|.
Размерность углового ускорения получаем из (8):
[е] = угловая скорость/время=рад/с2=с
(8)
Если ф>0 при ф>0, то алгебраическая угловая скорость воз-
растает с течением времени и, следовательно, тело вращается уско-
ренно в рассматриваемый момент времени в положительную сторо-
ну (против часовой стрелки). При ф<0 и ф<0 тело вращается
ускоренно в отрицательную сторону. Если ф < 0 при ф > 0, то имеем
замедленное вращение в положительную сторону. При ф>0 ф<0,
т. е. замедленное вращение совершается в отрицательную сторону.
Угловую скорость и угловое ускорение на рисунках изображают
дуговыми стрелками вокруг оси вращения. Дуговая стрелка для
угловой скорости указывает направление вращения тела.
Для ускоренного вращения дуговые стрелки для угловой скоро-
сти и углового ускорения имеют одинаковые направления, для
замедленного — их направления противоположны.
Частные случаи вращения твердого тела
Вращение называется равномерным, если со = const. Алгебраичес-
кая угловая скорость отличается от модуля угловой скорости толь-
ко знаком. Поэтому она тоже постоянна и при интегрировании ее
можно вынести за знак интеграла. Имеем
d<p/dt = ф; dcp = <pdt; dcp = ф
о
df, ср = ф1,
если принять ср — О при t=0.
Вращение будет равнопеременным, если е=const. Алгебраическое
угловое ускорение при этом тоже постоянно. Его при интегрирова-
нии можно вынести за знак интеграла. Имеем
52
~(ф) = ф-, <1ф = фй1;
Ф i
*
&ф = ф ск;
Фо о
ф = фо + фГ,
если ф = фо при t — 0.
Так как
dtp...............
—=(р; <p=(p0+(pt,
а/
ф ! t
d<p = <poJd*+0 t&t
о оо
t2
(p = (pot+(p~,
если <p = 0 при t=0.
В общем случае, если ф не постоянно,
Скорости и ускорения точек тела
Известно уравнение вращения твердого тела вокруг неподвиж-
ной оси (p=f(t) (рис. 31). Расстояние s точки М в подвижной
плоскости П по дуге окружности (траектории точки), отсчитыва-
емое от точки Мй, расположенной в неподвижной плоскости, выра-
жается через угол <р зависимостью s=hq>, где h — радиус окру-
жности, по которой перемещается точка. Он является кратчай-
шим расстоянием от точки М до оси вращения. Его иногда
называют радиусом вращения точки. У каждой точки тела радиус
вращения остается неизменным при вращении тела вокруг непо-
движной оси.
Алгебраическую скорость точки М определяем по формуле
Модуль скорости точки
v=ha>. (9)
53
Скорости точек тела при вращении вокруг неподвижной оси пропор-
циональны их кратчайшим расстояниям до этой оси. Коэффициен-
том пропорциональности является угловая скорость. Скорости то-
чек направлены по касательным к траекториям и, следовательно,
перпендикулярны радиусам вращения.
Скорости точек тела, расположенных на отрезке прямой ОМ,
в соответствии с (9) распределены по линейному закону. Они взаим-
но параллельны, и их концы располагаются на одной прямой,
проходящей через ось вращения.
Ускорение точки разлагаем на касательную и нормальную со-
ставляющие, т. е.
a = at+a„.
Касательное и нормальное ускорения вычисляются по фор-
мулам
at=s=h<p; a„ = v2/p = h2a)2/h = ha)2,
так как для окружности радиус кривизны p=h (рис. 32). Таким
образом,
|ат| = Ле, a„ = hai2; a=y/a2 + a2 = hs/£z + aj4'.
(Ю)
Касательные, нормальные и полные ускорения точек, как и ско-
рости, распределены тоже по линейному закону. Они линейно зави-
сят от расстояний точек до оси вращения. Нормальное ускорение
направлено по радиусу окружности к оси вращения. Направление
касательного ускорения зависит от знака алгебраического углового
ускорения. При ф>0 и ф>0 или ф<0 и ф<0 имеем ускоренное
вращение тела и направления векторов ат и v совпадают. Если
фиф имеют разные знаки (замедленное вращение), то аТ и v направ-
лены противоположно друг другу.
Обозначив а угол между полным ускорением точки и ее ради-
усом вращения, имеем
54
tga = |ar|/a„=E/co2
(И)
так как нормальное ускорение а„ всегда положительно. Угол а для
всех точек тела один и тот же. Откладывать его следует от ускоре-
ния к радиусу вращения в направлении дуговой стрелки углового
ускорения независимо от направления вращения твердого тела.
Пример. Диск 1 вращается вокруг неподвижной оси, проходящей через его центр
О] перпендикулярно плоскости диска, по закону <р= t — t2 (рис. 33) и приводит во
вращение диски 2 и 3, имеющие общую неподвижную ось вращения и жестко
скрепленные друг с другом.
Определить угловые скорости и угловые ускорения дисков, а также скорости
и ускорения точек их соприкосновения А в момент времени t=5 с, если радиусы
дисков Г] =20 см, г2=30 см, гз = 20 см; скольжение между дисками отсутствует.
Решение. Определяем алгебраические угловую скорость и угловое ускорение
диска 1. Имеем:
ф = 1 — 2t, ф= — 2.
В момент времени Г=5 с соответственно
ф= — 9, о>1 = |ф|=9 с-1,
ф=—2, £|=|ф|=2 с-2.
В этот момент времени дуговые стрелки для угловой скорости и углового ускорения
следует направить в сторону, противоположную положительному направлению угла
<р, так как алгебраические угловая скорость и угловое ускорение оказались от-
рицательными.
Скорости и касательные ускорения точек соприкосновения дисков 1 и 2 при
отсутствии скольжения между ними одинаковы. Поэтому
v=ria>i =Г2О)2', »=na>i =180 см/с,
laj =r1E1 =г2е2; kl =ri«i =40 см/с2.
Кроме того,
ПШ, ПЕ! |aj 4
йъ=---=6 с ; £2——=—==-«1,3 с .
г2 г2 г2 3
Дуговые стрелки для а>2 и «2 следует направить
в стороны, противоположные дуговым стрелкам для
а>1 и Е] соответственно.
Диски 2 и 3 жестко скреплены друг с другом,
поэтому их угловые скорости и угловые ускорения
одинаковы, т. е.
O)3=<U2=6 с'1; ез=е2 = 1,3 с-2.
Определяем нормальные ускорения точек А дисков
1 и 2.
Для диска 1 получаем
=20 • 81 =1620 см/с3 = 16,2 м/с2.
55
Для диска 2 соответственно
= г2Ш* = 30 36 = 3080 см/с2 = 10,8 м/с2.
Полные ускорения точек соприкосновения дисков
<4 = VМ1+(ej,)2 = 1б>2 м/с2>
Дл3=7(“1)2 + (^3)«10,87м/с2.
Векторы скоростей и ускорений точек А дисков 1 и 2 и составляющие ускорений
этих точек изображены на рисунке.
Векторы угловой скорости и углового ускорения
Введем понятия векторов угловой скорости и углового ускоре-
ния тела. Если к — единичный вектор оси вращения, направленный
в ее положительную сторону, то векторы угловой скорости со и уг-
лового ускорения £ определяют выражениями
оо=фк; е=фк.
(12)
Так как к — постоянный по модулю и направлению вектор, то из
(12) следует, что
e = dco/df.
(13)
При ф>0 и ф>0 направления векторов со и е совпадают. Они
оба направлены в положительную сторону оси вращения Oz (рис.
34, а). Если ф>0 и ф<0, то они направлены в противоположные
стороны (рис. 34, б). Вектор углового ускорения совпадает по
направлению с вектором угловой скорости при ускоренном враще-
нии и противоположен ему при замедленном.
Рис. 34
56
Векторы со и ё можно изображать в любых точках оси вращения.
Они являются векторами скользящими. Это их свойство следует из
векторных формул для скоростей и ускорений точек тела.
Векторные формулы для скоростей и ускорений
точек тела
Выразим скорость, касательное, нормальное и полное ускорения
точки тела в векторной форме. Скорость точки по модулю и напра-
влению можно представить векторным произведением
v=taxr, (14)
где г — радиус-вектор точки М, проведенный из произвольной точ-
ки оси вращения Oz, например точки О (рис. 35). Выражение (14)
называется векторной формулой Эйлера. Убедимся в справедливо-
сти этой формулы проверкой. Действительно, вектор со х г перпен-
дикулярен плоскости, в которой расположены векторы, входящие
в векторное произведение. По направлению он параллелен скорости
v, направленной по касательной к окружности. Модуль векторного
произведения
|о> х r| = cor sin (со,Л г) = coh ~ v,
так как г sin (со,Л r)=h. Таким образом, векторное произведение
со х г по модулю и направлению определяет скорость точки. Следу-
ет только считать этот вектор приложенным в точке М\ он не
зависит от точки приложения вектора со на оси вращения, а также
точки оси, в которой помещено начало вектора г. В частности,
в качестве радиуса-вектора г можно использовать вектор h, напра-
вив его из точки О\ в точку М.
Из определения ускорения и векторной формулы Эйлера имеем
_ dv d - - dai _ _ dr
a=—=—(coxr)=— xr + cox—.
dt dt dt dt
Учитывая, что
dco/d/ = £; dr/df=v,
получаем
a—EXr+coxv. (15)
Первое слагаемое в (15) является касательным ускорением,
а второе — нормальным, т. е.
а,=^Ёхг; On=coxv = cox(coxr)=—hco2. (16)
57
В справедливости (16) убеждаемся вычислением их правых частей.
Имеем
|ё х ё| = er sin (ё,Л г)=eh,
что совпадает с касательным ускорением. Направление вектора ё х г
параллельно вектору касательного ускорения (рис. 36).
Для векторного произведения to х v имеем
|со х ё| = cor sin (со,Л ё)=сои=йсо2 = а„,
так как векторы со и v взаимно перпендикулярны. Направление
вектора со х v параллельно вектору нормального ускорения и напра-
влено от точки М к оси вращения, поэтому
ап— —hco2,
если условиться вектор Л направлять от оси вращения. Справед-
ливость формул (16) установлена.
Из определения скорости точки известно, что
v=dr/dt,
где г — радиус-вектор точки, проведенный из любой неподвижной
точки, в частности из любой точки на оси вращения тела, враща-
ющегося вокруг неподвижной оси. Но скорость точки при враща-
тельном движении тела определяется по векторной формуле Эйлера
v=a> хё.
Сопоставление двух формул для скорости точки дает формулу для
вычисления производной по времени от вектора г:
58
dr/dt = a>xr. (17)
В этой формуле вектор г имеет постоянный модуль, так как
соединяет все время две точки твердого тела. Вектор со, являясь
угловой скоростью вращения твердого тела вокруг неподвижной
оси, выполняет также роль угловой скорости вращения вектора г,
жестко скрепленного с телом.
Формула (17) остается справедливой также для вектора г, начало
которого находится в любой точке тела, а не только на оси враще-
ния. По этой формуле вычисляется производная по времени от
любого вектора, величина которого постоянна.
ГЛАВА 3
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Плоским движением твердого тела называют такое его движе-
ние, при котором каждая его точка все время движется в одной
и той же плоскости. Плоскости, в которых движутся отдельные
точки, параллельны между собой и параллельны одной и той же
неподвижной плоскости. Поэтому плоское движение твердого тела
иногда называют плоскопараллельным движением. Траектории то-
чек тела при плоском движении являются плоскими кривыми.
Плоское движение твердого тела имеет большое значение в тех-
нике, так как звенья большинства механизмов и машин, применя-
емых в технике, совершают плоское движение. Вращательное дви-
жение твердого тела вокруг неподвижной оси можно считать част-
ным случаем плоского движения.
При изучении плоского движения, как и любого другого, необ-
ходимо рассмотреть способы задания этого движения, а также
приемы вычисления скоростей и ускорений точек тела.
Пусть твердое тело совершает плоское движение, параллельное
неподвижной плоскости По (рис. 37). Тогда любая прямая, перпен-
дикулярная этой плоскости и жестко скрепленная своими точками
с движущимся телом, будет двигаться поступательно, т. е. все точки
этой прямой движутся одинаково.
Следовательно, для изучения движения точек, лежащих на рас-
сматриваемой прямой, достаточно изучить движение одной точки
этой прямой, например точки М. Рассуждая аналогично для любой
другой прямой, перпендикулярной плоскости По и скрепленной
с движущимся твердым телом, можно сделать вывод, что для
изучения плоского движения твердого тела достаточно изучить
движение точек этого тела, лежащих в ка-
кой-либо плоскости П, параллельной не-
подвижной плоскости По, т. е. точек тела,
лежащих в сечении рассматриваемого те-
ла плоскостью П и образующих плос-
кую фигуру.
Таким образом, для изучения плос-
кого движения твердого тела до-
статочно изучить движение плоской
фигуры в ее плоскости, параллель-
ной неподвижной плоскости По. По-
ложение фигуры на ее плоскости полно-
стью определяется положением отрезка
60
прямой линии, жестко скрепленной с этой плоской фигурой. Раз-
личные по форме твердые тела, совершающие плоское движение,
имеют в сечениях разные плоские фигуры. В общем случае за
плоскую фигуру примем всю плоскость и, следовательно, рассмот-
рим движение этой подвижной плоскости по другой, неподвижной
плоскости.
§ 1. УРАВНЕНИЯ ПЛОСКОГО ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
Для задания положения плоской фигуры на плоскости относите-
льно системы координат OiX}y}, лежащей в плоскости фигуры,
достаточно задать на этой плоскости положение отрезка ОМ (рис.
38), скрепленного с фигурой. Положение отрезка ОМ относительно
системы координат Охху, определится заданием координат какой-
либо точки этого отрезка и его направления. Например, для точки
О нужно задать координаты х0, Уо, а направление задать углом
ф, который образует отрезок ОМ с какой-либо осью, например
О1ХЬ или ей параллельной осью Ох\. Вместо угла ф можно
взять угол между любой другой осью или отрезком, скрепленными
с плоской фигурой, и осью 01X1, например угол ср. Тогда ф = (р + <х,
где а не зависит от времени. Таким образом, уравнения движения
плоской фигуры в ее плоскости, а следовательно, и плоского
движения твердого тела относительно системы координат OiXj_pi
имеют вид
x0=fi(t);<p=fi(О-
Плоское движение твердого тела определилось заданием трех
независимых параметров х0, у0, д> в зависимости от времени. Следо-
вательно, твердое тело, совершающее плоское движение в общем
случае, имеет три степени свободы. В частных случаях оно может
иметь и одну и две степени свободы.
Положение любой точки М плос-
кой фигуры относительно подвижной
системы координат Оху, скрепленной
с этой движущейся фигурой и лежа-
щей в ее плоскости, полностью опре-
деляется заданием координат х и у точ-
ки М, которые при движении плоской
фигуры в ее плоскости не изменяются
с изменением времени. Между коорди-
натами точки М в двух системах коор-
динат OiXi^] и Оху существует следу-
ющая зависимость (см. рис. 38):
61
*1 = *n + Г cos (а+ср); yt = у0 + г sin (а + ср),
где г — длина отрезка ОМ; а — постоянный угол между отрезком
ОМ и осью Ох.
Раскрывая косинус и синус суммы двух углов и учитывая, что
rcosa = x; rsina=y, получаем окончательные формулы в следующем
виде:
Xi = Хо+хсовф — ysinip; yi =yo+ycos(p + xsin(p. (1)
Формулы (1) являются уравнениями движения точки плоской
фигуры относительно системы координат OIxlyl.
Эти формулы позволяют определить координаты любой точки
плоской фигуры по заданным уравнениям движения этой фигуры
и координатам ее точки относительно подвижной системы коор-
динат, скрепленной с движущейся фигурой.
Используя векторно-матричную символику, (1) можно выразить
в форме
Р!=р0 + Лг, (Г)
где А — матрица поворота на плоскости:
(cos <р — sin <р\
],
sintp cost?/
г — вектор-столбец.
§ 2. РАЗЛОЖЕНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
НА ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ
Любое движение твердого тела, в том числе и движение плос-
кой фигуры в ее плоскости, бесчисленным множеством способов
можно разложить на два движения, одно из которых поступатель-
ное, а другое — вращательное. Основой этого разложения являет-
ся теорема о конечном перемещении плоской фигуры в ее плоско-
сти: плоскую фигуру в ее плоскости из одного положения
в любое другое можно перевести двумя перемещения-
ми — поступательным перемещением в плоскости фигу-
ры вместе с полюсом и поворотом в этой плоскости вок-
руг полюса.
Для доказательства теоремы рассмотрим два любых положения
плоской фигуры I и И в ее плоскости, определяемые двумя положе-
ниями отрезка АВ, скрепленного с плоской фигурой (рис. 39).
В общем случае, когда отрезок АВ в одном положении не
параллелен тому же отрезку в другом положении, из рис. 39 следует,
62
Рис. 39
что плоскую фигуру действительно сначала можно переместить
поступательно, например вместе с точкой А этой фигуры, причем
скрепленный с фигурой отрезок АВ займет положение А\В\, а затем
повернуть фигуру вокруг точки Ах на угол ср до совпадения А}В\
с AiBi.
В частном случае, когда отрезок АВ параллелен отрезку AiBt,
угол ср равен нулю и, следовательно, вращательного перемещения
в этом случае не будет. Очевидно, что в общем случае, когда ср не
равно нулю, сначала плоскую фигуру можно повернуть на угол
ср вокруг точки А, а затем переместить поступательно. И нако-
нец, совершая плоское поступательное перемещение вместе с точкой
А, фигуру можно поворачивать вокруг этой точки так, чтобы в мо-
мент совпадения точки А с точкой А} эта фигура повернулась на
угол ср.
Действительное плоское перемещение фигуры из положения
I в положение II может быть любым, но его всегда можно заменить
двумя простыми плоскими перемещениями — поступательным
и вращательным — так, чтобы конечное положение плоской фигу-
ры в обоих случаях было одним и тем же.
Действительное перемещение фигуры в ее плоскости из одного
положения в другое, бесконечно близкое к первому, в пределе
можно точно заменить двумя элементарными простыми плоскими
перемещениями — поступательным и вращательным.
Поступательное перемещение зависит от выбора точки фигуры,
вместе с которой совершается это поступательное перемещение,
в то время как угол поворота вокруг полюса не зависит от выбора
полюса.
На рис. 39 показаны случаи, когда за полюсы выбираются
сначала точка А, а затем точка В. Штриховой линией указаны
положения плоской фигуры после поступательных перемещений
вместе с точками А и В.
63
§ 3. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ ТЕЛА
ПРИ ПЛОСКОМ ДВИЖЕНИИ
Для характеристики вращательной части плоского движения
твердого тела вокруг подвижной оси, проходящей через выбранный
полюс, аналогично случаю вращения твердого тела вокруг непо-
движной оси можно ввести понятия угловой скорости со и углового
ускорения £. Если угол поворота вокруг подвижной оси, проходя-
щей через полюс, обозначить ср, то
со = |d<p/dz|; £=|dco/d/| = |d2<p/dz2|.
Так как вращательная часть движения не зависит от выбора
полюса, то и характеристики этой части движения — угловая ско-
рость и угловое ускорение — также не зависят от выбора полюса.
Следовательно, для заданного плоского движения фигуры в данный
момент они одинаковы относительно подвижной оси, проходящей
через любую точку фигуры.
При плоском движении тела угловую скорость и угловое ускоре-
ние можно считать векторами, направленными по подвижной оси,
перпендикулярной плоскости фигуры и проходящей через выбран-
ный полюс. Вектор угловой скорости со при плоском движении
фигуры направлен по подвижной оси так, чтобы с конца его стрелки
можно было видеть вращение фигуры против часовой стрелки.
Вектор углового ускорения е при ускоренном вращении фигуры
совпадает с направлением вектора угловой скорости со, а при замед-
ленном вращении эти векторы имеют противоположные направле-
ния. Так как со и е не зависят от выбора полюса на плоской фигуре,
то, следовательно, их можно приложить в любой точке фигуры, не
изменяя модулей и направлений этих векторов, т. е. со и е являют-
ся свободными векторами. Вектор углового ускорения является пер-
вой производной по времени от вектора угловой скорости, т. е.
e—dcojdt.
§ 4. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Установим зависимость между скоростями двух точек
А и В плоской фигуры при ее движении в своей плоскости от-
носительно системы отсчета O\X\y\Z\. Радиусы-векторы этих точек
удовлетворяют в любой момент времени векторному уравнению
(рис. 40, а)
гв=гл + АВ. (1)
64
Продифференцируем (1) по времени, рассматривая изменения
векторных величин относительно выбранной системы отсчета.
Имеем:
или
vB=»а + co x AB, (2)
- drj
так как по определению скорости vB=-------скорость точки В,
dt
- dr^
vA~-----скорость точки А плоской фигуры, а
dt
d
— (АВ ) = to х АВ
как производная по времени от вектора, имеющего постоянный
модуль. Расстояние между точками А и В плоской фигуры не
изменяется при ее движении.
Угловая скорость плоской фигуры со является и угловой скоро-
стью вектора АВ, скрепленного с плоской фигурой. Часть скорости
точки в форме векторного произведения обозначают vBA, т. е.
vBA = со х АВ', vBA — шАВ. (3)
Такую скорость имела бы точка твердого тела при его вращении
вокруг неподвижной оси. В рассматриваемом случае скорость
vBA является скоростью точки В от вращения плоской фигуры вокруг
подвижной оси, проходящей через точку А перпендикулярно плос-
кой фигуре, или кратко — скорость точки В от вращения плоской
фигуры вокруг полюса А.
65
Формула (2) с учетом (3) принимает форму:
vB=vA+vBA. (4)
Вектор vBA, выражающийся векторным произведением, перпендику-
лярен к отрезку АВ и направлен в сторону дуговой стрелки ш. Его
модуль имеет величину vBA=АВ а>, так как векторы и дв перпен-
дикулярны.
Согласно (4), строим в выбранном для этого масштабе треуголь-
ник скоростей для точки В (рис. 40, б).
Таким образом, скорость какой-либо точки фигуры при ее плос-
ком движении равна векторной сумме скорости полюса и скорости
этой точки от вращения фигуры вокруг полюса. Формула (4) выра-
жает зависимость между скоростями двух любых точек тела при
плоском движении в любой момент времени.
Скорость точки, принимаемой за полюс, и угловую скорость
плоской фигуры можно определить из заданных уравнений плоско-
го движения твердого тела.
Пример. Колесо радиусом R (рис . 41) катится со скольжением по прямой линии,
имея в рассматриваемый момент времени скорость центра v0 и угловую скорость си.
Определить в этот момент времени скорости точек обода колеса М, Р, N, рас-
положенных на концах вертикального и горизонтального диаметров.
Решение. Для точки М скорости полюса «0 и от вращения вокруг полюса
vmo направлены по одной прямой в одну и ту же сторону. Следовательно, по форму-
ле (4)
vm=vo+vmo,
где
кмо=а>0М = coR.
Для точки Р скорости v0 и vP0 противоположны по направлению, поэтому
Vp = l)p —Vpp,
vpo = <o' OP = <oR.
причем
При качении колеса по прямой линии без скольже-
ния скорость точки Р равна нулю и, следовательно,
в этом случае скорость центра vp и угловая скорость
ш связаны соотношением
vq = v ро — (oR.
Отсюда угловую скорость можно выразить через ско-
рость центра колеса «0 и его радиус R.
В точке N скорости vp ит vyp перпендикулярны.
Следовательно,
Рис. 41
66
«N=\/vo + vjfO,
где
vf/o = (oON=a)R.
§ 5. МГНОВЕННЫЙ ЦЕНТР СКОРОСТЕЙ
В каждый момент времени при плоском движении фигуры в ее
плоскости, если со ± 0, имеется единственная точка этой фигуры,
скорость которой равна нулю. Эту точку называют мгновенным
центром скоростей. Обозначим ее Р.
JSyis. доказательства этой теоремы достаточно указать способ
нахождения мгновенного центра скоростей, если известны по моду-
лю и направлению скорость какой-либо точки О плоской фигуры
и угловая скорость этой фигуры в рассматриваемый момент време-
ни. Пусть вращение происходит по часовой стрелке (ф<0 и со= |ф|)
(рис. 42). Скорость точки Р плоской фигуры равна нулю, если
скорость полюса О и скорость от вращения вокруг полюса
О в этой точке равны по модулю, но противоположны по направ-
лению. Эти точки лежат на перпендикуляре к скорости v0 в точке
О. В других точках векторная сумма двух векторов не может быть
равна нулю.
Итак, если vP=vo+vPo = 0, то vP0 = —v0; vP0 = v0.
Но
следовательно,
OP = vPO/co — vo/co.
Таким образом, мгновенный центр скоростей находится на пер-
пендикуляре к скорости vo, проведенном из точки О, на расстоянии
OP=vo)(o.
Мгновенный центр скоростей является единственной точкой
плоской фигуры для данного момента времени. В другой момент
времени мгновенным центром является уже другая точка плоской
фигуры.
Если мгновенный центр известен, то, приняв его за полюс и учи-
тывая, что скорость его в этом случае равна нулю, согласно (3) и (4),
для точки А фигуры имеем
1>а = vap, = vAp = (оАР, (5)
где АР — расстояние от точки А до мгновенного центра скоростей.
По направлению скорость vA в этом случае перпендикулярна
отрезку АР. Для точки В, аналогично,
67
vb=(oBP,
причем скорость vB перпендикулярна отрезку ВР.
Из (5) и (6) имеем
(o=vaIAP=vbIBP
и
va[vb=APIBP.
(6)
(7)
(8)
Следовательно, если мгновенный центр скоростей известен, то ско-
рости точек плоской фигуры при ее движении в своей плоскости
вычисляют так же, как и в случае вращения фигуры в рассматрива-
емый момент вокруг своего мгновенного центра скоростей с угловой
скоростью со.
Для нахождения скоростей точек тела при его плоском движении
обычно предварительно находят мгновенный центр скоростей. Но
можно применить формулу, выражающую зависимость между ско-
ростями двух точек тела.
Рассмотрим способы нахождения мгновенного центра скоро-
стей. Существует два основных способа его нахождения: из механи-
ческих условий задачи и по скоростям точек плоской фигуры.
В некоторых случаях удается сразу указать точку плоской фигу-
ры, скорость которой в рассматриваемый момент равна нулю. Эти
точки в таких задачах и являются мгновенными центрами скоро-
стей. Так, в случае качения без скольжения одного тела по поверх-
ности другого неподвижного тела точка соприкосновения поверх-
ностей тел и является мгновенным центром скоростей.
Например, при качении без скольжения колеса по неподвижной
прямой линии (см. рис. 48) и одного колеса по неподвижному
другому колесу (см. рис. 57) мгновенный центр скоростей находится
в точках соприкосновения колеса с прямой и соответственно колеса
с колесом. В общем случае, если известны скорости двух точек
Рис. 42
68
Рис. 45 Рис. 46 Рис. 47
плоской фигуры (рис. 43), мгновенный центр скоростей находится на
пересечении перпендикуляров к скоростям этих точек.
В этом случае, когда точки лежат на общем перпендикуляре
к скоростям этих точек, скорости точек параллельны и концы их
лежат на одной прямой, проведенной через мгновенный центр
скоростей (рис. 44 и 45), так как скорости точек пропорциональны
расстояниям от этих точек до мгновенного центра скоростей. Если
скорости двух точек, расположенных на общем перпендикуляре
к этим скоростям, еще и равны (рис. 46), то имеем мгновенное
поступательное движение плоской фигуры, при котором скорости
всех точек фигуры одинаковы по модулю и направлению. Угловая
скорость плоской фигуры при мгновенном поступательном движе-
нии равна нулю, и в этом случае, согласно формуле (7), мгновенный
центр скоростей находится в бесконечности.
Заметим, что при мгновенном поступательном движении только
скорости точек одинаковы, а их ускорения в общем случае различ-
ны. Невозможен случай, когда скорости двух точек, не лежащих на
общем перпендикуляре к скоростям, не равны друг другу по моду-
лю, но параллельны (рис. 47), так как для него не выполняется
теорема о проекциях скоростей двух точек тела на прямую, соеди-
няющую эти точки.
Пример. Колесо радиусом R (рис. 48) катится
без скольжения по неподвижной прямой, имея ско-
рость центра «о. Определить скорости точек М,
N и L обода колеса в данный момент времени.
Решение. Мгновенный центр скоростей в этом
случае находится в точке Р соприкосновения колеса
с прямой. Угловая скорость колеса определяется по
формуле (7):
vo «о
<о=—• —.
OP R
По формуле (5) для скоростей указанных точек
имеем
Рис. 48
69
vm~vl = (oMP=vgy/2; vff=aiNP=2vo,
так как
MP=LP=Ry/2-, NP=2R.
Скорости точек колеса направлены по перпендикулярам к отрезкам прямых,
соединяющих мгновенный центр скоростей с рассматриваемыми точками.
§ 6. ВЫЧИСЛЕНИЕ УГЛОВОЙ СКОРОСТИ
ПРИ ПЛОСКОМ ДВИЖЕНИИ
Угловую скорость плоской фигуры при плоском движении мож-
но вычислить, согласно ее определению, как
а» = ]d<p/dz|.
Затем ее можно определить по формуле (7):
(o=vaIAP—vbIBP.
Чтобы определить угловую скорость, надо скорость какой-либо
точки плоской фигуры разделить на расстояние от этой точки до
мгновенного центра скоростей. Направление вращения определяем
по направлению скорости какой-либо точки, считая, что плоская
фигура в данный момент вращается вокруг мгновенного центра
скоростей с угловой скоростью а>.
Угловую скорость при плоском движении можно вычислить
путем предварительного нахождения скорости какой-либо точки
плоской фигуры от вращения фигуры вокруг другой ее точки,
принятой за полюс, например vBA или vCA- Тогда угловая скорость,
согласно формуле (3),
со=vba)AB=vca)AC.
Знак угловой скорости определяют по направлению скорости
какой-либо точки фигуры от вращения фигуры вокруг другой ее
точки, выбранной за полюс.
Применяют и другие способы определения угловой скорости.
Так, если предварительно установить зависимость угла поворота
плоской фигуры от линейных и угловых величин других плоских
фигур тождественным соотношением, то, дифференцируя его по
времени, получаем соотношение, из которого иногда удается опре-
делить искомую угловую скорость. Этот способ используют часто
для нахождения зависимости угловых скоростей отдельных звеньев
плоских механизмов.
Пример. В кривошипно-шатунном механизме (рис. 49) даны длины кривошипа г,
шатуна / и расстояние h от оси вращения кривошипа до направляющей ползуна В.
70
Установить зависимость между угловыми скоро-
стями кривошипа си и шатуна coi при любом
положении механизма.
Решение. Положение кривошипа ОА опре-
деляется углом (р, а шатуна — углом ф. До тех
л
пор пока <р <—, справедливо тождество
2
rsin<p +A = /sim/c.
Дифференцируя тождество по времени, получим
г cos<p ф = 1со$ф ф.
Но |ф|=ш, ||^| = СО], следовательно,
r<o costp—la>i созф.
Полученное соотношение и является искомой зависимостью между угловыми
скоростями кривошипа и шатуна. При h=0 имеем частный случай кривошипно-
шатунного механизма. Если дополнительно /=г, то ф = <р и со1=со. Направления
вращений кривошипа и шатуна противоположны. При вращении кривошипа против
часовой стрелки шатун вращается по часовой стрелке.
§ 7. УСКОРЕНИЕ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ
Получим зависимость между ускорениями двух точек
А и В плоской фигуры при ее движении в своей плоскости дифферен-
цированием по времени векторного равенства для скоростей этих
точек
VB = VA + (° Х АВ ,
справедливого для любого момента времени. Выполняя дифферен-
цирование с учетом изменения векторных величин относительно
выбранной системы отсчета О^у^, получим:
dvB
dt
dv^ dco — d
=—4— xAB+cox — (AB).
dr dr dr
dvB _ dvA _
Здесь — = aB, — = aA — ускорения точек В и А относительно вы-
dr dr
dco -
бранной системы координат; — = е — вектор углового ускорения
dr
плоской фигуры.
У вектора АВ постоянный модуль. Его производная по скаляр-
ному аргументу t выразится в форме
d ->
— (АВ ) = со х АВ.
dr
71
Объединяя полученные результаты, имеем
ав=аА + ёхАВ + шх(шх АВ). (9)
Введем обозначение
аал = ех ТВ 4- со х (й х АВ).
Ускорение, равное аВА, имела точка твердого тела при вращатель-
ном движении вокруг неподвижной оси. В рассматриваемом случае
ускорение аВА является ускорением точки В от вращения плоской
фигуры вокруг полюса А.
После введения аВА формула (9) примет вид:
ад=ал + аял, (10)
или
йв=ОА + оВА + апВА, (Ю')
так как ускорение от вращательного движения вокруг полюса, как
и в случае вращения тела вокруг неподвижной оси, состоит из
касательной и нормальной составляющих аВА и а"ВА. Таким образом,
ускорение какой-либо точки плоской фигуры при плос-
ком движении равно векторной сумме ускорений полюса
и ускорения этой точки от вращательного движения
плоской фигуры вокруг полюса.
Для вращательного ускорения вокруг полюса имеем:
аВА — аВЛ + ^ВАг OU
причем
и
а'ВА = гАВ-, (12)
<?вл = со2АВ (13)
аВА—у/(Ава)2 + (.^ва)2=АВ \/е2 + со4 . (14)
Касательное ускорение аВА направлено по перпендикуляру к от-
резку АВ в сторону дуговой стрелки углового ускорения е (рис. 50,
а). Нормальное ускорение cfBA соответственно направлено по линии
АВ от точки В к полюсу А. Наконец, полное ускорение авл состав-
ляет с отрезком АВ угол а, тангенс которого можно определить по
формуле
tga=|a^|/|a^l = e/w2-
(15)
72
Из формулы (15) следует, что угол а для всех точек плоской
фигуры одинаков. При ф>0 угол а от ускорения аВА к отрезку ВЛ
надо откладывать по часовой стрелке, т. е. во всех случаях, незави-
симо от направления вращения фигуры, угол а всегда надо от-
кладывать в направлении дуговой стрелки углового ускорения. В соот-
ветствии с (10') можно построить в выбранном масштабе много-
угольник ускорений для точки В (рис. 50, б).
Пример. Колесо радиусом R катится по неподвижной прямой со скольжением,
совершая плоское движение (рис. 51). Ускорение центра колеса в рассматриваемый
момент времени ао, а угловая скорость и угловое ускорение колеса со и е. Дуговые
стрелки для <о и £ направлены по часовой стрелке, т. е. ф<0 и ф<0. Определить
в этот момент времени ускорения точек М, N и Р, расположенных на концах
вертикального и горизонтального диаметров обода колеса.
Решение. Ускорение точки М, приняв за полюс точку О, определим по
формуле
ам=ао + ^мо + амо
и аналогичным формулам для точек N и Р. Для касательного и нормального
ускорений точки М от вращения колеса вокруг точки О имеем:
о^0 = ш2 OM=cd2R\ аТМ0=е OM=eR.
Ускорение ахмо перпендикулярно отрезку ОМ и направлено в сторону, указыва-
емую дуговой стрелкой £, а ускорение а^0 направлено от точки М к точке О,
принятой за полюс. Аналогично направлены ускорения для точек N и Р. Так как
для точки М ускорения ао и ахмо направлены по одной прямой, то, предварительно
их сложив, получим две перпендикулярные составляющие ускорения, и следо-
вательно,
a-M=\J+ (“о+4го)2 = >/R1<°*+(“о+Л£)2-
73
ON=OM=R,
окончательно для точки N имеем
аы=у/(ао - a"N0)2 + (°уо)2 = >Лао- Ясо2)2 + Я2е2.
Для точки Р соответственно
аР— у/ (Ро-аро)2 + (а"ро)2 = J(a0- Re)2 + R2a>*.
В том случае, когда колесо катится без скольжения, точка Р является мгновен-
ным центром скоростей и скорость точки Р в любой момент времени равна нулю.
Скорость точки О в этом случае можно определить по формуле
v0=a) ’ OP=aR.
Дифференцируя по времени обе части этого тождества, получим:
dvo dco
— = Я—,
dz dt
или
ао = аЬ = Ле>
так как точка О движется прямолинейно, и
dco d«o
s= — , ah- —
dz ° dz
Учитывая, что
apo=E' OP=eR—ao,
имеем
ao~aTpo=®-
Следовательно, при качении колеса по прямой без скольжения
dp — Орд 3е О,
т. е. ускорение мгновенного центра скоростей, скорость которого равна нулю, не
равно нулю.
Если угловое ускорение не задано, то при отсутствии скольжения колеса по
прямой его можно определить по формуле
ао
Е=---.
R
§ 8. МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
В каждый момент движения плоской фигуры в своей плоскости,
если со и вне равны нулю одновременно, имеется единственная точка
этой фигуры, ускорение которой равно нулю. Эту точку называют
мгновенным центром ускорений. Обозначим ее через Q. Для до-
74
казательства этой теоремы предположим, что известны по модулю
и направлению ускорение какой-либо точки плоской фигуры, уг-
ловая скорость и угловое ускорение этой фигуры. Пусть ф<0
(рис. 52). Мгновенный центр ускорений лежит на линии, про-
веденной под углом а к ускорению точки, тангенс которого вы-
числяем по формуле
tga = e/ca2.
При этом угол а надо отложить от ускорения а0 в направлении
дуговой стрелки углового ускорения е, т. е. в рассматриваемом
случае по часовой стрелке. Только в точках этой прямой ускорение
а0 и ускорение от вращения aQ0 могут иметь противоположные
направления и одинаковые значения, т. е.
flg = Яд + aQ0 = О,
и тогда
flgo= — а0-
Но
aQo—Q0 \/е2 + со4 = ad,
следовательно,
0Q = яео/л/£2-|-ш4 = ао/\/£2 + си4-
Из приведенного доказательства следует, что мгновенный центр
ускорений является единственной точкой плоской фигуры, ускоре-
ние которой в рассматриваемый момент времени равно нулю.
В другой момент времени мгновенный центр ускорений находится
в общем случае в другой точке плоской фигуры.
Если мгновенный центр ускорений известен, то, выбрав его за
полюс, для ускорения точки А плоской фигуры по формуле (10)
получаем
я л = ас+Яле=
так как
Яе=0
и, следовательно,
ал = Яле = Л2л/£2 + сл4. (16)
Ускорение ал направлено под углом а к отрезку AQ, соединя-
ющему точку А с мгновенным центром ускорений в сторону дуго-
вой стрелки углового ускорения £ (рис. 53).
75
Для точки В, аналогично,
+ О7)
и ускорение ав также направлено под углом а к отрезку BQ.
Из формул (16) и (17) имеем
aAlaB=AQIBQ, (18)
т. е. ускорения точек плоской фигуры при плоском движении пропо-
рциональны расстояниям от этих точек до мгновенного центра
ускорений.
Итак, суммируя результаты, получаем, что ускорения точек
плоской фигуры при плоском движении можно определить так
же, как и при вращательном движении плоской фигуры вокруг
мгновенного центра ускорений с угловой скоростью со и угловым
ускорением г.
Для вычисления скоростей точек плоской фигуры при плоском
движении принимают, что плоская фигура вращается вокруг мгно-
венного центра скоростей, а для вычисления ускорения следует
считать, что она вращается вокруг мгновенного центра ускорений.
При качении без скольжения колеса по прямой (см. пример в § 7)
получается, что ускорение мгновенного центра скоростей не равно
нулю; следовательно, в общем случае мгновенные центры скоростей
и ускорений являются различными точками плоской фигуры.
Ускорения точек плоской фигуры при плоском движении, по-
добно скоростям точек, можно определять двумя способами: по
формуле (10), выражающей зависимость ускорений двух точек
плоской фигуры, и по формуле (16), используя мгновенный центр
ускорений. Обычно мгновенный центр ускорений, кроме частных
случаев, когда угловая скорость или угловое ускорение равны
нулю, располагается на плоской фигуре так, что трудно опреде-
лить расстояние от него до рассматриваемых точек фигуры. По-
76
этому определение ускорения точек рекомендуется вычислять по
формуле (10).
Рассмотрим способы нахождения мгновенного центра ускорений
как в частных, так и в общем случаях.
1. Пусть известно, что угловое ускорение е=0, а угловая ско-
рость су ^0. Очевидно, это возможно в случае, когда плоская фигура
вращается в своей плоскости с постоянной угловой скоростью или
когда угловая скорость достигает относительно наибольшего или
наименьшего значения. В этом случае для угла а
tga=e/co2 = 0
и, следовательно, угол а=0.
Мгновенный центр ускорений лежит на прямой линии, по кото-
рой направлено ускорение какой-либо точки плоской фигуры (рис.
54). Так как это справедливо для любой точки фигуры, то, следова-
тельно, мгновенный центр ускорений лежит в точке пересечения
прямых линий, по которым направлены ускорения точек плоской
фигуры. Ускорения точек плоской фигуры в этом случае направ-
лены к мгновенному центру ускорений, так как они состоят только
из одной нормальной составляющей от вращения вокруг мгновен-
ного центра ускорений.
Если известно ускорение, например точки А, то мгновенный
центр ускорений можно найти по расстоянию AQ'.
AQ=aAl<o2.
Эта формула получается из (16) в том случае, когда угловое
ускорение равно нулю.
2. Пусть угловая скорость со = 0, а угловое ускорение £#0. Это
возможно при мгновенном поступательном движении.
Тогда
tga=e/cu2 = oo
и, следовательно, угол a — прямой. Его надо откладывать от уско-
рения точки в направлении дуговой стрелки углового ускорения.
Мгновенный центр ускорений лежит на пересечении перпендикуля-
ров к ускорениям точек плоской фигуры, проведенных из этих точек
(рис. 55). Если известно числовое значение ускорения какой-либо
точки А, то расстояние от А до мгновенного центра ускорений
можно вычислить по формуле AQ = aAj£, которая получается из
формулы (16) при ш=0.
3. В общем случае, когда угловая скорость со и угловое ускорение
£ известны и не равны нулю, для угла а имеем
tga=e/co2^0.
77
Рис. 54
Мгновенный центр ускорений лежит на пересечении прямых
линий, проведенных к ускорениям точек фигуры под одним и тем
же углом а, причем угол а нужно откладывать от ускорений точек
в направлении дуговой стрелки углового ускорения независимо
от направления угловой скорости плоской фигуры (см. рис. 53).
Если известно ускорение, например точки А, то расстояние от
точки А до мгновенного центра ускорений можно найти по фор-
муле (16), т. е.
4. Пусть в данный момент времени известны ускорения двух
точек плоской фигуры: А и В (рис. 56). Укажем способ нахождения
мгновенного центра ускорений в этом случае. По формулам
(10)...(13), приняв за полюс точку А, имеем
ав—^а + ^ва + ^ва^
(19)
где
@вА~ АВсо2, ОвА = АВб.
Проецируя левую и правую части век-
торной формулы (19) на две взаимно пер-
пендикулярные оси Вх и By, получаем
ав cos)?=аА cosy + АВсо2;
ав sin/?=аА siny + АВе,
где Д и у — известные углы соответствен-
но между ускорениями ав и аА и положи-
тельным направлением оси Вх.
При принятом направлении оси Вх
проекцию с?ВА на эту ось надо взять со
знаком плюс, так как апвА направлена
78
всегда от точки В к полюсу А. Проекцию ускорения ахЯА на ось By
предположительно возьмем с плюсом, считая дуговую стрелку
£ в рассматриваемом случае направленной против часовой стрелки.
Определяя со2 и е, легко находим
со2 = (ав cos/? — аА cosy)/АВ; Е — (а3 sin/? — аА slay)/АВ.
Естественно, что в реальных случаях величина аз2, найденная из
полученной формулы, должна оказаться положительной. Знак же
углового ускорения £ определяется знаком правой части формулы
ДЛЯ £.
После того как найдены ей со2, задача нахождения мгновенного
центра ускорений сводится к уже рассмотренному случаю 3.
§ 9. ОСНОВНЫЕ СПОСОБЫ ВЫЧИСЛЕНИЯ УГЛОВОГО
УСКОРЕНИЯ ПРИ ПЛОСКОМ ДВИЖЕНИИ
При вычислении ускорений точек фигуры при плоском движении
необходимо знать угловое ускорение. Рассмотрим некоторые при-
емы его определения.
1. Если известен угол поворота или угловая скорость в зависи-
мости от времени, то угловое ускорение £ определяем путем диф-
ференцирования их по времени, т. е.
£ = |dto/dz| — |d2<p/d/ 2|.
2. Обычно требуется определить угловое ускорение в какой-либо
момент времени по другим величинам, известным в этот же момент
времени. В этом случае угловое ускорение тоже можно получить
путем дифференцирования угловой скорости по времени, считая ее
для вывода формулы известной функцией времени. Угловую ско-
рость можно найти по формуле (7):
co=va/AP,
где А — точка плоской фигуры; Р — мгновенный центр скоростей.
Дифференцируя со по времени, получаем
dtu 1 dvA d /1 \
— =------\-vA— I — ].
dr AP dt dtXAPJ
В тех случаях, когда АР постоянно,
Е—а\/АР, (20)
так как
79
e=|dto/d/|; а\ = |d^/d/|,
где aA — касательное ускорение точки А.
Так, при качении колеса без скольжения по неподвижной прямой
линии (см. рис. 51), если за точку А взять центр колеса О, то,
учитывая, что он движется прямолинейно, получим
£=aoIR,
так как в этом случае
OP=R=const и ао=ао,
где R — радиус колеса.
При качении без скольжения одного колеса по неподвижному
другому колесу сначала установим зависимость между угловой
скоростью tOj подвижного колеса и угловой скоростью со кривоши-
па ОА (рис. 57). Учитывая, что мгновенный центр скоростей подви-
жного колеса лежит в точке соприкосновения колес, получаем
«А VA R + r
со,=—= -=со-----,
АР г г
где R — радиус неподвижного колеса; г — радиус подвижного ко-
леса.
Дифференцируя по времени (21), имеем
61 =—е, (22)
Г
так как
е, = Idcoj/dr); £=|dco/dt|.
Из сравнения (21) и (22) видно, что связь между угловыми
скоростями и угловыми ускорениями колес полностью аналогична.
Это справедливо и для углов поворота колес, если нулевые их
значения выбрать в один и тот же момент времени.
При внешнем зацеплении дуговые стрелки угловой скорости
и углового ускорения подвижного колеса совпадают с дуговыми
стрелками соответственно угловой скорости и углового ускорения
кривошипа О А.
При внутреннем зацеплении колес дуговые стрелки со и £ колеса
и кривошипа имеют противоположные направления.
3. Иногда угловое ускорение можно найти путем проецирования
на оси координат известного по направлению ускорения, например
точки В, если ускорение какой-либо другой точки А и угловая
скорость фигуры со известны или их можно вычислить предвари-
тельно.
80
Так, если ускорение точки В
ав—ал+Овл + ^ва,
(23)
то, проецируя обе части (23) на ось Ох, перпендикулярную ускоре-
нию а в, получаем соотношение, из которого можно определить
угловое ускорение, если другие величины, входящие в это соотноше-
ние, известны.
Определим этим способом угловое ускорение линейки эллипсо-
графа АВ (рис. 58). Эллипсографом называют механизм, в кото-
ром одна точка А его линейки движется только по оси Ох, а другая
В — по оси Оу. Линейка эллипсографа обычно приводится в движе-
ние вращением кривошипа ОС вокруг оси О, причем точка С лежит
на середине линейки и описывает окружность с центром в точке О,
а точки части линейки ВС описывают всевозможные эллипсы, за-
ключенные между окружностью и прямой Оу. Точки части линейки
АС соответственно могут описать набор эллипсов, заключенных
между окружностью и прямой Ох.
В эллипсографе ускорения точек А и В направлены соответствен-
но по осям Ох и Оу. Проецируя (23) на Ох, получим:
О = ал + АВ со2 cost? — АВ • е sin<p, (24)
так как
(?вл = АВ • со2; атвл = АВ • е.
Соотношение (24) и служит для определения углового ускорения
линейки эллипсографа АВ, если все другие величины в этом соот-
ношении известны или их можно предварительно определить.
Описанным выше приемом удобно определять угловое ускоре-
ние шатунов в различных кривошипно-шатунных механизмах, ког-
да у шатуна есть точка, движущаяся прямолинейно.
Если известны ускорения двух точек А и В плоской фигуры по
модулю и направлению в какой-либо момент времени, то путем
81
проецирования соотношения (23) на два взаимно перпендикулярных
направления, одно из которых удобно направить по АВ, получим
два уравнения для определения угловой скорости и углового ускоре-
ния (см. п. 4 § 8).
Наоборот, по угловой скорости и угловому ускорению из этих
уравнений можно найти модули ускорений точек А и В, если извест-
ны направления ускорений этих точек.
4. В задачах (см. § 6, рис. 49), где зависимость между угловыми
скоростями различных тел можно установить путем дифференциро-
вания по времени тождественных соотношений между углами пово-
рота, зависимость между угловыми ускорениями часто можно по-
лучить путем двукратного дифференцирования по времени этих
тождеств. Так, после первого дифференцирования в рассматрива-
емом случае
ГС08фф = /С08<Д1^.
Дифференцируя вторично, имеем
— Г8Шфф + ГСО8фф= —/8Ш1Д1/г + /СО81Д1Д.
Так как £j = ||Д| — угловое ускорение шатуна АВ и s=|ф| — угло-
вое ускорение кривошипа О А, то
— rco2 simp -I- г£ cos<p = — ко2 sim/< + cosi/c
Если дополнительно известно, что угловая скорость со кривошипа
О А постоянна, т. е. е=0, то
— rco2 sin<£> = — ко2 sini/r + кх cosi/r.
Отсюда можно определить угловое ускорение шатуна в зависи-
мости ОТ УГЛОВ Ср И (Д И УГЛОВЫХ СКОрОСТеЙ СО И Ш].
Пример. Диск радиусом г=0,25 м приводится в движение от кривошипа О А
и вертикальной рейки (рис. 59). От кривошипа движение диску передается с помощью
шатуна АС. Рейка движется поступательно по закону S—1t2 м, кривошип вращается
л л
согласно уравнению <р=- sin -1 Угол <р отсчитывается от горизонтального направле-
2 2
ния. Определить угловые скорость и ускорение диска и шатуна, а также скорости
и ускорения точек В, С, D, мгновенные центры скоростей и ускорений диска в момент
времени (=1 с, если О А =АС= 1 ми точка D диска и О кривошипа расположены на
одной горизонтальной прямой.
Решение. Положение кривошипа в момент времени (=1 с определяется углом
л л л
q>=-sin-z=- рад. Кривошип в этот момент занимает вертикальное положение,
2 2 2
параллельное рейке.
82
Для алгебраических угловой скорости и углового ускорения кривошипа имеем
л2 и п3 п
<э =— cos -г, ё>= —— sin -1.
4 2 8 2
При t = 1 c
л3
ф = 0; ----=—3,87 c 2.
8
Таким образом, угловые скорость и ускорение кривошипа о)=|ф|=0, £ = |ф|=3,87 с-2.
Дуговую стрелку для е следует направить против положительного направления угла
<р, так как <р<0.
Для скорости и ускорения точки А кривошипа, вращающегося вокруг неподвиж-
ной оси, имеем:
vA = OAa> = 0; aA = c?A+azA; с?А = ОА'со2 = 0; аА = ОА е = 3,87 м/с2.
Ускорение аА = аА изображено на рис. 60 с учетом дуговой стрелки для с. У точки
А шатуна такие же скорость и ускорение, как и у точки А кривошипа.
Приняв точку А за полюс (рис. 61), определяем скорость точки С шатуна по
формуле
vc=»a+vca- (а)
Но v^=0, следовательно, vc=vCA, причем йСА перпендикулярна АС. В проекциях на
оси координат из (а) получаем:
»Сх=»са япР; vCy=vca cos/?. (а')
Траекторией точки С является вертикальная прямая. Поэтому «сх=0> *'с=1’,с>1-
С учетом этого из (а') имеем, что *’с=1’,с^1 =0 и угловая скорость шатуна
Вычисляем скорость и ускорение точки В рейки по формулам
vg=s=4i, aB=s=4. При Г=1 с гд=4 м/с, ав=4 м/с2.
Производные i и s положительны, поэтому vg я ag следует направить в сторону
возрастания s.
При отсутствии скольжения у точки В диска будут такие же скорость и состав-
ляющая ускорения в вертикальном направлении agy, как и у точки В рейки (рис. 62).
Приняв за полюс точку В диска, определяем скорость его точки С по формуле
•S4 1 / । X / Ц \ tat- I а 1^4 Г5 1 ^ = 50° Рис. 60
83
VC~«b + «CB-
(б)
Предположив, что диск вращается против часовой стрелки, строим треугольник
скоростей для точки С в соответствии с (б). Он выродился в отрезок прямой (рис.
62). В проекциях на оси координат из (б) имеем vCx=0, «су=«в~исв- Но vcy—0,
следовательно, «д—и vce=uB=4 м/с. Скорость v^b получилась положитель-
ной; следовательно, предположение о направлении вращения диска подтвердилось.
Угловую скорость диска определяем по формуле
«св «св ,
С0| =—=— = 16с
СВ г
Мгновенным центром диска является его точка С, так как vc=0. Используя эту
точку как МЦС, для точки D имеем:
vd = CD ш1=га)1=4 м/с.
Перейдем к определению ускорений точек и углового ускорения диска £j. Приняв
за полюс точку А шатуна, ускорение его точки С определяем по формуле
(»)
где <^.а=АСсоас=0, ахСА=АСеАС и nJ-л перпендикулярно АС. На основании (в)
строим многоугольник ускорений для точки С (рис. 63, а), предполагая, что еле на-
правлено против часовой стрелки.
В проекциях на оси координат из (в) (см. рис. 61 и 63, а) имеем
аСх = а л+ахСА sin# аСу=ахСА cos£
(в')
Ускорение точки С направлено параллельно оси О\у вследствие ее прямолинейного
ал
движения в этом направлении. Следовательно, а<>=0, асл= —------= —3,87/0,75 =
sin/?
= — 5,16 м/с2; асу=ахСАсо&Р= —2,55 м/с2, так как
О А —г .---------
sinp=-------=0,Т5', cosp=y/\ — sin2/?=0,66.
Так как ахСА получили со знаком минус, то направление для дуговой стрелки
противоположно предположенному (см. рис. 61).
Рис. 61
Рис. 62
84
Рис. 63
асл ,
Угловое ускорение шатуна е^с—---= 3,87 с-2. Ускорение ас направлено вверх,
АС
т. е. асу отрицательно, и ас=\асу\=2,55 м/с2. Для определения углового ускорения
диска «1 вычислим ускорение точки С, приняв за полюс точку В. Имеем:
где
ас=ов+^св+^св’
ОВ=аВх+аВу
(г)
В соответствии с (г) строим многоугольник ускорений для точки С, приняв £j
направленным против часовой стрелки (рис. 63, 6). В проекциях на оси координат из
(г) с учетом рис. 63, б получим:
aCx = aBx~dc& аСу = аВу~асв-
Но
Орд=СВ a)J=r<uJ= 64 м/с2; a^=s=4 м/с2; асу=— 2,55 м/с2.
С учетом полученных значений из (г') имеем:
одх=“сл=64 м/с2; а1св=аву—асу=4—(—2,55)=6,55 м/с2
и
ав=^а2Вх+0^=64,12 м/с2.
Ускорение ахсв получилось положительным, что подтверждает правильность
выбора направления для £j. Угловое ускорение диска
асв асв _2
£1=---= = 26,21 с .
СВ г
Приняв за полюс точку С, для ускорения точки D получим:
“п=“с+“дс+“Ьс> W
где
ifDC=DC со2 = по2 = 64 м/с2; azDC=DC ei=r ei = 6,55 м/с2.
На рис. 64 приведен многоугольник ускорений для точки D. В проекциях на оси
координат из (д) имеем:
аох=аде = 6,55 м/с2; aj)y= —ac~a!'DC= —2,55—64= —66,55 м/с2.
85
Определим ускорение точки D:
ао=л/“ох+а1у = 66>8 м/с2-
Для определения мгновенного центра ускорений Q диска вычисляем
si 26,2
tgaj =—=-----= 0,10; at] = 6°.
coj 256
Угол ai откладываем от ускорения ас в направлении дуговой стрелки £]. На линии,
проходящей через точку С под углом otj, находится точка Q. Расстояние до нее от
точки С определяем по формуле
аС 2,55
CQ=— -=----«0,08 м = 8 см.
^/eJ + co* 30,7
Точка Q находится вблизи точки С. На рис. 65 указаны в примерном масштабе
значения ускорений точек диска и положение Q. Ускорения ав и aD образуют такие
же углы ai с отрезками прямых, соединяющих эти точки с точкой Q.
Мгновенный центр ускорений шатуна АС находится в точке Qac, (см. Рис- 61),
так как для шатуна
tga=—^ = оо и a = 90°.
шлс
§ 10. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ
ПЛОСКОЙ ФИГУРЫ
Понятие мгновенного центра скоростей плоской фигуры при
плоском движении можно ввести, используя теорему о конечном
перемещении плоской фигуры. Фигуру в ее плоскости из заданного
положения I в любое другое положение II (рис. 66) можно перевести
одним поворотом в этой плоскости вокруг точки Р, называемой
центром конечного вращения.
86
Пусть в положении I плоская фигу-
ра характеризуется отрезком АВ, скре-
пленным с фигурой, а в положении
II этот отрезок займет положение А,В1.
Рассмотрим случай, когда АВ и AtBt
не параллельны. Можно доказать, что
центр конечного вращения Р находится
на пересечении перпендикуляров СР
и DP, восставленных из середин отрез-
ков А А} и ВВг. Для этого докажем, что заштрихованные треуголь-
ники АВР и А\ВХР равны по трем сторонам; АР=АхР как гипо-
тенузы в равных прямоугольных треугольниках АСР и AtCP, так
как по построению точка С есть середина отрезка ААЪ а СР —
общий катет треугольников. Аналогично, рассматривая равные
треугольники BDP и B{DP, получаем ВР=ВхР\ АВ—А\В}— по
условию.
Для перевода плоской фигуры из положения I в положение II
достаточно совместить между собой равные треугольники АВР
и AiBiP. Это можно осуществить одним поворотом треугольника
АВР в его плоскости вокруг вершины Р. При этом если сторону АР
до совмещения со стороной А\Р повернуть на угол ср, то сторону ВР
до совмещения со стороной В}Р следует повернуть на угол ф,
равный углу ср, так как углы ср и ф состоят из общего для них угла
Р и одинаковых углов а, лежащих в равных заштрихованных тре-
угольниках против равных сторон.
Итак, если отрезок АР повернуть вокруг Р на угол ср, то отрезок
ВР при этом повернется на тот же угол и в том же направлении, что
и отрезок АР, и, следовательно, точка А совпадает с точкой
а точка В — с точкой т. е. отрезок А В совпадет всеми своими
точками с отрезком АХВХ.
В том случае, когда отрезок АВ параллелен отрезку АуВу, перпен-
дикуляры СР к ААх и DP к ВВх параллельны и, следовательно,
пересекаются в бесконечности. В этом случае Р следует считать
находящимся в бесконечности и плоскую фигуру из положения
I в положение II можно перевести поступательным перемещением,
что соответствует повороту фигуры вокруг бесконечно удаленной
точки.
§ 11. МГНОВЕННЫЙ ЦЕНТР ВРАЩЕНИЯ. ЦЕНТРОИДЫ
Для двух бесконечно близких положений плоской фигуры вместо
центра конечного вращения получим так называемый мгновенный
центр вращения. Любое плоское перемещение фигуры можно при-
ближенно заменить последовательностью вращательных перемеще-
ний вокруг своих центров конечного вращения. В пределе плоское
87
перемещение фигуры можно заменить бесконечной последователь-
ностью элементарных мгновенных поворотов вокруг мгновенных
центров вращений, расположенных в определенной последователь-
ности.
Отсюда следует, что любое плоское движение фигуры можно
заменить последовательностью мгновенных вращений, совершае-
мых за тот же промежуток времени, что и рассматриваемое плоское
движение. Можно ввести угловую скорость вращения вокруг мгно-
венного центра вращения или, точнее, вокруг мгновенной оси, про-
ходящей через мгновенный центр вращения и перпендикулярной
плоскости движения.
При плоском движении фигуры мгновенный центр вращения
перемещается как в неподвижной, так и в подвижной плоскости,
скрепленной с движущейся плоской фигурой. Геометрическое место
мгновенных центров вращения на неподвижной плоскости называ-
ют неподвижной центроидой, а геометрическое место этих же мгно-
венных центров вращения на подвижной плоскости, скрепленной
с движущейся фигурой, — подвижной центроидой. Для каждого
плоского движения фигуры существуют свои две центроиды: по-
движная и неподвижная. Очевидно, что точка плоской фигуры,
с которой в рассматриваемый момент совпадает мгновенный центр
вращения, имеет скорость, равную нулю; следовательно, она явля-
ется в то же время мгновенным центром скоростей.
При плоском движении фигуры подвижная центроида катится
без скольжения по неподвижной центроиде. Эта теорема позволяет
плоское движение твердого тела рассматривать как качение без
скольжения одной плоской кривой по другой.
Центроиды нашли применение в некоторых вопросах кинемати-
ки механизмов. Рассмотрим пример нахождения центроид.
Пример. Стержень АВ, имеющий длину I, концами скользит по двум взаимно
перпендикулярным прямым (рис. 67). Найти центроиды стержня АВ при этом
движении.
Решение. Скорость точки А может быть направлена только по ОХА, а точки
В — только по О] В, так как траекториями этих точек являются указанные прямые.
Восстанавливая перпендикуляры в точках А и В к этим направлениям, получаем
положение точки Р, которая и будет мгновенным центром скоростей на подвижной
плоскости, скрепленной со стержнем, и мгновенным центром вращения на неподвиж-
ной плоскости. Из рисунка видно, что O1P=/=const во время движения, как диаго-
наль прямоугольника. Следовательно, неподвижная центроида есть окружность
радиуса I с центром в точке Oj.
На подвижной плоскости Аху, скрепленной со стержнем АВ, точка Р обладает
ОХР I
аналогичным геометрическим свойством, так как ОР=-=-= const, поэтому по-
I
движной центроидой является окружность радиуса - с центром в точке О.
2
При качении подвижной окружности по неподвижной без скольжения концы
А и В диаметра большой окружности движутся прямолинейно соответственно по
88
Рис. 68
прямым ОуА и ОуВ. Повернув на произвольный угол вокруг точки Оу в плоскости
чертежа оси координат Оухууу и рассмотрев этот случай после закрепления осей
координат в новом положении, можно обнаружить, что центроидами являются те же
окружности. Следовательно, другие две точки подвижной окружности движутся
прямолинейно.
Таким образом убеждаемся, что все точки подвижной окружности движутся по
прямым линиям, проходящим через точку Оу, центр неподвижной окружности. Это
свойство точек подвижной окружности можно использовать для преобразования
вращательного движения в прямолинейное поступательное движение.
В общем случае движения плоской фигуры мгновенный центр
скоростей — точка Р — и мгновенный центр ускорений — точка
Q — являются различными точками этой фигуры (рис. 68). Эти
точки совпадают, если плоское движение вырождается во враща-
тельное движение вокруг неподвижной оси.
Выберем точку А плоской фигуры и отметим точки Р и Q.
Поставим задачу — указать формулы, по которым можно вычис-
лить проекции ускорения точки А на оси Ах и Ау, Ах’ и Ау'. Ось Ах
перпендикулярна оси Ау и Ax’l.Ay’. Точка Q является мгновенным
центром ускорений. Следовательно, ускорение
aAy = -<pAQ=-AQ(B2
и аАу направлено всегда к точке Q\ проекция ускорения на перпен-
дикулярное направление ЛУ
= aAQ - AQe.
Точка Р является мгновенным центром скоростей. Скорость точки
А перпендикулярна АР, а скорость всегда направлена по касатель-
ной к траектории. Следовательно, ось Ах есть касательная к траек-
тории и проекция ускорения на нее является касательным ускорени-
ем и вычисляется по формуле для касательного ускорения
aAx=a\=dvAx/dt.
89
Ось Ay перпендикулярна касательной; следовательно, это глав-
ная нормаль траектории. Проекция ускорения на это направление
вычисляется по формуле для нормального ускорения
алу = ^л=:^л/Р-
Если аАу> 0, то траектория точки обращена выпуклостью к точке Р;
если аАу<0, то вогнутостью.
Кажется, что у точки А два различных нормальных и касатель-
ных ускорения. Но а\ и аА — касательное и нормальное ускорения
абсолютного движения точки А по отношению к неподвижной
системе координат (на рис. 68 не показана), a aAQ и а^е — со-
ответственно касательное и нормальное ускорения относительного
движения точки А по отношению к подвижной системе координат,
движущейся поступательно относительно неподвижной вместе
с точкой Q. Переносное ускорение точки А совпадает с абсолютным
ускорением точки Q, а оно равно нулю, так как эта точка фигуры
является мгновенным центром ускорений.
ГЛАВА 4
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТЕЛА
Вращением твердого тела вокруг неподвижной точки называют
такое движение, при котором одна точка тела остается все время
неподвижной. Это вращение часто называют сферическим движени-
ем твердого тела в связи с тем, что траектории всех точек тела при
таком движении располагаются на поверхностях сфер, описанных
из неподвижной точки. Тело, совершающее вращение вокруг непо-
движной точки, имеет три степени свободы, так как закрепление
одной точки тела уменьшает число степеней свободы на три
единицы, а свободное тело имеет шесть степеней свободы. Одной
из главных задач при изучении вращения тела вокруг неподвиж-
ной точки является установление величин, характеризующих это
движение, т. е. углов Эйлера, угловой скорости, углового ускоре-
ния, и вывод формул для вычисления скоростей и ускорений точек
тела.
§ 1. УГЛЫ ЭЙЛЕРА. УРАВНЕНИЯ ВРАЩЕНИЯ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Три степени свободы, которые имеет тело при вращении вокруг
неподвижной точки, требуют для задания положения тела относи-
тельно какой-либо системы координат трех независимых величин.
Эти три величины, или параметра, можно задать различными спо-
собами. В теоретической механике наибольшее применение получи-
ли так называемые углы Эйлера, рассмотренные ниже.
Через неподвижную точку О твердого тела проведем неподвиж-
ную систему координат Oxiy^Zi, относительно которой будем рас-
сматривать движение тела (рис. 69). Другую систему координат
Oxyz скрепим с телом, вращающимся вокруг неподвижной точки О.
Для определения положения движущегося тела относительно систе-
мы координат OxijiZi следует задать относительно этой системы
координат положение другой, подвижной, системы координат Oxyz,
скрепленной с движущимся телом. Для этой цели Эйлер предложил
три независимых параметра — углы Эйлера.
Первый из этих углов — угол прецессии — определяет поло-
жение линии узлов ОК, которая является линией пересечения ко-
ординатных плоскостей и Оху относительно неподвижной
координатной оси Ох}. Для изменения этого угла тело должно
91
z>l
Рис. 69
вращаться вокруг координатной оси Ozx, которую называют осью
прецессии. Положение линии узлов при движении тела изменяется
как относительно неподвижной системы координат Oxxyxzx, так
и относительно движущегося тела, т. е. подвижной системы коор-
динат Oxyz. Угол ф от положительной части оси Охх до положи-
тельного направления линии узлов ОК считается положительным,
когда он отсчитывается против часовой стрелки, если смотреть
с положительного направления оси Ozx. За положительное направ-
ление на линии узлов ОК выбираем то ее направление, с которого
поворот оси Ozx к оси Oz на наименьший угол виден происходящим
против часовой стрелки.
Вторым углом Эйлера является угол между координатными
плоскостями Оххух и Оху. Его измеряют углом 9 между перпен-
дикулярами к этим координатным плоскостям, которыми являются
оси Ozx и Oz. Угол 9 отсчитывают по оси Ozx до оси Oz в положи-
тельном направлении, если направление поворота оси Oz с положи-
тельного направления линии узлов ОК происходит против часовой
стрелки.
Угол 9 называют углом нутации, а ось ОК, вокруг которой
вращается тело при изменении угла 9, соответственно называют
осью нутации или линией узлов.
Для полного определения положения рассматриваемого тела
относительно системы координат Oxxyxzx нужно задать угол между
подвижной осью координат Ох и положительным направлением
линии узлов ОК — угол свойственного вращения ср. Угол ср от линии
узлов ОК до оси Ох считается положительным, если вокруг оси Oz
поворот оси Ох от линии ОК виден происходящим против часовой
стрелки.
При изменении угла <р тело вращается вокруг так называемой
оси собственного вращения Oz, перпендикулярной плоскости, в кото-
рой лежат прямые ОК и Ох, образующие этот угол. Таким образом,
92
угол <р определяет положение подвижной координатной оси Ох
относительно линии узлов ОК.
Углы Эйлера широко применяются в теории гироскопов. Движе-
ние гироскопа, т. е. симметричного тела, имеющего неподвижную
точку на оси симметрии и быстро вращающегося вокруг этой оси,
в общем случае можно представить состоящим из трех движений
(рис. 70): вращения с большой угловой скоростью вокруг оси сим-
метрии, или оси собственного вращения, при котором изменяется
угол собственного вращения ср; вращения гироскопа вместе со своей
осью симметрии вокруг неподвижной оси Ozb при котором изменя-
ется угол прецессии ф. Третье движение совершает ось симметрии,
которая, участвуя в прецессионном движении, описывает коничес-
кую поверхность с вершиной в неподвижной точке, а вследствие
изменения угла нутации в описывает в общем случае волнистую
поверхность.
Если угол в не изменяется, то коническая поверхность является
круговым конусом. Если коническую поверхность пересечь плос-
костью, перпендикулярной оси прецессии, то получится кривая
линия, на которой возможны узловые точки, или точки возврата.
Известно, например, что земной шар кроме собственного враще-
ния вокруг своей оси еще прецессирует и совершает нутационное
движение.
В технике особенно важное значение имеет так называемая
регулярная прецессия, когда угловые скорости вращения вокруг оси
собственного вращения и вокруг неподвижной оси прецессии посто-
янны и угол между этими осями (угол нутации) остается тоже
постоянным.
При вращении тела вокруг неподвижной точки в общем случае
изменяются все три угла Эйлера: ф, в и (р. Углы Эйлера являются
независимыми параметрами, или обобщенными координата-
ми, характеризующими положение тела
кой относительно неподвижной систе-
мы координат. Задание трех углов Эй-
лера для тела, вращающегося вокруг
неподвижной точки, как функций вре-
мени является необходимым и доста-
точным для полного описания такого
движения тела.
Итак, для определения положения
тела с одной неподвижной точкой
в любой момент времени надо задать
углы Эйлера как однозначные функции
времени, т. е.
e=Z2(0; ф=Уз(О- (D
с одной неподвижной точ-
93
Уравнения (1) являются уравнениями вращения твердого тела
вокруг неподвижной точки. Если эти уравнения заданы, то в любой
момент времени известно положение твердого тела относительно
системы координат Ox^zj.
Отметим, что углы Эйлера не являются единственной комбина-
цией трех независимых углов для тела, имеющего одну неподвиж-
ную точку. Существуют и другие комбинации углов, определяющих
положение одной системы координат относительно другой.
§ 2. ТЕОРЕМА О КОНЕЧНОМ ПЕРЕМЕЩЕНИИ ТВЕРДОГО ТЕЛА,
ИМЕЮЩЕГО ОДНУ НЕПОДВИЖНУЮ ТОЧКУ
Тело, имеющее одну неподвижную точку, из одного положения
в любое другое можно перевести одним поворотом вокруг оси, про-
ходящей через неподвижную точку. Эту ось называют осью конеч-
ного вращения.
Положение тела с неподвижной точкой относительно некоторой
системы отсчета можно полностью определить, если задать на
какой-либо неподвижной сфере, описанной из неподвижной точки
тела, положение сферической фигуры, скрепленной с этим телом. За
сферическую фигуру можно принять любую часть поверхности
сферы таким же радиусом, что и радиус неподвижной сферы, кото-
рый обычно принимают равным единице. За сферическую фигуру
можно принять также всю сферу единичного радиуса.
При движении тела вокруг неподвижной точки скрепленная
с движущимся телом сфера единичного радиуса движется по непо-
движной сфере того же радиуса. Положение сферы полностью
определяется заданием на этой сфере дуги большого круга, скреп-
ленной со сферой.
Пусть положение I тела характеризуется дугой большого круга
АВ, описанной из неподвижной точки тела, а в положении II — той
же дугой, но в другом положении на сфере AtB} (рис. 71). Аналогич-
но тому, как находится центр конечного вращения для плоской
фигуры при плоском перемещении, найдем точку Р на сфере в слу-
чае тела, имеющего одну неподвижную точку. Для этого соединяем
точки А с Л] и В с дугами большого круга, проведенным из
неподвижной точки тела и целиком лежащими на неподвижной
сфере. В серединах дуг АА\ ВВ^ из точек С и D проводим сфериче-
ские перпендикуляры, т. е. дуги большого круга СР и DP, касатель-
ные к которым перпендикулярны в точках С и D соответственно
касательным дуг АА} и ВВ}.
Эти перпендикуляры, лежащие на сфере, пересекутся в точке Р на
сфере. Из равенства прямоугольных сферических треугольников
BDP и DBxP, имеющих общий катет DP и равные катеты BD и DB\,
94
следует, что гипотенузы этих сферических
треугольников тоже равны, т. е. точки В и
равноудалены от точки Р.
Аналогично доказывается, что точки
А и А\ тоже одинаково удалены от точки Р.
Если повернуть заштрихованный сферичес-
кий треугольник АВР вокруг оси, проходя-
щей через точку Р и неподвижную точку О,
то этот треугольник, перемещаясь по сфере,
совпадет всеми своими точками с равным
ему по трем сторонам сферическим треуго-
льником AiBiP, так как сферический угол на
сфере,
фАР=а+Р,
на который надо повернуть вокруг ОР дугу АР до совпадения
с дугой АгР, равен сферическому углу на той же сфере
Фвр—Р+я,
на который надо повернуть дугу ВР до совпадения с дугой BiP.
Итак, путем поворота вокруг оси, перпендикулярной поверх-
ности сферы и проходящей через точку Р и, следовательно, прохо-
дящей также и через центр сферы, где расположена неподвижная
точка, тело можно переместить из одного положения в любое
другое. Для каждых двух положений тела получаются соответст-
вующая точка Р и, следовательно, соответствующая ось конеч-
ного вращения, проходящая через эту точку и неподвижную точку
тела.
Доказательство рассмотренной теоремы может вызвать затру-
днения в понимании из-за использования треугольников и углов
на сфере. Аналогичная теорема о конечном перемещении плоской
фигуры имеет более наглядное доказательство, так как в ней все
линии и углы расположены в одной плоскости. Для соответст-
вующих точек на обеих рисунках сохранены одинаковые обозна-
чения.
§ 3. МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ. АКСОЙДЫ
Ось, вокруг которой следует вращать тело, имеющее одну непо-
движную точку, для перевода его из одного положения в другое,
бесконечно близкое первому, называют мгновенной осью вращения
(или мгновенной осью) для данного момента времени.
95
Любое движение тела вокруг неподвижной точки можно
заменить последовательностью вращений вокруг совокупности
мгновенных осей. Геометрическое место мгновенных осей от-
носительно неподвижных осей координат, по отношению к ко-
торым рассматривается движение тела, называется неподвижным
аксвидом. Неподвижный аксоид является конической поверхностью
с вершиной в неподвижной точке тела, так как все мгновенные
оси проходят через неподвижную точку.
Геометрическое место мгновенных осей в движущемся теле
представляет подвижный аксоид, являющийся также конической по-
верхностью. Для каждого движения твердого тела вокруг непо-
движной точки имеется пара аксоидов. При этом, когда тело совер-
шает вращение вокруг неподвижной точки, подвижный аксоид ка-
тится по неподвижному без скольжения, так как общая образующая
этих аксоидов в каждый момент времени служит мгновенной осью,
вокруг которой вращается тело, и, следовательно, все точки оси
в рассматриваемый момент времени неподвижны. Если подвижный
аксоид катится без скольжения по неподвижному аксоиду, то осу-
ществляется движение тела вокруг неподвижной точки.
Очевидно, что при плоском движении твердого тела конические
аксиды являются цилиндрическими поверхностями, которые в пере-
сечении с плоскостью движения плоской фигуры образуют центро-
иды для этой фигуры.
Практически понятие аксоидов используется для классификации
видов прецессионных движений гироскопов.
§ 4. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
ПРИ ВРАЩЕНИИ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Так как движение тела, имеющего одну неподвижную точку,
в каждый момент времени можно считать вращением вокруг мгно-
венной оси, то в качестве величин, характеризующих это движение,
можно ввести мгновенную угловую скорость и мгновенное угловое
ускорение вращения твердого тела вокруг неподвижной точки. Оче-
видно, вводимая угловая скорость является векторной величиной,
направленной в каждый момент времени по соответствующей мгно-
венной оси, и при использовании правой системы координат вектор
угловой скорости со направлен по мгновенной оси так, что с направ-
ления этого вектора видно вращение тела вокруг мгновенной оси
против часовой стрелки. Модуль вектора угловой скорости можно
выразить через элементарный угол поворота deep вокруг мгновенной
оси за время Ас
.. |АФ|
со= Inn--.
Д/->0
96
Элементарный угол поворота Д<р, аналогично
случаю вращения тела вокруг неподвижной оси,
следует рассматривать как угол между двумя по-
ложениями в моменты t и / + Д/ подвижной плос-
кости, скрепленной с телом и проходящей через / \|
мгновенную ось в момент времени t. / А ]
Введенный таким образом вектор угловой ( 7 /
скорости (о характеризует угловую скорость вра- \ у7
щения вокруг мгновенной оси, направление мгно- ------
венной оси и направление вращения тела вокруг Рис- 72
этой оси. Вектор угловой скорости со можно при-
кладывать в любой точке мгновенной оси (рис. 72).
За вектор углового ускорения е при вращении тела вокруг непо-
движной точки принимают вектор, который характеризует измене-
ние угловой скорости со в данный момент как по числовой величине,
так и по направлению. Известно, что такой характеристикой явля-
ется производная по времени от вектора угловой скорости со. Таким
образом, угловое ускорение
E=dco/dC.
Так как угловая скорость может изменяться по модулю и напрале-
нию, то в общем случае угловое ускорение не направлено по мгно-
венной оси, а имеет направление как производная по времени от
вектора со, параллельное касательной к годографу этого вектора.
Условимся угловое ускорение е изображать в любой точке прямой,
параллельной этой касательной годографа со, но проходящей через
неподвижную точку тела.
§ 5. СКОРОСТИ ТОЧЕК ТЕЛА ПРИ ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
При рассмотрении вращательного движения тела вокруг непо-
движной оси получена векторная формула Эйлера, по которой
скорости точек тела полностью характеризуются общей для всех
точек тела угловой скоростью вращения и расположением точек
тела относительно оси вращения.
Формула Эйлера справедлива и для случая вращения твердого
тела вокруг неподвижной точки.
В этом случае в каждый момент времени тело вращается вокруг
мгновенной оси, проходящей через неподвижную точку, с угловой
скоростью со, направленной по мгновенной оси. Точки тела, лежа-
щие на мгновенной оси, имеют скорости, равные нулю, как и в слу-
чае неподвижной оси вращения.
По определению скорости точки
97
- dr
u =—,
dr
где г — радиус-вектор точки М. Модуль этого вектора — величина
постоянная, так как г соединяет две точки твердого тела (рис. 73).
По формуле для производной от вектора с постоянным модулем
по скалярному аргументу t имеем:
dr
- = со х г,
dr
где со — угловая скорость тела и вектора г, скрепленного с телом.
Из сравнения двух выражений для производной от г получаем:
v = со х г. (2)
Модуль скорости
v = cor sin(co,Л г) = coh, (3)
где h — кратчайшее расстояние от рассматриваемой точки до мгно-
венной оси.
Таким образом, скорости точек тела пропорциональны рассто-
яниям от этих точек до мгновенной оси. Направление скорости
какой-либо точки тела перпендикулярно плоскости, в которой
находятся векторы со и г, а следовательно, перпендикулярно отрез-
ку h.
Если требуется найти модуль угловой скорости тела в опреде-
ленный момент времени, то для этого, согласно (3), достаточно
разделить скорость какой-либо точки в этот же момент времени на
кратчайшее расстояние от этой точки до мгновенной оси.
Мгновенную ось в конкретных задачах часто находят из меха-
нических условий задачи, т. е. в рассматриваемый момент времени
она всегда проходит через две неподвижные точки тела. Так, если
движущееся тело касается в какой-либо точке неподвижной повер-
хности другого тела и при этом нет скольжения, то мгновенная
ось проходит через эту неподвижную в данный момент времени
точку.
В случае качения без скольжения одного конуса по другому,
неподвижному, конусу (рис. 74) мгновенной осью является та общая
образующая этих конусов О А, вдоль которой в данный момент
времени они касаются друг друга. Если, например, скорость vOi
точки Oi известна, то угловая скорость подвижного конуса
co = voJh=voJ(Hsince),
где Н=ООХ и а — угол полураствора подвижного конуса.
98
Проекции угловой скорости тела со как на подвижные, так
и неподвижные оси координат можно определить также через углы
Эйлера как функции времени, характеризующие положение тела
относительно неподвижной системы координат.
Если спроецировать правую и левую части (2) на координатные
оси, то получим формулы Эйлера для проекций скоростей v„
vy и vz:
Vx — (OyZ — О)гУ; Vy = COZX — COxz; Vz = (Oxy — COyX,
(4)
где x, у, z — координаты точек тела, скорости которых опре-
деляются.
Если взять точки тела, лежащие на мгновенной оси в рассмат-
риваемый момент времени, то для них скорости равны нулю,
а следовательно, приняв равными нулю vx, vy, vz, из (4) получим
следующие уравнения для координат этих точек:
a}yZ—cozy=0; cozx—a}xz=0;
а>ху—а)уХ=0.
Эти уравнения можно представить в виде
xl(ox=yla>y=zl(oz. (5)
Для определенного момента времени формула (5) является урав-
нением мгновенной оси. Если же величины, входящие в (5), рассмат-
ривать как функции времени, то она будет представлять собой
уравнения подвижного или неподвижного аксоида (в параметричес-
кой форме) в зависимости от того, в какой системе координат она
составлена.
Если х, у, z являются текущими координатами точки мгновен-
ной оси относительно подвижных осей, скрепленных с движущимся
99
телом, а сох, соу, coz — проекции угловой скорости тела на эти оси, то
формула (5) является уравнением подвижного аксоида.
Если вместо подвижных осей координат взять неподвижные оси,
относительно которых рассматривается движение тела, и проекции
угловой скорости тоже взять на эти оси, то тогда формула (5) будет
уравнением неподвижного аксоида.
Скорость какой-либо точки можно вычислить как первую про-
изводную по времени от радиуса-вектора г этой точки, проведен-
ного из неподвижной точки. С другой стороны, скорость точки
тела, вращающегося вокруг неподвижной точки, можно вычис-
лить по векторной формуле Эйлера (2). Следовательно, производ-
ная по времени от радиуса-вектора любой точки твердого тела,
вращающегося вокруг неподвижной точки, определится по фор-
муле
dr/dr = coxr. (6)
Длина радиуса-вектора г как расстояние между двумя точками
твердого тела является постоянной величиной при движении этого
тела. Следовательно, равенство (6) можно рассматривать как фор-
мулу для вычисления производной по времени от вектора, модуль
которого постоянен, и изменение этого вектора происходит только
вследствие вращения его с угловой скоростью со вместе с телом
вокруг неподвижной точки.
Если взять подвижную систему координат Oxyz, скрепленную
с телом, которое вращается вокруг неподвижной точки с угловой
скоростью со, то для единичных векторов i, j, к, направленных по
этим осям координат, как для векторов, модули которых постоян-
ны, на основании (6) имеем:
dr/dT - со х i; dj/dt=coxj-, dk/dt= coxk. (7)
Формулы (7) называют формулами Пуассона.
§ 6. УСКОРЕНИЕ ТОЧЕК ТЕЛА ПРИ ВРАЩЕНИИ
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Формулу для ускорения какой-либо точки М тела, вращающего-
ся вокруг неподвижной точки, нельзя получить непосредственно
используя формулу для ускорения при вращательном движении
вокруг неподвижной оси, так как в рассматриваемом случае угловое
ускорение е в общем случае не направлено по оси вращения, а сле-
довательно, и по со. Во всем остальном формулы для ускорения
в этих случаях полностью аналогичны.
100
Формулу для ускорения какой-либо точки тела М можно полу-
чить путем дифференцирования по времени вектора скорости, учи-
тывая, что скорость вычисляют по формуле (2). Выполняя это
дифференцирование, получаем
a=dv/d/=dw/d/ х r + co xdr/dt
Так как
dw/dz=E; dr/dt=v = co xr,
то
й=Ёхг+йхи. (8)
Формулу (8) часто называют формулой Ривальса.
Часть общего ускорения точки
авр=ёхг (9)
называют вращательным ускорением, а другую часть
аос=й xv (10)
— осестремительным ускорением. Следовательно, формула (8) при-
мет вид
а=аяр+аж, (11)
т. е. ускорение точки тела, вращающегося вокруг неподвижной точ-
ки, равно векторной сумме вращательного и осестремительного
ускорений.
В общем случае вращательное и осестремительное ускорения не
перпендикулярны; следовательно, модуль ускорения а вычисляют
как диагональ параллелограмма по формуле
а = -УавР++2авраОс cos (авр,л а»)- (12)
Рассмотрим вращательное и осестремительное ускорения по
отдельности. Вращательное ускорение вычисляют по формуле (9),
аналогичной формуле (2) для скорости точки. Только здесь вместо
угловой скорости со входит угловое ускорение е. Поэтому враща-
тельное ускорение авр направлено аналогично скорости v, если тело
вращается в рассматриваемый момент времени с угловой скоро-
стью, равной угловому ускорению Ё.
Модуль вращательного ускорения авр определяют аналогично
модулю скорости v [см. формулу (3)]:
авр = Л1£, (13)
101
Рис. 75
где Л] — кратчайшее расстояние от точки тела
до линии, по которой направлено угловое уско-
рение £ (рис. 75).
Формула (13) для авр получается из (9):
авр = |£ х r| = er sin (Ё, Л г)=Л1£,
где г sin(e, Л г) —/ij.
Из (13) следует, что вектор углового ускоре-
ния £ расположен на прямой линии, проходя-
щей через неподвижную точку. В противном
случае эта точка имела бы не равное нулю
вращательное ускорение.
Модуль осестремительного ускорения аж можно получить из
формулы (10):
аж=|ш х «| = см sin (со,Л v) = см = hco2,
(14)
так как угловая скорость со перпендикулярна скорости v.
Осестремительное ускорение направлено по перпендикуляру
к мгновенной оси, опущенному из точки, для которой оно вычисля-
ется, т. е. по отрезку h, так как, являясь векторным произведением
со и v, оно перпендикулярно плоскости, где находятся эти векторы,
и имеет направление вектора этого векторного произведения. Если
ввести вектор h, направленный по перпендикуляру от мгновенной
оси к рассматриваемой точке, то
aoc=—hco2. (15)
В случае вращения твердого тела вокруг неподвижной оси уг-
ловое ускорение и угловая скорость направлены по этой оси; тогда
расстояния h и равны. Следовательно, вращательное ускорение
превращается в касательное ускорение, а осестремительное — в
нормальное или центростремительное ускорение.
Таким образом, вращение тела вокруг неподвижной точки мож-
но рассматривать как более общее движение, чем вращение тела
вокруг неподвижной оси.
§ 7. ВЫЧИСЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ
Для вычисления ускорения точек тела необходимо знать угловое
ускорение Ё. Рассмотрим два основных способа его вычисления.
1. Если известны проекции угловой скорости на подвижные или
неподвижные оси координат сох, соу, coz, то проекции углового уско-
рения на те же оси определяют по формулам
102
Ex—dcox/df, Ey = dcoy/dt; £1=dcox/dt. (16)
По проекциям легко найти модуль углового ускорения и косину-
сы его углов с осями координат.
2. Другой способ определения углового ускорения е основан на
его разложении на две взаимно перпендикулярные составляющие.
Если ввести единичный вектор ш°, направленный по со, то
со=coco0;
I=dco/dt=(dco/dt) со° + со (da>°/dt). (17)
- dw _n
Составляющая ei полного углового ускорения £]=—со направ-
dt
лена по вектору со, когда dco/dt>0, и противоположно ему при
dco/dt<0.
- - d<u°
Составляющая полного углового ускорения е2=со— всегда
dr
перпендикулярна со, так как производная по времени от еди-
ничного вектора со0 есть вектор, перпендикулярный дифференци-
руемому единичному вектору и, следовательно, перпендикулярный
вектору со.
Составляющая углового ускорения £] является полным угловым
ускорением при вращении тела вокруг неподвижной оси, так как
составляющая е2 в этом случае равна нулю. Вычислим состав-
ляющую углового ускорения е2. Часто угловая скорость постоянна
по модулю и изменяется только по направлению. В этом случае
составляющая £] = 0 и полное угловое ускорение совпадает с Ё2.
Если же угловое ускорение £j не равно нулю, то его можно
вычислить отдельно и затем, сложив с составляющей е2, опреде-
лить полное угловое ускорение е. Итак, если угловая скорость
постоянна, то
_ _ d<u°
£ = £2 = С0 .
dr
В этом случае воспользуемся определением углового ускорения
через угловую скорость непосредственно:
£ = dco/dt.
Учитывая, что со=const, и применяя формулу, аналогичную
производной по времени от радиуса-вектора [см. формулу (6)],
когда радиус-вектор постоянен по длине, будем иметь
103
e = da)ldt = a)' x co,
(18)
где coe — угловая скорость вращения дифференцируемого по време-
ни вектора со, т. е. угловая скорость вращения мгновенной оси, по
которой направлен вектор со. Модуль углового ускорения можно
найти аналогично скорости точки, т. е.
Е = СО}СОе,
(19)
где расстоянием h является се»! — кратчайшее расстояние от кон-
ца вектора со до оси, по которой направлена угловая скорость сое
(рис. 76).
Вектор углового ускорения е пройдет через неподвижную точку
и будет параллелен касательной к годографу вектора со. Окон-
чательно направление е берут в соответствии с формулой (18), т. е.
по направлению вращения мгновенной оси в зависимости от уг-
ловой скорости сое.
Рассмотрим теперь пример на вычисление угловой скорости,
углового ускорения и линейных скоростей и ускорений точек тела,
вращающегося вокруг неподвижной точки.
Пример. Круговой конус I с углом раствора 2а катится без скольжения по
внутренней стороне неподвижного конуса II с углом раствора 2Д (рис. 77). Скорость
точки 01 подвижного конуса постоянна и равна v, расстояние ОО\ = Н.
Определить угловую скорость и угловое ускорение подвижного конуса и скоро-
сти и ускорения точек А и В этого конуса.
Решение. Мгновенной осью конуса I является его образующая О А. Если
скорость точки О] направлена от плоскости ОАО\ во внешнюю сторону, то угловая
скорость конуса со направлена по мгновенной оси от точки О к точке А. Модуль
угловой скорости
V V V
(О = — =----=-------= const.
ho, OtM Hsma
Скорость точки А равна нулю, так как точки нахо-
дится на мгновенной оси. Скорость точки В вычисляем
по формуле
V
va = <ohn = a>BL =----277sin = 2t>.
tfsina
Скорость vB перпендикулярна плоскости OLB и направ-
лена от нее во внешнюю сторону.
Угловое ускорение е вычисляем по формуле (19):
£ = СО]СОе.
Годографом вектора со является окружность ради-
уса сор
104
vsinfl
(Di = co sin/J =--.
Яяпа
Если рассмотреть плоскость, в которой расположены мгновенная ось О А, ось
подвижного конуса ОО\ и ось неподвижного конуса ОС (плоскость рисунка), то при
движении конуса / эта плоскость вращается вокруг оси неподвижного конуса ОС,
расположенной в указанной плоскости, и, следовательно, вокруг этой оси вращается
и мгновенная ось ОА, находящаяся в этой плоскости. Угловую скорость этого
вращения сое можно определить, если скорость какой-либо точки этой плоскости,
участвующей только во вращении вокруг оси ОС и не имеющей другого движения,
разделить на кратчайшее расстояние от этой точки до оси ОС. Отмеченными
свойствами обладают все точки подвижной оси подвижного конуса 001. Выбрав на
этой оси точку О], имеем:
v
<ое=—-,
OtC
где 01С — кратчайшее расстояние от точки О] до оси ОС. Так как
OiC=Hsin(J}— а),
то
v
ше=-----------------------------------------.
Яяп(/?—а)
Таким образом,
Г ЯП/? V V1 яп/?
£=а>1 =-------'----------=---------------.
#sina Яяп(Д—a) №sinasin(/f—a)
Так как скорость точки Oj направлена во внешнюю сторону от рисунка, то
мгновенная ось ОА вращается вокруг оси ОС по часовой стрелке и, следовательно,
Рис. 77
105
угловое ускорение г направлено перпендикулярно плоскости О АС во внешнюю
сторону.
Ускорение какой-либо точки подвижного конуса можно определить по формуле
Л-Лар^^ос-
Для точки А расстояние Л=0 и поэтому аос=Лш=0. Для вращательного ускорения
имеем
v2 sinfi
alp=hIe=e' О А =--------------.
Нsina cosa sin (fl— a)
Ускорение aBp, и следовательно, и полное ускорение аА этой точки направлено
перпендикулярно ОА и находится в плоскости ОАО^. Направление аА определяется
аналогично скорости, если бы угловой скоростью служило угловое ускорение и вра-
щение вокруг £ происходило против часовой стрелки.
Для точки В
V2 2v2
=<в2 • Л=ш2 • BL=----• 2Н sina=--;
№sin2a //sina
H v2 sinfl
a^p—ehi =eOB=—-------------------.
H2 sina • cosa sin (fl—a)
Ускорение аж направлено no BL от точки В к точке L, а ускорение авр перпен-
дикулярно О В и расположено в плоскости OBL. Полное ускорение точки В вычисля-
ется как диагональ параллелограмма, построенного на ускорениях Дос и aBV, т. е.
ав=>/^с+авр ~ ' “вр cos 2a.
Отметим, что ше можно получить, если угловую скорость а>, направленную по
мгновенной оси, разложить по правилу параллелограмма на составляющие по осям
подвижного и неподвижного конусов. Составляющая по оси неподвижного конуса
и будет угловой скоростью <йе. Оправданием этого служит доказанная далее теорема
о сложении вращений твердого тела вокруг пересекающихся осей.
§ 8. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ СВОБОДНОГО
ТВЕРДОГО ТЕЛА
Разложение движения свободного твердого тела
на поступательное и вращательное
Рассмотрим общий случай движения свободного твердого тела,
т. е. тела, имеющего шесть степеней свободы. Покажем, что самое
общее движение свободного твердого тела можно представить со-
стоящим из поступательного движения вместе с какой-либо точкой
тела и вращательного движения вокруг этой точки.
Положение тела относительно какой-либо системы координат
Oi-^iji^i полностью определяется заданием трех точек тела, не лежа-
106
щих на одной прямой, или заданием треугольника, скрепленного
с телом (рис. 78). Треугольник АВС, а следовательно, и тело,
скрепленное с ним, из одного положения I в любое другое положе-
ние И можно переместить одним поступательным перемещением
вместе с какой-либо точкой тела (например, точкой А, когда подви-
жная система координат Xx'ij'iz'i перемещается поступательно)
и поворотом относительно подвижной системы координат Ax\y\z\,
т. е. вокруг оси, проходящей через эту точку.
Поступательная часть перемещения тела зависит от выбора
точки, вместе с которой перемещается тело, а вращательная часть
перемещения вокруг оси или вокруг точки не зависит от выбора
точки. Поступательную часть перемещения можно поменять места-
ми с вращательной частью, и, наконец, их можно выполнять одно-
временно, т. е. пока тело совершает поступательное перемещение из
одного положения в другое, за это же время можно осуществить
и поворот тела вокруг точки на требующийся угол.
Если два положения тела бесконечно близки, то истинное элеме-
нтарное перемещение свободного твердого тела можно заменить
элементарным поступательным перемещением вместе с какой-либо
точкой тела и элементарным поворотом вокруг мгновенной оси,
проходящей через эту точку, осуществляемыми за то же время, что
и истинное перемещение тела.
Любое движение свободного твердого тела, таким образом,
можно заменить совокупностью поступательных движений вме-
сте с какой-либо точкой тела и вращений вокруг этой точки,
совершаемых за то же время, что и истинное движение.
Итак, любое движение свободного твердого тела можно со-
ставить из поступательного движения вместе с подвижной си-
стемой координат и сферического движения относительно этой
системы координат. Для сферического движения можно ввести
угловую скорость си и угловое ускорение £, которое является
Рис. 78
107
первой производной по времени от со, как в случае вращения тела
вокруг неподвижной точки.
Угловую скорость и угловое ускорение относительного враща-
тельного движения вокруг какой-либо точки тела называют в об-
щем случае угловой скоростью и угловым ускорением свободного
твердого тела. Эти величины не зависят от выбора точки тела. От
выбора точки тела зависит только поступательное движение тела.
Уравнения движения свободного твердого тела
В общем случае для определения положения свободного твер-
дого тела относительно системы координат О^у^ достаточно за-
дать относительно этой системы координат положение другой си-
стемы координат Ox’iy’iz'i, движущейся поступательно относитель-
но первой системы вместе с какой-либо точкой О рассматриваемого
тела, и углы Эйлера, определяющие положение системы координат
Oxyz, скрепленной с движущимся телом, относительно системы
координат Ox!xy\z!x (рис. 79).
Для простоты предположим, что оси Ох'ь Oy'h Oz't соответст-
венно параллельны осям Oiji, Oxzx. Таким образом, положение
свободного твердого тела относительно системы координат О, XijiZj
полностью определяется, если относительно этой системы задать
координаты точки О тела как однозначные функции времени и углы
Эйлера подвижной системы координат Oxyz, скрепленной с движу-
щимся телом, относительно системы координат Ox\y\z\, поступа-
тельно движущейся вместе с точкой О тела:
Xo=/1 (O;jo=/2(O; го=/з(О; е=МУ, <p=f6(ty (20)
Рис. 79
108
Уравнения (20) являются кинематическими уравнениями движе-
ния свободного твердого тела в общем случае его движения. Этих
уравнений шесть, т. е. столько, сколько степеней свободы у свобод-
ного твердого тела. Первые три уравнения (20) определяют движе-
ние тела вместе с точкой О, вторые три уравнения определяют
вращательное движение вокруг этой точки.
Первые три уравнения для рассматриваемого движения свобод-
ного твердого тела зависят от выбора точки О тела; последние три
уравнения (углы Эйлера) не зависят от выбора точки О, вокруг
которой рассматривается вращение тела.
Скорости и ускорения точек свободного
твердого тела в общем случае
Скорость произвольной точки М свободного твердого тела при
его движении относительно системы отсчета O\XXyiZ\ (рис. 80) полу-
чим дифференцированием радиуса-вектора р этой точки, представ-
ленного в форме суммы радиуса-вектора р0 точки О, принятой за
полюс, и радиуса-вектора г точки М, проведенного из полюса О.
Имеем:
р=р0 + г,
справедливое для любого момента времени. Продифференцировав
обе части этого равенства, рассматривая изменение векторных вели-
чин относительно выбранной системы отсчета, получим:
dp dpo dr
dr dr dr
dp _ dpo _
В этой формуле —=v, —=vo — скорости точек М и О тела от-
носительно рассматриваемой системы отсчета;
dr
—=шхг,
dr
производная от вектора г, имеющего постоянный модуль, по ска-
лярному аргументу. Радиус-вектор соединяет две точки твердого
тела. Его модулем является расстояние между этими точками, а оно
не изменяется при движении тела. Угловая скорость тела со есть
и угловая скорость вектора г, жестко скрепленного с телом.
Таким образом, для скорости произвольной точки тела имеем:
109
v=vo + coxr. (21)
Векторное произведение сох г, согласно формуле Эйлера, выражает
скорость точки М от вращения тела вокруг полюса О.
Формула (21) позволяет определить скорость любой точки
свободного твердого тела как векторную сумму скорости
полюса и скорости этой точки от вращения тела вокруг
полюса.
Ускорение произвольной точки М тела получим дифференциро-
ванием по времени ее скорости, используя (21). Имеем:
dv dvo dcu _ _ dr
—= 1—xr+cox-.
dr dr dr dr
dv — dv0 —
В этой формуле — = a, — = a0 — ускорения точек M и О тела
dr dr
dco —
относительно выбранной системы отсчета; — = £ — угловое ускоре-
dr
ние тела, со — угловая скорость и
dr
— = со х г
dr
является производной по времени от вектора, имеющего постоян-
ный модуль.
Для ускорения произвольной точки М (рис. 81) имеем:
а=а0 + £ х г+со х (со хг). (22)
Последние два слагаемых в этой формуле, согласно формуле Рива-
льса, представляют ускорение точки М от вращения тела вокруг
полюса, состоящего из вращательной составляющей е х г и осест-
ремительной составляющей со х (со х г).
Из (22) следует: ускорение точки свободного твердого
тела является векторной суммой ускорения полюса и
ускорения от вращения тела вокруг полюса.
Формулы (21) и (22) дают возможность получить распределе-
ние скоростей и ускорений по точкам свободного твердого тела
в самом общем случае его движения, если известны скорость
и ускорение полюса и угловая скорость и угловое ускорение
вращения тела.
При выборе различных точек тела в качестве полюса изменяют-
ся скорость и ускорение полюса. Угловая скорость и угловое уско-
рение при этом не изменяются. Докажем это для угловой скорости,
используя (21).
ио
Пусть А и В — точки свободного твердого тела. Приняв за
полюс точку А, для скорости точки В имеем
va=vA+coxAB, (23)
где соА — угловая скорость вращения тела вокруг точки А. Анало-
гично, приняв за полюс точку В, для скорости точки А получим
vA=(лвх BA —vb—(ОвХ АВ, (24)
где а>в — угловая скорость вращения тела вокруг точки В. Из (23)
и (24) имеем
— —• _ —♦ ___ , —♦
шахАВ =а)вхАВ; (соа — сов)х АВ = 0
для любых двух точек свободного твердого тела. Эти точки можно
выбрать так, чтобы АВ не было параллельно вектору (ёоА — сов).
Тогда получаем
со^ — сод=0; соА = а)в=а>, (25)
т. е. угловая скорость свободного твердого тела не зависит от
выбора полюса. Она инвариантна по отношению к выбору полюса.
Так как равенство (25) справедливо для любого момента време-
ни, то, дифференцируя его по времени, получим
dcoj/d/=dwa/dZ; £л = £д=£,
т. е. вектор углового ускорения свободного твердого тела тоже не
зависит от выбора полюса.
111
ГЛАВА 5
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 1. ОСНОВНЫЕ ПОНЯТИЯ
Во многих задачах движение точки приходится рассматривать
относительно двух (и более) систем отсчета, движущихся друг от-
носительно друга. Так, движение космического корабля, движуще-
гося к Луне, требуется рассматривать одновременно и относительно
Земли и относительно Луны, которая движется относительно Зем-
ли. Любое движение точки можно считать сложным, состоящим из
нескольких движений. Например, движение корабля по реке от-
носительно Земли можно считать сложным, состоящим из движе-
ния по воде и вместе с текущей водой.
В простейшем случае сложное движение точки состоит из от-
носительного и переносного движений. Определим эти движения.
Пусть имеем две системы отсчета, движущиеся друг относительно
друга. Если одну из этих систем OlXiylzI (рис. 82) принять за
основную или неподвижную (ее движение относительно других
систем отсчета не рассматривается), то вторая система отсчета
Oxyz будет двигаться относительно первой. Движение точки от-
носительно подвижной системы отсчета Oxyz называется от-
носительным. Характеристики этого движения, такие, как траек-
тория, скорость и ускорение, называются относительными. Их
обозначают индексом г; для скорости и ускорения vr, аг. Движение
точки относительно основной, или неподвижной, системы от-
счета OjXijjZj называется абсолютным (или сложным). Его также
иногда называют составным движением. Траектория, скорость
и ускорение этого движения называются абсолютными. Скорость
и ускорение абсолютного движения обозначают буквами v, а без
индексов. Переносным движением точки называют движение, ко-
торое она совершает вместе с подвижной системой отсчета, как
точка, жестко скрепленная с этой системой в рассматриваемый
момент времени. Вследствие относительного движения движущаяся
точка в различные моменты времени совпадает с различными точ-
ками тела 5, с которым скреплена подвижная система отсчета.
Переносной скоростью и переносным ускорением являются ско-
рость и ускорение той точки тела S, с которой в данный момент
совпадает движущаяся точка. Переносные скорость и ускорение
обозначают ve, ае.
Если траектории всех точек тела S, скрепленного с подвижной
системой отсчета, изобразить на рисунке, то получим семейство
112
линий — семейство траекторий переносного движения точки М.
Вследствие относительного движения точки М в каждый момент
времени она находится на одной из траекторий переносного движе-
ния. Точка М может совпадать только с одной точкой каждой из
траекторий этого семейства переносных траекторий. В связи с этим
иногда считают, что траекторий переносного движения нет, так как
приходится считать траекториями переносного движения линии,
у которых только одна точка фактически является точкой траек-
тории.
В кинематике точки изучалось движение точки относительно
какой-либо системы отсчета независимо от того, движется эта
система отсчета относительно других систем или нет. Дополним это
изучение рассмотрением сложного движения, в простейшем случае
состоящего из относительного и переносного. Одно и то же аб-
солютное движение, выбирая различные подвижные системы от-
счета, можно считать состоящим из разных переносных и соответ-
ственно относительных движений.
§ 2. АБСОЛЮТНАЯ И ОТНОСИТЕЛЬНАЯ ПРОИЗВОДНЫЕ
ОТ ВЕКТОРА. ФОРМУЛА БУРА
При рассмотрении сложного движения точки приходится рас-
сматривать изменение векторных величин с течением времени по
отношению к системам отсчета, движущимся друг относительно
друга. Одно изменение имеет векторная величина относительно
подвижной системы отсчета, движущейся относительно другой, не-
подвижной, и другое — относительно неподвижной системы от-
счета. Неподвижной системой отсчета считается система, движение
которой относительно других систем отсчета не рассматривается.
Введем обозначения производных от векторных величин при
рассмотрении их изменения относительно различных систем от-
счета, движущихся друг относительно друга. Для любого вектора
b(t) его производную по времени по отношению к неподвижной
113
системе отсчета называют полной (или абсолютной) производной
и обозначают db/dt Производную по времени при учете изменения
вектора b относительно подвижной системы отсчета называют от-
носительной (или локальной) производной и обозначают dZ>/dZ или
(dtyd/),.
Установим зависимость между полной и относительной произ-
водными по времени вектора Ь и величинами, характеризующими
движение подвижной системы отсчета относительно неподвижной.
Для этого разложим вектор b на составляющие, параллельные осям
подвижной системы координат. Имеем
b = bxi+bj+bzk. (1)
Изменение вектора b относительно неподвижной системы коор-
динат 0{x{y{Z\ в зависимости от времени состоит из изменения его
проекций Ьх, Ьу, bz на подвижные оси координат и изменения единич-
ных векторов г, j, к подвижных осей вследствие движения подви-
жной системы координат относительно неподвижной. Вычислим
полную производную по времени от вектора Ь, используя формулу
(1). Получим
db
dr
dbx- dbv- dbz - , dr , dj , dfc
=— гЧ---j-j— k+bx—\-by—\-bz—.
dt dt dt dt dt dt
(2)
Первые три слагаемых учитывают изменение вектора b при неиз-
менных г, j, к и поэтому составляют относительную производную,
т. е.
db dbx- dby- dbz-
— = —id-------j4----k.
dt dt dt dt
(3)
Производные по времени единичных векторов определим по фор-
мулам Пуассона
di/dt = coxr, dj/dt = coxj-, dk/dt= cbxk,
так как эти векторы не изменяются от поступательного движения со
скоростью v0 вместе с подвижной системой отсчета (рис. 83). Вектор
со есть угловая скорость вращательной части движения вокруг точки
О подвижной системы координат отнсительно неподвижной. Под-
ставляя эти значения производных единичных векторов в (2) и вы-
нося со за скобки, получим
db/dt= db/dt + cox(bxi+bj+bjc),
114
или, учитывая (1),
db/dt = db/dt + co xb. (4)
Получена формула_ зависимости
производных векторов b в двух систе-
мах отсчета, движущихся друг относи-
тельно друга. Формула (4) называется
формулой Бура.
Известно, что произвольное движе-
ние системы координат как свободного
Рис. 83
твердого тела можно представить как
поступательное движение вместе с полюсом, например с точкой О,
и вращение вокруг этой точки. Из формулы Бура следует, что
поступательная часть движения вместе с полюсом не влияет на
зависимость между произвольными, а влияет только вращательная
часть движения.
Рассмотрим частные случаи.
1. Если вектор b не изменяется относительно подвижной систе-
мы координат, то его относительная производная dZ>/d? = O и по
формуле (4) получаем
dbjdt = co х b.
Это формула для производной от вектора постоянного модуля,
доказанная ранее для радиуса-вектора при вращении вокруг непо-
движной оси. Она справедлива для любого вектора при произволь-
ном движении подвижной системы осей координат. В рассматрива-
емом случае ш не только угловая скорость вращения подвижной
системы координат, но и угловая скорость вращения вектора Ь, так
как вектор b можно при этом считать скрепленным с подвижной
системой координат.
2. Если вектор b не изменяется относительно основной системы
координат, то полная производная db/dt=O и, согласно (4), его
относительная производная
db/dt= — coxb.
3. Если Ь=ксо, т. е. вектор b все время параллелен вектору
угловой скорости со, то со х 6 = 0 и
db/dt=db/dt.
В частности, если Ъ — со, то
dco/dt = dco/dt=e.
115
Полная и локальная производные_также равны друг другу в те
моменты времени, в которые вектор b параллелен вектору угловой
скорости со.
§ 3. СЛОЖЕНИЕ СКОРОСТЕЙ
Если OiXijiZi — неподвижная система осей координат, a Oxyz —
подвижная (рис. 84), то, как известно, абсолютным движением
точки называют ее движение относительно неподвижной системы
осей координат, а относительным — ее движение относительно
подвижной. Переносным движением точки называют ее движение
в рассматриваемый момент времени вместе с подвижной системой
осей относительно неподвижных. Относительные скорость и ускоре-
ние обозначают vr и а„ переносные — ve и ае, а абсолютные — v и а.
Другие характеристики этих движений снабжаются соответству-
ющими значками.
Движение подвижной системы осей координат относительно
неподвижной можно охарактеризовать скоростью ее поступатель-
ного движения Но, например вместе с точкой О и вектором угловой
скорости со ее вращения вокруг О. Пусть точка М движется от-
носительно подвижной системы координат. Получим теорему сло-
жения скоростей. Для этого проведем векторы р и г, характеризу-
ющие положение точки М относительно неподвижной и подвижной
систем осей координат, и вектор р0 точки О. Для любого момента
времени
р = ро+г.
Продифференцируем по времени это векторное тождество, учиты-
вая изменения векторов относительно неподвижных осей коорди-
нат, т. е. вычислим полные производные. Получим
dp/df=dpo/d/+dr/d/. (5)
По определению, dp/dz=r является абсолютной скоростью точки
М, dpo/dt=v0 — абсолютной скоростью точки О. Для вычисления
dr/dt применим формулу Бура. Имеем
dr/dt=dr/dt + co*r.
Относительная производная dr/dt=vr является относительной ско-
ростью точки М по отношению к подвижной системе отсчета,
ай — угловая скорость вращения подвижной системы отсчета и,
следовательно, радиуса-вектора г, если бы он в рассматриваемый
116
момент времени был скреплен с подви-
жной системой осей координат. Таким
образом, из (5) получаем
v = vo+a> х r+vr. (6)
Скорость
Ve = Vo + CO X г
является скоростью точки свободного
твердого тела, скрепленного с подви-
жной системой координат, с которой
в данный момент совпадает точка
М в движении тела относительно неподвижной системы осей коор-
динат. Это есть переносная скорость точки М. Из (6) получаем
следующую теорему сложения скоростей для точки:
v = ve + vr,
(7)
т. е. скорость абсолютного движения точки равна векторной сумме
переносной и относительной скоростей.
В общем случае переносного движения
Ve — Vo + 03'X.f.
Пример. Капля дождя падает вертикально вниз со скоростью v относительно
Земли (рис. 85). Определить траекторию и скорость относительного движения капли
по отношению к автомобилю, движущемуся прямолинейно по горизонтальной до-
роге со скоростью й относительно Земли.
Решение. Движение капли считаем сложным, состоящим из переносного движе-
ния вместе с автомобилем и относительного по отношению к автомобилю. По
теореме сложения скоростей
В рассматриваемом случае ve=u и v перпендикулярно й. Следовательно,
и
tga=-, vr
v
y/u2+v2.
Траектории капель дождя относительно автомобиля наклонены к вертикали на
угол а. Если v и й постоянны, то траектории относительного движения капли прямые,
имеющие направления, параллельные vr.
На рисунке пунктиром показаны следы ка-
пель дождя на вертикальном стекле автомобиля.
При очень большой скорости автомобиля по
сравнению со скоростью падения дождя tga=u/v
стремится к бесконечности, а угол a — к пре-
дельному значению, равному 90°. Относительная
предельная скорость капли дождя равна по вели-
чине и противоположна по направлению скоро-
сти автомобиля.
117
§ 4. СЛОЖЕНИЕ УСКОРЕНИЙ ТОЧКИ
Абсолютное ускорение точки определим вычислением полной
производной по времени от абсолютной скорости (6). Имеем
- dv d - _ _ - dv0 d<i> _ _ dr dvr
a=—=—(v0 + a)xr+vr)= 1— xr+cax —H—.
dr dr dr dr dr dr
Для полных производных от векторов г и vr применим формулу
Бура. Получим
dr/dt=dr/dt+со х г; dvr/dt=dvr/dt+ a>xvr.
Учитывая, что
dvo/dt=ao, dcb/dt = E; dr/dt=vr; dvr/dt—ar,
получим для абсолютного ускорения
a—ao+EXr+cox(a3Xr) + ar+2(coxvr). (8)
В этой формуле первые три слагаемых составляют ускорение точки
свободного твердого тела в общем случае его движения вместе
с подвижной системой осей координат относительно неподвижной.
Первое слагаемое а0 — ускорение точки О, Ёхг и аз х (со х г) — со-
ответственно вращательное и осестремительное ускорение точки М,
если бы она двигалась только вместе с подвижной системой осей
координат, не имея в рассматриваемый момент времени относи-
тельного движения. После этого (8) примет вид
а=ае+аг+ак, (9)
где
ax=2(coxt;r). (10)
Ускорение а* называется ускорением Кориолиса. Иногда его также
называют добавочным (или поворотным) ускорением.
Формула (9) выражает теорему сложения ускорений точки, или
кинематическую теорему Кориолиса: абсолютное ускорение точки
является векторной суммой трех ускорений — переносного, относи-
тельного и Кориолиса.
Переносное ускорение рассматривалось при изучении движения
свободного твердого тела. Относительное ускорение изучалось в ки-
нематике точки. Его можно выразить в двух формах в зависимости
от способа задания относительного движения. При координатном
способе задания в декартовых координатах
ar=xi+yj+zk,
118
где х, у, z — координаты движущейся точки относительно под-
вижной системы осей координат; i, j, к — единичные векторы этих
осей. При естественном способе задания движения
ar=aj4-a?,
причем
alr=dvr/dt=sr', a"r = v2/p„
где sr — расстояние от начала отсчета до точки по траектории
относительного движения; р, — радиус кривизны этой траектории.
В частном случае, когда переносное движение есть вращение вокруг
неподвижной оси, переносное ускорение
ee=a^+aj,
где касательное переносное ускорение
а,=Й£,
причем h есть кратчайшее расстояние от движущейся точки до оси
вращения. Нормальное переносное ускорение
a”=h(o2.
Абсолютное ускорение в этом случае
а=а’+о^+а; + а?+ак. (11)
§ 5. УСКОРЕНИЕ КОРИОЛИСА
Рассмотрим ускорение Кориолиса и его свойства. Оно определя-
ется формулой (10)
aI = 2((oe^vr).
Угловую скорость вращательной части движения подвижной систе-
мы отсчета, т. е. угловую скорость переносного движения, заменили
на ше.
Ускорение Кориолиса является результатом взаимного влияния
двух движений: переносного и относительного. Часть его (a>eXvr)
получается вследствие изменения переносной скорости точки из-за
относительного движения. Другая его часть, тоже (toexvr), есть
результат изменения относительной скорости вследствие перенос-
ного движения. Это следует из анализа формул при выводе аб-
солютного ускорения.
119
Модуль ускорения Кориолиса в соответствии с (10) определяется
выражением
а,=2<uev, sin (a>t,* vr). (12)
Для определения ускорения Кориолиса очень удобно правило Н. Е. Жу-
ковского. Оно основано на формуле (10). Пусть имеем точку М,
движущуюся с относительной скоростью vr (рис. 86). Построим
плоскость П, перпендикулярную угловой скорости переносного вра-
щения (Ье, и спроецируем «, на эту плоскость. Проекцию обозначим
v*. Она является вектором; ее модуль
v*=vr sin (сое, Л vr).
Ускорение Кориолиса выразится в форме
aI=2coei£. (12')
Учитывая (10) и (12'), получаем правило Жуковского: модуль
ускорения Кориолиса равен удвоенному произведению угловой скоро-
сти переносного вращения на модуль проекции относительной скоро-
сти на плоскость, перпендикулярную оси переносного вращения; что-
бы получить направление ускорения Кориолиса, следует вектор про-
екции относительной скорости v* повернуть на 90° вокруг оси,
параллельной оси переносного вращения, в направлении этого враще-
ния.
Рассмотрим случаи обращения в нуль ускорения Кориолиса. Из
(12) следует, что ах = 0, если:
1) ше=0, т. е. переносное движение является поступательным;
2) vr=0, т. е. в те моменты времени, в которые происходит
изменение направления относительного движения;
3) sin(toe, Лг,)=0, т. е. когда скорость относительного движения
vr параллельна угловой скорости переносного вращения а>е.
120
Следует отметить, что при различном разложении одного и того
же абсолютного движения точки на переносное и относительное
получим разные ускорения Кориолиса.
Пример 1. Шар радиусом А = 1 м вращается вокруг вертикальной оси О? по
л(2
закону <р = 2г —г3 рад. По меридиану шара движется точка М по закону S=— (рис.
4
87, а). Расстояние S отсчитывается от точки Мо меридиана.
Определить абсолютные скорость и ускорение точки М в момент времени / = 1 с.
Решение. За переносное движение точки примем вращение ее вместе с шаром
вокруг оси О/ (рис. 87, б). Тогда относительным движением точки будет ее движение
по меридиану шара.
Определим положение точки М на меридиане в момент времени /=1 с. Имеем
я я
5(=1=- м. Так как А = 1 м, то положение точки определяется углом широты а=-
4 4
Вычислим угловые скорость и ускорение переносного движения. Получаем ф =
=2—З/2; при /=1 с ф = —1 с. Угловая скорость ш = |ф| = 1 с. Знак минус у <р показы-
вает, что вращение шара происходит в отрицательную сторону отсчета угла <р, т. е.
по часовой стрелке.
Так как ф= — б1 и при г = 1 с ф = —6 с-2, то угловое ускорение переносного
движения е=|ф| =6 с"2. Знак минус у ф показывает, что оно направлено по часовой
стрелке, против положительного направления угла <р. Знаки у ф и ф оказались
одинаковы. Следовательно, шар вращается ускоренно в рассматриваемый момент
времени.
Абсолютную скорость точки определяем по формуле
v = «e+vr.
Скорость переносного движения при /=1 с _ Ф ve = rco = Rco cosa=— 2 ф /ф \ / У \ \ 1/ / \ 1 /У Рис. 87 =0,7 м/с. lz' |Z \ ч 1 //
121
Скорость относительного движения точки i>=|£|, где и> =—. При /= 1 с .$=- = 1,6 м/с.
2 2
Следовательно, г, = 1,6 м/с. Знак плюс у $ указывает, что vr направлено в сторону
возрастания 5.
В рассматриваемом случае се направлена по касательной к параллели шара
и перпендикулярна которая направлена по касательной к меридиану. Следо-
вательно,
v=*^v2+v2 = y/o,5 + 2,6at'l,8 м/с.
Так как переносным движением является вращение шара вокруг неподвижной
оси, то абсолютное ускорение точки определяем по формуле
а=о^+а'+о^+д’+ак. (а)
Переносное нормальное ускорение
V2
о"=ли2=Ra>2 cosa=—» 0,7 м/с2.
‘ 2
Ускорение aj направлено по кратчайшему расстоянию от точки до оси, т. е. по МОу.
Переносное касательное ускорение ахе перпендикулярно aj и направлено в соответст-
вии с направлением дуговой стрелки углового ускорения, по скорости ve. Модуль
этого ускорения
a'=re=Re cosa=3 V2 ~ 4-,2 м/с2.
Относительное нормальное ускорение
«2 «2
о”=—=—=2,6 м/с2.
Р R
Ускорение направлено к центру кривизны траектории относительного движения,
т. е. к центру шара О. Относительное касательное ускорение aj=|$|, где 5=
=-=const=l,6 м/с2. Следовательно, a?=l,6 м/с2. Так как 5 положительно, то
_ 2
а* направлено в сторону возрастающих значений 5 по касательной к траектории
относительного движения. Относительное движение точки оказалось ускоренным
в рассматриваемый момент времени.
Ускорение Кориолиса определяем по правилу Жуковского. Его модуль ах=2ш»*,
где v* — проекция vr на плоскость, перпендикулярную оси переносного вращения
О/. Имеем
V2
«?=vrsina=l,6—«1,1 м/с.
2
После этого находим а1=2 • 1 • 1,1 =2,2 м/с2. Чтобы определить направление at, сле-
дует J* повернуть вокруг оси Mz, параллельной О/ на 90° в сторону переносного
вращения, т. е. в рассматриваемом случае по часовой стрелке. Получаем, что
ускорение а* направлено по ускорению а*.
122
Для определения абсолютного ускорения выбираем прямоугольные оси коор-
динат Mxyz и проецируем обе части векторного равенства (а) на эти оси, учитывая
направление составляющих ускорения (рис. 87, б). Получаем
ах — <£ + (?г cosa—a* sina = 0,7 + 2,6'0,7 — 1,6'0,7 ж 1,4 м/с2;
Оу=a*+a,=4,2+2,2=6,4 м/с2;
az= — sina—a*cosa = —2,6 0,7—1,6 0,7= —2,9 м/с2.
Модуль абсолютного ускорения
а = ^/о2 + о2 + c?z = 0+41 + 8,4 = Js 1,4 ж 7,2 м/с2.
Пример 2. Колечко М (рис. 88), надетое на стержень, движется в плоскости Оху
согласно уравнениям
X = 3(l +COS7U); У=4 — 8 sinrtr,
где х, у — в см, t — вс. Стержень может вращаться вокруг оси Oz. Определить
в момент t=0,5 с угловую скорость и угловое ускорение стержня, а также скорость
и ускорение движения колечка по стержню.
Решение. Положение колечка при г=0,5 с определяется координатами
*1 = 3(1 +cos л() = 3 см; У1=4—8 sin л/= — 4 см.
Примем движение колечка вместе с вращающимся стержнем за переносное.
Тогда его движение по стержню будет относительным движением. Оно прямолиней-
ное.
Вычислим проекции на оси координат абсолютных скорости и ускорения колечка
для произвольного момента времени. Имеем:
vx=x= — Зляп л/; vy=y= — 8л cos л/;
ах=х= — Зл2созл(; ay=y=8n2smnt.
Для <=0,5 с получаем
гх= —Зл= —9,4 см/с; i)y=0; v=^/v2+и2 = 9,4 см/с;
дх=0; ау=8л2 ж 78,9 см/с2; а=у/а2 + а$ ж 78,9 см/с2.
По проекциям изображаем на рисунке векторы абсолютных скорости и ускоре-
ния в рассматриваемый момент времени (рис. 89).
По теореме сложения скоростей для колечка
v = ve+vr.
Скорость переносного движения ve перпендикулярна стержню ОА, а скорость от-
носительного движения vr направлена по стержню. Разлагая асболютную скорость
v по двум направлениям, получаем:
tix=vsin<p; vg—vcos<p;
123
Х| 3 у, 4
cos<p==— =-; sm<p=—
y/xf+y2! 5 y/^i+y2 5
поэтому
v,=7,5 см/с; i>r=5,6 см/с.
Угловая скорость стержня определяется по формуле
7,5
<о =---=— = 1,5 с 2.
ОМ 5
В соответствии с направлением ve изображаем на рисунке дуговую стрелку для
угловой скорости.
В частном случае переносного вращения вокруг неподвижной оси по теореме
сложения ускорений для абсолютного ускорения имеем:
а=а^+а'+^+а^4-ах.
(а)
Вычисляем отдельные составляющие абсолютного ускорения а и изображаем их на
рис. 90. Для модуля нормального переносного ускорения получаем
<Q=OM со2 = 11,3 см/с-2.
Ускорение направлено к оси переносного вращения, т. е. к точке О. Касательная
составляющая переносного ускорения ате направлена перпендикулярно и по вели-
чине неизвестна. Предполагаем, что дуговая стрелка для е направлена против
часовой стрелки, изображаем на рисунке ускорение а*.
Нормальная составляющая относительного ускорения а^=0, так как относитель-
ное движение прямолинейно. Касательная составляющая относительного ускорения
в этом случае равна полному относительному ускорению, т. е. aj=ar. Предположим,
что а, направлено от точки М к А.
Ускорение Кориолиса аг определяем по правилу Жуковского. Для его модуля
имеем а^ = 2см*, где v* — проекция относительной скорости vr на плоскость, перпен-
дикулярную оси переносного вращения Oz. В рассматриваемом случае J* =?„ поэто-
му aI=2covr= 16,8 см/с2. Направление ускорения аж получаем поворотом на 90°
вектора v* по направлению дуговой стрелки со вокруг оси, проходящей через точку
М параллельно оси вращения стержня Oz.
124
Выбираем прямоугольные оси координат Л/У/ и проецируем векторы, входящие
в уравнение (а) на эти оси. Имеем:
для оси ЛГУ: — аып<р=аг—а%;
для оси Му1: acos^=a^+at.
Из этих уравнений определяем неизвестные ускорения
аг= —айпф+о^® —51,8 см/с2;
aj=acos<p—30,5 см/с2.
Ускорение аг получилось с минусом. Следовательно, предположение о направле-
нии его оказалось неверным. В действительности, а, направлено против ранее
принятого направления. Ускорение а* оказалось положительным. Предположение
о направлении дуговой стрелки для ъ подтвердилось.
Угловое ускорение стержня определяем по формуле
а'
е=----=6,1 с 2.
ОМ
ГЛАВА 6
СЛОЖЕНИЕ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
В простейшем случае рассматривают сложение двух движений
твердого тела, одно из которых является переносным, другое — от-
носительным. Относительным движением твердого тела счита-
ют его движение, в простейшем случае поступательное или враща-
тельное, относительно подвижной системы осей координат, движу-
щейся относительно другой, основной или неподвижной, системы
координат, т. е. системы координат, движение которой относитель-
но других систем координат не рассматривается. Переносным
движением твердого тела называют его движение, тоже в простей-
шем случае поступательное или вращательное, вместе с подвижной
системой координат в рассматриваемый момент времени относите-
льно неподвижной. Сложным движением твердого тела называ-
ется его движение относительно основной или неподвижной систе-
мы координат. Составление сложного движения из переносного
и относительного в простейшем случае или нескольких переносных
и относительных движений в общем случае называют сложением
движений твердого тела. Обратный процесс называется разло-
жением движения твердого тела на составляющие движения.
Этот процесс всегда возможен и для него справедливы формулы,
полученные для сложения движений твердого тела.
Плоское и движение свободного твердого тела считают уже
сложными. В общем случае переносное и относительное движения
твердого тела могут быть любыми сложными движениями тела.
При рассмотрении сложного движения твердого тела, состо-
ящего из нескольких движений, рассматривают сложение его
движений не за конечный промежуток времени, а в рассматри-
ваемый момент времени, т. е. в действительности рассматрива-
ется сложение скоростей линейных и угловых. Для вычисления
ускорений точек тела следует использовать формулы для слож-
ного движения точки или формулы для ускорений точек того движе-
ния твердого тела, которое получается в результате сложения дви-
жений.
§ 1. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНЫХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
Имеем твердое тело, участвующее одновременно в двух посту-
пательных движениях, одно из которых является переносным со
скоростью а другое — относительным со скоростью v2. Таким
образом, твердое тело движется относительно подвижной системы
126
координат Oxyz поступательно со ско-
ростью v2, а подвижная система коор-
динат движется относительно непо-
движной OiXiyiZi тоже поступательно
со скоростью «1 (рис. 91). Движение
тела относительно основной системы
координат является сложным.
Установим вид сложного движения.
Для этого вычислим скорость какой-
либо точки М тела относительно непо-
движной системы координат О^у^.
По теореме сложения скоростей для
точки имеем
v=ve + vr = vi+v2,
*1
Рис. 91
(1)
так как переносное и относительное движения тела являются посту-
пательными. Это справедливо для любой точки рассматриваемого
тела, а потому сложное движение тела является поступательным со
скоростью v. Таким образом, от сложения двух поступательных
движений твердого тела получается поступательное движение со
скоростью, равной векторной сумме скоростей составляющих по-
ступательных движений.
Если имеется последовательность поступательных движений те-
ла, первое из которых является относительным по отношению
к переносному второму, а это второе — относительным к перенос-
ному третьему и т. д. (скорости таких последовательных движений
соответственно v,, v2, ..., и„), то от сложения этих движений путем
последовательного применения (1) получим поступательное движе-
ние тела со скоростью
•v=Ylvk. (2)
*=i
§ 2. СЛОЖЕНИЕ ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
1. Сложение вращений вокруг пересекающихся осей. Пусть твер-
дое тело участвует одновременно в двух вращениях: переносном
с угловой скоростью с«1 и относительным с угловой скоростью аз2.
Оси вращений пересекаются в точке О (рис. 92, а). Векторы угловых
скоростей как скользящие векторы можно считать перенесенными
в точку О осей вращения.
Примером тела, участвующего в двух вращениях вокруг пере-
секающихся осей, является диск А, свободно насаженный на ось
00’ и вращающийся вокруг нее с угловой скоростью со2. Вместе
127
Рис. 92
с осью ОО' диск еще вращается вокруг другой оси ОгО2 (рис. 92, б)
с угловой скоростью а>1.
Определим вид движения твердого тела, участвующего в двух
вращениях вокруг пересекающихся осей. Точка О тела, расположен-
ная на пересечении осей вращения, является неподвижной, и ее
абсолютная скорость vo=0. Докажем, что любая другая точка
М тела, находящаяся на диагонали параллелограмма, построенного
на векторах угловых скоростей coj и <о2, тоже имеет в рассматрива-
емый момент скорость, равную нулю.
По теореме о сложении скоростей для точки М имеем
Так как переносное и относительное движения являются вращени-
ями вокруг осей, то
=2пл./\ОАМ; vMr=h2(o2=2an.^OBM,
где Л] и h2 — кратчайшие расстояния от точки М до соответству-
ющих осей вращения. Площади треугольников в параллелограмме
равны, поэтому VMe=vMr. Векторы скоростей vMe и vMr имеют проти-
воположные направления. Таким образом, г^=0. Это справедливо
для любой точки М, расположенной на диагонали параллелограм-
ма, так как масштаб векторов можно изменять. Точки оси ОМ
имеют скорости, равные нулю. Следовательно, ОМ является мгно-
венной осью вращения тела в рассматриваемый момент, т. е. при
сложении двух вращений вокруг пересекающихся осей, одно из кото-
рых переносное, а другое — относительное, получается вращение
тела вокруг мгновенной оси.
Для определения абсолютной угловой скорости вращения вок-
руг мгновенной оси выберем на теле точку N и вычислим ее
скорость один раз как скорость сложного движения, а другой — как
128
вращения вокруг мгновенной оси По формуле Эйлера для враща-
тельных движений при сложном движении имеем
V^f = V^g-j-V^r~(O\ X Г 4" С02 X Г = (t0| -f- СО2) х г.
Для абсолютного вращения вокруг мгновенной оси
vN=cox.r.
Приравнивая скорости, получаем
со = со}4- со2, (3)
т. е. угловая скорость абсолютного вращения равна векторной сумме
угловых скоростей составляющих вращений.
Последовательное применение этого правила сложения враще-
ний вокруг пересекающихся осей позволяет заменить любое количе-
ство вращений вокруг пересекающихся осей одним вращением,
угловая скорость которого со равна векторной сумме угловых ско-
ростей составляющих вращений, т. е.
(*)
Тело, участвующее в двух вращениях вокруг пересекающихся
осей, имеет неподвижную точку, расположенную на пересечении
осей. Оно вращается вокруг неподвижной точки, т. е. совершает
сферическое движение. Таким образом, сферическое движение твер-
дого тела можно считать состоящим из двух вращений вокруг
пересекающихся осей: переносного и относительного.
Сферическое движение совершает конус 2 при качении без сколь-
жения по неподвижному конусу 1 (рис. 92, в). Его движение можно
считать двумя вращениями вокруг пересекающихся осей. Относи-
тельное вращение происходит вокруг оси подвижного конуса Oz
с угловой скоростью сог, а переносное — вокруг оси неподвижного
конуса Oz} с угловой скоростью сое. Абсолютным движением явля-
ется вращение вокруг мгновенной оси ОС с угловой скоростью
со = сое 4- сог.
Мгновенная ось ОС, как и ось подвижного конуса Oz, вращается
вокруг оси неподвижного конуса Oz{ с угловой скоростью сое.
От движения подвижного конуса по неподвижному без скольже-
ния легко перейти к движению подвижной конической шестерни по
129
неподвижной шестерне, если у конусов отрезать их части плоскостя-
ми, перпендикулярными осям Oz\ и Oz.
2. Сложение вращений вокруг параллельных осей. Следует рас-
смотреть три случая.
1) Вращения имеют одинаковые направления. Тело участвует
в двух вращениях: переносном с угловой скоростью toj и относи-
тельном с угловой скоростью со2 (рис. 93, а). Таким телом является
диск, представленный на рис. 93, б. Пересечем оси вращения перпен-
дикулярной прямой. Получим точки пересечения Л и В, в которые
можно перенести векторы угловых скоростей со} и to2. На отрезке АВ
тела в рассматриваемый момент имеется точка С, скорость которой
равна нулю. Действительно, по теореме сложения скоростей для
точки С имеем
Vc=VCe + vCr.
Точки тела, для которых переносная и относительная скорости
параллельны и противоположны, могут находиться только на от-
резке АВ между точками А и В. Скорость точки С равна нулю, если
vce=vcr- Но vCe=coiAC, vcr=(O2BC. Следовательно,
а>1АС=(о2ВС,
или
<01 ВС
а>2 АС
(4)
Прямую, перпендикулярную осям вращения, можно провести на
любом расстоянии. Следовательно, существует ось, параллельная
осям вращения, скорости точек которой равны нулю в данный
момент. Она является мгновенной осью вращения в рассмат-
риваемый момент времени.
Рис. 93
130
Для определения угловой скорости со вращения тела вокруг
мгновенной оси вычислим скорость точки В, считая ее движение
сложным. Получим
VB — VBe + vgr,
НО
VBe = (O]AB, VBr=O>lBB = 0.
Следовательно,
vb=coiAB.
Для скорости точки В при вращении тела вокруг мгновенной оси
имеем
vb=coBC.
Приравнивая скорости точки В, полученные двумя способами,
имеем
шВС=со1АВ, АВ=ВС+АС.
Согласно (4)
АС (02
ВС О]
Поэтому
ВС+АС АС
СО = СО,----= Ш1 + СО.-= COi + Oh,
ВС ВС
т. е.
ta=to1 + w2- (5)
Формулу (4) можно представить в следующем виде:
СО] СО2
ВС~ АС
Образуя производную пропорцию и используя формулу (5), по-
лучим
<z>! СО2 СО]+СО2
ВС АС~ ВС+АС’
или
СО] СОэ со
(6)
ВС АС АВ
131
Таким образом, при сложении двух вращений тела вокруг
параллельных осей в одинаковых направлениях получается враще-
ние вокруг параллельной оси в том же направлении с угловой
скоростью, равной сумме угловых скоростей составляющих вра-
щений. Мгновенная ось полученного вращения делит отрезок
между осями составляющих вращений на части, обратно пропор-
циональные угловым скоростям этих вращений, внутренним об-
разом. Точка С при таком делении располагается между точками
А и В.
Естественно, справедливо и обратное. Вращение вокруг оси
с угловой скоростью со можно разложить на два вращения вок-
руг двух параллельных осей с угловыми скоростями а>} и й2.
Тело, участвующее в двух вращениях вокруг параллельных осей,
совершает плоское движение. Плоское движение твердого тела мож-
но представить как два вращения, переносное и относительное,
вокруг параллельных осей. Плоское движение колеса сателлита 2 по
неподвижному колесу 1 (рис. 93, в) является примером движения,
которое можно заменить двумя вращениями вокруг параллельных
осей в одном и том же направлении, например против движения
часовой стрелки. Колесо сателлита совершает переносное вращение
вместе с кривошипом АВ вокруг оси, проходящей через точку
А с угловой скоростью ct>i, и относительное вращение вокруг оси,
проходящей через точку В с угловой скоростью со2. Оба вращения
имеют одинаковые направления. Абсолютное вращение происходит
вокруг оси, проходящей через точку Р, которая является в данный
момент МЦС. Она находится в месте соприкосновения колес, если
подвижное колесо катится без скольжения по неподвижному. Уг-
ловая скорость абсолютного вращения
СО = СО1 + СО2-
Абсолютное вращение с этой угловой скоростью происходит в том
же направлении, что и составляющие движения.
2) Вращения имеют противоположные направления. Рассмотрим
случай, когда СО] > со2 (рис. 94, а). Получим следующие формулы:
со=со1 — (о2, (7)
(8)
ВС АС АВ
Для вывода этих формул разложим вращение с угловой скоро-
стью W1 на два вращения в том же направлении вокруг двух
параллельных осей с угловыми скоростями toHtaj. Ось одного из
вращений с угловой скоростью возьмем проходящей через точку
132
Рис. 94
В и выберем со2=со^ Другое вращение с угловой скоростью со прой-
дет через точку С (рис. 94, б). На основании (5) и (6) имеем
со со2 о>1
аи = а>2+а>, —=—=—,
АВ АС ВС
или
СО) <02 (О
СО = С01—СО2 = СО1—со2, —= — = —.
ВС АС АВ
Справедливость формул (7) и (8) доказана. Таким образом, при
сложении двух вращений твердого тела вокруг параллельных осей
в противоположных направлениях получается вращение вокруг па-
раллельной оси с угловой скоростью, равной разности угловых скоро-
стей составляющих вращений в сторону вращения с большей угловой
скоростью. Ось абсолютного вращения делит отрезок между осями
составляющих вращений на части, обратно пропорциональные уг-
ловым скоростям этих вращений внутренним образом. Точка С при
таком делении находится на отрезке АВ за точкой А, через которую
проходит ось вращения с большей угловой скоростью.
Можно также одно вращение разложить на два вокруг парал-
лельных осей с противоположными направлениями вращения. При-
мером плоского движения твердого тела, которое может быть
представлено двумя вращениями вокруг параллельных осей в про-
тивоположных направлениях, является движение колеса сателлита,
катящегося внутри неподвижного колеса без скольжения (рис. 94, в).
Переносным в этом случае является вращение колеса 2 вместе
с кривошипом АВ с угловой скоростью W] вокруг оси, проходящей
через точку А. Относительным будет вращение колеса 2 вокруг оси,
проходящей через точку В с угловой скоростью а>2, и абсолют-
ным — вращение этого колеса вокруг оси, проходящей через МЦС,
точку Р, с угловой скоростью со. В этом случае (o2>coi и потому
угловая скорость абсолютного вращения а>=(о2—СО]. Это вращение
по направлению совпадает с направлением вращения, имеющим
133
большую угловую скорость. Ось абсолютного вращения располо-
жена вне отрезка АВ за осью вращения с большей угловой скоро-
стью.
3. Пара вращений. Парой вращений называется совокупность
двух вращений твердого тела, переносного и относительного, вок-
руг параллельных осей с одинаковыми угловыми скоростями в про-
тивоположных направлениях (рис. 95, а). В этом случае СО] = — а>2.
Рассматривая движение тела как сложное, по теореме сложения
скоростей для точки М имеем
I’M = VMt + ”МГ- (9)
Составляющие движения являются вращениями с угловыми скоро-
стями СО] и со2. По формуле Эйлера для них получим
= С01 X Г], Vifr = С02 X Г2.
После этого для абсолютной скорости имеем
vM=iblxr1 + a)2xr2=a)l х(й —г2)>
так как со2= — СО]. Учитывая, что и — г2 = АВ, получаем
vM=(b1xAb —BA xcbt — AB хоз2. (9')
Из (9) следует, что скорость не зависит от положения точки
в теле (не зависит от й и г2). Она одна и та же для всех точек тела,
т. е. тело совершает поступательное движение.
Для модуля скорости, согласно (9), имеем:
v = \BA\cos{BA^ (o)a>i=ha)\=ha>2, (10)
так как ]ВА | cos (ВА Л со]) = h — кратчайшее расстояние между осями
пары вращений.
tr
Рис. 95
134
Направление скорости поступательного движения определяется
из векторного произведения. Оно перпендикулярно векторам со-
множителям, т. е. перпендикулярно к плоскости осей пары
вращений.
Таким образом, твердое тело, участвующее в паре вра-
щений, совершает поступательное движение со скоро-
стью, перпендикулярной осям вращения пары и равной
произведению угловой скорости пары на кратчайшее рас-
стояние между осями пары вращений.
Пару вращений и ее эквивалентность поступательному движе-
нию можно наглядно продемонстрировать на приборе (рис. 95, б),
состоящем из неподвижной 1 и подвижной 2 шестеренок, соединен-
ных цепью. При вращении кривошипа АВ вокруг оси, проходящей
через точку А, шестеренка 2 будет участвовать в двух вращениях
вокруг параллельных осей: переносном вместе с кривошипом и от-
носительном вокруг оси, проходящей через точку В. Вращения
противоположны. Их угловые скорости одинаковы. Скорости всех
точек шестеренки 2 равны скорости точки В, причем vB=lco1 все
время при движении этой шестеренки.
Если с шестеренкой 2 скрепить прямолинейный отрезок MN, то
он при движении механизма будет оставаться параллельным своему
первоначальному положению. Если этот горизонтальный отрезок
совместить с дном стаканчика с водой, прикрепив стаканчик к по-
движной шестеренке, то вода не выльется из стаканчика при движе-
нии механизма в вертикальной плоскости.
При поступательном движении траектории всех точек тела оди-
наковы. Точка В описывает окружность радиуса I. Траектории всех
других точек подвижной шестеренки будут тоже окружностями
такого же радиуса. Тело, участвующее в паре вращений, совершает
плоское поступательное движение.
§ 3. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО
ДВИЖЕНИЙ
Если тело одновременно участвует в переносном поступатель-
ном движении со скоростью v и относительном вращательном
с угловой скоростью со, то в зависимости от их взаимного рас-
положения целесообразно рассмотреть три отдельных случая.
1. Скорость поступательного движения перпендикулярна оси от-
носительного вращения. В этом случае векторы v и со перпендикуляр-
ны (рис. 96). На линии ОС, перпендикулярной плоскости, в которой
расположены v и со, имеется точка С, скорость которой равна нулю.
Определим ее расстояние от точки О. По теореме сложения скоро-
стей для точки С имеем
135
vc=ve+vr = v + co x ОС, (11)
так как при вращении вокруг оси
vr=a> х ОС.
Учитывая, что скорости » и«, противопо-
ложны по направлению, получим
vc=v — a)OC.
Так как vc=0, то v — соОС=0 и, следовательно, точки С и О находят-
ся на расстоянии
ОС=~.
О)
(12)
Другие точки, имеющие скорости, равные нулю, располагаются на
линии, проходящей через точку С, параллельно оси вращения тела
с угловой скоростью со. Таким образом, имеется мгновенная ось
вращения, параллельная оси относительного вращения и проходя-
щая через точку С. Для определения угловой скорости абсолютного
вращения £1 вычислим скорость, например, точки О двумя способа-
ми. Считая движение сложным, имеем
Vo = V0e + vOr.
Точка О находится на оси относительного вращения, и поэтому
vOr=0. Скорость переносного движения vOe в рассматриваемом слу-
чае переносного поступательного движения равна v. Следовательно,
v0=v. С другой стороны, эквивалентное абсолютное движение те-
ла является вращением вокруг мгновенной оси, проходящей через
точку С с угловой скоростью Q. Поэтому для скорости точки
О имеем
«о=£2ОС.
Приравнивая скорости точки О, вычисленные двумя способами,
и используя (12), получаем
V
v=QOC, или v=Q ,
(D
ИЛИ
£1 = со.
136
Вращение вокруг мгновенной оси должно иметь такое направление,
чтобы скорость точки О имела такое же направление, что и ско-
рость V. Отсюда получаем совпадение направлений вращения от-
носительного и абсолютного вращений. Следовательно, £1=ш. Та-
ким образом, при сложении поступательного переносного и враща-
тельного относительного движений твердого тела, у которого ско-
рость поступательного движения перпендикулярна оси относитель-
ного вращения, эквивалентное абсолютное движение является вра-
щением вокруг мгновенной оси, параллельной оси относительного
вращения с угловой скоростью, совпадающей с угловой скоростью
относительного вращения.
Такой же результат можно получить, если поступательное дви-
жение со скоростью v заменить парой вращений (со', £7), выбрав
С1 = со’ = со. Два вращения с угловыми скоростями со' и со можно
отбросить, так как (со', со)~0, и абсолютным движением окажется
вращение с угловой скоростью £1=со. Скорость поступательного
движения равна hco=coOC. Приравнивая их, получим v = coOC или
ОС=-,
О)
что совпадает с (12).
Еще одна интерпретация рассмотренного случая получается,
если рассмотреть параллельный перенос скользящего вектора уг-
ловой скорости £1 в точку О. Такой перенос, как известно, следует
компенсировать парой вращений, эквивалентной поступательному
движению со скоростью v.
На поступательное переносное и вращательное относительное
с осью вращения, перпендикулярной к скорости переносного движе-
ния, разлагается плоское движение твердого тела. Так, плоское
движение без скольжения колеса по прямой (рис. 97) можно со-
ставить из поступательного движения колеса вместе с центром О со
скоростью v и относительного вращательного вокруг оси, проходя-
щей через точку О с угловой скоростью со. Это же движение можно
рассматривать как вращение вокруг мгновенной оси, проходящей
через МЦС, который совпадает с точкой Р. Угловая скорость этого
абсолютного вращения О.=со, и оно имеет то же направление
вращения, что и относительное вокруг оси, проходящей через точку
О. Если в качестве точки О используется другая точка колеса,
например точка М, то изменится только скорость переносного
поступательного движения. Она будет равна скорости vM точки М.
Угловая скорость вращения тела вокруг оси, проходящей через
точку М, по величине и направлению будет той же самой, что
и вокруг осей, проходящих через точки О и Р.
137
2. Винтовое движение. Движение, при котором скорость пе-
реносного поступательного движения тела параллельна оси
относительного вращения, называется винтовым движением
твердого тела (рис. 98). Ось вращения тела в этом случае на-
зывается винтовой осью. При винтовом движении тело движется
поступательно параллельно оси винтового движения и вращается
вокруг этой оси. Винтовое движение не приводится к какому-либо
другому одному простому эквивалентному движению.
При винтовом движении векторы v и со могут иметь как одина-
ковые, так и противоположные направления. Винтовое движение
тела характеризуется параметром винтового движения, кото-
рым считают величину р = ~. Если v и со изменяются с течением
аз
времени, то и параметр винтового движения является переменным,
ds d</> ds d<p dj
В общем случае v=—, 03=— и P=^t' 7z=d’ Т' е" ? есть перемещение
тела вдоль оси винтового движения при повороте тела на один
радиан.
Для скорости точки М тела, совершающего винтовое движение,
по теореме сложения скоростей имеем
VM=vMe+vMr.
Но vMe=v, vMr=cor, где г — расстояние точки до винтовой оси.
Скорости v и vMr перпендикулярны. Следовательно,
«м = y/v2+v^r=^v2 + r2CO2.
Учитывая, что v=cop, получаем
1) = СОЛ/р2 + Г2.
(13)
Если тело вращается с постоянной угловой скоростью и имеет
постоянную скорость поступательного движения, то такое движе-
138
ние тела называется постоянным винтовым движением.
В этом случае точка тела при движении все время находится на
поверхности кругового цилиндра с радиусом г. Траекторией точки
является винтовая линия. Кроме параметра в рассматриваемом
случае вводят шаг винта, т. е. расстояние, на которое переместится
какая-либо точка тела при одном обороте тела вокруг оси винто-
вого движения. Угол поворота тела ср при со = const вычисляется по
формуле ср = cot. Для одного оборота тела ср = 2п. Необходимое для
этого время
... 2л
т=—.
ш
За время Т точка переместится в направлении, параллельном винто-
вой оси, на шаг винта
. ... 2л _
h=v T=v —=2пр.
ш
Отсюда получается зависимость шага винта от параметра винто-
вого движения Л = 2пр.
Уравнения движения точки М тела по винтовой линии (рис. 99)
в декартовых координатах выражаются в следующей форме:
х=г coscp - г cos cof,
у=r sing» = г sin cot;
z = v t.
В этих уравнениях величины со, г и v являются постоянными.
3. Общий случай. Пусть скорость переносного поступательного
движения v и угловая скорость относительного вращения со образу-
ют угол а. Случаи, когда а = 0, 90 и 180°, уже рассмотрены.
139
Разложим скорость v (рис. 100) на две перпендикулярные состав-
ляющие и vz, причем V] направим параллельно со. Тогда
vi=vcosa, «2=vsina.
Переносное движение со скоростью v2 и относительное вращение
с угловой скоростью со эквивалентны вращению вокруг оси, прохо-
дящей через точку С с угловой скоростью П=со (согласно случаю
. - _ «2 v sina
первому), причем ОС=—--------.
СО <0
Скорость поступательного движения v} имеют все точки тела.
Таким образом, получено винтовое движение с винтовой осью,
отстоящей от первоначальной оси вращения на величину
Параметр полученного винтового движения
«1 о cosa
Р= =-------
со со
Общий случай переносного поступательного и относительного вра-
щательного движений твердого тела оказался эквивалентным мгно-
венному винтовому движению.
ГЛАВА 7
ОСНОВЫ КИНЕМАТИКИ СПЛОШНОЙ СРЕДЫ
Сплошной средой считают деформируемые тела, различные жид-
кости, не очень разреженные газы. Понятия скорости и ускорения
точки сплошной среды такие же, как и в кинематике одной точки.
В кинематике сплошной среды роль точки отводится малой частице
этой среды. Рассмотрим задания движения сплошной среды и полу-
чим формулы, по которым вычисляются скорости и ускорения
точек сплошной среды.
Движение сплошной среды может быть изучено двумя метода-
ми, один из которых — метод Лагранжа — является обобщением
метода, применявшегося в кинематике одной точки. Движение в ме-
тоде Лагранжа задается в переменных Лагранжа. Другой метод —
метод Эйлера — широко использует концепцию теории поля. При
этом движение задается и изучается в переменных Эйлера. При
рассмотрении движения сплошной среды преимущественно исполь-
зуется полевой подход, базирующийся на методе Эйлера и соответ-
ственно использующий переменные Эйлера.
§ 1. ПЕРЕМЕННЫЕ ЛАГРАНЖА И ЭЙЛЕРА
Переменные Лагранжа. В выделенном объеме сплошной среды
каждая его точка (малая частица) в фиксированный момент време-
ни, например 7=0, имеет координаты х0, у0, z0 или другие парамет-
ры а, Ь, с, которые являются функциями этих координат
а = Ф1 (х0, у0, z0); b = q>2(x0, у0, z0); с = (р3(х0, у0, z0).
Параметры а, Ь, с, так же как и х0, у0, z0, дают возможность
отличать одну точку сплошной среды от другой. В разные моменты
времени t различные точки сплошной среды характеризуются четы-
рьмя независимыми переменными a, b, с, t, которые называются
переменными Лагранжа.
Для задания движения сплошной среды в переменных Лагранжа,
как и в случае одной точки, достаточно задать декартовы коор-
динаты х, у, z всех точек сплошной среды или их радиусы-векторы
г, но уже как функции четырех переменных Лагранжа:
x=f (а, Ь, с, t); y=f2(a, b, с, t); z=f3(a, b, c, t),
или
141
r=r(a, b, c, f).
В кинематике одной точки, которая рассматривалась ранее, ис-
пользовались переменные Лагранжа для этой точки. Параметры а,
Ь, с не применялись, так как не было других точек, от которых
следовало отличать рассматриваемую точку. Оставалась зависи-
мость координат точки или ее радиуса-вектора только от времени.
Для сплошной среды задание параметров а, Ь, с позволяет выделить
конкретную точку. Разным значениям этих параметров соответству-
ют различные точки сплошной среды.
Если движение сплошной среды задано в переменных Лагранжа,
то скорости и ускорения в этих переменных определяются по обыч-
ным формулам кинематики точки:
v = 8г[81,
или
vx=dxldt', vy=cylct\ vz = 8z/8t;
а=dv/dt = d2r)dt2,
или
ax=82x/8t2; ay=82y/8t2', az = 82z/8t2.
Производные по времени t частные, так как вычисляются при
фиксированных значениях переменных а, Ь, с. Величины х, у, z или
г можно также дифференцировать по каждому из переменных а, Ь, с.
В методе Лагранжа объектом изучения являются сами точки
движущейся сплошной среды.
Переменные Эйлера. В механике сплошной среды, особенно для
жидкостей и газов, а также в теории поля преимущественно
используются метод Эйлера и соответственно переменные Эй-
лера. В методе Эйлера рассматриваются не фиксированные точки
сплошной среды, а точки пространства, занятые движущейся
сплошной средой. За независимые переменные принимают время
t и декартовы координаты точки М пространства х, у, z или другие
параметры, характеризующие различные точки пространства. Че-
тыре независимые переменные величины х, у, z, t называют пере-
менными Эйлера.
Различные векторные и скалярные величины, характеризующие
сплошную среду, такие, как, например, скорость, ускорение, плот-
ность и т. п., рассматривают как функции этих переменных.
В случае сплошной среды изучаются поля скалярных и векторных
величин, характеризующих движущуюся сплошную среду и ее
свойства. Изучаются распределение этих величин по точкам про-
странства, занятого сплошной средой, и их изменение с течением
времени.
142
По известному векторному полю скоростей сплошной среды,
заданному в переменных Эйлера v=v(x, у, z, t), можно определить
векторное поле ускорений а в этих переменных. Получим соответ-
ствующую формулу. Движение сплошной среды в переменных Эй-
лера считается известным, если задано поле скоростей в этих пере-
менных. Согласно определению ускорения точки сплошной среды,
находящейся в какой-либо точке пространства М(х, у, z) в момент
времени t, следует рассмотреть положение этой точки сплошной
среды в момент времени t + At. Она в этот момент вследствие
движения сплошной среды окажется в другой точке пространства
Л/1 с координатами х+Ах, у + Ау, z+Az и будет иметь скорость ®ь
зависящую от координат этой новой точки пространства Мх и вре-
мени t+А. Изменение координат рассматриваемой точки сплошной
среды на Ах, Ay, Az произошло вследствие изменения времени на At,
поэтому
lim —=vx; lim — = vy; lim —= vz. (1)
ДГ-.0 Д<->0 AZ-.0
Разложим скорость в ряд по степеням величин Ах, Ay, Az, At:
vi=v(x+Ax, у+Ау, z+Az, t+At)=v(!x, у, z, /) +
+ (8v/8x)MlAx + (8v/8y)M,iAy+(8v/8z)MilAz+(8vl8t)M<tAt+...
Индексы M и t у производных указывают на то, что они берутся
в точке М(х, у, z) пространства в момент времени I. Согласно
определению ускорения а точки сплошной среды, находящейся
в точке пространства М в момент времени t, имеем
- «1—V Дх
а=1пп-----= ( — } + — I lim—|-
Д1-»0 \?1)мл \рх)Мл Дг-,0
(&>\ Ду / diA Дг
+ — I lim — + - lim—. (2)
\ду/ Мл Д(-»0 At \°ZJМЛ Дг->0 At
Остальные слагаемые ряда в пределе обращаются в ноль. Подстав-
ляя (1) в (2) и опуская для краткости индексы М и t у производных,
получаем
а=(8vj8f)+vx (8v/8х)+vy (8v/8y)+vz (8v/8z). (3)
В проекциях на координатные оси имеем
143
ах=8vx/8t + vx {cvxjdx)+vy (8vx/8y) 4- v. (8vx[8z)\
ay = dvyf 8t+vx (8vy/8x)+vy (8vy/8y)+vz (8vy/8z);
az — 8vzj8t+vx (8vz/ 8x)+vy (8vz/8y) + vz (ov.jdz).
(3')
По векторной формуле (3) вычисляют поле ускорений в перемен-
ных Эйлера, если известно поле скоростей. В эту формулу входят
Svfdt — локальная производная от вектора скорости — и груп-
па слагаемых vx(8vl8x) + vy(8vl8y)+vz(8v[8z), представляющая собой
конвективную производную от этого вектора. Полное измене-
ние вектора скорости с течением времени, т. е. ускорение, обозначим
Dv/Dt.
Локальная производная 8v)8t характеризует изменение вектора
скорости v в точке М(х, у, z) пространства вследствие изменения
только одного времени при неизменных х, у, z. Полная производная
Dv/Dt равна локальной производной 8v[8t в тех точках пространст-
ва, в которых скорость в рассматриваемый момент времени равна
нулю.
Группа слагаемых, представляющая конвективную производ-
ную, учитывает изменение вектора скорости, вызванное переносом
рассматриваемой точки сплошной среды самой движущейся средой.
Рассмотрим частные случаи.
1. Если v=v(x, у, z), т. е. поле скоростей стационарно, то
8vjdt=0 и a=DvlDt—vx(dvl8x) + vy(8vl8y)+vz(idvl8z).
2. При v=v(t) 8v/8x = 8v/8y=8v/8z = 0 и a=Dv)Dt = 8vl8t.
3. Если v=const, то 8vf8t=G, 8vl8x=8vjdy=8vldz=Q и a=
= Dv/Dt = 0.
По формуле (3) вычисляют полные, или субстанциальные, про-
изводные по времени в переменных Эйлера от любых векторных
или скалярных величин, характеризующих сплошную среду. Пусть,
например, известно скалярное поле плотностей р(х, у, z, t) сплош-
ной среды. Рассуждения, аналогичные приведенным при выводе
формулы для ускорения, приведут к полной производной от р по
времени t
DpfDt = 8pf8t+vx (8р)8х)+vy (8p/8y)+vz (8p/8z).
Если сплошная среда неподвижна, т. е. vx=vy=v2 = 0, то полная
производная по времени от любой векторной или скалярной функ-
ции, характеризующей сплошную среду, согласно (3), равна локаль-
ной производной.
144
Преобразованием конвективной производной из (3) можно полу-
чить другое выражение для ускорения (формула Лэмба — Громе-
ко):
(4)
а = dv)dt + V (v2/2) — v х rot v,
где rotv — вихрь вектора скорости, а V — символический опе-
ратор Гамильтона: „ -Э ~д Vs V=i-+j-+k-; 8х ду 8z
г, J, к — единичные векторы, направленные по осям декартовой си-
стемы осей координат. Вихрь вектора скорости определяется выра-
жением
£l = rotv = V х»=
8 8
8у 8z
(5)
В дальнейшем используется также вектор
половина вихря вектора скорости:
со, определяемый как
co = 1/2rot«.
(6)
В проекциях на оси координат
1 (dvZ fayX 1 (fa* ^Vz
w,= (---------1; cov=-1-------
2\8y 8z J 2\8z 8x_
1
2
(6')
Для выяснения физического смысла rotv рассмотрим несколько
примеров вычисления его по заданному полю скоростей.
Пример 1. Сплошная среда совершает плоское движение, параллельное оси Ох,
с постоянной скоростью v (рис. 101).
Имеем vx=r=const, vJ=0, vz=0. Для £5=rotv получаем:
145
dvT dvv dvx dv7
Qx= - - = 0, Qv = - - - =o,
Sy dz dz Sx
dvv dvx
Qz---------=0.
dx dy
Следовательно, fi=rotv=0 во всех точках пространства, занятого движущейся
сплошной средой.
Пример 2. Сплошная среда совершает плоское движение, параллельное оси Ох,
со скоростью, распределенной по линейному закону (рис. 102). Траекториями точек
сплошной среды являются прямые линии, параллельные оси Ох. В этом случае
«х=лу; «?=0, vz=0,
где n=tga=const. Имеем
3t>r dvv dvx dvz
Ях=——=0; й„=—
dy dz dz dx
dvv dvx
Qz=—------=-n.
dx dy
0;
Таким образом, во всех точках потока сплошной среды
Jl=rott,=flxj+nji/+nzfc= —пк,
где к — единичный вектор, направленный по оси Oz.
Пример 3. Точки сплошной среды движутся по круговым траекториям с цент-
рами на оси Oz и скоростями обратно пропорциональными радиусам окружностей
п
(рис. 103), т. е. «=-, где л=const. Имеем:
г
пу пх
ох= — vsin<p = ——; i»j,=vcos<p=—; vz=0,
так как
У х
япф=~; cos<p=-,
г г
где х, у — координаты точки. По формуле (5) имеем
dvy dvx (п 2лх х
Пх=0; П„=0;Пх=—-—= -
У dx dy V2 г3 г,
л
72
0,
так как х2 +у2 = г2.
Рис. 102
Рис. 101
146
Рис. 103
Следовательно, £l=rotv = 0 во всех точках, кроме точки г=0, для которой
вычисления не пригодны, так как в этой точке скорость обращается в бесконечность.
Пример 4. Сплошная среда вращается как твердое тело вокруг неподвижной оси
Oz с угловой скоростью coq- Скорости точек сплошной среды в этом случае рас-
пределены по линейному закону (рис. 104), т. е. v=coor и
vx= — «яп<р = сооу; v>=vcos9 = to0x; гг=0.
По формулам для вихря скорости имеем:
Sv., dvx
Qx=0; Qv=0; П2=---------=coo—(—a>0)=2a>a.
дх ду
Следовательно,
fi=rotv=2coofc,
где к— единичный вектор, направленный по оси Oz. Во всех точках потока rot v
имеет постоянную величину и постоянное направление, параллельное оси Oz, в том
числе и в точке О, где г=0 и »=0.
Угловая скорость
. 1 . _
CUo= rOtl' = <U,
т. е. она равна половине вихря вектора скорости. Таким образом, половина вихря
вектора скорости является вектором угловой скорости вращения твердого тела
вокруг неподвижной оси.
§ 2. РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ В МАЛОЙ ОКРЕСТНОСТИ
ТОЧКИ ПРОСТРАНСТВА
Пусть известны скорость в точке О в момент t и производные
от нее по координатам в этот же момент времени (рис. 105).
Получим формулу для вычисления скорости в этот же момент
времени в любой другой точке М из малой окрестности точки О.
Так как скорости в точках М и О рассматриваются в один и тот
же момент времени, то удобно выбрать начало осей координат,
147
МI х, у, z)
Рис. 105
относительно которых изучается движение
сплошной среды, в точке О.
Точки М пространства из малой окре-
стности точки О отличаются друг от друга
только координатами х, у, z или радиусом-
вектором г. Скорость в какой-либо точке
М для фиксированного момента времени
является функцией координат этой точки х,
у, z. Разложим v (х, у, z) в степенной ряд по
координатам х, у, z, ограничиваясь слага-
емыми первой степени по этим переменным
и пренебрегая слагаемыми второй и более высоких степеней, пред-
полагая, что ими можно пренебречь по сравнению с сохраняемыми
слагаемыми для достаточно малых х, у, z. Получим
»(х, у, z)=r(0, 0, 0)+(dvldx)ox + (dv/8y')oy+(8v/dz)oz, (7)
где v (0, 0, 0)=«о — скорость в точке О. Индекс О у производных
служит указанием на то, что они вычисляются в точке О простран-
ства. В дальнейшем его будем опускать. В проекциях на координат-
ные оси из (7) имеем
8v„ 8vv 8v,
Введем компоненты тензора скоростей деформации 5 в точке
О выражениями
1 (8v„ 8v2
148
Тензор скоростей деформаций удобно представить в форме табли-
цы или матрицы:
(9)
Компоненты тензора скоростей деформаций, характеризующие
движение сплошной среды, зависят от точки пространства и направ-
ления осей координат. Тензор 5 является симметричным тензором,
так как согласно формулам, определяющим его компоненты,
^ху ^уХ, ^yz ^Zy, &ZX &XZ'
Для таких симметричных тензоров в линейной алгебре доказывает-
ся, что в каждой точке существуют такие прямоугольные оси коор-
динат, называемые главными осями, для которых тензор принимает
диагональную форму:
(е1 О 0\
О е2 0 \
О 0 б3/
где бь б2, б3 — компоненты тензора скоростей деформаций для
главных осей. Известно также, что сумма диагональных компонен-
тов является инвариантом. Она не изменяется при повороте осей
координат в рассматриваемой точке, т. е.
exx + eyy + ezz = el +б2 + б3.
Скалярная величина
ехх + еУу + б„=dvjcx + dvyfcy+Svjdz
называется дивергенцией (расхождением) вектора скорости и обозна-
чается div и. Таким образом, по определению,
div v=dvx/dx+cvyfdy+dvjdz.
Величины 6i, e2, бз определяются из уравнения собственных
значений тензора S как его корни, т. е. как корни кубического
уравнения для е:
149
Известно, что числу соответствует геометрический образ, кото-
рым является точка на числовой оси. Вектору соответствует прямо-
линейный отрезок. Тензору S, компоненты которого имеют два
индекса, можно поставить в соответствие поверхность второго по-
рядка, которую называют эллипсоидом скоростей деформаций. Та-
кие тензорные поверхности дальше будут рассмотрены для тен-
зоров инерции и напряжений поверхностных сил.
Применим для производных по координатам от проекций век-
тора скорости на оси координат тождественные преобразования
Коши, прибавляя и вычитая одинаковые величины и используя (6')
и (8). Имеем
8vx 1 / 8vx 11 dvy 8vx\ |
—— I ”1” 1 I 1 — COZ,
8y 2\8y dx) 2\8x By)
8vx 1 (8vx 8i>z\ 1 [ 8vx 8vz\
= ~ I 1 I + ~ I-I = Sa + (Oy\
dz---------------------------------2\8z-dx / 2 \ dz dx )
8vr 1 j 3vv 3vx \ 1 (8vv Э«х \
-----— “ I-------------------1------------I + “ I-I = Sjq + COz\
dx 2\ dx--------------------------------------By) 2\8x By)
8vy 1 f 8vy Bvz\ 1 {8vz 8vy\
= ~ I 1 1-I-----I Syz — COX',
dz----------------------------------2\8z-By) 2\ By dz )
8vz 1 IBvz 3vx\ 1 / dvx 8vz\
— ~ I F* ) I 1 — Юу,
dx 2\8x 8z) 2\Bz 8x J
Sv2 1 (8vz Svy\ 1 18vz 8vy \
— — I-------1---l+l-----------) = Szy + COx.
By 2\6y dz) 2\8y dz)
Из (7') с учетом этих преобразований получаем
vx=vOx + +ехуу+exzz+coyz - czy>;
vy = vOy+еухх+еууу++со pc — coxz;
Vz=vOz+е1Хх+егуу+ezlz+co,# - coyx.
(10)
(11)
В векторной форме (11) примет вид
150
V = Vo + (O x г + «д,
(11')
где 1?д называется скоростью деформации. Проекции скорости дефор-
мации на оси координат определяют по формулам
Гдд. — еххх 4- ехуу 4-
— ^ух^ 4” &ууУ ^yz^y
Рцг &ZX^ 4“ ^2уУ 4“ ^ZZ% •
(12)
По формуле (1 Г) вычисляется скорость в момент времени t в лю-
бой точке М пространства из малой окрестности точки О, если
в этот же момент известны скорость, вихрь скорости и тензор
скоростей деформаций 5 в точке О. Формула (1 Г) является обобще-
нием на случай сплошной среды формулы (21) (см. § 8 гл. 4) для
скорости точки свободного твердого тела в общем случае его
движения. Для твердого тела йд=0. Кроме того, для сплошной
среды роль угловой скорости выполняет половина вихря вектора
скорости в точке О.
Рассмотрим скорость деформации ®я. Для простоты пусть мы
выбрали такую точку О, в которой в рассматриваемый момент
времени i;o=0 иш = 0. Тогда для скорости в какой-либо точке М из
малой окрестности этой точки, согласно (IV), имеем
(13)
или в проекциях на оси координат
vx = =еххх+ехуу+exzz;
Vy = VAy = еух% + ёууУ +
—Гда=ezxx -|- егуУ "Ь
(13')
Если в точке О exx^Q, а все остальные компоненты тензора скоро-
стей деформаций равны нулю, то из (13') получаем:
vx = exxx; vy = Q; vz—0.
(14)
Из (14) следует, что точки сплошной среды из малой окрестности
точки О, находящейся в плоскости Oyz, имеют скорости, равные
нулю, так как для них х=0. Точки, расположенные в плоскости,
параллельной этой координатной плоскости на расстоянии х в по-
ложительном направлении оси Ох, имеют одинаковые скорости,
151
пропорциональные х и направленные параллельно Ох, если ехх>0,
и в обратную сторону, если ехх<0. Для точек плоскости, параллель-
ной Oyz, но отстоящей от нее на — х, скорости имеют проти-
воположное направление. Таким образом, exx = vxjx в малой окре-
стности точки О характеризует скорость расширения (ехх>0) или
сжатия (ехх < 0) частицы сплошной среды, приходящуюся на единицу
расстояния в направлении, параллельном оси Ох (рис. 106). Анало-
гично, еуу и ezz характеризуют относительные скорости растяжения
или сжатия, приходящиеся на единицу расстояния в малой окре-
стности точки О, в направлениях, параллельных осям координат Оу
и Oz.
Допустим, что еху^0, а все остальные компоненты тензора
скоростей деформации равны нулю. Тогда из (13') следует:
-ёхуу; vy=е^х; vz=0.
Это показывает, что точки сплошной среды из малой окрестности
точки О, расположенные в плоскости Oyz, в частности на оси Оу,
для которых х=0, имеют скорости, параллельные оси Ох. Эти
скорости распределены по линейному закону (рис. 107) и направ-
лены в положительном направлении этой оси, если > 0, и в обрат-
ную сторону, если eXJ<0. Аналогично, точки, находящиеся в плос-
кости Oxz, в частности на оси Ох, имеют скорости, распределенные
по линейному закону и параллельные оси Оу. Если > 0, то точки
части сплошной среды из малой окрестности точки О, находящиеся
в момент времени t на осях координат Ох и Оу и образующих
прямой угол, в следующий момент времени расположатся на пря-
мых линиях, образующих острый угол. Если еху < 0, то прямой угол
превратится в тупой. Таким образом, величина exy = vx/y=vylx харак-
теризует относительную скорость скоса углов в плоскости Оху.
Соответственно и eyz характеризуют относительные скорости
скоса углов в плоскостях Oxz и Oyz, приходящиеся на единицу
длины.
Рис. 107
Рис. 106
152
В общем случае, если все компоненты тензора скоростей дефо-
рмации отличны от нуля, рассмотренные эффекты в окрестности
точки О наложатся друг на друга. Так как точка О является
произвольной точкой пространства, в котором движется сплош-
ная среда, то все изложенное применимо для малой окрестности
любой точки.
§ 3. ЛИНИИ И ТРУБКИ ТОКА
При рассмотрении движения сплошной среды и применении
переменных Эйлера используется понятие линий тока, т. е. линий,
в каждой точке которых в рассматриваемый момент времени век-
торы скоростей параллельны касательным этих линий. Если вектор
в какой-либо точке линии тока направлен по касательной к этой
линии, то, по определению линии тока, он должен быть параллель-
ным вектору скорости v в этой точке. Два параллельных вектора
отличаются друг от друга только скалярным множителем к (поло-
жительным или отрицательным). Следовательно,
dr=kv. (15)
Если проекции вектора dr на оси координат есть dx, dy, dz, то
в проекциях на эти оси выражение (15) примет форму
dx=kvx; dy=kvy; dz=kvz.
Отбрасывая произвольный множитель к, эти уравнения можно
представить в следующем виде:
dx dv dz
---------=-----. (15')
»х(х, У, Z, t) Vy(x, у, Z, 0 vz(x, у, Z, I)
Два уравнения (15') относительно координат х, у, z для фик-
сированного момента времени t являются дифференциальными ура-
внениями семейства линий тока. После интегрирования этих уравне-
ний появятся произвольные постоянные, различным значениям ко-
торых соответствуют разные линии тока. На фиксированной линии
тока в рассматриваемый момент времени находятся разные точки
сплошной среды в отличие от траекторий. Для стационарного
движения, при котором вектор скорости не зависит от времени,
семейство линий тока совпадает с семейством траекторий. Для
нестационарного движения это разные семейства линий.
Линии тока являются векторными линиями для векторного поля
скоростей точек сплошной среды. Аналогичные векторные линии
можно получить для любого другого векторного поля, например
153
векторного поля вихря вектора скоро-
_ СТИ и т. п.
Lxn Если выбрать в пространстве, в ко-
L тором движется сплошная среда, ка-
кой-либо замкнутый контур L (рис.
108) и через каждую его точку провести
свою линию тока, то получим трубку
тока. Сплошная среда не может выхо-
Рис. 108 дить из трубки тока через боковую ее
поверхность, так как в ее точках, состо-
ящих из линий тока, скорости точек сплошной среды направлены по
касательным к поверхности трубки тока. Сплошная среда может
входить и выходить из трубки тока только через ее торцовые
сечения. Трубки тока используются для формулировки некоторых
интегральных форм теорем о движении сплошной среды.
§ 4. ПОТОК И ЦИРКУЛЯЦИЯ ВЕКТОРА СКОРОСТИ
Поток вектора скорости. Выберем в пространстве, в котором
движется сплошная среда, неподвижную поверхность относительно
рассматриваемой системы отсчета. Разобьем ее на малые элемен-
тарные площадки с площадью d5 (рис. 109). Потоком вектора
скорости v через элементарную площадку d5, определяемую вне-
шней нормалью Мп, называется скалярная величина i>„d5, где v„ =
=vcos(v, ли) — проекция скорости на внешнюю нормаль к пло-
щадке.
Для замкнутой поверхности внешней нормалью в каждой ее
точке называют нормаль, которая направлена во внешнюю часть
объема, ограниченного поверхностью. Для незамкнутых поверх-
ностей дополнительно уславливаются, какое направление нормали
считать внешним.
Потоком Q вектора скорости v через воображаемую поверхность
5 называют скалярную величину
Q=j «ndS. (16)
w
Для вычисления потока можно получить другие выражения, если
учесть, что
V„ = vn — v 1 ' COS (и, Л и) = VJIX + ГуПу + Vznz,
где п — единичный вектор, направленный по внешней нормали; пх,
пу, nz — его проекции на оси координат. Для них имеем:
154
пх = 1 • cos (й,А х);
пу = 1 cos(й, Ау); nz— 1 cos(й,Аz).
Кроме того,
dS cos (п, Л х) = dydz; dS cos (п,Л у)=dzdx;
dS cos (й,Л z)=dxdy.
После этого для потока получаем
Q=
(Я (3)
[vx cos (й,Л х)+Vy cos (й,Л у)+vz cos (й,Л z)] dS=
= 'J(rxdj’dz+vJ,dzdx+vzdxdj). (16')
(3)
Наиболее часто используемое выражение для потока получают
применением формулы Гаусса — Остроградского для преобразова-
ния интеграла по замкнутой поверхности 5 в интеграл по объему V,
ограниченному этой поверхностью:
[р cos (й,Л х) + q cos (й, Л у) + г cos (п,Л z)] 65=
(3)
(17)
т
где p,q,r — любые функции переменных Эйлера, имеющие частные
производные. Замкнутая поверхность должна быть при этом до-
статочно гладкой.
Если принять p=vx, q=vy, r=vz, то, применяя (17) для потока
через замкнутую поверхность, имеем
edJ
(3)
vy cos (п,Л у)+vz cos (й,Л z)] dS=
Г Г Г (8vx д«у Bvz\
—+—+-• dK
By BzJ
(И
(16")
155
Но
8vx 8vy 8vz _ _ _
---1--1— = diw: v„=v n,
dx 8y 8z
поэтому
(S) (S) (V)
(18)
Для вектора вихря скорости поток через замкнутую поверхность
равен нулю, так как с учетом формул для проекций вектора вихря
на координатные оси имеем
_ апх
divtf=—+-— + — =
8х ду dz
8
дх
8v, 8v„\ 8 (8vx 8v,\ 8 (8vv
-------Id----1---------Id----1 —
8y dz j 8y\ dz dx) 8z\ 8x
Из (18) для потока AQ через элементарную замкнутую поверх-
ность, ограничивающую объем АГ, приближенно имеем
A0 = divv АГ.
Отсюда получаем для дивергенции вектора скорости
div« = lim —,
д^о^
т. е. дивергенцию вектора скорости в какой-либо точке можно
рассматривать как предел потока вектора скорости через замкну-
тую поверхность, приходящуюся на единицу объема, ограниченного
поверхностью, при стягивании объема в эту точку.
Циркуляция вектора скорости. Для введения понятия циркуляции
вектора скорости по какому-либо контуру следует выбрать контур
Z, разбить его на элементарные участки длиной dZ. Тогда циркуляци-
ей вектора скорости v по элементарному контуру dZ называют
величину vtdZ, где гт — проекция вектора скорости на положитель-
ное направление касательной к контуру в рассматриваемой точке
(рис. НО). За положительное направление касательной к контуру,
если контур замкнутый, выбирают то направление, при обходе
контура в котором ограниченная им поверхность остается слева.
156
Для незамкнутого контура о положитель-
ном направлении касательной уславлива-
ются дополнительно.
Циркуляция вектора скорости по все-
му контуру
Г= I vTdZ.
(19)
Для вычисления циркуляции можно
получить другие формулы, если учесть, что
Рис. ПО
VZ = V'T = V' 1 'COS(«, Л г) = VXTX + VyZy + VZTZ,
где т — единичный вектор в положительном направлении касатель-
ной к контуру; гх, ту, tz — его проекции на декартовы оси координат.
Учитывая, что
тх= 1 cos(t, лх); Ту= 1 cos(r, Лу); rz= 1 cos (t, Az);
dZcos (т,Л x)=dx; dZ cos (t,Л у)=dy; dZcos (т, л z)=dz,
получим
Г= «zdZ= [dxcos(t, ^x) + djcos(t, Ay)+vzcos(?, Az)]dZ=
w w
(yx dx+Vy dy+vz dz).
(19')
Ho
vxdx+vJdy+vzdz=vdr,
где r — радиус-вектор, проведенный из начала координат в точку
М контура. Поэтому имеем
r=xi+yj+zk; dr=dxi+dyj+dzk.
Таким образом,
157
Г = J vTd/= j vxdx+vydy+vzdz= vdr.
0 0 0
(19")
Для замкнутого контура можно применить формулу Стокса,
преобразующую интеграл по контуру в интеграл по поверхности,
натянутой на этот контур:
[р cos (т,Л х) + q cos (т,Л у) 4- г cos (т, Л z)] d/=
dr dq\ - Л (dp dr\ - a
---— I COS (л, Л X) + --— )сО8(л,Лу) +
oy oz J \pz OXJ
------I cos (л,Л z) dS.
(20)
Если принять p=vx, q=Vy, r=vz, то, применяя (20) для замкнутого
контура, имеем
Г = j [vx cos (т,Л х)+vy cos (т,Л у)+vz cos (т,Л z)] dZ=
0
dvz dvv\ a „ (dvx dvz\ a x
--------I COS (л, Л x) + l------)СО8(л, j) +
dy dz) \dz dx)
I OVv OVX \ — A
+ (--------I cos (л,A z) diS.
dx dy
Учитывая, что
являются проекциями вихря скорости, для циркуляции по замкну-
тому контуру получим
158
Г =
rot v n d5.
(21)
(0
(S)
Если rot v = 0, т. e. движение сплошной среды является потенци-
альным, то циркуляция при таком движении по замкнутому кон-
туру равна нулю, если контур не охватывает точек, в которых вихрь
скорости отличен от нуля.
Для вектора силы F циркуляция по какому-либо контуру являет-
ся работой силы на этом контуре.
РАЗДЕЛ II
ДИНАМИКА
В динамике изучаются равновесие и механические дви-
жения материальных объектов при их взаимодействиях.
В качестве материальных объектов рассматриваются материальная
точка, твердое тело, произвольная система материальных точек и,
в частности, любая сплошная среда.
Основной характеристикой взаимодействия простейших матери-
альных объектов, материальных точек, является сила. На ее основе
вводятся меры ее действия: моменты силы относительно точки
и оси, импульс и работа силы, обобщенная сила и др. Особое
внимание уделяется рассмотрению свойств сил, приложенных к тве-
рдому телу, замене сложных систем сил более простыми.
Движения точки, твердого тела и сплошной среды изучались
в кинематике. На основе кинематических величин, характеризую-
щих движения, вводятся меры движения материальных объектов,
такие, как количество движения, кинетический момент, кинетичес-
кая энергия и др.
Характеристикой материальности материальной точки является
масса. Используя понятие массы точки, вводят понятие центра
масс для системы материальных точек, моментов инерции для тел
и др.
Динамика базируется на системе основных аксиом, имеющих
опытное происхождение. Из аксиом путем введения соответству-
ющих понятий и использования законов логики получают следствия
в форме теорем и динамических уравнений для движений различных
материальных объектов, особенно движения твердого тела. Усло-
вия равновесия сил, приложенных к точке и твердому телу, получа-
ются как частный случай из динамических уравнений движения. При
этом главное внимание уделяется условиям равновесия сил, прило-
женных к твердому телу.
ГЛАВА 1
ВВЕДЕНИЕ В ДИНАМИКУ
§ 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
В теоретической механике, как и в других науках, имеются свои
понятия и определения, которые используются для формулирова-
ния ее аксиом, записи дифференциальных уравнений и теорем.
Рассмотрим основные понятия и определения, необходимые для
формулирования основ динамики.
Главным материальным объектом, на основе которого строятся
модели более сложных материальных объектов, является матери-
альная точка.
Материальной точкой называют простейшую модель мате-
риального тела любой формы, размеры которого достаточно малы,
и в рассматриваемых задачах его можно принять за геометричес-
кую точку, имеющую определенную массу. Введение понятия мате-
риальной точки позволяет не рассматривать в задачах механики
внутренние свойства тел, принимаемых за материальную точку. За
материальную точку может, например, принят земной шар при
рассмотрении его движения по орбите вокруг Солнца.
Механической системой, или системой материальных точек, счи-
тают произвольную совокупность материальных точек как связан-
ных между собой, так и не связанных.
Абсолютно твердым телом, или просто твердым телом, называ-
ется механическая система, расстояния между точками которой не
изменяется при любых взаимодействиях. Все тела в природе в той
или иной степени деформируемы, но во многих задачах деформаци-
ями тел можно пренебречь и считать тела твердыми. Сплошные
материальные тела, деформируемые и недеформируемые, а также
другие сплошные среды, как, например, жидкости и не очень раз-
реженные газы, считаются состоящими из материальных точек,
которыми являются малые частицы тел и сплошных сред, на кото-
рые мысленно разбиваются сплошные тела и среды.
Основной величиной, с помощью которой оценивается взаимо-
действие материальных точек, является сила. Представление о силе
можно составить, например, давлением руки на какое-либо тело.
Сила есть одна из мер действия какого-либо материального объекта
на другой выделенный объект, например, материальную точку.
Сила считается основным, первичным понятием, не выражающимся
через другие понятия. Она является векторной мерой, так как
характеризуется числовой величиной (модулем), направлением дей-
ствия и точкой приложения. Определение силы сводится к указанию
161
одной из мер действия, принимаемой за силу. В качестве такой
первичной меры действия принимают линейную силу упруго-
сти, т. е. меру, величина которой при действии на пружину динамо-
метра пропорциональна деформации пружины в пределах ее уп-
ругости. За первичную силу можно принять любую другую меру,
являющуюся силой, если для нее есть закон зависимости от рассто-
яния, скорости, ускорения и возможно других величин. Силы изме-
ряются в ньютонах.
При определении силы как меры действия одного материально-
го объекта на другой, выделенный объект, следует указать систему
отсчета наблюдателя, с точки зрения которого оценивается взаимо-
действие. Для материальной точки, действие силы на которую
оценивается, такой системой отсчета является собственная систе-
ма отсчета точки. Относительно собственной системы отсчета,
или системы покоя точки, материальная точка имеет равными
нулю и скорость, и ускорение. Для твердого тела имеется общая для
всех его точек собственная система отсчета, скрепленная жестко
с этим телом.
Силу как величину векторную обозначают какой-либо буквой
со знаком вектора, например F или Р и т. д. Для обозначения
модуля силы используется знак модуля вектора силы, т. е. |Д, |Р|
или те же буквы без знака вектора — F, Р. Механические взаимо-
действия материальных объектов осуществляются путем их сопри-
косновения или контакта (давление ножек стула на пол и т. д.), или
как действие на расстояние посредством силовых полей (сила при-
тяжения Земли Солнцем и т. д.).
Системой сил называют совокупность сил, действующих на
материальную точку, твердое тело, или в более общем случае, на
точки механической системы. Две системы сил называются эквива-
лентными, если их действие по отдельности на одну и ту же
материальную точку, или твердое тело, одинаково при других
равных условиях, т. е. если одна система сил, действующих, напри-
мер на материальную точку, сообщает ей какое-то движение, то
эквивалентная система сил сообщит этой точке такое же движение
при прочих одинаковых условиях. Эквивалентные системы сил вы-
зывают у материальной точки или твердого тела движения с оди-
наковыми характеристиками для одинаковых моментов времени,
если при этом были одинаковы начальные условия. Условия эк-
вивалентности двух систем сил (Д, F2, ..., Fn) и F2, ..., Д')
выражают в форме
(Д, Д,..., Д)~(Д, Д',..., Д),
где п и к — числа сил в эквивалентных системах сил.
162
Равнодействующей силой R* системы сил (Ft, F2, ..., F„) называют
силу, действие которой на материальную точку или твердое тело
эквивалентно рассматриваемой системе сил, т. е.
(я*)~(Л, Л,л.).
Система сил, действующих на материальную точку (или твердое
тело), называется эквивалентной нулю, или равновесной, если ее
равнодействующая сила равна нулю. Для твердого тела могут быть
системы сил, которые не имеют равнодействующей, как, например,
пара сил.
Если система сил, действующих на точку или твердое тело,
имеет равнодействующую, то эта система сил имеет также уравно-
вешивающую силу R*'. Уравновешивающей силой называется сила,
добавление которой к данной системе сил дает новую систему сил,
эквивалентную нулю, т. е.
(Л, л, Л, л*э~о,
или, используя равнодействующую силу R*,
(Я*, Л*Э~0.
Силы как величины векторные складываются по правилу век-
торного сложения, т. е. по правилу параллелограмма сил.
Согласно этому правилу или аксиоме параллелограмма сил: две
силы, действующие в одной точке твердого тела или на
одну материальную точку,эквивалентны равнодейству-
ющей силе, равной по модулю и направлению диагона-
ли параллелограмма, построенного на заданных силах
(рис. 1).
Аксиому векторного сложения, или аксиому параллелограмма
сил, длительное время в истории развития механики пытались
доказать и, следовательно, считали теоремой. Тщательный анализ
таких доказательств, часто очень остроумных, показал, что при
этом приходится использовать дополнительные положения, кото-
рые сами следует принимать за аксиомы.
Замену двух сил F\ и Р2 одной равнодействующей силой R* по
правилу векторного сложения математически выражают так:
Л*=Л+Л-
Если силы F] и Р2 направлены по одной прямой в одну или проти-
воположные стороны, то векторное сложение переходит в алгебра-
ическое.
163
Модуль равнодействующей силы Л* в общем
случае вычисляют по формуле для диагонали па-
раллелограмма
я*=л/^+^+гл^совСЛ,Л Л).
Рис. 1 Применяя теорему синусов к одному из треуголь-
ников параллелограмма, определяют синусы уг-
лов, которые образует равнодействующая сила Л* с составляющи-
ми ее силами Л и Р2'.
sin (Я*,А Л)=----------; sin (Я*, Л)=----------
R* R*
Более предпочтительным способом определения равнодейству-
ющей силы, особенно если система сил состоит из более чем двух
сил, является метод проецирования сил на оси координат. Этот
метод рассматривается в следующем параграфе.
По правилу параллелограмма сил можно также одну силу раз-
ложить на две составляющие силы.
Почти все положения теоретической механики формулируются
для свободной материальной точки и свободного твердо-
го тела, свобода перемещения которых относительно рассматрива-
емой системы отсчета не ограничивается другими материальными
объектами.
Материальная точка и твердое тело считаются свободными,
если действие всех материальных объектов, ограничивающих их
свободу перемещений, заменены силами. Эти силы обычно называ-
ют силами реакций связей, а материальные объекты их созда-
ющие — связями. Считается аксиомой, что связи эквивалентны си-
лам реакций связей, хотя это положение уже содержится в определе-
нии силы.
Замена связей твердого тела и точки силами реакций связей
является одной из главных задач динамики. Все действующие на
материальную точку или твердое тело силы делят на заданные
или активные силы и силы реакций связей (пассивные силы). Для
заданных сил задается закон зависимости их от других величин, как,
например, от времени, расстояний, скорости, ускорения и т. п. Для
сил реакций связей обычно таких законов нет. Силы реакций связей
считаются неизвестными, подлежащими определению. Они зависят
для рассматриваемой материальной точки или твердого тела, от
вида связи, заданных сил и при движении могут зависеть от харак-
теристик движения, как, например, скорости при движении в воз-
духе и ускорения.
164
Деление сил на заданные и реакции связей не является строгим,
но широко применяется. Обычно связями считают все тела и другие
материальные объекты, с которыми материальная точка или твер-
дое тело соприкасаются путем контакта. В механике сплошной
среды такие силы называют поверхностными силами в отличие от
объемных.
Движение материальных объектов происходит в пространстве
с изменением времени. Пространство в классической механике счи-
тается трехмерным эвклидовым пространством, независимым от
времени и находящихся в нем материальных объектов. Положение
точки в таком пространстве определяется тремя независимыми
параметрами, координатами точки относительно выбранной систе-
мы отсчета.
Время принимается универсальным, не связанным с простран-
ством и не зависящим от движения рассматриваемого материально-
го объекта и от системы отсчета наблюдателя. Во всех системах
отсчета, движущихся друг относительно друга и неподвижных, оно
одно и то же. Время определяют каким-либо периодическим процес-
сом, например, периодом колебания маятника часов, вращения
земного шара вокруг своей оси и т. п.
В механике теории относительности пространство и время свя-
заны между собой и рассматриваются как единое четырехмерное
пространство — время.
В кинематике рассматривалось движение материальных объек-
тов относительно произвольной системы отсчета. В динамике при
формулировке основных аксиом и теорем используются преимуще-
ственно инерциальные системы отсчета. Вопрос об инерциаль-
ных системах отсчета более детально рассматривается дальше.
Сейчас укажем, что в качестве основной приближенно инерци-
альной системы отсчета, как показывает опыт, можно принять
гелиоцентрическую систему отсчета, начало которой нахо-
дится в центре Солнца, а оси все время направлены на одни и те же
удаленные звезды.
§ 2. СЛОЖЕНИЕ И РАВНОВЕСИЕ СИЛ,
ПРИЛОЖЕННЫХ В ОДНОЙ ТОЧКЕ
Применяя к системе сил (F, F2, F„) (рис. 2) последовательно
правило параллелограмма, можно произвольную систему сил, при-
ложенных в точке, заменить одной равнодействующей силой R*
(рис. 3, а). Для этого сложим по правилу параллелограмма силы
системы F\ и F2. Получим их равнодействующую силу
-^12 = Д +F2,
165
которая геометрически изображается
диагональю параллелограмма, по-
строенного на этих силах. Затем при-
меним правило параллелограмма к
двум силам Ли и /3. Их равнодейству-
ющая сила
Л123 = Л12 + /з.
После замены силы Л|2 ее выражением
через силы Fi и F2 получим:
1?123 =/12+ 1*3— Fi +/2 + 1*3.
Продолжая этот процесс, приведем заданную систему сил к одной
силе Лиз...,, которая эквивалентна этой системе сил и, следователь-
но, является ее равнодействующей силой /*
п
/* = /123п = /1 +F2 + F3+ ...+F„ =
Таким образом, равнодействующая сила системы сил, при-
ложенных в одной точке, равна векторной сумме этих сил
и приложена в той же точке.
Процесс последовательного применения к силам системы прави-
ла параллелограмма, или их векторного сложения, приводит к по-
строению силового многоугольника из заданных сил систе-
мы. В силовом многоугольнике конец одной из сил служит началом
другой (рис. 3, б). Равнодействующая сила R* в силовом много-
угольнике соединяет начало первой силы системы с концом послед-
ней, т. е. изображается замыкающей силового многоугольника,
который в случае неравновесной системы сил является незамкну-
тым. Силы в силовом многоугольнике можно изображать в любой
Рис. з
166
последовательности. От этого изменится форма силового много-
угольника, но не изменится замыкающая, которая изображает рав-
нодействующую силу.
Формулы для вычисления равнодействующей силы
Для аналитического определения равнодействующей силы сле-
дует выбрать систему прямоугольных осей координат и восполь-
зоваться известной из геометрии теоремой о том, что проекция
замыкающей любого многоугольника на какую-либо ось равна
алгебраической сумме проекций составляющих его сторон на ту же
ось.
Так как равнодействующая сила R* является замыкающей сило-
вого многоугольника, или векторной суммой сил, то
1=1
Проецируя векторы векторного равенства на прямоугольные оси
координат, согласно теореме о проекции замыкающей, получим
Лх* = t F&, R* = f Fty\ Rf = £ Fb.
i=l i=l i=l
По проекциям определяем модуль равнодействующей силы и коси-
нусы ее углов с осями координат по формулам
______________________ /7» \2 / ’\2 7»\2
л*=V(^*)2+(Л*)2+(Л*)2 = Я zМ +(+(J>);
сов(Л*,Лх)=^; соз(Л*,ЛУ)=~~; cos (Л*,Л2)=~~-
В случае плоской системы сил, когда силы, приложенные к точке,
расположены в одной плоскости, одну из координатных осей,
обычно Oz, выбирают перпендикулярной силам. Тогда каждая
из сил системы даст проекцию на эту ось, равную нулю, а сле-
довательно, будет равна нулю и проекция равнодействующей силы
на эту ось, т. е.
167
Условия равновесия сил, приложенных в одной точке
Для равновесия системы сил, приложенных в одной точке, замы-
кающая силового многоугольника, изображающая равнодейству-
ющую по модулю и направлению, должна обратиться в точку, так
как равнодействующая сила в этом случае равна нулю. В силовом
многоугольнике конец последней силы должен совпасть с началом
первой силы системы. Такой многоугольник называют замкнутым
(рис. 4). Получено условие равновесия сил, приложенных в одной
точке в геометрической форме: для равновесия системы
сил, приложенных в одной точке, необходимо и достато-
чно, чтобы силовой многоугольник, построенный из этих
сил, был замкнутым.
Для определения неизвестных сил, входящих в равновесную
систему сил, предпочтительными являются условия равновесия си-
стемы сил в аналитической форме. При равновесии системы сил
равнодействующая сила равна нулю (силовой многоугольник за-
мкнут). Следовательно, равны нулю проекции равнодействующей
на оси декартовой системы координат, что для сил системы приво-
дит к условиям:
2Х=0; f Fiy=0;
i=l i=l i=l
Это и есть условия равновесия системы сил, приложенных в одной
точке в аналитической форме, т. е. для равновесия системы
сил, приложенных в одной точке, необходимо и достато-
чно, чтобы суммы проекций этих сил на каждую из трех
прямоугольных осей координат равнялись нулю.
В случае плоской системы сил, приложенных в одной точке, одну
из осей координат, обычно Oz, выбирают перпендикулярной силам.
Л
Тогда условие £ F,2=0 превратится в тождество. Отбрасывая его,
1=1
получаем:
£Fix=0; £Fiy=0,
U=1 1=1
т. е. для равновесия плоской систе-
мы сил, приложенных в одной точ-
ке, необходимо и достаточно, что-
бы суммы проекций этих сил на ка-
ждую из двух прямоугольных осей
координат, расположенных в плос-
кости сил, были равны нулю.
168
Проецирование силы на оси координат
Проекции силы F на прямоугольные оси координат могут быть
вычислены по формулам
Fx=F-7=Fcos(/i,Ax);
Fy=Fj=Fcos(F, Лу); FZ=F k = Fcos(F, Az),
где i, j, к — единичные векторы, направленные по осям координат.
Косинусы углов силы с осями координат удовлетворяют условию
cos2 (F,Л х) + cos2 (F,Л у)+cos2 (/,Л z) = 1.
Из трех углов независимыми являются только два. Целесообразно
при проецировании силы на прямоугольные оси координат исполь-
зовать тоже только два угла. Для этого силу предварительно раз-
лагают на две перпендикулярные составляющие, одна из которых
параллельна какой-либо оси координат, например оси Oz, а другая
находится в координатной плоскости двух других осей, в нашем
случае — координатной плоскости Оху (рис. 5). Получаем
P=FZ+Fxy.
Проецируя векторы векторного равенства на координатные оси,
имеем
Fx=Fxy cos fl=F sina cos fl;
Fy = Fxysinfl=F sina sinfl; Fz=Fcosa,
так как
Fx>,=Fsina.
При проецировании силы использованы только два угла а и fl.
Векторные величины Fx, Fy, Fz называются составляющими
силы F по осям координат. Скалярные
величины Fx, Fy, Fz являются проек-
циями силы F на оси координат. Та-
ким образом силу на оси координат
проецируют в два приема: сначала ее
проецируют на одну из осей и на коор-
динатную плоскость двух других осей.
Проекция силы на плоскость является
вектором. Этот вектор проекцируют
на координатные оси, расположенные
в координатной плоскости.
169
§ 3. ОСНОВНЫЕ АКСИОМЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
Основные аксиомы, или законы классической механики, имеют
опытное происхождение. Они сами и следствия из них проверяются
на опыте. Аксиомы формулируются для простейшего материально-
го объекта, материальной точки. Движение точки при этом рассмат-
ривается относительно инерциальной системы отсчета, а силы, при-
ложенные к материальной точке, оцениваются наблюдателем, нахо-
дящимся в собственной системе отсчета точки. Материальная точка
должна быть свободной, т. е. все материальные объекты, дейст-
вующие на нее, следует заменить силами по соответствующим
законам. Силы реакций связей тоже должны быть приложены к ма-
териальной точке.
Реальное пространство, в котором движется материальная точ-
ка, оказывает сопротивление ее движению. Сила этого сопротивле-
ния может зависеть от самого тела, принимаемого за материаль-
ную точку, от времени в связи с расширением пространства, от
места нахождения материальной точки в пространстве, от скорости
и ускорения точки относительно, например, инерциальной системы
отсчета и возможно других величин. Зависимость силы сопротивле-
ния от различных факторов должна устанавливаться эксперимен-
тально или теоретически путем разработки теории взаимодействия
движущихся материальных объектов с пространством.
Первая основная аксиома, которую целесообразно назвать
аксиомой Ньютона (она неявно содержится в его системе аксиом),
лишь приближенно оценивает зависимость силы сопротивления
пространства, действующую на движущуюся материальную точку.
Согласно этой аксиоме сила сопротивления пространства
Ф (сила инерции материальной точки) пропорциональна
ускорению а точки относительно инерциальной системы от-
счета и направлена против этого ускорения, т. е.
Ф=— та, (1)
где положительный коэффициент пропорциональности т называет-
ся инертной массой материальной точки. Инертная масса точки
зависит от тела, принимаемого за материальную точку, и является
своеобразным коэффициентом сопротивления пространства движе-
нию материальной точки. Она определяется величиной силы со-
противления пространства, приходящейся на единицу ускорения.
В классической механике инертная масса считается не зависящей
от скорости. При больших скоростях, близких к скорости света,
проявляется ее зависимость от скорости движения и, следовательно,
зависимость силы сопротивления пространства от скорости.
В технических задачах встречаются материальные объекты,
масса которых изменяется по заданному закону искуственно всле-
170
дствие изменения самого тела путем отделения от него частей.
Это изменение массы не связано непосредственно с телом постоян-
ного состава и принимаемом за рассматриваемую материальную
точку.
Другая, гравитационная масса, входит в закон тяготения
Ньютона и выполняет роль, аналогичную заряду в законе Кулона
для электростатической силы. Экспериментально установлено с вы-
сокой степенью точности совпадение инертной и гравитационной
масс.
В законе зависимости силы сопротивления пространства от уско-
рения, очевидно, следует учитывать ускорение точки относительно
системы отсчета, связанной с механизмом возникновения этой си-
лы. Выбранная в качестве основной инерциальной системы отсчета
гелиоцентрическая система отсчета может рассматриваться как при-
ближение к этой истинной инерциальной системе отсчета. Меха-
низм взаимодействия движущихся материальных объектов с про-
странством пока не изучен.
Сила сопротивления пространства, линейно зависящая от уско-
рения, аналогична силе сопротивления идеальной жидкости, кото-
рое она оказывает движущемуся в ней твердому телу. В идеальной
жидкости (в которую входят и газы) не возникает сил трения между
соседними слоями жидкости, имеющими разные скорости, и жид-
костью и телом. Возможно, что это только аналогия и в простран-
стве нет среды, аналогичной идеальной жидкости.
Другая возможность объяснения механизма возникновения силы
сопротивления пространства связана с обменом виртуальными ча-
стицами между пространством и движущимся материальным
объектом. Наконец, силу сопротивления пространства можно счи-
тать обусловленной изменением кривизны пространства при движе-
нии материального объекта. На это указывает общая теория от-
носительности. Установление механизма возникновения силы со-
противления пространства должно прояснить вопрос о первичной
инерциальной системе отсчета.
Вторая основная аксиома, которую можно назвать акси-
омой Даламбера из-за ее формального сходства с принципом Дала-
мбера в современной формулировке, устанавливает основное свой-
ство сил, действующих на материальную точку со стороны других
материальных объектов, и физического пространства при любом
движении и равновесии материальной точки. Согласно этой акси-
оме все силы, действующие на материальную точку при
любом ее состоянии, вместе с силой сопротивления про-
странства образуют равновесную систему сил, т. е. удов-
летворяют условию равновесия сил
£Л+Ф=о, (2)
1=1
171
где £ Fi — равнодействующая сила от действия на материаль-
(=1
ную точку всех материальных объектов, находящихся в прост-
ранстве.
На материальную точку действуют все объекты, находящиеся во
Вселенной. Их действие на точку следует оценивать в соответствии
с имеющимися законами для различных взаимодействий. Для сил
тяготения — по закону тяготения Ньютона, для сил упругости —
по закону Гука и т. п. Для удаленных от точки материальных
объектов силы тяготения малы и ими обычно пренебрегают. Они
обратно пропорциональны квадрату расстояний от точки.
При равновесии материальной точки относительно инерциаль-
ной системы отсчета или ее движении с постоянной векторной
скоростью (равномерно и прямолинейно), при которых ускорение
точки равно нулю, из второй аксиомы получаем условие равновесия
сил, действующих на материальную точку только со стороны мате-
риальных объектов Вселенной в форме,
£Л=0, (2')
1=1
так как в этом случае сопротивления пространства Ф=— та=0.
Материальная точка под действием такой равновесной системы сил
движется относительно инерциальной системы отсчета по инер-
ции или находится в покое.
У свободной точки три степени свободы. В проекциях на оси
координат из (2') для сил получается тоже три условия. Из этих
условий можно определить три неизвестные силы, которыми обыч-
но являются силы реакций связей.
Из первой и второй аксиом можно получить следствие в форме
основного уравнения движения материальной точки в ве-
кторной форме
ma=XF. (3)
*=1
При движении материальной точки под действем силы тяжести
л
и ускорение а равно ускорению свободного падения g. Из
<=1
(3) в этом случае имеем:
Р
т=,
g
172
т. е. масса точки выражается через силу тяжести точки
у Земли и ее ускорение под действием этой силы.
Третья основная аксиома, или закон Ньютона о равен-
стве сил действия и противодействия, утверждает, что силы
взаимодействия двух материальных точек равны по мо-
дулю и противоположны по направлению (рис. 6), т. е.
Л=-Л. (4)
Для механических взаимодействий дополнительно предполагается,
что силы взаимодействия материальных точек направле-
ны по одной прямой, соединяющей взаимодействующие
точки. Электромагнитные силы взаимодействия движущихся заря-
дов этому условию не удовлетворяют.
Если взаимодействующие точки удалены друг от друга, как,
например Земля и Солнце, то следует считать, что каждое из этих
тел, принимаемое за точку, взаимодействует с силовым полем
другой точки контактно. Запаздывание передачи противодействия
несущественно, если силовое действие не изменяется с течением
времени и сохраняется расстояние между взаимодействующими
точками. В противном случае закон о равенстве действия и проти-
водействия будет выполняться приближенно для механических си-
стем, размеры которых не велики и скорости распространения
силовых взаимодействий между точками не очень малы.
При рассмотрении взаимодействия материальных точечных
объектов с полями часто используются пробные точечные объекты,
которые, испытывая действие поля, не влияют на само поле. От-
метим также, что силы взаимодействия всегда приложены к разным
материальным точкам.
Три основных аксиомы классической механики являются осно-
вой для получения всех теорем и уравнений различных движений
материальных объектов. Аксиомы независимы и непротиворечивы
как сами, так и теоремы и уравнения, полученные при их исполь-
зовании.
Три основные величины — ускорение точки, сила и масса удов-
летворяют уравнению (3). Размерность уско-
рения выражается через размерность длины »м2
и времени. Если принять размерности длины
и времени за основные, то в качестве третьей ггг
независимой размерности можно выбрать раз- г'
мерность еще одной величины — массы или
силы. По международному соглашению (си- f '
стема СИ) для длины выбран метр, для М1
времени — секунда и массы — килограмм. Рис. 6
173
Размерность единицы силы на основании (3) выражается через эти
величины следующим образом:
[/]=[<[«]•
т» , мкг
Величина силы, равная 1 ----, называется ньютоном (Н), т. е.
с2
§ 4. МОМЕНТЫ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ
Введем одну из основных мер действия силы на материальную
точку, или твердое тело, ее момент относительно точки и оси.
Относительно точки следует ввести алгебраический и векторный
моменты силы.
Алгебраический момент силы относительно точки
Алгебраическим моментом силы относительно точки
называется произведение модуля силы на ее плечо от-
носительно моментной точки, взятое со знаком плюс или
минус (рис. 7). Плечом h силы F относительно точки О называют
кратчайшее расстояние этой точки до линии действия силы, т. е.
длину перпендикуляра, опущенного из точки О на линию действия
силы F. Алгебраический момент обозначают Мо (F) или просто Afo.
Тогда согласно определения
Mo(P)=+Fh. (5)
Знак плюс берется в случае, если сила стремится вращать точку
ее приложения против часовой стрелки вокруг О и минус — по
часовой.
д По модулю алгебраический момент
Ьсилы относительно точки равен удвоен-
ной площади треугольника, построенно-
го на силе F=AB, и моментной точке О,
т. е.
М0(/)=±2пл. Л О АВ. (5')
Алгебраический момент силы относите-
Рис 7 льно точки не зависит от переноса силы
174
вдоль линии действия. Площадь треугольника при этом не изменя-
ется. Изменяется только форма треугольника.
Размерность момента силы в СИ — Н м.
Векторный момент силы относительно точки
Векторным моментом силы относительно точки M0(F)
называется векторное произведение радиуса вектора г,
проведенного из моментной точки О в точку А приложе-
ния силы, на саму силу / (рис. 8), т. е.
Mo{P) = rxF.
(6)
Вектор MO(F) считается приложенным в моментной точке О. Мо-
дуль векторного момента силы относительно точки
|М0(/)|=/Л=2пл. LOAB,
где h — плечо силы относительно точки О. Направление векторного
момента M0(F) согласно определения векторного произведения
перпендикулярно плоскости, в которой расположены векторы г и F,
т. е. плоскости треугольника ОАВ. Из двух направлений, перпен-
дикулярных этой плоскости, следует выбрать то из них, с которого
направление движения точки приложения силы или вращения твер-
дого тела вокруг M0(F) под действием силы можно видеть в нап-
равлении против часовой стрелки.
Векторное произведение двух векторов выразим в форме опре-
делителя, в первой строке которого находятся единичные векторы
осей координат i, j, к, а во второй и третьей — соответственно
проекции на оси координат первого и второго векторных со-
множителей. Разлагая определитель по элементам первой строки,
получаем:
Mo (F) = rx F—
= i {yFz - zFy) +j (zFx - xFz) +
+ k(xFy—xFx),
где х, у, z — координаты точки при-
ложения силы относительно осей ко-
ординат, начало которых выбрано в
175
моментной точке О и Fx, Fy, Fz — проекции силы на оси коор-
динат.
Из (6') получаем формулы для проекций векторного момента на
оси координат
МОж (F)=yFz - zFy\ МОу (F)=zFx - xFz\ MOz (F)=xFy - yFx. (6")
Момент силы относительно оси
Моментом силы относительно оси называется алгеб-
раический момент проекции этой силы на плоскость, пер-
пендикулярную оси, относительно точки пересечения оси
с плоскостью (рис. 9). Проекция силы на плоскость является
вектором. Момент силы, например относительно оси Oz, обозна-
чим Mz (F). Тогда согласно определения
Mz (F) = Мо (Fj = ± Fah = ± 2 пл. Д ОА, (7)
где Fn — проекция силы F на плоскость П, h — плечо силы Fn от-
носительно точки О. Знак плюс у момента берется в случае, если
сила /п стремится двигать ее точку приложения или вращать твер-
дое тело вокруг положительного на-
правления оси Oz против часовой
стрелки и минус — по часовой стрелке.
Момент силы относительно оси
аналогично алгебраическому и век-
торному моментам не зависит от пе-
реноса силы вдоль линии действия. Из
определения момента силы относите-
льно оси следует, что он обращается
в нуль, если сила F параллельна оси
(Fn=0), или пересекает ось (й = 0).
В этих случаях сила F и ось Oz рас-
полагаются в одной плоскости.
Связь моментов силы относительно оси с векторным моментом
относительно точки на оси
Модуль момента силы относительно оси Oz
\MZ(F)\ = 2 пл. AOAiBi.
Модуль векторного момента силы относительно точки О на
оси Oz
176
|Л/о(/)| = 2пл.ДОЛД
и относительно другой точки оси О]
(рис. 10) \MOi (/)| = 2 пл. Д OtAB.
Векторные моменты Мо (F) и Мо, (F)
перпендикулярны соответственно плос-
костям треугольников ОАВ и О[АВ.
Треугольник OAtBi является проекцией
треугольников ОАВ и ОХАВ на плос-
кость П. Площадь проекции плоской
фигуры равна площади проецируемой
фигуры, умноженной на косинус дву-
гранного угла между плоскостями,
в которых расположены фигуры. Дву-
гранный угол между плоскостями ра-
вен углу между перпендикулярами к этим плоскостям, т. е. углу
между векторным моментом M0(F) и осью Oz и соответственно
моментом Л?0] (F) и той же осью. Таким образом, имеем:
Mz (F) = \MO (F)\ cosa=MOz (/); Mz (F)=
= \MOi (F)| cosa] = MOil (F). (8)
Формулы (8) дают искомую связь момента сила относительно оси
с векторными моментами силы относительно точек на оси: мо-
мент силы относительно оси равен проекции на эту ось
векторного момента силы относительно любой точки на
оси. Эту зависимость между моментами относительно оси и век-
торным моментом относительно точки на оси можно принять за
другое определение момента силы относительно оси, т. е. считать
моментом силы относительно оси проекцию на ось век-
торного момента этой силы относительно произвольной
точки на оси.
Формулы для моментов силы относительно осей координат
Используя связь момента силы относительно оси с векторным
моментом относительно точки на оси, можно получить формулы
для вычисления моментов силы относительно осей координат, если
известны проекции силы на оси координат и координаты точки
приложения силы (рис. 11). Имеем:
Мх (F)=МОх (/); Му (F)=МОу (Fy, Mz (F)=MOz (F). (9)
Согласно (6"),
177
MOx(F)=yFz—zFy,
MOy (F)=zFx - xFz; MOz (F)=xFy - yFx.
(10)
Для моментов силы относительно осей координат из (9) и (10)
получаем:
Mx{P)=yFz-zFy-,
Му (F)=zFx—xFz;
Mz(F)=xFy-yFx.
(Н)
По формулам (11) можно вычислить моменты силы относитель-
но прямоугольных осей координат. По этим формулам получаются
необходимые знаки у моментов относительно осей координат, если
в них подставлять со своими знаками проекции силы на оси коор-
динат и координаты точки приложения силы.
Для модуля векторного момента силы относительно начала
координат и косинусов углов его с осями координат имеем:
\М0 (F)\ = y/M%x+M%y+M%z=y/M2x+M2y+Mt =
= sj(yFz - zFy)2 + (zFx - xFz)2 + (xFy - yFx)2\
cos (Mo, x)=^^
l^ol
Mx Л \ Mo?
_ ; cos (Mo, Л y)=---
\MO\ |MO|
My
\M0\’
cos (Mo,
MOz Mz
\Mo\~ \Mo\
Пример. В плоскости П, параллельной координатной плоскости Oxz, приложена
сила F, образующая с направлением прямой, параллельной оси Ох, угол а. Известны
расстояния а, Ь, с (рис . 12). Определить моменты силы относительно осей координат
и величину момента этой силы относительно начала координат.
178
Решение. Координаты точки приложения силы
соответственно равны:
х=с; у= — a; z=b.
Проекции силы F на оси координат равны:
Fx = Fcosa; Fy=0; Fz = — /'sina.
Подставляя эти значения величин в формулы (И),
получим:
Рис. 12
Mx(F)=Mx=yFz—zFy =
=(—а)' (—/'sina)—А О — Fa sina;
Му (F)=Му=zFx—xFz=bF cosa—с (—/'sina)—F(b cosa+c sina);
Mz (F)=MZ=xFy—yFx = cO—(—a)Fa cosa=Fa cosa.
Для модуля момента силы относительно начала координат имеем:
| Мо (/)| = у/+Му+ М2=F у/a1 sin2a+(b cosa+с sina)2+a2 cos2a=
=Fy/a1+(b cosa+c sina)2.
§ 5. ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ МОМЕНТ СИСТЕМЫ СИЛ.
СВОЙСТВА ВНУТРЕННИХ СИЛ
Силы, действующие на точки механической системы, можно
разделить на силы внешние и силы внутренние по отношению рас-
сматриваемой механической системы. Внешними силами механи-
ческой системы называются силы, с которыми действуют на точки
системы тела и точки других систем, не принадлежащие к рассмат-
риваемой системе. Внутренними силами механической системы
называются силы взаимодействия между точками самой рассмат-
риваемой системы.
Силы тяжести точек механической системы, в которую не входит
Земля, являются внешними по отношению к этой системе. Внеш-
ними силами являются силы сопротивления воздуха, жидкости или
другой среды при движении точек рассматриваемой механической
системы в этих средах, если среды не включаются в механические
системы. Силы трения, возникающие от соприкосновения частей
рассматриваемой механической системы с шероховатыми поверх-
ностями тел, не входящими в выделенную систему, являются внеш-
ними силами. Таким образом в число внешних сил могут входить
не только активные силы, но и силы реакций связей.
Внешнюю силу, приложенную к к-й точке системы, обозначим
Дг), а внутреннюю — F$. Рассмотрим основные свойства внутрен-
них сил, действующих на точки всей выделенной механической
179
системы. Они, как и внешние, могут содержать как активные, или
заданные силы, так и силы реакций внутренних связей. Докажем,
что векторная сумма всех внутренних сил и векторная
сумма моментов этих сил относительно произвольной
точки равны нулю при любом состоянии системы, т. е. как
при ее равновесии, так и при произвольном движении.
Векторную сумму системы сил называют главным век-
тором этой системы сил. Главный вектор внутренних сил
к
внешних
к
Векторную сумму моментов системы сил относитель-
но какого-либо центра называют главным моментом
этих сил. Главный момент внутренних сил относительно центра О
к
внешних
к
Пусть механическая система состоит из п точек, где п — любое
конечное число. Для двух произвольных точек системы М2 и М2
(рис. 13) согласно третьей основной аксиоме динамики имеем:
^+Л°=0,
так как Fft и F? являются силами действия и противодействия. Эти
силы для механических взаимодействий направлены по одной пря-
мой, соединяющей взаимодействующие точки, и удовлетворяют
__________________ условию Fp= —F?.
Главный вектор всех внутренних сил
2 } системы состоит из векторных сумм та-
/ -fi) Т У ких сил действия и противодействия, так
/ /Ьис! как всю механическую систему можно
\ считать состоящей из пар взаимодейству-
ющих точек. Следовательно, для главно-
’ го вектора внутренних сил и его проекций
р 13 на оси координат имеем:
180
{я«=М=о;
к
лр=Е^=о.
(12)
Внешние силы тоже являются силами взаимодействия, но для
них силы действия приложены к точкам выделенной механической
системы, а силы противодействия приложены к телам и точкам, не
входящим в эту систему.
Рассмотрим векторную сумму моментов внутренних сил
и Р? относительно точки О. Получаем:
Мо(Р?) + Мо(Рр) = 0,
так как обе силы имеют одинаковые плечи относительно точки
О и противоположно направленные векторные моменты относи-
тельно этой точки. Главный момент внутренних сил 1$ относитель-
но точки О состоит из векторной суммы таких величин. Следова-
тельно, для главного момента внутренних сил системы относитель-
но точки О и осей координат Oxyz имеем:
!£«=2Х(^)=0;
к
аз)
к
Доказано, что главный вектор и главный момент внут-
ренних сил равны нулю для любой механической си-
стемы.
§ 6. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ И УСЛОВИЯ РАВНОВЕСИЯ
ТВЕРДОГО ТЕЛА
Из кинематики известно, что свободное твердое тело имеет
шесть степеней свободы. Динамических уравнений движения и усло-
вий равновесия для свободного твердого тела, находящегося под
действием сил, должно быть тоже шесть.
Для вывода динамических уравнений разобьем мысленно твер-
дое тело на N малых частиц (рис. 14), принимаемых за матери-
181
Рис. 14
альные точки, и прикладываем к каждой
из них силы действия других точек, входя-
щих в само твердое тело (внутренние си-
лы для твердого тела) и силы действия
материальных объектов, не входящих
в рассматриваемое твердое тело (внешние
силы).
Применяя для каждой точки, входя-
щей в твердое тело, общее уравнение ди-
намики, имеем:
m^k=Fk, к=1, 2, ..., N,
(14)
где Д — равнодействующая сила, действующая на к-ю точку, тк —
масса точки и ак — ускорение точки относительно инерциальной
системы отсчета.
Разлагая силу Fk на внешнюю Д’ и внутреннюю Д\ согласно
(14), получаем:
/и^=Д‘>+Д\ Ь=1, 2, ..., N. (14')
Суммируя (14') по всем точкам и учитывая, что главный вектор
внутренних сил
я(,)=£д=о
к
по свойству внутренних сил, имеем:
(15)
к
где F®=£fik — главный вектор внешних сил, приложенных к твер-
к
дому телу.
Умножая (14') слева векторно на радиус-вектор точки гк, прове-
денный из точки О (см. рис. 14), получаем:
гкхт^к=гкхф+~гкхР?, к=\, 2, ..., N, (16)
или
Мо(т^к)=Мо(р>) + Мо(р), к=1, 2, ..., N. (16')
Суммируя (16') по всем точкам твердого тела и учитывая, что по
свойству внутренних сил главный момент этих сил
182
Д?=£Я,(/Р)=о,
к
имеем:
YMo(mkak)=L%\
к
(17)
где £(о)=^Л/о(Д')) — главный момент внешних сил относительно
к
точки О, приложенных к твердому телу.
Динамические уравнения (15) и (17) можно также выразить
в другой форме, если ввести главный вектор сил инерции Ф = ^Ф*.
*
и главный момент этих сил L*=Мо (ФД где Ф*=— — сила
к
инерции к-й точки. Динамические уравнения примут форму
^'’+<5 = 0; (15')
2#+ДФ, = 0. (17')
При равновесии (покое) твердого тела относительно инерциаль-
ной системы отсчета ускорение каждой точки тела ак=0. В этом
случае из динамических уравнений (15) и (17) получаем следующие
условия равновесия в векторной форме для внешних сил, приложен-
ных к твердому телу,
Я<‘>=£^)=0;
к
U6> = YMo(F^)=0,
к
(18)
т. е. для равновесия твердого тела относительно инерци-
альной системы отсчета необходимо и достаточно, чтобы
главный вектор и главный момент относительно произ-
вольной точки внешних сил, приложенных к твердому
телу, равнялись нулю.
Условия равновесия (18) необходимы и достаточны для равнове-
сия твердого тела, так как в проекциях на оси координат они дают
все шесть условий равновесия для внешних сил. Главный вектор
и главный момент внутренних сил для твердого тела равны нулю не
только при равновесии тела, но и при любом его движении.
Условия равновесия для внешних сил (18) выполняются не толь-
ко при равновесии твердого тела относительно инерциальной систе-
мы отсчета, но и при произвольном его поступательном и прямоли-
нейном движении с постоянной скоростью. В этом случае векторы
183
скорости у всех точек тела одинаковы, а ускорения не только
одинаковы, но и равны нулю, как и при равновесии тела. Таким
образом, условия равновесия внешних сил выполняются не только
при равновесии твердого тела, но и при произвольном его поступа-
тельном движении прямолинейно и равномерно, т. е. при движе-
нии твердого тела по инерции относительно инерциальной
системы отсчета.
Проецируя векторы в (18) на оси координат и учитывая, что
Ме) = 0; R? = 0; Я<е) = 0; Де) = 0; L®=0; L?=0,
для внешних сил получаем следующие шесть условий равновесия:
М=0; S<’=0; Х^=0; )
* * * I (18)
2Хда=о; £хда=о; £>гда=о- (
к к к J
Таким образом, для равновесия внешних сил, приложен-
ных к твердому телу, необходимо и достаточно, чтобы
суммы проекций внешних сил на прямоугольные оси ко-
ординат и моменты этих сил относительно осей коор-
динат равнялись нулю.
Системы сил, приложенных к твердому телу, для которых глав-
ный вектор, главный момент этих сил относительно произвольной
точки равны нулю, называются равновесными, или эквива-
лентными нулю.
Два векторных динамических уравнения (15) и (17), эквивалент-
ные шести скалярным в проекциях на оси координат, необходимы
и достаточны для полного описания движения свободного твердого
тела относительно инерциальной системы отсчета. Число уравнений
совпадает с числом степеней свободы тела.
Динамические уравнения позволяют выразить эквивалентность
систем внешних сил, приложенных к твердому телу, через харак-
теристики самих сил систем, их главные векторы и главные мо-
менты.
Как известно, две системы сил, приложенных к твердому телу,
по отдельности эквивалентны, если под их действием тело движется
одинаково при прочих равных условиях. Движение твердого тела
относительно инерциальной системы отсчета, согласно динамичес-
ким уравнениям, зависит только от главного вектора и главного
момента внешних сил, действующих на твердое тело. Следователь-
но, для эквивалентности двух систем внешних сил, дейст-
вующих на одно и то же твердое тело, необходимо и до-
184
статочно, чтобы эти системы сил имели соответственно
одинаковые главные векторы и главные моменты при
прочих равных условиях, не зависящих от сил.
Очевидно, главные векторы и главные моменты любой системы
сил не изменятся, если к этим системам добавить или отбросить
системы сил, у которых главный вектор и главный момент от-
носительно произвольной точки равны нулю, т. е. добавить или
отбросить равновесные системы сил. Системы внешних сил твердо-
го тела, полученные из первоначальной добавлением равновесных
систем сил, взаимно эквивалентны, т. е. действие системы
внешних сил, действующих на твердое тело, не изменится
от добавления (отбрасывания) к этой системе сил любой
другой системы сил, главный вектор и главный момент
которой равны нулю.
Из эквивалентности систем внешних сил, приложенных к твердо-
му телу, можно получить важное свойство этих сил в форме:
действие внешней силы на твердое тело не изменится от
переноса силы вдоль своей линии действия.
Действительно, главный вектор системы сил как векторная сум-
ма этих сил не зависит от точек приложения сил системы. Для
одной силы он совпадает с этой силой по величине и направлению,
независимо от точки приложения силы. Главный момент одной
силы совпадает с векторным моментом этой силы, а он согласно
определения не зависит от переноса силы вдоль линии действия.
Точка приложения внешней силы, действующей на абсолютно тве-
рдое тело, не существенна.
Векторные величины, которые можно прикладывать в любой
точке их линии действия, называются скользящими. Внешняя
сила, приложенная к твердому телу, есть вектор скользящий.
В деформируемом теле силу нельзя переносить вдоль линии
действия. Сила в этом случае не является скользящим вектором.
Действие силы зависит от ее расположения на линии действия.
Для деформируемого тела как более сложной механической
системы точек, чем твердое тело, динамические уравнения (15)
и (17), хотя и справедливы, но они недостаточны для полного
описания движения деформируемого тела в отличие от твердого
тела. Скалярных динамических уравнений только шесть, а число
степеней свободы у свободного деформируемого тела больше ше-
сти. Дополнительно к динамическим уравнениям для деформиру-
емого тела следует добавить уравнения связи деформации с силами
в форме обобщенного закона Гука.
185
§ 7. ЧАСТНЫЕ СЛУЧАИ РАВНОВЕСИЯ ВНЕШНИХ СИЛ,
ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ
Произвольные пространственные системы сил в частных случаях
могут быть параллельными и сходящимися. У параллельных
сил линии действия взаимно параллельны. Линии действия сходя-
щихся сил пересекаются в одной точке.
Системы сил называются плоскими, если их линии действия
располагаются в одной плоскости. Плоские системы сил в частных
случаях могут быть также параллельными и сходящимися.
Для частных систем сил, приложенных к твердому телу, часть
условий равновесия сил обращается в тождества, которые выполня-
ются даже при произвольном движении тела. Тождества следует
исключить из условий равновесия и тогда условий равновесия сил
окажется меньше шести. Исключая тождества, получим условия
равновесия сил в частных случаях.
Условия равновесия пространственной системы внешних
параллельных сил
Для пространственной системы внешних параллельных сил, при-
ложенных к твердому телу, если выбрать ось Oz параллельной
силам (рис. 15), то
2>£М;5Х>=0,
к к
так как силы перпендикулярны к этим осям координат. Кроме того,
£ Mz (Fp) = 0, так как каждая из сил параллельна оси Oz и ее момент
к
относительно этой оси равен нулю. Эти условия равновесия явля-
ются тождествами. Отбрасывая тождества, не влияющие на равно-
весие сил, и учитывая, что сумма проекций сил на ось Oz превраща-
ется в алгебраическую сумму сил, из (18') для равновесия системы
внешних параллельных сил, приложенных
к твердому телу, получаем три условия
равновесия:
£Ле) = 0; £Л/х(Яг))=0; 2Х(Ле)) = 0. (19)
к к к
Оси координат Оху при этом перпен-
дикулярны силам. Таким образом, для
равновесия пространственной си-
стемы внешних параллельных сил,
приложенных к твердому телу, не-
186
обходимо и достаточно, чтобы алгебраическая сумма сил
равнялась нулю и суммы моментов сил относительно
осей координат, расположенных в плоскости, перпенди-
кулярной силам, тоже равнялись нулю.
Условия равновесия пространственной системы
внешних сходящихся сил
Для системы сходящихся сил, линии действия которых пересека-
ются в одной точке (рис. 16), за начало координат можно выбрать
точку, в которой пересекаются линии действия сходящихся сил.
В этом случае тождественно выполняются условия для любых
систем сходящихся сил:
= £М2(Л'>)=0.
к к к
Отбросив эти тождества из (18'), получим следующие три условия
равновесия пространственной системы сходящихся внешних сил,
приложенных к твердому телу:
Х^=0; Х^ = 0; Х^’=0, (20)
к к к
т. е. для равновесия системы сходящихся внешних сил,
приложенных к твердому телу, необходимо и достаточ-
но, чтобы суммы проекций этих сил на три координат-
ных оси равнялись нулю. Эти условия для сходящихся сил
можно получить другим способом. Сходящиеся силы в твердом
теле вдоль линий действия можно перенести в точку пересечения
линий действия. Получим систему сил, приложенных в одной
точке. Такая система сил приводится к равнодействующей силе,
которая при равновесии равна нулю, что и дает полученные условия
равновесия.
Для плоской системы сходящихся сил
оси координат Оху можно выбрать в плос-
кости действия сил. Условие = 0 будет
к
выполняться тождественно, и для плоской
системы сходящихся сил останется только
два условия равновесия:
Е/£М;£^ = 0. (20')
к к
187
Условия равновесия плоской системы внешних сил
Для плоской системы сил, расположенных в одной плоскости
(рис. 17), выберем оси координат Оху в плоскости действия сил.
Тогда станут тождествами условия:
£7^=0; ^Л/ж(Ле))^0; (#>)=(),
к к к
так как силы перпендикулярны оси Oz и расположены в одной
плоскости с осями координат Ох и Оу. Эти три условия выполня-
ются для плоской системы сил всегда, а не только при равновесии.
Их как тождества следует отбросить. Сумма моментов сил от-
носительно оси можно выразить через сумму алгебраических моме-
нтов этих сил относительно точки О, расположенной в плоскости
сил, т. е.
к к
Исключив тождества из условий равновесия (18'), получим три
условия равновесия плоской системы сил, действующих на твердое
тело, в форме:
М = 0; £<>=0; ^Мот=0,
к к к
(21)
т. е. для равновесия плоской системы внешних сил, дей-
ствующих на твердое тело, необходимо и достаточно,
чтобы суммы проекций этих сил на каждую из двух
координатных осей, расположенных в плоскости дейст-
вия сил, были равны нулю и сумма алгебраических мо-
ментов сил относительно любой точки, находящейся
в плоскости действия сил, также была равна нулю. Это
основная форма условий равновесия плоской
системы внешних сил. Будут получены еще две
формы условий равновесия плоской системы
внешних сил.
Для плоской системы параллельных сил,
если выбрать ось Оу параллельной силам, из
(21) получим следующие два условия равнове-
сия:
^Ле)=0;ЕМода=0, (21')
к к
188
так как = 0 выполняется тождественно и превращается
к к
в алгебраическую сумму параллельных сил.
Равновесие простейших систем внешних сил
Теорема о равновесии двух внешних сил
Для равновесия системы двух внешних сил, приложен-
ных к точкам твердого тела, необходимо и достаточно,
чтобы эти силы были равны по модулю и действовали по
одной прямой, проходящей через их точки приложения
в противоположных направлениях (рис. 18).
Для равновесия любой системы внешних сил, приложенных
к твердому телу, необходимо и достаточно, чтобы главный вектор
и главный момент этих сил равнялись нулю. Главный вектор двух
равных и противоположных сил /У* и F?
Л(е) = ^')+/у)=0,
так как F^ = —F^. Главный момент этих сил относительно любой
точки О
Г£=м0(/у>)+л/0(/у’)=о,
так как для рассматриваемых сил M0(F^) =
= -M0(Ff>).
Теорема доказана. Этой теоремой уста-
навливается простейшая система внешних
сил, эквивалентная нулю. Действие такой
системы внешних сил на покоящееся относи-
тельно инерциальной системы отсчета твер-
дое тело не изменит состояния покоя этого
тела.
Теорема о трех внешних силах
Для равновесия трех внешних сил, приложенных к тве-
рдому телу, две из которых пересекаются в одной точке,
необходимо, чтобы линии действия трех сил пересека-
лись в одной точке. Обратная теорема неверна, т. е. если линии
действия трех сил, приложенных к твердому телу, пересекаются
в одной точке, то они не обязательно находятся в равновесии. Для
равновесия трех сил еще требуется, чтобы силовой треугольник,
построенный из сил, был замкнутым.
189
Пусть имеем систему трех внешних сил
^е> f \ ^е), ^е)’ две из которых, например Рр и
* Г * Р$\ пересекаются в одной точке А (рис.
k Fz™''^-'fy/ 19). Докажем, что если три внешние силы
—___—находятся в равновесии, то линия действия
Рис 19 силы Р$ тоже пройдет через точку А и, сле-
довательно, линии действия трех внешних
сил пересекаются в одной точке.
Силы /)е) и Р$\ которые пересекаются в точке А, перенесем вдоль
линий действия в эту точку и заменим их равнодействующей силой
по правилу параллелограмма сил. Система трех сил (Р‘\ Р£*\
Р^) свелась к эквивалентной системе двух сил (Л$, Pf), находящих-
ся в равновесии по условиям теоремы. Согласно теореме о равнове-
сии двух сил эти силы должны быть направлены по одной прямой,
проходящей через их точки приложения. Следовательно, линия
действия силы Рр должна пройти через точку приложения силы
т. е. через точку пересечения сил Рр и Р?\ Таким образом, три
внешние силы пересекаются в одной точке.
Теорема о трех силах позволяет в случае равновесия трех внеш-
них сил, приложенных к твердому телу, определять линию действия
одной неизвестной силы, если известна точка пересечения других
двух сил. Теорему о трех силах можно применять к системам,
состоящим более чем из трех сил, если путем сложения части сил
системы всю систему сил можно заменить эквивалентной системой
трех сил, две из которых пересекаются в одной точке.
§ 8. ОСНОВНЫЕ ВИДЫ СВЯЗЕЙ ТВЕРДОГО ТЕЛА
Уже указывалось, что почти все теоремы, уравнения движения
и равновесия формулируются для материальной точки и твердого
тела, освобожденных от связей, т. е. когда связи заменены силами
реакций связей. Для твердого тела достаточно рассмотреть замену
силами только внешних связей, которые ограничивают свободу
перемещения рассматриваемого твердого тела как целого. Силы
реакций внешних связей твердого тела входят в систему внешних
сил этого тела. Силы реакций внутренних связей дадут вклад
в систему внутренних сил для тела.
Умение правильно заменять различные связи силами реакций
связей является одной из главных задач при изучении динамики.
Силы реакций связей твердого тела зависят прежде всего от прило-
женных к телу активных внешних сил и вида связей. При движении
тела силы реакций связей могут зависеть от характеристик движе-
ния — скоростей и ускорений. От скоростей реакции связей зависят
через силы сопротивления, если движение происходит, например,
190
в воздухе, а от ускорений они зависят через силы инерции, которые
входят в число внешних сил.
Приведем примеры основных видов связей твердого тела и их
замены силами реакций связей. Материальную точку при этом
можно рассматривать как частный случай твердого тела малых
размеров.
1. Абсолютно гладкая поверхность. Если связью является аб-
солютно гладкая поверхность (рис. 20, а, б) другого тела, то сила
реакции такой поверхности, если соприкосновение тел происходит
в одной точке, направлена по нормали к общей касательной в точке
соприкосновения тел независимо от действия других внешних сил,
приложенных к рассматриваемому твердому телу. Сила реакции
гладкой поверхности 2V направлена в сторону, противоположную
б)
Рис. 20
191
направлению, в котором связь препятствует перемещению рассмат-
риваемого тела. Модуль силы N при равновесии зависит от других
приложенных к телу внешних сил.
Если соприкосновение происходит по поверхности, то реакция
сведется к системе распределенных сил, которые иногда удается
заменить одной равнодействующей силой реакции связей. В общем
случае система распределенных сил может не приводиться к равно-
действующей силе.
2. Цилиндрический и шаровой шарниры. Пусть в качестве рас-
сматриваемого твердого тела имеем балку АВ, находящуюся в рав-
новесии под действием приложенной внешней силы и закреплен-
ную с помощью цилиндрического шарнира А на одном конце
и катковой опоры В — на другом (рис. 20, в, г). Цилиндрическим
шарниром называется устройство, позволяющее балке в отсутст-
вие катковой опоры поворачиваться вокруг оси в плоскости, перпен-
дикулярной оси. Ось цилиндрического шарнира препятствует пере-
мещению балки во всех направлениях, перпендикулярных оси, и,
следовательно, в зависимости от других внешних сил может создать
силу реакции связи, если отбросить ось шарнира, в любом направ-
лении, перпендикулярном оси. Цилиндрический шарнир аналогичен
подшипнику.
Неизвестную по модулю и направлению реакцию цилиндричес-
кого шарнира Ra разлагают обычно на две неизвестные состав-
ляющие ХА и УА, предположительно направляя их в положительном
направлении осей координат Ох и Оу, перпендикулярных оси цили-
ндрического шарнира (рис. 20, г).
Шаровой шарнир позволяет твердому телу вращаться вокруг
него в пространстве в определенных пределах. Сила реакции шаро-
вого шарнира в случае пространственной системы внешних сил,
действующих на твердое тело, раскладывается на три неизвестные
составляющие X, Y, Z, параллельные осям координат.
Катковая опора балки на ее конце В осуществляется с помо-
щью одного или нескольких катков. Если поверхности катков аб-
солютно гладкие, то реакции катков перпендикулярны к общим
касательным в точках соприкосновения поверхностей тел.
3. Подпятник и подшипник. Если у твердого тела имеется вер-
тикальная ось вращения АВ (рис. 20, д), то в точке А она закрепля-
ется с помощью подпятника, который ограничивает перемещения
оси тела не только в направлении, перпендикулярном к оси, но еще
в одном из направлений вдоль оси, например вниз вдоль оси Oz, и,
следовательно, создает силу реакции по оси Oz, направленную
вверх. Таким образом, в случае пространственной системы внешних
192
сил, действующих на твердое тело, сила реакции подпятника RA со-
стоит из трех неизвестных составляющих ХА, YA, ZA, параллельных
осям координат.
Подшипник В аналогично цилиндрическому шарниру создает
для оси тела силу реакции RB, состоящую из двух неизвестных
составляющих Хв, YB. Вдоль оси подшипника Oz составляющей
силы реакции не возникает. Подшипник не препятствует телу дви-
гаться в этом направлении.
Если приложенные к телу внешние силы расположены в одной
плоскости, например Oyz, то в подпятнике будет только две неиз-
вестных составляющих силы реакции — YA и ZA, а в подшипнике
одна — Уд.
4. Гибкие связи. В качестве гибких связей для твердого тела
используются нити, канаты, тросы, ремни, цепи. Они создают реак-
ции, направленные вдоль гибких связей, как в случае тела, подве-
шенного на нити, сила реакции нити 5 направлена по нити (рис. 21,
а, б). Для криволинейной гибкой связи, как, например, в случае
равновесия тела в форме элемента провода АВ (рис. 22, а, б), сила
реакции отбрасываемых частей провода на выделенный элемент
провода направлена по касательной к гибкой связи соответственно
в точке А и В. Это силы натяжения провода и 52.
Гибкие связи могут создавать силы реакции только испытывая
растяжение и не могут создавать их при сжатии.
5. Шарнирный стержень. Шарнирным стержнем называют твер-
дое тело в форме прямолинейного или изогнутого стержня, име-
ющего на концах шарниры, между которыми на стержень не дей-
ствуют другие внешние силы. На рис. 23, а шарнирным стержнем
является прямолинейный сержень DC, если пренебречь его силой
тяжести. Сила реакции шарнирного стержня на балку АВ направ-
лена по прямой, проходящей через шарниры стержня, так как при
равновесии стержня на него действуют со стороны других тел
только две силы через его шарниры. По аксиоме о равновесии двух
'//////,
Рис. 21
Рис. 22
193
сил две силы находятся в равновесии,
только если эти силы равны по величине,
противоположны по направлению и дей-
ствуют по одной прямой, проходящей че-
рез их точки приложения, т. е. прямой,
соединяющей шарниры.
Шарнирный стержень может в отли-
чие от гибких связей испытывать и рас-
тяжение и сжатие и, следовательно, созда-
вать силу реакции соответствующего на-
правления. Силы реакций других связей
дальше рассматриваются специально
и в примерах по мере накопления необ-
ходимых сведений о свойствах сил, при-
ложенных к твердому телу.
Пример. Имеем балку АВ, закрепленную, как
указано на рис. 23, а. На балку действует внешняя
Ад
сила F , направление которой задано углом а.
Определить реакции цилиндрического шарнира
А и шарнирного стержня DC на балку АВ.
Решение. Освободим балку от связей (рис. 23,
б), заменив связи силами реакций связей. Сила реакции шарнирного стержня DC на
балку АВ направлена по стержню DC. Ее линия действия пересекается с линией
действия заданной внешней силы в точке В (рис. 23, в). Согласно теореме о трех
силах, при равновесии балки через точку Е должна пройти и линия действия силы
реакции цилиндрического шарнира А. Ее направление определится углом р, для
которого имеем:
СЕ 12
АС
Если АС=ВС, то /?=а.
Шарнирный стержень DC препятствует перемещению точки С балки вниз, сле-
довательно, сила его реакции направлена вверх. Стержень испытывает растяжение.
Направление силы реакции цилиндрического шарнира по линии действия пока
неизвестно. Предположим, что она направлена вниз. Если после решения уравнений
равновесия сил получим со знаком плюс, то предполагаемое направление окажет-
ся верным. При знаке минус А^ направлено в противоположную сторону пред-
полагаемого направления.
Уравнения равновесия плоской системы внешних сходящихся сил имеет
форму:
M=o;Z^=o.
к к
В рассматриваемом случае имеем:
194
— RAcosp—cosa = 0; — RA sin/?—sina + Ac=0.
Из этих уравнений получаем:
мcosa _м
Ra = F ----; Д. = F cosa (tg£ + tga).
cos/?
Сила реакции шарнира RA получилась с плюсом. Следовательно, предположение о ее
направлении оказалось верным.
ГЛАВА 2
СВОЙСТВА СИСТЕМ СИЛ, ПРИЛОЖЕННЫХ
К ТВЕРДОМУ ТЕЛУ
Сложные системы сил, приложенные к твердому телу, можно
заменять более простыми эквивалентными им системами сил. Этот
процесс замены называется приведением системы сил к простейшему
виду.
Сложные системы могут состоять из внешних сил, сил инерции,
реакций связей и т. д. и любых их комбинаций. Простейшими
системами сил считаются одна сила, пара сил (две равные по
модулю антипараллельные силы) и их комбинация, т. е. сила вместе
с парой сил.
Известно, что для эквивалентности двух систем сил, приложен-
ных к твердому телу, необходимо и достаточно, чтобы они имели
одинаковые главные векторы и главные моменты при прочих рав-
ных условиях, не зависящих от рассматриваемых систем сил.
По аналогии с равновесием внешних и внутренних сил будем
называть любую систему сил равновесной или эквивалентной нулю,
если главный вектор и главный момент ее равны нулю.
При приведении систем сил к простейшему виду твердое тело, на
которое действует рассматриваемая система сил, может покоиться
или совершать любое движение. Движение тела может оказать
влияние только через прочие равные условия. Движение твердого
тела может, в частности, происходить от действия на тело других
сил, не входящих в рассматриваемую систему. Таким образом,
частные системы сил можно приводить к простейшему виду незави-
симо от действия на тело других сил, кроме рассматриваемых, если
при этом обеспечивается одинаковость прочих равных условий.
Прочие равные условия будут рассмотрены в дальнейшем.
Приведение сложных систем сил к простейшему виду целесооб-
разно начать с двух частных случаев, в которых равны нулю глав-
ный момент или главный вектор. В первом случае система сил
приведется к одной силе, равнодействующей, а во втором — к
одной паре сил.
§ 1. СИСТЕМА СХОДЯЩИХСЯ СИЛ
Системой сходящихся сил, или пучком сил, приложенных к твер-
дому телу (рис. 24, а), называется система сил, линии действия
которых пересекаются в одной точке, в центре сходящихся сил
или центре пучка. Неравновесная система сходящихся сил явля-
196
ется простейшей системой сил, приводящейся к одной равнодейст-
вующей силе.
Система сходящихся сил может быть пространственной и плос-
кой. Рассмотрим общий случай пространственной системы сходя-
щихся сил. Плоская система сходящихся сил является его частным
случаем. Так как сила, действующая на твердое тело, есть век-
тор скользящий, то можно считать, что силы системы (/], F2, ...,
..., F„) приложены в одной точке в центре сходящихся сил (рис.
24, б). Неравновесная система сил, приложенных в одной точке
последовательным векторным сложением сил, приводится к рав-
нодействующей силе R* (§ 2, гл. 1), геометрически изображающейся
замыкающей силового многоугольника, построенного из сил систе-
мы (рис. 24, в). Линия действия равнодействующей силы проходит
через центр сходящихся сил параллельно замыкающей силового
многоугольника.
Равнодействующая сила R* и ее проекции на прямоугольные оси
координат 7?*, R*, R* через заданные силы выражаются в форме:
к
к
Индекс суммирования «к» означает, что суммирование производит-
ся по всем его значениям от 1 до л. Его в дальнейшем для краткости
иногда будем опускать.
Модуль равнодействующей силы и косинусы ее углов с осями
координат определяются по формулам:
197
л*=7(Л?)2+(Л;)2+(Л*)2; cos (Л*,л *)=~;
cos (Л*, лу)=—; cos (Л*, лг)=—.
Л* R*
Для плоской системы сходящихся сил, расположенных в плоско-
сти Оху, проекция равнодействующей 7??=^Ffc = 0.
к
Для неравновесной системы сходящихся сил главный вектор R,
равный векторной сумме сил, совпадает по величине и направлению
с равнодействующей силой R*, т. е.
R = YFk=R*-
к
Главный момент относительно центра О сходящихся сил
4=W*)=°,
к
так как линии действия сил проходят через эту точку. Отно-
сительно других точек главный момент для неравновесной си-
стемы сил не равен нулю. Условия равновесия любых сходящихся
систем сил, приложенных к твердому телу, не отличаются от
условий равновесия внешних сходящихся сил, которые приведены
в § 7, гл. 1.
Пример 1. Подъемный кран, имеющий вертикальную ось вращения АВ, состоит
из трех стержней, скрепленных шарнирами. Ось крана закреплена с помощью
подшипника А и подпятника В (рис. 25, а). Пренебрегая силами тяжести стержней
и всего крана, определить силы реакции подшипника и подпятника на кран, усилия
в стержрнях 1, 2, 3, 4, если известны размеры Л и I, а также углы аь а2, аз- Стержни
2 и 5 горизонтальны. Кран с помощью троса CD удерживает груз, сила тяжести
которого равна Р.
Решение. Считая кран твердым телом, освободим его от связей, которыми
являются подпятник и подшипник, заменив их силами реакций связей. Сила реакции
подшипника (цилиндрический шарнир) перпендикулярна его оси. Направление силы
реакции подпятника заранее неизвестно и подлежит определению. На весь кран,
находящийся в равновесии, действуют три внешние силы: Р, Rg, fig (рис. 25, б).
Линии действия этих сил должны пересекаться в одной точке, т. е. линия действия
силы Rg должна пройти через точку К, в которой пересекаются линии действия сил
Р и Rg. Три силы, находящиеся в равновесии, должны образовывать также замкну-
тый силовой треугольник. Отложим силу Р в выбранном масштабе и проведем через
ее начало и конец линии, параллельные силам Rg и Rg. В полученном силовом
треугольнике три силы должны быть направлены друг за другом (рис. 25, в). Из
силового прямоугольного треугольника находим
198
р
Ra=-----; Aa=Ptga.
cosa
Из геометрического треугольника АВК имеем:
Л /
cosa=— ; tga=-.
Jh2 + l2 Л
Для определения усилий в стержнях 1 и 2 применим метод вырезания узлов. Для
этого рассмотрим равновесие отдельного шарнира или узла С. На этот узел действу-
ют внешние для узла сила Р через трос и силы реакций стержней 1 и 2, которые
следует мысленно отбросить. Силы реакций стержней на узел должны быть направ-
лены по стержням, так как на эти стержни между их шарнирами другие силы не
действуют (это так называемые шарнирные стержни). Условимся силы реакций
стержней направлять всегда от узла (рис. 25, г) и знак вектора у сил на рисунке не
ставить, чтобы не увеличивать без необходимости число обозначений для одина-
ковых по алгебраическому числовому значению сил.
Выбрав в точке С оси координат, составим условия равновесия для плоской
системы внешних сходящихся сил, действующих на узел С:
М=о>Е^=о-
к к
Эти условия в рассматриваемом случае принимают форму:
х) 52 + ^icosai=0,
у) P+Si smaj =0.
199
р р
S\ = —----, S2= —S[cosa1 =--.
sinai tgai
Знак «—» у Sj показывает, что направление этой силы противоположно приня-
тому, т. е. направлено к узлу. Рассматривая равновесие отдельного стержня У,
убеждаемся, что на него действуют только две силы со стороны узлов С и Е. Эти
силы при равновесии должны быть равны по модулю и противоположны по направ-
лению. Узел С действует на стержень 1 с силой Si, противоположной по направле-
нию силе действия стержня на узел Е (рис. 25, д'). Таким образом получаем, что при
рассмотрении равновесия узла С, когда Sj имеет отрицательное значение, стержень
1 будет сжат, S2 получили с плюсом. Следовательно, стержень 2 будет испытывать
растяжение.
На узел С действуют три внешние силы, и они поэтому должны образовывать
при равновесии замкнутый силовой треугольник. Построение силового треугольника
следует начать с известной силы Р, проводя через ее концы линии, параллельные
неизвестным по величине силам реакций стержней (рис. 25, е). Из силового треуголь-
ника можно определить силы S] и Sj.
Из силового треугольника или уравнений равновесия можно определить только
две неизвестные силы. Поэтому при дальнейшем решении задачи следует переходить
к рассмотрению равновесия узла, на который действуют не более двух неизвестных
сил. Таким узлом является узел L. На узел Е действуют три неизвестных силы. При
рассмотрении равновесия узла L будем направлять силы реакций стержней опять из
этого узла (рис. 25, ж) независимо от ранее полученных знаков для них. В уравнения
равновесия уже известную силу S2 следует подставить со знаком плюс, полученным
для нее ранее. Условия равновесия внешних сил, действующих на узел L, имеют
форму:
х) S2 + S3Cosa2—S4cos«3=0,
у) S3 яп«2+$4 sinas = 0.
Из этих уравнений находим:
япа2 S2tga3
S4 = — S3---; S3 = —--------------.
япа3 cosa2 (tga2+tga3)
Подставляя в выражение для S4 полученное значение S3, имеем
S2tga2tga3
S$=----------------.
sma3(tga2-l-tga3)
Усилие S3 при положительном S2 отрицательно. Следовательно, стержень 3 сжат.
Стержень 4 растянут, так как усилие S4 положительно.
Для узла L можно построить также замкнутый силовой треугольник и решить
задачу нахождения неизвестных сил геометрически.
Пример 2. Груз с силой тяжести Р=200 кН прикреплен с помощью троса
к шарниру D, который крепится к вертикальной стене тремя стержнями, два из
которых расположены в горизонтальной плоскости, а третий — в вертикальной,
с помощью шарниров. Сила сопротивления груза от ветра R= 100 кН горизонтальна
и параллельна стене.
Определить силу натяжения троса и усилия в стержнях, пренебрегая силами
тяжести стержней, если a = 60°, a = 30° (рис. 26, a).
Решение. На находящийся в равновесии груз Е действует система трех внешних
сходящихся сил, расположенных в вертикальной плоскости, параллельной стене. Это
200
Рис. 26
сила тяжести Р, сила сопротивления R и сила натяжения троса S, направленная по
тросу (рис. 26, б). Сила S должна уравновесить равнодействующую сил Р и R.
Следовательно,
S=у/p1 + R1 = 100^5 кН,
так как силы Р и R перпендикулярны. Сила 5 составляет с вертикалью угол ср, для
которого
R 1
Рассмотрим равновесие шарнира D, на который действуют внешние для шар-
нира силы реакции трех стержней §2, S3, направленные по стержням, и сила
натяжения троса S (рис. 26, в). Имеем пространственную систему сходящихся сил,
условия равновесия которой выражаются в форме:
M=o«D$=o, М=°-
к к к
В рассматриваемом случае для выбранных осей координат имеем:
х) S[ cosa—S2'cosa4-5 sin<p=0;
у) — 5] sina— S2'sina—S3sin^=0;
z) S • cos<p + S3' cos/J=0.
Так как
12 tg<p 1
cos<p=— sin<p=— -—=; a=60°; Д=30°,
v/l+tg2?» у/б yA+tg2<P V6
то система уравнений принимает вид:
11 Г 1
SV — 52'+100^5 —=0;
2 2 7б
201
г 2 7з
100V5—= + S3—= 0.
л/б 2
Решая эту систему уравнений, получаем:
S3= -210,8 кН; S2=152,l кН; S,= -33,2 кН.
Усилия в стержнях направляли от рассматриваемого ума и получили Sj и S3 со
знаком минус, а 52 — со знаком плюс. Это указывает, что стержни 1 и 3 подверга-
ются сжатию, а стержень 2 — растяжению.
§ 2. ПАРЫ СИЛ
Парой сил называется система двух равных параллельных сил,
приложенных к твердому телу, направленных в противоположные
стороны (рис. 27, а). Пара сил, наряду с силой, выполняет роль
простейшей системы сил или ее части, к которым приводятся неко-
торые произвольные системы сил, действующие на твердое тело.
Пара сил не является равновесной системой сил. Она не имеет
равнодействующей силы. Пару сил обычно прикладывают к твердо-
му телу, чтобы сообщить ему вращение вокруг оси (рис. 27, 6). Пара
сил может входить составной частью в другие, более сложные
системы сил.
Силы, входящие в состав пары сил, обладают всеми свойствами
любых других сил, приложенных к твердому телу. Они являются
скользящими векторами, их можно складывать с другими силами
системы сил, добавлять к паре сил и отбрасывать системы сил,
эквивалентные нулю. Рассмотрим свойства пары сил как единого
целого.
Действие пары сил на твердое тело зависит от плоскости дейст-
вия пары сил, ее момента, определяющего вращательную способ-
Рис. 27
202
ность, и направления вращения, в котором пара сил стремится
вращать тело. Для характеристики вращательной способности пары
сил, направления вращения введем понятия алгебраического и век-
торного моментов пары сил.
Алгебраический и векторный моменты пары сил
Алгебраическим моментом пары сил (рис. 28) называется про-
изведение модуля одной из сил пары на ее плечо, взятое со зна-
ком плюс или минус. Плечом пары сил h называется кратчайшее
расстояние между линиями действия сил пары. Обозначая алгебра-
ический момент пары M(F\, F2) или просто М для пары сил (Fi, F2),
имеем:
M=M(Fi,F2)=+Fih. (2)
Знак плюс условились брать, если пара сил стремится вращать
тело против часовой стрелки, минус — по часовой.
Модуль алгебраического момента пары сил в соответствии с (2)
равен площади параллелограмма ABCD, построенного на силах
пары, или удвоенной площади одного из треугольников, входящих
в параллелограмм, т. е.
]М|=F\h = пл. □ ABCD=2 пл. Д ABD.
Алгебраический момент пары сил не зависит от переноса сил
пары вдоль своих линий действия. Плечо пары при этом не изменя-
ется. Алгебраический момент равен нулю, если линии действия сил
пары F и F2 совпадают. Система сил в этом случае является
равновесной. Алгебраический момент пары сил не характеризует
плоскости действия пары сил. Для совместной характеристики плос-
кости действия пары сил и ее алгебраического момента введем
векторный момент пары сил M(Fi, F2) или просто М. Модуль
векторного момента пары сил (рис. 29) определяется так же, как
и алгебраического момента, т. е.
\M\=F1h = nn.E]ABCD = 2 пл. А АВС=2 пл. A ABD.
Векторный момент пары сил перпендикулярен плоскости дейст-
вия пары сил и направлен так, чтобы с его стрелки видеть стремле-
ние пары сил вращать тело против часовой стрелки. За точку
приложения векторного момента примем середину отрезка АВ,
соединяющего точки приложения сил пары. Таким образом вектор-
ный момент скрепим с силами пары.
203
Рис. 28
Векторный момент пары сил выразим в форме векторных про-
изведений двух векторов:
F2)=AB xF2=BA xFv (3)
Проверим справедливость этих формул. Имеем:
\АВ х Г2|=F2 АВ sin (АВ,Л F2)=F2 h = \М(Г,, /2)1,
так как
Л5яп(ЛДлГ2)=й.
Аналогично
\ВА хЛ|=^'А = |ЛОД, Л)|.
Таким образом, модули векторных произведений, входящие в
(3), равны модулю векторного момента пары сил. Векторные произ-
ведения и по направлению совпадают с векторным моментом пары
сил. Они, как и векторный момент пары сил, перпендикулярны
к плоскости действия пары сил и имеют одинаковые с ним направ-
ления.
Свойства пар сил
Системы сил, приложенных к твердому телу, эквивалентны, если
они имеют одинаковые главные векторы и главные моменты при
прочих равных условиях, не зависящих от систем сил. Главный
вектор R любой пары, равный векторной сумме сил, входящих
в состав пары, равен нулю, т. е.
Л=Л+Л = 0,
так как силы пары удовлетворяют условию Fi = — F2. Следователь-
но, эквивалентность пар сил и их действие на тело определяется
204
только главным моментом Lq сил пары относительно какой-либо
точки О.
Главный момент сил, входящих в состав пары, есть сумма
векторных моментов этих сил (рис. 30), т. е.
где
Мо (Л)=Г1 х Г,, Мо (Л) = г2 х Л
Силы пары удовлетворяют условию Л — — Л> следовательно:
Л = (^-^2)х Л = хЛ-
Радиусы-векторы г, и г2 зависят от выбора моментной точки О. Их
векторная разность ВА от выбора точки О не зависит и, согласно
(3), имеем:
В A xFi = M(Fl,F2).
Таким образом,
Lo = Мо^) + Мо (Л) = М (Л, Л), (4)
т. е. главный момент сил пары, равный сумме векторных
моментов этих сил, не зависит от выбора моментной
точки и равен векторному моменту пары сил.
Если за моментную точку последовательно выбирать точки
приложения сил пары А и В, то, учитывая, что
Мл(Л) = 0, мя(Л)=о,
из (4) получаем:
М(Л, Л)=Мл(Л)=^й(Л), (4')
или векторный момент пары сил равен векторному моме-
нту одной из сил пары относительно
другой.
В соответствии с этим при оценке вра-
щательной способности векторный момент
какой-либо силы, приложенной к твердому
телу, можно считать векторным моментом
пары сил, в которую входят рассматрива-
емая сила и равная и противоположно на-
правленная ей сила, приложенная в момент-
ной точке.
точки приложения
205
Главный векторный момент Lo сил пары оказался не зависящим
от выбора моментной точки О, т. е. он является вектором сво-
бодным, по величине и направлению равным векторному моменту
пары сил M(F\, F2), который, согласно определению, скреплен
с парой сил. Главный момент сил пары не изменится, если вместо
моментной точки О будет изменяться параллельно первоначаль-
ному положению плоскость действия пары сил в твердом теле
и положение пары сил в плоскости действия, т. е. будет изменяться
точка приложения векторного момента пары сил при сохранении
его величины и направления в пространстве. Таким образом,
действие пары сил, определяемое ее векторным момен-
том, не зависит от его точки приложения. Следовательно,
векторный момент пары сил, как и главный момент сил
пары, является вектором свободным. Его можно перено-
сить параллельно самому себе в любую точку твердого тела. От
этого действие пары сил на твердое тело не изменится. Пары сил
Lou.M(F\, F2) одинаковы и заменяют друг друга. На основе свойств
векторного момента пары сил Г2) можно сформулировать
следующие изменения пар сил, которые не изменяют их действие на
твердое тело:
1) пару сил, как жесткую фигуру, можно переносить и поворачи-
вать в ее плоскости действия;
2) пару сил можно переносить в параллельную плоскость;
3) у пары сил можно изменять плечо и силу, сохраняя величину
и направление векторного момента.
Используя векторный момент сил, можно сформулировать усло-
вие эквивалентности пар сил в форме: две пары сил, дейст-
вующие на одно и то же твердое тело по отдельности,
эквивалентны, если они имеют одинаковые по модулю
и направлению векторные моменты при прочих равных
условиях. В дальнейшем будет показано, что движение твердого
тела под действием пары сил зависит от распределения массы
в твердом теле относительно оси вращения, которое характеризует-
ся моментами инерции. В прочие равные условия должно входить
равенство моментов инерции, что требует фиксирования оси враще-
ния при действии эквивалентных пар сил. При равновесии и движе-
нии твердого тела по инерции относительно инерциальных осей
координат фиксирование оси вращения для свободного твердого
тела не требуется.
В частном случае пар сил, расположенных в одной плоскости,
если моментную точку выбрать в плоскости пары сил, то теорема
о сумме сил пары примет форму:
MoCF^ + MoCF^MCF, F2),.
206
т. е. сумма алгебраических моментов сил, входящих в со-
став пары сил, относительно точки, расположенной
в плоскости действия пары сил, равна алгебраическому
моменту пары сил и, следовательно, не зависит от выбо-
ра моментной точки.
Выбрав точки А и В, лежащие на линиях действия сил пары, за
моментные точки, получаем:
М(Л, Д)=мд(Д)=лд(Д),
т. е. алгебраический момент пары сил равен алгебраичес-
кому моменту одной из сил пары относительно точки,
лежащей на линии действия другой силы этой пары.
Сложение пар сил и их условия равновесия
Если на твердое тело действует система пар сил (Д, F[), (F2, F'^,
..., (Fm F'„) с векторными моментами М1г M2, ..., М„, то, вычисляя
главный вектор R всех сил, входящих в пары сил, получим:
Л = ^(Д+Д')=0,
к
так как силы, входящие в пары сил удовлетворяют условию Д =
- —Д. Таким образом, система пар сил приводится к эквивалент-
ной паре сил, так как главный вектор равен нулю, или находится
в равновесии, если и главный момент равен нулю.
Главный момент Lo системы пар сил равен сумме векторных
моментов всех сил, входящих в систему пар сил, и, если не равен
нулю, то согласно (4), равен векторному моменту М эквивалентной
пары сил, т. е.
Lo=Y^o(Fk)+Mo(Fi)]-, L0 = M.
к
Но сумма векторных моментов каждой пары сил равна векторному
моменту пары сил:
Мо (Fk)+Мо (Fi)=Мк (Fk, Fk)=Мк.
Следовательно,
M=YiMk(Fk, Д)=£^. (5)
к к
Таким образом, при сложении системы пар сил получает-
ся эквивалентная пара сил, векторный момент которой
207
равен сумме векторных моментов составляющих систему
пар сил.
При сложении пар сил, расположенных в одной или параллель-
ных плоскостях, векторное сложение переходит в алгебраическое
сложение алгебраических моментов пар сил:
М=^Мк,
к
т. е. пары сил, расположенные в одной и параллельных
плоскостях, приводятся к одной эквивалентной паре сил,
алгебраический момент которой равен сумме алгебраи-
ческих моментов составляющих пар.
При равновесии системы пар сил, действующих на твердое тело,
векторный момент эквивалентной пары сил, равный сумме вектор-
ных моментов заданных пар сил, должен равняться нулю, т. е.
Л7=£М*=0. (6)
к
Векторный момент в общем случае геометрически изображается
замыкающей векторного многоугольника, построенного из вектор-
ных моментов заданных пар сил. При равновесии пар сил вектор-
ный многоугольник, построенный из векторных моментов заданных
пар сил, должен быть замкнутым.
В проекциях на оси координат условия равновесия пар сил,
приложенных к твердому телу, согласно (6), примут форму
мх=^мкх=о,
к
My=YlMky=0,
к
Mz=YiMkz=0,
к
(6')
т. е. для равновесия пар сил, приложенных к твердому
телу, необходимо и достаточно, чтобы алгебраические
суммы проекций векторных моментов пар сил на каждую
из трех координатных осей равнялись нулю.
Если пары сил действуют в одной или параллельных
плоскостях, то для их равновесия необходимо и достато-
чно, чтобы сумма алгебраических моментов этих пар ра-
внялась нулю, т. е.
208
М=^Мк=О. (6")
к
В общем случае пары сил можно
уравновесить только нарой сил и не-
льзя уравновесить одной силой или
какой-либо другой системой сил, от-
личной от пары сил.
Пример. На твердое тело, находящееся гис' 31
в равновесии, одной из двух опор которого
является цилиндрический шарнир А, а другой — катковая опора В, действует систе-
ма пар сил, расположенная в одной плоскости. Расстояние между опорами равно I.
Определить реакции опор.
Решение. В случае плоской системы пар сил их на рисунке (рис. 31) обычно
изображают дуговыми стрелками, указывающими направления, в которых пары сил
стремятся вращать тело. Рядом со стрелами указывают величины векторных момен-
тов пар сил.
Так как на твердое тело действуют только пары сил, то реакции опор RA и Rg со-
ставляют тоже пару сил. Реакция катковой опоры Rg перпендикулярна плоскости
опоры катка и направлена вверх. Следовательно, реакция шарнира RA направлена
параллельно Rg вниз. Величины реакций равны. Их можно определить из условия
равновесия плоской системы пар сил (6"). Если принять, что положительна, то
к
получим:
£М*4-Ял/=0, RA = RB=--yMk.
к 1 к
§ 3. ПРИВЕДЕНИЕ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
К СИЛЕ И ПАРЕ СИЛ
Приведение силы к заданному центру
Силу можно переносить параллельно самой себе в лю-
бую точку твердого тела, добавляя при этом пару сил,
векторный момент которой равен векторному моменту
переносимой силы относительно новой точки приложе-
ния силы. Пусть имеем силу F, приложенную к твердому телу
в точке А (рис. 32). Известно, что силу, приложенную к твердому
телу, можно переносить вдоль ее линии действия, от чего действие
силы на тело не изменяется. Докажем, что силу можно переносить
на другую, параллельную линию действия. Но этот перенос следует
компенсировать добавлением соответствующей пары сил.
Приложим в точке тела В, выбранной за центр приведения,
систему двух равных по модулю, но противоположных по направле-
нию сил F' и F", параллельных заданной силе F. Силы F и F"
209
составляют систему сил, эквивалентную нулю,
и ее можно добавить к любой заданной систе-
ме сил. Пусть по модулю
F' = F" = F.
Тогда
(F)~(F, F', F")~[F', (F, /")].
Система двух равных по модулю и проти-
воположных по направлению параллельных
сил (F, F") составляет пару сил, которую назы-
вают присоединенной парой сил. Итак, вместо силы F, приложен-
ной в точке А, получены сила F', равная ей по модулю и направле-
нию, но приложенная в точке В, и присоединенная пара сил (F, F"),
векторный момент которой
M=M(F, F") = MB(F).
Процесс замены силы F силой F' и парой сил (F, F") называют
приведением силы F к заданному центру В. По теореме об
эквивалентности пар сил пару (JF, F") можно заменить любой
другой парой сил с таким же векторным моментом.
Итак, при параллельном переносе силы добавляется
пара сил, векторный момент которой перпендикулярен
силе. Справедливо и обратное: если сложить силу с парой сил,
векторный момент которой перпендикулярен силе, то получим ту
, м
же силу, смещенную параллельно на величину а= .
F
Действительно, пусть имеем силу F' и пару сил, векторный
момент М которой перпендикулярен силе F'. Перемещая пару сил,
меняя силы пары и ее плечо, приведем пару в положение, указанное
на рис. 32. Отбросив систему сил (F', F"), эквивалентную нулю,
получим силу F, которая равна и параллельна заданной силе, т. е.
я , 1^1
F=F , но смещена на величину а=—, где М — момент пары сил.
Приведение произвольной системы сил к силе и паре сил
Докажем теорему Пуансо, что произвольную систему сил,
действующих на твердое тело, можно в общем случае
привести к силе и паре сил. Процесс замены системы сил одной
210
силой и парой сил называют приведением системы сил к заданному
центру.
Пусть дана произвольная система сил (F\, F2, ..., F„), приложен-
ных к твердому телу. Выберем произвольную точку О тела за центр
приведения и каждую силу заданной системы приведем к точке
О (рис. 33). Получим в точке О систему сил (F(, F2, ..., и систему
присоединенных пар сил с векторными моментами М2, ..., М„,
причем:
Fi^F^ М^Мо^У,
F;=F2, M2=M0(F2y
F„=Fn, мп=м0(Рпу
или:
А'=А, Mk=Mo(Fk}, k=l, 2, ..., п.
Таким образом,
(Л, f2, ..., Л)~(Л', Л', Л, м2,..., мпу
т. е. система заданных сил (1\, Р2, F„) заменена системой таких
же по величине и направлению сил (//, F2, ..., приложенных
в точке О, и системой присоединенных пар сил с векторными
моментами М}, М2, ..., М„.
Систему сходящихся сил (//, F2, F’) заменим их равно-
действующей R, которая равна векторной сумме этих сил и геомет-
рически изображается замыкающим вектором силового много-
угольника, построенного на этих силах, т. е.
zi
211
(Л, F2, F^~(R),
л=/'1'+Л'+...+Л'=ЕЛ'.
к
Так как Fk = Fk, к=\, 2, п, то
л=г1+л+...+л=ЕА.
к
Для заданных сил (F}, F2, F„) сила R не является равнодейст-
вующей силой, так как она эквивалентна этой системе сил только
вместе с системой присоединенных пар сил. Сила R для заданной
системы сил есть векторная сумма этих сил, или их главный
вектор, т. е.
Я=1?к.
к
Систему присоединенных пар сил, векторные моменты которых
Мк=М0 (Fk), к= 1, 2, ..., и, заменим одной эквивалентной парой сил
с векторным моментом Lo. По теореме о сложении пар сил
Lo^Mt+Mi + ...+М^Мк,
к
или
Л0=М0 (/,)+Мо (А) +... + М0 (Fn)=X М0 (Fk).
к
Векторный момент эквивалентной пары сил Lo оказался равным
сумме векторных моментов заданных сил относительно центра
приведения О, т. е. Lo есть главный момент заданных сил
относительно точки О. Главный момент системы сил является
вектором, замыкающим векторный многоугольник, образованный
при сложении векторных моментов заданных сил системы относи-
тельно выбранного центра приведения.
Доказана основная теорема (теорема Пуансо) о свойствах
системы сил, приложенных к твердому телу: любую систему сил
можно привести к силе, равной главному вектору систе-
мы сил, и паре сил, векторный момент которой равен
главному моменту системы сил относительно точки, вы-
бранной за центр приведения. В краткой форме эту теорему
можно выразить так:
(Л, F2, ..., Fn)~(R, Lo}.
212
Формулы для вычисления главного вектора
и главного момента
Для любой системы сил (F\, Ё2, F„) главный вектор R является
векторной суммой этих сил:
(7)
к
а главный момент Lo — суммой векторных моментов сил относи-
тельно центра приведения:
£0=£Я,(Л). (8)
к
Проецируя обе части векторного равенства (7) на координатные
оси, для произвольной пространственной системы сил получаем:
R,=TF^ Ъ=1Гк:. (Т)
к к к
По проекциям определяют модуль главного вектора и косинусы его
углов с осями координат:
\R\=R = ^R2 + R2 + R2-
cos (R,Л х)=cos (R,Л у)=—; cos (Л,Л z)=
R R R
Проецируя обе части векторного равенства (8) на прямоуголь-
ные оси координат и используя связь момента силы относительно
оси с проекцией векторного момента этой силы относительно точки
на оси, имеем:
LOx=Lx=YMx(FkyA
к I
Loy = Ly=Му (Fk), У (8')
к I
L02=Lz=YM2(Fk). J
к
Модуль главного момента и косинусы его углов с осями коор-
динат равны
|£0|=£о = у/ L2 + L2+L2;
213
cos (£0,л х) =*; cos (Lo,лy)=—; cos(£o, Az) = -Z.
Lo Lo Lo
Для плоской системы сил если выбрать ось Oz перпендикулярно
плоскости действия сил, а оси Ох и Оу — в плоскости сил, то
главный вектор R будет расположен в плоскости Оху, и следовате-
льно:
RX=YF**, R,=YF^
к к к
\R\ = R=y/R? + R?,
cos (Л, л х)=—, cos (R,л у)=—.
Я Я
Главный момент плоской системы сил перпендикулярен главно-
му вектору, если центр приведения выбран в плоскости действия
сил. В этом случае все моменты сил перпендикулярны к плоскости
действия сил. Главный момент будет алгебраической суммой моме-
нтов заданных сил и, следовательно, равен сумме моментов задан-
ных сил относительно оси Oz. Таким образом,
Lx=Z Мх (Рк) =О,ЬУ=^МУ (Fk) = 0-,Lz = YMz (Fk) = ^М0 (Fk).
к к к к
§ 4. ИЗМЕНЕНИЕ ГЛАВНОГО МОМЕНТА ПРИ ПЕРЕМЕНЕ
ЦЕНТРА ПРИВЕДЕНИЯ
При перемене центра приведения векторные моменты сил изме-
няются, так как изменяются радиусы-векторы их точек приложения.
Вследствие этого изменяется главный момент. Оценим изменение
главного момента системы сил (Flt F2, ..., Fn). Пусть система сил
приведена к центру О и получены в этой точке главный вектор
R и главный момент £0 (рис. 34). Выберем в качестве центра
приведения другую точку О] и вычислим главный момент £О1 рас-
сматриваемой системы сил. Так как
(Л, F2, ..., Fn)~(R, Lo),
то для получения главного момента £01 достаточно привести к но-
вому центру систему (R, Lo). Силу R из точки О перенесем в точку
214
Oi параллельно. Получим в этой точке
силу Ri=R и, согласно теореме о парал-
лельном переносе силы, присоединенную
пару сил с векторным моментом Мо, (R)-
Векторный момент пары сил Lo, вычис-
ленный относительно точки О, как вектор
свободный можно приложить в любой
точке тела, в том числе и в точке Ot.
Новый главный момент относительно
точки О] по правилу сложения пар сил
является векторной суммой моментов Lo и Л/01 {R}, т. е.
Lo, — Lo + Я,, (-Л),
- - (9)
Lo-Lo = MOi(R). V 7
По формуле для векторного момента силы имеем
MOi(R) = O^bxR=-OO1 xR.
С учетом этого формула (9) примет вид
Lo^Lo-OOi xR. (10)
Итак, главный момент системы сил при перемене центра
приведения изменяется на величину векторного момента
главного вектора, приложенного в старом центре приве-
дения, относительно нового центра приведения.
§ 5. ИНВАРИАНТЫ СИСТЕМЫ СИЛ
Инвариантами системы сил называются величины, которые не
изменяются при перемене центра приведения. Одним из инвари-
антов является главный вектор системы сил,так какв любом
центре приведения он равен векторной сумме системы сил. Если
в центре приведения О главный вектор R, а в Oi он Ri, то
R = R}. (И)
Таким образом, главный вектор не зависит от выбора центра
приведения. Он является векторным инвариантом системы сил.
Из векторного равенства (11) следует равенство модулей и про-
екций главных векторов на координатные оси, т. е.
??=/?!, Rx=Rix, Ry=Riy, Rz=Riz. (И7)
215
Для получения второго, скалярного инварианта используем
формулу
Lqx = Lo—00 j х R.
Умножая обе части этого равенства скалярно на R\, причем в пра-
вой части при умножении вместо R\ используя R, получим
’ R\ ~ Lo ’ R — (ОО} х R) R,
или
Lo'R^LoR, (12)
так как смешанное произведение трех векторов, содержащих два
одинаковых множителя R, равно нулю, т. е.
(ОО, xR) R—0.
Выражение (12) является вторым, скалярным инвариан-
том: скалярное произведение главного момента на глав-
ный вектор не зависит от центра приведения. Этот инвари-
ант можно выразить в двух других эквивалентных формах, если
раскрыть скалярное произведение векторов в (12). Обозначив проек-
ции LOi на оси координат Llx, Lly, Llz, а проекции Lo — соответст-
венно Lx, Ly, Lz, второй инвариант примет вид
L\xRix+L\yR\y + LXzRXz = LXRX + LyRy+LZRZ. (12')
Кроме того, второму инварианту можно придать форму:
LOlRi cosai=LOR cosa,
где a] — угол между векторами LOi и Д, а a — между Lo и R (рис.
35). После сокращения на Ri = R, получим
LOi cosa! = Lo cosa. (12")
В этой форме второй инвариант утверждает: проекция
главного момента на направление главного вектора не
зависит от выбора центра приведения.
Если главный момент в каждом центре приведения разложить на
две взаимно перпендикулярные составляющие, одна из которых
направлена по главному вектору, то, учитывая, что главные век-
торы в различных центрах параллельны, согласно (12"), получим
Lo=U, (13)
216
где Lot — составляющая главного момента
LOl по направлению главного вектора Яь
a Lo — составляющая главного момента Lo
по направлению главного вектора R. Соот-
ношение (13) является следствием первого
и второго инвариантов. Из него следует:
составляющая главного момента в
направлении главного вектора не из-
меняется при перемене центра приве-
дения. Может изменяться при этом только вторая, перпендикуляр-
ная составляющая.
Рассмотренные инварианты системы сил (11) и (12) являются неза-
висимыми, т. е. из одного не следует другой. Комбинируя эти инва-
рианты, можно получить другие, зависящие от них инварианты.
§ 6. ЧАСТНЫЕ СЛУЧАИ ПРИВЕДЕНИЯ ПРОСТРАНСТВЕННОЙ
СИСТЕМЫ СИЛ
Произвольная система сил, действующая на твердое тело, при-
водится к силе, равной главному вектору R, и паре сил, векторный
момент которой равен главному моменту Lo- В зависимости от их
величин и взаимного направления, т. е. угла а между ними, можно
произвести дальнейшие упрощения. Возможны случаи приведения
к одной паре сил, к равнодействующей силе и к динаме.
Приведение к паре сил. Если Я=0, £о^0, то система сил
приводится к одной паре сил, причем главный момент в этом
случае не зависит от выбора центра приведения. В рассматрива-
емом случае оба инварианта системы сил равны нулю, т. е.
Я=0, 7>о’Я —0.
Приведение к равнодействующей. Возможны два случая.
1. Если R Ф 0, £о=0 (первый инвариант Я^О, второй £оЯ=0),
то система приводится к равнодействующей силе Я*, равной по
модулю и направлению главному вектору Я, т. е.
Я* = Я.
Линия действия равнодействующей в этом случае проходит через
центр приведения.
2. Если Я ф0, £о^0, но а=90°, т. е. LoLR (первый инвариант
Я т^О, второй — £0 • Я=0), то система сил тоже приводится к равно-
действующей, причем опять
217
л*=Л.
Но линия действия равнодействующей силы Л* отстоит от центра
Lo
приведения на расстоянии d=—. В этом случае имеем пару сил
R
с векторным моментом Lo, причем силы пары можно считать
расположенными в одной плоскости с силой R, так как векторный
момент пары сил перпендикулярен силе R (рис. 36). Поворачивая
и перемещая пару сил в ее плоскости, а также изменяя силы пары,
при сохранении векторного момента можно получить одну из сил
пары Rравной по модулю, но противоположной по направлению
главному вектору R. Другая сила пары R* и будет равнодейст-
вующей силой. Действительно,
(Л, £0)~(7?, R', £*)-(£*), R.* = R,
так как система двух равных по модулю, но противоположных по
направлению сил (R, Л')~0 и может быть отброшена. Таким об-
разом рассматриваемая система сил оказалась эквивалентной од-
ной равнодействующей силе R*, которая по модулю и направлению
совпадает с главным вектором R. Плечо пары сил (Rr, Л*) опреде-
ляется из условия
так как R=R'=R*. Отрезок dопределяет кратчайшее расстояние от
центра приведения О до линии действия равнодействующей силы
R*. Первый случай является частным случаем второго, когда за
центр приведения О взята точка, расположенная на линии действия
равнодействующей силы.
Приведение к динаме. Динамой в механике называют совокуп-
ность силы F и пары сил (Л, Л), действующих на твердое тело,
218
у которых сила перпендикулярна плоскости пары сил (рис. 37).
Используя векторный момент М пары сил (Fi, F\) можно также
динаму определить как совокупность силы и пары сил,
у которых сила параллельна векторному моменту пары
сил (рис. 38). Сила F и векторный момент пары сил М могут быть
направлены как в одну сторону, так и противоположно.
Рассмотрим случай, в котором £о^0 и векторы Lo и R не
перпендикулярны. В этом случае оба инварианта не равны ну-
лю, т. е.
Lo’Лт^О.
Покажем, что система сил в этом случае приводится к динаме,
элементами которой являются сила Rx = R и момент пары сил —
= L0 cosa, где a — угол между векторами Lo и R. Действительно,
после приведения системы сил к центру О получим главный вектор
R и главный момент Lo. Косинус угла а можно определить,выражая
скалярное произведение векторов Loa Rb двух формах:
L0R cosa—LXRX+LyRy+L2R2,
LXRX + LyRy 4- L2R2
cosa=-------------.
L0R
Разложим главный момент Lo на две взаимно перпендикуляр-
ных составляющих Ц и 1^, одна из которых L, направлена по
главному вектору R (рис. 39) и, следовательно, является инвариан-
том, не зависящим от центра приведения. Имеем
LXRX 4- LyRy + LZRZ
Li — Lo cosa—-----------; Li=L0 sina.
R
Векторный момент пары сил £2 перпендикулярен главному вектору
R. Такая система силы R и пары сил с моментом £2 приводится
к одной силе Ri = А, линия действия которой расположена от точки
О на расстоянии
Рассматриваемая система сил заменилась эквивалентной систе-
мой, состоящей из силы R} и пары сил с векторным моментом £ь
219
который как вектор свободный можно перенести в любую точку,
в том числе и точку О] на линии действия силы Кратко результат
можно выразить в форме
(R, Л)-
Линия, по которой направлена линия действия динамы, называ-
ется центральной винтовой осью. Во всех точках винтовой оси,
принятых за центры приведения, система сил приводится к одной
и той же динаме. Расстояние от центра приведения О до централь-
ной винтовой оси
Lesina
d=——.
R
Выбирая за центры приведения точки на поверхности цилиндра,
осью которого является центральная винтовая ось, получим в этих
центрах главные моменты, равные по модулю и образующие оди-
наковые углы с образующими цилиндра. Эти главные моменты
состоят из одного и того же момента £1э входящего в состав
динамы, и моментов Ьг, перпендикулярных Li, величина которых
пропорциональна расстоянию центра приведения от центральной
винтовой оси.
Совокупность сил, образующих динаму, можно заменить двумя
скрещивающимися силами. Для этого следует одну из сил пары R"
совместить с точкой приложения силы Ri и сложить с этой силой
(рис. 40).
Рассмотрены все возможные случаи, кроме случая равновесия
системы сил, при котором R = 0, Lo — 0. Убедились, что обращение
в нуль главного вектора и главного момента системы сил, прило-
женных к твердому телу, является необходимым и достаточным
условием равновесия этой системы сил.
220
Для плоской системы сил главный вектор R (как векторная
сумма сил) располагается в плоскости действия сил. Главный мо-
мент Lo, если центр приведения выбран в плоскости действия сил,
перпендикулярен этой плоскости, так как векторные моменты сил
перпендикулярны к ней. Главный момент будет векторной суммой
параллельных векторов. Таким образом плоская система сил не
может приводиться к динамке, так как векторы Lo и R всегда
перпендикулярны. Для приведения к динаме они должны быть не
перпендикулярны. Плоская система сил может привестись только
к паре сил, если R= 0, a Lo 0, и к равнодействующей, если R 0 при
любом значении главного момента Lo.
Не может привестись к динаме и система параллельных сил (рис.
41). Если выбрать ось Oz, параллельной силам, то всегда Лх=0,
Л,=0и только Д может не равняться нулю. Следовательно, глав-
ный вектор параллелен оси Oz и самим параллельным силам.
Проекция главного момента Lo на ось Oz, — так как
к
каждая из параллельных сил параллельна этой оси. Не равными
нулю могут быть только ЕХ=£Л/Х(Д) и Ly = £ Му (Fk). Следова-
к к
тельно, главный момент Lo располагается в плоскости Оху, перпен-
дикулярной оси Oz и главному вектору R. Такая система не может
привестись к динаме, а как и плоская система сил может приводить-
ся или к паре сил, или к равнодействующей силе.
Из рассмотрения частных случаев приведения систем сил следу-
ет, что при приведении системы сил к равнодействующей силе R*
эта сила равна и параллельна главному вектору R. Но линия
действия равнодействующей может не проходить через центр при-
ведения, в котором приложен главный вектор R. Если главный
вектор не равен нулю, то равнодействующей может и не быть, если
система приводится к динаме.
Пример. По ребрам куба с длиной стороны I—
= 3 см действуют силы Fi = F2 = 2 Н, Pj = 1 Н (рис.
42). Привести систему сил F\, F2, F3 к простейшему
виду.
Решение. Выберем точку О (начало координат)
за центр приведения сил и вычислим главный вектор
R и главный момент Lo- Для проекций этих век-
торов на оси координат имеем
^ = Z^=F2=2 Н; A?=£^=F3 = 1 Н;
к к
Рис. 41
221
R^^Fk^F^l H; LX=£MX(A)=O;
к к
к
Lz = XMz(.Fk)=F3l-F2l^-3 Нм.
к
Для величин главного вектора и главного момента получаем
Я=7ЛХ +Я/+Я/=79=3 Н; Lo=Jl2+L2+Lz2 =^45=6,8 Нм.
Определим угол а между векторами R и Lo- Для этого скалярное произведение
векторов Lo и R выразим в следующих двух формах
LoR=LqR cosa = LXRX+LyRy + LZRZ,
или
-y/45'3 ’ cosa=0'2 + 6 'l + (—3) '2=0.
Отсюда получаем cosa=0, т. e. векторы Lon R перпендикулярны. Система приводит-
ся к равнодействующей силе, которая по величине и направлению равна главному
вектору, т. е. R* — R, R* = R=3 Н.
Кратчайшее расстояние от дочки О (рис. 43) до линии действия равнодейст-
вующей силы
Lo 6,8
</= =—= 2,3 м.
R 3
§ 7. ТЕОРЕМА О МОМЕНТЕ РАВНОДЕЙСТВУЮЩЕЙ СИЛЫ
(ТЕОРЕМА ВАРИНЬОНА)
Для случая, когда произвольная система сил, приложенных
к твердому телу, плоская или пространственная, приводится к рав-
нодействующей силе, справедлива теорема Вариньона: вектор-
222
ный момент равнодействующей системы сил относитель-
но любой точки равен сумме векторных моментов всех
сил этой системы относительно той же точки.
Пусть на твердое тело действует любая система сил (/), F2,
F„) (рис. 44), имеющая равнодействующую силу R*, т. е.
(Л, /2,..., А)~(Л*).
Добавим к заданной системе сил ее уравновешивающую силу R*',
которая удовлетворяет, согласно ее определения, условию
(Г„ F2, ..., Fn, Л*')~0,
т. е. при добавлении к системе сил ее уравновешивающей силы,
получается новая система сил, эквивалентная нулю и, следователь-
но, удовлетворяющая условиям равновесия системы сил, приложен-
ных к твердому телу. В частности, сумма векторных моментов сил
этой новой системы сил относительно любой точки О равна ну-
лю, т. е.
£л7о(Д)+Мо(Я*')=0. (14)
к
Уравновешивающая сила R*' и равнодействующая системы сил
R* образуют равновесную систему сил. Они равны по величине,
противоположны по направлению и имеют общую линию действия,
т. е. удовлетворяют условиям
2?*'= - Л*, Л/0(Л*')= -Л?0(Л*).
(15)
Подставляя (15) в (14), получаем теорему Вариньона
Л?о(^*)=Х^о(Л).
к
Если правую и левую части векторного ра-
венства (16) спроецировать на произвольную
ось Oz, проходящую через точку О, то, учиты-
вая связь момента силы относительно оси
с проекцией векторного момента относительно
точки на оси, получим теорему Вариньона от-
носительно оси
мг(л*)=^л/2(Л),
к
(16)
Рис. 44
223
т. е. момент равнодействующей силы относительно про-
извольной оси равен сумме моментов сил системы от-
носительно той же оси.
Для плоской системы сил, если точку О выбрать в плоскости
действия сил, из (16) получаем
Л/О(Л*)=^Л/О(А).
к
Это теорема Вариньона для плоской системы сил: алгебраичес-
кий момент равнодействующей плоской системы сил от-
носительно произвольной точки, расположенной в плос-
кости действия сил, равен сумме алгебраических момен-
тов всех сил этой системы относительно той же точки.
§ 8. РАЗЛИЧНЫЕ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ
ПЛОСКОЙ СИСТЕМЫ ВНЕШНИХ СИЛ
В § 7 гл. 1 получены условия равновесия плоской системы
внешних сил, действующих на твердое тело, в следующей форме:
^=0;^Л>0;^Мода=0. (17)
к к к
Условия равновесия (17) назовем условиями равновесия плоской
системы внешних сил в первой или основной форме.
Условия равновесия плоской системы внешних сил, приложен-
ных к твердому телу, можно сформулировать в других эквивалент-
ных формах. Существуют еще две эквивалентные формы необходи-
мых и достаточных условий равновесия. Рассмотрим эти условия
равновесия в виде теоремы о трех моментах и третьей
формы условий равновесия.
Теорема о трех моментах
(вторая форма условий равновесия)
Для равновесия плоской системы внешних сил, прило-
женных к твердому телу, необходимо и достаточно, что-
бы суммы алгебраических моментов внешних сил систе-
мы относительно трех любых точек, расположенных
в плоскости действия сил и не лежащих на одной прямой,
были равны нулю, т. е.
£ 1Ил(А)=0; £л/л(Л)=0; £1Ис(Л)=0. (18)
к к к
224
Необходимость этих условияй равновесия плоской системы
внешних сил обусловлена тем, что если плоская система внешних
сил находится в равновесии, то силы этой системы удовлетворяют
условиям равновесия в первой форме (17). Из последнего из этих
условий следует, что сумма алгебраических моментов сил относи-
тельно любой точки (следовательно, и точек А, В, С) равна нулю
(рис. 45).
Для доказательства достаточности условий (18) для равновесия
плоской системы внешних сил, действующих на твердое тело, до-
статочно провести следующие рассуждения. Так как главные моме-
нты относительно трех точек А, В, С равны нулю, то для любой из
этих точек, выбранных за центр приведения, система сил приводит-
ся или к равнодействующей, если главный вектор системы отличен
от нуля, или система сил оказывается в равновесии, если главный
вектор системы равен нулю. Предположим, что система сил приво-
дится к равнодействующей силе R*. Тогда если выбрать за центр
приведения точку А, то, используя теорему Вариньона, согласно
(18), получим
£Х(А)=мл(я*)=о.
к
Выбрав за центр приведения точку В, аналогично имеем
£адЛ)=л/я(Я*)=о.
к
Эти условия для равнодействующей силы Л* могут выполняться
только в том случае, если линия действия равнодействующей про-
ходит через точки А и В, или равнодействующая равна нулю. Из
последнего условия (18) после применения теоремы Вариньона по-
лучаем
XMc(Fk)=Mc(R*)= +hR* = 0.
к
Но /г / О, так как точка С не находится
на одной прямой с точками А и В. Следо-
вательно, равнодействующая сила равна
нулю, что и приводит к достаточности
условий равновесия плоской системы
внешних сил (18), приложенных к твердо-
Рис. 45
му телу.
225
Третья форма условий равновесия
Условия равновесия плоской системы внешних сил можно сфор-
мулировать и так: для равновесия плоской системы внешних
сил, приложенных к твердому телу, необходимо и до-
статочно, чтобы суммы алгебраических моментов сил
относительно двух точек, лежащих в плоскости действия
сил, были равны нулю и алгебраическая сумма проекций
этих сил на какую-либо ось из этой плоскости, не перпен-
дикулярную прямой, проходящей через две моментные
точки, также была равна нулю, т. е.
£Мл(Л)=0; £МДЛ) = 0; £ГЛх = 0,
к к к
(19)
где ось Ох не перпендикулярна АВ. Необходимость условий (19) для
равновесия плоской системы внешних сил следует из первой формы
условий равновесия. Первая часть теоремы о достаточности усло-
вий (19) для равновесия (линия действия равнодействующей силы
R* проходит через точки А и В) доказывается так же, как и в те-
ореме о трех моментах.
Из последнего условия (19) (рис. 46) следует, что
£Fkx=Л* = Л* cos (Л*,Л х)=0.
к
Но
cos (Л*, лх)#0,
так как ось Ох не перпендикулярна прямой, проходящей через точки
Ап В. Следовательно, равнодействующая сила Л* равна нулю, что
и доказывает достаточность условий (19) для равновесия плоской
системы внешних сил, приложенных к твердому телу.
В частном случае плоской системы параллельных внешних сил
можно сформулировать тоже другую форму условий равновесия
этой системы сил: для равновесия плоской системы парал-
Рис. 46
лельных внешних сил, приложен-
ных к твердому телу, необходимо
и достаточно, чтобы суммы алгеб-
раических моментов сил относите-
льно двух любых точек, лежащих
в плоскости сил, были равны нулю,
т. е.
£ Мл (Fk) = 0; £ Мв (Fk)=0. (20)
к к
226
Точки А и В нельзя брать на прямой линии, параллельной силам.
При применении (20) удобно за моментные точки А и В брать
точки, через которые проходят искомые силы, например реакции
связей. В этом случае в уравнения равновесия войдет по одной
неизвестной силе. Такие уравнения решаются проще, чем уравнения,
в каждое из которых входят обе неизвестные силы.
§ 9. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ И СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ
Для плоской системы внешних сил, действующих на твердое
тело, имеется только три независимых условия равновесия, каждое
из которых не является следствием двух других. Независимые усло-
вия равновесия можно брать в трех различных формах.
Следовательно, для любой плоской системы внешних сил из
условий равновесия можно определить не более трех неизвестных,
а для плоских систем параллельных внешних сил, а также сходящих-
ся — не более двух неизвестных. Для произвольной пространствен-
ной системы внешних сил из условий равновесия можно определить
не более шести неизвестных.
Если в какой-либо задаче на равновесие тела число неизвестных
сил окажется больше числа независимых условий равновесия, то
такую задачу нельзя решить, используя только уравнения равнове-
сия сил, без рассмотрения прежде всего деформации тела и исполь-
зования закона Гука для сил упругости, т. е. без отказа от основной
гипотезы теоретической механики об абсолютно твердом теле.
Задачи, в которых число неизвестных не больше числа независи-
мых условий равновесия для данной системы сил, приложенных
к твердому телу, называют статически определимыми. Для произ-
вольной плоской системы внешних сил, приложенных к твердому
телу, в статически определимой задаче число неизвестных не долж-
но быть больше трех, а для плоских систем параллельных и сходя-
щихся внешних сил — не больше двух. Если число неизвестных
больше числа независимых условий равновесия, то задачи называ-
ются статически неопределимыми.
Пример простейшей статически неопределимой задачи приведен
на рис. 47, где представлена балка заданной длины, закрепленная на
концах с помощью двух неподвижных цилиндрических шарниров
А и В. На балку действуют заданные внешние силы F\ и Г2,
расположенные в одной плоскости. Известны также точки приложе-
ния этих сил. Так как для цилиндрического шарнира имеются две
неизвестные, например, составляющие силы реакции по осям коор-
динат, то общее число неизвестных равно четырем, а независимых
уравнений для внешних сил при равновесии балки можно составить
только три.
227
Рис. 47
Чтобы сделать задачу статически определимой, следует балку на
одном конце закрепить, например при помощи так называемой
катковой опоры. Тогда одна из неизвестных сил будет равна нулю.
Если катковая опора находится в точке В и плоскость опоры катков
параллельна оси Ох, то сила Хв равна нулю. После этого задача
становится статически определимой. В однопролетных мостах одну
опору всегда делают катковой, чтобы избежать появления составля-
ющих сил реакций в опорах от изменения температуры и вызван-
ного этим изменения длины балки.
§ 10. РАВНОВЕСИЕ СИСТЕМЫ ТВЕРДЫХ ТЕЛ
Рассмотрим равновесие системы внешниих сил, приложенных
к системе нескольких взаимодействующих между собой твердых
тел. Тела могут быть соединены между собой шарнирами, просто
соприкасаться друг с другом или взаимодействовать каким-либо
другим способом, вызывая силы взаимодействия. Такую систему
взаимодействующих тел иногда называют сочлененной системой
тел.
Силы, действующие на рассматриваемую систему тел, можно
разделить на силы внешние и внутренние по отношению к системе
тел. Внешними силами по отношению к системе тел называют силы,
с которыми на тела рассматриваемой системы действуют тела, не
входящие в эту систему. Внутренними по отношению к системе тел
называют силы взаимодействия между телами рассматриваемой
системы тел.
Если, например, рассматриваемой системой тел является желез-
нодорожный поезд, то для него внешними силами являются силы
тяжести вагонов и тепловоза, силы реакций рельсов на колеса, силы
сопротивления воздуха при движении поезда. Внутренними силами
по отношению к поезду являются натяжения в стяжках, силы давле-
ния газов в цилиндрах и т. п.
Силы тяжести для любой системы тел, в которую не входит
Земля, являются внешними как для всей системы тел, так и для
отдельных тел.
228
При рассмотрении равновесия системы тел можно мысленно
расчленить систему на отдельные твердые тела и к внешним силам,
действующим на эти тела, применить условия равновесия для одно-
го тела. В эти условия равновесия войдут кроме внешних сил для
отдельных тел также некоторые внутренние силы для системы тел.
Для отдельных тел они будут внешними.
Внутренние силы для системы тел на основании аксиомы о ра-
венстве сил действия и противодействия в каждой точке сочленения
тел образуют равновесную систему сил (силы R'A и RA, рис. 48).
Поэтому внешние силы, действующие на систему тел от-
дельно без внутренних сил, удовлетворяют условиям
равновесия внешних сил, приложенных к одному твердо-
му телу. В этом отношении система тел ведет себя как отдельные
твердые тела.
Покажем это на примере системы двух твердых тел (см. рис. 48).
Составляя условия равновесия внешних сил для каждого твердого
тела, имеем
для тела I
^Л'+л;=0; ^Мо(Д')+Л7о(Л;)=0; (21)
к к
для тела II
^Л"+л;=0; ^м0(Л")+^0(л;)=о. (22)
к к
Кроме того, из аксиомы о равенстве сил действия и противодей-
ствия для двух взаимодействующих тел имеем
мо (r'a)= -Мо (л;). (23)
Если сложить (21) и (22), учитывая (23), то
Рис. 48
229
Z A+Z A"=0; Z Mo (Fl) + Z Mo (Fl') = 0.
к к к к
Эти уравнения и есть условия равновесия внешних сил, действу-
ющих на систему двух тел.
Для системы N тел в том случае, когда на каждое тело действует
любая плоская система внешних сил, можно составить ЗЛГ условий
равновесия и, следовательно, определить 3JV неизвестных. Если
число неизвестных не больше 32V, то задача является статически
определенной, если больше 3N — статически неопределенной.
В случае статической определимой задачи 37V условий равновесия
можно получить, если составлять их для каждого тела в отдель-
ности, учитывая и силы взаимодействия тел, или составлять усло-
вия равновесия внешних сил для любых комбинаций групп тел,
в том числе и для всей рассматриваемой системы тел. При этом
внутренние силы для отдельных групп тел учитывать не надо.
Число уравнений равновесия как для отдельных тел, так и для
любых их групп для плоской системы сил не должно быть больше
трех, а всего уравнений для N тел не больше 3N.
§ 11. РАСПРЕДЕЛЕНИЕ СИЛЫ
В динамике рассматриваются силы, приложенные к точке или
твердому телу в какой-либо его точке, и потому такие силы
называются сосредоточенными. В действительности обычно силы
приложены к какой-либо части объема тела или его поверхности,
а иногда к некоторой части линии. Так как все аксиомы и теоремы
динамики формулируются для сосредоточенных сил, то необходи-
мо рассмотреть способы перехода от распределенных сил
к сосредоточенным в простейших, наиболее часто возника-
ющих случаях.
Распределенные силы характеризуются интенсивностью, т. е.
силой, приходящейся на единицу объема, площади поверхности
и длины линии. Часто встречаются параллельные и сходящиеся
распределенные силы. К параллельным силам, распределенным по
объему тела, относятся силы тяжести частиц этого тела. Сила
давления воды на плотину относится к распределенным параллель-
ным силам по площади поверхности плотины. Сила тяжести частиц
тонкой проволоки характеризует распределенные силы по длине
линии.
Рассмотрим только замену распределенных сил по длине линии
сосредоточенными силами, т. е. замену линейных распределенных
сил. Для простоты рассмотрим случаи, когда отрезок линии, по
которому распределены силы, является отрезком прямой, а интен-
сивность этих сил или постоянна (силы распределены по прямо-
230
угольнику), или распределена по линейному закону, в простейшем
случае — по треугольнику. Комбинируя эти два случая, можно
получить линейное распределение интенсивности распределенной
силы в более общем случае.
Параллельные силы постоянной интенсивности,
распределенные по отрезку прямой линии
Пусть на участке АВ прямой линии длиной I распределены
параллельные силы, интенсивность которых q постоянна (рис. 49, а).
Заменим эти распределенные силы сосредоточенной силой их рав-
нодействующей. Для этого отрезок АВ разобьем на отрезки А4
достаточно малых размеров по сравнению с его длиной. На каждый
такой малый отрезок действует сила q&lk, которую при достаточ-
ной малости длины отрезка можно считать сосредоточенной силой.
Заменяя полученную таким образом систему сосредоточенных па-
раллельных сил qAlk равнодействующей силой, получим
R-Y q& к=q^ Ык=ql-
к к
Равнодействующая R параллельна распределенным силам и при-
ложена вследствие симметрии распределенных сил в середине отрез-
ка АВ. Равнодействующая сила оказалась равной площади прямо-
угольника со сторонами q и АВ.
Если параллельные силы постоянной интенсивности q распреде-
лены по отрезку прямой, наклоненному к распределенным силам, то
величина равнодействующей R таких сил опять равна ql и в этом
случае уже не равна площади параллелограмма, построенного на
АВ и q (рис. 49, б).
231
Параллельные силы, распределенные по отрезку прямой
с интенсивностью, изменяющейся по линейному закону
Рассмотрим распределенные параллельные силы, изменяющиеся
по линейному закону (рис. 50, а). Обычно считают, что такие силы
распределены по треугольнику. Параллельные распределенные по
треугольнику силы приводятся к равнодействующей R, равной по
величине
где qan — наибольшая интенсивность распределенной силы. Это
легко можно проверить путем сложения параллельных сосредото-
ченных сил q&x, приложенных к каждому элементарному отрезку
длиной Ах. Наиболее просто это можно сделать путем интегрирова-
ния. Действительно,
Если х отсчитывать от точки А, то из подобия треугольников
имеем
Q Qraax.
х~ I
Вставляя под интеграл вместо q его значение, получаем
/
Л Г 9тах - *7тах-*2
R= —xdx=----------
J l 12
о
9max
о- 2
Точка приложния С равнодействующей силы R смещается в сто-
рону, где интенсивность распределенной силы больше, и совпадает
с центром тяжести площади треугольника, который находится
1
в точке пересечения медианы, расположенной на расстоянии - от
2 2
основания треугольника и - от его вершины А, т. е. ЛС=-/. Точку
приложения равнодействующей силы можно также определить при-
менением теоремы Вариньона о моменте равнодействующей силы.
232
Для этого вычислим момент элементарных сосредоточенных сил
qdx, например относительно точки А, и приравняем моменту рав-
нодействующей силы относительно той же точки. Имеем
qxdx = R' АС;
, Яmax Г j , ?max I3 9тах^ 2
qxax=— х ах=-—---= Rl;
J I J /333
о о
2
-R1
3 2
АС=—=-1.
R 3
Если распределенные силы с интенсивностью q, изменяющейся
по линейному закону, распределены по отрезку прямой, наклонен-
ному к направлению сил (рис. 50, б), то их равнодействующая
^_</п|х делиТ отрезок АВ так же, как и в том случае, когда
распределенные силы перпендикулярны отрезку АВ. Величина рав-
нодействующей силы в этом случае не равна площади треугольника,
образованного отрезком прямой и распределенными силами, как
это было, когда распределенные силы составляли прямой угол
с отрезком АВ.
В более сложных случаях распределенных сил равнодейству-
ющую силу и ее точку приложения определяют путем интегрирова-
ния и применения теоремы Вариньона. Величину равнодейству-
ющей силы в случае не параллельных сил находят так же, как
и параллельных, только суммируют (и, следовательно, интегриру-
ют) не сами элементарные силы qk&lk, а их проекции на оси коор-
динат. Проекции сил являются параллельными силами. По проек-
циям вычисляют равнодействующую силу и косинусы ее углов
с осями координат.
233
Реакция заделки
Пусть имеем твердое тело, находящееся в равновесии, например
балку АВ, один конец которой заделан в стену (рис. 51, а). Такое
крепление конца балки А А' называют заделкой в точке А. Пусть на
балку действует плоская система внешних сил (/), F2, F„). Опре-
делим силы, которые надо приложить в точке (сечении) А балки,
если часть балки АА’ отбросить.
К части балки при освобождении ее от заделки в стене приложе-
ны распределенные силы. Если эти силы заменить элементарными
сосредоточенными силами и затем привести их к точке А, то в точ-
ке А получим силу RA (главный вектор элементарных сосредоточен-
ных сил qk&lk) и пару сил с моментом МА (главный момент от-
носительно точки А элементарных сил Часть балки АА'
можно считать отброшенной. Момент МА называется моментом
заделки.
Таким образом, заделка в отличие от шарнира создает не только
неизвестную по величине и направлению реакцию RA, но еще и пару
сил с неизвестным моментом в заделке МА (рис. 51, б), т. е. заделка
в случае плоской системы внешних приложенных к балке сил экви-
валентна трем неизвестным: RA(XA, YA) и МА. Для пространствен-
ной системы внешних приложенных сил заделка дает шесть неиз-
вестных — Ra (Ха, Ya, Za) и Ма (МАх, МАу, МАг).
Если рассмотреть любую часть балки, расчленив ее мысленно
по сечению тп, то в месте расчленения надо приложить неизвест-
ные силу и пару сил, заменяющие отброшенную часть балки на
рассматриваемую ее часть, причем сила и момент пары сил,
действующих на различные части балки, будут иметь противопо-
ложные направления действия, как всякое действие и противодей-
ствие.
234
§ 12. ПРИМЕРЫ НА РАВНОВЕСИЕ ТВЕРДЫХ ТЕЛ
Перед рассмотрением конкретных примеров на равновесие твер-
дого тела и системы твердых тел, находящихся под действием
плоских и пространственных систем сил, сделаем ряд замечаний,
позволяющих наметить границы применимости используемых
условий равновесия для внешних сил, приложенных к твердому
телу.
При равновесии (покое) твердого тела относительно инерциаль-
ной системы отсчета, внешние силы, приложенные к твердому телу,
удовлетворяют условиям равновесия соответствующей системы
сил. Если внешние силы удовлетворяют условиям равновесия, то
само твердое тело может находиться не только в равновесии, но
может совершать любое движение по инерции, при котором ускоре-
ния точек твердого тела равны нулю относительно инерциальной
системы отсчета.
Обычно рассматривается равновесие твердых тел относительно
системы отсчета, скрепленной с Землей, которая не является инерци-
альной. При рассмотрении равновесия твердого тела относительно
неинерциальных систем отсчета форма условий равновесия внешних
сил не изменяется, только к внешним силам, как будет показано
дальше, следует дополнительно добавить переносные и кориолисо-
вы силы инерции точек тела, как поправки на неинерциальность
системы отсчета.
Для неинерциальной системы отсчета, скрепленной с Землей,
главные поправки пропорциональны квадрату и первой степени
угловой скорости вращения Земли вокруг своей оси. Они малы по
сравнению с другими встречающимися силами и ими обычно прене-
брегают.
К внешним силам, приложенным к твердому телу, относятся
заданные или активные силы и силы реакций связей, которые для
случая равновесия твердого тела зависят не только от вида связей,
но еще и от активных сил. Выявление всех внешних сил, действу-
ющих на рассматриваемое твердое тело или систему тел, особенно
правильная замена различных видов связей их реакциями, являет-
ся одним из главных этапов при решении задач не только на
равновесие, но и на движение твердого тела. При движении твер-
дого тела к внешним силам следует дополнительно добавить силы
инерции точек тела, чтобы получить уравнения движения твердого
тела.
Основные виды связей для твердого тела уже рассмотрены. При
рассмотрении равновесия системы твердых тел и ее расчленении на
отдельные тела или группы тел следует учитывать, что внутренние
силы для системы тел в местах расчленения становятся внешними
для отдельных тел или их групп. Целесообразно эти силы для
235
взаимодействующих тел или их групп изображать противополож-
ными по направлению с одинаковыми алгебраическими значениями
для разных тел или их групп. Это позволит уменьшить число
неизвестных, а следовательно, и число уравнений для их определе-
ния.
Удачный выбор твердых тел или их групп для рассмотрения
равновесия, использование целесообразной формы условий равно-
весия, удачный выбор осей координат и моментных точек позволя-
ют составить наиболее простые уравнения равновесия для неизвест-
ных сил или моментов пар сил.
Пример 1. Дана система двух твердых тел, соединенных шарниром С (рис. 52).
Балка АС изогнута под прямым углом, имеет заделку в точке А. Круговая арка СВ
закреплена в точке В с помощью шарнирного стержня. Размеры тел и приложенные
внешние силы указаны на рисунке. Дуговая стрелка обозначает пару сил. Силами
тяжести тел пренебречь. Определить силы реакций в точках А я В.
Решение. Заменим распределенные силы сосредоточенными. Величина равно-
действующей силы Л] (рис. 53) распределенных по треугольнику сил на участке АЕ
определяется по формуле
1 1
R\ =- AEqraiK=- 3 40 = 60 кН.
2 2
1
Точка приложения силы Ri отстоит от точки Е на - АЕ, т. е. на 1 м.
3
Можно доказать, что значение равнодействующей Я2, распределенных по арке
сходящихся радиальных сил, определяется как произведение длины хорды BD,
п
стягивающей дугу BD, на интенсивность распределенных сил q, т. е.
Я2=ВР ?=4-20 = 80 кН.
Линия действия равнодействующей силы Я2 вследствие симметрии распределен-
ных сил проходит через центр арки О, деля угол, стягивающий арку, на равные части.
Рассмотрим сначала равновесие системы двух тел, состоящих из балки АС и арки
ВС. На эту группу тел действуют внешние силы F, Я2, пара сил с моментом М,
силы реакций в заделке А и опоре В.
Реакция в заделке в общем случае плоской системы внешних сил состоит из двух
неизвестных составляющих по осям координат силы Ед и момента пары сил Мд.
Одну неизвестную силу YB дает шарнирный стержень в точке В. Таким образом
имеем четыре неизвестных, а независимых уравнений для их определения можно
составить только три. Систему тел следует расчленить на отдельные тела (рис. 54),
приложив к каждому из них в точке С силы действия одного тела на другое, которые
равны по величине, но противоположны по направлению.
На рисунке у стрелок, изображающих силы, будем ставить только буквы,
обозначающие алгебраические значения сил, без знака вектора над ними. Это
уменьшит число неизвестных и, следовательно, количество уравнений для их опреде-
ления.
Всего имеется шесть неизвестных, считая составляющие по осям координат силы
реакции в шарнире С, которые определять не требуется. Составляя по три уравнения
равновесия внешних сил для каждого тела, можно получить шесть уравнений для
определения из них всех неизвестных. Требуется определить только четыре неизвест-
236
Рис. 52
ные реакции в точках А и В. Поэтому составим уравнения так, чтобы в них не
входили реакции в точке С и по возможности в каждое уравнение входило не более
одной новой неизвестной.
Составим для арки СВ одно уравнение равновесия внешних сил в форме момен-
тов сил относительно точки С. Имеем
—Af—A2rcos30°+Удг=0, т. е. -100-80 4 —+ Уд'4 = 0,
2
откуда получаем Уд=94 кН.
Для всей системы тел применим условия равновесия в форме суммы проекций
внешних сил на оси Ох и Оу. Они должны равняться нулю. Получаем
Ха + R\ — Fcos53°—Я2 cos30°=0,
Ya~ ^sin53°- «2sin30°+ Уа=0;
откуда Xa=99 кН, Ya = 66 кН.
237
Рис. 54
Для определения момента пары сил МА в заделке достаточно применить для
тела АС условие равновесия в форме суммы моментов внешних сил относительно
точки С. Имеем
Fsin53° • 1 -Rx 1 -ХА -3- YA 2+Ма=0,
откуда МА = 370 кН м.
Если дополнительно требуется определить силы Хс и Yc, то следует применить
условия равновесия внешних сил для тела СВ в форме проекций сил на оси Ох и Оу.
Тогда
-Хс-A2cos30°=0; -rc-/J2sin30°+ Ув=0.
Из этих уравнений получаем
Хс=69 кН, Ус=54 кН.
Для контроля правильности определения реакций в точках А и В следует
составить контрольное условие равновесия внешних сил, например в форме суммы
моментов относительно точки С для всей системы тел. Полученные значения неиз-
вестных сил должны обратить его в тождество.
Задача считается решенной, если определены проекции искомых сил на оси
координат, так как по проекциям легко определяются величины этих сил и косинусы
углов сил с осями координат.
Пример 2. Для системы тел, находящихся в равновесии, определить силу реакции
шарнира В (рис. 55). Необходимые данные указаны на рисунке. Стержни АЕ и ВС,
блоки и нить считать невесомыми. Трением в шарнирах пренебречь. Дуговой стрел-
кой обозначена пара сил, |Л/| — модуль алгебраического момента.
Решение. Рассмотрим всю систему тел, освободив ее от связей, т. е. от цилинд-
рических шарниров в А и В. Неизвестные силы реакций этих шарниров разложим на
составляющие ХА, YA, Хв, Yg, предположив, что они направлены по положитель-
ному направлению осей координат.
Неизвестных четыре, а условий равновесия внешних сил для всей системы тел
можно составить только три. Поэтому рассмотрим равновесие других комбинаций
тел или отдельных тел системы.
Для определения удобно составить условие равновесия внешних сил для всей
системы тел в форме суммы моментов сил относительно точки А. Имеем
'£MA(Fk)=0-, XB'3—F'4—\M\—P 10=0,
к
238
или
^ 3 — 2 4 — 5—10 10 = 0; Уд = 37,7кН.
Другие условия равновесия внешних сил для всей системы тел не позволяют
определить неизвестную силу Уд, так как в уравнения равновесия войдет неизвестная
сила Уд.
Рассмотрим отдельно равновесие стержня ВС (рис. 56), освободив его от связей.
В шарнире С неизвестную силу реакции заменим ее составляющими Хс и Ус,
направленными параллельно осям координат в положительную сторону. В точке
К приложим силу натяжения отброшенной нити, которая по величине равна силе
тяжести груза Р и направлена по нити.
Для определения силы Уд составим условие равновесия для внешних сил, прило-
женных к стержню ВС, в форме суммы моментов сил относительно точки С. В это
условие не войдут неизвестные силы Хс и Ус, которые определять не требуется.
Имеем
2Хс(А)=0; -Уд-6+Уз'3-Р-4+^-2=0,
к
ИЛИ
113
Ys6+----3 — 10 4 + 2'2 = 0.
3
Отсюда находим Уд а* 12,8 кН. Знак плюс у этой силы указывает на правильность
предположения о ее направлении.
Для приобретения опыта силового анализа в системах тел рассмотрим допол-
нительно еще несколько вариантов систем тел и отдельных тел с приложенными
к ним внешними силами (рис. 57...60). При замене отброшенных тел силами реакций
учтено, что оси блоков D и Е являются цилиндрическими шарнирами и реакции от
них следует разлагать на составляющие, параллельные осям координат. Рассмат-
ривая силы, с которыми тела действуют друг на друга, следует учитывать, что силы
действия и противодействия равны по величине и противоположны по направлению.
Так, если стержень АЕ действует на блок в точке D силами XD и Уд, направленными
в положительные стороны осей координат (рис. 60), то блок будет действовать на
стержень АЕ (рис. 59) с силами, равными по величине, но направленными в проти-
воположные стороны.
При отбрасывании нити следует учитывать, что ее сила натяжения при рав-
новесии во всех точках при отсутствии трения в осях блоков одинакова по
величине и напралена по касательной к нити. Нить при этом должна испытывать
только растяжение. При равновесии отдельного блока силы натяжения нитей
239
Рис. 56
следует приложить в двух сечениях, в которых отбрасываются части нити. Силы
реакций в системе тел при их расчленении следует прикладывать только в тех местах,
где что-то отбрасывается.
Пример 3. Изогнутый под прямым углом стержень ABDC находится в равнове-
сии в горизонтальной плоскости. Стержень закреплен с помощью подпятника
А и подшипника В (рис. 61). На стержень под прямым углом насажен жестко диск
радиуса R=0,5 м. В плоскости диска по касательной действует сила S под углом
у = 30° к вертикали. В точке С стержня приложена внешняя сила Р=20 кН под углом
а=60° к вертикали и углом /?=60°, которые образуют вертикальные плоскости,
проходящие через точку С, одна из которых содержит силу Р, а другая — параллель-
на плоскости Axz.
Определить силы реакций подпятника и подшипника, а также силу S, необ-
ходимую для равновесия тел, если /! = /2 = 1 м, /3=0,5 м, 1$ = 1,5 м.
Решение. Рассмотрим равновесие стержня ABDC вместе с диском. На эту
систему тел действуют внешние силы Р, S, реакция в подпятнике с составляющими
ХА, Ya, Za, реакция в подшипнике с составляющими Xs и Уд, которые предполагаем
направленными в положительную сторону осей координат.
Составим шесть условий равновесия для внешних сил. Для проекций на оси
координат имеем:
£/^=0, ХА+Хв~Psinasin/J— Ssiny = O,
к
£pg=O, Ya+ Yb+Pcom-Scosy=0,
к
£р^=0, ZA—P sina cos/?=0.
к
(a)
Рис. 59
240
При определении проекций силы Р на оси координат
предварительно разлагаем ее на две перпендикулярные со-
ставляющие, одна из которых параллельна оси Ау и имеет
проекцию на эту ось Ру=Р cosa. Перпендикулярная состав-
ляющая Pxz расположится в плоскости, параллельной Axz,
и будет иметь проекцию на эту плоскость Pxz = Psina. Силу
как вектор проекцируем на оси координат Ах и Az. Имеем
Рис. 60
Рх = — Pxz sin/? = — Р sina sin/?;
Pz = Ра cosfi -= Р sina cos/?.
Для моментов сил относительно осей координат получаем
ХЛГх(^'))=0, -KB(Zi + Z2)+ScosyZ1-Pcosa(Z1+Z2 + Z3)=0, Л
к I
£ Му =0, Хв (1\ +12) — 5 siny l\~P sina cos/? Z4—Р sina sin/? (Zj + Z2 + Z3)=0, V
к f (6)
£ЛММе))=°> -S R+PcosalA=0. j
к J
При вычислении момента силы относительно оси координат, согласно определе-
нию, проецируем силу на плоскость, перпендикулярную оси, и затем вычисляем
момент проекции силы относительно точки пересечения оси с плоскостью. Силы,
параллельные оси или ее пересекающие, дают моменты относительно оси, равные
нулю. При опрделении моментов силы относительно осей координат раскладываем
ее на составляющие, параллельные осям координат, вычисляя на основании теоремы
Вариньона моменты каждой из составляющих относительно осей координат и скла-
дывая их алгебраически. Значения составляющих сил равны проекциям силы на оси
координат и их можно взять из уравнений проекций сил на оси координат (а).
Аналогично определяются моменты силы Р относительно осей координат. Для нее
Мх(Л)=0; Му(Ру)=0; Mz(Pz)=0; Mx(Pz)=0; Mz(Px)=0.
Подставляя в уравнения (а) и (б) заданные значения сил, расстояний и углов,
имеем
Рис. 61
241
J3 Уз 1 1 y/3
XA+XB-20 — —-S-=0; Ya+Yb+20--S — =0;
2 2 2 2 2
л/3 1 х/З 1
Za-2-— —=0; — YB 2+10 — 1-20 - 2,5 = 0;
2 2 2 2
1 J3 1 J3 J3 1
XB2—S -1-20 — -1,5-20— — '2,5=0, -5 0,5+20 - 1,5=0.
2 2 2 2 2 2
Решая эту систему уравнений, получим
5=30 кН, Уд = 2,6 кН, Уд=32,6 кН,
Уд = 15,4 кН, Уд=0,5 кН, Уд=8,5 кН.
Пример 4. Балка АВ с жестко прикрепленным стержнем CD расположены в го-
ризонтальной плоскости. Один конец балки А заделан в вертикальную стену, а дру-
гой В — нагружен вертикальной силой Р (рис. 62, а). К стержню приложена внешняя
сила F=4P, расположенная в вертикальной плоскости П, под углом а=60° и к гори-
зонтали KL. Плоскость П образует угол Д=30° с вертикальной плоскостью, прохо-
дящей через стержень CD. К балке приложена пара сил с моментом М-Pl, рас-
положенная в перпендикулярной к балке плоскости.
Определить реакцию заделки, если AC=CB=CD=l. Размеры указаны на рисун-
ке. Силами тяжести балки АВ и стержня CD пренебречь.
Решение. Рассматривая вместе равновесие балки АВ и стержня CD, освобожда-
ем балку от заделки в точке А. Реакция заделки состоит из силы RA(XA, Уд, Ид)
и пары сил с векторным моментом МА(МАх, МАу, MAz). Всего шесть неизвестных
величин (рис. 62, б).
Освобожденная от заделки балка со стержнем находятся в равновесии под
действием внешних сил Р, F, RA, пар сил с моментами М и МА. Для пространствен-
ной системы внешних сил можно составить шесть условий равновесия: три суммы
проекций внешних сил на координатные оси равны нулю и три суммы моментов сил
относительно осей координат тоже равны нулю. При проецировании сил на оси
координат пары сил вклада не дают, так как сумма проекций сил пары на любую ось
равна нулю.
Рис. 62
242
В уравнения моментов внешних сил относительно осей координат следует вклю-
чить проекции векторных моментов пар сил на эти оси. Для этого пару сил,
приложенную к балке АВ, представим ее векторным моментом, направленном
в рассматриваемом случае по оси Ау (см. рис. 62, б).
При проецировании силы F на оси координат предварительно раскладываем ее
на две перпендикулярные составляющие, одна из которых F, параллельна оси Az,
а другая — расположена в плоскости, параллельной Аху. После этого для
проекций силы F на оси координат имеем
Fxy=F cosa, •FI=.Fsina,
.Fx=.FX),cos/J=.F'cosacos/J,
Fy = ~ FxysmP=Fcosasinp.
При вычислении моментов сил относительно осей координат, таких как F,
вычисляем моменты каждой составляющей этой силы, величины которых рав-
ны проекциям силы F на оси координат. При этом MX(FX)=O; My(Fy)=0;
MZ(FZ)=O, так как эти силы Fx, Fy, Fz параллельны осям Ах, Ay, Az соответственно.
Кроме того, Afx(/y)=O; My(Fx) = 0, так как сила Fy пересекает ось Ах, а сила
Fx пересекает ось Ау.
Составляем шесть условий равновесия внешних сил. Имеем
х) J’cosacos/?=0,
у) У4 —Fcosasin/?=0,
z) ZA+Fsina—P=0,
mJ MAx—P2l+Fzl=0,
my) MAy+M—Fzl—0,
mJ MAz—Fxl—\Fy\ 1=0.
Подставляя в уравнения значения силы F, момента М и углов а, Р, получаем
1 у/З 11 у/З
Хл+4Р-- =0; YA-4P--=0;ZA+4P—-P=0;
2 2 2 2 2
у/з у/з 1 у/з I I
MAx-2Pl+4P—l=0;MAv+Pl-4P—l=0; МАх-4Р - —1-4Р - ~1=0.
2 2 2 2 2 2
Из этих уравнений находим
ХА=^ЗР- YA = P; ZA=(2y/3-l)P; Л^=2(1 +0)Pl-
МЛу = (2у/3-\)Р1- MAz = {y/3-\)P.
Задача считается решенной, если определены проекции неизвестных RA и МА на
оси координат.
243
ГЛАВА 3
ТРЕНИЕ
При движении или стремлении двигать одно тело по поверх-
ности другого из-за шероховатости поверхностей тел в касательной
плоскости поверхностей соприкосновения возникает сила трения
скольжения.
Если одно тело, например цилиндрический каток, катится или
стремится катиться по поверхности другого тела, то кроме силы
трения скольжения из-за деформации поверхностей тел дополни-
тельно возникает пара сил, препятствующая качению катка.
Возникновение силы трения, препятствующей скольжению, иногда
называют трением первого рода, а возникновение пары сил, препят-
ствующей качению,— трением второго рода.
§ 1. ТРЕНИЕ СКОЛЬЖЕНИЯ
Пусть на тело действует плоская система внешних сил и тело
находится в равновесии относительно инерциальной системы от-
счета, соприкасаясь с поверхностью другого тела, являющегося
связью для рассматриваемого тела. Если поверхности соприкаса-
ющихся тел абсолютно гладкие и тела абсолютно твердые, то
реакция поверхности связи направлена по нормали к общей каса-
тельной в точке соприкосновения и направление реакции в этом
случае не зависит от действующих на тело внешних сил. От внешних
приложенных сил зависит только величина силы реакции.
В действительности, абсолютно гладких поверхностей и абсолю-
тно твердых тел не бывает. Все поверхности тел в той или иной
степени шероховаты и все тела деформируемы. В связи с этим
и сила реакции шероховатой поверхности, даже при отсутствии
деформации, при равновесии тела зависит от внешних активных сил
не только по величине, но и по направлению (рис. 63).
Если силу реакции Л шероховатой поверхности разложить на
составляющие, одна из которых N направлена по общей нормали
к поверхности соприкосновения, а другая F находится в касательной
плоскости к этим поверхностям, то составляющая силы реакции
F является силой трения скольжения, а составляющая N —
нормальной реакцией.
В теоретической механике рассматривается только сухое трение
между поверхностями тел, при котором между ними нет смазыва-
ющего вещества. Для сухого трения следует различать трение
скольжения при покое или равновесии тела и трение скольже-
244
ния при движении одного тела по поверхности другого с некото-
рой относительной скоростью.
При покое сила трения зависит только от внешних активнх сил.
При выбранном направлении касательной в точке соприкосновения
поверхностей тел сила трения определяется зависимостью
к
Аналогично, при выбранном направлении нормали нормальная
реакция выражается через заданные внешние силы
-N=£F%.
к
В 1781 г. Кулон установил основные приближенные законы для
сухого трения скольжения. В дальнейшем законы Кулона многокра-
тно проверялись другими исследователями. Но эти законы прибли-
женно подтверждались в случаях, когда шероховатость была не
очень велика и поверхности тел не вдавливались друг в друга.
Законы Кулона можно установить с помощью прибора, схема
которого приведена на рис. 64.
На этом приборе можно изменять нормальное давление Р,
изменяя силу тяжести гири. Изменяя силу тяжести гирь Q, можно
изменять силу Q, которая стремится двигать рассматриваемое тело
вдоль поверхности другого тела, являющегося связью.
Очевидно, что если £2=0, то тело находится в равновесии и сила
трения F в этом случае равна нулю. Если силу Q увеличивать
(при этом тело не скользит по поверхности связи), то по условию
равновесия возникшая сила трения F уравновешивает силу тяжести
гирь Q. Нормальная реакция N равна нормальному давлению Р.
Увеличивая силу Q при одном и том же нормальном давлении,
можно достичь и такого положения, когда ничтожно малое даль-
нейшее увеличение силы Q выведет тело из равновесия, заставляя
его скользить по поверхности связи. Очевидно, будет достигнуто
245
предельное положение, при котором сила трения стала наиболь-
шей и не может уравновешивать силу Q при ее дальнейшем увели-
чении.
Изменяя силу нормального давления Р, можно исследовать, как
изменяется при этом предельная сила трения Можно также
исследовать влияние площади соприкосновения тел на предельную
силу трения, сохраняя при этом величину нормального давления,
а также влияние материала тел, характер обработки поверхностей
и других факторов. Такие опыты позволяют проверить законы
Кулона для сухого трения скольжения. Из-за влажности чисто
сухого трения не бывает.
Законы Кулона
1. Величина силы трения скольжения изменяется в пределах
0^F<Fmax.
Она не зависит от шероховатости внутри интервала изменения,
а зависит только от приложенных внешних активных сил F=^F£.
к
От шероховатости зависит интервал (0, Fm„) изменения силы тре-
ния. Сила трения в касательной плоскости соприкосновения тел
направлена против возможного или реального скольжения. Мак-
симальное значение силы трения достигается в момент выхода тела
из положения равновесия.
2. Максимальная сила трения скольжения при прочих равных
условиях не зависит от площади соприкосновения трущихся пове-
рхностей. Из этого закона, в частности, следует, что, чтобы сдви-
гуть кирпич, надо приложить одну и ту же силу независимо от
того, какой гранью он положен на поверхность — широкой или
узкой.
3. Максимальная сила трения скольжения пропорциональна нор-
мальной реакции (нормальному давлению), т. е.
F^=fN, (1)
где безразмерный коэффициент f называется коэффициентом тре-
ния скольжения. Коэффициент f не зависит от нормального давле-
ния.
4. Коэффициент трения скольжения зависит от материала и фи-
зического состояния трущихся поверхностей, т. е. от величины
и характера шероховатости, температуры, влажности и других
условий. Коэффициент трения скольжения в зависимости от раз-
личных условий устанавливается экспериментально. Так, коэф-
246
фициент трения для кирпича по бетону равен 0,76, для стали по
стали — 0,15, для материала из дуба по дубу — поперек воло-
кон — 0,62.
Опыты показывают, что при скольжении одного тела по поверх-
ности другого с некоторой относительной скоростью возникает
сила трения скольжения, равная максимальной, только при этом
коэффициент трения скольжения незначительно изменяется в зави-
симости от скорости скольжения. Для большинства материалов он
уменьшается с увеличением скорости скольжения, но для некоторых
материалов, наоборот, он увеличивается, как, например, при трении
кожи по металлу.
В приближенных технических расчетах обычно принимают, что
коэффициент трения скольжения не зависит от скорости скольже-
ния.
В отличие от сухого трения, трение при наличии смазывающего
слоя между поверхностями определяется распределением относи-
тельной скорости скольжения в этом слое. В этом случае трение
происходит не между поверхностями тел, а между слоями смазыва-
ющего вещества. Теория трения в смазывающем слое рассматрива-
ется с использованием уравнений гидродинамики.
Угол и конус трения
Многие задачи на равновесие тела на шероховатой поверхности
при наличии силы трения удобно решать геометрически, наглядно.
Для этой цели введем понятия угла и конуса трения.
Пусть твердое тело под действием внешних активных сил нахо-
дится на шероховатой поверхности в предельном состоянии равно-
весия, при котором сила трения достигла своего предельного значе-
ния для данной нормальной реакции (рис. 65). В этом случае полная
реакция шероховатой поверхности отклонена от нормали общей
касательной плоскости соприкасающихся тел на наибольший угол.
Этот наибольший угол ср между полной реакцией, построенной на
наибольшей силе трения при данной нормальной реакции, и направ-
лением нормальной реакции называется углом трения.
Угол трения ср зависит от коэффициента
тпения f Лейстнитепьно
следовательно,
Рис. 65
247
t&p=f,
(2)
т. e. тангенс угла трения равен коэффициенту трения.
Конусом трения называют конус, описанный полной реакцией,
построенной на максимальной силе трения вокруг направления
нормальной реакции. Его можно получить изменяя внешние актив-
ные силы так, чтобы тело на шероховатой поверхности находилось
в предельных положениях равновесия, стремясь выйти из равнове-
сия по всем возможным направлениям, лежащим в общей касатель-
ной плоскости соприкасающихся поверхностей.
Если коэффициент трения во всех направлениях одинаков, то
конус трения круговой. Если неодинаков, то конус трения не кру-
говой, например в случае, когда свойства поверхностей в различ-
ных направлениях разные вследствие расположения волокон для
древесины или вследствие обработки на строгальном станке для
металла.
Равновесие тела на шероховатой поверхности
При равновесии внешних сил, действующих на твердое тело,
находящееся в равновесии на шероховатой поверхности, возникает
дополнительно неизвестная сила реакции шероховатой поверхно-
сти — сила трения. В случае предельного равновесия сила трения
достигает своего максимального значения и по закону Кулона
выражается через нормальную реакцию. В общем случае сила тре-
ния при равновесии заключена между нулем и ее максимальным
значением. Поэтому соответствующие уравнения внешних сил, в ко-
торые входит сила трения после замены ее максимальной вели-
чиной, становятся неравенствами. После этого неизвестные находят
путем совместного решения уравнений и неравенств. Для всех неиз-
вестных или для их части получают решения в виде неравенств.
Некоторые задачи на равновесие тел с учетом трения удобно
решать геометрически, используя конус трения. Можно сформули-
ровать условие равновесия тела на шероховатой поверхности, при-
меняя конус трения. Если внешние активные силы, действующие на
тело, приводятся к равнодействующей R , то при равновесии тела
на шероховатой поверхности равнодействующая сила по теореме
о равновесии двух сил, приложенных к твердому телу, уравновеши-
вается полной реакцией R шероховатой поверхности (рис. 66). Пол-
ная реакция проходит через вершину конуса трения, а следователь-
но, через вершину конуса проходит и равнодействующая внешних
активных сил.
Очевидно, при изменении равнодействующей внешних активных
сил тело находится в равновесии до тех пор, пока составляющая ее
248
Q не будет превышать наибольшего значе-
ния силы трения Лп„. Предельным положе-
нием равновесия тела является случай, когда
сила Q равна силе Fm„. В этом случае равно-
действующая внешних активных сил R нап-
равлена по образующей конуса трения, так
как Р — составляющая равнодействующей
внешних активных сил по нормали — урав-
новешена нормальной реакцией N, если то-
лько внешние активные силы не отделяют
тело от шероховатой поверхности.
Условие равновесия тела на шероховатой поверхности с учетом
изложенного можно сформулировать так: для равновесия тела
на шероховатой поверхности необходимо и достаточно,
чтобы линия действия равнодействующей внешних ак-
тивных сил, действующих на тело, проходила внутри ко-
нуса трения через его вершину (рис. 67).
Тело нельзя вывести из равновесия любой по величине внешней
активной силой, если ее линия действия проходит внутри конуса
трения. Если линия действия равнодействующей внешних активных
сил не проходит внутри конуса трения или по его образующей, то
тело на шероховатой поверхности не может находиться в равнове-
сии (рис. 68) при любой сколь угодно малой величине равнодейст-
вующей силе.
Првмер 1. Тело, сила тяжести которого Р= 100 Н, удерживается в равновесии
внешней силой Т на шероховатой наклонной плоскости с углом наклона к горизонту
а=45° (рис. 69). Коэффициент трения скольжения между телом и плоскостью /=0,6.
Внешняя сила Т действует на тело под углом /?=15° к линии наибольшего ската.
Определить величину силы Т при равновесии тела на шероховатой наклонной
плоскости.
Решение. К находящемуся в равновесии телу приложены внешние силы Р, Т,
N и сила трения F. Возможны два случая предельного равновесия тела и соответст-
венно два предельных значения силы Т при двух направлениях силы трения по
249
наклонной плоскости вниз и вверх в зависимости от направления возможного
скольжения вверх и вниз по наклонной плоскости. Для составления уравнений
равновесия целесообразно ввестиf\=kf, где к= +1.
Составляя условие равновесия в форме суммы проекций внешних сил на коор-
динатные оси сразу для обоих предельных случаев, имеем
Г cos/? — F— Psina = 0, Т sin/? + iV—Р cosa = 0.
По закону Кулона
F=ftN=kfN.
Решая эти уравнения относительно Т, получаем
Т=Р (sina+kfcosa)/(cos/? -I- kfsin/?).
Отсюда при fc= +1
P (sina-I-/cosa)
Ti =—-------------«102 H,
cos/? +f sin/?
при k= — 1
cos/?—/sin/?
Таким образом, сила T при равновесии тела должна удовлетворять условию
35«Т<102 Н.
Пример 2. Однородный тяжелый стержень длиной / опирается концом А на
гладкую вертикальную стену, а другим концом В — на шероховатую вертикальную
стену (рис. 70). Расстояние между стенами Л</.
Определить коэффициент трения о стену / при котором возможно равновесие
стержня.
Решение. Рассмотрим случай, когда точка А стержня расположена выше
точки В. Равновесие стержня невозможно, если точка А стержня расположена ниже
точки В. На стержень действуют внешние силы: сила тяжести стержня Р, прило-
женная посредине стержня, нормальная реакция NA стены в точке А и реакция
шероховатой стены RB, которую разложим на нормальную реакцию NB и силу
трения FB.
Составим условия равновесия плоской системы внешних сил, действующих на
стержень, в основной форме
250
M=0; NA-NB~O;
к
Z^=0; F3—P=O;
к
XMB(fP)=O; P—NAlsma=O.
к 2
К этим условиям следует добавить неравенство для силы трения
FB^NB.
Из уравнений равновесия находим
Ph
na=n3=N; fb=p - n=na--------.
2/sina
Из геометрических условий задачи имеем
y/P-h2
sina =-----.
I
Для силы трения FB получили уравнение и неравенство:
fh
FB=P, FBH—==.
2jl2-h2
Исключив силу трения FB, после сокращения на Р, имеем
1</й/(2^2—А2)-
Условие для коэффициента трения f при равновесии стержня принимает форму
2yjl2-h2
h
§ 2. ТРЕНИЕ КАЧЕНИЯ
Если рассматриваемое тело имеет форму катка и под действием
приложенных внешних активных сил может катиться по поверх-
ности другого тела, то из-за деформации поверхностей этих тел
в месте соприкосновения могут возникнуть силы реакции, препятст-
вующие не только скольжению, но и качению. Примерами таких
катков являются различные колеса у электровозов, вагонов, авто-
машин, шарики и ролики у подшипников и т. п.
Пусть цилиндрический каток находится на горизонтальной плос-
кости под действием внешних активных сил. Соприкосновение катка
с плоскостью из-за деформации происходит не вдоль одной об-
разующей, как в случае абсолютно твердых тел, а по некоторой
251
площадке, если внешние активные силы приложены симметрично
относительно среднего сечения катка, т. е. вызывают одинаковые
деформации вдоль всей его образующей, то можно изучить только
одно среднее сечение катка. Этот случай и рассмотрен ниже.
Внешние активные силы, действующие на катки в форме колес
(рис. 71), обычно состоят после их приведения к центру колеса из
вертикальной силы Р, горизонтальной Q, параллельной общей ка-
сательной в точке А и пары сил с моментом Lo, стремящейся катить
колесо, которое в этом случае называется ведомо-ведущим. Если
Lo = 0, а 2^0, то колесо называется ведомым. Если L0^Q, a Q — 0,
то колесо называется ведущим. Ведомо-ведущими являются колеса
электровоза, идущего вторым в составе поезда.
Если внешние активные силы, действующие на колесо, привести
к точке А соприкосновения колеса с плоскостью в предположении,
что у них нет деформации, то в общем случае получим силу и пару
сил, стремящиеся заставить колесо скользить и катиться. Следует
различать чистое качение, когда точка А соприкосновения катка не
скользит по неподвижной плоскости, и качение со скольжением, при
котором наряду с вращением катка есть и скольжение, т. е. точка
А движется по плоскости. При чистом скольжении без качения
каток движется по плоскости, не имея вращения.
Соприкосновение катка, его среднего сечения, с неподвижной
плоскостью из-за деформации катка и плоскости происходит по
некоторой линии BD. По этой линии на каток действуют рас-
пределенные силы реакции со стороны плоскости (рис. 72). Если
привести распределенные силы к точке А, то в этой точке получим
главный вектор R распределенных сил с составляющими N (нор-
мальная реакция) и F (сила трения скольжения), а также пару сил
с моментом М. При симметричном распределении сил по линии BD
относительно точки А момент пары сил М равен нулю. В этом
случае должны отсутствовать внешние активные силы, стремящиеся
катить каток в каком-либо из двух направлений.
Приведем симметричные относительно среднего сечения цилин-
дрического катка внешние активные силы (/)е), F{\..., Дг)) к точке А.
Рис. 71
В этой точке получим главный вектор этих сил
Л(е) и пару сил, момент которой равен главному
моменту сил относительно точки ЬА (рис. 73).
При равновесии катка, т. е. при отсутствии его
качения и скольжения по плоскости, внешние ак-
тивные силы должны уравновешиваться силами
реакции плоскости, и, следовательно, имеем
-R=jt\ -M=La,
252
где
L,=2X(fP).
к к
Изменяем внешние активные силы, приложенные к катку, так,
чтобы увеличивался момент LA пары сил, стремящийся катить
каток. Пока каток находится в равновесии, увеличивается и равный
ему по величине, но противоположный по направлению момент
пары сил М, препятствующий качению катка по плоскости. На-
ибольшее значение достигается в момент начала качения катка
по плоскости.
Установлены экспериментально следующие приближенные зако-
ны трения качения.
1. Момент пары сил М, препятствующий качению, удовлетворя-
ет условию
Величина момента
к
и не зависит от деформации. От деформации зависит интервал (О,
Мта,) изменения момента М. Максимальное значение Л/тах, завися-
щее от деформации, достигается в момент начала качения катка.
2. Наибольшее значение момента пары сил, препятствующего
качению в довольно широких пределах, не зависит от радиуса катка.
3. Предельное значение момента пропорционально нор-
мальной реакции (нормальному давлению), т. е.
Mmax = S-N. (3)
253
Коэффициент пропорциональности <5 называется коэффициентом
трения качения. Из формулы (3) следует, что д имеет размерность
длины.
4. Коэффициент трения качения зависит от материала катка
и поверхности, а также от физических условий, таких, как тем-
пература, влажность и др.
Коэффициент трения качения можно считать независящим от
угловой скорости катка и его скорости скольжения в технических
расчетах. При качении вагонного колеса по стальному рельсу коэф-
фициент трения качения <5 % 0,5 мм.
Законы трения качения, как и законы трения скольжения, спра-
ведливы для не очень больших нормальных давлений и не слишком
легко деформирующихся материалов катка и поверхности.
Эти законы позволяют не рассматривать деформации катка
и плоскости, считая их абсолютно твердыми телами, соприкаса-
ющимися в одной точке, но в этой точке кроме нормальной реакции
и силы трения следует приложить еще пару сил, препятствующую
качению.
Коэффициент трения качения геометрически наглядно можно
представить равным длине d, которая вычисляется таким образом.
Сложим нормальную реакцию N с парой сил М, препятствующей
качению в момент, когда М=Мт„. Получим ту же силу N, но
сдвинутую параллельно своему первоначальному направлению на
расстояние
я=---=— — О.
N N
В предельном случае равновесия катка d=8. Эту длину следует
отложить в направлении, в котором внешние активные силы стре-
мятся катить каток (рис. 74).
Для того чтобы каток не скользил, внешние активные силы
должны удовлетворять условию
^F^=fN,
(4)
так как при этом сила трения по величине должна быть меньше
т. е.
1Л < Fmm =fN.
Для того чтобы каток не катился, должно выполняться условие
254
Для внешних активных сил оно принимает форму
к
^Mmul=3N.
(5)
Для примера рассмотрим случай ведомого колеса, к которому
кроме силы тяжести Р приложена в центре колеса горизонтальная
внешняя активная сила Q (рис. 75).
Если каток находится в равновесии, то из условий равновесия
плоской системы внешних сил, приложенных к катку, после его
освобождения от связи получаем
F=Q; N=p- rQ = M,
где за моментную точку взята точка А.
В случае отсутствия скольжения, согласно условию (4), с учетом
условий равновесия для сил получаем
Q = F^fP.
Аналогично, при отсутствии качения из условия для сил (5)
имеем
rQ=M^3P.
Таким образом, при отсутствии скольжения внешняя активная
сила Q должна удовлетворять условию Q^JP, а при отсутствии
качения эта же сила Q должна удовлетворять другому условию
Q^-P.
Г
255
При fP>Q^ P каток катится без скольжения (чистое качение).
г
В случае Q^fP кроме качения появляется еще и скольжение.
5
При ->f каток находится в равновесии, пока Q^fP- Если
г
д
P>Q^fP, он должен скользить без вращения (поступательное
г
5
движение). При Q^P кроме скольжения появится качение катка.
г
п S г
В том случае, если -=], каток будет находиться в равновесии,
г
Ъ Ь
пока Q^ P=fP. Если же Q^P=fP, то он будет катиться со
г г
скольжением.
.т _ „ <5 ,
На практике обычно встречается случаи, при котором и,
г
следовательно, для начала качения катка требуется значительно
меньшая сила Q, чем для начала его скольжения. Поэтому по мере
увеличения силы Q каток сначала начнет катиться, а при даль-
нейшем увеличении силы Q к качению добавится еще и скольжение.
С точки зрения затраты энергии выгодно заменять скольжение
качением. Этим объясняется преимущество шариковых и ролико-
вых подшипников по сравнению с подшипниками скольжения, если
даже в них трение и не уменьшается введением смазывающего
вещества.
Аналогично трению качения можно рассмотреть и трение верче-
ния, т. е. случая, когда внешние активные силы стремятся вращать
тело, например в форме шара, вокруг нормали к общей касательной
поверхности соприкосновения шара с плоскостью. В этом случае
возникает пара сил, препятствующая верчению, причем наиболь-
ший ее момент, возникающий в момент начала верчения, также
пропорционален величине нормальной реакции. Коэффициент про-
порциональности или коэффициент верчения обычно значительно
меньше коэффициента трения качения.
ГЛАВА 4
ЦЕНТР СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
И ЦЕНТР ТЯЖЕСТИ. ЦЕНТР МАСС
Для введения понятия центра тяжести тела требуется предвари-
тельно ввести понятие центра параллельных сил.
§ 1. ЦЕНТР СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
Для системы параллельных сил, действующих на твердое тело
и приводящихся к равнодействующей силе Л*, алгебраическое зна-
чение которой равно алгебраической сумме параллельных сил, мож-
но ввести понятие центра параллельных сил. Для этого предполо-
жим, что на твердое тело действует система параллельных сил (Рь
F2,..., Л), приводящаяся к равнодействующей силе, не равной нулю.
Силы системы приложены в точках А2,..., А„ твердого тела. При
переносе сил вдоль линий действие центр параллельных сил будет
изменяться. Поэтому силы системы в этом случае считаются со-
средоточенными в своих точках приложения.
Определим линию действия равнодействующей R* параллель-
ных сил для заданного направления этих сил. Затем через точки
приложения параллельных сил проведем взаимно параллельные
оси, перпендикулярные силам. Повернем параллельные силы вокруг
этих осей на общий угол в одном и том же направлении (рис. 76).
Получили новую систему параллельных сил (F{, F2,..., /^), равнодей-
ствующая этой системы параллельных сил R*’ равна по величине
равнодействующей силе R*, так как при повороте величины парал-
лельных сил не изменялись.
Линии действия двух равнодействующих сил R* и R.*' пересекут-
ся в точке С, которая и называется центром параллельных сил. Если
равнодействующую силу R* приложить в точке С вместо Сь то при
повороте заданных параллельных сил (F\, F2, ..., F„) на угол а она
повернется на тот же угол а вокруг оси, проходящей через точку
С и параллельной осям, вокруг которых поворачиваются заданные
параллельные силы. Оси поворота сил должны быть перпендикуля-
рны параллельным силам.
Центр параллельных сил не зависит от угла поворота и направ-
ления параллельных осей, вокруг которых поворачиваются парал-
лельные силы. Из определения центра параллельных сил следует,
что его положение зависит от точек приложения параллельных сил.
257
Поэтому параллельные силы следует считать приложенными в точ-
ках твердого тела.
Получим формулу для определения радиуса-вектора центра па-
раллельных сил, если известны параллельные силы и радиусы-век-
торы их точек приложения. Для этого выберем единичный вектор 7,
параллельный силам. Тогда каждая из параллельных сил
Fk=Fkl,
где Fk — алгебраическое значение силы. Оно положительно, если
сила Fk направлена в одну сторону с единичным вектором 7, и от-
рицательно, если направление силы противоположно направлению
единичного вектора. Для равнодействующей силы параллельных
сил соответственно имеем
R* = ^Fk=r^-
к к
Так как система сил по предположению приводится к равнодей-
ствующей, то к ней можно применить теорему Вариньона относи-
тельно точки О'.
Mo(R^=Y^o(Fk).
к
(1)
Для векторных моментов сил относительно точки О соответст-
венно имеем
Мо (Л*)=г с х Л* = г с х Fk; Мо (Fk) = rkxFk=rkx ~lFk,
k
где г с — радиус-вектор центра параллельных сил, проведенный из
точки О; гк — радиус-вектор точки приложения силы Fk, проведен-
ный из той же точки (рис. 77).
258
Если подставить эти значения векторных моментов сил в (1), то
после переноса всех слагаемых в левую часть равенства и вынесения
за скобку общего множителя 7 получим
(^Е^-Е^Л)х7=0. (2)
к к
Так как центр параллельных сил, а следовательно, и его радиус-
вектор не зависят от направления параллельных сил, характеризу-
емого единичным вектором, то условие (2) должно выполняться при
любом направлении этого вектора. Это возможно только при об-
ращении в нуль векторной величины, стоящей в скобках, т. е.
к к
ИЛИ
UkFk
к
По формуле (3) определяется радиус-вектор центра параллель-
ных сил, если заданы эти силы и их точки приложения. Так как
алгебраические значения параллельных сил входят и в числитель,
и в знаменатель (3), то гс не зависят от того, какое из двух
направлений параллельных сил считается положительным.
В проекциях на оси координат из (3) получаем
\ к / / к \ к /1 к
\ к / I к
(3')
По формулам (3') вычисляют координаты центра параллельных
сил, если известны алгебраические величины сил Fk и координаты
точек приложения сил хк, ук, zk.
Векторную величину
$0-^к
к
называют статическим моментом системы параллельных сил от-
носительно точки О. Алгебраические величины
259
&Oyz— У XkFfo §Oxz ^}\Ук&к1 Soxy У % kFfc
к к к
называют статическими моментами относительно координатных
плоскостей. Для плоской системы параллельных сил, расположен-
ных, например, в плоскости Оху, вводят понятия статических моме-
нтов относительно осей координат Ох и Оу по формулам
&Ox = ,y\ykFk, Spy ~ У У kF'<•
k k
Статические моменты параллельных сил относительно точки
и координатных плоскостей определяются по единому правилу:
алгебраические значения сил умножают на расстояния от точек
приложения сил до точки или плоскости и результаты суммируют.
Расстояния от точек приложения сил до координатных плоскостей
есть величины скалярные: это соответствующие координаты этих
точек. Расстояния от точки О до точек приложения параллельных
сил берутся векторные. Ими являются радиусы-векторы точек при-
ложения параллельных сил, проведенные из точки О.
§ 2. ЦЕНТР ТЯЖЕСТИ
Центр тяжести применяется при исследовании устойчивости по-
ложений равновесия тел и сплошных сред, находящихся под дейст-
вием сил тяжести и в некоторых других случаях.
Для введения понятия центра тяжести разобьем мысленно рас-
сматриваемое тело на достаточно большое число малых по сра-
внению с телом или элементарных его частиц произвольной формы.
Силу тяжести элементарной частицы с индексом к от действия
на нее Земли обозначим через ДР*, а силу тяжести всего тела —
через Р.
Силы тяжести элементарных частиц тела направлены прибли-
женно к центру Земли, т. е. образуют систему сходящихся сил. Если
размеры рассматриваемого тела малы по сравнению с размерами
земного шара, то силы тяжести элементарных частиц тела можно
считать системой параллельных сил, направленных в одну сторону.
Центром тяжести тела называют центр системы параллельных
сил, которую приближенно образуют силы тяжести его элементар-
ных частиц. Радиус-вектор центра тяжести тела гс вычисляем как
радиус-вектор центра параллельных сил (рис. 78) по формуле
7с=^7*АР*)/удр*=(у7*ДР*)/р, (4)
\* /I к \к //
260
где rk — радиус-вектор точки приложе-
ния силы тяжести элементарной части-
цы тела, принятой за точку; ДР* — си-
ла тяжести элементарной частицы; Р=
= £ДР* — сила тяжести всего тела.
к
Центр тяжести является точкой при-
ложения равнодействующей силы тя-
жести, если силы тяжести отдельных
его элементарных частиц считать си-
стемой параллельных сил.
Если в (4) перейти к пределу, увеличивая число элементарных
частиц до бесконечности, то после замены ДР* дифференциалом dP,
а сумму — интегралом получим
(4')
где г — радиус-вектор элементарной частицы тела, принятой за
точку.
В проекциях на оси координат из (4) и (4') получаем
где хс, ус, zc — координаты центра тяжести; х*, ук, гк — координаты
точки приложения силы тяжести ДР*.
§ 3. ЦЕНТР МАСС
Центр масс системы материальных точек является одним из
основных понятий динамики, широко используемым при рассмот-
рении движения твердых тел и других механических систем.
Определение центра масс и формулы для его вычисления
Используя понятие центра тяжести, можно ввести понятие цент-
ра масс тела. Силы тяжести элементарных частиц тела и всего тела
можно выразить через их массы Дт* и М и ускорение силы тяжести
g с помощью формул
261
APk=gAmk, P=gM.
Подставляя эти значения сил тяжести в (4) после сокращения на g,
которое принимаем одинаковым для всех частиц тела, имеем
rc=(^rkbmk\lM.
\ к //
По формуле (5) вычисляют радиус-вектор центра масс тела.
При определении центра тяжести предполагалось, что размеры
тел достаточно малы по сравнению с Землей. Нельзя, например,
определить и использовать центр тяжести океана, так как силы
тяжести его частей не будут параллельными, но понятие центра
масс океана, Земли, Солнечной системы, тел любых других раз-
меров можно ввести и использовать. Для этого надо определить
центр масс независимо от центра тяжести, чтобы таким путем
освободиться от ограничительных допущений. Для определения
центра масс достаточно использовать формулу (5) для радиуса-
вектора центра масс без учета ее получения из понятия центра
тяжести. Используя эту формулу, определим центр масс любой
системы материальных точек (механической системы) независимо
от допущений, которые были сделаны при ее выводе.
Если механическая система состоит из конечного числа точек
с массами mi, ?п2, ..., т„, радиусы-векторы которых, проведенные из
одной и той же точки О, —й, й, ..., г„ (рис. 79), то центром масс
механической системы называется геометрическая точка С, радиус-
вектор которой гс определяется выражением
rc= М, (5)
\ к //
где М=^тк — масса системы материальных точек.
к
Если механическая система представляет собой сплошное тело,
то его мысленно разбивают на элемен-
тарные частицы с бесконечно малыми
массами dm и с непрерывно изменяю-
щимся от частицы к частице радиусом-
вектором г. Сумма в пределе переходит
в интеграл. Формула (5) принимает вид
гс=
г dm I / М.
(5')
262
Центр масс является не материальной точкой, а геометричес-
кой. Он может не совпадать ни с одной материальной точкой
системы, как, например, в случае кольца. Центр масс системы
характеризует распределение масс в системе.
В проекциях на оси координат из (5) и (5') получаем формулы
для координат центра масс
где хс, ус, zc — координаты центра масс; х, у, z — координаты
точек частиц; хк, ук, zk — координаты точек механической системы.
Начало координат находится в точке О, из которой проводились
радиусы-векторы.
Векторная величина
S0=Yimljk
к
называется статическим моментом массы относительно точки О.
Скалярная величина
oyz ~ У, т^хк
к
называется статическим моментом массы относительно коорди-
натной плоскости Oyz. Величины
SOyz = 'Lmkxk, 5Ох2=^ткУк, SOxy=YmkZk
k к у
являются соответственно статическими моментами массы относи-
тельно координатных плоскостей Oyz, Oxz и Оху.
Радиус-вектор и координаты центра масс через статические мо-
менты выражаются в форме
Гс^ SolM-
xc=SOyzlM', ус=SoJM-, Zc = Soxy!M.
Для однородных сплошных тел определение центра масс сводит-
ся к вычислению центров масс объемов, площадей, длин линий.
Действительно, если тело имеет объем V, то для его массы и массы
263
частицы имеем M=pV, &n = pdV, где р — плотность тела, dK —
объем элементарной частицы. Для тела в форме тонкого однород-
ного листа (поверхности), имеющего поверхность 5 для М и d/n,
соответственно получаем M=ps'S; dm = ps6S, где ps — поверх-
ностная плотность, d5 — площадь элементарной частицы. Если
тело имеет форму тонкой проволоки, то M=ptl, dm — p^l, где
I — длина отрезка линии, pt — линейная плотность, d/ — длина
элементарного отрезка линии.
Подставляя значения М и d/и в (5') после сокращения на плот-
ности для однородных тел в рассмотренных случаях, для радиусов-
векторов центров масс объемов, площадей, длин линий соответст-
венно получим
Методы определения центров масс
Методы определения центров масс можно применять и для
определения центров тяжести. Имеется три основных метода опре-
деления центров масс: симметрии, разбиения на части и отрицатель-
ных масс.
1. Метод симметрии. При определении центров масс тел широко
используется симметрия этих тел. Докажем, что для однород-
ного тела, имеющего плоскость симметрии, центр масс
находится в плоскости симметрии. Для доказательства выбе-
рем начало координат в плоскости — плоскости симметрии тела
(рис. 80). Каждая частица массой Awi*, находясь по одну сторону
плоскости симметрии, имеет симметричную частицу такой же мас-
сы по другую сторону этой плоскости. Координаты Хк, Ук У симмет-
ричных частиц одинаковы при сделанном выборе осей координат,
а координаты по оси Oz отличаются только знаком. Для коор-
динаты центра масс zc имеем
\ к //
Разбивая сумму в числителе на две по симметричным частям
тела, получим
zc=( ^кЬтк-^кЬктк ] М=0,
\(1) (2) //
так как симметричные части тела 7 и 2 одинаковы.
264
Таким образом, центр масс располо-
жен в плоскости симметрии и для его опре-
деления достаточно вычислить только
две его координаты хс, Ус-
Аналогично доказывается, что для
однородного тела, имеющего ось
или центр симметрии, центр масс
находится соответственно на оси
симметрии или в центре симмет-
рии.
2. Метод разбиения на части (метод
группировки). Некоторые тела сложной
формы можно разбить на части, центры масс которых известны или
предварительно могут быть определены. В таких случаях центры
масс сложных тел вычисляются по общим формулам, определя-
ющим центр масс, только вместо элементарных частиц тела следует
брать его конечные части, на которое оно разбито, используя
вместо точек элементарных частиц, центры масс конечных частей
тела. Покажем это на примере плоской фигуры, изображенной на
рис. 81.
Плоскую фигуру сложной формы можно разбить на три простых
части, центры масс которых Сь С2, С3 известны. Они находятся на
пересечении диагоналей прямоугольников. Их радиусы-векторы й,
г2, г3 и площади S2, S3 известны. Общая площадь сложной
фигуры S—5i + S2 + 53.
Используя определение центра масс и производя группировку
слагаемых под знаком суммы по частям фигуры, на которые она
разбита, получим
^Sk
ГС = к= Ш£21£31
S S14-^2^"53
Радиусы-векторы центров масс частей тела определяем по фор-
мулам
г3=(^Гк&8к\ Si, r2 = (^rk&Sk\ S2, r3 = (^rkASk\ S3,
\(1) // \(2) // \(3) //
или
^r*AS*=r15i, '^rkASk=r2S2, ^г*Д5*=г353.
(1) (2) (3)
265
Рис. 81
Используя эти формулы для радиуса-вектора всей фигуры, по-
лучим
Й51+Г2>52+гз5з
гс=--------------•
>Si Ч-гУз + ^з
Эта формула имеет ту же структуру, что и формула, определяющая
радиус-вектор центра масс тела при разбиении его на элементарные
частицы, только в нее входят соответствующие величины для конеч-
ных частей тела.
3. Метод отрицательных масс. Видоизменением метода разби-
ения на части является метод отрицательных масс. Проиллюстриру-
ем его тоже на примере плоской фигуры (рис. 82). При определении
центра масс этой фигуры ее можно разбить на три части, но проще
поступить по-другому. Дополним нашу фигуру до прямоугольника
и примем, что этот прямоугольник с площадью S'] и центром масс
Ci полностью заполнен массой (имеет положительную площадь).
На той части фигуры, которую добавили, следует распределить
отрицательную массу (отрицательную площадь) той же плотности.
Площадь этой добавленной фигуры, по которой распределена от-
рицательная масса (отрицательная площадь), обозначим S2, а ее
центр масс — С2. Применяя метод разбиения на части, радиус-
вектор заданной фигуры определим по формуле
Г1Х1+Г2(— S?)
ГС =------------.
Si + (—5г)
(6)
В отличие от обычного метода разбиения на части в формуле (6)
массы и, следовательно, площади добавляемых частей входят со
знаком минус. Метод отрицательных масс особенно удобен при
определении центров масс тел, имеющих отверстия и полости раз-
личной формы.
266
Центры масс тел простейшей формы
При определении центров масс тел сложной формы методом
разбиения на части или методом отрицательных масс необходимо
уметь определять центры тяжести масс тел простейшей формы, на
которые разбивается тело сложной формы. Рассмотрим некоторые
из тел, для определения центров масс которых известны простые
способы их нахождения или вычисления по формулам.
1. Прямолинейный отрезок. Центр масс прямолинейного одно-
родного отрезка располагается на его средине, а неоднородного —
на самом отрезке и не может находиться вне прямолинейного
отрезка.
2. Площадь треугольника. Для опреления центра масс площади
треугольника разобьем его прямолинейными отрезками, параллель-
ными одной из его сторон AD, на полоски, которые в пределе
можно принять за прямолинейные отрезки (рис. 83). Центры масс
отрезков и, следовательно, полосок находятся посредине. Все они
расположатся на медиане С[В треугольника. В пределе центры масс
полосок непрерывно покроют медиану, но не равномерно, так как
площади полосок (длины отрезков) разные. В каждом центре масс
полоски следует считать сосредоточенной массу или площадь этой
полоски, пропорциональную длине полоски, если ширину полосок
выбирать одинаковой.
Затем разобьем треугольник на полоски отрезками прямых ли-
ний, параллельными другой стороне АВ треугольника. Центры их
масс покроют неравномерно медиану C2D. Центры масс неоднород-
ных прямолинейных отрезков С\В и C2D должны располагаться на
этих отрезках, а следовательно, в точке их пересечения С, явля-
ющейся точкой пересечения медиан треугольника. Эта точка делит
медианы в отношении 1:2, т. е. если длина медианы С}В равна I, то
CiC=h, СВ=2~1.
3 3
3. Дуга окружности. Дуга окружности АВ определяется радиусом
R и стягиваемым ею центральным углом 2а (рис. 84). Она имеет ось
симметрии, делящую угол пополам. Центр масс находится на оси
симметрии дуги, которую примем за ось Ох. Координату центра
масс дуги вычисляем по формуле
fxdZ
Хс——ХС — ОС.
В рассматриваемом случае
l=R2a, x=Rcosq>, dl=Rd<p.
267
Подставляя эти значения в выражение для хс, получаем
+ а +«
ОС=^- J 2?2cos<pdqj=—sin<p =—[sina—sin( —а)] = Л—.
—a —a
Таким образом,
____ „ sina
OC = R .
a
Для полуокружности a=. Приняв я=—, имеем
_ 1 2R 7 „ R
OC=R==R>.
я/2 п 11 2
4. Площадь кругового сектора. Центр масс площади кругового
сектора с радиусом R и центральным углом 2a находится на оси
симметрии, принимаемой за ось Ох (рис. 85). Разобьем сектор на
одинаковые элементарные треугольники. Центры масс треуголь-
ников в пределе при увеличении их числа до бесконечности равно-
2
мерно покроют дугу окружности радиусом r=-R. Используя фор-
мулу для центра масс дуги окружности, получим
__sina 2 _ sina
OC=r—=-R—,
a 3 a
ИЛИ
____2 _ sina
OC= R—.
3 a
268
Для площади полукруга а=~, sina = 1. При - - получаем
3 я/2
4Л-14д<Л
Зл~33 2
ОС=-Л—=
5. Объем пирамиды и конуса. Определим положение центра масс
объема конуса (рис. 86). Для простоты рассмотрим прямой конус,
у которого высота является осью симметрии и выражается длиной
отрезка, соединяющего вершину конуса О с центром масс основа-
ния С].
Выберем начало координат в вершине конуса, а ось Oz направим
по оси симметрии конуса. Тогда центр масс объема конуса рас-
положится на оси Oz. Разобьем конус плоскостями, перпендикуляр-
ными оси Oz, на элементарные тонкие диски толщиной dz и площа-
дью Sz. Все полученные сечения (диски) конуса подобны его осно-
ванию.
Координату центра масс объема конуса вычислим по формуле
Отношения линейных размеров сечений к соответствующим раз-
мерам основания конуса пропорциональны их расстояниям до вер-
шины конуса. Отношения площадей пропорциональны квадратам
расстояний. Приняв OCt = h, имеем
5
- S; = -2Z2.
h1 h2
Учитывая, что
О
Рис. 86
269
dV=—S2dz, V=~Sh,
з
имеем
Л $2
fz—z2dz J
; h2 3 , ,
0
или
OC=-h.
4
Таким образом, центр масс прямого конуса находится на рассто-
з, 1 ,
янии -п от вершины или -лот основания. Это справедливо для
4 4
объема любого конуса и любой пирамиды, как прямых, так и на-
клонных, т. е. центр масс объема конуса или пирамиды
1
находится на расстоянии - расстояния от центра масс
площади основания до вершины.
6. Объем полушара. Полушар имеет ось симметрии, которую
примем за ось Ох (рис. 87). Разобьем объем полушара на элемен-
тарные диски толщиной dx и радиусом у, который является коор-
динатой точки окружности, получившейся от пересечения полушара
с координатной плоскостью Оху. Уравнение этой окружности
х2+у2 = Л2,
где Л — радиус полушара. Для координаты центра масс объема
полушара имеем
fxdK
Хс=—хс=ОС,
где х — координата центра масс элементарного диска. Объем полу-
шара
V=1-nR3 = 2/3nR3.
2 3
Объем элементарного диска
V= nr2 dx = ny2 dx=it(R2—х2) dx,
270
так как радиус диска г=у. Выполняя инте-
грирование в пределах от х=0 до x=R, по-
лучим
ос=±
2/3 nR3
3
2R3
R2
2
Рис. 87
Таким образом, центр масс объема полу-
шара находится от его центра на расстоянии
OC=-R.
8
Это расстояние меньше половины радиуса полушара.
Пример. Определить координаты центра масс площади плоской фигуры, раз-
меры которой указаны на рис. 88, а.
Решение. Присоединим к заданной фигуре (рис. 88, 5) дополнительно полукруг
3 и разобьем полученную фигуру на прямоугольник 1 и треугольник 2. Получили три
фигуру, две из которых, прямоугольник 1 и треугольник 2, имеют положительные
площади и одна — полукруг 3, имеет отрицательную площадь. В выбранной системе
координат для координат центра масс заданной фигуры имеем
+S2X2— S3X3 5]У1 + >52У2— ^зУз
хе=---------------; ус=-------------’ (а)
S,1+S2-S3 5’1+52-5з
где X], уь х2, у2; х3, у3 — координаты центров масс отдельных фигур, Sb S2, S3 —
площади этих фигур.
Вычислим площади и координаты центров масс отдельных фигур, учитывая их
размеры. Имеем
1 1 „ л-225
51=40-60 = 2400 см2; 5, =~ 40 30 = 600 см2; 53=-лг2 =-®353,2 см2;
2 2 2
б)
а)
Рис. 88
271
1 1 40
xj = 30 см; yi = 20 см; х2 = 60ч— 30=70 см; у2= 40«— см;
/ 2 sina\ 60
*з=20 + 15=35 см; уз = [ h—-r-)=40——«33,6 см.
\ 3 a J Зл
Подставляя полученные значения в (а), получим
72000 + 42000-12362
хс=------------------«38,4 см;
2646,8
48000+12000-11857,5
ус=-------------------«18,2 см.
2646,8
ГЛАВА 5
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ ОТНОСИТЕЛЬНО
ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ОТСЧЕТА
§ 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
В ПРОЕКЦИЯХ НА ОСИ КООРДИНАТ
Из основных аксиом классической механики было получено
уравнение движения материальной точки относительно инерциаль-
ной системы отсчета в векторной форме
ma = Y,Fi, (1)
I
где т — масса точки, а — ускорение точки относительно инерди-
альной системы отсчета, — векторная сумма всех сил, прило-
женных к точке, включая и силы реакции связей. Уравнение (1)
справедливо для материальной точки, освобожденной от связей.
Связи, наложенные на материальную точку, должны быть отброше-
ны и заменены силами реакций связей.
Силы реакций связей при движении точки могут зависеть в об-
щем случае не только от вида наложенных на точку связей и прило-
женных к ней сил, но и от характера ее движения, например от ее
скорости при движении в воздухе или в какой-либо другой со-
противляющейся среде. В дальнейшем не будем делать различия
между свободной и несвободной материальными точками. Обозна-
чая равнодействующую всех заданных сил и сил реакций связей F,
из (1) получаем
nia = F. (2)
Из (2) можно получить дифференциальные уравнения движения
материальной точки в проекциях на различные оси координат.
Из кинематики точки известно, что ускорение а выражается
через радиус-вектор г (рис. 89):
a=d2r/d/2. (3)
Дифференциальное уравнение движения материальной точки
в векторной форме имеет вид
273
(4)
d2r -
m— = F.
dz2
Если спроецировать обе части уравнении (2) или (4) на коор-
динатные оси, то можно получить дифференциальные уравнения
движения точки в проекциях на эти оси.
В декартовой системе координат в общем случае
max=Fx; may=Fy; maz=Fz.
(5)
Проекции ускорения на координатные оси можно выразить
через вторые производные по времени от координат движущейся
точки:
dvx d2x dvj, d2y dv2 d2z
— =—S «» = —=—S az = —=—~-
dt dt2 dz dz2 dz dz2
(6)
Дифференциальные уравнения движения материальной точки
в прямоугольной декартовой системе координат имеют вид
т—=FX; т
dt2
(7)
Частные случаи. Если известно, что материальная точка движет-
ся в одной и той же плоскости, то, принимая ее за координатную
плоскость Оху, имеем
d2x d2_y
т—=FX; т —=FV.
dz2 dz2 y
(8)
Так как z=0, то, следовательно, F2=0.
В случае движения точки по прямой линии, направив по ней
координатную ось Ох, получим одно дифференциальное уравнение
прямолинейного движения точки
274
(9)
d2x
m—=FX.
dt2
Так как при движении y=z = O, то, следовательно, Fy=Fz = 0.
Для естественных подвижных осей координат (рис. 90), проеци-
руя обе части (2) на эти оси, получаем:
maT=FT; ma„=F„; mab=Fb,
(Ю)
где at, ап, аь и Fz, F„, Fb — соответственно проекции ускорения
и равнодействующей силы на касательную, главную нормаль и би-
нормаль к траектории в рассматриваемом положении движущейся
точки. Учитывая, что
ar=d2j/d/2; an=v1jp-, ab = 0,
(И)
где р — радиус кривизны траектории, дифференциальные уравне-
ния движения точки в проекциях на естественные оси имеют вид
d2s
/л —=F.;
dt2
v2
m-=F„; 0=Fb.
Р
(12)
Второе уравнение из (12) можно преобразовать:
ds v2 v di 1 d<p
р =—; —=v- = v----------— v—,
dtp p p dtdsjdtp dz
где dcp/dt — угловая скорость вращения касательной к траектории
движущейся точки и, следовательно, dtp — угол смежности между
касательными в двух бесконечно близких точках.
Дифференциальные уравнения (12) можно представить в виде
dv dtp
m —=Fz; mv~ = F„; 0=Fb.
dt dt
(12')
Эта форма дифференциальных уравнений движения точки удоб-
на при исследовании некоторых случаев полега снарядов и ракет,
особенно по траектории, лежащей в плоскости. Тогда <р будет углом
между касательной к траектории и любой осью, лежащей в плоско-
сти траектории.
275
Дифференциальные уравнения движения точки можно предста-
вить в любой другой системе координат. Для этого надо знать
выражения проекций ускорения на эти оси координат.
§ 2. ДВЕ ОСНОВНЫЕ ЗАДАЧИ ДИНАМИКИ точки
Используя дифференциальные уравнения движения материаль-
ной точки в той или другой системе координат, можно решать две
основные задачи динамики точки.
Первая задача. Зная массу точки и ее закон движения, можно
найти действующую на точку силу. Действительно, если, например,
заданы уравнения движения точки в декартовой системе координат
х=/1(0;;и=Л(0;*=/з(0,
то проекции силы на оси координат определяются из дифференци-
альных уравнений движения точки (1), т. е.
d2x d7i d2y d2/j d2z d2/3
Fx=m——m—; Fv=m —=m—; F,=m —= m—.
dt2 dr2 y dr2 dt2 dr2 dr2
Зная проекции силы на координатные оси, легко определить
модуль силы и косинусы углов силы с осями координат.
Пример 1. Точка М, имеющая массу т (рис. 91), движется в плоскости Оху так,
что уравнениями ее движения являются
x=acoskr, y=bsmkt,
где a, b, к — постоянные величины, t — время.
Определить силу, под действием которой точка совершает это движение.
Решение. Найдем уравнение траектории точки в координатной форме, ис-
ключая время из уравнений движения:
х2 У2 ,, . ,, ,
—I—=cos2 kl+sin2 kt = 1.
a2 b2
Траекторией точки является эллипс с полуосями а и Ь.
На основании дифференциальных уравнений движения точки (8)
d2x , d2y _
Fx=m—= — тк acosfcl; F«=m— — —mkbsmkt,
dt2 y dt2
или, если ввести координаты движущейся точки,
Fx = —тк2х; Fy = —mk2y;
F=y/F2+F2=mk2 у/х1+у2=тк2г,
276
где г — радиус-вектор движущейся точки. Косинусы углов силы Рс осями координат
- Л Р* х -л Ру У
cos(F, х) =—cos(F, Лу) =—= —
F г F г
Отсюда можно заключить, что сила F направлена противоположно радиусу-векто-
ру г.
Окончательно
F=—mk2r.
Пример 2. Точка М, имеющая массу т (рис. 92), движется из состояния покоя по
окружности радиусом R с постоянным касательным ускорением а,. Определить
действующую на точку силу в момент, соответствующий пройденному точкой по
траектории расстоянию s=Ry/l.
Решение. Применяя дифференциальные уравнения движения точки в проекциях
на естественные оси, имеем:
V1
Fz=maz; F„=m—; Fb=0.
R
Так как движение происходит с постоянным касательным ускорением ат без
начальной скорости, то
t2
v=aTt; s=az—,
2
тогда
Р-,=та^; F„—m---; F=y/F2+F2=maxy/l+a2l*'IR2.
R
Г t1 , Г
В момент времени, когда s=R->/2=ax—, azt2=2yJ2 и, следовательно, —- = 8,
J?=znat=^/1 + 8 = 3/иот.
Тангенс угла а между радиусом-вектором точки в рассматриваемый момент
времени и силой Р
277
F-c mazR R R ^/1
8 mat‘2 azt2 2y/2R 4
Из рассмотрения первой задачи динамики точки видно, что по
заданной массе точки и уравнениям ее движения сила полностью
определяется как по величине, так и по направлению.
Вторая задача. По заданной массе и действующей на точку силе
необходимо определить движение этой точки. Рассмотрим реше-
ние этой задачи в прямоугольной декартовой системе координат.
В общем случае сила F, а следовательно, и ее проекции на коор-
динатные оси могут зависеть от времени, координат движущейся
точки, ее скорости, ускорения и т. д. Для простоты ограничимся
случаем зависимости силы и ее проекций на оси координат от
времени, координат и скорости. Дифференциальные уравнения дви-
жения точки (0 имеют вид
d2x d2y
=Л(/; x, у, z; x, у, z); m-~-=Fy(t\ x, y, z\ x, y, z);
dt2 dr
d2z
m—=Fz (t; x, y, z\ x, y, z). (T)
dr
Для нахождения уравнений движения точки в декартовых
координатах необходимо проинтегрировать систему трех обык-
новенных дифференциальных уравнений второго порядка. Из
теории обыкновенных дифференциальных уравнений известно,
что решение одного дифференциального уравнения второго по-
рядка содержит две произвольные постоянные. Для случая си-
стемы трех обыкновенных дифференциальных уравнений второ-
го порядка имеется шесть произвольных постоянных: Сь С2, С3,
С4, С5, С6.
Каждая из координат х, у, z движущейся точки после интег-
рирования системы уравнений (7') зависит от времени t и всех шести
произвольных постоянных, т. е.
х=/1(/; С„ Сг, С3, С4, С;, Сб);Л
G, Сг, С3, С4, Cj, Q); > (13)
2=/з(?; С„ Сг, Сг, С4, С$, Се). _)
Если продифференцировать уравнения (13) по времени, то опре-
деляются проекции скорости точки на координатные оси:
278
vx—x=f[(t', Ci, Сг, Сз, Сд, C5, C6);
vy=y=f2(t', Ci, C2, C3, Сд, C5, C6);
vz~^=/з(С C, C2, C3, C4, C4, C6).
(14)
Таким образом, задание силы не определяет конкретного движе-
ния материальной точки, а выделяет целый класс движений, харак-
теризующийся шестью произвольными постоянными. Действу-
ющая сила определяет только ускорение движущейся точки, а ско-
рость и положение точки на траектории могут зависеть еще от
скорости, которая сообщена точке в начальный момент, и от на-
чального положения точки. Так, например, материальная точка,
двигаясь вблизи поверхности Земли под действием силы тяжести,
имеет ускорение g, если не учитывать сопротивление воздуха. Но
точка будет иметь различные скорости и положение в пространстве
в один и тот же момент времени и различную форму траектории
в зависимости от того, из какой точки пространства началось
движение и с какой по величине и направлению начальной скоро-
стью.
Для выделения конкретного вида движения материальной точки
надо дополнительно задать условия, позволяющие определить про-
извольные постоянные, которых в общем случае будет шесть. В ка-
честве таких условий обычно задают так называемые начальные
условия, т. е. в какой-то определенный момент времени, например
при /=0 (рис. 93), задают координаты движущейся точки х0, у0,
zQ и проекции ее скорости vOx, vOy, vOz:
х=х0; У=Уо', z=z0;
x=vqx, y=vOy; z=v01.
(15)
Используя эти начальные условия и формулы (13) и (14), получа-
ем шесть следующих уравнений для определения шести произволь-
ных постоянных:
xo=/i(0; Ci, С2, С3, С4, Cs, С6);
Уо=/2(О; Ci, С2, Сз, С4, С5, С6);
zo—fs№ Ci, С2, С3, С4, С5, С6);
«ох=//(О; Ci, С2, ..., С6);
(16)
Vty—Уг(О; Ci, С2, ..., Сб);
’,oz=^ (O> Ci, С2, ..., С6).
279
Если система уравнений (16) удов-
летворяет условиям разрешимости, то
из нее можно определить все шесть
произвольных постоянных.
Начальные условия в форме (15)
определяют единственное решение
системы дифференциальных уравнений
(7') при соблюдении соответствующих
условий теории дифференциальных
уравнений. Условия в других формах,
как, например, задание двух точек, че-
рез которые должна проходить траек-
тория движущейся точки, могут дать или несколько решений, удов-
летворяющих этих условиям, или не дать ни одного решения.
При движении точки в плоскости Оху имеется два дифференци-
альных уравнения движения. В решении этих уравнений входят
четыре произвольные постоянные. Постоянные определяются из
начальных условий
< = 0; х=х0; у=у0; x=vOx; y=vOy.
В случае прямолинейного движения точки имеется только одно
дифференциальное уравнение и в его решение входят две произволь-
ные постоянные. Для их определения необходимо задать начальные
условия:
/=0; х=х0; x=vOx.
Задача интегрирования системы дифференциальных уравнений
(7') при заданных начальных условиях в общем случае является
довольно трудной. Даже в простейшем случае прямолинейного
движения, когда имеется только одно дифференциальное уравнение,
его решение удается выразить точно в квадратурах лишь при опре-
деленной зависимости силы от времени t, координаты х и скорости
V. Поэтому важно определение таких соотношений из системы
уравнений (7'), которые являются следствиями этой системы и в ко-
торые входят производные от координат точки только первого
порядка. Такие соотношения, например, в виде f(t\ х, у, z; х, у, z)—С
называют первыми интегралами системы дифференциальных урав-
нений (7').
Если из системы (7') удается найти три независимых первых
интеграла, то задача интегрирования упрощается, так как вместо
интегрирования системы дифференциальных уравнений второго по-
рядка достаточно проинтегрировать систему трех дифференциаль-
ных уравнений первого порядка, которую представляют эти первые
интегралы.
280
Для прямолинейного движения точки первые и вторые интег-
ралы, т. е. само решение дифференциального уравнения (9) можно
получить в квадратурах (через интегралы от заданных функций)
в следующих трех частных случаях:
-=/i (0, - =Л (х), -=f3 (х),
т т т
где fi (t), f2 (х), /3 (х) — заданные функции.
Основой получения первых интегралов и самих решений служат
dv
две подстановки. Если обозначить x=v, то х=—. Эта подстановка
dt
dv
позволяет из (9) определить v=v(f). Другая подстановка х=« —
dx
. dx
получается из первой умножением и делением на ох, с учетом —=v.
dt
Использование второй подстановки дает возможность определить
v=v (х).
В случае задания f(t) из дифференциального уравнения после
dv
сокращения на массу получаем x=f(t) или —=f(t) и для i>(t)
dt
имеем
v(t)= fl(t)dt + C,
где С — постоянная интегрирования. Это и есть первый интеграл
дифференциального уравнения (9).
г» dx „
Заменяя v на — и интегрируя еще раз, найдем второй интеграл,
dt
т. е. само решение дифференциального уравнения x=x(t).
При задании /И*) =/2 Од дифференциальное уравнение принима-
dv
ет форму x=f2(y) и после применения подстановки х= получим
dt
и первый интеграл -----= t + C, где С — опять постоянная интегри-
J /2 W
рования. Отсюда определяется v=v(t), а затем и x=x(t). При при-
dv
менении подстановки х=«— после разделения переменных получим
dx
281
vdv I vdv
---= ax, или =x + C.
fi(y) J/2(4)
Из этого интеграла можно определить v=v(x), а затем и x=x(t).
В третьем случае дифференциальное уравнение принимает
dv
форму x=f3(x). Здесь можно применять только подстановку x=v—
dx
для получения первого интеграла. После разделения переменных
и интегрирования он выразится в форме
V2 Г
— = /3(x)dx+C.
Из этого первого интеграла можно в неявной форме получить само
решение, если использовать v = v(x), разделить переменные в пер-
вом интеграле и выполнить интегрирование. Получаем
f dx
I —=== = t + Ci,
J V2f/2(x)dx+C
где С и Ci — постоянные интегрирования.
В дальнейшем будет рассмотрен способ получения первых интег-
ралов дифференциальных уравнений движения точки из так называ-
емых общих теорем динамики в некоторых частных случаях движе-
ния точки.
Для выяснения особенностей решения второй основной задачи
динамики, имеющей прикладное значение, рассмотрим ее решение
для случая как прямолинейного, так и криволинейного движения
материальной точки.
§ 3. ОСНОВНЫЕ ВИДЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ точки
Дифференциальное уравнение прямолинейного движения точки
вдоль оси Ох, согласно (9), имеет вид
d2x
/и —=Fx(t; х, v),
dt2
(9')
если рассматривается случай зависимости силы только от времени,
координаты и скорости.
Начальные условия можно задать в форме / = 0, х=х0, x—vx=v0.
Наиболее важные случаи прямолинейного движения материаль-
ной точки получаются тогда, когда сила Fx постоянна или она
282
зависит только от времени, или от координаты х, или от скорости
V. Если сила постоянна, имеем случай равнопеременного движения,
т. е. движения с постоянным ускорением. От времени сила зависит
обычно, когда ее изменяют путем регулирования, например регули-
руют силу тяги самолета изменением режима работы его двига-
телей.
Силу, зависящую от координаты х, могут создать сжатая или
растянутая пружина и другие упругие тела при их деформации.
Силы, зависящие от скорости движения,— это прежде всего силы
сопротивления, когда материальная точка движется в какой-либо
среде, например в воздухе, в воде и т. д.
Отметим, что в перечисленных случаях интегрирование диф-
ференциального уравнения (9') выполняется наиболее просто и его
можно довести до конца в квадратурах. В более общем случае, если
сила одновременно зависит от времени t, координаты х и скорости
v, в большинстве случаев дифференциальное уравнение можно про-
интегрировать лишь приближенно.
Рассмотрим примеры на составление и интегрирование диф-
ференциального уравнения прямолинейного движения точки. Эти
примеры позволяют выявить некоторые особенности решения та-
ких задач. Ниже приведены примеры, когда сила зависит только от
времени, или от скорости, или от координаты.
Пример 1. Точка массой т (рис. 94) падает вертикально вниз без начальной
скорости под действием силы тяжести, испытывая силу сопротивления воздуха R,
величина которой пропорциональна квадрату скорости и массе точки, т. е. R=kmv2,
где к — постоянная положительная величина.
Найти уравнение движения точки.
Решение. Направим ось Ох по вертикали вниз, выбрав за начало координат
начальное положение точки. В этот момент примем t = 0.
В произвольный момент времени прикладываем к точке действующие на нее
силы Р и Ни составляем дифференциальное уравнение ее движения. Имеем
d2x
т---=mg—kmv2.
dt2
Скорость в этом случае можно определить в зависимости
d2x
от времени или координаты, используя подстановки — =
dr2
dv dv
=—= v—.
dt dx
Используя первую подстановку, получаем дифференци-
альное уравнение в следующем виде:
Разделяя переменные и выполняя интегрирование, имеем
О
I
I
пр
X
Рис. 94
283
f dv
---=k
Jg 2
-~ — V
°k
0
Для того чтобы не искать дополнительно постоянную интегрирования, интег-
ралы возьмем определенные, сохраняя переменным верхний предел для последующе-
го интегрирования, а для нижних пределов используем условие v=0 при 1=0.
Выполняя интегрирование и подставляя пределы, получаем:
d(Vg/fc-«) ! d(Vg/fc+v)-
s/gjk-v s/gjk+v -
или
hX—-—In 1 = — 'L-jgkt.
s/glk+v
Потенцируя и решая относительно v, имеем
v—y/gfk------~~ = Vgjk—-------— = Vg/k th (Vgk l). (a)
-ij&t Vgkt -J&t
1—e e +e
Переходя в (а) к пределу при t, стремящемся к бесконечности, получаем
____ ___________________
«хр=«/= оо = Vg/fc lim-----zr =y/glk-
Для достижения предельной скорости требуется бесконечно большое время.
Более подробные расчеты показывают, что скорость, близкая к предельной, устанав-
ливается довольно быстро.
Отметим, что для свободного падения в воздухе парашютиста вблизи Земли без
раскрытия парашюта предельная скорость равна 50...60 м/с; для авиационной бомбы
она составляет 200...300 м/с.
Для нахождения закона движения точки подставляем в (а) вместо скорости v ее
dx
значение —. Тогда
dr
^=Vg^th(VgL).
dr
Интегрируя это уравнение после разделения переменных, имеем:
284
о
или
= y/g/k' y/ll(kg) In ch (Jgk t) =-Inch (Jgk i).
к
о
Пример 2. Материальная точка массой т (рис. 95), брошенная вертикально вверх
с поверхности Земли со скоростью »о, движется под действием силы тяготения,
изменяющейся по закону Ньютона.
Определить зависимость скорости точки от ее расстояния до центра Земли,
пренебрегая сопротивлением воздуха.
Решение. Направив ось Ох по прямолинейной траектории точки, выберем
начало координат в центре Земли. Тогда по закону Ньютона для силы тяготения
к
имеем F=—.
х2
Постоянный коэффициент к можно выразить через другие величины, в частности
k — GMm, где М — масса Земли, G — универсальная постоянная тяготения. Для
рассматриваемого случая удобнее к выразить из условия, что на поверхности Земли
сила тяготения F равна силе тяжести P=mg. Приравнивая F и Р при x=R, получим
к
mg=—, k=mgR2, где g — ускорение силы тяжести у поверхности Земли; R — радиус
R2
Земли. Подставляя полученное значение в выражение для силы тяготения, имеем
Составляем дифференциальное уравнение движения точки. Получаем
d2x mgR2
т—- =FX\ тх=-----—
Знак минус в правой части этого уравнения определяется знаком
проекции силы F на ось Ох. Проекция силы отрицательна для
положительного значения х и левую часть дифференциального
уравнения для таких х принимаем положительной.
Исключая время из дифференциального уравнения подста-
dv
новкой *~v ПОЛуЧавМ
d« gR2
dx
Разделяя переменные и беря интегралы с учетом, что v=«o при
x=R, имеем
Рис. 95
285
v dv = — gR1
или
Отсюда находим
Для определения наибольшего расстояния хтах в зависимости от скорости
«о следует положить v=0. Тогда из последней формулы получим
*max = 2gfl2/(2g.R-v2).
Расстояние хтах увеличивается с ростом «о, и при vj=^2gR оно становится равным
бесконечности. Это означает, что точка, брошенная с Земли со скоростью vj = ^/2gR,
не возвратится на Землю. Приняв g=9,8 м/с2, R — 6,4- 10е м, получим
v^ = y/2gRas 11,2 км/с.
Скорость v* называют второй космической скоростью. Это наименьшая ско-
рость, которую должен иметь космический корабль для полета к другим планетам
Солнечной системы.
Наименьшая скорость космического корабля, при которой он становится спутни-
ком Земли, как будет показано ниже, приблизительно равна 8 км/с.
Пример 3. Материальная точка массой т (рис. 96) движется прямолинейно под
действием силы притяжения F к неподвижной точке О. Эта сила пропорциональна
массе точки и обратно пропорциональна кубу расстояний между точками. Коэф-
фициент пропорциональности равен единице. В начальный момент t=0 начальное
расстояние точки х=2 м и начальная скорость vq = 0,5 м/с.
Определить уравнение движения точки.
Решение. Выбирая за начало координат точку О для величины силы, имеем
т
F=~. При положительном х левую часть дифференциального уравнения следует
тоже считать положительной, а проекцию силы на ось Ох — отрицательной. Имеем
dv
Используя подстановку x=v—, получим следующее дифференциальное уравнение
dx
dv 1
V— — —-.
dx х3
286
Разделяя переменные и интегрируя, имеем:
О
F t
или
Рис. 96
__*L—1
2 2 2Х2 2х2
Подставляя начальные значения величин, получаем:
1 dx dx 1
»=-; v=—; —=-.
х dt dr х
dx
Заменяя v на — и после разделения переменных интегрируя это уравнение, имеем
dt
t
Закон движения точки выразится в форме
§ 4. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
В случае криволинейного движения по плоскости имеется два
дифференциальных уравнения движения точки в декартовой системе
координат, а в общем случае движения в пространстве — система
трех дифференциальных уравнений. Дифференциальные уравнения
криволинейного движения точки интегрируются сравнительно про-
сто, если каждое из этих уравнений интегрируется независимо от
других уравнений и при этом возможен один из трех рассмотренных
случаев зависимости проекции равнодействующей силы от времени,
координаты и скорости.
Пример 1. Материальная точка массой т (рис . 97) движется по плоскости под
действием силы притяжения F к неподвижной точке О. Сила притяжения (сила
упругости) изменяется по закону F=—mk2r, где г — радиус-вектор движущейся
точки, проведенный из точки О; к — постоянный коэффициент. В начальный мо-
мент t=0, х=/, у=0, vx=0, Vy=vo, если начало координат выбрано в неподвижной
точке О.
Определить уравнения движения точки и уравнение ее траектории в координат-
ной форме.
Решение. Пусть в момент t движущаяся точка имеет положительные коор-
динаты х и у. Этого всегда можно достичь выбором направления координатных
287
Рис. 97
осей. Левые части дифференциальных уравнений
тогда следует считать положительными, а проек-
ции сил на оси координат взять с теми знаками,
которые получаются при заданном направлении
сил. Имеем
d2x d2y
т—=Рх; m—=Fy,
dt2 dt2
Fx = —mk2rcos<p; Fy = —mk2rwa<p.
Учитывая, что rcos<p=x, гяпф=у, диффере-
нциальные уравнения принимают форму:
х= — к2х; у= —к2у.
Система уравнений распалась на два независимых уравнения. Для интегрирова-
dvx d«j,
ния этих уравнений применим подстановки x=vx—, y=vy— или интегрируем их
dx dy
как линейные дифференциальные уравнения с постоянными коэффициентами. Ис-
пользуя подстановки, имеем
vxd«x= —к2 I xdx,
или
v2 к2
^=-~(12-х2).
2 2
Аналогично для vy получаем
Учитывая, что
dx dy
—’ Vy =
dt y
dt'
имеем
dx ,-------- d v ,----------
— = fcv//2-x2;—=ky/v2lk2-y2.
dt dt
Эти дифференциальные уравнения интегрируем путем разделения переменных.
Получаем
=к dt.
о
о
о
288
Выполняя интегрирование и подставляя пределы, имеем
х у
arcsin- — arc sin 1 =kt\ arc sin-arcsinO=fcZ,
/ v^k
или
X / у
-=sin kt—- |=cosjtz;--------=sinkf,
Z \ 2/ vo/k
и уравнения движения точки принимают вид
x=lcoskt; у = (уо/к) sin kt.
Возводя в квадрат cos kt и sin kt и складывая, получаем уравнение траектории
точки в координатной форме:
X2 у2
- +-----;=1-
z2 Ык)2
«о
Траекторией точки оказался эллипс с полуосями Z и —.
Пример 2. Материальная точка массой т (рис. 98) брошена с поверхности Земли
в вертикальной плоскости со скоростью «о под углом а к горизонту. Определить
уравнения движения точки, если сила сопротивления воздуха R=kmv, где к — поло-
жительный постоянный коэффициент пропорциональности, v — скорость точки.
Решение. Задачу удобно решать в прямоугольной декартовой системе коор-
динат, начало которой находится в точке бросания, а ось Oz направлена по вер-
тикали вверх. Оси Ох и Оу при этом расположатся в горизонтальной плоскости. Для
определенности предположим, что начальная скорость «о располагается в плоскости
Oyz. Для составления дифференциальных уравнений движения точки направим оси
Ох и Оу так, чтобы в момент времени t координаты точки х, у, z и х, у, z были
положительны.
На точку действуют сила тяжести Р, направленная по вертикали вниз, и сила
сопротивления R, направление которой противоположно направлению скорости v.
Равнодействующая сила F=P+R, причем R= —kmv.
Jiflst проекций равнодействующей силы на оси координат имеем
Fx= —kmvx= —ктх\
Fy= —kmvy= —кту;
Fz= —mg—kmvI=—mg — kmi.
Знак минус у проекций силы сопротивления указывает на то, что их знаки
противоположны знакам проекций скорости, принятым положительными.
Дифференциальные уравнения движения точки имеют форму
тх= — ктх; ту = — кту, mz= — mg—kmz. (а)
При сделанном выборе осей координат имеем следующие начальные условия
z=0, х=0, у=0, »х=х=0, v>=y=vocosot, vz=z=»osina. (б)
289
Система уравнений распалась на независимые отдельные уравнения. После
сокращения на т, имеем
dvx dvy dvz / к \
—=-ь»—=-ь,;—=-g i+-»zl (в)
dr dr dr \ g J
Разделяя переменные и интегрируя каждое уравнение по отдельности, получаем:
/ к \
lni>x= —fcr+lnCi; In 15,= — fcr+ln Су, In I 1H—v2 ]=—fer+lnCj.
\ g /
После потенцирования имеем
—kt —kt —kt
vx=*C\e ',Vy=Cie ;vz= — C^e . (r)
Подставляя в (г) начальные значения для vx, vy, vz, получаем уравнения для
определения произвольных постоянных Clt С2, Су.
g
0 = Cf, vocosa = C2; uosina= — ~ + C2.
к
Из этих уравнений имеем:
g
Ci=0; C2=vocosa; Сз=+i^sina.
к
После подстановки значений постоянных в (г) и замены проекций скорости на
оси координат производными по времени от координат получаем
dx dy -kt dz (g \ -kt g
—=0;—=i>ocosae ;—=l-+vosina)e —. (r)
dr dr dr ) к
Разделяя в (г') переменные и интегрируя каждое из уравнений первого порядка,
имеем
«оcosa 1/g . \ -kt g
x=C4;y=-------e + Cy,z=— l-+vosinale —-r+Cj.
к k\k ) к
(Д)
Подставляя в (д) начальные условия для х, у, z, получаем уравнения для
определения постоянных интегрирования С4, С5, С«:
290
«оcosa 1 /g \
0 = C4; 0 -------1-С5; 0 = —— I ~ 4-vq sina j 4- C^.
к k\k /
Из этих уравнений имеем
«о cosa (g/fc)+vosina
С4=0; С5=—-—; С6=-------------.
к к
Подставляя значения постоянных в (д), получаем искомые уравнения движения
точки
«О cosa
х=0; у =--------(1-е );
к
(g/fc)+vosina _kt g
z —-------------(1— e )—t.
к к
Проведем некоторые исследования движения точки. Из уравнений движения (е)
путем предельного перехода при к, стремящемся к нулю, получим уравнения движе-
ния точки под действием только одной силы тяжести. Обозначая координаты точки
в этом случае xj, yi, z\, раскрывая неопределенности по правилу Лопиталя, для
У1 получаем
У]=«о cosa lim---------=v0 cosa lim-----------=
к-,о к Ак№
-kt
te
=v0 cosa lim----=v0t cosa.
it-o 1
Прежде чем переходить к пределу z, преобразуем его к виду
—kt —kt
g(l— е —kt) vosina(l— e )
z=------------------1--------------.
te к
После этого
(d2/di2) (1 — e k‘—kt) 1 — e
zi =g lim--------------------1-vo sina lim-------
^0 (d2fc2/dfc2) к
=g lim---------F vo sina lim---------hvoz sina.
. „ 2 . n 1 2
k-*Q k-»0
Получены следующие уравнения движения точки под действием одной силы
тяжести
г2
*1=0; yi=vo/cosa; z^vo/sina—g—.
291
Исключением из этих уравнений времени t получаем уравнение траектории точки
в координатной форме
Траекторией точки является парабола, расположенная в плоскости xj=0.
Если в (ж) принять zj = 0, то окажется горизонтальной дальностью I, которая
определяется по формуле
Vq sin 2а
/=2ugCosasina/g=----. (з)
g
Из (з) следует, что наибольшая горизонтальная дальность получается при угле
бросания a=45°:
4пах ~volg‘
При других углах бросания а одну и ту же дальность I, как это следует из (з), можно
получить,бросая точку под углом а к горизонту или под тем же углом а к вертикали
с той же скоростью vq.
§ 5. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
Как уже известно, для несвободной материальной точки диф-
ференциальные уравнения движения имеют такой же вид, как и для
свободной точки, только к действующим на точку силам добавляют
все силы реакций связей. Естественно, что в этом случае движения
точки могут возникнуть соответствующие особенности при решени-
ях первой и второй основных задач динамики, так как силы реакций
связей заранее не известны и их необходимо дополнительно опреде-
лить по заданным связям, наложенным на движущуюся материаль-
ную точку.
При решении первой основной задачи динамики действующая
на точку равнодействующая сила определяется по заданному дви-
жению точки из диффефренциальных уравнений ее движения. Затем
из этой равнодействующей силы по заданным связям выделяют
силу реакции связей. Таким образом получается задача о разложе-
нии известной силы на ее составляющие.
Полную силу реакции точки при ее движении обычно разлагают
на две составляющие. Составляющая силы реакции связей, урав-
новешивающая заданные силы, приложенные к точке, называется
статической реакцией. Другая составляющая полной силы реакции,
зависящая только от движения точки под действием заданных сил,
называется динамической реакцией. Она уравновешивает силу инер-
ции движущейся точки.
При решении второй основной задачи динамики, когда по
заданным силам и начальным условиям требуется определить дви-
жение несвободной точки, часть сил, действующих на точку, а имен-
но все силы реакций связей, заранее не известны и их необходимо
292
определить по заданным связям в процессе решения задачи. Таким
образом, вторую основную задачу динамики для несвободной ма-
териальной точки можно сформулировать так: по заданным силам,
начальным условиям и связям, наложенным на точку, определить
движение этой точки и силы реакции связей.
Рассмотрим решение этой задачи для движения точки по повер-
хности и кривой линии. Дифференциальные уравнения при этом
выражают в той системе координат, которая наиболее соответству-
ет конкретной задаче. Разберем постановку и решение задачи в пря-
моугольной декартовой системе координат.
Движение точки по поверхности
Пусть гладкая неподвижная поверхность, по которой движется
точка массой т под действием данной силы F, задана уравнением
f(x, у, z)=0, где х, у, z — координаты движущейся точки. Так как
рассматриваемая поверхность является гладкой, то сила трения
отсутствует. Обозначив N неизвестную нормальную силу реакции
поверхности, получим следующие дифференциальные уравнения
движения точки по поверхности:
d2jc d2y d2z
m—=Fx+Nx; m-—=Fy+Ny; m--=Fz + Nz. (17)
dt2 dt2 dt2
Из дифференциальной геометрии известно, что косинусы углов
внешней нормали к поверхности с осями координат, а следователь-
но, и силы N, параллельной главной нормали, можно вычислить по
формулам
cos(y, Лх)=- —; cos(y, Лу)=—cos(y,Az)=——,
Д/йх ^foy tyfBz
где
Таким образом,
Ух=Усо$(У,Л х)=——;
Д/Эх
У,=Усо8(У,лу)=--;
у " Д/5/
Nz=У cos (У, Л z)=
293
Обозначив k=N[bf и подставив значения Nx, Ny, Nz из (18) в (17),
получим:
d2* r , , 8f А2У г , 8f d2z 8f
m— = FX + A—; m —=Tv + 2—; m—=Fz+a—.
dr2 dx At2 y 8y dt2 8z
Эти дифференциальные уравнения называют дифференциальны-
ми уравнениями Лагранжа первого рода для движения несвободной
материальной точки. Из этих трех дифференциальных уравнений
и одного конечного уравнения — уравнения поверхности f(x, у, z)=
= 0 — можно найти четыре неизвестных — координаты точки х, у,
z и неопределенный множитель Лагранжа 2 как функции времени
и произвольных постоянных интегрирования. Произвольные посто-
янные определяют из начальных условий.
По найденному неопределенному множителю Лагранжа 2 легко
определить силу реакции поверхности N=M±f, которая в общем
случае зависит от времени.
Если поверхность не гладкая, то кроме нормальной силы реак-
ции возникает предельная сила трения F^, проекции которой надо
добавить в правые части дифференциальных уравнений движения
точки. Это добавление усложнит решение задачи, но задача и в этом
случае принципиально разрешима, так как наряду с добавлением
неизвестной силы добавляется и конечное уравнение, связывающее
эту силу с нормальной реакцией:
Fn^kN,
где к — коэффициент трения.
Так как сила трения скольжения всегда направлена против ско-
рости, то проекции этой силы на оси координат можно представить
в виде
^х = - ^max COS (V, Лх)= -Fmax-= -f^ax
» y/x2+^+Z2
аналогично
f ~A z _ н
max— * max max— ‘max .-•
y/x2+y2+z2 Jf+f+Z2
Учет силы трения значительно усложняет задачу интегрирова-
ния дифференциальных уравнений движения несвободной мате-
риальной точки.
294
Движение точки по гладкой кривой линии
Кривую неподвижную линию в пространстве можно рассматри-
вать как линию пересечения двух поверхностей:_/i(x, у, z)=0 иf2(x,
у, z)=0. Эти поверхности создадут для движущейся точки две
нормальные реакции и N2, и поэтому полная реакция кривой
линии N=Ni+N2.
Дифференциальные уравнения Лагранжа первого рода движения
точки по кривой линии имеют вид
где соответственно
Присоединяя к дифференциальным уравнениям Лагранжа перво-
го рода (19) два конечных уравнения поверхностей fi(x, у, z)=0
и f2(x, у, z) = 0, получаем пять уравнений для определения пяти
величин х, у, z, Л1г Л2 как функций времени. Таким образом, и в этом
случае поставленная задача может быть разрешена. Она принципи-
ально разрешима и при учете силы трения.
Если при рассмотрении этой задачи за оси координат взять
естественные оси, то дифференциальные уравнения движения точки
по гладкой кривой примут вид
d2j v2
m —=Ft; m-=F„+Nn; 0=Fb+Nb,
At2 n
(20)
dr2 p
где Fz — проекция силы F на касательную; F„ и Nn — проекции сил
на главную нормаль; Fb и Nb — проекции сил на бинормаль; р —
радиус кривизны кривой линии.
295
Из первого дифференциального уравнения системы (20) незави-
симо от двух других уравнений можно найти закон движения
точки и, следовательно, скорость точки v. После этого из двух
оставшихся уравнений (20) можно определить проекции неизвест-
ной нормальной реакции N соответственно на главную нормаль
и бинормаль.
Пример. Материальная точка массой т (рис. 99) движется под действием силы
тяжести по внутренней части поверхности сферы радиуса R вблизи устойчивого
положения равновесия. В начальный момент t=0, x=xq, у = 0, vx=0, ty=i>Q. Ось Oz
направлена по вертикали вниз, а Ох и Оу расположены в горизонтальной плоскости.
Начало координат находится в центре сферы.
Определить движение точки и силу реакции абсолютно гладкой поверхности
сферы на точку. Эта задача известна как задача о сферическом маятнике.
Решение. Дифференциальные уравнения движения точки по поверхности сферы
имеют вид
8f if 8f
тх—2—;ту=).—;mz=mg + ).—, (а)
8х ду 8z
N
где Л=—.
А/
К дифференциальным уравнениям следует добавить уравнение связи, т. е. урав-
нение поверхности сферы
f(x, у, z')=R2—(x2+y2+z2)=0.
Тогда
3f . Sf n
— = — 2y; —= —2z;
dy dz
A/= +
=2y/x2+y2+z2=2R,
Рис. 99
s/x2+y2+z2=R.
Подставляя в уравнения (а) значения производ-
ит Sf 3f
ных —, — и —, имеем
8x 8y 8z
mx= —22x; my= — 22y; mz=mg—2Xz. (a')
Эту систему уравнений и надо проинтегрировать.
Для этого обычно из этих уравнений прежде всего
исключают неизвестную А, учитывая, что производ-
ные от нее не входят в уравнения (а')- Система
сложна для интегрирования. Проинтегрируем ее
приближенно. Для получения первого приближения
сохраним в уравнениях только первые степени вели-
чин х/Л, yfR и пренебрежем их квадратами в выра-
жении для Z'.
296
z-y/R2- (x^+y2).
Разлагая это выражение в ряд по формуле бинома Ньютона, получаем
z=R
' х2+у2
R2
( х?+у2\^ (
= R 1------ 1-
\ R2 J \
Полагая в третьем уравнении системы (а')т=Яиг=0, имеем
mg
mg—2AR — 0; Л=—; N=)Af=mg.
2R
Подставляя значение 2 в первые два уравнения системы (а'), получаем
g g g g
x= — — x; y= —у или x+—x=0; y4—y=0.
R R R R
Решения таких дифференциальных уравнений (см. § 4, пример 1), зависящие
каждое от двух постоянных интегрирования, уже рассматривались. Решения имеют
форму
x=Ci яп(-У«/Л/ + С2); y=C3sin(Vg/^z+C4). (б)
Дифференцируя их по времени, получаем
х=Ci у/g/R cos (у/g/R t+C2); у = C3 у/g/R cos (у/g/R 14- C4). (в)
Используя начальные условия из (б) и (в), имеем следующие уравнения для
определения постоянных Сь С2, С3, С4:
xo = CisinC2; 0 = CjsinC4; ")
___ __ > (г)
0 = Ci y/g/RcosC2', VQ=C3y/g/RcosC4.j
п
Из второго и третьего уравнений системы (г) находим С4=0, С2=-. Подставляя
2
эти значения в первое и четвертое уравнения, имеем
Ci=x0; C3=vOy/R!g.
Искомые уравнения движения точки по сфере при принятых допущениях прини-
мают форму
х=х0 sin {у/g/Rt)', у=у/R/g vo cos (у/g/R t); z=R.
297
Если из этих уравнений исключить время t, то получим уравнения траектории
точки в координатной форме:
х* /g t
х* Rv*
Траекторией точки при принятых допущениях является эллипс, расположенный
в плоскости z=R с центром на оси Oz.
Не следует думать, что система уравнений (а') проинтегрирована с точностью до
членов первого порядка х/Я, y/R, так как дополнительно принято z=0. Если интег-
рирование выполнить с точностью до указанных слагаемых, приняв за первое
приближение полученное решение, то вместо эллипса получится незамкнутая кривая,
близкая в первом витке к эллипсу. Движение по такой незамкнутой кривой рассмат-
риваемой точки можно воспроизвести, если полученный эллипс поворачивать равно-
мерно с определенной скоростью в сторону движения точки.
ГЛАВА 6
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ ОТНОСИТЕЛЬНО
НЕИНЕРЦИАЛЬНОЙ СИСТЕМЫ ОТСЧЕТА
§ 1. ВЫВОД ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Во многих задачах динамики рассматривается движение мате-
риальной точки относительно системы координат, движущейся от-
носительно инерциальной системы. Движение точки относительно
таких подвижных осей координат называют относительным в от-
личие от абсолютного, совершаемого точкой относительно инерци-
альной системы отсчета. Дифференциальные уравнения движения
материальной точки относительно таких подвижных, в общем слу-
чае неинерциальных, систем отсчета получают из уравнений движе-
ния точки относительно инерциальной системы отсчета и кинемати-
ческой теоремы Кориолиса о сложении ускорений.
Имеем инерциальную систему отсчета OlxlyIz1 и материальную
точку массой т, на которую действуют приложенные силы F и
N (рис. 100), где F— равнодействующая заданных активных сил;
N — равнодействующая сил реакций связей. Если а — ускорение
точки относительно инерциальной системы отсчета (абсолютное
ускорение), то согласно уравнению движения точки в векторной
форме имеем
ma=F+N. (1)
Если ввести другую, неинерциальную, систему отсчета Oxyz, кото-
рая в общем случае может двигаться относительно инерциальной
как свободное твердое тело, то по теореме сложения ускорений
имеем
а=ае+аг+а1, (2)
где ае, ап а* — соответственно переносное, относительное и кори-
олисово ускорения.
Подставляя значение абсолютного ускорения а из (2) в (1)
после переноса слагаемых, кроме таг, из левой части в правую по-
лучим
7па,=/+2?+Ф(.+Ф1, (3)
299
где Фе — — та/, Фх = — тах называются
соответственно переносной и кори-
олисовой силами инерции. Получена
динамическая теорема Кориоли-
са, или уравнение относительного
движения точки в векторной форме:
материальная точка движется относи-
тельно неинерциальной системы отсче-
та так же, как и относительно инер-
циальной, только к приложенным ак-
тивным силам и реакциям связей сле-
дует добавить переносную и кориолисову силы инерции.
Силы инерции Фе и Фх являются поправками на неинерци-
альность системы отсчета. Для инерциальной системы отсчета они
равны нулю, так как в этом случае абсолютное и относительное
движения точки совпадают. Переносная и кориолисова силы
инерции участвуют в создании относительного ускорения совер-
шенно так же, как и приложенные силы со стороны материаль-
ных тел.
Если координаты движущейся точки относительно подвижной
системы координат Oxyz в момент времени t есть х, у, z, то
в проекциях на подвижные оси координат (3) примет форму
тх=Fx+Nx+Фех+Ф„;
ту=Fy + Ny+Феу+Ф ху;
mz=Fz+Nz+Фи+Фк.
(3')
Это дифференциальные уравнения движения точки относительно
подвижной системы координат в проекциях на декартовы подви-
жные оси координат. Они отличаются от дифференциальных урав-
нений абсолютного движения относительно инерциальной системы
отсчета только наличием поправок на неинерциальность системы
отсчета.
§ 2. ЧАСТНЫЕ СЛУЧАИ
Относительное движение по инерции. Если материальная точка
движется относительно подвижной системы отсчета прямолинейно
и равномерно, то такое движение называют относительным движе-
нием по инерции. В этом случае относительная скорость vr постоянна
по модулю и направлению, а потому относительное ускорение
а,=0. Из (3) следует в этом случае
300
/+2V+Фе + Фж = 0. (4)
Это условие для сил при относительном движении точки по инер-
ции.
Относительное равновесие. При покое материальной точки от-
носительно подвижной системы отсчета ее относительные скорость
и ускорение равны нулю, т. е. v,=0 и аг=0. Ускорение Кориолиса
тоже равно нулю, так как
aI=2(coxvr).
Из (3) получаем условие относительного равновесия для сил:
/ЧУ+Ф^О. (5)
При абсолютном движении по инерции или абсолютном равно-
весии относительно инерциальной системы отсчета имеем для сил
одно и то же условие F+N=0. Условие относительного равновесия
для сил отличается от условия относительного движения по инер-
ции.
Инерциальные системы отсчета. Переносное ускорение в общем
случае вычисляется по формуле
ае=а0+£ х г+со х (со х г),
где ао — ускорение точки, принятой за полюс, например начало
координат подвижной системы координат; со — угловая скорость
вращения подвижной системы координат вокруг выбранного полю-
са; e=dco/dt — угловое ускорение этого вращения; г — радиус-
вектор движущейся точки относительно выбранного полюса.
Пусть подвижная система отсчета все время движется относите-
льно основной инерциальной системы поступательно, равномерно
и прямолинейно. В этом случае переносная и кориолисова силы
инерции равны нулю, т. е.
Фе = —тае = 0; Фх= — та1 = 0,
так как при поступательном движении со = 0 и £=dcu/df=O. При
равномерном и прямолинейном движении Оо=0. Таким образом,
в этом случае из (3) получаем уравнение относительного движения
mar=F+N, (6)
которое совпадает с уравнением движения относительно инерциаль-
ной системы отсчета (1).
301
Все подвижные системы отсчета, которые движутся поступа-
тельно, равномерно и прямолинейно относительно основной инер-
циальной системы отсчета, называются тоже инерциальными. От-
носительно всех инерциальных систем отсчета получаются оди-
наковые уравнения движения материальной точки. Ускорения ма-
териальной точки относительно всех инерциальных систем от-
счета одинаковы.
Отсутствие принципиальной возможности каким-либо механи-
ческим опытом, основанным на наблюдении за движением матери-
альных тел, отличить одну инерциальную систему отсчета от дру-
гой находится в основе принципа относительности классичес-
кой механики — принципа Галилея — Ньютона, который утверж-
дает: все механические явления в различных инерциальных системах
отсчета протекают одинаково, или никаким механическим опытом
нельзя обнаружить инерциальное движение системы отсчета, уча-
ствуя вместе с ней в этом движении. Наоборот, неинерциальную
систему отсчета можно обнаружить и отличить одну от другой по
поправкам на неинерциальность.
Скорости материальной точки относительно различных инерци-
альных систем отсчета разные, но нет возможности из наблюдений
за движением материальной точки в различных системах отсчета
сделать утверждение, какая из инерциальных систем отсчета явля-
ется основной, неподвижной, а какая — подвижной.
В специальной теории относительности имеет место принцип
относительности Эйнштейна, который утверждает: все физи-
ческие явления во всех инерциальных системах отсчета протекают
одинаково. Физические явления кроме механических включают так-
же электромагнитные процессы.
Возьмем две инерциальные системы отсчета: О\Ххухг и Oxyz (рис.
101). Примем, что система отсчета Oxyz движется относительно
с постоянной по модулю и направлению скоростью v парал-
лельно оси 01X1, причем в начальный момент времени при 1=0
начала координат и соответствующие оси координат совпадают.
В соответствии с концепцией классической механики время для
обеих систем координат одно и то же. Нетрудно видеть, что коор-
динаты какой-либо точки М в двух
инерциальных системах отсчета связа-
ны соотношениями параллельного пе-
реноса. Имеем:
x—Xi~ttf; y=yi', t=tx. (7)
Рис. 101
Эти соотношения называются преобра-
зованиями Галилея в частном случае
движения двух инерциальных систем
отсчета друг относительно друга.
302
Преобразования Галилея не изменяют формы уравнения движе-
ния точки (1), т. е. оно инвариантно по отношению к преобразова-
ниям Галилея.
§ 3. ДВИЖЕНИЕ ТОЧКИ ОТНОСИТЕЛЬНО ЗЕМЛИ
Для неинерциальной системы отсчета уравнение движения мате-
риальной точки под действием силы отличается от уравнения дви-
жения относительно инерциальных систем отсчета. Согласно (3),
оно имеет форму
d2r — - -
т—=Г+Фе+Ф1. (8)
Наличие поправок на неинерциальность систем отсчета в виде сил
инерции Фе и Фх позволяет установить неинерциальность системы
отсчета и отличить эти системы отсчета одну от другой.
Система отсчета, скрепленная с земным шаром, не является
инерциальной. Земной шар движется относительно гелиоцентричес-
кой инерциальной системы отсчета. При рассмотрении движения
материальных тел относительно Земли должны проявлять себя
эффекты, связанные с неинерциальностью системы отсчета. Земной
шар движется относительно гелиоцентрической системы отсчета как
свободное твердое тело. Его центр перемещается по эллиптической
орбите, близкой к окружности. Кроме того, он вращается вокруг
оси, проходящей через его центр, с почти постоянной по модулю
и направлению угловой скоростью, совершая один оборот за сутки.
Угловая скорость вращения Земли
со=2л/(24 -60-60)® 0,00007 с"1,
т. е. величина малая по сравнения с единицей.
В общем случае переносная сила инерции
Фе= —тае— — пг[а04-£ х r+со х (со х г)],
где ао — ускорение центра земного шара относительно гелиоцент-
рической системы отсчета; г — радиус-вектор движущейся точки,
проведенный из центра Земли. Ускорение ао с очень большой сте-
пенью точности можно считать равным нулю, так как центр Зем-
ли движется по эллиптической орбите очень больших размеров.
Угловое ускорение е можно тоже считать равным нулю, так как
со считаем постоянным вектором. Оставшаяся часть переносного
ускорения со х (со х г) пропорциональна со2, т. е. величина малая
303
по сравнению с величинами порядка со для не очень больших
расстояний г. Величиной порядка со является сила инерции Кори-
олиса
Фх= — та,= — т2(со х«г),
где vr — скорость материальной точки относительно Земли. Таким
образом, неинерциальность системы отсчета, скрепленной
с Землей, проявляется главным образом через влияние
силы инерции Кориолиса, если рассматривается движение ма-
териальной точки вблизи Земли, при котором г не очень велико.
Рассмотрим несколько примеров этого влияния кориолисовой силы
инерции.
Маятник Фуко. Если подвесить на длинной нити груз достаточно
малых размеров, то действующая на него сила F будет состоять из
силы притяжения Р к Земле, направленной к центру Земли, и силы
натяжения нити S (рис. 102, а). Эти силы расположены в одной
вертикальной плоскости П (рис. 102, б). Если начальные отклонения
и скорость груза тоже находятся в плоскости П, то маятник при
колебаниях должен все время находиться в плоскости П, непо-
движной относительно гелиоцентрической системы отсчета. Зем-
ной шар поворачивается относительно этой системы отсчета с уг-
ловой скоростью со. Следовательно, плоскость П по отношению
к Земле должна поворачиваться в сторону, противоположную
Земле, с угловой скоростью со, если маятник подвесить на полюсе.
Для маятника на широте ср угловая скорость вращения плоскости
колебаний маятника равна со sin ср. На экваторе эта скорость равна
нулю.
Если тело маятника имеет выступ, который при колебаниях
может оставлять след, например на песке, то этот след при движе-
нии маятника в одну сторону будет отличаться от следа при движе-
С (О
Рис. 102
304
нии в противоположную сторону из-за вращения Земли. Это от-
личие тем больше, чем больше период колебаний и, следовательно,
чем длиннее нить маятника. Фуко в 1857 г. использовал маятник
длиной /=67 м. Маятник Фуко наглядно демонстрирует вращение
Земли относительно инерциальной системы отсчета.
Отклонение движущихся тел вправо в Северном полушарии. В Се-
верном полушарии из-за дополнительного действия силы инерции
Кориолиса, вызванной вращением Земли, все движущиеся тела
должны смещаться в правую сторону, если смотреть в направлении
движения. Пусть материальная точка движется со скоростью vT от-
носительно Земли по касательной к меридиану с севера на юг (рис.
103). Определим проекцию г* этой скорости на плоскость, перпен-
дикулярную оси вращения Земли. Повернув вектор v* вокруг оси,
параллельной оси вращения земного шара, на 90° в направлении его
вращения, получим, согласно правилу Жуковского, направление
ускорения Кориолиса а, по касательной к параллели с запада на
восток. Сила инерции Кориолиса Фх — — та* соответственно направ-
лена с востока на запад, т. е. вправо от направления движения.
Действие такой силы вызовет у движущейся точки дополнительное
ускорение относительно Земли в направлении этой силы, а следова-
тельно, и ее перемещение, если точка движется в течение некоторого
времени. Движение точки может иметь направление, отличное от
касательной к меридиану. Важно, чтобы оно имело отличную от
нуля проекцию скорости v* на плоскость, перпендикулярную оси
вращения земного шара.
Если рассмотреть поступательное движение железнодорожного
вагона, то для него сила инерции Кориолиса пройдет через центр
его тяжести слева направо, если смотреть по движению вагона. Это
приведет к увеличению давления на правый рельс и к его уменьше-
нию на левый. На двухколейных железных дорогах правый рельс
изнашивается быстрее левого.
Для частички воды в реке действие силы Кориолиса слева напра-
во, если смотреть по течению реки, приведет к прижиманию этой
частички к правому берегу, способствуя большему его подмыва-
нию. Правый берег рек в Северном полушарии более подмыт, чем
левый на прямолинейных участках реки. Этот эффект известен
в географии как закон Бэра. На закруглениях реки вследствие
центробежных сил инерции может оказаться подмытым и левый
берег.
Действие силы инерции Кориолиса на летящие самолеты, раке-
ты, снаряды, движущийся воздух, морские течения приводит к их
отклонению в правую сторону в Северном полушарии. В Южном
полушарии отклонение будет в левую сторону. Сила инерции Кори-
олиса способствует образованию циклонов, антициклонов, вихрей,
305
Рис. 103
смерчей и т. д. Если в каком-то месте образовалось пониженное
давление, например вследствие местного нагревания воздуха, то
к этому месту начнет двигаться воздух из мест с повышенным
давлением. Сила инерции Кориолиса отклонит движущиеся частич-
ки воздуха вправо, создав местный вихрь (рис. 104), а для больших
масс воздуха — циклон. Аналогично, в местах с повышенным дав-
лением образуются антициклоны.
Отклонение падающих тел к востоку. Рассмотрим в Северном
полушарии тело, падающее вертикально вниз под действием силы
тяжести без начальной скорости. Действие силы инерции Кориолиса
в этом случае в первом приближении сведется к отклонению пада-
ющего тела к востоку. Действительно, если скорость тела vr направ-
лена по вертикали к центру Земли, то ее проекция на плоскость
параллельного круга направлена к центру этого круга (рис. 105).
Ускорение Кориолиса ат соответственно направлено по касательной
к параллели на запад, а сила инерции Кориолиса Фк — по касатель-
ной к параллели на восток. Она вызовет отклонение падающего
тела к востоку. Как показывают расчеты, это отклонение при
падении с высоты 160 м составляет приблизительно 2,8 см при
ср = 50°, что хорошо согласуется с результатами опытов.
Пример. Внутри трубки, имеющей гладкую поверхность, находится шарик мас-
сой ти=1 кг (рис. 106). Шарик притягивается к неподвижной точке О трубки силой,
пропорциональной расстоянию шарика до этой точки. Коэффициент пропорциональ-
ности с=4,9 Н/м. Трубка наклонена к вертикали Ozj на угол а=60° и вращается
вокруг оси Ozi с постоянной угловой скоростью со = 1 с'1. В начальный момент
шарик находился в точке Мо на расстоянии ОЛГр=2,4 м и имел скорость от-
носительно трубки vo = 10 м/с.
Определить закон движения шарика по трубке, принимая его за точку, силу
я
давления шарика на стенку трубки и силу притяжения в момент времени /=- с.
2
Решение. Выберем систему подвижных осей координат Oxyz, вращающихся
вместе с трубкой. Ось Ох направим по трубке.
306
Рис. 105
Рис. 106
Векторное уравнение движения шарика относительно подвижной системы коор-
динат имеет вид
niar=F+ Р+N+ Фе+Ф*.
В проекциях на подвижные оси координат
тх = — F— Р cosa+Фе sina; 0=Ny—Р sina— Фе cosa; 0=Nz+Ф*.
Здесь P=mg — сила тяжести шарика; N — сила реакции трубки; F — сила притяже-
ния; Фе, Ф^ — переносная сила инерции и сила инерции Кориолиса.
Так как у=const=0, z=const=0, то y=z=0. Ось Oz направлена параллельно
силе Ф^, а ось Оу вместе с другими осями образует правую систему осей координат.
В рассматриваемом случае
, V3
Фе = тха> sina=-^x; Ф^ = 2яких81па = ^3х;
f=cx=4,9x; g = 9,8 м/с2.
Подставляя эти значения сначала в общем виде в уравнения движения, после простых
преобразований получаем:
х+(с/т—са2 sin2a)x= —gcosa; Ny=тsina(g+xai2cosa); Nz= — 2m<axsina.
После подстановки числовых значений величин имеем
У3/ Л г
х+4,1х=—4,9; №=— 9,8+- ; Wz=-V3x.
2 \ 2/
Дифференциальное уравнение оказалось линейным неоднородным; следователь-
но, его решение
Х = Х[ +Х2,
307
где X] — общее решение однородного уравнения; х2 — частное решение неоднород-
ного уравнения, правая часть которого постоянна. В качестве частного решения
4,9
в этом случае можно взять постоянную х2 = —— = — 1,2. При подстановке этого
4
значения х2 в дифференциальное уравнение получаем тождество, т. е. х2 является
искомым частным решением.
Общее решение однородного уравнения X] является решением однородного
уравнения
X] +4,1X1 =0.
Его характеристическое уравнение +4,1 =0. Корни характеристического уравнения
А],2= +21 чисто мнимые. Следовательно, решение однородного уравнения, завися-
щее от двух постоянных интегрирования Q и С2, можно выразить в форме
х( = Q cos 2t + С2 sin 2t.
После этого
х=xi + х2 = Ci cos 2t + С2 sin 2г — 1,2;
х = - 2Q sin 2г +2С2 cos 2t.
Начальные условия задачи
Г=0; х=х0= —2,4 м; х = го = Ю м/с.
Подставляя их в выражения для х и х, получаем следующие уравнения для постоян-
ных интегрирования
-2,4 = -Cj-l,2; 10=2С2.
Их решения Ci = 1,2; С2 = 5.
Уравнения движения шарика с учетом значений постоянных принимает вид
х = 1,2(cos 2г — 1)+5 sin 2t; х = — 2,4 sin 2t +10 cos 2г.
л
В момент времени г=- с
2
х= 1,2 (cosл — l) + 5sin7t= —2,4 м; х = — 2,4sinn + 10cosn=— 10 м/с.
Подставляя эти значения х и х в выражения для Ny и Nz, имеем
V3 г
У„= (9,8-1) = 7,3 Н; NZ=J1 10= 17,3 Н.
2
Давление шарика N' на трубку равно по величине силе реакции трубки на шарик.
Поэтому
^=#=^/+#/ = 18,8 Н.
п
Сила притяжения Кири г=- с
F=c|x|=4,9'2,4=11,8 Н.
308
§ 4. НЕВЕСОМОСТЬ
Динамическая теорема Кориолиса позволяет рассмотреть состо-
яние невесомости, которое, в частности, возникает при движении
космических кораблей как искусственных спутников Земли. При
рассмотрении невесомости материальной точки целесообразно ее
представлять как твердое тело, имеющее поверхность, которой оно
может соприкасаться с другими телами. Будем предполагать, что
скорости и ускорения всех точек тела одинаковы, а реакции со-
прикасающихся тел приводятся к равнодействующей.
Под невесомостью такой материальной точки понимают от-
сутствие давления этой точки на каждое из тел, с которым она
может соприкасаться. В частности, невесомая материальная точка
не давит на площадку весов (не имеет веса), находящихся в покое по
отношению к той системе отсчета, относительно которой покоится
материальная точка.
Систему отсчета, относительно которой материальная точка
находится в покое и, следовательно, имеет относительно нее
скорость и ускорение, равные нулю, назовем собственной систе-
мой отсчета материальной точки. Все величины относительно
этой системы отсчета условимся обозначать специальным индек-
сом *. Тогда имеем v*, а*, а* и т. д. Естественно, что г* и а* равны
нулю.
Невесомая материальная точка (тело), прикрепленная на пружи-
не к любому телу, покоящемуся относительно ее собственной систе-
мы отсчета, не деформирует эту пружину. Учитывая, что давление
точки на какое-либо тело, по модулю совпадает с силой реакции
тела на эту точку, невесомость наблюдается при равенстве нулю
силы реакции от любого тела, соприкасающегося с рассматрива-
емой невесомой материальной точкой.
Если в общем случае рассматривать невесомость материального
тела, а не точки, то реакции окружающих его тел сведутся к рас-
пределенным силам по поверхности его соприкосновения с этими
телами. Сила реакции, отнесенная к единице площади поверхности
соприкосновения (напряжение силы реакции), должна при невесомо-
сти тела быть равна нулю в каждой точке его поверхности. Это
является условием невесомости для любого тела, не обязательно
твердого.
Для абсолютно твердого тела при его невесомости вместо равен-
ства нулю напряжения поверхностной силы в каждой точке его
поверхности соприкосновения достаточно равенства нулю главного
вектора и главного момента этих сил относительно любого центра
приведения.
Ограничимся рассмотрением невесомости материальной точки,
т. е. абсолютно твердого тела, для которого все поверхностные
силы приводятся только к одной равнодействующей силе —
309
реакции тел, соприкасающихся с ним. Невесомость материальной
точки не связана с системой отсчета или с наблюдателем, находя-
щимся в той или иной системе отсчета. Но для выявления сил,
действие которых испытывает материальная точка, выберем ее
собственную систему отсчета, по отношению к которой ее относи-
тельные скорость и ускорение равны нулю, т. е. v* = 0 и а* = 0.
В этом случае сила инерции Кориолиса тоже равна нулю и для сил
выполняется условие относительного равновесия
Р+Я+Ф*=0,
где F — равнодействующая активных или заданных сил от тел, не
соприкасающихся с точкой; N — равнодействующая реакция от
всех соприкасающихся с точкой тел; Ф* = — та* — переносная сила
инерции в собственной системе отсчета рассматриваемой точки.
Из условия относительного равновесия сил имеем
-N=F+<&*.
Согласно определению невесомости, N=0 и, следовательно,
/ЧФ? = 0.
Таким образом, условие невесомости через силы можно выра-
зить как N=Q или как _Р+Ф* = 0, т. е. для невесомости материаль-
ной точки необходимо и достаточно, чтобы равнодействующая
активных сил от материальных объектов, не соприкасающихся
с точкой, вместе с переносной силой инерции в собственной системе
отсчета рассматриваемой точки образовывали равновесную систе-
му сил.
Согласно теореме о сложении ускорений, абсолютное ускорение
в общем случае определяется по формуле
a = ae + ar + ак.
Если абсолютное ускорение рассматривать относительно инер-
циальной системы отсчета, а в качестве подвижной системы отсчета
выбрать собственную систему отсчета, то v* = 0, а* = 0, а* = 0 и,
следовательно, а=а*. Сила инерции в инерциальной системе от-
счета Ф= —та, таким образом, совпадает с переносной силой инер-
ции в собственной системе отсчета Ф*= — та*. Учитывая, что
Ф*=Ф, условие невесомости можно выразить как /+Ф = 0, т. е. как
уравновешивание силой инерции в инерциальной системе отсчета
равнодействующей сил от действия тел, не соприкасающихся с неве-
сомой материальной точкой.
310
Проверим выполнение условия невесомости для материаль-
ной точки, находящейся в космическом корабле, который дви-
жется поступательно относительно Земли в качестве ее искус-
ственного спутника за пределами атмосферы. За инерциальную
систему отсчета можно принять систему отсчета, скрепленную
с Землей.
Пусть материальная точка неподвижна относительно косми-
ческого корабля. Тогда собственной системой отсчета будет систе-
ма отсчета, скрепленная с кораблем. Силой от действия тел, не
соприкасающихся с точкой, является сила тяготения Земли F= mg,
где т — масса точки, a g — ее ускорение, создаваемое силой
тяготения. Сила инерции точки в ее движении относительно Земли
Ф=— та совпадает с переносной силой инерции Ф*=— та*, где
а* — переносное ускорение точки от поступательного движения
вместе с собственной системой отсчета, скрепленной с космическим
кораблем.
Если корабль не испытывает действия других сил, кроме силы
тяготения Земли, то его ускорение от этого тяготения тоже равно g,
так как ускорения от силы тяготения не зависят от масс тел,
а зависят только от расстояния этих тел до центра Земли. Таким
образом, a* = a=g и, следовательно, условие невесомости точки
/Ч-Ф = 0 выполняется. Материальная точка будет находиться в не-
весомости и, следовательно, не должна оказывать давления на
любое тело, движущееся вместе с космическим кораблем.
В космическом корабле, который кроме поступательного
движения имеет также и вращение, каждая из материальных
частиц корабля не находится в состоянии невесомости, хотя весь
корабль как целое находится в состоянии невесомости. Для него
главный вектор и главный момент поверхностных сил равны
нулю, так как нет тел, с которыми корабль соприкасается своей
поверхностью.
Материальная точка внутри кабины корабля находится в состо-
янии невесомости, пока она не соприкасается со стенками корабля
и с другими телами, скрепленными с кораблем.
Кажется, что для невесомости тела необходима невесомость
каждой его точки. Это приводит к требованию отсутствия взаим-
ных давлений между точками тела или к отсутствию внутренних
напряжений в теле. Но такие напряжения всегда имеются при
невесомости вследствие естественной связи точек тела друг с дру-
гом, на которую можно влиять, например, термообработкой,
изменением температуры и т. д. При невесомости тела как целого
не обязательно отсутствие даже дополнительных напряжений,
создаваемых движением тела. Достаточно равенства нулю напря-
311
жений в точках поверхности тела, создаваемых другими, соприка-
сающимися телами (связями), а для абсолютно твердого тела —
равенства нулю главного вектора и главного момента поверхност-
ных сил.
В невесомости находятся земной шар и другие планеты Сол-
нечной системы, их спутники, если пренебречь действием на них
метеоритов, космического излучения и т. д.
В состоянии невесомости находилось бы свободно падающее
тело вблизи Земли, если бы не было действия воздуха. Невесомость
можно создать искусственно вблизи Земли в герметизированной
кабине летательного аппарата, заставив его с помощью двигателей
совершать поступательное движение с ускорением g, равным уско-
рению от силы притяжения Земли.
ГЛАВА 7
ГЕОМЕТРИЯ МАСС
§ 1. ЦЕНТР МАСС
При рассмотрении движения твердых тел и других механических
систем важное значение имеет точка, называемая центром масс.
Это понятие уже было введено в связи с понятием центра
тяжести (см. гл. 4). Там же рассмотрены методы определения
центра масс. Напомним определение центра масс и понятий стати-
ческих моментов масс.
Если механическая система состоит из конечного числа матери-
альных точек N с массами т{, т2,..., mN, радиусы-векторы которых,
проведенные из одной и той же точки О, —й, г2, rN, то центром
масс называется геометрическая точка С, радиус-вектор которой
гс определяется выражением
N
rc= £ т^М, (1)
*=1
N
где М = £ тк — масса системы. Обозначая декартовы координаты
к-1
материальных точек (хь zj, ..., (xN, yN, zN), из (1) проецированием
на декартовы оси координат получим следующие формулы для
координат центра масс:
W N
хс= £ ткхк(М\ ус= £ rn^kfM-, zc= £ mkzkjM. (Г)
Jt=l *=1 к—I
Центр масс является не материальной точкой, а геометричес-
кой. Он может не совпадать ни с одной материальной точкой
системы, как, например, в случае кольца. Центр масс системы
характеризует распределение масс в системе.
n
Векторная величина So= £ т^гк называется статическим мо-
к=1
ментом массы относительно точки О. Скалярная величина SOyz =
N
= называется статическим моментом массы относительно
k-l
313
N N
координатной плоскости Oyz. Величины SOxz= m^ и SOxy= £ mkzk
t=i *=i
являются соответственно статическими моментами массы относи-
тельно координатных плоскостей Oxz и Оху.
Радиус-вектор и координаты центра масс через статические мо-
менты массы выражаются формулами
fc = So!M', Xc = Soy-JM', yc=SoalM’, Zc= SoxylM.
§ 2. МОМЕНТЫ ИНЕРЦИИ
Для характеристики распределения масс в телах при рассмотре-
нии вращательных движений требуется ввести понятия моментов
инерции.
Моменты инерции относительно точки и оси
Моментом инерции механической системы, состоящей из N ма-
териальных точек, относительно точки О называется сумма произ-
ведений масс этих точек на квадраты их расстояний до точки О (рис.
107), т. е.
Jo= f mkdk2. (3)
*=i
Момент инерции относительно точки часто называют полярным
моментом инерции. В случае сплошного тела сумма переходит
в интеграл и для полярного момента инерции имеем
J0=p2dm, (3')
где dm — масса элементарной частицы тела, принимаемой в преде-
ле за точку; d — ее расстояние до точки О.
Моментом инерции Jt системы материальных точек относитель-
но оси 01 называется сумма произведений масс этих точек на квад-
раты их расстояний rk до оси 01 (рис. 107), т. е.
Ji= X mkrk- (4)
i=l
В частном случае сплошного тела сумму следует заменить интегра-
лом:
314
Ji= r2 dm.
(4')
Моменты инерции одинаковых по форме
однородных тел, изготовленных из разных ма-
териалов, отличаются друг от друга. Харак-
теристикой, не зависящей от массы материала,
является радиус инерции. Радиус инерции р/ от-
носительно оси 01 определяется по формуле
Pl = y^M,
где М — масса тела.
Момент инерции относительно оси через радиус инерции от-
носительно этой оси определяется выражением
Ji=Mp2. (5')
В справочниках по моментам инерции приводят таблицы значений
радиусов инерции различных тел.
Формула (5') позволяет считать радиус инерции тела
относительно оси расстоянием от этой оси до такой точ-
ки, в которой следует поместить массу тела, чтобы ее
момент инерции оказался равным моменту инерции тела
относительно рассматриваемой оси.
Моменты инерции относительно оси и точки имеют одинаковую
размерность — произведение массы на квадрат длины (кг м2).
Кроме моментов инерции относительно точки и оси использу-
ются также моменты инерции относительно плоскостей и центро-
бежные моменты инерции. Эти моменты инерции удобно рассмот-
реть относительно координатных плоскостей и осей декартовой
системы координат.
Моменты инерции относительно осей координат
Моменты инерции относительно декартовых осей координат Ох,
Оу и Oz п их начала — точки О (рис. 108) — определяются выраже-
ниями
V N N
Jx= Е тк(уI+4); Jy = £ тк(zk+Xk);J2=Y тк(хк + УкУ, (6)
fc=l Л=1 к=1
Jo = £ rnk (xl+yl+zly (7)
Jt=l
315
где хк, ук, zk — координаты материальных
точек системы. Для сплошных тел эти
формулы примут вид
Jx= (y2+z2)dm; Jy= (z2 + x2)dm;
Jz= (x2+y2)<bn; Jo= i(x2+y2 + z2)dm.
Из приведенных формул следует зави-
симость
2J0 — Jx+Jу+Jz.
(8)
Если через точку О провести другую систему декартовых осей
координат Ox'y'z', то для них по формуле (8) получим
2Jo=J^-\- Jy'+J?- (8')
Из сравнения (8) и (8') следует, что
Jx + Jy-\- — Jk + Jy + Jz:-
Сумма моментов инерции относительно декартовых осей коор-
динат не зависит от ориентации этих осей в рассматриваемой
точке, т. е. является величиной, инвариантной по отношению к на-
правлению осей координат.
Для осей координат Oxyz можно определить следующие три
центробежных момента инерции:
W N
Jxy= Е Jyz= Е т^к,
k=\ k=\
N
Jzx= E mkZk*k- (9)
k=\
Центробежные моменты инерции часто называют произведениями
инерции.
Моменты инерции относительно осей и точек — величины поло-
жительные, так как в них входят квадраты координат. Центробеж-
ные моменты инерции содержат произведения координат и могут
быть как положительными, так и отрицательными.
Центробежные моменты инерции имеют важное значение при
рассмотрении давлений на подшипники при вращении твердого
тела вокруг неподвижной оси и в других случаях.
316
Кроме рассмотренных моментов инерции иногда используются
моменты инерции относительно координатных плоскостей JOxy, Joyz,
JOzx, которые определяются выражениями
У N N
Joxy= Е mkZk\ Joyz= Е J°™ = Е ткУк-
к=1 к=1 к=1
§ 3. ТЕОРЕМА О МОМЕНТАХ ИНЕРЦИИ ОТНОСИТЕЛЬНО
ПАРАЛЛЕЛЬНЫХ ОСЕЙ (ТЕОРЕМА ШТЕЙНЕРА)
Установим зависимость между моментами инерции системы
относительно параллельных осей, одна из которых проходит через
центр масс. Пусть имеем две системы прямоугольных, взаимно
параллельных осей координат Oxyz и Cx!y'z'. Начало системы коор-
динат Cx'y'z' находится в центре масс системы (рис. 109).
По определению момента инерции относительно оси имеем
N
Joz= Е тк(хк+у1У,
fc=l
Jcz!= Е тк(Хк+Ук),
к=1
где тк — масса точки Мк, а хк, ук, zk и х[, у’к, z’k — координаты этой
точки относительно систем координат Oxyz и Cx'y'z' соответствен-
но. Если обозначить хс, ус, zc координаты центра масс относитель-
но системы координат Oxyz, то для взаимно параллельных осей
координаты одной и той же точки Мк связаны соотношениями
параллельного переноса
хк=х!к+хс, Ук=у'к+Ус, zk=z'k+zc.
Подставим эти значения координат в выражение момента инер-
ции JOz. После преобразования получим
N (
Joz = Е тк(х^к +у )+2хс Е ткХ'к+
Л=1 Jt=l
X N
+ 2ус Е МкУк +(*c+jc) Е тк-
*=1 *=1
В этом соотношении Е тк=М — мас-
к=1
317
У N
са системы, Е ткх'к = Мх'с = О и Е так как х'с—0 и
*=1 *=i
у'с=О вследствие того, что по условию центр масс находится в на-
чале координат этой системы координат.
Величина x£+yc=d2, где d — расстояние между осями Oz и Cz'.
Окончательно
Joz=Jcz'+Md2.
Связь моментов инерции относительно двух параллельных осей,
одна из которых проходит через центр масс, составляет содержание
так называемой теоремы Штейнера или Гюйгенса — Штейнера:
момент инерции системы относительно какой-либо оси равен момен-
ту инерции относительно параллельной оси, проходящей через центр
масс, плюс произведение массы системы на квадрат расстояния
между этими осями.
Из теоремы Штейнера следует, что для совокупности параллель-
ных осей момент инерции является наименьшим относительно оси,
проходящей через центр масс.
Если взять ось OjZj параллельной Oz, то для нее получим
Jo,z, = JaJrMd2,
где d\ — расстояние между параллельными осями 0{zx и Cz'.
Исключая момент инерции из двух последних формул, полу-
чим зависимость моментов инерции относительно двух параллель-
ных осей, не проходящих через центр масс:
Jo,z=Jot+M(d2-d2).
Установим изменение центробежных моментов инерции при па-
раллельном переносе осей координат. Имеем
N N N N N
jyz= Е ткУк2к= Е ткУк?'к + Ус Е mkZk + Zc Е ткУк+Ус2с Е тк-
Л=1 it=l Jt=l к= 1
N N N
Учитывая, что Е m^'kz’k=Jy^, Е mkz'k = Mz’c, ткУк=Му'с,
Jt=l Л=1
N
^тк=М, получаем
*=1
Jyz = JУ+ -Л/ус^С + MzсУс + Мус^с,
318
где у'с, z'c — координаты центра масс относительно системы коор-
динат Cx'/z'. Аналогичные формулы получаются для двух других
центробежных моментов инерции:
Лх=Лх' + Mzqx'c+Mxcz!c+Mzcxc,
Jxy = J*y+МхсУс+Mycx'c+МхсУс-
Так как начало системы коордиат Cx’y'z' находится в центре
масс, то х'с=0, у'с—0, ^=0 и тогда
JJz = /yz' + Myc^Cj Jzx = J;!y +MZcXc, Jxy = J^y + МХсУс, (Ю)
т. е. центробежные моменты инерции при параллельном переносе
осей координат из любой точки в центр масс изменяются в соответ-
ствии с (10).
Если производится параллельный перенос осей О&у^ из точки
01 в центр масс, то, согласно (10), имеем:
Лл = Z/z' + МУ1С21С» Jzxxx—Jz!x! Л-MZ\cxIC\
Jxxy=Jyy + MxiCyiC- (10')
Исключая из (10) и (10') центробежные моменты инерции Jyy, J/y,
Jyy, получим формулы для изменения центробежных моментов
инерции при параллельном переносе осей координат из точки
О] в точку О:
Jryz, = Jyz + М (yiczic~yczc)'i Jzxx= Jzx + M(zicxic~zCxc)i
Jx.yx=Jxy + M (xicyic — хсУс),
где (xiC, yiC, zic) И (x& Ус, Zc) — координаты центра масс в двух
системах взаимно параллельных осей координат.
§ 4. МОМЕНТЫ ИНЕРЦИИ ПРОСТЕЙШИХ ОДНОРОДНЫХ ТЕЛ
Моменты инерции тел сложной формы часто удается вычислить,
если их предварительно разбить на тела простой формы. Моменты
инерции сложных тел получают суммируя моменты инерции частей
этих тел. Получим формулы для вычисления моментов инерции
некоторых однородных простейших тел.
319
Однородный стержень
Имеем однородный стержень длиной I и массой М (рис. НО).
Направим по стержню ось Ох. Вычислим момент инерции стержня
относительно оси Oz, проходящей перпендикулярно стержню через
его конец. Согласно определению момента инерции сплошного тела
относительно оси, имеем
1
Joz = х2 dm=р х2 dx,
так как dm=pdx, где р=МЦ — плотность массы стержня.
Вычисляя интеграл, получаем
i
м Г mi3 i1
JOz=— xdx=-------= Л/-.
I 13 3
«/
о
Таким образом,
Joz=M1^. (11)
Момент инерции стержня относительно оси С/, проходящей
через центр масс и параллельной оси Oz, определяется по теореме
Штейнера:
Рис. 110
Joz=Ja+Мd2, где d2 = (111)2 = /2/4.
Следовательно,
Ja - Joz - Md2 = M--M- = M-,
3 4 12
t. e.
/cy = ^. (12)
Прямоугольная пластина
Прямоугольная тонкая пластина имеет размеры I и h и массу
М (рис. 111). Оси Ох и Оу расположим в плоскости пластины, а ось
Oz — перпендикулярно ей. Для определения момента инерции пла-
стины относительно оси Оу разобьем пластину на элементарные
полоски шириной dx и массой dm=p/zdx и проинтегрируем по х от
0 до I. Получим
320
так как phl=M.
Аналогичные вычисления для оси Ох дадут
JX=M~,
12
так как эта ось Ох проходит через середину пластины.
Для определения момента инерции пластины относительно оси
Oz следует предварительно вычислить момент инерции отдельной
заштрихованной полоски относительно параллельной оси О'/ по
формуле (12) для стержня и применить затем теорему Штейнера.
Для элементарной полоски имеем
, h2 ,
ат—\-xam.
12
Интегрируя это выражение в пределах от 0 до I, получим
Итак, для моментов инерции пластины относительно осей коор-
динат получены следующие формулы:
h2 I2 /Л2 12\
Jx = M—\ Jy=M~; Jz = m[ + .
12 У 3 \12 З/
(13)
321
Круглый диск
Имеем тонкий однородный диск радиусом Л и массой М (рис.
112). Вычислим момент его инерции Jo относительно точки О. Этот
момент инерции для тонкого диска совпадает с моментом инерции
Л относительно координатной оси Oz, перпендикулярной плоскости
диска. Разобьем диск на концентрические полоски шириной dr,
принимаемые в пределе за материальные окружности. Масса полос-
ки равна ее площади 2wdr, умноженной на плотность р = М/(тсЛ2),
т. е. dm = p'2nrdr. Момент одной полоски относительно точки
О равен г2 dm. Для всего диска
М R
Г Г -Л4- R2
Jo— \r2dm=p 2n \r3dr=p2n——М—.
J J 4 2
о о
Таким образом,
Jz=J0=MR2j2.
(14)
Для осей координат Ох и Оу, расположен-
ных в плоскости диска, в силу симметрии
Jx=Jr Используя (8), имеем 2J0 — Jx+Jy +Jz,
но JZ=JO, поэтому
Jx=Jy=42J0=MR2l4. (15)
В случае тонкого проволочного кольца
или круглого колеса, у которых масса рас-
пределения не по площади, а по его ободу,
имеем
JZ=JO=MR2; Jx=Jy=lj2MR2. (16)
Круглый цилиндр
Для круглого однородного цилиндра, масса которого М,
радиус R и длина I (рис. 113), вычислим прежде всего его момент
инерции относительно продольной оси симметрии Oz. Для этого
разобьем цилиндр плоскостями, перпендикулярными оси Oz,
на тонкие диски массой dm и толщиной dz. Для такого диска
R2 ,
момент инерции относительно оси Oz равен — dm. Для всего
цилиндра
322
R2 A R2 Г. R2
— dm =— \dm=M—,
2 2 2
JZ=MR2[2. (17)
Вычислим момент инерции цилинд- Рис-113
ра относительно его поперечной оси
симметрии Су. Для этого разобьем цилиндр поперечными сече-
ниями, перпендикулярными его продольной оси, на элементарные
диски толщиной dz. Момент инерции элементарного диска мас-
сой d/n = 7t7?2pdz относительно оси Су, по теореме Штейнера,
, R2 , ,
ши—\-z dm.
4
Чтобы получить момент инерции всего цилиндра относительно
оси Су, следует проинтегрировать полученное выражение по
z в пределах от 0 до Z/2 и результат удвоить. Получим
М Z/2
Г Г foi ii\
Jcy= \(R2/4+z2)dm=2nR2p I (R2/4+z2)dz=nR2/pi—I—I.
J J \4 12/
о о
Ho TtR2lp — M — масса цилиндра. Следовательно,
JQ = M(7?2/4 + /2/12).
Таким образом, момент инерции цилиндра относительно его
поперечной оси симметрии получается как сумма моментов инер-
ции относительно этой оси диска и стержня, массы которых равны
по отдельности массе цилиндра. Диск получается из цилиндра
симметричным сжатием его с торцов до срединной плоскости при
сохранении радиуса, а стержень — сжатием цилиндра в однород-
ный стержень, расположенный по оси цилиндра, при сохранении
длины.
Шар
Пусть масса шара М, радиус R (рис. 114). Разобьем шар на
концентрические сферические слои радиусом г и толщиной dr. Мас-
м м
са такого слоя d/w=pd7, где р=—=------; dV— объем слоя, рав-
V */3nR3
ный произведению площади поверхности сферы радиусом г на
323
толщину слоя dr, т. е. dK=4nr2dr. Таким
образом, масса элементарного слоя dm —
= pdV= p4nr2 dr.
Для момента инерции шара относитель-
но его центра О имеем
R
I r4dr=p47t —=-MR2,
J 5 5
о
JO = 3I5MR2.
(18)
Для осей координат, проходящих через центр шара, в силу сим-
метрии Jx=Jy=J,. Но 2J0=Jx+Jy + Jz=3Jx=3Jy=3Jz. Следова-
тельно,
Jx=Jy = Jz = 2/3Jo = 2/5MR2.
(19)
§ 5. МОМЕНТЫ ИНЕРЦИИ ОТНОСИТЕЛЬНО ОСЕЙ,
ПРОХОДЯЩИХ ЧЕРЕЗ ЗАДАННУЮ ТОЧКУ
В заданной точке О выберем декартову систему осей координат
Oxyz. Ось 01 образует с осями координат углы а, Д у (рис. 115). По
определению момента инерции относительно оси 01 имеем
Ji= Е т^к
к=1
(20)
или для сплошных тел
В дальнейшем используется определение (20). Сплошные тела
считаются разбитыми на N малых частей, принимаемых за точки.
324
Из прямоугольного треугольника ОАкМк получаем
<//=г/-(О^2, (21)
где rk =хк +ук +zk, хк, ук, zk — координаты точки Мк. Отрезок ОАк
является проекцией радиуса-вектора rk=xki+ykj+zkk на ось О1. Для
получения проекции вектора гк на ось 01 его следует умножить
скалярно на единичный вектор этой оси 7° = i cosa 4-J cos/? 4-£ cosy.
Имеем
OAk=rk l° = (xki+y/j4-zji) (icosa 4- jcos/?+к cosy)=
=xk cosa+yk cos/?4-zk cosy. (22)
Умножая в (21) rk, выраженный через координаты точки Мк, на
единицу в виде cos2a4-cos2/?4-cos2y = 1 и используя значение (22) для
ОАк, получим
dk = (хк 4- у2 4- z2) (cos2a 4- cos2/? 4- cos2y) —
— (хкcosa4-ук cos/?4-zkcosy)2=(у2 4-z2) cos2a 4- (z2 4- x2) cos2/? 4-
4- (xk + Ук) cos2y — 2ykzk cos/? cosy—2zkxk cosy cosa —
— 2xkykcosacosfl. (23)
Подставляя (23) в (20) и вынося косинусы углов за знаки сумм,
имеем
Jz=cos2a
N
тк(ук+zk) +COS2р Y mk(zk+xl) +
к=\
*=1
N N
4-cos2y Е tfik(x24-y2) —2cos/?cosy £
к=1 к~\
N N
— 2 cosy cosa Е mkzkxk—2 cosa cos/?
k=l k=l
Учитывая, что
N N N
Ym^k+ Zk) = Л; E (Zk + Xk) = E mk (Xk +Ук) = Jz
Jc=l fcssl jt= i
— моменты инерции относительно осей координат, а
325
N N N
Ylm*ykZk = Jyz, YmkZkXk = Jzx, XmkXkyk = Jzy
k=l k~i k=i
— центробежные моменты инерции относительно тех же осей, по-
лучим
Ji=Jx cos2a+Jу cos2/?+Jz cos2y — 2Jyz cos/! cosy —
— 2JZX cosy cosa — 2Jxy cosa cos/?. (24)
Для определения момента инерции кроме углов a, /?, у, определя-
ющих направление оси, необходимо знать в точке О шесть момен-
тов инерции: Jx, Jy, Jz, Jyz, Jzx, Jxy. Их удобно расположить как
элементы единой таблицы или матрицы:
(25)
Матрица, или таблица (25), составленная из осевых и центробеж-
ных моментов инерции относительно декартовых осей координат,
называется тензором инерции в точке О. В тензоре инерции услови-
лись центробежные моменты инерции брать со знаком минус. Ком-
поненты тензора инерции (отдельные осевые или центробежные
моменты инерции) зависят не только от выбора точки, но и от
ориентации осей координат в этой точке.
Для определения момента инерции относительно какой-либо
оси, проходящей через заданную точку, для рассматриваемого тела
необходимо иметь тензор инерции в этой точке и углы, определя-
ющие направление оси с осями координат.
§ 6. ЭЛЛИПСОИД ИНЕРЦИИ
Для введения главных осей инерции и характеристики распреде-
ления моментов инерции тела относительно различных осей, прохо-
дящих через заданную точку, используется поверхность второго
порядка — эллипсоид инерции. Для построения этой поверхно-
сти на каждой оси 01 (см. рис. 115), проходящей через точку О,
откладывают от этой точки отрезок
ОК= (26)
Геометрическое место концов отрезков ОК расположится на
поверхности, которая называется эллипсоидом инерции. Получим
326
уравнение эллипсоида инерции. Для этого выразим косинусы углов
а, р, у через координаты х, у, z точки К. Имеем:
cosa=^=-^/7/x; cosft=-^=y/jiy; cosy=^^=y/jiz.
Подставляя эти значения косинусов углов в (24) и сокращая на Jb
получим уравнение поверхности второго порядка:
Jxx2 + Jyy2 + Jzz2 — 2Jyzyz—2Jzxzx—2Jxyxy = 1. (27)
Это действительно уравнение эллипсоида, так как отрезок ОК
имеет конечную длину для всех осей, для которых моменты инерции
не обращаются в нуль. Другие поверхности второго порядка, на-
пример гиперболоиды и параболоиды, имеют бесконечно удален-
ные точки. Эллипсоид инерции вырождается в цилиндр для тела
в виде прямолинейного отрезка, если точка О расположена на
самом отрезке. Для оси, направленной по этой прямой линии,
момент инерции обращается в нуль и соответственно отрезок ОК
равен бесконечности.
Для каждой точки О имеется свой эллипсоид инерции. Эллипсо-
ид инерции для центра масс тела называют центральным эллипсо-
идом инерции. Оси эллипсоида инерции (его сопряженные диаметры)
называются главными осями инерции. В общем случае эллипсоид
инерции имеет три взаимно перпендикулярные главные оси инер-
ции. Они являются его осями симметрии.
В случае эллипсоида вращения все прямые, расположенные в эк-
ваториальной плоскости эллипсоида, перпендикулярной оси враще-
ния, будут главными осями инерции. Для шара любая прямая,
проходящая через его центр, есть главная ось инерции.
Моменты инерции относительно главных осей инерции называ-
ются главными моментами инерции, а относительно главных цент-
ральных осей инерции — главными центральными моментами инер-
ции.
Если уравнение эллипсоида инерции отнести к его главным осям
Ох!, Оу, Oz!, то оно примет вид
Л'Х2+/уу'2-1-Л?=1, (27')
где х', у', z' — текущие координаты точки, расположенной на эллип-
соиде инерции, относительно главных осей инерции; J*, Jy>, —
главные моменты инерции. Уравнение эллипсоида инерции (27') не
содержит слагаемых с произведениями координат точек. Поэтому
центробежные моменты инерции относительно главных осей инер-
ции равны нулю, т. е.
327
= J„—0; Jrxy = 0.
Справедливо и обратное утверждение: если центробежные моменты
инерции относительно трех взаимно перпендикулярных осей равны
нулю, то эти оси являются главными осями инерции. Обращение
в нуль трех центробежных моментов инерции является необходи-
мым и достаточным условием того, что соответствующие прямо-
угольные оси координат есть главные оси инерции.
Главные моменты инерции часто обозначают Jb J2, Л вместо J^,
Jjf, Ji. Для главных осей инерции формула (24) принимает форму
Ji=cos2 а+J2 cos 2/?+J3 cos 2у. (24')
§ 7. СВОЙСТВА ГЛАВНЫХ ОСЕЙ ИНЕРЦИИ
Теорема 1. Если одна из декартовых осей координат, например
Oz (рис. 116), является главной осью инерции для точки О, а две
другие оси Ох и Оу — любые, то два центробежных момента
инерции, содержащих индекс главной оси инерции Oz, обращаются
в нуль, т. е. J„=0 и Jy! = 0.
Главная ось инерции Oz является осью симметрии эллипсоида
инерции. Поэтому каждой точке эллипсоида, например М(О, у, z),
соответствует симметричная относительно этой оси точка М'(О,
—у, z). Подставляя в уравнение эллипсоида инерции (27) последова-
тельно координаты этих точек, получим
Л?’2 + JZZ2 - Myjz = 1; Jу ( - у)2+Jzz2 - 2 Jyt (-y)z = 1.
Вычитая из первого уравнения второе, имеем
— 4 Jylyz = 0.
Так как всегда можно выбрать точки, для которых у и z отличны от
нуля, то 7^=0.
Аналогичные рассуждения для двух симметричных относитель-
но оси Oz точек N(x, О, z) и N'(—x, О, z) приводят к заключению,
что Jxz = 0. В аналитической геометрии при исследовании уравнений
поверхностей второго порядка доказывается обратное утверждение,
что если /„=0 и 7>г = 0, то ось Oz есть главная ось. Таким образом,
обращение в нуль центробежных моментов инерции Jxz и
JyZ является необходимым и достаточным условием, что-
бы ось Oz была главной осью инерции для точки О.
Теорема 2. Если однородное тело имеет плоскость симметрии,
то для любой точки, лежащей в этой плоскости, одна из главных
осей инерции перпендикулярна плоскости симметрии, а две другие
главные оси инерции расположены в этой плоскости.
328
Для доказательства теоремы выберем в плоскости симметрии
П точку О и в ней оси прямоугольной системы координат Oxyz,
причем ось Oz направим перпендикулярно плоскости симметрии
(рис. 117). Тогда каждой точке тела Мк(хк, ук, zk) массой тк соответ-
ствует симметричная относительно плоскости П точка Мк(хк, ук,
—zk) с такой же массой. Координаты точек Мк и Мк отличаются
только знаком у координат zk.
Для центробежного момента инерции Jyi имеем
Az = Е ткУк2к = Е "Wk + Е ткУк ( - Z*) = о,
*-1 0) (П)
так как часть тела (I), соответствующая точкам с положительными
координатами zk, одинакова с частью тела (II), у которой точки
имеют такие же координаты zk, но со знаком минус. Аналогично
доказывается, что
N
Лг= Е f»kXkZk = 0.
Jt=l
Так как центробежные моменты инерции Jyz и Ja обращаются
в нуль, то ось Oz есть главная ось инерции для точки О. Другие две
главные оси инерции перпендикулярны оси Oz и, следовательно,
расположены в плоскости симметрии.
Центр масс однородного симметричного тела находится в плос-
кости симметрии. Поэтому одна из главных центральных осей
инерции перпендикулярна плоскости симметрии, а две другие рас-
положены в этой плоскости.
Доказанная теорема справедлива и для неоднородного тела,
имеющего плоскость материальной симметрии.
Теорема 3. Если однородное тело имеет ось симметрии или
неоднородное тело имеет ось материальной симметрии, то эта ось
является главной центральной осью инерции.
Рис. 117
329
Теорема доказывается аналогично предыдущей. Для каждой
точки тела Мк с положительными координатами хк, ук, zk и массой
тк существует симметричная относительно оси точка с такой же
массой и такими же по величине, но отрицательными координатами
—хк, —ук, +zk, если осью симметрии является ось Oz. Тогда
N
Jxz = X mkXkZk = XmkXkzk +Ymk(-xk)zk = $,
k=l (I) (П)
так как суммы по симметричным относительно оси частям тела (I)
и (II) отличаются друг от друга только знаком у координаты хк.
Аналогично доказывается, что Jy2=0.
Таким образом, ось Oz является главной осью инерции для
любой точки, расположенной на оси симметрии тела. Она есть
главная центральная ось инерции, так как центр масс находится на
оси симметрии.
Теорема 4. Главные оси инерции для точки О, расположенной на
главной центральной оси инерции, параллельны главным централь-
ным осям инерции (рис. 118).
Выберем в точке О главной центральной оси инерции Cz систему
декартовых осей координат Ox'y’z', взаимно параллельных главным
центральным осям инерции Cxyz. Тогда координаты точки тела
Мк в двух системах осей координат будут связаны между собой
формулами параллельного переноса осей
ук=ук; z'k=zk-h,
где h = ОС. Используя эти формулы, вычисляем центробежные мо-
менты инерции Jy/, и Лу. Имеем
Гу/ = X ткУ'Л= х mkykZk-h X ткУк=Jyz-hMyc,
к=1 к=1
так как
N
X mkykZk=Jyz, X ткУк=Мус,
к-\ к=\
где М — масса тела; ус — координата
центра масс относительно системы коор-
динат Cxyz.
Аналогично получаем
J^,! = JZx — hMXc, Jk)/ = Jxy
330
Если С — центр масс системы, то хс=0 и ус=0- Для главных
центральных осей инерции центробежные моменты инерции равны
нулю, т. е.
Jyz = 0; Jzx = 0; Jxy = Q.
Используя полученные формулы при этих условиях, имеем:
Jy/ = 0; J/y = 0; 7^ = 0.
Следовательно, оси Ох1, Оу', Oz' есть главные оси инерции для
произвольной точки О, расположенной на главной центральной оси
инерции Cz. Теорема доказана.
Из доказанной теоремы в качестве следствия получаем: главная
центральная ось инерции является главной осью инерции для всех
своих точек. Действительно, главная ось инерции Oz’ для точки О,
лежащей на главной центральной оси инерции Cz, совпадает с этой
осью. Главная ось инерции таким свойством не обладает. Главные
оси инерции для точки Оъ расположенной на главной оси инерции
точки О, не параллельны главным осям инерции для этой точки.
Они в общем случае повернуты относительно этих осей.
§ 8. ОПРЕДЕЛЕНИЕ ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ
И НАПРАВЛЕНИЯ ГЛАВНЫХ ОСЕЙ
Пусть известны компоненты тензора инерции в точке О от-
носительно осей координат Oxyz. Для определения направления
главных осей инерции в точке О использум уравнение эллипсоида
инерции относительно этих осей
<р (х, у, z) = JjX2 + Jyy2 + Jzz2 —
- 2Jyzyz - 2Jzxzx - 2Jxyxy -1 = 0. (27")
Если оси координат Ох'у'/ являются главными осями инерции, то
радиус-вектор г точки М эллипсоида инерции, расположенной на
главной оси инерции, например оси Oz' (рис. 119), направлен по
нормали к эллипсоиду, т. е. параллельно вектору gradcp, который,
согласно его определению, вычисляется по формуле
. 8а> - д<р - 8ф-
grad<p=— i+—j+—k.
ox dy oz
Параллельные векторы отличаются друг от друга скалярным
множителем, который обозначим 2J. Тогда для параллельных век-
торов г и grad<p и их проекций на оси координат имеем:
331
2Jr=grad<p; (28)
Ux=дср1дх\ Uy=d<pfdy,
Uz = d(p)8z. (28')
В этих уравнениях x, у, z являются коор-
динатами точки конца вектора г, прове-
денного из точки О вдоль какой-либо
главной оси инерции для этой точки.
В частных производных из (27") полу-
чаем:
д<р!дх=2 JxX—U^y—Uaz\
дср/ду = — UxyX -I- Uyy—Uyzz\
dcpjdz = — Uzxx—Uyzy + Uzz.
Подставляя их значения в (28') и перенося все слагаемые в левую
часть, после объединения и сокращения на общий множитель полу-
чим следующую систему уравнений для определения координат х,
у, z точки М, находящейся на главной оси инерции:
(Jx J)x Jxyy —О,
—Jyxx+ (Jy—J)y—Jyxz=0;
7”zxx+Jsyy+(Jr 7) z=0.
(29)
Так как (29) является однородной системой линейных уравнений,
то отличные от нуля решения для координат х, у, z получаются
только при условии, что определитель этой системы равен нулю,
т. е.
(30)
Это кубическое уравнение для определения J называется уравнением
собственных значений тензора инерции.
В общем случае имеется три различных действительных корня
кубического уравнения Л, J2, J3, которые являются главными мо-
ментами инерции. Действительно, если ось Ох совпадает с глав-
332
ной осью инерции, то для точки М эллипсоида инерции, рас-
положенной на этой оси, у=0 и z — О. Первое уравнение (29) прини-
мает вид
(Jx—J)x=0.
Так как х#0, то Jx—J=0 и JX=J, которое следует обозначить
Аналогично можно получить Jy=J=J2, JZ—J=J3, если оси Оу
и Oz — главные оси инерции.
Подставляя в (29) J=J\, получим только два независимых урав-
нения для определения координат точки х, у, z эллипсоида инерции,
соответствующих главной оси инерции, для которой главный мо-
мент инерции есть Jx. Третье уравнение системы будет следствием
двух других уравнений, так как определитель этой системы равен
нулю. Из (29) можно найти только две величины, например x/z
и y/z. Они определят направление вектора й вдоль главной оси
инерции, момент инерции относительно которой есть Jj. Модуль
радиуса-вектора гх остается неопределенным. Аналогично определя-
ются направления векторов г2 и й вдоль двух других главных осей
инерции, для которых главные моменты инерции равны Л и J3.
Можно доказать, что векторы гь г2, г3, направленные вдоль главных
осей инерции, взаимно перпендикулярны.
Таким образом, если известен тензор инерции для осей Oxyz, то
можно определить как направление главных осей инерции, так
и главные моменты инерции. Для главных осей инерции тензор
инерции (25) принимает форму
§ 9. ВЫРАЖЕНИЕ КОМПОНЕНТ ТЕНЗОРА ИНЕРЦИИ
ЧЕРЕЗ ГЛАВНЫЕ МОМЕНТЫ ИНЕРЦИИ
Определим компоненты тензора инерции в точке О относитель-
но осей координат Oxyz, если в этой точке известны главные
моменты инерции относительно главных осей инерции Oxiy’z!, т. е.
Л = Л', Л=Л > й=Л- Предположим, что ориентация осей координат
Oxyz относительно главных осей инерции Ox!y'z! задана таблицей
углов:
333
Ox!; i' Oy';j' Oz'; X
Ox; i ai
Oy;j a2 Pi 72
Oz; к a3 Pi 7з
Осевые моменты инерции относительно осей Ох, Оу, Oz через
главные моменты инерции определяются по формуле (24'). Прини-
мая последовательно за ось О1 оси координат Ох, Оу, Oz, получим
Jx=Jx- cos2ai + Jy' cos2/?! + Л cos2?!;
J у = Jx- cos2a2+Jy-cos2/?2+Jz- cos2y2;
Л=JX' cos2a3 4- Jy- cos2/?3 + Jz- cos2y3.
(31)
Для выражения центробежных моментов инерции через главные
моменты инерции используем формулы преобразования координат
точек тела при повороте осей координат вокруг точки О (рис. 120).
Эти формулы получим проецированием на оси Oxyz радиуса-век-
тора гк точки Мк, разложенного предварительно на составляющие,
параллельные осям двух систем осей координат в точке О. Имеем
rk=xki+yij+zkk=x'ki'+y’kj'+z\k', (32)
где xk, yk, zk — координаты точки Mk относительно системы осей
координат Oxyz, а ik, у'к, z'k — относительно Oxty'z!. Проецирование
вектора на какую-либо ось прямоугольной системы координат эк-
вивалентно скалярному умножению этого вектора на единичный
вектор оси. Умножая обе части (32) последовательно на единичные
векторы осей координат i, j, к и учитывая таблицу углов для осей,
получим
Хк-Гк • i = (х’кГ+y'J + 4Л') i=
=x'kcos<i[ 4-yicos/?! -t-zicosyb
Ук=Гк (x,ki'+yki’ + 4&Т/=
=xk cosa2+yk cos/?2+z'k cosy2;
=rk • к=(x'ki'+y'ij'+z$) к=
= x'k cosa3+y'k cos/?3+z'k cosy3.
(33)
334
Используя (33) для центробежного мо-
мента инерции Jxy, имеем
У /У \
Е = ( Е )cosa1cosa2+
Jt=l \Jt=l /
(N \
£ jcos/?1cos/J2+
Ar=l /
(N \
ICOS?! COSy2,
*==1 /
(34)
так как центробежные моменты инерции относительно главных
осей инерции равны нулю, т. е.
У У
Лу= Е ткх'ку’^О;
*=1 к=\
N
Qca координат Ох и Оу взаимно перпендикулярны, поэтому коси-
нусы их углов удовлетворяют условию
cost*! cosa2+cos/?, cos/?2 + cosy! cosy2=0,
или
cosy! cosy2= — (COS(X| cosa2 + cos/?! cos/?2).
Используя это соотношение для исключения величины cosyicosy2
и добавляя в первом слагаемом (34) под знаком суммы (у’2—у’2) = 0,
а во втором (У/—х^2)=0, после объединения слагаемых с оди-
наковыми произведениями косинусов получим
тк (xi2+yi2)- £ z«i0i2+42)
*=1
cosai cosa2 +
cos^! cos^2=
= (J/—Л-) cost*! cosa2 + (Л—cos/?i cosjB2,
335
где Sw*(42+y*2)=^; Е"кб42+42)=7Х-; Ymk(z'k2+x,k2)=j)l-
— главные моменты инерции. Аналогично получаются выражения
для Jyz и J1X. Итак имеем
Jxy=(7/ — Jy) cosa! cosa2+(Jy — 7У) cos^ cos/?2;
Jyz=(7?—7y) cosa2 cosa3 + (7f — 7y) cos/?2 cos /?3;
7zx=(7/—7y) cosa3 cosai + (7/—7y) cos/?3 cos/J].
(35)
Формулы (31) и (35) дают выражения всех компонент тензора
инерции для осей координат Oxyz через главные моменты инерции,
если известны углы этих осей с главными осями инерции. В прило-
жениях встречаются частные случаи, когда одна из осей координат
Oxyz совпадает с главной осью инерции.
Если ось Ох совпадает с главной осью инерции Ох' (рис. 121), то
7xy=7XJ=0; 72x=7zx=0. Это же можно получить из (35). Необходи-
мые для вычисления углы соответственно равны:
а2 = 90°, а3 = 90°, &=а, Д3 = 90°-а.
Из (35) имеем
Лг ~ (Jz— Jy) cosa si°a=~~~ s*n (35')
В формуле (35') с плюсом следует брать главный момент инер-
ции с индексом той оси, на положительное направление которой
указывает дуговая стрелка поворота осей Oyz на угол a <90° до
совпадения с осями Oy'z'. В рассматриваемом случае поворот осей
Oyz вокруг Ох до совпадения с главными осями производится от
оси Оу к оси Oz\ следовательно, с плюсом следует взять главный
момент инерции 7Х- и с минусом — 7У.
Если оси расположены, как показано на рис. 122, то дуговая
стрелка поворота осей Oyz до совпадения с главными осями инер-
ции Оу'?! на угол a <90° направлена к отрицательному направлению
оси Oz. Поэтому в (35') 7/ следует взять со знаком минус, а 7У — со
знаком плюс, в чем нетрудно убедиться, используя (35) и таблицу
углов. Имеем:
а2 = 90°; а3 = 90°; /?2 = а; /?3 = 90° + а;
7JZ = (7У — 7У) cosa (—sina) =
Jу' —— 7у
= (7У — 7г-) cosa sina=----sin 2а.
336
Аналогично при совпадении осей Оу с Оу' и повороте осей Oxz
вокруг Оу до совпадения с осями Oxi на угол /?<90° от Oz к Ох
в направлении против часовой стрелки имеем:
Jxy — Jxy — 0> Jyz—Jy'i — 0» Jzx—-----sin2/J.
При совпадении осей Oz и Oz' и повороте осей вокруг Oz на угол
у <90° от Ох к Оу против часовой стрелки получим:
2
sin 2у.
ГЛАВА 8
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ И СИСТЕМЫ
§ 1. ВВЕДЕНИЕ
Механической системой называется любая совокупность матери-
альных точек.
Внешними силами механической системы называются силы, с ко-
торыми действуют на точки системы тела и точки, не входящие
в рассматриваемую систему.
Внутренними силами механической системы называют силы вза-
имодействия между точками рассматриваемой системы.
Внешнюю силу, приложенную к какой-либо точке системы, обо-
значим Вр, а внутреннюю — F$. Заметим, что внутренние и внеш-
ние силы могут включать в себя как активные силы, так и силы
реакций связей.
При рассмотрении внутренних сил, действующих на всю механи-
ческую систему, доказано (гл. 1), что главный вектор всех внут-
ренних сил системы и главный момент этих сил относите-
льно произвольной точки равны нулю при любом состо-
янии системы, т. е. при ее равновесии и при произвольном движе-
нии.
Таким образом, для главного вектора и главного момента и их
проекций на оси координат, имеем
*=1
Л«=£ ^ = 0;
к=1
(1)
L^= £ Л?ода=0,
к=1
*=1
iy= £ My(F2)=0-,
k=l
L®= £ М(Я°) = 0.
' *=1
(2)
338
§ 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
Пусть даны внешние и внутренние силы, действующие на систе-
му, состоящую из N точек (рис. 123). Если к каждой точке системы
приложить равнодействующую силу внешних сил Fjp и равнодейст-
вующую силу всех внутренних сил то для любой к-й точки
системы можно составить дифференциальное уравнение движения,
например, в векторной форме, т. е.
(к=1, 2, ..., N). (3)
dt2
Систему N дифференциальных уравнений (3) называют диффере-
нциальными уравнениями движения механической системы в вектор-
ной форме. Если спроецировать векторные дифференциальные урав-
нения (3) на прямоугольные декартовы оси координат, то получим
систему 3N дифференциальных уравнений, описывающих движение
точек механической системы.
Для нахождения движения механической системы по заданным
силам и начальным условиям для каждой точки системы нужно
проинтегрировать, следовательно, систему 3N дифференциальных
уравнений. Эту задачу не удается точно решить в общем случае
даже для одной точки. Она исключительно трудна в случае двух
материальных точек, которые движутся только под действием сил
взаимодействия по закону всемирного притяжения (задача о двух
телах) и совершенно неразрешима в случае трех взаимодейству-
ющих точек (задача о трех телах).
Задача интегрирования дифференциальных уравнений механи-
ческой системы еще сложнее, если на механическую систему нало-
жены связи, силы реакций которых заранее не известны и должны
быть дополнительно определены по заданным силам и связям
аналогично случаю движения несвободной материальной точки по
поверхности и кривой линии.
В некоторых случаях из дифферен-
циальных уравнений движения систе-
мы можно получить первые интегралы,
т. е. соотношения, в которые не входят
производные второго порядка от коор-
динат по времени.
Если известны первые интегралы,
то задача интегрирования системы
дифференциальных уравнений облегча-
ется. Хотя отдельные первые интег-
ралы и не могут полностью описать
Рис. 123
339
движения всех точек системы, однако они иногда характеризуют
важные стороны движения системы в целом.
Первые интегралы системы дифференциальных уравнений удоб-
но получать из так называемых общих теорем динамики, когда
выполняются некоторые дополнительные условия для действующих
сил. Кроме того, общие теоремы динамики, даже когда по ним
нельзя определить первые интегралы, дают ценную информацию
о движении точки или системы. В некоторых задачах, где не требу-
ется полного знания движения системы, эти сведения могут оказать-
ся достаточными.
Общие теоремы динамики являются следствиями системы диф-
ференциальных уравнений движения точки или соответственно си-
стемы точек.
§ 3. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС
Количество движения точки и системы
Одной из мер движения точки или системы является количество
их движения.
Количеством движения материальной точки q называют вектор,
равный произведению массы точки т на ее скорость v, т. е.
q=mv. (4)
Количество движения точки в физике часто называют импульсом
материальной точки.
Проекции количества движения точки на прямоугольные декар-
товы оси координат:
qx=mvx = mx; qy=mvy=mjr, qz=mv2=mz. (4')
Размерность количества движений в СИ — кг • м/с или Н • с.
Количеством движения системы Q называют векторную сумму
количеств движений отдельных точек систем, т. е.
Q = Yl=m^k, (5)
к
и, следовательно, проекции количества движения системы на прямо-
угольные декартовы оси координат
Qx ~ ^k^kxt Qy ~ У ^kvkvf Qz = У^ ^k^kz- (5)
к к к
340
Вектор количества движения системы Q в отличие от вектора
количества движения точки q не имеет точки приложения. Вектор
количества движения точки считается приложенным в самой движу-
щейся материальной точке, а вектор Q является свободным век-
тором.
Вычисление количества движения системы
Количество движения системы можно выразить через массу
системы М и скорость центра масс гс:
Q = Mvc. (6)
В проекциях на прямоугольные декартовы оси соответственно
<2х = Л^Сх=Л/хс; Qy=MvCy = Myc; Qz=MvCz = Mzc, (6')
где хс, ус, ?с — координаты центра масс системы.
Выведем формулу (6):
(7)
где гк — радиус-вектор к-й точки системы (рис. 124).
По формуле для радиуса-вектора цен-
тра масс
^ткгк=Мгс- (8)
к
Подставляя значение статического мо-
мента массы (8) в (7), имеем
- d _ dr с -
Q=T(Mrc)=M~ = Mvc,
dr dt
так как масса системы М не изменяется Рис. 124
при движении системы.
Элементарный и полный импульсы силы
Действие силы F на материальную точку в течение времени dz
можно охарактеризовать так называемым элементарным импуль-
сом силы Fdt. Полный импульс силы F за время t, или импульс силы
S, определяют по формуле
341
S= Fdt. (9)
о
Проекции импульса силы на прямоугольные оси координат вы-
ражаются формулами
/ t
Sx = Sy= Fydt; Sz = Fzdt. (9')
ООО
Единица импульса силы — Нс.
Теорема об изменении количества движения точки
Дифференциальное уравнение движения материальной точки
под действием силы F можно представить в следующей векторной
форме:
Так как масса точки т принята постоянной, то ее можно внести
под знак производной. Тогда
^nw)=F. (10)
dr
Формула (10) выражает теорему об изменении количества дви-
жения точки в дифференциальной форме: первая производная по
времени от количества движения точки равна действующей на точ-
ку силе.
В проекциях на координатные оси (10) можно представить в виде
у (mvx)=Fx, Y(mvy)=Fy; у (mvz)=Fz. (10')
dr dr dr
Если обе части (10) умножить на df, то получим другую форму
этой же теоремы — теорему импульсов в дифференциальной
форме:
d(mv)=Fdt, (11)
т. е. дифференциал от количества движения точки равен элементар-
ному импульсу силы, действующей на точку.
342
Проецируя обе части (11) на коор-
динатные оси, получаем
d(»n>x)=f’xdf;')
&(jnvy)=Fydt, > (If)
d.(mvz) = Fz&t. J
Интегрируя обе части (И) в преде-
лах от нуля до t (рис. 125), имеем
mv—mv0 = S,
Рис. 125
(12)
где v — скорость точки в момент t; «0 — скорость при /=0; 5 —
импульс силы за время t.
Выражение в форме (12) часто называют теоремой импульсов
в конечной (или интегральной) форме: изменение количества движе-
ния точки за какой-либо промежуток времени равно импульсу силы
за тот же промежуток времени. В проекциях на координатные оси
эту теорему можно представить в следующем виде:
mvx—mvOx=5Х; mvy—mvOy - Sy, mvz — mvOz=Sz. (12')
Для материальной точки теорема об изменении количества дви-
жения в любой из форм, по существу, не отличается от дифференци-
альных уравнений движения точки.
Теорема об изменении количества движения системы
Аналогично тому, как для одной материальной точки, выведем
теорему об изменении количества движения для системы в различ-
ных формах. Пусть к точкам системы приложены внешняя и внут-
рення силы. Тогда для каждой точки можно применить теорему
об изменении количества движения, например в форме (10):
|-(ад)=Д')+Яс, к=\, 2, ..., N.
dt
Суммируя по всем точкам системы правые и левые части этих
соотношений и учитывая, что сумма производных равна производ-
ной от суммы, получаем
d/ к к к
343
Так как, по свойству внутренних сил и определению количества
движения системы,
X^=°; Xm^k=Q,
к к
то приведенное соотношение можно представить в виде
= (В)
к
Выражение (13) является теоремой об изменении количества
движения системы в дифференциальной форме: производная по вре-
мени от количества движения системы равна векторной сумме всех
внешних сил, действующих на систему. В проекциях на прямоуголь-
ные декартовы оси координат
d^/d^z^’; dez/d/=^^, (137
k k k
т. e. производная no времени от проекции количества движения
системы на какую-либо координатную ось равна сумме проекций всех
внешних сил системы на ту же ось.
Умножая обе части (13) на dz, получаем теорему импульсов для
системы в дифференциальной форме:
de = Z^dZ, (14)
к
т. е. дифференциал количества движения системы равен векторной
сумме элементарных импульсов всех внешних сил, действующих
на систему. В проекциях на координатные оси эта теорема при-
мет вид
de,=S^df; de^S^dz; (Ю
k k k
Вычисляя интегралы от обеих частей (14) по времени от нуля до t,
получаем теорему импульсов для системы в конечной или интег-
ральной форме:
(15)
к
где @0 — количество движения системы в момент Z=0; Q — коли-
344
чество движения в момент t\ Sft — импульс внешней силы, деист-
t
л
вующей на к-ю точку за время t; Sj? = dt
о
Теорема импульсов для системы в конечной форме формулиру-
ется так: изменение количества движения системы за какое-либо
время равно векторной сумме всех импульсов внешних сил, действу-
ющих на систему за то же время.
В проекциях на прямоугольные оси согласно (15) имеем:
2x-eox=Z^; Qy-QOy=Y^-, Qz-Qoz=^s^- (15')
k k k
Внутренние силы системы не входят явно в теорему об измене-
нии количества движения системы в любой из форм и, следователь-
но, не влияют непосредственно на изменение количества движения
системы. Они могут влиять на изменение количества движения
только неявно через внешние силы.
Из теоремы об изменении количества движения для точки и си-
стемы при некоторых условиях для внешних сил можно получить
так называемые первые интегралы системы дифференциальных ура-
внений точки и системы. Эти первые интегралы называют законами
сохранения количества движения или проекции количества движе-
ния на ось. Рассмотрим эти законы сохранения для точки и системы
одновременно, считая материальную точку механической системой,
состоящей из одной точки.
Законы сохранения количества движения
Законы сохранения количества движения системы получаются
как частные случаи теоремы об изменении количества движения для
системы в зависимости от особенностей системы внешних сил,
приложенных к рассматриваемой механической системе, а для од-
ной точки — от особенностей сил, действующих на точку. Внутрен-
ние силы при этом могут быть любыми, так как они явно не влияют
на изменение количества движения системы.
Возможны два частных случая.
1. Если векторная сумма всех внешних сил, приложенных к
системе, равна нулю, т. е. = то из теоремы об измене-
k
нии количества движения системы, например в форме (13), сле-
дует, что
(5 = const (16)
345
Этот закон (точнее, частный случай теоремы) формулируется
так: если главный вектор внешних сил системы равен нулю, то
количество движения системы постоянно по величине и направле-
нию. В проекциях на координатные оси, по этому закону,
Gx = Ci; Qy = C2, Q2=C„ (16')
где Ci, Cz, C3 — постоянные величины.
В соотношения (16) и (16') входят производные от координат
точек по времени не выше первого порядка и не входят вторые
производные от этих координат. Следовательно, эти соотношения
являются первыми интегралами дифференциальных уравнений си-
стемы (3).
2. Если равна нулю проекция главного вектора внешних сил на
какую-либо координатную ось Ох, т. е. = 0, то из (13') имеем
к
gx=const. (17)
Выражение (17) является законом сохранения проекции количе-
ства движения системы: если проекция главного вектора всех внеш-
них сил системы на какую-либо ось равна нулю, то проекция количе-
ства движения на ту же ось является постоянной величиной.
Применим закон сохранения количества движения системы для
объяснения принципа реактивного движения. Пусть, например,
система состоит из двух сочлененных твердых тел, находящихся
в покое и свободных от действия внешних сил. Тогда для рассмат-
риваемой системы количество движения все время постоянно и рав-
но нулю. Допустим, что при взрыве пиропатрона (действие внутрен-
них сил) первому телу массой Мг сообщена скорость Тогда
скорость второго тела массой М2 определится из закона сохранения
количества движения:
Q = М! V! + М-Рг = const = 0.
Следовательно,
Mi _
v2= - — Vi,
М2
т. e. второе тело движется в сторону, противоположную первому
телу. Если его движению препятствует какая-либо связь, то рас-
сматриваемое тело давит на эту связь с некоторой силой по направ-
лению скорости v2. Эту силу называют реактивной. В реактивных
двигателях она создается за счет истечения газа с большой скоро-
стью (около 2...2,5 км/с) из сопла двигателя.
346
Теорему об изменении количества движения в той или другой
форме удобно применять для решения задач именно в рассмотрен-
ных частных случаях, хотя в некоторых случаях ее применяют
и в общем случае.
Следует отметить особую роль внутренних сил системы. Они не
входят в теорему об изменении количества движения системы явно,
но могут изменять количество движения неявно, путем создания
новых внешних сил или изменения действующих, особенно в таких
механических системах, которые содержат жидкости и газы, и даже
деформируемые твердые тела. Находясь под действием вертикаль-
ной силы тяжести, за счет внутренних молекулярных движений,
силы тяжести жидкости преобразуются в давления, которые по
закону Паскаля передаются во всех направлениях.
Внутренние силы могут создавать у точек системы ускорения,
изменяя скорости и положение точек системы. Следовательно, внут-
ренние силы могут создавать силы инерции, которые для любой
механической системы являются внешними, изменять и создавать
силы сопротивления внешних сред и создавать и изменять силы,
зависящие от расстояний и положения точек в пространстве, как
например, силы тяготения внешнего силового поля.
Таким образом, внутренние силы могут изменять количество
движения системы и некоторые другие величины неявно, через
посредство внешних сил. Это следует учитывать и при применении
законов сохранения количества движения системы, которые выпол-
няются только для изолированных систем, т. е. систем, точки
которых не могут за счет внутренних сил прийти в соприкосновение
с внешними телами и средами, отсутствующих для изолированных
систем. В изолированных системах не должно быть и внешних
гравитационных полей, силы которых могли бы изменяться за счет
внутренних сил.
Все механические системы вблизи Земли являются неизолиро-
ванными прежде всего из-за действия поля сил тяжести.
Пример. Через изогнутую под прямым углом трубу постоянного сечения за
1 с протекает жидкость массой т (рис. 126). Скорость течения жидкости v постоянна,
т. е. одна и та же у всех частиц жидкости.
Определить силу, с которой жидкость давит на участок трубы вследствие пово-
рота потока на прямой угол.
Решение. Применим к объему жидкости, заключенному между стенками трубы
и поперечными сечениями 1 и 2, теорему импульсов за промежуток времени, равный
1 с. За секунду частички жидкости из сечения 1 сместятся на расстояние v• 1 и займут
положение Г, а точки жидкости из сечения 2 займут положение Z. По теореме
импульсов для выделенного объема жидкости имеем
2-е0= Fit; Fdt=F 1, (а)
347
о
о
Рис. 127
где 2о — количество движения жидкости, заключенной между сечениями 1 и 2;
Q— количество движения жидкости, заключенной между сечениями Г и Z; F —
главный вектор распределенных сил, с которыми стенки трубы действуют на выде-
ленный объем жидкости.
Так как в общей части объема жидкости количества движения, входящие
в б и 2о взаимно уничтожаются при их вычитании, то из (а) получаем
Р=П№-П№0.
(б)
Сила давления жидкости на стенки трубы по аксиоме о равенстве действия
и противодействия выразится в виде
F' = —F=mvQ—mv.
Проецируя (б) на оси координат, получаем
F'x= —mv; F'y=mv0=mv,
так как v=v0- После этого
F' = J(F'x)2 + (Fy=mvj2.
Направление силы давления жидкости F' указано на рисунке.
Если бы через сечение 1 жидкость не поступала, а создавалась внутри трубы, как
в реактивном двигателе образуются газы после сгорания топлива, а через сечение
2 она выходила (рис. 127), то сила F', согласно (б), имела бы значение F' = —mv. Эта
сила F' является частью реактивной силы двигателя вследствие выброса продуктов
сгорания из двигателя, являющегося источником газа.
Другая часть реактивной силы двигателя, равная (р— pa)S, получается за счет
разности давлений р, в струе выходящего из сопла газа и давления в среде ра, куда
выходит из двигателя газ. Здесь 5 — площадь выходного сечения сопла.
Полная реактивная сила двигателя
R=mv + (p-pa)S.
По направлению часть реактивной силы, зависящая от скорости истечения газов,
всегда противоположна этой скорости. Для получения большей скорости истечения
газа из двигателя через сопло его следует расширять в направлении выходного
сечения, если газ движется по соплу со сверхзвуковой скоростью, что обычно имеет
место в реальных реактивных двигателях.
348
Теорема о движении центра масс системы
Следствием теоремы об изменении количества движения систе-
мы является теорема о движении центра масс системы.
По теореме об изменении количества движения системы (13),
а<2/а/=ЕДе)-
к
Но количество движения системы можно вычислить по форму-
ле (6):
Q=Mvc,
где vc — скорость центра масс; М — масса системы.
Подставляя (6) в (13) и учитывая, что масса системы постоянна,
получаем теорему о движении центра масс в векторной форме:
d' к
или
M~ac=Y^\ (18)
к
где ас — ускорение центра масс.
Теорема о движении центра масс формулируется так: центр масс
системы движется так же, как и материальная точка, мас-
са которой равна массе всей системы, если на точку действуют
все внешние силы, приложенные к рассматриваемой механической
системе.
Проецируя (18) на прямоугольные декартовы оси координат
(рис. 128), получаем дифференциальные уравнения движения центра
масс:
м—
dr2 у ’
где хс, ус, zc — координаты центра
(18')
масс.
349
Из теоремы о движении центра масс можно получить следствия,
аналогичные законам сохранения количества движения и проекции
количества движения на ось.
1. Если главный вектор внешних сил, действующих на систему,
равен нулю, т. е. £_Р£е) = 0, то из (18) следует, что ускорение центра
_ к
масс ас равно нулю, а следовательно, скорость центра масс vc явля-
ется постоянной по модулю и направлению, т. е. центр масс движет-
ся прямолинейно и равномерно по инерции или находится в покое.
Если, в частности, в начальный момент он находится в покое, то он
покоится в течение всего времени, пока главный вектор внешних сил
равен нулю.
2. Если проекция, например на ось Ох, главного вектора внеш-
них сил, действующих на систему, равна нулю, т. е.
к
то из (18') следует, что проекция ускорения хс центра масс на эту ось
равна нулю, а следовательно, проекция скорости центра масс явля-
ется постоянной величиной, т. е. vCx=xc=const.
Если дополнительно в начальный момент vCx = 0, то тогда
хс=const, т. е. координата хс центра масс не изменяется при движе-
нии системы.
Внутренние силы не влияют явно на движение центра масс. Они
могут влиять только неявно, через внешние силы. Следовательно,
одними внутренними силами, без внешних, нельзя вывести из рав-
новесия или изменить движение центра масс системы. Но внутрен-
ними силами для неизолированной механической системы можно
создать движение отдельных частей системы и, следовательно, вза-
имодействие с внешними телами, вызывая этим внешние силы
реакций связей или изменяя активные силы. Это может изменить
движение центра масс или вывести его из равновесия.
Пусть человек стоит на абсолютно гладкой горизонтальной
плоскости вблизи скрепленного с этой плоскостью тела. Так как на
человека не действуют внешние силы в горизонтальном направле-
нии, то внутренними силами он не может вывести из равновесия
в этом направлении свой центр масс. Но человек может оттолкнуть-
ся рукой от препятствия, т. е. внутренними силами вызвать внеш-
нюю силу реакций препятствия и таким образом вызвать движение
своего центра масс в горизонтальном направлении. Все, что движет-
ся по Земле, летает в воздухе, плавает по воде, совершает это
с помощью внутренних сил, создавая внешние силы трения на
твердых поверхностях внешних тел, отталкиваясь от воздуха или
воды.
350
Пример 1. Два груза с силами тяжести Р] и Р2, соединенные нерастяжимой
нитью, перекинутой через блок, скользят по боковым граням равнобедренного клина
(рис. 129). Клин стороной ВС опирается на гладкую горизонтальную плоскость.
В начальный момент система находится в покое. Определить перемещение клина при
опускании груза Р\ на высоту h. Сила тяжести клина P=2Pi и Pi=2P2. Массой блока
и нити пренебречь.
Решение. Внешними силами, действующими на клин вместе с грузами, являют-
ся силы тяжести Pi, Р2, Р и нормальная реакция горизонтальной гладкой плоскости
N. Следовательно ^^=0-
к
Учитывая, что в начальный момент система находится в покое, на основании
второго следствия из теоремы о движении центра масс, имеем хс=const. Вычислим
хс при f=0 и х* в момент, когда груз опустится на высоту Л.
Для момента /=0
_ (Л/g) Х[ + (P^g) Х2 + (P/g) X _ PtXl + Р2х2 + Рх
Хс~ Pllg+Pllg+Plg ~ Р1+Р2+Р ’
где Xi, х2 и х — соответственно координаты центра масс по оси Ох грузов Pi,
Р2 и клина.
Пусть вся система вместе с клином переместилась в положительном направле-
нии оси Ох на величину / при опускании груза Р] на Л. Тогда
Pi (xi +1-Л)+Р2 (х2+1-Л)+Р (х+/)
ХС~ Р1+Р2+Р
так как грузы вместе с клином передвинутся на I вправо и по клину вдоль от-
рицательного направления оси Ох на Л при заданном угле клина, равном 45°.
Так как хс—х* =0, то после вычитания получим
P1(Z-A)+P2(/-A)+PZ=0.
Отсюда
(Pj+P2)A (2Р2+Р2)А 3
1=---------—------------=-п.
Pi+Рг+Р 2Р2+Р2+4Р2 7
Так как величина I оказалась положительной, то клин действительно переместит-
ся вправо в положительном направлении оси Ох.
Пример 2. В электромоторе корпус (статор) имеет силу тяжести Р] = 700 Н. Ротор
вращается по часовой стрелке с частотой п = 980 мин-1 (рис. 130). Центр масс ротора
вследствие его несимметричности отстоит от оси вращения на расстоянии 1=5 см.
Определить горизонтальную силу, с которой действует мотор на болты, крепя-
щие его к фундаменту, и вертикальное давление на пол.
Решение. Предположим, что при /=0 центр масс ротора находится на оси Оу.
Тогда в момент времени t координаты центра масс ротора можно выразить как
х2=I sin<p=/sin cot; у2 = I cos<p=I cos cot,
nn n 980 98л
где <u=—=------=— c .
30 30 3
Для определения давления мотора на болты и пол рассмотрим в качестве
механической системы весь мотор, для которого внешней силой в горизонтальном
351
Рис. 130
направлении является только сила действия болтов F, а в вертикальном направле-
нии — сила тяжести и нормальная реакция пола.
Для координат центра масс всего мотора
m{Xi+m2X2 т\у\+т2У2
хс=-----------; ус—---------.
/И] +«2 ЛИ1+/И2
где От] и m2 — массы корпуса мотора и ротора соответственно; хь у] и %2> У2 —
координаты их центров масс.
Центр масс корпуса закрепленного мотора является неподвижной точкой и на-
ходится в начале координат. Следовательно, Xj=0 и У1=0, и потому координаты
центра масс всего мотора
«2*2 Ргх2 т2У2 Р2Х2
хс=-------; ус=------------=—-•
Ml +/И2 Р[+Р2 «1+т2 Р1+Р2
Используя дифференциальные уравнения движения центра масс мотора в проек-
циях на координатные оси, получим
р + /*
-*-------2yc=N-(Pi+P2'), (а)
g
где F — сила действия болтов на корпус мотора в горизонтальном направлении по
оси Ox; N — нормальная составляющая силы реакции пола. Так как
Р2 Р2
хс --------Zco2 sin cot; ус =-----/со2 cos cot,
Р\+Р2 Р1 + Р2
то из (а) следует
Р2 Р2
F=— — lea2 sin cot; N=---ко2 cos cot + (Pi + Pi).
g g
Сила действия мотора на болты F' и давление N' на пол равны
F'=-F; =
352
Наибольшие значения этих сил
Р2 300'5'982я2
= — 1<о2 =------= 16 200 Н = 16,2 кН;
“ g 980'9
Р2
Лтах = -Р1+Р2+~/а,2~1000+16200 = 17200 Н = 17,2 кН.
g
Если болтов нет, то корпус мотора может подпрыгивать в направлении оси Оу.
Динамическое условие подпрыгивания в рассматриваемом случае выразится как
jV<0. Кинематическое условие подпрыгивания мотора есть у\ >0.
Дифференциальные уравнения поступательного движения
твердого тела
Из теоремы о движении центра масс системы получаются диф-
ференциальные уравнения поступательного движения твердого те-
ла. Имеем
Мас=^.
к
Но при поступательном движении твердого тела ускорения всех
точек тела одинаковы по модулю и направлению, т. е. ас=а, где
а — ускорение произвольной точки тела. Учитывая это, из теоремы
о движении центра масс получаем следующее дифференциальное
уравнение поступательного движения тела в векторной форме:
Ma = ^F^.
к
Проецируя на оси координат, имеем:
Mz^F'b.
к к к
Это и есть дифференциальные уравнения поступательного движения
твердого тела в проекциях на прямоугольные оси координат. В этих
уравнениях х, у, z являются координатами произвольной точки
тела, в частности могут быть координатами его центра масс. Тело,
совершающее поступательное движение, имеет три степени свобо-
ды, и поэтому можно составить три дифференциальных уравнения
его движения.
Дифференциальные уравнения поступательного движения твер-
дого тела аналогичны дифференциальным уравнениям движения
одной материальной точки. С помощью этих уравнений можно
решать такие же задачи, как и для одной точки.
353
§ 4. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
Кинетический момент точки и системы
Наряду с количеством движения в качестве векторной меры
движения можно использовать кинетический момент, или момент
количества движения. Для материальной точки массой т, движу-
щейся со скоростью v, кинетическим моментом к0 относительно
какого-либо центра О называют момент количества движения точ-
ки относительно этого центра О (рис. 131), т. е.
k0 — M0(mv) = r xmv. (19)
Кинетический момент к0 приложен к точке О, относительно
которой он вычисляется.
Проецируя обе части (19) на прямоугольные декартовы оси,
получаем кинетические моменты точки относительно этих осей
координат, если точка О является началом осей координат:
кх—Мх (mv) = т (yvz—zvy)—m(yz — zy );
ky=My (mv) = m (zvx—xvz) = m (zx—xz);
kz=Mz (mv)=m (xvy—yvx)=m (xy—yx).
(19')
В физике кинетический момент точки иногда называют момен-
том импульса точки.
Единица кинетического момента в СИ — кг • м2/с, или Н м • с.
Для механической системы кинетическим моментом Ко (или
главным моментом количества движения системы относительно
какой-либо точки О) называют векторную сумму кинетических мо-
ментов точек этой системы, взятых относительно точки О (рис. 132),
т. е.
354
Ko = YMo (mkvk) = £ rk x mkvk.
к к
(20)
Кинетический момент системы Ко приложен к точке О, относи-
тельно которой он вычисляется.
Если спроецировать (20) на прямоугольные декартовы оси коор-
динат, то получим проекции кинетического момента на эти оси, или
кинетические моменты относительно осей координат:
Кх=£ Мх (mkvk) =^£тк (ykzk - z^);
к к
Ку У Му (mkv^) = У тк (zkxk xkzk),
к к
K2=^MZ (mkvk)='£тк {ХкУк-укХк).
к к
(20')
Кинетический момент относительно оси вращения
при вращательном движении твердого тела
Вычислим кинетический момент твердого тела относительно оси
вращения, когда тело вращается вокруг этой неподвижной оси
с угловой скоростью со (рис. 133). По определению кинетического
момента относительно оси [(см. формулы (20')] имеем
Kz = YMz(mkvk).
к
Но при вращении тела вокруг оси vk=
= hifij, причем количество движения точки
mkvk перпендикулярно отрезку hk и лежит
в плоскости, перпендикулярной оси враще-
ния Oz. Следовательно, момент количества
движения относительно оси Oz для одной
точки
Mz (mkvk) = h^nkvk=т^со.
Для всего тела
К = У т^со = со У /иА2 = со Jz,
к к
т. е.
Kz=Jzco. (21)
Рис. 133
355
Таким образом, кинетический момент тела относительно оси
вращения при вращательном движении равен произведению угловой
скорости тела на его момент инерции относительно оси вращения.
Знак кинетического момента относительно оси совпадает со знаком
угловой скорости вращения вокруг этой оси: при вращении против
часовой стрелки кинетический момент положительный; при враще-
нии по часовой стрелке — отрицательный.
Дополнительно без вывода приведем формулы для кинетических
моментов относительно двух других осей координат Ох и Оу,
перпендикулярных оси вращения Oz. Имеем
Кх= Ку= —Jyfij,
где Jxz=y£mkxkzk и Jyz=^imkyk?k — центробежные моменты инерции.
к к
Эти формулы можно получить как частный случай более общих
формул для случая вращения твердого тела вокруг неподвижной
точки. Они могут быть получены и непосредственно.
Если ось вращения Oz является главной осью инерции для точки
О, то Jxz = Jyz=0 и, следовательно, Kx=Ky = Q для этой точки. В этом
случае кинетический момент Ко относительно точки О направлен по
оси вращения. В общем случае Ко не направлен по оси вращения,
так как имеет не равные нулю проекции Кх и Ку на оси координат,
перпендикулярные оси вращения Oz.
Теорема об изменении кинетического момента точки
Для материальной точки основной закон динамики можно пред-
ставить в виде
di -
m —=F.
dt
Умножая обе части этого соотношения слева векторно на ради-
ус-вектор г (см. рис. 131), получаем
rxmil'=rx F. (22)
dt
В правой части этой формулы имеем момент силы относительно
неподвижной точки О. Преобразуем левую часть, применив фор-
мулу производной от векторного произведения:
- dt d - _ dr
rxm— -(r xmv)------xmv.
dt dt dt
356
Но
— х mv=v х mv = О
dt
как векторное произведение параллельных векторов.
После этого из (22) получаем
d _ _ _ _
— (г х mv) = г х F,
dt
или
dkn - -
~=M0(F). 23)
dr
Таким образом, первая производная по времени от кинетического
момента точки относительно какого-либо центра равна моменту
силы относительно того же центра.
Это и есть теорема об изменении кинетического момента для
точки.
Проецируя (23) на прямоугольные декартовы оси координат,
получаем теоремы об изменении кинетического момента точки
относительно этих осей координат:
dkx/dt=Мх (F); dkyldt = My(F); dkz/dt=MZ(F). (23')
Теорема об изменении кинетического момента системы
Если к точкам системы приложить все внешние и внутренние
силы (рис. 132), то для каждой точки системы можно выразить
теорему об изменении кинетического момента в форме (23), т. е.
у(гЛхт^)=гкх/^)+гАхД°, k=l, 2, ..., N.
dt
Суммируя правые и левые части этих соотношений по всем
точкам системы и заменяя суммы производных производной от
суммы, получаем
7 Е х =ЕЛ х Ле)+ЕЛ х Я0
d'T к к
Так как, по свойству внутренних сил,
ЕлхД° = 0,
к
357
а по определению кинетического момента системы,
'^rkxmkvk=Ko,
к
ТО
d£o/d/=^7tx^.
к
Если обозначить главный момент всех внешних сил [$, т. е.
к к
то теорему об изменении кинетического момента системы можно
представить в виде
djt0/d/=£Se)- (24)
Следовательно, первая производная по времени от кинетического
момента системы относительно какой-либо точки равна векторной
сумме моментов внешних сил, действующих на систему, относи-
тельно той же точки.
В эту теорему входит кинетический момент системы Ко в ее
движении относительно инерциальной системы отсчета, причем
кинетический момент и моменты внешних сил вычисляются от-
носительно неподвижной в этой системе отсчета точке О. Получим
теорему об изменении кинетического момента системы такого же
движения, но выберем в качестве точки при вычислении кинетичес-
кого момента и моментов внешних сил точку А, движущуюся
относительно инерциальной системы отсчета со скоростью vA.
По определению кинетического момента системы относительно
точки А имеем (рис. 134)
Rx — ^f'k^ ffik^k-
k
Вычислим производную по времени от кинетического момента
КА по правилу дифференцирования векторных произведений. По-
лучим
'гп /&к — — у-, — — —
—-=L — х mkvk+гк х тк — = 2, [(«* - «л) х mkvk+
d/ V\d' АЧ к
+ гк х(Дг)+7^)] = -vA х £mkvk+YrkxRj‘\
к к
358
- - - dr* dp* dpA
так как rk = pk-pA, -- =-----------=
_ dz dz dz
=vk—vA;
mk^=ty+FP; vkxmkvk=O;
dz
£7*xf^ = 0.
к
Рис. 134
Учитывая, что Q = ^mkvk=Mvc, по-
k
лучим
dJ^/d/ = - vA x Mvc+£ rk x Ffi,
к
или
dKA/dt=MvcxvA + L^.
Рассмотрим частные случаи этой теоремы.
1. Если точка А совпадает с центром масс С, то Mvcxvc=0
и теорема принимает форму
dKc/dt=L$.
2. Если в случае плоского движения твердого тела выбрать
в качестве точки А мгновенный центр скоростей Р, то vA=vP^0, так
как в рассматриваемом случае vP есть скорость движения мгновен-
ного центра скоростей по неподвижной центроиде, а она не равна
нулю в отличие от скорости точки тела, совпадающей с точкой Р,
которая равна нулю. Очевидно, vP х Mvc=Q, если vP параллельна «с,
т. е. если касательные к центроидам и траектории центра масс
параллельны или, что то же самое, центр масс находится на нор-
мали к центроидам в точке Р. Тогда
dKPldt=L$.
Эти частные случаи показывают, что для подвижных точек
центра масс для любой системы и мгновенного центра скоростей при
плоском движении твердого тела в рассмотренном случае теорема
об изменении кинетического момента для абсолютного движения
имеет ту же форму, что и для неподвижной точки О.
Внутренние силы непосредственно не влияют на изменение кине-
тического момента системы. Они могут влиять а него только через
внешние силы, т. е. неявно.
359
Проецируя (24) на прямоугольные декартовы оси координат,
получаем теоремы об изменении кинетического момента системы
относительно этих осей координат, т. е.
dKx/dt=dX,/dt=dK2/dt=L®. (24')
Теорема об изменении кинетического момента позволяет из-
учать вращательное движение твердого тела вокруг оси и точки или
вращательную часть движения тела в общем случае движения сво-
бодного твердого тела.
Законы сохранения кинетических моментов
Выведем законы сохранения кинетических моментов для систе-
мы, рассматривая материальную точку как механическую систему,
у которой число точек равно единице. Естественно, что для одной
материальной точки все действующие на нее силы являются внеш-
ними. Возможны следующие частные случаи теоремы об изменении
кинетического момента системы.
1. Если главный момент внешних сил системы относительно
точки О равен нулю, т. е. £^ = 0, то, согласно (24), кинетический
момент системы Ко относительно той же точки постоянен по моду-
лю и направлению, т. е.
Ко = const. (25)
Этот частный случай теоремы об изменении кинетического мо-
мента системы называют законом сохранения кинетического
момента. В проекциях на прямоугольные декартовы оси коор-
динат по этому закону
КХ = С{, КУ=С2, К2 = С2, (25')
где Ci, С2, С3 — постоянные величины.
Соотношения (25') являются первыми интегралами дифференци-
альных уравнений движения системы (3). Закон сохранения кинети-
ческого момента системы показывает, что одни внутренние силы не
могут изменить кинетический момент системы, так же как они не
изменяют ее количество движения.
2. Если сумма моментов всех внешних сил системы относи-
тельно оси Ох равна нулю, т. е. Л^) = ^Л/х(/^е))=0, то из (24') сле-
*
дует, что
Кх=const. (26)
360
Следовательно, кинетический момент системы относительно
какой-либо координатной оси постоянен, если сумма моментов внеш-
них сил относительно этой оси равна нулю, что, в частности, наблю-
дается, когда внешние силы параллельны оси или пересекают ее.
В частном случае для тела или системы тел, которые все вместе
могут вращаться вокруг неподвижной оси, и если при этом
то
или
£« = ^Л/г(Яг)) = 0,
к
Kz = Jzw=const
(27)
где Jz и оз — момент инерции системы тел и их угловая скорость
относительно оси вращения в произвольный момент времени t;
JZo и аз0 — момент инерции тел и их угловая скорость в момент
времени, выбранный за начальный, например при 1=0.
Закон сохранения кинетического момента в форме (27) использу-
ют в своей деятельности акробаты, прыгуны, танцоры и т. д.
Наглядно его можно продемонстрировать в опыте на скамье Жу-
ковского (рис. 135). Если человек с гирями в руках встанет на
горизонтальную платформу скамьи Жуковского, которая может
вращаться вокруг вертикальной оси почти без трения, и затем ему
сообщить угловую скорость вокруг этой оси, то
J— J
так как внешние силы или параллельны оси
вращения (силы веса человека, гирь и платфор-
мы), или пересекают ось (реакции подшипника,
если пренебречь силами трения).
Следовательно, если человек увеличит мо-
мент инерции, например разведением рук с ги-
рями в сторону, то угловая скорость вращения
уменьшится, и наоборот. В действительности
угловая скорость хотя и медленно, но все вре-
мя уменьшается вследствие наличия сопротив-
ления воздуха и трения в подшипнике скамьи.
Пример. Однородный горизонтальный диск радиусом
R и силой тяжести Р может вращаться без трения вокруг
вертикальной оси. Как изменится угловая скорость дис-
ка, если первоначально стоящий на диске на расстоя-
нии г от его оси человек с силой тяжести Р\ пойдет по
окружности радиусом г по диску с относительной ско-
ростью v (рис. 136)?
361
Решение. Пусть угловая скорость диска вначале
был а>о, а потом вследствие движения человека по диску
стала со. Так как внешние силы для системы, состоящей
из человека и диска, параллельны оси Oz (силы тяжести
Р и Р\) или ее пересекают (реакции Ri и R^), то
£Мг(^е)=0,
к
и, следовательно,
Kz=const.
Составим К. для двух моментов времени и прирав-
няем друг другу. В начальный момент, когда человек
стоит, кинетический момент системы
Л
Kz = Jz(DQ + —r1(Do.
g
После того, как человек пойдет по диску, его кинетический момент станет
равным кинетическому моменту от вращения вместе с диском плюс кинетический
момент от относительного движения по диску, если человек идет в сторону вращения
диска, т. е.
Л Р1
Kz = JzCD-\-T2CU4----П.
g g
Приравнивая полученные кинетические моменты, получаем
Р\ Pi Pi
Jzco-\— г2 ш Ч— rv = J^o Ч— r2a>o-
g g g
Отсюда
(.Jzg+Pl'^'pDO-Pirv
(D=------------------.
Jlg+Plf3
Для однородного диска Jz=- '—, поэтому угловая скорость
g 2
{PR^ + lP^CDo-ZPyn
CD=-------------------.
PR' + lPir1
Угловая скорость диска от движения по нему человека уменьшилась на величину
2Ап'/(^2Ч-2Р1г2).
Если вместо диска рассматривать земной шар, то движение по нему различных
материальных объектов (воздуха, течений воды и т. д.), которые имеют не равные ну-
лю проекции скорости на касательные к параллелям, вызовет изменение угловой ско-
рости вращения Земли. Она уменьшится, если проекции скоростей положительны для
направления по вращению земного шара, и увеличится, если против вращения.
362
Дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси
Из теоремы об изменении кинетического момента (24') получим
дифференциальное уравнение вращения твердого тела вокруг непо-
движной оси Oz (рис. 137). Имеем
dXI/d/=^Mz(/l‘))-
Для случая вращения твердого тела вокруг неподвижной оси,
согласно (21), имеем
Kz=Jfij,
где /г — постоянный для твердого тела момент инерции относи-
тельно неподвижной оси вращения; ш — угловая скорость. Учиты-
вая это, получаем
dt к
Если ввести угол поворота тела ср, то, учитывая, что d<u/d/=<p,
имеем
ЛФ=2Х(Ле)).
к
Это и есть дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси. Оно полностью аналогично дифференци-
альному уравнению поступательного движения твердого тела в про-
екции на какую-либо ось, например на ось Ох.
В дифференциальное уравнение вращения тела вокруг неподвиж-
ной оси вместо координаты х входит угол поворота ср, вместо
массы тела М — момент инерции относительно оси вращения
вместо суммы проекций внешних сил на ось
Ох — сумма моментов внешних сил относите-
льно оси вращения Oz или так называемый
вращательный момент внешних сил.
Реакции подшипников RA и RB оси враще-
ния являются внешними силами, но их момен-
ты относительно оси вращения равны нулю,
так как они пересекают ось, если пренебречь
силами трения.
В частном случае, когда
£ Mz (R[e)) = L®=const,
к
363
TO 6 = ф = L^IJz = const,
т. е. вращение тела происходит с постоянным угловым ускоре-
нием.
Если
^A/Z(^) = L«=O,
к
ТО
^=dca/|dt=O и ш=const.
Это случай равномерного вращения тела по инерции без дейст-
вия вращательного момента внешних сил.
Дифференциальное уравнение вращательного движения твердо-
го тела в общем случае позволяет решать две основные задачи: по
заданному вращению тела определять вращающий момент внеш-
них сил и по заданному вращательному моменту и начальным
условиям находить вращение тела. При решении второй задачи для
нахождения угла поворота как функции времени приходится интег-
рировать дифференциальное уравнение вращательного движения.
Методы его интегрирования полностью аналогичны рассмотрен-
ным выше методам интегрирования дифференциального уравнения
прямолинейного движения точки.
Движение точки под действием центральной силы.
Теорема площадей
Секторная скорость. Теорема площадей. Наряду с введенными
в кинематике точки скоростью v и ускорением а можно ввести
другие характеристики движения точки, например секторные ско-
рость и ускорение. Секторной скоростью точки va или da/dt от-
носительно точки О (рис. 138) называют векторную величину, опре-
деляемую по формуле
- Да di
vff=lnn — - , (28)
д/-»о At dt
где Ад — вектор, численно равный заштрихованной на рисунке
площади, ометаемой радиусом-вектором г движущейся точки за
время At; направление вектора До берется по перпендикуляру к за-
штрихованной площади так, чтобы с конца этого вектора при
ометании заштрихованной площади видеть поворот радиуса-век-
тора г против часовой стрелки.
364
Для случая движения точки по плоскости секторная скорость
перпендикулярна этой плоскости, если точка О выбрана в той же
плоскости, в которой движется точка. Секторная скорость всегда
приложена в той точке, относительно которой она вычисляется.
Секторное ускорение aff можно ввести как производную по вре-
мени от вектора секторной скорости, т. е.
=d 2 ст/d/2 = dvff/d/.
Секторную скорость можно выразить через момент линейной
скорости v относительно точки О'.
(29)
Векторное произведение г х v, согласно определению, имеет та-
кое же направление, как и v„. Следовательно, для доказательства
формулы (29) достаточно показать, что величины левой и правой
частей одинаковы. Вычислим левую часть формулы (29):
но
| Аст| =1 /2 rh = 1/2г |Аr| sin (г,Л Аг).
Следовательно,
Г1 г |Д^ 1/ г |Д71 Г Лал
|«ff| = lim — = Ч2г lim — sin (г,n Ar)
Д;->0 Д(->01_Д'
= 1/2гг sin (г,д v),
что совпадает с модулем векторного произведения, стоящим справа
в формуле (29).
Если движение точки происходит в плоскости, то секторную
скорость можно считать алгебраической величиной. В этом случае
365
секторную скорость точки часто выражают в полярных координа-
тах. Из формулы (29) секторная скорость
rff=da/dz= il2rv sin (г,Л v).
Но из кинематики точки в полярной системе координат на
л — dtp
плоскости известно (рис. 139), что г sin (г, /'v)=«P=r—.
Следовательно,
d'=‘/2^. (30)
dt dt
Формула (30) выражает секторную скорость в полярных коор-
динатах в случае плоского движения точки.
Используя формулу (29), кинетический момент через секторную
скорость можно выразить в виде
к0 = г х mv = 2mva. (31)
Соответственно теорему об изменении кинетического момента
(23) для точки можно выразить через секторную скорость формулой
2т— = M0(F). (32)
dt
В форме (32) теорему об изменении кинетического момента для
точки называют теоремой площадей.
Движение точки под действием центральной силы. Центральной
силой F называют такую силу, линия действия которой при движе-
нии точки ее приложения проходит через одну и ту же точку О,
называемую центром центральной силы.
Центральная сила может быть притягивающей (направленной
к центру) и отталкивающей (направленной от центра). Так как для
центральной силы момент силы относи-
JTenbHO своего центра равен нулю, т. е.
— то, следовательно, по теореме
об изменении кинетического момента для
'г точки (23),
к0=const. (33)
В проекциях на прямоугольные оси
декартовой системы с началом в точке
Рис. 139 О по (33) имеем:
366
kx=m(yz—zy)=C\, ку=т(гх—хг)=Сг\
kz=m (xy—yx) = C3,
(33')
где Ci, C2, C3 — постоянные величины.
Умножая первое соотношение (33') на х, второе — на у, тре-
тье— на z и складывая, получаем О = С[Х+С2у+Сзг, т. е. коор-
динаты движущейся точки х, у, z удовлетворяют уравнению плос-
кости, проходящей через начало координат.
Следовательно, траектория точки, движущейся под действием
центральной силы, является плоской кривой, лежащей в плоскости,
проходящей через центр силы.
Так как при движении точки под действием центральной силы
^0=const,
то, учитывая формулу (31), имеем
v0=do-/dz=const
и, следовательно,
vff=do-/dt=const = C, (34)
или
a = a0+Ct.
Формула (34) выражает так называемый интеграл площадей:
при движении точки под действием центральной силы секторная
скорость является постоянной величиной и, следовательно, вмета-
емая радиусом-вектором площадь пропорциональна времени.
Учитывая формулу (30), интеграл площадей (34) в полярных
координатах можно представить в виде
rz — = const. (35)
dt
В этой форме интеграл площадей широко используется при
рассмотрении движения планет вокруг Солнца и вообще различных
спутников, в частности искусственных спутников Земли.
Теорема об изменении кинетического момента системы
в относительном движении по отношению к центру масс
Рассмотрим относительное движение системы только относите-
льно системы координат, движущейся поступательно вместе с цен-
тром масс системы.
367
Прежде чем рассмотреть теорему, выведем формулу для вы-
числения кинетического момента системы.
Формула для кинетического момента системы. Пусть механичес-
кая система совершает движение относительно основной системы
координат OxijiZj. Возьмем подвижную систему координат Cxyz
с началом в центре масс системы С, движущуюся поступательно
относительно основной системы координат. Из рис. 140 следует, что
для любого момента времени Рк=Рс+гк-
Дифференцируя это тождество по времени, получаем
dPk_dPc !
dt dt dt
ИЛИ
Vk^Vc+Vkr,
где vk — абсолютная скорость точки Мк', vc — абсолютная скорость
центра масс; t^^dr^/dz — относительная скорость точки Мк от-
носительно подвижной системы координат Cxyz. При поступатель-
ном движении подвижной системы координат ее угловая скорость
а> равна нулю и по формуле Бура полная производная по времени
от радиуса-вектора г совпадает с локальной производной, равной
относительной скорости.
Согласно определению кинетического момента Ко относительно
неподвижной точки О, для абсолютного движения системы от-
носительно системы координат Ох{у^ по формуле (20) имеем
Ко^^Рк'Х-ГПкКк.
к
Подставляя в эту формулу значения и vk, после небольших
преобразований получаем
= Р С * VC £ Шк + £ Гк X ntkVkr +
к к
_ V"* &к f — 1 —
+ РсхХтк~~+ Xvc. (36)
к dt \ к /
В этой формуле ^тк — М— масса
к
системы. Кроме того, последние два
слагаемых равны нулю. Действитель-
368
но, по определению радиуса-вектора центра масс относительно
этого центра масс имеем
0=rc=Ym^lM-
к
Следовательно, ^ткгк=0 и последнее слагаемое в (36) тоже
к
равно нулю.
Другое слагаемое можно предварительно преобразовать:
— &к — d f гл — \
= Хт^Гк )•
к dt d‘\k /
Это слагаемое также равно нулю, так как все время £т^=0.
Формула (36) принимает следующий окончательный вид:
Ko=~pc*Mvc+Q\ (37)
где Дг)=^гкх?и^.
Величина RJ& является кинетическим моментом системы относи-
тельно центра масс для относительного движения относительно
системы координат, движущейся поступательно вместе с центром
масс, т. е. системы координат Cxyz.
Формула (37) показывает, что кинетический момент абсолют-
ного движения системы относительно неподвижной точки О равен
векторной сумме кинетического момента центра масс относитель-
но той же точки, если бы в центре масс была сосредоточена вся
масса системы, и кинетического момента системы относительно
центра масс для относительного движения системы по отношению
к подвижной системе координат, движущейся поступательно вме-
сте с центром масс.
Теорема об изменении кинетического момента системы в относи-
тельном движении по отношению к центру масс. Для абсолютного
движения системы и неподвижной точки О теорема об изменении
кинетического момента имеет вид
d' к
Подставляя сюда значения "рк и Ко по формуле (37) и производя
дифференцирование и группировку членов, получаем
х Mvc+~pc х = рс х Y^ + Tjk х
d' dr dr V к
369
Перенося из правой части в левую первое слагаемое и учи-
тывая, что
&Рс — — —
— х Mvc=vc х Mvc=Q
dt
как векторное произведение параллельных векторов, после объеди-
нения слагаемых имеем
__ dvr <—। -/ ч
pcx +
d' к
d4r)_y
В этой формуле выражение в квадратных скобках равно нулю на
основании теоремы о движении центра масс системы (18) и, следо-
вательно, формула примет вид
fit к
или
(38)
где ='£гкх является главным моментом всех внешних сил
к
относительно центра масс.
Формула (38) и выражает рассматриваемую теорему об измене-
нии кинетического момента системы относительно центра масс
для относительного движения системы по отношению к системе
координат, движущейся поступательно с центром масс; она фор-
мулируется так же, как если бы центр масс был неподвижной
точкой.
Эту теорему применяют для изучения вращательной части плос-
кого движения и движения свободного твердого тела вокруг центра
масс.
Дифференциальные уравнения плоского движения
твердого тела
Используя теоремы о движении центра масс и изменении кине-
тического момента системы относительно центра масс для относи-
тельного движения системы по отношению к системе координат,
движущейся поступательно с центром масс, получим дифференци-
альные уравнения плоского движения твердого тела.
В плоскости движения центра масс тела, совершающего плоское
движение, выберем неподвижную систему координат Ох^, относи-
370
тельно которой рассматривается движение, и движущуюся поступа-
тельно вместе с центром масс систему Сху (рис. 141). Пусть
хс и ус — координаты центра масс тела относительно неподвижной
системы координат. Тогда по теореме о движении центра масс
получим два следующих дифференциальных уравнения плоского
движения твердого тела:
Mxc^I^ Мус=Т№
к к
где М — масса тела.
Третье дифференциальное уравнение плоского движения твердо-
го тела получим из теоремы об изменении кинетического момента
в относительном движении по отношению к центру масс (38) в про-
екции на подвижную ось Cz:
ада/=ЕмСг(Д'’).
к
Плоское движение твердого тела можно считать состоящим из
поступательного движения вместе с центром масс С и вращения
вокруг подвижной оси Cz. Для случая вращения вокруг оси кинети-
ческий момент относительно этой оси вычисляется по формуле
где со — угловая скорость; JCz — момент инерции тела относитель-
но оси Cz.
Так как JCz является величиной постоянной, то после подстанов-
ки KQ в теорему об изменении кинетического момента в относи-
тельном движении получим
d' к
Если ввести угол поворота ср вокруг
получим следующее дифференциальное
уравнение:
к
Таким образом, для твердого тела, со-
вершающего плоское движение и, следо-
вательно, имеющего три степени свобо-
ды, соответственно получим следующие
три дифференциальных уравнения:
подвижной оси Cz, то
371
Mxc=^-, Myc=^F%- = (39)
к к к
С помощью этих уравнений можно решать две основные зада-
чи: по заданному плоскому движению твердого тела находить
действующие на тело внешние силы и по заданным внешним
силам и начальным условиям определять его движение. При
решении этих задач должны быть заданы масса тела М и его
момент инерции.
Теорема Резаля
Теореме об изменении кинетического момента системы можно
дать следующее кинематическое истолкование. Из кинематики точ-
ки известно, что скорость точки можно рассматривать как скорость
конца радиуса-вектора, следящего за движущейся точкой, или как
скорость изменения самого радиуса-вектора, если он проведен
в движущуюся точку из какой-либо неподвижной точки (рис. 142).
Траектория движущейся точки при этом является годографом ради-
уса-вектора г, а скорость точки направлена по касательной к этому
годографу и равна первой производной по времени от радиуса-
вектора. Аналогично этому, и производную по времени от кинети-
ческого момента можно рассматривать как своеобразную скорость
конца этого вектора при движении по годографу кинетического
момента (рис. 143). Эта скорость не является обычной скоростью
точки, так как кинетический момент имеет иную размерность, чем
радиус-вектор. Это есть скорость изменения вектора кинетического
момента.
Таким образом, если обозначить через и скорость конца кинети-
ческого момента, т. е. u = dK0/dt, то теорему об изменении кинети-
ческого момента системы (24) можно представить в новой форме —
в виде так называемой теоремы Резаля:
Теорему Резаля можно сформулировать так: при движении меха-
нический системы скорость точки, совпадающей с концом вектора
кинетического момента при движении по годографу этого вектора,
равна по величине и параллельна по направлению главному моменту
всех внешних сил системы. Точка, относительно которой вычисля-
ются кинетический момент системы и главный момент внешних сил,
одна и та же.
В форме теоремы Резаля может быть сформулирована и теорема
об изменении кинетического момента в относительном движении по
отношению к центру масс.
372
Рис. 143
Теорема Резаля особенно удобна для приближенного исследова-
ния движения быстровращающихся гироскопов.
Аналогично и теорему об изменении количества движения для
системы можно сформулировать в форме теоремы Резаля для коли-
чества движения: при движении механической системы скорость
точки, совпадающей с концом вектора количества движения при
движении по его годографу, равна по величине и параллельна по
направлению главному вектору всех внешних сил, действующих на
систему.
§ 5. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Для рассмотрения теоремы об изменении кинетической энергии
необходимо ввести новое понятие «работа силы» и рассмотреть
некоторые простейшие способы ее вычисления.
Работа силы
Работа силы на каком-либо перемещении является одной из
основных характеристик, оценивающих действие силы на этом пе-
ремещении. Рассмотрим элементарную работу, полную работу
и мощность.
Элементарная работа силы. Элементарная работа dA силы F на
элементарном (бесконечно малом) перемещении ds определяется
следующим образом (рис. 144):
dA = Fx ds, (40)
где Fx — проекция силы F на направление скорости точки приложе-
ния силы или на направление элементарного перемещения, которое
считается направленным по скорости точки.
373
Элементарная работа является ска-
лярной величиной. Ее знак определяет-
ся знаком проекции силы Fz, так как
перемещение ds принимаем положи-
тельным. При FT>Q элементарная ра-
бота бЛ>0, а при Ft<0, наоборот,
бЛ<0. Так как F^Fcoscp, где <р —
угол между силой F и направлением
скорости точки v, то выражение (40)
можно представить в виде
dA =Fcos<p cb.
(41)
В этой формуле величины F и ds положительны и знак dA
определяется знаком cos<p. Если (р — острый угол, то dA положите-
льна; если ср тупой угол, то dA отрицательна.
Итак, элементарная работа силы равна произведению элементар-
ного перемещения на проекцию силы на это перемещение. Отметим
частные случаи, которые можно получить из (41):
<р — 0°, dA=Fds;
Ф = 90°, 6Л = О;
<р=180°, dA=-Fds.
Таким образом, если сила перпендикулярна элементарному пе-
ремещению, то ее элементарная работа равна нулю. В частности,
работа нормальной составляющей к скорости силы F„ всегда равна
нулю.
Приведем другие формулы для вычисления элементарной рабо-
ты силы. Из кинематики точки известно, что v = dr/dt; r = |r| = ds7d/.
Следовательно, dr = |dr|=v dt.
После этого, согласно (41), элементарная работа
dA—F |dr|cos<p=jFdr. (42)
Элементарная работа силы равна скалярному произведению силы на
дифференциал радиуса-вектора точки приложения силы.
Так как dr=vdt, то, согласно (42),
dA=fidr=Fvdt=Fdtv. (43)
Элементарная работа равна скалярному произведению элементар-
ного импульса силы на скорость точки.
Если силу F и радиус-вектор г разложить по осям координат, то
374
F=Fxi+FJ+Fzk', r=xi+yj+zk.
Из последней формулы имеем
dr=dxi+dyj+dzfc.
Подставляя в (42) значения F и dr, получаем
dA=Fxdx+Fydy+Fzdz. (44)
Формулу (44) называют обычно аналитическим выражени-
ем элементарной работы. Хотя выражение для элементарной
работы (44) по форме и напоминает полный дифференциал функции
координат точки, в действительности в общем случае элементарная
работа не является полным дифференциалом. Элементарная работа
является полным дифференциалом функции координат точки толь-
ко для специального класса сил — так называемых стационарных
потенциальных сил, которые рассмотрены ниже.
Полная работа силы. Для определения полной работы силы F на
перемещении от точки Мо до точки М разобьем это перемещение на
п перемещений, каждое из которых в пределе переходит в элемен-
тарное. Тогда работу А можно выразить формулой
п
А = lim £ dAk,
л-» со к® 1
где dAk — работа на к-м элементарном перемещении, на которые
разбито полное перемещение.
Так как сумма в определении работы является интегральной
суммой определения криволинейного интеграла на участке кривой
MqM, то, используя для элементарной работы формулу (40), полу-
чаем
м
А= Fzds. (45)
*
Используя другие выражения для элементарной работы, полную
работу силы можно представить также в виде
м м
A — Fdr= (Fxdx+Fydy+Fzdz), (46)
ма м„
или
375
4=jFvd/, (47)
о
где момент времени t = 0 соответствует точке Мо, а момент времени
t — точке М.
Формула (47) особенно удобная для вычисления работы силы,
когда сила известна как функция времени. Отметим, что из опреде-
ления элементарной и полной работы следует:
1) работа равнодействующей силы на каком-либо перемещении
равна алгебраической сумме работ составляющих сил на том же
перемещении;
2) работа силы на полном перемещении равна сумме работ этой
же силы на составляющих перемещениях, на которые любым об-
разом разбито все перемещение.
Первое свойство, очевидно, достаточно доказать только для
элементарной работы равнодействующей силы.
Если сила R является равнодействующе силой системы сил (/ь
..., Fk), приложенных к рассматриваемой точке, то она выражается
геометрической суммой этих сил. Тогда по определению элементар-
ной работы силы имеем
R dr= (Fi +F2 +... +Fk)' dr=Fi dr+F2' dr +... + Fk' dr.
Первое свойство доказано.
Второе из отмеченных свойств непосредственно следует из воз-
можности разбиения любым образом полного промежутка интег-
рирования на составляющие, причем определенный интеграл по
полному промежутку интегрирования равен сумме интегралов по
составляющим. Единицей полной работы, так же как и элементар-
ной, в СИ является джоуль: 1 Дж= 1 Н • м.
Если проекция силы на направление скорости Fz, является вели-
чиной постоянной, то из (45) получим
где s — путь, пройденный точкой.
Так как Fz=Fcosq>, то последнюю формулу можно представить
в виде
A=Fscos<p.
Следует отметить, что в этой формуле как F, так и <р могут быть
переменными, но Fcosq? является постоянной величиной. Это вы-
376
полняется, если F и <р постоянны. Если дополнительно угол <р = 0
или 180°, то тогда
A=+Fs,
причем эта формула применима как для прямолинейного, так и для
криволинейного движения. Для этого необходимо, чтобы сила F бы-
ла постоянной по модулю и все время направленной по касательной
к траектории точки. В случае прямолинейной траектории сила F,
следовательно, должна быть все время направлена по траектории
в одну и ту же сторону.
Мощность. Мощность силы или работоспособность какого-либо
источника силы часто оценивают той работой, которую он может
совершить за единицу времени.
Итак, по определению, мощность
FT=d^/dZ.
Учитывая (43) для элементарной работы, мощность W можно
представить в виде
W=Fv=Fvcos(p. (48)
Таким образом, мощность равна скалярному произведению силы
на скорость точки. Из формулы (48) получаем, что чем больше
скорость, тем меньше сила при одной и той же мощности. Следова-
тельно, если от источника силы с заданной мощностью нужно
получить большую силу, то ее можно получить только при малой
скорости. Так, например, когда железнодорожному локомотиву
надо увеличить силу тяги, то для этого надо уменьшить скорость
поезда.
В СИ единицей мощности является ватт: 1 Вт= 1 Дж/с.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения
точки приложения силы. Следовательно, для вычисления работы
надо знать движение этой точки. Но в природе имеются силы
и примеры движения, для которых работу можно вычислить срав-
нительно просто, зная начальное и конечное положение точки.
Рассмотрим работу силы тяжести и линейной силы упругости,
изменяющейся по закону Гука, и вычисление работы силы, прило-
женной к какой-либо точке твердого тела в различных случаях его
движения. В качестве простейших примеров движения укажем слу-
чаи, когда работа равна нулю. Так, работа любой силы равна нулю,
если она приложена все время в неподвижной точке или в точках,
377
скорость которых равна нулю, как, например, в случае, когда сила
все время приложена в мгновенном центре скоростей при плоском
движении тела или все время в точках, лежащих на мгновенной оси
вращения, в случае вращения тела вокруг неподвижной точки. Эти
случаи возможны в задачах, когда рассматривают работу силы
трения в точке соприкосновения двух тел при отсутствии скольже-
ния одного тела по другому. При этом работа силы трения равна
нулю.
Работа силы тяжести. Силу тяжести Р материальной точки мас-
сой т вблизи поверхности Земли можно считать постоянной, рав-
ной mg, направленной по вертикали вниз. Если взять оси координат
Oxyz, у которых ось Oz направлена по вертикали вверх (рис. 145), то
P=mg; Рх = 0; Ру=0; Pz= -mg.
Вычисляя работу А силы Р на перемещении от точки Мо до
точки Л/j по формуле (46), имеем
A— (Pxdx+Pydy+Pzdz) =
м0
Z1
= -mg^dz= -mg(zi-z0) = mg(z0-z1),
*0
или
A—mgh, (49)
где h=z0—Z] — высота опускания точки.
При подъеме точки смещение (z0—zj является отрицательным.
Следовательно, в общем случае работа силы тяжести P=mg равна
A=+Ph. (50)
Работа силы тяжести равна произведению этой силы на высоту
опускания (работа положительна) или высоту подъема (работа
отрицательна). Из формулы (50) следует, что работа силы тяжести
не зависит от формы траектории между точками Мо и Му, и если эти
точки совпадают, то работа силы тяжести равна нулю (случай
замкнутого пути). Она равна нулю, если точки Мо и Му лежат
в одной и той же горизонтальной плоскости.
Если имеем систему N материальных точек, то для каждой точки
с массой тк будем иметь работу ее силы тяжести
378
Ak=ml^(zok-zxk'),
где z№ и zik — начальная н конечная координаты точки.
Работа всех сил тяжести системы материальных точек
N / N N \
А= Y Ak=gl £ т^- mkzlk\ = Mg(z0C-ziC),
fc=i V=i jt=i /
так как
N N
Ymkzok=MzOc, Ymkzik=MziC,
*=i *-i
где M — масса системы точек; zoc и zic — начальная и конечная
координаты центра масс системы точек. Вводя обозначение для
изменения высоты центра масс zoc—Zic= +hc, имеем
A=+Mghc. (50')
Из (50') следует, что для перемещений точек системы, при которых
Лс=0, работа сил тяжести Л = 0.
Работа линейной силы упругости. Линейной силой упругости (или
линейной восстанавливающей силой) называют силу, действующую
по закону Гука (рис. 146):
F=—cr,
где г — расстояние от точки, где сила равна нулю, до рассматрива-
емой точки М\ с — постоянный коэффициент жесткости.
Выберем начало координат в точке О, где сила равна нулю, тогда
Fx= — ex; Fy= — су, Fz= —cz.
После этого работу на перемещении от точки Мо до точки
Л/1 определим по формуле
z Mq (xOt ySt ZqI \M/x,y,z/ ip у 'x Рис. 145 z MdlXo.yn.Zo) I y\M(x,y,zi r°l r/\ 1 /f / / Jb /0 у 'x Рис. 146
379
MQ
+ydy+zdz)= — c Jrdr,
r0
так как
xdx+ydy+zdz=rdr,
где r2=x2+y2 + z2.
Выполняя интегрирование, получаем
Л=-^(Г1-Го)- (51)
По этой формле вычисляют работу линейной силы упругости
пружины при перемещении по любому пути из точки Мо, в которой
ее удлинение (начальная деформация) равно 2о = го, в точку где
деформация соответственно равна A = rt. В новых обозначениях (51)
принимает вид
А= -|(Я2-Я§). (51')
При перемещении из положения, где Л> = 0 (пружина не дефор-
мирована), в любое положение с деформацией 2, работа линейной
силы упругости
А=-С12. (52)
2
Работа линейной силы упругости на перемещении из состояния
равновесия всегда отрицательна и равна половине произведения
коэффициента жесткости на квадрат деформации. Из формулы (51)
или (52) следует, что работа линейной силы упругости не зависит от
формы перемещения и работа по любому замкнутому перемеще-
нию равна нулю. Она также равна нулю, если точки Мо и лежат
на одной сфере, описанной из точки равновесия.
Работа силы, приложенной к твердому телу. Получим формулы
для вычисления элементарной и полной работы силы, приложенной
в какой-либо точке твердого тела, которое совершает то или иное
движение. Сначала рассмотрим поступательное и вращательное
движения тела, а затем общий случай движения твердого тела.
380
z
При поступательном движении твердого тела все точки
тела имеют одинаковые по модулю и направлению скорости (рис.
147). Следовательно, если сила F приложена к точке Мк, то, так как
vk=v, где v — общая скорость для точек,
dA = Fvkdt=Fvdt=Fdr, (53)
где г — радиус-вектор произвольной точки твердого тела.
На каком-либо перемещении полная работа
м
А = Fdr. (54)
При вращении твердого тела вокруг неподвижной оси
скорость точки М можно вычислить по векторной формуле Эйлера
(рис. 148):
v = со х г;
тогда элементарную работу силы F определим по формуле
dA=Fvdt=F(coxr)dt.
В смешанном произведении векторов, которое выражается в ви-
де определителя, можно переставлять сомножители в круговом
порядке:
/•(йхг) = й(г х/)
и
381
dA = оз • (r x F) dt = й • Mo dt=co dtM0 cosa,
так как
rxF=Mo(F)=Mo
является моментом силы относительно точки О и со направлена
по Oz.
Учитывая, что M0cosa = A/x — момент силы относительно оси
вращения Oz и codt=dcp, окончательно получаем
dA=Mzdcp. (55)
Таким образом, элементарная работа силы, приложенной к ка-
кой-либо точке тела, вращающегося вокруг неподвижной оси, равна
произведению момента силы относительно оси вращения на диф-
ференциал угла поворота тела.
Полная работа
Ч>
А = Mzdcp. (56)
о
В частном случае, если момент силы относительно оси вращения
является постоянным, т. е. Mz (F) = const, работу определяют по
формуле
(57)
где ср — угол поворота тела, на котором вычисляют работу силы.
Так как dA=со • Мо (F) dt, то мощность в случае вращения твер-
дого тела вокруг неподвижной оси
W= dA/dt=coM0(F)=coMz (F). (58)
Мощность силы, приложенной к вращающемуся вокруг неподвиж-
ной оси твердому телу, равна произведению угловой скорости тела
на момент силы относительно оси вращения тела.
Для свободного тела в общем случае движения скорость
точки М, в которой приложена сила F (рис. 149),
v=vo+fflX г,
следовательно,
dA = F vdt=F vodt+F' (coxrjdt.
Учитывая, что
382
vod/=dro и F(cbхг)=ш'(г xF) = ar Mo,
имеем
dA = F dr0+co Mo (F) dt=F • dr0 + wd/A/0 cosa.
Но так как A/ocosa=A/M— момент силы относительно мгно-
венной оси относительного вращения вокруг точки О, codt=dcp —
элементарный угол поворота вокруг этой оси, то окончательно
получаем
dA = F'dr0+Мш (F) dcp.
(59)
Таким образом, элементарная работа силы, приложенной в ка-
кой-либо точке твердого тела, в общем случае движения складыва-
ется из элементарной работы на элементарном поступательном
перемещении вместе с какой-либо точкой тела и на элементарном
вращательном перемещении вокруг этой точки.
В случае вращения твердого тела вокруг неподвижной точки,
выбрав эту точку за полюс О, по (59) для элементарной работы
имеем
dA=Mm(F)dcp.
(60)
Поворот на угол dcp следует рассматривать в каждый момент
времени вокруг своей мгновенной оси вращения.
Формулу (59) применяют и для плоского движения твердого
тела, только в этом случае мгновенная ось относительного враще-
ния перпендикулярна плоскости движения и проходит через произ-
вольную точку тела.
При действии на твердое тело системы сил (F, F2, ..., FN) для
элементарной работы силы Fk, согласно полученным формулам,
имеем
Рис. 149
Рис. 150
383
dAk=Fk- dr0 + Mo (A)cod t=Fk'dr0+Ma (Fk) dcp.
Элементарная работа системы сил
n I N \
dA= £ dA=( E A) dr0+
*=i V=i /
E^«(A)
jt-i
<yd/=
= R' dr+Lo' codt=R dr0+Ladcp,
где
R= £ Fk, Lo= E Я(А); La= E ^(A)
k=l k=l Jt=l
соответственно являются главным вектором и главными момен-
тами системы сил относительно точки О и мгновенной оси от-
носительного вращения, проходящей через точку О. Таким об-
разом,
бЛ = Лбго+Лшб<р = ^бго-1-Д)(абг, (59')
т. е. элементарная работа системы сил, приложенных
к свободному твердому телу в общем случае его движе-
ния, складывается из элементарной работы главного век-
тора системы сил на элементарном поступательном пере-
мещении вместе с какой-либо точкой тела и элементар-
ной работы главного момента этих сил относительно
выбранной точки на элементарном вращательном пере-
мещении вокруг этой точки.
Работа внутренних сил твердого тела. Докажем, что для твер-
дого тела сумма работ внутренних сил равна нулю при любом
его перемещении. Очевидно, достаточно доказать, что сумма
элементарных работ всех внутренних сил равна нулю. Рассмот-
рим две любые точки твердого тела: и М2 (рис. 150). Так как
внутренние силы есть силы взаимодействия точек тела, то для этих
двух точек
Fp= -Fp-
Введем единичный вектор 7°, направленный по силе Тогда
^=7°^; Fp= —l°Fp = —l°Fp.
Сумма элементарных работ сил Fp и Fp
dA?+dAP=Fp vxdt+Fp v2dt=Fpdt(«, l°-v2-7°).
384
Раскрывая скалярные произведения векторов в скобках, по-
лучаем
(«! cosai — v2 cosa2)=0,
так как в кинематике твердого тела доказано, что проекции скоро-
стей любых двух точек твердого тела на направление прямой
линии, соединяющей эти точки, равны друг другу при любом
движении твердого тела. В полученном выражении в скобках
стоит разность этих проекций скоростей двух точек, т. е. величина,
равная нулю.
Твердое тело можно считать состоящим из пар взаимодейству-
ющих точек, для каждой из которых сумма элементарных работ
внутренних сил равна нулю.
Суммируя элементарные работы для всех пар точек, получаем
£сиР=0.
Как уже известно, главный вектор и главный момент всех внут-
ренних сил для любой механической системы равны нулю. Сумма
работ внутренних сил равна нулю только в случае твердого тела,
а для любой механической системы в общем случае она не равна
нулю.
В задачах в качестве механической системы часто рассматрива-
ют систему сочлененных твердых тел. При вычислении работы всех
сил, приложенных к такой системе тел, очевидно, достаточно учесть
работу внутренних сил в местах сочленения твердых тел. Если
твердые тела сочленяются с помощью шарниров без трения, сумма
работ таких двух внутренних сил равна нулю, так как внутренние
силы в точке сочленения, как действие и противодействие, равны по
модулю, но противоположны по направлению, а перемещение у то-
чек приложения сил общее.
Таким образом, сочленение твердых тел с помощью шарниров
без трения при вычислении работы внутренних сил не нарушает
жесткости системы тел, так как сумма работ внутренних сил в этих
шарнирах равна нулю при любых перемещениях системы сочленен-
ных твердых тел. Систему сочлененных с помощью таких шарниров
твердых тел при вычислении работы всех внутренних сил можно
считать одним твердым телом. Это характерно и для случая со-
членения системы твердых тел с помощью нерастяжимых нитей,
канатов и т. п. В этом случае работа внутренних сил натяжений
также равна нулю.
385
Кинетическая энергия
Кинетическая энергия точки и системы. Кинетической энергией
материальной точки называют половину произведения массы точки
на квадрат ее скорости, т. е. mv1)! или »w2/2, так как скалярный
квадрат любого вектора равен квадрату модуля этого вектора.
Кинетическая энергия является скалярной положительной величи-
ной. В СИ единицей кинетической энергии является джоуль:
1 Дж=1 Нм.
Кинетической энергией системы Т называют сумму кинетичес-
ких энергий всех точек механической системы, т. е.
(61)
к 1 к 2
Кинетическая энергия как точки, так и системы не зависит от
направления скоростей точек. Кинетическая энергия может быть
равна нулю для системы только при условии, если все точки систе-
мы находятся в покое.
Вычисление кинетической энергии системы (теорема Кёнига).
Разложим движение механической системы на переносное посту-
пательное вместе с центром масс системы и относительное по
отношению к системе координат, движущейся поступательно вме-
сте с центром масс. Аналогично тому, как это производилось при
выводе формулы для кинетического момента при таком разложе-
нии абсолютного движения, для каждой точки системы Мк (см.
рис. 140) имеем
Рк = Рс + Гк
и соответственно
Vk = Vc + Vh;
где vkr=dr/dt является относительной скоростью точки, так как
подвижная система координат движется поступательно (ш = 0) и,
следовательно, полная производная по времени от гк совпадает
с локальной производной, равной относительной скорости точки.
Подставляя значение скорости vk в выражение кинетической
энергии абсолютного движения системы, т. е. ее движения относи-
тельно системы координат Ox1ylz1, после очевидных преобразова-
ний получаем
y1 mkVk l'c v , V*mkVkr , _ V _
T=\~-=—\imk+2^-—- + vc-YlmkVkr- (62)
к 1 2 к к 2 к
386
Но
»с У пцйь = vc У тк ~ = vc у ( У ткгк ) = О,
к к dt dt\k J
так как
У wv>=const=0.
к
Учитывая, что ^тк=М — масса системы, и обозначая вто-
к
рое слагаемое в (62), имеем
где
Т=—- + 71г),
2
к 2
(63)
Величина Тр является кинетической энергией относительно дви-
жения системы относительно системы координат, движущейся по-
ступательно вместе с ее центром масс, или кинетической энергией
системы относительно центра масс.
Формула (63) выражает так называемую теорему Кёнига: кине-
тическая энергия системы в абсолютном движении складывается из
кинетической энергии центра масс, если в нем сосредоточить всю
массу системы, и кинетической энергии системы относительно цен-
тра масс.
Кинетическая энергия твердого тела. При поступательном
движении твердого тела кинетическая энергия
2 2 2
T=Y~^=~Yrnk=M- (64)
к 2 2 к 2
так как при поступательном движении твердого тела скорости всех
точек тела одинаковы, т. е. vk=v, где v — общая скорость для всех
точек тела.
Таким образом, кинетическая энергия твердого тела при посту-
пательном движении вычисляется так же, как и для одной точки,
у которой масса равна массе всего тела.
При вращении тела вокруг неподвижной оси кинетичес-
кую энергию можно вычислить, если учесть, что скорость какой-
либо точки тела Мк можно выразить как
387
где hk — кратчайшее расстояние от точки Мк до оси вращения;
со — угловая скорость тела.
Тогда
к 2 2 к 2
ИЛИ
со2
T=JZ-, (65)
2
где Jz — момент инерции тела относительно оси вращения Oz.
Следовательно, кинетическая энергия тела при вращательном
движении вокруг неподвижной оси равна половине произведения моме-
нта инерции тела относительно оси вращения на квадрат угловой
скорости тела.
Из сравнения (64) и (65) следует, что эти формулы подобны,
только при вращательном движении аналогом массы является
момент инерции тела относительно оси вращения, а скорости —
угловая скорость тела. Такая аналогия между поступательным
и вращательным движениями твердого тела наблюдается во многих
формулах, относящихся к этим двум движениям.
При плоском движении твердого тела кинетическую энер-
гию можно вычислить по теореме Кёнига. Так как в этом случае
относительное движение относительно центра масс (точнее, относи-
тельно системы координат, движущейся поступательно вместе с це-
нтром масс) является вращением вокруг центра масс с угловой
скоростью со, то
где JCz — момент инерции тела относительно оси Cz, проходя-
щей через центр масс тела перпендикулярно плоскости движе-
ния. Следовательно, на основании (63) для плоского движения
тела имеем
2
2
(66)
Таким образом, при плоском движении тела кинетическая энер-
гия складывается из кинетической энергии поступательного движе-
ния тела вместе с центром масс и кинетической энергии от враще-
ния вокруг оси, проходящей через центр масс и перпендикулярной
плоскости движения.
388
Учитывая, что vc=(O' СР (Р — мгновенный центр скоростей), из
(66), используя теорему Штейнера, получаем еще одну формулу для
кинетической энергии твердого тела при плоском движении:
2 1 0 1
V?’ СО со „ СО
T=M-j+JCl- = - [JCI+М (СР)2]=у, (66')
где JPz — момент инерции тела относительно оси Pz, проходящей
через мгновенный центр скоростей перпендикулярно плоскости дви-
жения.
Если механическая система состоит из нескольких твердых тел,
то следует вычислить кинетическую энергию каждого тела, а затем
полученные кинетические энергии сложить. Так определяется кине-
тическая энергия системы тел.
Теорема об изменении кинетической энергии точки
Для материальной точки массой т, движущейся под действием
силы F, основное уравнение динамики можно представить в виде
Умножая обе части этого соотношения скалярно на дифферен-
циал радиуса-вектора точки dr, имеем
-dr _ _
mdv —=Fdr
dr
или
mvdv—Fdr,
где v = dr/dt — скорость точки.
Учитывя, что dA = F dr — элементарная работа, получаем
mvdv—dA.
Так как
miv • dv=d (mvz/2)=d (mv2/2),
то окончательно
d(mv2/2) = dA. (67)
Формула (67) выражает теорему об изменении кинетической
энергии для точки в дифференциальной форме: дифференциал кине-
тической энергии точки равен элементарной работе силы, дейст-
вующей на точку.
389
Если обе части (67) разделить на d? и учесть, что d^/df = W —
мощность, то теорему можно также выразить в виде
df \ 2 /
(67')
Производная по времени от кинетической энергии точки равна
мощности, подводимой к этой точке.
Интегрируя обе части (67) от точки Мо до точки М (см. рис. 144),
получаем теорему об изменении кинетической энергии точки в ко-
нечной форме:
mv2 »Wq
2 2
(68)
т. е. изменение кинетической энергии точки на каком-либо перемеще-
нии равно работе силы, действующей на точку на том же перемеще-
нии.
Пример 1. Тело, имеющее силу тяжести Р, падает без начальной скорости на
пружину с высоты Л. Определить наибольшее обжатие пружины А, если статическое
сжатие ее под действием силы тяжести этого тела равно 2^. Массой пружины и тела
А пренебречь (рис. 151).
Решение. Применим к движению тела теорему об изменении кинетической
энергии точки
mv2 mvi
---=А,
2 2
приняв за начальное положение тела начало его падения с высоты Л, а за конечное —
момент максимального обжатия пружины. Изменение кинетической энергии за этот
промежуток времени равно нулю, так как »о=О и при наибольшем сжатии пружины
«=0. Следовательно, работа А =0.
На тело после его соприкосновения с пружиной действуют две силы: сила
тяжести тела Р и сила упругости пружины. Сила Р совершает работу на перемещении
с
(Л + Л) и ее работа P(h+2). Работа силы упругости есть — -А2, так как удлинение
2
пружины в конце обжатия равно Л, а в начале оно равно нулю. Эта работа
отрицательна, так как сила упругости направлена против перемещения. Следо-
вательно,
Л=Р(Л+Л)-~А2=0.
2
Р
В положении статического равновесия Р=с2сг и поэтому с=—. Подставляя это
Ал
в выражение работы, получаем
Л+Л-— А2=0,
2Ал
390
Рис. 151
или
A2-2ACTA-2ACIh=0.
Решая квадратное уравнение, имеем
а=Лст+-^/л^+г^стЛ.
Знак плюс перед корнем выбран потому, что Л>АСГ.
При Л=0 наибольшее обжатие пружины 2=2^, т. е. при динамическом действии
груза на пружину ее наибольшее обжатие в два раза больше статического обжатия.
Пример 2. Грузу с силой тяжести Р, подвешенному на пружине в точке О\,
сообщена начальная скорость vq из положения Mq вертикально вниз (рис. 152).
Статическое удлинение пружины под действием силы тяжести Р равно 2^-.
Определить скорость груза в положении М, если груз, принимаемый за точку,
скользит по кольцу радиусом R без трения. Расстояние OO\=R и длина недефор-
мированной пружины равна R.
Решение. Применим к движению груза теорему об изменении кинетической
энергии, приняв за начальное положение груза в точке Mq и конечное — в точке М.
Получим
Pv2 Pv2a
Работу совершают сила тяжести груза и сила упругости пружины. Нормальная
реакция кольца N все время перпендикулярна к перемещению и ее работа равна
нулю. Следовательно,
А <= Ph--(г2-ф=Ph-— (г? - Го),
Z ZZct
так как работа силы упругости Ар вычисляется по формуле
с Р
AF= — a2-ty-c~—,
2 Лет
391
где 2=ri—удлинение пружины в конце и 2о=го— удлинение в начале, с —
жесткость пружины.
В рассматриваемом случае
h=R; r0=Ry/2-R; r{=2R—R=R,
поэтому
Р — Г R -
A —PR------[R2-R2(y/2-l)2] = PR 1-----G/2-1)2 •
По теореме об изменении кинетической энергии имеем
Pv2 Pv2
---—-=PR
g2 g2
(У2-1)2Л~|
2^ J
Vo+2gR
G/2-l)aJt~
24т _
Теорема об изменении кинетической энергии системы
Приложив к точкам системы все внешние и внутренние силы, для
каждой точки системы можно выразить теорему об изменении
кинетической энергии (67) в форме
б(ад2/2)=Ле) drk+W'drk, к=1, 2, N.
Суммируя правые и левые части этих соотношений по всем
точкам системы и вынося знак дифференциала за знак суммы,
получаем
<й,
к к к
ИЛИ
(69)
к к
где кинетическая энергия системы
к
элементарная работа внешних и внутренних сил соответственно
будет
392
dA[e)=Лг)' dr*, dAtf=Л0 ‘ dr*.
Формула (69) и выражает теорему об изменении кинетической
энергии системы в дифференциальной форме: дифференциал от
кинетической энергии системы равен сумме элементарных работ
всех внешних и внутренних сил, действующих на систему.
Если обе части (69) проинтегрировать между двумя положени-
ями системы — начальным и конечным, в которых соответственно
кинетическая энергия То и Т, то, изменяя порядок суммирования
и интегрирования, имеем
Мк мк
T-T0=Y [d4‘>+£ f d<
к J к .
Мкй МкВ
или
Т-Т^ХАР + ХАР, (70)
к к
Мк
где Aft = J dAtf*'— работа внешней силы для точки системы Мк при
МкО
ее перемещении из начального положения Л/*о в конечное положение
Мк
Мк, А$ = dAj? — соответственно работа внутренней силы, дейст-
МкО
вующей на точку Мк.
Формула (70) выражает теорему об изменении кинетической
энергии системы в конечной или интегральной форме: изменение
кинетической энергии системы при ее перемещении из одного положе-
ния в другое равно сумме работ всех внешних и внутренних сил,
действующих на систему, на соответствующих перемещениях то-
чек системы при том же перемещении системы.
Частный случай. Для абсолютно твердого тела сумма работ
всех внутренних сил системы равна нулю:
Z4°=o.
*
Следовательно, теорему об изменении кинетической энергии,
например, в конечной форме можно представить в виде
Т- То=^\
к
(71)
393
Изменение кинетической энергии твердого тела при каком-либо
перемещении равно сумме работ всех внешних сил, действующих на
тело, на соответствующих перемещениях точек тела при том же
перемещении твердого тела.
Таким образом, в отличие от рассмотренных других общих
теорем динамики системы в теорему об изменении кинетической
энергии могут входить внутренние силы. Они не входят в эту
теорему в случае абсолютно твердого тела.
Пример 1. В маятнике Максвелла однородный цилиндр силой тяжести Р и ради-
усом R падает вниз без начальной скорости, разматывая нить, намотанную на
цилиндр в его среднем сечении.
Определить скорость оси цилиндра в зависимости от высоты ее опускания h (рис.
153).
Решение. По теореме об изменении кинетической энергии цилиндра как твердо-
го тела имеем
7’-т’о=Е4е)-
к
Так как в начальный момент времени цилиндр покоится, то 7о=О. Цилиндр
совершает плоское движение. Его кинетическая энергия в момент достижения высо-
ты Л
Pv2r со2 PR2
т=------ь Jcz ; Jcz= ;
g 2 2 g 2
Поэтому
г
g 2 g 2 2R2 igVc'
Внешними силами являются сила тяжести Р и сила натяжения нити 5. Сила S все
время приложена в мгновенном центре скоростей цилиндра, имеющем скорость,
равную нулю. Работа силы S тоже равна нулю. Следовательно, =Ph.
к
Подставляя вычисленные величины в теорему об изменении кинетической энер-
гии, получаем:
Рис. 153
Рис.154
394
ЗР , 2
-~v2c=Ph; vc=-y/3gh.
4g 3
Пример 2. Груз M имеющий силу тяжести Q, с помощью нити, перекинутой через
блок А, приводит в движение каток В, катящийся без скольжения по горизонтальной
плоскости (рис. 154). Блок А и каток В — однородные диски радиусом R. Их силы
тяжести равны Р. Коэффициент трения качения катка к. Трением в осях катка
и блока, а также массой нити пренебречь.
Определить скорость груза М в зависимости от его высоты опускания. В началь-
ный момент система покоится.
Решение. По теореме об изменении кинетической энергии системы, состоящей
из груза, нити, блока и катка, имеем
г-т0=£4)+х4°.
к к
где Го=О, так как вначале система покоится. Обозначим Ть Г2 и Тз кинетические
энергии груза, блока и катка соответственно после опускания груза на высоту Л,
получаем
Ov2 аЛ з Pvj, ш.
= T2=JOzA-, Г= ^+JCz^.
g2 2 g 2 2
Но
PR2 v vc v
Joz-JCz= ^ ', vC = v;
g 2 R R R
Следовательно,
V2 V2
Т=Тг + Тг + Тз--—(2б+ЗР+Р)=-(е+2Р).
4g 2g
Так как работа внутренних сил натяжения нити равна нулю, то вообще ^А^=0
для всей системы твердых тел, соединенных нитью. Работа сил тяжести блока
и реакции оси R$ равны нулю, так как эти силы приложены в неподвижной точке О.
Сила тяжести катка Р перпендикулярна перемещению, а силы N и приложены
в мгновенном центре скоростей и, следовательно, работа их равна нулю. Работу
производят сила Q и пара сил с моментом Mg, препятствующим качению катка по
плоскости. Имеем
^A?=Qh-Mg<p,
к
где <р — угол поворота катка при опускании груза М на Л и Mg=const.
Так как
h
Mg=kN=kP; q>=-,
то
^A^Qh-kP-.
к К
Подставляя значения полученных величин в теорему об изменении кинетической
энергии, получаем
395
i>2 / к \
— (б+2Р)=Л\Q--P ;
2g \ R )
Заметим, что груз имеет не только силу тяжести Q, совершающую работу, но он
еще обладает массой Q/g и, следовательно, имеет кинетическую энергию. И работа
силы тяжести, и кинетическая энергия груза входят в теорему об изменении кинети-
ческой энергии.
Теорема об изменении кинетической энергии
в относительном движении
Теорема об изменении кинетической энергии материальной точки.
Пусть точка М совершает переносное движение вместе с подвижной
системой координат Oxyz относительно основной системы коор-
динат OjXijiZi и относительное движение по отношению к системе
координат Oxyz (рис. 155). Абсолютным движением точки М явля-
ется ее сложное движение относительно системы координат OiXxy\Zx.
Дифференциальное уравнение относительного движения точки М в
векторной форме можно представить в виде
/иаг=Г+Фг4-Фг, (72)
где <5е= — тае — сила инерции переносного движения точки;
<5Ж = — 2т (со х vr) — сила инерции Кориолиса.
Вывод теоремы об изменении кинетической энергии для точки
в относительном движении произведем так же, как и вывод анало-
гичной теоремы в абсолютном движении, умножив обе части (72)
скалярно на вектор элементарного относительного перемещения dr,
и преобразуем левую часть полученного выражения. Значок ~ над
дифференциалом радиуса-вектора г и других векторов указывает,
что при дифференцировании надо брать изменение соответству-
ющего вектора относительно подвижной системы координат Oxyz.
Таким образом,
- J- 5“ А~ ^А~ а(™*\ а(ПЮг\
та.аг=т— ar=mav' — = mavr—a[ — = d — .
dr dr \ 2 J \ 2 J
В правую часть входят элементарные работы сил F, Фе и Фж на
относительном перемещении dr. Оказывается, что элементарная
работа силы инерции Кориолиса на относительном элементарном
перемещении всегда равна нулю, так как эта сила перпендикулярна
относительной скорости vr и, следовательно, перпендикулярна от-
396
носительному перемещению dr = vrdt.
В выражение силы инерции Кориолиса
входит векторное произведение a>xvr,
а оно всегда перпендикулярно каждо-
му из векторов сомножителей, в част-
ности vr.
Итак, теорема об изменении кине-
тической энергии точки в дифференци-
альной форме имеет вид
d(mv*l2)=Fdr + $eSr. (73)
Теорема об изменении кинетической энергии в относительном
движении точки выражается так же, как и в абсолютном движе-
нии, только к элементарной работе приложенной силы добавляют
элементарную работу силы инерции переносного движения на от-
носительном перемещении.
Теорема об изменении кинетической энергии системы в относитель-
ном движении. Для системы рассмотрим наиболее важный случай,
когда в качестве переносного движения берется поступательное
движение системы вместе с центром масс и, следовательно, кинети-
ческую энергию системы в абсолютном движении можно вычислить
на основании теоремы Кёнига (63): Т=Mvc/2+ Тф.
Теорему об изменении кинетической энергии системы для аб-
солютного движения (см. рис. 140) можно представить в виде
(74)
к к
Так как
Рк = Рс + Рк
и, следовательно,
dpk=dpc+drJt,
то, заменяя в (74) dp* и Т их значениями, получаем
d + d7£> = (' dpc+Е Ле)' dF*+
+ £^°dr*+fM0\dpc. (75)
к \к /
По свойству внутренних сил, Е^=0.
к
397
Если теорему об изменении кинетической энергии для центра
масс выразить так же, как и для точки, у которой масса равна массе
всей системы, и эта точка находится под действием всех внешних
сил, действующих на систему, то
\ 2 / X к /
Отбросив в (75) эти члены, получим следующую теорему об
изменении кинетической энергии системы в относительном движе-
нии по отношению к системе координат, движущейся поступатель-
но вместе с центром масс:
(76)
к к
Сравнивая (76) с (74), видим, что теорема об изменении кинети-
ческой энергии в относительном движении системы по отношению
к системе координат, движущейся поступательно вместе с центром
масс системы, формулируется так же, как и для абсолютного
движения системы.
§ 6. ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ
Для вычисления работы силы на каком-либо перемещении в об-
щем случае необходимо знать закон движения точки на этом пере-
мещении. Есть класс сил, для которых работа не зависит от харак-
тера движения точки на рассматриваемом перемещении. Эти силы
называют потенциальными, и они имеют важное значение в различ-
ных областях механики и физики.
Потенциальное силовое поле и силовая функция
Силовым полем называют часть пространства, в каждой точ-
ке которого на материальную точку действует определенная сила,
зависящая от координат точки и времени.
В теории поля применяются полевые переменные (перемен-
ные Эйлера) х, у, z, t, где х, у, z — координаты точки простран-
ства, независящие от времени, t — время. В теоретической меха-
нике обычно координаты х, у, z считаются координатами дви-
жущейся точки, зависящими от времени. Это различие ко-
ординат всегда следует учитывать. Силовое поле считают ста-
ционарным, если действующие силы не зависят от времени. Если
же силы зависят от времени, то силовое поле является нестаци-
онарным.
398
Силовое поле называют потенциальным, если имеется функция
U, зависящая от координат точки и времени для нестационарного
силового поля. Через силовую функцию U проекции силы на коор-
динатные оси в каждой точке поля (рис. 156) определяются по
формулам
Fx = д U/дх; Fy = d U/ду, Fz = d U/dz. (77)
Функцию U (х, у, z, I) называют силовой функцией.
Рассмотрим основные свойства силовой функции стационарного
силового поля. Из (77) следует, что силовая функция определяется
с точностью до постоянной, так как для проекций силы на коор-
динатные оси требуются только частные производные по коор-
динатам от этой функции и добавление постоянной к функции U не
влияет на значения Fx, Fy, Fz. Элементарная работа
dU dU 8U
dA = Fxd.x+Fydy+Fzdz =—dx-| dy+.dz=dC7,
дх ду dz
т. е.
dA=dU. (78)
Таким образом, элементарная работа силы в потенциальном
силовом поле равна полному дифференциалу от силовой функции. Для
нестационарного силового поля полный дифференциал силовой фу-
нкции
, dU , dU , dU , dU ,
dU=—dxH—dyH—dz-|—dt
дх dy dz dt
не равен элементарной работе.
Полная работа силы F на участке от точки Мо до точки М
м м
А= dA= \ dU=U(x, у, z)-U(x0, уо, z0)=U—U0,
т. е.
A = U-U0, (79)
где Uo= U(х0, у0, z0), U=U(x, у, z).
Следовательно, полная работа силы
на каком-либо перемещении точки равна
разности значений силовой функции
в конечной и начальной точках переме-
щения и не зависит от формы траек-
Рис. 156
399
тории, по которой оно совершается, если силовая функция является
однозначной.
Из (79) следует, что работа силы в потенциальном силовом поле
по любому замкнутому пути равна нулю, так как значение силовой
функции в начальной и конечной точках перемещения одинаково,
если силовая функция не принимает других значений после воз-
вращения в первоначальную точку.
Силовая функция может принимать другие значения после воз-
вращения в первоначальную точку в зависимости от количества
обходов, если область, ограниченная замкнутым путем обхода,
содержит в себе специальные особые точки силовой функции.
Если применить понятие вектор-градиента от скалярной функ-
ции U
-cU -8U -8U
grad U=i—\-j—\-k—,
dx 8y dz
где z, j, k — единичные векторы, направленные по осям координат,
то силу F можно выразить как градиент силовой функции U:
F= grad U.
Определим условия, которые позволяют по силам силового поля
устанавливать, будет ли силовое поле потенциальным.
Если силовая функция U существует, то
8Fxl8y — 82UI(8y 8х); dFy/8x=82U/(8x 8у).
Так как
d2UI(dy 8x) = 82U/(8x 8у),
то
8Fxldy—8Fyl8x или dFJcy—8Fyl8x=Q.
Аналогично,
SFJdy - 8Fy/8z=0; 8Fx/8z - 8Fz/8x = 0.
Таким образом, полученные условия имеют вид
8FZ 8Fy 8FX 8FZ 8Fy 8FX
—------=0; —-----=0; —------ = 0. (80)
8y dz 8z dx dx 8y
В векторном исчислении доказывается, что условия (80) не толь-
ко необходимы, но и достаточны для существования силовой функ-
ции. Если использовать вектор вихря rot F от вектора силы F
_ -/8FZ 8Fy\ - 8FX 8FZ\ - [ 8Fy 8FX
rotF=i —------- +j( —----- +£ —------
\ 8y dz J \8z dx J \8x 8y
400
то условия (80) можно выразить более кратко:
rotF=0.
(80')
Таким образом, для того чтобы силовое поле было поте-
нциальным, необходимо и достаточно, чтобы оно было
безвихревым.
Непотенциальными силами являются силы сопротивления, зави-
сящие от скорости, и силы трения. Силы сухого трения не будут
потенциальными, так как хотя сила трения по величине может не
зависеть от скорости и даже быть постоянной, но по направлению
она всегда от скорости зависит. Сила трения противоположна ско-
рости.
Поверхности уровня. Силовые линии
Если рассматривать точки потенциального силового поля, в ко-
торых силовая функция имеет одно и то же значение, например
(7= С, то все эти точки располагаются на поверхности, которую
называют поверхностью равного уровня или поверхностью уровня.
Уравнение поверхности уровня имеет вид
U (х, у, z) = С.
Отметим некоторые свойства поверхностей уровня.
1. Работа силы равна нулю, если начальная и конечная точки
перемещения лежат на одной поверхности уровня. Действительно,
A = U-U0.
Если начальная и конечная точки лежат на одной поверхности
уровня, то U— Uo и, следовательно, А = 0. Работа силы на перемеще-
нии между точками Мо и Л/ не зависит от положения этих точек на
своих поверхностях уровня. На любом перемещении между двумя
точками рассматриваемых поверхностей уровня она одинакова
(рис. 157).
2. Сила в потенциальном силовом поле всегда перпендикулярна
поверхности уровня или, точнее, касательной плоскости поверх-
ности уровня. Действительно, пусть имеем поверхность уровня
U=C. Возьмем на ней две бесконечно близкие точки М и и вы-
числим элементарную работу на перемещении djj между этими
точками:
dA=Fdst cos (F,Л MMX).
С другой стороны,
401
dA=U(Mt)-U(M) = C-C=O.
Так как F и d.v, не равны нулю, то cos (F, Л Л/Л/]) = 0 и, следова-
тельно, угол между силой F и перемещением Л/Л/], лежащим в ка-
сательной плоскости к поверхности уровня, является прямым.
3. Сила в потенциальном силовом поле всегда направлена в сто-
рону возрастающих значений силовой функции. Для доказательства
этого свойства силы возьмем точку Л/2 на перпендикуляре к поверх-
ности уровня, восставленном в точку Л/ в направлении возраста-
ющих значений силовой функции. Тогда элементарная работа на
элементарном перемещении Л/Л/2, равном ds2, вычисляется по
формуле
Fds2 cos (F,Л Л/Л/2) = С2 - С > О,
так как С2>С.
Следовательно, cos(F, ЛЛ/Л/2)>0; поэтому угол, равный 180°,
исключается и получается, что сила F направлена по Л/Л/2 в сторону
возрастающих значений силовой функции.
4. Если все силовое поле разбить поверхностями уровня на
и равных значений так, что для первой поверхности уровня = С/п,
для второй С2=2С/п и последней C„ = nCjn = C, то там, где соседние
поверхности уровня ближе друг к другу, модуль силы F больше, чем
в местах, где поверхности уровня дальше отстоят друг от друга.
Это свойство можно проверить, если заметить, что работа между
точками любых двух соседних поверхностей в этом случае одна и та
же. Следовательно, там, где расстояние между поверхностями мень-
ше, сила по числовому значению больше, и наоборот.
Наряду с поверхностями уровня в силовом поле вводят понятие
силовой линии, т. е. такой линии, в каждой точке которой сила
направлена по касательной к этой линии (рис. 158). Так как вектор
dr с проекциями на оси dx, dy, dz всегда направлен по касательной
к кривой, то из условия параллельности dr и F следует, что
Рис. 157
Рис. 158
402
dx/Fx = dy/Fy = dz/Fz.
(81)
Эти дифференциальные уравнения относительно координат х, у,
z являются дифференциальными уравнениями силовой линии.
Потенциальная энергия
В случае потенциального силового поля наряду с силовой функ-
цией можно ввести другую функцию, характеризующую запас энер-
гии в данной точке поля,— потенциальную энергию в этой точке
(рис. 159), или потенциальную энергию материальной точки в рас-
сматриваемой точке силового поля.
Потенциальной энергией П материальной точки в рассматрива-
емой точке силового поля М называют работу, которую совершают
силы поля, действующие на материальную точку при перемещении ее
из точки М в начальную точку Мо, т. е.
П=Амм0,
или
n=AMM=U0-U=C0-C. (82)
Постоянная Со одна и та же для всех точек поля, зависящая от
того, какая точка поля выбрана за начальную. Очевидно, что потен-
циальную энергию можно ввести только для потенциального сило-
вого поля, в котором работа не зависит от формы перемещения
между точками М и Мо. Непотенциальное силовое поле не имеет
потенциальной энергии, для него не существует и силовой функции.
На основании (77) и (82) имеем:
dU дП „ dU дП „ dV дП
— =---; F =—=----; Fz =——--.
дх дх’ У ду ду’ Z dz dz
Из (78), (79) и (82) соответственно получаем
dA=dU=-dH, А=и~иа=П0-П.
Из приведенных формул следут, что
П определяется с точностью до произ-
вольной постоянной, которая зависит
от выбора начальной точки, но эта
произвольная постоянная не влияет на
вычисляемые через потенциальную эне-
ргию силы и работу этих сил. Учиты-
вая это, формулу (82) можно выразить
так:
Mix,у,г)
Van
.)
и0 ~
Мо1хв,у01г0)
Рис. 159
403
П= —17+const,
(82')
или
п=-и.
Потенциальную энергию в какой-либо точке поля с точностью
до произвольной постоянной можно определить как значение сило-
вой функции в этой же точке, взятое со знаком минус. По существу,
достаточно одной из функций П или U.
Понятие потенциальной энергии было введено раньше, чем си-
ловая функция. Силовая функция более удобна, так как некоторые
формулы, содержащие эту функцию, не имеют знака минус.
Примеры вычисления силовых функций
Если вычислить силовую функцию, то на основании (82') будет
известна и потенциальная энергия. Вычислим силовые функции
однородного поля силы тяжести, силового поля линейной силы
упругости и силового поля силы притяжения, действующей по
закону Ньютона.
Силовая функция однородного поля силы тяжести. Если ось Oz
(рис. 160) направить вертикально вверх, то проекции силы тяжести
на координатные оси будут равны
Рх = 0; Ру — 0; Pz= -mg.
Вычисляя элементарную работу силы Р, получаем
dA — Pxdx+Pydy + Pzdz = — mgdz=d(—mgz).
Так как элементарная работа является полным дифференциа-
лом, то силовое поле силы тяжести является потенциальным и си-
ловая функция этого поля определяется по формуле
U= —mgz + const. (83)
По формуле (83) определяют силовую функцию однородного
поля силы тяжести, т. е. поля, в котором сила тяжести постоянна по
модулю и направлению. Уравнение поверхности уровня U=C или
z=const, т. е. поверхностями уровня являются горизонтальные
плоскости.
Силовая функция линейной силы упругости. Для линейной силы
упругости (см. рис. 146) имеем:
F= — cr; Fx= — ex; Fy = — су; Fz—— cz.
Следовательно,
404
d^=Fxdx+.F>d}’+Fzdz= — c(xdx+ydy+zdz)=
= — crdr=d(—cr2/2),
так как xdx+ydy+zdz=rdr; r2=x2+y2 + z2.
Силовую функцию линейной силы упругости определяют по
формуле
С с
U=-----1- const = — - (х2+у2 + z2)+const. (84)
2 2
Поверхностями уровня U—C являются сферы г=const.
Силовая функция силы притяжения по закону Ньютона. Вычислим
силовую функцию поля земного притяжения. Если выбрать начало
координат в центре Земли (рис. 161), то сила притяжения точки
земным шаром F=kjr2.
Сила Г направлена к центру Земли; следовательно, вводя еди-
ничный вектор г° по радиусу-вектору от этого центра в рассмат-
риваемую точку М, имеем
Проецируя силу F на координатные оси, получаем:
к к к
Fx= —-Х-, Fy= —у; Fz= —z.
г г3 г1
Тогда
/с
dA=Fxdx+Fydy+Fzdz= (xdx+ydy+zdz) =
г3
к , , (к
=---rdr=dl -
г3 \г) так как xdx+ydy+zdz=rdr; r2 = x2+y2 + z2. 1 Ip / S' /° у /С х Xх* Рис. 160 М (х, у, z) fZ 'О ) У Рис. 161
405
Таким образом, силовая функция силы притяжения, по закону
Ньютона,
к к
U= -+const=—•=== + const. (85)
Г •JxL-'rf+Z2
Постоянную к для случая Земли можно выразить так:
к = GmM=mgR 2,
где М — масса Земли; R — радиус Земли; g — ускорение силы тя-
жести на поверхности Земли; т — масса точки; G — постоянная
тяготения.
Если вместо Земли рассматривается другое небесное тело, изме-
няется только постоянная к.
Силовая функция и потенциальная энергия системы
Для механической системы в потенциальном силовом поле мож-
но ввести силовую функцию как функцию, зависящую от координат
всех точек системы, т. е. от положения системы в силовом поле.
Если система состоит из N точек, то силовая функция U(хь yh х2,
у2, z2; ...; xN, yN, zN) зависит в общем случае от координат всех точек.
Проекции силы, действующей на каждую точку системы,
ги ди ди
Fkx=—-, Fky=~-~, F^——, к=\, 2, ..., N. (86)
8хк дук dzk
Сумма элементарных работ всех сил, действующих на точки
системы, определяется по формуле
Е d А=£ (Лх dx*+Fky dyk+Fkz dzk) =
k k
^/8U, dV, dU , \ ,T7
=L dx*+~—dy*+-~ dz* ] = dC7,
* \8xk dyk dzk J
ИЛИ
£d4t=dt7.
k
(87)
Таким образом, сумма элементарных работ сил поля, действу-
ющих на механическую систему, равна полному дифференциалу
от силовой функции. Если вычислить сумму работ, которую сове-
ршат силы поля, действующие на механическую систему при
406
перемещении системы из положения (Af0), в котором имеется си-
ловая функция Uq, в положение (М), в котором есть силовая функ-
ция U, то
2>=L f dA=
к kJ
W
(Afl
dU=U—U0,
(M,)
или
YAk=U-U0.
(88)
Следовательно, сумма работ сил поля, действующих на систему
при перемещении системы из одного начального положения в дру-
гое, равна разности значений силовой функции в конечной и началь-
ном положениях системы.
Потенциальной энергией системы П в рассматриваемом положе-
нии (М) потенциального силового поля называют сумму работ сил
поля, действующих на систему, которую эти силы совершают при
перемещении системы из рассматриваемого положения в начальное
положение (A/i), т. е.
n=Y, Ак~ Ui— U= — C7+const, (89)
к
где U — значение силовой функции для системы сил в положении
(М); их —значение силовой функции в начальном положении.
Из (86) — (89) следует:
г _8U 8П _ 8U_ 8П _8U_ 8П
Гкх~~ - ~7~’ Fky~~^~ Fkz~~T~
8хк 8хк 8ук 8ук 8zk 8zk
YdAk=dU= —dTZ; £ Ak = U- Uo = По-П.
к
§ 7. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Закон сохранения механической энергии точки
Для материальной точки теорему об изменении кинетической
энергии можно выразить в следующем виде:
mv2/2 — mv2/2 = А.
Если материальная точка движется в стационарном потенциаль-
ном силовом поле, то
407
А = Пп—П.
Следовательно,
mv2/2—mv2/2=Пй—П или mv2/2 + П— mv2/2 + n0=h,
где h — постоянная величина.
Обозначая через Е полную механическую энергию точки, состо-
ящую из ее кинетической и потенциальной энергий, получаем
E=mv2/2 + n=h.
Таким образом, при движении точки в стационарном потенци-
альном силовом поле ее полная механическая энергия остается по-
стоянной величиной, что является законом сохранения механической
энергии для точки, который и есть первый интеграл дифференциаль-
ных уравнений движения точки.
Закон сохранения механической энергии системы
Теорему об изменении кинетической энергии для системы можно
представить в виде
г-г0=^(4'>+4°)=Ел. (90)
к к
Если система движется в стационарном потенциальном силовом
поле, то
£Л = /70-/7,
к
где П — потенциальная энергия внутренних и внешних сил, дейст-
вующих на систему. Следовательно,
Т— То—По—П или Т + П = То -j- По = Л,
где h — постоянная величина.
Обозначая через Е полную механическую энергию системы,
имеем
Е=Т+П=И. (91)
Формула (91) выражает закон сохранения механической энергии
для системы: полная механическая энергия при движении системы
в стационарном потенциальном силовом поле внешних и внутренних
сил является постоянной величиной.
408
В случае абсолютно твердого тела работа всех внутренних сил
равна нулю и, следовательно, потенциальная энергия внутренних
сил является постоянной величиной, которую можно считать рав-
ной нулю. Тогда в (91) за потенциальную энергию следует принять
только потенциальную энергию внешних сил, которая вместе с ки-
нетической энергией является постоянной величиной. При движении
изменяемой механической системы сумма кинетической энергии
системы и потенциальной энергии внешних сил не является постоян-
ной. Она становится постоянной только вместе с потенциальной
энергией внутренних сил. Механические системы, для которых вы-
полняется закон сохранения механической энергии, называют кон-
сервативными.
При движении точки или системы в непотенциальном силовом
поле, встречающемся в действительности, когда непотенциаль-
ность связана с действием сил сопротивления, механическая энер-
гия изменяется, причем она всегда уменьшается на работу сил
сопротивления. Потерянная системой часть механической энергии
обычно переходит в тепловую энергию. Полная энергия всех
видов (механическая, тепловая, химическая и т. д.) не изменяется
при движении точки или системы в любом силовом поле. При
этом происходит только преобразование одного вида энергии
в другой.
Рассмотрим теперь комплексный пример на основные виды
движения твердого тела: поступательное, вращение вокруг не-
подвижной оси и плоское движение, а также вычисление количе-
ства движения, кинетического момента и кинетической энергии
системы.
Пример. Груз А силой тяжести Р\ = 150 Н опускается вниз, приводя в движение
с помощью невесомой и нерастяжимой нити однородный диск D силой тяжести
Р=900 Н (рис. 162). Нить намотана на диск D и переброшена через блок В силой
тяжести Р2 = 140 Н. Нить по блоку не скользит. Диск D имеет радиус Л=30 см. Он
движется по горизонтальному рельсу. Коэффициент трения качения 5=0,15 см. Блок
считать однородным диском с радиусом г. Трением на оси блока пренебречь.
Система начинает движение из состояния покоя.
Определить уравнения движения диска D, давление блока В на ось, количество
движения и кинетическую энергию системы и кинетический момент катка D от-
носительно его точки соприкосновения с рельсом через 1 с после начала движения.
Решение. Составим уравнения движения отдельных тел под действием прило-
женных к ним сил.
Каток D совершает плоское движение. К нему
приложены внешние для него силы: сила тяжести Р,
натяжение нити 5 и реакция рельса, состоящая из
нормальной реакции N, силы трения F и пары сил,
препятствующей качению с моментом L (рис. 163).
Силу трения предполагаем направленной в положи-
тельную сторону оси Ох. При составлении уравне-
ний моменты сил и угловые характеристики тел
считаем положительными, если они направлены
против часовой стрелки.
Рис. 162
409
Для катка D имеем следующие уравнения движения:
-*c=M=s+^
g к g к
Jc^=Y^Cz^=FR-SR+L,
к
(а)
где JCz — момент инерции тела относительно оси Cz, проходящей через центр масс
перпендикулярно плоскости катка. При сделанном выборе осей координат yc=R =
=const и, следовательно, Ус=Ус—^-
Блок В вращается вокруг неподвижной оси C\z, проходящей через его центр масс
С] (рис. 164). На блок действуют внешние силы тяжести Р2, реакция оси с состав-
ляющими Xi, У) и силы натяжения нитей, числовые значения которых S и 5].
Дифференциальное уравнение вращения блока вокруг неподвижной оси
Jc^Z^c^^Sr-Str, (б)
к
где JclZ — момент инерции блока относительно оси вращения Ctz.
Груз А совершает прямолинейное движение по оси O[Z (рис. 165). К нему
приложены внешние силы тяжести Р\ и натяжение нити Sj. Уравнение движения
груза
-i=Y^=pi-Fi-
g к
(в)
Имеем систему пяти уравнений (а), (б), (в), в которую входят девять неизвест-
ных хр, ф, фь z, N, F, L, S, Sj. Так как ус—®> то ег0 считаем известным.
К системе пяти уравнений движения следует добавить уравнения связи движений
тел вследствие нерастяжимости нити и отсутствия ее скольжения по катку D и бло-
ку В.
Если переменные величины отсчитывать от начальных положений тел, то для
момента времени t для блока и груза (см. рис. 163, 164) получаем z= — r<pi, и после
дифференцирования по времени
410
z=-r<pi; z=-r<h.
(г)
Знак минус здесь и дальше ставится для того, чтобы при отрицательном значении
<pi (вращение блока происходит по часовой стрелке) получить положительное значе-
ние z (груз движется вниз в положительную сторону оси Oiz). Так как нить не
скользит по катку D и блоку В, то скорости и касательные ускорения точек Е катка
и К блока одинаковы, т. е. xe=xr и Но для точки К блока хЕ= — гф}
и хЕ=—гф\. Для точки Е катка, приняв за полюс точку С, по формуле связи
скоростей двух точек тела при плоском движении для произвольного момента
времени с учетом знаков величин, имеем хЕ=хс— Rip. После дифференцирования по
времени хЕ=хс~~ R&- Таким образом, получим дополнительное уравнение связи
движений
хс-Кф=-гф1. (д)
Кроме того, считаем, что при движении груза А вниз каток D катится по рельсу.
Условие его качения для момента пары, препятствующей качению, выразится
в форме L=Lm„=6N. В тех случаях, когда направление качения катка заранее
неизвестно, следует задать направление L и решить задачу. Если вращение катка
получится при этом против принятого направления для L, то предположение о на-
правлении L правильно. Если вращение катка получится по направлению L, то
следует изменить направление L на обратное и заново решать систему уравнений.
Качение катка может быть как со скольжением, так и без скольжения. Поэтому
сила трения остается неизвестной и по модулю, и по направлению. Добавились два
уравнения (г) и (д) и одно неизвестное L выразилось через другое N. Для полной
определенности задачи необходимо иметь еще одно уравнение и, кроме того, следует
еще установить характер движения катка, т. е. будет ли он катиться со скольжением
или без скольжения.
Предположим, что каток катится без скольжения, т. е. мгновенный центр скоро-
стей находится в точке соприкосновения катка с рельсом. Тогда скорость хс точки
С, предполагаемой положительной, выражается через угловую скорость ф зависимо-
стью хс= —Кф, так как ф при этом отрицательно, а хс положительно. Дифферен-
цированием по времени получим дополнительное условие
хс=~Ьф- (е)
После этого уравнение (д) примет вид
2Еф=гф\. (д')
Уравнение (е) справедливо только при отсутствии скольжения катка в отличие от
других уравнений, которые не зависят от характера движения катка.
Имеем систему семи уравнений с семью неизвестными, считая, что L исключено
из уравнений благодаря зависимости L = 6N.
Характер движения катка можно установить, если из полученной системы линей-
ных уравнений определить силу трения F и сравнить ее величину с предельной силой
трения Fmax=fN. Если окажется |.F]<.Fmax, то система уравнений не приводит
к противоречию с динамическим условием отсутствия скольжения. Предположение
отсутствия скольжения катка правильно. Если же |J] > Лпах, то предположение
об отсутствии скольжения неверно, так как требует такой силы трения, которая
возникнуть не может. В этом случае каток катится со скольжением и условие (е)
не выполняется. Но при качении со скольжением И=Лпм=./Х т. е. имеем
дополнительное уравнение для одной из неизвестных вместо отбрасываемого уравне-
ния (е). Число неизвестных оказывается равным числу уравнений и задачу можно
411
решить. Силу трения fnal следует подставить в уравнения вместо F, не соответст-
вующей по модулю, с тем же знаком, с которым она получилась из уравнений при
использовании уравнения (е).
Для определения силы трения F с использованием условия (е) целесообразно
свести систему семи линейных уравнений последовательным исключением неизвест-
ных к двум линейным уравнениям для F и, например, ф, чтобы затем использовать
правило Крамера.
Так как _Рс=О, то из второго уравнения системы (а) следует N=P и потому
Fmax=/P=0,36 кН, L=iN=5P. Определим предварительно силы натяжения
5 и 5] в общем случае не используя (е). Из уравнения (в) с учетом (г) и (д) имеем
Si = Р{ z=P1 +— гфх =Pi (хс-Лр). (ж)
g g g
При отсутствии скольжения, т. е. при выполнении условия (е), из (ж) получаем
2Р1
51=ЛН----
g
Pir1
Из уравнения (6) с учетом (ж) и значения момента инерции Jc,z—-определи-
g 2
ем силу натяжения:
Jc.z (Р\ Рс^\ /2Р14-Р2\
5=5,+-----Ф\=‘Р\-(хс-Рф)\~+—г =Р1-(хс-Я<р) —--------------- . (з)
Г \g г J \ 2g J
Таким образом, при выполнении условия (е), имеем
Рф
5=Pj+—(2Р,+Р2). (з')
g
Определим силу трения в предположении отсутствия скольжения, т. е. когда для
сил натяжения выполняются условия (ж*) и (з'). Подставляя эти значения
5 и 5] в оставшиеся уравнения системы (а) с учетом (е), после несложных преоб-
разований получаем следующую систему двух линейных уравнений:
R
ф(р+2Л+/’2)-+-Р’=-Л;
g
(Р \р 5
ф -+2Р1+Р2 -^=-Р1+-Л
\2 ) g R
PR2
так как момент инерции катка Jcz =- Эту систему уравнений кратко можно
g 2
выразить в форме
а\ф + Р= —Р[; а2ф — Р=Ь,
где
412
R 1340 0,3 /Р \R 890 0,8
ai = (P + 2P14-P2)~=~-——=41,1; a2 = (j + 2Pj + P2)-=—= 27,3; (и)
8
b=-Pi+-P=-145,5.
R
Из системы уравнений (и) определяем силу трения
-Л
а2 Ь
а2 1
а,/> + а2Р,
---------=27,5 Н.
-(О1+а2)
(к)
Сила трения из уравнений получилась со знаком плюс, следовательно, предположе-
ние о ее направлении в положительную сторону оси Ох подтвердилось. Сравнивая
числовое значение полученной силы F с предельной силой трения FI!aK=fP=
=0,36 кН = 360 Н, имеем И<Лпах- Предположение об отсутствии скольжения не
привело к противоречию. Каток действительно катится без скольжения и хс и ф
удовлетворяют уравнению (е). Подставляя значение полученной силы трения из (к)
в первое уравнение (и), получаем
-(Pi+F) g 177,5 9,8
ф=-------------------------- —4,34 с .
P+2Pi + P2R 1340 0,3
t2
Так как #=const, то <р=ф—b-Cit + C2. В начальный момент 1=0, <р=0 и ф=0.
2
Поэтому Cj = С2=0. Для (/> имеем
t2
а>=ф — = —2,17г2 рад.
2
Из (е) находим
хс=Л<р = 1,30 м/с2.
t2
Так как хс—const, то хс=хс—НСз1+С4. Из начальных условий 1=0, *с=0,
2
хс=0 получаем Сз = С4=0. Следовательно,
t2
хс=хс~ =0,65t2 м.
2
Получены следующие уравнения движения катка
хс=0,6512 м; yc=R=0,3 м; <р= —2,17т2 рад. (л)
По известным значениям хс и ф, используя (д') и (г) и условие (е), получаем
z=—гфх =—2Рф = 2хс; i = 2xc=2xct- (м)
413
Реакцию оси блока определяем из условия, что центр масс блока неподвижен,
и потому на основании теоремы о движении центра масс суммы проекций внешних
сил для блока на оси координат С\х и С\у равны нулю. Имеем
Xi— 5=0;
или
у, =S; Kj = /»!+$!.
Определяем силы натяжения нитей 5 и S1 из (ж7) и (з')
2Р, 2Р,+Р2
5,=Р1+—Я<р = 111 Н;5=Р] +----------Яф=93 Н.
g g
Для силы реакции оси блока имеем
ЛГ1=5=93 Н; = Л+51=251 Н; Я, = = 145 Н.
Давление блока на ось совпадает с реакцией оси блока Pi по модулю.
Количество движения, кинетическую энергию и кинетический момент катка
определяем из общих теорем динамики.
По теореме об изменении количества движения системы,
^7=1^;
d' k dl к
Система не движется в направлении оси Oz, поэтому Qz=0.
Внешними силами системы являются силы тяжести Р, Рь Р2, составляющие
реакций оси блока Xi, Pi и сила реакции рельса N, F и пара сил с моментом L. Все
силы натяжения нити для всей системы являются внутренними силами. Для проекций
внешних сил на оси координат имеем
к
YIP^=P+X1 = 12D,5 Н; £Р$^+Г1-(Р+Р1+Р2)=-39 H.
к
Таким образом,
dQx d6v
— = 120,5;—=-39,
dt dt
или
dQx = 120,5 dt; dQy=-39 dt.
Интегрируя эти выражения в пределах от (=0 до (=1 си учитывая, что при t—0,
Qx=Qy=0, получим
ех=120,5Н с; е?=-39Н с; Q=y/Q2 + Q2 + Q2z = 126,5 Н с.
По теореме об изменении кинетической энергии системы для промежутка време-
ни от t=0 до t=l с имеем
г-то=14е)+240-
к к
414
Здесь То=О. Кроме того £-^=0, так как силы натяжения нити дают работу,
к
равную нулю. Работа внешних сил системы за рассматриваемый промежуток
времени
^Л^ = 7’12+/’(А'с + Яф) + Л4> = 150'1,3 + 0+1,35'2,2=192 Н м,
к
так как
z=xcf2 = l,3; ф=—2,2; £=<5Р=0,0015'900 = 1,35 Н м
и перемещение точки соприкосновения катка D с рельсом хс+^<р=0 при качении без
скольжения. Другие внешние силы Р, N, Pi, X, ?i не совершают работы, так как
перпендикулярны к перемещениям или приложены в неподвижных точках. Таким
образом,
Т=24') = 192Нм.
к
По теореме об изменении кинетического момента относительно неподвижной
оси Oz для катка D
^=2ХОг(Пе))-
d' к
Внешними силами для катка D являются силы Р, S, N, Р и пара сил с моментом L.
Имеем
^Moz(^е)) = -S' ZR-Pxc+N хс+L= -93 0,6 +1,35 = -54,5 Н'м.
к
Так как N=P, то
-Pxc+Nxc=0.
После этого
dKOz= — 54,4dz.
Интегрируя в рассматриваемом интервале времени, получаем
Кдг = — 54,4 Н' м.
Проверим полученные значения количества движения, кинетической энергии
и кинетического момента, вычислив их по формулам.
Количество движения Q состоит из векторной суммы количеств движения от-
дельных тел:
б = 2л + йл+2о- (н)
Так как центр масс блока В неподвижен, то Qg=0. Для катка D
- р- р. Р.
во = ~еС> Qdx = ~Xc, воу = ~~УС = 0-
g g g
415
Груз А движется в положительную сторону оси O^z (вниз), следовательно
Pi
Qaz=~2.
g
Проецируя (н) на оси координат, когда Ох направлена по горизонтали вправо,
а Оу — по вертикали вверх и используя (м), получаем
Р Р Рх Pi
Qx=Qdx=~xc=~xcr,Qy=-QAz =------z=-----2xct.
g g g g
При t=l c
1,3 2,6
Qx=900 — = 119; G„=-150 —= -40;
9,8 У 9,8
e=Ve?+e*+Cz2=i27H c.
Кинетическая энергия системы T состоит из кинетических энергий отдельных тел
T=TA+TB+TD.
Каток совершает плоское движение. Его кинетическая энергия при /=1 с
Р ф2 ЗР ЗР 3-900 1,32
TD =-^c+Ja—=— х2с=- - (хс<)2 =——------117 Н м.
g 2 4g 4 g 4 9,8
Блок вращается вокруг неподвижной оси; следовательно, при t — 1 с
Ф? ^2 , , Лг , 140 1,32
Tb=Jc.z~=—г Ф{=— (xcf) =-------=24 Н м.
2 4g g 9,8
Груз движется поступательно. Для него при /=1 с
Piz2 Pi(2xct)2
ТЛ~ g 2~ g 2
2Pt „ 300 1,3 2
----(xct) =-----------= 52 H м.
g 9,8
Кинетическая энергия системы через 1 с после начала движения
Т=Тл + Та+Гр = 52+24+117 = 193 Н м.
Кинетический момент катка D относительно неподвижной точки О рельса вычис-
ляем по формуле
= Рсх Mvc+
где
Kg)=|Kg|=JCz|p|.
Для проекции Kq на ось Oz, учитывая, что кинетический момент в направлении
часовой стрелки следует считать отрицательным, имеем
Kqz= —RMxc+JczV-
416
Так как плечо вектора Mvc, приложенного в точке С относительно точки О не
зависит от ее положения на рельсе, то и Koz не зависит от положения точки О.
Точкой О может быть любая точка соприкосновения катка с рельсом. В рассмат-
риваемом случае КОх=Коу—0, поэтому при Z=1 с
K0 = \Koz\ =
Р PR2 PR PR
— Rxc-i--Ф =—1—2xc+R&\=—| —3ic| =
g g 2 2g 2g
3PR
=—|-*c'l =
2g
3'900 0,3 1,3
2'9,8
-54 Нм.
Полученные двумя способами величины Q, Г, Kq почти совпадают. Небольшие
различия связаны с округлениями величин при вычислениях.
ГЛАВА 9
АКСИОМА ДАЛАМБЕРА. ДИНАМИЧЕСКИЕ РЕАКЦИИ
ПРИ ВРАЩЕНИИ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Для определения сил реакций связей и ускорений точек при
движении несвободных материальной точки и точек механической
системы целесообразно непосредственно использовать вторую ос-
новную аксиому динамики точки или аксиому Даламбера. Ее при-
менение при движении позволяет использовать формы условий
равновесия внешних сил, действующих на твердое тело при его
равновесии или движении по инерции относительно инерциальных
систем отсчета.
Силы реакций связей при движении зависят не только от вида
связей и приложенных активных сил, но и от характеристик движе-
ния через посредство сил инерции. Эта зависимость в частности
проявляется в важном для техники случае вращения твердого тела
вокруг неподвижной оси. Динамические реакции, зависящие от вра-
щения тела, могут быть сделаны равными нулю при специальном
выборе оси вращения твердого тела.
§ 1. АКСИОМА ДАЛАМБЕРА ДЛЯ ТОЧКИ
И МЕХАНИЧЕСКОЙ СИСТЕМЫ
Вторая основная аксиома динамики точки или аксиома Далам-
бера утверждает, что все силы, действующие на материаль-
ную точку, образуют равновесную систему сил при лю-
бом состоянии точки, т. е. удовлетворяют условию
Г+Я + Ф^О.
(1)
Равнодействующая всех сил, действующих на материальную точку,
разложена на равнодействующую активных сил F, равнодейству-
ющую сил реакций связей R и силу сопротивления пространства
Ф или силу инерции точки.
Сила инерции Ф точки приложена к материальной точке и со-
гласно первой основной аксиоме динамики точки (аксиоме Ньюто-
на) выражается через массу т точки и ее ускорение а относительно
инерциальной системы отсчета зависимостью
Ф= —та.
(2)
418
Система сил F, R, Ф, приложенных к материальной точке, явля-
ется системой сходящихся сил, удовлетворяющей уравнению (1).
Условие равновесия этих сил можно также выразить в форме
(F, R, Ф)~0, (3)
т. е. при движении материальной точки активные силы,
реакции связей вместе с силой инерции точки образуют
систему сил, эквивалентную нулю.
У свободной материальной точки три степени свободы. Из (1)
в проекциях на декартовы оси координат получаем тоже три уравне-
ния равновесия сил:
+Rx+Фх = Oj Fy+Ry + Фу=0; = (4)
Ускорение точки относительно инерциальной системы отсчета
можно разложить на составляющие по осям декартовой системы
координат, а также на касательное и нормальное ускорения и на
переносное, относительное ускорение и ускорение Кориолиса, если
движение точки считать сложным, состоящим из переносного и от-
носительного. Соответственно силу инерции Ф можно разложить на
такие же составляющие:
Ф = Фх7+Ф^+ФЛ=Ф1+Ф„=Фг+Ф1+Ф1. (5)
Касательная сила инерции
Фт= -та,,
где ат — касательное ускорение; нормальная, или центробежная,
сила инерции
Фл= -та„,
где а„ — нормальное ускорение. Переносная и относительная силы
инерции, а также сила инерции Кориолиса через ускорения выража-
ются соответственно так:
Фс= — та,; Ф,= —та,; Фг = — та,.
Аналогично выражаются через проекции а на прямоугольные
оси декартовой системы координат проекции силы инерции Фх, Ф>5
Фг. Силу инерции как и ускорение можно разложить по осям любой
системы координат, в том числе любой криволинейной.
Рассмотрим систему N материальных точек. К каждой точке
системы в общем случае приложены равнодействующая активных
419
сил и равнодействующая реакций связей. Применяя аксиому Да-
ламбера к каждой точке системы, получим
А+Д+<А=0, к=1, 2, N, (6)
где Ф^= — — сила инерции для к-й точки (рис. 166).
Условия (6) можно представить в эквивалентной форме:
{А,Яь<А}~0,£=1,2, ...,У. (7)
N векторных условий (6) или (7) выражают аксиому Даламбера
для системы: при движении механической системы активная сила
и реакция связей вместе с силой инерции составляют равновесную
систему сил для каждой точки системы.
Представим равнодействующую силу, приложенную к каждой
точке системы, разложенной не на активную силу и реакцию связей,
а на внутреннюю и внешнюю силы по отношению ко всей системе:
л+д=де)+ж
Тогда аксиому Даламбера для системы можно представить
в другой форме:
Лг)+Л°+Ф*=0, £=1, 2, ..., N. (8)
Из аксиомы Даламбера для системы в форме (6) или (8) можно
получить следствия в виде шести условий равновесия для сил,
действующих на точки системы, и сил инерции.
Если просуммировать левые части (6) по всем точкам си-
стемы, то
XA+f Л+£<5*=0. (9)
*=1 jt-1 it=l
Умножая векторно каждое из соотношений (6) слева на радиус-
вектор точки rk и опять суммируя по точкам системы, получаем
Е &ХА)+ Е А)+ Е ftx<A)=o,']
fc=l k= 1 fc=l |
ИЛИ I (10)
Е м0 (А) + Е (А) + Е Я (<А)=о. I
£=1 jt-1 J
420
Следствие из аксиомы Даламбера
(10) справедливо как для неподвижной
в рассматриваемой инерциальной си-
стеме отсчета точки, так и движущейся,
так как начало радиусов-векторов гк
можно выбирать в любой точке.
Условия (9) и (10), если выразить их
через проекции на координатные оси,
дадут шесть условий равновесия, ана-
логичных условиям равновесия внеш-
них сил, приложенных к твердому телу при равновесии.
Если использовать аксиому Даламбера в форме (8), то получим
следствия в форме
N N
£Ле)+ЁФ*=0;
fc=l k=l
£ Л7о(Ле))+ £ Мо(Ф*)=0,
*=1 Jt=l
(11)
(12)
так как внутренние силы системы по свойству этих сил удовлетворя-
ют условиям
N N
£Л°=о; £ЖЖ=о.
к=1 к=1
Если спроецировать (11) и (12) на координатные оси, то опять
получим шесть условий равновесия для сил. Особенностью условий
равновесия сил в форме (11) и (12) является отсутствие в них
внутренних сил, что делает их особенно удобными при решении
многих задач динамики системы.
В действительности условие (И) представляет собой теорему
об изменении количества движения, а (12) — теорему об измене-
нии кинетического момента для системы, если их представить
в форме
£/le)-y = 0; (11')
it=i d/
£ Л/о(Ле))-^=О. (12')
*=, dt
Сравнивая (11) с (1Г) и (12) с (12'), получаем формулы для
вычисления главных вектора и момента сил инерции систе-
мы через количество движения и кинетический момент:
421
Ф= £ Ф*= -(13)
*=1 dr
Г£>=£Мо(Ф*)=-^. (14)
*-i dr
В (12') точка О неподвижна в выбранной инерциальной системе
отсчета. Следовательно, по формуле (14) можно вычислить главный
момент сил инерции только для неподвижной точки О. Для движу-
щейся точки вместо (12') следует использовать ранее доказанную
теорему об изменении кинетического момента для движущейся
точки А:
£ МА (Ле)) - + Mvc х VA = 0. (12")
t-i dr
После замены в (12) точки О на Л и сравнения с (12") получим
формулу для вычисления главного момента сил инерции относите-
льно движущейся точки А:
dKA _ _ fdKA _ \
£<?> =-~ + MvcXvA= — — + vAxMvc . (14')
dr \ dr J
В формуле (14') vA и vc — соответственно скорости точки А и центра
масс С относительно рассматриваемой инерциальной системы от-
счета; М — масса системы.
Так как Q = Mvc, то для главного вектора сил инерции
получаем формулу
Ф=£ф,= -^=-Л/ас. (15)
*=i dr
Здесь М — масса системы, vc и ас — скорость и ускорение центра
масс соответственно.
В тех случаях движения твердого тела, когда силы инерции
приводятся к равнодействующей, последняя совпадает по модулю
и направлению с главным вектором этих сил. Но равнодейству-
ющая сил инерции необязательно проходят через центр масс тела,
хотя ее модуль и направление всегда определяются по формуле (15).
Проецируя векторы из (14) на ось Oz, получаем
N dK
(И")
k-i dr
422
Аналогичные формулы можно получить и для других коор-
динатных осей. В случае вращения твердого тела вокруг неподвиж-
ной оси Oz, как известно,
К.=.Цо.
Подставляя это значение Kz в (14"), имеем
£ _ dKz dco
Z ЛЛ(Ф*)= -—z= -J-= -Ле,
dv/ d/
или
Д(Ф)=£ Mz@k)=-Jze. (16)
k=l
По формуле (16) вычисляют момент сил инерции относительно
оси вращения при вращательном движении твердого тела вокруг
неподвижной оси. Этот момент создают касательные силы инерции,
так как нормальные силы инерции для каждой точки тела пересека-
ют ось вращения и, следовательно, момента не создают.
Из аксиомы Даламбера для системы можно получить еще одно
следствие — теорему об изменении кинетической энергии. Для это-
го умножаем (8) скалярно на dr* и суммируем полученные соот-
ношения по всем точкам. Получаем
£ F?drk+ f ^'dF*+ £ <5*dr*=0,
fc=l k=l k=l
или в других обозначениях
£ d^e) + £ dA$) + £ dA*k=0. (17)
*=1 k=l k=\
Сравнивая (17) с теоремой об изменении кинетической энергии
системы в дифференциальной форме
N N
бЛ/£) —dT=0,
k=l k=l
получаем выражение для суммы элементарных работ сил инерции
через кинетическую энергию системы Т:
N N
£Ф*б7*=£бЛ^=-бТ. (18)
k=l к=1
423
Интегрируя (18), получаем
£лф,= -(Т-Т0). (19)
*=i
Таким образом, сумма работ сил инерции на каком-либо переме-
щении системы равна изменению кинетической энергии на этом
перемещении, взятому с обратным знаком.
Методы решения задач динамики с использованием сил инерции
называют кинетостатическими.
§ 2. СИЛЫ ИНЕРЦИИ ТВЕРДОГО ТЕЛА
В ЧАСТНЫХ СЛУЧАЯХ ЕГО ДВИЖЕНИЯ
При поступательном движении. Если твердое тело движется по-
ступательно, то ускорения его точек одинаковы. Силы инерции этих
точек составляют систему параллельных сил, направленных в одну
сторону. Такая система сил приводится к равнодействующей силе
Ф*, которая равна главному вектору, т. е.
Ф* — Ф= — Мас.
Линия действия равнодействующей силы инерции в этом случае
проходит через центр масс, так как главный момент сил инерции
точек тела относительно центра масс
N
№= £ Л?С(Ф,)=О.
k=l
Действительно, согласно следствию из аксиомы Даламбера (12) для
центра масс, имеем
N
jt=i
При поступательном движении тело не совершает вращения вокруг
N
центра масс и поэтому £ МС(Р^)=О. Следовательно, и L^ = 0.
*=i
При вращении вокруг неподвижной оси. Если выбрать за центр
приведения сил инерции точку О на оси вращения Oz, то в этой
точке получим главный вектор и главный момент сил инерции:
Ф= -Mac, L^= — dKo/dt.
424
Если центр масс находится на оси вращения, то Ф=0. Проекции
главного момента сил инерции на неподвижные оси координат
в общем случае можно вычислить по формулам
£<ф) = -d/^/d^O; L™ = -dKy/dt*Q; L™ = -dKzjdt = —J#.
Моменты сил инерции и вычисляются в следующем
параграфе. Они равны нулю, если ось Oz является главной осью
инерции для точки О.
При плоском движении. Выбрав за центр приведения сил инерции
центр масс, получим в этой точке главный вектор и главный момент
сил инерции. Для главного вектора сил инерции имеем
Ф= —Мас-
Для главного момента сил инерции относительно центра масс С,
который является движущейся точкой при плоском движении тела,
получим формулы, аналогичные формуле (14), выведенной для не-
подвижной точки О.
Согласно следствию из принципа Даламбера (12), главный
момент сил инерции относительно центра масс удовлетворяет
условию
N
к=\
С другой стороны, из теорем об изменении кинетического момента
относительно центра масс для абсолютного и относительного дви-
жений имеем
у w
dKc/dt= Y Mc(F?y, d^ldt=
*=1 k=l
Из этих соотношений следует
= - dKc/dt = - dXg’/dr.
Проекции L&, L'*} на оси координат с началом в центре масс
и движущиеся поступательно вместе с центром масс соответственно
L®= -dK&/dt*O; L$= -dK^/dt^O-,
L®= -dK^ldt= -JCze,
где ось Cz перпендикулярна плоскости, параллельно которой совер-
шают движение точки тела.
425
Моменты сил инерции L$ и вычисляются так же, как и при
вращении тела вокруг неподвижной оси. Они равны нулю, если ось
Cz является главной осью инерции для точки С. Это, в частности
выполняется, если тело имеет плоскость симметрии, проходящую
через центр масс и параллельную плоскости движения тела.
В общем случае движения твердого тела для главного вектора
и главного момента сил инерции следует применять общие фор-
мулы:
Ф= = -Mac, L^=------------
dt dt
если точка О неподвижна в рассматриваемой инерциальной системе
отсчета. Формулы для Ф и справедливы и для любой механичес-
кой системы при произвольном ее движении относительно инерци-
альной системы отсчета.
Векторные уравнения равновесия сил (следствия аксиомы Дала-
мбера)
Е Fk+Y А+Ф = о; Е Мо (Fk) + X Мо (Rk) + Цф) = 0,
к к к к
или в другой эквивалентной форме
ЕЛе)+Ф = 0; £м0(Ле’)+Дф) = о,
к к
для случая движения твердого тела, имеющего шесть степеней
свободы, в проекциях на координатные оси дадут шесть уравнений
равновесия сил. В эти уравнения входят только главные векторы
и главные моменты сил и их проекции на оси. Это дополнительно
подтверждает принцип эквивалентности систем сил, приложенных
к твердому телу: две системы сил, приложенных к твердо-
му телу эквивалентны, если они имеют одинаковые глав-
ные векторы и главные моменты при прочих равных усло-
виях.
Пример 1. Груз А силой тяжести Р\ опускается вниз по грани призмы с силой
тяжести Р, приводя в движение груз В, имеющий силу тяжести Р2, с помощью нити
перекинутой через блок С.
Считая пол, грани призмы и грузов гладкими, определить давление призмы на
пол и выступ, препятствующий перемещению призмы, а также силу натяжения нити.
Углы наклона граней призмы а и Р (рис. 167, а, 6).
Решение. Применим к системе, состоящей из призмы, грузов, нити и блока,
следствия из аксиомы Даламбера, составив условия равновесия внешних сил и сил
инерции системы тел.
Предположим, что ускорение груза А направлено вниз и равно а. Для абсолют-
ных величин сил инерции грузов А и В имеем
426
Pl Pl
Ф|=—а; Ф2 =—a.
g g
Направления сил инерции указано на рисунке.
Составляя уравнения равновесия внешних сил системы Ру, Pi, Р, N, F и сил
инерции Ф] и Ф2 в проекциях на координатные оси Ох, Оу, получим:
A A Pi Pl
F——acosa——acos/?=0; N— Py — Pi~P-\—asina——asin/J=O. (a)
g g g g
Из этих уравнений имеем
а
F—-(Py cosa + A cos/?);
g
a
N=Py +P2 + P— -(A sina—Asm/D-
g
Для определения силы натяжения S и ускорения грузов применим аксиому
Даламбера к каждому грузу в отдельности, составив уравнения равновесия внешних
сил грузов и их сил инерции в проекциях на направление нити. Для груза А получим
(рис. 167, а)
Pi
SH—a— P1sina = 0, (б)
g
для груза В (рис. 167, б)
5——в—Asin/?=0, (б')
g
так как S' = 5 для случая невесомого блока.
Из (б) и (б'), исключая 5, определяем а:
A sina—Р2 sin/?
Для того чтобы груз А двигался вниз, должно выполняться условие а>0 или
Рис. 167
427
Pi sina—P2sin/?>0.
Подставляя полученное значение а в (а), получаем
(Pl cosa + P2cosfT) (Pi sina—P2 sinP)
(Pi sina —P2 sin fl)2
N= Pi + P2 + P----------------.
Pi+Pi
Давление призмы на выступ, согласно аксиоме о равенстве сил действия и про-
тиводействия, будет F' = — Р; давление призмы на пол N'= —N.
Для определения натяжения нити 5 следует подставить значение ускорения
а в одно из уравнений (б) или (6Q. Тогда
Р2 PiP2(sina + sin^)
5=Р2 sin Д -I— а=-----------.
g Р1+Р2
Пример 2. Однородный тонкий стержень АВ силой тяжести Р и длиной / жестко
скреплен с вертикальным валом ОО\ под углом а (рис. 168, а). Вал OOj вместе со
стержнем АВ вращается с постоянной угловой скоростью со.
Определить реакции стержня в заделке А.
Решение. Применим к внешним силам и силам инерции стержня следствия из
аксиомы Даламбера в форме равновесия сил. Неизвестные силу реакции Ra и вектор-
ный момент в заделке Ма разложим по осям координат.
Если разбить стержень на элементарные участки одинаковой длины, то ускоре-
ния средних точек этих участков распределятся вдоль стержня по линейному закону
(рис. 168, 6), так как ускорение каждой точки стержня а*=г*со2, где гк — расстояние
к-й точки стержня до оси вращения. Силы инерции элментарных участков стержня,
принимаемых за точки, распределятся тоже по линейному закону, образуя треуголь-
ник. Распределенные так параллельные силы имеют равнодействующую силу, линия
1 2
действия которой отстоит от основания треугольника на -I по стержню и - / от
428
вершины треугольника. Равнодействующая сила Ф* всегда равна главному вектору
Ф распределенных по треугольнику сил инерции. Для главного вектора сил инерции
имеем Ф = — Мас, где ас — ускорение центра масс стержня, т. е. его средней точки.
Таким образом^
Р Р J
ф* =ф=-ас=-ar-sina.
g g 2
Составим для пространственной системы сил шесть уравнений равновесия, при-
няв, что стержень в рассматриваемый момент времени находится в координатной
плоскости Ayz. Тогда для проекций сил и моментов их относительно осей координат
Ах, Ay, Az имеем
хА=0; гА+Ф*=о-,гА-р=о;
I 2
МАх—P-sina— ®*-/cosa=0; 3fAv=0; MAz=0.
2 3
Отсюда
Pl Pl( la1 \
XA=0; Ya= — ar-sina; ZA=P; MAx=— sina-I-----sin2a ; MAr=0; 3/^=0.
g 2 2 \ 3g )
Для сил реакций и момента в заделке имеем
/------:------ pi ( \
МА = V М2Лх+М\у+МгА1 = — (^sina+— sin 2a J.
§ 3. ДИНАМИЧЕСКИЕ РЕАКЦИИ ПРИ ВРАЩЕНИИ
ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Формулы для реакций
Твердое тело, имеющее две закрепленные точки А и В, вращает-
ся вокруг неподвижной оси Oz, проходящей через эти точки, под
действием внешних приложенных сил F\, Ё2, FN (рис. 169). Осво-
бодив тело от связей в точках А и В, приложим к телу силы реакций
связей RA и Rb, проекции которых на оси координат обозначим
соответственно ХА, YA, ZA и Хв, YB, ZB. Эти силы тоже являются
внешними силами для тела.
Приложив к точкам тела силы инерции, применим к телу следст-
вия из аксиомы Даламбера для системы, считая, что тело разбито
на N частиц (малых), принимаемых за точки. Для этого следует
приравнять нулю главный вектор и главный момент всех внешних
сил и сил инерции точек тела. Имеем
429
£ 0;
л=1
£ Mo{Tk)+Mo(RA)+M0(RB}+L^^.
k=l
(20)
Для определения из (20) сил реакций RA и RB необходимо выра-
зить главный вектор сил инерции Ф и главный момент этих сил
Lffl через величины, характеризующие само тело и его вращение.
Для главного вектора сил инерции используем выражение
У N
ф= Z Фк= z (-тЛ)= -Мас, (21)
*=1 *=i
где М — масса тела; ас — ускорение центра масс.
При вращении тела вокруг неподвижной оси ускорение любой
точки тела вычисляется по формуле
ак=£ х ?>+со х (со х гк),
(22)
где гк — радиус-вектор рассматриваемой точки; е и со — соответст-
венно векторы углового ускорения и угловой скорости тела, направ-
ленные по оси вращения. Для центра масс в (22) вектор гк следует
заменить радиусом-вектором центра масс гс.
Векторное произведение двух векторов выражается определи-
телем, в первой строке которого расположены единичные векторы
z, j, к, направленные вдоль осей координат, а в двух других
строках — проекции на оси координат векторов сомножителей.
Определитель можно разложить по элементам первой строки.
Получим
= i ( — coy с) + jcoxc 4- £0,
так как cox — coy — G и coz = co. Здесь хс, ус,
zc — координаты центра масс. Исполь-
зуя полученные величины для ускоре-
ния центра масс ас, имеем
430
к
ас=е х rc+co х (со х rc) = О О
к i
е + О
zc -соус
j
О
й)хс
О
хс Ус
= г (- Еус - со2хс) + j (ехс - ао2ус)+кО, (22')
так как ех=еу = О, ez=e.
Из (21) с учетом (22') для проекций главного вектора сил инер-
ции на оси координат получаем выражения
ф= z Ф*; ’ Л=1 ГФх = - МаСх=МуСЕ+Мхссо2-, Л \ Ф> = - МаСу = — Мхсе+Муссо2-, > (23) Uz=-AfaCz = 0. J
Формулы (23) можно применять не только для главного вектора
сил инерции, но и для силы инерции отдельной точки тела. Для
этого следует массу тела М в них заменить массой точки тк,
а координаты хс, у с, ?с центра масс — координатами хк, ук, zk точки.
Так, для силы инерции к-й точки Фк, согласно (23), имеем
= - ткйкх=ШкУ/fi+тда2;
Фку = - = - ткхк£+ткУкСо2; > (23')
Фь= -«1^ = 0. J
Проекции главного момента сил инерции относительно точки на
оси вращения Lffl на оси координат вычисляем по формулам для
моментов сил относительно этих осей. Используя (23') и вынося
со и е за знаки сумм, получаем:
N N
L(^ = £ (УкФк1-гкФку)=Е Y mkxkzk-
к=1
N
-(О2 Y ткукгк=eJxz-ao2Jyz;
fc=l
Ц )= ХкФкг) “ Е ^кУк^к 4"
*=1 к=\
N
fc=i
431
N N
ЦФ) = E (^ф*у-№ф*х)= ~e E тк(Хк+Ук)= -ej„
k-l Ы
N N N
где Ja= E mk*kZk', Jyz=Y,m^Zk, Jz= £/nfc(xi+y^) —центробеж-
*=1 *=1 k=\
ные и осевые моменты инерции. Получены формулы для вычисле-
ния проекций главного момента сил инерции Lffl на координатные
оси:
Дф)= Е м0(ФкУ,
к=1
L<?=£jxz - co2Jyz; L™=Uyz + co2Sxz; Uf> = - sJz. (24)
При выводе формул (23) и (24) для проекций главного вектора
и главного момента сил инерции на оси координат не делалось
никаких предположений относительно этих осей. Они могут быть
как неподвижными осями, относительно которых рассматривается
вращение тела, так и подвижными осями, скрепленными с враща-
ющимся телом. Поэтому эти формулы можно применять как для
неподвижных осей координат, так и для осей координат, враща-
ющихся вместе с телом.
Из (20) в проекциях на координатные оси с учетом (23) и (24)
получаем следующую систему уравнений для определения проекций
полных реакций ХА, YA, ZA и Хв, YB, ZB:
Fkx+^A+^B+Myce + Mxca>2=0;
N i E $k+&А + -£д-+-Ф=0; ' k=l N j Л-1 2. Л=1 N Z Fky+YA + YB-Mxce + МУС0>г = 0; Ь=1 N Z Fkz+ZA + ZB=0; z N /(25) E Mx(/jt)+r^-^+b7xz-^z=0; k=l N E My^-XAhA+X^B+Ejy^^J^O; jt=l N L E мг(^ь^=о, J vjt=i
432
так как
Мх (Ra) + Мх (RB) = YAhA - YBhB,
Му (RA)+My (RB)= -XAhA + XJiB.
В последнее уравнение системы (25) не входят силы реакций
закрепленных точек. Это уравнение является уравнением вращения
твердого тела вокруг неподвижной оси Oz. Из него по заданным
силам определяется угловое ускорение е, если известен момент
инерции тела относительно оси вращения. По угловому ускорению
интегрированием определяется угловая скорость, если известно ее
значение в начальный момент. Для определения шести неизвестных
проекций сил реакций остается пять уравнений. Система уравнений
(25) не позволяет определить каждую из неизвестных ZA и ZB. Из
третьего уравнения системы можно определить только сумму этих
неизвестных. Для того чтобы из этой системы можно было опреде-
лить все неизвестные, необходимо закрепить тело в точках
А а В так, чтобы неизвестных проекций сил реакций в них было не
более пяти. Этого можно достигнуть, например, поместив в точке
А подпятник, а в точке В — подшипник (рис. 170). Для таких опор
оси тела ZB=0 и все оставшиеся неизвестные могут быть определе-
ны из системы уравнений (25).
Разложим полные реакции RA и RB на статические и динамичес-
кие составляющие:
Ra = R^ + R*a-,Rb=R!Z+R*b.
Статическими реакциями RA и RB называют части полных
реакций, которые статически уравновешивают приложенные внеш-
ние силы. Уравнение для их определения получим из первых пяти
уравнений системы (25), положив в них е=0 и ш = 0. Имеем
Fkx + XA+X^ = 0;
*=i
£1^+17+17=0;
fc=l
£ Ffa+ZJ = 0;
Л=1
N
Mx(Fk) + Y^hA- YghB=0-,
N
Y My(Fk)—X^hA+XBhB=0.
k=l
A
>
(26)
433
Рис. 170
В векторной форме (26) принимают вид
£ Д+^ + Л? = 0;
Jt=l
£ Мо (Рк)+Мо (Я?) + Мо да = о
*=i
Это известные уравнения равновесия для
внешних сил, приложенных к твердому
телу, имеющему неподвижную ось враще-
ния. Но под действием приложенных
внешних сил тело может вращаться вок-
руг неподвижной оси Oz. От вращения
у точек тела возникнут силы инерции. Части полных реакций RA и
RB, которые уравновешивают силы инерции точек тела, называют
динамическими реакциями.
Уравнения для определения динамических реакций получим
из первых пяти уравнений системы (25), если учтем, что прило-
женные внешние силы уравновешены статическими реакциями.
Получим
2^ + Хд+Мус&+Мхс(о2 = 0;
—Мхсе+Мус<о2 = 0;
— eJy2 + a>2Jxz = 0.
(27)
В векторной форме (27) принимают вид
RaA + RB+Ф = 0; Мо (Rfi+Мо (7%)+ДФ)=0. (27')
Составляющих динамических реакций опор в направлении оси
вращения Oz не возникает, так как у точек тела нет составляющих
сил инерции в этом направлении. В неподвижных точках тела
имеются только поперечные по отношению к оси вращения со-
ставляющие динамических реакций. Это справедливо при любом
закреплении точек А к В, позволяющем телу вращаться вокруг
оси, проходящей через эти точки. Из системы уравнений (27)
определяются все проекции динамических реакций на оси коор-
динат.
434
Статическая уравновешенность
Тело, имеющее неподвижную ось вращения, называют стати-
чески уравновешенным, если центр масс этого тела находится на оси
вращения. Для статически уравновешенного тела с осью вращения
Oz координаты центра масс тела хс=ус=0. Из первых двух уравне-
ний системы (27) в этом случае следует:
А^ + Лд=0; ^+У^=0 (28)
или
RaA=-RaB. (28')
Динамические реакции для статически уравновешенного тела об-
разуют пару сил. Пара сил может уравновешиваться только парой
сил. Следовательно, силы инерции точек тела, уравновешивающие
динамические реакции, в этом случае тоже приводятся к одной
паре сил.
Используя (28), из двух последних уравнений системы (27) полу-
чим:
eJvz + o/Jrz tJxl—<о2 Jv,
_уд _ _ _уд _ у _ уд _ ул - z с
Лл + hB hA + hB
И
+ + (29)
hA + hB
где
^=V(^)2+(^)2; ^=VW)2+(n)2-
Из (29) следует, что динамические реакции зависят не только от
углового ускорения, но и от угловой скорости, т. е. они возникают
даже при вращении тела по инерции с постоянной угловой скоро-
стью. Динамические реакции пропорциональны квадрату угловой
скорости как в частном случае статической уравновешенности, так
и в общем случае и при вращении тела с большой угловой скоро-
стью могут достигать довольно значительных величин.
Формулы (23) и (24) справедливы как для неподвижных, так
и подвижных осей координат. Этим же свойством обладают
и формулы (27). Поэтому динамические реакции как в частном
случае статически уравновешенного тела, так и в общем случае,
когда центр масс не находится на оси вращения, можно считать
вращающимися вместе с подвижными осями координат, т. е. вместе
с телом, если угловая скорость постоянна. Опоры оси вращения
тела будут испытывать действие циклически изменяющихся дина-
435
мических давлений, что может привести к их усталостному раз-
рушению или разрушению от вибраций, если собственная круговая
частота мест их закрепления совпадает или близка к угловой скоро-
сти вращения тела.
Динамическая уравновешенность
Динамической уравновешенностью называется случай обращения
в нуль динамических реакций. Динамические реакции обратятся
в нулю, как следует из (29), если равны нулю центробежные момен-
ты инерции и Jyz, т. е. дополнительно к статической уравновешен-
ности ось вращения Oz должна быть главной осью инерции для
любой точки О этой оси. Так как центр масс в этом случае рас-
положен на этой оси, то ось вращения при динамической уравновешен-
ности является главной центральной осью инерции. При вращении
тела вокруг главной центральной оси инерции динамические реак-
ции обращаются в нуль. Следовательно, силы инерции точек тела,
создающие динамические реакции, в этом случае образуют равно-
весную систему сил. Главный вектор и моменты сил инерции
и равны нулю. Момент сил инерции при этом может
быть отличным от нуля.
Главную центральную ось инерции называют свободной осью
вращения — свободной от динамических реакций опор. При враще-
нии тела вокруг свободной оси вращения могут возникнуть только
статические реакции. Если тяжелое тело вращается по инерции
с постоянной угловой скоростью вокруг свободной оси вращения,
то статические реакции должны уравновесить только силу тяготе-
ния тела. При специальном дополнительном движении тела кроме
вращения его вокруг оси с постоянной угловой скоростью может
возникнуть положение, при котором силы инерции точек тела при-
ведутся к равнодействующей силе, уравновешивающей силу тяготе-
ния. В этом случае статические реакции тоже обратятся в нуль
и подшипник и подпятник для крепления оси вращения окажутся
ненужными. Такое положение имеет место при вращении земного
шара вокруг оси и его дополнительном движении по орбите вокруг
Солнца. То же имеет место для других планет Солнечной системы,
а также при движении Луны вокруг Земли и при движении естест-
венных и искусственных спутников планет.
Для того чтобы сделать ось вращения тела свободной осью
вращения, в технике осуществляют его балансировку на специаль-
ных балансировочных установках. При этом прибегают иногда
к высверливанию в теле отверстий и при необходимости заполня-
ют их более тяжелым металлом, например свинцом. Достаточно
подобрать две массы в заранее заготовленных в теле отверстиях-
точках.
436
Основные виды неуравновешенностей. Неуравновешенности тоже
можно разделить на статические и динамические.
Если ось вращения является главной осью инерции хотя бы для
одной точки на оси J„=Jyz=0, а центр масс не находится на оси
вращения, то из (27') следует, что динамические реакции взаимно
параллельны. Этот случай можно назвать статической неурав-
новешенностью.
Если центр масс находится на оси вращения, а ось вращения не
является главной ни для одной точки этой оси, то имеем случай
статической уравновешенности. Его также можно назвать динами-
ческой неуравновешенностью.
Общий случай неуравновешенности, когда и центр масс не нахо-
дится на оси вращения, и нет точки на этой оси, для которой она
была бы главной осью инерции, можно считать наложением двух
неуравновешенностей: статической и динамической. Динамические
реакции получаются при этом сложением реакций от двух указан-
ных неуравновешенностей.
Пример 1. Однородная тонкая пластина массой т=4 кг, длиной 1=50 см
вращается вокруг вертикальной оси вместе с валом АВ с постоянной угловой
скоростью со=20 с*1 (рис. 171). Пластина прикреплена к валу АВ с помощью
стержня OD и пружины, расположенных в горизонтальной плоскости. Жесткость
пружины С=5 кН. Пружина образует угол а с вертикалью и не деформирована при
а=0.
Силами тяжести вала АВ, стержня OD, пружины и трением в подпятнике А и
1
подшипниках В и D пренебречь; OD=l0 = 30 см, ОА = ОВ=50 см.
2
Определить угол а, считая его малым, и полные реакции подпятника А и под-
шипников В и D.
Решением. Для определения угла а и реакций подшипника D составим уравне-
ния равновесия внешних сил пластины и сил инерции. Внешними силами пластины
являются сила тяжести Р, сила упругости пружины F, реакция подшипника Яд (О,
Уд, Zd) и силы инерции пластины с главным вектором Ф и главным моментом
где О — неподвижная точка на оси вращения Oz (рис. 172).
Рис. 172
437
Так как а>=const, то е=0 и для малых углов sina=я и cosa= 1. Сила упругости
пружины F=CA=C/sina = C/a потому, что удлинение пружины A=/sina=/a.
Для главного вектора Ф сил инерции имеем
Фх=тус в+тхса)2=0;
Ф^, = — тхс в+тус<о2 = mycoi2 - — moi2 +- я^;
Фг=0;
/ I \ / I \
так как координаты центра масс хс=0, ус = — I OD -I— shm I = — I Iq Н— я . Проекции
\ 2 / \ 2 /
на оси координат вычисляем по формулам
=Jx:e—Jyzai2 = — Jyzco2;
L^=Jyze+Jxzai2=0;
l(®)=_jz£=o.
Центробежный момент инерции пластины Лг = 0, так как ось Ох является главной
осью инерции для точки О, расположенной в плоскости симметрии ODC пластины
и перпендикулярной этой плоскости.
Вычислим центробежный момент инерции Jyz=^mkykzk. Для этого выберем
систему осей координат Dxiyizi, оси которой взаимно параллельны осям Oxyz. При
параллельном переносе осей координаты точек пластины связаны соотношениями
Ук=У1к->0, zk=zlk. Тогда
—£ mj^y\kz^k mlgZic—2y1z1 m - /q,
где Jyiit=Ylmkyikzik и =»^ic=»i-cosH=m-. Центробежный момент инерции
Jy1Z1 вычисляем через главные осевые моменты инерции для точки, в которой
известны главные оси инерции и осевые главные моменты инерции относительно
этих осей. Обычно это центр масс тела. В случае пластины можно использовать ее
точку D, для которой главная ось Dx' совпадает с Dx^, главная ось D/ — с осью
симметрии пластины DC и главная ось Dy" перпендикулярна к Dx1 и Главные оси
Dy и Dz’ получаются поворотом осей Ду] и Dzi на угол я вокруг оси Dxp
Центробежный момент инерции JyiZl через главные осевые моменты инерции выра-
жается в виде
I2
Jyiz,=—-—sin2я=(J/—JyJ я= — m— я,
где для пластины
h2 h2 I2
Jz’=m—: Jj =m—l-m—;
12 7 12 3
Л — ширина пластины. Таким образом,
438
L*------Jyz(02-----1 JylZl
I \ I2 Ik
—m -ln ]=m— a+m—.
2/3 2
Составим уравнение равновесия сил для пластины в проекциях на координатные
оси DxiyiZi. Получаем
У1) 1Ъ+ФЛ=0; zi) Zb—Р+Фг1=0; 1
1 ,Л, _ f
Л/Х1) zng sina — Flcosa + L^'+Mx (Ф) = 0, ]
2 '
отбросив тождества. Учтено, что Д^=£0+Л?д (Ф) и, следовательно,
£(»)=/,(*)+ Д/Х1(ф).
Для взаимно параллельных осей координат ФУ1=Фу, ФХ1=ФХ=О,
I/® = = — Jyz(o2 — та>2 (— а Н—'j
X yz 2у
и Л/х> (Ф)=0, так как Ф пересекает ось Dx\.
Подставляя в эти уравнения вычисленные величины, имеем
(а)
и уравнение для определения угла а
1 С/ /со2 /осо2
g а------аН-----аН---= 0.
2 т 3 2
Имеем
/осо2 0,3'400
а=--------------=------------------------------=0,14 рад=7,6°.
2С/ 2 , 2'5000 0,5 2 0,5'400
-----g—- /со2 9,8 —
т 3 4-3
На всю систему тел (рис. 173) действуют внешние силы Р, RA, RB и силы инерции,
главный вектор которых Ф и главный момент Условия равновесия этих сил
в проекциях на оси координат Oxyz имеют вид
х) Хл+Уэ+Фх=0; у) ГА + Гв+Фу=0-, z) Z^-P+Ф^О; )
/ / х Рб)
Мх) YaOA-YsOB-P /0+ а +£<ф)=0; М„) -XaOA+X]PB+L™=0.\
\ 2 J ' J
Здесь отброшено уравнение, выполняющееся тождественно.
Подставляя в эти уравнения значения некоторых величин, получим
439
ХА + ХВ=О; УА+Ув+Фу=О; ZA—P=O;
( 1 \ 1ал
YaOA-YbOB-P\ /0+-а +£<ф> = 0; -ХаОА + XbOB = Q.
\ 2 /
(бэ
Вычислив а, определяем Ф>; и силы реакций Yd, Zd- Имеем
/ I \ / 0,5 \
Фу=-та>2 /0+-а = -4 400 0,3+— 0,14 =-546,6 И;
\ 2 J \ 2 )
,Л, // 4)\ /0,5 0,3\
Л(гф)=-/„/о2 = лпш2/ -а+- =4-400 * 0,5 — 0,14 + — =138,4 Н м.
У \3 2/ V 3 2 J
Из уравнений (а) получаем
Yd= -Ф> = 546,6 Н; Zc=P=mg=39,2 Н.
Из первого и последнего уравнений (б') имеем А^ = Хд=0; из третьего ZA = P=
= 39,2 Н; из второго и четвертого
/ 1 \
-Ф/>В+7Ч1о+-а1-£<ф)
1
=— [546,6 1+39,2 0,335-138,4]=280,1 Н,
1,5
и
YB = - УА-Фу = -280,1 +546,6=266,5 Н.
Получены результаты: я=0,14=7,6°; Уд = 546,6 Н; Ид=39,2 Н;
У^=280,1 Н; Уд=266,5 Н; Ид=39,2 Н; ХА = Хв=0.
Пример 2. Однородный круглый цилиндр силой тяжести Р=200 Н, ради-
усом R = 20 см, длиной /=80 см с помощью вала вращается вокруг вертикаль-
ной оси с постоянной угловой скоростью со=20 с-1 (рис. 174). Ось вращения
цилиндра касается поверхности цилиндра посередине образующей в точке
О так, что отрезок ОС, соединяющий точку касания с центром масс цилиндра
Рис. 174
440
перпендикулярен оси вращения. Продольная ось цилиндра наклонена к вертикали
на угол а=45°.
Определить динамические реакции подшипника А и подпятника В, если
АВ= 100 см, ОА = 60 см. Массой вала и трением пренебречь.
Решение. Выберем правую систему осей координат Oxyz, скрепленных с дви-
жущимся цилиндром и началом координат в точке О. Ось Oz направим по оси
вращения; ось Ох — по линии, соединяющей точку О с центром масс С; ось Оу
направим перпендикулярно Ох и Oz.
Динамические реакции вместе с силами инерции системы образуют равновес-
ную систему сил, т. е. удовлетворяют условиям равновесия для сил
Ra + Rb+®=0-, M0{RA)+M0{RB) + L^=(i, (а)
где Ф — главный вектор сил инерции; — главный момент сил инерции от-
носительно точки О, выбранной за центр приведения сил инерции. Главный вектор
сил инерции при вращении цилиндра вокруг неподвижной оси вычисляется по
формулам
ГФХ= — Масх=Мусе + Мхса>2;
ф=£ф4=-Л/ас\ ф>= -МаСу=-Мхсе+Мус(о2-,
к I Ф2=-Macz=0.
Для главного момента сил инерции относительно точки на оси вращения спра-
ведливы формулы
1£^=-------=Jxze—Jvza>2;
х di У
£(Ф)=_^=7 . + /
У dt У
где М — масса цилиндра; хс, у с, zc — координаты центра масс. При сделанном
выборе осей координат хс=— R, yc=0, zc=0. Кроме того, так как со=const, то
угловое ускорение е=0. Еще одно упрощение связано с тем, что ось Ох является
главной осью инерции для точки О, так как эта точка находится на главной
центральной оси инерции СУ. Поэтому Jxz=0.
С учетом упращений спроецируем векторные величины уравнения (а) на оси
координат. Получим следующие пять уравнений для определения динамических
реакций:
Р
Xa+Xs—<o2R=G- Ya + Yb=&, ZB=b
g
- Ya OA+Yb OB-Jyz <o2 =0; XA OA-XB OB = 0.
Из второго и четвертого уравнений этой системы определяем проекции динами-
ческих реакций Ya и Yb. Имеем
441
Ya=~Yb--
Jyz^2
AB '
Из первого и пятого уравнений соответственно получаем
PRco2 О В PRco2 ОА
Хл =---------®653 И; Хв=----------«980 Н.
g АВ g АВ
Для полного решения задачи необходимо вычислить центробежный момент
инерции Jyz.
Центробежные моменты инерции обычно вычисляются через главные осевые
моменты инерции. Получим необходимую формулу.
Выберем в точке С систему координат Cx^Zj, оси которой параллельны осям
Oxyz. Координаты любой точки цилиндра относительно этих двух систем осей
координат связаны между собой формулами параллельного переноса в направлении
оси Сх] на величину OC=R; поэтому
Xk=xik-R', Ук=У1к', Zk=zIk.
Так как
Jyz^ткУк^к, Jy,z, = ЪткУ\к2\Ь
к к
ТО JyZ = JylZl-
Для вычисления центробежного момента инерции JyiZi в качестве вспомогатель-
ных осей координат возьмем главные центральные оси инерции цилиндра Cx'y'z' (оси
его симметрии). Систему осей координат СХу/Х можно получить из системы Cx1y1z),
поворачивая ее на угол а вокруг оси СХ. Формулы преобразования координат точки
тела при повороте осей (рис. 175) можно выразить в форме
у ut=rk cos (а -I- срк) = cos срк cosa—г к sin q>k sina =y^cosa—z* sina;
zik=fk sin (a + <P*)=гк cos q>k sina+•rk sin cpk cosa =y'k sina+z'k cosa,
так как
a cos cpk=yk; rk sin cpk=Xk.
Используя эти формулы, имеем
Jy,z, = 1^ткУ\к2\к^( Y,mk№k) (cos2a—sin2a) + (Ук ~*к)cosasina.
к J к
52т^=/у/=О,
к
В рассматриваемом случае
Рис. 175
как центробежный момент инерции относительно
главных осей инерции Су', СХ. Прибавляя в выраже-
нии для JyiZi величину
52 ткХк — 52 ткХк I cosa sina=О,
•к к ’
получаем
442
sin 2a,
где J/ и J у — моменты инерции относительно главных центральных осей инерции
С/ и С/ соответственно. Они для цилиндра определяются по формулам
Итак, для искомого центробежного момента инерции имеем
J^-Jy Р (R2 l2\ PR1 (I2 \
Jvz=Jv z =-----sin 2a=— ——— sin 2a --------1 — — 3 sin 2a=
У “ 2 2g \4 12/ 24g V?2 /
200 400 /6400
------1-----— 3 |'1 = —44,2 кг' cm2.
24 980 \ 400 J
После этого
Таким образом определены динамические реакции в форме проекций на оси
координат, т. е. поставленная задача решена.
ГЛАВА 10
АНАЛИТИЧЕСКАЯ МЕХАНИКА
В аналитической механике изучаются равновесие и движение
механических систем. При этом широко используется понятие воз-
можного перемещения точки и системы. Наиболее удобная для
применения форма условий равновесия и уравнений движения систе-
мы получается при применении обобщенных координат и обо-
бщенных сил.
§ 1. СВЯЗИ И ИХ КЛАССИФИКАЦИЯ
В аналитической механике необходимо более подробно рассмот-
реть связи, налагаемые на точки механической системы. Механичес-
кой системой, как известно, называют любую совокупность матери-
альных точек. Условия, ограничивающие свободу перемещения точек
механической системы, называются связями. Математически связи
могут быть выражены уравнениями или неравенствами, в которые
входят время, координаты всех или части точек системы и их
производные по времени различных порядков. Для одной точки
уравнение связи в общем случае можно выразить в форме
f(x, у, z; х, у, z; х, у, z; ...; 0 = 0- (1)
В дальнейшем ограничимся рассмотрением связей, в уравнения
которых могут входить производные по времени от координат не
выше первого порядка.
Для механической системы, состоящей из N точек, / уравнений
связей представятся системой уравнений
f,(xk, yk, zk, xk, yk, zk; z) = 0, 5= 1, 2, ..., /. (2)
Считается, что индекс k принимает все или часть значений от 1 до
N как для координат, так и для их производных.
Если в уравнения связей (2) входят только координаты точек
и не входят производные от координат, то связи называются геоме-
трическими. Уравнение геометрической связи для системы имеет
форму
/(**, yk, zk, 0 = 0.
Если в уравнения связей кроме координат входят еще и их произ-
водные по времени (проекции скоростей точек на оси координат)
или только одни производные, кроме времени, то связи называются
444
кинематическими. В этом случае уравнения связей являются диф-
ференциальными уравнениями для координат точек. Из геомет-
рических связей дифференцированием можно получить связи кине-
матические. Из кинематических связей геометрические получаются
не всегда, так как дифференциальные уравнения не всегда могут
быть проинтегрированы. Иногда дифференциальное уравнение свя-
зи можно представить как производную по времени от некоторой
функции координат и, возможно, времени:
f(xk, yk, zk; t}=^-<p(xk, yk, zk, 0 = 0.
dr
После интегрирования такая кинематическая связь становится гео-
метрической.
Все геометрические и интегрируемые кинематические связи
называются голономными. Неинтегрируемые кинематические свя-
зи, которые нельзя свести к геометрическим, являются неголоном-
ными. Важный класс механических систем с неголономными свя-
зями (неголомных систем) интенсивно исследуется в настоящее
время, и эти исследования еще далеки от завершения. В дальнейшем
изложении систематически системы с такими связями не рассмат-
риваются.
При движении механической системы координаты точек и их
производные по времени, входящие в уравнения связей, могут зави-
сеть от времени. Кроме того, в уравнения связей время может
входить явно, помимо координат и их производных. Связи, в урав-
нения которых время явно не входит, называются стационарными
или склерономными. Если время входит явно в уравнение связи, то
связь называется нестационарной или реономной. Нестационарные
связи обычно реализуются посредством движущихся или дефор-
мирующихся тел. В простейшем случае одной точки нестационар-
ная геометрическая связь в форме движущейся или деформируемой
поверхности имеет уравнение
f(x, у, z, Г) = 0.
Связи называют неосвобождающими или двусторонними, если
они выражаются математически уравнениями, и освобождающими
или односторонними, если они выражаются неравенствами. Для
одной точки М, скрепленной с концом жесткого стержня, другой
конец которого закреплен в неподвижной точке О, связь (жесткий
стержень) является геометрической, неосвобождающей (рис. 176).
Ее уравнение
x2+y2 + z2-/2 = 0,
445
где I — длина стержня. Если стержень за-
менить нитью такой же длины, то связь
(нить) будет освобождающей. Она мате-
матически выражается неравенством хг +
+y2+z2-/2s$0.
Если при движении точка М окажется
от точки О на расстоянии, меньшем дли-
ны нити, то нить уже не стесняет свободу
перемещения точки. Связь освобождает
точку от своего действия (пунктир на рис. 176). В дальнейшем
освобождающие связи рассматривать не будем.
Все связи можно разделить на реальные и идеальные.
К идеальным связям относятся все связи без трения. Некоторые
связи с трением тоже относятся к идеальным. Понятие идеальных
связей дается после введения понятия возможного перемещения
системы.
§ 2. ВОЗМОЖНЫЕ ПЕРЕМЕЩЕНИЯ
Для формулирования принципа возможных перемещений, опре-
деляющего условия равновесия механической системы, требуется
ввести понятие возможного, или виртуального, перемещения.
Для одной точки возможным перемещением называется такое бес-
конечно малое (элементарное) мысленное перемещение, которое до-
пускается в рассматриваемый момент времени наложенными на
точку связями. Для возможного перемещения не требуется времени
на его совершение. Это мысленное перемещение, которое могла бы
совершить точка при наложенных на нее связях в рассматриваемый
момент времени. В отличие от элементарного (бесконечно малого)
действительного перемещения точки dr, которое совершает точка за
время d/ под действием приложенных сил при заданных начальных
условиях и наложенных связях, возможное перемещение <5г опреде-
ляется только связями в данный момент. Проекции возможного
перемещения Sr на оси координат, или вариации координат, обозна-
чают Sx, Sy, Sz, а проекции элементарного действительного переме-
щения на оси координат, или дифференциалы координат при изме-
нении времени на dt, обозначают dx, dy, dz.
Если связью для точки является, например, движущаяся поверх-
ность, уравнение которой f(x, у, z, t) = 0, то действительное переме-
щение точки dr за время dt является в общем случае векторной
суммой перемещений по поверхности и вместе с поверхностью. Все
возможные перемещения точки Sr в данный момент времени t рас-
положатся на поверхности в положении, которое она занимает
в рассматриваемый момент времени. Действительное перемещение
446
при заданных начальных условиях и силах, которое точка может
совершить от момента времени t до момента t + dt, только одно.
Возможных перемещений у точки в момент времени t бесконечно
много. Все они допускаются связью (поверхностью) и как отрезки
бесконечно малой длины расположатся в касательной плоскости
к поверхности в точке, в которой находится рассматриваемая точка
в данный момент времени.
Возможное перемещение дг, как и действительное dr, является
вектором и потому всегда изображается направленным прямоли-
нейным отрезком. Очевидно, что элементарное действительное
перемещение точки принадлежит к числу возможных, если связь
стационарна, т. е. действительное перемещение не содержит переме-
щения вместе со связью.
Возможное перемещение точки дг считают изохронной вариаци-
ей радиуса-вектора, т. е. его полным дифференциалом, но при
фиксированном времени, когда изменяются (варьируются) только
координаты точки. Соответственно дх, ду, dz — изохронные вари-
ации координат точки, допускаемые связями. Действительное пе-
ремещение dr является полным дифференциалом радиуса-вектора,
который определяется по изменению координат точки в зависимо-
сти от изменения времени; dx, dy, dz — полные дифференциалы
координат точки при изменении независимого переменного t на
величину dt
Возможным перемещением системы называют любую совокуп-
ность возможных перемещений точек системы. В общем случае
система может иметь несколько и даже бесконечно много возмож-
ных перемещений. Вследствие уравнений связей, наложенных на
систему, не все возможные перемещения являются независимыми.
Число независимых возможных перемещений называют числом сте-
пеней свободы системы.
Свободная точка имеет три степени свободы. В этом случае
возможные перемещения (вариации) дх, ду, dz (или выраженные
через вариации каких-либо других координат) являются независи-
мыми. Если точка движется по поверхности fix, у, z, Z) = О, то дх, ду,
dz связаны соотношением
д/= дх-\—ду-|—dz = 0, (3)
дх ду dz
которое получают разложением в степенной ряд функции f(x+dx,
у+ду, z + dz, 0 = 0 при пренебрежении слагаемыми второго и более
высокого порядка по отношению к дх, ду, dz. Независимых вари-
аций коордиат, а следовательно, и степеней свободы будет две.
Время при этом не варьируется, оно фиксировано. Связь между
вариациями координат не зависит от того, входит время явно
447
в уравнения связей или нет. Проекции на оси координат действи-
тельного перемещения точки dx, dy, dz, если связь выражается
уравнением/(х, у, z, Z) = 0, в отличие от возможных определяется
зависимостью
а/ а/ sf sf
d/=—dx+—dy+—dz+—df=O, (4)
8х 8у 8z 8t
которая получается вычислением дифференциала от /(х, у, z, /), или
разложением в степенной ряд функции /(x+dx, y + dy, z + dz,
z-bd/) = O и отбрасыванием слагаемых второй и более высоких сте-
пеней величин dx, dy, dz, dz. Если точка движется по кривой линии,
то степеней свободы у нее будет только одна, так как кривую линию
можно представить как пересечение двух поверхностей.
§ 3. ЭЛЕМЕНТАРНАЯ РАБОТА СИЛЫ
НА ВОЗМОЖНОМ ПЕРЕМЕЩЕНИИ.
ИДЕАЛЬНЫЕ СВЯЗИ
Элементарную работу силы на возможном перемещении ее точ-
ки приложения вычисляют по обычным формулам для элементар-
ной работы, например 5A = F- 8r=Fx&x+Fy8y+Fz6z, и другим фор-
мулам для элементарной работы. Для механической системы, со-
стоящей из N точек, к которым приложены силы, элементарная
работа этих сил на каком-либо возможном перемещении системы
соответственно выразится так:
(5)
к=1
Элементарная работа сил при этом зависит от выбора возможного
перемещения системы.
Обозначим силы реакций связей для точек системы Л*. Тогда
связи системы называются идеальными, если для любого возмож-
ного перемещения системы выполняется условие
£ИкЯк=0. (6)
А = 1
Условие (6) является определением идеальных связей. Важно от-
метить, что это условие должно выполняться для всех возможных
перемещений системы. При этом вся совокупность связей является
идеальной. Может быть идеальной каждая из связей в отдельности.
Приведем примеры идеальных связей.
448
1. В абсолютно твердом теле точки связаны идеальными
связями. Силами реакций связей в этом случае являются внутренние
силы, для которых было доказано, что сумма элементарных работ
этих сил на любых элементарных перемещениях точек тела равна
нулю.
2. Абсолютно гладкая поверхность, или абсолютно
гладкая линия, является идеальной связью для точки. Возможные
перемещения точки с такими связями направлены по касательным
к поверхности или линии. Силы реакции в этих случаях направлены
по нормалям к ним, т. е. перпендикулярны силам. Так, например,
все шарниры (поверхности) без трения, подвижные и неподвижные,
являются связями, идеальными для тел, соединенных такими связя-
ми. Шарниры без трения, как связи идеальные, эквивалентны связям
между точками в твердом теле.
3. Гибкие нерастяжимые связи типа нитей, канатов, тросов
и т. п., соединяющих точки системы, являются связями идеаль-
ными. В каждом сечении такой связи силы реакций (силы натяже-
ния) равны по модулю и противоположны по направлению, а воз-
можные перемещения у их точек приложения одни и те же. Сумма
элементарных работ сил натяжений для всех мыслимых сечений
таких связей равна нулю.
4. Закрепленные точки системы по отдельности являются
связями идеальными, так как их возможные перемещения равны
нулю.
5. Шероховатая поверхность для катков, катящихся по ней
без скольжения, при отсутствии трения качения и, следовательно,
соприкосновения в одной точке или по одной линии, скорости точек
которых равны нулю, является связью идеальной. Возможные пере-
мещения в точке или в точках линии соприкосновения равны нулю
в каждый момент времени, так как равны нулю скорости в точках
соприкосновения, как и для закрепленных точек.
§ 4. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Принцип возможных перемещений, или принцип Лагранжа, со-
держит необходимые и достаточные условия равновесия некоторых
механических систем. Он формулируется следующим образом: для
равновесия механической системы, подчиненной идеальным, стаци-
онарным и неосвобождающим связям, необходимо и достаточно,
чтобы сумма элементарных работ всех активных сил, приложенных
к точкам системы, была равна нулю на любом возможном перемеще-
нии системы, если скорости точек системы в рассматриваемый
момент времени равны нулю, т. е.
£/?<£*=О, (7)
к=1
449
где Fk — активная сила, приложенная к к-й точке системы; гк —
радиус-вектор этой точки (рис. 177). При равновесии системы vk = 0
и ак=0.
Докажем необходимость условия (7) для равновесия системы,
т. е. докажем, что если система находится в равновесии, то актив-
ные силы удовлетворяют условию (7). Действительно, если механи-
ческая система находится в равновесии, то для каждой ее точки
активная сила Fk и сила реакции связей Rk удовлетворяют условию
равновесия статики для сил, приложенных к точке:
Л+Д=0, к=1, 2, ..., N.
Умножая обе части этого равенства скалярно на возможное переме-
щение точки дгк и суммируя по всем точкам системы, получим
^+£л<5^=0.
k=l к=1
N
По условию идеальности связей, Rk 5rk=0 и для активных сил
<t=i
получаем условие (7).
Докажем достаточность условия (7) для равновесия системы,
т. е. что если это условие выполняется для активных сил, действу-
ющих на точки системы, то система находится в равновесии при
выполнении других условий принципа возможных перемещений. Те-
орема о достаточности условия (7) для равновесия системы до-
казывается методом от противного. Предполагается, что условие
(7) и все остальные условия теоремы выполняются, а система
вышла из равновесия. Если теорема о достаточности справедлива,
то должно возникнуть противоречие с условиями теоремы. Итак,
пусть все условия теоремы выполняются, а система вышла из
равновесия. При этом, по крайней мере для одной точки системы,
не будет выполняться условие равновесия для сил, т. е.
Рис. 177
Fk+Rk*0. (8)
Дадим системе возможное перемещение.
Так как связи стационарные, то элементар-
ное действительное перемещение для каж-
дой точки системы под действием не равной
нулю равнодействующей силы принадлежит
к числу возможных перемещений и их сово-
купность можно выбрать в качестве возмож-
ного перемещения системы. Скорости точек
450
системы в рассматриваемый момент времени по условию равны
нулю; следовательно, элементарные действительные перемещения
будут направлены по ускорениям точек, т. е. по равнодействующим
силам. Умножая (8) скалярно на drk = drk, получим
(Л+Л) Srk>0 (9)
по крайней мере для одной точки системы, вышедшей из равнове-
сия. Суммируя (9) по всем точкам системы, будем иметь
YFkSrk+YRk'5rk>0. (9')
/г=1 k=l
Для идеальных связей
Е Rk^=0.
k=l
Поэтому из (9') получаем
N
ЕА ^>о,
jt=i
что находится в противоречии с условием (7). Следовательно, систе-
ма не может выйти из равновесия при выполнении условий принци-
па возможных перемещений. Принцип полностью доказан.
Без дополнительного условия о равенстве нулю скоростей точек
системы в рассматриваемый момент принцип возможных переме-
щений утверждает только то, что равны нулю ускорения точек
системы. Вместе с равенством нулю скоростей точек это дает
равновесие системы в тот момент, в который выполняется для
активных сил условие (7). При длительном выполнении этого усло-
вия система соответственно будет находиться в равновесии тоже
длительно, т. е. скорости и ускорения точек равны нулю, если
скорости точек системы равны нулю в начале интервала длитель-
ности.
В принцип возможных перемещений не входят силы реакций
связей. Но его можно применять также и для определения не-
известных сил реакций связей. Для этого связь, силы реакции ко-
торой необходимо определить, отбрасывают (освобождают систе-
му от этой связи), заменяя ее силами реакции. Эти силы добавляют
к активным силам. Оставшиеся связи системы должны быть иде-
альными. Иногда неидеальную связь заменяют идеальной, ком-
пенсируя неидеальность соответствующими силами. Так, если свя-
зью для тела является шероховатая поверхность, то ее можно
заменить гладкой поверхностью, добавляя к активным силам силу
трения скольжения и в более общем случае — еще и пару сил,
451
препятствующую качению. Связь в виде заделки для твердого тела
можно заменить неподвижным шарниром, плоским или шаровым
соответственно, добавляя момент заделки, векторный или алгебра-
ический. Таким образом, в принцип возможных перемещений вхо-
дят в действительности не активные силы, а все приложенные
к точкам системы силы, кроме сил реакций идеальных связей,
которые по условиям задач не требуется определять.
Пример 1. В механизме (рис. 178) допускается поворот кривошипа вокруг гори-
зонтальной оси, проходящей через точку О. По стержню может перемещаться ползун
В, шарнирно соединенный со стержнем ВС, который может скользить вдоль вер-
тикальных направляющих. К кривошипу ОА приложена пара сил с моментом М;
OD=l.
Определить вертикальную силу F, приложенную к стержню в зависимости от
угла ф, при равновесии механизма. Силами тяжести звеньев механизма и силами
трения пренебречь.
Решение. Связи в механизме неосвобождающие и стационарные. Они не созда-
ют сил трения, и потому идеальные. Применим к механизму принцип возможных
перемещений:
N
А=1
Активными силами являются F и пара сил с моментом М.
Дадим системе возможное перемещение, допускаемое наложенными связями,
повернув мысленно стержень О А на элементарный угол 6<р в сторону возрастания
угла ф. Тогда, согласно принципу возможных перемещений,
— М 6q>+F Syc=0, (а)
где дус — возможное перемещение точки С. Стержень твердый, поэтому перемеще-
ния его концов В и С при наложенных связях одинаковы, т. е. дус = дув-
У механизма только одна степень свободы, поэтому дер и дув зависят друг от
друга. Установим предварительно зависимость ув от ф. Имеем ya=/tg<p. Проварьи-
руем это уравнение связи аналогично вычислению полных дифференциалов от обеих
частей равенства, получим
1
8ув=1—г6(Р-
СО5ф
Подставляя полученное значение дув в (а)
и вынося д<р за скобки, имеем
( \
<5ф( — Л/Н-------1 = 0.
\ СО52ф/
Величину <5ф можно выбрать отличной от
нуля, а потому равно нулю выражение в скобках,
т. е.
Fl М ,
— Мл-----~~=0; F=— сов2ф.
соб2ф I
452
Дополнительно установим зависимость дер и дув непосредственно, не используя
процесс варьирования уравнения связи. При повороте стержня О А на угол дер точка
В переместится вместе с соответствующей точкой стержня перпендикулярно стерж-
ню на 55] = О В • дер и, кроме того, ползун В передвинется вдоль стержня на dS2, для
того, чтобы точка В переместилась только параллельно направляющим на дув, так
как другие направления перемещения точки В не разрешаются направляющими
стержня ВС. Вектор возможного перемещения точки В изобразится диагональю
прямоугольника, построенного на составляющих перемещениях. Из прямоугольника
для его диагонали имеем
dSi OB I
дув—----, или дув =---дер =--— дер,
cosep сехер ex>s2ep
так как OB=l/ce>sep.
Пример 2. Стержневая система (рис. 179), расположенная в вертикальной плос-
кости, находится в равновесии под действием двух пар сил с моментами М\ и М2.
Стержни АС и BD параллельны. Стержень ВС составляет с ними угол а.
Пренебрегая силами тяжести стержней и трением в шарнирах, определить реак-
ции в заделке и усилие в стержне BD.
Решение. Освободим систему стержней от заделки, приложив силы ХА и YA
и момент в заделке МА (рис. 180, а). Оставшиеся связи являются идеальными, если
в них не возникает сил трения.
Дадим стержню АС возможное перемещение ds, допускаемое оставшимися
связями, в направлении оси Ах. Точка В может иметь перемещение dsB только
перпендикулярное BD.
Для возможных перемещений точек твердого тела, аналогично мгновенному
центру скоростей при плоском движении, можно построить мгновенный центр
перемещений. Для установления связи между возможными перемещениями точек
твердого тела можно использовать и другие формулы связи скоростей точек твердо-
го тела как при плоском движении, так и в других случаях движения.
Мгновенный центр перемещений стержня ВС находится на пересечении перпен-
дикуляров к возможным перемещениям точек стержня В и С. Вокруг мгновенного
центра перемещений Р стержень ВС повернется на угол дер, который определяется
отношением перемещения ds к расстоянию СР, т. е.
ds ds
д<р=—--------. (а)
СР /2япа
Из принципа возможных перемещений имеем
XAds+M2dep=0. (б)
Момент пары сил М2 и угол дер имеют одинаковые направления — по часовой
стрелке. Поэтому элементарная работа пары сил является положительной вели-
чиной. Подставляя (а) в (б), получаем
Рис. 179
453
м2
ХА =---•
l2 sina
Для определения МА дадим системе возможное перемещение, повернув стержень
АС вокруг точки А на угол 8q>i (рис. 180, б). Из принципа возможных перемещений
в этом случае имеем
MA8q>i +Mi5<i>i =0.
Следовательно МА = —М\.
Чтобы определить YA (рис. 180, в), дадим стержню АС возможное перемещение,
повернув его на угол 6<р2 вокруг точки С. Получим
Л/15^2+Ма&<?2—?а = 0-
Для определения усилия в стержне BD отбросим этот стержень, заменив его
действие силой S, направленной по стержню, сохранив заделку (рис. 180, г).
В этом случае связи допускают поворот стержня ВС на угол 6<р2. Точка В при
этом переместится на 6s g. Проекция перемещения на направление силы 5 при этом
равна
6sд sina=126<Рз sina.
Составим сумму элементарных работ сил на этом возможном перемещении и при-
равнивая ее нулю согласно принципу возможных перемещений, имеем
Отсюда получаем
М28<рз+S6s в sina=0.
М2
S=------.
l2 sina
Освобождать систему от связей можно не полностью. Так, заделка эквивалентна
шарниру вместе с моментом заделки.
Рис. 180
454
§ 5. ОБОБЩЕННЫЕ КООРДИНАТЫ СИСТЕМЫ
Пусть система состоит из N точек и, следовательно, ее положе-
ние в пространстве в каждый момент времени определяется ЗУ
координатами точек системы, например декартовыми хк, ук, zk.
Предположим, что на систему наложены голономные связи, уравне-
ния которых в общем случае могут содержать и производные от
координат точек, но после их интегрирования они свелись к геомет-
рическим и имеют форму
f3(xk, Ук, zk, 0 = 0, s= 1, 2, ..., /. (10)
Системы, имеющие освобождающие связи, выражающиеся неравен-
ствами, не рассматриваются. Таким образом, ЗУ координат связа-
ны / уравнениями и независимых координат будет и = ЗУ — Z.
Любые п декартовых координат можно задать независимо друг
от друга. Остальные координаты определятся из уравнений связей.
Вместо п независимых декартовых координат можно выбрать
любые другие независимые параметры qu q2, ..., q„, зависящие от
всех или части декартовых координат точек системы. Эти не-
зависимые параметры, определяющие положение системы в про-
странстве, называются обобщенными координатами системы. В об-
щем случае они могут зависеть от всех декартовых координат
точек системы, т. е.
Ч,=qt(xk, ук, zk), (11)
где к изменяется от 1 до N. Задание обобщенных координат полно-
стью определяет положение точек системы относительно выбран-
ной системы отсчета, например декартовых осей координат.
У свободной точки три обобщенные координаты. Если точка
должна двигаться по заданной поверхности, то обобщенных коор-
динат только две и т. д. Используя уравнения связей (10) и выраже-
ния обобщенных координат через декартовы (11), можно при выпо-
лнении условий разрешимости этой системы уравнений выразить
декартовы координаты через обобщенные, т. е. получить
xk = xk(qt, q2, ..., q„, t)\ yk=yk(qx, q2, ..., q„, fy,
zk=zk(.4l, ?2, 4n, fy
Соответственно для радиуса-вектора каждой точки системы гк=
—X/j+yJ+z/ji получим
rk=rk(qi, 42, q«, fy (12)
455
В случае стационарных связей время явно не входит в уравнения
связей. Поэтому и в (12) оно войдет только неявно, через обобщен-
ные координаты, если система движется. Для голономных систем
вектор возможного перемещения точки дгк в соответствии с (12)
можно выразить в форме
_ 8гк 8гк 8гк Л, дгк
3rk=^3ql+^3q2+...+^Sq„=Y^dq.. (13)
cq2 oqn |s=1 oqt
Система, имеющая n независимых обобщенных координат, хара-
ктеризуется также п независимыми возможными перемещениями
или вариациями 8qi, Sq2, ..., 3q„, если связи голономны. Для голо-
номных систем число независимых возможных перемещений со-
впадает с числом независимых обобщенных координат. Следовате-
льно, число степеней свободы голономной системы равно числу неза-
висимых обобщенных координат этой системы, т. е. и = З.У—/.
Для неголономных систем в уравнения связей (10) могут входить
производные от декартовых координат точек и даже могут быть
такие уравнения связей, в которые входят только одни производ-
ные. Такие уравнения связей наложат ограничения на вариации 3qx,
Sq2, ..., 3qn и, следовательно, уменьшат число независимых вари-
аций, не связывая функциональной зависимостью сами обобщенные
координаты qh q2, ..., q„. Для неголономных систем в общем случае
число независимых вариаций (возможных перемещений) меньше
числа обобщенных координат. Число степеней свободы неголоном-
ной системы, равное числу независимых возможных перемещений,
тоже меньше числа обобщенных координат системы.
В дальнейшем рассматриваются только голономные системы,
т. е. системы с голономными связями. Рассмотрим вопрос обобщен-
ных координат на примере простого механизма.
Пусть имеем кривошипно-шатунный механизм (рис. 181). Его
положение на плоскости вполне определяется заданием положения
трех его точек О, А и В с координатами соответственно (0, 0), (хА,
Уа), (хв, 0). Координат, не равных нулю, только 3, т. е. 32V=3.
Можно составить два уравнения связей, учитывая постоянство длин
ОА = г и АВ=1. Имеем
хА + У а = г2; (хв-хА)2 +у% = / 2. (а)
Число степеней свободы
и = 3 —2=1.
Из трех не равных нулю координат только одну можно задать
независимо. Две другие выразятся через нее как решения уравнений
связей. В качестве независимой координаты можно выбрать любую
456
У
из трех координат хА, уА, хв или любую комбинацию этих коор-
динат. Нужно только, чтобы она однозначно определяла положение
механизма относительно осей координат Оху. Координаты
хА и хв следует исключить. Они неоднозначно определяют положе-
ние механизма. Удобно в качестве независимой обобщенной коор-
динаты q выбрать угол ср, т. е.
<7 = Ф = arctg—-. (б)
хл
Из уравнений (а) и (б) координаты хА, уА, хв можно выразить через
угол ф. Для этого следует решить эту систему уравнений относитель-
но координат. Удобно, не решая системы уравнений, выразить
координаты через угол ср, используя рис. 181. Получим
jQ = rcos<p, y^ = rsin<p, xB=rcos(p + lcosi//.
Но
уА = г sintp — Zsini/r; sini/r=- sin<p;
cosi/r = 5/1 — sin2i/r=j 5/z2 —r2sin2</>.
С учетом этого искомые выражения для координат принимают
форму
хА = г coscp; yA = r sin<p; хА = г cost? + -у//2 —r2sin2<p.
Нетрудно проверить, что эти значения декартовых координат удов-
летворяют системе уравнений (а) и (б).
§ 6. ОБОБЩЕННЫЕ СИЛЫ
Определение обобщенных сил. Имеем сумму элементарных работ
сил, действующих на точки системы, на возможном перемещении
системы:
457
5А=^Гк8-Г1с.
fc=l
(14)
Пусть голономная система имеет п степеней свободы и, следова-
тельно, ее положение в пространстве определяется п обобщенными
координатами qx, q2, ..., q„. Тогда для дгк, согласно (13), имеем
е- 5П &Гк с
>=1 гЧ1
(13')
Подставляя (13') в (14) и изменяя порядок суммирования по индек-
сам к и i, получим
/«1\Ы 1-1
(14')
где скалярная величина
А - дгк
к= 1 S4i
называется обобщенной силой, отнесенной к обобщенной координате
qt. Используя известное выражение для скалярного произведения
двух векторов, обобщенную силу можно также представить в виде
_ _ 8rk n / gXk Qyk gZj\
е.= Z ^(Fkx^+Fky^+Fkz- ),
fc=l fyi k=\ \ °4i °4i)
(15)
где F^ Fky, F& — проекции силы на оси координат; xk, yk, zk —
координаты точки приложения силы Fk.
Размерность обобщенных сил. Размерность обобщенной силы
в соответствии с (14') следующим образом зависит от размерности
6qt, совпадающей с размерностью qk
[G<]=™=w,
[ад ад
(16)
т. е. размерность обобщенной силы равна размерности работы силы
(энергии) или момента силы, деленной на размерность обобщен-
ной координаты, к которой отнесена обобщенная сила. Если [gj —
длина, то
458
_ _, работа силадлина
[Q J=------=------------= сила,
длина длина
т. е. обобщенная сила имеет размерность силы. В том случае, когда
[?J = 1, как это имеет место, если в качестве обобщенной коор-
динаты выбран угол, [2,] — момент силы.
Этот случай часто встречается при решении практических задач.
Вычисление обобщенных сил. 1. Обобщенную силу можно вычис-
лить по формуле (15), ее определяющей, т. е.
„ Д _ 8гк Л ( 8хк дук 8zk
fc=l v<li jt=l\ "Qi "Qi,
2. Обобщенные силы можно вычислять как коэффициенты при
соответствующих вариациях обобщенных координат в выражении
для элементарной работы (14'), т. е.
лг _ "
£ X Qis4i=Qi^i + Q2^2+-+Qn^n- (15')
£=1 >=1
3. Наиболее целесообразен способ вычисления обобщенных сил,
который получается из (15'), если системе сообщить такое возмож-
ное перемещение, при котором изменяется только одна обобщенная
координата, а другие при этом не изменяются. Так, если 691 О,
а остальные 6д2=3д2 = ... = 3q„=0, то из (15') имеем
/ N
Z Fk S'rk
Индекс указывает, что сумма элементарных работ вычисляется
на возможном перемещении, при котором изменяется (варьируется)
только координата 9Ь Если изменяющейся координатой является
9„ то
(n \
X ?к &Гк\
• (17)
Ч
4. Для потенциальных сил по их определению имеем:
F^SU/dXk, Fky = dU[8yk, F^BU/dZk, (18)
459
где U — силовая функция, зависящая от координат точек системы
и, следовательно, через них — от обобщенных координат, т. е.
U=U(хк, ук, zk)= U(qi, q2, q„). (19)
В случае нестационарных силовых полей, которые дальше не рас-
сматриваются, силовая функция может еще явно зависеть от вре-
мени.
Для обобщенной силы, согласно ее определению, с учетом (18)
и (19) имеем
N
G.= Z
*=i
аиаУк auszk
к= 1 \3xjt 8qt дук 8qt 8zk 8qh
ги
8q,
Таким образом, в случае существования силовой функции
Q^dUldq^-dnidqi, (20)
так как потенциальная энергия системы П связана с силовой функ-
цией U соотношением
П= — t/-f-const.
Итак, обобщенная сила равна частной производной от силовой функ-
ции по соответствующей обобщенной координате.
§ 7. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ
Условия равновесия системы выводятся из принципа возможных
перемещений. Они применимы к системам, для которых этот при-
нцип справедлив. Согласно принципу возможных перемещений,
условие
ЕЛ ^=0
*=i
является необходимым и достаточным для равновесия системы. Но
в соответствии с (15')
£ Fk йгк= 01^91 + 02^91 + + 0п^9п-
k=l
Следовательно, необходимым и достаточным условием равновесия
является равенство
460
Qi$9i + 02^?г + ••• + Q^4n- 0.
(21)
Так как обобщенные координаты независимы, то их вариации dq^
6q2, ...,dqn являются тоже независимыми, произвольными, бесконеч-
но малыми величинами. Можно принять <5^1/0, а все остальные
5q2 = dqi = ... = dqn = 0. Тогда из (21) получим Qi = 0. Аналогично,
приняв dq2^0, a 6ql = 3qi = ... = 3qn = 0, будем иметь 2г = 0 и т. д.
Таким образом, из (21) получаем следующие условия равновесия
системы:
ei=o, е2=о,..., е„=о, (22)
т. е. для равновесия механической системы, подчиненной голономным,
стационарным, идеальным и неосвобождающим связям, в момент,
когда скорости всех точек системы равны нулю, необходимо и до-
статочно, чтобы все обобщенные силы были равны нулю.
О голономности связей условились при введении обобщенных
координат и обобщенных' сил, а также при определении числа
степеней свободы. Другие условия для связей входят в формулиров-
ку самого принципа возможных перемещений.
В статике для равновесия свободного твердого тела, имеющего
шесть степеней свободы, было получено шесть условий равнове-
сия для приложенных к телу внешних сил. Эти условия можно
получить также приравняв нулю каждую из шести обобщенных
сил. Для этого следует выбрать в качестве обобщенных координат
декартовы координаты х, у, z какой-либо точки тела и углы
поворота тела вокруг осей координат, проходящих через эту
точку. Обобщенные силы, отнесенные к координатам х, у, z,
превратятся соответственно в суммы проекций приложенных сил
на эти оси, а обобщенные силы, отнесенные к углам поворота
вокруг осей координат,— в суммы моментов сил относительно
этих осей.
Условия равновесия (22) для системы, находящейся под действи-
ем потенциальных сил, вместе с (20) дадут следующие условия для
силовой функции:
Q^dU/dq^O, Q2 = dU/8q2 = 0, ..., Q„=dU/dqn=0, (22')
т. е. все частные производные от силовой функции по обобщен-
ным координатам равны нулю. Это является необходимым усло-
вием существования экстремума силовой функции. Таким обра-
зом, при равновесии механической системы, находя-
щейся под действием потенциальных сил, силовая фу-
нкция и потенциальная энергия могут достигать экст-
ремума.
461
Пример. Дифференциальный планетарный механизм, расположенный в горизон-
тальной плоскости, состоит из двух шестерен радиусами п и гз и кривошипа ОА,
соединенного спиральной пружиной с шестерней 2 (рис. 182). К кривошипу приложе-
на пара сил с моментом М, а к шестерням 1 и 2 — пары сил с моментами М\ и М^.
Определить момент пары сил М\ и момент упругости Л/п спиральной пружины
при равновесии механизма.
Решение. Связи системы осуществляются твердыми телами и подвижным
А и неподвижным О шарнирами, а также спиральной пружиной, которую отбросим,
заменив моментами упругости. Оставшиеся связи являются идеальными, голоном-
ными, стационарными и неосвобождающими. Система имеет две степени свободы.
Действительно, можно закрепить шестерню 1, тогда кривошип ОА и шестерня
2 сохранят еще возможность вполне определенного движения. Если дополнительно
закрепить еще и кривошип ОА, то движение каких-либо звеньев механизма невоз-
можно.
Выберем в качестве обобщенных координат угол <pi поворота шестерни 1 и угол
поворота <р кривошипа ОА, отсчитываемых от каких-либо фиксированных положе-
ний этих тел. По условиям равновесия системы обобщенные силы, отнесенные к этим
координатам, равны нулю, т. е. бФ1 = 0, 2Ф = 0. Вычислим обобщенные силы по
формулам
Индексы у скобок указывают, что суммы элементарных работ должны вычисляться
при изменении той обобщенной координаты, которая указана в индексе. Другая
обобщенная координата при этом не должна изменяться.
К числу активных сил следует отнести пары сил с моментами М, М\, М2, силы
тяжести шестерен и кривошипа и внутренние силы S] и §2 действия шестерен друг на
друга в точке Р. Эти силы, как силы действия и противодействия удовлетворяют
условию Si = —S2- Кроме того к шестерне 2 и кривошипу О А следует приложить
пары сил с моментами Мв от спиральной пружины. Примем, что Ма, приложенный
к шестерне 2, направлен против часовой стрелки, тогда для кривошипа он будет
направлен по часовой стрелке.
Так как механизм расположен в горизонтальной плоскости, то элементарные
работы сил тяжести его звеньев равны нулю. Возможные перемещения точек прило-
жения этих сил располагаются в горизонтальной плоскости, перпендикулярной си-
лам тяжести.
Дадим шестерне 1 возможное перемещение
S<pi, например в сторону возрастания угла <pi,
приняв при этом <?>=const. Имеем по (а)
Рис. 182
MiScpi-U^ + MJScpP
Элементарные работы пар сил Afj и Мп отрица-
тельны, так как моменты пар сил и Sqty направ-
лены в противоположные стороны. Суммы эле-
ментарных работ сил Sj и S2 равны нулю, так как
у них общая точка приложения и одно и то же
возможное перемещение, а сами силы равны по
модулю и противоположны по направлению.
462
При 8<р—0 углы поворота шестерен 8<pi и 8<ffl направлены в противополож-
ные стороны. Перемещения точек соприкосновения шестерен одинаковы. Следова-
тельно,
ri6q>l = r28<ffl‘, 5(р^=— 8<pi.
Л
Подставляя это значение 8<р^ в (б) и сокращая на 8<?i, получим
(6')
Л
Сообщая теперь кривошипу О А возможное перемещение Зср, например в направ-
лении момента пары сил М, считая при этом угол <р\ постоянным. Тогда согласно (а)
(М+М„) 8q>-(М2 + Л/п) 6<р2
Qq>~ х
dtp
(в)
В этом случае угол Зф2 и моменты М2 и Ми опять противоположны. Точка сопри-
косновения шестерен Р является теперь мгновенным центром перемещений для
шестерни 2. Элементарная работа сил 5] и §2 в этом случае равна нулю для каждой
силы в отдельности.
Вычислим возможное перемещение точки А как точки кривошипа и шестерни 2,
имеющей мгновенный центр перемещений в точке Р. Имеем
SsA=(ri+r2')6cp=r28(p2.
Отсюда получаем
с Л+Л
Оф2=-----°Ч>-
Л
Подставляя это значение в (в) и сокращая на 8д>, получаем
еда=М+Мп-(М2+Мп)Г1—Г2. (в')
Г2
По условиям равновесия 2Ф1 = 0, 2ф=0.
Учитывая (б') и (в'), имеем
Л/1-(Л/2+Л/п)-=0; м+мп-(м2+мУ-^^=о
Л г2
или
Ml = М2 - + Ма - = М— М2,
г2 Г2
г2 (Л + г2>
МВ = М -М2—------
Л л
463
§ 8. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
В соответствии с аксиомой Даламбера для любой механической
системы активные силы, силы реакций связей вместе с силами
инерции удовлетворяют условию равновесия сил для каждой точки
системы, т. е.
А+Д+Ф*=0, £=1, 2, ..., N, (23)
где Fk — активная сила; Rk — сила реакции связей; Фк — сила инер-
ции точки. Умножая скалярно каждое из этих соотношений на
возможное перемещение точки дгк и суммируя по всем точкам
системы, получим
N N N
YFk Srk+YRk- &rk+ Z Ф*' &гк=0. (24)
к= 1 к=\
Это и есть общее уравнение динамики для системы с любы-
ми связями. Обычно его применяют для систем с идеальными
связями, для которых выполняется условие
%Rk 8гк=0.
*=i
В этом случае (24) принимает одну из форм
n лг _
£ (Л + ФО Srk=0; £ (Fk — mkak)8rk=0;
k~l fc=I
£(Л-шЛ)^=0, (25)
*=i
так как сила инерции через ускорение ак относительно инерциальной
системы отсчета выражается в форме
Фк= -пца^ — ткгк,
где гк — радиус-вектор точки.
Таким образом, согласно общему уравнению динамики, в лю-
бой момент движения системы с идеальными связями сумма эле-
ментарных работ всех активных сил и сил инерции точек системы
равна нулю на любом возможном перемещении системы, допуска-
емом связями. Общее уравнение динамики (24) можно назвать
также общим уравнением механики. Оно в случае равновесия
системы при обращении в нуль всех сил инерции точек системы
переходит в принцип возможных перемещений статики, только
464
пока без доказательства его достаточности для равновесия си-
стемы.
Общему уравнению динамики можно придать другие, эквива-
лентные формы. Раскрывая скалярное произведение векторов, его
можно выразить в виде
N
Е [(-Ffcr + Ф*х) <5*Jt + {Fky + by к + (Fkz + Ф&) fizjJ = О,
к=1
где хк, ук, zk — координаты к-й точки системы. Учитывая, что
проекции сил инерции на оси координат через проекции ускорений
на эти оси выражаются соотношениями
Фкх= -ткакх= -тк**, ®ку= -ткаку= -МкУк,
Фъ= -ткак1= -mkzk,
общему уравнению динамики можно придать форму
N
Е - гПкХд Зхк+(Fky - ШкУк)Ьук+(Fkz ~ mkZk)5zk]=0. (25')
В этом виде его называют общим уравнением динамики
в аналитической форме.
Общее уравнение динамики для систем, подчиненных голоном-
ным, идеальным, неосвобождающим связям, дает полную инфор-
мацию о движении таких систем, т. е. из него аналогично тому, как
из принципа возможных перемещений получались условия равнове-
сия системы, можно получить полную систему дифференциальных
уравнений. Для вывода этих уравнений следует использовать поня-
тия обобщенных координат и обобщенных сил.
Пусть имеется система, подчиненная голономным, идеальным,
неосвобождающим связям. Предположим, что она имеет п степеней
свободы и, следовательно, ее положение в пространстве определяет-
ся обобщенными координатами qb q2, ..., q„. Радиус-вектор каждой
точки системы в общем случае нестационарных связей зависит от
обобщенных координат и времени, т. е. rk=rk(qi, q2, , qm 0- Для
возможного перемещения дгк имеем
Ьгк=£3~^, (26)
i = i
так как время при этом считается неизменным. Подставляя (26)
в общее уравнение динамики (25), после перемены порядка сум-
мирования по к и i получим
465
” / & _ дг]е ~ _ дГ1г\
X (Z т + S Фк г) =°- (27)
, = i \*=1 °4i к=\ °4iJ
Используя обобщенные силы активных сил Qt и сил инерции
т. е.
СП - ^гк /лп СП - &гк
(28)
k=l к=\
из (27) получим общее уравнение динамики в следующей форме:
Х(е. + (2<Ф))Ч=0. (29)
1-1
Обобщенные координаты системы независимы, вариации этих коор-
динат не только независимы, но и произвольны. Последовательно
принимая только одну из вариаций обобщенных координат не
равной нулю, а все остальные — равными нулю, из (29) получаем
следующую систему условий:
Qi + Q^ = 0, z=l, 2, ..., п. (30)
Условия (30) можно назвать аксиомой Даламбера для систе-
мы, выраженным через обобщенные силы. Из (30) следуют
условия равновесия системы Qt=0, i= 1, 2, ..., п, если силы инерции
точек системы, а следовательно, и обобщенные силы инерции равны
нулю.
При использовании общего уравнения динамики необходимо
уметь вычислять элементарную работу сил инерции системы на
возможных перемещениях. Для этого применяются соответству-
ющие формулы для элементарной работы, полученные для обыч-
ных сил. Рассмотрим их применение для сил инерции твердого тела
в частных случаях его движения.
При поступательном движении. В этом случае тело имеет три
степени свободы и вследствие наложенных связей может совершать
только поступательное движение. Возможные перемещения тела,
которые допускают связи, тоже являются поступательными.
Силы инерции при поступательном движении приводятся к рав-
нодействующей Ф* = — Мас— — Ма. Для суммы элементарных ра-
бот сил инерции на поступательном возможном перемещении тела
получим
N _____ _
£ Фк 6гк=Ф* <5гс=Ф* дг = —Ма 6г,
к=1
466
где 5rc=5r — возможное перемещение центра масс и любой точки
тела, так как поступательное возможное перемещение у всех точек
тела одинаково; одинаковы и ускорения, т. е. ас = а.
При вращении твердого тела вокруг неподвижной оси. Тело в этом
случае имеет одну степень свободы. Оно может вращаться вокруг
неподвижной оси Oz. Возможное перемещение, которое допускается
наложенными связями, является тоже поворотом тела на элемен-
тарный угол дер вокруг неподвижной оси.
Силы инерции, приведенные к точке О на оси вращения, сводятся
к главному вектору Ф и главному моменту L{q\ Главный вектор сил
инерции приложен к неподвижной точке, и его элементарная работа
на возможном перемещении равна нулю. У главного момента сил
инерции не равную нулю элементарную работу совершит только
его проекция на ось вращения L(^=—Jz&. Таким образом, для
суммы работ сил инерции на рассматриваемом возможном переме-
щении имеем
Е ДФ)<5<Р = -
к=\
если угол 5ср сообщить в направлении дуговой стрелки углового
ускорения е.
При плоском движении. Связи, наложенные на твердое тело,
допускают в этом случае только плоское возможное перемещение.
В общем случае оно состоит из поступательного возможного пере-
мещения вместе с полюсом, за который выберем центр масс, и по-
ворота на элементарный угол 5ср вокруг оси Cz, проходящей через
центр масс и перпендикулярной плоскости, параллельно которой
может совершать тело плоское движение.
Так как силы инерции при плоском движении твердого тела
можно привести к главному вектору Ф и главному моменту (ес-
ли за центр приведения выбрать центр масс), то сумма элементар-
ных работ сил инерции на плоском возможном перемещении сведет-
ся к элементарной работе главного вектора сил инерции Ф = — Мас
на возможном перемещении центра масс и элементарной работе
главного момента сил инерции на элементарном поворотном пере-
мещений вокруг оси Cz, проходящей через центр масс. При этом не
равную нулю элементарную работу может совершить только проек-
ция главного момента сил инерции на ось Cz, т. е. L!$=—Jc^-
Таким образом, в рассматриваемом случаем имеем
N
У, Ф* 5гк=Ф • 5r с+ L$5(p = - Mac' 8rc - Jcz^><P,
к=\
467
если поворот на элементарный угол 3<р направить по дуговой
стрелке для е.
В общем случае. У свободного твердого тела шесть степеней
свободы и, следовательно, шесть независимых возможных переме-
щений, например, поступательное перемещение вместе с центром
масс 3rc(3xc, Зус, 3zc) и вращательное вокруг центра масс, состо-
ящее из трех поворотов Зсрх, 3<ру, д<рг вокруг осей координат Cxyz,
движущихся поступательно вместе с центром масс относительно
выбранной инерциальной системы координат.
В общем случае движения твердого тела силы инерции приво-
дятся к главному вектору Ф= —Мас, приложенному в центре масс,
и главному моменту абсолютного движения относительно центра
АКС
масс L(c—------. Для элементарной работы сил инерции имеем
dz
N
X рк^=Ф• Згс+Ь^З^+Ь^З^ + Ь^,
£=1
где L$, L$, L$ — проекции на прямоугольные оси Cxyz.
Пример 1. Центробежный регулятор вращается вокруг неподвижной вертикаль-
ной оси О]С>2 с постоянной угловой скоростью а> (рис. 183, а). Силы тяжести
точечных грузов Mi и Mi равны Р, ползуна D — соответственно Q\ длины стержней
AiMi =AiMi=MiBi =MiBi=l, OA\ = OAi = li. Поперечными размерами ползуна D,
массами пружин, ползуна Е и всех стержней пренебречь. Коэффициенты жесткости
пружин одинаковы и равны с. Длины пружин в недеформированном состоянии
равны /р
Определить зависимость между угловой скоростью вращения регулятора со и уг-
лом ф.
Решение. Применим к регулятору общее уравнение динамики в форме:
N
Е [№х + Ф*х)^+(/*2 + Ф*2)5г^ = 0,
к=1
так как проекции активных сил Fk и сил инерции Фк на ось Оу равны нулю.
Активными силами являются силы тяжести Р и Q и силы натяжения пружин Ёк и Fk.
Силы инерции следует учесть только центробежные для шаров М\ и Mi (рис. 183, б),
так как касательные при вращении с постоянной угловой скоростью равны нулю.
Если пренебречь силами трения, то связи в рассматриваемой задаче можно
считать идеальными. Они неосвобождающие и стационарные. Декартовы координа-
ты точки М\. z\, D: 0, z2. Применение общего уравнения динамики к регулятору
дает
2Ф <5jC] + 2Р 6zi — 2F’ 3xi + Q 3zi = 0. (a)
При составлении этого уравнения отдельно вычислена работа сил на возможных
перемещениях для шара М\. Чтобы учесть элементарную работу таких же сил для
шара М2, результат надо удвоить. Работа сил упругости F', приложенных к ползуну
Е, равна нулю.
468
Рис. 183
Для модулей сил инерции Ф и упругости F имеем
Ф=— (Zj +1sintp) со2; F= сЛ=cl simp, (б)
g
где А — удлинение пружин.
Для установления зависимости между вариациями координат точек получим
предварительно зависимость самих координат от угла ср:
Xi = Z] +1 simp; zj = Icos<p; z2=2/cos<p.
Варьируя эти зависимости, имеем
<5xi =Zcos<p<5<p; &i = —/япф йф; Sz2=— 2lsmq>Sq>.
(в)
Все вариации координат выразились через вариацию одного угла ср, следователь-
но, система имеет одну степень свободы.
Подставляя значения величин из (б) и (в) в (а), после сокращения на 21'дер
получаем
Р
— (li+l sin<p)co2Z cos<p—Р simp—cl sin<p cos<p — Q simp=0. (a’)
g
Разделив обе части этого соотношения на cos<p, получаем искомую зависимость
между со и ср:
Р1
— (Zi + Z simp)co2 — Р tg<p—cl sin<p — Q tg<p,
g
или
(P+2)tg<p+cZsimp
co2 =-----------------g.
Pl (li + Z sin<p)
469
Пример 2. Призма А, имеющая силу тяжести Р}, расположена на гладкой
горизонтальной плоскости (рис. 184). По грани призмы, наклоненной к горизонту на
угол а, может двигаться груз В, имеющий силу тяжести Pi. Груз В прикреплен
к призме с помощью пружины, имеющей жесткость с.
Определить движение призмы А и груза В по призме, если в начальный момент
система находилась в покое и пружина была не деформирована. Силами трения груза
В о призму А пренебречь.
Решение. Система имеет две степени свободы. В качестве обобщенных коор-
динат выберем х и s. Связи системы неосвобождающие стационарные и идеальные,
так как поверхности гладкие.
Активными силами являются силы тяжести Pj и Р2 и силы упругости пружины
F (рис. 185).
Общее уравнение динамики в обобщенных координатах для случая двух степеней
свободы можно выразить в форме
е1+еГ=о;е2+$ф)=о. (а)
Здесь 61 и Q2 — обобщенные силы, отнесенные к обобщенным координатам х и з;
6^ и 6^ — обобщенные силы инерции, отнесенные к тем же координатам.
Обобщенные силы для координаты х вычисляем по формулам
(б)
где Fk — активная сила, приложенная к к-й точке системы, — сила инерции для
той же точки. Индекс х в числителе указывает, что сумму элементарных работ на
возможных перемещениях точек Згк следует вычислять при изменении только коор-
динаты х, считая координату j при этом постоянной.
Сообщив системе возможное перемещение Зх в направлении возрастания коор-
динаты х, имеем по формуле (б) Qi =0, так как силы тяжести Д, Р2 перпендикулярны
возможному перемещению, а силы упругости (одна приложена к грузу, другая,
равная первой, но противоположная по направлению,— к призме в точке закрепле-
ния пружины) в сумме дают работу, равную нулю при постоянном з.
Для обобщенной силы инерции соответственно имеем
— Ф1х'5х—Фтг<5х Лх+Л^сова+х)
е$ф)=—- s - = -(ф1х+Ф2х)= - -—------------------=
dx g
(Pi + Р2)х+P2s cosa
g
так как проекции сил инерции призмы и груза на ось
Л Рг
Ф1Х=—х; ®2x=—(s cosa 4-х).
g g
Обобщенные силы Q2 и на возможном перемещении Зз, направленном
в сторону возрастания координаты з, при неизменном значении координаты х,
вычисляем по формулам
470
Имеем
22 =
(в)
Asina ds—F8s
Qi —---------------=P2 sin® ~ = A sina—с (Ал-+s) = — cs,
Ss
так как сила упругости F= c^ = c(Z_ + s)s если s отсчитывать от положения статичес-
кого равновесия груза В; — статическое удлинение пружины под действием силы
тяжести груза В в положении равновесия. В положении равновесия действующие на
груз силы удовлетворяют условиям равновесия. Проецируя их на ось 0's из условий
равновесия, получаем Р2 sina — сЛст = 0.
Для обобщенной силы инерции имеем
.„ -Фц'^ Рг
= (54-xcosa),
8s----------g
где ®2, — проекция силы инерции груза В на ось O's.
Подставляя полученные значения обобщенных сил в (а), получаем следующую
систему дифференциальных уравнений
А
(Pi -i-P2)x-h/’2'SCosa=0; — cs-(J+xcosa)=0. (а')
g
Исключая из второго уравнения (а') с помощью первого х, имеем следующее
уравнение для j:
(А + Р1) eg
S -I------------------— 5 = 0,
A[A + A(l-cos2a)]
или
5+-£25 = 0, (г)
где
(А+А)с«
к-‘=--------------—.
А (А+АО-005 ®)1
Интегрируя (г), получим
Рис. 184 Рис. 185
471
s=Ci cos kr+C2 sin Ат.
(г*)
Постоянные Q и C2 определяем по начальным условиям
P2sina
(=0; 5= — Лст=-------; s=0.
с
Дифференцируя (г'), имеем
s=— Ciksakt + Cikcoskt. (г*)
Из (г”) и (г") при <=0 получаем
= С2=0.
После этого имеем
Р2 sina (А+^2) eg
5 = — COS АТ = —-----COS /---------------t.
С у ^*2 [A +^2Sin2“]
Подставляя значение 5“ из (г) в первое уравнение (а”), получаем дифференциальное
уравнение для х:
J,2k2AeTcosa
х=----------cos kt. (д)
Рх + Рг
Интегрируя его, имеем
T^ArrCosa
х=------------sinki + C3. (д')
Pi+P2
Интегрируя еще раз, получим
РгЛл-cosa
х = —--------cos kt +- C3t + С4. (д")
Рх+Рг
Постоянные С3 и С4 определяем, используя начальные условия t=0, х=0, х=0.
Из (д') и (д") и начальных условий имеем
0=С3;0= —
РгАггСоза
Р1+Р2
+ с4,
или
Рг^-ст cosa
С3 =0; С4—---------.
Рх+Рг
После этого
РгЛст-сова
х=-----------(1 — cos кг).
Рх + Р2
472
§ 9. УРАВНЕНИЯ ЛАГРАНЖА
Из (30) получим уравнения Лагранжа второго рода, или просто
уравнения Лагранжа. Уравнения Лагранжа первого рода — уравне-
ния с неопределенными множителями Лагранжа — получены для
одной точки в § 5 гл. 5. Уравнения Лагранжа первого рода можно
получить и для системы.
Тождества Лагранжа. Для получения уравнений Лагранжа потре-
буется использовать три тождества. Одно из них — хорошо извест-
ная формула дифференцирования скалярного произведения двух
любых векторов а и Ь, т. е.
d — — da — — db
-(ab)=-b+a-
At At At
или
da - d - - _ Ab
-b=-(ab)-a~.
dr dr dr
- - - ^к
Если принять за а вектор скорости vk = гк, а за о -— вектор —, то
а9|.
в соответствии с этим тождеством получим
~ 8rk d Д ЗгД - d (ёгк
гк ~=т Т~
Sqi dry oq,J At\8qit
(31)
Другое тождество (тождество Лагранжа) выражается в виде
ёгк^=бгк1д(11, (32)
где точки над величинами означают их производные по времени.
Величина q^&qifdt называется обобщенной скоростью. Тождество
(32) утверждает, что «точки» (дифференцирование по времени) мож-
но поставить одновременно в числителе и знаменателе или их
«сократить». Справедливость (32) доказывается вычислением вхо-
дящих в него величин и их сравнением. Действительно, в общем
случае
rk = rk(qt (t), q2(t), q„(t), t).
При движении системы обобщенные координаты тоже есть функции
времени. Дифференцируя rk по времени как его сложную функцию,
имеем
д drk crk crk
r=—?i+— <h+-+—<!„ +
d<7i oq2 oq„
473
дгк " 8rk . 8гк
4-----— А — 4» 4---------•
St “1 Sq, dt
(33)
Частные производные drkl8qi и drkfdt не могут зависеть от обобщен-
ных скоростей 4ь следовательно, дифференцирование частным об-
разом по 4/ с фиксированным номером обеих частей (33) дает
только коэффициент при этой переменной. Все остальные слага-
емые при дифференцировании дадут нули, так как они не зависят от
qt с этим фиксированным номером. Имеем
Тождество (32) доказано.
Другое тождество Лагранжа заключается в перестановке поряд-
ка дифференцирования по времени и обобщенной координате век-
тора гк, т. е.
а /8гк
dz \Sqi
ёгк
dqt
(34)
Для доказательства этого тождества вычислим dr^dq,, используя
(33) и учитывая, что обобщенные скорости не зависят от обобщен-
ных координат. Получим
8гк
Sq,
82гк 82гк . 82гк .
------4i “I------4г 4" 4----------4л4-------•
dqfiqi 8qfiq2 8qj8q„ 8q,-8t
(35)
С другой стороны^ drk/8qi есть сложная функция времени, которая
зависит от него не только явно, но и через обобщенные координаты.
По правилу дифференцирования сложных функций имеем
d
dz
82rk . 82rk . 82rk . 82rk
------4i "I-------4г 4- • • • 4----4л 4-------•
dqidqt 8q28qi Sqn8qt 8t8qt
(36)
Порядок частного дифференцирования в смешанных производных
можно изменять. С учетом этого (35) и (36) совпадают. Таким
образом, второе тождество Лагранжа доказано.
Вывод уравнений Лагранжа. Для получения из (30) уравнений
Лагранжа для обобщенной силы инерции необходимо доказать
справедливость следующей формулы:
d I 8Т
dZ
8Т
8qt_'
(37)
474
где
r= £
*=i 2 *=i 2
— кинетическая энергия системы при ее движении относительно
инерциальной системы отсчета.
Для доказательства (37) вычислим £)<ф), используя ее определение
через силу инерции Ф*= —— ткгк. Имеем
/э(Ф) V ^k V • ^Гк
Qi= 1Ф* — = - L ткГк —-
k=l °4i k=\ S4i
Преобразуем выражение
(38)
. -• Srk
А~гк —.
Sgi
В соответствии с тождеством (31)
i afk d Л ЗгД л d / 8гк
А = гк—= гк— —г* — —
8qt dz\ 8qJ dt\8qi
Применим тождества Лагранжа:
8rk 8rk 8vk d 18rk\ 8rk 8vk
dqt 8qj 8q’ dz J 8qt 8qt
После этого
d ( - 8vk\ _ 8vk d 8
I vk‘— 1— vk' —=— —
d/ Sift) 8qi dz 8qi
Подставляя это значение Л в (38) и внося постоянную массу под
знак производных, а производные вынося за знак сумм, получим
d / 8 Л rnkv%\ 8 Л mkv^
2 / 2
d /ат\ 8Т~
dt\8qjj 8qj
Формула (37) доказана.
Подставляя выражение (37) для $ф) в (30), получим следующую
систему уравнений Лагранжа:
d ат 8Т
- —-~- = е„ г=1, 2, ..., п. (39)
а/ oqi oqt
475
Число уравнений Лагранжа равно числу степеней свободы си-
стемы.
Структура уравнений Лагранжа и их составление. Уравнения Лаг-
ранжа для обобщенных координат являются обыкновенными диф-
ференциальными уравнениями второго порядка, как и дифференци-
альные уравнения движения точки в декартовых координатах. Чис-
ло уравнений Лагранжа совпадает с числом обобщенных коор-
динат. Действительно, для кинетической энергии системы, исполь-
зуя ее определение и формулу (33) для rk—vk, имеем
2i=l ;=1 i=l 2
где введены обозначения
_ 8rk дгк
^=Ътк——-,В^^тк
Jt=l dQj Ь=1
Srk
dt'
N
C= X mk
k=l
Величины Aih Bi} С могут зависеть от обобщенных координат и вре-
мени, но не зависят от обобщенных скоростей. С учетом этого
^=2 A^+Bi
84i y=i
И
d дТ ААн. \ ад-
——— 4j) н—
drS?,- “Д ™ dt J df
Это выражение содержит qj, т. е. производную от обобщенной
координаты только второго порядка. Другие слагаемые уравнений
Лагранжа содержат производные от обобщенных координат не
выше первого порядка. Активные силы Fk, если они не зависят от
ускорений точек, не могут дать зависимости Qt от обобщенных
ускорений.
Интегрируя уравнения Лагранжа для случая заданных активных
сил, получим все обобщенные координаты как функции времени
и 2п постоянных интегрирования. Для определения этих постоянных
следует дополнительно задать начальные условия, т. е., например,
при t = 0 задать
476
где q° и 4° — начальные значения обобщенных координат и обо-
бщенных скоростей.
При составлении уравнений Лагранжа можно рекомендовать
следующий порядок операций.
1. Вычислить кинетическую энергию системы в ее движении
относительно инерциальной системы отсчета.
2. Выбрав обобщенные координаты, число которых равно числу
степеней свободы системы, преобразовать кинетическую энергию
к обобщенным координатам.
3. Выполнить операции дифференцирования кинетической энер-
гии, предусмотреные уравнениями Лагранжа.
4. Вычислить одним из способов, указанных в § 6, обобщенные
силы системы.
5. Приравнять величины левой и правой частей, входящих в ура-
внения Лагранжа.
Уравнения Лагранжа для потенциальных сил. Если силы, дейст-
вующие на точки системы, являются потенциальными, то для обо-
бщенных сил справедлива формула Qi=dUldqi. Силовая функция
U не зависит от обобщенных скоростей, поэтому производную от
нее по обобщенной скорости SU/Sq.^Q можно добавить к dTjcqi.
С учетом этого после переноса всех слагаемых в левую часть
получим следующую систему уравнений Лагранжа:
(вт ви\ л „
— I —I— 1 = 0, z = 1, 2, ..., п.
Если ввести функцию Лагранжа, или лагранжиан, по формуле
L=T+C/=T-77, (40)
то уравнения Лагранжа для случая потенциальных сил примут
форму
d 8L
dz 8q, 8qt
Функция Лагранжа отличается от полной механической энергии
системы
Е= Т+П=Т-и.
Из уравнений Лагранжа для стационарных потенциальных сил
и случая стационарности связей системы можно просто получить
477
d (ВТ 8V\
— I---1---)
dZ \8qt 8qtJ
, 1=1, 2, ..., n. (41)
в этом случае ранее установленный закон сохранения полной меха-
нической энергии
£=Т+77=/1,
где h — постоянная величина.
Уравнения Лагранжа (41) можно получить как уравнения Эйлера из вариацион-
ного исчисления для экстремума функционала
'1
5= LdZ,
где L=T+U — функция Лагранжа. Функционал S, зависящий от функций 9,(0
и 9,(0, называется действием по Гамильтону. Для того чтобы действие по Гамиль-
тону имело экстремум, должна равняться нулю его вариация, т. е.
6S=0. (419
Условие (41х) выражает так называемый принцип Гамильтона. Принцип Гами-
льтона утверждает, что для действительного движения системы из од-
ного положения в другое действие по Гамильтону имеет экстремум по
сравнению с другими возможными движениями системы при фиксиро-
ванных значениях qt на границах, т. е. при (] и tj.
Принцип Гамильтона позволяет получить уравнения Лагранжа без использова-
ния основных аксиом динамики. Следовательно, он в основном заменяет эти акси-
омы при выводе уравнений Лагранжа для случая движения системы под действием
потенциальных сил.
Циклические координаты и циклические интегралы. Функция Лаг-
ранжа L= Т+ U в общем случае зависит от обобщенных скоростей,
обобщенных координат и времени. Если какая-либо обобщенная
координата, например q,, не входит в выражение функции Лагран-
жа, то для нее
dL/8qj=0. (42)
Обобщенная координата, которая удовлетворяет условию (42), на-
зывается циклической. Для циклической обобщенной координаты
qj уравнение Лагранжа примет форму
d 5L п
----= 0.
dz 8'qj
Из него получаем циклический интеграл уравнений Лагранжа:
8Lldqj=Cj, (43)
где Cj — постоянная величина.
478
В циклический интеграл могут входить производные по време-
ни от обобщенных координат, в том числе и производная по
времени от циклической координаты не выше первого порядка.
Следовательно, (43) в отличие от уравнений Лагранжа в общем
случае является обыкновенным дифференциальным уравнением не
выше первого порядка. Если все обобщенные координаты являют-
ся циклическими, то система уравнений Лагранжа, имеющих вто-
рой порядок, заменится циклическими интегралами, имеющими
только первый порядок. Интегрировать систему уравнений перво-
го порядка значительно проще, чем систему второго порядка.
Отыскание обобщенных координат, которые являются цикличес-
кими, имеет важное значение. Используя циклические интегралы,
можно так называемым методом игнорирования координат уме-
ньшить число уравнений Лагранжа на количество циклических ко-
ординат, не повышая при этом порядка получаемых дифференци-
альных уравнений.
Другое направление в аналитической динамике состоит в оты-
скании самих интегралов уравнений Лагранжа или другой системы
уравнений, им эквивалентной.
Аналитическая механика после Лагранжа получила большое
развитие и применение в различных областях науки и техники. Ее
методы особенно широко применяются в теории колебаний систем
и в квантовой механике.
Пример 1. Ступенчатый каток А массой т, радиусами ступеней Лиг катится со
скольжением по горизонтальному прямолинейному рельсу (рис. 186). Коэффициент
трения скольжения катка равен /. На каток намотана нерастяжимая нить, которая
перекинута через блок В, к концу которой прикреплен груз D с массой т\. Радиус
инерции катка относительно продольной оси симметрии, проходящей через центр
масс С равен р. Нить по катку не скользит. Она между катком и блоком горизонталь-
на. Массами блока В, нити, трением качения катка и трением в оси блока пренебречь.
Определить обобщенные силы и кинетическую энергию системы в трех случаях
выбора обобщенных координат: у и <р; у и xq\ хс и <р.
Решение. Система имеет две степени свободы. Кинетическая энергия системы
Т состоит из кинетических энергий катка ТА и груза Тц. Каток совершает плоское
движение. Его кинетическая энергия
479
Хс:
TA=m~+Jcz
Ф2
2’
где Jr,=mp2. Груз совершает поступательное движение. Для него Тр=т—. Кинети-
2
веская энергия системы
Хр ф2 у2
Т— Тл +1d=fn \-ntp2 H/nj .
2 2 2
(а)
Это выражение кинетической энергии следует преобразовывать к заданным
обобщенным координатам. Скорости хс, у и угловая скорость ф связаны соотноше-
нием
у=хс+Яф-
(6)
Активными силами системы каток, нить, блок и груз являются силы тяжести
катка Р и груза Р], и сила трения катка о рельс. Рельс является неидеальной связью.
Заменим его гладким рельсом, компенсировав его шероховатость силой трения F,
направив ее в положительную сторону оси Ох. Гладкий рельс, нерастяжимая нить,
ось блока без трения будут идеальными связями.
Для обобщенных координат у и <р при вычислении Т следует из (б)" выразить
хс=у—Лф и подставить в (а). Опуская эту простую выкладку, приступим к вычисле-
нию обобщенных сил заданных сил тяжести P=mg и Pi=mjg и силы трения
F=F^=fN
при скольжении катка по рельсу. Нормальную реакцию N можно определить из
уравнения отсутствия движения центра масс катка в перпендикулярном направлении
к оси Ох. Проекции сил на это направление дают 7V— Р=0, т. е. N=P=mg. Тогда
F=fN=fmg.
Для обобщенной силы, отнесенной к обобщенной координате у, имеем
так как при <5<р=0 каток совершает поступательное возможное перемещение, при
котором перемещение 5s\ точки приложения силы F равно перемещению точки
К и следовательно возможному перемещению бу.
Возможные перемещения бу, б<р, бхс следует давать всегда в положительных
направлениях этих обобщенных координат.
Обобщенную силу, отнесенную к обобщенной координате <р, получаем:
Е SAk
— F6s2
б<р
= —F(R + r),
так как <5у=0 и точка К— мгновенный центр возможных перемещений катка. В этом
случае 5s2 = (R+r)6<p и 6s2 направлено против силы F.
480
При выборе в качестве обобщенных координат у и хс в кинетической энергии
следует выразить ф через у и хс- Из (б) имеем
У-хс
Обобщенная сила
z N \
I j
4-1 Л Pifyi-F-Ssj Г
так как 5хс=0 и точка С не совершает возможного перемещения, а потому
Ss-y г
— Ssk=8y.
6sk R
Для обобщенной силы QX(, имеем
/ N \
( Z
4=1 'хс F'Ssj R+r
Qx=-----------=------= F------.
c 8xc 8xc R
В этом случае <5y=0 и точка К — мгновенный центр перемещений катка, при
котором
<5s4 R+r
8хс R
При выборе в качестве обобщенных координат хс и <р следует у выразить через
хс и <р и заменить его в выражении кинетической энергии.
Обобщенная сила
• N ч
у, 8Ак j
*=i Ас Pi fo+.F
дхс 6хс
= Pt+F.
В этом случае 8<р=0 и каток совершает поступательное возможное перемещение, при
котором 8sj = 8sk=3xc; 8sk=8y.
Для обобщенной силы Qq> имеем
P\-8yi-F-
=PiR-Fr,
так как <5x^=0 и точка С не совершает возможного перемещения, а потому
481
6yi =5sic = R ' Sep; 8s$ = r'8<p
и перемещение Ss6 направлено против силы F.
Имея кинетическую энергию, выраженную через обобщенные координаты, и обо-
бщенные силы, легко составить уравнения Лагранжа и в некоторых случаях проин-
тегрировать их.
Пример 2. Однородный диск А силой тяжести Р= 100 Н обмотан нерастяжимой
нитью, которая перекинута через блок В и прикреплена к грузу D, имеющему силу
тяжести Pj = 200 Н (рис. 187). Груз может скользить по неподвижной наклонной
плоскости с углом наклона а = 30°. Коэффициент трения скольжения между грузом
и плоскостью/=0,3. Блок В, имеющий силу тяжести Pi = 400 Н принять за однород-
ный диск.
Определить ускорение груза D и оси диска А, а также натяжение нити и давление
на ось блока, если нить не скользит по блоку. Трением на оси блока и массой нити
пренебречь. Движение начинается из состояния покоя.
Решение. Система движущихся тел имеет две степени свободы. За обобщенные
координаты системы примем перемещение s груза по наклонной плоскости и угол
<р поворота диска А. Угол <р считаем положительным против часовой стрелки,
а перемещение s — вниз по наклонной плоскости.
Связями системы являются нить, ось блока и негладкая наклонная плоскость.
Если наклонную плоскость заменить силами реакций связей, то оставшиеся связи
окажутся идеальными, но появится дополнительная степень свободы у груза D.
Можно сделать связи идеальными, считая наклонную плоскость гладкой, а шерохо-
ватость ее поверхности и поверхности груза D компенсировать силой трения. В этом
случае дополнительной степени свободы не появится. Связи окажутся идеальными
и для движения системы можно составить уравнения Лагранжа:
d ат ат а ат ат
. ... - ~Qs> ,
dz 8s ds dt Sip dtp
Кинетическая энергия системы состоит из кинетических энергий отдельных тел:
T=TA + TB+TD.
Диск А совершает плоское движение. Его кинетическая энергия вычисляется по
формуле
Рг2
где vc — скорость центра масс диска; Jci —--— момент инерции диска относи-
8 2
тельно оси, проходящей через центр масс перпендикулярно плоскости диска; г —
радиус диска.
Блок В вращается вокруг неподвижной оси. Его кинетическая энергия
А 4
где ф1 — угловая скорость блока; Jc i=--— момент инерции относительно оси
g 2
вращения; Г] — радиус блока.
Груз D движется поступательно, и его кинетическая энергия
482
Pi's2
Та= ^
g 2
Так как нить нерастяжима и не скользит по
блоку, то угловая скорость блока связана со
скоростью груза соотношением j=—пфр Ско-
рость груза предполагаем направленной в поло-
жительную сторону, т. е. вниз по наклонной
плоскости, а следовательно, в начале движения
груза из состояния покоя вниз направлено
и ускорение груза. Все точки нити имеют оди-
наковое числовое значение скорости |j|. Следова-
тельно, такую же скорость имеет и точка М дис-
ка. Приняв ее за полюс, определяем скорость
точки С по формуле, связывающей скорости
двух точек тела при плоском движении:
vc—vm+vcm>
где«слт=Л/С'|ф|.
При вращении диска против часовой стрелки скорость «саг направлена вер-
тикально вниз, a — вертикально вверх при движении груза D вниз по наклонной
плоскости. Следовательно, vc=s—гф, где направление вверх считается положитель-
ным для точки С.
Выражаем кинетическую энергию системы через обобщенные скорости и коор-
динаты. Имеем
T=TA + TB+TD =
Pfs-rcrf
g 2
s2f Pi \ 3Pr2 Pr
— ( Ph--ьРг H----Ф2——^Ф-
2g\ 2 / 4g g
Вычисляем производные, входящие в левые части уравнений Лагранжа:
ат ат ат sf Pi \ Pr d ат sf р{ \ Pr
—=—=0; — =-1 p н—ьРт)—— Ф;------~~ I p^—^~Pz I—Ф;
8s 8<p 8s g\ 2 / g dt 8s g\ 2 / g
8T 3Pr2 Pr d 8T 3Pr2 Pr
— =-----ф---j;--=-----ф——s.
8ф 2g g dtScp 2g g
При вычислении обобщенных сил следует учитывать силы тяжести Р, Р\, Р^ и си-
лу трения F наклонной плоскости. Реакции идеальных связей (нить, ось блока,
гладкая наклонная плоскость) учитывать не надо. Важно выбрать правильное нап-
равление для силы трения F, которая всегда направлена против скорости движения
груза D, заранее неизвестной. Предположим, что движение груза направлено вниз по
наклонной плоскости. Тогда сила трения будет иметь противоположное направле-
ние. Решаем задачу при этом предположении. Если получим s (в данном случае и s,
так как движение начинается из состояния покоя) со знаком плюс, то принятое
предположение правильно. Если же ускорение s (а следовательно и скорость s)
получим отрицательным, то следует изменить направление силы трения на обратное
483
и снова решать задачу, так как предполагаемое направление силы трения оказалось
направленным по движению груза, т. е. неправильно. При s=0 движение груза из
состояния покоя начаться не может.
Установив предполагаемое направление силы трения вверх по наклонной плос-
кости, вычисляем обобщенную силу Qs. При этом сообщаем системе такое возмож-
ное перемещение, допускаемое связями, при котором угол q> не изменяется, а изменя-
ется только 5 на положительную величину 6s, т. е. сообщаем грузу возможное
перемещение вниз по наклонной плоскости. По формуле для обобщенной силы
имеем
(S )
Is (P2sma—fN)6s — P'6s
Qs---------=-------------------= P2 dna-JN- P,
6s ds
так как при <p = const перемещение точки С диска такое же, как и у точки М,
a F=FTalL1L=fN. Сила Pi приложена в неподвижной точке, и ее элементарная работа
на возможном перемещении равна нулю, так как возможное перемещение неподвиж-
ной точки равно нулю.
Нормальную реакцию N наклонной плоскости определяем из условий равнове-
сия сил для груза D в направлении нормали к наклонной плоскости. Имеем
С учетом этого
N— P2cosa=0; N=P2Cosa.
Qs=Рг (sina —f cosa)—P.
При вычислении обобщенной силы сообщаем системе возможное перемеще-
ние, при котором изменяется только угол <р на положительную величину 6<р,
а обобщенная координата s не изменяется. Получим
\ к ' <Г Р' 6sC
Q<p=----------=-------
v 6<р 6<p
В этом случае точка М диска является мгновенным центром возможных перемеще-
ний, поэтому 6хс=г-6ф и при положительном 6д> направлено вниз по силе Р.
Элементарная работа других сил на этом возможном перемещении равна нулю, так
как точки их приложения остаются неподвижными при этом возможном перемеще-
нии. Таким образом,
Р 6хс
а9=——=рг.
6<р
Подставляя вычисленные значения величин в уравнения Лагранжа, получим
s / Р[ \ Ф
- Рн---1-Р2 I— — Pr=Р2(sina—/cosa)—Р;
g\ 2 J g
s <?3
- Pr—--Pr2 = —Pr.
g g2
484
2
Из последнего уравнения выражаем в> через s. Имеем np=-(g+s). Подставляя
3
это значение в первое уравнение, получаем
Р Pi \ Р
-Н----И Pi )=7>2(sin«—/cosa)—
-1300 = 600 0,24 —100; s=0,034g и 0,33 м/с2.
g
Знак плюс у j (в данном случае и у j) указывает, что движение груза D дейст-
вительно направлено вниз по наклонной плоскости, как и предполагалось.
Ускорение точки С можно получить дифференцированием по времени выраже-
ния для скорости vc=s~гф, справедливого для любого момента времени. Имеем
di>c
—=5—гф.
dt
Таким образом,
2 s 2
ac=axc=S—ry=ii—-(g+s) =----------------g= —0,656g = —6,43 м/с2.
Знак минус у ас указывает, что ускорение ас направлено вниз, так как за положитель-
ное направление было принято направление вверх.
Для определения сил натяжения нитей применим к грузу и диску аксиому
Даламбера. Для груза D (рис. 188), проецируя силы на ось Ох, получаем
5г + ®2 ~-Р sina+/У=0.
Но
Следовательно,
ф2 = — j; N=Pi<x>sa..
g
(А
sina—/cosa—- 1=41,2 H.
gJ
485
51+ф_р=0,
Р ( ас\
но Ф=-ас. Поэтому 51=Р 1— ) = 100(1-0,656)® 34,4 Н.
g X gJ
Так как центр масс блока неподвижен, то по теореме о движении центра масс
(рис. 190) получаем уравнения равновесия сил
0 = + 52 cosa; 0 = Y[ — — Р2 — S2 sina.
Из этих уравнений определяем проекции реакций оси Х^ и Y\:
Xi = -S2cosa =-35,4 Н; У] =P2 + 5i+52 sina = 455,1 Н.
Модуль силы реакции оси блока, а следовательно,и давление блока на ось
Nl=y/X2l + Y2l№456,4 Н.
§ 10. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
Уравнения Лагранжа (39) представляют собой п обыкновенных
дифференциальных уравнений второго порядка для обобщенных
координат qt. Эти уравнения многими способами можно свести
к системе 2п уравнений первого порядка путем введения новых
переменных. Канонические уравнения или уравнения Гами-
льтона дают такую систему дифференциальных уравнений первого
порядка, эквивалентную уравнениям Лагранжа, в наиболее удобной
симметричной форме.
Получим уравнения Гамильтона. Для этого введем в качестве
дополнительных к независимых переменных систему обобщен-
ных импульсов
(44)
где L= Т+ U = Т—П — функция Лагранжа, представляющая собой
избыток кинетической энергии над потенциальной. Определим но-
вую функцию, функцию Гамильтона,
Н=^Р^-Ь. (45)
Можно показать, что функция Гамильтона для случаев, когда кине-
тическая энергия является однородной квадратичной формой обо-
бщенных скоростей
т=121
2=1
486
и силовая функция не зависит от обобщенных скоростей и явно от
времени t, совпадает с полной механической энергией:
Е=Т+П.
Для других случаев функция Гамильтона является лишь неким
аналогом полной механической энергии.
Для вывода уравнений Гамильтона вычислим вариацию функ-
ции Н, используя ее определение (45) и учитывая, что время при
этом не варьируется. Так как L=L{qt, q„ t), то получаем
ЗН= X pi ’ + X 4.' &Pi ~ SL,
i i
i "Qi i vQi i i
При этом учтено, что согласно определению Р, и уравнениям Лаг-
ранжа, имеем
SL cL d dL dPt .
~ = =---=— = Pt.
dqt dq, dr 8qi dr
С учетом значения SL выражение для SH принимает форму
SH=Y Pi <54.+X 4. • <5Л - X Pi <54. - X Pi ^i=
i i i i
^q-SP^P-Sq, (47)
i i
так как первое и третье слагаемые в сумме дают нуль.
С другой стороны,Н есть функция новых переменных qh Р, и воз-
можно, времени t, т. е.
H=H(qt, Ph t).
Поэтому для ее вариации, выраженной через эти переменные, имеем
(48)
Приравнивая значения SH из (47) и (48) и учитывая, что qit Р,
независимы, и следовательно, их вариации независимы и произ-
вольны, получаем следующие уравнения Гамильтона
487
q,
p.
8P,
bh . , _
-----, z= 1, 2, n.
Bq,
(49)
Уравнения Гамильтона служат для определения q, и Р„ если для
них дополнительно заданы начальные условия, по которым можно
определить постоянные интегрирования.
Уравнения Гамильтона по сравнению с уравнениями Лагранжа
имеют ряд преимуществ. Для них разработаны методы нахождения
интегралов. Формализм Гамильтона широко применяется в кван-
товой и статистической механике.
Пример. Составить уравнения Гамильтона и проинтегрировать их для системы
с одной степенью свободы, для которой кинетическая и потенциальная энергии
выражаются в форме
2 2
Я Я
Т=а—;П=с—, (а)
2 2
где а и с — постоянные положительные величины.
Такие значения кинетической и потенциальной энергий встречаются в теории
колебаний систем с одной степенью свободы.
Решение. Вычисляем функцию Лагранжа. Имеем
q2
L=T+U=T-n=a—-с-.
2 2
Определяем обобщенный импульс Р. Получаем
8L 8Т
так как П не зависит от обобщенной скорости.
Для функции Гамильтона, согласно определению, используя (б), имеем
а2 а2 аа2 са2
H~YPflt-L=Pq-a—+c—=—+— = T+n=E, (в)
2 2 2 2
I
т. е. в рассматриваемом случае функция Гамильтона Н равна полной механической
энергии Е.
Для составления уравнений Гамильтона выразим функцию Н через переменные
q и Р, используя (б). Получим
aq2 cq2 Р2 cq2
Из (г) путем дифференцирования имеем
8Н Р 8Н
— =-; — = cq.
8Р a 8q
Подставляя эти значения производных в уравнения Гамильтона
488
дН . дН
q=—, Р=—,
8Р 8q
получим следующую систему уравнений
Р .
(д')
а
Из системы уравнений Гамильтона (д') путем дифференцирования первого урав-
нения по времени и подстановки Р в полученное уравнение из второго уравнения
получим дифференциальное уравнение для определения q'.
q + k2q=0, (е)
с
где к2=~. Решая (е), представим q в двух эквивалентных формах
а
q — Ci cos kt + C2 sin fa; (ж)
q=A sin (fa+а), (ж*)
где С], C2, A, a — постоянные величины, определяемые по начальным условиям для
q. Вычисляя q и подставляя его значение в первое уравнение (д'), имеем
Р = aq — ак (— Cj sin kt + С2 cos kt) = akA cos (fa + a). (3)
Получены решения уравнений Гамильтона (ж), (з).
ГЛАВА И
ТЕОРИЯ КОЛЕБАНИЙ
Теория колебаний механических систем — один из самых об-
ширных и развитых разделов теоретической механики, имеющий
большое прикладное значение.
Колебательные движения встречаются во многих отраслях со-
временной науки и техники и требуют для рассмотрения широкого
использования различных математических методов.
Рассмотрим основные свойства малых колебаний механичес-
ких систем с одной и двумя степенями свободы на основе примене-
ния уравнений Лагранжа; некоторые результаты для системы с лю-
бым конечным числом степеней свободы приведем без вывода.
Механическая система может совершать малые колебания только
вблизи устойчивого положения равновесия. Обобщенные ко-
ординаты системы в положении равновесия принимают равными
нулю, т. е. отсчитывают их от положения равновесия. Тогда колеба-
тельным движением механической системы в общем случае считают
всякое ее движение, при котором все обобщенные координаты или
часть из них изменяются не монотонно, а имеют колебательный
характер, т. е. принимают нулевые значения по крайней мере неско-
лько раз.
Ниже рассмотрены только периодические и псевдопериодичес-
кие колебания.
Для рассмотрения малых колебаний следует дать определение
устойчивости положения равновесия системы и установить условия,
при выполнении которых положение равновесия является устой-
чивым.
§ 1. ПОЛОЖЕНИЕ РАВНОВЕСИЯ СИСТЕМЫ
И ЕГО УСТОЙЧИВОСТЬ
Положение равновесия механической системы относительно ине-
рциальной системы отсчета можно определить из уравнений равно-
весия внешних сил. Для свободного твердого тела, имеющего шесть
степеней свободы имеется и шесть уравнений равновесия внешних
сил. Если внешние силы заданы, то из этих уравнений можно найти
параметры, определяющие положение равновесия твердого тела
с точностью до произвольной постоянной скорости поступатель-
ного движения тела, которую дополнительно следует положить
равной нулю относительно выбранной инерциальной системы от-
счета.
490
Положение равновесия механической системы, подчиненной не-
освобождающим, голономным, стационарным и идеальным свя-
зям, можно определить из уравнений равновесия внешних активных
сил, выраженных через обобщенные силы системы Qt в форме
б, = 0, i=l, 2, ..., п,
где п — число степеней свободы механической системы, совпада-
ющее с ее числом обобщенных координат q,. Скорости точек систе-
мы не определяются из этих уравнений. Их следует дополнительно
положить равными нулю относительно выбранной инерциальной
системы отсчета, относительно которой рассматривается равнове-
сие механической системы.
Для механической системы, находящейся под действием потен-
циальных сил, обобщенные силы выражаются через потенциальную
энергию системы в форме
Qi=----, i= 1, 2, ..., п,
dqj
где П — потенциальная энергия внешних активных сил для систем
с идеальными связями.
При равновесии механической системы потенциальная энергия
удовлетворяет условиям
— = 0, i=l, 2, ..., п.
Для наглядности рассмотрим положение равновесия на примере
одного твердого тела. Пусть таким телом является однородный
стержень (рис. 191) с горизонтальной осью вращения без сил тре-
ния, проходящей через точку О. Вычислим потенциальную энергию
стержня, имеющего одну степень свободы и, следовательно, одну
обобщенную координату <р — угол отклонения стержня от вертика-
ли вниз. Внешними активными силами для стержня является только
одна его сила тяжести Р.
Потенциальная энергия по определению равна работе, которую
совершают силы поля при перемещении механической системы из
заданного положения в начальное положение. Для стержня задан-
ным положением является его положение под углом ср к вертикали,
а за начальное положение примем его положение при (р = 0.
Итак, для потенциальной энергии стержня имеем
n=A=Ph=P-^(\ —cost?),
491
if=O
a)
Рис. 191
где Л=^—^cosijo — высота опускания центра масс стержня С, /—
длина стержня. При равновесии стержня
сП I .
— = Psin<p = 0,
а<р 2
или sin<p = 0. Стержень имеет два положения равновесия: <р = 0°
и д>—180°.
В положении равновесия активная сила тяжести Р и реакция
в точке О, Ro составляют равновесную систему сил.
Чтобы установить, будет ли рассматриваемое положение равно-
весия стержня устойчивым, следует дать стержню достаточно малое
начальное отклонение от положения равновесия, а в общем случае
сообщить ему еще достаточно малую начальную угловую скорость
и рассмотреть его последующее движение. Для простоты ограни-
чимся только одним малым начальным отклонением от положения
равновесия. В отклоненном положении силы, действующие на стер-
жень (сила тяжести и реакция в точке О), уже не являются урав-
новешенными.
Если существует такое достаточно малое начальное отклонение
стержня от положения равновесия, при котором силы стремятся
вернуть стержень в положение равновесия, то такое положение
равновесия считается устойчивым.
Положение равновесия стержня при <р = 0° (рис. 191, а) является
устойчивым, так как при начальном его отклонении на малый угол
силы, действующие на стержень, стремятся вернуть его в положение
равновесия.
В том случае, когда силы еще дальше отклоняют стержень от
положения равновесия, положение равновесия является неустой-
чивым.
492
Положение равновесия стержня при <р = 180° может служить
примером неустойчивого положения равновесия (рис. 191,6). Силы,
действующие на стержень, в этом случае стремятся отклонить его
еще дальше от положения равновесия при любом как угодно малом
начальном его отклонении от положения равновесия.
Если стержень, получив любое малое начальное отклонение от
положения равновесия, остается в равновесии в новом отклонен-
ном положении, то такое положение равновесия называется безраз-
личным.
Примером безразличного положения равновесия может служить
равновесие стержня, у которого закрепленная точка О совпадает
с центром масс С. В этом случае силы, приложенные к стержню,
образуют равновесную систему сил при любом начальном его
отклонении от первоначального положения равновесия (рис. 191, в).
В общем случае кроме начального отклонения стержню следует
сообщить также еще и некоторую достаточно малую начальную
угловую скорость. Естественно, что тогда случай безразличного
положения равновесия стержня следует отнести к неустойчивому
положению равновесия, так как, получив любую малую начальную
угловую скорость, стержень дальше будет удаляться с этой угловой
скоростью по инерции от своего первоначального положения рав-
новесия.
Все изложенное о положении равновесия стержня характерно не
только для любого твердого тела, но и для любой механической
системы. Наибольший интерес представляет устойчивое положение
равновесия тела или механической системы, так как в таком поло-
жении равновесия тело или система могут находиться длительно,
если им не сообщается какое-либо возмущение.
При устойчивом положении равновесия система, выведенная из
положения равновесия достаточно малыми возмущениями в виде
начальных отклонений и скоростей, которые сообщаются всем точ-
кам системы или их части, совершает колебания около положения
равновесия или приближается к нему без колебаний.
При неустойчивом положении равновесия случайные возмуще-
ния приводят к тому, что система при дальнейшем движении все
дальше отклоняется от положения равновесия. Таким образом,
прежде всего необходимо установить характер положения равнове-
сия системы. Для этого требуется ввести точное понятие устой-
чивости положения равновесия системы.
Строгое определение понятия устойчивости положения равнове-
сия было дано в конце прошлого века в работах русского ученого
А. М. Ляпунова. Приведем это определение для системы с любым
конечным числом степеней свободы п.
Условимся обобщенные координаты qt, q2, , q„ отсчитывать от
положения равновесия системы, т. е. принимать их равными нулю
493
в положении равновесия. Начальное возмущение системы состоит
в общем случае из начальных значений обобщенных координат q°,
q°, q° и начальных обобщенных скоростей q°, q°, q°.
По Ляпунову, равновесие системы называется устойчивым, если
для любого достаточно малого £>0 можно выбрать два других
малых числа rji>0 и ^2>0, что при удовлетворении начальными
значениями обобщенных координат и скоростей неравенств
14,°| < г]2 в любой момент времени все обобщенные координаты подчи-
няются условиям \q, (/)| < £.
Таким образом, по Ляпунову, положение равновесия считается
устойчивым, если можно задать достаточно малую область изме-
нения начальных значений обобщенных координат в окрестности
положения равновесия и область начальных обобщенных скоро-
стей, для которых величины обобщенных координат при последу-
ющем движении системы ограничены заданной е окрестностью
вблизи положения равновесия. Ясно, что области начальных зна-
чений q° и q°, определяемые положительными числами ту и ту,
зависят от выбранной £-окрестности, т. е. самого числа £. Эти
области начальных значения q° и q° не должны соответствовать
?7i = 0 и ^2 = 0, т. е. только самому положению равновесия, для
которого q° = 0 и q° = 0.
Теорема Лагранжа — Дирихле
Малые колебания системы могут длительно совершаться только
в окрестности устойчивого положения равновесия системы. Поэто-
му важное значение имеет теорема Лагранжа — Дирихле, устанав-
ливающая достаточные условия устойчивости положения равно-
весия системы. Теорема утверждает: для устойчивости положения
равновесия системы, подчиненной голономным, идеальным, стаци-
онарным и неосвобождающим связям и находящейся в стационарном
потенциальном силовом поле, достаточно, чтобы потенциальная
энергия в положении равновесия имела изолированный относитель-
ный минимум.
Докажем сначала теорему для системы с одной степенью
свободы, допускающую наглядную геометрическую интерпрета-
цию. Потенциальная энергия системы с одной степенью свободы
для стационарного силового поля зависит только от одной обо-
бщенной координаты q, равной нулю в положении равновесия.
Примем потенциальную энергию в этом положении равной ну-
лю, т. е. 77(0) = 0. По условию теоремы в положении равновесия
потенциальная энергия имеет изолированный относительный ми-
нимум, т. е. 77пйп = 77(0) = 0, и функция n=II{q') в малой окрест-
ности ?=0, принимая только положительные значения, являет-
494
ся возрастающей функцией q, т. е. имеет вид, представленный на
рис. 192.
Доказательство теоремы состоит из двух частей. Первая часть
доказательства содержит выбор значения потенциальной энергии
77*. Во второй части доказывается существование положительных
чисел z/j и q2, отличных от нуля, обеспечивающих выполнение
условий устойчивости.
Для определения значений 77* зададим положительное число
е настолько малым, чтобы окрестность |<?| < £ не содержала соседних
экстремумов функции П—П{д). Рассмотрим значения функции
77= 77 (г?) при q = s и q = — е, т. е. 77(e) и 77(—е). Из двух положитель-
ных величин выберем наименьшую, например 77(e), и примем ее за
77*. Если при движении системы оказалось, что потенциальная
энергия П(д)<П*, то из выбора значений 77* следует, что q'<q<e,
т. е. q обязательно должно удовлетворять условию |<?| <е.
Для доказательства второй части теоремы учтем, что при
движении консервативной системы и выполнении других условий
теоремы о связях справедлив закон сохранения полной механичес-
кой энергии
Т+П- То+По,
где Та и 770 — значения кинетической и потенциальной энергий в на-
чальный момент. Они зависят от начальных значений q° и q°, т. е.
Ло = 77(9°), То — Т(q°, q°).
Кинетическая энергия системы может быть только положитель-
ной. Поэтому из закона сохранения механической энергии получаем
следующее неравенство для потенциальной энергии:
77< То + 770.
Это неравенство позволяет установить соответствующие положи-
тельные числа гц и q2- Неравенство допускает бесчисленное ко-
личество значений для q° и q°, удовлетворяющих ему. Действи-
тельно, неравенства 770 < 77*/2 и То < П*[2 обеспечивают выполнение
П(Ц
Рис. 192
495
рассматриваемого неравенства для потенциальной энергии. Из не-
равенства 77о<77*/2 получаем |^°|<?/i^0, а из двух неравенств
Т0<77*/2, |?°|<^i следует l^0! < q2 э6 0- Подставляя значения Т0<77*/2
и 770<77*/2 в основное неравенство, получим следующее условие
для потенциальной энергии:
П < 7о + Но <П*,
что в соответствии с выбором числовой величины 77* обеспечивает
для обобщенной координаты выполнение условия |<?| < £.
Доказано, что для любого достаточно малого числа е<0 суще-
ствуют положительные числа тц и ^2, и если |^°|<?/i и |4°| <Л2, то
|<?| < к, т. е. положение равновесия устойчиво.
Для системы с двумя степенями свободы доказательство
второй части теоремы почти не изменяется, за исключением того,
что П0=П(д°, q2) и То= T(q°, q2, q°, q2), но это не вносит существен-
ных изменений в последующие рассуждения. Некоторые особен-
ности возникают при выборе величины 77*.
Для системы с двумя степенями свободы n=n{qx, q2). В положе-
нии равновесия системы <7i=^2 = 0 принимаем 77(0, 0)=77^ = 0.
Следовательно, 77^ = 77(0, 0)=0.
Потенциальная энергия 77=77(<?1, q2) в малой окрестности изо-
лированного минимума положительна, и ее зависимость от обо-
бщенных координат имеет форму поверхности, изображенной на
рис. 193, а.
Выберем е>0 и рассмотрим значения потенциальной энергии
77= 77 (в, q2) и 77=77( —£, q2), где q2 — любое, удовлетворяющее
условию |^2| = е- Зависимость 77= 77 (в, q2) является уравнением ли-
нии пересечения плоскости q^ = е (плоскость 7) с поверхностью 77=
q2). Аналогично, 77= 77(—е, q2) есть линия пересечения пло-
скости ?!=-ес той же поверхностью. Из множества значений П(е,
q2) и 77( —в, q2) (рис. 193, б) при изменении q2 в интервале |^2|^е
выбираем наименьшее 772. Затем рассматриваем 77= 77(71, в) и 77=
=П(дъ — е). Опять получим в плоскостях q2=e и q2= —е по кривой,
аналогичной изображенной на рис. 109, б. Из множества этих
значений потенциальной энергии выбираем наименьшее П2. Из двух
положительных величин 772 и П2 наименьшее принимаем за 77*.
Из способа выбора значения 77* следует, что если в какой-то
момент движения системы 77(71, q2)<17*, то обобщенные коор-
динаты удовлетворяют условиям |<7i|<£ и |^2| <£
Рассмотрим доказательство теоремы Лагранжа — Дирихле для
системы с п степенями свободы и, следовательно, с qx, q2,
q„ обобщенными координатами.
496
Примем в положении равновесия все <?, = 0 и /7(0, 0, 0) = 0.
Тогда 77^=77(0, 0, 0)=0. Выберем достаточно малое положи-
тельное число £>0, такое, чтобы в е-окрестности не содержалось
других экстремумов функции 77=77(^b q2, q„). Дадим обобщен-
ной координате значения qi = £ и qi= — s, т. е. |<?i| = £, а другие
обобщенные координаты при этом удовлетворяют условияю |<?,| < £.
Из всех значений потенциальной энергии в этом случае выбираем
наименьшее 77]. Затем даем q2 значение |?2| = е, а другие при измене-
нии удовлетворяют условию |^,| < е. Наименьшее значение потенци-
альной энергии при этих условиях обозначим П2. Продолжая этот
процесс со всеми обобщенными координатами, получим последова-
тельность положительных чисел П\, П2, П„, наименьшее из
которых принимаем за 77*.
Пока при движении системы 77 <77* выполняется условие |^,|<£
для всех обобщенных координат.
Пусть системе сообщили соответствующие начальные обобщен-
ные координаты и скорости и она движется. При движении консер-
вативной системы, удовлетворяющей связям, указанным в условии
теоремы, справедлив закон сохранения механической энергии
Т-\-П= Т$+По,
где Пй = П(^, ql, ..., <?°) и T0=T(<fl, q%, ..., q°; fl, ..., q°), t. e.
величины, зависящие от начальных значений обобщенных коор-
n .л
динат и скоростей. Так как при движении системы Т= ----->0, то
2
из закона сохранения энергии следует
77< Го +770.
Это неравенство выполняется, если справедливы, например, два не-
равенства: 770<77*/2 и Го <77*/2. Из условий 770<77*/2 получим ряд
497
значений q^, удовлетворяющих условию |^°|</;1 #0, а из условия
Тй^П*12 и неравенства — ряд значений q°, удовлетворя-
ющих условию |<7,°| с^^О. Для потенциальной энергии после этого
имеем
П < То + По < 77*.
Следовательно, в соответствии с выбором 77* все обобщенные
координаты удовлетворяют условию |?,|<е.
Итак, существуют такие положительные числа щ и q2, определя-
ющие область начальных значений q° и q°, для которых все обо-
бщенные координаты удовлетворяют условию |<?,|<е, т. е. положе-
ние равновесия устойчиво. Теорема Лагранжа — Дирихле полно-
стью доказана.
В некоторых случаях установить неустойчивость равновесия мо-
жно на основании теорем Ляпунова.
Приводим эти теоремы без доказательства.
1. Равновесие консервативной системы неустойчиво, если потен-
циальная энергия системы в положении равновесия не имеет мини-
мума и отсутствие минимума определяется слагаемыми второго
порядка малости в разложении потенциальной энергии в ряд по
степеням обобщенных координат.
2. Равновесие консервативной системы неустойчиво, если потен-
циальная энергия системы в положении равновесия имеет максимум
и наличие максимума определяется членами наименьшего порядка
малости в разложении потенциальной энергии в ряд по степеням
обобщенных координат.
§ 2. КОЛЕБАНИЯ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Механическая система с одной степенью свободы имеет одну
обобщенную координату q, и ее движение описывается одним урав-
нением Лагранжа
1—=0. (1)
dt dq Bq
Обобщенную силу Q можно считать состоящей из трех частей:
+ + QB- Здесь Qn — обобщенная сила потенциальных сил.
Она выражается через потенциальную энергию 77 по формуле Qn=
= — dnjdq. Потенциальная энергия в общем случае зависит от коор-
динат точек системы и, следовательно, от обобщенной координаты
q и не зависит от обобщенной скорости q. Для нестационарного
498
силового поля, а также нестационарных связей потенциальная энер-
гия может зависеть явно еще и от времени.
В Q включим ту часть обобщенной силы, которая получается
от действия сил сопротивления, зависящих как от числовых значе-
ний, так и направлений скоростей точек системы. В дальнейшем
рассматривается случай линейного сопротивления, когда силы
сопротивления точек системы пропорциональны скоростям этих
точек и направлены в стороны, противоположные скоростям.
Часть обобщенной силы QB получается от так называемых
вынуждающих, или возмущающих сил, зависящих прежде
всего от времени. Ниже рассмотрен случай гармонической воз-
мущающеи силы, когда Q изменяется с течением времени по
синусоидальному закону. В общем случае зависимости Q от време-
ни ее можно разложить в ряд Фурье и рассматривать дифференци-
альные уравнения движения для каждого из синусоидальных слага-
емых.
Собственные линейные колебания системы
Рассмотрим малые колебания системы с одной степенью свобо-
ды под действием одних потенциальных сил, т. е. когда Q = Qn=
= — dnfdq. Считаем, что сил сопротивления и возмущающих сил
нет. Такие колебания называются собственными или свободными.
Колебания считаются малыми, если при движении системы обо-
бщенные координата, скорость и ускорение достаточно малы
и в уравнении Лагранжа (1) можно пренебречь всеми слагаемыми
второго и более высокого порядков относительно q, q и q, т. е.
слагаемыми, в которые входят квадраты этих величин, произведе-
ния и т. д. В случае малых колебаний системы получается линейное
дифференциальное уравнение для обобщенной координаты q. Коле-
бания, для которых дифференциальное уравнение является линей-
ным, называются линейными. Малые колебания принадлежат к чис-
лу линейных. Но линейными могут быть не обязательно малые
колебания.
Обычно ограничения, которые следует наложить на величины,
характеризующие движение, чтобы колебания были малыми, удает-
ся установить только после полного решения задачи в предположе-
нии, что колебания малые. Ниже рассматриваются только малые
или, если не малые, линейные колебания.
Дифференциальное уравнение собственных линейных колебаний
системы. Для вывода из уравнения Лагранжа (1) линейного уравне-
ния малых собственных колебаний следует кинетическую и потенци-
альную энергии разложить в ряды в окрестности положения равно-
весия системы, где q = 0.
499
Пусть система, на которую наложены голономные, идеальные,
неосвобождающие и стационарные связи, состоит из N точек и дви-
жется вблизи положения равновесия. Ее кинетическая энергия
Т=~ Ё mkvk=~ Ё ткГк-
2Jt=l 2jt=l
Так как при сделанных допущениях о стационарности связей ради-
ус-вектор гк каждой точки системы зависит от времени только через
- дгк -
обобщенную координату q\ то г*=— q. Подставляя это г к в выраже-
8ч
ние кинетической энергии, получаем
где
А = Е тк
к=1
Величина А, как и гк, может зависеть только от q и не может
зависеть от q. Разлагая A (q) в окрестности q=0 в степенной ряд,
имеем
.. . . //82а\ q1
Л(^)=Л0+( —) ?+177/ 7+—
\oqjo \°ч Jo 2
Здесь и дальше индекс 0 означает, что соответствующие вели-
чины следует вычислять при q—0.
Для получения в разложении кинетической энергии слагаемых не
выше второго порядка по отношению к q и q достаточно из раз-
ложения A(q) взять только постоянное значение Ай, которое обо-
значим а. При учете других слагаемых из разложения A (q) появля-
ются члены третьего и более высокого порядков.
Итак, выражение кинетической энергии с отбрасыванием слага-
емых третьего и более высокого порядков можно представить
в виде
r=1/2aq2.
(2)
Положительная постоянная а называется коэффициентом инер-
ции. Обычно по размерности коэффициент инерции является или
массой, или моментом инерции.
Потенциальная энергия системы П для стационарного силового
поля и стационарных связей является функцией только обобщенной
500
координаты q. Разлагая ее в степенной ряд в окрестности q=Q,
получаем
(дп\ (d1n\q1 /83П\ q3
Потенциальную энергию По в положении равновесия при q = 0
примем равной нулю. Величина (сП!дд)0 есть значение обобщенной
силы Q в положении равновесия системы, равное нулю.
Будем считать, что в положении равновесия потенциальная энер-
гия имеет минимум. Это является достаточным условием устой-
чивости положения равновесия системы. В этом случае величина
(52Т7/д^2)0 положительна. Обозначим ее с. Постоянную с называют
коэффициентом жесткости или просто жесткостью.
Таким образом, отбрасывая слагаемые третьего и более высоко-
го порядков, имеем
#(?)=1/2^2- О)
Системы, для которых кинетическая и потенциальная энергии
выражаются точно по формулам (2) и (3) без отбрасывания слага-
емых более высокого порядка, называются линейными. Для них вся
математическая теория является такой же, как и для систем, совер-
шающих малые колебания, хотя колебания для линейных систем
могут быть любыми, не обязательно малыми. В дальнейшем рас-
сматриваются линейные колебания, в число которых входят и ма-
лые колебания.
На основании (2) и (3) получаем:
8Т Л 8Т d 8Т 8П
—=0; — = до;----= aq\ — = cq.
dq 8q dz 8q 8q
Подставляя эти значения производных в уравнение Лагранжа
(1), получим следующее дифференциальное уравнение малых со-
бственных колебаний системы с одной степенью свободы:
aq + cq = Q. (4)
При учете слагаемых третьего и более высокого порядка в раз-
ложениях кинетической и потенциальной энергий в уравнении (4)
появляются члены второго и более высокого порядка и дифферен-
циальное уравнение становится нелинейным.
Получим дифференциальное уравнение прямолинейных колеба-
ний материальной точки, не обязательно малых. Пусть материаль-
ная точка М массой m движется прямолинейно по оси Ох под
501
действием силы F, которая линейно зависит от расстояния точки от
положения равновесия О и стремится возвратить точку в положение
равновесия (рис. 194).
Поместим начало отсчета расстояний х в положение равнове-
сия — точку О. Сила F будет направлена к началу отсчета рас-
стояний — точке О. В этой точке она равна нулю. Ее проекция на
ось Ох
Fx— — сох,
где постоянная величина с0 — жесткость.
Силу F в этом случае называют линейной восстанавливающей
силой. Силы упругости, подчиняющиеся закону Гука, являются
линейными восстанавливающими силами.
Подставляя в дифференциальное уравнение прямолинейного
движения точки значение линейной восстанавливающей силы и пе-
ренося все члены в одну часть уравнения, получаем
тх + сох=О. (5)
Уравнение (5) является дифференциальным линейным уравнени-
ем собственных прямолинейных колебаний материальной точки.
Сравнивая (4) и (5), видим, что эти уравнения полностью
аналогичны. Только в уравнение для системы вместо координаты
х входит обобщенная координата q, вместо массы — коэффициент
инерции а, а вместо жесткости с0 следует взять коэффициент жест-
кости с.
Интегрирование дифференциального уравнения собственных коле-
баний. Если разделить обе части уравнения (4) на а и обозначить
положительную величину cja = k2, то получим дифференциальное
уравнение собственных линейных колебаний системы с одной степе-
нью свободы в окончательной форме
q + k2q=Q. (6)
Постоянная величина k = \fc[a называется круговой (или цик-
лической) частотой колебаний.
Для прямолинейных колебаний материальной точки соответст-
венно имеем
x + fc2x=0,
;_____________ где к 2 = с0/т.
_х_____* Размерность круговой частоты
к можно установить из уравнения (6).
Рис. 194 Так как
502
r-п М
м*й
то
г,2, М [?]1 1 ГМ 1 1 -1
[к ]=—=------=—; [х]===с \
[?] [/21М Р2] И с
если время t выражать в секундах. Размерность к не зависит от
размерности обобщенной координаты.
Круговая частота выражается в тех же единицах, что и угловая
скорость, в частности единица круговой частоты колебаний точки
к тоже с-1.
Дифференциальное уравнение (6) является однородным линей-
ным уравнением второго порядка с постоянными коэффициентами.
Его решение можно искать в виде q=e . После подстановки этого
выражения в (6) получаем характеристическое уравнение для урав-
нения (6)
22 + £2 = 0.
Это квадратное уравнение имеет два чисто мнимых корня: 21>2 =
= + ki.
На основе теории дифференциальных уравнений решение урав-
нения (6) можно представить в виде
q = Су cos кt+С2 sin kt (7)
и для обобщенной скорости
q = — Сук sin kt+С2к cos kt.
Произвольные постоянные Су и С2 определяются из начальных
условий t=0, q = qo, q = 9o, где q0 и q0 — начальные значения обоб-
щенной координаты и обобщенной скорости.
Используя выражения для q и q при ?=0, получаем Cy = qa’, С2 —
= q^k.
Подставляя их значения в (7), имеем
q=qacoskt-\—sin kt. (8)
к
Уравнение (8) — одна из двух основных форм выражения со-
бственных колебаний.
Для колебаний материальной точки соответственно
х = х0 cos kt Ч— sin kt,
503
где х0 и v0 — начальное отклонение точки от положения равновесия
и начальная скорость.
Представим выражение для q в другой, так называемой амп-
литудной, форме:
q=A sin (kt + а) = A sina cos kt+A cosa sin kt.
Из сравнения этого выражения с (7) для новых постоянных
получим формулы
С = Л sina; C2 = ylcosa.
Отсюда
А = s/Ci+ Cl; sina = С\ /Л; cosa = C2/A. (9)
Иногда вычисляют tga= Ci/C2.
Подставляя в (9) вместо Ct и С2 их выражения через начальные
значения, получаем:
. / 2 , 90 • 90 90 <70*
Л = qo~i—;; sinacosa=—; tga =—. (10)
у к1 А Ак 4о
Величину А считают положительной и называют амплитудой
колебаний. Она определяет наибольшее отклонение обобщенной
координаты от положения равновесия, соответствующего значению
q = 0. Обобщенная координата q изменяется в пределах от +А
до -А.
Безразмерная постоянная а называется начальной фазой колеба-
ний. Она является значением фазы колебаний (kt+a) при t=0.
Начальная фаза может изменяться в пределах от 0 до 2тс. Для
определения начальной фазы а по начальным условиям можно
использовать любую комбинацию двух ее тригонометрических
функций из (10), например sina и cosa. По одной тригонометриче-
ской функции, например tga, получится два различных значения
для а.
Собственные линейные колебания в амплитудной форме с уче-
том начальных условий можно представить в окончательной
форме:
Для прямолинейных колебаний точки соответственно
504
> ”0 I x X0K \
x= Xq-i—IfeZ+arctg—I.
V k2 \ v'o /
Движение системы, определяемое (8) или эквивалентной ему
амплитудной формой (И), называется гармоническим колебанием.
Гармоническими называются такие колебания, при которых обо-
бщенная координата изменяется с течением времени по закону
синуса или косинуса. Изменением фазы на л/2 от синуса можно
перейти к косинусу.
Собственные линейные колебания системы с одной степенью
свободы являются гармоническими. Материальная точка под дей-
ствием линейной восстанавливающей силы тоже совершает гар-
монические колебания.
Обобщенная координата q изменяется по закону синуса, кото-
рый является периодической функцией аргумента с наименьшим
периодом 2л; следовательно, и q является периодической функцией.
Значение периода колебаний т для переменной t получим из
условия, по которому добавление периода к этой переменной долж-
но изменить фазу колебаний на наименьший период синуса 2л.
Имеем
k(t + t) + a=kt+a.+2iv, т:=2л/к=2лу/а/с. (12)
Для прямолинейных колебаний точки период х=2п^т\с^.
Период колебаний выражается в единицах времени, например
в секундах. Величина, обратная периоду v = 1/t, называется часто-
той колебаний. Частота колебаний обычно определяется числом
колебаний в секунду или в герцах (Гц). Частота, равная 1 Гц,
соответствует одному колебанию в секунду.
Круговая частота к выражается через период колебаний и часто-
ту в форме
k=2n/z = 2nv. (13)
Из (13) следует, что круговая частота к есть число колебаний за
время, равное 2л с.
На рис. 195 представлен график собственных гармонических
колебаний системы с одной степенью свободы. Он представляет
собой синусоиду.
Гармонические колебания полностью определяются амплитудой
колебаний, периодом и начальной фазой. Отметим основные свой-
ства собственных линейных колебаний.
Собственные линейные колебания системы являются гармоничес-
кими. Амплитуда этих колебаний — величина постоянная и опреде-
505
ляется начальными условиями. Период колебаний тоже величина
постоянная, не зависящая от амплитуды и, следовательно, от на-
чальных условий.
Величина периода определяется только свойствами колеблю-
щейся системы, т. е. коэффициентом инерции а и жесткостью с.
Независимость периода колебаний от амплитуды называется изо-
хронностью колебаний. Собственные линейные колебания, если нет
возмущающих сил, могут возникнуть только при начальных усло-
виях, не равных нулю, т. е. когда в начальный момент система
имеет не равные нулю начальную обобщенную координату q0 или
начальную обобщенную скорость q0.
Гармонические колебания точки при наличии линейной восста-
навливающей силы возникают вследствие начального отклонения
точки х0, или начальной скорости и0, или и того и другого вместе.
Гармонические колебания обладают той особенностью, что, воз-
никнув однажды в какой-то момент времени, они продолжаются
сколь угодно долго без изменения параметров колебаний, если нет
других воздействий. Но обычно колебания всегда сопровождаются
возникновением сил сопротивления, которые изменяют характер
собственных колебаний.
Собственные колебательные движения, кроме графика коле-
баний, можно изобразить на фазовой плоскости — плоскости пе-
ременных q и q, которые называются фазовыми переменными.
Для случая колебаний точки фазовыми переменными являются
х и v=x. Построим фазовый портрет гармонических колебаний
точки. Имеем
х=Аsin(£z + a); v=x—Akcos(kt + a).
Исключая из этих уравнений время t, получаем на фазовой
плоскости (х, v) семейство эллипсов:
-+—= 1.
А2 А2к2
Эти кривые (рис. 196), зависящие от параметра А, называют
фазовыми траекториями. Семейство фазовых траекторий зависит
Рис. 195
506
от амплитуды колебаний, которая, в свою очередь, определяется
начальными условиями. Каждой фазовой траектории соответствует
пара начальных значений х0 и Do-
Положению равновесия точки на фазовой плоскости соответ-
ствует начало координат х = 0, « = 0. Когда материальная точка
совершает гармонические колебания, то с течением времени изменя-
ются ее координата х и скорость v. Следовательно, каждому момен-
ту времени на фазовой плоскости соответствует определенное поло-
жение изображающей точки с координатами х и v. За время
одного полного гармонического колебания (за период) изобража-
ющая точка описывает на фазовой плоскости эллипс.
Отметим, что периодическим колебаниям на фазовой плоскости
соответствуют замкнутые фазовые траектории, и наоборот. Вид
фазовых траекторий характеризует устойчивость или неустойчи-
вость положения равновесия, достаточную малость колебаний
и т. д.
Фазовые траектории для консервативной системы можно по-
строить используя интеграл энергии. Каждой фазовой траектории
соответствует определенное значение полной механической энер-
гии.
В тех случаях, когда дифференциальное уравнение колебатель-
ного движения является нелинейным, исследование движения с по-
мощью фазовых траекторий — один из часто применяемых ме-
тодов.
Пример. Груз, имеющий силу тяжести Р=20 Н, подвешен на пружине (рис. 197).
Статическое удлинение пружины под действием силы тяжести груза Лл-=5 см.
Определить движение груза, если в начальный момент удлинение пружины Ао =
= 8 см и начальная скорость груза и0= 10 см/с и направлена вниз.
Решение. Груз будет двигаться прямолинейно. За начало отсчета расстояний
х следует выбрать положение статического равновесия груза, при котором сила
тяжести Р уравновешивает силу упругости пружины F, направив ось Ох вниз по
траектории движения груза. Силу упругости пружины считаем пропорциональной ее
удлинению А из недеформированного состояния. Пусть груз в мо-
мент времени t находится на расстоянии х от начала отсчета. На
груз действуют сила тяжести Р и сила упругости F, причем
F= спЛ - сп (Act+х),
где (Лст + х) — удлинение пружины; сп — коэффициент жесткости
пружины. В положении статического равновесия груза х=0, F=
Р
=са)^ = Р. Следовательно, сп=—.
Ап
Дифференциальное уравнение прямолинейного движения
груза в общем случае имеет вид
тх= £ Fjtx-
*=1
X
Рис. 197
507
В рассматриваемом случае
N
X. ^кх = Р F~ Р сп(Лст-|-х) = (Р - спх= спх.
к=\
Следовательно,
znx=—епх; х+к2х=0; k = -jcjm.
Если за начало отсчета выбрать не положение равновесия, то уравнение будет
иметь постоянную правую часть, т. е. будет неоднородным.
Дифференциальное уравнение груза можно получить из уравнения малых (или
линейных) колебаний системы (4):
ах+сх = 0, (4')
если за обобщенную координату принять х. Для этого достаточно вычислить коэф-
фициент инерции а и коэффициент обобщенной жесткости системы с. Эти коэффици-
енты входят в разложения кинетической и потенциальной энергии, т. е.
х2
В рассматриваемом случае Т=т— и а=т. Потенциальная энергия, состоящая из
2
потенциальных энергий силы упругости и силы тяжести имеет вид
сп дП a). S2
77=—(22 — Х2~)+Рх-, —=сп;.-=сп2; — = 1.
2 ст ex ax 8х
Обобщенный коэффициент жесткости для стационарного силового поля можно вы-
(82П\ 8Х
числить по формуле с = (--) =сп— = сп.
\8х2/х=о 8х
Подставляя значения а и с в (4'), получим тоже самое дифференциальное
уравнение движения груза.
Решение дифференциального уравнения можно выразить в форме
x=Qcoskt + C2sink/; v = x = — C|ksink/ + Cjkcosk/.
Постоянные интегрирования Ct и C2 определяются по начальным условиям: /=0,
начальная скорость х=«о = 1О см/с, х=хо = Хо—2СТ = 8 — 5=3 см. Круговая частота
= 14 с *.
Постоянные Cj и С2 после подстановки величин при /=0 в формулы для х и х полу-
чают значения
«о
С1=х0 = 3 см; С2= =0,71 см.
508
Уравнение движения груза принимает вид
x = 3cos!4f+0,71 sinl4(.
Приведем его у другой амплитудной форме. Амплитуда
А = = у/9 + 0,50 = 3,08 см.
Для начальной фазы а
Ci С2
sma—— = 0,97>0; cosa=— = 0,71/Л>0.
А А
Следовательно, угол а находится в первой четверти и по значению, например, sina
получаем a = 1,34 = 0,43л.
Уравнение движения груза в амплитудной форме имеет вид
x = 3,08sin (14< +0,43л) см.
Период собственных гармонических колебаний груза
2я
т=—=0,45 с.
к
Влияние линейного сопротивления на малые
собственные колебания системы
с одной степенью свободы
Линейное сопротивление и диссипативная функция. Если на точки
системы с одной степенью свободы кроме потенциальных сил дей-
ствуют еще силы сопротивления, то дифференциальное уравнение
Лагранжа выразится в форме
d ВТ ВТ
dz Bq Bq
где Qn=—cnidq — обобщенная сила потенциальных сил; 2*—
обобщенная сила сил сопротивления.
Рассмотрим случай линейного сопротивления, когда силы соп-
ротивления Rk точек системы линейно зависят от скоростей этих
точек, т. е.
Rk — — Цкг>к= —р-к^к,
где — постоянный коэффициент сопротивления.
Вычислим обобщенную силу сопротивления. Согласно определе-
нию обобщенной силы, имеем
509
пф V б ^к V ~
Q = 1 Rk —=_ 2. мл—-
"Ч к=1
(15)
к«1
Для дальнейшего преобразования использум тождество Лагран-
жа, полученное при выводе уравнений Лагранжа [см. формулу (32)
§ 9 гл. 10]:
ork_lcq = crkjcq.
Получим
(15')
Введем обозначение:
N ,, ~2 N “2 N 2
£
к=1 к=1 к=1 2
(16)
Функцию Ф называют диссипативной функцией или функцией
Рэлея. Эта функция по своей структуре аналогична кинетической
энергии системы, только в нее вместо массы точек входят коэф-
фициенты сопротивления.
Из (15') для обобщенной силы сопротивления имеем Q =
= —дФ)дд.
Выразим функцию Ф через q и q. Учитывая, что
- - - д^к
rk=rk(q); rk=-- q,
имеем
ф=Е
к=1
№к V Л'А2 1 п-2
V=7 L ) =~,Bq ’
Z 2 к— 1 \
(16')
У
где B=B(q) = £ цк
*=1
Функция В зависит только от q и не зависит от q, так как от q не
зависит величина drk[dq.
Для выяснения физического смысла диссипативной функции по-
лучим энергетическое соотношение, которому она удовлетворяет.
Для этого умножим на q уравнение Лагранжа (14)
. d дТ ,гт 8П. 8Ф .
q------q =--------q------q
dr 8q Sq 3q Sq
(17)
510
и выполним ряд преобразований.
Учитывая, что
т=1/2л(9)42,
имеем
4~ = A(q)q2 = 2T. (18)
dq dq
Аналогично,
Ф=1/2ВШ2;
следовательно,
8Ф 8Ф
~=B(q)q-,q-=B(q)q2^. (19)
dq dq
Потенциальная энергия для случая стационарного потенциаль-
ного поля зависит от времени только через координату q.
Следовательно,
. 8П АП
q—=—.
cq dt
(20)
Преобразуем первое слагаемое в (17), учитывая (18). Имеем
. d ST d
q-----= —
dt 8q dt
. 8T\ 8T d 8T
q— \ — q — (2T) — q- .
8qJ dq AT 8q
(21)
Подставляя (18) — (21) в (17), получим
8T 8Т\ АП ~
q----\-q~ )=------2Ф.
8q 8qJ At
(21')
Учитывая, что Т — функция только q и q, зависящих от t, имеем
8Т 8Т АТ
-q-\---q = ~-
dq 8q At
После переноса — йП/dt в левую часть (2Г) и объединения
слагаемых получаем
d d
- (2Т— Т+ П) = - 2Ф или - (Т+ П) = - 2Ф.
dt dt
Если ввести полную механическую энергию Е=Т+П, то окон-
чательно имеем энергетическое соотношение
511
d£/dz=-20.
(22)
Это соотношение показывает, что диссипативная функция Ф ха-
рактеризует скорость убывания полной механической энергии систе-
мы вследствие действия сил линейного сопротивления. На убывание
полной механической энергии указывает знак минус в (22). Дис-
сипативная функция Ф, согласно (16), является величиной положи-
тельной.
Разложим диссипативную функцию в ряд в окрестности положе-
ния равновесия системы. Для этого в соответствии с (16') следует
разложить в ряд по степеням q функцию B(q) в окрестности q — 0.
Имеем
B(q) = B(0) +
82В\ q2
— ~ +
Bq Jo 2
Подставляя это разложение в (16') и оставляя в нем только В(0),
получаем
Ф = 1/2В(0)д2 = 1/2рд2,
(23)
где введено обозначение р = В(О). Положительная постоянная вели-
чина р называется обобщенным коэффициентом сопротивления.
Дифференциальное уравнение малых собственных движений при
действии линейного сопротивления. Вблизи положения равновесия
системы имеем следующие выражения для кинетической и потенци-
альной энергий и диссипативной функции:
Т=а42/2; n=cq2j2\ Ф = д$2/2.
Подставляя их в уравнение Лагранжа
At 8q 8q
и учитывая, что
8Т л dST „я 8П ® 8Ф
— = 0;---= aq; Q =---=-cq; Q =------
8q At 8q 8q 8q
= ~M,
получаем следующее дифференциальное уравнение:
aq = —cq — pq\ aq + pq + cq = 0.
(24)
Это приближенное уравнение. При его получении отброшены все
слагаемые второго и более высокого порядков.
512
Если разделить обе части уравнения на а и ввести обозначения
к2 — с/а, 2п = ц/а, то после переноса всех членов уравнения в левую
часть получим дифференциальное уравнение движения системы
в окончательной форме:
q + 2nq + k2q = 0. (24')
Постоянная к = ^с!а является круговой частотой собственных
колебаний системы без учета сопротивления. Величина и = д/(2а)
называется коэффициентом затухания. Ее размерность такая же,
как и у круговой частоты. Вместо п иногда употребляют величину
т0 = 1/п, которая называется постоянной времени затухания
и имеет размерность времени.
Интегрирование дифференциального уравнения движения. Диффе-
ренциальное уравнение (24) является однородным линейным урав-
нением второго порядка с постоянными коэффициентами. Его ре-
шение следует искать в форме q=e , где постоянная 2 определяется
из характеристического уравнения 22 + 2и2 + &2 = 0, которое получа-
ется после подстановки решения в дифференциальное уравнение.
Характеристическое уравнение имеет два корня:
21,2= —n + sjn2 — к2. (25)
Могут представиться три случая: 1) п<к — это случай малого
сопротивления; 2) п > к — случай большого сопротивления; 3) п =
=к — случай критического сопротивления. Рассмотрим эти случаи
по отдельности.
Затухающие колебания. Если п<к, то величина под знаком квад-
ратного корня в (25) отрицательна. Обозначим к2 положительную
величину (к2 — п2). Тогда кг = >Jk^—n2 и из (25) получим следующие
значения для корней характеристического уравнения:
212 = — n + kj.
Соответственно общее решение дифференциального уравнения
q + 2nq + k2q=0,
зависящее от двух произвольных постоянных, выразится в виде
q = е~п‘ + С2*е"**') = е-"' (С, cos k.t + С2 sin kJ), (26)
где Cf, Cf и Ci, C2 — произвольные постоянные.
Решение (26) можно также представить в другой, амплитудной,
форме:
513
q = An "’sin^Z+a),
(27)
где Лиа — тоже произвольные постоянные.
Раскрывая синус суммы, имеем
q=Аеsin (к{ t+a) = е"! (Л sina cos к{ t+A cosa sin кА).
Сравнивая это уравнение с (26), получаем формулы связи посто-
янных:
Ci = A sina; C2 = Acosa.
или
А = С2', sina = C\IA\ cosa = С2/Л; tga = Ci/C2. (28)
Постоянные Сь С2 и соответственно А, а определяются из
начальных условий Z=О, q — qo, q = qo-
Диференцируя (26) по времени, имеем
q= —ne~m(Ci cosfciZ + C2sinA:1f) +
+ е~"! (— Ciki sin C2ki cos kA). (29)
Используя выражение (26) для q, а (29) — для q при Z=0, получа-
ем уравнения для определения С2 и С2:
Яо = Са qo= —пС\+к\С2.
Из них
С, = qa, С2 = (q0 + и?о)/&1 = Йо + nqa)ljk2-n2.
Соответственно постоянные Лиа через начальные условия
выразятся в следующей форме:
qojk2-n2
tga=-----------
<7о + «9о
Величина А положительна. Она не является амплитудой. На-
чальная фаза а может иметь значения в пределах от 0 до 2л.
Для выяснения изменения функции q(t) построим ее график,
используя уравнение (27). Вид графика функции q = Ae nt sin (кА+л)
514
(рис. 198) можно выяснить с помощью построения графиков вспо-
могательных функций qi = Ae~n‘ (кривая 7) и q2 = — Ае (кривая 2).
Кривые 1 и 2 являются ограничивающими для sin(fci/+a), который
изменяется между 1 и —1.
Таким образом, изобразив синусоиду между ограничивающими
кривыми 7 и 2, можно составить представление о виде графика
функции q(i). На рис. 198 в действительности представлены графи-
ки отдельных функций q (/), + Ае и — Ае п!.
Из графика функции q(t) следует, что величины последователь-
ных наибольших отклонений q от положения равновесия уменьша-
ются с увеличением времени, стремясь к нулю при неограниченном
возрастании времени. В соответствии с этим движение, определя-
емое уравнением (27) или (26), называют затухающими колебани-
ями.
Условным периодом затухающих колебаний (или периодом) на-
зывают период sin (kit+ а). Он является периодом прохождения
системы через положения равновесия, так как функции q (f) и
sin (ki t+а) равны нулю одновременно. Круговой частотой sin^Z+a)
является величина £(=^/А:2—яЛ Следовательно, период затуха-
ющих колебаний
Т1 = 2л/£1=2п/^/&2--п2. (31)
Период затухающих колебаний — величина постоянная, не зави-
сящая от начальных условий. Он больше периода собственных
колебаний при отсутствии сопротивления т=2л/£.
Из (31), разлагая Т] в ряд по степеням nfk с использованием
бинома Ньютона, имеем
2л
Jk2-n2
(31')
Для очень малых njk по сравнению
с единицей можно считать Tj~t, т. е.
малое сопротивление не изменяет пе-
риода собственных колебаний систе-
мы. В более общем случае можно ис-
пользовать приближенную формулу
1Л2
2k2
(31")
515
В действительности функция q (f) не является периодической, так
как не существует величины ть удовлетворяющей условию пери-
одичности q(j + i:i)=q(f) для любого момента времени.
Определим моменты времени, в которые функция q (/) достигает
максимальных и минимальных значений. В эти моменты времени
4(/)=о.
Дифференцируя выражение q(t) из (27) и приравнивая нулю
производную, получим следующее уравнение:
4=Ле-л<[—nsin(fc1/-|-a) + £| cos (£^4-a)] = 0.
Так как е равно нулю только при /=со, то соответствующие
моменты времени определяются из условия равенства нулю выра-
жения в квадратных скобках:
— п sin (kit + ct)+ kt cos(^i/+a) = 0,
или
tg(kit+ai)=kl/n.
Если ti — одно из искомых значений t, удовлетворяющих этому
тригонометрическому уравнению, то, учитывая, что период танген-
са равен л, все остальные искомые значения времени будут удовлет-
ворять соотношению
к{ t + a=(ki ti -I- a)+mn
или
n
t=ti+m—,
ki
где m — любое натуральное число.
Таким образом, моменты времени, в которые функция q(t)
достигает максимумов и минимумов, образуют бесконечную после-
довательность значений
п я
tl, t2 = ti+—, tj= ti+2-~, ... .
k\ k\
Из графика функции q(f) (см. рис. 198) следует, что между
каждыми ее двумя максимумами расположен один минимум, и на-
оборот. Следовательно, два соседних максимальных значения функ-
ции q(t) наступают через промежуток времени, равный 2лДь ко-
торый совпадает с периодом затухающих колебаний ть Два после-
довательных минимума тоже разделяет промежуток времени, рав-
ный Т].
516
Переменную величину Ае”‘ называют условной амплитудой за-
тухающих колебаний. Она не является максимальным значением
функции q(t). Установим закон изменения условной амплитуды
Ае~п‘ при изменении времени на период ть Если в момент времени
условная амплитуда Л1 = Ле”,‘, то через промежуток времени, рав-
ный периоду затухающих колебаний ть в момент /2 = Л + Т1
Л2=Ае е = А{е
Это справедливо для любых двух моментов временни, отлича-
ющихся на период Действительно, если при /т = Л+шТ1
. . ~ ntt —ШПТ.
Ат = Ае е
где т — любое натуральное число, большее единицы, то при 1т+1 =
= + (ш + 1)Tj
Таким образом, последовательные значения условных амплитуд
в моменты времени, отличающиеся на условный период, образуют
убывающую геометрическую прогрессию А{, А{е "г‘; А\в **;
. — тит. — пт.
Ахе ; ... со знаменателем е
Можно показать, что по такому же закону убывающей геомет-
рической прогрессии изменяются любые последовательные значе-
ния функции
q = А е ~nt sin (fcj t + a)
для моментов времени, отличающихся друг от друга на условный
период. Так, если в момент времени
qx =Ае~п'' sin + а),
то для момента времени t2=t1 + x1
q2=Ae~'“'e~mt sin(k1ti + a) — qie~m',
так как sin [fcj (f i + ti)+a] = sin (kx tx + a), вследствие того что Г] являет-
ся периодом.
Аналогично, если для tm=tl+rnrx
qm=Ae~nt'e~mm' sin + a),
517
то для rm+i = ii + (m+ l)Tj
qm+l = Ae e sin (Ш a) = qme .
Поэтому последовательные значения qt, q2, ..., qm, ... образуют
убывающую геометрическую прогрессию со знаменателем е
Так как любые два значения функции q(t), соответствующие
моментам времени, отличающимся на период ть связаны соотноше-
нием
то этому соотношению удовлетворяют и два последовательных
значения максимума:
<ЙТ1=<Й“е"’’Т‘.
Они отстоят друг от друга по времени на период т,.
Величину отношения двух последовательных максимумов
называют декрементом колебания.
Натуральный логарифм декремента колебания называется лога-
рифмическим декрементом колебания. Для логарифмического дек-
ремента колебания q имеем
q—In D=nxi. (32)
Кроме декремента и логарифмического декремента колебания
часто используется другая характеристика затухания — доброт-
ность системы Q, которая определяется приближенным соотноше-
нием
Q=k/(2n), (33)
где к — частота собственных колебаний без учета сопротивления;
п — коэффициент затухания.
Логарифмический декремент колебания можно выразить через
добротность. Действительно, из (32) и (33) с учетом (31)
Ч = ^1^2-~4- (34)
Таким образом, из проведенного исследования можно заклю-
чить, что малое линейное сопротивление незначительно увеличивает
518
период колебаний по сравнению со случаем отсутствия сопротивле-
ния, но сильно уменьшает последовательные значения условных ам-
питуд, которые уменьшаются с течением времени по экспоненциаль-
ному закону.
Затухающие движения. Рассмотрим случай, когда п>к (случай
большого сопротивления). Корни характеристического уравнения
в этом случае имеют значения
Л1>2= — п+у/п2 — к2 = — п+к2,
где введено новое обозначение для положительной величины
Оба корня характеристического уравнения действительны и от-
рицательны, так как к2<п. Следовательно, общее решение диф-
ференциального уравнения q+2nq+k2q=0 имеет вид
i^t —Tit . ft
+С2е =е (Ge +С2е ),
(35)
где Ci и С2 — произвольные постоянные, которые можно опреде-
лить по начальным условиям
t=0; q=q0; q=q0-
Не выполняя этих вычислений, можно оценить поведение функ-
ции q(t), используя уравнение (35). Для q0>0 могут представиться
три случая в зависимости от знака и значения q0 (рис. 199).
При qo>O функция q(t) некоторое время возрастает до опреде-
ленного максимума, а затем убывает, асимптотически приближаясь
к нулю, так как lim q (t) = 0 вследствие того, что показатели степеней
21 и 22 отрицательны при к2 < п (кривая 7).
При не очень больших по абсолютной величине отрицательных
значениях qQ может сразу начаться убывание q(t) (кривая 2). При
больших по модулю отрицательных значениях qa функция q(t),
убывая, может достичь нулевого значе-
ния, соответствующего положению рав- 9 f1
новесия системы, стать отрицательной К.
и, оставаясь отрицательной, асимпто- ча
тически прибижаться к нулю (кривая \
3). Во всех этих случаях движение явля- я'—V-------~
ется затухающим, неколебательным, \ J
которое иногда незывают также one-
риодическим. Рис. 199
519
При п=к (случай критического сопротивления) характери-
стическое уравнение имеет кратный отрицательный корень
21 = 22 = — п.
Соответственно этому решение дифференциального уравнения
q+2nq + k2q = 0 имеет вид
q = e-n‘(Clt+C2). (36)
Произвольные постоянные С\ и С2 определяются по начальным
условиям. В этом случае при t, стремящемся к бесконечности, q (t)
стремится к нулю при любых конечных значениях постоянных
Ci и С2, так как
lim (e-n,f) = lim — = О,
nt
t-*aD t-*ao e
что проверяется раскрытием неопределенности по правилу Ло-
питаля.
Таким образом, случай критического сопротивления тоже дает
затухающее движение.
При п^к движение не является колебательным и с некоторого
момента времени начинается так называемое лимитационное дви-
жение, при котором система асимптотически стремится вернуться
к положению равновесия.
Анализ влияния линейного сопротивления на собственные ма-
лые колебания показывает, что линейное сопротивление не может
сделать устойчивое положение равновесия неустойчивым. Если
в окрестности устойчивого положения равновесия система соверша-
ет незатухающие малые колебания, то линейное сопротивление
превратит их в затухающие или сделает даже затухающими движе-
ниями.
Пример. Система состоит из точечного груза М с силой тяжести Р=200 Н,
прикрепленного к концу невесомого стержня длиной /=90 см, другой конец которого
закреплен с помощью цилиндрического шарнира О (рис. 200). К стержню в точке
В прикреплены две одинаковые пружины, коэффициенты жесткости которых сц =
=20 Н/см, а в точке А — демпфер, создающий линейную силу сопротивления. Коэф-
фициент сопротивления демпфера = 15 Н с/см. Система расположена в вертикаль-
ной плоскости. Статическому положению равновесия системы соответствует вер-
тикальное положение стержня, при котором пружины не деформированы. В началь-
ный момент времени стержень отклонен от вертикали против часовой стрелки на
угол <ро=6° и отпущен без начальной скорости.
Определить движение системы, считая его малым, и усилие в шарнире О в на-
чальный момент движения, если 1} =40 см, /2=30 см. Массой пружины и подвижных
частей демпфера, а также трением в шарнирах пренебречь.
520
Решение. Система имеет одну степень свободы. За
обобщенную координату примем угол <р, отсчитывая
его от положения равновесия стержня против часовой
стрелки. Связи системы, состоящие из шарниров без
трения, следует считать идеальными.
На систему действуют потенциальные сила тяжести
и сила упругости пружин, а также сила линейного со-
противления демпфера. Возмущающих сил, зависящих
от времени, нет. Дифференциальное уравнение малых
движений системы согласно (24) имеет форму
aq+nq + cq = 0; д = <р; q = <p. (24")
Рис. 200
Постоянные коэффициенты инерции а, обобщенного
трения ц и обобщенной жесткости системы с определя-
ются из разложений кинетической и потенциальной энергий и диссипативной функ-
ции, т. е.
„ Г „ Я Л Я
Т=а—; П=с—; Ф = и —.
2 2 2
Кинетическая энергия системы
Pv2 P(l<p)2 Pl2i?2 Р12
Т=-----=-----=------; а=—.
g 2 g 2 g 2 g
Потенциальная энергия системы равна работе потенциальных сил при перемеще-
нии системы из рассматриваемого положения системы в положение равновесия.
Вычислим потенциальную энергию сил Р и упругости F:
27=P(Z-/cos<p)+2cn-----
2
Работа силы тяжести положительна, так как точка ее приложения опускается вниз
в направлении действия силы при рассматриваемом перемещении. Если угол <р счи-
тать малым, то удлинение каждой из пружин будет 2=(/i +/2)ф. Удлинение при этом
следует учитывать только в горизонтальном направлении. Обе силы упругости
пружин направлены в одну сторону (одна пружина растянута, другая — сжата), и их
работа положительна; 2о=О, так как в положении равновесия пружины не дефор-
мированы. Для малых углов <р, отбрасывая малые третьего и более высоких поряд-
ков, получаем
Ф2
П=Р1(1 -cos^+cJ/j +l2)2q>2=[Pl+2cM +/2)2]—;
2
ф2
с=Р1+2сп(Ц + Z2)2; cos<p= 1 ——.
2
Коэффициент жесткости системы для стационарного потенциального поля мож-
но определить по формуле
521
без разложения потенциальной энергии в ряд. Имеем
еп ал ал аЛ)
— = P/sin</>+2cn2—; — = /[ + /2; — = 0;
8<р dtp 8(р 8<р
/82П\ Г ал I
с=(—-) = PZ cos<p 4-2сп— (/1+/2) = Р/+2сп(/1+/2)2.
\3ф /Ф=о L 8<? Л>=о
Сила сопротивления демпфера Я=—дд«д, где 1’^ = /1|ф| для малых (риф.
Диссипативная функция вычисляется как и кинетическая энергия, только вместо
массы следует взять коэффициент сопротивления дд. Следовательно,
VA Ч>2
Ф=ца-=цл1^~; Д=М-
Подставляя полученные значения коэффициентов а, д, с в (24") получаем диф-
ференциальное уравнение малых движений системы:
W2
— ф + ца11ф + [Р1+2сиЦх + /2) ]<Р = 0,
g
или
<р + 2лф+к2ф=0,
где
Pl+2cn(li + l2y
к =----------------
200'90 4-2'20'702
g=------------------- 980 = 129,45; fc=ll,4 с-1;
Pl2 200 902
Pjig
2P12
= 7,25 c"1.
Приближенное дифференциальное уравнение малых движений системы можно
получить также применяя уравнение вращательного движения твердого тела (стер-
жень с грузом) вокруг горизонтальной оси, проходящей через точку О:
к
В рассматриваемом примере коэффициент затухания п<к. Следовательно, име-
ем случай затухающих малых собственных колебаний системы. Решение дифферен-
циального уравнения в этом случае имеет вид
<р—е "‘(Ci cosAqГ+С2sin£]/)=/!£ n<sin(kj/4-a),
где ______ _______
kl=y/k2-n2=^/16,»9 = S,l с-2.
Дифференцируя ср по времени, получим
ф=— ne (C1cosfc1t + C2ankit)+k1e ”'(—С]sink1f+C2cosk1«).
522
п я
При г=0, ф = фо=— '^=—> ф=0. Подставляя эти значения в выражения для (р и ф,
180 30
имеем
л
— = C[j 0=—«Ci + C2^i
30
или
п пСх 7,25 0,105
С1=—=0,105; С2=—=-------------=0,09;
30 ki 8,7
/------ Ci 0,105
Я = 7С? + С?=0,13; tga=—=-------= 1,2>0.
С2 0,09
Ci
Так как и sma=—>0, то угол расположен в первой четверти. По значению
А
тангенса этого угла находим a = 0,28л.
Таким образом,
-7,25г
Ф = 0,13е яп (8,7/ + 0,28 я).
Для определения реакции шарнира О применим для стержня с грузом следствие
из аксиомы Даламбера для системы, составив условия равновесия приложенных
к ним внешних сил вместе с силами инерции груза в проекциях на оси координат.
К стержню и грузу приложены сила тяжести Р, сила упругости пружин F, сила
сопротивления R, составляющие реакций шарнира Ао, и составляющие силы
инерции груза Ф„ и Фг (рис. 201), изображенные на рисунке для случая положитель-
ных ф, ф и <р.
Р ,
Сила инерции Фл = 1ф — 0, так как величинами второго порядка пренебрегли
g
еще при составлении дифференциального уравнения малых колебаний. Если при
вычислениях такие величины, как Ф„, получаются недостаточно малыми по сравне-
нию, например, с силой тяжести и упругости, то допущение, что колебания малые,
Р
недостаточно точное. Сила инерции Фг=— 1ф, причем ф следу-
g
ет сюда подставлять с полученным знаком для этой величины.
Сила сопротивления R = цд«а = ЦдЬф. Сила упругости F=
=2сп(/1+/2)<р.
Составляя уравнения равновесия для сил, имеем
Хо —R—F— ®Tcos<p=0; Yo~Р— ®tsin<p=0.
71
Согласно начальным условиям, при /=0, ® = ®о=—, Ф=0.
30
Угловое ускорение определяем из дифференциального уравне-
ния движения
ф = — к2<р — 2пф.
При <р = сро и ф = 0,
Рис. 201
523
ф= -к1 <ро=~ 129,45 О,105= -13,6 с-2.
Кроме того, при <р=<ро
п
Л=0; cos<p=l; sin<p=<po =—•
Учитывая это, при <р = <р0 уравнения для Хд и Уд примут вид
Р
•Х’о~2сп(/1+/2)фо—— Z^q = O; Уд-Р=0.
g
Следовательно,
Р
Xo=2cn(lj + /2)<ро Н— /фо = 2'20 70'0,105 +
g
200 90
+------(—13,6) «44 Н; Уо = Р=200Н.
980
Реакция шарнира, а следовательно, и числовое значение давления на шарнир
^=^/lf^ + У^!5!205 Н.
Вынужденные колебания системы без учета сопротивления
Для возбуждения вынужденных колебаний необходимо действие
на точки механической системы возбуждения в той или иной форме.
Наиболее часто встречаются случаи силового и кинематичес-
кого возбуждений. Рассмотрим эти случаи на примере прямолиней-
ных колебаний груза массой т по горизонтальной гладкой плоско-
сти (рис. 202, а) под действием пружины, жесткость которой с.
Пусть на груз дополнительно действует зависящая от времени
сила F(t). У груза одна степень свободы. Связи (гладкая поверх-
ность) являются идеальными. Составим для движения груза уравне-
ние Лагранжа, приняв х за обобщенную координату, отсчитыва-
емую от положения груза, при котором пружина не деформирована.
Имеем
dz дхдх
Силы сопротивления отсутствуют, т. е. Q*=0. Кинетическая
энергия груза
Потенциальная энергия и обобщенная сила
524
П=сх212\ Qn = —дГЦёх— — ex.
Для обобщенной силы Q8 получаем
QB=Х ' <5F*/(5x)=F- SxMx)=F(f),
к
где 6х — возможное перемещение груза в направлении возраста-
ния х.
Вычислим производные от кинетической энергии. Имеем
ВТ ВТ d ВТ
— = 0; ——тх',---— тх.
Зх Зх dt Зх
Подставляя полученные величины в уравнение Лагранжа, получаем
тх= — cx+F(t) или mx+cx=F(t).
В случае гармонической возбуждающей силы
QB=F(t) = Hsin(pt+6),
где Н, р и 6 — постоянные величины. Уравнение движения груза
принимает форму
тх+сх=Н sin (pt+6).
Предположим в той же задаче о движении груза, что сила F= 0,
а следовательно, и Q =0, но вместо этого задано движение конца
пружины — точки А в направлении оси Ох — в форме z=z(t) (рис.
202, б). Составим уравнение Лагранжа для груза относительно
подвижной системы отсчета Оху, начало которой движется вместе
с точкой А так, что ОА остается все время постоянным. В этом
случае по-прежнему
Qn = —дП1дх= — сх.
Кинетическая энергия груза
Рис. 202
525
mv2 (x+z)2
T=— — m-----
2 2
так как движение груза можно рассматривать как сложное, состо-
ящее из переносного поступательного вместе с точкой А и от-
носительного по отношению к теперь уже подвижной системе коор-
динат Оху. По теореме о сложении скоростей скорость абсолют-
ного движения v равна сумме скоростей переносного и относитель-
ного движений, т. е. v=z + x. Для производных от кинетической
энергии имеем:
аг аг . ааг
— = 0; —=m(x+z);----=m(x+z).
dx 8x dt dx
Подставляя полученные величины в уравнение Лагранжа, получим
m(x+z) = — ex; mx + cx= — mz.
Роль обобщенной силы в этом уравнении выполняет величина —
mz. Если точка А совершает гармонические колебания, то
z=zosin (pt + 3),
где z0, р, д — постоянные величины. В этом случае
—mz=mzop2 sin (pt+<5)
и дифференциальное уравнение движения груза примет форму
тх + сх=mz0p2 sin (pt 4- 8),
т. е. то же, что и в первом случае, но H=mz<p2.
Если вместо z(t) задать скорость точки А, изменяющуюся по
гармоническому закону
i^=z=zosin (pt + 8),
то уравнение движения груза примет вид
(с А
+ о —- 1
и в этом случае Н= mzop.
Существенное различие этих случаев состоит в том, что при
силовом возбуждении Н не зависит от круговой частоты р. При
кинематическом возбуждении заданием движения z=zosin(p/ + <5)
526
точки А оно пропорционально р2, а при возбуждении заданием
скорости z=zosin(p/ + <5) точки А—пропорционально р. Силовое
возбуждение эквивалентно возбуждению путем задания ускорения
точки А.
При дальнейшем рассмотрении вынужденных колебаний в ос-
новном ограничимся случаем силового возбуждения.
Пусть обобщенная сила состоит из двух сил: потенциаль-
ной Qn= —5IIISq= — cq и гармонической возбуждающей QB=
= 7Zsin (pt+&).
Часть обобщенной силы Q*, зависящую от сил сопротивления,
считаем равной нулю. Постоянные Н, р и 5, характеризующие
гармоническую возбуждающую силу, соответственно являются ам-
плитудой, круговой частотой и начальной фазой этой силы. В этом
случае, как и в случае собственных линейных колебаний, из уравне-
ния Лагранжа в предположении, что для кинетической и потенци-
альной энергий справедливы формулы (2) и (3), получаем дифферен-
циальное уравнение
aq + cq = Н sin (pt+ <5). (37)
Разделим обе части (37) на а и введем обозначения k2 = cja,
h = Hja.
Здесь к — круговая частота собственных колебаний, h — отно-
сительная амплитуда возбуждающей силы.
Дифференциальное уравнение вынужденных колебаний без со-
противления в окончательной форме имеет вид
q+k2q = hsva.(pt + 8). (38)
Получено неоднородное линейное дифференциальное уравнение
второго порядка с постоянными коэффициентами. Его решение,
согласно теории дифференциальных уравнений, состоит из общего
решения однородного уравнения qx и частного решения неоднород-
ного уравнения q2. Общее решение уравнения (38) есть сумма этих
двух решений, т. е. q = q{ + q2.
Однородное уравнение для определения qx, т. е. уравнение qx +
+ k2qi = 0, совпадает с дифференциальным уравнением собственных
колебаний. Поэтому его решение qx называют собственным колеба-
нием системы. Оно может быть выражено в двух эквивалентных
формах:
qi = G cos kt + С2 sin kt = At sin (kt+a^. (39)
Часть движения системы, характеризуемая функцией q2, является
частным решением уравнения (38). Эту часть движения называют
527
вынужденным колебанием системы. Функция q2 определяется по-
разному в зависимости от соотношения частот собственных колеба-
ний и возбуждающей силы.
Возможны два случая: отсутствие резонанса p^kut резонанс при
р = к. Рассмотрим их.
1. Случай отсутствия резонанса. В случае отсутствия резо-
нанса р^к и частное решение q2 следует искать в той же форме, что
и правая часть уравнения (38):
^2 = 5sin(p/ + 5). (40)
Постоянная В подлежит определению из условий, что функция
q2 является частным решением уравнения (38) и, следовательно,
подстановка q2 в это уравнение должна обратить его в тождество.
Определим необходимые производные по времени от q2:
q2 — Bp cos (pt + <>); q2 = — Bp1 sin (pt+<5).
Подставляя q2 и ее производные в уравнение (38) и перенося все
члены в одну часть, получаем следующее тождество, справедливое
в любой момент времни:
(—Вр2 + Вк2 —Л) sin (р/ + й) = О.
Так как синус переменного аргумента равен нулю не для всех
значений t, то полученное тождество выполняется, если постоянный
коэффициент в скобках при су нусе равен нулю:
B(k2—p2) — h = Q.
Отсюда
B=hl(k2-p2).
Подставляя значение В в q2, получаем вынужденные колебания
в форме
?2=~—^sin(p/ + <5). (41)
к —р
Таким образом, движение системы характеризуется обобщенной
координатой q, состоящей из двух колебаний с различными часто-
тами — собственных qi с круговой частотой к и вынужденных
q2 с круговой частотой р:
q = qi + q2 = Ci cos kt 4- С2 sin kt -I — sin (pt+<5). (42)
k2— p2
528
В амплитудной форме
q = A{ sin(A7+ai)H—sin(p?+<5). (42')
к2— р2
Постоянные С\ и С2 или и oti определяются из начальных
условий Т = 0, q=qa, q = qo-
Подставляя эти значения в выражения (42) для q и q при г = 0,
получаем
qo=С, 4—-—- sin<5; qo = С2& 4—-—- cos<5.
к2— р2 к2—р2
Отсюда
„ h • S hP S
C«i — Qq----sindi Cj—-----------coso.
4 k2-p2 к k(k2—p2)
Амплитуда собственных колебаний Ах и начальная фаза otj через
Ci и С2 выражаются формулами
А{ =\/С2 + С2; tgoti = С,/С2.
Следовательно, амплитуда и начальная фаза собственных коле-
баний при действии возбуждающей силы зависят не только от
начальных условий, но и от параметров этой силы, т. е. собственные
колебания в этом случае могут возникнуть не только из-за началь-
ных условий, но и благодаря действию возбуждающих сил даже при
нулевых начальных условиях.
Введем амплитуду вынужденных колебаний Л2=Л/(|А:2—р2|). Тог-
да в зависимости от соотношения между частотами вынужденные
колебания можно выразить в двух формах:
при р<к
q2 = A2si.n (pt+S)\
при р>к
q2= —A2sin(pt + S)=A2sin(pt + 6 — ri).
Следовательно, прир<к фаза вынужденных колебаний совпада-
ет с фазой возбуждающей силы. В этом случае сдвиг фаз е между
ними равен нулю, т. е. вынужденные колебания и возбуждающая
сила, в частности, достигают одновременно максимальных и мини-
мальных значений.
При р> к сдвиг фаз е=п. Действительно, сдвиг фаз как разность
фаз между возбуждающей силой и вынужденными колебаниями
529
Е = (pt + 8)—(pt + <5 — л) = it.
В этом случае вынужденные колебания находятся в противопо-
ложной фазе по отношению к возбуждающей силе, т. е., в частно-
сти, если возмущающая сила достигает максимума, то функция q2 (?)
достигает минимума, и наоборот.
Итак, вынужденные колебания системы без сопротивления при
р^к, возбуждаемые гармонической возбуждающей силой, являются
гармоническими колебаниями с постоянной амплитудой. Их часто-
та совпадает с частотой возбуждающей силы. Они совершенно не
зависят от начальных условий.
2. Случай резонанса. Резонансом называется случай совпаде-
ния частот собственных колебаний и возбуждающей силы, т. е. когда
р=к. При совпадении частот частное решение уравнения (38) следу-
ет искать в форме q2=Btcos(pt + 8).
Постоянная В определяется из условия, что q2 есть частное
решение уравнения (38), обращающее его в тождество. Аналогично
рассмотренному случаю, подставив q2 и ее производные в (38)
и приравняв нулю постоянный коэффициент при sin (pt+8) [члены
с Btcos(pt + 8) взаимно уничтожаются], получаем В= —hf(2p). Тогда
вынужденные колебания выразятся в форме
ht , ht . I „ я \ х
q2=----cos (/И + <5) = -sin [ р? + <5—). (43)
2р 2р \ 1)
Главной особенностью вынужденных колебаний при резонансе
является зависимость их амплитуды от времени: =/г?/(2р). Амп-
литуда вынужденных колебаний в этом случае увеличивается пропо-
рционально времени. Сдвиг фаз при резонансе, как это следует из (43),
равен л/2. Круговая частота вынужденных колебаний при резонансе
совпадает с круговой частотой возбуждающей силы.
Заметим для построения графика вынужденных колебаний при
резонансе, что q2 изменяется в пределах от q2 = A2=ht/(2p) до q2 =
= — Л2 = —ht/(2p). Следовательно, согласно (43), графиком вынуж-
денных колебаний является синусоида, заключенная между двумя
прямыми q(p = ht/(2p) и q^= —htl(2p), проходящими через точки
</2 = 0 и 1=0 (рис. 203).
Рассмотренный случай колебаний при резонансе без сопротив-
ления практически не встречается, так как при движении системы
всегда есть силы сопротивления движению. Установленный те-
оретически рост амплитуды с течением времени по линейному
закону в действительности тоже не наблюдается, хотя амплитуды
при резонансе достигают довольно больших значений по сравне-
нию со случаем отсутствия резонанса. Эта особенность вынужден-
ных колебаний при резонансе приводит к тому, что случайно
530
Рис. 203
возникший резонанс в машинах, установках и сооружениях (мо-
сты, роторы турбин, полы зданий и т. д.) может привести к их
разрушению.
Построим для вынужденных колебаний графики амплитуды
и сдвига фаз в зависимости от круговой частоты возмущающей
силы. Имеем
. h , И2
А2 =-------при р^=к или —
\к2-Р2\ н г л20
1
1-^
к2
где введено обозначение A2Q = hjk2 (рис. 204).
При р^к величина Л2-»оо, но при р=к эту формулу для амп-
литуды вынужденных колебаний применять нельзя. Справедлива
другая формула: A2—htl{2p).
График зависимости е от р (рис. 205) состоит из двух отрезков
горизонтальных прямых и одной точки, так как при р<к е=0; при
р=к, е — л/2; при р>к, е=п.
Пример 1. Груз, имеющий силу тяжести Р=20 Н, подвешен на пружине (рис. 206),
статическое удлинение которой под действием груза 2^=5 см. На груз действует
возбуждающая сила 5=20 sin 14/. В начальный момент пружина растянута на Л> =
=6 см и грузу сообщена скорость t>o= Ю см/с, направленная вниз.
Определить движение груза.
Рис. 204 Рис. 205 Рис. 206
531
Решение. Груз имеет одну степень свободы. За его обобщенную координату
примем х, направив ось Ох по вертикали вниз и выбрав за начало отсчета положение
статического равновесия груза точку О.
На груз действуют потенциальные силы тяжести и упругости пружины, а также
возбуждающая сила, зависящая от времени. Имеем случай динамического возбужде-
ния. Сил сопротивления, зависящих от скорости, нет. Дифференциальное уравнение
в этом случае согласно (37) имеет вид
в
aq + cq = Q (t)',q = x. (а)
в
Вычислим входящие в уравнение коэффициенты а и с и обобщенную силу Q (t).
Кинетическая энергия груза
х2
Т=т—; а=т.
2
Потенциальная энергия силы тяжести Р и силы упругости F
Р=-Рх+^(Л2-Л2„).
Работа силы тяжести отрицательна, так как груз следует поднимать вверх на вели-
чину х против силы, чтобы возвратить груз в положение статического равновесия,
ал
Удлинение пружины 2=2™.+х, — = 1. Силовое поле стационарно. Для коэффициента
8х
жесткости имеем
8П 8). 8Л 8^
— = —Р+спЛ—= —Р+спЛ; — = 1;-------= 0;
8х 8х дх дх
/82П\ 8Х
Обобщенную силу силы Q (t) вычисляем по формуле
Х5Ак
в ь
Q Ю=±—-
ох
S8x
---= S.
Зх
Возможное перемещение Зх следует направить в сторону возрастания х. В эту же
сторону направлена сила S. Ее элементарная работа положительна.
Подставляя вычисленные величины в (а),получаем
5
mx+cax=S\ х+к2х; - = h sin (Pt + 5),
а
с g
где к2 ==— = 196; к= 14 с *, так как в положении статического равновесия Р=саке',
а Яст
Р 20
2сг = — = 980; р= 14 с-\ <5 = 0; Л=—g = 980.
св Р
532
Дифференциальное уравнение движения груза можно получить и из уравнения
прямолинейного движения точки.
Итак, имеем
х +196х = 980 sin 14/.
Частота возмущающей силы р совпадает с частотой собственных колебаний к.
Имеем случай резонанса. Собственные колебания груза
X] = С! cos 14/ + С sin 14/.
Вынужденные колебания при резонансе
Л/ 980/
х2 = — — cos 14/ = —-= — 35/ cos 14/.
Ip 2-14
Общее движение груза
x=xj +X2=Cj cos 14/+C2Sin 14/—35/cos 14/.
Скорость движения
i)=x= — 14С[ sin 14/ + 14C2COS 14/—35cos 14/+35 • 14/sin 14/.
Подставляя в х и х начальные значения /=0, х=х0=2о=Лст= 1 см, х=«о = 1О см/с,
получим следующие уравнения для определения постоянных Cj и С2:
l=Cj; 10=14С2—35.
Их решения
Ci — 1 см; С2 = 3,2 см.
Уравнения движения груза принимает вид
x=cos 14/4-3,2sin 14/— 35/cos 14/ см.
Приведем уравнение собственных колебаний к амплитудной форме. Имеем
.----- Ci С2
^i = -(/Cj + C2®3,35 cm; sina=—=0,30>0; cosa=—>0.
^1 Ai
Угол а находится в первой четверти, так как sina и cosa положительны. По значению,
например, синуса этого угла находим a=0,305 рад. Уравнение движения груза
принимает форму
л
14/—
2
Пример 2. Система, состоящая из точечного груза М силой тяжести Pi = 80 Н,
невесомых стержней и пружины жесткостью с=5 Н/см, расположена в вертикальной
плоскости (рис. 207). Штанга ОА движется в вертикальных направлениях по закону
Уо = /sinpt, где /=1,6 см, р=8 с. Горизонтальное положение стержня ВМ соответству-
ет положению статического равновесия системы при уо = О. В начальный момент
система находилась в положении статического равновесия. Угловая скорость стерж-
ня ВМ равна нулю и уо = О. Трением пренебречь.
х = 3,35 sin (14/+0,305)+35/ sin
533
Рис. 207
Определить малое движение груза М в вер-
тикальном направлении, если Zi=90 см, 12 =
— 60 см.
Решение. Система имеет одну степень сво-
боды. Выберем за обобщенную координату угол
<р, отсчитываемый от горизонтального направле-
ния против часовой стрелки.
Связями системы являются направляющие
поверхности и шарниры, трением в которых пре-
небрегаем. Такие связи считаются идеальными
и неосвобождающими. Они также принадлежат
к голономным связям, так как нет уравнений
связей в форме дифференциальных уравнений.
Кинетическая энергия системы относительно
инерциальной системы отсчета через производ-
ную по времени от у0 будет зависеть явно от
времени. Будет зависеть явно от времени и по-
тенциальная энергия, т. е. потенциальное сило-
вое поле нестационарно.
При рассмотрении теории малых и линейных колебаний предполагалось, что
и кинетическая энергия и потенциальное силовое поле не зависят явно от времени.
Следовательно рассмотренную теорию нельзя применять в рассматриваемом случае
кинематического возбуждения заданием движения точки.
Имеющаяся теория неприменима. Но уравнения Лагранжа использовать можно.
Связи системы этому не препятствуют. Имеем
d st дТ
ЛТ8ф 8ср
Кинетическую энергию системы, в которой массу имеет только груз, вычислим
по формуле
А»2 А .
т= ~=— (уо+АФ) ,
g 2 2g
так как движение груза относительно инерциальной системы отсчета можно считать
сложным, состоящим из переносного поступательного движения вместе с точкой
О со скоростью yo=lp cos pt, и относительного вращательного движения с угловой
скоростью ф вокруг горизонтальной оси Oz, проходящей через точку О перпен-
дикулярно стержню и плоскости Оху. Так как угол ср и угловая скорость ф считаются
малыми, то скорость от вращения вокруг оси равна 1\ф и направлена вертикально,
как и скорость переносного движения уо- По теореме сложения скоростей, направлен-
ных В ОДНУ СТОрОНу, К=У() + 11ф.
Для определения обобщенной силы системы сообщим системе в момент
t возможное перемещение Зср против часовой стрелки в сторону возрастания угла
ср и вычислим элементарную работу всех внешних активных сил на этом переме-
щении в предположении, что угол ср — малая величина в рассматриваемой задаче.
Имеем
У ЗА/с
~ -Pih 8cp+Fl23cp
------------------= -Pih +Pl2,
Оф Оф
534
где Р=сЛ — сила упругости пружины, Л=^ст+(уо—— ее удлинение. Следова-
тельно,
Q=-P\h + +cl2 (Уо -h<P)= ch Oo - ^ф)>
так как в положении статического равновесия момент силы тяжести и момент силы
упругости относительно точки О равны друг другу, т. е.
P\l\ =c^nh-
Вычислим производные, входящие в левую часть уравнения Лагранжа
дТ дТ Pih d дТ Pih
—=°; —= (уо+Аф); тт7= Сйо+/1Ф)-
о<р оф g шеф g
После подстановки этих значений производных в уравнение Лагранжа получим
---(Уо+h Ф) = cl2 (Уо - h<P),
g
или
cl2g clig
ф+^-^г°~ь-
Но уо = — Ip2 sin pt, поэтому
chg Уо Icl-yg р2\
—“Уо— = —-+— /sinpz.
Pll2! h VPll2! hJ
Дифференциальное уравнение малого движения системы можно составить также
применением уравнения относительного вращательного движения твердого тела
(стержень с грузом) с учетом сил инерции от переносного движения.
Вводя обозначения
fclig р2\
Л =-----+г— /=(0,45+0,71) 1,6 = 1,86 с-2,
\Р^ hJ
получим следующее дифференциальное уравнение малых колебаний
y+k2<p=hsiapt.
Его решение <p=<pi +<р2, где
Ф1 = С] coskt+CiSmkt
— общее решение однородного уравнения (собственные колебания),
h
Ф2=—----, sin/Ц
к—р*
535
— частное решение неоднородного уравнения (вынужденные колебания), так как
р^к.
Таким образом,
Л
<р = Cj cos kt + С2 sin kt Ч—--sin pt,
k—p2
hp
tp= — C\ksmkt + C2k cos kt 4-cospt.
k2—p2
Начальные условия задачи: t=0, ф=0, ф=0. Подставляя их в выражения для
Ф и ф, получаем уравнения для определения постоянных Cj и С2:
hp
0 = Ci; 0 = C2fc4-~,
к—р2
или
С учетом этого решение дифференциального уравнения примет вид
Ф—0,0785 sin 5,2/—0,0505 sin 8/.
Для координат груза М имеем
x=/j=90 см; у=уо+/1<Р=1>6яп 8/4-90(0,0785sin5,2/—
— 0,0505 sin 81) = 7,1 sin 5,21 — 2,9 sin 8/ см.
Влияние линейного сопротивления на вынужденные колебания
Дифференциальное уравнение вынужденных колебаний и его интег-
рирование. Для выяснения влияния линейного сопротивления на
вынужденные колебания рассмотрим наиболее общий случай, ког-
да обобщенная сила Q состоит из трех сил: потенциальной Qn=
= — 8II/dq —cq, линейного сопротивления QW = — 8<$/8q = — pq и
гармонической возбуждающей QB=Hsin(pt+ <5).
Подставляя это значение обобщенной силы Q = Q‘7+q*+qb
в уравнение Лагранжа, получаем
aq + pq + cq=Hsin (pt + <5).
Разделим обе части уравнения на а и введем обозначения к2 =
= с la, 2п = p/а, h = Hja. Здесь к — круговая частота собственных
колебаний; п — коэффициент затухания и h — относительная амп-
литуда возбуждающей силы.
Дифференциальное уравнение в окончательной форме
536
q + 2nq + k2q = hsia (pt+ <5).
(44)
Получено линейное дифференциальное уравнение с постоянны-
ми коэффициентами вынужденных колебаний с учетом линейного
сопротивления.
Так как оно является неоднородным уравнением, то его решение
состоит из двух частей: q} — общего решения однородного уравне-
ния, q2 — частного решения неоднородного уравнения. Общее реше-
ние однородного уравнения удовлетворяет уравнению собственных
колебаний при линейном сопротивлении, поэтому его называют
собственным движением или даже собственными колебаниями,
хотя это движение может и не быть колебательным.
Частное решение неоднородного уравнения q2 называют вынуж-
денными колебанием. Общее движение системы характеризуется
обобщенной координатой q, которая равна сумме q} и q2, т. е. q—
= ?i + ?2- Величину q называют общим вынужденным движением
(или вынужденным колебанием).
Общее решение q^ однородного дифференциального уравнения
qi + 2nqi + к 2qj = 0 в зависимости от соотношения между величинами
п и к выражается в одной из трех форм:
п<к, qi = Aie~n‘sin(y/k2^n2t+a.i),
n=k, q\=e~n‘ (Ci/+C2);
n>k,qi=e С/ +C2e I.
Известно, что в любом из этих случаев из-за наличия множителя
е~п‘ стремится к нулю с возрастанием времени, т. е. затухает.
При малых значениях коэффициента затухания (п<к) затухающее
движение q} носит колебательный характер, а при больших (п^к)
затухание так велико, что движение не является колебательным.
Следовательно, при наличии линейного сопротивления по истече-
нии достаточного времени общее вынужденное движение q несуще-
ственно отличается от вынужденных колебаний и можно считать,
что q = q2-
Частное решение q2 уравнения (44) следует искать в форме q2 =
—A sin (pt + 8 — е).
Постоянные Айе определяются из следующего условия: если
подставить q2 в уравнение (44), то оно превратится в тождество.
Вычислим для этого производные от q2:
q2 = Ар cos (pt+ 6 — е); q2 = — Ар2 sin (pt+5 — e).
537
Преобразуем правую часть уравнения (44) так, чтобы в нее
входили косинус и синус такого же аргумента, что и у функции q2.
Для этого следует к фазе правой части прибавить и вычесть вели-
чину е и раскрыть синус суммы:
h sin (pt + 8) = h sin [(p? + <5 — e) + s] =
=h sins cos (pt 4- d — e)+h cose sin (pt + <5 — s).
Учитывая это, подставим значение qy2 и его производных в урав-
нение (44) и соберем члены при sin(pf+<5 —в) и cos(p/ + <5 —е). Полу-
чим тождество
[А (к2 —р2) — Л cose] sin (pt + S — s)+
+ [2Лир — h sins] cos (pt + 5 — e)=0.
Так как синус и косинус переменного аргумента не равны нулю
одновременно, то тождество может выполняться только тогда, ког-
да каждая из постоянных в квадратных скобках равна нулю, т. е.
А (к 2 — р2)=h cose; 2Апр=h sins.
Из этих уравнений определяем амплитуду вынужденных колеба-
ний А и сдвиг фаз е:
а h . 2Апр А(к2—р2) 2пр
А = =; sins=---; cose=------; tgs=----.
у/(к2-р2)2+4п2р2 к к к2~Р2
(45)
(46)
Из формулы для sin£ следует, что sins является положительной
величиной. Следовательно, значения е заключены между Ойл. Поэ-
тому для определения в достаточно использовать формулу только
для одной тригонометрической функции, например для tgs.
Окончательная форма выражения вынужденных колебаний
q2=A sin (pt+д — е),
где
. h 2пр
А= -------------tgE=—------; 0<£<я.
2-р2)2+4л2р2 к 2-р2
Основные свойства вынужденных колебаний. Из (45) и (46) следу-
ют основные свойства вынужденных колебаний при наличии линей-
ного сопротивления. Вынужденные колебания не затухают. Их
частота совпадает с частотой возбуждающей силы. Вынужденные
колебания и при линейном сопротивлении не зависят от начальных
538
условий. Следовательно, их нельзя возбудить с помощью ненулевых
начальных условий. Для возникновения вынужденных колебаний на
систему должно действовать возбуждение.
Амплитуда и сдвиг фаз вынужденных колебаний зависят от
частот собственных и вынужденных колебаний и коэффициента
затухания. Чем больше коэффициент затухания при прочих рав-
ных условиях, тем меньше амплитуда вынужденных колебаний.
Незатухающий характер вынужденных колебаний при линейном со-
противлении — главное отличие их от собственных колебаний, кото-
рые при действии линейного сопротивления всегда затухают, со-
храняя колебательный характер (п<к), или затухают почти моно-
тонно (п^к).
Другая важная особенность влияния линейного сопротивления
на вынужденные колебания связана с явлением резонанса. В случае
резонанса при линейном сопротивлении амплитуда вынужденных
колебаний не возрастает пропорционально времени, как при отсут-
ствии сопротивления, а остается постоянной величиной. Достаточ-
но как угодно малого сопротивления, чтобы амплитуда вынужден-
ных колебаний при резонансе была постоянной, хотя, возможно,
и достаточно большой, но не переменной, возрастающей с течением
времени. Это свойство вынужденных колебаний хорошо подтверж-
дается опытными данными.
Исследование вынужденных колебаний. Амплитуда и сдвиг фаз
вынужденных колебаний Лиев соответствии с (46) не зависят от
начальной фазы д возбуждающей силы. При их вычислении можно
считать, например, <5=я/2 + е. Если бы возбуждающая сила была
постоянной, равной амплитуде Н, то правая часть уравнения (44)
была бы тоже постоянной и в качестве частного решения неод-
нородного уравнения q2 можно взять постоянную величину стати-
ческого смещения q2=hjk1. Проверка убеждает, что это значение
q2 удовлетворяет уравнению (44).
Если вычислять q2 из (45), учитывая (46) как частный случай,
соответствующий р=0и«5=|-|-Е, то получим q2={A)p^fa=A^=h/k2,
что совпадает со статическим смещением. Следовательно, A0 — hfk2
можно считать «амплитудой» вынужденных колебаний при дейст-
вии постоянной возбуждающей силы, совпадающей по модулю
с наибольшим значением гармонической возбуждающей силы. Ве-
личину А/Ай называют коэффициентом динамичности.
Коэффициент динамичности характеризует относительную ве-
личину амплитуды вынужденных колебаний, т. е. показывает, во
сколько раз амплитуда вынужденных колебаний при действии гар-
монической возбуждающей силы отличается от статического сме-
щения, которое вызывает постоянная возбуждающая сила, равная
по модулю наибольшему значению гармонической силы.
539
Исследование показывает, что для достаточно малого сопротив-
ления коэффициент динамичности может быть значительно больше
единицы. Проведем исследование коэффициента динамичности.
Найдем, когда он принимает максимальное и минимальное значе-
ния, когда стремится к нулю и т. д.
Учитывая значения А и Ао, после преобразования получаем
А _ h 1 _ 1
Ло у/(к2—р2)2+4п2р2 л/(1 — z2)2+4Z>2z2
Здесь введены обозначения: z=p[k— коэффициент расстройки,
или относительная частота возмущающей силы; b=n[k— относи-
тельный коэффициент затухания. Коэффициент динамичности за-
висит от параметров z и Ь. Исследуем его изменение в зависимости
от изменения z при фиксированных значениях Ь.
Из (47) следует, что коэффициент динамичности стремится
к нулю при z->cc и любом относительном коэффициенте затуха-
ния Ь.
Следовательно, и амплитуда вынужденных колебаний А стре-
мится к нулю, когда коэффициент к очень мал по сравнению
с р (z=plk^>co). В этом случае действие возмущений с большой
частотой не воспринимается колеблющейся системой и не нарушает
режима собственных колебаний, которые под влиянием сопротивле-
ния для линейных систем затухают.
Это свойство вынужденных колебаний широко используется на
практике при перевозке грузов, не переносящих толчков. Грузы
подвешивают на таких пружинах к перевозящему их транспорту,
для которых частота собственных колебаний оказалась бы малой по
сравнению с частотой возбуждающих сил (толчки от стыков рель-
сов для вагонов, толчки от неровностей дороги для автотранспорта,
вибрации корпуса самолета от работающих двигателей и т. д.). На
этом же свойстве вынужденных колебаний основано применение
рессор у различных видов транспорта.
Для дальнейшего исследования коэффициента динамичности
введем функцию/(z) = (l — z2)2+4Z>2z2, зависящую от z и параметра
Ь. Тогда
ДМо = 1/у7(Г)- (47')
Очевидно, что когда /(z) достигает максимума, то Л/Ло имеем
минимум, и наоборот. Для определения экстремальных значений
/(z) вычисляем ее производные по z:
/'(z)=-4z(l-z2) + 8A2z=-4z(l-2Z>2-z2);
/"(z)=—4(1—z2) + 8zz + 8d2 = 8z2—4(1 —2Z>2 —z2).
540
Функция /(z) достигает экстремума при тех значениях z, для
которых f'(z)=0. Из этого условия для z получаем два значения:
Z] = 0; z2=-у/1 — 262.
Так как относительная частота может быть только положитель-
ной и равна нулю для постоянной возбуждающей силы, то 1 —262 >
>0; следовательно, 6<^/2/2—0,7. Для таких b f"(z)<Q при z=zi,
а поэтому функция /(z) в этом случае достигает максимума и коэф-
фициент динамичности — минимума. Для z=z2=-4/l — 2b2, наобо-
рот,/"(z)>0 и, следовательно,/(z) имеет минимум, а коэффициент
динамичности — максимум.
Для значений Ь, при которых 1—262 = 0 (6 = -^2/2), имеем zt =
= z2 = 0 и /" (z) = 0. Дополнительные исследования третьей и четвер-
той производных показывают, что в этом случае f(z) при z=0
достигает минимума, а коэффициент динамичности имеет макси-
мум. Других экстремальных значений /(г) не имеет.
Если 1— 26 2 <0, то z2 становится чисто мнимым. Это можно
интерпретировать как отсутствие других значений z, кроме z=0,
при которых /(z) достигает экстремума. При z—0 f(z) достигает
минимума, а коэффициент динамичности — максимума. С увеличе-
нием z коэффициент динамичности при 1 — 262^0 монотонно убы-
вает от своего максимума при z=0 до нуля при z->oo.
Результаты исследования коэффициента динамичности изоб-
ражены графически в виде так называемых резонансных кривых,
или амплитудно-частотной характеристики системы (рис.
208, а), зависимости А/Ао от z для различных значений относи-
тельного коэффициента затухания Ь. При этом использованы ре-
Рис. 208
541
зультаты исследования, полученные при отсутствии сопротивления,
когда Ь = 0.
Проведенное исследование позволяет сделать дополнительные
выводы о влиянии линейного сопротивления на вынужденные коле-
бания. Так, максимум коэффициента динамичности, а следователь-
но, и амплитуды вынужденных колебаний наступает не при резонан-
се, когда z=l/(p = k), а при значении z=z2 = ->/l — 2/>2, меньшем
единицы. Чтобы получить величину максимальной амплитуды Атах,
следует в ее выражение (47) вместо z подставить z2=-y/l —262, что
соответствует критическому значению круговой частоты возбуж-
дающей силы
Pip = k У1""2!’=
Поэтому
Aq h Ао
л/(1 — 2пу/к2—п2 2b-J\—b2
Для малых b по сравнению с единицей приближенно
AmiaZiAolQb).
Амплитуда вынужденных колебаний при резонансе Лрез получа-
ется из (47) при z—1:
Ара = h/(2nk) = А0/(2Ь) < Лтах,
т. е. амплитуда вынужденных колебаний при резонансе меньше мак-
симальной амплитуды, которая достигается при pTp = yJk2 — 2n2.
Критическая круговая частота, при которой амплитуда вынужден-
ных колебаний достигает максимума, уменьшается с увеличением
коэффициента затухания. Величины Лтах и Лрез тоже при этом умень-
шаются.
В случае кинематического возбуждения путем задания движения
точек системы по гармоническому закону, как было показано,
Н=НоР2 и
, Н Но 2 ,2
h=-=—p—hop,
а а
где ho=Hofa — постоянная, не зависимая от круговой частоты воз-
буждения р.
542
В этом случае по формуле (46) для амплитуды вынужденных
колебаний получаем
у/(к2— р2)2 + 4п2р2 y/(l—z2)2+4b2z2
и для безразмерной (относительной) амплитуды, аналога коэффи-
циента динамичности,
Л/Ло=z2/V(l-z2)2 + 4Z>2z2.
Построение графиков для A/h0 облегчается, если ввести вспомо-
гательную переменную zt=~. Зависимость А/ho от zi совпадает
Z
с зависимостью А/Ао от z, графики для которой уже построены (рис.
208, а). Для перехода от zx к z в А/ho следует учесть, что 2j = oo
переходит в z = 0, zt=Q в z = ao и Z] = 1 в z=l.
На рис. 208, б приведена амплитудно-частотная характеристика
системы для этого случая. Величина h0 теперь не является статичес-
ким смещением Ао.
Исследуем влияние линейного сопротивления на сдвиг фаз. В со-
ответствии с (46)
tgE = 2np/(k2—p2) = 2bz/(].—z2), О^е^л. (46')
Тангенс сдвига фаз £ выражается простой зависимостью от z.
Пользуясь монотонностью изменения тангенса в зависимости от
изменения аргумента, легко построить график зависимости £ от
z при различных фиксированных значениях Ь. Подготовим необ-
ходимые данные, учитывая, что при отсутствии сопротивления £=0
для Z< 1, £=л/2 при Z— 1 И £ = Л при z> 1.
Из (46') следует, что при z=0 tge=O. Учитывая значение е при
отсутствии сопротивления (е монотонно и непрерывно изменяется
в зависимости от Ь), получаем е=0. При z = 1 tg£= оо и, следователь-
но, е=л/2, как и при отсутствии сопротивления. Когда z-»oo, то
tg£—*0, что соответствует £->л. Если учесть дополнительно моно-
тонность тангенса, то для е имеем результаты:
2=0, £ = 0;
0<z< 1, 0<£<л/2;
z=l, £ = л/2;
1<2<оо, л/2<е<л;
2->00, £—>Л.
543
Рис. 209
Эти данные позволяют построить
график изменения сдвига фаз (фазо-
частотную характеристику систе-
мы) в зависимости от относительной
частоты возмущающей силы для фик-
сированных значений относительного
коэффициента затухания (рис. 209).
Тангенс сдвига фаз £ не зависит от
h, и потому фазочастотная характери-
стика системы не зависит от способа
гармонического возбуждения. Она од-
на и та же как для динамического, так и для кинематического воз-
буждений.
Проведенное исследование сдвига фаз показывает, что сдвиг фаз
при резонансе не зависит от линейного сопротивления. Он равен л/2.
Если при частотах, близких к резонансным (z= 1), при отсутст-
вии сопротивления сдвиг фаз изменяется скачкообразно, то под
влиянием линейного сопротивления это изменение является непре-
рывным и тем более плавным, чем больше относительный коэф-
фициент затухания.
Общие свойства вынужденных колебаний. Отметим основные
свойства вынужденных колебаний при действии линейного сопроти-
вления.
1. Вынужденные колебания при линейном сопротивлении явля-
ются незатухающими, т. е. амплитуда их постоянна как при отсут-
ствии резонанса, так и при резонансе.
2. Линейное сопротивление не влияет на частоту вынуденных
колебаний, которая совпадает с частотой возбуждающей силы.
3. Вынужденные колебания при линейном сопротивлении не
зависят от начальных условий, так же как они не зависят от них при
отсутствии сопротивления.
4. Амплитуда вынужденных колебаний стремится к нулю быст-
рее при линейном сопротивлении с увеличением относительной
частоты возбуждающей силы, чем при отсутствии сопротивления.
Основы виброзащиты
Во многих случаях от работы машин, механизмов и других
устройств, представляющих собой колеблющиеся системы, переда-
ются вредные вибрации на фундаменты. Защищать фундаменты
и иные крепления колеблющихся систем следует прежде всего от
вынужденных колебаний, так как собственные колебания при нали-
чии сопротивления быстро затухают.
Для уменьшения переменных сил, передающихся от колеблю-
щихся систем на фундаменты, представляющие собой упругие ос-
544
новация, применяются различные способы. Силы от колеблющихся
систем с одной степенью свободы, пропорциональные ускорениям,
пропорциональны амплитудам колебаний.
Существует два основных способа уменьшения амплитуды выну-
жденных колебаний. Один из них состоит в значительном разносе
частот вынужденных и собственных колебаний системы, что имеет
место при больших значениях z=pjk. Другой способ связан с увели-
ением коэффициента сопротивления, что достигается с помощью
специальных устройств, называемых демпферами. Процесс уме-
ньшения амплитуды колебаний за счет увеличения коэффициента
сопротивления называют демпфированием колебаний.
Для выяснения особенностей, связанных с демпфированием вы-
нужденных колебаний, рассмотрим колеблющуюся систему с одной
степенью свободы, совершающую колебания в вертикальном на-
правлении под действием возбуждающей силы QB= Hsin(pt+8),
действующей в том же направлении (рис. 210). Корпус колеблющей-
ся системы укреплен на фундаменте с помощью пружин с суммар-
ной жесткостью с и демпфера с коэффициентом сопротивления р.
Определим наибольшую силу, передающуюся на фундамент
вследствие вынужденных колебаний системы.
За обобщенную координату q выберем перемещение корпуса
колеблющейся системы по вертикали вниз от положения статичес-
кого равновесия. На фундамент через пружины и демпфер будет
передаваться сила
F=cq2+pq2,
где
q2=A sin (pt+8 — е),
q2 — вынужденные колебания системы, возникающие под действи-
ем возбуждающей силы. Так как q2=Apcos(pt+8 — е), то
F=Ac
sin (pt+ 8 — е)+ —cos (pt+ 8 — e)
c
= Ac
sin (pt + 8 — Е+у),
где у — дополнительная начальная фаза. Таким образом,
2*4щдх — Ас
Величину отношения
545
называют коэффициентом передачи силы. Пребразуем его выраже-
ние, используя известные формулы
и Н К2 с Л h э д
п=—; k — Ао=-~; 2п=~.
а а к2 а
Тогда
A h Н с
Ас = — Аос; Аос=-~с=—-=Н.
Ао к2 а к2
Для максимальной силы имеем
„ Л „ Л 4п2а2р2 А „ гЛ------
Ао \ С2 Aq
р , п
где z=~, b=-.
к к
Для коэффициента передачи силы используя выражение для
коэффициента динамичности —- (47), получаем
Лпах V1+4Z.V Fma
н y/(l-z2)2+4b2z2’ Н
О при z-»oo.
Из этого выражения следует, что —'=1 при z=0 и z=4/2.
Рис. 210
546
С учетом этого на рис. 211 приведены графики коэффициента пере-
дачи силы в зависимости от z и Ь.
р
Из графиков следует, что убывает с ростом b при изменении
н
z в интервале Q<z<^/2. Здесь демпфирование эффективно.
Коэффициент передачи силы растет при изменении z в пределах
V2 <z<oo. В этом интервале изменения z демпфирование не
эффективно, так как оно приводит не к уменьшению, а к увеличе-
нию коэффициента передачи силы с ростом коэффициента сопроти-
вления.
Вынужденные колебания при периодическом возбуждении
с произвольным периодом
Рассмотрим общий случай вынужденных колебаний механичес-
кой системы с одной степенью свободы при действии произволь-
ного периодического воздействия. Дифференциальное уравнение
движения системы в этом случае согласно (44) имеет форму
q + 2nq+k2q=h(t).
Здесь h (f) — периодическое воздействие, удоветворяющее условию
периодичности h(f)=h(t + z), где т — произвольный постоянный пе-
риод.
2л
Введем круговую частоту периодического возбуждения р=—
т
и разложим периодическую функцию в ряд Фурье, если она удовлет-
воряет условиям Дирихле. Имеем
h (/)=— + О] cos pt+bx sin pt -I- a2 cos 2pt+b2 sin 2pt+
+ ...+a,cos spt+b3sin spt+... .
Преобразуем члены ряда с одинаковыми номерами к амплитуд-
ной форме по известным формулам. Получаем
a, cos spt + bs sin spt=h, sin (spt 4- bs),
где
h, = \/a2 + b2-, sin <5,=-; cos bs—-.
h, hs
Разложение функции h(t) в ряд в новых обозначениях примет
форму
547
h(t) = ho+ hssin (spt + 5,).
J=1
Периодическое возбуждение с произвольным периодом оказа-
лось выраженным бесконечной суммой гармонических возмуща-
, “О
ющих воздействии вместе с постоянным воздействием Ло=—, кото-
2
рые уже рассматривались.
Используя формулы (45) и (46) для каждого гармонического
воздействия с номером s, получим
q г,=A, sin (spt + 6S — £,);
h, 2n' sp
Aa= .-------- ; tg£,= , J O«Se,^tc; 5=1, 2, 3,
\/[fc2 * * — (s/>)2]2+4л2 (5/1)2 ~ (SP)
где As — амплитуда вынужденных колебаний от гармонического
воздействия с номером s, е3 — сдвиг фаз.
Используя закон суперпозиции для частных решений линейного
дифференциального уравнения, имеем следующее частное решение
при общем периодическом воздействии h (/):
q2 = А о + £ А3 sin (spt + <5, - е5).
s= 1
Таким образом, частное решение рассматриваемого дифферен-
циального уравнения при периодическом воздействии с произволь-
ным периодом выразилось постоянным статическим смещением
Ад
Ай=— и бесконечной суммой ряда вынужденных колебаний от
к1
отдельных гармонических воздействий, круговая частота которых
кратна частоте периодического воздействия.
Для вычисления величин А3, 83 и е3 необходимо использовать
формулы для коэффициентов ряда Фурье. Имеем
2 I
а,=- Л (t) sin spt d
T J
о
548
b,=- Л (?) cos лр/• d/; s= 1, 2, 3, ... .
T J
0
Поставленная задача решена. Из ее решения следует:
1) амплитуды вынужденных колебаний А3 от отдельных гар-
монических воздействии убывают с ростом номера воздействия
s и стремятся к нулю при s, стремящемся к бесконечности;
2) резонанс, т. е. совпадение частот вынужденных и собственных
колебаний без учета сопротивления может наступить при каждом
гармоническом воздействии, т. е. при р=ки при sp=k. Наибольшая
амплитуда при этом будет при р — к.
В практических задачах обычно ограничиваются небольшим ко-
личеством членов ряда в выражении для вынужденных колебаний,
учитывая убывание его коэффициентов с ростом номера члена ряда.
Условия Дирихле для сходимости ряда Фурье и возможности
использовать формулы для его коэффициентов для непрерывных
функций сводятся к отсутствию бесконечного числа экстремумов на
интервале времени в один период. Для разрывных функций на
интервале времени в один период должно быть конечное число
разрывов на конечные величины. В этом случае ряд Фурье дает
среднеарифметическое значение функции.
Вынужденные колебания при произвольном
вынуждающем воздействии
Дифференциальное уравнение для системы с одной степенью
свободы согласно (44) имеет форму
q 4- 2nq + k2q = h(f),
где h (t) — произвольное вынуждающее воздействие, как периоди-
ческое, так и непериодическое. Получим вынужденное движение
системы q2 при и = 0. Диференциальное уравнение будет
q+k2q = h(t).
Его решение q = qx 4- q2, где qx — общее решение однородного урав-
нения, a q2 — частное решение неоднородного уравнение или вы-
нужденное движение системы.
Решение однородного уравнения, зависящее от двух произволь-
ных постоянных Ci и С2, имеет вид
q 1 = Ci cos kt 4- C2 sin kt.
549
Будем искать частное решение q2, применяя метод вариации посто-
янных, в той же форме, что и для qi, но считая Ci(t) и C2(t),
подлежащими определению, функциями времени, т. е.
92 = С (0 cos kt + С2 (t) sin kt.
Вычислим производные по времени от q2 для последующей их
подстановки в дифференциальное уравнение. Имеем
q2=—cos kt -I--sin kt+к (— Ci sin kt + C2 cos kt),
dt dt
dCi dC2
He уменьшая общности, наложим на — и — дополнительное
dr dt
условие
— cos kt Ч---sin kt=0.
dt dt
Тогда
92=к (—Ci sin kt + C2 cos kt);
q2 = kt----sin kt 4-coskt I —k 2 (Geos kt 4-C2 sin kt).
\ dt dt /
Подставляя q2 и q2 в дифференциальное уравнение после очевид-
ных сокращений, получим уравнение, которое вместе с принятым
дополнительным условием дадут систему уравнений для определе-
dc, dc2
ния — и —:
dt dt
dQ dC2 1
sin kt -I cos kt=- h (t);
dt----------dr-к
dCi , dC2 . л
— cos kt 4--sin kt=0.
dt dt
Умножая первое уравнение на cos kt, а второе на sin kt и вычитая из
первого второе, получим
dC 1
-----=- h (t) cos kt; cos2 kt + sin2 kt = 1.
dt к
dC2
Аналогично для — имеем
dt
550
dC2 1
— = - h (/) sin kt.
d/ к
Выполняя интегрирование в пределах от 0 до t, получим
— Ci(0=- A(f)cos£rdf;
kJ
о
С2(/)=- h (t) sin kt dt
к
о
Заменяя переменную интегрирования под знаком интеграла на
£ и внося cos kt и sin kt под знак интеграла, для Ci (?) и С2 (/) имеем
q2 (t) = Ci (t) cos kt + C2 (/) sin kt =
t
=- I Л (£) (—sin k£ cos kt+cos k£ sin kt) d£ =
к J
О
t
=11 hu)wkk(f-fr<x,
к
о
так как — sin k£ • cos kt+cos kt, sin kt = sin к (t — O-
Получено решение для q2 (t) в интегральной форме
92(0=7 b(Osinfc(/-^) de.
к J
О
Рассмотрим общий случай, в котором л/0. Его можно свести
к рассмотренному случаю для малого сопротивления п<к, но для
новой функции q*(f), связанной с q2(t) соотношением q2 = e n‘q*.
Получим дифференциальное уравнение для q* (0, подставляя в ис-
ходное дифференциальное уравнение q2(t) и его производные по
времени:
q2= — пе n'q* + e n‘q*; q2=n2e ”‘q*—2ne n‘q* + e "'q*;
e"‘ [(w2?* — 2«9* + q*) + 2n ( — nq* + q*)+k 2q*]=h(t);
или
551
q* + (k2 — n2)q* = e‘h(t); q*+k2q*=hx (t).
Дифференциальное уравнение для q* (t) совпадает с уравнением для
q2 при п = 0, только к2 следует заменить на к2=к2 — п2, a h(t) — на
h} = e‘h.
Для q2 (?) имеем
t
Яг (0 = e~n‘q* (t)=~ f е~я('-0 sin кх (t-g)' d£.
J
о
Это решение для вынужденных движений системы применимо
при любом вынуждающем воздействии, как гармоническом и пери-
одическом, так и при любом другом непрерывном и разрывном, для
которого интеграл, входящий в q2(t), не теряет смысл. Полученное
решение в интегральной форме удовлетворяет условиям д2(0) =
= q2 (0) = 0 при выбранном нулевом значении нижнего предела в ин-
теграле для q2 (?).
§ 3. МАТЕМАТИЧЕСКИЙ И ФИЗИЧЕСКИЙ МАЯТНИКИ
Математическим круговым маятником называется материаль-
ная точка, движущаяся в одной и той же вертикальной плоскости по
окружности под действием силы тяжести. Математическим маятни-
ком является груз достаточно малых размеров, подвешенный к не-
подвижной точке О с помощью невесомого стержня или невесомой
нерастяжимой нити (рис. 212). Расстояние ОМ=1 называют длиной
математического маятника. Положение материальной точки М мо-
жно охарактеризовать углом <р, отсчитываемым от вертикали —
положения равновесия маятника.
Математический маятник можно рассматривать как систему
с одной степенью свободы. Связь в виде нити или стержня является
идеальной. Выберем за обобщенную координату угол ср. Составим
для маятника уравнение Лагранжа:
d дТ 8T_q
dt 8<р дер
Кинетическая энергия Т математического маятника
mv2 ml2(p2 Pl2 ip2
~ 2 “ 2 ” g 2’
так как
552
V = l(D. ^2
Активная сила — сила тяжести Р — является । \
потенциальной силой; следовательно, обобщен- 1<А г
ная сила Q через потенциальную энергию выра-
зится в виде । \ х
Q=-dIIId<p. jp
Для того чтобы вычислить потенциальную
энергию в отклоненном положении маятника, Рис-212
следует подсчитать работу силы тяжести при
перемещении точки М из этого положения в положение равновесия
Мо, где ср = О. Работа равна произведению силы тяжести на высоту
опускания точки М и является положительной величиной, т. е.
n=AMM<t = Pl(l-cos<p);
Q = — дП]д<р = — Pl sintp.
Вычисляем производные, входящие в уравнение Лагранжа:
8Т n 8Т РР d 8Т РР
— = 0; —=— ср;----= — ф.
8<р 8ф g dt 8ф g
Уравнение Лагранжа для математического маятника после пере-
носа всех членов в левую часть выразится в форме
ф+^8щ<р = 0. (48)
Получено нелинейное дифференциальное уравнение. Оно не ин-
тегрируется в элементарных функциях.
В случае малых колебаний, когда (р достаточно мало, можно
считать sintp «<р. Уравнение малых собственных колебаний матема-
тического маятника примет форму
ф+-<р = О, (49)
или ф + к2ср, где круговая частота колебаний k=^gjl. Его решение
имеет вид
<р=А sin (Л/+а).
Постоянные величины Лиа являются амплитудой и начальной
фазой. Период малых колебаний математического маятника
553
т = 2n/k = In-y/llg.
(50)
Малые колебания математического маятника являются гармо-
ническими. Период их колебания зависит только от длины матема-
тического маятника и ускорения силы тяжести и не зависит от
амплитуды колебаний. Так как ускорение силы тяжести g зависит от
широты места, то, следовательно, период малых колебаний матема-
тического маятника тоже зависит от широты.
Отмеченными свойствами, очевидно, не обладают колебания
математического маятника, которые не являются малыми. Эти
колебания уже не являются гармоническими, и их период колебаний
зависит от амплитуды А.
Как показывает более подробное исследование, эту зависимость
периода колебаний от амплитуды можно выразить в виде ряда:
т = 2я
sin4+...
2
Если принять 8шЛ/2»Л/2 и удержать первые два члена ряда, то
получим приближенную формулу для периода колебаний в зависи-
мости от амплитуды:
Физическим маятником называется твердое тело, вращающееся
под действием силы тяжести вокруг неподвижной горизонтальной
оси, не проходящей через центр масс (рис. 213). Ось вращения
физического маятника называется осью привеса, а точка ее пересече-
ния О с перпендикулярной оси привеса вертикальной плоскостью,
в которой находится центр масс, называется точкой привеса.
Физический маятник можно считать системой с одной степе-
нью свободы. За обобщенную координату примем угол ср между
вертикалью и отрезком ОС, соединяющим точку привеса О с
центром масс С. Считаем, что трения в подшипниках оси привеса
нет и, следовательно, связи, наложенные на маятник, являются
идеальными. Составим для физического маятника уравнение Лаг-
ранжа:
d dT дТ_ 8П
dtSip 8<р 8ср
Кинетическая энергия маятника как твердого тела, вращающего-
ся вокруг неподвижной горизонтальной оси привеса Oz, определяет-
ся по формуле
554
Г
Oz 2’
где JOl — момент инерции маятника относи-
тельно его оси привеса.
Потенциальная энергия вычисляется так
же, как и для математического маятника:
IJ=Ph{\ —costp) = Mgh(\ —cos<p),
где Р — сила тяжести; М — масса физичес-
кого маятника и h= ОС.
Производные, входящие в уравнение Лагранжа,
ВТ ВТ т . d ВТ т ..
— — 0; Т7 — JozV', —— — JozV',
dtp dtp at dtp
сП , •
— = Mgh sirup,
dtp
Уравнение Лагранжа после деления обеих частей на J01
носа всех членов в одну часть принимает вид
ф Ч------sintp = 0.
и nepe-
(51)
Его можно получить применив к физическому маятнику диф-
ференциальное уравнение вращения твердого тела вокруг непо-
движной оси:
/Огф= х MOzm,
k=l
где
Y МОг(ф)= -Ph sirup.
к=1
В случае малых колебаний simp «ср и дифференциальное уравне-
ние примет форму
•• . Mgh п
ф+ ф = °
JOz
ИЛИ
555
ф + к2д> = 0,
(52)
где к 2 = MghiJoz=Ph)JOz.
Если для физического маятника ввести условную длину I—
=JOzl(Mh), то период его малых колебаний через эту длину вы-
разится так же, как и период математического маятника. Действи-
тельно,
т = 2п[к = 2пу/JozKMgh) = 2ny/ljg. (53)
Эту условную длину l=JOzl{Mh) называют приведенной длиной
физического маятника.
Малые собственные колебания физического маятника, так же как
и математического, являются гармоническими с периодом, не зави-
сящим от амплитуды.
Если от точки привеса О отложить по линии ОС приведенную
длину физического маятника /, то получим точку Оь которая назы-
вается центром качаний. Для приведенной длины физического маят-
ника справедливы следующие теоремы Гюйгенса.
1. Приведенная длина физического маятника больше расстояния
от точки привеса до центра масс, т. е. l>h. Для доказательства
теоремы применим к физическому маятнику теорему Штейнера
о связи моментов инерции относительно параллельных осей, одна
из которых проходит через центр масс. Получим
, Joz Jcz + Mh1 JCz
I——----------------\-h>h,
Mh Mh Mh
так как отрезок OxC=Jczl(Mh) = l—h>Q. Здесь JCz — момент инер-
ции относительно горизонтальной оси, параллельной оси привеса
и проходящей через центр масс.
2. Центр качаний и точка привеса физического маятника взаим-
ны, т. е. если то же твердое тело подвесить за горизонтальную ось,
проходящую через центр качаний, параллельно первоначальной
оси, проходящей через точку привеса, то получим новый физический
маятник, приведенная длина которого равна приведенной длине
прежнего маятника, т. е. 1\ = 1.
Вычислим приведенную длину 4 физического маятника, у кото-
рого ось привеса проходит через точку — центр качаний прежне-
го маятника. Согласно определению приведенной длины, применяя
теорему Штейнера, имеем
JOiZ JCz + M(l-h)2 Jcz , , , ,
ч —-----—----------—--------\-l—h — 1,
MOXC M(l—h) M(l—h)
так как из (54) следует, что JCl = Mh(l—h).
556
Если от точки 01 отложить отрезок 1\ = 1, то получим точку О,
т. е. центр качаний и точка привеса взаимны. Периоды малых
колебаний физических маятников вокруг горизонтальных осей, про-
ходящих через точку привеса и центр качаний, одинаковы.
Важное прикладное значение теории малых колебаний физичес-
кого маятника состоит в том, что ее можно положить в основу
экспериментального определения моментов инерции тел. Для опыт-
ного определения момента инерции тела силой тяжести Р относите-
льно какой-либо оси достаточно сделать эту ось горизонтальной
осью привеса, определить период малых колебаний тела вокруг
этой оси и расстояние от точки привеса до центра масс. Тогда,
согласно (53), момент инерции относительно горизонтальной оси
привеса определится по формуле
JOz=~Ph. (55)
§ 4. МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ
СВОБОДЫ (РЕЗУЛЬТАТЫ ДЛЯ ОБЩЕГО СЛУЧАЯ)
Дифференциальные уравнения малых колебаний системы с дву-
мя степенями свободы получим из уравнения Лагранжа:
d ат ат ~ а ат ат
--------= 6ь---------
dta^i dq\ dtdqi 8qz
Каждая из обобщенных сил в общем случае состоит из трех сил:
обобщенной силы от потенциальных сил Qf, сил сопротивления Q*,
возмущающих сил Qf.
Для рассмотрения малых колебаний системы в окрестности
устойчивого положения равновесия необходимо получить разложе-
ния в ряды кинетической и потенциальной энергий и диссипативной
функции.
Кинетическая энергия
Кинетическая энергия системы вычисляется по формуле
N ~2 W „ 72
mkvk _ £ тк?к
k=t 2 k=l 2
Для системы с двумя степенями свободы, на которую наложены
стационарные, идеальные, голономные, неосвобождающие связи,
= О2. (56)
557
радиус-вектор каждой точки гк является функцией только обобщен-
ных координат q{, q2. При движении системы обобщенные коор-
динаты qx и q2 зависят от времени. Следовательно, производная по
времени от радиуса-вектора
д 8гк 8гк
rk=—qi+—q2.
8qx oq2
Подставляя ее в выражение кинетической энергии, получаем
т 1 2 V (^к\2 I Т • V ^Гк &Гк I
?12ЛЧГ +29192 1"»*— — +
2L *=1 V?l/ *=1 5?1 ^02
Q~ 1
=~G4u9? + 2-^129192 + +2292)5
Д.-2Г Л'*
+ 92 Z"»* —
k=l \S42,
где введены обозначения
N
Лц =
*=1
8rk\2 л V 8~Tk S'k л V
— ; +12= 1 +22= 1 mk
p4\J k=i o<7i °42 k=x
Величины Ац, Al2, A22 зависят только от qx и q2, как и гк, и не за-
висят от 41 и q2. Разложим каждую из этих функций в ряд по сте-
пеням qx и q2 в окрестности положения равновесия, приняв в поло-
жении равновесия 9i = 92 = 0. Имеем для Ап
(5Лц\ f
— /91 + 1 ~ ) 9г + ••• •
°Ч\ /О \ дЧ2 /о
Индекс 0 здесь и далее указывает, что эти величины следует
вычислять при qx = q2=0. Аналогичные разложения получаются для
Л12 и А-п- Введем обозначения:
вц=(^п)о; ai2= (^12)о; O22 = (^422)0-
Постоянные величины ан, а12, называются коэффициентами
инерции системы. Отбрасывая члены третьего и более высокого
порядков по отношению к q\, q2, qx, q2, получаем следующее выраже-
ние для кинетической энергии
2’=1/2(<2и9?+2fli29i92 + 0229г)- (57)
Однородной квадратичной формой двух переменных Xj и х2 на-
зывают выражение вида
558
F— B\ ixf + 2Б12Х|Х2 + B22X2,
где j?lb BI2, B22 — постоянные величины, не все равные нулю.
Квадратичная форма, которая принимает только положитель-
ные значения в области изменения переменных xt и х2 и равна нулю
только при нулевых значениях переменных, называется определенно-
положительной.
Если пренебречь слагаемыми третьего и более высокого поряд-
ков, кинетическая энергия системы в окрестности положения равно-
весия будет однородной квадратичной формой обобщенных скоро-
стей 41 > 4г- Так как кинетическая энергия всегда положительна
и равна нулю только при нулевых значениях обобщенных скоро-
стей, то она выражается вблизи положения равновесия системы
определенно-положительной квадратичной формой обобщенных
скоростей.
Для того чтобы квадратичная форма F была определенно-поло-
жительной, необходимо и достаточно, чтобы ее коэффициенты удо-
влетворяли условиям
> 0; Т?22 > 0; ^11^22 — В22—
(58)
Получим эти условия. Пусть F — определенно-положительная
квадратичная форма. Тогда, если F>0 при х2=0, Xj/О, то Ви>0.
Аналогично из условия, что F>0 при х2^0, Х] = 0, следует, что
В22>0. Это необходимые условия определенной положительности
квадратичной формы, но они недостаточны, так как F может стать
отрицательной вследствие того, что В12 имеет достаточное по вели-
чине отрицательное значение.
Преобразуем квадратичную форму, введя переменную х=х1/х2,
если в рассматриваемой области х2 не равна нулю. В противном
случае можно поменять местами х} и х2. Квадратичная форма
F примет вид
F= х2 (Bi 1Х2+25,2х+В22).
Для того чтобы F была всюду положительной в области рас-
сматриваемых значений х, необходимо и достаточно, чтобы квад-
ратное уравнение
В\ ,х2+2Bi2x+В22=0
не имело действительных корней, т. е. парабола
у=ВцХ2 + 2В12х+В22,
559
для которой -8ц > 0 и В22>0, целиком располагалась над осью
абсцисс.
Для этого дискриминант квадратного уравнения должен быть
отрицательным, т. е.
Bi2~ ВПВ22<0 ИЛИ ВцВ22 — #2>0.
Условия (58) доказаны.
Так как кинетическая энергия в окрестности положения равнове-
сия представляется определенно-положительной квадратичной фор-
мой, то ее коэффициенты должны удовлетворять условиям (58);
поэтому для ап, а12, а22 имеем
«11>0» «22>0j «11«22— fl?2 —
All «12
«12 d22
>0.
(59)
Для системы с любым конечным числом степеней свободы
п кинетическая энергия в окрестности положения равновесия выра-
жается однородной квадратичной формой
Т = */2 («119? + «129192 + «219291 + «2292 +... + amq*).
Условия ее определенной положительности таковы:
«п>0;
«и
«21
«12
«22
«11 «12 «13
«11 «12 «1л
«21 «22 «2з >0; ...;
«21 «22 «2л >д
«31 «32 «33
«л1 «л2 •* «лл
Потенциальная энергия
Потенциальная энергия системы с двумя степенями свободы
зависит только от обобщенных координат qx и q2, если силовое поле
и связи стационарны. Разлагая потенциальную энергию П в окре-
стности положения равновесия qx — q2 = 0 в ряд по степеням qx и q2,
имеем
H(qx, q2) = (Л)о + (dnidqdvfa + (d77/^2)0?2 + (3277/^?)09?/2 +
+ {d2ni(dqidq2)]0qxq2 + (а2П/а92)0?22/2 +... .
560
Потенциальную энергию в положении равновесия (Л)о принима-
ем равной нулю; величины (577/5<7i)o=O, (8ni8qi)0 = Q как значения
обобщенных сил в положении равновесия системы. Окончательно,
удерживая члены второго порядка и пренебрегая слагаемыми
третьего и более высокого порядков, потенциальную энергию выра-
зим в форме
П= Ч2 {ciiQl + ^2qxq2 + c22ql). (60)
Постоянные величины
Сц = (52Т7/^?)0; с12 = (a27Z/(a^1^<72)]0; с22 = (82II/8q%)o
называются коэффициентами жесткости.
Потенциальная энергия с принятой точностью является одно-
родной квадратичной формой обобщенных координат qi и q2. В том
случае, когда потенциальная энергия в положении равновесия
имеет минимум, т. е. положение равновесия является устойчивым,
коэффициенты разложения си, с12, с22 как вторые производные от
П по переменным qx и q2 при минимуме должны удовлетворять
условиям
Сп>0; с22>0; СцС22 — Сп>0. (61)
Эти условия совпадают с условиями (58) определенной положи-
тельности квадратичной формы для П. Следовательно, потенциаль-
ная энергия с принятой точностью выражается определенно-поло-
жительной квадратичной формой в окрестности своего минимума
при qt = q2 = 0, т. е. в окрестности устойчивого полжения равновесия
системы.
Потенциальная энергия в случае п степеней свободы выражается
в форме
П= 11г (cnql + c^q^ + c2lq2qt + c22q$ +... + cmq2).
Условия определенной положительности сведутся к условиям
для коэффициентов жесткости, полностью аналогичным условиям
для коэффициентов инерции.
Диссипативная функция
Пусть на точки системы действуют линейные силы сопротивле-
ния Rk, пропорциональные скорости точки vk, т. е.
Rk— — P-kvk = ~P-krk,
где цк — постоянные коэффициенты сопротивления.
561
Обобщенная сила Qf от сил сопротивления, согласно определе-
нию обобщенной силы, если использовать выведенное в гл. 6 тож-
дество Лагранжа
дгк18дх=ёгк1дс[ъ
может быть выражена в форме
п^-Х'о-8^- V 5 бф
Qi ~ А — Zj ^кГк я. ~ я. Д я — я. •
к=1 Sqi к=1 dqi 2 8q}
о л V ^к V А г л
ЗдесьФ = у — = у---------диссипативная функция. Аналогично,
Jt-I 2 А=1 2
Qf через диссипативную функцию выразится как
О?=-дФ/д<12.
Так же как и в случае системы с одной степенью свободы, для
системы с двумя и любым конечным числом степеней свободы
можно получить энергетическое соотношение
АЕ/й1=-2Ф,
где Е—Т+П — полная механическая энергия системы.
Таким образом, диссипативная функция в общем случае харак-
теризует скорость убывания полной механической энергии вследст-
вие действия линейных сил сопротивления.
Диссипативная функция по своей структуре аналогична кинети-
ческой энергии, только в нее вместо масс тк входят коэффициенты
сопротивления рк.
Выполнив для Ф разложение в ряд окрестности положения рав-
новесия и отбросив члены третьего и более высокого порядков, так
же как и для кинетической энергии, получим
Ф=Чг (дп4?+2^129142+fe42)- (62)
Постоянные величины дп, д12, р22 называются приведенными ко-
эффициентами сопротивления.
Квадратичная форма для Ф, так же как и для кинетической
энергии, по своей физической сущности является определенно-поло-
жительной; следовательно, ее коэффициенты удовлетворяют усло-
виям
Д11 >0; д22>0; Дп№2-Д?2>0.
562
Для системы с п степенями свободы диссипативная функция
выразится в форме
Ф = Х/2 (Дп9? + Mi 14г + М219291 + Д22?2 + - + /W„2 )•
Приведенные коэффициенты сопротивления удовлетворяют усло-
виям, которые полностью аналогичны условиям для коэффициен-
тов кинетической инерции.
Дифференциальные уравнения собственных колебаний
Если система, имеющая две степени свободы, движется только
под действием потенциальных сил, то, учитывая формулы для
кинетической и потенциальной энергий (57) и (60), имеем:
61 = б17= ~ 7~ = — (С11?1 + С12?2Х
a?i
0.2—Ql = — — (С12?1+ с22?2);
oqz
ат ат ат . . ат
= = ~ = а1141 + а12?2; Т7"~ а12?1 + а2292-
й<?1 °42 е<?1 oq2
Подставляя эти значения в уравнения Лагранжа (56), получаем
линейные дифференциальные уравнения малых собственных колеба-
ний системы с двумя степенями свободы без сопротивления:
(Я11?1 +C11?1) + (<Z12?2 + C12?2) = O;
(ai2<)'i + c12<7i) + (а22<?2 + с229г)=0.
Механические системы, для которых квадратичные выражения
для кинетической и потенциальной энергий (57) и (60) являются
точными без отбрасывания членов более высокого порядка, называ-
ются линейными. Для линейных систем дифференциальные уравне-
ния (63) являются точными, а не приближенными, как в случае
малых колебаний. Математическая теория малых колебаний не
отличается от теории линейных колебаний. Но линейные колебания
могут быть не обязательно малыми.
Для системы с любым конечным числом степеней свободы
дифференциальные уравнения собственных колебаний выразятся
в следующей форме:
(63)
563
(ai i9i + ci i9i) + (ai2?2 + с12?з) + •• • + (a\„q„+с i„q„) — 0;
0*2191 + С219i) + (0229’2 + С2292) + - + (a2„qn + c^„) = 0;
(а„, iii + с„ । qi)+(а„292 + сЛ29г) + • • + (аот9л+cmq„) = 0.
Интегрирование дифференциальных уравнений.
Уравнение частот
Решение системы уравнений (63) следует искать в форме qx =
= Cie , q2 — C2e . Но в случае малых колебаний в окрестности
устойчивого положения равновесия все значения 2, в чем нетрудно
убедиться, чисто мнимые и, следовательно, решение можно искать
в виде
qi = Ai sin (kt 4- a); 1/2=^2sin(A/+a),
(64)
где постоянная к — круговая частота колебаний. Как доказано
ниже, она является действительной величиной. Постоянные Ль А2,
Айа подлежат определению. Величины At и А2 называются амп-
литудами, а a — начальной фазой. Вычислим производные:
9! = — Л!А:2sin(£/+a); q2 — — А2к2 sin(kt+a).
Подставим их и значения qt и q2 из (64) в систему уравнений (63).
Получим тождества, в которых постоянные коэффициенты при
sin (А/+ а) должны быть равны нулю. Это дает систему двух одно-
родных линейных уравнений для определения амплитуд Ах и А2:
^1 (сн —О1Л2) + ^2 (с12 — O\ikz) — 0;
Ai (ci2—ai2k2)+А2 (c22 — a22k2)=0..
(65)
Однородная линейная система уравнений имеет решения, отлич-
ные от нуля, если определитель системы равен нулю:
Сц-ацк2 Ci2-ai2k2
ci2-a}2k2 с22-а22к2
= 0.
Раскрывая определитель, получаем уравнение частот:
(cn-ank2)(c22-a22k2)-(ci2-ai2k2)2 = Q. (66)
564
Только для значений к, удовлетворяющих уравнению частот,
существуют отличные от нуля значения А\, А2 и, следовательно,
9ь 92-
Уравнение частот как биквадратное уравнение в общем случае
имеет два значения для квадрата частоты к2. Для системы с двумя
степенями свободы, если квадратичные формы для кинетической
и потенциальной энергий удвлетворяют условиям определенной
положительности (59) и (61), эти условия необходимы и достаточны
для того, чтобы оба решения для к2 были действительными и поло-
жительными. Только для действительных и положительных значе-
ний к2 обобщенные координаты q} и q2 выражаются синусоидаль-
ной зависимостью от времени. Для значений к2, не удовлетво-
ряющих этим условиям, движение системы не является колеба-
тельным.
Отбрасывая отрицательные значения частот, как не дающие
новых решений и не имеющие физического значения, получаем две
частоты. Меньшую из частот обозначают к}, большую — к2. Часто-
ты кх и к2 являются частотами собственных колебаний системы. Они
не зависят от начальных условий и полностью определяются значе-
ниями коэффициентов инерции и жесткости.
Исследуем уравнение частот. Рассмотрим функцию
у = (С1, - анх) (с22 - а22х) - (с12 - а12х)2, (67)
где х = к2. Уравнение (67) является уравнением параболы. Корням
уравнения частот к2 и к2 соответствуют точки пересечения парабо-
лой оси абсцисс X] и х2.
Так как квадратичные формы для кинетической и потенциальной
энергий определенно-положительны, то коэффициенты инерции
и жесткости удовлетворяют условиям (59) и (61), т. е.
Пц>0, а22>0, ПцЯ22—>0, (59)
ЙЦ>0, с22>0, с11с22 — cf2>0. (61')
Предположим для определенности, что сн/ан <с22/а22. Для
построения параболы зададим ряд значений х и определим из
(67) соответствующие значения у, учитывая условия (59') и (61').
Имеем:
х=хо = О, у=уо=сцс22-с22>0;
С]1 [
х=х'=—>0, у—у'— — I Ci2 — а12—1 <0;
ап \ ан/
565
С22 [ С22 \2
x=x”=—>0,y=y"=-lct2-aI2—] <0.
а22 \ а12/
Расположив в (67) слагаемые по убывающим степеням х, по-
лучим
У — (ai 1 ^22—а?2)х2 — (ci 1 Он + с22а\ i + 2ci2ai2)x+
+ с11с22~с?2- (67Z)
Так как коэффициент аца22 — а22 при х2 положителен, то у—»+ оо,
когда х-+оо. По полученным данным строим график параболы (рис.
214). Из графика параболы следует, что корни уравнения частот
х, и х2 располагаются в интервале
0 <xj <Сц/ац <с22/а22<х2< оо,
т. е. парабола пересекает ось абсцисс в двух различных точках xt =
= к2 и х2=к2, так как значения у' и у" отрицательны в точках х' =
= с11/а1] и х!' = с22]а22, что и требовалось доказать.
Колебание системы с частотой, квадрат которой х' = А712 = Сц/ац
и обобщенная координата q\, получается в том случае, если другая
обобщенная координата q2 = const, т. е. при дополнительном нало-
жении связи на систему. Аналогично, колебание с квадратом часто-
ты х" = к!2 = c22ja22 и обобщенной координатой q2 получается при
const, что тоже связано с дополнительным наложением связи.
Частоты fcj^^/сц/ац и к2 — у/с22/а22 называются парциальными ча-
стотами системы, соответствующие механические системы с одной
степенью свободы, полученные из системы с двумя степенями сво-
боды, называются парциальными системами.
Из приведенного анализа следует, что они заключены между
главными частотами, причем наименьшая из них больше первой
главной частоты. Так влияет на частоты дополнительное наложение
связей, при котором не изменяются коэф-
фициенты инерции и жесткости системы.
Случай, когда xt = х2, возможен при
x=k2 = cn/an = c22/a22 = ci2/ai2,
при этом у'=у" = 0. Парабола касается
оси Ох.
В случае равных частот каждое из ура-
внений системы (65) является тожде-
ством, справедливым при любых значе-
566
ниях Ai, А2. Система дифференциальных уравнений (63) распадается
на два независимых уравнения: одно — для qb другое — для q2. Их
решения имеют вид
qi=Ai sin (А:/+ <*]); <?2 = Л2 sin (А:/+ а2).
Постоянные А2, аь а2 определяются из начальных условий
/=0; ?i = ^0); q2 = q^-, qy = q^\ ?2 = ^0).
Система в этом случае совершает гармонические колебания.
Каждая из обобщенных координат qA и q2 изменяется по синусо-
идальному закону независимо друг от друга с одинаковыми часто-
тами.
В случае разных частот каждой из них соответствуют определен-
ные значения Л15 А2, a: А\'\ А^\ ai — для частоты к^, А\2\ А^\
а2 — для частоты к2. В соответствии с этим получим по два значе-
ния обобщенных координат qt и q2.
q^ = А^ sin (кА + aj; q^ — Аф sin (A:j 7+
^2)=^2)sin(fc2?+a2); <7^ = ^2)sin(A2/+a2);J
составляют главное колебание для частоты ку, а q(2>, q(2 '' — для
частоты к2. Каждое из главных колебаний является гармоническим
для обеих обобщенных координат.
Система однородных линейных уравнений (65) дает возмож-
ность определить только отношение амплитуд. Для первого и вто-
рого главных колебаний соответственно получаем
_ Сц-Л11*л _ _ С12 —Д12^1Д.
А<р Cl2-“l2kf C22-a22kf
А%>_ Сц-ацк2_ С12-а12к^
Лр’ с12-а12к£ с22-а22к$
Отношения амплитуд в главных колебаниях и /?2 называют
коэффициентами формы. Из (68) следует, что коэффициенты формы
равны отношениям обобщенных координат в главных колебаниях'.
№№=</№ (70)
Коэффициенты формы /?] и /J2 характеризуют формы главных
колебаний. Они могут быть положительными и отрицательными.
567
Если, например, Д1>0, то q^ и qP имеют одинаковые фазы; если
Pi < 0, то их фазы отличаются на п.
Общее решение системы уравнений (63), учитывая (70), можно
выразить в форме
91 = 95°+?!2)—sin (ki t+а0+Аф sin (k2t + а2); 'I
92 = g£4^2) = )M?) + ft9$2) = M?)sin(fc1/+ai)+ > (71)
+ P2A^sin(k2t+a2). J
Четыре произвольные постоянные А^, а1; а2 определяются
из начальных условий.
Итак, собственные линейные колебания системы с двумя степе-
нями свободы состоят из суммы двух главных гармонических коле-
баний с частотами ki и к2.
Главные координаты
Если за новые обобщенные координаты системы выбрать
и q'P, то главное колебание с частотой к} будет характеризовать-
ся только обобщенной координатой q^, а главное колебание с ча-
стотой к2 — координатой q^\
Обобщенные координаты, каждая из которых представляет то-
лько одно главное колебание, называются главными координатами
системы. Произвольные обобщенные координаты через главные
в соответствии с (71) должны выражаться их линейными комбина-
циями:
9i = 9V’ + ?12); ?2 = ^19?)+^2)- (72)
В случаях равных частот любые обобщенные координаты явля-
ются главными. Для главных координат система уравнений должна
распадаться на два отдельных, независимых уравнения, как в случае
равных частот.
Определив обобщенные координаты q^ и q(\\ найдем главные
координаты системы. Главные координаты можно также опреде-
лить основываясь на рассмотрении преобразования кинетической
и потенциальной энергий системы.
Для того чтобы система уравнений распалась на отдельные
независимые уравнения, выражения потенциальной и кинетической
энергий не должны содержать членов с произведениями перемен-
ных. Это можно положить в основу для отыскания главных коор-
динат. Действительно, пусть qx и q2 — произвольные обобщенные
координаты, a q* и q2 — главные координаты.
568
Попытаемся получить равенства нулю членов с произведениями
в разложениях кинетической и потенциальной энергий, приняв ли-
нейную зависимость между qu q2 и q*, q2, т. е.
?i = ai9* + a29?; q2 = Piq* + ^2- (72')
Постоянные aj и a2 включим в q* и q2, т. е. примем a! = a2=l.
Тогда неизвестные постоянные р{ и р2 можно определить из усло-
вий, что для главных координат
Т= х/2 + a?2??2); П= х/2 (с*\Ч*2 + С2*22??2), (73)
т. е. а*2 = с*=0. Сохраним для неизвестных постоянных /?ь р2 обо-
значения коэффициентов формы, так как в действительности они
ими и являются.
Подставляя (72') в выражения кинетической и потенциальной
энергий (57) и (60), получаем
Т= 1/2 {(«п + 2ai2Pi + a22j82)4*2 + 2[an + ai2(j?i + /?2)+ Л
+ a22^1ft] 4*4* +(all +2aj2/?2 + Я22/?2)?*2}i I
П= г/2 {(сп +2ci2Pi + c22p2)q*2 + 2[cH + Ci2(/?i +/?г)+ |
+ с22/?1/?2] ЯлЯг +(сп +2с12^2+с22^2)дг*2}. J
Из сравнения (73) и (74), используя условия а*2 = 0, с*2 = 0, имеем
a*2 = aH +ai2(^i + ^2)+a22^i^2 = 0;)
I (75)
С*2 = С11 +^12(^1 + Рг) + с22Р1р2 = ®, )
а также формулы связи новых и старых коэффициентов инерции
и жесткости
a*i — ai 1 + 2ai2Pi + а22р2, a22 = ai 1 + 2ai2p2 + a22p2',
c* =cn +2С12Д1 + c22p2, c22=Cn + 2ci2p2 + e22p2.
Из (75) получаем
„ o anci2—ai2cn o „ о22сц-ацс22
PiP2=------------; pi+p2=---------------•
O12C22 — О22П2 «12^22-«22C12
(76)
(77)
Эти соотношения позволяют построить квадратное уравнение,
корнями которого являются р} и р2:
(°12с22 — а22си)Р2 ~ (с22с11 ~ Оцс22)Р+ (<2цс12 — а12с11) = 0- (78)
569
Можно доказать, что корни этого уравнения вещественны.
Таким образом, коэффициенты и р2 можно определить двумя
путями: как коэффициенты формы по формулам (69) или как корни
квадратного уравнения (78).
Система уравнений малых колебаний (63) для главных коор-
динат q* с учетом того, что а*=с*=0, распадается на два
независимых уравнения:
+ С* <?* = 0> <2*2<7*2 + С*2<?2 = 0- (79)
Их решения имеют вид
#* = sin (&f/ + «!); #T=H^2)sin(A:*f+a2), (80)
где к* и — частоты главных колебаний. Они вычисляются по
формулам
кГ = ./ctja*-, к^^с^аЪ. (81)
Используя (72') и (80) для произвольных обобщенных координат
qx и q2, можно получить выражения (71).
Частоты изменения главных координат совпадают с частотами
главных колебаний, т. е.
kf=ki, к% = к2, (82)
так как частоты не зависят от выбора тех или иных обобщенных
координат путем линейных преобразований. Они определяются
свойствами системы и потенциальным силовым полем, в котором
движется система. В случае системы с двумя степенями свободы
в справедливости (82) можно убедиться прямыми вычислениями
с использованием формул (76).
Кажется, что по (81) вычислять частоты проще, чем из уравнения
частот (66), но предварительное отыскание главных координат
представляет собой задачу, равноценную по трудности решению
уравнения частот. Главные координаты удобны для теоретических
исследований, особенно для исследования вынужденных колебаний
без учета сопротивления.
Итак, каждая из главных координат системы изменяется по
гармоническому закону, имея определенную частоту, амплитуду
и начальную фазу, так же как и в случае системы с одной степенью
свободы. Этот результат остается справедливым и для собственных
колебаний системы с любым конечным числом степеней свободы.
Некоторые частоты могут оказаться одинаковыми, но это не при-
водит к резонансным явлениям.
570
Влияние линейного сопротивления на собственные колебания
Пусть и q2 — главные координаты системы. Тогда квадратич-
ные формы для кинетической и потенциальной энергий содержат
только квадраты своих переменных:
7’=1/2(ац4?+а2242); П=1/2(Сц?? + С22^2)- (S3)
Диссипативная функция в общем случае сохраняет член с произ-
ведением даже для случая главных координат:
Ф = Х/г (Ди?? + 2^12^142 + Дгг?2)- (84)
Подставляя эти значения Т, П и Ф в уравнения Лагранжа (56),
получаем следующую систему уравнений собственных колебаний
с учетом линейного сопротивления:
(Оц4'1 + Д1141 + С1191) + Д12?2 = 0;)
? (85)
Д12?1 + (й22?1 + Д22<?2 + С22?г) = 0. J
Коэффициенты системы уравнений удовлетворяют условиям
ац>0, а22>0, сн>0, €-22>0; Дц>0, д22>0, ДнД22-Д?2>0. (86)
Использование главных координат не приводит к распадению
системы уравнений на независимые уравнения, но система уравне-
ний становится несколько проще. Решение системы (85) можно
искать в форме
qi = Cieil; q2=C2el‘. (87)
Подставляя (87) в систему уравнений (85) и сокращая на
получаем
Ci (дц22+Дц2+Сц)+ C2(J.i2X=0;)
, ( (88)
С1Д12А+ С2 (О22^ 4" Д22^'4"С22) = 0-3
Для того чтобы эта система однородных линейных уравнений
относительно неизвестных Сь С2 имела ненулевые решения, должен
быть равен нулю определитель этой системы:
ац22 +ДцА-1-Сц д122
Д12^ Й22^2 + Д22^ + с22
= 0.
571
Получено характеристическое уравнение для А, являющееся ура-
внением четвертой степени. В развернутом виде характеристическое
уравнение имеет форму
а11^22^4 + (Оц/^22 + О22Д11)^3 + (а11С22 + fl22C 11 + Д11/^22 — Д?г)^2 +
+ (^11с22 + ^22с11)^ + с11с22 = 0- (89)
Каждому из четырех его корней 21; А2, 23, 24 соответствуют
определенные значения постоянных Ci и С2.
Из уравнений (88) определяются не величины и С2 для каж-
дого корня А,, а только их отношения:
С0 fli |2? 12/4- «1 1 ui22;
- = =-------, i= 1, 2, 3, 4. (90)
Су' Д12Л,- а22)* + Д22Л + «22
Индекс i указывает, для какого корня 2; берутся постоянные
С] и С2.
Не проводя подробного исследования, отметим, что при выпол-
нении условий (86) возможны следующие варианты корней харак-
теристичиеского уравнения (89) и соответственно решений системы
дифференциальных уравнений (85).
1. Корни комплексные. Они попарно сопряженные, так как
коэффициенты уравнения вещественны и имеют отрицательные ве-
щественные части:
212 =—-j-।f: 22>3=—Лэ4-kii.
Этот случай получается при малом сопротивлении. Подставляя
эти значения 2 в (87), после несложных преобразований получаем
qi = е~П1‘ cos k\t+sin kt Z] + e"2‘ [2^2) cos k2t+
+Z)j2) sin k2t] = A\l)e~"1' sin (£jZ+aj1’)+А\2)е~П1‘ sin (k2t+a$2));
q2 = e~",! cos kA+sin k{t\ + е~П1‘ [2^2) cos k2t +
+D(2) sin k2t\ = A^e-”2' sin (ki t+a^) + A^e"2' sin (fc2Z+ a^2)).
Здесь все В, D, A, a. — постоянные величины.
Каждая главная координата является суммой двух затухающих
колебаний. Четыре из восьми постоянных А\'\ А\2\ А^, А^2), aj1’, aj2),
<4IJ, a^2) определяются из начальных условий; другие четыре — через
величины С^, С^.
572
2. Корни действительные. Их можно представить в форме
21,2 = — «1 +&ь 23,4 = —п2+к2,
причем &i <«1, к2<п2. Для главных координат qx и q2 в этом случае
?1 = е~п'‘ (С^е'1+C?e~kl') + е-”3' (С^е*3'+С)4)е~*3');
?2= -е~п'\^ек1‘+<^е^к'‘) + е~П1‘(С^е1,+ С?е~к2‘).
Движение непериодическое, затухающее. Оно получается при
большом сопротивлении.
3. Два корня действительные, а два — комплексно-со-
пряженные:
21,2= —п1+к1; 23,4= — n2 + k2i.
Для ^1 и q2 получаем
9i = e~"l‘ (С^е2‘ 4- С^е~к'1) 4- А[2)е~”г‘ sin (k2t+а$2));
92 = е~П1‘ (С^ек1‘ -I- С^е^') 4- Л^е-"3' sin (k2t 4- а^2)).
В этом случае имеем наложение затухающих колебаний на зату-
хающее движение. Неглавные обобщенные координаты линейно
выражаются через главные в соответствии с (72). Следовательно,
для них каждая из обобщенных координат является линейной ком-
бинацией рассмотренных трех видов движений. Аналогичное поло-
жение будет в случае любого конечного числа степеней свободы.
Вынужденные колебания без учета сопротивления
Рассмотрим вынужденные колебания системы с двумя степеня-
ми свободы без учета сопротивления под действием гармоничес-
ких возмущающих обобщенных сил, отнесенных к главным коор-
динатам. Гармонические возмущающие силы для других коор-
динат можно привести к гармоническим возмущающим силам для
главных координат, если частоты первоначальных возмущающих
сил одинаковы. Действие возмущающих сил, имеющих разные
частоты, следует рассматривать по отдельности, используя свой-
ство суперпозиции решений линейных дифференциальных урав-
нений.
Итак, для главных координат 91 и 92 из уравнений Лагранжа (56)
получим следующую систему уравнений вынужденных колебаний:
fli 191 + <4i9i = sin (pt 4- <5); a22q2 4- c22q2 = H2 sin (pt 4- 3),
573
или после деления первого уравнения на alh второго — на а2г
9i + k2qi = hi sin (pt + 6); q2 + kjq2 = h2 sin (pt + <5). (91)
Здесь введены обозначения для постоянных: к2 = Сц/аи, к2 =
= c22la22 — квадраты собственных частот; hi—Hijan, h2 = H2/a22 —
относительные амплитуды возмущающих сил.
Каждое из уравнений системы (91) можно интегрировать незави-
симо от другого уравнения. Общие решения этих уравнений, соглас-
но теории дифференциальных уравнений, являются суммой общих
решений уравнений без правых частей (собственные колебания)
и частных решений уравнений с правыми частями (вынужденные
колебания):
91 — ?1с + 9ibS 9з = 92с + ^гв-
Свойства собственных колебаний qic и q2c уже рассмотрены. Они
являются гармоническими колебаниями с частотами ki и к2. Рас-
смотрим вынужденные колебания qlB и q2t. Возможны следующие
характерные случаи.
1. Частота возмущающей силы р не совпадает ни с одной из
частот собственных колебаний кх и к2. Тогда частные решения
можно искать в форме
91в = Ci sin (pt + 5); q2B = С2 sin (pt + 5).
Подставляя это в (91) и приравнивая нулю коэффициенты при
синусах в полученных тождествах, имеем следующие уравнения для
определения постоянных С] и С2:
— Cip2 + klCi = hi, -C2p1 + klC2=h2.
Отсюда
Cl = hii(k2i -р2У, С2 = h2/(k2 -р2). (92)
Вынужденные колебания через главные координаты выражаются
в форме
Aj Л2
918=г;—-sin(p/ + <5); q2t=——-sin(p/ + <5). (93)
*i~r k2-p2
Если обобщенные координаты не являются главными, то вынуж-
денные колебания, согласно формулам перехода (72), будут линей-
ной комбинацией (93).
2. Частота возмущающей силы совпадает с одной из частот
собственных колебаний, например p — ki. Это случай резонанса на
574
этой частоте. Решение для вынужденных колебаний можно искать
в виде
q 1В = Ci t cos (pt + 5); q2t = C2 sin (pt + <5). (94)
Подставляя (94) в систему уравнений (91), получаем уравнения
для определения постоянных Ci и С2. Из этих уравнений находим
Cl = -hiKlki)- C2=h2/(k2 -р2}. (95)
Вынужденные колебания для главных координат выражаются
в форме
Л1< . hit . / тЛ
?iB=----cos(p/ + d) =—sini р/+<5— I;
2^i 2к\ у 2 J
/12
72b=,2—;sin(p*+<5). (96)
По одной главной координате получается резонанс.
Переход к другим, не главным, обобщенным координатам по
формулам перехода (72) приводит к резонансу по обеим коор-
динатам.
При р=к{ = к2 получается резонанс по обеим главным коор-
динатам. Для системы с двумя степенями свободы резонанс насту-
пает при совпадении частоты возмущающей силы с одной из двух
частот собственных колебаний.
Для системы с п степенями свободы для появления резонанса
достаточно совпадения частоты возмущающей силы с одной из
п частот собственных колебаний.
Влияние линейного сопротивления на вынужденные колебания
Так как использование главных координат при учете линейного
сопротивления не ведет к существенным упрощениям системы диф-
ференциальных уравнений, но в то же время нарушает симметрию,
то целесообразно использовать произвольные обобщенные коор-
динаты qi и q2. В этом случае кинетическая и потенциальная энергии
выражаются формулами (57) и (60), а диссипативная функция —
(62).
Обобщенные возмущающие силы считаем гармоническими:
Qi = Hi sin (pt+<5); Qf=H2 sin (pt+ 8).
Подставляя эти значения указанных величин в уравнения Лаг-
ранжа (56), получаем следующую систему линейных дифференци-
575
альных уравнений вынужденных колебаний с учетом линейного
сопротивления:
(a^qi + Дн91 + С1191)+(«12^2 + Д12?2 + С12?2) = нх sin (pt + 3);
(fll2?l + Д12<71 + с12^1)+ (а22?2 + Д22?2 + С22^2)= /Г2 8Ш (pt + 5). ^7)
Решение системы уравнений (97) для каждой координаты явля-
ется суммой собственных движений #lc, q2c и вынужденных колеба-
ний ?1в, q2„:
?1=?1с + ?1в; ?2=?2с+^2в-
В зависимости от корней характеристического уравнения для
однородной системы уравнений, которая получается из (97) путем
отбрасывания правых частей, они могут быть линейной комбинаци-
ей затухающих колебаний с затухающими непериодическими дви-
жениями или этими движениями по отдельности.
Рассмотрим вынужденные колебания <?1В, q2t. Они являются част-
ными решениями системы уравнений (97). В этом случае их следует
искать в форме
qi„ = Bi sin (pt + 3)+Di Cos (pt+S) = Ai sin (pt+3 — eO;)
> (98)
<?2в = B2 sin (pt + 3)+D2 cos (pt+3) = A2 sin (pt+3 — s2). j
Постоянные Bt, Db B2, D2 связаны с постоянными A2, eb e2
соотношениями
j5i=^icoseb Z>i= — Я, sinEb)
( (99)
B2=A2 cos e2, D2 = — A2 sin e2, J
и соответственно амплитуды A}, A2 и сдвиги фаз еь е2
А1 = у/ В^ + Di; tg £] = — Di)Bi
,_____ > (100)
A2 = yjB2-\-D^', tgs2= —Z)2/B2.J
Подставим (98) в систему уравнений (97). Получим тождества,
справедливые для любого момента времени. Если в каждом тож-
дестве собрать отдельно члены с синусами и косинусами, то коэф-
фициенты при них должны быть равны нулю. Это дает систему
четырех уравнений для определения неизвестных Bt, В2, Dt, D2:
576
Д (с,! - ai 1Р2) - DiHi tp+B2 (c12 - a12p2) -
—D2pnp=Hi',
BiPnp+Di (си —ацр2)+B2pi2p+D2(ct2 — ai2pz)=0',
Вх(сп-а{2р2)-О1рх2р+В2 (c22 - a22p2) -
—D2p22p=H2,
Bipi2p+D{ (c,2 - al2p2) + B2p22p + D2 (c22 - a22p2) = 0.
(101)
Можно доказать, что это система неоднородных линейных урав-
нений, т. е. ее определитель не равен нулю ни при каких значениях
р. Решая систему уравнений (101), полностью определим постоян-
ные Bi, В2, Di, D2, а следовательно, At, А2, еь е2.
Не выполняя решения системы уравнений (101), можно сделать
выводы о влиянии линейного сопротивления на вынужденные коле-
бания системы с двумя степенями свободы. Как и для случая
системы с одной степенью свободы, вынужденные колебания явля-
ются незатухающими гармоническими колебаниями и происходят
с частотой возмущающей силы. Они не зависят от начальных
условий. При резонансе амплитуды вынужденных колебаний оста-
ются постоянными в отличие от случая отсутствия сопротивления.
В случае системы с п степенями свободы выводы о влиянии
линейного сопротивления на вынужденные колебания остаются пре-
жними.
Более сложные колебания совершают системы с бесконечным
числом степеней свободы, как, например, различные типы сплош-
ных сред. В некоторых случаях их можно с достаточной точностью
заменить системой с конечным числом степеней свободы.
Для сплошных сред дифференциальные уравнения движения бу-
дут уравнениями в частных производных в отличие от систем
с конечным числом степеней свободы, для которых дифференциаль-
ные уравнения являются обыкновенными.
Пример. Два груза с массами mi и т2 прикреплены к пружинам с коэффициен-
тами жесткости ci и с2 (рис. 215, а). Исследовать колебания системы.
Решение. При движении грузов по вертикали система имеет две степени свобо-
ды. Примем в этом случае за обобщенные координаты системы смещения грузов
X] и х2, отсчитываемые от положения статического равновесия грузов вниз.
Вычислим кинетическую энергию системы относительно инерциальной системы
отсчета. Имеем
Сравнивая ее с разложением кинетической энергии (57), получаем значения коэф-
фициентов инерции:
577
all=ml> а12 = 0> ац=т2-
Для определения потенциальной энергии следует вычислить работу внешних
и внутренних сил системы на перемещении из рассматриваемого положения системы
с координатами грузов Xj и х; в положение статического равновесия. Сначала
переместим систему как единое твердое тело без деформации второй пружины на
величину xj. На этом перемещении работу будут совершать силы тяжести грузов
и сила упругости первой пружины F\ = cj2[ = cj (2iCT4-xi). У этих сил общее переме-
щение их точек приложения. Работу будет совершать разность сил
(™1 +m2)g-Fi =(mi +/H2)g-Micr-eiXi = -cixb
так как в положении статического равновесия (mj +^2)^=сМ1ст- Работа разности сил
будет положительной при перемещении вверх на хь Работа внутренних сил системы
в точках присоединения пружины к грузам и в сечениях второй пружины равна нулю.
Внутренние силы, как силы взаимодействия равны по величине и противоположны
по направлению, а перемещения у их точек приложения общее.
Осталось переместить второй груз на величину х2 при неподвижном первом
грузе. На второй груз действуют сила тяжести этого груза и сила упругости второй
пружины F2 = C2I2 = с2[-3-2ст (х2~xj)], так как нижний конец удлиняет пружину на хг,
а верхний —ее сокращает на хь Разность сил, приложенных ко второму грузу
m2g-F2 =m2g-с22.2ст~с2 (х2 -х^ = - с2 (х2 -xj),
так как в положении статического равновесия m2g — сг^2ст- Переменная разность сил
(Х2-Х])2
на перемещении (х2—xj) совершит работу A2 = c2-------. Все остальные силы
2
приложены к грузу с массой т\, а он при рассматриваемом перемещении непо-
движен.
Потенциальная энергия системы
Рис. 215
578
xf (x2-Xl)2
71= A [ + A2 = ^~c2 .
Вычисляем коэффициенты жесткости clb ci2, c22:
8П
— =C1X1+C2(X2-X1)(-1) = C1X1-C2(X2-*1);
OX]
8П (82n\
—=^(^2-^1); — =^i+c2;
0X2 X OXi Jo
/ 82П \ /д2П\
c!2= “ ; =-c2;c22=I —I =C2.
\8xxdx-Jo \8x^Jo
Система дифференциальных уравнений малых собственных колебаний (63) при-
мет форму
+ (с! + С2)Х] — с2х2=0; — с2Х{ +т2х2+с2х2=0.
Уравнение частот, согласно (66), имеет вид
[(ci + c2)-mifc2] (с2—т2к2)—с2=0.
Для упрощения вычислений предположим, что пружины одинаковы, т. е.
С! =С2 = с. Тогда уравнение частот примет форму
(2с—т 1 к2) (с—т2к 2)—с2 = 0;
2(m2 + mi)c с2
к*-—----------к2+---=0.
2И17И2 mim2
Его решение
(2»12+>”1)с /(2»12 + 2П1)2С2 с2
к2 2=--------+ /-------------------.
’ 2/Him2 V 4/И17И2 т\т2
Оба решения, как и следовало ожидать, оказались действительными и положи-
ла
тельными. Если масса очень велика по сравнению с массой т2, то, приняв —=0,
Гс „
получаем fci=0, к2= /—. т. е. груз с массой т\ не колеблется, а груз с массой
V т2
т2 колеблется так, как если бы он был прикреплен с помощью одной пружины
к неподвижному телу.
Полагая массу т2 бесконечно большой по сравнению с т\, имеем fci = 0, к2 =
12с
= /—. В этом случае груз, имеющий бесконечно большую массу, не колеблется,
V «1
а груз с массой mi колеблется, как если бы он был прикреплен к неподвижному телу
на двух пружинах.
579
Рассмотрми случай, при котором т]=/П2=т. Система уравнений собственных
колебаний примет вид
тхх +2cxi~с*2=0; тх2~+ сх2=0.
Уравнение частот соответственно выразится в форме
(2с—тк2) (с—тк2)—с2=0
или
тк* — Зтск 2 + с2 = 0.
Из уравнения частот определяем квадраты частот главных колебаний:
=~(3-х/5); к2=~(3+^5).
2т 2т
Коэффициенты формы в этом случае, согласно (69), имеют значения
сп—1
Д1 =--------i=-(V5+l)»l,62.
с22~а22^| 2
С12-"12*22 1 Г
= ---------=-(V5-l)«-0,62.
€22-^22*2 2
Первое главное колебание с частотой к\ состоит из х^ и х^=/?]Х^\ Так как
Р\ >0, то знаки смещений xj1-1 и х^ в первом главном колебании одинаковы и колеба-
ния грузов совпадают по фазе. Второе главное колебание с частотой к2 включает
в себя смещения х^ и х^=/?2Х^2\ Так как /?2<0> то знаки смещений и
з&Р противоположны. Колебания грузов отличаются по фазе на я.
Формы главных колебаний изобразим графически. Для этого отложим смещения
грузов в главных колебаниях вправо по горизонтали положительные, влево — от-
рицательные. По вертикали отложим расстояния грузов от верхнего конца первой
пружины. Для первого главного колебания смещение первого груза изобразится
горизонтальным отрезком х^'\ смещение второго груза — горизонтальным отрез-
ком х^ (рис. 215, б). Оба отрезка направлены вправо, так как у них одинаковы знаки,
например, положительные. Для второго главного колебания отрезок х^ отложим
опять вправо, тогда хф надо отложить влево, так как х!? будет отрицательным (рис.
215, в).
Точка пружины D при втором главном колебании остается все время неподвиж-
ной. Такие точки называются узлами. Второе главное колебание имеет один узел.
Первое главное колебание узлов не имеет.
Гашение части вынужденных колебаний
В системе с двумя степенями свободы вынужденные колебания
одной координаты можно погасить за счет колебаний системы.
Пусть имеем систему двух грузов с массами ту и т2, соединен-
ных пружиной с жесткостью с2 и подвешенных на пружине с жест-
костью сг (рис. 215, а). На первый груз дополнительно действует
580
сила F(г) = Нsin (pt + <5), направленная по вертикали вниз. При этом
Н, Р, 8 — постоянные величины. Определим условия, при выполне-
нии которых первый груз не будет совершать вынужденных колеба-
ний.
Система грузов с пружинами при движении только по вертикали
имеет две степени свободы. За обобщенные координаты примем
смещения грузов Xi и х2 по вертикали вниз от статического равно-
весия грузов. Массами пружин и сопротивлением воздуха при дви-
жении грузов пренебрегаем.
Для рассматриваемой задачи имеем следующую систему диф-
ференциальных уравнений
(ai л + СцхО+(а12х2+с12х2) = (/);
(ai2xi + Cj2Xi) + (a22x2 + с22х2)= Q2 (t).
Для применения этой системы уравнений следует определить
коэффициенты инерции ап, а12, а22 и коэффициенты жесткости сн,
Си, С22.
Кинетическая энергия системы
X? X?
Т=т1-+т2-,
2 2
так как грузы движутся поступательно, имея скорости Xi и х2 от-
носительно инерциальной системы отсчета. Для коэффициентов
инерции из кинетической энергии имеем
at2 = 0; а22=т2.
Потенциальную энергию системы следует вычислить как работу
всех внешних и внутренних сил системы, не учитывая силу F(t), на
перемещениях грузов из положения, при котором они имеют смеще-
ния Xi и х2 в положение их статического равновесия при Х] = 0
и х2 = 0.
Рассмотрим систему двух грузов вместе с соединяющей их пру-
жиной, заменив первую пружину силой ее упругости Fi = Ci2i =
— Ci Gier + Xi). Внешними силами выделенной системы являются си-
лы тяжести грузов и сила упругости Fx. Вычислим их работу на
перемещении выделенной системы как единого целого на Xi вверх.
Перемещения у точек приложения сил одинаковые. Работу будет
совершать разность сил
(тх +m2)g-Fi=(m1 +m2)g-cI2Ici-cIxI = - CjX,,
581
так как в положении равновесия («i1+/n2)g=c12lcr. Работа этой
переменной разности сил на перемещении от Xj до нуля
= С1
Внутренние силы в точках крепления пружины с грузами как
действия и противодействия равны и противоположны. Их работа
на общем для их точек приложения перемещении равна нулю.
Аналогично будет и с внутренними силами в любом сечении пружи-
ны, соединяющей грузы.
Чтобы система оказалась полностью в положении равновесия
следует переместить только один второй груз на (х2 — Xi), так как на
Xj он уже перемещен. На второй груз действуют внешние силы
тяжести второго груза и отбрасываемая пружина, сила упругости
которой
^2 == с2^-2 = С2 [Л.2ст + (Х2 — X])],
так как ее нижний конец при перемещении второго груза на х2 удли-
нил пружину на эту величину, а смещение груза с массой тх на х}
сократит длину пружины на х,. Разность сил, действующих на
второй груз,
т-£ -F2 = mig - с2 [22ci + (х2 - xt)] = с2 (х2 - Xj).
Работа этой переменной разности сил на перемещении от (х2—Xj) до
нуля
. (x2-xj)2
Л2 —С2 -
Потенциальная энергия системы
X? (Х2-Х1)2
—Ьс2---------
2 2
Вычислим коэффициенты жесткости:
— = С1Х, + с2 (х2 - хО • (-1); —- = с2 (х2 - Х[);
vXj дх2
(д2п\ / д2П \
С\ 1 — I - I — С\ “hСэ! Ci? = I - I — — ^21
Vх! Л V-X13x2/o
582
f 82П\
б?22—I -- 1 —&!•
\M/o
Обобщенные силы вычисляем только от действия одной силы
F(t). Имеем
(Z5Ak\ F5xy (1<5Ак) n
Qf=-k------------=F- Q2=—-----—= 0,
<5*1 <5x2 5x2
так как <5xi следует направить вниз в сторону положительного хь
а вниз направлена и сила F. Q2 = Q, так как сила F не совершает
работы на перемещении <5х2.
Подставляя вычисленные величины в систему дифференциаль-
ных уравнений, получим
[/MiX] + (с, + c2)xj+[ - c2xj=Н sin (pt+6);
[ - c2xt] + [»i2x2 + c2x2]=0.
Решения для вынужденных колебаний (частные решения) следует
искать в форме:
x1B = Ay sin (pt+ 8)-, х2в=Л2 sin (pz + <5).
Тогда
xlB = — A ip2 sin (pt + 5); x2g = — A p2 sin (pt+8).
Подставляя х1в и х2в и их производные в систему дифференциальных
уравнений и после сокращения на sin(pZ+<5) получим систему линей-
ных алгебраических уравнений для определения постоянных амп-
литуд вынужденных колебаний
А1 [-т{р2 + (с, + с2)]+Аг [- с2]=Н\
Ау [-CJ + А2 [-nip2 4-cJ = 0.
Из этой системы определим Ау по правилу Крамера:
Н -с2
0 (с2-тгр2)
сг-тгр2
= п------.
Д Д
Амплитуда вынужденных колебаний первого груза Ау = 0, а сле-
довательно нет и вынужденного колебания первого груза, если
583
выполняется условие сг — m1p2 = Q. В этом случае определитель си-
стемы
- тр2 + (С) + с2) -с2
— сг сг-ттр2
- [(С1 + Сг) - ШхР2} (с2 - т^р2)-с%= -с?^0.
Таким образом, вынужденные колебания первого груза, на кото-
рый действует периодическая вынуждающая сила, окажутся пога-
шены, если круговая частота этой силы р =
этом масса
груза wij и жесткость пружины Cj могут быть любыми.
ГЛАВА 12
ДИНАМИКА ТВЕРДОГО ТЕЛА С ОДНОЙ
НЕПОДВИЖНОЙ ТОЧКОЙ
Изучение движения тела с одной закрепленной точкой имеет
важное значение. Во-первых, телом с одной закрепленной точ-
кой, имеющим широкое практическое применение, является ги-
роскоп — тело осесимметричное. Во-вторых, движение свобод-
ного твердого тела можно представить состоящим из двух дви-
жений: поступательного вместе с какой-либо точкой тела и вра-
щения его вокруг этой точки. В качестве точки, вместе с которой
рассматривается поступательное движение, выбирают центр
масс тела, так как для него имеется теорема о движении центра
масс. К изучению движения тела вокруг, например, центра масс
можно применить общие положения о движении тела вокруг
неподвижной точки.
§ 1. КИНЕТИЧЕСКИЙ МОМЕНТ ТЕЛА,
ВРАЩАЮЩЕГОСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
Имеем твердое тело, одна из точек котороо закреплена. Движе-
ние тела рассматривается относительно некоторой системы коор-
динат Oxyz (рис. 216), начало которой находится в закрепленной
точке тела. Вращение тела вокруг неподвижной точки в каждый
момент времени есть вращение вокруг мгновенной оси с угловой
скоростью со, направленной по этой оси. Для кинетического момен-
та Ко относительно неподвижной точки, согласно его определению
имеем
N
K0=Y^'xmkvk, (1)
*=i
где rk — радиус-вектор какой-либо точки тела; тк — масса точки;
vk — скорость этой точки относительно выбранной системы от-
счета. Для сплошного тела роль точек выполняют малые элемен-
тарные частицы тела, на N которых оно разбито.
Из кинематики известно, что скорости точек тела при его враще-
нии вокруг неподвижной точки вычисляются по векторной формуле
Эйлера
585
vk=coxrk=
(Ox
Xk У к zk
+j (и* - a>xzk) + к ((O^k - (OyXk), (2)
которую в проекциях на оси координат,
учитывая, что векторное произведение
можно представить в виде определителя,
выразим в форме
Vkx— G>yZk ШхУк> ®ку— ^zXk (OxZk, Vkz— ШхУк ^уХк, (2 )
где хк, ук, zk — координаты точки тела с массой тк.
Для проекции кинетического момента на ось Ох с учетом (2')
имеем
У N
KX=Y mkiykVkz-ZkVky^ S тк\Ук{(ОхУк~(ОуХ^~
£=I jt=l
N
- zk (cozxk - (OxZk)] = a>xX тк(Ук+ Zk) -
k=l
N N
-a>yX mkxyyk -cozY (Г)
k=l k=l
Проекции угловой скорости сох, coy, coz вынесены за знаки сумм, так
как они не зависят от точек тела, по которым ведется суммирова-
ние. Суммы в (Г) представляют собой соответственно осевой
Jx и центробежные J^,, Jxz моменты инерции. С учетом этого для
Кх и по аналогии для Ку и Kz получаем
Кх----JХ^Х Jxytt>y JZZ^ZJ
Ку = — Jyx(Dx + JyWy — JyzO)z,
Kz — Jufl)x Jzy^y “b «Л/^z-
(3)
По формулам (3) вычисляются проекции на оси координат кине-
тического момента тела относительно его закрепленной точки. Эти
проекции являются линейными функциями проекций угловой скоро-
сти вращения тела на те же оси координат. Кинетический момент
Ко по проекциям определяется формулой
586
K0=K~i+Kj+Kzk.
(1")
Проекции на оси координат кинетического момента по фор-
мулам (3) можно вычислить как для осей, относительно которых
рассматривается вращение тела (неподвижные оси), так и любых
других подвижных осей, например скрепленных с вращающимся
телом. Для неподвижных осей осевые и центробежные моменты
инерции изменяются при вращении тела и, следовательно, зависят
от времени вследствие изменения положения тела относительно
этих осей. Для подвижных осей, скрепленных с телом, моменты
инерции являются постоянными, не зависящими от времени, так как
положение тела относительно этих осей не изменяется при его
вращении. В случае проецирования кинетического момента на по-
движные оси координат следует иметь в виду, что кинетический
момент вычисляется для движения тела относительно неподвижных
осей.
Если применить тензор инерции
и учесть правило умножения тензора на вектор-столбец со, то (3)
можно кратко выразить формулой
K0=Ja>.
Формулы (3) упрощаются для проекций кинетического момента
на главные оси инерции для неподвижной точки О. Для таких осей
координат Л,,=/|,г=Лх = 0 и из (3) получаем:
Кх = Ку=Jy(oy; Kz=Jzwz. (4)
В этом случае проекции кинетического момента вычисляются так
же, как и в случае, если бы каждая из главных осей инерции была
неподвижной осью вращения тела.
Главные оси инерции для неподвижной точки О обычно под-
вижные оси, скрепленные с самим вращающимся телом. Только
такие оси могут быть главными в течение всего времени вращения
тела. Другие подвижные или неподвижные оси могут быть глав-
ными только в отдельные моменты времени.
587
Частный случай. Если имеем тело, ко-
торое вращается вокруг неподвижной оси
Oz (рис. 217), то в этом случае вектор уг-
ловой скорости со направлен по оси враще-
ния и его проекции на две другие оси, пер-
пендикулярные оси вращения, равны нулю,
т. е. сох=соу=0. Так как вращение вокруг
неподвижной оси есть частный случай вра-
щения тела вокруг неподвижной точки, то
по формулам (3) в этом случае имеем:
= Jxy&>z, Ку = Jyz^zi К = JZ^Z- (5)
Если ось вращения Oz является главной осью инерции для ее точки
О, то Jxz=Jyz=0 и из (5) получаем:
Кх = 0; Ку=0; К=Ксох. (5')
Кинетический момент для случая главной оси направлен по оси
вращения. В других случаях он не направлен по оси вращения. Ось
вращения является главной осью инерции для всех своих точек, если
она является главной центральной осью инерции.
§ 2. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТЕЛА С ОДНОЙ
ЗАКРЕПЛЕННОЙ ТОЧКОЙ
В соответствии с определением кинетической энергии имеем
! * _ 1 N
Т=- £ m&k=-У mkvk vk. (6)
2Jt»=l 2*=1
Если заменить один из векторов скорости vk его значением из (2), то
получим
Iх 1 N
Т=- £ mk(coxrk)-vk=- Y mkvk(coxrk). (6')
2jt-i 2*=i
В смешанном произведении трех векторов можно переставлять
сомножители в круговом порядке, т. е.
Vk• (со х rk)=rk (vkxco)=co- (гк X vk).
С учетом этого после вынесения вектора со за знак суммы по-
лучим
588
N
T= Va"’ E rkxmkvk =ll2cb-K0, (1)
k-l
так как
E rkxmkvk=K0.
к- 1
Итак, кинетическая энергия тела, вращающегося вокруг непо-
движной точки, равна половине скалярного произведения угловой
скорости вращения тела и кинетического момента относительно
закрепленной точки.
Скалярное произведение можно представить в двух формах:
Т = ll2io' Ко = 112(оК0 cos (аз,Л Ко)=
=1 /2 (fO*Kx + (ОуКу+согХг). (7')
Так как кинетическая энергия может иметь только положительные
значения, то из (7') следует cos (оз,Л Хо) > 0, т. е. угол между мгно-
венной осью, по которой направлен вектор угловой скорости, и ки-
нетическим моментом относительно закрепленной точки всегда ост-
рый.
Если в (7') величины Кх, Ку, К, заменить их значениями из (3), то
получим
Т= 1/2 (Jjfi3x + JyO3^+Jza3% — 2Jyfi3yO>z —
—Jzxo3^3x—2Jxya3xo3y), (8)
т. e. кинетическая энергия тела с одной закрепленной точкой явля-
ется квадратичной формой проекций угловой скорости на оси коор-
динат.
В матричной форме, учитывая (Г), кинетическую энергию можно
представить формулой
Т^/^Лз).
Если оси координат Oxyz являются главными осями инерции
для закрепленной точки О, то JXy = JyZ—Jzx=Q и (8) примет вид
Т= х/а М++ Лсог2). (9)
Эта формула является обобщением выражения кинетической эне-
ргии, полученного при рассмотрении вращения твердого тела во-
круг неподвижной оси. Согласно (9), кинетическая энергия при
вращении тела вокруг неподвижной точки получается так же, как
589
при одновременном вращении вокруг трех неподвижных главных
осей инерции, проходящих через эту точку.
Проверкой можно убедиться, что как в общем случае, так
и в случае главных осей инерции справедливы формулы
Кх = 8Т/дсох; Ку = 8Т/8соу; Kz = 8T/dcoz.
Для случая вращения тела вокруг неподвижной оси
Kz = 8T/da>z.
Пример. Диск 1, имея закрепленную точку О (рис. 218, а), катится без скольжения
по плоскости.
Определить кинетическую энергию диска.
Решение. Выберем за подвижные оси координат главные оси инерции диска для
точки О, скрепленные с диском. Имеем
1
Т=- (Jx(a2 + J/b2 4- J/o2).
Мгновенная ось для диска 1, по которой направлена угловая скорость со,
проходит через неподвижную точку О и точку соприкосновения диска с неподвижной
плоскостью. Главными осями инерции диска являются ось симметрии Oz и две
любые оси Ох и Оу, перпендикулярные ей, в силу симметрии диска. Для этих осей
имеем
г R
сох=0; cov=cucosa=£o—. - ; сог=со sina=co—==.
7г2+Я2 7г2+Я2
mr2
Момент инерции Jz —---. Моменты инерции относительно осей Ох и Оу вычис-
2
ляем с использованием теоремы Штейнера. Имеем
Jx = Усх'+ягК2; Jy=Jcy+mR2.
Для диска (рис. 218, 6)
»-,_2
mr
Jcx:'=Jcy=~~~-
4
Используя эти значения моментов инерции, получаем
Рис. 218
590
Для кинетической энергии с учетом шх=0 имеем
таг2
Т=-----
2
(г2+4А2)
г
4(г2 + Я2)
2r2 R2 1
4 г2 + Я2
та>2г2
8(г2 + Я2)
та) г
(г2 +4R2 + 2R2) =-------(г2 + 6А2).
8(г2+Я2)
§ 3. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Динамические уравнения Эйлера вращения тела вокруг непо-
движной точки под действием сил получают из теоремы об измене-
нии кинетического момента. Согласно этой теореме,
dKo/dt=Ltf, (10)
где Ro — кинетический момент тела относительно его закрепленной
точки от вращения тела относительно инерциальной системы от-
N
счета; L$ = £ Мо (ffi) — векторная сумма моментов внешних сил,
t-i
действующих на тело (рис. 219). К числу внешних сил относится
также сила реакции закрепленной точки.
Если выразить (10) в проекциях на инерциальные (неподвижные)
оси координат, то через Кх, Ку, Kz в полученные уравнения, согласно
(3) в общем и (4) в частном случаях главных осей, войдут изменя-
ющиеся с течением времени моменты инерции, для вычисления
которых следует уже знать движение тела, которое само подлежит
определению по заданным силам. Чтобы избежать этого, Эйлер
предложил проецировать векторы, входящие в (10), на подвижные
оси координат, скрепленные с вращающимся телом. Для таких осей
моменты инерции не зависят от времени.
Подготовим векторное уравнение (10) для проецирования на
подвижные оси координат, скрепленные с движущимся телом. Для
этого абсолютную производную по времени от кинетического мо-
мента необходимо выразить через относительную производную,
используя формулу Бура, т. е.
d^o dKo _ _
^=~ + (охКо, (11)
dt dt
так как подвижная система осей координат имеет ту же угловую
скорость, что и само тело, с которым скреплены эти оси.
591
Для удобства проецирования предста-
вим векторное произведение векторов
в виде определителя с последующим раз-
ложением его по элементам первой стро-
ки, т. е.
Кх Ку Kz
+j (a>zKx - coxKz)+k (a>xKy - coyKx),
(12)
где i, j, k — единичные векторы, направленные по осям координат
подвижной системы осей координат. Используя формулу (11),
теорему об изменении кинетического момента (10) представим
в форме
— + vxKo=L&.
dt
(Ю')
В проекциях на подвижные оси координат, скрепленные с враща-
ющимся телом, из (10') с учетом (12) получим
dx*
— + (oyKz-(ozKy=L?;
dt
dKy
-^ + wzKx-coxKz=L^;
dt y
dKz
—z + c«A-cuA=^e)-
(13)
Эти уравнения после подстановки в них значений Кх, Ку, Kz из (3)
приведут к обобщенным динамическим уравнениям Эй-
лера. Это еще довольно сложные уравнения. Дальнейшее их
упрощение получается, если использовать второе предложение
Эйлера — выбрать в качестве подвижных осей координат, скреп-
ленных с телом, главные оси инерции для точки О. В этом случае
Кх, Ку, К2 определяются по формулам (4). Моменты инерции
по-прежнему не будут зависеть от времени и их можно выносить
за знак производных по времени. Таким образом, из (13), ис-
пользуя (4), получим следующие динамические уравнения
Эйлера:
592
dco, ..
Jx — + (Л - Jy^COyOJ; = L{‘\
a/
dco^ ..
~b (*Zx jLy ,
at
dtoT , x
Jx~ + (Jy-Jx)coxa3y = Li‘\
at
(14)
К этим динамическим уравнениям Эйлера следует присоединить
кинематические уравнения Эйлера
сох=ф sin 0 sin<p + 0 coscp;
со у=ф sin0 cos<p — 0 sirup;
coz=фсоь0 + ф,
(15)
которые выражают проекции вектора угловой скорости вращения
тела на подвижные оси координат, скрепленные с телом, через углы
Эйлера, ф, в, ср и их производные по времени.
§ 4. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Установим зависимость проекций вектора угловой скорости на
оси координат, скрепленные с телом, от углов Эйлера ф, в, <р и их
производных по времени.
Тело, имеющее неподвижную точку О, движется относительно
осей координат OxiyiZi (рис. 220). С движущимся телом скреплена
система подвижных осей координат Oxyz, движение которой и ха-
рактеризует движение рассматриваемого твердого тела относитель-
но осей OxtfiZ}. Положение подвижной системы координат относи-
тельно неподвижной, а следовательно, и положение самого движу-
щегося тела определяются тремя углами Эйлера: ф, в, ср.
Изменение угла прецессии ф, образованного координатной осью
Oxi и линией узлов ОК, которая является линией пересечения коор-
динатных плоскостей Oxtyi и Оху, соответствует вращению тела
вокруг оси прецессии Ozb перпендикулярной линиям, образующим
угол, с угловой скоростью фк1, направленной по этой оси. Здесь
ki — единичный вектор оси Oz}.
При изменении угла нутации в, заключенного между осями
координат Ozi и Oz, тело вращается вокруг перпендикулярной
этим осям линии узлов ОК с угловой скоростью вп, где п —
593
Рис. 220
единичный вектор, направленный в положительную сторону ли-
нии узлов.
Изменение угла собственного вращения ср, образованного коор-
динатной осью Ох и линией узлов ОК, приводит к вращению тела
вокруг оси собственного вращения Oz, перпендикулярной этим ли-
ниям, с угловой скоростью фк., где к — единичный вектор оси Oz.
При изменении углов Эйлера в и <р движение тела можно
рассматривать как сложное, состоящее из трех вращений вокруг
пересекающихся осей Ozi, ОК и Oz с угловыми скоростями фк\, вп
и фк соответственно. Совокупность этих трех вращений эквивалент-
на вращению тела вокруг мгновенной оси с угловой скоростью 55,
направленной по этой оси.
По теореме о сложении вращений вокруг пересекающихся осей
имеем
й = фкх + вп + фк. (16)
Определим проекции вектора угловой скорости со на подвижные
оси координат Oxyz, скрепленные с телом. Движение тела при этом
рассматривается относительно неподвижной системы отсчета
OxtfiZ], При проецировании на оси координат Oxyz векторной
суммы правой части (16) следует проецировать на эти оси каждый
из слагаемых векторов.
Вектор угловой скорости фк направлен по оси Oz и дает проек-
цию на эту ось, равную ф, так как он перпендикулярен двум другим
осям: Ох и Оу.
Угловая скорость вп, направленная по линии узлов, располагает-
ся в плоскости подвижных осей Ох и Оу, и ее проекция на ось Ох
равна 0cos<p, а на ось Оу — (— Osinrp). Знак минус у проекции на ось
Оу поставлен потому, что при изображенном на рисунке расположе-
594
нии осей координат вектор дп при разложении по осям Ох и Оу
имеет составляющую в отрицательном направлении оси Оу. Про-
ецируемый вектор Вп перпендикулярен оси Oz и его проекция на эту
ось равна нулю.
Для того чтобы спроецировать на оси координат Oxyz вектор
его следует предварительно разложить на две перпендикуляр-
ные составляющие, одна из которых направлена по оси Oz, а другая
перпендикулярная составляющая расположится в плоскости осей
координат Ох и Оу. Имеем
фку = ф cos0' к+ф sin0 • 7,
(17)
где 7 — единичный вектор, направленный по линии OL. При проек-
цировании вектора фк^ на оси координат следует проецировать
на эти оси каждый вектор из правой части (17). Вектор ф cos0 • к дает
проекцию ф cos0 только на ось Oz. Остается спроецировать вектор
фьтв!, расположенный в плоскости осей координат Ох и Оу, на
эти оси. В плоскости этих осей расположится также линия узлов ОК
(рис. 221). Линия OL, по которой направлен проецируемый вектор
ф$1п0 1, и линия узлов взаимно перпендикулярны, так как линия
узлов перпендикулярна осям координат Oz и Oz}, а следовательно,
она перпендикулярна и линии OL, расположенной в плоскости этих
осей. Угол <р между осями Ох и ОК является также углом между
перпендикулярными к ним осям Оу и OL. Таким образом, проек-
ции вектора ф sin07 на ось Оу равна ф sin0 cos<p, а на ось Ох —
(ф sin0 sincp). Собирая вместе проекции на оси координат векторов,
входящих в правую часть (16), с учетом полученных проекций
векторов из правой части (17) получим кинематические уравнения
Эйлера:
сох=ф sin0 sintp + 0 cos<p;
а>у = ф sin0 coscp — 0 sintp;
coz = ф cos0 + <p.
Выразим дополнительно косинусы уг-
лов оси прецессии Oz} с осями координат
Oxyz, скрепленными с движущимся те-
лом, через углы Эйлера. По оси прецессии
Ozi направлен вектор угловой скорости
ф к). Поэтому множители при ф в форму-
лах для сох, а>у, coz и есть искомые
X
Рис. 221
595
косинусы указанных выше углов. Обозначая их для краткости уь у2,
Уз, получаем
У! = cos (zt,Л х)=sinfl sing>; >
у2=cos (zi,л у)=sin# cos<p; > (18)
y3 = cos(zbAz)=cos0. J
§ 5. ЗАДАЧА О ВРАЩЕНИИ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ.
СЛУЧАИ ИНТЕГРИРУЕМОСТИ
Даны приложенные к телу внешние силы к кото-
рым следует присоединить и силу реакции закрепленной точки (см.
рис. 219). Ограничимся рассмотрением случая сил, для которых
проекции главного момента L(‘\ L® на подвижные оси коор-
динат, скрепленные с телом, зависят от времени, углов Эйлера ср, ф,
9 и их первых производных по времени ф, ф, в и не зависят от
производных более высоких порядков от этих величин. Если тело
задано, то известны его моменты инерции относительно главных
осей инерции для закрепленной точки тела. Требуется определить
движение тела, т. е. определить углы Эйлера в зависимости от
времени. Для этого следует проинтегрировать систему шести дина-
мических (14) и кинематических (15) уравнений Эйлера. При этом
появятся шесть произвольных постоянных интегрирования, для
определения которых дополнительно следует задать начальные
условия, т е. при 1=0 задать числовые величины углов Эйлера и их
первых производных. Итак, следует задать:
t=0; ср = ср0; ф = ф0', д=Оо',
ф = фо,ф = фо, 9 = 0о. (19)
Интегрирование системы нелинейных дифференциальных урав-
нений (14) и (15) при общих начальных условиях (19) — задача
чрезвычайно трудная. Она в общем случае начальных условий не
решена даже тогда, когда внешними силами являются только сила
тяжести самого тела и реакция закрепленной точки. Для тяжелого
твердого тела, вращающегося вокруг неподвижной точки, в трех
случаях была указана система первых алгебраических интегралов
дифференциальных уравнений, из которых неизвестные углы Эй-
лера в зависимости от времени определяются в квадратурах, т. е.
путем вычисления интегралов. Эти частные случаи называют случа-
ями интегрируемости уравнений Эйлера.
596
Случай Эйлера. Тело имеет любую форму, но закреплено
в его центре масс, т. е. = Дг) = 0. В этом случае углы Эйлера
выражаются через специальные эллиптические функции.
Случай Лагранжа (случай симметричного гироскопа). Тело
имеет ось симметрии, например Oz. В силу симметрии Jx=Jyn эл-
липсоид инерции для закрепленной точки будет эллипсоидом вра-
щения. Закрепленная точка О и центр масс С расположены на оси
симметрии. В этом случае могут быть указаны шесть независимых
первых интегралов, из которых углы Эйлера вычисляются в квад-
ратурах.
Случай Ковалевской. Долгое время не удавалось указать
других случаев интегрируемости, пока русский математик С. Кова-
левская, участвуя в конкурсе, объявленном Французской академией
наук, не открыла еще один, получивший название случая Ковалевс-
кой. В случае Ковалевской Jx = Jy=2J.. Закрепленная точка рас-
полагается на оси симметрии Oz, а центр масс находится в эк-
ваториальной плоскости эллипсоида инерции (плоскости Оху) для
неподвижной точки тела.
Во многих важных случаях, особенно симметричных тел, явля-
ющихся гироскопами, уравнения Эйлера интегрируются прибли-
женно. Известен также ряд частных случаев начальных условий, для
которых уравнения Эйлера при движении гироскопа под действием
силы тяжести могут быть проинтегрированы точно.
§ 6. АСТАТИЧЕСКИЙ ГИРОСКОП
Гироскопом обычно называют симметричное твердое тело, сове-
ршающее движение вокруг неподвижной точки О, расположенной
на оси симметрии Oz (рис. 222). Эллипсоид инерции гироскопа
относительно его неподвижной точки является эллипсоидом враще-
ния (на рисунке он изображен штриховой линией), а любая его ось
в экваториальной плоскости, перпендикулярной оси гироскопа (на-
пример, Ох и Оу),— главной осью инерции. Все эти оси имеют
одинаковые моменты инерции. Ось гироскопа Oz является главной
центральной осью инерции.
Крепление оси гироскопа в одной точке обычно осуществляется
с помощью рамок той или иной формы (рис. 223). Волчок, у кото-
рого точка О движется по плоскости, совершает более сложное
движение, чем гироскоп, имеющий одну закрепленную точку на оси.
Астатическим (или уравновешенным) гироскопом называют ги-
роскоп с неподвижной точкой в центре масс, если на него действуют
только сила тяжести и реакция неподвижной точки. В астатическом
гироскопе имеем соединение двух случаев интегрируемости — Эй-
лера и Лагранжа.
597
Рис. 222
Если Oz — ось симметрии гироскопа, то
для осей координат Oxyz, скрепленных с ги-
роскопом, Jx=Jy. Для астатического гиро-
скопа главный момент внешних сил относи-
тельно закрепленной точки
£ л?0(Лг)=о,
к=1
так как силы тяжести и реакция закреплен-
ной точки проходят через эту точку О, если
нет сил трения в закрепленной точке (рис.
224).
Из теоремы об изменении кинетического
момента для абсолютного движения гиро-
скопа относительно неподвижных осей ко-
ординат
dKo/dt = L&=0
следует, что кинетический момент относительно неподвижной точ-
ки гироскопа Kq = const. В частности, постоянной величиной являет-
ся модуль кинетического момента Ко.
Если одну из неподвижных осей координат Ozx направить по
вектору кинетического момента Ко, имеющему неизменное направ-
ление в пространстве осей координат OxijiZi, то проекция Ко на ось
Oz, как главную ось инерции для точки О и одновременно ось
собственного вращения гироскопа, выразится в форме
Kz=Kocos6,
где 0 — угол между осью Oz} и осью собственного вращения Oz. Он
обозначен так же, как и угол нутации. В дальнейшем окажется, что
он им и является.
С другой стороны, так как ось Oz является главной осью инер-
ции гироскопа для неподвижной точки О, то Kz =Jzcoz.
Следовательно,
=Ко cos0 и cosfl=JfliJKo. (20)
Определим движение уравновешенного гироскопа, т. е. устано-
вим зависимость углов Эйлера 1Д, 0, <р от времени при заданных
начальных условиях. Так как L$ = 0, то Li‘)=L^)=L^)=0. Учитывая
598
это и условие симметричности Jx~Jy, получим следующие динами-
ческие уравнения Эйлера:
Jx Jxj^fi^y — 0> I
(П I
Jy^ + (Л-Л)«хСОг = 0; ? (21)
dcu, I
Jz —= 0. J
dt '
К ним следует присоединить кинематические уравнения Эйлера
сох=ф sin0 simp + 9 cos<p; 'I
(Оу = ф sin0 costp — 6 simp; > (22)
сог=|Дсо80 + ф. J
Вместо системы уравнений (21) удобнее использовать первые
интегралы этой системы, один из которых получается умножением
(21) соответственно на (ох, соу, а)2 и суммированием. После пре-
образований получаем
d j (а>2 + а>2) । j со2,
dt Х 2 1 2
Jx(cox + <oj')+Jzcoj=const=2Л. (23)
599
Это соотношение [первый интеграл системы (21)], в котором
постоянная обозначена 2h, выражает закон сохранения механичес-
кой энергии T+II=h, где П— потенциальная энергия — постоян-
ная, принятая равной нулю.
Если уравнения системы (21) соответственно умножить на Jxcox,
JyU)y, Jz(o. и сложить, то после интегрирования получается другой
первый интеграл:
Jx (со2 + со2) + J2co2 = const = Ко- (24)
Соотношение (24) является законом сохранения кинетического
момента относительно закрепленной точки.
Из третьего уравнения системы (21) следует еще один первый
интеграл:
со2=const=coz°\ (25)
где со*® — значение со2 при /=0.
Первые интегралы (23) — (25) системы уравнений (21) можно
использовать вместо самой системы уравнений. Заменяя со2 на со*® и
учитывая, что Ко=const, из (20) получаем, что угол нутации —
постоянная величина. Действительно,
cos0=Jzco*®/Ko=const — COsOq,
где в0 — значение в при t=0. Так как в=const, то угловая скорость
нутации в=0. С учетом этого система уравнений (22) примет вид
сох = ф sine0 sin<p; соу=ф sine0 cos<p; со™ = ф cos00 + ср. (22')
Возведем первые два уравнения этой системы в квадраты и сло-
жим. Получим
со2 + со2 = fy2 sin2e0 (sin2<p -I- cos2<p) = ф2 sin2e0. (26)
Определяя величину co2 + co2 из (23), убеждаемся, что она являет-
ся постоянной, так как
со2 + со2 = (2й—Л<)2) jJx=const. (27)
Учитывая (27), из (26) получаем
|Д2 — (со2 + co2)/sin20o = const,
т. е. угловая скорость прецессии |Д=const = <Д0 и, следовательно,
600
ф = фо/+фо, (28)
где ф0, Фо — значения угловой скорости прецессии и угла прецессии
в начальный момент времени.
Из (22') с учетом (25) и (28) получаем, что угловая скорость
собственного вращения тоже постоянная величина, так как
ф = о40) —фо cos0o=const = ф0 (29)
и, следовательно,
(p = yot+<po, (29')
где ф0, сро — постоянные величины.
Движение гироскопа с постоянной скоростью собственного
вращения ф, постоянной скоростью прецессии ф и постоянным
углом нутации в называется регулярной прецессией. Уравновешен-
ный гироскоп, следовательно, в общем случае совершает регуляр-
ную прецессию по инерции вокруг направления кинетического момен-
та Ко.
Для того чтобы уравновешенный гироскоп совершал регуляр-
ную прецессию по инерции, т. е. без действия момента внешних сил
относительно его неподвижной точки, необходимо выполнение
условия
/гф = (Л—Л)фсо$0. (30)
Условие (30) получено в § 8 главы. Оно следует также из (29).
Если ф, ф и 0 не удовлетворяют этому условию, то для поддер-
жания регулярной прецессии требуется действие на гироскоп момен-
та внешних сил.
Если уравновешенному гироскопу сообщить начальную угловую
скорость (оа вокруг оси собственного вращения, то кинетический
момент гироскопа Ко, сохраняющий свое направление неизменным,
будет все время направлен по этой оси. В этом случае угол нутации
равен нулю и ось собственного вращения совпадает с осью прецес-
сии, по которой направлен кинетический момент, сохраняющий
постоянное направление в неподвижном пространстве. Ось такого
гироскопа тоже будет сохранять неизменным свое направление
в этом пространстве. Это свойство уравновешенного гироскопа
сохранять неизменным свое направление, например на какую-либо
удаленную звезду, широко используется в различных гироскопичес-
ких устройствах, таких, как гироскопические компасы, автопилоты
и т. д.
601
Действие кратковременных возмущений, действующих на ги-
роскоп, например вследствие движения объекта, на котором он
установлен, с ускорением в течение короткого промежутся вре-
мени, рассматривается в приближенной теории гироскопа.
§ 7. ДВИЖЕНИЕ ГИРОСКОПА ПОД ДЕЙСТВИЕМ
СИЛЫ ТЯЖЕСТИ
Если пренебречь силами сопротивления среды, в которой дви-
жется гироскоп, и силами трения в закрепленной точке или соответ-
ственно в подшипниках рамок, то кроме силы реакции в закреплен-
ной точке на гироскоп всегда действует сила его тяжести. Пусть
в этом случае гироскоп, с которым скреплена система координат
Oxyz (ось Oz является осью симметрии гироскопа), движется от-
носительно системы координат Ox^Zi, у которой оси Ozx с единич-
ным вектором кх направлена вертикально вверх (рис. 225).
Для силы тяжести Р, направленной вертикально вниз, т. е.
против положительного направления оси Ozt, имеем Р=—Ркх. Ее
проекции на подвижные оси координат, скрепленные с гироскопом,
выразятся в виде
Рх= — Pcos(zb лх)= — Руь')
Ру= -Pcos(zbAy)= -Ру2; > (31)
Pz= — Pcos (z}, А z) = — Руз, J
где уь у2, Уз — косинусы углов оси Ozx с осями координат подвиж-
ной системы Oxyz.
Главный момент внешних сил L$ относительно закрепленной
точки сведется только к векторному моменту силы тяжести от-
602
носительно этой точки. Поэтому, учитывая, что хс=0, ус=0, zc=l,
и используя (31), получим
= Мх (Р)=УсР; - ZCP, = - ZcP, = Р1У2,
iy = My(P)=zcPx-XcPz=ZcPx= -Р1уй
L? = Mz(P)=xcPy-ycPx=0.
(32)
Динамические уравнения Эйлера для симметричного гироскопа
(Jx=Jy), движущегося под действием силы тяжести, примут вид
Jxd~ + (Ji - A)®/»z=Р1уг,
dz
Jy +(Л - = - Р1у\;
dt
dm,
Jz = 0.
dt
(33)
К динамическим уравнениям следует присоединить кинематичес-
кие уравнения Эйлера
а>х=ф sin0 sintp 4- в costp;
соу = ф cos0 costp — в sintp;
taz = ^cos0+<p.
(34)
К системе уравнений (33) и (34) надо добавить формулы (18),
выражающие косинусы углов уь у2, у3 через углы Эйлера:
У1 = sin# sinep; y2=sin0cos<p; y3=cos0. (35)
Систему уравнений (33) и (34) с учетом (35) проинтегрируем
в наиболее важном частном случае начальных условий:
t=0; а>х=соу=0; сог=сао; <p = t/t=O; 0=0О- (36)
Вместо динамических уравнений Эйлера (33) целесообразно ис-
пользовать первые интегралы этих уравнений, которые можно по-
лучить из самих уравнений или из общих теорем диамики, приме-
ненных к гироскопу. Один из этих интегралов следует из последнего
уравнения системы (33):
603
(Oz = const = Су.
Два других первых интеграла получим применением общих те-
орем динамики.
Связи, наложенные на гироскоп, при отсутствии трения в закреп-
ленной точке,являются идеальными и стационарными. Сила тяже-
сти, действующая на него, является потенциальной. При этих усло-
виях справедлив закон сохранения механической энергии (интеграл
энергии)
Т+ П— const = С2.
Кинетическая энергия гироскопа при Jx = Jy вычисляется по формуле
Потенциальная энергия П, если принять ее равной нулю, когда
центр масс находится в горизонтальной плоскости Охууу, определя-
ется через координату центра масс zic в неподвижной системе
координат выражением:
n=Pzyc.
Значение ziC получим проецированием радиуса-вектора центра масс
гс = 1к, направленного по подвижной оси Oz, на неподвижную ось
Ozy. Имеем
zlc=rccos(z1,A z)=ly3.
Таким образом,
П=РгуС=Р1у3.
Подставляя значения кинетической и потенциальной энергий
в интеграл энергии, получим
Jx (сох + (Оу)+J2(oz + 2Р1у3 = С2.
Из теоремы об изменении кинетического момента в абсолютном
движении гироскопа относительно неподвижной оси Ozy имеем
dKit/dt=L^=0,
так как сила тяжести Р параллельна этой оси. Отсюда получаем
следующий интеграл сохранения кинетического момента относите-
льно оси Ozy :
604
KZl=const = C3.
Выразим K2i через кинетические моменты относительно подвижных
главных осей инерции Oxyz для точки О:
Kz JХ(ОХ, ~ ' Jy(Oy J
Так как кинетический момент Ко можно разложить на составля-
ющие по осям подвижной системы координат КО=КХ' i+Ky'j+
+ K2k, то К2 можно получить проецированием векторной суммы на
ось Ozt. Имеем
K2l = Кх cos (zi,Л х) + Ку cos (zt,л у)+К2 cos (zi,л z)=Jx(ox?i +
+ Л^^2 + ЛшгУз-
Интеграл сохранения кинетического момента относительно оси Огг
принимает форму
Л (о>х71 + а>уУ2)+Jxco2y3 = С3.
Получены следующие три первых интеграла динамических урав-
нений Эйлера:
Шг=Сь
Л (“х + &у)+JzW2 + 2PZy3 = С2;
Л (уi"x+у2(оу)+]гу3(ог = С3.
Согласно начальным условиям <yz = too, азх — соу = 0 при t=0, из
этих первых интегралов получаем следующие уравнения для опре-
деления постоянных С2, С3:
Wo^Ci', Jz(o20+2Ply30=C2, J2y30(o0= С3.
Подставляя эти значения постоянных в выражения для первых
интегралов, имеем
со2 = (о0; (31)
Jx (а>2 + (о2)=2Р1 (cos0o — cos0); (38)
Л (?1®х+ y2(Oy)=J2coo(cos0o—cos0), (39)
так как, согласно (35) и начальным условиям, у30 — y3 = cos0o—cos0.
605
Из кинематических уравнений Эйлера (34) с учетом (35) получа-
ем соотношения
со2 + со2 = t^2 sin20 + 62; (40)
7i^x + y2<w> = <Asin20. (41)
С учетом (40) и (41) формулы (38) и (39) примут вид
Jx (ф2 sin20 + в2)=2Р1 (cos90—cos0); (42)
sin20 = JztOo(cos0o—cos0). (43)
Из последнего уравнения системы (34), приняв coz - со0, имеем
<z)o = i/rcos0+<p. (44)
Получена система нелинейных обыкновенных дифференциаль-
ных уравнений (42), (43) и (44), интегрированием которых можно
определить углы Эйлера ф, 0, в зависимости от времени при
заданных начальных условиях. Это сложная для интегрирования
система уравнений. Подготовим ее для приближенного интегриро-
вания.
В (42) левая часть положительна; следовательно, должна быть
положительна и правая часть, т. е. cos0o—cos6>0. С учетом этого
из (43) для ф имеем
ф——(cos0o—cos0) > 0, (45)
Jxsin20
т. е. прецессионное движение гироскопа с угловой скоростью пре-
цессии ф происходит все время в одном и том же направлении, так
как при ф > 0 угол ф возрастает с течением времени.
Определяя угловую скорость нутации в из (42) с использованием
(45), получим
02=—(cos0o+cost?) —Jz(°° (cos0o—COS0)2 =
Jx J* sin20
=—(COS0Q—COS0) 1-------—---(COS0Q—COS0)
Jx IPlJxsaPe
(46)
Так как левая часть (46) положительна, то и правая часть должна
быть положительна. Учитывая, что cos0o —cos0>O, получаем, что
выражение в квадратных скобках должно быть тоже положитель-
ным, т. е.
606
Л2°>0
2P/Jxsin20
(cos0o—COS0)< 1.
(47)
Для создания предпосылок последующих допущений прибли-
женной теории гироскопа выполним приближенное интегрирование
полученных уравнений для углов Эйлера в случае быстровраща-
ющегося гироскопа, для которого собственный кинетический мо-
мент Jzto0 — величина достаточно большая по сравнению с на-
ибольшей величиной знаменателя 2PIJX в (47). Этот случай пред-
ставляет наибольший практический интерес. Для таких гироскопов
разность cos0fl—cos0, как это следует из (47), будет величиной
малой. При этом будет малой и разность углов в — в0=и, где и —
изменение угла нутации гироскопа. В этом случае приближенно
можно принять, отбрасывая малые второго и более высоких поряд-
ков,
cosu = l; sinu=M;
cost?=cos (в0+и)=cos0o—и sin0o; sin0=sin0o.
Учитывая, что 0=d0/d/=du/dz, из (46) получим следующее диф-
ференциальное уравнение для определения и:
(duldt)2 = a2u(fl—u), (46')
где введены обозначения для постоянных
а2=J2(o2!J2-, р=2PIJX sin0o/( 2).
Из (46') после извлечения квадратного корня и разделения перемен-
ных получим
du
J y/a2u(fi-u)
О
о
Пределы в интегралах поставлены с использованием начальных
условий. Интеграл левой части вычисляется с помощью подстанов-
ки u=Psinz£. Выполняя интегрирование, окончательно имеем
и=0 — 0О=/? sin2
/аА 2Рихяпв0
• 2
sm
(48)
Подставляя значение 0 из (48) в (45) с учетом принятых допуще-
ний, получим
607
} Л“о
|Д=-------и.
Jx sin^o
(45')
Отсюда интегрированием находится
угол прецессии ф.
Для угловой скорости собственного
вращения из (44) с учетом (45') и приня-
тых допущений имеем
/j<D0COSflo
(р = (Оо-------------и.
Jxsin0Q
(44')
Из этого соотношения квадратурой по-
лучается угол ср в зависимости от вре-
мени.
Не производя вычисления интегралов, уже можно сделать сле-
дующие основные выводы о движении быстровращающегося ги-
роскопа.
1. Модули угловых скоростей прецессии |^r| и нутации |0| малы
по сравнению с модулем угловой скорости собственного вращения.
2. Если прецессионное движение происходит все время в одном
и том же направлении (1Д>0), то нутационное движение носит
колебательный характер.
Отсюда следует, что если взять на оси гироскопа какую-либо
точку А, то ее траектория на поверхности сферы, согласно (48),
будет иметь вид, указанный на рис . 226. При w = 0, как следует из
(45'), <^ = 0, т. е. прецессия на мгновение прекращается. В случае
очень больших значений Jz(o0 наибольшее изменение угла нутации
«гам будет очень малым и тогда можно принять 0 = const = в0. Если
ввести постоянную среднюю угловую скорость прецессии за рас-
сматриваемый промежуток времени, то движение гироскопа будет
очень близким к регулярной прецессии, для которой угловые скоро-
сти прецессии и собственного вращения постоянны и прецессия
происходит вокруг неподвижной оси при постоянном угле нутации.
В действительности движение гироскопа немного отличается от
регулярной прецессии. Движение гироскопа, близкое к регулярной
прецессии, называют псевдорегулярной прецессией.
§ 8. ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПА
В технике применяются гироскопы с угловой скоростью соб-
ственного вращения порядка 2000...5000 с-1 (20 000...50 000 об/мин).
В современной технике гироскопы нашли очень широкое примене-
ние. Гироскопические явления проявляются при всех видах движе-
608
ния тела, когда это тело совершает сложное движение, содержащее
в своих частях вращательное движение. Рассмотрим основные гиро-
скопические явления быстровращающихся гироскопов приближен-
но, приняв, что гироскопу сообщена вокруг оси симметрии или оси
гироскопа Oz собственная угловая скорость а>}.
Основные допущения приближенной теории
При применении гироскопов в различных устройствах важно
знать движение его оси. Собственное вращение вокруг оси обычно
задано, и угловая скорость собственного вращения при этом подде-
рживается постоянной. Движение оси быстровращаюгцегося гиро-
скопа можно установить по кинетическому моменту гироскопа,
вычисленному относительно неподвижной точки, так как кинетичес-
кий момент можно считать приближенно направленным по оси
гироскопа. Для быстровращающегося гироскопа угловая скорость
прецессии мала по сравнению с угловой скоростью собственного
вращения и также мало изменение угла нутации, т. е. угла между
осью собственного вращения и осью прецессии.
Мгновенную угловую скорость гироскопа щ=а»] + coj + cw3 от вра-
щения вокруг неподвижной точки в первом приближении (рис. 227)
можно принять
ШХ СО],
где cot — угловая скорость собственного вращения; со2 и со3 — соот-
ветственно угловые скорости прецессии и нутации.
Учитывая, что оси Ох, Оу, Oz — главные оси инерции, a Jx=Jy,
для проекций кинетического момента на эти оси имеем:
Кх — Jх^хг Ку — Jy(Dy, Kz — JZCOZ.
Так как со направлена приближенно по оси
собственного вращения Oz, то сох~0, со^даО и,
следовательно,
Ко=у]Кх+Ку+К}
Таким образом, для быстровращающегося
гироскопа с большим собственным кинетичес-
ким моментом J.CO] можно считать кинетиче-
ский момент Ко равным по модулю собствен-
ному кинетическому моменту гироскопа Л®]
и направленным по оси гироскопа, т. е.
Рис. 227
609
(49)
Это приближенное выражение для кинетического момента гиро-
скопа будет точным, если ось гироскопа является его неподвижной
осью вращения.
Для решения вопроса о поведении осей таких гироскопов можно
пользоваться теоремой Резаля, позволяющей характеризовать дви-
жение конца вектора кинетического момента по известному главно-
му моменту внешних сил.
Для сохранения существенных свойств гироскопа угловую ско-
рость прецессии Wj следует учитывать, пренебрегая только угловой
скоростью нутации, но при вычислении кинетического момента
гироскопа используем формулу (49).
Особенности движения оси гироскопа
Рассмотрим особенности движения оси гироскопа по сравне-
нию с движением оси такого же тела, не имеющего собственного
вращения вокруг оси симметрии Oz. Пусть центр тяжести в обоих
случаях расположен в неподвижной точке О и трением в этой
точке пренебрежем. Если к покоящемуся телу перпендикулярно
оси Oz приложена сила F в какой-либо точке А его оси симметрии
(рис. 228), то тело начинает вращаться вокруг оси Ох, перпен-
дикулярной плоскости расположения силы и оси симметрии, а точка
А тела начнет двигаться в направлении действия силы. Если дейст-
вие силы прекращается, то тело дальше вращается вокруг оси Ох по
инерции с постоянной угловой скоростью, если позволяет крепление
тела в точке О.
Совершенно иначе ведет себя быстровращающийся гироскоп
под действием такой же силы F (рис. 229), приложенной в точке А.
Точка А, согласно приближенной теории, начнет двигаться не в на-
правлении действия силы F, а, как это следует из теоремы Резаля,
в направлении векторного момента этой силы относительно непо-
движной точки О — параллельно оси Ох. При этом ось гироскопа
вращается вокруг оси Оу. Действительно, гироскоп еще до действия
силы имел кинетический момент направленный по оси
гироскопа, так как гироскоп вращался только вокруг собственной
оси Oz с угловой скоростью Шр По теореме Резаля скорость ив кон-
ца вектора Ко равна и параллельна 1$ векторной сумме моментов
относительно точки О всех внешних сил, т. е. uB=L$.
В данном случае
L$ = M0(F),
610
причем момент Мо (F) направлен по оси Ох.
Таким образом, скорость точки В конца вектора Ко и при
принятых допущениях приближенной теории всех других точек оси
гироскопа параллельна Mo(F), что соответствует вращению оси
гироскопа Oz или прецессии гироскопа вокруг оси Оу. Ось гироско-
па прецессирует под действием силы в направлении момента этой
силы. Если момент силы в какой-либо момент времени равен нулю,
то прецессия оси гироскопа тоже прекращается. Ось гироскопа не
обладает инерцией. Для гироскопа не имеет существенного значения
сила F, так как его прецессионное движение определяется только
моментом этой силы относительно неподвижной точки гироскопа.
Если центр тяжести гироскопа не находится в неподвижной точке,
то надо в общем суммарном моменте сил учесть момент силы
тяжести.
Сформулируем следующее правило прецессии: если к вращающе-
муся вокруг оси гироскопу приложить внешние силы, создающие
момент сил относительно его неподвижной точки, то та часть оси
гироскопа, по которой направлен кинетический момент, начнет пре-
цессировать в направлении векторного момента этих сил.
Выведем приближенную формулу для оценки угла прецессии
ф в рассмотренном случае действия силы F. За достаточно малый
промежуток времени т точка В конца вектора Ко смещается по дуге
годографа на величину
uyr=Мо (F)i=Fix=Ft I.
Угол поворота вокруг оси Оу
sb Мо (Fp Ftl
ф = — =-----=----,
OB Kq
(50)
611
так как
ОВ~ Kq—
Из (50) следует, что угол тем меньше, чем больше собственный
кинетический момент гироскопа Jza>\, угол ф прямо пропорционален
моменту импульса силы относительно неподвижной точки гироско-
па. Формулу (50) применяют для оценки действия на гироскоп
кратковременных сил возмущений, когда величина т очень мала.
Если собственный кинетический момент достаточно велик по
сравнению с моментом импульса силы, то ось гироскопа почти не
отклоняется, т. е. на нее не влияют кратковременные импульсы сил
или удары. Ось гироскопа устойчива к таким импульсам сил. Удары
по оси гироскопа не приводят к заметному ее отклонению от
первоначального направления.
Гироскопический момент
Как уже известно, если на гироскоп действуют внешние силы,
создающие момент относительно неподвижной его точки, то гиро-
скоп прецессирует с некоторой угловой скоростью. Если момент
внешних сил становится равным нулю, то и прецессия гироско-
па прекращается. Таким образом, для создания прецессии гироско-
па по приближенной теории требуется момент внешних сил, и на-
оборот.
Пусть гироскоп прецессирует с угловой скоростью со2. Вычислим
момент внешних сил, вызывающих эту прецессию. По теореме
Резаля, момент внешних сил относительно неподвижной точки ги-
роскопа
L^=dKoldt=uB.
Так как вектор Ко, направленный по оси гироскопа, вращается
вокруг неподвижной точки с угловой скоростью прецессии со2, то
скорость точки В, совпадающей с концом вектора Ко, вычисляется
по формуле, аналогичной векторной формуле Эйлера для скорости
точки тела при сферическом движении, т. е.
и в—со2 х О В — со2 х Ко,
так как О В = К0 = Jzcb}.
Для момента внешних сил имеем
Де) = х Ко=Л (со2 х а>,).
(51)
612
Если к гироскопу применить одно из следствии аксиомы Далам-
бера, что сумма векторных моментов внешних сил вместе с момен-
том сил инерции точек гироскопа равна нулю, то
£+££>=О,
где L — момент всех сил инерции гироскопа относительно непо-
движной его точки. Этот момент L называют гироскопическим
моментом. Учитывая (51), получаем
£ = — = — Jz(p)2 X Ct)]) = Jz(tO! х со2),
или окончательно
L = Jz(ajx'x. (Ь2У, L=Jz(O\032sin0, (52)
где в — угол нутации, т. е. угол между осью собственного вращения
и осью прецессии.
Гироскопический момент можно представить как момент гиро-
скопической пары сил, с которой гироскоп действует на тела, при-
нуждающие его прецессирвать под действием момента внешних сил
L$. Обычно противодействие гироскопа в виде гироскопической
пары сил передается на эти тела через подшипники, в которых
помещена ось гироскопа. Если эти тела или одно из них могут
двигаться, то гироскопическая пара сил может вызвать его дви-
жение.
Из (52) видно, что гироскопический момент может быть равен
нулю, если угловая скорость прецессии со2 равна нулю или если ось
гироскопа параллельна оси прецессии.
Действие гироскопической пары сил полностью определяется
гироскопическим моментом этой пары, вычисляемым по формуле
(52). Но во многих случаях более предпочтительно определять это
действие по правилу Жуковского, основанному на этой же фор-
муле.
Правило Жуковского: если быстровращающемуся гироскопу
сообщают вынужденное прецессионное движение, то возникает
гироскопическая пара сил, стремящаяся сделать ось гироскопа
параллельной оси прецессии, причем так, чтобы после совпадения
направления этих осей оба вращения вокруг них имели одинаковое
направление.
Если какое-либо тело препятствует гироскопу двигаться так,
чтобы сделать его ось параллельной оси прецессии, то гироскоп
давит на это тело и закрепленную точку гироскопа.
В том случае, когда таким гироскопом является ротор турбины,
установленный на корабле, совершающем разворот вокруг верти-
кальной оси (рис. 230), гироскопическое давление воспринимается
613
Рис. 230
подшипниками турбины. Силу этого давления N определяют по
формуле
Nl=L=со2 sin0
или
N=Lll=Jjtox(o2sin9ll, (53)
где I — расстояние между подшипниками турбины; со2 — угловая
скорость поворота корабля (угловая скорость прецессии); 9 — угол
нутации (в рассматриваемом случае 0=90°).
Техническое применение гироскопа
Из многочисленных применений прецессирующего гироскопа,
движение которого легко оценить на основании правила Жуковс-
кого, рассмотрим для примера измерение угловых скоростей. Пусть
гироскоп, ось которого помещена в подшипниках, расположенных
на каком-либо летательном аппарате, совершает быстрое вращение
вокруг своей оси. Если летательный аппарат поворачивается вокруг
какой-либо мгновенной оси с угловой скоростью со2, то для гироско-
па эта угловая скорость является угловой скоростью прецессии и ее
можно оценить по силе гироскопического давления N. Эту силу,
в свою очередь, можно измерить, например, по деформации пружи-
ны, на которой укреплен один из подшипников гироскопа (рис. 231).
Для ш2 по формуле (53) имеем
(l>2 = NII(Jzco\ sin0). (54)
В практике измерения угловых скоростей обычно используют
случай, когда 0=90°. Если на летательном аппарате осуществить
регулирующее устройство, которое бы с помощью, например, рулей
стремилось создать для него угловую скорость ш2 равной нулю, то
летательный аппарат можно стабилизировать по угловой скорости
относительно соответствующей оси. Создавая с помощью привода
614
соответствующее давление N на пружин-
ную опору, которое эквивалентно утло- । /
вой скорости прецессии, этим регулиру- [ /
ющим устройством с рулями МОЖНО I
управлять летательным аппаратом. Оче- --------у I
видно, для полной стабилизации и управ- / /W
ления летательным аппаратом достаточ-
но трех таких гироскопов со взаимно пер-
пендикулярным расположением осей. w Уж/ % \
Кроме рассмотренной стабилизации ______J у У"'
с помощью регулирующих устройств, /
когда гироскоп применяют в качестве у \ \ '
чувствительного элемента, его можно \ )
применять и для непосредственной ста-
билизации артиллерийских и иных уста- Рис 2з1
новок на кораблях, для успокоения кач-
ки, стабилизации вагонов однорельсовой
железной дороги и т. п.
Другое важное свойство гироскопа, которое нашло широкое
применение,— это способность сохранять направление своей
оси, если нет приложенного к гироскопу момента внешних сил.
Тогда ось гироскопа не прецессирует и сохраняет неизменным
свое направление в пространстве. Это свойство уравновешен-
ного гироскопа используют в гирокомпасах, указателях поворо-
та, стабилизирующих устройствах и т. п. Для этой цели применя-
ют гироскопы с тремя степенями свободы, или свободные гиро-
скопы.
Прецессия тяжелого гироскопа по приближенной теории
Рассмотрим прецессию тяжелого гироскопа (рис. 232) под дейст-
вием силы тяжести. Согласно правилу прецессии, под действием
момента силы тяжести Р относительно точки О гироскоп прецес-
сирует вокруг вертикальной оси Ozt в направлении, указанном на
рисунке дуговой стрелкой. Так как в каждый момент времени
£= -£g>; £=£Se),
то, следовательно,
Jza>iO)\ sind=Pl sinO,
где l=OC — расстояние от неподвижной точки до центра тяжести
гироскопа.
Угловая скорость прецессии
(O^PIKJ^). (55)
615
Рис. 232
Из (55) следует, что угловая скорость
прецессии тяжелого гироскопа не зависит от
угла наклона оси гироскопа: она обратно
пропорциональна собственному кинетичес-
кому моменту гироскопа J/Oj, прямо пропор-
циональна его силе тяжести и расстоянию от
центра тяжести гироскопа до неподвижной
точки.
Пример. Бегуны вращаются вокруг вертикальной
оси Oz с постоянной угловой скоростью ш0 (рис. 233).
Сила тяжести каждого бегуна — Р радиус — R; радиус
инерции относительно оси собственного вращения — р.
Определить силу давления бегуна на дно чащи
и давление бегуна на шарнир О, используя приближен-
ную теорию гироскопа.
Решение. Бегун считаем прецессирующим гиро-
скопом с осью собственного вращения Oz и осью пре-
цессии Огр Сила давления Q бегуна на дно чаши состоит из силы тяжести бегуна
и силы гироскопического давления N, т. е. Q=P+N. Предполагая, что средняя точка
А бегуна неподвижна, т. е. находится на мгновенной оси бегуна, заключаем, что О А
является мгновенной осью бегуна, по которой направлена его угловая скорость,
состоящая из скорости прецессии йо, направленной по оси Oz\, и собственной
угловой скорости бегуна а>\, направленной по оси бегуна Oz. Из подобия угловых
скоростей и линейных величин
col / cuqZ
—=-; caj =—.
coq R R
Рассматривая бегун как прецессирующий гироскоп с угловой скоростью прецес-
сии од и угловой скоростью собственного вращения ш,, по правилу Жуковского
получаем, что бегун давит на дно чаши с силой N, а на шарнир О с такой же по
модулю силой, но вверх. Так как угол нутации 0 = 90°, то по формуле (53) имеем
•М>1<г>0 Pp2o}qI Рр2о>д
I glR ~ gR ’
поскольку
Сила давления
Давление на шарнир О от двух бегунов направлено вверх, и его величина
Р2(0о
Q1=2Nl=2N=2P----
gR
616
Рис. 233
fl
R
Если бегун является однородным диском, то р=—= и
^2
g=P 1+—2 ; 21=Р—
X 2g / g
Для получения больших давлений на дно чаши применяют бегуны большого
радиуса, так как сила гироскопического давления пропорциональна радиусу бегуна.
§ 9. РЕГУЛЯРНАЯ ПРЕЦЕССИЯ ГИРОСКОПА
Как известно, уравновешенный (астатический) гироскоп может
совершать регулярную прецессию по инерции без действия внешних
сил. По приближенной теории получается, что прецессия может
быть вызвана только действием внешних сил. Очевидно, допущения
приближенной теории позволяют рассмотреть прецессионное дви-
жение гироскопа с точностью до некоторой регулярной прецессии,
существовавшей до действия внешних сил. Если этой начальной
прецессии по инерции нет, то приближенная теория находится в со-
ответствии с точной теорией.
Рассмотрим случай регулярной прецессии гироскопа. Известно,
что регулярной прецессией гироскопа называют такое его движение,
при котором угловые скорости собственного вращения и прецессии
постоянны, прецессия происходит вокруг оси постоянного направ-
617
ления и угол нутации, т. е. угол между осью собственного вращения
и осью прецессии, тоже является постоянным.
Получим формулу для гироскопического момента при регуляр-
ной прецессии и рассмотрим ее следствия.
Гироскопический момент при регулярной прецессии
В случае регулярной прецессии мгновенная угловая скорость
гироскопа
СО = Ш1 + С02,
где со1 — собственная угловая скорость, направленная по оси гиро-
скопа Oz; со2 — угловая скорость прецессии, направленная по непо-
движной оси Ozi (рис. 234).
Если выбрать ось Ох в экваториальной плоскости эллипсоида
инерции так, чтобы она лежала в плоскости осей Oz и Ozv, то для
проекции со на подвижные координатные оси Oxyz, жестко скреп-
ленные с гироскопом, имеем:
tox=to2sin0; 0^ = 0; taz = ta1 + co2cos0.
Определим проекции вектора кинетического момента на оси Ох,
Оу, Oz, которые являются главными осями инерции для точки О.
Получаем:
Кх=Jxcox=Jxa>2 sin0;
Ку—Jycoy=0;
Kz = Jzcoz = Jz (<Bi + co2 COS0).
Следовательно, кинетический момент гироскопа относительно
неподвижной точки О
Ко = Kxi+К j + KJc=J^o2 sin0z + Jz («i + Wj cosff)k. (56)
Гироскопический момент L как момент сил инерции гироскопа
можно вычислить по формуле
L = — dK0/dt = —us.
При регулярной прецессии 0^= const, 0=const, со2=const; следо-
вательно, Кх=const, Ку = 0, Kz=const, т. е. вектор кинетического
момента Ко постоянен по модулю и изменяется только по направ-
лению. Для того чтобы найти скорость конца этого вектора — точ-
618
ки В, надо знать угловую скорость враще-
ния этого вектора вокруг неподвижной точ-
ки О.
Если рассмотреть плоскость, в которой
лежат ось гироскопа Oz и ось прецессии Ozx
(плоскость Oxz), то в случае регулярной пре-
цессии ось прецессии Oz\ является неподвиж-
ной. Лежащий в этой плоскости вектор Ко
вращается вместе с этой плоскостью вокруг
оси Ozi с угловой скоростью а>2, направлен-
ной по этой оси. Таким образом, по фор-
муле, аналогичной формуле Эйлера для ско-
рости точки тела при его сферическом дви-
жении,
Ug—СО2 х Хд.
Тогда
Lt — — Ug ~ — СО2 X Kq — Ко х 0)2*
Рис. 234
(57)
Из формулы (57) следует, что момент L перпендикулярен плос-
кости Oxz, в которой лежат векторы а>2 и Ко, и, следовательно,
параллелен оси Оу, совпадающей с линией узлов.
Если в(57) вместо Ко подставить его значение из (56), то
L=Jxa>2 sin0 (i х й2)+Jz (g)i + со2 cos0) (к х со2).
Гироскопический момент
L = — Jxa£ sin0 cos0+Jz (со 14- со2 cos0)o2 sin0=
= [ J+ (Jz—Jx)co2 cos0]ta2 sin0, (58)
так как
|i x ш2| = ш2 cos0; \k x й2| = co2 sin0
и векторы (i x й2) и (k х са2) параллельны, но противоположны по
направлению.
Приняв направление вектора (fcxco2) за положительное, после
введения единичного вектора co°=k имеем
L=[JztO] + (Л—Jx)w2 cos0] (й° х ш2). (59)
Формула (59) является выражением для вектора гироскопичес-
кого момента при регулярной прецессии. Гироскопический момент,
619
как это следует из (59), можно разложить на две составляющие
и L", где
L' = Jz(Ox (й° х со2)=JZ(O\ х со2; (60)
L" = (Л — Jx)co2 cos0 (co° x й2). (61)
Гироскопический момент L' совпадает с гироскопическим мо-
ментом, полученным по приближенной теории. Гироскопический
момент L" является поправкой к гироскопическому моменту L'
в случае точного вычисления кинетического момента при регуляр-
ной прецессии. Момент L" равен нулю, если JZ=JX (эллипсоид
инерции является шаром), и при 0=90°, т. е. когда ось гироскопа
перпендикулярна оси прецессии.
Отметим, что L' и L" направлена в одну сторону, если (Jz —
—Jx)cos0>O, и в противоположные стороны при (Jz — Jx)cos0<O.
Регулярная прецессия по инерции
В случае регулярной прецессии без действия внешних сил, т. е.
регулярной прецессии по инерции, имеем
Отсюда, учитывая (58), получаем
L=[J/Oj + (Л—Л)со2 cos6]w2 sin0=0
и, следовательно,
(02 =-------
(Jx—Jz)cosO
Таким образом, возможна регулярная прецессия по инерции
с угловой скоростью, определяемой по формуле (62), если гироскоп
не обладает шаровой симметрией (JZJ= Jx) и ось прецессии не перпен-
дикулярна оси гироскопа.
Известно, что по инерции без действия сил может двигаться
материальная точка с постоянной скоростью по прямой линии
и вращаться твердое тело вокруг неподвижной оси с постоянной
угловой скоростью. К этим случаям следует добавить случай регу-
лярной прецессии гироскопа по инерции.
Итак, регулярная прецессия может происходить по инерции
и быть вынужденной, т. е. происходящей под действием внешних
сил. В приближенной теории рассматривается только вынужденная
прецессия. В точной теории регулярной прецессии рассматривают
обе эти прецессии.
620
(62)
Регулярная прецессия тяжелого гироскопа
Для тяжелого гироскопа
L=L^ = P/sin#
и, учитывая значение L, из (58) получаем
[/jW] + (Jz — Jx)a>2 cos#]w2 sin# = Pl sin#.
Отсюда угловая скорость прецессии
— ± \/-^z03! + 4(Л — COS0
С02 =----------------------------.
2(JZ—Jx)cos0
(63)
Таким образом, регулярная прецессия тяжелого гироскопа воз-
можна, если
JZM+4(JZ- Jx)Pl cos# > 0.
(64)
Условие (64) выполняется, если величина J2Wi достаточно вели-
ка. В этом случае, вычислив приближенное значение квадратного
корня из (63) по биному Ньютона, ограничиваясь первыми степеня-
ми малых величин, получаем
4(Л
4(A-Jx)WcOSe“|1/2
+4(Jz-Jx)PZcos#=Jzwl 1+Vz
« JzCOl
HJz-Jx)Pl COS0
Подставляя значение этого выражения в (63) и беря верхний
и нижний знаки перед корнем, имеем два приближенных значения
угловой скорости прецессии:
(1) (2) ^2^1
соу=-------; а>у'=----------
Jjtoi (Jx-Jz)cosO
(65)
Прецессия с угловой скоростью со^ — медленная прецессия. Та-
кая угловая скорость прецессии получается и по приближенной
теории. Прецессия с угловой скоростью а42) — быстрая прецессия.
Ее получают, как и прецессию по инерции. Тяжелый гироскоп при
выполнении условия (64) может совершать две прецессии — мед-
ленную и быструю, близкие к рассмотренным двум прецессиям
с угловыми скоростями и а^2’.
621
ГЛАВА 13
ТЕОРИЯ УДАРА
§ 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ И ПОНЯТИЯ ТЕОРИИ УДАРА
Ударом называют явление, при котором за малый промежуток
времени, т. е. почти мгновенно, скорости части или всех точек
системы изменяются на конечные величины по сравнению с их
значениями непосредственно перед ударом или после него. Длитель-
ность удара составляет обычно десятые и меньшие части долей
секунды.
Встречаются различные по характеру случаи ударных явлений.
В простейших случаях удар проявляется как почти мгновенное
наложение или снятие связей. Примером удара, связанного с мгно-
венным наложением связей, может служить столкновение поступа-
тельно движущегося тела с другим, например неподвижным, телом.
Удар, обусловленный мгновенным снятием связей или их разруше-
нием, можно представить как отрыв части тела при его быстром
вращении вокруг оси и т. п. Могут быть ударные явления более
сложного характера, связанные, например, с периодическим нало-
жением и снятием связей (ковка, штамповка и др.).
Изменение скоростей точек при ударе на конечные величины
связано с большими ударными ускорениями этих точек, возникнове-
ние которых требует больших ударных сил. Если F — ударная
сила, т — длительность, или время удара, то характерный график
изменения ударной силы за время удара от момента Ц до момента
t2 имеет вид, показанный на рис. 235. Ударная сила быстро воз-
растает от нуля в момент начала удара до максимального значения,
затем так же быстро уменьшается обычно по другому закону до
нуля в конце удара. Во многих случаях не требуется детального
знания закона изменения ударной силы. Достаточно знать только
суммарный импульс этой быстро меняющейся силы за время удара
или ударный импульс. Ударным импульсом называют векторную
величину
т
5=рМг. (1)
о
Ударный импульс графически изображается на рисунке заштрихо-
ванной площадью, ограниченной кривой линией изменения ударной
силы, и осью абсцисс, по которой откладывается время.
622
Рис. 235
силы тяжести тела, за
Иногда рассматривают среднюю
ударную силу — постоянную в течение
удара силу, которая за время удара дает
такой же ударный импульс, как и пере-
менная ударная сила. Средняя ударная
сила определяется из соотношения
= (2)
Большие ударные силы дают конечные
ударные импульсы за малое время удара.
Средняя ударная сила, согласно ее опре-
делению, имеет величину порядка 1/т, т. е.
при малом т является величиной боль-
шой.
Импульс неударной силы, например
время удара имеет порядок величины т, т. е. является величиной
малой по сравнению с ударными импульсами. Поэтому импульсами
неударных сил можно пренебрегать по сравнению с ударными импуль-
сами.
При ударе двух тел в месте их соприкосновения возникают
деформации и, следовательно, перемещения точек тел, обусловлен-
ные деформациями. Вследствие малости деформаций по сравнению
с перемещениями точек тел за конечный промежуток времени пере-
мещения точек тел за время удара являются величинами малыми.
В общем случае, если — средняя скорость за время удара какой-
либо точки системы, испытывающей удар, то перемещение этой
точки имеет порядок величины т, так как средняя скорость есть
величина конечная. Поэтому перемещениями точек за время удара
можно пренебрегать. Считают, что за время удара точки системы
не успевают изменить свое положение, а следовательно, не изменя-
ются радиусы-векторы точек и их координаты. Если, например,
тело падает на спиральную пружину, то за время удара величина
перемещения тела равна сжатию пружины за это время. Этим
перемещением можно пренебречь по сравнению, например, с пере-
мещением тела от начала удара тела до момента наибольшей
деформации пружины. При ударе пружину можно считать твердым
телом в приближенных расчетах при рассмотрении перемещения
тела за время удара.
Явление удара широко используется в технике при ковке, штам-
повке, забивке свай и т. д. Это же явление часто является нежела-
тельным, особенно при ударе деталей в машинах друг о друга
вследствие люфтов, при ударе колес транспорта о неровности до-
роги, стыки рельсов и т. п.
623
Многие величины, характеризующие удар, с достаточной точ-
ностью могут быть получены из общих теорем динамики. Рассмот-
рим особенности применения этих теорем к явлению удара.
§ 2. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
И О ДВИЖЕНИИ ЦЕНТРА МАСС ДЛЯ УДАРА.
ТЕОРЕМА КЕЛЬВИНА
Пусть до удара точка М массой т двигалась по участку траек-
тории AM, имея непосредственно перед ударом скорость v (рис.
236). Под действием ударной силы F и неударной F* точка изменила
скорость, которая сразу после удара стала и. После удара точка
продолжает двигаться по участку траектории МВ. Удар точки
М характеризуется почти мгновенным изменением ее скорости от
v до и по модулю и направлению и, следовательно, в общем случае
резким изломом ее траектории в момент удара. По теореме об
изменении количества движения для точки в интегральной форме
имеем
mu—mv = F&t+ F*dt,
о о
где т — время удара. Обозначая импульс ударной силы S и пренеб-
регая импульсом неударной силы за время удара по сравнению
с ударным импульсом, получаем следующую теорему об изме-
нении количества движения точки при ударе:
mu—mv = S,
(3)
т. е. изменение количества движения точки за время удара равно
ударному импульсу, приложенному к точке. В проекциях на оси
координат имеем:
тих—mvx = Sx; тиу—mvy - Sy, mu.—mv, = Sz.
(3')
Изменение скорости точки при ударе и — v = S/m, т. е. оно параллель-
но ударному импульсу.
Для любой механической системы, состоящей из N точек, раз-
делим ударные силы на внешние и внутренние. Применяя теорему
об изменении количества движения для удара к каждой точке систе-
мы, получаем
mkuk-mkvk=S^ + S^, k= 1, 2, ..., N,
624
где 5[е) и S? — ударные импульсы
внешних и внутренних сил. Импульса-
ми неударных сил за время удара пре-
небрегаем. Суммируя по всем точкам
системы, имеем
Y ткйк - Y ”tkvk=Е $е) + Е
к к к к
Обозначая количества движения систе-
мы после и до удара соответственно
о
Рис. 236
к к
и учитывая, что по свойству внутренних сил, в том числе и ударных,
= имеем
к
Q-Q0=U?-
к
(4)
Соотношение (4) выражает теорему об изменении количества
движения системы при ударе: изменение количества движения
системы за время удара равно векторной сумме внешних ударных
импульсов за время удара, приложенных к точкам системы. В проек-
циях на координатные оси получаем:
0л-0ох = ЕЖ Qy-QOy=YS^, Q-Qb^Sj* (4')
k k k
Применяя формулу для вычисления количества движения систе-
мы через массу системы и скорость центра масс, имеем
Q = Muc, Qo = Mvc,
где М — масса системы; vc и ис — скорости центра масс до и после
удара. С учетом этого из (4) получаем следующую теорему о дви-
жении центра масс системы:
M{uc-vc) = Y^.
к
(5)
В проекциях на координатные оси она примет форму
625
M(uCx-vCl} = ^S<&
к
M(uCy-vCy) = YS&
к
M(uc-vCz) = YS%.
к
(5')
Частные случаи. 1. Если £5^ = 0, то из (4) и (5) следует
к
Q = Qo', Uc = vc, (6)
т. е. количество движения системы и скорость центра масс не
изменяются, если векторная сумма внешних ударных импульсов за
время удара, приложенных к точкам системы, равна нулю. Это
законы сохранения количества движения и движения центра масс
системы при ударе.
2. Если имеется координатная ось, например Ох, для которой
^5^=0, то из (4') и (5') получаем следующие законы сохранения
к
проекций количества движения и движения центра масс:
Qx=Qoxi wCx=«Cx. (6')
Из (3) можно получить теорему Кельвина для работы ударной
силы за время удара. Непосредственно вычислить работу ударной
силы за время удара трудно, так как ударные силы очень большие,
а перемещения точек системы за время удара малы и ими пренеб-
регают. Теорема Кельвина позволяет выразить работу силы через
импульс силы и среднее значение скоростей точки, т. е. величины,
конечные при ударе. Умножив (3) последовательно на и и v скаляр-
но, получим
ти2 — ти v = S и; muv—mv2 = Sv.
После сложения этих равенств и деления на 2 имеем
ти2/2—mv2/2=^S' (v + м).
По теореме об изменении кинетической энергии для точки левая
часть этого равенства равна работе А, приложенной к точке силы F.
Поэтому
626
A=^S(u+v). (7)
Это и есть теорема Кельвина: работа силы, приложенной к точ-
ке, за какой-либо промежуток времени равна скалярному произведе-
нию импульса силы за тот же промежуток времени на полусумму
начальной и конечной скоростей точки.
Теорема Кельвина применима ко всем случаям движения точки,
в том числе и к явлению удара.
Для механической системы теорема Кельвина получается из (7)
путем суммирования по всем точкам системы, т. е.
£ («*+«*)> (8)
к 2 к
где Sk=S^ + S^— импульс внешней и внутренней сил, действу-
ющих на к-ю точку.
§ 3. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ПРИ УДАРЕ
Пусть материальная точка под действием ударного импульса
испытывает удар. По теореме об изменении количества движения
для точки имеем
mu—mv = S,
где v и и — скорости точки до и после удара. Умножим это век-
торное равенство слева векторно на радиус-вектор точки г, кото-
рый один и тот же непосредственно перед ударом и после него.
Получаем
rxmu — rxmv = rx S. (9)
Это соотношение выражает теорему об изменении кинетичес-
кого момента для точки при ударе. Применяя ее для каждой
из N точек системы, имеем
rkxm£k-rkxmkvk=rkx Sfi + rkx S$, к=\, 2, ..., N, (9')
где Sft и Sg1 — внешний и внутренний ударные импульсы, дейст-
вующие на к-ю точку системы. Суммируя (9') по всем точкам
системы и вводя обозначения кинетических моментов системы до
и после удара и векторной суммы моментов внешних ударных
импульсов относительно точки О, получим следующую теорему об
изменении кинетического момента системы при ударе:
627
£о-Д0)=£Я>да, (io)
к
так как
Ко=£ Г к х mjik- К$> = £ гк х mkvk,
к к
Т/кхs^=YMo(.s^y, Тлх$0=£м0($°)=о
к к к к
по свойству внутренних сил. Таким образом, изменение кинетичес-
кого момента системы относительно точки за время удара равно
векторной сумме моментов относительно той же точки внешних
ударных импульсов, приложенных к точкам системы. В проекциях
на оси координат векторное равенство (10) принимает следующую
форму:
Кх - К® = £ Мх (&); Ку - =£ Му ($'>);
к к
KZ-K^ = ^MZ(,S^. (10')
*
Есди удар испытывает твердое тело, вращающееся вокруг непо-
движной оси Oz, и со0 и со — угловые скорости до и после удара, то,
учитывая, что
Kz=Jzco; K^0)=J2coo,
где Jz — момент инерции тела относительно оси вращения, из (10')
получаем следующее изменение угловой скорости тела:
Jz(co-co0)=YM^y
к
ИЛИ
CD-COQ = YM^lJt- О1)
к
В (11) не входят моменты ударных импульсов реакций закреп-
ленных точек оси вращения, так как они пересекают ось вращения,
если не возникают ударные импульсы сил трения в местах закрепле-
ния оси.
Частные случаи. 1. Если ^Л/О(5}е)) = 0, то из (10) следует
к
закон сохранения кинетического момента системы относительно
точки при ударе:
628
K0 = K$ = const.
(12)
2. Если имеется ось, например Ох, относительно, которой
^MI(S^r))=0, то из (10') получаем закон сохранения кинетического
к
момента системы относительно оси при ударе:
КХ=К® = const. (12')
§ 4. УДАР ТОЧКИ О НЕПОДВИЖНУЮ ПОВЕРХНОСТЬ
Прямой удар. Удар называют прямым, если скорость точки
v перед ударом направлена по нормали к поверхности в точке удара
М (рис. 237). После удара материальная точка отделится от поверх-
ности, имея в общем случае скорость и, направленную тоже по
нормали к поверхности.
Для оценки ударных свойств поверхности и тела, принимаемого
за материальную точку, введем коэффициент восстановления
к. Коэффициентом восстановления называют отношение модуля
скорости точки после удара к модулю ее до удара, т. е.
k=\u\/\v\ = u/v. (13)
Если к=1, то удар называется абсолютно упругим. В этом случае
u=v и при ударе точки изменяется только направление скорости на
противоположное. При к — 0 удар считается абсолютно неупругим.
Скорость точки при таком ударе о неподвижную поверхность после
удара и = 0. В более общем случае абсолютно неупругого удара
точки по движущейся поверхности точка после удара движется
вместе с соответствующей точкой поверхности. В случаях, при
которых Q<k< 1, удар называют просто упругим (или частично
упругим).
Процесс удара точки о неподвижную поверхность можно раз-
делить на фазу деформации и фазу восстановления. Фаза
деформации продолжительностью Т] отсчитывается от момента
начала удара до момента наибольшей деформации тела, которое
принимается за материальную точку. В конце этой фазы скорость
точки при ударе о неподвижную поверхность равна нулю. В течение
фазы восстановления т2 материальная точка от момента наиболь-
шей деформации до ее отделения от поверхности частично вос-
станавливает свою первоначальную форму при упругом ударе. При
абсолютно упругом ударе форма тела восстанавливается полно-
стью. В случае абсолютно неупругого удара форма тела совсем не
восстанавливается, удар имеет только одну фазу деформации. Об-
629
щее время удара т = Т] + т2. При абсолютно
неупругом ударе т2 = 0 и т = ть
На точку при ее прямом ударе о непо-
движную поверхность со стороны поверх-
ности действует ударная сила реакции по-
верхности N. Она изменяется по величине
в течение удара, но все время направлена по
нормали к поверхности.
Применим к первой и второй фазам уда-
ра точки теорему об изменении количетва
движения в проекции на направление вне-
шней нормали к поверхности, за которое
принимаем направление, противоположное
скорости точки до удара. Для первой фазы
имеем
О — (—mv)=Si,
где 5)= Ndt— ударный импульс силы реакции поверхности за
о
первую фазу удара. Для второй фазы соответственно
ти — 0 = 52,
где S2=J Ndt — ударный импульс силы реакции поверхности за
о
вторую фазу удара. Действием импульсов неударных сил за время
удара, например силы тяжести, пренебрегаем.
Итак, имеем
mv = Si; mu = S2.
Отсюда
k = ulv = S2IS\.
(14)
Формула (14) дает выражение коэффициента восстановления через
ударные импульсы: коэффициент восстановления при прямом уда-
ре точки о неподвижную поверхность равен отношению числовых
значений ударных импульсов за вторую и первую фазы удара.
Выражение коэффициента восстановления через ударные импуль-
сы, полученное при ударе точки о неподвижную поверхность, счита-
ют справедливым и в случае прямого удара точки по движущейся
поверхности.
630
Полный ударный импульс S складывается из импульсов 5] и
S2, т. е.
S=Si + S2=mv\ 1 +-)=»w (1 + к).
\ v/
При к = 1 S—2mv; при к=0 S=mv. Ударный импульс при абсолют-
но неупругом ударе в два раза меньше ударного импульса при
абсолютно упругом ударе.
Косой удар. Удар называется непрямым или косым, если ско-
рость точки перед ударом направлена под углом а к нормали
поверхности. При а = 0 имеем прямой удар. Угол а. (рис. 238)
называют углом падения. В общем случае скорость точки и после
удара составит с нормалью к поверхности угол Р, который называ-
ют углом отражения.
Разложим скорости до и после удара на нормальные и касатель-
ные составляющие:
v=vn+vT; й = й„+иг.
Коэффициентом восстановления при косом ударе называют вели-
чину fc=|u„|/|iin| = Mn/vn. Применение теоремы об изменении количест-
ва движения в проекции на нормаль к поверхности приводит к вы-
ражению коэффициента восстановления через ударные импульсы
k=unlv„ = S2njSin,
где S2n и Sln — проекции ударных импульсов на нормаль к поверх-
ности за вторую и первую фазы удара.
В случае не идеально гладкой поверхности < vt. В дальнейшем
принимаем, что поверхность не обладает ударным трением и поэто-
му uT=vz. В этом случае
tgfi = ut/u„=vT/u,,; tgoc = uz/u„,
к
Эта формула выражает зависимость между углом падения и уг-
лом отражения при различных коэффициентах восстановления и от-
сутствии ударного трения.
Экспериментальное определение коэффициента восстановления.
Коэффициент восстановления можно определить эксперименталь-
но, измеряя высоту, на которую поднимется тело, обычно в форме
небольшого шара, после прямого удара о поверхность (рис. 239)
631
п
Рис. 238
при падении с заданной высоты. Если шарик падает на неподвиж-
ную поверхность с высоты Ль то его скорость непосредственно
перед ударом v = -Jlghb Сразу после удара скорость и шарика через
высоту подъема его над поверхностью выражается зависимостью
u=sjlgh-l. Для коэффициента восстановления имеем
^=«/« = ^/^2/^1.
Измеряя Л2 при заданном йь получают значения коэффициентов
восстановления для различных материалов шарика и поверхности.
Многочисленные опыты показали, что коэффициент восстанов-
ления зависит не только от материала соударяющихся тел, но и от
их масс, формы тел, скоростей соударения и других факторов.
Использование коэффициента восстановления в расчетах (в пред-
положении, что он зависит только от материала соударяющихся
тел) допустимо лишь в очень грубом приближении к действитель-
ности. В более точных расчетах следует учитывать не только дефор-
мации, возникающие при ударе, но в некоторых случаях и процесс
их возникновения и восстановления. Учет деформаций при ударе
производится в задачах теории упругости. Методы теории упруго-
сти позволяют более глубоко проникать в явления удара. В те-
оретической механике обычно рассматриваются предельные случаи
абсолютно упругого и абсолютно неупругого ударов.
§ 5. ТЕОРЕМА КАРНО
При абсолютно упругом ударе точки о неподвижную поверх-
ность в отсутствие ударного трения скорость точки может изме-
няться только по направлению. Числовое значение ее остается
неизменным. Кинетическая энергия точки и системы точек, нахо-
632
дящихся в таких условиях, не изменяется за время удара. При
упругом и абсолютно неупругом ударах кинетическая энергия изме-
няется.
Установим изменение кинетической энергии в случае абсолютно
неупругого удара при мгновенном наложении связей для точки
и системы в отсутствие ударного трения. По теореме об изменении
количества движения для точки (рис. 240) имеем
mu—mv = S, (15)
где т — масса точки; v и и — ее скорости непосредственно до
и после удара; 5 — ударный импульс от действия поверхности. При
отсутствии ударного трения ударный импульс направлен по нор-
мали к поверхности. Скорость точки после такого удара направлена
по касательной к поверхности, т. е. ее проекция на нормаль и„=0.
В рассматриваемом случае ударный импульс 5 и скорость точки
после удара и взаимно перпендикулярны и поэтому удовлетворяют
условию
§й=0.
Учитывая это, умножим обе части (15) скалярно на и. Получим
вспомогательное соотношение
—mvu+mu2=0. (16)
При абсолютно неупругом ударе кинетическая энергия точки
уменьшится на mv2/2—ти2/2. Добавляя в это выражение величину,
равную нулю в форме (16), получим
mv2 mu2 тй2 тй2 - -
-------=---------h(—mvu+mu ) =
2 2 2 2
mv2 тй2 - - т - - -
=---1-----mv ' и— - (у — и).
2 2 2
Получена теорема Карно для точки о потере
кинетической энергии при абсолютно неупру-
гом ударе и отсутствии ударного трения:
mv2 ти2 т-ч,
-- - = -(«-«)
2 2 2
Векторную величину v — u называют потерян-
ной скоростью. Теорему Карно для точки мож-
Рис. 240
633
но сформулировать в следующей форме: потеря кинетической энер-
гии точки при абсолютно неупругом ударе и отсутствии ударного
трения в случае мгновенного наложения связей равна кинетической
энергии от потерянной скорости.
Имея (17) для точки, получим теорему Карно для системы
в случае абсолютно неупругого удара и отсутствия ударного тре-
ния. Необходимо при этом, чтобы связи для точек системы, ис-
пытывающих удар, создавали ударные импульсы Sk, перпендику-
лярные скоростям точек после удара йк, т. е. чтобы для каждой
точки выполнялось условие Sk' ик=0. Тогда для каждой точки спра-
ведлива теорема (17)
mkv2k тки2к тк
—-----—=—(yk-Uk), (17)
2 2 2
где vk—uk — потерянная скорость k-Й точки системы. Суммируя
(17') по всем точкам системы и обозначая кинетическую энергию
системы до удара То, а после дара — Т, получим
Т0-Т=^Утк (ук-йк)2,
2 к
где
т0=Е^; т=^. (18)
к 2 к 2
Для справедливости теоремы Карно для системы при мгновен-
ном наложении связей вместо условия Sk uk=Q для каждой точки
достаточно выполнения менее ограничительного условия
^Skuk=Q.
к
Получена теорема Карно для системы: потеря кинетической энергии
при абсолютно неупругом ударе в случае мгновенного наложения
связей и отсутствия ударного трения равна кинетической энергии
от потерянных скоростей точек системы.
Теорему Карно для точки и системы можно получить также для
удара, который возникает при мгновенном снятии связей. При этом
кинетическая энергия после удара больше кинетической энергии до
удара. Потеря кинетической энергии становится отрицательной.
Ударный импульс Sk при снятии связи должен быть перпендикуля-
рен скорости точки vk до удара, так как точка двигалась согласно со
634
связью до удара при абсолютно неупругом ударе. Вспомогательное
соотношение для точки при снятии связей принимает форму
ти v — mv1 = 0, (16')
а теорема Карно в этом случае имеет вид
ти1 mv2 т,
----------------------------= (v-u)z.
2 2 2
Для системы она выразится в форме
Т-Тй = \^тк$к-йк)2. (18')
2 к
При этом для каждой точки системы, испытывающей удар, должно
выполняться условие Skvk—Q, или ^Sk vk=0.
к
§ 6. УДАР ДВУХ ТЕЛ
В прикладных задачах обычно встречается удар двух тел, движу-
щихся поступательно или вращающихся вокруг параллельных или
совпадающих осей. Рассмотрим некоторые особенности примене-
ния общих теорем и теоремы Карно в этих случаях.
Пусть два тела 7 и 2 массами тх и т2 непосредственно до и после
удара движутся поступательно (рис. 241). Их скорости перед ударом
«1 и v2; после удара — соответственно их и м2- У соударяющихся тел
отсутствует ударное трение. Ударные импульсы в этом случае
направлены по общей нормали в месте соприкосновения, т. е. по так
называемой линии удара. В случае центрального удара линия
удара проходит через центры масс тел. Применим теорему об
изменении количества движения при ударе к каждому телу в отдель-
ности. Имеем
тхщ—m\Vx = Sx, т2и2—m2v2 = S2. (19)
При ударе двух тел Si = — S2 по закону о равенстве действия
и противодействия, поэтому из (19) получаем
miul+m2u2=mivi+m2v2, (20)
т. е. количество движения при ударе двух тел не изменяется. Если
удар абсолютно неупругий, то скорости тел после удара одинаковы
и равны и. Из (20) тогда имеем
635
_ 4-/И2г2
и=------------
7И1 +/И2
(21)
При прямом ударе двух тел скорости их vj и v2 до удара направ-
лены по линии удара и тогда из (21), проецируя на линию удара,
получаем
+/M2V2
U =---------,
mi+m2
(21')
Здесь и, ®i, v2 — алгебраические значения скоростей.
Для прямого центрального удара двух тел к каждому телу для
первой и второй фаз применим теорему об изменении количества
движения в проекции на ось Ох, направленную по линии удара (рис.
242). Получим
т^и—т^х= —S[‘,
т{щ — т{и = —5i";
т2и—miv2— — S2;
m2u2—m2u = S2;
Qf crff, _ CUf
0j—02 > —02 9
(22)
где и — общая скорость тел в конце первой фазы; S{, S2 и
S", S2 — ударные импульсы соответственно за первую и вто-
рую фазы удара. К уравнениям (22) следует присоединить выраже-
ние для коэффициента восстановления через ударные импульсы.
Имеем
k=S"/S[ = S2/S2.
(22')
Получили семь алгебраических уравнений (22) и (22'), из которых
можно определить и, щ, и2, S[, S2, S", S2, если известны скорости до
удара vt, v2 и коэффициент восстановления к. Из уравнений (22)
и (22'), в частности, можно получить формулы
636
Ui-U2
k=-------,
VJ +v2
(23)
Ui-«i= -(1 +k)—— («1-V2);
mi + m2
ml
u2—V2 = (1 + к)----(vj — v2).
mt+m2
(24)
Используя (22) и (22') и следствия из них, можно вычислить
потерю кинетической энергии тел То—Т при ударе:
mjvJ m2v2\ / mluf
2 2 J \ 2 2
mim2
2(mt +m2)
(l-k2)(V1-v2)2.
(25)
При абсолютно упругом ударе двух тел к= 1 и То= Т, т. е. потери
кинетической энергии не происходит. При абсолютно неупругом
ударе к=0 и
То-Т=
m\m2
2(mi +т2)
(vi—v2)2.
(25')
Если использовать потерянные телами за время удара скорости
vj — и и v2—u, то потерю кинетической энергии можно также полу-
чить в форме теоремы Карно для удара двух тел:
Т0-Т=^(ч-и)2 + ^(р2-и)2. (25")
При абсолютно неупругом ударе двух поступательно движущих-
ся тел для каждого тела налагаемая связь не является стационарной
и условия §1'й = 0 и 52 й=0 по отдельности не выполняются. Они
использовались при выводе теоремы Карно для системы. Но выпол-
няется условие для двух тел
S u = S{ u+S2u=(Sl + S2)u = 0, (26)
так как
S = Si + S2=О,
поэтому теорема Карно (25") остается справедливой. Ее можно
получить непосредственно преобразованием потерянной энергии,
637
применяя следствия из (22) и (22') без использования условия (26).
Условие (26) для удара двух поступательно движущихся тел рас-
ширяет область применения теоремы Карно.
Из теоремы Карно (25") для двух тел можно получить общую
скорость тел после удара при прямом центральном ударе этих тел:
+nt2V2
U =-------.
т\ +т2
Частные случаи. 1. Пусть тх, т2 и vh v2 — соответственно массы
и скорости первого и второго тела до удара, причем v2 = 0.
Кинетическая энергия тел до удара в этом случае
T0=mivll2.
Общая скорость после абсолютно неупругого прямого удара
u = mlvl/(mi+m2).
Кинетическая энергия тел после удара
- / , х"2 т1 mlVl т> г
Т= (mi+т2) -=-------—=--------То. (27)
2 mi+m2 2 Wj+mj
Потеря кинетической энергии, затраченная на деформацию тел,
(т\ \ т.2
1-----— То=-----—То. (28)
wl+m2/ mi+m2
Если тг^тх, то, полагая m2/(wi + »i2)~ 1, согласно (28), имеем
т. е. почти вся энергия тел, которую они имели до удара, затрачива-
ется на деформацию тел. Такой случай имеет место при ковке
и в других аналогичных случаях. В этом случае т2 — масса нако-
вальни вместе с поковкой (они покоятся перед ударом), а тх и —
соответственно масса и скорость молота до удара по поковке.
Энергия тел при ковке, которая затрачивается на преодоление раз-
личных сопротивлений при последующем движении,
Т=—т0«о,
W1+W2
т. е. на преодоление сопротивлений энергия не тратится. Очевидно,
чем больше т2 по сравнению с тем эффективнее работа молота.
638
2. Если mi»т2, то для потери кинетической энергии на сам
удар, считая m2/(mi +m2)«0, имеем
m2
То-Т=-----— То«О.
mi +т2
В этом случае потери энергии на удар почти нет и вся первоначаль-
ная энергия затрачивается на преодоление сопротивления движению
тел после удара, так как
т=----— ТохТо.
т\ +т2
Такой случай имеет место при забивке свай, костылей, гвоздей
и т. п. Для наибольшей эффективности этих процессов должно
выполняться условие mi»т2. В этом случае mi — масса бабы или
кувалды (молотка), vj — их скорость до удара, а т2 и v2 = 0 —
соответственно масса сваи или костыля (гвоздя) и скорость до
удара. Их масса, чтобы рационально использовалась энергия, долж-
на быть много меньше массы бабы или кувалды. Вся кинетическая
энергия бабы или кувалды при таком ударе не тратится на дефор-
мации при ударе, а передается свае или костылю, которые движутся
вместе с забивающими их бабой и кувалдой. Эта энергия расходу-
ется на преодоление сопротивления движению сваи или костыля при
пследующем движении в среде, в которую они забиваются.
При рассмотрении удара двух тел, вращающихся вокруг одной
оси или параллельных осей, следует применять теорему об изме-
нении кинетического момента к каждому телу или теорему Карно.
При применении теоремы об изменении кинетического момента
к двум телам вместе при вращении тел вокруг параллельных осей
войдут моменты неизвестных ударных импульсов в местах закреп-
ления по крайней мере одной из осей вращения. Эти моменты
сами являются неизвестными. Применение общих теорем при
ударе к одному телу, вращающемуся вокруг неподвижной оси,
рассмотрено в следующем параграфе. Здесь отметим только неко-
торые особенности применения теоремы Карно к системе двух
вращающихся тел.
При вращении двух тел вокруг одной оси (рис. 243) О|О2 с уг-
ловыми скоростями до удара <У] и а>2 в одном и том же направлении
и моментами инерции относительно этой оси Jx и J2 можно при-
менять теорему Карно, если удар тел выступами при сближении
абсолютно неупругий. Здесь выполняется условие применимости
этой теоремы для двух тел S u = 0j так как S=5i+ 5^=0, хотя для
каждого тела в отдельности Si'u^O и S2u^0. Согласно теореме
Карно, имеем
639
Л to? ! Ла>2
2 2
(О1
2
=у (со 1 - со)2 + у (со2 - со)2, (29)
где со — общая угловая скорость тел
после удара; сох — со и со2 — со — поте-
рянные угловые скорости тел. После
несложных преобразований из (29) получим следующую формулу
для угловой скорости тел после удара:
4- ^2°^2
О> =-----------
•Л+^2
(30)
Это же значение со можно получить применяя теорему об изменении
кинетического момента относительно оси вращения для двух тел,
так как в этом случае сумма моментов ударных импульсов от
действия подшипников и от выступов относительно оси вращения
равна нулю, если отсутствует ударное трение в подшипниках и на
выступах.
Если тела до удара вращались в противоположных направлени-
ях, то в (30) следует брать алгебраические значения угловых скоро-
стей тел.
Пример 1. Груз 1 массой т\ до удара о плиту 2 массой т2 падал с высоты h без
начальной скорости (рис. 244). Плита 2, закрепленная на пружине с коэффициентом
жесткости с, совершает колебания и в момент удара имеет скорость v2=^2gh,
"bg
направленную вверх. Пружина при этом деформирована на величину >-о=-.
с
Определить наибольшую величину деформации пружины, считая удар тел аб-
солютно неупругим.
Решение. Груз 1 перед ударом вследствие падения с высоты h имеет скорость
«1 = Ф-gh, направленную вниз. В результате абсолютно неупругого удара оба тела
приобретут одинаковую скорость й и будут дальше двигаться вместе как одно тело.
Для определения этой скорости и применим теорему Карно для мгновенного наложе-
ния связей
/0)-Т=^&-5*)2. (а)
к 2
Условия применения этой теоремы выполняются, т. е.
'и 4- S2 'и — (Sj 4-S2)' и = 0,
640
так как +S2=0, где 5] и S2 — ударные импульсы перво-
го и второго тел. Ударный импульс от пружины равен
нулю. У пружины деформация равна нулю. Ею пренеб-
регаем.
В рассматриваемом случае кинетическая энергия перед
ударом
J0) "2
Т =Ш\ 1-/И2—.
2 2
После удара кинетическая энергия
и1
T=(mi +m2) —.
2
Рис. 244
Потерянные при ударе скорости для тел соответственно равны («| — и) и (—v2—и).
Кинетическая энергия от этих потерянных скоростей
1 _ . ч, («1 —и)2 (-^2-и)2
2 Lmk(yk-UkF=mi-----~—+m2------~---.
2 к 2 2
Подставляя полученные значения величин в (а) после несложных преобразова-
ний, получаем
тщ +m2(—v2) (mj—mi) y/lgh
u=-------------=---------------. (6)
/И1+7И2 mi +m2
Если масса плиты m2 = 0, то u=i>i и изменения скорости груза при ударе по
пружине не происходит.
Скорость и можно вычислить также применяя к удару теорему об изменении
количества движения для груза и плиты как единой системы в проекциях на ось Ох,
направленную вниз. Имеем
(в)
к
Количество движения перед ударом и после удара соответственно равны
Q^=mm+m2{-vi)- Qx=(.mi+mi)u.
Внешний ударный импульс, действующий на соударяющиеся тела, может со-
здать только пружина. Импульсами неударных сил за время удара следует пренеб-
речь. Пружина создает силу упругости, а следовательно импульс вследствие дефор-
мации, которая за время удара произойти не успевает. Таким образом, £sj^=O и из
. . к
(а) получаем опять
m\vi +m2(—vi)
и=------------.
mi+m2
Имея скорость и, тела, двигаясь, будут деформировать пружину. Наибольшая
деформация ее произойдет при скорости тел v=0. По теореме об изменении кинети-
641
ческой энергии от момента после удара до остановки тел при изменении направления
движения, имеем
Г-7’о = ^4< (г)
к
В момент наибольшей деформации Т=0, а после удара
и2 (mi-mjflgh (mx-m2}2gh
T0=(mi +т2) — = (>”) +т2}~----—=-------------.
2 2(/И|+W2) /И1+/И2
Работу внешних сил тяжести и упругости на перемещении 5 вычисляем по
формуле
+m2)gs~-(Л2-Л2),
к 2
где Л=Ло+з; 2q =--. Подставляя значения величин в (г), получим
с
— (wi— m2)2gh с
------------= (/П1+ m2)gs — (Л^+S2 4- 2Лоз - Л%).
mi+m2-------2
Так как c2o=»i2g> то после сокращений имеем
—(«![— m2)2gh cs2
------------=m}gs-~~,
mt +т2------2
или
2тя Ighlmi-mtf
s2 ---5-------------= 0.
c c(mi+m2)
Решая квадратное уравнение и отбрасывая знак минус перед квадратным корнем,
дающий отрицательное значение s, получаем
mig Wg2 2gh(m1-m2)2
I "> ।-----------'
с у с cfrni+m^
Наибольшая деформация пружины будет
(m{+m2)g jm2g2 2gh(mi-m2)2
Л=2о+s = + / — + - —
с у с c(mi+m2)
При /И2=0
mig Mg2 2ghmi
'' +. Г~Г"1------
с у с с
642
Wig
Учитывая это в случае-=Лс, получаем
с
2=Дл-+у/+2ДлЛ.
Пример 2. Однородный прямоугольный контейнер высотой h и шириной I нахо-
дится на платформе, движущейся по прямолинейному пути со скоростью v (рис. 245).
Определить условие для скорости платформы, при выполнении которого не
произойдет опрокидывания контейнера вследствие вращения его вокруг закреплен-
ного ребра при мгновенной остановке платформы. Крепление ребра контейнера не
оказывает сопротивления его повороту вокруг этого ребра.
Решение. Применим к контейнеру при остановке платформы теорему об изме-
нении кинетического момента относительно закрепленного ребра Oz при ударе
(а)
к
Внешними ударными импульсами для контейнера является только ударный импульс
5о от действия крепления ребра. Он пересекает ось Oz, поэтому при отсутствии
ударного трения
S^Oz(«l<)) = A/0z(So)=0.
к
После мгновенной остановки платформы контейнер начнет вращаться вокруг
оси Oz с угловой скоростью со. Для кинетического момента контейнера относительно
закрепленного ребра имеем Koz=Joz<u, где Joz — момент инерции контейнера
относительно закрепленного ребра. До остановки контейнер двигался вместе с плат-
формой поступательно. Его кинетический момент относительно оси Oz определяют
суммированием кинетических моментов малых частиц, на которые мысленно разби-
ваем контейнер. Имеем
= Е Wjfcvyjt=V Y ™кУк, (в)
к к
тле mt — масса элементарной частицы контейнера, у* — координата этой частицы
по оси Оу. Но
Mh
ЪткУк=Мус=~-, (г)
к 2
h
где ус=~ — координата центра масс контейнера по оси Оу.
2
Подставляя значения величин из (б), (в) и (г) в уравнение (а), получим
h
Jo2co—M~v=0. (а')
2
Для угловой скорости контейнера в момент остановки платформы имеем
Mhv
со=~. (д)
^Oz
643
Применим к контейнеру после получения им
угловой скорости а> теорему об изменении кине-
тической энергии
к
(е)
За начальное положение примем положение кон-
тейнера сразу после остановки платформы по
окончании удара. В этом положении кинетичес-
кая энергия
а»1
To=Joz~~-
2
В качестве конечного примем положение контейнера при наивысшем положении его
центра масс, т. е. положение после поворота контейнера на 45°. Чтобы контейнер не
опрокинулся, необходимо, чтобы угловая скорость его в этом положении была равна
нулю, т. е. Т=0.
Внешними силами для контейнера являются его сила тяжести P=Mg и реакция
Я ребра Oz. Поэтому работа внешних сил сведется только к работе сил тяжести при
( Л\
подъеме центра масс на высоту ОС— I. Работа силы реакции Я равна нулю.
\ 2/
Имеем
.. ( й\
М^-р{ос—1
к \ Ч
где ОС=--------. Подставляя все вычисленные величины в (е), получим
(О1 ,----- 1
-УОгу=-Р(7/2+Л2-Л)-,
или
/Mhv\2 .--------
Лъ — =^(7/2+й2-Л).
\2Jqz/
Отсюда получаем для скорости платформы следующее условие, при котором не
произойдет опрокидывания контейнера
Для момента инерции Joz по теореме о моментах инерции относительно двух
параллельных осей, одна из которых проходит через центр масс, имеем
Joz=Jcz+M{OCf.
Аналогично для оси O'z, параллельной Oz,
644
Jl7z = Jcz + M(O’C)2.
Исключая из этих двух выражений Jcz, получим
Joz-Joz = M[(OC)2-(O’C)2]; JOz = Jaz+M[(OQ2-(O'C)2]. (з)
Момент инерции Jffz определяем по формуле для однородной прямоугольной
пластины. Эта формула справедлива в рассматриваемом случае, только в ней надо
поменять местами Ли I. Имеем
/Л2 l2\ h2 + l2 h2
Jaz=M ; (°О =--------------; (О'С)=—•
\3 12/ 4 4
После этого
/Л2 12\ 1 1
J01 = M -+- +Л/(Л2+/2-А2) - = М(А2+/2) -. (и)
\ 3 12/ 4 3
Подставляя из (и) в (ж), получаем
Для случая /=А, и^л/l.lgA. Если Л=2 м, то
и ^4,6 м/с» 16,6 км/ч.
§ 7. ЦЕНТР УДАРА
Если по твердому телу, которое может вращаться вокруг непо-
движной оси, произвести удар, приложив ударный импульс S, то
при выполнении некоторых условий не возникнет ударных реакций
в подшипниках оси вращения. Получим эти условия.
Пусть твердое тело с неподвижной осью АВ, по которой направ-
лена координатная ось Oz, имеет до удара угловую скорость
о)0 (рис. 246). К телу приложен ударный импульс S; угловая скорость
изменяется и становится равной а>. Освободив тело от связей и за-
менив их импульсами реакций SA и SB, применим к явлению удара
теоремы об изменении количества движения и кинетического моме-
нта. Имеем
ё-бо=£31е)=3+£<+&;
Зо - ЗЯ»=£ Л/о да=мо (3)+Л/о (Зл)+Мо (Зэ),
(31)
645
Рис. 246
где Q и Ко — количество движения и ки-
нетический момент после удара, a Qo и
— соответственно те же величины пе-
ред ударом.
Скорости точек при вращении тела
вычисляем по формуле Эйлера:
Vk = COXrk.
Следовательно, количество движения
Q=Mvc=М (со х г с);
Q - Qo = М [(й - й0) х гс],
где М — масса тела; гс — радиус-вектор центра масс. Так как й и
йо направлены по оси вращения, то
Q-Qo=M О О
Хс Ус Zc
= {’ [ “ Ус (аз - со0)] + j [*с (со — а>0)] + к • 0} М. (32)
Проекции кинетического момента на оси координат можно опре-
делить по формулам для тела, имеющего одну закрепленную точку,
но при условии, что шх=шу=0 и coz = co. Имеем:
KX = JX(OX JjtyCOy JaCOz = JaO)',
Ку — — Jyx(l)x -f- JyCOy — JyfiJz — — JyzCO',
K?— JrzxC0x JZyCOy I JZCOZ—
Используя эти формулы, получим:
Кх-К®= —Jxz(co — co0y
Ку - Х<0) = - JyZ (со - сооУ, (33)
^2-^=-Л(со-Шо).
Проецируя (31) на оси координат и учитывая (32) и (33), по-
лучаем
646
— Му с (w — C00) — Sx + S^x +
Mxc (co — co0)=Sy + SAy + SBy;
Q — Sz+Saz',
- Jxz (co - to0)=Mx (S) + Mx (SA)+Mx (SB);
— Jyz (co — C0o) = My (S) + My (SA) + My (Sb);
Jz(co — co0)=Mz(S)+Mz(Sa)+Mz(Sb). J
(34)
Из системы уравнений (34) определяем импульсы реакций SA и
SB и изменение угловой скорости при ударе со — со0 для заданного
тела и внешнего ударного импульса S.
Определим условия, при которых удар по телу не вызывает
ударных реакций в подшипниках, т. е. когда SA = SB=0. Из системы
уравнений (34) в этом случае получаем:
-Myc(co-co0)=Sx; '
Mxc(aJ-co0) = Sy;
0 — Sz;
-Ja(co- co0)=Mx (S);
- Jyz (co - co0)=My (S);
Jz(co-co0)=Mz(S). J
(35)
Из соотношений (35) следует: так как SZ=Q, то ударный импульс
S находится в плоскости, параллельной Оху. Выберем начало коор-
динат О на оси вращения так, чтобы импульс S лежал в плоскости
Оху, а координатную ось Ох направим параллельно S. Тогда
ударный импульс S пересечет ось Оу в точке К. При таком выборе
начала координат и осей 5^ = 0, SX = S, Mx(S) = 0, My(S)=0, так как
S параллелен Ох и пересекает Оу.
Учитывая это, из условий (35) получаем: из второго уравнения
хс=0, из четвертого Jxz = 0, из пятого JJ2=0, т. е. центр масс
находится в плоскости Oyz и ось вращения Oz является главной
осью инерции для точки О. Так как ударный импульс S параллелен
оси Ох, то, следовательно, он перпендикулярен плоскости Oyz,
проходящей через ось вращения и центр масс и расположен в плос-
кости, перпендикулярной оси вращения. Ось вращения пересекается
647
с этой плоскостью в точке О, для которой ось вращения должна
быть главной осью инерции.
Для тела, имеющего плоскость симметрии, ударный импульс
S должен находиться в этой плоскости, а ось вращения Oz ей
перпендикулярна. Тогда ось вращения будет главной осью инерции
для любой точки О, находящейся в плоскости симметрии.
Если ввести длину 1=ОК, то MZ(S) = —IS при направлении
5 в положительную сторону оси Ох. С учетом этого, исключая S из
первого и шестого уравнений (35), получаем
l=OK=JzIMyc. (36)
При сделанном выборе осей координат ус — расстояние от оси
вращения Oz до центра масс. Если его обозначить h, то
Получена формула, по которой вычисляется приведенная длина
физического маятника.
Точка пересечения К линии действия ударного импульса с пло-
скостью, проходящей через ось вращения и центр масс при отсут-
ствии ударных реакций в подшипниках, называется центром уда-
ра. Любой по числовой величине ударный импульс S, линия
действия которого проходит через точку К перпендикулярно плос-
кости, содержащей ось вращения и центр масс, не вызывает удар-
ных реакций в подшипниках; если ось вращения является главной
осью инерции для точки О — точки пересечения оси вращения
с перпендикулярной плоскостью, содержащей ударный импульс 5;
если расстояние от оси вращения до линии действия ударного
импульса Z равно приведенной длине физического маятника; если
центр удара К и центр масс С лежит по одну сторону от оси
вращения.
Если центр масс находится на оси вращения, то h=yc=0 и рас-
стояние I от оси вращения до центра удара К равно бесконечности.
В этом случае центра удара не существует.
Так как для центра масс, находящегося на оси вращения, йс=
=«с=0, то Q — Qo=M(uc—vc)=O и из первого уравнения (31) полу-
чаем
0 = 5+5^ + §в,
откуда
Sa + Sb= — S,
т. е. ударный импульс, приложенный к телу, целиком передается на
подшипники.
648
Пример. Дверь, имеющая форму прямоугольной пласти-
ны (рис. 247), закреплена в точке А с помощью подпят-
ника, а в точке В — подшипника. Ширина двери Л. Опре-
делить положение центра удара двери, если она открывает-
ся приложением ударного импульса.
Решение. Ударный импульс 8 должен быть перпен-
дикулярен плоскости, проходящей через ось вращения
и цнтр масс двери, т. е. находиться в плоскости симметрии,
перпендикулярной плоскости двери.
Плоскость симметрии, в которой расположен ударный
импульс, должна дать точку пересечения О на оси враще-
ния, для которой эта ось является главной осью инерции.
Таким свойством обладает точка О, расположенная на оси
Oz, в которой пересекается плоскость двери с ее попереч-
ной плоскости симметрии для однородной двери.
Расстояние ОК=1 до центра удара К определяем по
формуле для приведенной длины физического маятника
Мус
В рассматриваемом случае
Л Mh2
Следовательно,
Mh2 2 2
/=-----=-Л.
3Mh 3
Любой по абсолютной величине ударный импульс, линия действия которого
перпендикулярна плоскости двери и проходит через центр удара К на расстоянии от
2
оси /=-Л, не передается на подпятник А и подшипник В.
ГЛАВА 14
ЭЛЕМЕНТЫ ТЕОРИИ КОСМИЧЕСКИХ ДВИЖЕНИЙ
§ 1. ВВЕДЕНИЕ
Космические корабли различного назначения выводятся на ор-
биту (траекторию) с помощью ракет-носителей. Каждая ступень
ракеты-носителя имеет двигатели, баки с топливом и другие устрой-
ства. Остатки использованной ступени обычно отделяют от оста-
льной части ракеты. Последней ступенью служит космический ко-
рабль или эквивалентное ему устройство, которые в конце работы
двигателей предпоследней ступени получают скорость v0 под углом
а к горизонту вследствие запрограммированного отклонения раке-
ты-носителя с помощью рулевого устройства.
Движение космического корабля после его отделения от оста-
тков ракеты-носителя совершается под действием силы тяготения
Земли при старте с ее поверхности. Высота над Землей, где кос-
мический корабль начинает свое автономное движение после рабо-
ты двигателей, достаточно велика и силой сопротивления воздуха
можно пренебречь. Можно пренебречь также силами тяготения
Солнца и других планет, если движение космического корабля
происходит вблизи Земли.
Для рассмотрения движения центра масс космического корабля
в рассматриваемом случае хорошей моделью является движение
точки под действием силы тяготения земного шара. Эта задача
известна как задача Ньютона.
Движение точки в задаче Ньютона рассматривается относитель-
но системы отсчета, скрепленной с Землей, принимаемой за инерци-
альную вследствие малости поправок на неинерциальность по срав-
нению с силой тяготения. Земной шар в задаче Ньютона считается
однородной сферой. В этом случае он притягивает материальную
точку как одна точка, центр шара, имеющая массу всего земного
шара. В более точных расчетах учитывают несферичность Земли
и ее неоднородность.
Об особенностях движения космического корабля вместе с раке-
той-носителем при работе двигателей одной из ступеней можно
составить приближенное представление рассмотрев движение точки
переменной массы, являющейся упрощенной моделью движения
центра масс тела, на движение которого существенное влияние
оказывает процесс изменения массы.
650
§ 2. ЗАДАЧА НЬЮТОНА
Имеем материальную точку массой т, движущуюся под дейст-
вием силы тяготения земного шара, массой М и радиусом R. Зем-
ной шар считаем однородной сферой. Силу тяготения, действу-
ющую на материальную точку, согласно закону тяготения Ньюто-
на, можно выразить в форме
к
F=--r°, (1)
г"1
где г — расстояние точки до центра земного шара; к — постоянный
коэффициент; г ° — единичный вектор, направленный от центра Зе-
мли к рассматриваемой точке.
Коэффициент к из закона Ньютона равен
k=GMm,
где G — универсальная постоянная тяготения. Другое выражение
для к получается, если применить формулу (1) к материальной
точке, находящейся на поверхности земного шара, где сила F пере-
ходит в силу тяжести P=mg. Приравнивая эти две силы при r—R,
получаем
£
k=mgR2
где g — ускорение земного тяготения.
При рассмотрении движения точки под действием центральной
силы доказано, что траектория точки является плоской кривой, т. е.
в этом случае у точки только две степени свободы. Сила тяготения
однородного шара относится к числу центральных сил. Задачу
о движении точки под действием таких сил удобно решать в поляр-
ных координатах.
Ограничим решение задачи Ньютона нахождением уравнения
траектории движения точки в полярных координатах r=f((p), где
(р — полярный угол (рис. 248).
Для решения поставленной задачи следовало бы использовать
уравнения движения точки в проекциях на полярные оси координат.
Удобнее применять следствия из этих уравнений в форме теорем об
изменении кинетической энергии и кинетического момента точки.
По теореме об изменении кинетической энергии точки,
mv2 mvi
651
где работа силы в потенциальном си-
ловом поле тяготения Земли равна
к к
A = U-U0 =-----, (3)
г Го
£
так как U=- (см. § 6 гл. 8); г0 — рас-
г
стояние материальной точки до центра
земного шара в момент, когда точка
имеет скорость «0.
Для квадрата скорости в полярных координатах имеем
v2 = v2 + v2 =г2 + г2ф2,
(4)
где vr и Vp — радиальная и трансверсальная скорости. Используя (3)
и (4), из (2) получаем
, , 2к[1 1\ ., , 2fc/1 1\
«2=«о +- — К r2+rV=»0+--------• (2)
m\rraJ m\rroJ
По теореме об изменении кинетического момента относительно
оси Oz, перпендикулярной плоскости траектории и проходящей
через центр земного шара, имеем
—= Л/г(/)=0,
dr
так как сила тяготения F пересекает ось Oz. Следовательно,
Kz = const. (5)
Но
Kz=mrvp=тг2ф,
так как vp = r(p.
В начальный момент движения по орбите
Kz—mr ovo cosa=Cm,
где
С=const - rovo cosa.
Таким образом, из (5) получаем
г2—=С. (У)
dr
652
Исключим из (2') и (5') dt Из (5') имеем
, г ,
dZ=do>.
С
Подставляя значение dz в (2'), получаем:
'dA2C2 С2 (dr\2C2 С2 , 2k/1
~) -7 + ^=«0 +-— •
d<p/ г г \~Ф/ r r m\r r§J
(6)
Уравнение (6) является дифференциальным уравнением траектории
точки в полярных координатах. Интегрируя его, найдем уравнение
траектории в конечной форме. Введем новые обозначения для по-
стоянных величин
гт 2 2 к -
H=vt--------------; p.=-=gR2.
mrQ r0 m
Тогда из (6) имеем
ZdA2 С2 С2 „ 2д
—) —+—=Н+-,
г г2 г
ИЛИ
(6')
Преобразуя подкоренное выражение в (6') и выполняя интегрирова-
ние, получаем
где
(6")
653
а2 = Н+—:х=
с2
с_р.
г d
р0 — постоянная интегрирования. Таким образом, из (6"), учиты-
вая, что косинус — четная функция, имеем
С д
= COS (ф — фо)-
Отсюда
С , / и , I \
у = ~+ /Я+—СОЗ(ф-ф0),
или окончательно
Р
1 +ecos (ф—<до)
(7)
где постоянные величины имеют следующие значения:
rivl cos2a
1<2 2 / 2 I
1 +vg cos a-1 vq — 2— 1.
ГЛ \ r0 /
Приняв приближенно r0~7?, получим
I v„cos2a , _
e=7i+-g^(«o-2^)-
(8)
Формула (7) является уравнением конического сечения в поляр-
ных координатах с параметрами р и е. При различных значениях
параметров получаются разные конические сечения, являющиеся
траекториями движущейся точки под действием силы тяготения
Земли. В зависимости от значения параметра е возможны следу-
ющие три типа траекторий:
1) е<1, что получается, согласно (8), при v2<2gR или
v0<y/lgR-, траекториями точки являются различные эллипсы в за-
висимости от значения параметра р;
654
2)е=1, или ио = ,2 км/с; траекториями будут параболы;
3) е>1, или v0>s/2gR = 11,2 км/с; траектории имеют форму
гипербол;
4) е = 0; траекториями являются окружности, радиус которых
согласно (8) г=р. При а = 0° в этом случае, приравнивая е нулю,
получаем
0=g2R2+v$-2gRv2,
или
v0 = y/gR=l,9 км/с.
Можно показать, что при < yfgR траекториями точки являют-
ся дуги эллипса, которые начинаются на некоторой высоте над
Землей и обязательно оканчиваются на земном шаре, т. е. точка,
брошенная с Земли, в этом случае обязательно упадет на Землю.
Наименьшая скорость точки, для того чтобы ее траектория не
пересекала земной шар, если движение ее начинается на некоторой
высоте над поверхностью Земли, получается в том случае, если
траекторией точки является окружность, т, е. при v^=y/gR=
= 7,9 км/с при а = 0°. Эту скорость называют первой космичес-
кой скоростью. По мере увеличения и0 сверх первой космической
скорости окружность деформируется в эллипсы и при 42) = s/lgR =
= 11,2 км/с получается траектория в форме параболы. Эту скорость,
при которой эллипс переходит в параболу, называют второй кос-
мической скоростью. Парабола является незамкнутой кривой.
Двигаясь по ней, точка покинет окрестности Земли. Для скоростей
Vo> ^2gR=ll ,2 км/с парабола превращается в гиперболы различ-
ной формы. На рис. 249 показаны траектории точки в зависимости
от ее начальной скорости, если точка начинает движение на некото-
рой высоте h над поверхностью Земли при а=0°.
Формула (7) для траектории материальной точки, движущейся
под действием тяготения однородного шара, справедлива не только
для земного шара, но и любого другого однородного шара, напри-
мер Луны, Солнца и т. п., только для них параметры g и R будут
иметь свои значения.
Материальная точка, имея начальную скорость 42)=И,2 км/с,
может покинуть окрестности Земли. Молекулы газов, входящих
в состав земной атмосферы, приобретая от взаимных столкновений
скорости, равные или большие второй космической скорости, поки-
дают пределы Земли. Такие скорости могут приобрести прежде
всего молекулы самого легкого газа, т. е. водорода. Земная атмос-
фера постоянно теряет преимущественно водород.
655
Гипербола
\ v0 ’/1,2 км/с
^Окружность
v'"~19kM/C
^Парабола
\ц-'г1=11,!км/с
Эллипс
Рис. 249
Минимальная скорость, которую необходимо иметь точке, начи-
нающей движение с Земли, чтобы преодолеть силу притяжения
Солнца и покинуть Солнечную систему, составляет 16,7 км/с. Эту
скорость называют третьей космической скоростью.
Законы движения центров масс искусственных и естественных
спутников Земли не отличаются от законов движения спутников
других планет, например Юпитера, и движение планет вокруг Со-
лнца или какой-либо другой звезды. Полное решение задачи Нью-
тона дает все данные о движении центров масс искусственных
и естественных спутников. Из этих данных, в частности, можно
вывести законы Кеплера (1571 — 1630), которые им впервые были
получены, используя астрономические наблюдения Тихо Браге
(1546 — 1601). Приведем законы Кеплера в современной формули-
ровке без вывода:
1) все планеты описывают вокруг Солнца плоские орбиты, следуя
закону площадей',
2) орбиты планет являются эллипсами, в одном из фокусов
которых находится Солнце',
3) квадраты звездных времен обращения планет вокруг Солнца
пропорциональны кубам больших полуосей их орбит.
§ 3. ДВИЖЕНИЕ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
В современной технике возникают случаи, когда масса точки
и системы не остается постоянной в процессе движения, а изменяет-
ся. Так, при полете космических ракет вследствие выбрасывания
продуктов сгорания и отделения ненужных частей ракет изменения
массы достигают 90...95% общей начальной величины. Довольно
значительно изменяется масса при полете современных реактивных
самолетов вследствие расхода топлива при работе двигателей
и в ряде других случаев. Даже в такой области техники, как тек-
стильное производство, происходят значительные изменения массы
656
различных веретен, шпуль и рулонов при современных скоростях
работы станков и машин.
Рассмотрим главные особенности, связанные с изменением мас-
сы, на примере движения одной точки переменной массы. Точку
переменной массы примем за геометрическую точку с конечной
массой, непрерывно изменяющейся в процессе движения. Вместо
точки можно рассматривать также тело переменной массы, если
оно совершает поступательное движение.
Дифференциальные уравнения движения точки
переменной массы
К точке переменной массы нельзя непосредственно применить
основной закон динамики точки постоянной массы.
Дифференциальные уравнения движения точки переменной мас-
сы получим, применяя закон независимого действия сил и теорему
об изменении количества движения системы. Известно, что дейст-
вующая на точку сила сообщает ей такое ускорение, которое не
зависит от действия других сил. В случае точки переменной массы
кроме приложенной к точке силы F действуют силы, вызванные
отделением от точки частицы массой d'M.
Считаем, что изменения скорости v точки переменной массы от
действия силы F и от изменения массы точки не зависят друг от
друга, или общее изменение скорости du в течение времени d/
складывается из изменения скорости duj от действия силы F при
постоянной массе точки и изменения скорости dv2, вызванного
изменением массы точки в отсутствие силы F.
Имеем точку переменной массы М. От действия силы F скорость
точки постоянной массы относительно инерциальной системы от-
счета изменяется за время dt в соответствии с основным уравнением
динамики точки постоянной массы на
d^dt (9)
м
Изменение скорости точки dv2 за время dr, вызванное изменени-
ем ее массы в отсутствие действия силы F, определяют по теореме
об изменении количества движения системы постоянной массы. Так
как механическая система, состоящая из точки переменной массы
и отделившихся от нее частиц, свободна от действия внешних сил,
то ее количество движения является постоянной величиной. Внут-
ренние силы взаимодействия точки с отделяющимися частицами не
изменяют количества движения рассматриваемой системы. Приме-
657
няя закон сохранения количества движения за промежуток времени
от t до z+dt, имеем
Qi—Qi+dt- (Ю)
Учитываем только взаимодействие точки переменной массы
с отделившейся от нее частицей массы d'M за время dt и пренебрега-
ем действием на точку и эту частицу ранее отделившихся частиц
(рис. 250). Получаем Qt = Mv, так как в момент t имеется одна
точка массой М (Z), движущаяся со скоростью v относительно инер-
циальной системы координат Oxyz.
В момент r+d/ имеются точка массой М—d'M, скорость кото-
рой v + dv2, и отделившаяся частица массой — d'M, скорость кото-
рой и относительно той же инерциальной системы координат Oxyz.
Количество движения их в момент z+dz
Qt+dt — (М—d'M) (v + dv2) + “ d'M.
Приравнивая, согласно (10), количества движения после сокра-
щения и отбрасывания малого слагаемого второго порядка dM' dv2
по сравнению со слагаемыми первого порядка, получаем
- <УМ-
а«2= —-(ч-v)
м.
при d'M>0 или, включая знак минус в dM (тогда dM<Q), имеем
dv2 = — (и — v).
м
Общее изменение скорости
dv=dvi+dvi,
или, учитывая (1) и (3),
(И)
658
г ада _ -
dr=—df4----(и — v).
М М
После умножения обеих частей этого уравнения на массу точки
М и деления на At получаем следующее дифференциальное уравне-
ние движения точки переменной массы в векторной форме:
du _ dM _ _
M-=F+ (и-v). (12)
dt dt
Выражение (12) называют дифференциальным уравнением Ме-
щерского. Оно было получено им впервые в 1897 г.
Если с точкой переменной массы связать подвижную систему
координат, поступательно движущуюся относительно инерциаль-
ной системы координат Oxyz, то абсолютную скорость и отделив-
шейся частицы массой AM по теореме о сложении скоростей можно
выразить как u = ve+vr.
Так как в данном случае vr=v, то относительная скорость от-
делившейся частицы
vr=u—V.
Подставляя значение и—v в (12), имеем
dv _ dM _
M—=F+—vr. (12')
dt dt
— dM - .
Если ввести обозначение Фг=—v„ то (12 ) примет вид
dt
dv — —
М =Р+ФГ. (12")
dt
Величину Фг называют реактивной силой, a AM) At является ско-
ростью изменения массы. Она характеризует изменение массы точ-
ки за единицу времени, например за 1 с. Поэтому реактивная сила
равна произведению секундного изменения массы точки на относи-
тельную скорость отделения частиц массы от точки переменной
массы.
В случае уменьшения массы точки с изменением времени вели-
чина AMjAt является отрицательной, а при возрастании ее массы —
положительной. При уменьшении массы точки вследствие отделе-
ния от нее частиц реактивная сила Ф, направлена в сторону, проти-
воположную относительной скорости отделяющихся частиц vr,
659
а при увеличении массы точки величина больше нуля и реак-
тивная сила Ф, направлена в сторону относительной скорости ча-
стиц vr. Для реактивного двигателя скорость изменения массы
dM/dt является отрицательной, равной секундному расходу массы,
a vr — скорость вылета газа из сопла двигателя.
Реактивная сила является тягой двигателя, обусловленной вы-
бросом газа через сопло. Она направлена противоположно скорости
вылета газа из сопла двигателя.
Проецируя обе части (12") на прямоугольные декартовы оси
координат, получаем дифференциальные уравнения движения точки
переменной массы в проекциях на эти оси:
d2x d2y d2z
1И—=Г,+Ф„; М~^=Гу + Фгу; М— = Р1 + Ф„. (13)
dt2 dt2 dt2
Из (12") или (13) следует, что дифференциальные уравнения дви-
жения точки переменной массы имеют такой же вид, как и для
точки постоянной массы, только кроме приложенных к точке сил
действует дополнительно реактивная сила, обусловленная изменени-
ем массы точки.
Дифференциальные уравнения движения точки переменной мас-
сы превращаются в аналогичные уравнения для точки постоянной
массы, если величина AM/dt равна нулю. Из дифференциальных
уравнений движения точки переменной массы, аналогично тому, как
и в случае точки и системы постоянной массы, можно вывести
общие теоремы для точки и системы переменной массы.
§ 4. ЗАДАЧИ ЦИОЛКОВСКОГО
Рассмотрим две задачи Циолковского: прямолинейное движение
точки переменной массы под действием только одной реактивной
силы и вертикальное движение точки вблизи Земли в однородном
поле силы тяжести. Эти задачи впервые рассматривались К. Э.
Циолковским.
Первая задача Циолковского
Пусть точка переменной массы или ракета движется прямоли-
нейно в так называемом, по терминологии Циолковского, свобод-
ном пространстве под действием только одной реактивной силы.
Считаем, что относительная скорость vr отделения частиц постоян-
на и направлена в сторону, противоположную скорости v движе-
ния точки переменной масы (рис. 251). Тогда, проецируя (12") на ось
Ох, направленную по скорости движения точки, дифференциальное
660
уравнение прямолинейного движения точки пе-
ременной массы принимает вид
, dv dM
М — =-----vr.
dt dt
Разделяя переменные и выполняя интегриро-
вание, имеем
где v0 — начальная скорость, направленная по ре-
активной силе; Мо — начальная масса точки.
Выполняя интегрирование, получаем
Рис. 251
, Мо
V = v0 + v. ш—.
М
(14)
Если в формулу (14) подставить значения величин, характеризу-
ющих конец горения, когда масса точки (ракеты) состоит только из
массы несгоревшей части (массы приборов и корпуса ракеты) Л/р,
то, обозначая через т массу топлива, для скорости движения vt
в конце горения имеем
т \
1Ч--1.
м*)
Вводя число Циолковского Z=mjMv, получаем следующую
формулу Циолковского:
vi =vo + vrln(l +Z). (15)
Из формулы Циолковского следует, что скорость в конце горения
не зависит от закона горения, т. е. закона изменения массы. Ско-
рость в конце горения можно увеличить двумя путями. Одним из
этих путей является увеличение относительной скорости отделения
частиц vr или для ракеты увеличения скорости истечения газа из
сопла реактивного двигателя.
Современные химические топлива позволяют получать скорости
истечения газа из сопла реактивного двигателя порядка 2...2,3 км/с.
Создание ионного и фотонного двигателей позволит значительно
увеличить эту скорость. Другой путь увеличения скорости ракеты
в конце горения связан с увеличением так называемой массовой, или
661
весовой, отдачи ракеты, т. е. с увеличением числа Z, что достигается
рациональной конструкцией ракеты. Можно значительно увеличить
массовую отдачу ракеты Мо)Мр путем применения многоступен-
чатой ракеты, у которой после израсходования топлива первой
ступени отбрасываются баки и двигатели от оставшейся части
ракеты. Так происходит со всеми баками и двигателями уже от-
работавших ступеней ракеты. Это значительно повышает число
Циолковского для каждой последующей ступени, так как уменьша-
ется Л/р за счет отброшенных масс баков и двигателей.
Для определения уравнения движения точки переменной массы
из (14) имеем
dx Mq
---— Vo + V. In —,
dz-М
или, выполняя интегрирование после разделения переменных и счи-
тая х=0 при 1=0, получаем
t
, Л/fl Z1
x=tV+«r In—dt (16)
м
о
В теоретических работах по ракетодинамике обычно рассматри-
вают два закона изменения массы: линейный и показательный.
При линейном законе масса точки с течением времени изменяет-
ся так:
M=Mo(\-at), (17)
где а=const (а — удельный расход), а Мо — масса точки в началь-
ный момент времени.
При показательном законе изменение массы
М=Мое~х'. (18)
Выполняя интегрирование в (16) при линейном законе изменения
массы (17), получаем следующее уравнение движения:
x=vot+-[(l — at)ln(l — otf) + at|. (19)
а
При показательном законе изменения массы (18) соответственно
av.t2
X = vot~i—(20)
Отметим, что при линейном законе изменения массы (17), если
vr=const, секундный расход массы
662
(—dM/df)=аМ0=const
и реактивная сила
Ф,=(—dM/dt)vr=aMovr-const.
При показательном законе секундный расход массы и реактив-
ная сила являются переменными, но ускорение точки переменной
массы аг, вызванное действием на точку одной реактивной силы Ф„
является постоянным, т. е.
а,=<&rjM = avr=const.
Вторая задача Циолковского
Если точка переменной массы (ракета) движется по вертикали
вверх вблизи Земли (см. рис. 251), то, считая поле земного притя-
жения однородным (g=const) и пренебрегая сопротивлением воз-
духа, а также учитывая все предположения первой задачи Циолковс-
кого, получаем следующее дифференциальное уравнение движения
точки:
dv dM
М— = — Ms------vT.
At dt
После выполнения интегрирования имеем
. Мо
v=«o—gt+vrHl—•
м
Для х в зависимости от времени, если, как и в первой задаче
Циолковского, отсчитывать х от начального положения точки, по-
лучаем следующую формулу:
t
x=iV- —+tdln—df. (21)
2 J М
о
Из (21) при линейном законе изменения массы (17) получаем
17/2 Vr
x=vot-----1— [(1 — «0 In (1 —a/) + at].
2 a
При показательном законе изменения массы (18) соответст-
венно
gt2 axrt2
X — Vot---1-----.
2 2
663
ГЛАВА 15
ВВЕДЕНИЕ В ДИНАМИКУ СПЛОШНОЙ СРЕДЫ
§ 1. УРАВНЕНИЕ НЕРАЗРЫВНОСТИ
Для сплошной среды важное значение имеет уравнение со-
хранения массы, или уравнение неразрывности. Для его
вывода введем понятие плотности сплошной среды. Плотностью
р в точке М пространства называют предел отношения массы А/л
в элементарном объеме А К к этому объему, охватывающему точку
М, при стягивании его в эту точку, т. е.
р = Inn —.
Получим уравнение неразрывности. Выберем в пространстве
неподвижную замкнутую поверхность, ограничивающую объем V
(рис. 252). Сплошная среда при своем движении относительно рас-
сматриваемой системы отсчета частично входит в объем, ограни-
ченный поверхностью, частично из него выходит. Считается, что
сама выбранная поверхность не влияет на движение сплошной
среды. Через элемент площади поверхности dS за единицу времени
входит или выходит количество массы сплошной среды pv„dS
(определяется знаком потока), где п — направление внешней по
отношению к объему нормали. Через всю поверхность войдет или
выйдет количество массы pv„dS. Если это величина положитель-
ная, то получим уменьшение плотности в точках объема в единицу
времени на —dp/dt. В малом объеме dK это уменьшение составит
— dV. Если масса сплош-
dt
ной среды сохраняется, то поток ее через поверхность должен
компенсироваться изменением плотности в рассматриваемом объ-
еме, т. е.
J pv„ dS+
~dK=0.
dt
(1)
664
Это и есть уравнение неразрывности,
или сохранения массы, в интегральной
форме.
От интегральной формы уравнения нера-
зрывности для объема можно перейти к ура-
внению неразрывности в каждой точке про-
странства. Для этого следует интеграл по
поверхности в (1) преобразовать в интеграл
по объему, ограниченному замкнутой повер-
хностью, по формуле Гаусса — Остроградс-
кого:
Рис. 252
[(р cos (п,Л х)+q cos (п,Л у) + г cos (и,Л z)] dS=
В рассматриваемом случае
v„ = v n = vxnz + vyny + vznz = vxcos(n,/{x) + vycos(n, лу) +
+ l)zCOS(«, Az).
Полагая в формуле Гаусса — Остроградского p=pvx, q=pvy, r=pvz,
получим
pv„dS= jj (pv)ndS=
J [(pvx) cos (n,Л x)+(pvy) cos (й,л у) +
- « ГГГГа(р«х) s(pvv) s(pvz)
+ (pvz) cos (n,л z)]dS= III (2)
(Ю
Подставляя (2) в (1) и объединяя интегралы в один, имеем
8(pvx) c(pvy) d(pvz)
_8t+ 3x + dy + dz
dK=0.
(D
Так как (Г) выполняется для произвольного объема, то это может
быть только в том случае, если подинтегральное выражение равно
нулю в каждой точке, т. е.
665
др । 8(pvx) [ 8(pvy) । d(pvz)_Q
St 8x 8y 8z
(3)
Это и есть уравнение неразрывности сплошной среды в диф-
ференциальной форме.
Для несжимаемой сплошной среды, для которой плотность
р — const, из (3) получим
или
dvx dvv dv?
—= 0,
дх ду dz
ёхх ~f" буу 4“ 0.
(4)
8vx dvy 8vz
Величина----1----1—, как известно, называется дивергенцией векто-
8х 8у 8z
ра скорости v. Уравнение неразрывности для несжимаемой сплош-
ной среды кратко можно выразить в форме
diw = 0.
(4')
В более общем случае оно имеет вид
^+div(^)=0. (3')
at
§ 2. СИЛЫ ОБЪЕМНЫЕ И ПОВЕРХНОСТНЫЕ
Силы, действующие на рассматриваемую частицу сплошной сре-
ды, разделяют на силы объемные, или массовые, и повер-
рхностные. Объемными силами называют силы, которые действу-
ют на точки объема сплошной среды со стороны других материаль-
ных объектов, в том числе и со стороны точек самой выделенной
частицы сплошной среды. Объемную силу обычно характеризуют ее
интенсивностью.
В окрестности точки М пространства рассмотрим малую части-
цу сплошной среды объемом А К. Тогда масса этой частицы прибли-
женно имеет значение рАИ, где р — плотность в точке М. Если на
все точки выделенной малой частицы сплошной среды действует
объемная сила AF, то интенсивностью этой силы в точке простран-
ства М является предел отношения AF к массе частицы при стягива-
нии ее объема в точку М т. е.
= А/
F= lim---.
666
Объемными силами являются силы гравитационного тяготения,
силы инерции и некоторые другие силы.
Поверхностными силами считают силы, которые действуют со
стороны остальной сплошной среды на выделенную частицу через
ее поверхность. Поверхностную силу в каждой точке поверхности
характеризуют ее напряжением, т. е. силой, приходящейся на
единицу площади. Если через площадь AS малого элемента поверх-
ности выделенной частицы остальная среда действует с силой АР,
то напряжением р в точке поверхности является предел отношения
АР к AS при стягивании AS в точку М, т. е.
- I- д/5
р= lim —.
§ 3. СВОЙСТВА ПОВЕРХНОСТНЫХ сил
Поверхностные силы для выделенной частицы сплошной среды
являются аналогом распределенных по поверхности сил реакций
связей для твердого тела, которые рассматривались в статике.
Через каждую точку пространства могут проходить поверхности
многих выделенных частиц сплошной среды. Возникает задача
определения таких величин в рассматриваемой точке, через которые
можно выразить напряжение на элементе поверхности любой из
частиц, проходящих через эту точку. Для этого достаточно знать
в точке так называемый тензор напряжений.
Поверхности различных частиц, проходящих через рассматрива-
емую точку, характеризуют направлениями внешних нормалей к по-
верхностям этих частиц. У каждой частицы в какой-либо точке ее
поверхности имеется своя внешняя нормаль, направленная во внеш-
нюю сторону объема частицы.
Выделим из сплошной среды малую частицу в форме тетраэдра
О АВС с вершиной в точке О — начале координат декартовой систе-
мы (рис. 253). Внешняя нормаль и к наклонной площадке АВС
площадью AS„ образует с осями координат углы а, р, у соответст-
венно. Внешней нормалью к площадке О ВС является отрицательное
направление оси координат Ох, а ее площадь — ASX. Аналогично,
для площадки О АС площадью AS? внешней нормалью будет от-
рицательное направление оси Оу. Для площадки ОАВ внешняя
нормаль — отрицательное направление оси Oz, площадь ASZ.
Применим к выделенному малому тетраэдру следствие из акси-
омы Даламбера для системы, согласно которой векторная сумма
всех сил, действующих на точки сплошной среды в выделенном
тетраэдре, вместе с силами инерции этих точек относительно инер-
циальной системы отсчета равна нулю. На точки сплошной среды
667
Рис. 253
Силы инерции для всех
в выделенном тетраэдре действуют
объемные силы. Их векторная сумма
ДрРсрАК где Гер — средняя интенсив-
ность объемной силы; — средняя
плотность; ДУ — объем тетраэдра. Для
поверхностных сил, действующих на
выделенный тетраэдр через поверхность
грани О ВС, действует сила p_xASx, где
р_х — среднее напряжение на этой по-
верхности. Аналогично, для грани О АС
поверхностная сила равна p_yASy, для
грани OAB—p_AS. и для ABC—p„AS„.
точек сплошной среды в тетраэдре равны
(—РсрОсрЛУ), гДе Аср — среднее ускорение. Векторная сумма сил
должна быть равна нулю, т. е.
ЛрРсрД V~ У+р„Д5„+р_хД5х Vp-yASy +p-zASz = 0. (5)
Площади ASX, ASy, ASZ на основании теоремы о связи площадей
проекции и проецируемой фигуры выражаются через площадь на-
клонной площади Д5„ соотношениями
AS'x=AS'„cosa; ASy=AS„cosp; ASz=ASncosy.
Объем А У = 1l3hAS„, где h — высота тетраэдра, опущенная из
его вершины О на наклонную грань АВС. Поделим обе части (5) на
AS„ и перейдем к пределу, устремив высоту тетраэдра h к нулю.
Получим
р„+р_х cosa +р_у cosfi+p-z cosy = 0, (5')
так как
lira — = 1/3ИгаЛ = О
Л-0 ^S„ Л-0
и слагаемые с объемными силами обращаются в нуль, если другие
величины, входящие в их выражение, остаются конечными во всех
точках тетраэдра. В (5') входят напряжения (после перехода к пре-
делу) уже не средние, а те, которые действуют в точке О. Условие
(5') для поверхностных сил показывает, что главный вектор поверх-
ностных сил для элементарного тетраэдра в пределе (при стягива-
нии тетраэдра в точку) равен нулю. Это справедливо для частицы
любой формы, так как отношение ее объема к площади поверхности
в пределе стремится к нулю.
668
На основании закона о равенстве сил действия и противодейст-
вия для напряжений имеем:
Р-х = Рх, Р-у = Ру, P-z= Pz- (6)
Например, есть напряжение от действия отброшенной части
сплошной среды на выделенный тетраэдр через поверхность грани
ОВС. Напряжение рх следует считать действием тетраэдра через ту
же грань на остальную сплошную среду. Для нее внешней нор-
малью является положительное направление оси Ох. Аналогично
обосновываются два других соотношения из (6).
С учетом (6) после переноса слагаемых со знаком минус в пра-
вую часть (5') примет форму
Рп=Рх cosa +pycosP+pz cosy. (7)
Формула (7) выражает напряжение на наклонной площадке в точке
О через напряжения по трем взаимно перпендикулярным площад-
кам, проходящим через ту же точку.
Если сплошной средой является идеальная жидкость, в которой
напряжениями являются только давления, параллельные нормалям
к площадкам, то, проецируя (7) последовательно на оси координат
Ох, Оу, Oz и считая напряжения направленными в отрицательные
стороны внешних нормалей, получим:
— |р„| cosa = — |рх| cosa; — |р„| cos/J = — cos/?;
-|p„| cosy = -|pz| cosy.
Таким образом,
&l = lfl>l = |Pz| = lA>l=A
т. e. давление p в какой-либо точке идеальной жидкости не зависит
от ориентации площадки в этой точке. Это хорошо известный
закон Паскаля.
§ 4. ТЕНЗОР НАПРЯЖЕНИЙ
Напряжение на наклонной площадке с нормалью п через напря-
жения по трем взаимно перпендикулярным площадкам, нормалями
к которым являются оси координат, определяется по формуле (7).
В общем случае любой сплошной среды рх, ру, р2 не направлены по
нормалям к площадкам, т. е. по осям координат Ох, Оу, Oz, так же
как р„ не направлено по нормали к наклонной площадке. В проек-
циях на оси координат из (7) получаем
669
Рпх=Рхх cosa+рух cosfi +р2Х cosy ;л
Pny=PxyCosa+pyycosP +p2ycosy, I
Pnz = Pxz cosa + py2 cos/? + p22 cosy. J (7 )
Отметим, что первый индекс у проек-
ции напряжений обозначает нормаль
к площадке, на которой рассматрива-
ется напряжение. Второй индекс указы-
вает координатную ось, на которую
проецируется это напряжение.
Чтобы иметь возможность опреде-
лить рт необходимо кроме углов а, /?, у, определяющих направ-
ление нормали к площадке, знать девять компонент тензора нап-
ряжений рхх,рху, ...,ра в рассматриваемой точке. Тензор напряжений
П удобно выразить в виде таблицы или матрицы:
(8)
Значение компонентов тензора напряжений для случая, когда
они все положительны, видно из рис. 254, на котором точки Оъ О2,
Оз, расположенные в плоскостях 1, 2, 3, следует совместить в одной
точке О. Например, рхх — проекция напряжения на площадке, нор-
малью к которой является ось Ох, на эту же ось; р^ — проекция на
ось Оу напряжения рх и т. д.
Компоненты тензора напряжений, характеризующие напряже-
ния по различным площадкам, проходящим через рассматрива-
емую точку, в общем случае зависят от выбора точки и направления
осей координат.
§ 5. УРАВНЕНИЯ ДВИЖЕНИЯ СПЛОШНОЙ СРЕДЫ
В НАПРЯЖЕНИЯХ
Выберем в пространстве, в котором движется сплошная среда,
неподвижную относительно инерциальной системы отсчета, за-
мкнутую поверхность площадью S, ограничивающую объем V. Эта
воображаемая поверхность не препятствует движению сплошной
среды. Применим к сплошной среде, которая находится в выделен-
ном объеме в момент времени /, первое следствие из аксиомы
670
Даламбера для системы: векторная сумма всех действующих на
точки сплошной среды объемных и поверхностных сил вместе с си-
лами инерции точек относительно инерциальной системы отсчета
равна нулю. На элементарный объем сплошной среды действует
объемная сила FpdV и сила инерции для него соответственно
(—apdV), где F—интенсивность объемной силы; а — ускорение
относительно инерциальной системы отсчета; р — плотность. Для
всего выделенного объема векторная сумма этих сил выразится
| (Г—a) pd И (рис. 255).
интегралом по объему
(Ю
На элемент d5 поверхности выделенной части сплошной среды
действует поверхностная сила р„ dS, где рп — напряжение поверх-
ностной силы в точке поверхности с внешней нормалью, имеющей
углы a, ft, у с осями координат Ох, Оу, Oz. Векторная сумма всех
поверхностных сил выразится интегралом по поверхности *Jр„ dS.
(S)
Согласно первому следствию из аксиомы Даламбера, для выде-
ленной части сплошной среды в объеме V имеем
J (F—a)pdV+ j pnd5=0.
(Г) (S)
(9)
Преобразуем интеграл по поверхности в интеграл по объему. По
формуле Гаусса — Остроградского, заменив р„ его значением из (7),
получим
(рх cosa + ру cos ft+pz cosy) dS=
(S) (3)
JJ\ax 8y 8z J
(10)
Подставляя (10) в (9) и объединяя два интеграла в один, имеем
f[ff-5p+/p+—+^+—)dK=0.
J J J \ 8х 8у 8z J
(Ю
(9Э
671
Условие (9') выполняется для произвольного объема, поэтому
подынтегральное выражение обращается в нуль в каждой точке
этого объема. Приравнивая его нулю, получаем уравнение дви-
жения сплошной среды в напряжениях в векторной форме,
если слагаемое (—ар) перенести в другую часть уравнения:
е , 8Рх , 8Ру , 8Pz ч
pa — pF+ —. (11)
ох оу oz
В проекциях на оси координат имеем
_ , 8Рхх , 8Рух , 8Ргх
pax=pFx-{---1---1---; I
Зх Зу dz I
> (И,
Зх оу 8z I
ЗрХ2 сру2 Зр22 1
ра2 = рЛ+-—+—+““• J
ах ду az
При равновесии сплошной среды ускорение а=0ииз(11) полу-
чим следующее условие равновесия для сил:
р/+^+^+~ = 0. (12)
Зх Зу dz
В проекциях на оси координат из (12) имеем
dx dy dz I
р^+^у+^Руу+^у = 0. 1 dx dy dz f pFz + d^ + 8^ + 8pF=0. dx dy dz J (12')
672
§ 6. СИММЕТРИЧНОСТЬ ТЕНЗОРА НАПРЯЖЕНИЙ
Применим к выделенной части сплошной среды (см. рис. 255)
второе следствие из аксиомы Даламбера, согласно которому век-
торная сумма моментов относительно неподвижной точки О всех
объемных и поверхностных сил вместе с силами инерции равна
нулю. Моменты объемной силы и силы инерции для элементарного
объема d V равны
rx(pF— pa)dV,
где г — радиус-вектор, проведенный из точки О в какую-либо точку
элементарного объема. Для всей сплошной среды в выделенном
объеме это дает
[Fx(pF-pa)]d/.
(И
Аналогично для поверхностных сил получим
JJ(? xp„)d5. Со-
(3)
гласно второму следствию из аксиомы Даламбера, имеем
j j[7x(p/-pa)]dr+ JJ(Fxp„)dS=O. (13)
т и
Преобразовав поверхностный интеграл в объемный по формуле
Гаусса — Остроградского и используя (7), получим
jJ(Fxp.)dS=JJ[(?xpJeos« + (?xp,)cos?+fxp,)eoS/l+
(3) (3)
, г fffp(Fx^) , 8(гхру) 5(гхрг)”1
+ (rxpz)cosy]dS= ——+—-—+—— dr.
jJJL Зх 3у 3z
(И
Выполняя дифференцирование векторных произведений под знаком
интеграла по объему, получим
g(rxpx) । д(гхру) । й(гхрг)
дх ду dz
dV=
673
5/>zYldK (14)
dr - dr - dr - - (dpx dp у
— X Px~i ^Py~^ X рг + Г X I 1---------1
dx dy y dz \dx dy dz
(Ю
Подставляя значение интеграла (14) в (13), после объединения слага-
емых имеем
Г - ( - = 8рх 8ру 8Pz\
rx[-pa+pF-\-----1—-Ч—) +
J J L \ dx dy dz J
(dr - dr - dr -
-xpx+-xp,+-xpz
ox ay oz
dK=0.
(13')
_ _ dpx dp«
Согласно уравнению движения в напряжениях — pa + pF+ ~-Ч-—Ч-
dpz
4— = 0, из (13') получим
dz
Ж“Хрхч-^хр,ч-^хрг)бУ=О. (13")
dx dy dz )
(Ю
Условие (13) выполняется для произвольного объема, поэтому по-
дынтегральное выражение равно нулю в каждой точке, т. е.
dr - dr _ dr
-*Px + -*Py + ~*Pz = Q- (15)
ox oy oz
Так как r—xi+yj+zk, то
Srldx=i', drjdy=j', 8rldz=k,
где i, j, к — единичные векторы декартовой системы осей коор-
динат.
Разлагая напряжения рх, ру, pz на составляющие по осям коор-
динат, имеем:
Px=Pxxi+Pxyj+Px£', Py=Pyxi+Pyyj+Pyzk-, Pz=Pzxi+Pzj + Pzzk. (16)
Подставляя (16) в (15) и выражая векторные произведения в виде
определителей, получим
674
i j k
1 0 0
Pxx Pxy PX
0
Pxz
i j к
0 1 0
Pyx Pyy Py
0
Pyx
i j k
0 0 1
Pxx Pxy Pxi
1
Pxx
= 0.
(15')
После разложения определителей по элементам первых строк и ко-
мпоновки слагаемых с множителями i, j, к имеем
(Рух ~Pxy)i + (pxx -РхгЦ + (Pxy ~Рух}к = 0.
(15")
Если вектор равен нулю, то равны нулю его составляющие по осям
координат, т. е.
Рух Pzyy Pzx РXZ9 Pxy Рух‘
(17)
Соотношения (17) являются условиями симметрии тензора напря-
жений сплошной среды. Оно получено в предположении, что среди
поверхностных сил нет пар сил, моменты которых следует допол-
нительно учитывать в (13).
Проведем в какой-либо точке две площадки с единичными век-
торами п и т по нормалям к ним и напряжениями рп и рт. Проеци-
руя напряжение р„ на направление т, получим р„т, а проецируя рт на
направление п, получим р^. Используя условия симметрии тензора
напряжений, можно получить условие взаимности напряжений по
двум любым площадкам, проходящим через общую точку:
Рпт Ртп‘
(18)
В частности, приняв последовательно за нормаль т оси координат
Ох, Оу, Oz, из (18) получим:
Рпх —Рхп, Рпу —Руп, Pnz —Рхп-
§ 7. ЭЛЛИПСОИД НАПРЯЖЕНИЙ
Тензору напряжений, как и любому другому тензору с двумя
индексами (тензору второго ранга), можно поставить в соответст-
вие геометрический образ — поверхность второго порядка, так же
как тензору с одним индексом (тензору первого ранга, или вектору)
можно поставить в соответствие прямолинейный отрезок, а числу
(тензору нулевого ранга) — точку на числовой оси.
Пусть имем в точке О площадку с нормалью On, углы которой
с осями координат есть а, /?, у (рис. 256). Разложим напряжение р„,
675
Рис. 256
действующее на выбранной площадке,
на составляющие, параллельные осям
координат. Получим
Pn=Pnxi+Pnij + Pn^, (19)
где рпх, рпу, p„z — проекции напряжения
рл на оси координат. Спроецируем на-
пряжение р„ на направление нормали
On, используя (19). Имеем
cosa+pnjcos^+p„2 cosy. (20)
Подставляя в (20) значения рпх, р„у, pnz из (7'), получим
Рпп = Рхх cos2a + руу cos2//+ра cos2y -I- 2pyz cos// cosy +
+ 2pzx cosy cosa+2pxy cosa cos/?. (21)
Отложим на нормали On отрезок OK, величина которого обратно
пропорциональна корню квадратному из модуля рт, т. е.
OK=l/^\. (22)
Если х, у, z — координаты точки К, то
cosa=~ = VKnlx; c°s^=^-=VW У, cosy=-J- = x/W*- (23)
СЛл UK. UK
Подставляя (23) в (21) и сокращая на |рта|, получим
Рх^2+РУУУ2 +PzzZ2 + 2pyzyz+2pzxzx 4- 2рхуху = ± 1. (24)
Это и есть уравнение эллипсоида напряжений. Получаем
действительно эллипсоид, если ни по одному из направлений, про-
ходящему через точку О, рт не обращается в нуль. В этом случае
расстояние от точки О до точек эллипсоида не равно бесконечности.
В правой части (24) следует взять знак плюс в случае растяжения
(рт > 0) и знак минус — при сжатии (р„„ < 0).
Эллипсоид имеет три взаимно перпендикулярные главные оси.
Компоненты касательных напряжений для площадок, перпендику-
лярных главным осям, равны нулю. Для главных осей Oxt, Oyt, Ozt
уравнение эллипсоида напряжений принимает вид
Pi*2 +piy? +рз22 = ± 1, (24')
676
где pi, р2, рз — нормальные напряжения для главных осей, или
главные напряжения. Тензор напряжений при переходе к глав-
ным осям принимает диагональную форму:
Для различных осей координат, проходящих через рассматрива-
емую точку, сохраняет свою величину сумма диагональных ком-
понент, т. е.
Pxx +Руу +Pzz =Pi +Р2 +Рз-
(25)
Она является инвариантом, не зависящим от выбора осей коор-
динат в рассматриваемой точке.
Если известны компоненты тензора напряжений для любых
координатных осей, то главные напряжения р2, Рз определя-
ются как корни уравнения собственных значений тензора напря-
жений:
(26)
Это кубическое уравнение дляр имеет корнирх,р2,р3. Оно аналогич-
но уравнениям собственных значений тензоров инерции и скоростей
деформаций. Все эти тензоры второго ранга.
Можно получить также формулы, по которым вычисляются
компоненты тензора напряжений для любых прямоугольных
осей координат, если известны их направления относительно
главных осей и главные напряжения р2, рг. Приведем их без
вывода:
Pxx = Р\ cos2<Xi + р2 cos2a2 + рз cos2a3;
Руу=Р\ cos2/?! + р2 cos2/?2+Рз cos 2/?3;
plz=Pi cos2y!+p2cos2y2-|-p3cos2y3;
(27)
677
Рху =Рух =Pi cosa! e°s Д i + pt cosa2 cos/?2 + '
+p3cosa3cos/?3;
Pyx=Pzy=Pl COS^J cosy, + p2 COS& COSy2 +
p3 cosp3 cosy3;
Pzx = Pxz = Pi cosy! cosai + p2 cosy2 cosa2 +
+p3 cosy3 cosa3. >
(28)
В этих формулах ось Ох имеет с главными осями Ох{, Oyt, 0z3 углы
аь а2, «з5 ось Оу — соответственно углы /?ь р2, /?3; ось Oz — углы
Уь Уз, Уз- Формулы (27) полностью аналогичны формулам (31)
для моментов инерции относительно осей координат, а (28) —
формулам для центробежных моментов инерции (35) § 9 гл. 3.
Это и естественно, так как компоненты тензоров второго ранга
преобразуются по единым формулам при переходе от глав-
ных осей к другим осям координат, повернутым относительно
главных.
§ 8. РЕОЛОГИЧЕСКОЕ УРАВНЕНИЕ
Для различных сплошных сред зависимости тензора напряжений
от тензора скоростей деформаций отличаются друг от друга. Для
упругих сплошных сред тензор напряжений зависит от тензора
деформаций. Зависимость между тензорами напряжений и скоро-
стей деформаций часто называют реологическим уравнением. Сфор-
мулируем реологическое уравнение в тензорной форме для сплош-
ных сред, называемых жидкостями, для которых тензор напряжений
не зависит от тензора деформаций. К жидкостям относятся обыч-
ные капельные жидкости, например вода и газы. Примером газа
является воздух при нормальных атмосферных условиях.
В каждой точке пространства, занятого движущейся жидкостью,
имеем тензор напряжений П и тензор скоростей деформаций 5.
Первоначально были сформулированы и экспериментально прове-
рены простейшие частные случаи зависимости компонент этих двух
тензоров, как, например, закон Ньютона для касательных напряже-
ний. Эти зависимости оказались линейными. Это привело к пред-
положению, что линейная зависимость соблюдается и в общем
случае. Для жидкостей эта линейная зависимость тензора напряже-
ний от тензора скоростей деформаций носит название обобщенного
закона Ньютона или закона Навье—Стокса.
Линейная зависимость между тензорами П и 5 в общем случае
изотропной жидкости выражается в форме
678
II=aS+bI,
(29)
где I — единичный тензор; а и b — скалярные коэффициенты. Так
как зависимость между компонентами тензоров П и 5 предполага-
ется линейной, то скалярный коэффициент а не должен зависеть от
компонентов этих тензоров. Он должен характеризовать жидкость.
Обозначим этот коэффициент 2д. Коэффициент д называют коэф-
фициентом динамической вязкости. В общем случае он может иметь
различные значения в разных точках и изменяться с течением
времени.
Скалярный коэффициент b может линейно зависеть от компо-
нент тензоров П и 5, но только от таких комбинаций, которые не
зависят от направления осей координат в рассматриваемой точке,
т. е. он может зависеть от линейных инвариантов тензоров
П и S. Эту зависимость можно получить из (29), приравняв линей-
ные инварианты обеих частей. Получим
Рхх+Руу+р^=2ц(ехх+еуу+е1г}+Ь'3, (30)
так как линейный инвариант единичного тензора
Л ° о\
/=( О 1 о I
\°0 1/
равен 3. Линейный инвариант тензора S для сокращения записи
обозначим в, т. е.
dvx dvy dvz , _
9 = ₽хх + еуу + ezz = — + — + —' — div V.
Вх By 6z
Коэффициент 9 называют также относительной скоростью объем-
ного расширения. Для b имеем из (30):
1 2
Ь=-^рхх+руу+рхх)-^ц9. (31)
Дальнейшее преобразование связано с определением статичес-
кого давления в жидкости или просто давления. Для идеальной
жидкости (жидкость без сил трения) было доказано, что рхх=руу =
=ри. Абсолютную величину р этого общего отрицательного напря-
жения и называют давлением в рассматриваемой точке. В вязкой
жидкости нормальные напряжения рхх, руу, ра не равны друг другу.
Естественно определить давление р в этом случае как среднее
679
арифметическое нормальных напряжений, взятое с обратным зна-
ком, т. е.
Р=--з(Рхх+Руу+Р^. (32)
Подставляя (32) в (31), получаем
Ь=-р-2/3рв. (33)
При таком определении давления вязкие свойства жидкости хара-
ктеризуются одним коэффициентом р. Для некоторых жидкостей
этого недостаточно. Тогда предполагают, что давление зависит
еще линейно и от относительной скорости объемного расширения
в, т. е.
Р= -~3(Рхх+Руу+ Pzz) + 2'0, (34)
где 2' — второй коэффициент вязкости. В этом случае
6=-р + 20, (33')
где 2=2'—-р. Если 2'=О, то 2= — - р. В дальнейшем для Ь исполь-
зуем величину из (33'), как более общую. Из (33') значение Ь, опре-
деляемое соотношением (33), получается как частный случай при
Давление р нельзя определить произвольно, так как оно должно
соответствовать определению давления в термодинамике через ки-
нетическую энергию движения молекул.
Подставляя b из (33') в (29), получаем следующее реологическое
уравнение для жидкостей в тензорной форме:
77=2/zS’+(—/>+20)7 (29')
или
Тензорные равенства, справедливые в одной системе координат,
выполняются в любой другой системе координат, не только в де-
680
картовои, но и в криволинеинои, так как все тензоры при переходе
от одной системы координат к другой преобразуются по одним
и тем же общим правилам.
Тензорное уравнение (29") эквивалентно шести уравнениям для
компонент. Имеем
Рхх= ~Р+№+2рехх; рху—рух—2реХу,
Руу = Р 4" ^0 2р,Суу, Рух ~Рху—2р.бух,
Pzz= -p+20 + 2fj.ezz; pzx=pxz = 2^ezx,
где
dvx dvy dvz
&xx~ 9 == J ^ZZ = ~~~9
dx dy dz
1 [ ^x dVy \ 1 / &vy
^xy — ^yx — — j9 gyz- ^zy-~ I
y 2\8y дх) У У 2\8z
1 [ 8vz 8vx\
ezx 7 exz = ~ I-1-1>
2\8x 8z)
(35)
(36)
„ 8vx 8vv 8vz -
0=^ + _2+_г = (Цуг.
8х ду 8z
Шесть скалярных уравнений (35) выражают обобщенный закон
Ньютона или Навье — Стокса для жидкостей.
В частном случае движения несжимаемой жидкости (0=diw=O)
параллельно оси Ох, при котором ^=^=0 и vx=v(y) (рис. 257), для
касательных компонентов тензора напряжений из (35) с учетом (36)
имеем
dvx dv
Рху =Рух= Zpexy = Р— = Р~;
ду ау
Pyz=Pzx = 0-
Обозначим рХу через т. Тогда закон для касательных напряжений
выразится в форме
d«
Это и есть закон Ньютона для касательных напряжений в жидкости.
Для некоторых жидкостей линейной зависимости между тензорами
681
у напряжений и скоростей деформаций не-
_______»-// достаточно. Такие жидкости называют
__________________ // неньютоновскими жидкостями.
j Обобщенный Закон Гука для упругих
*7 сплошных сред тоже получают как линей-
—у/____________ную зависимость между тензором напря-
гу_____________ жений П и тензором деформаций S', ком-
х поненты которого выражаются по фор-
' мулам (36), только вместо вектора скоро-
Рис. 257 сти v используется вектор смещения и,
характеризующий деформацию сплош-
ной среды. Тензор деформаций и обобщенный закон Гука для
упругих сплошных сред подробно рассматриваются в теории уп-
ругости и курсах сопротивления материалов с элементами теории
упругости. Здесь ограничимся только краткими сведениями, от-
носящимися к обобщенному закону Гука.
Для упругих сплошных сред линейная зависимость между тен-
зором напряжений П и тензором деформаций S', который тоже
является симметричным, аналогична (29) и выражается в форме
П=2р5' + Ы, (37)
где
Ь = Чз(Рхх +рУу +Pzz} ~ 21зРв'> 0'=div й.
Величина в' называется относительным объемным расширением.
Дополнительно принимают, что среднее арифметическое значение
осевых напряжений линейно зависит от относительного объемного
расширения, т. е.
1/з(Р«+Л>+Аг) = ^0'- (38)
С учетом (38) тензорная зависимость (37) принимает вид
77=207+2д£". (39)
Если (39) выразить в компонентах, то получим обобщенный закон
Гука в следующей форме:
682
или в компанентной форме
^„ = 20'4-2^; р^=р>х = 2де^;
Руу ~^~^P^yyf Pyz Pzy ^P£yZ>
Pzz “ 20 4" 2/Ze^z, Pzx “Pxz ~ ^P^ZX’
(40)
Коэффициенты 2 и p, характеризующие упругую сплошную среду,
называются параметрами Ламэ. Они связаны с модулем упругости
Юнга Е и коэффициентом Пуассона а соотношениями
д(32+2д) Л
Е=--------; <т =----.
2+д 2(2+д)
В том случае, если деформации не малы, используется нелиней-
ная зависимость между компонентами тензоров напряжений и де-
формаций.
§ 9. МОДЕЛИ ЖИДКОСТЕЙ И УРАВНЕНИЯ ДВИЖЕНИЯ
В механике ньютоновских жидкостей рассматривают различ-
ные их модели. Наиболее простой моделью жидкости является
несжимаемая идеальная жидкость, для которой плотность
р=const (несжимаемая) и коэффициент динамической вязкости
ц=0 (идеальная). Другой моделью является вязкая несжима-
емая жидкость. Для нее p=const и /z=const. Самой простой
моделью сжимаемой жидкости является идеальная сжимаемая
жидкость, или идеальный газ. Для него д = 0, а плотность уже
не является постоянной. Она для совершенного газа связана с давле-
нием р и температурой Т уравнением состояния (уравнением Кла-
пейрона)
p=RpT,
где R — газовая постоянная, зависящая от рода газа. Это уравне-
ние, справедливое для обратимых процессов, считается справед-
ливым и при движении газа. Более сложной моделью сжимаемой
жидкости является вязкий газ, или вязкая сжимаемая жид-
кость. В этом случае от давления и температуры зависит не только
плотность, но и коэффициент динамической вязкости (величина
переменная). Коэффициент динамической вязкости зависит главным
образом от температуры.
683
Если в рассмотренных моделях жидкостей учесть электромаг-
нитные силы, действующие на точки сплошной среды, то получим
модели жидкостей магнитной гидродинамики.
В случае вязкого газа полная система уравнений, характеризу-
ющая его движение и различные процессы в нем, слишком сложна
и содержит много уравнений. В качестве примеров получим полную
систему уравнений движения вязкой несжимаемой жидкости, а так-
же уравнения движения идеальной несжимаемой жидкости и идеаль-
ного газа.
Уравнения движения вязкой несжимаемой жидкости. Если жид-
кость вязкая и несжимаемая, то д = const, 0 = divt> = O и слагаемые
с параметром 2 из (35) выпадают. Подставляя в них значения
величин из (36), получим
8vx f Svx Svy\
р^= -р+2ц~-, Рху=рух=рн + 3- ;
дх \ ду дх j
dvy f dvy dvz\
Pyy= -p+2p—\ pyz=pXy=pl —+— ;
dy \ dz dy J
dvz / dvz dvx\
ри=-р+2д—; pa=plx=p —+— .
dz \ dx dz /
(41)
Используя (41), получаем
др / d2vx d2vv d2vz\ d (8vx dvv 8vz\ dp
= --? + д —x+^+— +Д- —
дх У dx2 dy2 dz2) dx \ dx dy dz) dx
где введено обозначение
82vx 82vv 82vz
&>x = —+^ + —
dx2 dy2 dz2
и использовано условие несжимаемости
8vx 8vv dv-
dx dy dz
С помощью аналогичных преобразований получим
684
дргх , 3pZy 8pzz Зр
----1-----1----=--------1- pAvz.
8х ду dz dz
С учетом этого уравнения движения сплошной среды в напряжениях
для вязкой несжимаемой жидкости вместе с уравнением неразрыв-
ности дают следующую систему уравнений:
8vx 8vx 8vx 8vx 1 Зр и .
dt 8х 8у dz р8х р
8vy 8vy 8«у 8vy 1 dp p
dt 8x y dy 8z y p8y p y
8vz 8vz 8vz 8vz 1 dp p
F vx F Vy F vz — = FZ--F -
dt---------------------------dx dy dz pdz-p
8vx 8vv 8vz
—+-^+—=0.
dx dy dz
(42)
Первые три уравнения (42) называются уравнениями Навье —
Стокса. Имеем четыре уравнения для определения четырех неиз-
вестных vx, Vy, vz, р в зависимости от х; у\ z; t. Для интегрирования
этой системы уравнений следует дополнительно задать начальные
и граничные условия. Начальные условия считаются заданными,
если, например, при t=0 известны во всем пространстве функции
vx=vx(x, у, z, 0); Vy=Vy(x, у, z, 0);
(43)
«г=гг(х, у, z, 0); р=р(х, у, z, 0).
Для установившихся движений задавать начальные условия не тре-
буется, так как в этом случае неизвестные от времени не зависят.
В качестве граничных условий для вязкой жидкости используют-
ся условия прилипания жидкости к поверхности тел, находящихся
в потоке. Если эти тела неподвижны, то скорости жидкости на их
поверхности равны нулю, а следовательно, равны нулю касатель-
ные и нормальные по отношению к поверхности тел составляющие
скоростей.
Уравнения движения идеальной несжимаемой жидкости. Для того
чтобы получить уравнения движения идеальной несжимаемой жид-
кости, следует в (42) принять д=0. Получим
685
dvx dvx 8vx dvz 1dp \
----Fvx-------t-Vy----Fvz— — rx------------;
8t dx dy dz p dx
8vv
dt
8vz
dt
8vx
dx
dvy dvy dvy I dp
---F Vy F vz ——Fy-----;
dx dy dz pdy у
dvz dvz dvz 1 dp
F Vy Fvz—=FZ-;
dx-----------------dy-dz p dz
dvv dvz
—Ч-=о. У
dy dz
(44)
Первые три уравнения (44) называются уравнениями движения
идеальной несжимаемой жидкости или уравнениями Эйлера. На-
чальные условия в этом случае задаются так же, как и в случае
вязкой жидкости. Существенно изменяются граничные условия.
Вместо условий прилипания вязкой жидкости используется условие
отсутствия проникания жидкости через поверхность твердого тела,
при котором обращаются в нуль нормальные составляющие скоро-
стей в точках поверхности неподвижного тела, т. е. принимается,
что вектор скорости направлен по касательной к поверхности об-
текаемого тела.
Уравнения движения идеального газа. Первые три уравнения
движения идеального газа (или просто газа) совпадают с аналогич-
ными уравнениями несжимаемой идеальной жидкости. При их вы-
воде не использовалось условие несжимаемости р = const. Таким
образом,
8vx 8vx 8vx 8vx 1 dp
Fi>x F Vy F vz——Fx-----;
dt--------------------------dx-dy-dz pdx
dvy dvy dvy dvy 1 dp
—Ft>x }-Vy l-vz——Fy------------;
dt dx dy dz p dy
8vz 8vz 8vz 8vz 1 dp
F vx Fi>y Fv2— = FZ--------.
dt--------------------------dx dy dz pdz
(45)
Слагаемые c 2 выпадают из уравнений, так как принимается, что
2= — 2д/3, а /х = 0 для идеального газа. В уравнениях (45) плотность
р является для газа переменной. К этим уравнениям следует присо-
единить уравнение неразрывности для газа в форме
dp d(pvx) d(pvy) 8(pvz~)
--1-------1-----1------= U.
dt dx dy dz
686
Четыре уравнения связывают пять величин vx; vy; v2; р; р, завися-
щих от переменных х\ у, z; t. Для замыкания системы уравнений
следует добавить еще одно уравнение, характеризующее процесс,
связанный с движением газа. Наиболее часто встречающимся про-
цессом является баротропный процесс, при котором давление
есть только функция плотности, т. е. p=f(p}. Типичным баротроп-
ным процессом является адиабатический процесс, при котором
р = срх, где с — константа; аг = с^/ср — показатель адиабаты, зави-
сящий от теплоемкостей газа при постоянном давлении (ср) и объ-
еме (Су).
В более общем случае давление и плотность считаются связан-
ными уравнением состояния Клапейрона. Появится новая неизвест-
ная — температура Т, требующая для своего определения допол-
нительного уравнения. Этим уравнением является уравнение балан-
са энергии.
В магнитной гидродинамике (при учете электромагнитных сил)
к рассмотренным выше уравнениям для различных моделей жид-
костей следует добавить уравнения Максвелла для электромагнит-
ных полей, а также дополнить начальные и граничные условия для
жидкости условиями для электромагнитных величин.
§ 10. КРИТЕРИИ ПОДОБИЯ ПРИ ОБТЕКАНИИ ТВЕРДЫХ ТЕЛ
ПОТОКОМ ВЯЗКОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
Из уравнений движения жидкости и газа как в общем, так
и в частных случаях можно получить критерии подобия, которые
позволяют устанавливать зависимость между величинами, харак-
теризующими взаимодействие потока и обтекаемого тела, в наибо-
лее целесообразной, критериальной форме.
Два явления называются подобными, если величины одного
могут быть получены из соответствующих величин другого ум-
ножением на одинаковые коэффициенты подобия для всех сходст-
венных точек и моментов времени, т. е. подобные явления отлича-
ются только масштабами величин, их характеризующих.
Для подобия плавного обтекания двух тел вязкой несжимаемой
жидкостью должны быть геометрически подобны сами тела и оди-
наковы безразмерные уравнения движения жидкости и безразмер-
ные начальные и граничные условия.
Преобразуем уравнения движения вязкой несжимаемой жид-
кости к безразмерному виду введением в уравнения безразмер-
ных величин как независимых переменных, так и искомых. Для
независимых переменных, имеющих размерность длины, выбе-
рем характерную длину /, или масштаб длин. Для тела в форме
шара в качестве масштаба длин можно взять радиус шара. Для
687
крыла самолета за характерную длину обычно выбирают сред-
нюю хорду крыла, являющуюся его характерной шириной. В ка-
честве масштаба времени возьмем Т, для скоростей — V, давле-
ния — Р. Постоянные величины сами являются для себя масш-
табными.
Для безразмерных величин имеем:
х? = хЦ-, y'=ylh z' = z/Z; t' = tjT", p'^pjP', v'x=vxIV-, v'y=vy/V;
v't=vz/V-,v'=v/V.
Дополнительно примем, что объемными силами являются только
силы тяжести, и ось Oz с единичным вектором к направлена вер-
тикально вверх, т. е. F— —gk.
Переходя в уравнениях движения вязкой несжимаемой жидкости
(42) к безразмерным величинам и выразив для краткости первые
три уравнения в векторной форме, имеем
Vdv V2 f t dv' r dv' t dv
-------1 1 vx l-Vj —
Tdt' I \ dx! y dy dz
V (dv' dv' dv'\ „
4=0.
Шх' dy dz! J
(42')
где
Vp'=
dp'- . dp'- dy т
— id—j-\—к
dx! dy dz!
— градиент давления. Разделив первое векторное уравнение (42) на
V2jl, а второе скалярное — на V/1, получим
dv' dv dv dv
Sh—--------Fvj,-|-«z— =
dt' dx! y dy' dz!
1 , „ „ , 1 fd2v' d2v' d2v’\
=----fc-EuVp -I—I —--I—-4—- ;
Fr ReySV2 dy2 dz!1 J
dv' dv dv
— 4—^+-^=0.
dx! dy dz!
(42")
688
Здесь введены следующие обозначения для чисел подобия: Sh=
I „ Р ™
=-----число Струхаля; Еи=-------число Эйлера; Ке=-----число
TV pV2 v
У2
Рейнольдса; Fr=-----число Фруда.
gl
Получены уравнения движения вязкой несжимаемой жидкости
в безразмерной форме. Для подобия течений такой жидкости
должны быть одинаковы полученные уравнения в безразмерной
форме, а для этого необходимо выполнние критериев подобия,
т. е. чтобы были одинаковы для подобных течений числа Струхаля,
Эйлера, Рейнольдса, Фруда.
Критерии подобия имеют важное значение не только при те-
оретических, но и при экспериментальных исследованиях течений
вязкой несжимаемой жидкости. Если, например, необходимо опре-
делить силу сопротивления R, действующую на тела одинаковой
формы при обтекании их потоком несжимаемой вязкой жидкости,
то целесообразно ввести безразмерный коэффициент этой силы
(безразмерную силу сопротивления)
PV2S12
где 5 — характерная площадь тела, например площадь попереч-
ного сечения (наибольшая) в направлении, перпендикулярном пото-
ку жидкости.
Для всех тел одинаковой формы имеется общая критериаль-
ная зависимость безразмерной силы сопротивления от чисел по-
добия:
CA=/(Sh, Eu, Re, Fr). (46)
Вид функции f полностью определяется формой рассматриваемых
тел. Аналогичные критериальные зависимости получаются для дру-
гих безразмерных величин.
Критериальная зависимость (46) может быть получена путем
использования результатов интегрирования уравнений (42) при за-
данных начальных и граничных условиях или из экспериментальных
данных, получаемых обычно на модели тела, уменьшенной по
сравнению с его натуральной величиной.
Если движение жидкости установившееся, то число Струхаля
не войдет в число критериев подобия, так как в этом случае
dv'/dt—0. При пренебрежении силами тяжести выпадает из кри-
териев подобия число Фруда. Критериальная зависимость (46)
тогда примет вид
689
Сл=/(Еп, Re). (46')
Во многих случаях число Эйлера несущественно. Оно может
оказаться зависящим от числа Рейнольдса. В таких случаях
Q=/(Re)=/^, (46")
т. е. безразмерная сила сопротивления зависит только от числа
Рейнольдса.
При установлении критериальной зависимости (46") по резуль-
татам эксперимента на модели обтекаемого тела в диапазоне чисел
Рейнольдса, имеющих место для натуры, характерный размер кото-
рой может быть в десятки раз больше соответствующего размера
модели, большие числа Re приходится получать за счет увеличения
скорости или уменьшения коэффициента кинематической вязкости
v или, наконец, и того и другого вместе. Для критериальной зависи-
мости несущественно, за счет чего на модели будут достигнуты
числа Re, характерные для натуры. Кинематическую вязкость для
некоторых жидкостей v=/z/p можно уменьшить путем увеличения
плотности, если коэффициент динамической вязкости от плотности
не зависит или зависит от нее слабо.
При учете сжимаемости жидкости появится новое число подо-
бия: число Маха М = V/a, где а — скорость звука в жидкости. Это
число подобия тоже войдет в критериальную зависимость типа
(46).
Критериальные зависимости можно также получать используя
теорию размерностей физических величин. Теория размерностей
позволяет установить параметры, от которых зависит искомая без-
размерная величина. Вид функции f и с помощью теории размер-
ностей удается установить лишь в редких случаях.
§ И. УСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ВЯЗКОЙ НЕСЖИМАЕМОЙ
ЖИДКОСТИ В КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ТРУБЕ
Рассмотрим ламинарное (слоистое) течение вязкой несжимаемой
жидкости в гладкой цилиндрической трубе. Примем, что движение
установившееся. На этом примере покажем, как устанавливается
критериальная зависимость сопротивления трубы от числа Рей-
нольдса. Решение поставленной задачи важно и само по себе как
случай точного интегрирования уравнений движения вязкой несжи-
маемой жидкости.
Для установившегося движения жидкости, пренебрегая силами
тяжести, имеем из (42) следующую систему уравнений:
690
dvx dvx dvx 1 др ____________
vx— + vy~~+vz—~= — —+ vVvx;
dx dy dz pdx
8vv dvv dvv 1 dp
^ + vy-^ + vz^ = —T + vVt>y,
dx dy dz pdy
dvz 8vz 8vz 1 dp
vx---1-®.---l-vz—=--------hvVvz;
dx y dy dz pdz
dvx Ovv dvz
(47)
дх dy dz
где
d2 d2 d2
-------------------•>’
dx2 dy2 dz2
К этим уравнениям следует добавить граничное условие прили-
пания вязкой жидкости к стенкам трубы, т. е. обращение в нуль
скорости жидкости на стенках трубы.
Направим координатную ось Oz по оси трубы, тогда оси Ох
и Оу расположатся в поперечном сечении трубы, имеющем форму
круга, радиусом R (рис. 258).
Ищем решение уравнений (47), удовлетворяющее условиям vx —
=vy = 0. Тогда дальнейшему определению подлежит только vz—vz(x,
у, z), если решение такого вида удовлетворяет уравнениям движения
жидкости. Из первых двух уравнений (47) получим <Эр/йх = 0;
др/ду=О, т. е. p=p(z), или что давление в каждом поперечном
сечении одно и то же во всех точках и изменяется только вдоль
трубы. Из уравнения неразрывности при принятом допущении по-
лучаем, что dvz/8z = 0, т. е. vz=v(x, у). После этого третье уравнение
системы (47) примет вид
др (d2v d2v\
— = Д\ + )•
dz ydx2 dyj
Левая часть этого уравнения может зависеть только от z, а пра-
вая — только от х и у. Это возможно только в том случае, если
и правая и левая части этого уравнения постоянны, т. е.
dp dp / d2v 82v\
—=— — const; и I---1--I = const.
dz dz \dx2 dy2 J
Так как dp/dz=const, то давление, приходящееся на единицу
расстояния вдоль трубы, можно выразить в виде
691
dp Po-P bp
— =------=------=const,
dz I I
где pa— p = &p — перепад давлений на длине / между двумя сечени-
ями трубы вдоль ее оси. Знак минус поставлен потому, что движе-
ние жидкости происходит только в направлении убывания давле-
ния.
Для определения v имеем следующее уравнение:
Будем искать решение уравнения (48) в форме
Это значение удовлетворяет граничному условию прилипания на
стенках трубы, так как « = 0 при х2 +у2 = R2. Остается дополнитель-
но определить только константу А путем подстановки выражения
(49) в (48).
Так как
dv А 2х dv А2у d2v 2А d2v 2А
дх R2 ’ ду R2 ’ дх2 R2’ ду2 R2’
то уравнение (48) примет вид
4А Лр
R2 >11
Отсюда
Д/г R2
4р1
Используя это значение А и вводя переменную г=^/х2+у2—
расстояние до рассматриваемой точки от оси трубы, решение (49)
можно выразить в форме
Рис. 258
692
(49')
\p R2
v =------
4pZ
где vm„ = &pi R21(4 и!)— значение скорости при г=0, т. е. на оси
трубы.
Полученное выражение для v является решением поставленной
задачи.
Определим секундный объем жидкости, протекающий через по-
перечное сечение трубы (рис. 259). Он для всех сечений одинаков,
так как скорость v не изменяется вдоль трубы. Секундный объем
жидкости, проходящей через заштрихованную площадь тонкого
кольца, равен площади этого кольца, умноженной на скорость
движения жидкости, т. е. 2тглх1г. Через все поперечное сечение трубы
за 1 с пройдет объем жидкости
я
Q = ^2nrvdr.
о
Используя для v выражение (49'), после вычисления интеграла
получим
R
2n&p'R2 2 2\jzd2 2\ ТИ'тахЯ4 ™тах^2
0=----------(R—r)d(R—r2) =-------------=-------,
4plR2 J R2 2 2
О
так как d(7?2 — г2) — —2r dr, т. е.
е = = (50)
2 8р!
Это известный закон Гагена — Пуазейля. Секундный объем жид-
кости, протекающей через поперечное сечение трубы, оказался про-
порциональным величине Л4, что неожиданно. Кажется, что он
должен был быть пропорционален площади поперечного сечения,
т. е. R2.
Введем среднюю скорость течения жидкости у_,
Vq, как постоянную по сечению трубы скорость, /jf
при которой получается тот же секундный объем- / Х/Й ^х\
ный расход жидкости Q, что и при переменной I 1
скорости. Используя уравнение (50), имеем I j
Q vmax ДрЯ2 /С1\ .S
v™ = = =-----------. (51) ------
tiR2 2 Я pl Рис. 259
693
Сопротивление трубы можно охарактеризовать перепадом да-
вления, приходящегося на единицу длины вдоль трубы, т. е. от-
ношением Ар//. Чем больше эта величина, тем больше сопро-
тивление трубы, обусловленное силами трения между слоями жи-
дкости. Введем безразмерный коэффициент сопротивления трубы
2 как безразмерную величину перепада давления на единицу длины
Ар//. Получим
(52)
I 2R 2
где pv^/2 — скоростной напор; 2R — диаметр трубы. Из (51) для
Ар// имеем
<519
I R1
Приравнивая значения Ар// из (51) и (52), получаем
2 pv^>_s>№cp
2R 2 ~ R2 ‘
Отсюда имеем
2=—^=—, (53)
lAvcpp Re
так как 22?vcp/v=Re — число Рейнольдса, отнесенное к диаметру
трубы.
Получена критериальная зависимость коэффициента сопротив-
ления трубы от числа Рейнольдса, которая была предсказана теори-
ей подобия течений вязкой несжимаемой жидкости.
Логарифмируя уравнение (53), получим
Ig2=lg64 —IgRe. (53')
В логарифмическом масштабе зависимость (53) выражается графи-
чески отрезком прямой линии 1 (рис. 260). Эта линейная зависи-
мость подтверждена многочисленными экспериментами. Но она
выполняется примерно до чисел Re <2 • 103. Затем после некоторого
переходного участка экспериментальные точки соответствуют пря-
мой 2. Прямая 1 дает закон сопротивления при ламинарном
режиме течения жидкости в трубе, а прямая 2 — при турбулент-
ном, характеризующемся интенсивным перемешиванием жидкости
в поперечном к течению направлении.
694
Рис. 260
До чисел Re<2 103 устойчивой формой течения в трубе явля-
ется ламинарная форма, а для Re>2 103 —турбулентная. Коэф-
фициент сопротивления при турбулентном режиме течения во мно-
го раз больше, чем при ламинарном, для одних и тех же чисел
Рейнольдса.
§ 12. РАСПРОСТРАНЕНИЕ МАЛЫХ ВОЗМУЩЕНИЙ
В ИДЕАЛЬНОМ ГАЗЕ. СКОРОСТЬ ЗВУКА
Рассмотрим движение газа (сжимаемой жидкости) параллельно
оси Ох. Такое движение газа называют одномерным. В случае
одномерного движения vy=vz=0; vx=v(x, t) и уравнения (45) в слу-
чае баротропного процесса принимают форму
dv dv 1 др
—h v — =------;
dt дх р дх
SP j
dt дх ’
Р=/(р)-
(54)
Предположим, что имеем покоящийся газ с параметрами
1?=1>о=О; р=Ро, р = Ро, где р0 и р0 — постоянные величины. В началь-
ный момент в газе создано такое малое возмущение, при котором
дальнейшее движение газа происходит параллельно оси Ох и все
величины, характеризующие движущийся газ, зависят только от
координаты х и времени t. В произвольный момент времени для
скорости, давления и плотности имеем:
v=v'(x, t); р=р0+р'(х, t); р = р0+р'(х, t),
695
где t/; р'\ р' — малые возмущения скорости, давления и плотности.
Допуская, что производные от малых возмущений тоже величины
малые, линеаризируем систему уравнений (54), отбрасывая в них
малые слагаемые второго и более высокого порядка. Для производ-
ных в рассматриваемом случае имеем:
dv dv' dv dv dp dp' dp dp'
dt dt’ dx dx’ dt dt ’ dx dx
Кроме того,
1_ 1
P Po+p'
dp dp dp dp dp'
dx dp dx dp dx
Разлагая в степенной ряд производную dp/dp по р', получим
dp (&р\ , (d2p\ , ,
— 1 — ) "Н ----з I Р "*•••
dp \dp/o \dp /0
(dp \
— I =aj. Эта постоянная величина дейст-
dp/o
вительно положительна, так как с возрастанием давления плот-
ность возрастает, а при убывании давления — убывает для баро-
тропных процессов.
После этого, отбрасывая в (54) малые величины второго и более
высокого порядка, имеем
dv' tig dp' dp' dv'
— =--------; —h Po—
dt po dx dt dx
(55)
Получена система уравнений (линейных) для малых возмущений
скорости и плотности (у' и р').
Линеаризация уравнения p=f(p) приведет к выражению для
возмущения давления р’=а£р'.
Дифференцируя первое уравнение системы (55) по t, а второе —
по х и вычитая после этого из первого второе, которое умножено на
a^/ро имеем
52v' - d2v
(56)
696
Аналогичным способом для р' получим такое же по виду урав-
нение
а2р' 2 а2р'
-------йо— = 0.
at2 ах2
(56')
Возмущение давления р' удовлетворяет аналогичному уравнению.
Уравнение (56) называется волновым уравнением. Если бы движе-
ние газа не было параллельным оси Ох, то после линеаризации
уравнений (45) получили бы для р' уравнение вида
&р' 2 (82Р' . 82Р' , РР'Х п
at2 a°\ax2 + ay2 + az2J ’
или
1 а2р' /а2р' । а2р'
Bt2 By2 dz2 J
При Оо-* оо и конечных значениях производных оно перейдет в урав-
нение Лапласа:
д2р' д2р' 82р'
—7 "I-7"*---г = 0.
дх2 ay2 az2
Волновое уравнение и уравнение Лапласа являются двумя из трех
типов основных уравнений математической физики. Они дают ма-
тематическое описание многих физических процессов.
Волновое уравнение (56) решают или методом разделения пере-
менных (метод Фурье), или используют решение Даламбера, кото-
рое для v выражается в форме
v'(x, t)=f,(^)+f2^2), (57)
где новые переменные и £2 связаны с х и t следующими зависимо-
стями: ^=х — Opt; ^2 = x+Oot, a/j uf2 — прозвольные функции, кото-
рые следует определять по начальным и граничным условиям.
Непосредственной проверкой можно убедиться, что решение (57)
обращает уравнение (56) в тождество, т. е. оно является решением
этого уравнения.
Рассмотрим функции /i($i) и/2(<^2) по отдельности, т. е. примем
сначала, что v'=/i(^j). Если в начальный момент времени 1 = 0 (рис.
261) отметить начальное возмущение vl>, соответствующее х=х0 и,
следовательно, £ю = Хо, то будет v' = v'o, если при изменении х и t не
изменится т. е. при этом ^ = х — Oot=x0 и остается постоянной.
Отсюда получаем, что х=х0+ооЛ т. е. что возмущение v'o сместится
697
Рис. 261
за время t в положительном направлении оси Ох на расстояние aot.
Скорость этого смещения постоянна и равна а0. Таким образом,
ао является скоростью распространения в покоящемся газе малых
возмущений скорости и соответственно всех других малых воз-
мущений. Начальное возмущение скорости на отрезке O^x^xi за
время t без изменения формы сместится на расстояние aot в по-
ложительном направлении оси Ох.
Таким образом, v'=/i(Ci) является волной, распространяющейся
по газу со скоростью До в положительном направлении оси Ох.
Соответственно и'=/2(^2) есть волна, которая распространяется
с той же скоростью ао, но в отрицательном направлении оси Ох, так
как в этом случае %2=x + aot.
Скорость <2о распространения малых возмущений называется
скоростью звука в покоящемся газе. В движущемся газе скоростью
звука называют величину а = dp/dp, являющуюся в общем случае
величиной переменной, которая зависит от координат точки про-
странства и времени. Как показывают более детальные исследова-
ния, со скоростью звука распространяются любые малые возмуще-
ния. Конечные возмущения распространяются со скоростями, боль-
шими скорости звука, в зависимости от величины возмущения.
Такие возмущения обычно называют ударными волнами.
Если жидкость, в которой распространяется звук, несжимаема,
т. е. p = const, то dp = 0 и а=ао.
И. Ньютон в 1687 г. считал, что распространение звука есть
процесс изотермический, т. е. при распространении звука аб-
солютная температура Т= const. Тогда из уравнений состояния
Клапейрона имеем
p = RTp = cp,
где константа c=RT. В этом случае
a^ = dp/dp = c=p/p-, a^ = y/pTp.
698
Опыты показали, что наблюдаемая скорость звука больше, чем она
получается по формуле Ньютона. Это расхождение Ньютон объяс-
нял наличием в воздухе водяных паров.
П. Лаплас в 1810 г. предположил, что распространение звука
в газе есть процесс адиабатический, т. е. что давление и плот-
ность связаны уравнением адиабаты:
p=cipe\ ci=const; аэ = ср/сг.
В этом случае
dp ж-1 рж р
— — С\8Вр —6ВС} — — дВ —
dp р р
и для скорости звука имеем
„= ё.
У dp у Р
Формула Лапласа для скорости звука дает значения, хорошо со-
гласующиеся с опытными данными. Таким образом, распростране-
ние звука и любых других малых возмущений есть процесс ади-
абатический.
Из уравнения Клапейрона р/р = RT; следовательно,
а=sjaep/p=^aeRT,
т. е. скорость звука зависит только от абсолютной температуры
и рода газа. Для воздуха скорость звука — в м/с:
a = 20,l-v/T’.
При Т=273°К (/=0° С) а=332 м/с.
Скорость звука тесно связана со средней скоростью свободного
пробега молекул va, где а® 0,7^,.
Движение газа со скоростями v<a называется дозвуковым.
В этом случае число Маха М = «/а<1. Движение газа при М = 1
называют звуковым. При сверхзвуковом движении газа М> 1.
Интересна особенность распространения малых возмущений
в газе, движущемся со сверхзвуковой скоростью. Если при этом
в какой-либо точке произведено малое возмущение газа в момент
t—О, то в любой другой момент времени t точка газа, в которой
произведено возмущение, сместится вместе с движущимся газом
на расстояние vt, а возмущение по газу распространится на сферу
радиусом at. Все возмущения, таким образом, локализуются в ко-
нусе с вершиной в той точке, где призведено начальное воз-
699
Рис. 262
мущение. Угол полураствора конуса а (рис. 262) определяется из
выражения
at а 1 1
sina= ==—=—.
vt v via М
При М = 1 величина sina= 1 и а = л/2. При М->оо угол а-» 0, т. е. все
возмущение локализуется в области, стягивающейся в отрезок пря-
мой линии.
§ 13. ОДНОМЕРНОЕ УСТАНОВИВШЕЕСЯ ТЕЧЕНИЕ ГАЗА
ВДОЛЬ ТРУБЫ ПЕРЕМЕННОГО СЕЧЕНИЯ
Одномерное установившееся течение газа вдоль трубы перемен-
ного сечения является некоторым приближением к действитель-
ности, так как в основу его положено предположение, что парамет-
ры потока газа, такие, как скорость потока, давление и плотность,
одинаковы во всех точках каждого из поперечных сечений, перпен-
дикулярного оси трубы. Это предположение довольно хорошо соот-
ветствует действительности для элементарной трубки тока, но его
применяют и для труб конечных размеров, используя средние вели-
чины по сечениям трубы.
Предварительно получим из уравнений движения газа (45) в ча-
стном случае установившегося безвихревого движения следствие
в форме уравнения Бернулли. Для этого выразим левые части трех
этих уравнений (45) в форме Лэмба — Громеки. Пренебрегая объ-
емными силами, имеем
St
dvy
St
Sv2
St
8 (v2\ 1 dp
~ I ~ — (v>Hz—v/lj,) = — —;
8x\2 J pdx
8 (vA 1 8p
^A2/ p8y
3 (,A 1 dp
- (-) - (у A - ® Д) = — -
8z\2 / p8z
700
Предполагая, что движение стационарное х=-^=—*=0^ и ®®3'
вихревое (Пх=П>=Пг=0), получим из этих уравнений:
8 fv2^ 1 др 8 ( v2^ 1 8р 8 (i>2^ 1 др
8x\2j рдх 8y\2J рду 8z\2J pdz
Умножая первое из этих уравнений на dx, второе — на dy,
третье — на dz и складывая, получим
или
(58)
Это и есть уравнение Бернулли в дифференциальной форме.
Если (58) проинтегрировать от состояния газа, в котором «=«0;
р=Ро, р = Ръ, до состояния с параметрами соответственно v; р\ р, то
будем иметь уравнение Бернулли в интегральной форме:
р
2 2 р
Ра
(59)
Интеграл в уравнении (59) зависит от уравнения, характеризу-
ющего баротропный процесс, т. е. от вида зависимости p=f(p)-
Для несжимаемой жидкости р = const и уравнение Бернулли при-
нимает форму
_£°=о
2 2 р р ’
или
«2 Р «о Ро
— = const.
2 р 1 Р
Уравнение Бернулли для несжимаемой жидкости широко использу-
ется при рассмотрении многих технических задач, связанных с дви-
жением жидкости. Его обычно в этом случае обобщают, учитывая
действие потенциальных объемных сил, прежде всего сил тяжести
жидкости.
701
Для газа уравнение Бернулли (59) широко используется для
адиабатических процессов, для которых р/ро = (р/ро)ж
Преобразуем уравнение Бернулли в дифференциальной форме
для газа так, чтобы можно было ввести число М. Имеем
, dpdp „ , -dp Л
vdvH----= 0; vdv + a2 — = 0,
dp р p
так как dp/dp=a2. Поделив обе части на а2, получим
или в окончательном виде
Мг-+^ = 0. (58')
1> р
Другое уравнение, необходимое для анализа течений газа в тру-
бе переменного сечения, является уравнением неразрывности,
или сохранения массы. Получим его непосредственно для рассмат-
риваемой задачи в наиболее удобной форме (рис. 263).
Через каждое поперечное сечение трубы в случае одномерного
течения проходит за 1 с масса газа m—Svp, где S— площадь
поперечного сечения трубы; v — скорость течения газа; р — плот-
ность газа. При установившемся движении через все поперечные
сечения должна пройти одна и та же масса газа, т. е. т = Svp=const.
Прологарифмируем это уравнение сохранения массы. Получим
1ши InS+Inv + lnp = const.
Считая переменными величины S'; v, р, возьмем полные дифферен-
циалы от обеих частей. Имеем
dS dv dp
—+-+- = 0. (60)
S v p
Это и есть искомое уравнение неразрывности для установившегося
одномерного течения идеального газа в трубе переменного сечения.
Из уравнения неразрывности (60) и уравнения Бернулли (58')
исключим величину dp/p. Получим
d*y dv _
—=—(М2 —1). (61)
5 v
Это уравнение (61) называют уравнением Гюгонио.
702
Используя уравнение Гюгонио, проанализируем характер воз-
можных течений газа в трубе переменного сечения. Из уравнения
(61) следует: при М<1, что соответствует дозвуковым течениям,
знаки величин dS" и dv противоположны, т. е. там, где возрастает S,
в направлении течения скорость должна убывать, и наоборот. Для
сверхзвуковых течений М > 1 и знаки у dS и dv одинаковы, т. е.
сверхзвуковой поток распространяется противоположно дозвуково-
му. Чтобы увеличить его скорость, трубу следует расширять. При
М = 1 имеем 65=0, т. е. в этом случае 5 достигает максимума или
минимума. Можно показать, используя (61), что М = 1 может быть
только в самом узком сечении трубы, где S,= S,min.
Выводы о характере течений газа в трубах переменного сечения
нашли применение в конструкциях сопел современных реактивных
двигателей и аэродинамических труб больших скоростей. Для полу-
чения больших сверхзвуковых скоростей выходящего из сопла газа
следует сначала сопло сужать, чтобы получить звуковую скорость
газа в узком сечении сопла, а затем сопло надо расширять для
дальнейшего увеличения скорости выходящего из него газа (рис.
264). Наибольшая скорость, которая может быть получена на выхо-
де из сопла, зависит от площади выходного сечения и должна
обеспечиваться необходимым для каждой скорости давлением на
входе в сопло.
ПРИЛОЖЕНИЕ
1. НОВАЯ ФОРМА ОСНОВНЫХ АКСИОМ
По Ньютону, свойство инерции материальных объектов зависит
от самих объектов, т. е. оно является внутренним свойством этих
объектов. Возможна другая точка зрения, что инерция является
сопротивлением физического пространства, в котором движутся
материальные объекты.
Физическое пространство заполнено электромагнитным и грави-
тационным излучением. В нем находятся различные элементарные
и неэлементарные частицы. Возможно, что не все частицы нам еще
известны. Свойства пространства, согласно общей теории относите-
льности, зависят от материальных объектов, находящихся в нем,
и от других факторов.
Предлагаемая концепция инерции требует новой формы основ-
ных аксиом классической механики. Для их формулировки требует-
ся ввести новые понятия и уточнить ранее применявшиеся. Аксиомы
формулируются для материальной точки, понятие которой остается
прежним. Прежними остаются также понятия пространства и вре-
мени, только пространство для принятой концепции инерции долж-
но обладать свойством оказывать сопротивление движущимся
в нем материальным объектам.
Используемое в классической механике понятие силы тоже со-
храняется, только силу, действующую на материальную точку,
должен устанавливать не инерциальный наблюдатель, находящийся
в инерциальной системе отсчета, а собственный, т. е. наблюда-
тель, находящийся в собственной системе отсчета той материальной
точки, на которую действует сила. Собственная система отсчета
ранее была определена как система покоя точки.
Сила является величиной векторной, а векторы складываются по
правилу векторного сложения. Поэтому сложение сил, приложен-
ных к одной материальной точке по правилу параллелограмма,
можно считать содержащимся в определении силы как вектора.
Нет необходимости вводить определение приложенной силы. На
рассматриваемую точку действуют все материальные объекты,
704
в том числе и само физическое пространство. Силы этого действия
следует определять по законам физики для различных взаимодей-
ствий.
Потребуется понятие инерциальной системы отсчета, связан-
ной с физическим пространством и, следовательно, с материаль-
ными объектами Вселенной, определяющими свойство простран-
ства оказывать сопротивление движущимся материальным
объектам. Для наших целей в качестве такой инерциальной систе-
мы отсчета достаточно использовать гелиоцентрическую систему
отсчета.
В общем случае сила сопротивления пространства может зави-
сеть от времени, так как пространство расширяется, от места нахо-
ждения материальной точки в пространстве, ее скорости, ускорения
и т. д. Установление зависимости силы сопротивления пространства
от указанных факторов должно производиться путем эксперимента
или путем создания теории взаимодействия пространства с движу-
щимися материальными объектами.
Первая аксиома, которую можно назвать аксиомой Ньютона,
лишь приближенно отражает реальную закономерность. Она утвер-
ждает: сила сопротивления пространства пропорциональна ускорению
точки относительно инерциальной системы отсчета и направлена
против этого ускорения, т. е.
Ф=— та, (1)
где Ф — сила сопротивления пространсва или сила инерции точки;
а — ускорение точки относительно инерциальной системы отсчета.
Коэффициент пропорциональности т выражает значение силы
сопротивления пространства, приходящуюся на единицу ускорения
и называется инертной массой точки. Таким образом, инертная
масса точки является своеобразным коэффициентом сопротивления
пространства. Для малых скоростей движения точки по сравнению
со скоростью света масса не зависит от скорости и является вели-
чиной постоянной. Физическое пространство ведет себя как идеаль-
ная жидкость, которая тоже не оказывает сопротивления движению
тел с постоянной скоростью. При больших скоростях масса зависит
от скорости.
Вторая аксиома, или аксиома Даламбера, постулирует одно из
основных свойств всех сил, действующих на материальную точку
при любом ее состоянии со стороны других материальных объек-
тов, в том числе и со стороны пространства Вселенной. Согласно
этой аксиоме, все силы, действующие на материальную точку, об-
разуют равновесную систему сил, т. е.
/+Ф = 0, (2)
705
где F — равнодействующая сила от действия на точку всех других
материальных объектов, кроме пространства.
Из уравнений (1) и (2) получаем следствие
ma=F, (3)
которое является основной аксиомой Ньютона в его системе аксиом.
Из (3) по известной силе F и массе можно определить ускорение
точки, и наоборот. Из (2) следует, что силы от действия материаль-
ных объектов и сила сопротивления пространства полностью рав-
ноправны.
Получено условие для сил, действующих на материальную точку
не только при покое, но и при любом ее движении. Такого условия
нет в механике, основанной на аксиомах Ньютона. Таким образом,
на любой материальный объект в природе действуют только равно-
весные системы сил.
Третья аксиома, или закон о равенстве сил действия и проти-
водействия, определяет зависимость между силами взаимодействия
двух материальных точек: силы взаимодействия двух материальных
точек равны по величине или модулю и противоположны по направле-
нию, т. е.
Л = -Л, (4)
где F\ — сила действия второй материальной точки на первую;
F2 — сила действия первой точки на вторую.
Для механических взаимодействий в теоретической механике
дополнительно предполагается, что силы взаимодействия точек
направлены по одной прямой, проходящей через точки. Если это не
предполагать, то электромагнитные силы тоже будут удовлетво-
рять (4).
При взаимодействии двух точек, находящихся на расстоянии
друг от друга, целесообразно считать, что каждая из точек взаимо-
действует контактно с полем другой точки.
Предлагаемые основные аксиомы в новой форме независимы.
Их число минимально. Они не противоречивы. Введение их в ос-
новы классической механики вместо аксиом Ньютона устраняет все
трудности, присущие механике, основанной на аксиомах Ньютона,
в том числе снимается вопрос о гравитационном парадоксе. От-
падает необходимость вводить в теоретическую механику всякого
рода неполноценные силы.
2. СИСТЕМЫ ОТСЧЕТА
При рассмотрении движения материальной точки и всех других
материальных объектов вблизи Земли учитывается сила притяже-
ния Земли и не учитываются силы тяготения всех остальных мате-
риальных объектов Вселенной, хотя эти силы очень велики по
сравнению с силой притяжения Земли. В учебной литературе объяс-
нение этого или отсутствует, или дается неверно, путем ссылки на
удаленность этих объектов Вселенной.
Для выяснения истинных причин, по которым не учитываются
силы тяготения некоторых объектов Вселенной, проведем анализ
различных систем отсчета. Анализ удобно провести, используя
основную аксиому механики в новой форме:
Г+Ф = 0, (2')
где F — равнодействующая сила от действия на точку всех матери-
альных объектов; Ф=— та — сила сопротивления пространства
(сила инерции точки), зависящая от ускорения точки а относительно
выделенной инерциальной системы отсчета, определяющей сопро-
тивление пространства.
Условие (2') для сил справедливо для наблюдателя, находящего-
ся в собственной системе отсчета точки. Только в этих системах
отсчета определяется действие сил. Простейшей собственной систе-
мой отсчета точки является ее система покоя, относительно которой
скорость и ускорение точки равны нулю. Рассмотрим некоторые
особенности, связанные с выбором различных систем отсчета, дви-
жущихся относительно выделенной инерциальной системы отсчета.
Разложим движение точки на переносное и относительное. Тогда
сила сопротивления пространства выразится в форме
ф = фе+Фг+Ф1; (5)
где Фе= — тае — сила сопротивления пространства от переносного
движения; Фг= — таг — сила сопротивления пространства от от-
носительного движения и Ф1=—та1 — сила сопротивления Ко-
риолиса.
Выбирая в качестве подвижных систем отсчета системы, для
которых Фг = 0, тогда Фж тоже равна нулю, получим класс других
инерциальных систем отсчета. Этот класс можно расширить, если
принять Фе + Фж=0. Движение таких обобщенно-инерциаль-
ных систем отсчета должно зависеть от параметров относитель-
ного движения точки, но принципиально возможно введение таких
систем отсчета. Для всех инерциальных систем отсчета (2') прини-
707
мает форму F+ Фг = 0 и для таких систем отсчета Ф = Фг. В учебной
литературе обобщенно-инерциальные системы отсчета не рассмат-
риваются.
Из совокупности подвижных систем отсчета можно выделить
класс локально-инерциальных систем отсчета. Для этого разложим
F на составляющие:
Ms + Ъ, (6)
где F, — сила от действия на точку тел и сред, соприкасающихся
с ней (поверхностная сила); F, — сила действия на точку материаль-
ных объектов посредством силовых полей. В рассматриваемом
случае это силы гравитационного тяготения. Силу тяготения тоже
разложим на составляющие
Д = (7)
где — сила тяготения от материальных объектов, не включен-
ных в тела подвижной системы отсчета; F\r) — сила тяготения от
объектов, входящих в подвижную систему отсчета.
С учетом этих разложений (2') примет такую форму:
Л+Дг) + ^те) + Фг+Фг + Фк = 0. (2")
Системы отсчета, движущиеся относительно выделенной инер-
циальной, для которых выполняются условия /^е)4-Фе=0 и Фк = 0,
или ю = 0; называются локально-инерциальными системами
отсчета. Эти системы отсчета не вращаются относительно инерци-
альных и их движение не зависит от относительного движения
точки. Именно этот класс локально-инерциальных систем отсчета
фактически используется в задачах механики, хотя это и не осозна-
ется.
Для движения локально-инерциальных систем отсчета и движе-
ния точки относительно любой из них выполняются условия:
/)е) + Фе = 0; (8)
Л + Дг) + Ф, = 0. (9)
Используя эти условия, проведем анализ различных локально-инер-
циальных систем отсчета и движения точки относительно таких
систем.
Из (2') с учетом (6) получаем
Л+Гт+Ф = 0.
708
Из этого условия при Fs = 0 получается условие, которое выполня-
ется при невесомости точки по отношению к выделенной инерци-
альной системе отсчета, а следовательно, и всех других инерциаль-
ных систем отсчета. Если Fs=0, то из (9) получаем условие невесо-
мости точки относительно локально-инерциальной системы отсчета
в форме
Д') + фг=0.
Можно рассматривать различные локально-инерциальные систе-
мы отсчета. Они отличаются от семейства инерциальных систем
отсчета. Все они не вращаются относительно инерциальных систем,
т. е. движутся относительно их поступательно, но с ускорением.
Условие (8) выполняется при невесомости материальной точки,
движущейся вместе с выбранной локально-инерциальной системой
отсчета относительно любой из инерциальных систем отсчета. В ка-
честве точки, вместе с которой движется локально-инерциальная
система отсчета, можно выбрать любую точку, находящуюся в не-
весомости относительно инерциальной системы отсчета под дейст-
вием силы тяготения FF. В качестве таких систем отсчета обычно
в практике используются системы, движущиеся поступательно вме-
сте с центрами масс материальных объектов, находящихся прибли-
женно в невесомости относительно инерциальных систем отсчета.
Это центры масс скоплений галактик, нашей галактики, солнечной
системы, самого Солнца, земного шара, естественных и искусствен-
ных спутников Земли и других планет; свободно падающего у Земли
лифта в пустоте и т. п. Приближенность невесомости рассматрива-
емых материальных систем обусловлена тем, что различные систе-
мы материальных объектов не свободны от сил сопротивлений
сред, в которых они движутся. Для пояснения этого разложим силу
Fs на составляющие, т. е.
F3=F™ + F<r\ (10)
где — часть силы, в основном сопротивления среды, для точки
и векторная сумма этих сил для системы материальных объектов
при движении вместе с подвижной системой отсчета; Fp — часть
силы сопротивления для точки и векторная сумма сил сопротивле-
ния системы материальных объектов при относительном движении.
Для движения центра масс реальной системы материальных
объектов относительно инерциальной системы отсчета, как и для
материальной точки, имеем
/У’ + Ё<е) + Фе = 0, (11)
709
где fif1 — сила тяготения, действующая на всю совокупность мате-
риальной системы; Фе = Фс= — Мас= — Мае — сила сопротивления
пространства для всей системы; М — масса системы; ас — ускоре-
ние центра масс, которое равно переносному ускорению материаль-
ной точки, совпадающей с центром масс, но имеющей добавочное
движение относительно системы отсчета, движущейся поступатель-
но вместе с центром масс.
Для того чтобы для центра масс выполнялось условие невесомо-
сти и, следовательно, система материальных объектов как единая
совокупность тоже находилась в невесомости по отношению к инер-
циальной системе отсчета, должно выполняться условие /^ = 0.
Тогда для центра масс справедливо условие
Де) + Фе = 0 (12)
и система отсчета, движущаяся вместе с центром масс относительно
инерциальной системы, окажется локально-инерциальной.
Все реальные системы материальных объектов не свободны от
сил сопротивления различных сред. Материальным объектам нашей
галактики оказывает сопротивление межгалактическая среда, явля-
ясь для нее внешней. Для Солнца к этому добавится сопротивление
внутренней среды нашей галактики, а для искусственного спутника
Земли — еще и сопротивление атмосферы. Кажется, что при пере-
ходе от небольших систем материальных объектов к более крупным
системам, например от искусственного спутника Земли, к самой
Земле, Солнцу, галактике, сопротивление среды будет уменьшаться.
Для каждого материального объекта, очевидно, это справедливо.
Но по мере продвижения к более крупным скоплениям возрастает
число объектов, испытывающих сопротивление среды. При движе-
нии центра масс следует учитывать силы сопротивления от всех
объектов. Без специального исследования трудно оценить, какая из
систем отсчета, движущаяся вместе с центром масс какой-либо
системы материальных объектов, более близка к идеальной локаль-
но-инерциальной системе отсчета.
Для движения точки относительно локально-инерциальной си-
стемы отсчета из (2') и определения такой системы получаем усло-
вие:
/У’+Дг) + Фг=0, (9')
если пренебречь силой Это условие аналогично (2') при движе-
нии точки относительно инерциальной системы отсчета. В (9') вхо-
дят только силы действия на точку со стороны материальных
объектов, вместе с центром масс которых движется выбранная
локально-инерциальная система отсчета. Сила сопротивления про-
710
странства зависит тоже только от движения точки относительно
выбранной системы отсчета.
При использовании любой локально-инерциальной системы от-
счета часть сил тяготения не входит в (9') и, следовательно, ею
не требуется пренебрегать. Пренебрегать приходится только силой
Ff* для системы отсчета, движущейся вместе с центром масс реаль-
ной материальной системы.
Для невесомости материальной точки относительно локально-
инерциальной системы отсчета должно выполняться условие
Дг) + Фг=0,
которое получается из (9'), если для точки F-? = 0, где Fsr> — сила от
соприкосновения точки с телами и средой, входящими в локально-
инерциальную систему отсчета при движении точки относительно
этой системы отсчета. Сила тяготения Дг) создается тоже только
материальными объектами, включенными в локально-инерциаль-
ную систему отсчета. Условие невесомости точки относительно
локально-инерциальной системы отсчета аналогично условию неве-
сомости относительно инерциальной системы отсчета.
Для невесомости точки относительно инерциальной системы
отсчета должны выполняться условия ее невесомости относительно
локально-инерциальной системы отсчета и условие невесомости от
движения вместе с локально-инерциальной системой отсчета от-
носительно инерциальной системы. Невесомость точки из-за неод-
нородности полей тяготения от различных материальных объек-
тов строго осуществляется только в одной точке и приближенно
в области, содержащей эту точку. Область невесомости точки зави-
сит от размеров материальных объектов, участвующих в создании
полей тяготения и их удаленности.
Для определения семейства локально-инерциальных систем от-
счета необходимо знать хотя бы одну инерциальную систему от-
счета. Для введения всей совокупности инерциальных систем от-
счета требуется иметь выделенную или основную инерциальную
систему отсчета. С основной системой отсчета связан вопрос о ме-
ханизме возникновения сил сопротивления пространства при движе-
нии в нем различных материальных объектов. Сила сопротивления
пространства для материальной точки Ф=— та аналогична силе
сопротивления идеальной жидкости (жидкость без трения), дейст-
вующей на движущиеся в ней тела. Эта аналогия приводит к мысли,
что основная инерциальная система отсчета должна быть связана
с той жидкостью без трения, которую содержит пространство.
В качестве одного из кандидатов на такую жидкость называлось
реликтовое излучение. Возможно, что силы сопротивления простра-
нства носят обменный характер. Тогда основную инерциальную
711
систему отсчета следует выбирать по-другому. В общей теории
относительности при движении материальных объектов в простран-
стве происходит изменение кривизны пространства. Силу сопротив-
ления пространства можно считать зависящей от изменения этой
кривизны.
Из сказанного ясно, что вопрос о выборе основной инерциаль-
ной системы отсчета еще не решен. В учебной литературе в насто-
ящее время в качестве основной инерциальной системы отсчета
выбирают обычно гелиоцентрическую систему, которая одновре-
менно является одной из приближенно локально-инерциальных си-
стем отсчета.
В некоторых учебниках по теоретической механике и физике для
выбора инерциальных систем отсчета используют аксиому инерции.
В одном из учебников аксиома инерции сформулирована так: «Си-
стемы отсчета, в которых справедлив принцип инерции, называются
инерциальными системами отсчета». Принцип инерции, как извест-
но, состоит в том, что материальная точка движется прямолинейно
и равномерно по инерции относительно инерциальной системы
отсчета, если на точку не действуют силы или действует равновес-
ная система сил.
Использование принципа инерции для выбора инерциальных
систем отсчета предполагает его расширение на другие системы
отсчета, из которых выбираются инерциальные системы отсчета.
Из проведенного анализа систем отсчета следует, что принцип
инерции справедлив в локально-инерциальных системах отсчета, но
локально-инерциальные системы отсчета не могут все принадле-
жать к инерциальным системам отсчета, так как они движутся
относительно инерциальных хотя и поступательно, но с ускорением.
ОГЛАВЛЕНИЕ
Предисловие к шестому изданию.......................................... 3
Введение .............................................................. 5
РАЗДЕЛ I. Кинематика.............................................. 9
Введение .............................................................. 9
ГЛАВА 1.Кинематика точки.............................................. 10
§ 1. Скорость точки .............................................10
§ 2. Ускорение точки............................................ 12
§ 3. Векторный способ изучения движения......................... 13
§ 4. Координатный способ изучения движения...................... 14
Задание движения и траектория............................... 14
Скорость в декартовых координатах........................... 16
Уравнение годографа вектора скорости ....................... 17
Ускорение точки в декартовых координатах.................... 18
§ 5. Естественный способ изучения движения.......................20
Естественный способ задания движения.........................20
Скорость точки при естественном способе задания движения . . 22
Геометрические понятия. Дифференцирование единичного вектора 23
Ускорение точки при естественном способе задания движения 27
Частные случаи движения точки................................31
§ 6. Скорость и ускорение точки в полярных координатах...........32
§ 7. Скорость и ускорение точки в криволинейных координатах ... 38
§ 8. Скорость и ускорение точки в цилиндрических координатах . . 42
§ 9. Скорость и ускорение точки в сферических координатах .... 45
ГЛАВА 2. Простейшие движения твердого тела.............................47
§ 1. Степени свободы и теорема о проекциях скоростей.............47
§ 2. Поступательное движение твердого тела.......................48
§ 3. Вращение твердого тела вокруг неподвижной оси...............50
Угол поворота, угловая скорость и угловое ускорение .... 50
Частные случаи вращения твердого тела........................52
Скорости и ускорения точек тела..............................53
Векторы угловой скорости и углового ускорения................56
Векторные формулы для скоростей и ускорений точек тела ... 57
ГЛАВА 3. Плоское движение твердого тела................................60
§ 1. Уравнения плоского движения твердого тела...................61
§ 2. Разложение плоского движения твердого тела на поступательное и
вращательное ...................................................62
§ 3. Угловая скорость и угловое ускорение при плоском движении . . 64
§ 4. Скорости точек тела при плоском движении....................64
713
§ 5. Мгновенный центр скоростей................................67
§ 6. Вычисление угловой скорости при плоском движении..........70
§ 7. Ускорение точек тела при плоском движении.................71
§ 8. Мгновенный центр ускорений............................... 74
§ 9. Основные способы вычисления углового ускорения при плоском
движении ..................................................... 79
§ 10. Теорема о конечном перемещении плоской фигуры............86
§ И. Мгновенный центр вращения. Центроиды.....................87
ГЛАВА 4. Вращение твердого тела вокруг неподвижной точки.
Общий случай движения тела...........................................91
§ 1. Углы Эйлера. Уравнения движения твердого тела вокруг неподвиж-
ной точки .....................................................91
§ 2. Теорема о конечном перемещении твердого тела, имеющего одну
неподвижную точку..............................................94
§ 3. Мгновенная ось вращения. Аксоиды...........................95
§ 4. Угловая скорость и угловое ускорение при вращении тела вокруг
неподвижной точки..............................................96
§ 5. Скорости точек тела при вращательном движении вокруг неподвиж-
ной точки .....................................................97
§ 6. Ускорение точек тела при вращении вокруг неподвижной точки 100
§ 7. Вычисление углового ускорения ...........................102
§ 8. Общий случай движения свободного твердого тела...........106
Разложение движения свободного твердого тела на поступательное
и вращательное ...........................................106
Уравнения движения свободного твердого тела...............108
Скорости и ускорения точек свободного твердого тела в общем
случае ...................................................109
ГЛАВА 5. Сложное движение точки..................................... 112
§ 1. Основные понятия ........................................ 112
§ 2. Абсолютная и относительная производные от вектора. Формула
Бура ...................................................... 113
§ 3. Сложение скоростей............116
§ 4. Сложение ускорений точки .....118
§ 5. Ускорение Кориолиса......................119
ГЛАВА 6. Сложение движений твердого тела............................126
§ 1. Сложение поступательных движений твердого тела.............126
§ 2. Сложение вращательных движений твердого тела...............127
§ 3. Сложение поступательного и вращательного движений .... 135
ГЛАВА 7. Основы кинематики сплошной среды.............................141
§ 1. Переменные Лагранжа и Эйлера...............................141
§ 2. Распределение скоростей в малой окрестности точки пространства 147
§ 3. Линии и трубки тока........................................153
§ 4. Поток и циркуляция вектора скорости........................154
РАЗДЕЛ II. Динамика.................................160
ГЛАВА 1. Введение в динамику ........................................161
§ 1. Основные понятия и определения............................161
§ 2. Сложение и равновесие сил, приложенных в одной точке . . . . 165
Формулы для вычисления равнодействующей силы...............167
714
Условия равновесия сил, приложенных в одной точке .... 168
Проецирование силы на оси координат.........................169
§ 3. Основные аксиомы классической механики.....................170
§ 4. Моменты силы относительно точки и оси......................174
Алгебраический момент силы относительно точки...............174
Векторный момент силы относительно точки....................175
Момент силы относительно оси................................176
Связь моментов относительно оси с векторным моментом силы
относительно точки на оси...................................176
Формулы для моментов силы относительно осей координат . . 177
§ 5. Главный вектор и главный момент системы сил. Свойства внутрен-
них сил .........................................................179
§ 6. Динамические уравнения и условия равновесия твердого тела . . 181
§ 7. Частные случаи равновесия внешних сил, приложенных к твердому
телу ...........................................................186
Условия равновесия пространственной системы внешних парал-
лельных сил ................................................186
Условия равновесия пространственной системы внешних сходящих-
ся сил......................................................187
Условия равновесия плоской системы внешних сил..............188
Равновесие простейших систем внешних сил...................189
§ 8. Основные виды связей твердого тела.........................190
ГЛАВА 2. Свойства систем сил, приложенных к твердому телу . . . 196
§ 1. Система сходящихся сил................................ .... 196
§ 2. Пары сил ............................................. .... 202
Алгебраический и векторный моменты пары сил.................203
Свойства пар сил ....................................... ... 204
Сложение пар сил и их условия равновесия....................207
§ 3. Приведение произвольной системы сил к силе и паре сил . . . 209
Приведение силы к заданному центру...............................209
Приведение призвольной системы сил к силе и паре сил .... 210
Формулы для вычисления главного вектора и главного момента 213
§ 4. Изменение главного момента при перемене центра приведения 214
§ 5. Инварианты системы сил.....................................215
§ 6. Частные случаи приведения пространственой системы сил . . . 217
§ 7. Теорема о моменте равнодействующей силы (теорема Вариньона) 222
§ 8. Различные формы условий равновесия плоской системы внешних
сил.............................................................224
Теорема о трех моментах (вторая форма условий равновесия) . . 224
Третья форма условий равновесия.............................226
§ 9. Статически определимые и статически неопределимые задачи . . 227
§ 10. Равновесие системы твердых тел............................228
§ И. Распределенные силы.......................................230
Параллельные силы постоянной интенсивности, распределенные
по отрезку прямой линии....................................231
Параллельные силы, распределенные по отрезку прямой с интен-
сивностью, изменяющейся по линейному закону...............232
Реакция заделки............................................234
§ 12. Примеры на равновесие твердых тел.........................235
ГЛАВА 3. Трение ....................................................244
§ 1. Трение скольжения..........................................244
Законы Кулона ..............................................246
Угол и конус трения ........................................247
Равновесие тела на шероховатой поверхности..................248
§ 2. Трение качения ............................................251
715
ГЛАВА 4. Центр системы параллельных сил и центр тяжести. Центр масс . . 257
§ 1. Центр системы параллельных сил..........................257
§ 2. Центр тяжести...........................................260
§ 3. Центр масс..............................................261
Определение центра масс и формулы для его вычисления . . . 261
Методы определения центров масс..........................264
Центры масс тел простейшей формы.........................267
ГЛАВА 5. Дифференциальные уравнения движения материальной точки . . 273
§ 1. Дифференциальные уравнения движения в проекциях на оси коор-
динат .........................................................273
§ 2. Две основные задачи динамики точки.............................276
§ 3. Основные виды прямолинейного движения точки....................282
§ 4. Криволинейное движение материальной точки......................287
§ 5. Движение несвободной материальной точки........................292
Движение точки по поверхности...................................293
Движение точки по гладкой кривой линии..........................295
ГЛАВА 6. Дифференциальные уравнения движения материальной точки относи-
тельно неинерциальной системы отсчета ..............................299
§ 1. Вывод дифференциальных уравнений ..............................299
§ 2. Частные случаи ................................................300
§ 3. Движение точки относительно Земли..............................303
§ 4. Невесомость ...................................................309
ГЛАВА 7. Геометрия масс ...............................................313
§ 1. Центр масс.............................................313
§ 2. Моменты инерции .......................................314
Моменты инерции относительно точки и оси.................314
Моменты инерции относительно осей координат..............314
§ 3. Теорема о моментах инерции относительно параллельных осей
(теорема Штейнера).......................................317
§ 4. Моменты инерции простейших однородных тел..............319
Однородный стержень......................................320
Прямоугольная пластина...................................320
Круглый диск.............................................322
Круглый цилиндр .........................................322
Шар .....................................................323
§ 5. Моменты инерции относительно осей, проходящих через заданную
точку ..........................................................324
§ 6. Эллипсоид инерции......................................326
§ 7. Свойства главных осей инерции .........................328
§ 8. Определение главных моментов инерции и направления главных
осей ......................................................331
§ 9. Выражение компонент тензора инерции через главные моменты
инерции ....................................................333
ГЛАВА 8. Общие теоремы динамики точки и системы.......................338
§ 1. Введение...................................................338
§ 2. Дифференциальные уравнения движения системы................339
§ 3. Теоремы об изменении количества движения и о движении центра
масс ...........................................................340
Количество движения точки и системы.........................340
Вычисление количества движения системы .....................341
Элементарный и полный импульсы силы.........................341
Теорема об изменении количества движения точки..............342
Теорема об изменении количества движения системы............343
716
Законы сохранения количества движения..............................345
Теорема о движении центра масс системы.............................349
Дифференциальные уравнения поступательного движения твердого
тела ..............................................................353
§ 4. Теорема об изменении кинетического момента........................354
Кинетический момент точки и системы................................354
Кинетический момент относительно оси вращения при вращатель-
ном движении твердого тела ........................................355
Теорема об изменении кинетического момента точки...................356
Теорема об изменении кинетического момента системы .... 357
Законы сохранения кинетических моментов............................360
Дифференциальное уравнение вращения твердого тела вокруг не-
подвижной оси .....................................................363
Движение точки под действием центральной силы. Теорема площа-
дей ...............................................................364
Теорема об изменении кинетического момента системы в относи-
тельном движении по отношению к центру масс........................367
Дифференциальные уравнения плоского движения твердого тела 370
Теорема Резаля ....................................................372
§ 5. Теорема об изменении кинетической энергии.........................373
Работа силы .......................................................373
Примеры вычисления работы силы.....................................377
Кинетическая энергия...............................................386
Теорема об изменении кинетической энергии точки....................389
Теорема об изменении кинетической энергии системы .... 392
Теорема об изменении кинетической энергии в относительном дви-
жении .............................................................396
§ 6. Потенциальное силовое поле .......................................398
Потенциальное силовое поле и силовая функция.......................398
Поверхности уровня. Силовые линии..................................401
Потенциальная энергия .............................................403
Примеры вычисления силовых функций ................................404
Силовая функция и потенциальная энергия системы....................406
§ 7. Закон сохранения механической энергии ............................407
Закон сохранения механической энергии точки........................407
Закон сохранения механической энергии системы......................408
ГЛАВА 9. Аксиома Даламбера. Динамические реакции при вращении твердого
тела вокруг неподвижной оси......................................418
§ 1. Аксиома Даламбера для точки и механической системы . . . . 418
§ 2. Силы инерции твердого тела в частных случаях его движения . . 424
§ 3. Динамические реакции при вращении твердого тела вокруг непод-
вижной оси.....................................................429
Формулы для реакций.......................................429
Статическая уравновешенность ......................................435
Динамическая уравновешенность.............................436
ГЛАВА 10. Аналитическая механика...................444
§ 1. Связи и их классификация .....................................444
§ 2. Возможные перемещения........................................ 446
§ 3. Элементарная работа силы на возможном перемещении. Идеальные
связи ..................................................................448
§ 4. Принцип возможных перемещений...................................449
§ 5. Обобщенные координаты системы ..................................455
§ 6. Обобщенные силы ................................................457
§ 7. Условия равновесия системы .....................................460
§ 8. Общее уравнение динамики........................................464
717
§ 9. Уравнения Лагранжа .......................................473
§ 10. Канонические уравнения...................................486
ГЛАВА 11. Теория колебаний ...........................................490
§ 1. Положение равновесия системы и его устойчивость............490
Теорема Лагранжа — Дирихле..................................494
§ 2. Колебания системы с одной степенью свободы.................498
Собственные линейные колебания системы......................499
Влияние линейного сопротивления на малые собственные колеба-
ния системы с одной степенью свободы........................509
Вынужденные колебания системы без учета сопротивления . . 524
Влияние линейного сопротивления на вынужденные колебания 536
Основы виброзащиты.........................................544
Вынужденные колебания при периодическом возбуждении с произ-
вольным периодом...........................................547
Вынужденные колебания при произвольном вынуждающем воздей-
ствии .....................................................549
§ 3. Математический и физический маятники......................552
§ 4. Малые колебания системы с двумя степенями свободы (результа-
ты для общего случая).................................557
Кинетическая энергия..................................557
Потенциальная энергия .....................................560
Диссипативная функция .....................................561
Дифференциальные уравнения собственных колебаний .... 563
Интегрирование дифференциальных уравнений. Уравнение частот 564
Главные координаты ........................................568
Влияние линейного сопротивления на собственные колебания 571
Вынужденные колебания без учета сопротивления..............573
Влияние линейного сопротивления на вынужденные колебания 575
Гашение части вынужденных колебаний........................580
ГЛАВА 12. Динамика твердого тела с одной неподвижной точкой...........585
§ 1. Кинетический момент тела, вращающегося вокруг неподвижной
точки ...........................................................585
§ 2. Кинетическая энергия тела с одной закрепленной точкой . . . 588
§ 3. Динамические уравнения Эйлера............................591
§ 4. Кинематические уравнения Эйлера .........................593
§ 5. Задача о вращении твердого тела вокруг неподвижной точки. Слу-
чаи интегрируемости .............................................596
§ 6. Астатический гироскоп ...................................597
§ 7. Движение гироскопа под действием силы тяжести............602
§ 8. Приближенная теория гироскопа............................608
Основные допущения приближенной теории......................609
Особенности движения оси гироскопа..........................610
Гироскопический момент......................................612
Техническое применение гироскопа............................614
Прецессия тяжелого гироскопа по приближенной теории . . . 615
§ 9. Регулярная прецессия гироскопа.............................617
Гироскопический момент при регулярной прецессии.............618
Регулярная прецессия по инерции.............................620
Регулярная прецессия тяжелого гироскопа.....................621
ГЛАВА 13. Теория удара................................................622
§ 1. Основные положения и понятия теории удара..................622
§ 2. Теоремы об изменении количества движения и о движении центра
масс для удара. Теорема Кельвина.................................624
§ 3. Теорема об изменении кинетического момента при ударе . . . 627
§ 4. Удар точки о неподвижную поверхность.......................629
718
§ 5. Теорема Карно ............................................632
§ 6. Удар двух тел.............................................635
§ 7. Центр удара ..............................................645
ГЛАВА 14. Элементы теории космических движений.......................650
§ 1. Введение..................................................650
§ 2. Задача Ньютона............................................651
§ 3. Движение точки переменной массы...........................656
Дифференциальные уравнения движения точки переменной массы 657
§ 4. Задачи Циолковского ......................................660
Первая задача Циолковского ................................660
Вторая задача Циолковского ................................663
ГЛАВА 15. Введение в динамику сплошной среды.........................664
§ 1. Уравнение неразрывности ..................................664
§ 2. Силы объемные и поверхностные.............................666
§ 3. Свойства поверхностных сил ...............................667
§ 4. Тензор напряжений.........................................669
§ 5. Уравнения движения сплошной среды в напряжениях...........670
§ 6. Симметричность тензора напряжений.........................673
§ 7. Эллипсоид напряжений .....................................675
§ 8. Реологическое уравнение...................................678
§ 9. Модели жидкостей и уравнения движения.................... 683
§ 10. Критерии подобия при обтекании твердых тел потоком вязкой не-
сжимаемой жидкости ........................................... 687
§ 11. Установившееся движение вязкой несжимаемой жидкости в круг-
лой цилиндрической трубе.......................................690
§ 12. Распространение малых возмущений в идеальном газе. Скорость
звука .........................................................695
§ 13. Одномерное установившееся течение газа вдоль трубы перемен-
ного сечения...................................................700
Приложение...........................................................704
1. Новая форма основных аксиом.................................704
2. Системы отсчета.............................................707
Николай Никитич НИКИТИН
КУРС
ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Учебник
Издание восьмое,
стереотипное
ЛР № 065466 от 21.10.97
Гигиенический сертификат 78.01.07.953.П.007216.04.10
от 21.04.2010 г., выдан ЦГСЭН в СПб
Издательство «ЛАНЬ»
lan@lanbook.ru; www.lanbook.com
192029, Санкт-Петербург, Общественный пер., 5.
Тел./факс: (812) 412-29-35, 412-05-97, 412-92-72.
Бесплатный звонок по России: 8-800-700-40-71
ГДЕ КУПИТЬ
ДЛЯ ОРГАНИЗАЦИЙ:
Для того чтобы заказать необходимые Вам книги, достаточно обратиться
в любую из торговых компаний Издательского Дома «ЛАНЬ»:
по России и зарубежью
«ЛАНЬ-ТРЕЙД». 192029, Санкт-Петербург, ул. Крупской, 13
тел.: (812) 412-85-78, 412-14-45, 412-85-82; тел./факс: (812) 412-54-93
e-mail: trade@lanbook.ru; ICQ: 446-869-967
www.lanpbl.spb.ru/price.htm
в Москве и в Московской области
«ЛАНЬ-ПРЕСС». 109263, Москва, 7-я ул. Текстильщиков, д. 6/19
тел.: (499) 178-65-85; e-mail: lanpress@lanbook.ru
в Краснодаре и в Краснодарском крае
«ЛАНЬ-ЮГ». 350072, Краснодар, ул. Жлобы, д. 1/1
тел.: (861) 274-10-35; e-mail: lankrd98@mail.ru
ДЛЯ РОЗНИЧНЫХ ПОКУПАТЕЛЕЙ:
интернет-магазины:
Издательство «Лань»: http://www.lanbook.com
«Сова»: http://www.symplex.ru; «Ozon.ru»: http://www.ozon.ru
«Библион»: http://www.biblion.ru
Подписано в печать 22.07.11.
Бумага офсетная. Гарнитура Таймс. Формат 60x90 1/16.
Печать офсетная. Усл. п. л. 45,00. Тираж 1500 экз.
Заказ №
Отпечатано в полном соответствии с качеством
предоставленных материалов в ОАО «Дом печати — ВЯТКА»
610033, г. Киров, ул. Московская, 122