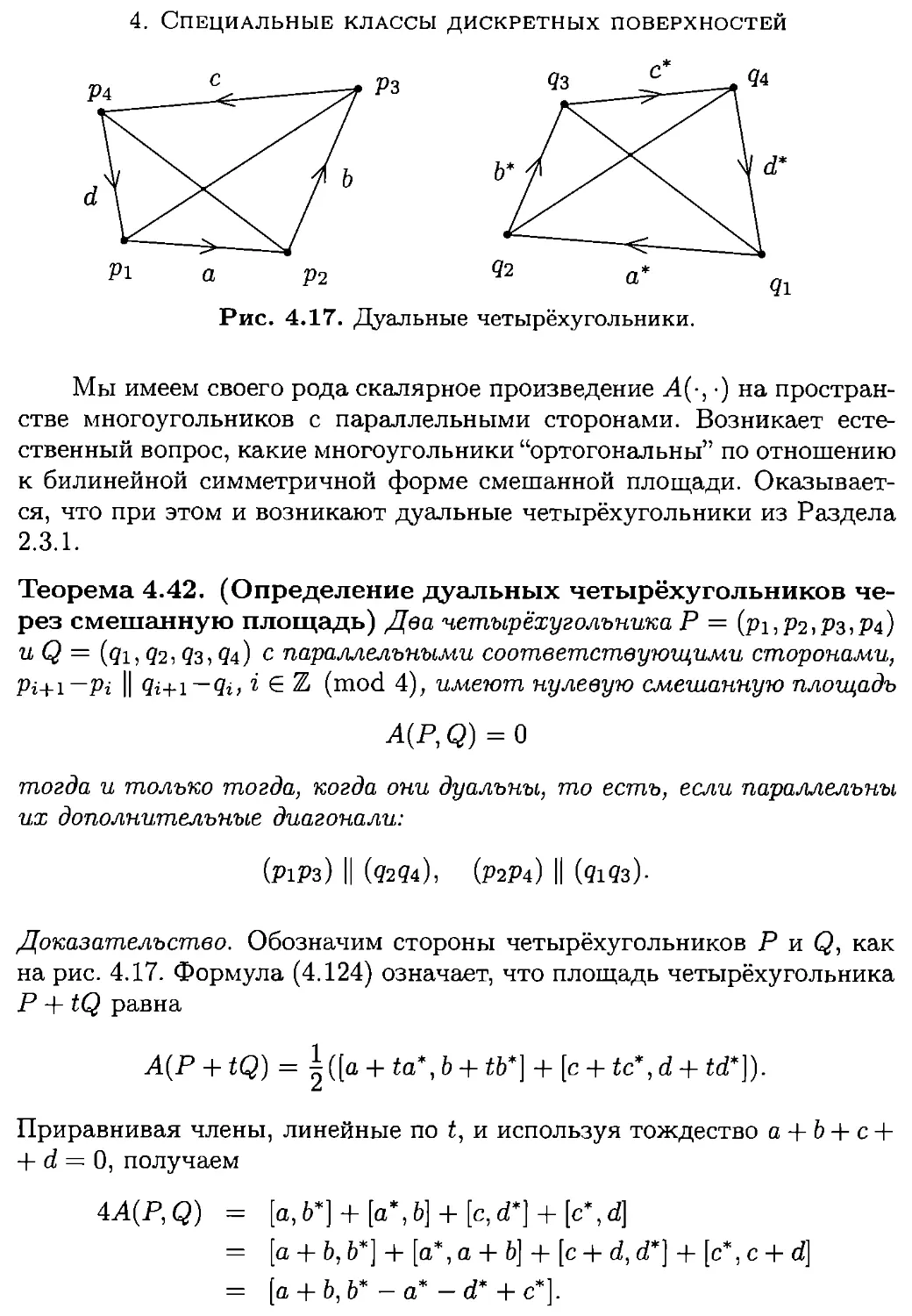
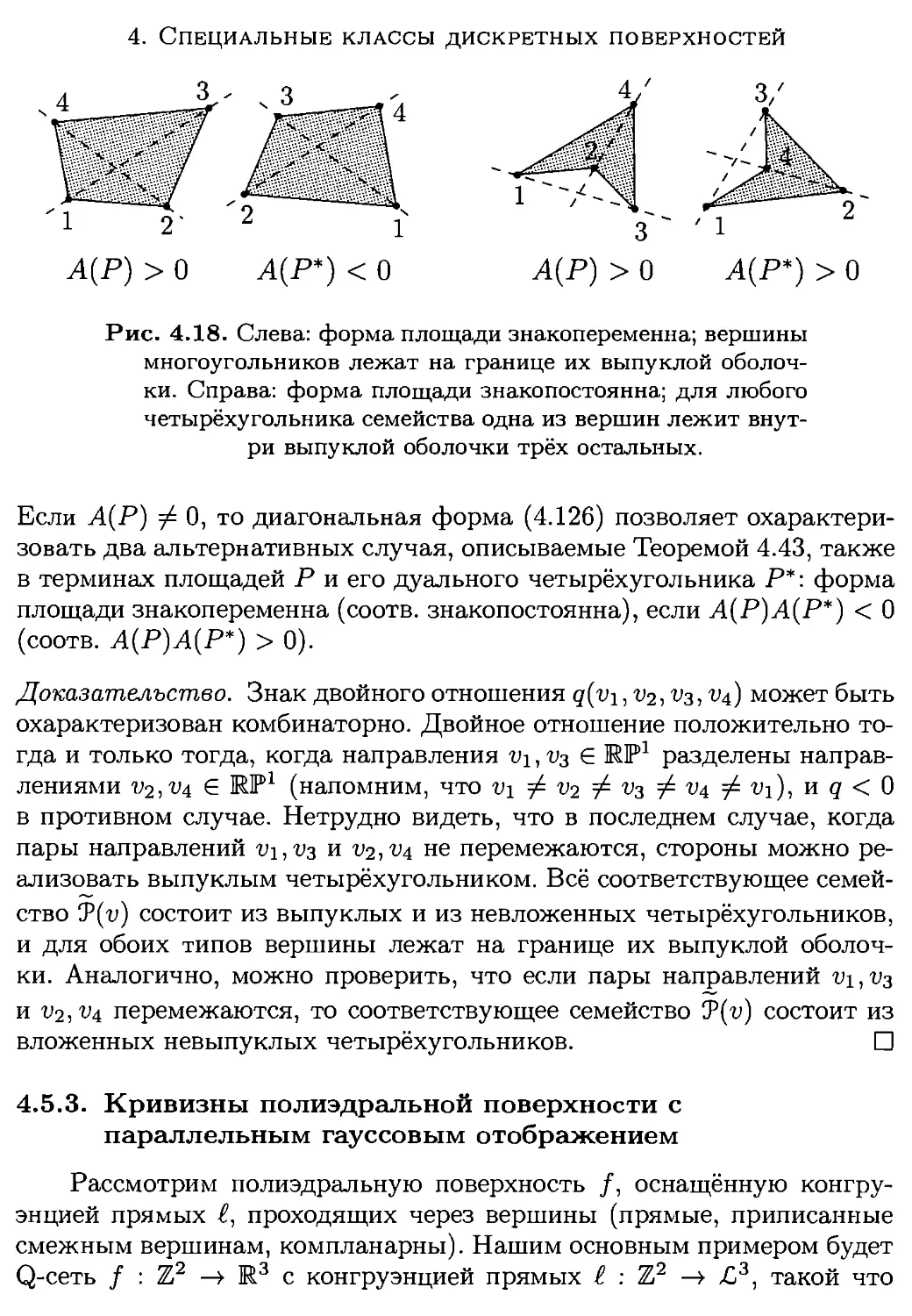
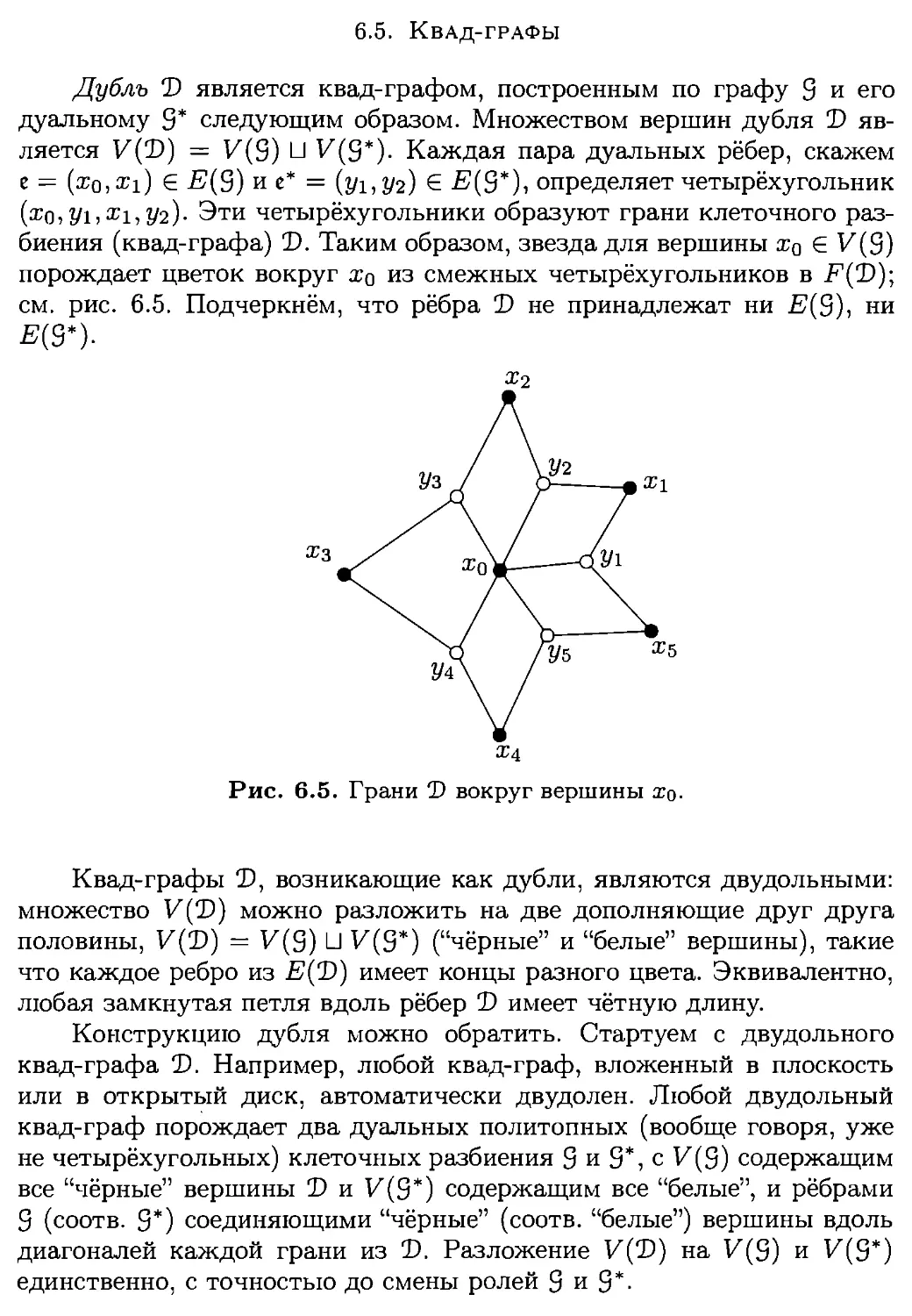
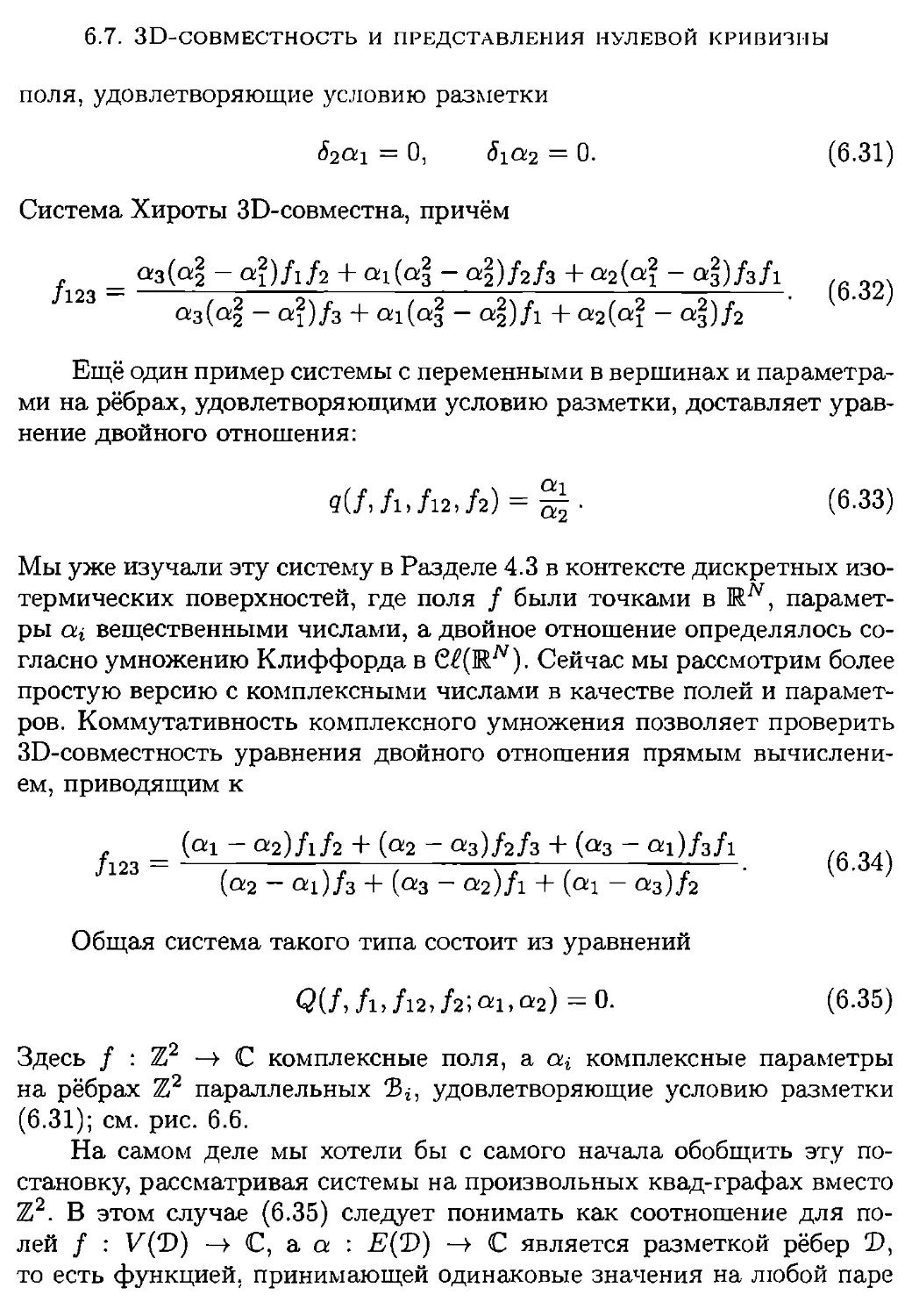
/



























































































































Text
А. И. Бобенко. Ю. Б. Сурис
Дискретная
дифференциальная
геометрия
ИНТЕГРИРУЕМАЯ СТРУКТУРА
х ;• * >• • х х >: >• .
Discrete Differential
Geometry
Integrable Structure
Alexander I. Bobenko
Yuri B. Suris
А.И. Бобенко, Ю.Б. Сурис
Дискретная
дифференциальная
геометрия
Интегрируемая структура
Введение
Что такое дискретная дифференциальная геометрия
Новая область дискретная дифференциальная геометрия возник-
ла и развивается на стыке дифференциальной и дискретной геомет-
рии; см., например, недавнюю книгу (Bobenko-Schroder-Sullivan-Ziegler
2008). Тогда как классическая дифференциальная геометрия изучает
гладкие геометрические формы (такие, как поверхности), а дискрет-
ная геометрия изучает геометрические формы, состоящие их конеч-
ного числа элементов (такие, как многогранники), целью дискретной
дифференциальной геометрии является разработка разностных экви-
валентов понятий и методов гладкой теории поверхностей. Послед-
няя воспроизводится в результате непрерывного предела. Современ-
ный интерес к этой области обусловлен не только её важностью для
чистой математики, но также и её актуальностью для других областей:
см. курс лекций (Desbrun-Grinspun-Schroder 2005) по дискретной диф-
ференциальной геометрии в компьютерной графике, недавнюю книгу
(Pottmann-Asperl-Hofer-Kilian 2007) по архитектурной геометрии, и ма-
тематический видеофильм (Janzen-Polthier 2007) о полиэдральных ре-
шётках и их роли в геометрии, численных методах и компьютерной
графике.
Для данной гладкой геометрии можно предложить много различ-
ных дискретизаций с одним и тем же непрерывным пределом. Ка-
кой из них лучше? С теоретической точки зрения, следует старать-
ся сохранить фундаментальные свойства гладкой теории. Приложе-
ния предъявляют разнородные требования к хорошей дискретизации: с
одной стороны, требуется наилучшая аппроксимация гладкой формы,
с другой стороны, представляющая её дискретная форма должна со-
держать как можно меньше элементов. Хотя эти критерии различны,
оказывается, что дискретизации, основанные на разумной теории, от-
личаются также хорошими характеристиками для приложений. В ка-
честве примера приведём дискретный оператор Лапласа на симпли-
циальных поверхностях (“формула котангенса”) введённый в (Pinkall-
Polthier 1993) при исследовании дискретных минимальных поверхно-
Введение
стей. Он оказался чрезвычайно важным и нашёл множество приложе-
ний и при обработке геометрических данных, упомянем только рабо-
ты (Desbrun-Meyer-Alliez 2002) и (Botsch-Kobbelt 2004). Другим приме-
ром служит теория дискретных минимальных поверхностей (Bobenko-
Hoffmann-Springborn 2006), у которых оказались удивительные свой-
ства сходимости: эти дискретные поверхности аппроксимируют свои
непрерывные аналоги с бесконечным порядком точности.
Прямым способом дискретизовать дифференциальную геометрию
было бы взять её аналитическое описание в терминах дифференциаль-
ных уравнений и применить стандартные методы численного анали-
за. Такая дискретизация делает гладкие задачи доступными для чис-
ленных методов. Однако, дискретная дифференциальная геометрия не
идёт по этому пути. Её основной принцип —
дискретизовать всю теорию, а не только уравнения.
Это означает, что следует развивать такую дискретную теорию,
которая отражала бы фундаментальные аспекты непрерывной; какие
именно свойства следует принять в рассмотрение, является нетриви-
альной проблемой. Дискретная геометрическая теория оказывается
столь же богатой, как и её непрерывный аналог, или даже более бо-
гатой. В частности, в сердцевине классической теории имеется много
известных теорем существования. Надлежащая дискретизация откры-
вает путь к их конструктивному доказательству. В настоящее время
утверждение о богатстве дискретной дифференциальной геометрии мо-
жет показаться преувеличенным, так как число подкрепляющих его
примеров ограничено (хотя и быстро растёт). Однако, не следует за-
бывать, что мы находимся в самом начале развития этой дисципли-
ны, тогда как классическая дифференциальная геометрия развивалась
наиболее выдающимися математиками на протяжении столетий.
Применение аппарата дифференциальных уравнений для описа-
ния геометрии, естественно, связано с выбором параметризации. Часть
классической дифференциальной геометрии, имеющая дело с пара-
метризованными поверхностями, координатными системами и их пре-
образованиями, являлась предметом фундаментальных исследований
(Darboux 1914-27) и (Bianchi 1923). В настоящее время эта часть диф-
ференциальной геометрии связана с теорией интегрируемых систем;
см. (Fordy-Wood 1994), (Rogers-Schief 2002). Несколько неожиданно,
что недавний прогресс в дискретной дифференциальной геометрии
привёл не только к дискретизации большого числа классических ре-
Введение
зультатов, но также и к лучшему пониманию некоторых фундамен-
тальных структур, лежащих в основе самой классической дифферен-
циальной геометрии и теории интегрируемых систем. Наша книга име-
ет целью дать систематическое изложение современных достижений в
этой области.
Что касается аналитического описания геометрических объектов,
не удивительно, что замечательные дискретизации приводят к заме-
чательным дискретным уравнениям. Основная идея дискретной диф-
ференциальной геометрии, переформулированная для специалистов по
интегрируемым системам, звучит так:
дискретизовать уравнения, дискретизуя геометрию.
Глубина и плодотворность этого принципа демонстрируются на протя-
жении всей книги.
Интегрируемость
Сделаем короткий обзор исторического развития аспектов инте-
грируемости в дискретной дифференциальной геометрии. В результа-
те классического периода теории поверхностей, к началу 20-го века был
получен огромный запас знаний о многочисленных специальных клас-
сах поверхностей, координатных систем и их преобразованиях, что бы-
ло отражено в обширных томах (Darboux 1910, 1914-27), (Bianchi 1923)
и др.. Можно сказать, что в течение этого периода локальная диффе-
ренциальная геометрия специальных классов поверхностей и коорди-
натных систем была завершена. Математики той эпохи нашли боль-
шинство (если не все) геометрий, представляющих интерес, и знали
почти всё об их свойствах. Было замечено, что специальные геометрии,
такие, как минимальные поверхности, поверхности постоянной кривиз-
ны, изотермические поверхности, ортогональные и сопряжённые коор-
динатные системы, сферические конгруэнции Рибокура, конгруэнции
прямых Вайнгартена и т.п. имеют много общих черт. Среди прочего,
отметим преобразования типа Бэклунда и Дарбу с замечательными
свойствами перестановочности, исследованными в основном Бьянки,
и существование специальных деформаций, не выводящих за преде-
лы класса (ассоциированное семейство). Геометры осознавали, что все
эти общие свойства совершенно различных геометрий должны объ-
единяться и унифицироваться некой фундаментальной структурой; не
подлежит сомнению, что они искали эту структуру; см. (Jonas 1915) и
(Eisenhart 1923).
Введение
Много позже, с приходом теории интегрируемых систем в послед-
ней четверти 20-го века, было осознано, что эти общие черты ассо-
циированы с интегрируемостью соответствующих дифференциальных
уравнений. Теория интегрируемых систем (известная также как теория
солитонов) является значительной областью математической физики с
обширнейшей литературой. Она имеет приложения в различных обла-
стях, от алгебраической и дифференциальной геометрии, перечисли-
тельной топологии, статистической физики, квантовых групп и теории
узлов до нелинейной оптики, гидродинамики и космологии.
Наиболее известными моделями этой теории являются уравне-
ния Кортевега-де Фриза (КдФ), синус-Гордона и нелинейное уравне-
ние Шрёдингера. Уравнение КдФ играло наиболее значительную роль
на раннем этапе теории. Оно было выведено в (Korteweg-de Vries 1895)
при описании распространения волн на мелкой воде. Локализованные
решения этого уравнения, известные как солитоны, дали своё имя всей
теории. Рождение теории солитонов связывается со знаменитой статьёй
(Gardner-Green-Kruskal-Miura 1967), в которой был изобретён метод об-
ратной задачи рассеяния для аналитического решения уравнения КдФ.
Старейшим и наиболее важным для геометрии интегрируемым урав-
нением является уравнение синус-Гордона. Оно описывает поверхности
постоянной отрицательной гауссовой кривизны и восходит по крайней
мере к (Bour 1862) и (Bonnet 1867). Многие свойства этого уравнения,
которые сейчас ассоциируются с интегрируемостью, были известны в
классической теории поверхностей.
Об основных структурах в теории интегрируемых систем можно
прочитать в многочисленных книгах. Упомянем лишь несколько из
них: (Newell 1985), (Faddeev-Takhtajan 1986), (Hitchin-Segal-Ward 1999),
(Dubrovin-Krichever-Novikov 2001).
Среди общепризнанных характеристик интегрируемых систем наи-
более важны следующие:
В теории солитонов нелинейные интегрируемые уравнения обычно
представляются в виде условия совместности некой линейной си-
стемы, которое называется представлением нулевой кривизны (и
известно также как представление Лакса или Захарова-Шабата).
На этом представлении основаны различные аналитические мето-
ды исследования солитонных уравнений (такие, как метод обрат-
ной задачи, алгебро-геометрическое интегрирование, асимптотиче-
ский анализ, и т.п.).
Другой неотъемлемой чертой интегрируемых систем является то,
Введение
что они обладают преобразованиями Бэклунда-Дарбу. Эти специ-
альные преобразования часто используются для построения новых
решений по известным.
Характеристической чертой солитонных (интегрируемых) диффе-
ренциальных уравнений в частных производных является то, что
они возникают не по отдельности, но всегда организованы в иерар-
хии коммутирующих потоков.
Следует отметить, что общепринятого математического определения
интегрируемости не существует (как видно из названия сборника “Что
такое интегрируемость?” (Zakharov 1991)). Разные учёные предлагают
в качестве определения разные свойства. Обычно, используются неко-
торые дополнительные структуры, такие, как отмеченные выше. В этой
книге мы предлагаем алгоритмическое определение интегрируемости в
терминах самой системы.
В обеих областях, в дифференциальной геометрии и в теории ин-
тегрируемых систем, предпринимались значительные усилия для дис-
кретизации фундаментальных понятий.
В теории солитонов задача заключается в том, чтобы дискретизо-
вать интегрируемое дифференциальное уравнение, сохранив его инте-
грируемость. Различные подходы к этой проблеме начали обсуждаться
в солитонной литературе начиная с середины 1970-х. Основная идея
заключается в том, чтобы дискретизовать представление нулевой кри-
визны непрерывной системы, то есть найти правильные дискретные
аналоги соответствующих линейных задач. Эта идея возникла впервые
в работе (Ablowitz-Ladik 1975). Её различные реализации, основанные
на билинейном методе, алгебро-геометрическом интегрировании, инте-
гральных уравнениях, R-матрицах и лагранжевой механике были раз-
виты в (Hirota 1977а,b), (Krichever 1978), (Date-Jimbo-Miwa 1982, 1983),
(Quispel-Nijhoff-Capel-Van der Linden 1984), (Faddeev-Takhtajan 1986),
(Moser-Veselov 1991) (мы приводим здесь лишь немногие выборочные
ссылки). Энциклопедическое изложение гамильтонова подхода в зада-
че интегрируемой дискретизации представлено в (Suris 2003).
Развитие данной области привело к прогрессу во многих разде-
лах математики. Пары коммутирующих разностных операторов бы-
ли проклассифицированы в (Krichever-Novikov 2003). Преобразования
Лапласа для разностных операторов на регулярных решётках были по-
строены в (Dynnikov-Novikov 1997); см. также (Dynnikov-Novikov 2003)
в связи с развитием дискретного комплексного анализа на триангули-
рованных многообразиях. Характеризация якобианов алгебраических
Введение
кривых, основанная на алгебро-геометрических методах интегрирова-
ния разностных уравнений получена в (Krichever 2006).
От дискретного к непрерывному
В дифференциальной геометрии исходной идеей в поиске разум-
ной дискретизации было желание найти простое объяснение изощрён-
ных свойств гладких геометрических объектов. Эта мотивация ранних
работ в этой области прослеживается в (Sauer 1937, 1970) и (Wunderlich
1951). Современный период начался с работ (Bobenko-Pinkall 1996а,b)
и (Doliwa-Santini 1997), где были установлены связи с теорией интегри-
руемых систем. В течение следующего десятилетия эта область испы-
тала быстрое развитие, что отражено в многочисленных публикациях.
В частности, совместные усилия основных специалистов в этой области
отражены в книгах (Bobenko-Seiler 1999) и (Bobenko-Schrdder-Sullivan-
Ziegler 2008). Настоящая книга даёт исчерпывающее изложение резуль-
татов дискретной дифференциальной геометрии параметризованных
поверхностей и координатных систем, вместе с их связью с интегриру-
емыми системами. Подробные библиографические комментарии даны
в замечаниях, помещённых в конце каждой главы книги.
Дискретная дифференциальная геометрия имеет дело с многомер-
ными дискретными сетями (то есть отображениями из регулярной ку-
бической решётки Zm в RN или в некоторое другое подходящее про-
странство), заданными определёнными геометрическими свойствами.
В этой постановке, дискретные поверхности возникают как двумерные
слои многомерных дискретных сетей, а их преобразования отвечают
сдвигам в трансверсальных направлениях решётки. Характерной чер-
той теории является то, что все направления решётки считаются равно-
правными по отношению к определяющим геометрическим свойствам.
Благодаря этой симметрии, дискретные поверхности и их преобразо-
вания становятся неразличимыми. Мы обозначаем такую ситуацию
как многомерную совместность (геометрических свойств и уравнений,
служащих их аналитическим описанием). В каждом случае, многомер-
ная совместность, а следовательно, существование и построение много-
мерных дискретных сетей оказывается связанной с некоторой теоремой
инцидентности элементарной геометрии.
Концептуально, можно представлять переход к непрерывному пре-
делу как уменьшение шага в некоторых из направлений решётки. В
этих направлениях сеть сходится к гладким поверхностям, тогда как
направления, оставшиеся дискретными, отвечают преобразованиям по-
Введение
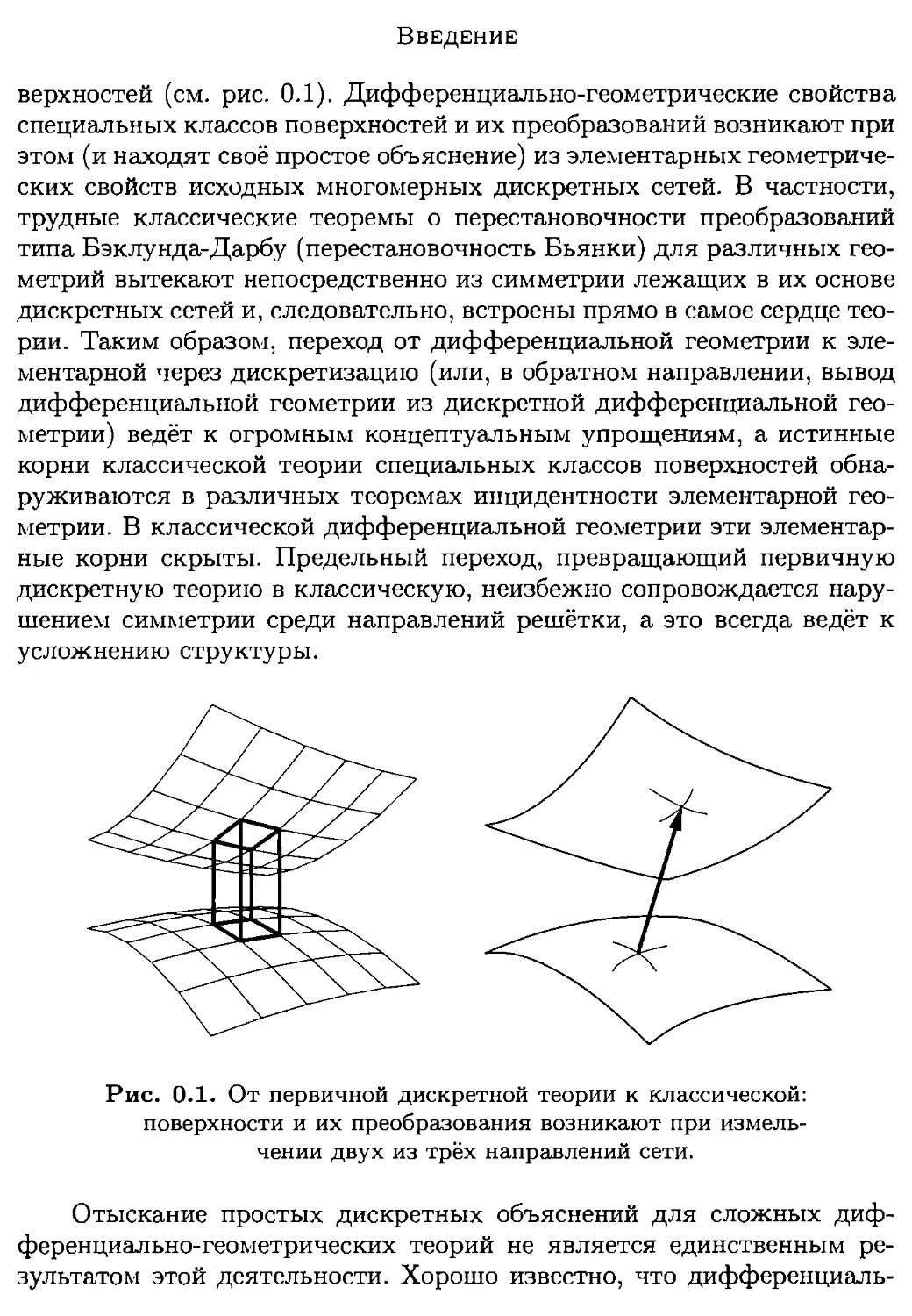
верхностей (см. рис. 0.1). Дифференциально-геометрические свойства
специальных классов поверхностей и их преобразований возникают при
этом (и находят своё простое объяснение) из элементарных геометриче-
ских свойств исходных многомерных дискретных сетей. В частности,
трудные классические теоремы о перестановочности преобразований
типа Бэклунда-Дарбу (перестановочность Бьянки) для различных гео-
метрий вытекают непосредственно из симметрии лежащих в их основе
дискретных сетей и, следовательно, встроены прямо в самое сердце тео-
рии. Таким образом, переход от дифференциальной геометрии к эле-
ментарной через дискретизацию (или, в обратном направлении, вывод
дифференциальной геометрии из дискретной дифференциальной гео-
метрии) ведёт к огромным концептуальным упрощениям, а истинные
корни классической теории специальных классов поверхностей обна-
руживаются в различных теоремах инцидентности элементарной гео-
метрии. В классической дифференциальной геометрии эти элементар-
ные корни скрыты. Предельный переход, превращающий первичную
дискретную теорию в классическую, неизбежно сопровождается нару-
шением симметрии среди направлений решётки, а это всегда ведёт к
усложнению структуры.
Рис. 0.1. От первичной дискретной теории к классической:
поверхности и их преобразования возникают при измель-
чении двух из трёх направлений сети.
Отыскание простых дискретных объяснений для сложных диф-
ференциально-геометрических теорий не является единственным ре-
зультатом этой деятельности. Хорошо известно, что дифференциалы
Введение
ные уравнения, аналитически описывающие интересные специальные
классы поверхностей интегрируемы (в смысле теории интегрируемых
систем), и наоборот, много интересных интегрируемых систем допус-
кают дифференциально-геометрическую интерпретацию. Обнаружив
корни интегрируемой дифференциальной геометрии в многомерной
совместности дискретных сетей, мы приходим к новому (геометриче-
скому) пониманию самой интегрируемости. Прежде всего, мы прихо-
дим к выводу, что центральную роль в этой теории играют дискрет-
ные интегрируемые системы. В частности, огромное многообразие
интегрируемых дифференциальных уравнений может быть выведено
из нескольких фундаментальных дискретных систем при различных
непрерывных пределах. Далее, что важнее, мы приходим к мысли, что
многомерная совместность дискретных уравнений может служить как
конструктивное и почти алгоритмическое определение их интегриру-
емости. Эта идея была введена в (Bobenko-Suris 2002а) (и независи-
мо в (Nijhoff 2002)). Данное определение интегрируемости ухватывает
достаточно, чтобы гарантировать такие традиционные атрибуты инте-
грируемых уравнений, как представления нулевой кривизны и преоб-
разования Бэклунда-Дарбу (которые, в свою очередь, служат основой
для применения аналитических методов, таких, как обратная задача
рассеяния, конечнозонное интегрирование, задача Римана-Гильберта
и т.д.). Непрерывным аналогом (и следствием) многомерной совмест-
ности служит тот хорошо известный факт, что интегрируемые системы
никогда не появляются поодиночке, но организованы в иерархии ком-
мутирующих потоков.
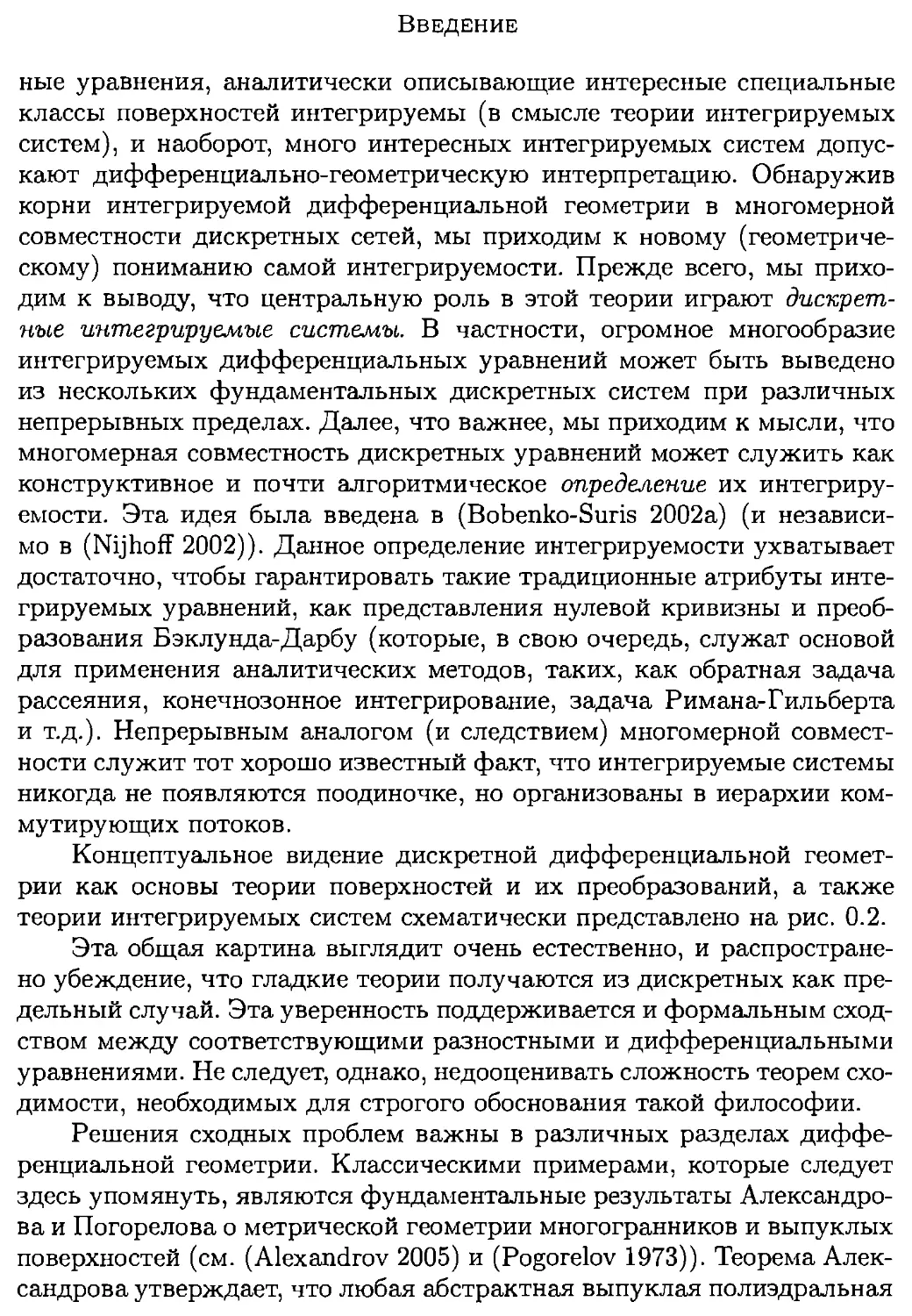
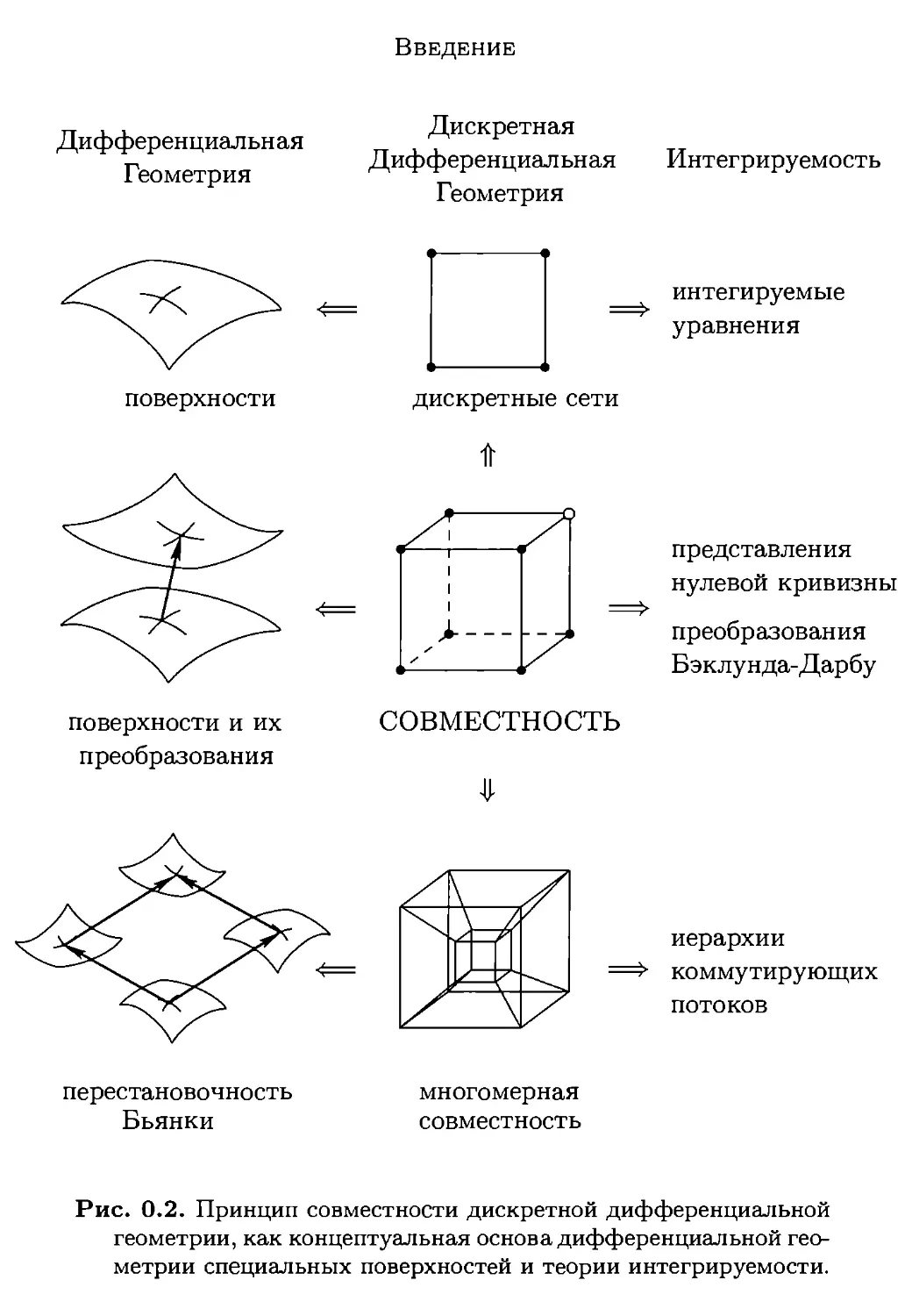
Концептуальное видение дискретной дифференциальной геомет-
рии как основы теории поверхностей и их преобразований, а также
теории интегрируемых систем схематически представлено на рис. 0.2.
Эта общая картина выглядит очень естественно, и распростране-
но убеждение, что гладкие теории получаются из дискретных как пре-
дельный случай. Эта уверенность поддерживается и формальным сход-
ством между соответствующими разностными и дифференциальными
уравнениями. Не следует, однако, недооценивать сложность теорем схо-
димости, необходимых для строгого обоснования такой философии.
Решения сходных проблем важны в различных разделах диффе-
ренциальной геометрии. Классическими примерами, которые следует
здесь упомянуть, являются фундаментальные результаты Александро-
ва и Погорелова о метрической геометрии многогранников и выпуклых
поверхностей (см. (Alexandrov 2005) и (Pogorelov 1973)). Теорема Алек-
сандрова утверждает, что любая абстрактная выпуклая полиэдральная
Введение
Дифференциальная
Геометрия
Дискретная
Дифференциальная
Геометрия
Интегрируемость
поверхности
интегируемые
уравнения
дискретные сети
поверхности и их
преобразования
ft
представления
нулевой кривизны
преобразования
Бэклунда-Дарбу
ft
иерархии
коммутирующих
потоков
перестановочность
Бьянки
многомерная
совместность
Рис. 0.2. Принцип совместности дискретной дифференциальной
геометрии, как концептуальная основа дифференциальной гео-
метрии специальных поверхностей и теории интегрируемости.
Введение
метрика допускает единственную реализацию выпуклым многогранни-
ком в трёхмерном евклидовом пространстве. Погорелов доказал соот-
ветствующий результат о существовании и единственности для выпук-
лых римановых метрик при помощи аппроксимации гладкой поверх-
ности многогранниками. Другим примером является аппроксимация
Тёрстона конформных отображений упаковками кругов (см. (Thurston
1985)). Теория упаковок кругов (см. книгу (Stephenson 2005)) интер-
претируется как дискретный комплексный анализ. В сердце этой тео-
рии лежит теорема Кёбе-Андреева-Тёрстона, утверждающая, что лю-
бое симплициальное разбиение сферы допускает единственную (с точ-
ностью до преобразований Мёбиуса) реализацию как упаковка кру-
гов. Согласно (Rodin-Sullivan 1987), конформное риманово отображе-
ние можно аппроксимировать такой упаковкой (даже со всеми произ-
водными, как показано (He-Schramm 1998)).
Первые результаты о сходимости, относящиеся к переходу от сред-
ней к левой колонке на рис. 0.2 (от дискретной к гладкой дифферен-
циальной геометрии) были доказаны в (Bobenko-Matthes-Suris 2003,
2005). Это превратило общую философию дискретной дифференци-
альной геометрии в твёрдо установленную математическую истину для
некоторых важных классов поверхностей и координатных систем, та-
ких как сопряжённые сети, ортогональные сети, включая поверхно-
сти параметризованные главными линиями кривизны, поверхности по-
стоянной отрицательной гауссовой кривизны, и общие поверхности па-
раметризованные асимптотическими линиями. Для некоторых других
классов, таких как изотермические поверхности, сходимость ещё нуж-
дается в строгом обосновании.
Геометрический способ мышления привёл также к новым поняти-
ям в теории дискретной интегрируемости. Важной и неотъемлемой чер-
той различных параметризаций поверхностей является наличие выде-
ленных точек, где меняется комбинаторика координатных линий (как
для омбилических точек с их особой комбинаторикой линий кривиз-
ны). В дискретной постановке это может быть смоделировано квад-
графами, которые являются клеточными разбиениями двумерных топо-
логических многообразий с четырёхугольными гранями; см. (Bobenko-
Pinkall 1999). Их элементарные строительные блоки по прежнему че-
тырёхугольны, но их соединение друг с другом может быть значи-
тельно более сложным, чем в Z2. Систематическое развитие теории
интегрируемых систем на квад-графах было предпринято в (Bobenko-
Suris 2002а). В рамках многомерной совместности, квад-графы реали-
зуются как поверхности из четырёхугольников, вложенные в решётку
Введение
достаточно высокой размерности. Эта интерпретация оказывается
плодотворной при аналитическом изучении интегрируемых систем на
квад-графах, в таких вопросах, как интегральное представление дис-
кретных голоморфных функций и изомонодромной функции Грина в
(Bobenko-Mercat-Suris 2005).
Структура книги
Структура книги следует логике Введения. Глава 1 начинается с
обзора некоторых классических результатов из теории поверхностей,
фокусируясь на преобразованиях поверхностей. Сжатое изложение в
этой главе ориентировано на читателей, уже знакомых с дифференци-
альной геометрией поверхностей. Рассматриваемые геометрии включа-
ют общие сопряжённые и ортогональные сети в пространствах произ-
вольной размерности, кёнигсовы сети, асимптотические сети, как на
общих поверхностях, так и на специальных, таких как изотермические
и поверхности постоянной отрицательной гауссовой кривизны. Доказа-
тельства в этой главе не приводятся. Аналитические доказательства,
обычно трудоёмкие, могут быть найдены в оригинальной литературе.
Дискретный подход, развиваемый в последующих главах, приведёт к
концептуально прозрачным и технически гораздо более простым дока-
зательствам.
В Главе 2 определяются и исследуются дискретные аналоги наибо-
лее фундаментальных объектов проективной дифференциальной гео-
метрии: сопряжённых, кёнигсовых и асимптотических сетей и конгру-
энций прямых. Например, дискретные сопряженные сети являются
просто многомерными сетями, состоящими из плоских четырёхуголь-
ников. Мы фокусируемся здесь на идее многомерной совместности дис-
кретных сетей и дискретных конгруэнций прямых.
Согласно Эрлангенской программе Клейна, классические геомет-
рии (евклидова, сферическая, гиперболическая, мёбиусова, плюккеро-
ва, лиева и т.д.) могут быть получены в результате ограничения про-
ективной геометрии на квадрику. В Главе 3 мы следуем этому подходу
и показываем, что сети и конгруэнции, определённые в Главе 2, до-
пускают ограничение на квадрику. Таким образом, мы определяем и
исследуем дискретные аналоги поверхностей, параметризованных ли-
ниями кривизны и ортогональных сетей, и даём описание дискретных
асимптотических сетей в рамках плюккеровой геометрии прямых.
Накладывая одновременно несколько связей на (дискретные) со-
пряжённые сети, мы приходим к специальным классам поверхностей.
Введение
Это является предметом Главы 4. Основными примерами служат дис-
кретные изотермические поверхности и дискретные поверхности посто-
янной кривизны. С аналитической точки зрения, эти примеры пред-
ставляются 2-мерными разностными уравнениями (в отличие от 3-
мерных в Главах 2, 3).
Далее, в Главе 5 развивается теория аппроксимации для гипербо-
лических разностных систем, которая применяется для вывода класси-
ческой теории гладких поверхностей, как непрерывного предела дис-
кретной теории. Мы доказываем, что дискретные сети из Глав 2, 3 и 4
аппроксимируют соответствующие гладкие геометрии из Главы 1, при-
чём одновременно с их преобразованиями. В этом контексте, теоремы
Бьянки о перестановочности получаются как простые следствия.
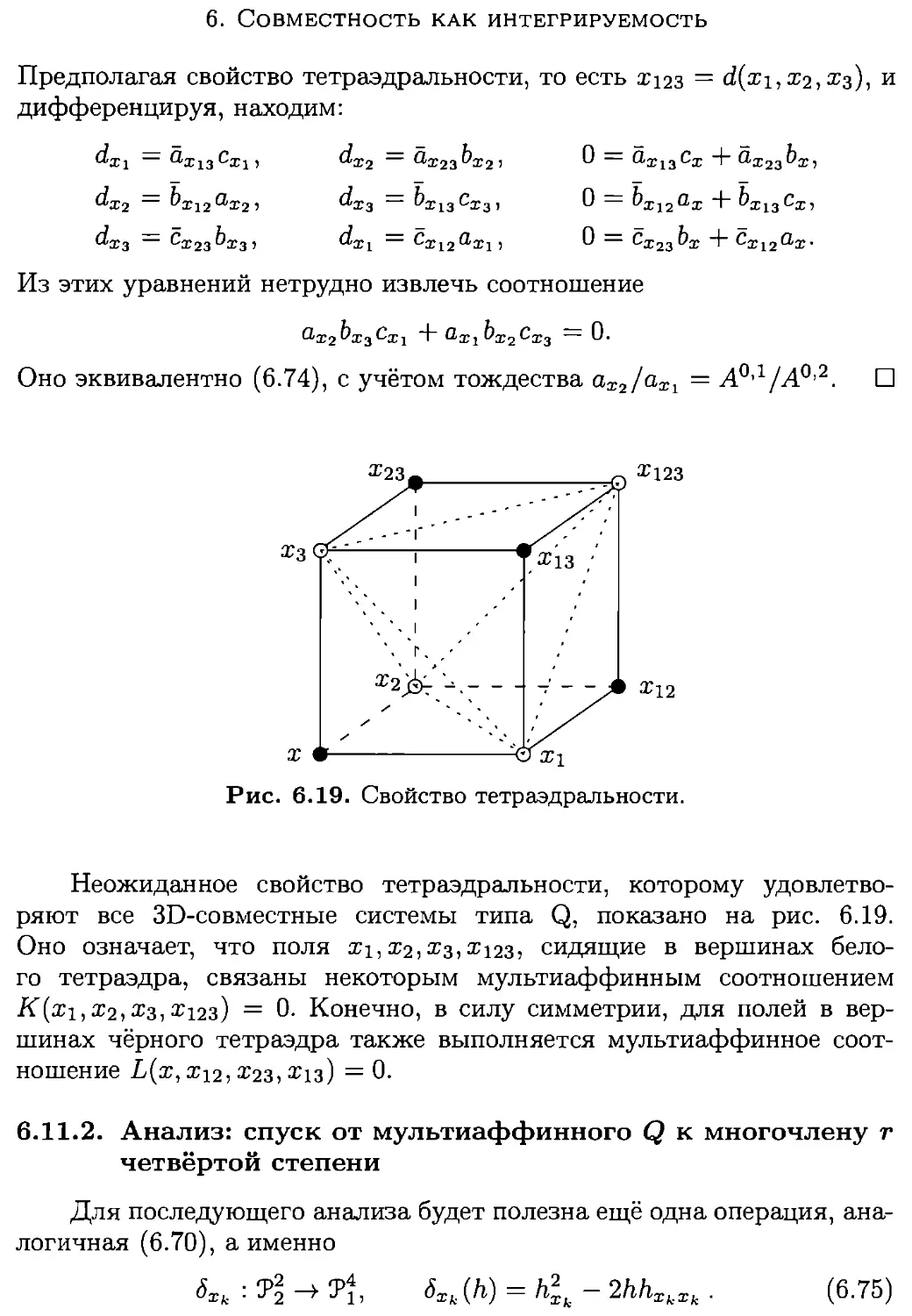
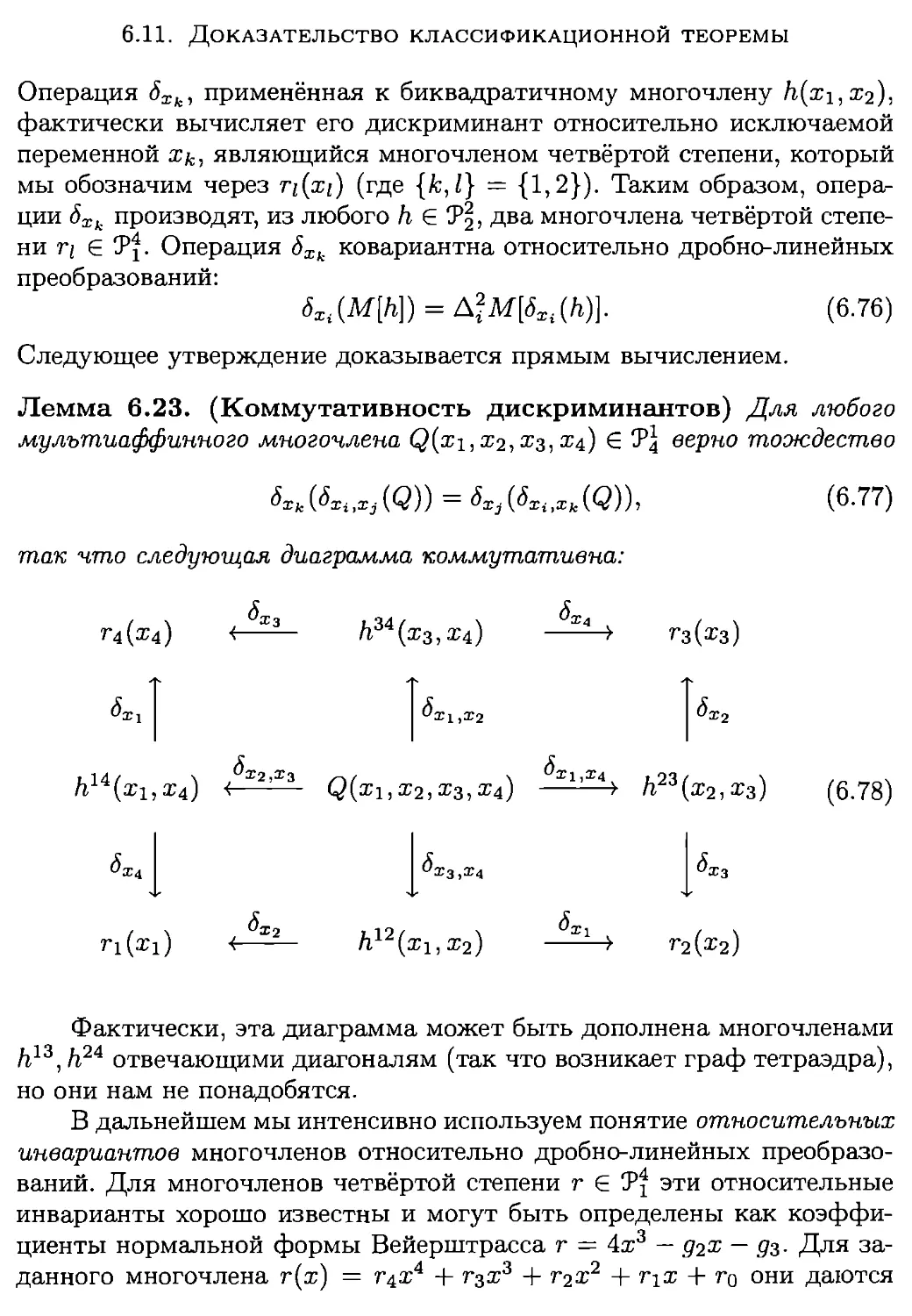
В Главе 6 мы формулируем понятие многомерной совместности,
как определяющий принцип интегрируемости. Из принципа совместно-
сти мы выводим основные свойства интегрируемых систем, такие как
представление нулевой кривизны, и преобразования Бэклунда-Дарбу.
Более того, мы получаем полный список 2-мерных интегрируемых си-
стем. Эта классификация является впечатляющим приложением прин-
ципа совместности.
В Главах 7 и 8 эти идеи применяются к дискретному комплексно-
му анализу. Мы изучаем операторы Лапласа на графах и дискретные
гармонические и голоморфные функции. Линейный дискретный ком-
плексный анализ возникает как линеаризация теории циркулярных ре-
шёток. Принцип совместности позволяет выделить случаи, в которых
мы получаем более подробные аналитические результаты (типа функ-
ции Грина и изомонодромных специальных функций).
Наконец, в Главе 9 для удобства читателя приводится краткое из-
ложение проективной геометрии и геометрий Ли, Мёбиуса, Лагерра и
Плюккера. Мы также включили ряд классических теорем инцидентно-
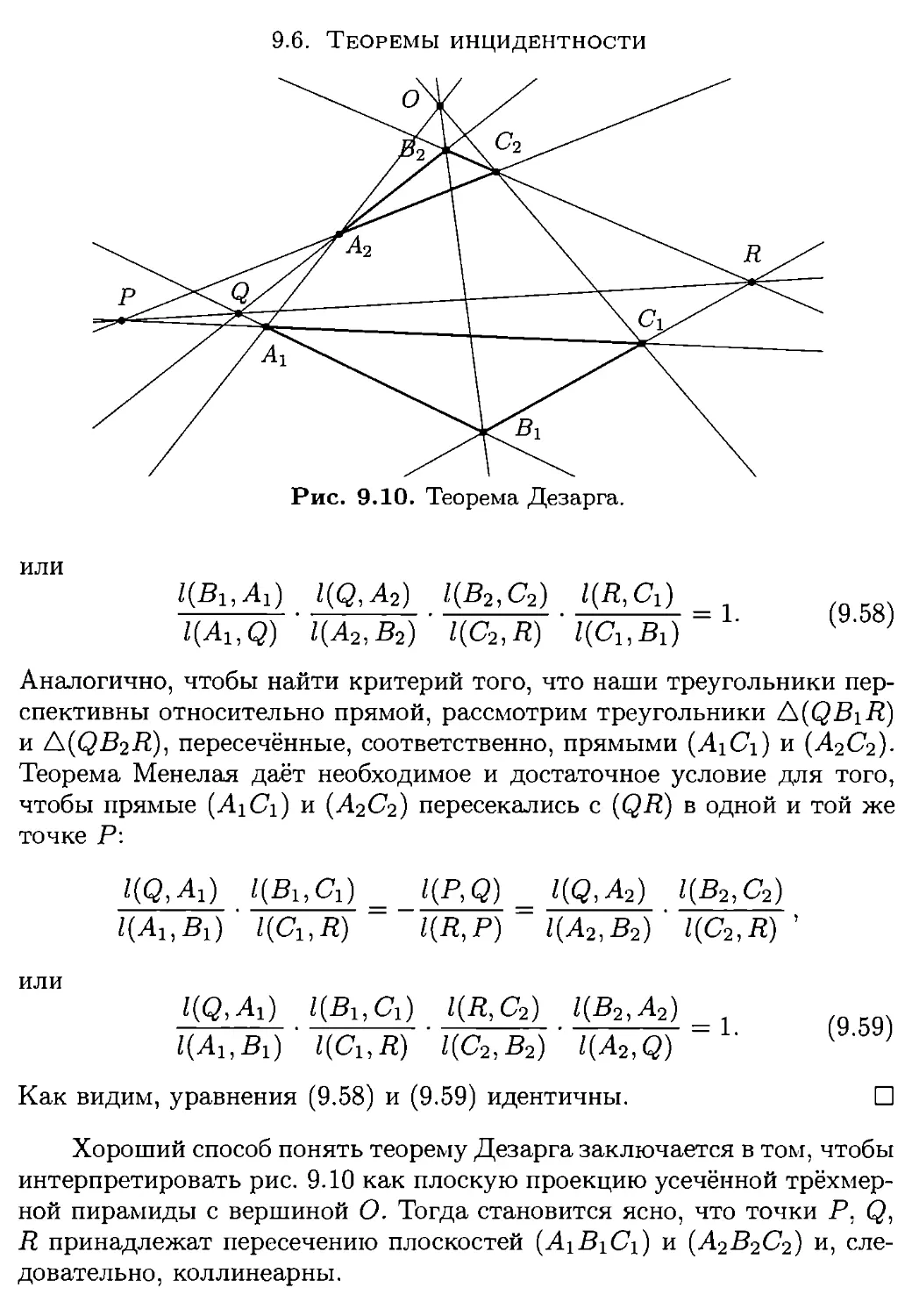
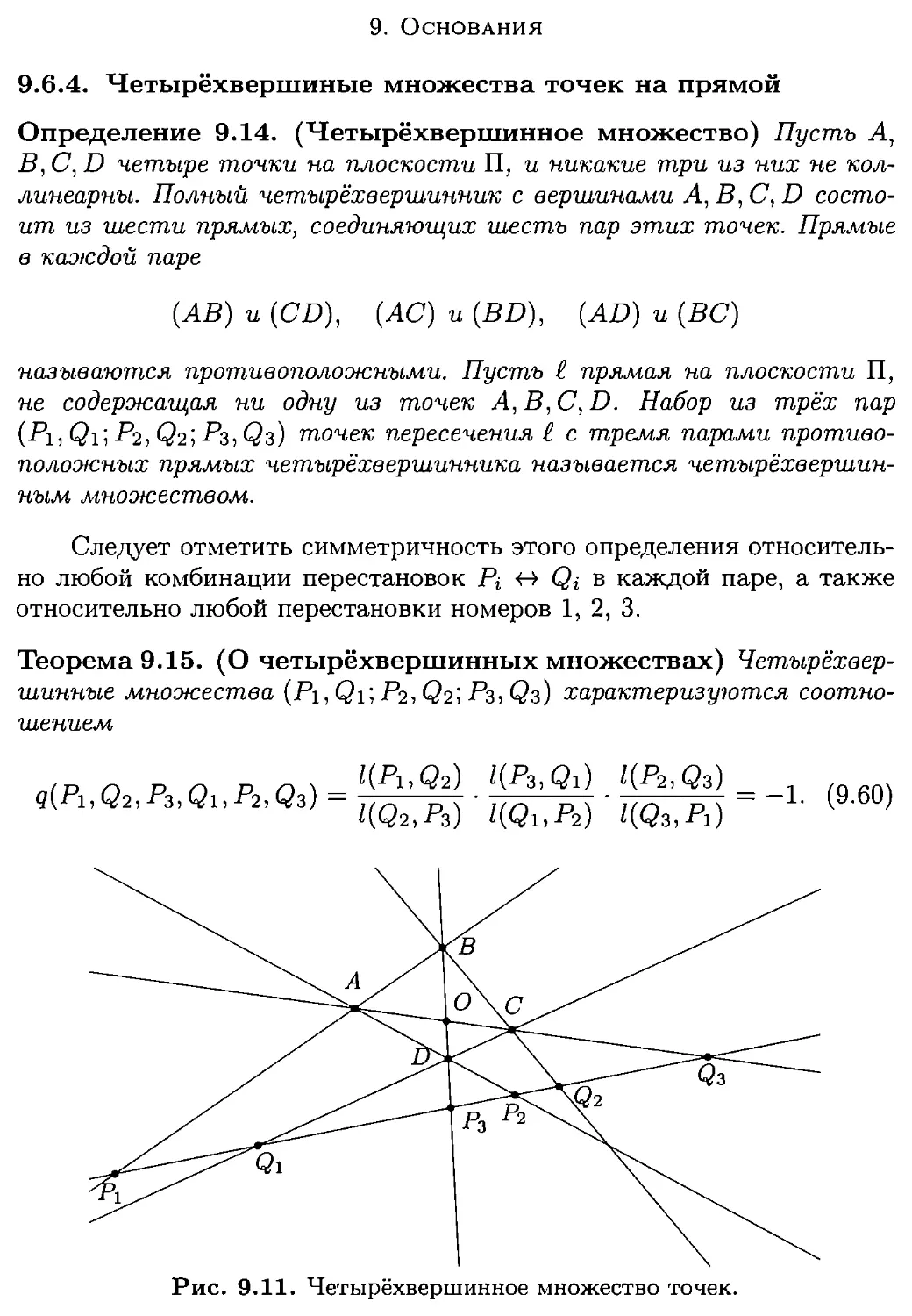
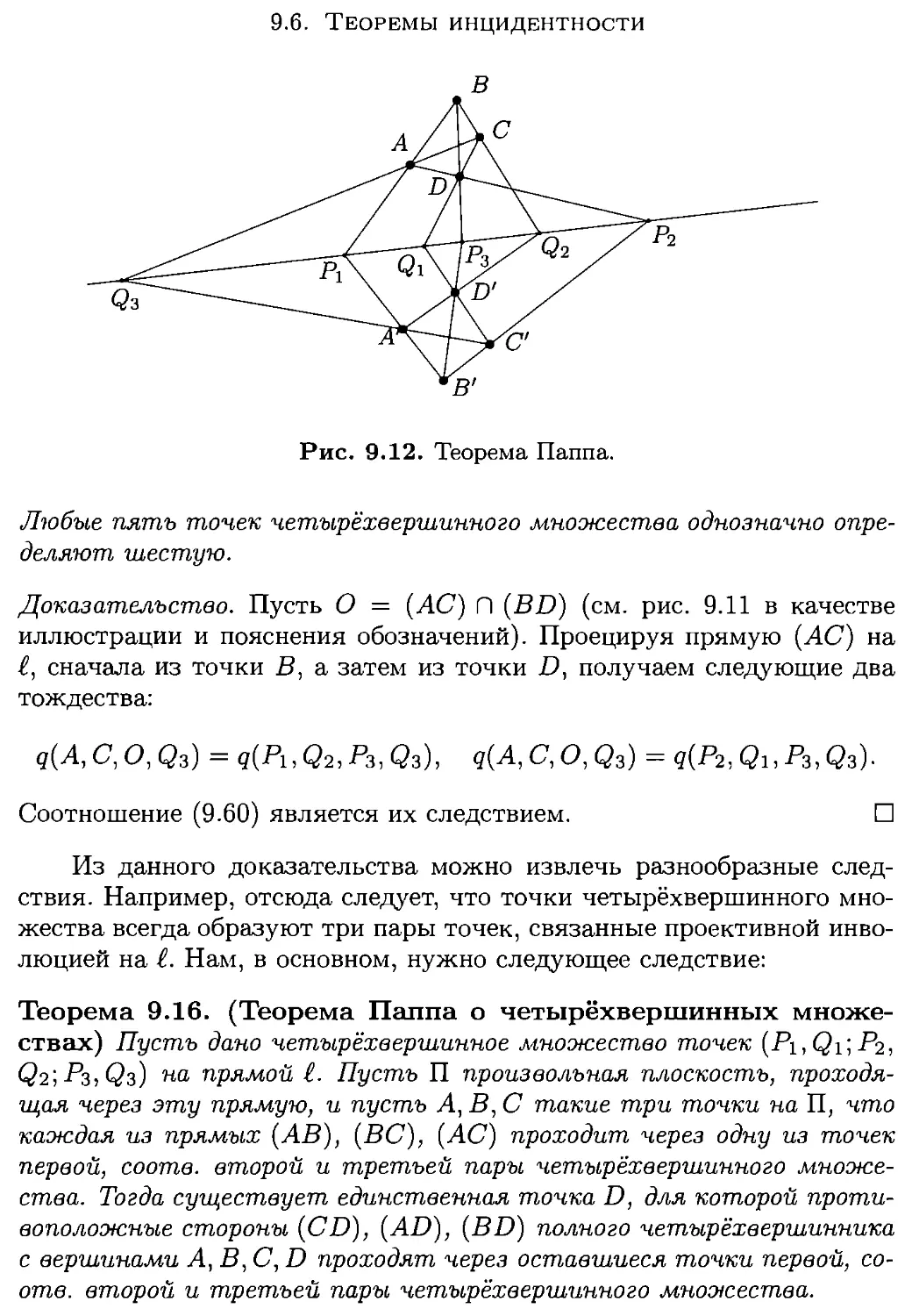
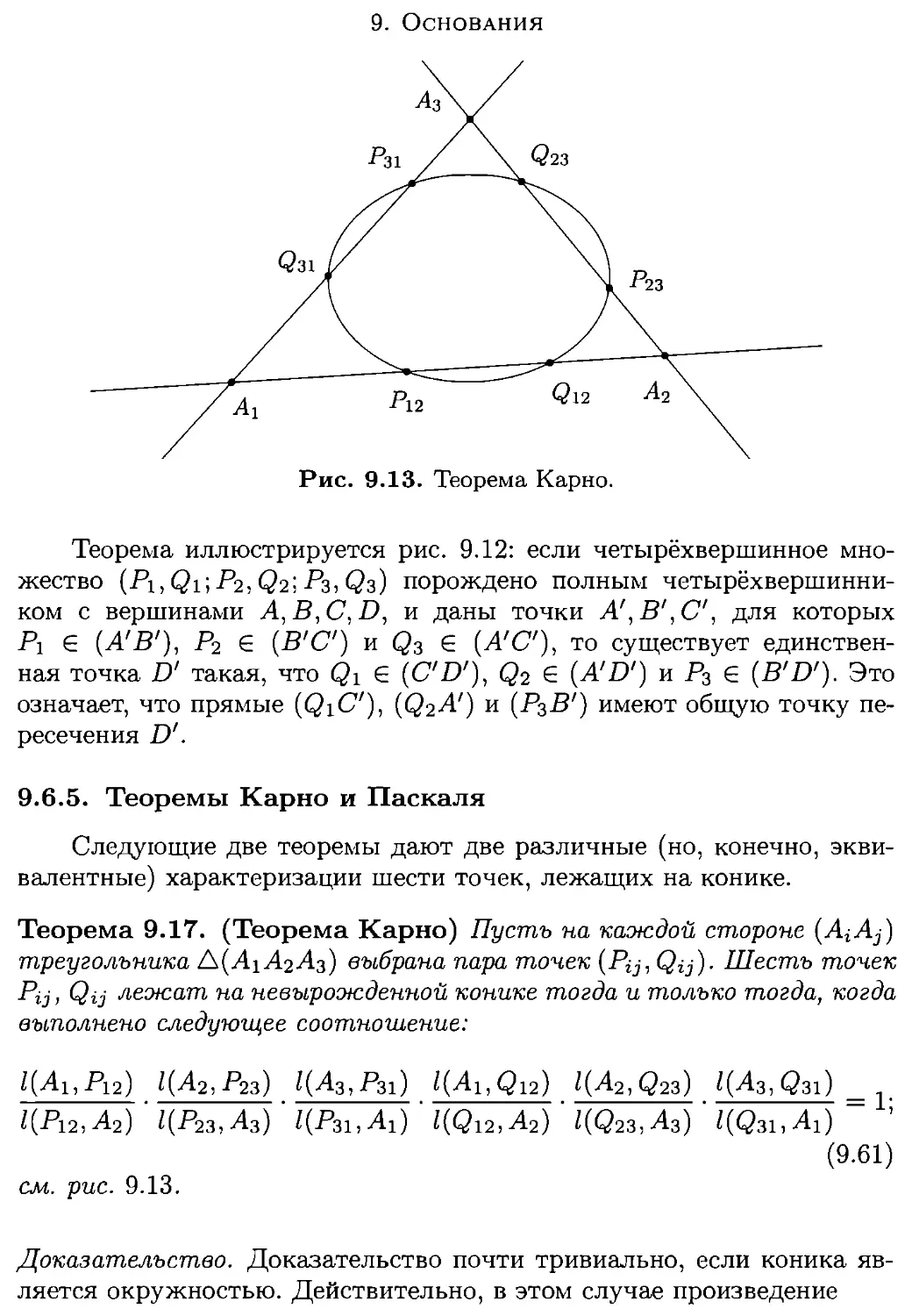
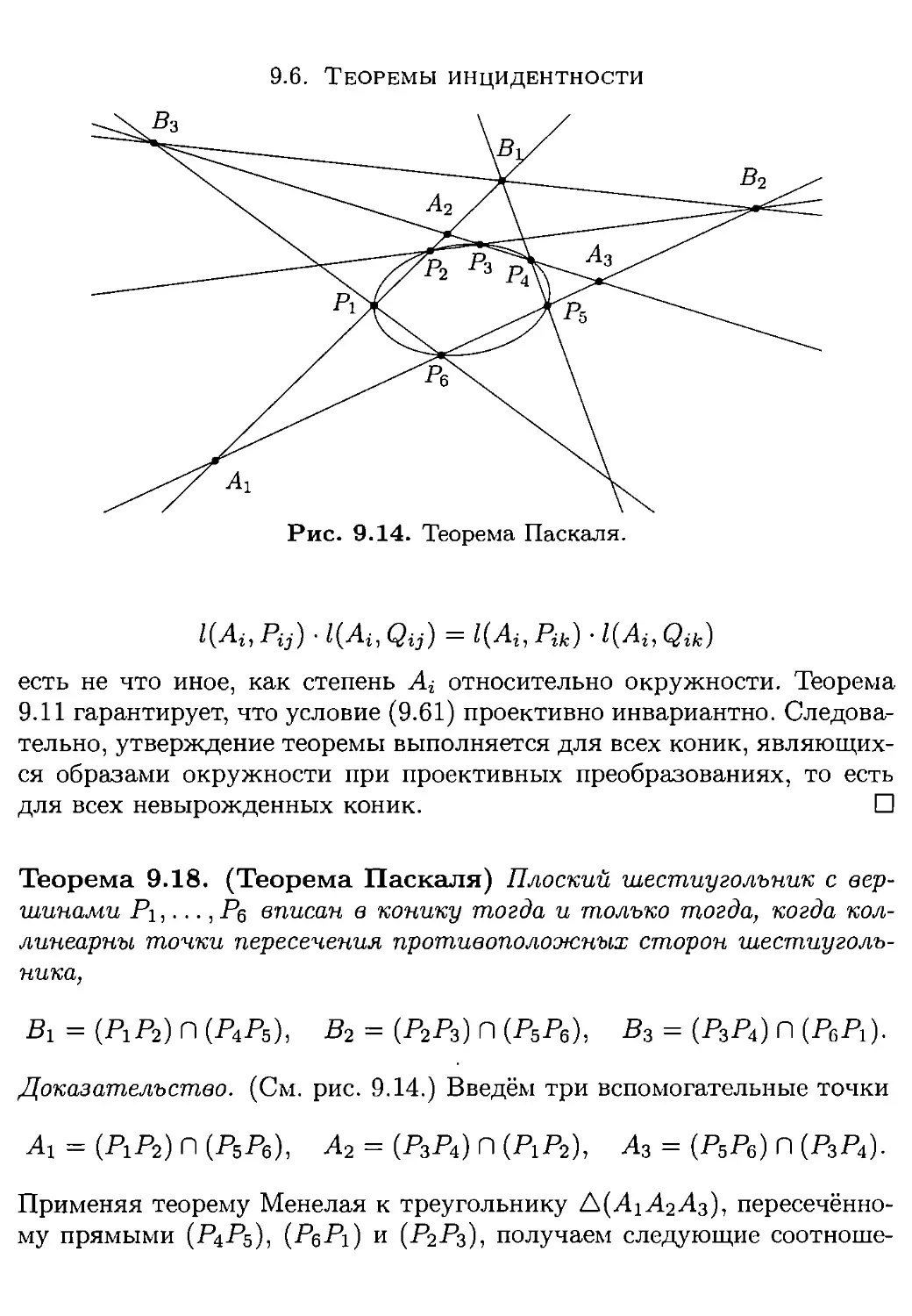
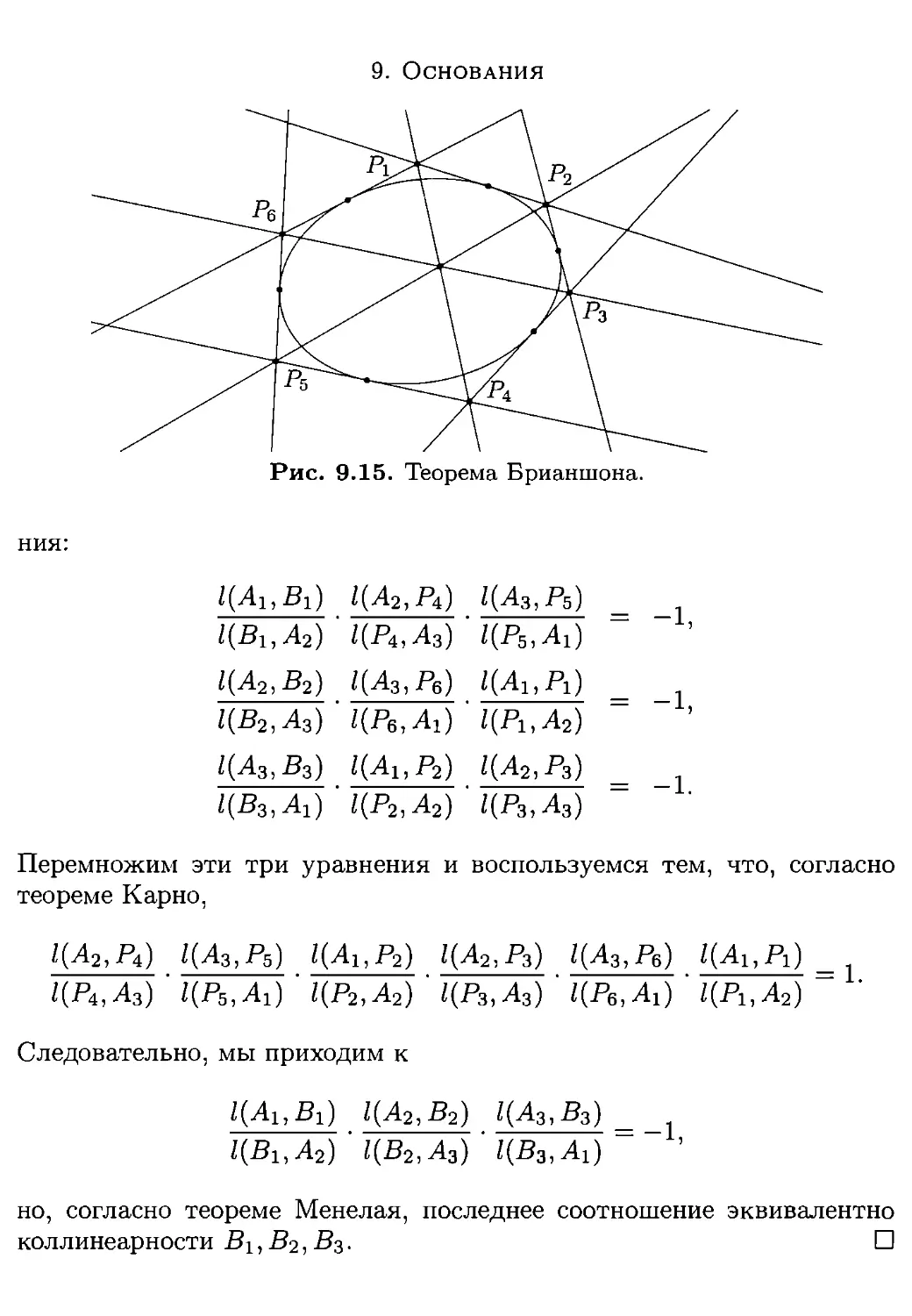
сти, имеющих отношение к дискретной дифференциальной геометрия.
Как читать эту книгу
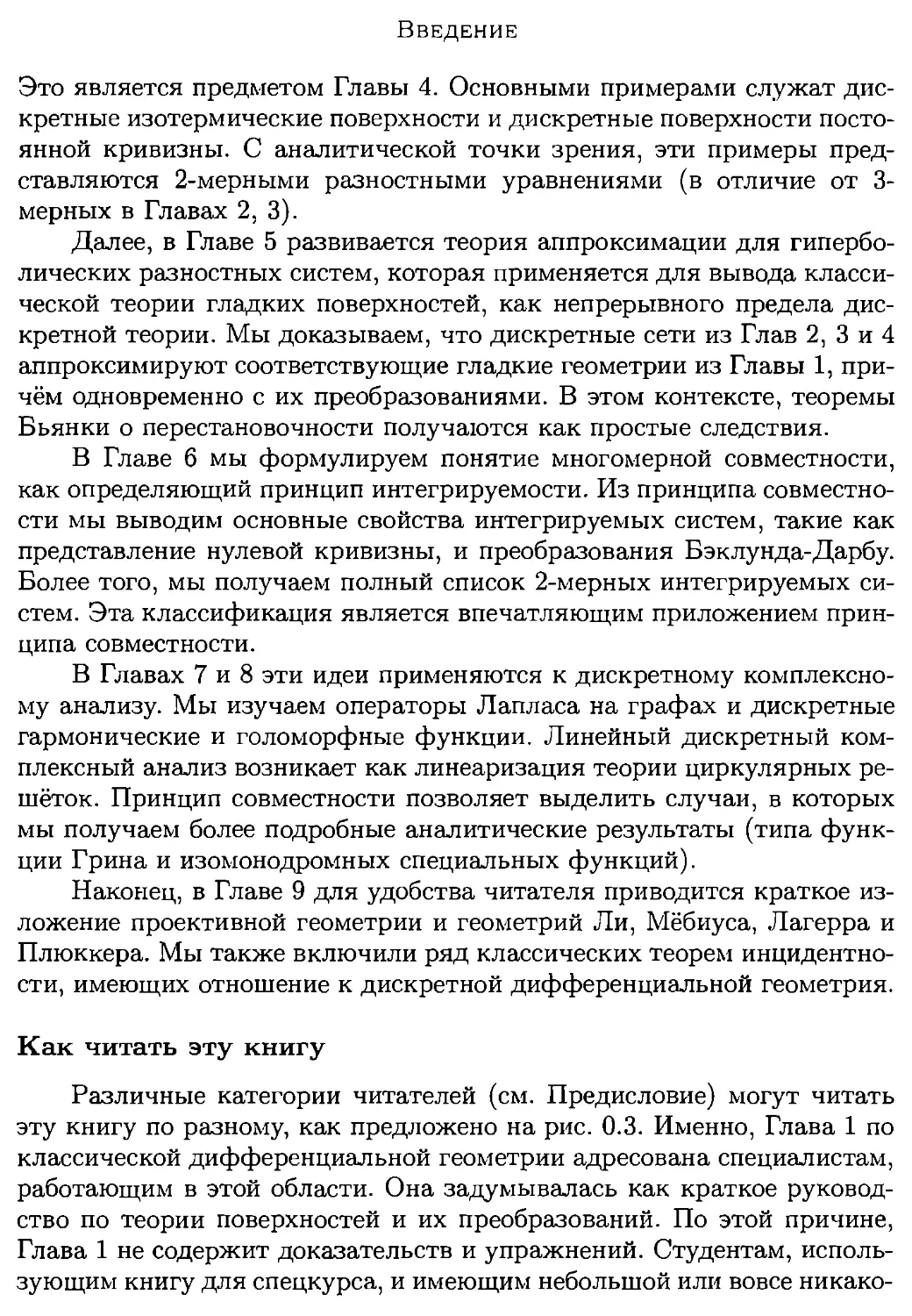
Различные категории читателей (см. Предисловие) могут читать
эту книгу по разному, как предложено на рис. 0.3. Именно, Глава 1 по
классической дифференциальной геометрии адресована специалистам,
работающим в этой области. Она задумывалась как краткое руковод-
ство по теории поверхностей и их преобразований. По этой причине,
Глава 1 не содержит доказательств и упражнений. Студентам, исполь-
зующим книгу для спецкурса, и имеющим небольшой или вовсе никако-
Введение
го опыта в дифференциальной геометрии, лучше пропустить эту главу
и начать чтение сразу с Главы 2 (и свериться с Главой 1 по заверше-
нии курса, после овладения дискретной теорией). Именно так этот курс
читался в Берлине и Мюнхене, без требований к знанию дифференци-
альной геометрии. Читателям, интересующимся, в основном, приложе-
ниями дискретной дифференциальной геометрии, рекомендуется вы-
бирать чтение из Глав 2-4 и, возможно, также Главы 5, в зависимости
от того, какие задачи представляют наибольший интерес. Почти все
результаты сопровождаются элементарными геометрическими форму-
лировками, доступными для неспециалистов. Наконец, исследователи,
интересующиеся теорией интегрируемых систем, могут начать чтение
с Главы 6 и обращаться к предыдущим главам для лучшего понима-
ния геометрических истоков идеи совместности, являющейся основой
нашего подхода к интегрируемости.
спецкурс
Рис. 0.3. Рекомендации по чтению глав, в зависимости от
подготовки читателя.
Благодарности
Существенные части этой книги основаны на результатах, полу-
ченных совместно с Всеволодом Адлером, Тимом Хофманом, Дани-
элем Маттесом, Кристианом Мерка, Ульрихом Пинкалем, Гельмутом
Поттманом и Иоганнесом Вальнером. Мы сердечно благодарим их за
вдохновляющее сотрудничество.
Мы очень благодарны Адаму Доливе, Удо Хертрих-Иеромину,
Николаю Решетихину, Вольфгангу Шифу, Петеру Шрёдеру, Борису
Шпрингборну, Сергею Царёву, Александру Веселову и Гюнтеру Циг-
Введение
леру за приятные и полезные дискуссии по дискретной дифференци-
альной геометрии, оказавшие влияние на содержание этой книги.
С благодарностью отмечаем поддержку Немецкого Исследователь-
ского Общества (Deutsche Forschungsgemeinschaft). Работа авторов над
книгой была частично поддержана Исследовательской группой DFG
“Polyhedral Surfaces” и Исследовательским Центром DFG Matheon
“Mathematics for key technologies” в Берлине.
Глава 1
Классическая дифференциальная
геометрия
В этой главе мы обсуждаем некоторые классические результаты
дифференциальной геометрии сетей (то есть параметризованных по-
верхностей и координатных систем) в R77, в основном связанные с те-
мами преобразований сетей и их свойствами перестановочности. Эта
классическая область была очень популярна в дифференциальной гео-
метрии 19-го и первой четверти 20-го века, что хорошо отражено в
фундаментальных трактатах Бьянки, Дарбу, Эйзенхарта и др.. Наше
изложение в основном следует этим классическим образцам, разумеет-
ся, с модификациями, отражающими современную точку зрения. Мы
не ставим задачей проследить точное происхождение конкретных клас-
сических результатов: довольно часто это оказывается сложным вопро-
сом из истории математики, ещё ожидающим компетентного исследо-
вания.
Для классов сетей, описываемых существенно двумерными систе-
мами (такие специальные классы поверхностей, как поверхности по-
стоянной отрицательной гауссовой кривизны, или как изотермические
поверхности), теоремы о перестановочности, восходящие в основном к
Бьянки, формулируются для четвёрки поверхностей (изображаемых
как вершины так называемого четырёхугольника Бьянки). Если три
поверхности из такой четвёрки заданы, то четвёртая определяется од-
нозначно; см. Теоремы 1.27 и 1.31.
Для классов сетей, описываемых существенно трёхмерными систе-
мами (сопряжённые сети; сети Мутара; поверхности, параметризован-
ные асимптотическими линиями; ортогональные сети, в том числе по-
верхности параметризованные линиями кривизны), ситуация несколь-
ко иная. Соответствующие теоремы о перестановочности (Теоремы 1.3,
1.10, 1.15 и 1.20) состоят из двух частей. Первая часть каждой такой
теоремы представляет традиционную точку зрения и имеет дело с че-
тырёхугольником Бьянки. Мы считаем, что в трёхмерном контексте
1. Классическая дифференциальная геометрия
такое описание недостаточно, что отражается в неединственности чет-
вёртой сети в этих теоремах. Естественное описание перестановочности
даётся второй частью, где перестановочность формулируется для вось-
ми сетей, изображаемых как вершины комбинаторного куба, так что
восьмая сеть однозначно определяется по семи (шестигранник Эйзен-
харта). Происхождение таких теорем о перестановочности становится
совершенно прозрачным в рамках нашей дискретной философии.
Несколько замечаний об обозначениях. Мы обозначаем независи-
мые переменные сети f : Rm —> R77 через и = (ui,... ,ит) € Rm и
полагаем di = д/дщ. Все сети предполагаются достаточно гладкими,
так что все требуемые частные производные определены. Для з-мерных
координатных плоскостей (или осей, при s = 1) используется обозна-
чение
= {u€Rm: Щ - 0 при i / ii,... ,zs}
1.1. Сопряжённые сети
1.1.1. Определение сопряжённых сетей
Мы всегда предполагаем, что размерность объемлющего простран-
ства N 3.
Определение 1.1. (Сопряжённая сеть) Отображение f : Rm ->
R77 называется т-мерной сопряжённой сетью в R77, если в каждой
точке и £ Rm и для всех пар 1 < i j < т выполняется равенство
didjf е span{dif,djf').
Двумерная сеть (т = 2) есть не что иное, как параметризованная
поверхность. Параметризация поверхности в трёхмерном пространстве
(т — 2, N = 3) является сопряжённой сетью, если её вторая фунда-
ментальная форма диагональна. Для поверхности общего положения
в трёхмерном пространстве можно найти бесконечно много таких па-
раметризаций. Поверхности общего положения в четырёхмерном про-
странстве отвечает по существу единственная сопряжённая сеть (един-
ственность понимается здесь с точностью до параметризации коорди-
натных кривых). В пространстве высшей размерности такой парамет-
ризации вообще может не существовать (то есть сопряжённые сети мо-
гут быть заданы только на специальных поверхностях коразмерности
>2).
1.1. Сопряжённые сети
Из Определения 1.1 следует, что сопряжённые сети описываются
(линейными) дифференциальными уравнениями
didjf = Cjidif + Cijdjf, (1.1)
с некоторыми функциями c2J : Rm —> R. Совместность этих уравнений,
т.е. требование di(djdkf) = dj{dzdkf), выражается следующей системой
(нелинейных) дифференциальных уравнений:
diCjfc = CijCjk “Ь CjiCik Cjk^ik, 7^ (^’2)
Отметим, что последние уравнения для коэффициентов cZj уже не со-
держат f. Система (1.1), (1-2) является гиперболической (см. Главу 5);
следующие данные определяют корректно поставленную задачу Гурса
для этой системы и однозначно определяют сопряжённую сеть f:
(Qi) значения f на координатных осях при 1 i т, то есть т
гладких кривых /[щ с общей точкой пересечения /(0);
(Q2) значения dj, Cji на координатных плоскостях rBz] для всех
1 < г < J < тп, то есть т(т — 1) гладких вещественнозначных
функций от двух переменных.
Важно отметить, что Определение 1.1, а также Определение 1.2 ни-
же могут быть переформулированы в проективно-инвариантных тер-
минах и следовательно относятся к проективной дифференциальной
геометрии. В такой постановке объемлющее пространство Rw сопря-
жённой сети следует интерпретировать как аффинную часть проек-
тивного пространства RPN = P(RJV+1), где RjV+1 является простран-
ством однородных координат. Уравнения (1.1) выполняются при этом
для стандартного поднятия (/, 1) е RN+1 сопряжённой сети / ~ :
1] £ RP77, тогда как произвольное поднятие f = А(/, 1) € RN+1 харак-
теризуется более общей линейной системой
didjf = Cjidif + cijdjf + ptjf, (1.3)
(с соответствующими условиями совместности для коэффициентов Cij,
Pij, обобщающими уравнения (1.2)). Дальше мы не будем развивать
это описание.
1. Классическая дифференциальная геометрия
1.1.2. Альтернативное аналитическое описание сопряжённых
сетей
Классическое описание сопряжённых сетей использует следую-
щую конструкцию. Для заданных функций Cij определим функции
gi : Km —> R* как решения системы дифференциальных уравнений
digj = cijgj, (1.4)
Совместность этой системы выражается равенством дгс3к = д3ак и яв-
ляется следствием уравнений (1.2) (правая часть которых симметрич-
на относительно перестановки i J). Решения gi определяются по их
значениям на соответствующих координатных осях которые мож-
но задавать произвольно. Определим векторы Wi — g~1dif. Из (1.1) и
(1.4) следует, что эти векторы удовлетворяют следующим дифферен-
циальным уравнениям:
= ^c3iWi, j. (1.5)
Таким образом, определив коэффициенты вращения как
_ 9i ~ д3 СИ ’ (1-6)
мы приходим к следующей системе:
dif = giWi, (1-7)
diW3 = y-awt, (1-8)
&i9j = 9i1ij i % 7^ j- (1-9)
Коэффициенты вращения удовлетворяют замкнутой системе диффе-
ренциальных уравнений, которая получается из (1.2) при подстановке
(Тб):
= 'Yki'Yij i 7^ 7 7^ 7^ (4-Ю)
Уравнения (1.10), известные как система Дарбу, можно рассматри-
вать как условия совместности линейных дифференциальных уравне-
ний (1.8).
Отметим важное отличие между двумя описаниями сопряжённых
сетей: функции сч- описывают локальную геометрию сети, а для коэф-
фициентов вращения 7ij это не так. Действительно, для их определения
следует найти сначала дг, как решения дифференциальных уравнений
(1-4).
1.1. Сопряжённые сети
1.1.3. Преобразования сопряжённых сетей
Наиболее общий класс преобразований сопряжённых сетей был
введён Йонасом и Эйзенхартом.
Определение 1.2. (Фундаментальное преобразование) Гово-
рят, что две т-мерные сопряжённые сети f, f+ : Rm —> связа-
ны фундаментальным преобразованием (F-преобразованием), если для
всех 1 < i < т три вектора dif, dif+ и Sf = f + — f компланарны
в каждой, точке и G Rm области определения. Сеть f+ называется
F-образом сети f.
Из определения следует, что F-преобразования описываются сле-
дующими (линейными) дифференциальными уравнениями:
dif+ = aidif + bi (/+-/). (1.11)
Конечно, функции ai,bi : Rm —> R должны удовлетворять (нели-
нейным) дифференциальным уравнениям, выражающим совместность
(1.11) и (1.1):
d^dj (1-12)
dibj = cijbj + cjibi - bibi’ (1-13)
aicij — diC^j + 1). (1-14)
Следующие данные однозначно определяют F-образ /+ заданной со-
пряжённой сети /:
(Fi) точка /+(0);
(F2) значения a,, bi на координатных осях Bi, 1 < i < т, то есть 2т
гладких вещественнозначных функций аД®,, Ь, одной пере-
менной.
Отметим замечательное концептуальное сходство между Опреде-
лениями 1.1 и 1.2. Действительно, можно интерпретировать условие
Определения 1.1 как планарность инфинитезимального четырёхуголь-
ника (f(u), f(u + eiei),f(u + CjCi + ejej),f(u + с^еД), в то время как
условие Определения 1.2 может быть интерпретировано как планар-
ность бесконечно узких четырёхугольников (/(и),/(и + с^е,),/+(и+
+ с;ег),/+(и)).
1. Классическая дифференциальная геометрия
F-преобразования можно итерировать и получить последователь-
ность сопряжённых сетей f, f+, (/+)+ и т.д.. Мы увидим, что это мож-
но интерпретировать, как порождение сопряжённой сети размерности
М = т + 1, ст непрерывными направлениями и одним дискретным.
Наиболее замечательным свойством F-преобразований является следу-
ющая теорема о перестановочности.
Теорема 1.3. (Перестановочность F-преобразований)
1) Пусть даны т-мерная сопряжённая сеть f и два её F-
преобразования f<T), Тогда существует двухпараметрическое се-
мейство сопряжённых сетей /(12\ являющихся F-преобразованиями
как f^, так и /^2\ Соответственные точки четырёх сопряжённых
сетей f, f^, и /(12) компланарны.
2) Пусть дана т-мерная сопряжённая сеть f, три её F-преобра-
зования и и, далее, три такие сопряжённые сети /^12\
f™ и /(13\ что есть одновременно F-преобразование от и
f(T>. Тогда, в случае общего положения, существует единственная со-
пряжённая сеть у<123) являющаяся F-преобразованием от /^12\ /^23^
и /<13). Сеть /(123) однозначно определяется условием, что для каж-
дой перестановки (ijk) индексов (123) соответствующие точки f^\
f№), и /С123) компланарны.
Конструкции, описанные в этой теореме, могут быть интерпрети-
рованы, соответственно, как сопряжённые сети размерности М = т + 2
V. М = т + с т непрерывными и двумя либо тремя дискретными на-
правлениями.
Теория дискретных сопряжённых сетей позволяет сделать все на-
правления равноправными и объединить теории гладких поверхностей
и их преобразований. Более того, мы увидим, что обе эти теории мож-
но рассматривать как непрерывный предел (в некотором точном смыс-
ле) полностью дискретной теории, если шаг решётки становится бес-
конечно малым по всем или некоторым направлениям (см. рис. 0.1).
Этот взгляд на вещи является ведущей идеей и философией дискрет-
ной дифференциальной геометрии.
В теории поверхностей важно следующее специальное F-преобра-
зование.
Определение 1.4. (Преобразование Комбескюра) Две т-мерные
сопряжённые сети f, f+ : Rm —> Rw связаны преобразованием Комбес-
кюра, если в каждой точке и G Rm и для всех 1 < i < т векторы dif,
dif+ параллельны. Сеть f + называется параллельной f, или преобра-
зованием Комбескюра сети f.
1.1. Сопряжённые сети
1.1.4. Классическая формулировка F-преобразования
Наше определение F-преобразований довольно сильно отличается
от классического, которое восходит к Йонасу и Эйзенхарта и основано
на формуле
г = (1-15)
где даны: дополнительное решение ф : Rm —> R уравнения (1.1), пре-
образование Комбескюра р : Rm —> Rw от f и функция ф : Rm —> R,
связанная с ф так же, как р связано с f. Сейчас мы покажем, как иден-
тифицировать все эти ингредиенты в рамках нашего подхода и как они
определяются по начальным данным
Из (1.12)—(1.14) следует, что
1,21-
bi bj bi
C^ai ~ djdi •
(1-16)
bi. 1 < i
т.
Из симметрии правых частей (1.16)
функции ф, ф+ : Rm —> R, такой что
дгф bi дгф+
Ф+ ~
Эти уравнения определяют ф, ф+ однозначно, с точностью до постоян-
ных множителей, которые можно зафиксировать, потребовав 0(0) =
= 0+(О) = 1. Лёгкое вычисление, основанное на (1.16), (1.13), показы-
вает, что функции ф, ф+ удовлетворяют следующим уравнениям:
didjtp = Сг^д^фCjidid>, (1.18)
didrf+ = c+5j0++ с±<М+, (1.19)
для всех 1 < i / jт. Таким образом, F-преобразование определя-
ет некоторые дополнительные скалярные решения ф и ф+ уравнений,
описывающих сети f и f+, соответственно. Из этих двух, решение ф
непосредственно определяется по исходной сети f и начальным дан-
ным (F2). Действительно, данные (F2) определяют значения ф вдоль
координатных осей посредством интегрирования первых уравнений в
(1.17); эти значения однозначно определяют решение (1-18) с извест-
ными коэффициентами с^.
и (1.13) следует существование
1. Классическая дифференциальная геометрия
Далее, введём величины
= -^- t1’20)
ф~ ф
Тогда прямое вычисление, основанное на (1.11), (1.12)-(1.14) и (1.17)
показывает, что выполнены следующие уравнения:
dip = cudif, (1-21)
д,ф = а&ф, (1.22)
где
. (1.23)
Ф
Итак, р является преобразованием Комбескюра от f, а ф есть функция
ассоциированная с ф в терминологии Эйзенхарта. Ещё одно вычисление
ведёт к соотношению
diOtj = Cijlat - aj). (1.24)
То же рассуждение, что и выше, показывает, что данные (F2) опреде-
ляют значения ф+ и, тем самым, значения щ на координатных осях 3j.
Это однозначно определяет функции сц во всём R"1 как решения сов-
местной линейной системы (1.24) с известными коэффициентами Cij.
Это, в свою очередь, ведёт к однозначному определению решений р, ф
уравнений (1.21), (1.22) с начальными данными р(0) — — f(0) и
ф(0) = 1 (при этом в конструкцию входят данные (Fi)). Итак, класси-
ческая формула (1-15) восстановлена.
1.2. Сети Кёнигса и Мутара
1.2.1. Определение сетей Кёнигса и Мутара
Один важный геометрический подкласс двумерных сопряжённых
сетей, популярный в классической дифференциальной геометрии, мо-
жет быть проще всего определён следующим образом.
Определение 1.5. (Кёнигсова сеть) Отображение f : R2 —> Rw
называется кёнигсовой сетью, если оно удовлетворяет дифференци-
альному уравнению
did2f = (d2logp) д-if + (Si log z/) d2f (1.25)
с некоторой скалярной функцией z/ : R2 —> R+.
1.2. Сети Кёнигса и Мутара
Иными словами, сеть Кёнигса это двумерная сопряжённая сеть с
коэффициентами С21, С12, удовлетворяющими условию <?iC2i — д2щ2.
Классически это свойство интерпретировалось как равенство так на-
зываемых инвариантов Лапласа сети (по этой причине кёнигсовы сети
известны также, как сети с равными инвариантами). Замечательным
образом, это свойство инвариантно относительно проективных преоб-
разований, так что понятие кёнигсовых сети принадлежит фактически
к проективной геометрии. Следующие данные однозначно определяют
кёнигсову сеть /:
(Ki) значения f на координатных осях Bj, ®2, то есть две гладкие
кривые с общей точкой пересечения /(0);
(Кг) гладкая функция z/: R2 —> R+.
Оставляя в стороне многочисленные геометрические свойства кё-
нигсовых сетей, открытые классиками, сформулируем здесь только
следующую их характеризацию.
Теорема 1.6. (Сеть, дуальная по Кристоффелю к кёнигсовой)
Сопряжённая сеть f : R2 —> Rw является кёнигсовой тогда и только
тогда, когда существует такая скалярная функция v : R2 —> R+, что
дифференциальная один-форма df*, определённая равенствами
д,Г = ^4, д2Г = -^4 (1.26)
z/ и
замкнута. В этом случае отображение f* : R2 —> Rw, определённое (с
точностью до переноса) интегрированием этой один-формы, также
является кёнигсовой сетью и называется дуальной по Кристоффелю
к f.
Доказательство следует непосредственно из вычисления пере-
крёстных производных (1.26). Последние уравнения можно сформу-
лировать по другому:
d^rw, d2r\\d2f,
(й + а2)Г|| (й - d2)f, (дг-д^Г II (й+W- (1.27)
Если рассматривать объемлющее пространство Rw кёнигсовой се-
ти как аффинную часть RP/V, то в пространстве R/v+1 однородных
1. Классическая дифференциальная геометрия
координат имеется важный выбор представителей для f ~ (/, 1), а
именно,
У = ^1(/Д)- (1-28)
Действительно, прямое вычисление показывает, что представители
(1.28) удовлетворяют следующему простому дифференциальному урав-
нению:
did2y = q12y (1.29)
со скалярной функцией 912 = ndid2(n~1'). Дифференциальное уравне-
ние (1-29) известно как уравнение Мутара, а у называется мутаров-
ским представителем кёнигсовой сети /.
Определение 1.7. (Сеть Мутара) Отображение у : R2 —> RN+1,
удовлетворяющее дифференциальному уравнению Мутара (1.29) с
некоторым q^2 : R2 —> R, называется сетью Мутара.
Итак, мы видим, что мутаровские сети возникают как специальное
поднятие кёнигсовых в пространство однородных координат. Наоборот,
если у является сетью Мутара в Rw+1, то нетрудно вывести условие
для скалярной функции v : R2 —> R, при котором f = ну удовлетворя-
ет уравнению типа (1.1): должно быть решением того же самого
уравнения Мутара (1.29), и тогда
д\d2f = (д2 log z/)Si/ + (#1 log ^)d2f.
Например, в качестве z/-1 можно выбрать любую компоненту векто-
ра у, в этом случае N компонент f = vy, отличных от 1, образуют
кёнигсову сеть в Rw.
Конечно, мутаровы сети можно рассматривать и сами по себе, то
есть не обязательно рассматривать объемлющее пространство RN+1
мутаровой сети как пространство однородных координат для RP^ Тем
не менее, такая интерпретация в большинстве случаев полезна.
Следующие данные однозначно определяют сеть Мутара у.
(Mi) значения у на координатных осях ®i, “В2, то есть две гладкие
кривые с общей точкой пересечения у(0);
(М2) гладкая функция qj2 : R2 —> R, коэффициент в уравнении Му-
тара.
1.2. Сети Кёнигса и Мутара
1.2.2. Преобразования сетей Кёнигса и Мутара
Замечательный аналитический аппарат для преобразования мута-
ровских сетей принадлежит самому Мутару.
Определение 1.8. (Преобразование Мутара) Две мутаровских
сети у, у+ : R2 —> Rw называются преобразованиями Мутара друг
для друга, если они удовлетворяют (линейным) дифференциальным
уравнениям
diy+ + dry = pi(y+-y), (1.30)
д2у+— д2у = р2(у+ + у) (1.31)
с некоторыми функциями р^,р2 : R2 —> R (или аналогичным уравнени-
ям с переставленными знаками, что эквивалентно переобозначению
координатных осей 1 о 2).
Функции pi, р2, определяющие преобразование Мутара, должны
удовлетворять (нелинейным) дифференциальным уравнениям, служа-
щим условием совместности для (1.30), (1-31) с (1.29):
31Р2 = <Э2Р1 = -912+Р1Р2, (1-32)
912 = -912 + 2р1р2- (1-33)
Следующие данные определяют преобразование Мутара у+ для задан-
ной сети Мутара у:
(MTi) точка у+(0) С Rw;
(МТ2) значения функции pi на координатных осях при i — 1,2,
то есть две гладкие функции рЛв, одной переменной.
Геометрическое содержание преобразования Мутара нетрудно вы-
яснить, рассматривая мутаровские сети у, у+ в Rw+1 как поднятия
кёнигсовых сетей f = [у], /+ = [у+] в R27. Введём две поверхности
jf(i)!/?(2) ; ]R2 _> ]RW с однородными координатами
F(1) = [y+ + y], Г^ = [у+-у].
Тогда для каждого и € R2 точки F^\ лежат на прямой (//+), а
уравнения (1.30), (1-31) показывают, что эта прямая касается обеих по-
верхностей F^, F^. Говорят, что эти поверхности являются фокаль-
ными поверхностями для конгруэнции прямых (//+). Далее, неслож-
ная выкладка показывает, что на каждой такой прямой четыре точки
1. Классическая дифференциальная геометрия
f, F^\ f+, F^ образуют гармоническое множество, то есть
9(/,^(1\/+,^) = -l, (1-34)
где q обозначает двойное отношение четырёх коллинеарных точек; см.
(9.53).
Определение 1.9. (Преобразование Кёнигса) Две кёнигсовы сети
f, f+ : R2 -> RN называются связанными преобразованием Кёнигса,
если фокальные точки F^, F^ конгруэнции прямых (ff+) гармони-
чески разделяют точки f, f+.
Можно показать, что любое преобразование Кёнигса аналитически
представляется как преобразование Мутара (1.30), (1-31) при подходя-
щем выборе мутаровских поднятий у, у+.
Теорема 1.10. (Перестановочность преобразований Мутара)
1) Пусть у мутаровская сеть, а у^ и у^ два её преобразова-
ния Мутара. Тогда существует однопараметрическое семейство му-
таровских сетей у^12\ являющихся мутаровскими преобразованиями
как у^\ так и у^.
2) Пусть у мутаровская сеть. Пусть у^, у^ и у^ три её му-
таровских преобразования, и пусть даны также три т.аких мутаров-
ских сети т/12\ ?/23) и т/13\ что у№ является одновременно образом
у(г) и yU) Тогда в случае общего положения существует единствен-
ная сеть У<123\ являющаяся мутаровским преобразованием от т/12),
у^23^ и т/13).
1.2.3. Классическая формулировка преобразования Мутара
Согласно первому уравнению в (1.32), для любого преобразования
Мутара существует функция 6 : R2 —> R, единственная с точностью до
постоянного множителя, такая что
дД
РГ=-^:
ЭД
Р2 = ~^-
(1.35)
Из последнего уравнения в (1.32) следует, что д удовлетворяет (1.29).
Это скалярное решение (1.29) может быть задано своими значениями
на координатных осях 3^ (г = 1,2), которые можно получить из дан-
ных (МТо), интегрируя соответствующие уравнения (1.35). Это уста-
навливает связь с классической формулировкой преобразования Мута-
ра, согласно которой образ Мутара у+ решения у уравнения Мутара
1.3. Асимптотические сети
(1.29) определяется по дополнительному скалярному решению 9 этого
же уравнения посредством формул (1.30), (1.31) с (1.35). Заметим, что
эти уравнения можно эквивалентно переписать, как
di(0y+) = -0W|Y д2(0у+) = 92д2(%). (1.36)
Из этих уравнений можно вывести, что у+ удовлетворяет уравнению
Мутара (1-29) с преобразованным потенциалом
д+ = ^2-25^2 10g 0+ = ± (1.37)
В нашей формулировке, происхождение функции в становится понят-
ным: она получается из р^, р2 при интегрировании системы (1.35).
Уравнение (1.37) есть не что иное, как эквивалентная форма (1.33).
1.3. Асимптотические сети
Определение 1.11. (A-поверхность) Отображение f : R2 —>
R3 называется A-поверхностью (поверхностью, параметризованной
асимптотическими линиями), если в каждой точке векторы f, d%f
лежат в касательной плоскости к поверхности f, натянутой на dif,
d2f.
Таким образом, вторая фундаментальная форма А-поверхности
в R3 внедиагональна. Такая параметризация существует для общей
поверхности с отрицательной гауссовой кривизной. Определение 1.11,
подобно определению сопряжённых сетей, можно переформулировать
так, чтобы оно содержало лишь проективно инвариантные понятия.
Следовательно, A-поверхности фактически принадлежат геометрии
трёхмерного проективного пространства. Однако, в нашем изложении,
мы будем для удобства использовать дополнительные структуры в R3
(евклидову структуру и векторное произведение). Удобное описание А-
поверхностей даётся представлением Лелёвра : существует единствен-
ное (с точностью до знака) поле нормалей п : R2 —> R3 к поверхности
f такое, что
= дрп х п, d2f = 72 х д2п. (1.38)
Перекрёстное дифференцирование (1.38) показывает, что д^д2пхп = 0,
то есть, поле нормалей Лелёвра удовлетворяет уравнению Мутара
did2n = qi2n (1.39)
1. Классическая дифференциальная геометрия
с некоторой (?i2 : R2 —> R. Рассуждение можно обратить: интегрирова-
ние уравнений (1.38) с любым решением п : R2 —> R3 уравнения Мутара
порождает A-поверхность f : R2 —> R3.
Теорема 1.12. (Нормали Лелёвра к A-поверхности образуют
сеть Мутара) Представление Лелёвра (1.38) определяет взаимно-
однозначное (с точностью до переносов f) соответствие между А-
поверхностями f : R2 —> R3 и мутаровскими сетями п : R2 —> R3.
A-поверхность f однозначно (с точностью до переноса) восстанав-
ливается по своему полю нормалей Лелёвра п. В свою очередь, мута-
ровская сеть п однозначно определяется по начальным данным (Mi^),
которые мы обозначим в данном контексте через (Ацг):
(Ai) значения поля нормалей Лелёвра на координатных осях ®1( '£>2,
то есть две гладкие кривые тДщ с общей точкой пересечения тг(О);
(Аг) гладкая функция Q12 : R2 —> R, играющая роль коэффициента
в уравнении Мутара для п.
Определение 1.13. (Преобразование Вайнгартена) Пара А-по-
верхностей /, /+ : R2 —> R3 связана преобразованием Вайнгартена, ес-
ли для всех и G R2 прямая (/(u)/+(u)) касается обеих поверхностей f
и f + в соответствующих точках. Поверхность f+ называется обра-
зом Вайнгартена поверхности f. Прямые (/(u)y+(u)) образуют так
называемую W-конгруэнцию.
Можно показать, что поле нормалей Лелёвра пары Вайнгартена
А-поверхностей /, /+ удовлетворяет (при подходящем выборе знаков)
следующему соотношению:
f+ — f = п+ х п. (1-40)
Дифференцируя последнее уравнение и используя формулы Лелёвра
(1.38) для f и f+, легко увидеть, что поля нормалей пары Вайнгартена
связаны (линейными) дифференциальными уравнениями
д-[П++ din — Pi(n+-n), (1-41)
д2п+- д2П = р2(п++п) (1-42)
с некоторыми функциями Д1,рг R2 R- Мы имеем:
1.4. Ортогональные сети
Теорема 1.14. (Преобразование Вайнгартена = преобразова-
ние Мутара для нормалей Лелёвра) Поля нормалей Лелёвра п,
п+ для пары Вайнгартена A-поверхностей f, f+ являются преобра-
зованиями Мутара друг для друга.
Преобразование Вайнгартена /+ для данной A-поверхности f вос-
станавливается по преобразованию Мутара п+ поля нормалей Лелёвра
п. Для этого необходимо задать данные (МТ^г) для п:
(Wi) точка n+(0) е R3;
(W2) значения функции Pi на координатных осях ®г при i = 1,2, то
есть две гладкие функции одной переменной.
Следующее утверждение является прямым следствием Теоремы
1.10.
Теорема 1.15. (Перестановочность преобразований Вайнгарте-
на)
1) Пусть даны A-поверхность f и два её преобразования Вайнгар-
тена и Тогда существует однопараметрическое семейство
A-поверхностей /^12\ являющихся преобразованием Вайнгартена как
для так и для f^.
2) Пусть даны A-поверхность f, три её преобразования Вайнгар-
тена и /^3\ и три такие A-поверхности /(12\ /(23) и /^13\
что является преобразованием Вайнгартена одновременно для
и fW. Тогда, в случае общего положения, существует единствен-
ная A-поверхность /^123\ являющаяся преобразованием Вайнгартена
для /(12\ и /(13\ Сеть /(123) однозначно определена условием,
что каждая её точка лежит в касательных плоскостях к /<12\ /^23^
и J^13) в соответствующих точках.
1.4. Ортогональные сети
1.4.1. Определение ортогональных сетей
Важный подкласс сопряжённых сетей выделяется следующим
определением.
Определение 1.16. (Ортогональная сеть) Сопряжённая сеть f :
Rm —> R77 называется т-мерной ортогональной сетью в Rw, если
dif ± djf для всех и 6 Rm и всех пар 1 < i j < т. Если т = N, то
такая сеть называется ортогональной координатной системой.
1. Классическая дифференциальная геометрия
Класс ортогональных сетей (а также их преобразования Рибокура,
см. Определение 1.19 ниже) инвариантен относительно преобразований
Мёбиуса и следовательно относится к мёбиусовой дифференциальной
геометрии. Чтобы показать это, достаточно доказать инвариантность
относительно инверсии / ь-> f — f/|У12 • Прямое вычисление показыва-
ет, что инверсия отображает сопряжённую сеть с коэффициентами
и свойством ортогональности в сопряжённую сеть с коэффициентами
Cij — Cij — 2(dif,f)/\f\2, также являющуюся ортогональной.
Поскольку ортогональные сети принадлежат к мёбиусовой диффе-
ренциальной геометрии, полезно описать их при помощи соответству-
ющего языка (набросок этого дан в Разделе 9.3). В этом формализме
точки в Rw (или, лучше, на конформной TV-сфере являющейся
компактификацией Rw) представляются элементами проективизиро-
ванного светового конуса P(L7V+1,1) в проективизированном простран-
стве Минковского P(R7V+1,1). Световой конус
LN + 1,1 = {^ е R^1’1 ; = 0}
имеет центральное значение в геометрии Мёбиуса (абсолютная квад-
рика).
Пусть {ej,..., едг+2} обозначает стандартный базис пространства
Минковского Ryv+1,1. Обозначим также ео = ^(едг+2 — едг+1) и ею —
= i(e/v+2 +ew-i-i)- Евклидово пространство Rw отождествляется, по-
средством
7г0 : RW 9 f f = f + ео + |/|2еоо е < , (1.43)
с сечением конуса Lyv+1,1 аффинной гиперплоскостью {£о — 1}, где
£о является ео-компонентой £ 6 RN+1,1 в базисе {е^ ... .едг.ео^оо}.
Элегантная характеризация ортогональных сетей принадлежит
Дарбу:
Теорема 1.17. (Характеризация ортогональных сетей в мёби-
усовой геометрии) Сопряжённая сеть f : Rm —> Rw ортогональна
тогда и только тогда, когда скалярная функция |/|2 удовлетворяет
тому же уравнению (1.1), нто и f, или, эквивалентно, если поднятие
f = 7Tq 0 f : Rm —> является сопряжённой сетью в RN+1,1.
Иными словами, образ ортогональной сети в проективизированном
световом конусе P(L7V+1,1) является сопряжённой сетью в P(R7V+1,1). В
1.4. Ортогональные сети
частности, любое поднятие f — Xf сети f в LAr+1’1, не обязательно нор-
мированное, как в (1.43), удовлетворяет линейным дифференциальным
уравнениям (1.3). Этот критерий делает инвариантность ортогональ-
ных сетей относительно преобразований Мёбиуса самоочевидной. При
дискретизации будет важно сохранить эту группу симметрий.
Этот глубокий результат Дарбу служит примером весьма общего
явления, которое будет неоднократно использоваться на протяжении
этой книги. Оказывается, что сопряжённые сети допускают согласован-
ную редукцию на любую квадрику в проективном пространстве. Как
мы увидим в Главе 3, дискретная дифференциальная геометрия да-
ёт ясное понимание истоков этого нетривиального утверждения (и его
простое доказательство). Квадрикой, отвечающей геометрии Мёбиуса,
является световой конус P(L7V+1,1). Выбирая различные квадрики, мы
приходим к классическим геометриям клейновской Эргангенской про-
граммы, включая гиперболическую, сферическую, лиеву, плюккерову,
лагеррову, и т.п.
1.4.2. Аналитическое описание ортогональных сетей
Для аналитического описания ортогональной сети f : Rm —>
введём метрические коэффициенты hi = |Д/| и (попарно ортогональ-
ные) единичные векторы Vi = h^dif. Тогда выполняются следующие
уравнения:
Д/ = hiVi, (1-44)
diVj = PjiVi, г + j, (1-45)
dihj i^j, (1-46)
difaj (1-47)
аналогичные (1.7)—(1.10). Действительно, уравнение (1.45) выполняет-
ся, поскольку f сопряжённая сеть, a Vj являются единичными нормаля-
ми. Это уравнение служит определением коэффициентов вращения /3ji.
Уравнение (1.46) является прямым следствием (1-44), (1.45), тогда как
система Дарбу (1.47) выражает совместность линейной системы (1.45).
Итак, одной из отличительных черт ортогональных сетей среди общих
сопряжённых сетей является то, что система (1.4) допускает решение,
заданное локально определёнными метрическими коэффициентами hi.
В том же духе, коэффициенты вращения fyi отражают локальную гео-
метрию сети.
1. Классическая дифференциальная геометрия
Систему Дарбу (1-47) следует дополнить ортогональной связью
di/3ij + djl3ji = , i/j. (1.48)
Чтобы вывести (1.48), рассмотрим тождество didj{vi,Vj) = 0 и исполь-
зуем (1.45). Уравнение (1.48) служит для системы (1.44)-(1.47) допу-
стимой связью. Это надо понимать следующим образом: в уравнении
(1.48) участвуют только две независимые переменные i, j, и следова-
тельно имеет смысл требовать, чтобы оно выполнялось на координат-
ной плоскости Легко проверить, что если решение системы (1.44)-
(1.47) удовлетворяет (1.48) на всех координатных плоскостях Вг} при
1 г < ут, то оно выполнено во всём Rm. Смысл условия орто-
гональности (1.48) в том, что координатные поверхности пара-
метризованы вдоль линий кривизны. Тот факт, что это условие рас-
пространяется на всё пространство, является своего рода обращени-
ем классической теоремы Дюпена, утверждающей, что координатные
поверхности в трижды ортогональной координатной системе пересека-
ются вдоль своих линий кривизны. Координатные поверхности f
могут быть охарактеризованы функциями — djffji) на Bij.
Таким образом, для однозначного определения ортогональной сети
f можно использовать следующие данные:
(01) значения f на координатных осях Bi при 1 Sj i Sj т, то есть т
гладких кривых /(д ., ортогонально пересекающих друг друга в
/(0);
(Ог) т(т — 1)/2 гладких функций : В^ —> R для всех 1 SC i < j
т.
1.4.3. Спинорные реперы ортогональных сетей
Описание ортогональных сетей на языке мёбиусовой геометрии
имеет первостепенные концептуальные и технические преимущества.
Во-первых, это описание линеаризует инвариантную группу ортого-
нальных сетей, то есть мёбиусову группу сферы (которую мож-
но рассматривать как компактификацию точкой на бесконечно-
сти). Евклидовы движения Клг сохраняющие ориентацию представля-
ются как сопряжения элементами Доо, изотропной подгруппой ею в
Spin+(N + 1,1). Далее, использование модели мёбиусовой дифферен-
циальной геометрии в алгебре Клиффорда позволяет дать реперное
1.4. Ортогональные сети
описание ортогональных сетей, которое оказывается ключевым техни-
ческим инструментом.
Как легко видеть, метрические коэффициенты hi = \dif\ удовле-
творяют также уравнениям hi = где / = / + ео + |/|2еоо. Сле-
довательно, векторы щ = h~1dif = Vi + имеют (лоренцеву)
длину 1. Так как (/, f) = 0, то отсюда находим немедленно (ф,щ) = О
и hi = -{diii, f).
Теорема 1.18. (Спинорный репер ортогональной сети) Для ор-
тогональной сети f : Rm —> RN, то есть для соответствующей со-
пряжённой сети f : существует такая функция ф : Rm —>
Лоо (называемая репером f), -что
f = ф^ео-ф, (1.49)
щ — 1 < i < т, (1.50)
и удовлетворяющая системе дифференциальных уравнений
diip = -eii/tSi, Si = ±diVi, 1 г < m. (1-51)
Заметим, что для ортогональной координатной системы (т = IV)
репер ф однозначно определяется в любой точке из условий (1.49) и
(1.50).
Нетрудно видеть, что единичные касательные векторы щ удо-
влетворяют уравнению (1.45) с теми же коэффициентами вращения
0ji = (diVj,Vi) — —(diVi,Vj). С помощью репера ф расширим мно-
жество векторов {ii : 1 i т} до ортонормированного базиса
{щ : 1 k < N} в TfQ%-.
Vk — ф~гекф, 1 <к < N. (I-52)
Соответственно, расширим набор коэффициентов вращения согласно
формулам
Pkt = = ~(diVi,vk) = -(д^ф^е/гф),
1 i т, 1 к N.
Напомним, что мы также имеем
hi - ~(diVi,f) = ~(д{щ,ф~1еоф), 1 i т.
1. Классическая дифференциальная геометрия
Итак, введя векторы S) = \ получаем следующее разложение по
векторам е*.:
Si =ipsii/j~1 = ^ф(дгугуф~г = - j + hi^oo- (1-53)
k^i
Легко видеть, что (1-47) по прежнему выполняется, если распростра-
нить значения индексов на все попарно различные i,j,k при 1 i,j
т и 1 к Sj N, и, что ортогональную связь (1-48) можно теперь запи-
сать как
drfij + dj^ji = - ^2 PkiPkj (1-54)
Система, состоящая из (1-47), (1.54), называется системой Ламе.
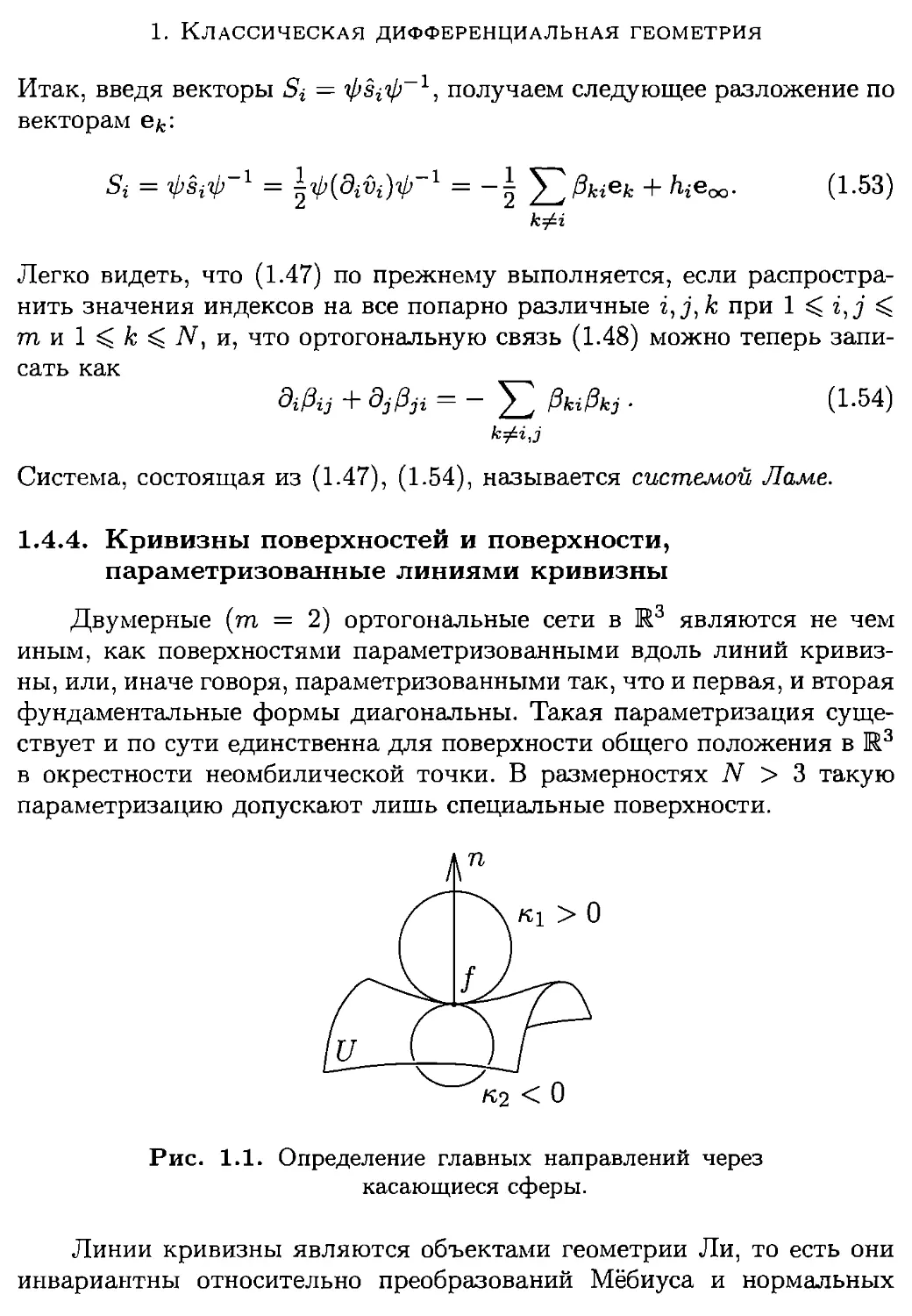
1.4.4. Кривизны поверхностей и поверхности,
параметризованные линиями кривизны
Двумерные (т = 2) ортогональные сети в R3 являются не чем
иным, как поверхностями параметризованными вдоль линий кривиз-
ны, или, иначе говоря, параметризованными так, что и первая, и вторая
фундаментальные формы диагональны. Такая параметризация суще-
ствует и по сути единственна для поверхности общего положения в R3
в окрестности неомбилической точки. В размерностях N > 3 такую
параметризацию допускают лишь специальные поверхности.
Рис. 1.1. Определение главных направлений через
касающиеся сферы.
Линии кривизны являются объектами геометрии Ли, то есть они
инвариантны относительно преобразований Мёбиуса и нормальных
1.4. Ортогональные сети
сдвигов. Чтобы увидеть это, рассмотрим бесконечно малую окрест-
ность U точки f на ориентированной гладкой поверхности в R3 и пучок
сфер S(k) с кривизнами к, касающийся поверхности в /; см. рис. 1.1.
Кривизна к, так же как и ориентированный радиус г — 1/к, считают-
ся положительными, если S(k) лежит с той же стороны касательной
плоскости, что и нормаль п, и отрицательной в противном случае; са-
ма касательная плоскость совпадает с 5(0). Для больших kq > 0 сфе-
ры S(kq) и S(—Kq) пересекают U только в /. Множество касательных
сфер обладающих этим свойством (пересечение с U только в f) имеет
две связные компоненты: М+ содержащую 5 (ко) и М_ содержащую
S(—ко) при больших kq > 0. Граничные значения
Ki = inf {к : S(к) 6 М+ }, кг = sup {к : 5(к) 6 }
являются главными кривизнами поверхности в /. Направления, в ко-
торых S(ki) и 5(кг) касаются U, являются главными направлениями.
Линии кривизны служат интегральными кривыми поля главных на-
правлений. Симметрические функции
К = К1К2,
_ К1 + к2
2
называются соответственно гауссовой и средней кривизной .
Ясно, что все ингредиенты этого описания мёбиусово-инвариантны.
При нормальном сдвиге на расстояние d центры сфер с главными кри-
визнами сохраняются, а их радиусы изменяются на d. Отсюда следует,
что главные направления, а следовательно, и линии кривизны, также
сохраняются при нормальных сдвигах.
Ли-геометрическая природа параметризации линиями кривизны
означает, что она допускает ли-инвариантное описание. Поверхность в
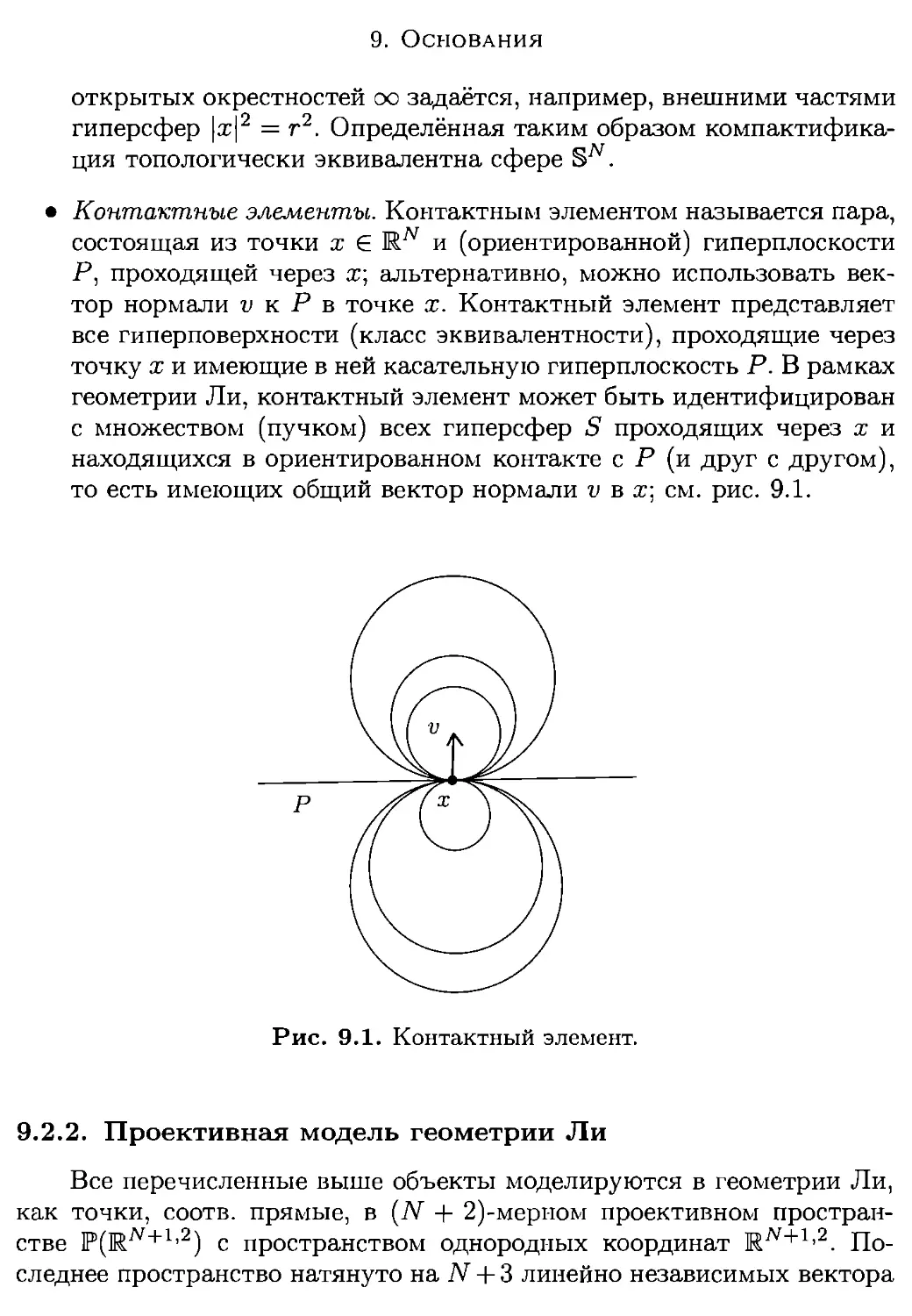
геометрии Ли рассматривается, как состоящая из контактных элемен-
тов. Контактный элемент можно идентифицировать с пучком сфер,
проходящих через общую точку с общей (направленной) нормалью
в этой точке. Два инфинитезимально близких контактных элемента
(сферических пучка) принадлежат одной и той же линии кривизны то-
гда и только тогда, когда они имеют общую сферу, являющуюся сферой
главной кривизны.
Рассмотрим бесконечно малую окрестность поверхности f и её
гауссово отображение п. Для достаточно малых t формула
ft = f + tn
1. Классическая дифференциальная геометрия
определяет гладкие поверхности, параллельные f. Инфинитезималь-
ная площадь параллельной поверхности Д оказывается квадратичным
многочленом от t и задаётся классической формулой Штейнера
dA(ft) = (1 - 2Ht + Kt2)dA(f), (1.55)
Здесь dA инфинитезимальная площадь соответствующей поверхности,
Н и К, соответственно, средняя и гауссова кривизны поверхности /.
1.4.5. Преобразование Рибокура ортогональных сетей
Следующее определение задаёт важный класс преобразований
между ортогональными сетями.
Определение 1.19. (Преобразование Рибокура) Пара т-мерных
ортогональных сетей f, f+ : Rm —> связана преобразованием Ри-
бокура, если соответствующие координатные кривые f и f+ огиба-
ют однопараметрические семейства окружностей, то есть, если для
всех и G Rm и 1 г т прямые с направляющими векторами d{f,
dif+ в соответственных точках f, f+ переходят друг в друга при
отражении относительно срединной ортогональной гиперплоскости
отрезка [f, f+], Сеть f+ называется преобразованием Рибокура от f.
Сети f, f+ служат двумя огибающими для конгруэнции сфер Ри-
бокура
Sm : Rm -> {m-сферы bF).
Иными словами, /(и), /+(и) 6 Sm(u), а касательные m-пространства к
Sm(u) в /(и) и /+(и) натянуты, соответственно, на dif(u) и на <Эг/+(и),
где i = 1,..., т.
Чтобы описать преобразование Рибокура аналитически, запишем
dj+ = n(dif - 2 , (1.56)
с некоторыми функциями : Rm —> R*. Удобно определить мет-
рические коэффициенты преобразованной сети как h* = rihi =
= sign(ri)|<9i/+|, с соответствующими единичными векторами vf =
— Далее, обозначим £ — |<5/| и введём единичный вектор
у = £-15f, так что /+ — f + £у. Тогда находим:
Ч+ = vi ~ “2(vi,y)y, diy = +vi), (1.57)
1.4. Ортогональные сети
где функции 9i : Rm —> R определены как 9i — — hi)/1. — (тп — l)hi/£.
Из уравнений (1.57) следуют уравнения для метрических коэффици-
ентов:
hf = hi + 9i£, di£ =—{vi,y)(h+ + hi). (1.58)
Совместность системы (1.57) означает, что 9г должны удовлетворять
определённым дифференциальным уравнениям:
= di9j = ^9i^tj+^- (1-59)
Следующие данные однозначно определяют преобразование Рибокура
/+ для данной ортогональной сети /:
(R1) точка /+(0);
(R2) значения 9i на координатной оси 2^ при 1 i т, то есть т
гладких функций от одной переменной.
Согласно общей философии, итерирование преобразований Рибо-
кура можно интерпретировать как добавление дополнительного (дис-
кретного) измерения в ортогональную сеть. Ситуация, возникающая
при добавлении двух или трёх дискретных измерений, описывается сле-
дующей фундаментальной теоремой.
Теорема 1.20. (Перестановочность преобразований Рибокура)
1) Пусть дана т-мерная ортогональная сеть f и два её преобра-
зования Рибокура и Тогда существует однопараметрическое
семейство ортогональных сетей /^12\ являющихся преобразованием
Рибокура для обеих сетей и . Соответствующие точки четы-
рёх ортогональных сетей f, f^\ и лежат на одной окруж-
ности.
2) Пусть дана т-мерная ортогональная сеть f, три её образа Ри-
бокура и и три такие ортогональные сети /^12\ /^23^ и
/^13\ что является преобразованием Рибокура одновременно для
и fV). Тогда, в случае общего положения, существует единствен-
ная ортогональная сеть /(123\ являющаяся преобразованием Рибоку-
ра для /^12\ f(23^ и /<13). Сеть /(123) однозначно определена условием,
что для любой перестановки (ijk) индексов (123) соответствующие
точки и /(123) лежат на окружности.
Теории гладких ортогональных сетей и теория их преобразований
будут объединены в теории дискретных ортогональных сетей.
1. Классическая дифференциальная геометрия
1.5. Сферические конгруэнции с главной
параметризацией
Формализм мёбиусовой геометрии очень удобен при описании ги-
персферических конгруэнций. В классическом случае речь идёт, конеч-
но, о двухпараметрических семействах сфер в R3. Неориентированные
сферы в R3 можно представить элементами P(R4'Jt), где
R4O’U\ = {5 е R4’1 : (5,5) >0} (1.60)
является пространственноподобной частью R4,1.
Определение 1.21. (Конгруэнция сфер с главной параметри-
зацией) Отображение
S : R2 —> {неориентированные сферы в R3} (1-61)
называется конгруэнцией сфер с главной параметризацией, если соот-
ветствующее отображение s : R2 —> P(R4’ut) является сопряжённой
сетью, то есть, если
did^s е span(5,д\5,dzs) (1.62)
для любого его поднятия в R4.
Для конгруэнции в общем положении главная параметризация су-
ществует и единственна. Её классическое описание звучит так. Для
произвольной параметризации конгруэнции рассмотрим для сферы
S(u) две соседние S(u + dui), S(u + duz), полученные инфинитезималь-
ными сдвигами вдоль обеих координатных кривых; они пересекут ис-
ходную сферу по двум окружностям Ci(u) и Cz(u). Следовательно, в
проективной модели геометрии Мёбиуса в R3, основанной на простран-
стве Минковского R4,1 пентасферических координат, эти окружности
описываются, как L4,1 П (span(5, Э15))±, соотв. L4,1 П (span(5, с^))'1'; то
есть их точки представляются элементами х € L4,1 удовлетворяющими,
соответственно, уравнениям
Ci : (5,х) = 0, (diS,x) = 0,
Cz (5,£) = 0, (<Э25,£) = 0.
(1.63)
(1-64)
1.6. Постоянная отрицательная гауссова кривизна
Эти две окружности пересекаются в двух точках. Такие пары точек об-
разуют две огибающие поверхности конгруэнции, описываемые в мёби-
усово-геометрическом формализме как L4,1 П (span(s, dis, ^s))-*-. Ины-
ми словами, огибающие представляются элементами х Е L4,1 удовле-
творяющими
(s,£)=0, (dis,x) = 0, (d2S,x) = 0. (1.65)
Далее, главная параметризация характеризуется следующим усло-
вием: при инфинитезимальном смещении вдоль одной из координатных
линий, скажем, вдоль линии и%, четыре точки касания огибающей с
двумя бесконечно близкими сферами S(u), S(u + d.U2) лежат на окруж-
ности, а именно, на Ci(u). Действительно, дифференцируя первые два
уравнения (1.65) по U2 и используя третье, а также уравнение (1.62),
мы приходим к
(s,32i)=0, (Да, = О,
и сравнение с (1.63) доказывает утверждение.
Удобным выбором представителей з для гиперсфер S является ев-
клидов, в терминах центров с и радиусов г:
s : R2 —> Rfut п Ко = 1}, s = с + е0 + (|с|2 - г2)е0О. (1.66)
Условие того, что это даёт сопряжённую сеть в R4’1, приводит к сле-
дующему классическому утверждению.
Теорема 1.22. (Сферические конгруэнции с главной парамет-
ризацией; центры и радиусы) Отображение (1-61) является сфе-
рической конгруэнцией с главной параметризацией тогда и только
тогда, когда центры с : R2 —> R3 сфер S образуют сопряжённую сеть
в R3, а радиусы г : R2 —> R+ таковы, что функция |с|2 — г2 удовлетво-
ряет тому же уравнению (1.1), что и центры с.
1.6. Поверхности постоянной отрицательной
гауссовой кривизны
До сих пор мы обсуждали специальные классы координатных си-
стем в пространстве, или специальные параметризации общих поверх-
ностей. Теперь мы обратимся к обсуждению некоторых специальных
классов поверхностей. Отличительной чертой этих классов является
1. Классическая дифференциальная геометрия
существование преобразований с определёнными свойствами переста-
новочности. Одним из наиболее глубоких примеров проявления инте-
грируемости в дифференциальной геометрии являются К-поверхности.
Определение 1.23. (К-поверхность) Поверхность параметризо-
ванная асимптотическими линиями f : R2 —> R3 называется К-
поверхностъю (или псевдосферической поверхностью), если её гауссо-
ва кривизна К постоянна, то есть не зависит от точки и 6 R2.
Имеется эквивалентная характеризация, как чебышевских сетей,
то есть сетей с инфинитезимальными координатными полосами посто-
янной ширины.
Теорема 1.24. (К-поверхности — A-поверхности со свойством
Чебышёва) Поверхность f : R2 —> R3, параметризованная асимпто-
тическими линиями, является К-поверхностью если и только если
функции Pi = \dif\ (г = 1, 2) зависят только от щ: /3, = /3^(а<).
Один из подходов к аналитическому изучению К-поверхностей ос-
нован на том, что угол ф(и\,и2) между асимптотическими линиями
подчиняется уравнению д^д^ф = —КРх{и\)Р2(и2) sin ф. После перепара-
метризации асимптотических линий мы приходим к знаменитому урав-
нению синус-Гордона
<?i~ sin ф. (1-67)
Ещё одно описание основано на отображениях Гаусса.
Теорема 1.25. (Гауссово отображение К-поверхности являет-
ся сетью Мутара) Поле нормалей Лелёвра п : R2 —> R3 для К-
поверхности с К = — 1 принимает значения на сфере S2 С R3 и тем
самым совпадает с отображением Гаусса. Наоборот, любая сеть Му-
тара на единичной сфере S2 является гауссовым отображением и по-
лем нормалей Лелёвра для некоторой К-поверхности с К = — 1. Кроме
того, |(^n| = Pi (г = 1, 2), с теми же функциями Pt = PituP), что и в
Теореме 1.24.
Таким образом, К-поверхности с К = — 1 находятся во взаимно-
однозначном соответствии с сетями Мутара в S2. Функции п : R2 —>
S2 удовлетворяющие уравнению Мутара (1.39) иногда называются
лоренцевски-гармоническими отображениями в S2 (имеется в виду гар-
моничность относительно метрики Лоренца на плоскости R2 с коорди-
натами (ui,U2))- Важно отметить, что в уравнении Мутара (1.39) для
1.6. Постоянная отрицательная гауссова кривизна
лоренцевски-гармонического отображения п, коэффициент <712 полно-
стью определяется своими производными первого порядка:
<712 = (д1д2П, п) — -{дт.п, д2п). (1.68)
Поэтому, следующие данные определяют гауссово отображение п для
К-поверхности /:
(К) значения отображения Гаусса на координатных осях ®2, то
есть две гладкие кривые на S2 пересекающиеся в точке п(0).
К-поверхность f восстанавливается по п однозначно, с точностью до
переноса, по формулам (1.38).
Определение 1.26. (Преобразование Бэклунда) Преобразование
Вайнгартена f+ К-поверхности f : R2 —> R3 называется преобразо-
ванием Бэклунда, если расстояние \f+ — f\ постоянно, то есть не
зависит от и 6 R2.
Как и для общей пара Вайнгартена, поля нормалей Лелёвра (гаус-
совы отображения) п, п+ для бэклундовой пары К-поверхностей /, /+
могут быть выбраны так, чтобы выполнялось уравнение (1-40) и следо-
вательно п, п+ были связаны преобразованием Мутара (1.41), (1.42). Из
этих уравнений легко следует, что для пары Бэклунда величина {п, п+)
постоянна; итак, угол пересечения касательных плоскостей в соответ-
ствующих точек бэклундовой пары постоянен. Кроме того, из (1.40)
вытекает, что этот постоянный угол и постоянное расстояние между f
и /+ связаны соотношением
\f+ - /I2 = 1 - (п,п+)2.
Тот факт, что п,п+ G S2, позволяет выразить коэффициенты pi, Р2 в
уравнениях (1.41), (1.42) в терминах самих решений:
{дуп, п+) — (n,din+)
2 — 2(тг, тг+)
(тг, д2П+) — (д2П,п+)
2 + 2{п, п+)
(дтп, тг+)
1 — (тг, п+) ’
— (с^тг, п+)
1 + (тг, тг+)
(1.69)
(1-70)
После подстановки этих выражений (1.41), (1.42) превращаются в сов-
местную систему дифференциальных уравнений первого порядка для
тг+; поэтому следующее данное определяет преобразование Бэклунда
1. Классическая дифференциальная геометрия
f+ заданной К-поверхности f однозначно:
(В) точка n+(0) G S2.
Теорема 1.27. (Перестановочность преобразований Бэклунда)
Пусть дана К-поверхностъ f и два её преобразования Бэклунда f^1'
и Тогда существует единственная К-поверхностъ /(12\ явля-
ющаяся одновременно преобразованием Бэклунда для и для f^2\
Точки четвёртой поверхности /^12^ лежат на пересечении касатель-
ных плоскостей к и в соответствующих точках и одно-
значно определяются свойствами |/^12^ — f^\ = \f^ — f\ и —
—/(2)| = l/t1) — f\ или, в терминах отображений Гаусса, =
= (п,П<&) U (п(2\ л/12)) = (п, л/1)). Эквивалентно, отображение Гаус-
са п^12'! для /<12) характеризуется условием, что вектор п^12^ — п па-
раллелен — П®.
Мы увидим, что теория гладких К-поверхностей и их преобразо-
ваний Бэклунда унифицируется в теории дискретных К-поверхностей.
1.7. Изотермические поверхности
Теория изотермических поверхностей и их преобразований рас-
сматривалась классиками как одно из высших достижений локальной
дифференциальной геометрии.
Определение 1.28. (Изотермическая поверхность) Поверхность
f : R2 —> ИД", параметризованная линиями кривизны, называется
изотермической, если её первая фундаментальная форма конформна
при подходящей перепараметризации независимых переменных щ и->
<Pi(wi) (г — 1,2), то есть если \dif\2/\d2f\2 = ai(ui)102(^2) в каждой
точке ней2.
Другими словами, изотермические поверхности характеризуются
соотношениями span(<3i/, c^J) и
(й/,Я2/) = 0, l^/l2 = a1S2, &Л2 = а2з2, (1.71)
где s : R2 —> ИД коэффициент конформной метрики, а функции а, за-
висят лишь от щ (г — 1,2). Эквивалентно, эти условия представляются
как
Э152/ = (a2logs)3i/ + (<Эг logs)<32/, (9i/,52/)=0. (1.72)
1.7. Изотермические поверхности
Сравнение с (1.25) показывает, что изотермические поверхности есть
не что иное, как ортогональные кёнигсовы сети.
Теорема 1.29. (Дуальная по Кристоффелю изотермическая
поверхность) Пусть f : R2 —> RN изотермическая поверхность. То-
гда RN -значная один-форма df*, определённая равенствами
я „ dxf drf d2f d2f , .
= 7^712 = d2f =-“2777i2=----------------Г’ I1-73)
l^i/| s IM s
замкнута. Поверхность f* : R2 —> R^ определяемая (с точностью do
переноса) интегрированием этой один-формы, является изотермиче-
ской, с
(д1Г,д2Г)=0, \dif*\2 — ais~2, \d2f*\2 = a2s~2. (1.74)
Поверхность /* называется дуальной по Кристоффелю к поверхно-
сти f. Наоборот, если для поверхности параметризованной линиями
кривизны /* : R2 —> Rw существуют такие функции аг = aifuf), что
один-форма df*, определённая равенствами
M = d2f* = -a2^~, (1.75)
\dif\2 \d2f\2
замкнута, то поверхность является изотермической, с метрикой s,
определённой формулой (1.71).
Ещё один важный класс преобразований изотермических поверх-
ностей составляют преобразования Дарбу.
Определение 1.30. (Преобразование Дарбу) Преобразование Ри-
бокура f+ : R2 —> R^r заданной изотермической поверхности f : R2 —>
Rn называется преобразованием Дарбу, если первая фундаменталь-
ная форма образа конформна при той же самой параметризации неза-
висимых переменных щ •-> </?Дщ) (i = 1,2), при которой конформ-
на первая фундаментальная форма f, то есть, если в каждой точке
и 6 R2 выполняется равенство |3i/+ |2/|с,2./’+12 = Qi(ui)/а2{и2) с те-
ми же функциями ач, что и для f.
Введём соответствующую функцию s+ : R2 —> R+ для поверхности
f+ и обозначим г = s+ /з : R2 —> R+. Таким образом, |5г/+|2/|Д/|2 =
= (s+/s)2 = г2 при г — 1,2. Сравнивая это с определением (1.56) пре-
образований Рибокура, видим, что выполняется одна из двух возмож-
ностей:
(i) 74 = г2 = г, или (ii) Г1 = —г2 = —г.
1. Классическая дифференциальная геометрия
Можно показать, что в случае (i) поверхность f+ с необходимостью
является преобразованием Мёбиуса для /; этот тривиальный случай
мы не будем рассматривать. В случае (ii) возникают настоящие преоб-
разования Дарбу. Важным свойством преобразований Дарбу является
то, что величина
постоянна, то есть не зависит от и 6 К2. Она называется парамет-
ром преобразования Дарбу. Преобразование Дарбу f+ для заданной
изотермической поверхности f однозначно определяется следующими
данными:
(Di) точка /+(0);
(D2) вещественное число с, значение постоянной (1.76).
Как обычно, мы рассматриваем итерирование преобразования
Дарбу как добавление третьего (дискретного) измерения к двумерной
изотермической сети. Основным результатом о преобразованиях Дарбу
является следующая классическая теорема, которая гарантирует, что
можно добавлять несколько дискретных измерений, совместных друг
с другом.
Теорема 1.31. (Перестановочность преобразований Дарбу)
Пусть дана изотермическая поверхность f и два её преобразования
Дарбу /(1) и с параметрами щ и С2, соответственно. Тогда су-
ществует единственная изотермическая поверхность f^12\ являю-
щаяся одновременно преобразованием Дарбу для с параметром сг
и преобразованием Дарбу для с параметром щ. Поверхность
однозначно определяется условием, что соответствующие точки че-
тырёх изотермических поверхностей лежат на окружности и име-
ют постоянное двойное отношение
Замечание. Чтобы определить двойное отношение четырёх точек на
окружности a,b,c,d 6 RN, можно отождествить плоскость, в которой
они лежат, с комплексной плоскостью и затем положить
q(a, b, с, d) = (а — Ь)(Ь — с) Дс — d)(d — а)
(1-77)
1.7. Изотермические поверхности
В более инвариантной манере, можно использовать двойное отношение
в алгебре Клиффорда. Для этой цели, точки интерпретируются как
элементы алгебры Клиффорда С^(КЛГ), и для операций умножения и
взятия обратного в этой алгебре приведённая выше формула по преж-
нему работает, при этом порядок множителей является существенным.
Объединение теорий гладких изотермических поверхностей и их
преобразований Дарбу достигается в теории дискретных изотермиче-
ских поверхностей.
Мёбиусово-геометрическая характеризация изотермических
поверхностей и их преобразований Дарбу. Легко проверить, что
условия (1-71) инвариантны относительно евклидовых движений и рас-
тяжений в йлг, а также относительно инверсии f //(/,/)• Иными
словами, понятие изотермических поверхностей принадлежит мёбиусо-
вой дифференциальной геометрии. Это же относится и к их преобразо-
ваниям Дарбу. Следовательно, полезно описать эти понятия в рамках
формализма геометрии Мёбиуса. (При этом, однако, понятие дуальной
поверхности, или преобразования Кристоффеля, существенно опирает-
ся на евклидову структуру в объемлющем пространстве Кл'.)
Чтобы найти такое описание, прежде всего заметим (следуя Дар-
бу), что уравнения (1.72) эквивалентны равенству
diд2/ = (д2 log s)3i/ + (й log s)d2f
для отображения f : R2 —> поверхности f на квадрику С
1Л+1-1.
Теорема 1.32. (Изотермические поверхности = сети Мутара на
световом конусе) Поднятие s = s-1/ : R2 —> L7V+1,1 изотермической
поверхности f : R2 —> Rw на световой конус Rw+1,1 удовлетворяет
уравнению Мутара
did2s = Q12S, (1-78)
где gi2 = sellers-1). Это поднятие является мутаровским предста-
вителем f.
Наоборот, если задана сеть Мутара s : R2 —> ЛЛ+1,1 на световом
конусе, определим s : R2 —> R* и f : R2 —> Rw согласно
s = s 1(f + e0 + |/|2ето)
1. Классическая дифференциальная геометрия
(так что з~1 есть ео-компонента, a s-1 f есть RN-часть з в базисе
ei,..., е/у, ео, еж). Тогда f изотермическая поверхность и выполняет-
ся определение (1.71) с функциями аг = (Да, Да) зависящими лишь
ОТП U'i •
Отметим, что во второй части теоремы можно всегда считать, что
а : R2 —> R+, заменяя, при необходимости, з на—з.
Итак, мы видим, что изотермические поверхности находятся во
взаимно-однозначном соответствии с сетями Мутара в Lw+1,1, то есть
с лоренцевски-гармоническими ЛЛ+1,1-значными функциями.
Рассмотрим проблему выбора минимального набора данных, одно-
значно определяющих изотермическую поверхность (то есть мутарову
сеть на Lw+1,1). Руководствуясь аналогией со случаем К-поверхностей,
можно предположить, что такими данными будут две произвольные
кривые а,"®; на L/v+1,1. Однако, то обстоятельство, что теперь квадри-
кой, на которой живут сети Мутара, является световой конус LJV+1,1 —
= {(a, а) = 0}, а не сфера S2 = {(n,п) = 1}, приводит к тому, что мы
не можем получить выражение для t?i2 через первые производные от
а: вместо этого имеем
(Э^а, д^з) (д^зДД)
^12 (51S,91S) (<Э2а,<Э2а)
Это показывает, что координатные кривые не произвольны, а удо-
влетворяют некоторым дополнительным условиям. Мы оставляем во-
прос о правильной постановке начальной задачи для изотермической
поверхности открытым.
Пары Дарбу изотермических поверхностей характеризуются, в
терминах мутаровских представителей, следующим образом.
Теорема 1.33. (Преобразование Дарбу = преобразование Му-
тара на световом конусе) Поднятия s, s+ : R2 —> LJV+1,1 па-
ры Дарбу изотермических поверхностей f, f+ : R2 —> R^^ связаны
преобразованием Мутара, то есть существуют две такие функции
Pi,P2 : R2 —> R, что
di§+ + dis = pi(s+ — а), д2з+ — д2з = р2(а+ + a). (1.79)
Наоборот, для сети Мутара з на световом конусе Lw+1,1 любое пре-
образование Мутара з+ со значениями в L7V+1,1 служит поднятием
преобразования Дарбу f+ изотермической поверхности f.
1.8. Поверхности постоянной средней кривизны
Отметим, что величина (s,s+) постоянна (не зависит от и 6 R2) и
связана с параметром с преобразования Дарбу: (s.s+) = —с/2. Форму-
(з, diS+) — {dis, з+) (Дз, s+)
Рг 2(s,s+) (s, s+)
i = 1,2,
(1.80)
делают очевидным, что преобразование Мутара з+ полностью опре-
деляется заданием его значения з+(0) в одной точке. Действительно,
уравнения (1-79) с коэффициентами (1.80) образуют совместную си-
стему дифференциальных уравнений первого порядка для s+ : R2 —>
Ln+1,1. Конечно, данные (D12) закодированы в з+(0) непосредствен-
ным образом.
1.8. Поверхности постоянной средней кривизны
Определение 1.34. (Поверхность постоянной кривизны) По-
верхность f : R2 —> R3 называется поверхностью постоянной средней
(соотв. гауссовой) кривизны, если функция Н (соотв. функция К) по-
стоянна на поверхности. Поверхности, у которых средняя кривизна
тождественно равна нулю, называются минимальными.
Поверхности постоянной кривизны обладают замечательными гео-
метрическими свойствами.
Теорема 1.35. (Поверхности постоянной средней кривизны яв-
ляются изотермическими) Поверхности постоянной средней кри-
визны без омбилических точек являются изотермическими.
Теорема 1.36. (Минимальная поверхность является дуальной
по Кристоффелю для своего гауссова отображения) Минималь-
ная поверхность без омбилических точек f : R2 —> R3 является ду-
альной по Кристоффелю
f =
для своего гауссова отображения п : R2 —> S2.
Теорема 1.37. (Параллельные к поверхности постоянной сред-
ней кривизны) Пусть f : R2 —> R3 поверхность постоянной средней
кривизны Но / 0 и без омбилических точек, и пусть п : R2 —> S2 её
гауссово отображение. Тогда
1. Классическая дифференциальная геометрия
(i) любая параллельная поверхность ft = f + tn является линей-
ной поверхностью Вайнгартена, то есть её средняя и гауссова
кривизны Ht,Kt удовлетворяет линейному соотношению aHt +
+ /3Kt — 1 с постоянными коэффициентами а, /3;
(И) параллельная поверхность
Но
1
Но
является дуальной по Кристоффелю для f и имеет постоянную
среднюю кривизну Но:
(in) серединная поверхность
2Н0
~f+2Hon
имеет постоянную положительную гауссову кривизну Kq =
Результаты данной главы подытожены в следующей таблице:
кёнигсова сеть f в RN мутарова сеть у в R/v+1
A-поверхность f в R3 мутарова сеть п в R3
ортогональная сеть f в сопряжённая сеть f в С ~ Р01Л+1-1)
конгруэнция сфер с главной параметризацией S в R3 сопряжённая сеть з в Rout
К-поверхность / в R3 мутарова сеть п в S2
изотермическая поверхность f в Rw мутарова сеть s в L7V+1,1
минимальная поверхность f в R3 изотермическая сеть тг in S2
Все эти понятия и соотношения будут дискретизованы в основной ча-
сти книги. Фактически, список примеров, рассматриваемых в книге,
1.9. Библиографический комментарий
ещё длиннее. Мы дискретизуем и некоторые другие классические при-
меры, включая конгруэнции прямых и поверхности постоянной средней
кривизны. В контексте лиевой и плюккеровой геометрии изотропные
конгруэнции прямых интерпретируются как поверхности, параметри-
зованные, соответственно, линиями кривизны и асимптотическими ли-
ниями. Дискретная версия этой теории также развивается в основной
части книги.
1.9. Библиографический комментарий
Достижения классического периода дифференциальной геометрии
поверхностей и их преобразований задокументированы в трактатах
(Darboux 1910, 1914-27), (Bianchi 1923) и (Eisenhart 1909, 1923). Эти
книги покрывают огромный материал и являются неоценимыми ис-
точниками для детального изучения специальных геометрий, рассмот-
ренных в этой главе.
Раздел 1.1: Сопряжённые сети и их преобразования. Класси-
ческое описание многомерных сопряжённых сетей, данное в Разделе
1.1.2, можно найти в (Darboux 1914-27). Фундаментальные преобразо-
вания сопряжённых сетей, данные в Разделе 1.1.4, также как теоре-
ма о перестановочности для F-преобразований (первая часть Теоремы
1.3) восходят к (Eisenhart 1923) и (Jonas 1915). Первым упоминани-
ем шестигранника Эйзенхарта (вторая часть Теоремы 1.3), которое мы
смогли найти, является “расширенная теорема перестановочности” для
сопряжённых сетей в (Eisenhart 1923, §24).
В современной литературе по интегрируемым системам система
Дарбу (1.Ю) известна как уравнение n-волн; см. (Novikov-Manakov-
Pitaevskii-Zakharov 1984).
Раздел 1.2: Сети Кёнигса и Мутара и их преобразования. В
классике, кёнигсовы сети были известны как сети с равными инвари-
антами Лапласа. Их геометрия изучалась в (Koenigs (1891, 1892а,b),
(Darboux 1914-27), (Tzitzdica 1924) и др.. Исчерпывающее изучение се-
тей с зависимыми инвариантами Лапласа имеется в (Во1 1967).
Относительно классической формулировки преобразования Мута-
ра см. напр. (Moutard 1878), а его геометрическая интерпретация как
преобразования Кёнигса появилась в (Koenigs 1891). Двух- и трёхмер-
ные теоремы о перестановочности преобразований Кёнигса восходят к
(Eisenhart 1923). В терминах преобразований Мутара они были сфор-
мулированы в (Ganzha-Tsarev 1996) и (Nimmo-Schief 1997).
1. Классическая дифференциальная геометрия
Раздел 1.3: Асимптотические сети и их преобразования. Описа-
ние асимптотических сетей, W-конгруэнций и их преобразований Вайн-
гартена в терминах нормалей Лелёвра можно найти в классических
книгах (Darboux 1914-27), (Bianchi 1923) и (Eisenhart 1923) или, на-
пример, в (Lane 1942). Двумерная перестановочность преобразований
Вайнгартена (первая часть Теоремы 1.15) установлена (Bianchi 1923).
Относительно проективной интерпретации нормалей Лелёвра см.
(Konopelchenko-Pinkall 2000). Обзор интегрируемых систем в проек-
тивной дифференциальной геометрии, основанный на параметризации
асимптотическими линиями имеется в (Ferapontov 2000а).
Раздел 1.4: Ортогональные сети и их преобразования. Фунда-
ментальной монографией по ортогональным координатным системам
является (Darboux 1910). Подробное изучение сопряжённых сетей на
произвольной квадрике имеется в (Tzitzeica 1924). Теория поверхностей
в рамках мёбиусовой, лагерровой и лиевой геометрий была развита в
(Blaschke 1929). Теорема перестановочности для преобразований Рибо-
кура (первая часть Теоремы 1.20) принадлежит (Bianchi 1923). Пере-
становочность эйзенхартовского типа для этих преобразований (вторая
часть Теоремы 1.20) была установлена в (Ganzha-Tsarev 1996).
Ортогональные координатные системы изучались с точки зрения
теории интегрируемых систем в (Zakharov 1998). Алгебро-геометричес-
кие ортогональные координатные системы были построены в (Krichever
1997). Обзор интегрируемых систем в геометрии Ли имеется в (Ferapon-
tov 2000b). Спинорные реперы для ортогональных сетей были введены
в (Bobenko-Hertrich-Jeromin 2001). Книга (Hertrich-Jeromin 2003) яв-
ляется современным учебником по мёбиусовой теории поверхностей,
включая теорию ортогональных сетей. Ли-геометрическое описание
преобразований Рибокура дано в (Burstall-Hertrich-Jeromin 2006).
Раздел 1.5: Сферические конгруэнции в главной параметриза-
ции. Эта тема была достаточно популярна в классической литературе,
см. напр. (Darboux 1914-27), (Coolidge 1916), (Eisenhart 1923), но в со-
временной литературе представлена плохо.
Раздел 1.6: К-поверхности и их преобразования. Поверхности
постоянной отрицательной гауссовой кривизны (псевдосферические по-
верхности) играли важную роль в теории поверхностей и их преобразо-
ваний. Уравнение синус-Гордона является старейшим интегрируемым
уравнением. Оно восходит, по крайней мере, к (Bour 1862) и (Bonnet
1867). Преобразование Бэклунда было найдено в (Backlund 1884); тео-
1.9. Библиографический комментарий
рема перестановочности принадлежит (Bianchi 1892). Современное из-
ложение. обобщения и описание в терминах групп петель имеется в
(Rogers-Schief 2002) и (Terng-Uhlenbeck 2000).
Раздел 1.7: Изотермические поверхности и их преобразования.
Классический период теории изотермических поверхностей подытожен
в работах (Darboux 1914-27) и (Bianchi 1923). В частности, преобразо-
вания Дарбу для изотермических поверхностей, так же как характе-
ризация изотермических поверхностей как мутаровых сетей в свето-
вом конусе, данная в Теореме 1.32, принадлежат Дарбу. Перестановоч-
ность преобразований Дарбу установлена Бьянки. Свойство постоян-
ства двойного отношения в теореме перестановочности было доказано
в (Demoulin 1910). Мутаровы сети на общих квадриках изучались в
(Tzitzeica 1924).
Изотермические поверхности играли важную роль в развитии со-
временной интегрируемой дифференциальной геометрии. Связь клас-
сической теории изотермических поверхностей с теорией интегрируе-
мых систем была установлена в (Cieslinski-Goldstein-Sym 1995). Спи-
норное представление нулевой кривизны для изотермических поверх-
ностей было найдено в (Bobenko-Pinkall 1996b). Связь изотермических
поверхностей с так называемыми “curved flats” (см. (Ferus-Pedit 1996))
была установлена в (Burstall-Hertrich-Jeromin-Pedit-Pinkall 1997). Опи-
сание пар Бонне (пар изотермических поверхностей с одной и той
же средней кривизной) в терминах изотермических поверхностей да-
но в (Kamberov-Pedit-Pinkall 1998). Изотермические поверхности в
многомерных пространствах были изучены (Schief 2001) и (Burstall
2006). Конструкция преобразований Дарбу для изотермических по-
верхностей, использующая кватернионное уравнение Риккати, была
предложена в (Hertrich-Jeromin-Pedit 1997). Систематическое изложе-
ние теории изотермических поверхностей и их преобразований дано в
(Hertrich-Jeromin 2003).
Раздел 1.8: Поверхности постоянной средней кривизны. Теория
поверхностей постоянной положительной гауссовой кривизны и парал-
лельных им поверхностей (включая поверхности постоянной средней
кривизны) восходит к Бонне и может быть найдена, наир, в Дарбу
(Darboux 1914-27) и (Bianchi 1923).
Глава 2
Принципы дискретизации.
Многомерные сети
В этой главе мы приступаем к разработке дискретных аналогов
для классов сетей (параметризованных поверхностей и координатных
систем) и их преобразований, рассмотренных в Главе 1. Мы увидим,
что на дискретном уровне между сетями и их преобразованиями нет
существенной разницы, и их можно рассматривать просто как различ-
ные части многомерных дискретных сетей, характеризуемых некото-
рыми элементарными геометрическими свойствами. То, что эти свой-
ства возможно наложить на многомерную сеть, обычно основывается
на некоторой теореме инцидентности из элементарной геометрии, ко-
торая и является истинной причиной существования преобразований и
их замечательных свойств перестановочности. Так как существование
преобразований типа Бэклунда со свойствами перестановочности ассо-
циируется с интегрируемостью соответствующих дифференциальных
уравнений, то мы приходим к точке зрения на многомерную совмест-
ность их дискретизаций, как на основу самой интегрируемости.
Относительно обозначений: в этой главе, ещё не затрагивающей во-
просы аппроксимации, мы рассматриваем дискретные сети как функ-
ции на Zm. Операторы сдвига и разности определяются стандартным
образом:
(-Г»/)(и) = /(и + с»), (<J</)(u) = /(и + - f(u),
где Ci есть г-й координатный вектор Zm. Вместо Tif, TiTjf мы часто
пишем fi, fij, и т.д.. Обозначения для (дискретных) s-мерных коорди-
натных плоскостей те же, что в непрерывном случае:
®ii...is = {« 6 : щ = 0 при i 21,..., is}.
Элементарный s-мерный куб с 2s вершинами и + + ... +
61 € {0,1} будет обозначаться через
Ci1...is — ,а (и).
2.1. Дискретные сопряженные сети (Q-сети)
2.1. Дискретные сопряженные сети (Q-сети)
2.1.1. Определение и совместность Q-сетей
Напомним, что размерность объемлющего пространства Rw на-
ших сетей всегда предполагается большей или равной 3.
Определение 2.1. (Q-сеть) Отображение f : Zm —> Rw называется
т-мерной Q-сетъю (дискретной сопряжённой сетью) в Rw, если все
её элементарные четырёхугольники плоские, то есть, если для каж-
дого и G Zm и каждой пары 1 < i j < т четыре точки f, rtf, Tjf и
TiTjf компланарны:
6i6jf = cji6if + cij5jf, i^j, (2.1)
или, эквивалентно,
- f = (1 + Cji)6if + (1 + Ci^Sjf, i^j. (2.2)
Здесь удобно считать, что вещественные числа c,J; Cji, а также и
сами уравнения (2.1), приписаны к элементарным квадратам С^- в
параллельным координатной плоскости
Определение 2.1, как и его непрерывный аналог, Определение 1.1,
фактически относится к проективной геометрии, так как свойство ком-
планарности четырёх точек, очевидно, инвариантно относительно про-
ективных преобразований. Если объемлющее пространство RN интер-
претируется как аффинная часть RPW = P(RW+1), то произвольное
2. Принципы дискретизации. Многомерные сети
поднятие f = p(f, 1) G R774-1 Q-сети f в пространство однородных
координат !RjV+1 характеризуется следующим условием: для каждого
и G Zm и для каждой пары i j, четыре элемента f, Tif, Tjf и TiTjf яв-
ляются линейно зависимыми (их линейная оболочка задаёт трёхмерное
векторное подпространство):
TiTjf = ajiTif + aijTjf +/3ijf. (2.3)
Чтобы проанализировать существование и способы построения
дискретных сопряженных сетей, рассмотрим различные значения т.
т — 2 : Дискретные поверхности, параметризованные сопря-
жёнными линиями. Рассмотрим Q-поверхность f : Z2 —> RjV. До-
пустим, что заданы две её координатные линии, и Чтобы
продолжить поверхность, например, в квадрант Z+2, применяется ин-
дукция, один шаг которой состоит в выборе /12 в плоскости, проходя-
щей через f, fi и /2, при условии, что эти три точки уже известны (и
находятся в общем положении). Условие планарности выражается, как
+ (2.4)
Итак, на каждом шаге имеются два свободных вещественных парамет-
ра С21, С12, приписанных к элементарному квадрату Ci2(u) решётки
Z2. Таким образом, можно определить Q-поверхность f, задавая две её
координатные линии /(з,, /Гв2 и две вещественнозначные функции
С121С21 определённые на всех элементарных квадратах Z2.
Плоскости (/, fi, /12, /2) Q-поверхности могут быть приписаны эле-
ментарным четырёхугольникам в Z2, то есть вершинам дуальной ре-
шётки (Z2)*. Это, скорее, отвечает представлению о поверхности как
огибающей её касательных плоскостей, а не множестве точек. В случае
объемлющего пространства размерности N — 3, эта точка зрения на
Q-поверхности превращает их в пример следующего понятия.
Определение 2.2. (Q’-сеть) Отображение
Р : Z2 —> {плоскости в R3} (2.5)
называется Q*-сетью, если в каждом и G Z2 четыре плоскости
Р, Pi, Р2, Р12 имеют общую точку.
Ясно, что это определение проективно двойственно Определению
2.1. Следовательно, естественнее рассматривать Q*-ceTH в рамках про-
ективной геометрии в RP3, чем в R3. Каждая плоскость Р в RP3 описы-
вается как элемент р G (RP3)*, с некоторыми представителями р G R4 в
2.1. Дискретные сопряженные сети (Q-сети)
пространстве однородных координат. Условие, что Р, Р\, Р?, Рц имеют
общую точку эквивалентно условию, что линейная оболочка р, щ, р2,
Р12 является трёхмерным векторным подпространством. Иными сло-
вами, Q*-ceTb есть не что иное, как Q-сеть в дуальном пространстве
р : Z2 (RP3)*, а точки пересечений плоскостей Q*-ceTH образуют
Q-сеть в RP3.
Важно отметить, что комбинаторика Q-поверхности может при
этом быть сложнее, чем Z2. Определение 2.1 можно дословно распро-
странить и на отображения f : V(I>) —> RAr, где V(D) множество
вершин произвольного квад-графа D. Квад-графом называется клеточ-
ное разбиение поверхности, все грани которого четырёхугольные; см.
точное определение в Разделе 6.7. Таким образом, плоские четырёх-
угольники обобщённой Q-поверхности могут примыкать друг к другу
не обязательно регулярно, единственным условием является, что непу-
стое пересечение двух разных четырёхугольников равно либо общему
ребру, либо общей вершине.
т = 3 : основная 3D система. Допустим, что заданы три коорди-
натные поверхности трёхмерной Q-сети f, то есть /|’в12, УГ®23 и /|b13.
Конечно, каждая из них является Q-поверхностью. Для продолжения
сети в октант Z+3, применяется индукция, шаг которой состоит в опре-
делении /123, при условии что /, fi и fij известны. Покажем, что усло-
вие планарности определяет точку /123 однозначно.
Замечание. (Предположение общего положения) Мы всегда бу-
дем предполагать, в духе локальной дифференциальной геометрии, что
в наших утверждениях и рассуждениях все данные находятся в общем
положении, без явного напоминания об этом. В частности, в следую-
щей теореме молчаливо предполагается, что четыре точки /, fi порож-
дают трёхмерное пространство, и что никакие три точки fi,fij,fik не
коллинеарны.
Теорема 2.3. (Элементарный шестигранник Q-сети) Для дан-
ных семи точек f, fi и fij (1 < г < j < 3) в K‘V таких, что каж-
дый из трёх четырёхугольников (f, fi, fij, fj) плоский, определим три
плоскости TiUjk проходящие через тройки точек (fi, fa, фД) соответ-
ственно. Тогда эти три плоскости пересекаются в одной точке:
/123 = Т1П2з И Т2Щ3 П Т3П12 - (2.6)
Доказательство. Планарность четырёхугольников (/, fi, fij, fj) га-
рантирует, что все семь начальных точек f, fi и fij принадлежат трёх-
мерному аффинному пространству П123, проходящему через четыре
2. Принципы дискретизации. Многомерные сети
точки f,fi- Следовательно, плоскости лежат в этом трёхмерном
пространстве, и следовательно, в случае общего положения, пересека-
ются в точности в одной точке. □
Таким образом, элементарный шаг построения трёхмерной Q-сети
по её трём координатным поверхностям состоит в нахождении восьмой
вершины элементарного шестигранника по семи известным вершинам.
Это представлено символически на рис. 2.2. Именно эта картинка все-
гда подразумевается в рассуждениях о дискретных 3D системах с за-
висимыми переменными (полями) приписанными к регулярной куби-
ческой решётки.
Рис. 2.2. 3D система на элементарном кубе; поля в вершинах.
Аналитическое описание Q-сети ведёт к следующей картине. Ха-
рактеристическое свойство Q-сети закодировано в уравнении (2.1).
Шесть таких уравнений приписаны к шести граням элементарного ку-
ба в Z3, изображённого на рис. 2.2. Из этих уравнений следует, что
8i(8jSkf) может быть выражена как линейная комбинация 6gf (1
I 3). Приравнивая коэффициенты в выражениях для 8i(8j8kf)
для трёх циклических перестановок (i,j, fc) индексов (1,2,3), видим,
что уравнения для Cjk отделяются от уравнений для /:
8-i.Cjk = Т ('TfcCjQc^fc j к i. (2.7)
Точнее, уравнения (2.7) являются достаточными для совместности си-
стемы из шести уравнений (2.1), и также необходимыми, если три век-
тора 6ef (1 I 3) линейно независимы.
Рассмотрим числа на трёх гранях, смежных с f, как извест-
ные, а числа {riCjk} на трёх гранях, смежных с Дгз, как неизвестные.
2.1. Дискретные сопряженные сети (Q-сети)
Тогда уравнения (2.7) можно рассматривать как систему из шести (ли-
нейных) уравнений для определения шести неизвестных переменных
TiCjk в терминах известных с^- По геометрическим соображениям (су-
ществование и единственность Д23 в случае общего положения), эта
система, вообще говоря, допускает единственное решение. Возникаю-
щее отображение
{cjfc} {ncjk} (2-8)
бирационально. Явные формулы этого отображения слишком громозд-
ки для использования. Тем не менее, это отображение, представленное
схематически рис. 2.3, следует рассматривать как ещё одну фундамен-
тальную 3D систему, ассоциированную с Q-сетями.
Рис. 2.3. 3D система на элементарном кубе; поля на гранях.
т 4 : совместность. Обращаясь к случаю т 4, видим, что мы мо-
жем задать все двумерные координатные поверхности Q-сети, то есть
для всех 1 < i < j: < т. Действительно, понятно, что эти дан-
ные независимы, и по ним строится вся сеть. Для этого опять приме-
няется индукция. Шаг индукции по существу трёхмерен и состоит в
определении fak, при условии что f, fi и fa известны. Однако, этот
индуктивный процесс срабатывает, только если мы не наталкиваемся
на противоречия. Чтобы увидеть их возможный источник, рассмотрим
сначала случай т = 4 подробнее. По /, Д и Д^- (1 г < j 4) все
fak определяются однозначно. После этого имеется, в принципе, четы-
ре разных способа определить Д234 из четырёх 3D кубических граней,
смежных с этой точкой; см. рис. 2.4. Замечательным свойством Q-сетей
является то, что эти четыре значения для Д234 автоматически совпа-
дают. Мы называем это свойство 4О-совместностью.
2. Принципы дискретизации. Многомерные сети
Определение 2.4. (4О-совместность) 3D система называется 4D-
совместной, если её можно задать на всех трёхмерных гранях эле-
ментарного гиперкуба в Z4.
Рис. 2.4. 4В-совместность 3D систем.
Конечно, это определение приложимо не только к дискретным 3D
системам с полями в вершинах, как в геометрическом построении Q-
сетей, но и к другим типам систем, таким как отображение (2.8), кото-
рое является дискретной 3D системой с полями на гранях. Для таких
отображений {cjfc} {riCjk} 4О-совместность означает, что два значе-
ния Ti(TjCke) и Tj^TiCke) совпадают для каждой перестановки к,б)
индексов (1,2,3,4).
Теорема 2.5. (4В-совместность Q-сетей) 3D система описываю-
щая Q-cemu 40-совместна.
Доказательство. В приведённом выше построении одно из четырёх
рассматриваемых значений равно
/1234 = П72П34 А Т1Т3П24 П Т1Т4П23 ,
а три другие получаются циклической перестановкой индексов. Таким
образом, нужно показать, что шесть плоскостей пересекаются
в одной точке.
2.1. Дискретные сопряженные сети (Q-сети)
Сначала, предположим, что объемлющее пространство имеет
размерность N 4. Тогда, в общем положении, аффинное простран-
ство П1234, проходящее через пять точек /, fa (1 < i < 4) четырёхмерно.
Легко понять, что плоскость является пересечением двух трёх-
мерных подпространств и Действительно, подпростран-
ство проходящее через четыре точки fa, faj, fak, fae, содержит
также fajk, fijt, и fake- Следовательно, как Tjlljke, так и содер-
жат три точки faj, fajk и fajt определяющие плоскость TiTjlfae. Далее,
рассматриваемое пересечение можно альтернативно описать, как пере-
сечение четырёх трёхмерных подпространств Т1П234, T2II134, Т3П124 и
Т4П123 одного и того же четырёхмерного пространства П1234- Это пе-
ресечение состоит, в случае общего положения, в точности из одной
точки.
Из этого рассуждения следует также 4И-совместность отображе-
ния {с?*,} {T;Cjfc}. Это отображение, однако, не зависит от размерно-
сти N объемлющего пространства f. Из 4И-совместности отображения
{cjfc} {ricjk} следует, в свою очередь, 4И-совместность построения
Q-сети также в случае N = 3. □
Аналогично случаю т = 4 определяется m-мерная совместность
3D системы при т > 4. Замечательный и достаточно общий факт за-
ключается в том, что из 4-мерной совместности уже следует т-мерная
совместность для всех т > 4.
Теорема 2.6. (Из 4П-совместности следует совместность во
всех высших размерностях) Любая JD-совместная дискретная 3D
система является также т-мерно совместной для всех т > 4.
Доказательство. Для определённости, мы приведём доказательство
только для дискретных систем с полями в вершинах (случай полей
на двумерных гранях аналогичен). Доказательство проводится по ин-
дукции от m-мерной к (т+ 1)-мерной совместности, но, для простоты
обозначений, мы приведём детали только для случая т = 5; общий
случай ничем не отличается.
Начальные данные для 3D системы на 5D кубе 612345 с полями в
вершинах состоят из полей f, fa и faj для всех 1 i < j' 5. Их эти
данных сначала получаются десять полей fajk при
и затем пять полей fajke при l^i<j<k<£-^5 (то, что послед-
ние корректно определены, есть не что иное, как предположение о 4D-
совместности для 4D кубов Cijki)- Далее, имеется десять, возможно раз-
личных, значений для /12345, приходящих из десяти 3D кубов TiTjCktm-
2. Принципы дискретизации. Многомерные сети
Чтобы доказать, что эти десять значений совпадают, рассмотрим пять
4D кубов TiQjktrrf Например, для четырёхмерного куба и62345 предпо-
ложение о совместности гарантирует совпадение четырёх значений для
/12345, приходящих из четырёх 3D кубов
т’1'г2Сз45, т’1'гзС245, 74746235, Т1Т5^234-
Аналогично, для четырёхмерного куба 64345 4О-совместность ведёт
к заключению, что совпадают четыре значения для /12345 приходящие
из
1'1'^26345, 1’2136145, T2T4G135, Т2Т~5^134-
Заметим, что 3D куб тт726345, равный пересечению 7162345 и 7261345,
присутствует в обоих наборах, так что теперь мы имеем семь совпадаю-
щих значений для /12345- Применяя аналогичные выводы к остальным
4D кубам TiCjkim, приходим к требуемому результату. □
Теоремы 2.5, 2.6 означают, что Q-сети m-мерно совместны для лю-
бого т. На уровне формул имеем при т 4 системы (2.1), (2.7), где
теперь все индексы z, j, к меняются от 1 до т. Эта система состоит из
взаимосвязанных трёхмерных строительных блоков: для любой трой-
ки попарно различных индексов (г,/, fc) уравнения, в которые входят
только эти индексы, образуют замкнутую подсистему. Для всей систе-
мы m-мерная совместность означает, что все эти трёхмерные блоки
могут быть состыкованы без противоречий. Набор начальных данных,
определяющий решение системы (2.1), (2.7) состоит из
(QA) значений / на координатных осях Тц при 1 i т;
(QA) значений ctj, Cji на всех элементарные квадратах координат-
ных плоскостей 'Bij, при 1 г < j т.
2.1.2. Преобразования Q-сетей
Естественным обобщением Определения 1.2 является следующее
понятие.
Определение 2.7. (Дискретное фундаментальное преобразова-
ние) Говорят, что две т-мерные Q-сети f, f+ : Zm —> связа-
ны фундаментальным преобразованием (F-преобразованием), если для
каждого и 6 Zm и всех 1 < г < т четыре точки /, 7</, /+ и Tif+
компланарны. Сеть f+ называется F-преобразованием сети /.
2.1. Дискретные сопряженные сети (Q-сети)
Однако, это соотношение можно перефразировать следующим об-
разом: положим F(u,Q) = f(u) и F(u, 1) = /+(и); тогда F : Т?" х
{0,1} —> Ж77 образует (два слоя) М-мерной Q-сети, где М = т + 1.
Таким образом, в дискретном случае нет никакой разницы между со-
пряжёнными сетями и их F-преобразованиями. Определение 2.7 опи-
сывается уравнением
<V+ = W + W+-/), (2.9)
где коэффициенты а^, bi есть не что иное как щ — 1 + сд/г, bi — см.
Эти коэффициенты естественно приписываются к элементарным квад-
ратам Zm х {0,1} параллельным координатной плоскости Ъм. Удобно
также представлять, что они приписаны к рёбрам Zm параллельным
В, (тем, к которым примыкают соответствующие “вертикальные” квад-
раты). Уравнения системы (2.7) с одним из индексов равным М дают:
didj — (Tj7)2)(Cj 1) 4“ (т^ di TiCLj^Cij у
5ibj
aictj
cijbi + Cjibi ~ (jibjjbi,
(Tjai')cij + (Tjbi)(aj — 1).
(2.10)
(2-11)
(2-12)
Чтобы задать F-образ f + для данной m-мерной Q-сети f, нужны
следующие данные:
(F^) значение /+(0);
(F^) значения a,, bi на всех рёбрах соответствующих координатных
осей при 1 г т.
Можно переформулировать (т + 2)-, соответственно, (т + 3)-
мерную совместность Q-сетей как следующее свойство перестановоч-
ности дискретных F-преобразований.
Теорема 2.8. (Перестановочность дискретных F-преобразова-
ний)
1) Пусть дана т-мерная Q-сеть f и два её дискретных F-
преобразования и f^. Тогда существует двухпараметрическое се-
мейство Q-сетей являющихся дискретными F-преобразованиями
обеих и Соответствующие точки четырёх Q-сетей f,
и компланарны.
2) Пусть дана т-мерная Q-сеть f. Пусть даны три её дискрет-
ных F-преобразования f^, и и три такие Q-сети f^23^ и
2. Принципы дискретизации. Многомерные сети
f(13\ что является одновременно дискретным F-образом для
и JW. Тогда, в случае общего положения, существует единственная
Q-сетъ /(123) являющаяся дискретным F-преобразованием /(12\
и Сеть Д123> однозначно определяется условием, что для каж-
дой перестановки (ijk) индексов (123) соответствующие точки f^,
и у(123) компланарны.
Доказательство. В первой части теоремы, определим такую (т + 2)-
мерную Q-сеть F : IF1 х {О, I}2 —> что
F(u,0,0) = f(u), F(u,l,0) = /(1)(u), F(u, 0,1) = f{2\u).
Единственное дополнительное начальное данное, которое требуется
для построения F, это значение F(u, 1,1) = Д12)(и) в одной точке
и е Zm, например в и = 0. Точка /^12^(0) 6 Ж77 может быть вы-
брана произвольно в плоскости, проходящей через точки /(0),
/(2)(0), что ведёт к двухпараметрическому семейству Q-сетей /^12\ Ле-
вая часть рис. 2.5 иллюстрирует продолжение /^12^ по рёбрам Zm, что,
конечно, описывается 3D системой для построения Q-сети; совмест-
ность этой процедуры для различных координатных направлений га-
рантируется многомерной совместностью Q-сетей.
Аналогично, вторая часть теоремы связана фактически с (т + 3)-
мерной Q-сетыо F : Zm х {О, I}3 —> Ж77, такой что F(u, 0,0,0) — f(u), и
сдвиг F в (т + г)-м координатном направлении обозначается верхним
индексом i у f, так что, например, F(u, 1,1,1) = /(123)(u), Для каж-
дого и G Zm точка /(123) однозначно определяется остальными семью
точками /, f^\ и что иллюстрируется правой частью рис. 2.5. □
2.1.3. Альтернативное аналитическое описание Q-сетей
В полной аналогии с гладким случаем, можно дать (нелокальное)
описание дискретных сопряженных сетей, при помощи в чём-то более
простых уравнений. Следует отметить, что это описание имеет аффин-
ную (а не проективную) природу.
Рассмотрим вопрос о существовании такой нормировки векторов
Wi параллельных рёбрам Q-сети f, что
SiWj = (2-13)
с некоторыми вещественными коэффициентами -yji, называемыми дис-
кретными коэффициентами вращения Q-сети. Ясно, что, вообще гово-
2.1. Дискретные сопряженные сети (Q-сети)
Рис. 2.5. К теореме перестановочности для
дискретных F-преобразований.
ря, 3{Wj является линейной комбинацией Wi и Wj, поэтому (2.13) выра-
жает требование, что в ней отсутствует Wj-компонента. Геометрически,
конец вектора TiWj лежит на пересечении прямой (.frfij) с прямой, про-
ходящей через конец вектора Wj параллельно вектору см. рис. 2.6.
Рис. 2.6. Геометрическое построение векторов TiWj.
Это построение корректно определено также в многомерной ситу-
ации. Чтобы показать это, нужно доказать, что TifrjWk) = Tj^Wk)- Но
концы обоих векторов могут быть определены как пересечение прямой
(fijfijk) с плоскостью, проходящей через конец вектора Wk параллель-
но плоскости Пу грани (/, fi, fij, fj ')', см. рис. 2.7.
Обращаясь к аналитическому описанию, введём вещественнознач-
2. Принципы дискретизации. Многомерные сети
Рис. 2.7. Векторы Wk корректно определены в элементарном
шестиграннике Q-сети.
ные величины дг. приписанные к рёбрам, параллельным г-й координат-
ной оси, согласно
w^g^Sif. (2.14)
Подставляя (2.14) в (2.1), видим, что требование (2.13) эквивалентно
Ti9j = (1 + cij)dj $i9j = cij9j > * 7^ Ji (2-15)
и что дискретные коэффициенты вращения задаются согласно
_ 9г _ 9г
~ Tigj - g-j 1 + Cij
(2.16)
Разностные уравнения (2.15) явно определяют эволюцию функций д^
на рёбрах в любом элементарном четырёхугольнике Q-сети. Совмест-
ность этих разностных уравнений в любом элементарном шестигран-
нике гарантируется совместностью построения векторов щ. Конечно,
согласованность уравнений (2.15) можно проверить и аналитически;
см. Упражнение 2.5. Таким образом, нормировочные коэффициенты дг
могут быть определены заданием их значений на всех рёбрах соответ-
ствующих координатных осей В;.
2.1. Дискретные сопряженные сети (Q-сети)
Окончательно, приходим к следующему альтернативному описа-
нию Q-сети:
&if = 9iWi,
SiWj = 7jiWi, i/j,
Si9j =
(2-17)
(2.18)
(2-19)
Коэффициенты вращения удовлетворяют замкнутой системе разност-
ных уравнений {дискретная система Дарбу), которая заменяет систе-
му (2.7) и может быть получена как условие совместности линейных
разностных уравнений (2.18):
^i'Ykj = {'Fj'‘Yki)'‘Yij • i 7^ j 7^ 7^ 2. (2.20)
Эта система значительно проще (2.7), поскольку состоит из трёх от-
дельных систем, каждая относительно двух неизвестных. Уравнения
(2.19) и (2.20) неявны, но их нетрудно разрешить относительно сдви-
нутых переменных, что приводит к
Ti9j
9j "I” 9iYij
1 — 'lij'lji
TzYkj
7kj “b 'Yki'Yij
1 —
(2-21)
(2.22)
г
Последняя формула определяет явное рациональное 3D отображение
{7fcj} Подобно отображению {с^} {тгс^} для локаль-
ных плакетных коэффициентов, отображение (2.22) 4В-совместно, но
теперь проверка этого сводится к несложному вычислению, которое
можно провести вручную (см. Упражнение 2.6).
2.1.4. Непрерывный предел
Заметим, что уравнения (2.1), (2.7) совершенно аналогичны урав-
нениям (1.1), (1-2), характеризующим гладкие сопряжённые сети. Мы
продемонстрируем в Главе 5, что статус этого сходства может быть
повышен до математической теоремы об аппроксимации гладких со-
пряжённых сетей дискретными. Точнее, будет показано, как выбирать
начальные данные для дискретной системы (с малым шагом решётки
е), чтобы она аппроксимировала заданную m-мерную гладкую сопря-
жённую сеть при е —> 0.
2. Принципы дискретизации. Многомерные сети
Точно так же, уравнения (2.9)-(2.12) аналогичны (1.11)—(1.14). Со-
ответственно, начальные данные дискретной системы ст + 1 независи-
мой переменной могут быть выбраны так, что в пределе, оставляющем
одно направление дискретным, возникают гладкая сопряжённая сеть и
её F-преобразование.
Исходя из дискретных систем ст + 2ит + 3 независимы-
ми переменными, получаются доказательства свойств перестановочно-
сти F-преобразований, сформулированных в Теореме 1.3, при сохра-
нении дискретными, соответственно, последних двух и трёх направле-
ний. Таким образом, перестановочность F-преобразований, являющая-
ся нетривиальной теоремой дифференциальной геометрии, становится,
в сочетании с отмеченным выше результатом о сходимости, очевид-
ным следствием многомерной совместности дискретных сопряжённых
сетей.
2.2. Дискретные конгруэнции прямых
С Q-сетями тесно связаны дискретные конгруэнции прямых. Мы
с самого начала будем рассматривать их в проективно-геометрической
постановке. Пусть £N пространство прямых в ЖРЛ?; его можно отож-
дествить с грассманианом Gr(.A + 1,2) двумерных векторных подпро-
странств в Ж77-1"1.
Определение 2.9. (Дискретная конгруэнция прямых) Отобра-
жение I : Zm —> Ln называется т-мерной дискретной конгруэнцией
прямых в ЖРЛ? (N 3), если любые две соседние прямые £, (для всех
и 6 Zm и всех 1 i т) пересекаются (компланарны).
Например, прямые № = (ffi), соединяющие соседние точки
f = f(u) и fi = f(u + ej произвольной Q-сети f : —> ЖР77, об-
разуют дискретную конгруэнцию прямых. Точно так же, дискретную
конгруэнцию образуют прямые I = (//+), соединяющие соответству-
ющие точки / = /(и) и /+ = /+(и) двух Q-сетей f,f+ : Zm —> ЖР7*7
связанных F-преобразованием.
Будем говорить, что двумерная дискретная конгруэнция прямых
находится в общем положении, если любые две прямые, соседние по
диагонали, (то есть и12, а также I и +12) не пересекаются. Каждая из
этих двух пар прямых порождает трёхмерное пространство V12, в кото-
ром лежат все четыре прямые I, t\, и £12, см. рис. 2.8. Аналогично,
m-мерная дискретная конгруэнция прямых находится в общем поло-
жении, если для каждой вершины m-мерного элементарного куба т
2.2. Дискретные конгруэнции прямых
Рис. 2.8. Четыре прямые дискретной конгруэнции прямых в
общем положении.
прямых, отвечающих всем его т соседним вершинам, порождают про-
странство Vi2...m максимально возможной размерности т + 1. Это про-
странство содержит все прямые, приписанные вершинам т-мерного
куба. Мы всегда будем считать, что рассматриваемые дискретные кон-
груэнции прямых находятся в общем положении.
Наше построение конгруэнции прямых аналогично построению Q-
сетей. Начнём со случая т = 2. Трём известным прямым £, £i, £2 кон-
груэнции отвечает двухпараметрическое семейство прямых, претенду-
ющих на роль четвёртой прямой они проходят через любую пару
точек на и ^2- Таким образом, если заданы две последовательности
прямых TZx {0} —> £jN и £ : {0} х Z —> ZN с общей прямой -£(0,0), в
которых любые две соседние прямые компланарны, то их можно про-
должить до двумерной конгруэнции прямых I : Z2 —> £N бесконечным
числом способов: на каждом шаге индуктивной процедуры имеется сво-
бода выбора прямой из двухпараметрического семейства.
Следующая теорема показывает, что конгруэнции прямых общего
положения описываются дискретной 3D системой:
Теорема 2.10. (Дискретные конгруэнции прямых описываются
3D системой) Пусть даны семь прямых £, £i, £ц G LN (1 < i < j< 3)
удовлетворяющих условиям конгруэнции прямых, тогда, в случае об-
2. Принципы дискретизации. Многомерные сети
щего положения, существует единственная прямая Д%з пересекаю-
щая все три прямые (Д.
Доказательство. Все семь прямых, а следовательно также трёхмер-
ные пространства TiVjk = span(^j, ^^), лежат в V123- Прямая, пересе-
кающая три прямые (Д должна лежать в пересечении этих трёх трёх-
мерных пространств. Но пересечение трёх трёхмерных пространств в
V123 является прямой, в случае общего положения:
^123 = T1V23 А 72V13 А ТзУ12- (2.23)
Нетрудно понять, что эта прямая действительно пересекает все три 1Д.
Например, пУгз AT2V13 = span(^i2, ^13) A span(^i2, ^23) есть плоскость,
содержащая ^12; следовательно, её пересечение с T3V12 (прямая ^123)
пересекает ^2- □
Аналогичным рассуждением (см. Упражнение 2.10) доказывается:
Теорема 2.11. (Дискретные конгруэнции прямых 4В-совмест-
ны) 3D система описывающая дискретные конгруэнции прямых об-
щего положения JfD-совместна.
Как и в случае Q-сетей, из этой теоремы следует существование
преобразований дискретных конгруэнций прямых с замечательными
свойствами перестановочности.
Определение 2.12. (F-преобразование конгруэнции прямых)
Две т-мерных конгруэнции прямых 1Д+ : Zm —> £N называются
связанными F-преобразованием, если для каждого и G Zm соответ-
ствующие прямые I = £(ы) и ИД = ^+(и) пересекаются, то есть, если
отображение L : Zm х {0,1} —> £N, определённое как L(u, 0) — Ди) и
L(u, 1) = ^+(u), является двойным слоем в (т+1)-мерной конгруэнции
прямых.
Из Теоремы 2.10 следует, что F-образ (Д заданной конгруэнции
прямых И. однозначно определён, как только заданы его прямые вдоль
координатных осей.
Согласно Определению 2.9, любые две соседние прямые И = Ди}
н Д = Ди + ej из конгруэнции пересекаются в точности в одной точ-
ке F = I А Д 6 RF^, которая комбинаторно ассоциируется с ребром
{и,и + сг) решётки Zm: F = F(u,u + ej. Однако, иногда удобнее ис-
пользовать для этой точки обозначение F(u,u + щ) = F^\u), тем са-
мым ассоциируя её с вершиной и решётки (и, конечно, с координатным
направлением г).
2.2. Дискретные конгруэнции прямых
Определение 2.13. (Фокальная сеть) Для дискретной конгруэн-
ции прямых € : Zm —> &N, отображение : Zm —> RP;V, определяе-
мое как F^(u) = ^(u) + e^), называется её i-й фокальной сетью.
Это понятие иллюстрируется рис. 2.8.
Теорема 2.14. (Фокальные сети являются Q-сетями) Все фо-
кальные сети F^ : Zm -> RPW, 1 k т невырожденной дискрет-
ной конгруэнции прямых I: Zm —> £>N являются Q-сетями.
Доказательство. Доказательство состоит из двух шагов.
1. Сначала покажем, что в к-й фокальной сети F^ все элементар-
ные четырёхугольники (F^fc\ F-k\ F^\ F^) плоские. Это верно для
любой конгруэнции прямых. Действительно, обе точки F^ и F^':> ле-
жат на прямой £к, а обе точки F^ и F^ лежат на прямой £ik. Следо-
вательно, все четыре точки лежат в плоскости, натянутой на эти две
прямые £к и £ik, пересекающиеся по определению конгруэнции прямых.
2. Далее, покажем, что в /с-й фокальной сети F^ плоскими яв-
ляются все элементарные четырёхугольники (F^ft\ F^k\ F^, F^), где
оба индекса г j отличны от к. Здесь существенно используется пред-
положение о том, что конгруэнция прямых £ находится в общем поло-
жении. Все четыре рассматриваемые точки лежат в каждом из трёх-
мерных пространств
Vij = span(^i,^,4>) и TkVij = spa.n(£k,£ik,£jk,£ijk)
(см. рис. 2.9). Оба 3-мерных пространства лежат в 4-мерном Vijk =
— span(^, £i, £j, £k), так что в случае общего положения их пересечением
является плоскость. □
Следствие 2.15. (Фокальная сеть F-преобразования конгруэн-
ции прямых) Для двух общих конгруэнций прямых £,£+ : Zm —> ,
связанных F-преобразованием, точки пересечений F — £п£+ образуют
Q-сетъ F RPW.
Другой аспект тесной связи между Q-сетями и конгруэнциями пря-
мых описан в следующей теореме.
Теорема 2.16. (Продолжение Q-сети до конгруэнции прямых)
Для заданной Q-сети f : Zm —> RN существуют такие дискретные
конгруэнции прямых I : Z™ —> , что f(u) £ £(и) для всех и £ Z’n.
Такая конгруэнция однозначно определяется заданием прямых £!-в,-
проходящих через точки f\'Bi вдоль координатных осей.
2. Принципы дискретизации. Многомерные сети
Рис. 2.9. Элементарный (^-четырёхугольник к-тл
фокальной сети.
Доказательство. Предъявим построение для одного элементарного
3D куба; остальная часть утверждения следует из 4В-совместности.
Начнём с двумерной грани. Для двух заданных скрещивающихся
прямых Д2 и точки /12 в трёхмерном пространстве натянутом на
эти прямые, существует единственная прямая Л2 проходящая через Д2
и пересекающая К и ^2 (эта прямая является пересечением плоскостей,
проходящих через Д2, и через /12, ^2).
Если три прямые ^i2, -£13, ^23 построены, то Теорема 2.10 достав-
ляет нам единственную прямую ^12з по формуле (2.23). Точка /123 яв-
ляется пересечением трёх плоскостей (2.6). Инцидентность /123 £ Л23
следует из тЩ-ц, С □
Q-сети с конгруэнциями прямых, введёнными в Теореме 2.16 иг-
рают важную роль в теории Q-поверхностей; см. Раздел 4.5. Они тес-
но связаны с дискретными преобразованиями Комбескюра. Следую-
щее определение служит непосредственной дискретизацией Определе-
ния 1.4.
Определение 2.17. (Дискретное преобразование Комбескюра)
Две т-мерные Q-сети f, f+ : Zm —> Rw связаны преобразованием Ком-
бескюра, если их ребра 5if и 5if+ параллельны при всех и е 171 и всех
2.3. Дискретные сети Кёнигса и Мутара
1 < г < т. Сеть f+ называется параллельной f, или преобразованием
Комбескюра f.
Следующий результат доказывается непосредственно.
Теорема 2.18. (Преобразования Комбескюра и конгруэнции
прямых) Пусть дана Q-сетъ f : —> RN с дискретной конгру-
энцией прямых t. : TH1 —> £N, то есть f(u) G ^(u) для всех и 6 Z™.
Тогда существует однопараметрическое семейство параллельных Q-
сетей ft : Zm —> R^, для которых ft (и) е ^(u). Каждая такая сеть
однозначно определяется одной своей вершиной ft(uo) 6 ^(uq). Наобо-
рот, Q-cemuf,f+, связанные преобразованием Комбескюра, определя-
ют конгруэнцию прямых согласно Ди) — (f(u)f+ (и)) при всех и Е Zm.
2.3. Дискретные сети Кёнигса и Мутара
2.3.1. Определение дуальных четырёхугольников
Определение 2.19. (Дуальные четырёхугольники) Два плоских
четырёхугольника (Л, В, С, D) и (А*, В*, С*, D*) называются дуаль-
ными, если их соответствующие стороны параллельны:
(А*В*) || (АВ), (В*С*) || (ВС), (C*D*) || (CD), (D*A*) || (DA),
(2.24)
а диагонали параллельны дополнительным диагоналям:
(А*С*) || (BD), (B*D*) || (ДС). (2.25)
Рис. 2.10. Дуальные четырёхугольники.
2. Принципы дискретизации. Многомерные сети
Лемма 2.20. (Существование и единственность дуального че-
тырёхугольника) Для любого плоского четырёхугольника (Л, В, С, D),
дуальный существует и единствен с точностью до растяжения и
параллельного переноса.
Доказательство. Единственность формы дуального четырёхугольни-
ка может быть доказана следующим образом. Обозначим точку пересе-
чения диагоналей (Л, В, С, D) через М = (АС) Г) (ВВ). Произвольную
точку М* в плоскости назначим точкой пересечения диагоналей ду-
ального четырёхугольника. Проведём две прямые С и ^2, проходящие
через М* параллельно (АС) и (ВВ), соответственно, и выберем произ-
вольную точку А* на ^2- Тогда всё остальное построение однозначно:
проведём прямую проходящую через 4* параллельно (АВ); её точка
пересечения с С будет В*; проведём прямую через В* параллельно
(ВС); её точка пересечения с £2 будет С*; проведём прямую через С*
параллельно (СВ); её точка пересечения с будет D*. Остаётся уви-
деть, что это построение замыкается, а именно, что прямая проходящая
через D* параллельно (ВЛ) пересекает £2 в Л*. Ясно, что это свойство
не зависит от начального выбора 4* на £2, поскольку этот выбор вли-
яет лишь на масштаб дуальной фигуры. Следовательно, достаточно
показать свойство замкнутости для некоторого выбора А*, или, иными
словами, доказать существование одного дуального четырёхугольника.
Это можно сделать следующим образом.
Обозначим через е± и ег некоторые направляющие векторы диаго-
налей, и введём коэффициенты а,... ,5 согласно
мХ = aei, мХ = /Зе2, М& = 761, М15 = 5в2, (2.26)
так что
4B = /3e2-aei, ВС = 76! -/Зе2,
сХ) = 5в2 — 761, dX = aei — <5ег-
Построим четырёхугольник (А*. В*, С*, В*), полагая
М*А1 = , М*В1 = , М*С1 = М*В* = . (2.28)
р I о
По построению, его диагонали параллельны дополнительным диаго-
налям исходного четырёхугольника. Соответствующие стороны также
параллельны:
2.3. Дискретные сети Кёнигса и Мутара
р “ ар
= -Ь2 + |е1 =
' Р Р7
OD1 = -1е1 + 1е2 = ±ёД
0 7 7д
= -±e2 + ±ei = ±D%,
и д да
то есть, четырёхугольник (Л*, B*,C*,D*) дуален (Л, В, C.D'). □
Заметим, что величины а,..., 5 в (2.26) не вполне определены гео-
метрией четырёхугольника (А, В, С, D), так как зависят от выбора век-
торов Ci, е2. Вполне определёнными являются их отношения, которые
можно задавать также, как отношения направленных длин соответ-
ствующих отрезков диагоналей, например, 7 : а = 1(М,С) : ЦМ, А) и
6 : /3 = 1{М, D) : 1[М,В). Естественно ассоциировать эти отношения с
направленными диагоналями:
Определение 2.21. (Отношение отрезков диагоналей) Для дан-
ного четырёхугольника (А, В, С, D), с точкой пересечения диагоналей
М = {АС) П (BD), положим
Смена направления диагонали отвечает обращению ассоциированной
величины q.
Заметим, что
(А, В, С, D) выпуклый О q(A&) < 0 и q(B15) < 0. (2.30)
Это иллюстрируется четырёхугольниками, изображёнными на рис.
2.11: выпуклым с о(А(3) < 0 и q{Bj5) < 0; вложенным невыпуклым
с q(AC) > 0 и q(BD) < 0; и невложенным с q(AC) > 0 и q(BD) > 0.
2. Принципы дискретизации. Многомерные сети
Рис. 2.11. Различные формы плоских четырёхугольников.
2.3.2. Определение дискретных кёнигсовых сетей
Определение 2.22. (Дискретная кёнигсова сеть) Q-сетъ f :
Zm называется дискретной кёнигсовой сетью, если для неё
существует Q-сетъ f* : Zm —> RJV, называемая дуальной по Кри-
стоффелю, в которой любой элементарный четырёхугольник дуален
соответствующему четырёхугольнику сети f:
51ГН1/, 52f*\\52f,
/1*2 - Г II fl - /2, /1* - /2* || /12 - /• (2.31)
Это определение можно воспринимать как дискретизацию условия
(1-27).
Чтобы понять, какие ограничения на Q-сеть накладывает это опре-
деление, начнём со следующего построения. Каждая решётка Zm дву-
дольна: её вершины можно раскрасить в чёрный и белый цвет так, что
каждое ребро будет соединять чёрную и белую вершины (например,
можно объявить чёрными все вершины и = (ui,..., ит), у которых
значение |u| = щ + ... + ит чётно, и белыми, у которых значение |и|
нечётно). У каждого элементарного четырёхугольника имеется чёрная
диагональ (соединяющая две чёрные вершины) и белая. Можно ввести
чёрный граф Z’”en с множеством вершин, состоящим из чёрных вершин
Zm и множеством рёбер, состоящим из чёрных диагоналей всех эле-
ментарных четырёхугольников в Zm, и аналогичный белый граф Z^d.
Геометрия элементарных четырёхугольников Q-сети f : 7Lm —> ин-
2.3. Дискретные сети Кёнигса и Мутара
дуцирует, согласно Определению 2.21, величины q (отношения направ-
ленных длин отрезков диагоналей) на всех направленных диагоналях,
и белых, и чёрных.
Определение 2.23. (Дискретная один-форма) Пусть G граф с
множеством вершин V и множеством ориентированных рёбер Е.
Пусть W векторное пространство.
(i) Функция р : Е —> W называется дискретной (аддитивной)
один-формой на G, если р(—е) = — р(е) для каждого направленного
ребра е € Е. Она называется точной, если сумма значений р вдоль
каждого цикла по ориентированным рёбрам обращается в ноль.
(ii) Функция q : Е —> R* называется мультипликативной один-
формой на G, если q(—e) = l/q(e) для каждого направленного ребра
е 6 Е. Она называется точной, если произведение значений q вдоль
каждого цикла по ориентированным рёбрам равно единице.
Замечание. В этом книге рассматривается только случай тривиаль-
ной топологии, когда каждый цикл гомологичен сумме простых цик-
лов, то есть циклов по нескольким соседним вершинам. Стандартным
примером служит Z™, где локальными циклами являются элементар-
ные квадраты. Другой пример задаётся клеточным разбиением диска,
где локальными циклами являются границы ячеек. В этих случаях
условие точности достаточно проверить лишь для локальных циклов.
Случай нетривиальной топологии требует дополнительных рассмотре-
ний. Например, для графов на поверхности с нетривиальной топологи-
ей следует переходить к универсальной накрывающей поверхности.
Теорема 2.24. (Интегрирование точной формы)
(i) Если р : Е —> W точная дискретная один-форма на графе G с
множеством вершин V и множеством ориентированных рёбер Е, то
существует функция f : V —> W, такая что для любого е = (х,у) 6 Е
выполняется р(е) = f(y) — f(x). Такая функция f определяется с точ-
ностью до аддитивной постоянной, которая может быть зафикси-
рована заданием f произвольно в одной вершине.
(ii) Если q : Е —> R* точная мультипликативная один-форма
на G, то существует функция и : V —> R*, такая что для любого
е = (х,у) Е Е выполняется q(e) = р(у)/р(ж). Такая функция и опре-
деляется с точностью до мультипликативной постоянной, которая
может быть зафиксирована заданием и произвольно в одной вершине.
2. Принципы дискретизации. Многомерные сети
Рис. 2.12. Четыре четырёхугольника вокруг вершины
двумерной сети.
В терминах Определения 2.23, можно сказать, что любая Q-сеть
порождает мультипликативную один-форму q, точнее, две мультипли-
кативные один-формы, на чёрном и белом графах в Z™.
Теорема 2.25. (Алгебраическая характеризация дискретных
кёнигсовых сетей) Q-сеть f : Zm —> является кёнигсовой тогда
и только тогда, когда мультипликативная один-форма q точна, как
на Z™en, так и на Z^d.
Доказательство. По данной Q-сети можно попытаться построить ду-
альную, применяя Лемму 2.20, стартуя с произвольного четырёхуголь-
ника. Легко понять, что при продолжении этого построения на всю
сеть могут возникнуть препятствия, при обходе вдоль замкнутой цепи
из элементарных четырёхугольников, в которой любые два последова-
тельных четырёхугольника имеют общее ребро.
т = 2. Основным примером замкнутой цепи четырёхугольников в
этом случае служат четыре элементарных четырёхугольника с общей
(например, чёрной) вершиной f. Пусть диагонали каждого четырёх-
угольника делятся точкой пересечения в отношениях "fk ' ak и 5k ' 0k
(к = 1,... ,4), как на рис. 2.12. Дуальные четырёхугольники определе-
ны с точностью до масштабных множителей Aj, (к = 1,..., 4). Стыков-
ка на общем ребре дуальных четырёхугольников 1 и 2 даёт соотношение
2.3. Дискретные сети Кёнигса и Мутара
между их множителями:
Ai _ А2 Ai оцф
ат<51 OL2P2 А2 OL2P2
Аналогично находим:
А2 _ 0.282 A3 _ О!з<5з А4 _ 01484
Аз с*з/3з ’ А4 Ai 01/31
Все четыре ребра, смежные с /, можно состыковать тогда и только
тогда, когда циклическое произведение отношений масштабных мно-
жителей равно единице. Это условие имеет вид
О1<31 02^2 Оз<53 Ск4<54
02^2 О3/З3 О4/34 01/31
или
<31 82 <5з <^4
31 /З2 /Зз /34
(2.32)
Это есть не что иное, как условие точности формы q для элементарно-
го четырёхугольника белого графа. Все другие белые и чёрные циклы
являются суммами элементарных; следовательно, условия (2.32) для
всех элементарных белых и чёрных циклов являются необходимыми
и достаточными для точности формы q. С другой стороны, легко ви-
деть, что если условие точности выполняется для всех белых и чёрных
циклов, то при построении дуальной сети никакая замкнутая цепь че-
тырёхугольников не приводит к препятствиям.
т = 3. В этом случае простейшая замкнутая цепь четырёхугольников
задаётся тремя гранями любого элементарного шестигранника сети с
общей (чёрной, для определённости) вершиной /; см. рис. 2.13.
Дальнейшие рассуждения полностью аналогичны двумерному слу-
чаю. Стыкуя рёбра, общие для дуальных четырёхугольников 1 и 2, ду-
альных четырёхугольников 2 и 3, и дуальных четырёхугольников 3 и
1, находим соотношения между их масштабными множителями:
Ai _ cki<5i А2 _ 0x282 A3 _ аз<5з
А2 0202' A3 013/З3 ’ Ai ai/31
Все три ребра, смежных с f, можно одновременно состыковать тогда и
только тогда, когда циклическое произведение отношений масштабных
2. Принципы дискретизации. Многомерные сети
Рис. 2.13. Три четырёхугольника вокруг вершины
трёхмерной сети.
множителей равно единице, что, после сокращений, даёт условие
51 62 63
01 02 03
(2.33)
Это есть не что иное, как условие точности для элементарного цикла
белого графа решётки Z3, который является треугольником. Все циклы
белого и чёрного графов (включая и те, которые имелись в случае т =
= 2, то есть квадраты двумерных слоёв белого и чёрного графов в Z3)
являются суммами элементарных треугольников; см. рис. 2.14. Опять,
условие точности для всех белых и чёрных циклов гарантирует, что ни
одна замкнутая цепь четырёхугольников не приведёт к противоречию.
т 4. В этом случае любой белый или чёрный цикл также равен
сумме элементарных треугольников, как и при т — 3; следовательно,
никакие дополнительные условия не возникают. □
Замечание. Заметим, что три четырёхугольника дискретной кёниг-
совой сети, смежные в общей вершине, как на рис. 2.13, не могут быть
выпуклыми одновременно, так как в этом случае произведение соот-
ветствующих трёх величин q было бы отрицательным.
2.3. Дискретные сети Кёнигса и Мутара
Рис. 2.14. Элементарный квадрат на чёрном графе в Z2 равен сумме
четырёх элементарных треугольников на чёрном графе в Z3.
2.3.3. Геометрическая характеризация двумерных
дискретных кёнигсовых сетей
Определение дискретной кёнигсовой сети, очевидно, принадлежит
аффинной геометрии, так как в нём используется понятие паралле-
лизма. Оказывается, однако, что класс дискретных кёнигсовых сетей
проективно инвариантен. Доказательство соответствующей проектив-
но инвариантной характеризации опирается на обобщённую Теорему
Менелая (Теорема 9.12), сходную по духу: её предположение имеет
аффинно-геометрическую природу, а заключение проективно инвари-
антно.
В последующих рассуждениях для обозначения обратных сдвигов
rf1, т^1 используются отрицательные индексы —1, —2. Мы дадим ха-
рактеризацию двумерной кёнигсовой сети в терминах четырёх элемен-
тарных четырёхугольников, смежных с точкой f = f(u). то есть четы-
рёхугольников с (ij) е {(±1,±2)}.
Теорема 2.26. (Дискретные 2D кёнигсовы сети; характериза-
ция в терминах точек пересечения диагоналей) Пусть f : Z2 —>
IRW такая Q-сетъ, что для каждой точки f = /(и) четыре её соседние
f±i> /±2 не лежат в одной плоскости. Тогда f дискретная кёнигсова
сеть тогда и только тогда, когда для каждой точки f = f(u), точ-
ки пересечения диагоналей четырёх четырёхугольников смежных с f
компланарны, то есть, если точки пересечения диагоналей образуют
Q-сетъ.
Доказательство. Это немедленно следует из уравнения (2.32) и слу-
чая п = 4 обобщённой Теоремы Менелая (Теорема 9.12). □
2. Принципы дискретизации. Многомерные сети
Иногда оказывается более удобной другая характеризация, в ко-
торой участвуют только точки сети, без точек пересечений диагоналей
четырёхугольников.
Теорема 2.27. (Дискретные 2D кёнигсовы сети; характериза-
ция в терминах вершин) Пусть f : Z2 —> такая Q-сетъ, что
для каждой точки f = f(u) четыре её соседние /±1, /±2 не лежат в
одной плоскости.
I) Если в каждой вершине четыре смежных четырёхугольника
порождают 4-мерное пространство, то f является дискретной кё-
нигсовой сетью тогда и только тогда, когда для каждого и е Z2
пять точек f и /±1,±2 лежат в трёхмерном подпространстве V =
= V(u) С RN, не содержащем четыре соседние точки f±i, /±2- Заме-
тим, что если хотя бы одна из соседних точек лежит в V, то это
же верно для всех четырёх.
II) Если N = 3, то f дискретная кёнигсова сеть тогда и только
тогда, когда для каждого и Е Z2 три плоскости
п(ир) = (//12/_1>2), n<down) = (П1.-2/-1,-2), = (/A/.i)
имеют общую прямую £d); или, эквивалентно, три плоскости
ndeft) = П^Ь‘) = (/Л.2/1.-2), П(2) = (Я2/-2)
имеют общую прямую ^2).
Доказательство. I) Пусть сначала f кёнигсова сеть и, следовательно,
удовлетворяет свойству Теоремы 2.26. Тогда пространство V проходя-
щее через f и /±1,±2, очевидно, трёхмерно. Наоборот, пусть это про-
странство трёхмерно. Четыре четырёхугольника (/, fi,fij,fj) лежат в
четырёхмерном пространстве, проходящем через f, /±1, /±2. Точки пе-
ресечения их диагоналей лежат в пересечении V с трёхмерным про-
странством, проходящим через /±1, /±2- Пересечение двух трёхмерных
подпространств четырёхмерного в случае общего положения является
плоскостью.
II) Пусть Mij точка пересечения диагоналей четырёхугольни-
ка' (/, fijt fj)> ПРИ (Л J) € {(±1, ±2)}. Компланарность четырёх
точек эквивалентна утверждению, что прямые 1,2) и
(ЛТ1_2-Л^—1,—2) пересекаются. Обозначим их точку пересечения через
pd) Эти дВе прямые лежат в плоскостях (/i/2/-i), (/1/-2/-1), соот-
ветственно; следовательно их точка пересечения должна принадлежать
2.3. Дискретные сети Кёнигса и Мутара
пересечению этих плоскостей: Р^ G (/1/-1). Таким образом, компла-
нарность точек Mij эквивалентна тому, что три прямые (ЛД ^.М-дг),
(ЛД^ЛАд-г) и (/1/-1) имеют общую точку см. рис. 2.15. Да-
лее, плоскости П(ир\ n(down) и можно рассматривать, как плоско-
сти проходящие через точку f и прямые (ЛДдМ-дг),
и соответственно. Следовательно, их пересечением является
прямая проходящая через f и Р^. □
Рис. 2.15. Четыре четырёхугольника вокруг вершины
кёнигсовой сети.
Замечание. Эквивалентность двух условий в части II Теоремы 2.27
следует, конечно, из того факта, что в понятии дискретных кёнигсовых
сетей нет никакой асимметрии между координатными направлениями
1 и 2. Однако, полезно привести и более прямое рассуждение в пользу
этой эквивалентности. Такое рассуждение задаётся (пространственной)
теоремой Дезарга. Действительно, если треугольники Д^МдгЛД-г)
и -г) перспективны относительно точки Р^\ то они
также перспективны относительно прямой, лежащей в пересечении
плоскостей этих двух треугольников. Ясно, что эта прямая есть не что
иное, как (fzf-z), которая, следовательно, содержит точку пересечения
Р^ прямых (ЛД^ЛД.-г) и
2. Принципы дискретизации. Многомерные сети
Замечание. Нетрудно видеть, что в размерности 7V > 4 из усло-
вия части I Теоремы 2.27 автоматически следует условие части II
(в случае общего положения). Действительно, при N 4 все де-
вять точек /, /±1, /±2 и /±1,±2 в случае общего положения ле-
жат в четырёхмерном подпространстве Ш1^. В этом подпростран-
стве можно рассмотреть, вместе с трёхмерным подпространством V,
трёхмерные подпространства: V(up\ содержащее два четырёхугольни-
ка (/, /1, /12, Л), (/, /-1, /-1,2, /2), И V(down), содержащее четырёхуголь-
ники (/,/i,/i-2,/-г), (/, /-1, /-1,-2, /-2). Очевидно, что
ц(иР) = 0иР) |~) у jj(down) _ у (down) п у pj(l) _ у (up) q у (down) _
В случае общего положения три трёхмерных подпространства V, уОр)
и y(down) в четырёхмерном пространстве пересекаются вдоль прямой
Ж
2.3.4. Геометрическая характеризация трёхмерных
дискретных кёнигсовых сетей
Теорема 2.28. (Дискретные 3D кёнигсовы сети; характериза-
ция в терминах точек пересечения диагоналей) Трёхмерная Q-
сетъ / : Z3 —> является дискретной кёнигсовой сетью тогда и
только тогда, когда для каждой точки / = /(и) и каждого элемен-
тарного шестигранника с вершиной f, точки пересечения диагоналей
трёх смежных с / граней шестигранника коллинеарны.
Доказательство. Это просто переформулировка (2.33) в терминах тео-
ремы Менелая (случай п = 3 Теоремы 9.12). □
Характеризация в терминах только точек сети даётся следующим
образом.
Теорема 2.29. (Дискретные 3D кёнигсовы сети; характериза-
ция в терминах вершин) Q-сетъ / : Z3 —> является дискрет-
ной кёнигсовой сетью тогда и только тогда, когда в каждом элемен-
тарном шестиграннике сети четыре его белые вершины компланарны,
или компланарны четыре чёрные (из любого из этих условий следует
второе).
Доказательство. Рассмотрим элементарный шестигранник с верши-
нами /, fi, fij, /123- Обозначим точки пересечений диагоналей четы-
рёхугольников (/, fi, fij, fj) через Mij. Ясно, что если точки Mij колли-
2.3. Дискретные сети Кёнигса и Мутара
неарны, то четыре точки f и fij (чёрные) компланарны. Аналогично,
компланарны четыре белые вершины элементарного шестигранника.
Покажем теперь, что для Q-сети из компланарности четырёх чёр-
ных точек элементарного шестигранника следует компланарность че-
тырёх белых точек.
Допустим, что четыре чёрные точки f, fy лежат в плоскости По-
Пусть П1 плоскость проходящая через три точки Д, Д, Д- Поло-
жим £ = По О П1. Тогда точки пересечений Mij диагоналей четырёх-
угольников (Д принадлежат I. Обозначим через Оу точки
пересечений прямых (fikfjk) С По с I. Тогда из классической теоре-
мы Паппа (Теорема 9.16) следует, что три прямые (ДО23); (ДО13),
(/3O12) С П1 пересекаются в одной точке. Этой точкой является, оче-
видно, /123 € Щ, так что четыре точки fi, Д23 компланарны. Точки
Oij = (fikfjk) О (ДД23) являются точками пересечений диагоналей че-
тырёхугольников (Д, fik, /123> fjk)- См. рис. 2.16, который есть не что
иное, как рис. 9.12 в наших текущих обозначениях.
Рис. 2.16. Элементарный шестигранник 3D кёнигсовой сети.
Теперь мы можем закончить доказательство Теоремы 2.29 следу-
ющим образом. Допустим, что чёрные вершины элементарного шести-
гранника Q-сети компланарны. Тогда компланарны также белые вер-
шины этого шестигранника. Тогда точки пересечений диагоналей всех
шести граней шестигранника коллинеарны (они лежат на общей пря-
мой для “чёрной” и “белой” плоскостей). Согласно характеризации из
Теоремы 2.28, сеть является кёнигсовой. □
2. Принципы дискретизации. Многомерные сети
2.3.5. Функция v и дуальность Кристоффеля
Начнём со следующего утверждения, являющегося прямым след-
ствием алгебраической характеризации дискретных кёнигсовых сетей,
приведённой в Теореме 2.25, и Теоремы 2.24.
Теорема 2.30. (Функция и для дискретной кёнигсовой сети)
Q-сетъ / : Zm Rw является дискретной кёнигсовой сетью то-
гда и только тогда, когда существует вещественнозначная функция
о : Zm —> R* со следующим свойством: для каждого элементарного
четырёхугольника выполняется
уц ,—> щ ,—к UM, f,)
= = * = = <2-34>
где М = (ffij) Г) (fifj) точка пересечения диагоналей.
На чёрном и белом графах в Zm такая функция и определяется
с точностью до мультипликативной постоянной. Эта свобода фиксиру-
ется заданием произвольных значений и в одной чёрной и одной белой
точке.
Уравнения (2.34) эквивалентны
Ж = |Й = М (2.35)
•'J
что можно переписать также, как
Отсюда следует, что
(_1___L') (h-L — L\ = (_1 I') ([i _ (2 37}
ViJyvij ”) \Vij »i)' 1 ’
Эта формула может быть использована для элегантного представления
дуальной кёнигсовой сети для f.
Теорема 2.31. (Дуальность по Кристоффелю) Пусть f : Zm —>
IRW дискретная кёнигсова сеть, а функция и : Zm —> R* определе-
на свойством (2.34). Тогда R7'7-значная дискретная один-форма 6f*,
определённая согласно
5гГ = (2-38)
Глава 3
Принципы дискретизации. Сети на
квадриках
Многочисленные примеры многомерных сетей, обсуждавшиеся в
предыдущей главе, оправдывают следующий фундаментальный прин-
цип дискретизации.
1. Принцип многомерной совместности: дискретизация поверхно-
сти, координатной системы, или другого гладкого параметризо-
ванного объекта должна допускать продолжение до многомерно
совместной сети.
Теперь мы хотели бы сформулировать второй принцип.
2. Принцип неизменности группы преобразований: гладкий геомет-
рический объект и его дискретизация должны принадлежать од-
ной и той же геометрии, то есть быть инвариантными относительно
одной и той же группы преобразований.
Объясним, почему такие разнородные требования, как принцип сов-
местности и принцип группы преобразований допускают сочетание при
дискретизации в классических геометриях. Группы преобразований в
различных геометриях, включая геометрии Ли, Мёбиуса и Лагерра,
а также плюккерову геометрию прямых, гиперболическую геометрию
и т.д., могут быть смоделированы как подгруппы проективной группы
преобразований подходящего пространства большей размерности. Име-
ется классическое описание таких подгрупп, как подмножества проек-
тивных преобразований, сохраняющих некоторую выделенную квад-
рику, называемую абсолютом. Замечательным обстоятельством явля-
ется то, что многомерные Q-сети и дискретные конгруэнции прямых,
будучи, очевидно, проективно инвариантными объектами, допускают
ограничение на произвольную квадрику. Это и является причиной, по
которой приведённые выше фундаментальные принципы дискретиза-
ции срабатывают одновременно в классических геометриях.
3. Принципы дискретизации. Сети на квадриках
В этой главе, мы начнём с подробного обсуждения циркулярных
сетей, являющихся основным примером сопряжённых сетей на квад-
риках. Мы введём циркулярные сети элементарными геометрически-
ми средствами, и затем придём к их мёбиус-геометрической характе-
ризации. Этот пример мотивирует формулировку общих результатов
относительно редукций на квадрики, что позволяет продолжить рас-
смотрение дальнейших классов многомерных сетей, иллюстрирующих
второй принцип дискретизации.
3.1. Циркулярные сети
3.1.1. Определение и совместность
Определение 3.1. (Циркулярная сеть) Отображение f : >
RN называется т-мерной циркулярной сетью в R7'7, если все её эле-
ментарные четырёхугольники вписаны, то есть, если для всех и £ Zm
и для любой пары индексов 1 i Д j т четыре точки f, Tif, Tjf и
TiTjf леэюат на окружности.
Пример циркулярной сети показан на рис. 3.1.
Рис. 3.1. Циркулярная сеть.
Чтобы лучше понять особенности построения циркулярных сетей,
рассмотрим, как обычно, различные значения т.
тп = 2 : дискретные поверхности, параметризованные линия-
ми кривизны. Двумерная циркулярная сеть (т = 2) интерпретиру-
3.1. Циркулярные сети
ется как дискретный аналог поверхности, параметризованной линиями
кривизны. Естественно рассматривать прямые, проходящие через цен-
тры окружностей ортогонально их плоскостям, как нормали к дискрет-
ной циркулярной поверхности. Поведение этих нормалей характерно
для нормалей к гладкой поверхности вдоль линии кривизны; а имен-
но, дискретные нормали к любым двум соседним четырёхугольникам
циркулярной сети пересекаются. Действительно, обе нормали лежат в
серединной ортогональной плоскости общего ребра. Точка пересечения
является центром сферы, содержащей обе окружности; см. рис. 3.2.
Рис. 3.2. Нормали двух соседних четырёхугольников
циркулярной сети пересекаются.
Допустим, на циркулярной поверхности f заданы две координат-
ные линии f\'B1 и Элементарный шаг индукции при продолже-
нии циркулярной поверхности в квадрант Z+2 состоит в выборе Дг
на окружности, проходящей через f, j\ и Д. При этом на каждом та-
ком шаге имеется свобода в выборе одного вещественного параметра,
например, двойного отношения четырёх точек <712 = q(f, fi, fi2, Д), ко-
торое естественно приписывать элементарному квадрату С(и). Таким
образом, чтобы определить циркулярную поверхность f, необходимо
задать координатные прямые Дщ и f\%2 и одну вещественнозначную
функцию <?12, определённую на элементарных квадратах в Z2.
Как и в случае Q-поверхности, комбинаторика циркулярной по-
верхности может быть более сложной, чем у Z2, так как Определение
3.1 дословно обобщается для произвольного квад-графа. Эта возмож-
3. Принципы дискретизации. Сети на квадриках
ность важна с геометрической точки зрения, так как вершины валент-
ности отличной от 4 служат моделью омбилических точек гладкой по-
верхности параметризованной вдоль линий кривизны.
т — 3 : основная 3D система. Допустим, что заданы три коорди-
натных поверхности трёхмерной циркулярной сети f, то есть f Гз12,
и Индуктивный шаг их продолжения основан на следую-
щей теореме:
Теорема 3.2. (Элементарный шестигранник циркулярной се-
ти) Пусть даны семь точек f, fi, и fij (1 i < j' 3) в та-
кие, что каждая из трёх четвёрок (f,fi,fj,fij) лежит на окружно-
сти С^. Определим три новые окружности TiCjk, проходящие через
тройки (fi, fij, fik), соответственно. Тогда эти новые окружности
пересекаются в одной точке:
/123 — Т1С23 А Т2С31 Г) Т3С12 •
Рис. 3.3. Элементарный шестигранник циркулярной сети.
Доказательство. В силу условия теоремы, семь точек f, fi, fij лежат
на некоторой двумерной сфере S2. Действительно, имеется единствен-
3.1. Циркулярные сети
ная сфера S2, проходящая через четыре точки /, Окружности С^,
проходящие через тройки fj) лежат на S2, и так как fij € С^, то
находим, что также fij € S2. При стереографической проекции сферы
S2 фигура становится плоской; см. рис. 3.4.
Рис. 3.4. Теорема 3.2 на плоскости.
Если полюс стереографической проекции взят в точке f, то её об-
раз уходит на бесконечность, окружности Cij превращаются в прямые
(fifj), и утверждение теоремы сводится к классической теореме Мике-
ля (Теорема 9.21). □
Теорема 3.2, иллюстрируемая рис. 3.3, показывает, что нахождение
восьмой точки трёхмерной циркулярной сети по семи известным явля-
ется 3D системой в смысле рис. 2.2. Таким образом, можно сказать, что
классическая теорема Микеля просто утверждает существование этой
3D системы. Теперь мы в состоянии доказать случай т = 3 следующей
теоремы.
Теорема 3.3. (Циркулярная редукция Q-сети) Если координат-
ные поверхности f\‘Bij Q-сети f : Zm —> RJ'V являются циркулярными,
то и вся сеть f циркулярна.
Доказательство. Рассмотрим элементарный шестигранник Q-сети с
тремя циркулярными координатными четырёхугольниками (J,fi,fij,
3. Принципы дискретизации. Сети на квадриках
Д). Его восьмая вершина определяется как единственная точка пере-
сечения трёх плоскостей т^П^, проходящих через тройки (Ji, fij, fik)-
Теорема 3.2 гарантирует, что три окружности TiCjk = TjJkGiS2, прохо-
дящие через тройки (Ji, Jj, fik), пересекаются в общей точке /123- Сле-
довательно, восьмая вершина Q-сети должна совпадать с /123; постро-
енной как пересечение трёх окружностей; иными словами, она должна
быть восьмой вершиной циркулярной сети. Таким образом, при данном
построении циркулярная связь разносится с координатных поверхно-
стей на всю Q-сеть. □
тп 4 : совместность. 4В-совместность циркулярных сетей наследу-
ется из аналогичного свойства Q-сети, так как, согласно случаю m = 3
Теоремы 3.3, циркулярная связь сохраняется при построении Q-сети
по её координатным поверхностям. Это доказывает также Теорему 3.3
для общих m 4.
Начальные данные, позволяющие однозначно задать т-мерную
циркулярную сеть, состоят из:
(Of1) значений f на координатных осях ®г;
(Of1) значений m(m — 1)/2 вещественнозначных функций =
= ?(/, fit fij, fj) на всех элементарные квадратах координатных
плоскостей при 1 С i < j тп.
Завершим этот подраздел следующим наблюдением.
Теорема 3.4. (Элементарные ячейки циркулярной сети явля-
ются сферическими) Пусть f : Zm —> циркулярная сеть с
т N. Для любого и G Z”1 все 2т значений f в вершинах т-мерной
ячейки С1...т принадлежат некоторой (т — J-сфере Sm-1.
Доказательство. Проведём индукцию по т. При т — 3 утверждение
было уже доказано в Теореме 3.2. Допустим, что оно выполняется для
всех (т — 1)-мерных ячеек в Zm. Определим S”"-1 = как (т — 1)-
сферу проходящую через т + 1 точку f,T^f, ... ,rmf. Тогда, по пред-
положению индукции, значения f во всех вершинах каждой (т — За-
мерной ячейки J т принадлежат (т — 2)-сфере Sr т С S”1-1.
Это доказывает утверждение для f во всех вершинах кроме
Ti .. -Tmf. Чтобы доказать утверждение и для этой последней точки,
рассмотрим (т— 1)-мерную ячейку TiG2...m- По предположению индук-
ции, значения f во всех её вершинах, включая Ti... Tmf, принадлежат
(т — 2)-сфере тА..™ проходящей через т точек п/, т^тД, ..., rirmf.
3.1. Циркулярные сети
Но, снова используя предположение индукции, видим, что TiS2...m С
S™'1. Это завершает доказательство. □
3.1.2. Преобразования циркулярных сетей
Естественным обобщением Определения 1.19 является следующее.
Определение 3.5. (Дискретное преобразование Рибокура) Па-
ра т-мерных циркулярных сетей f, f+ : TP1 —> связана преобра-
зованием Рибокура, если четыре точки f, Tif, f+ и Tif+ лежат на
одной окружности для всех и £ Zm и 1 < i < т. Сеть f+ называется
преобразованием Рибокура сети f.
Но это означает просто, что если положить F(u, 0) = /(и),
F(u, 1) = /+(п), то F : Z”1 х {0,1} —> Rw является М-мерной цир-
кулярной сетью, где М = т+ 1. Итак, в дискретном случае между ор-
тогональными сетями и их преобразованиями Рибокура нет разницы.
Чтобы определить преобразование Рибокура f+ от заданной т-мерной
циркулярной сети f, необходимы, очевидно, следующие данные:
(R.A) значение /+(0);
(R.A) значения q^M = q(f, fi, , /+) на “вертикальных” элементар-
ных квадратах, приписанных ко всем рёбрам координатной оси
при 1 i С т.
Из многомерной совместности циркулярных сетей вытекает следу-
ющая теорема.
Теорема 3.6. (Перестановочность дискретных преобразований
Рибокура)
1) Пусть дана т-мерная циркулярная сеть f и два её преобра-
зования Рибокура и . Тогда существует однопараметрическое
семейство циркулярных сетей /^12\ служащих преобразованием Ри-
бокура для обеих и У®. Соответствующие точки четырёх цир-
кулярных сетей f, f<F), и f^12^ лежат на одной окружности.
2) Пусть дана т-мерная циркулярная сеть f. Пусть f^\
и три её дискретных преобразования Рибокура, и даны ещё три
такие циркулярные сети /(12\ /^23^ и f^13\ что одновременно
дискретное преобразование Рибокура и f№. Тогда, в случае общего
положения, существует единственная циркулярная сеть /(123) явля-
ющаяся преобразованием Рибокура /^12\ f^2y> и Сеть /123> од-
нозначно определяется условием, что соответствующие точки f^,
3. Принципы дискретизации. Сети на квадриках
/('Л и /С123) леэюат на одной окруэюности для каждой переста-
новки (ijk) индексов (123).
Доказательство. Это доказательство совершенно аналогично доказа-
тельству Теоремы 2.8. В первой части, определим (т + 2)-мерную цир-
кулярную сеть F : Z”1 х {О, I}2 —> RN, такую что
F(u,0,0) = f(u), F(u,l,0) =/(1)(п), F(u,0,l) =/(2)(и).
Единственным дополнительным начальным данным, необходимым для
построения F, является значение F(u, 1,1) = /^12^(u) в и = 0, которое
может быть произвольно выбрано на окружности проходящей через
точки /(0), /(^(О), /(2)(0). Это ведёт к однопараметрическому семей-
ству циркулярных сетей /<12). □
3.1.3. Аналитическое описание циркулярных сетей
Теорема 3.7. (Критерий циркулярности) Пусть /1,/2, /31 /4 € К4
четыре компланарные точки:
aifi + ад/2 + од/з + = 0 с од + од + од + оц = 0. (3.1)
Они лежат на одной окружности тогда и только тогда, когда вели-
чины |Д|2 удовлетворяют тому же самому линейному соотношению:
оц |/i |2 + CV2I/2I2 + од|/з|2 + CK4I/412 = 0. (3.2)
Таким образом, Q-сеть f : Zm —> циркулярна тогда и только
тогда, когда |/|2 удовлетворяет тому же уравнению (2.1), что и /.
Доказательство. Заметим, что (3.2) выполняется одновременно с (3.1)
тогда и только тогда, когда
ОД |/1 — с|2 + Од|/2 — с|2 + Од|/з — с|2 + О4|/1 — с|2 = 0 (3.3)
при всех с G R77. Выберем в качестве с центр окружности проходящей
через три точки /1, /2, /3, так что |/i - с|2 = |/2 - с|2 = |/3 - с|2 = г2.
Тогда из уравнения (3.3) следует, что I/4 — с|2 = г2, так что /4 лежит
на той же окружности. □
Обратимся к аналитическому описанию циркулярных сетей. Сле-
дует сказать, что использование двойных отношений элементарных че-
тырёхугольников в качестве плакетных переменных превосходно с кон-
3.1. Циркулярные сети
цептуальной точки зрения, но оказывается менее удобным с техниче-
ской стороны. В некоторых отношениях более практичными оказыва-
ются дискретные коэффициенты вращения. Эти величины были введе-
ны в Разделе 2.1.3 для общих Q-сетей как функции, характеризующие
форму плоских четырёхугольников. Тогда как для каждого плакета
общей Q-сети имеется два коэффициента вращения 7^ и 7^, для цир-
кулярной сети они, естественно, подчинены некоторой связи, посколь-
ку для определения циркулярной поверхности необходима лишь одна
функция на плакете.
Теорема 3.8. (Аналитический критерий циркулярности) В тер-
минах дискретных коэффициентов вращения и дискретных каса-
тельных векторов Wi циркулярные сети выделяются среди Q-cemeu
любым из следующих эквивалентных соотношений:
7ji|wi|2 +yij\wj\'2 = -2{wi,Wj), (3.4)
(TjWi'Wj) + (TiWj,Wi) = 0, (3.5)
|TjWi|2 \TiWj\2 1 (3.6)
1 12 — 1 i2 ~ 1 ^г3 !31' Ы |wj|2
Доказательство. Используем условие планарности в виде (2.2)
TiTjf - f = (1 + + (1 + c0)5j/. (3.7)
Из формулы (3.3) при с = f следует:
\TiT.f - f\2 = (1 + С^\6Д\2 + (1 + с^\6Д\2. (3.8)
Подставляя в левую часть выражение для TiTjf — f из (3.7), приходим,
после некоторых преобразований, к
р • • р. .
тдд- IVI2 + ~~ IM2 = ~2{Sif,6jf). (3.9)
1 -|- -L г Cji
При 6if = giWi и обозначениях (2.16) для коэффициентов вращения
последнее уравнение эквивалентно (3.4).
Эволюция векторов Wi задаётся уравнениями (2.18):
TjWi = Wi +yijWj, TiWj = Wj +-fjiWi.
Умножая эти уравнения, соответственно, на Wj, Wi и складывая ре-
зультаты, видим, что (3.4) эквивалентно (3.5). Аналогично, вычисляя
квадраты длин векторов в левых частях и используя (3.4), приходим к
(3.6). □
3. Принципы дискретизации. Сети на квадриках
Замечание. Отметим следующую интерпретацию уравнения (3.6):
функции di, определённые для произвольной Q-сети уравнением (2.80)
из Упражнения 2.7, приобретают в случае циркулярных сетей красивое
геометрическое истолкование как = |wi|2.
Итак, мы имеем аналитическое описание циркулярных сетей как
частного случая Q-сетей. Это описание состоит из уравнений (2.17)-
(2.20), дополненных циркулярной связью (3.4). Данные, необходимые
для корректной постановки начальной задачи для этой системы со-
стоят, например, из координатных линий f\rBi (или, эквивалентно, из
точки /(0) и функций Wi, gi на рёбрах координатных осей при
i = 1,..., т и одного коэффициента вращения 7^ (например) для каж-
дого плакета на координатных плоскостях при 1 i < j т, так
как второй коэффициент вращения 7д на может быть найден из
этих данных при помощи связи (3.4). Тот факт, что связь разносится
при эволюции в силу (2.17)-(2.20), следует из Теоремы 3.3.
Локальные коэффициенты вращения. В этом месте важно об-
ратить внимание на существенное отличие от непрерывного случая.
Для гладких ортогональных сетей из ортогональности следует, что
Д|и?г|2 — 0, так что можно считать, что касательные векторы w, име-
ют единичную длину, и следовательно соответствующие коэффициен-
ты gi приобретают интерпретацию в терминах локальной геометрии
сети: gi = |Д/|. В силу (3.6) для циркулярных сетей это уже не так.
Однако, имеется следующий выход. Введём положительные величи-
ны ai = |wj|, ассоциированные с рёбрами циркулярной сети. Согласно
(3.6), они удовлетворяют уравнениям
TiOj — Vijdj, (3.10)
где
= Vji = (1 7г.J7jг) * (3-11)
Введём единичные векторы Vi = a~rwi, направленные как Wi, и дис-
кретные метрические коэффициенты hi = aigi, так что 6if = hiVi и
|^г/| = Заметим, что hi имеют тот же знак, что и gi, и не обя-
зательно положительны. Можно обеспечить положительность всех hi,
если все элементарные четырёхугольники циркулярной сети являют-
ся вложенными, как на рис. 3.5. Таким образом, по крайней мере во
вложенном случае, коэффициенты hi и единичные векторы Vi опре-
деляются локальной геометрией элементарного четырёхугольника. В
3.1. Циркулярные сети
Рис. 3.5. Элементарный четырёхугольник циркулярной сети.
невложенном случае, они определяются локальной геометрией с точ-
ностью до знаков.
Вновь введённые величины подчиняются следующим уравнениям:
Tif = f + hiVi, (3-12)
Tivj = + PjiVi), (3.13)
Tihj — Vji (^J + (3.14)
Здесь введены новые дискретные коэффициенты вращения /3^:
/3ji — yji а. ,
(3.15)
а величины Vij могут быть выражены в терминах /3ji:
^ = ^ = (1-/3^)1/2- (3-16)
Заметим, что, благодаря уравнениям (3.13), новые коэффициенты вра-
щения Pij (почти) локальны. Они эволюционируют согласно системе,
являющейся прямым следствием (2.22):
(3-17)
Эта последняя представляет условие разрешимости системы линей-
ных уравнений (3.13) и может быть выведена из равенства т^(т^щ) =
= Tj(TiVk)- Как и в случае общих Q-сетей, эти уравнения отщепля-
ются от остальных и порождают хорошо определённое отображение
3. Принципы дискретизации. Сети на квадриках
{0kj} > {Tt0kj}- В терминах локальных геометрических величин цир-
кулярная связь (3.4) упрощается:
0ij + 0ji + 2(щ, Vj) = 0, (3.18)
а формула (3.5) остаётся прежней:
(TjVi,Vj) + (TiVj,Vi) = 0. (3.19)
Геометрическую интерпретацию последней формулы легко понять: она
означает, что сумма углов между и т,ь3 и между Vj и TjVi равна тг.
Уравнения (3.12), (3.13), (3.14), (3.17) и связь (3.18) выглядят ана-
логично системе (1.7)—(1.10) и связи (1.48), описывающим гладкие ор-
тогональные сети. В Разделе 5.6 мы продемонстрируем, что, как и в
случае сопряжённых сетей, этой аналогии можно придать количествен-
ное содержание, и гладкие ортогональные сети можно аппроксимиро-
вать циркулярными. Кроме того, мы покажем там же, как выбирать
данные на решётке с шагом е в т направлениях и шагом 1 в (т + 1)-м
направлении, чтобы получить одновременно аппроксимацию гладкой
ортогональной сети и её преобразований Рибокура. Переход к непре-
рывному пределу, при котором два или три направления остаются дис-
кретными, позволяет вывести свойства перестановочности преобразо-
ваний Рибокура, сформулированные в Теореме 1.20, из Теоремы 3.6.
При таком способе перестановочность преобразований Рибокура ста-
новится простым следствием свойств циркулярных сетей, в сочетании
с отмеченными результатами о сходимости.
3.1.4. Описание циркулярных сетей в геометрии Мёбиуса
Важно заметить, что Определение 3.1 инвариантно относительно
преобразований Мёбиуса. Таким образом, естественно вложить цирку-
лярные сети в мёбиусово-геометрическую модель евклидова про-
странства R''v. Теорема Дарбу 1.17 допускает почти буквальное обоб-
щение на дискретный случай.
Теорема 3.9. (Циркулярные сети, мёбиусово-геометрическая
характеризация) Пусть fa, /2, /3, А € К4 четыре компланар-
ные точки, удовлетворяющее уравнению (3.1). Они лежат на од-
ной окружности тогда и только тогда, когда соответствующие
fk : компланарны в R77-1-1,1 (будучи связанными той же
самой линейной комбинацией, что и fk):
01/1+02/2 + 03/3 + 04/4 = 0 при 01 + 02 + 03 + 04 = 0.
3.1. Циркулярные сети
Таким образом, Q-сетъ f : Zm —> циркулярка тогда и только
тогда, когда соответствующая сеть f : Zm —> является Q-сетью
в RN+1,1.
Доказательство. Вычислительное доказательство следует немедлен-
но из Теоремы 3.7 и формулы f = f + ео + |/|2еоо для канонического
поднятия f G на световой конус L77+1,1 С R7V+1,1. В более кон-
цептуальной манере, точки Д лежат на окружности тогда и только
тогда, когда ортогональное дополнение эрап(Д,..., Д)1- является (ЛГ —
— 1)-мерным векторным подпространством в К^1’1, то есть, если
dim зрап(Д,..., Д) — 3. (3.20)
Так как eg-компоненты евклидовых представителей Д равны 1, то по-
следнее условие эквивалентно их компланарности. □
Замечание. Условии циркулярности в виде (3.20) выполняется не
только для евклидовых представителей Д точки Д G RN, но и для
любых представителей Д = Xkfk € Lj7+1,1 с произвольным Д G R*. В
частности, утверждение Теоремы 3.9 выполняется также для предста-
вителей f в QY-
Для циркулярной сети f : Zm —> R77 и соответствующей Q-сети f :
Zm —> L77+1,1 определим лоренцевские единичные векторы Д согласно
6if = hiii, где hi (почти) локальные метрические коэффициенты из
Раздела 3.1.3, с |Д| = |Д/| = |ДД. Из (/,/) = (т^Дт;/) = 0 сразу
следует, что
{тД + Д Vi) = 0 о (2/ + hiVi,Vi) = 0,
так что hi = —2(f,Vi). Следовательно,
Tif = f + Ыщ = f- 2{f, щ)щ = Abi (/). (3.21)
Таким образом, щ интерпретируются в картине геометрии Мёбиуса,
как гиперплоскости, отражения относительно которых переводят f в
Tif (серединные ортогональные гиперплоскости отрезков [Д Tif]).
Теорема 3.10. (Критерий циркулярности на языке алгебр
Клиффорда) Для элементарного четырёхугольника (f,fi,fij,fj)
3. Принципы дискретизации. Сети на квадриках
циркулярной сети f (и соответствующего плоского четырёхуголь-
ника Q-сети f) выполняется равенство
Vj(TjVi) + VifriVj) = 0. (3.22)
Доказательство. В силу Теоремы 3.9 векторы щ удовлетворяют тем
же линейным соотношениям (3.13), что и и,, с теми же дискретными
коэффициентами вращения /3ji'.
TiVj = + PjiVi). (3.23)
Так как то отсюда следует, что левая часть (3.22) равна щщ +
+ ViVj + + /3jiV? = — 2{vj, Vi) — flij — /3ji с точностью до множителя
i/^1. Ссылка на критерий циркулярности (3.18) завершает доказатель-
ство. □
Геометрический смысл этой теоремы очень прост: в ней говорится,
что композиция четырёх отражений относительно серединных орто-
гональных гиперплоскостей к сторонам вписанного четырёхугольника
равна тождественному отображению. Это так, поскольку эти гипер-
плоскости пересекаются вдоль нормали к плоскости четырёхугольника,
проходящей через центр окружности; см. рис. 3.6.
Рис. 3.6. Композиция четырёх отражений относительно сере-
динных ортогональных гиперплоскостей к сторонам вписан-
ного четырёхугольника равна тождественному отображению.
3.2. Q-сети на квадриках
Теорема 3.11. (Спинорный репер циркулярной сети) Для цир-
кулярной сети f : Zm —> R'v с т N, а следовательно и для соответ-
ствующей Q-сети f : , существует функция -ф : Zm —> IKqo
(называемая репером f), такая что
f = ф 1е0-ф,
(3.24)
и удовлетворяющая системе разностных уравнений:
— —еД/щ , 1 i < т.
(3.25)
Доказательство. Уравнение (3.22) является в точности условием сов-
местности системы (3.25) линейных разностных уравнений для -ф. Дей-
ствительно, условие разрешимости тДъ'ф') = г^^-ф) записывается, как
eiej^i)j(TjVi') =
что эквивалентно (3.22). Таким образом, решение (3.25) существует и
однозначно определяется выбором ?Д0) £ Э^оо- Выберем i/?(0) так, что-
бы (3.24) выполнялось в и = 0. Тогда из (3.25), (3.21) следует, что
(тч-ф) 1e0(ri^) = -щ 1е0-ф)щ = = nf,
и (3.24) выполняется на всём Zm.
3.2. Q-сети на квадриках
При стереографической проекции циркулярные сети можно оха-
рактеризовать как Q-сети на сфере С RN+1, а в мёбиусово-
геометрической формулировке Теоремы 3.9 они есть не что иное, как
Q-сети на квадрике С RN+1,1 (или на QY С JRN+1,1). Далее в этой
главе мы увидим, что редукциями Q-сетей на некоторые квадрики или
пересечения квадрик оказывается и множество других возникающих в
геометрии сетей. Это обусловлено следующим общим фактом: Q-сети
допускают ограничение на произвольную квадрику в с сохранением
свойства совместности. В свою очередь, глубокой причиной этого яв-
ляется следующий фундаментальный результат, хорошо известный в
классической проективной геометрии: для семи точек общего положе-
ния в СР3 существует единственная восьмая точка принадлежащая
любой квадрике, проходящей через данные семь точек.
3. Принципы дискретизации. Сети на квадриках
Эвристически, это можно понять так. Уравнение Q = 0 квадрики
Q С СР3 имеет десять коэффициентов (мы отождествляем квадрику с
её уравнением, левая часть которого является однородным квадратич-
ным многочленом от 4-х переменных). Следовательно, девять точек в
общем положении определяют единственную квадрику Q проходящую
через них. Аналогично, восемь точек в общем положении определяют
пучок (одномерное линейное семейство) квадрик AiQi + АгОг, проходя-
щих через них, а семь точек в общем положении определяют двумер-
ное линейное семейство квадрик AiQi + A2Q2 + A3Q3, проходящих через
них. В случае общего положения решение системы трёх квадратичных
уравнений
Qi =0, 02 = 0, Q3 = 0,
определяющих пересечение трёх квадрик в СР3, состоит из восьми то-
чек. Эти восемь точек лежат на каждой квадрике двумерного семей-
ства, проходящего через исходные семь точек. Мы не будем пытаться
придать строгость этому рассуждению, и докажем вместо этого следу-
ющее, более слабое утверждение, достаточное для наших целей.
Теорема 3.12. (Ассоциированные точки) Пусть множество пе-
ресечений трёх квадрик в RP3 состоит из восьми различных точек
(такие точки называются ассоциированными). Любая квадрика, про-
ходящая через любые семь из этих точек проходит и через восьмую.
Доказательство. Пусть Ai,A2,...,As множество пересечений трёх
квадрик Qi, £>2, 2з- Заметим, что никакие три из восьми точек А/,
не коллинеарны, так как иначе множество пересечения трёх квадрик
содержало бы целую прямую, а не всего восемь точек (см. Упражнение
3.7). По аналогичным причинам, никакие пять из восьми точек Ak не
могут быть компланарными. Действительно, пять компланарных то-
чек, никакие три из которых не коллинеарны, определяют единствен-
ную конику. Пересечение трёх квадрик Qj, Q2, Q3 содержало бы тогда
эту конику, а не всего восемь точек.
Выберем любые семь точек Ai, Аг,..., А?. Покажем, что каждая
квадрика Q проходящая через эти семь точек должна принадлежать
семейству
Q — AiQi + A2Q2 + A3Q3 ;
как следствие, восьмая точка пересечения Ав будет автоматически ле-
жать на Q. Допустим, что наоборот, Q линейно независима от Qi, Ог, 2з-
Рассмотрим семейство квадрик
Q' = A1Q1 + A2Q2 + A3Q3 + pQ. (3.26)
3.2. Q-сети на квадриках
В силу предполагаемой линейной независимости, можно найти квад-
рику из этого семейства, проходящую через любую наперёд заданную
тройку точек в ИР3. Покажем, что это ведёт к противоречию.
Сначала предположим, что никакие четыре точки из Ai, Л2,..., А7
не компланарны. Выберем три точки B,C,D в плоскости Д1,Д2,Лз
так, чтобы шесть точек А1,А2,Аз,В,С,О не лежали на конике. Най-
дём квадрику Q1 в семействе (3.26), проходящую через B,C,D. Эта
квадрика должна быть приводимой, с плоскостью Ai, А2, Аз в качестве
одной из компонент (действительно, в противном случае Q' пересека-
ла бы эту плоскость по конике, проходящей через А1; А2,Лз, В, С, D,
что противоречит выбору В, С, D). Другая компонента Q’ должна быть
плоскостью, содержащей четыре точки Л4, Л5, Л6, Л7 — противоречие.
Оставшийся случай, когда среди Ai, А2,...,Ат имеются четыре
компланарные точки, рассматривается аналогично. Пусть Л1, Лг, Л3 и
А4 компланарны. Обозначим плоскость, проходящую через эти четы-
ре точки через П. Возьмём две точки В, С в плоскости П так, что-
бы шесть точек Ai, А2,Л3, А4, В, С не лежали на конике, и точку D
не компланарную с Ав,Ав,А7 (что всегда возможно, так как послед-
ние три точки не коллинеарны). Существует квадрика Q' из семейства
(3.26), проходящая через B,C,D. Опять, эта квадрика должна быть
приводима и состоять из двух плоскостей, одной из которых служит
плоскость П. Другой компонентой Q' должна быть плоскость, содер-
жащая Л5, Ав, A?, D, что опять приводит к противоречию (на этот раз,
с выбором D). □
Теорема 3.13. (Элементарный шестигранник Q-сети на квад-
рике) Если семь точек f, fi, и fij (1 i < j2>) элементарного
шестигранника Q-cemu принадлежат квадрике Q С RP'V, то это же
верно и для восьмой точки f 123-
Доказательство. Восемь точек f, fi, fij , /123 лежат в трёхмерном про-
странстве, и мы знаем, что они образуют пересечение трёх (вырожден-
ных) квадрик — пар плоскостей П,*, U т^Пщ при (Jk) — (12), (23), (31).
Следовательно, они являются ассоциированными точками. Согласно
Теореме 3.12, любая квадрика Q проходящая через семь точек f, fi, fij
автоматически проходит через восьмую. □
Теорема 3.14. (Редукция Q-сети на квадрику) Если координат-
ные поверхности f\‘B,j Q-сети f : Zm —> RP'V принадлежат квадрике
Q, то и вся f лежит на ней.
3. Принципы дискретизации. Сети на квадриках
Доказательство. При т = 3 это следует из Теоремы 3.13. При т 4
утверждение следует из m-мерной совместности Q-сетей. □
Другая версия Теоремы 3.13 может быть сформулирована следую-
щим образом. Она основана на очевидном факте, что для неизотропной
прямой I, имеющей непустое пересечение с Q, это пересечение состоит
в случае общего положения из двух точек (поскольку задаётся квад-
ратным уравнением).
Теорема 3.15. (Элементарное преобразование Рибокура на
квадрике) Пусть (/, А,/12> А) плоский четырёхугольник (с верши-
нами) на квадрике Q. Пусть ДАД2Д12 неизотропные прямые
содержащие соответствующие точки А А, А> Аг и такие, что лю-
бые две соседние прямые пересекаются. Обозначим вторые точки пе-
ресечений прямых с Q через f+, ft > f 12-1 ft ’ соответственно. Тогда
четырёхугольник (/+, А+> Аг>/2") также плоский.
Доказательство. Восемь точек А А, А, Аг, f+-, ft’ /щ, ft лежат в
трёхмерном пространстве, и мы знаем, что они образуют пересече-
ние трёх квадрик: одна из них Q, а двумя другими являются пары
плоскостей span(AA) Uspan(A,A2) и span(^, A) Uspan(A,£12). Следо-
вательно, это ассоциированные точки. Пара плоскостей (/, /1, /12, /2) и
(/А А+, А+) содержит семь из них; следовательно, восьмая точка, ft>
должна лежать в плоскости (f+, ft, ft)• О
В качестве глобального следствия из этого локального утвержде-
ния, немедленно получаем:
Теорема 3.16. (Преобразование Рибокура Q-сети на квадрике)
Рассмотрим квадрику Q С RPW и Q-сетъ f : Zm —> Q. Пусть дана
дискретная конгруэнция неизотропных прямых I : Zm —> £N. такая
что f(u) G Ди) для всех и G Zm. Обозначим через f+(u) вторую
точку пересечения Ди) с Q, так что Ди) П Q = {f(u), f+(u)}. Тогда
f+ : Zm —> Q также Q-сетъ.
3.3. Дискретные конгруэнции прямых на квадриках
Рассмотрим квадрику Q С RIP'V порождённую симметричной невы-
рожденной билинейной формой (•, •) в пространстве ®А+1 однородных
координат. Допустим, что сигнатура соответствующей квадратичной
3.3. Дискретные конгруэнции прямых на квадриках
формы содержит по крайней мере две положительных и две отрица-
тельных компоненты. В этом случае квадрика Q содержит изотропные
прямые I С Q; фактически, через любую точку Q можно провести по
крайней мере две таких прямых. Пусть обозначает множество изо-
тропных прямых на Q.
Следующее утверждение даёт хорошее представление о возможно-
стях построения дискретных конгруэнций прямых на Q.
Лемма 3.17. Пусть I 6 изотропная прямая, и точка fi Е Q не
лежит на I. Если плоскость, проходящая через I и fi, неизотроп-
на, то существует единственная изотропная прямая ti, проходящая
через fi и пересекающая I.
Доказательство. Пусть /, g однородные координаты двух произволь-
ных точек f,g 6 I, так что прямая I задаётся линейной комбинацией
а/ + fig. Из соотношения (а/ + fig, fi) — 0 следует
а = _ (д,А)
(По предположению, по крайней мере одно из скалярных произведений
и (g, fi) не равно нулю.) Таким образом, существует единствен-
ная точка f^ £ I такая, что (f^\ fi) — 0. Прямая определяется по
двум точкам Ди/1’. □
Теперь понятно, что если даны три прямые I, ti, конгруэнции
изотропных прямых, то в случае общего положения имеется однопара-
метрическое семейство прямых, допустимых в качестве четвёртой пря-
мой ^12: через любую точку проходит единственная изотропная пря-
мая, пересекающая (.2- Таким образом, если заданы любые две после-
довательности изотропных прямых I: Z х {0} —> £q и I: {0} х Z —> £д,
имеющие общую прямую ^(0,0) и такие, что любые две соседние пря-
мые пересекаются, то их можно продолжить до двумерной конгруэн-
ции изотропных прямых I : Z2 —> бесконечным числом способов: на
каждом шаге индуктивной процедуры имеется свобода выбора прямой
из однопараметрического семейства (в отличие от двухпараметриче-
ского в общем случае неизотропных конгруэнций прямых).
В то же время, 3D система, описывающая конгруэнции прямых
(см. Теорему 2.10), может быть совместно редуцирована на изотропный
случай без каких-либо дополнительных ограничений.
3. Принципы дискретизации. Сети на квадриках
Теорема 3.18. (3D дискретные конгруэнции прямых на квад-
рике) Пусть даны семь таких изотропных прямых I, lit lij G
(1 < г < j < 3), что l пересекает каждую li, пространство V12.3
натянутое на I, li, I2, I3 имеет размерность 4, и каждая li пере-
секает как lij, так и lik. Тогда в случае общего положения имеется
единственная изотропная прямая I123 G пересекающая все три
I-
Доказательство. Единственная прямая G £N пересекающая все
три 1^ (см. Теорему 2.10) имеет три точки на Q, а именно, ЛгзО^. Сле-
довательно, она должна быть изотропной, ^щз € (см. Упражнение
3.7). □
Ещё одна важная конструкция изотропных конгруэнций прямых
приводится в следующей теореме.
Теорема 3.19. (Продолжение Q-сети на квадрике до изотроп-
ной конгруэнции) Для данной Q-сети f : Zm —> Q существуют
такие дискретные конгруэнции изотропных прямых I : Zm —> ,
что f(u) G Ки) для всех и G Zm. Такая конгруэнция однозначно опре-
деляется заданием изотропной прямой ^(0), проходящей через точку
/(0).
Доказательство. Построение опирается на Лемму 3.17. Согласно ей,
можно построить изотропные прямые конгруэнции вдоль координат-
ных осей Кроме того, согласно Теореме 2.16, существует един-
ственная конгруэнция прямых проходящих через точки f, с этими на-
чальными данными. Остаётся показать, что все прямые этой конгруэн-
ции изотропны. Это следует из рассмотрения одной двумерной грани.
Если прямые l±, К изотропны, то прямая ^2 содержит по меньшей ме-
ре три точки из Q, а именно /12 и ещё две точки '= К О I12 и
/2(1) = 12 п ^12- Следовательно, изотропна. □
3.4. Конические сети
Нашим следующим примером Q-сетей на квадриках будут так на-
зываемые конические сети. Их можно рассматривать, как подкласс Q-
сетей в R3, удовлетворяющих определённому условию на четыре четы-
рёхугольника с общей вершиной. Однако, оказывается более удобным
с самого начала принять двойственную точку зрения и обратить основ-
ное внимание на плоскости четырёхугольников, а не на их вершины.
3.4. Конические сети
Определение 3.20. (Коническая сеть) Отображение Р : Zm —>
{ориентированные плоскости в R3} называется конической сетью, ес-
ли для всех и & Zm и для каждой пары индексов 1 i j т четыре
плоскости Р, Pi, Pij, Pj пересекаются в общей точке и, кроме того,
находятся в ориентированном контакте с конусом вращения (с вер-
шиной в общей точке всех четырёх плоскостей); см. рис. 3.7.
Рис. 3.7. Четыре плоскости конической сети.
Напомним, что ориентированную плоскость Р в R3 можно задать
парой (v,d~) G S2 х R, где
Р — {т 6 R3 : (v, х) — d},
при этом v G S2 единичный вектор нормали к Р, a d расстояние от
Р до начала координат. Двум ориентациям одной и той же плоскости
отвечают две пары (и, d) и (—v, —d). Заметим, что если пренебречь ори-
ентацией плоскости, то конические сети образуют подкласс (Д-сетей.
Слегка нарушая терминологию, мы будем относить конические сети к
0*-сетям.
Двумерные конические сети можно мыслить, как ещё одну (поми-
мо циркулярных сетей) дискретизацию поверхностей параметризован-
ных линиями кривизны. Оси конусов вращения, упоминаемых в Опре-
делении 3.20, служат дискретными нормалями к поверхности, опреде-
лёнными в точках дуальной решётки (Z2)*. Для любых двух соседних
конусов имеется единственная сфера, касающаяся их обоих. Центром
3. Принципы дискретизации. Сети на квадриках
этой сферы служит точка пересечения осей конусов; см. рис. 3.8. Дей-
ствительно, для двух соседних четвёрок плоскостей две плоскости яв-
ляются общими, и плоскость делящая пополам образованный ими дву-
гранный угол содержит оси обоих конусов, которые, следовательно,
пересекаются (ориентации плоскостей фиксируют один из двух дву-
гранных углов).
Рис. 3.8. Оси двух соседних конусов конической сети
пересекаются.
Простой геометрический критерий того, что Q*-ceTb Р является
конической, может быть дан в терминах гауссова отображения Р,
v:Zm->S2, (3.27)
образованного (направленными) единичными векторами нормалей и к
плоскостям Р.
Теорема 3.21. (Отображение Гаусса для конической сети цир-
кулярно) Q*-cemb Р : Zm -> {ориентированные плоскости в R3} яв-
ляется конической тогда и только тогда, когда элементарные четы-
рёхугольники её гауссова отображения v : Zm —> S2 плоские, то есть,
если гауссово отображение является циркулярной сетью на S2.
Доказательство. Все четыре единичных вектора v, Vi, Vj, Vij образу-
ют равные углы с осью касательного конуса; следовательно, их кон-
цы находятся на равном (сферическом) расстоянии от точки S2, пред-
ставляющей направление оси конуса. Таким образом, четырёхугольник
3.4. Конические сети
(у, Vi, Vij, Vj) на S2 вписанный, со сферическим центром окружности в
этой точке. □
Чтобы определить коническую сеть, достаточно задать циркуляр-
ное гауссово отображение v : Zm —> S2 и, дополнительно, задать числа
d (что отвечает выбору плоскости Р = {ж 6 R3 : (у,х) — d} с данной
нормалью г) вдоль координатных осей 23, в Zm. Эти данные позволяют
однозначно восстановить коническую сеть. Для этого применяется ре-
куррентная процедура, элементарный шаг которой состоит в нахожде-
нии четвёртой плоскости при условии, что известны три плоскости
Р, Pi, Pj и направление нормали четвёртой плоскости. Но это легко:
Pij это плоскость, нормальная к v^ и проходящая через единственную
точку пересечения трёх плоскостей P,Pi,Pj.
Важным наблюдением является то, что Определение 3.20 факти-
чески принадлежит геометрии Лагерра. Это означает, что для дан-
ных плоскостей свойство касания общего конуса вращения инвариант-
но относительно преобразований Лагерра, в частности, при сдвиге всех
плоскостей на одно и то же расстояние в соответствующих им нормаль-
ных направлениях (нормальный сдвиг). Напомним (см. Раздел 9.4), что
плоскость Р = {т 6 R3 : (v,x) = d} представляется в проективной мо-
дели геометрии Лагерра (цилиндрическая модель Бляшке) точкой в
P(L3,1,1) с P(R3,1,1) с представителем р = v + 2detx> +ев в пространстве
однородных координат.
Теорема 3.22. (Коническая сеть, лагеррово-геометрическая
характеризация) Сеть
Р : Zm —> {ориентированные плоскости вй3}
коническая тогда и только тогда, когда соответствующие точки р :
Zm —> P(L3,1’1) образуют Q-сеть в P(R3,1’1).
Доказательство. Представители р плоскости Р образуют Q-сеть то-
гда и только тогда, когда они удовлетворяют (2.1), то есть, если этому
уравнению удовлетворяют v : Zm —> S2 и d : Zm —> R. Из уравнения
(2.1) для v следует, что v : Zm —> S2 является Q-сетью в S2, так что
любой четырёхугольник (y,Vi,Vij,Vj) в S2 плоский, и следовательно
вписанный. Из уравнения (2.1) для (v,d) следует, что (единственная)
точка пересечения трёх плоскостей Р, Pi, Pj также лежит на Р^, так
что все четыре плоскости пересекаются в одной точке. Таким образом,
3. Принципы дискретизации. Сети ил квадриках
мы приходим к характеризации Р, как сети плоскостей, в которой каж-
дая четвёрка плоскостей (Р. Д. Р^. Pj) конкурреитпа и каждый четы-
рёхугольник (и, Vi, Vij,Vj) из единичных векторов нормалей вписанный.
Согласно Определению 3.20 и Теореме 3.21, Р является конической се-
тью. □
Таким образом, конические сети составляют ещё один пример мно-
гомерных Q-сетей, ограниченных на квадрику (абсолютную квадрику
в проективной модели лагерровой геометрии).
3.5. Сети главных контактных элементов
Мы встретились с двумя классами сетей (циркулярными и кониче-
скими сетями), которые можно проинтерпретировать, как дискретный
аналог поверхностей параметризованных вдоль линий кривизны. Цир-
кулярные сети являются объектами геометрии Мёбиуса, а конические
сети принадлежат геометрии Лагерра. Вообще, есть несколько способов
описания поверхностей и дискретизации этого понятия, и циркулярные
и конические сети служат примером лишь двух из них.
Поверхность можно рассматривать просто, как состоящую из то-
чек. Это имеет смысл в любой геометрии, где точки являются выде-
ленными пространственными элементами, такой, как проективная гео-
метрия, евклидова геометрия, и т.д.. Сюда относится, в частности, и
геометрия Мёбиуса. Дискретной поверхностью в одной из таких гео-
метрий служит отображение
f : Z2 ->R3.
С другой стороны, поверхность можно рассматривать, как огибаю-
щую системы её касательных плоскостей. Это имеет смысл, коль скоро
плоскости играют роль выделенных пространственных элементов, на-
пример, в проективной геометрии, в евклидовой геометрии, и также в
геометрии Лагерра. Дискретная поверхность в такой геометрии пони-
мается, как отображение
Р : Z2 -> {ориентированные плоскости в R3}.
Существенной частью такого описания поверхности является её гаус-
сово отображение
и : Z2 -> S2,
3.5. Сети главных контактных элементов
состоящее из единичных нормалей v к плоскостям Р = {.г € R3 :
(у,х) — d}.
Имеются также геометрии, где в выделенными являются кон-
тактные элементы. Контактный элемент можно интерпретировать,
как пару состоящую из точки f поверхности вместе с (ориенти-
рованной) касательной плоскостью Р, проходящей через f (или, экви-
валентно, с вектором нормали v к Р в /). Поверхность тогда рассмат-
ривается, как составленная из её контактных элементов. Например, в
геометрии Ли, контактный элемент может быть представлен в терми-
нах ориентированных сфер и их ориентированного контакта, как одно-
параметрическое семейство (пучок) всех сфер S, проходящих через f
и находящихся в ориентированном контакте с Р (и друг с другом), то
есть имеющих общий вектор нормали ив/; см. рис. 9.1 в Разделе 9.2.
Другим примером служит плюккерова геометрия прямых, где контакт-
ный элемент понимается в терминах прямых из RP3 и их пересечений,
как однопараметрическое семейство (пучок) прямых в Р, проходящих
через f. Ясно, что описание поверхности в терминах её контактных эле-
ментов содержит больше информации, чем описание в терминах только
точек или описание в терминах только касательных плоскостей; факти-
чески, оно комбинирует их. Это описание может быть дискретизовано
естественным образом: дискретная поверхность есть отображение
(f,P) : Z2 —> {контактные элементы в R3}.
Сценой, на которой разворачивается проективная модель геомет-
рии Ли, служит квадрика Ли P(L4,2) С P(R4,2). В частности, кон-
тактные элементы моделируются, как изотропные прямые (прямые в
Р(Ж4,2), лежащие в P(L4,2)). Обозначим множество изотропных прямых
Р(Р4,2) через £q'2. Дискретизация ли-геометрической теории поверхно-
стей может и должна быть основана на обоих фундаментальных прин-
ципах, откуда следует необходимость изучения конгруэнций прямых и
Q-сетей на квадрике Ли.
Определение 3.23. (Сеть главных контактных элементов, про-
ективная модель сферической геометрии) Отображение £ : Z2 —>
40 называется сетью главных контактных элементов, если оно яв-
ляется дискретной конгруэнцией изотропных прямых в P(R4,2), то
есть, если каждые две соседние прямые пересекаются:
£(u)n£(u + ei) = sw(u) eP(L4'2), Vu € Z2, Vi = 1,2. (3.28)
3. Принципы дискретизации. Сети на квадриках
С конгруэнцией изотропных прямых £ естественно ассоциируются
две фокальные сети
: Z2-> P(L4’2), i = 1,2; (3.29)
сравните с Определением 2.13. Точки € P(L4,2) представляют ори-
ентированные сферы в Ж3.
Прямой перевод Определения 3.23 на язык геометрии сфер в Ж3
выглядит следующим образом.
Определение 3.24. (Сеть главных контактных элементов, ев-
клидова модель сферической геометрии) Отображение
(f,P) ;%2 {контактные элементы в Ж3}
называется сетью главных контактных элементов, если каждые два
соседних контактных элемента (f,P), (Tif,TiP) имеют общую сферу
, то есть сферу в ориентированном контакте с обеими плоско-
стями Р, TiP в соответствующих точках f, т,/.
Таким образом, нормали к соседним плоскостям Р, Pi в соответ-
ствующих точках /, fi пересекаются в точке (центре сферы а
расстояния от до f и до fi равны; см. рис. 3.9. Естественно приписы-
вать сферы к рёбрам Z2, параллельным i-й координатной оси. Они
будут называться сферами главных кривизн для дискретной сети кон-
тактных элементов. Это даёт дискретизацию ли-геометрического опи-
сания поверхности параметризованной линиями кривизны, согласно
которому два инфинитезимально близких контактных элемента (пуч-
ка сфер) принадлежат одной и той же лини кривизны тогда и только
тогда, когда они имеют общую сферу.
Добавление дополнительного измерения к решётке независимых
переменных (или, эквивалентно, рассмотрение многомерных конгруэн-
ций изотропных прямых в P(L4,2)) приводит к следующему определе-
нию.
Определение 3.25. (Преобразование Рибокура, проективная
модель сферической геометрии) Две сети главных контактных
элементов £, £+ : Z2 —> £q’2 называются преобразованиями Рибокура
друг для друга, если эти дискретные конгруэнции изотропных прямых
связаны F-преобразованием, то есть, если каждые две соответству-
ющие прямые пересекаются:
£(u) n£+(u) = s(u) е P(L4’2), VueZ2. (3.30)
3.5. Сети главных контактных элементов
Опять, прямой перевод этого в общепринятые геометрические тер-
мины выглядит следующим образом.
Определение 3.26. (Преобразование Рибокура, евклидова мо-
дель сферической геометрии) Две сети главных контактных эле-
ментов
(f,P), (f+, Р+) : Z2 —> {контактные элементы в Ж3}
называются преобразованием Рибокура друг для друга, если каждые
два соответствующих контактных элемента (f,P) и (f+,P+) име-
ют общую сферу S, то есть сферу в ориентированном контакте с
обеими плоскостями Р, Р+ в соответствующих точках f,f+.
Сферы S из преобразования Рибокура естественно приписывать
вершинам и решётки Z2, или, лучше, к “вертикальным” рёбрам, соеди-
няющим вершины (и, 0) и (и,1) решётки Z2 х {0,1}. В проективной
модели, их представители
s : Z2 —> P(L4,2)
(3.31)
3. Принципы дискретизации. Сети на квадриках
Рис. 3.10. Преобразование Рибокура.
образуют фокальную сеть трёхмерной конгруэнций прямых по третье-
му координатному направлению.
Согласно Теореме 2.14, обе фокальные сети для сети главных
контактных элементов являются Q-сетями в P(L4,2) С Р(Ж4,2), и это
же верно для сфер s преобразования Рибокура общего положения. Это
мотивирует следующее определение.
Определение 3.27. (Дискретная R-конгруэнция сфер) Отобра-
жение
S : Zm —> {ориентированные сферы в Ж3}
называется дискретной R-конгруэнцией (конгруэнцией Рибокура) сфер,
если соответствующее отображение
s : Zm -> P(L4,2), s = с + е0 + (|с|2 - r2)eoo + re6, (3.32)
является Q-сетъю в Р(Ж4,2).
Таким образом, можно сформулировать:
Следствие 3.28. (R-конгруэнции сфер главной кривизны и
преобразований Рибокура)
а) Для дискретной сети контактных элементов, сферы главной
кривизны i-го координатного направления (г — 1,2) образуют двумер-
ную дискретную R-конгруэнцию.
Ь) Сферы преобразования Рибокура общего положения образуют
дискретную R-конгруэнцию.
3.6. Q-КОНГРУЭНЦИИ СФЕР
R-конгруэнция сфер главной кривизны для i-ro координатно-
го направления вырождена в том смысле, что плоскость каждого её
элементарного четырёхугольника (s^, , s'^, ) содержит две изо-
тропные прямые ti, tij, так что трёхмерное векторное пространство
S = span(s^\ sjl)) С R4,2
содержит два двумерных изотропных подпространства. Наоборот, R-
конгруэнция сфер общего преобразования Рибокура невырождена:
трёхмерное векторное пространство S её элементарных четырёхуголь-
ников не содержит двумерных изотропных подпространств. Геомет-
рическая характеризация невырожденных дискретных R-конгруэнций
сфер будет приведена в Разделе 3.7.
3.6. Q-конгруэнции сфер
Имея в виду последующую геометрическую характеризацию дис-
кретных R-конгруэнций сфер, заметим, что из (3.32) немедленно сле-
дует, что отображение
S : Zm —> {ориентированные сферы в R3}
является дискретной R-конгруэнцией тогда и только тогда, когда цен-
тры с : Zm —> R3 образуют Q-сеть в R3, а две вещественнозначные
функции,
|с|2 - г2 : Zm -> R и г : Zm -> R,
удовлетворяют тому же уравнению типа (2.1), что и центры с.
Опустив последнее требование для ориентированных радиусов
г, мы приходим к менее ограничительному определению, чем R-
конгруэнция, а именно, к Q-конгруэнции сфер. Они являются, есте-
ственно, объектами геометрии Мёбиуса, а не геометрии Ли. Напомним
(см. Раздел 9.3), что сферы в R3 могут быть представлены в мёбиусово-
геометрическом формализме как элементы P(R4’ut), где
К4о’и\ = р е R4-1 : (s,s)>0} (3.33)
пространственноподобная часть R4,1. В оставшейся части этого раздела
мы используем символ з исключительно в мёбиусово-геометрическом
смысле!
3. Принципы дискретизации. Сети на квадриках
Определение 3.29. (Q-конгруэнция сфер) Отображение
S : Z"' —> {неориентированные сферы в R3} (3.34)
называется Q-конгруэнцией сфер, если соответствующее отображе-
ние
s : Zm ->Р(Ж^), з = с + е0+(|с|2-г2)еоо, (3.35)
является Q-сетъю в P(R4,1).
Таким образом, отображение (3.34) есть Q-конгруэнция тогда и
только тогда, когда центры с : Zm —> К3 сфер S образуют Q-сеть в
R3, а функция |с|2 — г2 удовлетворяет тому же уравнению (2.1), что и
центры с. Ясно, что при г —> 0 последняя характеризация превращает-
ся в критерий Теоремы 3.7. Следующая теорема даёт геометрическое
описание Q-конгруэнций.
Теорема 3.30. (Три типа Q-конгруэнций) Четыре (неориентиро-
ванные) сферы (Si, S2, S3, Si) в R3 образуют элементарный четырёх-
угольник Q-конгруэнции тогда и только тогда, когда они удовлетво-
ряют одному из следующих трёх условий:
(i) они имеют общую ортогональную окружность, или
(И) их пересечение состоит из Q-сферы, то есть пары точек, или
(Иг) их пересечение состоит в точности из одной точки.
Случай (iii) может рассматриваться как вырождение любого из слу-
чаев (i) и (ii).
Концептуальное доказательство. Для Q-конгруэнции векторное под-
пространство
Е = span(si, s2, S3, s4) С К4,1
трёхмерно, следовательно, его ортогональное дополнение Е± двумерно.
Если Е2- лежит в то есть, если ограничение скалярного произведе-
ния Минковского на Е2- положительно определено (сигнатуры (2,0)),
то Е1 представляет 1-сферу (окружность), ортогональную нашим че-
тырём сферам, и имеет место случай (i). Если, наоборот, ограничение
скалярного произведения на Е2- имеет сигнатуру (1,1), так что Е ле-
жит в Rout, то Е представляет 0-сферу, которая служит пересечением
наших четырёх сфер, и имеет место случай (ii). Наконец, если ограни-
чение скалярного произведения на Е2- вырождено, то Е П Е2- является
изотропным одномерным векторным подпространством, представляю-
щим общую точку наших четырёх сфер; это случай (iii). □
3.6. Q-КОНГРУЭНЦИИ СФЕР
Вычислительное доказательство. Для Q-конгруэнции, четырёхуголь-
ник в R3 с вершинами в центрах сфер Ci, с2, Сз, с4 является плоским:
обозначим его плоскость через П. Покажем, точно так же, как в дока-
зательстве Теоремы 3.7, что существует такая точка С G П, что
|С1 - С|2 - г2 = |с2 - С|2 - г2 = |с3 - С|2 - г2 - |с4 - С|2 - г2. (3.36)
Действительно, пусть центры сг и величины сг|2 — г2 удовлетворяют
одному и тому же линейному соотношению вида (3.1). Тогда третье ра-
венство из (3.36) выполнено автоматически, если выполнены два пер-
вых. Но два первых равенства эквивалентны
(2С - ci - с2, ci - с2) = г! - г2, (2С - с2 - с3, с2 - с3) = г2 - г} ,
откуда точка С однозначно определяется, как пересечение двух прямых
£12 и £2з в П, где
£ij {х е П : (2х - сг - Cj, Ci - Cj) = г2 - г2}.
Далее, если общее значение всех четырёх выражений в (3.36) положи-
тельно, скажем, равно Я2, то рассматриваемые четыре сферы ортого-
нальны окружности в плоскости П с центром С и радиусом R, так что
имеем случай (i); см. рис. 3.11. Если общее значение (3.36) отрицатель-
но, скажем, равно —Л2, то пара точек на прямой, проходящей через С
ортогонально к П, на расстоянии R от С, принадлежит всем четырём
сферам, и имеем случай (ii). Наконец, если общее значение (3.36) равно
О, то С точка пересечения всех четырёх сфер, и имеем случай (iii). □
Ясно, что случай (i) Q-конгруэнций сводится к циркулярным се-
тям, если радиусы всех сфер становятся бесконечно малыми; см. рис.
3.11. Q-конгруэнции с пересечениями типа (ii) служат естественными
дискретными аналогами сферических конгруэнций с главной парамет-
ризацией, поскольку четыре инфинитезимально близкие сферы такой
конгруэнции пересекаются именно так, при этом пары точек пересече-
ния образуют две огибающие поверхности конгруэнции (Раздел 1.5).
Q-конгруэнций сфер многомерно совместны, со следующей оговор-
кой: если даны семь точек s, зг, §ij в P(R4’ut), то Q-свойство (условие
планарности) однозначно определяет восьмую точку ф23 в P(R4,1), ко-
торая, однако, может лежать вне lP(Ro„t) и следовательно не будет
представлять вещественную сферу. Таким образом, соответствующая
3. Принципы дискретизации. Сети на квадриках
Рис. 3.11. Элементарный четырёхугольник Q-конгруэнции
сфер, в случае ортогональной окружности.
дискретная 3D система корректно определена только в некотором от-
крытом подмножестве в пространстве начальных данных. Там, где она
определена, она может быть использована для порождения преобразо-
ваний Q-конгруэнций, с обычными свойствами перестановочности.
Теорема 3.31. (Элементарный шестигранник Q-конгруэнции
циркулярного типа) Рассмотрим трёхмерную Q-конгруэнцию сфер,
со всеми гранями типа (i), то есть с ортогональными окружностя-
ми. Для элементарного шестигранника такой конгруэнции, шесть
ортогональных окружностей, отвечающие шести граням, лежат на
2-сфере, ортогональной всем восьми сферам, приписанным к верши-
нам.
Доказательство. Существование ортогональной окружности для гра-
ни 612 (например) означает, что Е^2 = span(s,si,вг)1 двумерное век-
торное подпространство лежащее в Ж^’иг Следовательно,
S123 — span(s, з1( S2, зз)1-
одномерное векторное подпространство лежащее в Это подпро-
странство содержится во всех Е^, ^13> ^23> а также в (тзЕхг)1,
(7’2^1з)±, (пЕгз)"*-. Оно представляет сферу, содержащую все шесть
окружностей, приписанных граням и ортогональную всем восьми сфе-
рам, приписанным вершинам. □
Набросок более элементарного геометрического доказательства
этого утверждения имеется в Упражнении 3.17.
3.7. Рибокуровские КОНГРУЭНЦИИ СФЕР
3.7. Рибокуровские конгруэнции сфер
Вернёмся теперь к изучению R-конгруэнций (ориентированных)
сфер, то есть Q-сетей на квадрике Ли P(L4,2) С Р(Ж4,2). Итак, в этом
разделе обозначение s опять относится к ли-геометрическому форма-
лизму!
Ограничимся невырожденными R-конгруэнциями, для которых
подпространства, натянутые на их элементарные четырёхугольники
S = span(si, §2, S3, s4) не содержат двумерных изотропных подпро-
странств. Тем самым, мы оставляем в стороне главные сферические
конгруэнции. Случай, когда сигнатура (•, -)|s± равна (3,0), так что сфе-
ры Si, S2, S3, S4 не имеют общей касающейся сферы, не имеет аналога в
гладкой дифференциальной геометрии и следовательно менее важен с
точки зрения дискретной дифференциальной геометрии. Поэтому, мы
рассмотрим здесь только циклидальный случай, когда сигнатуры как
(, 01s, так и (•, -)|Е± равны (2,1), так что любому элементарному четы-
рёхугольнику (si, S2, S3, S4) дискретной R-конгруэнции отвечает цикли-
да Дюпена (см. Определение 9.4 в подразделе 9.2.4).
Теорема 3.32. (Геометрическая характеризация R-конгруэнций
циклидального типа) Рассмотрим четыре (ориентированные) сфе-
ры (Si, S2, S3, S4) в Ж3, такие что существует непустая сфера
So в ориентированном контакте с тремя из них, например, с
81,82,83. Четыре сферы (Si, S2, S3, S4) образуют элементарный че-
тырёхугольник R-конгруэнции тогда и только тогда, когда они обра-
зуют (как неориентированные сферы) элементарный четырёхуголь-
ник Q-конгруэнции, a Sq находится в ориентированном контакте
также с четвёртой сферой, S4.
Доказательство. Пусть сфера So в ориентированном контакте с тре-
мя сферами Sy, S2, S3 имеет центр с0 и (конечный) ориентированный
радиус Го 0. Это означает, что выполняются следующие условия:
(Ci,co) - |(|сД2 - г2) - |(|с0|2 - Го) - ПГО = 0, г = 1,2, 3 (3.37)
(касание Si с So', ср. (9.10)). Далее, используя тот факт, что сг и сг|2 —г2
подчинены одной и той же линейной зависимости типа (3.1), приходим
к заключению, что (3.37) выполняется для (с4,т4) тогда и только то-
гда, когда щ удовлетворяет той же линейной зависимости (3.1), что и
Ci, \с{|2 — г2. Это доказывает теорему в случае, когда радиус общей ка-
сательной сферы So к трём сферам Si, S2, S3 конечен. Случай, когда Sq
3. Принципы дискретизации. Сети на квадриках
имеет бесконечный радиус, то есть фактически является плоскостью,
исследуется аналогично при помощи уравнения
{ci,v0) - п - d0 = 0, (3.38)
которое заменяет (3.37). □
Замечание. Мы видели, что если, в случае общего положения, три
ориентированные сферы S1( Si, S3 имеют общую сферу в ориентиро-
ванном контакте, то они имеют однопараметрическое (циклидальное)
семейство общих касающихся сфер, представляемое трёхмерным ли-
нейным подпространством Е4- в R4,2. Легко видеть, что если проек-
ция Е4- на е^, не равна нулю, то семейство сфер, представляемое Е4-,
содержит в точности две плоскости. (Для конического циклидального
семейства Е все элементы имеют нулевую eg-компоненту и представля-
ют плоскости, а семейство Е4- не содержит плоскостей.) Следователь-
но, во всех случаях, кроме конического, четыре сферы элементарного
четырёхугольника циклидальной R-конгруэнции можно охарактеризо-
вать тем свойством, что, как неориентированные сферы, они образуют
четырёхугольник Q-конгруэнции, и обладают общей касательной плос-
костью (фактически, двумя общими касательными плоскостями).
Отметим следующее различие между Q-конгруэнцией и R-конгру-
энцией: если даны три сферы Si, S?, S3 элементарного четырёхуголь-
ника, то для четвёртой сферы S4 имеется двухпараметрическое семей-
ство в случае Q-конгруэнции, и только однопараметрическое семейство
в случае R-конгруэнции. Это отражает тот факт, что R4^ является от-
крытым множеством в R4’1, тогда как L4,2 является гиперповерхностью
в R4,2 (не содержащей изотропных плоскостей).
Теорема 3.33. (Общая касательная сфера двух соседних четы-
рёхугольников R-конгруэнции) Для двух соседних четырёхуголь-
ников дискретной R-конгруэнции сфер, несущих циклидальное семей-
ство, существуют, в случае общего положения, в точности две сфе-
ры в ориентированном контакте со всеми шестью сферами конгруэн-
ции.
Доказательство. Пусть рассматриваемые четырёхугольники принад-
лежат плоским семействам, порождённым подпространствами Ei и Е2
сигнатуры (2,1). Эти четырёхугольники имеют две общие сферы, по-
рождающие линейное пространство сигнатуры (1,1). В случае общего
3.8. Параметризация дискретными линиями кривизны
положения, каждое из плоских семейств Si и So добавляет один про-
странственноподобный вектор, поэтому линейное пространство Ei UEo
натянутое на все шесть сфер конгруэнции четырёхмерно и имеет сиг-
натуру (3,1), а его ортогональное дополнение (Si U Ег)1 двумерно и
имеет сигнатуру (1,1). Пересечение L4,2 с двумерным линейным под-
пространством сигнатуры (1,1) даёт, при проективизации, в точности
две сферы: действительно, если 61,62 образуют ортогональный базис
(El U Ег)1 с (ei,ei) = — (62,62) = 1, то сферы в этом пространстве
отвечают aiei + 02^2 с (opei + 0262,0161 + 0262) =0 <=> о2 =
= о| Qi : а2 = il- □
В частности:
а) Для любых двух соседних четырёхугольников циркулярной се-
ти, рассматриваемой, как R-конгруэнция сфер, имеется одна неори-
ентированная сфера (следовательно, две ориентированные) содержа-
щая обе окружности. Её центром является точка пересечения прямых
проходящих через центры окружностей ортогонально отвечающим им
плоскостям; см. рис. 3.2.
Ь) Для любых двух соседних четырёхугольников конической се-
ти, рассматриваемой, как R-конгруэнция сфер, имеется единственная
ориентированная сфера в ориентированном контакте со всеми шестью
плоскостями сети (и второй такой сферой служит бесконечно удалён-
ная точка). Центр этой сферы совпадает с точкой пересечения осей
конусов; см. рис. 3.8.
Теорема 3.34. (Общие касательные сферы элементарного ше-
стигранника R-конгруэнции) Для элементарного шестигранника
дискретной R-конгруэнции сфер, все грани которой несут циклидалъ-
ные семейства, имеется, в случае общего положения, в точности две
сферы в ориентированном контакте со всеми восемью сферами, при-
писанными к вершинам.
Доказательство. Это доказательство следует доказательству Теоре-
мы 3.33, с дополнительным использованием Теоремы 3.32. □
3.8. Параметризация дискретными линиями
кривизны в геометриях Ли, Мёбиуса и Лагерра
Мы видели, что сети главных контактных элементов служат дис-
кретными аналогами поверхностей, параметризованных линиями кри-
3. Принципы дискретизации. Сети на квадриках
визны. Теперь мы обратимся к изучению геометрии элементарного че-
тырёхугольника из контактных элементов в сети главных контактных
элементов. Он состоит из четырёх изотропных прямых I, £2, ^12
(в проективной модели), или из четырёх контактных элементов (/,Р),
(/1, Pi), (/2,Рг), (fi2,Pi2) (в евклидовой модели). Если все четыре пря-
мых имеют общую точку и порождают четырёхмерное пространство,
то мы имеем дело с вырожденной (омбилической) ситуацией. Геомет-
рически, это означает, что все четыре контактных элемента содержат
некоторую сферу S С R3. В этой ситуации нельзя вывести никакого
дальнейшего заключения относительно четырёх точек f,fi,f2,fi2 на
сфере S', они могут быть произвольными. Мы ограничим наше вни-
мание неомбилической ситуацией, когда пространство, натянутое на
четыре прямые £, ^1^2^12 трёхмерно. Тогда выполняется следующее
утверждение, иллюстрируемое рис. 3.12.
Рис. 3.12. Геометрия сети главных контактных элементов. Че-
тыре соседних контактных элемента представлены точками и
(касательными) плоскостями. Точки лежат на одной окруж-
ности, а плоскости касаются кругового конуса. Соседние нор-
мали пересекаются в центрах сфер главной кривизны.
Теорема 3.35. (Точки и плоскости сетей главных контактных
элементов) Для сети главных контактных элементов £ : Z2 —>
3.8. Параметризация дискретными линиями кривизны
или
(f,P) : Z2 —> {контактные элементы в R3},
её точки f : Z2 —> R3 образуют циркулярную сеть, а её плоскости Р :
Z2 —> {ориентированные плоскости в R3} образуют коническую сеть.
Доказательство. В неомбилической ситуации, четыре точки f, /1,/г,
У12 € P(L4,2), полученные как пересечение четырёх изотропных пря-
мых 1Д1Д2, ^12 с проективной гиперплоскостью P(eg-) в P(R4,2), лежат
в двумерной плоскости. Они отвечают точкам /, Д, /2, /12 € R3- Кроме
того, опуская несущественную (нулевую) вб-компоненту, мы приходим
к плоскому четырёхугольнику на сфере Мёбиуса P(L4,1) С Р(Р4,1), так
что соответствующий четырёхугольник в R3 вписанный, согласно Тео-
реме 3.9.
Аналогично, четыре точки P,Pi,P2,P12 € P(L4,2), полученные как
пересечение четырёх изотропных прямых I, /ч, ^12 с проективной ги-
перплоскостью Р(е^) в P(R4,2), лежат в двумерной плоскости. Они
отвечают плоскостям Р, Pi, Р2, Р12 С R3. Опуская несущественную (ну-
левую) ео-компоненту, мы приходим к описанию, в лагерровой геомет-
рии, плоскостей как точек на P(L3,1,1) с P(R3,1,1). Согласно Теореме
3.22, плоскому четырёхугольнику здесь отвечает коническая четвёрка
плоскостей в R3. □
Доказательство Теоремы 3.35 иллюстрируется рис. 3.13.
С учётом Теоремы 3.35, возникает естественный вопрос: пусть за-
дана циркулярная сеть f : Z2 —> R3 или коническая сеть Р : Z2 —>
{ориентированные плоскости в R3}; существует ли тогда сеть главных
контактных элементов
(f,P) : Z2 —> {контактные элементы в R3}
с предписанной половиной данных (/ или Р)?
Теорема 3.36. (Продолжение циркулярных и конических се-
тей до сетей главных контактных элементов)
i) Для данной циркулярной сети / : Z2 —> R3 существу-
ет двухпараметрическое семейство конических сетей Р : Z2 —>
{плоскости в R3}, такое что f е Р для всех и е Z2, а
(J, Р) : Z2 -$ {контактные элементы в R3}
3. Принципы дискретизации. Сети на квадриках
Лагерр
Ли
Мёбиус
Рис. 3.13. Элементарный четырёхугольник сети главных контакт-
ных элементов с вершинами f и касательными плоскостями Р
в проективной модели. Вершины f образуют циркулярную сеть
(геометрия Мёбиуса), и лежат в плоскостях Р, образующих ко-
ническую сеть (геометрия Лагерра). Контактные элементы (f,P)
представляются изотропными прямыми I (геометрия Ли). Сферы
главной кривизны проходят через пары соседних точек f, fi
и касаются соответствующих пар плоскостей P,Pi.
является сетью главных контактных элементов. Такая коническая
сеть однозначно определяется заданием, плоскости Р(0,0) проходя-
щей через точку /(0,0).
ii) Для данной конической сети
Р : Z2 {ориентированные плоскости в R3}
существует двухпараметрическое семейство циркулярных сетей f :
Z2 —> R3, такое что f € Р для всех и е Z2, а
(f,P) : Z2 {контактные элементы в R3}
является сетью главных контактных элементов. Такая циркулярная
сеть однозначно определяется заданием точки /(0, 0) на плоскости
Р(0,0).
Доказательство, i) Здесь на каждом шаге построения нужно решать
следующую задачу: дан контактный элемент (/, Р) и точка fi, най-
ти плоскость Pi, проходящую через fi, такую что существует сфера
3.9. Дискретные асимптотические сети
S^\ касающаяся обеих плоскостей Р, Pi в точках f, fi, соответствен-
но. Решение: Р^ получается из Р отражением относительно серединной
ортогональной плоскости к стороне [f, fi]. Центр с^ сферы нахо-
дится, как пересечение нормали к Р в f с серединной ортогональной
плоскостью к стороне [/, /,]. То, что это построение замыкается вокруг
четырёхугольника (/, /1, /12, /2), следует из того факта, что четыре се-
рединные ортогональные плоскости его сторон пересекаются по общей
прямой, а это следствие вписанности четырёхугольника.
ii) Аналогично, здесь элементарный шаг построения сводится к
такой задаче: дан контактный элемент (f,P) и плоскость Pi, найти
такую точку fi на Pi, что существует сфера S^z\ касающаяся обеих
плоскостей Р, Pi в точках f, fi, соответственно. Решение: точка fi по-
лучается из f отражением относительно плоскости, делящей пополам
двугранный угол, образованный Р и Р{. Центр с^ сферы находит-
ся как пересечение нормали к Р в f с этой секущей плоскостью. Опять,
построение замыкается вокруг четырёхугольника, благодаря условию
коничности. □
Теорема 3.36 допускает далеко идущее обобщение (напомним, что
в рамках геометрии Ли и циркулярные и конические сети являются
частными случаями R-конгруэнций сфер, введённых в Определении
3.27).
Теорема 3.37. (Огибающие сети главных контактных элемен-
тов для дискретной R-конгруэнции сфер) Для данной дискрет-
ной R-конгруэнции сфер общего положения
S : Zm {ориентированные сферы в R3}
существует двухпараметрическое семейство сетей главных кон-
тактных элементов
(f, Р) : Zm —> {контактные элементы в R3},
такое что, для каждого и е Z”1, сфера S принадлежит контактному
элементу (f,P), то есть Р является касательной плоскостью кЗв
точке f € S. Такая сеть главных контактных элементов однозначно
определяется заданием контактного элемента (f, Р)(0), содержащего
сферу 5(0).
Доказательство. Это переформулировка Теоремы 3.19 в рассматри-
ваемом контексте. □
3. Принципы дискретизации. Сети ил квадриках
3.9. Дискретные асимптотические сети в
плюккеровой геометрии прямых
Контактный элемент в плюккеровой геометрии прямых понимает-
ся как семейство прямых, проходящих через точку / g R3 лежащую
в плоскости J С R3. Контактный элемент может быть отождествлён
с парой (/,?), такой что f G ?. В настоящем разделе, мы рассматри-
ваем контактные элементы только в смысле плюккеровой геометрии
прямых. Нетрудно понять, что Определение 2.39 дискретной асимпто-
тической сети допускает следующую переформулировку.
Определение 3.38. (Дискретная A-сеть, евклидова модель гео-
метрии прямых) Отображение
(J,?) : Zm —> {контактные элементы в R3}
называется А-сетъю, если каждая пара соседних контактных эле-
ментов имеет общую прямую, то есть, если прямая
(ffi) принадлежит обеим плоскостям ?, ЗД
Это может быть немедленно переведено на язык проективной
модели плюккеровой геометрии прямых, где контактные элементы
г 3,3
представляются множеством Со изотропных прямых на плюккеровой
квадрике P(L3,3) С P(R3,3).
Определение 3.39. (Дискретная A-сеть, проективная модель
геометрии прямых) Отображение I : Zm —> называется А-
сетъю, если она является дискретной конгруэнцией изотропных пря-
мых в P(R3,3), то есть, если каждые две соседние прямые пересека-
ются:
£(u)n£(u + ei) = Zw(u)GP(L3’3), Vu G Ът, Vi G {1, 2,..., m}. (3.39)
Элементы фокальных сетей № : Zm —> P(L3,3) представляют пря-
мые (ffi) A-сети в R3. Сравнение Определений 3.23 и 3.39 показывает,
что единственным различием между сетями главных контактных эле-
ментов и дискретными асимптотическими сетями является сигнатура
основной квадрики проективной модели соответствующей геометрии.
Это является одним из примеров знаменитого соответствия Ли между
сферами и прямыми в R3. Продолжим переформулировкой Определе-
ния 2.44:
3.9. Дискретные асимптотические сети
Определение 3.40. (Дискретная W-конгруэнция, евклидова
модель геометрии прямых) Две дискретные А-сети
(f,?), (,f+,35+) : {контактные элементы в R3}
называются преобразованиями Вайнгартена друг от друга, если для
каждой пары соответствующих контактных элементов ДД), (f+,
СР+) прямая I = (ff+) принадлежит обеим касательным плоскостям
У, ?+. Говорят, что соединяющие прямые I : Zm —> {прямые в R3}
пары Вайнгартена образуют дискретную W-конгруэнцию.
На языке проективной модели это звучит так:
Определение 3.41. (Дискретная W-конгруэнция, проективная
модель геометрии прямых) Две дискретных А-сети £, £+ : Zm —>
£q’3 называются преобразованиями Вайнгартена друг для друга, ес-
ли эти дискретные конгруэнции изотропных прямых связаны F-
преобразованием, то есть, если каждые две соответствующие пря-
мые пересекаются:
£(и) П £+(и) = l(u) G P(L3,3), Vu G Zm. (3.40)
Точки пересечений I : Zm —> P(L3,3) представляют прямые дискретной
W-конгруэнции.
В ситуации Определения 3.40, обе А-сети (/,?) и (/+,?+) на-
зываются фокальными сетями W-конгруэнции I — (ff+). Вообще,
дискретная А-сеть (/, У) называется фокальной для дискретной W-
конгруэнции I, если каждая прямая I принадлежит соответствующему
контактному элементу (/,У), то есть f G I и I с У. Следует отметить
терминологическую путаницу, к сожалению, неизбежную по историче-
ским причинам: дискретная W-конгруэнция не является дискретной
конгруэнцией прямых в смысле Определения 2.9, а фокальная А-сеть
дискретной W-конгруэнции не является фокальной сетью в смысле
Определения 2.13.
Характеризация дискретных W-конгруэнций, не опирающаяся на
понятие их фокальных A-сетей немедленно следует из Теоремы 2.14:
Следствие 3.42. (W-конгруэнции = Q-сети на квадрике Плюк-
кера) В общем положении W-конгруэнция прямых представляется
Q-сетъю на плюккеровой квадрике P(L3,3).
3. Принципы дискретизации. Сети на квадриках
В частности, четыре вектора ,lj) в R33, представляющие
четыре прямые элементарного четырёхугольника W-конгруэнции об-
щего положения линейно зависимы. Это означает, что четыре прямые
(Z, Ц, lij, lj) в R3 принадлежат регулусу (гиперболоидному семейству
прямых).
В полной аналогии с Теоремой 3.37, выполняется следующее утвер-
ждение.
Теорема 3.43. (Фокальные A-сети дискретной W-конгруэнции)
Для заданной дискретной W-конгруэнции общего положения
I : Zm —> {прямые в R3}
существует двухпараметрическое семейство дискретных А-сетей
(f,1?) : Zm —> {контактные элементы в R3},
такое, что для любого и G Zm прямая I принадлежит контактному
элементу (/Д), то есть проходит через точку f и лежит в плоско-
сти У. Такая дискретная А-сетъ однозначно определяется заданием
контактного элемента (/, ?)(0), содержащего прямую £(0).
Доказательство. Утверждение является переводом Теоремы 3.19 на
язык плюккеровой геометрии прямых. □
3.10. Упражнения
3.1. Следующую теорему можно рассматривать как пространственное
обобщение теоремы Микеля (Теорема 9.21): рассмотрим тетраэдр с вер-
шинами /1, А, А, А и выберем точку fij на каждой стороне (Jifa)- То-
гда четыре сферы TiSjki проходящие через (A, fij, fik, fu) пересекаются
в одной точке /1234- Докажите эту теорему, используя 4В-совместность
циркулярных сетей.
3.2. Докажите, что четырёхугольник (A, fa, fa, А) в С вписан тогда и
только тогда, когда его двойное отношение вещественно:
?(А, А, А, А) = е к.
J2 ~ J3 J4 “ J1
3.10. Упражнения
3.3. Пусть четырёхугольник (/i,/2./зг/4) в С вписанный. Докажите,
что он является вложенным (то есть его противоположные стороны не
пересекаются) тогда и только тогда, когда его (вещественное) двойное
отношение отрицательно: q(/i, /2> fa, /4) < 0.
3.4. Рассмотрим элементарный шестигранник циркулярной сети. До-
кажите, что можно так выбрать двойные отношения q^,... ,q6 шести
циркулярных граней (выбирая подходящую перестановку вершин), что
их произведение будет равно 1. Используйте этот результат для нового
доказательства Теоремы 3.2 о циркулярном шестиграннике.
3.5. Обобщите утверждение Упражнения 3.4 для замкнутой циркуляр-
ной ориентированной квад-поверхности, топологически эквивалентной
сфере, то есть для клеточного разбиения сферы, у которого все гра-
ни являются вписанными четырёхугольниками. Найдите соответству-
ющее обобщение Теоремы Микеля.
3.6. * Критерий циркулярности (3.22) сформулирован в терминах ал-
гебры Клиффорда. Дайте его геометрическое доказательство, рассмат-
ривая отражения относительно серединных перпендикулярных плоско-
стей к сторонам вписанного четырёхугольника (f,ft,fij,fj)-
3.7. Покажите, что если квадрика содержит три коллинеарные точки,
то она содержит всю прямую, проходящую через них.
3.8. Докажите, что для любых трёх прямых в RP3 существует квадри-
ка содержащая их. Совет: выберите тройку точек на каждой из пря-
мых; квадрика, проходящая через эти девять точек содержит все три
прямые, согласно предыдущему упражнению.
3.9. * Докажите Теорему 2.40 о Мёбиусовой паре тетраэдров при помо-
щи Теоремы 3.12 о восьмой ассоциированной точке.
3.10. * Докажите, что дискретные A-сети допускают ограничение на
произвольную квадрику Q С RPN.
3.11. Следующие три теоремы образуют начало бесконечной последо-
вательности (клиффордовой цепочки теорем).
Первая теорема Клиффорда. Пусть (Д, С2, С3, С4 четыре
окружности общего положения на плоскости, проходящие через об-
щую точку /. Пусть вторая точка пересечения окружностей С; и
Cj. Пусть Cijk обозначает окружность, проходящую через fij, fik, fjk-
3. Принципы дискретизации. Сети на квадриках
Рис. 3.14. Первая теорема Клиффорда.
Тогда четыре окружности С123, С124, С'134, С234 проходят через одну
точку У1234? см. рис. 3.14.
Вторая теорема Клиффорда. Пусть Ci,...,Cg пять окружно-
стей общего положения на плоскости, проходящие через общую точ-
ку /. Тогда пять точек /1234, /1235, /1245, /1345, /2345 лежат на одной
окружности С12345-
Третья теорема Клиффорда. Пусть Ci,..., Cq шесть окружно-
стей общего положения на плоскости, проходящие через общую точку
/. Тогда шесть окружностей С12345, С12346, С12356, С12456, С13456, С23456
проходят через одну точку /щз45б-
Докажите эти теоремы, ограничивая цепочку теорем Кокса на сфе-
ру-
s.12. Рассмотрим трёхмерную систему с полями на рёбрах из Упраж-
нения 2.8. Любой выбор двух диаметрально противоположных вершин
элементарного куба определяет шесть “белых” рёбер — тех, что не яв-
ляются инцидентными к выбранным вершинам. Таким образом, мы
имеем четыре “белые” шестёрки точек. Докажите, при помощи теоре-
3.10. Упражнения
мы Паскаля, что если шесть точек одной “белой” шестёрки лежат на
конике, то это же верно и для трёх остальных “белых” шестёрок.
3.13. Пусть Pi, ..., Р4 четыре точки пересечения коники с окруж-
ностью. Докажите, что главные оси коники параллельны биссектри-
сам углов, образованных прямыми (Р1Р2) и (Р3Р4). Совет: рассмотри-
те пучок (однопараметрическое семейство) коник, проходящий через
Pi,..., Р4. Комментарий: Если Pi,..., Р4 являются точками некото-
рой поверхности, то коника аппроксимирует пересечение поверхности
со слегка сдвинутой касательной плоскостью (индикатриса Дюпена), а
главные оси коники аппроксимируют главные направления кривизны
на поверхности.
3.14. Докажите, что через каждую точку на гиперболоиде Н =
= {(x,y,z) 6 R3 : х2 + у2 — z2 = 1} проходит две прямые, лежащие
на Н (изотропные прямые). Они образуют два семейства, в которых
каждая прямая одного семейства пересекает каждую прямую второго,
а прямые из одного семейства не пересекаются.
3.15. Рассмотрим четыре четырёхугольника двумерной Q-сети с об-
щей вершиной. Обозначим их углы, смежные с этой вершиной, через
wi, W2, Ш3, W4 (в циклическом порядке). Покажите, что данная верши-
на коническая (то есть ориентированные плоскости четырёх четырёх-
угольников касаются общего ориентированного конуса вращения) то-
гда и только тогда, когда wi + W3 = W2 + 0/4.
3.16. Пусть даны сфера S и окружность С ортогонально пересека-
ющая S. Покажите, что любая сфера содержащая С ортогональна к
S. Совет: примените преобразование Мёбиуса, отправляющее одну из
точек пересечения С и S в бесконечно удалённую.
3.17. * а) Покажите, что все окружности, ортогональные двум непере-
секающимся сферам проходят через две общие точки.
Ь) Используйте этот факт, чтобы дать геометрическое доказатель-
ство Теоремы 3.31 в случае, когда две сферы, отвечающие вершинам,
разделены для каждого ребра элементарного куба.
с) Согласно предыдущей части этого упражнения, каждому эле-
ментарному кубу в Z3 отвечает сфера, на которой лежат все шесть
окружностей, отвечающих граням. Покажите, что эти сферы состав-
ляют Q-конгруэнцию типа (ii): четыре сферы, отвечающие четырём
элементарным кубам с общим ребром, пересекаются в двух точках.
3. Принципы дискретизации. Сети на квадриках
3.11. Библиографический комментарий
Раздел 3.1: Циркулярные сети. Циркулярные сети, как дискрет-
ные аналоги линий кривизны параметризованных поверхностей упоми-
наются в (Nutbourne-Martin 1988). Основной темой этой работы была
кусочная аппроксимация поверхностей циклидами, и авторы отмеча-
ют, что угловые точки кусков конциркулярны. Циркулярная дискре-
тизация трижды ортогональных систем координат была представлена
в 1996 и опубликована в (Bobenko 1999). Следующий решающий шаг
в развитии теории был сделан в работе (CieSlinski-Doliwa-Santini 1997),
где циркулярные сети рассматриваются, как редукции Q-сетей, даётся
их обобщение на произвольную размерность и доказывается их много-
мерная совместность на основе классической теоремы Микеля (Miquel
1838а,b). Специальные циркулярные сети (дискретные изотермические
поверхности) были исследованы ранее в (Bobenko-Pinkall 1996b).
Аналитическое описание циркулярных сетей из подраздела 3.1.3
восходит к (Konopelch.enko-Sch.ief 1998).
Аналитические методы теории солитонов применялись к цирку-
лярным сетям в (Doliwa-Manakov-Santini 1998) (5-метод) и в (Akhmet-
shin- Vol’vovskij-Krichever 1999) (алгебро-геометрические решения). Опи-
сание циркулярных сетей на языке алгебры Клиффорда дано в
(Bobenko-Hertrich-Jeromin 2001).
Некоторые фрагменты общей картины циркулярных сетей были
известны в рамках теории преобразований гладких поверхностей; см.
(Eisenhart 1923). Бьянки обнаружил (Bianchi 1923) при изучении пре-
образований Рибокура ортогональных координатных систем, что точ-
ки, соответствующие вершинам диаграммы перестановочности двух
преобразований Рибокура (четырёхугольник Бьянки) лежат на окруж-
ности. Трёхмерная диаграмма перестановочности преобразований Ри-
бокура была открыта в (Ganzha-Tsarev 1996). Современное изложение
этого вопроса имеется в (Rogers-Schief 2002).
Раздел 3.2: Q-сети на квадриках. Теорема об ассоциированной точ-
ке является классической; см. напр. (Pedoe 1970). Наблюдение, что
Q-сети могут быть совместно ограничены на произвольную квадрику,
принадлежит (Doliwa 1999).
Раздел 3.3: Дискретные конгруэнции прямых на квадриках.
Нам неизвестны предшествующие изложения общей теории конгру-
энций прямых на квадриках. Относительно специальных случаев, см.
библиографический комментарий к разделам 3.5 и 3.9.
3.11. Библиографический комментарий
Раздел 3.4: Конические сети были введены в (Liu-Pottmann-
Wallner-Yang-Wang 2006) как Q-сети, допускающие нормальный сдвиг
(параллельное смещение граней). Это свойство интерпретировалось,
как дискретный аналог параметризации линиями кривизны. Кониче-
ские сети можно характеризовать также в терминах углов четырёх-
угольных граней, см. (Wang-Wallner-Liu 2007).
Раздел 3.5: Сети главных контактных элементов были введены
в (Bobenko-Suris 2007а).
Раздел 3.6: Q-конгруэнции сфер введены в (Bobenko-Suris 2005).
Раздел 3.7: Рибокуровы конгруэнции сфер. Аналитическое опре-
деление 3.27 принадлежит (Doliwa 2001b). Геометрическая характе-
ризация Теоремы 3.32 была дана в (Bobenko-Suris 2007а). Следует
отметить, что сферы, приписанные к элементарному шестиграннику
рибокуровой пары циркулярных сетей не образуют дискретную R-
конгруэнцию, вопреки утверждению из (Doliwa 2001b).
Раздел 3.8: Параметризация дискретными линиями кривизны
в геометриях Ли, Мёбиуса и Лагерра. Наше изложение следует
работе (Bobenko-Suris 2007а). Теорема 3.36 была получена независимо
в (Pottmann-Wallner 2008).
Раздел 3.9: Дискретные асимптотические сети в плюккеро-
вой геометрии прямых. Изучение дискретных асимптотических се-
тей при помощи плюккеровой квадрики восходит к (Doliwa 2001а). Тео-
рема 3.43 является новой.
Раздел 3.10: Упражнения.
Упр. 3.1: эту теорему можно найти уже в (Miquel 1838b).
Упр. 3.5: см. (Below-Krummeck-Richter-Gebert 2003).
Упр. 3.6: см. (Bobenko-Hertrich-Jeromin 2001).
Упр. 3.11: первая теорема цепочки фактически принадлежит
(Miquel 1838b). Относительно всей цепочки теорем см. (Clifford 1871)
и, например, (Coxeter 1969). Это ещё один пример того, как класси-
ческие цепочки теорем инцидентности, см. (Coolidge 1916) и (Berger
1987), связаны с многомерной совместностью (ср. с Упр. 2.28). Отме-
тим, что в старых статьях (Godt 1896), (Neville 1926) и (Ziegenbein
1940), посвящённых конфигурациям Клиффорда, даже используется
нумерация точек и окружностей вершинами n-мерного куба, хотя это
не отмечается явно.
3. Принципы дискретизации. Сети ил квадриках
Упр. 3.12: трёхмерная система с полями па рёбрах и коническим
условием изучалась в (Schief 2003b) под названием дискретной системы
СКР. Корректная задача Коши и 4В-совместность для этой системы
установлены в (King-Schief 2006).
Упр. 3.13: см. (Bobenko-Tsarev 2007), где данное утверждение ис-
пользуется для построения главных направлений кривизны поверхно-
сти.
Упр. 3.15: см. (Liu-Pottmann-Wallner-Yang-Wang 2006) и (Wang-
Wallner-Liu 2007).
Глава 4
Специальные классы дискретных
поверхностей
Обратимся теперь к изучению специальных дискретных поверхно-
стей, описываемых дискретными двумерными уравнениями. Дискрет-
ное уравнение считается двумерным, если оно допускает корректно по-
ставленную начальную задачу на элементарном квадрате (двумерной
ячейке) регулярной квадратной решётки. Например, если поля (зависи-
мые переменные) такого уравнения приписаны вершинам, то требует-
ся, чтобы любые три вершины элементарного четырёхугольника опре-
деляли четвёртую вершину однозначно. Такие уравнения естественно
возникают в контексте Q-сетей при одновременном наложении двух до-
пустимых редукций. Многомерная совместность при этом наследуется
и интерпретируется как интегрируемость двумерного уравнения. Наи-
более важный класс таких сетей возникает при наложении свойства
Кёнигса и одновременном ограничении на квадрики. Таким образом,
мы приходим к изучению Т-сетей на квадриках.
4.1. Дискретные сети Мутара на квадриках
Пусть оснащено невырожденной симметричной билинейной
формой (•, •) (не обязательно положительно определённой), и пусть да-
на квадрика
Q={/eRw :(/,/) = ко}
в Мы будем изучать Т-сети f : 7Lr" —> Q.
т = 2 : основная 2D система. Знание двух координатных кривых
/}®2 двумерной Т-сети f : Z2 —> Q позволяет продолжить сеть f
на всё Z2. Шаг индукции состоит в вычислении
Tir2f = f + ai2(r2f - Trf),
4. Специальные классы дискретных поверхностей
где коэффициент а^2 (приписанный к каждому элементарному квад-
рату в Z2) определяется из требования T-[T2f 6 Q, при условии, что
/, л/, т2/ 6 Q. Простое вычисление, использующее формулы
(f + 012(7-2/ - Л/), / + ai2(T2f - Tif)) = к0,
показывает, что это условие эквивалентно
= (/,ч/ - т2/)
а12 Ко - (Т1/,Т2/) '
Этот элементарный шаг построения, то есть нахождение четвёртой вер-
шины элементарного четырёхугольника по трём известным, символи-
чески представлен на рис. 4.1. Именно эту картину мы будем иметь в
виду, говоря о дискретных 2D системах (или уравнениях) с полями в
вершинах.
/2 •----------------Q /12
/*-----------*/1
Рис. 4.1. 2D система на элементарном четырёхугольнике.
тп 3 : совместность. Обращаясь к случаю m 3, видим, что мож-
но задать все координатные линии Т-сети п в Q, то есть f\'gi для всех
1 < i < m. Действительно, эти данные независимы, и по ним можно
индуктивно построить всю сеть. Шаг индукции существенно двуме-
рен и состоит в определении TiTjf, при условии, что известны /, T{f и
Tjf. Чтобы этот индуктивный процесс осуществлялся без противоре-
чий, уравнения
( f rf — Т f}
TiTjf - / = ац(Tjf -Tif), aij = —7 (4.1)
КО \TifjTjf/
должны обладать весьма специальным свойством. Чтобы увидеть это,
рассмотрим подробнее случай m — 3; следующие размерности не доба-
вят ничего нового. Из / и fi однозначно определяются все fj. После
4.1. Дискретные сети Мутара на квадриках
этого, имеется, в принципе, три разных способа определить /12з, по
трём квадратам, смежным с этой точкой; см. рис. 4.2. Эти три значе-
ния /123 должны совпасть, независимо от начальных условий.
Определение 4.1. (ЗВ-совместность) 2D система называется 3D-
совместной, если она может быть задана на всех двумерных гранях
элементарного куба в Z3.
Рис. 4.2. SD-совместность 2D системы.
Как и в случае 4В-совместности для 3D систем, это определение
не ограничивается системами с полями в вершинах, и имеет смысл, на-
пример, для систем с полями на рёбрах. Этот случай будет рассмотрен
более подробно в Главе 6. Выполняется вполне общая теорема, анало-
гичная Теореме 2.6.
Теорема 4.2. (Из ЗВ-совместности вытекает совместность во
всех высших размерностях) Любая ЗО-совместная дискретная 2D
система является также т-мерно совместной для всех т > 3.
Доказательство. Доказательство использует индукцию по т и анало-
гично доказательству Теоремы 2.6. □
Теорема 4.3. (ЗВ-совместность Т-сетей на квадрике) 2D систе-
ма (4.8) описывающая Т-сети на Q является ЗО-совместной.
Доказательство. Это можно проверить утомительным вычислением,
которого, однако, удаётся избежать следующим концептуальным рас-
суждением. Т-сети на Q являются результатом наложения двух допу-
стимых редукций на Q-сети, а именно, Т-редукции и ограничения на
4. Специальные классы дискретных поверхностей
квадрику Q. Это понижает эффективную размерность системы на еди-
ницу (позволяет определить четвёртую вершину элементарного четы-
рёхугольника по трём известным), и превращает исходное 3D уравне-
ние в условие ЗВ-совместности редуцированного 2D уравнения. Дей-
ствительно, после нахождения /12, /23 и Дз, можно построить /123 со-
гласно условию планарности (как пересечение трёх плоскостей). Тогда
для всех трёх четырёхугольников смежных с /123 выполнены как Т-
условие, так и Q-условие. Следовательно, эти четырёхугольники также
удовлетворяют нашей 2D системе. □
Чтобы сформулировать ещё одно важное и часто используемое в
дальнейшем свойство Т-сетей на квадриках, удобно принять следую-
щее определение.
Определение 4.4. (Разметка рёбер) Система функций ai, задан-
ных на рёбрах Zm, параллельных координатным осям Д, называется
разметкой рёбер, если эти функции удовлетворяют условию
Tiaj=aj, (4.2)
mo есть, если в каждом элементарном квадрате противоположные
стороны несут равные значения соответствующих 04.
Если отнести значение на ребре (u, u+ej к узлу решётки и g Zm,
то условие разметки выражается как а, = аДщ) при i =
Чтобы определить разметку, достаточно задать её на координатных
осях 23j.
Теорема 4.5. (Свойство разметки для Т-сети на квадрике) Для
Т-сети f : Zm —> Q, функции
= (4.3)
определённые на рёбрах Zm параллельных “Bi, удовлетворяют условию
разметки (4.2).
Доказательство. Непосредственно из (4.1) следует, что
= {Tif,f), {TiTjf,Tif) = (Tjf,f),
что эквивалентно (4.2). □
4.2. Дискретные К-сети
В обозначениях (4.3) выражение из (4.1) для коэффициентов аг]
дискретных уравнений Мутара принимает вид
Ко - {Tif, Tjf) '
(4-4)
4.2. Дискретные К-сети
4.2.1. Определение дискретной К-сети
При дискретизации К-поверхностей и их преобразований, мы при-
мем, в качестве исходной точки, характеризацию, данную в Теореме
1.24.
Определение 4.6. (Дискретная К-сеть) Дискретная А-сетъ f :
—> R3 называется т-мерной дискретной К-сетъю, если для каж-
дого элементарного четырёхугольника (f,Tif,TiTjf,Tjf)
\TiTjf -Tjf\ = \Tif - f\ и \ътД-тД\ = |тД -/|; (4.5)
другими словами, если функции /3{ = |Ф/|, определённые на рёбрах,
параллельных координатным осям Т>г при i = 1,... ,т, подчиняются
условию разметки (зависят только от щ).
Рис. 4.3. Дискретная К-поверхность
4. Специальные классы дискретных поверхностей
Свойство (4.5) сети f известно, как свойство Чебышева, поэтому
четырёхугольник (/,Tif,TiTjf,Tjf), удовлетворяющий (4.5), можно на-
звать 'чебышевским четырёхугольником. Чебышёвский четырёхуголь-
ник можно представлять себе как параллелограмм, согнутый вдоль од-
ной из его диагоналей.
Лемма 4.7. (Чебышёвский четырёхугольник) Чебышёвский че-
тырёхугольник симметричен относительно вращения на 180° вокруг
оси, проходящей через середины его диагоналей.
Доказательство. Пусть Oi и <?2 обозначают середины диагоналей
[/, TiTjf] и [Tif, Tj f], соответственно (см. рис. 4.4). Достаточно показать,
что определяемая ими ось перпендикулярна обеим диагоналям. Но, как
следует из рассмотрения конгруэнтных треугольников /ДД, Tif, TiTjf)
и Д(/,Tjf, T^jf), точка Oj равноудалена от Tif и Tjf, и, следова-
тельно, принадлежит плоскости, проходящей через О2 перпендикуляр-
но [^f, Tjf]. Следовательно, прямая (OiO2) также перпендикулярна
[Tif,Tjf]- По аналогичным причинам, эта прямая перпендикулярна и
ко второй диагонали. □
Рис. 4.4. Геометрия чебышёвского четырёхугольника.
Характеризация поля нормалей Лелёвра дискретной К-сети ана-
логична гладкому случаю.
Теорема 4.8. (Гауссово отображение дискретной К-сети = Т-
сеть на сфере) Поле нормалей Лелёвра п : Zm —> R3 дискретной К-
сети f : Zm —> R3 принимает значения на некоторой сфере S2 С R3,
возможно после чёрно-белого растяжения, и, тем самым, пропорци-
онально отображению Гаусса.
4.2. Дискретные К-сети
Наоборот, любая Т-сетъ на единичной сфере п : Zm —> S2 являет-
ся гауссовым отображением и полем нормалей Лелёвра для дискрет-
ной К-сети f : Zm —> R3. Функции
cos Qi = n) (4.6)
удовлетворяют условию разметки (зависят только от щ), которое,
следовательно, выполняется также для
7i = |^n| = 2|siny | и = |sinai|. (4.7)
Доказательство. Определение К-сетей эквивалентно следующим усло-
виям на нормали Лелёвра:
\TiTjn X Тутг| = |т^71 X п|,
[тгТуП X Tin\ = \TjH X n|.
В силу симметрии, сформулированной в Лемме 4.7 (очевидно, что сим-
метрия вращения следует из неё также для направлений нормальных
векторов), выводим:
\TiTjn\ \Tjn\ = |ТгП| |n|, \TiTjn\ |т;п| = \т^п\ |П|.
Как следствие,
\TiTjn\ = |n|, |т;п| = |rj7l|.
Таким образом, поле нормалей Лелёвра дискретной К-поверхности об-
разует, возможно после чёрно-белого растяжения, Т-сеть на сфере, яв-
ляясь примером класса сетей, рассмотренного в Разделе 4.1. Это дока-
зывает первое утверждение теоремы.
Обращаясь ко второму утверждению, начнём с Т-сети п на еди-
ничной сфере S2, описываемой уравнениями
TiTjn п — а^{туП Т{п),
{п, ТгП — Tjn)
1 — {Т{П, Tjn)
(4.8)
В силу Теоремы 4.5, функции на рёбрах cos а, = (тп, п) зависят лишь
от щ, и следовательно 72 — |<У;п|2 = 2(1 — cos а;) = 4sin2(a,/2) также
зависят только от щ. Определим дискретную A-сеть f : Zm —> R3
согласно (2.62). Тогда
(д2 — |^/|2 = 1 — {^п, п)2 = 1 — cos2 ai = sin2 оу,
что доказывает справедливость (4.5).
□
4. Специальные классы дискретных поверхностей
Согласно Теореме 4.8, дискретные К-сети f (по модулю растяже-
ний и параллельных переносов) находятся во взаимно-однозначном со-
ответствии с Т-сетями п в S2. В качестве набора начальных данных,
определяющего сеть из этого класса, можно выбрать
(Кл) значения п на координатных осях Т>г при 1 С i С т, то есть т
дискретных кривых nf®, в S2, проходящих через общую точку
п(0).
4.2.2. Преобразование Бэклунда
Определение 4.9. (Дискретное преобразование Бэклунда) Две
дискретные К-сети f, f+ : Zm —> R3 с соответствующими рёбрами
равной длины,
\i~if+ - /+| = |-rj - /|, г=1,...,тп,
связаны преобразованием Бэклунда, если они связаны преобразованием
Вайнгартена и расстояние \f+ — f\ постоянно, то есть не зависит
от и 6 Zm. Сеть f+ называется преобразованием Бэклунда от f.
Сравнивая это с Определением 4.6, видим, что сеть F : Zm х
{0,1} —> R3 с F(u,0) = f(u) и F(u, 1) = /+(и) является М-мерной
дискретной К-сетью, с М — т + 1. Как и в других случаях, преобразо-
вания дискретных К-сетей не отличаются от самих сетей. В частности,
чтобы определить преобразование Бэклунда f+ для данной т-мерной
дискретной К-сети f, или, эквивалентно, преобразование Мутара п+
от гауссова отображения п, можно задать следующие данные:
(Вл) значение n+(0) <Е S2.
Перестановочность преобразований Бэклунда для дискретных К-
сетей является прямым следствием ЗВ-совместности Т-сетей на S2.
Теорема 4.10. (Перестановочность дискретных преобразова-
ний Бэклунда) Пусть f дискретная К-сетъ, a и два её
преобразования Бэклунда. Тогда существует единственная дискрет-
ная К-сетъ /(12\ являющаяся одновременно преобразованием Бэклун-
да для и . Точки четвёртой поверхности У^12-* лежат в пересе-
чении касательных плоскостей к и в соответствующих точ-
ках, и однозначно определяются свойствами |У^12) — f^\ = \f^2'> — f\
и |/(12) - /(2)| = |/(1) - /|, или, в терминах гауссовых отображений,
4.2. Дискретные К-сети
(п/1), п/12)) = (п,г№) и (п(2\т?/12)) = (п,п^). Четыре отображения
Гаусса связаны дискретным уравнением Мутара с минусами, то есть
вектор п/12) — п параллелен .
4.2.3. Уравнение Хироты
Для удобного аналитического описания дискретных К-сетей и их
гауссовых отображений используем следующий матричный форма-
лизм. Пространство R3 можно отождествить с алгеброй Ли su(2),
L"-X, ~X2ix.iX1]esu^ ° (4.9)
Соответствие между векторным произведением в R3 и матричным ком-
мутатором в su(2) задаётся равенством
к, у] = 2т х у.
Этот изоморфизм позволяет не различать векторы в R3 и матрицы в
su(2). Иными словами, мы используем следующий базис в линейном
пространстве su(2):
(О -А /0 -1\ f-i 0\
ei - ^-г oj -~г(71’ е2 - о ) ~ -г<72’ ез " 0 г)=~г(Тз’
где aj матрицы Паули. Скалярное произведение (-,-) на su(2) индуци-
руется из R3. Легко видеть, что в матричной форме оно может быть
представлено, как
(г, У} = tr(zy) = | tr(xy*), (4.10)
где х* обозначает матрицу, эрмитово сопряжённую х.
Вращения в R3 удобно описываются присоединённым действием
группы Ли SU(2), состоящей из комплексных матриц Ф размера 2x2,
удовлетворяющих условию ФФ* = Ф*Ф = 1, где 1 обозначает единич-
ную матрицу размера 2x2 (единицу группы), так что Ф-1 — Ф*. В
терминах компонент:
Ф=(^г?\ а,ЬеС, |а|2 + |Ь|2 = 1.
\ го о у
Следующее свойство делает группу SU(2) подходящей для описания
вращений в R3.
4. Специальные классы дискретных поверхностей
Лемма 4.11. (Вращения в терминах матриц 2x2) Произвольную
матрицу Ф € SU(2) можно записать как
Ф = cos# 1 + sin# • 2?0, с а?о Е su(2), (т0,;г0)=4. (4-11)
В этих обозначениях действие Ф-1хФ на произвольный вектор х 6
su(2) есть не что иное, как поворот х вокруг вектора Xq на угол 29.
Для данной дискретной К-сети f : Zm —> R3 с гауссовым отобра-
жением п : Zm —> S2 введём репер Ф(и) € SU(2) в каждой точке и € Zm
по формуле
п(и) = Ф-1(и)езФ(и). (4-12)
Ясно, что репер определяется не однозначно, а с точностью до преоб-
разований типа
Ф(д) ь-> ехр(ш(и)сг3)Ф(и) (4.13)
с вещественнозначными функциями к. Допустимые преобразования
(4.13) репера называются калибровочными преобразованиями. Опреде-
лим также матрицы перехода
ПДи) = Ф(и + еДф-1(и) 6SU(2), (4.14)
которые естественно приписываются рёбрам (и, и + еД в Zm. Калибро-
вочные преобразования (4.13) действуют на матрицы перехода согласно
Uj(u) exp(zKj(T3)t7j(u) ехр(—гкстз),
к = к(и), Kj = к.(и + еД. (4-15)
По определению, матрицы перехода удовлетворяют тождеству
(пС/ДС/fc = (TjClfc)^ . (4.16)
Теорема 4.12. (Уравнение Хироты для Т-сети на сфере) Пусть
п : Zm —> S2 Т-сетъ на S2 с разметкой (rij, п) = cos otj. Тогда репер
Ф : Zm —> SU(2) может быть откалиброван так, чтобы все матрицы
перехода Uj = Uj(u) имели вид
^ /003(0^/2)6^ -isin(Qj/2) \
7 у —г sin(aj/2) cos(aJ/2)e_^J /
4.2. Дискретные К-сети
с некоторыми числами = £j(u) G R/(2ttZ), приписанными рёбрам
(и, и + ej). Существует такая функция ф : Жт —> R/(4ttZ), что
6' = - 0),
где, как обычно, ф = ф(и) и фj — ф(и+еф). Эта функция удовлетворяет
так называемому уравнению Хироты
sin J (ф,к + фк~ Фj - </>) = gin 1 + ф, _фк_фу (4.18)
** ъЗИ( Qi / z I **
Доказательство. Для матриц перехода Uj =
|aj2 + l&jl2 = 1, соотношение
гЬЛ
_ , с условием
aj J J
cos(aj) = {rij,n) = tr(n,n) = —1г(Ф • 1е3Ф^Ф 1е3Ф)
эквивалентно |aj|2 — |&J2 = cos(aj), откуда
|oj|2 = cos2(aj/2), |bj|2 = sin2 (a j/2).
Таким образом, матрицы перехода допускают параметризацию
и=( cos(aj/2)e^ -2sin(aj/2)eM
i у—isin(aj/2)e-2r,J cos(aj/2)e-7^ у
c € IR/(27rZ).
Обратимся теперь к уравнению (4.16). Для краткости будем писать
Uj и U'k вместо rkUj и TjUk, соответственно, и аналогично для рёберных
переменных и T]j. В этих обозначениях из (4.16) следует:
cos cos = Sin
sin
cos sin (Ж+riC _ = Sin
io oXXX ** у oxxx 2
cos^(e7(^+7?’) -e^i-^.
4. Специальные классы дискретных поверхностей
Это можно переписать как
cos у- cos sin |(С< - Cj - Cfc + Cfc)
= exp | (-C< - Cj - Cfc - Cfc + rij ~ rij + Лк~Лк)
x sin sin^y sin 1(7?'- +r?j -7]'k -т)к), (4.20)
cos sin sin |(C< + Cj - Лк + Лк)
= exp |(-C< + Cj + Cfc - Cfc + ilj + r)j -Лк~Лк)
xsin^- cos^y sin|(-7?'- + 7?j + Cfc + Cfc)- (4-21)
Лемма 4.13. Имеем либо
Cj ~ Cj ~ Cfc + Cfc = 0, 7?' + 7?j - 7?fc - 7/fc = 0, (4.22)
cos sin sin |(C' + Cj ~Лк+Лк)
= sin^-cos^ sin|(-7?'.+7?j+Cfc+ Cfc), (4.23)
Cj+Cj - + 77fc = 0, -7?'+7/j + Cfc + Cfc = 0, (4.24)
cos Y cos sin |(C< - Cj - Cfc + Cfc)
= sin y sin sin | (t?< + т/j - rfk - rjk) (4.25)
(здесь и далее сравнения понимаются по модулю 2тг).
Доказательство. Допустим, что ни одно из сравнений (4.22), (4.24) не
выполняется, так что ни один из синусов в уравнениях (4.20), (4.21) не
равен нулю. Тогда обе экспоненты в этих уравнениях должны иметь
вещественные значения, и тогда
-Cj - Cj - Cfc - Cfc + r]j ~ Из + Лк - Лк = 2тгр, р е Z,
-Cj + Cj + Cfc -Cfc + ?7j + Лз - Лк-Лк = ^л, 9 e Z.
4.2. Дискретные К-сети
Таким образом.
fa + Лз ~Лк ~Лк) = -Cfc + £fc) +^Q,
rfj + Vj + £k + Cfc) = — — Лк + Лк) —
Подстановка этих соотношений в (4.20), (4.21) даёт
cos cos = (—1)р+9 gin sin ,
cos sin = (—l)p+9+1 sin-у-cos .
Следовательно, имеем одновременно cos(aj ± at)/2 = 0 и sin(oj ±
а.к)/'^ = 0, при одинаковом выборе знаков. Это противоречие дока-
зывает лемму. □
Вернёмся к доказательству Теоремы 4.12. Оказывается, что для
Т-сетей на сфере может выполняться (и, следовательно, действитель-
но выполняется) только первая альтернатива из Леммы 4.13. Полное
доказательство этого утверждения придётся отложить до доказатель-
ства Теоремы 4.15 ниже, где будет показано, что вторая альтернатива
из Леммы 4.13 характеризует М-сети на сфере.
Итак, допустим, что уравнения (4.22) выполнены. Второе из этих
сравнений, записанное как
+ Лj = "ЪЛк + Лкг
гарантирует существование функции к : Zm —> R/(2ttZ), определённой
на вершинах решётки и такой, что
T]j — т](и, и + e-j) = — к.(и + Cj) — к(и)
на всех рёбрах (u, u + ej). Осуществляя калибровочное преобразование
(4.15) с этой функцией к, мы можем добиться, чтобы все r)j = 0, при
этом все матрицы перехода будут вида (4.17). Оставшееся соотношение
из (4.22), записанное как
Tk^j + Ct —
4. Специальные классы дискретных поверхностей
можно интерпретировать как условие точности дискретной один-
формы £, что гарантирует существование функции ф : Zm —> 1К/(4тг2),
определённой на вершинах решётки и такой, что
& = £(и, и + е,) = | (ф(и + е,) - ф(и)) (4.26)
для всех рёбер (л, и + ej). Подставляя это выражение и rjj = 0 в (4.23),
приходим к уравнению Хироты (4.18).
Докажем теперь, что в данном случае единичные векторы п —
— Ф-1езФ с необходимостью образуют Т-сеть на S2. Мы хотим пока-
зать, что n-jk — п || Пк — nj, то есть
Ф;/е3Ф^ - Ф-1е3Ф || Фд? 1е3ФА: - Ф-^зФ, ,
или, эквивалентно, с точностью до общего поворота Ф-1(- • • )Ф,
(^С/Д-1е3(С/'^)-ез || U^Uk -
Умножая слева на Uj и справа на Uj^\ приведём это соотношение к
виду
- U3a3U^ || а3и^ - UjU^, (4.27)
где символ параллельности означает, что матрицы связаны умноже-
нием на вещественное число. Прямое вычисление с матрицами (4.17)
показывает, что
а3и,и^-и,и^а3 = ,
где
Р = cos sin + е1^Л + sin -у cos Ге-г?,с -I- ег^к Y
Q — —2 cos sin ег^ + 2 sin cos ег^к.
Благодаря равенству
cos -у- sin (е~1^ — — sin -у- cos — О,
4.2. Дискретные К-сети
можно представить Q в виде
Q = — cos -у- sin (е~г^ + е1^ + sin -у- cos + el^k 'j.
Теперь легко видеть, что, согласно (4.26),
P1Q g е-^Фзк-Фз~Фк+Ф')/^ . JJ
так что P/Q 6 IR, что доказывает (4.27).
Теорема 4.12 тем самым доказана, с точностью до утверждения,
что для Т-сети на сфере вторая возможность из Леммы 4.13 не может
иметь место. □
Для дальнейших ссылок отметим, что в терминах переменных w —
= егф^2 : Zm —> S1 уравнение Хироты (4.18) принимает вид
Wjk _ tan(afc/2) wk - 1ап(а,/2) Wj
w tan(afc/2) Wj — tan(aj/2) wk '
Мы вывели это уравнение из SD-совместной геометрической системы
(Т-сети на сфере), что гарантирует SD-совместность (4.28). Однако, это
свойство можно проверить и непосредственно; см. Упражнение 4.1.
4.2.4. Дискретное представление нулевой кривизны
Заметим, что параметры входят в уравнение (4.18) только в отно-
шениях
tan(aj72)/tan(afc/2).
Следовательно, это уравнение остаётся инвариантным при замене па-
раметров aj аДА), при которой tan (aj (А)/2) = Atan(aj/2). Рас-
смотрим матрицы Uj(X) 6 SU(2) зависящие от параметра А (назы-
ваемого спектральным параметром), получающиеся из Uj при замене
“j аДА):
СУДА) =
C0S(^W)ei(^-^)/2
• • / \
- ((^) \
-ZSin(^y-)
cos(^^)e-’WW)/2
(4.29)
По построению, уравнения (4.16) выполняются в силу уравнения Хи-
роты (4.18) также для этих матриц Uj(A) при любом фиксированном
А. Рассматривая А как формальный параметр, мы можем сделать об-
ратное утверждение.
С/°(А) =
4. Специальные классы дискретных поверхностей
Теорема 4.14. (Дискретное представление нулевой кривизны
для уравнения Хироты) Уравнение (4.16) с матрицами U}(X) вида
(4.29), зависящими от спектрального параметра, эквивалентно урав-
нению Хироты (4.18).
Доказательство. Прямое вычисление; см. Упражнение 4.2. Заметим,
что в этом вычислении удобно отфакторизовать соответствующие ска-
лярные нормирующие множители cos(aj(A)/2) и работать с матрицами
перехода
еЦ^-^/2 _iAtan/2i)\
о (4.30)
—zAtan(-y) е Х)/2 J
с более простой (рациональной) зависимостью от спектрального пара-
метра. □
Уравнение (4.16) с матрицами Uj(X) (или J7°(A)), зависящими от
спектрального параметра, известно как дискретное представление ну-
левой кривизны для уравнения Хироты и служит классическим атрибу-
том интегрируемости. В Главе 6 мы покажем, как выводить представ-
ление нулевой кривизны для ЗВ-совместного уравнения, исходя из него
самого, используя пример уравнения Хироты в качестве иллюстрации.
4.2.5. Дискретные К-поверхности
Для дискретных К-поверхностей, то есть для дискретных К-сетей
при т — 2, можно, как обычно, модифицировать понятие нормали
Лелёвра так, чтобы непрерывный предельный переход осуществлялся
непосредственно. Действительно, после обычной замены переменных
(2.68), отображение Гаусса п : Z2 —> S2 превратится в дискретную М-
сеть на S2, удовлетворяющую дискретному уравнению Мутара с плю-
сами:
(n, Tin + Т2п)
Т1Т2п + п = а^^п + т2п), 0.12 = ----------г- (4.31)
1 + (Т1гг,г2гг)
Альтернативно, такие сети называются дискретными лоренцевски-
гармоническими сетями в S2. Конечно, замена переменных (2.68) долж-
на сопровождаться формулами Лелёвра (2.69):
= Tin х п = din х п, 52f = п х т2п — п х 52п. (4-32)
4.2. Дискретные К-сети
Рис. 4.5. Дискретные К-поверхности вращения.
Отсюда следует также смена знака cos 012 1—> — cos 012, то есть 012 ь-> тг —
— m2 для разметки рёбер второго координатного направления.
Модификация Теоремы 4.12 для случая дискретных лоренцевски-
гармонических сетей на сфере, необходимая для непрерывного предела
с хорошим поведением, приведена в следующем утверждении.
Теорема 4.15. (Уравнение Хироты для М-сетей на сфере)
Пусть п : Z2 —> S2 М- сеть на S2 с разметкой (rij, п) = cos aj. Тогда
репер Ф : Z2 —> SU(2) можно откалибровать так, чтобы матрицы
перехода Uj = Uj(u) имели вид
Ui
U2
cos(ai/2)e^1 — isin(oi1/2)
—isin(oii/2) cos(ai/2)e_^1
cos(oi2/2) isin(oi2/2)eJ7?2
/'sin(<T2/2)e"17?J cos(oi2/2)
(4.33)
(4.34)
с некоторыми £1 = £i(w),7?2 = ^(w) £ R/(2ttZ), приписанными рёбрам
4. Специальные классы дискретных поверхностей
первого, соответственно, второго координатного направления. Суще-
ствует такая функция ф : Z2 —> R/(4ttZ), что
£1 = ^(</>1 — </>), = ^(Фг + ф).
Эта функция удовлетворяет уравнению Хироты в следующей форме:
sin | (</>12 - Ф1 - ф2 + Ф) = tan tan sin | (</>12 + </>i + ф2 + ф) • (4.35)
Доказательство. Доказательство параллельно доказательству Теоре-
мы 4.12, и мы оставляем детали читателю; см. Упражнение 4.3. □
Конструкция представления нулевой кривизны, зависящего от
спектрального параметра, для уравнения Хироты в форме (4.35) долж-
на быть модифицирована следующим образом. Уравнение зависит
только от произведения tan(a1/2) tan(oi2/2), и, следовательно, остаётся
инвариантным при замене параметров ctj >—> aj(X) такой, что
tan= Л tan tan = A-1tan^. (4.36)
Теорема 4.16. (Дискретное представление нулевой кривизны
для уравнения Хироты для М-сети на сфере) Уравнение Хироты
(4.35) допускает дискретное представление нулевой кривизны (4.16)
со следующими матрицами, зависящими от спектрального парамет-
ра:
С/!(Л) =
СШ) =
cos
(^1И)ег(0!-0)/2 _isin(^)
—isin(Q1(^)) cos(—^^)е_г^1-1^/2
/02 (А) \
cos(^-)
isin(^)e-^+0)/2
а2(Л))ег(4>2+4>)/2^
/ 02(A) ч
cos(—) у
(4.37)
(4.38)
где &j(X) определены в (4.36). С точностью до скалярных нормирую-
4.2. Дискретные К-сети
щих множителей cos(dj(A)/2), эти матрицы совпадают с
/ ег(ф1 — iAtan(^)\ тт°(\\ = 2 1И; у—iAtan(^) Г (4.39)
/ 1 гА-11ап(^)е^2+^/2\ 2[ 1 1гА-Чап(^)е-^+^/2 j 1’ (4.40)
Переход от многомерно-совместной версии (4.18) уравнения Хиро-
ты к существенно двумерной версии (4.35), имеющей преимущество для
непрерывного предела с хорошим поведением, достигается преобразо-
ванием, аналогичным уже знакомому нам из рассмотрения дискретного
уравнения Мутара, а именно
</>(u) (-l)U2</)(u).
Как обсуждалось выше, ему должна сопутствовать замена а2 ь так что tan(oi2/2) должно быть заменено на cot(oi2/2). -> 7Г —012,
Обратимся теперь к преобразованию Бэклунда /+ для дискретной
К-поверхности /. Её гауссово отображение п+ удовлетворяет уравне-
ниям
+ 7. / + Ч Ь (п,Т1П-П+) Т1п+ п = 61 (n+ пп), 01 = , . . , 1 — (Т1П, тг) + L / + 1 г (п,т2п + п+) Т2П' + п = &2(« + 7-2п), &2 = . . . , 1 + (т2п,п+) (4-41) (4.42)
или, эквивалентно,
х + , х , + ч {5-!П,п+ + п} ЩТГ + <5171 = Р1(ПГ Т171), Р1 = , 1 — (Т171, х + х , + L Ч (<^271,71+ - 71) <527l+ <527l = p2(ra +7271), Pl = , . . . , 1 + V271,71+) (4.43) (4.44)
где Pi = 6,-1. Преобразованная К-поверхность /+ получается из гаус-
сова отображения п+ при помощи (2.70). Видна прямая аналогия с
4. Специальные классы дискретных поверхностей
гладким результатом (Теорема 1.27), а строгое доказательство будет
приведено в Разделе 5.7.
Преобразование Бэклунда действует на решения уравнения Хиро-
ты согласно следующим формулам:
sin ^(т1ф+ — ф+ + т^ф — </>) (4.45)
= sin | (Т1Ф+ + Ф+ -пф-ф),
tan(7/2) 4
sin |(т2</>+ - ф+ -Т1ф + ф) (4.46)
— tan(a2/2) tan(7/2) sin ^(т2ф+ + ф+ + т2ф + ф}.
Здесь параметр Бэклунда 7 возникает из cos 7 = (п+, п).
4.2.6. Дискретное уравнение синус-Гордона
В этом разделе рассматриваются углы между смежными рёбрами
дискретной К-поверхности / : Z2 —> R3. Поверхность / будет предпола-
гаться погруженной, то есть в каждой касательной плоскости четыре
ребра, инцидентные с вершиной /, упорядочены циклически, как по-
казано на рис. 4.6, и угол между любыми двумя последовательными
рёбрами лежит в (0, тг). Согласно свойству Чебышёва, у каждого эле-
ментарного четырёхугольника (/,/1,/12,/2) имеется две пары равных
углов,
V = ^(7Х,7Й = /(wLwb (4.47)
и —> —> _______________>
V = Z(/ifi2, /1/) = /(/2/, /2/12). (4.48)
Оказывается возможным выразить эти углы через функцию ф : Z2 —>
R, введённую в предыдущем разделе и удовлетворяющую уравнению
Хироты (4.35).
Утверждение 4.17. (Рёбра дискретной К-поверхности) С точ-
ностью до общего поворота Ф-1 ( • - )Ф, рёбра дискретной К-поверх-
ности, лежащие в касательной плоскости при вершине f, задаются
4.2. Дискретные К-сети
/2
Рис. 4.6. Четыре четырёхугольника дискретной К-сети
смежные с вершиной /, и их внутренние углы.
формулами:
/1 -/ = ( 0 1 ШПОН \^еЦф1-ф)/2 е-г(Ф1-ф')/2> 0 /
/2 -f = ( 0 isina2 ^e_i(02+0)/2 е»(02+4')/2> 0 2
/-1 -f = ( 0 гэша! ег(0-0_1)/2 0
/-2 -f = ( 0 г Sin 012 1 _^ф+ф_^/2 ег(0+0-г)/2 0
(4.49)
(4.50)
(4-51)
(4-52)
(В первых двух формулах метки он и а2 приписаны, соответственно,
рёбрам {и,и + ei) и (и,и + 62), а в двух последних, соответственно,
рёбрам (u — ei, и) и (и — е2, и).)
Доказательство. Вывод всех четырёх формул одинаков, и мы рас-
смотрим подробно только две первые. Из дискретного представления
Лелёвра (4.32) и выражения (4.12) для гауссова отображения п через
4. Специальные классы дискретных поверхностей
репер Ф получаем:
fi~f = п-! х п = |[Ф^1е3Ф1,Ф_1е3Ф] = |ф-1[{71_1е3г71,ез]Ф,
f2~f = п х п2 = |[Ф-1е3Ф, Фз^эФг] = |ф-1[е3,{72-1е3{72]Ф-
Подставляя е3 = —г<т3 и выражения (4.33), (4.34) для матриц перехода,
получаем формулы
[П/езПьез] = -гзшоц Q j,
, / Л eiV2 \
[е3,{72 е3П2] = -isina2 ( i7}2 Q V
что совпадает с (4.49), (4.50). □
Следствие 4.18. (Углы между рёбрами дискретной К-поверх-
ности) В обозначениях рис. 4.6,
V — ^(01 + Ф2), <£-1,-2 = Jj(0-i + 0-г)1 (4.53)
Р-1 = 7Г - |(02 + Ф-1), <^12 = 7Г - |(</>_2 + </>1). (4.54)
Доказательство. Опять, все четыре формулы проверяются аналогич-
но; приведём детали только для первой. Применив формулу (4.10) для
скалярного произведения зп(2)-представителей для векторов в R3, на-
ходим:
</i-/,/2-/) -tr(A-/)(f2-f)
C0S<^ НА -/II • 11/2 -/II 2 sin 04 sin а2
L fе~^ф1+ф2^2 0 \ Ф1+Ф2
“ 2tr 0 ei(0i+^)/2J -cos 2 ’
Это доказывает первое уравнение из (4.53). Точно так же можно пока-
зать, что
0-1 + 0-2
СО8(/?_ц_2 = COS --—,
, 02 + 0-1 , 01 + 0-2
COS7?_1 = —COS--------, cos<p_2 = — COS ----------•
Это завершает доказательство. □
4.2. Дискретные К-сети
В качестве следствия можно вывести разностное уравнение, кото-
рому подчиняются углы ip между асимптотическими линиями дискрет-
ной К-поверхности:
Теорема 4.19. (Дискретное уравнение синус-Гордона) Углы
ip четырёх элементарных четырёхугольников дискретной К-поверх-
ности с общей вершиной f удовлетворяют так называемому дискрет-
ному уравнению синус-Гордона,
ег(<^—<p_i—v>_2+v>-i.-2) _ н-ie . 1 к 2е
1 - к-ie^-1 1 - к_2е^-2
Здесь обозначения как на рис. 4.6, а k_i и к_2 равны, соответственно,
значениям величины
к, = tan tan (4.56)
на четырёхугольниках (/-i, f, f2, f-1,2) и (f-2, /1,-2, /1, /)•
Доказательство. Перепишем уравнение Хироты (4.35) для четырёх-
угольника (/, А, У12,/2) как
1 р—Л012+0——4>2)/2 к ('г{ф\+ф1}/2 __ — i(0i2+0)/2\
J. О ——• Гь I С С It
где величина к определена как в (4.56) и считается приписанной этому
четырёхугольнику. Согласно (4.53), (4.54) имеем:
¥> = + <м
<р* =7Г- 1(</>12 + </>).
(4-57)
Таким образом, уравнение Хироты приводит к соотношению между
углами (р и tp* в чебышёвском четырёхугольнике:
е^+^’ + 1 = к(е^ + eiv'
_ 1 - кегу> _ 1 - ке1Ч>
6 к-е^ ~ в 1 - '
С учётом этого соотношения, дискретное уравнение синус-Гордона
(4.55) следует немедленно из планарности звезды при вершине:
Щ + <£-1,-2 + V’-i + V-2 — 27Г- □
(4.58)
4. Специальные классы дискретных поверхностей
4.3. Дискретные изотермические сети
4.3.1. Определение дискретной изотермической сети
Определение 4.20. (Дискретная изотермическая сеть) Дис-
кретной изотермической сетью называется циркулярная кёнигсова
сеть, то есть циркулярная сеть f : Zm —> Rw, допускающая дуаль-
ную сеть f* : Zm -> RN в смысле Определения 2.22.
Чтобы найти характеризации дискретных изотермических сетей,
можно использовать характеризации кёнигсовых сетей, выведенные в
Разделе 2.3. Для этого рассмотрим циркулярную сеть f : Zm —> R'v.
Тогда её поднятие f = f + ео + |/|2еоо на световой конус L77+1,1 удо-
влетворяет тому же уравнению (2.1), что и сама сеть f. В частности,
f кёнигсова сеть в R77 тогда и только тогда, когда f кёнигсова сеть в
Rlv+1,1.
Проективно инвариантные характеризации кёнигсовых сетей f в
R77+1,1 немедленно переводятся в мёбиусово-геометрические характе-
ризации изотермических сетей f в R77. В этом контексте, условия типа
“точки / лежат в d-мерном пространстве” следует понимать как “век-
торы f порождают (d + 1)-мерное линейное подпространство”, что пе-
реводится как “точки f принадлежат (d— 1)-мерной сфере”; см. Раздел
9.3.2.
Переводя в этом духе Теорему 2.27, применённую к двумерной кё-
нигсовой сети f в R77"*"1,1, на язык геометрии Мёбиуса в R77, приходим
к следующему утверждению.
Теорема 4.21. (Сферы пяти точек для дискретных изотерми-
ческих поверхностей)
1) Двумерная циркулярная сеть f : Z2 —> R77, не лежащая на 2-
сфере, является дискретной изотермической тогда и только тогда,
когда для каждого и ё Z2 пять точек f и /±ц±2 лежат на 2-сфере,
не содержащей четыре точки /±1, /±2-
2) Двумерная циркулярная сеть f : Z2 —> S2 С R77 на 2-сфере
является дискретной изотермической тогда и только тогда, когда
для каждого и ё Z2 три окружности, проходящие через точку f,
№ = circled, /12, /_1>2), c(down) = circle(/i Д_2
С(1) = circle(/,/1,/_1),
4.3. Дискретные изотермические сети
имеют одну дополнительную общую точку, или, эквивалентно, три
окружности, проходящие через f,
C(left) = circle(/, /_lj2) Л^), = circle(f, /1>2, /i,_2),
C(2) = circle(/,/2,/_2),
имеют одну дополнительную общую точку.
Рис. 4.7. Четыре окружности общей дискретной изотерми-
ческой поверхности, со сферой пяти точек.
Случаи 1), 2) Теоремы 4.21 иллюстрируются рис. 4.7, 4.8, соответ-
ственно.
Аналогично можно перевести Теорему 2.29, применённую к много-
мерной кёнигсовой сети f в R77"1"1,1, на язык мёбиусово-геометрических
свойств сети f в R'v. Получаем следующее утверждение.
Теорема 4.22. (Многомерные дискретные изотермические се-
ти) Циркулярная сеть f : Rw является дискретной изотер-
мической тогда и только тогда, когда для каждого элементарного
шестигранника сети четвёрка его белых вершин лежит на одной
окружности (как и четвёрка чёрных; любое из этих условий следует
из другого).
При стереографической проекции элементарный шестигранник
дискретной изотермической сети превращается в конфигурацию Клиф-
форда; см. первую теорему Клиффорда в Упражнении 3.11. Если полюс
стереографической проекции выбрать в /, то возникает конфигурация,
описанная в Упражнении 4.12.
4. Специальные классы дискретных поверхностей
Рис. 4.8. Четыре окружности плоской (или сферической)
дискретной изотермической сети.
4.3.2. Характеризация дискретных изотермических сетей
посредством двойного отношения
Можно дать ещё одну характеризацию дискретных изотермиче-
ских поверхностей в терминах двойных отношений. Напомним, что
для любой четвёрки точек на окружности a, b,c,d G ЕД их (веще-
ственнозначное) двойное отношение определяется формулой (1.77), с
умножением в алгебре Клиффорда СДВД). Клиффордово произведе-
ние х, у С удовлетворяет равенству ху + ух = — 2(т, у), а обратный
элемент х G в алгебре Клиффорда равен х-1 = —т/|2;|2. Альтер-
нативно, можно отождествить плоскость четырёхугольника (a, b, с, d) с
комплексной плоскостью С, и тогда умножение в (1.77) интерпретиру-
ется как умножения комплексных чисел. Важным свойством двойного
отношения является его инвариантность при преобразованиях Мёби-
уса.
Для дискретных изотермических поверхностей из Теоремы 4.21 из-
влекается следующая характеризация.
Теорема 4.23. (Двойные отношения четырёх смежных четы-
рёхугольников) Двумерная циркулярная сеть f : Z2 -> являет-
ся дискретной изотермической поверхностью тогда и только тогда,
когда двойные отношения q = q(f,fi,fi2,f2) её элементарных четы-
4.3. Дискретные изотермические сети
рёхуголъников удовлетворяют условию
Q • 9-1,—2 — 9-1 • 9-2-
(4.59)
Здесь, как обычно, отрицательные индексы —i обозначают обратные
сдвиги т~г, например, = 9(/-i,/,/2,/-1,2); см. рис. 4.9.
Рис. 4.9. Четыре смежных четырёхугольника дискрет-
ной изотермической поверхности: двойные отношения
удовлетворяют q g-1,-2 = 9-i 9-2-
Доказательство. Сделаем преобразование Мёбиуса, отправляющее f
на оо. При таком преобразовании четыре смежные окружности, прохо-
дящие через /, превращаются в четыре прямые (/±1/±г), содержащие
соответствующие точки /±1,±2- Двойные отношения превращаются в
отношения направленных длин, например,
,, , , , х ^(/1,2,/г)
9иД1Д1,2, J2) - —т—г-
Ц/1, Jl,2)
Если аффинное пространство, проходящее через точки f±i, f±2, трёх-
мерно, то, согласно части 1) Теоремы 4.21, четыре точки /±1,±2 лежат
4. Специальные классы дискретных поверхностей
в плоскости (2-сфере, проходящей через f = оо). Обобщённая теорема
Менелая (Теорема 9.12) доставляет следующее необходимое и доста-
точное условие для этого,
/(/2,/1,2) /(/1,/1,-2) /(/—2,/—1,—2) /(/-!,/-!,2)
/(/1,2,/1) ' /(/1,-2,/-2) ‘/(/-1,-2,/-1) /(/—1,2,/2) ’ 1 '
Это эквивалентно (4.59) с f — оо.
Если, наоборот, четыре точки /±1, /±2 компланарны, то, согласно
части 2) Теоремы 4.21, обе прямые (/-i,2/i,2) и (/_i>_2/i,—2) пересека-
ют прямую (/-i/х) в одной и той же точке р^. Таким образом, мы
получаем ситуацию рис. 4.10, описываемую теоремой Дезарга. Здесь
мы дважды применяем теорему Менелая, к треугольнику A(/_i, /2, /1)
пересечённому прямой (/—i,2/i,2), и к треугольнику A(/_i,/_2, Д) пе-
ресечённому прямой (/-ii_2/ii_2):
Z(/2, /12) /(/-!,/-!,2) = Цр(1),/-1) = /(/-2,/1,-2) Z(/-1, /_1,_2)
/(/12,/1) ’ /(/-1,2,/2) Z(/1,PW) /(/1,-2,/1) ’ /(/-!,-2,/-2)’
Отсюда опять следует формула (4.60). □
Для многомерных дискретных изотермических сетей из Теоремы
4.22 следует аналогичная характеризация.
4.3. Дискретные изотермические сети
Теорема 4.24. (Двойные отношения трёх смежных четырёх-
угольников) Циркулярная сеть f : Zm —> является дискретной
изотермической тогда и только тогда, когда двойные отношения её
элементарных четырёхугольников удовлетворяют условию
q(f, fi, fa,fj) q(f, fj, fjk, fk) • q(f, fk,fki, fi) = 1 (4.61)
для любой тройки различных индексов i,j, k.
Доказательство. Опять, сделаем преобразование Мёбиуса, переводя-
щее f на оо. При этом три смежные окружности, проходящие через f
превращаются в три прямые (ftfj), (fjfk) и (fkfi), содержащие (белые)
точки fij, fjk и fki, соответственно. То, что эти белые точки лежат на
одной окружности с f, означает просто, что они коллинеарны. Необхо-
димое и достаточное условие этого выражается теоремой Менелая:
Kfj, fij) Kfk, fjk) l(fi, fki) _ (4 62)
l(fij,fi) ’ Kfjk,fj) ’ l(Jki,fk) ~ ’
Мёбиусово-инвариантное значение отношений направленных длин за-
даётся соответствующими двойными отношениями,
l(fa, f^
qft,ti,tij,tj)--[q-j-y
следовательно, уравнение (4.62) эквивалентно (4.61). □
Заключения Теорем 4.23, 4.24 можно подытожить следующим об-
разом.
Теорема 4.25. (Факторизованные двойные отношения) Цирку-
лярная сеть f : 1т —> является дискретной изотермической то-
гда и только тогда, когда двойные отношения её элементарных че-
тырёхугольников удовлетворяют
q(f,fi,fij,fj) = %:, (4-63)
где ai (г = 1,...,т) образуют вещественнозначную разметку рёбер
Zm (зависят только от щ).
4. Специальные классы дискретных поверхностей
Таким образом, обе стороны (и, и + е.;) и (u + ej, и + е, + ej) эле-
ментарного квадрата в Zm помечены о, = оДи) = oti(u + Sj) и,
аналогично, две другие стороны (и, и + Cj) и (u + ег, и + е, + е3) помече-
ны ctj — aj(u) — aj(и + ej; см. рис. 4.11. В следующем подразделе мы
дадим более конкретный способ определения по данной дискретной
изотермической сети.
Рис. 4.11. Разметка сторон дискретной изотермической сети.
Следует отметить, что если дана разметка рёбер а$, то уравнение
(4.63) определяет 2D систему: значения /, fi, fj однозначно определя-
ют fij. Само существование многомерных дискретных изотермических
сетей основано на следующем фундаментальном свойстве уравнения
двойного отношения.
Теорема 4.26. (SD-совместность дискретных изотермических
сетей) 2D уравнение двойного отношения (4.63) SD-совместно для
любой разметки рёбер ai.
Мы приведём два совершенно разных доказательства этой теоре-
мы. Концептуальное доказательство, связанное с дискретными сетями
Мутара на квадрике, будет представлено в Разделе 4.3.5. Прямое вы-
числительное доказательство, с одновременным выводом представле-
ния нулевой кривизны, будет приведено в Разделе 4.3.7. Приняв пока
справедливость Теоремы 4.26 на веру, сформулируем, какие начальные
данные полностью определяют дискретную изотермическую сеть:
(1^) значения f на координатных осях 23, (г = 1,... ,пг), то есть т
дискретных кривых с общей точкой пересечения /(0);
4.3. Дискретные изотермические сети
(1^) т функций а, : —> R на рёбрах координатных осей при
i = 1,..., т.
Заметим, что данные (1^) порождают разметку рёбер Zm, при раз-
несении на все рёбра согласно правилу naj — Uj.
4.3.3. Преобразование Дарбу дискретных изотермических
сетей
Как обычно, многомерная совместность дискретных изотермиче-
ских сетей ведёт к их преобразованиям.
Определение 4.27. (Дискретное преобразование Дарбу) Пусть
пара дискретных изотермических сетей f, f+ : Zm —> имеет оди-
наково факторизованные двойные отношения, так что выполняется
(4.63) и
(4.64)
Такая пара связана преобразованием Дарбу, если двойные отношения
“вертикальных” элементарных четырёхугольников также фактори-
зованы:
i = (4.65)
при некотором с & R. Сеть f+ называется преобразованием Дарбу
сети f с параметром с.
Ясно, что следующие данные однозначно определяют преобразо-
вание Дарбу /+ заданной дискретной изотермической сети f:
(D^) точка /+(0);
(D^) вещественное число с, параметр преобразования.
Определение преобразований Дарбу означает, что, если положить
F(u, 0) = f(u), F(u, 1) = /+(и), то F : Zm х {0,1} —> являет-
ся М-мерной изотермической сетью, где М = т + 1. В частности, F
циркулярная сеть, так что преобразование Дарбу является частным
случаем преобразования Рибокура. Параметр с играет роль функции
ам, приписанной ко всем рёбрам, параллельным М-му направлению
решётки. Многомерная совместность уравнения двойного отношения
немедленно переводится в следующее фундаментальное утверждение.
4. Специальные классы дискретных поверхностей
Теорема 4.28. (Перестановочность дискретных преобразова-
ний Дарбу) Пусть f дискретная изотермическая сеть, а f^
два его преобразования Дарбу, с параметрами ci, сг, соответственно.
Тогда существует единственная дискретная изотермическая сеть
являющаяся одновременно преобразованием Дарбу от с па-
раметром С2 и преобразованием Дарбу от f^> с параметром щ.
Сеть однозначно определяется условием, что соответствующие
точки четырёх дискретных изотермических сетей лежат на одной
окруэюности и имеют постоянное двойное отношение
4.3.4. Метрика дискретной изотермической сети
Обратимся теперь к характеризации дискретных кёнигсовых сетей
из Теоремы 2.30. В приложении к циркулярным сетям, она говорит, что
такая сеть f кёнигсова тогда и только тогда, когда существует такая
функция s : Tjm —> R*, что
_ sij _ Sj
l(M,f) ~ s ’ l(M,M ~ ^.ы>)
для любого вписанного четырёхугольника (/, fi, fij, fj) с точкой пересе-
чения диагоналей M. (Отметим, что мы сменили обозначение v, резер-
вируемое для общих кёнигсовых сетей, на s.) Будем называть функцию
s для циркулярных сетей метрическим коэффициентом, что оправда-
но тем, что она имеет следующее дополнительное свойство.
Теорема 4.29. (Метрический коэффициент дискретных изо-
термических сетей) Для дискретной изотермической сети f со-
отношения (4.66) определяют функцию s : Zm —> R* однозначно, с
точностью до чёрно-белого растяжения (s >-> As в чёрных точках и
s ь-> цз в белых), что фиксируется заданием s произвольно в одной
чёрной и одной белой точке. Существует такая разметка а рёбер
Zm, что
\fi~f\2 = oiiSSi (г = 1,...,т). (4.67)
Чёрно-белое растяжение функции s сводится к растяжению а н->
(Ад)-1<т разметки а.
4.3. Дискретные изотермические сети
Доказательство. Во вписанном четырёхугольнике с точ-
кой пересечения диагоналей М имеем две пары подобных треугольни-
ков
Л(/,А,м)~л(л,/0-,м),
ср. рис. 4.12. Следовательно,
\Mfi3\ \мщ _ |/0- - Л1
\мп\ \Mf\ |л-/| ’
Отсюда следует, что
\ММ \MfA _ \fi3 - л-12
\Mf\ ' \Mfi\ 1Л-/12 ’
Это можно переписать как
W/о) |Л, -Л12
1Л-/12 ’
IW _ IM/Д _ \fzj - fi\
\Mfj\ \Mf\ 1Л-/1
\Mfi\ _ |Д- - Al2
= Al2
(4.70)
Действительно, рассматривая рис. 4.12, нетрудно понять, что дроби в
левых частях обоих уравнений в (4.70) либо обе отрицательны (для
вложенного четырёхугольника), либо обе положительны (для невло-
женного четырёхугольника), поэтому замена отношений длин в (4.69)
на отношения направленных длин в (4.70) законна. Подставим опреде-
Рис. 4.12. Вписанные четырёхугольники, вложенный
(слева) и невложенный (справа).
4. Специальные классы дискретных поверхностей
ляющие соотношения (4.66) для функции s в (4.70):
2
SjSij \fij fj\ SiSij
= I/, - /I2 ’ \fj ~ f\2 ’
(4-71)
Но это эквивалентно утверждению, что функции
-л2
SSi
(4-72)
□
удовлетворяют условию разметки TjUi — а^.
То, что обозначение о, для разметок в Теоремах 4.25 и 4.29 совпа-
дает, имеет своё объяснение.
Теорема 4.30. (Происхождение разметки рёбер для фактори-
зованных двойных отношений) Если разметка рёбер ai для дис-
кретной изотермической сети f : Zm —> введена согласно уравне-
нию (4.67), то двойные отношения её элементарных четырёхуголь-
ников факторизуются, как в уравнении (4.63).
Доказательство. Для вписанного четырёхугольника (/, fi, fij, fj) име-
ем:
где е = — 1 для вложенного четырёхугольника и е = 1 для невложенно-
го. Таким образом,
При помощи уравнений (4.67) и (4.68) эту формулу можно переписать
в виде
(f f f f \ — aiSi I _ O-iSj
Ji, Jij,Jj) - e ajSj ajSj ,
и, наконец, в силу (4.66) приходим к
f -Г f \ — OtiSj, Sj _______
q\J, Ji, Jij, Jj) - ajSj Si - a.
что доказывает теорему.
□
4.3. Дискретные изотермические сети
Замечание. Теорема 4.29, в том виде, как она сформулирована, не
обращается: из существования функции s. удовлетворяющей (4.67). не
следует свойство кёнигсовости. Действительно, из (4.67) и (4.70) нахо-
дим:
_ SjSij
~ sgi ’
что эквивалентно
W,/)
1(М,Ы
SiSij
SSj~ 1
(4.73)
Ц-M, fij) _ . $ij
Si
l(M,fj) Sj
(4.74)
(с одинаковыми знаками ± в обоих уравнениях). Последние уравнения
слегка слабее, чем (4.66), которое служит необходимым и достаточным
условием того, что сеть f кёнигсова. Однако, выбор плюсов в послед-
ней формуле может быть обеспечен учётом некоторой дополнительной
информации о f. Например, если известно, что все элементарные че-
тырёхугольники двумерной циркулярной сети f вложены, то свойство
(4.67) достаточно для того, чтобы гарантировать, что f сеть Кёнигса.
Действительно, в этом случае огг/си < 0, так что из (4.67) следует
S2/S1 < 0 и S12/S < 0, и тогда в (4.74) должен быть выбран знак плюс.
Замечание. Для пары Дарбу дискретных изотермических сетей фор-
мула (4.67) для (т + 1)-го направления имеет вид
|/+ - /|2 = css+, (4.75)
и буквально совпадает с соответствующей формулой (1.76) в гладком
случае.
4.3.5. Мутаровские представители дискретных
изотермических сетей
Метрический коэффициент дискретной изотермической сети f
можно использовать для того, чтобы получить её мутаровского пред-
ставителя, при подходящем растяжении поднятия f на световой конус в
RAr+1’1. Это ведёт к новой характеризации дискретных изотермических
сетей, являющейся очевидным образом мёбиус-инвариантной, так как
она формулируется полностью на языке проективной модели геомет-
рии Мёбиуса. Следующее утверждение служит дискретным аналогом
Теоремы 1.32.
4. Специальные классы дискретных поверхностей
Теорема 4.31. (Дискретная изотермическая сеть = Т-сеть на
световом конусе) Если f : Z"1 —> R:V дискретная изотермическая
сеть, то её поднятие s — s-1 f : Zm —> L7V+1,1 на световой конус в
Rw+i,i удовлетворяет дискретному уравнению Мутара
TiTjS — s = aij(rjS — Tis). (4-76)
Наоборот, если дана дискретная Т-сетъ s : Zm —> L7V+1,1 на световом
конусе, то определим функции s : Zm —> К и f : Zm —> RN согласно
s = + e0 + |/|2ето) (4.77)
(то есть s~l есть е^-компонента, a s~*f есть Rw-часть s в базисе
ei,..., еуу, ео, Тогда f дискретная изотермическая сеть.
Доказательство. Это следует из Теоремы 2.32 и того факта, что если
f кёнигсова сеть в R7'7, то сеть f = f + ео + |/|2воо также кёнигсова на
световом конусе L7V+1,1 С R7V+1-1_ □
Итак, найдена интерпретация дискретных изотермических сетей
как Т-сетей на квадрике, подчиняющихся уравнению (4.76) с
Разметка рёбер дискретной изотермической сети f (обеспечивающая
факторизацию (4.63) её двойных отношений) уже закодирована в её
поднятии s на световой конус. Действительно,
IA-/I2 9/.
а* = SSi =
и Теорема 4.5 гарантирует, что эти величины зависят только от щ.
Теорема 4.3 гласит, что Т-сети на квадрике ЗЭ-совместны. Это до-
казывает ЗЭ-совместность дискретных изотермических сетей (Теорема
4.26). В частности, преобразования Дарбу это не что иное, как преоб-
разования Мутара на световом конусе. Они описываются дискретными
уравнениями Мутара
rLs+ - § = bi(s+ - Tis),
bi =
(4.79)
4.3. Дискретные изотермические сети
и определяются заданием величины s+(0) в одной точке. Параметр с
преобразования Дарбу закодирован в величине
.+. I/+-/I2
с — —2(.s,.s) —-----—,
ss+
которая не зависит от u € Zm, так что с = — 2(s(0), s+(0)).
4.3.6. Двойственность Кристоффеля для дискретных
изотермических сетей
Специализация понятия двойственности Кристоффеля общих кё-
нигсовых сетей на случай циркулярных приводит, прежде всего, к сле-
дующему существенному наблюдению: для дискретной изотермической
сети дуальная сеть тоже дискретная изотермическая. Действительно,
любой четырёхугольник со сторонами, параллельными соответствую-
щим сторонам вписанного четырёхугольника, очевидно, также вписан.
Более точное описание дуальности для дискретных изотермических се-
тей содержится в следующей теореме.
Теорема 4.32. (Дуальная по Кристоффелю дискретная изо-
термическая сеть) Пусть f : Zm —> Rw дискретная изотермическая
сеть, с факторизованными двойными отношениями
= (4.80)
и метрическим коэффициентом s : 7Lm —> R*. Тогда точна Rw-значная
дискретная один-форма 6f*, определённая согласно
S,f = i = (4.81)
Её интегрирование определяет (с точностью до параллельного пере-
носа), сеть R77, называемую дуальной по Кристоффелю для
сети f. Сеть f* дискретная изотермическая, с двойными отношени-
ями
= (4-82)
и метрическим коэффициентом s* = s-1 : Zm —> R*. Наоборот, если
для данной Q-сети f : Zm —> Rw существует такая разметка рёбер
4. Специальные классы дискретных поверхностей
ai, что дискретная один-форма
5if* = (4.83)
\W
точна, то f дискретная изотермическая сеть, с двойными отноше-
ниями, как в (4.80).
Доказательство. Первая часть теоремы является следствием общего
построения дуальной кёнигсовой сети. Уравнение (4.82) следует непо-
средственно из (4.80), (4.81). Чтобы доказать обратное, отождествим
плоскость четырёхугольника (f,fi,fij,fj) с С. Тогда условие точно-
сти для элементарного четырёхугольника эквивалентно (комплексно
сопряжённому) уравнению
a-i______0-1 _ aj_________aj
fi- f fij - fj ~ fj- f fij - fi'
После преобразований, оно превращается в уравнение двойного отно-
шения (4.80) (в общем положении, при fij — fi — fj + f 0). Таким
образом, точность формы (4.83) фактически характеризует дискрет-
ные изотермические сети. □
Следствие 4.33. Дополнительные диагонали любого элементарного
четырёхугольника дискретной изотермической сети f и её дуальной
по Кристоффелю связаны соотношениями
(4.84)
\Jij J\ I Ji Jj]
Доказательство. Начнём с переписывания (4.63) в нескольких экви-
валентных формах; эти вычисления выполняются не только в алгебре
Клиффорда C€(R;v), но и в произвольной ассоциативной алгебре с еди-
ницей А. Будучи записанным как
Vittij - Wi - fr1 = Vjttij - Шз - (4-85)
это уравнение отражает симметрию по отношению к диагональным пе-
рестановкам в элементарном четырёхугольнике, fi <-> fj и f <-> fij,
соответственно (в обоих случаях им сопутствует замена ai <-> а?). За-
писывая (4.85) как
adfij - f)(fi - ГГ1 -ai = ajifij - f)(f3 - f)-1 - Oj,
4.3. Дискретные изотермические сети
и деля слева на fij—f, мы приходим к так называемой трёхногой форме
для уравнения двойного отношения:
(<*; ~ aj)(fij - Л-1 = adfi ~ ~ aj(fj - ГГ1- (4-86)
Заметим, что, согласно (4.81), правая часть (4.86) равна —(/* — /*) +
+ (fj ~ f*) = fj ~ fi - Это доказывает первое уравнение (4.84), если
принять в расчёт формулу инверсии £-1 = — £/|£|2 для векторов £ €
IR77 С C^(R;v). Второе уравнение (4.84) аналогично. □
Заметим, что умножая (4.86) на fij — f справа, мы приходим к
равенству
<*i(fi - n~4fij - fi) = aj(fj - f)~\fij - fj), (4.87)
что доказывает его эквивалентность (4.85), факт неочевидный из-за
некоммутативности. Окончательно, диагональное отражение f о fij
превращает (4.86) в
(a* - aj)(fij - f)-1 = ai(fij - fj)-1 - aj(fij - Л)-1
и, сравнивая последнее уравнение с (4.86), мы обнаруживаем важное
следствие из (4.63):
c*i(fi ~ f)-1 ~ <*j(fj ~ /Г1 = adfij - fj)-1 - ajtfij - fi)-1. (4.88)
Таким образом, получено альтернативное, некоммутативное доказа-
тельство точности один-формы 6f*.
4.3.7. ЗВ-совместность и представление нулевой кривизны
Обратимся теперь к прямому алгебраическому доказательству
Теоремы 4.26. Это доказательство, как и многие другие результаты о
дискретных изотермических сетях, допускает немедленное обобщение
на случай, когда поля f в уравнении двойного отношения (4.63) при-
нимают значения в произвольной ассоциативной алгебре А с единицей
(над полем ЗС), с метками принимающими значения в X. В нашей
геометрической ситуации А = C£(R/V) и X = R.
Доказательство Теоремы 4.26. Мы должны показать, что, если урав-
нения двойного отношения наложены на все шесть граней элементарно-
го куба 6123 в Z3, то совпадают три значения /123> приходящие с граней
4. Специальные классы дискретных поверхностей
TiCjk - В случае коммутирующих полей f это является результатом пря-
молинейного вычисления; однако в некоммутативном контексте такое
вычисление едва ли осуществимо без помощи специального матрично-
го формализма. Общепринято представлять дробно-линейные преоб-
разования в С линейным действием группы GL(2,C); мы расширим
эту идею, определив действие на А группы обратимых матриц размера
2 х 2 с элементами из А согласно формуле
j [z] = (az + b)(cz + d) \
a, b, c,d,z e A.
Легко видеть, что это действительно задаёт левое действие группы, при
условии, что групповое умножения определено естественной формулой
а' Ь'\ (а Ь\
d d'J \с d)
а1 а + b'c a'b + b'd\
с'а + d'c с'Ъ + d'd) '
Мы хотим записать уравнение (4.63) как выражение для fa в виде
дробно-линейной функции от fj с коэффициентами, зависящими от /,
fi (и от ai, ofa. Для этой цели запишем уравнение двойного отношения
(4.63) как
fij -h = %- (fij - Wi - frXfj - f).
3
Представив левую часть как fij — fj = (fij — fi) — (fj — fi), преобразуем
последнее уравнение к виду
(fa - fi) (1 + (f - fiT^fi - /)} = fj - fi,
или, окончательно,
/ \ -i
fij -fi = (ifj -/) + (/- fi)) (1 + (f - fi)-\fj - f))
В матричном виде это уравнение записывается как
fa - fi = L(fa f, at, aj)[fj - f],
где
/ 1 f - fi
L(fi,f,ai,aj) = a
1
(4.89)
(4.90)
4.3. Дискретные изотермические сети
Таким образом, уравнение (4.63) на гранях 613, Соз элементарного 3D
куба 6123 можно переписать как
/13-/1 = L(/i,/,ai,Q3)[/3-/], (4.91)
/23-/2 = £(/2,/,а2,а3)[/з-/]. (4.92)
Из (4.91) и (4.92) выводим посредством сдвига во втором и первом коор-
динатном направлениях выражения для /123, получаемые из уравнений
двойного отношения на гранях Т2С13 и Т1С2з:
/123 —/12 = £(/12,/2, ai, а3)[/2з -/2], (4.93)
/123 —/12 = £(/12,/1, <12, аз)[/1з ~/1]- (4.94)
Подставляя (4.91), (4.92) в правые части (4.94), (4.93), соответственно,
мы представим равенство между этими двумя значениями /123 (кото-
рое нужно доказать) в следующем виде:
£(/12, /1, а2, <i3)£(/i, /, <11, <1з)[/з — /]
- £(/12, /2, «1, <1з)£(/2, /, <12, огз)[/з - /]• (4.95)
Покажем, что фактически выполнено более сильное утверждение:
£(/12, /1, <12, <1з)£(/1, /, <11, <1з)
= £(/12, /2, <11, <1з)£(/2, /, <12, аз). (4.96)
Действительно, элементы (12) в обеих частях равны f — /)2. Равенство
элементов (11) эквивалентно уравнению (4.85), равенство элементов
(22) эквивалентно (обратному) уравнению (4.87), а равенство элемен-
тов (21) эквивалентно уравнению (4.88). Это завершает доказатель-
ство. □
Замечание. Матрицы Ь(/г, появляющиеся в этом доказа-
тельстве, на самом деле служат чрезвычайно важным атрибутом инте-
грируемых (ЗВ-совместных) 2D уравнений. Они известны как матри-
цы перехода в представлении нулевой кривизны для таких уравнений,
и будут более подробно обсуждаться в Главе 6. В данный момент, от-
метим только следующее свойство (4.96): это уравнение выполняется
тождественно по параметру <т3, который является фактически един-
ственным, что осталось в этом уравнении от третьего координатного
направления (все остальные его ингредиенты относятся к двумерной
4. Специальные классы дискретных поверхностей
координатной плоскости 12). Этот параметр, обычно обозначаемый А,
известен как спектральный параметр в представлении нулевой кривиз-
ны. Именно зависимость от спектрального параметра делает возмож-
ным применение мощных аналитических методов теории интегрируе-
мых систем. В последнем доказательстве мы продемонстрировали, как
вывести представление нулевой кривизны; фактически, этот метод вы-
вода имеет очень общую природу, так как он не основан ни на чём,
кроме ЗВ-совместности.
4.3.8. Непрерывный предел
Чтобы осуществить непрерывный предел к гладким изотермиче-
ским поверхностям, следует стартовать с дискретных изотермических
поверхностей (дискретных изотермических сетей при т = 2) с вло-
женными элементарными четырёхугольниками. Удобно представлять
их отрицательные двойные отношения в виде
, (4.97)
с положительными метками и Формально, это не более чем смена
обозначений ct2 > —аг- Эта операция также приводит некоторые даль-
нейшие выражения к виду, более близкому к их непрерывным анало-
гам. Мы оставим формулу (4.67) так, как она есть; это потребует лёгкой
модификации в определении функции s, а именно s(u) н-> (—l)“2s(u),
а также аналогичной модификации в поднятии з. Это переопределе-
ние гарантирует положительность з в случае положительных aj, аг-
Уравнение (4.81) превращается в
А Г* - J1L -6_1L A f* - _ AL - (л
1/ 1151/|2 SS1’ 2|г>2/|2 ss2’ ( - }
что служит прямым дискретным аналогом (1.73). Преобразования Дар-
бу в контексте (4.97) принимают вид
9(/,/2,Л+Д+) = -^. (4.99)
Замечание. Напомним, что в гладком случае (см. Определение 1.28),
функции оц, аг могут быть абсорбированы в перепараметризацию
независимых переменных иг •-> >рг(и^ (г = 1,2), за счёт чего всегда
можно добиться, чтобы cti — 02 = 1, так что первая фундаментальная
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
форма поверхности f будет конформной. Конечно, такая перепарамет-
ризация невозможна в дискретном контексте. Тем не менее, можно рас-
смотреть более узкий класс дискретных изотермических поверхностей,
характеризуемый свойством (4.97) с cni = а2 — 1:
q(.f, fi, f12, /2) = -1- (4.100)
Это условие (все элементарные четырёхугольники f являются кон-
формными квадратами) может рассматриваться как дискретизация
конформности первой фундаментальной формы. Уравнение (4.100),
будучи частным случаем (4.63) со специальной разметкой, разделяет
все свойства общего случая. Однако, важно понять, что оно не 3D-
совместно само с собой, то есть его нельзя наложить на все грани 3D
куба. Действительно, если оц/аг — — 1, то невозможно, чтобы допол-
нительно выполнялось а2/аз = — 1 и cii/аз = — 1.
Отмеченная выше модификация s превращает её в дискретную М-
сеть на световом конусе LJV+1,1:
(fi, T1S 4- Т2в)
T1T2S + S = ai2(riS-|-T2S), <212 = —--1--7—, (4.101)
(ns, t2s)
и преобразования Дарбу могут быть сформулированы как дискретные
преобразования Мутара на
T]S+ — s = f>i(s+ — ti§), r2s++ s = b2(s++ r2s). (4.102)
4.4. S-изотермические сети
Согласно Теореме 4.31, дискретные изотермические сети характе-
ризуются как Т-сети на световом конусе ЬЛГ+1,1 в пространстве Мин-
ковского К^1’1. Замена светового конуса 1Л+1,1 на гиперболоид
L^+i’i = {eeRN+1’1:(e,e) = K2}
отвечает раздутию точек в сферы (см. Раздел 9.3.2). Как обычно, мы
рассмотрим подробно только случай N = 3, хотя обобщение для про-
извольного N прямолинейно.
Определение 4.34. (S-изотермические сети) Отображение
S : Zm —> {ориентированные сферы вК3} (4.103)
4, Специальные классы дискретных поверхностей
(4.105)
(4.106)
называется S-изотермической сетью, если соответствующее отоб-
ражение s : Z”' —> L4:1 С Ж'1,1,
з = ^(с + е0 + (|с|2 - г2)еоо), (4.104)
является Т-сетъю в Ж4,1.
Из этого определения следует, что сферы S-изотермической сети,
рассматриваемые как неориентированные сферы, образуют специаль-
ную Q-конгруэнцию (ср. Определение 3.29).
Напомним, что выбор представителей (4.104) из ориентированных
сфер в пространстве Минковского Ж4,1 мёбиусовой геометрии экви-
валентен выбору в пространстве Ж4,2 геометрии Ли представителей с
фиксированной компонентой вдоль eg,
SLie = У (с + е0 + (Iс|2 - Г2)еоо + ге6).
Однако, в этом разделе мы не будем использовать ли-геометрические
представители.
S-изотермическая сеть подчиняется уравнению
TiljS —- S — djj(Tj’S — Т;з)
в Ж4Д с
s, TiS — Tjs) — aj
К2 — TjS) К2 - (TiS,TjS)
Если (направленные) радиусы всех сфер равномерно становятся малы-
ми, r(u) ~ ns(u), к —> 0, то в пределе мы возвращаемся к дискретной
изотермической сети с метрикой s.
Из многомерной совместности Т-сетей в Иф1 (являющейся част-
ным случаем Теоремы 4.3) следуют, в частности, преобразования Дарбу
для S-изотермических сетей, подчиняющиеся уравнению (4.79). Преоб-
разование Дарбу s+ : Zm —> Иф1 для данной S-изотермической сети
s : Zm -> Иф1 однозначно определяется выбором одной из его сфер
з+(0).
Величины ai = (з,тгз) имеют смысл косинусов углов пересечения
соседних сфер или, если они не пересекаются, их так называемых ин-
версных расстояний, и удовлетворяют условию разметки, то есть за-
висят только от щ. Оказывается, что это условие почти характеризует
S-изотермические сети среди Q-конгруэнций сфер.
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
Теорема 4.35. (Уравнение Мутара следует из условия размет-
ки) Пусть четыре точки з, 81,82,812 G L4,1 порождают трёхмерное
векторное пространство Е С К4,1, на котором ограничение скаляр-
ного произведения Минковского невырождено, или, иными словами,
S А Е1- = {0}. Если
(з, si) = (s2,si2) = оц, (s, s2) = (si,s12) = a2, (4.107)
то выполняется одно из двух соотношений: уравнение Мутара с ми-
нусами,
312 - S = («2 - S1), (4.108)
к - \3!,32)
или уравнение Мутара с плюсами,
si2 + s= 2ai+a2. , (si+s2)- (4.109)
к + <31,32)
Доказательство. Для простоты обозначений, положим в этом доказа-
тельстве к = 1 (общий случай получается простым перерастяжением).
Запишем условие линейной зависимости как
з12 = Аз + Д31 + z/s2. (4.110)
На три неизвестных коэффициента А, р, v имеется три условия. Два
линейных условия получаются из требований (4.107) при вычислении
скалярных произведений (4.110) с si, з2. Обозначив 7 = (si,s2), запи-
шем их в виде
Aai+jU + Z/7 — 02, (4.111)
Aa2+/ry + z/ = од. (4.112)
Третье, квадратичное, условие возникает из (si2,si2) = 1:
А2 + р2 + v2 + 2Ащ11 + 2Az/a2 + 2pvy = 1. (4.113)
Пусть сначала 72 1. Тогда из первых двух уравнений (4.111), (4.112)
можно выразить р, v в терминах А:
а2 - 017 - А(н1 - а27) от - а27 - А(а2 - 047)
М =------------------------, i/ =-----------------------. (4.114)
1 - 74 1 — 7
4. Специальные классы дискретных поверхностей
При подстановке выражений (4.114) в (4.113), для А возникает квад-
ратное уравнение, которое после целого ряда сокращений принимает
вид
(oj + 6*2 + 72 _ 201027 - 1)(А2 - 1) = 0.
Если числовой множитель в этом квадратном уравнении не равен нулю,
ai + Q2 + 72 — 2oio27 — 1 7^ 0, то имеем решения А = 1 и А = —1, и
подстановка в (4.114) приводит к
Qi — Qo Qi + Q2
P = — U = —:---- , СООТВ. Ц, = V = —;----
P 1 -7 ’ M 1+7
Это отвечает уравнениям Мутара (4.108), соотв. (4.109).
Равенство
ai + а2 + 72 — 2oio27 — 1 = 0 (4.115)
интерпретируется как равенство нулю определителя системы
А + Воц + С02 = О,
Л01 + В + Су — О,
Ло2 + By + С = О,
для (Л, В, С), что эквивалентно (ст, s) = (ст, si) = (ст, s2) = 0 при ст =
= As + Bsi + С§2- Но это означало бы ст € Е П ЕЛ, что исключено
условием теоремы.
Остаётся рассмотреть случай у1 = 1. Если у = ±1, то из (4.111),
(4.112) следует д ± v = 0:2 — Aai = ±(07 — Аа2)- Можно считать, что
оз ±о2 (иначе мы приходим к исключённому случаю (4.115)). Следо-
вательно, А = +1 и = a2±ai. Подставляя это в (4.113), получаем
в результате р = ±р = (а2 ± oi)/2, что опять приводит к уравнениям
Мутара (4.109), соотв. (4.108). □
Интересный частный случай S-изотермических сетей характеризу-
ется касанием любой пары соседних сфер. В этом случае предел малых
сфер не годится; следовательно, удобно ограничиться рассмотрениями
при фиксированном значении к, например к = 1.
Теорема 4.36. (S-изотермическая поверхность попарно каса-
ющихся сфер) Q-конгруэнция сфер, в которой любые две соседние
сферы имеют внешнее касание, является S-изотермической поверх-
ностью (в частности, она с необходимостью двумерна).
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
Доказательство. Условие касания означает, что все о, = (s. т,.§) могут,
в принципе, принимать значения ±1. Рассмотрим сначала случай т =
— 2. Ориентируя все сферы одинаково, например, выбирая все нормали
внешними, имеем
(s, Si) = (s, s2) = (si, S12) = <S2, S12) = -1. (4.116)
Тогда из Теоремы 4.35 следует, что s, §1, s2,si2 удовлетворяют дискрет-
ному уравнению Мутара с плюсами:
si2 + s = — —ту («1 + s2) (4.117)
1 + (si,s2)
(так как версия с минусом становится тривиальной при 0ц = а2). Как
мы знаем, уравнение Мутара с плюсами не ЗП-совместно. Конечно,
нетрудно вернуться к исходному Определению 4.34, меняя ориентацию
сфер в каждом втором ряду, так чтобы их нормали были внутренними
и выполнялось
(Mi) = (s2,s12) = -1, (s, s2) = (si,si2) = 1.
Эта смена ориентации приводит к дискретному уравнению Мутара с
минусами. □
Вообще, S-изотермические поверхности (то есть S-изотермические
сети при т = 2) удобнее описывать как М-сети наЬ^+1,1, подчиняющи-
еся уравнению (4.109). Как обычно, связь с описанием, как Т-сетей на
LN+m
, подчиняющихся уравнению (4.108), устанавливается при смене
знаков s(u!,u2) >-> (—l)U2s(u!,u2). На геометрическом языке, это сво-
дится к смене ориентации (или ориентированного радиуса) для всех
сфер вдоль каждого второго ряда в одном из координатных направле-
ний. Преобразования Дарбу S-изотермических поверхностей описыва-
ются уравнением (4.102).
Обратимся теперь к геометрическим свойствам S-изотермических
сетей.
Теорема 4.37. (Центры и радиусы S-изотермической сети)
Отображение (4.103) является S-изотермической сетью тогда и
только тогда, когда её неориентированные сферы образуют Q-конгруэн
а центры с : > R3 образуют сеть Кёнигса, в которой роль функ-
ции и играют ориентированные радиусы г : Zm —> R*. Иными словами,
4. Специальные классы дискретных поверхностей
для любого элементарного четырёхугольника (e,Ci,Cij,Cj')
Cjj) _ T"ij ЦМ, Cj) _ Tj
Z(M,c) “ r ’ Z(M,Ci) “ 1 J
где M точка пересечения диагоналей.
Доказательство. Это является прямым следствием формулы (4.104)
и Теоремы 2.32. □
Теперь мы можем дать альтернативное, более геометрическое до-
казательство Теоремы 4.36. Нужно доказать соотношение (4.118) при
условии касания гиперсфер S. Очевидно, эта ситуация относится к слу-
чаю (i) Q-конгруэнций, то есть четыре сферы S, Si, S2, и S12 каждого
элементарного четырёхугольника имеют общую ортогональную окруж-
ность. Рассмотрим сечение четырёх сфер плоскостью их центров (на
ней лежит и общая ортогональная окружность). Пусть А, В, С, D точ-
Рис. 4.13. Элементарный четырёхугольник S-изотермической
поверхности, образованной попарно касающимися сферами.
ки касания S с Si, S с S2, Si с S12, и S2 с S12, соответственно. Общая
ортогональная окружность вписана в четырёхугольник (с, щ, С12, С2) и
касается его сторон в точках А, В, С, D. Ключевым наблюдением яв-
ляется следующее свойство описанных четырёхугольников: точка пе-
ресечения (AD) П (ВС) прямых, соединяющих противоположные точ-
ки касания, совпадает с М, точкой пересечения диагоналей (сщг) и
(С1С2). Фактически, это не что иное, как вырожденный случай теоре-
мы Брианшона, см. Теорему 9.20. Далее, рассмотрим два треугольника
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
Д(с, Л, М) и Л(с12, D, М). По теореме синусов,
sin Z(Ac, Ал}) sin Z(Mc, мА)
|ём] = м ’
sin Z(Dcj2, BTll) sin Z(Mci2, Л1^)
|ci2-A<f| |C12-D|
Но, очевидно,
z(Mc,m!) = z(m^,mI5), z(^,aa^) = 7r-z(n^,mJ).
Следовательно, находим:
|С12-/И| _ |С12^| _ Г12
\сМ\ ~ |сА| “ ~ ‘
Это доказывает соотношения (4.118).
Аналогично доказывается следующая геометрическая характери-
зация общих S-изотермических сетей типа (i) (с общей ортогональной
окружностью для каждого элементарного четырёхугольника).
Теорема 4.38. (Геометрия S-изотермических сетей) Отображе-
ние (4.103) является S-изотермической сетью типа (г) тогда и толь-
ко тогда, когда её неориентированные сферы образуют Q-конгруэнцию
типа (г), а каждый элементарный четырёхугольник обладает следу-
ющим свойством: пусть А и В точки пересечения сферы S с общей
ортогональной окружностью и аналогично для Si, Sj, и Sij, тогда
точка пересечения (ААЧ) A (BBij) совпадает с точкой пересечения
(A^Aj) A (BiBj). Эта точка совпадает также с точкой пересечения
диагоналей М = (ccij) A (c,Cj).
Ясно, что характеризация из Теоремы 4.38 может служить осно-
вой построения четвёртой сферы Sij в элементарном четырёхугольни-
ке S-изотермической сети, если заданы три сферы S, Si, Sj: сначала
находится точка М = (A^Aj) A (BiBj), затем Aij и В,3 как точки пере-
сечения ортогональной окружности с (AM) и (ВМ), соответственно,
и, наконец, сч- как точка пересечения касательных к ортогональной
окружности в точках Ау и BTJ. Заметим, что это построение на самом
деле не однозначно, а двузначно, так как зависит от обозначения то-
чек в каждой паре {Aj, В;} и {Aj, Bj}. Перестановка Аг <-> Bi отвечает
смене ориентации сферы Si-
4. Специальные классы дискретных поверхностей
Рис. 4.14. Элементарный четырёхугольник общей
S-изотермической сети типа (i).
Для S-изотермических поверхностей, состоящих из попарно каса-
ющихся сфер, можно дать красивую геометрическую конструкцию ду-
альности по Кристоффелю. С этой целью построим четырёхугольники
с вершинами в центрах сфер, центрах ортогональных окружностей и
точках касания сфер. Получающаяся в результате сеть f, называемая
центральным расширением s, является двудольной, с центрами сфер
и ортогональных окружностей в качестве белых вершин, и с точка-
ми касания в качестве чёрных. Все элементарные четырёхугольники f
имеют форму кайта с двумя прямыми углами (при чёрных вершинах);
см. рис. 4.15. Легко видеть, что верно и обратное утверждение: дву-
дольная Q-сеть, все четырёхугольники которой являются прямоуголь-
ными кайтами (с прямыми углами при чёрных вершинах), является
центральным расширением S-изотермической поверхности попарно ка-
сающихся сфер.
Прямоугольные кайты являются конформными квадратами (см.
Упражнение 4.9), откуда следует, что центральное расширение f явля-
ется дискретной изотермической сетью, с двойными отношениями всех
элементарных четырёхугольников равными q = — 1.
Теорема 4.39. (Дуальность по Кристоффелю для централь-
ного расширения S-изотермической поверхности) Дуальная по
Кристоффелю сеть f* для центрального расширения f состоит
из прямоугольных кайтов, и, следовательно, является централь-
ным расширением некоторой S-изотермической сети S* : Z2 —>
{сферы вй3}, называемой дуальной по Кристоффелю для S. Радиу-
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
Рис. 4.15. Элементарные четырёхугольники центрального
расширения S-изотермической поверхности с попарно ка-
сающимися сферами являются прямоугольными кайтами.
сы г* : Z2 -> R* сфер S* равны г* — г \ а центры с* : Z2 —> Ж3
удовлетворяют соотношениям
фс
ГГ1 ’
г *___ 5gc
2 — ГГ2 •
51 с*
(4.119)
Доказательство. Длины сторон четырёхугольника, дуального кон-
формному квадрату, обратны длинам соответствующих сторон послед-
него, см. часть а) упражнения 4.10. Это доказывает г* = г-1. Рас-
сматривая два соседних четырёхугольника, видим, что сторона [с*с*]
параллельна [ссф а их длины связаны равенствами
г + г,
ТГг
\а ~ С1
гп
Учёт направления дуальных сторон (см. Упражнение 4.10) доказывает
соотношения (4.119). □
Дуальность S-изотермических сетей, образованных попарно каса-
ющимися сферами, иллюстрируется на рис. 4.16.
Замечательно, что формулы Теоремы 4.39 позволяют строить ду-
альные по Кристоффелю сети также и для общих S-изотермических
4. Специальные классы дискретных поверхностей
Рис. 4.16. Дуальность S-изотермических сетей, образован-
ных попарно касающимися сферами.
сетей. Следующую теорему можно рассматривать, как обобщение Тео-
ремы 4.32.
Теорема 4.40. (Дуальная по Кристоффелю S-изотермическая
сеть) Пусть
S : Zm -> {ориентированные сферы в Ж3}
S-изотермическая сеть. Обозначим евклидовы центры и (ориентиро-
ванные) радиусы S через с : Zm —> R3 и г : Zm -> R, соответственно.
Тогда R3 -значная дискретная один-форма 6с*, определённая согласно
6iC* = , 1 «С i т, (4.120)
точна, и её интегрирование определяет (с точностью до параллель-
ного переноса) функцию с* : R3. Определим также г* : Zm -> R
согласно г* = г-1. Тогда сферы S* с центрами с* и радиусами г* обра-
зуют S-изотермическую сеть, называемую дуальной по Кристоффе-
лю к S.
Доказательство. Рассмотрим уравнение (4.76), в терминах
s = г-1 (с + е0 + (|с|2 - т2)еоо).
4.4. S-ИЗОТЕРМИЧЕСКИЕ СЕТИ
Из его ео-части следует: а^- = (г^-1 — г 1)/(rJ- 1 — т\ г). Это позволяет
переписать (4.76) как
(s”1 ~ Гг-1)(5у - s) = (rij1 - - Si). (4.121)
Прямое вычисление показывает, что IR77-часть этого уравнения можно
переписать как
Cj ~ С Cij — Cj _ Cj — С Cjj — Cj
ГГг TiTij TT j TjVij ' '
что эквивалентно точности формы 6с*, определённой (4.120), на эле-
ментарном четырёхугольнике. Точно так же, воо-часть (4.121) эквива-
лентна точности дискретной формы 6w, определённой соотношением
По аналогичным причинам, второе утверждение теоремы эквивалентно
точности формы
(напомним, что здесь г* = 1 /г). При помощи соотношения с* — с* —
= (ci — с)/гг\ легко проверяется, что формы 6w и 6w* можно записать
в виде
6iW = (с* - c*,Ci + c) - у- + ,
6iW* = {а-с,с* + с*)-^ + г^.
Сумма этих один-форм точна:
6i(w + w*) = 2{c*:,Ci) — 2(с*,с);
следовательно, точность одной из этих форм эквивалентна точности
второй. □
4. Специальные классы дискретных поверхностей
4.5. Дискретные поверхности постоянной кривизны
Мы изложим здесь теорию кривизны полиэдральных поверхностей
(дискретных поверхностей с плоскими гранями), основанную на дис-
кретной версии формулы Штейнера (1.55). В основном, мы будем рабо-
тать с Q-сетями, хотя некоторые части представленной теории кривиз-
ны имеют отношение и к более общем полиэдральным поверхностям,
не обязательно четырёхугольным. Как и в гладком случае, кривизны
выводятся из изменения площади при движении вдоль одномерного
аффинного пространства параллельных поверхностей. Определяемые
таким способом дискретные поверхности постоянной кривизны обла-
дают красивыми геометрическими свойствами; в частности, они явля-
ются специальными дискретными сетями Кёнигса.
4.5.1. Параллельные дискретные поверхности и конгруэнции
прямых
Имея в виду формулу Штейнера (1.55) для кривизн, рассмотрим
параллельные полиэдральные поверхности, определённые как дискрет-
ные поверхности, у которых параллельны соответствующие рёбра. По-
лиэдральные поверхности, параллельные данной, образуют векторное
пространство. Для двух параллельных поверхностей f и f+ формула
ft = tf + + (1 — t)f даёт интерполирующее семейство параллельных по-
верхностей. В частности, поверхность п — f+ — f параллельна как f+,
так и /, и можно считать, что рассматриваемое однопараметрическое
семейство параллельных поверхностей образовано из поверхности f и
её ‘‘обобщённого гауссова отображения” п:
ft = f + tn, t € R. (4.123)
Параллельные дискретные Q-сети связаны преобразованием Ком-
бескюра; см. Определение 2.17. В случае Q-сетей семейство (4.123)
параллельных дискретных поверхностей можно интерпретировать, со-
гласно Теореме 2.18, как Q-сеть f : Z2 -> R3 с конгруэнцией прямых
С : Z2 —> .С3. Направления прямых £ определяются обобщённым отоб-
ражением Гаусса п : Z2 —> R3.
4.5.2. Многоугольники с параллельными сторонами и
ориентированная площадь
Начнём с теории многоугольников с параллельными сторонами
(напомним, что такие многоугольники служат гранями параллельных
4.5. Дискретные поверхности постоянной кривизны
поверхностей). Рассмотрим последовательность касательных направ-
лений
vi,...,vfc е RP1 =§7{±1}
в А:-угольнике Р = (pi,... ,pk) на плоскости; p,+i — pi || Vi. Обозначим
через J’(v), v = (vi,...,Vk), пространство fc-угольников со сторонами,
параллельными Vi,... ,Vk- Не предполагается, что многоугольники вы-
пуклые или вложенные. Допускаются и вырождения сторон. Tlv) явля-
ется fc-мерным векторным пространством. Отфакторизовывая парал-
лельные переносы (например, принимая нормировку pi =0), получаем
(k — 2)-мерное векторное пространство У(и)-
Пусть А(Р) ориентированная площадь многоугольника Р. Ори-
ентированная площадь fc-угольника с вершинами pi,... ,Pk~.Pk+i = Pi
равна
k
А'р) =
i=l
где [а, 5] = det(a,5) форма площади на плоскости. Для четырёхуголь-
ника Р = (Р1,Р2>Рз>Р4) с ориентированными сторонами а = р2 — pi,
b = рз — р2, с — рц — рз, d = pi — р4 имеем
А(Р) = |([а,6] + [c,d]). (4.124)
Ориентированная площадь А является квадратичной формой на век-
торном пространстве J’(w). Отвечающая ей билинейная симметричная
форма Д(-, •) имеет центральное значение в последующей теории.
Определение 4.41. (Смешанная площадь) Пусть Р и Q два k-
уголъника, у которых соответствующие (возможно вырожденные)
стороны параллельны. Их смешанная площадь задаётся билинейной
симметричной формой
А(Р, Q) = 1(А(Р + Q) - А(Р) - Д(С)).
Площадь линейной комбинации двух многоугольников задаётся
квадратичным многочленом
А(Р + tQ) = А(Р) + 2tA(P, Q) + fz4(Q).
(4.125)
4. Специальные классы дискретных поверхностей
Мы имеем своего рода скалярное произведение А(-, •) на простран-
стве многоугольников с параллельными сторонами. Возникает есте-
ственный вопрос, какие многоугольники “ортогональны” по отношению
к билинейной симметричной форме смешанной площади. Оказывает-
ся, что при этом и возникают дуальные четырёхугольники из Раздела
2.3.1.
Теорема 4.42. (Определение дуальных четырёхугольников че-
рез смешанную площадь) Два четырёхугольника Р = (р1,Р2,Рз,Р4)
и Q = (<7i, <72! <7з> <?4) с параллельными соответствующими сторонами,
Pi+i~Pi || Qi+i—Qi, i Е Z (mod 4), имеют нулевую смешанную площадь
А(Р, Q) = О
тогда и только тогда, когда они дуальны, то есть, если параллельны
их дополнительные диагонали:
(Р1Рз) || (9294), (Р2Р4) II (<71<7з)-
Доказательство. Обозначим стороны четырёхугольников Р и Q, как
на рис. 4.17. Формула (4.124) означает, что площадь четырёхугольника
Р + tQ равна
А(Р + tQ) = ^([а + ta*, b + tb*] + [с + tc*,d + td*]).
Приравнивая члены, линейные по t, и используя тождество а + b + с +
+ d — 0, получаем
4A(F,Q) = [а, 6*] + [а*, 6] + [с, d*] + [c*,d]
= [а + b, 6*] + [а*, а + 6] + [с + d, d*] + [с*, с + d]
= [а + b, b* — а* — d* + с*].
4.5. Дискретные поверхности постоянной кривизны
Равенство нулю последнего выражения эквивалентно параллельности
дополнительных диагоналей, (а + Ь) || (6* + с*). □
Четырёхугольник нулевой площади автодуален: А(Р) = А(Р, Р) =
— О, то есть его диагонали параллельны. В случае А(Р) / 0, суще-
ствование и единственность дуального четырёхугольника, доказанные
в Лемме 2.20, следуют теперь из того факта, что соответствующее про-
странство У(и) двумерно. Кроме того, четырёхугольник Р с ненулевой
площадью и его дуальный Р* образуют ортогональный базис простран-
ства У (и):
А(ХР + мР*) = А2Д(Р) + р2А(Р*). (4.126)
Мы назовём пространство IP(d), v = (щ, г>2, г>з, щ) (и все четырёх-
угольники в этом пространстве) невырожденным, если в нём любые
два последовательные касательные направления различны, щ+1 7^ Vi.
Сигнатура формы площади А : Т(г) —> R зависит от четвёрки v =
= (гьДгДз,^) 6 (RP1)4 и может быть также охарактеризована в тер-
минах четырёхугольников из ?(г)).
Теорема 4.43. (Сигнатура формы площади) Пусть У(и), v =
= (^i, V2, Дз, иД, невырожденное пространство четырёхугольников, с
последовательными сторонами параллельными касательным направ-
лениям v\,V2,v^,v 4 G RIP1 = S1/{±/}, и пусть Р G У(г>) четырёхуголь-
ник с ненулевыми сторонами. Форма площади А : СР('и) —> R является
знакопеременной (соотв. знакопостоянной) тогда и только тогда, ко-
гда выполнены следующие два эквивалентных условия:
(i) двойное отношение <?(гд, г>2, г>з, щ) < 0 (соотв. q> 0),
(ii) все вершины Р являются экстремальными точками их выпук-
лой оболочки (соотв. одна из вершин Р лежит во внутренности
выпуклой оболочки трёх других вершин). См. рис. 4.18.
Формулировка этой теоремы может потребовать разъяснений.
Двойное отношение можно вычислить как
/ х _ [г>1, г)2] [г>3, г>4]
4 V [г»2,г)з][щ,г>1] ’
где Vi G R2 некоторые представители щ G RP1. Отметим также, что
свойство (ii) не зависит от выбора четырёхугольника Р из семейства.
4. Специальные классы дискретных поверхностей
Рис. 4.18. Слева: форма площади знакопеременна; вершины
многоугольников лежат на границе их выпуклой оболоч-
ки. Справа: форма площади знакопостоянна; для любого
четырёхугольника семейства одна из вершин лежит внут-
ри выпуклой оболочки трёх остальных.
Если А(Р) 0, то диагональная форма (4.126) позволяет охарактери-
зовать два альтернативных случая, описываемые Теоремой 4.43, также
в терминах площадей Р и его дуального четырёхугольника Р*: форма
площади знакопеременна (соотв. знакопостоянна), если А(Р)А(Р*) < О
(соотв. Л(Р)Л(Р*) > 0).
Доказательство. Знак двойного отношения q(yi, v2, Дз, гц) может быть
охарактеризован комбинаторно. Двойное отношение положительно то-
гда и только тогда, когда направления гц, Дз G RP1 разделены направ-
лениями v2,vi G RP1 (напомним, что гц v2 7^ Д3 7^ Д4 Д1), и q < 0
в противном случае. Нетрудно видеть, что в последнем случае, когда
пары направлений гц,дз и ь2,щ не перемежаются, стороны можно ре-
ализовать выпуклым четырёхугольником. Всё соответствующее семей-
ство У(д) состоит из выпуклых и из невложенных четырёхугольников,
и для обоих типов вершины лежат на границе их выпуклой оболоч-
ки. Аналогично, можно проверить, что если пары направлений гц,Дз
и перемежаются, то соответствующее семейство У(д) состоит из
вложенных невыпуклых четырёхугольников. □
4.5.3. Кривизны полиэдральной поверхности с
параллельным гауссовым отображением
Рассмотрим полиэдральную поверхность f, оснащённую конгру-
энцией прямых £, проходящих через вершины (прямые, приписанные
смежным вершинам, компланарны). Нашим основным примером будет
Q-сеть f : Z2 —> R3 с конгруэнцией прямых t : Z2 —> £3, такой что
4.5. Дискретные поверхности постоянной кривизны
f(u) G Ди) для всех и е Z2. Пусть п : Z2 —> R3 соответствующее обоб-
щённое гауссово отображение. Если t односвязна, то сеть п определена
с точностью до постоянного множителя и фиксируется заданием длины
нормали в одной вершине.
Теорема 4.44. (Площадь параллельной поверхности) Площадь
параллельной поверхности ft = f + tn подчиняется закону
A(ft) = z - 2tHp + еКр) A<J(pYh (4.127)
р
где
A(f(P),n(P)) А(п(Р))
A(f(P)) ’ Р A(f(P)Y
(4.128)
Здесь сумма берётся по всем (комбинаторным) граням Р, a f(P) и
п(Р) соответствующие грани поверхности f и её обобщённого отоб-
ражения Гаусса п.
Доказательство. Так как соответствующие грани и рёбра дискретных
поверхностей f и п параллельны, то утверждение следует из формулы
(4.125). □
Имея в виду формулу Штейнера, приходим к следующему есте-
ственному определению кривизн в дискретном случае.
Определение 4.45. (Средняя и гауссова кривизны полиэдраль-
ных поверхностей) Пусть (f, п) две параллельные полиэдральные по-
верхности. Рассмотрим п как обобщённое гауссово отображение от
f. Функции Нр и Кр, определённые на гранях согласно (4.128), назы-
ваются средней и гауссовой кривизнами пары (f,n), то есть полиэд-
ральной поверхности f по отношению к гауссову отображению п.
Заметим, что, как и в гладком случае, гауссова кривизна опреде-
лена как отношение площадей гауссова образа и исходной поверхности.
Поскольку для данной полиэдральной поверхности с конгруэнцией пря-
мых отображение п определяется с точностью до общего множителя,
кривизны на гранях также определены с точностью до умножения на
постоянную.
Главные кривизны «1, к2 на гранях естественно определяются, при
помощи формул Н = («1 + к2)/2 и К = к1к2, через нули квадратного
трёхчлена
Д(Д) = (1 - 2tH + t2K)A(J) = (1 - tK1)(l - ix2)A(/). (4.129)
4. Специальные классы дискретных поверхностей
Определение 4.46. (Главные кривизны Q-сети) Пусть дана Q-
сетъ с обобщённым отображением Гаусса, (J, п) : Z2 —> R3 х R3. Допу-
стим, что форма площади А : У —> R знакопеременна для всех граней
f(P). Тогда функции из (4.129) вещественнозначны и называ-
ются главными кривизнами пары (Д,п).
Из результатов Раздела 4.5.2 вытекает, что главные кривизны су-
ществуют для четырёхугольных граней с вершинами на границе вы-
пуклой оболочки. В частности, для циркулярных сетей главные кри-
визны существуют для любого гауссова отображения.
4.5.4. Q-сети постоянной кривизны
Рассмотрим Q-сеть с обобщённым гауссовым отображением (/, п) :
Z2 —> R3+3 и пусть ft — f + tn : Z2 —> R3, t G R соответствующее од-
нопараметрическое семейство параллельных Q-сетей. Мы определим
специальные классы поверхностей так же, как в классической теории
поверхностей; единственным отличием является то, что гауссово отоб-
ражение не определяется поверхностью. Такая трактовка аналогична
подходу в относительной дифференциальной геометрии.
Определение 4.47. (Q-сети постоянной кривизны) Будем гово-
рить, что пара (f,n) имеет постоянную среднюю (соответственно,
гауссову) кривизну, если средняя (соответственно, гауссова) кривиз-
ны, определённые согласно (4.128), равны для всех граней Q-cemu. Ес-
ли средняя кривизна тождественно равна нулю, Н = 0, то пара (f, п)
называется минимальной.
Хотя это определение использует гауссово отображение, нормиров-
ка длины п несущественна, и оно корректно вводит понятие сети по-
стоянной кривизны для Q-сетей, оснащённых конгруэнцией прямых.
Теорема 4.48. (Минимальная Q-сеть с конгруэнцией прямых)
Пара (f,ri) минимальна тогда и только тогда, когда f : Z2 —> R3
дискретная кёнигсова сеть, а п — f* : Z2 —> R3 её дуальная по Кри-
стоффелю .
Доказательство. Имеем эквивалентности
Н = 0 <=> A(f, п) = 0 <=> п — f*. □
Этот результат аналогичен классической Теореме 1.36. На рис. 4.19
представлен пример минимальной Q-сети, построенной как дуальная
4.5. Дискретные поверхности постоянной кривизны
Рис. 4.19. Дискретная сеть Кёнигса, интерпретированная
как гауссов образ п, и её дуальная по Кристоффелю ми-
нимальная Q-сеть f = п*.
по Кристоффелю для гауссова образа п, являющегося дискретной кё-
нигсовой сетью.
Утверждение о поверхности с ненулевой постоянной средней кри-
визной напоминает соответствующие факты из классической теории;
см. Теорему 1.37.
Теорема 4.49. (Q-сеть с конгруэнцией прямых постоянной
средней кривизны) Пара (f, п) имеет постоянную среднюю кривиз-
ну Но тогда и только тогда, когда f : Z2 —> R3 дискретная кёнигсова
сеть, а параллельная поверхность fi/H0 является дуальной по Кри-
стоффелю к f:
f*=f+±-n.
Но
Средняя кривизна этой параллельной поверхности (J + -±-п,—п) (с
Но
противоположным гауссовым отображением) также постоянна и
равна Но- Серединная поверхность f + ^г-п имеет постоянную поло-
2ло
жителъную гауссову кривизну Ко = 4Hq, по отношению к тому же
отображению Гаусса п.
Доказательство. Имеем эквивалентность
Л(Лп) = -Н0А(/) & A(f,f + -±-n)=0 <=> f* = f+-Ln.
\ Jtlq / Jtio
4. Специальные классы дискретных поверхностей
Гауссова кривизна серединной поверхности равна
К , = ^>- =------------------------= 4И’. □
4</+2®П) Л(/ + 2®П'/) + ЙЗЛМ
Оказывается, что кривизны всех поверхностей, параллельных по-
верхности постоянной кривизны имеют замечательные свойства, в пол-
ной аналогии с классической теорией поверхностей; ср. с Теоремой 1.37.
Теорема 4.50. (Параллельные Q-сетям постоянной средней
кривизны являются линейными сетями Вайнгартена) Пусть
(f, п) пара Q-сетей с постоянной средней кривизной. Рассмотрим се-
мейство параллельных Q-сетей ft — f + tn. Тогда для любого t пара
является линейной сетью Вайнгартена, то есть её средняя и
гауссова кривизны Ht и Kt удовлетворяют линейному соотношению
aHt + /3Kt = l (4.130)
с постоянными коэффициентами а,р.
Доказательство. Это проверяется прямым вычислением; см. Упраж-
нение 4.20. □
Как видим, любая дискретная кёнигсова сеть f может быть рас-
ширена до минимальной или до Q-сети постоянной средней кривизны,
при подходящем выборе гауссова отображения п. Действительно,
(У, п) минимальна при п = /*;
(У, п) имеет постоянную среднюю кривизну при п = f* — f.
Однако, гауссовы отображения п, определяемые с такой общностью,
могут увести нас слишком далеко от гладкой теории. Естественно ис-
кать дополнительные требования, которые приблизили бы их к гауссо-
ву отображению поверхности. В гладком случае п является отображе-
нием на единичную сферу. Естественно рассматривать следующие три
дискретные версии этого факта:
(1) п полиэдральная поверхность, все вершины которой лежат на еди-
ничной сфере S2. Отсюда следует, что все грани Q-сети п впи-
санные. Это условие выполняется также для любой параллельной
поверхности. В частности, f также является циркулярной сетью.
4.5. Дискретные поверхности постоянной кривизны
(2) п полиэдральная поверхность, все грани которой касаются единич-
ной сферы S2. Отсюда следует, что для любой вершины р имеется
конус вращения с вершиной р, касающийся всех граней п, смежных
с р. Это свойство выполняется для любой параллельной поверхно-
сти. В частности, сеть f также коническая.
(3) п полиэдральная поверхность, все рёбра которой касаются единич-
ной сферы S2. Многогранники с этим свойством называются мно-
гогранниками Кёбе. Для любой вершины р, все стороны смежные
с р лежат на конусе вращения с вершиной р. Это свойство выпол-
няется также для любой параллельной поверхности, в частности
для f. Такие сети называются сетями типа Кёбе.
Введение в теорию этих дополнительных требований делает её бо-
лее интригующей.
4.5.5. Кривизна сетей главных контактных элементов
В этом разделе мы рассмотрим случай, когда гауссов образ п ле-
жит на 2-сфере S2, то есть является единичным, |n| = 1. Оказывается,
что это случай сетей главных контактных элементов.
Пусть f : Z2 —> К3 Q-сеть с параллельным единичным гауссовым
отображением п : Z2 —> S2. Вводя ориентированные плоскости Р, со-
держащие соответствующие вершины f и ортогональные соответству-
ющим нормалям п, получим сеть контактных элементов
(f,P) : Z2 —> {контактные элементы в R3};
см. Раздел 3.5. Её можно канонически отождествить с отображением
(/, n) : Z2 -> R3 х S2
рассмотренным ранее. Его тоже будем называть сетью контактных эле-
ментов.
Теорема 4.51. (Q-сети с единичными гауссовыми отображени-
ями являются сетями главных контактных элементов) Пусть
f : Z2 —> R3 Q-сетъ с параллельным единичным гауссовым отображе-
нием тг : Z2 —> S2. Тогда f циркулярна, а
(f,n) : Z2 —> R3xS2
4. Специальные классы дискретных поверхностей
сеть главных контактных элементов. Наоборот, если (f, Р) сеть
главных контактных элементов, то сеть f циркулярна, а единичная
сеть п, канонически связанная с Р соотношением п 1 Р, является
параллельным, отображением Гаусса для f.
Доказательство. Циркулярность f следует из того простого факта,
что любой четырёхугольник со сторонами, параллельными сторонам
вписанного четырёхугольника, также вписан. Рассмотрим элементар-
ный куб, образованный двумя параллельными четырёхугольными се-
тями f и f + п. Все боковые грани этого куба являются трапециями,
откуда следует, что сеть контактных элементов (/, п) главная. □
Рис. 4.20. Параллельные Q-сети f и f + n с единичным гаус-
совым отображением п. Все сети циркулярны. Пара (/, п)
образует сеть главных контактных элементов.
Средняя и гауссова кривизны сетей главных контактных элемен-
тов (У, п) определяются формулами (4.128). В Разделе 4.5.3 было пока-
зано, что в циркулярном случае главные кривизны всегда существуют.
4.5.6. Циркулярные минимальные сети и сети постоянной
средней кривизны
Минимальность и постоянство средней кривизны определяются
для сетей главных контактных элементов, как в Разделе 4.5.4. Так как
циркулярные кёнигсовы сети являются изотермическими, то из Теорем
4.48, 4.49 получаются следующие результаты.
Следствие 4.52. (Минимальные циркулярные поверхности как
сети главных контактных элементов) Сеть главных контактных
элементов (J, п) : Z2 —> R3 х S2 минимальна тогда и только тогда,
4.5. Дискретные поверхности постоянной кривизны
когда сеть п : Z2 —> S2 изотермическая, a f = п* её дуальная по
Кристоффелю.
Дискретные изотермические сети описываются через двойные от-
ношения их четырёхугольников. Стереографическая проекция а :
R2 -> S2 сохраняет двойные отношения. В сочетании с формулой f =
= п*, это приводит к представлению Вейерштрасса для дискретных
минимальных поверхностей через изотермические сети на плоскости,
см. Упражнение 4.21.
Следствие 4.53. (Циркулярные поверхности постоянной сред-
ней кривизны как сети главных контактных элементов) Сеть
главных контактных элементов (f,n) : 1? —> R3 х S2 имеет посто-
янную среднюю кривизну Но 0 тогда и только тогда, когда цир-
кулярная сеть f : Z2 —> R3 является изотермической и существует
дуальная к ней дискретная изотермическая поверхность f* : Z2 —> R3
на постоянном расстоянии \f — f*\ = Единичное гауссово отобра-
жение п, определяющее сеть главных контактных элементов
задаётся формулой
n = H0(f*-f). (4.131)
Сеть главных контактных элементов параллельной поверхности (/+
+ —п) также имеет постоянную среднюю кривизну Но- Середин-
Но
ная поверхность (f+ Лу-,п) имеет постоянную гауссову кривизну
2Но
4Я2.
Доказательство. В этом утверждении некоторых дополнительных
рассуждений может потребовать только часть “если”. Если дискретные
изотермические поверхности f и f* находятся на постоянном расстоя-
нии 1/Я0, то отображение п, определённое согласно (4.131), унитарно,
и тем самым циркулярно. Как и в доказательстве Теоремы 4.51, от-
сюда опять следует, что сеть контактных элементов (/, п) главная. Её
средняя кривизна равна
Л(/,п) = Д(/,Яр(Г-/)) =
Ж Л
Замечание. Отметим, что имеется теория дискретных поверхностей
минимальной и постоянной средней кривизны типа Кёбе, в которой
получены дискретные аналоги многих знаменитых классических по-
верхностей. Её изложение выходит за рамки данной книги.
4. Специальные классы дискретных поверхностей
4.6. Упражнения
4.1. Проверьте ЗП-совместность 2D уравнения (4.28).
4.2. Проверьте прямым вычислением утверждение Теоремы 4.14.
4.3. * Проработайте детали доказательства Теоремы 4.15.
4.4. * Рассмотрим чебышёвский четырёхугольник (У, Д, У12, Уг). Пусть
его внутренние углы равны 95 и <р*. Кроме того, пусть (п,711,7112,712)
будут (единичные) нормали Лелёвра, удовлетворяющие дискретному
уравнению Мутара с плюсами: П12 + тг || п± + тгг- Пусть (тг,п±) =
— (n2,ni2) = cosoi и (тг,тг2) = (711,7112) = созаг- Допустим, что оц
и а2 выбраны так, что |tan(ai/2)| < 1 и |tan(a2/2)| < 1. Покажите,
что углы четырёхугольника (У, У1, У12, Уг) удовлетворяют инволютив-
ному соотношению
eiv‘ _ 1 — кег,р _ 1 — кег>р
к-е^ к- ё1*' '
где к = tan(oi/2) tan(a2/2).
4.5. Покажите, что преобразование Бэклунда (4.45), (4.46) от триви-
ального решения ф(и) = 0 задаётся формулой
<^+(wi,u2) /с + ai\U1 /1 + ca2\U2 х </>+(0,0)
tan---------- = ------- ---------- tan----------,
4 \с- ai/ \1 - са2/ 4
где a.j = tan(a?j/2) и с = tan(7/2).
4.6. * Существует замечательный аналитический механизм, позволяю-
щий построить дискретную К-поверхность f : Z2 —> К3 из решения
ф : Z2 —> К уравнения Хироты. Сначала строится так называемый рас-
ширенный репер
Ф(-,А) : Z2 -4. SU(2)[A, А-1]
в силу совместных уравнений
Ф(и + ej, А) = Uj(u, А)Ф(гг, A), j = 1,2. (4.132)
Эти уравнения следует сравнить с уравнениями (4.14) для репера Ф.
Совместность (4.132) гарантируется соотношениями нулевой кривизны.
Докажите, что так называемая формула Сима
= 2Аф-1(гг,А)ЭФ^’ (4.133)
и Л
4.6. Упражнения
определяет при А £ R семейство дискретных К-поверхностей f\ : Z2 —>
su(2) ~ R3, отвечающих одному и тому же решению ф уравнения Хи-
роты (так называемое ассоциированное семейство). При А = 1 это даёт
исходную К-поверхность f.
4.7. Расширенный репер для решения из Упражнения 4.5 равен, с точ-
ностью до скалярного множителя,
Ф(и,А) = В(и, А)Ф°(и,А),
где
Ф°(и,А)=( *
4 ' у—zAai
- zAaiV1
1 J
1
гЛ-1а2
гХ аг А
1 J
служит расширенным репером для тривиального решения ф(и) = 0, и
В(и, А) =
е^+(«)/2
—iXc
-iXc
е-гф+(и)/2
отвечает преобразованию Бэклунда. Применяя формулу Сима из
Упражнения 4.6, вычислите соответствующие дискретные К-поверх-
ности (преобразование Бэклунда от прямой). Для определённых зна-
чений ai = Д2 и для с — 1 поверхность, получающаяся в результате,
является дискретной псевдосферой.
4.8. Как построить дискретную К-поверхность с двумя прямыми
асимптотическими линиями? Совет: соответствующие кривые гауссова
отображения должны лежать на двух больших окружностях S2. Такие
поверхности называются поверхностями Амслера.
4.9. Конформным квадратом, по определению, является образ квад-
рата при дробно-линейном преобразовании. Докажите, что четырёх-
угольник является конформным квадратом тогда и только тогда, когда
двойное отношение его сторон равно q = — 1.
4.10. а) Рассмотрим конформный квадрат в С со сторонами a, b, с, d.
Покажите, что существует четырёхугольник с рёбрами
*___ 1 _ а г*_________1 __ b *_________ 1 _ с т*_________1 __ d
d |a|2’ b |5|2’ c |c|2 ’ d |d|2 ’
то есть a* + b* + c* + d* = 0, и что этот четырёхугольник дуален исход-
ному.
4. Специальные классы дискретных поверхностей
Ь) То же утверждение справедливо, если исходный четырёхуголь-
ник вписанный, с вещественным двойным отношением
q = q(a, b,c,d) — , а, /3 G R*,
Ьа р
и
* 1 а
а = а = = а
а ы2
* _ 1 _ с
С ~а с ~а |с|2 ’
b
|Г
= в - = В—.
р d р Idl2
Ь* =/?| = /3
о
4.11. * Пусть дана дискретная A-сеть. Докажите, что её гауссово отоб-
ражение (построенное из единичных нормалей, что следует отличать
от нормалей Лелёвра) циркулярно тогда и только тогда, когда оно дис-
кретное изотермическое.
4.12. * Рассмотрим следующую специализацию условия Теоремы Ми-
келя (Теорема 9.21): пусть точки Д, G (fifj) на сторонах треугольника
А(Д, Д, /з) выбраны коллинеарными (конфигурация Менелая). Дока-
жите, что точка пересечения Д23 трёх окружностей, проходящая через
(Д, ftj, ftk) лежит на описанной окружности A(/i, /2, /3); см. рис. 4.21.
Рис. 4.21. Теорема Микеля для конфигурации Менелая.
4.6. Упражнения
4.13. Пусть f : Z2 —> Rw дискретная изотермическая поверхность,
описываемая уравнением двойного отношения
Матрицы перехода в его представлении нулевой кривизны равны
Ь(Л, f, А) = (Аа.(/ _ у.)-! f i
Определим подвижный репер Ф : Z2 —> GL(2, C^(RW))[A] следующим
образом: пусть Ф(0, А) = ^д ^1^^’ если е1, • • • >еп последователь-
ность рёбер, соединяющих 0 = (0,0) с и = (uj, U2) € Z2, то
Ф(и,А) = fj Ь(<МА)Ф(О,А).
Далее, определим так называемое преобразование Калапсо д = T\f :
Z2 —> Rw, согласно
Ф-VA) (J) (TA{(U)) •
Здесь эквивалентность матриц размера 2 х 1 с элементами из C^(R7V)
понимается по модулю одновременного правого умножения их эле-
ментов на один и тот же обратимый элемент из алгебры, так что
/а\ /аЬ-1\ „ . п ,, /1 — f(u)\
( 1 ~ [ I. Ясно, что для А = 0 получаем Ф(и, 0) = I g 1 J ’
g j = I J 1 1. Следовательно, T\f = f + 0(A) при
малых А. Докажите, что преобразование Калапсо является дискретной
изотермической поверхностью с двойным отношением
01/(1 - Aoi)
5(5,51,512,52) — ---ттт---—г •
02/(1 — А02)
4.14. Докажите, что преобразование Калапсо д — T\f действует на
всех звёздах сети f преобразованиями Мёбиуса. То есть, для каждого
4. Специальные классы дискретных поверхностей
и ё Z2 существует преобразование Мёбиуса М\(и) : Rw —> Rw, такое
что
д{и) - М\(и) • /(и) и gi(u) = Мх(и) fi(u) (г = ±1, ±2).
4.15. Пусть даны три попарно касающиеся сферы. Докажите, что
окружность, проходящая через точки касания, ортогональна всем трём
сферам.
4.16. Рассмотрим цепочку из четырёх сфер, касающихся двух сосед-
них. Докажите, что четыре точки касания лежат на одной окружности,
и что она пересекает все сферы под одним и тем же углом.
4.17. В предыдущем упражнении: если окружность пересекает сфе-
ры ортогонально, то сферы линейно зависимы (и следовательно S-
изотермические).
4.18. Докажите так называемую “лемму о касающихся монетах”: если
каждая из четырёх окружностей в трехмерном пространстве касается
двух соседних, и они не лежат на общей сфере, то они ортогонально
пересекают сферу, проходящую через точки касания.
4.19. Восстановите детали доказательства Теоремы 4.43.
4.20. * Докажите Теорему 4.50 и вычислите коэффициенты <т,/3.
4.21. Выведите следующее дискретное представление Вейерштрасса
для циркулярных минимальных поверхностей:
г , „ г» Л “919 *(1+919) 9i+g\
di t — Qi rle I ----.---------,----- 1 .
У 91 -9 91 -9 91 -9J
xr „ r>Q । 1 “ З29 3(1 + 929) 92+д\
92 - 9 92 - 9 92 - 9 J
где g : Z2 —> С дискретное голоморфное отображение, то есть решение
уравнения двойного отношения
9(9,91,912,92) =
см. Главу 8. Совет: изотермическое гауссово отображение п : Z2 —> S2
задаётся стереографической проекцией д,
. х ( 29 |9|2 — А
4.7. Библиографический комментарий
4.22. Выведите явную формулу для дискретной минимальной поверх-
ности Эннепера через дискретное представление Вейерштрасса из Раз-
дела 4.5.5, применяя его к стандартной квадратной решётке. Последняя
является простейшей изотермической сетью на плоскости.
4.7. Библиографический комментарий
Раздел 4.1: Дискретные сети Мутара на квадриках. Общие се-
ти Мутара на квадриках были введены в (Bobenko-Suris 2005) (первая
электронная версия этой книги), вместе с наиболее важным приме-
ром мутаровских представителей дискретных изотермических сетей.
Последний пример был обобщен в (Bobenko-Suris 2007b), где исследо-
вались дискретные изотермические сети в различных сферических гео-
метриях. В дальнейшем этот же класс сетей (кёнигсовы сети на квад-
риках) рассматривался в (Doliwa 2007b).
Раздел 4.2: Дискретные К-сети. Понятие дискретных К-сетей при-
надлежит (Sauer 1950) в случае т = 2 и (Wunderlich 1951) в слу-
чае т = 3. Изучение дискретных К-поверхностей в рамках теории
интегрируемых систем было осуществлено в (Bobenko-Pinkall 1996а)
геометрически, и в (Bobenko-Pinkall 1999) аналитически. Изложение в
(Bobenko-Matthes-Suris 2005) основано на понятии совместности. Изу-
чение гауссова отображения К-поверхностей ведёт к понятию дис-
кретных лоренцевски-гармонических сетей на S2, также введённому в
(Bobenko-Pinkall 1996а), где впервые был отмечен случай т = 2 Теоре-
мы 4.8.
Специальные классы дискретных К-поверхностей были построе-
ны в (Hoffmann 1999) (дискретные поверхности Амслера; см. также
Упражнение 4.8) и (Pinkail 2008) (дискретные К-цилиндры, касающи-
еся плоскости вдоль замкнутой кривой или имеющие коническую точ-
ку). Цветные иллюстрации дискретных К-поверхностей приведены в
книге (Bobenko-Seiler 1999). Изображения дискретных поверхностей на
рис. 4.3, 4.5 получены при помощи программного обеспечения, разра-
ботанного Ульрихом Пинкалем.
К-поверхности находятся в так называемом “обратно параллель-
ном соответствии” (reciprocal parallel) с геодезическими сопряжёнными
сетями, называемым поверхностями Восса. Дискретные поверхности
Восса были введены в (Sauer-Graf 1931) как Q-поверхности со свой-
ством равенства противоположных углов в каждой вершине. В (Sauer
1950) показано, что соотношение между поверхностями Восса и К-
4. Специальные классы дискретных поверхностей
поверхностями сохраняется в дискретной постановке; см. также совре-
менное изложение в (Scliief-Bobenko-Hoffmann 2008).
Рассмотрение угла между асимптотическими линиями на дискрет-
ных К-поверхностях ведёт к дискретизации уравнения синус-Гордона,
осуществлённой в (Bobenko-Pinkall 1996а). Тесно связанная с ней ин-
тегрируемая дискретизация уравнения синус-Гордона была введена в
(Hirota 1977b) без геометрической интерпретации. Её симплектическая
структура изучалась в (Faddeev-Volkov 1994). Стационарные решения
дискретного уравнения синус-Гордона описывают дискретный маят-
ник, изучавшийся в (Suris 1989), (Bobenko-Kutz-Pinkall 1993).
Помимо дискретных К-поверхностей, существуют дальнейшие за-
мечательные специальные классы дискретных асимптотических сетей:
дискретные аффинные сферы, изученные в (Bobenko-Schief 1999а, Ь),
и дискретные поверхности Бьянки, изученные в (Doliwa-Nieszporski-
Santini 2001).
Раздел 4.3: Дискретные изотермические сети. Дискретные изо-
термические поверхности были введены в (Bobenko-Pinkall 1996b).
Преобразования Дарбу для дискретных изотермических поверхно-
стей были введены в (Hertrich-Jeromin-Hoffmann-Pinkall 1999). В част-
ности, Теорема 4.26 о ЗВ-совместности уравнения двойного отноше-
ния была дана в этой статье для кватернионных случаев N = 3,4
под названием “леммы о шестиграннике” с доказательством при по-
мощи компьютерной алгебры. Аналитическое описание преобразова-
ния Дарбу как одевающего преобразования было дано в (Cieslinski
1999). Трёхмерные дискретные изотермические сети были введены в
(Bobenko 1999) и (Bobenko-Pinkall 1999). Концептуальное доказатель-
ство ЗВ-совместности в более общем контексте произвольной ассоциа-
тивной алгебры было дано в (Bobenko-Suris 2002b).
Преобразование Калапсо для дискретных изотермических поверх-
ностей (см. Упражнения 4.13, 4.14), а также свойства перестановоч-
ности различных преобразований принадлежат (Hertrich-Jeromin 2000,
2003). Дискретные изотермические поверхности в высших размерно-
стях изучались в (Schief 2001).
Помимо дискретных изотермических сетей, существует другой ин-
тересный специальный класс многомерных циркулярных сетей. Это
дискретные аналоги егоровских метрик. Они характеризуются свой-
ством, что в любом элементарном четырёхугольнике (/, Д,/у, Д) уг-
лы при вершинах Д и Д прямые. (Заметим, что в этом определении
существенна фиксация направлений всех координатных осей.) Теория
4.7. Библиографический комментарий
дискретных егоровских сетей была разработана в (Schief, неопублико-
вано), (Akhmetshin-Vol’vovskij-Krichever 1999) и (Doliwa-Santini 2000).
Раздел 4.4: S-изотермические поверхности. Изложение в этом
разделе следует в основном (Bobenko-Suris 2007b). S-изотермические
поверхности, вместе с их дуальными поверхностями были впервые вве-
дены в (Bobenko-Pinkall 1999) для специального случая касающихся
сфер. Общий класс из Определения 4.34, вместе с преобразованиями
Дарбу и дуальными поверхностями, восходит к (Hoffmann).
Раздел 4.5: Дискретные поверхности постоянной кривизны.
Циркулярные минимальные поверхности были введены в (Bobenko-
Pinkall 1996b) как дуальные по Кристоффелю к их изотермическим
гауссовым отображениям. В этой статье было выведено также дискрет-
ное представление Вейерштрасса. Циркулярные поверхности постоян-
ной средней кривизны появились впервые в (Bobenko-Pinkall 1999) и
(Hertrich-Jeromin-Hoffmann-Pinkall 1999) как изотермические сети с ду-
альной по Кристоффелю на постоянном расстоянии. Во второй статье
было показано, что циркулярные поверхности постоянной средней кри-
визны можно эквивалентно определить как изотермические поверхно-
сти, у которых на постоянном расстоянии находится преобразование
Дарбу.
Кривизны циркулярной поверхности по отношению к произволь-
ным отображениям Гаусса п G S2, основанные на формуле Штейнера,
были введены в (Schief 2003а, 2006), где было показано также, что по-
верхности, параллельные поверхности постоянной гауссовой кривизны
являются линейными поверхностями Вайнгартена. Теория кривизны
для общих полиэдральных поверхностей, основанная на понятиях па-
раллельных поверхностей и смешанной площади, развита в (Pottmann-
Liu-Wallner-Bobenko-Wang 2007) и (Bobenko-Pottmann-Wallner 2008).
В циркулярном случае из этой теории следует тот же класс поверх-
ностей постоянной кривизны, что был определён ранее в (Bobenko-
Pinkall 1999), (Hertrich-Jeromin-Hoffmann-Pinkall 1999); см. Следствия
4.52, 4.53. Дискретные поверхности на рис. 4.19 были получены при по-
мощи программного обеспечения, разработанного Петером Шрёдером.
Теория минимальных поверхностей тип Кёбе была развита в
(Bobenko-Hoffmann-Springborn 2006). Эти поверхности являются S-
изотермическими и их отображения Гаусса являются многогранниками
Кёбе. Глобальные результаты в этой теории основаны на том замеча-
тельном факте, что комбинаторика многогранника Кёбе определяет его
4. Специальные классы дискретных поверхностей
по существу однозначно. Эта теория тесно связана с теорией ортого-
нальных конгруэнций окружностей (см. Главу 8).
Раздел 4.6: Упражнения.
Упр. 4.6, 4.7: см. (Bobenko-Pinkall 1996а).
Упр. 4.8: см. (Bobenko-Pinkall 1996а), (Hoffmann 1999).
Упр. 4.11: см. (Wallner-Pottmann 2008); соответствующую теорему
для гладких поверхностей можно найти в (Darboux 1914-27, §874).
Упр. 4.13, 4.14: см. (Hertrich-Jeromin 2000, 2003).
Упр. 4.18: см. (Bobenko-Hoffmann-Springborn 2006).
Упр. 4.21, 4.22: см. (Bobenko-Pinkall 1996b).
Глава 5
Аппроксимация
У нас уже было несколько случаев отметить, что понятия, кон-
струкции и результаты дискретной дифференциальной геометрии име-
ют не просто качественное сходство со своими гораздо более сложными
аналогами в гладкой теории. Напротив, последние получаются из пер-
вых в результате хорошо определённого непрерывного предела. Строго
говоря, такой непрерывный предел до настоящего времени был уста-
новлен только для геометрий, описываемых гиперболическими систе-
мами разностных и, соответственно, дифференциальных, уравнений.
Для этого класса уравнений может быть развита подробная теория
аппроксимации, аналогичная соответствующей теории для обыкновен-
ных разностных и дифференциальных уравнений. Фактически, эта ги-
перболическая теория покрывает существенную часть сетей, рассмот-
ренных в данной книге.
5.1. Дискретные гиперболические системы
Чтобы сформулировать общую схему, покрывающую большинство
ситуаций, которые мы до сих пор встретили, запишем наши гиперболи-
ческие системы в виде уравнений первого порядка. Следует подчерк-
нуть, что это необходимо лишь в общетеоретических рассмотрениях, и
в конкретных примерах мы этого никогда не делаем.
Определение 5.1. (Гиперболическая система) Гиперболической
системой уравнений первого порядка в частных разностях называет-
ся система вида
5iXk = gk,i(x)> (5.1)
относительно функций Xk : —> JCj, co значениями в банаховых
пространствах Для каждого Хк, уравнения (5.1) задаются для
г € St С {1,..., М}. то есть на непустом множестве эволюционных
направлений Хк- Дополнение &к = {1, • • •, М] \ Ед, состоит из стати-
ческих направлений Хк-
5. Аппроксимация
Мы рассматриваем переменную хк(и) как приписанную к элемен-
тарной ячейке Cfc(u) размерности #8*,, примыкающей к точке и G ZM
и параллельной :
Sfc = efc(u) = e [0,1
iGSfc
Напомним здесь, что
= {и E ZM : щ — 0 если i 8},
для множества индексов 8 С {1,..., М}.
Определение 5.2. (Задача Гурса)
1) Локальная задача Гурса для гиперболической системы (5.1)
заключается в построении решения хк для всех к и всех ячеек 6k
элементарного куба в начале координат %м, исходя из предписанных
значений хк(0). Система (5.1) называется совместной, если локальная
задача Гурса для этой системы однозначно разрешима для произволь-
ных начальных данных хк (0).
2) Глобальная задача Гурса состоит в построении решения (5.1)
на ZM, удовлетворяющего начальным данным
хк\ъ,=Хк, (5.2)
где Xk : > SQ заданные функции.
Верно следующее, вполне очевидное, но чрезвычайно важное
утверждение.
Теорема 5.3. (Корректно поставленная задача Гурса) Задача
Гурса для совместной гиперболической системы (5.1) имеет един-
ственное решение х на всём Iм.
Условие совместности имеет вид 6jdiXk = 5t5jXk для всех i j.
Подставляя (5.1), получаем следующие уравнения:
sj9k,i(x:) = 6igkd(x), i / j, (5.3)
или gkti(x + gj(xY) - дкДх) = gkJ(x + gt(r)) - gktj(x), где g^x) век-
торнозначная функция, у которой А я компонента равна <^ц(т), если
i 6 £-е, и неопределена в противном случае.
5.1. Дискретные гиперболические системы
Лемма 5.4. Для совместной системы гиперболических уравнений
(5.1) функция gk,i зависит лишь от тех компонент xg. для которых
Sf С §k U {г}.
Доказательство. Уравнения (5.3) должны выполняться по х тожде-
ственно. Это означает, что функция дк,г может зависеть лишь от тех
компонент xg, для которых 6jXg определена, то есть для которых j g £^.
Так как (5.3) должно выполняться при всех j 6 £*,, j i, то, для этих
£,tk\{i]ctg. □
Из Леммы 5.4 следует, что, для любого подмножества S С
{1,...,М}, уравнения из (5.1) для k с Sk С S и для i £ S образуют
замкнутую подсистему, в том смысле, что дк,г зависит лишь от xg с
Sg С S.
Определение 5.5. (Существенная размерность) Число
d = 1 + max (#Sfc) (5.4)
называется существенной размерностью системы (5.1).
Если d = М, то система (5.1) не имеет гиперболических подсистем
меньшей размерности. Если d < М, то d-мерные подсистемы, отвеча-
ющие S с — d являются гиперболическими. В этом случае, сов-
местность системы (5.1) является отражением весьма специального
свойства её d-мерных подсистем, которое мы интерпретируем как дис-
кретную интегрируемость (по крайней мере, если исключить некото-
рые неинтересные ситуации, такие как тривиальная эволюция в неко-
торых направлениях). Систематическому изучению интегрируемости,
понимаемой как совместность, посвящена Глава 6.
Пример 1. Рассмотрим разностное уравнение с М = 3 независимыми
переменными:
5152^3^ = F(x, 6ix, 5?х, 5зх, 5i5?x, 5Дзх, <52<5з.т). (5-5)
Можно поставить задачу Гурса, задавая значения х на координатных
плоскостях ®12, ®1з, ®2з- Уравнение (5.5) может быть переписано как
гиперболическая система уравнений первого порядка, посредством вве-
5. Аппроксимация
дения дополнительных зависимых переменных а, Ь, с, /, д, h:
{6i_x — а, — b, 83Х = с,
5га = /, 83а — д,
6]b = f, 83b — h, (5.6)
51 с = д, 82с = h,
5sf = 82д = 6ih = F(x, a, b, c, /, g, /1).
Естественно считать, что переменная х живёт в точках кубической ре-
шётки и е Z3; переменные а, Ь, с живут на рёбрах СДи), 62(11), 63(1/)
решётки, смежных с точкой и и параллельных координатным осям
®i, ®2, ®з, соответственно; а переменные /, д, h ассоциированы с дву-
мерными ячейками (элементарными квадратами) 612(11), 613(11), 623(11)
смежными с точкой и и параллельными координатным плоскостям
®12,®13,®23, соответственно. Таким образом, х не имеет стацио-
нарных направлений; стационарными направлениями а,Ь,с являют-
ся {1},{2},{3}, а стационарными направлениями f,g,h являются
{1,2}, {1,3}, {2,3}, соответственно. Задача Гурса для этой системы бу-
дет определяться предписанными значениями х в точке (0,0,0), зна-
чениями а, Ь, с на осях ®i,®2,®з, соответственно, и значениями /,
д, h на плоскостях ®12, ®13, ®23, соответственно. Существенная раз-
мерность этой дискретной системы равна d = 3 = М. Поучительно
сравнить это построение с его непрерывным аналогом: уравнение (5.5)
служит естественной дискретизацией дифференциального уравнения в
частных производных
дт&дзх = F(x, djx, дзх, did2x, д1дзх, с^Дз^)- (5.7)
Для последнего уравнения можно ввести вспомогательные переменные
a,b,c,f,g,h как частные производные, аналогично (5.6). Все эти пере-
менные равноправны, будучи определёнными просто в точках и 6 R3.
Пример 2. Рассмотрим разностные уравнения, описывающие М-
мерные Q-сети:
8i8jX — Cij8jX I CjiSiX. (5.8)
После введения вспомогательных переменных Vi их можно переписать
как гиперболическую систему уравнений первого порядка:
8iX = Vi,
< 8jVi = CijVj + CjiVi, i ± j, (5.9)
6iCjk = (TkCijjCjk + (TkCji)Cik (TiCjk)сц,, i j k i.
5.2. Аппроксимация дискретных гиперболических систем
Последнее уравнение совпадает с (2.7). см. Раздел 2.1.1, где можно
узнать подробности о его происхождении, а также о том, как привести
его к виду с правой частью, зависящей только от несдвинутых перемен-
ных Cij. Естественно считать, что переменная х живёт в точках кубиче-
ской решётки и е ZM, переменные щ живут на рёбрах 6, (и) решётки,
смежных с точкой и и параллельных координатной оси 23г, а перемен-
ные Cij,Cji, при i < j, живут на двумерных ячейках (элементарных
квадратах) 6^-(и), смежных с точкой и и параллельных координатным
плоскостям Hij. Таким образом, х не имеет стационарных направле-
ний, стационарным направлением для щ является {г} и стационарным
направлением для является {г, j}. Задача Гурса ставится заданием
значения х в точке 0 6 Zw, значений на осях 23, и значений с,7, Cji
на координатных плоскостях 23, у. Существенная размерность этой дис-
кретной системы равна d — 3, независимо от М. В частности, вполне
может быть d < М. Совместность этой системы для любого М 3
интерпретируется как её интегрируемость.
5.2. Аппроксимация дискретных гиперболических
систем
Чтобы работать с аппроксимацией дискретных геометрических мо-
делей, нужно ввести малые параметры в гиперболические системы
уравнений в частных разностях. Областью определения наших функ-
ций становится
23€ = eiZ х • • • х бд/Z.
Если €i = 0 для некоторого индекса г, то соответствующая компонента
в 23€ заменяется R. Например, если е — (0,... ,0), то 23е = RM. Таким
образом, области 23е обладают непрерывными и дискретными направ-
лениями, с размером шага, зависящим от параметров б,. Определения
сдвигов и разностных производных модифицируются для функций на
23е очевидным способом:
(т*/)(и) = f(u + CiCi), (<W)(u) = (/(U + 6,6,) - /(u)).
Если £i = 0, то 5i, естественно, заменяется частной производной <Э,. Для
мультииндекса а = (гц,..., щ/j, полагаем 5а = <5“‘ • • • .
Определение элементарных ячеек 6/,, несущих переменные мо-
5. Аппроксимация
дифицируется следующим образом:
Cfc — + 57 Miei ' Mi € [0, £г
iesk
(так что размер ячейки сжимается до нуля в направлениях с 6j = 0).
Мы видим, что дискретность помогает навести порядок: в непрерывном
случае, когда все б^ = 0, все функции х^ живут в точках, независимо
от размерности #Sfc их статических пространств. В дискретном слу-
чае, когда все б; > 0, можно, очевидно, проводить различия между
функциями, живущими на вершинах (те, у которых нет стационарных
направлений), на рёбрах (в точности с одним стационарным направле-
нием), на элементарных квадратах (в точности с двумя стационарными
направлениями), и т.д..
Имея в виду предел б —> 0, рассмотрим только случай, когда пер-
вые т С М параметров стремятся к нулю согласованно, ei — =
= em = б, а остальные М — т остаются постоянными, em+i = • • • =
= ем = 1. В этом случае 23€ = (cZ)m х ZM-m, и мы полагаем ® =
= 23° — Rm х ZM~m. Предполагая, что функции дьл = g^i в правых
частях (5.1) гладко зависят от б и имеют пределы при б —> 0, изучим
сходимость решений хе разностной гиперболической системы (5.1) к
решениям х° предельной дифференциальной (или дифференциально-
разностной) гиперболической системы
diXk = г е П {1,... ,m}, (5.10)
5iXk = g°,i&), i G St П {m+ 1,... ,M}. (5.П)
Естественно, (5.10), (5.11) описывает соответствующую m-мерную
гладкую геометрию с М — т перестановочными преобразованиями.
На протяжении всей этой главы, под гладкой функцией g : D —> X
подразумевается функция, бесконечно дифференцируемая в области
определения, g G C°°(D). Будем говорить, для компактного множества
X С D, что последовательность гладких функций р£ сходится к гладкой
функции д° с порядком О (б) в С°°(Х), если
11р£ _ Р°Нс£(К) < сее
при подходящих постоянных се для любого £ G N. Сходимость в C°°(D)
означает сходимость в С°°(Х) для всех компактных множеств X С D.
5.2. Аппроксимация дискретных гиперболических систем
Определение 5.6. (Аппроксимация гиперболических уравне-
ний) Говорят, что разностная гиперболическая система (5.1) аппрок-
симирует дифференциальную (или дифференциально-разностную) ги-
перболическую систему (5.10), (5.11), если gki —> , с точностью
0(e) в C°°(Xfc).
Сходимость дискретных функций (определённых на решётках 23£
с различными е) понимается следующим образом. Мы будем говорить,
что семейство дискретных функций Xе : Ъе —> X сходится к функции
х° : В —> X с порядком точности 0(e) в С°°(®), если для любого муль-
тииндекса а = (оч,..., ам)
sup |<5q(2!£ — т°)(и)| < cQe
USB6
с некоторыми постоянными ca. Символ x° в левой части понимается
как ограничение х на 23е С В.
Наконец, отметим, что нас в основном интересуют локальные за-
дачи, так что мы фактически работаем с ограниченными областями в
решётках ®£,
23£(т) = {и £ Ве : Ui G [0, г] при 1 < i < т,
щ £ {0,1} при т + 1 < i < М}.
Каждый 23 е (г) содержит лишь конечное множество точек (хотя их чис-
ло бесконечно растёт при е —> 0, если г остаётся фиксированным). Для
функций хе, определённых лишь в ограниченной области на решётке
23£(г), понятие сходимости модифицируется очевидным образом: верх-
няя грань берётся по всем узлам решётки и, где существует соответ-
ствующая разностная производная Saxe(u) .
Теперь можно сформулировать фундаментальное утверждение о
сходимости решений дискретных гиперболических систем к решениям
гиперболических систем уравнений в частных производных.
Теорема 5.7. (Сходимость решений для дискретных гипербо-
лических уравнений) Рассмотрим задачу Гурса (5.1), (5.2) для ги-
перболической системы разностных уравнений. Допустим, что:
i) дискретная система (5.1) совместна для всех е > 0;
И) дискретная система (5.1) аппроксимирует дифференциальную
(дифференциально-разностную) систему (5.10), (5.11) с точно-
стью 0(e) в С°°(ЗД);
5. Аппроксимация
Hi) данные задачи Гурса X) сходятся к гладким функциям с по-
рядком 0(e) в C°°(®s(*:)(r))-
Тогда существует г G (0, г], такое что, при достаточно малом е > О,
решение хк задачи Гурса существует и единственно на 23£(f); кроме
того, решения xj. сходятся к гладким функциям хок с точностью 0(e)
в С°° (23(f)); эти функции служат единственными решениями на
23(f) задачи Гурса для (5.10), (5.11) с данными Гурса Хк.
В условии ii), сходимость gk i —> gk i в C°°(Xfc), то есть на каждом
компактном подмножестве Хд,, предполагается лишь для простоты из-
ложения. В приложениях, функции gk i часто определены на некото-
рых подобластях Tk С Хд,, со свойством, что 22° открыта и плотна в
Хд,. В таком случае, в ii) требуется сходимость gki —> gki в С°°(1)0).
Тогда заключения Теоремы 5.7 верны для начальных данных общего
положения.
Что касается условия iii), то гладкие данные Xk : 23§fc —> Хд, обыч-
но заданы a priori, и дискретные данные Хк получаются ограничением
на решётку: Xk = Хк . В этой ситуации, условие iii) выполнено
автоматически.
Мы не будем приводить здесь полное доказательство Теоремы 5.7,
ограничившись наиболее существенной частью, иллюстрирующей все
необходимые технические идеи. А именно, мы проведём рассуждения
для простейшей ситуации М = т — 2; в этом частном случае продемон-
стрируем только сходимость хк — х° —> 0 для самих решений и опустим
доказательство 5а(хк — т°) —> 0 для мультииндексов ас |а| 1. Ины-
ми словами, мы докажем С0(23)-сходимость вместо С°°(23)-сходимости.
Доказательство С°°(®)-сходимости для общих М требует технической
работы, но не существенно новых идей. Итак, рассмотрим дискретную
гиперболическую систему
foa =/е(а, 6), <515 = де(а, 5), (5-12)
с гладкими функциями /е,/:ХхХ-> X и с данными Гурса
a(ui, 0) = AE(ui), 5(0, u2) — Be(u2) (5.13)
при щ G 23((r). Предполагается, что функции /£, р£ удовлетворяют
/е(а, 5) =/°(а, 5) + 0(e), д\а, 5) = д°(а, 5) + 0(e), (5.14)
5.2. Аппроксимация дискретных гиперболических систем
равномерно на компактных подмножествах ЗС х ЗС, и что выполняется
соотношение аналогичное (5.14) для всех частных производных функ-
ций /£, де. Далее, предполагается, что дискретные данные Гурса (5.13)
также имеют гладкие пределы:
Ae(ui) = Л0(щ) + 0(e), B£(u2) = B°(u2) + 0(e), (5.15)
равномерно по щ G 23£(т). Тогда решения (а£,6£) задач Гурса для си-
стем (5.12) сходятся равномерно в B(f), при подходящем г 6 (0,г], к
паре функций Липшица (а0,6°),
ae(ui, u2) = a°(ui, u2) + 0(e), 6£(ui, u2) = 6°(ui, u2) + 0(e), (5.16)
образующих единственное решение в 23(f) задачи Гурса для системы
5га =/°(а, 6), dib = g°(a, 6), (5-17)
с данными Гурса
a(ui, 0) = A°(ui), 6(0, u2) = B°(u2) (5.18)
при щ e 23j(f).
Лемма 5.8. (Априорная оценка) Пусть нормы данных Гурса Ае,
Ве ограничены независящими от е постоянными. Тогда существует
некоторое f 6 (0,г], такое что нормы решений задачи Гурса
(5.12), (5.13) ограничены на ®£(f) независимо от е.
Доказательство. Пусть |А£|, |В£| < Mq, и выберем М\ > Mq произ-
вольно. Определим
f = (Mi - Мо)/sup sup {|/£(а,6)| + |рЕ(а,6)|}.
е |а |, | Ь| < Mi
Покажем, что |а£|, |6£| < Mi на 23£(f). Перепишем (5.12), как
a£(ui,u2 + e) = a£(ui,u2)+e/£(a£(ui,u2),6£(u1,u2)), (5.19)
6£(ux + e,u2) = 6£(ui,u2) + eg£(a£(u1,u2),6£(ui,u2)), (5.20)
и затем получим по индукции, что
|a£(ui,u2)| < Mo + (Mi — Мо) < Mi,
№1,U2)| < Мо + (М1-Мо)^<М1,
при (ui, u2) е 23£(f). □
5. Аппроксимация
Замечание. Вообще, нельзя ожидать, что г = г поскольку решения
непрерывной задачи Гурса могут иметь особенности, отсутствующие в
дискретизации. Однако, если /£, де обладают глобальной постоянной
Липшица, то, как и для обыкновенных дифференциальных уравнений,
особенности невозможны, и в Лемме 5.8, а также в Теореме 5.7 можно
принять г = г.
Лемма 5.9. (Дискретная лемма Гронуолла) Пусть неотрица-
тельная функция Д : Z+ —> R удовлетворяет
Д(п + 1) < (1 + JC)A(n) + к, (5-21)
с неотрицательными постоянными Кик для всех п 0. Тогда вы-
полнена следующая оценка:
Д(п) < (Д(0) + пк) ехр(Кп). (5.22)
Доказательство. Это легко доказывается по индукции, с использова-
нием неравенства 1 + К < ехр(/С). □
Лемма 5.10. (Оценка Липшица) Допустим, что начальные дан-
ные А°, В0 непрерывной задачи Гурса являются функциями из С1, и
что начальные данные А£, В£ дискретной задачи Гурса удовлетворя-
ют неравенствам
|А£(щ) - Л°(щ)| < Me, |B£(u2) -B°(u2)| < Me, (5.23)
с постоянной М независящей от е. Тогда разностные производные
5гае, 62ае, 6Де, 62Ье
решения дискретной задачи Гурса ограничены на 23е(г) равномерно по
е, где f G (0, г] выбрано согласно Лемме 5.8.
Доказательство. В силу (5.12) и Леммы 5.8 ясно, что разностные про-
изводные 62ае и 6-[Ь£ равномерно ограничены. Пусть решения (а£,6£)
дискретных задач Гурса ограничены М^, и положим
M2=sup sup {|/е(а,Ь)|, |р£(а,6)|, \daf€(a,b)\, ..., |а6р£(а,5)|),
что является конечной величиной, так как /£ —> /° и дс —> р° локально
равномерно в С1. Без потери общности, М > М\ и М > М2. Докажем
5.2. Аппроксимация дискретных гиперболических систем
теперь оценку для Переходя от и2 к иэ + б, находим:
|<5iae(ui,u2 + е)| < |<Siae(ui,и2)\ + c|<5i/£(a£(ui,u2),5£(ui,u2))|
< |51a€(ui,u2)| + eM (|<5ia€(ui,u2)| + |516e(ui,u2)|)
< (1 + eM)|5iae(u1,u2)| + eM2.
Теперь из Леммы 5.9 для всех |u2| < г следует:
|51ae(tzi, u2)| < (|<51А£(и1)| + M2f) exp(A-ff).
В предположениях леммы, находим:
|<Ме(М < |<5M°(U1)| + (|A£(ux + e) - A°(U1 + e)|
+ |A£(u1)-A°(u1)|)/e^3M,
откуда следует искомая оценка:
|51ae(ui, u2)| < (ЗМ + M2f) exp(Aff).
Те же рассуждения применимы к <526е. □
Доказательство Теоремы 5.7. Приведём это доказательство только
для М = т = 2. Рассмотрим последовательность {(а£, 6€)}€=2-it с чле-
нами, продолженными до функций 23 (г) —> ТхТ посредством линейной
интерполяции. Согласно Лемме 5.10, существует постоянная L > 0, та-
кая что
|a£(u'1,U2)-a£(u1,u2)|+|J>e(u'1,U2)-J>e(ui,u2)| < L(|ui-ui|-|-|u2-u2|).
В комбинации с Леммой 5.8, отсюда следует, что семейство является
равностепенно непрерывным, и следовательно удовлетворяет предпо-
ложению теоремы Арцела-Асколи. Следовательно, существует подпо-
следовательность {(а£, 6e)}£=2-kn равномерно сходящаяся к непрерыв-
ным функциям a0, b° : 23(т) —> X. Кроме того, (а0,6°) удовлетворяют
приведённому выше условию Липшица с постоянной L. Чтобы пока-
зать, что (а0,Ь°) удовлетворяет дифференциальным уравнениям (5.17),
заметим, что из соотношения (5.19) и свойства Липшица для ае следует
[и2/е]-1
a£(ui, u2) = A£(ui) + е fe(cf(ui, fee), be(ui, fee)) + 0(e) (5.24)
k=0
5. Аппроксимация
для (u\.uz) Е ®(f). Так как сходимость подпоследовательности
{(af, 6е)}с=2-к„ равномерна и /£ —> f в С1, то можно перейти к пре-
делу е —> 0 в обеих частях (5.24) и получить
a°(ui, u2) = Л0(их) + f /°(a0(ui,7?),6°(ui,7?))(/7?. (5.25)
Jo
Отсюда следует, что а0 дифференцируема по и2, и <Э2а° = /°(а°,Ь0).
Функция Ь° рассматривается точно так же.
Теперь оценку (5.16) можно доказать для произвольного е = 2_fe.
Определим погрешность аппроксимации
Д€(п) = max {|a£(ui,u2) — a0(u!,u2)| + |b€(ui,u2) — 6°(u1,u2)| :
(ui,u2) G ®6(f), ui + u2 = ne}.
Комбинируя формулу (5.19) с интегральным представлением (5.25), по-
лучаем
Д£(п + 1) < Д£(п) + |А£ - А°|(пб + б) + |5£ - В°|(пб + б)
+б max {|<5i(a£ - a°)|(ui,u2) + |<52(Ье - b°)[(ui,u2)}
li 1+^2 =716 k J
< Ac(ri)+e max {|/€(a£,6£)(ui,u2) -/°(a°, b°)(ui,u2)|
U 1+122=716
+ |ge(a£,b£)(m,u2) -p°(a°,b°)(ui,u2)|} + 0(б)
< (1 + О(б))Д£(п) + О(е).
По Лемме 5.9, получаем Д£(п) = 0(c) при пе < г. Отсюда следует
оценка (5.16). □
5.3. Сходимость Q-сетей
Дискретизация сопряжённой сети. Напомним, что сопряжённая
сеть f : Rm —> RN может быть определена данными (Qi,2) (см. Раздел
1.1), тогда как Q-сеть /£ : (cZ)m —> Rw можно определить начальными
данными (Q^2) (см. Раздел 2.1). Сейчас мы продемонстрируем, как по-
лучить из гладких данных (Qi,2) некоторые дискретные данные (Q^2),
которые будут гарантировать сходимость соответствующих Q-сетей к
заданной гладкой сопряжённой сети.
5.3. Сходимость Q-сетей
Определим дискретные кривые /еГзе, ограничивая кривые на
точки решётки:
/£(и) = /(и), и € 3{, 1 г т.
Аналогично, определим функции на плакетах сС > ограничивая
на точки решётки:
Ещё лучшим выбором служат значения в центрах соответству-
ющих плакетов в 3^:
Cij(u) Cij(u+jei +jej), иеЪС, 1 i / j т.
Оба выбора приводят к начальным данным (Q^2)’ определяющим за-
висящее от с семейство Q-сетей /€: (б2)т —> R77, называемых канони-
ческими Q-сетями, отвечающими начальным данным (Qi,2).
Теорема 5.11. (Сходимость Q-сетей) Существует г > 0, такое
что канонические Q-сети fe : 3е (г) —> К77 сходятся, при б —> 0, к
единственной сопряжённой сети f : 3(г) —> К77 с начальными данны-
ми (Qi,2)- Сходимость имеет порядок О(б) в С°°(3(г)).
Доказательство. Это следует непосредственно из Теоремы 5.7, так как
системы (2.1), (2.7) и (1-1), (1-2), очевидно, гиперболические (и легко
могут быть переписаны в виде уравнений первого порядка). □
Дискретизация F-преобразования. Напомним, что F-преобразо-
вание заданной сопряжённой сети определяется начальными данными
(Е1д) (см. Раздел 1.1). Теперь мы породим из них начальные данные
(Ff^) (см. Раздел 2.1) для зависящего от б семейства F-преобразований
канонических Q-сетей, отвечающих начальным данным (Q1]2).
Возьмём точку /+(0) из (Fi). Определим функции на рёбрах а\ ,
bl ограничивая функции на точки решётки, или, луч-
ше, на середины соответствующих рёбер в 3J. Это даёт набор дан-
ных (Г^2); вместе с данными (Qf^), порождёнными выше, это при-
водит, каноническим образом, к зависящему от б семейству Q-сетей
Fe : (б2)т х {0,1} -> К77, которое будет называться каноническими
Q-сетями с начальными данными (Qi,2), (Fij2).
5. Аппроксимация
Теорема 5.12. (Сходимость дискретных F-преобразований) Ка-
нонические Q-сети = F£(-,l) : ®б(г) —> К77 сходятся к сети
f+ : 25 (г) —> К7^, которая является единственным F-преобразованием
от f с начальными данными (Fii2). Сходимость имеет порядок 0(e)
в С00^)).
Доказательство. Опять, это следует непосредственно из Теоремы 5.7,
применённой к гиперболической системе, состоящей из (2.10)—(2.12) в
дискретном случае и из (1.12)-(1.14) в гладком случае. Заметим, что
дискретные уравнения неявны, и их разрешимость при достаточно ма-
лом е гарантируется на открытом и всюду плотном подмножестве фа-
зового пространства {а, 0 : 1 < j т}. □
5.4. Сходимость дискретных сетей Мутара
Дискретизация сети Мутара. Для заданной сети Мутара у : К2 ->
IR77, определённой начальными данными (М112) (см. Раздел 1.2.1), по-
родим начальные данные (Mfk2) Для зависящего от е семейства дис-
кретных М-сетей уе : (cZ)2 —> IR77 (см. Раздел 2.3.10). Дискретные кри-
вые получаются из гладких кривых г/Г®,- ограничением на точки
решётки:
уе(и) — у(и), иЕТ>1, г = 1,2.
Плакетная функция af2 : (cZ)2 -> IR получается из функции <712 огра-
ниченной на точки решётки:
af2(u) = 1 + |e2Qi2(u), и £ (eZ)2
(можно также считывать gi2 в центрах соответствующих плакетов).
Тогда канонические дискретные М-сети ус : (eZ)2 —> IR77 для данной
сети Мутара у определяются как решения разностного уравнения (2.56)
с начальными данными (М^2).
Теорема 5.13. (Сходимость дискретных сетей Мутара) Кано-
нические дискретные М-сети уе: 2Р(г) —> IR77 сходятся, при е —> 0, к
единственной М-сети у : "В(г) —> IR77 с начальными данными (Mj2).
Сходимость имеет порядок 0(c) в С°°(В(г)).
5.4. Сходимость дискретных сетей Мутара
Доказательство. Уравнение (2.56) очевидно гиперболично (и легко за-
писывается через уравнения первого порядка). Оно аппроксимирует
уравнение (1.29), поскольку может быть переписано, как
<51<52у = |gi2('Tiy + T2!/) = ?1г(у + + 7}62у).
Теперь применима Теорема 5.7. □
Дискретизация преобразования Мутара. Пусть заданы началь-
ные данные (МТц2) для преобразования Мутара (см. Раздел 1.2.2).
Определим переменные на рёбрах bf через функции ограни-
ченные на точки решётки:
bi(ui,0) = 1 +epi(ui,0), b2(0, u2) = 1+ cp2(0,u2), щ е cZ
(также, можно ограничить Pif^i на середины соответствующих рёбер).
Это даёт нам начальные данные (МТ^2) для канонических дискретных
М-сетей (ре) + : (cZ)2 —> К77 (см. Раздел 2.3.9).
Теорема 5.14. (Сходимость дискретных преобразований Му-
тара) Канонические дискретные М-сети (ус)+ : ®е(г) —> R77 сходят-
ся к единственному преобразованию Мутара у+ : ®(г) —> К77 от у
с начальными данными (MTj 2). Сходимость имеет порядок 0(c) в
С°°(Ъ(гУ).
Доказательство. Система уравнений (2.58), (2.59) является гипербо-
лической. При подстановке bi — 1 + epi и ai2 = 1 + ^62Qi2, эти уравнения
можно записать, как
$1У+ + Фу = Р1(у+ - Пу), б2у+ - б2у = р2(у+ + т2у),
и
1 + ет-2Р1 = 1 + enp2 _ 1 + (б2/2)д^2 _________1_____________
1 + еР1 1 Т ср2 1 + (e2/2)gi2 1 + c2(?i2 - Р1Р2) + 0(с3)
Ясно, что при е —> 0 они аппроксимируют уравнения (1.30)—(1.31) и
(1.32)-(1.33), соответственно. Остаётся применить Теорему 5.7. □
5. Аппроксимация
5.5. Сходимость дискретных асимптотических сетей
Дискретизация A-поверхности. Начальные данные (Aii2) для А-
поверхности (см. Раздел 1.3) есть не что иное, как начальные дан-
ные (Mi,2) для поля нормалей Лелёвра n : R2 —> К3. Таким об-
разом, дискретизуя последнее, как описано в Теореме 5.13, мы при-
ходим к каноническому построению начальных данных (Af)2), кото-
рые дают сходящееся семейство дискретных полей нормалей Лелёв-
ра п£ : (eZ)2 R3 (см. Раздел 2.4.2). Уравнения (2.69) определяют
дискретные A-поверхности fe : (eZ)2 -> К3, называемые канонически-
ми дискретными A-поверхностями, отвечающими начальным данным
(Ацг)-
Теорема 5.15. (Сходимость дискретных асимптотических се-
тей) Канонические дискретные A-поверхности /с : 23е (г) —> К3 схо-
дятся, при е —> 0, к единственной А-поверхности / : 23(г) —> К3
с начальными данными (А^о). Сходимость имеет порядок 0(e) в
С°°(23(г)).
Доказательство. Уравнения (2.69) гиперболичны и аппроксимируют
уравнения (1.38). После того, как сходимость пе доказана, для доказа-
тельства сходимости применима Теорема 5.7. □
Дискретизация пары Вайнгартена. Начальные данные (Wji2) для
преобразования Вайнгартена (см. Раздел 1.3) есть не что иное, как на-
чальные данные (MTi,2) для преобразования Мутара от поля норма-
лей Лелёвра. Конструкция Теоремы 5.14 обеспечивает начальные дан-
ные для семейства полей нормалей Лелёвра (пе) + : (eZ)2 —> К3; их
и можно рассматривать, как данные (W^2) Для преобразованных А-
поверхностей (/е)+ : (eZ)2 -> К3, полученных посредством (2.70) (см.
Раздел 2.4.3).
Теорема 5.16. (Сходимость дискретных преобразований Вайн-
гартена) Канонические дискретные А-сети (/е)+ : 23£(г) —> R3 схо-
дятся к единственному преобразованию Вайнгартена f+ : 23(/') —> К3
от f с начальными данными (Wi 2). Сходимость имеет порядок 0(e)
е С°°(23(г)).
Доказательство. Это доказывается сравнением (идентичных) формул
(1.40) и (2.70), после того как установлена сходимость пе и (п£)+. □
5.6. Сходимость ЦИРКУЛЯРНЫХ СЕТЕЙ
5.6. Сходимость циркулярных сетей
В этом разделе мы обращаемся к задаче аппроксимации гладких
ортогональных сетей дискретными циркулярными сетями. Напомним,
что первые описываются системой (1.44)-(1.47) со связью (1.48), то-
гда как последние описываются похожими уравнениями (3.12)—(3.14),
(3.17) со связью (3.18). Мы продемонстрируем, что этому сходству мо-
жет быть придано количественное содержание, так что по данной ор-
тогональной сети можно построить аппроксимирующее её семейство
циркулярных сетей. Однако, при реализации этого имеется существен-
ное препятствие, которое можно увидеть при аккуратном сравнении
связей (1.48) и (3.18). В нашем представлении, гладкие коэффициенты
вращения аппроксимируются дискретными. Но так как у дискретных
коэффициентов вращения j3kj эволюционными направлениями являют-
ся только i k,j (то есть, это плакетные переменные, приписанные к
элементарным квадратам параллельным ®jk), то кажется, что невоз-
можно получить аппроксимацию таких гладких величин, как d-flij, вхо-
дящих в гладкую связь ортогональности (1.48). Чтобы достичь такой
аппроксимации, нам нужны некоторые дискретные аналоги гладких
коэффициентов вращения, которые жили бы на рёбрах.
Для этой цели, обратимся к мёбиусово-геометрическому описанию
циркулярных сетей из Раздела 3.1.4, точнее, к реперному уравнению
(3.25). Введём векторы V) = ipViip-1; тогда реперные уравнения прини-
мают вид = — ejVi. Разлагая эти векторы по базисным векто-
рам еь, получаем формулу, аналогичную (1.53):
Vi = V'l'iV’-1 = ~ Е Pkiek + hie°°- (5-26)
k^i
То, что еор-компонента здесь равна hi, легко доказать. Действительно,
из (3.25) следует, что Tif — f = hiVi = Теперь уравнение
(3.24) позволяет эквивалентно переписать это, как [ео, (т^)^>-1] = htei,
и сделанное утверждение доказано. Отметим также условие нормиров-
ки
= (5-27)
k^i
Коэффициенты pkt являются рёберными переменными, аналогично
гладким коэффициентам вращения. Действительно, векторы К опре-
делены на рёбрах Zm параллельных координатной оси Однако,
5. Аппроксимация
эти векторы не отражают непосредственно локальную геометрию око-
ло этих рёбер: наоборот, они получаются интегрированием реперного
уравнения (3.25), и следовательно имеют нелокальную природу.
Таким образом, в дискретном случае мы имеем два различных
аналога коэффициентов вращения: локальные плакетные переменные
^ij при 1 i j т, определённые на элементарных квадратах
Zm параллельных Ъг], и нелокальные рёберные переменные Pki при
1 i т, 1 k N, k г, определённые на рёбрах Zm параллель-
ных 'В;.
Эволюционные уравнения для Vi получаются из (3.13) и реперного
уравнения (3.25):
7г V) = Vej(Vj' + ftijVi^Qi.
При выводе используется тождество Ui(vj + /3jiVi)vi = Vj + pijVi, ко-
торое легко следует из (3.18). В результате получаются эволюционные
уравнения для рёберных переменных pkj:
TiPkj = k'ji (.Pkj + Pki0ij)y (5.28)
TiPij = v^t-pij+ZcTipij). (5.29)
Здесь 1 i 7^ j < m, 1 k < N, и k i,j. Циркулярную связь (3.18)
можно переписать теперь, как
fiij Н” fiji = &iPij &jPji 2 ' PkiPkj у (5.30)
k^i,j
что даёт соотношение между локальными плакетными переменными
Ptj и нелокальными рёберными переменными р^- Система, состоящая
из (5.28), (5.29) и (5.30) может рассматриваться как дискретная систе-
ма Ламе\ ср. (1.47), (1.48).
Обращаясь к проблеме аппроксимации, начнём с аппроксимации
одной ортогональной сети f : Rm -> Для аппроксимирующих цир-
кулярных сетей имеем М = т и все ei = е. Во всех формулах Раздела
3.1 и настоящего раздела следует заменить заданные на решётке функ-
ции hi, /3ij, pkj соответственно на ehi, eftij, epkj- Заметим, что формулы
(3.16), (5.27) превратятся в
Vji = Vij = (1 - e2Z?ijZ?ji)1/2 - 1 + O(e2),
5>201/2 = 1+0(e2)-
k^i
5.6. Сходимость ЦИРКУЛЯРНЫХ СЕТЕЙ
При таком растяжении уравнения (3.12). (3.13). (3.14) и (3.17) мож-
но привести к стандартному виду (5.1), с функциями в правой части,
аппроксимирующими соответствующие функции в уравнениях (1.7)-
(1.10) с порядком 0(c) при с —> 0.
Тем не менее, Теорему 5.7 ещё нельзя применить к ортогональ-
ным сетям. Причина заключается в том, что полная система диффе-
ренциальных уравнений, описывающих ортогональные сети, состоит из
уравнений (1.7)—(1.10) и связи (1.54) и не является гиперболической. Её
негиперболичность основана на факте, что связь (1.54) не разрешена
относительно производных difiij. Заметим, однако, что связь (1.54) не
принимает участия в эволюции решений, стартующей с данных, постав-
ленных в координатных плоскостях 23^-: связь выполняется автомати-
чески, при условии, что она выполнена на координатных поверхностях
Следовательно, мы получим результат о сходимости для орто-
гональных сетей, как только он будет установлен для координатных
поверхностей.
Дискретизация поверхности, параметризованной линями кри-
визны. Начальными данными для гладкой поверхности, параметризо-
ванной линями кривизны f : 2>i2 —> RjV являются:
(i) две гладкие кривые /|'-в (г = 1,2), ортогонально пересекающиеся
в /(0);
(ii) гладкая функция 712 : 2312 —> R, равная по определению 712 =
= | (91^12 — ^2^21) •
Пусть f\‘Bi образы кривых f\'Bi в модели мёбиусовой геометрии Qq(.
Пусть hi — \dif \ и ii = h~rdif метрические коэффициенты и единич-
ные касательные векторы координатных кривых. Выберем начальный
репер ^>(0) € Лоо, такой что
/(0) = V’-1(0)eoV'(0), й(0) = ^“1(0)е^(0) (г = 1,2).
Определим реперы ф : Bi —> Лоо кривых /1®; как решения уравнений
(1.51) при г = 1,2 (рассматриваемых, как обыкновенные дифферен-
циальные уравнения) с начальным значением ф(0). Коэффициентами
вращения кривых являются функции /3ki : 23^ —> R определённые
формулой (1.53) for i = 1,2.
Определим дискретные координатные кривые /е[фе, ограничивая
функции на точки решётки. Пусть h£ = и v£ — (hl)~16ife
5. Аппроксимация
дискретные метрические коэффициенты и единичные векторы вдоль
дискретных кривых. Определим репер фе : 23 ( —> итерируя раз-
ностное уравнение (3.25) при i = 1,2 с начальным условием ?/?Е(0) =
= V’(O)- Тогда каноническими коэффициентами вращения дискретных
кривых служат коэффициенты pki :!> чйв разложениях
V* = V’4£(V’e)-1 = ^i ~ | ^Pkiek + c/i-eoo.
Наконец, пусть плакетные функции 7)2 : Т>е12 —> К получаются огра-
ничением 712 на точки решётки (или на середины соответствующих
плакетов в ®j2).
Таким образом, мы получаем корректные данные Гурса для ги-
перболической системы разностных уравнений первого порядка отно-
сительно переменных /£, vf, hj, pki, состоящей из уравнений (3.12),
(3.13), (3.14), (5.28) и (5.29) с различными i,j е {1,2} и 1 k N, в
которые необходимо подставить следующие выражения:
/^12 = СТ1Р12 “ | (2 ^1^-2 —712) 1 021 — °2Р21 “ 2 zE2 ^1^2+712)
fc>2 fc>2
Сети fe : ®i2 —► Qo > определённые как решения только что поставлен-
ной задачи Гурса, являются циркулярными поверхностями, так как
подчиняются циркулярной связи (5.30). Будем называть их канониче-
скими циркулярными поверхностями, построенными по перечислен-
ным начальным данным.
Теорема 5.17. (Сходимость циркулярных поверхностей) Су-
ществует г > 0, такое что канонические циркулярные поверхно-
сти fe : ®i2(r) —> Qgf сходятся, с порядком 0(e) в С,00(®12(г)),
к единственной поверхности, параметризованной линями кривизны
f ’ ^12(7") Qcf с начальными данными /|ф4 (г = 1,2) и |(с>1/312 -
— 02^2i) = 712- Рёберные коэффициенты вращения pki и плакетные ко-
эффициенты вращения j3f2, 02i циркулярной поверхности Д сходятся
к соответствующим коэффициентам вращения поверхности, па-
раметризованной линями кривизны f.
Доказательство. Начнём с доказательства сходимости реперов, Д
ф, и коэффициентов вращения, pki —> Ofci, вдоль дискретных кривых
5.6. Сходимость ЦИРКУЛЯРНЫХ СЕТЕЙ
/е Г®‘. Это следует из двух наблюдений. Во-первых, й£(0) = i),(0) +
+ |(3iVi)(0) + О(е2), так что
(П - 1)^(0) = е^(0)(^)(0) + 0(б2).
Во-вторых, комбинируя реперные уравнения на двух соседних рёбрах
Ъ*, находим, что
(т» - г”1)# = -Мб(1 - = -се^6(Дщ) + О(е2)
везде на 23 е. Утверждение доказывается стандартными методами тео-
рии ОДУ.
Теперь применение Теоремы 5.7 показывает, что функции /£ :
®12 Qo сходятся к функции / : ®12 ~> Qq\ решающей задачу Гур-
са для гиперболической системы дифференциальных уравнений пер-
вого порядка, состоящей из (1.44)-(1.47) с различными i,j е {1,2} и
1 k N, и
<Э1/?12 = — К У2/3/с1/?*:2 +712; С>2^21 = — К 52 $fcl/3fc2 — 712-
к>2 к>2
Решения /Зы удовлетворяют соотношению ^(51/312—(З2/З21) = 712 и связи
ортогональности (1.48). □
Дискретизация m-мерной ортогональной сети. Если заданы на-
чальные данные (Ощ) для m-мерной ортогональной сети (см. Раздел
1.4), то мы можем применить процедуру, описанную в предыдущем па-
раграфе, с начальным репером ^>(0) € таким что
/(0) = ^-1(0)ео^(0), щ(0) = ^’1(0)едД0) (1 i т),
и породить, каноническим способом, циркулярные поверхности /Е|щ
и их плакетные коэффициенты вращения Это даст нам данные
(Of^) (см. Раздел 3.1) для зависящего от е семейства циркулярных
сетей /Е : (eZ)m —> Эти сети будут называться каноническими
циркулярными сетями, отвечающими начальным данным (О^).
Теорема 5.18. (Сходимость циркулярных сетей) Канонические
циркулярные сети fe : 23Е(г) —> К77 сходятся, при е —> 0, к единствен-
ной ортогональной сети f : В(г) —> К77 с начальными данными (Оцг).
Сходимость имеет порядок 0(e) в С00 (23 (г)).
5. Аппроксимация
Доказательство. Данные (0^2) определяют корректно поставленную
задачу Гурса для гиперболической системы разностных уравнений пер-
вого порядка относительно переменных /е, г}, /г-, /??•, состоящую из
(3.12), (3.13), (3.14), (3.17). Сходимость этих данных Гурса гаранти-
руется Теоремой 5.17. Утверждение теоремы следует теперь непосред-
ственно из Теоремы 5.7. □
Дискретизация преобразования Рибокура. По начальным дан-
ным (Дцг) для преобразования Рибокура от ортогональной сети (см.
Раздел 1.4), определим плакетные коэффициенты вращения на
“вертикальных” плакетах вдоль рёбер координатной оси 23', ограни-
чивая соответствующие функции на точки решётки или, альтерна-
тивно, на середины соответствующих рёбер 23':
/Зд/г(г<) = или e6i{u + |), и G 23Е, 1 i т.
Таким образом, получаются данные (R^2) (см. Раздел 3.1), которые
позволяют, вместе с (О^2), построить, каноническим способом, цир-
кулярные сети Fe : (eZ)m х {0,1} —> К77. Назовём их каноническими
циркулярными сетями, отвечающими начальным данным (Оцг), (Ri^)-
Теорема 5.19. (Сходимость дискретных преобразований Рибо-
кура) Канонические циркулярные сети (/')+ = Fe(-,1) : ®Е(г) —> R77
сходятся к единственному преобразованию Рибокура f+ : 23 (г) —> R77
от f с начальными данными (Ri 2). Сходимость имеет порядок 0(e)
в С°°(23(г)).
Доказательство. Определим ТдДО), как единичный вектор, парал-
лельный <5/(0) = /+(0) -/(0), и положим heM(0) = |<5/(0)|. Эти данные,
вместе с (3£Mi на координатных осях, вдобавок к ранее найденным /£(0),
vf, hl, Plj при 1 i,j т, образуют корректные данные Гурса для
системы (3.12), (3.13), (3.14), (3.17).
Из циркулярной связи (3.18) следует, что /3fM — -2{^,ием) — Д
на всех рёбрах 23'. Сделаем подстановку
г’л/=У + О(Е)> heM—£ + O(e), PeMi = е0; + О(е2), (Дм — у) +0(е)
в уравнениях (3.13), (3.14), (3.17) с одним их индексов, равным М.
Учитывая, что в этом пределе
Чм = "м\ = 1 - ^,у)в{ + 0(е2),
5.7. Сходимость дискретных К-поверхностей
видим, что предельные уравнения совпадают с (1.57), (1.58). (1.59).
Ссылка на Теорему 5.7 завершает доказательство. □
5.7. Сходимость дискретных К-поверхностей
Дискретизация К-поверхности. По начальным данным (К) для К-
поверхности (см. Раздел 1.6), определим начальные данные (Кд) (см.
Раздел 4.2) зависящего от 6 семейства дискретных К-поверхностей при
61 = 62 = е, ограничивая nfsj на точки решётки, как для общих А-
поверхностей. Таким образом, мы получаем две пересекающиеся дис-
кретные кривые в S2. Определим дискретные М-сети п~ : (eZ)2 —> S2
как решения разностных уравнений (4.31) с начальными данными
(КЛ). Наконец, определим дискретные К-поверхности : (eZ)2 —> R3
при помощи дискретного представления Лелёвра (2.69). Назовём их ка-
ноническими дискретными К-поверхностями, отвечающими началь-
ным данным (К).
Теорема 5.20. (Сходимость дискретных К-поверхностей) Ка-
нонические дискретные К-поверхности fe; СВ6 (г) —> R3 сходятся, при
6 —> 0, к единственной К-поверхности f : 23(г) —> R3 с начальными
данными (К). Сходимость имеет порядок (9(e) в С°°(Ъ(гУ).
Доказательство. Имеем, при п = пе:
е (п,т-)_п + т2п) 2 + е(п, 6гп + <52п)
12 1 + {тгп, т2п) 2 + е(п,6-[П + 62п) + е2(6-[П,62п}
Так как (п, <5;?г) — 0(e), то находим, что
0-12 = 1 — |62(<5171, д2п) + (9(б4).
Сравнивая это с (1.68), видим, что применима Теорема 5.7, из которой
следует сходимость сети пе : (eZ)2 —> S2 к гладкой сети п : R2 —> S2.
Окончательно, сходимость /€ к f следует точно так же, как для общих
А-поверхностей. □
Дискретизация пары Бэклунда. Пусть заданы начальные данные
(В) для преобразования Бэклунда заданной К-поверхности /, то есть
точка п+(0). Примем её в качестве начального данного (Вл) для дис-
кретных преобразований Бэклунда (/£)+ : (eZ)2 —> R3 от семейства f£
дискретных К-поверхностей, построенных в Теореме 5.20.
5. Аппроксимация
Теорема 5.21. (Сходимость дискретных преобразований Бэк-
лунда) Канонические дискретные К-поверхности (/£)+ : ®е(т) —> R3
сходятся к единственному преобразованию Бэклунда f+ : 33 (г) —> R3
от К-поверхности f с начальным данным (В). Сходимость имеет
порядок 0(e) в С^Д®^)).
Доказательство. Для преобразования Бэклунда выполняются урав-
нения (4.43), (4.44). В гладком пределе находим:
(<51П, п+ + п)
1 — (Т1П, п+)
(62п, п+ — п)
1 + (т2п,п+)
(Sin, п+)
1 — (тг,п+)
+ 0(е),
(б2П, п+)
1 + (п, тг+)
+ 0(е).
Сравнивая это с (1.41)—(1.42) и применяя Теорему 5.7, доказываем схо-
димость отображений Гаусса. □
5.8. Упражнения
5.1. Проверьте, что каждое из следующих четырёх разностных уравне-
ний для х : eZ —> ЗС аппроксимирует обыкновенное дифференциальное
уравнение dx/dt = f(x) для х : R —> ЗС:
6x = f(x), 5x = f(rx), = 5х =
где dx(t~) = (x(t+e) — т(£))/е. Используйте, при необходимости, теорему
о неявной функции.
5.2. Сведите уравнение Хироты для ф : (eZ)2 —> R,
1 е2 1
sin 4(7-1-720 — ъф- т2ф + ф) = -^зт-(т1т2ф + т1ф + т2ф+ф),
и уравнение синус-Гордона для ф : R2 —> R,
дД2ф = sin 0,
к гиперболическим системам первого порядка, и проверьте, что первая
аппроксимирует последнюю при е —> 0.
5.9. Библиографический комментарий
5.3. Сведите разностное уравнение для дискретных лоренцевски-
гармонических функций п : (eZ)2 —> S2,
(п, Tin + т2п)
TiT2n + п - ------------ {Туп + т2п),
1 + vin, т2п)
и дифференциальное уравнение для лоренцевски-гармонических функ-
ций п : R2 —> S2,
diд2п = — {din, д2п) п,
к гиперболическим системам первого порядка, и проверьте, что пер-
вая аппроксимирует последнюю при е —> 0. Почему это утверждение
неверно для аналогичных уравнений в случае функций со значениями
в 1Л+1-1?
5.4. Докажите следующую версию дискретной леммы Гронуолла:
пусть Д, а, b : Z+ —> R+ три неотрицательные последовательности, удо-
влетворяющие
п— 1
Д(п) < ап + 57 bbAtk').
fc=i
Тогда
Д(п) < а„ + 57 akbk JJ (1 + bj)-
fc=0 j=k+l
Интересный (и важный) частный случай отвечает постоянным коэф-
фициентам ап = к и Ьп = К.
5.9. Библиографический комментарий
Геометрические теоремы о сходимости имеются в литературе,
посвящённой задачам, описываемым эллиптическими уравнениями в
частных производных, таким, как задача Плато из теории минималь-
ных поверхностей; см., например, (Dziuk-Hutchinson 1999). Сходимость
метрических и геометрических свойств общих полиэдральных поверх-
ностей была доказана в (Hildebrandt-Polthier-Wardetzky 2006) на основе
анализа оператора Лапласа “с котангенсом”.
Для поверхностей, описываемых гиперболическими уравнениями
в частных производных, первые результаты по аппроксимации получе-
ны в (Bobenko-Matthes-Suris 2003, 2005). Изложение в данном разделе
5. Аппроксимация
следует этим статьям. Полное доказательство основной Теоремы 5.7 об
аппроксимации можно найти в (Matthes 2004).
Близкое чисто геометрическое построение циркулярных сетей, ап-
проксимирующих общие поверхности с параметризацией линиями кри-
визны приведено в (Bobenko-Tsarev 2007).
Глава 6
Совместность как интегрируемость
В предыдущих разделах мы встретили множество примеров мно-
гомерных сетей, которые служат дискретизациями гладких геометрий,
традиционно ассоциируемых с интегрируемыми системами. Ядром
теории интегрируемых систем является концепция совместности (или
согласованности). Мы сталкиваемся с ней уже в самом определении
полной интегрируемости по Лиувиллю-Арнольду для гамильтоновых
потоков, означающем в точности, что поток должен включаться в пол-
ное семейство совместных (коммутирующих) гамильтоновых потоков.
Невозможно перечислить все приложения и реинкарнации этой идеи.
Отметим лишь некоторые из них, имеющие отношение к данному из-
ложению.
• В теории солитонов нелинейные интегрируемые уравнения пред-
ставляются в виде условия совместности линейной системы, ко-
торое называется представлением нулевой кривизны (и известно
также, как представление Лакса или Захарова-Шабата). На этом
представлении основаны различные аналитические методы иссле-
дования солитонных уравнений (такие, как метод обратной задачи,
алгебро-геометрическое интегрирование, асимптотический анализ,
и т.п.).
• Характерной чертой солитонных (интегрируемых) дифференци-
альных уравнений в частных производных является то, что они
возникают не по отдельности, но всегда организованы в иерархии
коммутирующих потоков.
• Другой неотъемлемой чертой интегрируемых систем является то,
что они обладают преобразованиями Бэклунда-Дарбу. Эти специ-
альные преобразования часто используются для построения новых
решений по известным.
6. Совместность как интегрируемость
На самом деле все эти свойства взаимосвязаны, и обычно интегри-
руемость понимается как наличие одной (или комбинации) этих черт.
В этой главе мы покажем, что развитие дискретной дифференци-
альной геометрии ведёт к новому пониманию самого понятия интегри-
руемости и её свойств.
6.1. Непрерывные интегрируемые системы
Рассмотрим уравнение синус-Гордона
дудзф = sin </• (6.1)
для функции ф : R2 —> R, одну из самых знаменитых интегрируемых
систем, имеющую многочисленные приложения в дифференциальной
геометрии, а также в математической физике. Напомним геометриче-
скую интерпретацию уравнения синус-Гордона. Пусть f : R2 —> R3
поверхность параметризованная вдоль асимптотических линий. По-
верхности постоянной отрицательной гауссовой кривизны К = — 1 (К-
поверхности, для краткости) в параметризации асимптотическими ли-
ниями характеризуются дополнительным требованием, что |3i/| не за-
висит от иг, a P2/I не зависит от щ. Перепараметризуя, если необхо-
димо, асимптотические линии К-поверхности, можно положить |3i/| =
= l^a/l = 1- Тогда угол ф — ф(и) между векторами d\f и Эг/ удовле-
творяет уравнению синус-Гордона (6.1).
Интегрируемость уравнения синус-Гордона имеет множество про-
явлений, из которых для нас особенно важны два: представление ну-
левой кривизны и наличие преобразований Бэклунда.
Чтобы сформулировать представление нулевой кривизны для
уравнения синус-Гордона, рассмотрим матрицы
U
-А
~д\ф
(6-2)
(6.3)
if 0 Х~хе*
2 \ Х~1е~^ О
Они зависят от переменной и 6 R2, входящей через функцию ф и её
частные производные, а также от (вещественного) параметра А, из-
вестного в теории интегрируемых систем, как спектральный параметр.
6.1. Непрерывные интегрируемые системы
Принято рассматривать U, V как функции от и G R2 со значениями в
алгебре петель
<?[А] = {£:>*—> su(2) I £(-А) = сг3£(А)<т3}, <?3 = ( J Д ) .
Нетрудно проверить прямым вычислением, что ф служит решением
уравнения (6.1) тогда и только тогда, когда выполняется условие ну-
левой кривизны
d2U-d^V+ [U,V] =0, (6.4)
тождественно по А. Термин “нулевая кривизна” объясняется тем, что
(6.4) выражает свойство плоскости для связности на R2, определён-
ной дифференциальной один-формой Udm + Vdu2 (точнее, для одно-
параметрического семейства связностей). Это условие гарантирует раз-
решимость следующей системы линейных дифференциальных уравне-
ний:
ДФ = ПФ, <Э2Ф = УФ, (6.5)
относительно функции Ф : R2 —> G[A] со значениями в скрученной
группе петель
G[A] = ч SU(2) | Е(-А) = <73S(A)<73}.
Существование представления нулевой кривизны рассматривает-
ся, как один из главных признаков интегрируемости уравнения синус-
Гордона (и подобных ему). В общих словах, оно связывает нелинейное
уравнение (6.1) с системой линейных уравнений (6.5), которые подда-
ются анализу. В частности, спектральная теория первого уравнения
(6.5) лежит в основе метода обратной задачи рассеяния, применяе-
мого для решения некоторых граничных задач для уравнения синус-
Гордона. Непосредственно из представления нулевой кривизны выво-
дятся также сохраняющиеся величины (интегралы) уравнения синус-
Гордона.
Более того, представление нулевой кривизны позволяет восстано-
вить К-поверхность, отвечающую решению ф уравнения синус-Гордона.
Для заданного решения ф : R2 —> R введём матрицы (6.2), (6.3) удо-
влетворяющие (6.4). Определим функцию Ф : R2 —> G[A], как решение
уравнения (6.5) с начальным условием Ф(0, 0; А) — 1. Тогда погружение
f : R2 —> R3, определяемое формулой Сима
/и = 2АФ~1(щА) дФ!^;Л) , (6.6)
О Л
Л=1
6. Совместность как интегрируемость
при каноническом отождествлении (4.9) su(2) с R3, является К-
поверхностыо, параметризованной асимптотическими линиями, с уг-
лом ф между асимптотическими направлениями. Функция Ф известна,
как расширенный репер для f. Кроме того, правая часть (6.6) доставля-
ет, при произвольном А, семейство погружений Д : R2 —> R3, каждое из
которых оказывается К-поверхностью, параметризованной асимптоти-
ческими линиями. Эти поверхности Д образуют для f так называемое
ассоциированное семейство.
Классическое преобразование Бэклунда служит ещё одним общим
признаком всех известных интегрируемых систем. В случае уравнения
синус-Гордона оно определяется следующей конструкцией. По задан-
ному решению ф уравнения (6.1), новое решение ф+ можно построить,
решая следующую систему дифференциальных уравнений:
дгф+ +дгф= sin 2 \ д2ф+ - <Э2</> = 2аsin . (6.7)
Эта система совместна, то есть д2(д^ф+) = дг(д2ф+'), в силу условия,
что ф является решением синус-Гордона, и при этом ф+ также явля-
ется решением. Оно определяется параметром а и значением ф+(0,0)
в одной точке. Геометрически, ф+ является углом между асимптоти-
ческими направлениями для преобразования Бэклунда /+ : R2 —> R3
от заданной К-поверхности f : R2 —> К3, а это преобразование ха-
рактеризуется, согласно Определению 1.26, тем, что отрезки прямых
[/(w),/+(гг)] касательны к обеим поверхностям f и /+, и их длина не
зависит от и.
Можно проверить прямым вычислением, что уравнения (6.7) эк-
вивалентны следующим матричным дифференциальным уравнениям,
выполняющимся тождественно по спектральному параметру А:
91W = [7+W - W,
d2W = V+W - WV,
(6-8)
где матрица W имеет вид
W =
еИФ+-Ф)/2
—гаА
—iaX
е-Цф+-ф)/2
(6-9)
С другой стороны, (6.8) задают условие разрешимости для системы,
состоящей из (6.5) и аналогичных уравнений для матричной функции
ф+ = "МФ.
(6.10)
6.2. Дискретные интегрируемые систем
Можно показать, что Ф+ служит расширенным репером для поверхно-
сти f+, полученной преобразованием Бэклунда.
Замечательное свойство преобразований Бэклунда описывается
Теоремой Бьянки о перестановочности: если ф^ преобразование Бэк-
лунда от ф с параметром а, а ф^ преобразование Бэклунда от ф с
параметром /3, то существует единственное решение уравнения
синус-Гордона, которое является одновременно преобразованием Бэк-
лунда от ф^ с параметром /3 и преобразованием Бэклунда от ф^ с
параметром а; это решение определяется формулой
sin + ф№ — ф^ — </>) = sin — ф^ + ф^ — ф). (6.11)
Итак, интегрируемые системы, для которых уравнение синус-
Гордона служит прототипом, характеризуются такими свойствами, как
представление нулевой кривизны и преобразования Бэклунда со свой-
ством перестановочности. Происхождение и само существование этих
свойств рассматривается в классической теории интегрируемых систем
как нечто таинственное и трансцендентное.
6.2. Дискретные интегрируемые систем
Теория дискретных интегрируемых систем развивалась некоторое
время как часть общей теории интегрируемых систем. Её цели на ран-
нем этапе были не слишком амбициозны: просто найти разностные ана-
логи интегрируемых дифференциальных систем, обладающие теми же
свойствами интегрируемости. В этом вводном разделе мы приведём, в
качестве иллюстрации, пример интегрируемой дискретизации уравне-
ния синус-Гордона, известный как уравнение Хироты:
1 е2 1
sin -^(тгт2ф - туф - т2ф + ф) = -^ sin -^(тутуф + туф + т2ф + ф). (6.12)
Здесь ф вещественнозначная функция на (eZ)2, а операторы сдвига
обозначают Ткф(и) = ф(и + ее^)-
Оказывается, что уравнение Хироты (6.12) описывает дискретные
К-поверхности, то есть дискретные A-поверхности f : (eZ)2 —> К3, у
которых все рёбра имеют одну и ту же длину е£, так что |<5i f | = |<ЗгУ| =
= I. Здесь, конечно, <5fc/(u) = (/(u + eefc) - У(и))/е.
Дискретное представление нулевой кривизны для уравнения (6.12)
формулируется в терминах матриц 11, V : (eZ)2 —> G[A], определённых
6. Совместность как интегрируемость
формулами
еИт1ф-ф)/2
1
£i(A)
геА
~2
геА
V
(6.13)
е-Цт1ф-ф)/2
1
Ш)
рг(.т2ф+ф)/2 \
2А
(6-14)
ге
2А 6
-г(т2ф+4>)/2
и
V
1
1
где нормировочные множители /л(А) = (1 + е2А2/4)1/2 и ^г(А) = (1 +
+ е2А-2/4)1/2 введены с целью обеспечить условие И, V € G[A]. Мат-
ричное уравнение
(r2U)V = (riV)U (6.15)
выполняется тождественно по А тогда и только тогда, когда функция
ф удовлетворяет (6.12). Уравнение (6.15) называется дискретным пред-
ставлением нулевой кривизны для уравнения Хироты (6.12). Оно вы-
ражает плоскость дискретной б[А]-значной связности, заданной мат-
рицами 11, приписанными ориентированным рёбрам (iz, u + eei), и мат-
рицами V, приписанными ориентированным рёбрам (и, и+еег) решётки
(eZ)2; см. рис. 6.1. В свою очередь, это условие гарантирует разреши-
мость следующей системы линейных разностных уравнений для функ-
ции Ф : (eZ)2 —> G[A]:
71Ф=ИФ, т2Ф=УФ.
(6.16)
Как и в непрерывном случае, дискретное представление нулевой
кривизны может быть использовано как исходный пункт для примене-
ния аналитической техники метода обратной задачи. Оно также даёт
сохраняющиеся величины (интегралы) для уравнения Хироты. Кро-
ме того, его можно использовать для восстановления дискретной К-
поверхности, отвечающей данному решению ф : (sZ)2 —> R уравнения
Хироты, буквально так же, как и в гладком случае. Для данного реше-
ния ф уравнения (6.12), введём матрицы (6.13), (6.14) удовлетворяю-
щие (6.15). Определим функцию Ф : (eZ)2 —> G[A], как решение (6.16) с
начальными условиями Ф(0,0; А) = 1. Тогда формула Сима (6.6) опре-
деляет сеть f : (eZ)2 —> R3, являющуюся дискретной К-поверхностью
6.2. Дискретные интегрируемые систем
ъФ t2U Т1Т2(£
V T1V
ф И пФ
Рис. 6.1. Дискретная плоская связность.
с характеристической угловой функцией ф и длиной ребра е£, где £ =
= (1 + е2/4)-1. Опять, правая часть (6.6) для разных А, не обязатель-
но равных 1, доставляет ассоциированное семейство /д дискретных К-
поверхностей.
Преобразование Бэклунда для уравнения (6.12) задаётся разност-
ными аналогами формул (6.7):
sin|(Ti<?!>+ - ф+ + пф-ф) = +Ф+ - Т1Ф - ф), (6.17)
sin | (т2ф+ - ф+ - т2ф + ф) = sin | (т2ф+ + ф+ + т2ф + ф). (6.18)
Выполняются утверждения, аналогичные случаю уравнения синус-
Гордона. Разностные уравнения (6.17), (6.18) совместны; то есть
п(т2ф+) = т2(пф+), при условии, что ф решение (6.12), и тогда ф+
также является решением (определённым параметром а и значением
ф+(0,0) в одной точке). Геометрический смысл преобразования Бэк-
лунда также аналогичен непрерывному случаю: отрезки прямых, со-
единяющие соответствующие точки дискретной К-поверхности f и её
преобразования Бэклунда f+ лежат в касательных плоскостях обеих
поверхностей, а их длина не зависит от и Е (eZ)2.
Прямое вычисление показывает, что уравнения (6.17), (6.18) экви-
валентны матричным уравнениям
(nW)U = U+W, (t2W)V = V+W, (6.19)
выполняющимся тождественно по А, с той же матрицей W, что и в
(6.9). Эти уравнения гарантируют разрешимость системы, состоящей
6. Совместность как интегрируемость
из (6.16) и аналогичных уравнений для матричной функции Ф+, опре-
делённой (6.10). Последняя матрица Ф+ есть не что иное, как расши-
ренный репер преобразованной поверхности.
Теорема Бьянки о перестановочности формулируется в точности,
как в непрерывном случае, и выражается той же самой формулой
(6.11).
6.3. Дискретные двумерные интегрируемые
системы на графах
Прежде чем переходить к объяснению ключевой идеи, что в каче-
стве определения интегрируемости 2П-уравнений следует принять свой-
ство их ЗП-совместности, мы обсудим чуть подробнее традиционную
точку зрения на понятие интегрируемых систем, основанную на дис-
кретных представлениях нулевой кривизны. Это последнее понятие ра-
ботает в более общем контексте, чем системы на регулярной квадрат-
ной решётке Z2, а именно, оно естественно формулируется для систем
на графах.
Граф S будет для нас не просто комбинаторным объектом, на нём
будет задана дополнительная структура вполне регулярного политоп-
ного клеточного разбиения ориентированной поверхности. Множество
вершин графа будет обозначаться V(9)> множество ориентированных
рёбер Е(9), и множество граней F(9). Любому такому графу 9 ка-
нонически отвечает дуальное клеточное разбиение 9*; оно определено
с точностью до изотопии, но может быть зафиксировано при помо-
щи конструкции Вороного-Делоне. Вершины 9* находятся во взаимно-
однозначном соответствии с гранями 9 (фактически, их можно вы-
брать, как некоторые точки внутри соответствующих граней; ср. рис.
6.2).
Переменные дискретной системы (поля в терминологии математи-
ческой физики) будут пониматься, как элементы f некоторого множе-
ства X (фазового пространства системы), приписанные либо верши-
нам, либо рёбрам 9. (Можно представить себе и смешанную ситуацию,
когда часть полей приписана вершинам, а другая - рёбрам.) Сама си-
стема имеет следующую природу. Рассмотрим замкнутый путь по ори-
ентированным рёбрам, образующим границу грани в 9:
ei = (zi,T2), е2 = (^2,тз), • ••, Сп = Сеп,Я1).
Предполагается, в случае полей, приписанных к вершинам, что поля
6.3. Интегрируемые системы на графах
Рис. 6.2. Грань 9 и соответствующая вершина 9*.
..., подчиняются определённому условию, геометрическо-
го или аналитического происхождения, выраженному уравнением, ас-
социированным с этой гранью:
Q(/(^i), • • • ,/(^п)) = 0. (6.20)
Если поля приписаны рёбрам, /(ci),..., то уравнение имеет, со-
ответственно, вид
Q(/(ei),...,/(en)) =0. (6.21)
Дискретная система состоит из множества таких уравнений, ассоци-
ированных со всеми гранями 9-
Говорят, что такая система допускает дискретное представление
нулевой кривизны, если имеется набор матриц L(e; Л) 6 G[A] из неко-
торой группы петель G[A], ассоциированных с каждым направленным
ребром е е (так называемые матрицы перехода) и со следующими
свойствами. Для системы с полями в вершинах, L(e; А) зависит от по-
лей У(т1),/(т2), где е = (ti,тг); для систем с полями на рёбрах, Г(е; А)
зависит лишь от поля /(е). Аргумент А матриц из G[A] известен в тео-
рии интегрируемых систем, как спектральный параметр. Требуется,
чтобы:
• для любого направленного ребра е = (яд, хг), если —е = (х2, яд),
то
L(-e,A) = (£(е,А))-1; (6.22)
6. Совместность как интегрируемость
• для любого замкнутого пути по ориентированным рёбрам
ci = (ii,x2), е2 = (:Е2,£з), , еп = (^п,£1)
выполнялось условие
L(en,A)---L(e2,A)L(ei,A) = l. (6.23)
В случае, когда путь является обходом вокруг одной грани 9, дискрет-
ное условие нулевой кривизны (6.23) должно быть эквивалентно урав-
нению на этой грани (или, по крайне мере, следовать из него).
При выполнении условий (6.22), (6.23) в вершинах 9 можно опреде-
лить волновую функцию Ф : У(9) —> G[A], согласно следующему требо-
ванию: для любого направленного ребра е = (л1,л2) С £(9), значения
волновой функции на его концах должны быть связаны равенством
Ф(т2, А) = £(е, А)Ф(т1, А). (6.24)
На произвольном графе, аналитические следствия из существо-
вания представления нулевой кривизны для заданного набора урав-
нений не ясны. Однако, для случая регулярных графов, таких, как
квадратная решётка Z + С С, или регулярная треугольная решётка
Z + e27rl^3Z с С, такое представление может быть использовано для
определения сохраняющихся величин для поставленных надлежащим
образом задач Коши, а также для построения конкретных решений при
помощи мощных аналитических методов.
6.4. Дискретные уравнения типа Лапласа
Существуют дискретные уравнения на графах, не покрывающиеся
конструкциями из Раздела 6.3.
Определение 6.1. (Дискретные уравнения типа Лапласа) Пусти
дан граф 9, с множеством вершин У(9) и множеством рёбер 7?(9).
Дискретное уравнение типа Лапласа на графе 9 для функции f :
V(9) —> С имеет вид
^2 ^(/(a;o),/(z);*'(a:o,z)) = 0. (6.25)
star(zo)
Каждой вершине xq Е V(9) отвечает одно уравнение; суммирование
осуществляется по star(io); множеству вершин S, связанных с Xq
6.4. Дискретные уравнения типа Лапласа
ребром (см. рис. 6.3^; функция ф зависит от некоторых параметров
v : E(S) —> С, приписанных рёбрам S-
Классические (линейные) дискретные уравнения Лапласа на 9 яв-
ляются частным случаем этого определения:
^2 v(x0,x)(f(x) - /(л0)) = 0, (6.26)
хЕ star(xo)
с некоторыми весами v : Е(9) —> R+, приписанными (ненаправленным)
рёбрам 9-
Рис. 6.3. Звезда вершины я:о в
графе 9.
Рис. 6.4. Грань 9* дуальная
хо € 9-
Понятие интегрируемости для дискретных уравнений типа Лапла-
са не является пока твёрдо установленным. Мы обсудим здесь опреде-
ление, которое основано на понятии дискретного представления нуле-
вой кривизны и работает при дополнительных предположениях отно-
сительно графа 9. Именно, он должен возникать из строго регулярного
политопного клеточного разбиения ориентированной поверхности, как
и в предыдущем разделе.
Рассмотрим, чуть подробнее, дуальный граф (клеточное разбие-
ние) 9*. Каждое ребро е 6 Е(9) разделяет две грани 9, которые, в
свою очередь, отвечают двум вершинам 9*. Путь между этими двумя
вершинами объявляется ребром е* 6 Е(9*), двойственным к е. Если
ребру е е Е(9) приписано направление, то дуальное ребро е* 6 Е(9*)
6. Совместность как интегрируемость
также считается направленным — в соответствии с ориентацией несу-
щей поверхности, а именно, так, что пара (е,е*) положительно ори-
ентирована в точке пересечения. Из этого соглашения об ориента-
ции следует, что е** = —е. Наконец, грани 9* находятся во взаимно-
однозначном соответствии с вершинами 9: если xq £ К(9), и соседние
вершины ад,..., хп £ V(9) связаны с xq рёбрами ci = (tq, ti), ..., en =
= (xo,xn) £ E(3), то двойственная к xq грань 9* ограничена двой-
ственными рёбрами ej = (3/1,£/2), • • •, e* — (уп,У1У, см. рис. 6.4.
Будем говорить, что система дискретных уравнений типа Лапла-
са на 3 обладает дискретным представлением нулевой кривизны, если
имеется набор матриц L(e*; А) £ G[A] из некоторой группы петель G[A],
ассоциированных с ориентированными рёбрами е* £ Е(3*) дуального
графа 9*, для которого:
• матрица L(e*;A) зависит от полей У(а;0), Да;) в вершинах ребра
е = (tq,t) 6 Е(3), двойственного ребру е* £ Е(3*У и
• на дуальном графе выполняются условия плоской связности (6.22),
(6.23).
Матрица Т(е*;А) интерпретируется как матрица перехода вдоль
ребра е* £ -Е(9*), то есть перехода через ребро е £ Е(ЗУ Волновая
функция Ф в этой ситуации определяется на множестве У(9*) вершин
дуального графа.
6.5. Квад-графы
Хотя интегрируемые 2D системы можно рассматривать на самых
разных типах графов на поверхности, имеется один тип — квад-графы
— отвечающий наиболее фундаментальным интегрируемым системам.
Определение 6.2. (Квад-граф) Квад-графом D называется строго
регулярное политопное клеточное разбиение поверхности, все грани
которого четырёхугольны.
Так как нас в основном интересует локальная теория интегрируе-
мых систем на квад-графах, и чтобы избежать обсуждения некоторых
тонких граничных эффектов, мы всегда будем считать, что несущая
поверхность квад-графа не имеет границы.
Квад-графы привилегированы по той причине, что из произволь-
ного строго регулярного политопного клеточного разбиения 9 можно
построить некоторый квад-граф В, называемый дублем 9.
6.5. Квад-графы
Дубль В является квад-графом, построенным по графу 9 и его
дуальному 9* следующим образом. Множеством вершин дубля В яв-
ляется V(B) = V(S)UV(S*). Каждая пара дуальных рёбер, скажем
е = (ло, ii) £ Е(Д) и е* = (у1,уг) 6 £\9*), определяет четырёхугольник
(xo,yi,xi,y2). Эти четырёхугольники образуют грани клеточного раз-
биения (квад-графа) В. Таким образом, звезда для вершины л0 6 К(9)
порождает цветок вокруг хо из смежных четырёхугольников в -Р(В);
см. рис. 6.5. Подчеркнём, что рёбра В не принадлежат ни Е(Д), ни
Я(9*).
Рис. 6.5. Грани В вокруг вершины то.
Квад-графы В, возникающие как дубли, являются двудольными:
множество К(В) можно разложить на две дополняющие друг друга
половины, У(В) = V(9) LJ V(S*) (“чёрные” и “белые” вершины), такие
что каждое ребро из E(D) имеет концы разного цвета. Эквивалентно,
любая замкнутая петля вдоль рёбер В имеет чётную длину.
Конструкцию дубля можно обратить. Стартуем с двудольного
квад-графа В. Например, любой квад-граф, вложенный в плоскость
или в открытый диск, автоматически двудолен. Любой двудольный
квад-граф порождает два дуальных политопных (вообще говоря, уже
не четырёхугольных) клеточных разбиения 9 и 9*, с У(9) содержащим
все “чёрные” вершины В и У(9*) содержащим все “белые”, и рёбрами
9 (соотв. 9*) соединяющими “чёрные” (соотв. “белые”) вершины вдоль
диагоналей каждой грани из В. Разложение К(В) на У(9) и У(9*)
единственно, с точностью до смены ролей 9 и 9*.
6. Совместность как интегрируемость
Отметим, что если квад-граф В не двудольный (то есть, если в
нём есть петли, состоящие из нечётного числа рёбер), то из В нетруд-
но получить новый двудольный квад-граф D', простым измельчением
каждой четырёхугольной грани из F(T>) на четыре части.
Так как нас в основном интересует локальная теория, то мы все-
гда предполагаем (если не оговорено противное), что наши квад-графы
являются клеточными разбиениями открытого топологического диска.
В частности, наши квад-графы D всегда двудольны, поэтому S и 3*
корректно определены.
6.6. Трёхмерная совместность
Внимательное изучение примеров из Разделов 6.1, 6.2 приводит к
замечательным наблюдениям, имеющим отношение к основной фило-
софии этой книги. Можно прийти к выводу, что теория непрерывного
уравнения синус-Гордона состоит из нескольких компонент довольно
различной природы: основным объектом является дифференциальное
уравнение в частных производных, его преобразования Бэклунда опи-
сываются совместной системой двух обыкновенных дифференциаль-
ных уравнений, а формула суперпозиции для преобразований Бэклун-
да выражается в чисто алгебраических терминах. В дискретном кон-
тексте ситуация драматически меняется.
Все компоненты дискретной теории имеют, по существу, одну
и ту же структуру: уравнение (6.12), описывающее дискретные К-
поверхности, уравнения (6.17), (6.18) для преобразований Бэклунда
дискретной К-поверхности и уравнение (6.11) для их принципа супер-
позиции. Эта общая структура заключена в следующей формуле для
функции ф : Zm ->R на m-мерной решётке:
sin | (ФзЬ + Фк - 4>j - Ф) = sin | -фк + Фj ~ ф) (6.27)
Здесь нижний индекс j обозначает сдвиг по j-му направлению решёт-
ки, а параметры а3 приписаны всем рёбрам, параллельным j-му на-
правлению. В геометрическом контексте мы имеем, фактически, дело
со случаем т = 4. Индексы 1, 2 помечают координатные направления
дискретных поверхностей, тогда как индексы 3,4 используются в ка-
честве замены верхних индексов (1), (2) для преобразований Бэклунда.
Соответствующие значения параметров равны: а± = е/2, = 2/е,
аз = а и 04 = (3. Уравнения (6.17), (6.11) имеют в точности вид (6.27),
6.6. Трёхмерная совместность
а уравнения (6.12), (6.18) приводятся к нему после смены знака ф на
каждой второй гиперплоскости, трансверсальной второму координат-
ному направлению, то есть при замене переменных ф(и) ( — 1)и2ф(и).
Это отражает тот факт, что определяющие геометрические свой-
ства дискретных К-поверхностей и их преобразований Бэклунда иден-
тичны и заключены в определении многомерных К-сетей, то есть А-
сетей (сетей в R3 с плоскими звёздами в вершинах) удовлетворяющих
дополнительному требованию, чтобы в каждом элементарном четырёх-
угольнике противоположные стороны были равной длины. Дискретная
К-поверхность является К-сетью при т = 2, итерации преобразования
Бэклунда для дискретной К-поверхности порождают К-сеть с т = 3, а
в теореме Бьянки о перестановочности двух преобразований Бэклунда
для дискретной К-поверхности возникает К-сеть с т = 4.
Замена переменных f = ехр(г<^>/2) приводит (6.27) к виду
fjk &jfj *-*kfk
f &jfk &kfj
(6.28)
также известному как уравнение Хироты.
fk fjk
Рис. 6.6. 2D уравнение.
Рис. 6.7. ЗВ-совместность.
Уравнение Хироты (6.28) является двумерным дискретным урав-
нением, поскольку оно связывает переменные f в вершинах любой эле-
ментарной двумерной ячейки (квадрата) m-мерной решётки, так что
любые три переменные однозначно определяют четвёртую. В вопро-
се о возможности наложить это уравнение на всю m-мерную решётку
6. Совместность как интегрируемость
случай т — 3 является ключевым. Соответствующее свойство трёх-
мерной совместности следует понимать так: допустим, что заданы
четыре значения /, fi, fj, fk (обозначения пояснены на рис. 6.7). То-
гда уравнение (6.28) определяет fij, fjk и /Д, и дальнейшее применение
этого уравнения даёт три a priori различных значения fij к- Оказывает-
ся, что эти три значения совпадают автоматически, при произвольных
начальных данных. Действительно, прямое вычисление показывает:
= ak^-a^fifj+a^al-a^fjfk+aj^-aDfkfi
}ijk~ ak{^-a^fk + a^-a^fl + aj^-a^fj ’
Это совпадение и означает ЗБ-совместность уравнения Хироты. Как
следствие, уравнение Хироты может быть совместно приписано всем
элементарным квадратам многомерной решётки.
6.7. От ЗБ-совместности к представлениям нулевой
кривизны и преобразованиям Бэклунда
Мы подошли к основной идее в понимании дискретных интегри-
руемых систем, а именно, что свойство ЗБ-совместности, подмеченное
в Разделе 6.6 для уравнения Хироты, имеет на самом деле фундамен-
тальное значение и ведёт прямо к сути всей теории. Мы покажем, что
остальные свойства интегрируемых систем, такие как представление
нулевой кривизны и преобразования Бэклунда, являются следстви-
ями ЗБ-совместности. Настоящий раздел посвящён реализации этой
идеи для систем на квад-графах с полями в вершинах и размеченными
рёбрами.
Типичным представителем этого класса уравнений служит систе-
ма Хироты, которую мы перепишем ещё раз в виде
/12 <*1/1 - ОДЛ ((, „„х
Т = (630)
В геометрическом контексте К-поверхностей мы имели f = ехр(0/2) 6
S1. В нынешнем аналитическом рассмотрении мы будем считать поля
f произвольными комплексными числами, приписанными вершинам
Z2, a ai (комплексными) параметрами, которые естественно приписы-
вать рёбрам Z2, параллельным Тч, и которые постоянны вдоль полос в
дополнительном направлении. Иначе, можно интерпретировать аг как
6.7. 3D-COBMECTHOCTb И ПРЕДСТАВЛЕНИЯ нулевой кривизны
поля, удовлетворяющие условию разметки
<52O!i = 0, <5102 = 0. (6.31)
Система Хироты ЗЭ-совместна, причём
f = оз(а2 +ai(aj ~а2)/2/з +02(0? ~ а3)/з/1 , „ ,
123 аз(а2 - а?)/з + - а2)Л+02(0? - а!)/г
Ещё один пример системы с переменными в вершинах и параметра-
ми на рёбрах, удовлетворяющими условию разметки, доставляет урав-
нение двойного отношения:
g(/,/i,/i2,/2) = gj - (б.зз)
Мы уже изучали эту систему в Разделе 4.3 в контексте дискретных изо-
термических поверхностей, где поля f были точками в R^', парамет-
ры ai вещественными числами, а двойное отношение определялось со-
гласно умножению Клиффорда в C£(RN). Сейчас мы рассмотрим более
простую версию с комплексными числами в качестве полей и парамет-
ров. Коммутативность комплексного умножения позволяет проверить
ЗВ-совместность уравнения двойного отношения прямым вычислени-
ем, приводящим к
Г _ (Ql - Q2)/l/2 + (Q2 - ^зУг/з + (<*3 ~ <^1)/з/1
(a2 — сц)/3 + (a3 - a2)/i + (ai - a3)/2
Общая система такого типа состоит из уравнений
<Э(/, А,/12,/2; «1,0:2) = 0. (6.35)
Здесь / : Z2 —> С комплексные поля, а а^ комплексные параметры
на рёбрах Z2 параллельных Hi, удовлетворяющие условию разметки
(6.31); см. рис. 6.6.
На самом деле мы хотели бы с самого начала обобщить эту по-
становку, рассматривая системы на произвольных квад-графах вместо
Z2. В этом случае (6.35) следует понимать как соотношение для по-
лей / : V(D) —> С, а а : Е(Т>) —> С является разметкой рёбер D,
то есть функцией, принимающей одинаковые значения на любой паре
6. Совместность как интегрируемость
Рис. 6.8. Грань размеченного квад-графа; поля в вершинах.
противоположных рёбер любого четырёхугольника из F(D). В контек-
сте уравнений на общих квад-графах, выделенные координатные на-
правления отсутствуют; тем не менее, удобно по-прежнему использо-
вать обозначения (6.35), подразумевая, что индексы используются ло-
кально (в пределах одного четырёхугольника), а не обозначают сдвиги
по глобально заданным координатным направлениям. Таким образом,
fi fi, /12, /2 могут быть любой циклической перестановкой вершин эле-
ментарного четырёхугольника. Иногда мы будем подчёркивать отсут-
ствие глобальных координатных направлений, записывая (6.35) в дру-
гой системе обозначений, используя просто циклическую нумерацию
вершин (см. рис. 6.8):
Q(/i,/2,/3,/4;a,^) = о. (6.36)
Для самой возможности задавать уравнение (6.36) на квад-графах
общего вида, это уравнение должно быть однозначно разрешимо отно-
сительно любого из своих аргументов 6 С; поэтому, при рассмот-
рениях в полной общности, следующее предположение является есте-
ственным:
Линейность. Функция Q является многочленом степени 1 по каж-
дому аргументу Д (мультиаффинная функция), с коэффициента-
ми, зависящими от параметров а,/?:
<2(/1,/2,/з,/4;а,^) = ai(a,^)/i/2/3/4 + ... + <zi6(a,/3). (6.37)
Для уравнения Хироты (6.30) имеем
Q = afih + W2/3 - а/3/4 - /3/1Л,
6.7. 3D-COBMECTHOCTb И ПРЕДСТАВЛЕНИЯ нулевой кривизны
а для уравнения двойного отношения (6.33) с комплекснозначными пе-
ременными можно взять
Q = Ж - /Ж - А) - Ж - /з)(А - /1).
Допустим теперь, что уравнение (6.35) обладает свойством 3D-
совместности; ср. рис. 6.7. Мы покажем, что это замечательное свой-
ство автоматически ведёт к двум основным структурам, ассоциируе-
мым в теории солитонов с интегрируемостью: к преобразованиям Бэк-
лунда и представлению нулевой кривизны.
Теорема 6.3. (Преобразования Бэклунда следуют из 3D-cob-
местности) Пусть уравнение (6.35) SD-совместно. Тогда для лю-
бого решения f : V(D) -> С соответствующей системы (6.36) на
квад-графе D, имеется двухпараметрическое семейство решений /+ :
V(D) —> С этой же системы, удовлетворяющее
Q(/,A,/+,/+;^,A) = o (6.38)
для всех рёбер 6 F(D). Такое решение f+ называется преоб-
разованием Бэклунда для f, и определяется его значением в одной
вершине D и параметром А.
Доказательство. Продолжим формально квад-граф D в третье изме-
рение. Для этой цели, обозначим через D+ вторую копию Т> и до-
бавим рёбра, соединяющие каждую вершину f 6 V(D) с её копией
f+ 6 V(D+). (Здесь мы слегка смешиваем обозначения, используя од-
ну и ту же букву f для вершин квад-граф и для полей, приписанных
этим вершинам.) Это даёт нам “3D квад-граф” D, с множеством вер-
шин
V(D) = ф)иф+),
множеством рёбер
F(D) = F(D) U F(D+) U {(/, /+) : f 6 V(D)},
и множеством граней
F(D) = F(D) U F(D+) U {(/, /i, /+, /+) : /i 6 V(D)}.
Элементарными строительными блоками D служат комбинаторные ку-
бы (/, А, Дг, /г, /+, /1", /12, /2"), как показано на рис. 6.9. Разметка на
6. Совместность как интегрируемость
-E(D) определяется естественным образом: каждое ребро (f+,fi~) £
Е(Т)+) имеет ту же метку ai, что и его копия 6 £?(D), а все
“вертикальные” рёбра (/,/+) имеют одну и ту же метку А. Ясно, что
содержание рис. 6.9 то же самое, что и у рис. 6.7, с точностью до обозна-
чений. Далее, решение /+ : V(D+) чСна втором этаже D корректно
определено благодаря ЗВ-совместности, и определяется его значением
в одной вершине Т)+ и параметром А. Можно считать, что областью
определения f+ служит V(3)), а не V(D+), поскольку эти два множе-
ства находятся во взаимно-однозначном соответствии. □
Рис. 6.9. Элементарный куб в D.
Теорема 6.4. (Представление нулевой кривизны следует из
ЗВ-совместности) Пусть уравнение (6.35) ЗИ-совместно. Тогда со-
ответствующая система (6.36) на квад-графе D допускает представ-
ление нулевой кривизны в матрицах размера 2x2, зависящих от спек-
трального параметра: существуют матрицы, ассоциированные с ори-
ентированными рёбрами D,
L(e,a(e);A) : Ё(Т>) -> GL(2,C)[A], (6.39)
такие что для любой четырёхугольной грани (/,/1,/12>/2) £ F(D)
выполнено равенство, тоэюдественно по А:
Ь(/12, /1, а2; A)L(/1, f, Oi; А) = Т(/12, /2, ai; A)L(/2, f, o2; A). (6.40)
Доказательство. В силу предположения линейности, /+ выражается
из уравнения (6.38) в виде дробно-линейного преобразования от /+, с
6.7. 3D-COBMECTHOCTB И ПРЕДСТАВЛЕНИЯ нулевой кривизны
коэффициентами, зависящими от /,
/+ =L(A,/,ai;A)[/+]- (6.41)
Здесь мы используем стандартное матричное обозначение для действия
дробно-линейного преобразования:
L[z] = {az + b)(cz + d)-1, где L = d)’ (6.42)
Из ЗИ-совместности для f+2 следует, что для любого f+,
[/+]
= L(/12, /2, ai; X)L{f2, f, a2; A) [/+]. (6.43)
Следовательно, (6.40) выполняется по крайней мере проективно, то
есть с точностью до скалярного множителя. Нормировка определите-
лей L (или любая другая подходящая калибровка) позволяет добиться
того, чтобы (6.40) выполнялось в обычном смысле. □
В качестве примера, выведем представление нулевой кривизны для
уравнения Хироты (6.30). В этом случае спектральный параметр удоб-
но переопределить заменой А А-1. Тогда уравнение Хироты на вер-
тикальных гранях рис. 6.9 записывается в следующем виде:
f+ = f f+ ~ Xaifi
Ji fi~ xaif+ ’
Этому отвечает дробно-линейное преобразование (6.41) с матрицей
/ f -Ха{//Л
у Хаг fi )
Нормируя её так, чтобы определитель был постоянным (не зависел от
полевых переменных), приходим к матрице
” ,“СА'»*(/Л)-1/2 (Л/Л‘/2 Л 1
Калибровочное преобразование
L(A,/,ai;A) r’UWi-AaiiW)- Ж/) = r°i/2) >
6. Совместность как интегрируемость
приводит к альтернативной форме матриц перехода:
(6.45)
Это калибровочное преобразование отвечает интерпретации матрицы
(6.45), как описывающей дробно-линейные преобразования для пере-
менных /+:
/+//г = ЦА,/,^;А) [/+//].
Матрицы перехода (6.45) по существу совпадают с матрицами из (4.30)
(чтобы сопоставить формулы, нужно заменить в (6.45) спектральный
параметр А на гА, переопределить параметры а» tan(ai/2), и сделать
экспоненциальную замену полевых переменных f = е-’^'2).
Нашим вторым примером будет вывод представления нулевой кри-
визны для комплексного уравнения двойного отношения (6.33). Опять,
удобно переопределить спектральный параметр, А -> А-1, тогда верти-
кальным граням на рис. 6.9 будут отвечать уравнения
(/^-/+)(/-А)
(Г - /)(А - /+)
Это даёт дробно-линейные преобразования (6.41) с
Ь(А,/,^,А)=/+-^ (6.46)
Определитель этой матрицы постоянен (равен 1 — AaJ; следовательно,
дальнейшая нормировка не требуется. Более употребительная форма
матриц перехода в представлении нулевой кривизны для комплексного
уравнения двойного отношения получается при калибровочном преоб-
разовании
ОД,/,адА) -»
Ж/) = (J
Л
1 / ’
что ведёт к матрицам
ОД./.а.;А)=(Да;(фЛ)_, //<). (6.47)
6.8. Граничные задачи для интегрируемых уравнений
Эти матрицы (6.47) интерпретируются как матрицы дробно-линейных
преобразований для переменных на вертикальных рёбрах:
/+-А = £(Л,/,^;Л) [/+-/].
Подведём итог: ЗП-совместность двумерных квад-уравнений с ком-
плексными полями в вершинах и размеченными рёбрами гарантиру-
ет существование преобразований Бэклунда и представления нулевой
кривизны. Более того, это не просто утверждение существования, а
конструкция: оба атрибута выводятся систематически, прямо из урав-
нения, без какой-либо дополнительной информации; в определённом
смысле, они закодированы в самом уравнении, при условии, что оно
ЗП-совместно.
6.8. Геометрия граничных задач для
интегрируемых двумерных уравнений
Имеется несколько важных аспектов задачи вложения квад-графа
в регулярную многомерную квадратную решётку, связанных с инте-
грируемыми уравнениями.
6.8.1. Задача с начальными данными
Начнём с вопроса о корректных задачах с начальными данны-
ми (задачах Коши) для дискретных 2D уравнениях на квад-графах.
Пусть Р путь на квад-графе D, то есть последовательность рёбер с7 =
= (zj,Tj+i) 6 £/(D). Обозначим через Е{Р) = {е5} и V(P) = {т7} мно-
жества рёбер и вершин пути Р, соответственно. Говорят, что задача
Коши для пути Р корректно поставлена, если для любого набора дан-
ных fp : V(-P) —> С существует единственное решение f : V(3>) —> С,
такое что f\v(p)= fp- Нетрудно найти примеры путей на квадратной
решётке, для которых задача Коши корректна. Нас интересует вопрос,
как охарактеризовать, для заданного квад-графа D, все пути с этим
свойством.
Решение этой задачи даётся при помощи понятия полосы в D.
Определение 6.5. (Полоса) Полосой в D называется такая после-
довательность четырёхугольных граней qj £ Р(®), что любая пара
qj-i, qj смежна по ребру Zj = qj-t П qj, и Zj, e^+i являются про-
тивоположными рёбрами qj. Иными словами, полоса это путь в D*,
6. Совместность как интегрируемость
Рис. 6.10. Начальный путь
Рис. 6.11. Начальный путь
с одним углом.
в виде лесенки.
состоящий из рёбер tj = (qj-i,qj) 6 Е(Т>*), в котором каждая после-
довательная пара z*, с*+1 входит в четырёхугольник qj и выходит из
него через пару противоположных рёбер Zj, Zj+i- Рёбра z3 называются
поперечными рёбрами полосы.
Итак, в размеченном квад-графе 2) любая полоса может быть ас-
социирована с меткой а, сидящей на всех её поперечных рёбрах Zj. По-
лосы заменяют координатные направления в регулярной квадратной
решётке, и их можно рассматривать как дискретный аналог характери-
стик для гиперболической системы уравнений в частных производных
с двумя независимыми переменными.
Теорема 6.6. (Корректно поставленные задачи Коши на квад-
графах) Пусть D конечный односвязный квад-граф без самопересека-
ющихся полос, и Р путь без самопересечений в Т>. Рассмотрим 3D-
совместное уравнение типа (6.35) на квад-графе D. Тогда:
i) Если каждая полоса в D пересекает Р в точности один раз, то
задача Коши на Р корректно поставлена.
И) Если некоторая полоса в D пересекает Р более одного раза, то
задача Коши на Р переопределена (вообще говоря, не имеет реше-
ний).
iii) Если некоторая полоса в D не пересекает Р, то задача Коши на
Р недоопределена (вообще говоря, имеет больше одного решения).
Доказательство. Мы только наметим доказательство утверждения i).
Оно основано на вложении Т множества V(D) в единичный куб Zn, где
6.8. Граничные задачи для интегрируемых уравнений
п равно числу рёбер в Р (или числу различных полос в D). Выберем
любую вершину хд £ V(D) и положим Т(хо) = 0 6 Zn. Образ лю-
бой другой вершины х £ V(D) определяется рекуррентно вдоль пути,
соединяющего зд с я, пРи помощи следующего правила:
Для любых двух соседей х,у е V(D), если ребро (а;,у) £ .E(D)
принадлежит полосе с номером i £ {1,2,..., я}, то Т(у) = Т(х) +
+ Ci (mod 2), где щ есть i-й координатный вектор Zn.
Результат не зависит от пути, соединяющего хд с х, так как каж-
дый замкнутый путь имеет чётный индекс пересечения с любой по-
лосой; следовательно, вклад любой полосы в Т вдоль замкнутого пу-
ти равен нулю. Рёбра и грани D отвечают рёбрам и двумерным гра-
ням единичного я-мерного куба. Т-образом пути Р является путь
(0,0,0,..., 0), (1,0, 0,..., 0), (1,1,0,..., 0), ..., (1,1,1,..., 1). Ясно, что
для ЗВ-совместного уравнения данные вдоль этого пути определяют
корректно поставленную задачу Коши для единичного куба в В
частности, эти данные однозначно определяют значения решения на
T(V(D)). □
Следует отметить, что эта теорема не верна для уравнений без
свойства ЗВ-совместности. Следующая теорема основана на представ-
лении нулевой кривизны со спектральным параметром; следовательно,
она также специфична для ЗВ-совместных уравнений на размеченных
квад-графах. Мы сформулируем эту теорему для конкретного уравне-
ния (уравнения двойного отношения), но фактически она применима и
в гораздо более общих ситуациях. См., тем не менее, Упражнение 6.5,
иллюстрирующее пример, когда эта теорема не верна.
Теорема 6.7. (Связь данных на двух путях Коши) Рассмотрим
общее решение уравнения двойного отношения (6.33) на односвязном
квад-графе Т>. Пусть каждый из двух путей Р — (xq, ,..., хп) и Р —
= (io, ii,..., £п) в D с общими начальной точкой х0 — хд и конечной
точкой хп = хп пересекает каждую полосу в D в точности один
раз. Тогда поля (/о, /1, • • •, /п) вдоль Р определяют поля (/0, Д,..., Д)
вдоль Р однозначно, коль скоро известны последовательности меток
ai = a(xi^i,Xi) вдоль Р и оц = а(хг-\,хг) вдоль Р, то есть без учёта
какой-либо дополнительной информации о комбинаторике D.
Доказательство. Доказательство основано на представлении нулевой
кривизны уравнения двойного отношения с матрицами перехода L ви-
да (6.47). По предположению теоремы, последовательность (Si,..., <5П)
6. Совместность как интегрируемость
является перестановкой последовательности (од...., ап). Из условия
нулевой кривизны (6.23) следует, что
Л-1, ОД; А) = Пш, Л_!, од; А). (6.48)
Вообще говоря, такое равенство не выполняется автоматически для не-
нормированных матриц перехода, но в нашем случае det L(fi, fi—i,Gil A)
= 1 — X&i, откуда следует равенство определителей в обеих частях
(6.48). Обозначим левую часть (6.48) через
Т(А) == Д-т.од; А).
Все элементы этой матрицы полиномиальны по А. Мы хотим показать,
что эта матрица однозначно переразлагается, как
Т(А) = ПМА.Л-ьод; А),
с /о — /о, fn = fny и с предписанной перестановкой (од) параметров
(од) вдоль пути Р.
Покажем, что имеется единственная матрица вида
/о;А)
такая, что все элементы матрицы Т(А)Т-1(У1,/о> оч; А) полиномиаль-
ны по А. Так как detT(A) = J)[(l — Аод), то Т(А) вырождена в точно-
сти в точках А = а^1. Для общего решения rank Т(аГ1) = 1, то есть
dimkerT(a“1) = 1. Определим Д из
кегТ^од1) =R (J1
(напомним, что Д = /0). Тогда компоненты вектора
Т(А) (J1 "
6.8. Граничные задачи для интегрируемых уравнений
являются многочленами, делящимися на 1 — Adj. Заметим теперь, что
b-1(A,A,di;A)
= 1 (К - ЛА ЛА - АГ1 V _ ( 0 оа
1-айД 1 Д 1 ) ЛА-А)-1 oj ’
откуда немедленно следует, что T(A)L-1(/1, fo, dx; А) полиномиальна
по А.
Индуктивное применение этой процедуры приводит к искомому
переразложению матрицы Т(А). Остаётся показать, что для найденной
таким образом последовательности (/)) выполняется равенство fn =
= fn. Но это следует немедленно из того факта, что свободный член
элемента (12) в Т(А) равен /0 — fn = fo — fn- Это завершает доказа-
тельство. □
Эта теорема имеет довольно удивительные следствия. Рассмот-
рим квад-граф, полученный из регулярной квадратной решётки заме-
ной некоторого прямоугольника размера т х п конечным односвязным
квад-графом с той же самой границей. Получившийся квад-граф назы-
вается регулярной квадратной решёткой с локализованным дефектом.
Дефект называется слабым, если все полосы, проходящие через дефект,
сохраняют направление, хотя и могут менять порядок. Слабый дефект
размера 3x2 показан на рис. 6.12.
Рассмотрим задачу Коши для уравнения двойного отношения на
регулярной решётке со слабым дефектом и с начальными данными вне
дефекта. Допустим, что снаружи дефекта все горизонтальные рёбра
имеют одну и ту же метку а, а все вертикальные рёбра одну и ту же
метку /3 (так что на рис. 6.12 должно быть 04=02 = аз)- Сравним ре-
шение этой задачи с решением этой же задачи Коши, но на регулярной
квадратной решётке без дефектов. Удивительным следствием Теоремы
6.7, является то, что вне дефекта решения совпадают. Можно сказать,
что для уравнения двойного отношения (и ему подобных) с однородной
разметкой слабые дефекты являются прозрачными.
6.8.2. Продолжение на многомерную решётку
Проблема вложения квад-графа Т> в регулярную многомерную ку-
бическую решётку имеет также аспекты другой природы.
6. Совместность как интегрируемость
Рис. 6.12. Слабый локализованный дефект на регулярной
квадратной решётке.
Теорема 6.8. (Ромбическое представление) Квад-граф D допуска-
ет представление в С, все грани которого ромбические тогда и только
тогда, когда выполняются следующие два условия:
i) Ни одна полоса не пересекает себя и не является замкнутой.
И) Две различные полосы пересекают друг друга не более раза.
Для доказательства этой теоремы мы отсылаем читателя к (Кепуоп-
Schlenker 2004).
Мы покажем, что ромбические представления тесно связаны с 3D-
совместностью уравнений на D. По заданному ромбическому представ-
лению р : V(D) —> С с рёбрами единичной длины (что всегда достига-
ется растяжением, и предполагается в дальнейшем), определим следу-
ющую функцию на ориентированных рёбрах Т> со значениями в S1 =
= {0еС:|0| = 1}:
0(х,у) = р(у) -р(ж), V(s,y) £ E(D). (6.49)
Эту функцию можно назвать разметкой ориентированных рёбер, по-
скольку она удовлетворяет равенству 0(—е) — — 0(e) для любого е £
Е(Т>), а значения 0 на двух противоположных и одинаково ориентиро-
ванных рёбрах четырёхугольника из F(T>) равны (см. рис. 6.13). Для
любой разметки 0 : Е(Т>) —> S1 ориентированных рёбер, функция а =
= 02 : Е(Т>) —> S1 является разметкой (ненаправленных) рёбер D в
нашем обычном смысле.
6.8. Граничные задачи для интегрируемых уравнений
Рис. 6.13. Разметка ориентированных рёбер.
Определение 6.9. (Квазикристаллическое ромбическое пред-
ставление) Ромбическое представление р : V(D) —> С квад-графа Т>
называется квазикристаллическим, если множество значений функ-
ции в : Е(Т>) —> S1, определённой уравнением (6.49), является конеч-
ным, 0 = {±#1,..., ±0^}.
Примером квазикристаллического (фактически периодического)
ромбического квад-графа с d = 3 является так называемая дуальная
решётка кагоме, показанная на рис. 6.14.
Рис. 6.14. Дуальная решётка кагоме.
Примером непериодического квазикристаллического ромбического
квад-графа с d = 5 служит знаменитое замощение Пенроуза, показан-
ное на рис. 6.15.
Очень важно, что любое квазикристаллическое ромбическое пред-
ставление р можно рассматривать как своего рода проекцию некото-
рой двумерной комбинаторной поверхности П® в многомерной регу-
лярной квадратной решётке Zd. Вершины Пц задаются отображением
6. Совместность как интегрируемость
Рис. 6.15. Ромбическое замощение Пенроуза.
Р : V(D) —> Zd, которое строится следующим образом. Зафиксируем
некоторую 2?о е V(D), и положим P{xq) = 0. Образы всех остальных
вершин Т> в Zd определяются рекуррентно по правилу:
для любых двух соседей х, у £ V(D), если р(у) — р(х) — ±@i £ О,
то Р(у) — Р(х) = ±ег, где Ci есть г-й координатный вектор в Zd.
Рёбра и грани Оц отвечают рёбрам и граням D, так что комбинаторика
Qd та же, что у Т>.
Чтобы проэксплуатировать доставляемые ЗВ-совместностью воз-
можности, разнесём разметку О : Е(Т>) —> S1 на все рёбра Zd, считая,
что все рёбра параллельные (сонаправленные с) ед, имеют метку 0k-
Это даёт, конечно, также разметку а = О2 для неориентированных рё-
бер Zd. Теперь, любое ЗВ-совместное уравнение может быть задано не
только на Qd, но и на всём Zd:
fk;aj,ak) = 0, (6.50)
Здесь индексы обозначают сдвиги по координатным направлениям.
Очевидно, для любого решения f : Zd —> С уравнения (6.50), его огра-
6.8. Граничные задачи для интегрируемых уравнений
ничение на V(Qd) ~ V(D) даёт решение соответствующего уравнения
на квад-графе Т>. Что касается обратной процедуры, то есть продол-
жения произвольного решения (6.36) с D на Zd, то здесь необходимы
более аккуратные рассуждения. Элементарный шаг такого продолже-
ния состоит в определении f в четвёртой вершине элементарного квад-
рата из известных значений в трёх вершинах, в силу (6.50). Благодаря
ЗБ-совместности это продолжение определено корректно. В частности,
можно найти f в восьмой вершине элементарного 3D куба из известных
значений в семи вершинах; см. рис. 6.16. Альтернативно, это можно
описать, как продавливание (элементарное преобразование) на множе-
стве ромбических квад-графов D, или на множестве соответствующих
поверхностей Пц в Zd. На любом квад-графе D (или любой соответ-
ствующей поверхности Qd), получающемся из исходного такими про-
давливаниями, определено единственное решение (6.50), являющееся
продолжением исходного.
Рис. 6.16. Элементарное продавливание.
Определение 6.10. (Оболочка) Для заданного множества V С Zd,
его оболочкой 3T(V) является минимальное множество IX С Zd со-
держащее V и удовлетворяющее условию: если три вершины элемен-
тарного квадрата принадлежат то это же верно для четвёртой
вершины.
По индукции доказывается, что оболочка произвольного связного
субкомплекса в Zd с множеством вершин V является бруском
Па,ь = {п = («1,..., nd) е zd : ak nk bk, k = 1,..., d }, (6.51)
6. Совместность как интегрируемость
где
ак = ак(У) — min пк, bk = bk(V) = тах.пк, к — 1,..., d; (6.52)
n€V n€V
в случае, когда пк неограничены на V снизу или сверху, полагаем
а*,(У) = —оо или, соответственно, bk(V) = оо.
Комбинаторно, до всех точек оболочки !K(V(£2d)) можно добрать-
ся из £7® при помощи описанной выше процедуры продолжения. Од-
нако, при продолжении решений (6.36) с комбинаторной поверхности
в Zd на её оболочку могут встретиться препятствия, не имеющие от-
ношения к ЗВ-совместности. Например, поверхность £2, показанная на
рис. 6.17 поддерживает решения (6.36), которые нельзя продолжить на
решения (6.50) во всём !К(У(£2)): рекурсивное продолжение приведёт к
противоречиям. Причина этого заключается в немонотонности £2: она
содержит пары точек, которые нельзя связать монотонным путём в £2,
то есть путём, все ориентированные рёбра которого лежат в одном ок-
танте Zd. Однако, такие поверхности £2 не возникают из ромбических
представлений, и в случае £2® противоречий не возникнет.
Рис. 6.17. Немонотонная поверхность в Z3.
Теорема 6.11. (Продолжение решений с квад-поверхности на
Zd) Пусть комбинаторная поверхность £2 и в Zd возникает из квази-
кристаллического ромбического представления квад-графа Т>, а её обо-
лочка равна £K(V(£2d)) = Па(,. Произвольное решение SD-совместного
уравнения (6.36) на £2и может быть однозначно продолжено до ре-
шения уравнения (6.50) наПО1ь-
Доказательство этой теоремы можно найти в (Bobenko-Mercat-
Suris 2005).
6.9. 3D-cobmecthhe уравнения с некоммутативными полями
6.9. SD-совместные уравнения с некоммутативными
полями
Справедливость выводов, сделанных в конце Раздела 6.7, о том,
что ЗВ-совместность квад-уравнения даёт конструкцию для преобра-
зований Бэклунда и представления нулевой кривизны, ни в коем слу-
чае не ограничивается той ситуацией, для которой это было показано
(комплексными полями в вершинах). В этом разделе мы продемонстри-
руем, что эти конструкции допускают обобщение для уравнений с по-
лями в вершинах, принимающих значения в некоторой ассоциативной,
но некоммутативной алгебре А с единицей над полем X, и метками на
рёбрах со значениями в X. Матрицами перехода в представлении нуле-
вой кривизны будут в этом случае матрицы размера 2 х 2 с элементами
из А. Они действуют на А согласно (6.42), где теперь важен порядок со-
множителей. Фактически, доказательство Теоремы 4.26, приведённое в
Разделе 4.3.7, служит примером вывода представления нулевой кривиз-
ны для уравнения двойного отношения (6.33) с полями в А = C^(R;v) и
с параметрами ai из X = R, описывающего дискретные изотермические
поверхности в (нужно интерпретировать произвольный параметр
оз в уравнении (4.96) как спектральный параметр А). Буквальное обоб-
щение этого доказательства для произвольной ассоциативной алгебры
А ведёт к следующему утверждению.
Теорема 6.12. (Уравнение двойного отношения на ассоциатив-
ной алгебре) Уравнение двойного отношения на ассоциативной ал-
гебре А ЗО-совместно. Оно обладает представлением нулевой кри-
визны с матрицами перехода (6.47), с операцией взятия обратного
элемента из А.
Приведём ещё два примера подобных результатов для уравнений с
некоммутативными полями. Первый связан с некоммутативным урав-
нением Хироты. Оказывается, что корректным способом определить
его некоммутативное обобщение является следующий:
/12/”1 = (ai - ^/Г^М/Г1 - а2')~1. (6.53)
Теорема 6.13. (Уравнение Хироты на ассоциативной алгебре)
Некоммутативное уравнение Хироты (6.53) ЗИ-совместно. Оно до-
пускает представление нулевой кривизны с матрицами перехода
ж,/,о.,л)=(д74).
(6.54)
6. Совместность как интегрируемость
Доказательство. Некоммутативное уравнение Хироты на грани (/, fi,
можно записать формулой, определяющей fij как дробно-
линейное преобразование от fj:
fij = (aifi ~ ajfj^ifj ~ ctjffr1/ = Hfi, f, а,)[Д], (6.55)
где
£(/i,/,ai,aJ)=(_Q“j;_1 а~“-д.У (6-56)
Здесь мы используем те же обозначения для действия группы GL(2,7l)
на Л, что и в доказательстве Теоремы 4.26, приведённом в Разделе 4.3.7.
Таким образом, уравнение (6.53) на гранях С1з, 623 элементарного 3D-
куба 6x23 может быть записано как
Лз = (6.57)
/23 = £(/2,/, а2, а3)[/3]. (6.58)
При помощи сдвига во втором и первом координатном направлениях
мы получаем отсюда выражения для /123, полученные, соответственно,
из уравнений (6.53) на гранях т2С1з и тхбгз:
/123 — £(/12,/2, ах , Оз) [/23], (6.59)
/123 = £(/12,/1, <22, О!з)[/1з]. (6.60)
Подставляя (6.57), (6.58) в правые части уравнений (6.60), (6.59), соот-
ветственно, представим равенство двух значений для /х2з (которое мы
хотим доказать) в матричном виде:
£(/12,/1,а2,аз)£(/1,/,а1,а3)[/з] = £(/12, /2, ат, a3)L(f2, /, а2, а3)[/3].
На самом деле, выполняется более сильное утверждение, а именно
£(/12, /1, а2, a3)£(/i, /, ai, а3)
= £(/12,/2,а1,а3)Т(/2,/,а2,аз). (6.61)
Действительно, элементы (И) в обеих частях данного матричного ра-
венства равны а| + ахаг/хг/-1- Равенство элементов (12) в обеих ча-
стях эквивалентно уравнению Хироты для грани (/, Д, /12, /г), и то же
самое справедливо для элементов (21). Наконец, равенство элементов
6.9. ЗО-СОВМЕСТНЫЕ УРАВНЕНИЯ С НЕКОММУТАТИВНЫМИ ПОЛЯМИ
(22) эквивалентно условию, что коммутирует с /2/f1, ч'го> к0-
нечно, справедливо в силу (6.53). Тем самым, ЗБ-совместность неком-
мутативного уравнения Хироты доказана. Утверждение о представле-
нии нулевой кривизны есть не что иное, как только что доказанное
соотношение (6.61), в котором параметр од заменён на А. □
Рассмотрим ещё одно уравнение подобного типа:
(/12 -/)С/2 -/1) = од - оъ (6.62)
с переменными / в вершинах, принимающими значения в Л и с мет-
ками а на рёбрах из X. В случае вещественнозначных полей /, это
уравнение известно под названием дискретного уравнения КдФ\ поми-
мо прочего, оно выражает формулу суперпозиции типа Бьянки для
преобразований Бэклунда уравнения Кортевега-де Фриза. В случае,
когда рассматриваемые поля / принадлежат Rw С А = C^(R7V), реше-
ния этого уравнения являются специальными Т-сетями в Rw:
/12~/ = ,^~.%(/2-/1). (6-63)
112 - Л|
В векторной форме (6.63) это уравнение известно под названием дис-
кретного уравнения Калапсо.
Теорема 6.14. (Дискретное уравнение КдФ на ассоциативной
алгебре) Уравнение (6.62) на ассоциативной алгебре А с единицей 3D-
совместно. Оно обладает представлением нулевой кривизны с мат-
рицами перехода
L(Ji,f,ai-,X)= (6-64)
Доказательство. Уравнения (6.62) на вертикальной грани рис. 6.9
имеют вид:
/+ = / + (А - а,)(/+ - А)”1 = Ь(Л, А) [/+].
Это приводит к матрицам перехода, которые можно использовать для
доказательства ЗБ-совместности, в том же духе, как в доказательстве
Теоремы 4.26, приведённом в Разделе 4.3.7, и в доказательстве Теоремы
6.13. □
6. Совместность как интегрируемость
Наш последний пример в этом разделе имеет геометрическое про-
исхождение. и его природа слегка отличается от предыдущих. В Разде-
ле 4.1, при изучении Т-сетей на квадриках, нам встречалось уравнение
с переменными в вершинах f : Z2 —> Q = {f £ : (/, f) = к2}:
/i2~/ = a(/2-/i), a=~2----7, TV = ~T7----T12-- (6-65)
* -<А,/г) l/i - /2Г
A priori, оно не содержит никаких параметров. Однако, величины а; —
— 2(/, fi), будучи функциями от переменных в вершинах /, а не пара-
метрами уравнения, удовлетворяют условию разметки (6.31). Сравни-
вая уравнения (6.65) и (6.63), видим, что первое можно рассматривать
как частный случай последнего.
Теорема 6.15. (Т-сети на квадриках) Уравнение (6.65), описываю-
щее Т-сети на квадриках, SD-совместно. Оно обладает представлени-
ем нулевой кривизны с матрицами перехода с элементами из e^(RJV):
Ш,/;А)=({ Xtf^f
(6.66)
Доказательство. Геометрически, ЗВ-совместность была доказана в
Теореме 4.3. Что касается матриц перехода, их можно взять из (6.64) с
<*; = 2(/,/,) =-/Л - А/.
Отметим геометрический смысл спектрального параметра: А = 2(/, /+),
где /+ преобразование Бэклунда, по которому строятся матрицы пере-
хода. □
6.10. Классификация дискретных интегрируемых
двумерных систем с полями в вершинах. I
Понятие ЗВ-совместности, будучи фундаментальным для опреде-
ления и изучения 2В интегрируемости, оказывается чрезвычайно по-
лезным также в различных классификационных задачах из теории
интегрируемых систем. Благодаря своей конструктивной природе, его
можно принять за основу классификации, при определённых предполо-
жениях. Мы представим здесь решение весьма общей задачи, связанной
6.10. Классификация интегрируемых квад-уравнений. I
с ЗП-совместными системами, состоящими из (возможно различных)
квад-уравнений с комплексными полями в вершинах. Квад-уравпения
имеют вид
Q(xi,x2,X3,X4) = 0, (6.67)
где полевые переменные Xi G СР1 приписаны вершинам четырёхуголь-
ника (в циклическом порядке), a Q удовлетворяет лишь одному пред-
положению, а именно линейности, уже сформулированному в Разделе
6.7: считается, что Q является неприводимым многочленом и имеет
степень 1 по каждой переменной. Отсюда следует, что уравнение (6.67)
разрешимо для любой переменной, и решение является рациональной
функцией от трёх остальных переменных.
Задача, которую мы собираемся решить, касается ЗП-совместности
шести a priori различных квад-уравнений, размещённых на гранях ко-
ординатного куба: система из шести квад-уравнений,
А(х,х1,х12,х2) = 0,
В(х, х2, х23, х3) = 0,
С(Т, Тз,Т23,^1) = 0,
Л(х3, Z13, Z123, ^2з) = 0,
В(Т1, Х12,х123,х13) = 0,
С(х2,х23,х123,х12) = 0,
(6.68)
должна допускать единственное решение адгз для произвольных на-
чальных данных х, Xi, х2, Хз; см. рис. 6.18. Функции А,..., С мультиаф-
финны, и a priori не предполагается, что они как-либо связаны друг с
другом.
При решении классификационных задач следует отфакторизо-
ваться от группы преобразований, может быть, достаточно большой,
оставляющей инвариантным множество классифицируемых объектов.
В нашей задаче каждое квад-уравнение сохраняет вид при действии
группы (Л/оЬ)4 дробно-линейных преобразований, независимых для
каждого поля в вершине. Удобно обозначить через СР™ множество мно-
гочленов от п переменных и степени т по каждой переменной, при-
чём действие дробно-линейных преобразований на многочлены Р G СР™
определено формулой
М[Р](з;1, ... ,zn)
_ / „ । j \m ( ~ । j \m о/ ^1*^1 "Ь ^1 + Ьп \
— (Cl 2Ц + UJ) • • • (спТп + ип) РI ,,..., iJ/’
kcni+di cnxn + dnJ
где
Дг — 0.
(6.69)
6. Совместность как интегрируемость
Рис. 6.18. ЗВ-совместная система из шести различных квад-
уравнений: А и А ассоциированы с нижней и верхней гранями
куба, В и В с левой и правой, С и С с передней и задней.
Таким образом, квад-уравнения (6.67) характеризуются многочлена-
ми Q G Тд. Важным шагом в решении нашей задачи будет класси-
фикация таких многочленов и нахождение их нормальных форм по
модулю действия (МоЬ)4. Полная задача, являющаяся нашей оконча-
тельной целью, заключается в классификации нормальных форм для
ЗП-совместных систем (6.68) по модулю действия (Л/оЬ)8 (независимых
дробно-линейных преобразований во всех восьми вершинах куба).
Мы решим эти задачи, налагая определённое условие невырожден-
ности. При формулировке этого условия, и во всей дальнейшей теории,
важную роль играют следующие операции:
(<?) = QxtQXj - QQxzXj (6.70)
(Переменные в нижних индексах обозначают частные производные.)
Операция bXi,Xj применяется к мультиаффинному многочлену Q(xi, х?,
£3,2:4) и исключает переменные Xi,Xj, приводя к биквадратичному
многочлену от переменных Xk,xi (предполагается, что =
= {1,2,3,4}), который мы будем обозначать через hkl(xk,xi) =
= hlk(xk, xi). Таким образом, для любого Q G операции 6XitXj произ-
водят шесть биквадратичных многочленов hkl G Т2, четыре из них от-
вечают рёбрам соответствующего четырёхугольника, а два оставшихся
6.10. Классификация интегрируемых квад-уравнений. I
-диагоналям. Заметим, что операции 5XitXj ковариантны относительно
дробно-линейных преобразований:
5Xi,Xj(M[Q]) = (6.71)
где определено в (6.69).
Определение 6.16. (Невырожденная биквадратика) Биквадра-
тичный многочлен h(x.y') G называется невырожденным, если ни
один многочлен в его классе эквивалентности относительно дробно-
линейных преобразований не делится на множитель вида х — с или
у — с (при с = const/
Таким образом, многочлен h(x, у) G невырожден, если он либо
неприводим, либо имеет вид (оцал/ + (Лх + 713/ + &х){а.2ху + /З2Т + 72 г/ +
+ <5г) с OL-ifii — 7^ 0. В обоих случаях уравнение h = 0 определяет
у как двузначную функцию от х и наоборот. Примером вырожденной
биквадратики служит многочлен h(x, у) = х — у2 (рассматриваемый
как элемент так как ПРИ инверсии х Ш он превращается в
т(1 — ху2).
Определение 6.17. (Квад-уравнение типа Q) Мулътиаффинная
функция Q G Т4, или соответствующее квад-уравнение Q = 0, отно-
сится к типу Q, если четыре связанные с ней биквадратики на рёбрах
hpk е j>2 невЫр0Ж^енЫ! и к типу Н в противном случае.
Оказывается, что мультиаффинные уравнения типа Q допускают
исчерпывающую классификацию по модулю (Mob)4, и имеют всего че-
тыре нормальные формы.
Теорема 6.18. (Классификация уравнении типа Q) Любое мулъ-
тиаффинное уравнение Q(xi, Х2, хз, х4) = 0 типа Q эквивалентно,
по модулю дробно-линейных преобразований из (М'дЪ)4, действующих
независимо по каждой переменной, одному из уравнений следующего
списка, называемого списком Q:
(Q4) sn(a)(zia;2 + Z3Z4) - sn(^)(xiT4 + £2^3) - sn(o - /3)(xix3 + z2z4)
+ sn(o - /3) sn(o) sn(/3)(l + к2Х1Х2Хзх4) = 0,
(Q3) sin(a)(zia;2-l-Z3Z4)-sin(/3)(2;ia;4+a;2Z3) -sin(a-/3)(a;ia;3+a;2Z4)
+(5 sin(o — /3) sin(o) sin(/3) = 0,
6. Совместность как интегрируемость
(Q2) а(.Т1.т2 + Т3Т4) - /3(.Т1Х-4 + .т2.г3) - (о - /3)(ti.t3 + т2т4)
+а(3(а - /3)(т1 + а2 + а?3 + х4) - а(3(а - (3)(а2 - оф + /З2) = О,
(Q1) а(т1Т2 + т3т4) - /3(zi2;4 + т2т3) - (а - /3)(tit3 +
+5а0(а — /3) = 0.
В уравнении (Q4) используются обозначения sn(a) = sn(a;/c) для эл-
липтической функции Якоби с модулем к. Параметр S в уравнениях
(Q3), (Q1) может быть отскалирован, так что можно считать, не
теряя общности, что S - 0 или <5=1.
Важно заметить, что a priori в многочленах Q G !Р4 нет никаких
встроенных параметров а, /3; они возникают в процессе классификации.
Оказывается, что они естественно ассоциируются с рёбрами четырёх-
угольника (ti,т2,а:3,т4). Уравнение (Q4) является в списке наиболее
общим; оно параметризуется двумя точками эллиптической кривой.
Уравнения (Q1)-(Q3) получаются из (Q4) при вырождении эллипти-
ческой кривой в рациональные. Поэтому может возникнуть искуше-
ние свести список Q к единственному пункту (Q4). Однако, необхо-
димые для этого предельные переходы лежат вне группы допустимых
(дробно-линейных) преобразований, и, с другой стороны, во многих си-
туациях “вырожденные” уравнения (Q1)-(Q3) интересны сами по себе
(например, простейшее уравнение списка, (Q1) с 5 = 0, есть не что иное,
как комплексное уравнение двойного отношения). Это напоминает си-
туацию со списком шести уравнений Пенлеве и каскадом вырождений
между ними.
Остаётся выяснить, как уравнения из Теоремы 6.18 компонуются
в ЗП-совместные системы на кубе.
Теорема 6.19. (SD-совместные системы типа Q) Каждое уравне-
ние списка Q SD-совместно. Наоборот, любая ЗИ-совместная систе-
ма (6.68), у которой все шесть уравнений имеют тип Q, эквивалент-
на, по модулю дробно-линейных преобразований из (Mob)8, действую-
щих независимо на каждую переменную, системе
Q(x,xi,xtj,xj:,ai,a:j') =0, Q(xk,%ik,X123,Xjk',&i,aj) = 0, (6.72)
где (ijk) обозначает любую из трёх циклических перестановок (123),
и Q(xi,X2,X3,X4;a,/3) является одним из многочленов (Q1)~(Q4)-
Набросок основных идей доказательства этого замечательного ре-
зультата приводится в следующем разделе.
6.11. Доказательство классификационной теоремы
6.11. Доказательство классификационной теоремы
6.11.1. SD-совместные системы, биквадратики и свойство
тетраэдральности
Биквадратичные многочлены № для заданного Q G Уд тесно свя-
заны с так называемыми сингулярными решениями основного уравне-
ния (6.67). В случае общего положения, уравнение Q(ti, х%, хз, 2д) = О
разрешимо относительно любой переменной: если Q = p(xj, хк, xi)xi +
+ q(xj, Xk, %i), то Xi = —q/p для общих значений Xj,Xk,xi. Однако,
значение Xi не определено, если точка (xj, Xk,xi} лежит на кривой Si в
(СР1)3, заданной уравнениями
Si~. p(xj,xk,xi) = q(xj,xk,xi) = 0. (6.73)
Так как р = QXi и q = Q — Xip = Q — XiQXi, то уравнения (6.73)
эквивалентны
Q{x\,X2,X3,Xi) — QXi{Xi,X2,X3,Xi) = 0.
Определение 6.20. (Сингулярное решение) Решение (21,22,23,тд)
уравнение (6.67) называется сингулярным относительно Xi, если оно
удовлетворяет также уравнению QXi(xi, х2, Х3, 2д) = 0. Множество
решений, сингулярных относительно х^, параметризуется кривой
(6.73), называемой сингулярной кривой для Xi-
Проекция кривой Si на координатную плоскость (fc, Z) является в
точности биквадратикой hkl = pqx. - pXjq = QXiQXj — QQXi,Xj - 0.
Лемма 6.21. (Сингулярные решения и биквадратики) Если ре-
шение (тд, 22, хз, 2д) уравнения (6.67) сингулярно относительно Xi, то
h?k = h?1 = hkl = 0 на этом решении. Наоборот, если для некоторого
решения hkl = 0, то оно сингулярно относительно 2, либо Xj.
Доказательство. Так как hkl = QXiQXj — QQXi,Xj, то на решениях
уравнения Q = 0 уравнение hkl = 0 эквивалентно QXiQXj =0. □
В следующей теореме мы будем иметь дело с биквадратичными
многочленами, отвечающими различным мультиаффинным многочле-
нам; будем обозначать биквадратики теми же буквами, что и порожда-
ющие их квад-уравнения, обозначая оставшиеся переменные верхним
индексом, так что, например, Л0,1 = SX2tX12A есть результат исключе-
ния 22,212 из Л(2, 21,212,22).
6. Совместность как интегрируемость
Теорема 6.22. (Свойство тетраэдральности и биквадратики
для SD-совместных систем) Рассмотрим ЗВ-совместную систему
(6.68), у которой все шесть функций А,...,С имеют тип Q. Тогда:
• Система (6.68) обладает свойством тетраэдральности: значение
Т123 как функция начальных данных х, Xi, х2,2:3 не зависит от х;
см. рис. 6.19.
• Для любого ребра куба, два биквадратичных многочлена, приходя-
щих с двух граней, пересекающихся по этому ребру, совпадают с
точностью до постоянного множителя.
Доказательство. Значения Т12з> полученные из уравнений А — О, В =
= 0 и С — 0, соответственно, возникают в результате исключения адг,
2?13 и ^23, что можно выразить уравнениями
,2 1 i з i .
F(x,Xi,X2,X3,Xr23)
= Л113,Х2зВС- Ах2зВСХ1Э Ах13ВХ23С + АВХ23СХ13 = О,
,2 3 111
G{x,X-l,X2,X3,Xt_23)
= ^2:12,2:13 CA ВХ1ЭС АХ12 ВХ12СХ13А + ВСХ13 АХ12 = О,
,2 1 3 1 1 .
Л (X, Xi, Х2, Хз, Х12з)
— ^12,2:23^45 ~ СХ12АВХ23 — СХ23АХ12В + САХ12ВХ23 = 0.
Здесь числа над аргументами многочленов F, G, Н указывают их сте-
пень по соответствующей переменной. Эти степени понимаются в про-
ективном смысле, то есть с учётом действия дробно-линейных преобра-
зований, и могут быть вычислены, исходя из правых частей равенств. В
силу ЗБ-совместности, выражения для Т123 как функции от х, Xi, х2, хз,
найденные из этих трёх уравнений, совпадают. Следовательно, много-
члены F,G,H должны допускать факторизацию вида
F = f(x,x3)K, G = g(x,x\)K, Н = h(x,x2)K,
К = К(х, Т1, Х2, Тз, Т123),
где многочлен К задаёт общее значение Т123 как функции от х, Xi, х2, Х3.
Здесь f, g, h являются некоторыми многочленами степени 2 по второму
аргументу. Степени f,g,hn К относительно х нуждаются в уточнении.
Мы сделаем это, анализируя сингулярные решения.
6.11. Доказательство классификационной теоремы
Пусть начальные данные х, Xi, х? будут свободными переменными,
а хз выбирается так, чтобы удовлетворялось уравнение f(x, Х3) — 0. То-
гда F = 0, и, следовательно, система В = С = А = 0не определяет
значение £123- Кроме того, уравнение В = 0 может быть разрешено
относительно Т23, так как иначе начальные данные были бы связаны
уравнением В°’2(х,Х2) = 0. Аналогично, уравнение С = 0 разрешимо
относительно 2Ц3. Следовательно, неопределённость возникает из син-
гулярности уравнения А = 0 относительно зцгз- Следовательно, выпол-
няется соотношение А3,23(тз, Т23) = 0. В силу предположения теоре-
мы, Т2з (двузначная) функция от хз и не зависит от Х2- Это означает,
что уравнение В = 0 сингулярно относительно .гд, и, следовательно,
В0,3(х,хз) = 0. Аналогично, С°’3(т,тз) = 0.
Таким образом, мы доказали, что если хз — <р(х) нуль многочлена
/, то он является также нулём многочленов В0,3, С0,3. Если один из
этих трёх многочленов неприводим, то отсюда уже следует, что они
совпадают с точностью до постоянного множителя. Если многочлены
приводимы, то может быть f = а2, В0,3 = ab, С0,3 = ас, где а, Ь, с муль-
тиаффинны по х, хз. В любом случае, deg^ f = 2, и этого достаточно
для завершения доказательства.
Действительно, отсюда следует deg^ К — 0, так что выполняется
свойство тетраэдральности, и первое утверждение теоремы доказано.
В свою очередь, свойство тетраэдральности может быть использовано,
чтобы доказать соотношение
А0’1^0’2^’3 + А°’2В0’3С0,1 = 0. (6.74)
Переменные в этом соотношении разделяются:
В0’3 = _ А0'1 В0’2
£<о,з £<о,1 а0,2 '
так что В0’3/С°’3 может зависеть лишь от х. Благодаря невырожденно-
сти биквадратик В0,3, С0,3, это отношение постоянно, что доказывает
второе утверждение теоремы.
Итак, остаётся доказать уравнение (6.74). Для этой цели перепи-
шем систему (6.68) в виде
Т12 = а(х,Т1,Т2), Х23 — Ь(х,Х2,Хз), Т13 = с(т, Т1,Тз),
Z123 = а(хз,Х13,Х2з) = Ь(Т1, Т12,Т1з) = с(т2,Т12,Т2з).
6. Совместность как интегрируемость
Предполагая свойство тетраэдральности, то есть Т123 = d(zi,^з), и
дифференцируя, находим:
— ^Е13 ^1 >
^Х2 — 5
^Хз —
^3?2 — ^-3?23^3?2’
dX3 = bXl3 сХз,
dXl —
О — Ч” ^X2jbx
О Ьх^^х Ч- ЬХззСх,
О — СХ23ЬХ Ч" СХ32^Х'
Из этих уравнений нетрудно извлечь соотношение
Ч- ^XibX3CX3 — 0.
Оно эквивалентно (6.74), с учётом тождества ахз1а,хх = А0,1 /А0,2. □
Рис. 6.19. Свойство тетраэдральности.
Неожиданное свойство тетраэдральности, которому удовлетво-
ряют все ЗВ-совместные системы типа Q, показано на рис. 6.19.
Оно означает, что поля зц, х^, %з, Т123> сидящие в вершинах бело-
го тетраэдра, связаны некоторым мультиаффинным соотношением
/С(т1,Т2,тз, Т123) = 0. Конечно, в силу симметрии, для полей в вер-
шинах чёрного тетраэдра также выполняется мультиаффинное соот-
ношение L(x, Т12, Т23, Т1з) — 0.
6.11.2. Анализ: спуск от мультиаффинного Q к многочлену г
четвёртой степени
Для последующего анализа будет полезна ещё одна операция, ана-
логичная (6.70), а именно
5Хк : У2 -> 5Хк (Д) = h2k - 2hhXkXk . (6.75)
6.11. Доказательство классификационной теоремы
Операция дХк, применённая к биквадратичному многочлену h(xi, х3),
фактически вычисляет его дискриминант относительно исключаемой
переменной Хк, являющийся многочленом четвёртой степени, который
мы обозначим через п(т() (где {к, 1} = {1,2}). Таким образом, опера-
ции 6Хк производят, из любого h G , два многочлена четвёртой степе-
ни Ti G Tf. Операция 6Хк ковариантна относительно дробно-линейных
преобразований:
SXi(M[h]) = A2M[SXi(h)]. (6.76)
Следующее утверждение доказывается прямым вычислением.
Лемма 6.23. (Коммутативность дискриминантов) Для любого
мулътиаффинного многочлена Q(zi, т2,2?з, тД Е СР} верно тождество
dXk(6Xi,Xj(Q» = 3Xj(5Xi,Xk(Q)), (6.77)
так что следующая диаграмма коммутативна:
гДх4) < Хз h34(x3,x4) > тз(т3)
dXi
Г1(Т1)
^3,^4
/i12(ti, т2)
дХз
•Ф
Г2(т2)
Фактически, эта диаграмма может быть дополнена многочленами
h13, h24 отвечающими диагоналям (так что возникает граф тетраэдра),
но они нам не понадобятся.
В дальнейшем мы интенсивно используем понятие относительных
инвариантов многочленов относительно дробно-линейных преобразо-
ваний. Для многочленов четвёртой степени г G СР{ эти относительные
инварианты хорошо известны и могут быть определены как коэффи-
циенты нормальной формы Вейерштрасса г = 4т3 — р2т — д3. Для за-
данного многочлена г(т) = г4х4 + г3х3 + г2т2 + щх + го они даются
6. Совместность как интегрируемость
формулами
5г(г) = Ta(2rrIV ~ ‘2г>г'" + (г„)2) = Тэ(12гоГ4 - Зт1Гз + г%),
1Z
5з(г) = ^(12rr"rIV - 9(r'frIV - 6r(r"')2 + 6rW" - 2(r")3)
«54ЭО
= ^(Т2гоГ2Г4 - 27r2r4 + 9Г1Г2ГЗ - 27т0Гз - 2^).
При дробно-линейной замене х = Xi эти величины просто умножаются
на постоянные множители:
РДМ[г]) = A2fePfc(r), fc = 2,3.
Для биквадратичного многочлена h € СР| ,
h(x, у) = h22x2y2 + h21x2y + h20x2 + h12xy2
+ hnxy + h10x + h02y2 + h01y + h00, (6.79)
относительные инварианты определены, как
^2(^) — 2hhxxyy 2hxhxyy 2hyhXXy 4- 2hxxhyy -1- f^Xy
— 8hooh22 — 4/101Л21 — 4/iio/ii2 + 8ho2h2Q + h2lt
(h 1
^xy h'xxy I — det
hyy hxyy hXxyy /
Отметим, что может быть определён также формулой
-4г3(Д) =
При дробно-линейных заменах х = Xi и у = а;2т
Д(М[/г]) = A*A*u(h), к = 2,3.
Следующие свойства операции 6Х,У, 6Х доказываются непосредственно.
Лемма 6.24. (Противоположные биквадратики и все четыре
многочлена четвёртой степени имеют одинаковые инвариан-
ты) Для любого мультиаффинного многочлена Q(xi, х2, хз, Х4) €
положим: h12(xi, х2) = 6X3iX4(Q) и Н34(хз, 24) = 5XliX2(Q). Для любого
6.11. Доказательство классификационной теоремы
биквадратичного многочлена h^xi.x?') G положим: /’i(j'i) = <5IO(/i)
u ^(х?) = <5xi(h). Тогда
ik(h12) = ik(h3i), k = 2,3, (6.80)
5fc(r2) = 5fc(n), fc = 2,3. (6.81)
Иными словами, в диаграмме (6.78), каждая пара биквадратичных
многочленов на противоположных сторонах имеет одинаковые инва-
рианты ггДз; а все четыре многочлена четвёртой степени г, имеют
одинаковые инварианты д2,дз-
Эти результаты подсказывают следующий подход к классифика-
ции мультиаффинных уравнений Q = 0 по модулю дробно-линейных
преобразований. Допустим, что для рассматриваемого Q g известны
четыре многочлена четвёртой степени r,(Ti), ассоциированные с вер-
шинами четырёхугольника на диаграмме (6.78). Тогда можно приме-
нить дробно-линейные преобразования для приведения этих многочле-
нов к каноническому виду. После этого, можно восстановить биквад-
ратики на рёбрах hl\ исходя из пар многочленов Окончательно,
мультиаффинный многочлен Q восстанавливается по биквадратикам
на рёбрах.
6.11.3. Синтез: подъём от многочлена г четвёртой степени к
биквадратике h
Согласно формулам (6.71), (6.76),
= ^^M[SXl(SXjtXk(Q))] = СЛ~2М[гг],
где С — Д2 Д2ДзД2. Так как многочлен Q определяется с точностью до
произвольного постоянного множителя, то можно считать, что дробно-
линейная замена переменных в уравнении Q = 0 индуцирует преобра-
зования
14 нэ Д“2М[п]
для многочленов г,. Это позволяет привести каждый rt к одной из
следующих шести канонических форм:
г = (т2 — l)(fc2x2 — 1), г = х2 — 1,
г = х2, г = х, г = 1, г = 0, (6.82)
6. Совместность как интегрируемость
согласно шести возможностям для распределения нулей т: четыре про-
стых нуля, два простых и один двойной, две пары двукратных, один
простой и один тройной, один нуль кратности четыре и, наконец, г
тождественно равный нулю. Заметим, что в первой канонической фор-
ме всегда будет подразумеваться, что к2 0,1, так что вторая и третья
формы не рассматриваются как частные случаи первой.
Не любая пара таких многочленов допускается как пара многочле-
нов в двух смежных вершинах, так как, согласно (6.81), в последнем
случае относительные инварианты обоих многочленов должны совпа-
дать. Мы определим все допустимые пары, а затем решим проблему
восстановления биквадратичного многочлена (6.79) по паре его дис-
криминантов
6y(h) - h2 - 2hhyy = Г1(х), 6x(h) = h2 - 2hhxx = r2(y), (6.83)
что эквивалентно системе из 10 (билинейных) уравнений для 9 неиз-
вестных коэффициентов многочлена h.
Лемма 6.25. (Восстановление биквадратики по двум дискри-
минантам) Невырожденные биквадратичные многочлены с заданной
парой дискриминантов (ri(x), г2(у)) в канонической форме (6.82) су-
ществуют тогда и только тогда, когда п(х) = г(х) и r-^y) = г(у)
с одной и той же канонической формой г. Эти многочлены h могут
быть приведены к следующим нормальным формам, возможно после
дробно-линейных преобразований х,у, не меняющих г:
(q4)
(q3)
(q2)
(qi)
r(x) = (x2 —l)(fc2x2 —1) : h — ^-(x2 + y2 — 2Axy — a2 — k2a2x2y2),
где A2 = r(a);
9 . 4 /9 9 _ / , \ 5 sin(a)
r(x) = S-x2 : h = . (x2 + y2 - 2 cos(a) xy)-------,
2sin(a) 2
где <5 = 0,1;
/х , 1 / x9 a, , a3
r(x)=x: h =—(x — y) ——(x + y) + — ;
r(x) = <5: h=(x~y)2 где 5 = 01.
v 2a 2
В случаях (q4), (q3)^=i и (q2) любая биквадратика h с заданной
парой дискриминантов (r(x),r(i/)) автоматически имеет вид, указан-
ный в лемме; в случаях (q3){=o и (ql) для приведения h к указанной
форме может понадобиться дополнительное дробно-линейное преобра-
зование (например, в случае (ql){=o, то есть при г(х) = г(у) = 0, любая
6.11. Доказательство классификационной теоремы
биквадратика h — (кху + Хх + уу + и)2 имеет эту пару дискриминантов,
и любое дробно-линейное преобразование х,у сохраняет этот вид /г).
Происхождение эллиптической кривой в случае (q4) отчётливо
прослеживается: решение задачи нахождения биквадратики h(x,y) с
парой дискриминантов (r(x),7’(i/)) в случае г(х) = (х2 — l)(fc2x2 — 1) па-
раметризуется точкой (а, А) соответствующей эллиптической кривой.
Вводя униформизующую переменную а согласно а = sn(a), так что
А = sn^a) = cn(a)dn(a), можно записать соответствующую биквадра-
тику (q4) в виде
h(x,y,a) = —у-т-(х2+у2— 2 cn(a)dn(o!)x?/—sn2(a)(14-fc2x2?/2)). (6.84)
2 sn(a)
Можно распознать в этом многочлене теорему сложения для эллипти-
ческой функции sn(x;fc); Точнее, h(x,y,a) = 0 тогда и только тогда,
когда х = sn(£; fc) и у — sn(r/; к) при £ — ц = ±а.
6.11.4. Синтез: подъём от биквадратик h1? к
мультиаффиному Q
На следующем шаге по биквадратичным многочленам восстанав-
ливается мультиаффинный. Для этого оказываются полезными следу-
ющие формулы (они доказываются прямым вычислением).
Лемма 6.26. (Восстановление мультиаффинного уравнения по
биквадратикам на рёбрах) Для любого мультиаффинного много-
члена Q 6 Р\ выполняются следующие тождества, в обозначениях
hij = 6Хк,М 6 Pl.-
/ /г12 h12 £ J'l
4гз(/г12)^14 = det h12 Т2 М2 £ ,CXiX2
1 /г12 \ lf,X2X2 h12 £ ,CXiX2X2 ^X2X2
где £ = h23h34 - h23h3\ + /г23/г34
л-З^З А3 *3
(6.85)
2QX1 h12h3i - h“h23 + /г23/г34 - /г23/г34
= /г12/г34 - /г14/г23
(6.86)
Тождество (6.85) означает, что /г14 можно выразить через осталь-
ные три биквадратичных многочлена (при условии, что гз(/г12) / 0).
6. Совместность как интегрируемость
Дифференцирование (6.86) по х? или .тц ведёт к соотношению ви-
да Q2 — F[/i12,/г23,/г34, Л1 *], где F рациональное выражение от /г.2-7 и
их производных. Следовательно, если биквадратичные многочлены на
трёх рёбрах (из четырёх) известны, то Q находится явно. Конечно, из
Леммы 6.26 ясно, что не всякий набор из трёх биквадратичных много-
членов реализуется, как /г2-7 для некоторого Q G
Доказательство Теоремы 6.18. Мы продемонстрируем процедуру вос-
становления в наиболее интересном случае (Q4). Пусть многочлены
/г.12, /г.23, /г,34 и /г14 имеют вид (q4), с параметрами, обозначенными (а, А),
(6, В), (а, А) и (Ь, В), соответственно, лежащими на эллиптической кри-
вой А2 = г(а). Относительные инварианты «г, ®з для /г12 и /г34 должны
совпадать в силу (6.80), и легко проверить, что это условие оставляет
лишь следующие возможные значения для (а, А):
(а, А), (-а,-А), ±(-а,А).
кал ка
Согласно (6.71), дробно-линейная замена переменных в уравнении Q =
= 0 приводит к
6Xk,Xl(M[Q]) = ^k^M[6Xk,Xl(Q)] =
где С — Д1Д2ДзД4- Так как Q определены лишь с точностью до
мультипликативной постоянной, то можно считать, что эта дробно-
линейная замена индуцирует преобразования
hij Д^Д"1^/?-7]
биквадратичных многочленов /г.2-7. В частности, если
/г.34 = Ыхз, хл; — а, — А) или /г34 = к(хз, т4; -Д,—Д?
\ ка ка2
то соответствующее дробно-линейное преобразование, Тз >—> —Тз или
Х3 н-> 1/(/стз), приведёт /г34 к виду
—h(—Х3, хл', — а, — А), соотв. — kx^hf-r^, 2:4; Д-,—Дт
\кх3 ка ка2
каждый из которых совпадает с /г(тз, т4; а, А) в силу симметрий много-
члена (q4). Таким образом, после подходящего дробно-линейного пре-
образования переменной хз (не влияющего на многочлен г(тз)), можно
6.11. Доказательство классификационной теоремы
считать, что (а, А) = (а, А). После этого многочлен /А4 однозначно на-
ходится по формуле (6.85), и оказывается, что для него автоматически
выполняется равенство (Ь, В) = (5, В). Таким образом, замена одной пе-
ременной позволяет добиться равенства параметров, отвечающих про-
тивоположным рёбрам квадрата. Прямое вычисление, использующее
формулу (6.86), приводит к уравнению
a(xix2 + x3xi') + b(xix^ + Х2Х3) — c(xiXs + x2Xll') — abc(l + = О,
где с = (аВ + ЬА)/(1 — fc2a2b2). Униформизующая подстановка а =
= sn(a), b = — sn(/3) (так что А — sn'(a), В — sn'(/3), и следовательно
с = sn(a — /3)) приводит это уравнение к виду (Q4).
Также и в остальных случаях (Q1)-(Q3), подходящее дробно-ли-
нейное преобразование переменных х2, ^4 позволяет привести мно-
гочлены к виду /г12 = /z(xi, х2; а), h,23 = /г(х2,Тз; /3), /г34 = /г(тз, х4-, а).
Прямое вычисление по формуле (6.85) доказывает, что при этом /г14 =
= h(xi,x4-, /3). Наконец, мультиаффинный многочлен Q находится из
(6.86). □
6.11.5. Размещение уравнений Q = О на кубе
Доказательство Теоремы 6.19. Для заданной ЗП-совместной системы
(6.68), все уравнения которой имеют тип Q, существуют дробно-
линейные преобразования из (Mob)8, приводящие все шесть уравнений
к каноническому виду из списка Q. Так как, согласно Теореме 6.22,
биквадратики приходящие на ребро с двух смежных граней должны
совпадать, с точностью до постоянного множителя, то все шесть урав-
нений должны быть одного и того же типа (Q1)-(Q4). Кроме того,
параметр к2 в случае (Q4) и 6 в случаях (Q3), (Q1) должен быть один
и тот же для каждой грани куба. Следовательно, уравнения на гра-
нях могут отличаться лишь значениями а и 0. Рассмотрим уравнения,
отвечающие трём граням, смежным с одной вершиной, скажем, с х:
А(т,Т1,Х12,х2) = Q(x, xi, Х12, Х2‘, а, /3) = О,
В(т,х2,х23,хз) = Q(x,x2,x23,x3;/3,y) = О,
С(х, 13,2:13,^1) = Q(t,t3, xi3,ti;-у,а) - 0.
Покажем, что можно записать эти три уравнения, как
Q(x,Xi,Xij,Xj;ai,aj) = 0.
(6.87)
6. Совместность как интегрируемость
Для многочленов (Q1)-(Q4) из списка Q имеем
h12(xi,x2) = SX3tX4Q(x4,X2,x3,x4;a,0) = K(a,0)h(x!,X2;a), (6.88)
/i14(zi, z4) = 6X2tX3Q(xi, Х2,хз, x4; a, /3) = k(0, a)h(xi,x4-,0), (6.89)
с биквадратиками h(x,y,a) перечисленными в Теореме 6.25, как (ql)-
(q4). Таким образом, находим:
A0,1(z,zi) = к(а, 0}h(x, Xi; а),
В°’2(х, 12) = «(/?,7)/г(ж, Х2', 0),
С°’3(х,х3) = «(q, d)/z(i,T2;7),
А0,2(х,х2) = «(/3, a)h{x,X2‘, 0)
В°’3{х,х3) = /t(7,/3)/z(z,z3;7).
С'0,1(а:,;Г1) = к(а, 'y')h(x,x1-,a')
Согласно второму утверждению Теоремы 6.22 и формуле (6.74), долж-
ны выполняться следующие соотношения:
/г(т,Х1;а) h(x,x2;0') .а -а. /г(х,х3;7) ,
= (ът)'
(6.90)
к(а,3)«(^,7)>г(7,Д) m =
Для наиболее сложного случая (Q4), которым мы ограничимся в этом
доказательстве, биквадратика (q4) задана в (6.84), и прямое вычисле-
ние даёт к(а, 0) — 2sn(a) sn(/3) sn(a — 0). Уравнения (6.90) показывают,
что а может принимать только значения ±а, что отвечает т(а,а) —
= ±1, и аналогично для /3,7. Уравнение (6.91) с только что приведён-
ным значением к(а,/3) даёт т(а, а)т(0,0)т(,у, 7) = 1. Таким образом,
с точностью до перенумерации, возможны два случая:
а = а, 0 = 0, 7 = 7 или <5 = а, 0 = —0, 7 = —у.
В первом случае вид уравнений А = 0, В = 0, (7 = 0 уже такой,
какой указан в (6.87), с ai = а, «2 = 0, а3 = 7. Во втором случае
достаточно заметить, что уравнение В = 0 не меняется при замене
параметров (/3,5) на (—0, — 7) = (—/3,7), что опять ведёт к тому же
виду (6.87) с ai = а, а2 = —0, аз — 7- Аналогичные рассуждения
для граней, смежных с остальными вершинами показывают, что знаки
параметров на рёбрах всегда могут быть подправлены на всём кубе
так, что получается система (6.72). □
6.12. Классификация интегрируемых квад-уравнений. II
6.12. Классификация дискретных интегрируемых
двумерных систем с полями в вершинах. II
В предыдущих двух разделах мы проклассифицировали квад-
уравнения Q = 0 типа Q, то есть те, у которых все биквадратики на
рёбрах невырождены, и доказали их ЗВ-совместность. Однако, то, что
у квад-уравнений типа Н биквадратики (все или некоторые) вырожде-
ны, ещё ни в коем случае не означает, что они менее интересны или ме-
нее важны. Достаточно упомянуть, что весьма заслуженное уравнение
Хироты относится к типу Н (что и объясняет выбор данного обозна-
чения). Классификация мультиаффинных уравнений типа Н представ-
ляется достаточно сложным и утомительным занятием. Тем не менее,
при постулировании некоторых дополнительных свойств такую клас-
сификацию можно получить. Наши предположения о квад-уравнении
<2 = 0 будут следующие:
► Линейность. Левая часть уравнения
Q(xi,xz,x3,x,l-,a,l3') = 0 (6.92)
есть многочлен степени 1 по каждой переменной, зависящий от двух
параметров, приписанных рёбрам.
► Симметрия. Функция Q обладает свойствами симметрии
Q(xi, Х2, Х3, Х4; а, /3) — eQ(xi, Х4, х31 х2; /3, а), е = ±1 (6.93)
— aQ(x2, х3, Х4, хц /3, а), а = ±1. (6.94)
► Свойство тетраэдральности. Значение хщз, определённое в си-
лу ЗВ-совместность, зависит от xj, х2 и хз, но не от х.
Требования свойства симметрии естественны, поскольку позволя-
ют нам накладывать уравнения на произвольные квад-графы, для чего
они не должны зависеть от способа нумерации вершин. Заметим, что
нормальные формы из списка Q обладают этими симметриями. Свой-
ство тетраэдральности, по-видимому, наименее естественное предполо-
жение, но оно выполняется для подавляющего большинства извест-
ных интересных примеров, включая все уравнения из списка Q и само
уравнение Хироты; см. формулу (6.32). Мы рассмотрим здесь пробле-
му ЗО-совместности для уравнения (6.92) в смысле системы (6.72), с
одним и тем же многочленом Q. В силу предположений симметрии,
группа допустимых преобразований, которую можно использовать для
приведения уравнений к нормальной форме, существенно меньше, чем
б. Совместность как интегрируемость
в Разделе 6.10: а именно, дробно-линейные преобразования для полей
во всех вершинах должны быть одни и те же.
Теорема 6.27. (Классификация симметричных уравнений со
свойством тетраэдральности) Любое ЗБ-совместное квад-уравнение
вида (6.92) удовлетворяющее свойствам линейности, симметрии и
условию тетраэдральности эквивалентно, по модулю дробно-линейных
преобразований действующих одинаково на все переменные Xi и точеч-
ных преобразований параметров а, /3, одному из уравнений следующих
списков. Список Q из Теоремы 6.18:
(Q4) sn(a)(ziZ2 + Z3Z4) - sn(/3)(2?iz4 +Z2Z3) - sn(o -/3)(х1Хз +12^4)
+ sn(a - /3) sn(a) sn(/3)(l + к2Х\х2ХзХ4) — 0,
(Q3) sin(a) (Z1Z2+Z3Z4) - sin(/3) (xxx4+х2£з) -sin(a-/3) (xix3 +т2х4)
+<5 sin(o — /3) sin(a) sin(/3) = 0,
(Q2) o(xix2 + Z3Z4) - /3(21^4 + I2Z3) - (a - /3)(ziz3 + 12^4)
+a/3(a - /3)(xi + x2 + x3 + 14) - a/3(a - /3)(a2 - a/3 + /32) = 0,
(QI) a(ziZ2 + Z3Z4) - /3(ziz4 + Z2Z3) - (a - (3)(x!X3 +12^4)
+5a/3(a — /3) = 0;
список H:
(H3) a(xix2 + Z3Z4) - /3(1114 + Z2Z3) + 8(a2 - /32) = 0,
(H2) (ii - z3)(z2 - £4) + (/3 - a)(xi + яг + £3 + £4) + /32 - a2 = 0,
(Hl) (zi - z3)(z2 - £4) +/3 - a = 0;
и список A:
(A2) sm(a)(ziz4 + Z2Z3) - sin(/3)(TiT2 + 13^4)
— sin(a — /3)(1 + Z1Z2Z3Z4) = 0,
(Al) 0(11X2 + Z3Z4) - /3(xix4 + Z2Z3) + (a - /3)(ziz3 + Х2Я4)
—6afi(a — /3) — 0.
6.12. Классификация интегрируемых квад-уравпепий. II
Замечания.
1) Параметр <5 в уравнениях (Q3), (Q1), (НЗ), (А1) может быть
отскалирован, так что можно считать, не теряя общности, что <5 = 0
или <5 = 1.
2) Если расширить группу допустимых преобразований уравнения,
разрешая дробно-линейные преобразования, действующие на перемен-
ные Xi, Хз раздельно от х%, х4 (что отвечает белым и чёрным вершинам
двудольного квад-графа), то уравнение (А2) превращается в (Q3)i=o
при замене (х2,х4) <-> (1/2:2,1/24), а уравнение (А1) превращается в
(Q1) при замене (2:2,24) (—22, -24). Таким образом, по настоящему
независимые уравнения содержатся в списках Q и Н.
3) Уравнение (НЗ) является самым общим в списке Н, так как (Н1)
и (Н2) можно рассматривать, как его предельные случаи. Отметим, что
(Н1) это дискретное уравнение КдФ, а (Н3)д=о это версия уравнения
Хироты со свойствами симметрии (6.93), (6.94).
Общая схема доказательства Теоремы 6.27 та же, что в Разделе
6.11. Начнём с этапа “анализ”. Благодаря предположению симметрии,
для многочлена Q(xy,X2,X3, х4\а,Д) все биквадратики на рёбрах зада-
ются одним и тем же биквадратичным многочленом д(х, у; а, /3), так
что
/i12(2i,22) = <5I3,I4 (Q) = д(х1,х2;а,^),
h14(x!,x4) = dX2,X3(Q) = д(х1,х4;/3,а).
Кроме того, многочлен д симметричен: д(х, у; а, /3) — д(у,х\а,(3).
Лемма 6.28. (Спуск от мультиаффинного Q к г четвёртой сте-
пени) Биквадратика д(х, у, а, 0) допускает представление
д(х, у; а, 0) = fc(a, 0h(x, у, а), (6.95)
где множитель к антисимметричен, k(J3,a) = — к(а,0), а коэффи-
циенты многочлена h(x, у, а) зависят лишь от параметра а, причём
так, что дискриминант r(x) = Sy(Ji) вовсе не зависит от а.
Доказательство. В доказательстве Теоремы 6.22 мы сначала доказы-
вали свойство тетраэдральности, а затем использовали его для вывода
формулы (6.74). В нынешней постановке свойство тетраэдральности
постулируется, так что мы по прежнему можем использовать формулу
(6.74), которая принимает следующий вид, благодаря предположениям
6. Совместность как интегрируемость
симметрии:
д(х, xi; ai, а2)д(х, х2-а2, а3)д(х, х3; а3, aj
= -д(х, хи ai, а3)д(х, х2; а2, аг)д(х, х3; а3, а2).
Из этого соотношения следует, что дробь д(х, xi; а^, а2)/д(х, Xi; а4, аз)
не зависит от Xi и, в силу симметрии, не зависит также от х. Как видим,
в этом рассуждении предположения о симметрии заменяют требование
невырожденности биквадратик, использованное в Теореме 6.22, чтобы
прийти к тому же заключению. Находим:
ff(x,xi;ai,a2) _ K(ai,a2)
p(x,xi;ai,a3) «(ai,a3)’
где функция к удовлетворяет уравнению
к(а1,а2)к(а2,аз)к(аз,а1) = -к(а2, ai)/t(a3, а2)к(а1, а3).
Это уравнение эквивалентно
к(/3,а) =
Ф(0)
то есть функция fc(a,/3) = ф(а)к(а, 0) антисимметрична. Имеем:
д(х,у;а,(3) _ д(х,у;а,-у) д(х,у;а,Р) _ д(х,у,а,'у)
к(а,/3) к(а,7) k(a,/3) fc(a, 7)
откуда следует (6.95). Чтобы доказать последнее утверждение леммы,
заметим, что
/z12(xi,x2) — fc(a,/3)/i(xi,x2; a), /г14(х4,х4) = — k(a, /3)/z(xi, х4; /3),
и, благодаря Лемме 6.23, <5X2(ft(xi,x2;a)) — 6Х4 (/z(xi,x4;/3)). Таким об-
разом, г не зависит от а. □
Теперь мы можем перейти в доказательстве к этапу “синтеза”, то
есть к восстановлению Q из г. Сначала используем дробно-линейные
преобразования, чтобы привести многочлен г(х) к одной из шести ка-
нонических форм, и будем искать симметричные биквадратики, допус-
кающие г(х) в качестве дискриминанта.
6.12. Классификация интегрируемых квад-уравнений. II
Лемма 6.29. (Восстановление симметричной биквадратики по
дискриминанту) Для заданного многочлена г(х) четвёртой степени
в одной из канонических форм (6.82), симметричные биквадратичные
многочлены h[x,y), имеющие г(х) в качестве дискриминанта, исчер-
пываются биквадратиками (ql)-(q4) из Леммы 6.25 и следующими
тремя семействами:
(h3) г(х) = х2 : h = 'у0х2у2 + ^ху + 72, 71 “ 47о72 = 1,'
(h2) г(х) = 1 : Ь^^х + уУ2+'п(х + у)+у2, 7i“47o72 = 1;
(hl) r(z)=0: h = (70x3/ + 7i (т + у) + 72)2.
Таким образом, для каждого из многочленов г(х) = (т2 — 1)(/с2т2 —
— 1), г(х) = 1 — х2 и г(х) — х существует лишь одно семейство симмет-
ричных биквадратик с дискриминантом т(х), вида (q4), (q3)<5=i, соотв.
(q2). Напротив, для многочленов г(х) — х2, г(х) = 1 и т(х) = 0 имеют-
ся, в дополнение к (q3)^=o и (ql), ветви (h.3), (h2), (hl).
Доказательство Теоремы 6.27. После того, как биквадратики h най-
дены, можно наконец восстановить мультиаффинные Q с биквадра-
тиками на рёбрах, удовлетворяющими условиям Леммы 6.28. Это до-
стигается решением линейных систем для коэффициентов Q. Условия
Леммы 6.28 являются необходимыми для ЗП-совместности со свой-
ством тетраэдральности. Оказывается, что они также почти достаточ-
ны. Точнее, биквадратики (ql)-(q4) однозначно определяют функции
Q, удовлетворяющие условиям Леммы 6.28. Это функции (Q1)-(Q4), и
соответствующие уравнения ЗП-совместны со свойством тетраэдраль-
ности.
В случаях (hl)-(h3) аккуратный анализ приводит к нескольким
дробно-рационально неэквивалентным семействам биквадратик, при-
водящим к мультиаффинным функциям Q, удовлетворяющим услови-
ям Леммы 6.28:
a <22,^ 1 + q2
(h3) -4 < (Ь3)г=1 : h = i „2 I1 " 1 1 „2 ХУ 1 — 1 — xy + a,
. (413)<5=о : h = xy\
(h2) -4 < (а1)г=1 : h = 1 . a — (x + yr , 2a( 2
[ (Ь2) : h = x + у + a;
6. Совместность как интегрируемость
(al)d=0 : h=^-(x + y')2,
(hl): h=l.
Все эти семейства, за исключением (h3)d=o и (hl), вовсе не содержащих
параметров, приводят к функциям Q вида (А2), (H3)d=i, (Н2), (Al)d=i,
и (Al)d=o, отвечающим ЗВ-совместным уравнениям со свойством тет-
раэдральности. Таким образом, во все этих случаях необходимые усло-
вия Леммы 6.28 оказываются также достаточными.
В каждом из двух оставшихся случаев (h3)d=g и (hl), имеется се-
мейство многочленов Q, содержащее произвольную кососимметричную
функцию к(а,/3) = —k(J3,a), удовлетворяющее условиям Леммы 6.28:
Q = (1 + fc(a,^))(T!X2+я?з^4) - (1 - fc(a,^))(xiT4 + х22:з),
Q = (ti - х3)(х2 - х4) + к(а,/3),
соответственно. Эти два случая являются единственными, когда не все
уравнения, проходящие через необходимое условие из Леммы 6.28, ока-
зываются ЗВ-совместными. Первое уравнение из этих двух кандидатов
ЗП-совместно тогда и только тогда, когда
1 + fc(a,/3) = а
1 — к(а, /3) /3’
с точностью до преобразования параметров. Это уравнение (H3)d=g.
Второе уравнение ЗВ-совместно тогда и только тогда, когда к(а, /3) =
= /3 — а, с точностью до преобразования параметров. Это уравнение
(Н1). □
6.13. Интегрируемые дискретные уравнения типа
Лапласа
Геометрическая конструкция дубля Т> для заданного графа 9 на
поверхности, описанная в Разделе 6.5, ведёт к построению набора инте-
грируемых дискретных уравнений типа Лапласа, основанному на глу-
боком и в чём-то таинственном свойстве ЗВ-совместности уравнений с
полями в вершинах квад-графа. Мы запишем квад-уравнение (6.36) на
двудольном квад-графе Т> в слегка модифицированных обозначениях,
как
Q(x0,yi,x1,y2-,ai,a2) = 0; (6.96)
6.13. Интегрируемые дискретные уравнения типа Лапласа
см. рис. 6.20. Для упрощения обозначений, вершины х отождествляют-
ся здесь с соответствующими полями /(д); рёбра (.'Cq, j/j), (х0, у2) несут,
соответственно, метки ai, а2-
Рис. 6.20. Грань размечен-
ного двудольного квад-
графа; поля в вершинах.
Рис. 6.21. Трёхногая форма
квад-уравнения.
Определение 6.30. (Трёхногая форма) Уравнение (6.96) облада-
ет трёхногой формой, центрированной в вершине xq, если оно экви-
валентно уравнениям
^(х0,?/1;а:1) - ф(х0,У2',О12') = ф(х0,х1-,а1,а2) (6.97)
с некоторыми функциями ф,ф- Члены в левой части отвечают “ко-
ротким ногам" (xo,yi), (хо,у2) € £?(D), а правая часть отвечает
“длинной ноге" (x0,xi) G Д(3)-
Суммирование уравнений на квад-графе для цветка из четырёх-
угольников, смежных с “чёрной” вершиной xq G V(S) (см. рис. 6.5)
немедленно приводит, благодаря телескопическому эффекту, к следу-
ющему утверждению.
Теорема 6.31. (От квад-уравнений к уравнениям типа Лапла-
са)
а) Допустим, что уравнение (6.96) на двудольном квад-графе D
обладает трёхногой формой. Тогда ограничение любого решения f :
V(D) —> С на “чёрные" вершины V(S) удовлетворяет дискретному
уравнению типа Лапласа,
^2 ф(х0,хк-,ак,ак+1) = 0. (6.98)
Xk & Star(xo)
6. Совместность как интегрируемость
Ь) Наоборот, пусть дано решение f : V(9) —> С уравнения типа
Лапласа (6.98) на односвязном поверхностном графе 3, тогда суще-
ствует однопараметрическое семейство расширений f : V(D) —> С,
удовлетворяющих уравнению (6.96) на дубле Т>. Такое расширение
однозначно определяется значением в одной произвольной вершине
V(S*).
Иногда удобнее записывать трёхногое уравнение (6.97) в мульти-
пликативном виде:
Ф(х0, Уй ац)/Ф(;го, У2\аг) = Ф(х0, ^Т, «1, «2) (6.99)
с некоторыми функциями Ф, Ф, так что уравнение типа Лапласа (6.98)
также становится мультипликативным:
Ф(я?о, iCfc; O!fc, Offc+1) = 1- (6.100)
Xke Star(xo)
Оказывается, что все ЗБ-совместные уравнения из списков Q, Н,
и А из Теоремы 6.27 допускают трёхногие формы. Они предъявлены в
следующей теореме для списков Q и Н (результат для списка А следует
отсюда).
Теорема 6.32. (Трёхногие формы интегрируемых квад-урав-
нений) Трёхногие формы для всех уравнений списков Q, Н из Теоремы
6.27 имеют следующий вид:
(Q4): мультипликативная, с Ф(х,у;а, /3) = Ф(х,у;а — /3),
<Э(Ао + а) sn(X0+<*)-sn(Xi)
Ф(х0, Х1-,а) = ----------—-----------—— , (6.101)
0(Ао _ a) sn(Ao — а) — sn(Ai)
где х = sn(AT), и 9(X) обозначает тэта-функцию Якоби;
(Q3)i=i.- мультипликативная, с Ф(х,у,а, (3) = Ф(х, у, а — /3),
, . sin(An + а) — sin(Xi)
ф х0(Xi; а = —, 6.102
sm(A0 - a) — sin(Ai)
где х = sin(X);
(Q3)a=o’ мультипликативная, с Ф(х,у,а, /3) = Ф(х,у,а/f3),
(6'103)
6.13. Интегрируемые дискретные уравнения типа Лапласа
(Q2): мультипликативная, с Ф(х, у, а, (3) — ^1>(х,у,а — /3),
т, , (Хо + а)2 - X?
ф(1°|11;а) = (х0-<1)2-хГ
(6.104)
где х = X2;
(Q1)<5=i •' мультипликативная, с Ф(х, у, а, 0) = Ф(х, у; а — (3),
*(*o,*i;a) = gt*_g;
(6.105)
(Ql)<5=0- аддитивная, с ф(х, у, а, /3) = ф(х, у,а — /3),
ф^х^а) = ——— ;
XQ ~ Х1
(6.106)
(НЗ): мультипликативная, с
™ 0х — аи
Ф{х,уа,Р) =-----— ,
ах — ру
Ф(х0, хи а) = x0Xi + 6а-
(6.107)
(Н2): мультипликативная, с
, ч х — V 4- а — 0
Ф(х, у, а, /3) = -—-———г ,
х - у - а + [3
Ф(х0, xi; а) = х0 + Xi + а;
(6.108)
(Н1): аддитивная, с
ф(х,у,а,/3} = ,
•ь у
ф(х0, xi; а) = х0 + хр
(6.109)
Доказательство. Доказательство этой теоремы получается прямым
вычислением; см. Упражнение 6.15. Однако, это ничего не говорит о
том, как такие трёхногие формы могут быть получены. Общий способ
вывода трёхногих форм обсуждается в Упражнении 6.16. □
Замечание. Следует отметить, что существование трёхногой формы
позволяет вывести (и, в некотором смысле, объяснить) свойство тет-
раэдральности из Раздела 6.11. Действительно, рассмотрим три грани,
смежные с вершиной xj23i как на рис. 6.19, а именно, четырёхугольни-
ки (Х1,Х12,Х123,Х13), (^2,^23, ^123,^12), и (х3,Хщ,Х12з,^2з)- Суммиро-
вание (соотв. перемножение) трёхногих форм центрированных в T123
6. Совместность как интегрируемость
для уравнений на этих трёх гранях ведёт, соответственно, к аддитив-
ному уравнению
а2, а3) + </>(zi23, ^2! <*з, оц) + </>(т123,яз; <*1, од) = 0, (6.110)
или мультипликативному уравнению
Ф(т12з,Х1; О2,о:з)Ф(2:123,Т2; а3, О'1)Ф(т12з, т3; ад, а2) = 1. (6.111)
Эти уравнения связывают поля в вершинах “белых” тетраэдров на рис.
6.19. Заметим, что их можно интерпретировать как дискретные уравне-
ния типа Лапласа, возникающие из пространственных цветков с тремя
лепестками.
Функции ф(х,у; а, /3) (соотв. Ф(х, у; а, /3)) отвечающие “длинным
ногам”, порождают аддитивное (соотв. мультипликативное) уравнение
типа Лапласа на произвольных планарных графах. Проверка списка из
Теоремы 6.32 показывает, что в нём имеется всего шесть функций для
“длинных ног”. Из них три рациональны по т, у; каждая из соответству-
ющих систем типа Лапласа допускает два различных продолжения до
системы на квад-графе: одну из списка Q, где форма “коротких ног”
совпадает с формой “длинных”, и вторую из списка Н, для “коротких
ног” другого вида. Это, соответственно, уравнения (Q3)s=o, (Ql)<5=i;
(Ql)<5=0, и (НЗ), (Н2), (Н1). Остальные три функции Ф рациональны
лишь по у, и требуется униформизующая замена переменной х. Соот-
ветствующие системы типа Лапласа допускают лишь одно продолже-
ние до системы на квад-графе, (Q4), (Q3)a=i и (Q2).
Теорема 6.33. (Интегрируемость уравнения типа Лапласа) Ад-
дитивное уравнение типа Лапласа (6.98) с формулами ф(х, у, а, (3) для
“длинных ног”, соотв. мультипликативное уравнение типа Лапласа
(6.100) с формулами Ф(х, у\а, 13) для “длинных ног”, приведёнными в
Теореме 6.32, интегрируемо в смысле Раздела 6.4.
Доказательство. Заметим, что функции ф, соотв. Ф, всегда содержат
параметры а, /3 в комбинации а — /3. Это означает, что параметры на
рёбрах для расширения системы типа Лапласа до системы на квад-
графе определены лишь с точностью до аддитивной постоянной А.
Пусть уравнения расширенной системы на квад-графе имеют вид
Q(x0,yk, хк,ук+1-ак + A,afc+i + А) = 0.
6.14. Поля НА РЁБРАХ: ОТОБРАЖЕНИЯ ЯНГА-БАКСТЕРА
Перепишем это уравнение как дробно-лииейпое преобразование
Ук+1 = L(x0,xk,ak,ak+i-,X)[yk]- (6.112)
Тогда (нормированная, если необходимо) матрица L(xq, хк, ак, Offc+i; А)
является матрицей перехода через ребро (xq, хк) G -Е(9), или вдоль реб-
ра (ук, Ук+i) ё F(9*), в представлении нулевой кривизны для системы
типа Лапласа на 9- О
Пример. Рассмотрим аддитивную систему типа Лапласа на 9, отве-
чающую уравнению (Ql)<5=o (уравнению двойного отношения):
у -"^±-- = 0. (6.113)
х0 - хк v '
star(xo)
Продолжение до квад-уравнения имеет вид:
(х0 Ук)(х1к yk+i) ____ ак + А
(.Ук - хк)(ук+1 - т0) Ofc+i+A’
что может быть записано, как дробно-линейное преобразование (6.112)
с матрицами
Г / \ х / \ . \ -а । ^fc +1 f к Z0Z Л
L(j?O5 ^fc+ij A) (A 4- cvfc)l 4 — I -I I
З'О “ у J- —‘I'O /
= (A + Qfc+1)l + Qfe ~ Qfe+- (Xo (6.114)
v K+1' x0-xk 1 -xk j v >
Эти матрицы дают представление нулевой кривизны для системы типа
Лапласа (6.113) на произвольном графе-поверхности 9-
6.14. Поля на рёбрах: отображения Янга-Бакстера
Теперь мы обратимся к изучению другого большого класса 2D си-
стем на квад-графах, с полями, приписанными рёбрам. В этой ситуа-
ции естественно считать, что каждый элементарный четырёхугольник
служит носителем отображения F:3Cx3C—>ЗСхЗС, где ЗС является
множеством значений полей х,у, так что F(x,y) = (х2,У1); см. рис.
6.22. Концепция SD-совместности таких отображений может быть ин-
терпретирована несколькими способами, в зависимости от того, какую
начальную задачу на элементарном 3D кубе мы хотим поставить.
6. Совместность как интегрируемость
Рис. 6.22. Отображение на элементарном четырёхугольнике
с полями на рёбрах.
При одном способе начальные данные х, у, z выбираются на трёх
рёбрах элементарного куба, смежных с одной вершиной. Тогда сначала
вычисляется
F(x,y) = (z2,2/i), F(y,z) = (y3,z2), F(z,z) = (zi,z3),
и затем
F(x3,y3) = (х23,У1з), ^(2/1,21) = (j/13,-Z12), F(z2,X2) = (Z12, X23),
так что для каждого из полей с двумя индексами т2з, 2/13,212 имеется
a priori два различных ответа; см. рис. 6.23.
Определение 6.34. (ЗО-совместное отображение) Отображение
F:IxI->IxX называется ЗВ-совместным, если оба значения для
каждого поля (x23,yi3, zi2) совпадают, для любых начальных данных
(x,y,z) (см. рис. 6.23/
Важный пример ЗВ-совместного отображения, возникающий из
дискретной дифференциальной геометрии, обсуждается в Упражнени-
ях 6.19, 6.20.
У Определения 6.34 имеется одно неудобство в обозначениях: так
как каждое начальное условие используется на первом шаге двумя
различными отображениями, то свойство ЗВ-совместности невозмож-
но выразить в терминах композиции отображений. Это может быть
преодолено за счёт другого выбора начальных данных, а именно, при
выборе их вдоль пути состоящего из трёх рёбер, отвечающих трём
различным координатным направлениям. Это ведёт к понятию отоб-
ражения Янга-Бакстера (по традиции, оно обозначается R, а не F).
6.14. Поля на рёбрах: отображения Янга-Бакстера
Рис. 6.23. ЗБ-совместность 2D систем с полями на рёбрах.
Определение 6.35. (Отображение Янга-Бакстера) Отображе-
ние R : X хХ -» X х % называется отображением Янга-Бакстера,
если оно удовлетворяет соотношению Янга-Бакстера
R12 ° Л13 О /?23 = R-23 ° Я13 ° R12, (6.115)
где каждое отображение Rij : ЗС3 >—> ЗС3 действует как R на факторах
i,j декартова произведения ЗС3, и тождественно на третьем факто-
ре.
Уравнение (6.115) понимается следующим образом. Считается, что
поля х и у приписаны рёбрам, параллельным, соответственно, первой и
второй координатным осям. Дополнительно, рассмотрим поля z, при-
писанные рёбрам, параллельным третьей координатной оси. Началь-
ными данными являются поля х, у, z вдоль пути, состоящего из трёх
рёбер, отвечающих трём различным координатным направлениям; см.
рис. 6.24. Левая часть этого рисунка отвечает композиции отображений
в левой части уравнения (6.115), что визуализируется как последова-
тельность отображений на трёх передних гранях куба:
&2з(у, z) = (уз, z2), Д1з(^, *2) = (^з, Z12), -Ri2(t3, уз) = (т2з, Угз)•
(Здесь и ниже мы несколько упрощаем обозначения для отображений,
опуская аргументы, на которых они действуют тождественно.) Анало-
гично, правая часть рисунка отвечает цепочке отображений в правой
части (6.115), что визуализируется отображениями на трёх задних гра-
нях куба:
R12(x,y) = (х2,У1), -R13(z2,z) = (£23,24), /?23(j/l,2i) = (У13,212).
6. Совместность как интегрируемость
Итак, уравнение (6.115) гарантирует, что два способа получения
(т2з, У13,-212) из начальных данных (х, у, z) приводят к одним и тем
же результатам.
Рис. 6.24. Соотношение Янга-Бакстера.
Понятие представления нулевой кривизны для отображения Янга-
Бакстера имеет непосредственный смысл и выражается как
L(t, A)L(y, А) = L(yj, A)L(x2, А). (6.116)
Имеется способ построения представления нулевой кривизны для отоб-
ражения Янга-Бакстера, близкий по духу к Теореме 6.4, и не исполь-
зующий другой информации, кроме самого отображения. Рассмотрим
отображение Янга-Бакстера с параметрами R(ct,/3), где параметры
а, /3 G С приписаны тем же рёбрам четырёхугольника на рис. 6.22, что
и поля х, у, а противоположным рёбрам отвечают те же самые парамет-
ры. Хотя это можно рассматривать как частный случай общего поня-
тия, вводя X = ХхС и R(x, a;y,f3) = R(a, (3)(х, у), для нас будет удобно
следить за параметром отдельно. Таким образом, на рис. 6.24 все рёб-
ра, параллельные оси х (соотв. у, г) несут параметр а (соотв. /3,7), и
соответствующая версия соотношения Янга-Бакстера имеет вид:
Л12(а,^)Л1з(а',7)-й2з(^,7) = -??2з(/3,7)/?i3 (с*, 7)^12 (<*,/3) • (6.117)
Теорема 6.36. (Представление нулевой кривизны для отобра-
жения Янга-Бакстера) Допустим, что на множестве X задано эф-
фективное действие линейной группы G = GL(N,C) (то есть А е G
6.14. Поля НА РЁБРАХ: ОТОБРАЖЕНИЯ ЯНГА-БАКСТЕРА
действует тождественно на ЗС, только если А = I), и что отобра-
жение Янга-Бакстера R(a, (3) имеет следующий специальный вид:
^2 = В(у,Р,а)[х], у! = А(х,а,/3)[у]. (6.118)
Здесь А, Б : ЗС х С х С —> G некоторые матричнозначные функции
на ЗС, зависящие от параметров а и /3, и Xfrr] обозначает действие
А 6 G на х 6 ЗС. Тогда имеем, в силу (х2, yi) = R(a, (Т)(х, у):
А(х,а, Х)А(у, (3, X) = А(у1у /3, Х)А(х2,а, А), (6.119)
В(у, /3, Х)В(х, а, А) = В(х2, а, Х)В(у1, /3, А). (6.120)
Иными словами, как А(х,а, А), так и В~1(х, а, А) (или В'Дх.а.Х))
образуют представления нулевой кривизны для R.
Доказательство. Рассмотрим значения z^2, полученные согласно обе-
им частям соотношения Янга-Бакстера (6.117): левая часть даёт Z12 =
— А(х, а,-у)А(у, /3,7) [г], а правая часть 272 = A(yi, /3,-у)А(х2, a,-y)[z].
Так как действие G предполагается эффективным, то немедленно при-
ходим к соотношению
А(х, а, у)А(у, 3.7) = А(у!, /3, у)А(х2, а, 7),
которое выполняется, как только (x2,yi) = R(a,/3)(х,у). Это совпада-
ет с (6.119), а произвольный параметр 7 играет роль спектрального
параметра А.
Аналогично, можно рассмотреть значения 2:23, полученные соглас-
но обеим частям (6.117): левая часть даёт 2:23 = В(у3, (3, a)B(z2,7, а)[а:],
а правая 2:23 = B(z, у, а)В(у, (3, а)[яф Опять, эффективность действия
G приводит к
В(уз,^,а)В(г2,7,а) = B(z,^, а)В(у,(3,а),
при (у3, z2) = R(/3,y)(y, z). Это совпадает с (6.120); здесь роль спек-
трального параметра А принадлежит произвольному параметру а. □
Чтобы покрыть все известные примеры, схему Теоремы 6.36 нуж-
но расширить следующим образом. Будем говорить, что А(а;, о, А) даёт
проективное представление нулевой кривизны для отображения Янга-
Бакстера R, если соотношение (6.116) выполняется с точностью до
умножения на скалярную матрицу cl, где с может зависеть от всех пе-
ременных в соотношении. Предположим, что действие G = GL(7V, С)
6. Совместность как интегрируемость
на X проективно, то есть тривиально действуют скалярные матрицы и
только они. Тогда предыдущие рассуждения показывают, что матрицы
А(х, а, А) и В~г{х, а, А) дают проективные представления нулевой кри-
визны для соответствующего отображения Янга-Бакстера (6.118). На
практике, естественный выбор матриц А, В в (6.118) фактически ве-
дёт к настоящим представлениям нулевой кривизны, как показывают
следующие примеры.
Пример 1: отображение Адлера. Здесь X — СР1 и отображение
имеет вид х~у х + у' У~х х + у- (6-121)
Тогда
/3 - а _ х2 + ху - (/3 - а)
х + у ~ х + у
= Л(т,а,^)[?/],
где
( х х2 + а — А \
Л(т,о,А)=( т х I,
и группа G = GL(2, С) проективно действует дробно-линейными пре-
образованиями на СР1. В этом примере В{х, а, А) — Л(гг, а, А), так что
матрицы Вт = Лт дают альтернативное представление нулевой кри-
визны.
Пример 2: взаимодействие матричных солитонов. Наш следу-
ющий пример приходит из математической физики. Матричное урав-
нение Кортевега-де Фриза Ut + 3UUX + 3UXU + Uxxx = 0 допускает
одно-солитонные решения вида С7(т,<) = 2а2Р sech2{ах — 4а3£), где
параметр а отвечает за скорость солитона, а матрица амплитуды Р
должна быть проектором: Р2 — Р. Проекторы ранга 1 имеют вид Р =
— С77Т/(С>7?)- Оказывается, что изменение матриц амплитуд Р после
взаимодействия двух солитонов со скоростями од и аг описывается
следующим отображением Янга-Бакстера:
fl(ai,a2) : (£1, ?7i; &2, ^Тг) (6,771! 6,6),
2а2 (6,772) л , 2а2(6,7?1) „ ,R 19<я
(а-i-а2)(&,772) 2’ 1 1 (ai - аг)(6,7/2) ^2’
, + ъ=т+, 2а1у <6123)
(а2 - а1)(6,щ) (а2-а1)(6,’?1)
6.14. Поля НА РЁБРАХ: ОТОБРАЖЕНИЯ ЯНГА-БАКСТЕРА
В этом примере X является множеством проекторов Р ранга 1, которое
является многообразием CPJV-1 х CPJV-1, а проективное действие груп-
пы G = GL(1V, С) на X индуцируется соотношением А[(£, у)] = (А£, Лц).
Легко видеть, что формулы (6.123) можно записать как
(Л2,т) = Л(£1,771,а1,а!2)[(£2,7?2)]
с матрицами
Л / Л \ А Т I 2d
лк,ч,а.л) = / + ^-^.
Таким образом, матрицы А(£,т], а, А) дают проективное представле-
ние нулевой кривизны для отображения взаимодействия солитонов, но
нетрудно видеть, что это фактически настоящее представление нулевой
кривизны. Как и в Примере 1, В(£,т],а, А) = Л(£,ц, а, А).
Пример 3: отображения Янга-Бакстера, возникающие из гео-
метрических кристаллов. Пусть X = Сп, и определим R : X х X —>
X х X по формулам
Pj Pi — 1
xj=xjp—> Уз=Уз~Б-’ j = (6.124)
где
л /а—1 п \
Pj = У } I Ц xj+k JJ yj+k j (6.125)
а=1 \/c=l к—а-\-1 J
(в этой формуле нижние индексы j+к берутся (mod п)). Ясно, что отоб-
ражение (6.124) сохраняет инвариантными подмножества XQ х Х^ С
X х X, где
п
Xq = {(Т1 , . . . , Tfi) £ X . J J Tfc — о}.
fc=l
Можно показать, что ограничение R на XQ х Х^ может быть записано в
виде (6.118). Для этого применяется следующий трюк. Вложим XQ хХ^
в СР"-1 х СР"-1 посредством J(x,y) = (z(z), w(y)), где
z(t) = (1 : 2i : • •
Zn-1), w(y) = (wi :: w„-i : 1),
j П
Zj = II Xk ’ = II Ук
fc=l /c=j + l
6. Совместность как интегрируемость
Тогда легко видеть, что в координатах (z,w) отображение R записы-
вается, как
z — В(у, /3, a)[z], w = А(х, а, /3)[w],
с некоторыми матрицами В, А из G = GL(n, С), где используется стан-
дартное проективное действие GL(n, С) на СР"-1. Кроме того, простое
вычисление показывает, что обратные матрицы являются циклически-
ми двухдиагональными:
В~Чу,В,а)
А 1(х,а,/3)
/ У1 -1 0 0 0 >
0 У2 -1 . .. 0 0
0 0 Уз • .. 0 0 , (6.126)
0 0 0 . • • Уть— 1 -1
\ —а 0 0 . .. 0 Уп )
/ ад 0 0 .. . 0 -/3\
-1 2^2 0 .. . 0 0
0 -1 %з •• . 0 0 (6.127)
0 0 0 .. 2*71 — 1 0
0 0 0 -1 2*71 /
Точнее, матрицы А, В определены лишь с точностью до умножения
на скалярные матрицы. Эти скалярные матрицы выбраны в (6.126),
(6.127) так, чтобы зависимость матриц В-1, Л-1 от своих “собствен-
ных” параметров (/3, соотв. а) сокращалась, так что единственным па-
раметром, остающимся в представлении нулевой кривизны является
спектральный. Иными словами, представление нулевой кривизны не
зависит от подмножества XQ х Хд на которое ограничивается отобра-
жение. Можно проверить, что фактически оно является настоящим (а
не только проективным) представлением нулевой кривизны. Заметим
также, что в этом примере матрицы Вт совпадают с А (то есть они
не приводят к альтернативному представлению нулевой кривизны для
Л).
6.15. Классификация отображений Янга-Бакстера
Рассмотрим отображения Янга-Бакстера 7?:ХхХ—>ХхХ,
(х,у) i-t (и, г) в следующей специальной постановке. Допустим, что X
является неприводимым алгебраическим многообразием, и R является
6.15. Классификация отображений Янга-Бакстера
Рис. 6.25. Отображение F на У х У, его обратное и его
сопутствующие.
бирациональным автоморфизмом на X х X. Таким образом, определено
бирациональное отображение 7?-1 : X х X —> X х X, (и, и) ь-> (х,у). Это
изображается левым квадратом на рис. 6.25. Кроме того, на R наклады-
вается условие невырожденности: должны быть корректно определены
рациональные отображения и(-, у) : X —> X и v(x, •) : X —> X, для общих
х, соотв. у. Иными словами, должны быть определены бирациональные
отображения R : X х X —> X х X, (т, и) (ц, у) и R-1 : X х X —> X х X,
(и, у) н-> (гг, и), называемые сопутствующими отображениями для R.
Это требование визуализируется правым квадратом на рис. 6.25. Би-
рациональные отображения R, удовлетворяющие этому условию, на-
зываются квадрирациональными. Формальное определение чуть более
общего понятия (где допускается, что аргументы х и у могут принад-
лежать разным пространствам) выглядит следующим образом.
Определение 6.37. (Квадрирациональное отображение) Пусть
Xi,X2 два неприводимых алгебраических многообразия над С. Рацио-
нальное отображение F : Хг х Х2 —> Xi х Х2, отождествляемое со
своим графиком, алгебраическим многообразием Гр С Xi х Х2 х Xi х Х2,
называется квадрирационалъным, если, для любой фиксированной па-
ры (т,у) G Xi х Х2, за возможным исключением некоторых замкну-
тых подмногообразий коразмерности 1, многообразие Гр пересека-
ет каждое из мноэюеств {х} х {у} х Xi х Х2, Xi х Х2 х {х} х {у},
Xi х {у} х {т} х Х2, и {т} х Х2 х Xi х {у} в точности один раз, то
есть, если Гf является графиком для четырёх рациональных отоб-
ражений F, F-1 : Хх х Х2 —> Xi х Х2.
В случае Xi — Х2 — СР1 оказывается возможным проклассифи-
цировать все квадрирациональные отображения; мы приведём крат-
6. Совместность как интегрируемость
кое изложение соответствующих результатов. Бирациональные изомор-
физмы на СР1 х СР1 с необходимостью имеют вид
а(у)х + Ь(у) А(х)у + В(х)
F : и = ——------—— , v = - ч----, (6.128)
с(у)х + d(y) С(х)у + D(z)
где а(у),..., d(y) многочлены от у, и А(х),..., D(x) многочлены от х.
Для квадрирациональных отображений, степени всех этих многочле-
нов не превосходят 2. В зависимости от старшей степени коэффици-
ентов в каждой дроби в (6.128), мы будем говорить, что отображение
имеет тип [1:1], [1:2], [2:1] или [2:2]. Самым богатым и наиболее интерес-
ным подклассом является [2:2]. Для отображений из этого подкласса
многочлены Д(а:) = A(x)D(x) — Btx'jCtx') и <5(у) — a^y^d^y) — Ь^с^у)
имеют степень четыре. Многочлен четвёртой степени принадлежит к
одному из следующих пяти типов, в зависимости от распределения ну-
лей:
I: четыре простых нуля,
II: два простых и один двукратный нуль,
III: два нуля кратности два,
IV: один простой и один трёхкратный нуль,
V: один нуль кратности четыре.
Оказывается, что для отображения типа [2:2] необходимым условием
того, что оно является квадрирациональным, является то, что много-
члены Д(а:) и <5(у) относятся к одному и тому же типу I-V. Достаточ-
ные условия более сложны и выражаются в терминах сингулярностей
отображения F, то есть таких точек (£,у) G СР1 х СР1, в которых об-
ращаются в ноль и числитель, и знаменатель по крайней мере одной
из дробей в (6.128):
а(у)£ + Ь(у) = О, с(ц)£ + d(y) = О (6.129)
или
л(е)у + б(о = о, с(е)у + д(е) = о. (6.130)
Например, если оба многочлена Д(а:) и <5(у) имеют тип I, то необходи-
мое и достаточное условие квадрирациональности отображения (6.128)
заключается в том, что нули Х{, уг (г = 1,..., 4) многочленов Д(х), <5(у)
можно упорядочить так, что оба уравнения (6.129), (6.130) будут удо-
влетворены при (£,т?) = (ii,yi), г = 1,..., 4; иными словами, четыре
сингулярных точки для обеих дробей в (6.128) расположены в (з^,уг).
6.15. Классификация отображений Янга-Бакстера
Для всех квадрирациональных [2:2] отображений можно найти
нормальные формы относительно действия группы естественных преоб-
разований, которой в данном случае является группа (М6Ь)4 дробно-
линейных преобразований действующих независимо на каждое поле
x,y,u,v.
Теорема 6.38. (Классификация квадрирациональных отобра-
жений на СР1 х СР1) Любое квадрирационалъное отображение типа
[2:2/ на СР1 х СР1 эквивалентно, при некоторых дробно-линейных за-
менах переменных, независимых для каждого поля x,y,u,v, одной из
следующих пяти нормальных форм:
& о а г> г> (1 - + /3 - а + (о - 1)у
Fi: и = ауР< v = ВхР. Р = —--------г--------т------—----—,
/3(1 - а)х + (а- /3)ух + а(/3 - 1)у
„ у „ х „ ах — By + в — а
Fn: и=-Р, v= -Р, Р=--------------,
а р х — у
у _ х _ ах — Ви
Fni.- и=±Р, v = -P, Р =----------
а р х — у
В — а.
Fiv- и = уР, v = хР, Р = 1 -\------,
х-у
а. — В
Fy: и = у + Р, v = х + Р, Р=-------,
х-у
при подходящих постоянных а,{3.
Каждое из отображений Fj,..., Fy является инволюцией и совпа-
дает со своим сопутствующим отображением, так что все четыре стрел-
ки на рис. 6.25 описываются одними и теми же формулами. Заметим,
что параметры а, /3 возникают в этих отображениях естественным об-
разом. В Теореме 6.38 не предполагается никакая конкретная зависи-
мость от этих параметров, ни само их существование. Геометрическая
интерпретация этих параметров может быть дана в терминах сингуляр-
ностей отображения; оказывается, что параметр а естественно припи-
сывается рёбрам х,и, а /3 - рёбрам у,и. Например, для отображения
Fj параметр а есть не что иное, как двойное отношение четырёх ну-
лей Хг многочлена Д(т), и аналогично /3 служит двойным отношением
четырёх нулей yi многочлена 5{у).
Наиболее замечательным фактом об отображениях F\,... ,Fy яв-
ляется их ЗН-совместность. Для Т = I,II, III, IV или V, обозначим со-
ответствующее отображение Fr из Теоремы 6.38 через Fr(oi,/3), явно
6. Совместность как интегрируемость
указывая параметры. Кроме того, для любых он,012,013 6 С, обозна-
чим через = РДоч, а}) соответствующие отображения, действую-
щие нетривиально на г-м и j-м факторах в (СР1)3.
Теорема 6.39. (Нормальные формы квадрирациональных отоб-
ражений на СР1 х СР1 SD-совместны) Для любых Т = I, II, III, IV
или V, система отображений FVJ является 3D-совместной, а также
удовлетворяет соотношению Янга-Бакстера с параметрами (6.117).
Доказательство. Доказательство может быть получено прямым вы-
числением (см. упражнения 6.22). Оно следует также из Теоремы 6.40
ниже, после того как мы предъявим геометрическую интерпретацию
отображений Ft- □
Фактически, SD-совместность квадрирациональных отображений
на СР1 х СР1 выполняется не только для нормальных форм Ft, но и
при гораздо более общих условиях. Единственное условие для квадри-
рациональных [2:2] отображений состоит в том, что их сингулярности
должны совпадать вдоль всех рёбер куба. Аналогичные утверждения
верны также для квадрирациональных отображений типа [1:1] и [1:2],
так что в случае Xi = ЗС2 = СР1 свойства квадрирациональности и
ЗВ-совместности оказываются очень тесно связанными.
Отображения Ft из Теоремы 6.38 допускают очень красивую гео-
метрическую интерпретацию. Рассмотрим пару невырожденных коник
Qi, Q2 на плоскости СР2, так что обе Qi являются неприводимыми
алгебраическими многообразиями изоморфными СР1. Возьмём точки
X 6 Qi, Y G Q2, и рассмотрим прямую I — (ХУ) проходящую через
X, Y (корректно определённую при X ф У). В случае общего положе-
ния, прямая I пересекает Qi ещё в одной точке U X, и Q2 ещё в
одной точке V ф У. Это определяет отображение
S': Qi х Q2 —> Qi х Q2,
?(X,Y) = (17, V);
(6.131)
см. рис. 6.26 для R2 иллюстрации. Отображение У квадрирационально,
является инволюцией и, кроме того, совпадает с обоими сопутствую-
щими отображениями. Это немедленно следует из того, что если один
корень квадратного уравнения известен, то второй является рацио-
нальной функцией от данных задачи. Точки пересечений X G Qi П Q2
отвечают сингулярным точкам (X, X) отображения У.
В случае общего положения две коники пересекаются в четырех
точках; однако, имеются и вырожденные случаи. Имеется пять воз-
можных типов I — V пересечения двух коник:
6.15. Классификация отображений Янга-Бакстера
Рис. 6.26. Квадрирациональное отображение на паре коник.
I: четыре простые точки пересечения;
II: две простые точки пересечения и одна точка касания;
III: две точки касания;
IV: одна простая точка пересечения и одна точка касания
второго порядка;
V: одна точа касания третьего порядка.
Все коники, проходящие через общую четвёрку точек, составляют ли-
нейное семейство, или пучок коник. Имеется пять типов I-V пучков
коник.
Используя рациональные параметризации коник
СР1 Э х Х(х) 6 Qi С СР2, соотв. СР1 У(у) G Q2 С СР2,
легко видеть, что Т сводится к отображению F : (х,у) ь-> (u,v), квад-
рирациональному по СР1 х СР1. Прямое вычисление показывает, что
отображения F для пяти описанных выше типов пересечений дают в
точности пять отображений, перечисленных в Теореме 6.38. Далее, мы
получаем следующую геометрическую интерпретацию утверждений из
Теоремы 6.39.
Теорема 6.40. (SD-совместные отображения на пучке коник)
Пусть Qi, i = 1,2,3 три невырожденных коники из линейного пучка.
Пусть X Е Qi, Y 6 Q2 u Z G Q3 произвольные точки на этих ко-
никах. Определим отображения 3^ как в (6.131), отвечающие паре
коник Положим (Х2,У1) = ЭцДХ, У), (Аз,£1) = Z) и
6. Совместность как интегрируемость
Рис. 6.27. ЗВ-совместность на линейном пучке коник.
(Уз, ^2) = У23(У,£). Тогда
Х23 = (Х3У3) П (X2Z2) 6 Qr, У13 = (Х3У3) A (yZi) G Q2,
Z12 = (KiZi) П (X2Z2) G Q3. (6.132)
Иными словами, отображения ЗД ЗИ-совместны.
Доказательство. Будем работать с уравнениями прямых и коник в
СР2 в однородных координатах, используя одно и то же обозначение
для геометрического объекта и однородного многочлена, обращающе-
гося в ноль на этом объекте. Построим прямые а = (YZ\ b = (XZ) и
с = (ХУ). Пусть
X2 = (cAQi)\X, У1=(сП£2)\У,
X3 = (dAQ1)\X, У3 = (a A Q2) \ У.
Далее, построим прямую С — (X3Y3), и пусть
Х23 = (С A \ Х3, У13 = (С A Q2) \ У3.
Наконец, построим прямые А = (У1У13) и В = (Х2Х23).
Мы имеем четыре точки X, Х2, Х3 и Х23 на конике Qi, и две
пары прямых (С, с) и (Б, Ь), каждая из которых проходит через две из
6.16. Дискретные интегрируемые трёхмерные системы
этих точек. Следовательно, существует Ц1 е СР1, такое что коника Qi
задаётся уравнением
Qi = piBb + Сс = 0.
Аналогично, коника Q2 задаётся уравнением
Qz = щМа + Сс — 0.
Рассмотрим конику
Ql ~ Q2 = MlВЬ — = 0.
Она принадлежит к линейному пучку коник, порождённому Qi и
Кроме того, точка Z = аПЬ лежит на этой конике. Следовательно, кони-
ка Qi -Q2 должна совпадать с Q3, имеющей, следовательно, уравнение
Оз = р^ВЬ - = 0.
Кроме того, две точки Z2 = аПВ и Zj = b П Л также лежат на Оз-
Так как Z2 G В, то имеем В = (X2Z2). Аналогично, так как Z\ е А,
то А = (YiZi). Окончательно, получаем, что точка Z12 = А Г) В =
= (ViZi) Г) (X2Z2) также лежит на Оз, что эквивалентно (6.132). □
6.16. Дискретные интегрируемые трёхмерные
системы
Основная часть этой главы была посвящена очень богатой тео-
рии интегрируемости 2О-уравнений, корни которой были идентифици-
рованы с их ЗВ-совместностыо. В последнем разделе мы обратим на-
ше внимание на интегрируемость 3D систем, теперь понимаемую как
4В-совместность. Характерной чертой является то, что это увеличение
размерности приводит к драматическому уменьшению числа интегри-
руемых систем: известно лишь полдесятка дискретных 3D систем со
свойством 4О-совместности. Все они имеют геометрическое происхож-
дение и фактически уже появлялись в Главах 2, 3 и 4. Мы собираемся
обсудить вкратце их общие алгебраические свойства.
В 3D контексте имеется a priori множество типов систем, в зави-
симости от того, где размещены поля: на вершинах, рёбрах, или эле-
ментарных квадратах кубической решётки.
6. Совместность как интегрируемость
6.16.1. Поля на двумерных гранях.
Рассмотрим сначала ситуацию, когда поля (предполагается, что
они принимают значения в некотором пространстве ЗС) приписаны эле-
ментарным квадратам. Обозначим через а, Ь, с поля, приписанные
двумерным граням, параллельным координатным плоскостям 12, 13,
23, соответственно. Рассматриваемая система является отображением
F : ЗС3 и-> ЗС3, которое мы запишем, как F(a, b, с) = (тза,Т2Ь,т-[с) =
— (аз, ^2, ci). Можно представить, что поля а, Ь, с сидят на нижней,
передней и левой гранях куба, а а3, b?. щ на верхней, задней и правой
гранях, как изображено на рис. 6.28.
Рис. 6.28. 3D система на элементарном кубе: отображение с
полями на двумерных гранях.
Концепция 4В-совместности такого отображения означает, что его
можно распространить на четырёхмерную квадратную решётку. Таким
образом, в дополнение к полям а, Ь, с, имеются поля d, е, f, приписан-
ные двумерным граням, параллельным координатным плоскостям 14,
24, 34, соответственно. Поля a, b, с, d, е, f задают начальные данные
на шести двумерных гранях четырёхмерного куба, смежных с одной из
вершин. Они позволяют применить отображение F к четырём трёхмер-
ным граням 4П-куба (на рис. 6.29 это внутренняя, нижняя, передняя
и левая грани):
-F123 (а,Ь,с) (а3,Ь2,С1), Т124 : (а, d, е) ь-> (a4,d2,ei),
Л34 : (b,d,f) нэ- (b4,d3,/i), Т234 : (с,е,/) (с4,е3,/2).
Здесь Fijk обозначает отображение F, действующее на 3-мерной грани,
отвечающей координатным направлениям Далее можно приме-
6.16. Дискретные интегрируемые трёхмерные системы
нить отображение F к остальным четырём трёхмерным граням (внеш-
ней, верхней, задней и правой):
•F123 (Я4,^4,С4) >-> (а34, &24, С14),
Г134 (&2, ^2, УЪ) (^24, <^23,/12),
•F124 (аз>^з,ез) н-> (а34, <^23> 613),
•F234 (с1,е1,Д) i-> (ci4, С13,/12).
Таким образом, для каждого из шести полей а34, 624, сц, с^з- ещ, /12
имеется два ответа, и отображение F является 4В-совместным, если
эти пары значений тождественно совпадают для всех шести полей и
при любых начальных данных.
Рис. 6.29. Начальные данные и результаты двух-
ступенчатого применения 4В-совместного отобра-
жения с полями на двумерных гранях.
Упомянем здесь два примера систем обсуждаемого типа, оба имею-
щие геометрическое происхождение. Первым является дискретная си-
стема Дарбу, описывающая Q-сети в аффинной постановке; см. Раз-
дел 2.1.3. Для этой системы, каждая двумерная грань координатного
направления г < j, несёт поле, состоящее из пары вещественных
чисел Отображение задаётся формулами
I'k'Yij —
'yij “И 'Yik'Ykj
1 - 'Tjk'Tkj ’
к £ i,j.
(6.133)
6. Совместность как интегрируемость
Теорема 6.41. (4В-совместность дискретной системы Дарбу)
Дискретная система Дарбу (6.133) 4В-совместна.
Вторым примером служит отображение звезда-треугольник, опи-
сывающее Т-сети; см. Раздел 2.3.8. Для этой системы, каждая двумер-
ная грань координатного направления i < j, несёт лишь одно веще-
ственное число aij, и выполняется соглашение аг] = —а}г. Отображение
задаётся формулами
(6.135)
1 ku'i'i — . । , rv / h
aijajk + ajfcUki + a^aij
Симметричная форма этого отображения является следствием приня-
того соглашения. Если хочется рассматривать только аг] при г < j, то
в знаменателе появляются минусы. В свободных от индексов обозна-
чениях для полей а = ai2, Ь = ащ, с = агз, использованных в начале
этого раздела, отображение звезда-треугольник записывается, как
F(a, Ь, с) = (а3, Ь2, щ)
а Ь с
ab + be — са ’ ab + be — са ’ ab + Ьс — са
Теорема 6.42. (4П-совместность отображения звезда-треуголь-
ник) Отображение звезда-треугольник (6.135) 40-совместно.
Как и в случае 2D систем (см. Раздел 6.14), наше определение сов-
местности нельзя записать в терминах композиции отображений, так
как каждый фрагмент начальных данных используется одновременно
в двух различных отображениях. Однако, возможно изменить началь-
ную задачу на 4В-кубе так, чтобы получающееся условие совместно-
сти формулировалось в терминах композиций. Нетрудно сообразить,
что для этого начальные данные следует задавать на шести двумер-
ных гранях (для всех шести двумерных координатных направлений),
образующих поверхность, топологически эквивалентную диску. Такая
поверхность изображена слева на рис. 6.30.
К этой начальной поверхности можно применить две различные
последовательности продавливаний, типа изображённого на рис. 6.28,
обе приводящие к поверхности на рис. 6.30 справа. Одна последова-
тельность стартует с продавливания внутренней трёхмерной грани, за-
тем верхней, передней и правой. Обозначим отображения, отвечающие
6.16. Дискретные интегрируемые трёхмерные системы
Рис. 6.30. Поверхность начальных данных для отображения,
удовлетворяющего функциональному уравнению тетраэд-
ра, и результат её четырёхкратного продавливания.
этим продавливаниям через Sijk', они служат “сопутствующими отоб-
ражениями” для исходного F, то есть они возникают из F при разреше-
нии вдоль других диагоналей исходного куба. Возникает композиция
отображений:
5123 : (а,Ь,с) ь-> (03,62,01),
5134 : (62, (&24, с?2з, Л),
5124 : (аз,d,e) (аз4, с?2, ei),
5234 ' (С1,е1,У1) н-> (С14, 613, Дг).
Другая последовательность стартует с продавливания левой трёхмер-
ной грани, затем задней, нижней и внешней:
5234 : (с,е,/) (с4, е3, /2),
5124 (0,6/3,63) (04,6/23,013),
5134 : (6, d, /2) (^4, </з,/12),
5123 (04,64,04) >-> (034,624,014)-
Требование, чтобы эти две цепочки отображений приводили к одному
результату, записывается в виде равенства
5234 ° 5134 О 5124 ° 5123 = 5123 ° 5124 ° 5134 О 5234- (6.136)
Определение 6.43. (Функциональное уравнение тетраэдра) Го-
ворят, что отображение S : X3 —> X3 удовлетворяет функционально-
му уравнение тетраэдра, если выполнено равенство (6.136), где каж-
дое Sijk является отображением на X6(a,b,c,d,e, f), действующим
6. Совместность как интегрируемость
Рис. 6.31. 3D система на элементарном кубе: уравнение с
полями в вершинах.
как S на факторах декартова произведения X6, отвечающих перемен-
ным, сидящим на гранях, параллельным плоскостям ij, ik, jk, и три-
виально на трёх остальных факторах.
Мы видим, таким образом, что концепция функционального урав-
нения тетраэдра по сути совпадает с концепцией 4О-совместности для
3D систем с полями на двумерных гранях, и основное отличие заклю-
чается в способе задания начальной задачи для рассматриваемой си-
стемы. Можно показать (см. Упражнение 6.26), что 4О-совместность
отображения звезда-треугольник (6.135) переговаривается в следую-
щий результат.
Теорема 6.44. (Решение типа звезда-треугольник для функ-
ционального уравнения тетраэдра) Отображение
S(a, Ь. с) = (аз, Ь^с-О = \ -——— , а + с — abc,-——— | (6.137)
\ а + с — abc а + с — abc J
удовлетворяет функциональному уравнению тетраэдра (6.136).
Отображение (6.137) сопряжено с отображением (6.135) заменой
b i-> 1/6. Одним из свойств интегрируемости для 4О-совместных отоб-
ражений (или, эквивалентно, отображений, удовлетворяющих функ-
циональному уравнению тетраэдра) является 3D аналог представления
нулевой кривизны. Для отображения (6.137) это обсуждается в Упраж-
нении 6.27.
6.16. Дискретные интегрируемые трёхмерные системы
6.16.2. Поля в вершинах.
Другая версия 3D систем связана с полями, приписанными к вер-
шинам. В этом случае каждый элементарный куб отвечает только од-
ному уравнению
Q(x, Т1, х2, х3, х12,х23,2Дз, £12з) = 0, (6.138)
связывающему поля х 6 X в его восьми вершинах. Такое уравнение
должно быть разрешимо относительно любого из восьми аргументов в
терминах семи остальных. Это изображено на Рис. 6.31.
4В-совместность такой системы определяется следующим образом.
Начальными данными на 4D-Ky6e служат 11 полей х, Xi (1 i ^4),
Ту (1 i < j ^4). Эти данные позволяют однозначно определить, в
силу (6.138), все поля хгз’к (1 г < j: < к 4). После этого имеется
четыре различные возможности, чтобы найти поле Т1234, отвечающие
четырём трёхмерным граням смежным с вершиной Щ234 гиперкуба; см.
рис. 6.32. Если все четыре значения совпадают для любых начальных
данных, то уравнение (6.138) 4В-совместно. Для таких систем, урав-
нения (6.138) могут быть совместно заданы на всех трёхмерных кубах
решётки Z4.
Все известные нам примеры 4В-совместных рациональных уравне-
ний с одним скалярным полем в каждой вершине связаны с соотноше-
Рис. 6.32. 4В-совместность 3D системы с полями в вершинах.
6. Совместность как интегрируемость
пнем звезда-треугольник и возникают при различных факторизациях
переменных atJ па гранях.
Для заданного (комплекснозначного) решения уравнения (6.134),
из соотношений
Tkaij TiUjk 'TjO-ki /'cion'i
-а— = -a^T = (6.139)
следует, что существует функция z : Zm —> С, такая что
2 z
= (6.140)
Она по существу единственна (с точностью до значений на координат-
ных осях, влияние которых сводится к тривиальному растяжению z).
В силу (6.134), функция z удовлетворяет на каждой 3-мерной грани
уравнению
zzijk - ZiZjk + ZjZik - ZkZij =0, i < j < к. (6.141)
Мы будем называть его билине иным уравнением на кубе (в литературе
используются также названия дискретное уравнение ВКР и уравнение
Хироты-Мивы).
Теорема 6.45. (4В-совместность билинейного уравнения на ку-
бе) Уравнение (6.141) 4В-совместно. Значение Z1234 равно
•ZZ1234 - Z12Z.34 + 213^24 “ -Z23Z34 = 0. (6.142)
Следует отметить, что (6.142) по существу воспроизводит само би-
линейное уравнением на кубе. Более того, Z1234 фактически не зависит
от значений Zi, 1 i 4. Это задаёт связь полей на чётной подрешёт-
ке, что можно рассматривать, как аналог свойства тетраэдральности
из Раздела 6.11. Иногда билинейное уравнения на кубе (6.141) запи-
сывается в слегка отличной и более симметричной форме, со всеми
плюсами в левой части. На каждом трёхмерном подпространстве эти
две формы легко преобразуются одна в другую. Однако, на всём Zm
это невозможно, при т 4. Уравнение (6.141) с плюсами в левой части
не является 4И-совместным и не может быть распространено на Zm.
Ещё одно скалярное уравнение на кубе, тесно связанное с отобра-
жением звезда-треугольник, можно получить, вспомнив, что последнее
возникает, как условие совместности для уравнений Мутара (2.51), ко-
торым подчиняются Т-сети. Рассматривая уравнения Мутара со ска-
лярными полями, мы видим, что для заданного (комплекснозначиого)
6.16. Дискретные интегрируемые трёхмерные системы
решения уравнений (6.134), соотношения
—
Xij — X
X j Хг
г /j,
(6.143)
определяют функцию х : Zm —> С. Она определена однозначно, как
только заданы её значения на координатных осях. Теперь из соотноше-
ний (6.139) следуют равенства для т:
(.Xijk £fc)
(£jfc £)(£,j £ifc)
(£j £j)(£fc £ijfc)
(t £ij)(£ifc ‘Cjk')
г Ф j / к / i. (6.144)
На самом деле, все уравнения (6.144) со всевозможными перестановка-
ми заданной тройки индексов эквивалентны, то есть каждой трёхмер-
ной грани отвечает лишь одно такое уравнение. Естественно назвать
его уравнением двух двойных отношений. Это уравнение типа (6.138),
однозначно разрешимое относительно поля х в произвольной вершине
любой трёхмерной грани, при заданных полях в семи остальных вер-
шинах.
Теорема 6.46. (4В-совместность уравнения двух двойных от-
ношений) Уравнение (6.144) ^D-совместно.
Замечательной чертой уравнения (6.144) является его высокая сте-
пень симметрии: фактически, оно допускает группу симметрий куба
Dg. Точнее, если записать (6.144) в форме (6.138) с мультиаффинным
многочленом Q, то для любого отражения S из D% имеем Q о S = —Q.
Оказывается, что одно это свойство уже характеризует уравнение двух
двойных отношений.
Теорема 6.47. (Симметрийная характеризация уравнения двух
двойных отношений) Рассмотрим мулътиаффинный многочлен
Q(x, Xi, Х2, xg, Т12, Т2з, £лз, Т12з)> такой что Q о S = a$Q для любого
отражения S из группы симметрий куба D%, где а$ £ {1, — 1}- Тогда:
а) Уравнение Q = 0 либо совпадает с (6.144), либо дробно-линейно
эквивалентно одному из линеаризуемых уравнений
(х + Т12 + £23 + £1з) ± (£1 + £2 + £3 + £12з) = О,
££12£23£13 ± £1£2£з£123 = О,
££1£2£з£12£23£13£123 = ±1.
Ъ) Если as — — 1 для любого отражения S из D%, то уравнение
Q = 0 совпадает с (6.144).
6. Совместность как интегрируемость
6.17. Упражнения
6.1. Докажите прямым вычислением, что комплексные уравнения Хи-
роты и двойного отношения ЗП-совместны: проверьте уравнения (6.34),
(6.32).
6.2. Проверьте, что (6.34) можно привести к виду уравнения с двойным
отношением:
<7(Л,/з,/2,/12з) = (6-145)
6.3. Докажите прямым вычислением ЗВ-совместность дискретного
уравнения КдФ (/ - /12Х/2 - /1) = /3 - а.
6.4. Рассмотрим интегрируемую 2В систему на Z2 и её представле-
ние нулевой кривизны с матрицами перехода Т(е, А), при периодиче-
ских граничных условиях fm,n = fm+M,n+N- Рассмотрим монотонный
путь (ti,..., ер) с начальной точкой (т, п) и конечной (т + М, п + N)
(то есть р = М + N). Определим матрицу монодромии, как Тт,п =
— L(ep, А) L(ei, А). Покажите, что (i) для данной начальной точки
(т, п) матрица Ттп не зависит от выбора пути; (ii) собственные зна-
чения Ттп не зависят от начальной точки (т, п).
6.5. Сравните решения задачи Коши для линейного волнового урав-
нения
/12 — /1 — /г + / = О
на регулярной квадратной решётке без дефектов и с локализованным
дефектом, как на рис. 6.12. Покажите, что для линейного волново-
го уравнения даже слабые дефекты непрозрачны. Замечание: Теорема
6.7 не выполняется для линейного волнового уравнения, поскольку по-
следнее не содержит параметров, и следовательно не допускает пред-
ставления нулевой кривизны со спектральным параметром.
6.6. Опишите квад-поверхность Q<d в Z3, канонически отвечающую
дуальной решётке кагоме: охарактеризуйте вершины и рёбра Пц-
6.7. Восстановите детали в доказательстве Теоремы 6.14 о ЗП-совмест-
ности некоммутативного дискретного уравнения КдФ.
6.8. Докажите ЗП-совместность следующих уравнений с полями / в
ассоциативной алгебре Д:
а(/1 - /12 + /?)(/ -fl- «Г1 = /3(/2 ~ /12 + а)(/ - /2 - ЗГ1
6.17. Упражнения
(неабелева версия уравнения (Q1)<5=i ), и
(1 - а2)(Л - PhM - Л)-1 = (1 - /32)(Л - «ЫШ - АГ1
(неабелева версия уравнения (Q3),5=o). Совет: попытайтесь действо-
вать, как в доказательстве Теоремы 4.26, приведённом в Разделе 4.3.7,
или в доказательстве Теоремы 6.13.
6.9. Докажите, что для любого Q с 7$ многочлен Р, определённый
следующей формулой, также принадлежит
(Q QZ] Qx3 \
Qx3 Qz^2 Qt2X3 (6.146)
Qx& Qx^Xq Qx3Xj J
Будем называть его сопутствующим многочленом для Q.
6.10. * Найдите сопутствующий многочлен Р, определённый формулой
(6.146), для многочленов (Q1)-(Q4).
6.11. Покажите, что необходимое и достаточное условие ЗВ-совмест-
ности для уравнения
(/ - - /2) + fc(a,/3) = О
с кососимметрической функцией к(а, (3) = —к(/3, а) заключается в том,
что к(а. /3) = /3 — а, с точностью до точечных преобразований парамет-
ров.
6.12. Рассмотрим квад-уравнение
(х - - Ojjfxi - Oi)(xj - ej - (x - ег)(ту - о,)(^ - е7)(т^ - оД = О
с парой параметров (ег, о,) приписанных рёбрам г-го координатного на-
правления. Покажите, что это уравнение ЗП-совместно, но не обладает
свойством тетраэдральности. Проверьте, что его биквадратики на рёб-
рах вырождены, в согласии с Теоремой 6.22.
6.13. Покажите, что если отбросить условие невырожденности биквад-
ратик из Теоремы 6.25, то можно найти биквадратики с дискриминан-
тами Г1 (т), тДу) различных канонических типов. Докажите, что список
6. Совместность как интегрируемость
таких биквадратик, по модулю дробно-линейных преобразований, име-
ет вид:
Г1(ж) = х2 - 1, r2(j/) = у2 :
Г1(ж) = х, r2(y) = 1 :
Г1(я) = 1, r2(j/) = 0 :
9 1
h = ay ±ху +
h =
h = 7oJ/2+7U/ + 72, 71 -47о72 = 1-
6.14. Рассмотрим следующий список квад-уравнений:
(Н36)
a(ajiaj2 + 23^4) - £(2124 + 2223) + (а2
Л(<5 + ^)-0,
\ ар /
(Н2б) (Ж1 - хэ)(х2 - х4) + ((3 - а)(а?1 + х2 + х3 + 24) + (З2 - а2
+е(/3 — а)(222 + а + /3) (224 + а + /3) + е(/3 — а)^ = О,
(Н1б) (Ж1 - 23)(22 - х4) + (/3 - а)(1 + б2224) = 0.
Эти уравнения служат е-деформациями списка Н. Вычислите их би-
квадратики на рёбрах и многочлены четвёртой степени в вершинах, и
покажите, что они относятся к типам, рассмотренным в Упражнении
6.13. Проверьте, что эти уравнения обладают симметриями ромба
Q(xi,X2,X3,x4,a,(3) — -Q(x3,x2,x1,x4, /3,а) = -Q(x1,x4,x3,x2,/3,a),
переставляющими пары вершин одного цвета. Покажите, что каждое
из этих уравнений может быть распространено совместным образом на
многомерную решётку, если следить за раскраской вершин:
Q(x,Xi,X{j,Xj,ai,aj) =0,
Q(xtk, хк, Xjk, 21231 а-i, Qj) 0, A:} {1,2,3}.
При этом выполняется свойство тетраэдральности.
6.15. Проверьте трёхногие формы для квад-уравнений из списков Q,
Н из Теоремы 6.32.
6.16. * Докажите следующий рецепт для нахождения трёхногих форм
произвольного мультиаффинного уравнения Q(x4, х2, х3, х4) = 0: для
каждой перестановки (i,j,k,l) от (1,2, 3,4),
fij(Xi^Xj) + fik(Xi,Xk) + fil(Xi,Xi) = ф(х^, (6.147)
6.17. Упражнения
где
ftj(xi,Xj) = f .. -, hXj) = 6Xk,Xl (Q). (6.148)
J hi:i{Xi,Xj)
Это трёхногая форма уравнения Q = 0 центрированная в Xi. Мож-
но считать, что функция </>(хг) в правой части (6.148) возникает из
постоянных интегрирования для интегралов в левой части. Её можно
определить, рассматривая некоторое (на самом деле, любое) решение
уравнения Q = 0, сингулярное в Xi, для которого h]k = 0, hki = О,
М1 = 0.
6.17. * Используйте рецепт Упражнения 6.16, чтобы вывести трёхногие
формы уравнений из списков Q, Н.
6.18. * Для уравнений из списка Q можно вывести ЗП-совместность
из существования трёхногой формы. Пусть уравнение (6.36) допускает
симметрии (6.93), (6.94) и трёхногую форму (мультипликативную, для
определённости)
Ф(т1,х2;а)/Ф(т1,2;4;/?) = Ф(т1,т3;а - /3).
Докажите, что тогда оно ЗП-совместно.
6.19. * Рассмотрим следующее отображение с полями в ассоциативной
алгебре А с единицей:
!Х2 = (х — у)х(х — у)"1,
z (6-149)
У1 = (У - х)у(у - х) *.
Докажите его ЗВ-совместность в смысле Определения 6.34.
6.20. Определение (6.149) отображения F из предыдущего упражне-
ния переписывается в эквивалентном виде
Х2 + У = У1 + х, x2y = yix. (6.150)
Проверьте, что это отображение допускает дискретное представление
нулевой кривизны
L(x2, X)L(y, А) = L(?/i, A)L(rc, А)
6. Совместность как интегрируемость
с матрицами
L{x, А) = Al + х.
Можете ли вы вывести это представление нулевой кривизны, следуя
идеям Теорем 6.4, 6.36?
6.21. Рассмотрим специализацию отображения (6.149) или, эквива-
лентно, (6.150), на случай полей из алгебры Н кватернионов. Пока-
жите, что вещественные части кватернионов т, х2 равны, так же, как и
вещественные части кватернионов а мнимые части всех четырёх
кватернионов образуют (неплоский) четырёхугольник в R3 с проти-
воположными сторонами равной длины (чебышевский четырёхуголь-
ник). Иными словами, существуют а,/3 G R и /,/i,/2,/i2 G ImH =
= su(2) К3, такие что
х = al + (Л - /),
х2 = al + (/12 - /2),
У = /31 + (/2 - /),
У! = /31 + (/12 - /1),
1/12 -/2| = |/1 -/|, |/12-/1| = |/2-/|- (6-151)
Кроме того, выполняется соотношение
+ 1 дЛ/12 -/) X (/2 -/1), (6.152)
2(а - р)
определяющее коэффициент пропорциональности между векторами
/12-/1 - /2 + / и (/12 - /) X (/2 - /1); эти векторы параллельны в
силу
(/12 ~ /1 - /2 + /> /12 - /) — (/12 - /1 - /2 + /, /2 - /1) — 0,
что эквивалентно соотношениям (6.151). Из ЗИ-совместности отоб-
ражения (6.149) вытекает ЗВ-совместность уравнения (6.152) с По-
значными полями в вершинах, если а, /? рассматривать, как веществен-
нозначную разметку рёбер.
6.22. Проверьте (вручную, или при помощи системы компьютерной
алгебры), что отображения из Теоремы 6.38 удовлетворяют соотноше-
нию Янга-Бакстера.
6.23. Постройте представления нулевой кривизны для отображений
Янга-Бакстера из Теоремы 6.38, основываясь на Теореме 6.36.
6.17. Упражнения
6.24. Рассмотрим пучок коник, имеющих тройное касание в точке
(Wi : ИЛ2 : 1Г3) = (0 : 1 : 0) (в однородных координатах на СР2).
Коники этого пучка и их рациональная параметризация задаются (в
неоднородных координатах) формулами
Q(a): W2 — W2 — а = 0, Х(х) = (ТУДт), W2(z)) = (т, х2 + а).
Проверьте, что если Qi — Q(a), Q2 = Q(J3), то отображение У, опреде-
лённое на (6.131), задаётся в координатах отображением Fy из Теоремы
6.38.
6.25. Рассмотрим пучок коник, проходящий через четыре точки О =
= (0,0), (0,1), (1,0), (1,1) 6 СР2, в неоднородных координатах (ИД, W2)
на С2, аффинной части СР2 (любые четыре точки в СР2, никакие три
из которых не лежат на прямой, можно перевести в эту четвёрку про-
ективным преобразование). Коники этого пучка описываются уравне-
нием
Q(a) : 1У2(ИД - 1) = аИД(ИД - 1).
В качестве рациональной параметризация этих коник можно принять,
например
ВД = (тед, иад) = (4=^,
'х — а х — а /
Здесь параметр х имеет интерпретацию углового коэффициента пря-
мой (ОХ). Значения х для четырёх точек локуса пучка Q(a) равны
х = а,оо,0 и 1. Покажите, что если Qi = Q(a), Q2 = Q(0), то отоб-
ражение Э", определённое в (6.131), задаётся в координатах формулами
Fi из Теоремы 6.38.
6.26. Геометрическим содержанием дискретного уравнения Мутара
Xij — х = aij(xj — х^ является параллелизм прямых (xxij) и (xiXj).
Следовательно, имеется, в принципе, четыре способа ввести поле ач,
как коэффициент пропорциональности между двумя рассматриваемы-
ми векторами: ±aij и ±1/0^. Докажите, что можно так ввести поля аг]
для шести двумерных координатных направлений в Z4, что все четыре
отображения в (6.136) будут задаваться формулами (6.137).
6.27. * Проверьте следующий 3D аналог представления нулевой кри-
визны для отображения (6.137):
Г2з(с)Ь1з(6)Ь12(а) = -^12(а3)Г13(Ь2)Г2з(с1),
6. Совместность как интегрируемость
Рис. 6.33. Уравнения на треугольниках.
где
/ —а 1 — а 0\ / — b 0 1 — б\
£12(0) = I 1 + о о 0 | , = I 0 1 0 | ,
\ О 0 1/ \1 + Ь о ь /
Л о о \
Z/23(с) = 0 -с 1 - с .
уО 1 + с с /
Можете ли вы вывести это представление?
6.28. Рассмотрим систему линейных уравнений
Х2 — х = a(xi — х), хз — х = b(xi — х) (6.153)
для скалярной функции х на Z3. Уравнения в (6.153), так же как ко-
эффициенты а, Ь, естественно приписывать к треугольникам; см. рис.
6.33. Покажите, что совместность этих уравнений гарантируется сле-
дующими уравнениями на коэффициенты а, Ь:
(а3 - 1)(Ь - 1) = (Ь2 - 1)(а - 1), a36i = 62ai, (6.154)
что следует понимать, как отображение (a, ai,b, bi) ь-> (03,62)- Кор-
ректные начальные данные для такого отображения могут быть зада-
ны на поверхности, изображённой на рис. 6.34.
6.17. Упражнения
Рис. 6.34. Начальные данные для системы (6.154).
Покажите, что, в силу второго уравнения (6.154), существует ска-
лярная функция f на Z3, такая что а = /2/Л, Ъ = /з/fi- и что эта
функция удовлетворяет уравнению
— + ~ Г 1 = 0. (6.155)
J23 /13
Функция х на Z3 удовлетворяет уравнению с мулъти-отношением, из-
вестным также, как дискретное шварцево уравнение КП:
(ti - Ж12)(т2 - £2з)(£з - из) = (6 156)
(т12 - т2)(т2з - £з)(£13 ~ И)
Дайте геометрическую интерпретацию уравнений (6.153), (6.156) (Со-
вет: эти уравнения кодируют конфигурацию Менелая). Можете ли вы
найти линейную систему типа (6.153), которая привела бы к так назы-
ваемому билинейному уравнению на октаэдре (или билинейному урав-
нению Хироты, или дискретному уравнению КП):
^1^23 + ^2г13 + ^зг12 = 0 ? (6.157)
Естественно называть уравнения типа (6.155), (6.156), (6.157), не содер-
жащие поля в вершинах х и Игз элементарного куба, октаэдрическими
уравнениями, в отличие от общих уравнений на кубе (6.138).
6.29. Октаэдрические уравнения (6.155), (6.156), (6.157) обладают
свойством 4П-совместности определённого рода. Эти уравнения вво-
дятся для трёх трёхмерных координатных направлений (zj4):
£12 = /(£1,£2,£4,£14,£24),
£13 = s(£i, £3, £4, £14, £34), (6.158)
£23 = h(x2, £3, £4, £24, £34)-
6. Совместность как интегрируемость
По сравнению с обычной 4В-совместностью уравнений на кубе, в этой
системе вершины х и Xij4 не появляются, и рассматриваются только
три уравнения. Проверьте, что справедливо следующее свойство: урав-
нения
£123 = /(ff, h, Т34, д, h) = g(f, h, x24, f, h) = h(f, g, x14, f, 5), (6.159)
выполняются тождественно относительно 11 независимых переменных
(выбранных в качестве начальных данных):
3* 11 ^2 j ^3 ? ^4 j 14 j ^24 •> ^34» ^441 144 > *^244 j *^344 *
В уравнении (6.159) “шляпка” обозначает сдвиг в 4-м направлении:
f = Titf) = /(Т14,Т24,^44>Т144,Т244)> И Т.Д..
Проверьте также, что для каждой из рассматриваемых систем выпол-
няется уравнение вида
fc(a?i2,Ti3,T23,2:14,T24,2:34) = 0. (6.160)
Например, для уравнения (6.156) имеем
(Х14 — Т12)(Т24 — Т2з)(тз4 — Т1з) _
(Х12 — Т24)(Т23 — Тз4)(Т13 — Л14)
6.18. Библиографический комментарий
Разделы 6.1, 6.2: Непрерывные и дискретные интегрируемые
системы. Теория интегрируемых систем (называемая также теори-
ей солитонов) является обширной областью в математической физи-
ке с богатой литературой. Темы различных публикаций в этой об-
ласти варьируются от алгебраической геометрии, перечислительной
топологии, статистической физики, квантовых групп и теории уз-
лов до приложений в нелинейной оптике, гидродинамике и космо-
логии. Приведём подборку математических монографий (в хроноло-
гическом порядке): (Toda 1978), (Novikov-Manakov-Pitaevskii-Zakharov
1980), (Ablowitz-Segur 1981), (Calogero-Degasperis 1982), (Newell 1985),
(Faddeev-Takhtajan 1986), (Ablowitz-Clarkson 1991), (Dubrovin 1991),
(Matveev-Salle 1991), (Hirota 1992), (Korepin-Bogoliubov-Izergin 1992),
(Belokolos-Bobenko-Enol’skii-Its-Matveev 1994), (Hitchin-Segal-Ward
6.18. Библиографический комментарий
1999), (Kupershmidt 2000). (Rogers-Schief 2002), (Babelon-Bernard-Talon
2003), (Reyman-Semenov-Tian-Shansky 2003), (Suris 2003), (Dubrovin-
Krichever-Novikov 2004), (Fokas-Its-Kapaev-Novokshenov 2006).
Относительно основного конкретного примера в этих разделах,
уравнения синус-Гордона: преобразование Бэклунда было найдено в
(Backlund 1884); теорема перестановочности принадлежит (Bianchi
1892). Представление нулевой кривизны найдено в (Ablowitz-Kaup-
Newell-Segur 1973) и (Takhtajan 1974). Формула погружения для по-
верхностей постоянной отрицательной гауссовой кривизны в терминах
репера получена в (Sym 1985). Дискретизация (6.12) уравнения синус-
Гордона вместе с её преобразованием Бэклунда принадлежат (Hirota
1977b). Геометрическая интерпретация обнаружена в (Bobenko-Pinkall
1996а).
Разделы 6.3, 6.4, 6.5: Интегрируемые системы на графах. На-
ше изложение общей теории интегрируемых систем на графах следу-
ет (Bobenko-Suris 2002а). Примеры интегрируемых систем на регуляр-
ной треугольной решётке рассматривались в (Adler 2000), (Bobenko-
Hoffmann-Suris 2002) и (Bobenko-Hoffmann 2003). Фундаментальная
роль квад-графов для дискретной интегрируемости была понята в
(Bobenko-Suris 2002а).
Другой подход к интегрируемым системам на графах был разра-
ботан Новиковым с соавторами. В частности, преобразования Лапласа
на графах изучались в (Dynnikov-Novikov 1997), теория дискретных
операторов Шрёдингера на графах была развита в (Novikov 1999а,b),
теория рассеяния на деревьях принадлежит (Krichever-Novikov 1999).
Sections 6.6, 6.7: От ЗБ-совместности к представлениям нуле-
вой кривизны и преобразованиям Бэклунда. Идея совместности
является ключевой в теории интегрируемых систем. Она появляется
уже в самом определении полной интегрируемости гамильтонова по-
тока в смысле Лиувилля-Арнольда, которое означает, что поток до-
пускает вложение в полное семейство коммутирующих (совместных)
гамильтоновых потоков; см. (Arnold 1989). В дискретном контексте (d+
+ 1)-мерная совместность d-мерных уравнений отмечалась многократ-
но. В случае d — 1 она была использована как возможное определение
интегрируемости отображений в (Veselov 1991). Чёткая формулиров-
ка в случае d = 2 была дана в (Nijhoff-Walker 2001). Решающий шаг
был сделан независимо в (Bobenko-Suris 2002а) и (Nijhoff 2002): бы-
ло показано, что существование представления нулевой кривизны для
двумерных систем следует из трёхмерной совместности.
6. Совместность как интегрируемость
Раздел 6.8: Геометрия граничных задач для интегрируемых
двумерных уравнений. Обсуждение задачи Коши на квад-графах в
подразделе 6.8.1 следует (Adler-Veselov 2004). Вложение квад-графов в
кубические решётки, как чисто комбинаторная задача, было изучено
в более общей постановке для произвольных кубических комплексов в
(Dolbilin-Stan’ko-Shtogrin 1986, 1994) и (Shtan’ko-Shtogrin 1992). Теоре-
ма 6.8 принадлежит (Kenyon-Schlenker 2004). Понятие квазикристалли-
ческих ромбических представлений и распространение на многомерные
решётки из подраздела 6.8.2 принадлежит (Bobenko-Mercat-Suris 2005).
Отметим, что пересечения Q© с брусками отвечают комбинаторно вы-
пуклым подмножествам D, определенным в (Mercat 2004).
Раздел 6.9: ЗО-совместные уравнения с некоммутативными
полями. Понятие SD-совместности в некоммутативном варианте вве-
дено в (Bobenko-Suris 2002b), где приведён также вывод представления
нулевой кривизны. Дальнейшие примеры, принадлежащие Адлеру и
Соколову, приведены в (Adler-Bobenko-Suris 2009). Дискретное уравне-
ние Калапсо (6.63) вместе с представлением нулевой кривизны появи-
лось в (Schief 2001).
По некоммутативным интегрируемым системам имеется обширная
литература. Одним из фундаментальных результатов в теории кван-
товых интегрируемых систем с дискретным пространством-временем
является квантование системы Хироты в (Faddeev-Volkov 1994). Систе-
матическое изложение некоммутативных интегрируемых систем дано в
(Kupershmidt 2000). Ссылки на дискретные некоммутативные системы
включают (Matveev 2000), (Nimmo 2006), (Schief 2007).
Разделы 6.10, 6.11, 6.12: Классификация дискретных интегри-
руемых двумерных систем с полями в вершинах. Классифи-
кация дискретных интегрируемых 2D систем, основанная на понятии
ЗВ-совместности была получена в (Adler-Bobenko-Suris 2003, 2009). В
первой из этих статей рассматривались уравнения, обладающие куби-
ческой симметрией и свойством тетраэдральности (Теоремы 6.27). В
разделах 6.10, 6.11 представлена классификация из второй статьи, по-
лученная при гораздо более слабых предположениях (Теоремы 6.18,
6.19).
Уравнения (H3)f=o и (Н1) являются, вероятно, старейшими в спис-
ке; их можно найти в работе (Hirota 1977a,b). Уравнения (Q1) и (Q3)i5=0
восходят к (Quispel-Nijhoff-Capel-Van der Linden 1984). Уравнение (Q4)
было найдено в (Adler 1998) (для эллиптической кривой в форме
Вейерштрасса). Форма уравнения в нормировке Якоби принадлежит
6.18. Библиографический комментарий
(Hietarinta 2005). Уравнения (Q2), (Q3)d=i, (Н2) и (H3)j=i в явном ви-
де впервые появились в (Adler-Bobenko-Suris 2003).
Основное уравнение (Q4) было исследовано в работе (Adler-Suris
2004), где была раскрыта его связь с различными двумерными инте-
грируемыми системами. Специальные решения для этого уравнения
были найдены в (Atkinson-Hietarinta-Nijhoff 2007). Симметрии квад-
уравнений из приведённых списков были изучены в (Papageorgiou-
Tongas-Veselov 2006) и (Rasin-Hydon 2007).
ЗВ-совместное уравнение без свойства тетраэдральности было най-
дено в (Hietarinta 2004). В (Ramani-Joshi-Grammaticos-Tamizhmani
2006) было показано, что оно линеаризуемо. Его геометрическая ин-
терпретация приведена в (Adler 2006).
Раздел 6.13: Интегрируемые дискретные уравнения типа Ла-
пласа. Связь дискретных (гиперболических) систем на квад-графах
с (эллиптическими) уравнениями типа Лапласа была обнаружена в
(Bobenko-Suris 2002). Примеры уравнений типа Лапласа на графах по-
явились ранее в (Adler 2001). Трёхногие формы интегрируемых квад-
уравнений были найдены в (Adler-Bobenko-Suris 2003) (с формулой для
(Q4) в нормировке Вейерштрасса). В (Adler-Suris 2004) трёхногая фор-
ма (Q4) была использована для вывода эллиптических систем типа
Лапласа на графах.
Раздел 6.14: Отображения Янга-Бакстера были введены в (Drin-
feld 1992) под названием теоретико-множественных решений урав-
нения Янга-Бакстера. Термин “отображения Янга-Бакстера” вместо
“теоретико-множественных решений” предложен в работе (Veselov
2003), где изучались различные определения интегрируемости, в част-
ности, строились коммутирующие отображения монодромии и обсуж-
дались представления нулевой кривизны. Общая конструкция пред-
ставлений нулевой кривизны (Теоремы 6.36) была дана затем в (Suris-
Veselov 2003). Хороший обзор этой темы имеется в (Veselov 2007).
Отображение Примера 1 появилось впервые в (Adler 1993). Пример
2 изучался в (Goncharenko-Veselov 2004) вместе с более общими отоб-
ражениями Янга-Бакстера на грассманианах. Пример 3 исследовался
в (Noumi-Yamada 1998) и (Etingof 2003).
Раздел 6.15: Классификация отображений Янга-Бакстера.
Квадрирациональное отображения Янга-Бакстера были введены и про-
классифицированы в (Adler-Bobenko-Suris 2004). Относительно пучков
коник, использованных в этой классификации, можно прочитать, на-
пример, в (Berger 1987).
6. Совместность как интегрируемость
Раздел 6.16: Дискретные интегрируемые трёхмерные систе-
мы. В литературе появлялись различные алгебраические структуры,
связанные с интегрируемостью дискретных систем в высших размер-
ностях. Роль, которую в двумерном случае играет представление ну-
левой кривизны, в трёхмерном случае принадлежит так называемому
локальному уравнению Янга-Бакстера, введённому в (Maillet-Nijhoff
1989). Некоторые трёхмерные системы, обладающие этой структурой,
были найдены в (Kashaev 1996). Функциональное уравнение тетраэдра
введено в (Kashaev-Korepanov-Sergeev 1998) как одна из версий 4D-
совместности. Отметим, что, в отличие от формулы (6.136), обозначе-
ния в этой статье используют индексы 1 г, j, к 6 в Sijk для нумера-
ции двумерных координатных плоскостей. Эта статья содержит также
список решений этого уравнения, обладающих локальным представ-
лением Янга-Бакстера при некоторых предположениях относительно
структуры участвующих в нём тензоров.
Дискретная система Дарбу была выведена в (Bogdanov-Konopel-
chenko 1995). Тот факт, что отображение звезда-треугольник удо-
влетворяет функциональному уравнению тетраэдра, был отмечен в
(Kashaev 1996). В дискретной дифференциальной геометрии отобра-
жение звезда-треугольник появилось в (Konopelchenko-Schief 2002а).
Дискретное уравнение ВКР введено в (Miwa 1982). Его форма в ви-
де уравнения с двумя двойными отношениями принадлежит (Nimmo-
Schief 1997). 4Б-совместность была отмечена в (Adler-Bobenko-Suris
2003). Теорема 6.47 принадлежит (Tsarev-Wolf 2007).
Первые работы по квантованию дискретной дифференциальной
геометрии появились недавно. Квантовые версии дискретной системы
Дарбу и её редукции на циркулярные сети были изучены в (Sergeev
2007) и (Bazhanov-Mangazeev-Sergeev 2008). Квантование циркулярных
решёток предложено в (Bazhanov-Mangazeev-Sergeev 2007).
Раздел 6.17: Упражнения.
Упр. 6.8: Этот результат принадлежит Адлеру и Соколову; см.
(Adler-Bobenko-Suris 2009).
Упр. 6.9, 6.10, 6.11: см. (Adler-Bobenko-Suris 2003).
Упр. 6.12: см. (Hietarinta 2004).
Упр. 6.13: см. (Adler-Bobenko-Suris 2009).
Упр. 6.14: см. (Adler-Bobenko-Suris 2009) и (Atkinson 2008).
Упр. 6.16: неопубликованный результат Адлера.
Упр. 6.18: см. (Adler-Suris 2004).
6.18. Библиографический комментарий
Упр. 6.19: в полной общности этот результат, по-видимому, явля-
ется новым.
Упр. 6.20, 6.21: см. (Hoffmann 2008), (Schief 2007) и (Pinkall-Spring-
born-WeiBmann 2007).
Упр. 6.25: см. (Adler-Bobenko-Suris 2004). Отображение Fi возни-
кало, в другом контексте, также в (Tongas-Tsoubelis-Xenitidis 2001).
Упр. 6.27: см. (Kashaev-Korepanov-Sergeev 1998).
Упр. 6.28: близкие результаты содержатся в (Konopelchenko-Schief
2005).
Упр. 6.29: из текущей работы с Адлером.
Глава 7
Дискретный комплексный анализ.
Линейная теория
7.1. Основные понятия дискретного комплексного
анализа
Многие конструкции дискретного комплексного анализа парал-
лельны дискретной дифференциальной геометрии в пространстве ве-
щественной размерности 2.
Напомним, что гармоническая функция и : R2 ~ С —> К характе-
ризуется соотношением
Д“ = й + Й = °-
дх ду
Сопряжённая гармоническая функция v : R2 ~ С —> R определяется
уравнениями Коши-Римана
ди _ ди ди_ _ ди
ду дх ’ дх ду
Это эквивалентно тому, что функция / = u + w:R2~C—>С голо-
морфна, то есть удовлетворяет уравнению Коши-Римана
д£ = .д£
ду г дх'
Вещественная и мнимая части голоморфной функции являются гар-
моническими, и любую вещественнозначную гармоническую функцию
можно рассматривать, как вещественную часть голоморфной функции.
Стандартный классический способ дискретизации этих понятий
заключается в следующем. Функция и : Z2 —> R называется дискрет-
ной гармонической, если она удовлетворяет дискретному уравнению
7.1. Основы ДИСКРЕТНОГО КОМПЛЕКСНОГО АНАЛИЗА
Рис. 7.1. Регулярная квадратная решётка и её дуальная.
Лапласа
— ^тп+1,п “Ь 1,п ^тп,п+1 “Ь ^т,п- 1 ^^т,п — О*
Естественной областью определения сопряжённой дискретной гармо-
нической функции v : (Z2)* —> R является дуальная решётка-, см. рис.
7.1. Определение дискретных уравнений Коши-Римана выглядит сле-
дующим образом:
vm+l/2,n+l/2 — ^m+l/2,n —1/2 = ^т+1,п — ^т,ти
^m+l/2,n+l/2 — vm —1/2,п —1/2 = (^m,n+l — ^т,п),
с естественной нумерацией на дуальной решётке; ср. рис. 7.2. Соот-
ветствующая дискретная голоморфная функция f : Z2 U (Z2)* —> С
определяется на объединении исходной квадратной решётки Z2 и её
дуальной (Z2)*, согласно формуле
/= ( U’ *’
заменяющей непрерывную версию f = и + iv. Замечательно, что дис-
кретное уравнение Коши-Римана для f задаётся одной и той же фор-
мулой
fm,n+l/2 fm,n —1/2 ^(Ут+1/2,п fm—1/2,п)
на каждом из двух квадратов, показанных на рис. 7.3.
7. Дискретный линейный комплексный анализ
«1
I
ио •-----------!------• U1
I
6 v0
U1
и0
«1 - v0 = Ui - и0 V1-Vo = -(ui - u0)
Рис. 7.2. Дискретные уравнения Коши-Римана в терминах и, v.
fi-f2= i(f3 ~ /i)
Рис. 7.3. Дискретные уравнения Коши-Римана в терминах f.
Данная дискретизация уравнений Лапласа и Коши-Римана, оче-
видно, сохраняет большую часть важных структурных свойств. Её
обобщение на произвольные графы даётся следующим образом.
Дискретные гармонические функции можно определить на произ-
вольном графе 9 с множествами вершин У(9) и рёбер Е(9).
Определение 7.1. (Дискретный лапласиан и дискретные гар-
монические функции) Пусть на рёбрах 3 задана весовая функция
и : E'(S) —> ®+, тогда дискретный лапласиан определяется как опера-
тор, действующий на функциях / : К(9) —> С согласно формуле
(Д/)(т0) = м(т0,т)(/(т)-/(т0)), (7.1)
где суммирование распространяется на вершины х, связанные с х0 по
ребру. Функция f : У(9) —> С называется дискретной гармонической
(относительно весов и) если = 0.
7.1. Основы ДИСКРЕТНОГО КОМПЛЕКСНОГО АНАЛИЗА
Положительность весов и в этом определении важно с аналитиче-
ской точки зрения, так как она гарантирует, например, принцип мак-
симума для дискретного лапласиана при надлежащих граничных усло-
виях (так что дискретные гармонические функции минимизируют вы-
пуклый функционал). Однако, с чисто алгебраической точки зрения,
можно иногда рассматривать и произвольные вещественные (или даже
комплексные) веса.
Пусть граф S возникает как клеточное разбиение ориентированной
поверхности, S* его дуальный граф, а квад-граф D их дубль; см. Раздел
6.4. Весовая функция продолжается на рёбра S* по правилу
1/(е*) = 1/м(е). (7.2)
Определение 7.2. (Дискретные уравнения Коши-Римана и
дискретные голоморфные функции) Функция f : V(D) —> С на-
зывается дискретной голоморфной (относительно весов и), если
~ f(.yo) . , , 1
— —— = гм(т0, Ti) = - —------------ (7.3)
/(т1)-/(т0) гКУо,У1)
для любого положительно ориентированного четырёхугольника (т0, уо
х1гУ1) € P’(D) (см. рис. 7.4). Эти уравнения называются дискретны-
ми уравнениями Коши-Римана.
Рис. 7.4. Положительно ориентированный четырёхугольник, с
разметкой направленных рёбер.
Соотношение между дискретными гармоническими и дискретны-
ми голоморфными функциями то же самое, что и в непрерывном
случае. Оно сформулировано в следующем утверждении, являющем-
ся частным случаем Теоремы 6.31.
7. Дискретный линейный комплексный анализ
Теорема 7.3. (Связь между дискретными гармоническими и
дискретными голоморфными функциями)
а) Если функция f : V(D) —> С дискретная голоморфная, то её
ограничения на V(S) и ^(S*) являются дискретными гармонически-
ми.
Ь) Наоборот, любая дискретная гармоническая функция f :
V(S) —> С допускает семейство дискретных голоморфных расшире-
ний на V(D), отличающихся на V(S*) аддитивной постоянной. Такое
расширение однозначно определяется значением в одной произвольной
вершине у G V(S*)-
7.2. Преобразование Мутара для дискретных
уравнений Коши-Римана
Заметим, что дискретные уравнения Коши-Римана (7.3) формаль-
но не отличаются от уравнений Мутара (2.51) для Т-сетей. Нужно
лишь зафиксировать ориентацию на всех четырёхугольных гранях
(т0, уо, %i, yi) G F(D). Мы будем считать, что она наследуется из ори-
ентации исходной поверхности.
После этого к дискретным голоморфным функциям можно при-
менять преобразование Мутара из Раздела 2.3.9. Для этого нуж-
но выбрать ориентацию всех элементарных четырёхугольников на
рис. 7.5. Это можно сделать, например, так: для четырёхугольников
(zj, уд", х+, у+) G F(D+) выберем ту же ориентацию, что и у соответ-
ствующих (tq,уо,ti,yi) € Е(Т). Для “вертикального” четырёхуголь-
ника над ребром (х, у) G Е(Т>) примем, что х G V(S), У G V(S*), и
выберем положительную ориентацию, отвечающую циклическому по-
рядку (х,у,у+ ,х+) его вершин. Отметим, что при таком соглашении
два противоположных “вертикальных” четырёхугольника всегда име-
ют разную ориентацию.
Для случая произвольного квад-графа нужно обобщить ещё один
ингредиент преобразования Мутара, а именно данные (МТ^).
Теорема 7.4. (Преобразование Мутара для дискретных голо-
морфных функций) Для произвольного двудольного квад-графа D,
корректные начальные условия для преобразование Мутара дискрет-
ных уравнений Коши-Римана состоят из
(MCR.A) значения f+ в одной точке т(0) € К(В);
7.2. Преобразование Мутара для уравнений Коши-Римана
Рис. 7.5. Элементарный куб D.
(MCRA) значений весов на “вертикальных" четырёхугольниках (х, у,
у+,т+) приписанных ко всем рёбрам {х,у} вдоль пути Коши на Т>.
В Теореме 6.6 приводятся необходимые и достаточные условия то-
го, чтобы путь на графе являлся путём Коши, то есть поддерживал
начальные данные для корректно поставленной задачи Коши. Есте-
ственно приписывать веса на “вертикальных” четырёхугольниках со-
ответствующих рёбрам D.
Веса у на гранях D вместе с данными (MCR^) определяют преоб-
разованные веса у+ на гранях D+, а также веса на всех рёбрах -E(D).
Это можно рассматривать, как преобразование Мутара для уравнений
Коши-Римана на D. Построение решения f : V(D+) —> С преобразо-
ванных уравнений требует дополнительно задания (MCR^).
Отметим, что система весов у сильно избыточна, согласно (7.2).
Чтобы зафиксировать принцип, по которому выписываются уравне-
ния, будем придерживаться весов, приписанных “чёрным” диагоналям
четырёхугольных граней комплекса D. На нижнем этаже они совпада-
ют с рёбрами “чёрного” графа S; на следующем этаже это рёбра “чёр-
ного” графа, являющегося копией S*; для “вертикальных” граней это
рёбра вида (х, у+) с х € V(S) и у G V(S*)- Само собой, в последнем слу-
чае веса можно приписать рёбрам квад-графа (х, у) € E(D). Итак, мы
записываем дискретные уравнения Коши-Римана следующим образом:
/(У1) - /(Уо) = г^(т0,Т1)(/(т1) - /(т0)), (7.4)
f&o ) - ) = НУо’. У1 ) (/(У1") - ЯУо )) > (7-5)
/(т+) - /(у) = гу(т, у+)(/(у+) - /(т)). (7.6)
7. Дискретный линейный комплексный анализ
Для краткости обозначим
z/ = 1/(10,11), Z/+ = г/(у^,у+), Mjfc = )•
Веса 1/, моо и До1 можно рассматривать как входные данные для пре-
образования Мутара на элементарном шестиграннике в D, тогда на
выходе получаем веса i/+, дю и дц, заданные формулами (ср. (2.59))
р+i/ = -дпдоо = —MioMoi = (7-7)
Moo — Moi — v
Это преобразование корректно определено для вещественных весов 1/,
но оно не сохраняет, вообще говоря, положительность весов и.
Чтобы дать другую форму этого преобразования, заметим что
из соотношения дцДоо = MioMoi для каждого элементарного четы-
рёхугольника (т0, уо, ii, 1/1) в D следует существование функции в :
V(D) —> С, определённой с точностью до постоянного множителя, та-
кой что ipjk = 9{yk)/6{xj) (см. Упражнение 7.1). Кроме того, видно,
что если выбрать 0(то) вещественным в некоторой точке хо € V(S),
то 9 принимает вещественные значения на V(9) и чисто мнимые на
V(S*). Несложное вычисление показывает, что последнее уравнение в
(7.7) эквивалентно
0(У1) - 0(Уо) = ггх(щ0,Щ1)(0(a;i) - 0(то)),
так что функция 9 дискретная голоморфная относительно весов р. Для
преобразованных весов и+ имеем:
9(х0)9(х1У
Наоборот, произвольная дискретная голоморфная функция 9 : V(D) —>
С определяет, посредством (7.8), преобразование Мутара для дискрет-
ных уравнений Коши-Римана. Следует отметить, что данные (MCR^)
можно переформулировать в терминах функции 9\
(MCR.A) значения 9 во всех вершинах вдоль пути Коши на D.
Замечание. Преобразование Мутара для дискретных уравнений Коши-
Римана порождает, при ограничении на “чёрные” графы, своего рода
преобразование Дарбу произвольных дискретных лапласианов на 3 в
дискретные лапласианы на S*.
7.3. Интегрируемые дискретные уравнения Коши-Римана
7.3. Интегрируемые дискретные уравнения
Коши-Римана
Обратимся теперь к полезному вопросу о “неподвижных точках”
преобразования Мутара, обсуждавшемуся в предыдущем разделе. Точ-
нее, это вопрос о том, каким условиям должны удовлетворять веса
v : 75(3) —> R-н чтобы существовало преобразование Мутара, для кото-
рого противоположные грани любого элементарного шестигранника в
D (см. рис. 7.5) отвечали идентичным уравнениям.
Теорема 7.5. (Интегрируемость дискретных уравнений Коши-
Римана) Система дискретных уравнений Коши-Римана с весовой
функцией и : £7(3) LJ £7(3*) —> удовлетворяющей (7.2) допускает
преобразование Мутара в себя тогда и только тогда, когда для всех
х0 6 V(S) и всех у0 & V(S*) выполнены следующие условия:
п
e6star(zo;S)
1 + ii/(e)
1 — ii/(e)
= 1,
п
e*estar(j/0:S*)
1 +it/(e*)
1 - w(e*)
= 1.
(7.9)
Доказательство. Противоположным граням D и D+ отвечают одина-
ковые уравнения, если v+v = 1, в (7.7). Ясно, что отсюда следует так-
же МпМоо — MioMoi = — 1, что означает, что противоположные “верти-
кальные” грани также отвечают идентичным уравнениям (напомним,
что противоположные “вертикальные” грани имеют различную ориен-
тацию). Кроме того, при заданном и = v(xq,x\) для элементарного
четырёхугольника (xq, уо, zi, тд) на D, мы находим, что входные дан-
ные доо, дм преобразования Мутара должны быть связаны следующим
образом:
^MooMoi _ Моо -17
— 1 MOI — । 1
Moo — Moi ~ v Moo17 + 1
1
v
— v
1
[Moo],
где использовано стандартное обозначение для действия PGL(2, С) на
С посредством преобразований Мёбиуса. Это означает, что все веса на
вертикальных гранях “стационарного” преобразования Мутара полно-
стью определяются по одному из них, так что такие преобразования об-
разуют однопараметрическое семейство. Чтобы вывести условие на г/,
гарантирующее существование “стационарного” преобразования Мута-
ра, рассмотрим цветок из четырёхугольников (zq,Ук-i,х*, Ук) с общей
7. Дискретный линейный комплексный анализ
вершиной хо 6 V(9) (см. рис. 6.5). Имеем, в естественных обозначени-
ях:
Mo,fc-i ~ ук /1 -щД г ,
Mo,fc = 7---„ । 1 = 1 Mo,fc-i •
Обход вокруг а?о должен для каждого ц00 привести к тому же значению,
то есть матричное произведение
(— ГТ ( 1 “'''Л
(В A J 11 (г/fc 1 J
должно быть пропорционально единичной матрице. Это матричное
произведение легко вычисляется (см. Упражнение 7.2):
А = + В= 2i ( П/1 + ~ IL1 “ ’
к к к к
и условие В = 0 эквивалентно первому равенству в (7.9). Второе усло-
вие в (7.9) доказывается аналогично, при рассмотрении цветка четы-
рёхугольников вокруг у0 е V(S*)- □
Итак, существование “стационарного” преобразования Мутара вы-
деляет специальный класс дискретных уравнений Коши-Римана, ко-
торые следует рассматривать, как 2D системы со свойством 3D-
совместности; см. Раздел 6.7. Иначе говоря, такие уравнения Коши-
Римана следует называть интегрируемыми. Основное отличие от при-
меров из Раздела 6.7 заключается в том, что дискретные уравнения
Коши-Римана естественным образом зависят от ориентации элемен-
тарных четырёхугольников, и что их параметры о, очевидно, ассоции-
руются не с рёбрами квад-графа, а с диагоналями граней.
Условие интегрируемости (7.9) допускает красивую геометриче-
скую интерпретацию. Удобно (особенно для положительной веществен-
нозначной функции г/) использовать обозначение
i/(e) = tan 0(e) 6 (0, тг). (7-10)
Условие i/(e*) = l/i^(e) переписывается в виде
0(е*) = д - 0(e),
(7.11)
7.3. Интегрируемые дискретные уравнения Коши-Римлиа
тогда как условие (7.9) означает, что для всех то G V(S) и всех у0 6
У(3*) выполнены соотношения
П ехр(г</>(е)) = 1, Ц ехр(г</>(е*)) = 1. (7.12)
e6star(zo;S) e'£star(i/o;S*)
Эти условия следует сравнить с условиями, характеризующими углы
ф : E(S) LJ E(S*) —> (0, тг) ромбического представления квад-графа D,
которое состоит из (7.11) и
52 ф(е) = 2тг, 52 </>(е*) = 2тг, (7.13)
e€star(zo;S) е'6star(y0;S*)
для всех То € V(S) и всех уо G У(8*)- Итак, условие интегрируемости
(7.12) гласит, что система углов ф : E(S) U Е(8*) —> (0, тг) возникает
из ромбической реализации квад-графа ® в С. Цветки в таком пред-
ставлении могут закручиваться вокруг своих вершин больше одного
раза.
Ещё одна формулировка условий интегрируемости даётся в терми-
нах рёбер ромбических реализаций.
Теорема 7.6. (Интегрируемые уравнения Коши-Римана в тер-
минах ромбических рёбер) Условие интегрируемости (7.9) для ве-
совой функции v : £?(S)u£?(S*) —> R+ эквивалентно следующему: су-
ществует разметка направленных рёбер D, в : ECD) —> S1, такая
что, в обозначениях рис. 7.4,
1/(т0,Т1) = —-—7 = п° , п1 (7-14)
v(.yo,yi) 0о + 01
При выполнении этого условия, SD-совместность дискретных урав-
нений Коши-Римана гарантируется при следующих значениях весов
v на диагоналях вертикальных граней D:
г/(т,у+) =г|-^, (7.15)
где 0 = 0(т, у) и A G С произвольное число, интерпретируемое как
метка, приписанная всем вертикальным рёбрам в D: А — 0(х,х+) =
= в(У,У+)-
7. Дискретный линейный комплексный анализ
Итак, интегрируемые дискретные уравнения Коши-Римана можно
записать с параметрами, приписанными направленным рёбрам D:
/(У1) ~ /(Уо)
/(^1) - f&0)
01 ~ 0Q
01 + 0р ’
(7-16)
где
0о =р(Уо) - PM =p(rci) -p(i/i), 01 =р(г/1) ~р(х0) =p(zi) -р(уо),
и р : V(S) —> С ромбическая реализация квад-графа D. Так как
01 - 0р = Р(У1) -р(Уо)
01+0Q p(aii) - р(х0У
то мы видим, что для дискретной голоморфной функции f : V(S) —> С
отношение диагоналей в /-образе любого четырёхугольника (tq, уо, ад,
Ух) € F(D) равно отношению диагоналей соответствующего ромба.
Стандартная конструкция представления нулевой кривизны для
ЗВ-совместных уравнений, данная в Теореме 6.4, ведёт в данном случае
к следующему результату.
Теорема 7.7. (Представление нулевой кривизны дискретных
уравнений Коши-Римана) Дискретные уравнения Коши-Римана
(7.16) допускают представление нулевой кривизны с матрицами раз-
мера 2x2, зависящими от спектрального параметра, определёнными
вдоль (х,у) G Е(Т>) по формуле
Т( п (х + е -20(/(т) + Ж)А ,717.
Цу,х,а;Х) = I _ I, (7.17)
где в = р(у) — р(х).
Линейность дискретных уравнений Коши-Римана отражается тре-
угольной структурой матриц перехода.
Кроме того, все конструкции Раздела 6.8 применимы и к инте-
грируемым дискретным уравнениям Коши-Римана. В частности, для
весов, возникающих из квазикристаллического ромбического представ-
ления квад-графа D, с метками 0 = {±0ц ..., ±0<i}, дискретные голо-
морфные функции могут быть продолжены с соответствующей поверх-
ности Пт, С на её оболочку, с сохранением дискретной голоморфно-
сти. Здесь имеется в виду следующее естественное определение:
7.4. Дискретные экспоненциальные функции
Lfc(n;А) =
(7-19)
Определение 7.8. (Дискретные голоморфные функции в Zrf)
Функция f : Zd —> С называется дискретной голоморфной, если опа
удовлетворяет на каждом элементарном квадрате в уравнению
f(n + ej + ek) -f(n) = Oj + 6k
f(n + ej - /(n + ek) 01-ек- 1 J
Для дискретных голоморфных функций в Zd матрицы перехода
вдоль рёбер (п, п + ек) из Zd задаются формулой
Х + дк -20k(J(n + efe) + /(n))
о х-ек
Все результаты этого раздела верны также в случае общих ком-
плексных весов I/, что ведёт к в G С и реализации D параллелограм-
мами.
7.4. Дискретные экспоненциальные функции
Важный класс дискретных голоморфных функций составляют
дискретные экспоненциальные функции. Мы определим их для про-
извольной ромбической реализации р : V(D) —> С. Зафиксируем точку
то € V(D). Для любой другой точки х G V(D), выберем некоторый
путь С Е(Т)), связывающий xq и х, так что tj = (xj-i,Xj') и
хп = х. Пусть угловой коэффициент j-ro ребра равен Oj — p(xj) —
- p(xj-i) е S1. Тогда
Ясно, что это определение зависит от выбора точки хо € ^(®), н0 не
от пути, соединяющего z0 и х.
Продолжение дискретной экспоненциальной функции с Пщ на всю
Zd определяется следующей простой формулой:
е(п;г) = П(|±^)П'!- (7.20)
Л , \г-ик/
7. Дискретный линейный комплексный анализ
Дискретные уравнения Коши-Римана для дискретной экспоненциаль-
ной функции легко проверяются: они эквивалентны простому тожде-
ству
/z + 0j z + 0k /(z + z + 6k\ _ Qj + 6k
\Z — 6j z — 6k J / \z — Oj z — 6k' ~
Для заданного ng Z^, дискретная экспоненциальная функция рацио-
нальна относительно параметра z, с полюсами в точках ,..., ed0d,
где 6fc = signnfc.
Эквивалентно, можно идентифицировать дискретную экспоненци-
альную функцию её начальными значениями на осях:
e(nefc;z)= (7.21)
V z - vk )
Другая характеризация гласит, что e(-;z) является преобразованием
Бэклунда нулевого решения дискретных уравнений Коши-Римана на
Zd, с “вертикальным” параметром z.
Покажем теперь, что дискретные экспоненциальные функции об-
разуют базис в некотором естественном классе функций (с не более чем
экспоненциальным ростом).
Теорема 7.9. (Дискретные экспоненты образуют базис дис-
кретных голоморфных функций) Пусть f дискретная голоморф-
ная функция на V(D) ~ Р(Пц), удовлетворяющая условию
|/(гг)| exp(C'(|n1| Н-h |nd|)), VneV(QD), (7.22)
при некотором С 6 R. Продолжим её до дискретной голоморфной
функции на оболочке ЗДрДДр)). Существует функция д, определён-
ная на несвязном объединении малых окрестностей точек ±0^ € С и
голоморфная в каждой из этих окрестностей, такая что
/H-/(0) = ^-^5(A)e(n;A)dA, Vn 6 И(Р(ад, (7.23)
где Г есть набор из 2d малых петель, каждая из которых обходит,
против часовой стрелки, вокруг одной из точек ±0fc.
Доказательство. Доказательство конструктивно и состоит из трёх
шагов.
7.5. Дискретная логарифмическая функция
(i) Продолжим f с V(Qd) на ЗДТДПц)); неравенство (7.22) при
этом также продолжается, если выбрать постоянную С достаточно
большой.
(ii) Введём ограничения функции f : 9£(V(Qd)) -> С на коорди-
натные оси:
fn} = f(.nek), ^Ьк(Пф).
(iii) Положим g(A) - Y,k=i(9kW + ff-fc(A)), где функции g±fc(A) равны
нулю везде, кроме малой окрестности точки ±0^, соответственно,
и определяются сходящимся рядом
(СО \ й \
-/(0) + £ (7-24)
n=l /
и аналогичной формулой для д_*,(А). Формула (7.23) тогда легко
проверяется при вычисления вычетов в А = ±0^ (см. Упражнение
7.5). □
Важно отметить, что данные необходимые для построения
д(А), не содержатся среди значений f на У(Д) ~ У(Пц) известных
вначале, а определяются в процессе продолжения.
7.5. Дискретная логарифмическая функция
Определим теперь дискретную логарифмическую функцию на
ромбическом квад-графе D. Зафиксируем некоторую точку тд 6 V(D)
и положим
^(т)= 2^^^^е(т;АМА, Vz € У(Р). (7.25)
Здесь путь интегрирования Г тот же, что и в Теореме 7.9, и для опреде-
ления дискретной экспоненциальной функции на D необходима фикса-
ция Xq. Чтобы превратить (7.25) в строгое определение, нужно указать
ветвь log(A) в окрестности каждой точки ±0^. Этот выбор зависит от
х и делается следующим образом.
Допустим, без потери общности, что точки ±0^ на положительно
ориентированной единичной окружности S1 взяты в циклическом по-
рядке 01, ... ,ва, —01, ..., — 0^. Положим Ok+d = —6к при к = 1, ...,d. и
7. Дискретный линейный комплексный анализ
определим 0, для всех г 6 Z по 2(7-периодичности. Для каждого г G Z,
припишем вг = exp(iyr) 6 S1 некоторое значение аргумента 7r G R: вы-
берем значение 71 аргумента произвольно, а затем продолжим его
по правилу
7r+i — 7r G (0, тг), Vr G Z.
Ясно, что 7r+d = 7г + тг, следовательно также 7г+2</ = 7Г + 2%. Удобно
рассматривать точки 6Г, с приписанными аргументами 7Г, как лежащие
на римановой поверхности Л логарифмической функции (ветвящееся
накрытие комплексной А-плоскости).
Для каждого т G Z, определим “сектор” Um в плоскости С содер-
жащей квад-граф D, как множество всех точек V(D), которые дости-
жимы из то вдоль путей по рёбрам из {6т,... ,0т+а-1}- Два сектора
Um, и Um2 имеют непустое пересечение тогда и только тогда, когда
|m.i — т,2\ < d. Объединение U = IJm=-oo Um является многолистным
накрытием квад-графа D, и служит областью определения дискретной
логарифмической функции.
Определение (7.25) последней следует понимать следующим об-
разом: при х G Um, полюсы е(т; А) в точности совпадают с точками
вт, • • •, Qrn+d-i € л. Путь интегрирования Г состоит из d малых петель
на Л вокруг этих точек, a arg(A) = Imlog(A) принимает значения в
малой открытой окрестности (в R) отрезка
[Т'тп, T'm+d—1] (7.26)
длины меньше чем тг. Если т увеличивается на 2d, то отрезок (7.26)
сдвигается на 2%. Дискретная голоморфность функции I получается
как следствие, а её ограничение на множество V(S) “чёрных” точек
является дискретной гармонической везде на U за исключением точки
2-0 •
М(х) = 5ХоХ. (7.27)
Итак, функции дь в интегральном представлении (7.23) произ-
вольной дискретной голоморфной функции, определённые изначаль-
но в несвязных окрестностях точек аг, являются, в случае дискретной
логарифмической функции, фактически ограничениями единственной
аналитической функции log(A)/(2A) на эти окрестности. Это позволяет
деформировать путь интегрирования Г в связный контур, лежащий на
одном листе римановой поверхности логарифма, а затем использовать
стандартные методы комплексного анализа, чтобы получить асимп-
тотические выражения для дискретной логарифмической функции. В
7.5. Дискретная логарифмическая функция
частности, можно показать, что в “чёрных” точках V(S)
£(х) ~ log |ге — 2?о|, х —> оо. (7.28)
Свойства (7.27), (7.28) характеризуют дискретную функцию Грина на
S- Итак:
Теорема 7.10. (Дискретная функция Грина) Дискретная лога-
рифмическая функция на D, ограниченная на множество вершин V(S)
“чёрного” графа S, совпадает с дискретной функцией Грина на S-
Теперь мы продолжим дискретную логарифмическую функцию на
Zd, что позволит получить существенную дополнительную информа-
цию о ней. В дополнение к единичным векторам 6 Zd (отвечающим
Ok 6 S1), введём противоположные к ним е^+(/ — — ещ к 6 [1, d] (отвеча-
ющие 6k+d = — Ok), и определим еГ для всех г 6 Z по 2й-периодичности.
Тогда d-мерный октант
m+d— 1
Sm = ф Zer С Zd (7.29)
r=m
содержит в точности часть , являющуюся P-образом сектора Um С
D. Ясно, что среди Sm появляются лишь 2d различных октантов (из 2d
возможных d-мерных октантов). Определим Sm как октант Sm, осна-
щённый отрезком значений (7.26) для lmlog(0r). По определению, Sm}
и Sm2 пересекаются, если исходные октанты Smi и Sm,2 имеют непу-
стое пересечение, натянутое на общую координатную полуось Zer, и
lmlog(0r) совпадают для этой общей полуоси. Легко видеть, что Smi и
Sm2 пересекаются тогда и только тогда, когда |mj — m21 < d. Объеди-
нение S = Um=-oo $т является разветвлённым накрытием множества
iXd=1 sm с zd.
Определение 7.11. (Дискретная логарифмическая функция на
Zd) Дискретная логарифмическая функция на S определяется форму-
лой
l(n) = e(n; A)dA, Vn 6 S, (7.30)
ZiTT'i Jy 2A
где путь интегрирования Г для п 6 Sm состоит из d петель вокруг
точек 0т, ..., Om+d-i на Д и Im log(A) на Г выбран в малой открытой
окрестности отрезка (7.26).
7. Дискретный линейный комплексный анализ
Дискретная логарифмическая функция на Д может быть описана
как ограничение дискретной логарифмической функции на S на раз-
ветвлённое накрытие Пд ~ Т). Это выполняется для произвольного
квазикристаллического квад-графа D, для которого угловые коэффи-
циенты рёбер совпадают с 0 = {±$1,..., ±0Д.
Теперь мы в состоянии дать альтернативное определение дискрет-
ной логарифмической функции. Ясно, что она полностью характери-
зуется своими значениями ^(ner), г € [т,т + d — 1] на координатных
полуосях произвольного октанта Sm. Подчеркнём ещё раз, что точки
пег не лежат, вообще говоря, на исходной квад-поверхности Ощ.
Теорема 7.12. (Значения дискретной логарифмической функ-
ции на координатных осях) Значения & = £(пеГ), г € [m, m+d— 1]
дискретной логарифмической функции на Sm С S задаются формула-
ми
4’> = ( 2(1 + з+ + ДД п ч6гно' (7.31)
[ log(0r) = ?7Г, п нечётно.
Здесь значения log(0r) = ДТ выбраны в интервале (7.26).
Доказательство. Сравнивая формулу (7.30) с (7.24), видим, что зна-
чения tn'1 могут быть получены при разложении log(A) в окрестности
А = 9Г в степенной ряд по переменной (A — 0r)/(A + 0r). Это разложение
имеет вид
1о6(А) = 1о6(»,) + £ (Д|)".
п=1 Г
Таким образом, мы приходим к простому разностному уравнению
п(4г;1-4’’21) = 1-(-1)п, (7-32)
с начальными условиями
4Г) = £(0) = 0, 4г) = = log(0r), (7.33)
откуда и следует (7.31). □
Отметим, что значения (7.31) в чётных (соответственно, нечётных)
точках имитируют поведение вещественной (соответственно, мнимой)
7.5. Дискретная логарифмическая функция
части функции log(A) вдоль полупрямых arg(A) = arg(0r). Это нетруд-
но распространить на весь S. Ограничение дискретной логарифмиче-
ской функции на чёрные точки п G S (те, для которых щ + • • • + nd
чётно) моделирует вещественную часть логарифма. В частности, оно
вещественнозначно и не ветвится: его значения на Sm зависят лишь от
т (mod 2d). Другими словами, это корректно-определённая функция
на Sm. Наоборот, ограничение дискретной логарифмической функции
на белые точки п € S (те, для которых ni + • • • + нечётно) принима-
ет чисто мнимые значения, и увеличивается на 2тгг при увеличении т
на 2d. Таким образом, это ограничение функции моделирует мнимую
часть логарифма.
Оказывается, что рекуррентные соотношения (7.32) характеризу-
ют важный класс решений дискретных уравнений Коши-Римана, а
именно изомонодромные решения. Чтобы определить этот класс, на-
помним, что дискретные голоморфные функции в обладают пред-
ставлениями нулевой кривизны с матрицами перехода (7.19). Подвиж-
ный репер Ф(-, А) : > GL(2, С)[А] определяется выбором некоторого
Ф(0; А) и его рекуррентным продолжением по формуле
Ф(п + ек;А) = £к(п;А)Ф(п;А). (7.34)
Наконец, определим матрицы 4(-; А) : —> gl(2, С)[А] согласно
4(п;А) = ^^Ф-Ч^А). (7.35)
(ZA
Эти матрицы удовлетворяют рекуррентному соотношению, которое по-
лучается при дифференцировании (7.34),
Д(п + fit; А) = х(п; А) + Lfc(n; A)4(n; A)LJ71(n; А), (7.36)
«А
и следовательно они определены однозначно, при фиксированном
4(0; А).
Определение 7.13. (Изомонодромия) Дискретная голоморфная
функция / : —> С называется изомонодромной, если, для некоторо-
го выбора 4(0; А), матрицы А(п',Х) мероморфны в А, а положение и
порядок их полюсов не зависит от ng Zd.
Данный термин происходит из теории интегрируемых нелинейных
дифференциальных уравнений, где он применяется для решений с по-
добными аналитическими свойствами.
7. Дискретный линейный комплексный анализ
Ясно, как расширить Определение 7.13 для функций на накрытии
S. В следующем утверждении мы ограничимся, ради простоты обозна-
чений, октантом Si = (Z+)d.
Теорема 7.14. (Дискретная логарифмическая функция изомо-
нодромна) При надлежащем выборе Д(0; А), матрицы Д(п;А) име-
ют, в каждой точке п 6 (Z+)d, лишь простые полюсы:
я А<0)("> 4. V (вты 4. 17т
А(„, Л) = + X + -дТвД. (7.37)
где
(П (_1?Ш—l-nd\
1 } , (7.38)
0 0/
д({), S Л -№)+^(п-е<))\ ,_Ч£П
В( Дп) = щ I Q I , (7.39)
НО г > (° ^ + ez)+€(n)\
СА Дп) = 71^1 1 I’ (7.40)
В каждой точке п € S выполняется следующая связь:
d
У7 ni (^(п + е0 _ ^(п _ е*)) = 1 ~ (-1)П1+ "+nd. (7.41)
i=i
Доказательство. Надлежащий выбор Д(0; А), упомянутый в Теореме,
может быть выведен из формулы (7.38):
Л(О;Л) = 1(“ J).
Доказательство состоит из двух частей.
(i) Во-первых, докажем утверждение для точек на координатных по-
луосях. Для любого г — 1,... ,d, построим матрицы Д(пег; А) вдоль
r-й координатной полуоси по формуле (7.36) с матрицами перехода
7.6. Упражнения
(7.19). Эта формула показывает, что особенности А(пег:Х) явля-
ются полюсами вА=0ивА= ±0Г, и что полюс А — 0 остаётся
простым при всех п > 0. Прямое вычисление и индукция дока-
зывают, что рекуррентное соотношение (7.32) при = /(ner)
гарантирует в точности, что полюсы А = ±0Г остаются простыми
при всех п > 0. Таким образом, (7.37) выполняется на r-й коорди-
натной полуоси, с В^(пег) = С^(пег) = 0 при I г.
(ii) Вторая часть доказательства концептуальна и основывается лишь
на многомерной совместности. Будем действовать по индукции, за-
полняя выпуклую оболочку координатных полуосей: каждая новая
точка имеет вид п + ej + е^, j к, и три точки п, п + и п +
+ ед, известны из предыдущих шагов, для которых будем считать
утверждение доказанным. Допустим, что (7.37) выполняется при
n + ej, п + вк- Новая матрица A(n + ej -Pet; А) получается по двум
альтернативным формулам, одна из них
, ч dLAn + е,; А) ,,
А(п + ej + ек; А) =----—------- Lk\n + ej; А)
ил
+ Lfc(n + ej; А)Л(п + ej; A)L^1(n + е^-; А), (7.42)
вторая отличается перестановкой к и j. Уравнение (7.42) показы-
вает, что все полюсы А(п + + ек \ А) остаются простыми, может
быть, за исключением А = ±0fc, чей порядок может увеличиться
на 1. Это же заключение верно и при замене к на j. Но тогда все
полюсы остаются простыми, и (7.37) выполняется при п + ej + ек-
Формулы (7.38)-(7.40) и связь (7.41) получаются прямым вычис-
лением, основанным на (7.42). □
7.6. Упражнения
7.1. Пусть Т) двудольный квад-граф, с чётными вершинами Xj и бе-
лыми г/j. Пусть функция ц : Е(Т>) —> С, такая что, для любого элемен-
тарного четырёхугольника (xo,yo,x\,yi) G E(D),
м(®0, Z/1) = м(^о, Z/i)m(:ci , Уо)-
Покажите, что существует функция в : У(1>) —> С, такая что для каж-
дого ребра (х,у) & E(D) выполняется гц(х, у) = 9(у)/9(х). Если ц ве-
щественнозначна, то можно считать, что в принимает вещественные
значения в чёрных точках и мнимые в белых.
7. Дискретный линейный комплексный анализ
7.2. Докажите по индукции, что элементы матрицы
Л — _ ТТ / 1 — l/fc\
В A J ~ 11 1 )
имеют вид
А = i(№+iVk')+№ _iVk>>)> в = М№+^-П(1-М-
fc к к к
7.3. Проверьте, что функция f : Z2 —> С, вида /(772,77) = (тпд\ +пд‘2)2
удовлетворяет дискретному уравнению Коши-Римана
/(тп + 1, п + 1) - f(m, п)
f(m + 1, n) — /(ттг, п + 1)
01 + 02
01 — 02
Обобщите эту функцию («дискретный z2») на и на произвольные
квад-графы D.
7.4. Постройте «дискретный z3», то есть функцию f : Z2 —> С, поли-
номиальную по т, п степени 3, с кубическими членами (m0i + тг02)3, и
удовлетворяющую дискретным уравнениям Коши-Римана.
7.5. Докажите, что для функции дДА) из (7.24) выполняется
ResA=et _ /(о).
\А — 6^/
7.6. Оцените разность — logn для значений, определённых форму-
лой (7.31) ДЛЯ чётНЫХ 72.
7.7. Библиографический комментарий
Раздел 7.1: Основные понятия дискретного комплексного ана-
лиза. Стандартная дискретизация гармонических и голоморфных
функций на правильной квадратной решётке восходит к (Ferrand 1944)
и (Duffin 1956). Эта дискретизация уравнений Коши-Римана сохраняет
большинство важных структурных свойств очевидным образом. Пио-
нерский шаг в направлении дальнейшего обобщения понятий дискрет-
ных гармонических и голоморфных функций был предпринят в (Duffin
7.7. Библиографический комментарий
1968), где комбинаторика Z2 была заменена произвольным плоским
графом с ромбическими гранями. Далеко идущее обобщений этих идеи
было дано (Mercat 2001), распространившим теорию на дискретные ри-
мановы поверхности.
Раздел 7.2: Преобразование Мутара для дискретных уравне-
ний Коши-Римана. Относительно общих преобразований Мутара см.
библиографический комментарий к Разделу 2.3 и Упражнению 2.27.
Дальнейшее обсуждение преобразований Дарбу для дискретных опе-
раторов Лапласа, индуцированных преобразованиями Мутара для дис-
кретных уравнений Коши-Римана можно найти в (Doliwa-Grinevich-
Nieszporski-Santini 2007).
Раздел 7.3: Интегрируемые дискретные уравнения Коши-
Римана. Условие (7.13) на систему углов ф : Д(9) U Д(9*) -> (0, тг)
характеризующее ромбическое представление дано в (Kenyon-Schlenker
2004). Теоремы 7.5, 7.6 характеризующие SD-совместные (интегрируе-
мые) уравнения Коши-Римана и их представления нулевой кривизны
из Теоремы 7.7 взяты из (Bobenko-Mercat-Suris 2005).
Раздел 7.4: Дискретные экспоненциальные функции. Дискрет-
ная экспоненциальная функция на Z2 была определена и изучена в
(Ferrand 1944) и (Duffin 1956). Обобщение для квад-графов D дано в
(Mercat 2001) и (Kenyon 2002). Вопрос о том, образуют ли дискретные
экспоненциальные функции базис в пространстве дискретных голо-
морфных функций на Д (Теорема 7.9) был поставлен в (Kenyon 2002),
ответ был получен в (Bobenko-Mercat-Suris 2005).
Раздел 7.5: Дискретная логарифмическая функция. Дискрет-
ная логарифмическая функция на ромбическом квад-графе Т> была
введена в (Kenyon 2002). В этой статье были доказаны также асимп-
тотические формулы (7.28) и Теорема 7.10. Все остальные результаты
раздела, начиная с продолжения дискретной логарифмической функ-
ции на взяты из (Bobenko-Mercat-Suris 2005). Относительно теории
изомонодромных решений дифференциальных уравнений и её прило-
жений к интегрируемым системам см. (Fokas-Its-Kapaev-Novokshenov
2006). Изомонодромная связь (7.41) была найдена в (Nijhoff-Ramani-
Grammaticos-Ohta 2001), вне связи с дискретной логарифмической
функцией.
Глава 8
Дискретный комплексный анализ.
Интегрируемые конгруэнции
окружностей
8.1. Конгруэнции окружностей
Идея, что упаковки окружностей и, в более общей постановке, кон-
груэнции окружностей служат дискретным аналогом аналитических
функций, является в настоящее время вполне обоснованной. Мы при-
ведём некоторые результаты в этой области, исследующие взаимосвязи
между конгруэнциями окружностей и интегрируемыми системами.
Определение 8.1. (Конгруэнция окружностей) Пусть 9 про-
извольное клеточное разбиение открытого или замкнутого диска в
С. Отображение z : V(9) —> С определяет конгруэнцию окружно-
стей с комбинаторикой 9, если выполнено следующее условие. Пусть
у 6 Г(9) ~ И(9*) произвольная грань 9, и пусть х-^х?,...,хп её после-
довательные вершины. Тогда точки z(xi), z(x2), , z(xn) 6 С лежат
на окружности, в приведённом выше циклическом порядке. Обозна-
чим эту окружность С (у), тем самым устанавливая соответствие
с гранью у, или, эквивалентно, с соответствующей вершиной дуаль-
ного клеточного разбиения 9*
Как следствие этого условия, если две грани yo,yi 6 Г(9) име-
ют общее ребро (zq, ti), то окружности С^уо) и С(ух) пересекаются
в точках z(xi), ztx?). Иначе говоря, рёбра Е(9) отвечают парам со-
седних (пересекающихся) окружностей конгруэнции. Аналогично, ес-
ли несколько граней ух, у%,..., ут 6 Г(9) пересекаются в одной точ-
ке xq 6 V(9), то соответствующие окружности С(у\), С^уъ), • •, С(ут)
также имеют общую точку пересечения г (то)- Конечная часть конгру-
энции окружностей показана на рис. 8.1.
8.1. Конгруэнции окружностей
Рис. 8.1. Конгруэнция окружностей.
Если задана конгруэнция окружностей с комбинаторикой 9, мы
можем продолжить функцию z на вершины дуального графа, положив
z(y) = центр окружности С(у), у G F(9) V(9*)-
После такого расширения отображение z определено на всём V(D) =
= V(9)U V(9*), где D дубль 9- Рассмотрим какую-нибудь грань дубля.
Её z-образом служит четырёхугольник в форме кайта, вершины ко-
торого отвечают точкам пересечения и центрам двух соседних окруж-
ностей Со, Ci конгруэнции. Обозначим радиусы Со, С через то,Г1, со-
ответственно. Пусть хо,х1 отвечают точкам пересечения, а уо,У1 отве-
чают центрам окружностей. Припишем окружностям Cq,Ci положи-
тельную ориентацию (индуцированную ориентацией плоскости С), и
пусть ф 6 (0, л) обозначает угол пересечения этих ориентированных
окружностей. Этот угол ф равен углам кайта в “чёрных” вершинах
z(xo), см. рис. 8.2, на котором показан также дополнительный
угол ф* — тг — ф. Удобно приписать угол пересечения ф = ф(е) к “чёр-
ному” ребру е — (zq^i) € Е(9), а дополнительный угол ф* = к
дуальному “белому” ребру е* = (уо,У1) £ ^(9*)- Таким образом, функ-
ция ф : Е(9) LI Е(9*) (0, тг) удовлетворяет (7.11).
Из геометрии рис. 8.2 вытекают следующие соотношения. Прежде
8. Интегрируемые конгруэнции окружностей
Рис. 8.2. Две пересекающиеся окружности.
всего, двойное отношение четырёх точек, отвечающих вершинам четы-
рёхугольной грани D выражается через угол пересечения окружностей
Со.Сц
q(z(z0), z(y0), Ф1 V(?d)) = ехр(2г</>*). (8.1)
Далее, обходя вокруг “чёрной” вершины D (общей точки пересечения
нескольких окружностей конгруэнции), мы видим, что сумма последо-
вательных углов кайта обращается в ноль (mod 2тг), следовательно
П ехр(г</>(е)) = 1, tf.r0 6 V(9). (8.2)
e€star(zo;S)
Наконец, пусть V’oi угол кайта (z(to), z(i/o), z(zi), z(yi)) в “белой” вер-
шине z(yo), то есть угол между лучами с началом в центре z(yo) окруж-
ности Со, проходящими через точки пересечения Дто), z(zi) с окруж-
ностью Ci - Нетрудно вычислить этот угол:
. То+riexp(z</>*)
exp(z^oi) = —---------,
г0 + Г1 exp(-z0*)
Обходя вокруг “белой” вершины D, приходим к соотношению
Го + г, ехр(г</>*)
3 =1, Vy0GV(9*),
(8-3)
(8-4)
J=i г° + О ехр(-г</>*)
8.2. Интегрируемые системы двойного отношения и Хироты
где произведение берётся по всем рёбрам е*- = (г/о> 2/j) 6 star(yo; 9*) и
a rj равны радиусам окружностей Cj = C(yj).
8.2. Интегрируемые системы двойного отношения и
Хироты
В основном нас интересуют конгруэнции окружностей с предпи-
санной комбинаторикой и предписанными углами пересечения между
всеми парами соседних окружностей. Согласно формуле (8.1), зада-
ние всех углов пересечения сводится к заданию двойных отношений
для всех четырёхугольных граней квад-графа D. Таким образом, мы
приходим к изучению уравнения двойного отношения на произвольном
квад-графе.
Пусть задана функция Q : E(S) LI Е(9*) —> С, удовлетворяющая
условию
Q(e*) = 1/Q(e), Ve 6 Е(9). (8.5)
Определение 8.2. (Система двойного отношения) Система
двойного отношения на D, отвечающая функции Q, состоит из сле-
дующих уравнений для функции z : V(D) С, по одному для каждой
четырёхугольной грани (то, ЗЛь ^1, ?л) в D:
g(z(zo),z(yo),z(zi),.z(yi)) = Q(xq,xi) = 1/Q(yo,yi). (8.6)
Важное отличие от дискретных уравнений Коши-Римана заключа-
ется в том, что уравнения двойного отношения фактически не зависят
от ориентации четырёхугольников.
Мы уже встречались с ЗВ-совместными системами двойного отно-
шения на в Разделе 6.7 (см. уравнение (6.33)), в варианте с раз-
меченными рёбрами. Естественное обобщение на случай произвольных
квад-графов таково:
Определение 8.3. (Интегрируемая система двойного отноше-
ния) Система двойного отношения называется интегрируемой, если
существует такая разметка а : Е(Т)) С неориентированных рёбер
Т), что функция Q допускает следующую факторизацию (в обозначе-
ниях рис. 8.3):
Q(x0,xJ= 1 = g. (8.7)
<2(уо,У1) 1
8. Интегрируемые конгруэнции окружностей
Рис. 8.3. Четырёхугольник, с разметкой неориентированных рёбер.
Ясно, что интегрируемые системы двойного отношения 3D-cob-
местны (см. Теорему 4.26), допускают преобразования Бэклунда и обла-
дают представлением нулевой кривизны с матрицами перехода (6.47).
Нетрудно дать эквивалентную переформулировку условия интегриру-
емости (8.7).
Теорема 8.4. (Условие интегрируемости для системы двойного
отношения) Система двойного отношения с функцией Q : E'(S) U
F(9*) —> С интегрируема тогда и только тогда, когда для всех xq 6
V(S) и всех уо 6 У(9*) выполняются следующие условия:
П Q(e) = 1, П = (8-8)
e6star(zo;S) e^gstarfi/oiS")
Для разметки неориентированных рёбер а : Е(Т)) С, можно най-
ти такую разметку в : E(D) С ориентированных рёбер, что а — в2.
Функция р : V(D) С определённая равенством р(у) — р(т) = 9(х,у)
даёт, согласно (8.8), представление квад-графа D посредством паралле-
лограммов (разветвленное вложение). Уравнения двойного отношения
записываются, как
О2
q(z(xo),z(yo), z(zi), z(yi)) = = д(р(то),р(уо),р(г1),р(у1)); (8.9)
иными словами, для каждого четырёхугольника (то, Уо, У1) 6 F(D)
двойное отношение вершин его образа при отображении z равно двой-
ному отношению вершин соответствующего параллелограмма. В част-
ности, всегда имеется тривиальное решение z(x) = р(х) для всех
х е V(D).
8.2. Интегрируемые системы двойного отношения и Хироты
Очень полезное преобразование системы двойного отношения опи-
сывается следующей конструкцией.
Определение 8.5. (Система Хироты) Для заданной разметки ори-
ентированных рёбер 0 : ЕДУ) —> С система Хироты состоит из сле-
дующих уравнений на функцию w : V(D) —> С, по одному на каждую
четырёхугольную грань (то, yo,£i, yi) € ЕДУ):
0ow(zoMyo) + 0iw(yoMzi)-0ow(ziMyi)-0iw(yi)w(zo) = 0. (8.10)
Отметим, что уравнение Хироты совпадает с уравнением (6.30) из
Раздела 6.7 (кстати, это показывает, что также и в предыдущей версии
было естественно приписывать параметры ориентированным рёбрам).
В терминах параллелограмной реализации р : V(D) —> С квад-графа
D, отвечающей разметке 0, уравнение (8.10) принимает вид
w(xo)w(yo)(p(yo) -р(хоУ) + w(y0)w(xi)(p(a;i) -р(уо))
+ w(xi)w(yi)(p(yi) -p(ti)) + w(yi)w(xo)(p(xo) -p(yi)) = 0. (8.11)
Очевидно, преобразование w ь-> cw на V(S) и w н-> c-1w на V(S*) с по-
стоянной с £ С, в дальнейшем называемое чёрно-белым растяжением,
переводит решения системы Хироты в решения. Связь между системой
с двойным отношением и системой Хироты основана на следующем на-
блюдении.
Теорема 8.6. (Связь между системами с двойным отношением
и системами Хироты) Пусть w : V(D) -> С удовлетворяет системе
Хироты. Тогда соотношение
z(y) - z(x) = 0(х, y)w(x)w(y) = w(x)w(y)(р(у) - р(х)) (8.12)
для всех ориентированных рёбер (х, у) G ЕДУ) определяет единствен-
ную (с точностью до аддитивной постоянной) функцию z : V ДУ) —> С
являющуюся решением системы двойного отношения (8.9). Наоборот,
для любого решения z системы двойного отношения (8.9), соотно-
шение (8.12) определяет единственную (с точностью до чёрно-белого
растяжения) функцию w : V(D) —> С; эта функция w удовлетворяет
системе Хироты (8.10).
В частности, тривиальное решение z(x) = р(х) системы двойного
отношения отвечает тривиальному решению системы Хироты, w(x) = 1
для всех х € V(D). Прямое вычисление позволяет установить следую-
щее фундаментальное свойство.
8. Интегрируемые конгруэнции окружностей
Теорема 8.7. (Интегрируемость системы Хироты) Система Хи-
роты (8.10) ЗЕ-совместна.
Как обычно, в качестве следствия получаем, что система Хироты
допускает преобразования Бэклунда и обладает представлением нуле-
вой кривизны с матрицами перехода вдоль ребра (х, у) € E(D) вида
,, л \\ ( 1 -<Му) )
Цу, х. 0; А) = I ,
\—A0/w(x) w(y)/w(x)J
(8.13)
где 6 = р(у) -р(х).
8.3. Интегрируемые конгруэнции окружностей
Вернёмся к конгруэнциям окружностей. Пусть {z(rc) : х G V(9)}
точки пересечения окружностей конгруэнции, a {z(y) : у G V(S*)} их
центры. В силу (8.1), функция z : V(D) —> С удовлетворяет систе-
ме двойного отношения где Q : -E'(S) U £(S*) —> S1 определена, как
Q(e) = ехр(2г</>(е)). В силу (8.2), первое из условий интегрируемости
(8.8) выполняется для произвольной конгруэнции окружностей. Следо-
вательно, интегрируемость системы двойного отношения для конгру-
энции окружностей с заданными углами пересечения ф : ^(S*) -> (0, я)
эквивалентна уравнениям
П ехр(2г</>(е*)) = 1, Vy0 € V(9*). (8.14)
e*6star(yo;S*)
Это эквивалентно существованию такой разметки рёбер а : Е(ТУ) —> С,
что в обозначениях рис. 8.2,
ехр(2г</>*) = g. (8.15)
Кроме того, можно считать, что разметка а принимает значения в S1.
Наше определение интегрируемой конгруэнции окружностей по-
требует немного больше, чем интегрируемость соответствующей систе-
мы двойного отношения.
Определение 8.8. (Интегрируемая конгруэнция окружностей)
Конгруэнция окружностей с предписанными углами пересечения ф :
8.3. Интегрируемые конгруэнции окружностей
Е(3*) —> (0, л) называется интегрируемой, если
П ехр(^(е*)) = 1, VyoeV(S*), (8.16)
e*gstar(yo;S')
то есть, если для каждой окружности конгруэнции сумма её углов
пересечения со всеми соседними окружностями равна нулю (mod 2л).
Это требование эквивалентно несколько более сильному утвержде-
нию, чем (8.15), а именно, существованию разметки ориентированных
рёбер 0 : F(D) —> S1, такой что в обозначениях рис. 8.2,
д д
ехр(0) = <=> ехр(г</>*) = (8.17)
(70 01
(Конечно, из последнего условия следует (8.15) с а = (?2.) Паралле-
лограмная реализация р : V(D) —> С, отвечающая разметке 6 € S1
является фактически ромбической.
Теорема 8.9. (Изорадиальный критерий интегрируемости)
Комбинаторные данные 3 и углы пересечения ф : Е(3) —> (0, л) при-
надлежат интегрируемой конгруэнции окружностей тогда и толь-
ко тогда, когда они допускают изорадиалъную реализацию. В этом
случае, дуальные комбинаторные данные 3* и углы пересечения ф :
Е(3*) —> (0, л) также допускают реализацию изорадиалъной конгру-
энцией окружностей.
Доказательство. Ромбическая реализация р : V(D) —> С квад-графа
Т> отвечает конгруэнции окружностей с той же комбинаторикой и теми
же углами пересечения, как исходная, и со всеми радиусами, равными
1, и, в то же время, аналогичной дуальной конгруэнции окружностей.
□
Рассмотрим D в ромбической реализации р : V(D) -> С. Реше-
ния z : V(D) -> С соответствующей интегрируемой системы двойно-
го отношения, приходящие из интегрируемой конгруэнции окружно-
стей, характеризуются свойством, что г-образ любого четырёхугольни-
ка (гео, уо, Ti, У1) из Е(Т>) является кайтом с предписанным углом ф в
чётных вершинах z(.tq), z(zi) (ср. рис. 8.2). Оказывается, что описание
этого класса связанных с кайтами решений допускает более удобную
аналитическую характеризацию в терминах соответствующих решений
w : V(D) —> С системы Хироты, определённных в (8.12).
8. Интегрируемые конгруэнции окружностей
Теорема 8.10. (Решения системы Хироты для конгруэнции
окружностей) Решение z системы двойного отношения отвечает
конгруэнция окружностей тогда и только тогда, когда решение w
системы Хироты, связанное с z посредством (8.12), удовлетворяет
условию
w(x)eS1, w(y)eR+, Vrc е V(9), у е К(9*). (8.18)
Значения w(y) G R+ интерпретируются при этом как радиусы
окружностей С (у), а аргументы значений w(x) G S1 измеряют по-
ворот касательных к окружностям, пересекающимся в z(x), относи-
тельно изорадиалъной реализации конгруэнции.
Доказательство. Как легко видеть, условия для кайтов эквивалентны
|w(jq)| _ w(y0)
|w(xi)| И w(yi) +‘
Отсюда следует (8.18), возможно, с точностью до чёрно-белого растя-
жения. □
Условия (8.18) образуют допустимую редукцию системы Хироты
с 9 € S1, в следующем смысле: если любые три из четырёх точек w(xq),
w(yo), w(a?i), w(yi) удовлетворяют условию (8.18), то это же верно и
для четвёртой. Это становится очевидным, если переписать уравнение
Хироты (8.10) в одной из двух эквивалентных форм:
w(a?i) _ gjw(yi) - gpw(yo) w(yi) _ gow(To) +giw(xi)
w(x0) 0iw(yo) - 0ow(yi) w(yo) 0ow(zi) + 9iw(xoy
Как следствие этого замечания, мы получаем преобразования Бэклун-
да для интегрируемых конгруэнций окружностей.
Теорема 8.11. (Преобразования Бэклунда для интегрируемых
конгруэнций окружностей) Пусть все 9 е S1, и пусть р : V(D) —>
С соответствующая ромбическая реализация D. Пусть решение w :
V(D) —> С системы Хироты отвечает конгруэнции окружностей с
комбинаторикой 9, то есть удовлетворяет (8.18). Рассмотрим её
преобразование Бэклунда w+ : V(D) —> С с произвольным парамет-
ром A G S1 и с произвольным начальным значением w+(xq) G R+ или
w+(yo) G S1. Тогда
w+(i)eR+, w+(y)e§1, Vrce К(9), У е V(9*), (8.20)
8.19
8.3. Интегрируемые конгруэнции окружностей
так что w+ отвечает конгруэнции окружностей с комбинаторикой
S*, которую мы назовём преобразованием Бэклунда исходной конгру-
энции окружностей.
Мы завершим этот раздел упоминанием некоторых уравнений ти-
па Лапласа, которые могут быть использованы для описания интегри-
руемых конгруэнций окружностей. Прежде всего, ограничение функ-
ции z на V(S) (то есть на точки пересечения окружностей) удовлетво-
ряет уравнению
у-' ak - <Tfc+i _ Q
z(zfe) - z(x0)
Здесь г(то) любая точка пересечения п окружностей C(yi),..., С(уп),
z(a;fc) вторая точка пересечения С(уь) с C(yfc+i) для каждого к, и ak
метки на рёбрах (хо,уь) G Е(Т>). Аналогично, ограничение функции z
на V(S*) (то есть на центры окружностей) удовлетворяет уравнению
т
у» 0,-1 — aj _ Q
Д? z(Vj) - z(yo)
Здесь z(yo) центр любой окружности С'(уо), пересекающей т окруж-
ностей C(yi),..., С(уто) с центрами в точках г(у^); пересечение С'(уо)
с C'(yj) состоит из двух точек z(xj-i), z(xj), и aj служат метками на
рёбрах (уо,х^) € Е(Т>). Эти два уравнения типа Лапласа следуют из
первого утверждения Теоремы 6.31, применённого к системе двойного
отношения, которая есть не что иное, как случай (Ql)<5=o Теоремы 6.32.
Аналогичная конструкция применима к системе Хироты, записан-
ной в трёхногой форме (8.19). Опять, отсюда следуют два мультипли-
кативных уравнения типа Лапласа - на 9 и на S*- Поучительно взгля-
нуть на уравнение на S* (для радиусов окружностей Tj — w(уj)):
ТТ ®jrj ~ |
8jro ~ ej-^j
В силу (8.17), это уравнение может быть записано в терминах углов
пересечения <f>j of С'(уо) с C'(yj), в виде уравнения (8.4). Интересно,
что последнее выполняется для любой конгруэнции окружностей и не
является специфичным для интегрируемых (в отличие от аналогичного
уравнения типа Лапласа на S)-
8. Интегрируемые конгруэнции окружностей
8.4. Конгруэнции окружностей za и log z
Благодаря ЗВ-совместности систем двойного отношения и Хироты,
мы можем воспользоваться процедурой из Раздела 6.8 и продолжить
решения этих систем с квазикристаллического квад-графа D, реализо-
ванного как квад-поверхность С Zd, на всё Zd (точнее, на оболочку
Qd). Далее, можно поставить вопрос об изомонодромных решениях.
Это ведёт к дискретным аналогам степенной функции. Естественно,
эти дискретные степенные функции определены на том же разветвлён-
ном накрытии S множества (Jm=i С Zd, что и дискретная логариф-
мическая функция из Раздела 7.5.
Дискретная система двойного отношения на Zd имеет вид
q(z(n), z(n + е,), z(n + еу + е*,), z(n + efe)) = (8.21)
и удовлетворяет дискретному представлению нулевой кривизны с мат-
рицами перехода вдоль рёбер (п, п + еД в Zd, вида
(1 z(n) - z(n + ек) \
• (8-22)
A0^/(z(n)-z(n + efc)) 1 /
Преобразование
z(n + efc) — z(n) = 0fcw(n)w(n + ек), (8.23)
переводит решения системы двойного отношения в решения системы
Хироты на Zd,
0.,w(n)w(n + ej) + 0kw(n + ej)w(n + ej + ek)
— 6jw(n + ej + e*;)w(n + еД — 0*,w(n + e*;)w(n) = 0. (8.24)
Последняя система обладает дискретным представлением нулевой кри-
визны с матрицами перехода вдоль рёбер (п, п + еД в Zd, вида
(1 -9kw(n + ек) \
(8.25)
A0fc/w(n) w(n + efc)/w(n) /
Особые решения этих двух систем на S определяются следующим вы-
бором начальных данных.
8.4. Конгруэнции окружностей za и logz
Определение 8.12. (Дискретная степень z2“) Для а € (0.1), дис-
кретная функция z2a является решением системы двойного отноше-
ния на S, определённым значениями на координатных полуосях z^ —
= z(ner), г G [т,т + d — 1], удовлетворяющими рекуррентному соот-
ношению
(^n+l ^п)(^П 1)
Zn— 1
= 0,Zn
(8.26)
с начальными условиями
z^ = z(0) = 0, = z(er) = 02а = exp(2alog(?r),
(8.27)
где log $г выбран в интервале (7.26).
Определение 8.13. (Дискретная степень w2“-1) Для а 6 (0,1),
дискретная функция w2a~1 является решением системы Хироты
на S, определённым значениями на координатных полуосях w„ ' =
— w(ner), г G [m,m + d — 1], удовлетворяющими рекуррентному соот-
ношению
nwn+1-wn! =/_М/1_(_1)п) (828)
с начальными условиями
w^} = w(0) = 0, w'r) — w(er) — t?2“-1 = exp((2a — 1) log#r), (8.29)
где log(?r выбран в интервале (7.26).
По индукции можно вывести следующие явные выражения для
решений Zn'1'-
n-1 n
_(г) _ I I к + a n z)2a (r) _ I I fe Q л2а (о эм
z2n- 11 k_a n-a , z2n+i-[[k_a , (8.30)
fc=i fc=i
(r)
и для Wn :
•OK <8-31)
fc=l
Отметим асимптотические соотношения для п -> оо:
Z^ = c(a)(n0r)2a(l + OK1)), (8.32)
8. Интегрируемые конгруэнции окружностей
w2n = с(а)п2а 1(1 + О(п х)). (8.33)
Основное техническое преимущество переменных w видно из следую-
щего наблюдения.
Теорема 8.14. (Дискретная степень z2a определяет конгруэн-
цию окружностей) Функция w2“-1 принимает значения в R+ на
белых точках и значения в S1 на чёрных. Следовательно, функция
z2a определяет конгруэнцию окружностей.
Доказательство. На координатных осях утверждение для w2“-1 оче-
видно из явных формул (8.31), и продолжение на всё S доказывается
согласно замечанию после Теоремы 8.10. После этого утверждение для
z2a следует из Теоремы 8.10. □
Ограничение z2a на различные квад-поверхности Пд приводит к
дискретным аналогам степенной функции на соответствующих квази-
кристаллических квад-графах D с набором О = {±<?15..., ±0^} угло-
вых коэффициентов; см. рис. 8.4. Эти графики подводят к гипотезе,
что г2“-конгруэнции окружностей являются вложенными. Один из воз-
можных подходов к аналитическому изучению этих конгруэнций осно-
ван на применении хорошо развитой техники изомонодромных реше-
ний. Для каждой из систем можно ввести подвижный репер, как в
(7.34):
Ф(п + efc; А) = Lk(n; А)Ф(п; А),
и определить их логарифмические производные, как в (7.35):
иЛ
Теорема 8.15. (Дискретная степень z2a изомонодромна) Рас-
смотрим решение системы двойного отношения в (Z+)d с начальны-
ми данными (8.30). При подходящем выборе А(0; А), матрицы А(п; А)
имеют лишь простые полюсы в каждой точке п € (Z+)d;
где
А(п-, А) =
А(°)(п)
А
Л В^п)
+s^-
(8.34)
A<»>(n) = (-»/2
I 0 a/2
(8.35)
8.4. Конгруэнции окружностей z“ и logz
Рис. 8.4. Конгруэнции окружностей z4^5 с комбинаторикой
квадратной решётки, и z2//3 с комбинаторикой регулярной
гексагональной решётки (изотропной и неизотропной).
В(/)(п) = ---------------------
z(n + ei) - z(n - ei)
* /z(n + ej - z(n) (z(n + ej - z(n))(z(n) - z(n - ej)
\ 1 z(n) — z(n — 6/)
В каждой точке n € S дискретная z2a удовлетворяет следующей
связи:
(z(n + е_,) — z(n))(z(n) — z(n — е_,))
nj--------—-— ------------------------= az(n). (8.37)
z(n + ej) — z(n — ej)
8. Интегрируемые конгруэнции окружностей
Теорема 8.16. (Дискретная степень гг2“-1 изомонодромна) Рас-
смотрим решение системы Хироты в (Z+)rf с начальными данными
(8.31). При подходящем выборе >1(0; А), матрицы А(п; А) имеют лишь
простые полюсы в каждой точке п 6 (Z+)d:
Л(п;Л)^+£^), (8.38)
л г=1 А -
где
А(0)(п) = f-a/2 * (8.39)
\ 0 а/2)
В^(п) =_______—________
w{n + ej + w(n — е/)
х (w{n + ei) 0гш(п + ez)w(n - et)\ .g 4Q,
\ 1/flj w(n - 6() J • \ J
Верхний правый элемент матрицы обозначенный в (8.39)
звёздочкой, равен A^(n) = — -®12 (п)- В каждой точке п Е S
дискретная w2a~l удовлетворяет следующей связи:
d
^ni
w(n + ej — w(n — e()
w(n + ez) + w(n — ez)
= (a_l)(l-(-l)n1+-+ndy
(8-41)
Доказательство. Доказательство обеих теорем следует схеме доказа-
тельства Теоремы 7.14: сначала доказывается, что полюсы А(пег;А)
остаются простыми на координатных осях, при помощи рекуррентных
соотношений (8.26), соотв. (8.28), затем доказывается, при помощи мно-
гомерной совместности, что порядок полюсов не увеличивается в точ-
ках п вне координатных осей. □
Переход от переменных z к w является делом прямых вычислений.
Фактически, обе теоремы описывают одни и те же матрицы, записан-
ные в разных переменных.
Интересно изучить предельное поведение функции z2a при а —> 0.
Нетрудно видеть, что для всех п О верно z2a(n) —> 1. Обозначим
L(n) = lim-----5—
' a—>о 2a
(8.42)
8.5. Линеаризация
Эта функция называется дискретной логарифмической функцией: её
не следует смешивать с функцией £(п) из линейной теории (Раздел
7.5). Из (8.42) получается следующая характеризация: дискретная ло-
гарифмическая функция L является решением системы двойного от-
ношения на S, определяемым значениями на координатных полуосях
Цг) = L(ner), г £ [т,т + d — 1], удовлетворяющими рекуррентному
соотношению
(Ln+i — Ln)(Ln — Ln_i) _ j
П т т — 9
L'n+l -L»n—1
с начальными условиями
Ьцг) = L(0) = оо, L<r) = L(er) = log 0r, (8.44)
где log бф выбираются в интервале (7.26). Явные выражения:
L2n = log Яг + | , L2n+1 = 1OS | • (8-45)
A:=l fc=l
Теорема 8.17. (Конгруэнция окружностей определяет изомо-
нодромный логарифм) Дискретный логарифм изомонодромен и
удовлетворяет в любой точке n£S следующей связи:
A (L(n + ej)-L(n))(L(n)-L(n-e>)) !
-------L(n + е,) - L(n - е,)-----= 2 <8Л6>
При ограничении на квад-поверхности Пц мы приходим к дис-
кретной логарифмической функции на произвольном квазикристалли-
ческом квад-графе D. По построению, все они отвечают конгруэнции
окружностей. Кажется правдоподобной гипотеза, что эти конгруэнции
окружностей вложены (см. рис. 8.5).
8.5. Линеаризация
Пусть даны разметка рёбер в : Ё(Т>) —> С, и пусть р : V(D) —> С
соответствующая ей параллелограмная реализация Т>, определённая
согласно р(у) — р(х) — 0(х,у). Рассмотрим тривиальные решения
го(т) = р(т), wq(.t) = 1, Vt £ V(D)
8. Интегрируемые конгруэнции окружностей
Рис. 8.5. Конгруэнции окружностей для дискретного лога-
рифма с комбинаторикой регулярной квадратной и гекса-
гональной решёток.
системы двойного отношения (8.9) и соответствующей системы Хиро-
ты (8.11). Допустим, что zq : V(D) —> С принадлежит однопараметри-
ческому дифференцируемому семейству решений : V(D) —> С, е £
(—ео, ео) той же самой системы двойного отношения, и обозначим через
we : V(D) —> С соответствующие решения системы Хироты. Обозначим
dze
f =
dwf \
de J
(8-47)
e=0
Теорема 8.18. (Дискретная производная дискретных голо-
морфных функций) Обе функции f,g : V(D) —> С удовлетворяют
дискретным уравнениям Коши-Римана (7.16).
Доказательство. Дифференцируя (8.12), получаем соотношение меж-
ду функциями /, g : V(D) —> С:
g(y) -у(т) = (/(я) +/(у)) (р(у) -p(z)), V(x,y) £ ЕДУ). (8.48)
Доказательство теоремы основано на этом единственном соотношении.
Действительно, условие точности для формы в правой части для эле-
ментарного четырёхугольника имеет вид
(ДЫ) + /(уо)) (р(уо) - р(^о)) + (/(уо) + /(^i)) (р(^1) - р(уо))
+ (/(^1) + /(У1)) (р(У1) - р(^1)) + (/(У1) + Я^о)) (р(^о) - р(У1)) = О,
8.5. Линеаризация
что эквивалентно (7.16) для функции f. Аналогично, из условия точ-
ности для f, то есть
(/(^о) + /(уо)) - (/(уо) + /(2:1)) + (/(2:1) + /(yi)) - (/(yi) + /(2:0)) = О,
следует
у(уо) - y(zp) _ y(zi) -g(yo) g(yi) -y(zi) _ y(zp) -y(yi) = 0
р(уо)-р(то) р(л1)-р(уо) p(yi)-p(2:i) р(2:0)-р(у1)
При условии р(уо) — р(то) = р(а?1) — p(yi), это эквивалентно (7.16) для
д. □
Замечание. Это доказательство показывает, что для заданной дис-
кретной голоморфной функции / : V(D) —> С соотношение (8.48) кор-
ректно определяет единственную, с точностью до аддитивной постоян-
ной, функцию д : V(D) —> С, также дискретно голоморфную. Наоборот,
для любой 5, удовлетворяющей дискретным уравнениям Коши-Римана
(7.16), соотношение (8.48) определяет функцию / однозначно (с точно-
стью до аддитивной чёрно-белой постоянной); эта функция / также
удовлетворяет дискретным уравнениям Коши-Римана (7.16). Фактиче-
ски, формула (8.48) означает, что дискретная голоморфная функция /
является дискретной производной от д, и что д получается из / дис-
кретным интегрированием.
Подводя итог, мы получаем следующее утверждение.
Теорема 8.19. (Линеаризация конгруэнции окружностей)
а) Касательное пространство к множеству решений интегри-
руемой системы двойного отношения в точке, отвечающей ромби-
ческому вложению квад-графа, состоит из дискретных голоморфных
функций на этом вложении. Это верно для обоих описаний данного
множества: в терминах переменных z, удовлетворяющих уравнени-
ям двойного отношения, и в терминах переменных w, удовлетворяю-
щих уравнениям Хироты. Соответствующие два описания касатель-
ного пространства связаны посредством дискретной производной (со-
отв. неопределённого интеграла) для дискретных голоморфных функ-
ций.
Ь) Касательное пространство к множеству интегрируемых кон-
груэнций окружностей заданной комбинаторики в точке, отвечаю-
щей изорадиалъной конгруэнции, состоит из дискретных голоморф-
ных функций на ромбическом вложении соответствующего квад-
графа, принимающих вещественные значения на белых вершинах и
8. Интегрируемые конгруэнции окружностей
чисто мнимые значения в чёрных. Это выполняется для описания
конгруэнции окружностей в терминах радиусов окружностей и уг-
лов поворота в точках пересечения (система Хироты).
Эффектный пример этого свойства линеаризации доставляет изо-
монодромный дискретный логарифм изучавшийся в Разделе 7.5 и изо-
монодромная г2а-конгруэнция окружностей из Раздела 8.4.
Теорема 8.20. (Линеаризация ш2“-1-конгруэнции окружно-
стей является дискретным логарифмом) Касательный вектор к
пространству интегрируемых конгруэнций окружностей вдоль кри-
вой, состоящей из ш2а-1 -конгруэнций, в изорадиалъной точке, отве-
чающей а — 1/2, является дискретной логарифмической функцией I,
определённой в Разделе 7.5.
Доказательство. Нужно доказать, что дискретный логарифм £ и дис-
кретная степенная функция w2a-1 связаны равенством
£(n) = (,|-^-w2a-1(n)') .
\2 da /а=1/2
В силу Теоремы 8.18, достаточно доказать это для начальных данных
на координатных полуосях. Но это следует из дифференцирования от-
носительно а начальных значений (8.31) в точке а = 1/2, где все w — 1:
результат совпадает с (7.31). □
8.6. Упражнения
8.1. Проверьте, что формулы (8.30), (8.31) дают решения соответству-
ющих разностных уравнений (8.26), (8.28).
8.2. Докажите асимптотические соотношения (8.32), (8.33).
8.3. Заполните пропуски в доказательствах Теорем 8.15, 8.16.
8.4. Определим для каждого решения z : > С системы двойного
отношения (8.21) дуальное решение z* : > С по формуле
^2
г*(п + еД - z*(n) = J----—.
Z\TL + бД — z(n)
Дуальное решение определено однозначно с точностью до трансляции,
и этот произвол можно зафиксировать выбором г*(0). Покажите, что
8.7. Библиографический комментарий
для a G (0,1) решение, дуальное к дискретному z2a, нормированное
нулевым значением в п = 0, совпадает с дискретным г2^г~а\
8.5. Покажите, что предел а —> 1 в Определении 8.12 ведёт к дис-
кретному z как решению уравнения двойного отношения, удовлетво-
ряющему рекуррентным соотношениям (8.26) с a = 1 на координатных
полуосях, с начальными данными
^2 _
2(0) = 0, г(е,) = 0, 2(2е,) = ^, 4^ + <=>) = г(1оД _
В частности, один сектор дискретного г2, определённый на (Z+)2, в
случае $i = 1, 02 = i, характеризуется начальными данными
г(0,0) = г(1,0) =г(0,1) = 0, г(2,0) = 1, г(0, 2) = -1, г(1,1) = г |.
8.6. Покажите, что дуальным решением к дискретному г2 служит дис-
кретный логарифм L.
8.7. Покажите, что для системы двойного отношения на (Z_|_)2 при
= 1, &2 = i, решение, дуальное к z(m, п) — 1/(т + in) имеет вид
z*(m, п) = | ((m + in)3 — (m — in)).
Его можно рассматривать, как дискретный куб z3.
8.7. Библиографический комментарий
Раздел 8.1: Конгруэнции окружностей. Идея, что упаковки
окружностей и, в более общей постановке, конгруэнции окружностей
служат дискретным аналогом аналитических функций, является те-
перь вполне обоснованной, см. монографию (Stephenson 2005). Источ-
ник этой идеи связан с подходом (Thurston 1985), к теореме об отоб-
ражении Римана, использующим упаковки окружностей. После этого
теория разветвилась в нескольких направлениях.
Одно из них связано в основном с задачами аппроксимации. Наи-
более популярными являются шестиугольные упаковки, для которых
сходимость к отображению Римана была установлена в (Rodin-Sullivan
8. Интегрируемые конгруэнции окружностей
1987). В (He-Schramm 1998) было показано, что эта сходимость факти-
чески выполняется в классе С°°, то есть аппроксимируются все стар-
шие производные. Похожие результаты имеются также для конгруэн-
ций окружностей с комбинаторикой квадратной решётки, введённых в
(Schramm 1997), и даже ещё более общих конгруэнций окружностей;
см. (Bucking 2007).
Другое направление концентрируется вокруг теоремы Кёбе-Анд-
реева-Тёрстона об униформизации, и связано с упаковками окруж-
ностей, реализующими клеточные комплексы с предписанной комби-
наторикой, свойствами жёсткости, построением гиперболических 3-
многообразий, и т.д.; см. (Thurston 1997), (Не 1999), (Stephenson 2005).
Вариационное описание упаковок окружностей было инициирова-
но в (Colin de Verdiere 1991). Дальнейший прогресс был достигнут бла-
годаря (Bragger 1992), (Rivin 1994) и (Bobenko-Springborn 2004). Экс-
тремали функционала, использованного в последней статье, описыва-
ются уравнением (8.4). Приложением этого подхода к дискретной диф-
ференциальной геометрии является построение дискретных минималь-
ных поверхностей посредством конгруэнций окружностей (Bobenko-
Hoffmann-Springborn 2006).
Основной темой этой главы является взаимосвязь конгруэнций
окружностей с интегрируемыми системами. См. замечания к Разделу
8.3.
Раздел 8.2: Интегрируемые системы двойного отношения и
Хироты. В рассматриваемой общности (для произвольных квад-
графов) этот материал принадлежит (Bobenko-Suris 2002а). На Z2
связь между системами двойного отношения и Хироты рассматрива-
лась в (Capel-Nijhoff 1995). Наше изложение следует (Bobenko-Mercat-
Suris 2005).
Раздел 8.3: Интегрируемые конгруэнции окружностей. Ор-
тогональные конгруэнции окружностей с комбинаторикой квадрат-
ной решётки изучались в (Schramm 1997). Шестиугольные конгруэн-
ции окружностей с фиксированными углами пересечения исследова-
лись в (Bobenko-Hoffmann 2003), и со свойством мульти-отношения
в (Bobenko-Hoffmann-Suris 2002). Представленная здесь общая теория
была сформулирована в (Bobenko-Mercat-Suris 2005).
Раздел 8.4: Конгруэнции окружностей za и log г. Конгруэнции
окружностей типа za на квадратной решётке были введены в (Bobenko
1999) и изучались в (Bobenko-Pinkall 1999) и (Agafonov-Bobenko 2000).
8.7. Библиографический комментарий
Гипотеза, что эти конгруэнции являются вложенными, то есть, что
внутренние части различных кайтов не пересекаются, сформулиро-
вана в первой из этих статей. Теория была обобщена для правиль-
ной шестиугольной решётки в (Bobenko-Hoffmann 2003). Тот факт, что
конгруэнции окружностей za погружены, то есть, что соседние кай-
ты не накладываются друг на друга, был доказан в (Agafonov-Bobenko
2000) для случая квадратной решётки и в (Agafonov-Bobenko 2003) для
комбинаторики шестиугольной решётки. Вложенность была доказана
в (Agafonov 2003) для комбинаторики квадратной решётки. Изомоно-
дромная связь (8.37) была получена впервые при а = 1/2 в (Nijhoff
1996), без геометрической интерпретации. Изомонодромная связь (8.41)
для системы Хироты была выведена в (Nijlioff-Ramani-Grammaticos-
Ohta 2001), также вне связи с геометрией. Наше изложение следует
здесь (Bobenko-Mercat-Suris 2005).
Раздел 8.5: Линеаризация. Операция дискретного интегрирова-
ния для дискретных голоморфных функций рассматривалась в (Duffin
1956, 1968) и (Mercat 2001). Линеаризация конгруэнции окружностей
изучалась в (Bobenko-Mercat-Suris 2005); в частности, вывод функции
Грина из ^“-конгруэнции окружностей взят из этой статьи.
Раздел 8.6: Упражнения.
Упр. 8.3: см. (Bobenko-Mercat-Suris 2005).
Упр. 8.5: см. (Agafonov-Bobenko 2000).
Упр. 8.6: для случая регулярной квадратной решётки см. (Agafonov-
Bobenko 2000).
Упр. 8.7: см. (Bobenko-Pinkall 1999).
Глава 9
Основания
Для удобства читателя мы даём здесь краткое введение в проек-
тивную геометрию и геометрии Ли, Мёбиуса, Лагерра и Плюккера.
Приведён также ряд классических теорем инцидентности, имеющих
отношение к дискретной дифференциальной геометрии. В качестве ис-
точников, содержащих расширенное изложение этих классических ре-
зультатов мы рекомендуем, в частности, учебники (Blaschke 1954) и
(Pedoe 1970) по проективной геометрии и плюккеровой геометрии пря-
мых, (Blaschke 1929) по сферическим геометриям, (Cecil 1992) по гео-
метрии Ли, и (Hertrich-Jeromin 2003) по геометрии Мёбиуса.
9.1. Проективная геометрия
Проективная геометрия изучает свойства геометрических объек-
тов, остающиеся инвариантными относительно группы проективных
преобразований. Последняя порождена евклидовыми движениями, го-
мотетиями и центральными проекциями. Подходящий аналитический
аппарат проективной геометрии вводится через понятие однородных
координат.
Основное пространство вещественной проективной геометрии,
RPW = Р(КЛГ+1),
является множеством классов эквивалентности Kw+1 \ {0} относитель-
но следующего отношения эквивалентности:
х ~ у <=> х = Ху, х, у 6 RJV+1 \ {0}, A G К*.
Вообще, построение множества классов эквивалентности относительно
отношения ~ называется проективизацией. Таким образом, точки PRJV
являются проективизациями 1-мерных векторных подпространств в
Rjv+1.
9.1. Проективная геометрия
Класс эквивалентностит = (xi, .... xn, arjv+i) € КЛ +1\{0} обозна-
чается [rr] = [а?! : • • • : хы : х^+^]. Пространство R74'4-1 называется про-
странством однородных координат на RP7'7. Говорят, что х G R7'74"1 \{0}
является поднятием [т] в пространство однородных координат, или
представителем [а:] в пространстве однородных координат. Обычное
пространство R77 можно идентифицировать с подмножеством классов
эквивалентности элементов R774-1, у которых rrjv+i 0:
х = (xi,..., zjv) G RW ~ : Zjv : 1]
Это подмножество называется аффинной частью PR77. Дополнение к
аффинной части, то есть множество классов эквивалентности [ад : • • :
хм : 0], называется гиперплоскостью на бесконечности, а его элемен-
ты бесконечно удалёнными точками. Конечно, играет в этой кон-
струкции выделенную роль. Можно выбрать и другую координату вме-
сто a:jv+i, и получить другую аффинную часть. Все N + 1 аффинные
части, полученные таким образом, образуют атлас PR7'7 как веществен-
ного многообразия, состоящий из N + 1 карты.
Вообще, проективные гиперплоскости в PR7X7 являются проективи-
зациями гиперплоскостей, или векторных //-подпространств в R7V+1.
Любая гиперплоскость и может быть задана уравнением
W+1
(и,х) = UiXi = 0,
г=1
где (ui, ..., ujv, Ujv+i) G (R774-1)* \ {0}, a {,•} обозначает спаривание
между двойственными пространствами R774-1 и (R774-1)*. Фактически, в
этом описании важен лишь класс эквивалентности [-щ : • • • : и^ : ujv+i],
и можно идентифицировать гиперплоскость с этим классом эквива-
лентности. Набор [ui : • • • : идг : ujv+i] называется однородными коор-
динатами гиперплоскости и. Например, гиперплоскость на бесконеч-
ности имеет однородные координаты [0 : • - - : 0 : 1]. Таким образом,
множество (RP^7)* всех проективных гиперплоскостей само изоморфно
RP7^. Смена ролей точек из RP77 и гиперплоскостей из (RP7'7)* назы-
вается проективной двойственностью.
Для любого 1 С d N — 1, проективное (/-пространство в RP7'7 яв-
ляется проективизацией векторного (d+ 1)-пространства в R7V+1. Име-
ется два способа задать проективное (/-пространство.
• Пусть даны d + 1 точка х^,... ,Xd+i в RP77, в общем положении,
с представителями ii,...,id+i в пространстве однородных коор-
9. Основания
динат. Условие общего положения означает, что векторное про-
странство Е = span(ii,..., irf+i) имеет размерность d + 1. То-
гда Р(Е) является d-мерным пространством, проходящим через
£1,..., Xd+i- Точки Р(Е) задаются, в однородных координатах, все-
возможными линейными комбинациями х = Ci£i + • • • + Cd+i£d+i
с (ci,... ,cd+i) / (0,... ,0).
• Альтернативно, пусть в даны N — d гиперплоскостей
ui,..., ujv-j в общем положении, с представителями й1,...,
в пространстве однородных координат. Опять, условие общего по-
ложения означает, что векторное пространство Е1- = span(ui,...,
tijv-d) имеет размерность N — d. Тогда векторное пространство
Е = [х G RJV+1 :(&!, х) = = (ujv-j, х) = 0}
имеет размерность d+ 1, а проективное d-пространство Р(Е) опре-
деляется как пересечение гиперплоскостей ui,..., u^-d-
Если di +da N, то пересечение di-пространства с d2-npocTpaHCTBOM в
KPW является проективным пространством размерности > di +d2 — N,
причём в случае общего положения выполняется равенство. Например,
пересечение проективной прямой с проективной гиперплоскостью, в об-
щем положении, является точкой. Здесь “общее положение” означает,
что прямая не лежит на гиперплоскости.
Проективная двойственность распространяется с отношений меж-
ду точками и гиперплоскостями на отношения между проективными
пространствами любых двух дополнительных размерностей di и d^, то
есть таких, что d\ + d% = N — 1. Знаменитый и впечатляющий прин-
цип двойственности проективной геометрии утверждает, что любо-
му утверждению об инцидентности проективных пространств отвечает
двойственное утверждение, в котором каждый объект заменён двой-
ственным, с одновременной заменой всех отношений инцидентности.
Например, в плоской проективной геометрии двойственные утвержде-
ния получаются при замене понятий согласно следующему (неполному)
словарику:
точка прямая
прямая точка
прямая проходит через точку точка лежит на прямой
точка пересечения двух прямых прямая соединяющая две точки
три прямые конкуррентны три точки коллинеарны
9.1. Проективная геометрия
В трёхмерной проективной геометрии, неполный словарик выглядит
следующим образом:
точка плоскость
прямая прямая
плоскость точка
прямая, проходящая через точку прямая, лежащая на плоскости
прямая, образованная пересечением двух плоскостей прямая, соединяющая две точки
точка пересечения прямой с плоскостью плоскость, проходящая через прямую и точку
точка пересечения трёх плоскостей плоскость, проходящая через три точки
четыре плоскости конкуррентны четыре точки компланарны
Проективные преобразования, или коллинеации, в RPjV индуциру-
ются невырожденными линейными отображениями в пространстве од-
нородных координат: у = Г.г. Г 6 GL(N + 1,R).
Теорема 9.1. (Фундаментальная теорема проективной геомет-
рии)
а) Пусть у : RP-^ RPjV инъективное отображение, такое что
y(RPN) не лежит в гиперплоскости, и для любых трёх коллинеар-
ных точек х\,Х2,хз их образы y(xi), 7(^2),7(^3) также коллинеарны.
Тогда у проективное преобразование.
Ь) Для любых двух множеств {ту,..., ядг+г} С RPjV и {у^,...,
Vn+z} С RPjV таких, что в каждом множестве никакие N + 1 точ-
ка не лежат в гиперплоскости, имеется единственное проективное
преобразование у, такое что yt — 7(^fc) для всех k = 1,..., N + 2.
Проективное преобразование прямой характеризуется свойством,
что двойное отношение четырёх точек сохраняется.
В заключение, обсудим кратко понятие квадрики в проективном
пространстве. Пусть Q : RjV+1 х RjV+1 R невырожденная симмет-
ричная билинейная форма; обозначим матрицу этой формы через Q.
Множество точек х 6 RPjV с однородными координатами х G R'/v+1,
удовлетворяющими квадратичному уравнению
N+1
Q(x,X) — QjkXjXfc — 0 (9.1)
J,fc=l
9. Основания
называется (невырожденной) квадрикой Q с ЙРЛ’. Конечно, представ-
ляют интерес только непустые квадрики, отвечающие знакоперемен-
ным билинейным формам. В частности, невырожденная квадрика в
RP2 называется коникой. Две точки х,у G RP77 с однородными коор-
динатами х, у G RjV+1 называются сопряжёнными относительно квад-
рики, если
N + 1
Q(£,y) = 52 = °-
Точки, сопряжённые данной точке х G RPjV, образуют полярную ги-
перплоскость для х. Таким образом, полярная гиперплоскость опреде-
ляется, как Р(тх), где ортогональное дополнение берётся относительно
скалярного произведения Q:
= {у 6 Rn+1 : Q(x, у) = О}.
В качестве однородных координат полярной гиперплоскости можно вы-
брать
й = Qt.
Полюс х гиперплоскости и имеет однородные координаты
х = Q-1&.
Две гиперплоскости и, v с однородными координатами й, v G RjV+1 на-
зываются сопряжёнными относительно квадрики Q, если
N+1
5 (Q = О-
j,k=l
Каждая из них содержит полюс другой гиперплоскости. Касательная
гиперплоскость к квадрике Q самосопряжена, так что её однородные
координаты удовлетворяют квадратичному уравнению
N+1
52 = °- (э.2)
J,fc=l
Квадрику можно рассматривать и как множество точек, удовлетворя-
ющих (9.1), и как огибающую её касательных гиперплоскостей, удовле-
творяющих (9.2).
9.2. Геометрия Ли
Отношение полярности обобщается с точек и гиперплоскостей па
проективные пространства произвольных размерностей. Полярное под-
пространство проективного d-подпространства U = P(J7) определяет-
ся как Р(П±), где ортогональное дополнение берётся относительно ска-
лярного произведения Q. Полярность можно рассматривать как обоб-
щение двойственности.
9.2. Геометрия Ли
9.2.1. Объекты геометрии Ли
Элементами геометрии Ли являются следующие геометрические
объекты в евклидовом пространстве RN:
• Ориентированные гиперсферы. Гиперсфера в R-^ с центром с £ RN
и радиусом г > 0 определяется как S = {а; £ RN : |х — с|2 =
— г2}. Она разделяет R77 на две части, внутреннюю и внешнюю.
Объявляя одну из частей R77 положительной, мы приходим к по-
нятию ориентированной гиперсферы. Таким образом, для каждой
S имеются две ориентированные гиперсферы 5±. Ориентацию ги-
персферы можно учитывать, приписывая ей радиус со знаком ±г.
Например, можно приписывать положительные радиусы г > 0 ги-
персферам с полем единичных нормалей, направленным внутрь, и
отрицательные радиусы г < 0 гиперсферам, у которых поле еди-
ничных нормалей направлено наружу.
• Ориентированные гиперплоскости. Гиперплоскость в RN задаёт-
ся уравнением Р = {х g RN : (и,х) = d}, с единичной нормалью
и е SN-1 и d £ R. Ясно, что пары (v,d) и (—и, —d) представляют
одну и ту же гиперплоскость. Она делит RN на два полупростран-
ства. Объявляя одно из них положительным, мы приходим к по-
нятию ориентированной гиперплоскости. Таким образом, каждой
Р отвечает две ориентированные гиперплоскости Р±. Ориентацию
можно учитывать, приписывая гиперплоскости пару (v,d) с еди-
ничной нормалью и направленной в положительное полупростран-
ство.
• Точки. Точки х £ Rw интерпретируются как гиперсферы нулевого
радиуса.
• Бесконечность. Пространство RjV компактифицируется добавле-
нием бесконечно удалённой точки ос, причём считается, что базис
9. Основания
открытых окрестностей оо задаётся, например, внешними частями
гиперсфер |т|2 = г2. Определённая таким образом компактифика-
ция топологически эквивалентна сфере
• Контактные элементы. Контактным элементом называется пара,
состоящая из точки х G и (ориентированной) гиперплоскости
Р, проходящей через .т; альтернативно, можно использовать век-
тор нормали v к Р в точке х. Контактный элемент представляет
все гиперповерхности (класс эквивапентности), проходящие через
точку х и имеющие в ней касательную гиперплоскость Р. В рамках
геометрии Ли, контактный элемент может быть идентифицирован
с множеством (пучком) всех гиперсфер S проходящих через х и
находящихся в ориентированном контакте с Р (и друг с другом),
то есть имеющих общий вектор нормали и в х; см. рис. 9.1.
Рис. 9.1. Контактный элемент.
9.2.2. Проективная модель геометрии Ли
Все перечисленные выше объекты моделируются в геометрии Ли,
как точки, соотв. прямые, в (.ZV + 2)-мериом проективном простран-
стве P(RJV+1’2) с пространством однородных координат К77"1"1’2. По-
следнее пространство натянуто на N + 3 линейно независимых вектора
9.2. Геометрия Ли
ej,... ,едг+з и оснащено псевдоевклидовым скалярным произведением
{ej, ej) = <
1,
-1,
О,
i = 3' € {1, • • •,N + 1},
i= j e {N + 2,N + 3},
i/j.
Удобно ввести два изотропных вектора
во = |(ew+2 - ejv+i), 600 = 1(677+2+677+1), (9.3)
для которых
(бо,во) — (боо,6оо) — 0, (бо,6оо) — 2’
Моделями этих элементов в пространстве Клг+1,2 однородных коорди-
нат являются:
• Ориентированная гиперсфера с центром с g ]RN и ориентирован-
ным радиусом г е R:
s = с + е0 + (|с|2 - г2)е00 + reN+3. (9.4)
• Ориентированная гиперплоскость {v,x) = d cv G SN’ 1 и d е К:
р = v + 0 • е0 + 2(/еоо + ет7+з- (9.5)
• Точка х G KN:
ж = z + е0 + Iz^eoo + 0 • ет7+3. (9.6)
• Бесконечность оо:
сю = еоо. (9.7)
• Контактный элемент (х, Р):
span(x,p). (9.8)
В проективном пространстве P(RJV+1,2) первые четыре типа элементов
представлены точками, которые являются для (9.4)-(9.7) классами эк-
вивалентности относительно отношения £~77<=>£ = At;cA6IR* для
6 KN+1>2. Контактный элемент представлен прямой в P(KJV+1,2)
проходящей через представители х и р. Укажем несколько фундамен-
тальных свойств этой модели:
9. Основания
(i) Все вышеперечисленные элементы лежат на квадрике Ли P(LN+1,2),
где
L77+1,2 = е ijN+1,2 . = 0} (9,9)
Кроме того, точки P(L7V+1,2) находятся во взаимно-однозначном
соответствии с ориентированными гиперсферами в R77, включая
вырожденные случаи: истинные гиперсферы в R77 отвечают точ-
кам P(Ln+1,2) у которых как ео- , так и е/у+з-компоненты не рав-
ны нулю, гиперплоскости в К77 отвечают точкам в P(L77+1,2) у
которых равна нулю ео-компонента, точки в отвечают точ-
кам Р(1Л+1,2) с нулевой е/у+3-компонентой, и бесконечность от-
вечает единственной точке в Р(1Л+1,2) у которой обе ео- и едг+з-
компоненты равны нулю.
(ii) Две ориентированные гиперсферы бДДг находятся в ориентиро-
ванном контакте (то есть касаются друг друга, причём единичные
нормали в точке касания сонаправлены) тогда и только тогда, ко-
гда
|С1 - С2|2 = (и - г2)2, (9.10)
что эквивалентно (si,s2) = 0.
(iii) Ориентированная гиперсфера S = {х & R77 : |яг — с|2 = г2} нахо-
дятся в ориентированном контакте с ориентированной гиперплос-
костью Р = {х е R77 : {v, х) = d} тогда и только тогда, когда
(c,v) —1— d = 0. (9-11)
Действительно, уравнение гиперплоскости Р касающейся S в xq е
S имеет вид До — с, х — с) = г2. Обозначив и — (с — хо)/г единич-
ный вектор нормали к Р (напомним, что положительные радиусы
приписываются сферам, у которых единичная нормаль направле-
на внутрь), мы можем записать это уравнение, как (ид) —de
d — (с, (с — хо)/г) — г = (с, и) — г, что доказывает (9.11). Далее,
последнее уравнение эквивалентно (s,p) = 0.
(iv) Точку х можно рассматривать как гиперсферу радиуса г — 0 (в
этом случае обе ориентированные гиперсферы совпадают). Отно-
шение инцидентности х Е S с гиперсферой S (соотв. х G Р с ги-
перплоскостью Р) можно интерпретировать как частный случай
ориентированного контакта сферы радиуса г — 0 с S (соотв. с Р),
и оно выполняется тогда и только тогда, когда (х, §) — 0 (соотв.
(±,р) = 0).
9.2. Геометрия Ли
(v) Для любой гиперплоскости Р. (6о,р) = 0. Можно интерпретиро-
вать гиперплоскости как гиперсферы (бесконечного радиуса), про-
ходящие через оо. Точнее, гиперплоскость (у, х) = d можно интер-
претировать как предел, при г —> ос, гиперсфер радиусов г с цен-
трами в с = rv + u, где (у, и} = d. Действительно, представителями
(9.4) таких сфер являются
s — (tv + и) + е0 + (2dr + (и, и))^ + reN+3
~ (v + О(1/г)) + (1/г)е0 + (2d + 0(1/т))еоо + ejv+3
= р + О(1/г).
Кроме того, по аналогичным причинам, бесконечность оо можно
рассматривать, как предельное положение для любой последова-
тельности точек т с |т| —> оо.
(vi) Любые две гиперсферы Si, в ориентированном контакте опреде-
ляют контактный элемент (точку контакта и общую касательную
гиперплоскость). Прямая в P(RW+1,2), проходящая через точки на
Р(1Л+1’2) с представителями si, яг в RN + i,2
, является изотропной.
то есть полностью лежит на квадрике Ли P(L/V+1,2). Это следует
из
(aiSi + a2s2, ctiSi + a2s2) = 2aia2(s!,s2) = 0.
Такая прямая содержит в точности одну точку, у которой пред-
ставитель х имеет нулевую едг+3-компоненту (и отвечает х, общей
точке контакта всех гиперсфер) и, если х ф оо, в точности одну
точку, у которой представитель р имеет нулевую eg-компоненту (и
отвечает Р, общей касательной гиперплоскости всех гиперсфер). В
случае, когда изотропная прямая содержит до, все её точки пред-
ставляют параллельные гиперплоскости, образующие контактный
элемент, проходящий через ос.
Итак, если считать гиперплоскости гиперсферами бесконечного
радиуса, а точки гиперсферами нулевого радиуса, то можно заклю-
чить, что:
► Ориентированные гиперсферы находятся во взаимно-однозначном
соответствии с точками квадрики Ли P(LJV+1,2) в проективном про-
странстве P(KJV+1,2).
► Ориентированный контакт двух ориентированных гиперсфер отве-
чает ортогональности (любых) представителей соответствующих
точек в P(KJV+1,2).
9. Основания
► Контактные элементы гиперповерхностей находятся во взаимно-
однозначном соответствии с изотропными прямыми в P(RN+1,2).
Обозначим множество всех таких прямых через £^+1,2.
9.2.3. Сферические преобразования Ли
Согласно Эрлангенской программе Клейна, геометрия Ли изучает
свойства преобразований, переводящих ориентированные гиперсферы
(включая точки и гиперплоскости) в ориентированные гиперсферы и,
кроме того, сохраняющие ориентированный контакт пары гиперсфер.
В описанной выше проективной модели, геометрия Ли изучает про-
ективные преобразования P(RJV+1,2), оставляющие Р(1Л+1,2) инвари-
антным, и, кроме того, сохраняющие ортогональность точек Р(1Л+1,2)
(что понимается как ортогональность их поднятий в Lw+1,2 С RN+1,2;
ясно, что это отношение не зависит от выбора поднятий). Такие преоб-
разования называются сферическими преобразованиями Ли.
Теорема 9.2. (Фундаментальная теоремы геометрии Ли)
а) Группа сферических преобразований Ли изоморфна фактору
O(W+l,2)/{±/}.
b) Каждый диффеоморфизм P(LN+1,2), сохраняющий прямые, яв-
ляется ограничением сферического преобразования Ли на P(L/V+1,2).
Поскольку равенство нулю ео- или едг+з-компоненты точки в
p(LN+1-2) не является инвариантным свойством относительно общих
сферических преобразований Ли, в геометрии Ли нет различий между
ориентированными гиперсферами, ориентированными гиперплоскостя-
ми и точками.
9.2.4. Планарные семейства сфер; циклиды Дюпена
В этом подразделе рассматривается наиболее важный геометриче-
ски случай N = 3.
Определение 9.3. (Плоское семейство сфер) Плоским семей-
ством (ориентированных) сфер в R3 называется множество сфер, у
которых представители s е P(L4,2) содержатся в проективной плос-
кости Р(Е), где Е трёхмерное векторное подпространство R4,2 такое,
что ограничение (•,•) на Е невырождено.
Таким образом, плоское семейство сфер является коническим се-
чением Р(Е A L4,2). Ясно, что имеется две возможности:
9.2. Геометрия Ли
(а) Сигнатура (•,-)|е равна (2,1), и тогда сигнатура (-.^Isx также
равна(2,1).
(Ь) Сигнатура (•, -)|s равна (1,2), тогда сигнатура (•, -)|Е± равна (3,0).
Легко видеть, что плоское семейство является однопараметрическим
семейством, параметризованным окружностью S1. Действительно, пусть
61,62,63 ортогональный базис Е, (например) такой что (ej,ei) =
= (е2>б2) — —(ез,ез) = 1, тогда сферы из плоского семейства возни-
кают из линейных комбинаций s = diCi + «262 + 63 с
(оцех + а2е2 + е3, <*161 + а2е2 + е3) = 0 <=> а? + а% = 1.
Во втором из приведённых выше случаев, пространство Ех имеет лишь
тривиальное пересечение с L4,2, так что сферы из плоского семейства
P(L4,2 IT Е) не имеют общих касающихся сфер.
Определение 9.4. (Циклидальное семейство сфер) Плоское се-
мейство сфер называется циклидалъным, если сигнатура (•, -)|s равна
(2,1), так что сигнатура (•, -)|s± также равна (2,1).
Для любого циклидального семейства P(L4,2 П Е) имеется двой-
ственное циклидальное семейство P(L4,2 П Е4-), любая сфера которого
находится в ориентированном контакте с любой сферой первого семей-
ства. Семейство P(L4,2lTE), как всякое однопараметрическое семейство
сфер, огибает каналовую поверхность в К3, и эта поверхность являет-
ся огибающей также для двойственного семейства P(L4,2 Г) Е4-). Такие
поверхности называются циклидами Дюпена.
Примеры:
а) Точки окружности образуют плоское циклидальное семейство
сфер (нулевого радиуса). Двойственное семейство состоит из всех (ори-
ентированных) сфер, проходящих через данную окружность, с центра-
ми на прямой, проходящей через центр окружности, перпендикулярно
её плоскости; см. рис. 9.2, слева. Соответствующей циклидой Дюпена
служит сама окружность. Можно показать, что любая циклида Дю-
пена является образом этого случая при сферическом преобразовании
Ли.
Ь) Плоскости, касательные к круговому конусу, также образуют
плоское циклидальное семейство сфер. Двойственное семейство состо-
ит из всех (ориентированных) сфер, касательных к конусу, с центрами
на его оси; см. рис. 9.2, справа. Соответствующей циклидой Дюпена
служит сам конус.
9. Основания
Рис. 9.2. Слева: циклидальное семейство сфер, проходящих
через окружность. Справа: циклидальное семейство сфер,
касательных к конусу.
9.3. Геометрия Мёбиуса
9.3.1. Объекты геометрии Мёбиуса
Геометрия Мёбиуса является подгеометрией геометрии Ли, в кото-
рой точки выделены среди всех гиперсфер, как гиперсферы нулевого
радиуса. Следовательно, геометрия Мёбиуса изучает свойства гипер-
сфер в RN, инвариантные относительно подгруппы сферических преоб-
разований Ли, сохраняющей множество точек. Элементами геометрии
Мёбиуса в RN являются следующие геометрические объекты:
• Точки х £ RN.
• Бесконечность оо, компактифицирующая Rw в SjV.
• (Неориентированные) гиперсферы S = {х G R77 : \х — с|2 = г2} с
центрами с 6 Rw и радиусами г > 0.
• (Неориентированные) гиперплоскости Р = {х G R77 : (у,х) = d},
с единичными нормалями v G и d G R.
Группа Мёбиуса Mdb(/V) в RjV состоит из точечных преобразо-
ваний, порождённых отражениями относительно гиперплоскости Р =
= {х G RjV : (v,x) = d}:
9.3. Геометрия Мёбиуса
(v, х) — d
х х — 2 —----------------г— v ,
(l>, V)
(9-12)
и инверсиями относительно гиперсферы S = {х Е : |х — с|2 = г2}:
.2
(9.13)
Ясно, что Mdb(TV) содержит, как подгруппу, группу Е(У) евклидовых
движений в порождённую отражениями относительно гиперплос-
костей. Она содержит также растяжения, так как их можно предста-
вить как композицию инверсий относительно двух концентрических
гиперсфер. При N 3, теорема Лиувилля утверждает, что МбЬ(У)
совпадает с группой конформных диффеоморфизмов.
Рис. 9.3. Стереографическая проекция.
Компактификация добавлением точки оо приводит к N-сфере
Удобно моделировать как вложение в RJV+1:
= {у eF+1 -.(у, у) = 1}
(мы используем одно и то же обозначение для скалярных произведений
в и в RJV+1; его смысл в каждом случае ясен из контекста). (Об-
ратная) стереографическая проекция ст : \ {уос} из северного
9. Основания
полюса уоо = ejv+i определяется формулой
о |х|2 — 1
У = О~Сг) =, Д Д + 2^1 ejV+i; (9’14)
|х|2 + 1 |х|2 + 1
см. рис. 9.3. Формула
2 2
сг(х) = ejv+i + -j—75—- (х — ejv+i) = ejv+i + ----— (х — eyy+i)
И2 + 1 |х- ejv-ыГ
показывает, что стереографическую проекцию <т можно рассматривать
также как ограничение на инверсии в RJV+1 относительно гипер-
сферы с центром ejv+i и радиусом \/2. Доопределение сг(оо) = у^ пре-
вращает <т в диффеоморфизм <т : RN U {00} —> Гиперплоскости и
гиперсферы в отображаются при стереографической проекции <т в
гиперсферы в а образы гиперплоскостей являются гиперсферами,
проходящими через у ос- Таким образом, гиперплоскости в Rw можно
интерпретировать как гиперсферы, проходящие через оо.
Элементами геометрии Мёбиуса в являются:
• Точки у G
• (Неориентированные) гиперсферы S С
Любая гиперсфера S С за исключением больших, может быть опи-
сана как пересечение с аффинной гиперплоскостью {у G R'v+1 :
(s,y) = 1}. Точка s G Rn+1, являющаяся полюсом этой гиперплоскости
относительно лежит снаружи и S С SN является множеством
контакта с касательным конусом к с вершиной s. Также, S С SN
является пересечением и ортогональной TV-сферы S С R'v+1 с цен-
тром s и радиусом р, заданным р2 — (s, s) — 1, см. рис. 9.4. (Для большой
гиперсферы S С S'^, являющейся пересечением с гиперплоскостью
{у е RJV+1 : (s,y) = 0}, последняя гиперплоскость также играет роль
ортогональной TV-сферы S, а касательный конус превращается в ци-
линдр.)
Группа Мёбиуса Mob(TV) для SN порождена инверсиями относи-
тельно гиперсфер S С S'^,
Р2
----— (у —s'}. (9.15)
1у-«1
9.3. Геометрия Мёбиуса
Рис. 9.4. Гиперсфера S С S77 и соответствующая точка s &
Rw+1, с ортогональной TV-сферой S проходящей через S.
Преобразование (9.15) совпадает с ограничением инверсии в RJV+1 на
относительно TV-сферы S, ортогональной к и пересекающей
по гиперсфере S.
Гиперсферу S в (или в можно также интерпретировать,
как множество точек х е S. Это позволяет ввести сферы низшей раз-
мерности:
• Сферы, /с-сфера является (общим) пересечением N — к гиперсфер
Si (г = l,...,N-k).
Они являются дополнительными объектами геометрии Мёбиуса (в от-
личие от геометрии Ли). Это означает, что класс /с-сфер сохраняется
преобразованиями Мёбиуса.
9.3.2. Проективная модель геометрии Мёбиуса
При моделировании элементов геометрии Мёбиуса (в обоих про-
странствах R'v U {оо} или можно использовать ли-геометрическое
описание, просто опуская едг+з-компоненту. Получающиеся в резуль-
тате объекты являются точками (.W + 1)-мерного проективного про-
странства P(RJV+1,1) с пространством однородных координат Рл,+1’1.
Последнее пространство натянуто на N + 2 линейно независимых век-
9. Основания
тора ei,... ,ejy+2 и оснащено скалярным произведением Минковского
1, i= j е {1,..., АГ + 1},
-1, i=j = N + 2,
О, i / j.
Мы будем использовать обозначения (9.3) и в контексте геометрии Мё-
биуса.
Элементы мёбиусовой геометрии Rw моделируются в пространстве
однородных координат Rw+1,1 следующим образом:
• Точка х € RJV:
х = £euc = х + е0 + |х|2еоо. (9.16)
• Бесконечность оо:
об = воо. (9-17)
• Гиперсфера с центром с G RN и радиусом т > 0:
S = SEuc = С + е0 + (|с|2 - г2)е00. (9.18)
• Гиперплоскость (v,x) = d с v е SW-1 и d £ R:
Р = PEuc = v + о • е0 + 2dex. (9.19)
В проективном пространстве P(RW+1,1) эти элементы представляются
точками, которые служат для (9.16)—(9.19) классами эквивалентности
относительно обычного отношения (~7р»^ = А?]сА€Й‘ для е
RJV+1,1. Эта идентификация обладает следующими фундаментальными
свойствами:
(i) Бесконечность об можно рассматривать как предел любой после-
довательности х для х G Rw при |х| —> оо. Точки х € Rw U {оо}
находятся во взаимно-однозначно соответствии с точками проек-
тивизированного светового конуса P(LJV+1,1), то есть с прямоли-
нейными образующими конуса
L^1’1 = {£ е R^1’1 : (е,0 = 0}. (9.20)
Точки х е RN отвечают точкам P(LJV+1,1) с ненулевой ео-
компонентой, тогда как оо отвечает единственной точке Р(ИЛ+1,1)
с нулевой ед-компонентой. Евклидовы представители (9.16) обла-
дают важным свойством:
(xi,x2) =-||:ei - х2|2, Vzi,:r2 е Rw. (9-21)
9.3. Геометрия Мёбиуса
(ii) Гиперсферы s и гиперплоскости р принадлежат P(R^f1Л). где
iCt1’1 = {е е К"*1’1 : (С 0 > 0} (9.22)
множество пространственно-подобных векторов в пространстве
Минковского RJV+1’1. Гиперплоскости интерпретируются как ги-
персферы (бесконечного радиуса), проходящие через оо.
(iii) Две гиперсферы 81,82 с центрами щ, с2 и радиусами тх,г2 пересе-
каются ортогонально тогда и только тогда, когда
|С1 - с2|2 = г2 + т%, (9.23)
что эквивалентно (si,s2) = 0. Аналогично, гиперсфера S пересе-
кается ортогонально с гиперплоскостью Р тогда и только тогда,
когда её центр лежит на Р:
(с, v) — d = 0,
что эквивалентно (s,p) =0.
(iv) Точку х можно рассматривать как предельный случай гиперсферы
радиуса г = 0. Отношение инцидентности х G S с гиперсферой S
(соотв. х € Р с гиперплоскостью Р) может быть интерпретировано
как частный случай ортогонального пересечение сферы радиуса
т = 0 с S (соотв. с Р). Имеем:
х G S <=> (х, s) = 0,
х G Р <=> (х,р) = 0.
Переход от евклидова пространства КД к сфере отвечает дру-
гому выбору представителей для точек P(RW+1,1):
• Точка у :
У = ysph = У + &N+2- (9.24)
• Гиперсфера S = {у € : (s,y) = 1}:
s - ssph = s + eN+2. (9.25)
• Большая гиперсфера S = {у € : (s,y) = 0}:
s = ssph = s + 0 • ejv+2- (9.26)
9. Основания
Свойства этого выбора представителей:
(i) В формулах (9.24), (9.25), у и s являются точками R7V+1, для
которых {у,у) = 1 и (s,s) > 1, что эквивалентно у е L774-1,1
и & е Сы1,1 , соответственно. Кроме того, элементы (9.26) (по-
прежнему определённые с точностью до вещественного множите-
ля) принадлежат s € lKout .
(ii) Отношение инцидентности:
yeS <=> (у, s)=0.
Действительно, соотношение (у, з) = 0 для у из (9.24) и для s из
(9.25) эквивалентно (s,y) = 1. Аналогично, соотношение (у, s) =
= 0 для элементов s с нулевой е;у+2-компонентой, как в (9.26),
эквивалентно (s,y) = 0, что характеризует большие гиперсферы.
Подведём итог: в пространстве Минковского R7'74'1,1 однородных
координат геометрическим местом точек и гиперсфер (отличных от
гиперплоскостей) евклидова пространства R7'7 служит аффинная ги-
перплоскость (£,ето) = — в частности,
R" ~ Q" = {£ € 11Л+1’1 : £N+2 ~ £n+i = 1},
7Го : R7'7 н i =хEuc = z + ео + |х|2ето (9.27)
=х + I(№ - 1) ew+i + |(И2 + 1) &N+2 € Qq
(евклидова метрика d£? + • • • + df^ индуцируется из объемлющего
R7V+i’i). Модель <Qq евклидова пространства R7'7 можно рассматри-
вать как параболоид в (ДГ + 1)-мерном аффинном подпространстве,
проходящем через ео и натянутом на ei,..., едг, е^.
Аналогично, точки и гиперсферы S7V (отличные от больших гипер-
сфер) находят своё место в аффинной гиперплоскости (£,ejv+2) = — 1
пространства Минковского R7V+1>1; в частности,
S7V ~ < = К е L7V+1,1: £n+2 = 1},
7Г1 : Э у у = ySph = У + ejv+2 € . (9.28)
Модель QY для A-сферы S77 можно рассматривать как копию S7'7 в
(А + 1)-мерном аффинном подпространстве проходящем через еы+2 и
натянутом на ei,..., ejv+i-
9.3. Геометрия Мёбиуса
Отметим, что соответствие между и QY 110 прямолинейным
образующим LJV+1,1 индуцирует стереографическую проекцию о (ср.
(9.27) с (9.28) и (9.14)). В частности, образующие 1Л+1,1, проходящие
через точки ед и , отвечают нулю и точке на бесконечности в Rw, а
в соответственно, южному полюсу уо = — едг+1 и северному полюсу
Уоо — ®N + 1 •
Рис. 9.5. Проективная модель геометрии Мёбиуса.
Обращаясь к проективным моделям сфер низшей размерности, на-
помним, что гиперсфера S в RN (или в Sw) может быть также интер-
претирована как множество точек х € S, и следовательно допускает,
наряду с представлением s, двойственное представление как транс-
версальное пересечение P(L7V+1,1) с проективным TV-пространством
Р(5Х), полярным точке § относительно Р(1Л+1,1); здесь, конечно, s3- =
= {i€ Rn+1’1 : {s,x} — 0}. Это может быть обобщено и при моделиро-
вании сфер низшей размерности.
• Сферы, /с-сфера является пересечением (общего положения) N — к
гиперсфер Si, представленных как §i G R^f1,1 (г = 1,..., N — к).
Общее положение для такого пересечения означает, что (N —
— А:)-мерное линейное подпространство в RJV+1,1, натянутое на ф,
9. Основания
пространственно-подобно:
S = span(si,... ,§N-k) С
Как множество точек, эту fc-сферу представляет P(LW+1,1 П Е2-),
где
N—k
s3- = Q sj- = {z € Rn+1,1 : (si,z) = • • • = (sN-k,z) = oj
i=l
(fc + 2)-мерное линейное подпространство в Rw+1,1 сигнатуры (fc +
+ 1,1)-
Через любые к + 2 точки х-[,..., хь+2 € Rw в общем положе-
нии можно провести единственную /с-сферу. Она отвечает (fc + 2)-
мерному линейному подпространству
Е2" = span(ii,..., Хк+з),
сигнатуры (fc + 1,1), с fc + 2 линейно независимыми изотропными
векторами ii,... ,Хк+2 Е 1Л+1’1. В полярной формулировке, этой
fc-сфере отвечает (N — /с)-мерное пространственно-подобное линей-
ное подпространство
fc+2
Е = Q € Rn+1’1 : (s,ii) = • • • = (s,ifc+2) = o|.
j=i
В заключение отметим, что иногда для гиперсферы s использует-
ся ещё один выбор представителей в RJV+1>1: фиксируется лоренцева
норма s. Для любого к > 0 введём квадрику
L^+1-1 = {С е Rn+1’1 : (С,О = к2}, (9.29)
и выберем в качестве представителя гиперсферы в L^+1,1:
S = ЗМЙЬ = ^(s + ejv+2) = у (с + е0 + (|с|2 - г2)еос) € L*+1’1. (9.30)
Фактически, уравнение (9.30) даёт для любой гиперсферы два предста-
вителя, отвечающие противоположным значениям р, соответственно г.
Выбор знака отвечает одной из возможных ориентаций гиперсферы, и,
9.3. Геометрия Мёбиуса
следовательно, это уравнение представляет ориентированные гипер-
сферы. Строго говоря, это выводит нас за рамки проективной модели
геометрии Мёбиуса, и является наследием ли-геометрического подхо-
да. Мы будем называть р € R (соотв. г € R) ориентированным сфе-
рическим (соотв. евклидовым) радиусом гиперсферы. Для любых двух
(ориентированных) гиперсфер Si, S2, скалярное произведение их пред-
ставителей змбь мёбиусово инвариантно: если к = 1, то
(Si,.*2) = p~((sr,s2) - 1) = + г2 - |С1 - С2|2)
равно косинусу угла пересечения Si, S2, когда они пересекаются, и
равно инверсному расстоянию между Si, S2 в противном случае.
9.3.3. Преобразования Мёбиуса
Геометрия Мёбиуса посвящена изучению свойств (неориентирован-
ных) гиперсфер, инвариантных относительно проективных преобразо-
ваний P(R7V+1,1), переводящих точки в точки) то есть оставляющих
Р(1Л+1,1) инвариантным. Такие преобразования называются преобра-
зованиями Мёбиуса.
Теорема 9.5. (Фундаментальная теорема геометрии Мёбиуса)
а) Группа преобразований Мёбиуса изоморфна O(N + 1,1)/ {±/} ~
O+(N + 1,1), группе преобразований Лоренца Rw+1,1, сохраняющих
времени-подобное направление.
Ь) Каждый конформный диффеоморфизм SN ~ Rw U {оо} индуци-
руется ограничением преобразования Мёбиуса на Р(1Д+1,1).
Группа O+(N + 1,1) порождена отражениями,
KN+i,i) АД5)=5-^Ц^в- (9.31)
(s,s)
Эти отражения сохраняют световой конус ЛЛ+1,1 и переводят прямо-
линейные образующие в прямолинейные образующие. Следовательно,
они индуцируют некоторые преобразования на P(LJV+1’1) ~ соотв.
на Q#.
Индуцированные преобразования на Rw получаются из
(9.31) прямым вычислением с представителями (9.16) для точек и пред-
ставителями (9.18) для гиперсфер, и задаются формулами (9.13) (ин-
9. Основания
версия относительно гиперсферы S = {.т 6 R'v : |х — с|2 = г2}); анало-
гично, если s = р есть гиперплоскость (9.19), то преобразование, ин-
дуцированное на RN отражением Ар, как легко установить, имеет вид
(9.12) (отражение относительно гиперплоскости Р = {х 6 : (v,x) —
= dB-
Аналогично, индуцированные преобразования на <Q>Y — полу-
чаются прямым вычислением с представителями (9.24) для точек и
(9.25) для гиперсфер:
л /-л ( , B~sl2 А , 1у-512
As(y) = [y~s+——sj +——ew+2,
и индуцированное преобразование на задаётся (9.15).
Так как (не)равенство нулю ед-компоненты точки в P(RW+1,1)
неинвариантно относительно общего преобразования Мёбиуса, в гео-
метрии Мёбиуса нет различий между гиперсферами и гиперплоскостя-
ми. Элементы подгруппы изотропии О+,(У + 1,1) преобразований Ло-
ренца, оставляющие неподвижным, порождены отражениями отно-
сительно гиперсферы (9.19), индуцирующими отражения относительно
гиперплоскости в iVB Следовательно, 0+ (N + 1,1) идентифицируется
с Е(У), группой евклидовых движений в iVB
Удобно работать со спинорными представлениями этих групп. На-
помним, что алгебра Клиффорда С^(У + 1,1) это алгебра над R с об-
разующими ei,... ,ejv+2 G RJV+1’1, удовлетворяющими соотношениям
- -2<е,ц)1 = -2(е,ц), ve,77 е RJV+1,1.
Отсюда следует £2 = — (£,£); следовательно, любой вектор £ G
jjjJV+1,1 \ |jv+i,i имеет обратный £-1 = — £/(£,£)• Мультипликатив-
ная группа, порождённая обратимыми векторами, называется группой
Клиффорда. Нам понадобится её подгруппа, порождённая единичными
пространственно- подобными векторами:
S = Рт+(У + 1, 1) = {ф = Ci • • : & = -1},
и подгруппа, порождённая векторами, ортогональными к е^:
доо = Рш+(У+1,1) = {^ = е1---еп: £2 = -1, (Сг,еоо)=0}.
Эти группы действуют на RJV+1,1 подкрученными сопряжениями:
А/,(ц) = (—1)п^-1ц^. В частности, для вектора £ с £2 = —1 имеем:
AM = = У - 2(С,т?)С,
9.4. Лагеррова геометрия
что является отражением относительно гиперплоскости, ортогональ-
ной (. Таким образом. 8 порождена отражениями, тогда как 8ос порож-
дена отражениями, оставляющими неподвижным ео и, следовательно,
оставляющими инвариантным. Фактически, 8 является двойным
накрытием O+(N + 1,1) — Mob(.ZV), a Soo является двойным накры-
тием + 1,1) — E(.ZV). Преобразования из S, Soo, сохраняющие
ориентацию, образуют подгруппы
Л = Spin+(W + 1,1), Лто = Spin+^ + l,l),
определяемые условием, что в мультипликативное представление их
элементов = £1 • • '(п входит чётное число векторов Алгебры Ли
групп Ли Л и Лоо состоят из бивекторов:
f) = spin(N + l,l) = span|ejeji, j 6 {0,1,..., N, oo}, i /
boo = spinoo(2V + 1,1) = span|eiey : i, j e {1,..., N, оо}, i
9.4. Лагеррова геометрия
Геометрия Лагерра является специализацией геометрии Ли, в ко-
торой гиперплоскости выделены среди всех гиперсфер, как гиперсфе-
ры, проходящие через оо. Таким образом, лагеррова геометрия изуча-
ет свойства гиперсфер, инвариантные относительно подгруппы сфери-
ческих преобразований Ли, сохраняющих множество гиперплоскостей.
Элементами лагерровой геометрии являются следующие объекты в К77:
• (Ориентированные) гиперсферы S = {т 6 Ж77 : |т — с|2 = г2) с
центрами с е Ж77 и (возможно, отрицательными) радиусами г 6 Ж
ставятся в соответствие с (.А + 1)-ками (с,г).
• Точки х 6 Ж77 рассматриваются, как гиперсферы нулевого радиу-
са, и отвечают (.W + 1)-кам (т,0).
• (Ориентированные) гиперплоскости Р = {х & Rw : (v,x) = d}, с
единичными нормалями v G и d 6 Ж ставятся в соответствие
с (N + 1)-ками (v,d).
В проективной модели геометрии Ли гиперплоскости определяют-
ся как элементы P(LJV+1,2) с нулевой компонентой ео. Таким образом,
9. Основания
геометрия Лагерра изучает подгруппу сферических преобразований
Ли, сохраняющую подмножество P(LAf+1’2) с нулевой компонентой во-
По-видимому, не существует модели лагерровой геометрии, в кото-
рой гиперсферы и гиперплоскости моделировались бы точками одного
и того же пространства. В зависимости от того, какой из этих двух ти-
пов элементов моделируется точками, мы приходим либо к цилиндри-
ческой модели Бляшке, либо к циклографической модели лагерровой
геометрии. Мы будем использовать первую модель, преимуществом ко-
торой является более простое описание выделенных объектов лагерро-
вой геометрии, то есть гиперплоскостей. Основным достоинством вто-
рой модели является более простое описание группы преобразований
Лагерра.
Арена обеих моделей состоит из двух дуальных (7V + 1)-мерных
проективных пространств. Соответствующие пространства однород-
ных координат RM1,1 и (irM1,1)* возникают из R77+1,2 при “забывании”,
соответственно, ео- и воо-компонент. Таким образом, R77,1,1 натянуто
на N + 2 линейно независимых вектора ei,..., e^v, ejv+З; есс, и оснаще-
но вырожденной билинейной формой сигнатуры (N, 1,1), относитель-
но которой приведённые выше векторы попарно ортогональны, причём
первые N пространственно-подобны: (е^,е,) = 1 при 1 г ./V, пред-
последний времени-подобен, а последний изотропен: (ejv+3i едг+з) = — 1
и (во^воо) = 0. Аналогично, в (R^1,1)* имеется ортогональный базис,
состоящий из ei,..., е^, е^+з; ео, опять с изотропным последним век-
тором: (во, е0) — 0. Отметим, что для обеих вырожденных билинейных
форм в наших двух пространствах используется один и тот же сим-
вол (•,•). Мы придадим ему ещё дополнительную нагрузку, и будем
использовать для обозначения (невырожденного) спаривания между
этими пространствами, определённого равенством (ео,еоо) — — в до-
полнение к приведённым соотношениям. (Заметим, что вырожденная
билинейная форма не может быть использована для идентификации
векторного пространства с двойственным.)
В обеих упомянутых выше моделях:
• Гиперплоскость Р = (v,d) моделируется точкой проективного
пространства P(R77,1,1) с представителем
р = v + 2deoo + ejv+з- (9.32)
• Гиперсфера S = (с, г) моделируется точкой проективного про-
странства P((R77,:L’1)*) с представителем
s = с + ео + rejv+з*
(9.33)
9.4. Лагеррова геометрия
Обе модели возникают, если рассмотреть одно из пространств как из-
бранное (фундаментальное) пространство, а точки второго простран-
ства интерпретировать как гиперплоскости избранного пространства.
В цилиндрической модели Бляшке, избранным является простран-
ство PQR77,1’1), точки которого моделируют гиперплоскости Р С Ж77.
Тогда гиперсфера S С Жлг моделируется как гиперплоскость {£ G
P(RJV’1’1) : (s,£) = 0} в пространстве P(RJV’1,1). Основные свойства этой
модели следующие:
(i) Ориентированные гиперплоскости Р С Ж77 находятся во взаимно-
однозначном соответствии с точками р квадрики P(LAr,1’1)) где
L27,1,1 = {£ 6 jRJV.M . = о}. (9.34)
(ii) Две ориентированные гиперплоскости Fi, Рг С Ж27 находятся в
ориентированном контакте (параллельны) тогда и только тогда,
когда их представители р^, р% отличаются на вектор, параллель-
ный воо, то есть, если (Р1,рг) = 0.
(iii) Ориентированная гиперсфера S С Ж77 находится в ориентирован-
ном контакте с ориентированной гиперплоскостью Р С К77 тогда и
только тогда, когда (р, з) = 0. Таким образом, гиперсфера S интер-
претируется, как множество всех её касательных гиперплоскостей.
Квадрика Ж^27,1,1) диффеоморфна цилиндру Бляшке
2 = {(иД) е RW+1 : М = 1} = S27-1 х Ж с Ж27+1. (9.35)
Две точки этого цилиндра представляют параллельные гиперплоско-
сти, если они лежат на одной прямолинейной образующей 2, парал-
лельной его оси. В объемлющем пространстве Ж274-1 цилиндра Бляш-
ке, ориентированные гиперсферы S С Ж77 находятся во взаимно-
однозначном соответствии с гиперплоскостями, не параллельными оси
2:
S ~ {(v, d) 6 жл'+1 : (с, и) - d - г = 0}. (9.36)
Пересечение такой гиперплоскости с 2 состоит из точки в X, представ-
ляющей касательные гиперплоскости к S С R27, как следует из (9.11).
В циклографической модели избранным является пространство ги-
персфер (Ж77,1,1)*, так что гиперсферы S С R27 моделируются как точ-
ки s € Р((Ж27,1,1)*), а гиперплоскости Р С Ж27 моделируются как ги-
перплоскости {£ : (р,£) = 0} С Р((Ж27,1,1)*). Таким образом, гипер-
плоскость Р интерпретируется как множество гиперсфер S, имеющих
ориентированный контакт с Р.
9. Основания
Вот основные черты этой модели:
(i) Множество ориентированных гиперсфер S С Ж77 находится во
взаимно-однозначном соответствии с точками
и — (с, г) (9.37)
пространства Минковского Ж77’1, натянутого на векторы ej,...,
e^v, ejv+з- Это пространство интерпретируется как аффинная
часть Р((ЖЛ7,1,1)*).
(ii) Ориентированные гиперплоскости Р С Ж7'7 можно представлять
как гиперплоскости в Ж77,1:
тг — {(с,г) € Ж77,1 : ((и, 1), (с,г)) = (и, с} — г = d}. (9.38)
Таким образом, ориентированные гиперплоскости Р 6 Ж77 нахо-
дятся во взаимно-однозначном соответствии с гиперплоскостями
я С Ж77,1, составляющими угол тг/4 с подпространством Ж77 =
= {(т,0)}сЖЛ7’1.
(iii) Ориентированная гиперсфера S С Ж77 находится в ориентирован-
ном контакте с ориентированной гиперплоскостью Р С Ж77 тогда
и только тогда, когда <т 6 я.
(iv) Две ориентированные гиперсферы Si, S2 С Ж77 находятся в ориен-
тированном контакте тогда и только тогда, когда их представители
в пространстве Минковского <Т1,сг2 Е Ж77,1 отличаются на изотроп-
ный вектор: |<7i — сг2| = 0.
В циклографической модели, группа преобразований Лагерра до-
пускает красивое описание:
Теорема 9.6. (Фундаментальная теорема лагерровой геомет-
рии) Группа преобразований Лагерра изоморфна группе аффинных
преобразований Ж7'7,1: у н-> ХАу + Ь, где A 6 O(N, 1), А > 0 и b 6 Ж77,1.
9.5. Плюккерова геометрия прямых
В этом разделе мы обозначаем однородные координаты точки х €
ЖР3 через х = (гг°, ге1 , ге2 , ге3) 6 Ж4. Для удобства обозначений, примем
сокращение V = Ж4.
9.5. ПЛЮККЕРОВА ГЕОМЕТРИЯ ПРЯМЫХ
Проективные подпространства ЖР3 являются, стандартным обра-
зом, проективизациями векторных подпространств V. В частности,
пусть х, у 6 RP3 любые две различные точки, и пусть х. у G V их
произвольные представители в пространстве однородных координат.
Тогда прямая д = (ху) С №Р3 является проективизацией двумерного
векторного подпространства span(i, у) С V.
Следуя Грассману и Плюккеру, идентифицируем последнее под-
пространство с (проективизированным) приводимым бивектором
д = х А у е А2 У. (9.39)
Выберем базис Л2 У, состоящий из ег Л Oj при 0 < i < j < 3. Коорди-
натное представление бивектора (9.39) в этом базисе имеет вид
д = Ле-j, д13 = хгу3 - х3уг. (9.40)
(и)
Числа (501,502,503,512,513,523) называются плюккеровыми координа-
тами прямой д. Они определены проективно (с точностью до общего
множителя). Действительно, замена пары точек х, у, определяющей д,
на х, у с однородными координатами х3 = ах3 + by3, у3 = сх3 + dy3,
ad — be 0, приводит к одновременному умножению всех дгз на общий
множитель дгз — (ad — Ьс)дгз.
Не всякий бивектор представляет прямую в ИР3, поскольку не вся-
кий бивектор приводим, как в (9.39). Очевидное необходимое условие
приводимости для ненулевого д 6 Л2У имеет вид
gAg = 0. (9.41)
Можно показать, что оно также и достаточно. В плюккеровых коорди-
натах это условие записывается, как
501523-502513 + № = 0. (9.42)
Окончательно, получаем следующее описание £3, множества пря-
мых в ЮР3, в рамках плюккеровой геометрии прямых. На шестимерном
векторном пространстве А2У с базисом е^Ле*, определено невырожден-
ное скалярное произведение, посредством таблицы отличных от нуля
скалярных произведений базисных векторов:
(е0 Aei,e2 Ае3) = -(e0Ae2,ei Ле3) = (e0Ae3,ei Л е2) = 1.
9. Основания
Нетрудно проверить, что сигнатура этого скалярного произведения
равна (3, 3). то есть можно считать Л2У ~ Ж3,3. Обозначим
1?’3 = {дбЛ2У:(д,д)=0}. (9.43)
Точки плюккеровой квадрики P(L3,3) находятся во взаимно-однозначном
соответствии с элементами £3.
Фундаментальным свойством данной модели является следующее:
• Две прямые g, h в IMP3 пересекаются тогда и только тогда, когда
их представители в Л2У полярны друг к другу:
(g,h) = g01h23-g°2h13+g03h12+g23h01-g13h02+g12h°3 =0. (9.44)
В этом случае прямая I С Р(Л2У), проходящая через [д] и [А],
изотропна: t С P(L3,3).
Для доказательства заметим, что если прямые д, h пересекаются в
точке z, то д = xAz nh = у Az, и тогда gAh = 0. Наоборот, если прямые
д, h не пересекаются, то их поднятия в V порождают всё пространство
V, и тогда дЛh ± 0. Остаётся заметить, что gAh = (g, /1) еоЛе! Ле2Лез.
Обратимся теперь к важным линейным подмножествам плюкке-
ровой квадрики.
• Любая изотропная прямая I С Р(1Л3) отвечает однопараметриче-
скому семейству прямых в RP3 проходящих через общую точку и
лежащих в одной плоскости. Такое семейство прямых естественно
интерпретируется как контактный элемент (точка и проходящая
через неё плоскость) в рамках геометрии прямых.
• В отличие от геометрии Ли, в рассматриваемом случае сигнатуры
(3,3) в L3,3 существуют также изотропные плоскости, являющие-
ся проективизациями 3-мерных векторных подпространств в Л2Н.
На плюккеровой квадрике P(L3,3) имеется два сорта изотропных
плоскостей. Изотропная плоскость может представлять:
а) двухпараметрическое семейство всех прямых в ИР3, прохо-
дящих через некоторую общую точку; такое семейство есте-
ственно идентифицировать с этой общей точкой;
(3) двухпараметрическое семейство всех прямых некоторой плос-
кости в RP3; такое семейство естественно идентифицировать
с этой общей плоскостью.
9.5. П.'ПОККЕРОВА ГЕОМЕТРИЯ ПРЯМЫХ
Чтобы понять, почему выполняется последнее утверждение, рас-
смотрим три неколлипеарпые точки в изотропной плоскости. Все пря-
мые, попарно соединяющие их, изотропны. Следовательно, эти три точ-
ки представляют три попарно пересекающиеся прямые в RP3. Если они
конкуррентны, то мы имеем ситуацию а). В противном случае, они ле-
жат на плоскости в RIP3, и имеет место ситуация /3).
Проективные преобразования P(R3’3), оставляющие плюккерову
квадрику P(L3,3) инвариантной, могут быть поделены в зависимости
от их действия на два типа изотропных плоскостей.
Теорема 9.7. (Фундаментальная теорема плюккеровой геомет-
рии прямых)
а) Группа проективных преобразований R.P3 изоморфна подгруппе
0(3, 3)/(±7), состоящей из преобразований, сохраняющих трёхмерные
векторные подпространства типов а) и /3) в L3,3.
Ь) Группа корреляций RP3 изоморфна подгруппе О(3,3)/(±/), со-
стоящей из преобразований, меняющих ролями трёхмерные вектор-
ные подпространства типов а) и /3) в L3,3.
Теперь мы обсудим плоские семейства прямых. Такое семейство
прямых представляется коническим сечением Р(Е П L3,3), где Т обо-
значает трёхмерное векторное подпространство R3,3 с невырожденным
ограничением скалярного произведения (•, -)|s- Нетрудно понять, что
четыре попарно непересекающихся (скрещивающихся) прямых в R.P3
принадлежат плоскому семейству (имеют линейно зависимые предста-
вители в L3,3) тогда и только тогда, когда они принадлежат регулу-
су (одному из семейств образующих линейчатой квадрики в RP3, то
есть однополостному гиперболоиду или гиперболическому параболои-
ду). Дополнительный регулус представляется двойственным плоским
семейством прямых Р(Е± ПЬ3,3).
Наконец, упомянем коротко о двойственности в плюккеровой гео-
метрии прямых. Любое проективное подпространство Р(Е) С RP3 мож-
но описать при помощи его двойственного подпространства Р(£-*-) С
(RP3)*, где S1- С V* служит аннулятором векторного подпростран-
ства S С V. Как множество точек, Р(Е) является пересечением плоско-
стей, представленных Р(Е±). Таким образом, плоскость и С RP3 можно
описать при помощи элемента Р(Е-*-) С (RP3)* с однородными коорди-
натами и = (uq, Ui, «2, из) = UlG*i К*. Как множество точек,
эта плоскость состоит из х G R.P3 с однородными координатами х =
9. Основания
= (х°, х1, х2, х3) 6 V, удовлетворяющими
з
= 0. (9.45)
/=о
Это описание и двойственно описанию посредством проективизации
трёхмерного векторного подпространства span(£, у, z) С V, где х, у, z
служат однородными координатами любых трёх неколлинеарных то-
чек х, у, z 6 и. В духе подхода Грассмана-Плюккера, последнее вектор-
ное подпространство можно представить (проективизированным) при-
водимым три-вектором и — хЛуЛгЕ A3V. В базисе A3V, состоящем
из ег Л ej, /\ efc, 0 i < j < к < 3, имеем:
___27 i 27 j 27
й = 52 ei Л е> Л efe ’ ul]k = Vi Уэ Ук
(ijk) Zi Zj Zk
Легко видеть, что однородные координаты щ можно нормировать так,
чтобы
и0=и™, U1 = -u023, и2=и013, u3 = -u012.
Аналогично, в двойственном описании, любую прямую д С IMP3
можно рассматривать как пересечение двух плоскостей u,v С RIP3, и
следовательно можно задать как span(u,v) € V*, что, в свою очередь,
представляется (проективизированным) бивектором
д = й Л v е Л2(У*). (9.46)
В координатах:
д = uAv = ^gij е* Ле’, gij = UiVj -UjVi. (9.47)
(ij)
Шестёрка чисел (501,502,503,512,513,523) называется двойственными
плюккеровыми координатами прямой д. Замечательно, что этот новый
набор координат весьма просто связан с плюккеровыми координатами
введёнными ранее: если и, и две любые плоскости в RP3 пересекающие-
ся по прямой 5, то можно так нормировать их однородные координаты
Vi, что двойственные плюккеровы координаты (9.47) прямой д =
= uQv совпадут, при подходящем переупорядочении, с её координатами
(9.40):
501 = 523, 502 = -513, 5оз = 512;
523 = 501- 513 = -502, 512 = 5°3-
(9.48)
9.5. Плюккерова ГЕОМЕТРИЯ ПРЯМЫХ
Чтобы увидеть это, возьмём д = (ху) — и A v и выберем точки р 6
и, q 6 v так, чтобы р 0 v и q 0 и. Можно нормировать однородные
координаты плоскостей u, v так, чтобы
х° X1 х2 z3\ Vo
У° У1 У2 У3 | | U1 V1
Р° Р1 Р2 У3 1 и2 V2
.q° q1 q2 У/ \и3 ЦЗ
/О 0\
О 0|
0 1'
V 0/
Теперь (9.48) следует из хорошо известного обобщения правила Кра-
мера, утверждающего, что определители размера 2x2 дг] — U{Vj —UjVi
пропорциональны определителям размера 4x4, полученным из матри-
цы последней линейной системы заменой г-го и j’-ro столбцов столбцами
в правой части системы.
В заключение, отметим пару полезных соотношений для обычных
и двойственных плюккеровых координат прямой. Они следуют непо-
средственно из определений.
• Однородные координаты плоскости и, проходящей через прямую
д и точку р 0 д, равны
з
Uj = ^2 0 = 0,1,2,3); (9.49)
k=0
однородные координаты точки пересечения х прямой д и плоскости
v, не содержащей д, равны
з
^ = J2?4 0 = 0, 1,2,3).
к=0
(9.50)
• точка х принадлежит прямой д тогда и только тогда, когда
з
£>fczfc = 0 0 = 0,1,2,3); (9.51)
к=0
прямая д лежит на плоскости и тогда и только тогда, когда
з
^gjkuk=0 0 = 0,1,2,3). (9.52)
к=0
9. Основания
Кстати, последнее утверждение позволяет дать простое доказательство
для утверждения, что любому д 6 L3,3 отвечает прямая в ЖР3. Действи-
тельно, (д,д) = 0 и д ф 0 эквивалентно тому, что ранг системы (9.52)
равен 2, и, следовательно, решение этой системы даёт две различные
плоскости. Они пересекаются вдоль искомой прямой.
9.6. Теоремы инцидентности
Этот раздел содержит коллекцию классических теорем инцидент-
ности, лежащих в основе дискретной дифференциальной геометрии.
Мы часто будем использовать двойное отношение четырёх коллинеар-
ных точек а, 6, с, d, определённое, как
l(a, b) l(c,d)
q(a, b, с, d) = —— • ттл—, (9.53)
1(0, с) l(d, а)
и тот факт, что оно инвариантно относительно проективных преобра-
зований.
9.6.1. Теоремы Менелая и Чевы
Теорема 9.8. (Теорема Менелая) Пусть точки Р12, Р23, F31 ле-
жат, соответственно, на сторонах (А1А2), (А2А3), (А3А1) тре-
угольника Л(А1А2>1з) и отличны от его вершин. Эти точки колли-
неарны тогда и только тогда, когда
1(Ai,Pi2) . ЦА2,Р23) КАз,Р31) = , ,
К-Р12М2) К-^2зМз) К^31М1)
9.6. Теоремы инцидентности
Теорема 9.9. (Теорема Чевы) Пусть точки Р12, Ръз, -Р31 лежат,
соответственно, на сторонах (Л1Л2), (Л2Л3), (Л3Л1) треугольника
Л(Л1Л2/1з) и отличны от его вершин. Три прямые (Л1.Р23), (Л2.Р31),
(Л3.Р12) пересекаются в одной точке тогда и только тогда, когда
(9.55)
ЦЛ2,Р2з) Z(A3,P3i)
КА2М2) ’ /(Р2зМз) ' ЦРзыЛ)
Обе теоремы, Чевы и Менелая, имеют сходный характер: их пред-
положения имеют очевидную аффинно-геометрическую природу (ле-
вые части уравнений (9.54), (9.55) выражены в терминах отношения
направленных длин), тогда как заключения проективно инварианты.
На самом деле, можно показать, что численные значения циклических
произведений отношений направленных длин в левых частях (9.54),
(9.55) сами являются проективно инвариантными величинами. Это вы-
текает из следующей теоремы.
Теорема 9.10. (Проективная инвариантность циклического
произведения отношений направленных длин в треугольни-
ке) Рассмотрим треугольник Л(Л1Л2>1з), и пусть точки Р12, Р23,
F31 лежат на прямых (Л1Л2), (Л2Л3), (Л3Л1), соответственно, и
отличны от вершин Ai треугольника.
а) Обозначим через Q12 точку пересечения прямых (Л1Л2) и
9. Основания
Рис. 9.8. Проективно-инвариантный смысл циклического
произведения из теоремы Менелая.
(Р23Р31), см- рис. 9.8. Тогда
1{Ах,р12) г(А2,р23)
Z(P12,A2) ’ /(Р2з,Аз)
Ц4з,-Рз1) (л Г> Д п \
Z(P3iMi) _-9( ь 121 2,Q12)-
(9.56)
b) Пусть О = (Л1Р23) П (Л2Рз1); обозначим через Pi2 точку пе-
ресечения прямых (AjA2) и (А3О), см. рис. 9.9. Тогда
ПЛ.ад 1(Л2,Р23) |(Л3,Р31)
W45 клРад л" р'2’Аг'w (9'57>
Доказательство. Ясно, что теоремы Менелая и Чевы следуют из этой
теоремы: двойные отношения в правых частях уравнений (9.56), (9.57)
равны 1 тогда и только тогда, когда Q12 = Р12, соотв. Pi2 = Pi2. Для
доказательства заметим, что, так как обе части в (9.56), (9.57) инвари-
антны относительно аффинных преобразований, достаточно рассмот-
реть Ai = (0,0), А2 = (1, 0), А3 = (0,1), и тогда Р12 = (зц, 0), Р23 = (1-
— ^2,^2), Рз1 = (0,1 — 2?з) при некоторых 2:1,2:2, ^з £ R \ {0,1}. После
этого оба утверждения теоремы устанавливаются прямым вычислени-
ем. □
9.6.2. Обобщённая теорема Менелая
Используя результаты Теоремы 9.10 для “обрезания вершин”, мож-
но доказать следующий результат.
9.6. Теоремы инцидентности
Рис. 9.9. Проективно-инвариантный смысл циклического
произведения из теоремы Чевы.
Теорема 9.11. (Проективная инвариантность циклического
произведения отношений направленных длин) Пусть даны та-
кие п 3 точек Ai, А%,..., Ап в что никакие три последова-
тельные точки, при циклической нумерации, не коллинеарны. Пусть
точки Р12, .РгЗ) • • •, -Pni лежат на прямых (Ai А2), (А2А3),..., (AnAi),
соответственно. Тогда произведение отношений направленных длин
г -Рг,г+1)
“ А+1)
инвариантно относительно проективных преобразований.
Следующий результат даёт геометрическое описание ситуации, ко-
гда циклическое произведение в Теореме 9.11 принимает специальное
значение (—1)п.
Теорема 9.12. (Обобщённая теорема Менелая) Пусть даны п
точек Ai,..., Ап общего положения в Rn-1, так что аффинное про-
странство, проходящее через них, (п — Т)-мерно. Пусть точки Рщ-щ
лежат на прямых (АгАг+1) и отличны от Ai, Al+i (индексы берутся
по модулю п). Тогда п точек Рщ+i лежат в (п — Т)-мерном аффинном
подпространстве тогда и только тогда, когда выполнено следующее
равенство для отношений направленных длин:
тт Pi,i+l)
l(Pi,i+l, ^i+1)
9. Основания
Доказательство. Точки Pi^+i лежат в (п — 2)-мерном аффинном под-
пространстве, если имеется нетривиальная линейная зависимость
п п
'ДгРг,г+1 = О С = О*
г = 1 г=1
Подставляя Рщ+i — (1 — Ф)Д + и принимая в расчёт условие
общего положения, которое означает, что векторы ДЛ; линейно неза-
висимы, приходим к однородной системе из п линейных уравнений на
п коэффициентов щ:
^iP-г Т (1 Сг+1)Мг+1 — 0, i = 1, . . . , 71
(индексы понимаются по модулю п). Ясно, что она допускает нетриви-
альное решение тогда и только тогда, когда
П = П г(Л’Рм+1) = (-1)".
(Теорема Менелая отвечает п = 3.) □
9.6.3. Теорема Дезарга
Теорема 9.13. (Теорема Дезарга) Треугольники Л(Л151Д) и
ЛДгДД); лежащие в одной плоскости, перспективны относитель-
7Ю точки тогда и только тогда, когда они перспективны относитель-
но прямой. Это означает, что три прямые (ДД), (ДД) и (ДД)
конкуррентны тогда и только тогда, когда три точки пересечения
(AiBi) П (Л2Д), (Л1С1) П (ДД) и (ДД) П (ДД) коллинеарны.
Доказательство. Для иллюстрации, см. рис. 9.10. Чтобы найти кри-
терий того, что наши треугольники перспективны относительно точки,
обозначим Q — (ДД) П (ДД), R — (ВДД) П (ДД) и рассмотрим
два треугольника Л(Д<ЭД) и Л(ДЛД), пересечённые, соответствен-
но, прямыми (ДД) и (Д Д). Из теоремы Менелая следует необходи-
мое и достаточное условие для того, чтобы прямые (Л1Л2) и (ДД)
пересекались с (Д Д) в одной и той же точке О:
l(Q,A2) _ l(Br,O) _l(B1,C1) 1(Д,С2)
l(Ar,Q) ’ l(A2,В2) ~ 1(О,Д) “ ЦД, Д ’ /(Д, Д) ’
9.6. Теоремы инцидентности
или
Z(B1M1) l(Q,A2) ЦВ2,С2) KJM)
ЦАМ) 'ЦА2,В2)' l(C2,R) ’ ЦС^Вг)
(9.58)
Аналогично, чтобы найти критерий того, что наши треугольники пер-
спективны относительно прямой, рассмотрим треугольники /\(QBiR)
и A(QB2-R), пересечённые, соответственно, прямыми (AiCi) и (А2С2).
Теорема Менелая даёт необходимое и достаточное условие для того,
чтобы прямые (AiCi) и (А2С2) пересекались с (QR) в одной и той же
точке Р:
ЦВМ1) = l(P,Q) = l(Q,A2) ЦВ2,С2)
ЦАМ)' ЦСМ) l(R,P) ЦА2,В2)' l(C2,R) ’
или
l(Q,Ar) ЦВМ) ЦВ,С2) ЦВ2,А2)
ЦАМ) ' ЦСМ) ’ ЦС2,В2) ' ЦАМ)
Как видим, уравнения (9.58) и (9.59) идентичны.
□
Хороший способ понять теорему Дезарга заключается в том, чтобы
интерпретировать рис. 9.10 как плоскую проекцию усечённой трёхмер-
ной пирамиды с вершиной О. Тогда становится ясно, что точки Р, Q,
R принадлежат пересечению плоскостей (AiBiCj) и (А2В2С2) и, сле-
довательно, коллинеарны.
9. Основания
9.6.4. Четырёхвершиные множества точек на прямой
Определение 9.14. (Четырёхвершинное множество) Пусть А,
В, С, D четыре точки на плоскости П, и никакие три из них не кол-
линеарны. Полный четырёхвершинник с вершинами А, В, С, D состо-
ит из шести прямых, соединяющих шесть пар этих точек. Прямые
в каждой паре
(АВ} и (CD}, (АС} и (BD}, (AD} и (ВС}
называются противоположными. Пусть I прямая на плоскости П,
не содержащая ни одну из точек А, В, С, D. Набор из трёх пар
(-Pii Q1!-Рг, Q2;-Рз) <Эз) точек пересечения i с тремя парами противо-
положных прямых четырёхвершинника называется четырёхвершин-
ным множеством.
Следует отметить симметричность этого определения относитель-
но любой комбинации перестановок Pi О Qt в каждой паре, а также
относительно любой перестановки номеров 1, 2, 3.
Теорема 9.15. (О четырёхвершинных множествах) Четырёхвер-
шинные множества (Pi, Qi; Р%, Q2', Рз, <Эз) характеризуются соотно-
шением
Рис. 9.11. Четырёхвершинное множество точек.
9.6. Теоремы инцидентности
Любые пять точек четырёхвершинного множества однозначно опре-
деляют шестую.
Доказательство. Пусть О = (АС) П (BD) (см. рис. 9.11 в качестве
иллюстрации и пояснения обозначений). Проецируя прямую (АС) на
£, сначала из точки В, а затем из точки D, получаем следующие два
тождества:
<?(А, С, О, <Эз) = q(Pi, Q2, Р3, Оз), <?(А, С, О, Оз) — д(Рг, 01, Рз, Оз)-
Соотношение (9.60) является их следствием. □
Из данного доказательства можно извлечь разнообразные след-
ствия. Например, отсюда следует, что точки четырёхвершинного мно-
жества всегда образуют три пары точек, связанные проективной инво-
люцией на I. Нам, в основном, нужно следующее следствие:
Теорема 9.16. (Теорема Паппа о четырёхвершинных множе-
ствах) Пусть дано четырёхвершинное множество точек (Pi,Qi',P2,
О2;-Рз,Оз) на прямой I. Пусть П произвольная плоскость, проходя-
щая через эту прямую, и пусть А, В, С такие три точки на П, что
каждая из прямых (АВ), (ВС), (АС) проходит через одну из точек
первой, соотв. второй и третьей пары четырёхвершинного множе-
ства. Тогда существует единственная точка D, для которой проти-
воположные стороны (CD), (AD), (BD) полного четырёхвершинника
с вершинами А, В, С, D проходят через оставшиеся точки первой, со-
отв. второй и третьей пары четырёхвершинного множества.
9. Основания
Рис. 9.13. Теорема Карно.
Теорема иллюстрируется рис. 9.12: если четырёхвершинное мно-
жество (Pi, Qi; Р2, Q2; Рз, Q3) порождено полным четырёхвершинни-
ком с вершинами Л, В, С, О, и даны точки Л', В', С', для которых
Pi £ (А'В1), Р2 £ (В'С1) и Q3 £ (A'C), то существует единствен-
ная точка D1 такая, что Qi £ (С'В'), Q2 £ (A'D') и Р3 £ Это
означает, что прямые (бДС”), (Q2A') и (Р3В') имеют общую точку пе-
ресечения D'.
9.6.5. Теоремы Карно и Паскаля
Следующие две теоремы дают две различные (но, конечно, экви-
валентные) характеризации шести точек, лежащих на конике.
Теорема 9.17. (Теорема Карно) Пусть на каждой стороне (AiAj)
треугольника Л(А1А2А3) выбрана пара точек (Pij, Qij). Шесть точек
Pij, Qij лежат на невырожденной конике тогда и только тогда, когда
выполнено следующее соотношение:
ЦА^Ру) z(a2,p23) ЦЛз,р31) z(a1;q12) i(a2,q23) z(a3,q3i)
Z(Pi2,A2) Z(P23, Аз) ’ Z(P31, Ai) ' Z(Q12,A2) ’ Z(Q23, Аз) ’ Z(Q31, AJ ’
(9.61)
см. puc. 9.13.
Доказательство. Доказательство почти тривиально, если коника яв-
ляется окружностью. Действительно, в этом случае произведение
9.6. Теоремы инцидентности
Z(X,, Pij) l(At, Qij} = l(Ai, Pik) l(Ai, Qik)
есть не что иное, как степень Аг относительно окружности. Теорема
9.11 гарантирует, что условие (9.61) проективно инвариантно. Следова-
тельно, утверждение теоремы выполняется для всех коник, являющих-
ся образами окружности при проективных преобразованиях, то есть
для всех невырожденных коник. □
Теорема 9.18. (Теорема Паскаля) Плоский шестиугольник с вер-
шинами Pi,... ,Pq вписан в конику тогда и только тогда, когда кол-
линеарны точки пересечения противоположных сторон шестиуголь-
ника,
Вг = (ад) А (ад), в2 = (ад) А (ад), в3 = (р3л)а(р6р1).
Доказательство. (См. рис. 9.14.) Введём три вспомогательные точки
А = (ад2) А (ад), а2 = (Р3Р4) А (ад2), Л3 = (ад) А (ад).
Применяя теорему Менелая к треугольнику Д(Л1А2Л3). пересечённо-
му прямыми (P4F5), (РвР}) и (Р2Н3), получаем следующие соотноше-
9. Основания
ния:
Рис. 9.15. Теорема Брианшона.
/(Л1,В1) z(a2,f4) z(a3,f5)
1(ВъА2) ' Z(P4,A3) ’ Z(P5Mi)
Z(A2,P2) Z(A3,P6) Z(A1,P1)
1(В2,А3) ’ Z(P6,Ai) ' /(Р1М2)
Z(A3,P3) ЦА!,Р2) Z(A2,P3)
/(В3,А1) ’ 1(Р2,А2) ' /(РзМз)
Перемножим эти три уравнения и воспользуемся тем, что, согласно
теореме Карно,
ЦЛ2,Р4) ЦАз,Р5) ЦА1,Р2) Z(A2,P3) Z(A3,P6) /(АьРх)
/(Р4,Лз) ’ Z(P5,Ai) ’ г(Р2,А2) ' 1(Рз,А3) ' 1(Р6,Аг) ’ Z(P1,A2)
Следовательно, мы приходим к
/(AlBi) Z(A2,P2) l(A3,B3)
Z(B!,A2) ’ ?(П2,Аз) ‘ Z(B3,A1)
но, согласно теореме Менелая, последнее соотношение эквивалентно
коллинеарности В3, В2, В3. □
9.6. Теоремы инцидентности
9.6.6. Теорема Брианшона
Теорема 9.19. (Теорема Брианшона) Плоский шестиугольник с
вершинами Pi, . . . , Р^ описан около коники тогда и только тогда, ко-
гда его три диагонали (Р1Р4), (Р2Р5) и (РзРе) конкуррентны; см. рис.
9.15.
Доказательство. Утверждение теоремы проективно двойственно тео-
реме Паскаля. □
Важный частный (точнее, вырожденный) случай возникает, когда
две противоположные точки Pi лежат на конике.
Следствие 9.20. Пусть плоский четырёхугольник описан около ко-
ники, так что прямые (Р1Р2), (Р2Р3), (^зА); (^4^1) касаются коники
в точках Mi, М2, М3, М4, соответственно, тогда диагонали (Р1Р3),
(Р2Р4) и прямые (М1М3), (М2М4), соединяющие противоположные
точки касания, конкуррентны; см. рис. 9.16.
Рис. 9.16. Вырожденный случай теоремы Брианшона.
9.6.7. Теорема Микеля
Теорема 9.21. (Теорема Микеля) Рассмотрим треугольник с вер-
шинами fi, f2, /3 и выберем точку fij на каждой стороне (fifj). Тогда
три окружности TiCjk, проходящие через (fi, fij, fik)> пересекаются
в одной точке /123-
9. Основания
Рис. 9.17. Теорема Микеля.
Доказательство. (См. рис. 9.17.) Обозначим углы треугольника Л(А,
/2> А) через ai, az, аз> соответственно. Окружности Т1С23, проходящая
через (А, Аг, Аз), и т2(713, проходящая через (А, Аг, Аз), пересекают-
ся в двух точках, одной из них служит /12. Вторую точку пересечения
обозначим /12з- Нужно показать, что она принадлежит также окруж-
ности Т3С12, проходящей через (А, Аз, Аз)- Для этого заметим, что
из вписанности четырёхугольников (/1, /12, /123, Аз) и (f2, Аг, А23, Аз)
вытекает
ДАгзАг, АгзАз) — тг — щ, -ДАгзАг, АгзАз) = тг — а2.
Как следствие, находим:
^(АгзАз, АгзАз) — 2тГ — (тг — (2]) - (тг - <22) = <21 + <22 = ТГ - <2з,
что означает, что четырёхугольник (А, Аз, Агз, Аз) также вписан. □
Приложение. Решения избранных
упражнений
А.1. Решения упражнений к Главе 2
2.2. Обозначим точки пересечения следующим образом (см. рис. А.1):
Ak; = (ХХг) П (XkXik), = (XjXi,) П (XjfeXi23).
Рис. А.1. Элементарный шестигранник плоской Q-сети.
Условие коллинеарности А3, А2, А32, А21 приводит к следующему
построению точки Хщз по семи точкам X, Xi, Xij. Построим точки
пересечения
А? = (ХХО П (Х3Х13), А3 = (ХХ2) П (Х3Х2з),
Приложение
проведём прямую и определим точки её пересечения с прямыми
(Х2Х12) и (XiX12):
А312 = (Х2Х12) А (ЛМ1), All = (ХЛ2) А (АМ1),
тогда Х12з определяется как точка пересечения
Х123 = (А?2^2з) п (А^Хзз).
Остаётся доказать, что тот же результат получится, если в каче-
стве основы для построения использовать коллинеарность четвёрки
А2, A3, А23, А32 или четвёрки Aj, А3, А33, Aj3.
Идея доказательства заключается в построении трёхмерной фигу-
ры, для которой исходная является плоской проекцией (эта же идея
часто используется при доказательстве теоремы Дезарга). Пусть на-
ша фигура лежит в плоскости а, точки Af, А2, Af2, А21 лежат на
одной прямой, и пусть /3 есть некоторая другая плоскость, прохо-
дящая через эту прямую. Выберем точку О вне обеих плоскостей
и определим четырёхугольник (У3, Уз, У23, Угз) на /3 как проекцию
четырёхугольника (Хз, Хщ, Х123, Х23) из О на /3. Все грани шести-
гранника (X, Х\, Х12, Х2, Уз, Уз, У123, Уз) плоские. Например, грань
(X, Х2, У23, Уз) плоская, так как прямые (Х3Х23) и (У3У23) пересекают-
ся, по построению, в точке А2, являющейся также точкой пересечения
прямых (Х3 Х2з) и (ХХ2).
Далее, рассмотрим точки
А2 = (ХХ2) А (Х!Х12), В3Х = (ХУ3) А (Х1У13),
В1з = (У3У2з) А (У13У123), В}2 = (Х2У23) А (Х12У123).
Они принадлежат пересечению плоскостей (XХ2У23У3) и (Х1Х12У123
Уз) и следовательно коллинеарны. Отсюда, точки А2, А3, А23, А32, яв-
ляющиеся их проекциями из О на а, также коллинеарны. Аналогично
доказывается коллинеарность точек Aj, А3, А13, А31.
2.3. Комбинаторная структура в рассматриваемом случае та же, что
у гиперкуба; ср. рис. А.2. Требуется доказать, что четыре плоскости,
комбинаторно отвечающие четырём “горизонтальным” элементарным
квадратам этой фигуры, имеют общую точку. Это можно сделать при
помощи тех же рассуждений, что и в доказательстве Теоремы 2.5, допу-
стив сначала, что вся конфигурация лежит в четырёхмерном простран-
стве, и затем осуществляя обычный предельный переход к трёхмерной
А.1. Решения упражнений к Главе 2
ситуации. В четырёхмерном случае можно рассуждать следующим об-
разом: пересечение четырёх плоскостей
ППП(1)ПП(2>ПП(12>
может быть альтернативно определено как пересечение четырёх трёх-
мерных пространств
00,1) р 00,2) р 01,12) п 02,12)
где пространство V(k,e> при k,f' € {0,1,2,12} натянуто на плоскости
n(fc) И nW соответствующих четырёхугольников из сетей и f^.
Пересечение же четырёх трёхмерных пространств в R4 состоит, в слу-
чае общего положения, из одной точки.
Рис. А.2. Четырёхугольник (/, /1, /12, /2) и соответствующие
ему в сетях /(1), f1-2^ и /(12).
2.4. Из уравнений (2.10)—(2.12) выводятся следующие формулы:
+ - 1 + (1 + Ci^4 + + Cji^i’
(1 + Tjbj)(l + bi) — 1 + (1 + c+j)bj + (1 + c^)bi. (A.2)
Приложение
Из симметрии их правых частей следует, что уравнения (2.79) совмест-
ны. и, следовательно, определяют функции ф, ф+ : Zm —> R (ассоции-
рованные с точками Zm) однозначно с точностью до постоянных мно-
жителей, которые можно зафиксировать условием </>(0) = <^>+(0) = 1.
Кроме того, из (А.1), (А.2) следует, что функции ф,ф+ удовлетворяют
уравнениям
6i8j<p+ = с^6,ф++ С±б1ф+,
J IJ J Jt’
(А.З)
(А.4)
для всех 1 i j' т. Решение ф уравнения (А.З) непосредственно
определяется по начальным данным (F^), посредством “интегрирова-
ния” первого из уравнений (2.79) вдоль координатной оси Введём
функции р : Zm —> Rw и ф : Zm —> IR по формулам (1.20), так что
классическое представление (2.75) останется верным. Прямое вычисле-
ние, основанное на (2.9), (2.10) -(2.12) и (2.79) показывает, что формулы
(2.76), (2.78) выполняются при
(А.5)
Наконец, проверим, что величины ai удовлетворяют (2.77). Решения аг
этой системы однозначно определяются значениями на соответствую-
щих координатных осях которые, в свою очередь, можно получить
из значений ф+ на координатных осях, определённых данными (F^)
фундаментального преобразования. Это позволяет найти решения р, ф
уравнений (2.76), (2.78) с начальными данными р(0) = /+(0) — /(0) и
V-(o) = 1.
2.5. Условие совместности имеет вид тДт^) = Tj^ngk) и выполняется
в силу уравнения
(1 + TjCjfc)(l + Cj/j) = (1 + TjCi/c)(l -|- Cj/c), (А.6)
которое, в свою очередь, является следствием (2.7). Действительно,
(2.7) эквивалентно переписывается как
(1 + T,Cjfc)(l + Сщ) = 1 + (1 + TkCij)cjk + (1 + TkCj^dh,
с правой частью, симметричной относительно перестановки i -н- j.
А.1. Решения упражнений к Главе 2
2.7. Требуется проверить условие совместности для системы (2.80).
Ti(7j0k) — Tjfjidk). Иначе говоря, нужно показать, что равенство
Ti(Tj0k) _ TitTjOk) Tjdk _ (л , Л г. ,
ек ~ т^к '0k v1
симметрично относительно i и j. Последнее выражение вычисляется
непосредственно при помощи (2.22):
'Угк + 'Yij'Yjk Укг 3~/. \
\ " 1 - yjkykj ' 1 - 7>i7v ) (
1 7»j7ji 7j к'Укj Ук'1.У{к yij7jkyki yjiyikykj
1 — 'Vji'yij
и его симметричность очевидна.
2.16. Пусть стороны одного из четырёхугольников представляют-
ся комплексными числами a, Ь, с, d, а стороны второго — числами
аа, /ЗЬ, ус, 5d, где а, /3,7,6 6 R. Тогда
а + b + с + d = 0, аа + /36 + ус + 5d = 0.
Комплексные двойные отношения четырёхугольников равны тогда и
только тогда, когда ау — /35. Нужно лишь показать, что из этого ра-
венства следует, что четырёхугольники дуальны, то есть их дополни-
тельные диагонали параллельны:
а + b || /ЗЬ + ус, b + с || аа + /ЗЬ.
Оба соотношения доказываются аналогично. Например, для первого
имеем
(а —5)а+(/3 —5)Ь + (7 —(5)с = 0 <=> (5 — а)(а + 6) = (/3 — а)Ь+(у — 5)с.
Остаётся использовать равенство (/3 — а) : /3 — (7 — <5) : 7, которое
следует из ау — /35.
2.20. Для каждой четвёрки (Pi, Р2, Р3, Pi) плоскостей в RP3 с общей
точкой можно ввести понятие “диагональной плоскости” как плоскости,
натянутой на прямые Pi П Р3 и Р? О Р4. Далее, можно сформулировать
(и принять в качестве определения) теорему, проективно двойственную
Приложение
Теореме 2.26: Q’-сеть Р : Z2 —> { плоскости в RP3} называется дуаль-
ной кёнигсовой сетью, если диагональные плоскости четырёх четвёрок
(Р, Pi, Pij, Pj) при (z,j) е {(±1,±2)} пересекаются в общей точке. Кри-
терий, полученный при помощи проективной двойственности из Тео-
ремы 2.27 гласит, что Q’-сеть Р : Z2 —> {плоскости в RP3} является
дуальной кёнигсовой тогда и только тогда, когда для каждого и 6 Z2
три точки
X(up) = Р А Р12 А Р-1,2, X(down) = Р A Pi,_2 А Р-1-2,
х(1) =РпР! АР-i
коллинеарны, или, эквивалентно, если коллинеарны точки
X(left) = р р р_12 п р_1_21 X(right) = Р А Р1,2 А Р1 -2,
Х(2) = р п р2 п р_2
Существует ещё одна эквивалентная формулировка этого критерия.
Обозначим через Х^, (i,j) е {(±1,±2)} точки пересечения четырёх
плоскостей (Р, Pi,Pij,Pj~). Таким образом, все четыре точки лежат
в плоскости Р. Для Q’-сети Р, рассматриваемой как Q-сеть, эти точки
являются вершинами элементарного четырёхугольника в плоскости Р.
Его диагоналями являются прямые
£(+) = (%(-! -2)х(1’2)), ^(-) = (Х(-1’2)Х(1~2)).
Согласно теореме Брианшона, Q*-ceTb Р : Z2 —> {плоскости в 1RP3}
является дуальной кёнигсовой тогда и только тогда, когда для любого
и € Z2 шесть прямых
^(+), и ^=PnPy, (i,j) 6 {(±1,±2)},
касаются общей коники в плоскости Р.
2.21. Согласно Теореме 2.32, уравнение сети f можно взять в виде fi2~
— f = a(f2 — fi), так что формулы из Упражнения 2.15 дают h = аа_2
и к — aa-i- Что касается сети М, формулы (2.36) показывают, что в
подходящих однородных координатах М, а именно
её уравнения принимают вид М12 — М = (L2M2 — «и Mi, то есть h = а^а
и к = а^а.
А.1. Решения упражнений к Главе 2
2.22. Можно считать, что в RP2 выбрана система однородных коорди-
нат, в которой
/2 = (0,1,1), /12 = (1,1,1).
/ = (0,0,1), Л = (1,0,1),
Тогда
Li = (1,0,0),
и можно считать, что
Ьз = (€з,0,1), т4 = (е4,1,1),
Ь2 = (0,1,0),
^5 = (о,е5,1), l6 = (i,e6,1).
Теперь легко вывести условие того, что Li,..., Le лежат на конике: оно
имеет вид
£4&(£з - 1)(& - 1) = £з£б(^4 - 1)(& - 1)-
В то же время, имеем:
д(/,Т1,/1,Тз) = ^^, д(/2,Т4,/12,Т1) = ^4,
<?(/, L2, f2, L5) = g(/i, L6, /12, L2) = -Ц.
S5 S6 - 1
Это доказывает утверждение.
2.23. Прямые I = (ММ+) можно приписать элементарному шести-
граннику F. Каждая прямая I является пересечением “чёрной” и “бе-
лой” плоскостей соответствующего шестигранника. Кроме того, две
прямые, отвечающие двум соседним шестигранникам имеют общую
точку, а именно пересечение диагоналей общей грани. Итак, шестёрка
точек в I состоит из точек пересечения диагоналей всех шести граней
соответствующего шестигранника (М, М+ приходят с нижней и верх-
ней граней, остальные четыре точки с четырёх боковых граней). При
доказательстве Теоремы 2.29 было показано, что эти шесть точек об-
разуют четырёхвершинное множество.
2.26. Если Т-сеть рассматривается как частный случай Q-сети, то ко-
эффициенты Cij уравнения Лапласа для Q-сети равны = 1 + сг] =
= — aji. Уравнение (2.16) для коэффициентов вращения 7^ даёт:
_ _____cijCjj_____ _ /______1\ /_________________1
(1 + Cij-)(1+Cj,) <^)\ а2-
Приложение
Теперь из (2.84) следует
Сравнение с (2.81) показывает, что можно принять р — ст2.
2.27. Система разностных уравнений (2.90) совместна в силу перво-
го уравнения (2.59). Решение 0 : Z2 —> R этой системы определяет-
ся по своим значениям на координатных осях 23;, которые немедлен-
но получаются, при помощи (2.90), из данных (МТ^). Из последнего
уравнения (2.59) следует, что эта функция является скалярным реше-
нием дискретного уравнения Мутара. Напомним, что f+ есть решение
дискретного уравнения Мутара (2.56) с преобразованным потенциалом
а^2- Второе уравнение (2.59) приводит к представлению (2.89) для а^2
в терминах в.
2.29. Утверждение является локальным, так как свойство кёнигсово-
сти относится лишь к четырёхугольникам, смежным с одной вершиной.
Кроме того, так как утверждение проективно инварианто, достаточно
доказать его для одной проекции, выбранной удобным образом. В каче-
стве плоскости проекции выберем касательную плоскость У в вершине
f A-сети, так что точки f и будут совпадать со своими проекци-
ями. Рассмотрим ортогональную проекцию на эту плоскость (то есть
выберем центр проекции в точке, бесконечно удалённой по направле-
нию вектора нормали п). Для всех (z,j) G {(±1,±2)}, обозначим fij
ортогональную проекцию точки fij на СР:
fij = fij -сп, с = (fij - f, п)/(п, п).
Теперь используем представление Лелёвра для A-сети f. Имеем: fij —
— f — nij ХПг+ЩХП = (riij — n) X П;, И анЭЛОГИЧНО fij —f= (nij — n) X rij.
Итак, вектор fij—f ортогонален и n;, и rij и следовательно, параллелен
п; х nj. Следовательно, fij — f — ащ х rij — сп. Аналогичная формула
выполняется для М — /, где М произвольная тока прямой (ffij).
М — f = апг х nj — сп (А.7)
(так как точные значения а и с в этой формуле не важны в рассмат-
риваемом контексте, мы используем те же буквы, что и в формуле для
fij ~ f)-
A.2. Решения упражнений к Главе 3
Используем последний результат для М, являющейся точкой пере-
сечения диагоналей (ff^) и (fifj) спроецированного четырёхугольни-
ка (fifiifijifj)- Величина q(fifj) = l(M,fj)/l(M,fi), ассоциированная
с направленной диагональю fifj равна
= -т
где
М-/-м(А-/) + Л(Л-/), Л + м = 1. (А.8)
Воспользуемся представлением Лелёвра для правой части последней
формулы, и сравним результат с (А.7):
х п + Xrij х п — апг х rij — сп.
Рассмотрев скалярные произведения этого с тц и nj, находим:
Xfrtj X П,Пг) = ~с{п,щ), д(Пг X П, Tlj) = — с(п, Uj),
и следовательно
Ясно, что произведение таких выражений вдоль замкнутого пути по
направленным диагоналям четырёхугольников смежных с f равен 1,
что и доказывает утверждение, согласно Теореме 2.25.
А.2. Решения упражнений к Главе 3
3.6. Достаточно рассмотреть случай N = 3. Четыре плоскости в R3,
отвечающие лоренцевым единичным векторам €<г, Vj, TjVi, Tiij, явля-
ются ортогональными плоскостями к соответствующим сторонам че-
тырёхугольника (/, fi, fij, fj), проходящими через их середины. Ясно,
что для вписанного четырёхугольника эти плоскости пересекаются по
прямой, проходящей через центр описанной окружности ортогонально
плоскости четырёхугольника. Следовательно, композиция отражений
относительно плоскостей vif тщ совпадает с композицией отражений
относительно плоскостей Vj, TjVj. Следовательно, Vi(riVj) = ±'и](т]'и1).
Выбор знака ± диктуется уравнением (3.19).
Приложение
3.9. Допустим, что выполнены семь условий
fi&Ti, fij
нужно показать, что /123 € Тшз- Восемь точек f, fi, fij и /123 принад-
лежат каждой из вырожденных квадрик (пар плоскостей)
J1! и ?231 5*2 и ?31, ?3 U 5’12,
и, следовательно, являются восьмеркой ассоциированных точек. Пер-
вые семь из них принадлежат также паре плоскостей CPU?12з- Так как
/12з не лежит в СР, то она должна лежать в СР^з, что и требуется.
3.10. Согласно предыдущему упражнению, восемь вершин элементар-
ного шестигранника дискретной A-сети являются ассоциированными
точками. Следовательно, если семь вершин принадлежат некоторой
квадрике Q, то это же верно и для восьмой вершины.
3.17. Ортогональные окружности для пары граней, имеющих общее
ребро всегда пересекаются в двух точках и, следовательно, лежат на
общей сфере. Рассмотрим три ортогональных окружности С12, С23, С/з
для трёх граней 612,623, Сщ, имеющих общую вершину. Проведём сфе-
ру, проходящую через окружности С^Сгз- Эта сфера содержит две
точки пересечения окружностей 6'13 и С12, а также две точки пересе-
чения 6'13 с С'23. Таким образом, на этой сфере лежат четыре точки
окружности Си, следовательно, она лежит на сфере целиком. Анало-
гично доказывается, что все шесть окружностей, отвечающие граням,
лежат на одной сфере. Наконец, четыре таких сферы, отвечающие че-
тырём кубам, имеющим общее ребро, имеют две общие точки: это точки
пересечения всех ортогональных окружностей к двум сферам, припи-
санным к концам данного ребра.
А.З. Решения упражнений к Главе 4
4.3. Нужно рассмотреть лишь вторую альтернативу из Леммы 4.13.
Итак, допустим, что уравнения (4.24) выполнены. Как и в первом слу-
чае, мы можем использовать одно из этих соотношений, чтобы зафик-
сировать калибровку, для максимального упрощения всех матриц пе-
рехода Uj. На этот раз нельзя сделать так, чтобы результат выглядел
одинаково для всех координатных направлений, что и является при-
чиной, по которой это рассмотрение ограничивается случаем т = 2.
А.З. Решения упражнений к Главе 4
Здесь удобно изменить знак о.^ (что приводит также к соответствую-
щим изменениям в формуле (4.25)). Используя уравнение
Т1С2 + $2 = Т2?71 - 7/1,
можно показать существование функция к : Z2 —> R/(2ttZ), такой что
7/1 = и + ei) = —к(и + в1) — к(и),
^2~^(и,и + в2) = -к(и + е2) + к(и).
Затем калибровочное преобразование (4.15) приводит к матрицам пе-
рехода Uj с 771 = 0 и £2 — 0. После этого, оставшееся соотношение в
(4.24),
Т2£1 + Cl = T11J2 — У2
гарантирует существование такой функции ф : Z2 -> R/(4ttZ), что
Ci = C(u,u + ei) = |(<?!)(u + e1) - 0(u)),
772 = 77(7/, u + e2) = |(0(u + e2)+ 0(u)).
Подставляя эти выражения и 771 = £2 = 0 в (4.25), получаем уравне-
ние Хироты (4.35). Чтобы завершить доказательство, покажем, что в
данном случае единичные векторы тг = Ф-1езФ с необходимостью об-
разуют М-сеть в S2. Это делается аналогично предыдущему случаю.
Соотношение тгщ + тг || щ + тг2, которое мы хотим доказать, эквива-
лентно
(U^-'asUi + U^U^1 || + U1U^1a3. (А.9)
Для матриц (4.33), (4.34) легко находим:
(Р п \
О -р)'
азЩи^ +ихи^аз = (^ _°q),
где
Р = cos cos + е’^1) + sin sin (ег7?2 + е-г7?2),
Q = 2 cos cos е^1 - 2 sin sin е-г7?2.
Приложение
Благодаря равенству
cos cos — sin sin (е17?2 — е-г7?2) = О,
можно представить Q как
Q — cos cos (е1^1 + — sin sin (ег7?2 + е-”72).
Отсюда следует, что
р Q g gi(012+01-02-0)/4 . ]g>,
так что P/Q 6 R, что и доказывает утверждение (А.9).
4.4. Мы можем рассматривать стороны четырёхугольника fi — f =
— n-j, х п и f2 — f = пхп? как лежащие в касательной плоскости
Тп§2 к S2 в точке п. Геометрически очевидно, что угол р между эти-
ми сторонами дополняет до тг угол между касательными к S2 в точке
п вдоль соответствующих больших кругов, проходящих через п, щ и
через п,П2- Легко видеть, что эти касательные натянуты на векторы
п'г = П1 — (п1,п)п, п'2 = П2 — {П2,П)П,
рассматриваемые как векторы с началом в п и, следовательно, принад-
лежащие Тп§2. Длины этих векторов немедленно находятся из |п' |2 =
= 1 — (tij, п)2 — sin2 ар Итак, имеем
(п^п^) (П1,П2) — (ni,n)(n2,n) (п\,П2) — COS СЕ i COS 012
C0SI/,~ sin О! sin 02
Фактически, мы вывели уравнение
(П1,П2) = C0SO1 COS 02 — COS р sin О1 sin 02, (А.10)
которое есть не что иное, как сферическая теорема косинусов для сфе-
рического треугольника с вершинами n, ni, П2- Аналогично,
(п, П12) = cosoi cos о2 — cos р* sinoi sin02. (А.11)
Остаётся связать величины из (А.10), (А.11). Это делается при помощи
дискретного уравнения Мутара
(П,П1+П2).
П12 + п = ——--------- (П1 + п2),
1 + (П1,П2)
А.З. Решения упражнений к Главе 4
из которого немедленно следует, что
(1 + (ni,n2))(l + <П12,п)) = (costti + coso2)2 * *.
Подставим (А.10), (А.11) в последнюю формулу; простые преобразова-
ния приводят к
cos<р + cosр* sinai sinа2 /л
- -fi * ( • 4 “ )
1 + cos р cos р 1 + cos ai cos o2
Тем самым найдено соотношение между р и р*-, остаётся привести его к
виду, приведённому в формулировке упражнения, что является делом
простой тригонометрии. Из (А. 12) получаем:
2 / Qi + \
2 Р 2 Ч>* _ 1 + cos(al + «2) _ C°S К 2 ) _ С1 - к)2
tan л tan _ . . — — .
2 2 1 + 005(04 - а2) „„2 ( ai - а2 \ (1 + к)2
I 2 )
Так как |«| < 1, находим:
2 2 (e^ +l)(e^ +1) i + «
что эквивалентно
е^+^* + i = + е^').
4.6. Для функции, определённой согласно (4.133), (4.132),
А(и + еД-А(и) - ф-1ы(2Л[/71(и)Щ^)ф(и),
fx(u - ej) - j\(u) = Ч>~\и)(^-2Хди^дх еД^Ф(ц).
Эти четыре вектора (при j = 1, 2) имеют общие множители Ф-1 слева
и Ф справа, описывающие их одновременное вращение. При рассмотре-
нии локальной геометрии этим вращением можно пренебречь. Прямое
вычисление даёт:
Приложение
dU^u-ех)
— ZA
дХ
dU2(u — e2)
— ZA
дХ
е
е
0 е-г(</>-^)/2>
е»(ф1-ф)/2 0 >
0 +<£)/2^
g—Цфз+Ф)/? 0 У
0 ег(^>-<^_1)/2
-^ф-ф_1)/2 0
0 еЦф+ф-2)/2'
-г(0+0_2)/2 0
Конечно, в двух последних формулах метки оц(А) и а2(Х) относятся,
соответственно, к рёбрам (и — е±, и) и (и — е2,и). При выполнении это-
го вычисления, удобно использовать матрицы У°(А) вместо [Л, (А). Они
отличаются скалярными множителями; их вклад в логарифмические
производные заключается в прибавлении членов, пропорциональных
единичной матрице. Эти члены можно учесть после вычисления лога-
рифмических производных Uj, вычитая подходящие скалярные мат-
рицы, чтобы результаты имели нулевой след.
Приведённые выше выражения представляют векторы в su(2) ~
Ж3, ортогональные к — ia2 ~ ез и, следовательно, компланарные. Вос-
становив общее вращение Ф-1(.. ,)Ф, мы можем сказать, что все четыре
вектора fx(u ± ej) — fx(u) лежат в плоскости, ортогональной к
пх(и) = — гФ-1озФ,
так что fx действительно является дискретной К-поверхностью с гаус-
совым отображением пх-
Полагая А = 1, имеем Ф = Ф, и, сравнив приведённые формулы с
(4.49)-(4.52), убеждаемся, что исходная К-поверхность восстановлена.
4.11. Если v : Zm -> Ж3 является полем нормалей Лелёвра для дис-
кретной A-сети, то гауссово отображение п : Zm —> S2 С Ж3 имеет
вид п = ^/|^|- Гауссово отображение циркулярно тогда и только тогда,
когда оно является Q-сетью. Согласно Упражнению 2.1, это эквива-
лентно утверждению, что |м| : Zm —> R* удовлетворяет тому же урав-
нению (дискретному уравнению Мутара), что и само и. Таким образом,
(^, |р|) = |zz|(п, 1) : Zm —> Ж4 служит решением дискретного уравнения
Мутара. Согласно Теореме 2.32, это эквивалентно тому, что п является
дискретной кёнигсовой сеть.
А.З. Решения упражнений к Главе 4
4.12. Заметим, что условие Менелая
f г г т f \ /1 -/12 /2 -/23 /3-/13 ,
<7(71, /12, J2, J23, /з, 7132 = 7-т~ • 7-т- ' 7-г = -i
J12 — J2 J23 — J3 J13 — J1
во-первых, инвариантно по отношению к дробно-линейным преобра-
зованиям комплексной плоскости переменных f, и, во-вторых, инва-
риантно по отношению к циклическому сдвигу аргументов мульти-
отношения q. Сделаем дробно-линейное преобразование, отправляющее
/123 на бесконечность (а бесконечность в некоторую конечную точку /).
Тогда три окружности из теоремы Микеля превратятся в три стороны
треугольника A(/i2,/23,/1з), с условием, что fa е (fajfak)- Стороны
исходного треугольника превратятся в окружности, проходящие через
(fik, fa, /к) и через /. Условие Менелая означает, что точки /1, /2, /з
коллинеарны. Для исходных точек это значит, что окружность, прохо-
дящая через /1,/г,/з проходит также через /123-
4.20. Обозначим через Н и К кривизны основной поверхности (/, п)
с постоянной средней кривизной. Вычислим кривизны Ht и Kt парал-
лельной поверхности (/ + tn, ri). Имеем
A(f + (t + 6)п) 1 - 2Я(7 + 5) + K(t + <5)2
A(f +tn) ~ 1 - 2Ht + Kt2
= 1 _ м Н — Kt + р К
l-2Ht + Kt2 1 - 2Ht + Kt2
= 1 - 2Ht5 + Kt52.
В последнем равенстве / + (t + 8)n рассматривается как параллельная
поверхность для f + tn. Наконец, для кривизн имеем
тт _ Н - Kt к К
1 - 2Ht + Kt2 l-2Ht + Kt2
Заметим, что H не зависит от грани, тогда как К меняется. Следова-
тельно, для приведённых выше значений Ht и Kt, соотношение (4.130)
эквивалентно
аН = P-at = !
1 - 2Ht t2
откуда следует
Приложение
А.4. Решения упражнений к Главе 6
6.10. Ответ: Для каждого из многочленов (Q1)-(Q4), соответствующий
Р получается заменой (а,В') (а, —/3).
6.16. Обозначим решение уравнения Q = 0 относительно Х[ через Х[ =
= Xi(xi,Xj,Xk). Тогда Х[ = —qjp, где р = QXl и q — Q - xiQXl. Отсюда
следует, что
= =-^. (А.13)
Легко понять, что равенство
X 1ц (Xi, Xj, Х[ (.Xi, Xj, Хк )) Хк
выполняется относительно Xi,Xj, хк тождественно. Дифференцируя
его по Xj, находим:
vt =0.
X / \Xl=Xi\XifXj ,Xk)
В силу (А.13), это можно переписать как
= 0.
X^l=Xl (Xi ,X-j ,Хк)
Отсюда,
= 0.
xi=Xi(Xi,Xj,xk')
Согласно Определению (6.148) для fij, это может быть представлено
как
Добавляя во внутренние скобки член, независящий от Xj,xi, находим
окончательно:
Х[ —X l(X{ ,Xj fXk')
Функция fij+fik+fn зависит от всех четырёх переменных Xi, Xj,xk, Xi-
На решениях Q = 0, то есть при xi = Xi(Xi,Xj,xk), она зависит лишь
от Xi,Xj,Xk- Мы только что показали, что она фактически не зависит
A.4. Решения упражнений к Главе 6
от Xj. Аналогично, она не зависит от Хк- Следовательно, она зависит
лишь от Xj, что и составляет содержание (6.147).
6.17. Наметим вычисление для уравнения (Q2). Находим:
h12(xi, Х2) = 2аР(а — P)h(xj,X2',a),
hlll(xi,х^) — —2а.р(а — p)h(xi,Xi', Р),
h13(xi, 2:3) = —2а/3(а —/3)h(rri, z3; а -/3),
где h(x,y; а) есть биквадратика (q2), то есть
Ых,у; а) = - у)2 -а(х + у) + ^ .
Отбрасывая множитель 2аР(а — Р), общий для всех трёх биквадратик
(и несущественный для уравнения Q — 0), получаем:
dx2
h(xt,X2', а)
1 . Х2- (>А1 + а)2
О / log ~г .— Го >
2v<ri Х2 - (y/xi - а)2
/14(2:1,2:4) — — j Г dx2 _ 1 1о ^4 - (y/x^ + P)2 h(xj.,Xi-,P) 2у[х{ °S 2:4 - (д/г/ - Р)2 ’
/13 (^1, ^з) J f dx3 _ 1 хз ~ (у/х^+а- Р)2 /1(2:1,2:3; а - Р) ^у/х[ х3 - (у/х^) - а + Р)2
Таким образом, трёхногая форма для (Q2) имеет вид
(у^1 + а)2 — х2 (уТ/ - Р)2 - х^
(у/Х\-О)2-Х2 (аДТ + /3)2 - Xi
(у/х^-а + Р)2 -х3
+ а - ^)2 - 2:3
= 0(^1).
Чтобы определить ф(хр), заметим, что
Х2 = а2, Xi^p2, х3 = (а + Р)2
является сингулярным решением Q = 0. При подстановке в предыду-
щую формулу это даёт
0(2:1) = 1.
Приложение
6.18. Рассмотрим трёхногие формы, центрированные в х^, для урав-
нений на трёх гранях 6i2, 6i3, "И623 основного куба, смежных с Xi (это
возможно благодаря свойствам симметрии):
Ф(тх, Z125 а2)/Ф(Т1, X- Q1) = Ф(гГ1,яг2; СЕ2 - Oil),
Ф(11,113;аз)/Ф(а;1,а:;а1) = Ф(ц, х3; а3 - ах),
Ф(т1,т12;а!2)/Ф(т1,2:13;а3) = Ф(т1, Ti23; а2 - а3).
Третье из этих уравнений отвечает вычислению rri23 по грани 71623.
Из этих уравнений следует уравнение, связывающее поля для белого
тетраэдра на рис. 6.19:
Ф(т1,т2;а2 - а1)/Ф(т1,т3;а3 - aj = Ф(т1,Т123;а2 - а3).
Это трёхногая форма для уравнения (выражающего тетраэдральное
свойство)
Q(zi, Х2, х3, Т123; <Т2 — оц, а2 — а3) = О,
центрированная в х±. В силу симметрии, она может быть центрирована
также в х3, что приводит к циклическому сдвигу индексов:
Ф(т2,т3;а3 - а2)/Ф(^2,^1;а1 - аг) = Ф(^2,^123;а3 - оц)-
Последнее уравнение, вместе с трёхногими формами уравнений на гра-
нях 612, 623 центрированных в х3,
Ф(т2, ад а1)/Ф(я:2,я; аг) = Ф(^2, ; »1 - а2),
Ф(а?2, ж23; а3)/Ф(т2, х; а2) = Ф(т2, т3; а3 - а2),
даёт
Ф(т2,Т23;а3)/Ф(т2,Т12;а1) = Ф(аг2, zi23; а3 - ах).
Но это есть не что иное, как трёхногая форма уравнения на грани r26i3.
Таким образом, результаты вычисления 2?i23 по граням ri623 и r26i3
совпадают.
6.19. Значения тгз, приходящие с граней r36i2, t26i3, равны, соответ-
ственно,
^23 = (я3 - Уз)х3(х3 - уз)"1 = UxU~\
х23 = (2:2 - z2)x2(x2 - z2)-1 = VxV^1,
A.4. Решения упражнений к Главе 6
где
U = (хз - у3)(х - z) = (х - z)x - уз{х - z)
= х2 - {у3 + z)x + y3z,
V = {х2 - z2)(x - у) = (х - у)х - z2(x - у)
= х2 - (z2 + у)х + z2y.
Соотношения уз + z = z2 + у и y2z — z2y, гарантирующие, что U = V,
эквивалентны определяющим формулам
Уз = (У - г)у(у - z)~\ z2 = (z - y)z(z - у)-1
системы на грани С2з.
6.27. Дискретное уравнение Мутара Ti2 — х — а(х2 — a?i) можно пе-
реписать в терминах переменных на рёбрах f = х± — х, д = х2 — х,
как
Ь + 9 = 51 + f = а(д - У) = a(yi - /2),
что определяет любые две из переменных f,g,f2,gi в терминах двух
оставшихся; например,
/А
-д)
= L(a) ( f2}
\~91 J
или (^2'\ = L(a x) ( ,
\9) \9'J
где
L(a) =
—a
1 “Г CL
1 — a
a
Теперь мы можем рассмотреть элементарный куб, с уравнением Мута-
ра на каждой грани, и записать в матричном виде два способа постро-
ения отображения (f2,gi,hi) в (Уз,5з>^-2); а именно
/з\
-5з
/
/Уз\ _ [ f\
Д2з(с) -5 = Ь2з(с)£1з(& х) I —5 I
\ h J \ /
( h \
Т2з(с)Т1з(Ь 1)Lj2(a) I —yi I
\ /ii )
Приложение
/ /23 \ /12
= />12(03) I — 513 I = />12(йз)/>1з(&2 Х) “513
\ hv ) у /112
( h\
= />12(Оз)/>1з(/’2 1)/>2з(С1) I —51 •
\ J
Остаётся выполнить сопряжение отображения заменой Ь ь-> Ь 1
Литература
[1] М. J. Ablowitz and Р. A. Clarkson (1991), Solitons, nonlinear
evolution equations and inverse scattering, London Mathematical
Society Lecture Note Series, vol. 149, Cambridge University Press,
Cambridge.
[2] M. J. Ablowitz, D. J. Каир, A. C. Newell, and H. Segur (1973).
Method for solving the Sine-Gordon equation, Phys. Rev. Lett. 30,
no. 25, 1262-1264.
[3] M. J. Ablowitz and J. F. Ladik (1975), Nonlinear differential-
difference equations, J. Math. Phys. 16, 598-603.
[4] M. J. Ablowitz and H. Segur (1981), Solitons and the inverse
scattering transform, SIAM Studies in Applied Mathematics,
vol. 4, Society for Industrial and Applied Mathematics (SIAM).
Philadelphia.
[5] V. E. Adler (1993), Cutting of polygons, Funct. Anal. Appl. 27, no. 2,
141-143.
[6] (1998), Bdcklund transformation for the Krichever-Novikov
equation, Internat. Math. Res. Notices 1, 1-4.
[7] (2000), Legendre transformations on a triangular lattice,
Funct. Anal. Appl. 34, no. 1, 1-9.
[8] (2001), Discrete equations on planar graphs, J. Phys. A 34.
no. 48, 10453-10460.
[9] (2006), Some incidence theorems and integrable discrete
equations, Discrete Comput. Geom. 36, no. 3, 489-498.
[10] V. E. Adler, A. I. Bobenko, and Yu. B. Suris (2003), Classification
of integrable equations on quad-graphs. The consistency approach,
Commun. Math. Phys. 233, 513-543.
Литература
[11| (2004), Geometry of Yang-Baxter maps: pencils of conics and
quadrirational mappings, Commun. Anal. Geom 12, 967-1007.
[12] (2009), Discrete nonlinear hyperbolic equations. Classification
of integrable cases, Funct. Anal, and Appl. 43, no. 1, 3-21.
[13] V. E. Adler and Yu. B. Suris (2004), QJ: Integrable master equation
related to an elliptic curve, Internal. Math. Res. Notices 47, 2523-
2553.
[14] V. E. Adler and A. P. Veselov (2004), Cauchy problem for integrable
discrete equations on quad-graphs, Acta Appl. Math. 84, 237-262.
[15] S. I. Agafonov (2003), Embedded circle patterns with the
combinatorics of the square grid and discrete Painleve equations,
Discrete Comput. Geom. 29, 305-319.
[16] S. I. Agafonov and A. I. Bobenko (2000), Discrete z7 and Painleve
equations, Internat. Math. Res. Notices 4, 165-193.
[17] (2003), Hexagonal circle patterns with constant intersection
angles and discrete Painleve and Riccati equations, J. Math. Phys.
44, 3455-3469.
[18] A. A. Akhmetshin, Yu. S. Vol’vovskij, and I. M. Krichever (1999),
Discrete analogs of the Darboux-Egorov metrics, Proc. Steklov Inst.
Math. 225, 16-39 (English translation of Tr. Mat. Inst. Steklova 225,
21-45).
[19] A. D. Alexandrov (2005), Convex polyhedra, Springer Monographs
in Mathematics, Springer-Verlag, Berlin. (Translated from the
1950 Russian edition by N. S. Dairbekov, S. S. Kutateladze and
A. B. Sossinsky, with comments and bibliography by V. A. Zalgaller
and appendices by L. A. Shor and Yu. A. Volkov).
[20] V. I. Arnold (1989), Mathematical methods of classical mechanics,
2nd ed., Graduate Texts in Mathematics, vol. 60, Springer-Verlag,
New York.
[21] J. Atkinson (2008), Bdcklund transformations for integrable lattice
equations, J. Phys. A 41, no. 13, 135202 (8 pp.).
[22] J. Atkinson, J. Hietarinta, and F. Nijhoff (2007), Seed and soliton
solutions for Adler's lattice equation, J. Phys. A 40, no. 1, F1-F8.
Литература
[23] О. Babeion. D. Bernard, and M. Talon (2003). Introduction to
classical integrable systems, Cambridge Monographs on Mathematical
Physics, Cambridge University Press, Cambridge.
[24] A. V. Backlund (1884), От ytor med /constant negativ krokning, Lund
Arsskrift 19, 1-48.
[25] V. V. Bazhanov, V. V. Mangazeev, and S. M. Sergeev (2007),
Faddeev-Volkov solution of the Yang-Baxter equation and discrete
conformal symmetry, Nuclear Phys. В 784, no. 3, 234-258.
[26] (2008), Quantum geometry of 3-dimensional lattices, J. Stat.
Meeh.: Theory and Exp. 7, P07004, 27 p.
[27] E. D. Belokolos, A. I. Bobenko, V. Z. Enol’skii, A. R. Its, and V. B.
Matveev (1994), Algebro-geometric approach to nonlinear integrable
equations, Springer Series in Nonlinear Dynamics, vol. 219, Springer-
Verlag, Berlin.
[28] A. Below, V. Krummeck, and J. Richter-Gebert (2003), Complex
matroids: phirotopes and their realizations in rank 2, Discrete and
computational geometry, Algorithms Combin., vol. 25, Springer,
Berlin, pp. 203-233.
[29] M. Berger (1987), Geometry. I, II, Springer, Berlin, x+406, xiv+428
pp.
[30] L. Bianchi (1892), Sulla trasformazione di Backlund per le superficie
pseudosferiche, Rom. Acc. L. Rend. 5, 3-12.
[31] (1923), Lezioni di geometric differenziale, 3 ed., Enrico
Spoerri, Pisa, iv+806, xi+832 pp.
[32] W. Blaschke (1920), Uber affine Geometric XXVI: Wackelige
Achtflache, Math. Z. 6, 85-93.
[33] (1929), Vorlesungen uber Differentialgeometrie III:
Differentialgeometrie der Kreise und Kugeln, Springer-Verlag,
Berlin, x+474 pp.
[34] (1954), Projektive Geometric, 3ed., Birkhauser, Basel, 197 pp.
Литература
[35] A. I. Bobenko (1999). Discrete conformal maps and surfaces,
Symmetries and Integrability of Difference Equations (Canterbury,
1996) (P. A. Clarkson and F. W. Nijhoff, eds.), London Math. Soc.
Lecture Notes, vol. 255, Cambridge University Press, pp. 97-108.
[36] A. I. Bobenko and U. Hertrich-Jeromin (2001), Orthogonal nets and
Clifford algebras, Tohoku Math. Publ. 20, 7-22.
[37] A. I. Bobenko and T. Hoffmann (2003), Hexagonal circle patterns
and integrable systems. Patterns with constant angles, Duke Math. J.
116, no. 3, 525-566.
[38] A. I. Bobenko, T. Hoffmann, and B. A. Springborn (2006), Discrete
minimal surfaces: geometry from combinatorics, Annals of Math.
164, 231-264.
[39] A. I. Bobenko, T. Hoffmann, and Yu. B. Suris (2002), Hexagonal
circle patterns and integrable systems: patterns with the multi-ratio
property and Lax equations on the regular triangular lattice, Int.
Math. Res. Not. 3, 111-164.
[40] A. I. Bobenko, N. Kutz, and U. Pinkail (1993), The discrete quantum
pendulum, Phys. Lett. A 177, no. 6, 399-404.
[41] A. I. Bobenko, D. Matthes, and Yu. B. Suris (2003), Discrete and
smooth orthogonal systems: C°°-approximation, Int. Math. Res. Not.
45, 2415-2459.
[42] (2005), Nonlinear hyperbolic equations in surface theory:
integrable discretizations and approximation results, Algebra i Analiz
17, no. 1, 53-83; English translation in St. Petersburg Math. J. 17
(2006), no. 1, 39-61.
[43] A. I. Bobenko, Ch. Mercat, and Yu. B. Suris (2005), Linear and
nonlinear theories of discrete analytic functions. Integrable structure
and isomonodromic Green’s function, J. Reine Angew. Math. 583,
117-161.
[44] A. I. Bobenko and U. Pinkail (1996a), Discrete surfaces with constant
negative Gaussian curvature and the Hirota equation, J. Differential
Geom. 43, 527-611.
[45] (1996b), Discrete isothermic surfaces, J. Reine Angew. Math.
475, 187-208.
Литература
[46] (1999), Discretization of surfaces and integrable systems.
Discrete integrable geometry and physics (A. I. Bobenko and
R. Seiler, eds.), Clarendon Press, Oxford, pp. 3-58.
[47] A. I. Bobenko, H. Pottmann, and J. Wallner (2009), A
curvature theory for discrete surfaces based on mesh parallelity,
arXiv:0901.4620 [math.DG], to appear in Math. Annalen.
[48] A. I. Bobenko and W. K. Schief (1999a), Discrete indefinite affine
spheres, Discrete integrable geometry and physics (A. I. Bobenko and
R. Seiler, eds.), Clarendon Press, Oxford, pp. 113-138.
[49] (1999b), Affine spheres: discretization via duality relations,
Experiment. Math. 8, 261-280.
[50] A. I. Bobenko, P. Schroder, J. M. Sullivan, and G. M. Ziegler (eds.)
(2008), Discrete differential geometry, Oberwolfach Seminars, vol. 38,
Birkhauser, Basel.
[51] A. I. Bobenko and R. Seiler (eds.) (1999), Discrete integrable
geometry and physics, Oxford Lecture Series in Mathematics and its
Applications, vol. 16, Clarendon Press, Oxford.
[52] A. I. Bobenko and B. A. Springborn (2004), Variational principles for
circle patterns and Koebe’s theorem, Trans. Amer. Math. Soc. 356,
659-689.
[53] A. I. Bobenko and Yu. B. Suris (2002a), Integrable systems on quad-
graphs, Internat. Math. Res. Notices 11, 573-611.
[54] (2002b), Integrable noncommutative equations on quad-
graphs. The consistency approach, Lett. Math. Phys. 61, 241-254.
[55] (2005), Discrete differential geometry. Consistency as
integrability, arXiv: math.DG/0504358, preliminary version of this
book.
[56] (2007a), On organizing principles of discrete differential
geometry. Geometry of spheres, Russian Math. Surveys 62, no. 1,
1-43 (English translation of Uspekhi Mat. Nauk 62, no. 1, 3-50).
[57](2007b), Isothermic surfaces in sphere geometries as Moutard
nets, Proc. Royal. Soc. A 463, 3171-3193.
Литература
[58] (2009), Discrete Koenigs nets and discrete isothermic
surfaces, Internat. Math. Research Notices 2009, 1976-2012.
[59] A. I. Bobenko and S. P. Tsarev (2007), Curvature line parametrization
from circle patterns, arXiv:0706.3221 [math.DG].
[60] L. V. Bogdanov and B. G. Konopelchenko (1995), Lattice
and q-difference Darboux-Zakharov-Manakov systems via d-dressing
method, J. Phys. A 28, L173-L178.
[61] G. Bol (1967), Projektive Differentialgeometrie. Teil III, Studia
Mathematica/Mathematische Lehrbiicher, Band 18, Vandenhoeck &
Ruprecht, Gottingen.
[62] O. Bonnet (1867), Memoire sur la theorie des surfaces applicables sur
une surface donnee, J. Ecole Polytech. 42, 1-151.
[63] M. Botsch and L. Kobbelt (2004), An intuitive framework for real
time freeform modeling, ACM Trans. Graph. 23, no. 3, 630-634.
[64] E. Bour (1862), Theorie de la deformation des surfaces, J. Ecole
Imperiale Polytech. 19, no. 39, 1-48.
[65] W. Bragger (1992), Kreispackungen und Triangulierungen, Enseign.
Math. (2) 38, no. 3-4, 201-217.
[66] U. Bucking (2007), Approximation of conformal mappings by circle
patterns and discrete minimal surfaces, PhD thesis, TU Berlin,
http://opus.kobv.de/tuberlin/volltexte/2008/1764/.
[67] F. E. Burstall (2006), Isothermic surfaces: conformal geometry,
Clifford algebras and integrable systems, Integrable systems,
geometry, and topology, AMS/IP Stud. Adv. Math., vol. 36, Amer.
Math. Soc., Providence, RI, pp. 1-82.
[68] F. E. Burstall and U. Hertrich-Jeromin (2006), The Ribaucour
transformation in Lie sphere geometry, Differential Geom. Appl. 24,
no. 5, 503-520.
[69] F. E. Burstall, U. Hertrich-Jeromin, F. Pedit, and U. Pinkail (1997),
Curved flats and isothermic surfaces, Math. Z. 225, no. 2, 199-209.
Литература
[70] F. Calogero and A. Degasperis (1982), Spectral transform and
solitons. Vol. I. Studies in Mathematics and its Applications, vol. 13.
North-Holland Publishing Co., Amsterdam.
[71] H. W. Capel and F. W. Nijhoff (1995), The discrete Korteweg-de
Vries equation, Acta Appl. Math. 39, 133-158.
[72] T. E. Cecil (1992), Lie sphere geometry. With applications to
submanifolds, Universitext, Springer-Verlag, New York.
[73] J. Cieminski (1999), The Backlund transformation for discrete
isothermic surfaces, Symmetries and Integrability of Difference
Equations (Canterbury, 1996) (P. A. Clarkson and F. W. Nijhoff,
eds.), London Math. Soc. Lecture Notes, vol. 255, Cambridge
University Press, pp. 109-121.
[74] J. Cieslinski, A. Doliwa, and P. M. Santini (1997), The integrable
discrete analogues of orthogonal coordinate systems are multi-
dimensional circular lattices, Phys. Lett. A 235, 480-488.
[75] J. Cieslinski, P. Goldstein, and A. Sym (1995), Isothermic surfaces
in E3 as soliton surfaces, Phys. Lett. A 205, no. 1, 37-43.
[76] W. K. Clifford (1871), A synthetic proof of Miquel’s theorem, Oxford
Cambridge Dublin Messenger Math. 5, 124-141.
[77] Y. Colin de Verdiere (1991), Un principe variationnel pour les
empilements de cercles, Invent. Math. 104, 655-669.
[78] J. L. Coolidge (1916), A treatise on the circle and the sphere, Chelsea
Publishing Co., Bronx, N.Y., 1971, Reprint of the 1916 edition.
[79] H. Cox (1891), Application of Grassmann’s Ausdehnungslehre to
properties of circles, Quart. J. Math. 25, 1-71.
[80] H. S. M. Coxeter (1969), Introduction to geometry, 2nd ed., John
Wiley & Sons Inc., New York.
[81] G. Darboux (1910), Legons sur les systemes orthogonaux et les
coordonnees curvilignes, 2nd ed., Gauthier-Villars, Paris, vii+567 pp.
[82] (1914-27), Legons sur la the one generale des surfaces et les
applications geometriques du calcul infinitesimal, 3rd ed.. vols. I-IV,
Gauthier-Villars, Paris.
Литература
[83] Е. Date, М. Jimbo, and Т. Miwa (1982), Method for generating
discrete soliton eguations. I-II, J. Phys. Soc. Japan 51, 4116-4124,
4125-4131.
[84] (1983), Method for generating discrete soliton eguations. III-
V, J. Phys. Soc. Japan 52, 388-393, 761-765, 766-771.
[85] A. Demoulin (1910), Sur les systemes et les congruences K, C.R.
Acad. Sci. Paris 150, 156-159.
[86] M. Desbrun, E. Grinspun, and P. Schroder (2005), Discrete
differential geometry: An applied introduction, SIGGRAPH course,
The Discrete Differential Geometry Forum at ddg. cs. columbia.edu.
[87] M. Desbrun, M. Meyer, and P. Alliez (2002), Intrinsic
parametrizations of surface meshes, Comput. Graph. Forum
21, 209-218.
[88] N. P. Dolbilin, M. A. Shtan’ko, and M. I. Shtogrin (1986), Cubic
subcomplexes in regular lattices, Dokl. Akad. Nauk SSSR 291, 277-
279.
[89] (1994), Cubic manifolds in lattices, Izv. Ross. Akad. Nauk Ser.
Mat. (Russian) 58, 93-107; English translation in: Russian Acad. Sci.
Izv. Math. 44 (1995), 301-313.
[90] A. Doliwa (1997), Geometric discretization of the Toda system, Phys.
Lett. A. 234, 187-192.
[91] (1999), Quadratic reductions of quadrilateral lattices, J. Geom.
Phys. 30, 169-186.
[92] (2001a), Discrete asymptotic nets and W-congruences in
Pliicker line geometry, J. Geom. Phys. 39, 9-29.
[93] (2001b), The Ribaucour congruences of spheres within Lie
sphere geometry, Backlund and Darboux transformations. The
geometry of solitons (Halifax, NS, 1999), CRM Proc. Lecture Notes,
vol. 29, Amer. Math. Soc., Providence, RI, pp. 159-166.
[94] (2003), Geometric discretization of the Koenigs nets, J. Math.
Phys. 44, 2234-2249.
Литература
[95] (2007а), The В-quadrilateral lattice, its transformations and
the algebro-geometric construction, J. Geom. Phys. 57. no. 4, 1171-
1192.
[96] (2007b), Generalized isothermic lattices, J. Phys. A 40, 12539-
12561.
[97] A. Doliwa, P. Grinevich, M. Nieszporski, and P. M. Santini (2007).
Integrable lattices and their sub-lattices: from the discrete Moutard.
(discrete Cauchy-Riemann) f-point equation to the self-adjoint 5-
point scheme, J. Math. Phys. 48, no. 013513, 28 pp.
[98] A. Doliwa, S. V. Manakov, and P. M. Santini (1998), d-reductions
of the multidimensional quadrilateral lattice. The multidimensional
circular lattice, Commun. Math. Phys. 196, 118.
[99] A. Doliwa, M. Manas, and L. Martinez Alonso (1999), Generating
quadrilateral and circular lattices in KP theory, Phys. Lett. A 262,
no. 4-5, 330 343.
[100] A. Doliwa, M. Nieszporski, and P. M. Santini (2001), Asymptotic
lattices and their integrable reductions: I. The Bianchi-Ernst and the
Fubini-Ragazzi lattices, J. Phys. A 34, 10423-10439.
[101] (2004), Geometric discretization of the Bianchi system, J.
Geom. Phys. 52, 217-240.
[102] A. Doliwa and P. M. Santini (1997). Multidimensional quadrilateral
lattices are integrable, Phys. Lett. A 233. 265-372.
[103] (2000), The symmetric, d-invariant and Egorov reductions of
the quadrilateral lattice, J. Geom. Phys. 36, 60-102.
[104] A. Doliwa, P. M. Santini, and M. Manas (2000), Transformations of
quadrilateral lattices, J. Math. Phys. 41, 944-990.
[105] V. G. Drinfeld (1992), On some unsolved problems in quantum group
theory, Lecture Notes Math., vol. 1510, Springer, Berlin, pp. 1-8.
[106] B. A. Dubrovin (1991), Geometry of Hamiltonian evolutionary
systems, Monographs and Textbooks in Physical Science. Lecture
Notes, vol. 22, Bibliopolis, Naples.
Литература
1107| В. A. Dubrovin. I. М. Krichever, and S. Р. Novikov (2001), Integrable
systems. I. Dynamical systems, IV. Encyclopaedia Math. Sci., vol. 4,
Springer, Berlin, pp. 177-332.
[108] (2004), Topological and algebraic geometry methods in
contemporary mathematical physics, Classic Reviews in Mathematics
and Mathematical Physics, vol. 2, Cambridge Scientific Publishers,
Cambridge.
[109] R. J. Duffin (1956), Basic properties of discrete analytic functions,
Duke Math. J. 23, 335-363.
[110] (1968), Potential theory on a rhombic lattice, J. Combinatorial
Theory 5, 258-272.
[Ill] I. A. Dynnikov and S. P. Novikov (1997), Discrete spectral
symmetries of small-dimensional differential operators and difference
operators on regular lattices and two-dimensional manifolds, Uspekhi
Mat. Nauk 52, no. 5, 175-234; English translation, Russian Math.
Surveys 52, 1057-1116.
[112] (2003), Geometry of the triangle equation on two-manifolds,
Mose. Math. J. 3, 419-438.
[113] G. Dziuk and J. E. Hutchinson (1999), The discrete Plateau problem:
convergence results, Math. Comp. 68, no. 225, 1-23 and no. 226, 519—
546.
[114] L. P. Eisenhart (1909), A treatise on the differential geometry of
curves and surfaces, Ginn and Co., Boston, ix+379 pp.
[115] (1923), Transformations of surfaces, Princeton University
Press, ix+379 pp.
[116] P. Etingof (2003), Geometric crystals and set-theoretical solutions to
the quantum Yang-Baxter equation, Comm. Algebra 31, no. 4, 1961—
1973.
[117] L. D. Faddeev and L. A. Takhtajan (1986), Hamiltonian methods
in the theory of solitons, Springer Series in Soviet Mathematics,
Springer-Verlag, Berlin, 1987; Translated from the 1986 Russian
original.
Литература
[118] L. D. Faddeev and A. Yu. Volkov (1994). Hirota equation as an
example of an integrable symplectic map, Lett. Math. Phvs. 32. no. 2,
125-135.
[119] E. V. Ferapontov (2000a), Integrable systems in projective differential
geometry, Kyushu J. Math. 54, no. 1, 183-215.
[120] E.V. Ferapontov (2000b), Lie sphere geometry and integrable systems,
Tohoku Math. J. (2) 52, no. 2, 199-233.
[121] J. Ferrand (1944), Fonctions preharmoniques et fonctions
preholomorphes, Bull. Sci. Math, 2nd ser. 68, 152-180.
[122] D. Ferus and F. Pedit (1996), Curved flats in symmetric spaces,
Manuscripta Math. 91, no. 4, 445-454.
[123] A. S. Fokas, A. R. Its, A. A. Kapaev, and V. Yu. Novokshenov
(2006), Painleve transcendents. The Riemann-Hilbert approach,
Mathematical Surveys and Monographs, vol. 128, AMS, Providence.
[124] A. P. Fordy and J. C. Wood (eds.) (1994), Harmonic maps
and integrable systems, Aspects of Mathematics, E23, Vieweg,
Braunschweig.
[125] E. I. Ganzha and S. P. Tsarev (1996), An algebraic superposition
formula and the completeness of Backlund transformations of (2 +
+ 1)-dimensional integrable systems, Uspekhi Mat. Nauk 51. no. 6,
197-198; English translation, Russian Math. Surveys 51, 1200-1202.
[126] C. S. Gardner, J. M. Green, M. D. Kruskal, and R. M. Miura (1967),
Method for solving the Korteweg-de Vries equation, Phys. Rev. Lett.
19, 1095-1097.
[127] W. Godt (1896), Ueber eine merkwiirdige Kreisfigur, Math. Ann. 47.
564-572.
[128] V. M. Goncharenko and A. P. Veselov (2004), Yang-Baxter maps and.
matrix solitons, New trends in integrability and partial solvability,
NATO Sci. Ser. II Math. Phys. Chem., vol. 132. Kluwer Acad. Publ.,
Dordrecht, pp. 191-197.
[129] Z.-X. He, Rigidity of infinite disk patterns (1999), Ann. of Math. 149,
1-33.
Литература
1130| Z.-X. Не and О. Schramm (1998), The C°° -convergence of hexagonal
disc packings to Riemann maps. Acta Math. 180, 219-245.
[131] U. Hertrich-Jeromin (2000), Transformations of discrete isothermic
nets and discrete cmc-1 surfaces in hyperbolic space, Manuscripta
Math. 102, 465-486.
[132] (2003), Introduction to Mobius differential geometry,
Cambridge University Press, xii+413 pp.
[133] U. Hertrich-Jeromin, T. Hoffmann, and U. Pinkall (1999), A discrete
version of the Darboux transform for isothermic surfaces, Discrete
integrable geometry and physics (A. I. Bobenko and R. Seiler, eds.),
Clarendon Press, Oxford, pp. 59-81.
[134] U. Hertrich-Jeromin and F. Pedit (1997), Remarks on the Darboux
transform of isothermic surfaces, Doc. Math. 2, 313-333 (electronic).
[135] J. Hietarinta (2004), A new two-dimensional lattice model that is
‘consistent around a cube’, J. Phys. A 37, no. 6, L67-L73.
[136] (2005), Searching for CAC-maps, J. Nonlinear Math. Phys.
12, suppl. 2, 223-230.
[137] K. Hildebrandt, K. Polthier, and M. Wardetzky (2006), On the
convergence of metric and geometric properties of polyhedral surfaces,
Geom. Dedicata 123, 89-112.
[138] R. Hirota (1977a), Nonlinear partial difference equations. I. A
difference analog of the Korteweg-de Vries equation, J. Phys. Soc.
Japan 43, 1423-1433.
[139] (1977b), Nonlinear partial difference equations. III. Discrete
sine-Gordon equation, J. Phys. Soc. Japan 43, 2079-2086.
[140] (1992), The direct method in soliton theory, Cambridge Tracts
in Mathematics, vol. 155, Cambridge University Press, Cambridge,
2004; Translated from the 1992 Japanese original.
[141] N. J. Hitchin, G. B. Segal, and R. S. Ward (1999), Integrable systems.
Twistors, loop groups, and Riemann surfaces, Oxford Graduate Texts
in Mathematics, vol. 4, Clarendon Press, Oxford.
Литература
[142] Т. Hoffmann (1999). Discrete Amsler surfaces and a. discrete. Painleve
III equation. Discrete integrable geometry and physics (A. I. Bobenko
and R. Seiler, eds.), Oxford Lecture Ser. Math. Appl., vol. 16, Oxford
Univ. Press, New York, pp. 83-96.
[143] (2008), Discrete Hashimoto surfaces and a doubly discrete
smoke-ring flow, Discrete differential geometry (A. I. Bobenko,
P. Schroder, J. M. Sullivan, and G. M. Ziegler, eds.), Oberwolfach
Seminars, vol. 38, Birkhauser, pp. 95-115.
[144] , Darboux transformation for S-isothermic surfaces, In
preparation.
[145] B. Janzen and K. Polthier (2007), MESH. A Journey Through
Discrete Geometry, Springer, xxii+2, DVD.
[146] H. Jonas (1915), Uber die Transformation der konjugierten
Systeme und uber den gemeinsamen Ursprung der Bianchischen
Permutabilitdtstheoreme, Sitzungsber. Berl. Math. Ges. 14, 96-118.
[147] G. Kamberov, F. Pedit, and U. Pinkall (1998), Bonnet pairs and
isothermic surfaces, Duke Math. J. 92, no. 3, 637-644.
[148] R. M. Kashaev (1996), On discrete three-dimensional equations
associated with the local Yang-Baxter relation, Lett. Math. Phys. 38,
389-397.
[149] R. M. Kashaev, I. G. Korepanov, and S. M. Sergeev (1998), The
functional tetrahedron equation, Theor. and Math. Phys. 117, 1402-
1413.
[150] R. Kenyon (2002), The Laplacian and Dirac operators on critical
planar graphs, Invent. Math. 150, 409-439.
[151] R. Kenyon and J.-M. Schlenker (2004), Rhombic embeddings of planar
quad-graphs, Trans. Amer. Math. Soc. 357, 3443-3458.
[152] A. D. King and W. K. Schief (2006), Application of an incidence
theorem for conics: Cauchy problem and integrability of the dCKP
equation, J. Phys. A 39, no. 8, 1899-1913.
[153] G. Koenigs (1891), Sur les systemes conjugues a invariants ёдаих, C.
R. Acad. Sci. CXIII, 1022-1024.
Литература
|154] (1892а), Sur les reseaux plans a invariants ёд a,их et les lignes
asymptotiques, C. R. Acad. Sci. CXIV, 55 -57.
[155] (1892b), Sur les reseaux plans a invariants ёдаих., C. R. Acad.
Sci. CXIV, 728-729.
[156] A. Kokotsakis (1932), Uber bewegliche Polyeder, Math. Ann. 107,
627-647.
[157] B. G. Konopelchenko and U. Pinkail (2000), Projective
generalizations of Lelieuvre’s formula, Geom. Dedicata 79, 81-
99.
[158] B. G. Konopelchenko and W. K. Schief (1998), Three-dimensional
integrable lattices in Euclidean spaces: conjugacy and orthogonality,
R. Soc. bond. Proc. Ser. A 454, 3075-3104.
[159] (2002a), Reciprocal figures, graphical statics, and inversive
geometry of the Schwarzian BKP hierarchy, Stud. Appl. Math. 109,
no. 2, 89-124.
[160] (2002b), Menelaus’ theorem, Clifford configurations and
inversive geometry of the Schwarzian KP hierarchy, J. Phys. A 35,
no. 29, 6125-6144.
[161] (2005), Conformal geometry of the (discrete) Schwarzian
Davey-Stewartson II hierarchy, Glasgow Math. J. 47, no. A, 121-
131.
[162] V. E. Korepin, N. M. Bogoliubov, and A. G. Izergin (1992), Quantum
inverse scattering method and correlation functions, Cambridge
Monographs on Mathematical Physics, Cambridge University Press,
Cambridge, 1993; Translated from the 1992 Russian original.
[163] D. J. Korteweg and G. de Vries (1895), On the change of form of long
waves advancing in a rectangular canal, and on a new type of long
stationary waves, Phil. Mag. 39, 422-443.
[164] I. M. Krichever (1978), Algebraic curves and nonlinear difference
equations, Uspekhi Mat. Nauk 33, no. 4(202), 215-216.
[165] (1985), Two-dimensional periodic difference operators and
algebraic geometry, Soviet Math. Dokl. 32, no. 3, 623-627; English
translation of Dokl. Akad. Nauk SSSR 285, no. 1, 31-36.
Литература
[166] (1997). Algebraic-geometric n-orthogonal curvilinear
coordinate systems and the solution of associativity equations,
Funct. Anal. Appl. 31, 25-39.
[167] (2006), Characterizing Jacobians via trisecants of the Kummer
variety, arXiv:math/0605625 [math.AG],
[168] I. M. Krichever and S. P. Novikov (1999), Trivalent graphs and
solitons, Uspekhi Mat. Nauk 54, no. 6, 149-150.
[169] (2003), A two-dimensionalized Toda chain, commuting
difference operators, and holomorphic vector bundles. Uspekhi Mat.
Nauk 58, no. 3(351), 51-88.
[170] B. A. Kupershmidt (2000), KP or mKP. Noncommutative
mathematics of Lagrangian, Hamiltonian, and integrable systems,
Mathematical Surveys and Monographs, vol. 78, AMS, Providence.
[171] E. P. Lane (1942), A Treatise on Projective Differential Geometry,
University of Chicago Press, Chicago.
[172] Y. Liu, H. Pottmann, J. Wallner, Y.-L. Yang, and W. Wang (2006),
Geometric modelling with conical meshes and developable surfaces,
ACM Trans. Graphics 25, no. 3, 681-689.
[173] J.-M. Maillet and F. Nijhoff (1989), Integrability for multidimensional
lattice models, Phys. Lett. В 224, no. 4, 389-396.
[174] D. Matthes (2004), Discrete surfaces and coordinate systems:
Approximation theorems and computation, PhD thesis, TU Berlin,
http://opus.kobv.de/ tuberlin/volltexte/2004/606/.
[175] V. B. Matveev (2000), Darboux transformations, covariance theorems
and integrable systems, L.D. Faddeev’s Seminar on Mathematical
Physics, Amer. Math. Soc. Transl. Ser. 2, vol. 201, AMS, Providence,
pp. 179-209.
[176] V. B. Matveev and M. A. Salle (1991), Darboux transformations
and solitons, Springer Series in Nonlinear Dynamics, Springer-Verlag,
Berlin, ix+120 pp.
[177] Ch. Mercat (2001), Discrete Riemann surfaces and the Ising model,
Commun. Math. Phys. 218, 177-216.
Литература
[178](2004), Exponentials form a basis of discrete holomorphic
functions, Bull. Soc. Math. France 132, 305-326.
[179] A. Miquel (1838a), Theoremes de geometric, J. Math. Pures Appl.
(Liouville J.) 3, 485-487.
[180] (1838b), Theoremes sur les intersections des cercles et des
spheres, J. Math. Pures Appl. (Liouville J.) 3, 517-522.
[181] T. Miwa (1982), On Hirota’s difference equations, Proc. Japan Acad.,
Ser. A (Math. Sci.) 58, 9-12.
[182] A. F. Mobius (1828), Kann von zwei dreiseitigen Pyramiden eine
jede in Bezug auf andere um- und eingeschrieben zugleich heissen?,
J. Reine und Angew. Math. 3, 273-278.
[183] J. Moser and A. P. Veselov (1991), Discrete versions of some classical
integrable systems and factorization of matrix polynomials, Comm.
Math. Phys. 139, no. 2, 217-243.
[184] Th. F. Moutard (1878), Sur la construction des equations de la forme
1 л2
- g g — X(x,y) qui admettenent une integrate generale explicite, J.
Ec. Pol. 45, 1-11.
[185] E. H. Neville (1926), The inverse of the Miquel-Clifford configuration,
J. Indian Math. Soc. 16, 241-247.
[186] A. C. Newell (1985), Solitons in mathematics and physics, CBMS-
NSF Regional Conference Series in Applied Mathematics, vol. 48,
SIAM, Philadelphia.
[187] F. W. Nijhoff (1996), On some “Schwarzian” equations and their
discrete analogues, Algebraic aspects of integrable systems. In
memory of Irene Dorfman (A. S. Fokas and I. M. Gelfand, eds.),
Birkhauser, Basel, pp. 237-260.
[188] (2002), Lax pair for the Adler (lattice Krichever-Novikov)
system, Phys. Lett. A 297, 49-58.
[189] F. W. Nijhoff, A. Ramani, B. Grammaticos, and Y. Ohta (2001), On
discrete Painleve equations associated with the lattice KdV systems
and the Painleve VI equation, Stud. Appl. Math. 106, 261-314.
Литература
[190] F. W. Nijhoff and A. J. Walker (2001). The discrete and continuous
Painleve VI hierarchy and the Garnier systems, Glasg. Math. J. 43A.
109-123.
[191] J. J. C. Nimmo (2006), On a non-Abelian Hirota-Miwa equation, J.
Phys. A 39, no. 18, 5053-5065.
[192] J. J. C. Nimmo and W. K. Schief (1997), Superposition
principles associated with the Moutard transformation: an integrable
discretization of a (2+1)-dimensional sine-Gordon system, Proc. Roy.
Soc. London Ser. A 453, 255-279.
[193] M. Noumi and Y. Yamada (1998), Affine Weyl groups, discrete
dynamical systems and Painleve equations, Comm. Math. Phys. 199,
no. 2, 281-295.
[194] S. P. Novikov (1999a), Schrodinger operators on graphs and
symplectic geometry, The Arnoldfest, Fields Inst. Commun., vol. 24,
AMS, Providence, pp. 397-413.
[195] (1999b), The discrete Schrodinger operator, Tr. Mat. Inst.
Steklova 224, 275-290; English translation, Proc. Steklov Inst. Math.
224, 250-265.
[196] S. P. Novikov, S. V. Manakov, L. P. Pitaevskii, and V. E.
Zakharov (1980), Theory of solitons. The inverse scattering method,
Contemporary Soviet Mathematics, Consultants Bureau [Plenum],
New York, 1984; Translated from the Russian 1980 original.
[197] A. W. Nutbourne and R. R. Martin (1988), Differential geometry
applied to curve and surface design. Vol. 1, Foundations, Ellis
Horwood Ltd., Chichester.
[198] V. G. Papageorgiou, A. G. Tongas, and A. P. Veselov (2006), Yang-
Baxter maps and symmetries of integrable equations on quad-graphs,
J. Math. Phys. 47, no. 8, 083502, 16 pp.
[199] D. Pedoe (1970), A course of geometry for colleges and universities,
Cambridge University Press, London.
[200] U. Pinkall (2008), Designing cylinders with constant negative
Gaussian curvature, Discrete differential geometry (A. I. Bobenko,
P. Schroder, J. M. Sullivan, and G. M. Ziegler, eds.), Oberwolfach
Seminars, vol. 38, Birkhauser, pp. 57-66.
Литература
[201] U. Pinkali and К. Polthier (1993), Computing discrete minimal
surfaces and their conjugates, Experiment. Math. 2, no. 1, 15-36.
[202] U. Pinkail, B. Springborn, and S. Weifimann (2007), A new doubly
discrete analogue of smoke ring flow and the real time simulation of
fluid flow, J. Phys. A 40, 12563-12576.
[203] A. V. Pogorelov (1973), Extrinsic geometry of convex surfaces,
Translations of Mathematical Monographs, vol. 35, AMS, Providence.
[204] H. Pottmann, A. Asperl, M. Hofer, and A. Kilian (2007), Architectural
Geometry, Bentley Institute Press, Exton.
[205] H. Pottmann, Y. Liu, J. Wallner, A. I. Bobenko, and W. Wang (2007),
Geometry of multi-layer freeform structures for architecture, ACM
Trans. Graphics 26, no. 3, 65-1-65-12.
[206] H. Pottmann and J. Wallner (2008), The focal geometry of circular
and conical meshes, Adv. Comp. Math. 29. no. 3, 249-268.
[207] G. R. W. Quispel, F. W. Nijhoff, H. W. Capel, and J. van der Linden
(1984), Linear integral equations and nonlinear difference-difference
equations, Physica A 125, no. 2-3, 344-380.
[208] A. Ramani, N. Joshi, B. Grammaticos, and T. Tamizhmani (2006),
Deconstructing an integrable lattice equation, J. Phys. A 39, no. 8,
L145-L149.
[209] O. G. Rasin and P. E. Hydon (2007), Symmetries of integrable
difference equations on the quad-graph, Stud. Appl. Math. 119, no. 3,
253-269.
[210] A. G. Reyman and M. A. Semenov-Tian-Shansky (2003), Integrable
Systems, ICS, Moscow-Izhevsk. (Russian)
[211] I. Rivin (1994), Euclidean structures on simplicial surfaces and
hyperbolic volume, Ann. of Math. 139, 553-580.
[212] B. Rodin and D. Sullivan (1987), The convergence of circle packings
to Riemann mapping, J. Diff. Geom. 26, 349-360.
[213] C. Rogers and W. K. Schief (2002), Backlund and Darboux
transformations. Geometry and modern applications in soliton theory,
Cambridge Texts in Applied Mathematics, Cambridge University
Press, Cambridge.
Литература
[214] R. Sauer (1933), Wackelige Kurvennetze bei einer infinitesimalen
Flachenverbiegung, Math. Ann. 108, 673-693.
[215] (1934), Krummungsfeste Kurven bei einer infinitesimalen
Flachenverbiegung, Math. Z. 38, 468-475.
[216] (1935), Infinitesimale Verbiegungen zueinander projektiver
Flachen, Math. Ann. Ill, 71-82.
[217] (1937), Projektive Liniengeometrie, W. de Gruyter & Co.,
Berlin, 194 pp.
[218] (1950), Parallelogrammgitter als Modelie pseudospharischer
Flachen, Math. Z. 52, 611-622.
[219] (1970), Differenzengeometrie, Springer, Berlin, 234 pp.
[220] R. Sauer and H. Graf (1931), Uber Flachenverbiegung in Analogic zur
Verknickung offener Facettenflache, Math. Ann. 105, 499-535.
[221] W. K. Schief (2001), Isothermic surfaces in spaces of
arbitrary dimension: integrability, discretization and Bdcklund
transformations. A discrete Calapso equation, Stud. Appl. Math.
106, 85-137.
[222] (2003a), On the unification of classical and novel integrable
surfaces, ii. difference geometry, R. Soc. bond. Proc. Ser. A 459,
373-391.
[223] (2003b), Lattice geometry of the discrete Darboux, KP, BKP
and CKP equations. Menelaus’ and Carnot’s theorems, J. Nonlin.
Math. Phys. 10, Suppl. 2, 194-208.
[224] (2006), On a maximum principle for minimal surfaces and
their integrable discrete counterparts, J. Geom. Phys. 56, no. 9, 1484-
1495.
[225] (2007), Discrete Chebyshev nets and a universal permutability
theorem, J. Phys. A 40, no. 18, 4775-4801.
[226] W. K. Schief, A. I. Bobenko, and T. Hoffmann (2008), On the
inegrability of infinitesimal and finite deformations of polyhedral
surfaces, Discrete Differential Geometry (A. I. Bobenko, P. Schroder,
J. M. Sullivan, and G. M. Ziegler, eds.), Oberwolfach Seminars,
vol. 38, Birkhauser, pp. 67-93.
Литература
[227] О. Schramm (1997), Circle patterns with the combinatorics of the
square grid, Duke Math. J. 86, 347-389.
[228] S. M. Sergeev (2007), Quantization of three-wave equations, J. Phys.
A 40, 12709-12724.
[229] M. A. Shtan’ko and M. I. Shtogrin (1992), Embedding cubic manifolds
and complexes into a cubic lattice, Uspekhi Mat. Nauk 47, no. 1, 219—
220; English translation, Russian Math. Surveys 47, no. 1, 267-268.
[230] K. Stephenson (2005), Introduction to the theory of circle packing:
discrete analytic functions, Cambridge University Press, 400 pp.
[231] Yu. B. Suris (1989), Integrable mappings of standard type, Funct.
Anal. Appl. 23, no. 1, 74-76.
[232] (2003), The problem of integrable discretization: Hamiltonian
approach, Progress in Mathematics, vol. 219, Birkhauser Verlag,
Basel, xxi+1070 pp.
[233] Yu. B. Suris and A. P. Veselov (2003), Lax matrices for Yang-Baxter
maps, J. Nonlinear Math. Phys. 10, Suppl. 2, 223-230.
[234] A. Sym (1985), Soliton surfaces and their applications (soliton
geometry from spectral problems), Geometric aspects of the Einstein
equations and integrable systems, Lecture Notes in Phys., vol. 239,
Springer, Berlin, pp. 154-231.
[235] L. A. Takhtajan (1974), Exact theory of propagation of ultrashort
optical pulses in two-level media, J. Exp. Theor. Phys. 39, no. 2,
228-233.
[236] C.-L. Terng and K. Uhlenbeck (2000), Backlund transformations and
loop group actions, Comm. Pure Appl. Math. 53, no. 1, 1-75.
[237] W. P. Thurston (1985), The finite Riemann mapping theorem, Invited
talk at the International Symposium on the occasion of the proof of
the Bieberbach conjecture, Purdue University.
[238] (1997), Three-dimensional geometry and topology. Vol.l,
Princeton Univ. Press.
[239] M. Toda (1978), Theory of nonlinear lattices, second ed., Springer
Series in Solid-State Sciences, vol. 20, Springer-Verlag, Berlin, 1989;
Translated from the 1978 Japanese original.
Литература
[240] A. Tongas. D. Tsoubelis, and P. Xenitidis (2001). A family of
integrable nonlinear equations of hyperbolic type. J. Math. Phys. 42,
no. 12, 5762-5784.
[241] S. P. Tsarev and T. Wolf (2007), Classification of 3-dimensional
integrable scalar discrete equations, arXiv: 0706.2464v3 [nlin. SI].
[242] G. Tzitzeica (1924), Geometric differentialle projective des reseaux,
Cultura Nationala, Bucharest.
[243] A. P. Veselov (1991), Integrable mappings, Russian Math. Surveys 46,
no. 5, 1-51.
[244] (2003), Yang-Baxter maps and integrable dynamics, Phys.
Lett. A 314, 214-221.
[245] (2007), Yang-Baxter maps: dynamical point of view,
Combinatorial aspect of integrable systems, MSJ Mem., vol. 17,
Math. Soc. Japan, Tokyo, pp. 145-167.
[246] J. Wallner and H. Pottmann (2008), Infinitesimally flexible meshes
and discrete minimal surfaces, Monatshefte Math. 153, no. 4, 347-
365.
[247] W. Wang, J. Wallner, and Y. Liu (2007), An angle criterion for
conical mesh vertices, J. Geometry Graphics 11, no. 2, 199-208.
[248] W. Wunderlich (1951), Zur Dijferenzengeometrie der Flachen
konstanter negativer Krummung, Osterreich. Akad. Wiss. Math.-Nat.
KI. 160, 39-77.
[249] V. E. Zakharov (ed.) (1991), What is integrability?, Springer Series
in Nonlinear Dynamics, Springer-Verlag, Berlin.
[250] (1998), Description of the n-orthogonal curvilinear coordinate
systems and Hamiltonian integrable systems of hydrodynamic type. I.
Integration of the Lame equations, Duke Math. J. 94, no. 1, 103-139.
[251] P. Ziegenbein (1940), Konfigurationen in der Kreisgeometrie, J. Reine
Angew. Math. 183, 9-24.
Обозначения
и = (ui,..., Um), независимая переменная сети (элемент Zm или Rm).
f = f(u), точки сети.
fi = f(u + ei).
f-i = /{и-ei).
fij ~ f{u + ei +ej).
Tf, оператор сдвига, Tif = fi-
6i, оператор разности, 6if — fi — f.
di, частная производная, dif = df /dui.
f+, преобразование f.
s-мерная координатная плоскость, {u 6 Zm или Rm : щ =
= 0 при i ii,..., is}.
Hi, i-я координатная ось.
(0)-я координатная плоскость.
— Cii...г,(п), элементарный s-мерный куб с 2s вершинами и +
+ +•••-!-Cjsejs, f.i G {0,1}.
Cjj, элементарный квадрат параллельный (гу)-й координатной плоско-
сти.
(а.£>), прямая через а и Ь.
Д(Л, В, С), треугольник А, В, С.
(f,fi, fij, fj), элементарный четырёхугольник сети f.
1(а, Ь), направленная длина отрезка а, Ь.
q(a, b, с, d), двойное отношение четырёх точек (на прямой, комплексной
плоскости или в ассоциативной алгебре), q(a, b, с, d) = (а —&)(&—с)-1(с—
— d)(d — а)-1.
Rp,Q,r, векторное пространство Rp+l?+r с квадратичной формой (х,х) =
_ Х^Р ...2 _ 5рР+« 2
— Z^i=lJ'i L-,i=p+lJ'i-
Kp,g = JRP.Q.O
(RP’9’r)*, двойственное пространство Rp’9’r.
Lp,Q, изотропное пространство Rp’9, {rr G Rp,<? : (x,x) = 0}.
Lp,Q,r, изотропное пространство Rp’Q’r.
C^(p, g), алгебра Клиффорда Rp,<?.
Обозначения
Qq7, сечение светового конуса LA' + 1,1 моделирующее евклидово про-
странство в геометрии Мёбиуса, {.т G ЬЛ'+1Л : xn+2 — = 1}-
сечение светового конуса LJV+1’1 моделирующее JV-сферу в геомет-
рии Мёбиуса, {х G L7V+1’1 : хдиг = 1}.
множество пространственно-подобных векторов R7V+1,1.
L^+1,1, сфера Лоренца {х G Rw+1,1 : (х,х) = к2}.
£N, пространство прямых в RPW.
, пространство изотропных прямых на квадрике Q С RPN.
£q’?, пространство изотропных прямых в P(RP’9).