/













































































































































































































































































































































Author: Волков А.А.
Tags: электротехника железнодорожный транспорт радиопередающие устройства
ISBN: 5-89035-079-X
Year: 2002




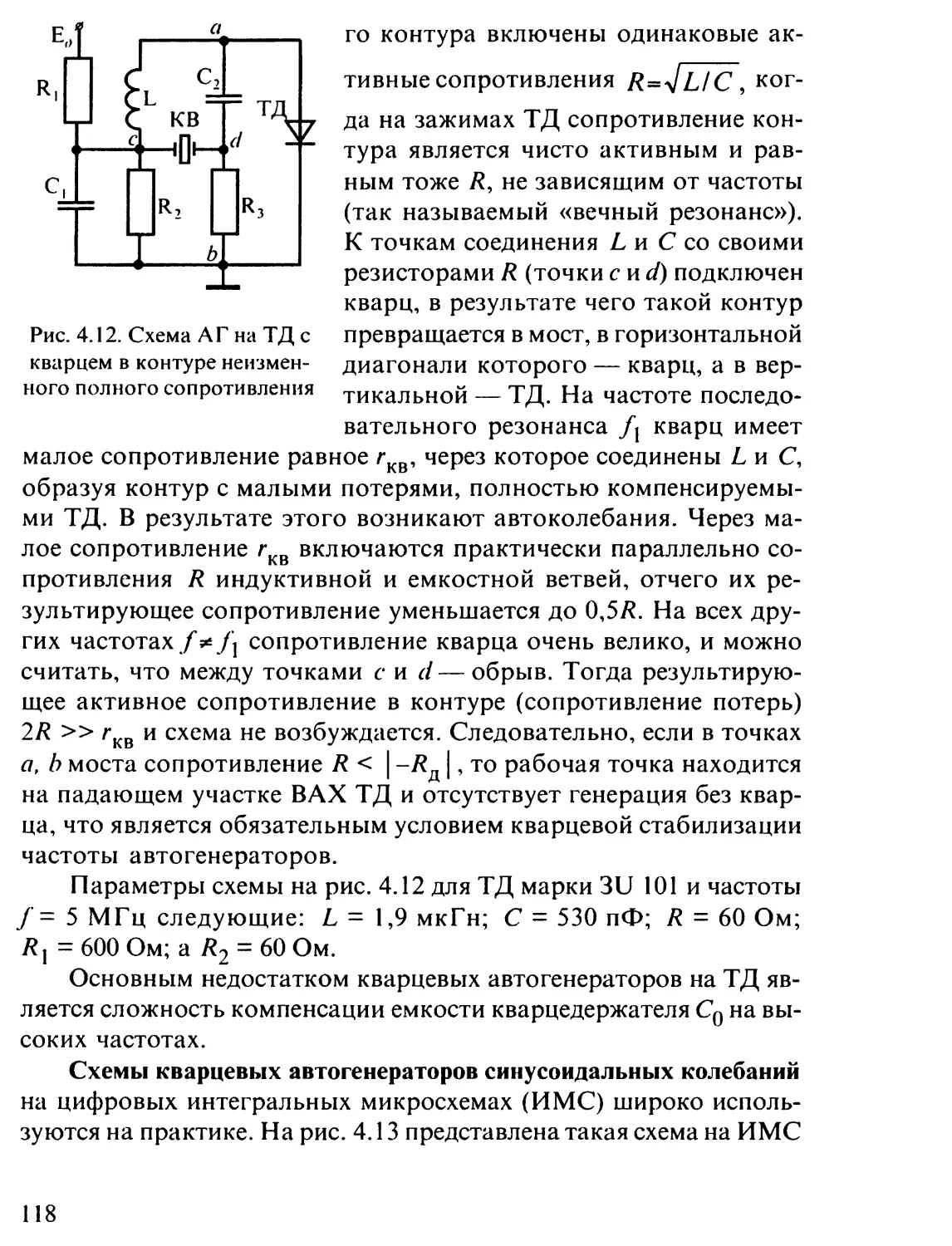
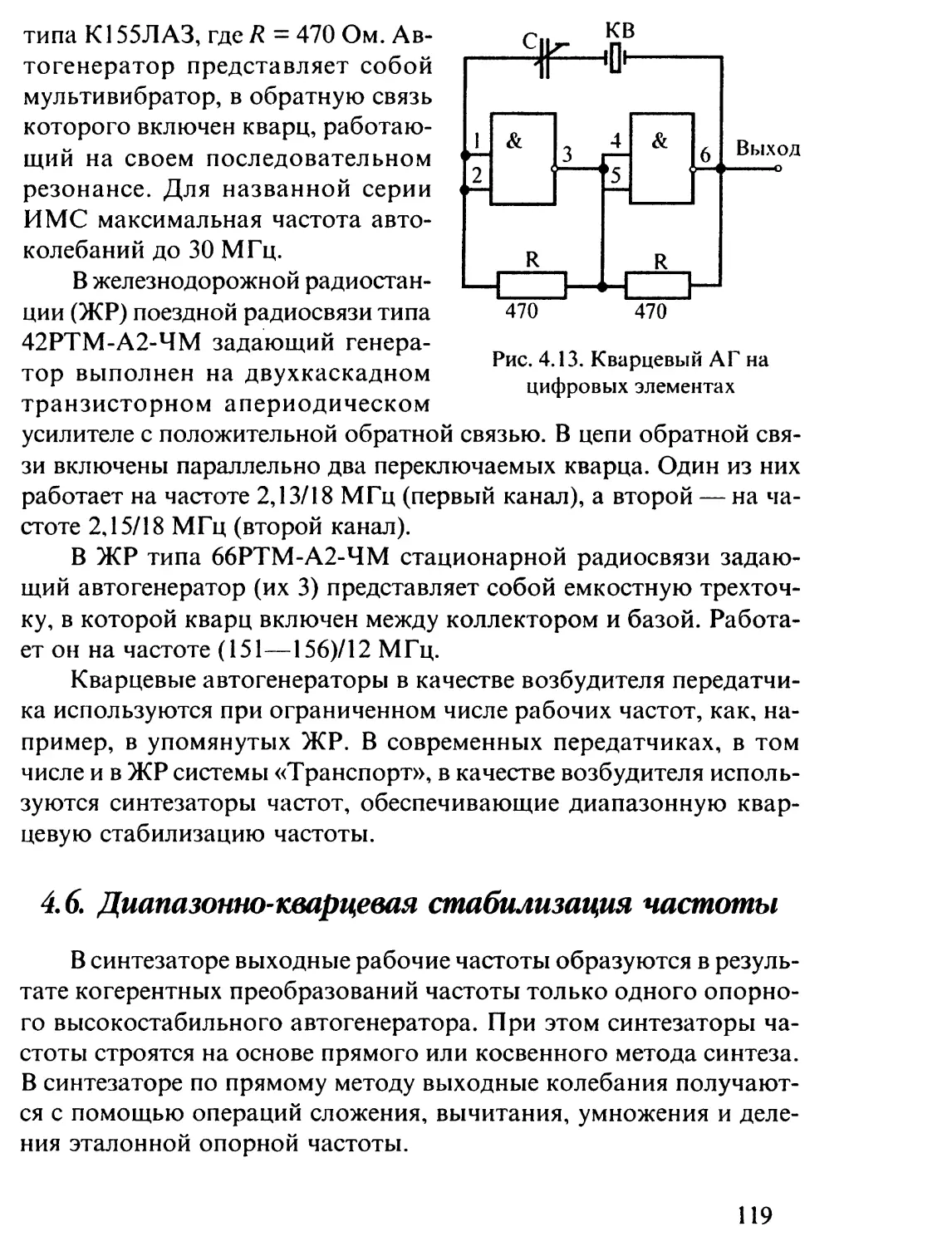
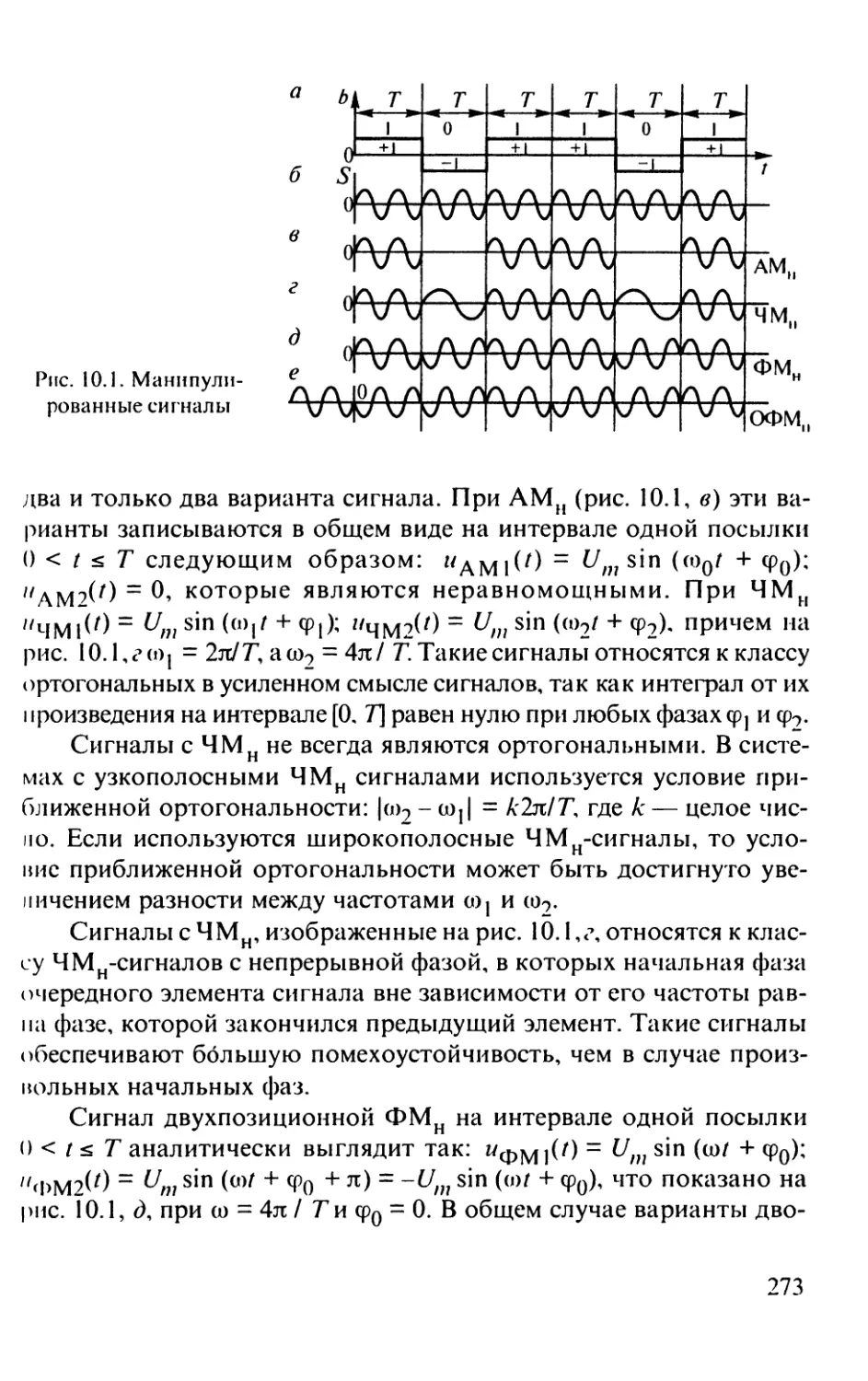
Text
СРЕДНЕЕ
ПЮФ1 ОНАЛЬНОЕ ОБРАЗОВАНИЕ
А.А.Волков
Радиопередающие устройства
А.А. ВОЛКОВ
РАДИОПЕРЕДАЮЩИЕ УСТРОЙСТВА
Утверждено Департаментом кадров и учебных заведений МПС России в качестве учебника для студентов техникумов и колледжей железнодорожного транспорта
МОСКВА
2002
УДК 621.396.61(075)
l»l»K 39.278
II 676
Волков А.А.
II 676 Радиопередающие устройства: Учебник для техникумов и кол-
леджей железнодорожного транспорта. — М.: Издательство «Маршрут», 2002. — 352 с.
ISBN 5-89035-079-Х
В учебнике изложены основы построения радиопередающих устройств железнодорожной радиосвязи, как используемых на практике (аналоговых), так и прогнозируемых (цифровых: сотовых, транкинговых, спутниковых).
Подробно рассмотрены принципиальные схемы основных узлов передатчиков, антенных устройств железнодорожного транспорта.
Предназначен для учащихся техникумов и колледжей железнодорожного транспорта по специальности Технологическая связь на железнодорожном транспорте и может быть полезен инженерно-техническим работникам служб сигнализации и связи, а также студентам вузов специальности АТС.
УДК 621.396.61(075)
ББК 39.278
Рецензенты: зам. руководителя Департамента информатизации и связи МПС России КЗ.И. Филиппов; главный конструктор отделения связи ВНИИУП МПС России О.С. Андрушко; преподаватель Московского колледжа железнодорожного транспорта Т.С. Кудинова.
ISBN 5-89035-079-Х
© А.А. Волков, 2002
© Издательство «Маршрут», 2002
СПИСОК ПРИНЯТЫХ ОСНОВНЫХ СОКРАЩЕНИИ
А — антенна
АГ — автогенератор
AM — амплитудная модуляция
АМН — амплитудная манипуляция
АИМ — аналого-импульсная модуляция
АО — амплитудный ограничитель
АПЧ — автоматическая подстройка частоты
ФАПЧ — фазовая АПЧ
АРУ — автоматическая регулировка уровня (усиления)
АЧХ — амплитудно-частотная характеристика
АЦП — аналого-цифровой преобразователь
БМ — балансный модулятор
БРТР — бортовой ретранслятор
В — возбудитель
ВБП — верхняя боковая полоса
ВРК — временное разделение каналов TDMA
ВЧ — высокая частота (3...30 МГц)
ГВВ — генератор с внешним возбуждением
ГМЧС — минимальный частотный сдвиг с гауссовской фильтрацией
ДГ — диод Ганна
ДФМН — двукратная фазовая манипуляция
ДЧМН — двукратная частотная манипуляция
ДПКД — делитель частоты с переменным коэффициентом деления
ДФКД — делитель частоты с фиксированным коэффициентом деления
ДИКМ — дифференциальная импульсно-кодовая модуляция
ДМ — дельта-модуляция
ДЧ — делитель частоты
ЖР — железнодорожная радиостанция
3
ЖРУ ЖР унифицирования
К' земная станция
11 логическая схема «И»
IIKM импульсно-кодовая модуляция
IК ’3 искусственный спутник Земли
КАМ квадратурная амплитудно-фазовая модуляция
К Б В коэффициент бегущей волны
КРК — кодовое разделение каналов (СДМА)
КСВ — коэффициент стоячей волны
КПД — коэффициент полезного действия
КВ — короткие волны
КГ — кварцевый генератор
КЭ — квантовый эталон частоты
ЛПД — лавинно-пролетный диод
МЧС — минимальный частотный сдвиг
МВ — метровые волны
НБП — нижняя боковая полоса
НЧ — низкие частоты (30...300 кГц)
ОБП — одна боковая полоса
ОБП AM — ОБП с амплитудной модуляцией
ОГ — опорный генератор
ОФМН — относительная фазовая манипуляция
ОЭ — общий эмиттер
ПГ — подстраиваемый генератор
ПР — преобразователь частоты
ПЧ — промежуточная частота
ПСП — псевдослучайная последовательность
ПРС — поездная радиосвязь
РПД — радиопередатчик
РПДУ — радиопередающее устройство
РПМ — радиоприемник
РПМУ — радиоприемное устройство
РРЛ — радиорелейная линия
4
РРС — радиорелейная станция
СВЧ — сверхвысокие частоты (З...ЗО ГГц)
ССПС — системы сухопутной подвижной связи
ССПР — системы сухопутной подвижной радиосвязи
ТД — туннельный диод
ТВ — телевидение
ТФОП — телефонная связь общего пользования
ТКЕ — температурный коэффициент емкости
ТКИ — температурный коэффициент индуктивности
ТКЧ — температурный коэффициент частоты
Тр — трансформатор
УЧ — умножитель частоты
ФД — фазовый детектор
ФИМ — фазоимпульсная модуляция
ФМ — фазовая модуляция
ФМН — фазовая манипуляция
ФНЧ — фильтр низких частот
ФОС — формирователь однополосного сигнала
ФСЦ — фазосдвигающая цепочка
ЦАП — цифроаналоговый преобразователь
ЧМ — частотная модуляция
ЧМН — частотная манипуляция
ЧРК — частное разделение каналов FDMA
ЧИМ — частотно-импульсная модуляция
ШПС — шумоподобные сигналы
ШИМ — широтно-импульсная модуляция
5
ПРЕДИСЛОВИЕ АВТОРА
Данный учебник предназначен для техникумов и колледжей железнодорожного транспорта по специальности 2016 «Технологическая связь на железнодорожном транспорте», специализация 2016.01 «Радиосвязь на железнодорожном транспорте».
Материал учебника излагается в соответствии с требованиями примерной программы, одобренной учебно-методической комиссией Учебно-методического кабинета МПС России поданной специальности.
Программа предусматривает изучение радиопередающих устройств аналоговых (непрерывных) сигналов, поскольку в настоящее время только они находятся в эксплуатации. Важнейшими из них являются передатчики поездной (ПРС), станционной (СРС) и ремонтно-оперативной радиосвязи (РОРС). Эти радиопередающие устройства работают в телефонном режиме в диапазонах гектометровых, метровых и дециметровых волн. Модуляция в них только частотная (ЧМ). Сеть железных дорог России имеет огромный парк железнодорожных радиостанций (ЖР) с такими передатчиками. Замена их на более совершенные, с другими видами модуляции, на отдельных участках дорог практически невозможна с точки зрения безопасности движения поездов, так как ЧМ не совместима ни с какими другими видами модуляции. Заменить же сразу все ЖР по всей сети дорог невозможно ни по техническим, ни по экономическим соображениям.
Тем не менее в последние годы на железнодорожном транспорте стали использоваться современные системы радиосвязи — многоканальные цифровые сотовые, транкинговые, спутниковые, причем не только с частотным или временным разделением каналов, но и с кодовым разделением канальных шумоподобных сигналов (ШПС). Последние наиболее эффективны по использованию частотно-временного ресурса. Их называют системами радиосвязи 3-го поколения — системами XXI в., хотя развертывать их стали уже в конце XX в. и планируют закончить в 2010 г. Современные системы радиосвязи достаточно подробно описаны в данном учебнике.
6
При написании данного учебника автор использовал свой многолетний опыт чтения лекций по этому курсу в Московском государственном университете путей сообщения (МИИТ), но с поправкой на техникумы и колледжи. Материал учебника излагается с использованием школьной математики: алгебры, тригонометрии, интегрального исчисления, элементов рядов Фурье. Учебник базируется также на электронике, микроэлектронике, физике, электротехнике, которые изучаются в техникумах и колледжах. Основной акцент делается на конкретные устройства, их принципиальные схемы, назначение элементов, принципы и режимы их работы, технический расчет. Именно это в первую очередь позволяет грамотно эксплуатировать аппаратуру, осуществлять ее ремонт и настройку.
Автор признателен рецензентам:
Филиппову Ю.И. — зам. руководителя Департамента ЦИС МПС;
Андрушко О.С. — главному конструктору отдела радиосвязи ВНИИУП МПС;
Кудиновой Т.С. — преподавателю Московского колледжа железнодорожного транспорта (МКЖТ), чьи замечания учтены в данном учебнике.
Автор благодарит преподавателя МКЖТ Волкову В.А. за помощь в написании учебника.
7
ВВЕДЕНИЕ
Генеральная конференция международной организации государств — членов ЮНЕСКО призвала весь мир отметить в 1995 г. столетие изобретения радио. Сто лет назад, в 1895 г. 7 мая русский ученый Александр Степанович Попов первый в мире продемонстрировал действующую систему радиопередачи на заседании физического отделения Русского физико-химического общества (РФХО) в Петербурге. Этот день и стал днем рождения радио, что и подтвердил данный призыв ЮНЕСКО.
Широкая международная основа празднования 100-летия изобретения радио в 1995 г. объясняется значимостью этого изобретения. Без радио не мыслим прогресс человечества. Радио — основа телевидения, радиолокации, радионавигации, систем управления космическими объектами и т.д. Оно является самым массовым, вошедшим в каждый дом, в каждую семью.
Радиопередающее устройство является единственным средством доставки информации на подвижной объект и обратно. Оно повышает безопасность движения поездов, являясь неотъемлемой частью любой системы радиосвязи. Это подтверждает обобщенная структурная схема всевозможных систем связи, представленная на рисунке. Здесь блоки преобразователь ПР1 и радиопередатчик РПД образуют радиопередающее устройство РПДУ, обведенное пунктирной линией. ПР1 преобразует сообщение а, поступающее от источника ИС, в первичный электрический сигнал b(t). В передатчике РПД сигнал b(t), обычно низкочастотный, преобразуется путем модуляции во вторичный (высокочастотный) сигнал 5(/), пригодный для передачи по используемой линии связи ЛС (радиолинии). В последней на сигнал S(t) воздействуют помехи n(t) с источника ИП, в результате чего он преобразуется в сигнал р(/), поступающий на вход радиоприемника ПРМ. В последнем после фильтрации, усиления, преобразования по частоте сигнал y(t) демодулируется, в результате чего на его выходе имеет место искаженный помехами первичный сигнал b( t). В блоке ПР2 сигнал b( t) преобразуется в сообщение а, которое поступает к получателю сообщения ПС. Блоки ПРМ и ПР2 образуют радиоприемное устройство РПМУ, которое обведено пунктирной линией на рисунке.
8
РИДУ РПМУ
Структурная схема обобщенной системы связи
Как видно, РПД связан с РПМ, антенной, радиолинией. Соответственно и дисциплина «Радиопередающие устройства» связана с дисциплинами «Радиоприемные устройства», «Антенны и распространение радиоволн», «Теория передачи сигналов» и др.
Источником сообщения ИС могут быть человек, вычислительная машина, автомат и т.д. При передачи речи (телефония) функцию преобразователя ПР1 сообщения а в первичный электрический сигнал b(t) выполняет микрофон, при передаче изображения — телевизионная камера и т.д. Преобразование b(t) в S(t) в блоке РПД необходимо для энергетического согласования выхода передатчика со входом антенны. Если на антенну подать первичный НЧ-сигнал b(t), то для него входное сопротивление антенны будет равно нулю и излучения не будет. Кроме того, с помощью модуляции в блоке РДП осуществляется уплотнение каналов в многоканальной системе связи. В РПМУ имеет место обратный процесс.
Сигнал b(t), отображающий сообщение г/, является функцией времени г, даже если сообщение таковым не является. Если сигнал b(t) может принимать любые значения в некотором интервале, то он называется непрерывным по состоянию или аналоговым. Если же сигнал b(t) принимает только определенные дискретные значения Ьц (например, 1 или 0), то его называют дискретным или, точнее, дискретным по состоянию. Соответственно и передатчики называют передатчиками аналоговых или дискретных сигналов. В ряде случаев непрерывные сигналы используют для передачи дискретных сообщений, а дискретные сигналы —для передачи непрерывных сообщений.
На железнодорожном транспорте используется множество систем радиосвязи, которые, как и РПДУ, можно классифицировать по многим параметрам:
- по типу передаваемого сообщения (аналоговое или дискретное);
9
по диапазону частот (гектометровые, метровые, деци- и са। п иметровые волны);
по числу каналов (одноканальные или многоканальные);
- по назначению (поездная ПРС, станционная СРС, ремонтно-оперативная радиосвязь РОРС и др.).
Для ПРС выделены две частоты: /j = 2,13 МГц и/2 = 2,15 МГц, которым соответствуют гектометровые длины волн k = Clf s 140 м (С = 3 • 108 м/с — скорость света). Используется также диапазон частот 151,7—156 МГц (метровые волны — МВ). На этих же метровых волнах организуются СРС и РОРС, которые, как и ПРС, работают в симплексном режиме (или только передача, или только прием). На скоростных участках ПРС осуществляется в дуплексном режиме (и передача, и прием) на частотах f - 307,0—307,45 и 343,0—343,45 МГц (дециметровые волны — ДМВ). Дуплексная ПРС организуется также в полосах частот457,4—458,55 и 467,4—468,45 МГц (тоже ДВМ). В радиорелейной и спутниковой связи используются сантиметровые волны (СМВ).
В данном учебнике изучаются передатчики, определяемые приведенной классификацией. Что касается преобразователей сообщения в сигнал и наоборот (микрофон и телефон), то они изучаются в других курсах, например в телефонии.
Наиболее важными с точки зрения безопасности движения поездов являются передатчики ПРС, СРС, РОРС, которые являются аналоговыми. Поэтому с них и начинается изучение данного курса.
10
Глава 1. РАДИОПЕРЕДАТЧИКИ АНАЛОГОВЫХ СИГНАЛОВ
1.1. Общие сведения о радиопередатчиках аналоговых сигналов ЖР
Состав и связи между блоками передатчика определяет его структурная схема. В настоящее время в эксплуатации поездной и станционной радиосвязи находятся радиостанции системы ЖРУ и системы «Транспорт», структурные схемы которых несколько разнятся между собой. На рис. 1.1 представлена упрощенная структурная схема передатчика железнодорожной радиостанции (ЖР) системы ЖРУ, в которой используются следующие обозначения: В — возбудитель, БК — буферный каскад, ФМ — фазовый модулятор, УЧ — умножители частоты, У — усилитель, А — антенна, М — микрофон, МУ — микрофонный усилитель, К — компрессор, ФНЧ — фильтр нижних частот, ИЦ — интегрирующая цепочка.
Передатчик функционирует следующим образом.
Микрофон М преобразует звуковые волны говорящего, несущие сообщение а, в первичный НЧ-сигнал b(t). Этот сигнал после усиления в МУ, компрессии в блоке К, фильтрации в ФНЧ поступает через интегрирующию цепочку ИЦ на НЧ-вход фазового модулятора ФМ. На его ВЧ-вход подается ВЧ-колебание с возбудителя В через буферный каскад БК, предотвращающий дестабилизацию частоты автоколебаний со стороны блока ФМ. Параметрами ВЧ-колебания
Рис. 1.1. Структурная схема передатчика ЖР системы ЖРУ
11
u(t) = Ucos (со/ + ф), (1.1)
являются U—амплитуда; со — круговая частота; ф—фаза колебания. Общий принцип модуляции состоит в изменении одного из названных параметров ВЧ-колебания (1.1), в данном случае частоты со по закону передаваемого сообщения а. Это значит, что ВЧ-коле-бание является переносчиком передаваемого сообщения а, поэтому его часто называют сигналом-переносчиком или колебанием несущей частоты или модулируемым колебанием. Первичный НЧ-сигнал b(t), однозначно соответствующий сообщению а, называется модулирующим. В данном случае частотная модуляция (ЧМ) называется косвенной, потому что она представляет собой фазовую модуляцию (ФМ), проинтегрированную по времени модулирующим сигналом в блоке ИЦ.
Косвенная ЧМ позволяет обеспечить высокостабильную (квар-цованную) среднюю частоту ВЧ-колебания (1.1), при малой ее девиации, т.е. при недостаточном отклонении частоты от ее среднего значения. Поэтому для увеличения девиации частоты до заданной используют умножители частоты (УЧ) соответствующей кратности. После этого ЧМ-сигнал усиливается по напряжению и мощности в блоке У и излучается антенной А в радиолинию. Ясно, что средняя частота со колебания (1.1) в и раз меньше рабочей частоты передатчика со0 на его выходе (со = coq/м), где п — кратность умножения частоты в блоке УЧ.
Передатчики поездной и станционной радиосвязи системы «Транспорт» выполняются на синтезаторах частоты СЧ, в которых максимальная девиация частоты составляет 5 кГц. Поэтому в них отсутствуют умножители частоты. Структурная схема передатчиков ЖР системы «Транспорт» представлена на рис. 1.2.
При амплитудной модуляции (AM) по закону передаваемого сообщения а изменяется амплитуда U ВЧ-колебания (1.1). Упро-
Рис. 1.2. Структурная схема передатчика ЖР системы «Транспорт»
12
Рис. 1.3. Структурная схема передатчика АМ-колебаний
щенная структурная схема передатчика AM-сигналов представлена на рис. 1.3. Обозначения здесь такие же, как и на рис. 1.1, кроме блоков ПК — предварительный каскад, ОК — оконечный каскад, входящих в блок У на рис. 1.1. Это усилители мощности. Амплитудная модуляция осуществляется в оконечном каскаде передатчика, иногда в предоконечном или в обоих сразу.
Разновидностью AM является балансная модуляция БМ. Это тоже AM, но с исключенной несущей в ее составе. От этого увеличивается мощность, приходящаяся на полезный сигнал. Структурная схема передатчика сигналов БМ аналогична представленной на рис. 1.3, но в качестве блока ОК используется БМ.
Сигналы AM и БМ имеют две боковые полосы частот, которые несут одну и ту же информацию. Поэтому с точки зрения экономии полосы частот и тем самым сокращения дефицита частотного ресурса целесообразно использовать однополосную передачу информации, т.е. передачу одной боковой полосы частот АМ-колебания (ОБП AM). На железнодорожном транспорте она используется в радиорелейной связи, в многоканальной проводной связи и др.
Структурная схема передатчиков сигналов ОБП AM представлена на рис. 1.4. Первичный НЧ-сигнал b(t) частоты Q с микрофона М через усилитель МУ поступает на НЧ-вход формирователя
однополосных сигналов
13
однополосного сигнала ФОС, на ВЧ-вход которого подается колебание поднесущей частоты (Oj с генератора Г1. На выходе ФОС имеет место ОБП AM верхняя со। + Q или нижняя (Dj - Q. Так как поднесущая частота u)j меньше несущей частоты передатчика, то эта боковая полоса переносится на вторую несущую частоту (о2 в преобразователе частоты ПР. При передаче верхней боковой на выходе блока ПР частота (Dj + <о2 + Q, где сумма coj + а>2 = u)q — несущая частота передатчика. Сигнал ОБП AM на несущей частоте передатчика усиливается по напряжению в блоке УН и по мощности в блоках ПК и ОК и излучается антенной А в радиолинию.
1.2. Основные технические показатели радиопередатчиков ЖР
1. Диапазон рабочих частот. Железнодорожная радиосвязь осуществляется на фиксированных частотах (указаны ранее) и является беспоисковой и бесподстроечной.
2. Стабильность частоты колебания передатчика. В ЖР относительная нестабильность частоты порядка 10А т.е. стабильность частоты высокая, обеспечивающая беспоисковую и бесподстроечную связь.
3. Мощность передатчика. Для подвижных радиостанций мощность передатчика не превышает 20 Вт, для стационарных — до 60 Вт согласно ГОСТ 12252—86.
4. Коэффициент нелинейных искажений передаваемого сигнала. Максимальный коэффициент обычно не превышает 7 %.
5. Вид модуляции. В ЖР используется исключительно частотная прямая или косвенная модуляция: прямая — в ЖР системы «Транспорт», а косвенная — в ЖР системы ЖРУ.
6. Девиация частоты. Максимальная девиация частоты А/дН; номинальная А/дн = 0,6А/дн. Для поездной радиосвязи А/Дн is 3 кГц, а для станционной радиосвязи 5 кГц в ЖР системы «Транспорт» и 10 кГц в ЖР системы ЖРУ.
7. Частотный разнос между соседними каналами А/к. Для поездной радиосвязи А/к = 20 кГц, а для станционной 25 кГц при использовании ЖР системы «Транспорт» и 50 кГц при использовании ЖРУ.
14
8. Контрольная ширина полосы частот излучения передатчика Д/эс. В ЖР системы «Транспорт» УКВ диапазона (СРС) А/эс = = 2,4 Д/дн + 2FB = 18,8 кГц. По этой же формуле определяется полоса частот канала поездной радиосвязи, которая не превышает 12 кГц. В ЖРУ УКВ диапазона Д/эс равна 27 кГц.
9. Уровень побочных излучений. Побочные излучения — это излучения мощности Рпоб за пределами рабочей полосы частот (внеполосные излучения). Они не должны превышать -70 дБ от основных Росн, т.е. -70 дБ = 10 ^поб^осн)- ® ЖР требования несколько выше: для стационарных радиостанций при мощности несущей >25Вт, а для остальных передатчиков 2,5 мкВт.
10. КПД передатчика. КПД — это отношение мощности сигнала в антенне к потребляемой мощности передатчика от источника питания. У передатчиков малой мощности КПД г| = 10—20 %, а у ПРД большой мощности г| = 40—60 %.
Из рис. 1.1—1.4 следует, что при различных видах модуляции структурные схемы передатчиков несколько различаются, хотя и имеют много общих блоков.
Далее будет подробно рассмотрен каждый из названных блоков. Следующая глава посвящена изучению последнего каскада передатчика — усилителя мощности.
Усилители мощности являются резонансными усилителями. В радиопередающих устройствах их называют генераторами с внешним возбуждением (ГВВ) или с независимым возбуждением (ГНВ).
15
Глава 2. ГЕНЕРАТОРЫ С ВНЕШНИМ ВОЗБУЖДЕНИЕМ
2.1. Принципиальная схема
Принципиальная схема ГВВ представлена на рис. 2.1. Она состоит из транзистора VT, входного трансформатора Т, нагрузочного параллельного колебательного LC-контура, источника базового смещения источника коллекторного питания Ек. Выходные каскады передатчика, как правило, выполняются на биполярных транзисторах. Обычно это кремниевые транзисторы (КТ) п-р--/? проводимости, которые включаются по схеме с общим эмиттером (ОЭ). При таком включении транзистора обеспечивается наибольшее усиление им по мощности входного сигнала.
Анализ ГВВ ведется с использованием Y-параметров транзистора, которые определяются его вольт-амперными характеристиками. В общем случае Y-параметры транзистора комплексные, состоящие из действительной и мнимой частей. Мнимая часть определяется высокой рабочей частотой /. Однако если f <. 0,3/т, где /т — граничная частота транзистора, включенного по схеме с ОЭ, то мнимая часть много меньше действительной, и поэтому мнимой частью можно пренебречь, считая Y-параметры транзистора действительными (вещественными), как на низких частотах.
В этом случае анализ и расчет ГВВ можно вести непосредственно по характеристикам транзистора. Для упрощения Математичес-
Рис.2.1. Принципиальная схема ГВВ
ких выкладок характеристики транзистора спрямляют (идеализируют), что позволяет записать коллекторный ток простейшим уравнением — уравнением прямой линии. Погрешность такой идеализации тем меньше, чем больше уровень входного сигнала. Она не превышает 15 %, что вполне прием-
16
лемо. Надо отметить, что спрямление характеристик означает замену плавных кривых на ломаные линии (кусочно-линейные).
На рис. 2.2 представлена спрямленная выходная характеристика транзистора, включенного по схеме с общим эмиттером: zK = Ф j(екэ, <?бэ), а на рис. 2.3 — спрямленная проходная характеристика /к = Фэ(ебэ, екэ) и спрямленная входная характеристика /б = Ф3(ебэ, екэ) По выходной Iхарактеристике рис. 2.2 определяется крутизна линии критического ре-
_ diK
жима (ЛКР): 5 = tgcpj = ~ , раз-
- л/d ССкэ
мерность которой A/В, как и осталь-
Рис. 2.2. Спрямленная выходная характеристика транзистора
, а по входной — крутизна входной ха-
ных крутизн. По проходной характеристике рис. 2.3 определяется б//к
ее крутизна SK = tgqp2 = “3—
рактеристики = tgcp3 = divideбэ. Пе-
ресечение прямых с осью абсцисс на рис. 2.3 определяет напряжение сдвига £*бо характеристик от начала отсчета (fi’gQ составляет десятые доли В). Если напряжение на базе |<?бэ| г* I^qI и напряжение на коллекторе |ек| > |ек min|, то коллекторный /ки базовый /^токи не зависят от коллекторного напряжения. Поэтому согласно спрямленным характеристикам рис. 2.3 токи можно записать уравнениями прямой линии:
zk ^к(еб £6О>’
(2.1)
Рис. 2.3. Спрямленная проходная и входная характеристика транзистора
'б - *Меб ~ ^бо)-
(2.2)
2-6764
17
Тогда статический коэффициент усиления по току |3q = iK/i^ = = а входное сопротивление биполярного транзистора ZBX = = - 1/5б. Обычно р0 е 30 раз, a ZBX— единицы или десятки ом.
Из рис. 2.1 видно, что на базе транзистора имеются постоянное напряжение Е§ и переменное напряжение u^(t) со вторичной обмотки входного трансформатора Т: [ебэ = + г/б(/)]. На вход
оконечного каскада передатчика ЖР приходит частотно-модули-рованное колебание. Но изменение частоты в нем незначительное, так что колебательный контур практически не расстраивается. Действительно, в ПРС несущая частота/’= 2,13 МГц, а максимальное ее отклонение от этого значения (на половину полосы) составляет только 6 кГц, т.е. 0,28 %. Мощность ЧМ и гармонического колебаний одинаковы при прочих равных условиях. Поэтому для упрощения анализа входной сигнал полагают гармоническим, т.е. cos со/. Тогда полное напряжение на зажи-
мах базы-эмиттера транзистора e§(t) = Е§ + u§(t) = Е^+ cos со/, что определяет коллекторный ток согласно (2.1):
ек = 5к(£б - £6О + еб> = 5к<£б - £6О + U6 cos = 5к <£б - Ебо)+
+ 5KC/6coso)Z. (2.3)
Здесь 5K(E6-f60) = /к0 — постоянная составляющая коллекторного тока, aSKt/6 = /к1 — амплитуда переменной составляющей коллекторного тока (его первой гармоники), т.е. /к = /к0 + /к| cos со/.
Так как параллельный контур в коллекторной цепи настроен в резонанс с несущей частотой входного сигнала, то он в эквиваленте представляет собой большое активное сопротивление/?к для переменной составляющей тока. Поэтому на контуре выделяется напряжение амплитуды UK - IkJ. Rk = SKU§RK. При этом согласно уравнению Кирхгофа мгновенное напряжение на коллекторе ск = Ек - UK cos со/. При cos со/ = 1 значение ек = ек min = Ек - UK
Постоянная составляющая коллекторного тока Zkq практически не создает падения напряжения на контуре, так как проходит через индуктивность контура, активное сопротивление которого близко к нулю. Напряжение UK является усиленным напряжением входного сигнала Коэффициент этого усиления по напряжению Kjj - UJUcz = R„.
\J i\ V i\ i\
18
Процесс усиления по напряжению можно пояснить графически, что сделано на рис. 2.4. Здесь постоянное базовое напряжение выбрано такой величины, чтобы рабочая точка находилась в середине спрямленной проходной характеристики (см. рис. 2.3), а амплитуда переменного базового напряжения < Е§. В этом случае /к| не достигает нуля и максимально допустимого значения. Из рис. 2.4 следует, что мб(/) и находятся в фазе, а мк(г) им противофаз-но, т.е. транзистор с ОЭ поворачивает фазу сигнала на 180°.
Однако более общим и
Рис. 2.4. Временные диаграммы работы ГВВ
важным показателем выход-
ного (мощного) каскада передатчика является его КПД, который в основном определяется режимом его работы.
2.2. Режим работы
В зависимости от величины постоянного напряжения на базе и амплитуды входного напряжения различают режим колебаний 1-го и 2-го рода.
Режим колебаний 1-го рода в ГВВ имеет место тогда, когда постоянное напряжение на базе Е§ соответствует средней точке линейного участка проходной характеристики, а амплитуда базового напряжения не выходит за этот линейный участок. При этом форма коллекторного тока полностью повторяет форму напряжения на базе, как это показано на рис. 2.5. КПД г| есть отношение полезной мощности Рк| (мощности переменной составляющей коллекторного тока) к общей потребляемой мощности транзистором: г|к = Мощность переменной составляющей определяет-
19
Рис. 2.5. Режим колебаний ГВВ 1-го рода
ся произведением эффективного значения ее коллекторного тока /к ] Эф= 1К у/2 на эффективное значение напряжения на контуре Ук,ф Р„, =
= 0,5/к1 (7к,где/к1 и UK—амплитудные значения тока и напряжения. Потребляемая мощность коллекторной цепи Ро = где Ек — на-
пряжение источника коллекторного питания, а /к0 — постоянная составляющая коллекторного тока. Поэтому КПД коллекторной цепи
^к! _ 1 Лс1
^кО /к0 Ек
Из рис. 2.5 следует, что в режиме колебаний 1-го рода /к1 /к0, т.е. 1. Отношение UJEK- £ называется коэффициентом
использования коллекторного напряжения. Так как £ s 1, то г|к < 0,5, что недостаточно. Низкий КПД коллекторной цепи — основной недостаток режима колебаний ГВВ 1-го рода. Достоинством его является низкий уровень нелинейных искажений, так как входное базовое напряжение не выходит за пределы линейного участка проходной характеристики.
Причиной низкого КПД в режими колебаний 1-го рода является ббльшая величина постоянной составляющей коллекторного тока /к0, поскольку рабочая точка выбрана в середине линейного участка проходной характеристики.
Режим колебаний 2-го рода характеризуется тем, что рабочая точка выбирается внизу проходной характеристики (из-за соответствующего значения Еб), а амплитуда переменного напряжения на базе выходит за пределы линейного участка снизу (отсекается снизу) и не
20
выходит за его пределы сверху. Поэтому коллекторный ток имеет вид синусоидальных (гармонических) импульсов, как это показано на рис. 2.6. Импульсы коллекторного тока характеризуются углом отсечки 0 и амплитудой 1К пг Угол отсечки 0 = cor j определяется тем, что в его пределах коллекторный ток изменяется от нуля до максимума /к т или наоборот. Из рис. 2.6 следует, что постоянная составляющая коллекторного тока Zkq в режиме колебаний 2-го рода существенно меньше /к0 в режиме колебаний 1-го рода, т.е. меньше потребляемая мощность Pq = IK()EK- Для количественной оценки КПД т]к надо разложить периодические импульсы коллекторного тока на гармонические составляющие.
23. Разложение импульсов коллекторного тока на гармонические составляющие
Периодические импульсы коллекторного тока могут быть разложены в тригонометрический ряд Фурье, т.е. на гармонические
21
составляющие. Для упрощения этого разложения начало отсчета выбирают в середине импульса, считая, что импульсы описываются четной (симметричной) функцией. Четные функции, как известно, раскладываются в ряд Фурье только по косинусам:
00
/к(а>Г) = 7к0 + 2 rKmcosn(ot, К— 1
где коэффициенты ряда Фурье
| 2л
^кО = 2л 0
] 2л
1кт =— /zK(co/)cos nwt dwt.
л 0
Чтобы определить эти коэффициенты, надо иметь аналитическое выражение коллекторного тока z’K(co/). Последнее определяется
по формуле (2.3) и ее следствиям:
'к = 5к<Еб - F60 + U& cos (2-3)
О = \(£б - £б0 + U6 cos 0); (2.4)
zK = 5К t/6(cos со/ - cos 0); (2.5)
zK = SK t/6(l-cos0). (2.6)
В точке 0 = со/, ток zK = 0 (см. рис. 2.6), поэтому (2.3) переходит в (2.4). При вычитании из (2.3) выражения (2.4) получается (2.5). При со/ = 0 значение zK = 7К т и (2.5) переходят в (2.6). Из отношения (2.5) к (2.6) получается
cosco/ - cos 0
iK(<0/) - IK m • (2.7)
Это и есть искомая функция. Тогда нулевая гармоника имеет коэффициент
22
। 2л । ГО 2л
/кО = —+ fiK(wt)d03t
2л о 2Л о 2л-0
1 ® cosco/-cos0 , r sin cot-со/cos 0 ®
=----]1кт-------------dtot = 1К -------------
2л _0 l-cos0 к/и 2л(1-соз0) ш/1_0
sin0-0cos0
Л(1 -COS0)
Отношение
^кО ^кт
sin0-0cos0
л(1 -cos0)
можно обозначить как а0.
Отсюда/к0 = /кша0.
Коэффициент первой гармоники
, 1 ® cosco/-cos0 , r 0-sin0cos0
IK\ = — f IKm-----------cosco/c/coz = IKm----------,
Л.0 ’ 1-COS0 юп л(1 —COS0)
Iv, 0-sin0cos0
а отношение —=-----------------= ai, т.е. /vI = lv .„a..
7 / i * К1 К til 1
КП7 Jt(l-cos0)
Аналогично по формуле /кп находятся а2, аз? •’ значения которых представлены графически на рис. 2.7 и в виде таблицы приложения П2.
Из рис. 2.7 следуют важные особенности функции az, иногда называемых функциями Берга .
1. Максимальное значение а1 = 0,536 при 0 = 120°.
2. Максимумы а2, аз> ••• имеют место при 0Л = 120°М, где п — номер гармоники. Например, для п = 2 максимум а2 имеет место при 0 = 60°.
3. При 0 = 90° значение а3 = 0.
Теперь уточним КПД ГВВ в режими колебаний 2-го рода.
Подводимая к коллектору мощность
^к0 ” £к'к0 ~ ^к^к/77аО*
*Берг А.И. (1893—1979), академик АН СССР.
23
Рис. 2.7. Функции Берга
Мощность первой гармоники (полезная мощность)
РК1 —
кпд
Пк
= ^*к1 = а1
Рк0 2 olq
Отношение к можно обозначить через у. Тогда т|к = 0,5%/.
Из графика рис. 2.7 следует, что при 0 = 180° значение у = 1, а при 0 = 0 — у = 2. В последнем случае r|K = 1. Реально в режими колебаний 2-го рода т]к = 0,7—0,9, что превосходит КПД режима колебаний 1-го рода, который меньше 0,5. При угле отсечки 0 = 120° полезная мощность Рк1 максимальна: Рк|тах. Если же требуемая мощность Рк1 < Рк1гпах, то следует выбирать угол осечки 0 < 120°, так как в противном случае меньшим будет КПД. Обычно при расчетах задаются углом отсечки 0 s 90°.
Режим колебаний 2-го рода подразделяется на классы, которые определяются значением угла отсечки 0. Это классы А, В, АВ, С. Для более четкого понимания такой классификации приведем второе определение угла отсечки коллекторного тока. Угол отсечки 0 — это половина фазового угла, соответствующего времени прохождения коллекторного тока через транзистор за период колебания.
24
Класс А имеет место при 0 = 180°. Фактически это режим колебаний 1-го рода. Действительно, ток /к проходит через транзистор в течение всего периода Т и согласно второму определению О = а)772 = 360°/2 = 180°.
Класс В имеет место при 0 = 90°. В этом случае постоянное напряжение на базе Е§ = а коллекторный ток /к проходит через транзистор в течение половины периода, как это показано на рис. 2.8.
Класс АВ имеет место при 90° < 0 < 180°, когда напряжение на базе несколько больше E^q В этом случае (см. рис. 2.8) ось переменного базового напряжения со/ должна сместиться вправо, что показано стрелочкой в сторону АВ. От этого амплитуда импульса коллекторного тока возрастет.
Класс С соответствует 0 < 90°, когда Е§ < Еб0, т.е. ось wt напряжения w6(r) должна быть смещена (см. рис. 2.8) влево, что показано стрелочкой в сторону С. От этого амплитуда импульса коллекторного тока уменьшится.
Следует отметить, что режим колебаний 1-го рода — это линейный режим, так как усиление ведется только на линейном участке проходной характеристики. Режим колебаний 2-го рода — нелинейный, так как сигнал выходит за линейный участок этой характеристики снизу, что определяет его отсечку. Отсечка сигнала — признак ярко выраженной нелинейности характеристики. В линей
25
ном режиме новые частотные составляющие входного сигнала не появляются. Если входной сигнал гармонический, как в рассмотренном случае, то на выходе ГВВ он тоже гармонический. Гармоника не раскладывается на другие гармоники. Когда же входной гармонический сигнал отсекается снизу (или сверху), то он перестает быть гармоническим (синусоидальным или косинусоидальным) и превращается в периодическую последовательность соответствующих импульсов. Эти импульсы, в свою очередь, раскладываются в тригонометрический ряд Фурье, т.е. состоят не только из первой и нулевой гармоник, но и гармоник более высокого порядка: второй, третьей и т.д. Последние определяют нелинейные искажения сигнала и внеполосные излучения передатчика. Хотя контур в коллекторной цепи, настроенный в резонанс на первую гармонику, и ослабляет остальные гармоники, но недостаточно. Нужное ослабление достигается дополнительными мерами, которые будут рассмотрены далее.
Таким образом, основным достоинством режима колебаний 2-го рода является его более высокий КПД, а основным недостатком — большие нелинейные искажения сигнала (первой гармоники) и внеполосные излучения передатчика по сравнению с режимом колебания 1-го рода. Тем не менее режим колебаний 2-го рода является основным режимом работы мощных (выходных) каскадов передатчика. Режим колебаний 1-го рода используется в предварительных усилителях (усилителях напряжения).
Режимы работы ГВВ классифицируются не только по углу отсечки коллекторного тока, но и по напряженности генератора.
2.4. Режимы работы ГВВ по напряженности
Различают недонапряженный, критический и перенапряженный режимы работы ГВВ. Эту классификацию удобно рассмотреть в координатах выходной характеристики транзистора, показанной на рис. 2.9. Как раз в ней линия критического режима (ЛКР) разделяет недонапряженный режим (справа от ЛКР) от перенапряженного (слева от ЛКР). Согласно уравнению Кирхгофа для резонансного ГВВ мгновенное напряжение на коллекторе ск = Ек - t/Kcos or изображено под осью абсцисс (см. рис. 2.9).
26
(tot
Рис. 2.9. Режимы ГВВ по напряженности
Мгновенное напряжение на коллекторе ек и мгновенное напряжение на базе - E^q + cos cor определяют мгновенное
значение коллекторного тока в динамическом режиме, когда в коллекторной цепи транзистора включено эквивалентное сопротивление RK. Динамический режим характеризуется динамической характеристикой ДХ, представляющей собой прямую линию zk = (^к "ек) на рис. 2.9. Динамическая характеристика пе-
ресекает ЛКР в точке А, которая определяет минимальное мгновенное напряжение на коллекторе eKmin по оси абцисс и максимальное значение импульса коллекторного тока 1кт по оси ординат. Если мгновенное напряжение на коллекторе ек > eKrnin, т.е. UK < Ек -- то напряжение на коллекторном контуре UK (кривая 1 на рис. 2.9) не выходит за линию ДХ, а ток /к не достигает точки А.
27
Это недонапряженный режим. В нем импульс колекторного тока /К1 синусоидальный, остроконечный, а его амплитуда меньше 1кт.
Критический режим имеет место при ек = ^кт,п, когда напряжение UK (кривая 2 на рис. 2.9) соответствует точке А. В этом случае импульс коллекторного тока наибольший (/к1 = 1кт ), синусоидальный или со слегка уплощенной вершиной.
Перенапряженный режим имеет место приек< eKmin, когда UK (кривая 3 на рис. 2.9), возрастая, достигает значения, соттветствующего точке А, и далее опускается вниз по ЛКР до Ек - ек. При уменьшении она совершает обратный путь. В результате импульс коллекторного тока /к3 имеет провал в середине (седловину), как это показано на рис. 2.9. Очевидно, что наибольшая площадь у импульса /к2. Это значит, что наибольшая полезная мощность имеет место в критическом режиме, хотя КПД выше в слабо перенапряженном режиме.
Наблюдать форму импульса коллекторного тока /к при разных режимах можно на экране осциллографа. Для этого эмиттер транзистора ГВВ подключают к общей точке через безиндуктивный резистор малого номинала (~ 5 Ом) и к последнему подсоединяют осциллограф.
Часто режимы ГВВ по напряженности характеризуют по соотношению максимального напряжения на базе e6max = Е§ - Е^ + и минимального напряжения на коллекторе eKmjn - Ек - UK.
Недонапряженный режим имеет место при \Е§ + (7б| < |ЕК - (7К|, когда /к » /б.
Критический режим — при |Еб + иб\ «|ЕК - (/к|, когда /к > /б.
Перенапряженный режим — при |Еб + (/б| > |£к- t/J, когда /б.
При этом Е§ + не должно превосходить предельно допустимого значения^ доп, являющегося параметром транзистора, приводимым в справочнике.
2.5. Нагрузочные характеристики транзисторного ГВВ
К чилу основных характеристик, определяющих работу транзисторного ГВВ, относятся его нагрузочные характеристики. Последними называются зависимости электрических показателей — выходной мощности первой гармоники сигнала Рк1, потребляемой мощности по коллекторной цепиРк0, коэффициента полезного дей
28
Рис. 2.10. Нагрузочные характеристики ГВВ
режим соответствует толь-
ствия т]к и т.д. — от модуля сопротивления коллекторной нагрузки \Zn\. Под Zn понимается нагрузка, пересчитанная к выходным электродам транзистора (коллектор-эмиттер, см. рис. 2.1), т.е. измеренная в этих точках схемы при отключенном транзисторе. На рис. 2.10 представлены примерные нагрузочные характеристики.
С изменением сопротивления нагрузки RK изменяется напряжение на коллекторном контуре UK = = 1К\РК и, значит, минимум напряжения на коллектореeKmin = Ек- UK, а следовательно, и напряженность режима. На рис. 2.10 указаны области недонапряженного и перенапряженного режимов. Критический
ко одному значению RK = /?ккр, являясь границей между названными режимами, что отмечено пунктирной линией.
В недонапряженном режиме увеличение нагрузки RK вызывает увеличение напряжения на контуре UK. При этом из-за действия обратной связи несколько уменьшаются постоянная составляющая /kq и первая гармоника /к| коллекторного тока. В перенапряженном режиме увеличение RK ведет к незначительному увеличению колебательного напряжения UK из-за ограничивающего действия коллекторного перехода. При этом увеличивается длительность интервала насыщения, соответственно увеличивается провал в импульсе коллекторного тока и, следовательно, уменьшается величина первой гармоники коллекторного тока /kJ , а также постоянной составляющей /к0. Поэтому колебательная мощность РК| = 0,5/2к1/?к = 0,5С7к2//?к имеет максимальное значение вблизи критического режима. Одновременно зависимость т]к от Рк также достигает максимального значения вблизи критического режима справа. В области перенапряженного режима, хотя КПД изменяется мало, колебательная мощность, а значит, и коэффициент
29
усиления по мощности уменьшаются значительно. Поэтому оптимальным можно считать критический режим.
При работе транзистора в недонапряженном режиме настройка коллекторной цепи производится непосредственно по показаниям приборов, измеряющих мощность Рк1 в нагрузке. Настройка по прибору, измеряющему постоянную составляющую коллекторного тока /к0, может быть затруднена или вообще невозможна.
Если транзистор может заходить в перенапряженный режим, настройка коллекторной цепи возможна по показаниям прибора, измеряющего постоянную составляющую коллекторного тока Однако на высоких частотах из-за инерционности рассасывания заряда из области коллектора настройка на минимум тока /к0 может не соответствовать настройке коллекторного контура в резонанс. Поэтому настраивать генератор в резонанс и на критический режим работы транзистора более правильно по показаниям приборов, измеряющих выходную мощность генератора, максимум которой соответствует режиму, близкому к критическому. При этом обеспечиваются практически максимальный коэффициент усиления по мощности генератора и наибольший КПД коллекторной цепи. Последний, как известно, определяется отношением полезной мощности Рк| к полной мощности Рк0, потребляемой от источника коллекторного питания Ек. Разница мощностей Рко“^к1 = Ркпвыделяется на/?-и-переходе транзистора в виде тепловых потерь. От этого температура транзистора не должна превышать предельно допустимое значение. Подробнее эти вопросы рассматриваются в следующем разделе.
2.6. Предельно допустимые значения параметров мощных высокочастотных транзисторов
Для правильного и наиболее эффективного применения транзисторов в схеме генератора надо знать их параметры и уметь ими пользоваться при расчете электрического режима работы каскада. Полученные значения электрических параметров не должны превышать их предельно допустимые эксплуатационные значения. Поэтому далее будут рассмотрены наиболее характерные параметры мощных высокочастотных транзисторов, используемые при расчете электрического режима работы генератора.
30
В каталогах на транзисторы обычно приводятся четыре предельно допустимых параметра, ограничивающие полезную мощность: температура перехода г°кд; напряжение на коллекторе екд; гок коллектора /кд; обратное напряжение на эмиттерном переходе <?эбд. Для расчетов они используются следующим образом.
I. /°пд — максимальная температура переходов (в первую очередь коллекторного), при которой не возникает тепловой пробой перехода и надежность прибора падает незначительно. Для транзистора на основе кремния /° = 150—200°С, на основе германия /°пд = 85—100°С.
В работающем транзисторе температура переходов превышает температуру окружающей среды t°c на величину, равную отношению мощности, рассеиваемой на коллекторе и базе Рр = Ркр + , к
эквивалентному тепловому сопротивлению переход—среда /?пс. Сопротивление /?пс равно приближенно сумме /?пк + Якс, где /?пк — тепловое сопротивление переход—корпус, а /?кс — тепловое сопротивление корпус—среда. Сопротивление /?пс или Лпк (для мощных транзисторов с теплоотводами) указывается в каталогах в градусах на ватт. Величина /?пк зависит от конструкции транзистора, /?кс — от условий охлаждения.
Допустимая мощность рассеяния определяется разностью температур /°пд и t°c в установившемся тепловом режиме
t°
р _ Дпд 1С рд R
2ХПС
На низких частотах потери в базе невелики и Рбр < 0,1 Ркр, а КПД г|к = Рк /(Рк\ + Ркр) = 0,7. Тогда оказывается, что заданная мощность Рк1 при заданном КПД тоже определяется разностью температур и оценивается по формуле
* =_Р£__
к1' 1,1 1-пк рд‘
Чем выше г°с , тем меньше Ррд и полезная мощность Рк^.
Поддержание температуры /?-и-переходов и корпуса ниже допустимых значений является одним из непременных условий на-
31
дежной работы транзистора. Основной способ отбора тепла от транзистора состоит в применении радиатора, который должен иметь хороший тепловой контакт с корпусом прибора.
Для лучшего отвода тепла от радиатора его поверхность делают ребристой и применяют принудительное воздушное охлаждение. Для электрической изоляции электродов транзистора от корпуса с одновременным обеспечением хорошего теплового контакта используют бериллиевую керамику — диэлектрик с малым тепловым сопротивлением, таким же, как у латуни.
2. <?кд — максимальное напряжение на коллекторе, при котором еще не происходит пробой коллекторного перехода. Часто приводится два значения екд: екэд — для случая открытого эмиттера перехода (работы без отсечки) и екбд г* екэд — для запертого эмит-терного перехода. В генераторных режимах «опасное» напряжение ектах = Ек + UK = Ек (1 + £) надо сравнивать с екбд, потому что в этот момент напряжение на базе e6min = Е^- U6 отрицательное и запирает эмиттерный переход. При £ = ^кр = 0,9 получаем выражение для выбора напряжения источника питания цепи коллектора:
екбд/1’9-
Для кремниевого транзистора = 30—60 В, а для германие-
вых екд = 15 В.
3. /кд — максимальное мгновенное значение тока коллектора, превышение которого либо снижает надежность транзистора, либо способствует перегоранию его выводов. Высота импульса коллекторного тока не должна превышать /кд: iwn /кд.
4. е — максимальное мгновенное значение обратного напряжения на эмиттерном переходе, превышение которого может привести к пробою этого перехода. В генераторах наибольшее обратное напряжение на эмиттерном переходе получается при минимальном напряжении на базе ^6min. Для низких частот e6rnin = Е§- U& При расчетах необходимо проверять выполнение условия l^5min| < |еэд|. Значение еэд колеблется в пределах 0,2—4 В.
5. Граничная частота транзистора. Чаще всего используются две граничные частоты: граничная частота по крутизне/^ и максимальная частота/т усиления по току в схеме с общим эмиттером.
Граничная частота по крутизне^ — это частота, на которой модуль крутизны |SK| проходной характеристики уменьшается в 41 раз.
32
Известно, что на высоких частотах эта крутизна комплексная, что отмечают точкой над нею: 5К . В Y-параметрах она обозначается как
Yzl =SK = —, 1 + ./(0Т5
где 5К — низкочастотное значение крутизны;
4 xs — постоянная времени цепи открытого транзистора.
Так как ту = 1/2ji/s, то 5К =----
1 +./ ~— В показательной форме fs
• * V • /-Л
SK =1SK Iejys--, K g~yarc4 fs J.
V UJ
Действительно, при f = fs модуль |5K| =^к / V2~ уменьшается В\[2 раз. Границей между низкими частотами, на которых крутизна действительная, и высокими является условие: (оту<< 1 или flfs « 1. Но даже если взять f < 0,3/у, то мнимая часть крутизны будет существенно (в 3,33 раза) меньше вещественной и ею можно пренебречь, считая вещественой, как на низких частотах. Тогда можно воспользоваться проходной характеристикой для ее определения (см. раздел 2.1).
Нередко границей между низкими и высокими частотами для транзистора считают частоту, равную 0,5так как на ней ошибка в определении модуля |5К| составляет 12 %. Поэтому для генератора выбирают f is 0,5 /у.
В справочниках чаще указывается не частота а максимальная частота усиления по току /т в схеме с общим эмиттером, кото-
3-6764
33
рая связана сfs зависимостью: fs - SKr& где — сопротивление материала базы. Вообще/ = |/*21 э1/ •> гДе 1^>1Э1 — модуль коэффициента передачи по току в схеме с общим эмиттером, а/ — частота, на которой измеряется параметр |/?9 । |. Из этого выражения следует, что |Л9 ।э| = 1 при f-fy В этом случае коэффициент усиления по мощности // = 3—6 дБ для подавляющего числа высокочастотных и сверхвысокочастотных транзисторов. Частота / определяется временем пролета ттб неосновных носителей заряда через базу транзистора: / = 1/2jit^.
Изложенный материал данной главы позволяет теперь перейти к методике расчета генератора.
2.7. Методика расчета генератора в критическом режиме
Дано: колебательная мощность генератора Ркр рабочая частота/ максимальная температура окружающей среды / °C.
Требуется определить напряжение на коллекторном контуре UK, токи транзистора, его КПД и коэффициент усиления по мощности.
Для этого:
• выбираем по справочнику транзистор согласно заданной мощности Рк] и рабочей частоте / 0,3/, где/— граничная частота по крутизне;
• выписываем паспортные данные транзистора: допустимое напряжение на коллекторе ек ; максимально допустимый коллекторный ток / ; крутизна: 5 — линии критического режима на выходной характеристике, — проходной характеристики, — входной характеристики, напряжение сдвига Е^, которые можно определить по спрямленным характеристикам; /° — максимальная температура переходов; Лпк — тепловое сопротивление переход—корпус или /?пс — тепловое сопротивление переход—среда;/ — граничная частота по крутизне или/— максимальная частота усиления по току в схеме с общим эмиттером;
• находим напряжение коллекторного питания Ек транзистора из условия^ max = £K + t/K=£K(l +?)<ек доп,т.е. Ек <ек.доп/(1 + £). В этом неравенстве полагают £ а 1, и тогда Е„ < 0,5ev п~п
1 к к. дин.
34
Задаемся углом отсечки 0 и из приложения 3 выписываем значения коэффициентов cxq, <Х|...
Решение начинается с определения напряжения на коллекторном контуре UK = вернее, с точного определения
Согласно рис. 2.9 максимум коллекторного тока 1кт определяется точкой пересечения динамической характеристикой ДХ линии критического режима (точкой А), соответствующей минимуму напряжения на коллекторе <?Krnjn, т.е.
4/и “ ^кректт “ ^кр^к “ ~ ^кр^к( “ ^кр)’
где индекс «кр» у означает ее соответствие критическому режиму (точка А на рис. 2.9).
Первая гармоника коллекторного тока 41" а14м — а1^кр^к^ ~^кр)-
Следовательно, полезная (заданная) мощность PkJ = 0,5 UK IKj=
- 0,5a|^Kp£’K5Kp£’K(l -5кр) — 0,5а|^кр£* 5кр-0,5а|^Кр E^SK^.
Отсюда
_ £ 2Рк1 _
Ькр Ькр + 2 °*
кр^к
Решением данного квадратного уравнения является
_ 1 1 L 8?71 1 2РК1
КР 2 2 ¥ а]5К1Х '
I 1 кр к 1 кр к
Здесь корень квадратный разложен в биномиальный ряд (бином Ньютона) и приведен только его второй член, т.к. уже третьим можно пренебречь.
Порядок расчета генератора в критическом режиме, в котором максимальная полезная мощность и КПД, следующий.
1. Находят точное значение ^кр по приведенной формуле.
2. Определяют напряжение на выходном коллекторном конту-Ре Ц< - ^кр^К’
3. Первая гармоника коллекторного тока /к1 =
4. Максимальное значение импульса коллекторного тока 1кт= “ 41/а1-
35
5. Постоянная составляющая коллекторного тока /к0 =
6. Мощность, потребляемая коллекторной цепью, = /к0 Ек.
7. КПД коллекторной цепи r|K = Pk\/Pkq.
8. Мощность рассеяния (нагрева) на /?-/?-переходе коллектор-эмиттер транзистора Ркр = Рк0 - Рк1.
9. Допустимая мощность рассеяния на коллекторе транзисто-ра Ррд = (Т'птах - Т’ктах У ^тп-к, причем ДОЛЖНО быть Ркр s Ррд.
10. Требуемое сопротивление коллекторной нагрузки RK =
11. Амплитуда напряжения на базе согласно (2.6)
/?KSKa1 (1 -cosO)
12. Напряжение смещения на базе согласно (2.4) = Е^-
- ^cosO ’ пРичем должно быть |l'6mjn| = 1^60 - t/6| £ £-эбд.
13. Амплитуда первой гармоники тока базы /^1 = s6u6.
14. Колебательная мощность в базовой цепи = 0,5/б|(7б.
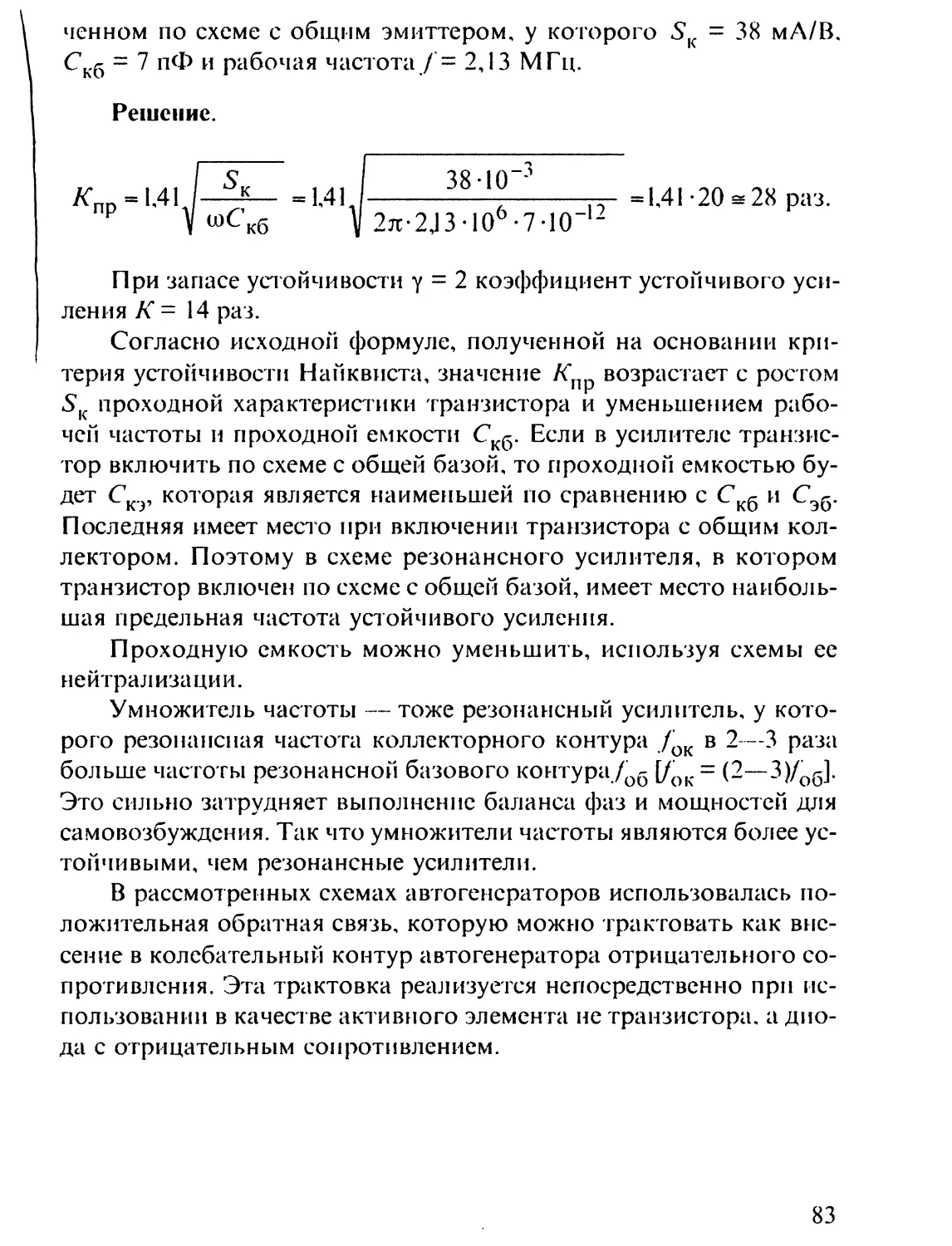
15. Коэффициент усиления по мощности КуР = Рк\/Р§[-Пример расчета генератора.
Исходные данные: мощность генератора в нагрузке Рк1 =20 Вт; рабочая частота/= 2,13 МГц.
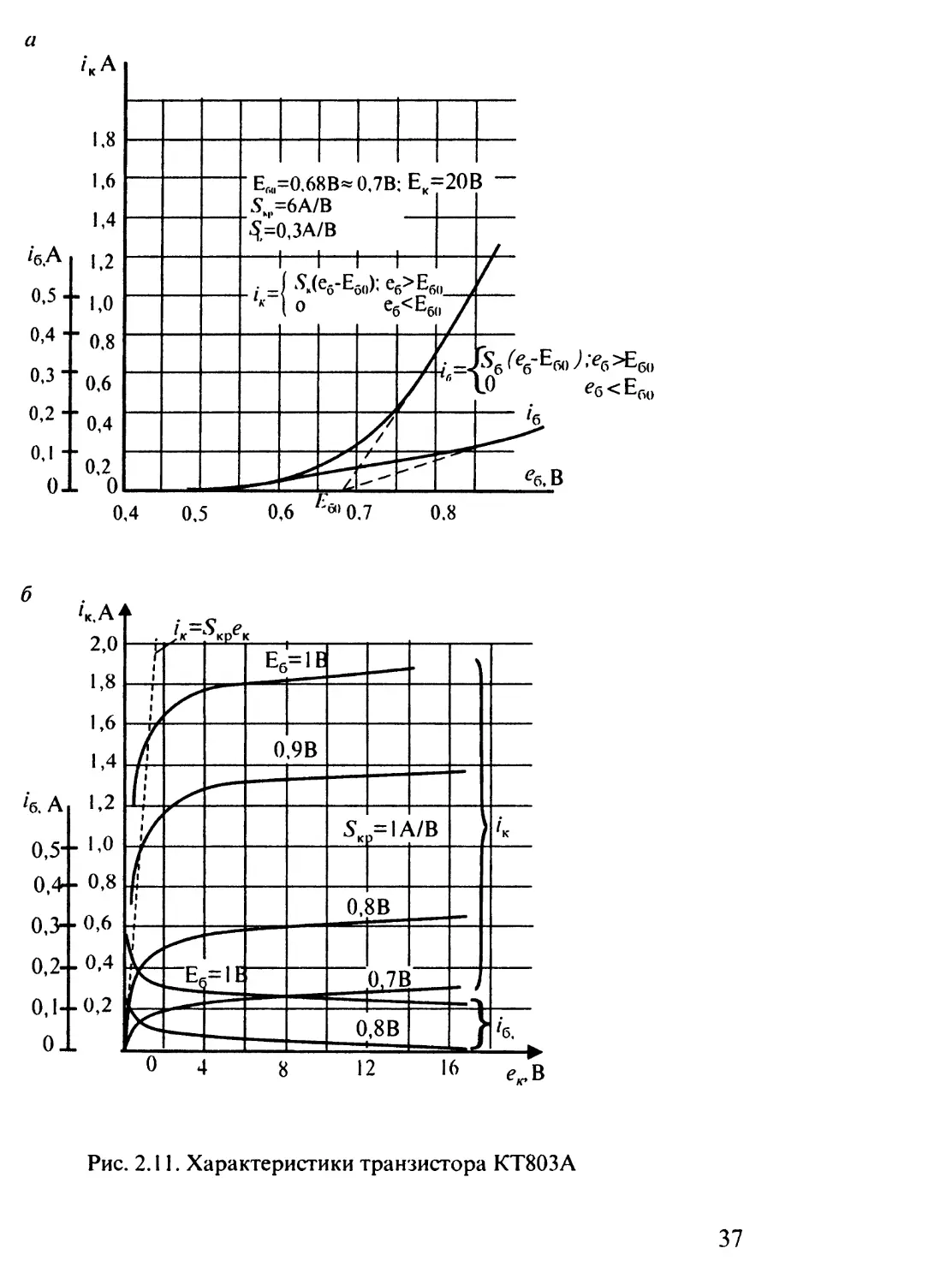
Выбираем транзистор КТ803А, параметры которого наиболее близки к заданным.
Выписываем параметры транзистора КТ803А:
граничная частота/т = 20 МГц; максимально допустимая мощ-ность рассеяния Рк/„ах = 60 Вт; екэдоп = 60 Вт; 1кп = 10 А; еэбдоп = 4 В; Тк - 50°С — температура корпуса; Гпшах = 150 °C — максимально допустимая температура перехода; /?тп_к = 150 °C — тепловое сопротивление переход—корпус.
Характеристики транзистора представлены на рис. 2.11, из которых следуют их крутизны: S' = I A/В; Зк = 6 A/В; = 0,3 A/В и Еб0 = 0,7 В.
Определяем напряжение коллекторного питания из условия: Ек < 0,5екэд = 0,5 • 60 = 30 В. Принимаем Ек = 24 В.
Задаем угол отсечки 0 = 90° и из приложения П2 выписываем значения коэффициентов cxq = 0,32 и = 0,5.
36
Рис. 2.11. Характеристики транзистора КТ803А
37
Теперь рассчитаем параметры генератора в указанной выше последовательности.
? Р 9 Р
ъ — I _ к! _ 1 _ _ 1
1 ^КР 1 9 ” 1 ” 1
а1*$кр^к ¥кр^
2. ик = 5кр Ек = 0,86 • 24 = 20,64 В.
з. /к| =2^к1_=222_=]594д. ик 20,64
4. /ю„ —= ^- = 3,88 А. ю" а, 05
5. /к0 = I^Oq = 3,88 • 0,32 = 1,24 А.
6. Рк0 = Ек 1к0 = 24 • 1,24 = 29.8 Вт.
п Рк1 20
7- Лк =—~ =------= 0,67.
к Л<о 29,8
8- 7>кр = 7>кО — ^1=29,8 -20 = 9,8 Вт.
2-20 -------у-= 0,86. 0,5 -1 -242
Т° _Т° 1S0°-50‘
о р _ 7 птах 1 ктах _ 1
рд ₽ " 1,66
1ХТП-К
10. Лк=-^- = ^^-= 10,64 Ом.
7К1 1,94
602 Вт > /’ = 9,8 Вт. кр
11. и.------------------------2ом
RKSK«|(l-cos0) 10,64-6-0.5
12. £б = Eqq - cos 0 = Еб0 = 0,7 В, причем
e6min= 1*6 - ^б1 = °’7 - °’65 = °’05 < % = 4 В
13. /б1 = 5б(/б = 0,3 • 0,65 = 0,195 А.
14. Рб1 = 0,5 /б1 Uq = 0,5 • 0,195 • 0,65 = 0,063 Вт.
Рк1 20
15. # р = -— = ———= 317,5 раз, или 25 дБ.
7 ^61 и,иоэ
0.65 В.
38
2.8. Практические схемы однотактных транзисторных генераторов с внешним возбуждением
Схемы ГВВ отличаются одна от другой прежде всего способом коллекторного питания и базового смещения. Различают схемы ГВВ с последовательным и параллельным коллекторным питанием и таким же базовым смещением. На рис. 2.1 рассмотрена схема ГВВ с последовательным коллекторным питанием Ек и последовательным базовым смещением Е^. В ней переход транзистора коллектор-эмиттер и контур, на котором выделяется усиленное напряжение (7К, подключены последовательно к источнику коллекторного питания Ек, отсюда и такое название. Точно так же и для базовой цепи: переход база—эмиттер и вторичная обмотка входного трансформатора с переменным базовым напряжением подключены последовательно к источнику базового смещения Е§.
На рис. 2.12 представлена принципиальная схема ГВВ с параллельным коллекторным питанием Ек и параллельным базовым смещением £*б. Здесь переход коллектор—эмиттер транзистора VT и колебательный контур подключены к источнику коллекторного питания Ек параллельно. На схеме показан один зажим источника питания +ЕК. Другой его зажим -Ек заземлен (подключен к общему проводу) и на схемах не показывается («холодный» зажим). Точно так же переход база-эмиттер и вторичная обмотка входного трансформатора подключены параллельно к одному зажиму источника базового смещения Еб Другой его зажим тоже заземлен и на схемах обычно не показан. Напряжение питания Ек на коллектор транзистора VT подается через дроссель Др1, представляющий собой катушку индуктивности. Сопротивление этого
Рис. 2.12. Принципиальная схема ГВВ с параллельным коллекторным питанием и базовым смещением
39
дросселя переменному (усиливаемому) току Адр = со£др во много раз больше (7 в 10 раз) резонансного сопротивления контура,ZK^ = В этом случае дроссель Др1 преграждает путь переменному току коллектора zK через источник питания 2^. Это необходимо для того, чтобы переменный ток не создавал падения напряжения на его внутреннем сопротивлении R-.
Хотя 7?-и мало (доли Ома), но коллекторный ток мощного каскада велик, так что падение напряжения на R{ может быть существенным. Если источник является общим для всех каскадов передатчика, то некоторые из них из-за падения напряжения на R{> могут возбудиться, т.е. перейти из усилительного режима в автоколебательный. В этом случае передатчик будет неработоспособным. Во избежание последнего и используется дроссель Др1. Переменный коллекторный, ток iK проходит через колебательный контур на эмиттер, замыкающий коллекторную цепь. Разделительный конденсатор С2, через который контур подключен к коллектору, для переменного тока представляет собой практически короткое замыкание (к.з.), так как его сопротивление Xq = 1/соС s 0. Его назначение — исключить к.з. источника постоянного коллекторного питания на землю через дроссель ДР1 и обмотку LK. При этом постоянный ток не проходит через конденсатор С, так как сопротивление последнего для св = 0 очень велико (Xq = 1/соС s 00). Ясно, что рабочее напряжение этого конденсатора определяется напряжением Ек: обычно (/^раб ^,5 Ек.
На дросселе Др1 постоянный ток создае т падение напряжения t/др = г/к0, где г — активная составляющая сопротивления дросселя, которая незначительна (несколько Ом) по сравнению с выходным сопротивлением транзистора. Поэтому напряжение (/др мало и им можно пренебречь. Если закороти ть конденсатор С2, то. напряжение на коллекторе транзистора будет равно нулю и усилитель работать не будет. Ведь сопротивление ка тушки контура г во много раз меньше, чем сопротивление дросселя Др 1 постоянному току. В этом случае источник питания Л’к вы Идет из строя, если у него нет электронной защиты от к.з., а обмотка контура может сгореть. Если же закоротить дроссель Др1. то источник питания Ек, имея очень малое внутреннее сопротивление (доли Ом), закоротит колебательный контур по высокой час го те и усилитель тоже работать не будет.
40
В схеме на рис. 2.12 коллектор транзистора подключен не ко всему контуру, а к части его витков. Такой контур называется контуром 2-го вида и в отличие от контура 1-го вида подключаются все витки и вся емкость контура. Резонансное сопротивление контура 2-го вида ZKp2 = ZKpj/?2, где р = Lk/(Lk1 + Lk2) 1 — коэффициент включения контура 2-го вида, a ZKpl = RK— резонансное сопротивление контура 1-го вида, т.е. ZKp9 < ZKpl в р- раз. Коэффициент включения р можно изменять от 0 до 1 путем перемещения точки подключения коллектора к контуру. В некоторой точке сопротивление контураp~RK будет равно выходному дифференциальному сопротивлению транзистора /?|д = </екэ/</к|, и тогда транзистор (генератор) отдаст максимальную мощность в контур (нагрузку), т.е. генератор и нагрузка будут энергетически согласованы между собой. Такое согласование является основной целью настройки мощного высокочастотного генератора с внешним возбуждением.
Необходимо отметить, что мощные высокочастотные транзисторы имеют весьма низкие входные и выходные сопротивления — от нескольких до сотен Ом, что подтверждается также выполненным ранее расчетом генератора. Поэтому и нагрузка должна быть согласована с контуром. Для этого она подключена тоже к части витков контура (см. рис. 2.12). Нагруженный контур должен отобрать у транзистора максимум мощности и максимум ее передать в нагрузку.
В базовой цепи дроссель Др2 исключает шунтирование перехода база-эмиттер и вторичную обмотку входного трансформатора источником базового смещения Е§. Конденсатор С1 предотвращает короткое замыкание источника базового смещения на землю через вторичную обмотку трансформатора. Его сопротивление переменному току практически равно нулю. Источник внешнего возбуждения энергетически согласуется со входом транзистора с помощью трансформатора.
На рис. 2.13 представлена схема ГВВ с использованием параллельного колебательного контура 3-го вида на входе. Его сопротивление ZKp3 = ZKpl/?2, где р = C^ICy В свою очередь, = С । С2/(С^ + + С9). Меняя соотношение емкостей С\ и С9 без изменения резонанса контура, можно согласовать возбудитель со входом транзистора ГВВ.
41
Вход
Коллекторный контур является контуром 2-го вида со стороны коллектора и контуром 3-го вида со стороны нагрузки. Контур согласуется с двух сторон.
Коллекторное питание Ек и базовое смещение в данной схеме параллельные. Коллектор транзистора подключен к источнику питания Ек через Г-образный LC-фильтр. Последний не пропускает переменную составляющую /к через источник Ек. исключает шунтирование коллекторного контура источником питания Ек, осуществляет дополнительную фильтрацию напряжения Ек.
Внешний источник базового смещения Е§ отсутствует. Его функции выполняет выпрямитель базового тока с фильтром нижних частот (ФНЧ). Переход база-эмиттер выпрямляет высокочастотные входные колебания, и импульсы тока /б заряжают конденсатор Сф до максимального значения. В непроводящую часть периода конденсатор Сф разряжается через резистор /?ф. Но поскольку постоянная времени этой цепочки Тф = ЯфСф много больше периода ВЧ-колебаний Г, то конденсатор СфЗа время 772 разряжается незначительно, а в проводящую часть периода он опять дозаря-жается. Таким образом, поддерживается практически постоянным напряжение смещения на базе Е§ Базовый дроссель Др 1 исключает шунтирование емкости С? и перехода база-эмиттер через Сф по переменному току.
На рис. 2.14 представлена принципиальная схема ГВВ с П-об-разным фильтром типа «К» в базовой и коллекторной цепях. Такой фильтр позволяет получить усиление в широкой полосе частот. Пра-
42
Рис. 2.14. Схема ГВВ с П-образным контуром
вильный выбор параметров фильтра позволяет получить не только усиление в широкой полосе, но и требуемое энергетическое согласование входа и выхода ГВВ. В этой схеме коллекторное питание Ек и базовое смещение (за счет базовых токов) тоже параллельные.
Рассмотренные схемы ГВВ являются однотактными. На практике используются также и двухтактные, которые обладают важными уникальными свойствами.
2.9. Двухтактные генераторы с внешним возбуждением
На рис. 2.15 представлена упрощенная принципиальная схема двухтактного оконечного генератора передатчика 42РТМ-А2-ЧМ
железнодорожной радиостанции. Состоит он из двух однотактных генераторов. Один из генераторов выполнен на транзисторе VT1, а другой — на VT2. Транзисторы — идентичные, типа КТ805Б, включены последовательно. Эмиттеры транзисторов заземлены. Коллекторы транзисторов подключены к противоположным концам параллельного ко
Рис. 2.15. Схема двухтактного ГВВ
43
лебательного контура, состоящего из двух идентичных, последовательно соедеиненных конденсаторов CkJ и Ск2 и катушки индуктивности LK со средней точкой. Через эту среднюю точку подается питание Ек на коллекторы обоих транзисторов относительно их заземленных эмиттеров, которые соединены с общей точкой конденсаторов Ск| и Ск2 Катушка индуктивности контура является первичной обмоткой выходного трансформатора Т2, ко вторичной обмотке которого подсоединен фидер (коаксиальный кабель), соединяющий ее с антенной.
Базы транзисторов подключены к противоположным концам вторичной обмотки трансформатора Т1, средняя точка которого соединена с эмиттерами через источник смещения Это напряжение включено последовательно с напряжением на половинах вторичной обмотки трасформатора Т1. Последний обеспечивает переход к симметричному выходу и противоположному возбуждению транзисторов. Поэтому напряжения на базах этих транзисторов будут всегда равны по величине и противоположны по знаку: - Е§+ cos со/; сб2(Г) = х cos (со/ + л).
Под действием этих напряжений в коллекторных цепях будут протекать токи, которые в режиме колебаний 2-го рода имеют гармонические составляющие:
/к1(/) “ ^кО + /К1 cos 0)Z + А<2 cos + А<3 cos + ••• ’
/кэ(0 = /ко + 7K|C°S (ш/ 4- л) 4- /кэ COS 2((0/ 4" л) 4- COS 3(U)Z 4- л) 4-...
Так как cos (а 4- лп) = -cos а для //-целых нечетных и cos (а 4- лп)= = cos а для л-целых четных, то последнее уравнение можно переписать в виде
/к2(Г) = 4о “ 'к! cos + А<2 cos “ А<3 cos +---
Токи /Ki(0 и /k2(0 подводятся к контуру с противоположных направлений, и поэтому результирующий ток через контур равен их разности: /к(г) = /к| - /к2 - 2/к| cos со/ 4- 2/к3 cos Зоэ/ 4- 2/к5 cos 5а>/4-4-..., т.е. состоит из удвоенных нечетных гармоник. Четные гармоники и постоянные составляющие коллекторного тока взаимно компенсировались. Полная компенсация имеет место только в случае полной симметрии двухтактной схемы, когда транзисторы VT1 и VT2 и конденсаторы Ск| и Ск2 идентичны, а обмот
44
ки трансформаторов строго симметричны относительно своих средних точек. Если выбранный угол отсечки 0 = 90°, то = 0 (см. рис. 2.7) и результирующий коллекторный ток будет состоять практически только из первой гармоники, так как вторая отсутствует как четная, третья равна нулю в силу 0 = 90°, четвертая отсутствует как четная, а пятая и более высокие гармоники настолько малы, что их можно не учитывать, тем более что их хорошо подавляет выходной контур. Отсутствие постоянной составляющей тока исключает постоянное подмагничивание магнитопровода, на котором намотана катушка индуктивности выходного контура. Это позволяет существенно уменьшить массу магнитопровода, что выгодно с точки зрения веса и габаритов передатчика.
По сравнению с однотактным генератором (одной половиной двухтактного ГВВ) в двухтактном ГВВ выходная мощность увеличивается в 2 раза, а КПД не изменяется. Расчет ГВВ двухтактного ведется для одной его половины по рассмотренной методике. Затем мощности Рк1 и Pkq удваиваются. Необходимо отметить, что в общем проводе, соединяющем контур с источником питания Ек, наоборот, присутствуют исключительно удвоенные четные гармоники и удвоенная постоянная составляющая, так как там токи zK|(/) и /к9(г) не вычитаются, а складываются.
Двухтактный ГВВ может работать не только в оптимальном классе В (0 = 90°), но и в классе АВ (90° < 0 < 180°) и А (0 = 180°). В классе А токи /к|(/) и /^(0 состоят только из постоянной составляющей /к0 и первой гармоники /к1. Класс С (0 < 90°) в двухтактных ГВВ не используется из-за дополнительного увеличения нелинейных искажений. В самом деле, при 0 = 90° один транзистор усиливает положительную полуволну, а другой — отрицательную полуволну входного синусоидального сигнала, сумма которых в выходном контуре дает исходный неискаженный синусоидальный сигнал (рис. 2.16, а). При 0 < 90° (класс С) каждый транзистор усиливает не полуволну, а меньшую ее часть, находящуюся за штриховой линией (рис. 2.16, а). При сложении этих частей в выходном контуре получается искаженная синусоида с горизонтальными «полочками» на оси абцисс (рис. 2.16, 0, что дополнительно увеличивает нелинейные искажения сигнала.
45
Рис. 2.16. Временные диаграммы двухтактного ГВВ
Если в двухтактном ГВВ отключить один из транзисторов, то оставшийся будет ощущать нагрузку в 2 раза меньшую, чем при обоих работающих транзисторах. Это значит, что в случае выхода из строя одного из транзисторов двухтактного ГВВ его режим из критического перейдет в недонапряженный. Емкости транзисторов Ск_э в двухтактной схеме включены последовательно относительно контура, что умень
шает начальную емкость схемы.
Двухтактные ГВВ на трансформаторах с магнитной связью между обмотками работают на частотах до 10 МГц при небольших уровнях колебательной мощности (до десятков ватт). На более высоких частотах и больших уровнях мощности двухтактные транзисторные ГВВ выполняются на трансформаторах из отрезков длинных линий.
Таким образом, достоинствами двухтактного ГВВ являются:
-дополнительная (фазовая) компенсация четных гармоник, что
существенно уменьшает внеполосное излучение передатчика;
- дополнительная (фазовая) компенсация постоянной составляющей коллекторного тока позволяет уменьшить массу магнитопровода, на который намотана катушка выходного контура;
- отсутствие нечетных гармоник в проводе питания (они фазокомпенсированы), что исключает паразитную обратную связь через источник питания коллектора Ек для других каскадов передатчика;
- последовательное включение выходных емкостей транзисто
ров относительно контура уменьшает начальную емкость схемы. Это важно для коротких и ультракоротких волн;
- большая в 2 раза полезная мощность, чем в однотактной схеме, при равных КПД и напряжении питания Ек.
К недостаткам двухтактного ГВВ следует отнести: усложнение схемы, требования ее строгой симметрии, высокого сопротивления контура, симметрия входа и выхода.
46
2.10. Использование гармоник тока коллектора для повышения КПД ГВВ
КПД повышается за счет гармоник при работе генератора в ключевом режиме, в сильно перенапряженном режиме класса С с расстроенным в индуктивную сторону выходным (коллекторным) контуром, при подключении дополнительного контура в выходную цепь и настроенного на соответствующую гармонику (вторую или третью).
Ключевой режим (режим класса D). Чем меньше мощность потерь (рассеяния) на переходе коллектор—эмиттер транзистора, тем выше КПД коллекторной цепи. Минимизация мощности рассеяния на коллекторе транзистора сводится к максимальному приближению формы импульсов коллекторного тока и напряжения на коллекторе к меандру, т.е. к периодическим импульсам прямоугольной формы. Кроме того, транзистор должен находиться либо в состоянии отсечки, либо в состоянии насыщения, т.е. транзистор должен работать в ключевом режиме. В идеальном случае в состоянии отсечки ток коллектора iK = 0, а напряжение на переходе коллектор—эмиттер екэ = Ек, и поэтому мощность рассеяния на коллекторе Р = /к екэ = 0. В состоянии насыщения, наоборот, /к = /к/н, а екэ = 0, но тоже Ркр = /к екэ = 0.
Переход из области отсечки в область насыщения и наоборот происходит через активную область, где мощность рассеяния на коллекторе значительно больше, чем в области отсечки и насыщения. Поэтому переход активной области должен быть быстрым. Так как режим насыщения задается входным импульсом, а режим отсечки — паузой, то крутизна фронта импульса определяет время перехода из области отсечки в область насыщения, а крутизна среза импульса — наоборот, время перехода из области насыщения в область отсечки. Чтобы напряжение на переходе коллектор—эмиттер транзистора тоже было прямоугольной формы с большой крутизной фронта и среза, надо обеспечить одинаковое сопротивление для всех гармоник в коллекторной цепи. Другими словами, коллекторная нагрузка должна быть широкополосной, а из нее должна без искажений выделяться первая гармоника.
47
Рис. 2.17. Осциллограммы двухтактного ГВВ
На рис. 2.17 представлена схема ГВВ с нагрузкой, удовлетворяющей данным требованиям. Она состоит из двух фильтров, подключенных параллельно к выходу генератора. Один из них — фильтр нижних частот (ФНЧ) — пропускает только первую гармонику в нагрузку /?н, а другой—фильтр верхних частот (ФВЧ)—пропускает вторую гармонику и бо-
лее высокие в балластное сопротивление R§ = RH. Точнее, ФНЧ — это полосно-пропускающий первую гармонику фильтр и полосно-заграждающий все остальные гармоники, ФВЧ, наоборот, — по-лосно-заграждающий первую гармонику фильтр и полосно-пропускающий все остальные гармоники. В сумме ФНЧ и ФВЧ обес
печивают одинаковое сопротивление для всех гармоник, т.е. в эквиваленте представляют собой широкополосное сопротивление (резистивное), из которой выделяется без искажений первая гармоника. Поэтому импульс коллекторного тока 1кт имеет прямоугольную форму, как и входное напряжение, а напряжение на переходе коллектора—эмиттера транзистораекэ — тоже прямоугольной формы, но со сдвигом по фазе на 180° по отношению к 1кт, что минимизирует потери на коллекторе и максимизирует КПД генератора. Последний достигает 90—98 %. Чем выше КПД, тем большую полезную мощность может отдать генератор. ГВВ в ключевом режиме может работать на частотах до 100 МГц.
Ключевой режим используется в передатчиках поездной радиосвязи (ЖРтипа КР-1), работающих на частоте 2,13 МГц. Там гармонический ЧМ-сигнал до мощного усилителя преобразуется в сигнал прямоугольной формы в результате глубокого амплитудного ограничения.
Сильно перенапряженный режим класса С с расстроенной в индуктивную сторону коллекторной нагрузкой. В этом режиме может работать любая схема ГВВ, если в ней задать класс С и повышенное входное напряжение. В сильно перенапряженном режи
48
ме провал в импульсе коллекторного тока настолько большой, что импульс раздваивается. При этом расстройка коллекторного контура в индуктивную сторону обеспечивает уровень и фазировку высших гармоник так, что минимум падения напряжения на пере-коде коллектор—эмиттер скэ соответствует максимуму коллекторного тока, чем и обеспечивает высокий КПД ГВВ (до 91 %).
Метод дополнительных контуров. В этом случае в ГВВ последовательно с имеющимся коллекторным контуром, настроенным на первую гармонику, включается дополнительный контур, настроенный на третью гармонику.
Причем, в момент времени (о/ = 0 напряжения на этих контурах должны быть в противофазе, а амплитуда UK^ = (0,15—0,3) UKj. Сумма напряжений на этих контурах 67к1(/) и обеспечивает напряжение на переходе коллектор—эмиттер транзистора, напоминающее по форме коллекторный ток в слабо перенапряженном режиме, т.е. с провалом в его середине. В этом случае можно увеличить амплитуду напряжения первой гармоники Ск| в 1,15—1,3 раза, отчего возрастет коэффициент использования коллекторного напряжения £ = UK^/EK и соответственно возрастет КПД коллекторной цепи транзистора с 70 до 80 %.
Вместо третьей гармоники можно использовать вторую. Но тогда применяются два контура, настроенные на эту гармонику, причем один из них включается в коллекторную цепь, а другой — в базовую. От этого КПД достигает 85 %.
2.11. Связь генератора с антенной
Связь ГВВ с антенной бывает непосредственной, через промежуточный контур или с помощью фидера (кабеля).
Схема непосредственной связи ГВВ с антенной А показана на рис.2.18, а, которая часто называется простой схемой выхода ГВВ. Пунктирной линией показаны эквивалентные параметры антенны: ее емкость Са и активное сопротивление /?а. Эти параметры входят в состав замкнутого колебательного контура земля—/?а—Са—LH— Ср—LCB—Сф—земля. Контур настраивается в резонанс на рабочую частоту передатчика а)0, чтобы нейтрализовать Са, и поэтому его суммарное реактивное сопротивление равно нулю
49
4-6764
1 , 1 fin
---h Юл Lrn-ь С0лА„-= 0. со0Сф 0 tB <o0Cp 0 o)0Ca
С помощью переменной индуктивности LCB обеспечивается согласование антенны А с выходом ГВВ, когда /?а равно выходному активному сопротивлению ГВВ. В этом случае в антенну поступает максимальная мощность сигнала и соответственно обеспечи
вается максимальная дальность радиосвязи.
В последнем выражении емкостные сопротивления фильтра
1
сооСф
и разделительного конденсатора (о0Ср практически рав-
ны нулю и их можно не учитывать.
Рис. 2.18 . ГВВ с простой схемой выхода (а) и кривые его настройки (б)
В поездной радиосвязи используются Г-образные антенны с емкостной составляющей Са и П-образные антенны с индуктивной составляющей La.B последнем случае элементом настройки является не индуктивность LH, а емкость настройки Сн для получения резонанса. Поэтому в общем случае надо обозначить на схеме рис. 2.18 не Ся, а X., (X. = 1/(DOCM, или Х.А-а а х а и а7 а — ШдЛа), не LH, а Хн (Хн — u)q Lh, или Хн = 1/(п0Сн).
Настройка контура в резонанс производится по максимуму тока в антенне /а= = max = /К|, обеспечивающему максимум мощности в антенне Ра. При этом постоянная составляющая коллекторного тока /к0 достигает
50
минимума, и поэтому потребляемая мощность Рк0 = EKIK$ = min, как показано на рис. 2.18, б.
Основными недостатками непосредственной связи ГВВ с антенной являются:
- трудность согласования транзистора с антенной в рабочем
диапазоне частот;
- резкое увеличение мощности потерь Ркр = Рк0 - Рк| при расстройке или обрыве антенны (см. рис. 2.18, б), что может привести
к выходу из строя транзистора;
- плохая фильтрация гармоник.
Тем не менее простые схемы выхода ГВВ находят применение
в некоторых маломощных передатчиках.
От названных недостатков свободна сложная схема выхода.
Связь ГВВ с антенной через промежуточный контур, часто называемая сложной схемой выхода ГВВ, показана на рис. 2.19. Здесь имеют место два связанных между собой контура: промежуточный ПК и антенный АК.
Антенный контур АК образуется эквивалентными параметрами антенны /?а, Ха и органами настройки Хн и связи JfCB с промежуточным контуром ПК. Оба контура АК и ПК настраиваются на одну и ту же частоту передатчика и между ними подбирается оптимальная связь. Это так называемый полный резонанс связанных контуров. Сложная схема выхода получила на практике
самое широкое распространение. В ней настройка антенны не связана с подбором оптимального сопротивления нагрузки транзис-
тора, как в простой схеме выхода, и это в большинстве случаев позволяет повысить КПД схемы.
Как уже отмечалось, в сложной схеме выхода лучшая фильтрация гармоник, чем в простой. На рис. 2.20 представлены варианты схем связи антенного АК и промежуточного ПК контуров. Схемы с трансфор-
Рис. 2.19. ГВВ со сложной схемой выхода
51
маторной (рис. 2.20, а), автотрансформаторной (рис. 2.20, б), и емкостной (рис. 2.20, в) связью с точки зрения фильтрации равноценны. Схема с емкостной связью, представленная на рис. 2.20, г, обладает лучшей фильтрацией. Недостатком схем с емкостной связью является трудность плавной регулировки
связи ввиду того, что
Рис. 2.20. Варианты сложной схемы выхода ГВВ применение переменно-
го конденсатора связи приводит к изменению настройки конту
ров, что недопустимо.
Настройка сложной схемы выхода ГВВ. Для этого необходимо настроить ПК по минимуму постоянной составляющей коллекторного тока /к0. Настройку желательно производить в режиме пониженной мощности.
Антенный контур АК настраивают по максимуму тока в нем при слабой связи с ПК. Далее регулируют связь между контурами до получения максимально возможного тока в антенне. После подбора оптимальной связи подстраивают ПК, так как при изменении связи возможна его расстройка. В сложной схеме выхода ГВВ наиболее опасна расстройка ПК, которая приводит к резкому увеличению потерь на коллекторе. Расстройка АК (или обрыв антенны) не приводит
к заметному увеличению мощности потерь на коллекторе в отличие от простой схемы выхода ГВВ, где расстройка или обрыв антенны весьма опасны и могут привести к выходу из строя транзистора.
Если реактивное сопротивление антенны имеет индуктивный характер, то на рис. 2.20 вместо емкости Са надо включить индуктивность антенны La, и тогда элементом настройки будет не индуктивность LH, а емкость Сн.
Мощность сигнала в АК определяется выражением
^ак ^Kl^nK ^ак’
52
где т]пк = 0,6—0,9 — КПД промежуточного контура, причем нижний предел относится к более коротким волнам;
т|ак = 0,8—0,9 — КПД антенного контура.
Если задана мощность Рак, то ее пересчитывают в мощность РК1 по этой же формуле и затем осуществляют расчет генератора по методике, изложенной в разделе 2.7.
Итак, можно сделать вывод, что сложная схема выхода ГВВ превосходит простую по фильтрации гармоник, по КПД, безопасности расстройки антенны и обеспечивает более удобный подбор режиме) транзистора независимо от величины сопротивления антенны.
Связь генератора с антенной с помощью фидера. Такая связь имеет место тогда, когда антенна удалена от передатчика на некоторое расстояние. Локомотивные антенны тоже соединены с передатчиком с помощью фидера (коаксиального кабеля). Для передачи максимума мощности сигнала в антенну фидер должен быть согласован энергетически с выходом передатчика и входом антенны. Это означает, что активные сопротивления выхода передатчика и входа фидера, выхода фидера и входа антенны уравнивают, а реактивные сопротивления этих стыков нейтрализуют внешним реактивным сопротивлением противоположного знака. Коаксиальный кабель имеет активное волновое сопротивление рв = 75 или 50 Ом, а выход передатчика — Рпрд = 20—40 Ом < рв, т.е. фидер рассогласован с выходом передатчика.
Все локомотивы, выпущенные в последние годы, оборудованы только заземленными П-образными антеннами, имеющими кроме активной /?а и индуктивную реактивную составляющую входного сопротивления Za = /?а + +yu)La, причем /?а = 2—4 Ом, а Ла = 12—18 мкГ. Для этого случая на рис. 2.21 представлена полная схема согласования фидера с помощью двух параллельных конденсаторов Сп и Ссв, включенных между жилой и оболочкой кабеля. Эквивалентная схема концов фидера
Передатчик
Рис. 2.21. Конденсаторное АСУ
53
а б
Рис. 2.22. Согласующая RC-цепь
показана на рис. 2.22, а, в виде параллельной RC-цепочки, где R — волновое сопротивление фидера рв, а С — емкость Сп или Ссв. Эта RC-цепочка согласует фидер с двух концов. Ее входное сопротивление
; xcr
^ВХ =----
R + Xc
Так как реактивное сопротивление конденсатора Хс = 1/доС, то
~FR я
jwC R
Z, вх =------= ---;—ТГТГ-
D 1 1 + jwCR
Параллельную RC-цепочку можно пересчитать в последовательную, для чего числитель и знаменатель последнего выражения умножают на комплексно-сопряженное число знаменателя, т.е. на 1 -уюСЯ:
• = R wCR2
1 + Ш2С2Л2 ~^|+(|>2С2/?2
Первое слагаемое есть активная составляющая Л|, а второе — реактивная (емкостная) составляющая Х\ последовательной RjCj-цепочки на рис. 2.22, б. Видно, что Л| < рв, так как знаменатель больше единицы. Подбирая Сп, можно сделать равными выходное сопротивление передатчика и Л|, т.е. энергетически согласовать выход передатчика с входом фидера. Аналогично и со стороны антенны волновое сопротивление фидера выравнивается с активным сопротивлением антенны. Пересчитанная емкость С| = 1//ulVc последовательно соединена с емкостью Сн, сумма сопротивлений которых позволяет полностью компенсировать индуктивное сопро
54
тивление элементов настройки передатчика. С другой стороны фидера пересчитанная емкость С| соединяется с емкостью Ср, суммарное сопротивление которых компенсирует индуктивное сопротивление антенны u>La.
Видно, что с помощью параллельного конденсатора Сп можно согласовать фидер с двух концов, если его волновое сопротивление больше выходного активного сопротивления передатчика и входного активного сопротивления антенны.
Известно, что в передатчиках последнего поколения (система «Транспорт») используется один источник питания Ек = 12,6 В, в том числе и для мощного выходного усилителя (ГВВ). Мощность, заданная на выходе этого каскада, обеспечивается за счет увеличенного тока коллектора транзистора. А это означает, что выходное сопротивление таких передатчиков ниже названного и не превосходит 20 Ом.
Если же волновое сопротивление фидера рв меньше выходного сопротивления передатчика, то используется трансформатор для согласования, что усложняет схему и снижает КПД передатчика. Если же антенна имеет емкостную составляющую входного сопротивления, то она компенсируется внешней реактивностью индуктивного характера.
Устройства, согласующие выход передатчика с входом антенны, называются антенными согласующими устройствами (АСУ). Радиостанции различного поколения поездной радиосвязи имеют разные схемы АСУ. Например, у передатчика 42РТМ-А2-ЧМ антенное согласующее устройство состоит из входного согласующего трансформатора Т1, емкостных элементов настройки С (рис. 2.23). Вход АСУ (входная обмотка трансформатора Т1) соединена с выходом передатчика через фидер — коаксиальный кабель РК-75-4-16, а
55
его выход (емкость С) соединен с антенной А и противовесом (землей) 3. На этом же рисунке показана индикаторная цепь, состоящая из трансформатора Т2, диодного однополупериодного выпрямителя, миллиамперметра. Настройка АСУ производится по максимальному показанию миллиамперметра, подбором витков Т1 и емкости настройки С, компенсирующей индуктивность антенны и трансформатора.
В метровом диапазоне волн локомотивные передатчики не имеют специальных АСУ. Там согласование с антенной осуществляется за счет длины фидера. Последний подключается к передатчику через фильтр нижних частот, ослабляющий неосновные излучения передатчика.
2.12. Неосновные излучения передатчика
Излучения передатчика делятся на основные и неосновные. К основным относятся излучения на частоте или частотах, находящихся в пределах полосы, необходимой для передачи данного вида сигналов (сообщений). Неосновные излучения находятся за пределами этой полосы. Их можно исключить или снизить, не влияя на качество и скорость передачи сигналов. Неосновные излучения могут распространяться по антенно-фидерному тракту, цепям питания и коммутации, через кожухи, разъемы кабелей и прочие элементы передающего устройства.
В свою очередь, неосновные излучения передатчика делятся на побочные и внеполосные. Побочные излучения определяются нелинейными процессами в каскадах передатчика при прохождении их токами высокой частоты. Эти излучения не связаны с модуляцией. Они включают в себя излучения на частотах гармоник и субгармоник, комбинационные и интермодуляционные излучения. Три первых излучения не должны превышать 26 мкВт для радиостанций 2-го класса. Интермодуляционные излучения не должны превышать 70 дБ для радиостанций 1-го класса. Они возникают при взаимодействии сигналов двух передатчиков, работающих на одну общую или близко расположенные антенны. ГОСТ 12252—86 регламентирует внеполосные излучения как продукты модуляции в соседнем канале, значение которых указано в разделе 1.2.
56
Рис. 2.24. Фильтр побочных излучений передатчика
На рис. 2.24 представлена схема фильтра нижних частот (ФНЧ) приемопередатчика 66РТМ-А2-ЧМ для подавления побочных излучений передатчика. Его выход соединен с входом фидера Ф (коаксиального кабеля), а вход подключен к выходу транзистора 2Т907А оконечного (мощного) каскада передатчика. Каскад работает в режиме колебаний второго рода, класса В. Его вход согласуется с предоконечным каскадом аналогичными элементами (как и на выходе). В передатчиках железнодорожных радиостанций типа ЖРУ предоконечным и более предшествующими каскадами являются транзисторные умножители частоты.
2.13- Транзисторные умножители частоты
Транзисторные умножители частоты — это тоже генераторы с внешним возбуждением, работающие в режиме колебаний 2-го рода, класса С, у которых выходной контур настроен на нужную гармонику: вторую (2cdq) или третью (Зсо0) и т.д.
Поэтому частота выходного сигнала будет больше основной, входной, частоты соответственно в 2 или 3 раза и т.д., чем и реализуется умножение частоты.
Схемой умножителя частоты может быть любая из рассмотренных схем. Чаще всего на практике используется схема умножителя с одним источником напряжения £к, показанная на рис. 2.25. В ней напряжение смещения на базе Е§ определяется разницей напряжений на резисторе R2 и эмиттерном резисторе R3: Е§ = C/r? - £/r3. Знаки (полярности) этих напряжений относительно земли указаны на схеме: знак U^2 определяется знаком напряжения Ек, a {/r3 — направлением движения эмиттерного тока (положительного), указанного стрелочкой эмиттера. Часто резистор R1 делителя исключают, и тогда Е§ = -Ur3 ,
57
т.е. Еб будет запирающего знака, обеспечивающее угол отсечки 0 < 90° (класса С), когда вторая и третья гармоники имеют максимумы.
Необходимость использования умножителей частоты в передатчиках ЖР с частотной модуляцией вызвана прежде всего малой протяженностью максимального линейного учаегка модуляционной характеристики их частотных (фазовых) модуляторов, и поэтому максимальное линейное отклонение частоты от ее среднего значения (девиация частоты) меньше требуемого. При умножении частоты ее девиация увеличивается в то же число раз, что позволяет выйти на заданное значение.
В передатчике ЖР-У-КВ (42РТМ-А2-ЧМ) используются последовательно включенные два утроителя и один удвоитель частоты, обеспечивающие 18-кратное ее умножение. Удвоитель частоты подключен ко входу оконечного каскада передатчика, а первый утроитель — к выходу частотного (фазового) модулятора. Удвоитель частоты здесь является предоконечным каскадом передатчика. Он должен подать мощность на вход оконечного каскада, равную выходной мощности последнего Рк|, деленную на его коэффициент усиления по мощности Кур.
В локомотивных передатчиках ЖР выходная мощность РК1= 10—12 Вт, а К р- 10—20 раз, и поэтому предоконечный каскад (удвоитель частоты) должен обеспечить мощность Рвх = 1—0,6 Вт. От утроителей по аналогии требуется еще меньшая мощность. Поэтому транзисторные умножители частоты можно выполнить на каскадах ГВВ, в которых транзистор включен по схеме с общей базой. Именно такие умножители частоты используются в передатчике 66РТМ-А2-ЧМ, работающем в диапазоне частот 151—156 МГц.
58
Режим работы транзисторных умножителей частоты — обычно недонапряженный. Порядок их расчета определяется методикой, изложенной в разделе 2.7, с учетом того, что в формулах вместо коэффициента разложения ос j следует подставлять коэффициенты а/7, относящиеся к и-м гармоникам. При удвоении частоты оптимальный угол отсечки 0 = 60°, а при утроении 0 = 40°. С увеличением номера гармоники понижается выходная колебательная мощность РК1 = 0,5ZKn С/кп и КПД г] = Рпк\/Рк& а мощность рассеяния на коллекторе Ркр = Ркц - Р"К| увеличивается. Этим объясняется то, что кратность умножения в транзисторных генераторах не превышает 3—4. Вторая причина заключается в сложности фильтрации сигнала основной частоты и гармоник. Подавление побочных составляющих на 30—40 дБ по отношению к полезной гармонике является удовлетворительной нормой для однокаскадного транзистора умножителя частоты. Подавление побочных составляющих до 60 дБ (принятая норма в современных передатчиках) осуществляется или в последующих каскадах высокочастотного тракта, или путем применения полосового фильтра, подключенного к выходу передатчика (см. рис. 2.24).
Настройка транзисторного умножителя частоты сводится к настройке коллекторного контура в резонанс на выделяемую гармонику (2cdq или 3(о0) и к установке оптимального угла отсечки коллекторного тока 0/7, при котором амплитуда этой гармоники максимальна.
Умножение частоты может быть достигнуто не только изменением угла отсечки, но и в результате использования нелинейной емкости коллекторного перехода транзистора.
В качестве умножителей частоты мощных сигналов используют так называемые варакторные умножители частоты. Варактор — это диод, у которого эффект нелинейности емкости является доминирующим. Емкость является реактивным элементом, и поэтому активные потери в нем малы.
В качестве умножителей частоты используются также диоды с накоплением заряда.
Контрольные вопросы и задания
1. Что представляет собой генератор с внешним возбуждением?
2. Почему выходной каскад передатчика выполняют на транзисторе, включенном по схеме с общим эмиттером?
59
3. Назовите и нарисуйте характеристики транзистора. Зачем их спрямляют?
4. Напишите уравнение коллекторного тока транзистора ГВВ.
5. Перечислите режимы работы ГВВ, их достоинства и недостатки.
6. Изобразите графически режимы колебаний 1-го и 2-го рода.
7. Что такое угол отсечки коллекторного тока?
8. Как определяется оптимальный угол отсечки коллекторного тока?
9. На какие классы подразделяется режим колебаний 2-го рода? Поясните классы временными диаграммами.
10. Какой угол отсечки выбирается при мощности, меньше максимальной мощности генератора: > 120° или < 120°?
11. Режимы ГВВ по напряженности, их достоинства и недостатки. Как их можно наблюдать на экране осциллографа?
12. Опишите режимы генератора по напряженности с помощью динамической характеристики.
13. Поясните нагрузочные характеристики.
14. Назовите и поясните методы повышения КПД передатчика.
15. Нарисуйте принципиальные схемы ГВВ с параллельным коллекторным питанием и последовательным смещением на базе и наоборот.
16. Нарисуйте двухтактную схему ГВВ и объясните принцип ее работы. Перечислите достоинства и недостатки двухтактных ГВВ.
17. Какие классы режима колебаний используются в двухтактных ГВВ?
18. Простая схема выхода передатчика и порядок ее настройки.
19. Сложная схема выхода ГВВ и порядок ее настройки.
20. Чем отличается сложная схема выхода ГВВ от простой? Назовите ее преимущества и недостатки.
21. Что такое АСУ и какова его структура?
22. Как согласуется передатчик с антенной, если они связаны между собой фидером (коаксиальным кабелем)?
23. Что такое неосновное излучение передатчика и как его подавляют?
24. Для чего нужны умножители частоты и что они собой представляют?
25. Назовите и обоснуйте порядок настройки умножителя частоты.
60
Глава 3. ГЕНЕРАТОРЫ С САМОВОЗБУЖДЕНИЕМ
3.1. Принцип самовозбуждения генератора
Если у ГВВ отключить источник внешнего (усиливаемого) сигнала, а его вход соединить соответственно с его выходом, то получится генератор с самовозбуждением (автогенератор). Связь выхода генератора с его входом называется обратной связью. Сказанное можно представить в виде структурной схемы, показанной на рис. 3.1. В ее состав входят ГВВ с коэффициентом усиления К и звено обратной связи с ко
Рис. 3.1. Структурная схема автогенератора (АГ)
эффициентом передачи р. Оба этих коэффициента являются комплексными в общем случае, зависящими от частоты, что отмечено точками над их буквенными обозначениями. На рис. 3.1
также показан источник постоянного питания Ек генератора.
Напряжение на входе ГВВ wBx(O = ₽wBwx(z)’ а напряжение на
его выходе wBblx(r) = KuBX(t) = К|ЗиВЬ1Х(/), т.е.
Кр = 1, (3.1)
• •
что является условием самовозбуждения. Так как АГ =|АГ|е7Ф, а
• • • •
Р =| Р I е № , т.е. Кир — комплексные в показательной форме, то выражение (3.1) можно записать в виде
\К\е™ |Р|^ = |*||рИ+^ =1,
• •
где | К | и | Р | — модули, а <р и ф — фазы этих коэффициентов.
Левая часть этого выражения комплексная, а правая — вещественная, равная единице. Это значит, что мнимая ее составляющая равна нулю или целому числу 2л радиан, т.е.
61
Ф + гр = /?• 2л,
(3.2)
где п = 0, 1,2...
Значит, произведение модулей
|лгцр|=1. (3.3)
Равенство (3.2) называется условием баланса фаз, а равенство (3.3) — условием баланса амплитуд. Эти условия являются необходимыми и достаточными для возникновения автоколебаний в генераторе.
Условие баланса фаз означает, что в стационарном режиме в автогенераторе имеет место положительная обратная связь, так как сумма фазовых сдвигов выходного напряжения ГВВ и звена обратной связи равна нулю или целому числу 2л радиан: Еф/ =Я’2л, 11 = 0, 1,2... '
Условие баланса фаз (3.2) для ГВВ, поворачивающего фазу выходного сигнала на 180° относительно входного, например для ГВВ, в котором транзистор включен по схеме с общим эмиттером. В этом случае уравнение (3.1) принимает вид
- /ср = | к |б>7'(ч>М1) |р =i,
в котором ф + л + гр = 0 или целому числу 2л радиан. Отсюда гр = = -ф + л, т.е. звено обратной связи осуществляет дополнительный поворот фазы сигнала на л радиан (180°), чтобы скомпенсировать такой же фазовый сдвиг в ГВВ и обеспечить тем самым положительную обратную связь, т.е. баланс фаз.
Баланс амплитуд выполняется при | К | > 1, так как блок обрат-•
ной связи пассивный, и поэтому | р | < 1. Но в генераторах, в которых транзистор включен по схеме с общим коллектором, коэффициент усиления по напряжению К < 1, и тогда баланс амплитуд формально не выполняется. Тем не менее такие автогенераторы работают, т.е. в них условия самовозбуждения выполняются. Это значит, что условие баланса амплитуд (3.2) является не общим. Поэтому условия возникновения колебаний будут рассмотрены далее с общих позиций.
62
Из курса физики известно, что если зарядить конденсатор Ск постоянным напряжением Ек, а затем подключить его к катушке индуктивности LK, то в образовавшемся LC-контуре возникнут свободные гармонические (синусоидальные) колебания. Если бы контур был без потерь (его активное сопротивление г - 0), то эти свободные колебания были бы незатухающими, т.е. имели бы постоянную амплитуду. Но во всяком резонансном контуре есть активные потери (г > 0), и поэтому свободные колебания затухающие. Кроме того, от источника сигнала отбирается некоторое количество энергии в последующие каскады передатчика. Поэтому простой контур не может служить генератором гармонических колебаний: запас энергии, которой был первоначально ему сообщен, быстро исчерпается и колебания затухнут. Для получения незатухающих колебаний в контуре необходимо периодически пополнять запас энергии по мере ее расходования, а такт с уже имеющимися в нем колебаниями.
На рис. 3.1 источником энергии является блок питания Ек, а устройством фазировки и дозировки этой энергии в контур является транзистор или другой активный элемент — усилитель, управляемый со стороны контура. Вот почему принципиальными блоками любого автогенератора гармонических колебаний являются колебательный контур, источник постоянного напряжения, усилитель, звено обратной связи.
Автоколебательная система подчиняется закону сохранения энергии: всякий электрический генератор можно рассматривать как преобразователь энергии постоянного тока в энергию переменного тока.
3.2. Обобщение баланса амплитуд
Мощность, теряемая в активном сопротивлении контура г - rL + + гс (рис. 3.2), определяется выражением
Р_____
П 2Q1 г
где Q — добротность контура.
63
Рис. 3.2. Колебательный контуре потерями
Рис. 3.3. Зависимость мощности Рот напряжения U[P=J(U-)] в линейном автогенераторе
Рис. 3.4. Р =/((/2) в нелинейном автогенераторе (мягкий режим)
Мощность Рп пропорциональна квадрату амплитуды напряжения на контуре U*, т.е. зависимость =/({/?) — прямая ли-
II к
ния, проходящая через начало координат, как это показано на рис. 3.3. Обозначим мощность, поступающую в контур от источника энергии Ек через Р+. Если бы вся схема автогенератора была линейной, то и мощность Р+ росла бы с квадратом амплитуды тоже линейно, проходя через начало координат, как это показано на рис. 3.3. Если прямая Р+ лежит выше прямой PfV как на рис. 3.3, то это означает, что контур получает больше энергии, чем теряет, т.е. запас энергии в контуре возрастает, отчего растет и амплитуда колебаний в контуре. Если же прямая Р+ лежала бы ниже прямой Л то это значило бы, что расход энергии превосходит ее поступление и амплитуда колебаний в контуре затухает. В условиях, показанных на рис. 3.3, амплитуда колебаний росла бы неограниченно.
Практически этого не может быть, так как всякая реальная схема нелинейная. Поэтому поступающая мощность Р+ растет медленнее, график ее искривляется и принимает вид, показанный на рис. 3.4. При некотором значении амплитуды графики Р+ и Рп пересекаются. Точка пересечения отвечает балансу энергии, т.е. точному равенству теряемой и получаемой энергии. Очевидно, что только при условии баланса запас энергии в контуре остается неизменным и, следовательно, амплитуда колебаний — постоянной. Последняя определяется абсциссой точки пересечения Р+ и Рц.
64
Поэтому баланс амплитуд является следствием (частным случаем) баланса мощностей.
А это означает, что в общем случае необходимым и достаточным условием возникновения автоколебаний в генераторе являются баланс мощностей и баланс фаз. Только тогда можно сказать, что автоколебания возможны в генераторе, в котором транзистор включен по схеме с общим коллектором, если там выполнены баланс фаз и баланс мощностей, хотя баланс амплитуд и не выполняется.
Баланс энергии может достигаться и не
Рис. 3.5. Зависимость/^ =/(U-) при жестком режиме самовозбуждения
при одном значении амплитуды. На рис. 3.5 имеются две точки (а и б) пересечения кривой Р+ и прямой Рп. Каждая точка определяет установившуюся амплитуду колебаний. Установившаяся амплитуда является устойчивой, если некоторое внешнее воздействие, изменившее ее, прекратилось и в автоколебательной системе восстановилось первоначальное значение амплитуды. Если же, напротив, амплитуда будет и дальше изменяться в том же направлении уже без внешнего воздействия, то система динамически неустойчива. Таким образом, для определения устойчивости системы надо вывести ее из данного состояния и посмотреть, как она будет себя вести. В данной области от нуля до точки а прямая Рп лежит выше кривой Р+, что означает, что система теряет энергии больше, чем получает. Поэтому амплитуда будет убывать и далее, пока колебания совсем не затухнут. Если же взять амплитуду U > то будем иметь Р+ > Рп и амплитуда будет возрастать. Отсюда следует, что точка а, хотя и отвечает условию баланса энергии, но не является
устойчивой: при малейшем изменении амплитуды появится тенденция к дальнейшему ее изменению в ту же сторону. При (/ > Ц амплитуда будет нарастать до Uq. Дальнейший рост амплитуды прекратиться, так как при U > Uq снова выполняется неравенство Рп > Р+.
Таким образом, точка б является устойчивой точкой и ее абс
цисса определяет установившуюся амплитуду t/0.
Различие между системами, свойства которых отображены графиками рис. 3.4 и 3.5, состоит в том, что первая самостоятельно раскачивается до установившегося значения амплитуды (/q, вто
65
5-6764
рая нуждается в первоначальном толчке, который создал бы амплитуду U > после чего дальнейшее нарастание амплитуды до Uq произойдет уже автоматически.
Первая система называется системой с мягким самовозбуждением или просто мягкой системой, вторая — с жестким самовозбуждением или жесткой системой. Жесткая система имеет устойчивое состояние покоя (в точке 0), а мягкая — неустойчивое.
3.3. Другая трактовка баланса фаз и мощностей в автогенераторе
Ее суть состоит в том, что положительная обратная связь (баланс фаз) в автогенераторе рассматривается как внесенное в контур отрицательное сопротивление -г, компенсирующее его собственное положительное сопротивление потерь +г. Если модуль отрицательного сопротивления |—г| больше положительного (Рг| > г), то
Рис. 3.6. Схема АГ: полная (а) и по переменному току (6)
выполняется и баланс мощностей и автогенератор работает. Эта трактовка находит прямое применение в автогенераторе и усилителях, выполненных на диодах с отрицательным сопротивлением. Такие устройства широко используются на практике, в том числе и на железнодорожном транспорте. Поэтому рассмотрим данную трактовку подробнее. Для этого рассмотрим переходной режим работы автогенератора.
На рис. 3.6, а представлена принципиальная схема автогенератора на полевом транзисторе с автотрансформаторной обратной связью. Колебательный контур вклю
чен в стоковую цепь последовательно с источником питанияЕс Обмотка обратной связи LCB подключена
66
к затвору относительно истока транзистора через источник смещения Еу Баланс фаз в этой схеме выполняется следующим образом. При фиксации фазы напряжение на затворе, например знаком «+», на контуре будет напряжение отрицательного знака, так как транзистор поворачивает фазу на 180°. Вторичная обмотка должна быть подключена к затвору таким концом, чтобы можно было повернуть фазу напряжения на нем еще на 180° относительно контурного. На рис. 3.6 это включение отмечено точками у обмоток. В результате знак напряжения обратной связи UQC совпадает с зафиксированным знаком, «+» и, следовательно, баланс фаз выполняется. Баланс мощностей обеспечивается числом витков в обмотке £св.
На рис. 3.6, а источники смешения и питания закорочены конденсаторами, через которые проходит переменная составляющая токов. При рассмотрении переходного режима используют схему автогенератора только по переменному току. Такая схема, соответствующая исходной на рис. 3.6, г/, представлена на рис. 3.6, б. В ней отсутствуют источники постоянного напряжения и конденсаторы, их шунтирующие, а контур и обмотка обратной связи £св подключены непосредственно к истоку транзистора. Сопротивление потерь в контуре учитывается только в его индуктивности rL = г.
Переходной режим автогенератора начинается сразу после включения напряжений Ес и Еу При этом возникшие колебания имеют малую амплитуду, и генератор можно рассматривать как линейный усилитель. При этом ток в цепи стока i транзистора по первому закону Кирхгофа равен сумме токов в индуктивной iL и в емкостной ветви контура :
' = iL + ZC. (3.4)
Известно, что ток через конденсатор
zc = CKduK(t)ldt, (3.5)
а ток через катушку индуктивности LK контура определяется по напряжению на нем: uK(t)= ur(t)+ U/(t). Так как ur(t) = г/д, а diL(t)
th (t) = L di, (t)ldt, to uK(t) = ri, + L -г—•
lx L-t l\ l\ /r r
После дефференцирования no t левой и правой части последнего уравнения, получается
67
J</K(/) diL । L
dt dt K
2.
d 1L 1С
= согласно (3.5) или dt~ ^к
_^ + CKLK
K dt K K f/H
Тогда
/ = iL + Iq - iL + rCKdi+ LKCKd~iL(t)ldt~. (3.6)
Для упрощения анализа активную составляющую выходной проводимости полевого транзистора принимают равной 0, что практически всегда выполняется. Ток стока / связан с напряжением на затворе соотношением / = SuQC, где 5 — крутизна про-diL ходной характеристики транзистора. Так как uQC = М - , то
dib i= SM—^, dt
(3.7)
где М — взаимная индуктивность обмоток трансформатора. Приравнивая (3.6) и (3.7) имеем:
Г
( r SM \ dii I . n
—+-------------—— +-------1 / = 0.
dt~ \ LK CKLK I dt LKCK
III \ t\ t\t\/ I\t\
о г 1 ( SM .
Если обозначить ---- г------= аг (коэффициент затуха-
-^к \ Ск )
ния), a \/LKCK = <»(*j (резонансная частота контура), тогда последнее уравнение примет вид
d^ij ~ di/ т. п
г- + 2«г—+ =°-
dr dt
68
Решение этого уравнения имеет вид гармонического колебания 'L^ = /Lme~ar 'C0S + Фо)’
где 1— амплитуда; ф0— начальная фаза.
/ 9 ?
Частота колебаний о>г =^а)б “а7 практически равна частоте
свободных колебаний с)0 в контуре, так как в колебательном режиме (Dq > аг
Характер изменения амплитуды тока ILme во времени зависит от знака коэффициента аг При аг < 0 ток возрастает, а при аг > 0 затухает.
Знак аг =----- г------определяется разностью в круглых
2LK I Ск )
скобках.
Всличину SMICK, имеющую размерность сопротивления, можно рассматривать как отрицательное сопротивление, что имеет место только при положительной обратной связи в автогенераторе, т.е. при соблюдении в нем баланса фаз. Это внесенное отрицательное / SM \
сопротивление--------компенсирует положительное сопротивле-
с р (SM
нис потерь контура г. Если при этом --
\ )
бания нарастают, имеет место баланс мощностей. Это количествен
> г, т.е. а < 0, то коле-
но подтверждает суть второй трактовки баланса фаз и мощностей.
Так как сопротивление потерь контура г =gKp~ (где#к — проводимость контура на резонансной частоте (gK = 1/Як), р2 = —
волновое сопротивление контура в квадрате) то условие нарастания колебаний в контуре можно записать в виде
MILK>gKIS. (3.8)
Коэффициент обратной связи в автогенераторе = U^f t)!UK(t),
r r . . _ л dii т r / \ . r dir _ dir _
где Uoc(t) = M—a t/K(r) = nL + LK—— =LK——. Оконча-dt dt dt
тельно KQQ = M!LK. С учетом g22 и (3.8) имеем: Koc > (£K + tf22)/S.
69
Предыдущее условие нарастания амплитуды в переходном режиме можно записать в виде Кос > \/К, где К - SI(gK + #ээ) — коэффициент усиления линейного усилителя в этом режиме. Когда это неравенство переходит в равенство (из-за уменьшения К). то переходный режим заканчивается и начинается стационарный (установившийся) режим, которой был рассмотрен в предыдущем разделе.
3.4. Трехпючечные LC-авпюгенераторы
Трехточечные схемы автогенераторов, представленные на рис. 3.7 и 3.8. находят широкое применение на практике. Они так называются потому, что колебательный контур подключается к транзистору тремя точками. Элемент обратной связи является частью колебательного контура: на рис. 3.7 — это конденсатор Ссв, а на рис. 3.8 — катушка индуктивности LCB. С этих элементов снимается напряжение обратной связи UQC. Первая схема называется емкостной. а вторая — индуктивной трехточечной схемой автогенератора. Следует рассмотреть, каким именно образом выполняется баланс фаз в этих схемах.
Известно, что баланс фаз соблюдается, если сумма фазовых сдвигов сигнала в транзисторе, колебательном контуре, элементе связи равна нулю (положительная обратная связь). Так как транзистор включен по схеме с общим эмиттером, то он поворачивает
Рис. 3.7. АГ с емкостной обратной связью
Рис. 3.8. ЛГ с автотрансформаторной обратной связью
70
ик
Рис. 3.9. Векторная диаграмма контура
фазу сигнала на 180°, т.е. выходное напряжение uK(t) сдвинуто по фазе на 180° по отношению к напряжению на входе u§(t). Частота генерируемых колебаний практически совпадает с резонансной частотой коллебательного контура u)o = U]LKCK , где Ск = Ссв С/(Ссв + Q для схемы на рис. 3.7 и LK = LCB + L для схемы на рис. 3.8.
На рис. 3.9 представлена векторная диаграмма параллельного колебательного контура генератора. Напряжение UK является общим для обеих ветвей контура: индуктивной и емкостной.
При отсутствии потерь в контуре при параллельном резонансе токи в этих ветвях 1[ и Iq равны по величине и противоположны по знаку и сдвинуты по фазе на 90° по отношению к напряжению UK, как показано на рис. 3.9. Ток в индуктивной ветви IL создает на конденсаторе Ссв генератора (см. рис. 3.7) напряжение (70С, которое отстает по фазе на 90° от этого тока и, значит, противоположно напряжению UK, чем и компенсируется фазовый сдвиг на 180° в транзисторе. Поэтому напряжение совпадает по фазе с первоначальным напряжением на базе, т.е. баланс фаз в схеме рис. 3.7 соблюдается.
В схеме на рис. 3.8 общим электродом транзистора является тоже эмиттер, отчего в транзисторе фаза сигнала сдвигается на 180°. Индуктивность обратной связи LCB включена в емкостную ветвь контура, и поэтому ток Iq создает падение напряжения на LCB, опережающее по фазе на 90° этот ток и на 180° напряжение
Так что и здесь баланс фаз соблюдается.
Основываясь на схемах рис. 3.7 и 3.8, можно сделать обобщение по балансу фаз. Именно в трехточечных автогенераторах, в которых транзистор включен по схеме с общим эмиттером (инвертирует входной сигнал), для соблюдения баланса фаз необходимо, чтобы между переходом база-эмиттер и коллектор-эмиттер транзистора были бы включены реактивные элементы одного знака.
Равенство частоты f генерируемых колебаний и резонансной частоты /0 контура, которое предполагалось, имеет место только при отсутствии потерь в контуре высших гармоник и базового тока. Поскольку реально эти факторы имеют место, то равенство названных частот — приближенное.
71
С нарушением баланса фаз частота генерируемых колебаний изменяется так, чтобы скомпенсировать это нарушение. Названное условие — устойчивость баланса фаз — обеспечивает колебательный контур тем больше, чем выше его добротность. Устойчивость баланса фаз объясняется характером изменения фазы сигнале! в контуре с частотой. При/ < /0 фазовый сдвиг сигнала в контуре Дер > 0, а при / > /0 значение Дер < 0, т.е. изменения частоты и фазы противоположно по знаку:
Д<р V
/•-/О
Д/->0
В схеме на рис. 3.7 коллекторное питание Ек и базовое смещение параллельные. Базовое смещение задается резистивными делителями R1 и R2 напряжения Ек: Е§ - ® схеме на Рис- 3.8 коллек-
торное питание — последовательное, а базовое смещение — параллельно-последовательное. В ней тоже используется один источник напряжения Ек. Особенностью данной схемы является автоматическое изменение положения рабочей точки на характеристике сразу после включения генератора и перехода его в стационарный режим работы. Необходимость такого смещения определяется энергетическими показателями автогенератора. Энергетически выгоден режим колебаний 2-го рода класса С. Однако при 0 < 90° крутизна проходной характеристики в рабочей точке очень мала, отчего мал и коэффициент усиления транзистора для сигналов малой амплитуды. В результате при включении автогенератор может не возбудиться, так как может не выполняться баланс амплитуд (мощностей). Чтобы возбудить его, надо или увеличить глубину обратной связи UQC, или раскачать генератор, используя внешний источник возбуждения. Это так называемый жесткий режим возбуждения.
Если же использовать режим колебаний 1-го рода, то рабочая точка находится на линейном участке проходной характеристики транзистора, где ее крутизна наибольшая, и поэтому легко реализуется мягкий режим самовозбуждения автогенератора. Однако, как было показано в разделе 2.3, режим колебаний 1-го рода энергетически существенно уступает режиму колебаний 2-го рода. Чтобы
72
совместить достоинства обоих режимов, используют автоматическое смещение рабочей точки на проходной характеристике с помощью RC-цепочек: при включении автогенератора имеет место режим колебаний 1-го рода и рабочая точка находится на линейном участке, создавая мягкий режим самовозбуждения, затем по мере роста амплитуды колебаний переходит в режим колебаний 2-го рода.
На рис. 3.8 RC-цепочка включена в базовую цепь и выполняет функции фильтра нижних частот в однополупериодном выпрямителе, состоящем из перехода база-эмиттер (диод) и обмотки LCB. В исходном состоянии смещение на базе Ебисх устанавливается с помощью резистивного делителя Rl, R2 напряжения Ек, которое нс меняется. Значение Е$цск задает рабочую точку на линейном участке проходной характеристики транзистора, где ее крутизна максимальна. При включении Ек в коллекторной цепи начнет течь ток, определяемый смещением £gHCX, который содержит постоянную и переменную (шумовую) составляющие. Амплитудный спектр шумовой (флуктуационной) составляющей очень широк и почти равномерен до частот порядка 1012 Гц. Поэтому там всегда найдется
частотная составляющая, совпадающая с резонансной частотой коллекторного контура. Эта составляющая будет выделена контуром и по цепи обратной связи поступит на вход транзистора и усилится им. Так как в генераторе выполняется баланс фаз и амплитуд, то выделенное напряжение будет нарастать. От этого нарастает и постоянное напряжение на RC-цепочке, которое является запирающим для транзистора. Последнее сдвигает напряжение базового смещения Ебэ = Ебисх - £рС влево, как показано на рис. 3.10, пока не установится стационарный режим колебаний 2-го рода класса С. Напряжение на RC-цепочке имеет и пе-
Рис. 3.10. Переходной процесс в автогенераторе
73
Рис. 3.11. АГ на транзисторе с общим коллектором
ременную составляющую. Действительно, пока длится импульс базового тока, соответствующий положительной полуволне базового напряжения, конденсатор С быстро подзаряжается через небольшое сопротивление открытого перехода база-эмиттер до амплитуды напряжения (7^. При отсечке базового тока конденсатор С разряжается через резисторы И1и R2, включенные при разрядке параллельно, обмотку обратной связи LCB, источник коллекторного питания Ек. Сопротивление перехода база-эмиттер при этом очень велико, и оно практически не участвует в разряде. Так как постояная времени разряда много больше постоянной времени заряда, то за время отсечки конденсатор С заметно не разрядится, и поэтому можно считать напряжение на RC-цепочке практически постоянным.
На рис. 3.11 представлена трехточечная схема автогенератора с автотрансформаторной обратной связью, в которой общим электродом транзистора является коллектор. При таком включении транзистор не инвертирует входной сигнал. Коллекторное питание Ек включено последовательно с контуром. Базовое смещение задается RC-цепочкой в базовой цепи, как в предыдущей схеме. При правильном соотношении витков между электродами и угле отсечки 0 = 60° в слабо перенапряженном режиме обеспечивается высокий КПД т]к = 90 %.
На рис. 3.12 представлена принципиальная схема автогенератора с трансформаторной обратной связью, где общим электродом транзистора является база.
Рис. 3.12. АГ на транзисторе с общей базой
74
Транзистор с таким включением тоже не инвертирует входной сигнал. Коллекторное питание — последовательное. Базовое смещение — комбинированное: задается резистивным делителем R2, R1 напряжения Ек и RC-цепочкой в эмиттерной цепи. Конденсатор С2 имеет практически нулевое сопротивление на рабочей частоте и подключает базу к общей шине.
Все рассмотренные трехточечныс схемы автогенераторов могут быть сведены к одной, обобщенной схеме, показанной на рис. 3.13. Последняя состоит из активного (усилительного) элемента и пассивного трехполюсника, со
Рис. 3.13. Обобщенная трехточечная схема АГ
держащего комплексные сопротивления Z]. Z2. Z3. Если транзистор автогенератора включен по схеме с общим эмиттером, то • •
сопротивления Z1 и Z2 должны иметь одинаковый знак (харак-
тер), a Z3 — противоположный. При Zi< 0 и Z2< 0, a Z3> О схема автогенератора представляет собой емкостную трехточку, в
противном случае — индуктивную трехточку.
Автогенератор может быть выполнен и на операционном усилителе (ОУ). Принципиальная схема такого автогенератора представлена на рис. 3.14. Резисторы R1 и R2 образуют цепь отрицательной обратной связи: резистор R1 подключен к инверсному входу ОУ. Резонансный контур включен как звено положительной обратной связи (соединен с прямым входом ОУ). Обычно автогенераторы на ОУ работают на частотах до 15 МГц.
Энергетический расчет автогенератора и генератора с внешним возбуждением (раздел 2.7) совпадают
Рис. 3.14. АГ на ОУ
между собой, хотя для автогенерато-
75
ра угол отсечки выбирается обычно 60—75°. Поэтому следует рассмотреть расчет только колебательной системы генератора.
3.5. Расчет колебательной системы трехточечных автогенераторов
В трехточечных автогенераторах колебательной системой является параллельный LC-контур, который шунтируется транзистором п нагрузкой. Поэтому параметры контура рассчитываются с учетом названного шунтирования. Из предварительно выполнен
ного энергетического расчета автогенератора известны: транзистор, проводимости g и емкости С его переходов, рабочая частота/ напряжение на контуре в точках коллектор-эмиттер (7К, коэффициент обратной связи /<ое = U^IU^ модуль эквивалентного со-•
противления контура ZKJKp и его угол фк*:
/™Р--Л
— 7
= Z кэкр с
где а — обобщенная расстройка контура: доротность ненагружен-ного контура Q{}. Заданы также напряжение на внешней нагрузке Uu и ее
Рис. 3.15. Контур ЛГс емкостной обратной связью
параметры — проводимость g и емкость Сц. Все это исходные данные для расчета.
Колебательные системы автогенераторов с емкостной, автотрансформаторной, трансформаторной обратной связью пред-ставлены на рис. 3.15— 3.17. Для всех трех схем справедливы коэффициенты включения контура в
* При / « /т, /‘«S 0,3 /т а = 0 и срк = 0, а
Икэкр — RK.
76
цепь базы в цепь коллектора тк, в цепь внешней
нагрузки /ин : -—— ,
Ц)
Uk UH
тк =-п~' т» = 7Г~' где UQ Ц)
Uq — полное напряжение контура. Коэффициент обратной связи KQC = U§IUK = = т^/тк. а коэффициент нагрузки Ки = = т^тк.
Эквивалентная проводимость контура между точками коллектор-эмиттер, необходимая для критического режима,
кэкр = “7 s 7 / 7?к.
IZ I • кэкр I
Известные величины Кос,
Рис. 3.16. Контур АГ с автотрансформаторной обратной связью
Рис. 3.17. Контур АГ с трансформаторной обратной связью
7СН и #КЭКр позволяют однозначно определить все коэффициенты
включения и, следовательно, рассчитать все элементы схемы.
Действительно, для любой из схем на рис. 3.15—3.17 выражение для эквивалентной проводимости контура, пересчитанной к его зажимам без учета выходной проводимости транзистора
можно записать в виде
э
#к = £о + '"б
1 г 1
где^0 — собственная проводимость контура: go s —— e—~ =—т~-^к р~ РИ)
Проводимость#^, пересчитанная к точкам коллектор-эмиттер, должна
быть равна g , т.е. + ^ocgl 1 + = #юкр-
1 '"к
77
Откуда
"’к =
£к?кр (1 _ rr2 g| 1 _ лл2 gH
Л 0 <?кэкр &кэкр ?
После этого определяются = Л*осшк, ти - Кптк
Входящая в выражение для тк собственная проводимость кон-о)С тура равна
Полная емкость контура (задается в начале расчета)
С = Со + ! + /Я^С22 + н + См,
где Со — собственная емкость;
С| ।, — входная и выходная емкости транзистора соответственно;
— емкость монтажа, м
С ученом вносимых потерь эквивалентная добротность контура Q) ~ Q{) гдс ” "к + — полная эквивалентная про-
водимость на зажимах контура. После этого определяются собственная частота конгура (п(), полная индуктивность, емкость и остальные элементы схемы.
Порядок расчета каждой из колебательных систем, представленных на рис. 3.15—3.17, следующий.
Расчет колебательной системы автогенератора с емкостной обратной связью (см. рис. 3.15).
1. Емкость контура определяется согласно табл. 3.1.
Таблица 3.1
/; мгц 0,3 0,3—1,5 1,5—6 (>—30 30—150
С, пФ 500—300 300—200 200—100 100—50 50—13
78
Ее составляющие:
1 1 1 1
С ' с; + с. + <„ •
где q - С + С,С, - г < 22: С <, + С„.
с2 + с3
Коэффициенты /нб, тк, тн, А"ос, Кн в этом случае имеют вид
Из этих соотношений можно определить все емкости контура:
С[=-----; С]=С|'-Сц; С3 =-----; С2 = —— (С3 -С22);
тб "'к
С2 = с; - Сн; С3 = С2 К" ; Сн = —------------------г
2 - н J_______!_____L
с с; с3
2. Собственная проводимость контура = coC/Qq.
3. Эквивалентная проводимость контура между точками коллектор-эмиттер, необходимая для обеспечения критического режи-
cosq)^ 1
ма’ <?кэкр = * s •
| Zкэкр I К
4. Коэффициент включения контура в цепь коллектора
£кэкр f1 ^2 £11 zz2 gH
1 ^св
<?0 £кэкр <?кэкр t
79
5. Коэффициент включения контура в цепь базы = KQC тк.
6. Коэффициент включения контура в цепь внешней нагрузки '”н =
7. Полная эквивалентная проводимость на зажимах контура
2 2 2
Sj = <?() + шб&11 + тк§22 + ™н£и-
8. Эквивалентная добротность контура Q3 = Qq g^/gy
9. Собственная частота контура /0 =---------—---, где
1 + д/22э
а = -tgq)K = 2Q3———-----обобщенная растройка контура.
/о !
10. Индуктивность контура L = —-—. o)JC
Расчет колебательной системы автогенератора с автотрансформаторной обратной связью (см. рис. 3.16)
Полная емкость контура С задается согласно табл. 3.1, а затем повторяются все пункты предыдущего расчета до 10-го включительно. В последнем определяется полная индуктивность контура
L - Далее находят:
индуктивность катушки обратной связи LCB - КосткЦ
- индуктивность катушки, включенной между точками коллектор-эмиттер, LK = mKL;
- индуктивность катушки связи с внешней нагрузкой LH = mH L = - mvKuL
Расчет колебательной системы автогенератора с трансформаторной обратной связью (см. рис. 3.17) производится согласно описанной методике расчета с учетом того, что где К —
конструктивный коэффициент связи (К - 0,02—0,1).
Расчет любой рассмотренной колебательной системы значительно упрощается, если рабочая частота автогенератора /много меньше граничной/гр частоты транзистора (/«/гр). Тогда частота /практически равна резонансной частоте /0 контура (f &/0). Определив полную емкость контура С из табл. 3.1, можно сразу рассчитать полную индуктивность контура L = 1/(2л/0)2С. Если при
80
этом тк = 1, что имеет место для маломощного кремниевого транзистора, то, к примеру, для генератора с автотрансформаторной обратной связью Lro = и L = KUL.
1 vd Ou H rl
3.6. Самовозбуждение резонансного усилителя
। В схемах автогенераторов процесс самовозбуждения являет-I ся полезным и необходимым, а в схемах резонансных усилителей | (ГВВ) — совершенно недопустимым, так как нарушает нормаль-| ную работу радиопередающего устройства и радиосвязь в целом. I На рис.3.18 представлена принципиальная схема транзисторного резонансного усилителя (генератора с внешним возбуждением). В нем имеется обратная связь между цепью коллектора и цепью базы через межэлектродную емкость коллектор-база Скб. Поэтому принципиально такое нежелательное самовозбуждение возможно.
В самом деле, баланс фаз выполняется на частоте f меньшей резонансной частоты базового и коллекторного контуров, при которой последние представляют собой в эквиваленте индуктивности (Лбэ, £кэ). Как было отмечено ранее, баланс фаз имеет место тогда, когда реактивные сопротивления в точках база-эмиттер Х^3 и коллектор-эмиттер Агкэ одного знака [в данном случае положительные (индуктивности)], а в точках коллектор-база Хк§ —
противоположного знака [отрицательные (емкость Скб)]. Эти реактивности в сумме образуют колебательную систему, представляющую собой в эквиваленте контур 2-го вида. Если в этой системе потери мощности за период восполняются полностью, т.е. имеет место баланс мощностей, то усилитель становится автогене-
Рис. 3.18. Резонансный усилитель
ратором гармонических колебаний на частоте опреде-
6-6764
81
1
1
U) = .... < O)0 = - ,
д/^кб(^бэ + ^кэ)
ляемой из условия резонанса данной колебательной системы:
*бэ + Акб + *кэ = 0.
Количественная сторона баланса фаз и мощностей выглядит следующим образом. Напряжение UK на коллекторном контуре через емкость обратной связи Скб вызовет ток в цепи базы
/________и*_______
~ jwLfr +\ljtf)C 5 ' который создает падение напряжения в базовой цепи
U. = j^L^I = ; .
+ l//u)CK^ 1—1/
Если модуль второго слагаемого знаменателя больше единицы, то напряжение t/6 противоположно по знаку напряжения UK и баланс фаз выполняется. Если при этом модуль данного слагаемого приближать к единице, то напряжение (7б будет быстро расти и баланс амплитуд обеспечится.
Самовозбуждение нарушает нормальную (устойчивую) работу усилителя. Считается, что усилитель по этой причине неустойчив в работе, если его коэффициент усиления К больше предельно допустимого коэффициента устойчивого усиления
^пр ~
. о)Скб
Если К < Л*Пр, то усилитель работает устойчиво с запасом устойчивости у - /СПр /К.
В качестве примера можно определить коэффициент устойчивого усиления К резонансного усилителя с запасом устойчивости у = 2. Усилитель выполняет на транзисторе КТ315А, вклю
82
ченном по схеме с общим эмиттером, у которого 5’1< = 38 мЛ/В, Ск£ = 7 пФ и рабочая частота / = 2,13 МГц.
Решение.
^пр
= 1,41
= 1,41
38 Ч0~3 2я-2,13-106-7-10“12
= 1.41-20® 28 раз.
При запасе устойчивости у = 2 коэффициент устойчивого усиления К = 14 раз.
Согласно исходной формуле, полученной на основании критерия устойчивости Найквиста, значение Л* возрастает с ростом SI< проходной характеристики транзистора и уменьшением рабочей частоты и проходной емкости Скб. Если в усилителе транзистор включить по схеме с общей базой, то проходной емкостью будет Скэ, которая является наименьшей по сравнению с Скб и Сэб. Последняя имеет место при включении транзистора с общим коллектором. Поэтому в схеме резонансного усилителя, в котором транзистор включен по схеме с общей базой, имеет место наибольшая предельная частота устойчивого усиления.
Проходную емкость можно уменьшить, используя схемы ее нейтрализации.
Умножитель частоты — тоже резонансный усилитель, у которого резонансная частота коллекторного контура /ок в 2—3 раза больше частоты резонансной базового контураf § [/ок - (2—3)/об]. Это сильно затрудняет выполнение баланса фаз и мощностей для самовозбуждения. Так что умножители частоты являются более устойчивыми, чем резонансные усилители.
В рассмотренных схемах автогенераторов использовалась положительная обратная связь, которую можно трактовать как внесение в колебательный контур автогенератора отрицательного сопротивления. Эта трактовка реализуется непосредственно при использовании в качестве активного элемента не транзистора, а диода с отрицательным сопротивлением.
83
3.7. Автогенераторы на диодах с отрицательным сопротивлением
К диодам с отрицательным сопротивлением, широко используемым на практике, относятся туннельный диод (ТД), лавиннопролетный диод (ЛПД), диод Ганна (ДГ). Эти приборы являются почти идеальными активными элементами для построения автогенераторов малой и средней мощности, способных работать на частотах от сотен мегагерц до десятков гигагерц. Отрицательное сопротивление этих приборов подключается параллельно колебательному контуру. Если это сопротивление полностью компенсирует все потери в контуре, то последний возбуждается, генерируя колебания определенной частоты. Частичная компенсация потерь в контуре используется для создания усилителей.
Так как физические основы функционирования названных диодов совершенно различны, то имеется необходимость отдельного рассмотрения автогенераторов на каждом из них.
Автогенераторы на туннельных диодах. Простейшая схема автогенератора на ТД показана на рис. 3.19. Назначение ее элементов определяется вольт-амперной характеристикой (ВАХ)ТД/ =/(//), представленной на рис. 3.20. На участке АВ ее крутизна отрицательна, что соответствует отрицательному сопротивлению диода /?д = du/di. Для генерирования автоколебаний исходная рабочая
Рис. 3.19. АГ на ТД с послед о вател ьн ы м п i гга и нем
Рис. 3.20. ВАХ ТД
84
точка должна находиться на падающем участке, например в точке С (см. рис. 3.20). Она задается подачей на ТД постоянного напряжения Ед. Источники питания ТД должны иметь малое внутреннее сопротивление Ri и малую относительную нестабильность напряжения АЕ/Е - (0,05—0,3) %, много меньшую, чем для транзисторов (АЕ/Е = 10 %). Схемы на ТД питаю! от стандартных элементов с напряжением 1,5—2,2 В, в то время как требуемое напряжение не превышает 200 мВ. Избыток напряжения гасится балластным сопротивлением Rq. В схеме на рис 3.19 балластное сопротивление выполнено в виде делителя напряжения, состоящего из резисторов RI и R2. В этом случае питание на ТД подается через сопротивление Eq = /?|/?V( R\ + /?э), которое включает в себя и внутреннее сопротивление источника питания Rr входящее в R2. По модулю сопротивление R$ должно быть меньше отрицательного сопротивления диода |-/?д| (/?q < |-Рд|), чтобы возникли автоколебания. На рис. 3.20 это отражено прямой М. Если Rq > I-PJ, то возможны три состояния равновесия: С, С, С".
Если, выбрав исходную рабочую точку С на характеристике, ввести извне колебательное напряжение с изменяющейся амплитудой, то зависимость первой гармоники тока диода /д| от амплитуды приложенного напряжения представит собой так называемую колебательную характеристику (рис. 3.21). Проведем на этой плоскости прямую под углом ср = arctg(///?3), где — эквивалентное сопротивление колебательного контура, включенного в цепь диода вместо источника переменного напряжения. Стационарное состояние генератора
определяется точками пересечения колебательной характеристики и прямой линии нагрузки. Как было показано в разделе 3.2, состояние покоя устойчиво, если с точки 0 крутизна Е колебательной характеристики (пунктирная прямая на рис. 3.21) больше крутизны линии нагрузки. При малых колебаниях можно считать, что |Е| = 1/|-/?д| и, таким образом, условие самовозбуждения можно записать в виде 1/|-Ед| > 1/Лэ или /?э > |-Лд|. Точка Л определяет стационарное колебательное состо-
Рис. 3.21. Характеристики АГ на ТД
85
янис, в которой R3 = |-/?д|'. Здесь |-КдГ — приведенное внутреннее сопротивление диода, равное по абсолютному значению отношению колебательного напряжения к току первой гармоники в стационарной точке. Изгиб колебательной характеристики обусловлен изменением отрицательного сопротивления -Я вдоль ВАХ диода /д =./(ед) и переходом при дальнейшем увеличении амплитуды (7Д в область положительных значений внутреннего сопротивления диода. Статическая ВАХ является одновременно и динамической характеристикой диода. Положение линии нагрузки на динамической характеристике ТД при выбранной начальной точке С показано на рис. 3.20 в виде пунктирной линии. Две другие точки пересечения обеих зависимостей находятся в областях, где сопротивление диода положительно, и непосредственного отношения к колебательному режиму нс имеют.
Рост колебаний при самовозбуждении ограничивается нелинейностью падающего участка ВАХ. Можно считать, что если в начальной точке С значение R3 = (1,5—2)|-Я |, то колебания нарастают до амплитуды U (см. рис. 3.20), характеризуемой точкой А на динамической характеристике, причем точка А лежит вблизи максимального значения тока диода на левой ветви ВАХ.
Следовательно, амплитуду колебаний можно приближенно оценить непосредственно по ВАХ диода, если на ней выбрана начальная рабочая точка С. Ее не следует выбирать слишком «низко» на ВАХ, лучше в верхней половине ее падающего участка или на его середине, так как иначе самовозбуждение может оказаться жестким. У выпускаемых промышленностью ТД сопротивление, соответствующее падающему участку, составляет 50—200 Ом, а ее емкость перехода — порядка десятков пикофарад. Для обеспече-
Рис. 3.22. АГ па ТД с параллельным питанием
ния рабочего режима эквивалентное сопротивление колебательного контура должно быть при этом порядка 100— 400 Ом. Чтобы не использовать конденсаторы большой емкости, применяют неполное включение контура, как это показано на рис. 3.22. Питание здесь ТД — параллельное, че
86
рез дроссель £др. Чтобы не возник-
ли паразитные колебания дроссель- L г
ного типа, последовательно с £др —I S—< С/
включено сопротивление г. I.....||.....1---1|--
Характеристические частоты с„
ТД можно определить по его экви-
валентной схеме, показанной на Рис. 3.23. Эквивалентная схема ТД рис. 3.23, где использованы следующие обозначения:
-Яд = diddi — дифференциальное отрицательное сопротивление ТД;
Сд — емкость р-л-перехода ТД;
гд — суммарное сопротивление потерь в материале полупроводника, в контактах и выводах;
Тд — суммарная индуктивность ТД, в которую входит индуктивность его патрона и выводов;
Сп — паразитная емкость патрона и выводов ТД.
Численные значения этих параметров зависят от материала, из которого изготовлен ТД, его конструктивного оформления, концентрации примесей* и лежат в пределах: -Я - (5—500) Ом; Сд = = (1—200) пФ; La = (IO’8—IO’10) Гн; гд = (1—15) Ом.
Согласно рис. 3.23 эквивалентное сопротивление ТД
ш^дОх
1 + (<оСд/?д)2
*ТД изготовляют из арсенида галлия (GaAs), антимонида галлия (GaSb), антимонида индия (JnSb), кремния, германия.
87
Из равенства нулю действительной части Z определяется критическая частота ТД
1 f ~ ^д ।
2лСд|- 7?д| у гд
выше которой сопротивление ТД не может быть отрицательным, и поэтому не может быть автоколебаний или усиления. Если в предыдущей формуле к гд добавить внешнее активное сопротивление гвн, то можно получить предельную частоту генерации /г, максимальное значение которой/тах = 1 /лСд|-/?д|. Максимальному значению частоты генерации соответствует |-Ядт|п|, которое составляет приблизительно 40 % от значения интегрального сопротивления |-Яд'|, приводимого в паспорте на ТД. Последнее является средним значением модуля отрицательного дифференицального сопротивления
где Ij, U\ — максимальный туннельный ток и соответствующее ему напряжение;
/9, — максимальный ток и соответствующее ему напряжение на
ВАХТД.~
•
Приравнивая к нулю мнимую часть сопротивления Z, можно определить резонансную частоту ТД
у- =_______J_____ I ^Д^Д
Урез~ 2яСд |-Кд| V Лд
Если /рез 2* / то ТД «потенциально устойчив», так как его сопротивление положительно. Если же /рез / , то диод «потенциально неустойчив», так как в этом случае его сопротивление отрицательно и он генерирует колебания даже при отсутствии внешних реактивных элементов.
88
При работе на частотах/< / сопротивление ТД носит емкостный, а при/ >/ — индуктивный характер.
ТД способен работать на весьма высоких частотах — до 10й Гц, в широком интервале рабочих температур — до 400°С, с высоким допустимым уровнем радиации — до 1017 нейтронов на 1 см2; имеет сравнительно низкий уровень собственных шумов (2—3 дБ), малые габариты и массу, малое потребление энергии, высокую механическую прочность и надежность работы, длительный срок службы; прост в изготовлении.
Основным недостатком ТД является малая его выходная мощность.
Автогенераторы на лавинно-пролетных диодах. На рис. 3.24, а дано схематическое изображение структуры лавинно-пролетного диода (ЛПД), где 1 — выход для подведения питания; 2 — р-область; 3 — «-область (пролетный промежуток); 4 — запорный слой; 5 — слой умножения.
При подаче на диод постоянного обратного напряжения ток диода практически отсутствует до напряжения ниже пробивного. Распределение приложенного напряжения между областями диода
определяется характером распределения примесей в различных областях полупроводника (рис. 3.24, б). В р- и «-областях концентрация примесей относительно высока (сопротивление мало), а в запорных слоях 4 и особенно в слое умножения 5 примеси взаимно компенсируют друг друга и, значит, сопротивление в этих слоях велико. Поэтому все приложенное напряжение выделяется на слое умножения и запорном слое. Распределение напряженности электрического поля Е в ЛПД приведено на рис. 3.24, в.
При повышении напряжения до пробивного напряжен
Рис. 3.24. Структура и характеристики ЛПД
89
ность поля в слое умножения достигает таких величин, при которых начинается ударная ионизация. При этом отдельные электроны и дырки, ускоренные внешним электрическим полем, выбивают из ионов кристаллической решеткой большее число зарядов, чем их участвовало в процессе в первое мгновение, т.е. коэффициент ионизации при этом становится больше единицы. Происходит так называемый процесс лавинного пробоя запорного слоя (/?-/?-перехода). Если же не принять мер для ограничения тока, то лавинный пробой перейдет в тепловой, и в результате этого диод выйдет из слроя. Отметим, что при смещениях, близких к пробивному,
ток диода очень сильно зависит от приложенного напряжения.
При подключении такого ЛПД параллельно резонансному контуру (рис. 3.25,а) можно предположить, что в контуре из-за тепловых флуктуаций и других причин существуют установившиеся колебания, небольшие по амплитуде. В этом случае к />-/?-переходу приложены постоянное напряжение, равное напряжению пробоя, и переменное напряжения контура (рис. 3.25, б). В связи с сильной зависимостью тока диода от приложенного напряжения в момент
положительного полупериода начинается резкое увеличение тока диода. В отрицательный полупериод рост тока прекращается. Од
Рис. 3.25. АГ на ЛПД и его временные характеристики
на ко из-за инерционности процесса развития лавины максимум тока смещается относительно максимума положительного переменного напряжения примерно на л/2 радиан, или 90°. Такое запаздывание обеспечивается выбором нужной толщины запорного слоя (рис. 3.24, б, в). Образовавшиеся электроны и дырки под дейтствием приложенного постоянного напряжения движутся в противоположных направлениях к своим электро
90
дам: дырки — налево, электроны — направо. Для работы ЛПД существенное значение имеет л ишь тот сгусток зарядов, который движется в пролетном промежутке диода ( в//-области). Величина пролетного промежутка выбирается такой, чтобы время прохождения его сгустком электронов (импульсом тока) соответствовало примерно 1/4 периода переменного напряжения, т.е. сдвиг фаз между импульсом тока и переменным высокочастотным напряжением составлял л/2 радиан. Таким образом, в целом из-за задержки в развитии лавины и наличия пролетного промежутка обеспечивается сдвиг по фазе на величину л радиан между импульсами тока и высокочастотным полем. Зл о значит, что сгустки электронов движу гея в тормозящем высокочастотном поле, отдавая во внешнюю цепь (контур генератора) свою энергию (рис. 3.25. б\ сплошные линии).
Сдвиг по фазе на величу л радиан (180°) между образующимися импульсами тока и переменным высокочастотным напряжением означает, что диод в динамическом режиме обладает отрицательным сопротивлением, которое называют динамическим отрицательным сопротивлением.
Рассмотренный режим работы ЛПД является простейшим и называется IMPA 7Т-режимом от начальных букв английских слов, означающих «ударная лавина и пролетное время». Известны и другие режимы, среди которых наиболее перспективным является TRA РА ТТ-режим от начальных букв английских слов, означающих «захваченная плазма и пробег области лавинного умножения». Этот режим еще называют «аномальным», поскольку рабочая частота много ниже пролетной. Генераторы в TRAP А ТТ-режиме обладают высокими мощностями и КПД. В импульсном режиме мощность Р = 1,2 кВт получена на пяти последовательно соединенных диодах на частоте 1,1 ГГц. Максимально полученный КПД т] равен 75 % на частоте 0.6 ГГц. Но этот режим технически очень сложен.
В непрерывном IMPA ТТ-режиме мощность Р - 3—5 Вт на частоте 6—14 ГГц при КПД 12—15 %. В импульсном режиме Р - 30 Вт на частоте 9 ГГц при КПД 10 %.
Типичная конструкция генератора на ЛПД сантиметрового диапазона показана на рис. 3.26. ЛПД / установлен в тороидальный резонатор 2. связанный с высокочастотным трактом окном связи 3. Штырь 4 служит для регулировки связи с нагрузкой, а ин-
91
Рис. 3.26. Конструкция ГЛПД
дуктивный штырь 5 — для подстройки частоты. Питание на ЛПД подается через СВЧ-фильтр 6.
На железнодорожном транспорте используются генераторы на ЛПД сантиметрового диапазона волн (X s 3 см) в датчиках измерения и контроля устройств. ЛПД работают в IMPA 7Т-режиме.
Автогенераторы на диодах Ганна. Диод Ганна (ДГ) представляет собой однородную пласгину из полупроводникового материала (обычно арсенид галлия) с двумя омическими контактами на ее гранях. Элек
трод, на который подается положительное напряжение питания, называется анодом, а другой — катодом. Свойство диодов Ганна характеризуются процессами, протекающими в объеме однородного полупроводника, а не в/?-л-переходе, как у ТД, ЛПД. Подробное рассмотрение достаточно сложного механизма работы ДГ возможно только с при
и теории строения вещества. Поэтому
влечением квантовой теории
Рис. 3.27. Диаграммы уровней
далее приводится лишь качественное описание принципа его работы.
Особенность структуры зоны проводимости арсенида галлия (Ga As), наиболее типичного материала для приборов Ганна, состоит в том, что эта зона не является однородной, а состоит из центрального минимума (нижней долины) и нескольких боковых минимумов (верхних долин). На рис. 3.27 показана упрощенная структура GaAs. На рисунке видны две долины, разделенные энергетичес
92
ким зазором, равным 0,36 эВ. Свойства долин, как показывает квантовая теория, неодинаковы. В нижней долине электрон обладает большей подвижностью, а в верхних — значительно меньшей. Под подвижностью ц понимается коэффициент пропорциональности между средней дрейфовой скоростью электрона р и напряженностью приложенного электрического поля Е, т.е. р = цЕ. Этот коэффициент характеризует «легкость», с которой электрон движется в заданной зоне проводимости. При комнатной температуре в отсутствие внешних полей электроны находятся на нижней долине, так как количество тепловой энергии 4 • 10~21 Дж, которое в среднем может получить элеюрон, явно недостаточно для перехода на верхнюю долину (0,58 • 10~19 Дж).
Подвижность электронов, а следовательно, и проводимость в этом случае высоки. Если к пластине из арсенида галлия приложить постоянное напряжение, то электроны, приобретая в этом внешнем поле кинетическую энергию, будут переходить в верхнюю долину с малой подвижностью.
Общая усредненная по всему образцу подвижность электронов
определяется соотношением числа электронов, находящихся на нижней и верхней долинах при данном внешнем поле. Поэтому как толь
ко часть электронов начнет переходить на верхний уровень, так сразу же начнется замедление роста средней дрейфовой скорости электронов, а при некоторой напряженности (для Ga As Екр = 3,5 кВ/см) рост скорости вообще прекращается. Эта напряженность называет-
ся критической или пороговой. При Е > Екр большинство электронов переходит в верхние долины с малой подвижностью частиц, в
результате дрейфовая скорость начинает падать, несмотря на рост
напряженности электрического поля Е. Это означает, что при силь-
ных полях дифференциальная подвижность dv IdE приобретает отрицательный знак. Поскольку плотность тока пропорциональна скорости движения электронов, а напряженность поля — напряжению, приложенному к образцу, кривую (Е/бдр) можно заменить ВАХ (рис. 3.28). Наличие отрицательного сопротивле-
93
пня приводит к тому, что в зависимости от параметров ДГ и подключаемой внешней цепи могут возникнуть в ней колебания различного типа.
Основной пролетный режим представляет собой собственно эффект Ганна, хотя и не имеет большого практического значения ввиду малого КПД и выходной мощности. Этот режим может иметь место в сравнительно низкоомном образце GaAs при NI > (Л7)(), где / — толщина образца, N— концентрация электронов, i 1012 см“2, помещенном в низкодобротную внешнюю схему. В этих условиях в полупроводнике, находящемся под действием небольшого внешнего напряжения, устанавливается однородное электрическое поле. С увеличением внешнего напряжения вблизи катода образуется область со значительно большей, чем в остальной части образца, напряженностью поля. Это значит, что переход электронов из нижней долины в верхнюю характерен не для всего объема образца, а только для довольно узкой его части. С приближением напряжения к критическому значению /7кр = 1ЕК? неоднородность поля возрастает, и при U > UKp область с повышенной напряженностью, называемая электрическим доменом, отрывается от катода и начинает дрейфовать к аноду с относительно низкой скоростью v « 107 см/с, обусловленной малой подвижностью и верхней долине (зоне).
Образование домена сопровождается уменьшением тока через образец: вне домена напряженность поля уменьшается и, следовательно, падает скорость электронов. После того как домен достигает анода, он гаснет, а напряженность поля образца возрастает до величины выше критической, и у катода образуется новый домен. Во время гашения и формирования домена ток в цепи диода возрастает.
Затем процесс повторяется, и в низкодобротной схеме генерируются периодические импульсы тока малой длительности с «пролетной» частотой /пр« Рдр/7, не зависящей от приложенного напряжения и параметров схемы.
Динамическая ВАХ ДГ представлена на рис. 3.29, где участок кривой ОА определяет силу тока, проходящего через образец в отсут-ствие домена, а участок ВСД — при наличии домена. Характеристика имеет гистерезисный характер: домен возникает при U = t/Kp и гас-
94
нет при (/р < (/кр (t/p — напряжение рассасывания домена).
Режим с задержкой домена может иметь место в ДГ, помещенном в СВЧ-резонатор сравнительно высокой добротности, определенным образом связанный с нагрузкой. В этом случае на постоянное напряжение смещения (70, приложенное к прибору, накладывается высокочастотное напряжение с амплитудой С/м и периодом, несколько большим времени пролета домена от катода к аноду т, причем (70 - (7М > t/p (рис. 3.29, б). В момент времени /, когда напряжение U > (7кр, образуется и начинается двигаться домен. Ток в этот момент (рис. 3.29, я) падает от /П1ах до /min и остается постоянным в течение времени т. Следующий домен возникает не сразу после рассасывания на аноде предыдущего, а момент времени /9, т.е. с задержкой на время Т- т, которая определяет длительность импульсов тока. Частота колебаний здесь всегда ниже частоты основного пролетного режима. Он зависит от настройки резонатора и при = (7кр может изменяться в преде-лах от 0,5/пр до /пр.
Теоретически КПД генератора на ТД в таком режиме может достигать 27 %.
Режим с гашением домена наблюдается при установке ДГ в резонатор с достаточно высокой добротностью при (70 - С/м < т.е. для получения такого режима необходимо, чтобы в течение части периода колебаний напряжение на диоде было ниже напря-
95
жения рассасывания доменов (7р. Кроме того, время пролетах должно быть больше той части периода колебаний, когда напряжение меняется от I/ до (7р. При таких условиях домей гаснет, не доходя до анода, а частота колебаний почти не зависит от толщины образца и может меняться в широких пределах при перестройке резонатора. Теоретически КПД генератора в таком режиме может достигать 13 %. В двух последних режимах выполняется условие N/f* 5 • 104 с/см3.
Режим с ограниченным накоплением объемного заряда (ОНОЗ) характеризуется тем, что образование перемещающих доменов подавляется высокочастотным напряжением, амплитуда которого вследствие высокой добротности резонатора достаточно велика, чтобы полная напряженность поля в каждый период колебаний оказывалась меньше Е„п. Частота колебаний на-кр
столько высока, что за эту часть периода, когда Е > £кр, домен не успевает сформироваться. Для реализации такого режима необходимо выполнение условия 2 • 105 2* N/f» 104 с/см\ Колебания, вызванные эффектом Ганна, в этом режиме отсутствуют, но на зажимах прибора появляется отрицательное сопротивление. Частота генерации в режиме ОНОЗ не зависит от времени полета электронов и определяется только схемой, в которую включен ДГ. Поэтому диоды могут изготовляться существенно большей толщины, чем для других режимов, что позволяет работать при значительных напряжениях. Максимальное расчетное КПД генератора в таком режиме 18—23 %.
Гибридные режимы занимают промежуточное положение между доменными и ОНОЗ и характеризуются тем, что в течение большей части высокочастотного периода колебаний в образце существует несформировавшийся нарастающий домен. Время формирования домена может быть сравнимо со временем пролета т или может составлять большую часть периода высокочастотных колебаний и быть в то же время меньше х. В принципе любой ДГ может быть переведен из доменного режима в гибридный увеличением питающего напряжение. Достоинством гибридных режимов являются меньшая, чем у ОНОЗ, чувствительность к изменениям нагрузки и параметров схемы и более широкая область допустимых значений N/f
96
На рис. 3.30 представлена получившая широкое распространение лабораторная конструкция генератора на ДГ сантиметрового диапазона, которая позволяет реализовать основной пролетный режим, а также режимы с задержкой и гашением домена.
Диод / устанавливается вдоль Р,1С 3 30 Конструкция ДГ
широкой стенки волновода, трансформатор сопротивлений 2 предназначен для регулировки связи с нагрузкой, а плунжер 3 — для перестройки рабочей частоты.
В настоящее время генераторы на ДГ обладают в сантиметро
вом диапазоне волн мощностями: в непрерывном режиме единицы ватт и в импульсном режиме сотни ватт при средних значениях КПД 2—9 %. Нестабильность частоты простейших генераторов — от 106 за 10 мин до 10~5 в течение 2—3 ч.
Рассмотренные автогенераторы на диодах с отрицательным сопротивлением работают в диапазоне сверхвысоких частот, когда колебательный контур представляет собой полосковый или коаксиальный, или объемный резонатор. В ряде случаев требуется автогенераторы гармонических колебаний очень низких частот (десятки или сотни герц). Тогда колебательную систему автогенератора выполняют на RC-элементах, так как LC-элементы на таких частотах имеют очень большие габариты и массу. RC-автоге-нераторы хорошо представлены в учебной литературе, и поэтому более подробно они далее не рассматриваются.
3.8. Цифровые автогенераторы гармонических колебаний
Структурная схема цифрового автогенератора гармонических колебаний представлена на рис. 3.31, где МВ — мультивибратор, СТ — счетчик, ПЗУ — постоянное запоминающее устройство, ЦАП — цифроаналоговый преобразователь, ФНЧ — фильтр нижних частот.
97
7-6764
Рис. 3.31. Структурная схема цифрового АГ
Рис. 3.32. Синусоида
В ячейки ПЗУ записывается таблица значений синусоидальной функции единичной амплитуды, соответствующих своим фазовым углам от 0 до 2л радиан через Аср (рис. 3.32). Адресная шина ПЗУ подключена к выходам двоичного счетчика СТ, вход которого соединен с выходом мультивибратора МВ. Выходы ПЗУ подключены к входам ЦАП, нагруженного на ФНЧ.
При подаче напряжения начинает работать мультивибратор МВ, выдавая периодическую последовательность прямоугольных импульсов на вход счетчика СТ. В этом счетчике десятичный номер каждого входного импульса преобразуется в двоичный согласно табл. 3.2, что необходимо для работы ПЗУ.
Таблица 3.2
Десятичное число Двоичный код
0 0 0 0 0
1 ООО 1
2 00 10
3 0 0 11
4 0 100
5 0 10 1
6 0 110
7 0 111
8 1 000
Номер импульса в двоичном коде — адрес ячейки ПЗУ, из которой считывается информация об уровне отсчета синусоиды тоже в двоичной системе счисления. Цифровые значения синусоиды счи
98
тываются из ПЗУ последовательно, начиная с первого (с первой его ячейки). В ЦАП цифровые значения преобразуются в отсчеты синусоиды (см. рис. 3.32), из которых в ФНЧ восстанавливается непрерывный синусоидальный сигнал. Чтобы погрешность этого восстановления не превышала 1 %, достаточно использовать 8 разрядов в кодовом слове, один из которых — знаковый. Напомним, что кодовое слово — это цифровая запись одного отсчета непрерывного сигнала.
ПЗУ на рис. 3.31 может работать от микропроцессора. Для этого надо к ПЗУ подключить соответственно его адресную шину. Адресация там осуществляется программным способом.
На рис. 3.33 представлена принципиальная схема цифрового автогенератора синусоидального сигнала, в которой вместо ЦАП используется резистивная матрица. В этой матрице самый большой номинал имеет резистор младшего разряда R - 649 к, а самый малый — резистор старшего разряда R = 4,99 к. Номинал резистора каждого следующего разряда уменьшается примерно 2 раза по сравнению с соседним предыдущим. Сопротивление суммирующего резистора R% = 390 Ом.
К561ИЕ20 (CD4040)
2716
К561ЛА7
3 51
16
32
64
128
256
512
1024
2048
5.
3 7
2 6
4 5
13 4
12 3
14 2
СЕ
18
J. 23 ^22 .20
АО А!
А2 АЗ А4 А5 А6 А7 А8 А9
ППЗУ
D0
D1
D2
D4
D5
D6
D7 AI
9 649 к
162 к
80.6к
14
15
16 10 к —।—к
I 7 4.99 к
+ 10,0x10 В
Вход модуляции —I—
Выход
390
8
ю
Рис. 3.33. Цифровой АГ с ПЗУ
99
a
DD2 74HC4094
Рис. 3.34. Цифровой АГ без ПЗУ и его временные диаграммы.
На рис. 3.34, а изображена принципиальная схема еще более простого цифрового формирователя синусоидального сигнала, состоящего из регистра сдвига RG, резистивной матрицы и ФНЧ. Сигнал с восьми выходов регистра сдвига, число которых равно разрядности кодового слова, суммируется в резистивной матрице. На вход С интегральной микросхемы (ИМС) DD2 (RG) через инвертор(ИМС DD1) подается тактовый сигнал формы меандр с частотой F.
100
Использование обратной связи с выхода регистра Q7 (ИМС DD2) на его вход D через инвертор DD1.2 приводит к тому, что на каждом выходе Q{ регистра появляется высокий уровень напряжения с задержкой на один такт после первого выхода Q1 и сохраняется в течение прохождения первых 8 тактовых импульсов. Напряжение на выходе резистивной матрицы за этот период изменяется от минимума до максимума. В течение следующих 8 тактовых импульсов напряжение на каждом выходе регистра становится низким с задержкой тоже на один такт после первого выхода Q1. В это время напряжение на выходе резистивной матрицы изменяется в обратном порядке: от максимума до минимума. Далее процесс периодически повторяется. Следовательно, частота периодических колебаний на выходе устройства будет в 16 раз меньше частоты поступающих тактовых импульсов (рис. 3.34, б).
Сигнал на выходе суммирующей (резистивной) матрицы R2—R9 — ступенчато-синусоидальный, а на выходе ФНЧ, состоящего из резисторов ЯП, А12 и конденсатора СЗ, — синусоидальный (без ступенек). Искажения синусоиды минимальны, если ступеньки одинаковы, чего добиваются подбором сопротивлений весовых резисторов R2—R9.
Таблица 3.3
Г раничная частота, Гц 10' 10? Юз 10* 105
Емкость СЗ, нФ 100 10 1 0,1 0,01
Значение емкости конденсатора СЗ для нескольких граничных частот приведены в табл. 3.3. В качестве регистра сдвига можно использовать ИМС типа КР 1561ПР1 как инвертор КР 1561ТЛ1, а в качестве выходного повторителя (ИМС ДА1) КР140УД7.
В цифровой технике связи, в том числе и железнодорожной, широко используются микропроцессоры семейства A DSР-21 хх, где именно цифровым методом формируется гармоническое колебание — колебание несущей частоты.
101
Контрольные вопросы и задания
1. Чем отличается автогенератор от генератора с внешним возбуждением?
2. Из каких принципиальных узлов состоит автогенератор?
3. Назовите необходимые достаточные условия самовозбуждения.
4. Что означает физический баланс фаз? Поясните его на принципиальной схеме автогенератора с автотрансформаторной обратной связью.
5. Назовите трактовки баланса фаз.
6. Поясните баланс мощностей (амплитуд) в автогенераторе.
7. Поясните мягкий и жесткий режимы самовозбуждения автогенератора.
8. Режим колебаний 1-го или 2-го рода используется в автогенераторах?
9. Для чего используется автосмещение в автогенераторах?
10. Назовите порядок энергетического расчета автогенератора.
11. Как рассчитывается колебательная система автогенератора?
12. Поясните термин «трехточечные схемы автогенераторов».
13. Нарисуйте принципиальные схемы автогенераторов с трансформаторной, автотрансформаторной и емкостной обратной связью.
14. В чем суть устойчивой работы резонансного усилителя?
15. Поясните принцип работы автогенераторов на диодах с отрицательным сопротивлением.
16. Поясните принципы работы лавинно-пролетного диода, диода Ганна и туннельного диода.
17. Назовите режим работы ЛПД, ДГ.
18. Нарисуйте структурную схему цифровых автогенераторов синусоидальных колебаний и поясните ее работу.
19. Нарисуйте схему автогенератора синусоидальных колебаний на регистре сдвига и поясните ее работу.
21. Изобразите принципиальную схему LC-автогенератора на операционном усилителе и поясните ее работу.
22. Какие из рассмотренных автогенераторов работают в диапазоне низких, высоких и сверхвысоких частот?
102
Глава 4. СТАБИЛИЗАЦИЯ ЧАСТОТЫ АВТОКОЛЕБАНИИ
4.1. Общие положения
Радиопередатчик должен работать на предписанной ему частоте /0, т.е. номинальной. Отклонение рабочей частоты от номинальной называется абсолютной нестабильностью частот ы а отношение А/7/q или А/7/’— относительной нестабильностью частоты. Нестабильность частоты может быть источником существенных помех радиостанциям, работающим на соседних частотах. Эти помехи называются сосредоточенными по спектру помехами или станционными помехами или синусоидальными помехами. Они недопустимы с точки зрения электромагнитной совместимости. Поэтому стабильность частоты является одним из важнейших параметров передатчика. Она определяется стабильностью частоты задающего автогенератора (возбудителя).
Требования к стабильности частоты передатчика определяются его назначением, выходной мощностью, диапазоном рабочих частот. В эксплуатируемых железнодорожных радиостанциях комплекса ЖРУ выходная мощность передатчика Рвых = 8—10 Вт (подвижная ЖР) и допустимое относительное отклонение частоты А/7/q = ±6 • 10~6, а при действии дестабилизирующих факторов А///о - ±20 • 10”6. У радиостанций системы «Транспорт» РВых ~ 12 Вт (подвижная ЖР) и относительная нестабильность частоты А/7/q = 10 • 10“6. При этом железнодорожная радиосвязь — беспоисковая и бесподстроечная.
В радиовещательных станциях длинных и средних волн абсолютная нестабильность А/< 10 Гц, а в станциях коротких или ультракоротких волн относительная нестабильность частоты А/‘- 100 "/>//$ - 0,002 %. В подвижных связных станциях А///о = 0,02 %.
Различают кратковременную и долговременную нестабильность частоты. Нестабильность частоты, проявляющаяся за время наблюдения менее 1 с, относится к кратковременной, а больше 1 с — к долговременной. Первая определяется быстрыми изменениями частоты, вызванными тепловым, дробовым и другими эффектами, а вторая — медленными изменениями частоты, вызванными ме
103
теоусловиями, изменением напряжения источников питания, старением элементов схемы автогенератов и др. Подробнее эти вопросы рассмотрены в [6].
Частота колебаний автогенератора зависит от собственной частоты контура, его добротности и фазового сдвига между первой гармоникой коллекторного тока /к| и напряжением на контуре UK,
4.2. Эталонность и фиксирующая способность контура автогенератора
Собственная частота контура ojq =
--------5- опре-к V 4<22)
деляется не только его индуктивностью LK и емкостью Ск, но и его добротностью Q. Одной из причин изменения частоты автоколебаний является нестабильность параметров его колебательной системы (Лк, Ск), а другой — изменение фазового сдвига между первой гармоникой коллекторного тока /к| и напряжением на контуре t/K, возникающее при нарушении баланса фаз. Способность контура противостоять этим двум явлениям оценивается соответственно его эталонностью и фиксирующей способностью.
Эталонность контура — способность сохранять неизменной номинальное значение частоты колебаний. Она зависит от качества его деталей (£к, Ск) и от стабильности паразитных емкостей Спар, входящих в колебательную систему. Последнее является определяющим, так как качество современных деталей является высоким. Влияние паразитной емкости уменьшается при увеличении добротности контура Q. Действительно, при заданном значении резонансного сопротивления контура /?к = р(2 увеличение Q позволяет уменьшить характеристическое сопротивление контура р = yJlK/CK , т.е. увеличить полную емкость контура Ск и тем самым уменьшить относительное изменение емкости ДСпар/Ск, а следовательно, уменьшить и изменение частоты Д/. Но при увеличении рабочей частоты приходится уменьшать емкость контура Ск и, следовательно, увеличивать относительную нестабильность ем
104
кости ДСпар/Ск. Поэтому с укорочением длины волны стабильность частоты автоколебаний уменьшается.
Фиксирующая способность контура — свойство изменять сдвиг фаз ср между напряжением на контуре UK и первой гармоникой коллекторного тока /к| без существенного изменения частоты автоколебаний. Всякое изменение режима работы цепи базы или коллектора транзистора автогенератора вызывает изменение фазового сдвига Дфсв в цепи обратной связи и, следовательно, нарушение баланса фаз ф + фсв = 0. Для восстановления последнего автоматически изменяется частота автоколебаний, создавая компенсирующий сдвиг фаз Дф в коллекторной цепи. Очевидно, что чем больше крутизна фазочастотной характеристики (ФЧХ) колебательного контура Дф/До), тем при меньшем изменении частоты будет происходить эта компенсация. Иначе говоря, фиксирующая способность контура тем выше, чем больше его добротность Q.
4.3- Параметрическая стабилизация частоты автогенератора
К внешним дестабилизирующим факторам относятся: изменение температуры деталей и транзисторов, изменение влажности и давления воздуха, емкостное влияние соседних предметов, нестабильность напряжения источников питания, нестабильность нагрузки автогенератора, смена транзисторов и деталей контуров, вибрации деталей, неточность установки частоты и др.
Изменение температуры приводит к изменению размеров дегалей контуров и диэлектрической проницаемости изоляторов. От этого изменяется индуктивность контура L на ДД и его емкость С на ДС. а следовательно, и резонансная частота контура <пк = 1/JlC на величину
До)к =-7-....—----------
7(£ + Д£)(С+ДС) ylLC
Ak)(1+^£)
105
Так как &L&CILC много меньше остальных слагаемых подкоренного выражения знаменателя, то им можно пренебречь.
Если разложить в биномиальный ряд (бином Ньютона) первое слагаемое
и ограничиться вторым его членом ввиду малости &LIL и &CIC, получим:
. / ДА ДС \ Да) 1 / Д£ ДС \
До)к=—Н—+ или ----------------= ~тНг’+’7^" •
2 I L С а)и 2 I L С
\ / К \ /
После деления обеих частей этого равенства на изменение температуры Д/, вызвавшее ДЛ и ДС, получается
Асо 1 / ДС ДС
о)кА/ 2 ( С А/ СА/
где —температурный коэффициент частоты (ТКЧ), т.е. отно-
си тельное изменение частоты Дюк/(1)к при изменении температуры на 1 °C;
АС
— температурный коэффициент индуктивности (ТКИ);
ДС
у — температурный коэффициент емкости (ТКЕ).
Последнее уравнение можно записать в виде ТКЧ = -0,5(ТКИ + ТКЕ).
106
Если ТКИ и ТКЕ разных знаков, то имеет место термокомпенсация, повышающая стабильность частоты автогенератора. ТКИ всегда положителен, а ТКЕ может быть и отрицательным. Это конденсаторы, у которых в качестве диэлектрика используется тиконд, температурный коэффициент диэлектрической проницаемости которого отрицательный.
При изготовлении задающих генераторов стремятся использовать материалы с малым температурным коэффициентом. Например, катушки индуктивности изготавливают путем вжигания металла в керамический каркас. Индуктивность такой обмотки имеет ничтожно малый ТКИ. В качестве диэлектрика конденсаторов постоянной емкости используют радиокерамику, а обкладки конденсаторов наносятся методом вжигания серебра. В наиболее ответственных случаях вместо керамики применяют плавленый кварц.
На стабильность частоты автогенератора влияет также изменение параметров транзистора, так как к контуру автогенератора подключены активные проводимости и емкости/?-/? переходов транзистора. Первые снижают добротность контура, а вторые изменяют непосредственно частоту автоколебаний.
Тепловой режим автогенератора определяется не только температурой окружающей среды, но и тепловыми процессами, протекающими непосредственно в транзисторе. Для повышения стабильности частоты автогенератора снижают снимаемую с него мощность, что облегчает тепловой режим транзистора. Стабильность частоты повышают также путем термостатирования, т.е. когда автогенератор помещают в термостат, внутри которого температура не изменяется.
Изменение напряжения источников питания (например, Ек) вызывает изменение проводимостей и емкостейр-п переходов транзистора и, как следствие, изменение частоты колебаний автогенератора. Для каждого типа транзистора можно указать оптимальное значение напряжения коллекторного питания Ек и постоянной составляющей коллекторного тока /к0, при которых стабильность частоты будет наибольшая. Для уменьшения влияния изменения параметров транзистора на частоту автоколебаний уменьшают его связь с колебательным контуром. Для борьбы с изменением напряжения источников питания используют стабилизаторы напряжения.
107
Нестабильность нагрузки автогенератора является причиной нестабильности его частоты. Нагрузкой автогенератора является вход следующего за ним каскада. Изменяться может как активная, так и реактивная составляющая нагрузки. Изменение активной составляющей нагрузки устраняется использованием буферного режима следующего за автогенератором каскада, когда отсутствуют его входные токи, обеспечивая очень высокое входное сопротивление. Для борьбы с изменением реактивной составляющей нагрузки используют развязки цепей, экранирование, а также умножение частоты.
Механические воздействия на автогенератор (вибрации, толчки, тряска) также являются причиной нестабильности частоты его автоколебаний. Особенно сказываются механические воздействия на автогенераторы, установленные на подвижных объектах. От них изменяются электрические параметры схемы, взаимные емкости и индуктивности элементов, входящих в контур и, следовательно, частота автоколебаний. Для уменьшения этого влияния автогенератор следует устанавливать в том месте, где амплитуда этих воздействий минимальна. В подвижных объектах применяют амортизаторы: резиновые растяжки и т.д.
Влажность и давление воздуха непосредственно сказываются на диэлектрической проницаемости воздуха, что вызывает изменение емкости конденсатора с воздушным диэлектриком. Для исключения этого явления используют герметизацию деталей автогенератора.
Транзисторы и элементы контура имеют разброс параметров, и поэтому при их смене может изменяться частота автоколебаний. Во избежание этого транзисторы и элементы контура для автогенератора следует выбирать более долговечными.
Неточность установки частоты автоколебаний существенна в передатчиках с плавной настройкой. В железнодорожной радиосвязи — связь беспоисковая и бесподстроечная.
Ослабление влияния внешних дестабилизирующих факторов на частоту генерируемых автоколебаний, а также подбор элементов автогенератора, обеспечивающих минимальное изменение частоты относятся к параметрической стабилизации частоты автогенератора. Параметрическая стабилизация частоты позволяет сни
108
зить относительную ее нестабильность до 10-5, чего недостаточно для железнодорожной связи. Кварцевая стабилизация частоты более эффективна (5 • 10“6).
4.4. Кварцевая стабилизация частоты автогенератора
Кварц представляет собой кристаллическую двуокись кремния
SiO2, являясь хорошим диэлектриком.
Для кварцевых резонаторов используются либо кристаллы естественного происхождения (горный хрусталь), либо кристаллы, синтезированные искусственно. Добротность кварцевых резонаторов на несколько порядков превышает добротность обычных LC-контуров и достигает величины в несколько десятков тысяч и даже несколько миллионов. Природные или синтетические кристаллы кварца имеют форму шестигранной призмы, ограниченной сверху и снизу шестигранными пирамидами (рис. 4.1, а). Свойства кристалла зависят от направлений относительно главных кристаллографических осей: оптической ZZ', трех электрических XX' и трех механических У У' (рис. 4.1, б).
Кварцевая пластина вырезается из призматической части кристалла под определенным углом относительно этих осей. Различают прямые срезы, при которых пластины параллельны оси X или Y (срезы обозначают соответственно X или У), и косые срезы, при которых ребра пластины не параллельны осям X или У, а образуют с ними некоторые углы (рис. 4.2).
Рис. 4.1. Кристалл кварца
109
Рис. 4.2. Срезы кварца: прямой (а) и косой (б)
В кварцевом резонаторе пластину кварца помещают между двумя металлическими обкладками, которые изготавливают путем вжигания слоя серебра в пластину кварца. Крепление пластины осуществляется с помощью кварцедержателей, выполненных из специальных пружин, припаянных к металлизированному слою кварца. Пластина кварца вместе с кварцедержателями помещается в герметичный баллон.
Кварцевая пластина обладает пьезоэлектрическим эффектом. Прямой пьезоэффект заключается в том, что механическая деформация пластины кварца вызывает появление электрических зарядов на ее гранях. Под действием высокочастотного напряжения, приложенного к металлическим обкладкам резонатора, возникают упругие механические колебания с очень малым декрементом затухания (обратный пьезоэффект). При этом час
тота механических колебаний определяется геометрическими раз-
мерами пластин и видом их среза. В настоящее время, как правило, используются кварцевые пластины косых срезов с колебаниями сжатия—растяжения по ширине (диапазон 50—500 кГц) и кварцевые пластины срезов с колебаниями сдвига по толщине (диапазон выше 500 кГц). Основная частота механических колебаний квар
цевого резонатора при колебаниях сдвига по толщине определяется соотношением /кв = Mid, где М = 1,7—3,0 МГц • мм — частотный коэффициент, зависящий от среза;;/ — толщина пластины, мм. Видно, что уменьшение d вызовет повышение /кв. Минимальное
НО
значением/ < 0,1 мм, что обеспечивает /кв = 17—30 МГц. При необходимости стабилизации более высоких частот используют механические гармоники кварцевого резонатора, причем только нечетные (л = 3, 5, 7,...), так как только в этом случае на обкладках резонатора образуются заряды противоположного знака. Было установлено, что добротность кварцевого резонатора на третьей и пятой гармониках примерно такая же (или несколько выше), как на первой, а начиная с седьмой она снижается.
Рис. 4.3. ТКЧ кварца
Кварцевый резонатор имеет множество собственных частот, разнос которых достигается выбором типа среза пластины, ее геометрических размеров и обработкой поверхности кристаллов. Температурные свойства кристалла характеризуются ТКЧ, величина и знак которого зависит тоже от типа среза. На рис. 4.3 приведены ТКЧ кварца для трех типов среза: АТ, ЖТ, ВГ. В ограниченных интервалах температур для косых срезов кварца ТКЧ близок к нулю (например, для АТ или ЖТ при температуре 40—50 °C), что позволяет, используя термостат, обеспечить оптимальные условия для работы кварцевого резонатора. Однако с течением времени значение собственной частоты кварцевого резонатора изменяется. Это так называемое старение кварца. Уход частоты серийно выпускаемых кварцевых резонаторов с частотой свыше 800 кГц согласно ГОСТ 12252—86 не должен превышать ±2 • 10-5 за весь гарантийный срок работы (примерно 12—14 тыс. часов).
Старение кварцевого резонатора в значительной мере определяет реальную долговременную нестабильность частоты автогенератора с кварцем. Мощность, рассеиваемая на кварцевом резонаторе, во многом определяет стабильность его собственной частоты. Обычно она не превосходит нескольких милливатт, что указывается в паспортных данных резонатора. В случае, когда мощность, рассеиваемая на резонаторе Ркв, превышает допустимое значение Рквд,
111
КВ -КВ кв
Рис. 4.4. Эквивалентная схема кварца
стабильность собственной частоты кварцевого резонатора резко ухудшается из-за изменения структуры его кристаллической решетки и даже разрушения кристалла кварца. Поведение кварца в электрической цепи характеризуется его эквивалентной схемой, представленной на рис. 4.4, вблизи его собствен
ной частоты. На этой схеме обозначено: Со — статическая емкость кварцедержателя (Со = 2...8 пФ); LKB— индуктивность кварца, характеризующая инерционные свойства пластины (LKB равна десятым долям — единицам генри); Скв — емкость кварца, характеризующая его упругие свойства (Скв равняется сотым долям—десятым долям пикофарад); гкв — активное сопротивление кварца, определяющее потери мощности в нем (гкв равно единицам—десяткам ом). Подробнее эти параметры представлены в приложении 3.
Из эквивалентной схемы кварцевого резонатора видно, что имеются две собственные частоты резонанса. Первая из них соот
ветствует частоте последовательного резонанса Wj =1/A/LKBCKB ,
а вторая, более высокая, параллельному резонансу
=—. ....... =ц)1 ,/1 + /Со
" 7lkbCo-Ckb/(Co+Ckb)
Рис. 4.5. Частотная зависимость сопротивлений кварца
Так как Скв/С0« 1, то со9 = = п)|( 1 + Скв/2С0) и не превышает десятых долей процента от (Ор На рис. 4.5 приведены графики зависимости реактивного YKB и полного |ZKB | сопротивлений кварца от частоты (о. График |ZKB| изображено учетом активных потерь в кварце. В диапазоне частот 0—<0| и со?—оо реактивное сопротивление кварцевого резонатора носит емкостный характер, а в диапазоне о) ।—(оэ —
112
индуктивный. Вблизи же частоты со। кварц эквивалентен последовательному резонансному контуру с высокой добротностью, а вблизи частоты о)7 — высокодобротному параллельному контуру. Фазочастотная характеристика (ФЧХ) высокодобротного кварцевого резонатора вблизи частоты последовательного резонанса имеет большую крутизну, что, как уже отмечалось, очень важно для построения высокостабильных автогенераторов. Кроме того, кварц обладает высокой эталонностью собственных частот, мало зависящей от действия дестабилизирующих факторов.
4.5. Схемы кварцевых автогенераторов
Все схемы кварцевых автогенераторов можно разделить на две группы. В первой группе кварцевый резонатор в эквиваленте представляет собой индуктивность (так называемые «осцилляторные схемы»), во второй — последовательный резонансный контур. В осцилляторных схемах кварц включается чаще всего между коллектором и базой (емкостная трехточка, рис. 4.6, а), либо между коллектором и эмиттером (индуктивная трехточка, рис. 4.6, 5), реже между эмиттером и базой (индуктивная трехточка, рис. 4.6, в). Видно, что кварц является принципиальным элементом, без которого нет колебательной системы автогенератора.
В автогенераторе баланс фаз выполняется тогда, когда реактивности между электродами база — эмиттер %бэ и коллектор — эмиттер одного знака, а между коллектором и базой YK6 — противоположного знака, чтобы имела место колебательная система (контур). У емкостной трехточки А"бэ и Хкэ — отрицательного знака (емкости С1 и С2), а Хк^ — положительного знака (эквивалентная индуктивность кварца). Такая схема конструктивно проста,
Рис. 4.6. Трехточечные схемы кварцевых АГ по переменному току
113
8-6764
легко настраиваема. При работе на механических гармониках кварца она усложняется тем, что между коллектором и эмиттером включают индуктивность L параллельно конденсатору С2 (на рис. 4.6, а показана пунктиром). При этом резонансная частота контура LC? должна быть ниже рабочей частоты f, но выше частоты соседней снизу нечетной механической гармоники. Тогда на рабочей частоте /контур LC2 эквивалентен конденсатору и автогенератор представляет собой обычную емкостную трехточечную схему, в которой выполняется баланс фаз. Для соседней снизу механической гармоники кварца контур ЬСЭ эквивалентен индуктивности, отчего баланс фаз не выполняется и автогенератор не возбуждается.
В емкостной трехточечной схеме с кварцем из условия баланса фаз имеем X।(сог) + ^((Ор) + Хквр(о)г) = 0, где (ог — частота автоко-
лебаний; Х|((пг) =-----; ; А" п можно определить
u)rCi ti)rC2 Р
по эквивалентной схеме кварца или графически.
Частоту автоколебаний (лг можно найти непосредственно из решения последнего уравнения. Если пренебречь потерями кварцевого резонатора гквр, то
1
2
1 +
О)г s(D]
С кв_______ Со +^|_________________^(^1 +^2)
На рис. 4.7, а представлена структурная схема обобщенного трехточеч
ного автогенератора с кварцем в цепи обратной связи. Кварц и резистор R образуют делитель напряжения обратной связи. На частоте последовательного резонанса (о। сопротивления кварца минимально, отчего напряже-
Рис. 4.7. Схема АГ по переменному току с кварцем в цепи обратной связи без нейтрализации (а) и с нейтрализацией (6)
114
ние на резисторе R максимально, при котором выполняется баланс амплитуд и автогенератор самовозбуждается. При отклонении частоты от о)] сопротивление кварца резко возрастает, отчего напряжение на R резко уменьшается, нарушая баланс амплитуд, и автогенератор не самовозбуждается. Таким образом, частота генерации (лг близка к частоте последовательного резонанса кварца а)|.
Наличие емкости кварцедержателя С() приводит к возникновению паразитных колебаний на частотах а)п > (о।. Во избежание этого используют схему с нейтрализацией емкости Со, показанную на рис. 4.7, б. В ней кварц составляет одно из плеч моста, включенного в цепь обратной связи генератора. Емкость кварцедержателя Со нейтрализуется при этом специальным (нейтродинным) конденсатором Сн, включенным в другое плечо моста, причемCh^Cq. При балансе моста обратная связь отсутствует и автогенератор не возбуждается. На частотах же, близких к частоте последовательного резонанса о)| кварца (или к частоте его п-й гармоники д/о)[), полное сопротивление кварца резко уменьшается, баланс моста нарушается, что приводит к увеличению коэффициента обратной связи и выполнению амплитудного условия самовозбуждения. Следовательно, в схеме автогенератора с нейтрализацией емкости Со колебания возникают только на частотах близких к o)j.
Проанализированные ранее схемы кварцевых автогенераторов не содержали источники питания, т.е. являлись схемами, работающими по переменному току. Необходимо рассмотреть полные схе-
мы кварцевых автогенераторов, используемых на практике.
Практические схемы кварцевых автогенераторов (с источниками питания). На рис. 4.8 представлена емкостная трехточечная схема автогенератора с кварцем между коллектором и базой транзистора. Как и на рис. 4.6, а, здесь колебательная система образована эквивалентной индуктивностью кварца и емкостями С] и С2. Коллекторное питание транзистора Ек параллельное, через дрос-
Рис. 4.8. Схема АГ с кварцем в цепи КБ
115
Рис. 4.9. Схема АГ с кварцем в контуре
сель L , который с конденсатором С4 образует Г-образный фильтр. К источнику питания подключен делитель напряжения Ек, состоящий из резисторов R1 и R2, а их общая точка соединена с базой транзистора. Его эмиттер подключен к общему проводу через цепочку автосмещения R3, СЗ, в результате чего напряжение смещения на базе Еб = UR2 ~ UR3- Дроссель Ьдр снижает шунтирование кварца резистором R1. Для частот
/= 1—25 МГц параметры схемы следующие: = 4,1 к; = 1,3 к; /?3 = 3,2 к; = 2500 пФ. Так как в данной схеме отсутствует колебательный контур, то затруднено возбуждение автогенератора на
гамониках кварца.
Поэтому применяется схема емкостной трехточки с колебательным контуром, внутри которого включен кварц (рис. 4.9), работающий на своем последовательном резонансе. Однако дополнительные элементы контура несколько снижают долговременную стабильность частоты автоколебаний. Кроме того, на очень высоких частотах (250 МГц), когда необходимо компенсировать емкость Cq, схе-
Рис. 4.10. Схема кварцевого АГ Батлера
ма склонна к паразитным колебаниям. От этих недостатков свободна схема Батлера (рис. 4.10).
В схеме Батлера кварц включен в цепь обратной связи, представляющую собой в эквиваленте последовательный резонансный контур (2-я группа автогенераторов). Эмиттер транзистора подключен к общему проводу через резистор R3, создающий отрицательную обратную связь в автогенераторе, мень-
116
Рис. 4.11. Полная схема А г с кварцем в цепи обратной связи
шую, чем положительная. Устойчивость схемы Батлера к паразитным колебаниям определяется относительно глубокой отрицательной обратной связью и слабой связью с контуром звена обратной связи (кварца и R3). Так как сигнал обратной связи подается на эмиттерное сопротивление R3, то на базе его фаза меняется на 180°, компенсируя такой же фазовый сдвиг, создаваемый транзистором. Емкость кварцедержателя Со ком
пенсируется с помощью индуктивности L, образующей с Cq параллельный колебательный контур, резонирующий на частоте /2 кварца. Схема Батлера считается одной из самых высокочастотных, работающей до 300 МГц. Ее параметры:/?! = 13 к;Я9 = 2,4 к;= 300 к; LK = 0,1 мкГн; С| = 51 пФ; С2 = 52 пФ для частоты /= 100 МГц.
Кварц в цепи обратной связи автогенератора может подключаться не только к эмиттеру, но и к базе, как показано на рис. 4.11. Такая схема, используемая на практике, имеет следующие параметры на частоте 80 МГц: С| = 91 пФ; С? = 10 пФ; L| = 0,65 мкГн; /?j = 20 Ом; С3 = 4300 пФ; R2 = 12 к; R3 = 1,1 к; Я4 = 300 Ом; С4 = 16 000 пФ.
Кварцевые автогенераторы на туннельных диодах (ТД) также используются на практике, имея суточный относительный уход частоты 10-9 и предельно высокую частоту генерации 500 МГц. Так как активное сопротивление кварца (гкв = 10—30 Ом) существенно меньше модуля отрицательного сопротивления ТД (| -/?д | = 100—50 Ом), то ТД подключается к кварцу через согласующий трансформатор сопротивлений. В качестве последнего используется контур неизменного полного сопротивления, П-образный фильтр нижних частот, последовательный контур, состоящий из внешней индуктивности L и емкости Сд перехода ДТ, настроенных на частоту последовательного резонанса кварца /р
На рис. 4.12 представлена принципиальная схема кварцевого автогенератора на ТД с контуром неизменного полного сопротивления. Это значит, что в индуктивную и емкостную ветви это-
117
Рис. 4.12. Схема АГ на ТД с
го контура включены одинаковые активные сопротивления R=^LIC, когда на зажимах ТД сопротивление контура является чисто активным и равным тоже R, не зависящим от частоты (так называемый «вечный резонанс»). К точкам соединения L и С со своими резисторами R (точки с и d) подключен кварц, в результате чего такой контур превращается в мост, в горизонтальной
кварцем в контуре неизмен- диагонали которого — кварц, а в верного полного сопротивления тикальной — ТД. На частоте последовательного резонанса / кварц имеет малое сопротивление равное гкв, через которое соединены L и С, образуя контур с малыми потерями, полностью компенсируемыми ТД. В результате этого возникают автоколебания. Через ма
лое сопротивление гкв включаются практически параллельно сопротивления R индуктивной и емкостной ветвей, отчего их результирующее сопротивление уменьшается до 0,5Я. На всех других частотах/# J\ сопротивление кварца очень велико, и можно считать, что между точками с и d—обрыв. Тогда результирующее активное сопротивление в контуре (сопротивление потерь) 2R » гкв и схема не возбуждается. Следовательно, если в точках а, b моста сопротивление R < | -Я |, то рабочая точка находится на падающем участке ВАХ ТД и отсутствует генерация без кварца, что является обязательным условием кварцевой стабилизации частоты автогенераторов.
Параметры схемы на рис. 4.12 для ТД марки 3U 101 и частоты f - 5 МГц следующие: L - 1,9 мкГн; С = 530 пФ; R = 60 Ом; 7?! = 600 Ом; а /?2 = 60 Ом.
Основным недостатком кварцевых автогенераторов на ТД является сложность компенсации емкости кварцедержателя Со на высоких частотах.
Схемы кварцевых автогенераторов синусоидальных колебаний на цифровых интегральных микросхемах (ИМС) широко используются на практике. На рис. 4.13 представлена такая схема на ИМС
118
типа К155ЛАЗ, где R = 470 Ом. Автогенератор представляет собой мультивибратор, в обратную связь которого включен кварц, работающий на своем последовательном резонансе. Для названной серии ИМС максимальная частота автоколебаний до 30 МГц.
В железнодорожной радиостанции (ЖР) поездной радиосвязи типа 42РТМ-А2-ЧМ задающий генератор выполнен на двухкаскадном транзисторном апериодическом
Рис. 4.13. Кварцевый АГ на цифровых элементах
усилителе с положительной обратной связью. В цепи обратной свя-
зи включены параллельно два переключаемых кварца. Один из них работает на частоте 2,13/18 МГц (первый канал), а второй — на частоте 2,15/18 МГц (второй канал).
В ЖР типа 66РТМ-А2-ЧМ стационарной радиосвязи задающий автогенератор (их 3) представляет собой емкостную трехточку, в которой кварц включен между коллектором и базой. Работает он на частоте (151—156)/12 МГц.
Кварцевые автогенераторы в качестве возбудителя передатчика используются при ограниченном числе рабочих частот, как, например, в упомянутых ЖР. В современных передатчиках, в том числе и в ЖР системы «Транспорт», в качестве возбудителя используются синтезаторы частот, обеспечивающие диапазонную кварцевую стабилизацию частоты.
4.6. Диапазонно-кварцевая стабилизация частоты
В синтезаторе выходные рабочие частоты образуются в результате когерентных преобразований частоты только одного опорного высокостабильного автогенератора. При этом синтезаторы частоты строятся на основе прямого или косвенного метода синтеза. В синтезаторе по прямому методу выходные колебания получаются с помощью операций сложения, вычитания, умножения и деления эталонной опорной частоты.
119
В ЖР системы «Транспорт» используются синтезаторы частоты (СЧ) по методу косвенного синтеза (методу анализа). Такие СЧ содержат в своем составе автогенератор, подстраиваемый по частоте (ведомый) петлей фазовой авто подстройки частоты (ФАПЧ). На рис. 4.14 представлена структурная схема СЧ по косвенному методу, где ОГ — опорный (кварцевый) автогенератор; ФД — фазовый детектор; ДПКД — делитель частоты с переменным коэффициентом деления /V; ФНЧ — фильтр нижних частот; ПГ — подстраиваемый по частоте автогенератор (не кварцованный); УЭ — управляющий элемент (варикап).
УЭ подключен к контуру ПГ, отчего последний является час-тотно-модулированным. Стрелками показано кольцо ФАПЧ подстраиваемого автогенератора.
Колебания на выходе системы создаются подстраиваемым автогенератором ПГ, частота которого поддерживается стабильной (кварцевой) путем автоматического ее регулирования напряжением, поступающим на управляющий элемент УЭ с выхода фазового детектора ФД через ФНЧ. Этот детектор вырабатывает управляющее напряжение путем сравнения фаз колебаний опорного ОГ Wq(Z) = C/q cos (o)q/ + <p0) и подстраиваемого ПГ через ДПКД
//](Г)=Ц cos—(c^r+cpj)
генераторов. Так как ФД представляет
собой перемножитель этих колебаний с ФНЧ на его выходе, то на входе ФНЧ имеется напряжение
^ФД(/)=ио(/)чп(0=^осо8(а)(и + Фо)^] cos—((01/+Ф1 )= N
(0| \
0)°-— /+ф° -
=0,56Ш cos
-77 +0.5t/o^icos («)о+-^]/+фо+-77- •
N \ N ) N
120
ФНЧ задерживает слагаемое с суммой частот и начальных фаз (второе), пропуская на свой выход первое слагаемое, которое используется в качестве управляющего напряжения
Яфд(/)»ЛСО8
Ф1
1 + Фо ——
, где А = О,5(7оС/| — ампли-
туда. В стационарном синхронном состоянии а)0 = соф/У. Меняя коэффициент деления N. можно повышать или понижать частоту
на выходе синтезатора = 2V(Dq. При этом шаг кварцованной сетки частот синтезатора равен частоте u)q = 2л/0.
В ЖР системы «Транспорт» метрового диапазона волн /0 = 25 кГц. Так как полоса частот этого диапазона равна 5 МГц (156- 151 = 5 МГц), то СЧ позволяет работать на одной из 200
кварцованных частот через 25 кГц. В ЖР этого диапазона опорный генератор ОГ работает на частоте 10 МГц, а /0 = 25 кГц получается в результате деления частоты 10 МГц на 400. В качестве делителей частоты на 400 и ДПКД используются счетчики импульсов, выполненные на цифровых ИМС как средней, так и большой
степени интеграции. В ДПКД коэффициент деления частоты W = (151—156)/25 • 1(Г3) = 6040—6240 раз. Видно, что ДПКД го-раздо сложнее делителей частоты на 400. Цифровые ДПКД устойчиво работают на частотах выходного сигнала до 2 ГГц. Если
/пг > 2 ГГц, то ее снижают либо вычитанием, либо делением.
На рис. 4.15 представлена структурная схема СЧ, в которой частота понижается вычитанием в преобразователе частоты ПР. На один вход ПР поступает частота с КГ, умноженная в К раз в умножителе частоты УЧ, а на другой его вход — частота /пг от ПГ. На выходе ПР выделяется разница частот /пг - К/ф которая делится в N раз в блоке ДПКД. В синхронном режиме частоты на входах ФД равны
Рис. 4.15. Схема СЧ с понижением частоты путем вычитания
121
Рис. 4.16. Схема СЧ с понижением частоты путем деления
~(/пг-^6) = ./6 • Отсюда
А
/пг =/0(А + Л*).
На рис. 4.16 представлена структурная схема СЧ с понижением частоты путем деления в т раз. На выходе ДПКД частота равна В синхрон-
ном режиме частоты на входах ФД равны /пг/тА = /0. Отсюда /пг = Nmf^ где /л/0 — шаг сетки частот синтезатора. В СЧ с
делением чище спектр выходного сигнала.
ПГ, как правило, — транзисторный автогенератор по схеме емкостной трехточки, к контуру которого подключен варикап в качестве УЭ. Автогенератор ПГ с подключенным к его контуру варикапом представляет собой частотный модулятор, который будет подробно рассмотрен в следующей главе.
Система ФАПЧ — основа синтезатора по косвенному методу.
Режимы работы ФАПЧ. Если частоты ОГ и ПГ равны и эффект медленных изменений параметров ПГ, определяющих его частоту, полностью компенсируется действием ФАПЧ, последняя работает в так называемом режиме удержания. Область начальных расстроек частот ОГ и ПГ, в которой возможен этот режим, называется полосой удержания. Ширина полосы удержания определяется разностью граничных значений частоты ПГ, соответствующих наибольшему и наименьшему напряжению на выходе ФД.
Возможен и другой режим работы системы, при котором в среднем разность частот, вырабатываемых генераторами сигналов, равна нулю, а разность фаз периодически изменяется. Этот режим, используемый крайне редко, называется режимом квазисинхронизма. Обычно систему проектируют так, чтобы он не возникал.
Третий режим работы — режим биений. Его характерной особенностью является непрерывное нарастание в среднем разности фаз колебаний ПГ и ОГ. Режим биений наблюдается в тех случаях, когда начальная расстройка ПГ относительно ОГ (т.е. расстройка,
122
соответствующая нулю напряжения на выходе ФД) больше полосы удержания. Иногда он может иметь место при начальной расстройке меньшей, чем полоса удержания. В режиме биений среднее значение частоты ПГ отличается от частоты ОГ. Состояние
системы, при котором режим биений переходит с течением време
ни в режим квазисинхронизма, называется режимом удержания.
Под полосой захвата понимается область начальных расстроек ПГ и ОГ, в которой при любых начальных условиях устанавливается режим удержания (или квазисинхронизма). Обычно в момент включения системы частоты ПГ и ОГ не совпадают и в системе наблюдается режим биений, когда сигнал ПГ модулируется по частоте напряжением биений. В зависимости от знака мгновенного напряжения биений разность частот ПГ и ОГ то повышается, то понижается. В результате разной длительности положительной и отрицательной полуволн напряжения биений на выходе ФД образуется постоянная составляющая напряжений, которая приводит к изменению частоты биений относительно начальной расстройки. Если начальная расстройка не выходит за пределы полосы захвата, то постоянная составляющая снижает частоту биений до нуля и возникает режим удержания. Если же начальная расстройка пре
вышает полосу захвата, то постоянная составляющая напряжения недостаточна для ее полной компенсации и в системе наблюдается
режим биений.
В общем случае полосы удержания и захвата не равны друг другу. На рис. 4.17 сплошной линией показано устойчивое изменение средней разности частот (частоты биений) Q ОГ и ПГ в замкнутой системе ФАПЧ при изменении начальной расстройки QH от больших значений к малым. Штриховой линией показано неустойчивое изменение Q при изменении QH от малых значений к большим. Прямая линия отображает зависимость Q и Йн в разомкнутой системе ФАПЧ. Поскольку кривые, как правило, получа
Рис. 4.17. Режимы работы ФАПЧ
123
ются симметричными, то под полосами удержания и захвата принято понимать половины соответствующих областей, т.е. Q3 и Qy. Соотношения между Q3 и Qy определяется инерционностью цепи управления системы. Так, если ФНЧ в цепи управления отсутствует (цепь управления безинерционная), то Q3 = Qy. Но в этом случае фильтрующая способность системы ФАПЧ оказывается низкой и помехи, действующие на выходе ФД, непосредственно воздействуют на частоту ПГ. При наличии фильтра и с уменьшением его полосы пропускания полоса захвата системы становится меньше полосы удержания, что объясняется падением напряжения на входе УЭ, а также появлением в кольце регулирования дополнительного фазового сдвига, вносимого фильтром. Если в качестве ФНЧ используется простейшая интегрирующая RC-цепочка, то соотношение между полосами удержания и захвата определяется при QyT>3 приближенной зависимостью Q3/Qy «1,27/^712у , где Т- RC — постоянная времени фильтра. Из этого соотношения видно, что с увеличением Т уменьшается полоса захвата системы ФАПЧ. При этом улучшается фильтрация внешних помех, действующих непосредственно на входе ФД, и ухудшается фильтрация внутренних помех, обусловленных собственными шумами ПГ. На практике инерционность цепи управления выбирают исходя из компромисса между необходимостью обеспечения широкой полосы захвата и фильтрующей способностью по отношению к внешним помехам. С этой целью в цепи управления системы часто используют более сложные фильтры.
Как уже было указано, система ФАПЧ входит в состав синтезатора частот, построенного на основе метода косвенного синтеза.
В синтезаторах, выполненных на основе метода прямого синтеза, которые часто используются на практике, используется компенсационный метод, метод идентичных декадных преобразователей, цифровые методы.
Компенсационный метод реализуется схемой, показанной на рис. 4.18, где КГ — кварцевый генератор; И — исказитель; СМ — смеситель; Ф — фильтр; ВГ — вспомогательный гетеродин.
Здесь кварцевая сетка частот формируется из гармоник кварцевого (опорного) генератора КГ /?/0, где п <> 100 — номер гармо-
124
Рис. 4.18. Компенсационный метод кварцевой стабилизации частоты
ники, а — частота КГ. Кварцевый генератор КГ вырабатывает высокостабильное гармоническое (синусоидальное) колебание (без гармоник) мкг(/) = t/cos (о0г. Для получения гармоник это колебание искажают в блоке И, например преобразуя его в колебание
прямоугольной формы иn(t) = '2Un cos. Многочастотное колебание un(t) поступает в смеситель СМ 1. на второй вход которого подается колебание вспомогательного перестраиваемого гетеродина ВГ. Так как этот гетеродин не кварцован, то учитывается абсолютная нестабильность частоты Ag> в его колебании: wB(r) = t/Bcos (g)b + Ag))Z. Смеситель в эквиваленте представляет собой перемножитель сигналов, и поэтому колебание на его выходе
ПСМ1 (^)=wb(Z)‘w«(/)=^b COS(WB + COS77?G)0/ =
n
= 0,5t/B
2 Un COS ( G)B - J7G)0 + A(O)Z + 2 un COS ( + A7G)0 + AG))
/7 n
К выходу CM1 подключен неперестраиваемый фильтр Ф1 с узкой полосой пропускания Ао)пр, определяемой нестабильностью частоты ВГ, средняя частота которой сопр. Вспомогательный генератор ВГ подстраивается так, чтобы через Ф1 на вход СМ2 поступала только разностная частота с нужной (д/^-й) гармоникой g>b - а?। gjq = (Оф. Все остальные гармоники Ф1 не пропускает на свой выход. На второй вход СМ2 поступает колебание uB(t) того же ВГ. На выходе СМ2 напряжение
нем 2( О=ыф (t )мв (t)=Un[ cos (coB - Л1(оо + Ag))/ cos (coB + Ag>)Z =
= 0,5Un\UB[cos((oB +Ag)-cob +niG)o -Aco)z+cos(g)b + Асо+сов -Л|(0о + Ag>)z].
125
Фильтр Ф2 пропускает на свой выход только первое слагаемое, т.е. нужную гармонику. Для изменения выходной частоты достаточно менять только частоту ВГ. Видно, что нестабильность частоты Да) ВГ скомпенсирована в СМ2 и не влияет на выходную частоту. Отсюда и название метода — метод компенсаций. Относительная нестабильность гармоник одинаковая, равная нестабильности частоты КГ, и составляет порядка 10-6.
Метод идентичных декадных преобразователей (ДП) позволяет сколь угодно дробить шаг сетки частот, используя при этом однотипные блоки, как это показано на рис. 4.19. Устройство состоит из п одинаковых декадных преобразователей, каждый из которых содержит смеситель СМ, неперестраиваемый полосовой
Рис. 4.19. Метод идентичных декадных преобразователей
126
фильтр ПФ и десятикратный делитель частоты ДЧ. Последний ДП не имеет ДЧ. В состав устройства входят также опорный кварцевый генератор ОКГ и магазин частот МЧ с переключателями П.
ОКГ вырабатывает колебание w0(r) - (/cos (DqZ частоты (Dq = 2ji/q. После ряда его преобразований получаются колебания частоты/а и в МЧ колебания 10 частот с одинаковым шагом А/'. На один вход ДП1 подается частота /а, а на другой — частота из МЧ /В1 = 9fd + 7V|/\f, набираемая переключателем П1, гдеN - 0, 1,2,...9. Его смеситель СМ1 с учетом ПФ1 суммирует эти частоты. Выходная частота ДП 1
/l-0.l(9/a+MV+/a)-/a+-^-V
поступает на один вход СМ2 преобразователя ДП2, который суммирует ее с частотой /в2 - 9/а + набираемой переключателем П2 из МЧ. После делителя ДЧ2 получается частота
г г ( N\ Ny \ а f'y = /\ +1--------1-----Az
2 а 100 10 )
Выходная частота каждого ДП поступает на один вход СМ последующего ДП, на другой вход которого поступает частота /в из МЧ, определяемая своим числом У. В результате этого на выходе последнего преобразователя ДП/Г у которого нет ДЧ, частота
И-1 П-.
г in/’ (м Мц-2 А^2 V г
Л =10 Л + Nn +---------+-------+...+----—— А/.
" d I " 10 100 ю"-* ю" I
Все ДП работают примерно в одинаковом интервале частот /а—(/а + 1 ОД/), что позволяет их выполнить из одинаковых элементов. Исходя из 5-процентной относительной ширины полосы, вполне приемлемой для ПФ и ДЧ, можно, к примеру, принять /а = 2,0 МГц и А/’= 100 кГц. Тогда на выходе ДП/7 получается диапазон частот fn = 20—20,99 ... МГц. Колебания этих частот поступают на один вход СМП + j, на другой вход которого подаются колебания частот из МЧ, умноженные по частоте в 10 раз в блоке УЧ,
127
Рис. 4.20. Цифровом синтезатор частоты
отчего их частоты находятся в интервале 180—189 МГц. На выходе СМЛ + । получается сумма его входных частот, составляющая 200—209,99 ... МГц. Колебания этих частот поступают на один вход СМ/г + 2, на второй вход которого подаются колебания с М Ч, увеличенные по часто
те в блоке УЧ в 10 раз и лежащие в интервале 200—180 МГц. Так как СМ// + ? выделяет разницу частот его входов, то на выходе СМ/7 + 7 имеет место кварцованная сетка частот f - 0—29,9 МГц с шагом А/’= 100 кГц (во всем КВ диапазоне).
В последнее время при создании синтезаторов частот по принципу прямого синтеза стали широко использовать цифровые методы.
Цифровой синтезатор частот может быть выполнен по структурной схеме (рис. 4.20), если к блоку ПЗУ этой схемы, где хранятся отсчеты синусоиды, подключить блок установки частоты УЧ, в котором по определенной программе записан код частоты.
Используются также цифровые синтезаторы частот, рабо
тающие по принципу суммирования импульсных последовательностей и др.
4.7. Квантовые стандарты частоты
В качестве эталонов частоты /() часто используют квантовые эталоны (КЭ), прецизионная относительная нестабильность частоты которых очень низкая — порядка 10~13. Это водородные, рубидиевые, цезиевые и другие эталоны частоты.
На железнодорожном транспорте для тактовой синхронизации цифровой сети (ТСС) применяется водородный эталон частоты навигационного спутника ГЛОНАСС (Россия). Этот эталон частоты теоретически можно использовать и для решения различных навигационных задач, например для определения координат и скорости движения поезда. Однако КЭ имеют очень высокую частоту— единицы гигагерц и низкую мощность, меньше 10~10Вт, что является препятствием их непосредственного использования. По-
128
этому частоту КЭ понижают с помощью специальных схем без потерь стабильности, но с повышением мощности, которые называются схемами переноса стабильности частоты КЭ.
Схемы переноса строят либо с автоподстройкой частоты высокостабильного кварцевого автогенератора (КГ) по
Рис. 4.21. Квантовый эталон частоты с вычитанием ошибок
сигналу КЭ, либо используют кварцевый автогенератор в схеме
двойного гетеродинного преобразования частоты КЭ (схемы с вычитанием ошибки КГ).
Упрощенная схема переноса с вычитанием ошибки (ВО) показана на рис. 4.21. Здесь частота КГ умножается в п раз и смешивается с эталонной частотой /кэ в первом смесителе СМ 1. На выходе СМ 1 выделяется слабый сигнал промежуточной частоты /кэ - п/кг который усиливается в многокаскадном усилителе УПЧ и поступает на вход делителя частоты с коэффициентом деления п. С выхода делителя получаем сильный сигнал с частотой fK3ln -,/кг, который вместе с колебанием КГ поступает на второй смеситель СМ2. На выходе СМ2 при помощи фильтра выделяется сигнал с суммарной частотой равной /кэ/и -/кг + /кг = fK3ln-
В выходном сигнале ква-
зистатические уходы частоты КГ взаимно исключаются и стабильность выходной частоты определяется стабильностью частоты КЭ.
Схема переноса с ФАПЧ изображена на рис. 4.22. Здесь КГ снабжен управителем частоты УЧ. Как и в схеме с ВО, частота подстраиваемого КГ тоже умножается в п раз и смешивается с частотой КЭ в смесителе СМ. Сигнал разно
Рис. 4.22. Квантовый эталон частоты с АПЧ
129
9-6764
стной частоты ./кэ-^/кг после усиления в УПЧ подается вместе с колебанием КГ на фазовый детектор ФД. Выходное напряжение ФД через ФНЧ и управитель УЧ изменяет частоту колебаний КГ так, что в стационарном синхронном режиме она становится равной /кэ/(// + 1), а разность фаз колебаний, подводимых к ФД, устанавливается постоянной. При этом квазистатические уходы частоты колебаний КГ полностью устраняются системой ФАПЧ и стабильность выходной частоты равна стабильности частоты КЭ. К недостаткам схемы с ФАПЧ следует отнести возможность выпадения системы из синхронизма и наличие УЧ, который несколько увеличивает нестабильность частоты КГ. Однако при правильном проектировании эти недостатки можно ослабить.
Контрольные вопросы и задания
1. В чем суть и значение стабилизации частоты передатчиков?
2. Как определяются абсолютная и относительная нестабильности частоты передатчика и каковы их значения в ЖР?
3. Как и чем определяются кратковременная и долговременная нестабильности частоты?
4. Поясните эталонность и фиксирующую способность контура автогенератора.
5. В чем суть параметрической стабилизации частоты?
6. Перечислите дестабилизирующие частоту автогенератора факторы.
7. Дайте определения температурных коэффициентов ТКЧ, ТКЕ, ТКИ.
8. С какими температурными коэффициентами выбирают элементы контура автогенератора?
9. Поясните сущность кварцевой стабилизации частоты автогенератора и сравните ее с параметрической.
10. Поясните свойства кварца и принцип его работы в автогенераторах.
11. Нарисуйте частотную характеристику кварца, составьте его эквивалентную схему и приведите численные значения ее параметров.
12. Как подразделяются схемы кварцевых автогенераторов и какова эквивалентная схема кварца в них?
130
13. Нарисуйте принципиальную схему автогенератора с кварцем в цепи база—коллектор и поясните баланс фаз в ней.
14. Нарисуйте принципиальную схему кварцевого автогенератора Батлера и поясните баланс фаз в ней.
15. Для чего нужна нейтрализация емкости кварцедержателя?
16. Перечислите методы и объясните сущность нейтрализации емкости кварцедержателя.
17. Назовите наиболее высокочастотные схемы кварцевых автогенераторов и укажите их максимальные рабочие частоты.
18. Нарисуйте принципиальную схему автогенератора с кварцем в цепи обратной связи и укажите его эквивалентную схему.
19. Нарисуйте принципиальную схему кварцевого автогенератора на туннельном диоде, поясните ее работу и укажите максимальную рабочую частоту.
20. Каким требованиям должен удовлетворять кварц в схемах автогенераторов?
21. Нарисуйте принципиальную схему кварцевого автогенератора на цифровых ИМС.
22. Что такое диапазонно-кварцевая стабилизация частоты и как подразделяются синтезаторы частот?
23. Нарисуйте структурную схему ФАПЧ и поясните принцип ее работы.
24. Перечислите режимы работы ФАПЧ и назовите ее параметры.
25. Как осуществляется диапазонно-кварцевая стабилизация частоты в ЖР?
26. Нарисуйте структурную схему понижения частоты опорного автогенератора с автоподстройкой кварцевого автогенератора и поясните ее работу.
27. Нарисуйте структурную схему понижения частоты опорного генератора с вычитанием ошибок и поясните ее работу.
28. Поясните компенсационный метод диапазонно-кварцевой стабилизации частоты по структурной схеме.
29. Нарисуйте структурную схему метода идентичных декадных преобразователей и поясните ее работу.
30. Поясните цифровой метод получения кварцованной сетки частот.
131
Глава 5. ВИДЫ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ КОЛЕБАНИЙ АНАЛОГОВЫМИ СИГНАЛАМИ
5.1. Общие положения
Модуляция — это изменение одного или нескольких параметров высокочастотного (ВЧ) колебания по закону передаваемого сообщения. Параметрами ВЧ-колебания
u(t) = Um cos (со/ + ф) (5.1)
являются амплитуда Um, частота <о и фаза ф. Соответственно и модуляция (М) называется амплитудной (AM), частотной (ЧМ) и фазовой (ФМ).
Сообщение a(t) любой природы с помощью соответствующего датчика преобразуется в пропорциональную электрическую величину /?(/) = Ka(t\ где К—размерный коэффициент пропорциональности. Таким датчиком в связи является микрофон, преобразующий сообщения говорящего из звуковых непрерывных колебаний (волн) в аналогичный по закону изменения электрический сигнал />(/)— первичный электрический сигнал, который является низкочастотным (НЧ) и тоже непрерывным (аналоговым). Если один из параметров гармонического непрерывного ВЧ-колебания изменяется по закону аналогового сигнала, то модуляция называется аналоговой. При этом ВЧ гармоническое колебание^/) называется модулируемым колебанием или колебанием несущей частоты или сигналом — переносчиком сообщения, а первичный сигнал b(t) — модулирующим. Сигналом-переносчиком может быть импульсная периодическая последовательность, и тогда при аналоговом модулирующем сигнале модуляция называется аналого-импульсной. Развитие последней приводит к цифровой модуляции. Если модулирующий сигнал дискретный или цифровой, то и модуляция называется дискретной. Данная глава посвящена аналоговым видам модуляции. Именно аналоговые ЧМ и ФМ используются в современных ЖР.
132
5.2. Амплитудная модуляция
В этом случае в ВЧ гармоническом колебании (5.1) изменяется только амплитуда Um(t) = Um + Kb(t) по закону модулирующего сигнала b(t) вокруг среднего значения Um, причем размерный коэффициент пропорциональности К выбирается так, чтобы амплитуда Um(t) была всегда положительной. Тогда уравнение
W(O = [Um + Kb(j)] cos (woz + cp0) (5.2)
описывает амплитудно-модулированное колебание (AMK). Его график приведен на рис. 5.1. Видно, что (5.2) — уравнение прямой линии относительно первичного сигнала />(/), почему амплитудную модуляцию называют линейной системой. В простейшем случае b(t) является гармоническим колебанием с круговой частотой Q и начальной фазой ф: b(t) = В cos (Qz + ф), когда (5.2) принимает вид
w(z) = Um[ 1 + М cos (QZ + ф)] cos (u)q/ + ф0), (5.3)
где М = KB/Um — глубина (коэффициент) AM.
Так как амплитуда положительная, то 0 М <> 1. При М = 0 уравнение (5.3) превращается в простое гармоническое колебание. Если же М - 1, то (5.3) имеет максимум t/max - 2ЦП и минимум (/min = 0 (рис. 5.2). При А/ > 1 (перемодуляция) появляются нелинейные искажения.
Рис. 5.2. АМК при синусоидальном модулирующем сигнале
133
Рис. 5.3. Многочастотный модулирующий сигнал
Раскрывая скобки в (5.3) получаем спектр АМК
= Um cos + Фо) +
+ 0,5М Um cos [((о0 + Q)/ + <Pq + ф] +
+ 0.5Л/(7от cos [(ю0-й)г + <р0- ф],
который состоит из колебания несущей частоты (первое слагаемое), колебаний верхней (ВБЧ) о)0 + Q и нижней (НБЧ) u)q - Q боковых частот. Если b(t) содержит ряд гармонических составляющих, например как показано на рис. 5.3, т.е. b(t) занимает полосу частот Q5- Q|, то у АМК имеют место не боковые частоты, а боковые полосы — ВБП и НБП. В этом случае боковые полосы изображают в виде прямоугольных трапеций, как показано на рис. 5.4. Из этого рисунка следует, что расстояние между ближайшими спектральными составляющими боковых полос A(omjn “ 2Qmin, а вся полоса частот АМК Ао)п = 2Qmax.
Векторную диаграмму можно получить, изображая вектором каждую гармоническую составляющую АМК и находя результирующий вектор. На рис. 5.5 несущее, верхнее и нижнее боковые колебания показаны в виде векторов, исходя из предположения, что модулирующий сигнал гармонический. При этом несущее колебание изображается неподвижным вектором длины Um под углом <Pq к начальному положению оси проекции. Верхнее и нижнее бо-
Рис. 5.4. Спектр АМК
АМК
134
ковше колебания имеют вид векторов одинаковой длины MUm!2. но располагающихся под разными углами к начальному положению оси: под углом ср0 + ф для ВБЧ и под углом ср0 - ф для НБЧ. Вектор ВБЧ вращается против часовой стрелки, а вектор НБЧ — по часовой стрелке с угловой скоростью Q. Через некоторое время сумма векторов боковых частот будет изменяться по модулю, но всегда находиться на линии вектора несущего колебания, совпадая с ним по направлению или не совпадая. Поэтому модуль суммарного вектора AM К тоже будет меняться со временем.
Принцип работы амплитудного модулятора. Устройства, с помощью которых формируется АМК, называются амплитудными модуляторами. Таким устройством в передатчике является его выходной каскад (мощный), который выполняется на транзисторе. В нем AM осуществляется путем изменения смещения на базе транзи
стора или в результате изменения его коллекторного напряжения. В первом случае AM называется базовой, а во втором —коллекторной. Может быть и комбинированная AM.
На рис. 5.6, а представлена схема модулятора базовой AM, а на рис. 5.6, б — спрямленная проходная характеристика транзистора iK = при Ек = const и временные диаграммы, поясняющие ее работу.
В этом модуляторе транзистор VT включен по схеме с общим эмиттером. На его базу (вход) поступает колебание несущей частоты cdq и параллельно НЧ модулиру
Рис. 5.6. Амплитудный модулятор (а) и его временные диаграммы (б)
135
ющее напряжение /?(/), а также постоянное напряжение смещения На коллектор транзистора подается напряжение питания Ек через колебательный контур, который настроен в резонанс с колебанием несущей частоты о)0. Дроссели Др вместе с конденсаторами образуют Г-образные фильтры, которые не пропускают ВЧ-колебания в источники постоянного напряжения. Они создают высокое сопротивление токам высокой частоты и незначительное — для токов низкой частоты. Смещение на базе транзистора Ебсм = Е§ + b(t) изменяется по закону £(/), а ВЧ-ко-лебание несущей частоты изменяется вокруг b(t) как вокруг своего среднего значения, создавая однополярные импульсы коллекторного тока iK разной амплитуды пропорциональной b(t) (см. рис. 5.6, б). На коллекторном контуре выделяется коллекторное напряжение первой гармоники этих импульсов, отчего образуется AM, соответствующая (5.3), как показано на последней временной диаграмме рис. 5.6, б.
Отметим, что AM — нелинейный процесс, так как при этом ВЧ-напряжение несущей частоты отсекается снизу согласно проходной характеристике транзистора (см. рис. 5.6, б) и образуются импульсы коллекторного тока. Это достигается выбором величины постоянного напряжения смещения на базе (рабочей точки) вблизи излома проходной характеристики транзистора. В линейном режиме AM невозможна, так как при этом значение находится в середине линейного восходящего участка проходной характеристики, а результирующее базовое напряжение не выходит за его пределы. В этом случае линейная сумма напряжений базовой цепи (см. рис. 5.6, б) без изменения пройдет в коллекторную цепь, колебательный контур которой выделит только колебание несущей частоты, так как он на нее настроен.
Если в схеме рис. 5.6, а вторичную обмотку трансформатора Т отключить от базовой цепи и подключить ее в коллекторную цепь последовательно с колебательным контуром, то будет иметь место схема коллекторной AM. Работу такого модулятора можно пояснить с помощью выходной характеристики транзисторе! и нагрузочной прямой. Модулятор коллекторной AM работает в перенапряженном режиме, то время как модулятор базовой AM — в недонапряженном режиме.
136
Коллекторная AM обеспечивает больший КПД передатчика, меньшие нелинейные искажения сигнала по сравнению с базовой AM, и поэтому она используется в мощных передатчиках.
Достоинства и недостатки AM. Достоинства — простота схемных реализаций, а недостатки определяются следующим. Из (5.2) следует, что амплитуда модулированного колебания изменяется от Цпт = ДО ^АМ max = + а мощность соответ-
ственно от Pmin = Рн(1 - Л/)2 до Ртах = Рн(1 + Л/)2, где Р /2/?н — мощность колебания несущей частоты на сопротивлении нагрузки RH.
Средняя мощность AM колебания за период низкой частоты Т
U2 Т U2 \ т ч
Рср=4^-/ЫАМ(ОЛ=^-—J(I + A/cosQ02^ = /’h(1+0,5M-). 2//<н 0 Кн 21 О
При М = 1 мощность Pmax = 4РН, Pmin =0 и = 1,5РН. Отношение /’ср/^тах = 0,375 < 1, т.е. передатчик недостаточно используется по мощности, что является существенным недостатком AM. Это происходит потому, что большая часть общей генерируемой мощности расходуется на передачу колебания несущей частоты, которое не несет передаваемой информации. Эта часть при М = 1 составляет
8=Т^~ г общ
Л.
+ ^бок
----=0,67=70%, . М2 3
2
р _1 м2и2, где гбок “ D
4 Ки
мощность колебания обеих боковых по
лос. Исправить данный недостаток можно путем исключения из АМК составляющей несущей частоты. АМК без несущей называется колебанием балансной модуляцией (КБМ).
137
5.3- Балансная модуляция
Балансно-модулированное колебание (БМК) определяется выражением (5.3) без несущей
"БМ^) = Kh^Um cos (oj0Z + ф0) = Kh(t)s(t), (5.4)
т.е. оно получается в результате перемножения модулирующего сигнала /?(/) и сигнала-переносчика s(t). Если оба сигнала гармонические: /?(/) = U cos Q/ и s(t) - Um cos cdq/, to БМК
= cos cos w(/ =
= Q,5KUUm[cos (cdq + Q)r + cos(u) - Q)/]. (5.5)
Видно, что оно состоит только из двух боковых частот (по-
лос): верхней (1)0 + Q и нижней cdq- Q. Процесс перемножения этих
г U
О
f-F f f+F f
сигналов показан на рис. 5.7,6/, б, в. На рис. 5.7, г — частотный спектр этого БМК. Очевидно, что полоса частот БМК такая же, как и АМК: А/БМ “ 2Fmax, а боковые полосы отстоят друг от друга на А/’= 2Fmin.
Устройство, реализующее (5.5), — балансный модулятор, представляет собой перемножитель сигналов (рис. 5.8). Мощный каскад модулятора выполняется на основе двухтактной транзисторной схемы, представленной на рис. 5.9. Однако на ее выходе будут не только две боковые, но и модулирующий сигнал b(t), что является недостатком схемы, хотя его можно устранить путем усложнения схемы. Если же модулятор выполнить по двойной двухтактной схеме, показанной на рис. 5.8 (диод-
Рис. 5.7. Временные диаграммы работы диодного перемножнтеля
ной), то на его выходе сигнал /?(/) отсутствует.
138
Рис. 5.8. Диодный балансный
Рис. 5.9. Транзисторный балансный
модулятор
Демодуляция БМК осуществляется когерентным или синхронным детектором. Каждый из них состоит из перемножителя сигналов П и фильтра нижних частот (ФНЧ),
модулятор
подключенного к его выходу (рис. 5.10). В Рис 5 10 Схема когерент. блоке П перемножаются между собой БМК ного модулятора AM К
и опорное колебание won(/). Если последнее
совпадает с колебанием несущей частоты won(z) = Ks(i), т.е. у них одинаковые частоты и фазы или фазы жестко связаны между собой, то
детектор называется когерентным. Если же совпадают только часто
ты, а фазы разные, то детектор называется синхронным. Для AM К можно использовать только когерентный детектор, в противном случае уровень его выходного сигнала будет меняться во времени.
Для детектирования БМК может использоваться любой из названных детекторов. В случае won(0 = Ks(t), т.е. использования когерентного детектора, в блоке П перемножаются между собой входной БМК и опорное колебание w0(r) = Ks(t) = KU cos о)0/, так что на выходе перемножителя получается колебание
wn(/)=AZ>(/)?(/)%Z>(r)t/2cos2a)0^A-Z>(Z)t7m 1+со^2(|)0/ =±д-ц2/х?) + 1 ?
+—kb(t)U„i cos2o)(}/.
ФНЧ отфильтровывает ВЧ-составляющие, так что на выходе фильтра имеет место переданный сигнал b(t).
139
Обе боковые полосы БМК несут одну и ту же информацию. Это подтверждает то, что на выходе перемножителя когерентного детектора сигнал wn(Z) = u^(t)ks(t) = &(/[cos((d0 + Q)z + cos(o)q --Q)t]kUm cos (Dor, а на выходе ФНЧ Мф(г) = 0,5W(/w(cos Qz + cos QZ) = = Q,5kUm[(b(t) + b(t)] = kUnjb(t). Поэтому одну из них можно исключить, а сообщение передавать с помощью другой. Это сокращает полосу частот передаваемого сигнала в два раза и увеличивает помехоустойчивость связи. Такая передача называется однополосной или передачей одной боковой полосы частот (ОБП AM). При том модуляция называется тоже однополосной.
5.4. Однополосная модуляция
Известно несколько методов формирования одной боковой полосы частот AM колебания (ОБП AM): фильтровой, фазовый, фильтро-фазовый, фазо-фильтровой, синтетический. Основным из них в настоящее время является фильтровой.
Фильтровой метод формирования ОБП AM определяется структурой БМК (5.5), состоящего из колебаний двух боковых полос. С
помощью полосового фильтра можно выделить одно из них, например верхней боковой полосы (ВБП) z/0(Z) = U cos (u)q + Q)Z.
На рис. 5.11, а показана структурная схема формирования ОБП AM, состоящая из перемножителя П и полосового фильтра
Рис. 5.11. ФОС фильтровым методом
ПФ. Блок П выполняется чаще всего по кольцевой диодной схеме (двойной балансной), на выходе которой минимален уровень нелиней
ных искажений сигнала и отсутствует модулирующий сигнал Z?(z) и колебание несущей частоты s(t). В качестве ПФ чаще всего используются электромеханические фильтры (ЭМФ), обычно работающие на несущей частоте 500 кГц (рис. 5.11, б). На более высокой частоте труднее выдержать требуемую крутизну скатов ее амплитудно-частотной характери-
140
Рис. 5.12. Метод последовательных преобразований
стики (АЧХ) 0,1 дБ/Гц, при которой нерабочая боковая полоса подавляется на 60 дБ. Если несущая частота /н > 500 кГц, то требуются минимум два преобразования частоты, т.е. надо соединить последовательно как минимум два формирователя (рис. 5.12). Причем у второго преобразователя несущая/н2 >/н1. В случае третьего преобразования /н3 >/и> Поэтому фильтровой метод формирования ОБП AM называется еще и методом последовательных преобразований.
Достоинством фильтрового метода формирования однополосного сигнала является высокая степень подавления нерабочей боковой полосы (60 дБ). Недостаток — громоздкость схемы.
Фазовый метод формирования вытекает из выражения однополосного сигнала
j/q(Z) = kUUm cos((d0 + Q)/ = kUUm(cQS cdq/ cos Qr - sin cog/sin Qr). Это выражение справедливо для верхней боковой полосы (ВБП). Для НБП знаки в этом выражении меняются на обратные, так что в общем виде ОБП AM можно записать
Л Л
uo(t) = kUUJcoscoqZcosQ/ + sinarsing)/)= k[s(t)b(t)+ s(t)/?(/)], (5.6)
где знаки «-» — справедливы для ВБП, а знаки «+» — для НБП; Л Л
b(t), s(j)—преобразованные по Гильберту b(t),s(t), т.е. b(t) и Xг) сдвинуты по фазе на 90°.
На рис. 5.13 представлена структурная схема формирователя ОБП AM фазовым методом согласно правой части (5.6). На рисунке ПФВ — полосовой фазовращатель на 90° сигнала £(/); П1 и П2 — пе-ремножители сигналов; Г — гене
Рис. 5.13. ФОС фазовым методом
141
ратор колебания несущей частоты; ФВ — фазовращатель на 90° колебания несущей частоты; ФИ — фазоинвертор; 2— сумматор.
Работа схемы определяется выражением (5.6).
На выходе перемножителей П1 и П2 колебания
WpjlW ~ = kU cos й/ (7/wcos =
= 0,5/vt/f7/??[cos(u)Q - Q)r + cos(co0 + Q)r];
л л
пП2^) = ^-b(t)s(t) = kUsinQtUm sin <п0Г =
= 0,5£C77„Jcos(wQ-Q)/~cos(a)o +Q)r],
которые в сумме, т.е. на выходе блока S, дают и%(1) = иП|(/) + + WppU) = kUUnlcos(wQ - Q) t — НБП, а их разность W "
~ “ kUUmcos(a)Q + Q)Z — ВВП. Метод называется фазовым
потому, что в нем НБП подавляется путем фазовой компенсации. Степень этого подавления
2 о д 1 ’ Д£>’
у/a -2acosAq) + l
где a — отношение амплитуд, а Аф— разница фаз колебаний на входах сумматора X
При a = 1, что несложно выполнить, а - 20 1g 5ш(0,5Аф). Чтобы получить а - 60 дБ, как в фильтровом методе, надо иметь Аф = 7 мин, что нереально для современных ПФВ. Последние имеют Аф 2* 1°, чему соответствует а <> 40 дБ < 60 дБ и то только в лабораторных условиях и в полосе речевого сигнала 3,1 кГц. Реально Аф > 1° и а < 40 дБ, что является недостатком фазового метода, сдерживающим его широкое применение на практике. Достоинством метода является простота схемы формирователя: ОБП AM формируется в результате только одного преобразования частоты теоретически на любой несущей и может формироваться на относительно высокой мощности.
Уменьшить недостатки рассмотренных методов можно, используя их комбинацию, одной из которых является фильтро-фазовый метод формирования ОБП AM.
142
Фильтро-фазовый метод (ФИФА) формирования однополосного сигнала (ФОС) реализуется структурной схемой, показанной на рис. 5.14, где ПI, П2, ПЗ— перемножители сигналов; Г1, Г2 — генераторы; ПФ — полосовой фильтр; У — усилитель; КД 1, КД2 — когерентные детекторы; ФВ1, ФВ2 — фазовращатели на 90°; ФИ — фазоинвертор; 2 — сумматор. Блоки П1, Г1, ПФ, У реализуют фильтровой метод ФОС1, который вместе с когерентными детекторами КД1, КД2 и ФВ1 образуют полосовой фазовращатель на 90° для ФОС2 фазовым методом, в состав которого входят блоки П2, ПЗ, Гн, ФВ2, ФИ,2. Если однополосный сигнал с выхода ФОС1 Uq(Z) = U(t) cos [(DqZ - ф(Z)], где t/(Z), cp(Z) — огибающая и фаза модулирующего (однополосного) сигнала, а с выхода генератора П колебание z/j(Z)= Щ то на выходе КД, представляющего собой перемножители с ФНЧ на их выходах, напряжения:
ыКД1^) = = cos ~
-<р(/)] • С7| cos io? = 0,56^ (7(/){ cos ф(г) + cos [2<о/ + <р(/)]};
Л
мКД2(0=мо(?) w 1(/) = t/(/)cos[co/-ф(/)](/[ cos l<o/-^-j =
. ч Л ^t)+—
=0,5t/,t/(r)Jcos
_ z ч Я
+ cos 2u)Z + q)(Z) + —
143
Высокочастотные составляющие (вторые слагаемые) устраняются ФНЧ детекторов, в результате чего сигналы КД1 и КД2 отличаются только фазовым сдвигом на 90°, т.е. представляют собой модулирующий сигнал z/Q(r) и его квадратуру z/Q(z). Это необходимо для нормальной работы ФОС2.
Видно, что сдвиг фазы на 90° только опорного колебания приводит к фазовому сдвигу на этот же угол всего спектра модулирующего сигнала Uq(i) = U(t) cos ср(/). Причем погрешность этого сдвига может быть сколь угодно малой (Дер < 1°), так как поворачивается на 90° опорное колебание КД2 только одной (вспомогательной несущей) частоты. Последнее возможно только в случае однополосного сигнала, что является одним из уникальных его свойств.
Далее сигнал «кд|(/) поступает на сигнальный вход перемножителя П2, а сигнал мКд9(/) — на сигнальный вход ПЗ. С генератора Гн колебание несущей частоты z/H - U cos (Dq/ подается на высокочастотный вход П2 непосредственно, а на ВЧ-вход ПЗ — через фазовращатель ФВ2 на 90°. На выходе этих перемножителей образуются колебания
»П2^) - uKJ\\^un^ - cos COS (O0r =
= 0,5(/£/(/){cos [otyZ-qXz)] + cos [wq/ +
л
2
A
»Пз(О="КД2(О Wii(0 = t/(/)cos <p(/)+y t/cos^a)()/ + -^-j = = 0,5UU(t) {cos[w0/-cp(r)]-cos[w0r + q)(r)]},
которые поступают на соответствующие входы сумматора 2. Если zzn3(z) поступает непосредственно на 2, то на его выходе имеет место НБП = zzn?(r) + zzn3<z) = ^^(z) cos [(noz ~ ф(0], а если чеРез фазоинвертор ФИ, то верхняя боковая полоса = z/n?(r) “ - *'n3<z) ~ ии^ cos [(o0z + <P<z)b
В схеме на рис. 5.14 используются стандартные блоки, выпускаемые промышленностью, и поэтому ее реализация не вызывает труда. В качестве ПФ удобно использовать электромеханический (ЭМФ) или пьезокерамический фильтр, работающие чаще всего на средней частоте 500 кГц. Сравнительно несложно изготовить ПФ
144
Рис. 5.15. Принципиальная схема ФВ на 90°
на среднюю частоту в несколько десятков килогерц. Фазовращатель на 90° вспомогательной несущей (ФВ1) целесообразно выполнить на цифровых ИМС, например на К155ТМ2, как показано на рис. 5.15, вместе с генератором Г1 на К155ЛАЗ. Работа такого ФВ — в разделе 4.5.
В качестве перемножителя сигналов П можно использовать интегральные микросхемы типа К525ПС2, или KP140MAI, или диодный кольцевой балансный модулятор (см. рис. 5.8).
На железнодорожном транспорте AM непосредственно не используется, если не считать внутрипоездного радиовещания. ОБП AM используется в многоканальной связи с частотным разделением каналов (ЧРК): проводной, радиорелейной и др. БМ является промежуточной при формировании ОБП AM. Что касается поездной и станционной радиосвязи, то там используется исключительно угловая модуляция, подразделяющаяся на фазовую и частотную.
5.4. Фазовая модуляция
При фазовой модуляции (ФМ) фаза <р(/) высокочастотного колебания несущей частоты u(t) = Um cos [u)q/ + ф(/)] отклоняется от начального значения ф0 пропорционально модулирующему сигналу b(t): ср(/) = Фо + кЬ(1), т.е.
»Фм(/) = Um cos Н' + Фо + кь^' (5-7)
где к — размерный постоянный коэффициент пропорциональности. Уравнение (5.7) является нелинейным по отношению к модулирующему сигналу /?(/), так как последний находится под знаком тригонометрической функции. Поэтому ФМ является прямым не-
10-6764
145
Рис. 5.16. Временные диаграммы угловой модуляции
линейным видом модуляции. В простейшем случаеб(Г) является гармоническим колебанием b(t) = U sin Qz, при котором
“ Ц» cos W + sin + Фо)= cos И/ * П7ф s^n * %)•
(5.8)
Величина = kU называется индексом ФМ колебания или девиацией фазы, которая численно равна максимальному отклонению начальной фазы колебания от ее среднего значения ср0. На рис. 5.16 показаны модулирующий сигнал />(/) - U sin Qz; ФМ-ко-лебание (пунктирная линия) и немодулированное колебание несущей частоты (сплошная линия) для ср0 = 0.
При b(t) = U sin Qz > 0 колебание ФМ отстает, а при 6(Z) = U sin Qz < 0 опережает по фазе колебание несущей частоты. Этот фазовый сдвиг максимален при sin QZ - ±1, а при sin Qz = 0 отсутствует.
С учетом начальной фазы Ф модулирующего сигнала определяется спектр ФМ-колебания (5:7) по формуле косинуса суммы двух углов:
Мфм(') = cos (wo' + Фо) cos sin (Q/ + Ф)1 -- Um sin (o)q/ + ф0) sin [т sin (й/ + ф)].
Воспользовавшись соотношениями теории Бесселевых функций
sin(/nsinfi/)=2 2 1)Q/].
и-l
146
cos(msinQ/) = J0(m)+2 «=1 ’
можно получить
мФм(/) = ^Осо8(°)0/ + Ч’о) + ^»1 2 Л (w)cos[(ioq + nQ)t +Фо + «ф] + /7=1
+ Um 2(-I)Jn cos[((o0-nQ)f +<р0-«Ф1 (5.9)
ll=\
где Jn(m) — функция Бесселя первого рода и-го порядка от аргумента т.
Данное выражение (5.9) представляет собой разложение ФМК на гармонические составляющие при гармоническом законе модуляции с частотой Q гармонической несущей. Даже в этом простейшем случае ФМК имеет теоретически бесконечный спектр. Он состоит из составляющей несущей частоты а>0 (первое слагаемое) и двух боковых полос частот (второе и третье слагаемые): верхней (ВВП) u)q + и нижней (НБП) u)q-7?Q (рис. 5.17). Нечетные гармоники НБП противофазны нечетным гармоникам ВБП, что подтверждает наличие множителя (-l/7 в НБП. Амплитуды боковых частот пропорциональны Jn(m) и достаточно быстро убывают (хотя и немонотонно) с увеличением номера гармоники п. Практическая ширина спектра ограничивается (1 + т + ) парой боковых состав-
ляющих, когда пренебрегают боковыми частотами, амплитуды которых составляют 1 % и менее от амплитуды немодулированной несущей. В этом случае ширина спектра сигнала с фазовой модуляцией (ФМ) определяется формулой
A/om=2F(1 + /77 + V^7) • (5.10)
m-1
Рис. 5.17. Спектр ______I___________________।_______I_____•—
ФМК o)0-2Q I (о0 (d0+Q cd0+2Qco0+3Q
147
Рис. 5.18. Векторная диаграмма ФМК
При т » 1 можно пренебречь слагаемым \l~rn . Есть и другие аналогичные формулы. Сложнее определить ширину спектра ФМК и ЧМК при случайном модулирующем сигнале.
Однако и в этом случае пользуются формулой (5.10), подставляя в нее максимальную частоту модулирующего сигнала Fm41Y и максимальный индекс ФМ tn± tYV1Y.
11 id. A 11 let А
При Л7ф « 1 можно учитывать только первую гармонику /7=1, при которой ФМ-колебание имеет вид
"Фм(') - Um CQS («V + Фо) + 0,5ШфЦ„{сО8 [О)0 + Q)Z + Фо + ф] --COS [(CDQ-Q)r + Фо - ф]}.
Векторная диаграмма ФМ-колебания показана на рис. 5.18. Это ФМ-колебание состоит из несущей (Oq и двух боковых частот: верхней (ВБЧ) o)q + Q и нижней (НБЧ) cdq - Q, причем НБЧ имеет противоположное направление (знак минус). Из-за этого результирующий вектор Uбоковых частот всегда перпендикулярен вектору несущей частоты Uт. Результирующий вектор всего ФМ-колебания С 2 образует угол ф(7) с вектором несущей U т . С изменением амплитуды модулирующего сигнала изменяется фаза ф(/), т.е. имеет место ФМ, которая сопровождается и амплитудной модуляцией, поскольку изменяется модуль вектора |U2|. Эта AM является вредной (паразитной), и поэтому ее устраняют с помощью амплитудного ограничителя. Известно, что при AM результирующий вектор боковых полос всегда находится на линии вектора несущей U,„, что исключает ФМ. Из приведенного выражения ^фМ(г) для Шф « 1 следует, что ширина спектра ФМ-колебания в этом случае такая же, как и AM-колебания: Д/фМ = /дм ” 2ГП1ах.
Отметим, что мощности ФМ-колебания при любом /??ф и гармонического немодулированного колебания равны между собой при равенстве их амплитуд, хотя первое и содержит не только не-
148
Вход в.ч R
Рис. 5.19. Принципиальная схема ФМ на одиночном контуре
с
. С.
.U =
сущую, но и колебания боковых частот. С увеличением происходит перераспределение мощности в спектре и может отсутствовать составляющая несущей частоты со0, что существенно повышает эффективность использования излучаемой мощности.
Фазовые модуляторы в ЖР выполняются на одиночном, связанных контурах, а также с использованием мостовой схемы.
Схема фазового модулятора на одиночном колебательном контуре представлена на рис. 5.19. Этот контур с резистором R образуют делитель напряжения несущей частоты со0, на которую настроен контур. К последнему через разделительный конденсатор Ср подключен варикап — конденсатор переменной емкости Св, на который подается постоянное напряжение смещения Есм и низкочастотное модулирующее напряжение /?(/). Конденсатор Ср исключает короткое замыкание постоянного напряжения Есм через обмотку контура LK и осуществляет неполное подключение варикапа к контуру. Последнее следует из эквивалентной емкости контура Сю = Ск + СвСр/(Св + Ср). На рис. 5.20 представлена зависимость емкости варикапа Свот напряжения на нем, которая является нелинейной. Напряжение Есм определяет начальную (постоянную) емкость варикапа Сво (рабочую точку), относительно которой изменяется переменная составляющая, пропорциональная модулирующему сигналу b(t). При этом резонансная частота контура u)0 =1/^LKCK3 .
Дроссель Др, имея большое сопротивление Удр = ц)£др для колебания несущей частоты о, не пропускает его на свой выход и исключает шунтирование контура со сто-
Рис. 5.20. Зависимость емкости варикапа от напряжения
149
Рис. 5.21. ФЧХ колебательного контура ФМ
роны генератора модулирующего сигнала b(t). Для модулирующего сигнала b(t) сопротивление дросселя незначительно, так как его частота Q « ах
Физической основой работы фазового модулятора, представленного на рис. 5.19, является фазочастотная характеристика (ФЧХ) его колебательного контура ср = arctgfz, где а — обобщенная расстройка контура. В свою очередь
Да)
я=2-----Q , где о)0, Q — резонансная ча-
стота и добротность контура соответственно, а Да)— отклонение входной частоты со от резонансной о)0, т.е. До) = o)q-(о. На рис. 5.21 показана эта ФЧХ, имеющая линейный (рабочий) участок в окрестности точки а = 0 (со = cdq), достигающий ±30°, и горизонтальные асимптоты фас = ±90°. ФЧХ определяет фазовый сдвиг выходного высокочастотного сигнала относитель
но высокочастотного входного и зависит от его частоты а) или расстройки Да) = а)0- ах Последнее может быть достигнуто за счет изменения резонансной частоты контура а)0 при постоянной частоте входного сигнала ах
В случае если это изменение происходит только за счет изменения постоянного смещения £*см, то модулирующий сигнал b(t) = 0. Если напряжение смещения Есм соответствует резонансную частоту контура 0)0, равную частоте оо входного ВЧ-колебания, то ф = 0. При изменении Есм емкость варикапа Св и эквивалентная емкость контура Скэ изменяются. Когда Св < Сво уменьшится и Скэ, а его резонансная частота возрастет и станет равной о)0|, и ФЧХ сместится вправо параллельно самой себе (штриховая линия /). Поскольку при этом несущая частота о) не изменилась, то фаза выходного сигнала определяется точкой пересечения кривой 1 с осью абсцисс— точкой ф| > 0. Это значит, что выходное напряжение отстает по фазе относительно входного на угол ф] > 0. Если же емкость варикапа Св > Сво, то ФЧХ сместится влево (кривая 2) относительно о). В этом случае ф = ф2 < 0. Можно считать, что рабочая точка скользит по сплошной линии ФЧХ с изменением £\... Это
150
значит, что ФЧХ является статической модуляционной характеристикой, определяющей ФМ при подаче на варикап модулирующего сигнала /?(/).
На практике, в том числе и в ЖР, используются фазовые модуляторы не только на одиночных, но и на связанных контурах, число которых л 2* 2.
Схема фазового модулятора на связанных контурах представлена на рис. 5.22. Связь между контурами внешнеемкостная, через Ссв. Каждый контур настроен в резонанс с колебанием несущей частоты. Назначение элементов в схеме такое же, как и у модулятора на одиночном контуре. Так как любое число связанных контуров пересчитывается в одиночный, то принцип работы схемы (см. рис. 5.22) ясен из описания предыдущей схемы. Максимальный линейный участок ФЧХ связанных контуров определяется выражением Афмл/? = ±(п - 1 )л/2 рад, где п — число связанных контуров. При п-2 значение Асрмл2 = л/2 рад =ЗДсрмл1. Если же /1 = 4, то Д<рмл4 = 9Д<рмл1. Увеличение линейного участка фазового модулятора позволяет сократить число каскадов умножения частоты в передатчике.
На рис. 5.23 представлена мостовая схема фазового модулятора. Она представляет собой Т-образный фильтр с управляемыми реактивностями — варикапами. В пос-
Q
Рис. 5.23. Принципиальная схема ФМ на Т-образном фильтре
151
ледовательное и параллельное плечи моста включены колебательные контуры. Настройка модулятора осуществляется с помощью сердечников этих контуров. На варикапы тоже подается напряжение смещения. Такие модуляторы используются в ЖРУ.
Согласно векторной диаграмме (см. рис. 5.18) фазовая модуляция может быть получена из балансной путем добавления к ней колебания несущей частоты, сдвинутого по фазе на 90°. Известны также методы фазовой модуляции с большим индексом, получаемой из многофазной амплитудной модуляции. Большой индекс ФМ может быть получен путем каскадного (последовательного) включения модуляторов с малым индексом ФМ.
В ЖР используется не только фазовая, но и частотная модуляция.
5.5. Частотная модуляция
При частотной модуляции (ЧМ) частота <о(/) ВЧ-колебания изменяется относительно среднего значения а)0 пропорционально модулирующему сигналу b(t): uXO - % + kb(t), где к— размерный коэффициент пропорциональности. Так как под знаком косинуса или синуса стоит всегда угол или полная фаза гр(Г) = fa(t)dt, то аналитическое выражение частотно-модулированного колебания (ЧМК) имеет вид
ичм(t) = Um cosф(t) = Um cos/cv(t)dt=Um cos/[co0 + kb{t)]dt =
t
= Um cos[(0or+<Ро + ^//?(г)б/г].
0
Видно, что ЧМК можно рассматривать как ФМК, у которого фаза изменяется пропорционально не модулирующему сигналу/>(/), а интегралу от него. Поэтому ЧМ является нелинейной интегральной системой в отличие от ФМ — прямой нелинейной системы. В простейшем случае />(/) = U cos (Qr + ф) и тогда
/
w4M(r)=t//H cos[(Dq/ + фо + k$Ucos(Q/ + $)dt] = о
к U
Q
= Unl cos
шоГ + Фо +
8ш(ЙГ + ф)
=Um cos[u)0r + ф0 + /л sin(Qr + ф)].
152
Здесь т = kU/Q является индексом ЧМ, который пропорционален амплитуде U модулирующего сигнала b(t) и обратно пропорционален его частоте Q. Величина kU = Дсод называется девиацией частоты. Это наибольшее мгновенное отклонение частоты о(г)
До)д
от среднего значения (о0. Поэтому /77 =-— ,
На рис. 5.16 показана временная зависимость г/цМ(/). При т sin Qr > 0 частота о)(/) > u)q с максимумом при sin Qt = 1, а при т sin Qr < 0, наоборот, «)(/) < (п0 с минимумом при sin Qt = -1. При sin Qt = 0 частота оз(/) = а)0.
Аналитическое выражение ЧМК такое же, как и ФМК. Поэтому спектр ЧМК определяется так же, как и для ФМК, но имеет свои особенности. При ЧМК с увеличением частоты модулирующего сиг-
Д/д
нала /^индекс /л=---уменьшается, отчего количество спектраль-
F
ных составляющих тоже уменьшается, изменяясь по амплитуде. При ФМК т не зависит от F. В обоих случаях с ростом Fспектральные составляющие «раздвигаются», но их количество у ЧМК, как отмечалось, уменьшается, а у ФМК остается неизменным. Поэтому полоса частот ЧМК с ростом F увеличивается гораздо меньше, чем у ФМК согласно общей формуле Д/Лум =2F(1 + m + ), где УМ — угло-
вая модуляция, включающая ФМ И ЧМ. Векторная диаграмма ЧМК такая же, как у ФМК (см. рис. 5.18).
Различают прямой и косвенный методы частотной модуляции. При прямом методе модулятор представляет собой управляемый по частоте автогенератор, сам вырабатывающий колебание несущей частоты, а при косвенном — фазовый модулятор с интегратором на его низкочастотном входе. В последнем случае колебание несущей частоты подается извне.
В этом разделе рассматриваются модуляторы с прямой ЧМ, в которых используется как параметрическая, так и кварцевая стабилизация частоты автоколебаний, а также методом ее автоподстройки. Параметрическая стабилизация частоты позволяет получить относительно большую девиацию частоты и исключить полностью или частично умножители частоты в передатчике. Однако при этом стабильность частоты не достаточно высока. Для исключения это
153
го недостатка в ЖР системы «Транспорт» по частоте модулируется некварцованный ведомый автогенератор (ВГ), охваченный петлей ФАПЧ в синтезаторе частот. В этом случае обеспечивается низкая относительная нестабильность частоты 5 • 10-6, такая же, как у кварцевого автогенератора, выполняется требование по девиации частоты в 5 кГц в метровом диапазоне волн, что полностью исключает необходимость в умножителях частоты передатчика.
Схема транзисторного некварцованного частотно-модулирован-ного автогенератора представлена на рис. 5.24, в которой используется трансформаторная обратная связь и параллельное коллекторное питание. К контуру автогенератора через разделительный конденсатор Ср подключен варикап Св, на который подается модулирующее напряжение /?(/) со вторичной обмотки трансформатора Т2 через высокочастотный дроссель Др и последовательно с ним — постоянное напряжение смещения Есм с потенциометра /?п. Резистор R3 и колебательный контур с варикапом представляют собой фазовый модулятор на одиночном колебательном контуре. Если оборвать обратную связь коммутатором К, то будет иметь место фазовый модулятор на одиночном контуре и транзисторном усилителе колебания несущей частоты (на генераторе с внешним возбуждением).
Частота колебаний частотно-модулированного автогенератора (см. рис. 5.24) , где эквивалентная емкость кон-
тура Скэ = Ск + СрСв/(Ср + Св). Так как емкость варикапа Св меняется при подаче на него модулирующего сигнала b(t), как показано на рис. 5.20, то имеет место рассмотренная ранее частотная
Рис. 5.24. Принципиальная схема ФМ частотного модулятора
154
модуляция. Основной характеристикой частотного модулятора является его модуляционная характеристика MX, представляющая собой зависимость частоты f выходного колебания от напряжения модулирующего сигнала U при заданной его частоте F, Примерный вид MX /= ср(U) показан на рис. 5.27. Линейно возрастающий участок этой MX яв-
сч
Рис. 5.25. ЧМ в петле ФАПЧ СЧ
ляется рабочим, который характеризуется коэффициентом нели-
нейных искажений Ау>. Для частотного модулятора Ay-не должен превышать 5 %. Важной является также частотная характеристика модулятора — зависимость девиации частоты А/д от частоты модулирующего сигнала F.
На рис. 5.25 представлена полная структурная схема синтезатора частот, в котором ведомый генератор (ГУН) дополнительно модулируется по частоте с помощью управителя Уп1. Смодулированный синтезатор частот описан ранее, в разделе 4.6.
Если необходимо иметь модуляционную характеристику с большим линейным участком, то целесообразно в качестве варикапа к
контуру подключить постоянную емкость через диоды, работающие в ключевом режиме.
Схема частотного модулятора на диодах, работающих в ключевом режиме, представлена на рис. 5.26. Это — частотно-модул и ро ванный автогенератор, выполненный на операционном усилителе (ОУ). К контуру автогенератора подключен конденсатор С постоянной емкости через
155
диоды УД1 и УД2. Последовательно с УД1 включена цепочка RC, на которую подается модулирующий сигнал b(t). Частота автоколебаний изменяется потому, что емкость С подключается к контуру лишь в течение части периода высокой частоты, что определяется значением b(t). Эквивалентная емкость Су управляющей цепи, состоящей из постоянной емкости С, диодов УД и RqCq-цспочки, лежит в пределах 0 < Су < С. Точное значение Су = С(л - 2ср - sin 2ф)/2л, где
Ф=агс8Ш
________ у л_______
/ <oCg^ \
и т\ +1
\ Л /
При этом Uт — амплитуда колебания несущей частоты uu(t) = Um sin (о/, вырабатываемое частотно-модулированным автогенератором в режиме молчания, когда b(t) = 0. Можно принять С s 0,5Ск.
Частота автоколебаний модулятора / = 1/2лд/£кСкэ , где
Скэ = Ск + Су, т.е. зависит от b(t). Цепь управления вносит в колебательный контур потери, сопротивление которых Ry = 2л/ соС( 1 + cos 2ф). Последнее определяет
Рис. 5.27. MX ЧМ на коммутируемых диодах
паразитную AM. На рис. 5.27 представлена частотная модуляционная характеристика /=ф(Сй) и характеристика паразитной AM U = ф((7й). Последняя устраняется с помощью амплитудного ограничителя.
Прямое и обратное сопротивления диодов не влияют существенно на стабильность средней частоты автоколебаний, если первое значительно меньше, а второе значительно больше
подключаемого реактивного сопротивления 1/ojC.
156
Для еще большего увеличения протяженности линейного участка MX применяют двухтактное включение диодов, как показано на рис. 5.28.
Если требуется высокая стабильность средней частоты автоколебаний, то используют кварцевый частотно-модулированный автоге-
нератор. Рис. 5.28. Двухтактная схема
Схема кварцевого частотного моду- Ч М на коммутируемых диодах
лятора представлена на рис. 5.29, а.
Это — емкостная трехточка, в которой кварц, варикап и индуктивность L2 включены последовательно в переход база—коллектор транзистора. Их эквивалентная реактивность должна представлять собой индуктивность Ly Так как кварц работает на частоте последовательного резонанса, то эта индуктивность определяется значением Л2 и
С • =cdZo--------— >0 или cdLo >—!—. Эквивалентная схема ко-
в э 2 <оСв 2 (пСв
лебательной системы модулятора показана на рис. 5.29, б.
Генерация осуществляется на частоте о)г, близкой к частоте последовательного резонанса кварца а)|кв, так как емкостью кварцедержателя Со можно пренебречь,
б
R3 _L_.
RI
а -Е.
R2
Рис. 5.29. Кварцевый частотный модулятор (а) и эквивалентная схема его колебательной системы (б)
157
U)r
^кв
0,5
где ^3
С|<3
С1+С3
Высокая стабильность частоты колебаний кварцевого автогенератора не позволяет получить девицию частоты Д/д значительной величины на линейном участке MX, что является недостатком таких частотных модуляторов. Удается иметь Д/д = 2—3 кГц при несущей частоте = 10—20 МГц. Достоинством таких частотных модуляторов является высокая стабильность средней частоты их автоколебаний.
5.6. Косвенная частотная модуляция
Так как частота (в(/) и фаза ср(/) связаны между собой известным соотношением о>(/) = dq>(t)ldt, то ФМ всегда сопровождается ЧМ и наоборот. У описанного ранее ФМК круговая частота
. ч <7<р(Г) d г ,>/ м , db(t)
аХО=—-—=—[«)(/ +<р0+££>(/)] = а)0 + £—3—• at at at
Следовательно, ФМК можно рассматривать как ЧМК, у которого частота изменяется пропорционально не модулирующему сигналу />(/), а его производной по времени: Д(о(г) = kdb(t)ldt. В случае гармонического модулирующего сигнала b(t) = U cos (Йг + ф) частота
а)(/) =—[aV + ФО со8(ЙГ + ф)]=с)о-7ИЙ8т(Й/ + ф). Так
dt dt
как максимальное значение sin (ЙГ + ф) = 1, то максимальное отклонение частоты (£>(/) от среднего значения <о0, называемое девиацией частоты ДсОд, равно /иЙ = kQU = Дсод. Из этого выражения
158
следует, что при ФМ девиация частоты пропорциональна не только амплитуде т - kU, но и частоте модулирующего сигнала Q. В рассмотренном ранее ЧМК девиация частоты от Q не зависит. Это значит, что ЧМ, сопровождающая ФМ, является искаженной. Ее можно исправить, исключив Q из девиации путем интегрирования по времени модулирующего сигнала b(t):
cos(Qr + <())^=—sin (Й/+ф)+С,
где С — постоянная интегрирования.
Подставляя 6И(/) в последнее выражение, получим неискаженную (истинную) ЧМ, которая называется косвенной, так как получена из ФМ путем интегрирования по времени модулирующего сигнала. В качестве интегрирующей может быть RC- или RL-цепочка (рис. 5.30).
Для RC-цепочки выходное напряжение
и =и ............
ВЫХ ВХ I---------—
JK2+( —— 'I
V I QC )
Если Л»——, то t/выха^вх77^77’ т.е. t/Bblx обратно про-порциональной, что является признаком интегрирования. Аналогично определяется t/BbIX и для RL-цепочки. Через интегри-
рующую цепочку необходимо подать модулирующий сигнал b(t) на низкочастотный вход фазового модулятора, чтобы получить неискаженную ЧМ на его выходе. При косвенной ЧМ девиация частоты на выходе модулято-
R L__
Рис. 5.30. Интегрирующие цепи
159
ра значительно меньше, чем при прямой ЧМ при прочих рав-ных условиях. Именно А/дм = CaeFmin — минималь-
ная частота модулирующего сигнала/>(/), а Дфмл„ — максималь-ный линейный участок ФЧХ /7-связанных контуров. Для увеличения девиации частоты до требуемой используют умножение частоты ЧМ-сигнала.
Пример. Рассчитать:
1) девиацию частоты Д/дм косвенной ЧМ, выполненной на двух связанных контурах;
2) кратность умножения частоты в передатчике и ее реализацию;
3) рабочую частоту модулятора, если модулирующим сигналом является речевой сигнал с минимальной частотой Fniin = 300 Гц, а девиация частоты на выходе передатчика А/дпер = 5 кГц, его рабочая частота /0 = 151 —156 МГц.
Решение.
Так какДфмл/? = л(п- 1 )/2, то для двух связанных контуров п = 2 и А(₽мл2 = л/2- Тогда А/дм = £ттА(Рмл2 = °'3 ’ л/2 = °’471 кГц- ПРИ этом необходимая кратность умножения частоты у = Д/дпер/ /Д/дм = 5/0,471 = 10,6 раза, что реализуется двумя удвоителями и одним устроителем частоты, т.е. принимаетсяу = 22 • 3 = 12 раз. При этом модулятор должен работать на одной частоте из диапазона (151 —156)/12 = 12.6—13 МГц.
Из ЧМ можно получить косвенную ФМ, так как ф(г) -/ц)(/)</г.
У ФМ, сопровождающей ЧМ,
Дшп . ф(/)=(л0/ +----—sin(£2/ + ф).
^2
Индекс ФМ т = Да>д/£2 зависит от Q обратно пропорционально, т.е. ФМ, сопровождающая ЧМ, является искаженной. Для ее исправления надо исключить Q из индекса путем дифференцирования по времени модулирующего сигнала. Если модулирующий сигнал b(t) - U cos (Q/ + ф) предварительно продифференцировать по времени: />д(/) = db(t)klt - -QU sin (Q/ + ф), то частота ЧМ колебания оэ(/) = u)q + kb^t) - g)q- kQU sin (Qr + ф), а фазаср(/) = - kU cos (Qr + ф) + ф0. Поскольку девиация фазы
160
(индекс ФМ т = kU) не зависит от Q, косвенная ФМ является неискаженной (истинной).
Реализовать дифференцирование можно с помощью RC- или LR-цепочки. Для этого в схеме, приведенной на рис. 5.30, надо поменять местами R и С, R и L. В самом деле, для дифференцирующей цепочки RC выходное напряжение
(J =и _____-____
ВЫХ ВХ I------—
ru-l]
V I QC )
При /?«напряжение ^BbIx^ QC/?t/BX пропорционально Q, что является признаком дифференцирования по времени. Подавая его на низкочастотный вход модулятора ЧМ, будем иметь неискаженную косвенную ФМ.
При дифференцировании по времени модулирующего сигнала девиация частоты ЧМ-колебания А(од = kQU пропорциональна не только его амплитуде С/, но и частоте Q. При увеличении этой частоты в 2 раза (на октаву) девиация частоты ЧМ-колебания возрастает тоже в 2 раза, т.е. на 6 дБ (20 1g 2 = 20 • 0,3 = 6 дБ). Поэтому такое дифференцирование при ЧМ называют предыскажением 6 дБ на октаву, когда ЧМ преобразуется в ФМ. Такое предыскажение используется на практике для повышения помехоустойчивости приема ЧМ-сигнала.
5.7. Подмодулятор
Подмодулятор — это низкочастотный тракт передатчике! от микрофона до модулятора, состоящий из последовательно включенных микрофонного усилителя, усилителя-ограничителя амплитуды, фильтра нижних частот (ФНЧ).
Сигнал с микрофона усиливается по напряжению до максимального (порогового) уровня, который в нормальных условиях не превышается. Если же порог превышается, напри
161
11-6764
мер, при выкриках, то сигнал ограничивается по уровню в усилителе-ограничителе. При этом появляются гармоники, которые искажают сигнал (нелинейные искажения). Их ослабляет ФНЧ, частота среза которого Fcp = 3400 Гц. Главная цель ограничения больших уровней микрофонного сигнала заключается в следующем. Уровень модулирующего сигнала определяет девиацию частоты ЧМ-колебания (АД = kU), т.е. полосу частот ЧМ-сигнала. Если эта полоса превышает заданную, то создаются помехи соседним каналам. В документах [26] рекомендуется эффективную полосу частот ЧМ-колебания определять не по формуле (5.10), а по формуле
A/3C = 2,4F4n + 2FB = 2FB(l + l,2,nn),
где Гдп — пиковая (максимальная) девиация частоты: 0,6Лдп ~ — номинальная девиация;
F — верхняя частота модулирующего сигнала;
шп “ Лдг/^в— пиковый индекс ЧМ.
Эта формула справедлива для метрового диапазона волн с частотным разносом соседних каналов на 25 кГц и Гдп = 5 кГц (ЖР системы «Транспорт»). Так как для речи FB = 3400 Гц, то А/эс = 2,4 • 5 + 2 • 3,4 = 18,8 кГц.
Для ЖРУ УКВ с частотным разносом соседних каналов 50 кГц и F^n = 10 кГц (ЖР типа 66РТМ-А2-ЧМ) эффективную полосу частот рекомендуется в этих документах определять по формуле А/эс = 2ГДП + 2FB = 2FB( 1 + /ип), что составляет 27 кГц для данной ЖР. По этой же формуле определяется полоса частот ЧМ-сигнала поездной радиосвязи (ПРС), т.е. сигналов гектометрового диапазона волн, где девиация частоты не превышает 3 кГц, а разнос между соседними каналами 20 кГц: А/эс = 2^дп + 2FB 2 • 3 + + 2 • 3,4 = 12,8 кГц. Усилитель-ограничитель не позволяет превышать указанные полосы частот.
Контрольные вопросы и задания
1. Дайте определение модуляции высокочастотного колебания и поясните, для чего она нужна.
2. Перечислите все виды аналоговой модуляции.
162
3. Назовите принцип амплитудной модуляции и структуру АМ-колебания.
4. Чему равна полоса частот АМ-колебания?
5. Дайте определения глубины (коэффициента) AM и назовите пределы его изменения.
6. Что представляет собой векторная диаграмма АМ-колебания?
7. Назовите все виды AM и принципы работы их модуляторов.
8. Перечислите достоинства и недостатки AM.
9. Чем отличается балансная модуляция (БМ) от амплитудной AM?
10. Нарисуйте схему транзисторного и диодного балансного модулятора.
11. Чем отличается однополосная модуляция от БМ и AM?
12. Перечислите методы формирования ОБП AM, их достоинства и недостатки.
13. Нарисуйте схемы формирователей ОБП АМ-сигналов.
14. Перечислите достоинства и недостатки ОБП AM по сравнению с AM и БМ.
15. Дайте определение фазовой модуляции (ФМ) и поясните ее графически.
16. Что представляет собой девиация и индекс ФМ?
17. Назовите структуру ФМ-колебания.
18. Почему ФМ называется нелинейной и прямой системой модуляции?
19. Как определяется полоса частот ФМ-колебания?
20. Нарисуйте схемы фазовых модуляторов на одиночном, связанных контурах и мостовой схеме и поясните принцип их работы.
21. Дайте определение частотной модуляции (ЧМ) и поясните структуру ЧМ-колебания.
22. Почему ЧМ является нелинейной и интегральной?
23. Дайте определение девиации и индекса ЧМ и сравните их с таковыми ФМ.
24. Как определяется полоса частот ЧМ-колебания?
25. Чем отличается прямой метод ЧМ от косвенного?
26. Чем отличается модулятор ЧМК от модулятора ФМК?
27. Нарисуйте схему транзисторного некварцованного частотного модулятора и поясните ее работу.
163
28. Нарисуйте схему частотного модулятора в синтезаторе частот и поясните ее работу.
29. Нарисуйте схему частотного модулятора на диодах, работающих в ключевом режиме, и поясните ее работу.
30. Нарисуйте схему частотного модулятора на кварце и поясните ее работу.
31. Как формируется косвенная ЧМ?
32. Нарисуйте схему модулятора косвенной ЧМ.
33. Как формируется косвенная ФМ?
34. Нарисуйте схему модулятора косвенной ФМ.
35. Что такое предыскажение ЧМ сигнала 6 дБ на октаву?
36. Назовите структуру подмодулятора и его назначения.
Глава 6. АНТЕННЫ
Нагрузкой передатчика является антенна, к которой он подключается обычно через фидер.
6.1. Принцип работы передающей антенны
Принцип работы антен
Рис. 6.1.6/ — структура передающей линейной антенны: б — эквивалентное значение тока в передающей линейной антенне
ны можно пояснить с помощью рис. 6.1, я, на котором изображена двухпроводная линия (горизонтальные провода), разомкнутая на конце и питаемая генератором Г в ее начале. Для определенности длина этой линии / выбрана равной четверти длины волны к тока в ней (/ = АУ4), хотя / может быть произвольной длины. На этом рисунке показано распределение тока I (сплошные линии) и заря
да q (пунктирные линии) в ее проводах. Это распределение является синусоидальным для тока / и косинусоидальным для заряда q, причем в заданном сечении линии I и q в одном проводе равны по модулю I и q в другом проводе, но противоположны по знаку. Поэтому при расстоянии между проводами d много меньшем длины волны к тока в них (d « к) такая линия не излучает электромагнитной энергии: в каждой точке пространства магнитные поля 7/, порождаемые токами I обоих проводов, взаимно компенсируются, как и электрические поля £, порожденные электрическими зарядами q этих проводов. Если провода этой линии развести на 180°, как показано на рис. 6.1, а (вертикальная линия), то противофазные токи станут синфазными. Теперь токи в проводах не только равны по модулю, но и совпадают по направлению и фазе, а векто
165
ры Н и Е в любой точке пространства в общем случае не компенсируются, а складываются геометрически. Такая простейшая антенна эффективно излучает электромагнитную энергию. Ее называют симметричным вибратором, потому что ток в ней распределен симметрично относительно центра. Закон распределения амплитуды тока 7т(с) вдоль линейного тонкого вибратора определяется выражением
I--I).
где 1 — амплитуда тока в пучности;
к = 2лА — волновое число в свободном пространстве (постоянная фазы);
п — текущая координата внутри вибратора (| -1 — модуль z).
Для полуволнового вибратора (2/ = А/2) пучность тока нахо-
дится в его середине (г = 0), так как sin kl=sin f=1 На кон-y X 4 у
цах вибратора (| - | =7) ток равен нулю. Распределение заряда q(z) по длине вибратора определяется уравнением непрерывности тока
1 <//„;(.-)
9 где y = V-l •> а со = 2 л/—круговая частота yuj Cl—
тока в проводе. Приведенные выражения свидетельствуют о том, что ток распределен неравномерно вдоль вибратора. Если же вибратор мысленно разбить на множество бесконечно малых частей dz, то ток в этих частях будет практически постоянным, хотя и разной амплитуды (рис. 6.1, б). Элемент проводника с электрическим током называется элементарным электрическим излучателем. Электромагнитное поле излучения всего вибратора в любой точке пространства может быть найдено путем геометрического суммирования полей излучения всех его элементов. Поле излучения элементарного излучения находится сравнительно просто.
6.2. Элементарный электрический вибратор
Элемент проводника с током постоянной амплитуды эквивалентен электрическому диполю. Это вытекает из выражения
166
cl^^~ и может быть пояснено рисун-
ком 6.2. Поэтому такой элементарный излучатель часто называют электрическим диполем Герца. Как видно из рисунка, диполь состоит из двух электрических зарядов, равных по модулю и противоположных по знаку, отстоящих друг от друга на расстоянии dz = I—длины элемента. Диполь характеризуется моментом, который является векторной величиной: рт ^z^qml, где —
Рис. 6.2. Электрический диполь Герца
направляющий орт, т.е. вектор, модуль которо-
го равен единице. Электрический диполь Герца излучает электро
магнитные волны, что характеризуется вещественной частью вектора Пойтинга П=[ЕН], где квадратная скобка означает векторное произведение векторов Е и Н . На рис. 6.3 совмещены декартова система (х, у, z) и сферическая система (г, 0, ср) координат, в центре координат 0 по оси z расположен электрический диполь Герца. Плоскость, проходя
щая через ось z, является ме-ридиальной плоскостью, а плоскость, проходящая через центр сферы перпендикулярно оси 2, называется экваториальной. Положение любой точки М на сфере полностью характеризуется тремя координатами: радиусом сферы (наклонной дальностью) г, зенитным углом 0 и азимутальным углом ср, что записывают в виде М (г, 0, ф). Зенитный угол 0 образован осью z и радиусом-вектором ОМ, соединяющим центр сферы 0 с точкой М (ОМ = г). Азиму
Рис. 6.3. Электрический диполь Герца в сферической системе координат
167
тальный угол ср образован осью х и проекцией ОМ на экваториальную плоскость. Эти углы отсчитываются от положительных направлений соответствующих осей. Часто вместо0 используется угол места 6(6 = 90° - 0).
Строго электромагнитное поле диполя (векторы Е и Н) определяется с помощью уравнения Максвелла, что рассмотрено в специальных курсах. Структура этого поля в общем случае сложная. Для ее упрощения пространство вокруг вибратора разбивается на ближнюю (кг < 1), дальнюю (кг » 1) и промежуточную зоны. Излучение электромагнитных волн рассматривают в дальней зоне, где поле имеет только две составляющие: составляющую электрического поля Е, направленную по 0,
2г К
и составляющую магнитного поля Н, направленную по ср,
Hfr j^—smQe~jkr.
2гК
Как уже было указано, положительное направление по 0 определяется касательной к сфере в точке М по меридиану от оси + г, а по ср— касательной к сфере в точке М, параллельной экваториальной плоскости и направленной в сторону от оси + х. Следовательно, в дальней зоне векторы Е и Н взаимно перпендикулярны в пространстве, а их векторное произведение равно произведению их модулей и направлено по радиусу от центра сферы (см. рис. 6.3), т.е. векторы Е, Н , П взаимно перпендикулярны в пространстве. Видно, что вектор Пойтинга вещественен, т.е. диполь Герца излучает.
От комплексной формы записи напряженностей поля необходимо перейти к тригонометрической форме, предварительно умножив последние выражения на в/(0/ и взяв их вещественную часть:
E(t) - - Ет sin (со/ - кг)',
H(t)~- Нт sin (со/ - кг).
168
В дальней зоне амплитуды Ет и Нт связаны между собой
соотношением Н т - EmIW®, где =120л=337Ом —
_ V ео
волновое сопротивление свободного пространства, а
Ет = 60л —/ sin 6 . Амплитуда напряженности излученного в гХ
пространство поля ЕП1 зависит от 0 и не зависит от ср, т.е. изменяется только в меридиальной плоскости. Это изменение оценивается функцией
/(0,<р)=—------sin0=/(0),
Эдитах
представляющей собой характеристику направленности диполя Герца. Графическое изображение последней называется диаграммой направленности (ДН). В полярной системе координат (на меридиальной плоскости) ДН диполя Герца /(0) = sin 0 представляет собой восьмерку (рис. 6.4, а), а в пространстве — фигуру вращения этой восьмерки вокруг оси z, т.е. тороид. В сечении тороида плоскостью, параллельной экваториальной плоскости, всегда будет окружность, что говорит об отсутствии направленности излучения в этой плоскости. Иногда ДН изображают в декартовой системе координат (рис. 6.4, б), что проще в построении, зато менее наглядно, чем в полярной системе координат.
Рис. 6.4. Диаграмма направленности (ДН) электрического диполя Герца в полярной (а) и декартной (б) системе координат
169
6.3. Элементарный магнитный вибратор
Рис. 6.5. Магнитный диполь Герца (а) и его эквивалент (б)
Из электростатики известно, что замкнутый виток с постоянным током / на расстояниях, значительно превышающих его размеры, создает такое магнитное поле, как если бы на его месте находился магнитный диполь с моментом (рис. 6.5), где
5q — направляющий орт, ц —магнитная проницаемость среды, S — площадь витка.
Точно также виток с переменным электрическим током
/ = Ini cos со/ до тех пор, пока его размеры малы в сравнении с длиной волны X, эквивалентен переменному магнитному диполю, момент которого характеризуется комплексной амплитудой
= . Такой виток называют элементарным магнитным из-
лучателем или магнитным диполем Герца. Часто элементарный магнитный излучатель определяют по аналогии с элементарным электрическим излучателем: это элемент проводника с магнитным током.
Его поле в дальней зоне имеет две составляющие:
/М/ # Jм/
=“ 7TTsin ; =7’---oTsin Qe~'k' ’
2rk 2W°rk
где 7м — магнитный ток диполя;
— волновое сопротивление свободного пространства (И/0 = 120 л = 377 Ом);
точка над Е и Н означает их комплексность.
По сравнению с электрическим диполем Герца у магнитного диполя Герца составляющие поля Е и Н поменялись местами (Е вместо Н и вместо £’е). Такое же электромагнитное поле, как у магнитного диполя Герца, создает элементарная щель.
170
6.4. Элементарный щелевой вибратор
Это — узкая щель в проводящей поверхности. Длина щели / значительно меньше длины волны Х(/« X) и напряженность электрического поля Е вдоль нее не изменяется ни по амплитуде, ни по фазе. Щель считается узкой, если ее ширина во много раз меньше ее длины. Диаграмма направленности ДН элементарной щели в ее меридиальной плоскости (плоскости вектора Н) представляет собой правильную восьмерку, а в экваториальной плоскости (плоскости вектора Е) — окружность, т.е. направленность отсутствует. Щель излучает с максимальной интенсивностью перпендикулярно своей оси (перпендикулярно плоскости щели) и не излучает вдоль оси. Проводимость излучения щели, прорезанной в безграничном плоском идеально проводящем экране,
Такая щель аналогична элементарному электрическому вибратору, находящемуся в свободном пространстве. При этом надо иметь ввиду, что горизонтальная щель излучает вертикально поляризованные волны, а горизонтальный электрический диполь Герца — горизонтально поляризованные волны. На практике используются щелевые антенны. Это антенны, в которых излучение и прием электромагнитных волн осуществляется при помощи одной или нескольких щелей, прорезанных в волноводе или объемном резонаторе. На метрополитене используется щелевой кабель.
В природе не существуют магнитные заряды и токи. Однако ими пользуются в качестве удобной абстракции. С помощью магнитного диполя Герца удалось количественно выразить принцип Гюйгенса.
6.5. Элементарный вибратор Гюйгенса
Его чаще называют элементом Гюйгенса. Элемент Гюйгенса — это бесконечно малый элемент (точка) поверхности равных фаз (фронта) излучаемой волны. В диапазоне сантиметровых волн
171
широко используются антенны, представляющие собой излучающие поверхности. Это зеркальные, линзовые, рупорные и другие антенны. Их также называют апертурными антеннами. Излучающую поверхность в апертурных антеннах рассматривают как часть поверхности плоского волнового фронта (поверхности равных фаз). Любая точка этой поверхности (элемент Гюйгенса) характеризуется вектором Пойтинга П = [Е Н], т.е. взаимно ортогональными
векторами напряженности электрического Е и магнитного Н полей. Согласно граничным условиям вектор Е эквивалентен магнитному диполю Герца, а вектор Н — электрическому диполю Герца. Эти диполи взаимно перпендикулярны между собой, как показано на рис. 6.6, а
Диаграмма направленности ДН эквивалентного элементарного излучателя (элемента Гюйгенса) в полярной системе координат описывается кривой Г(0) = 0,5(1 + cos 0), называемой кардиоидой. Она представлена графически на рис. 6.6, б в предположении, что волна распространяется вдоль оси г (вектор П совпадает с положительным направлением оси с). При этом вектор Е направлен по оси х, а вектор Н —по оси у. Пространственная ДН есть фигура вращения этой кардиоиды вокруг оси г. Видно, что излучение элемента Гюйгенса направлено в одну сторону, в сторону движения фронта волны (вдоль оси z). Это является количественным подтверждением известного принципа Гюйгенса,
172
сформулированного еще во второй половине XVII века. Его суть состоит в возможности замены волновой поверхности системой вторичных источников сферических волн. Причем каждая точка волновой поверхности рассматривается как такой источник. Соответственно перемещение волновой поверхности сводится к распространению этих вторичных сферических волн на расстояние г = сАг, где Ar - t2 - Ц— интервал времени, а с — скорость света. Волновая поверхность после перемещения находится как огибающая вторичных сферических волн (рис. 6.7).
Рис. 6.7. Процесс распространения радиоволн
Принцип Гюйгенса был обобщен Френелем в начале прошлого
века, после чего он стал называться принципом Гюйгенса—Френеля. Математической интерпретацией этого принципа является формула Кирхгофа. Принцип Гюйгенса—Френеля поясняет процесс распространения радиоволн, а элемент Гюйгенса используется для описания
изучения электромагнитных волн апертурными антеннами.
6.6. Принцип работы приемной антенны
Если вектор напряженности электрического поля Е падает на провод антенны под углом а, то согласно второму уравнению Максвелла (Остроградского—Гаусса) наведенная в проводе ЭДС пропорциональна Е cos а, т.е. ЭДС = Лд£* cos а, где Лд — коэффициент пропорциональности (действующая высота антенны, провода). Эта ЭДС возбуждает в проводе антенны ток, который проходит по фидеру на вход приемника. Следовательно, приемная антенна является источником ЭДС с некоторым внутренним сопротивлением Zz. Ее нагрузочным сопротивлением является входное сопротивление приемника ZBX .
Если угол а = 0, то ЭДС максимальна. В этом случае говорится, что антенна согласована с полем по поляризации волны. Если же а = 90°, то ЭДС = 0 и сигнал на вход приемника не поступает (приема нет), то антенна полностью рассогласована с полем (разнесена по поляризации).
173
С помощью принципа взаимности передающих и приемных антенн доказывается равенство характеристик и параметров антенны при работе ее в режиме передачи и в режиме приема.
6.7. Поле симметричного вибратора
По сравнению с электрическим диполем Герца симметричный вибратор — сложная антенна, состоящая из бесконечного множества таких диполей. Поле симметричного вибратора в данной точке пространства М находится пу
Рис. 6.8. Симметричный вибратор
тем геометрического суммирования (интегрирования) полей в этой точке от всех элементарных излучателей. Это иллюстрируется рис. 6.8, где показан симметричный вибратор, расположенный по оси г, на котором выбраны два элемента (1,2) длиной dz. Так как точка М находится в дальней зоне (кг » 1), то лучи от этих элементов идут практически параллельно друг другу и лучу из центра вибратора 0. Из этого рисунка следует, что г। - Гд - z cos 0 и г9 = г । + z cos 0. Разность Г] - /*2 = Аг « Гд, и поэтому амплитуды этих лучей
практически одинаковы, т.е. dEfn\ = dEm2 - dEnr так как q ш r2 s При расчете фазового сдвига полей от этих элементов надо учитывать разность хода лучей Аг, т.е. Аср = £Аг. Следовательно, в точке М напряженности поляб/£'| = dEm sin (or -kr^dE^ = dEm sin (or - kr2).
Результирующее поле от двух элементов dE = dE\ + dE^ = - ^lEm sin (or - Avq) • cos (kz cos 0). Для определения напряженности поля в точке М от всего вибратора надо последнее выражение проинтегрировать по z в пределах от 0 до / с учетом того, что
dEni =60л 0, т.е.
гХ
174
Е=------sin 0 sin( cd/ - )flm (s) cos( kz cos 0) r/r
rX 0
Поскольку /,„(-) = Imxx sin k(l - | r | ), в результате интегрирования получается, что Е = ?п /’(0) sin( со/ — /с/~0), где 7/пп — амплитуда тока вибратора в пучности тока. Множитель sin (ая - /<г0) указывает на то, что симметричный вибратор излучает бегущие волны. В этом множителе фазовый угол со/ - кг§ зависит только от расстояния Гф (а не от Г| и г2) между точками М и 0 и не зависит от угловых координат. Первое означает, что средняя точка 0 является эквивалентной точкой излучения (фазовым центром), а второе — что излучаемые волны — сферические. Первые два множителя определяют амплитуду напряженности электрического поля в направлении угла 0:
£",„=60 -^-/(0),
Г
. cos( klcos 0) - cos kl
причем ./(“) =-------siri~0----- является функцией направлен-
ности, зависящей только от угла 0, т.е. ДН изменяется тоже только в меридиальной плоскости. Обратная пропорциональность амплитуды Ет расстоянию г — еще один признак того, что симметричный вибратор, как и диполь Герца, излучает сферические волны. Отсутствие в ДН угла ср указывает на то, что симметричный вибратор, как и диполь Герца, не обладает направленными свойствами в экваториальной плоскости. Если симметричный вибратор полуволновый (2/ = 0,5k), то нормированная ДН
с/m Л0) COS(O,57tCOS0) /„,(0) Sin0
мало отличается от соответствующей ДН диполя Герца (она уже).
Помимо симметричного вибратора в СРС используется и петлевой вибратор.
175
В
б
X
2
Рис. 6.9. Петлевой вибратор
6.8. Петлевой вибратор
Он состоит из двух электромагнитносвязанных полуволновых вибраторов В1 и В2, включенных параллельно (рис. 6.9). Так как заряды обоих симметричных вибраторов в крайних точках а, б равны между собой, то токи в обоих вибраторах совпадают по величине и направлению. Мощности излучения вибраторов В1 и В2 определяются выражениями
^i=(^ii+/?i2Vn2;
^22 =(Л22 + ^21)/п,
где Я| |, Я79— собственные сопротивления излучения вибраторов;
Яр, —сопротивления излучения, вносимые из одного вибратора в другой;
/п — действующее значение тока в пучности.
Так как расстояние между вибраторами очень
мало (rfa 0,02Х), то Яц s Я9Э s Яр s Я21 и мощность излучения всего петлевого вибратора
Р£п = ^21 + ^22 =4^1I Лч ’
Я = —=4 Я = 4 Я
а его сопротивление излучения 2п г 2 11 2с . т.е. в 4 раза
' п
больше сопротивления излучения одиночного полуволнового симметричного вибратора Я2с = 73,1 Ом и составляет Я2п = 292,4 Ом. ДН петлевого и одиночного симметричного вибратора совпадают между собой. Вибратор подключается к передатчику через фидер, представляющий собой коаксиальный кабель. Такой кабель несимметричен, и поэтому его подключают к симметричному вибратору через симметрирующее устройство. Если же кабель подключать к симметричному вибратору непосредственно, то ток в плече вибратора, подключенном к внешнему проводу кабеля (оплетке), будет меньше, чем в другом плече, подключенном к центральной жиле
176
кабеля. От этого нарушается симметрия вибратора, искажается его ДН. Нарушение симметрии происходит потому, что часть тока с внутренней поверхности оплетки кабеля переходит на ее внешнюю поверхность и фидер начинает излучать электромагнитные волны, как антенна (антенный эффект фидера).
Симметрирующее устройство в стационарной антенне манжетной конструкции СРС выполнено в виде четвертьволнового металлического полого стакана (цилиндра) 3, надетого на соосную с ним металлическую заземленную трубу 5, конец которой приварен ко дну стакана (рис. 6.10). Через трубу 5 и отверстие дна стакана 3 проходит конец коаксиального кабеля (фидера, заштрихованного на рисунке). Внешний провод фидера (оплетка) подключен к стакану 3, а внутренний (жила) — к верхнему штырю /, длина которого / равна четверти длины волны к (/ = А/4). Штырь / и стакан 3 составляют две половины симметричного полуволнового вибратора (антенны). Стакан 3 и труба 5 образуют новую коаксиальную линию четвертьволновой длины, закороченную на конце (в местах их сварки). Входное сопротивление этой линии (в точках начала стакана 3) равно бесконечности в случае отсутствия в ней потерь. Практически оно велико настолько, что ток, протекающий по внутренней поверхности стакана 3 (и внешней поверхности трубы 5), ничтожно мал и им можно пренебречь. Поэтому токи в обоих плечах вибратора (7 и 3) будут равны между собой, т.е. симметрия вибратора не нарушается. Труба 5 может быть исключена, а ее функции будет выполнять оплетка кабеля. Керамический изолятор 2 является опорным для штыря 7 и изолирует его от стакана. Изолятор 4 центрирует трубу 5 и стакан 3 и защищает пространство между ними от пыли и грязи.
Известны и другие симметрирующие устройства, например {/-колено.
На локомотивах устанавливают не симметричные, а заземленные вибраторы, позволяющие исключить симметрирующие устройства. Заземление оказывает определенное влияние на работу таких вибраторов, что необходимо учитывать.
Рис. 6.10. Симметричный вибратор манжетной конструкции
177
12-6764
6.9. Метод зеркальных отображений в антенной технике
Ранее рассмотренные диполь Герца и симметричные вибраторы находились в неограниченно свободном пространстве. Но наличие проводящего экрана обязательно окажет влияние на их излучение. Электрическое поле Е точечного заряда +# в свободном пространстве во всех направлениях радиально. Если же вблизи находится идеально проводящая плоскость РР (рис. 6.11), то форма электрических силовых линий меняется: они образуют прямой угол с плоскостью РР, как этого требуют граничные условия. Такую же конфигурацию, как известно, имеет электростатическое поле двух равных и противоположных по знаку зарядов +# и ~q. Следовательно, действие идеально проводящей поверхности РР(на поле заряда +б/ эквивалентно действию мнимого заряда -q обратного знака, который расположен зеркально относительно плоскости РР‘. Это положение относится и к токам вибраторов (рис. 6.12). Положительным зарядам в точках А, С, Е соответствуют отрицательные заряды в их зеркальных отображениях А', С, Е. а отрицательным зарядам в точках вибратора В, D, F— положительные заряды в точках В', D\ F'. Поскольку ток идет от
Рис. 6.11. Зеркальное отображение
Рис. 6.12. Зеркальные отображения вибраторов в земле
178
положительного заряда к отрицательному, то токи в действительном и мнимом отображениях вертикального вибратора совпадают по направлению и противоположны по направлению при горизонтальном расположении вибратора. Если же вибратор наклонный, то вертикальные составляющие тока /в направлены в одну и ту же сторону, а горизонтальные составляющие — противоположны.
Физическая сущность метода зеркального отображения заключается в том, что электромагнитные волны вибратора, падающие на поверхность экрана, возбуждают в нем токи, под действием которых появляется отраженная волна, эквивалентная волне от зеркального изображения вибратора.
6.10. Заземленный вибратор
Под заземленным вибратором понимают такой несимметричный вибратор (штырь), который подключается к одному зажиму источника ЭДС, при этом другой зажим источника заземляется (рис. 6.13, а). Заземленный вибратор в совокупности со своим зеркальным отображением образует симметричный вибратор (рис. 6.13, б). Поэтому диаграмма направленности заземленного вибратора представляет со-
Рис. 6.13. Заземленный вибратор (а), его эквивалент и характеристики (б)
179
бой верхнюю половину ДН соответствующего симметричного вибратора. Отсюда следует также, что максимум излучения вертикального заземленного вибратора при идеальной проводимости земли находится на ее поверхности. Ток и заряд в заземленном вибраторе (см. рис. 6.13, б) распределены неравномерно по его длине, как и в симметричном вибраторе. Поэтому часто их сводят к эквивалентному диполю Герца, ток которого постоянен по величине и направлению. В этом случае удается воспользоваться некоторыми формулами диполя Герца для симметричного и заземленного вибраторов.
Эквивалентными считаются такие вибраторы, которые при равных токах питания создают поля равной напряженности на одинаковом расстоянии г от них в направлении максимума излучения. Для диполя Герца амплитуда напряженности электрического поля Ет = 60л/т11г однозначно определяется моментом тока Л/ = 1т1. Поэтому условием эквивалентности вибраторов является равенство их моментов тока, т.е. Л/п = Л/_. Момент тока заземленного виб-
/
ратора Л/3=/Im(z)dz (см. рис. 6.13, б). В эквивалентном диполе г. 0
Герца ток полагают постоянным по длине /э и равным току у основания заземленного вибратора : Л/эд = 1п^1у Из условия Л/эд = М,у
/
т.е. Sнаходится эффективная длина (высота /ц):
1 / 1 /
= ~ /Лл ~~ f I пт s*n k(l — |-|)t/z =
hnO 0 ЛиО 0
I 1 I
= —cos/c(/-z) f =—(1-cos А:/);
Ли (Л г=0
0 . 2 kl kl
, , ~ 8т
ЛнО _ Лпп Sln Aj ~ I Il ~ 1,1 L'l ~ I
ksmk • kl kl к
£2sm—cos —
2 2
180
к! 2л I 1 , kl kl
Если/«к, to =———=л—«1 и tg—.
2 A, 2 A. 2 2
Поэтому
kl
к 2k 2
, к
Для заземленного четвертьволнового вибратора / =—, а
kl _ 2л А. _ л A.tg— ,
Т=ТТТ"4’ радиани /эз=--------
Z л 3J 2л 2л
Для симметричного полуволнового вибратора /эс=2/эз=—. л
Таким образом, эффективная длина /э меньше или равна геометрической длине / антенны (вибратора).
6.11. Характеристики и параметры антенн
Радиотехнические параметры передающих антенн наиболее полно характеризуют антенны с точки зрения эффективности преобразования энергии связанных электромагнитных волн в энергию свободных электромагнитных волн (радиоволн).
1. Сопротивление излучения — это коэффициент пропорциональности между мощностью излучения /V и эффективным значением квадрата тока в антенне /2: = R^I- Так как излучение —
безвозвратная потеря мощности PS, то сопротивление излучения является активным. Для диполя Герца мощность излучения определяется как поток вектора Пойтинга П через поверхность сферы s с
центром в диполе Герца (рис. 6.14): ^2 »/ПЛ Так как направление 5
векторов П и ds совпадают между собой (по радиусу сферы), а их
модули П =60я/21п---——; ds = 2лг2 sin 0<70, то в результате ин-
4г 2 А.2
181
Рис. 6.14. К вопросу определения
у
тегрирования =80л
/_£
2
.По
этой формуле можно определить
сопротивление излучения симметричного и заземленного вибраторов, в которую вместо / подставляют значение /э. Для симметричного полуволнового вибратора /?2с “ 80 Ом. Точное значение /?2с = 73,1 Ом. Для заземленного четвертьволнового вибратора Я2з = 0,5/?2с - 36,55 Ом.
Вычисленное через/э сопротивление излучения отнесено к тому на клеммах антенны Сопротив-
сопротивления излучения электрического диполя
ление излучения, отнесенное к пучности тока, 7?£п = ^£0 sin2 kl.
2. Сопротивление потерь Rn
определяется мощностью потерь Рп на нагрев проводов, в изоляторах, в земле, в предметах, расположенных вблизи антенны «„ = ра"2-
3. Полное активное сопротивление R.d определяется мощностью Ра, подводимой к антенне от передатчика:
р
Ра = + Рп = /2<Л2 + Лп)- Именно =-*-=Я2 + Дп .
4. КПД антенны — это отношение мощности излучения (полезной) Р^ к полной подводимой к антенне мощности P.d от передатчика
Р. ”^^П ~ I2RY+I2Rn ”^+*n •
5. Входное сопротивлениеантенны — это сопротивление на входных ее зажимах, которое в общем случае имеет активную Рвх и реактивную JfnY составляющие: ZnY = POY + /XOY. Если длина заземлен-* DA DA DA J DA
182
X ?/1 v
ного вибратора /<—, то принимают /?вх =40лг — , а
4 I X 1
Хвх = -JPB ctg kl. где рв — волновое сопротивление антенны. Антенна является нагрузкой для передатчика, и поэтому для максимизации ее энергетически согласуют с выходом передатчика, т.е. добиваются равенства активной составляющей выходного сопротивления передатчика и Лвх антенны. Реактивные составляющие при этом компенсируются.
6. Характеристика направленности (ХН) антенны — это зависимость напряженности поля Е(0, ф) от направления (0, ф) при условии измерения этого поля на одинаковом расстоянии от антенны. Ясно, что для этого случая наиболее подходит сферическая система координат (см. рис. 6.3). Напряженность поля в полной мере характеризуется амплитудой, фазой и поляризацией. В связи с этим можно говорить об амплитудной, фазовой, поляризационной характеристиках направленности. Чаще используется амплитудная характеристика направленности. Графическое представление ХН называют диаграммой направленности (ДН). Для построения пространственной ДН требуется изменять угол азимута ф и зенитный угол 0 с тем, чтобы представить эту ДН в виде поверхности, описываемой функцией /(0, ф). Иногда ДН строят по плотности потока мощности П (модуля вектора Пойтинга). Тогда ХН представляет собой /-(0, ф), т.к. П = Е2/120л. Для упрощения построения ДН обычно ограничиваются двумя плоскостями: экваториальной, где 0 = 90°, а изменяется угол ф, и меридиальной, где ф = const, а изменяется угол 0. ДН диполя Герца, симметричного и заземленного вибраторов были рассмотрены ранее (см. рис. 6.4).
7. Поляризационная характеристика антенны. Поляризация радиоволн определяется законом изменения направления вектора напряженности электрического поля Е во времени. Если конец вектора Е в данной точке пространства с течением времени описывает прямую линию, то поляризация называется линейной. В этом случае все точки луча вектора Е лежат в одной плоскости, называемой плоскостью поляризации. При эллиптической поляризации конец вектора Е описывает эллипс за период высокой частоты, а при круговой— окружность. Эллиптическая и круговая поляризации (вра-
183
Рис. 6.15. Поляризационная характеристика вибратора
щающаяся) являются следствием сложения двух взаимно перпендикулярных линейно-поляризованных полей, сдвинутых по фазе на некоторый угол б, т.е. е = £| sin со/ + £2 sin(<i>r - 5) (рис. 6.15). При б = пл (/7 = 0, 1, 2...) имеет место линейная поляризация, при б = (2п - 1 )л/2 и £| = £2 — круговая, а во всех других случаях — эллиптическая. Отношение малой полуоси b поляризационного эллипса к большой полуоси а называется коэффициентом эллиптичности Р = Ыа. Зависимость Р от направления излучения яв
ляется поляризационной характеристикой антенны. При линейной поляризации Р = 0, при круговой Р- 1, а в общем случае 0^ Р <• 1, что соответствует различной степени эллиптичности.
Электрический диполь Герца, расположенный по оси z (см. рис. 6.3) излучает электромагнитные волны меридиальной поляризации (£ = £0). Чтобы в приемной антенне ЭДС была максимальной, надо чтобы ее провод был параллелен вектору Ё (согласование по поляризации). Если же вектор Ё перпендикулярен проводу антенны, то ЭДС = 0 (разнос по поляризации), т.е. ЭДС в антенне пропорциональна косинусу угла между вектором Ё и проводом приемной антенны.
6.1. Параметры, выражающие направленное действие антенны. Такими параметрами являются: ширина ДН, коэффициент направленного действия (КНД) Д и коэффициент усиления (КУ) G. Их также называют вторичными параметрами, так как они являются производными от первичных параметров и выражаются через них.
Шириной ДН считают угловой сектор, охватывающий часть главного лепестка ДН, в пределах которого напряженность поля £ изменяется от максимума до 1/л/2~=0,707 его значения (рис. 6.16). Для ее определения из центра ДН проводят окружность
184
Рис. 6.17. Коэффициент направленного действия антенны
Рис. 6.16. Ширина ДН антенны
радиуса R = 0,707 от максимума; точки пересечения с главным лепестком ДН соединяют с центром. Образованный угол и есть ширина ДН 20. Для диполя Герца 20 = 78°.
Коэффициент направленного действия (КНД) Д есть отношение квадрата напряженности поля, излучаемого антенной в данном направлении, к усредненному по всем направлениям значению квадрата напряженности излученного поля. Обычно Д определяют в направлении максимального излучения (рис. 6.17):
д__ ^тах(^ ф) П(0,ф) max г 2 п
hcp Пср
nr II п Ео Ру 12Ру
Так как Етах=60л----, а Псо=—^—=—*==-=--------т.е.
А ср 120л 4лг2 4лг2
Р2 30/2/?2 п 120л2(//Х)2
£о =---z---, то Д=-----------. Для симметричного полувол-
г
нового вибратора R% = 73,10 ми Д. = 1,64. Для диполя Герца Д= 1,5.
Коэффициент усиления антенны (КУ) G = Дт]а, т е- Рав^н произведению КНД на КПД.
185
8. Диапазонные свойства антенны оцениваются диапазоном .рабочих частот (полосой пропускания), в пределах которого любой радиотехнический параметр изменяется в заданных пределах.
9. Максимальное напряжение в антенне не должно превышать допустимое, иначе ионизируется воздух возле антенны и произойдет электрический разряд. Это увеличивает потери электромагнитной энергии и уменьшает КПД антенны.
К передающим антеннам предъявляются следующие эксплуатационные требования.
1. Высокая механическая прочность и надежность в эксплуатации.
2. Минимальные габариты и масса.
3. Простота и эффективность согласования элементов антенной системы.
4. Минимальная стоимость изготовления и установки антенного устройства.
5. Безопасность эксплуатации.
6. Минимальное время, необходимое для развертывания антенны.
Согласно теореме взаимности, параметры и характеристики одинаковы, работает ли антенна в режиме передачи или приема. Однако некоторые из них меняют свой смысл. Если антенна работает в режиме передачи, то она представляет собой нагрузку для передатчика с определенным входным сопротивлением. Если же она работает в режиме приема, то для приемника антенна является источником сигнала с внутренним сопротивлением равным ее входному сопротивлению в режиме передачи. Действующая длина антенны в режиме передачи и приема одна и та же. Направленные свойства в обоих режимах одинаковы. Каждая антенна поездной и станционной связи работает как в режиме передачи, так и в режиме приема.
6.12. Антенны поездной и станционной радиосвязи
Локомотивные антенны ПРС— это линейные (проволочные) ненастроенные заземленные вертикальные антенны Г- или П-об-разной формы. Они устанавливаются на крыше локомотива и соединяются с выходом передатчика (входом приемника) с помощью кабеля (фидера), как показано на рис. 6.18.
186
Г-образная антенна ЖРУ (см. рис. 6.18) имеет вертикальную часть (снижение) высотой /? = 0,7—1 м и горизонтальную часть длиной / = 8—13 м, что много меньше длины волны ПРС X = 141 м. Излучающей частью является снижение, а горизонтальная часть служит для увеличения действующей ее высоты. Поэтому ДН такой антенны в горизонтальной плоскости представляет собой
Рис. 6.18. Локомотивные антенны ПРС системы ЖРУ
окружность, т.е. направленность отсутствует. Г-образную антенну можно рассматривать как вертикальный заземленный вибратор, изогнутый под углом 90° на высоте Л. Это подтверждает и распределение тока I вдоль такой антенны. Из рис. 6.18 следует,
что вдоль снижения ток I практически постоянен, т.е. геометрическая высота антенны практически совпадает с ее действующей высотой h s Лд. Как известно, увеличение Лд способствует увеличению входного сопротивления антенны и увеличению напряжения на входе приемника (7ВХ = Лд£. Однако на горизонтальном (разомкнутом) проводе антенны велики наводки от контактного провода. Поэтому с точки зрения безопасности свободный конец Г-образной антенны стали соединять с крышей локомотива (пунктирная линия на рис. 6.18), отчего антенна из Г-образной превратилась в П-образную (рамку).
П-образная антенна ЖРУ. Принцип ее действия иллюстрируется рис. 6.19, где изображена сама антенна (рамка) и падающая на нее электромагнитная волна (вектор Пойтинга П). Так как
волна имеет вертикальную поляризацию (вектор Е вертикален), то ЭДС индуктируется только в вертикальных проводах антенны ab и cd. Предполагается, что рамка находится в дальней зоне и поэтому лучи Г|, г7, Гф параллельны между собой. Пусть напряженность электрического поля на проводе cd будет Е(Г) = Ет sin a)Z. На проводе ab волна запаздывает по фазе на величину Аср = kl cos ф (см. рис. 6.19). Умножив соответствующую
187
напряженность £(/) на высоту рамки h получим ЭДС Э, индуктированную в ее проводах:
ЭС(1 = Ет h sin со/; = Emh sin (wt -Ik cos cp).
В рамке эти ЭДС действуют встречно друг другу, а поэтому ЭДС на ее зажимах Эд = Э^ - ЭаЬ = Emh[sin свг - sin (<ог -- Ik cos ср)] = 2Enihsin ^C0Si(> cos . Так как I s 13 м,
* ,л. • (Ik \ kl
а Л = 141 м, to sin —coscp s—coscp и
к
Э a = 2Emhl—cos ф cos (со/ - 0,5A7cos ф).
Произведение hl= S — площадь рамки. Тогда
„ 2Е,„5лсо8ф . .
Э а =---—-----— cos (сор—$$kl cos ф).
2£ Амплитуда этой ЭДС Э^д=---------coscp.
X
Отсюда следует, что вертикальная рамка в горизонтальной плоскости обладает направленными свойствами. В соответствии с
188
функцией направленности f = cos ср полярная ДН рамочной антенны имеет форму восьмерки с максимумом вдоль ее длины. В направлении, перпендикулярном плоскости рамки (ф = 90°), прием отсутствует (ЭА = 0). На рис. 6.20 изображен вид сверху на крышу локомотива, где расположены совмещенные Г- и П-образная антенны и их ДН: восьмерка для П-антенны (ДНП), а окружность для Г-антенны (ДНГ).
Если разделить Э/?/д на Ew, то получим действующую высо-
рсльсы
Рис. 6.20. ДН Г- и П-образной антенн
ту рамки hn =----. Эта формула справедлива не только для рам-
X
ки прямоугольной формы, но и любой другой, например круглой.
Если рамка содержит N витков, то //д увеличивается в W раз. Со-
2
противление излучения рамки =80л
Лд X
2
, а ее КНД Д = 1,5.
Рамочную антенну можно рассматривать как закороченный на конце отрезок длинной линии, много меньшей длины волны. Поэтому ее входное сопротивление имеет реактивную составляющую JfBX индуктивного характера. Последнюю можно компенсировать с помощью конденсатора. При тех же условиях Г-образная антенна разомкнута на конце, и поэтому реактивная составляющая ее входного сопротивления имеет емкостный характер. Для компенсации ее JfBX надо использовать перестраиваемую индуктивность, что хуже, чем перестраиваемая емкость.
Своеобразной рамкой является заземленный четвертьволновый петлевой вибратор (рис. 6.21, а), используемый в качестве локомотивной вертикальной антенны СРС. Он относится к группе настроенных антенн, не обладающих направленностью в горизонтальной
189
Рис. 6.21. Локомотивная антенна СРС системы ЖРУ (а) и распределение тока в ней (б)
плоскости. Его ДН такая же, как и у одиночного заземленного четвертьволнового вибратора (см. рис. 6.13, б). Направление максимального излучения совпадает с поверхностью идеально проводящей Земли (см. рис. 6.21, а), а в случае конечной проводимости последней ДН возвышается над ее поверхностью. Входное сопротивление заземленного петлевого вибратора равно половине входного сопротивления симметричного петлевого вибратора, т.е. 7?вх = 0’5 * 292,4 = 146,2 Ом. Коэффициент усиления G = 1,64.
Петлевой вибратор (см. рис. 6.21, а) представляет собой отрезок металлической трубы / (или стержня) длиной 0,5k согнутый вдвое. Один конец отрезка приварен к основанию 3 в форме диска, к которому крепятся шесть радиальных лучей 2 — противовесов. Длина каждого противовеса равна примерно 0,25Х. К другому концу стержня, пропущенного через изолятор 4, подключается коаксиальный кабель, идущий к приемопередатчику.
Распределение тока в такой антенне можно проиллюстрировать рис. 6.21, б на котором изображен вертикальный провод длиной 0,5Х. К верхнему концу антенны подведено питание, а нижний конец заземлен (см. рис. 6.21, б). При этом узел тока находится посередине провода, а направление тока показано на рисунке стрелками. Если провод согнуть пополам, то ток в обеих вертикальных половинках будет иметь одинаковое направление. Следовательно, напряженность поля в точке приема определяется удвоенным значением тока, протекающего по вибратору.
В качестве стационарной антенны ПРС используется обычно Г-образная вертикальная заземленная антенна, высота которой (сниже
190
ние)Л = 8—15 м, а длина горизонтальной (верхней) части / = 10—30 м. Генератор (приемопередатчик) подключается в разрыв нижнего конца снижения. И локомотивная, и стационарная антенны являются вертикальными, что обеспечивает согласование их по поляризации волн.
Стационарной антенной СРС является полуволновый вертикальный симметричный вибратор, рассмотренный ранее. Антенны носимых радиостанций — штыревые.
Рассмотренные антенны используются в радиостанциях системы ЖРУ.
Локомотивные антенны радиосредств системы «Транспорт». Для оборудования локомотивов и мотор-вагонного подвижного состава разработано несколько видов антенн, позволяющих обеспечить их высокую эффективность в условиях, когда имеются жесткие ограничения со стороны габаритов подвижного состава и когда в непосредственной близости от антенны находится различного рода крышевое оборудование. Эти антенны обладают достаточной механической прочностью и малым аэродинамическим сопротивлением встречному ветровому потоку.
Для локомотивов, имеющих высокий кузов, предназначены низко расположенные антенны АЛ/2 и АЛ/3 (А — антенна, Л — локомотивная, 2 — диапазон МВ 151 —156 МГц, 3 — диапазон ДМВ 307—344 МГц).
Антенна АЛ/2 представляет собой несимметричную трехпроводную петлевую антенну (рис. 6.22, а) с емкостной нагрузкой,
Рис. 6.22. Локомотивная антенна АЛ/2 системы «Транспорт» (а) и распределение тока в ней (б)
191
состоящей из металлической пластины длиной 500 и шириной 60 мм. На эквивалентной схеме (рис. 6.22,6) левая часть имеет индуктивный характер, а правая часть — емкостный. В целом антенна эквивалентна параллельному контуру, который при выполнении условий /| + h < 0,25k и /2 < 0,25Х будет настроен в резонанс. Резонансное сопротивление этого контура представляет собой входное сопротивление антенны, которое определяется отношением /|/(/| + Л>). Выбирая это отношение, можно получить входное сопротивление антенны, равное волновому сопротивлению фидера.
Антенна АЛ/2 имеет круговую диаграмму направленности, коэффициент усиления G на 0,5—0,8 дБ ниже, чем у четвертьволнового вибратора, а ее действующая высота /?д почти такая же, как у штыря высотой Х/4, поскольку распределение тока в вертикальных стойках приближается к равномерному благодаря емкостной нагрузке.
Антенна АЛ/2 имеет сварную конструкцию, образованную верхней пластиной 2 и нижним основанием и тремя трубчатыми стойками / диаметром 20 и 36 мм. Крайняя справа стойка опирается на антенный изолятор 3 с высокочастотным разъемом 4. Высота антенны АЛ/2 200 мм.
Аналогичную высоту имеет антенна АЛ/3, которая представляет собой несимметричный петлевой вибратор. Антенна состоит из двух стоек, основания и верхней пластины размерами 135 х 55 мм. Расстояние между стойками 90 мм. Электрические параметры АЛ/3 подобны параметрам антенны АЛ/2.
Для оборудования подвижных объектов, на крышах которых размещено различное оборудование (высоковольтные шины, быстродействующие выключатели, токоприемники и т.д.), предназначена дискоконусная антенна АЛП/2,3, способная эффективно работать в диапазонах МВ и ДМ В. Для уменьшения экранирующего влияния крышевого оборудования электрический центр этой антенны находится в верхней ее части. Кроме того, благодаря своей большой высоте (примерно 700 мм) антенна оказывается поднятой над окружающими ее предметами. Антенна имеет собственную противовесную часть, поэтому ее не обязательно устанавливать на металлической поверхности.
192
Конструктивно антенна АЛП/2,3 (рис. 6.23) состоит из собственно антенны, изолятора 4, диска 5 и стойки 3. Антенна представляет собой сварную конструкцию, состоящую из вертикальных труб 2, расположенных концентрически и выполняющих роль несущей конструкции и развязки (четвертьволновых стаканов, закороченных с внешней трубой) и конуса 7, образованного восемью прутками диаметром 10 мм. Угол при вершине конуса 40°.
Благодаря использованию короткозамкнутых шлейфов все элементы
Рис. 6.23. Локомотивная антенна АЛП/2, 3 системы «Транспорт»
антенны имеют гальваническую связь с корпусом подвижного объекта. Питание антенны осуществляется по коаксиальному кабелю 6 с волновым со
противлением 50 Ом. Кабель проходит через внутреннюю трубу и центральной жилой распаивается на внешний цилиндр, а оплеткой — на диск.
Характеристики направленности дискоконусной антенны близки к характеристикам полуволнового вибратора.
При оборудовании средствами радиосвязи автомобилей и другого нерельсового транспорта используются антенны АМ/2 и АМ/3, представляющие собой несимметричные вертикальные вибраторы (в виде штырей) четвертьволновой длины. Противовесом антенн служит металлический корпус подвижного объекта. Для снятия наведенных потенциалов антенный штырь соединяется с корпусом при помощи катушки индуктивности, размещаемой в основании антенны. Переносные радиостанции РВ-6 комплектуются антеннами типа АП, которые состоят из антенны АМ/2, снабженной тремя штыревыми противовесами. К антенне придается
специальная складная мачта, которую можно развернуть в местах проведения работ. Кроме того, специальный кронштейн со струбциной позволяет закрепить антенну на опорах контактной сети и других конструкциях.
193
13-6764
Рис. 6.24. Стационарная антенна АС-1 системы «Транспорт»
Стационарные антенны радиосредств системы «Транспорт». Стационарные радиостанции комплектуются широким перечнем разнообразных антенн, которые позволяют оптимально решить вопросы ЭМС и обеспечить требуемые дальности связи. Стационарным антеннам присвоен индекс «АС», тип антенны определяется следующей после индекса цифрой, а принадлежность к диапазону — цифрами 2 или 3, которые пишутся после типа через дробь.
Все антенны имеют грозозащитную конструкцию, т.е. все их металлические части гальванически соединены между собой и с основанием (крепежным фланцем) антенн, однако не могут служить молниеприемниками.
Основные параметры антенн приведены в табл. 6.1.
Простейшей стационарной антенной является антенна АС-1 (рис. 6.24), которая представляет собой полуволновой вибратор. На его основе строятся более сложные направленные антенны.
Антенна состоит из внутренней опорной трубы /, на которую наделы и соединены с ней два металлических стакана 2. Стаканы разделены между собой изолятором 3. Внутренняя поверхность верхнего стакана совмест но с поверхностью трубы образует собой короткозамкнутый отрезок коаксиальной линии длиной Х/4 с большим входным сопротивлением. Такую же роль играет и нижний стакан совместно с опорной трубой. Питание антенны осуществляется по коаксиальному кабелю 4, центральная жила которого распаивается к основанию верхнего ст акана, а внешний проводник — к вершине нижнего стакана.
Опорная труба приварена к основанию 6 с фланцем, с помощью которого антенна крепится к матче. Внутри основания установлен кронштейн. На нем закреплен высокочастотный разъем, служащий для подключения фидера, идущего от радиостанции.
При использовании АС-1 в качестве активного элемента более сложных антенн ее входное сопротивление изменяется из-за влияния рядом находящихся излучателей и отражающих поверхностей.
194
Поэтому для сохранения необходимой степени согласования с фидером в конструкцию антенны введена подстроечная муфта, состоящая из двух полуколец 5. Перемещением подстроечной муфты вдоль опорной трубы добиваются минимального значения КСВ в рабочем диапазоне частот.
Антенна АС-2 состоит из вибратора АС-1, рефлектора и стойки. Рефлектор выполнен в виде плоской решетки. На расстоянии 0,2k от решетки расположен вибратор. Такая конструкция позволяет сформировать диаграмму направленности в горизонтальной плоскости и форме кардиоиды с шириной 130° по уровню -3 дБ.
Антенна АС-3 состоит из вибратора АС-1 и уголкового зеркала, образованного двумя плоскими прямоугольными решетчатыми полотнами. Вибратор расположен в плоскости биссектрисы уголкового рефлектора. Уголковая антенна является одной из простейших направленных антенн, позволяющих при относительно небольших размерах сформировать довольно узкую диаграмму направленности с незначительными боковыми и задними лепестками, не превышающими 10—12% излучения в главном направлении.
Таблица 6.1
Основные параметры стационарных антенн диапазонов 160 и 30 МГц
Тип антенны Краткая характеристика конструкции Вид диаграммы направленности Коэффи-цпент усиления, дБ Масса, кг
Диапазон
2 3
АС-1 Полуволновый вибратор Круговая 0 2,0 1.45
АС-2 Антенна АС-1 с отражателем в виде плоской решетки Кардиоида 3 14,6 13.5
АС-3 Уголковый отражатель из двух плоских решеток с антенной АС-1 в плоскости биссектрисы угла Однонаправленная с шириной 45° на уровне -3 дБ 9 20,5 14,5
АС-4 Две антенны АС-3 с возможностью поворота относительно друг друга на угол от 90 до 180° Двунаправленная с изменением угла между лепестками 6 33 24
АС-5 Коллинеарная, состоящая из двух волновых вибраторов, расположенных друг над другом Круговая 5 30 14
195
Окончание таблицы 6.1
Тип антенны Краткая характеристика конструкции Вид диаграммы направленности Коэфф и-циент усиления, дБ Масса, кг Диапазон
2 3
АС-6 Две антенны АС-1, расположенные на расстоянии Х/2 и питаемые синфазно В виде «восьмерки», угол между максимумами излучения 180° 5 6 —
Примечания: 1. Данные о диаграммах направленности приведены для горизонтальной плоскости. 2. Коэффициент усиления указан по отношению к полуволновому вибратору.
Антенна АС-4 состоит из двух антенн АС-3, размещенных на общей стойке согласующего устройства и фидеров. Для уменьшения влияния одной уголковой антенны на направленные свойства другой излучатели запитываются противофазно. Противофазность обеспечивается разностью длин питающих кабелей. Для согласования входного сопротивления антенн с волновым сопротивлением фидера используется четвертьволновый трансформатор в виде коаксиальной линии жесткой конструкции. Имеется возможность изменения угла между направлениями максимального излучения в пределах (180 ±90)°.
Антенна АС-5 представляет собой коллинеарную антенну, имеющую круговую диаграмму направленности с повышенным коэффициентом усиления (5 дБ). Выигрыш достигается повышением направленности в вертикальной плоскости с помощью вертикальной линейной решетки, состоящей из двух волновых вибраторов, которые расположены друг над другом вдоль вертикальной оси. Вибраторы запитываются синфазно. Симметричное питание плеч каждого из вибраторов обеспечивается петлей симметрии, образованной отрезком коаксиального кабеля длиной 0,5k.
Несущей конструкцией антенны является центральная труба, на которую «насажены» два вибратора, каждый из которых собран из восьми прутков и трех колец. Длина АС-5/2 составляет 3500 мм, а АС-5/3 2200 мм.
Антенна АС-6/2 представляет собой простейшую антенну, обладающую направленными свойствами. Ее диаграмма направленности представляет собой восьмерку, максимумы излучения кото
196
рой всегда направлены в противоположные стороны (на 180°). Антенна состоит из двух вибраторов АС-1/2, расположенных на расстоянии 0,5Х и запитываемых синфазно. Благодаря этому результирующее поле в направлении, перпендикулярном плоскости расположения вибраторов, суммируется, а в направлениях 90 и 270° вычитается.
6.13. Измерение входного сопротивления вибраторных антенн и их эквиваленты
Основной особенностью измерений входных сопротивлений излучающих систем по сравнению с измерениями импедансов (полных сопротивлений) неизлучающих устройств L, С, R состоит в том, что измерительный прибор находится в поле, излученном антенной. Болес того, сам измерительный прибор становится элементом излучающей системы. Это, с одной стороны, может привести к погрешности из-за прямого воздействия поля на измерительный прибор, а с другой — к погрешностям в результате включения массы прибора (а иногда оператора) в излучающую систему. Первая особенность обычно легко устраняется. Вторая же является основным источником погрешностей. Например, при измерении входного сопротивления какой-либо несимметричной антенны, имеющей вполне определенную «противовесную» часть (лучевой противовес, корпус локомотива, радиостанции и т.п.), часто можно впасть в ошибку, применив прибор, питаемый от сети промышленного тока.
Суть ошибки состоит в том, что подключение прибора к антенне изменяет входное сопротивление противовесной части, так как параллельно ей подключается сопротивление сетевых проводов по высокой частоте. Следовательно, в суммарное сопротивление антенны ZA, которое в нормальных условиях состоит из собственно сопротивления антенны и сопротивления противовесной части, включаются также сопротивления сетевых проводов. Последнее обстоятельство приводит, как правило, к серьезным ошибкам при измерениях. Следует отметить, что измерение сопротивлений симметричных антенн приборами с сетевым питанием также может привести к погрешностям, если антенна не вполне сим-
197
мстрична. Сетевые провода здесь искажают величину сопротивления по однотактной волне тока.
Заметные ошибки наблюдаются при измерении входного сопротивления антенны, когда крыша локомотива заменяется другой аналогичной поверхностью меньших размеров, на которой устанавливается антенна. Замена противовесной части антенны приводит к искажению величины ZA по сравнению с действительной. Недопустимо также измерение входных сопротивлений несимметричных приземных антенн с использованием высокочастотного кабеля, если последний в реальных условиях не применяется.
В качестве общей рекомендации следует отметить целесообразность применения измерительных приборов с автономным питанием, исключающих подключение к сети промышленного тока. Приборы с автономным питанием позволяют вести измерения с антеннами, расположенными на различных транспортных средствах без применения заземления.
При проведении измерений ZA необходимо помнить о том, что «небольшие» по длине дополнительные соединительные провода или отрезки высокочастотного кабеля в определенных условиях могут в сильной степени трансформировать входное сопротивление антенны, исказив его истинную величину. Такого рода ошибки наблюдаются при измерении на участке диапазона частот, где антенна имеет параллельный резонанс.
Методами измерения входных сопротивлений антенн, чаще всего используемых на практике, являются:
- метод добавочных сопротивлений;
- метод 0-метра;
- мостовые методы.
Эквивалентами антенн называют неизлучающие двухполюсники, у которых частотная характеристика входного сопротивления в определенном диапазоне частот имитирует характеристику входного сопротивления реальной антенны.
Эквиваленты антенн нашли широкое применение как в лабораторной практике, так и при эксплуатации радиосредств. В первом случае с их помощью производится настройка выходных каскадов передатчиков, измерение их мощности, настройка различных трактов и фидерных устройств и т.п., а также настройка вход
198
ных цепей приемников. Во втором случае осуществляется настройка радиостанции без выхода в эфир.
Применение эквивалентов антенн в лабораторной практике позволяет значительно сократить время на различного рода измерения.
При разработке эквивалентов антенн основными задачами являются: возможно более точное воспроизведение картины изменения входного сопротивления антенны в заданном диапазоне частот, обеспечение рассеяния заданной мощности и создания надежного экрана, исключающего излучение эквивалента.
Разработка широкодиапазонных эквивалентов антенн оказывается довольно сложной задачей. В диапазоне метровых и дециметровых волн целесообразен переход на двухполюсники с распределенными постоянными.
В диапазоне гектометровых волн (ПРС) эквиваленты антенн выполняются на R, С, L-элементах.
6.14. Измерение коэффициента усиления и диаграммы направленности антенн
Коэффициент усиления (КУ) локомотивной антенны можно определить следующим простым способом, отличающимся надежностью полученных результатов. Схема измерений по данному способу приведена на рис. 6.25, где Э — эталонная антенна, А — испытуемая антенна, мА — миллиамперметр, Г — генератор сигналов, К — компаратор.
В качестве эталонной антенны Э применяется несимметричный вибратор, длина которого /э « к. Вибратор снабжается радиальным противовесом, состоящим из 4—6 лучей. К испы
Рис. 6.25. Схема измерения КУ и ДН локомотивной антенны
199
туемой А и эталонной Э антеннам подключаются миллиамперметры, с помощью которых измеряются токи на их входах. Показания прибора компаратора К должны быть пропорциональны напряженности поля Е:
EK=gE.
Коэффициент пропорциональности g для данной частоты должен быть постоянной величиной. При измерении компаратор удаляется от антенн А и Э в волновую (дальнюю) зону. Во всяком случае необходимо, чтобы расстояние от них г > (3 — 5)Хтах.
Измерения проводятся следующим образом.
Сначала с помощью высокочастотного моста или каким-либо другим способом снимается частотная зависимость выходного сопротивления испытуемой антенны А, т.е. ZA = Рд + /Хд. Затем к антеннам поочередно подключается генератор Г. При подключенном генераторе измеряются токи на входе антенн и /д. Одновременно с этим оператор, обслуживающий компаратор, отмечает его показания Ек^ - и Ек^ = gE^- Затем вычисляется коэффициент усиления антенны по формуле
^кА
Е&\
Где =
— мощность, излучаемая эталонной антенной;
Рд = — мощность, подведенная к испытуемой антенне.
Сопротивление излучения является расчетной величиной
/ / \2 16001-^-X
При /« К можно считать Лд = 0,5/.
В качестве компаратора можно применять обычный приемник с измерителем выхода. В этом случае в целях устранения погрешностей, связанных с возможной нелинейностью амплитудной ха
200
рактеристики приемника, регулируют подведенные к антеннам мощности так, чтобы установить Ек^ = £кд- Тогда
^={э^£Э ’ 'А*А ‘
Измерения проводятся достаточно быстро, если между пунктами, где расположены антенны и компаратор, имеется надежная связь.
Изложенный метод с успехом можно применять и для снятия диаграмм направленности антенн земных волн. Следует отметить, что применяемый нередко метод снятия ДН путем обхода (объезда) антенны с компаратором по окружности только тогда дает надежные результаты, когда антенна установлена на ровной площадке, свободной от каких-либо посторонних переизлучателей. Последнее нереально для антенн ПРС (см. раздел 6.12).
Результаты измерений методом обхода, проведенные в обычных условиях размещения антенн, имеют серьезнейшие погрешности, кроме того, трассировка на местности точек, где производится компарирование поля, очень сложна.
Измерение диаграммы направленности (ДН) антенны в горизонтальной плоскости G - С(ф) путем измерений КУ под разными азимутальными углами ср свободно от влияния местности. В самом деле, напряженность поля испытуемой А и эталонной Э антенн в общем виде записываются как
F ^Ipaga у . F у
ЕА = К--------У А’ £Э=Х-------УЭ’
ГА ГЭ
где х — размерный коэффициент;
У — множитель, характеризующий трассу антенна-компаратор;
г — расстояние между антенной и компаратором.
Если антенны А и Э расположены рядом, то Уд s Уэ гд s и, следовательно,
G еартэ
~ 4^а '
201
Это выражение примечательно тем, что оно свидетельствует о независимости измеренного КУ от трассы антенна-компаратор. Кроме того, выражение указывает также на отсутствие зависимости от длины трассы. Иными словами, если измеряемая А и эталонная Э антенны находятся вблизи друг друга, то КУ антенны можно измерять на любой местности и в произвольных ее точках. В этом удобство рассматриваемого метода.
Нормированную диаграмму направленности /(ср) = £(ф)/£тах в масштабе напряженности поля можно построить с помощью формулы
г(ф)-.Ж.
V ^тах
При измерениях исключают взаимное влияние антенн. Если такое влияние будет отмечено, то одну из антенн во время определения R, I и Ек следует убирать.
Кроме того, необходимо отметить, что в качестве эталонной можно применять любую антенну земных волн, если ее КУ относительно стандартной антенны — малого несимметричного вибратора без потерь — известен.
6.15. Моделирование антенн
Существенную пользу при исследовании сложных антенн, а также разработке и исследовании новых типов антенн может принести и приносит метод их моделирования. В основе этого метода лежит принцип электродинамического подобия, который для случая размещения антенн в воздухе над идеально проводящей плоскостью имеет весьма простую формулировку: «Если одновременно и в равной степени уменьшить линейные размеры антенны и рабочую длину волны, то основные электрические характеристики антенны — входное сопротивление и характеристики направленности — останутся неизменными». Особенно целесообразно применение метода моделирования при исследовании ДН приземных антенн в вертикальной плоскости, что практически невозможно выполнить. В этом случае антенну размещают над металлическим листом. Замена реальной земли металлическим листом приво-
202
лит к определенным погрешностям в оценке характеристики. Однако во многих случаях точность полученных таким образом результатов оказывается достаточной для инженерной практики. В то же время локомотивные антенны поездной радиосвязи расположены на металлической крышке локомотива или вагона, что значительно сокращает названную погрешность.
Конструкции установок для моделирования весьма разнообразны. Встречаются установки с неподвижным металлическим столом, на котором размещается модель, питаемая ВЧ-генератором, располагаемым обычно под столом. Диаметр стола желательно иметь равным 6—10 длин волн с тем, чтобы он, кроме того, в 2—4 раза превышал продольный размер антенны.
Независимо от конструктивного выполнения установка должна размещаться на ровной площадке вдали от возможных переизлучателей.
Однако и при соблюдении указанных мер следует критически относиться к результатам, полученным для углов б s 0, поскольку на них может сказываться кромка стола. Это излучение на соответствующей установке может быть обнаружено и оценено, например, путем измерения напряженности поля модели симметричного горизонтального вибратора под углом 6 = 0.
6.16. Индуктивная поездная радиосвязь
Индуктивная связь (ИС) подразделяется на поездную и станционную. Поездная ИС осуществляется с помощью электромагнитных волн, связанных с направляющей линией и распространяющихся вдоль нее. Эти линии расположены вдоль железнодорожного пути на расстоянии г от него, много меньшем длины электромагнитной волны к ПРС (г « к), т.е. в зоне индукции линии. Отсюда и название — ИС. Если длина ПРС к = 141 м, то /* <; 14 м, что выполняется на практике. В зоне индукции (ближней зоне) связанное с линией электромагнитное поле много больше поля излучения, чем в основном и определяется увеличение дальности ИС по сравнению с радиосвязью (свободными электромагнитными волнами).
В качестве направляющих линий используют либо специально подвешенный «волноводный» провод, либо провода других служб:
203
г
/77/777/7
Рис. 6.26. Направляющая линия поездной индуктивной связи с синфазной [а) и противофазной (б) волнами
линию ДПР (два провода — рельс): высоковольтная линия ВЛ, контактный провод. На участках с тепловолновой тягой используются провода воздушных линий связи. Группу проводов, включая в ряде случаев и землю, которые участвуют в передаче энергии, называют волновым каналом. В случае однопроводной линии волновой канал образуют провод и земля. Волна, распространяющаяся в таком канале, получила название земной. В двухпроводной направляющей линии волна может быть синфазной (рис. 6.26, а) или противофазной (межпроводной), показанной на рис. 6.26, б. Последняя испытывает меньшее затухание в линии, обеспечивая большую дальность связи, а потому является предпочтительной.
Для возбуждения направляющей линии (НЛ) параллельно ей подвешивают провод, питаемый от радиостанции, а лля приема сигналов используется локомотивная антенна. Такой способ возбуждения НЛ называется индуктивным (бесконтактным). На рис. 6.27 показана схема направляющей /, возбуждающей 2 и приемной 3 линий ИС. Стационарная возбуждающая линия 2 подключается к выходу передатчика радиостанции. Она состоит из горизонтальной части длиной /в, вертикальной части Ав (снижения) и коротко-замыкателя КЗ в качестве нагрузки. Такую же структуру имеет и локомотивная антенна, горизонтальная часть 3 которой показана
Рис. 6.27. Возбуждение однопроводной направляющей линии
204
на рис. 6.27. Отличаются антенна и линия размерами: /в = 0,25Х = = 35 м, где X = 141 м — длина волны сигнала в линии; //в = 8м; /д - 8—13 м; ЛА = 1 м над крышей локомотива. Если передача ведется с локомотива на стационар, то линии 2, 3 меняются ролями: 3— возбуждающая линия, 2—приемная линия, подключенная к выходу приемника радиостанции.
Направляющая линия 1 нагружена с обоих концов на сопротивление Лв, равное ее волновому сопротивлению, для того, чтобы в линии установился режим бегущих волн (без отражений от ее концов). Так как линии связаны между собой электромагнитно, то в НЛ вносится сопротивление Лвн от возбуждающей и приемной линий, и эти внесенные сопротивления должны быть равны тоже волновому сопротивлению НЛ, чтобы обеспечить максимальную дальность связи. Это Квн определяет и расстояние между НЛ и стационарной линией 2.
В качестве НЛ может быть контактный провод, к которому подключается радиостанция через последовательно включенные разделительный конденсатор Ср и пантограф. Это контактный способ запитки НЛ. Рабочее напряжение разделительного конденсатора Ср должно быть не меньше напряжения в контактном проводе, а его емкость должна обеспечивать очень малое сопротивление для радиосигнала частоты f- 2,13 МГц и очень большое для колебаний частоты F- 50 Гц, т.е. l/2nFs оо, a 1/2jt/ = 0.
Двухпроводная направляющая линия возбуждается индуктивным способом, по схеме, показанной на рис. 6.28. В проводах 1 НЛ возбуждается противофазная волна от линии 2. В отличие от возбуждения однопроводных линий снижения высотой// при расстояниях между
проводами d « X практически не излучают, т.е. практически нет потерь мощности по этой причине. В тоннелях большой протяженности наземного транспорта связь организуется чаще всего с помощью двухпроводной направляющей линии, т.е. индуктивной. Поездная ИС используется также и в метрополитенах по однопроводной или двухпроводной направляющей линии. У/1 2/h d Г Рис. 6.28. Индуктивный способ возбуждения двухпроводной направляющей линии
205
Контрольные вопросы и задания
1. Поясните принцип работы передающей антенны.
2. Почему вибратор называется симметричным или заземленным?
3. Поясните электрический диполь Герца и его роль в антенной технике.
4. Изобразите электрический диполь Герца в сферической системе координат и нарисуйте его диаграмму направленности.
5. Зачем и на какие зоны разбивается пространство вокруг диполя или антенны?
6. Назовите составляющие электромагнитного поля в дальней (волновой) зоне.
7. Что такое зона индукции антенны и как она используется на практике?
8. Поясните элементарный магнитный вибратор.
9. Поясните элементарный вибратор — элемент Гюйгенса.
10. Поясните процесс распространения электромагнитных волн по принципу Гюйгенса-Френеля.
11. Как определяется поле симметричного вибратора?
12. Зачем нужны симметрирующие устройства? Перечислите их и укажите принцип их работы.
13. Поясните принцип зеркальных отображений в антенной технике.
14. Нарисуйте схему заземленного вибратора и поясните отличие его параметров от параметров симметричного вибратора.
15. Дайте определение действующей высоты антенны.
16. Перечислите характеристики и параметры передающих и приемных антенн.
17. Поясните принцип работы Г- и П-образных локомотивных антенн ПРС и сопоставьте их диаграммы направленности.
18. Назовите станционные антенны ПРС системы ЖРУ.
19. Назовите локомотивные антенны ПРС системы «Транспорт» и поясните принцип их работы, особенности.
20. Назовите антенны станционной радиосвязи системы «Транспорт».
21. Для чего нужен эквивалент антенны?
22. Как измеряются коэффициент усиления и диаграмма направленности антенн земных волн?
23. Для чего нужно моделирование антенн?
24. Поясните принцип индуктивной поездной радиосвязи.
206
Глава 7. КОНСТРУКТИВНЫЕ И ЭКСПЛУАТАЦИОННЫЕ ОСОБЕННОСТИ ПЕРЕДАТЧИКОВ ЖЕЛЕЗНОДОРОЖНЫХ РАДИОСТАНЦИЙ
В настоящее время для поездной и станционной радиосвязи используются радиостанции системы ЖРУ и системы «Транспорт».
7.1. Передатчики радиостанций системы ЖРУ
К ним относятся радиостанция 42РТМ-А2-ЧМ и радиостанция 66РТМ-А2-ЧМ. Первая из них — КВ- и УКВ-диапазонов, а вторая — только УКВ. Больший интерес представляет первая ЖР.
Назначение
Радиостанция 42 РТМ-А2-ЧМ — приемопередающая, симплексная, телефонная, с частотно-фазовой модуляцией и частотно-избирательным вызовом — предназначена для организации поездной радиосвязи на железнодорожном транспорте.
Радиостанция устанавливается на подвижных объектах железнодорожного транспорта и эксплуатируется в следующих клима-
тических и механических условиях: температура окружающего воздуха, °C...............+50
-25
относительная влажность при 30 °C, %...............95
вибрационные нагрузки в диапазоне частот от 10 до 70 Гц, g.......................3,8
многократные удары, g.............................25
Технические данные
Радиостанция 42РТМ-А2-ЧМ имеет три частотных канала, разнесенных на 50 кГц в диапазоне от 150 до 156 МГц, и два частотный канала на частотах 2130 и 2150 кГц или 2444 и 2464 кГц. Частоты 2444 и 2464 кГц используются для организации связи на метрополитене.
207
Питание радиостанции осуществляется от источника постоянного тока с номинальным напряжением 50 или 75 В с допускаемым отклонением напряжения в пределах ±20% от номинала или от источника с напряжением 24 В при допускаемом изменении напряжения питания в пределах от 23 до 31 В. Напряжение пульсаций, измеренное в точках подключения радиостанции к источнику питания на частоте 100 Гц, не должно превышать 2 % от номинального напряжения питания.
Радиостанция обеспечивает:
а) работу с одного или двух пультов управления;
б) переключение в режимы ДЕЖУРНЫЙ ПРИЕМ, ПРИЕМ, ПЕРЕДАЧА;
в) посылку вызова с самоконтролем и прием вызова со световой индикацией;
г) переключение каналов;
д) ступенчатое изменение громкости;
е) световую индикацию включения питания;
ж) возможность подключения аппаратуры ТУ—ТС.
Устройство радиостанции
Радиостанция имеет два основных варианта исполнения:
- вариант КВ, включая вариант КВ-М, предназначенный для метрополитена;
- вариант КВ/УКВ.
Структурная схема передатчика ЖРУ рассмотрена в первой главе данного учебника.
Конструктивно радиостанция выполнена в виде отдельных блоков (рис. 7.1 и 7.2). Блоки 1, 2 (или 2М), 3, 4М (или 4Н) и 14 устанавливаются на амортизационных рамах. Все блоки при установке на локомотиве соединяются между собой кабелями, имеющими на концах разъемы типа 2РМ. Антенна с радиостанцией соединяется высокочастотным кабелем.
Блоки 1, 2 (2М), 3, 4М (4Н) и 5 имеют литые корпуса, а корпуса блоков 6, 7, 14 — штампованные. Основными функциональными элементами радиостанции являются приемопередатчик КВ (или УКВ), блок низкочастотных и вызывных устройств, пульт управления (один или два), микротелефон, блок питания, антенно-со-
208
14-6764
1
3
5
Рис. 7.1. Схема рабочего места для измерения параметров ПРД УКВ
Рис. 7.2. Схема рабочего места для измерения параметров ПРД КВ
209
гласующее устройство, антенна КВ (или УКВ), тройник и громкоговоритель (один или два).
При замене приемопередатчика КВ на приемопередатчик УКВ и исключении антенно-согласующего устройства можно получить функциональную схему УКВ полукомплекта радиостанции, входящего в состав варианта КВ/УКВ.
Размещение и монтаж
Размещение радиостанции на объекте производят по типовому проекту, утвержденному в установленном порядке, согласно габаритному чертежу, монтажным чертежам на антенны и схемам электрических соединений. Все блоки радиостанции устанавливают на вертикальной стенке в местах, удобных для замены блоков и простейшей проверки. Запрещается устанавливать блоки в дизельном отделении тепловозов или около печей на расстоянии менее 1,5 м.
Пульт управления (блок 5) устанавливают в кабине машиниста.
Амортизационные рамы блоков закрепляют на стенке при помощи болтов и гаек с приспособлениями, исключающими са-мораскручивание (разрезные или корончатые шайбы, контргайки). Блок, установленный на раме, не должен соприкасаться с соседними предметами и оборудованием. Расстояние между ними должно быть не менее 30 мм.
Амортизационные рамы устанавливают строго вертикально, без заметных перекосов. При закреплении блока на раме проверяют свободность подвески на амортизаторах и отсутствие задеваний и заеданий.
Соединительные кабели прокладывают по стенке и закрепляют металлическими скобами через 15—20 см. Под скобы должны быть подложены картонные, резиновые или пластикатовые прокладки, предохраняющие кабель от прорезания острыми краями скоб. Около блоков кабели должны иметь небольшие петли, обеспечивающие свободное колебание блока на амортизаторах. Допускается скрытая прокладка кабелей под обшивкой. Прокладывать кабели вблизи устройств и труб с температурой выше 60 °C недопустимо.
Антенну локомотивную УКВ (блок 11) устанавливают на крыше локомотива таким образом, чтобы металлические детали ло
210
комотива не заслоняли антенну в направлении связи и нижнее основание антенны имело надежный электрический контакт с корпусом трубостойки. Соединение блока 1 с антенной производят кабелем типа РК-75-4-16.
Антенный провод изолируют от стоек двумя орешковыми изоляторами. Снижение делают тем же проводом, из которого выполнена антенна, не нарушая целостности провода. У ввода снижение антенны подключают к проходному изолятору. На противоположном конце снижение подключают к крыше локомотива при помощи болта с гайкой. Для натяжения антенны используют винтовые стяжки. Длина горизонтальной части антенны зависит от типа локомотива и должна быть равна примерно 8 м, высота подвеса антенны — максимально возможная с условием соблюдения габарита подвижного состава.
Заземление блоков рекомендуется выполнять с помощью шин из ленты красной меди сечением не менее 40 мм2. Сопротивление заземления по постоянному току для соединения шины с корпусом локомотива не должно быть более 0,5 Ом.
При монтаже, обслуживании и эксплуатации радиостанции следует соблюдать правила техники безопасности.
Основание антенны УКВ должно быть надежно соединено с корпусом локомотива. Установка прокладок из изоляционного материала между основанием антенны и фланцем трубостойки не допускается. Под шайбами и головками антенных болтов, крепящих основание антенны УКВ к фланцу трубостойки, краска должна быть удалена. Надежность соединения основания антенны УКВ и снижения антенны КВ с корпусом локомотива должна быть проверена электрическим методом. Рамы амортизационные и блоки радиостанции должны быть надежно соединены с корпусом локомотива.
Запрещается вести какие-либо работы с антенной при нахождении локомотива под контактной сетью, вскрывать крышки блоков при включенной радиостанции.
Для предупреждения выхода из строя приемопередатчика запрещается включать радиостанцию без антенны.
Перед запуском дизеля на тепловозе или вспомогательной машины на электровозе радиостанцию следует выключить.
211
Подключение радиостанций КВ и УКВ производится отдельными проводами сечением не менее 1,5 мм- непосредственно к аккумуляторной батарее.
Расстояние между нижним основанием антенны УКВ (блок 11) и крышей локомотива не должно быть менее 200 мм.
Измерение параметров, регулирование и настройка
Проверка питающих напряжений. Питающие напряжения в радиостанции проверяют с помощью прибора Ц4324, расположенного в блоке ЮМ, поставляемого в комплекте радиостанций 71РТС-2А-ЧМ и 43РТС-А2-ЧМ. Для этого прибор подключают к контрольному разъему блока питания с помощью кабеля, заканчивающегося кабельным разъемом. Переключатель блока ЮМ и переключатель прибора Ц4324 переводятся в соответствующие измеряемому напряжению положения. Далее радиостанцию включают и проверяют питающие напряжения в режимах ПРИЕМ и ПЕРЕДАЧА.
При переводе блока 4М с напряжением 50 В и на 75 В и обратно перепаивают перемычки в блоке (в блоке перемычку на резисторе R18 перепаивают на свободный конец резистора R18), заменяют шильдик, указывающий номинальное напряжение питания, и производят подрегулировку блока в следующей последовательности:
устанавливают номинальное напряжение питающей сети (50 или 75 В);
подключают к контрольному разъему прибор Ц4324, как указано выше;
переводят радиостанцию в режим ПЕРЕДАЧА;
резистором R20 устанавливают напряжение 24 ± 0,2 В в положении переключателя блока ЮМ «24В» и стопорят ось резистора стопорной гайкой;
резистором R26 устанавливают напряжение 12,6 ± 0,2 В в положении переключателя блока ЮМ «12,6ВФ» и стопорят ось резистора стопорной гайкой;
проверяют выходные напряжения на разъеме ШЗ при изменении питающей сети на ±20 % от номинала.
При измерении питающих напряжений вольтметром постоянного тока вольтметр подключают к соответствующим контактам разъема ШЗ на блоке 4М (4Н).
212
Проверка выходной мощности передатчика УКВ. Проверка выходной мощности производится в следующем порядке:
соединяют приборы согласно схеме рис. 7.1;
включают радиостанцию;
снимают МТ с держателя пульта (блок 5) и нажимают тангеиту;
определяют выходную мощность передатчика по формуле
где Р — выходная мощность передатчика, Вт;
U — напряжение, измеренное вольтметром В7-26, В;
R — эквивалентное нагрузочное сопротивление 75 Ом.
Допускается измерение выходной мощности прибором типа МЗ-З. Измерения проводятся на всех каналах.
Для проверки выходной мощности передатчика с помощью индикатора мощности, поставляемого в комплекте радиостанции 71РТС-А2-ЧМ и 43РТС-А2-ЧМ, необходимо отключить высокочастотный кабель от антенного разъема приемопередатчика. Затем включают индикатор мощности между антенным разъемом приемопередатчика и антенным кабелем. МТ снимают с держателя и нажимают тангенту. Если передатчик и антенно-фидерная система радиостанции исправны, стрелка индикатора мощности должна установиться в секторе на шкале прибора. По окончании измерений индикатор мощности отключают и соединяют антенный кабель с антенным разъемом приемопередатчика.
Проверка чувствительности микрофонного и модуляторного входа передатчика УКВ. Соединяют приборы согласно схеме рис. 7.1.
К калиброванному ответвителю ЭНС подключают вход измерителя девиации СКЗ-26. С держателя пульта снимают микротелефон. Вынимают из МТ микрофон и подключают вместо него эквивалент Э.
Выход генератора ГЗ-ЗЗ и вход вольтметра B3-38 подключают к эквиваленту. Затем включают радиостанцию. Нажимают тангенту. От ГЗ-ЗЗ подают такой сигнал с частотой 1000 Гц, чтобы получить на СКЗ-26 девиацию 5 кГц.
По вольтметру B3-38 фиксируют напряжение на выходе ГЗ-ЗЗ.
213
Перед измерением параметров передатчика проводят установку регулятора НЧ ПРД на блоке 3 в положение, обеспечивающее номинальную чувствительность микрофонного входа равную 8 мВ.
Чувствительность модуляторного входа передатчика 66РТМ-А2-ЧМ определяют по описанной методике, вскрыв крышку приемопередатчика и подключив генератор ГЗ-ЗЗ и вольтметр B3-38 к модуляторному входу (контрольная точка 17 платы передатчика). Чувствительность модуляторного входа не должна быть хуже 130 мВ.
Проверка максимальной девиации часпюты передатчика УКВ. Приборы соединяют согласно схеме рис. 7.1. Включают радиостанцию и нажимают тангенту. Увеличивают выходной сигнал от ГЗ-ЗЗ на 12 дБ (в 4 раза) и, сохраняя уровень сигнала постоянным, изменяют частоту сигнала в диапазоне от 300 Гц до 3400 Гц. Затем определяют величину максимальной девиации.
Проверка допускаемого отклонения частоты передатчика УКВ. К антенному разъему приемопередатчика подключают эквивалентное нагрузочное сопротивление (Э9-4). Соединяют с калиброванным ответвителем Э9-4 частотомер типа 43-38. Радиостанцию переключают в режим ПЕРЕДАЧА и проверяют по частотомеру частоту передатчика на всех каналах. Определяют отклонение частоты передатчика от номинальной частоты канала. Далее вычисляют отношение наибольшего отклонения частоты передатчика к присвоенной частоте канала.
Измерение частот вызывных сигналов. Приборы подключают согласно схеме рис. 7.1. Микрофон включают в микротелефон. Включают радиостанцию. Настраивают СКЗ-26 на частоту передатчика.
Проверка выходной мощности передатчика КВ. Вставляют предохранитель 12,6 В—0,15 А в блоках 4М, 4Н. Приборы соединяют согласно схеме рис. 7.2. Затем включают радиостанцию. Микротелефон снимают с держателя пульта (блок 5) и нажимают тангенту.
Выходную мощность передатчика определяют по формуле
где Р — выходная мощность передатчика, Вт;
U — напряжение, измеренное вольтметром В7-26, В;
R — эквивалентное нагрузочное сопротивление 75 Ом.
214
Измерения производятся на всех каналах.
Проверка чувствительности микрофонного входа передатчика КВ. Приборы соединяют согласно схеме рис. 7.2. Вход измерителя девиации CK3-39 подключают к ответвителю Э2.
Микротелефон снимают с держателя пульта, а затем его вынимают из МТ и подключают вместо него эквивалент Э1.
Выход генератора ГЗ-ЗЗ и вход вольтметра B3-38 подключают к эквиваленту Э1.
Радиостанцию включают и нажимают тангенту. Подают от ГЗ-ЗЗ такой сигнал с частотой 1000 Гц, чтобы получить на CK3-39 девиацию 1,5 кГц. Напряжение на выходе ГЗ-ЗЗ фиксируют по вольтметру B3-38.
Перед измерением параметров передатчика регулятор НЧ ПРД устанавливают на блоке 3 в положение, обеспечивающее номинальную чувствительность микрофонного входа равную 8 мВ.
Проверка максимальной девиации частоты передатчика КВ. Соединяют приборы согласно схеме рис. 7.2. Включают радиостанцию и нажимают тангенту. Выходной сигнал от ГЗ-ЗЗ увеличивают на 12 дБ (в 4 раза) относительно чувствительности микрофонного входа и, сохраняя уровень сигнала постоянным, изменяют частоту сигнала в диапазоне от 300 до 3000 Гц.
Определяют величину максимальной девиации.
Проверка допускаемого отклонения частоты передатчика КВ. Вход электронно-счетного частотомера 43-38 подключают к эквивалентному нагрузочному сопротивлению. Переключают радиостанцию в режим ПЕРЕДАЧА и проверяют частоту передатчика на всех каналах. Определяют отклонение частоты передатчика относительно номинальных частот каналов связи и вычисляют отношение наибольшего отклонения частоты передатчика к присвоенной частоте канала.
7.2 Проверка работы стационарных радиостанций ПРС
Проверку работы стационарных радиостанций выполняет один раз в четыре недели старший электромеханик участка ПРС. Для этого используются измерительные приборы, инструмент и материалы: откалиброванный блок гектометрового приемопере
215
датчика радиостанции 42РТМ-А2-ЧМ, РК-1. РВ-1; милливольтметр ВЗ-55 с автономным питанием и B3-38; специальные ключи для открывания радиостанций.
Подготовка к работе
Работу стационарных радиостанций проверяют, проезжая на локомотиве. Перед измерениями необходимо осмотреть локомотивную антенну, настроить АСУ, проверить работоспособность возимой радиостанции. Установить предварительно откалиброванный блок приемопередатчика полукомплекта КВ в радиостанцию 42РТМ-А2-ЧМ или приемопередатчик УПП-1 в радиостанцию РК-1 или РВ-1. Подключить милливольтметр к разъему Ш4 приемопередатчика радиостанции 42РТМ-А2-ЧМ или к специально подготовленному кабелю приемопередатчика УПП-1.
Приемопередатчик УПП-1 должен быть специально подготовлен для проведения измерений. Для этого внутри корпуса УПП-1 контакт 9 разъема ХОЗ соединяется с контактом 4 разъема Х04 (тип РГС4). На время проведения измерений к низкочастотному разъему Х04 подключается дополнительный кабель. При этом милливольтметр подсоединяется к контактам 3 и 4 кабеля (контакт 3—«корпус»).
Проведение проверки
Во время движения локомотива проверяют прием стационарными радиостанциями вызова дежурного по станции (ДСП) и наличие сигнала подтверждения его приема; прохождение вызова дежурного поездного диспетчера (ДНЦ) от возимой радиостанции и наличие сигнала подтверждения его приема; качество связи машиниста локомотива (проверяющего) с дежурными по станциям и поездным диспетчером (электромехаником поездной диспетчерской связи) через все стационарные радиостанции.
Кроме этого измеряют уровни полезного сигнала и помех на выходе приемника возимой радиостанции.
Повторная выборочная проверка и измерения
При обратном проезде проверяющего производятся выборочные повторные измерения. Также осматривают направляющую
216
линию в целях выявления причин низкого уровня ВЧ-сигнала и места нахождения возможных источников радиопомех.
Оформление результатов проверки и устранение неисправностей
Результаты проверки оформляются актом. По ним устраняют обнаруженные неисправности стационарных радиостанций и линейных устройств. Кроме того, проводят настройку устройств высокочастного возбуждения направляющих линий, устраняют источники радиопомех.
Методика определения дальности радиосвязи между стационарной и возимой радиостанциями
Уровни сигналов в канале поездной радиосвязи в гектометро-вом диапазоне волн измеряются с помощью специально откалиброванного приемника радиостанции 42РТМ-А2-ЧМ или приемопередатчика УПП-1.
Минимально допустимый уровень сигнала на входе возимой радиостанции должен быть не менее: 76 дБ (на участках с электротягой переменного тока); 74 дБ (на участках с электротягой постоянного тока); 50 дБ (на участках с автономной тягой). Указанные уровни сигналов предполагают средний уровень помех на локомотивах равным 60 дБ (при электрической тяге переменного тока), 58 дБ (при электрической тяге постоянного тока), 38 дБ (при автономной тяге).
Для скоростных поездов (при скорости более 140 км/ч) значение напряжения помех на входе возимой радиостанции увеличивается на 3,5 дБ. На эту же величину должен быть увеличен и минимально допустимый уровень сигнала. Значения уровней сигналов определяются по максимальным показаниям измерительного прибора, подключенного к приемнику радиостанции 42РТМ-А2-ЧМ или приемопередатчику УПП-1.
Следует отметить, что значения минимально допустимых уровней увеличены по сравнению с приведенными в Правилах организации и расчета сетей поездной радиосвязи от 19 октября 1990 г. (ЦШ/4818). Это связано с тем, что в целях облегчения процесса измерений отсчеты значений ведутся не по средним, а по максимальным показателям измерительных приборов.
217
Непрерывная двусторонняя связь между поездным диспетчером и машинистом локомотива должна обеспечиваться при нахождении локомотива в любой точке перегона. Для этого должно выполняться условие
г। + Г') г* /п + 3, км,
гдег । и — дальность уверенной радиосвязи между возимой радиостанцией н стационарными радиостанциями, ограничивающими перегон, на котором находится локомотив;г । и г2 должны быть не менее 10 км на участках со скоростным движением и не менее 6 км на остальных участках. ЗначенияГ| и определяются в процессе измерений при удалении от передающей стационарной радиостанции и достижении минимально допустимого уровня сигнала в канале поездной радиосвязи;
/п — длина перегона или расстояние между соседними стационарными радиостанциями.
Приемник радиостанции 42РТМ-А2-ЧМ калибруется следующим образом. К антенному входу (разъем Ш1) подключается высокочастотный генератор. К выходу ПЧ приемника (разъем Ш4) подсоединяется измерительный прибор (вольтметр B3-38 или ВЗ-55).
Строится график зависимости показаний измерительного прибора от значения высокочастотного сигнала на входе приемника. Измерения производятся при различных значениях чувствительности приемника (положение переключателя 0, 10, 20, 30 дБ). Система ШОУ — широкая полоса, ограничение, узкая полоса — должна находиться во включенном состоянии.
7.3. Передатчики радиостанций системы «Транспорт»
Эксплуатационные особенности передатчиков радиостанций системы «Транспорт» в общем схожи. Их можно рассмотреть на примере передатчика конкретной радиостанции 55Р22В-1.1 М «Транс-порт-РВ-1.1М», которая является модернизацией радиостанции этой же системы «РВ-1», ранее выпускавшейся нашей промышленностью.
Назначение
Возимая двухдиапазонная симплексная локомотивная радиостанция 55Р22В-1.1М «Транспорт-РВ-1.1М» А 174.464424.007 пред
218
назначена для работы в системе поездной и станционной радиосвязи на железнодорожном транспорте. Устанавливается на подвижных объектах железнодорожного транспорта (поездных и маневровых локомотивах, дрезинах, автомототрисах и т.п.).
Радиостанция может эксплуатироваться при температуре окружающей среды от -40 до +55 °C (за исключением пульта управления ПУ-ЛП, который обеспечивает работу при температуре от 10 до +55 °C). В KB-диапазоне обеспечивается работа с антеннами, имеющими следующие входные параметры:
индуктивность, мкГн.............................9—17
активное сопротивление, Ом......................15—9
Питание радиостанции осуществляется от бортовых сетей подвижных объектов: в локомотивном варианте от бортовой сети постоянного тока напряжением от 35 до 155 В (блок питания локомотивный БПЛ) и в возимом варианте от бортовой сети постоянного тока напряжением от 10 до 32 В (блок питания возимый БПВ) с напряжением пульсаций первичной сети не более 30 % на частоте 100 Гц и допустимыми кратковременными (до 10 мс) изменениями напряжения первичной сети от 17,5 до 725 В для БПЛ и от 5 до 160 В для БПВ.
Технические данные
Радиостанция обеспечивает одновременную работу:
1) в симплексном режиме на любом из 6 каналов в любой одной из заранее установленных 8 групп частот в диапазоне УКВ от 151,7125 до 156,01250 МГц; минимальный разнос между соседними каналами 25 кГц;
2) в симплексном режиме в диапазоне КВ на любой из частот 2,130 или 2,150 МГц.
Радиостанции обеспечивают длительную работу в режимах «Дежурный прием» и «Прием». Соотношение времени работы в режимах «Прием» и «Передача» должно быть 3 : 1, с одноминутным автоматическим ограничением продолжительности режима «Передача» при однократном нажатии на тангенту.
Максимальная продолжительность работы непрерывно в режиме «передача» 15 мин.
219
Мощносгь несущей частоты, Вт, передатчика (ПРД) на нагрузке
50 Ом для диапазонов:
кв...............................................12+3
УКВ в режиме «Полная мощность»..................8±2
УКВ в режиме «Пониженная мощность»........0,35±0,15
Чувствительность модуляционного входа ПРД, мВ:
со входов микротелефонов....................400±80
входа ТУ-ТС..............................200±50
входа подключения выносного микрофона.....400±80
входа для подключения аппаратуры пожарной сигнализации (в диапазоне УКВ)..................800±200
Коэффициент нелинейных искажений ПРД.......не более 5 %
Максимальная девиация частоты ПРД, кГц:
в диапазоне КВ...........................не более 2,5
диапазоне УКВ...........................не более 5
Девиация частоты ПРД при посылке сигналов вызова и сигналов взаимодействия, кГц:
в диапазоне КВ...........................от 1,5 до 2,5
диапазоне УКВ.............................от 3 до 5
Отклонение частоты ПРД от номинального значения: в диапазоне КВ.................не более 50 миллионных
диапазоне УКВ...............не более 10 миллионных
Состав радиостанции
Радиостанция имеет следующие основные составные части: шкаф радиооборудования, содержащий приемопередатчик KB-диапазона (ППК), приемопередатчик УКВ-диапазона (ППУ), блок автоматики (БА) и 2 блока питания БПЛ (или 2 блока питания БПВ);
антенно-согласующее устройство АнСУ;
пульты управления ПУ-ЛП (1 или 2);
пульты управления дополнительные ПУ-Д (1 или 2);
громкоговорители ГГ (1 или 2);
микротелефонные трубки МТ (2 или 4);
коробки распределительные КР (1 или 2); антенна.
220
Рис. 7.3. Схема соединения блоков ПРД ЖР РВ1.1М
Схема соединения блоков двухкабинного варианта радиостанции приведена на рис. 7.3.
Внешний вид шкафа радиооборудования приведен на рис. 7.4.
Радиостанция сохраняет работоспособность по ведению переговоров в KB-диапазоне при выходе из строя блока автоматики. Расположение органов управления и индикации пультов управления приведено на рис. 7.5, 7.6.
Органы неоперативной регулировки, расположенные на приемопередатчике ППК и антенно-согласующем устройстве, показаны на рис. 7.7,7.8 соответственно. Контрольные гнезда Л ИУ на ППК предназначены для подключения прибора при настройке радиостанции и при пусконаладочных работах. Напряжение на гнездах ЛИУ пропорционально напряжению ВЧ на антенном вводе ППК.
С пультов управления ПУ-ЛП и ПУ-Д производится ведение радиотелефонной связи с абонентами КВ- и УКВ-диапазонов.
Пульт управления ПУ-ЛП обеспечивает индикацию режимов работы радиостанции, ввод и просмотр хранящихся в энергонеза-
221
Рис. 7.4. Внешний вид шкафа радиооборудования: / — приемопередатчик ППУ; 2— приемопередатчик ППК; 3 — блок автоматики; 4 — блок питания ППУ; 5 — клемма заземления; 6 — регулятор порога ПШ диапазона УКВ; 7 — контрольные гнезда Л ИУ диапазона УКВ;# — тумблер включения ПШ диапазона УКВ; 9— блок питания ППК; 10— индикатор выходного напряжения блока питания; 11 — индикатор входного напряжения блока питания; 12 — индикатор результатов теста БА; 13 — кнопка включения режима теста БА
висимой памяти радиостанции (находящейся в БА) данных о номерах поезда и локомотива, сетке частот, каналах для проведения режима контроля и т.п.
Порядковые номера знакомест индикатора отсчитываются слева направо, начиная с 1.
Порядок установки
Радиостанцию устанавливают на подвижных объектах железнодорожного транспорта по утвержденному типовому проекту согласно монтажному чертежу и схеме электрической общей.
222
Рис. 7.5. Передняя панель пульта ПУ-ЛП: 1 — индикаторное табло; 2 — клавиатура УКВ (диапазона МВ);3—датчик окружающей освещенности; 4 — клавиатура КВ (диапазона ГМВ); 5 — разъем подключения микротелефона; 6 — поворотный механизм; 7— кнопка подтверждения (ПДТВ); 8 — кнопка перехода в дежурный режим; 9 — клавиатура ограниченного доступа; 10— кнопка включения питания пульта; 11 — кнопка включения/отключения подсветки; 12 — крышка; 13— регулятор громкости громкоговорителя; 14 — регулятор контрастности; 15— разъем подключения пульта к КР; 16 — датчик уровня окружающего шума
/
Рис. 7.6. Передняя панель пульта ПУ-Д: / — индикатор включения режима «Прием» в соответствующем диапазоне; 2 — кнопка перехода в дежурный режим; 3 — разъем подключения микротелефона; 4 — разъем подключения пульта к КР; 5 — кнопка подтверждения (ПДТВ)
Рис. 7.7. Органы управления приемопередатчиком: / — переключатель чувствительности приемника; 2— контрольные гнезда ЛИУ; 3— тумблер включения ПИП; 4 — тумблер включения ПШ;5 — регулировка порога ПШ;
6 — антенный ввод
224
Рис. 7.8. Органы управления АСУ: 1 — клемма подключения антенны; 2 — разъем подключения приемопередатчика; 3 — переключатели грубой настройки со стороны приемопередатчика; 4 — переключатели грубой настройки антенны; 5 — регулятор точной настройки антенны; 6 — тумблер переключения чувствительности индикатора; 7— индикатор настройки; 8— клемма заземления: 9— тумблер переключения КСВ-1ант; К)—баланс
Блоки радиостанции располагают в кабине локомотива. Шкаф радиооборудования допускается устанавливать на стене кабины в машинном отделении. В месте установки радиостанции климатические и механические воздействия должны соответствовать требованиям А 174.464424.007.ТУ.
Заземление шкафа рекомендуется выполнять с помощью шин из ленты красной меди такого сечения, чтобы сопротивление за-
15-6764
225
земления по постоянному току с корпусом локомотива не превышало 0,5 Ом.
Подключение радиостанции к бортовой сети должно осуществляться непосредственно к аккумуляторной батарее отдельными проводами.
Снижение антенны KB-диапазона делают таким же проводом, из которого выполнена антенна, не нарушая целостности провода. У входа снижения антенны подключают к проходному изолятору, на противоположном конце снижение подключают к крыше локомотива при помощи болта с гайкой. Для натяжения антенны используют винтовые стяжки. Длина горизонтальной части антенны зависит от типа локомотива и должна быть равна примерно 8 м, высота подвеса антенны — максимально возможная с условием соблюдения габарита подвижного состава.
Антенны УКВ-диапазона должны устанавливаться на крыше подвижного объекта, минимально удаленной от места установки радиостанции. При этом антенна должна находиться на удалении не менее 1,5 м от экранирующих металлических надстроек и других антенн на крыше транспортных средств, искажающих ее диаграмму направленности и ухудшающих электрические параметры антенны. Место для крепления антенны должно обеспечивать надежный электрический контакт антенны на корпус объекта.
Для обеспечения надежной связи и увеличения срока службы радиостанции соблюдаются следующие правила:
- содержать радиостанцию в чистоте, особенно тщательно следить за состоянием разъемных соединений;
- не включать радиостанцию на передачу при отключенной или замкнутой на корпус антенне;
- периодически проверять работоспособность радиостанции и состояние антенно-фидерных устройств.
При включении и выключении двигателя маневрового локомотива радиостанция должна быть обязательно выключена.
Меры безопасности
Безопасность работающих с радиостанцией при подготовке ее к работе, эксплуатации и техническом обслуживании может быть гарантирована только при обеспечении:
226
надежного электрического контакта между клеммой КОРПУС и заземлением (корпусом объекта установки);
- отсутствия контакта между антенной и руками, недопущения монтажа, демонтажа или перемещения при включенном ПРД; съема и установки составных частей включенной радиостанции.
Подготовка к работе
Перед первым включением радиостанции проверяют правильность и надежность соединений всех кабелей и антенн.
Подавитель импульсных помех ППК должен быть включен на электрифицированных участках железных дорог.
Включают подавители шумов. Регулятор чувствительности приемника ППК устанавливают в положение, обеспечивающее уверенный прием сигнала в любой точке диспетчерского участка. В зависимости от помеховой обстановки чувствительности прием-
ника ППК рекомендуется установить:
при электротяге переменного тока в положение...20—40 дБ
при участках постоянного тока в положение......10—20 дБ
при участках с тепловозной тягой в положение....0—10 дБ
Микротелефонные трубки устанавливают таким образом, чтобы часть трубки, содержащая телефон, находилась напротив надписи ДР держателя микротелефона. А если микротелефон развернуть на 180° и отключить автоматический возврат радиостанции в дежурный прием при отсутствии управления радиостанцией, то при установленном в трубкодержатель МТ будет обеспечено прослушивание канала (реализован режим открытого канала).
Проверка технического состояния
Проверка основных электрических параметров производится после ремонта.
При проверке технического состояния производится измерение параметров, а также проверка работоспособности по «Тест 1».
Контрольно-измерительная аппаратура:
- генератор сигналов высокочастотный Г4-164;
227
- измеритель мощности МЗ-56;
- генератор низкочастотный ГЗ-121;
- милливольтметр ВЗ-57;
- осциллограф С1 -118А;
- измеритель модуляции СКЗ-45;
- измеритель коэффициента нелинейных искажений С6-11;
- частотомер электронно-счетный 43-63/1;
- высокочастотное нагрузочное сопротивление 50 Ом 20 Вт (2 шт.);
- блок питания.
Допускается использовать другие аналогичные измерительные приборы, обеспечивающие необходимую точность измерения.
В качестве источника питания может быть использован стандартный источник питания, обеспечивающий необходимое выходное напряжение или последовательное соединение нескольких источников постоянного тока.
Измерение параметров необходимо при напряжении питания: 50 В с допустимым отклонением ± 2 % для радиостанций с БПЛ; 24 В с допустимым отклонением ± 2 % для радиостанций с БПВ. Нормальными климатическими условиями для проведения измерений являются:
температура окружающей среды от 288 до 308 К (от 15 до 35 °C); относительная влажность от 45 до 75 %;
атмосферное давление от 86 до 105 кПа (от 650 до 800 мм рт. ст.).
Допускается измерения производить при любом допустимом значении напряжения питания:
от 35 до 155 В для радиостанций с БПЛ;
от 10 до 32 В для радиостанций с БПВ.
Измерение параметров производят не ранее чем через пять минут после включения радиостанции.
Для радиостанции с двумя одноименными пультами управления измерения параметров производят с каждого пульта, входящего в состав радиостанции.
При проведении измерений в одном диапазоне второй диапазон должен находиться в дежурном режиме.
Перед проведением измерений рекомендуется отключить автоматическую регулировку громкости.
228
Радиостанция----- МЗ-56
Рис. 7.9. Схема проверки мощности несущей
Рис. 7.10. Схема проверки модуляционных параметров
Проверку мощности несущей частоты передатчика в режиме «Полная мощность» производят по схеме рис. 7.9. Радиостанцию включают в режиме «Передача».
Мощность несущей часто-м>| передатчика измеряют на каналах, соответствующих наименьшей средней и наибольшей частоте У KB-диапазона и двух частотах КВ-диапазона.
Проверку модуляционных параметров передатчика производят по схеме рис. 7.10.
Радиостанцию включают в
режим «Передача». От генератора ГЗ-123 на модуляционный вход проверяемого тракта подают сигнал частотой 1000 Гц, обеспечивающий девиацию частоты передатчика 3 кГц для УКВ (1,5 кГц для КВ).
Напряжение UM генератора ГЗ-123, измеренное милливольтметром ВЗ-57, является чувствительностью модуляционного входа проверяемого тракта.
Не отпуская тангенту, производят отсчет по измерителю С6-11 величины коэффициента нелинейных искажений.
Установив уровень сигнала генератора ГЗ-123 на 10 дБ больше чем UM и изменяя частоту модулирующего сигнала от 300 до 3400 Гц, по измерителю СКЗ-45 производят отсчет максимальной девиации.
Проверку девиации несущей ПРД при посылке вызова производят по схеме рис. 7.11.
Рис. 7.11. Схема проверки девиации несущей
229
4) закрашивают зачищенные места на антенне оранжевой эмалью ХВ-16;
5) проверяют надежность соединения кабеля с антенной и при необходимости протирают тканью, смоченной в бензине;
6) подключают кабель питания к радиостанции.
Контрольные вопросы и задания
1. Чем отличаются структурные схемы передатчиков радиостанций системы ЖРУ от системы «Транспорт»?
2. Нарисуйте структурные схемы этих станций.
3. Назовите элементную базу выходных каскадов передатчиков ЖРУ и «Транспорт».
4. Как выполнены модуляторы в ЖР?
5. Как осуществляется монтаж и наладка локомотивного передатчика?
6. Меры техники безопасности при монтаже и эксплуатации ЖР.
7. Какие параметры проверяются при настройке и регулировании передатчиков? Каким образом?
232
Глава 8. ПЕРСПЕКТИВЫ РАЗВИТИЯ РАДИОСРЕДСТВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
8.1. Будущая система железнодорожной радиосвязи
В последнее десятилетие в странах Европейского сообщества ведется разработка и внедрение единой системы управления же-иезнодорожными перевозками ERTMS. Создание такой системы является одним их основных направлений транспортной политики и имеет своей целью увеличение пропускной способности пу-। си сообщения, сокращение интервалов следования поездов, уве-иичение скоростей международного сообщения при повышении безопасности движения. При этом поезда и участки дорог оснащаются более надежным и экономичным оборудованием. Система ERTMS включает в себя:
• генеральную концепцию развития телемеханики и автома-И1КИ на железнодорожном транспорте;
• европейскую систему безопасности управления движением поездов ETCS;
• систему подвижной связи железнодорожного транспорта (iSM-R для передачи данных и речевой информации, созданную на основе аппаратно-программных средств системы подвижной радиосвязи общего пользования GSM.
При разработке системы ERTMS предусматриваются три уровня развития системы, причем на третьем (самом высоком) уровне предполагается переход к управлению движением поездов с использованием беспроводной связи и подвижных блок-участков при непрерывной передаче управляющей информации, когда поезда самостоятельно определяют свое местоположение и допустимую скорость движения. Однако уже на первом и втором уровнях необходимо производить анализ особенностей построения и функционирования беспроводных сотовых сетей технологической связи с цепью оптимизации их структуры, пропускной способности И СТОИМОСТИ. Железнодорожные сотовые сети помимо свойств, традиционно присущих сотовым сетям подвижной связи общего пользования, приобретают ряд специфических особенностей, так как дол
233
жны обслуживать профессиональные группы пользователей в условиях специфического временного и пространственного распределения нагрузки.
В настоящее время перед отечественными разработчиками стоит задача выбора между внедрением уже существующей системы GSM-R и построением новой системы, учитывающей все достоинства и недостатки зарубежной системы и ориентированной на особенности российских железных дорог.
Необходимость разработки единого стандарта систем железнодорожной радиосвязи для европейских стран была вызвана следующими обстоятельствами. На железных дорогах различных стран использовались различные аналоговые железнодорожные радиосистемы. Поезда, проходящие по странам Европы, либо должны менять локомотив на границе, либо иметь локомотив, оборудованный всеми системами радиосвязи. Но даже в пределах одной страны иногда используются различные системы радиосвязи для различных целей. Успешное взаимодействие между такими системами или является невозможным, или может достигаться только в пределах определенного региона или через специальную транзитную сеть.
Новая единая система беспроводной связи охватывает все потребности всех пользователей в пределах железной дороги. Не имеет значения, где установлен подвижный терминал — на движущемся локомотиве, у маневрового работника, у диспетчера, механика или путевого обходчика, — связь всегда должна быть установлена в пределах обслуживаемой территории, на которой управление осуществляется центральной компьютерной системой. Кроме того, необходима возможность выхода в проводную сеть связи железной дороги. И наконец, общий европейский стандарт — главный шаг к будущему успеху GSM-R в странах европейского сообщества. Все эти соображения являются существенными и для России.
Системы железнодорожной связи, находящиеся в использовании сегодня, разрабатывались независимо от друг друга. Сначала, конечно, была создана система телефонных линий. Позже были предложены персональные подвижные радиоуслуги, например, для маневровой работы. Поездная радиосвязь с оперативной адресацией и службой коротких сообщений была разработана еще поз-
234
/|<с. Взаимодействие между всеми этими услугами происходило пишь от случая к случаю. Но даже если взаимодействие возможно, пользователю бывает сложно соединиться с другой системой. Такая ситуация объясняется тем, что указанные системы развивались и течение нескольких лет независимо друг от друга.
В будущих системах связи основные доступные услуги будут । акими же и только некоторые приложения будут обеспечиваться в пределах одной единственной сети. Хотя GSM обеспечивает взаимодействие со всеми другими сетями, для некоторых железнодорожных применений требуется внесение изменений в интерфейс и во внутреннюю сигнализацию, чтобы приспособить их для выполнения всех необходимых функций. Система GSM позволяет осуществлять роуминг к другим сетям, который необходим для обеспечения международных поездов услугами связи. Передача речи и данных, услуги факсимильной связи будут дос-।упны в каждой из сетей, поэтому все пользователи, связанные с одной из сетей, могут пользоваться любой услугой и связываться с любым пользователем, связанным с любой сетью. Но ETCS, например, будет являться услугой, которая будет возможна только в сети GSM-R, где предусмотрено соблюдение строгих ограничений на временные задержки.
На железных дорогах GSM-R прежде всего должна обеспечивать множество услуг, которые поддерживаются только радиосе-। ями персональной подвижной связи. Например, необходимы групповые и экстренные вызовы. Они, в основном, поступают от одно-। о источника к множеству абонентов и требуют осуществления передачи речи. Однако существует значительно больше типов необходимых услуг, указанных в табл. 8.1.
Таблица 8.1
Потребность Услуга
Речь Данные
( вязь контролера с по-сздным радиоустройством Используется Используется
Автоматическое управление движением поездов (АУДП) Не используется Используется
)кстренный групповой вызов Используется Не используется
235
Окончание таблицы 8.1
Потребность Услуга
Речь Данные
Маневровые групповые вызовы Используется Не используется
Ремонт пути Используется Не используется
Поездная связь Используется Используется
Местная связь на станциях Используется Используется
Радиосвязь на подвижном составе Используется Используется
Приоритетные вызовы Используется Используется
Отслеживание положения поезда Не используется Используется
Приложения телеметрии Нс используется Используется
Для автоматизированного управления движением поездов (АУДП) в системе ERTMS необходима совершенно новая услуга, использующая пакетную передачу данных GPRS (General Package Radio Service). Эта услуга может использоваться в условиях ETCS для передачи примерно 500 бит данных каждые 500 мс.
В железнодорожной системе сотовой подвижной связи охват площади услугами должен быть намного надежнее, чем для стандарта сетей общего пользования GSM, которые иногда планируются с границей вероятности 90 %. Должны выдерживаться определенные значения параметров качества связи: для 95 % вызовов соединение в течение 5 с, для 100 % вызовов соединение в течение 7,5 с, для экстренных вызовов соединение в течение 1 с, максимальная задержка 700 мс, вероятность битовой ошибки в 90 % случаев не превышает 0,0001, надежность 99,95 %.
Некоторые новые услуги требуют изменений протокола уровня 3 (сигнализация) беспроводного интерфейса GSM-R. Эти изменения были определены ETSI-SMG (Европейский институт стандартов связи — специальная группа подвижной связи).
Для системы GSM-R выделен частотный диапазон в 4 МГц (876—880 МГц для восходящей передачи от подвижных терминалов и 921—925 МГц для нисходящей передачи от базовых станций), что показано на рис. 8.1. Разнос частот между соседними каналами составляет 200 кГц, и поэтому в отведенной для при-
236
GSM-R E-GSM P-GSM GSM-R E-GSM P-GSM
876 880 890 915 921 925 935 960 / МГц
Рис. 8.1. Частотный диапазон системы GSM
Рис. 8.2. Возможная структура сети железнодорожной радиосвязи
сма/передачи полосе частот шириной 4 МГц размещается 19 час-|отных каналов связи.
С учетом возможностей GSM-R и особенностей передачи информации на железнодорожном транспорте возможная будущая ( истема железнодорожной связи может быть представлена в виде скемы на рис. 8.2.
237
8.2. Многостанционный доступ в системе GSM-R
В стандарте GSM используется многостанционный доступ с временным разделением каналов (TDMA), что позволяет на одной несущей частоте разместить 8 речевых каналов одновременно и обеспечить одновременную передачу речи по 152 каналам. TDMA — второе поколение подвижных систем сотовой связи. Однако в ближайшем будущем предполагается введение подвижных систем связи общего пользования третьего поколения. Для них характерны кодовое разделение каналов, иерархические структуры ячеек, расширение частотного диапазона, замена отказов в соединении плавным снижением качества связи, использование спутникового сегмента сети, децентрализованное управление. Возможно, принципы организации универсальной системы подвижной связи (УСПС) будут полезны или даже необходимы для организации подвижной связи на железнодорожном транспорте, и мы будем наблюдать создание системы УСПС-Т (для транспорта). Кроме того, поставщики оборудования для сотовых сетей связи третьего поколения могут быть заинтересованы в распространении их продукции на железнодорожном транспорте. В российских условиях это принесло бы им особенно большие прибыли. Поэтому важно реально оценить, какие преимущества могут иметь указанные системы для железнодорожного транспорта. Предполагается, что системы третьего поколения смогут обеспечить подвижную связь со всеми существующими видами услуг, с глобальным роумингом и широким набором возможностей мультимедиа. Главные дополнения в УСПС — это введение соединений с пакетной коммутацией для передачи данных и разработка, обеспечивающая большую ширину полосы, чем GSM (от 384 кбит/с при ограниченной подвижности абонента до 2 Мбит/с для неподвижного абонента). Однако расширенная полоса частот будет распределяться неравномерно: радиоинтерфейс разработан так, чтобы доступная пропускная способность уменьшалась с удалением подвижного терминала от базовой станции. Высокоскоростная передача данных требует наибольшей полосы частот, а передача речи — наименьшей, поэтому чтобы предот
238
вратить использование всей пропускной способности одним терминалом, наиболее удаленным от базовой станции, соединения там будут ограничены узкой полосой частот.
Таким образом, можно представить соту УСПС в виде нескольких концентрических колец с различными уровнями доступа к услугам, как показано на рис. 8.3.
Рис. 8.3. Пример соты УСПС
&3. Классификация сотовых сетей в системе GSM-R
Задачи проектирования железнодорожных сотовых сетей связи включают в себя и моделирование их структуры. При определении и описании структуры железнодорожных сотовых сетей связи вводят следующую классификацию. Различают перегонные и станционные сотовые сети.
Перегонными сотовыми сетями называют сети, структура которых представляет собой следующие друг за другом соты вдоль железнодорожного полотна, а базовые станции образуют линейную топологию. Очевидно, что сети с такой структурой будут обслуживать не только нагрузку на перегонах, но и на малых станциях, размеры которых не превышают радиуса одной соты. В этом смысле термин «перегонные сети» нужно считать условным.
Станционными сотовыми сетями называют сети, в которых соты должны быть сгруппированы в кластеры для покрытия больших обслуживаемых территорий. Такие сети необходимо будет проектировать для крупных железнодорожных станций с большим объемом сортировочной и маневровой работы на значительных территориях, а также с развитым пассажирским сер
239
висом. Базовые станции таких сетей будут образовывать решетчатую топологию.
Перегонные и станционные сотовые сети будут различаться не только структурой, но и особенностями обслуживаемой нагрузки. Для перегонных сетей свойственна сильная зависимость объема и характера нагрузки (соотношение телефонной нагрузки и передачи данных) от расписания движения поездов, их типа, классности и скоростей движения. Параметры трафика будут значительно меняться в зависимости от времени суток, дня, недели, времени года. Нагрузка подобных сетей будет складываться из телефонной нагрузки абонентов-пассажиров, нагрузки различных видов технологической связи, нагрузки поездной и станционной радиосвязи, нагрузки передачи данных, а в перспективе — части нагрузки системы регулирования движения поездов (в том числе интервального). Еще одной особенностью перегонных сетей можно считать высокую скорость движения подвижных терминалов и преимущественно линейную (одномерную) направленность их перемещения. В частности, высокие скорости движения пользователей потребуют применения быстрых алгоритмов управления передачей обслуживания абонентов при перемещении их из соты в соту, например, с использованием адаптивных нечетких предсказателей.
Для станционных сотовых сетей характерны более сложные траектории движения подвижных терминалов, более низкие скорости их перемещения, более широкий спектр типов обслуживаемой нагрузки. В этих условиях возможно применение многослойных иерархических сотовых структур, полный переход к которым планируется в сотовых сетях подвижной связи третьего поколения. В таких структурах низлежащая микросотовая сеть обслуживает зоны с высокой плотностью нагрузки, так называемые «горячие точки», а макросотовая сеть, накладываемая поверх микросот, обрабатывает их избыточную нагрузку. Макросота является общей для множества микросот, т.е. она действует как разделяемый ресурс каналов для множества входящих в нее микросот. Такая структура позволяет более рационально использовать сетевые ресурсы, а также применять современные стратегии управления сотовыми сетями, подобные алгоритмам с перестроением и переупаковкой соединений.
240
Система GSM-R является идеальной для линейной (перегонной) радиотелефонной связи. Для станционной радиосвязи, особенно для маневровой, более выгодной является транкинговая связь.
8.4. Принцип сотовой связи
В системе сотовой связи повторно используются пространственно разнесенные частоты. На рис. 8.4 приведена схема использования частотного ресурса в любой сотовой системе подвижной радиосвязи.
Вся территория обслуживания разбивается на отдельные небольшие по площади ячейки (соты, микрозоны), внутри которых устанавливаются базовые станции BS, связанные соединительными линиями с центром коммуникаций подвижной связи MSC, ко-। орый через транзитные ТЕ и местные LE телефонные станции осуществляет соединение абонентов сухопутных систем подвижной связи (ССПС) с абонентами телефонной сети общего пользования ТФОП. Передатчики BS обладают относительно малой мощностью излучения, что приводит к относительно небольшому радиусу действия BS, а следовательно, к возможности повторения рабочих частот (группы рабочих частот) соты уже через несколько сот.
Centura)
Рис. 8.4. Структура сотовой радиосвязи
241
MSC
Вызов MS
MS
Вызов MS
Подтверждение
Номер радиоканала
Подтверждение
Номер радиоканала
Запрос подтверждения номера радиоканала
Запрос подтверждения номера радиоканала
Подтверждение
Включить звонок
Подтверждение
Включить звонок
Разговор
Рис. 8.5. Схема организации входящего вызова
Схема возможного метода организации процесса установления входящего вызова приведена на рис. 8.5. На рис. 8.6 приведена схема возможного варианта обмена сообщениями в режиме «эс-
MSC
Подтверждение
Результаты измерения
Снижение качества Измерить качество
Номер радиоканала Номер радиоканала Запрос подтверждения по радиоканалу Подтверждение по радиоканалу
Разговор
Рис. 8.6. Схема обмена сообщениями в режиме «эстафетной передачи» подвижной станции от одной базовой станции к другой
242
тафетной передачи» подвижной станции MS от одной базовой станции BS к другой.
Аналогичные алгоритмы, использующие сравнение оценок качества приема от разных радиостанций, давно используются для обеспечения непрерывности связи в системах поездной радиосвязи диапазонов 160, 330 и 450 МГц.
Первыми моделями по
Рис. 8.7. Модель повторного использования частот для семи сот
вторного использования частот, которые применялись в аналоговых ССПС, были модели с круговыми диаграммами направленности (ДН) антенн базовых станций. В цифровых ССПС для сот с круговой ДН применяют модель повторного использования частот, включающую семь или девять сот. На рис. 8.7 показана модель повторного использования частот для семи сот. Модель с круговой ДН антенн предполагает передачу сигнала BS одинаковой мощности по всем направлениям, что для абонентских станций эквивалентно приему помех со всех направлений.
Эффективным способом снижения уровня соканальных помех (по совпадающим частотным каналам) может быть использование секторных антенн. В секторе направленной антенны сигнал излучается в одну сторону, а уровень излучения в противоположном направлении сокращается до минимума. Секторизация сот позволяет более часто повторно применять частоты в сотах при одновременном снижении уровня помех. Общеизвестная модель повтор
ного использования частот в секторизованных сотах включает в себя три соты и три BS (три 120-градусные антенны с формированием девяти групп частот) (рис. 8.8). Самую высокую эффективность использования полосы частот, т.е. наибольшее число абонентов сети в выделенной полосе частот, обеспечивает модель повторного использования частот, включающая две BS. На схеме рис. 8.9 каждая частота используется дважды в пределах модели, состоящей из четырех BS. Каждая из четырех BS в пределах действия шести 60-градусных антенн может работать на 12 группах частот.
243
Рис. 8.8. Модель повторного использования частот в секторизованных сотах (120-градусные антенны с формированием 9 групп частот)
В любой СПС емкость сетей зависит от количества каналов связи в соте А, которое, например, для TDMA определяется выражением
N -
где F— полоса частот ССПС;
к — коэффициент повторного использования частот;
244
f- FK/n — эквивалентная полоса частот, приходящаяся на один речевой канал;
FK — полоса частот одного радиоканала; п — число временных позиций в TDMA кадре; Flf — число речевых каналов связи.
8.5. Принцип транкинговой связи
Транкинговая система связи — система со свободным доступом к общему частотному ресурсу. Транкинг — один из методов распределения каналов в системах подвижной радиосвязи.
Транкинг обеспечивает автоматическое выделение пользователю свободного в настоящий момент канала, что минимизирует время ожидания и обеспечивает большую пропускную способность по сравнению с системами, не использующими этот метод, при том же количестве радиоканалов за счет того, что вероятность одновременной занятости всех каналов системы относительно невелика (особенно в больших системах). Концепция транкинга предполагает, что каждый пользователь использует радиоканал в течение небольших периодов времени и большое число пользователей не использует систему одновременно. В разных транкинговых системах применяются различные методы автоматического распределения каналов. Основные из них — Message Trunking и Transmission Trunking.
Message Trunking — метод автоматического выделения каналов, при котором канал закрепляется за пользователем на время всего радиообмена.
Transmission Trunking —метод автоматического выделения каналов, при котором канал закрепляется за пользователем только на время одной передачи. Он обеспечивает более рациональное использование частотного ресурса, так как, во-первых, пользова-1сль не занимает систему в перерывах между сообщениями и, во-вторых, возможна динамическая переброска пользователя между каналами системы в перерывах между передачами.
По методу поиска свободного канала транкинговые системы сухопутной подвижной радиосвязи (ССПР) делятся:
на системы с последовательным (сканирующим) поиском, которые характеризуются значительным временем установления ка
245
нала и предназначены для использования при небольшом (пять— восемь) числе каналов в стволе;
системы с выделенным каналом управления Control Channel (канал управления) — выделенный канал, по которому передается вся служебная информация, необходимая для функционирования системы и управления радиостанциями пользователей.
Необходимо отметить и транкинговые ССПР, использующие совмещенный канал управления, когда для передачи сигналов управления используется участок информационной полосы звуковых частот, расположенный, как правило, ниже спектра речевого сигнала (в системах LTR — ниже 150 Гц).
Считается, что наиболее перспективной транкинговой системой для железнодорожного транспорта является система стандарта TETRA, который разработан на основе стандарта GSM.
Итак, современное состояние развития средств технологической радиосвязи характеризуется переходом от аналоговых к цифровым системам. Наиболее перспективными для железнодорожного транспорта считаются многоканальные цифровые системы технологической радиосвязи с открытыми протоколами GSM-R (сотовая) и TETRA (транкинговая).
В связи с возрастающими скоростями движения интервальное регулирование движения поездов предполагается осуществлять с помощью спутниковой радионавигации.
Подробнее цифровые сотовые, транкинговые и спутниковые системы связи и навигации рассмотрим после изучения цифровых и дискретных видов модуляции.
246
Глава 9. ЦИФРОВЫЕ МЕТОДЫ ПЕРЕДАЧИ АНАЛОГОВЫХ СИГНАЛОВ
Цифровые виды модуляции обеспечивают передачу аналоговых сообщений в цифровой форме. Виды модуляции подразделяются на три основных класса: импульсно-кодовая (ИКМ), дифференциальная ИКМ (ДИКМ), дельта-модуляция (ДМ).
9.1. Импульсно-кодовая модуляция
ИКМ включает в себя дискретизацию непрерывного сигнала по времени, квантование по уровню его дискретных значений и кодирование квантованных уровней (рис. 9.1). Непрерывная шкала уровней передаваемого сигнале! b(t) (пунктирная кривая) по оси ординат (рис. 9.1, а) разбивается (квантуется) на определенное число разрешенных уровней. На оси абсцисс выбираются точки Гр /2 ty ••• через равный промежуток времени А/ < 1/FB согласно теореме Котельникова. Для речевого сигнала верхняя частота FB = 3400 Гц. Но при дискретизации ее принимают равной 4 кГц и тогда А/ = 1/2 • 4 = 125 мкс, а частота дискретизации Fq = 1 /А/ = 2 • 4 = 8 кГц. Для этих точек k At, где к =0, 1,2, ..., берутся отсчеты b(kAt) непрерывного сигнала b(t), что и
является дискретизацией по времени сигнала b(t). Квантование по уровню означает округление мгновенных значений отсчетов до ближайших разре-111енных уровней bK3(kAl), отмеченных на рис. 9.1 а крестиками. Точками отмечены истинные значения отсчетов. Кодирование сводится к записи кван-। ованного уровня отсчета в двоичной системе счисления, как показано на рис. 9.1, б трехразрядным кодом. Могут использоваться и другие системы счисления. Любое число в произвольной системе счисления может быть записано в виде комбинации элементарных цифр
Рис. 9.1. ИКМ
247
L = = por/° +Р|л’ + &a~ + ...+ |3a..|«A'
/=0
где к — разрядность кода, т.е. число используемых в кодовой комбинации элементарных символов (цифр);
Pz — разрядная цифра, принимающая значения 0, 1,2,..., а - 1; а — основание кода.
Устройство, осуществляющее ИКМ на передающей стороне, называется аналого-цифровым преобразователем (АЦП). На приемной стороне имеет место обратное преобразование ИКМ, что осуществляет цифро-аналоговый преобразователь (ЦАП).
9.2. Аналого-цифровой преобразователь
АЦП преобразует аналоговый сигнал в цифровой. По структуре построения АЦП делятся на два типа: с применением цифро-аналогового преобразователя (ЦАП) и без него.
На рис. 9.2 представлена структурная схема АЦП поразрядного типа с ЦАП. Основными ее блоками являются компаратор К, регистр
сдвига PC, регистр кода РК, ЦАП. Регистр кода РК состоит из RS-триггеров, число которых равно числу разрядов кодового слова. Выходы регистра PC соединены с R-входами соответствующих триггеров регистра РК через схемы совпадения ИЛ—И । и с их S-входами — непосредственно начиная с (п - 1)-го триггера и ниже. Выход каждого триггера соединен со своим входом ЦАП. К прямому входу компаратора К подключен выход ЦАП, а к его инверсному — входной сигнал, т.е. отсчет прямоугольной формы (АИМ-2). Выход компаратора К соединен со вторым входом всех схем совпадения И/7—И ।. На вход С регистра PC подаются сдвигающие импульсы СИ с генератора ГСП через схему совпадения Ио. Тактовые импульсы ТИ с генератора ГТИ поступают на S-вход триггера циклов ТЦ, на Д-вход регистра PC, на S-вход /7-го триггера РК и R-входы всех остальных триггеров. R-вход ТЦ соединен с последним выходом PC, а выход ТЦ — со вторым входом схемы Ио. Последняя является ключом для СИ. Аналогичные функции выполняют и схемы И/7—Ир
Работа АЦП происходит следующим образом.
Тактовый импульс с ГТИ поступает на S-вход ТЦ и одновременно на Д-вход PC, S-вход триггера Т/7 РК и на R-входы всех остальных его триггеров. От этого ТЦ переводится в состояние лог. 1, на выходе п регистров PC и РК появляется тоже лог. 1, а на остальных выходах РК — нули. ЦАП преобразует выходной код РК в опорное напряжение соответствующего уровня С/g, которое поступает на прямой вход компаратора К. На его инверсный вход подается напряжение отсчета С/вх непрерывного сообщения. Если С/вх < t/g, то на выходе К формируется лог. 1, которая поступает на вторые входы всех схем совпадений И/7—Ир Так как в данный момент лог. 1 имеется только на первом входе схемы И/7, то единица пройдет на выход последней и переведет триггер Т/7 РК в нулевое положение. Если же t7BX > t/g, то на выходе К будет 0 и сброса единицы в триггере Tw не произойдет. Так проверяется истинность старшего и остальных разрядов кодового слова. Поскольку ТЦ в состоянии лог. 1, то импульс сдвига СИ с генератора ГСИ пройдет через схему Ид на С-вход регистра PC и сдвинет единицу с /7-го в (и - 1)-й его выход. Теперь на прямом входе К будет новое значение t/g, которое опять будет сравниваться с t/BX, чтобы определить истинное значение (п- 1)-го разряда и т.д. Когда лог. 1 дойдет до конца регистра PC, то на выходе РК сформируется полный
249
цифровой код данного отсчета и переведется в нулевое состояние ТЦ, закрыв тем самым ключ Ио до прихода очередного тактового импульса. С приходом последнего процесс повторяется.
Частота следования СИ должна быть как минимум в п раз больше частоты следования ТИ, где п — разрядность кодового слова, а длительность отсчета на входе К должна быть такой, чтобы в течение этого времени сформировался и был считан соответствующий код.
9-3- Цифро-аналоговый преобразователь (ЦАП)
ЦАП преобразует код в аналоговый сигнал. На рис. 9.3 представлена структурная схема трехразрядного ЦАП с суммированием напряжений на аттенюаторе сопротивлений. Преобразователь
Входной код
250
состоит из триггеров, образующих регистр кода РК, ключей Кл, источника напряжения Е, матрицы R-2R (аттенюатора). Число । риггеров в РК соответствует числу разрядов входного кодового слова, а число ключей в 2 раза больше. Прямой выход каждого григгера РК соединен с управляющим входом ключа Кл. 1, а его инверсный выход — с управляющим входом ключа Кл. О, т.е. каждый триггер управляет работой своей пары ключей. Выходы этих ключей соединены между собой и подключены к узлу А матрицы через резистор 2R. Через ключ Кл. 1 подается напряжение Е в матрицу R-2R, а через ключ Кл. О — нулевое напряжение (земля).
Работа ЦАП происходит следующим образом. В регистр РК введено кодовое слово, соответствующее числу (отсчету) С = (4)ю = (100)2, где инДекс указывает систему счисления. В этом случае триггер Т3 находится в состоянии лог. 1 и в третьем (старшем) разряде открыт ключ Кл. 1, а в остальных разрядах триггеры в состоянии 0 и открыты ключи Кл. 0. После преобразования матрицы R-2R в эквивалентную схему выходное напряжение ЦАП (7ВЫХ = ^АЗ “ ^73. Если же в РК записано число G = (2) 10 = (010)2, то выходное напряжение t/BbIX = 0,5(7А2 ~ 0,5£73. При числе G = (1)10 = (001)9 напряжение (7ВЫХ - 0,25£73. В общем случае при //-разрядном регистре
с/вых=—]+... + ₽])=—
ВЫХ з \ ' // »/7 —1 • 1/ 7
т.е. пропорционально значению числа (7, введенного в РК.
9.4. Шум квантования
Возникающую погрешность округления с(г) при квантовании нельзя устранить, но можно контролировать, поскольку она не превышает половины шага квантования А/?. Погрешность квантования, представляющая собой разность между исходным сообщением h(t) и сообщением, восстановленным по квантованным отсчетам, называется шумом квантования. Важной особенностью шума квантования, отличающей его от аддитивных шумов, является то, что он возникает одновременно с появлением сообщения B(t). Шум квантова
251
ния коррелирован с сообщением и имеет тем меньшую мгновенную мощность Ркв, чем меньше уровень сообщения PQ
^кв п2
где П — пикфактор: П~ = 10 для речи;
п — разрядность кода.
В современных системах ИКМ используют неравномерное квантование, при котором малые уровни сигнала квантуются с меньшей ошибкой, чем большие. Изменяя шаг квантования пропорционально уровню входного сигнала, отношение мощностей PJP[<[} сохраняется постоянным при изменениях этого уровня. Условной неравномерное квантование можно представить как последовательное соединение устройства компрессии уровня входного сигнала и равномерного квантователя. Для сохранения постоянства Рс1РКь в широком диапазоне входных уровней характеристика компрессии должна быть близкой к логарифмической. Компрессия (сжатие) уровня входного сигнала производится на передающей стороне, а на приемной — экспандирование (расширение), при котором восстанавливается исходный динамический диапазон. Оба этих процесса называются компандированием. Характеристики компрессора и экспандера должны быть взаимно обратимыми. Амплитудная характеристика компандера описывается так называемым Л-законом или ц-законом. При нелинейном кодировании процессы квантования и кодирования обычно объединяют, а нелинейная квантующая характеристика формируется непосредственно в кодере. В кодере европейской системы иерархии применяют квазилогарифмическую характеристику Л-закона с линейным касательным отрезком следующего вида:
—— sgnx.xG
1 + In А
1 4- In Ах
1 + In А
sgn,v, xfE — ;1 А
252
где Л = 87,6 — параметр компрессии, х = UnJUnll m • у = Un,.J 1 1 * dA dA IlidA оЫл
^вых max*
Плавная характеристика компрессии заменяется ломаной линией, состоящей из прямолинейных отрезков-сегментов, приближенно аппроксимирующих указанный закон сжатия динамического диапазона передаваемых сигналов. Для систем с восьмиразрядным кодированием МККТТ рекомендуют характеристики компрессии, состоящие из 16 сегментов по восемь для положительных и отрицательных областей изменения сигнала, каждый из которых содержит 16 уровней линейного квантования.
Шум квантования — одна из причин, приводящая к отличию принятого сообщения от переданного в системе с ИКМ. Другая причина — помехи в канале, которые накладываются на передаваемые символы кодовых комбинаций и могут вызвать ошибки. Ошибки в символах (при отсутствии избыточности) приводят к ошибочному декодированию всей кодовой комбинации. В результате этого действительно переданное дискретное значение сообщения заменяется другим возможным (необязательно ближайшим); погрешность зависит от того, какие из символов кодовой комбинации приняты с ошибкой. Эту составляющую шума называют шумом ложных импульсов. Следовательно, при оценке помехоустойчивости следует учитывать суммарный шум в результате квантования и из-за ложных импульсов при декодировании. Шум квантования не связан с помехами. Его можно сделать сколь угодно малым, увеличив число уровней LK = При этом придется увеличивать число кодовых символов, приходящихся на каждый отсчет, а следовательно, сокращать длительность символа и расширять спектр сигнала в канале. Таким образом, как и при помехоустойчивых аналоговых видах модуляции, снижение этого шума достигается путем расширения спектра сигнала. Шум ложных импульсов является аномальным и определяется помехами в канале и видом модуляции несущей. При расширении спектра сигнала мощность аномального шума, как правило, возрастает, т.е. вероятность аномальной ошибки />ан определяет вероятность оценки сообщения, а среднеквадратическая ошибка е2(г) (нормальная) определяет точность (качество) этой оценки.
253
9.5. Дифференциальная ИКМ
Дифференциальная ИКМ (ДИКМ) является системой с предсказанием. Основная идея предсказания заключается в устранении избыточности, содержащейся в отсчетах сообщения. Так, в отсчетах />|, /?2.] содержится определенная информация об
отсчете bj в силу их статистической связи. Это значит, что по предыдущим можно предсказать данный отсчет с определенной ошибкой е(/). Но раз значение предсказывается, то оно известно (не случайно) и, следовательно, не несет информации, являясь избыточным. Его можно исключить путем вычитания из реального отсчета fy, в результате чего останется только сигнал ошибки предсказания е(Г) — случайная величина: е(г) = В ней
как раз и содержатся новые сведения (информация), и поэтому ее передают в линию связи. В ЦСП сигнал с(/) подвергается обычным операциям квантования и кодирования, в результате чего получается сигнал ДИКМ. Поскольку е(/) « то при том же числе уровней квантования отсчета, что и при ИКМ, уменьшается шум квантования. Последний можно сохранить прежним, уменьшив разрядность кода и, следовательно, скорость передачи информации, что эквивалентно ее сжатию.
На приемной стороне имеется такой же предсказатель, как и на передающей. Поскольку он оперирует с теми же предыдущими
отсчетами, предсказанное им значение нового отсчета 6/пр будет таким же, как и на передающей стороне. Добавив к нему принятое значение ошибки предсказания ё(г) можно восстановить переданный отсчет /?(/<) - bndk) + е(/) (значок л сверху означает, что дан-
ный элемент искажен помехами
в линии связи).
Структурная схемгг системы передачи с предсказанием (ДИКМ) в общем виде показана на рис. 9.4, где ПР — предсказатель; ЯС — линия связи; 2 — сумматор.
Рис.9.4. Структурная схема ДИКМ
254
Когда предсказанное значение отсчета Л/пр представляет собой взвешенную сумму предыдущих отсчетов /?/пр = (ab\ + bb2 + + cby + ...) ± 6, где 6 < 0,5ДЛ, то имеет место линейное предсказание. Это простейший случай предсказания, широко используемый на практике. Коэффициенты а, Ь, с\ ... подбираются из условия минимума среднеквадратического значения е(г), т.е. из условия
е2(/) = 0. Структурная схема линейного предсказателя ПР со-да
гласно предыдущему выражению показана на рис. 9.5.
Схема состоит из линии задержки ЛЗ с отводами. Отводы отстоят друг от друга на расстояние, соответствующее промежутку времени между отсчетами. С помощью этой линии заполняются предыдущие отсчеты h- ... Каждый отвод ЛЗ подключен к одному входу дифференциального суммирующего усилителя (ДСУ) через разделительный каскад РК и потенциометр Rn, устанавливающий абсолютную величину соответствующего коэффициента (а или Ь, или с, ...). Знак коэффициента (+ или -) задается путем подключения потенциометра Rn к одному или другому входу ДСУ. В последнем вычитается предсказанное значение из действительно-
Отсчеты
Рис.9.5. Структурная схема предсказателя
255
го так, что на его выходе получается сигнал ошибки предсказания: e(r) = bfik) - А/пр(/<). Вычитание предсказанного значения 6/пр(А) эквивалентно смещению порога квантования сообщения на величину Л/Пр(А ). В системах с ДИ КМ применяют неравномерное квантование сигнала ошибки е(/), так как наиболее вероятны малые ошибки.
В настоящее время известно большое число вариантов технического осуществления ДИКМ с линейным предсказанием. На рис. 9.6 показана типичная схема ДИКМ, по которой проводилось большинство исследований (КВ — квантователь, ПР — предсказатель, остальные обозначения, как в предыдущей схеме).
Ошибка квантования = е/А) - екв/(А) = /?/А) - />/пр(А) - екв/(А) = = Ь^к) - (Л/пр + екв/) = bi - bp В качестве критерия оценки качества работы системы выбирается отношение сигнал/шум
/ Рс \ <б/> <b;> <b?> <ej>
\ /ДИКМ < > < £/2 > >
где знак < > означает усреднение.
Второй множитель в этом выражении представляет собой отношение сигнал/шум при ИКМ, а первый характеризует при одинаковых параметрах квантователей выигрыш системы ДИКМ. Безусловно, он должен быть максимально возможным. В случае преобразования речевого сигнала, являющегося нестационарным процессом,
Передатчик
Рис.9.6. Структурная схема АДИКМ
256
его функция автокорреляции зависит от времени. Следовательно, для получения оптимальных характеристик коэффициенты предсказания ctj должны изменяться, что требует адаптивного построения системы. Кроме адаптации cq в современных системах ДИКМ используется адаптация и в квантователе. Система ДИКМ с адаптацией предсказателя и квантователя называется адаптивной ДИКМ (ЛДИКМ). В настоящее время разработана Рекомендация G721 МККТТ, которая определяет алгоритм АДИКМ на скорость передачи 32 кбит/с вместо 64 кбит/с при ИКМ. В кодере рекомендуется использовать адаптивный предсказатель 6-го порядка (/V = 6).
9.6. Дельта-модуляция (ДМ)
Корреляция между отсчетами возрастает по мере сокращения интервала между ними. Поэтому при большой частоте дискретизации число уровней квантования сигнала ошибки е(г) можно уменьшить до двух и перейти к одноразрядным системам. Такой способ кодирования называется дельта-модуляцией (ДМ). Ее можно рассматривать как частный случай ДИКМ, когда квантование сигнала ошибки предсказания осуществляется на два уровня и соответственно частота дискретизации равна скорости передачи.
Квантованный сигнал ошибки при ДМ екв(/с) = у(/<)Д6,
(. \ _ [+1, еслие(А')^О;
где Y\ / 1, еслиЕ(Л)<0.
По существу сигнал на выходе дельта-модулятора содержит лишь сведения о полярности (знаке) сигнала ошибки. На приемной стороне интегратор прибавляет или вычитает АЛ, обеспечивая, таким образом, уменьшение погрешности между значениями отсчетов и восстановленными значениями.
Принцип формирования сигнала ДМ показан на рис. 9.7, а. ()тсчеты Ь(к) передаваемого сообщения сравниваются с квантованным отсчетом bKB(k - 1), полученным в результате суммирования всех предыдущих квантованных сигналов ошибки:
/=0 /=0
257
I 7-А76Д
Рис.9.7. Структурная схема ДМ («) и ее временные диаграммы (б, в, г)
258
Если b(k) > bKB(k-l), квантователь KB формирует значение y(/v) = 1, в противном случае у(/с) = -1. Полученные символы у передаются по каналу связи (рис. 9.7, в). Одновременно импульсы Л/?у(7) поступают на интегратор (сумматор) И для формирования квантованного отсчета Лкв(/), который сравнивается с очередным отсчетом сообщения. На выходе сумматора квантованный сигнал имеет вид ступенчатой функции (рис. 9.7, 6). Каждый импульс +1 увеличивает, а каждый импульс -1 уменьшает ступенчатую функцию на один шаг квантования АЛ.
Операцию декодирования сигнала ДМ на приемной стороне выполняет интегратор (сумматор). Он такой же, как и на передающей стороне, на выходе которого при отсутствии ложных импульсов получается ступенчатое напряжение Лкв(/). После его сглаживания в фильтре нижних частот ФНЧ функция b(t) будет достаточно близка к переданной b(t). Разность /?(/)- Л(г) представляет собой шум квантования. Его значение тем меньше, чем выше частота дискретизации и чем меньше шаг квантования АЛ. Однако шаг АЛ ие должен быть слишком малым, чтобы избежать дополнительных искажений, называемых «перегрузкой по наклону». Последние вызваны тем, что ступенчатая функция не успевает следить за быстрыми изменениями сообщения b(t) (рис. 9.7, г).
Условием неискаженной передачи является неравенство |Л'(/)|тахАг АЛ. Для Реализации этого неравенства используют адаптивную ДМ (АДМ). В этом случае на передающей стороне (рис. 9.8) в цепь обратной связи, т.е. последовательно с интегратором И1, включают решающее устройство РУ, управляющее величиной шага квантования АЛ. Если знак приращения остается постоянным в течение 3—4 интервалов дискретизации, то это означает наличие перегрузки, и РУ удваивает амплитуду импульсов, поступающих на вход интегратора И1. Если и в этом случае знак приращения не изменяется, то размер шага АЛ снова удваивается и т.д.
По сравнению с ИКМ и ДИКМ сигнал ДМ имеет значительно большую частоту следования и на каждый отсчет приходится один импульс, в то время как при ИКМ — несколько (разряды). Поэтому при одинаковой верности передачи частота следования импуль-
259
а
Рис. 9.8. Исключение перегрузки по крутизне в ДМ: а — схема, 6 — временные диаграммы
сов при ИКМ и ДМ примерно одинакова и обе эти системы занимают примерно одинаковую полосу частот. Существенным преимуществом систем передачи с ДМ является сравнительная простота их кодирующих и декодирующих устройств. Кроме того, шум ложных импульсов при ДМ меньше, чем при ИКМ при одинаковой вероятности ошибки в канале. К недостаткам ДМ можно отнести явление размножения ошибок, создаваемых ложными импульсами (как и при ДИКМ), а также возможность перегрузки по наклону.
Системы цифровой связи широко используются на железнодорожном транспорте: в спутниковой связи МПС РФ — АДИКМ, в радиорелейной связи — ИКМ, ДМ, в волоконно-оптической, ка-бельной — ИКМ (ИКМ-30,
ИКМ-120 и др.).
В июле 1997 г. была утверждена Концепция создания цифровой сети связи МПС России, так что в будущем цифровые системы най
дут еще большее применение на железнодорожном транспорте.
9.7. Преимущества и недостатки цифровых систем передачи (ЦСП)
Основным техническим преимуществом ЦСП перед непрерывными системами является их высокая помехоустойчивость. Это преимущество наиболее сильно проявляется в ЦСП с многократной ретрансляцией (переприемом) сигналов: радиорелейных, кабельных линиях связи большой протяженности. В таких непрерывных системах помехи и искажения отдельных звеньев обычно на-
260
капливаются. В ЦСП для ослабления эффекта накопления помех при передаче с ретрансляциями помимо усиления применяют регенерацию импульсов, т.е. демодуляцию с восстановлением переданных кодовых символов и повторную модуляцию на переприемном пункте. При этом аддитивная помеха со входа ретранслятора нс поступает на его выход. Однако она вызывает ошибки при демодуляции, что передается на следующие регенераторы. Так что ошибки все же накапливаются, но значительно меньше, чем при отсутствии регенерации. При цифровой передаче непрерывных сообщений верность передачи можно повысить применением помехоустойчивого кодирования. Высокая помехоусточивость ЦСП позво-ияет осуществить практически неограниченную дальность связи при использовании каналов сравнительно невысокого качества.
Другим существенным преимуществом ЦСП является широкое использование современной элементной базы цифровой вычис-иительной техники и микропроцессоров.
Высокая помехоустойчивость ЦСП достигается в результате расширения спектра ИКМ сигнала по сравнению со спектром исходного непрерывного сообщения. Расширение спектра — недостаток ЦСП. В самом деле, если ширина исходного сообщения Fc то минимальная частота дискретизации Fo = 2FC (теорема Котельникова). Каждый отсчет после квантования может принимать L = (2Z?max/AZ>) + 1 возможных дискретных значений и заменяется при кодировании комбинацией из п = log L двоичных импульсов. Следовательно, длительность каждого импульса не может быть больше, чем ти = 1/2/*^?, а необхо-
— = FQn. Это значит, и
что спектр цифрового сигнала шире спектра исходного непрерывно-। о в у] = AfJFc = п раз. Обычное для связи число разрядов в кодовом слове /7 = 8. Как правило, в ЦСП используется вторая ступень моду-пяции, отчего спектр дополнительно расширяется в у2 Раз, так что общее его расширение у = У|У2. При вторичной модуляции:
- ОБП AM у2 - 1 и у = у|у7 = п = 8 раз;
- AM, БМ у2 = 2 и у = У1У2 ~ 2л = 16;
- ЧМ У2 =2(1 + //? + у[т~) и длял? = 1,5(подвижнаярадиосвязь) шачение у2 = 7,5 и у = 7,5л = 60.
А/ 1
/щмая полоса частот определяется как Д/и « — 2т
261
Из изложенного следует, что в ЦСП производится «обмен» мощности сигнала на полосу частот, как и в помехоустойчивых аналоговых системах модуляции (ЧМ, ФМ, ФИМ). Отношение мощности сообщения к мощности шума на выходе аналоговой системы растет пропорционально квадрату ширины спектра сигнала (в надпороговой области), в то время как в ЦСП это отношение растет значительно быстрее — экспоненциально. В настоящее время не существует систем модуляции более близких к идеальной, чем ЦСП, если спектр передаваемого сообщения равномерный.
9.8. Обработка речи в цифровых системах сухопутной подвижной радиосвязи
Процессы обработки речи в современных цифровых ССПР осуществляются в рамках принятой системы прерывистой передачи речи (Discontinuous Transmission — DTX), которая включает передатчик только тогда, когда абонент начинает разговор и отключает его в паузах и по окончании разговора. Система DTX управляется детектором активности речи (Voise Activity Detector — VAD) — обнаружителем речи OP, который обеспечивает обнаружение и выделение интервалов активности даже при соизмеримости уровней речи и шума. В состав DTX входит устройство формирования комфортного шума в паузах речи (в противном случае снижается разборчивость). DTX предусматривает интерполяцию фрагментов речи, потерянных из-за ошибок в канале. Структурная схема системы DTX GSM приведена на рис. 9.9. Главным устройством здесь является речевой кодек.
Большой интерес представляет процедура выбора речевого кодека стандарта GSM. Рабочей группой по разработке стандарта GSM были предъявлены требования к кодеку: высокое качество речи, не уступающее качеству в лучших аналоговых сотовых системах; низкая скорость передачи, обеспечивающая возможность эффективного канального кодирования и результирующую скорость передачи в канале не выше 16 кбит/с; малая задержка сообщения в процессе преобразования речи; устойчивость к ошибкам в канале; возможность работы в широком динамическом диапазоне входных воздействии как сигнала, так и шума; большой динами-
262
Рис. 9.9. Структурная схема системы ДТХ GSM ческий диапазон выходных сигналов; незначительное снижение качества речи при каскадном соединении кодеков; «прозрачность» для сигналов данных; прямое сопряжение со смежными устройствами терминалов; простота реализации; малое потребление энергии; низкая стоимость.
Для выбора кодека GSM был организован конкурс проектов. Первоначально было предложено 20 кодеков от девяти европейских стран. После международного тестирования количество было сокращено до шести из шести стран. На следующем этапе два из четырех подполосных (SBC) кодеков (норвежский и итальянский) были сняты с рассмотрения, к окончательному этапу осталось два SВС-кодека и два кодека с предикативным кодированием:
RPE-LPC-Regular-Pulse Excitation/Linear Predicative Coding (Германия, Philips) — кодек с регулярным импульсным возбуждением и линейным кодированием с предсказанием;
MPE-LTP-Multi-Pulse Excitation/Long-Term Prediction (Франция, IBM) — кодек с многоимпульсным возбуждением и долговременным предсказанием;
263
SBC-APCM-Sub-Band Coding/Block-Adaptive PCM in 14 SubBands (Швеция, ELLEMTEL)— 14-полосный подполосный кодек с адаптивной ИКМ;
SBC-ADPCM-Sub-Band Coding/Adaptive-Differ PCM in 6 SubBands (Англия, British Telecom Research) — шестиполосный подполосный кодек с адаптивной дифференциальной ИКМ.
Кодеки испытывались для речевых сообщений на семи языках в различных условиях передачи: 3 входных уровня: 12, 22, 32 дБ ниже уровня перегрузки; для трех значений вероятности ошибки: 0; 1; 0,1 %; при каскадном включении двух кодеков. Учитывались дополнительные условия (сравнение с компандированной ЧМ по отношению сигнал/шум от 8 до 25 дБ, с учетом имитации замираний при скорости движения подвижной станции 36 км/ч).
На графиках (рис. 9.10) показаны сравнительные характеристики кодеков при пятибалльной шкале средней экспертной оценки (MOS) и различных скоростях передачи (без защиты ошибок): кривая 1 — RPE-LPC; кривая 2 — MPE-LPC; кривая 3 — SBC-APCM; кривая 4 — SBC-ADPCM; кривая 5 — ЧМ.
По совокупности технических характеристик для стандарта GSM был выбран RPE-LPC кодек с долговременным прогнозиру-
264
ютим устройством от MPE-LTP кодека, что позволило снизить скорость передачи для предложенного MPE-LTP кодека с 14,77 до 13 кбит/с в принятом RPE/LTP кодеке. Уменьшение скорости до 13 кбит/с достигается тремя этапами: LPC — линейным кодированием с предсказанием, LTP — долговременным предсказанием, RPE — регулярным импульсным возбуждением. Поясним эти три этапа.
Основные требования к кодеку — сокращение избыточности в речевом сообщении и обеспечение прекращения передачи во время речевых пауз. Далее необходимо кодирование канала для защи-гы минимальных передаваемых сообщений от помех. При кодировании с (кратковременным) линейным предсказанием и регулярным импульсным возбуждением запоминаются последовательнос-। и по 160 отсчетов в течение 20 мс (каждый отсчет занимает 13 бит, | .с. всего 2080 бит). Запомненные последовательности обрабатывают, получая восемь коэффициентов фильтрации и возбуждающий сигнал для цифрового фильтра. Фильтр является моделью речевых органов человека: настраивается по восьми параметрам, а 1атем при его возбуждении рождается звук. Учитываются и дру-। ие особенности органов речи и слуха, например, соблюдается ло-। арифмический масштаб громкости.
160 отсчетов разбиваются на четыре равных блока (40 отсче-к)в, 5 мс). Каждый блок воспроизводится в отдельных последбва-юльностях (первый занимает 1-й, 5-й, ..., 37-й отсчеты; второй 2-й, 6-й,..., 38-й и т.д.). Цель — выбрать последовательность с наибольшей энергией, а следовательно, устранить избыточность и уменьшить скорость передачи. Но такая краткосрочная обработка не может быть использована для долгих гласных звуков, которые захватывают соседние блоки.
Для сокращения избыточности при произнесении долгих гласных используют долгосрочное предсказание. Запоминаются переданные последовательности (по 15 мс), с которыми сравниваются 1екущие последовательности. Выбирается наиболее похожая и передается только разница между ней и текущей последовательнос-। ыо. Так достигается еще большее сокращение объема передаваемой информации.
Вокодер QCELP-13 фирмы Qualcomm, работающий со скорос-н.ю 13,2 кбит/с, обеспечивает разборчивость речи и другие показа
265
тели ее качества, идентичные тем, которые обеспечиваются проводными абонентскими линиями. При этом качество сохраняется даже в условиях неблагоприятной электромагнитной обстановки. Экспертная оценка качества речи трех типов преобразователей речи при различном коэффициенте ошибки в канале приведена в табл. 9.1.
Таблица 9.1
Тип кодека Коэффициентошибки, % Качество речи (пятибалльная шкала)
ИКМ 64 кбит (проводная линия) 0 4,06
QCELP-13 (радиоканал) 0 4,02
QCELP-13 (радиоканал) 1 3,94
АДИКМ 32 кбит/с 0 3,55
9-9- Аналогово-импульсные виды модуляции, используемые в цифровых системах
Важнейшая операция цифрового преобразования—дискретизация аналогового сигнала по времени — представляет собой амплитудно-импульсную модуляцию (АИМ). Используется также и широтно-импульсная модуляция (ШИМ). Эти виды модуляции находят и самостоятельное применение. В них сигналом-переносчиком является периодическая последовательность видеоимпульсов, которая характеризуется амплитудой, длительностью, частотой следования, фазой (временным положением) импульсов. В связи с этим различают амплитудно-импульсную (АИМ), широтно-импульсную (ШИМ), частотно-импульсную (ЧИМ) и фазоимпульсную (ФИМ) модуляции, при которых непрерывные (аналоговые) сигналы дискретизируются по времени. Поэтому частоту следования импульсной поднесущей выбирают в соответствии с теоремой Котельникова: Ги > 2Fmax, где Fmax — максимальная частота спектра модулирующего (аналогового) сигнала. Для речи Fmax = 3400 Гц и Ги = 8 кГц.
Термин «аналого-импульсная модуляция» означает для радиотехнических систем двойную модуляцию: первичную модуляцию импуль-
266
иной поднесущей передаваемым аналоговым сообщением (АИМ, ШИМ, ФИМ) и вторичную модуляцию несущего гармонического ко-иебания напряжением, получаемым от первичной модуляции. Вторичной может быть любая из рассмотренных непрерывных модуляций: ЛМ, ОБП AM, ЧМ, ФМ. Часто аналого-импульсные системы передачи обозначают двумя группами букв: АИМ-ФМ, ФИМ-ЧМ и др.
Амплитудно-импульсная модуляция(АИМ) — простейший вид модуляции периодической последовательности импульсов (импульсной поднесущей, рис. 9.11, а), амплитуда которых изменяется по закону изменения модулирующего аналогового сигнала (рис. 9.11,6), образуя АИМ (рис. 9.11, в). Различают два вида АИМ: АИМ-1 и
267
ЛИМ-2. При АИМ-1 амплитуда каждого видеоимпульса поднесущей в течение всей его длительности повторяет закон изменения моделирующего сигнала (рис. 9.1, в). При АИМ-2 амплитуда каждого импульса последовательности определяется значением модулирующего сигнала в некоторый фиксированный момент времени, например значением, соответствующим моменту начала этого импульса (рис. 9.11, г). Различие между АИМ-1 и АИМ-2 становится незначительным, если длительность импульсатн поднесущей очень мала. Поскольку это условие обычно выполняется, то цифры в обозначении АИМ можно опустить.
Смодулированная периодическая последовательность видеоимпульсов поднесущей (см. рис. 9.11, а) раскладывается в ряд Фурье
.v„(r) = -^-+ S akCoskQot=-^-Uo+2-^-Uo S 2———2-----cosAQo^
2 A-l 7b To к-I
где t/0, th, — амплитуда, длительность импульсов, период импульсной последовательности соответственно.
Для нахождения спектра АИМ-сигнала в предыдущую формулу вместо (70 подставляют выражение t/0[ 1 + где
Мд им — глубина (коэффициент) АИМ, а Х(г) — нормированный модулирующий сигнал, т.е. сигнал />(/), максимальный уровень которого равен единице. Если X(r) = cosQr, то
•s(^',)=‘^r_f/0 + ~_t/0^AMMcosQz +
70 70
. Шти оо sin-----—
+ 2zt-Uq 5 2——2-------(1 + A/ammcosQ/)cosAQ0/.
То а=| Шти
Видно, что спектр сигнала АИМ содержит постоянную состав-
тн
ляющую ——Ць модулирующий сигнал (второе слагаемое) и на-А)
бор поднесущих Qo, 2Q0, ..., ArQ0 с двумя боковыми полосами /vQ() ± Q (рис. 9.11, д).
268
Модуляторы сигналов ЛИМ представляют собой перемножители, на один вход которых подается колебание немоду-нированной импульсной несущей или поднесущей, а на дру-। ой — модулирующий аналоговый сигнал b(t). Однако модуля-। оры чаще выполняются на ключевых схемах, которые матема-
। пиески эквивалентны перемно- рис. 9.12. Схема модулятора жителям. И те и другие могут сигналов ЛИМ
быть выполнены на транзисто-
рах или диодах; ключи же — и на интегральных микросхемах (ИМС). На рис. 9.12 представлена ключевая схема АИМ, выполненная на НМС К176КТ1 или К561КТЗ. Аналоговый сигнал подается на вход через контакт ножек 2, 7, который замыкается при наличии импульса на управляющем входе 13 и размыкается при его отсутствии.
Демодулятором АИМ сигналов может быть ФНЧ согласно
последнему выражению.
Широтно-импульсная модуляция (ШИМ) определяется тем, что по закону аналогового модулирующего сигнала b(t) (рис. 9.13) изменяется ширина (длительность) импульсов поднесущей при постоянстве их амплитуд и частоты следования. ШИМ иногда называют длительно-импульсной модуляцией (ДИМ). Различают одно- и двухстороннюю ШИМ. При односторонней ШИМ изменение ширины импульса происходит и11шь в результате смещения одно-। < > среза импул ьса (Ш И М-1), а при двусторонней — за счсг смещения ереза и фронта импульса (ШИМ-2).
Рис. 9.13. Графики ШИМ
269
Рис. 9.14. Схема модулятора сигналов ШИМ
Наиболее часто применяется односторонняя ШИМ. Спектр ШИМ-сигнала имеет много общего со спектром АИМ-сигнала, но отличается более сложной структурой.
Модулятор сигнала с ШИМ удобнее всего выполнить на ИМС К1006ВИ1 (таймере), схема которого представлена на рис. 9.14. На ножку 2 подается импульсная поднесущая, а на 5 — аналоговый модулирующий сигнал b(t). Сигнал ШИМ снимается с ножки 3.
Демодулятором сигнала ШИМ является тоже ФНЧ.
Фазоимпульсная модуляция (ФИМ) определяется только изменением временного положения видеоимпульсов поднесущей; их амплитуда и длительность остаются неизменными. Если продифференцировать по времени сигнал ШИМ, то получаются положительные и отрицательные импульсы. Положительные импульсы соответствуют фронту сигнала ШИМ, а отрицательные — его срезу. При ШИМ-1 положительные импульсы неподвижны, а отрицательные смещаются пропорционально модулирующему сигналу b(t) по оси времени. Неподвижные импульсы могут быть устранены с помощью однополупериодного выпрямителя с активной нагрузкой, а оставшиеся импульсы — ФИМ-сигнал.
Модулятор ФИМ-сигнала в этом случае состоит из модулятора ШИМ, к выходу которого подключены дифференцирующая цепочка ДЦ и однополупериодный выпрямитель ОВ с активной нагрузкой (рис. 9.15). Иногда к выходу ОВ подключают одновибратор для получения импульсов строго прямоугольной формы, модулированных по фазе (времени). Часто неподвижные импуль
Рис. 9.15. Схема модулятора сигналов ФИМ
270
сы не устраняют, а передают их вместе с подвижными в одной полярности. Первые называют опорными, а вторые — измерительными. Интервал времени между ними является носителем по-пезной информации. Такой метод передачи сигнала ФИМ облегчает его демодуляцию. Последняя происходит за счет преобразования ФИМ в ШИМ или АИМ с использованием далее ФНЧ.
ФИМ обеспечивает наибольшую помехоустойчивость по сравнению с другими видами аналого-импульсной модуляции.
Частотно-импульсная модуляция (ЧИМ) осуществляется с помощью импульсных автогенераторов, например с помощью муль-1ивибратора Рое’ра и др.
Контрольные вопросы и задания
1. Назовите последовательность операций аналого-цифрового преобразователя сигналов.
2. Как выбирается частота дискретизации аналогового сигнала?
3. Чем определяется шум квантования и как его можно снизить?
4. Для чего используется компандирование сигналов?
5. Поясните термины «отсчет» и «кодовое слово».
6. Как определяется скорость цифровой передачи и полоса частот?
7. Приведите структурную схему аналого-цифрового преобразователя (АЦП) и поясните назначение его блоков.
8. Перечислите виды цифровой модуляции.
9. Нарисуйте структурную схему дифференциальной ИКМ (ДИКМ) и поясните назначение ее блоков и принцип работы в целом.
10. Как в ДИКМ осуществляется сжатие информации?
11. Приведите структурную схему предсказателя ДИКМ и поясните его работу.
12. Для чего нужна и чем отличается адаптивная ДИКМ (АДИКМ)?
13. Приведите структурную схему дельта-модуляции (ДМ), принцип се работы, назначение блоков. Назовите ее достоинства и недостатки.
14. Поясните термин «перегрузка по наклону», каковы пути снижения этой перегрузки?
15. Назовите аналого-импульсные виды модуляции, входящие в цифровые.
16. Приведите схемы модуляторов АИМ, ШИМ, ФИМ.
17. Чем отличаются АИМ1 от АИМ2? ШИМ1 от ШИМ2?
271
ГЛАВА 10. ВИДЫ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ КОЛЕБАНИЙ ДИСКРЕТНЫМИ СИГНАЛАМИ
10.1. Общие положения
В этом случае модулирующим является дискретный (цифровой) сигнал, а модулируемым — обычно гармоническое колебание. При дискретном модулирующем сигнале модуляции часто называют манипуляциями: амплитудная (АМН), частотная (ЧМН), фазовая (ФМН) и относительная фазовая (ОФМН) соответственно. Важным параметром способа манипуляции является число вариантов сигнала на выходе модулятора и демодулятора (модема) или, что то же самое, число вариантов манипулируемого параметра выходного сигнала. Это число называют позиционностью сигнала и способа манипуляции. Если говорят: т — позиционная ФМН, то эго означает, что каждый элемент сигнала на выходе модулятора имеет одну из/п-допустимых начальных фаз. Если все т вариантов сигнала равновероятны, то производительность модулятора как источника информации на входе непрерывного канала связи прямо пропорциональна двоичному логарифму числа т : к = logy; г Эту величину называют кратностью модуляции, поскольку она показывает, во сколько раз (крат) увеличивается информационная емкость данной системы по сравнению с двухпозиционной (однократной) системой при той же длительности элементарного символа. Наиболее часто позиционность выбирают так, чтобы она равнялась целой степени числа 2, тогда кратность к — целое число.
На рис. 10.1 показаны сигналы для простейших способов двухпозиционной (однократной) модуляции сигнала-переносчика (рис. 10.1, б) в виде гармонического колебания. На рис. 10.1, а показан двоичный сигнал на входе модулятора в виде двуполярных импульсов, отображающих двоичные символы 0 и 1. На рис. 10.1, в- е — сигналы на выходе идеального модулятора при использовании двухпозиционной АМН, ЧМН, ФМН. Эти сигналы отражают основополагающую особенность системы цифровой передачи сообщений — принцип дискретности сигнала в канале связи. Для каждого из приведенных способов модуляции допускаются в канале
272
два и только два варианта сигнала. При АМН (рис. 10.1, в) эти варианты записываются в общем виде на интервале одной посылки 0 < t < Т следующим образом: Mami(z) ~ szn ((0oz +
= 0, которые являются неравномощными. При ЧМН "MMlW = Um sin (0)lz + z/4M2<Z) = Um sin (0)2Z + Ф2>’ пРичем иа
рис. 10.1,?(П| = 2л1Т, а= 4л/Т. Такие сигналы относятся к классу ортогональных в усиленном смысле сигналов, так как интеграл от их произведения на интервале [0, 7] равен нулю при любых фазах ф] и ф9.
Сигналы с ЧМН не всегда являются ортогональными. В системах с узкополосными ЧМН сигналами используется условие приближенной ортогональности: |о)? - cnj = к?лЛ\ где к — целое число. Если используются широкополосные ЧМн-сигналы, то условие приближенной ортогональности может быть достигнуто увеличением разности между частотами о>| и
Сигналы с ЧМН, изображенные на рис. 10.1,?, относятся к классу ЧМн-сигналов с непрерывной фазой, в которых начальная фаза очередного элемента сигнала вне зависимости от его частоты равна фазе, которой закончился предыдущий элемент. Такие сигналы обеспечивают большую помехоустойчивость, чем в случае произвольных начальных фаз.
Сигнал двухпозиционной ФМН на интервале одной посылки О < t < Т аналитически выглядит так: ифМ1(г) = Um sin (со/ + ф0); "ФМ2^) “ sin (0)Z + Фо + л) = s*n (0)Z + Ф(Л что показано на рис. 10.1, д, при (в = 4л / Т и ф0 = 0. В общем случае варианты дво
273
ичного сигнала с ФМН имеют некоторую произвольную начальную фазу фо и отличаются фазовым сдвигом сигнала на 180°, т.е. знаком. Поэтому такие сигналы называют противоположными в отличие от ортогональных сигналов с двухпозиционной ЧМН.
Интерес к цифровой передаче сообщений с помощью ФМН вызван в первую очередь тем, что согласно фундаментальным результатам теории потенциальной помехоустойчивости среди всех двухпозиционных сигналов противоположные потенциально обладают наибольшей помехоустойчивостью. Однако на пути реализации этого преимущества имеются трудности, в том числе принципиальные. Демодулятор сигналов с абсолютной ФМН может быть только когерентным, в котором должны формироваться и храниться образцы вариантов передаваемого сигнала, достаточно точно совпадающие с ним по частоте и фазе. Это важное условие было бы выполнено, если бы удалось установить, какому из передаваемых двоичных сигналов это опорное колебание соответствует. Последнее принципиально неразрешимо, если не вводить в передаваемый сигнал каких-либо признаков, например синхроимпульса или избыточных элементов. Если же этого не делать, то имеет место неопределенность начальной фазы или неоднозначность решения для абсолютной ФМН, что явилось фундаментальной причиной для перехода к относительной ФМН (ОФМН). Проблема неопределенности при ОФМН решается путем вычисления разницы фаз соседних посылок, которые неизменны и равны 0 или 180°. На рис. 10.1, е показан сигнал ОФМН, который состоит из таких же модулированных по фазе на 180° посылок, что и сигнал с абсолютной ФМН (см. рис. 10.1, б)), но отличается тем, что у ОФМН фаза данной посылки зависит не только от передаваемого символа, как при ФМН, но и от начальной фазы предыдущей посылки. Принцип формирования начальных фаз таков: если на данной посылке передается двоичный символ 0, то фаза устанавливается такой же, как у предыдущей посылки (разность фаз равна нулю); если же на данной посылке передается двоичный символ 1, то ее фаза изменяется на 180° по сравнению с фазой предыдущей посылки (разность фаз равна 180°). При ОФМН переданный двоичный символ определяется двумя посылками сигнала и все методы приема сигналов с ОФМН основаны на сравнении начальных фаз двух соседних посы
274
лок. В связи с этим для передачи первого двоичного символа в системе с ОФМН необходима одна дополнительная посылка сигнала, переданная собственно перед началом связи и играющая роль отсчетной (см. рис. 10.1, е). В системе с ФМН после изменения полярности опорного колебания все последующие символы принимаются наоборот: единицы — нулями, а нули — единицами. Это гак называемая «обратная работа», которая будет иметь место до следующего скачка фазы опорного колебания или входного сигнала. В системе с ОФМ скачкообразное изменение полярности опорного колебания внутри посылки приводит к тому, что:
- в цифровом потоке возникают в основном двойные ошибки, что усложняет кодек при использовании корректирующих кодов;
- вероятность ошибки увеличивается примерно вдвое.
К недостаткам ОФМН следует отнести также необходимость передачи отсчетной посылки в начале сеанса связи, усложнение модема, а к достоинствам — возможность приема не только когерентными, но и некогерентными методами.
Перечисленные выше характеристики и особенности различных видов манипуляции являются общими. Остановимся конкретнее на каждом из них.
10.2. Однократная абсолютная ФМН
Колебания ФМН* (ФМК) может быть записано в виде
»ФМ<0 = Um sin [°J0z + Y(0M> + Фо] ~
= Uni cos [у(/)Дф] sin (wor + ф0) + Um sin [у(/)Аф] cos [ш0(/) + <р0], где y(Z) — функция, определяющая закон изменения фазы Д<р.
Ширина спектра ФМК наибольшая, если у(г) — периодическая функция на интервале Т = 2т0, где т0 — длительность элементарной посылки, т.е.
J 1приО<^то,
> |-1 при-xo</sO.
* ФМН предложена советским ученым Пистолькорсом А.А. в 1932 г.
275
Если подставить это значение y(Z) в предыдущее выражение, получим:
“ФМ(О = ит tcos АФ sin W + Фо) + Y(0 sin Дер cos (о>0/ + ф0)].
Во втором слагаемом функция y(z) вынесена из-под знака синус, так как последний — нечетная функция, а y(z) принимает значения ±1. Косинус не реагирует на изменение знака своего аргумента, поэтому в первом слагаемом y(Z) исчезло. Далее, y(z) можно
_ / \ 2 “ l-cos&Jt . _ _
представить как ряд Фурье y(z)=— 2 -----------sinAW. Тогда
л £=1 к
ФМК запишется в виде
Иф М (z) =Um c°s Аф sin (coqZ+Фо) +
2СЛ, . д / l-cosbt . , _
+-----8шАф cos (o\)Z+фо) 2---------sinAcQz=
л к
= Um cos Аф sin (cdqZ + Фо)+
+ -^-sin Аф 2 —^^^sin [(шо+Ш^+фц]- sin [(coq—&Q)z + фо]|".
л £=i к
Отсюда следует, что спектр ФМн-сигнала содержит составляющую несущей частоты (первое слагаемое) и две боковые полосы теоретически бесконечной ширины. Уровень составляющей несущей частоты определяется множителем cos Аф, т.е. зависит от Аф. При манипуляции фазы на 180° угол Аф = 90° и, следовательно, составляющая несущей частоты отсутствует, а вся энергия ФМН сигнала содержится только в боковых полосах. Амплитуды боковых составляющих также зависят отАф, но по закону sin Аф, а не cos Аф.
Фазовый манипулятор на 180° может быть выполнен на пе-ремножителе знакопеременного цифрового (дискретного) сигнала и гармонического колебания несущей частоты. Однако на практике его чаще выполняют на ключевых схемах, одна из которых показана на рис. 10.2. К ножкам 1 и 3 ключей К173КТ1 или К561КТЗ подводятся противофазные колебания несущей частоты от генератора, выполненного на элементах ДД1.1 и ДД1.2
276
Рис. 10.2. Принципиальная схема однократной ФМП
ДД2-К173КТ1, К561КТЗ
ИМС К155ЛАЗ. Манипулирующий сигнал b(t) подается на управляющий вход 13 непосредственно и на управляющий вход 5 через инвертор. При b(t) - 1 замыкается контакт /, 2 и на выход ключа поступает колебание одной фазы. При этом контакт 3, 4 разомкнут. Если же b(t) = 0, то, наоборот, замыкается контакт 3, 4, а контакт 1, 2— разомкнут, и на выход ключа поступает колебание несущей частоты противоположной фазы. Так осуществляется ФМи на 180° в этой схеме, п
Ю.з. Манипулятор однократной ОФМН
ОФМН* представляет собой манипулятор ФМН с кодером на его входе, который перекодирует исходный код в относительный. Алгоритм перекодировки прост: если очередной символ 1, то фаза меняется на 180°, если же 0, то фаза не меняется. Структурная схе-
ма манипулятора ОФМН показана па рис. 10.3. В ней кодер, обведенный пунктирной линией, состоит из сумматора по модулю 2, линии задержки ЛЗ на длительность элементарного символа Т. Выход сумматора соединен со вторым его входом через ЛЗ.
Работа кодера поясняется । абл. 10.1. В первой строке таблицы
Рис. 10.3. Схема однократной ОФМН
* ОФМН предложена советским ученым Петровичем Н.Т. в 1954 г.
277
записан исходный код, поступающий на вход / сумматора, во второй — код с выхода сумматора (3-я строка), задержанный на элементарный символ, на что указывают стрелочки. При этом предполагается, что в начальном состоянии сигнал на выходе сумматора равен нулю, что соответствует и второму его входу. Сумма по модулю 2 сигналов обоих его входов 1+0=1 первого столбца таблицы записывается во вторую строчку 2-го столбца и т.д. В соответствии с данными таблицы под ней показаны исходный и перекодированный видеоимпульсы. Последние поступают на низкочастотный вход манипулятора абсолютной ФМН на 180° (блок ФМ), на высокочастотный вход которого подается колебание несущей частоты с генератора Г.
При ОФМН переданный двоичный символ определяется двумя посылками. Поэтому варианты сигналов с однократной ОФМН записываются на интервале двух посылок от 0 до 2Т:
( \ \Um sin(w/ + Gpn),
“ФМ"‘)- sin _ г)+ Фо J г</S2T;
/\ (t7.„sin(o)/+q)n), 0<tsT, "ФЛ/2^=|-С/,„ Sin[<n(r-r)+(p0J T<t<.2T.
Сигнал J(/) соответствует передаче разности фаз Дер = 0, а сигнал — разности фаз Дер = 180°. Если в посылке длитель-
ности Т укладывается целое число периодов колебания несущей частоты, то на интервале 0 < t < 2Т |(r) = Um sin (а>/ + <р0); //ФМ20=8ёп^^п‘уг^«? sin(u)/ + <p0). Сигнал ^ФМ|(0 в этом случае не имеет скачка фазы внутри интервала [0,27], а сигнал ^/фМ2^)
278
имеет скачок фазы на 180° в момент t = Г, что выражается через знаковую функцию sgn.
Большое значение имеет то, что варианты сигнала с однократной ОФМН на одной посылке являются противоположными, как и для ФМН, а на интервале двух посылок — ортогональными в усилен-2Т
ном смысле, что вытекает из равенства f ифм1(0^фм2^)^^0, спра-_ о
всдливого при любых ф0.
10.4. Манипулятор однократной ЧМН
Манипулятор выполняется обычно на автогенераторе, у которого изменяется параметр частно-задающей цепи по закону манипулирующего сигнала /?(/). На рис. 10.4
представлена схема такого манипулятора, где частота изменяется за счет переключения кварцев КВ1 и КВ2. Так как используется один автогенератор, то при скачкообразном изменении частоты фаза меняется плавно, что выгодно. Для ортогональных двоичных ЧМн-сигналов разнос частот /| -/2 = 1/тс, где тс — длительность элементарного символа. Эффективная полоса частот
Ч М н-сигнала А/эс = 0 + ^ЧМ )’
где Мчм — пиковый (максимальный) индекс ЧМН.
Рис. 10.4. Принципиальная схема однократной ЧМН
10.5. Амплитудный манипулятор
Манипулятор представляет собой перемножитель колебания несущей частоты и манипулирующего сигнала, изменяющегося от 0 до + Um, а не от-Um до + Um, как при ФМН на 180°. Это следует непосредственно из временнь'к диаграмм рис. 10.1. Поскольку при передаче
279
паузы колебание на выходе манипулятора отсутствует, то амплитудную манипуляцию (АМН) называют системой с пассивной паузой. В качестве амплитудного манипулятора может быть и контакт ключа, через который подается колебание несущей частоты (см. рис. 9.12). Контакт в этом случае замыкается и размыкается по закону манипулирующего сигнала. Именно такой манипулятор используется в железнодорожной числовой кодовой автоблокировке, в волоконно-оптических системах передачи для управления работой лазера.
Ширина полосы частот АМН сигнала такая же, как у сигналов ФМН или ОФМН на 180°, т.е. значительно меньшая, чем при ЧМН.
Колебания ЧМН, ФМН, ОФМН на 180° можно разложить на два колебания с АМН. При ЧМН они отличаются несущими (J\ или/2), при ФМН — начальными фазами (0 или 180°). Колебание ОФМН выражается через ФМН так же, как и ФМН.
Сигнал АМИ можно записать в виде wAM(r) = y(t)Um sin (wor + + ф0), где y(/) — функция, определяющая закон изменения амплитуды. Ширина спектра АМН сигнала наибольшая, если у(/) периодична на интервале Т = 2т0:
П, 0</<т0;
[0,-т</<0.
Представим у(г) рядом Фурье:
/ \ л с 1 S 1-cosbi .
у(/)=0.5 +— 2---------sinAQ/.
л А-=1 к
Тогда АМн-сигнал
mAm(')=£//»|v+— S 1 С°^Я sin£Q/]sin((o0r + <p0).
I 2 Л £ = ] К I
/ \ U„,T0 sin0,5(w-(B0)r0
Огибающая его спектра Л((л)) =—-------т-1----г-- .
2 0,5(а)-а)0)г0
Демодулятором АМн-сигналов является обычный детектор огибающей или синхронный (когерентный) детектор.
По сравнению с другими видами манипуляции АМН обеспечивает самую низкую помехоустойчивость приема: для достижения
280
заданной вероятности ошибки мощность АМн-сигнала должна быть в 4 раза больше мощности ФМн-сигнала и в 2 раза больше мощности ЧМ-сигнала.
г!
10.6. Манипуляция минимального частотного сдвига
Из всех рассмотренных этот вид манипуляции является наиболее спектрально-эффективным, так как имеет на два порядка меньшее побочное излучение, а полоса частот его сигнала составляет 0,64 от полосы сигнала с однократной ФМН при равной скорости передачи.
Сигнал минимального частотного сдвига (МЧС) формируется устройством, структурная схема которого приведена на рис. 10.5, где К — коммутатор; УД1, УД2 — удвоители длительности бита информации; П1—П4—перемножители сигналов; ФВ1, ФВ2 — фазовращатели сигнала на 90°; 2 — сумматор. Работу схемы поясняют временные диаграммы, представленные на рис. 10.6.
Входной цифровой поток v(/) с длительностью Т элементарного символа разделяется коммутатором К на два подпотока: синфазный /(/), состоящий из нечетных элементов, и квадратурный Q(t), состоящий из четных элементов. В блоках УД 1 и УД2 длительности элемен-
МЧС
Рис. 10.6. Временные диаграммы МЧС
281
тарных символов этих подпотоков удваиваются, и тем самым свободные позиции заполняются элементами предыдущих символов данного подпотока. В результате четные элементы [подпоток 0(f)] оказываются сдвинутыми относительно нечетных [подпотока /(/)] на четверть периода, т.е. на 90°. Из прямоугольной последовательности I(t) выделена ее первая гармоника, которая подается на второй вход перемножителя П1 непосредственно и на второй вход П2 — через фазовращатель ФВ1 на 90°. На первые входы П1 и П2 подаются /(г) и Q(t) с выходов УД1 и УД2 соответственно. На выходах перемножителей П1 и П2 имеют место гармонические колебания^ । (г) и иП2(/) (см- Рис- *0-6), сдвинутые между собой по фазе на 90° и имеющие в некоторых точках пересечения ими оси абсцисс скачки фазы на 180°. Эти квадратурные гармонические сигналы являются модулирующими для последующей части схемы, представляющую собой формирователь однополосного сигнале! фазовым методом (п. 5.4). При отсутствии названных скачков фазы на 180° на выходе перемножителя ПЗ имеет место сумма двух боковых полос (точнее частот), а на выходе П4 — их разница (нижняя минус верхняя). Поэтому на выходе сумматора 2 получается только нижняя боковая частота f— F. Если же у напряжения
|(/) или у Wpp(Z) произойдет скачок фазы на 180°, то нижняя боковая частота изменится на верхнюю. Может измениться знак сигнала боковой. В результате имеет место частотно-фазовая манипуляция: частотная — за счет смены нижней боковой частоты на верхнюю или наоборот, а фазовая — в результате смены полярности модулирующего сигнала. Последнее определяется структурой входного цифрового потока. Поэтому максимальное число разнящихся сигналов равно 4: две боковые частоты со знаком «плюс» или «минус».
Сам термин «манипуляция минимального частотного сдвига (МЧС), международная аббревиатура которой — MSK» объясняется следующим.
Любой действительный модулирующий сигнал можно представить в квазигармоническом виде: b(t) = U(t)cosop(t), где U(t) -огибающая, а op(t) — фаза сигнала. Из-за деления входного цифрового потока на два подпотока его частота уменьшилась в два раза и поэтому на выходе сумматора 2 имеет место однополосное колебание u2(Z) = ±kUcos[u)Z ±0,5<р(/)], где знаки чередуются. Отсюда следует, что девиация частоты (максимальное отклонение ее
282
от среднего значения)
л/-____1 <М‘>п,
h " 2л 2dt
FM 2
. Так как макси-
мальная частота входного цифрового потока где Т —
длительность входного элементарного символа, то Д/? = -^-. ®т‘ ношение девиации частоты А/g к максимальной частоте входного
Z-в/
потока есть индекс МЧС, т.е. m = ‘ ' = 0,5 , что и определяет Гм
название данного метода манипуляции.
Для увеличения степени подавления побочного излучения еще на 2 порядка схему рис. 10.5 модернизируют.
10.7. Манипулятор МЧС с гауссовской фильтрацией
Схема манипулятора представлена на рис. 10.7. В ней нет коммутатора К, делящего входной цифровой поток v(t) на два подпотока, ист удвоителей битов и первой пары перемножителей сигналов. Зато введены новые элементы: гауссовский фильтр ГФ, интегратор по времени И, блоки “cos” и “sin”. Их связи указаны на рис. 10.7: последова
тельно соединенные ГФ и И подключены к перемножителю сигналов П1 через блок “cos”, а к перемножителю П2 - через блок “sin” В этих блоках по их входному сигналу формируются косинус и синус этого сигнала, находящиеся в квадратуре между собой.
Работа схемы поясняется временными диаграммами рис. 10.8 (без ГФ). Видно, что несущая частота на выходе сумматора изменяется скачком с/| до /9 при изменении знака цифрового сигнала с плюса на минус. Фаза сигнала при этом изменяется непрерывно
(без скачков), что наиболее благоприятно. На интервале одного бита информации фаза изменяется на 90°. При наличии гауссовского фильтра (ГФ) дискретные изменения частоты становятся । ладкими. Импульсная реакция ГФ /?(/) = 2 ИИехр[ -я(2и7)2], где 1Г—ширина полосы частот ГФ на уровне -3 дБ. В стандарте
Рис. 10.7. Схема манипулятора МЧС с гауссовской фильтрацией
283
Рис. 10.8. Временные диаграммы МЧС с гауссовской фильтрацией
GSM величина нормированной полосы WT - 0,3, где Т — длительность одного бита информации.
Интегратор преобразует фазовую манипуляцию в блоках “cos” и “sin” в частотную с непрерывным изменением фазы (см. рис. 10.8).
Модуляцию, формируемую схемой рис. 10.8, часто называют манипуляцией минимального частотного сдвига с предмодуляци-онной гауссовской фильтрацией (ГМЧС), международная аббревиатура которой GMSK.
10.8. Дифференциальная квадратурная фазовая манипуляция со сдвигом л/4
Международное обозначение этой манипуляции — л74-DQPSK. Функциональная схема модулятора приведена на рис. 10.9. Вид сигналов в различных точках схемы показан на рис. 10.10. Формирование сигнала происходит в несколько этапов.
На первом этапе поступающие на вход модулятора биты цифрового сигнала объединяются попарно в так называемые дибиты. На рис. 10.10 границы дибитов отмечены пунктирными линиями. Каждому z-му дибиту в дешифраторе ставится в соответствие приращение фазового угла Дер,-. Такая процедура снижает скорость цифрового потока в два раза, так как два информационных бита коди-
284
Рис. 10.9. л/4-DQPSK манипулятор
Рис. 10.10. Временные диаграммы манипулятора л/4-DQPSK
285
Рис. 10.11. Положение фазы сигнала на комплексной плоскости при л/4-DQPSK манипуляции
руются одним значением фазового угла. Зависимость между дибитом и приращением фазового угла приведены в табл. 10.2.
Затем в накапливающем сумматоре, состоящем из линии задержки на длительность дибита и сумматора, происходит суммирование изменений фазы, в результате чего формируется фаза сигнала фу. На рис. 10.11 показана комплексная плоскость с отображением возможных позиций фазы. Из рисунка видно, что возможны 8 положений вектора с фазовыми углами кратными л/4.
На следующем этапе в соответствии со структурной схемой в функциональных преобразователях вычисляются квадратурные
компоненты комплексной огибающей сигнала:
ISi = cos (фу) — синфазная компонента;
QSl = sin (фу) — квадратурная компонента.
Сформированный сигнал в точках а и b структурной схемы имеет вид последовательности дельта-функций с ограниченным
Таблица 10.2
Дибит Приращение фазового угла (Дер,)
00 + 1 а
01 Зя + — 4
10 К | тг ।
11 Зя ~~4
286
набором нормированных значений амплитуды: 0, ±—=-, ±1. Им-V2
нульсный сигнал поступает на формирующие фильтры низкой частоты (ФНЧ). Эти фильтры предназначены для формирования спек-। ра радиосигнала и определенной формы его комплексной огибающей. Данные фильтры являются важнейшими элементами модулятора и демодулятора. Их характеристики отвечают определенным требованиям. Такие фильтры называют фильтрами Найквиста. На их выходе квадратурные компоненты приобретают сглаженный вид, соответствующий импульсным характеристикам фильтров. Сглаженные квадратурные компоненты можно представить в следующем виде:
75/(Л = Ас^ cos Qsi^ ~ AS<') sin W’
где Ac(t\ A^t) — амплитуды компонент.
На рис. 10.10, с, д показана приблизительная форма квадратурных компонент без учета задержки сигнала в ФНЧ. Однако принципиальным является то, что квадратурные компоненты плавно меняются на интервале дибита.
Генератор и фазовращатель формируют квадратурные колебания несущей или промежуточной частоты /0. После попарного перемножения квадратурных компонент и суммирования получает
сгся — — DQPSK-сигнал. Математически эти операции можно
представить следующим образом:
s(t) = Ac(t) cos ф,(/) cos (2л/0г) + As(t) sin <p,(7) sin (2л/0г) = = ^(/)cos [(2n/0/)-<p,(/)],
гдеЛ(г) = J/l2(l)cos2(f) +42(r)sin2(r) — огибающая сигнала;
ф,(0 = arctg
— фаза сигнала.
287
Сформированный сигнал при необходимости переносится на несущую частоту, усиливается и излучается в эфир.
Манипуляция л/4-DQPSK имеет еще одну важную особенность. Из приведенных пояснений следует, что обработка каждого дибита связана с плавным изменением фазы сигнала. А как известно, скорость изменения фазы можно рассматривать как частотную манипуляцию. При манипуляции я/4-DQPSK возможны две скорости изменения фазы: большая — при обработке дибитов, требующих изменения фазы на ± Зя/4, и меньшая при изменении фазы на ± л/4 • Значения девиации можно найти из выражения
2лТ ’
где Т — длительность дибита.
Подставив известные значения: Т = 1/18 кГц, Дф| = Зя/4, Дф2 = можно получить Л/] = 6,75 кГц, Д/2 = 2,25 кГц. Отсюда следует, что при передаче рассмотренного ранее поля коррекции частоты последовательно излучается частота на 6,75 кГц ниже несущей, затем на 2,25 кГц выше и снова на 6,75 кГц ниже, что позволяет при необходимости проводить синхронизацию несущей частоты на приемной стороне.
Таким образом, модуляцию я/4-DQPSK можно рассматривать как разновидность уровневой частотной модуляции.
Из приведенного описания основных этапов формирования сигнала следует, что реализация модулятора может быть выполнена при широком использовании цифровых элементов. Например, учитывая периодичность тригонометрических функций и ограниченный набор значений фазовых углов, приведенная схема от входа точек а и Ь может быть реализована с помощью известных схем дешифраторов, т.е. без математических вычислений.
10.9- Модуляция шумоподобных сигналов-переносчиков
Шумоподобные сигналы (ШПС) обладают уникальными свой- . ствами, очень важными для практики, что является причиной по-
288
вишенного интереса к ним. ШПС обеспечивают возможность: вести устойчивый прием, когда уровень сигнала ниже среднего уровня помех (скрытность передачи); работы в занятых диапазонах частот, так как селекция таких сигналов осуществляется по форме; повышения помехо-устойчивости приема при воздействии аддитивных и мультипликативных помех; наиболее точного измерения параметров движения объекта (скорости, координаты и др.); совмещения различных функциональных задач.
ШПС не являются случайными, так как формируются по определенному алгоритму. Однако их свойства близки к свойствам шума, ограниченного по частоте: энергоспектр почти постоянен, а функция корреляции имеет узкий основной пик и небольшие боковые выбросы. Отсюда и название ШПС. Они представляют собой цифровые последовательности максимальной длины М (^/-последовательности). Поскольку постороннему наблюдатс-ию неизвестен закон чередования единиц и нулей в Л/-последо-вательности, то они получили также название «псевдослучайные» последовательности (ПСП). Такую последовательность проще всего сформировать с помощью регистра сдвига с логической обратной связью.
Для примера на рис. 10.12 представлена такая простейшая схема регистра сдвига с логической обратной связью. Регистр состоит из трех триггеров Tl, Т2, ТЗ, сумматора © по модулю 2 в цепи обратной связи. Входы сумматора соединены с выходами Т2, ТЗ, а его выход соединен с входом Т1. Пусть на выходе I I — единица, а на выходах Т2, ТЗ — нули. Тогда исходное состояние сдвигового регистра характеризуется комбинацией выходных символов 100. В исходном состоянии на входе Т1 — нуль. При поступлении на вход регистра очередного сдвигающего импульса символы с входов триггеров переходят на их выходы. 11овое состояние регистра после первого Сдвигающего ИМПуЛЬСа бу- _____________ _____ _____ Выход
ю г 010, а на входе Т1 —единица. гЧ Т2 Ьр тз---------------
Xпалогично определяются все состо- | яния регистра, приведенные в |<|бл. 10.3. Рис. 10.12. Структурна схема
генератора ШПС
289
Таблица 10.3
Состояние регистра сдвига с логической обратной связью
Номер такта Вход Т1 Выход
Т1 Т2 тз
•
•
•
1 0 1 0 0
2 1 0 1 0
3 1 1 0 1
4 1 1 1 0
5 0 1 1 1
6 0 0 1 1
7 1 0 0 1
8 0 1 0 0
9 1 0 1 0
Из этой таблицы следует, что состояния регистра различны для тактов I—7, а для последующих тактов они повторяются. Так как число разрядов регистра к = 3, а основание системы счисления а = 2, то число всевозможных различных состояний регистра - 23 = 8. В табл. 10.3 отсутствует нулевая комбинация ООО, так как она не рабочая. Поэтому число всевозможных различных комбинаций на выходе регистра N = 2-3 - 1 = 7. При считывании символов с входа Т1 получается периодическая последовательность 01 11001011100101110 с периодом А = 7. Символы можно считывать с выхода любого триггера. В этом случае получаются последовательности, сдвинутые по времени.
Кодовую комбинацию с любым заданным периодом формируют с помощью цифрового автомата (ЦА), аналогичного рассмотренному регистру сдвига на рис. 10.12. Структура ЦА определяется характеристическим многочленом £, порождающим заданную ЛУ-последовательность. Этот многочлен должен быть неприводимым, т.е. его нельзя представить в виде произведения многочленов меньших степеней. Кроме того, он должен быть первообразным (примитивным) относительно двучлена XN- 1, т.е. делить последний без остатка. Известны таблицы, в которых приведены характеристические многочлены до степени к - 34. Для рассмотренного случая к = 3 характеристический полином (многочлен) имеет
290
вид 1011. Первая единица не входит в число к. Нуль говорит о том, что данный триггер Т1 регистра к сумматору по модулю 2 не подсоединяется, а единица — что подсоединяется. В данном случае к сумматору подсоединяются ТЗ и Т4.
Наибольшие возможности ШПС обеспечивают в цифровых системах передачи информации. С помощью ШПС-переносчиков искусственно расширяется полоса частот информационного цифрового сигнала. Для этого информационный цифровой сигнал с элементарной посылкой длительности Тперемножается с ШПС, длительность посылки которого т0« Т. Если цифровой сигнал знакопеременен ( + 1, -1) и прямоугольной формы, то при перемножении имеет место абсолютная ФМН на 180° ШПС-переносчика прямоугольной формы информационным цифровым сигналом тоже прямоугольной формы. От этого элемент информационного сигнала разбивается на /V бинарных (двоичных) элементов: N = 77т0 = ГД/Э = В, где В — база сигнала. Поскольку В » 1, то ШПС являются широкополосными (1/т0 » 1/7). В узкополосных системах 5=1. Базу ШПС можно рассматривать как параметр, характеризующий сознательно введенную избыточность в сигнал. Именно последняя определяет перечисленные достоинства ШПС.
На рис. 10.13, а представлена структурная схема модулятора ШПС-переносчика цифровой системы передачи. На ней обозначе-
ние. 10.13. Структурна схема передатчика ШПС (а) и его временные диаграммы (р)
291
но: ИИ — источник цифровой информации; П — перемножитель сигналов; ГШПС — генератор ШПС; С — синхронизатор; БМ — балансный модулятор; Г — генератор гармонической несущей; У — усилитель. Работа схемы происходит следующим образом. Цифровой сигнал (1 и 0) с блока ИИ поступает на один вход перемножителя П, на другой вход которого подается ШПС с генератора ГШПС. Фаза сигнала на выходе блока П равна нулю, если передается единица, в противном случае она равна 180°. Это ФМН на 180°. Сказанное поясняется временными диаграммами на рис. 10.13,6. На элементарной посылке цифрового сигнала Тс блока ИИ укладывается N = Т/т^ элементарных посылок длительности т() ШПС. Так как ширина спектра ШПС F= 1/т, то база ФМН сигнала В - FT~ N » 1. В блоке БМ информационный ШПС переносится на рабочую частоту передатчика и после усиления в блоке У излучается антенной А.
10.10. Двукратная фазовая манипуляция
Двукратная ФМН (ДФМН) состоит из двух однократных ФМН, в одной из которых фаза скачком изменяется от 0 до 180° (синфазный канал), а в другой — от 90 до 270° (квадратурный канал). Поэтому ДФМН часто называют четырехфазной (ш - 4). Фактически ДФМН реализует уплотнение двух каналов, которое называется комбинационным.
При передаче двоичных цифровых сигналов двух каналов (/< = 2) со строго синхронизированными между собой элементами, как показано в табл. 10.4, максимальное число возможных комбинаций цифровых элементов двух каналов т = = 22 = 4. Это от-
ражено числом элементов первых двух строк таблицы.
Таблица 10.4
Комбинационное уплотнение двух каналов
1 канал 0 1 0 1
2 канал 0 0 1 1
Номер комбинации 0 1 2 3
Фаза ф ф() ф| ф2 фз
Частотаf /о fl /з
292
В каждом столбце этой таблицы элементы каналов представляют собой запись номера комбинации символов в двоичной системе счисления, если считать элементы первого канала младшими разрядами. Этот номер комбинации записан третьим в каждом столбце таблицы в десятичной системе счисления, а их последовательность в 3-й строке образует начало натурального ряда. Каждый такой номер несет две двоичные единицы информации, т.е. два бита или один дибит. Следовательно, вместо двух элементов можно передавать один, соответствующий номеру комбинации, изменением какого-либо параметра высокочастот
ного колебания w(/) = t7cos(u)/+ф), например изменением фазы
Фу (4-я строка) или частоты /у = а)у/2я (5-я строка). На практике чаще используется управление фазой фу, поскольку фазовая манипуляция (ФМН) обладает наибольшей помехоустойчивостью при наименьшей ширине спектра ФМн-сигнала. На рис. 10.14 приведена структурная схема цифрового манипулятора двукратной (четырехфазной) ФМН. Она содержит генератор импульсов Г, фазосдвигающую цепочку ФСЦ, коммутатор с полосовым фильтром ПФ. Обычно ФСЦ представляет собой кольцевой ре
гистр, выполненный на двух D-триггерах, а коммутатор К — мультиплексор MX. На выходах такой ФСЦ имеют место импульсные последовательности со сдвигом фаз Аф = '3(№Чт. Так как для двух каналов т = 4 , то Аф = 90° и фазы соседних последовательностей таковы: 0, 90, 180, 270°. Поэтому мультиплексор должен иметь 4 информационных и 2 адресных входа, как это показано на рис. 10.14. На адресный вход АО подается сигнал
первого канала (1-я строка табл, канала (2-я строка табл. 10.4). Комбинация их элементов определяет подключение на выход мультиплексора импульсной последовательности соответствующей фазы (4-я строка табл. 10.4). В результате имеет место двукратная ФМН: 0—180° в синфазном канале и 90—270° в квадратурном канале.
10.4), а на А1 —сигнал второго
A0AI
Рис. 10.14. Структурная схема цифрового манипулятора двукратной ФМН
293
Рис. 10.15. Принципиальная схема ФСЦ (а) и ее временные диаграммы (б)
На рис. 10.15, а представлена принципиальная схема ФСЦ (ИМС К155ТМ2) на двух D-триггерах. Работа ее поясняется временными диаграммами рис. 10.15, б. Первая временная диаграмма — входной сигнал пвх(/), а остальные — напряжения на выходе соответствующих ножек ИМС. В первые два такта регистр заполняется единицами, а в последующие два — нулями, т.е. цикл смены возможных состояний равен четырем тактам входного сигнала. Это значит, что частота импульсной последовательности на выходе ФСЦ в четыре раза меньше, чем на ее входе. Видно, что на всех
выходах ФСЦ сигналы имеют одинаковый период повторения Т = 4 То но сдвинуты друг относительно друга на То, т.е. на четверть
периода Т, или на угол Дер = 90°, обеспечивая фазовые сдвиги 0, 90,
180, 270°. Правила кодирования фазы сигналов ФМН (или разности фаз сигналов ОФМН) согласно рекомендациям МККТТ V26 и V27 несколько отличаются от названных и приведены в табл. 10.5
в двух вариантах.
Рекомендации V26 и V27 МККТТ
Таблица 10.5
Характеристика (N С? " !’ m = 4 (к = 2) (вариант 1) ш =4 (к = 2) (вариант 2)
Кодовая комбинация 1 0 00 01 10 И 00 01 10 И
Фаза, градусы 180 0 0 270 90 180 45 135 315 225
Вариант 1 реализуется схемами рис. 10.14 и 10.15, а вариант 2 этими схемами не реализуется, так как в нем начальная фаза не 0, а 45°.
294
Для реализации варианта 2 блок ФСЦ должен быть выполнен на трех триггерных ячейках, когда т = 23 = 8. Тогда период выходных импульсов будет Т = 8Т0 и Аф = 360 78 = 45°. Если выбрать 4 вывода регистра согласно варианту 2 табл. 10.5 и подать их на соответствующие выходы мультиплексора, можно реализовать вариант 2 двукратной ФМН.
В качестве мультиплексора MX в схеме рис. 10.14 можно использовать ИМС К155КП2, а в качестве Г — кварцованный автогенератор на ИМС К155ЛАЗ (см. рис. 4.13).
Принцип построения га-позиционных ФМн-сигналов состоит в том, что /л-сигнальные точки располагаются равномерно на окружности радиуса /?, определяемого энергией Е сигнала: R = V/F . Эти точки соединяют с центром окружности. Соседние радиус-векторы образуют угол Аф = 3607/и. Если сигналом-переносчиком является гармоническое колебание u(t) = 67О sin (<о/ + ф), то
/? = = JfUo sin2(<jo/ +q>)dt = .
v vo vo 72
где T — длительность сигнала (посылки).
На рис. 10.16 показаны совокупности сигнальных точек на окружности радиуса R для т = 2 (а) ит = 4 (два варианта — б, в). Расстояние между соседними точками (радиус-векторами), т.е. сигналами s^t),
d(si, s2) = J /[л-2 (t) - A'i (t dt =
V 0
Jj[t7osin((oz+q))-t/0sina»/]2 dt 0
= sin (0,5cp).
e J1E
Рис. 10.16. Сигнальные точки на окружности при т - 2 (а) и т - 4 {6, в)
295
Рис. 10.17. Структурная схема двойной ФМН
При т ~ 2 (к = 1) значение dy = 2 \Ге , а прит = 4 (к = 2) значениея/д = J2E < d~>. Этот параметр d удобен для качественного сравнения различных систем сигналов, так как помехоустойчивость их приема пропорциональная/, за исключением сигналов ДФМН. При когерентном приеме помехоустойчивость однократной и двукратной ФМН одинаковы. Это уникальное свойство ДФМН.
Двукратную ФМН часто реализуют суммой двух однократных ФМН, как показано на рис. 10.17.
Уплотнять комбинационно можно не
только два, но и большее число каналов/;. При этом ФСЦ должна обеспечить т = 2^ фазовых сдвигов через Аф = 360°/ш, а мультиплексор должен иметь т информационных и к адресных входов. При многократной ФМН занимаемая полоса частот практически не расширяется по сравнению с однократной ФМН , но вероятность ошибки приема увеличивается очень быстро с ростом Л, и для сохранения требуемой верности передачи информации необходимо увеличивать мощность сигнала. Такие системы пригодны в тех случаях, когда существуют жесткие ограничения полосы пропускания канала, а мощность сигнала практически не лимитируется.
10.11. Двукратная частотная манипуляция
Двукратная ЧМН (ДЧМН) тоже четырехпозиционная (как и ДФМ ), в которой каждый дибит информации передается на своей частоте (последняя строчка табл. 10.4). Реализовать ДЧМН можно с помощью автогенератора (рис. 10.18), к колебательному контуру которого подключаются дополнительные конденсаторы через мультиплексор MX. На адресные входы АО и А1 мультиплексора подаются цифровые сигналы первого и второго каналов, которые, как и в случае ДФМН, должны быть строго синхронизированы между собой. Их комбинации (табл. 10.4) определяют под-
296
Рис. 10.18. Принципиальная схема манипулятора дчмн
ключаемые к контуру конденсаторы С1, или С2, или СЗ. При этом частота автоколебаний, как известно,
2jtyl ЬКСКЭ
где LK — индуктивность контура;
С., — эквивалентная емкость контура: = С + С„ / = 0, 1,2, 3.
В таком модуляторе фаза колебаний не имеет разрывов при смене посылок, что выгодно с точки зрения чистоты спектра ДЧМн-сигнала. Кратность ЧМИ может быть больше двух. В случае многократной ЧМН занимаемая полоса частот с ростом кратности к увеличивается экспоненциально при ортогональности передаваемых сигналов. Вероятность же ошибки в каждом канале практически не увеличивается. Поэтому ДЧМН применяется в тех случаях, когда используемый канал обладает большим частотным ресурсом, но его энергетические возможности ограниченны.
Контрольные вопросы и задания
1. Чем отличаются дискретные виды модуляции от аналоговых?
2. Перечислите дискретные виды модуляции и объясните принцип их работы графически (временными диаграммами).
3. Нарисуйте принципиальные схемы фазовых, частотных и амплитудных манипуляторов и поясните их работу.
4. Как отличается относительная ФМН (ОФМН) от абсолютной ФМН схемно и принципиально?
297
5. Нарисуйте структурную схему кодера ОФМН и поясните ее работу.
6. Нарисуйте схему манипулятора минимального частотного сдвига (МЧС) и поясните принцип его работы.
7. Чем отличается манипуляция МЧС от фазовой манипуляции ФМН?
8. Нарисуйте схему манипулятора МЧС с гауссовской фильтрацией и поясните его работу.
9. Какой манипулятор обеспечивает наименьшую ширину спектра выходного сигнала и наименьшее побочное излучение?
10. Поясните формирование шумоподобных сигналов (ШПС) — переносчиков информации.
11. Перечислите преимущества и недостатки систем связи с ШПС.
12. Нарисуйте структурную схему передатчика ШПС и объясните его работу.
13. Изобразите схему манипулятора--DQPSK и объясните
_ 4
принцип ее работы.
14. В чем состоит принцип комбинационного уплотнения каналов?
15. Изобразите схему двукратной ФМН и объясните принцип ее работы и работы ее элементов.
16. Изобразите схему двукратной ЧМН и объясните принцип ее работы.
298
Глава 11. СОВРЕМЕННЫЕ СИСТЕМЫ ПОДВИЖНОЙ РАДИОСВЯЗИ
11.1. Цифровые сотовые системы стандарта GSM
Общие характеристики GSM. Стандарт GSM предусматривает работу передатчиков в двух диапазонах частот: 890—915 МГц (для передатчиков передвижных станций MS), 935—960 МГц (для передатчиков базовых станций BTS). В стандарте GSM используется узкополосный TDMA (NB TDMA). В структуре TDMA кадра содержится восемь временных позиций на каждой из 124 несущих. Для защиты от ошибок применяется блочное и сверточное кодирование с перемежением. Повышение эффективности кодирования и псремежения при малой скорости перемещения подвижных станций достигается медленным переключением рабочих частот (SFH) в процессе сеанса связи. Для борьбы с интерференционными замираниями используются эквалайзеры, обеспечивающие выравнивание импульсных сигналов со средним квадратичным отклонением времени задержки до 16 мкс.
Система синхронизации рассчитана на компенсацию абсолютного времени задержки сигналов до 233 мкс, что соответствует максимальному радиусу ячейки (соты) 35 км.
Обработка речи осуществляется в рамках принятой системы прерывистой передачи речи (DTX), которая обеспечивает включение передатчика только при наличии речевого сигнала и отключения передатчика в паузах и в конце разговора (раздел 9.8). В качестве речепреобразующего устройства выбран речевой кодек с регулярным импульсным возбуждением [долговременным предсказанием и линейным предикативным кодированием с предсказанием (RPE/LTR-LPC-кодек)]. Общая скорость преобразования речевого сигнала-13 кбит/с. В стандарте GSM осуществляется шифрование сообщений по алгоритму шифрования с открытым ключом (RSA).
299
Основная характеристика стандарта GSM
Частота передачи, МГц: подвижной станции............................890—915
базовой станции..........................935—960
Дуплексный разнос, МГц............................45
Скорость, МГц: передачи в радиоканале........................270, 833
преобразования речевого кодека................13
Ширина полосы канала, кГц........................200
Максимальное число каналов.......................124
Максимальное число каналов, организуемых в базовой станции..................................16—20
Вид модуляции...................................GMSK
Индекс модуляции ВТ..............................0,3
Ширина полосы предмодуляционного гауссовского фильтра, кГц........................................81,2
Количество скачков по частоте в секунду..........217
Временное разнесение в интервалах TDMA-кадра (передача-прием) для подвижной станции.................2
Вид речевого кодека..........................RPE/LTR
Максимальный радиус соты, км....................до 35
Схема организации каналов..................TDMA/FDMA
Состав оборудования. На структурной схеме (рис. 11.1) MSC (Mobile Switching Centre) — центр коммуникации подвижной связи, BSS (Base Station System) — оборудование базовой станции; ОМС (Operations an Maintenance Centre) — центр управления и обслуживания; MS (Mobile Stations) — подвижные станции; BTS (Base Transceiver Station) — приемопередатчик базовой станции; BSC (Base Station Controller) — контроллер базовой станции; ТСЕ (Transcoder) — транскодер; VLR (Visited Location Register) — регистр перемещения (визитный); HLR (Home Location Register) — регистр положения (домашний); A VC (Authentication Center) — центр аутентификации; EIR (Equipment Identifi Register) — регистр идентификации оборудования; NMC (Network Management Center) — центр управления сетью; ADS (Administration Center) — административный центр; SSS (Switching Sub System) — подсистема комму
300
тации; PSTN (Public Switched Telephone Network) — коммутируемая телефонная сеть общего пользования (ТФОП); PDN (Packet Data Network) — сеть пакетной коммутации; ISDN (Integrated Services Digital Network) — цифровая сеть интегрального обслуживания (ЦСИО).
Все сетевые компоненты в стандарте GSM взаимодействуют в соответствии с системой сигнализации ITU-T SS № 7 (CCITT SS № 7).
Центр коммутации обслуживает группу сот и обеспечивает все виды соединений подвижной станции. MSC аналогичен ISDN коммутационной станции и представляет собой интерфейс между фиксированными сетями (PSTN, PDN, ISDN и т.д.) и сетью подвижной связи. Он обеспечивает маршрутизацию вызовов и функций управления вызовами. Кроме функций ISDN коммутационной станции на MSC возлагаются функции коммутации радиоканалов: «эстафетная передача», в процессе которой достигается непрерывность связи при перемещении подвижной станции из соты в соту, переключение каналов в соте при появлении помех или неисправностях.
MSC обеспечивает обслуживание подвижных абонентов в определенной географической зоне (например, Москве и области), управляет процедурами вызова и маршрутизации. Для телефонной сети общего пользования PSTN MSC обеспечивает функции сигнализации SS № 7, передачи вызова или другие виды интерфейсов. Он формирует данные, необходимые для выписки счетов за услуги связи, накапливает данные по состоявшимся разговорам и передает их в центр расчетов (биллинг центр), составляет статистические данные, необходимые для контроля работы и оптимизации сети, поддерживает процедуры безопасности, применяемые для управления доступа к радиоканалам.
Центр коммутации не только участвует в управлении вызовами, но и управляет процедурами регистрации местоположения и передачи управления, кроме передачи управления в подсистеме базовых станций BSS. Регистрация местоположения подвижных станций необходима для обеспечения доставки вызова перемещающимся подвижным абонентам от абонентов ТФОП или других подвижных абонентов. Процедура передачи вызова позволяет сохранять соединения и обеспечивать ведение разговора, когда подвижная станция перемещается из одной зоны обслуживания в другую. Пе-
301
рсдача вызова в сотах, управляемых одним контроллером базовых станций BSC, осуществляется этим BSC. Когда передача вызовов осуществляется между двумя сетями, управляемыми разными BSC, то первичное управление осуществляется в MSC. Предусмотрены процедуры передачи вызова между сетями, относящимися к разным MSC. Центр коммутации осуществляет слежение за подвижными станциями, используя регистры положения HLR и перемещения VLR (рис. 11.1).
В HLR хранится та часть информации о местоположении подвижной станции, которая позволяет центру коммутации доставить вызов станции. Регистр HLR содержит международный идентификационный номер подвижного абонента IMSI. Он используется для опознавания подвижной станции в центре аутентификации AUC. HLR представляет собой базу данных о постоянно прописанных в сети абонентах. В ней содержатся опознавательные номера и адреса, а также параметры подлинности абонентов, состав услуг связи, специальная информация о маршрутизации. Ведется регистрация
Рис. 11.1. Структурная схема цифровой сотовой системы радиосвязи стандарта GSM
302
данных о роуминге (блуждании) абонента, включая данные о временном идентификационном номере (TMSI) и соответствующем VLR. К данным, содержащимся в HLR, имеют дистанционный доступ все MSC- и VLR-сети, и, если в сети имеется несколько HLR, в базе данных содержится только одна запись об абоненте, поэтому каждый HLR представляет собой определенную часть общей базы данных сети об абонентах. Доступ к базе данных об абонентах осуществляется по номеру IMSI или MSISDN (номеру подвижного абонента в сети ISDN). К базе данных могут получить доступ MSC или VLR, относящиеся к другим сетям в рамках обеспечения межсетевого роуминга.
Другое основное устройство, обеспечивающее контроль за передвижением подвижной станции из зоны в зону, — регистр перемещения VLR. С его помощью достигается функционирование подвижной станции за пределами зоны, контролируемой HLR. Когда подвижная станция переходит из зоны действия одного BSC в зону другого BSC, она регистрируется новым BSC, и в VLR заносится информация о номере области связи, которая обеспечит доставку вызовов подвижной станции. Для сохранности данных, находящихся в HLR и VLR, в случае сбоев предусмотрена защита устройства памяти этих регистров.
VLR содержит такие же данные, как и HLR, однако эти данные находятся в VLR только до тех пор, пока абонент расположен в зоне, контролируемой VLR.
В сети GSM соты группируются в географические зоны (LA), которым присваивается свой идентификационный номер (LAC). Каждый VLR содержит данные об абоненте нескольких LA. Когда подвижный абонент перемещается из одной LA в другую, данные о его местоположении обновляются в VLR. Если старая и новая LA находятся под управлением различных VLR, то данные на старом VLR стираются после их копирования в новый. Текущий адрес VLR абонента, содержащийся в HLR, также обновляется.
Регистр VLR обеспечивает присвоение номера «блуждающей» подвижной станции (MSRN). Когда подвижная станция принимает входящий вызов, VLR выбирает его из MSRN и передает его MSC, который осуществляет маршрутизацию этого вызова к базовым станциям, находящимся рядом с подвижным абонентом. VLR
303
распределяет номера передачи управления при передаче соединений от одного MSC к другому. Он управляет распределением новых TMSI и передает их в HLR, а также управляет процедурами установления подлинности во время обработки вызова. По решению оператора TMSI может периодически изменяться для усложнения процедуры идентификации абонентов. Доступ к базе данных VLR может обеспечиваться через IMSI, TMSI или MSRN. В целом VLR представляет собой локальную базу данных о подвижном абоненте для той зоны, где находится абонент, что позволяет исключить постоянные запросы в HLR и сократить время на обслуживание вызовов.
Во избежание несанкционированного использования ресурсов системы вводятся механизмы аутентификации — удостоверения подлинности абонента. Центр аутентификации формирует ключи и алгоритмы аутентификации. С его помощью проверяются полномочия абонента и осуществляется его доступ к сети. Центр AUC принимает решения о параметрах аутентификации и определяет ключи шифрования абонентских станций на основе базы данных в регистре идентификации оборудования EIR.
Каждый подвижный абонент на время пользования системой получает стандартный модуль подлинности абонента (SIM), который содержит: международный идентификационный номер (IMSI), индивидуальный ключ аутентификации (Ki), алгоритм аутентификации (АЗ). С помощью записанной в SIM информации в результате взаимного обмена данными между подвижной станцией и сетью осуществляется полный цикл аутентификации и разрешается доступ абонента к сети.
Процедура проверки сетью подлинности абонента реализуется следующим образом. Сеть передает случайный номер (RAND) на подвижную станцию. На ней с помощью Ki и алгоритма аутентификации АЗ определяется значение отклика (SRES), т.е. SRES = = Ki [RAND]. Подвижная станция посылает вычисленное значение SRES в сеть, которая сверяет его значение со значением SRES, вычисленным сетью. Если значения совпадают, подвижная станция приступает к передачи сообщений. В противном случае связь прерывается, и индикатор подвижной станции показывает, что опознавание не состоялось. Для обеспечения секретности вычис
304
ление SRES происходит в рамках SIM. Несекретная информация (например, Ki) не подвергается обработке в модуле SIM.
EIR содержит централизованную базу данных подтверждения подлинности международного идентификационного номера оборудования подвижной станции (IMEI). Эта база данных состоит из списков номеров IMEI, организованных следующим образом.
Белый список— номер IMEI, о которых есть сведения, что они закреплены за санкционированными станциями; черный список — номера IMEI станций, которые украдены или которым отказано в обслуживании; серый список — номера IMEI станций, у которых существуют проблемы.
К базе данных EIR получают доступ MSC данной сети и других подвижных сетей.
1WF — межсетевой интерфейс, является одной из составных частей MSC. Он обеспечивает абонентам доступ к средствам преобразования протокола и скорости передачи данных, чтобы можно было передавать их между терминальным оборудованием (DIE) сети GSM и обычным терминальным оборудованием фиксированной сети. Межсетевой интерфейс «выделяет» модем из своего банка оборудования для сопряжения с соответствующим модемом фиксированной сети. IWF обеспечивает интерфейсы типа прямого соединения для оборудования, поставляемого клиентам, например, для пакетной передачи данных PAD по протоколу Х.25.
ЕС — эхоподаватель, используется в MSC со стороны PSTN для всех телефонных каналов (независимо от их протяженности) из-за физических задержек в трактах распространения, включая радиоканал, сетей GSM. Типовой эхоподаватель может обеспечивать подавление в интервале 68 мс на участке между выходом ЕС и юлсфоном фиксированной телефонной сети. Общая задержка в канале GSM при распространении в прямом и обратном направлениях, вызванная обработкой сигнала, кодированием-декодированием речи, канальным кодированием и т.д., составляет около 180 мс. )ia задержка была бы незаметна подвижному абоненту, если бы в 1глсфонный канал не был включен гибридный трансформатор с преобразованием тракта с двух- на четырехпроводный режим, нс-< в >ходимый, так как стандартное соединение с PSTN является двух-нроводным. При соединении двух абонентов фиксированной сети
305
эхо-сигналы отсутствуют. Без включения ЕС задержка от распространения сигналов в тракте GSM будет вызывать раздраженйе у абонентов, прерывать речь и отвлекать внимание. '
ОМС — центр эксплуатации и технического обслуживания, является центральным элементом сети, который обеспечивает контроль и управление другими компонентами сети и контроль качества ее работы. ОМС соединяется с другими компонентами сети по каналам пакетной передачи протокола Х.25. Он обеспечивает функции обработки аварийных сигналов, предназначенных для оповещения обслуживающего персонала, и регистрирует сведения об аварийных ситуациях в компонентах сети. В зависимости от характера неисправности ОМС позволяет обеспечить ее устранение автоматически или при активном вмешательстве персонала.
NMC — центр управления сетью, позволяет осуществлять рациональное иерархическое управление сетью GSM. Он обеспечивает эксплуатацию и техническое обслуживание на уровне всей сети, поддерживаемой центрами ОМС, которые отвечают за управление региональными сетями. Центр обеспечивает управление трафиком и диспетчерское управление сетью при сложных аварийных ситуациях. Он контролирует состояние устройств автоматического управления, задействованных в оборудовании сети, и отражает на дисплее состояние сети для операторов NMC. Это позволяет операторам контролировать региональные проблемы и при необходимости оказывать помощь ОМС, ответственному за конкретный регион. Таким образом, персонал NMC знает состояние всей сети и может дать указание персоналу ОМС изменить стратегию решения региональной проблемы. NMC концентрирует внимание на маршрутах сигнализации и соединениях между узлами с тем, чтобы не допускать условий для возникновения перегрузки в сети. Контролируются также маршруты соединений между сетью GSM и PSTN во избежание распространения условий перегрузки между сетями. При этом персонал NMC координирует вопросы управления сетью с персоналом других NMC. Центр обеспечивает также возможность управления трафиком для сетевого оборудования подсистемы базовых станций BSS. Операторы NMC в экстремальных ситуациях могут задействовать такие процедуры управления, как «приоритетный доступ», когда только абоненты с высоким
приоритетом (экстренные службы) могут получить доступ к системе. NMC может брать на себя ответственность в каком-либо регионе, когда местный ОМС является необслуживаемым, при этом ОМС действует в качестве транзитного пункта между NMC и оборудованием сети.
BSS — оборудование базовой станции, состоит из контроллера базовой станции (BSC) и приемопередающих базовых станций (BTS). Контроллер базовой станции может управлять несколькими приемопередающими блоками. BSS управляет распределением радиоканалов, контролирует соединения, регулирует их очередность, обеспечивает режим работы с прыгающей частотой, модуляцию и демодуляцию сигналов, кодирование и декодирование сообщений, кодирование речи, адаптацию скорости передачи речи, данных и вызова, определяет очередность передачи сообщений персонального вызова.
ТСЕ — транскодер, обеспечивает преобразование выходных сигналов канала передачи речи и данных MSC (64 кбит/с ИКМ) к виду, соответствующему рекомендациям GSM по радиоинтерфейсу (Рекомендация GSM 04.08). В соответствии с этими требованиями скорость передачи речи, представленной в цифровой форме, составляет 13 кбит/с. Этот канал передачи цифровых речевых сигналов называется «полноскоростным». Стандартом предусматривается в перспективе использование полускоростного речевого канала (скорость передачи 6,5 кбит/с). Снижение скорости передачи обеспечивается применением специального речепреобразующего устройства, использующего линейное предикативное кодирование (LPC), долговременное предсказание (LTP), остаточное импульсное возбуждение (RPE — иногда называется RELP). Транскодер обычно располагается вместе с MSC. Передача цифровых сообщений в направлении к контроллеру базовых станций BSC ведется с добавлением к потоку со скоростью передачи 13 кбит/с дополнительных битов (стафингование) до скорости передачи данных 16 кбит/с. Затем осуществляется уплотнение с кратностью четыре стандартный канал 64 кбит/с. Так формируется определенная Рекомендациями GSM 30-канальная ИКМ-линия, обеспечивающая передачу 120 речевых каналов. Шестнадцатый канал (64 кбит/с), «временное окно», выделяется отдельно для передачи информации
307
сигнализации и часто содержит трафик SS № 7 или LAPD. В другом канале (64 кбит/с) могут передаваться также пакеты данных, согласующихся с протоколом Х.25 ITU-T. Таким образом, результирующая скорость передачи по указанному интерфейсу составляет 30 х 64 кбит/с + 64 кбит/с + 64 кбит/с = 2048 кбит/с.
MS — подвижная станция, состоит из оборудования, которое служит для организации доступа абонентов сетей GSM к существующим фиксированным сетям. В рамках стандарта GSM приняты пять классов подвижных станций: от 1-го класса с выходной мощностью 20 Вт, устанавливаемой на транспортном средстве, до портативной 5-го класса, максимальной мощностью 0,8 Вт (табл. 11.1). Предусматривается адаптивная регулировка мощности передатчика, обеспечивающая требуемое качество связи.
Таблица 11.1
Класс подвижной станции по мощности 1 2 3 4 5
Максимальная мощность передатчика, Вт 20 8 5 2 0,8
Допустимые отклонения, дБ 1.5 1,5 1,5 1,5 1,5
Подвижный абонент и станция независимы друг от друга. Как отмечалось, каждый абонент имеет свой международный идентификационный номер IMSI, записанный на его интеллектуальную карточку. Такой подход позволяет устанавливать радиотелефоны, например, в такси и автомобилях, сдаваемых напрокат. Каждой подвижной станции также присваивается свой IMEI. Этот номер используется для предотвращения доступа к сетям GSM похищенной станции или станции без полномочий.
Сетевые и радиоинтерфейсы. При проектировании цифровых ССПС стандарта GSM рассматриваются интерфейсы трех видов: для соединения с внешними сетями; между различным оборудованием сетей GSM; между сетью GSM и внешним оборудованием. Все существующие внутренние интерфейсы сетей GSM показаны на структурной схеме (рис. 11.2). Они полностью соответствуют требованиям Рекомендаций ETS1/GSM 03.02.
308
Интерфейсы с внешними сетями. Соединение с телефонной сетью общего пользования PSTN осуществляется MSC по линии 2 Мбит/с в соответствии с системой сигнализации SS № 7. Электрические характеристики 2 Мбит/с интерфейса соответствуют Рекомендациям G.732. Для соединения с создаваемыми сетями ISDN предусматриваются четыре линии 2 Мбит/с, поддерживаемые системой сигнализации SS № 7 и отвечающие Рекомендациям Голубой книги ITU-T.
Центр коммутации подвижной связи соединяется с сетью N МТ-450 через четыре стандартные линии 2 Мбит/с и систему сигнализации SS № 7. При этом должны обеспечиваться требования Рекомендаций МККТТ по подсистеме пользователей телефонной сетью (TUP — Telephone User Part) и подсистеме передачи сообщений (МТР — Message Transfer Part) Желтой книги. Электрические характеристики линии 2 Мбит/с соответствуют Рекомендациям ITU-T G.732. В настоящее время обеспечивается подклю
309
чение сети GSM в Москве к общеевропейским сетям GSM. Эти соединения осуществляются на основе протоколов систем сигнализации (SCCP) и межсетевой коммутации подвижной связи (GMSC).
Внутренние GSM-интерфейсы. Интерфейс между MSC и BSS (A-интерфейс) обеспечивает передачу сообщений для управления BSS, передачи вызова, управления передвижением. А-интер-фейс объединяет каналы связи и линии сигнализации. Последние используют протокол SS № 7 МККТТ. Полная спецификация A-интерфейса соответствует требованиям серии 08 Рекомендаций ETSI/GSM.
Интерфейс между MSC и HLR совмещен с VLR (В-интерфейс). Когда MSC необходимо определить местоположение подвижной станции, он обращается к VLR. Если подвижная станция инициирует процедуру местоопределения с MSC, интерфейс информирует свой VLR. Эта процедура происходит всегда, когда MS переходит из одной области местоопределения в другую. В случае, если абонент запрашивает специальные дополнительные услуги или изменяет некоторые свои данные, MSC также информирует VLR, который регистрирует изменения и при необходимости сообщает о них HLR.
Интерфейс между MSC и HLR (С-интсрфейс) используется для обеспечения взаимодействия между MSC и HLR. MSC может послать указания HLR в конце сеанса, для того чтобы абонент мог оплатить разговор. Когда сеть фиксированной связи не способна исполнить установление вызова подвижного абонента. MSC может запросить HLR с целью определения местоположения абонента.
Интерфейс между HLR и VLR (D-интерфейс) используется для расширения обмена данными о положении подвижной станции, управления процессом связи. VLR сообщает HLR о положении MS, управляя ею и переприсваивая ей номера в процессе блуждания.
Интерфейс между MSC (Е-интерфейс) обеспечивает взаимодействие между разными MSC при HANDOVER — «передаче» абонента из зоны в зону при его движении в процессе сеанса связи без ее перерыва.
Интерфейс между BSC и BTS (A-bis интерфейс) служит для связи BSC и BTS и определен Рекомендациями ETSI/GSM для процессов установления соединений и управления оборудованием. Пере
310
дача осуществляется цифровыми потоками 2,048 Мбит/с. Возможно использование физического интерфейса 64 кбит/с.
Интерфейс между BSC и ОМС (Q-интерфейс) предназначен для связи BSC с ОМС, используется в сетях с пакетной коммутацией ITU-T Х.25.
Внутренний BSC-интерфейс контроллера базовой станции обеспечивает связь между различным оборудованием BSC и оборудованием транскодирования (ТСЕ); использует стандарт ИКМ-передачи 2,048 Мбит/с и позволяет организовать из четырех каналов со скоростью 16 кбит/с один канал со скоростью 64 кбит/с.
Интерфейс между MS и BTS (Um-радиоинтерфейс) определен в сериях 04 и 05 Рекомендаций ETSI/GSM.
Сетевой интерфейс между ОМС и сетью, так называемый управляющий интерфейс между ОМС и элементами сети, определен в ETS1/GSM Рекомендациями 12.01 и является аналогом интерфейса Q.3, который определен в многоуровневой модели открытых систем ISO OSI.
Соединение сети с ОМС может обеспечиваться системой сигнализации ITU-T SS № 7 или сетевым протоколом Х.25. Сеть Х.25 может соединяться с объединенными сетями PSDN в открытом или замкнутом режиме.
GSM — протокол управления сетью и обслуживанием также должен удовлетворять требованиям Q.3 интерфейса, который определен в ETSI/GSM Рекомендациях 12.01.
Интерфейсы между сетью GSM и внешним оборудованием. Интерфейс между MSC и сервис-центром (SC) необходим для реализации службы коротких сообщений. Он определен в ETSI/GSM Рекомендациях 03.40. Каждый центр управления и обслуживания сети должен соединятся с другими ОМС, управляющими сетями в других регионах или другими сетями. Эти соединения обеспечиваются Х-интерфейсами в соответствии с Рекомендациями ITU-T М.30. Для взаимодействия ОМС с сетями высших уровней используется ().3-интерфейс.
Структура служб и передача данных в стандарте GSM. Стандарт GSM содержи г два класса служб: основные службы и телеслужбы. Основные службы обеспечивают: передачу данных (асинхронно) в дуплексном режиме со скоростями 300, 600, 1200, 2400,
311
4800 и 9600 бит/с через ТФСОП, передачу данных (синхронно) в дуплексном режиме со скоростями 1200, 2400, 4800 и 9600 бит/с через ТФСОП, коммутируемые сети передачи данных общего пользования (CSPDN) и ISDN; доступ с помощью адаптера к пакетной асинхронной передаче данных со стандартными скоростями 300— 9600 бит/с через коммутируемые сети пакетной передачи данных общего пользования (PSPDN), например Datex-P; синхронный дуплексный доступ к сети пакетной передачи данных со стандартными скоростями 2400—9600 бит/с.
Телеслужбы предоставляют услуги телефонной связи, совмещенной со службой сигнализации, передачи коротких сообщений, доступ к службам «Видеотекс», «Телетекс», а также услуги службы «Телефакс».
Структура TDMA-кадров и формирование сигналов в стандарте GSM. Структура TDMA-кадров GSM описана в разделе 11.1. Каждый временной интервал, соответствующий длительности бита, обозначается BN с номером от Одо 155: последнему интервалу длительностью 1/4 бита присвоен номер 156. Для передачи информации по каналам связи и управления, подстройки несущих частот, обеспечения временной синхронизации и доступа к каналу связи в структуре TDMA-кадра используется пять видов временных интервалов («окон»): NB (Normal Burst) — нормальный временной интервал; FB (Frequency Correction Burst) — временной интервал подстройки частоты; SB (Synchronization Burst) — интервал временной синхронизации; DB (Dummy Burst) — установочный интервал; АВ (Access Burst) — интервал доступа.
NB используется для передачи информации по каналам связи и управления, за исключением канала доступа RACH. Он состоит из 114 бит зашифрованного сообщения и включает в себя защитный интервал (GP) 8,25 бит длительностью 30,46 мкс. Информационный блок 114 бит разбит на два самостоятельных блока по 57 бит, разделенных между собой обучающей последовательностью в 26 бит, которая используется для установки эквалайзера в приемнике в соответствии с характеристиками канала в данный момент времени.
В состав NB включены два контрольных бита (Steeling Flag), которые служат признаком того, содержит ли передаваемая группа речевую информацию или информацию сигнализации. В после
312
днем случае информационный канал (Traffic Channel) «украден» для обеспечения сигнализации.
Между двумя группами зашифрованных бит в составе NB находится обучающая последовательность из 26 бит, известная в приемнике. С помощью этой последовательности обеспечивается:
- оценка частоты появления ошибок в двоичных разрядах по результатам сравнения принятой и эталонной последовательностей. В процессе сравнения вычисляется параметр RXQUAL, принятый для оценки качества связи (только оценка связи, а не точные измерения, так как проверяется только часть передаваемой информации). Параметр RXQUAL используется при вхождении в связь, выполнении процедуры «эстафетной передачи» (Handover) и оценке зоны покрытия радиосвязью;
- оценка импульсной характеристики радиоканала на интервале передачи NB для последующей коррекции тракта приема сигнала использованием адаптивного эквалайзера в тракте приема;
- определение задержек распространения сигнала между базовой и подвижной станциями для оценки дальности связи. Эта информация необходима для того, чтобы пакеты данных от разных подвижных станций не накладывались при приеме на базовой станции. Удаленные на большое расстояния подвижные станции должны передавать пакеты раньше станций, находящихся в непосредственной близости от базовой станции.
FB предназначен для синхронизации по частоте подвижной станции. Все 142 бита в этом временном интервале — нулевые, что соответствует немодулированной несущей со сдвигом 1625/24 кГц выше номинального значения частоты несущей. Это необходимо для проверки работы своего передатчика и приемника при небольшом частотном разносе каналов (20 кГц), что составляет примерно 0,022 % номинального значения полосы частот 900 МГц. FB содержит защитный интервал 8,25 бит, как и NB. Повторяющиеся временные интервалы подстройки частоты FB образуют канал установки частоты (FCCH).
SB используется для синхронизации по времени базовой и подвижной станций. Он сосюит из синхропоследовательности длительностью 64 бита, несет информацию о номере TDMA-кадра и идентификационный код базовой станции. Этот интервал передается вместе
313
с интервалом установки частоты. Повторяющиеся интервалы синхронизации образуют так называемый канал синхронизации (SCH).
DB обеспечивает установление и тестирование канала связи. По своей структуре DB совпадает с NB и содержит установочную последовательность длиной 26 бит. В DB отсутствуют контрольные биты и не передается никакая информация. DB лишь информирует о том, что передатчик функционирует.
АВ обеспечивает разрешение доступа подвижной станции к новой базовой станции. АВ передается подвижной станцией при запросе канала сигнализации. Это первый передаваемый подвижной станцией пакет. Следовательно, время прохождения сигнала еще не измерено. Поэтому пакет имеет специфическую структуру. Сначала передается концевая комбинация 8 бит, затем последовательность синхронизации для базовой станции (41 бит), что позволяет базовой станции обеспечить правильный прием последующих 36 зашифрованных бит. Интервал содержит большой защитный интервал (68,25 бит длительностью 252 мкс), что обеспечивает (независимо от времени прохождения сигнала) достаточное временное разнесение от пакетов других подвижных станций.
Этот защитный интервал соответствует двойному значению наибольшей возможной задержки сигнала в рамках одной соты и тем самым устанавливает максимально допустимые размеры соты. Особенность стандарта GSM — возможность обеспечения связью подвижных абонентов в сотах радиусом 35 км. Время распространения радиосигнала в прямом и обратном направлениях составляет при этом 233,3 мкс.
Принятая структура TDMA-кадров и принципы формирования сигналов в стандарте GSM в совокупности с методами канального кодирования позволили снизить требуемое для приема отношение сигнал/помеха до 9 дБ, тогда как в стандартах аналоговых сотовых сетей связи оно составляет 17—18 дБ.
11.2. Цифровые транкинговые системы стандарта TETRA
Стандарт на цифровые транкинговые системы TETRA (TransEuropean Trunked Radio) разработан Европейским институтом те
314
лекоммуникационных стандартов (ETSI). Единому стандарту придается большое значение прежде всего с точки зрения упорядоченного распределения частот.
При выработке параметров нового стандарта учитывались опыт и достижения аналоговых технологий, а также некоторые решения, найденные при создании стандарта GSM. Этим объясняется выбор ширины радиоканала 25 кГц и TDMA. Кстати, разработчики GSM-систем также пришли к необходимости групповой связи, широковещательного режима передачи и приоритетного вызова (новые версии сотовых систем подвижной связи, условно называемые «GSM-сисгемы транкингового типа»).
Стандарт обеспечивает передачу как речи, так и данных. При этом данные могут передаваться в кадровом и пакетном форматах (до 28 кбит/с). В режиме одновременной передачи речи и данных TETRA может взаимодействовать с системами GSM, получая коммутируемый канал передачи данных. В режиме «только данные» (для него разработан специальный подстандарт PDO — Pacet Data Optimixed) возможны передачи коротких сообщений (пейджинг), электронной почты и удаленная обработка данных, передача видеоизображений. В стандарте заложены возможности индивидуального вызова, группового, группового вызова с подтверждением и широковещательного («всем, кто меня слышит»).
Среди дополнительных услуг систем TETRA есть режим прямого вызова (Direct mode), когда разговор идет без «посредничества» базовой станции, непосредственно между двумя радиостанциями. Наличие этого режима является одним из главных требований служб общественной безопасности.
Среди других требований можно перечислить несколько уровней приоритета (в том числе принудительное разъединение абонентов с низшим уровнем приоритета), режим сокращенного набора (менее 300 мс), помехоустойчивое кодирование (метод ACELP — наиболее помехоустойчивый из известных) и несколько уровней секретности. Засекречивание может происходить при помощи внешней аппаратуры от абонента к абоненту и может осуществляться в радиоканале (кодирование). Помимо этого при соединении возможна идентификация абонента и сети.
315
Из нестандартных особенностей можно отметить режим «псев-дооткрытого» канала. В этом режиме распространение нагрузки и ресурсов сети осуществляется по требованию абонента (с учетом приоритетности, удерживания вызова и прочих спецособенностей стандарта), в то время как «открытый» канал подразумевает постоянное распределение нагрузки и ресурсов.
Широкие возможности по передаче данных позволяют подключать в абонентский интерфейс различные виды терминального оборудования: переносные компьютеры, устройства PDA (цифровые ассистенты), факсы, принтеры и т.д.
В стандарте TETRA специфицированы все интерфейсы транкинговой системы: радиоинтерфейс, межсистемный интерфейс линия-станция, шлюзы с УАТС, ТФОП и сетью ISDN, а также интерфейс с центром сетевого обслуживания и управления.
Стандарт способен работать в весьма широком диапазоне частот — от 60 до более 1000 МГц. За европейскими службами безопасности уже закреплена полоса от 380 до 400 МГц, а для коммерческих целей выделены диапазоны 410, 450 и 870 МГц.
В стандарте TETRA используется TDMA с четырьмя временными «окнами», что позволяет обеспечить одновременно передачу четырех речевых каналов на несущую. Разнос соседних радиоканалов составляет 25 кГц и в обычных PMR системах связи.
Требуемый уровень излучения в соседнем канале минус 60 дБ. Дуплексный разнос радиоканалов для передачи и приема равен 10 МГц.
Общая структура временных кадров показана на рис. 11.3. Сообщения передаются мультикадрами (Multiframe). Один мультикадр содержит 18 простых TDMA-кадров и имеет длительность 1,02 с (рис. 11.3, а). Один TDMA-кадр (TDMA- frame) в мультикадре — контрольный TDMA-кадр содержит четыре пакета (time slots), его продолжительность составляет 56,67 мс (рис. 11.3, б).
Один пакет занимает временной интервал 14,167 мс и содержит 510 бит (рис. 11.3, в), 432 из них (два блока по 216 бит) относятся к информационному сообщению. В середине каждого пакета содержится синхропоследовательность SYNCH, которая применяется для временной синхронизации пакета и как тестирующая (или обучающая) последовательность для адаптивного канально-
316
GP— Guard period
Рис. 11.3. Общая структура временных кадров стандарта TETRA
го эквалайзера в приемнике. Пакеты линии «вверх» (uplink) содержат также интервал РА (Power Amplifier), предназначенный для установления уровня излучаемой мощности по первому передаваемому пакету, и защитный интервал GP в конце для исключения перекрытия соседних пакетов (рис. 11.3, г).
При организации каналов связи для обслуживания многих абонентов применяются две схемы уплотнения TBD. Для линии «вниз» (downlink) используется статистическое временное уплотнение (STM), для линии «вверх» — STMA — статистический многостанционный доступ (рис. 11.4).
Передача по четырем речевым каналам в полосе 25 кГц стала возможной благодаря использованию в стандарте TETRA низкоскоростного кодера речи с алгоритмом CELP, относящимся к классу алгоритмов «анализа и синтеза» речи. Скорость передачи цифрового речевого потока на выходе кодера речи равна 4,8 кбит/с.
Принцип «анализа и синтеза» состоит в преобразовании параметров речи и представлении их в такой форме, чтобы ошибка на
317
Рис. 11.4. Схемы уплотнения ТУД в стандарте TETRA
выходе синтезатора по отношению к входу была минимальной. Применительно к кодированию речи по алгоритму CELP формирующий выходной фильтр, определяющий восприятие синтезированной речи, должен обеспечивать качественное ее восстановление по передаваемым параметрам и узнаваемость. Для повышения помехоустойчивости канала связи в стандарте TETRA применяется канальное кодирование и перемещение. Канальное кодирование основано на введении избыточности в передаваемый цифровой поток добавлением тестовой последовательности. Прием искаженной при распространении радиоволн тестовой последовательности, закон формирования которой известен в приемнике, дает возможность осуществить оценку уровня ошибок и сравнение его с пороговым. При передаче данных, когда ошибки превышают заданный уровень, используется процедура автоматического запроса на повторную передачу пакета ARQ (Automatic Repeat Request). Этот метод не применяется при цифровой передаче речи, так как задерж
318
ка пакетов при ARQ непредсказуема. При передаче речи используется прямая коррекция ошибок (FEC — Forward Error Correction).
В условиях релеевских замираний сигнала в каналах подвижной связи эффективным методом борьбы с пакетами ошибок является прямоугольное перемежение, используемое также в стандарте TETRA. Если в процессе передачи потерян пакет сообщения, то при деперемежении (восстановлении) в приемнике он трансформируется в одиночные ошибки, которые исправляются методами FEC. Общая скорость сформированного в результате преобразования аналогового сигнала в цифровой, последующего его кодирования и пе-ремежения, а также формирования пакетов составляет 36 кбит/с.
В стандарте TETRA применяется цифровая я/4-DQPSK модуляция, которая позволяет снизить скорость передачи информационного цифрового потока с 36 до 18 кбит/с. Это обеспечивается тем, что л/4-DQPSK модуляция использует алфавит из четырех символов: {-я/4; л/4; -Зл/4; Зя/4}, каждому из которых ставится в соответствие два информационных бита (00, 01, 10, 11), передаваемых в общем потоке со скоростью 36 кбит/с. Преимущества выбора модуляции вида тс/4-DQPSK проявляются в следующем: передача двух информационных бит одним символом в радиоканале увеличивает спектральную эффективность до 2 бит/(сТц); передача информационных сообщений изменением фазы несущей не требует при приеме абсолютной оценки фазы сигнала, при этом могут быть использованы очень простые схемы демодуляторов. Передача сообщений в радиоканале осуществляется с постоянной огибающей.
В табл. 11.2 приведены сравнительные характеристики и услуги связи стандартов TETRA и GSM.
Таблица 11.2
Характеристика GSM TETRA
Технология доступа Цифровая TDMA Цифровая TDMA
Диапазон рабочих частот, МГц 890—915/935—960 380—400
Эффективная полоса час юг па один речевой канал, кГц 12,5 6,5
Время установления вызова, с, менее 1 1
Возможность передачи данных Да Да
Групповой вызов Да Да
319
Окончание таблицы 11.2
Характеристика GSM TETRA
Прямая связь между подвижными станциями (без участия базовой станции) Нет Да
Возможность расширения зоны обслуживания Да Да
Handover («эстафетная передача») Да Да
Роуминг Да Дд
Аутентификация и шифрование Да Да
Таблица 11.3
Режим передачи данных Вид данных Скорость передачи, кбит/с
Обычный Сканированный текст, графические файлы, видео 7,2—28,8
Защищенный Текст, картографическая информация 4.8—19.2
Повышенной секретности Информация с кредитных карт и другие конфиденциальные данные 2.4—9.6
Данные о скорости передачи данных при различных уровнях секретности приведены в табл. 11.3.
Основные параметры стандарта приведены далее.
Метод уплотнения каналов передачи речи и данных TDMA: четыре канала речи и данных в полосе 25 кГц.
Метод статистического уплотнения в режиме PDO — быстрая пакетная передача (менее 100 мс на пакет 128 байт).
Скорость модуляции 36 кбит/с.
Информационная скорость не более 19,2 кбит/с.
Время установления соединения менее 300 с.
Время повторного установления соединения менее 1 с.
Метод удаленного доступа — интервальная «щелевая» ALOHA.
Метод цифровой манипуляции — я/4-DQPSK.
Низкоскоростное кодирование 7,2 кбит/с.
Мощность 1,3 и 10 Вт.
Скорость транспортного средства до 200 км/ч.
Размер соты не более 60 км.
320
Многосервисная система Nokia TETRA System (NTS) предназначена для обеспечения цифровой транкинговой связи между подвижными абонентами и между подвижными абонентами и диспетчерским центром при высокой степени засекречивания связи. Система разрабатывается как дополнение к уже существующим аналоговым транкинговым системам стандарта МРТ 1327 и сотовым системам стандарта GSM.
Стандартом TETRA предусмотрены следующие дополнительные услуги: вызов через диспетчера, приоритетный вызов, приоритетный вызов с предварительным сбросом, выборочное прослушивание, удержание вызова, идентификация говорящей стороны, регистрация вызова, завершение вызова к обычному абоненту, переадресация вызова, обходной вызов, ожидание вызова, завершение вызова при отсутствии ответа абонента, адресация укороченным номером, подключение к разговору, блокировка исходящих вызовов, выделение динамических конформных групп (выделение группы абонентов).
11.3. Спутниковые системы радиосвязи
Спутниковые системы связи (ССС) обеспечивают возможность организовать дальнюю радиорелейную связь (РРС) в сантиметровом диапазоне волн с одним ретрансляционным пунктом на борту искусственного спутника Земли (БРТР на ИСЗ). При этом расстоя
ние между земными станциями (ЗС) спутниковой связи может достигать многих тысяч километров. Время, в течение которого сохраняется зона видимости ИСЗ с обеих ЗС, определяется видом орбиты, но которой движется ИСЗ, и скорое гыо его движения. Орбиты ИСЗ характеризуются углом наклонения / плоскости орбиты к плоскости экватора (рис. 11.5), высотой и формой. По углу наклонения различаю! экватори
Плоскость орбиты
Рис. 11.5. Типы орбит ИСЗ
альные, полярные и наклонные орбиты. В первом случае плоскость
321
Рис. 11.6. Эллиптическая орбита исз
орбиты совпадает с плоскостью экватора (/ = 0), во втором — с плоскостью меридиана (/ = 90°) и орбита ИСЗ проходит над Северным и Южным полюсами, в третьем — угол наклонения 0 < i < 90°.
По форме различают круговые и эллиптические орбиты. В первом случае форма орбиты близка к окружности, т.е. высота полета ИСЗ над поверхностью Земли почти неизменна и центр орбиты совпадает с центром Земли. Во втором случае высота полета спутника меняется от наименьшего значения — перигея до наибольшего — апогея (рис. 11.6). В соответствии с первым законом Кеплера (небесной механики) один из фокусов эллиптической орбиты совпадает с центром массы Земли. Согласно второму закону Кеплера радиус-вектор ИСЗ в рав
ные промежутки времени прочерчивает равные площади, заштрихованные на рис. 11.6. Это значит, что скорость движения ИСЗ максимальная в перигее и минимальная в апогее, т.е. область апогея ИСЗ проходит сравнительно медленно, а перигея — быстро. Период обра-
щения ИСЗ в часах можно определить по формуле Т = 0,087 где
а — большая полуось эллиптической орбиты (см. рис. 11.6) или радиус круговой орбиты. Спутник на круговой экваториальной орбите, имеющий период обращения Т = 24 ч, синхронный с Землей, будет неподвижным относительно ЗС. Его орбита называется геостационарной. Так как а - R3 + Л, где R3 = 6370 км — радиус Земли, то высота геостационарной орбиты/? = 36 тыс. км (точнее, 35 875 км).
Расчеты показывают, что 3 спутника на геостационарной орбите с интервалом через 120° создают зону прямой видимости на 98 % земной поверхности. Исключением будут небольшие области вблизи Северного и Южного полюсов.
322
Системы спутниковой связи, использующие ИСЗ на геостационарных и высокоэллиптических орбитах, применяются в основном для организации магистральной связи. У них приемопередающие абонентские станции имеют большие массу, габариты и стоимость. Большой практический интерес представляют низкоорбитальные спутники, особенно при организации связи с подвижными объектами и определении их координат. Они позволяют существенно снизить требования к энергетическим параметрам радиолиний и иметь на Земле малогабаритные абонентские приемопередающие станции массой от 1 до 5 кг при сравнительно небольших размерах антенны. Низкоорбитальные спутники вращаются на круговых или эллиптических орбита высотой 700—1500 км. Они строятся по принципу колец. Кольцо — это несколько спутников, движущихся на низких околоземных орбитах, находящихся в одной плоскости и образующих на поверхности Земли поле связи.
Основными особенностями ССС являются запаздывание сигналов и многостанционный доступ (МД) к БРТР. В случае геостационарных спутников запаздывание сигналов составляет ~300 мс. При МД сигналы от нескольких станций принимаются и ретранслируются общим приемопередающим стволом БРТР.
Структурная схема типовой многоствольной приемопередающей земной станции (ЗС) приведена на рис. 11.7. Она работает с
Рис. 11.7. Типовая приемопсредающая земная станция спутниковой связи
323
ИСЗ, находящимся на геостационарной орбите. Станция содержит приемопередающую антенну А, фидерный тракт с устройством разделения передачи и приема (дуплексером), аппаратуру многостанционного доступа и каналообразования (АМДК), передающий (снизу) и приемный (сверху) тракты, системы электропитания, контроля и управления. В состав передающего тракта входят последовательно включенные АМДК, тракт промежуточной частоты (ПЧ), преобразователь частоты вверх (ПЧВ), усилитель мощности СВЧ-сигнала (УМСВЧ), устройство сложения мощностей разных стволов 2, дуплексер, волновод (фидер), антенна.
На рис. 11.8 представлена упрощенная схема передатчика ЗС «Алиса-45», использующаяся в системе МПС. В этой схеме более полно представлена аппаратург1 каналообразования. Используемые обозначения: АДИКМ — адаптивная дифференциальная И КМ; MX — мультиплексор: С — синхронный, Н — низкоскоростной; МАСК — маскиратор; СКР — скремблер; КСК — кодер сверточного кода; ФМ — фазовый модулятор; ПРВ — преобразователь частоты вверх; СВЧ ПРД — сверхвысокочастотный передатчик (усилитель).
Блок МХС — устройство временного объединения речевого сигнала со скоростью 9,6 кбит/с и двух сигналов данных со скоростями 1,2 и 0,6 кбит/с. Первые два сигнала являются асинхронными, а третий — синхронным. Информационная скорость группового сигнала составляет 12 кбит/с.
Блоки маскиратор и скремблер обеспечивают защиту информации.
Рис. 11.8. Структурная схема передатчика спутниковой связи
324
Сверточное кодирование имеет параметры г = 1/2 и К = 5. Коэффициент г = 1/2 указывает на то, что каждый разряд, поступающий на вход кодера, получается ровно по 2 разряда. К = 5 обозначает длину связи, на которую распространяется объединение разрядов (кодовое ограничение). В блоке ФМ осуществляется двукратная ФМН поднесущей частоты 10 МГц. В блоке ПР она переносится на 140 МГц и по кабелю поступает на вход СВЧ ПРД. В последнем происходит преобразование частоты в 6 ГГц и усиление ФМН сигнала по мощности до 500 Вт. Последний по металлическому волноводу поступает на облучатель двойной зеркальной антенны (антенны Кассегрена). Излучаемые антенной электромагнитные волны имеют вращающуюся левовинтовую поляризацию с коэффициентом поляризации 0,7. Блок СВЧ ПРД расположен на обратной стороне параболического зеркала антенны, и поэтому металлический волновод имеет очень малую длину и поворачивается вместе с антенной. При этом исключается вращающееся сочленение волновода, что существенно упрощает его конструкцию. В качестве усилителей СВЧ используют обычно лампу бегущей волны (ЛБВ), пролетные клистроны — электровакуумные приборы. Однако в последнее время, особенно для бортовых ретрансляторов, стали использовать твердотельные элементы — арсенид-галлиевые полевые транзисторы. Так как мощность одного усилителя на полевом транзисторе значительно меньше требуемой, то с помощью специальных схем суммируют мощности большого числа однотипных усилителей.
Станция работает со спутником «Экспресс», находящимся на геостационарной орбите и имеющим точку стояния 90° восточной долготы (ВД).
Основными показателями любой ЗС являются:
- диапазон частот передачи и приема; в нашем случае 6/4 ГГц, т.е. 6 ГГц на передачу и 4 ГГц на прием;
- эквивалентная изотропно излучаемая мощность ЭИ ИМ — произведение мощности передатчика на усиление антенны (в полосе передачи) относитсльно изотропной антенны; обычно находится в пределах 50...95 дБ/Вт;
- добротность станции — отношение коэффициента усиления антенны на частоте приема к суммарной шумовой температуре
325
Рис. 11.9. Спутниковая антенна Кассегрена ЗС
станции, выраженной в децибелах отностительно одного градуса Кельвина.
Основной антенной ЗС ССС является двухзеркальная осесимметричная антенна Кассегрена. Ее схема представлена на рис. 11.9. Она состоит из основного 7, вспомогательного (малого) зеркала 2 и облучателя 3. Основное зеркало / является симметрично усеченным параболоидом вращения с фокусом, расположенным в точке О] и фокусным расстоянием F. Вспомогательное зеркало в схеме Кассегрена — это симметричный усечен
ный гиперболоид вращения. Один его фокус совпадает с фокусом параболоида в точке Ор а второй находится на оси параболоида в точке О вблизи его вершины. Облучатель 3 обычно выполняется в виде конического рупора и располагается на оси параболоида вблизи его вершины и так, чтобы фазовый центр облучателя совпадал с фокусом О гиперболоида. Фазовый центр рупора находится в точке пересечения его расходящихся сторон. Радиус вспомогательного зеркала R = (0,2—0,25)/?0, где — радиус основного (параболического) зеркала. Последний определяется из соотношения
Фо
ctg-y— = 2FIRty где ф0 — угол раскрыва параболоида. Это угол между осью параболоида и линией, соединяющий его фокус с крайней точкой параболы. Обычно 60° < ф0 < 90°.
Часть плоскости, ограниченная наружными краями параболоида, называется его раскрывом (апертурой). Вспомогательное зеркало облегчает оптимизацию распределения амплитуд в раскрыве параболоида и тем самым улучшает основные характеристики антенны. Принцип действия двухзеркальных антенн заключается в преобразовании сферического фронта волны облучателя в плоский волновой фронт в раскрыве антенны в результате последовательных переотражений от двух зеркал: вспомогательного и основ
326
ного, как показано на рис. 11.9. В результате этого слабонаправленные волны облучателя преобразуются в остронаправленные волны, излучаемые в пространство. Ширина диаграммы направленности ДН определяется формулой 20о 5 s 'IttklD*. Так, для длины волны к = 5 см и диаметра антенны £>а = 5 м, то значение 20о 5 = 0,7° вместо 30° для облучателя. ДН имеет игольчатую структуру в виде главного лепестка и направлена по оси параболоида.
11.4. Принципы определения параметров движения поезда с помощью систем спутниковой навигации
Параметры движения — это координата, скорость поезда. Безопасность и эффективность движения транспортных средств зависит от трех факторов: связи, навигации и наблюдения. Связь предполагает возможность оперативного обмена информацией между подвижным объектом и диспетчером. Навигация — это точное определение координат подвижного объекта. Наблюдение заключается в использовании связной и навигационной информации для отображения текущего положения объекта и отслеживании по электронной карте маршрута его передвижения. Эти три функции являются основными для осуществления интервального регулирования движения поездов диспетчером.
Навигация осущсс i вляется обычно с помощью навигационных спутников ГЛОНАСС и GPS. Российская система ГЛОНАСС расшифровывается как Глобальная навигационная спутниковая система, а американская GPS Global Positioning System, что в переводе означает «Глобальная система позиционирования».
Обе системы имеют одинаковое назначение, схожую структуру (по 24 спутника) и работают в L-диапазоне частот при высоте спутников от поверхности Земли 20 180 км (-20,2 тыс. км). Основным их различием являются методы разделения сигналов спутников: в ГЛОНАСС часто гно-пространственное, а в GPS — кодовое. В ГЛОНАСС два взаимноантиподных спутника работают на одной частоте, в резулыате чего используются 12 частот. В GPS используется только одна частота на все 24 спутника.
327
Главной особенностью спутников обеих систем является сверхвысокая стабильность частоты их сигналов или, что то же самое, сверхнизкая относительная нестабильность частоты — порядка 10“13. Это на семь порядков меньше отностительной нестабильности частоты кварцевых автогенераторов, используемых во всех радиостанциях.
Такой сверхвысокой стабильности частоты едва хватает для точного (до метров) определения параметров движения объекта, в том числе и поезда, с помощью спутниковой навигации, а также для решения задач геодезии. Сигналы этих спутников используются для тактовой сетевой синхронизации (ТСС) в цифровых системах железнодорожной связи в качестве сигналов первичного эталонного генератора (ПЭГ).
Сверхвысокая стабильность частоты этих сигналов достигается за счет использования в навигационных спутниках квантовых эталонов (стандартов) частоты, или атомных часов. Каждый спутник ГЛОНАСС и GPS имеет цезиевый атомный стандарт частоты (АСЧ), используемый для формирования бортовой шкалы времени (БШВ) и навигационных радиосигналов частот 1600 МГц (L1) и 1250 МГц (L2). Названные частоты используются в системе ГЛОНАСС, в то время как в GPS — частоты 1575,4 МГц (L1) и 1227,6 МГц (L2). Они формируются путем снижения частоты АСЧ без потери их стабильности. Например, по схемам рис. 4.21 и 4.22.
Особенности навигационных сигналов. Навигационный L1 радиосигнал — двухкомпонентный. На заданной несущей частоте в радиопередатчике формируется два одинаковых по мощности шумоподобных сигнала (ШПС), манипулированных по фазе на 180° и сдвинутых между собой на ±90°: узкополосный (стандартной точности, СТ) и широкополосный (высокой точности, ВТ). Узкополосный навигационный радиосигнал 1600 МГц образуется путем манипуляции фазы колебания несущей частоты на 180° с помощью модулирующей псевдослучайной последовательности ПСП1, которая образуется сложением по модулю 2 трех двоичных сигналов (рис. 11.10):
- псевдослучайной последовательности дальномерного кода (ПСПД), передаваемой со скоростью 511 кбит/с;
328
Рис. 11.10. Узкополосный радионавигационный сигнал
- сигналов цифровой информации (ЦИ) навигационного сообщения, передаваемой со скоростью 50 бит/с;
- меандрового колебания, передаваемого со скоростью 100 бит/с.
ПСПД представляет собой ПСП максимальной длины (М-пос-ледовательность) регистра сдвига с периодом повторения 1 мс. Она снимается с 7-го разряда 9-разрядного регистра. Образующий полином этого кода имеет вид Gg(x) = 1 + У5 + Х^. Информация навигационного сообщения формируется в виде непрерывно следующих строк длительностью 2 с. В каждой двухсекундной строке на интервале времени 1,7 с передается 85 двоичных сигналов ЦИ длительностью 20 мс, относительным кодом (с выхода блока, обведенного пунктирной линией кодера ОФМН).
Первый символ каждой строки является начальным («холостым») для относительного кода. Последние 8 символов в каждой строке являются проверочными символами кода Хемминга, позволяющими исправить одиночный ошибочный символ и обнаруживать 2 ошибочных символа в строке. 15 строк составляют кадр (30 с), а 5 кадров — суперкадр (2,5 мин). В составе каждого кадра передается полный объем онеративной ЦИ и часть альманаха системы. Полный альманах системы передается в пределах суперкадра.
Оперативная ЦИ в кадре относится к навигационному спутнику, излучающему навигационный радиосигнал, и содержит:
- признаки достоверности ЦИ в кадре;
- время начала кадра /к;
329
- эфемеридную информацию (ЭИ) — координаты и производные координат спутника в прямоугольной геоцентрической системе координат на момент времени z();
- частотно-временные поправки ЧВП на момент времени Zo в виде относительной поправки к несущей частоте навигационного радиосигнала и поправки к БШВ спутника;
- время Zq, к которому привязаны ЭИ и ЧВП и которое кратно 30 мин от начала суток.
Эфемериды — это данные об исправности спутника и параметры его орбиты — коэффициенты, с помощью которых приемник вычисляет текущие и будущие положения спутника, используя математическую модель Кеплера. Кроме того, эти сообщения содержат коэффициенты — поправки к спутниковым часам и к задержке распространения сигнала в ионосфере для санкционированных (военных) пользователей.
Альманах — это данные об эфемеридах и состоянии остальных спутников в системе (хранятся в памяти приемника). По этим данным приемник всегда «знает», где находятся все спутники системы, даже когда он их и не «видит», и какие спутники лучше использовать для определения координат.
Альманах системы содержит:
- время, к которому он (альманах) относится;
- параметры орбиты, номер пары несущих частот и поправку к БШВ для каждого спутника;
- поправку к шкале времени (ШВ) (^ 1 мкс) системы относительно ШВ страны.
Альманах системы необходим в навигационной аппаратуре потребителя (НАП) для планирования сеанса навигации и приема навигационных радиосигналов в системе. Необходимость оперативной ЦП определяется тем, что ЧВП вносится в результаты измерений, а ЭИ используется при определении координат и вектора скорости потребителя.
Метка времени (МВ) имеет длительность 0,3 с и передается в конце каждого двухсекундного интервала времени (в конце четных секунд). МВ содержит 30 двоичных символов длительностью 10 мс и представляет собой укороченную на один символ 31-символьную М-последовательность с характеристическим полиномом (7в(.г) = = 1 + + А'5. Границы между МВ в ЦИ когерентны. В приемнике
330
с помощью меандра осуществляется символьная синхронизация для МВ и с ее помощью — строчная и символьная синхронизации ЦИ.
Широкополосный навигационный сигнал 1600 МГц образуется путем манипуляции фазы колебания несущей частоты на 180° периодической двоичной последовательностью ПСП2 с тактовой частотой Г2 = 5,11 МГц. Двоичные символы ЦИ длительности 20 мс передаются путем инвертирования ПСП2.
Широкополосные радионавигационные радиосигналы в системе ГЛОНАСС предназначены для санкционированного использования. Они имеют защиту от несанкционированного использования.
Узкополосный навигационный сигнал в системе ГЛОНАСС
является открытым и предназначен для гражданских потребителей. Но параметры этого сигнала не искажаются с помощью процедуры селективного доступа, как это имеет место в системе GPS, и точность навигации для потребителей преднамеренно не ухудшается.
Особенности определения параметров движения объекта. Координаты объекта определяются по расстоянию до спутника. Если расстояние от объекта до спутника R^ то это значит, что объект находится где-то на воображаемой сфере радиуса с центром, совпадающим с этим спутником. Если при этом известно также расстояние до второго спутника, то аналогично можно построить вторую воображаемую сферу радиуса R^ с центром на втором спутнике. Местонахождение объекта будет где-то на окружности, яв
ляющейся линией пересечения двух таких сфер радиусом R{ и /<2. И наконец, зная расстояние до третьего спутника, можно аналогично построить третью сферу, которая пересечет названную окружность в двух точках. Одна из них будет находиться где-то далеко в космосе, а другая на Земле, рядом с объектом, и будет определять координату последнего. Поэтому трех спутников дос гаточно для определения координаты объекта (рис. 11.11).
Рис. 11.11. Схема определения координат объекта с помощью навигационных спутников
331
Ог спутника
Or наземного
приемника
Рис. 11.12. К вопросу определения псевдодальности объекта от навигационного спутника
Расстояние до спутника определяется путем умножения скорости электромагнитных волн с = 3 ♦ 108 м/с (скорость света) на время прохождения сигнала от спутника до навигационного приемника. Для измерения этого времени на спутнике и наземном приемнике одновременно генерируется одинаковый псевдослучайный код. Приемник измеряет задержку времени Т между одинаковыми участками принятого со спутника кода и кода, сформированного в нем (рис. 11.12). Вычисленная дальность R - сТ напрямую зависит от точности одновременного генерирования кода на спутнике и в земном приемнике, т.е. от точности хода их часов. Именно поэтому на спутнике устанавливают атомные часы, имеющие точность около одной наносекунды (10-9с). Устанавливать такие часы в каждом земном приемнике слишком дорого. Поэтому вместо атомных часов используют измерение дальности до четвертого спутника для устранения ошибки хода часов. При низкой точности хода земных часов неточными будут и дальности до спутников (псевдодальности). Четыре сферы, построенные по четырем псевдодальностям, не пересекутся в одной точке. Для обеспечения их пересечения в одной точке компьютер прибавляет ко всем дальностям или вычитает из них некоторый один и тот же интервал времени до тех пор, пока не найдет решения, когда все четыре сферы пересекутся в одной точке. Так определяется точная дальность с помощью четвертого спутника — метод последовательных приближений, или метод итерации. Что касается координат поезда, то достаточно иметь измерение дальности до двух спутников и карту его железнодорожного пути, так как последний имеет линейную топологию.
Аналитически псевдодальность Diu j\q /-го спутника определяется известной зависимостью
Diu +(Y-Yi)2 +(Z-Zi)2 +cT' + 6Dh
i= 1.2...N
332
где X, Y, Z без индексов — искомые прямоугольные координаты земного объекта, а с индексом / — z-ro спутника (известные); Т — расхождение шкал времени объекта и спутника; — погрешность определения псевдодальности.
Система таких уравнений решается итеративным методом наименьших взвешенных квадратов. Найденные значения X, Y, Z — прямоугольные геоцентрические координаты объекта — преобразуются в геодезические координаты: широту, долготу, высоту для воздушных и морских судов или координаты Гаусса—Крюгера — для наземных объектов.
* dy * clz
Составляющие л* = —, у = —z = ~~^~ вектора скорости
—> —> —♦ • —> • —
v( v = j х+ j у+ к z)определяются по измерениям доплеровского
’’ /• ,1R3 Г
сдвига частоты Д/д = — /ocosy =-----/ocosY , где п — угловая
с с
скорость обращения спутника вокруг Земли; = 6371 км — радиус земного шара; с - скорость света; /0 — частота передаваемых сигналов; у — угол между вектором скорости у и направлением спутник — объект.
Имеется несколько причин неизбежных погрешностей определения параметров движения. Самой существенной из них является задержка радиосигнала в ионосфере (слое заряженных частиц на высоте 120—200 км от Земли) и тропосфере (на высоте 8—18 км). Влияние задержки непостоянно и зависит от солнечной активности и погодных условий. Для минимизации этой ошибки используют два колебания разных несущих частот (1600 и 1250 МГц). По разности задержек двух радиосигналов нетрудно определить величину замедления скорости света в атмосфере. Для минимизации погрешности измерений спутники запущены на высоту 20180 км, где движение стабильно и прогнозируемо.
Одновременное обеспечение требований по измерению координаты и скорости объекта при простой (гармонической) структуре сигнала невозможно, и поэтому используют сложные сигналы — псевдослучайные последовательности ПСП. Упрощенный
333
а Несущая частота
Фазоманипулированный сигнал
t
Рис. 11.13. Сигнал навигационного спутника
вид подобного сигнала предоставлен на рис. 11.13, б. Здесь фаза высокочастотного колебания (а) модулируется навигационным кодом (б), который содержит дальномерный код и код двоичной информации. Такой принцип формирования ФМ-сигнала (в, г) системы позволяет по измерению доплеровского сдвига несущей частоты определять скорости, а по задержке элементов дальномерного кода — дальность спутника. При этом служебный код несет всю вспомогательную информацию (эфемериды спутников, альманах системы и др.), необходимую для обеспечения работы навигационного приемника.
Особенности приемных антенн навигационных сигналов. Для создания одинаковых условий приема всех сигналов, поступающих от находящихся в поле зрения спутников, антенная система должна иметь диаграмму направленности (ДН) в виде полусферы.
К настоящему времени в спутниковых приемниках наибольшее распространение получили микрополосковые антенны (мик-рополосковые склейки), которые представляют собой своеобразную плату с нанесенными на нее отдельными элементами антенны. При соответствующем соединении и фазировании их удается сфор
334
мировать требуемую ДН. В самом общем случае векторная комплексная характеристика направленности
F(0,<p) = ^(0,ф)р(0,ф)ехр[уФ(0,ф)]
состоит из произведений трех сомножителей, описывающих соответственно амплитудную F(0, ф), поляризационную />(0, ф) и фазовую Ф(0, ф) структуры дального поля антенны. Для земных приемников навигационных сигналов важное значение имеет не только амплитудная и поляризационная, но и фазовая ДН. Последняя оценивает временные (или фазовые) задержки сигналов при их прохождении через антенное устройство, что важно при определении параметров движения объекта. Идеальной формой фазовой ДН является тоже полусфера, обеспечивающая одинаковую величину задержек сигнала независимо от направления их прихода. При обеспечении такой формы эти задержки удается исключить в случае использования разностных методов измерения параметров движения объекта.
На практике реальная форма фазовой ДН несколько отличается от идеальной, в результате чего могут возникать ошибки в определении указанных параметров. При разработке высокоточных спутниковых навигационных систем геодезического типа стремятся к тому, чтобы уклонения реальной фазовой ДН от идеальной не превышали 5 10 °, что соответсвует ошибкам в определении расстояний около 3 5 мм.
Так как приемник навигационных сигналов является двухчастотным, то для обеих частот (L| и Д2) формы ДН должны быть по возможности идентичными. Как известно, амплитудная ДН оценивает в относительных единицах уровень сигнала на выходе антенны в зависимости oi направления его прихода (0, ф).
Наряду с ДН важными показателями антенного устройства приемника навигационных сигналов являются фазовый центр, его положение и стабильность этого положения с течением времени.
При этом под фазовым центром (ФЦ) понимается не поддающаяся геометрическим измерениям точка в антенной системе, от которой отсчитываю гея все измеряемые до спутников расстояния, а ее положение «при вязы вас гея» к положению соответствующей точки на пункте наблюдения.
335
При использовании антенны симметричной конструкции относительно своей вертикальной оси положение ФЦ в горизонтальной плоскости совпадает, как правило, с положением упомянутой оси симметрии. Что касается смещения этого центра по вертикали, то такое смещение определяется на основе специальных исследований (чаще всего в процесс настройки и калибровки антенны).
Еще одной специфической характеристикой антенн навигационных приемников является показатель невосприимчивости к приему сигналов, отраженных от подстилающей поверхности и других окружающих объектов. С этой целью стремятся к тому, чтобы устранить лепестки ДН, расположенные с нижней (тыльной) стороны антенны.
Попадание на антенну отраженных сигналов, прошедших отличный от прямых сигналов путь, приводит к возникновению ошибок в величине измеряемых расстояний. Для борьбы с влиянием многолучевости формируют такую ДН антенны, которая обеспечила бы максимальную чувствительность для прямых сигналов и минимальную — для отраженных.
В качестве дополнительной меры используют специальные металлические диски, устанавливаемые непосредственно под антенной. Но это влияет на амплитудную и фазовую ДН.
Для приема сигналов навигационных спутников используются микрополосковые спиральные антенны. Чаще всего это архимедовы и логарифмические (равноугольные) спирали. Логарифмическая спираль по своим диапазонным свойствам приближается к взаимно дополняющим структурам. Однако она имеет сравнительно большие размеры, необходимые для стабилизации параметров в диапазоне частот. Архимедова спираль проще по топологии и отличается более плотной намоткой на ее концах. Хорошим приближением к архимедовой спирали служит полукольцевая спираль, состоящая из набора полуколец разного размера, которая имеет наиболее простую топологию.
На рис. 11.14 представлена плоская двухзаходная спираль Архимеда. Ее плечи описываются уравнениями р|(ф) = яф + Ь, р2(ф) = = п(ф - л) + />, где р, ф — полярные координаты, аиЬ — постоянные величины. Антенна выполняется в виде двух проводников, кото
336
Рис. 11.14. Плоская двухзаходная спираль Архимеда
рые, в частности, могут иметь плоскую фому и выполняться печатным способом на тонком листе высокочастотного диэлектрика. Расстояние между проводниками Др и ширина проводников б постоянны по углу ср, причем расстояние между проводниками обычно берется равным ширине проводников (принципы дополнительности).
Возможны два режима возбуждения антенны: противофазный и синфазный. В противофазном режиме начальные точки спи
ралей А и В на рис. 11.14 присоединяются к двухпроводному фидеру или возбуждаются коаксиальным кабелем, проложенным вдоль одного из плеч. В синфазном режиме возбуждения начальные точки спиралей А и В замыкаются между собой и подключаются к внутреннему проводнику коаксиального кабеля. Наружный проводник кабеля присоединяется к противовесу, представляющему собой плоскую металлическую шайбу. Противовес может выполняться печатным способом на обратной стороне диэлектрического листа, несущего спиральные проводники. Центральная часть синфазной антенны вместе с проч ивовесом представляет собой распределитель в виде несимметричной полосковой линии и в излучении не участвует.
В первом приближении антенну можно рассматривать как двухпроводную линию, сверну тую в спираль.
Активная область плоской архимедовой спиральной антенны в режиме противофазно! о возбуждения условно может быть заменена одним витком радиуса pj = Х/2яс распределением эквивалентного электрического юка но закону бегущей волны (одноволновая рамка):/„ф =/()<’ /ч Периметр этого эквивалентного витка равен длине волны X. I Ipoi ивофазная спиральная антенна является частотно-независимой как по входному импедансу, так и по ДН, если К не превосходи ! параметра внешнего витка спирали. При синфазном возбуждении активная область плоской архимедовой спи
337
рали может быть заменена одним витком радиуса Pj = k/л с распределением эквивалентного электрического тока по закону бегу-
/ х гэ - т
щей волны (двухволновая рамка): 'сф “ '0е
Границы рабочего диапазона антенны определяются из условия /?п < к/л < /?вн, где Авн — внешний радиус антенны, Rn — радиус металлического противовеса в возбуждающем устройстве. При расчете характеристик направленности удобно расположить архимедову спиральную антенну в экваториальной плоскости сферической системы координат (начало координат совпадает с центром спирали). Полагая, что излучение антенны обусловлено распределением отмеченных выше сторонних токов, можно получить следующие формулы для расчета характеристик направленности:
£^(0, ф) =jA[Jfl _ 1 (л sin 0) + Jn + । (п sin 0)]cos 0
ф) = ЛЦ, _ ] (л sin 0) - Jn + ,(л sin 0)]
В этих формулах А представляет собой амплитудную константу, Jn±\(х) — функцию Бесселя первого рода п ± 1 порядка от аргумента х; причем, п ~ 1 относится к случаю противофазного возбуждения спирали и п = 2 — к случаю синфазного возбуждения спирали. На рис. 11.15 показаны рассчитанные по этим формулам ДН в меридиальной плоскости ф = 0. Ввиду симметрии антенны ДН
Рие. 11.15. Диаграммы направленности плоской спиральной антенны
338
построены лишь для верхнего квадранта. Полные пространственные ДН имеют вид тел вращения вокруг оси антенны. Всегда > Eq. Исключение составляет лишь случай 0 = 0 (или я) при /7=1, когда эти составляющие равны. Кроме того, Е^ и Е^ всюду находятся в фазовой квадратуре. Поэтому полное поле излучения архимедовых спиральных антенн имеет преимущественно эллиптическую поляризацию. Однако в плоскости спирали Eq = 0, и поэтому получается линейно-поляризованное поле. Чисто круговая поляризация возникает в осевом направлении 0 = 0 (или я) при противофазном возбуждении спирали. Режим осевого излучения — основной режим. При синфазном возбуждении спирали излучение вдоль оси Z отсутствует. Это режим ненаправленного излучения с воронкообразной ДН.
Плоские микрополосковые спирали используются в диапазоне частот/от 0,2 до 1,8 ГГц. Для частот f > 2 ГГц их изготавлива
ют по технологии гибридных интегральных схем СВЧ.
Наряду со спиралью Архимеда можно рассматривать и коническую логарифмическую спираль, описываемую уравнением г - как
структуру, остающуюся подобной себе при изменении масштаба. Действительно, с использованием масштабного множителя К последнее выражение преобразится:
Кг = М^е|п/' = + Фо),
где л/фо = In /<.
Постоянная ф0 свидетельствует лишь о повороте структуры относительно оси Z (рис. 11.16).
Обычно используемая логарифмическая антенна в виде усеченного конуса состои । из двух одинаковых проволочных спиралей, развернутых относительно иродоль-
Рис. 11.16. Коническая логарифмическая спираль
339
ной оси. Питание производится из вершины конуса коаксиальным кабелем, проходящим внутри него.
Спиральные логарифмические антенны являются слабонаправленными, но сохраняют свойственную им направленность действия в 10-кратном диапазоне частот и более. Широкий максимум излучения антенны ориентирован в осевом направлении в сторону вершины конуса. Характеристике! направленности и входные параметры антенны в диапазоне почти не изменяются, причем низшая частота этого диапазона определяется диаметром основания конуса, а верхняя — диаметром его усеченной части. Для некоторых ан-3. тенн диаметр основания на границе диапазона составляет —Л,, о
Преимуществом микрополосковых спиралей и антенных решеток являются малые габариты, масса и стоимость при высокой точности изготовления и воспроизводимости характеристик.
Конструкции спиральных микрополосковых антенн для приема сигналов навигационных спутников с правосторонней круговой поляризацией волн представлены на рис. 11.17.
ОАО «Ижевский завод» изготавливает антенно-усилительное устройство АУУ-1, представляющее собой малошумящий усилитель (МШУ). Последний подключается непосредственно к выходу антенны, отчего она является активной. Выход МШУ соединен с входом приемника через фидер. МШУ практически нс позволяет шумам фидера изменить отношение мощности сигнала к мощности шума на входе приемника по сравнению с таковым на выходе антенны, что важно для практики.
АУУ-1 предназначено для использования в составе систем на-
Рис. 11.17. Конструкция спиральных микрополосковых приемных антенн сигналов навигационных спутников
340
вигационной аппаратуры и имеет следующие технические характеристики:
Диапазон рабочих частот (GPS/ГЛОНАСС), МГц..570... 1625
Коэффициент усиления МШУ, дБ.......................42 ± 2
Коэффициент шума входного фильтра + МШУ, дБ........менее 2
Температурный диапазон, °C................-40...+50
Напряжение питания (по центр, жиле в ВЧ-кабеле), В.12...24
Ток потребления, мА........................менее 40
Габаритные размеры, мм....................190x75x45
Этот же «Ижевский завод» изготавливает 12-канальный (МЦОС-Ж12) и 18-канальный (МЦОС-А18) GPS/ГЛОНАСС навигационные приемники для систем управления движением железнодорожного транспорта. Приемник осуществляет автоматический поиск, прием и обработку сигналов спутников радионавигационных систем ГЛОНАСС и GPS NAVSTAR, измеряет навигационные параметры на частотах Ц GPS/ГЛОНАСС, включая комбинированную фильтрацию измерений по коду и несущей. Платы могут применяться в высокочастотных навигационных системах управления движением не только железнодорожного, но и других видов транспорта. Приемники обеспечивают устойчивую работу как при запуске без известного альманаха СНС GPS и ГЛОНАСС («холодный старт»), так и при известной априорной информации («теплый старт»).
Габаритные размеры плат приемников: 160x100x20 мм для МЦОС-Ж 12 и 150x105x20 мм для МЦОС-А18 при точности измерения (без режима дифференциальной коррекции) координаты < 30 м, а скорости — менее 0,15 м/с. При наличии дифференциальной коррекции точность определения координат повышается до 1 см.
Габаритные размеры АУУ-1 и платы приемника примерно одинаковые и незначительные.
В настоящее время снутниковая навигация используется в составе серийно выпускаемой заводом локомотивной аппаратуры «КЛУБ-У». Такое название представляет собой сокращение из первых букв: комплексное локомотивное устройство безопасности.
341
Контрольные вопросы и задания
1. Опишите структуру сотовой связи GSM-R.
2. Поясните структуру транкинговой связи.
3. Поясните принцип спутниковой связи, ее преимущества и недостатки.
4. Перечислите типы орбит спутников, их параметры.
5. Поясните геостационарную орбиту спутника, назовите ее высоту.
6. Приведите структурную схему системы спутниковой связи, поясните ее работу.
7. Какая земная антенна используется для спутниковой связи при геостационарной орбите спутника?
8. Приведите схему антенны Кассегрена и поясните принцип ее работы, назначение ее элементов.
9. Назовите навигационные спутники, высоту их орбит.
10. Как определяются параметры движения объекта (координата и скорость) с помощью навигационного спутника?
11. Назовите относительную нестабильность частоты сигналов навигационных спутников ГЛОНАСС/GPS.
12. В каких системах железнодорожного транспорта используются сигналы навигационных спутников?
342
ЗАКЛЮЧЕНИЕ
Разнообразные системы радиосвязи на железнодорожном транспорте предназначены прежде всего для повышения безопасности движения поездов, увеличения эффективности оперативного управления перевозочным и перерабатывающим процессами. Грамотная эксплуатация и ремонт таких систем требуют подготовки высококвалифицированных радиоспециалистов, хорошо знающих эти системы и их радиопередающие устройства. Причем специалистов, разбирающихся не только в эксплуатируемых в настоящее время аналоговых, но и во внедряемых цифровых сотовых, транкинговых, спутниковых и других системах.
Многообразие задач, стоящих перед разработчиками систем железнодорожной радиосвязи, можно свести к двум: к повышению эффективности и помехоустойчивости, которые взаимосвязаны между собой.
Проблема эффективности состоит в том, чтобы передавать наибольшее количество информации (сообщений) в заданное время наиболее экономным образом (в смысле использования полосы частот, затрат энергии и стоимости). Это достигается путем использования наиболее современных способов передачи (кодирования и модуляции) и приема (декодирования и демодуляции). Под помехоустойчивостью понимается способность системы передачи противостоять вредному воздействию разнообразных помех, обеспечивая необходимое качество (верность) передачи сообщений.
Наибольшую эффективность и помехоустойчивость обеспечивают системы радиосвязи 3-го поколения: многоканальные системы передачи шумоиодобиых сигналов (ШПС) со свободным доступом и с кодовым разделением каналов (СДМА). По сравнению с системами 2-го поколения (с временным разделением каналов TDMA) и 1-го поколения (FDMA) они обеспечивают наиболее полное использование частотно-временного ресурса.
Наиболее эффективной модуляцией колебания несущей частоты цифровых сие гем передачи является частотная манипуляция с минимальным частотным сдвигом (МЧС) и с предмодуля-ционной гауссовской филы рацией. В таком модуляторе цифро
343
вой модулирующий сигнал преобразуется в гармонический, которым осуществляется однополосная фазовая модуляция гармонической несущей со сменой верхней боковой полосы частот на нижнюю и наоборот.
Таким образом, можно утверждать, что произошло объединение в разумном сочетании аналоговых и дискретных, широкополосных и узкополосных систем, систем проводной и радиосвязи. В очередной раз проявился фундаментальный диалектический закон единства противоположностей.
Главы 1—5 учебника посвящены изучению структурных и принципиальных схем аналоговых радиопередающих устройств, используемых в настоящее время на железнодорожном транспорте. В главе 6 изучаются антенны. В главе 7 рассмотрены конструктивные особенности и особенности эксплуатации аналоговых передатчиков ЖР. В главе 8 анализируются перспективы развития радиосредств железнодорожного транспорта. Из приведенного анализа можно сделать вывод, что наибольшие перспективы у многоканальных цифровых сотовых, транкинговых и спутниковых систем связи и навигации. Именно этим и определяется содержание дальнейших глав учебника 9—11. В главе 9 рассмотрены цифровые, а в главе 10 — дискретные виды модуляции. Глава 11 посвящена непосредственно цифровым сотовым, транкинговым, спутниковым системам. Рассмотрены принципы определения параметров движения поезда с помощью спутниковых систем навигации и связи. Эти параметры с поезда должны передаваться диспетчеру поезда.
344
ПРИЛОЖЕНИЯ
Приложение 1
Диапазоны волн
Диапазон волн X, м /,Гц f
Радиоволны Сверхдлинные Длинные Средние Короткие Метровые Дециметровые Сантиметровые Миллиметровые Субмиллиметровые > 1СН 104—103 103—102 10—10 10—1 1—0,1 10"|—IO-? 10“-— IO"1 10'3 - 10"4 < 3 • 104 (3 - 30) • Ю4 (3 -ь 30) • 10s (3 4- 30) • 106 (3 -ь 30) • ю7 (3 4- 30) • 10“ (3 + 30) • 10* (3 -ь 30) • 1010 (3 + 30) • 104 < 3 кГц (30- 300) кГц (300 - 3000) кГц (3 - 30) МГц (30 + 300) МГц (300 4- 3000) МГц (3 4- 30) ГГц (30 -ь 300) ГГц (300 + 3000) ГГц
Оптический диапазон Инфракрасные лучи дальнего поддиапазона* Инфракрасные лучи ближнего поддиапазона Видимые лучи Ул ьтрафиол еловые лучи ближнего поддиапазона Ультрафиоле то-вые лучи дальнего поддиапазона 10-4-Ю’' 10’5+ 0,76 • I0’6 (0,76+0.4) • 1О’(’ 0,4 • 1О’к + 1О’7 К)'7 -10’8 (3 + 30) • 10'2 (3 + 40) • 10'1 (40 + 75) • 10'1 (75 + 300) • 10'-’ (3 + 30) • I015 (3 4- 30) ТГц (30 4- 400) ТГц (400 4- 750) ТГц
Рентгеновское и гамма-излучение Рентгеновские мягкие лучи Рентгеновские средние лучи Рентгеновские жесткие лучи Гамма-лучи 10 х—10’9 К)’4 .. 10’10 10 10 -10’11 ^10" (3 - 30) ’ 1016 (3 - 30) • 1017 (3 - 30) • 10«« >10’« —
Примечание. Термины «ближний», «дальний» указывают на степень удаленности данного поддиапазона от диапазона видимых лучей.
345
Приложение 2
Коэффициенты разложения импульсов
е° cos 0 «о СХ| Уо Yi Y 2 Y 0 ? Y Г
60 0,5(М)0 0,218 0,391 0,109 0,196 0,043 0,081
65 0,423 0,236 0,414 0,136 0,239 0,062 0,114
70 0,342 0,253 0,436 0,166 0,288 0,086 0,156
75 0,259 0,269 0,455 0,199 0,337 0,116 0,208
80 0,174 0,286 0,472 0,236 0,390 0,154 0,269
85 0,087 0,302 0,487 0,276 0,445 0,198 0,342
90 0,000 0,319 0,500 0,319 0,500 0,250 0,428
95 0,087 0,334 0,510 0,363 0,554 0,309 0,516
100 0,174 0,350 0,520 0,411 0,611 0,376 0,617
105 0,259 0,364 0,526 0,458 0,662 0,448 0,725
110 0,342 0,379 0,531 0,509 0,713 0,530 0,840
115 0,423 0,392 0,534 0,558 0,760 0,620 0,959
120 0,500 0,406 0,536 0,609 0,805 0,707 1,080
Приложение 3
Параметры некоторых серийных невакууминированных кварцевых
резонаторов ГОСТ 11599—65
№ п/п Частота последовательного резонанса динамической ветви, МГц Сопротивление динамической ветви, Ом Добротность, тыс. Емкость кварцедержателя, пФ
1 0,75 150 49,6 15,2
2 1,5 470 30,0 3
3 2,0 85 90,5 12,2
4 2,0 260 56,5 3
5 2,0 120 53,5 3,5
6 2,5 82 45,0 3,5
7 3,0 50 58,0 4
8 4,0 44 68,0 5
9 4,0 50 48,0 15
10 4,8889 18 91,0 25
11 4,8889 20 88,0 25
12 5,0 27,5 91,0 5,7
13 5,0 28,7 99,0 4,6
14 5,5556 12,5 107,5 25
346
Окончание приложения 3
№ п/п Частота последовательного резонанса динамической ветви. МГц Сопротивление динамической ветви, Ом Добротность, тыс. Емкость кварце держа тел я, пФ
15 6,0 24,5 59,0 6,3
16 6,0139 12,5 137,0 25
17 6,5555 10 120,0 10
18 7,0 17 48,5 7
19 7,0139 9,5 95,0 30
20 8,0 7,8 120,0 35
21 8,0 11 110,0 35
22 8,0 34 100,0 4
23 8,0 30 28,0 5
24 8,6667 8 170,0 35
25 8,6667 7 110,0 35
26 9,0 36 34,0 5
27 10,0 17 32,0 5
28 12,0 12 54,0 5
29 15,0 11 67,0 7
Примечание. Кварцы с порядковыми номерами 1, 3, 9, 10, И, 14, 16, 17, 19, 20, 21, 24, 25 в декелитовых держателях, негерметизированные. Остальные кварцы в металлических держателях, герметизированные (малогабаритные).
347
ЛИТЕРАТУРА
1. Волков А.А. Радио — 100 лет, а НТО РЭС им. А.С. Попова — 50 лет: Доклад на 5-й Межрегиональной НТК НТО РЭС им. А. С. Попова, посвященной 100-летию изобретения радио// Материалы НТК. Москва—Новосибирск, 1995. — С. 11— 13.
2. Горелов Г.В., Волков А.А., Шелухин В.И. Каналообразу-ющис устройства железнодорожной телемеханики и связи. М.: Транспорт, 1994.
3. Горелов Г.В., Фомин А.Ф., Волков А.А., Котов В.К. Теория передачи сигналов на железнодорожном транспорте. М.: Транспорт, 1999.
4. Шалягин Д.В., Цыбуля Н.А., Косенко С. С., Волков А.А. и др. Устройства железнодорожной АТС. М.: Желдориздат, 2000.
5. Ваванов Ю. В. и др. Радиотехнические системы железнодорожного транспорта. М.: Транспорт, 1991.
6. Радиопередающие устройства / Под ред. В. В. Шахгильдя-на. М.: Радио и связь, 1996.
7. Каганов В.И. Транзисторные радиопередатчики. М.: Энергия, 1976.
8. Радиосвязь на железнодорожном транспорте / Под ред. П.Н. Рамлау. М.: Транспорт, 1983.
9. Горелов Г.В., Кудряшов В.А., Шмытинский В.В. и др. Телекоммуникационные технологии на железнодорожном транспорте. М.: УМК МПС, 1999.
10. Шило В. Л. Популярные цифровые микросхемы. М.: Радио и связь, 1982.
11. Белоцерковский Г.Б. Антенны. М.: Сов. радио, 1969.
12. Лавров Г.А., Князев А.С. Приземные и подземные антенны. М.: Сов. радио, 1965.
13. Громаков Ю. А. Стандарты и системы подвижной радиосвязи. М.: ЭКО-ТРЕНДЗ, 1998.
14. Спутниковая связь и вещание / Под ред. Л.Я. Кантора. М.: Радио и связь, 1997.
15. Соловьев Ю.А. Системы спутниковой навигации. М.: ЭКО-ТРЕНДЗ, 2000.
348
16. Волков А.А., Слейман А.Х. Использование низкоорбитальных спутниковых систем связи для управления движением поездов // АСИ. 2000. №5. С. 12—15.
17. Феер К. Беспроводная цифровая связь. Методы модуляции и расширения спектра/ Пер. с англ.; под ред. В. И. Журавлева. М.: Радио и связь, 2000.
18. Варакин Л.Е. Системы связи с шумоподобными сигналами. М.: Радио и связь, 1985.
19. Волков А.А. Новые методы построения систем связи с ЧРК И Электросвязь, 1995, № 6. С. 18—20.
20. Волков А.А. Истинная однополосная угловая модуляция // Электросвязь. 2000. № 10. С. 18—20.
21. Волков А.А. Методы совершенствования управляемого слогового компаундирования // Радиотехника и электроника РАН: 1996. Т. 41. №9. С. 1125—1129.
22. Овчинников А.М., Воробьев С.В., Сергеев С.И. Открытые стандарты цифровой транкинговой радиосвязи. М.: Связь и бизнес, 2000.
23. Ash G.R. Dynamic Routing in Telcommunications Networks. New Jork: NY, Me. Graw-Hill, 1998.
24. Ромашкова O.H. Перспективы применения сотовых систем подвижной связи на железнодорожном транспорте // АСИ. 2001. № 8. С. 42—44.
25. Волков А.А. Особенности сигналов спутниковой навигации систем транспорта И АСИ, 2002, № 3. С. 5—8.
26. ГОСТ 12252 86 «Радиостанция с угловой модуляцией сухопутной подвижной службы. Типы, основные параметры, технические требования и методы измерений».
27. Регламент радиосвязи. Международный союз электросвязи. — М.: Радио и связь, 1985.
28. Общесоюзные нормы на допустимые отклонения частоты передатчиков всех ка rci орпй и назначений. — М.: Воениздат, 1985.
29. ГОСТ 13420 79 «Передатчики для магистральной радиосвязи. Основные параметры, технические требования».
349
СОДЕРЖАНИЕ
Список принятых основных сокращений................................3
Предисловие а втора................................................6
Введение...........................................................8
Глава 1. Радиопередатчики аналоговых сигналов
1.1. Общие сведения о радиопередатчиках аналоговых сигналов ЖР.......................................................11
1.2. Основные технические показатели радиопередчиков ЖР........14
Глава 2. Генераторы с внешним возбуждением
2.1. Принципиальная схема......................................16
2.2. Режим работы..............................................19
2.3. Разложение импульсов коллекторного тока на гармонические составляющие......................................................21
2.4. Режимы работы ГВВ по напряженности........................26
2.5. Нагрузочные характеристики транзисторного ГВВ.............28
2.6. Предельно допустимые значения параметров мощных высокочастотных транзисторов......................................30
2.7. Методика расчета генератора в критическом режиме..........34
2.8. Практические схемы однотактных транзисторных генераторов с внешним возбуждением............................................39
2.9. Двухтактные генераторы с внешним возбуждением.............43
2.10. Использование гармоник тока коллектора для повышения КПД ГВВ...........................................................47
2.11. Связь генератора с антенной..............................49
2.12. Неосновные излучения передатчика.........................56
2.13. Транзисторные умножители частоты.........................57
Глава 3. Генераторы с самовозбуждением
3.1. Принцип самовозбуждения генератора........................61
3.2. Обобщение баланса амплитуд................................63
3.3. Другая трактовка баланса фаз и мощностей в автогенераторе.66
3.4. Трехточечные LC-авто генератора...........................70
3.5. Расчет колебательной системы трехточечных автогенераторов.76
3.6. Самовозбуждение резонансного усилителя....................81
3.7. Автогенераторы на диодах с отрицательным сопротивлением...84
3.8. Цифровые автогенераторы гармонических колебаний...........97
Глава 4. Стабилизация частоты автоколебаний
4.1. Общие положения..........................................103
350
4.2. Эталонность и фиксирующая способность контура автогенератора.................................................104
4.3. Параметрическая стабилизация частоты автогенератора....105
4.4. Кварцевая стабилизация частоты автогенератора..........109
4.5. Схемы кварцевых автогенераторов........................113
4.6. Диапазонно-кварцевая стабилизация частоты..............119
4.7. Квантовые стандарты частоты............................128
Глава 5. Виды модуляции высокочастотных колебаний аналоговыми сигналами
5.1. Общие положения........................................132
5.2. Амплитудная модуляция..................................133
5.3. Балансная модуляция....................................138
5.4. Однополосная модуляция.................................140
5.4. Фазовая модуляция......................................145
5.5. Частотная модуляция....................................152
5.6. Косвенная частотная модуляция..........................158
5.7. Подмодулятор...........................................161
Глава 6. Антенны
6.1. Принцип работы передающей ап i енны....................165
6.2. Элементарный электрический вибратор....................166
6.3. Элементарный магнитный вибратор........................170
6.4. Элементарный щелевой вибратор..........................171
6.5. Элементарный вибратор Гюйгенса.........................171
6.6. Принцип работы приемной антенны........................173
6.7. Поле симметрично! о вибратора..........................174
6.8. Петлевой вибратор......................................176
6.9. Метод зеркальных отображений в антенной технике........178
6.10. Заземленный вибратор...................................179
6.11. Характерисгики и параметры антенн......................181
6.12. Антенны поездной п станционной радиосвязи.............186
6.13. Измерение входно! о сопротивления вибраторных антенн и их эквиваленты...............................................197
6.14. Измерение коэффициента усиления и диаграммы направленности антенн..........................................199
6.15. Моделирование ан тени.................................202
6.16. Индуктивная поездная радиосвязь.......................203
Глава 7. Конструктивные н эксплуатационные особенности передатчиков железнодорожных радиос i акций
7.1. Передатчики радиостанции системы ЖРУ...................207
7.2. Проверка работы стационарных радиостанций ПРС..........215
351
7.3. Передатчики радиостанций системы «Транспорт».............218
Глава 8. Перспективы развития радиосредств железнодорожного транспорта
8.1. Будущая система железнодорожной радиосвязи...........233
8.2. Мпогостанционный доступ в системе GSM-R..............238
8.3. Классификация сотовых сетей в системе GSM-R..............239
8.4. Принцип сотовой связи................................241
Глава 9. Цифровые методы передачи аналоговых сигналов
9.1. Импульсно-кодовая модуляция..........................247
9.2. Аналого-цифровой преобразователь.....................248
9.3. Цифроаналоговый преобразователь (ЦАП)................250
9.4. Шум квантования......................................251
9.5. Дифференциальная ИКМ.................................254
9.6. Дельта-модуляция (ДМ)................................257
9.7. Преимущества и недостатки цифровых систем передачи (ЦСП).260
9.8. Обработка речи в цифровых системах сухопутной подвижной радиосвязи.......................................................262
9.9. Аналогово-импульсные виды модуляции, используемые в цифровых системах..............................................266
Глава 10. Виды модуляций высокочастотных колебаний дискретными сигналами
10.1. Общие положения.........................................273
10.2. Однократная абсолютная ФМИ..............................276
10.3. Манипулятор однократной ОФМН........................278
10.4. Манипулятор однократной ЧМН.........................280
10.5. Амплитудный манипулятор.............................280
10.6. Манипуляция минимального частотного сдвига..........282
10.7. Манипулятор МЧС с гауссовской фильтрацией...........284
10.8. Дифференциальная квадратурная фазовая манипуляция со сдвигом л/4...............................................285
10.9. Модуляция шумоподобных сигналов-переносчиков........289
10.10. Двукратная фазовая манипуляция.....................293
10.11. Двукратная частотная манипуляция...................297
Глава 11. Современные системы подвижной радиосвязи
11.1. Цифровые сотовые системы стандарта GSM..............299
11.2. Цифровые транкинговые системы стандарта TETR А......314
11.3. Спутниковые системы радиосвязи......................321
11.4. Принципы определения параметров движения поезда с помощью систем спутниковой навигации.................................327
Заключение................................................343
Приложения................................................345
Литература................................................348
352
Учебное издание
А.А. ВОЛКОВ
РАДИОПЕРЕДАЮЩИЕ УСТРОЙСТВА
Учебник для техникумов и колледжей железнодорожного транспорта
Редактор: Е.Д. Кунинева Кор ре кто р: Л. Е. Лохова Компьютерная верстка: Т. В. Демина
11(VIIiiicxi।io в печать 29.08.2002 г.
Форма! 60x88 7h. Уел. печ. л. 22,5. Тираж 6000 экз. Зак. 6764
Ичда юльство «Маршрут»
107078, Москва, Басманный пер., 6
Отпечатано с готовых диапозитивов в филиале Государственного ордена Октябрьской Революции, Ордена Трудового Красного Знамени Московского предприятия «Первая Образцовая типография» Министерства Российской Федерации по делам печати, теле-радиовещапия и средств массовых коммуникаций
115114, Москва, Шлюзовая наб., 10