/






































































































































































Author: Тайманов И.А.
Tags: теория вероятностей и математическая статистика математика дифференциальная геометрия
ISBN: 5-93972-467-1
Year: 2006




Text
И. А.Тайманов
Лекции
по дифференциальной
геометрии
Издание второе, исправленное и дополненное
Рекомендовано учебно-методическим Советом по математике и механике
УМО по классическому университетскому образованию в качестве
учебного пособия для студентов высших учебных заведений,
обучающихся по специальности «010101 Математика»
R&C
Москва ♦ Ижевск
2006
УДК 519.2
Интернет-магазин *
http://shop.rcd.ru
Тайманов И. А.
Лекции по дифференциальной геометрии. — М.-Ижевск: НИЦ «Регулярная
и хаотическая динамика»; Институт компьютерных исследований, 2006. —
256 с.
Изложены основы дифференциальной геометрии кривых и поверхностей,
а также несколько дополнительных разделов, посвященных теории групп Ли и эле-
ментам теории представления. Книга возникла из курса лекций, прочитанных ав-
тором на механико-математическом факультете Новосибирского государственного
университета. Несмотря на компактность книги, все вопросы разобраны достаточно
доступно, имеются задачи для самостоятельного решения.
Может служить учебным пособием для студентов механико-математических
и физических специальностей университетов.
ISBN 5-93972-467-1
© И. А. Тайманов, 2006
© НИЦ «Регулярная и хаотическая динамика», 2006
физика
математика
биология
нефтегазовые
технологии
http://rcd.ru
http://ics.org.ru
Оглавление
Предисловие ко второму изданию 5
Предисловие 6
ЧАСТЬ I. КРИВЫЕ И ПОВЕРХНОСТИ 9
Глава 1. Теория кривых 11
§1.1. Основные понятия теории кривых 11
§ 1.2. Кривые на плоскости 14
§ 1.3. Кривые в трехмерном пространстве 17
§ 1.4. Группа ортогональных преобразований 20
Глава 2. Теория поверхностей 26
§2.1. Метрики на регулярных поверхностях 26
§ 2.2. Кривизна линии на поверхности 29
§2.3. Гауссова кривизна 32
§ 2.4. Деривационные уравнения и теорема Бонне 35
§2.5. Теорема Гаусса 40
§ 2.6. Ковариантное дифференцирование и геодезические 41
§2.7. Уравнения Эйлера-Л агранжа 47
§2.8. Формула Гаусса-Бонне 53
§ 2.9. Минимальные поверхности 61
ЧАСТЬ II. РИМАНОВА ГЕОМЕТРИЯ 65
Глава 3. Гладкие многообразия 67
§ 3.1. Топологические пространства 67
§3.2. Гладкие многообразия и отображения 70
§3.3. Тензоры 79
§3.4. Действие отображений на тензоры 85
§ 3.5. Вложение гладких многообразий в евклидовы пространства . 89
4
Оглавление
Глава 4. Римановы многообразия 92
§4.1. Метрический тензор 92
§ 4.2. Аффинная связность и ковариантное дифференцирование . . 93
§4.3. Римановы связности 99
§ 4.4. Кривизна 101
§4.5. Геодезические 109
Глава 5. Плоскость Лобачевского и пространство Минковского 116
§ 5.1. Плоскость Лобачевского 116
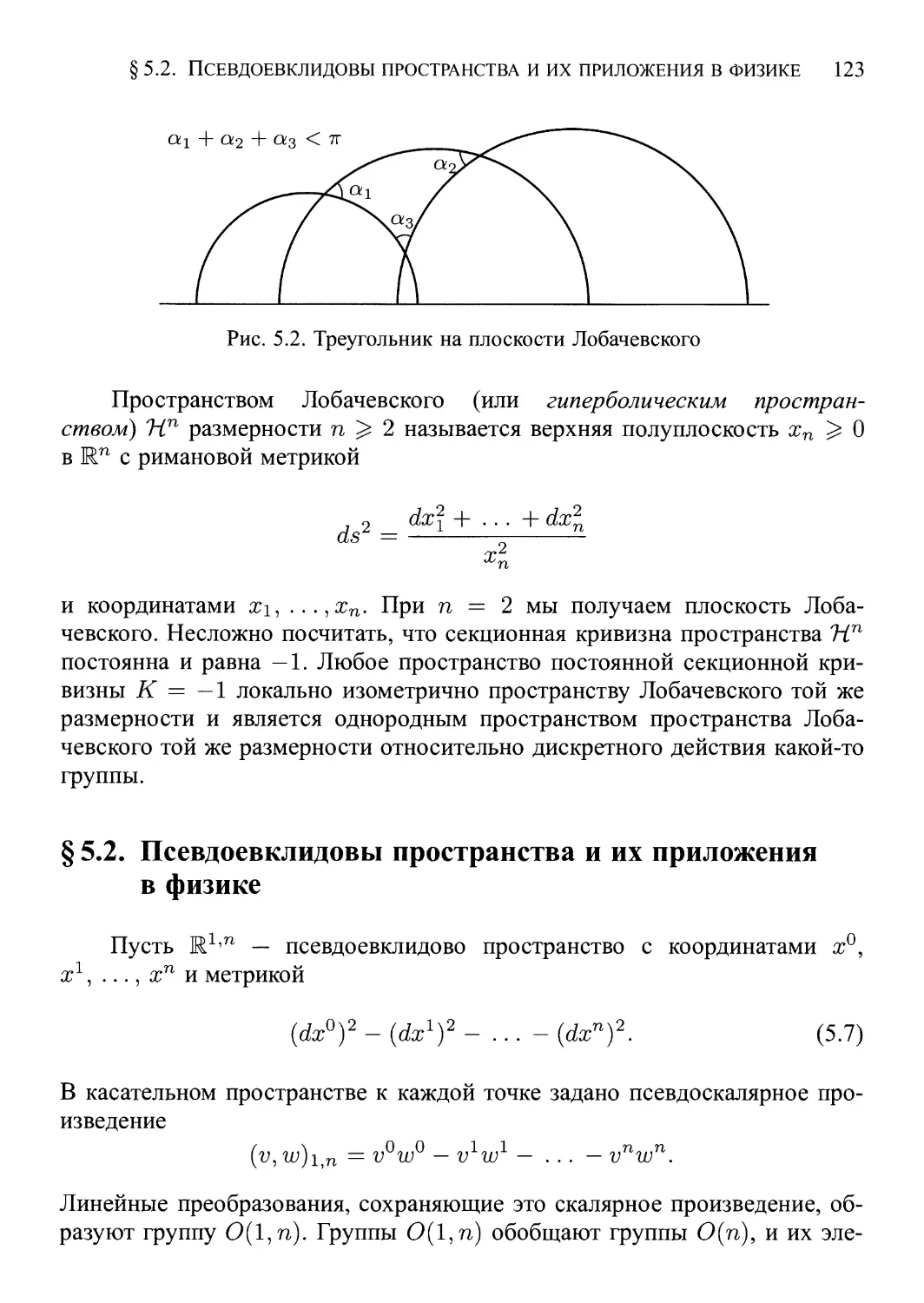
§ 5.2. Псевдоевклидовы пространства и их приложения в физике . 123
ЧАСТЬ III. ДОПОЛНИТЕЛЬНЫЕ ГЛАВЫ 129
Глава 6. Минимальные поверхности и комплексный анализ 131
§6.1. Конформная параметризация поверхности 131
§ 6.2. Теория поверхностей в терминах конформного параметра . . 136
§ 6.3. Представление Вейерштрасса 141
Глава 7. Элементы теории групп Ли 148
§ 7.1. Линейные группы Ли 148
§ 7.2. Алгебры Ли 156
§ 7.3. Геометрия простейших линейных групп 162
Глава 8. Элементы теории представлений 169
§ 8.1. Основные понятия теории представлений 169
§ 8.2. Представления конечных групп 174
§ 8.3. О представлениях групп Ли 183
Глава 9. Элементы пуассоновой и симплектической геометрии . 191
§ 9.1. Скобка Пуассона и уравнения Гамильтона 191
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 201
§ 9.3. Теоремы Дарбу и Лиувилля 210
§ 9.4. Вариационный принцип Гамильтона и расширенное фазовое
пространство 218
§ 9.5. Понижение порядка системы, симплектическая редукция . . . 222
§ 9.6. Уравнения Эйлера и уравнения движения твердого тела . . . 234
§ 9.7. Интегрируемые гамильтоновы системы 238
Список литературы 249
Литература 250
Предметный указатель 252
Предисловие ко второму изданию
Второе издание данной книги отличается от первого не только неболь-
шими правками, внесенными в текст.
В главе 3, например, добавлен параграф о действиях отображений на
тензоры и дано другое доказательство теоремы о вложении любого замкну-
того многообразия в евклидово пространство достаточно большой размер-
ности. В последнем случае мы предпочли использовать разбиение единицы,
введя и продемонстрировав на важном примере прием, который широко ис-
пользуется.
В главе 4 мы добавили краткое изложение наиболее общих связностей
в расслоениях, известных в физике как калибровочные поля.
В главе 8 при изложении представлений групп Ли добавлено элемен-
тарное (и краткое) введение в основные понятия теории унитарных беско-
нечномерных представлений некомпактных групп Ли.
Добавлена также и глава о пуассоновой и симплектической геомет-
рии. Этот раздел геометрии сейчас интенсивно развивается и существенно
используется в теории уравнений в частных производных, механике и ма-
тематической физике. Мы акцентируем внимание прежде всего на прило-
жениях к интегрируемым системам, оставляя в стороне, например, теорию
лагранжевых многообразий и рекомендуя для изучения других разделов
этой теории книги [10, 16, 20] и главы 2, 12 и 13 из книги [6].
Впрочем, изложенный материал по римановой, пуассоновой и симплек-
тической геометрии покрывает темы, входящие в программу кандидатского
минимума по специальности «геометрия и топология».
Мы приводим в списке литературы наиболее доступные книги и избега-
ем указания журнальных публикаций. Список дополнительной литературы
по дифференциальной геометрии и топологии можно найти в книгах [1,6].
Новосибирск, июль 2005 года И. А. Тайманов
Тайманов И. А. Лекции по дифференциальной геометрии. — Москва-Ижевск: Институт
компьютерных исследований, 2002.
Предисловие
Эта книга основана на трех брошюрах «Лекции по дифференциаль-
ной геометрии» [8], изданных в 1998 и 1999 годах в Новосибирском госу-
дарственном университете и излагавших лекции, которые читаются нами
с 1997 года в весенних семестрах для студентов второго курса механико-
математического факультета НГУ.
Краткость изложения соответствует краткости и возможностям семе-
стрового курса. Собственно курс состоял из глав 1, 2 и 5, которые излага-
лись в полном объеме, но почти весь материал по плоскости Лобачевского
излагался без доказательств, которые оставлялись в качестве упражнений.
Дополнительно рассказывались некоторые примеры гладких многооб-
разий (сферы и простейшие линейные группы) и объяснялось, как понятия
двумерной геометрии обобщаются на многомерный случай. В главах 3 и 4
это изложено значительно подробнее, чем в прочитанном курсе. Это бы-
ло сделано и с целью поддержки курса «Риманова геометрия», который
читается на четвертом курсе студентам, специализирующимся в «чистой»
математике.
Главы 6, 7 и 8 являются расширенными изложениями обзорных лекций
о связях геометрии с другими областями математики, прочитанных в 1997—
1999 годах. Так как представления групп не всегда излагаются в курсе ал-
гебры, мы остановились на них подробнее при написании брошюр (в част-
ности, на лекциях мы излагали без доказательств лишь простейшие факты
из теории представлений конечных групп и указывали на связь характеров
с базисами Фурье), хотя основной целью было объяснить топологическое
строение простейших групп Ли как важных примеров гладких многообра-
зий.
Мы хотим обратить внимание, что, следуя принятому в дифференци-
альной геометрии соглашению, мы будем подразумевать суммирование по
повторяющимся верхнему и нижнему индексам, если не оговорено против-
ное. Например,
η
a^yi := YJ aljV\ где ν G У, η = dim V.
3 = 1
Предисловие
7
Это правило почти не используется в учебной литературе, хотя является
общепринятым в научных публикациях, особенно по физическим приложе-
ниям дифференциальной геометрии.
При составлении списка литературы мы исходили из возможностей
библиотек российских университетов. Список литературы для дальнейшего
чтения по геометрии и топологии можно найти в книге [1].
Новосибирск, январь 2002 года
И. А. Тайманов
Часть I
Кривые и поверхности
Глава 1
Теория кривых
§1.1. Основные понятия теории кривых
Пусть Rn — евклидово пространство размерности η с координата-
ми х1, ..., хп. Расстояние р(х,у) между точками х — (ж1, . ..,:гп)
и у = (у1, ..., уп) определяется по формуле
р{х,у) = Vi*1 -Vl)2jr ··· +{хп -уп)2.
Для краткости n-мерное векторное пространство над полем R мы также
будем обозначать через Мп, считая, что каждый раз понятно из контекста,
о чем именно идет речь. Через (v, w) будем обозначать стандартное скаляр-
ное произведение в векторном пространстве Шп:
(viW) =v1w1 + ... +vnwn. (1.1)
Под словом «гладкий» мы будем понимать «дифференцируемый необ-
ходимое число раз». Любой желающий может восстановить оценки необхо-
димой гладкости во всех утверждениях или понимать выражение «гладкий»
как «дифференцируемый бесконечное число раз».
Под параметризованной кривой в евклидовом пространстве Rn пони-
мается линия, заданная функциями от одномерного параметра:
7(t) = (xl(t),...,xn(t)).
Ради краткости мы ограничимся случаями, когда этот параметр принимает
значения на отрезке [а, Ь] или на всей прямой Ш. При этом определении под
точкой Ρ кривой 7 понимается образ точки вместе со значением парамет-
ра t G [α, 6]:
P = (7(*)eRn,ie [α,6]).
Мы ограничимся изучением регулярных кривых:
12
Глава 1
• кривая 7 называется гладкой, если отображение η является гладким.
• гладкая кривая η называется регулярной, если во всех внутренних точ-
ках интервала [а, Ъ] производная η по параметру t не равна нулю:
d'y
-γ-(s) φ 0 при а < s < Ъ
at
и существуют ненулевые пределы производных справа и слева в ко-
нечных точках а и b соответственно.
Наше определение регулярной кривой несколько отличается от других
(см., например, [7]): ради краткости мы исключаем возможность появления
особых точек, в которых d'y/dt = 0.
Естественно отождествлять кривые, которые получаются прохождени-
ем одной и той же линии с разными скоростями:
• регулярные кривые
71 : [ai,6i]^RnH 72: [α2, b2] -> M™
называются эквивалентными, если существует отображение
φ : [aubi] -► [a2,b2]
такое, что φ обратимо, отображения φ и φ~λ являются гладкими и вы-
полняется соотношение
7i(t) =72(</?(£)) при t е [ai,bi].
Мы будем отождествлять эквивалентные кривые, a t и s — ip(t) рас-
сматривать как разные параметры на одной и той же кривой.
• длиной (параметризованной) кривой η\ [a,b]
< +00, называется значение интеграла
1п, где —оо < а < b <
о
L(7) = /
d7(i)
dt
dt
dxn(t)
dt
dt, (1.2)
Верна следующая лемма.
§1.1. Основные понятия теории кривых
13
Лемма 1.1. Длина кривой не зависит от выбора параметра на кривой.
Доказательство. Пусть 71 : [ai, h] -> Rn и 72 : [a2,62] —► ^n задают
одну и ту же кривую и параметры t G [ai, 61] и 5 G [α2, &г] связаны таким
монотонным отображением s = s(t)9 что производная ds/dt всюду суще-
ствует и положительна. Тогда из теорем о производной сложной функции
и замены переменной интегрирования следует, что
Ol
/
d7i
dt
d"J
dl2ds
ds dt
*-/
^72
ds
dt
ъ2
/I
<^72
ds
ds.
Лемма 1.1 доказана.
Мы видим, что это определение длины удовлетворяет естественным
требованиям: длина двух последовательно пройденных кривых равна сум-
ме их длин и для отрезка прямой длина совпадает с расстоянием между
концами отрезка.
С понятием длины связано понятие натурального параметра — такого
параметра /, что длина участка кривой, отвечающего изменению параметра I
от ai до Ъ\ > ai равна (bi — ai).
Имеет место следующая лемма.
Лемма 1.2. 1) Если параметр l G [a, b] на кривой η : [a, 6] —> Шп
натурален, то
|б?7 I
dl
= 1
в гладких точках.
2) На каждой регулярной кривой существует натуральный параметр.
Доказательство. Утверждение 1 немедленно следует из определения
длины кривой.
Пусть 7 · [а, Ь] —> Rn кривая с параметром t. Рассмотрим дифференци-
альное уравнение
ей
dt
d^
~аЧ
Так как его правая часть является гладкой функцией, то существует
и единственно решение этого уравнения с начальными данными 1(a) = О
(см. [14]). Очевидно, что 1(b) = Ц7). Возьмем функцию, обратную к I:
t = t(l): [О, Ц7)] —> [a, b], и определим / как параметр на η по формуле
7o(i) = lW))-
14
Глава 1
Очевидно, что
^7о
dl
=
dj
~dt
dt = 1
dl
Следовательно, / — натуральный параметр на η. Лемма 1.2 доказана.
§ 1.2. Кривые на плоскости
Пусть 7 · [а, Ь] —» М2 — регулярная кривая на двумерной плоскости.
Предположим, что на ней выбран натуральный параметр I. Считая плос-
кость ориентированной, выберем в каждой точке кривой такой базис векто-
ров г>, п в R2, что
1) ν = d'y /dl и, в частности, так как параметр I натурален, |г;| = 1;
2) вектор п ортогонален вектору ν, имеет единичную длину и ба-
зис (v,n) положительно ориентирован.
Этими условиями реперы (г>,п) определяются однозначно. Они назы-
ваются реперами Френе.
Теорема 1.1. При изменении натурального параметра I вдоль плоской
кривой 7 репер Френе деформируется согласно уравнениям
dl \n \-k 0 7 [π
Доказательство. Так как (г>, ν) = (η, η) ξ 1, то
(1.3)
dl \dV
d(n,n)=/^ _
dl \dl
Следовательно, υ _L dv/dl и n _L dn/dl. Так как (ν, n) — ортонормированный
базис в Ш2, существуют такие функции а(1) и ß(l), что
dv dn а
Но (г;, п) = 0, и поэтому
d{V'n) = (^,n) + (v,^)=a + ß = 0.
dl \dl' J \' dl
Положим к = а = —β. Теорема 1.1 доказана.
§1.2. Кривые на плоскости 15
Мы пришли к двум важным понятиям:
• уравнения (1.3) называются уравнениями Френе для плоской кривой;
• коэффициент /с, входящий в (1.3), называется кривизной (плоской) кри-
вой',
• радиусом кривизны кривой называется величина R = \k\~l.
Задача 1.1. Если кривизна h плоской кривой η постоянна и не равна
нулю, то 7 является дугой окружности радиуса R = |fc|_1. Если кривизна
к плоской кривой 7 всюду равна нулю, то 7 является участком прямой.
Для решения этой задачи достаточно найти решения уравнения (1.3)
с постоянными коэффициентами.
Кривизна кривой определяет кривую с точностью до движений плос-
кости R2.
Теорема 1.2. 1) Пусть к : [О, L] —>· R — гладкая функция. Тогда суще-
ствует гладкая кривая 7 : [О, L] —► R2, кривизна которой равна k(l).
2) Пусть 7i · [О, Ь] —> R2 и 72 · [О, Ь] —> R2 натурально параметризо-
ванные регулярные кривые и их кривизны совпадают: k\{ï) = &2(0 для всех
Ζ G [О, L]. Тогда существует такое двиэюение φ : R2 —* R2, сохраняющее
ориентацию, что 72(0 = <^(7i(0) ^ля всвх ' ^ [0,£]·
Доказательство.
1) Выберем какой-то положительно ориентированный ортонормиро-
ванный базис (г>о, no) в R2 и рассмотрим решение уравнения (1.3) с началь-
ными условиями v(0) = vo,n(0) = щ. Это — обыкновенное дифференци-
альное уравнение в R4 с гладкой правой частью. Поэтому такое решение
существует и единственно [14]. Скалярные произведения векторов υ и п
удовлетворяют системе уравнений
^ = -2k(v, η), —j— = 2k(v, η), —jj— = k(nin) - Kv> v)i
решение которой с начальными данными (г>о, vq) = (^о> по) := 1, (г»о, ?^о) = 0
тоже единственно, и заметим, что оно постоянно. Поэтому при любом значе-
нии параметра I векторы v(l) и п(1) составляют ортонормированный базис
в R2. Теперь определим кривую η по формуле
7(0 = / v(s)ds.
16
Глава 1
Легко заметить, что I — натуральный параметр на кривой, υ — вектор ско-
рости по отношению к данному параметру и, так как (ν, η) ортонормиро-
ванный базис и dv/dl = кп, к — кривизна кривой η.
2) Напомним, что группа движений евклидова пространства М2, со-
храняющих ориентацию, порождена сдвигами Та : х —» г + а, и вращения-
ми Ω : M2 —» M2 вокруг неподвижной точки [9].
Реперы Френе кривых 71 и 72 обозначим через {v\,n\) и (г;2,П2) со-
ответственно. Определим движение φ как композицию сдвига Та и враще-
ния Ω : M2 —* R2 вокруг точки 72(0):
φ = Ω·Τα: R2 ^R2,
где
α = 72(0)- 7i(0), Üv1(0)=v2(0).
Репер Френе кривой <^(7i(0) имеет вид (iïvi,Qni). Так как (vi,ni)
и (г>2, п2) удовлетворяют одному и тому же уравнению (1.3) и
d. (Ων Α _ /Ω θλ / 0 ΑΛ /νΛ _
dZ Vfimy V° Ω/ \-fc °У W
_ / 0 fc\ /ß 0\ fvA __ ( 0 k\ [Ων A
~ \-k OJ \0 ÜJ \гы) ~ \-k 0J [pm)'
το (Ω^Ι, Qm) удовлетворяет тому же самому уравнению. Более того,
(Q,vi(0), Qni(O)) = (^2(0),712(0)) согласно выбору Ω. Из единственности
решения уравнения (1.3) с заданными начальными данными следует равен-
ство:
(Ων1(Ζ),Ωη1(Ζ)) = (υ2(/),η2(/)).
Из выбора сдвига Та вытекает
i
72(0 = 72(0) + Jv2(t)dt = φ(Ι1 (/)).
о
Теорема 1.2 доказана.
Уравнение к = к(1) называется натуральным уравнением плоской кри-
вой и, согласно предыдущей теореме, определяет кривую с точностью до
движения плоскости.
§ 1.3. Кривые в трехмерном пространстве 17
§ 1.3. Кривые в трехмерном пространстве
В случае пространственных кривых нормаль к кривой может быть
определена бесконечным числом способов. Поэтому мы будем рассматри-
вать лишь бирегулярные кривые:
• натурально параметризованная регулярная кривая η : [α, b]
вается бирегулярной, если d2^/dl2 φ- 0 всюду;
• нормалью бирегулярной кривой называется вектор
μ27|
назы-
п
11,
dl2'
dl2
• кривизной (пространственной) кривой называется величина
μ27|
dl2
(1.4)
Если представить кривую 7(0 как траекторию материальной точки,
которая движется вдоль кривой с единичной скоростью (т.е. \d^/dl\ = 1),
то кривизна кривой есть модуль вектора ускорения.
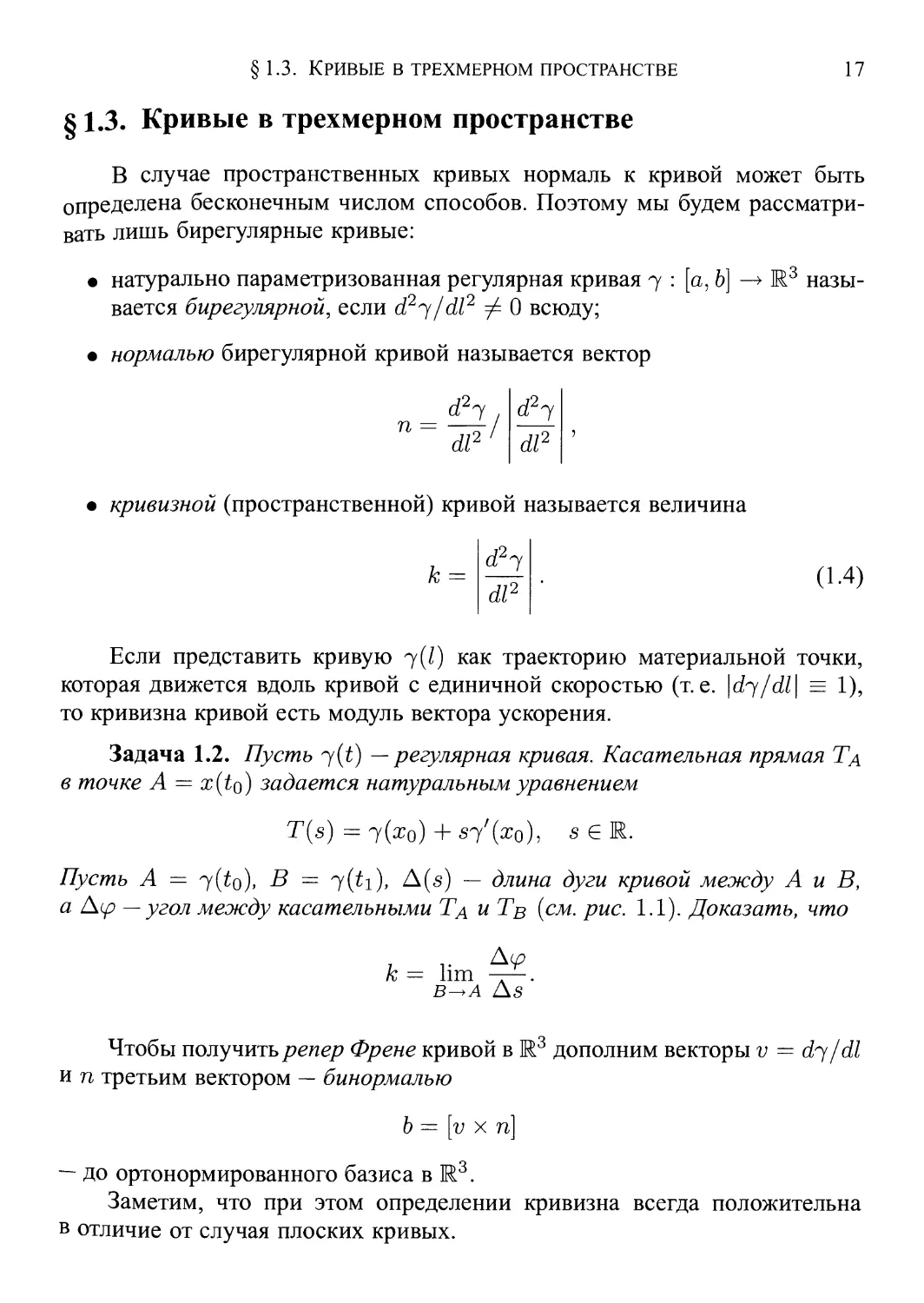
Задача 1.2. Пусть j(t) —регулярная кривая. Касательная прямая Та
в точке А = x(to) задается натуральным уравнением
Т(5) = 7Ы + 5УЫ, s eR.
Пусть А = 7(^о)> В = 7(^1 ), Δ (s) — длина дуги кривой между А и В,
α Αφ —угол меснсду касательными Та и Тв [см. рис. 1.1). Доказать, что
k= Hm ^.
в^а As
Чтобы получить репер Френе кривой в R3 дополним векторы υ = αη/dl
и η третьим вектором — бинормалью
Ь = [у х η]
— до ортонормированного базиса в М3.
Заметим, что при этом определении кривизна всегда положительна
в отличие от случая плоских кривых.
18
Глава 1
Рис. 1.1. Кривизна кривой
Теорема 1.3. Если η — бирегулярная кривая в R3, то при изменении на-
турального параметра I репер Френе деформируется согласно уравнениям
Френе для пространственной кривой
О к 0\ /гг
-к 0 κ\\п
О -к О/U,
(1.5)
Доказательство. Оно аналогично доказательству теоремы 1.1. Так
как (г>(/),п(/),6(7)) — ортонормированный базис при каждом значении па-
раметра /, то, в частности, длины этих векторов сохраняются, а, следова-
тельно, производная каждого из этих векторов ортогональна ему и поэтому
0
Ö21
&31
«12
0
«32
&13 \
&23
о /
V
п
\ ь
Осталось заметить, что
d(v,n)
dl
= au + a2i = О,
d(u, b)
dl
d{n,b)
dl
«23 + «32 = О,
«13 + аз1 = 0.
По определению п мы имеем an = к и a±s — 0. Полагая κ = <22з, мы при-
ходим к уравнениям (1.5). Теорема 1.3 доказана.
§ 1.3. Кривые в трехмерном пространстве
19
Величина х, входящая в (1.5), называется кручением кривой η. Этот
выбор термина также имеет под собой веские основания:
Задача 1.3. Пусть к > 0 и к постоянны. Тогда винтовая кри-
вая 7(0 — (Rcos(\l),Rsin(\l),ßl) при А = у/к2 + κ2, а = κ/Χ и R — к/Х2
натурально параметризована, ее кривизна всюду равна k, a ее кручение
тождественно равно κ.
Задача 1.4. Пусть j(t) — гладкая кривая с некоторым (не обязательно
натуральным) параметром t. Доказать, что,
1) если кривая j(t) регулярна: η' φ 0, то ее кривизна равна
,. IV х 7"!
В частности, кривизна кривой, расположенной на плоскости и заданной
уравнениями j(t) = (x(t),y(t)), равна
_ (х"у' - х'у")2
(х,2+у'2)3
(здесь x,y,z — евклидовы координаты б I3);
2) кривая 7(£) бирегулярна тогда и только тогда, когда к φ 0;
3) если кривая ^(t) бирегулярна, то ее кручение равно
= ([УХ7"],У")
* |[т'х7"]|2 '
Имеет место и аналог теоремы 1.2:
Теорема 1.4. 1) Пусть к : [0, L] —► R и κ: [0, L] -» R — гладкие
функции, причем функция к положительна. Тогда существует гладкая кри-
вая 7: [0, L] —> R3, кривизна которой равна k(l) и кручение которой рав-
но κ(1).
2) Пусть 7i: [0, Ь] —> R3 и 72 · [0, Ь] —> R3 — натурально пара-
метризованные бирегулярные кривые и их кривизны и кручения совпада-
ют: ki(l) = &2(0э xi(0 = х2(0 Эля всех / G [0, L]. Тогда существует такое
движение φ : R3 —> R3, сохраняющее ориентацию, что 72(0 = ^(7i(0)
Эля всех / G [0, L].
Доказательство теоремы 1.4 аналогично доказательству теоремы 1.2.
Уравнения к = /с(0, х = >с(1) называются натуральными уравнениями
пространственной кривой и из теоремы 1.4 следует, что они задают кривую
с точностью до движений трехмерного пространства.
20
Глава 1
§ 1.4. Группа ортогональных преобразований
Уравнения Френе (1.3) и (1.5) выводились из того, что скалярные про-
изведения между векторами, которые входят в реперы Френе, сохраняются.
Мы сделаем сейчас краткое отступление, посвященное ортогональной груп-
пе и выводу этих уравнений с общей точки зрения.
Линейные преобразования А : Шп —► Rn векторного пространства Мп,
сохраняющие скалярное произведение (1.1), называются ортогональными.
Следующая лемма очевидна.
Лемма 1.3. Множество ортогональных преобразований образует
группу относительно операции обычной композиции: А · В (у) = А (В (ν)).
Группа, образованная всеми ортогональными преобразованиями, назы-
вается ортогональной группой и обозначается через 0{п).
Множество линейных преобразований А : W1 —> Жп отождествим
с множеством (п х п)-матриц следующим образом: пусть ei, . .. ,еп — ор-
тонормированный базис в Rn, тогда матрица А = (ajk)i<^j,k^n взаимно
однозначно отвечает преобразованию, действующему на базисных векто-
рах по формуле
3 = 1
Лемма 1.4. Линейное преобразование ортогонально, если и только
если задающая его матрица А удовлетворяет уравнениям
АТА = 1п, (1.6)
где Ат — транспонированная матрица A (ajk = ащ) и \п — единич-
ная [п х п)-матрица.
Доказательство. Запишем скалярное произведение (1.1) в виде про-
изведения матриц (здесь мы рассматриваем векторы как (п х 1)-матрицы):
(v,w) = vTlnw.
Тогда
(Αν, Aw) = (Av)Tln(Aw) = vTATlnAw = vT (AT A)w
и А ортогонально, если и только если
ντ (АТ A)w = vTlnw для всех v.weW1,
что эквивалентно (1.6). Лемма 1.4 доказана.
§1.4. Группа ортогональных преобразований 21
Рассматривая матричные элементы а^ как координаты в п2-мерном
пространстве, отождествим пространство (п х п)-матриц с п2-мерным
евклидовым пространством Rn . Ортогональная группа выделяется
в нем п(п + 1)/2 полиномиальными уравнениями (1.6):
η
Fj/c(an, ... ,ann) - 5jk = ^J a™jamk - Sjk = 0, 1 ^ j ^ /с ^ n. (1.7)
m=l
Напомним теперь теорему о неявной функции (см., например, [11, 15]):
Теорема о неявной функции. Пусть F : U х V —> W1 — гладкое
отображение прямого произведения областей U С Rn и V С Rk с ко-
ординатами х и у, соответственно, в Rn. Пусть F(xo,yo) — Que точ-
ке (хо^Уо) £ U х V матрица
обратима. Тогда существует такая окрестность W С U x V точ-
ки (хо,Уо) и такая окрестность Vo С V точки уо G Шк, что
1) в Vo определены гладкие функции ψ1, . . ., ψη;
2) F(x, y) = 0 Эля (x, y) G VF, ес/ш w только если х1 = ф1(у), .. . 1хп =
= ГЫ-
Матрица
(dF*(xo)\
у дхш )
называется матрицей Якоби (или якобианом) отображения F в точке хо ·
Из теоремы о неявной функции следует, что в окрестности точ-
ки (хо,уо) множество нулей отображения F устроено как график отоб-
ражения Vo С Rk —> Мп, и поэтому точки этого множества гладко парамет-
ризуются точками области из Шк.
Теорема 1.5. Пусть M —множество точек из Rn+/c. Тогда следующие
условия эквивалентны:
1) в достаточно малой окрестности каждой своей точки M задается
как график гладкого отображения
х
1-ф1(хп+1,...,хп+к),
(1.9)
Хп =-фп(хп+\ ...,хп+к)
{после подходящей перенумерации координат х1, ..., хп+к);
22
Глава 1
2) в достаточно малой окрестности каждой своей точки M задается
как множество нулей такого гладкого отображения F : W С Жп+к —>МП,
что в этой окрестности матрица (1.8) обратима (после подходящей пе-
ренумерации координат х1, . . ., хп+к).
Доказательство. Из теоремы о неявной функции следует, что усло-
вие 2 влечет условие 1. Обратное тоже верно: зададим F формула-
ми Fx(x) = х1 -ψλ(Χη+\ ...,хп+к), ...,Fn(x) = хп - фп(хп+\ ...,
хп+к). Теорема 1.5 доказана.
Подмножество М, для которого выполнено любое из двух эквивалент-
ных условий из теоремы 1.5, называется fc-мерным гладким подмногообра-
зием (без края) в Мп+/с.
z = f(x,y)
Рис. 1.2. График функции от двух переменных
Пример. Сфера размерности η задается в
тт+1
уравнением
Она не задается глобально как график функции от двух переменных.
Пусть в окрестности точки х G M подмногообразие M задается как
график отображения (1.9). Тогда у1 = жп+1, . .. ,ук — хп+к задают локаль-
ные координаты в окрестности х и функция / на M называется гладкой
в точке х, если она является гладкой как функция от локальных коор-
динат: / = /(у1, ...,ук). Аналогично вводится понятие гладкости и для
других объектов на подмногообразиях и, в частности, для векторных по-
лей.
Пусть M является /с-мерным подмногообразием Мп+/с и х е М. Рас-
смотрим множество всех гладких путей на М, проходящих через точку х
и лежащих в ее окрестности, заданной формулами (1.9). Каждому такому
§1.4. Группа ортогональных преобразований 23
пути 7 сопоставим его вектор скорости в точке х: ν = d^(to)/dt, где 7(^0) —
= х. Множество таких векторов образует касательное пространство ТХМ
к подмногообразию M в точке х.
Лемма 1.5. Пусть M — k-мерное подмногообразие в Mn+fc. Тогда ка-
сательное пространство в любой его точке является k-мерным векторным
пространством.
ДОКАЗАТЕЛЬСТВО.
Любой путь 7 на М, проходящий через х, является поднятием пу-
ти 7о: [α·> Ь] —» Mfc с помощью (1.9). Поэтому вектор скорости αη/dt имеет
вид
£-"(£)-(··(£)·(£))■
где Ф* — дифференциал отображения Φ = (-01, ... ,ψη) вида (1.9). Линей-
ное отображение В имеет максимальный ранг к и потому является изо-
морфизмом на образ: оно задает изоморфизм векторного пространства Rk
и ТХМ. Лемма 1.5 доказана.
Существует и иное, эквивалентное, определение касательного про-
странства:
Задача 1.5. Если подмногообразие M С Мп+/с определено в окрестно-
сти W точки х £ M как множество нулей отображения F : W —► Шп,
то касательное пространство к M в точке х совпадает с ядром линейного
отображения
F.:R»+*^R« : ВД = lim ^±^bZM.
ε—►() ь
Важными примерами гладких подмногообразий являются ортогональ-
ные группы 0(п):
Теорема 1.6. Ортогональная группа 0(п) является п(п—1)/2-мерным
гладким подмногообразием п2-мерного евклидова пространства, образо-
ванного (п х п)-матрицами. При этом касательное пространство ТеО(п)
в единице группы состоит из всех ко со симметрических матриц.
Доказательство. Тождественное преобразование, задаваемое единич-
ной (п х п)-матрицей 1п, является единицей группы 0{п). В окрестно-
сти ln g 0(п) разделим переменные ajk на две группы: х отвечает^' ^ к, у
отвечает j > к. Рассмотрим отображение
ρ : Rn2 -► Rn(n+i)/2^
24 Глава 1
заданное многочленами (1.7). Легко посчитать, что в точке 1г
при j < к, г < s выполняются равенства
dFjk
dars
2 при j = г, к = s
1 при j = r,k = s,j ^ к
О в противном случае.
( dFj
Следовательно, в окрестности точки ln Gin матрица I ^-^ 1 обратима,
и так как 0(п) выделяется уравнениями F = 0, то по теореме о неявной
функции 0{п) является гладким подмногообразием в окрестности точки 1п.
Если A G 0(п), то определим отображение Fa по формуле Fa(X) =
= F(X · A~l). Так как 0(п) — группа, 0{п) также определяется уравнения-
ми Fa = 0. Из определения Fa следует, что ранг якобиана отображения Fa
в точке А совпадает с рангом якобиана отображения F в точке 1п и, следо-
вательно, равен п(п + 1)/2. Отсюда заключаем, что 0(п) является гладким
подмногообразием в окрестности любой своей точки.
Размерность подмногообразия 0{п) равна п2—п(п+1)/2 = п(п — 1)/2.
Пусть 7 — гладкий путь в О(п), проходящий через 1п. Можно считать,
что
7(ε) = 1η + Χε + 0(ε2),
где X G ТеО(п) — касательная матрица. Из (1.6) следует, что
7(ε)τ7(ε) = (1„ + (ХТ + Χ)ε + 0(ε2)) = 1η.
Значит, Χ — кососимметрическая матрица:
Хт + Х = 0,
и так как размерность пространства ко со симметрических матриц совпадает
с размерностью 0(п), то отсюда следует, что касательное пространство
к подмногообразию 0(п) в единице этой группы совпадает с пространством
кососимметрических матриц. Теорема 1.6 доказана.
Теперь вернемся к уравнениям Френе. Обозначим через R(l) репер
Френе, отвечающий значению параметра / на кривой 7· Переход от R(0)
κ R(l) задается ортогональным преобразованием А(1), так как все эти репе-
ры ортонормированы. Значит, мы имеем гладкий путь А(1) в группе 0(п)
и столбцы матриц А(1) задают разложения векторов из R{1) по базису R(0).
Уравнения Френе имеют вид
«от _ um M)+£)^-4f)-u. _ .
dl ε^Ο ь
§1.4. Группа ортогональных преобразований 25
где матрица В{1) — кососимметрическая, так как является касательным
вектором в единице группы 0{п).
Задача 1.6. Доказать, что для любой (п х п)-матрицы А ряд
ехрА = 1п+А+^А2 + ... +^ЛП+ ...
2! п\
сходится. (Указание: ряд для экспоненты нормы — ехр \\А\\ — сходится.)
Задача 1.7. Пусть А — кососимметрическая (п х п)-матрица. То-
гда j(t) = ехр (At) — гладкий путь β Ο (η).
Глава 2
Теория поверхностей
§2.1. Метрики на регулярных поверхностях
Регулярной поверхностью в Ж3 называется двумерное гладкое подмно-
гообразие в Ж3.
С помощью теоремы о неявной функции уточним это определение:
множество точек Σ С Ж3 называется регулярной поверхностью, если
выполняется одно из следующих условий:
1) в достаточно малой окрестности каждой своей точки оно выделя-
ется как множество нулей такой гладкой функции F(xl, х2, х3), что в этой
окрестности
после подходящей перенумерации координат х1, а:2, ж3;
2) в достаточно малой окрестности каждой своей точки оно задается
как график гладкого отображения
х3 = ^(х\х2)
после подходящей перенумерации координат х1, ж2, х3;
3) в достаточно малой окрестности каждой своей точки оно задается
как образ гладкого отображения
где U — область на плоскости с координатами и1, и2, причем во всех точках
этой области векторы ri = дг/ди1 и Г2 = дг/ди2 линейно независимы.
Лемма 2.1. Определения 1-3 регулярной поверхности эквивалентны.
Доказательство. Эквивалентность определений 1 и 2 уже была нами
установлена в § 1.4 в наиболее общем виде — для гладких подмногообра-
зий Мп. Для доказательства леммы достаточно доказать эквивалентность
определений 2 и 3.
§ 2.1. Метрики на регулярных поверхностях 27
Очевидно, что из 2) следует 3): достаточно рассмотреть отображе-
ние y{u1 ,и2) = (ii1,i^2,'0(ii1,w2)). Для доказательства того, что из 3) сле-
дует 2), применим следующее следствие теоремы о неявной функции:
Теорема об обратной функции. Пусть F : U С Шп —> Шп — глад-
кое отображение области из W1 в Шп и в точке Xq G U якобиан этого
отображения обратим:
\ OX J i^j^k^N
Тогда в некоторой окрестности V точки F(xq) определено гладкое отоб-
ражение G : V —> Шп, которое обратно к F: G · F(x) = х в обла-
сти G(V) С U.
Для доказательства этой теоремы достаточно применить теорему об
обратной функции к отображению Ф: [/хМп^Мп вида 4l{x,y) = y — F(x).
Покажем теперь, что 3) влечет 2). Пусть х G Σ. Без ограничения общ-
ности можно считать, что в точке х матрица
дх1/ди1 дх1/ди2
дх2 /ди1 дх2 /ди2
обратима, и потому по теореме об обратной функции в окрестности х па-
раметры и1 и и2 однозначно выражаются как функции от х1 их2: отоб-
ражение (u1, u2) —> {xl{ul,u2),x2{ul,u2)) обратимо. Теперь заметим, что
в окрестности точки х поверхность задается как график гладкого отображе-
ния
x3 = x3(u\x\x2),u2(x\x2)).
Лемма 2.1 доказана.
Хотя все три определения эквивалентны, мы в дальнейшем будем
пользоваться третьим, так как оно вводит понятие локальных коорди-
нат (и1,и2) G U С Ш2, т.е. таких величин, которые в окрестности каждой
точки задают координаты на поверхности.
Это удобно при рассмотрении кривых на поверхности — не надо зада-
вать кривую в R3 и накладывать на нее аналитические условия, чтобы она
лежала на поверхности, а достаточно задать кривую
j:[a,b]^Uc
Р2
как гладкое отображение в область U. Если кривая не лежит в окрестно-
сти с одними и теми же локальными координатами, то она задается как
28
Глава 2
семейство отображений в такие области. Эти отображения склеиваются
в областях, которые описываются несколькими системами координат, чтобы
корректно задать кривую и ее векторы скорости (которые разные в разных
системах координат). Определение такой склейки требует введения тензо-
ров, и мы отложим это до § 3.3, ограничиваясь по возможности участками
поверхностей, покрытыми одной системой координат.
Теорема 2.1. Пусть гладкое отображение г : U —» М3 задает регу-
лярную поверхность Σ с локальными координатами (и1, и2) G U. Тогда
1) в каждой точке r(u1, и2) векторы i*i и г2 задают базис в касатель-
ной плоскости к Σ/
2) длина регулярной кривой η : [α, b] —> U на поверхности равна
где
о
L(7) = j у/Щ/ùdt,
К«,«,) = („i νη-(Ερ FGyr2
— симметричная билинейная форма на векторном пространстве Ж2, зави-
сящая от точки поверхности и определяемая формулами
Д = (п,п), F=(n,r2), G = (r2,r2),
и 7 = d'y/dt = (u1, u2) — вектор скорости в локальных координатах.
Доказательство. Утверждение 1 следует из определения касательного
пространства. Утверждение 2 выводится из (1.2). Действительно, по опре-
делению
/о
L(7)= Ml -A-'"*-Г
и мы получаем прямыми вычислениями
fd(r-j) d(r-7)\ , .i , .2 .i , ·2ν
^-^'-^J = (ritt +γ^,γ1Μ +r2u) =
= £;(u1)2 + 2FuV + g(u2)2.
Теорема 2.1 доказана.
§ 2.2. Кривизна линии на поверхности
29
Согласно теореме 2.1, в касательном пространстве в каждой точке
задано скалярное произведение, определенное первой квадратичной фор-
мой. Оно задает углы φν^ между векторами г> и ги и длины \ν\ векто-
ров v.
I(v,w)
\v\ = y/l(v,v), cos(pv,w = , ,1 i при ^Оиад^О.
ни
Следующее определение площади части поверхности, как и опреде-
ление длины, вполне естественно, аддитивно и совпадает с обычным для
плоских поверхностей:
• если V С U, то площадь r(V) С Σ равна
//
ν
^EG-F2duldu2.
§ 2.2. Кривизна линии на поверхности
Обозначим через n(w1,w2) такую нормаль к регулярной поверхности
в точке г(и1,и2), что (ri,r2,n) — положительно ориентированный репер
в М3. Она находится явно по формуле
_ [п х г2]
ЦГ1 х r2j
д2г
Через Tjk обозначим вектор
du3 du
Пусть
7:[a,^[/cM2iM3
— регулярная кривая с параметром t, и пусть I — натуральный параметр
на 7. Согласно (1.4),
dl2
ГЬ Т1<у ,
где к — кривизна кривой, а п7 — нормаль к кривой η. Из доказательства
леммы 1.2 мы также знаем, что dl/dt = \d(r · j)(t)/dt\ = ^1(7,7).
30 Глава 2
Теорема 2.2 (Теорема Менье). Кривизна кривой η на поверхности
удовлетворяет уравнению
7 û U \ П(^)
k cost/ = /ein, πΙ) — — -,
1(7,7)
где θ —угол между п7 и п, нормалями κ кривой и к поверхности, а форма II
имеет вид
где
L = (m,n), Μ = (π2,η), TV- (г22,п).
Доказательство.
Прямыми вычислениями получим
<й2 ~ 7~<М ' <äTa «s
(m (й1)2 + 2r12«1«2 + r22 (u2)2 + nä1 + r2ü2) (I)2 +
dl2
+ (riu1 + r2u2)
и, так как ri и г2 ортогональны η, выводим
fe(n, n7) = ((Гц,п) (й1)2 + 2(Г12, п)^2 + (Г22, η) (û2)2)
Осталось только заметить, что (dt/dl)2 = (dl/dt)~2 = 1(7,7)-1. Теорема 2.2
доказана.
Форма П(г>, w) называется второй квадратичной формой поверхности.
Пусть г? — касательный вектор к поверхности в точке г(г^1,гх2) и η —
вектор нормали к поверхности в этой же точке. Проведем через точ-
ку г (и1, и2) двумерную плоскость, натянутую на векторы η и г>. Пересе-
чение этой плоскости и поверхности — кривая 7uW — называется нор-
мальным сечением, отвечающим точке г(и1,и2) и касательному вектору υ.
Из теоремы 2.2 вытекает
§ 2.2. Кривизна линии на поверхности 31
Следствие 2.1. Кривизна нормального сечения 7u1,u2,^ равна
Причем правая часть берется с полоэюительным знаком, если нормали к по-
верхности и к нормальному сечению совпадают, и с отрицательным знаком
в противном случае.
Задача 2.1. Пусть поверхность задана как график функции
х1 = и1, х2 = и2, х3 = f(ul,u2).
Тогда первая квадратичная форма имеет вид
E = l + fl F = hf2, G=l + fl
вектор нормали к поверхности задается формулой
и вторая квадратичная форма имеет вид
/il м = /l2 N _ /22
Vi + A2 + /22' \/î+7F+ïf' ч/1 + Л2 + /;
где через fj1. . jk мы обозначаем dkf/du^ . .. du^k.
Задача 2.2. Построим по функции f(x) поверхность вращения
{график этой функции вокруг оси Ох):
r(u,v) = {u,f(u) cos υ, f (и) sin υ).
Показать, что для этой поверхности первая квадратичная форма имеет
вид
£ = 1 + /'2, F = 0, G-/2,
вектор нормали к поверхности задается формулой
η = —, ( f ' cos v, sin υ)
и вторая квадратичная форма равна
f" f
32
Глава 2
§ 2.3. Гауссова кривизна
Отношение 11(υ,ν)/Ι(ν,ν) называется нормальной кривизной повер-
хности в направлении v.
Лемма 2.2. Пусть на векторном пространстве Шм заданы две сим-
метричные билинейные формы I и II, причем форма I положительно опре-
делена. Тогда в Шп существует базис е±, . . ., еп, в котором эти формы
принимают вид
I(v, w) = v1w1 + ... + vnwn, ПО, w) = AivV + . .. + \Nvnwn
{т. е. форма I задается единичной матрицей, а форма II — диагональной).
Доказательство этой леммы из линейной алгебры несложно. Рассмот-
рим форму I как скалярное произведение на Жм и с помощью ортогона-
лизации Грама-Шмидта найдем ортонормированный базис в RN. Теперь
рассмотрим II как симметричную билинейную форму на R^ со скаляр-
ным произведением I. Известно, что любая такая форма диагонализируется
в каком-то ортонормированном базисе [13]. Лемма 2.2 доказана.
Обозначим теперь через ΤΧΣ касательную плоскость к поверхности Σ
в точке х. На ней заданы квадратичные формы I и II. Применим в этой
ситуации лемму 2.2 и получим, что
Лемма 2.3. В ΤΧΣ молено выбрать базис ei, e<i, в котором формы I
и II одновременно диагонализируются:
1(г>, w) — v1w1 + v2w2,
Il(v,w) = k^w1 + k2V2w2.
Направления векторов е\ и β2 называются главными направлениями
и они определены однозначно, если к\фк<1. Значения к\ и к^ нормальных
кривизн вдоль главных направлений называются главными кривизнами. Они
являются экстремальными значениями для нормальных кривизн в точке, что
следует из теперь очевидного утверждения:
Теорема 2.3 (Формула Эйлера).
Π(υ,υ) , 2,7-2
— = ki cos φ + k2 sm φ,
где φ — угол между векторами е± и v.
Главные кривизны не зависят от выбора базиса в касательном про-
странстве, а являются инвариантами пары квадратичных форм I и II:
§2.3. Гауссова кривизна 33
Лемма 2.4. Пусть симметричные (2 х 2)-матрицы lull задают квад-
ратичные формы поверхности. Тогда главные кривизны к\ и к2 являются
корнями уравнения
Р(Х) = det(II - AI) = 0.
Доказательство. Пусть в базисе ei, е2 квадратичная форма J задается
симметричной одноименной матрицей J:
J(v,w) = (v1 »2 )■·/·($),
и координаты ν в новом базисе e"i,e2 связаны с координатами в старом
базисе соотношением υ = Av. Тогда мы имеем
J(v,w) = ( г?1 г;2 ) · Лт · J · А ■ ( f2 ) = J(v,w).
Значит, в новом базисе квадратичная форма J задается матрицей АТ JA.
Мы знаем, что в каком-то базисе главные кривизны к\ и &2 являются
корнями уравнения
det(II - λΙ) = 0.
Но так как
det(ATIL4 - ХАТ1А) = det AT -det A· det (II - λΙ)
и det Ат = det А ^ 0, в любом другом базисе аналогичное уравнение будет
иметь те же самые корни. Лемма 2.4 доказана.
Из леммы 2.4 следует, что произведение и сумма главных кривизн
в точке поверхности являются геометрическими инвариантами:
• произведение главных кривизн в точке называется гауссовой кривизной
поверхности в этой точке:
K = klk2 = ^=t^M
detl EG-F2
• полусумма главных кривизн в точке называется средней кривизной по-
верхности в этой точке:
н = fci + /с2
34
Глава 2
Задача 2.3. В условиях задачи 2.1 гауссова кривизна имеет вид
к fil f22 - fi2
(i + /i2 + /l)2'
Задача 2.4. Для поверхности вращения (см. задачу 2.2) главные кри-
визны имеют вид
f" 1
(l + f2)3/2 fy/ï+f*
гауссова кривизна равна
г
K /(1 + /'2)2
и средняя кривизна равна
H
i + r-ff
2/(1+ /'2)3/2-
Задача 2.5. Гауссова кривизна гиперболического параболоида z = ху
всюду отрицательна и равна
к~ 1
(i + x2 + y2)2'
а гауссова кривизна круглой сферы х2 + у2 + z2 = R2 радиуса R всюду
положительна и равна К = R~2.
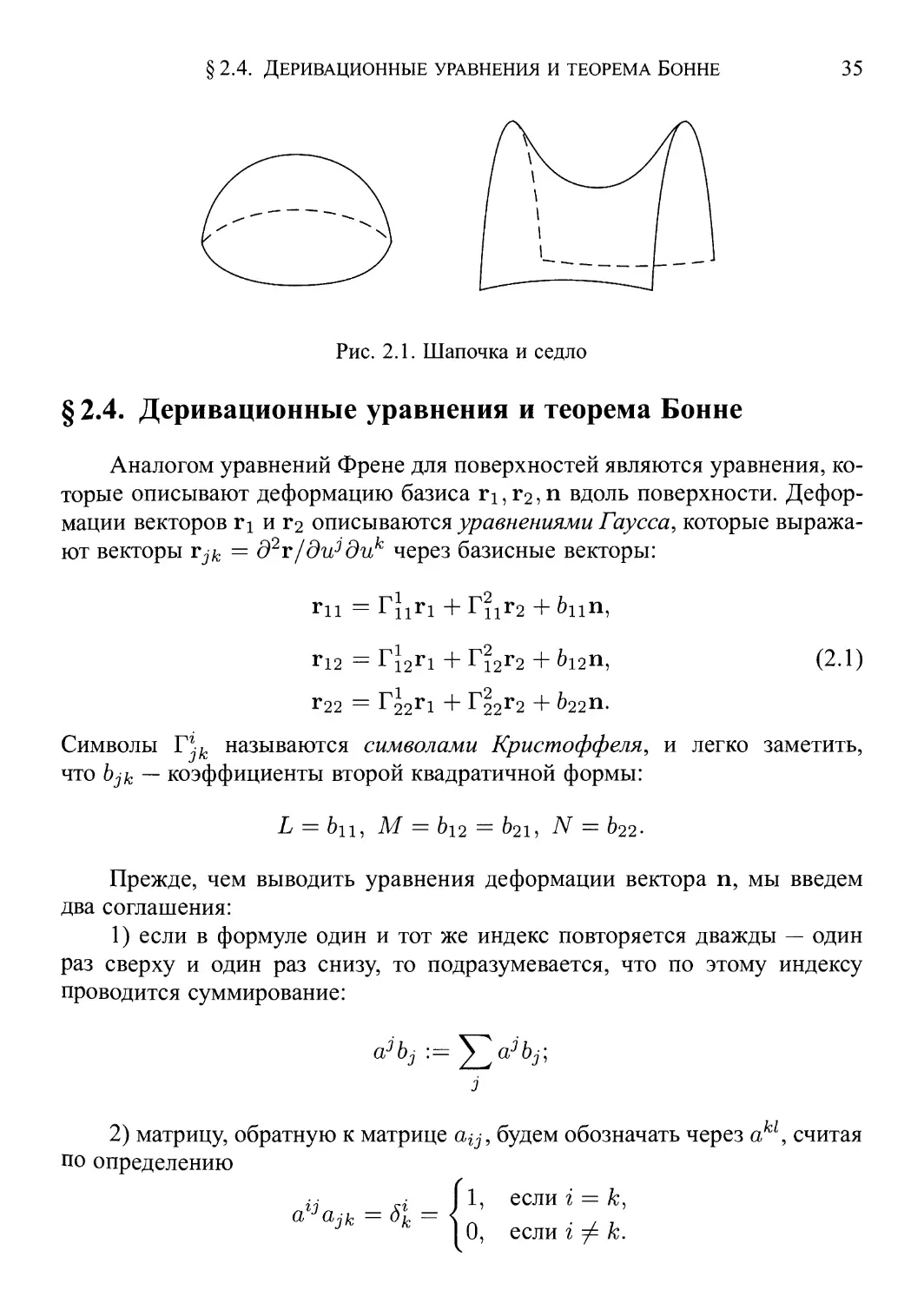
Задача 2.5 проясняет геометрический смысл знака гауссовой кривизны:
а) К > 0 в точке х е Σ. Тогда малая окрестность точки х лежит по од-
ну сторону от касательной плоскости ТХМ. Действительно, плоскость ТХМ
разделяет пространство на два полупространства и нормали всех нормаль-
ных сечений направлены в одно и то же полупространство — около точки х
поверхность выглядит как «шапочка»;
б) К < 0 в точке х G Σ. Тогда кривизны двух нормальных сечений
равны нулю (их касательные направления называются асимптотическими),
а нормали сечений, отвечающих главным кривизнам, направлены в разные
полупространства относительно плоскости ТХМ — около точки х поверх-
ность выглядит как «седло».
§ 2.4. Деривационные уравнения и теорема Бонне
35
Рис. 2.1. Шапочка и седло
§ 2.4. Деривационные уравнения и теорема Бонне
Аналогом уравнений Френе для поверхностей являются уравнения, ко-
торые описывают деформацию базиса ri, Г2, η вдоль поверхности. Дефор-
мации векторов i*i и г2 описываются уравнениями Гаусса, которые выража-
ют векторы Yjk = д2г/ди3дик через базисные векторы:
ru =r}1n+r21r2 + 6iin,
Γ12=Γ}2Γ1+Γ?2Γ2 + 612η, (2.1)
1*22 = Г22Г1 + Г|2Г2 + 622П.
Символы Тг-к называются символами Кристоффеля, и легко заметить,
что bjk — коэффициенты второй квадратичной формы:
L = bu, M = Ь12 = Ь21, -/V = 622.
Прежде, чем выводить уравнения деформации вектора п, мы введем
два соглашения:
1) если в формуле один и тот же индекс повторяется дважды — один
раз сверху и один раз снизу, то подразумевается, что по этому индексу
проводится суммирование:
а°ъз — ХУ6?;
3
2) матрицу, обратную к матрице ац, будем обозначать через а , считая
по определению
а _7- | 1, если г = /с,
alJajk = ôl = i
3 Ι 0, если г φ к.
36 Глава 2
Так как (η, η) ξ 1, (rij,n) = 0, и, следовательно, вектор п^· = дп/ди^
выражается в виде линейной комбинации векторов ri и т2. Далее выводим
d(n,rj)
——— - (nfe,rj) + (n,rjfc) - 0. (2.2)
cm*
Введем коэффициенты а°к как
nfc = α\γλ + α\γ2 = aJkTj
и обозначим через g^ = (г?,г/~) коэффициенты первой квадратичной фор-
мы:
Ε = #11, F = gi2 = 021, G = #22·
Перепишем (2.2) как
a{gil + 01012 = "bib al9l2 + ö?#22 = -&12,
«2011 + α2#12 = -&21, 02^12 + α2#22 = ~Ь22·
Полученные уравнения распадаются на две системы уравнений относитель-
но а}, а\ и а\, а|, которые могут быть записаны в виде системы
Так как матрица д^ обратима и симметрична, к ней существует симметрич-
ная обратная матрица gik = gkK Умножим обе части этой системы на gik
и просуммируем по повторяющемуся индексу j. Мы получим решение этой
системы:
-bij9ik = a?gJmgik = αΤδΙ = al
"i wm
В итоге нами доказана следующая теорема.
Теорема 2.4 (Уравнения Вейнгартена).
Пг = -bi:jgjkrk.
Вместе с уравнениями Гаусса эти уравнения образуют полный набор
деривационных уравнений. Как и уравнения Френе, мы можем записать их
в виде
§ 2.4. Деривационные уравнения и теорема Бонне
37
где
Ai =
Ао =
Г1
1 11
Г1
1 12
-W1
Г1
1 21
Г1
1 22
Г2
1 11
г?2
-W2
Г2
1 21
Г2
1 22
Ьц"
&12
0
&21
^22
-b2jyi -&2jy2 О
и символы Кристоффеля симметричны по нижним индексам: Г^ = Г^.-.
В отличие от уравнений Френе в данном случае возникают нетривиальные
условия совместности:
du1 du2 I n / du2 du1
что эквивалентно следующей системе уравнений
Л-А2--^А1=А1А2-А2Аи
ou1 ouz
которые называются уравнениями Гаусса-Кодацци.
Другая зависимость между величинами, которые входят в (2.1), и пер-
вой квадратичной формой выражается следующими формулами и является
следствием уравнений Гаусса.
Теорема 2.5.
1«-«9 » Qui + du' " ' '· ( '
Доказательство. Согласно (2.1) мы имеем
duk duk
Отсюда следует, что
= r{fcfly+rjfcffli.
99ji | dgu dgtj =2rm
du1 dui du1 υ
38
Глава 2
что влечет
Теорема 2.5 доказана.
Теперь мы можем сформулировать аналог теорем 1.2 и 1.4 для поверх-
ностей.
Теорема 2.6 (Теорема Бонне). Пусть
( 9l1 9l2\ и ( Ьи bl2 ^
V 921 (= 012) 022 У V &21( = ^) ^22 /
— гладкие квадратичные формы в области U, гомеоморфной внутренности
круга} причем первая из них положительно определена и коэффициенты
этих форм удовлетворяют уравнениям Гаусса-Кодацци.
Тогда существует и притом единственная (с точностью до движе-
ний) поверхность в R3, для которой эти формы являются первой и второй
квадратичными формами.
Доказательство. Мы дадим лишь набросок доказательства, указав
принципиальное отличие от доказательств теорем 1.2 и 1.4, — необходи-
мость выполнения условий совместности (уравнений Гаусса-Кодацци).
Пусть ^о = (^о> ио) £ U. Выберем такие векторы ао, bo, со, что
(а0,а0) =gu(uo), (a0,b0) =£12(^0), (b0,b0) = £22(^0),
(ао, со) = (bo, со) = 0, (со, с0) = 1,
как начальные данные для уравнений Гаусса-Вейнгартена:
ri(u0)=ao, г2(^о) = Ь0, п(и0) = с0.
Так как коэффициенты форм удовлетворяют уравнениям Гаусса -Петер-
сона-Кодацци, то построенные по этим формам уравнения Гаусса-Вей-
нгартена совместны и имеют единственное решение а, Ь, с с заданными
начальными данными в точке г^о-
'Как видно из доказательства, существенным является только свойство односвязности
области (определение односвязности будет дано в $ § 3.4): для построения поверхности инте-
грированием формы dr = rxdx-\- Yydy нам нужно, чтобы интеграл от замкнутой 1-формы по
пути зависел только от конечных точек пути.
§ 2.4. Деривационные уравнения и теорема Бонне 39
Так как —Щ = -^-— и область U гомеоморфна внутренности круга,
du ди
для любой замкнутой гладкой кривой без самопересечений η в области U
и любого j = 1,2,3 выполняется равенство
/
{a3du1 + Vdu2) = 0, (2.4)
где а = (a1, a2, a3), b = (fr1, б2, б3). Действительно, контур η ограничивает
какую-то область V G U и по формуле Стокса
/(aW + VA*2) = [ (Щ-Ц) du1 Л <Ь2.
7 J Уди1 ди1 )
Но правая часть этого равенства обращается в нуль, так как -Щг — ^-— = 0.
ди ди
Теперь легко построить такое отображение г : U —> M3, что
а = гьЬ = г2.
Для этого отобразим точку uo £ U в точку (0,0,0) G 13. Соединим любую
точку и G U с точкой щ каким-то гладким путем 7 в области U и зададим
точку г (и) следующей формулой:
г (и) = {adu1 +hdu2).
7
Из (2.4) следует, что это отображение не зависит от выбора пути η.
/(adu1 +hdu2
(0,0,0)
Рис. 2.2. Отображение г
40
Глава 2
Как и при доказательстве теоремы 1.4, простыми вычислениями дока-
зывается, что первая и вторая квадратичная форма этой поверхности совпа-
дают с исходными формами.
Однозначность поверхности с точностью до движений в IR3 доказыва-
ется как и однозначность искомой кривой с точностью до движений в плос-
кости в теореме 1.2. Эти рассуждения не сложны, и мы их опустим.
Теорема 2.6 доказана.
Задача 2.6. Пусть первая квадратичная форма диагональна:
gii=\(u1,u2)i 012 = 0, #22 = μ(μ1,υ?).
Тогда символы Кристоффеля имеют вид
Г1 -J-Ж г1 -J--ÖA. Г1 1 9μ
ill"2Aöu1' 12~2Хди2' 22~ 2\ди19
1 дХ Г2 =_L^/i Г2 1 дм
2μ^2' 12 2/х^1' 22 2μ^2'
Задача 2.7. Доказать, что для поверхности вращения (см. задачу 2.2)
символы Кристоффеля имеют вид
/I £// £/ £ £/
J р2 J_ pi J J pi p2 -p2 r\
11 ~~ 1 _l f'2 ' 12 ~~ f ' i 22 — 1 ,/2 J -1- 12 - -1 11 — -1 22 — U5
где (тх1,^2) := (гл, г>).
§ 2.5. Теорема Гаусса
Гаусс доказал, что гауссова кривизна определяется только первой квад-
ратичной формой. Это следует из выведенной им формулы, которая входит
в систему уравнений Гаусса-Кодацци.
Теорема 2.7 (Теорема Гаусса).
Ь2
К = Τ~Ι Τ = Τ""! l2~ \ У1 121 12 - I 111 22J 9kl +
д2ди 1 д2дп 1 д2д22
9\\922 - д22 911922 - 9\2
+
du1 du2 2 du2du2 2 duldul
§ 2.6. КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ И ГЕОДЕЗИЧЕСКИЕ 41
Доказательство. Из (2.1) следует, что
(ru, г22) - (i*i2, ri2) = ЬиЪ22 - Ь\2 + Г^Г22 дк1 - Тк12Т[2 дк1.
Но
/ ч / ч d2gi2 1 <92#и 1 д2д22
(ГЦ,Г22) - (Г12,Г12) -
du1 du2 2 du2du2 2 duldul '
что вытекает из соотношения
82gij d2{rurj)
dukdul dukdul
(Tik.Tji) + (r^,rifc) + (Гг,Где) + (TikhTj).
Осталось сравнить выражения для (гц,г22) — (1*12,1*12), чтобы завершить
доказательство. Теорема 2.7 доказана.
Из теорем 2.5 и 2.7 вытекает
Следствие 2.2. Гауссова кривизна выражается через коэффициенты
первой квадратичной формы и их первые и вторые производные.
Регулярные поверхности г:[/^М3иг:[/^М3 называются изо-
метричными, если для любой регулярной кривой 7 : [а, Ь] —» U длины
кривых г(7) и г(7) совпадают. Это эквивалентно тому, что во всех точках
совпадают значения первых квадратичных форм:
(14,1·,·) = (ГЬГД
Следствие 2.2 может теперь быть переформулировано следующим образом.
Следствие 2.3. Если две поверхности г : U —► R3 и г : С/ —» М3
изометричны, то их гауссовы кривизны совпадают для каждой пары то-
чек y(u1,u2) ur(v},u2).
Задача 2.8. Доказать, что гауссова кривизна конуса х2 + у2 — z2
в точке (ж, у, z) φ (0, 0, 0) равна нулю.
§ 2.6. Ковариантное дифференцирование и геодезические
Пусть г: U —► М3 задает регулярную поверхность, 7: [а, 6] —> Е/ —
регулярная кривая на поверхности и ν — такое гладкое векторное поле
вдоль кривой 7, что
1) для каждого t G [α, 6] вектор v(t) лежит в касательном пространстве
к поверхности в точке ^(t);
42 Глава 2
2) векторы v(t) гладко зависят от t.
Разложим векторное поле v(t) по базисам в касательных плоскостях:
Производная векторного поля вдоль кривой имеет вид
где 7 = (ù1, и2). Разложим правую часть последнего равенства на два слага-
емых, одно из которых касательно к поверхности, а другое — ортогонально:
ν = (^Ti + Τ%ν*υ>*τλ + v4kbjkn.
Ковариантной производной V^v векторного поля ν вдоль кривой η
на поверхности в R3 называется ортогональная проекция производной по-
ля ν вдоль кривой на касательную плоскость к поверхности:
Dv _ (ск^,Гг j -Л
dt '{dt + 1;*v« J*··
Предположим теперь, что векторное поле ν задано не только на кривой,
но и в целой области поверхности. Тогда мы можем рассматривать ковари-
антные производные поля вдоль различных кривых и формула для ковари-
антной производной поля ν в направлении вектора w примет вид
где w касательный вектор к поверхности. Эта операция обладает рядом
замечательных свойств.
Лемма 2.5. 1) Отображение (w,v) —> Vwv линейно по ν и w:
Vw{aivi + a2v2) = a{4wvi + a2V^2, ab a2 G M;
2) если f : U —» M — гладкая функция, то
Vfwv = fVwv, Vwfv = dwfv + fVwv,
§ 2.6. КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ И ГЕОДЕЗИЧЕСКИЕ 43
где dwî ~~ производная функции f в направлении вектора w:
dwf = yËLwj;
3
4Ï г*. = Tk -
5) производная скалярного произведения векторных полей вычисляется
по формуле
dw(vuv2) = (Vwvi,v2) + (vi,Vwv2).
Доказательство.
Утверждения 1-3 вытекают немедленно из определения ковариантного
дифференцирования. Утверждение 4 вытекает из данного нами определения
символов Кристоффеля и так же выводится из теоремы 2.5.
Утверждение 5 доказывается прямыми вычислениями:
Dw ((гьг>У2) =™fcA ((r;,r>i^)
duk
= wk (Г£(гта,г,·) +rfk(Ti,rm)) v{vi+
(ßvi \ ( ßyj \
= (^wVl,V2) + (V1,VWV2).
Лемма 2.5 доказана.
Взятие проекции на касательную плоскость при определении ковари-
антного дифференцирования ведет к рассмотрению внутренней геометрии
поверхности, при котором мы забываем про внешнее объемлющее про-
странство и строим всю геометрию только исходя из первой квадратичной
формы. Теорема Гаусса при этом имеет глубокий смысл: гауссова кривизна
44
Глава 2
является (в отличие от второй квадратичной формы) объектом внутренней
геометрии.
Если на подмногообразии евклидова пространства задана билинейная
операция на векторных полях и для нее выполняются утверждения 1 и 2
леммы 2.5, то говорят, что на подмногообразии задана аффинная связность.
Связность определяется величинами Г^ . Построенная нами связность удо-
влетворяет двум дополнительным условиям: она симметрична, т. е. для нее
выполняется утверждение 4 леммы 2.5, и согласована с метрикой, т. е. для
нее выполняется утверждение 5 леммы 2.5. Мы укажем без доказательства
следующий факт:
• симметричная и согласованная с метрикой аффинная связность един-
ственна и определяется по первой квадратичной форме дц форму-
лой (2.3).
Понятие ковариантного дифференцирования приводит к понятию па-
раллельного переноса: векторное поле v(t) вдоль кривой η параллельно,
если ковариантная производная υ вдоль η всюду равна нулю:
Теперь по аналогии с евклидовой плоскостью определим аналог прямой
линии: кривая η называется геодезической, если ее вектор скорости парал-
лелен вдоль кривой:
£-■
Имеет место
Лемма 2.6. 1) Геодезические — это кривые, удовлетворяющие уравне-
& + T)kùjùk = 0. (2.6)
нию
- jkl
2) Если j(t) — геодезическая и С Ε Μ, то кривая jc(t) — l{Ct) тоже
геодезическая.
3) Гладкая кривая η на поверхности Σ С М3 является геодезической,
если и только если в каждой точке кривой вектор нормали к кривой орто-
гонален к поверхности {т. е. коллинеарен вектору нормали к поверхности).
Доказательство леммы 2.6 состоит в элементарных вычислениях. Те-
перь укажем на одно важное следствие теоремы о существовании и един-
ственности решения обыкновенного дифференциального уравнения [14].
§ 2.6. КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ И ГЕОДЕЗИЧЕСКИЕ 45
Лемма 2.7. Пусть хо — точка на регулярной поверхности Σ, г>о — каса-
тельный вектор к Σ в точке х$ и η — кривая, проходящая через хо : 7(0) =
^ хо- Тогда
1) существует и притом единственное параллельное векторное по-
ле v(t) вдоль 7 такое, что υ(0) — г>о/
2) для любого достаточно малого ε > 0 существует и притом един-
ственная геодезическая η : [—ε, ε] —► Σ такая, что
7(0) = ж0, 7(0) =υ0.
ДОКАЗАТЕЛЬСТВО.
1) Так как уравнение (2.5) является обыкновенным дифференциальным
уравнением первого порядка с гладкими коэффициентами, для любых на-
чальных данных, т.е. для любого значения υ в нуле: г>(0) = г>о, решение
этого уравнения существует и единственно.
2) Уравнение (2.6) — это обыкновенное дифференциальное уравне-
ние первого порядка на множестве пар вида (х, и), где х G Μ, υ G ΤΧΣ.
В окрестности xq такие пары параметризуются точками (w1, и2, ν1, ν2) G M4:
x = r(w1, и2), ν = νλΥ\ + ν2Τ2. Уравнение (2.6) принимает вид
iï = ν\ ν1 = -rjk(u\u2) vj vk, г = 1, 2.
Теперь утверждение 2, как и утверждение 1, следует из теоремы о суще-
ствовании и единственности решения обыкновенного дифференциального
уравнения.
Лемма 2.7 доказана.
Пространство, образованное парами (х, ν), где х G Σ и ν G ΤΧΣ, назы-
вается касательным расслоением и обозначается ΤΣ.
Лемма 2.8. Пусть Σ — двумерное подмногообразие в R3. Тогда ΤΣ —
четырехмерное подмногообразие в М6.
Доказательство. Пусть (#о,^о) £ 2П. Можно считать, что в окрест-
ности точки xq поверхность Σ задается уравнением F(x) = 0 и (dF/dx1,
dF/dx2, dF/dx3) φ 0 в окрестности xq. Без ограничения общности можем
считать, что в этой окрестности dF/dx1 Φ 0. Тогда в окрестности (жсь^о)
касательное пространство выделяется в IR6 уравнениями
dF J
F(x,v) = 0, G(x,v)=J2dx,
46
Глава 2
(см. § 1.4, задача 1.5). Теперь лемма следует из теоремы о неявной функции,
так как определитель матрицы
(dF/дх1 dF/dv1^ _ fdF/dx1 О
[dG/dx1 dG/dv1) - \ * dF/дх1
отличен от нуля в окрестности точки (хо, ^о)· Лемма 2.8 доказана.
Согласно лемме 2.7 на ΤΣ задан поток или динамическая система,
т. е. задана система обыкновенных дифференциальных уравнений
х — v(x),
где v{x) — векторное поле (мы всегда будем предполагать его гладким) на
пространстве, которое называется фазовым пространством и расслаивает-
ся на траектории этой системы — интегральные кривые векторного поля υ.
Первым интегралом потока называется функция на пространстве, ко-
торая постоянна вдоль траекторий. Укажем почти очевидный первый инте-
грал геодезического потока.
Лемма 2.9. Если η — геодезическая, то
|(7,7)=0.
Доказательство. Из утверждения 5 леммы 2.5 следует, что
|W,7)-(§7,7) + (7.§7)=2(£m
Но по определению геодезических Dj/dt = 0. Лемма 2.9 доказана.
Задача 2.9. Пусть функция f{x) задает поверхность вращения
{см. задачи 2.2 и 2.7). Параллели есть сечения поверхности вращения
плоскостями, ортогональными оси вращения {они задаются уравнени-
ем и — const). Обозначим через а угол между вектором скорости геодези-
ческой и параллелью. Через R{x) обозначим расстояние от точки х G Σ
до оси вращения. Доказать, что функция I = Rcosa является {как и \^\
{см. лемму 2.9)) первым интегралом геодезического потока на поверхности
вращения1.
Функция / называется интегралом Клеро.
§2.7. Уравнения Эйлера-Лагранжа 47
§2.7. Уравнения Эйлера-Лагранжа
Пусть на касательном расслоении к поверхности Σ, заданной отобра-
жением
г : U -+ R3,
задана гладкая функция
L : ΓΣ -> R.
Обозначим через и1, и2 координаты в области [/с!2и рассмотрим их как
координаты на поверхности.
Выберем две точки х, у G Σ и рассмотрим множество Λ всех парамет-
ризованных (т. е. с фиксированным параметром) гладких кривых
7: [а, Ь]- Σ
с началом в точке х и концом в точке у:
7(a) = ж, 7(b) = У-
На Λ определен функционал действия
ь
S:A-+R, 5(7) = /l(7(î),7(*))*.
Многие задачи механики и физики сводятся к нахождению пути (точки
из бесконечномерного пространства Λ), на котором функционал S прини-
мает минимальное значение. Более общей задачей является описание кри-
тических точек функционала S. Объясним, что это значит.
Гладкой вариацией пути 7 называется такое однопараметрическое се-
мейство путей 7ε (7ε (t) = j(t,s)), что
1) 7 : [a, b] x (—εο,εο) —» Σ является гладкой функцией и по t G [a, 6]
и по ε G (-ε0,ε0);
2) η(α, ε) = х и 7(Ь, ε) = 2/ для всех ε G (-ε0, ε0);
3) j(t, 0) = 7(0 ДЛЯ всех i G [a, b).
Полем вариации W(t) называется векторное поле вдоль 7 вида
Wit)- д^£)
de
ε=0
Поле вариаций является естественным аналогом касательного вектора к Λ
в точке 7 G Λ.
48
Глава 2
Кривая 7 € А называется экстремалью функционала 5, если
öfe
О
ε=0
для любой гладкой вариации 7ε пути 7· Очевидно, что если на η функ-
ционал S достигает минимума, то кривая 7 — экстремаль функционала S.
Обратное не верно: как и в случае функций на конечномерном пространстве
не каждый экстремум является минимумом.
Теорема 2.8. Если кривая 7 — экстремаль функционала S, то вдоль
этой кривой выполняются уравнения
3L = d OL
du1 dt du1
(2.7)
Доказательство. Пусть η — экстремаль, j£(t) = (ν}(υ,ε),υ,2(υ,ε)) —
ее вариация и W(t) — поле вариации. Тогда
dS{le
de
о
I
dL(7(*,e),7(*,e))
de
dt =
ε=0
fdL(<y(t),<y(t))du%0) дЬЩ,ч(г))д2и%0У
\ du' de dû1 de dt
dt.
Проинтегрируем последнее выражение по частям, принимая во внимание,
что
W(a)=d^ = 0, W(b)=d^m = 0.
δε
de
(2.8)
Мы получим
dS(ls)
de
ε=0
b
f (— - 4—1 W\t)dt = 0. (2.9)
J \диг dt du1) w
Так как, очевидно, любое гладкое векторное поле W(t) вдоль 7, удовлетво-
ряющее (2.8), является полем гладкой вариации, из уравнения (2.9) вытека-
ют уравнения (2.7). Теорема 2.8 доказана.
§2.7. Уравнения Эйлера-Л агранжа 49
Уравнения (2.7) называются уравнениями Эйлера-Лагранжа для ва-
риационной задачи, которая отвечает функции Лагранэюа (или, как тоже
говорят, лагранжиану) L(x, х).
Примером уравнений Эйлера-Лагранжа являются уравнения геодези-
ческих (2.6).
Теорема 2.9. Если L(u,ü) — \ν)^ — gijùlùJ, то уравнениями Эйлера-
Лагранжа для этого лагранжиана будут уравнения геодезических (2.6).
Доказательство. Просто выпишем аккуратно уравнения Эйлера-Лаг-
ранжа:
диг диг диг
Уравнения Эйлера-Лагранжа принимают вид
^ у дик ди° диг J
9ijU
что переписывается как
λ γ дик ди3 диг J
Подставляя в последнюю формулу выражение для символов Кристоффе-
ля (2.3), получаем уравнение геодезических
иш + TVkùjùk = 0.
Теорема 2.9 доказана.
Рассмотрим вариационную задачу для лагранжиана
L0(u,ü) = \й\ = yjgijvïvj.
Функционалом действия для него будет длина кривой. Лагранжиан не диф-
ференцируем в точках, где й = 0. Но значение S не зависит от выбо-
50
Глава 2
pa параметризации на кривой: оно одинаково для эквивалентных кривых
(см. лемму 1.1: мы ограничились регулярными кривыми, но легко показать,
что в этом случае это ограничение несущественно). Поэтому, если кри-
вая, является экстремалью функционала длины, то эквивалентная ей кривая
с параметром пропорциональным натуральному (|й| = const) тоже является
экстремалью функционала длины.
Теорема 2.10. Экстремали функционала длины с точностью до экви-
валентности совпадают с геодезическими.
Доказательство. Для функционала длины уравнения Эйлера-Лагран-
жа принимают вид
1 dgjk ■ .k dl 1 .Λ ,0 im
—7== -uJu = — —Qiju · (2-10)
2\/9imùlùm диг dt \^/girnûlù™ J
Параметр на геодезических пропорционален натуральному (лемма 2.9).
Полагая g\rnv!'ùrn — const /Ob (2.10), мы получаем уравнения геодезиче-
ских (2.6) и заключаем, что геодезические являются экстремалями функци-
онала длины.
На каждой экстремали функционала длины мы можем положить пара-
метр пропорциональным натуральному. По отношению к этому параметру
экстремаль описывается уравнениями (2.6) и, следовательно, является гео-
дезической.
Теорема 2.10 доказана.
Введем на поверхности расстояние между точками:
d(x,y)= inf L(7).
Так как длина не зависит от выбора параметра, здесь под точками из АХуУ
можно понимать кривые с параметром t е [0,1], пропорциональным на-
туральному. Из теоремы 2.10 следует, что если существует кривая из AXjy
длины d(x, y), то она является геодезической. Мы ограничимся следующим
локальным фактом.
Теорема 2.11. Пусть η — геодезическая, проходящая через точку х^.
Существует такая окрестность хо на η, что для любых двух точек Х\
и Х2 из этой окрестности кратчайшей кривой, соединяющей точки Х\
и Х2, является отрезок геодезической η.
Доказательство. Прежде всего докажем техническую лемму.
§2.7. Уравнения Эйлера-Л агранжа
51
Лемма 2.10. Пусть xq — точка на поверхности и η — геодезическая,
проходящая через точку xq. Тогда в окрестности xq можно выбрать такие
координаты и1, и2, что первая квадратичная форма принимает вид
Ы = (J g)
и уравнение для η примет вид и2 = 0. В этих координатах линии и2 = const
будут геодезическими.
Доказательство. Выберем координаты у1, у2 в окрестности хо так,
что хо = (0,0) и касательный вектор к 7 в точке хо равен (1,0).
Через каждую точку с координатами (0, s) проведем геодезическую
с начальным вектором скорости (1,0). Тогда существует такая функ-
ция φ в окрестности хо, что эти геодезические задаются уравнения-
ми y2 = (p(y1,s)9 и так как начальные данные для геодезических гладко
зависят от 5, то φ — гладкая функция. Рассмотрим отображение (г/1, s) —>
-* {у1тУ2 — φ^1!8))- Его якобиан в точке xq равен
П
и по теореме об обратной функции это отображение обратимо около точ-
ки xq. Следовательно, у1 и s задают локальные координаты в окрестности xq
и кривые s — const являются геодезическими.
В каждой точке из этой окрестности хо возьмем касательный век-
тор w(y1^s), ортогональный кривой s — const и такой, что (w,w) — 1
и (w,rs) > 0. Малая окрестность точки xq расслаивается на траектории
гладкого векторного поля — решения уравнения х = w(x). Введем вме-
сто координаты у1 координату t, положив х = (£, s), если точка х лежит
на траектории потока х — w(x), пересекающей кривую s = 0 в точ-
ке (£, 0). По отношению к координатам (£, s) первая квадратичная форма
равна £ц = Λ, #22 = μ, 9i2 = 0.
Каждая кривая s = const является геодезической и, следователь-
но, Г^ =0. Значит, dX/ds = 0 (см. задачу 2.6) и координаты
t
и1 = / \/λ(τ) dr, и2 = s
о
являются искомыми. Лемма 2.10 доказана.
52
Глава 2
Перейдем к доказательству теоремы 2.11. Введем в окрестности xq
систему координат (и1,и2), связанную с хо и 7 как в лемме 2.10. Можно
считать, что xq = (0,0). Выберем ε > 0 таким, что круг В = {\и\ < ε}
полностью лежит в этой окрестности. Пусть С = ттхев G{x) и D =
= min{l,C}.
Если х\ и Х2 лежат в круге Во = {\и\ ^ ρε}, где ρ = D/(D + 2), то
l)\u1{x1)-u1(x2)\ ^2ρε;
2) любая гладкая кривая, соединяющая х\ и х2 и выходящая в какой-то
момент из круга В, имеет длину ^ 4ρε;
3) длина гладкой кривой, соединяющей х\ и х2 и полностью лежащей
в В, равна
/
(й1)2 + G (Û2)2 dt Z / V (ω1)2 Ζ Ιμ1^!) - w1^)!· (2.11)
Но в (2.11) равенство достигается в точности на отрезке 7о·
L(7o) < Un)
Рис. 2.3. Кратчайшая линия в полугеодезических координатах
Теорема 2.11 доказана.
Лемма 2.10 утверждает существование в окрестности любой точки спе-
циальных координат, удобных в вычислениях. Они называются полугеоде-
зическими координатами. Дадим точное определение.
Координаты (и1, и2) — (ос, у) называются полугеодезическими, если
первая квадратичная форма имеет вид
gijduldui = dx2 + Gdy2.
Задача 2.10. Доказать, что β полу геодезических координатах (ж, у)
любая кривая вида у = const является геодезической.
§2.8. Формула Гаусса-Бонне
53
Пример. Сферические координаты. Определим в R3 сферические ко-
ординаты г, 0, φ по формулам
ж1 = г cos φ sin 0, ж2 = г sin (/9 sin 0, ж3 = г cos 0,
где Γ>Ο,Ο^0<π,Ο^(^^2π. При каждом фиксированном значе-
нии г = const ^ 0 величины φ, 0 задают координаты на сфере радиуса г.
Метрический тензор равен
ds2 = dr2 + г2 αθ2 + г2 sin2 θ αφ2.
Поэтому при любом заданном значении г координаты (ж, у) — (г0, ψ) будут
полугеодезическими, а большие круги (/? = const — геодезическими на
сфере радиуса г.
Задача 2.11. Доказать, что гауссова кривизна поверхности с полугео-
дезическими координатами (ж, у) равна
к= 1 d2VG
VG дх2 '
Задача 2.12. Доказать, что если гауссова кривизна К поверхности
постоянна и К ф О, то существуют полугеодезические координаты (ж, у),
в которых первая квадратичная форма имеет вид
О sin2(^)) пРиК>^
(θ зЪ2(^Кх)) При К<°-
§2.8. Формула Гаусса-Бонне
Геодезические являются естественным обобщением прямых на случай
произвольных поверхностей (прямые являются геодезическими на плоско-
сти: в этом случае Гг-к = 0 в линейных координатах и уравнение геоде-
зических становится линейным и1 = 0). Отклонение произвольной кривой
от геодезической описывается аналогом кривизны плоской кривой, а имен-
но геодезической кривизной. Дадим ее определение.
54
Глава 2
Пусть 7: №, Щ —> U С Ш2 — натурально параметризованная кривая
на поверхности г: U —> М3. Выберем в касательных плоскостях к поверх-
ности ориентацию, считая базис (гх,Г2) положительно ориентированным.
В каждой точке 7(0 кривой выберем ортонормированный положительно
ориентированный базис (7, и) в касательном пространстве. Геодезической
кривизной называется величина
т.е. прямой аналог кривизны плоской кривой (1.3). Из леммы 2.6 следует,
что гладкая кривая является геодезической, если и только если ее геодези-
ческая кривизна всюду равна нулю.
Пусть W — малая окрестность точки поверхности, в которой введены
полугеодезические координаты (х, у) : = (иг,и2)9 и пусть 7 = 71 U ... U 7п —
кусочно-гладкий замкнутый контур (т. е. семейство последовательно прой-
денных регулярных кривых: конец jj совпадает с началом 7j+b и мы поло-
жим при этом 7n+i — 7i)· Мы предположим, что контур 7 не имеет точек
самопересечения и ограничивает область V cW.
Обозначим через olj угол между 7j и 7j+i в общей концевой точке,
направленный внутрь У, и через da — форму площади на поверхности
ασ = \Jgiig22 - g22 dx л ay.
Теорема 2.12 (Формула Гаусса-Бонне).
I kgdl = 2n-J2(n-aj)- j К da. (2.12)
7 -7"1 ν
Доказательство. В полугеодезических координатах (х,у) := (и1, и2)
первая квадратичная форма имеет вид
dx2 + Gdy2
и символы Кристоффеля равны (см. задачу 2.6)
pl Jl/^ ~р2 1 /υ р2 1 /-у
1 22 — 2 12 ~~ 2G ~~ 2G у'
остальные символы Кристоффеля равны нулю. Вектор нормали к кривой
берется по отношению к первой квадратичной форме и вычисляется явно
п= ——(-Gyrx +xr2)
VG
§2.8. Формула Гаусса-Бонне 55
(напомним, что под точкой понимается дифференцирование по натурально-
му параметру I: |7| = 1)· Теперь подставим эти выражения в формулу для
геодезической кривизны и получим
kg = VG i-xy + ху+ \Gxf + ^Gxx2y + ^Gyxy2Y
Так как \^\2 = х2 + Gy2 = 1, то
|arctg (^Щ = VG (-ху + iy+ ±GxÈ*y + ^Gvxy^,
(VG)j= (*» + Gf) Ü = VG (IG^ 4- ^G^y).
Отсюда следует, что
7 /Gy'
fc9 di = darctg ( —Л + (Vg\ ydl.
По формуле Стокса [11, 15] мы имеем
! ЫЩ у<и=[(ув) dy= [ (Vg) dxAdy
и, принимая во внимание формулу для гауссовой кривизны в полугеодези-
ческих координатах (см. задачу 2.11), выводим
f (Vg) ydl = - f К da.
7
Заметим теперь, что угол
arctg —:—
равен (с точностью до π) углу φ между η и ri. Если контур 7 — гладкий, то
Ι αφ — 2π,
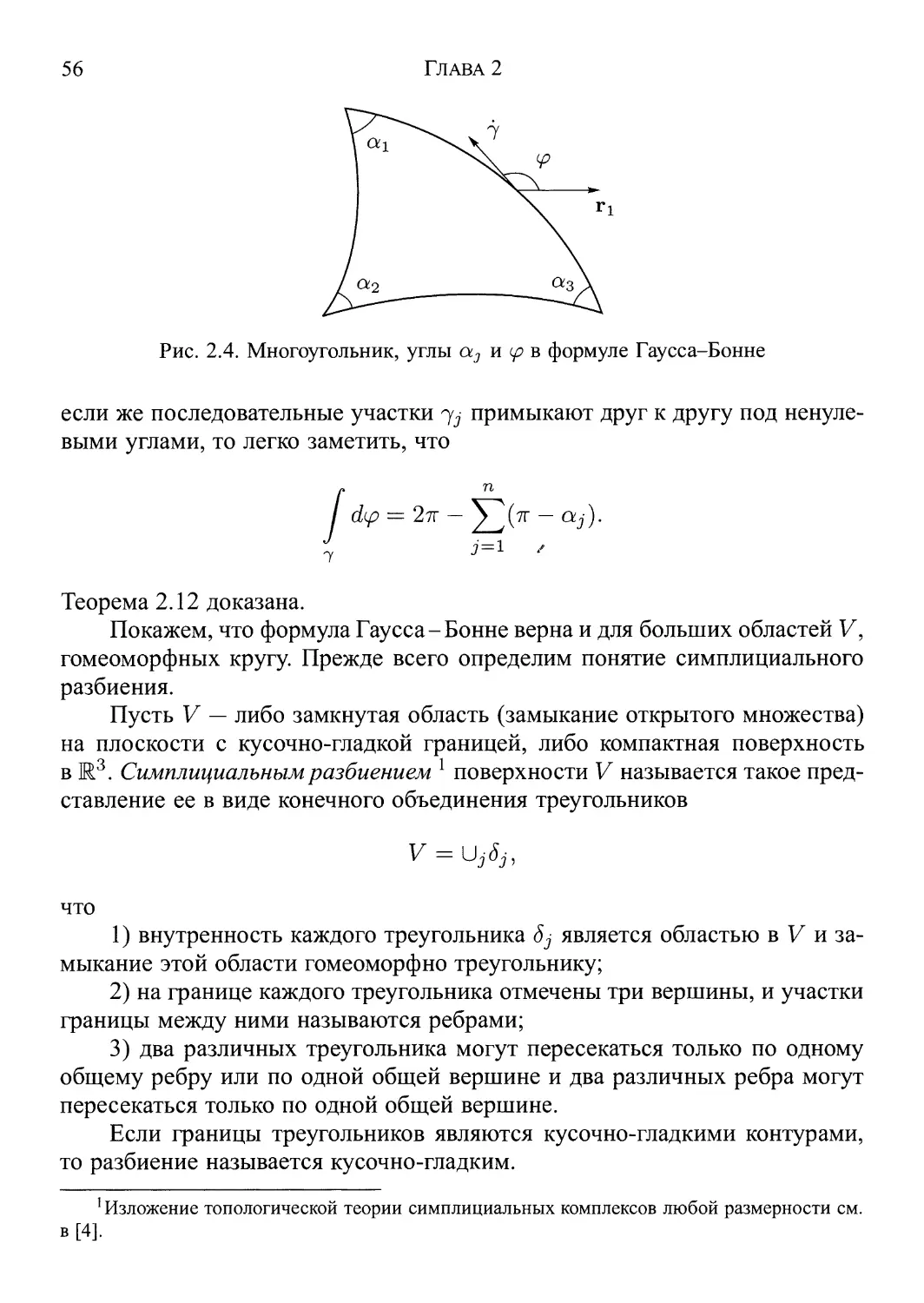
56
Глава 2
Рис. 2.4. Многоугольник, углы а3; и φ в формуле Гаусса-Бонне
если же последовательные участки 7^ примыкают друг к другу под ненуле-
выми углами, то легко заметить, что
/п
αφ — 2π — У"д7г — cxj).
Теорема 2.12 доказана.
Покажем, что формула Гаусса-Бонне верна и для больших областей V,
гомеоморфных кругу. Прежде всего определим понятие симплициального
разбиения.
Пусть V — либо замкнутая область (замыкание открытого множества)
на плоскости с кусочно-гладкой границей, либо компактная поверхность
в R3. Симплициалъным разбиением х поверхности V называется такое пред-
ставление ее в виде конечного объединения треугольников
что
1) внутренность каждого треугольника 5j является областью в У и за-
мыкание этой области гомеоморфно треугольнику;
2) на границе каждого треугольника отмечены три вершины, и участки
границы между ними называются ребрами;
3) два различных треугольника могут пересекаться только по одному
общему ребру или по одной общей вершине и два различных ребра могут
пересекаться только по одной общей вершине.
Если границы треугольников являются кусочно-гладкими контурами,
то разбиение называется кусочно-гладким.
1 Изложение топологической теории симплициальных комплексов любой размерности см.
в [4].
§2.8. Формула Гаусса - Бонне
57
Рис. 2.5. Симплициальное разбиение
Пусть Δ — симплициальное разбиение замкнутой области V. Обозна-
чим через ао число вершин, через а± — число ребер и через а2 — число
треугольников. Величина
х(А) =а0-а1+а2
называется эйлеровой характеристикой разбиения.
Теорема 2.13. Если замкнутая область V гомеоморфна кругу на плос-
кости, то эйлерова характеристика любого ее симплициалъного разбиения
равна единице.
Доказательство. Проведем его индукцией по а2. При а2 = 1 утвер-
ждение очевидно. Пусть оно верно при а2 ^ к.
Возьмем произвольное разбиение Δ замкнутой области V с а2 = к+1.
Выберем треугольник öj, примыкающий к границе по ребру 7*· Удалим
ребро 7* и внутренность ôj из V, получив в итоге новую замкнутую об-
ласть V с разбиением Δ \ ôj. Возможна одна из двух ситуаций:
1 ) замкнутая область V' гомеоморфна кругу;
2) замкнутая область V гомеоморфна объединению двух замкнутых
областей V\ и V2, на которых заданы разбиения Δ1 и Δ2, и эти области
пересекаются по общей вершине.
В первом случае очевидно, что х(А) = х{А') = 1. В втором слу-
чае х(А) = х(А') = х(Аг) + Χ(Δ2) -1 = 1.
Теорема 2.13 доказана.
Докажем теперь формулу Гаусса-Бонне для больших областей.
Теорема 2.14. Если V — гомеоморфная кругу замкнутая область
с кусочно-гладкой границей на поверхности, то для нее верна формула Га-
усса-Бонне (2.12).
Доказательство. Выберем кусочно-гладкое симплициальное разбие-
ние области V на маленькие треугольники £&, каждый из которых лежит
58
Глава 2
2)
Рис. 2.6. «Две различные ситуации»
в области с полугеодезическими координатами. Обозначим через со число
вершин, лежащих на границе dV области V, й через с\ — число ребер,
лежащих на границе dV этой области. Так как граница dV гомеоморфна
окружности, со = ci.
Выпишем для каждого треугольника δ к формулу (2.12) и просуммиру-
ем их. Так как интегралы от геодезической кривизны кд по внутренним ре-
брам берутся дважды с разными знаками, сумма левых частей равна J kgdl,
7
где 7 = 9V — граница V. Справа мы получим
2πα2 - 3πα2 + 2π(α0 — с0) + Y^ aj — К da,
i v
где oij — углы между гладкими участками границы V. Очевидно, что За2 =
= 2<2i — ci, и мы выводим, что
/ kgdl — 2πα2 — 2παΧ + пс\ + 27г(а0 - с0) + ^ otj — К da,
7 Э V
и, так как со = ci, с помощью теоремы 2.13 мы получаем
/ kgdl — 2π(α2 — а\ + αο) — /J(У — ocj) — / Кda —
7 J'ν
= 2тг - ^(π - aj) - Κ da.
Теорема 2.14 доказана.
§2.8. Формула Гаусса-Бонне
59
Формула Гаусса-Бонне имеет ряд красивых следствий.
Во-первых, ее можно применить к замкнутым поверхностям в М3,
т. е. к компактным поверхностям без края. Поверхность называется ориен-
тируемой, если в касательном пространстве в каждой точке можно выбрать
так ориентацию, чтобы она менялась непрерывно при движении точки по
поверхности. Простейшими примерами таких поверхностей являются тор
и сфера. Вырежем теперь из сферы и g кругов и получим сферу с g ды-
рами. Возьмем g торов, из каждого из которых вырезано по внутренности
круга, и приклеим каждый из этих торов к сфере с дырами, отождествив
граничные контуры. Мы получим сферу с g ручками. Известно, что
• каждая замкнутая ориентируемая поверхность устроена как сфера
с ручками1.
Рис. 2.7. Построение сферы с ручками
Если ориентация на поверхности выбрана, то поверхность называет-
ся ориентированной и по ней мы можем брать поверхностные интегра-
лы [11, 15], в частности, интегралы от К da.
Теорема 2.15. Пусть Σ — замкнутая ориентированная поверхность
в R3. Тогда для любого ее симплициального разбиения Δ выполняется ра-
венство
[ К da = 2πΧ(Α).
Σ
Доказательство. Всякое симплициальное разбиение можно так слег-
ка пошевелить, что оно станет кусочно-гладким (это выводится из того,
1 Т. е. гомеоморфна сфере с ручками (строгое определение гомеоморфности мы даем ниже
в 6). Доказательство этого факта можно найти, например, в [4, 6].
60 Глава 2
что любая непрерывная функция на отрезке сколь угодно близко прибли-
жается многочленами). При этом числа вершин, ребер и треугольников не
изменятся.
Предположим, что Δ — кусочно-гладкое симплициальное разбиение,
и применим к каждому треугольнику из Δ формулу Гаусса-Бонне (теоре-
ма 2.14). Просуммируем эти формулы. Так как интегралы от кд по ребрам
берутся дважды с разными знаками, мы получим в левой части нуль. Правая
часть суммы равна
2πα,2 — 3πα2 + 2παο —К da,
Σ
но 3<22 = 2<2i, так как все ребра — внутренние. В итоге мы заключаем, что
2π%(Δ) = / К da. '
Σ
Теорема 2.15 доказана.
Следствие 2.4. Для замкнутой ориентируемой поверхности Σ эйле-
рова характеристика симплициального разбиения не зависит от разбиения
и определяется только поверхностью. Она называется эйлеровой характе-
ристикой %(Σ) поверхности Σ.
Задача 2.13. Доказать, что эйлерова характеристика сферы с g руч-
ками равна 2 — 2д и, в частности, эйлеровы характеристики сферы и тора
равны двум и нулю, соответственно.
Другое замечательное применение формулы Гаусса-Бонне — это фор-
мула для суммы углов треугольника. Область, которая гомеоморфна вну-
тренности треугольника и ограничена тремя отрезками геодезических, на-
зывается геодезическим треугольником.
Теорема 2.16. Сумма углов ai, a2, аз геодезического треугольника Δ
на поверхности равна
ai + a2 -h as = π + К da.
Δ
Доказательство теоремы немедленно следует из формулы Гаусса-Бонне
с учетом того, что геодезическая кривизна сторон геодезического треуголь-
ника всюду равна нулю. Из теоремы следует, что если гауссова кривизна К
§2.9. Минимальные поверхности
ai + а2 + а3 > π
Рис. 2.8. Геодезический треугольник и сумма его углов (на сфере)
положительна, то суммы углов треугольников больше π, а если она отрица-
тельна, то меньше.
§ 2.9. Минимальные поверхности
Обобщением геодезических на двумерный случай являются минималь-
ные поверхности.
На ориентированной поверхности определена форма площади
da — wdet (gij) du1 Λ du2 = Jg\\Q22 — д22 du1 Λ du2,
где в каждом касательном пространстве репер ei,e2, отвечающий коорди-
натам и1, и2, положительно ориентирован.
Мы говорим, что однопараметрическое семейство поверхностей Σε
является гладкой деформацией поверхности Σ, если
1) Σ0 = Σ;
2) поверхности Σε задаются функциями, которые гладко зависят от па-
раметра деформации ε.
Говорят, что замкнутая область V С Σ является носителем деформа-
ции, если часть поверхности, лежащая вне V, не деформируется.
Если носитель деформации V компактен, то площадь S (ε) деформи-
руемой части V£ конечна и является гладкой функцией от параметра ε.
Поверхность называется минимальной, если
im
= 0
ε=0
62
Глава 2
Рис. 2.9. Деформация поверхности и ее носитель
для любой деформации с компактным носителем V.
Происхождение этого понятия довольно ясно: если мы имеем замкну-
тый контур 7в13и существует такая затягивающая его поверхность Σ,
что она имеет наименьшую площадь среди всех поверхностей, ограничен-
ных контуром 7, то эта поверхность Σ минимальна.1
В случае же геодезических мы рассматриваем одномерные объекты —
кривые, минимизирующие одномерный объем — длину — среди всех кри-
вых, ограниченных парой точек. Как и в случае геодезических, минимальная
поверхность, ограниченная контуром η, не обязательно реализует минимум
функционала площади — она лишь формально удовлетворяет уравнениям
Эйлера -Лагранжа для этого функционала, которые мы и выведем.
Теорема 2.17. Регулярная поверхность Σ, заданная отображени-
ем г : U —> 1R3, является минимальной, если и только если ее средняя кри-
визна всюду равна нулю:
Н = 0.
Доказательство. Пусть V — замкнутая подобласть в U и j — грани-
ца V. Деформация поверхности, сосредоточенная на V, имеет вид
г6 (и1,и2) = г(У, и2) + εφη + 0(ε2),
где функция φ равна нулю вне V. Площадь продеформированной части
поверхности re(V) равна
S (ε) = j ^(rf,^)^,^)-^,^)^,^)^1 du2,
ν
1 Знаменитая проблема Плато состояла в доказательстве существования минимальной по-
верхности, затягивающей произвольный кусочно-гладкий контур в!3, и ее изучение суще-
ственно повлияло на развитие теории уравнений в частных производных. Окончательное ее
решение было получено в 1930-х годах в работах Дугласа и Радо вариационными методами:
минимальная поверхность была получена как экстремаль другого функционала — функционала
Дирихле.
§ 2.9. Минимальные поверхности 63
Так как
г| = гк + εφηΙτ + eipkn + 0(ε2)
и (ri, η) = (r2, η) = 0, мы выводим
(г?,г^) = {п,г,) + е<р{(п,пз) + (г,,пг)) + 0{е2).
Из (2.2) следует, что (г^, п^) = —bij, и мы получаем
S(e) = fjl- 2evbn922 + b229ll-bl29921~b2igi2 + О(е') Λτ =
*/ V 911922 -9l2
= 5(0)-ε / bii^2 + ***η - b"f i - ^g"ydor + 0(g2).
V 911922 ~9l2
Сумма корней k\ и &2 уравнения Ρ (Χ) = det(6^ — λ^) = 0 равна, как легко
проверить,
Ьцд22 + ^22^11 - &12#21 - &21012
ki+k2 =
911922 - 9l2
и по лемме 2.4 это — в точности удвоенная средняя кривизна поверхно-
сти: 2Я = к\ Л- к2.
В итоге получаем
|зд
=0 J
Η φ da.
ν
Эта величина обращается в нуль при всех деформациях с носителем в V,
т. е. для любых гладких функций φ, равных нулю вне замкнутой области V,
тогда и только тогда, когда Η — 0 в каждой внутренней точке из V.
Теорема 2.17 доказана.
Задача 2.14. Доказать, что
1) поверхности вращения {см. задачу 6), полученные вращением гра-
фиков функций f(x) = acosh(x/a + b), где а ^ 0, минимальны [они назы-
ваются катеноидами)]
2) если поверхность вращения минимальна, то она либо является ка-
теноидом, либо плоскостью, которая получается вращением прямой, ор-
тогональной оси вращения.
Часть II
Риманова геометрия
Глава 3
Гладкие многообразия
§3.1. Топологические пространства
Топологическим пространством называется множество точек X, в ко-
тором отмечены подмножества, называемые открытыми, и при этом вы-
полняются следующие условия:
1) объединение любого числа открытых множеств открыто;
2) пересечение конечного числа открытых множеств открыто;
3) все множество X и его пустое подмножество открыты.
Дополнение к открытому множеству называется замкнутым множе-
ством.
Семейство открытых множеств называется базой (топологии), если
любое открытое множество представимо как объединение множеств из это-
го семейства. Чтобы задать на множестве точек X топологию (структуру
топологического пространства), иногда проще не указывать все открытые
множества, а лишь задать их аддитивные образующие — базу топологии.
Например, зададим топологию на метрических пространствах.
Метрикой на множестве X называется такая функция
что выполнены следующие условия:
1) р(х,у) =р(у,х);
2) р(х, х) — 0 и р(х, у) > 0 при х Φ у\
3) р(#, z) ^ р(ж, у) + р(г/, z) (неравенство треугольника).
Метрическим пространством называется множество точек X с метрикой ρ
и топологией, определенной базой, состоящей из всевозможных открытых
шаров ΒΧ,ε = {у е X : р(х, у) < ε}, где х е X и ε > 0.
Другой способ введения топологии состоит в ее индуцировании.
А именно, каждое подмножество Y с X топологического пространства X
наделено индуцированной топологией, при которой множество V С Y от-
крыто, если и только если оно представимо в виде пересечения V = U Π Υ,
68
Глава 3
где U — открытое множество в X. Впоследствии под топологией на подмно-
жествах топологических пространств мы всегда будем, если не оговорено
противное, понимать индуцированную топологию.
Задание топологии определяет между точками отношение близости:
• окрестностью точки х Ε Χ называется любое открытое множество U,
содержащее х: х G U,
и позволяет определить непрерывность отображения из X в Y:
• отображение /: X —> Y топологических пространств называется
непрерывным в точке х G X, если для любой окрестности V точки
f(x) существует окрестность U точки х такая, что f(U) С V,
• отображение /': X —> Y топологических пространств называется
непрерывным, если выполняется одно из следующих эквивалентных
условий:
а) отображение / непрерывно в каждой точке из X,
б) для любого открытого множества V С Y его прообраз f~l(V) С X
открыт.
Задача 3.1. Доказать эквивалентность условий а) и б) из определения
непрерывного отображения.
Непрерывное отображение / : X —> Ш называется непрерывной функ-
цией.
Для отображений метрических пространств понятие непрерывности
обобщает определение непрерывной функции на отрезке.
Задача 3.2. Отображение / : X —> Y метрических пространств X
и Y непрерывно в точке х G X, если и только если для любого ε > О
существует такое δ > 0, что если рх(х,х') < δ, то pY(f(x),f(x')) < ε.
Пусть
р(х,у)
— расстояние между точками х = (ж1, ... ,жп) и у = (у1, ... ,уп) в ев-
клидовом пространстве Rn. Тогда метрическая топология на W1 является
обычной топологией, известной из курса математического анализа [11, 15].
§3.1. Топологические пространства
69
Введем некоторые классы топологических пространств:
• пространство X называется хаусдорфовым, если для любой пары раз-
личных точек х, у G X существуют их окрестности U и V, которые
не пересекаются друг с другом: х е U, у eV nU DV — 9,
• пространство X называется связным, если оно не представимо в виде
объединения двух непустых подмножеств, каждое из которых открыто
и замкнуто одновременно,
• пространство X называется линейно связным, если любую пару раз-
личных точек х, у е X можно соединить непрерывной кривой, т. е. су-
ществует такое непрерывное отображение / : [0,1] —■> X, что /(0) = х
и/(1) = у.
Пусть X — топологическое пространство n{Ua}aeA — такое семейство
его подмножеств, индексированное элементами множества А, что объеди-
нение U a совпадает с X:
X — ^aeAUa.
В этом случае семейство {Ua} называется покрытием пространства X.
Если {Uß}ßeB — такое его подсемейство (т. е. Б с А), что оно само является
покрытием, то оно называется подпокрытием покрытия {Ua}aeA- Если все
множества Ua открыты, то покрытие называется открытым. Следующее
понятие является исключительно важным в топологии и анализе:
• пространство X называется компактным, если из любого его откры-
того покрытия можно выделить конечное подпокрытие,
• компактное хаусдорфово пространство называется компактом.
Примерами компактов являются отрезки [а, Ь] С М, — оо < а, 6 < оо
(лемма Гейне - Бореля; см., например, [И, 15]).
Задача 3.3. Подмножество X евклидова пространства Шп компакт-
но, если и только если оно замкнуто в Жп и ограничено (полностью содер-
жится в конечном кубе {\х\ ^ N} для некоторого N < ос/
Задача 3.4. Если f : X —► Y непрерывное отображение и X компакт-
но, то его непрерывный образ f(X) компактен.
Из утверждений задач 3.3 и 3.4 вытекает следующее свойство.
70
Глава 3
Задача 3.5. Если f : X —► R непрерывная функция и X компактно,
то f достигает своих максимума и минимума: существуют такие точ-
ки XminjXmax G X, Что /(xmin) < /О) ^ /(^max) ОЛЯ ÖCßX Ж G Χ.
Перечисленные свойства (хаусдорфовость, линейная связность, связ-
ность, компактность) являются топологическими инвариантами, т.е. они
одни и те же у пространств, неразличимых как топологические простран-
ства без каких-либо дополнительных структур. Это понятие неразличимо-
сти формализуется следующим образом:
• пространства X и Y гомеоморфны, если существуют такие непрерыв-
ные отображения f: X-^Yng.Y-^X, что они взаимно обратны:
gf: X ^ X и fg: Y —> Y — тождественные отображения X и У, соот-
ветственно. Такие отображения fug называются гомеоморфизмами;
• свойство топологически инвариантно, если из того, что оно выполня-
ется для пространства X, следует, что оно выполняется для любого
пространства У, которое гомеоморфно X.
§ 3.2. Гладкие многообразия и отображения
Топологическим n-мерным многообразием называется хаусдорфово
пространство М, каждая точка которого имеет окрестность, гомеоморфную
области из W1.
Открытое покрытие {Ua} многообразия M такое, что для каждого его
элемента Ua задан гомеоморфизм φα с областью Wa из Rn:
ψα · Wa -► Ua,
называется атласом. Каждый такой гомеоморфизм φα задает в области Ua
локальные координаты. А именно, если х = (ж1, ..., хп) G Шп, то локаль-
ные координаты точки (ра(х) — это ж1, ... ,хп. В пересечении координат-
ных областей Ua и Uß локальные координаты связаны функциями перехода:
ха — foiß\xß-> ' · · ixß)->
ГДе faß = ψαψβ1.
Мы говорим, что на топологическом многообразии задана гладкая
структура класса Ск, если на нем задан атлас, у которого все функции пе-
рехода непрерывно дифференцируемы к раз. Многообразие с таким покры-
§ 3.2. Гладкие многообразия и отображения
71
Рис. 3.1. Перекрывающиеся карты
тием называется гладким 1 (или дифференцируемым) (класса гладкости Ск),
а соответствующие локальные координаты — гладкими. В дальнейшем под
«гладкостью» мы будем для простоты понимать гладкость класса С°°.
Отображения faß обратимы, так как их композиция faßfßa является
тождественным отображением. Следовательно, их якобианы всюду невыро-
ждены:
Пример. Напомним, что сфера размерности η — это гладкое подмного-
образие в Rn+1, заданное уравнением
(х1)2+...+(^+1)2 = 1.
Построим на ней атлас с двумя картами. Пусть Рдг — «северный»
полюс: точка с координатами (0, ..., 0,1), a Ps — «южный полюс»
(О, ..., 0, —1). На дополнении к каждому полюсу определена проекция на
плоскость xn+l — 0 из данного полюса: мы соединяем полюс и точку на
сфере прямой, и проекцией данной точки является пересечение этой пря-
мой с плоскостью xn+l = 0. Эти проекции и есть искомые отображения φ^
и φ3:
φΝ:υΝ = Ξ2\ΡΝ, φΝ(Χ\ ...,xn+1
(проекция из северного полюса),
^:f/5 = 52\P5, φ8{Χ\..·,Χη+1)
1 Известно, что уже в размерности η = 4 существуют компактные топологические много-
образия, которые не допускают ни одной гладкой структуры.
= / X1 Хп
и-жп+1' '"'l-xn+1
1 + xn+1 '"■'!+ xn+1
72
Глава 3
(проекция из южного полюса). Карты Un и Us перекрываются по обла-
сти S2 \ {Pn, Ps}, и в ней формулы перехода от координат в Un к коорди-
натам в Us имеют вид
fSN{x\..^xn) = (fL f^\ |*|* = (*i)2+...+(*n)2
(мы оставляем вывод этой формулы перехода в качестве упражнения).
Согласно теореме о дифференцировании сложной функции, если на пе-
ресечении областей Ua Π Up задана функция / класса гладкости Ск по пе-
ременным хъа9 то она имеет тот же класс гладкости по переменным xi.
Это позволяет определить понятие гладкого или дифференцируемого отоб-
ражения:
• отображение гладких многообразий / : M —► TV имеет класс гладко-
сти Ск, если по отношению к гладким локальным координатам {хг}
на M и {у·7} на N оно задается вектор-функцией (у1, ...,ут) =
= /(ж1, ..., хп) класса гладкости Ск.
Гладкие отображения /: M —> R называются гладкими функциями,
а гладкие отображения η: [α, b] —> M — гладкими путями.
Заметим, что определение гладкости отображения f: M ^ N опи-
рается на гладкие структуры и на М, и на N. Если на одном и том же
топологическом многообразии X заданы две гладкие структуры, то мы по-
лучаем два гладких многообразия Mi и М^. Гладкие структуры считаются
совпадающими, если тождественные отображения Mi —> М2 и М.2 —► Mi
являются гладкими.
Многообразия M и TV называются диффеоморфными, если существу-
ют такие гладкие отображения / : M —► iV и # : TV —> M, что они взаимно
обратны, т. е. отображения fg: N -^ N ngf : M —> M тождественны. Такие
гладкие гомеоморфизмы / и g называются диффеоморфизмами. 1
1 Известно, что существует бесконечно много попарно недиффеоморфных гладких много-
образий, гомеоморфных R4 (при π φ 4 — такие многообразия единственны с точностью до
диффеоморфизма), а на топологическом пространстве S7, гомеоморфном единичной семимер-
ной сфере в Ш8 (S7 = {v G M8: |г>| = 1}), существует ровно двадцать восемь различных
(с точностью до диффеоморфизма) гладких структур. Все эти структуры на S7 реализуются
на подмногообразиях Е10, заданных уравнениями
6fc-l _| Я 1 J1 1 J1 1 J1 _ л
zl + z2 + z3 + z4 + ^5 — U5
|zi|2 + |«2|2 + k3|2 + |«4|2 + |«5l2 = i,
при /с = 1, ..., 28 (здесь z\, ..., 2:5 — комплекснозначные координаты в С5 « M10) (см.,
например, [2, 5]).
§ 3.2. Гладкие многообразия и отображения 73
Пусть 7(0 — гладкий путь в М. Тогда в локальной системе коорди-
нат {хга} путь 7(0 записывается в виде
i^(4(i),...,a£(i))
и его вектор скорости в точке 7(0 равен
7(i) = (ià(t),...,i£(i)).
В другой локальной системе координат {х^} путь 7(0 и его вектор скоро-
сти 7(0 имеют вид
t -+ (x}(t), ..., xnß(t)), j(t) = (xß(t), ..., i^(i)).
Отсюда мы выводим формулу, которая связывает записи векторов скорости
в различных системах координат:
(дх1 дхп \
-j-xia(t),...,^j-xi(t)j,
что влечет
■i _94-j
Xß~ дхСа-
Векторы скорости путей в M являются касательными векторами к М,
и вектор 7(0 касателен в точке 7(0· Мы приходим к следующему опреде-
лению:
• касательным вектором к n-мерному многообразию M в точке х на-
зывается объект, который в локальных координатах {хга} задается упо-
рядоченным набором чисел (г>^, ... , г>™) и его запись (гид, ... ,ги^)
в любой другой системе координат {x3ß} удовлетворяет уравнению
dxi .
«>β = 1ΓΤ<· (ЗЛ)
Касательные векторы в точке х образуют n-мерное векторное про-
странство, которое называется касательным пространством ТХМ в точ-
ке х. Каждая система координат задает в касательном пространстве базис,
обозначаемый через
δ1 = ε'···'0" = ^· (3·2)
74
Глава 3
Вектор скорости х разлагается в этом базисе по формуле
х = х1д1 -h ... +хпдп.
Многообразие ориентируемо, если существуют такие координатные
области Uа, покрывающие все многообразие, что на пересечении Ua П Up
любой пары областей выполняется неравенство
det (9Л) > 0.
Пусть многообразие — связное и ориентируемое. Тогда, считая ба-
зис д/дх1^ ..., д/дх1^, положительно или отрицательно ориентированным,
мы задаем ориентацию во всех касательных пространствах, полагая бази-
сы д/дх^ ..., d/dx'ß положительно или отрицательно ориентированными
соответственно. Если на многообразии выбрана какая-то ориентация, то оно
называется ориентированным.
Гладкое отображение f:M—>N индуцирует линейное отображение
касательных пространств
f*:TxM^Tf(x)N,
при котором вектор скорости пути 7(£) переходит в вектор скорости пу-
ти /(7(£)). Выберем в окрестности х локальные координаты {хг} и в окрест-
ности f(x) локальные координаты {у3}. Тогда отображение / записывается
в виде
yi = f*(x\...,xn)
и мы получаем
Значит, в данных координатах отображение /* записывается в виде
дР ■
уг -> W3 = -^—V\
дхг
Отсюда мы, в частности, видим, что оно является линейным.
Подпространство N является /с-мерным подмногообразием в М, если
для каждой точки х е N существует такая окрестность U с локальными
§3.2. Гладкие многообразия и отображения
75
координатами х1, ... , хп, что пересечение U Π Ν выделяется уравнения-
ми х1 = ... = хп~к = 0. Считая при этом у1 = xn-/c+1, ... ,ук = хп
локальными координатами на N, мы задаем на N структуру гладкого мно-
гообразия.
Введем следующее важное понятие:
• гладкое отображение F : M —* TV регулярно в точке х G M, если
при записи в каких-то (а значит, и любых) локальных координатах
yj _ jfTj'^i^ m. . , xn), j = 1, ... ,/с, ранг якобиана в точке х равен
размерности многообразия N:
птк(^-) = dim TV.
Vox* У
Если это условие выполнено, то точка х называется регулярной точкой
отображения F.
Примерами подмногообразий являются регулярные множества нулей
гладких отображений.
Лемма 3.1. Пусть на n-мерном многообразии M задано гладкое отоб-
ражение F: M —* Rn~k и множество его нулей Mq = F_1(0) состоит
из регулярным точек. Тогда Mq — гладкое подмногообразие в М.
Доказательство. Пусть х £ Mq. Тогда в окрестности точки х мы
имеем
rank (Щ) =п-к,
V дхг )
где {хг} — координаты на М. Без ограничения общности можно считать,
что в точке х минор, отвечающий координатам х1, ..., хп~к, не равен ну-
лю. По теореме о неявной функции в малой окрестности U С M точки х
определены такие функции ^i, ... ,^>п_&, что равенство F(x) — 0 выпол-
няется тогда и только тогда, когда х1 = 7/>i(xn-/c+1, ..., хп), ..., хп~к =
= фп-к{хп~к+1, ... ,хп). Примем теперь
X1 =X1-^i(xn-fc+1, ...,ХП), ...,
fn-/c = хп-к _ ψ^η-k+l^ ^п^
-П-/С+1 _ n-fc+1 -η _ η
«Χ/ — «л/ .... ^ «Λ/ — iL·
за локальные координаты в окрестности V точки х. В них множество У Π Mo
выделяется уравнениями х1 = ... = хп_/с = 0. Лемма 3.1 доказана.
76 Глава 3
Эта лемма дает большой запас примеров гладких многообразий,
которые могут строиться как подмногообразия других, уже известных.
При M — W1 мы получаем гладкие подмногообразия евклидова простран-
ства (см. § 1.4).
Пример. Сферы. Множество нулей гладкого отображения
f{x\ ...,xn+1)=(x1)2+...+(xn+1)2-l
евклидова пространства Rn+1 в R задает гладкую гиперповерхность —
n-мерную сферу Sn. Любое гладкое многообразие, диффеоморфное этой
сфере, тоже называется n-мерной сферой.
Пусть / : N —> M — такое гладкое отображение, что
1) / задает гомеоморфизм между N и f(N) С М\
2) в каждой точке х е N отображение /* является вложением каса-
тельных пространств.
Такое отображение / называется вложением N в М. Если выполнено
только условие 2, то отображение / называется погружением.
Лемма 3.2. Если f : N —>· M — вложение, то f(N) — подмногообразие
в M и f : N —> f(N) — диффеоморфизм.
Доказательство. В локальных координатах {у3} на TV и {х3} на M
вложение / записывается как х3 = х3 (у1, .. ., уп) и, так как точка х регу-
лярна для /,
rank (дхЛ = к
\дуг)
Без ограничения общности считаем, что
det (ψ\ φ 0
в окрестности точки х. По теореме об обратной функции в малой окрестно-
сти U точки f{x) определены такие гладкие функции ψ\, ..., φη, что у3 —
= ^-(я1, .. ., хк) при 1 ^ j ^ к, если и только если х3 = х3 (у1, .. ., ук).
Теперь возьмем
F :U -* Жп~к
в виде
FV» ...,хп)= xk+i - Χ^Ηφ^Χ1, ... ,xfe), . . .,<рк(х\ . . .,хк)).
§ 3.2. Гладкие многообразия и отображения
77
Множество нулей отображения F совпадает по построению с f(N) Π U
и на нем F регулярно. Применяя лемму 3.1, завершаем доказательство лем-
мы 3.2.
Пусть /: M —> Ш — гладкая функция на многообразии M и множе-
ство ее нулей Mo состоит из регулярных точек этого отображения. То-
гда М0 — подмногообразие, разделяющее M на две части, где / < О
и / > 0. В этом случае замкнутая область N, выделенная неравен-
ством f(x) ^ 0, называется многообразием с краем dN — Mq. Если
удалить из многообразия с краем N его край dN, то мы получим под-
многообразие N \ dN С М, размерность которого совпадает с размерно-
стью M и называется размерностью многообразия с краем. Если многообра-
зие с краем n-мерно, то его граница является (п — 1) -мерным многообразием
без края.
Рис. 3.2. Край многообразия
Отображение / : Ni —► N2 многообразий с краем iVi С Mi и^С М2,
выделяемых в Mi и М2 неравенствами, называется гладким, если суще-
ствует такая открытая область U С Мь что Ni С U и f продолжается до
гладкого отображения g : U —► М2.
Аналогично случаю многообразий без края определяется диффеомор-
физм многообразий с краем, и мы заметим, что если N является п-мерным
многообразием с краем, то каждая точка его границы имеет окрестность,
диффеоморфную пересечению n-мерного шара {\х\ < 1} С Шп с полупро-
странством хп ^ 0.
Если многообразие не имеет края и компактно, то оно называется за-
мкнутым.
Определим гладкую структуру на прямом произведении гладких мно-
гообразий. Пусть {Uа} — покрытие M областями с координатами {хга}
и {Vß} — покрытие N областями с координатами {yi}. Тогда {Ua х У β}
образует покрытие M х N областями, в которых примем {хха, ...,#£,
2/0, .. . ,ylß} за гладкие координаты (здесь к = dimM, / = dim TV). В даль-
78
Глава 3
нейшем под гладким многообразием M х N будем понимать данное мно-
гообразие.
Примеры. 1) Торы. Прямое произведение η экземпляров окружно-
сти S1 называется n-мерным тором:
Тп = S1 х ... х S1.
V -У
-ν
П
Двумерный тор получается, если мы возьмем квадрат {0 ^ ж, у ^ 1}
на плоскости и склеим противоположные стороны по правилу:
/(0,2/)-(1, у), (я,0)~(х,1).
На полученном торе величины х, у зададут координаты, определенные по
модулю единицы.
2) Бутылка Клейна. Возьмем квадрат {0 < х,у ^ 1} на плоскости
и склеим противоположные стороны по правилу
(0,2/) ~ (1,2/), (ж,0)~(1-ж,1).
Будем считать, что в достаточно малой окрестности любой точки получен-
ного пространства М2 величины ж, у задают гладкие локальные координа-
ты. Полученное замкнутое многообразие называется бутылкой Клейна.
Задача 3.6. Доказать, что бутылка Клейна неориентируема, так как
при непрерывном изменении ориентации в касательных пространствах
вдоль петли r(t) = (1/2, t), где t = [0,1], ориентация обращается.
Задача 3.7. Докажите, что неравенства 1/4 ^ х ^ 3/4 выделяют
в бутылке Клейна подмногообразие, которое неориентируемо и край кото-
рого состоит из одной компоненты, гомеоморфной окружности.1
Задача 3.8. Пусть Ri w R2 — две прямые с координатами х и у
соответственно. Пусть X — множество, полученное из этих прямых
отождествлением точек х £ Ri и у G R2 при х = у и х φ 0. Пря-
мые Rj естественным образом вкладываются в Χ: ρ у. Щ —» X. Введем
на X топологию, положив U С X открытым, если и только если его
прообразы p^l(U) С Ri и p^iU) С R2 открыты. Показать, что X
обладает всеми свойствами гладкого многообразия, кроме хаусдорфо-
вости.
1 Это многообразие с краем называется лентой Мебиуса.
§3.3. Тензоры 79
§3.3. Тензоры
Гладкие многообразия около каждой точки устроены так же как ев-
клидовы пространства, и функции на многообразиях — гладкие, если они
являются гладкими функциями от локальных координат.
Записи να и Wß одного и того же касательного вектора в различных
координатах (ха) и (xß) связаны формулой (3.1):
dxl .
J Р г
ß дхга а
Пусть / : M —> Ж — гладкая функция на М. В координатах {хга} ее гра-
диент grad / имеет вид
ν =
df df \
dxi-'-dx-l·
а в координатах {х\} —
df dxi df dxi
'"дх^дхъ)·
Формула, которая связывает записи градиента в различных координатах,
отличается от формулы для векторов (3.1).
Ковектором в точке х называется объект, который задается в ло-
кальных координатах {хга} упорядоченным набором чисел (vf, ...,г>™)
и (tuf, ... .w'ß), в другой системе координат {xJß} удовлетворяет уравне-
нию
Ч = —<· (з-з)
Мы заключаем, что
Лемма 3.3. Градиент функции является ковектором.
Производная функции в направлении касательного вектора ν рав-
на Dvf = (gra,df)ivl9 не зависит от системы координат и является ли-
нейной функцией на касательном пространстве. Последнее утверждение
верно для всех ковекторов.
80
Глава 3
Лемма 3.4. Ковектор w в точке х G M является линейной функцией на
касательном пространстве ТХМ, записываемой в локальных координатах
формулой (w,v) = WiV1.
Доказательство. Достаточно показать, что значение (w, v) не зависит
от выбора локальных координат. Но из (3.1) и (3.3) следует, что
β г дхЬ a 9Xß k
wivß = ir^wf—ïïX»
и, так как
мы получаем
dxlß J дх„
dxid4 = dxi=5j
dxlß дхка дха
(w,)v) =wPviß = w%vl
Лемма 3.4 доказана.
Из леммы 3.4 вытекает следующее утверждение.
Лемма 3.5. Ковекторы в точке х G M образуют линейное простран-
ство Т*М размерности η = dim M, сопряэюенное к касательному про-
странству ТХМ.
Пространство Т*М называется кокасательным пространством в точ-
ке х е м.
Обобщением векторов и ковекторов являются тензоры:
• тензором типа (fc, Z) в точке х G M называется такой объект
Th".'.jï> *ь ••м4,Л, . ..,.?* = 1, . ..,n = dimAf,
заданный для всех возможных значений верхних и нижних индексов г
и j, что его записи в различных системах координат связаны формулой
(ß)Ti1...ik = ^ß_ д_^_дх^_ дх^{а) шГк
• семейство тензоров одного и того же типа, непрерывно зависящее
от точки х G M, называется тензорным полем на М.
§3.3. Тензоры 81
Частным случаем тензорного поля является векторное поле. Если тен-
зорное (и, в частности, векторное) поле гладко зависит от точки, т. е. все
функции Т?1 ' [ г£ являются гладкими, то мы говорим, что такое поле глад-
кое.
Мы видим, что
1) касательный вектор является тензором типа (1,0),
2) градиент функции — типа (0,1).
Так как векторы ν сами являются линейными функциями на ковекторах
w вида v(w) = w(v), тензоры Τ типа (/с, Ζ) являются линейными функциями
от к ковекторов и^ и I векторов V(ny.
±{U ,...,71 ,7J(!), . . . ,V(i)) — ±jx _ jt Uh . . .Uik V^y . .V^y
Теперь формула (3.4) поаргументно выводится из формул (3.1) и (3.3), кото-
рые для касательных векторов и градиентов функций вытекают из теоремы
о дифференцировании сложной функции.
Формула (3.4) очевидна для тензорных произведений тензоров валент-
ностей (1,0) и (0,1): тензор A (g В валентности (к + £>, I + q) называется
тензорным произведением тензоров А и В типов (kj) и (р, q), соответ-
ственно, если
( Л 6à R)h ' · *ikVl " * *Гр — Aix ■ ■ ■ik - RTl ■ ■ · rp
Мы уже указали базис
ei = di, ..., еп = дп
вида (3.2) в пространстве векторов. Ему сопряжен базис
е1 =dx\ ..., еп = dxn
в пространстве ковекторов. Он однозначно определяется своих элементов
на базисных векторах
Тензорные произведения вида
eh g> ... (g eik (g ejl (g ... (g ejl
задают базис в пространстве тензоров типа (к,1) в любой точке. Для такого
тензора имеет место очевидное разложение
Г = T^;;;^eh (g ... (g eik (g ejl (g ... (g eJl.
82
Глава 3
Если задать в каждом касательном пространстве ТХМ скалярное про-
изведение (г>1, г>2) (для поверхностей в М3 — первую квадратичную форму),
то мы получим метрику
gijC1 ® é = gijdxldxi,
являющуюся тензором типа (0, 2):
(vuv2) = gijv\vJ2, gij = (euej).
Касательные векторы — пары (ж,г>) вида х G M,v G ТХМ — образуют
касательное расслоение ТМ.
Теорема 3.1. На касательном расслоении ТМ к n-мерному многооб-
разию M существует такая структура гладкого многообразия, что
а) проекция π : Τ Μ —» M является гладким отображением;
б) для любой точки х G M существует такая ее окрестность U,
что прообраз n~1(U) этой окрестности диффеоморфен прямому произ-
ведению U х Rn: /: π-1 (U) —> U x Шп, и при этом 7т(/_1(ж,г>)) = х,
где x G U, v G Шп (диффеоморфизм f согласован с проектированием).
Доказательство. Для каждой точки x G M возьмем какую-то ко-
ординатную окрестность Ua с координатами (ж^, . ..,ж™). Пусть Wa —
множество векторов г>, касательных к точкам из U. Введем на Wa коорди-
наты (ж^, ..., ж™, v]x, ..., υ%)9 где ν G ТХМ раскладывается по базису (3.2)
как υ = vladi.
Семейство Wa образует покрытие ТМ, и, считая координаты (х1а, ...,
xai vcti · · · > va) гладкими, мы вводим на Τ Μ искомую структуру гладкого
многообразия. Теорема 3.1 доказана.
В дальнейшем под гладкой структурой на ТМ мы будем понимать
структуру, построенную в доказательстве теоремы 3.1.
Аналогично доказывается, что на множестве ковекторов в точках M —
кокасательном расслоении Т*М к многообразию M — существует такая
структура гладкого многообразия, что проекция π : Τ* Μ —> M являет-
ся гладким отображением и для любой точки x G M существует такая
ее окрестность U, что прообраз π_1([/) этой окрестности диффеоморфен
прямому произведению [/xln, где η = dim M.
Тензор Tix... ik типа (0, к) называется кососимметрическим, если
его значение меняет знак при перестановке любой пары индексов:
— —7 ....
Ъ\ . . . %р . . Zq . . . Ъ]с Z\ . . . Zq . . . Zp . . . Z]ç '
§3.3. Тензоры 83
«Кососимметрические тензоры типа (0, к) находятся во взаимно одно-
значном соответствии с дифференциальными ^-формами» (известными из
курса математического анализа [11, 15]):
Τ^ωτ= J2 Тц..лкахи Л ... Adxik.
ii< . . . <ik
Действительно, мы имеем
dx1 Л ... Л dxk = ег Л ... Л ек = ^(-l^e*1 (g) . . . ® e<fc,
L^Sk
где S к — группа перестановок множества из к элементов и σ{υ) равно нулю
/1 к
или единице в зависимости от того, четна перестановка и = .
\%i ... гк
или нет. Отсюда следует, что
ωτ = Tix_AkdxiY (g) ... ®dxl\
где по всем повторяющимся индексам %\, ...,г& подразумевается суммиро-
вание.
При этом внешнее произведение форм ω\ = adx11 Л ... Л dx%k \\ω2 —
= ßdx^1 Л ... Л dxjl определяется как
ω\ Л ω2 = aßdxh Л ... Л dxik Л dxjl Л ... Л dxjl,
причем dxPl Л ... Л dxPrn = 0 (по определению), если среди индек-
сов pi, ... ,рт есть совпадающие. По линейности это произведение про-
должается на все дифференциальные формы.
Форма ω называется замкнутой, если du = 0. Если же ω — dr\
для какой-то формы η, то форма ω называется точной.
Задача 3.9. Доказать, что все замкнутые формы являются точными:
d2 = 0.
Задача 3.10. Доказать, что
ω\ Λ ω2 = (-1)Ηω2 Λ cji,
где cji — k-форма и ω2 — l-форма.
84
Глава 3
Если на ориентированном многообразии Мп задана риманова метри-
ка gijdxldx^, то ей отвечает форма объема
dp — y/g dx1 Λ ... Λ dxn, g = det (gij),
которая ведет себя как кососимметрический тензор типа (0, п) при заме-
нах координат, сохраняющих ориентацию. В общей теории относитель-
ности для псевдоримановых метрик типа (1,3) форма объема задается
как
αμ = v/-# dx1 Λ ... Λ dxn.
Эта форма необходима для интегрирования: а именно, по определению,
интегралом от функции f(x) по многообразию называется величина
/ f(x)dß.
Задача 3.11. Пусть ω\ — к-форма и ω2 — l-форма. Доказать, что
ω\ Λ ω2 = (-l)klLü2 Λ lui.
Задача 3.12. Каждому векторному полю ν сопоставим оператор iv,
переводящий η-формы в (п — 1)-формы по следующему правилу:
ivu)(rii, . . .,7fo_i) = ω(ξ,η!, - - - ,77^—1)
(или [iv^j!. .jn_i = v^jji.. .jn-i)' Доказать, что этот оператор явля-
ется антидифференцированием:
iv(ui Λ ω2) = (ivui) Λ ω2 + (-1)^1 Λ (ivcü2),
где ω\ — k-форма.
Задача 3.13. Пусть линейный оператор Т: V —> V задается в неко-
торых координатах в V величинами Тг- по формулам
Τξ = η, η*=Τ}?.
Доказать, что эти величины образуют тензор типа (1,1).
§ 3.4. Действие отображений на тензоры 85
§ 3.4. Действие отображений на тензоры
В § 3.2 мы указали действие гладкого отображения
f:Mn^N\ у1=(х1,...,хп),...,ук = ук(х\...,хп),
на касательные векторы. Отображение касательных пространств
U : ТхМп - Tf(x)Nk
переводит вектор скорости υ кривой j(t) в точке х = 7(0) в вектор скорости
кривой 7(£) = f(l(t)) при t = 0 и имеет вид
г дУ1 з (1 ч\
v^w: w = tVj. (3.5)
дхэ
Так как ковекторы являются линейными функциями на векторах, то отоб-
ражение / действует на ковекторах в обратную сторону по правилу
ï*:T}(x)Nk -, Т;Мп: (Γ(η),ν) = (η, f.(υ)),
которое в координатной записи принимает вид
ду1
Vi(y)dyl -► ъ(у(х))ауъ(х) = 4{y(x))—dxJ,
т. е.
с с дУ1 а с\
V-+Ç · Vi^tj = J-jVi- (3.6)
Хотя формулы (3.5) и (3.6) внешне похожи, они существенно отличаются
в одном: левая часть в (3.5) и правая часть в (3.6) есть вектор ν и ковектор ξ,
соответственно, в точке х G Mn, и, наоборот, правая часть в (3.5) и левая
часть в (3.6) есть вектор и ковектор в точке /(#).
Линейное отображение /* естественным образом продолжается на тен-
зоры типа (0,m):
Qyii ßyim
T{y)dy11 Θ .. . <g> dytrn -► T(y{x))-^— . .. -^—dxjl <g> ... <g> dxJm
dxn dxJm
и, в частности, на кососимметрические тензоры — дифференциальные фор-
мы:
T(y)dyil Λ ... Λ dyim -> Т(у(ж))^С- . .. ^-dxjl Λ ... Λ dx?m, (3.7)
дхп дх3гп
сопоставляя /-форме ω на Nk форму f*u того же типа на Mn.
86 Глава 3
Задача 3.14. Доказать формулу
Пример. Индуцированная метрика. Пусть gijdyidyj — риманова мет-
рика на Nk и / : Мп —> Nk — вложение. Действие /* на метрический
ßyi Qy3
тензор gij задает индуцированную метрику gij(f(x))—^-^dxpdxq. В слу-
чае η — 2 и Nk — R3 мы получаем так первую квадратичную форму на
поверхности.
Напомним факт из курса математического анализа [11, 15]: внешним
дифференциалом /с-формы
Σ Tilm .ikdxh Λ ... Adxik
ω =
ii< . . . <ik
есть следующая (к + 1)-форма
дТ
αω= V ll · : lk dxi л dxh л ... л dxik.
. /-^^. дхг
ъ\< . . . <гк
Задача 3.15. Доказать формулу:
f*dLV = df*LJ.
Введем еще одно важное определение: топологическое пространство X
называется односвязным, если любое непрерывное отображение
окружности S1 = {х2 + у2 = 1} (в плоскости Ш2) продолжается до непре-
рывного отображения
f:D2^X
круга D2 = {х2 + у2 ^ 1}. Это свойство особенно важно по следующей
причине:
• в односвязном гладком многообразии Мп значение интеграла от за-
мкнутой 1-формы ω вдоль пути η: [О,Τ] —» Мп зависит только от
конечных точек пути:
τ
7*w = /(P,Q), Ρ = 7(0), Q = l{T).
о
1
!■
§ 3.4. Действие отображений на тензоры
87
Действительно, если два гладких пути 71 и 72 соединяют две точки Ρ
и Q, то вместе они образуют отображение окружности / : S1 —>· X, которое
при у ^ 0 задает путь 71, пройденный по часовой стрелке, и при у ^ 0 —
путь 72, пройденный против часовой стрелки, и мы имеем
J Γω = j' Γω- j' Γω.
S1 71 72
Если отображение окружности продолжается до отображения круга д:
D2 —► Мп, то, как несложно показать, это продолжение можно сделать
гладким и тогда по теореме Стокса мы имеем
Jf*u = Jdf*u = J f*dw = 0,
S1 D2 D2
т. e. f /*ω — f f*u; (интеграл зависит лишь от конечных точек).
71 72
Перейдем к определению производной Ли тензорного поля.
Рассмотрим v(x) — гладкое векторное поле на Мп. По теореме о суще-
ствовании и единственности решений обыкновенных дифференциальных
уравнений для малой окрестности U каждой точки х$ G Mn и при малых
временах t < Τ существует и единственно решение уравнения
У = v{y)
с начальными данными y(t) = ж, где х G U (если Мп — компактно, то такое
решение заведомо существует глобально и при всех временах). Обозначим
через ψΙ точку (pt(x)=y(t), где y(t) —решение данного уравнения с у(0)=х.
По теореме о единственности решения мы имеем:
(/?s+t(x) = φ3 (4it{x)), 0 ^ s,i, s + t < T.
Траектории точек х — кривые j(t) = ^t(x) — называются интегральными
кривыми векторного поля, и теорема о существовании и единственности
решения утверждает, что через каждую точку проходит и притом в точности
одна интегральная кривая. Если v(xo) — 0, вырождается в неподвижную
точку xq.
Рассмотрим, как изменяется гладкое тензорное Т/Д' ' '^ типа (k.l)
интегральных кривых поля v. Обозначим через ei, ...,еп и е1 =
= dx1, ..., еп = dxn базисные векторные и ковекторные поля (мы рас-
сматриваем лишь малую координатную окрестность точки х G Mn). Опре-
делим теперь функцию от параметра t со значениями в тензорах типа (kj)
88 Глава 3
в точке х:
Sil ■' : 'Χ" We<1 ® ■ ■ ■ ® е<' ® е3г ® · · · ® e3k =
= Til '.' ik(.4>t(x))<fi№) ® · · · ® ¥»?(е*') ® Ы^Ы ® - · - Ы.-1^)·
Производной Ли тензорного поля Г вдоль векторного поля ν (в точке х)
называется тензор
(LvT)fi: = |s£::.t(*)
t=o
Вычислим эту производную. При малых значениях t мы имеем (в ко-
ординатах)
ipt[х)г = хг + ta*(ж) + о(£), г = 1, ..., п.
Поэтому
(^П=(^ + *^г + ^))з>.
В итоге мы получаем
ч ll дх1^ ) \ч дхг> J V ;
Отсюда заключаем
ÖTJl---Jk Л m
iL TV1 " -jk(τ) - vm ll- ■ -ч _l τη ■ ■ -Jkqv , ,
KLfv^)i1...il(X)-V Qxm ^1m. iiQxii'"^
. rph ■ ■ -jk dvm _ rprn. . .jk dvjl _ _ rpji . . .mdvjk
дхц г1...г1 дхт ■·· ц . . . гг fam ·
Если тензорное поле Τ также зависит от времени: Τ = Τ (ж, t), то иол-
ном производной вдоль векторного поля г> называется величина
dT _дТ ,Г гр
§ 3.5. Вложение гладких многообразий в евклидовы пространства 89
Задача 3.16. Доказать формулу
LV(R ® S) = {LVR) <g> S + R <8> {LVS).
Задача 3.17. Пусть ω\ и ω^ — дифференциальные формы. Доказать,
что
Lv(ui Λ ω2) = {Lvüüi) Λ ω2 + ω\ Λ (L^)·
Задача 3.18. Доказать, что для скалярной функции производная Ли
вдоль поля ν совпадает с производной в направлении поля:
L»f = vilTÎ=dvf,
дхг
а для векторного поля w — с коммутатором полей:
дхк охк
Задача 3.19. Пусть гу — оператор из задачи 3.12. Доказать тожде-
ство
îvd H- city — J-jy·
§ 3.5. Вложение гладких многообразий в евклидовы
пространства
В начале 20-го века под гладким многообразием понимали регулярное
множество нулей отображения / : MJ1 —» Жк, т. е. то, что сейчас называется
подмногообразием евклидова пространства. Внутреннее определение, дан-
ное в § 3.2, в действительности не является более общим. А именно, имеет
место следующая теорема Уитни:
• каждое гладкое n-мерное многообразие со счетной базой (т. е. имеющее
счетную базу открытых множеств) вкладывается в Ш2п.
Мы ограничимся доказательством более простого утверждения.
Теорема 3.2. Пусть M — замкнутое гладкое многообразие. Тогда су-
ществует его влоэюение φ : M —> Жы в евклидово пространство доста-
точно большой размерности.
90
Глава 3
Доказательство. Можно ограничиться случаем связного многообра-
зия. Пусть η — размерность многообразия.
Мы скажем, что на многообразии M задано разбиение единицы, если
заданы покрытие {Ua} многообразия M открытыми множествами и семей-
ство функций φα: Μ —» R такие, что
1) (pot(x) = 0, если точка х не лежит в Щ;
2) все функции φα неотрицательны: φα > 0;
3) в каждой точке х лишь конечное число функций φα отлично от нуля
2_^(fa(x) = 1.
а
Возьмем для компактного многообразия M открытое покрытие {Ua},
обладающее некоторыми дополнительными свойствами. А именно,
1) в каждой области Ua заданы локальные координаты ха такие, что
они пробегают внутренность шара J2i (Χα) < 1»
2) для некоторого ε > 0 подобласти Va С Ua, выделенные услови-
ем J2i (ха) < 1 — £> тоже образуют покрытие многообразия М.
Очевидно из компактности, что такое конечное покрытие легко можно
найти.
Построим по этому покрытию гладкое разбиение единицы следующим
образом: возьмем какую-то гладкую функцию /(г), определенную на полу-
оси г ^ 0 и обладающую следующими свойствами:
1) f(r) = 1 при г < 1 — ε;
2) f(r) = 0 при г ^ 1;
3) 0 < / < 1 при 1 - ε < г < 1.
Определим функцию фа как
7((4)2+···+(*5)2) принес/«
0 в противном случае
Ψα = ^ —, OL = 1, .. . ,/С,
ΣβΨβ
построив тем самым гладкое разбиение единицы, отвечающее покры-
тию {Ua}.
Для каждого а = 1, ..., к определим гладкое отображение fa :
M->Rn+1 по формуле
л / ч i (^О)Ха, - ■ - , Ч>а(х)х£,Ч>а{х)) При X G Ua
faix) = Sn
10 в противном случае.
Фа{х) =
И ПОЛОЖИМ
§ 3.5. Вложение гладких многообразий в евклидовы пространства 91
Так как каждое отображение fa задает вложение шара Va в Rn+1, то в точках
из Va ранг отображения fa максимален (равен п). Поэтому отображение
F:M^R("+1>fe : F(x) = (f^x), ..., fk{x))
является погружением M в Rfc(n+1).
Заметим, что
1)еСЛИ ^1,12 е Va И Xi ^X2,TO fa{xi) Φ /α(^);
2) если х\ G Va, а точка Х2 не лежит в 14, то (п + 1)-ая коорди-
ната отображения fa различна для этих точек: она равна единице для х\
и меньше, чем единица, для x*}.
Следовательно, отображение F является вложением M в М(п+1)*\ Те-
орема доказана.
Задача 3.20. 1) Доказать, что любое произведение сфер вида Skl x
х ... х Skn вкладывается в евклидово пространство на единицу большей
размерности — Rfcl + · · · +^+1.
2) Пусть замкнутое n-мерное многообразие Мп вкладывается в Rn+1.
Доказать, что Мп x Sk вкладывается в Rn+/c+1.
Задача 3.21. Пусть многообразие Мп вкладывается в Rn+1 как мно-
жество нулей гладкой функции f : Rn+1 —> R, причем на множестве {а = 0}
градиент функции f нигде не обращается в нуль. Доказать, что многооб-
разие Мп ориентируемо.
Глава 4
Римановы многообразия
§4.1. Метрический тензор
Пусть M — гладкое многообразие и в касательном пространстве к каж-
дой его точке задано скалярное произведение, которое в координатах на ка-
сательном расслоении записывается с помощью симметричного тензора дц :
ν, w G ТХМ —► (v, w) = gijVlwj G Μ, дц = д^.
Предположим, что д^ (х) непрерывно зависит от х G M. Такое многообра-
зие называется римановым, а тензор д^ называется метрическим тензором
(или римановой метрикой).1 Если метрика гладко зависит от х, то мы имеем
гладкое риманово многообразие.
Простейшие примеры гладких римановых многообразий даются под-
многообразиями в Жп.
Пусть /: M —> Rn — вложение многообразия M в Шп. Определим
на M метрику (·,·)/, индуцированную вложением. Пусть v,w G TXM
и f*(v)i f*(w) G ^/0)^η· Положим
(v,w)f = (/*(>),/*N),
где (·, ·) — обычное скалярное произведение в JRn. В случае поверхностей
в М3 метрический тензор, индуцированный вложением, называется первой
квадратичной формой.
Более обще следующее определение: если / : M —> N — гладкое
вложение M в риманово многообразие N, то метрика на многообразии М,
заданная формулой
(v,w)f = (f*(v)>f*(w))N,
где (·, -)jv — метрика на N, называется индуцированной вложением /.
Из теоремы 3.2 вытекает
!Не путать с метрикой как функцией расстояния между двумя точками.
§ 4.2. Аффинная связность и ковариантное дифференцирование 93
Следствие 4.1. На каждом замкнутом гладком многообразии сущест-
вует гладкая риманова метрика.1
Введем дг\ который однозначно задается следующими соотношения-
ми:
,·,· J1, если г = к
9J9jk=<n . ,,
I 0, если г ψ к.
Обобщением римановой метрики является понятие псевдоримановой
метрики: пусть тензор дц симметричен, но не обязательно положитель-
но определен, а задающая его матрица имеет к положительных и (п — к)
отрицательных собственных значений, где dim M = п. Тогда он задает
псевдориманову метрику сигнатуры (&, η — к).
Простейшим примером многообразия с такой метрикой является псев-
доевклидово пространство Жк>п, диффеоморфное Шк+п и оснащенное
в каждой касательной плоскости псевдоскалярным произведением
(v, w)k,n = vlwl + .. . + vkwk - vk+1wk+1 - ... - vk+nwk+n.
Пространство M1'3 называется пространством Минковского и известно как
«пространство-время» в специальной теории относительности (см. главу 5).
§ 4.2. Аффинная связность и ковариантное
дифференцирование
Формулы (3.4), связывающие записи тензоров в разных системах коор-
динат, как правило, нелинейны относительно координат на многообразии,
1 Более того: каждая риманова метрика индуцируется некоторым вложением в евклидово
пространство достаточно большой размерности. Такое вложение называется изометрическим.
А именно,
• каждое риманово n-мерное многообразие Мп допускает С1-гладкое изометрическое
вложение Mп —> М2п (при этом возможно, что метрический тензор является непрерыв-
ным, но не дифференцируемым) (Нэш-Кейпер);
• каждое гладкое риманово n-мерное многообразие Мп допускает гладкое изометриче-
^^(3η2 + 11η)(η+1) π ^
ское вложение в К г . Для замкнутых многообразии существует изомет-
i(3n2 + lln)
рическое вложение в ж2 и, если при этом риманово многообразие является
вещественно-аналитическим, то и вложение можно выбрать вещественно-аналитическим
(Нэш).
Мы сформулировали эти теоремы в виде, в котором изначально они были получены Нэшем
и Кейпером. В дальнейшем оценки в теореме Нэша были улучшены.
94
Глава 4
и поэтому не зависящее от координат определение дифференцирований тен-
зоров требует введения аффинных связностей.
Пусть M — гладкое многообразие.
Пусть задана функция, которая в каждой точке х G M сопоставляет
каждому векторному полю г> на M и каждому вектору w G TXM новый
касательный вектор
v,w-+ VwveTxM, (4.1)
и при этом выполняются следующие условия:
1) отображение (4.1) линейно по обеим аргументам:
V'a1w1+a2W2V = OL\VWlV + Où2VW2V,
Vw{oi\Vi + a2v2) = aiViw^i -I- a2Vwv2, ai, a2 G M;
2) если / : M —> R — гладкая функция, то
Vfwv = fVwv, Vwfv = (Dwf) ν + fVwv,
где Dwf — производная функции / в направлении вектора w.
Такая функция (4.1) называется аффинной связностью, а ее значе-
ние Vwv — ковариантной производной векторного поля ν в направлении
вектора w.
Если для гладких векторных полей ν и w векторное поле Vwv тоже
гладко, то связность называется гладкой. В дальнейшем мы будем подразу-
мевать все связности гладкими.
Заметим, что для определения связности не требуется, чтобы многооб-
разие M было римановым.
В координатах связность записывается через символы Кристоффе-
ля Г^·. А именно, пусть х1, ...,хп — координаты в области из M
и <9i, ...,<9n — соответствующие им векторные поля (3.2), образующие
базисы в касательных пространствах. Определим символы Кристоффеля
по формуле
Vd3di = Tki3dk. (4.2)
Из определения связности следует, что для любых векторных полей ν =
= vldi и w = w^dj ковариантная производная имеет вид
Vwv = VWJdj (ν%) = ^Va, (υ%) =
§ 4.2. Аффинная связность и ковариантное дифференцирование 95
(Vwv)k=^(^+viT^). (4.3)
и в итоге мы получаем
V7 „Л* — ппЗ ,
\дх3 ' "^
Из этих вычислений следует, что
• символы Кристоффеля однозначно задают связность.
Более того, из них же следует, что символы Кристоффеля не являются
тензорами. Покажем это.
Пусть у1, ..., уп — другие координаты в той же области и д\, .. ., дп —
отвечающие им координатные векторные поля. Из теоремы о дифференци-
ровании сложной функции следует, что
дхг дхг ду3 дхг
Подставим это в (4.2):
1%дк = У9Д = νβ. (°±Δ = -?*U + ^*Cv5 ~д1 =
13 3 3 \дхг ) дхЮх! дхг dxi дт
= д2у1 д + En^üf" дп = д2ут дхкэК + ^L^-fn dxk дк
дхгдх3 дхг дх3 m дхгдх3 ду1 дхг дх3 дут
и окончательно получаем, сравнивая коэффициенты при <9ь
k = ЭУ dxk ду1ду™дхь~
ij дх'дх3 дуР ^ дх' дх3 дуп 1т
(здесь мы для ясности заменили в первом слагаемом индекс I, по которому
производится суммирование, на р). Отсюда следует, что
• символы Кристоффеля преобразуются как тензоры только при линей-
д2угп
ных заменах координат (в этом случае —:—г = 0),
дхгдх3
• величина Т^ = Г^ — Г^ является тензором (и называется тензором
кручения).
96
Глава 4
Ковариантное дифференцирование распространяется на все тензоры
следующим образом.
Если / — гладкая функция на многообразии М, то естественно считать,
что
ох3
т. е. ковариантная производная совпадает с производной функции в направ-
лении поля w.
Пусть и — ковекторное поле на M, a υ — векторное поле на М. То-
гда f = щуг, значение и на ν — гладкая функция и
Vwf = ш
j д(щуг)
дх3
Делая естественное предположение, что ковариантное дифференцирование
удовлетворяет правилу Лейбница
^w(uy) = (Vwu)y +Ui(Vwv)\
мы выводим из (4.3), что
dxJ
Любой тензор валентности (к, I) представляется в виде линейной комбина-
ции элементарных тензоров вида
rnii...ik _ Ali дгк д(к+1) д(к+1)
1h--.ji - Λ(1) "-л(к)лп -"л31 '
т. е. тензорных произведений тензоров валентности (0,1) или (1,0). Теперь,
предполагая, что ковариантное дифференцирование удовлетворяет следую-
щему правилу Лейбница
VW(A <g> В) = (VWA) (g) В + A (g) (V«,5),
и зная его действие на векторах и ковекторах, можно выписать его действие
на любом тензорном поле. При этом
• ковариантная производная тензора является тензором.
§ 4.2. Аффинная связность и ковариантное дифференцирование 97
Задача 4.1. Показать, что определенное таким образом ковариант-
ное дифференцирование тензора имеет вид
/<9Т(г)
(/c) \ Л^' kk2. . .knL kxj ··' ^k!. . .kL knj~
dxJ
I лргг2 . . · ImT-Mi , , rp%\ . . . l-plm
^ 1(k) L ij "Τ" · · · "Г J- (fc) 1 2j
i? частности, для тензоров валентности (0, 2) верна формула
yw9ij =w^-wk {Tlik9lj + Tljk9ü).
Заметим, что мы стартовали с определения ковариантного дифференцирова-
ния векторных полей и нигде не предполагали, что многообразие риманово. В та-
ком виде определение связности может быть введено на любом гладком векторном
расслоении, т. е. на многообразии Е, на котором определено такое гладкое отобра-
жение π : Ε —► В, что
1) существует такое покрытие многообразия В областями Ua, что для каждой
области Ua существует диффеоморфизм
Рос :п~г(иа)^иа xF,
где F — векторное пространство, которое одно и то же для всех а, и диффеомор-
физм ра согласован с проектированием:
π(Ρα (XiV)) — Χ·> Х £ Ua, V G F]
2) если пересечение Ua Π Uß таких областей непусто, то отображение
PaPß1 : (Ua nUß)xF^ {Ua Π Uß) x F
имеет вид (х, г>) —> (х, ΑΧ(υ)), где для каждой точки х линейное преобразование Ах
принадлежит какой-то подгруппе G группы GL(F) всех обратимых линейных отоб-
ражений F в себя.
В этом случае Ε называется пространством расслоения, В — базой, G —
структурной группой расслоения, a F — слоем расслоения.
Простейшим, после прямого произведения M x F, примером векторного рас-
слоения является касательное расслоение к n-мерному многообразию М: его слой
изоморфен Rn, структурная группа — GL(n,R), и отображение π сопоставляет ка-
сательному вектору точку касания (теорема 3.1).
В математике встречаются более общие расслоения, когда слой F не обя-
зательно является векторным пространством и отображения ΡαΡ~βλ имеют вид
98
Глава 4
(ж, у) —► (x,fx(y)), где fx : F —> F — диффеоморфизмы, непрерывно зависящие
от х. В дальнейшем мы ограничимся векторными расслоениями.
Сечением υ : С/ —► £" расслоения, заданным в некоторой области U С В,
называется любая функция, сопоставляющая каждой точке х Ε U какой-то вектор,
лежащий в слое Fx = 7г_1(х) над этой точкой.
Векторное поле — это в точности сечение касательного расслоения.
Связность в расслоении определяется как правило, по которому дифференци-
руются гладкие сечения:
ν'"=(£+Α')"· (4·4)
где (ж1, .. ., хп) — координаты в U и А; (ж), г = j, ..., η — матрицы из алгебры
группы G (см. главу 7). При этом мы опять получаем сечения того же самого
расслоения. Связности в касательном расслоении задаются матрицами
А
(4) (4.5)
(здесь г, к — матричные индексы, a j — индекс при самой матрице; очевидно,
что в общем случае, когда размерности базы и слоя не совпадают, эти индексы
пробегают разные значения).
Связности общего вида играют фундаментальную роль в физике элементарных
частиц. Например, электромагнитное поле задается как связность в расслоении со
структурной группой G = U(l) (см. главу 7).
Связность определяет параллельный перенос в расслоении.
Пусть 7: [О, Г] —* В — гладкий путь на базе расслоения. Тогда
векторное поле v(t) (т.е. функция от t со значениями в слоях расслое-
ния: v(t) Ε 7г_1(7(£))) называется параллельным вдоль 7? если n(v(t)) =
= 7(0 Для любого t и выполняется уравнение
Dv
dt
VjV = 0. (4.6)
Расписывая левую часть, получаем, что поле ν параллельно тогда и только
тогда, когда
ж)'=^(е+гИ=о'k=i -■
Для любого заданного начального условия υ(0) уравнение (4.6) одно-
значно разрешимо, так как оно имеет первый порядок, и говорят, что век-
тор ν(1) получен из вектора υ(0) параллельным переносом вдоль пути 7·
§4.3. Римановы связности 99
§ 4.3. Римановы связности
Пусть M является гладким многообразием с метрикой д^, которая мо-
жет быть римановой или псевдоримановой, и на его касательном расслоении
задана аффинная связность.
Лемма 4.1. Следующие утверждения эквивалентны:
1 ) Для любого векторного поля w на M выполняется равенство
yw9ij = 0.
2) Если j(t) — гладкая кривая на M и ν и w — параллельные векторные
поля вдоль 7, то их скалярное произведение постоянно вдоль η:
ft(v(t),w(t))=0-
3) Если j(t) — гладкая кривая на M и υ и w — векторные поля вдоль η,
то
jt(v(t)Mt)) = (V^,w) + (v,V^w).
Доказательство. Прежде всего распишем — (г>(£), w(t)) в локальных
координатах и, используя задачу 4.1, получим его инвариантный вид:
jL(v(t),w(t)) = ft(gtJv*WJ) =
^9ij i j dvl j , idwi
= -dTvw +9^w +9^ν^Γ =
= (V^9lJ + rfolgkj + Tk3àlglk) «V + дц^ьР + 9ц*^ =
= V-^W + gl3 (^ + rkljlv^ w* + 9iy (^ + T{âlw^ =
Из последней формулы ясно, что 1) влечет 3). То, что 2) следует из 3),
очевидно. Осталось доказать, что 2) влечет 1). Выберем произвольную точ-
ку х G M и произвольные векторы u,v,w G ТХМ. Выпустим из х кривую
100
Глава 4
в направлении и и продолжим (однозначно) ν и w до параллельных вектор-
ных полей на кривой. Из 2) следует, что VugijVlw3 = 0. Так как все данные
взяты произвольно, отсюда следует 1). Лемма 4.1 доказана.
Если связность удовлетворяет одному из условий 1)-3) леммы 4.1,
то она называется согласованной с метрикой.
Другой важный класс связностей — симметричные: связность симмет-
рична, если ее тензор кручения тождественно равен нулю
rpk "р/с -р/с г»
ij ~~ ij L ji ~~ υ·
Это тождество очевидно эквивалентно следующему утверждению: для лю-
бой пары векторных полей и и υ выполняется соотношение
Vuv-Vvu = [u,v], (4.7)
где
г и ? дуг 7 диг
[U, У] = UJ г - V3 г
дх3 дх3
— коммутатор векторных полей ииу. Эквивалентность доказывается пря-
мыми выкладками.
Имеет место следующая теорема:
Теорема 4.1. На каждом римановом многообразии существует
и единственна симметричная связность, которая согласована с метрикой.
Ее символы Кристоффеля имеют вид
^к
1 м ( д9и . d9ij dgij
Доказательство. Пусть <9i, ..., дп — базис в ТХМ, отвечающий коор-
динатам ж1, ..., хп в области U С М, и тензор дц имеет вид дц = (Зг, dj).
Предположим, что на многообразии задана симметричная связность V,
согласованная с метрикой. Из леммы 4.1 следует, что в каждой точке из U
должно выполняться равенство
|^f = (Va,du dj) + (du VaA-) = T^gmj + T™l9im. (4.9)
Подставим это равенство в
дх3 дхг дх1
§4.4. Кривизна 101
и, принимая во внимание то, что и связность, и метрический тензор сим-
^к _ -рк
метричны: Γ^ = Y^gtj = Qji для всех г, j, /с, получим
9Г™ _ ддц dgij дд%3
Последняя формула переходит в (4.8) после умножения обеих частей на 2ды
и суммирования по /.
Обратно, если нам дана связность (4.8), то она, очевидно, симметрична.
Согласно лемме 4.1, она согласована с метрикой, так как удовлетворяет
уравнению (4.9). Теорема 4.1 доказана.
Эта теорема является обобщением теоремы 2.5, в которой речь шла
о поверхностях в R3, на произвольные римановы и псевдоримановы мно-
гообразия.
Случай поверхностей в М3 подсказывает следующую конструкцию та-
ких связностей на подмногообразиях.
Пусть M — риманово многообразие с симметричной связностью V,
согласованной с метрикой. Пусть N — подмногообразие в M с индуциро-
ванной метрикой. Рассмотрим векторное поле ν на Ν, и пусть w G TXN.
Ковариантная производная Vwv не обязана касаться N, поэтому разложим
ее на компоненты ~
Vwv = Vwv + B(w,v),
где Vwv G TXN, a вектор B(w,v) ортогонален к TXN. Верны следующие
утверждения, которые мы дадим без доказательства:
• V определяет на N симметричную связность, согласованную с инду-
цированной метрикой,
• В — симметричный билинейный оператор {вторая квадратичная
форма) на касательном расслоении к подмногообразию N со значени-
ями в ортогональных дополнениях к касательным пространствам TXN.
В случае поверхностей в М3 символы Кристоффеля определяют-
ся именно с помощью такой процедуры из тривиальной связности
на М3 (Г^ = 0 для евклидовых координат), а вторая квадратичная форма,
умноженная на вектор нормали к поверхности, совпадает с В.
§4.4. Кривизна
Пусть M — многообразие со связностью в касательном расслоении,
и пусть U — область на M с локальными координатами х1, ...,хп.
102
Глава 4
Пусть же M. Для простоты предположим, что координаты точки х рав-
ны (0, . ..,0).
Рассмотрим в области U маленький квадрат, стороны которого яв-
ляются отрезками в этих координатах и последовательно соединяют точ-
ки х = (0,0, ... ), у = (ε,0, ...), Ζ = (0,e,...),s= (ε, ε, ... ), где ...
обозначает нули. Определим два оператора Τ\ε и Т2£ из ТХМ в TSM.
Каждый из них является композицией последовательных параллельных
переносов вдоль сторон этого квадрата: Т\е — композиция переносов х
в у, а затем из у в s, а Т2£ — композиция переносов из х в z9 a затем
из г в s.
Рис. 4.1. Параллельные переносы вдоль сторон квадрата
В общем случае T\e{w) Φ T2£(w) и разность этих векторов описывает-
ся кривизной связности. Понятие кривизны определяется для любой связно-
сти на любом векторном расслоении, однако общее определение опирается
на теорию групп и алгебр Ли (см., например, [1]), и мы поэтому ограничи-
ваемся случаем связности на касательном расслоении.
Найдем T\e(w) — T2£(w) с точностью до членов малого порядка по ε.
Обозначим оператор параллельного переноса из х в у через ri, a оператор
параллельного переноса из у в s через Т2. Все касательные векторы будем
разлагать по базисам д\, ..., дп в касательных пространствах.
Из (4.6) следует, что
n{w)k =wk- eT\a(x)w> + 0(ε2),
r2(w)k =ük- еГ^(У1)€Р + 0(ε2) =
= wk-e (rk2j(x) +еЩ^ J & +0(ε2).
§4.4. Кривизна 103
Члены порядка ε2 тоже легко оценить: w является решением уравнения (4.6)
вида w = Aw и, подставляя вместо Anw их ряды Тейлора, получим
w(e) = w(0) - A(0)w(0)s - (À(0)w(0) + A(0)w(0))^ + 0(ε3).
Теперь, когда ясно, как производить все выкладки, мы приведем оконча-
тельный ответ:
Tle(w)k -T^w)" =
(ВГк дТк \
-^+ο# + Γ^-Γ^]^'·ε2 + 0(ε3)·
Последнее выражение записывается как
Tle(w) -T2e{w) = (Va2Vôl - VaiVd2)w ■ ε2 + 0(ε3). (4.10)
Эти вычисления приводят к введению тензора кривизны (или тензора
(кривизны) Римана), являющегося линейной функцией от трех векторных
полей и,υ и w:
R(u,v)w = (VyVu - VUVV + V[UtV])w.
(очевидно, что [di,dj] — 0).
Лемма 4.2. Значение R(u, v)w в точке х зависит только от значе-
ний u,v,w в х, и отображение
R : ТХМ х ТХМ х ТХМ -* ТХМ
линейно зависит от каждого из аргументов, т. е. Rlijk — тензор, где
(R(u,v)w)1 =R[ikukvjwi
ijk
.kn.jn..i
ijk L
dxj dxk
t>1 ik lJ , -pi -pm -pi -pm /л i i \
nijk — ~T~ ~7T~£" "·" L mjL ik L mkL ij · V*.Ll)
Доказательство. Прямыми вычислениями несложно показать, что
если умножить какое-то из трех полей, например поле и, на гладкую функ-
цию /, то R(fu, v)w = fR(u, v)w. Действительно, мы имеем
R(fu,v)w = (V^V/n - ν/ηνυ + ^[fu,v]) w =
= (V^/Vu - fVuVy + V(f[UiV]-Dvfu)) w =
= {DyfVu + /VvVu - fVuVv + fV[uM - DvfVu) w = fR(u, v)w.
104
Глава 4
Для ν и w это тождество доказывается аналогичными вычислениями. Раз-
лагая поля по базису {<%} и применяя это свойство, получаем
Я(икдк^да)(ь)%) = izW . R{dk,dj)di,
что завершает доказательство леммы 4.2.
Заметим, что в терминах матриц А3- — (Tij) (см. (4.5) формула (4.11) прини-
мает очень простой вид:
Qjk = «dfL _ *âi + A,-Afc - AkA3 = ψ± - д-\ + [Л,, Afc],
öxJ дхк дх3 дхк
где Ω^ = Rlijk. Для общей связности (4.4) Ω называется кривизной связности,
и в малых областях из базы, над которыми расслоение тривиально, она является
2-формой Ω = 5^j<fc Qjkdx3 Λ dxk со значениями в матрицах (над многообразием
она есть 2-форма со значениями в слоях некоторого расслоения, которые изоморфны
алгебре Ли группы G).
Связность имеет нулевую кривизну, если она удовлетворяет уравнениям нуле-
вой кривизны
дАк дА3
дх3' дхк
_i + [A,-,Afc]=0, j,fc = l, ...,
В одном важном частном случае эти уравнения уже возникали в главе 2, как урав-
нения Гаусса-Кодацци.
Рассмотрим дифференциальные формы, принимающие значения в слоях рас-
слоения, и определим дифференциал dv по формуле
<F Σ Tii ^dxh Λ · · · Λ dx*k =
\Н< <гк )
Σ ViTii **dxi Λ dxil Λ · · ·Λ dxik * (4·12)
где Vi = Vdi.
Задача 4.2. Доказать, что квадрат дифференциала dv есть оператор умно-
жения на форму кривизны:
(dv) ω = ΩΑω.
Инфинитезимальным вариантом формулы (4.10) является следующая
лемма.
§4.4. Кривизна
105
Лемма 4.3. Пусть г : U —>· M — погружение поверхности M и х,у —
координаты на поверхности. Тогда
дудх дхду~Щх' у)'
Здесь через D/dx и D/dy обозначены операторы полной производ-
ной (4.6) вдоль координатных линий на поверхности.
Доказательство. Локально координаты ж, у на поверхности продол-
жаются до системы координат x^y.z1, ..., zn~2 на n-мерном многообразии
и полные производные совпадают с ковариантными производными вдоль
координатных полей. Согласно определению тензора кривизны, мы имеем
R(rx,ry) = -VrxVry + VryVrx + V[rx,ry] = -VrxVry + VryVrx,
так как координатные векторные поля коммутируют: [r#,ry] = 0. Лемма
доказана.
Тензор кривизны удовлетворяет дополнительным соотношениям.
Лемма 4.4. Пусть R\-k — тензор кривизны связности (в касательном
расслоении). Тогда для произвольных векторных полей и, г?, w, z мы имеем
1)
R(u,v)w = —R{v,u)w,
что расписывается как
Rijk = ~Rikji hjyk,l = l, . . . , Щ
2) если связность симметрична, то
R{u, v)w -f R(v, w)u + R(w, u)v — 0,
что эквивалентно соотношению
Rïjk + Rlkij + Rljki = o. ij, *, z = î,..., ™;
3) если на M задана риманова метрика и связность согласована с ней,
то выполняется равенство
(R(u,v)w,z) = —(R(u1v)z,w);
106
Глава 4
4) если на M задана риманова метрика и связность согласована с ней
и симметрична, то
(R(u,v)w,z) = (R{w,z)u,v).
Доказательство. Утверждение 1 очевидно.
Так как R — тензор, утверждение 2 достаточно доказать для попарно
коммутирующих (например, координатных) полей. Тогда
R(u, v)w -f R(v, w)u + R(w, u)v —
= (- Vn Vvw + VvVuw) + (- Vv Vwu + VwVvu) + (- V™ Vuv + VuVwv)
и, применяя (4.7), показываем, что правая часть этой формулы тождественно
равна нулю.
Утверждение 3 состоит в кососимметричности выражения (Д(гх, v)w, z)
относительно wnz, что очевидно эквивалентно тождеству (R(u, v)w, w) = 0.
Так как R — тензор, опять можно ограничиться случаем, когда [и, υ] — 0.
В этом случае, обозначая через Du и Dv дифференцирования функций в на-
правлении полей и и υ и учитывая согласованность связности с метрикой,
получаем
DuDv(w,w) = Du(Vv(w,w)) = 2Du(Vvw,w) =
= 2Vu(Vvw, w) = 2(VuVvw, w) + 2(Vuw, Vvw)
и аналогично
DvDu(w, w) = 2{VvVuw, w) + 2(Vuw, Vvw).
Так как [и, ν] = 0, мы имеем DUDV = DVDU, откуда выводим
(DUDV - DvDu)(w,w) = -(R(u,v)w,w) = 0,
что и требовалось доказать.
Определим тензор
Rijki = 9imRJki (4.13)
или
Rijkiulvhwjzl = (R(u,v)w,z).
Утверждение 2 переписывается как
^zjfcZ + Riklj + ^г/j/c = -Кф'Ы] = 0·
§4.4. Кривизна
107
Утверждения 1 и 3 означают кососимметричность тензора Rijki по второй
и первой парам индексов
-ftijkl = k^ijlkt J^ijkl = -^jikl·
С учетом этих тождеств распишем
Ri[jlk] + Rl[ijk\ — Rj[ikl) ~ Rk[ilj] = ^{Rlijk ~ Rjkli) = 0,
что доказывает утверждение 4. Лемма 4.4 доказана.
Из определения тензора кривизны произвольной связности ясно, что для нее
утверждение 1 данной леммы очевидно: Fjk — —Fkj. Пусть в слоях векторного
расслоения задано скалярное произведение (в этом случае структурная группа есть
подгруппа ортогональной группы О (га), га = dimF), которое согласовано со связ-
ностью: Vw(u, υ) = (Vwu, ν) + (и, Vwv). Тогда для такой связности также выпол-
няется утверждение 3 данной леммы и его доказательство дословно повторяет то,
что приведено выше).
Задача 4.3. Предположим, что связность на римановом многообра-
зии M симметрична и согласована с метрикой. Если dim M = 2, то тен-
зор (4.13) полностью определяется одной своей компонентой — R\i\2, cl, ес-
ли dim M = 3 — шестью.
Из леммы 4.4 вытекает также, что если и, ν G TXM и σ — двумерное
подпространство в ТХМ, порожденное и и υ, то величина
К^ = 1 ν \—1 \2
(u,u)(y,v) - {u,vy
зависит только от σ. Она называется секционной кривизной вдоль двумер-
ного направления σ.
Лемма 4.5. Если M — двумерная поверхность в Ш3 с индуцированной
метрикой и связность на ней согласована с метрикой и симметрична, то
ее секционная кривизна К совпадает с гауссовой кривизной.
Доказательство. Пусть ρ е М. Так как гауссова и секционная кри-
визны не зависят от выбора локальных координат, для доказательства до-
статочно показать, что эти величины, вычисленные в какой-то специальной
системе координат, совпадают.
Выберем в R3 ортонормированные координаты (ж1, ж2,ж3) так, что
поверхность в окрестности точки ρ устроена как график функции ж3 =
= /(ж1, ж2). Тогда да = l + /2,pi2 = А/2 и
к _ /11/22 - А2
108 Глава 4
где нижние индексы у / обозначают дифференцирование по хг (задачи 2.1
и 2.3). Это выражение еще больше упростится, если мы направим ось х3
по нормали к поверхности в точке р: тогда grad/(p) = 0. В частности,
мы получим, что в точке ρ
К = /и/22 - /i2
и все символы Кристоффеля равны нулю. Тогда из (4.8) и (4.11) следует,
что
7? - д2д12
J4212
дх1дх2
= /il/22 + /l2 - 2 ' 4·^12 = ^И^22 ~~ Λ-2-
Отсюда следует, что в данных координатах и секционная, и гауссова кри-
визны равны /11/22 — /i2 и> следовательно, совпадают.
Лемма 4.5 доказана.
Особый интерес для приложений представляет не сам тензор кривизны,
а его след — тензор Риччи
дх1 дхк
г> г>1 г/с И |^ у\1 тлт -pZ тлт
*Чк — Щ1к — ~7Г1 "^"Т "+" L mlL ik ~ l mkL il ·
След тензора Риччи называется скалярной кривизной
R — g1 Rik-
Римановы пространства постоянной секционной кривизны устроены
достаточно просто. Любое n-мерное пространство постоянной секционной
кривизны К > 0 в окрестности каждой своей точки устроено как п-мерная
сфера радиуса ——. Это означает, что малая окрестность каждой точки мо-
жет быть гомеоморфна отображена на область сферы с сохранением длин
всех кривых. Пространства постоянной отрицательной кривизны мы рас-
смотрим в §5.1.
Задача 4.4. Доказать, что для двумерных римановых многообразий
тензор Риччи принимает вид
Rik = 2Kgik,
где К — гауссова кривизна, и при этом R — 2К.
§4.5. Геодезические
109
Задача 4.5. Доказать, что для трехмерных римановых или псевдори-
мановых многообразий тензор кривизны полностью определяется тензо-
ром Риччи по формуле
ТУ
Rijkl = Rik9jl + RjWik ~ Ril9jk ~ Rjk9ü + -pr {9ü9jk ~ 9ik9jl) ·
Задача 4.6. Доказать, что для многообразий размерности η ^ 4 тен-
зор кривизны не определяется однозначно тензором Риччи.
Задача 4.7. 1) Для связности на касательном расслоении доказать
тождество Бианки:
^rnR)kl + ^kR)im + ^iRjmk = °
для любых значений г, j, A:, /, га.
2) Для связности в произвольном векторном расслоении доказать
тождество Бианки
dvQ = 0,
где Ω — форма кривизны и оператор dv определяется по формуле (4.12).
§4.5. Геодезические
Пусть в касательном расслоении к гладкому многообразию M задана
аффинная связность. Геодезической называется кривая x(t), удовлетворяю-
щая уравнению
^=V*x = 0, (4.14)
которое расписывается в координатах как уравнение второго порядка
ж4 + rj.fci^'i* = 0. (4.15)
В касательном расслоении введем координаты ж1, ..., хп, г;1, ..., г>п,
как и при доказательстве теоремы 3.1. В них уравнение (4.15) записывается
как система обыкновенных дифференциальных уравнений первого порядка
xi = v\ ν1 = -T)k{x)vjvk.
К ней применима теорема о существовании и единственности обыкновенно-
го дифференциального уравнения [14], что влечет следующее утверждение.
по
Глава 4
Лемма 4.6. Для каждой точки х G M риманова многообразия M су-
ществуют такая ее окрестность U и такая постоянная ε > 0, что для
любой точки у G U и любого вектора ν G ТуМ длины < ε существует
и единственна геодезическая η : (—1,1) —■> M, удовлетворяющая началь-
ным условиям
7(0)= у, 7(0) = v. (4.16)
Доказательство. Формально из теоремы о существовании и един-
ственности решения обыкновенного дифференциального уравнения следу-
ет, что для некоторой окрестности W точки (ж, 0) G TM существует та-
кое δ > 0, что для любой точки (у, v) G W существует и единственна
геодезическая 71 · (—δ, δ) —» M с начальными данными (4.16).
Выберем теперь такую постоянную е\ > 0 и такую окрестность U С M
точки х, что (у, v) G И^ при 2/ G /7 и |г>| < si. Из (4.15) следует, что если
кривая η{τ) — геодезическая, то для любой постоянной С кривая j(t) =
= j(Ct) — тоже геодезическая. Примем теперь ε = fei и 7СО = 7i(^)·
Лемма 4.6 доказана.
Из леммы 4.6 следует, что для любой точки х <Е M в малом шаре ΒΧ,ε =
= {v G ТХМ : \v\ < ε} определено экспоненциальное отображение
ехрх : ВХ:£ -► М,
сопоставляющее точке (х,г>) конец геодезической 7(1)·
Ограничимся в дальнейшем геодезическими симметрических связно-
стей, согласованных с метриками. Совершенно так же, как и для поверхно-
стей, доказывается, что
• геодезические в точности совпадают с решениями уравнений Эйлера -
Лагранжа для функции Лагранжа L(x,x) = дцхгх\ где дц — риманова
метрика;
• геодезические являются натурально параметризованными (\х\ = const)
экстремалями функционала длины кривой.
Применим экспоненциальное отображение для доказательства следую-
щего факта.
Лемма 4.7. Для каждой точки х G M существует окрестность V
и постоянная η > 0 такие, что
1) каждые две точки из V соединяет одна и только одна геодезическая
длины ^ η и эта геодезическая гладко зависит от концевых точек;
§4.5. Геодезические
111
2) для каждой точки у G V отображение ехру отображает
шар Ву^ С Ту M диффеоморфно на окрестность у β Μ.
Доказательство. Рассмотрим функцию
F : Ü -> M х M,
где U С ТМ — область, образованная точками (ж,г>) с х G U и |г>| < ε,
и F(x, ν) = (ж, ехрх(г>)). Его производные в точке (ж, 0) имеют вид
дЩ = 0г dFi+n = gi дЦ=0 dF^n = ^
где F = (F1, .. ., F2n) и г = 1, ..., п. Так как якобиан этого отображе-
ния в точке (ж, 0) невырожден, по теореме об обратной функции в малой
окрестности точки (ж, ж) это отображение обратимо.
Выберем такую область Ü' С С/, образованную точками (ж, ν), где xeUf
и |г>| < ?7> что на ней отображение F действует диффеоморфно на образ.
Найдем теперь такую окрестность V С M точки ж, что V х V С F(U').
Легко заметить, что эта окрестность и будет искомой, так как длина отрезка
геодезической 7 от ж до expx(v) равна |г;| (это следует из натуральной
параметризации геодезических).
Лемма 4.7 доказана.
В окрестности V точки ж введем координаты, сопоставив точке у G M
координаты (V, ...,г>п), где ex.px(v) = y. Эти координаты называются
геодезическими.
Лемма 4.8. Для геодезических координат все символы Кристоффеля
в точке х равны нулю:
Т%(х)=0.
Доказательство. В геодезических координатах уравнение геодезиче-
ской 7(0 с начальными данными 7(0) = х и 7(0) —ν имеет вид j(t) = tv.
Расписывая для такой геодезической уравнение (4.15), получаем
T)kv4k = 0
вдоль геодезической. Так как в точке ж направление ν может быть выбрано
произвольным, символы Кристоффеля в ней тождественно равны нулю.
Лемма 4.8 доказана.
112 Глава 4
Лемма 4.9. Пусть σ — двумерная плоскость вТхМ, и пусть Σ — ело-
1нсенная двумерная поверхность, образованная геодезическими, выпущен-
ными в направлениях касательных к σ (т. е. Σ = ехрх(а Π ΒΧ,η)), и осна-
щенная индуцированной метрикой. Тогда гауссова кривизна поверхности Σ
в точке х совпадает с секционной кривизной M в точке х в двумерном
направлении σ.
Доказательство. Выберем в ТхM такой базис д\, ..., дп, что (<%, dj)=
= gij(x) = ôij, и построим по отношению к этому базису геодезические
координаты в V. Без ограничения общности будем считать, что σ натянуто
на векторы д\ и д2.
Так как в точке х все символы Кристоффеля равны нулю и gng22 —
— g 12 = 1, гауссова кривизна Σ в точке х (вычисленная по метрике, согласно
теореме Гаусса (см. § 2.5)) равна
к__ д2д12 1 д2ди i д2д22
дх1дх2 2 дх2дх2 2 дх1дх1
Выражение для секционной кривизны Κ(σ) тоже значительно упрощается:
дх1 дх2
Расписывая последнее выражение с использованием (4.8), получаем
d2gi2 1 д2дц \ д2д22
Ri
212
dxxdx2 1dx2dx2 2dzW
Лемма 4.9 доказана.
При малых t геодезические ex.px(tv) остаются в окрестности V
(см. лемму 4.7) и при этом сферы ехрж 5(х, т), где SXjT = {ν G ТХМ\ \v\ =
= τ < η} = ЗД^т, являются подмногообразиями в М.
Лемма 4.10. Геодезические exp^ (tv) ортогональны сферам ехрх (5Ж)Г).
Доказательство. Пусть ν (s) — произвольная гладкая кривая на сфе-
ре Sx^/2. Достаточно доказать, что для поверхности f(s,t) = ex.px(tv(s))
векторные поля ft = df /dt и fs = df/ds всюду ортогональны.
Прежде всего покажем, что
§4.5. Геодезические 113
Так как связность согласована с метрикой, то
~fli\js) Jt) = \~fîfJs,> h ] ' I J s ' л7 ^ *
Из симметричности связности следует, что для любой погруженной по-
верхности f(s,t) выполняется следующее тождество, которое проверяется
разложением по базису:
D_f = D_f
dtJs dsJt'
Так как при фиксированных s кривые f(s,t) — геодезические, то
Dft
dt °'
и мы окончательно выводим
Но fs = 0 при t = 0 и, следовательно, (fs,ft) = 0 при £ = 0, а значит,
и всюду. Лемма 4.10 доказана.
Эта лемма является частным случаем более общего утверждения: пусть
Σ — гиперповерхность в M и f(s,t) — семейство геодезических, парамет-
ризованных точками s G Σ и t, причем /(s,0) G Σ и вектор df(s,0)/dt
ортогонален Σ (т. е. ортогонален касательному пространству к Σ). Тогда при
всех t эти геодезические ортогональны поверхностям Σ$ = {/(s,£) : s G Σ}.
Координаты х1, ...,хп в области W называются полу геодезически-
ми, если метрический тензор удовлетворяет условиям gin — 0 при г =
= 1, . . .,(п- 1) и дпп = 1:
Qijaédx? = Σ 9zjdxidxJ + (dxn)2. (4.17)
Лемма 4.11. isc#w ж1, ..., хп — полу геодезические координаты, то для
любого вектора ξ G Mn_1 кривая (ж1, .. ., хп~1) = £ — геодезическая с на-
туральным параметром t = хп.
Доказательство. Согласно формулам для символов Кристоффеля,
мы имеем
114
Глава 4
так как все величины gin = 0 постоянны. Аналогично выводится, что
Гп 1 d9ij
ij 2 дхп '
Уравнения геодезических принимают вид
при г = 1, ... ,n. Очевидно, что любая кривая с х1 = ... = хп~г = О
удовлетворяет этим уравнениям при г = 1, ..., η — 1. Последнее уравнение
при г = η принимает в этом случае вид
хп = 0
и задает натуральный параметр t — хп на кривой (ж1, ..., xn_1 ) = ξ. Лемма
доказана.
Лемма 4.12. Пусть х G M и V — окрестность, которая дается
леммой 4.7. Тогда
1) в проколотом шаре expx(BXjV) \ х существуют полугеодезические
координаты;
2) пусть jy — единственная геодезическая, лежащая в V, соединяю-
щая точки х и у G V и имеющая длину < η. Для любой кусочно-гладкой
кривой ω: [О,Τ] —> M, соединяющей х и у и лежащей в V, длина ω не
меньше длины ην и равна ей только в случае, когда кривые ω и ην сов-
падают.
Доказательство. Выберем в качестве х1,... ,хп~1 координаты на сфе-
ре 5жд, а за хп возьмем натуральный параметр на геодезических, выходя-
щих из точки х. Эти координаты по построению имеют вид (4.17) и поэтому
являются полугеодезическими.1
Доказательство утверждения 2 сходно доказательству теоремы 2.11.
Запишем ω в полугеодезических координатах и положим w\ = (ω1, ...,
]Для поверхностей мы дали другой вывод существования полугеодезических координат
(лемма 2.10).
§4.5. Геодезические
115
ωη 1,0), w2 = (0, ..., 0, ω71). Пусть уп — η-ая координата точки у. Тогда
τ
L(7y)=3/n, Jw2dt = yn,
о
Цш) - / ^Ob^i) + (w2,w2)dt ^ / \f{w2,w2)dt ^ ?/n
и очевидно, что минимум длин ω достигается при случае w\ = 0, w2 =
= const. В этом случае он равен уп, а кривая совпадает с *уу-
Лемма 4.12 доказана.
Теорема 4.2. Если путь ω: [0,Τ] —> M, параметризованный длиной
дуги, не длиннее любого другого пути из ω(0) β ω(Τ), то он является
геодезической.
Доказательство теоремы 4.2 просто: для любой точки х — u(t) малая
окрестность пути лежит в области V (см. леммы 4.7 и 4.12) и имеет длину
меньше η. По лемме 4.12 этот отрезок является геодезической. Следова-
тельно, вся кривая ω является геодезической.
В случае евклидова пространства геодезическими являются прямые
линии и, как показывает теорема 4.2, для общего риманова многообразия
геодезические являются естественным аналогом прямых, как кратчайших
линий.
Глава 5
Плоскость Лобачевского и пространство
Минковского
§ 5.1. Плоскость Лобачевского
Пусть R2 — двумерная евклидова плоскость с ортонормированными
координатами х и у (в тензорных обозначениях х будем считать первой
координатой, а у — второй).
Рассмотрим верхнюю полуплоскость Η = {(ж,у) : у > 0} и введем
на ней другую метрику
911 =922 = -ρ, 912 = 0,
У2
которая в более привычном в теории поверхностей виде записывается как
ах2 + dy2
У2
(5.1)
Легко вычислить с помощью (4.8), что
р2 _ _1 pi _ pi _ р2 _ 1
1 11 — у> L 12 — L 21 — L 22 — у
и остальные символы Кристоффеля равны нулю.
Уравнения геодезических примут вид
.. 2 · . п
Х ~ УХу = '
у+±(х2-у2)=0.
Мы знаем, что длина вектора скорости сохраняется (из определения геоде-
зических следует, что D(j,j)/dt = 2(Dj/dt,j) = 0), и поэтому величина
х2 + у2
11 = 2
§5.1. Плоскость Лобачевского
117
(квадрат этой длины) является первым интегралом. Другой первый инте-
грал, как можно проверить, равен
х
Задача 5.1. Пусть j — геодезическая и ее вектор скорости v(t) =
= j(t) в точке 7(£) не вертикален. Проведем через точку j(t) прямую l(t)
(в евклидовой метрике на R2), которая ортогональна вектору v(t). Тогда х-
координата точки пересечения l(t) с осью Ох равна /2·
Теорема 5.1. Геодезические плоскости Лобачевского (в терминах ев-
клидовой метрики на Ж2) — это
1 ) лучи, ортогональные оси Ох;
2) полуокруэюности, лежащие в верхней полуплоскости и входящие
в ось Ох под углом π/2.
Задача 5.2. Доказать теорему 5.1.
Рис. 5.1. Геодезические на плоскости Лобачевского
Из теоремы 5.1 следует
Лемма 5.1. Любые две точки из Η соединяются геодезической и при-
чем только одной.
Фундаментальное свойство плоскости Лобачевского следующее:
Теорема 5.2. Секционная кривизна пространства Л постоянна и рав-
на К = -1.
118 Глава 5
Задача 5.3. Доказать теорему 5.2.
Введение абстрактной римановой метрики на верхней полуплоскости
существенно, так как по теореме Гильберта не существует погружения верх-
ней полуплоскости в М3, при котором индуцированная метрика была бы рав-
на (5.1).
На Η действует группа PSL(2,R) = SX(2,R)/Z2. Группа SX(2,R)
состоит из всех вещественных (2 х 2)-матриц
а Ъ
с d
с определителем, равным единице:
ad-bc=l. (5.2)
Она содержит подгруппу Z2, образованную матрицами
1 0\ (-1 О
О 1у' ^ 0 -1
и эта подгруппа нормальна. Факторгруппа SX(2, R)/Z2 и обозначается че-
рез PSL(2, R). Ее действие на H имеет следующий вид
z = x + iy^> A(z) = ^l±1 AePSL(2,R)· (5.3)
cz + a
Действительно, следующие утверждения проверяются прямыми вычисле-
ниями.
Задача 5.4. Показать, что
1) если Im z > О, то Im ; > 0;
J cz + d
2)A2(A1(z)) = (A2-A1)(z);
3) матрица
d -b
—с а
задает преобразование, обратное к (5.3);
4) подгруппа Т, порожденная матрицами
cos φ — sin φ
sin φ cos φ
§5.1. Плоскость Лобачевского 119
состоит в точности из тех элементов, которые оставляют точку (0,1)
неподвижной.
Выберем следующую параметризацию группы SL(2, R). Так как
a2 + с2 ^ О, можно считать, что
а = г cos φ, ο — τυηφ.
Тогда условие (5.2) записывается как г cos φ - à — г sin <£ · 6 = 1 и его общее
решение, зависящее от одного параметра seM, имеет вид
Ъ = —г""1 sin φ + s cos φ, d = r_1 cos </? + s sin </?.
Параметры r, 5,99 однозначно задают элементы SL(2, M):
(r cos </? — - sin φ + 5 cos уЛ
r sin φ - cos у? + s sin 99 y
где г > 0, 5 G Ш и параметр у? определен по модулю 2π.
Задача 5.5. £с/ш рассмотреть a,b,c,d как вещественные координа-
ты в пространстве R4, отождествленном с пространством веществен-
ных (2 х 2)-матриц, то уравнение (5.2) задает гладкое подмногообра-
зие SX(2, M) С Μ4, α построенные выше параметры r, s, φ являются глад-
кими координатами.
Заметим, что в § 1.4 мы доказали аналогичное утверждение для
групп 0(п).
Найдем преобразования из PSL(2, M), переводящие точку z = \ + Ιμ
в точку г. Задающие его матрицы из SL(2, Ш) выделяются условиями
ч _ аЪ + cd _ 1
а2 Л-с2' а2 + с2
и, используя данную выше параметризацию, получаем, что это в точности
матрицы с
Лемма 5.2. Любая точка из H преобразованием из PSL(2, Ш) может
быть переведена в точку (0,1), а следовательно, и в любую другую точку
из Н. Пространство H естественным образом отождествляется с прост-
ранством PSL(2, М)/Г левых смежных классов PSL(2, Ж) по подгруппе Г.
120
Глава 5
Доказательство. Для любой точки z = λ + г μ g Η согласно (5.4)
строится такое преобразование A G P5L(2, R), что A(z) — г. Пусть z\, z2 G H
и Ai(zi) = A2(z2) = г, тогда A^Aifa) = z2.
Предположим, что Pi (г) = B2(i). Тогда В^В^г) — г и, зна-
чит, P^PiGT. Очевидно, что если B^Bi G Г, то Pi (г) = В2(г). Усло-
вие B^lBi G Г эквивалентно тому, что В2Т = Pi Г, т.е. тому, что эти
левые смежные классы совпадают. Так как PSX(2,R)(i) = 7i, отсюда сле-
дует, что П = PSL(2, R)/Г.
Лемма 5.2 доказана.
Пусть дано действие группы G на многообразии М, т. е. задано отоб-
ражение
GxM -+М (5.5)
вида (д,х) -+ д(х)9 причем #i(#20)) = (gi · #2) (ж) для любых дид2 G G
и е(х) = х, где е — единица группы G.
Предположим также, что
1) группа G является гладким многообразием (см. главу 7);
2) отображение (5.5) — гладкое;
3) для любой пары точек xi,x2 G M существует хотя бы один такой
элемент g G G, что д(х\) = х2.
Если действие удовлетворяет условию 3, то оно называется транзи-
тивным.
Если эти условия выполняются, то M называется однородным про-
странством группы G и отождествляется с пространством левых смежных
классов G/Tx группы G по стационарной подгруппе любой точки х (Гх =
= {geG: g(x) = х}).
При выполнении некоторых дополнительных и естественных условий1
на однородном пространстве существует каноническая структура гладкого
многообразия (см., например, [6]).
Теперь лемма 5.2 формулируется следующим образом:
• H является однородным пространством группы PSX(2, R).
В римановой геометрии представляет интерес случай, когда группа G
действует изометриями. Отображение / : M —> M называется изометрией,
если для любой гладкой кривой η ее длина сохраняется L(/(7)) = Ц7)· Это,
очевидно, эквивалентно тому, что отображение /* : Τ Μ —> TM сохраняет
длины всех векторов.
1 Например, если G — компактная группа Ли, a H = Тх — замкнутая подгруппа в G.
§5.1. Плоскость Лобачевского 121
Лемма 5.3. Группа PSL(2, Ж) действует на Η изометриями.
Доказательство. Запишем метрику (5Л) в форме
dz dz
(Imz)2'
Длины векторов сохраняются преобразованием А тогда и только тогда,
когда
dz dz dA{z)dA{z)
- (5.6)
{Imzf (ImA(z)y
Действительно, любой вектор ν G TZM записывается в виде wd + wd,
где д = ^(дх — гду). Отображение А* действует на касательных векторах
как
öA[z) öA{z) ww ^ L 2 _ ww
\Mv)V= лV я4' .T^ и |„
dz dz (ImA(z))2 ' ' (Im z)
т. е. условие (5.6) доказано.
Прямыми вычислениями устанавливается, что
JmA{z)- lmz дА{2)- l
\cz + d\2 ' dz (cz + d)2 '
и, подставляя эти выражения в правую часть (5.6), устанавливаем, что дли-
ны векторов сохраняются любым A G PSL(2, M).
Лемма 5.3 доказана.
Теорема 5.3. Группа PSX(2,R) состоит из всех изометричных пре-
образований TL, сохраняющих ориентацию.
Доказательство. Любая изометрия переводит геодезические в геоде-
зические. Пусть Τ — изометрия пространства Н, сохраняющая ориентацию
и такая, что В (г) — z.
Возьмем такое отображение А е PSL(2,M), что А(г) = z. То-
гда ВА~1 — изометрия, которая оставляет точку г на месте. По лемме 5.1
каждая точка из H соединяется с точкой г геодезической и притом только
122
Глава 5
одной. Поэтому, так как изометрия переводит геодезические в геодезиче-
ские, отображение ΒΑ~λ полностью определяется порожденным им пово-
ротом TiH —► Т{Н касательного пространства в точке г и каждый такой по-
ворот однозначно определяет изометрию. Но все такие изометрии принад-
лежат группе Г и, значит, ΒΑ~λ е Г. Отсюда следует, что В е PSL(2,R).
Теорема 5.3 доказана.
Плоскость Лобачевского встречается во многих областях математики.
Мы ограничимся указанием одного из наиболее важных ее свойств — она яв-
ляется моделью неевклидовой геометрии.
Известная «пятая аксиома Евклида» гласит:
• Пусть I — прямая на плоскости их — точка на плоскости, которая не
лежит на прямой I. Тогда через точку х проходит и притом только одна
прямая, параллельная прямой I.
Попытки вывести эту аксиому из других аксиом евклидовой геометрии
привели к созданию неевклидовых геометрий. А именно, в 1825 году Лоба-
чевский ввел геометрию, в которой выполняется аксиома Лобачевского:
• Пусть I — прямая на плоскости их — точка на плоскости, которая не
лежит на прямой I. Тогда через точку х проходит бесконечное число
прямых, которые параллельны прямой I.
Из этого утверждения Лобачевский вывел, что таких прямых должно
быть бесконечно много и что сумма углов треугольника в такой геометрии
должна быть меньше π. Несколько позже и независимо к таким же выво-
дам пришел Бойяи. Классическое изложение геометрии Лобачевского дано,
например, в [3].
Плоскость Лобачевского является моделью такой геометрии.
Действительно, понимая под прямыми геодезические, а под их парал-
лельностью — отсутствие пересечения, мы заключаем, что на простран-
стве Н, гомеоморфном двумерной плоскости, реализуется геометрия, удо-
влетворяющая всем аксиомам Евклида, кроме «пятой». Из теоремы 5.1 сле-
дует, что для этой геометрии выполняется аксиома Лобачевского. Ось Ох
является при этом «бесконечно удаленной» — длина любой кривой, при-
мыкающей к этой оси, бесконечна: это следует из расходимости интегра-
ла J dy/y при стремлении нижнего предела интегрирования к нулю.
Легко проверить, что суммы углов геодезических треугольников будут
меньше π. Это, однако, следует и из формулы Гаусса-Бонне, доказательство
которой, данное в §2.8, проходит без изменений для любых двумерных
римановых многообразий.
§ 5.2. Псевдоевклидовы пространства и их приложения в физике 123
Рис. 5.2. Треугольник на плоскости Лобачевского
Пространством Лобачевского (или гиперболическим простран-
ством) Нп размерности η ^ 2 называется верхняя полуплоскость хп ^ О
в Rn с римановой метрикой
ds2 = dx2 + .. . + dx2n
Хп
и координатами xi, ...,жп. При η = 2 мы получаем плоскость Лоба-
чевского. Несложно посчитать, что секционная кривизна пространства ТСп
постоянна и равна —1. Любое пространство постоянной секционной кри-
визны К = — 1 локально изометрично пространству Лобачевского той же
размерности и является однородным пространством пространства Лоба-
чевского той же размерности относительно дискретного действия какой-то
группы.
§ 5.2. Псевдоевклидовы пространства и их приложения
в физике
Пусть М1'72 — псевдоевклидово пространство с координатами х°,
ж1, ..., хп и метрикой
{dx0)2 - (dx1)2 - ... -(dxn)2. (5.7)
В касательном пространстве к каждой точке задано псевдоскалярное про-
изведение
К w)i,n = v°w° - v1w1 - ... - vnwn.
Линейные преобразования, сохраняющие это скалярное произведение, об-
разуют группу 0(1, п). Группы 0(1,п) обобщают группы 0(п), и их эле-
124 ГЛАВА 5
менты задаются ((п + 1) х (п + 1))-матрицами А, удовлетворяющими усло-
виям
где 1П — единичная (п х п)-матрица (доказательство этого факта аналогично
доказательству леммы 1.4).
Задача 5.6. Доказать, что уравнения (5.8) выделяют в простран-
стве (п + 1) х (п + 1)-матрщ гладкое многообразие размерности п(п +
+ 1)/2 (Указание: см. доказательство аналогичного факта для групп 0(п)
в §1.4).
Пространство R1'3 возникает в физике и является «пространством со-
бытий» в специальной теории относительности — пространством-вре-
менем (оно также называется пространством Минковского). Координа-
ты хг,х2, х3 являются пространственными, а координата х° — ci — вре-
менной (здесь с — скорость света и t — время). Поэтому, если (г>, v)i^ < О,
то вектор ν называется пространственноподобным, если (v,v)i^ > 0 —
времениподобным, и, если (v,v)i^ —0, — световым. Последнее определе-
ние имеет под собой следующую физическую основу:
• скорость света в любой системе координат одинакова и равна с.
Поэтому, если x(t) — кривая в R1,3, вдоль которой распространяется
световой луч, то
2_ {dx}\2 _ (dx^\2 _ fdx3\2_Ci
\dt J \dt J \dt J
Группа О (п) имеет две компоненты связности, которые состоят из
преобразований, сохраняющих ориентацию, и преобразований, обращаю-
щих ориентацию (т.е. с detA — 1 и с detA = —1). Группа 0(1,п) име-
ет четыре компоненты: каждое семейство преобразований, сохраняющих
или обращающих ориентацию, разбивается еще на две компоненты в за-
висимости от того, обращает преобразование «направление времени» или
нет: (ео, ^(eo))i,3 < 0 или (ео, A(eo))i,3 > 0, где ео — базисный вектор,
отвечающий координате х°.
Задача 5.7. Показать, что группа 0(1,1) состоит из преобразований,
заданных матрицами
§ 5.2. Псевдоевклидовы пространства и их приложения в физике 125
где ε,δ = ±1, chcp = (е* + β~φ)/2 и sh^ = (е^ - е-*)/2. Я/?м ε > О
направление времени сохраняется, а при ε < 0 — обращается. При εδ = 1
ориентация сохраняется, а при εδ = — 1 — обращается.
Рассмотрим следующую задачу. Пусть заданы две системы коорди-
нат — К с координатами ci,ж1, ж2, а;3 и К с координатами ci, ж1,ж2, ж3.
Предположим, что при t = t = 0 они совпадают и система К движется
вдоль оси Ох1 с постоянной скоростью ν по отношению к системе коорди-
нат К (система координат К является инерциальной). Как найти формулы
перехода от одной системы к другой?
Ζ
К
\ у х
х
Рис. 5.3. Система координат К, равномерно движущаяся вдоль оси Ох
В галилеевой механике время универсально и формулы перехода имеют
простой вид (преобразование Галилея)
t = t, ж1 = ж1 + vt, ж2 = ж2, ж3 = ж3.
В специальной теории относительности постулируется, что расстояние
(в метрике (5.7)) между событиями — точками пространства-времени — со-
храняется при переходе к другой инерциальной системе координат. Отсюда
следует, что такой переход задается элементом группы Пуанкаре — группы
всех движений R1'3. Эта группа порождена сдвигами и элементами 0(1,3).
Так как начала координат совпадают при t = t, то переход от К к К
задается преобразованием из 0(1,3). Если мы непрерывно уменьшим ско-
рость ν до нуля, то мы получим тождественное преобразование — значит,
искомое преобразование сохраняет и ориентацию, и направление времени
126
Глава 5
(лежит в одной компоненте с тождественным). Так как это преобразование
только координаты £, х1 и £, х1, оно имеет вид
et = et ch φ + x1 sh φ,
Χ1 = et Sh (/? + Χ Ch (/9, Χ = Χ , Ж = Χ .
При xl = 0 мы получаем
et = ci ch y>, x1 = et sh φ
и в итоге
g=th<p.
Но точка х1 = х2 = х3 = 0 движется вдоль оси Ох1 с постоянной скоро-
стью ν и, значит,
Так как
, 1 г, thy?
ch φ = — -, sh φ —
γ/l-thV Vl-th2^
то мы получаем окончательную форму преобразований Лоренца
t= , г (t + x1^), х= ,l (x'+vt).
гл 7\ с2/ Г, 7
1_7 V ?
При ν очень малой по сравнению со скоростью света
1
1
1
и преобразования Галилея дают достаточно хорошее приближение к преоб-
разованиям Лоренца.
Укажем наглядные следствия полученных формул, известные из попу-
лярных изложений специальной теории относительности.
Собственной длиной объекта называется его длина в той системе ко-
ординат, в которой он покоится. Пусть нам дан стержень собственной дли-
ны Δ/, покоящийся в системе координат К, и при этом его концы имеют
§ 5.2. Псевдоевклидовы пространства и их приложения в физике 127
координаты х1 = а, 6, где Ъ — а = Al. В системе координат К его длина
другая — из преобразований Лоренца следует, что в каждый фиксированный
момент времени t разность х1-координат его концов равна
Δ/ =
т. е.
• линейный размер стержня сокращается в направлении скорости дви-
жения системы координат К.
Другой «парадокс» состоит в сокращении времени.
Пусть в системе координат К покоятся часы. Разница во времени меж-
ду двумя событиями в одной и той же точке пространства (х1 ,х2,х3 фикси-
рованы) в этой системе координат равно At. А разница во времени между
этими событиями в системе координат К равно
Δ«=- ΔΓ
'-S
т.е.
• время в движущейся системе координат изменяется медленнее, чем
в неподвижной.
Общая теория относительности, созданная в работах Эйнштейна, по-
требовала привлечения уже всего аппарата римановой геометрии и в зна-
чительной степени стимулировала ее развитие (см. [24]). Согласно этой
теории, гравитационное поле — это псевдориманова метрика дц на четы-
рехмерном пространстве М4. Метрика имеет сигнатуру (1,3), т. е. заменой
координат в каждой точке (но в общем случае не в целой области) приво-
дится к метрике Минковского
gijdxldxj = (da:0) - ^ (dx1)'
г=1
Пространство М4 является пространством событий и топологически может
отличаться от R4. Сама метрика должна подчиняться нелинейным уравне-
ниям, которые называются уравнениями Эйнштейна. Они утверждают, что
128
Глава 5
в пустоте (при отсутствии других полей) тензор Риччи гравитационного
поля равен нулю
Rik = 0.
Если заданы другие поля (например, электромагнитное), то уравнения Эйн-
штейна принимают вид
Rik — туЩък = Tik,
где R — glkRik — скалярная кривизна метрики д^ и Т^ — так называемый
тензор энергии-импульса этих полей. Это уравнение описывает взаимодей-
ствие гравитационного поля с другими полями, а собственное поведение
других полей описывается отдельными уравнениями (например, для элек-
тромагнитного поля — уравнениями Максвелла).
Задача 5.8. Пусть R4 = R х R3 и t — координата в Ш, а г, θ, φ —
сферические координаты в М3 {см. § 2.7). Покажите, что метрика1
dl2 = ( 1 - Ц· ) <?dt2 - -^г - r2(d02 + sin2 θαφ2), rg = const > 0,
r~
удовлетворяет уравнениям Эйнштейна в пустоте: Rik = 0.
Эта метрика называется метрикой Шварцшильда и описывает стационарные черные ды-
ры.
Часть III
Дополнительные главы
Глава 6
Минимальные поверхности
и комплексный анализ
§ 6.1. Конформная параметризация поверхности
Пусть M и M — римановы многообразия с метриками gjk и 'gjk, со-
ответственно. Гладкое отображение f : M —> M называется конформным,
если оно сохраняет углы между касательными векторами. Формально это
записывается следующим образом:
8fl(r) dfm(r\
91т(1(х))-!т\1-1-\1ахЧхк = X(x)gjk(x)dx4xk,
ох3 дхк
где λ (х) — функция на многообразии M, f(x) = (f1 (ж), ..., fq(x)), x1, ...,
хр — локальные координаты на многообразии М,р = dim M и q = dim M.
Очевидно, что ρ ^ q.
Римановы многообразия называются конформно эквивалентными, если
отображение / является диффеоморфизмом.
Риманово многообразие размерности η называется конформно евкли-
довым, если окрестность каждой его точки конформно эквивалентна обла-
сти п-мерного евклидова пространства. В этом случае линейные координа-
ты ж1, ... ,хп в евклидовом пространстве задают координаты на многооб-
разии, в которых метрика принимает вид gjk = X(x)ôjk (такие координаты
называются конформно евклидовыми).
Теорема 6.1. Каждое двумерное риманово многообразие конформно
евклидово.
На многообразия большей размерности эта теорема не обобщается.
Доказательство теоремы начнем со следующей леммы.
Лемма 6.1. Пусть и, ν — локальные координаты в окрестности точ-
ки ρ на поверхности Σ и Edu2 + 2Fdudv + Gdv2 — метрика на Σ.
132
Глава 6
Пусть в окрестности точки ρ существуют конформно евклидовы коор-
динаты ж, у. Тогда они удовлетворяют уравнениям
dx
du
дх
dv
[ду_ _
ди
ду_ _
dv
VEG - F2 \dv
1 fdy
du
F
dy_{
du
yjEG - F2
Системы (6.1) и (6.2) эквивалентны
Доказательство леммы 6.1.
Распишем равенство
у/EG - F2 \dv
1 (_^Αβ _l дх jp\
VEG - F2 \ dv du J
1 f dx ρ | dx ç\
\ dv du J'
λ (dx2 +dy2) = Ε du2 + 2Fdudv + Gdv2
(6.1)
(6.2)
как
Λ ( ( ψ-du + ψα,ν\ + \jrdu + jrdv I ) = Edu2+2Fdudv+Gdv2.
Оно эквивалентно системе уравнений
2 / о \ 2
(I) +(£) =λ",£·
дхд^^ду_ду_ = x-iF
du dv du dv '
dx
<9г/
A^G,
которая записывается в виде двух систем линейных уравнении
1 (сЕ
= λ-Χ
cF
G
(6.3)
§6.1. Конформная параметризация поверхности
133
где
Элемент площади — это 2-форма, равная
VEG - F2du Adv = XdxAdy = \(^^-- ^$4 du A dv.
\ ou αν σν du J
Отсюда следует, что
λ det A = \lEG-F2.
Поэтому
А-
VEG - F2
V
и, формально разрешая системы (6.3), мы получаем (6.1) и (6.2).
Разрешая (6.1) относительно ду/ди и dy/dv, получаем (6.2). Анало-
гично разрешая (6.2) относительно дх/ди и dx/dv, получаем (6.1). Следо-
вательно, эти системы эквивалентны. Лемма 6.1 доказана.
Для того, чтобы провести аналогию с многомерным случаем, обозна-
чим и — w1, ν — w2, gii = Ε, gi2 = F и #22 = G. Введем дифференциаль-
ный оператор, действующий на функциях на римановом многообразии:
1 д ( ^ik 9φ
Αφ=^-^-(^
y/g dwj V dwk
где g = detgjk. Он называется оператором Лапласа-Бельтрами, и для
евклидовой метрики он совпадает с обычным оператором Лапласа
Σ
З2
Ö (6-4)
{ßw>)
j\2'
Этот оператор зависит от римановой метрики на многообразии и не зави-
сит от выбора координат. Последнее устанавливается следующим образом.
Пусть ρ — произвольная точка на многообразии и U — ее окрестность
с координатами х1, ...,жп. Рассмотрим всевозможные гладкие функции
134 Глава 6
на многообразии, равные тождественно нулю вне U. Определим скалярное
произведение их градиентов как
(gradu?, grad-0) = д^к г—7da,
V6 Ψ Ь J J dxi дхк
где da = л/gdx1 Λ ... Λ dxn. Очевидно, что значение интеграла не зависит
от выбора координат, так как от их выбора не зависит подынтегральное
выражение. Но, интегрируя по частям, получаем
(grad φ, grad ψ) = — / Αφ · ψασ.
υ
Так как функция ψ произвольна, значение Αφ всюду не зависит от выбора
координат.
Лемма 6.2. Если х и у являются дважды непрерывно дифференциру-
емыми функциями, удовлетворяющими системе (6.1) (или эквивалентной
ей системе (6.2)), то
Ах = Ау = 0. (6.5)
Уравнение Αφ — 0 называется уравнением Белътрами, и его реше-
ния называются гармоническими функциями на римановом многообразии.
В случае евклидова пространства мы получаем обычные оператор Лапласа
и гармонические функции.
Доказательство леммы 6.2.
Так как функция х(и, ν) дважды непрерывно дифференцируема, то
д2х _ д2х
du dv dv du '
что согласно (6.1) переписывается в виде
д( 1 faF_àyA-d_( 1 (ЁУк-ЁуЛ=п
ди \ ^/EG — F2 Ψν du J J dv I y/EG — F2 \ &v &u
Последнее уравнение, как легко проверяется прямыми вычислениями, име-
ет вид Ау = 0. Аналогично доказывается, что Ах — 0. Лемма 6.2 доказана.
Следующую лемму мы приведем без доказательства, которое может
быть получено с помощью теории эллиптических дифференциальных урав-
нений с частными производными.
§6.1. Конформная параметризация поверхности
135
Лемма 6.3. Если в окрестности точки ρ коэффициенты метрического
тензора Е, F и G непрерывно дифференцируемы η раз по и и υ (т. е. име-
ют класс гладкости Сп), где η ^ 2, то в какой-то достаточно малой
окрестности точки ρ существуют
1) такое решение х(и, ν) класса Сп уравнения (6.5), что в этой окрест-
ности
i)2+(t)2*0·
2) решение y(u,v) класса Сп уравнения (6.2).
Для евклидовой метрики это утверждение очевидно. Для доказатель-
ства достаточно построить x(u,v), a затем y{u,v) находится из линейных
дифференциальных уравнений первого порядка.
Лемма 6.4. Если x(u,v) и y(u,v) удовлетворяют уравнениям (6.1)
и (6.2), то якобиан отображения (и, υ) —► (ж, у) равен
дхду_ _ дхду_ = 1 ,у у,
dudv dv du л/EG - F2 '
где V = ( ^p, — |p J и скалярное произведение берется по отношению
к метрике на поверхности.
Доказательство леммы 6.4 получается прямой подстановкой:
сЬду_ _ д^ду_ = дх . 1 (_ÇteF+dxG
du dv dv du du ^JEG — F2 \ dv du
_ ®x_ 1 /_&n , dx 77
dv y/EG — F2 \ dv du
2F——+E
VEG - F2 \ \duj dudv
VEG - F2
(V,V).
Лемма 6.4 доказана.
Теперь доказательство теоремы 6.1 просто: используя лемму 6.3, най-
дем Сп -гладкие решения х{и, ν) и у (и, ν) уравнений (6.1) и (6.2). По усло-
вию выбора решения x(u,v) вектор V нигде не равен нулю в окрестно-
сти U точки ρ G Σ. Поэтому согласно лемме 6.4 якобиан отображения
136
Глава 6
(и, υ) —> (ж, у) нигде не равен нулю в U и, более того, окрестность U по те-
ореме об обратной функции можно выбрать настолько малой, чтобы на
ней это отображение было обратимым: функции ж, у задают новые локаль-
ные координаты. Из (6.1) и (6.2) следует, что в этих координатах метрика
принимает вид X(dx2 + dy2), т.е. отображение (щу) G U —► (ж,у) задает
конформную эквивалентность.
Теорема 6.1 доказана.
По конформно евклидовым координатам ж, у на поверхности строится
комплекснозначный конформный параметр
Ζ = х + гу,
использование которого связывает теорию поверхностей с комплексным
анализом.
§ 6.2. Теория поверхностей в терминах конформного
параметра
Пусть г : U —> М3 — регулярная поверхность в трехмерном евклидовом
пространстве. Согласно теореме 6.1 в окрестности любой точки поверхно-
сти можно выбрать конформный параметр z — х + гу. Для простоты будем
считать, что параметр z задан в области U С С.
Условие конформности состоит в том, что первая квадратичная форма
имеет вид
I = \{z,~z)(dx2 + dy2) = X(z,~z)dzdz.
Так как
I = (rz,rz)dz2 + (ττ, rY)dz2 + 2(rz, r^dzdz,
то условие конформности параметра z эквивалентно уравнениям
(rz,rz) = (г*, г*) = 0, (гг,г*) = Щ^, (6.6)
где нижние индексы z и ~z обозначают дифференцирование по этим пере-
менным, а (·, ·) — обычное скалярное произведение в R3, распространенное
по линейности на С3:
з
(V,W) = Y^VjWj, V,WeCs.
J = l
§ 6.2. Теория поверхностей в терминах конформного параметра 137
Так как поверхность регулярна, в каждой ее точке векторы г2,г^, п,
где η — вектор нормали к поверхности, образуют базис в С3. Действи-
тельно, из регулярности следует, что гх, гу, η образуют базис в М3, аг2 =
= (гх — ггу)/2, г^ — (гх + ггу)/29 т. е. rz и τγ линейно выражаются через гх
и г у над полем комплексных чисел.
Выпишем деривационные уравнения (см. refsecl.8) в терминах кон-
формного параметра. Эти уравнения определяют деформацию репера
гz, r^, n и имеют вид
*(ïMï)· *ÊHï>
Найдем матрицы U и V. Прежде всего введем две дополнительные функ-
ции, которые играют роль символов Кристоффеля:
А= (ггг,п), В = (r^,n).
Заметим, что функция А — комплексная, а функция В — вещественная.
Лемма 6.5. Матрицы U и V имеют вид
/(In λ), О А\
и= о о в ,
\-2В/Х -2Α/Χ О/
/О О В\
V= 0 (In λ)* Ä .
\-2Α/λ -2Β/λ 0/
Доказательство. Мы выведем только вид матрицы U, так как вывод
другой матрицы аналогичен.
По определению vzz = Unrz + U^r^ + U1311. Заметим, что
Ui3 = (ггг,п) = А
и из (6.6) вытекают следующие равенства:
U12| = (rzz,r,) = ±J^r,,r,) = 0,
U1I2 = {*zz,*t) = — (rz,rz) - (rz,rzz) =
= löA_iArr r ^ = .Ш
2 dz 2dz(" z) 2 dz'
что влечет Un = (1ηλ)Ζ и Ui2 = 0.
138
Глава 6
Аналогично rzz = U2ir2 + U22^ + и2зп,
U23 = (r«,n) = B
и из (6.6) вытекает, что
U2i| = (r^,rF) = ^(i^,r2-)=0,
и22| = (г«,гж) = ^(гж,г0)=О.
Следовательно, U2i = U22 = 0.
По определению мы имеем nz = U3ii\z + U32ry + U33n. Так как
(η, π)ξ1, выполняются равенства
U33 = (n2,n) = ^(n,n) = 0.
Так как по определению (n, vz) — (η, r^) = 0, мы имеем
U3i| = (η*, г*) = J; (η, г*) - (n,r^) = -Б,
U32| = (n„r,) = £(n,rz) - (n,r«) = -Λ
что влечет U3i = -2B/X, U32 = -2A/X.
Лемма 6.5 доказана.
Напомним, что вторая фундаментальная форма равна
II = (rxx, n)dx2 + 2(гжу, n)dxdy + (ryî/, n)dy2,
корни уравнения
F(k) = det ( ^ n) - Хк , ^ »> ) = 0
являются главными кривизнами к\ и &2, их произведение называется гаус-
совой кривизной К — к±к2, а полусумма — средней кривизной Η =
= (fe!+fe2)/2.
Мы получаем простым пересчетом, что
§ 6.2. Теория поверхностей в терминах конформного параметра 139
Лемма 6.6.
II = (2Б + (А + Ä))dx2 + 2г(Л - Ä)dxdy + (2Я - (А + Л))^2,
2Б 4(£2-А4)
Я=Х' К= λδ ■
Уравнения Гаусса-Кодацци есть условие совместности систем дери-
вационных уравнений:
U^-V, + [U,V]=0.
Прямыми вычислениями получаем
Лемма 6.7. Уравнения Гаусса - Кодацци принимают следующий вид:
(1пА)^ + |(Б2-ЛЛ)=0, (6.7)
Ατ-ΒΖ + {]ηλ)ΖΒ = 0. (6.8)
Первое из этих уравнений с учетом формулы гауссовой кривизны
из леммы 6.6 есть
K = -2Qn\)zz
(теорема Гаусса). Второе уравнение распадается на два, так как оно утвер-
ждает равенство нулю и вещественной, и мнимой частей его левой части,
которая в общем случае комплекснозначна. С учетом леммы 6.6 они пере-
писываются в виде
a-z = \ez.
Форма (не кососимметрическая) Ω = Adz2 называется дифферен-
циалом Хопфа и является квадратичным дифференциалом. Это означает,
что если на поверхности задан другой конформный параметр w9 то в его
терминах дифференциал Хопфа задается в виде Ω = Adw2, где
Он обладает рядом замечательных свойств, которые мы предлагаем доказать
в качестве упражнения (они вытекают из леммы 6.7).
140 Глава 6
Лемма 6.8. 1) Дифференциал Хопфа равен в точке ρ G Σ нулю тогда
и только тогда, когда ρ — омбилическая точка (т. е. в этой точке главные
кривизны совпадают: к\ = &г);
2) Дифференциал Хопфа голоморфен [т. е. dA/dz = 0) на поверхности
тогда и только тогда, когда эта поверхность имеет постоянную среднюю
кривизну (Н = const).
Теорема Бонне об определимости поверхности первой и второй квадра-
тичной формы (теорема 2.6) теперь переформулируется в следующем виде:
• поверхность однозначно (с точностью до движений R3) определяется
метрикой \dzd~z, средней кривизной H — 2В/Х и дифференциалом
Хопфа Adz2, удовлетворяющими уравнениям (6.7) и (6.8);
• любой набор данных {Xdzdz, H, Adz2}, удовлетворяющий уравнениям
(6.7) и (6.8), задает поверхность.
Заметим, что существуют поверхности, которые могут гладко дефор-
мироваться с сохранением метрики и средней кривизны, и эти деформации
не сводятся к движениям поверхностей в евклидовом пространстве.
Отметим (без доказательства), что пространства голоморфных квадра-
тичных дифференциалов на замкнутых поверхностях конечномерны.
Лемма 6.9. Если Ω — голоморфный квадратичный дифференциал
на двумерной сфере S2, то Ω = 0 всюду.
Доказательство. Двумерная сфера покрывается двумя картами, каж-
дая из которых отождествляется с комплексной плоскостью. Комплексные
координаты z и w в этих картах связаны формулой перехода
-I.
Мы видим, что сфера получается из z-плоскости добавлением бесконечной
точки с координатой w = 0. Если a(z)dz2 и ß(w)dw2 — записи диффе-
ренциала Ω в этих картах, то в области z φ 0, в которой обе координаты
определены, мы имеем
ß(w)dw2 = ß(w(z)) (4jA dz2 = ß(w(z))z-4dz2 = a(z)dz2.
Так как при w = 0 значение функции ß(w) конечно, отсюда следует, что го-
ломорфная на ^-плоскости функция а имеет асимптотику
a(z) = О ( — ) при z —» со.
§6.3. Представление Вейерштрасса
141
Но убывающая на бесконечности голоморфная функция равна всюду нулю.
Лемма 6.9 доказана.
Из этой леммы вытекает
Теорема 6.2 (Теорема Хопфа). Если сфера, погруженная в М3, имеет
постоянную среднюю кривизну Н, то она совпадает {с точностью до па-
раллельного переноса) со стандартной сферой радиуса 1/Н.
Доказательство. Пусть средняя кривизна постоянна: Η = const.
Из лемм 6.8 и 6.9 следует, что А = О.Из леммы 6.5 вытекает, что nz = Hrz,
и это влечет
η = Hy -f с,
где с — постоянный вектор. Если Η = 0, то вектор нормали постоянен
и поверхность не может быть сферой (она полностью будет лежать в плос-
кости, ортогональной этому вектору). Если Η φ О, то сдвинем поверх-
ность на с/Н: г —► г = г + с/Н. Для сдвинутой поверхности получаем:
(Я?, Яг) = (η, η) = 1 и в итоге (г, г) - 1/Н2.
Теорема 6.2 доказана.
§ 6.3. Представление Вейерштрасса
Из деривационных уравнений (лемма 6.5) следует, что для произволь-
ной поверхности выполняется уравнение
rzz = Su,
что вместе с леммой 6.6 дает
vz-z = ±Я λη. (6.9)
В терминах конформного параметра оператор Лапласа-Бельтрами равен
Λ dzdz
и поэтому (6.9) переписывается как
Аг = 2#п. (6.10)
Из (6.10) следует
142 Глава 6
Лемма 6.10. Поверхность минимальна (Н = 0) тогда и только тогда,
когда ее координатные функции, описывающие погруэюение в Ш3, являются
гармоническими.
Из (6.9) следует, что комплекснозначная вектор-функция rz для мини-
мальных поверхностей является голоморфной. По условию (6.6) она также
удовлетворяет уравнению (rz,rz) = 0. Оказывается, формального выпол-
нения этих условий вектор-функции φ достаточно для того, чтобы φ = rz
для некоторой конформно параметризованной минимальной поверхности.
Лемма 6.11. Пусть UcC — односвязная область и пусть φ: U —>С3 —
такая вектор-функция, что
1) φ голоморфна (т. е. каждая ее компонента φ^ голоморфна)]
2) φ\ + φ\ + φ\ = 0;
3) φ не имеет нулей: <p(U) С С3 \ {0}.
Тогда существует такая регулярная минимальная поверхность г:
U —► R3, что φ = rz и z — конформный параметр на ней.
Доказательство. Пусть φj = a,j + ibj, где clj и bj — вещественные
функции. Голоморфность ifj состоит в выполнении условий Коши-Римана:
а<^н((£-£)+'(%+£))=°-
В частности, равенство нулю мнимой части dtpj/dz означает, что 1-фор-
ма ω j = CLjdx—bjdy замкнута: dujj = 0. Возьмем произвольную точку zqEU
и определим на U гладкую вещественнозначную функцию
z
fj(z) = 2 I Uj.
Так как U — односвязная область, по теореме Стокса значение интеграла не
зависит об выбора пути в U от zq до z. Прямое вычисление показывает, что
Следовательно, функции Д, /2, /з задают такое отображение
г: U -К3 : r = (/i,/2)/3),
§6.3. Представление Вейерштрасса 143
что г Ζ = φ. Так как tp(U) С С3 \ {0}, это отображение в каждой точке имеет
максимальный ранг, т. е. является погружением.
Из того, что (φ, φ) = 0, следует, что z — конформный параметр на по-
груженной поверхности. Так как rzz = 0, согласно лемме 6.10 эта поверх-
ность минимальна.
Лемма 6.11 доказана.
Из нее вытекает следующая теорема.
Теорема 6.3 (Теорема Вейерштрасса). Пусть U С С — односвязная
область и пусть ф\, ψ>2 ' U —> С — такие голоморфные функции, что \гр\ |2 +
+1 г[)212 нигде не равно нулю в U. Пусть (xj ? %о -> хо ) ^ ^3 и Ρ ^ U — заданные
точки.
Тогда формулы1
Ζ
x\z) = xl + \ f (Ц>\ - i>l)dz + (ΦΙ - φ22)αη,
Ζ
x2(z) = xl - I J ([ф\ + ψΙ)αΖ - {ψ\+ψΙ)ατ}, (6.11)
x3
Ζ
(z) =xl+ (ip^dz + ^^2dz)
задают погружение минимальной поверхности в R3. Индуцированная мет-
рика имеет вид
№i\2 + №2\2)2dzdz.
Любая минимальная поверхность в Ш3 в достаточно малой окрестно-
сти любой своей точки допускает такое представление.
Доказательство. Общее решение уравнения
ψ\ + ψ\ + ψ\ = 0
допускает представление в виде
ΨΙ = \{Φ21-ΨΙ), <P2 = -Utâ + Ip22), ΨΖ=ΦΙΦ2, (6.12)
обычно формулы Вейерштрасса-Эннепера приводятся в терминах / = tpf и g = т/^/^ь
144
Глава 6
причем любому ненулевому решению φ отвечают такие две пары — (^i, Ф2)
и (—V*b —Ψ2)· Голоморфность вектор-функции φ вытекает из голоморфно-
сти ф\ и ψ2. Отсюда и из леммы 6.11 следует, что формулы (6.11) задают
конформное погружение U в R3 и построенная поверхность будет мини-
мальна. Вид индуцированной метрики Xdzdz устанавливается элементар-
ным вычислением: 2(rz,r^) = λ.
Из (6.12) следует, что в окрестности любой точки минимальной поверх-
ности гz допускает такую параметризацию, а значит, поверхность представ-
ляется формулами (6.11).
Теорема 6.3 доказана.
Прежде чем приводить примеры минимальных поверхностей, отметим
следующий факт.
Теорема 6.4. В R3 не существует минимальных компактных поверх-
ностей без края.
Доказательство. Согласно принципу максимума гармоническая фун-
кция / (т.е. такая, что fZz = 0), определенная в какой-то области из С,
не может принимать максимального значения во внутренней точке области.
Предположим, что Σ — минимальная компактная поверхность без края, по-
груженная в R3. Так как она компактна, на ней любая из координатных
функций ж·7 достигает своего максимума. Предположим для определенно-
сти, что х1 достигает максимума в точке р. Но в окрестности точки ρ суще-
ствует такой конформный параметр z, что х\^ = 0 (согласно лемме 6.10),
т. е. гармоническая функция достигает максимума во внутренней точке (у Σ
нет края). Это возможно только в случае, когда координатная функция по-
стоянна. Повторяя это рассуждение для х2 и х3, мы доказываем, что все
координатные функции должны быть постоянны. Полученное противоре-
чие доказывает теорему 6.4.
Примеры минимальных поверхностей.
1) Плоскость: фг = 1, ψ2 = 0.
2) Катеноид (рис. 6.1):
у/а у/а
Ψ1 = —=z, ψ2 = —^-5 α G R, a > 0.
y/2 y/2z
Это — минимальная поверхность вращения. Здесь z G C\{0} и область
определения z (плоскость с выколотой точкой) не гомеоморфна кругу. Од-
нако в теореме 3 мы накладывали это требование на область, чтобы гаран-
тировать однозначное определение интегралов, входящих в формулы (6.11).
§ 6.3. Представление Вейерштрасса
145
Рис. 6.1. Катеноид
В случае катеноида эти интегралы все равно будут однозначно определе-
ны и катеноид будет вложенным (т. е. без самопересечений) минимальным
цилиндром. Мы уже указывали эту поверхность в задаче 2.14.
Явные формулы для катеноида имеют вид
х1 = achu cosf, х2 = ach и sin υ, x = au,
где z = euJrlv. Из этих формул видно, что катеноид описывается уравнением
3) Геликоид (рис. 6.2):
\Fayi \fayi _
ipi = * , гр2= * , a G M, a > 0.
\/2 V2z
Это — линейчатая поверхность, которая образуется при равномерном
вращении прямой I, пересекающей ось вращения и ортогональной ей и од-
новременным равномерным переносом I параллельно оси вращения, при-
чем отношение скорости переноса к скорости вращения равно а.
Здесь опять z G С \ {0}, однако интегралы, входящие в (6.11), уже
не определены однозначно. Чтобы добиться однозначности, выкинем из С
146
Глава 6
вещественную отрицательную полуось М_ = {z = х + гу \ х ^ 0, у = 0}.
При этом мы получим один виток геликоида, отвечающий одному обороту I
вокруг оси вращения. Дальше надо аналитически продолжить вложение,
склеив верхний берег одного экземпляра С \ R_ с нижним берегом другого
такого экземпляра и т. д.
Рис. 6.2. Геликоид
Явные формулы для геликоида имеют вид
х1 = ash г; sinii, х2 = ash ν cos и, х3 = au,
где z = е-г(п+гг;) = еу~ги. Отсюда следует, что геликоид задается уравне-
нием
- х3 х1
Катеноид и геликоид, отвечающие одному значению параметра а, ло-
кально изометричны: задающие их функции φ отличаются множителем уД,
однако глобально различны: топологически геликоид является вложенной
плоскостью, а катеноид — цилиндром.
4) Поверхность Эннепера (рис. 6.3): ψ1 = 1,ψ2 = z.
Эта поверхность уже не является вложенной, но, как и предыдущие,
является полной — любая геодезическая на ней неограниченно продолжа-
ется.
§ 6.3. Представление Вейерштрасса
147
Рис. 6.3. Поверхность Эннепера
Задача 6.1. Доказать, что график функции z = f(x, y) (в трехмерном
евклидовом пространстве с координатами x,y,z) является минимальной
поверхностью тогда и только тогда, когда
(1 + f2y)fxx - 2fxfyfxy + (1 + fDfyy = 0.
Глава 7
Элементы теории групп Ли
§ 7.1. Линейные группы Ли
Гладкое многообразие G, точки которого образуют группу и при этом
все групповые операции — гладкие, называется группой Ли. Это означает,
что
1) задано гладкое отображение G x G —> G —умножение, сопоставля-
ющее паре точек х,у G G их произведение ху\
2) (xy)z — x(yz) для всех x,y,z G G;
3) задан такой выделенный элемент — единица е G G, что хе = ех = х
для всех x G G;
4) задано гладкое отображение G —> G, обращение х —> х-1, сопостав-
ляющее каждому элементу x e G обратный элемент х-1 G G, произведение
которого с ж равно единице е:
хх-1 = х_1х = е.
Легко показать, что существует ровно один такой элемент.
Подгруппа H группы Ли G называется подгруппой Ли, если она одно-
временно является гладким подмногообразием G.
Мы уже указывали один пример группы Ли в § 1.4 — группу
вещественных ортогональных преобразований 0{п), которая является
(п — 1)п/2-мерным подмногообразием в пространстве Rn , реализован-
ном как пространство вещественных (п х п)-матриц. На других приме-
рах групп Ли, которые реализуются матрицами, мы сначала и сосредото-
чимся.
1) Полная линейная группа GL(n).
Пусть W1 — n-мерное линейное пространство над полем вещественных
чисел.
Выбрав базис ei, ... ,еп в Еп, каждому линейному отображению А:
Шп —► Rn сопоставим однозначно (п х п)-матрицу А = (а^), задающую
§ 7.1. Линейные группы Ли 149
его в этом базисе:
(Л
А '■ :
W
ап
^п\
Хотя мы знаем, что линейное отображение задается тензором типа (1,1)
(см. § 6.3), мы в этой главе будем нумеровать матричные элементы двумя
нижними индексами, что привычнее для курсов линейной алгебры. Тем са-
мым пространство M(n, R), образованное (п x п)-матрицами, отождествля-
2
ется с евклидовым пространством Rn , координатами в котором являются
коэффициенты а^ матриц. Линейные отображения Rn —>· Rn также назы-
ваются преобразованиями (линейного) пространства Rn.
Через 1п мы будем обозначать тождественное преобразование про-
странства Rn и задающую его единичную (п х п) -матрицу.
Полной линейной группой GL{n) = GL(n, R) называется группа, об-
разованная всеми обратимыми линейными преобразованиями простран-
ства Шп.
Теорема 7.1. Группа GL(n) является некомпактной группой Ли раз-
мерности п2.
Доказательство.
На пространстве M(n, R) определена гладкая функция — детерминант
(определитель)
det: M(n,R) -► R,
которая обращается в нуль только на матрицах, задающих необратимые
отображения. Следовательно, каждый элемент A G GL (ri) содержится
в GL (η) вместе со своей окрестностью, и поэтому GL (ri) — открытое мно-
жество, а следовательно, и п2-мерное подмногообразие в M(n,R) = Rn .
Так как функция det не ограничена, многообразие GL (ri) некомпактно (ина-
че на нем бы функция det достигала максимума и минимума). Операции
умножения и обращения матриц, очевидно, являются гладкими как функции
коэффициентов матриц. Следовательно, GL(n) — группа Ли. Теорема 7.1
доказана.
Из теоремы 7.1 немедленно выводится следующий факт о группе ор-
тогональных преобразований 0(п), введенной нами в § 1.4.
Следствие 7.1. 0(п) — компактная подгруппа Ли группы GL(n).
Здесь и всюду в дальнейшем будем отождествлять элементы 0(п)
с матрицами, которыми они задаются в каком-то выбранном ортонорми-
рованном базисе.
150
Глава 7
Следствие 7.1 выводится просто. Преобразования из 0(п) — это в точ-
ности те, которые сохраняют скалярное произведение
η
(и,υ) = у ^ypyi.
3 = 1
Это эквивалентно тому, что
АтА = 1п, АеО(п), (7.1)
где Ат — транспонированная матрица А (см. § 1.4). Следовательно, все
преобразования из 0(п) обратимыми вложение 0(п) С GL(n) является
гладким отображением. Значит, 0(п) — подгруппа Ли группы GL(n).
Утверждение о компактности также выводится просто. Из (7.1) следует,
что для каждой j-ой строки матрицы A G О (η) верно равенство
η
Σα% = 1> j,fe = 1, ...,n.
fc=l
Поэтому все коэффициенты a,jk матрицы А ограничены по модулю еди-
ницей: \ajk\ ^ 1. Так как множество решений уравнения (7.1) замкнуто
2
в!п = М(п, R), подмногообразие 0(п) — замкнутое и ограниченное под-
2
множество в Rn и, следовательно, оно компактно. Следствие 7.1 доказано.
Подгруппы Ли полных линейных групп GL(n) называются линейными
(или матричными) группами Ли.
Следующую лемму мы уже применяли в § 1.4 в случае H = О (η).
Лемма 7.1. Пусть Η С GL(n) — подгруппа, являющаяся в окрестно-
сти единицы 1П £ GL(n) гладким подмногообразием. Тогда H — гладкое
подмногообразие и, следовательно, подгруппа Ли группы GL{n).
Доказательство. То, что в окрестности U единичной матрицы 1п
подгруппа H является подмногообразием, означает, что в этой окрестно-
сти U Π H задается как множество нулей гладкого отображения F : U —> Шк,
матрица Якоби которого имеет максимальный ранг (см. теорему 1.5). Пусть
A G H. Этот элемент имеет окрестность AU, состоящую из точек вида AB,
где В G U. Так как H — подгруппа GL (ri), в AU элементы H выделяются
уравнением Fa(X) = 0, где Fa(X) = F(A~XX). В точке А матрица Якоби
отображения Fa : AU ^Жк имеет тот же ранг, что и матрица Якоби отобра-
жения F в точке 1п. Следовательно, этот ранг максимален и в окрестности
§7.1. Линейные группы Ли 151
любой точки A G H подгруппа H является гладким подмногообразием.
Лемма 7.1 доказана.
2) Унимодулярная (или специальная линейная) группа SL(n).
Обозначим через SL(n) поверхность уровня det = 1 детерминанта,
т. е. множество точек, в которых det = 1.
Теорема 7.2. SL(n) — подгруппа Ли группы GL(n). Она некомпактна
и имеет размерность п2 — 1.
Доказательство. Легко посчитать, что
0det(j4)|
дац
А=1п
Следовательно, в окрестности 1п группа SL(n) является гладким подмного-
образием. Из леммы 7.1 следует, что SL(n) — подгруппа Ли группы GL(n).
По теореме о неявной функции dim SL(n) = dim GL(n) — l. Так как матрич-
ные элементы неограничены на SL(n), эта группа некомпактна. Теорема 7.2
доказана.
3) Специальная ортогональная группа SO(n).
Пусть A G О (η). Из равенств det A det A~l = 1 и det А = det.AT
вытекает, что det Л = ±1 при A G О (η).
Группа SO(n) образована матрицами из 0(п) с det Л = 1.
Теорема 7.3. SO(n) — связная компонента группы Ли О (ri).
Доказательство. Прежде всего докажем две леммы.
Лемма 7.2. Группа О(2) состоит из двух компонент, образованных
матрицами вида
г\ ( C0S(/? sin^ \ 2, /cos</? sine/? λ
' у — sin φ cos φ у ' у sin φ — cos φ у \ - >
где φ G Μ. Каждая компонента диффеоморфна окружности S1 =
= {z G С | \z\ — 1} и первая из них совпадает с группой 50(2).
Доказательство леммы 7.2.
Пусть A G 0(2). Обозначим
152
Глава 7
Уравнение (7.1) принимает вид
а2 + Ъ2 = с2 + d2 = 1, ac + bd = 0.
Общее решение уравнения а2 + б2 = 1 представляется в виде α = cos φ,
b = sin (£>. Отсюда следует, что с — ± sin <р, d = q=cos V9· Следовательно,
все элементы 0(2) имеют вид (7.2). Определитель матриц первого вида
равен det А = 1, а для матриц второго вида det А = — 1. Лемма 7.2 дока-
зана.
Лемма 7.3. Пусть A G О (η). Тогда векторное пространство W1
представляется в виде прямой суммы таких одно- и двумерных подпро-
странств Vj, что они попарно ортогональны, т. е. Vi J_ Vj при г ф j,
и каждое из них инвариантно относительно А, т. е. A(Vj) = Vj для всех j.
Доказательство леммы 7.3.
Проведем его индукцией по п. Для η = 1 утверждение тривиально.
Предположим, что оно доказано для η < к. Пусть A G О (к). Выпишем
характеристическое уравнение
det (А - XI к) = 0.
Если оно имеет вещественный корень λ, то существует такой век-
тор w Elfc, что Αν = λν. В этом случае пространство Rk распадается
в прямую сумму — Жк = R-v+(R'v)± — одномерного подпространства Ш-υ,
натянутого на ν, и его ортогонального дополнения. Оба эти подпространства
инвариантны относительно А. Следовательно, ограничение Л на (Ш · ν)1-
задается матрицей Ai G О (к — 1). По индуктивному предположению для А\
утверждение леммы верно. Поэтому оно верно и для А.
Если уравнение det (Л — Α1&) = 0 не имеет вещественных корней,
то возьмем комплексный корень μ и такой комплексный вектор w — w\ +
+ iu>2 G Ck, где wi,W2 G Шк, что Aw = μνο. Очевидно, что A(w\ — 1W2) =
= ~ß{w\ — IW2) и векторы wi,u)2 порождают двумерное инвариантное под-
пространство R · wi + R · W2. Так как преобразование А ортогонально,
то ортогональное дополнение к R · w\ + R · W2 тоже инвариантно и, рас-
суждая как и в предыдущем случае, выводим утверждение леммы для А
из индуктивного предположения. Лемма 7.3 доказана.
Перейдем собственно к доказательству теоремы 7.3. Для того чтобы
показать, что SO{n) связно, достаточно любое преобразование A G S О (η)
продеформировать внутри SO(n) в тождественное преобразование 1П.
Из леммы 7.3 следует, что в подходящем базисе любой элемент A G О (η)
§7.1. Линейные группы Ли
153
представляется блочно-диагональной матрицей
Iм °\
I I '
\0 Ак)
где матрицы Aj либо одномерны (в этом случае они равны собственным
значениям ортогонального преобразования, т. е. =Ы), либо двумерны (в этом
случае они имеют вид (7.2)). В последнем случае, меняя непрерывно угол φ,
любую матрицу вида (7.2) можно продеформировать в диагональную мат-
рицу с диагональными элементами, равными ±1. Значит, А деформируется
в элемент В, который в подходящем базисе задается диагональной матри-
цей с ±1 по диагонали. Так как det А = det Б = 1, на диагонали стоит
четное число элементов, равных — 1. Разобьем их по парам и для каждой
пары выберем отвечающие ей собственные векторы г^г^. Ограничение В
на R · vi + R · V2 равно —1.2. Эта матрица имеет вид 1) из (7.2) при φ =
= π и, деформируя φ в 0, приведем ограничение В на это подпространство
в 12. Проделав это со всеми такими парами, приведем матрицу В к виду 1п,
т. е. продеформируем линейное преобразование А в тождественное преобра-
зование. Таким образом, мы показали, что S О (ri) — связное многообразие.
Пусть A G О (ri) и det Л = — 1. Образом гладкого и обратимого
(т. е. диффеоморфного) отображения S О (ri) —> О (η) вида X —► АХ будет
множество, образованное всеми матрицами из 0(п) с det = — 1. Отсюда
следует, что многообразие 0(п) распадается на две компоненты связности,
на которых определитель имеет разные знаки. Теорема 7.3 доказана.
Мы отдельно выделили доказательство этой теоремы из-за важности
групп S О (ri) и того, что его аналоги для других групп проще, но следуют
той же идее.
Задача 7.1. Используя вещественные жордановы формы матриц, по-
казать, что
а) для любого η группа GL(n) имеет две компоненты связности, вы-
деленные знаком det A;
б) для любого η группа SL(ri) связна.
4) Группа GL(n, С).
Обратимые линейные преобразования векторного пространства Сп над
полем С образуют группу GL(n, С).
Выберем базис ei, ...,еп в Сп и каждому линейному отображе-
нию А: Сп —► Сп сопоставим (п х ri)-матрицу А с комплексными ко-
154 Глава 7
эффициентами, задающую отображение в этом базисе. Пространство таких
матриц обозначим через М(п, С).
Преобразования А £ GX(n, С) выделяются условием det А ф 0. От-
сюда, как и в случае с группой GL(n)9 заключаем, что GL(n,C) является
группой Ли (вещественной) размерности 2n2 = dim Μ (η, С).
5) Унитарная группа U(n).
Пусть Сп — n-мерное линейное пространство над полем С. Обозначим
через (и, ν) эрмитово произведение на Сп, которое в ортонормированном
базисе ei, ..., еп записывается в виде
η
(и, ν) = 2_\и^^ ·
Отображение А е М(п, С) называется унитарным, если оно сохраняет это
эрмитово произведение. Очевидно, что оно не имеет ядра и обратимо.
Пространство М(п,С) естественно отождествляется с Cn , a значит,
и с R2n , в котором координатами являются вещественные и мнимые части
коэффициентов матриц: Re a,jk и Ima^. Так как каждое линейное преобра-
зование из M(п, С) задает линейное преобразование R2n —► М2п, где Ж2п
порождено над R векторами ei, iei, ..., en, ien, группа M (η, С) естествен-
но вкладывается в M(2n,R).
Теорема 7.4. Группа U(n), образованная всеми унитарными преобра-
зованиями пространства Сп, выделяется в GL(n, С) уравнением
ATÄ = 1п
и является компактной подгруппой Ли группы GL(2n), и ее размерность
равна п2.
Доказательство. Произведение двух унитарных преобразований и об-
ращение каждого унитарного преобразования унитарны. Поэтому унитар-
ные преобразования образуют группу, которую обозначим U(n). Эрмитово
произведение записывается как
(и, υ) = иТ 1пг7,
где и = (ui, ..., ип)т и ν = (fi, ..., νη)τ — векторы из Сп, записанные
как (п х 1)-матрицы. Матрица A G M(n, С) унитарна тогда и только тогда,
когда
(Au, Αν) = ит Ат 1п Α ν = (и, ν)
§7.1. Линейные группы Ли 155
для всех UyV G Cn. Это значит, что выполняется следующий комплексный
аналог уравнения (7.1):
ATÄ = ln, Ae U(n). (7.3)
Это уравнение расписывается в виде системы га2 полиномиальных уравне-
ний:
η
FJk = Σ (&е amj~Re атк + Imamjlmamk) - ôjk = О,
m=l
где 1 < j < к < η, и
Gjfc = ^ (ReamjImamJt - 1та^Кеатк) = 0,
ra=l
где 1 ^ j < к < η.
Функции FjA; и Gj/c задают отображение
F:M(n,C)^Rn2.
Докажем, что в точке ln G M(n, С) матрица Якоби этого отображения имеет
максимальный ранг, который равен га2. Выберем га2 переменных Rectjk,
1 ^ j ^ к ^ га, и Imajfc, 1 < j < к ^ п, и вычислим минор матрицы Якоби,
отвечающий этим переменным, при А = 1п:
ÖF .2 при j = r,k = sj = /c,
= < 1 при j = г,к = s,j < к,
9Re ars
0 в остальных случаях,
dGjk _ \ 1 при j = г, /с = 5,
j противном слу1
= 0 для всех j,/с, г, 5..
<9Im ars j 0 в противном случае,
dFjk dGjk
dim ars öRe ar
Следовательно, по лемме 7Л, U(n) — гладкое подмногообразие в R2n раз-
мерности dim U (га) = dimIR2n — η2 = η2.
Из (7.3) следует, что \a,jk\ < 1. Поэтому /7(га) — ограниченное подмно-
жество М2п , и, так как оно замкнуто, оно компактно. Теорема 7.4 доказана.
156 Глава 7
Цепочка вложений
U(ri) сМ(п,С) сМ(2п,1)
показывает, что группа U(ri) линейна.
6) Специальная унитарная группа SU (ri).
Из уравнения (7.3) следует, что | det А\ — 1 при A G U(n).
Матрицы из U(n) с det Л = 1 образуют подгруппу, которая обознача-
ется через SU(n).
Теорема 7.5. SU(n) — (η2 — 1)-мерная подгруппа Ли группы U(n).
Доказательство. В М(п, С) группа SU(n) выделяется теми же урав-
нениями Fjk = Gjk = 0, что и U(n), и еще одним дополнительным урав-
нением
det Л = 1,
которое мы заменим на
H (А) = Im det А = 0.
Это уравнение выделяет две компоненты det Л = ±1, одна из которых
и есть S U (ri). Матрица Якоби отображения F : Μ (η, С) -^Rn +1 вида
F(A) = (F(A),H(A))
имеет в точке А = 1п максимальный ранг. Чтобы показать это, дополним
множество переменных Rea^/c, 1 ^ j ^ к ^ п, и Imdjk, 1 ^ j < к < η,
переменной Im an и заметим, что —^ = 1 в точке А = 1п. Учитывая
aim ai 1
вычисления из доказательства теоремы 7.4, заключаем, что минор матри-
цы Якоби отображения F, отвечающий этим ri2 + 1 переменным, обратим
в точке А = ln G SU (ri). Следовательно, SU (ri) — гладкое подмногообра-
зие U (ri) и aim SU (ri) = η2 — 1. Теорема 7.5 доказана.
Задача 7.2. Используя комплексные жордановы формы матриц, пока-
зать, что группы U(ri) и SU (ri) связны для всех значений п.
§ 7.2. Алгебры Ли
Для линейной группы G С GL(n) касательное пространство в едини-
це 1П является линейным подпространством в М(п, R). Так как достаточно
§7.2. Алгебры Ли
157
малая окрестность каждой обратимой матрицы в М(п,Ж) состоит из обра-
тимых матриц (это следует из непрерывности функции det), для GL(n) ка-
сательное пространство в каждой точке совпадает с М(п,Ж). Аналогично
доказывается, что касательные пространства к группе GL(n, С) совпадают
сМ(п,С).
Теорема 7.6. Касательное пространство TeG к группе G в единице е
образовано
1) для G — SL(n) — бесследовыми матрицами:
ТгХ = 0;
2) для G = О (η) — ко со симметрическими матрицами:
J\. — νΥ . Xjk — Xkji
3) для G — U (η) — такими матрицами X G M (η, С), что
Л. — -Λ I Xjk = Xkj'i
4) для G — SU (η) — матрицами X G M (η, С), выделенными уравне-
ниями
Xjk — —Xkj и Тгх = 0.
Доказательство. Пусть j(t) = 1 + Xt + 0(t2) - гладкий путь в G,
проходящий через единицу е = 1.
Если G = SL(n), то det 7(0 = 1 и detj(t) = l + TrX-t + 0(t2) = 1.
Отсюда получаем, что ТгХ = 0. Так как размерность пространства бес-
следовых матриц совпадает с dim SL(n), любая такая матрица реализуется
касательным вектором.
Для G = О (η) мы уже приводили доказательство в § 1.4 и оно обоб-
щается на G = U(η) следующим образом: 7(£)7Т№ = Im и> так как
(1„ + Xt + 0(t2))(ln + XTt + 0(t2)) = 1та + (Хт + Ä> + 0(i2) = ln,
мы выводим, что ХТ — —X. Размерность пространства таких матриц сов-
падает с dim U(η).
В случае G — SU (η) достаточно объединить рассуждения для SL(n)
и U(n). Теорема 7.6 доказана.
Отклонение группы от коммутативной описывается ее коммутатора-
ми [х,у] — хух~1у~1, и равенство нулю всех коммутаторов в точности
158 Глава 7
выделяет коммутативные группы. Для группы Ли G ее касательное про-
странство в единице е G G наделяется следующей операцией
где
u = -^, г; = -g^ при t - 0, х(0) = у(0) = е.
Эта операция в алгебре Ли тоже называется коммутатором и может
быть определена по-другому.
Пусть {xi} — такие локальные координаты в окрестности едини-
цы е е G, что xi(e) = 0 для всех j. Тогда TeG можно отождествить с Мп,
где η = dim С, и записать умножение в терминах локальных координат
в форме ряда Тейлора
(хуУ = xj + yj + b3klxkyl + (члены порядка ^ 3), (7.4)
где мы считаем х-7 и yfc членами первого порядка малости. Тогда
Теорема 7.7. Операция [,] на касательном пространстве TeG в еди-
нице группы Ли линейна по каждой переменной и удовлетворяет соотно-
шениям:
[и, ν] = -[υ, и], (7.5)
[[и, v], w] + [[υ, w], и] -f [[w, и], ν] = 0 {тождество Якоби). (7.6)
Эквивалентность различных определений коммутатора и тождества
(7.5) и (7.6) доказывается прямыми и простыми вычислениями с помощью
рядов Тейлора. Мы оставим их в качестве упражнения и отметим, что они
подробно изложены в [25].
Линейное пространство (над каким-то полем), наделенное коммута-
тором, линейным по переменным и удовлетворяющим тождествам (7.5)
и (7.6), называется алгеброй Ли.
Если ei, ..., еп — базис в алгебре Ли, то коммутатор однозначно зада-
ется своими значениями на базисных элементах:
§7.2. Алгебры Ли
159
(здесь подразумевается суммирование по повторяющемуся индексу к). По-
стоянные с\, называются структурными константами алгебры Ли.
Если говорится об алгебре Ли группы Ли, то под ней подразумевается
касательное пространство к единице с введенной выше операцией комму-
тирования.
Известно, что любая конечномерная алгебра Ли над R или С является
алгеброй Ли какой-то матричной группы.
Гомоморфизмом групп Ли G и H называется гладкое отображе-
ние /: G —► H, являющееся гомоморфизмом групп. Каждое такое отоб-
ражение определяет отображение касательных пространств в единицах, со-
храняющее коммутаторы — гомоморфизм алгебр Ли
f* · g -► h,
т. е. такое линейное отображение соответствующих алгебр Ли, что
/.([«,«]) = [/.(«),/,(«)] (7.7)
для всех u,v e g = TeG. Действительно, равенство (7.7) следует из опреде-
ления коммутатора элементов алгебры Ли через коммутаторы путей в груп-
пах Ли:
/.([±(0),у(0)])
lÖ2/([x(i),t/(i)])
2 dt2
i=0
- [/*(s(0)),/*(î/(0))].
dt2
t=0
Очевидно, что если группы Ли гладко изоморфны, то их алгебры Ли
изоморфны. Это простое утверждение позволяет сводить большую часть
проблемы классификации групп Ли к задаче линейной алгебры. Алгебра
Ли строится по квадратичной части правила умножения (7.4), которое за-
дает умножение в группе. Последнее условие является очень сильным, и,
грубо говоря, это позволяет восстановить весь ряд Тейлора для умножения:
структурные константы c?kl полностью определяют умножение в достаточ-
но малой окрестности единицы (теорема Ли). Подробные доказательства
и классификационные результаты можно найти, например, в [25].
Для матричных групп, как мы сейчас покажем, коммутатор имеет про-
стой вид.
Однопараметрической подгруппой F(t) группы Ли G называется под-
группа F(t), являющаяся образом гомоморфизма групп Ли F: R —» G,
где Ш — аддитивная группа вещественных чисел.
160 Глава 7
Лемма 7.4. Для линейных групп G С GL(n) однопараметрические
подгруппы — это подгруппы F(t) = exp(Xt), где X eTeG.
Доказательство. Обозначим X = dF(0)/dt и через F производную F
по t. Тогда
F(s + t)-F(t) F(s)-En /ч
F{t) = lim -i J- li = lim -Ai- -F(t) = X F(t)
и, решая матричное уравнение
F^-XF
с постоянной матрицей Л и начальным условием F(0) = 1п, получаем
F(t) = exp(Xt) - ln + Xi + ±X2t2 + ... + ^ΙηΓ + ....
Лемма 7.4 доказана.
Для подгруппы eXi G G элемент X называется генератором однопа-
раметрической подгруппы ext (например, часто встречающееся выражение
«генератор вращений вокруг оси»).
Теорема 7.8. Для линейных групп G С GL(n) коммутатор на алге-
брах Ли является обычным коммутатором матриц
[X,Y] = XY - YX е g = TEnG С M(n,R).
Доказательство. Мы имеем
[exp(Xt),exp(Yt)] =
= (in + xt + |х2*2 + o(t3))(in + Yt + iy2*2 + o(î3)) x
x (in - xt + ±x2t2 + o(t3))(in - Yt + iy2t2 + o(t3)) =
= in + [x,y]t2 + o(t3)
и
id2[exppa),exp(Ft)]
2 öt2
Теорема 7.8 доказана.
= [X,Y].
t=0
§7.2. Алгебры Ли 161
Алгебры Ли матричных групп обозначаются аналогично с заменой
больших букв на маленькие. Например, gl(n) — алгебра Ли группы GL(n).
Примеры алгебр Ли.
1) Алгебра so{2) одномерна и коммутативна:
so(2)=R-eb [ebei]=0.
2) Алгебра so(3) порождена матрицами
ei = -1 υ υ , е2= и и 1 , е3
удовлетворяющими соотношениям
1ез>ек} = eljkeu (7·8)
где е1-к = 1, если подстановка
1 2 3
3 к I
четна, е1-к = — 1, если эта подстановка нечетна, и е1-к = 0, если хотя бы два
индекса из j, к, I совпадают.
3) Алгебра su(2) порождена (над полем Ж) матрицами
удовлетворяющими соотношениям (7.8).
Пусть ei, ег, ез — положительно ориентированный ортонормированный
базис в М3. Тогда векторные произведения этих базисных векторов тоже
удовлетворяют соотношениям (7.8).
Следствие 7.2. Алгебры Ли so(3) и su(2) изоморфны алгебре ве-
кторов М3 с операцией векторного произведения.
4) Алгебра si (2) порождена матрицами
ei = L η , е2 = V2 , е3
162
Глава 7
удовлетворяющими соотношениям
[ei, е3] = еь [е2, е3] = -е2, [еь е2] = е3.
Следствие 7.3. Алгебра 5/(2) неизоморфна алгебрам so(3) и su{2).
Действительно, векторное произведение [и, υ] в R3 ортогонально век-
торам и и v. Поэтому в алгебре so(3) уравнение [it, г>] = и не имеет
решения, а образующие ei и е3 алгебры 5/(2) удовлетворяют соотноше-
нию [ei,e3] = еь
§ 7.3. Геометрия простейших Линейных групп
I) Группа SU(2).
Из уравнений (7.3) следует, что матрица
принадлежит группе /7(2) С M(2, С) тогда и только тогда, когда
äb + cd = 0, |a|2 + |c|2 = |6|2 + |ii|2 = l.
Дополнительное условие, что A G SU(2) С U(2), принимает вид
ad — be = 1.
Запишем первое и последнее уравнения в виде системы уравнений
G 7) (0 ■ Ö-
Решая эту систему с учетом \а\2 + |с|2 = 1, получаем, что Ь = — с и d = α.
Таким образом, мы доказали следующую теорему.
Теорема 7.9. Группа SU{2) С М(2, С) состоит из матриц вида
где |а|2 + \Ъ\2 = 1.
§ 7.3. Геометрия простейших линейных групп 163
Следствие 7.4. Группа Ли SU(2) диффеоморфна трехмерной сфере.
Действительно, n-мерная сфера — это подмногообразие Rn+1, выделя-
емое уравнением
п+1
Σ И2 = !>
3 = 1
и, полагая а = х1 Л-гх2, Ь = х3 -fix4, мы приводим уравнение |а|2 +16|2 = 1
к виду уравнения трехмерной сферы.
2) Кватернионы.
Алгеброй кватернионов Ш называется четырехмерная алгебра над по-
лем Ж с такими операциями сложения и умножения, что
1) операции сложения и умножения ассоциативны
u(vw) = (uv)w, и+ (ν + w) = (u + υ) +w
при и, υ, w G H и удовлетворяют также условиям
ν + w = w + v, X(v + w) = Xv -h Ait;,
(λ + μ)υ = Аг> + μν, (Xv)(pw) = (Χμ)(ννο)
при г», κ; G Η и λ, μ G M;
2) существуют такие линейные образующие 1, i, j и к алгебры Н,
что 1 ν = υ 1 для любого ν G H, a умножение других образующих задается
по правилу
ij = -ji = k, jk = -kj = i, ki = -ik=j, i2 = j2 =k2 = -1. (7.10)
Эти правила однозначно задают умножение, которое некоммутативно
и обладает замечательным свойством: каждый ненулевой элемент имеет
обратный — такая алгебра называется алгеброй с делением.
Имеет место теорема Адамса, которая доказана топологическими ме-
тодами и утверждает, что
• размерность конечномерной алгебры с делением над полем R может
принимать только следующие значения: 1, 2,4 и 8.
164
Глава 7
Все эти возможности реализуются алгебрами вещественных чисел
(dim = 1), комплексных чисел (dim = 2), кватернионов (dim = 4) и ок-
тав Кэли (dim = 8)1.
Положим
1 = (о î)> i=(-°i ?)' J=(î "о1)' к=(~о S)·
Простой проверкой доказывается следующая лемма.
Лемма 7.5. Линейное подпространство в M(2, С), порожденное эти-
ми матрицами, с операциями сложения и умножения матриц изоморфно
алгебре кватернионов.
Матрицы
σΧ = ii, συ = ij, σΖ =ik
применяются в теоретической физике и называются матрицами Паули.
На алгебре кватернионов, как и на алгебре комплексных чисел, задана
операция сопряжения:
q = ul + xi + 2/j + zk н-» q = ul — xi — yj — zk.
Прямыми вычислениями выводятся следующие формулы:
ν + w — ν + гй, vw = w v.
Кватернион q называется мнимым, если q — —q. Очевидно, что мнимые
кватернионы — это в точности те, которые имеют вид
q = xi + у] + zk.
Алгебра H нормирована, т. е. для каждого элемента q определена его
норма \q\ G M, и при этом выполнены следующие условия:
\v + w\ < \v\ -h |w|, |viî;| = |v||îi;|,
\λν\ = \X\\v\ при^;,^ gH,AgR,
\v\ ^ 0 и |г>| = 0 тогда и только тогда, когда ν = 0.
1 Алгебра октав Кэли, умножение в которой не только не коммутативно, но и не ассоци-
ативно, и ее свойства и приложения изложены в [26]. Эта алгебра является примером аль-
тернативной алгебры, т. е. такой алгебры, в которой любая подалгебра, порожденная двумя
элементами, ассоциативна.
Указанные выше четыре алгебры исчерпывают все альтернативные алгебры с делением. Это
утверждение обобщает теорему Фробениуса, которая гласит, что любая ассоциативная алгебра
с делением над полем Ш изоморфна либо Ш, либо С, либо Ж
§ 7.3. Геометрия простейших линейных групп 165
Эта норма задается формулой
\я\ = λ/^5 = лА2 + х2 +у2 + z2
и кватернион q называется единичным, если \q\ = 1.
Из теоремы 7.9 и леммы 7.5 немедленно вытекает следующая лемма.
Лемма 7.6. Группа 5/7(2) изоморфна группе единичных кватернионов
с операцией умножения.
3) Группы 50(3) и 50(4).
С этого момента мы будем отождествлять группу SU(2) с группой
единичных кватернионов, линейное пространство R3 — с линейным про-
странством мнимых кватернионов и линейное пространство М4 — с про-
странством всех кватернионов.
Если ν — мнимый кватернион и q G H, то
qvq = qvq = —qvq
и, следовательно, qvq — тоже мнимый кватернион. Поэтому для каждо-
го g G 5£/(2) с H определено линейное отображение
R3-^M3: Q(v) = qvq. (7.11)
Это линейное отображение сохраняет нормы элементов
\Q(v)\ = \q\\v\\q\ = \v\,
которые записываются через скалярное произведение (fi,^) = х±Х2 +
+ 2/12/2 + ^2 как
M = V(v>v).
Так как
(г; + ги, г> + ги) = (г>, г>) + 2 (v, w) + (ги, u>)
и нормы элементов v,w и (г? + w) сохраняются под действием Q, то Q
сохраняет скалярное произведение на R3 = Im W:
(Q(v),Q(w)) = (v,w).
Два различных элемента q\ и #2 задают одно и то же линейное преобра-
зование тогда и только тогда, когда для каждого мнимого кватерниона υ
выполняется равенство
(ЪЯг) ν (Q1Q2) = ν,
166
Глава 7
что эквивалентно условию коммутативности
(q2qi)v = v{q2q1).
Из соотношений (7.10) легко выводится, что кватернион ~q2q\ коммутирует
с каждым мнимым кватернионом, только если он вещественный: q2qi =
= Λ 1, где λ G M. Но так как ~q2q\ — единичный кватернион, то он в этом
случае должен быть равен ±1.
Мы доказали следующую лемму.
Лемма 7.7. Формула (7.11) задает гомоморфизм групп
Ρ ■ SU(2) —> 0(3),
ядро которого равно {i^} и, следовательно, изоморфно Ъ^.
В терминах матричных элементов а и 6, которые являются гладкими
функциями на SU'(2), гомоморфизм ρ записывается простыми формулами,
из которых следует, что отображение ρ является гладким, т. е. гомоморфиз-
мом групп Ли.
Так как 12 G SU(2) переходит в 13 и группа Ли SU(2) связна, то образ
гомоморфизма ρ лежит в связной компоненте группы 0(3), содержащей
единицу, т.е. в 50(3).
Теперь отметим один общий факт.
Лемма 7.8. Пусть f : G —> H — гомоморфизм связных линейных групп
Ли одинаковой размерности, ядро которого является дискретной подгруп-
пой Τ С G (в индуцированной вложением топологии каждая точка Г имеет
окрестность, не содержащую других точек из Г). Тогда
1) дифференциал отображения
/* : TgG -> Tf(g)H
является изоморфизмом для каждого g G G;
2) f(G) = H;
3) алгебры Ли групп G и H изоморфны.
Доказательство. Так как гомоморфизм групп Ли переводит однопа-
раметрические подгруппы exp(Xt) в подгруппы ехр(/*(Х)£) и ядро / дис-
кретно, отображение /* является вложением. Так как dim G = dim H9 отоб-
ражение /* является даже изоморфизмом касательных пространств в еди-
ницах. Эти касательные пространства в единицах наделяются структурами
алгебр Ли, и /* задает изоморфизм алгебр Ли.
§ 7.3. Геометрия простейших линейных групп 167
Пусть g G G и g — алгебра Ли группы G. Каждый элемент в окрест-
ности q имеет вид дехр(Х), где X G g, и под действием / он перехо-
дит f(g)exp(f*X). Следовательно, в точке g Ε G дифференциал /* имеет
тот же ранг, что и в единице группы. Значит, этот ранг всюду максимален.
Так как /* имеет в каждой точке максимальный ранг и размерности G
и H совпадают, образ отображения / является гладким подмногообрази-
ем f(G) С Н. Но f(G) и H связны и поэтому совпадают. Лемма 7.8 дока-
зана.
Применяя эту лемму к отображению ρ : SU(2) —» 50(3), получаем
Теорема 7.10. Группа Ли SO(3) = SU(2)/{±1} диффеоморфна мно-
гообразию, которое получается из единичной трехмерной сферы в R4
отождествлением противоположных точек.
Действительно, ρ всюду имеет ранг 3 и прообраз каждого элемен-
та ρ е SO(3) состоит из пары точек ±q e SU(2).
Многообразие 50(3) является примером вещественного проективного
пространства RPn при η = 3, которое и определяется как многообразие,
полученное из сферы
71+1
Sn = {(x1, ...,xn+1)eRn+1: Σ(^')2 = 1}
отождествлением противоположных точек. В курсе аналитической геомет-
рии два других, более простых примера, уже встречались — проективная
прямая RP1 и проективная плоскость RP2 [9].
Пусть теперь ci, #2 — пара единичных кватернионов. Сопоставим ей ли-
нейное отображение H = R4 —> R4 вида
v^qivqï. (7.12)
Аналогично доказательству леммы 7.7 доказывается, что
Лемма 7.9. Формула (7.12) задает гомоморфизм групп Ли
577(2) х SU(2) -> SO(4),
ядро которого образовано элементами (I2,1г) и (—12, —12)·
Из нее с помощью леммы 7.8 выводится
Теорема 7.11. Группа Ли S О (4) диффеоморфна многообразию, ко-
торое получается из прямого произведения двух единичных трехмерных
сфер S3 х S3 отождествлением пар точек (г>, w) и (—г>, —w).
168 Глава 7
Алгебра Ли so(4) группы SO(4) изоморфна прямой сумме алгебр Ли
so{4) = so(3)®so(3).
Здесь под прямой суммой g θ h понимается алгебра Ли, образованная
парами (X, У), X G g, Y G h, с операцией коммутирования
[(X1,Y1),(X2,Y2)] = {[Xl,X2},[Yl,Y2])-
Если g и h — алгебры Ли групп G и H, то g Θ h очевидно является алгеброй
Ли прямого произведения групп G х Н.
Хотя so(4) = so(3) Θ so(3), легко показать, что 50(4) негомеоморфно
прямому произведению 50(3) х 50(3).
Разложение алгебры Ли so(4) в нетривиальную прямую сумму алгебр
Ли является парадоксальным свойством размерности 4: для всех других
значений η алгебры so(n) не представимы в виде прямых сумм ненуле-
вых алгебр Ли. С этим эффектом связано другое свойство размерности 4:
только для η = 4 существуют попарно недиффеоморфные многообразия,
гомеоморфные W1 (мы уже отмечали это в § 3.2).
Глава 8
Элементы теории представлений
§8.1. Основные понятия теории представлений
Матричные группы Ли имеют многочисленные приложения и, более
того, служат для изучения абстрактных групп посредством теории пред-
ставлений.
Представлением группы G называется гомоморфизм
ρ : G -> GL(V),
где V — векторное пространство, называющееся пространством представ-
ления, и GL{V) — группа его обратимых линейных преобразований. Ес-
ли dim V < оо, то представление называется конечномерным и dim V на-
зывается степенью представления.
Представление называется вещественным, если GL(V) = GL(n,R),
и комплексным, если GL(V) = GL(n,C). Если для вещественного ко-
нечномерного представления ρ на V = М71 существует такое невыро-
жденное скалярное произведение, что преобразования р{д) сохраняют его
для всех g G G, или, что то же самое, если
p(G) С 0(п) с GL(n),
где подгруппа 0(п) определена этим скалярным произведением, то пред-
ставление ρ называется ортогональным. Конечномерное комплексное пред-
ставление унитарно, если оно сохраняет невырожденное эрмитово произ-
ведение на V = Сп. Для краткости мы будем ортогональные представления
также называть унитарными.
Понятие унитарности естественно обобщается и на бесконечномерные
представления в случае, когда V — гильбертово пространство: здесь тре-
буется сохранение гильбертова произведения. Но в дальнейшем мы будем
рассматривать, не оговаривая это особо, только конечномерные веществен-
ные или комплексные представления.
170
Глава 8
Представление ρ называется точным, если его ядро содержит только
единицу е группы G: Кегр = е. Теперь легко переформулировать опреде-
ление линейной группы:
• группа Ли называется линейной, если существует ее точное конечно-
мерное представление.
Здесь мы не уточняем, что отображение ρ должно быть гладким —
можно показать, что это выполнится автоматически.
Общее определение линейности группы следующее:
• группа G — линейная, если она изоморфна подгруппе группы GL(n)
для какого-то значения п.
Два представления pi : G —> GL(V) и р2 : G —► GL(W) называются
эквивалентными, если существует такое обратимое линейное преобразова-
ние
А : V -+ W,
что для всех g Ε G выполняется равенство
Api(g) = p2(g)A:V->W.
В дальнейшем при подсчете или перечислении различных представлений
мы не будем различать эквивалентные представления.
Подпространство V С V называется инвариантным (относительно
представления р), если
p(g)V С V
для всех g G G. Простые примеры нетривиальных инвариантных подпро-
странств получаются в результате суммирования представлений. А имен-
но, представление р\ Θ р2 называется прямой суммой представлений
р\ : G —> GL (Vi) и р2: G —> GL(V2), если оно имеет вид
(pi®P2)(g) = (Pi(g),f>2(g)) е <ЗЗД) х GL(V2) с GL(VX ®v2),
где вложение GL (Vi) х GL(V2) С GL(Vi®V2), попросту говоря, реализует-
ся блочными матрицами. В этом случае подпространства Vi и V2 являются
инвариантными для представления pi Θ ρ2.
Представление называется неприводимым, если оно не имеет нетриви-
альных (т. е. отличных от нулевого и всего пространства V) инвариантных
подпространств. Важность этого определения, например, для унитарных
представлений, показывает следующее утверждение.
§8.1. Основные понятия теории представлений
171
Теорема 8.1. Каждое унитарное представление ρ разлагается в пря-
мую сумму неприводимых:
р = pi θ ... θ рк-
Доказательство. Проведем его индукцией по dim V, причем размер-
ность берется над R для вещественных представлений и над С — для ком-
плексных. Для diml/ = 1 утверждение очевидно и предположим, что оно
доказано для dim V < к.
Пусть р: G —» GL(V) — представление с dim У = к. Если V не со-
держит инвариантных подпространств, то ρ неприводимо и все доказано.
Пусть Vi — нетривиальное инвариантное подпространство и Vf1 — его ор-
тогональное дополнение. Так как ρ унитарно, то p{g)Vi~ С V^-. Огра-
ничения ρ на Vi и V2 = Vi~ задают представления р\ : G —► GL (Vi)
и Р2 ' G —» GL(V2), прямая сумма которых равна р:
p = pi®p2.
Так как размерности Vi и Vi меньше к, по индуктивному предположе-
нию р\ и р2 разлагаются в прямые суммы неприводимых представлений.
Теорема 8.1 доказана.
Из этой теоремы следует, что классификация унитарных представлений
группы G сводится к классификации унитарных неприводимых представ-
лений G.
Следующая теорема проста, но имеет фундаментальные следствия.
Теорема 8.2 («Лемма Шура»). Пусть р\ : G —» GL(V) и р2 · G —>
—> GL(W) — неприводимые представления, связанные соотношением
Api=p2A, (8.1)
где А: V —» W — линейное преобразование. Тогда выполняется одна из двух
возможностей:
1)4 = 0;
2) А изоморфизм.
Если представления комплексны и р\ = р2, то А является оператором
умножения на постоянную λ G С.
Доказательство. Из (8.1) немедленно следует, что ядро Ker A преоб-
разования А инвариантно относительно /?ь а его образ Im Л инвариантен
относительно р2- Так как эти представления неприводимы, то, либо Ker A —
= V, и тогда А = 0, либо Ker А = 0, и тогда Im А = W и А — изоморфизм.
172 Глава 8
Если представления комплексны, то А имеет собственный вектор ν G V:
Αν = λν. Если pi — р2, то оператор А — λ = А — А 1у, где 1у ' V —> V ~
тождественное преобразование, удовлетворяет соотношению типа (8.1)
(А-Х)р1=р1(А-Х).
Так как Кег (А — λ) φ 0, то А — \\у = 0. Теорема 8.2 доказана.
Следствие 8.1. Если группа коммутативна, то все ее неприводимые
комплексные представления одномерны.
Доказательство. Пусть р: G —> GL(V) — неприводимое представле-
ние и h G G. Тогда для всех g G G выполняется соотношение
p(h)p(g) =p(g)p(h).
Мы заключаем, что оператор p(h) является умножением на постоянную λ^
для каждого h G G, и так как это представление неприводимо, dime V = 1.
Следствие 8.1 доказано.
Для вещественных представлений утверждение следствия неверно.
Примером является двумерное представление группы U{\) = Μ/2πΖ вра-
щений плоскости:
/ cos φ — sin φ
ψ ^ ρ(ψ) =
\ sin φ cos </?
Преобразования р(у?) не имеют собственных векторов в Ж2 при ρ(φ) ^ ±1-2·
Характером представления ρ : G —> GL(V), где F — векторное про-
странство над полем F = M или С, называется функция
Xp:G^F : Xp{g) = Tr p(g).
Из следствия 8.1 вытекает, что неприводимое комплексное представление
коммутативной группы «совпадает» со своим характером.
Следующие свойства характеров хорошо знакомы из курса линейной
алгебры.
Лемма 8.1. 1) хр(е) = dimF;
2) XpihghT1) = Xp(g), т. е. характер определен на множестве классов
сопряженных элементов;
3) если представления pi и р2 эквивалентны, то их характеры
совпадают: хР1 = хР2;
§8.1. Основные понятия теории представлений
173
4) если представление ρ разлагается в прямую сумму представле-
ний р\, ..., pk, то
Хр = Xpi + · · · + Хрк ·
Доказательство. Утверждения 1 и 4 состоят в подсчете следов блоч-
ных матриц, а утверждения 2 и 3 вытекают из очевидного тождества, вер-
ного для квадратных матриц А и В:
Tr (ABA-1) = ТгБ.
Примеры. 1) G = U(l) = Μ/2πΖ. Пусть φ — линейный параметр на R,
который задает параметр на Е/(1), определенный по модулю 2π. Одномер-
ные комплексные представления имеют вид:
ρη{ψ) = ein*,
где η Ε Ζ. Характеры этих представлений «совпадают» с ними самими:
Любое из этих представлений неприводимо, и согласно следствию 8.1 каж-
дое неприводимое комплексное представление группы ?7(1) имеет такой
вид. Так как при η ф m характеры %п и %т не совпадают, представле-
ния рп и рш неэквивалентны. Значит,
{Pn}n£Z
есть множество всех классов эквивалентности неприводимых комплексных
представлений U(l). Заметим, что представления р±\ точны.
2) G - n-мерный тор Тп = U(l)n = U(l) x ...U(l). Пусть
η
ψ\·> · · · ·> φ η — линейные параметры на сомножителях вида {/(1). Анало-
гично случаю G — Î7(l) доказывается, что множество неприводимых ком-
плексных представлений группы Тп имеет вид
Pm(<Pi, · ..,<Рп) =ехр(г(ш1у?1 + · . .τηηφη)),
где m = (mi, ..., ran) G Zn. Все эти представления попарно неэквива-
лентны и «совпадают» со своими характерами %т. Характеры хт образуют
базис Фурье в пространстве периодических функций. Это не случайно —
174
Глава 8
теория характеров является основой гармонического анализа, теории преоб-
разования Фурье. Разложение периодической функции f(x) (или функции
на торе, что то же самое) в ряд по характерам рт :
/О) = ^WmW
m
называется рядом Фурье периодической функции, а коэффициенты ряда —
коэффициентами Фурье.
Унитарность представлений рт очевидна, но верен следующий общий
факт:
• любое конечномерное представление конечной группы или компактной
группы Ли унитарно.
Мы дадим его доказательство для конечных групп в 8 и обсудим идею
доказательства общего случая, а с этого момента ограничимся унитарными
представлениями.
Каждое вещественное представление ρ можно комплексифицировать
следующим образом. Пусть V = Шп — пространство представления
и ei, ... ,еп — базис в пространстве V. Положим Vе = Cei + ... +
+ Сеп и каждому преобразованию А : V —► V сопоставим преобразова-
ние Ас : Vе —> Vе, которое в базисе {е^} задается той же самой матрицей,
что и А. Полученное представление рс: G —> GL(VC) называется комплек-
сификацией представления ρ и очевидно, что характеры ρ и рс совпадают:
Поэтому впредь мы ограничимся комплексными представлениями.
Следуя традиции книг по теории представлений, мы будем в после-
дующих двух параграфах записывать элементы матриц А, задающих одно-
именные линейные отображения, с двумя нижними индексами
η
A(ej) = ^2aJkfk,
fc=l
где A: Сш -► Cn, {e^} - базис в Cm и {fk} - базис в Cn.
§ 8.2. Представления конечных групп
Напомним, что с этого момента мы рассматриваем только комплексные
представления.
Пусть G — конечная группа и \G\ означает ее порядок.
§8.2. Представления конечных групп 175
Теорема 8.3. Пусть ρ : G —* GL (η, С) — конечномерное представле-
ние. Тогда на Сп существует эрмитово произведение, которое сохраняется
операторами р(д), и, следовательно, ρ унитарно.
Доказательство. Оно основано на методе усреднения. Пусть (·, -)0 —
какое-то эрмитово произведение на Сп. Определим новое эрмитово произ-
ведение как
(v,w) = Y^(p(g)v,p(g)w)0. (8.2)
geG
Очевидно, что (p{g)v, p(g)w) = (ν, w) для всех g G G. Теорема 8.3 доказана.
Применяя теорему 8.1, получаем
Следствие 8.2. Каждое комплексное представление конечной группы
разлагается в прямую сумму неприводимых.
Унитарные представления обладают важным свойством.
Лемма 8.2. Если представление ρ : G —> GL (n, С) унитарно, то
Xp{g~l) = Xp(g) аля всех g eG.
Это утверждение верно для всех (не только конечных) групп.
Доказательство. Так как представление ρ унитарно, то в ортонорми-
рованном базисе в Сп задающие его матрицы удовлетворяют уравнению
Pio'^jk = {p(g)~l)jk = p(g)kj
и, следовательно, Trp(g-1) = Tvp(g). Лемма 8.2 доказана.
Обозначим через L(G) пространство комплекснозначных функций
на группе G. Оно изоморфно линейному пространству C'GL Изоморфизм
прост: отождествим образующие C'G' с элементами группы и определим
взаимно однозначное соответствие:
feL(G)^ ^/Ы-яеСЧ
geG
Поэтому элементы группы задают естественный базис {g}gec в L(G):
9W = 1 η h -i
10 при h ψ g.
176 Глава 8
Группа G действует на L{G) левыми и правыми сдвигами, которые
обозначаются через lh и г h, соответственно:
gee
geG
или, что то же самое,
lh(f)(g) = f(h-1g), rh(f)(g) = f(gh).
Эти формулы задают представления, так как мы имеем
1нЛЛШ = ЫШ^д) = fih^h^g) = ihlh2(f)(g)
и аналогично rh1h2 = rh1f>h2- Представления lh и г h называются левым
регулярным и правым регулярным представлениями, а пространство L(G) —
групповой алгеброй (конечной) группы G.
Регулярные представления действуют на базисе {д} перестановками,
и такая перестановка, отвечающая h G G, тождественна тогда и только
тогда, когда h является единицей группы: h = e G G. Отсюда следует
теорема.
Теорема 8.4. Регулярные представления точны, и поэтому любая ко-
нечная группа линейна.
На L(G) зададим эрмитово произведение
(/1,/2) = трй ЕЛ^)ЛЫ- (8.3)
11 geG
Базис {g}, geG, ортонормирован относительно этого произведения, и, так
как левое и правое регулярные представления действуют на нем переста-
новками, верно следующее утверждение:
Лемма 8.3. Левое и правое регулярные представления G сохраняют
эрмитово произведение (8.3).
Докажем теперь техническую лемму.
§ 8.2. Представления конечных групп 177
Лемма 8.4. Пусть ρ : G —» GL (га, С) и φ : G —> GL(n, С) — лред-
ставления группы G и А : Сп —» Ст —линейное отображение. Тогда отоб-
ражение А : Сп —► Ст, заданное формулой
Α=Σρ(9Γ1Α<ρ(9), (8.4)
связывает представления ρ и φ соотношением (8.1):
ρ А = Л<р.
Доказательство. Распишем ρ (/г) А:
р(Л) Л = р(Л) X] рЫ-1 А <р(д) = Σ P{h)p{g)-1 Α ψ{9) =
geG geG
= Σρ(α9-1)Αφ(9) = Σ piu^Aip^uh) =
geG u=gh-1eG
= ( Σ Ρ{η)-1Αφ{η)\ φ{Η) = Αφ{Κ).
\ueG )
Лемма 8.4 доказана.
Лемма 8.3 понадобится нам для доказательства следующей теоремы.
Теорема 8.5. Пусть р: G —> GL(n,С) и φ: G —» GL(ra, С) — непри-
водимые представления, заданные унитарными матрицами: p(g~1)jj£ =
— p{9)kj^{9~X)jk — цэ{д)кз· Тогда матричные элементы удовлетворяют
следующим соотношениям ортогональности:
(Prj, V^s/c) = 0, еслм ρ и у? неэквивалентны, (8.5)
(PjkiPrs) = ^SjkSrs. (8.6)
Доказательство.
Если представления ρ и <р неэквивалентны, то, применяя лемму Шура
к оператору А, получаем А = 0. Распишем теперь правую часть форму-
лы (8.4) в матричной форме:
^к = Σ Σ ^jr1 α^ ^)Sfc.
178 Глава 8
Правая часть является линейной формой от а^т, и, так как она тождественно
равна нулю, все коэффициенты этой формы нулевые:
Σ p(gÏJr !Аз)вк = о.
geG
Если представления заданы унитарными матрицами, то это равенство при-
нимает вид (8.5).
Докажем теперь (8.6). Для операторов А = А^'^ с
(Г,S) _ с- г
Üjk — OjrOks
найдем их усреднения А, заданные формулой (8.4) при ρ = φ:
4fcS) = T77\YJ^P(9~1)juSurSsvp(g)vk = v^rlY^p(g~1)jrp{g)sk·
II geG u,v 1и| 9eG
Согласно лемме 8.4, каждый из операторов А^г^ удовлетворяет тожде-
ству (8.1):
А^ p = pÂ^a\
а потому из леммы Шура следует, что он является умножением на постоян-
ную, которая очевидно равна
Но при ρ = φ след усредненного оператора совпадает со следом исходного:
ъа = ъ (^£/>(<tVp(s) I =ъа.
Отсюда выводим, что
Τ7η Σ P^~l)jr P(d)sk = 5jk Srs-TrA^s) = -Sjk ôrs.
' ' geG
В случае, когда матрицы, задающие представления, унитарны, это равенство
совпадает с (8.6).
Теорема 8.5 доказана.
Перейдем теперь к выводу следствий этой теоремы.
§ 8.2. Представления конечных групп
179
Следствие 8.3. Пусть ρ : G —> GL(m, С) и φ : G —► GL(n, С) —
неприводимые представления. Тогда
. 11, ес/ш ρ и срэквивалентны
КХр) Χφ) = 1 а
10, β противном случае.
Чтобы вывести это следствие из теоремы 8.5, достаточно заметить,
что Trp(g) — V. p(g)jj и что для эквивалентных представлений их харак-
теры совпадают, после чего остается применить соотношения (8.5) и (8.6).
Следствие 8.4. Пусть
ρ = pi Θ ... Θ pu (8.7)
— разложение представления ρ в прямую сумму неприводимых. Тогда чис-
ло сомножителей, эквивалентных неприводимому представлению φ, равно
эрмитову произведению характеров
\Xpi Χφ)
и, следовательно, разложение (8.7) единственно (с точностью до эквива-
лентности).
Доказательство. Заметим, что
κΧρ^Χψ) = / \Хрэ > Χφ)1
з
и правая часть равна числу компонент pj5 эквивалентных φ. Это число
называется кратностью вхождения φ в р. Следствие 8.4 доказано.
Следствие 8.5. Представления эквивалентны тогда и только тогда,
когда их характеры совпадают.
Доказательство. Действительно, из предыдущего следствия 8.4 вы-
текает, что характер полностью определяет разложение представления
на неприводимые и для каждого представления конечной группы такое раз-
ложение существует (следствие 8.2). Следствие 8.5 доказано.
Следствие 8.6. Если \ — характер представления р, то (%, %) —
целое положительное число, которое равно 1 тогда и только тогда, когда
представление ρ неприводимо.
180 Глава 8
Доказательство. Оно состоит в вычислении
т),
где rrij — кратность вхождения неприводимого представления pj в разложе-
ние ρ на неприводимые:
ρ = raipi Θ ... фтПкРк·
Следствие 8.6 доказано.
Следствие 8.7. Каждое неприводимое представление группы G со-
держится в регулярном с кратностью, равной своей степени.
Доказательство. Левое и правое регулярные представления эквива-
лентны, что, с учетом следствия 8.5, вытекает из совпадения их характеров,
которые равны
/ ч _ J |G|, если g (=e) единица группы G,
10, в противном случае.
Пусть теперь ρ : G —> GL (С, η) — неприводимое представление степени п.
Тогда
(Xreg,XP) = |^|Xreg(e)Xp(e) = r^\G\n - п.
Следствие 8.7 доказано.
Следствие 8.8. Порядок группы G равен сумме квадратов степеней
ее неприводимых представлений.
Доказательство. Пусть pi, ..., pk — все неприводимые представле-
ния G степеней rai, ..., гаь соответственно. Тогда, согласно следствию 8.7,
Xreg — 2_^ mjXpj
и мы заключаем, что
(Xreg,Xreg) = \G\ = J2m<J·
3
Следствие 8.8 доказано.
§8.2. Представления конечных групп 181
Обозначим через H(G) подпространство L(G), образованное цент-
ральными функциями, т. е. функциями, удовлетворяющими соотношению
f(x) = f{yxy~l) для всех х, у G G,
что эквивалентно
f(xy) = f(yx) для всех х,у eG.
Простейшими примерами центральных функций являются характеры (лем-
ма 8.1).
Лемма 8.5. Пусть f G H (G) up — представление G. Обозначим
через Af оператор
geG
Тогда
Afp = pAf.
Доказательство леммы 8.5 проводится простой проверкой:
Af p{h) = Σ НяШ P(h) = Ε f(9)p(9h) =
\geG ) geo
= £ Wh=r)p{u) = YjJWTü)p{u) =
u=gheG ueG
= p(h)^2Jïhz4)p(h-1u)=p(h) Ε W)p(v)=p(h)Af.
ueG v=h-1u
Лемма 8.5 доказана, и мы воспользуемся ей для доказательства следующего
факта.
Теорема 8.6. Характеры неприводимых представлений образуют ор-
тонормированный базис пространства H(G).
Доказательство. Пусть / — центральная функция, ортогональная
ко всем характерам. Построим по ней и левому регулярному представле-
нию preg оператор Af, который, согласно лемме Шура, должен быть опера-
тором умножения на постоянную Λ = Tr Af/\G\.
182
Глава 8
Вычислим след оператора Af :
geG geG
Из того, что характер регулярного представления есть линейная комбинация
характеров неприводимых представлений, вытекает равенство
(/, Xreg) = О,
которое влечет
Подействуем оператором Af на ? и получим
Af(e) = ^2Ki)g = 0.
gee
Функции g линейно независимы в L(G) и поэтому
f(g) = О для любого g G G.
Теорема 8.6 доказана.
Следствие 8.9. Число неприводимых представлений группы G совпа-
дает с числом классов сопряженности ее элементов.
Доказательство. Каждая центральная функция задается своими зна-
чениями на классах сопряженности (х и у принадлежат одному классу,
если х = gyg~l для какого-то g G G), и набор этих значений может быть
любым. Значит, dim H (G) = fc, где k — число классов сопряженности.
Но из теорем 8.5 и 8.6 следует, что dim H (G) равна числу неприводимых
представлений. Следствие 8.9 доказано.
Теперь следствие 8.1 усиливается следующим образом.
Следствие 8.10. Конечная группа коммутативна тогда и только то-
гда, когда все ее неприводимые представления одномерны.
Доказательство. Мы имеем
и если все rrij равны единице, то G имеет |G| различных неприводимых
представлений. Отсюда следует, что каждый класс сопряженности содер-
жит ровно один элемент, что эквивалентно коммутативности группы. След-
ствие 8.10 доказано.
§ 8.3. О ПРЕДСТАВЛЕНИЯХ ГРУПП ЛИ 183
§ 8.3. О представлениях групп Ли
Компактные группы.
Многие утверждения, доказанные в § 8.2 для конечных групп, остаются
верными для компактных групп Ли. Более того, доказательства сходны и по-
лучаются заменой суммирования по элементам из G на интегрирование —
«суммирование по гладкому множеству параметров».
Для того чтобы определить интегрирование на n-мерной группе G,
надо задать меру: гладкую п-форму
dg = f(g)dxl Λ .. . Adxn,
где {x3} — локальные координаты на G и f{g) > 0. Мерой множества U С G
называется значение интеграла
p(U) = Jdg.
и
Мера называется правоинвариантной (левоинвариантной), если форма dg
инвариантна относительно правых (левых сдвигов):
rh: G ^ G : g ^ gh (lh: G -> G : g -> hg).
Лемма 8.6. 1) На любой группе Ли существует правоинвариантная
мера, заданная гладкой п-формой.
2) На любой группе Ли существует единственная с точностью до
умножения на постоянную правоинвариантная мера.
3) Правоинвариантная мера на компактной группе Ли левоинвари-
антна.
Доказательство. Пусть С е Ш и С > 0. Зададим форму dg в единице
группы G формулой
dg = Cdx1 Λ ... Adxn
и определим ее значение в g G G как
ад = Сг*д(ахг Λ ... Adxn).
Очевидно, что любая правоинвариантная мера имеет такой вид и полно-
стью определяется постоянной С. Меры, отвечающие разным постоянным,
пропорциональны.
184
Глава 8
Пусть группа G компактна и мера dg правоинвариантна. Ее левые
сдвиги l*hdg тоже правоинвариантны, так как левые и правые сдвиги ком-
мутируют. Значит, rhdg = Chdg, где Ch — ростоянная для каждого h G G.
Но
d9 = lld9 = ch dg,
G G G
и отсюда следует, что Ch = 1. Лемма 8.6 доказана.
Двусторонне инвариантная мера на группе G называется мерой Хаара.
Теорема 8.7. Пусть G — компактная группа Ли.
1) Каждое конечномерное представление р: G —» GL(n, С) унитарно
и разлагается в прямую сумму неприводимых.
2) Пусть р: G —► GL(m, С) и φ: G —» GL(n, С) — неэквивалентные
неприводимые представления, заданные унитарными матрицами. Тогда
матричные элементы удовлетворяют соотношениям
где
(PrjitPsk) = 0, (PjkiPrs) = m^Jkàrs, (8.8)
(Λ,Λ) = -Д- /hig)W)dg. (8.9)
Утверждение 1 доказывается, как и теорема 8.3, с заменой эрмитова
произведения (8.2) на
J (P(9)v,
(v,w) = / (p(g)v,p(g)w)dg.
Утверждение 2 доказывается так же, как и его аналоги для конечных групп
(теорема 8.5) с заменой (8.3) на (8.9). При этом объем группы f dg является
G
аналогом порядка \G\ группы G.
Значительно более сложно доказывается аналог теоремы 8.4, который
мы приведем без доказательства.
Теорема 8.8. Каждая компактная группа Ли имеет точное конечно-
мерное представление и, следовательно, линейна.
§ 8.3. О ПРЕДСТАВЛЕНИЯХ ГРУПП ЛИ
185
Заметим, что
• существуют некомпактные группы Ли, у которых нет точных конечно-
мерных представлений.
Обозначим через L2{G) пространство комплекснозначных квадратично
интегрируемых функций на G со скалярным произведением
(Ψ,ψ) = -jrj- / Ψ{9)ψ{9)α9.
Id9J
G G
Такими являются все гладкие функции и, в частности, матричные элемен-
ты pjk операторов, задающих представления. Соотношения (8.8) показыва-
ют, что эти матричные элементы образуют ортогональную систему.
В случае конечной группы эта система содержит ровно \G\ различных
функций (следствие 8.8), и так как dimL{G) — \G\, то отсюда следует
Теорема 8.9. Матричные элементы неприводимых представлений ко-
нечной группы, заданных унитарными матрицами, образуют ортогональ-
ный базис в L(G).
Если группа G не конечна, то L2 (G) — бесконечномерное гильбертово
пространство (с гильбертовым произведением (8.9)) и, продолжая аналогию
с конечным случаем, следует ожидать, что матричные элементы порожда-
ют в каком-то разумном смысле L2(G). Это действительно так, и, чтобы
уточнить это утверждение, приведем без доказательства теорему 8.11.
Но прежде введем необходимые понятия и укажем опять без доказа-
тельства следующий факт.
Теорема 8.10. Неприводимые представления компактной группы Ли
конечномерны, и их число счетно.
Примеры. 1) Группа 517(2). Для каждого η ^ 0 определим Vn как
линейное пространство, образованное всеми комплексными однородны-
ми многочленами степени η от двух переменных zi,z2 £ С. Очевидно,
что dimT/д = η + 1 и многочлены вида z\z^~h, где к — 0, ... ,п, задают
базис в Vn. Зададим представление рп : SU(2) —► GL(Vn) = GL(n + 1,С)
по формуле
Pn(g)(f){zi,z2) = /(anzi + CI21Z2, a12zx + a22z2),
которая переписывается как
pn(g)(f)(z) = f(gTz),
186 Глава 8
где g = (all all) £ SU(2), z = (Ц). Легко проверить, что эта формула
задает представление, так как мы имеем
p(g)p(h)(f)(z) = p(h)(f)(gTz) = f(hTgTz) = f((gh)T z) = p(gh)(f)(z).
При η = 0 мы получим тривиальное представление: р(д) = 1, при η =
= 1 — стандартное вложение SU(2) —> GL(2, С).
• Представления рп,п > 0, — это в точности все неприводимые ком-
плексные представления группы SU(2).
Так как размерности пространств представлений различны, эти пред-
ставления попарно неэквивалентны.
2) Группа 50(3). Мы знаем, что SU(2)/{±1} = SO(3) (см. §7.3).
При четных значениях η представления рп обладают свойством р(1) =
= р(—1). Это означает, что они пропускаются через 50(3):
р2к : SU(2) -> SU{2)/{±1} = SO(3) -> GL(2k + 1, С).
• Представления р2к,к > О, — это в точности все неприводимые ком-
плексные представления группы SO(3).
Пусть {р1}^ — полная система неприводимых представлений груп-
пы G, a р1-к — матричные элементы задающих эти представления унитарных
операторов.
Рядом Фурье функции / е L2(G) называется ряд
где коэффициенты Фурье é-k определяются формулой
cjk = ~7E1(f^Pjk)
и щ — степень представления р1.
Теорема 8.11. 1) (Теорема Петера-Вейля) Непрерывная функция
на компактной группе G с любой степенью точности приблиэюается ли-
нейными комбинациями функций pl-k: для любого ε > 0 существует такая
конечная линейная комбинация ^ al-kpl-k, что
\f(g)-Y,aljkpl(g)jk\<e
для всех g G G;
§ 8.3. О ПРЕДСТАВЛЕНИЯХ ГРУПП ЛИ 187
2) Ряд Фурье функции f G Z/2 (G) сходится к f в норме L,2(G)
Ä, [f "ΣcljkPl(g)jkJ-ΣcljkPl(9)jk = о,
w, следовательно, система функций
X-ol
■—Pik
m J
является полной ортонормир о ванной системой в L<i(G).
В случае G = U(l) = Μ/2πΖ мы получаем обычные ряды Фурье пе-
риодических функций: матричными элементами неприводимых представ-
лений являются характеры егпх.
Для некоммутативных групп Ли функции pl-k — специальные функ-
ции — имеются в математической физике [17, 18], как и сама теория пред-
ставлений (например, приложения теории конечных групп изложены в [23],
а применения компактных групп Ли к теории элементарных частиц вместе
с теорией представлений таких групп — в [22]).
Заметим, что матричные элементы pl-k удовлетворяют целому ряду спе-
циальных соотношений, вытекающих из простого тождества
pl(gh)=pl(g)pl(h), g,heG.
В случае, когда р: S О (2) —> GL{2) — стандартное вложение, мы получаем
тригонометрические теоремы сложения:
. ч / cos φ — sin φ
Ρ(ψ) =
\ sin φ cos φ
и равенство р(а + β) — ρ{α)ρ(β) эквивалентно тождествам
cos(a + β) = cos a cos β — sin a sin /?,
sin(a + β) = sin a cos β + cos α sin β.
Для многомерных групп теоремы сложения для специальных функций (мат-
ричных элементов) выглядят значительно сложнее и вытекают из теории
представлений.
188
Глава 8
Некомпактные группы.
Для некомпактных групп Ли унитарные представления, как правило,
бесконечномерны. Их изучение было связано с развитием анализа на таких
группах и с построением аналога преобразования Фурье.
Предположим, что группа унимодулярна, т. е. на ней есть двусторонне
инвариантная мера αμ. Через L\(G) и L2(G) обозначим пространства инте-
грируемых и квадратично интегрируемых (по отношению к мере αμ) ком-
плекснозначных функций на G.
Преобразование Фурье имеет следующий вид. Нам дано простран-
ство G, точки которого параметризуют все неприводимые унитарные пред-
ставления группы G, и мера αμ на нем.
Преобразование Фурье функции / G Li (G) определяется равенством
f(X) = Jf(g)Tx(g)dß,
где λ G G и Т\ - унитарное представление, отвечающее λ. В случае, когда
унитарное представление бесконечномерно, преобразованием Фурье функ-
ции на группе, как мы видим, будет интеграл от унитарных операторов
в гильбертовом пространстве Н\ (пространстве представления Т\).
Если / G Li(G) Π 1^2(G), то для почти всех λ (по мере αμ) операто-
ры T\(f): H\ —> Н\ являются операторами Гильберта-Шмидта и имеет
место формула Планшереля:
J \Ι(9)\2αμ = J Тг (Τλ(/)Γλ*(/)) dß.
G G
Это соответствие продолжается до изометрии L2(G) ~ L2{G).
Для функций из всюду плотного подпространства Λ С L\(G) Π L2{G)
определено обращение преобразования Фурье:
f(g) = jTr(Tx(m(g))dß.
G
К настоящему моменту преобразования Фурье (гармонический анализ) по-
строены для широкого класса некомпактных групп Ли, включающего, фак-
тически, все интересные в приложениях случаи.
Примеры. 1) Группа Rn (классическое преобразование Фурье). Так
как эта группа коммутативна, все ее неприводимые представления одномер-
ны и совпадают с характерами. Унитарные неприводимые представления
имеют вид
§ 8.3. О ПРЕДСТАВЛЕНИЯХ ГРУПП ЛИ 189
где Λ = Rn = Rn, (А,х) = Σ™=1 XiXi- Преобразование Фурье принимает
вид
ДЛ) = J' f{xy^x4Xl...dxn,
где αμ — dx\ .. . dxn, а его обращение —
где αμ = (2π)-η dAi ... d\n.
2) Группа SX(2,R). Элементы этой группы будем обозначать через
9={с d)> "d-bc=l.
или
_ (ê 0 \ Л х\ ( cos6> sin 0'
д~ \0 е~ь) [θ \) \-ътв cos(9
Формула
αμ = dt Л dx Л d9
задает двусторонне инвариантную меру на G = SX(2, M).
Рассмотрим неприводимые представления Т+\,Т~\, X е R, Л ^ О,
и J9+n, D~n, n = 1,2,3, .... Все эти представления — неприводимые уни-
тарные, и они попарно неэквивалентны. Они не исчерпывают все множе-
ство О, но их достаточно для построения преобразования Фурье.
Прежде всего опишем эти представления:
а) Т+л и Т~\ действуют на L2Q&) по следующим формулам:
[T+x(g)f](x) = \bx + d\iX-1f
ах + с
Ъх + d
[Т-хШ] (*) - sgn (te + d)\bx + d^"1/ (ff±j) ,
^e/GL2(R);
б) обозначим через Н^ гильбертовы пространства функций, аналити-
ческих в полуплоскости ±Imz > 0 и с конечными значениями интегра-
лов (ψ,ψ),ψ е Я±, где
(ψ,φ)= / yn~1ip(x,y)(f(x,y)dxdy, z = x + iy,
±lmz>0
190 Глава 8
и эта формула задает скалярные произведения в Н^. Представления D^
заданы формулами
[о+пШ] ω = (bz+d)-n~H' (g^j),
Преобразование Фурье имеет вид
/(λ, ±) = J f(g)T±(g)dß, f(n, ±) = j f(g)D±(g)dß,
а формула Планшереля (для группы SL(2, R)) —
со
J \f(g)\2dß =^ïjTr (Т+а(/)Т+а(/)*)Аth ^dX+
О
со
+ ^2 JTr(T-x(f)T-x(fy)Xcth^dX+
о
со
+ X>n [Tr (D+n(g)D+n(gy) + Tr (D-n(g)D-n(g)*j\.
71=1
Для подпространства Л с L\(G) Π L2{G), образованного всеми гладкими
функциями с компактными носителями, обращение преобразования Фурье
задается формулой
со
/(5) = ^ J Тг(Т+х(/)Т+х(дУ)МЪ^аХ+
+ -^jTr(T-x(f)T-x(gr)Xcth ψαΧ+
+ Σ 2тг [TV (D\(f)D\(gr) + T> (£Γη(/)£Τη(<;)* )] ,
n=l
где / G Λ
Мы привели эти примеры для того, чтобы дать самое приближенное
представление о том, что такое гармонический анализ на некомпактных
группах Ли. Введение в этот анализ и изложение ряда глубоких результатов
из него можно найти в [17].
Глава 9
Элементы пуассоновой
и симплектической геометрии
§ 9.1. Скобка Пуассона и уравнения Гамильтона
В § 2.7 на примере уравнения геодезических на поверхностях мы ввели
уравнения Эйлера-Лагранжа
d (dL\_ dL ;_lje..jn} (9Л)
dt \дхЧ дх1
которые описывают экстремали функционала
/ L(x,x)
5(7)= / L(x,x)dt
на пространстве кривых в многообразии Мп.
Рассмотрим функцию
L(x,x) = ^-U(x),
где m — масса точечного тела, которое движется в n-мерном евклидовом
пространстве W1. Точка х G Rn задает положение этого тела. Функция U(q)
называется потенциалом (или потенциальной энергией). Уравнения Эйлера-
Лагранжа примут вид
тхг = - —, г = 1, . .. ,п.
дхг
Введя обозначение для импульса
Pi = тх\
(9.2)
192 Глава 9
мы запишем полученные уравнения в виде уравнений Ньютона
Й = -|^, г = 1,...,п. (9.3)
дхг
Система, состоящая из уравнений (9.2) и (9.3), переписывается в тер-
минах переменных жирв форме уравнений Гамильтона
±* = Α А = -Й> i = !,·■-,*, (9.4)
Фг дхг
где функция
Я0г,р) = |^+ [/(*)
называется функцией Гамильтона или гамильтонианом.
Чтобы дать наиболее общее определение уравнений Гамильтона, пере-
пишем уравнения (9.4) в виде
xi = {x\H}, i>i = {pi,H}, i = l, ...,n, (9.5)
где
Говорят, что на гладком многообразии M задана скобка Пуассона, если
на пространстве С°°(М), образованном всеми гладкими функциями на М,
задано билинейное произведение
f,9 —► {fi g},
относительно которого пространство С°° (М) является алгеброй Ли, т. е. это
произведение кососимметрично
U, 9} = -{»,/}
и удовлетворяет тождеству Якоби
{/, {g, h}} + {g, {h, /}} + {h, {/, g}} = 0,
и, кроме того, по отношению к умножению функций выполняется тожде-
ство Лейбница:
{fg,h} = f{g,h} + g{f,h}- (9.7)
При этом говорят, что на M задана пуассонова структура и само M является
пуассоновым многообразием.
§9.1. Скобка Пуассона и уравнения Гамильтона 193
Простой проверкой доказывается
Лемма 9.1. Формула (9.6) задает скобку Пуассона на С°° (М), где M —
евклидово пространство R2n с координатами ж1, . . ., xn,pi, ... ,ρη·
Любая гладкая функция Η на пуассоновом многообразии M однознач-
но определяет динамическую систему по формуле
! = {/,*}, (9-8)
задающей изменение значения произвольной гладкой функции / вдоль тра-
екторий этой системы. Полученная система называется гамильтоновой,
уравнения (9.8) называются уравнениями Гамильтона, а функция H — функ-
цией Гамильтона или гамильтонианом данной системы.1
Преимущества задания уравнений механики в виде уравнений Гамиль-
тона не были ясны до открытия квантовой механики, когда оказалось,
что уравнения Гамильтона дают удобный метод квантования классических
систем.
В квантовой механике наблюдаемым (в частности, координатам и импульсам)
отвечают операторы. Рассмотрим простейший пример. Пусть нам дана система с η
степенями свободы, для которой заданы координаты положения системы xÇln
и импульсы pGMn. Пространство состояний квантовой системы (волновых функ-
ций) есть гильбертово пространство Η. Возьмем в качестве Л пространство L2(Mn),
образованное всеми квадратично суммируемыми комплекснозначными функциями
от переменных ж1, ..., хп, со скалярным произведением
/·
(ψ, φ) = J φφαΧ,
где dx = dx1 .. . dxn.
Координате хг отвечает оператор умножения на функцию хг:
Xi(f)(x)=x*f(x),
а импульсу pi — дифференциальный оператор Pi :
.df(x)
Рг(1)(х) = -ih-
дх1
1 Здесь и всюду в дальнейшем мы предполагаем, что гамильтониан не зависит явно от вре-
мени, т. е. есть функция только от точки пуассонова многообразия.
194
Глава 9
где h = — и h — постоянная Планка. Эти операторы имеют всюду плотные об-
2π
ласти определения. Физически важными величинами являются средние значения
наблюдаемых, а именно, среднее значение наблюдаемой А в состоянии φ равно
(А\ф) = (Аф,ф) = [(Аф)фах
Пусть Н(х,р) — гамильтониан классической системы. Предположим, для про-
стоты, что он есть сумма аналитических функций от х и q:
H(x,p) = F(x) + G(q),
например имеет вид
где функция U(x) разлагается в сходящийся ряд по степеням ж. В квантовой меха-
нике этому гамильтониану отвечает оператор Гамильтона
H(X,P) = F(P) + G(X),
который получается из Н(х,р) формальной заменой переменных хг и pi в рядах
для F и С на операторы Xi и Р{. Заметим, что операторы координат попарно
коммутируют, как и операторы импульсов, поэтому значение подстановки не зависит
от порядка вхождения этих операторов. В общем же случае при подстановке X,
и Р/с в аналитическое выражение для Н(х,р) необходимо определять дополнительно
порядок вхождения операторов Xj и Pj, которые не коммутируют.
Пример. Гармонический осциллятор. Мы имеем η = 1, и функция Гамиль-
тона есть
г? 2 2
Оператор Гамильтона равен
h2 d2 , ω2Χ2
Η = -£_-?- +
2m dx2 2
Эволюция квантовой системы во времени задается (нестационарным) уравне-
нием Шредингера
гП—- — Нф.
dt
Сдвиг вдоль траекторий этой системы за время t является преобразованием гиль-
бертова пространства состояний:
Tt-.n^n.
§ 9.1. Скобка Пуассона и уравнения Гамильтона 195
Физическим требованием является самосопряженность оператора Н, из которой
следует, что преобразование Tt унитарно (сохраняет скалярное произведение) для
всех t:
(Ttil>,Tt<p) = (rl>,<p).
Альтернативное описание эволюции дается уравнением Гейзенберга
где
Л(<) = ГГ1АоГ4 = г;ЛоГ4,
Л о — оператор наблюдаемой (в момент времени t = 0), {·, -}q — квантовые скобки
Пуассона, которые равны
{А,В}Ч = ±(АВ-ВА)
для любой пары операторов А и В. При этом заметим, что
{Xj,Pk}q = {xj,pk} = öjk.
В первом подходе (уравнение Шредингера) со временем меняются состояния
и сохраняются наблюдаемые, а во втором (уравнение Гейзенберга) — меняются на-
блюдаемые, а состояния сохраняются. Но средние значения наблюдаемых для обоих
случаев совпадают:
(A(0)1>{t)№)) = (А(0)Та1>(0),Ъфг) = (TtM(0)T#(0), ψ(0)) = (А(Ь)ф(0)\ф(0)).
Следовательно, физические картины, которые даются двумя подходами, эквивалент-
ны.
Мы отсылаем за подробным изложением квантования классических систем
к [21, 23, 27].
Вернемся к пуассоновым многообразиям.
Лемма 9.2. Пусть M — пуассоново многообразие и х1, .. ., хп — ло-
кальные координаты в области U из М. Пусть fug— многочлены от
переменных х1, . . ., хп. Тогда
дх3 дхк дх3 дх
{f,9} = ^W,Xk} = ^h^). (9.9)
Доказательство. Пусть f = (х1)*1 (х2)к2... (хп)кп = (х1)/С1/г(ж2, ...
хп). Согласно тождеству Лейбница (9.7), мы имеем
{/,<?} = Μ*1)*1-1*^1.«?} + {xl)hl{h,g} = ^W'9} + (х1)"1 {h, g}.
196 Глава 9
Повторяя эти рассуждения для h — (х2)к2 ... (хп)кп, мы в итоге получим
тождество
которое по линейности распространяется на все многочлены /. Если g тоже
является многочленом, то правая часть этой формулы распишется как
oxJ oxJ oxK
и мы получим тождество (9.9). Лемма доказана.
Очевидно, что тождество (9.9) по линейности распространяется на
функции /ид, которые представляются сходящимися рядами от степе-
ней ж1, ..., хп. В дальнейшем мы всегда ограничимся случаем, когда скоб-
ка Пуассона имеет вид (9.9).
Теорема 9.1. Пусть M — n-мерное многообразие их1, ..., хп — ло-
кальные координаты в области из М.
1) Если на M задана скобка Пуассона, то величины hjk(x) = {xJ\ xk}
образуют ко со симметрический тензор типа (2, 0), и в любых других коор-
динатах у1, . . ., уп скобка Пуассона имеет вид
ÈLÊLs,j ,м
Qyj ßyk
if,9} = ^-^{yj,yk}-
2) Кососимметрический тензор hjk(x) задает по формуле (9.9) косо-
симметрическую билинейную форму на пространстве функций, удовлетво-
ряющую тождеству Лейбница.
Эта форма удовлетворяет тождеству Якоби и, следовательно, явля-
ется скобкой Пуассона тогда и только тогда, когда выполняются соотно-
шения
hudM^_ + hßd^ + hkl^ = 0i ,·>Μ = 1>...>η. (9.1())
ах ох1 ох1
Доказательство. 1) Применим формулу (9.9) к координатным функ-
циям ук = ук{х1, ... ,хп), к = 1, .. . ,п, получив
~hlm = { I т} = ду^ду^ к = д1Щ,к
oxJ дхК ох3 дхК
§ 9.1. Скобка Пуассона и уравнения Гамильтона 197
Следовательно, величины hjk задают тензор типа (2,0), который, очевидно,
кососимметричен: hjk = — hkj. Подставляя последнюю формулу в (9.9),
из теоремы о производной сложной функции выводим
_ df дд ( ду1 душ , j кЛ _ df dg , l m.
_ djW \ää~d^{x ,x ]) ~~ djdy^ 'y l
2) Если тензор hjk кососимметричен, то очевидно, что формула (9.9) за-
дает кососимметрическую билинейную форму, которая удовлетворяет тож-
деству Лейбница. Прямыми вычислениями доказывается, что при этом име-
ет место тождество
{/,{^Λ}} + {^{Λ,/}} + {Λ,{/,^}} =
%({х\{х3\хк}} + {х3\{хк,хг}} + {хк,{х\х3}}).
df dg dh (imi с j ju, rj Jfrk TiU, rj
дхг дх3 дхк
Поэтому тождество Якоби необходимо проверить для координатных функ-
ций хг,г = 1, ... ,п. Но опять же прямыми вычислениями показывается,
что
ох ох ох1
где hlJ = {хг, х3}, г, j = 1, ..., п. Лемма доказана.
Следствие 9.1. Любой кососимметрический тензор h%3 с постоянны-
ми коэффициентами (по отношению к координатам ж1, . . ., хп в обла-
сти U С W1) задает по формуле (9.9) скобку Пуассона на C°°(U).
Гамильтонова система (9.8), порожденная функцией Гамильтона Я,
является динамической системой на пуассоновом многообразии M и имеет
в координатах очень простой вид:
x = vH(x), ^я = ^^, г = 1, ...,п.
Так как hlk — тензор типа (2,0) и градиент grad/ — ковекторное поле, то
формула
/—>«/, v)=hik^-, i = l,...,n, (9.11)
ах
198 Глава 9
сопоставляет каждой гладкой функции /наМ векторное поле Vf.1 Вектор-
ное поле вида Vf называется гамильтоновым.
Следствие 9.2. Для любых двух функций f и g на пуассоновом много-
образии M коммутатор [vf,vg] векторных полей Vf и vg равен
[vf>vg] = -v{f,g}·
Доказательство. Распишем явно коммутатор двух векторных полей:
дх дх3 \ дх J dxL дх3 \
ËL^L (hikdhÇ. _ hßdffl)+hlkdlhuJ^_hßd^hik d*f
dxk дх1 V дх3 дх3 ) дхк дх3дх1 дх1 дх3 дхк
Так как в третьем члене по всем индексам, кроме г, происходит сумми-
рование, то мы можем сделать следующую замену индексов, не изменив
результата: j —> к,к —> 1,1 —> j. Согласно кососимметричности тензора hjk
и тождеству Якоби (9.10), мы имеем
hikdhil _hjidh^ = hjkdh^ + hjidh^ = hadhlkt
дх3 дх3 дх3 дх3 дх3
С учетом подстановки и последнего тождества мы получаем
дх3 дх дх1 дхк дх3дх1 дх3 дхкдх
дх3 дхк дх1 дх1 \ дхк дх3 )
(здесь мы в первом члене переставили индексы j и I)
= _hudî^dlds,+hJkhu_^(dLdL
дх1 дхк дх1 дх1 \ дхк дх3
дх1 V дхк дхк J дх1 дх1
Следствие доказано.
]Это поле часто называется косым градиентом и обозначается через sgrad /.
§9.1. Скобка Пуассона и уравнения Гамильтона
199
В каждой точке х G M скобка Пуассона задается матрицей Ь?к и ее
ранг называется рангом скобки Пуассона в точке х.
Пусть ранг скобки Пуассона в каждой точке максимален. Тогда мат-
рица h?k в каждой точке обратима: существует кососимметрический тен-
зор hjk такой, что
hjkhkl = δ13
всюду. В этом случае говорят, что M — симплектическое многообразие,
а 2-форма
ω — 2_, hjkdx^ Λ dx
j<k
называется симплектической.
Заметим, что по своему определению форма ω невырождена: матри-
ца hjk имеет в каждой точке максимальный ранг, или, что то же самое,
в каждой точке для каждого касательного вектора ξ существует другой та-
кой вектор η, касательный в той же точке, что
ω(ξ,η) = Η^ηΗφΟ.
Из курса линейной алгебры известно, что кососимметрическая невыро-
жденная 2-форма в линейном пространстве всегда приводится в подходящих
координатах риск виду
к
\^dpi A dql, n = 2к.
Мы получаем
Лемма 9.3.
1 ) Скобка Пуассона в каждой точке имеет четный ранг.
2) Симплектическое многообразие имеет четную размерность.
Рассмотрим вопрос, когда невырожденная 2-форма задает скобку Пуас-
сона.
Теорема 9.2. Невырожденная 2-форма ω = ]Г .<к hjkdxj Adxk задает
по формуле
{f,g} = h?kZL^L, h3khkl = hlkhk3=5lv
200 Глава 9
скобку Пуассона тогда и только тогда, когда эта форма замкнута:
du = 0.
Доказательство. Ко со симметрический тензор h?k задает скобку
Пуассона тогда и только тогда, когда
дх1 дх1 дх
для всех i,j,k (теорема 9.1). Опустим верхние индексы в этих соотноше-
ниях, умножив их на hrihjShkt и просуммировав по i,j, к:
hrihj.hu (hil^ + fti'|£ + Λ«|£) = 0. (9.12)
Рассмотрим, например, первое слагаемое в левой части:
7 дЪ^к 1 dh^k ßh^k
hrihjshkthl = S hjShkt . , = hjshkt ~ r —
дх1 дх1 dxr
_ (dh?khkt h1kdhkA _
" JS \ dxr n dxr )~
-h ( d5t h-ikdhkt\ - h L 7fc dhkt _ rfc dhkt _ dhst
~ njs [дхг П dxr J ~ njstl dxr - °s dxr - dxr '
Преобразуя аналогичным образом другие слагаемые в (9.12), мы получим,
что (9.12) эквивалентно тому, что для всех значений г, s, t выполняются
соотношения
_ dhst dhtr dhrs _
ürst - dxr + dxs + дх* " '
но это эквивалентно замкнутости формы ω, так как
du = 2_] arstdxr Λ dxs Λ dxb.
r<s<t
Теорема доказана.
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 201
Тем самым мы приходим к классическому определению симплектиче-
ского многообразия:
• многообразие M называется симплектическим, если на нем задана
невырожденная замкнутая 2-форма ω, которая называется симплекти-
ческой и задает на M симплектическую структуру.
На симплектических многообразиях скобка Пуассона записывается
и как
{/> 9} = -"{Vf, Vg) = Uj(Vg,Vf).
Действительно, распишем правую часть этой формулы
§ 9.2. Примеры пуассоновых многообразий. Лагранжев
формализм
1. Лагранжев формализм. Пусть на касательном расслоении ТМп к п-
мерному многообразию Мп задана гладкая функция L(x,x)9 где х G Mn
их — вектор, касательный к Мп в точке х. Эта функция задает лагранжеву
систему следующим образом.
Точки пространства Мп задают различные конфигурации (положения)
этой системы, и поэтому пространство Мп называется конфигурационным.
Траектории системы находятся из вариационного принципа Мопертюи-
Ферма (принципа наименьшего действия):
• каждый участок jo (t),t G [α, b], траектории 7о является экстремалью
функционала
5(7) = L(x,x)dt,
7
определенного на пространстве всех кусочно-гладких кривых
7(£), t G [α, b], с теми же концами, что и 7о(^)· l{°) — x(a)i т№ — x(b).
Для двумерных многообразий мы доказали §2.7 теорему 2.8 о том,
что кривая x(t) является экстремалью функционала S тогда и только тогда,
когда вдоль нее выполняются уравнения Эйлера-Лагранжа
А(ж) = дйу г = 1, ...,п. (9.13)
dt\dx4 дхг
202 Глава 9
Доказательство, данное в §2.7, без изменений проходит в общем случае
для многообразия Мп любой размерности. Напомним, что функция L(x,x)
называется лагранжианом или функцией Лагранжа данной системы.
Мы видим, что траектория системы определяется однозначно не ее
положением в любой заданный момент времени t = to, а парой, состо-
ящей из ее положения х е Мп и вектора скорости х = ^, заданных
при t = to- Мы получаем динамическую систему на пространстве ТМп,
которое по этой причине называется фазовым пространством данной ди-
намической системы.
Энергией (лагранжевой системы) называется следующая (скалярная)
величина:
дхг
а импульсом — ковектор ρ с координатами
dL . -,
Vi — —·, г — 1, . .. ,п.
дхг
Силой называется другой ковектор / с координатами
г dL ■ -,
fi = ^~» г = 1, ...,n.
дхг
В терминах этих ковекторов уравнения Эйлера-Лагранжа принимают вид
закона Ньютона:
P = f-
Вариационная производная функционала S определяется как
δ S dL d f dL
Sx\t) dxi dt \dx
и по определению она равна нулю для всех значений £ и г в точности для
экстремумов функционала S (как и в конечномерном случае, когда речь
идет о функции и ее производных). Ее смысл довольно прост: если мы
рассматриваем малую вариацию
x(t) -> x(t) + εη(η
гладкой кривой x(t), t G [α, b], где 7?(£) — касательное векторное поле вдоль
пути (вектор η{£) касателен в точке x{t) для любого t) с η (а) — г\{Ь) = 0,
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 203
то мы имеем формальное разложение
S(x + εη) = S{x) + ε J ^L·^ + 0(ε2)
(доказательство этой формулы было дано при доказательстве теоремы 2.8).
Лемма 9.4. 1) («Закон сохранения энергии») Энергия системы со-
храняется вдоль траекторий потока:
§-*■
2) («Закон сохранения импульса») Если лагранжиан явно не зависит
от переменной хг, то соответствующая координата импульса сохраняет-
ся вдоль потока: pi — 0.
Доказательство.
1 ) Прямыми вычислениями получаем
dE _ d i±idL_ _L
дх1 dt \dxl) дхг
= ±i(d_(dL\
\dt VôiV
Л = -Й = о.
дх1
-2k) =0.
дх1)
dt dt V дх
2) Мы имеем
Г) л =
дхг
Лемма доказана.
2. Примеры лагранжевых систем.
а) Рассмотрим классическую задачу — движение точечного массивного
тела в n-мерном евклидовом пространстве в потенциальном поле U(x):
L(x,x) = ^f-U(x),
где х G Mn, U(x) — потенциальная энергия. Полная энергия тела есть
тх2
Ε = Ш±- + U(x)
204
Глава 9
— сумма кинетической энергии Τ = ^Щ- и потенциальной энергии U(x).1
Импульс есть ρ = тх, и если потенциальная энергия равна нулю: U(x) = 0,
то импульс сохраняется.
б) Рассмотрим теперь движение точечного массивного тела в неод-
нородной среде, где кинетическая энергия — скалярный квадрат вектора
скорости (умноженный на Щ-) — вычисляется посредством более общего
риманова скалярного произведения. Мы имеем
L[x,x) = Щдгк(х)хгхк - Щх), (9.14)
где х G Мп и gik — риманова метрика на многообразии Мп. Импульс есть
Vi = 9ikXk,
и при отсутствии потенциального поля (U(х) = 0) мы получаем (в качестве
лагранжевой системы) геодезический поток на Мп.
в) Расширим предыдущую лагранжеву систему, добавив магнитное по-
ле и считая точечное тело заряженным (с зарядом е). Согласно уравнениям
Максвелла, магнитное поле задается замкнутой 2-формой
F = ^2FikdxiAdxk
г<к
и именно посредством этой формы входит в уравнения Эйлера-Лагранжа:
дхг dt\dx*J
где I/o — лагранжиан вида (9.14), или просто лагранжиан некоторой системы
без учета магнитного поля. Если форма F точна: существует 1-форма Aidx%
такая, что F = dA9 то включение магнитного поля выражается в изменении
лагранжиана
I/o —> L0 + eAix\
В общем случае это можно сделать только локально: взять область U, в ко-
торой все 2-формы точны (такова, например, любая область гомеоморфная
внутренности n-мерного шара), и рассмотреть в ней форму Аи = Afdx1
такую, что dAu = F в U. Тогда траектории данной системы в области U
1 Лагранжевы системы с лагранжианом L = Τ — U (разность кинетической и потенциаль-
ной энергии) называются в механике натуральными.
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 205
удовлетворяют уравнениям Эйлера-Лагранжа для подправленного лагран-
жиана
Если кривая η лежит одновременно в двух таких областях U и V, то для нее
определены значения двух функционалов Su — f Ludt и Sv = f Lvdt
(или, правильнее, двух ветвей многозначного функционала), имеющих сов-
падающие вариационные производные:1
As!L = AsL- x(t) cur\v.
5xl{t) ôxl(t) W
Траектории лагранжевой системы с лагранжианами (для кривых, лежащих
в областях U)
Lu (х,х) = 9ik {х)х1хк + AY {x)xl,
где dAu = F — глобально определенная 2-форма, сейчас называются маг-
нитными геодезическими.
3. Преобразование Лежандра: переход от лагранжева к гамильто-
нову формализму Каноническая скобка Пуассона на кокасательном
расслоении.
Мы не будем давать общего определения преобразования Лежандра.
В интересующем нас случае оно задает переход от функции L(x,x) от
переменных х,х к функции Н{х,р) от переменных х,р по следующим
формулам:
3L
L{x,x) -► Н(х,р) =РгХг -L(x,x), pi = —-, г = 1, ...,n.
дхг
Естественно мы подразумеваем, что эти формулы задают взаимно одно-
значную замену переменных (х,х) —» (х,р(х,х)) и в формуле для Н{х,р)
переменная х рассматривается как функция от х и р.
В новых переменных х, ρ уравнения Эйлера-Лагранжа примут гамиль-
тонов вид. Действительно, распишем дифференциал функции Н(х,р):
dH = x^pi+Pidx1 - ^dxl - Щах\
дхг дхг
!3το — общая процедура получения многозначных функционалов с корректно опреде-
ленными уравнениями Эйлера-Лагранжа, возникающих не только в задачах механики, но и,
например, квантовой теории поля (функционал Весса-Зумино-Новикова-Виттена). Подробное
изложение см. в приложении 1 (СП. Новикова) к [2].
206
Глава 9
который в силу уравнений Эйлера-Лагранжа равен
dL_
дхг
dH = xldvi - —dxi
Это равенство означает, что
dpi' У% dxi dxv
т.е мы получаем уравнения Гамильтона
Xi = {X\H), Pi = {Рг,Н}
для пуассоновой структуры
{х\Рк} = 4> {< хк} = °» te,Р/с} = 0, г, fe = 1, ..., п. (9.15)
Мы заключаем, что если x(t) есть траектория лагранжевой системы,
то (x(t),p(t)) — траектория гамильтоновой системы с H = pix1 — L. Легко
проверить, что обратное тоже верно, и поэтому данные лагранжева и га-
мильтонова системы эквивалентны.
Заметим, что ρ = ^-т- является ковектором и поэтому фазовым
пространством гамильтоновой системы является кокасательное расслое-
ние Т*Мп к конфигурационному пространству Мп (см. § 3.3).
На кокасательном расслоении пространстве Т*Мп задана полученная
пуассонова структура (9.15), которая нам уже встречалась и, как легко про-
верить, является симплектической. Соответствующая симплектическая фор-
ма на кокасательном расслоении равна
cj = dpiAdxi (9.16)
(здесь и в дальнейшем мы подразумеваем суммирование по повторяюще-
муся индексу г). Координаты х,р, в которых симплектическая форма при-
нимает данный вид, называются каноническими.
Гамильтониан по своему значению совпадает с энергией лагранжевой
системы:
Н = Е = ±% - L.
Закон сохранения энергии при этом переходит в тождество, которое оче-
видно следует из антикоммутативности скобки Пуассона:
f = {Я,Я} = 0.
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 207
Вообще, функция F, значения которой не изменяются вдоль траекторий
гамильтоновой системы
F = {F,H} = 0,
называется первым интегралом (или интегралом движения) системы. Га-
мильтониан всегда является первым интегралом порожденной им системы.1
Рассмотрим пример натуральной системы с лагранжианом L{x,x) —
— \д%кХгхк — U(x). Мы имеем
Pi = дгкх\ Н(х,р) = \дгкргРк + U(x), (9.17)
где g^gjk = Slk. В частности,
• геодезический поток на римановом многообразии Мп с метрикой д^
является гамильтоновой системой на кокасательном расслоении Т*Мп
с гамильтонианом (9.17) и пуассоновой структурой (9.15).
4. Магнитная скобка Пуассона на кокасательном расслоении. Ес-
ли магнитное поле задается точной формой F = dA, то построение гамиль-
тонова формализма для магнитных геодезических просто: вместо (9.17) мы
получим
Pi = дгкхк + еАи H = ^gik(pi - eAi)(pk - еАк),
где пуассонова структура будем иметь вид (9.15). Если же у нас нет гло-
бально заданного ковекторного поля А, то этот метод неприменим. Однако
существует совершенно общий подход, основанный на изменении пуассоно-
вой структуры. Если F = J2i<k ^ikdx1 Λ dxk — магнитное поле, то 2-форма
ω = dpi Λ dxl -f F
на Т*Мп является по-прежнему невырожденной и замкнутой (напомним,
что dF = 0). Этой симплектической форме отвечает скобка Пуассона
{x\Pk} = ô\i {х\хк} = 0, {piiPk} = Fik{x), z,fe= 1, ...,η,
и мы оставляем в качестве упражнения проверить, что гамильтонова систе-
ма с этой скобкой Пуассона и гамильтонианом
H = \дгкРгРк
'Напомним, что мы предполагаем, что гамильтониан явно не зависит от времени. Ситуа-
ция, когда это не так, разбирается ниже в § 9.4.
208
Глава 9
является магнитным геодезическим потоком (для этого достаточно подста-
вить pi = gikXk в уравнения Гамильтона).
5. Скобка Ли-Пуассона. Пусть хъ ..., хп — координаты в Rn. 1 За-
дадим простой вопрос:
Когда формула
{xuxj} = c!?jxk (9.18)
задает скобку Пуассона?
Здесь с?■ постоянны и не зависят от х. Очевидно, что необходимо
потребовать кососимметричности символов с^· по нижним индексам:
Сц С^, 2, J, /С 1, ...,71.
Согласно теореме 9.1) это необходимо и достаточно, чтобы выраже-
ние (9.18) было кососимметричным по / и g и удовлетворяло тожде-
ству Лейбница. Согласно этой же теореме, при этом для выполнения тож-
дества Якоби необходимо и достаточно выполнения соотношений (9.10)
для hli = c^jXk. Распишем эти соотношения и получим
cil xmCjk + cjlxmcki + ск1ХтСЦ = \Cil Cjk + Cjl Cki + CklCij) Xm = 0.
Так как эти тождества должны выполняться для всех х9 они эквивалентны
тождествам
ml , ml i ml _ п
cil cjk "·" cjlcki "·" cklcij ~ u>
которые в точности означают, что с^ — структурные константы некоторой
алгебры Ли (см. § 7.2). То есть соотношения
[е^, Cj\ = c-ijC-k
задают алгебру Ли g.
Теорема 9.3. Формула (9.18) задает {линейную по координатам) скоб-
ку Пуассона на Шп тогда и только тогда, когда c!?pi,j,k = 1, ... , η, —
это структурные константы некоторой n-мерной алгебры Ли.
Скобка (9.18) называется скобкой Ли-Пуассона. Естественно рассмат-
ривать ее как скобку на пространстве g*, двойственном алгебре Ли g,
т. е. образованном всеми линейными функционалами на алгебре g. В этом
1 Здесь мы умышленно используем нижние индексы, так как Жп будет отождествлено
с двойственным пространством к некоторой алгебре Ли g.
§ 9.2. Примеры пуассоновых многообразий. Лагранжев формализм 209
случае сами элементы алгебры Ли задают функции х\, ..., хп на простран-
стве g* по правилу x(f) = /(#), ^Gg,/Gg*.
Рассмотрим важный пример — скобку Пуассона, связанную с алге-
брой 5о(3), образованной всеми кососимметрическими матрицами порядка
три. Мы имеем
&ijk
1,
если перестановка
1°>
1 2 3
г j к
1 2 3
г j к
если хотя бы два индекса из г, j, к совпадают.
-1, если перестановка
четная
нечетная
Так как пространство R3 нечетномерно, то эта скобка Пуассона не симплек-
тическая. Легко проверить, что выполняется тождество
{/, х\ + х\ + х\\ = 0 для всех /.
Задача 9.1. Доказать, что скобку Пуассона, отвечающую алге-
бре 5о(3), молено корректно ограничить на любую сферу вида
получив при этом симплектическое многообразие.
По отношению к этой скобке рассмотрим гамильтонову систему с квад-
ратичным гамильтонианом
2 _| 2 | 2
Х\ \ Хо | ^з
гт _ 1 | Х1 , Х2
Я-2Т+БГ
4
с
Уравнения Гамильтона
%i — i^i?-" j — о cijxki
после замен
Xl
Х2
* = "¥'
г = 1,2,3,
хз
С
примут вид
Ар=(В- C)qr, Bq=(C- A)pr, Cr = (А - B)pq.
При положительных значениях А, В, С это — уравнения движения (трехмер-
ного) твердого тела около неподвижной точки (уравнения Эйлера). При этом
постоянные Л, Б, С — моменты инерции тела.
210 Глава 9
§ 9.3. Теоремы Дарбу и Лиувилля
Теорема 9.4 («Теорема Дарбу»). Пусть M — пуассоново многооб-
разие. Если в окрестности U точки уо G M скобка Пуассона имеет по-
стоянный ранг, равный 2т, то существуют такие окрестность V С U
точки уо и локальные координаты х1, ..., xm,pi, ... ,pm uz1, .. ., zn~2m
в этой окрестности, что скобка Пуассона во всей области V принимает
вид
{x\Pj} = 6), {x\zk} = {Pj,zk} = 0, (9.19)
где г, j = 1, ... , m, к = 1, ... ,гг — 2т.
Такие координаты на пуассоновом многообразии называют канониче-
скими. В симплектическом случае, когда η = 2га, мы получаем канониче-
ские координаты на симплектическом многообразии.
Доказательство. Пусть у1, ..., уп — локальные координаты в обла-
сти U. Если скобка Пуассона тождественно равна нулю в окрестности уо
(т = 0):
{y\yi} = W=0, ij = l, ...,n,
то в качестве z1, . .., zn можно взять любые координаты этой окрестности.
Если m φ 0, то возьмем за х1 функцию /, для которой вектор Vf не ра-
вен нулю в точке уо, а, следовательно, и в ее малой окрестности (напомним,
что его координаты равны υ\ — hlk—-). Функция / как гамильтониан по-
7 дук
рождает гамильтонову систему, и мы примем за р\ функцию р\ = t, где t —
временная координата для этой гамильтоновой системы.
Дадим строгое определение. Из теории обыкновенных дифференци-
альных уравнений известно, что если гладкое векторное поле ν не рав-
но нулю в точке у о: ν (у о) φ 0, то заменой координат оно линеаризуется.
Это означает, что в окрестности U' точки уо можно ввести такие координа-
ты и1, .. ., ип, что в этих координатах поле υ принимает вид
ν = (1,0,...,0).
При ν — Vf мы положим pi = — и1. По построению
Pi = -i = -1 = {pu x1} = -{ж1,Pi}·
Так как х1 сохраняется вдоль векторного поля vxi, то х1 = х1(тх2, ..., ип).
§9.3. Теоремы Дарбу и Лиувилля
211
Функция pi тоже порождает гамильтонову систему с векторным по-
лем vPl. Векторные поля vxi и vPl коммутируют, так как
[VX1,VP1] = -V{x\Pl} = 0
(функция {ж1,pi} постоянна), и функция р\ сохраняется вдоль траекторий
поля vPl (как гамильтониан этой системы). Поэтому
Vpi = (0, *, ..., *), υΡ1 = υΡ1 (и2, ...,ип)
(первое равенство следует из сохранения pi, a второе — из того, что поля
коммутируют).
Линеаризуем теперь поле vPl, заменив и2, ..., ип на такие координа-
ты и>°, ... ,wn~2, что
vPl =(1,0, ...,0).
При этом в качестве w° возьмем х1.
В итоге мы получаем в окрестности U (возможно меньшей, чем U)
точки у о координаты х1, pi, w1, ..., wn~2, в которых скобка Пуассона имеет
вид
{x\pi} = l, {x1,wi} = {puwi} = 0, г = 1, ...,п-2.
Если п — 2 = 0, то мы получили искомые координаты. Если п — 2>0,
то мы повторим указанную процедуру по отношению к координатам
it;1, ... ,wn~2, и будем делать это, пока не получим искомые координаты.
Теорема доказана.
Следствие 9.3. На симплектическом многообразии в окрестности
каждой точки можно ввести канонические координаты, т. е. такие ко-
ординаты х1, . .., xn,pi, ... ,рп, что в них симплектическая форма при-
нимает вид
üü = dpiAdx\ (9.20)
Следствие 9.4. На симплектическом многообразии существует нигде
равная нулю форма объема
αμ = ωη
и, в частности, симплектическое многообразие всегда ориентируемо.
212
Глава 9
Действительно, в канонических координатах мы имеем
—Χωη = dpi Λ dx1 Λ ... Λ dpn Λ dxn φ О,
η!
и положительно ориентированным базисом в касательном пространстве в
точке можно считать такой базис ei, ..., в2П, что
и;п(еь ...,е2п) >0.
Это задает ориентацию на М.
Заметим, что если симплектическое многообразие M — замкнутое
(компактное и без края), то форма ωη не может быть точной. Иначе, ес-
ли ωη = dr, то по формуле Стокса мы имеем
idr= /т = 0,
M M дМ
так как край дМ пуст. Но это противоречит тому, что J αμ > 0. Отсюда
м
следует, что и формы ω,ω2, ...,α;η_1 не точны: иначе, если и>к = da,
то ωη = d(a Λ ωη~Η). Это — очень сильное топологическое ограничение на
симплектические многообразия. Оно означает, что классы вещественных
когомологий [o;fc],fc = 1, ...,п, не равны нулю.1 Например, среди всех
сфер только на двумерной сфере S2 существуют симплектические формы.
Канонические координаты позволяют существенно упростить доказа-
тельство следующей теоремы.
Теорема 9.5. Пусть M — симплектическое многообразие.
1) Вдоль траекторий гамилътоновой системы на M симплектическая
форма ω сохраняется:
ω = 0.
2) Если вдоль траекторий векторного поля ν на M симплектическая
форма сохраняется, то поле ν является локально гамилътоновым: в неко-
торой окрестности U каждой точки х G M существует гладкая функ-
ция f такая, что
ν — Vf в U.
Доказательство. В канонических координатах мы имеем
ω = dpi Λ dxl -h dpi Λ dx1.
объяснение того, что означает это утверждение, можно найти, например, в [6].
/
§ 9.3. Теоремы Дарбу и Лиувилля 213
Если система гамильтонова, то правая часть этого соотношения расписыва-
ется как
-а(Щ)лах*+аРгЛа(Щ
\дхг) Р \dpi
-d (^-dxi + ψ-αρλ = -d(dH) = -d2H = 0,
\дхг dpi J
так как d2 = 0.
Если ω — 0 вдоль траекторий поля ν = (х,р), то
0 = dpi A dx1 + dpi Λ dxl = -d (xldpi - pidx1) .
Из курса математического анализа нам известно, что если в односвязной
области U С Rn дифференциал от 1-формы а равен нулю, то в U эта
форма является дифференциалом некоторой гладкой функции /:
a = df.
Для а = xldpi —pidx1 (здесь мы подразумеваем суммирование по повторя-
ющемуся индексу г) мы получаем, что в малой окрестности каждой точки
определена функция / = H такая, что
fa' Рг dx*' Ζ-1'-··'η·
Т. е. поле ν — локально гамильтоново. Теорема доказана.
Преобразование пространства
φ: R2n -^R2n
с координатами х1, ... ,xn,pi, . .. ,рп называется каноническим, если оно
сохраняет форму (9.20). Более общо этот термин используется сейчас для
преобразования произвольного симплектического многообразия М, сохра-
няющего симплектическую форму ω.
Утверждение 1 теоремы 9.5 состоит в том, что сдвиги вдоль траекторий
гамильтоновых векторных полей являются каноническими преобразовани-
ями.
Следствие 9.5 (Теорема Лиувилля о сохранении объема). Гамиль-
тонова система сохраняет форму объема
αμ = ωη = ω Λ ... Λα;
η
на фазовом пространстве M.
214
Глава 9
Действительно,
at
так как ω — 0.
Это следствие позволяет применять для изучения гамильтоновых си-
стем методы эргодической теории, изучающей такие преобразования про-
странств с мерой, которые эту меру сохраняют.
Как мы видим, скобка Пуассона может быть вырожденной. Функция /,
такая, что
{/>#} = 0 для всех #
называется функцией Казимира (или просто казимиром) данной скобки.
Более общо, любая алгебра А с коммутативным умножением и с били-
нейной операцией
а, Ъ —► {а, 6},
которая ко со симметрична, удовлетворяет тождеству Якоби и тождеству
Лейбница
{ab, с} = а{6, с} + 6{а, с},
называется алгеброй Пуассона. Элементы из центра Ζ а'.
{z, а} = 0 для любого а £ А,
алгебры А называются казимирами.
Симплектический лист — это такое подмногообразие L пуассонова
многообразия М, что
1) ранг скобки Пуассона в точках из L равен размерности L и на мно-
гообразии L задана симплектическая форма ωρ, которая порождает скобку
Пуассона {·, ·}/, на L;
2) если f,g — функции на М, то их скобка Пуассона {/,д} в точках
из L совпадает с {/|l,#|l}l (здесь /|l и д\ь — ограничения функций / и g
на L):
{Îi9}\l = {/|l,0|l}l.
Примеры.
1) Пусть в области U ранг скобки постоянен и заданы канонические
координаты:
{x\Vj} = 8), {x\zk} = {Pj,zk} = 0,
то в алгебре Пуассона C°°(U) казимиры — это в точности все функции
от ^-переменных, а симплектические листы — это подмногообразия z1 =
= ci, . .., zn~2m = cn_2m, где ci, .. ., cn_2m — постоянные. Симплектиче-
ские формы на этих листах даются формулой ω^ = dpi Λ dxl.
§ 9.3. Теоремы Дарбу и Лиувилля
215
2) Для скобки Ли-Пуассона на М3, связанной с алгеброй so(3), кази-
миры — это кольцо функций вида f(x\, Ж2, хз) = Mxi + х2 + жз)· Симплек-
тические листы — это сферы
2 | 2 , 2 _
Хл ~т~ Хо ' *^3 — ^
размерности 2 при с^ОиО при с = 0.
Эти два примера ведут к следующим важным конструкциям, которые
мы излагаем несколько схематично, оставляя детали доказательств в каче-
стве упражнений.
а) Слоение на симплектические листы. Рассмотрим всевозможные
гамильтоновы векторные поля Vf. В каждой точке х е M значения Vf(x)
гамильтоновых векторных полей порождают подпространство Рх С ТХМ
касательного пространства ТХМ в точке х. Любой ненулевой вектор из Рх
имеет вид Vf, и если t — временная координата для гамильтоновой систе-
мы с гамильтонианом H = /, то {£, /} = 1 (см. доказательство теоремы
Дарбу) и поэтому ранг скобки Пуассона в точке х равен размерности Рх
и, в частности, четен.
Так как [vf,vg] = —V{f,g}, то гамильтоновы поля образуют подалге-
бру алгебры Ли векторных полей и, согласно теореме Фробениуса, в малую
окрестность U каждой точки х вложено подмногообразие L такое, что в лю-
бой точке у G L касательное пространство к L есть Ру. Вся окрестность U
распадается на такие подмногообразия, которые являются симплектически-
ми листами. Заметим, что через каждую точку проходит в точности один
симплектический лист. Лист L естественно продолжается до некоторого
подмножества, которое мы также обозначим через L с M и которое яв-
ляется образом (возможно, несобственного)1 вложения симплектического
многообразия в М. Мы также будем называть такие множества L симплек-
тическими листами.
Мы приходим к следующему выводу:
• пуассоново многообразие распадается в дизъюнктное объединение
симплектических листов и такое представление единственно.
Запомним, что отображение называется собственным, если прообраз каждого компакт-
ного множества компактен. Типичным примером несобственного вложения является иррацио-
нальная обмотка тора Т2 с угловыми координатами φ\,ψ2, определенными по модулю целых
чисел. Такая обмотка имеет вид: t G К. —*■ ψ(£) = (t, at G Τ2, где a — иррациональное число).
Мы имеем ^(ii) ф Ψ fa) ПРИ ti Φ *2» à/ф Φ 0 всюду, а замыкание ψ (Ж) совпадает со всем
тором. Аналогичные ситуации встречаются и для симплектических листов L в пуассоновых
многообразиях.
216
Глава 9
Б) СИМПЛЕКТИЧЕСКИЕ ЛИСТЫ СКОБКИ ЛИ-ПУАССОНА. Пусть g* = Rn —
пространство линейных функций на алгебре Ли g группы G. На g* задана
скобка Ли-Пуассона.
Пусть х G g*. Рассмотрим пространство Рх, образованное значениями
всевозможных гамильтоновых полей Vf в точке х. Значение поля Vf в задан-
ной точке зависит только от линейной части разложения Тейлора функции /,
и поэтому, чтобы получить все пространство Рх, достаточно рассмотреть
только линейные функции а(х) = агХг. Пространство линейных функций
на g* совпадает с алгеброй Ли g:
а(х) = ж(а), ж G g*, α G (g*)* = g.
Гамильтоновы векторные поля в точке х — (xi, ..., хп) (напомним, что мы
координаты в g* пишем с нижними индексами) принимают значения
(va(x))j = cijxka\ j = 1, . - · , П.
Рассматривая их как элементы из g*, мы видим, что их значения на b G g
равны
va(x)(b) = с%хка1\Р = хк {[а,Ъ])к = х{[а,Ъ}). (9.21)
Напомним, что каждому элементу α G g алгебры Ли отвечает одно-
параметрическая подгруппа F(t) = eat G G (для матричных групп она
и имеет вид экспоненты от матриц at). На группе Ли заданы семейства
диффеоморфизмов — левые и правые сдвиги:
Lg\ G —► G : Lg(x) — gx\ Rg: G —► G : Rg{x) = xg,
где g,x G G (для матричных групп G это — умножения слева и справа
на матрицы g G G). Дифференциалы правых и левых сдвигов задают ком-
мутирующие отображения касательных пространств:
г * . τ г* ^ т1 Г1 п>* · т1 г^ ± т1 г*
J^g- ^ib -► J-gx^, ttg. 1xKj —> IxgU,
и порождают по очевидным правилам
p(L*gv) = L;_x(p)(i;), p(R*gv) = Я*д-г(р)(у)
отображения кокасательных пространств: L* : T*xG —► Τ*G и аналогично
для Rg. Композиция коммутирующих диффеоморфизмов Lg и Rg-i явля-
ется внутренним автоморфизмом группы:
х-> дхд
§ 9.3. Теоремы Дарбу и Лиувилля 217
а дифференциал этого отображения в единице задает действие G на алгебре
JlHg:
Аад^^Щ-г :g-g.
Мы получаем присоединенное представление Аа9, которое для матричных
групп имеет очень простой вид:
Adg(a) = gag'1, g G G, α G g.
Это представление порождает коприсоединенное представление Ad * на g* :
(Ad*(ж)) (α) = x(Adg(a)), x G g*, a G g, g G G.
Рассмотрим дифференциал отображения Ad^ в единице:
|Adeat(fc) = ada(6).
Для матричных групп, очевидно, мы имеем
ada(6) - j- (eatbe~at) = ab - ba = [α, Ь],
и эта формула верна в общем случае (чтобы это показать, достаточно вос-
пользоваться тейлоровским разложением умножения в единице группы, как
это мы делали в §7.2). Осталось заметить, что для дифференциала ad*
коприсоединенного представления мы имеем
ad*a(x)(b)=x(ada{b))=x([a,b]),
и сравнить эту формулу с (9.21). Мы видим, что значения гамильтоновых
векторных полей в точке х совпадают с касательными полями к орбите
коприсоединенного представления в х.
Отсюда мы заключаем, что
• орбиты коприсоединенного представления группы G являются сим-
плектическими листами скобки Ли-Пуассона на g* ;
• орбита коприсоединенного представления является симплектическим
многообразием с канонической симплектической формой (формой Ки-
риллова), порожденной скобкой Ли-Пуассона.
218
Глава 9
§ 9.4. Вариационный принцип Гамильтона и расширенное
фазовое пространство
Так как гамильтониан Η сохраняется гамильтоновой системой, то лю-
бая траектория этой системы полностью лежит на какой-то поверхности
уровня Мс = {Н = с}.
Рассмотрим случай, когда гиперповерхность Мс является гладким под-
многообразием в исходном симплектическом многообразии M (с симплек-
тической формой ω). В этом случае многообразие Мс нечетномерно и огра-
ничение формы ω на Мс уже не может быть невырожденным. В каждой
точке х G Mc касательное пространство к Мс содержит ненулевое подпро-
странство АХ9 называемое аннулятором формы ω, такое, что
ω(ξ, η) = 0 для всех ξ G Ах, η G ТХМС,
т. е. линейная форма 1(η) — ω (ξ, η) тождественно равна нулю.1
Если бы Ах содержало два линейно независимых вектора £i и £2,
то для любого касательного (в точке х) вектора η такого, что η и ТХМС
порождают все касательное пространство к М, можно было бы подобрать
такие числа а\ и аг, что
<j(ai£i +α2ξ2,η) = 0
_ и вектор ai£i + а2^2 лежал бы в аннуляторе формы ω на всем касательном
пространстве к М. Но это невозможно, так как форма ω, по определению, —
невырожденная. Следовательно, в каждой точке из Мс аннулятор Ах одно-
мерен.
Говорят, что кривая r(t) С Мс является характеристикой формы ω9
если в каждой ее точке r(t) касательный вектор к кривой лежит в аннуляторе
формы Ах.
В окрестности каждой точки xq можно выбрать векторное поле ν (х)
так, что v(x) φ 0 и v(x) порождает Ах (глобально, на всем многообразии Мс
это не всегда можно сделать — возникают топологические препятствия).
Характеристики при этом будут в точности интегральными кривыми этого
поля и мы с помощью теоремы о существовании и единственности решения
обыкновенного дифференциального уравнения заключаем, что
!Это определение аннулятора общее для любого линейного пространства с билинейной
формой (симметричной или кососимметричной) В (ξ, η): вектор ξ лежит в аннуляторе в точ-
ности тогда, когда В (ξ, η) = 0 для всех векторов η. Например, казимиры образуют аннулятор
скобки Пуассона на пространстве функций.
§ 9.4. Вариационный принцип Гамильтона 219
• через каждую точку поверхности уровня Мс = {Н = с} проходит
только одна характеристика формы ω и достаточно малая окрестность
точки расслаивается на эти характеристики.
Имеет место
Теорема 9.6. Траектории гамилыпоновой системы на поверхности
уровня Мс являются характеристиками формы ω на Мс.
Доказательство. Введем в окрестности точки х канонические коор-
динаты ж1, ..., xn,pi, ... ,рп. Условие, что вектор η касается Мс в точке х,
записывается как
„я„) = А1 + „.« = о
дхг opi
(здесь мы подразумеваем суммирование по г), а вектор ξ лежит в аннулято-
ре Ах тогда и только тогда, когда для всех η G TXMC мы имеем
ω(ξ,η) = [αΡ>Λ<1Χ*](ξ,η) = η1 С+1 + . . . +ηηξ2η-η^ξ1 - ... -ηηξ2η=0.
Сравнивая эти две формулы, мы видим, что вектор
с „ (дН дН\
лежит в Ах. Теорема доказана.
Рассмотрим теперь 1-форму а, заданную условием
da — ω на Мс,
и вариационную задачу для функционала
5(7) = У«
7
на пространствах кривых, удовлетворяющих некоторым дополнительным
условиям.
Возможно, форма а не определена глобально. Этот случай типичен,
например, когда M — замкнутое симплектическое многообразие. Мы опять
приходим к многозначному функционалу S (см. § 9.2), для которого урав-
нения экстремалей выписываются, как мы увидим ниже, глобально.
Мы рассмотрим два пространства кривых на Мс:
1) замкнутых кривых;
2) соединяющих два подмногообразия Vi и V^ таких, что ограничение а
на Vi и V2 равно нулю.
220
Глава 9
Теорема 9.7. Экстремали функционала S = J d~lu на любом из ука-
занных выше пространств кривых Г есть в точности характеристики
формы ω, лежащие в Г.
Доказательство. Пусть η — экстремаль функционала S. Если в точке х
кривой 7 касательный вектор η не принадлежит аннулятору АХ9 то суще-
ствует вектор ту G ТХМС такой, что ω(7, η) φ 0. Изменив, если необходимо,
направление ту, приведем все к случаю ω(η,η) > 0 и так продолжим ту на
малый участок кривой около точки х, что это неравенство будет выполнять-
ся на этом участке, а вне его ту = 0. Локальная вариация кривой 7 —> 7 + £Г1
приводит, по теореме Стокса, к вариации значения функционала
5(7)-^(7)+ε|α;(7,?7) + 0(ε2)) (9.22)
которая отлична от нуля при малых ε, что противоречит условию экстре-
мальности кривой 7- Следовательно, 7 — характеристика.
Из (9.22) следует, что обратное тоже верно: если η — характеристика,
то δ S = 0. Теорема доказана.
Следствие 9.6. Замкнутые траектории гамильтоновой системы на
поверхности уровня Мс — {Н = с} — это в точности замкнутые харак-
теристики формы ω на Мс.
Приведем другое следствие: пусть M = R2n, или, более общо, кокаса-
тельное расслоение Т*Хп к n-мерному многообразию X, с каноническими
координатами хг,рк- Форма а = α~λω определена глобально:
α~λω = pidx1.
Следствие 9.7. Траектории гамильтоновой системы на Т*Хп, ле-
жащие на поверхности уровня Мс = {Н = с} являются экстремалями
функционала
S = / pidx1
(здесь мы, естественно, подразумеваем суммирование по г) на простран-
стве кривых, лежащих в Мс и соединяющих пространства х = xqux = х\.
На всем симплектическом многообразии вариационный принцип за-
писывается в более привычной форме, и мы оставляем его доказательство
в качестве упражнения (все необходимые идеи и конструкции для его вы-
полнения были уже изложены).
§ 9.4. Вариационный принцип Гамильтона
221
Теорема 9.8 (Вариационный принцип Гамильтона). На симплекти-
ческом многообразии M траектории гамилътоновой системы являются
экстремалями функционала
5= f(d-luj-Hdt),
где H — гамильтониан.
Более того, формально такой вид принимает следствие 9.7 для систем
с гамильтонианом, зависящим от времени. В этом случае мы имеем обыч-
ные уравнения Гамильтона
I - <'·*>■
где / — любая функция на многообразии М, но гамильтониан уже явно
зависит от времени:
я-Ж,.*.), § = f.
Для того, чтобы привести эту неавтономную систему к автономному
виду, используется стандартный трюк — время делается одним из перемен-
ных. Надо рассмотреть новое симплектическое многообразие — расширен-
ное фазовое пространство M x R2 с симплектической формой
ωο = ω + dt Λ dE,
где «время» t и «энергия» Ε — координаты на М2. Заменив теперь гамиль-
тониан H(x,p,t) на
H(x,p,t,E)=H{x,p,t)-E,
мы получим гамильтонову систему,
/ = {/,#}, Е = {Е,Н} = Щ, i = {t,H} = l,
чье ограничение на поверхность уровня {Н = 0} совпадет с исходной:
Сделаем еще одно небольшое замечание: форма а = d~luo на (2п — 1)-
мерной поверхности уровня Мс (если она глобально определена) всюду
удовлетворяет неравенству
aA(da)n_1 ^0.
222
Глава 9
Многообразия размерности 2га — 1, на которых существует такая 1-форма,
называются контактными, а сама форма — контактной. Имеет место ана-
лог теоремы Дарбу, с помощью которой он и доказывается:
• в окрестности любой точки контактного многообразия существуют та-
кие локальные координаты х1, .. . ,xn_1,pi, ... ,pn_i,i, что в этой
окрестности контактная форма принимает вид
a — pidx1 — dt.
§ 9.5. Понижение порядка системы, симплектическая
редукция
1. Первые интегралы движения и понижение порядка динамиче-
ских систем. Пусть
х = v(x)
— динамическая система (поток) на n-мерном многообразии М.
Напомним, что в локальных координатах ж1, ..., хп — это просто си-
стема обыкновенных дифференциальных уравнений:
хг = ν1 (х1, . . . ,жп), i = 1,
,га.
Такие записи согласованы на пересечениях карт, в которых заданы различ-
ные координаты. Это означает, что v(x) — векторное поле на М.
Если нам известна нетривиальная функция F, которая сохраняется
вдоль траекторий этой системы:
dt dxl
(т. е. первый интеграл потока), то мы можем понизить порядок этой системы
на единицу в областях, где grad F φ 0. Для этого рассмотрим поверхности
уровня Мс = {F = с}. По теореме о неявной функции, если gradF(x) φ Ο
в точке х G M с, то в окрестности точки х поверхность уровня Мс являет-
ся (га — 1)-мерным подмногообразием с некоторыми локальными координа-
тами у1, . .., yn_1. Так как траектории системы с началом в точках из Мс
остаются в Мс, то поле υ будет всюду касательным к Мс и данная система
при ограничении на Мс примет вид
У
w\yx,...,yn-\ г = 1, ...,га-1.
§ 9.5. Понижение порядка системы, симплектическая редукция 223
Здесь w — ограничение поля υ на Мс. В результате этой процедуры мы упро-
стили систему, уменьшив число переменных — порядок системы — на еди-
ницу (см. рис. 9.1).
Рис. 9.1. Инвариантное подмногообразие Мс
Пусть нам известно большее число интегралов движения Fi, .. ., F&
и в некоторой точке хо эти интегралы (функционально) независимы, т. е. си-
стема ковекторов grad Fi, ..., grad F& — линейна независимая. Тогда при
ограничении потока на общую поверхность уровня
ГС1,.. .,Cfc = {Fi = ci = FiOo), .. .,Ffc = с* = Fk(xo)}
мы уменьшим порядок системы на к. Если при этом к = η — 1 и v(xq) Φ О,
то эта поверхность уровня будет одномерной и поэтому будет траекторией
потока. Мы тем самым получим (локальное) решение уравнения х — v(x)
с начальными данными х(0) — xq.
2. Понижение порядка гамильтоновой системы. Для гамильтоно-
вых систем на симплектическом многообразии знание одного дополнитель-
ного интеграла позволяет уменьшить порядок системы на два. Опишем эту
процедуру, которая уже неявно использовалась при доказательстве теоремы
Дарбу (§9.3).
Пусть H — гамильтониан системы, а / — дополнительный первый инте-
грал. Согласно уравнениям Гамильтона, / = {/, Н} = 0. Пусть grad/ φ Ο
в точке хо и f(xo) = с. Гамильтонова система ограничивается на поверх-
ность уровня
Гс = {/ = С},
и, более того, на этой поверхности уровня исходный поток и поток х — Vf
(гамильтонова система, порожденная функцией / как гамильтонианом) ком-
мутируют. Это следует из тождества [vf,Vh] = ~v{f,h} (CM· лемма 9.2).
224
Глава 9
Теперь возьмем в качестве еще одного интеграла движения функцию g —
временную переменную на траекториях потока х = Vf (ее корректное по-
строение дано при доказательстве теоремы Дарбу). Предположим (для про-
стоты), что {g, H} = 0. Тогда мы ограничим гамильтонову систему на об-
щую поверхность уровня
Гс,о = {/ = с, g = 0},
понизив ее порядок на два.
Данная процедура локальна. Ее можно сделать глобальной при двух
предположениях :
1) поверхность уровня Гс = {/ = с} является подмногообразием;
2) все траектории потока х — υ/ замкнуты и имеют одинаковый пери-
од Т. В этом случае можно предположить, что сдвиги ψΙ : Гс —► Гс вдоль
траектории за время t задают действие группы 51 = R/TZ.
Тогда исходная гамильтонова система ограничивается на симплектиче-
ское многообразие
Гс,о — Гс/5 .
Построение симплектической структуры на этом многообразии опять ана-
логично доказательству теоремы Дарбу: в каждой точке она получает-
ся ограничением исходной формы на ортогональное (относительно этой
формы) дополнение к пространству, порожденному координатами f,g,
где {/,#} = 1 (при доказательстве теоремы Дарбу это были координа-
ты x\pi, где {x\pi} = 1).
В общем случае, когда {д, Η} φ 0, мы по-прежнему можем понизить
порядок системы на два, перейдя к факторпространству Гс по действию
сдвигов вдоль интегральных кривых поля Vf. Прежде, чем объяснить эту
процедуру, определим понятия факторпространства и гладкой структуры на
нем.
3. Гладкая структура на факторпространстве. Мы должны опреде-
лить, что понимается под выражением
M = X/G
(например, Гс?о = Гс/'S1). Это — факторпространство пространства X по
действию группы G. Его точки — это множества вида Gx — {дх: g G G},
т.е. орбиты действия. На таком факторпространстве всегда можно вве-
сти каноническую топологию: множество U G X/G является открытым
тогда и только тогда, когда его прообраз π-1 (U) С X открыт. Здесь π:
X —> X/G — проекция, сопоставляющая точке х ее орбиту Gx.
§ 9.5. Понижение порядка системы, симплектическая редукция 225
Если действие — отображение X х G —* X вида (х,д) —> дх — гладкое,
группа G компактна и действие группы свободное (это означает, что ра-
венство дх = х выполняется только при g = 1), то на факторпространстве
существует структура гладкого многообразия. Это определяется следующим
образом.
Малая окрестность U произвольной точки хо е X расслаивается на ор-
биты действия группы G. Рассмотрим в U такое подмногообразие Z, что
в каждой его точке z касательное пространство к X распадается в прямую
сумму
TzX = Tz(Gz) + TzZ
касательного пространства в орбите Gz группы G и касательного про-
странства к Z. Тогда в U вводятся локальные координаты у1, ...,уш,
z1, ... ,z/c_m, где у — локальные координаты в окрестности V единицы
группы G и z — координаты на Ζ (см. рис. 9.2). Любая точка х G U
однозначно задается в виде х = gz, где g G V и z G Z. Более того, предпо-
ложим, что окрестность U взята настолько малой, что из g\z\ — #2^2, где
<7ъ<72 £ G, 2i,22 G Ζ, следует, что д\ — д2, z\ = z2 · (Для существования
такого однозначного разложения нам необходимо, чтобы G была компакт-
ной и, следовательно, ее орбиты были подмногообразиями.) Теперь точке х
сопоставим координаты точек д— (у1, ..., ут) — и z — (21, ..., zk~rn). Ко-
ординаты (z1, . .., zk~m) зададут координаты на факторпространстве X/G.
Касательные векторы к подмногообразию Ζ будут представлять при этом
касательные векторы к X/G. Если подмногообразие Ζ выбрано другим, то
мы получим другие координаты в окрестности точки Gx G X/G и другие
представители касательных векторов к X/G. За деталями мы отсылаем к [6].
Рис. 9.2. Факторпространство X/G
4. Пуассоновское действие группы и симплектическая редукция.
Говорят, что функции F и G на пуассоновом многообразии находятся в ин-
226
Глава 9
волюции, если их скобка Пуассона равна нулю:
{F,G} = 0.
Пусть нам даны m функций Fi, ..., ¥ш на симплектическом многооб-
разии, которые не обязательно попарно находятся в инволюции. Это означа-
ет, что они порождают некоммутативную алгебру Ли g относительно скобки
Пуассона. Мы рассмотрим случай, когда они задают линейна независимый
базис в этой алгебре g:
{Fi,Fj} = -^jFk.
Эти функции, взятые как гамильтонианы, задают m гамильтоновых потоков
с векторными полями v\ = Vfx, . . ., vm = Vfm, которые не коммутируют,
а удовлетворяют соотношению
(см. лемму 9.2). Сдвиги вдоль этих потоков порождают действие некоторой
связной группы Ли G на M со следующими свойствами:
1) алгебра g является алгеброй Ли группы G и ее элементы α G g
отождествляются с векторными полями a\V\-\- ... + amfm;
и так как сдвиг вдоль каждого потока сохраняет симплектическую форму
и каждый элемент из G есть композиция таких сдвигов, то
2) G действует на M посредством канонических преобразований
(по иному симплектоморфизмов, т. е. диффеоморфизмов φ : M —* M, со-
храняющих форму ω: φ*ω — ω):
M -^ M, g* ω =ω, g eG.
Мы пришли к важному понятию: действие группы G на симплекти-
ческом многообразии называется пуассоновским, если оно удовлетворяет
условию 2.
Это определение более общее, чем случай, который мы рассматрива-
ем: оно не предполагает, что для каждого элемента α G g алгебры Ли g
однопараметрическая подгруппа eat есть группа сдвигов вдоль траекторий
гамильтонова потока, а достаточно, что векторное поле v(x) = jj-eat(x) —
локально гамильтоново.
В нашей же ситуации с пуассоновским действием связано отображе-
ние момента:
A4:M->g*,
§ 9.5. Понижение порядка системы, симплектическая редукция 227
сопоставляющее каждой точке х G M следующую линейную функцию
на алгебре Ли g:
[М(х)](а) = aiFi(x) + . . . + amFm(x), a = αλνλ + . . . + ашут G g.
Имеет место
Лемма 9.5. Для всех g G G,x G M выполняется равенство
M(gx) = Ad*g(M(x)), (9.23)
т. е. отображение момента эквивариантно относительно коприсоединен-
ного представления группы G.
Доказательство достаточно дать для однопараметрической подгруп-
пы g = e6t, Ь G g. Мы имеем, по определению,
[М (еых)] (а) = aiFi (ebtx) + ... + amF (ebtx).
Продифференцируем по t обе части этого равенства
ft [M (ebtx)} (а) = cuiFuFb} {ebtx) + .. . + am{Fm,F6} (ebtx) =
= {Fa,Fb} (ebtx) = -F[aM (ebtx) = Fad;{a) (ebtx),
где Fa = ai Fi + ... 4- ашРш, Fb = biFi + . . . + bmFm. Тем самым мы
показали, что производные левых и правых частей (9.23) тоже совпадают
при всех t. Отсюда с учетом очевидного выполнения тождества при t = О
немедленно следует утверждение леммы.
Прообраз отображения момента в точке τ G g* обозначим через
Μ-\τ) = Μτ.
Следствие 9.8. 1) Mq — инвариантно относительно действия груп-
пы G.
2) Если группа G коммутативна, то для любого τ G g* множество Μτ
инвариантно относительно действия группы G.
Имеет место
Теорема 9.9. Пусть Mq — гладкое подмногообразие в М, группа G
компактна и свободно действует на Mo. Тогда на факторпростран-
стве Mred = Mq/G существует естественная симплектическая струк-
тура.
228
Глава 9
Доказательство. При введении гладкой структуры на факторпро-
странстве мы вводим координаты z1, .. . ,zk~m, к = dim M — m = dim Mo,
как координаты на некоторой площадке — подмногообразии — Z. Опреде-
лим кососимметрическое произведение на касательном пространстве к Ζ
по обычной формуле:
ω'(ξ,η)=ω(ξ,η), (9.24)
где ω — симплектическая форма на исходном многообразии M, a
ξ,η£ΤΖΖ CTZM0CTZM.
Естественно было бы так и определить симплектическую структуру
на Мгесь тем более, что форма ω' замкнута, как ограничение замкнутой
формы ω на подмногообразие Ζ. Но это определение необходимо строго
обосновать, доказав, что оно не зависит
1) от выбора координат на Mred;
2) от выбора точки х на орбите.
Необходимо также показать, что
3) форма о/ невырождена.
Именно эти три утверждения мы сейчас и докажем.
Прежде всего приведем вспомогательное утверждение.
Лемма 9.6. Пространства TxMq и Тх (Gx) являются ортогональными
дополнениями друг друга в ТХМ относительно формы ω.
Доказательство. Так как группа G действует гамильтоновыми преоб-
разованиями, то касательный вектор η к орбите имеет вид Vf для какой-то
функции вида / = axFi + ... + amFm:
rJ = vj = hjk—^-
f дхк'
Мы имеем
<ο(ξ,η) = hi3Crf = haVhjk^ - iff |4 = e|4 = dif,
OXK OXK ОХг
т. e. ω (ξ, η) есть производная функции / в направлении вектора ξ. Поэтому ξ
лежит в ортогональном дополнении к Tx{Gx) если и только если д^М = 0,
но условие выделяет касательное пространство к Mo. Тем самым мы пока-
зали, что
(Tx(Gx))±=TxM0.
§ 9.5. Понижение порядка системы, симплектическая редукция 229
Мы оставляем обратное утверждение
{ТХМ0)^ = Tx(Gx)
в качестве несложного упражнения. Лемма доказана.
Перейдем к доказательству корректности определения симплектиче-
ской структуры на Mreci'
1) замена координат фактически состоит либо в замене координат
на площадке Z, либо в замене площадки Z. Необходимо рассмотреть только
второй случай, так как при нем касательные векторы из ТМо, представля-
ющие касательные векторы к Mred, изменяются:
ξ-^ξ + ξ^η^η + ν',
где векторы ξ' и т/ касаются орбит группы G. Но согласно предыдущей
лемме значение симплектического произведения (9.24) при этом не изменя-
ется:
2) так как действие группы G гамильтоново, то оно сохраняет симплек-
тическое произведение:
и поэтому данное определение формы (9.24) не зависит от выбора точки х
на орбите.
3) если ω(ξ,η) = 0 для всех векторов η G TXZ, то ξ ортогонален
всем векторам из TxMq и по лемме 9.6 он касается орбиты группы G, т.е.
представляет нулевой вектор из TxMve^.
Теорема доказана.
Пусть г G g* и τ φ 0. Обозначим через GT подгруппу в G, образован-
ную всеми элементами д, сохраняющими г неподвижным:
Ad;(r) = r.
Следствие 9.9. Пусть МТ — подмногообразие, группа GT компактна
и действует на МТ свободно. Тогда на факторпространстве
Mr/GT
существует естественная симплектическая структура.
230
Глава 9
Доказательство. Обозначим через От орбиту г G g* при присо-
единенном представлении Ad* группы G. Рассмотрим на ней симплек-
тическую форму ωτ, как на симплектическом листе скобки Ли-Пуассона
(см. § 9.3). Присоединенное представление задает пуассоновское действие
группы G на От, для которого отображение момента совпадает с вложени-
ем О г С g* на прямом произведении
M хОт
рассмотрим симплектическую форму lüm — ωτ (т. е. сумму двух форм на со-
множителях). Тогда MT/GT = (M x Or)red (мы оставляем проверку этого
равенства в качестве упражнения). Следствие доказано.
Заметим, что все рассуждения при доказательстве теоремы фактиче-
ски локальны и поэтому мы в общем случае можем рассмотреть локальную
редукцию, упрощающую систему в некоторой области. Более того, ситуа-
ция, когда действие группы G свободно и мы получаем многообразие Мгесь
встречается нечасто, а имеет место обратное — группа G содержит конечные
подгруппы, которые оставляют неподвижными некоторые точки. В итоге
при факторизации этим точкам отвечают конические особенности в Mred.
Однако вдали от этих особенностей мы получаем хорошее симплектическое
многообразие.
Если гамильтониан H находится в инволюции с функциями Fi, ..., Fm,
то отвечающая ему гамильтонова система редуцируется до гамильтоновои
системы на 2 (n — m)-мерном симплектическом многообразии Mred — приве-
денном фазовом пространстве с симплектической формой cured. Посколь-
ку {Н, Fi} — 0, гамильтониан H при сдвигах вдоль гамильтоновых пото-
ков, заданных гамильтонианами Fi, ..., Fm, сохраняется, а, следовательно,
он сохраняется под действием группы G и при проекции π : Mo —» Mred =
= Mo/G. Поэтому исходная гамильтонова система редуцируется до си-
стемы на Mred с гамильтонианом Н1е&(х) = Н(п~1(х)) — приведенным
гамильтонианом.
При этом, если функция / инвариантна относительно действия груп-
пы G, то она опускается до функции на факторпространстве: f(x) —
— /redM#))5 и изменение / вдоль траекторий потока описывается урав-
нениями
/ = {/»^0 = {/red,#red}red,
где скобка Пуассона {·, -}red отвечает форме o;red·
Этот прием известен (на конкретных) примерах очень давно и неод-
нократно использовался в различных задачах механики. Он встречается,
§ 9.5. Понижение порядка системы, симплектическая редукция 231
когда гамильтонова система допускает группу симметрии и, как во многих
конкретных примерах, действие этой группы пуассоновское.
Прежде, чем переходить к примерам, сделаем замечание: существуют
интересные задачи, в которых на поверхности уровня первого интеграла F
градиенты функций F и H не всюду линейно независимы. Точке, где grad F
и grad H линейно зависимы, отвечает неподвижная точка (положение рав-
новесия) приведенной гамильтоновой системы, в то время как эта точка не
является положением равновесия исходной системы. Траектория, которая
проектируется в положение равновесия на Mred, называется относитель-
ным равновесием исходной системы. Например,
• если гамильтониан инвариантен относительно пуассоновского дей-
ствия группы G, то относительные равновесия — это в точности орбиты
однопараметрических подгрупп группы G.
5. Примеры.
а) Движение в центральном поле. Пусть M = T*R3 = M3 х M3 —
кокасательное расслоение к R3, хг,х2,х3 — евклидовы координаты в М3
и РъР2,.Рз — координаты в пространстве импульсов. Рассмотрим гамильто-
ниан
H(x,p) = ^+U(r),
описывающий движение частицы массы m в центральном поле U(r),r =
= \/{х1)2 + (х2)2 + (х3)2. Например, при U(r) = ψ, α = const < 0, мы по-
лучаем задачу Кеплера, описывающую движение планеты вокруг солнца
(в пренебрежении влиянием других сил). Гамильтониан инвариантен отно-
сительно пуассоновского действия группы вращений G = SO(3). Алгебра
Ли g порождена при этом компонентами вектора кинетического момента:
F = (FbF2,F3), F = p=[xxp].
Поверхность уровня Мт = {μ = τ}, τ φ 0, имеет размерность три, а груп-
па GT — одномерна. Поэтому размерность приведенного фазового простран-
ства равна двум. Приведем явные формулы.
Заменой переменных в М3 можно привести все к случаю г = (0,0, с).
Поверхность уровня Мт задается уравнениями
х3 = рз = 0, х1р2 - х2р\ = с.
232
Глава 9
Группа G г есть группа S О (2), образованная всеми поворотами вокруг
оси Ох3. В плоскости переменных ж1, ж2 введем полярные координаты г, φ,
а в импульсном пространстве — сопряженные переменные Ρτ,Ρφ·
х1 = г cos </?, х2 — г sin φ,
Ρφ . , Ρφ
Pi = Pr cos φ — sm φ, ρ2 = pr sin φ + — cos </?,
{r>Pr} = {<АР<Л = 1,
а скобки Пуассона для остальных наборов координат равны нулю. В новых
координатах поверхность Мт задается уравнениями
X3 = РЗ = 0, Ρφ = С.
Группа Gr действует вращениями: <р —> φ + 0, 0 ^ θ < 2π, и факто-
ризация Мт —► MT/GT сводится к исключению угловой переменной Θ.
В итоге мы получаем приведенное фазовое пространство Mred с коорди-
натами г,рг, симплектической формой dpr Λ dr и приведенным гамиль-
тонианом
#red(r,P,) = |(p2 + ^)+[/(r).
б) Задача Кеплера. Задача Кеплера имеет дополнительные первые ин-
тегралы — компоненты вектора Лапласа-Рунге-Ленца
' V 1
, ах
N
ixl«?]
Задача 9.2. I) Доказать, что скалярное произведение векторов кине-
тического момента и Лапласа-Рунге-Ленца равно нулю
(μ, ν) = 0,
но компоненты этих векторов в общей точке дают пять функционально
независимых первых интегралов задачи Кеплера.
2) Доказать, что скобки Пуассона компонент векторов μ, ν равны
§ 9.5. Понижение порядка системы, симплектическая редукция 233
р2
где Ε = Η — h ^Щ — энергия системы. Вывести отсюда, что на раз-
2га \х\ ^ г
личных поверхностях уровня энергии алгебра интегралов μ^ Vj замыкается
и изоморфна
а) алгебре Ли группы S О (А) при Ε < 0;
б) алгебре Ли группы движений трехмерного пространства при Е = 0;
в) алгебре Ли группы 50(1,3) при Ε > 0.
В частности, общая поверхность уровня μ = μο — const, ν — щ =
= const одномерна и является в точности траекторией задачи Кеплера.
в) Орбиты коприсоединенного представления групп Ли. Пусть
Μ = Τ* G, где G — группа Ли, которая действует сама на себе (и тем
самым на T*G) левыми сдвигами. Это действие пуассоновское, и соответ-
ствующие гамильтонианы линейны по импульсам и имеют вид
( deat I A
Fa(x,p) =p(ag) = ρ i—\t=ogJ , α G g,
где ρ (ν) — значение ковектора (линейной функции) ρ на векторе v. Выраже-
ние ад означает правый сдвиг R*a вектора a G g = T\G в точку g = x G G,
и мы имеем
р{Ща) = Я;_,р(а)
(см. § 9.3). Поэтому отображение момента для этого действия имеет очень
простой вид:
м(д) = щ(р)ее* = т;а
Прообраз Μ~λ(τ) отображения момента в точке г G g* диффеоморфен
группе G и образован точками вида (g, R* λτ) G T*G. Рассмотрим отобра-
жение
Образ этого отображения совпадает с орбитой точки г в коприсоединенном
представлении, а слой — с орбитой действия группы Gr, образованной
всеми такими элементами g G G, что
LgR;.lT = Ad*gr = т.
Таким образом мы получаем приведенное фазовое пространство Мгесь диф-
феоморфное орбите точки τ в коприсоединенном представлении. Постро-
енная симплектическая структура та же самая, что и на этой орбите, как
симплектическом листе скобки Ли-Пуассона на g* (см. § 9.3). Мы оставля-
ем проверку этого утверждения в качестве упражнения.
234
Глава 9
§ 9.6. Уравнения Эйлера и уравнения движения твердого
тела
Рассмотрим на кокасательном расслоении к группе Ли G гамильтонову
систему, инвариантную относительно левых сдвигов.
Например, пусть нам дана левоинвариантная метрика на группе Ли.
Это означает, что в касательном расслоении задана такая метрика, что
(ξ, η) = (Ζ£ξ, Lffl для всех geG
и всех векторов ξ и η, касающихся G в одной и той же точке. Очевидно,
что любая такая метрика получается заданием скалярного произведения
в единице 1 G G группы G. При этом в произвольной точке g G G скалярное
произведение касательных векторов определяется как
&v) = (L*g-^,L*g-lV).
Геодезический поток инвариантен относительно левых сдвигов на груп-
пе Ли, так как относительно левых сдвигов инвариантен его гамильтониан.
Левоинвариантный гамильтонов поток редуцируется на орбиты коп-
рисоединенного действия группы G на g* (см. пример) в § 9.5). Так как
эти орбиты являются симплектическими листами (см. § 9.3), то уравнения
Гамильтона принимают вид
х = {ж, Я},
где правая часть есть скобка Ли-Пуассона от ж G g* и редуцированного
гамильтониана H — Hred геодезического потока. Для геодезического потока
левоинвариантной метрики, порожденной метрикой д^ на g, мы имеем
Н(х) = ^gikXiXk-
В координатах уравнения Гамильтона записываются как
Хг = —{Хг,Х^ = С%Хк — .
Рассмотрим х как линейный функционал на g:
= x([£,grad#]) = -^(adgradtfO = -аа*гаая(ж)(0,
§ 9.6. Уравнения Эйлера и уравнения движения твердого тела 235
где grad Heg есть градиент функции Η на g*. Мы получили иную запись
уравнений Гамильтона:
^ = -ad*radH(x). (9.25)
Так как в случае левоинвариантной метрики на группе G = S О (S) мы полу-
чаем уравнение Эйлера движения твердого тела около неподвижной точки,
то общее уравнение (9.25) с квадратичным гамильтонианом H называется
уравнением Эйлера на g*.1
Пусть на алгебре Ли задано невырожденное скалярное произведение,
инвариантное относительно присоединенного представления. Невырожден-
ность произведения как обычно позволяет отождествить двойственные про-
странства g* и g по правилу:
Χ(ξ) = (Χ,ξ).
Инвариантность относительно Ad д влечет тождество
{[z,x],y) + (x,[z,y]) = 0 для всех x,y,zeg.
Действительно, мы имеем
(Ad eztx, Ad ezty) = (ж, г/), te M,
и поэтому
— (Adezta;,Adezt2/)|t=0 = (adzx,y) + (x,adzy) = {[z,x],y) + (x,[z,y]) = 0.
Перепишем теперь уравнение Эйлера как уравнение на алгебре Ли g:
(х,у) = (х, [у,gradН]) = -([gradH,x],y),
и мы получаем его окончательный вид:
х — [ж, grad-ff], х е g.
'Подробный вывод и анализ уравнений Эйлера, в том числе и для бесконечномерных
алгебр Ли, см. в добавлении 2 к [10].
236 Глава 9
Рассмотрим важные примеры, когда G — группа Ли Е(3), образованная
всеми (сохраняющими ориентацию) движениями трехмерного евклидова
пространства:
х^Ах + Ъ, AeSO(3), 6 e M3.
Задача 9.3. Доказать, что
1) алгебра Ли g = е(3) группы Е(3) порождена элементами
Mi,pk-> h к = 1,2, 3, где Mi — генератор вращений вокруг оси Охг, а рк —
генератор сдвигов вдоль оси Охк, и при этом выполняются коммутацион-
ные соотношения
[Mi, Mj] = SijkMk, [Mupj] = SijkPk, \pupj] = 0 (9.26)
(здесь подразумевается суммирование по повторяющемуся индексу к).
2) скобка Ли-Пуассона на е(3)* имеет два казимира:
h=p2 = PÏ + р\ +PÎ М2 = (М,р) =ps = MlPl + М2р2 + М3 +рз·
Поверхность уровня
Мр,в = {Д=р2, 12=рз}Се(ЗУ
диффеоморфна кокасательному расслоению к двумерной сфере S2. При этом
симплектическая структура задается формой
u = d£iA dq{ + sf(q\q2)dq1 Λ dq2 = d& Λ dq* + sF,
где ql,q2 — координаты на сфере, £i,£2 — импульсные координаты, a F —
замкнутая 2-форма на S2. При этом
s2
Следовательно, при s φ 0 мы получаем магнитные скобки Пуассона
наТ*^2.1
Уравнения движения тяжелого твердого тела около неподвижной
точки отвечают гамильтониану
Н(М,р) = ^2aikMiMk + Y^hPk = (AM,M) + /(ρ),
г, k k
квадратичному по переменным М и линейному по переменным р.
Доказательства этих утверждений см. в приложении 1 (СП. Новикова) к [2].
§ 9.6. Уравнения Эйлера и уравнения движения твердого тела 237
Уравнения Кирхгофа, описывающие движение твердого тела в идеаль-
ной жидкости, есть уравнения Эйлера, соответствующие гамильтониану,
квадратичному по переменным М,р
Н(М,р) = ^2(игкМгМк + bikMiPk + СгкРгРк),
г/с,/с
где CLik = CLkiiCik = Cki. Так как гамильтониан в задаче Кирхгофа имеет
смысл кинетической энергии, то подразумевается, что он положительно
определен.
Заменами координат в g, сохраняющими вид скобки (9.26)
M^AdgM, p^g(p), geSO(3),
гамильтониан уравнений движения твердого тела около неподвижной точки
приводится к виду
г
а гамильтониан уравнений Кирхгофа — к виду
Н(М,р) = ]Г аг^г + Σ (^r(MiPk + MkPi) + CikpiPk Y Cik = Cki.
i i,k \ '
Это очевидно следует из того, что любая положительно определенная квад-
ратичных форм в Шп приводится к диагональному виду ортогональным
преобразованием (в нашей ситуации это — ортогонализация Грама-Шмидта
формы А(М, М)).
Заметим, что появление группы Е(3) в этих двух задачах имеет совер-
шенно разную природу:
а) уравнения Кирхгофа — это уравнения геодезических левоинвариант-
ной метрики на Е(3);
б) в случае уравнений движения тяжелого твердого тела около непо-
движной точки выберем ортонормированную систему координат, связан-
ную с телом и с началом в неподвижной точке. В этой системе коорди-
нат G — —М — вектор кинетического момента, а р — единичный вектор
238
Глава 9
направления силы тяжести.1 В этой задаче один из казимиров по определе-
нию равен единице: 1\ — р2 = 1, а другой казимир — Ι2 = ps — называется
интегралом площадей.
§ 9.7. Интегрируемые гамильтоновы системы
Современное определение конечномерной интегрируемой системы
основано на следующем результате, известном как теорема Лиувилля об ин-
тегрируемых системах.
Теорема 9.10. Пусть M — симплектическое многообразие размерно-
сти 2п, на котором задана гамилътонова система с гамильтонианом Н.
Пусть даны η первых интегралов этой системы Д, .. ., /n_i, /п = Н, ко-
торые находятся в инволюции: {Д, Ik} = 0, j, к — 1, .. ., η, и функциональ-
но независимы почти всюду. Обозначим через M : M —>· W1 отобраэюение
момента: Л4(х) = (Д(ж), ...,/п(ж)).
Пусть X — компонента множества Ai"1 (г) такая, что на X функ-
ции Ii, . . ., In функционально независимы и X — компактное множество.
Тогда X диффеоморфно n-мерному тору Тп и существует такая
окрестность U множества X, что
\)U диффеоморфна прямому произведению n-мерного открытого ша-
ра Dn на Тп;
2) в U заданы координаты действие-угол: si, ..., sn и </?i, ..., φη,
причем поверхности уровня s = (si, . .., sn) — const являются инвариант-
ными торами гамильтоновой системы, а угловые координаты ψ\, . . ., φη
являются координатами на этих торах и определены по модулю 2π, при
этом симплектическая форма принимает вид
*Если оси системы координат направлены вдоль осей инерции тела, а А, В, С — соответ-
ствующие моменты инерции, то после подстановки
M = (-Ap,-Bq,-Cr), р=(7,У,7")>
(аьа2,аз) = (т' £' с)' ^ = ~т^(жо7 + УоУ + W)
в уравнения
М = {М,Н}, р = {р,Н}
мы получим уравнения движения в терминах, привычных для книг по аналитической меха-
нике. Здесь ω = (ρ, q, r) — вектор угловой скорости, m — масса тела, g — гравитационная
постоянная, Q = (xq,yo,zo) — координаты центра тяжести тела. При Q = 0 уравнения M =
— {M, H} совпадают с обычными уравнениями Эйлера (см. § 9.2), так как сила тяжести не
учитывается в гамильтониане.
§ 9.7. Интегрируемые гамильтоновы системы
239
3) в координатах действие-угол гамилътонова система принимает
вид
Sj = 0, фк =^k(si, · -.,Sn), j,fe = 1, ...,n.
Сделаем несколько замечаний:
1) под словами «почти всюду» («в точке общего положения», «в общей
точке») понимается обычно «на множестве полной меры», т. е. множество,
где данное условие не выполняется, имеет меру нуль по отношению к неко-
торой мере αμ = p{x)dxx Λ ... Λ dx2n, где р(х) — какая-то гладкая или
просто непрерывная функция на М. В условиях теоремы на общей поверх-
ности уровня {Ii = ci, ..., Iп = сп} функции 7i, ..., In функционально
независимы и сама поверхность является подмногообразием (по теореме
о неявной функции);
2) гамильтонова система называется интегрируемой (по Лиувиллю)
(или вполне интегрируемой), если для нее выполнены условия данной те-
оремы. В классической механике 19-го века обычно ограничивались слу-
чаем аналитически интегрируемых систем, при котором первые интегра-
лы Ii, ..., In должны быть вещественно-аналитическими функциями;
3) данная теорема не вполне эффективна без процедуры построения
координат действие-угол, которая существует и которую мы лишь вскользь
упомянем при доказательстве. При наличии такой процедуры можно явно
решить уравнения Гамильтона в окрестности U тора X: на каждом инвари-
антном торе оно сводится к линейному уравнению с постоянными коэффи-
циентами и движение по тору условно-периодическое:
<p(t) = ip(0)+rl>(s)t.
Доказательство. 1) Прежде всего докажем следующее утверждение.
Лемма 9.7. X диффеоморфно n-мерному тору.
Доказательство леммы.
Гамильтоновы потоки vi = vjx, ..., vn = vjn касаются поверхности
уровня X, так как при сдвиге вдоль этих потоков сохраняются все значения
интегралов Д, ..., 1п. Более того,
[vijiVik] = -v{ij,ik} =0> j,fe = 1, ...,п,
и, следовательно, эти потоки коммутируют. Так как многообразие X ком-
пактно, то любое обыкновенное дифференциальное уравнение вида х —
= Vi(x),i = 1, ... ,п, имеет решение глобально, т.е. при всех значениях
времени t.
240
Глава 9
Сдвиги вдоль траекторий этих потоков порождают действие группы Ш.п
на X, сопоставляющее каждой точке xGlee сдвиг φ^κ) за единичное
время вдоль траектории потока t\V\ + ... + tnvn, t G Mn. При малых t
это отображение имеет вид
х -* х + tifi + ... + £пг>п + 0(|t|2),
и поэтому при t = 0 якобиан отображения £ —> v?t(x) отличен от нуля
для каждой точки х G X. Следовательно, по теореме об обратной функ-
ции, при |£| < е{х)х отображение t —» <£t(#) диффеоморфно отображает
открытый шар \t\ < е(х) на образ.
Если х и у лежат в X, то соединим их путем и для каждой точки z
из этого пути возьмем окрестность, которая диффеоморфно покрывается
при отображении t —■> <ßt{z). Пересечение этих окрестностей с η обра-
зует открытое покрытие пути, из которого можно выбрать конечное под-
покрытие Uu ■ · ·, Uk, x G Ui,y G Uk, Ui Π E/i+i 7^ 0,г = 1, .. .,n - 1.
Положим £o = x, y = Хк и выберем точки Xj G ^ П f/г+ь Мы видим,
что Жг+i = iptifai)) для некоторого времени £^,г = 1, ...,& — 1. Сле-
довательно, г/ = (/^ifc_1 . . .(ftQ{x). Так как точки х,у е X были выбраны
произвольно, мы заключаем, что
fat(x) ' t e Rn} = X для любой точки x G X,
т. е. X является однородным пространством группы Rn:
X = Мп/Г.
Так как группа отображение t —>· <pt (x) является диффеоморфизмом при ма-
лых i, то существует для ненулевых векторов 7 из Г величина |7| ограничена
снизу и мы положим за ei вектор из Г с наименьшим значением нормы.
За б2 примем вектор из Г, лежащий на наименьшем нулевом расстоянии
до прямой Mei и продолжим этот процесс, принимая на каждом шаге за
вектор вг — вектор из Г, лежащий на наименьшем расстоянии до подпро-
странства Mei + ... + Me^-i. В результате мы построим базис ei, ..., еп
группы Г = Zn (мы оставляем в качестве упражнения подробное обосно-
вание этой процедуры). Поэтому
X = Жп/Ъп = Тп.
Лемма доказана.
Для удобства мы наделяем Rn евклидовой нормой: |i| = \lt\ + ... + t\
§ 9.7. Интегрируемые гамильтоновы системы
241
2) Докажем, что некоторая малая окрестность U тора X расслаивается
на инвариантные торы в прямое произведение n-мерного диска на тор Тп.
Так как ковекторы grad Д, ..., grad In в каждой точке х G X ли-
нейно независимы, то по теореме о неявной функции существует окрест-
ность Ux, диффеоморная прямому произведению Vx х Dx с такими коорди-
натами (у, z\ что у — локальные координаты на X, а A4 (г/, z) = z. Покро-
ем X окрестностями Vx и выберем конечное подпокрытие VXl, ...,VXl.
Пусть D — DiDXi с Шп. Объединение множеств U = UiVXi x D,
где VXi x D с VXi x DXi = UXi, задает искомую окрестность, замыка-
ние которой компактно, и поэтому каждая компонента из Л4~1(а),а G D,
компактна и, следовательно, гомеоморфна тору.
Мы получаем естественный диффеоморфизм U = X x D, при котором
отображение момента есть проекция на второй сомножитель.
3) Построим координаты действие-угол. Введем на инвариантных то-
рах из U угловые переменные </?i, ... ,φη, определенные по модулю 2π,
а в качестве координат в D примем значения первых интегралов Д, ..., 1п.
Но как и при доказательстве теоремы Дарбу можно в качестве коорди-
нат на торе взять времена сдвигов вдоль траекторий гамильтоновых пото-
ков г>1, . .., vn. Обозначим эти времена за ti, .. ., tn. Очевидно мы имеем
{tjjk} = 6jk, {IjJk} = {tj,tk} - 0. (9.27)
На каждом торе угловые переменные φ получаются из временных перемен-
ных t линейной заменой, зависящей от тора. Поэтому из (9.27) следует, что
в переменных 7", φ симплектическая форма имеет вид
ω = Y^ ajk(I, 4>)dlj Adlk + Σ bjk{I)dIj Λ dipk. (9.28)
j<k jyk
В частности, ограничение формы ω на инвариантные торы равно нулю
и в окрестности U определена 1-форма а такая, что
da — ω.
Это утверждение вытекает из топологических соображений: ограничение
формы ω на U реализует нулевой класс когомологий и внешний дифферен-
циал d на ω обратим: мы не будем здесь это доказывать, отсылая за деталя-
ми к [2, 6]. Для M = T*N в качестве а берется щахг (в таком виде вывод
формул для переменных действие-угол часто встречается в физической ли-
тературе). Положим теперь
7fc
242 Глава 9
Здесь 7& — контур на торе, заметаемый при изменении φ^ от 0 до 2π (другие
переменные <pi при этом не изменяются). Для кокасательного расслоения
мы получаем классические формулы из физической литературы:
Покажем, что функции s к, к = 1, .. ., п, не зависят от 99. Возьмем
любой другой контур У, который вместе с 7/с ограничивает поверхность S
на торе. Тогда по теореме Стокса мы имеем
а — а = /а = da = ω = 0.
Из (9.28) следует, что
а = ]Р / ^bjk(l)dlk \ d(pk + ^/^· + d/0
/с V i / к
и только первое слагаемое дает вклад при интегрировании по 7ь и мы
получаем
ds/c = 2J bjkdlj, -туг = bjfc(Ji, ..., /n).
Из невырожденности формы ω следует обратимость матрицы bjk, и мы
заключаем, что по теореме об обратной функции существует замена коор-
динат
1Ь . . . , Jn -> 5i, . . . ,Sn, 5 = 5(7)
(при этом мы, возможно, должны сузить область U до меньшей, но по-
прежнему расслаивающейся на инвариантные торы). Мы получаем
ω — j>cijkdsj Λ dsk + /_^ bjkdsj A dtpk-
j<k j,k
Но в новых координатах мы имеем
а = ]Р I ^bjkdsj dtpk -^^gjäsj + d#0
§ 9.7. Интегрируемые гамильтоновы системы
243
и получаем соотношение
dsk = y^jkdsk.
из которого следует, что bjk = àjk. Так как форма ω = Ση<]ς ^jkdsj i\dsk +
+ Y^k dsk Λ dipk замкнута, то коэффициенты ajk не зависят от угловых
переменных и форма Y^j<k^àjkdsj Λ dsk тоже замкнута:
Y^üjkdsj Λ dsk = d ^ftfc(s)d^Aj I.
j</e V /c /
Замена угловых переменных ^ —> φ^ + /г^ (J) приводит симплектическую
форму к искомому виду
ω — 2_]dsk Λ αφ^.
к
В этих координатах функция Гамильтона есть Η = H(si, ..., sn) и урав-
нения Гамильтона принимают вид
дН
èj = {sj,H} = Q, <£fc = {<pfe,tf} = —=-0fe(sb ....Sn), j, к = 1, . .. ,n.
Теорема доказана.
Существуют два естественных обобщения интегрируемости по Лиу-
виллю:
1) интегрируемость на поверхности уровня энергии или, более общо,
на общей поверхности уровня первых интегралов {h = ... = Ik = 0}.
Действительно, для многих систем только некоторые специальные
уровни энергии заполнены торами с условно-периодическими движения-
ми на них. В этом случае мы говорим, что система интегрируема на по-
верхности уровня N = {Ii = ci, .. . ,ifc = с/с}, если в окрестности этой
поверхности уровня определены функции 1\, ..., 1п (включающие гамиль-
тониан Н) и выполняются следующие условия:
а) функции 7~i, ..., 1п почти всюду функционально независимы на N
и их гамильтоновы потоки касаются поверхности уровня N;
б) гамильтоновы потоки с гамильтонианами Д, ..., 1п коммутируют
на TV.
244
Глава 9
Тогда
• на N определено отображение момента
M:N^ Rn~\ M(x) = (4+1 (s), .. . Jn{x)).
Если Χ — компактная компонента множества Лч-1(т) и Д, ... ,/п
функционально независимы на X, то X диффеоморфно тору и некото-
рая окрестность X в N расслаивается на инвариантные торы, на кото-
рых гамильтонов поток — условно-периодический.
Доказательство этих утверждений фактически то же самое, что и в до-
казательстве теоремы 9.10.
Заметим также, что возможна даже более общая интегрируемость, ко-
гда функция / не является первым интегралом, но некоторая ее поверхность
уровня {I = с} сохраняется гамильтоновом потоком и на ней этот поток
интегрируем. Такие случаи встречаются в динамике твердого тела.
2) интегрируемость посредством некоммутирующих интегралов.
Пусть нам дана алгебра Λ первых интегралов, линейно порожден-
ная функциями ii, ..., Tn+fc. Предположим, что эти функции почти всюду
функционально независимы. Пусть эти интегралы не всегда коммутируют:
не всюду выполняются тождества {7j, Ik) — 0. Пусть Λ содержит комму-
тативную подалгебру В, H G Б и
dim Λ + dim В = dim M = 2n.
Тогда
• общие поверхности уровня
Nc = {h = ci, ..., In+k = cn+/c}
есть (η — к)-мерные торы, на которых гамильтоновы потоки, отвечаю-
щие функциям из В, задают условно-периодические движения.
Доказательство этого утверждения сходно доказательству теоремы 9.10,
которая отвечает предельному случаю Λ — В.
Этот метод интегрируемости обобщается на случай, когда подалгебра В
зависит от поверхности уровня: В — Вс С Λ и на 7VC гамильтоновы потоки,
отвечающие функциям из ВС9 коммутируют. При этом поверхности Nc опять
являются торами с условно-периодическими движениями.
§ 9.7. Интегрируемые гамильтоновы системы
245
Подробное изложение как уже данных выше, так и других определений
интегрируемости, отталкивающихся от теоремы Лиувилля, дается в [16, 20].
Примеры интегрируемых систем.
1. Геодезический поток на поверхности вращения. Пусть поверх-
ность вращения Σ в Ш3 образована вращением графика функции f(x) вокруг
оси Ох (см. задачу 2.2). Она задается параметрическими уравнениями
х = и, у = f(u) cos ν, z = f(u)smv,
и метрика принимает вид
ds2 = (l + f'2)du2 + f2dv2.
Геодезический поток на Τ*Σ имеет гамильтониан
i + f'2Pu f2
н = т^Ри + f2PÎ
Поскольку dimT*E = 4, то для интегрируемости по Лиувиллю достаточно
найти еще один первый интеграл, который почти всюду функционально
независим с Н. Теорема Клеро (см. задачу 2.13) дает его нам в виде
J = /(u)cos^,
где ψ — угол между геодезической и параллелью. Этот факт является прояв-
лением закона сохранения импульса (лемма 9.4): метрика и, следовательно,
лагранжиан геодезического потока не зависят явно от ν и поэтому соответ-
ствующий импульс ρν = 1у/~Н сохраняется.
Задача 9.4. Доказать, что геодезические на поверхности вращения
задаются формулой
v(u) = / с— —du,
J VЯР-с2)
где с — значение интеграла I на геодезической: I = с.
2. Лиувиллевы метрики на двумерном торе. Пусть на поверхности
с координатами и и ν дана метрика
ds2 = (f(u) 4- g(v))(du2 + dv2)
246
Глава 9
(такая метрика называется лиувиллевой). Так как поверхность двумерна,
то для интегрирования геодезического потока достаточно найти еще один
ρ2 + ρ2
первый интеграл (кроме гамильтониана Η = —^ -). Легко проверить,
что следующая функция является первым интегралом:
9р1 - îpI
1 =
/■
Задача 9.5. Доказать, что для лиувиллевой метрики уравнение геоде-
зических записывается в виде
du =± У/(ц) + с
dv y/g(v)-c
где с — значение интеграла I на геодезической: 1-е.
Если переменные и и ν определены по модулю Ζ и f(u + l) =
— f(u)id(v + 1) — 9(v)> т0 мы получаем метрику Лиувилля на двумерном
тореЕ2/^2·
3. Уравнения Эйлера движения твердого тела около неподвижной
точки записываются как уравнения
х = {х,Н}
на пространстве, двойственном алгебре Ли группы SO(3) (см. §9.2).
Эта динамика редуцируется на симплектические листы — двумерные сфе-
ры \х\ = const. Для интегрирования гамильтоновой системы на двумерном
многообразии достаточно знать один интеграл, который нам уже дан — га-
мильтониан:
Пусть А > В > С. Поскольку гамильтониан и дополнительный инте-
грал \х\2 однородны по #1, Х2, хз, мы без ограничения рассмотрим поверх-
ность уровня X = {Н — i > 0}. Она расслаивается на пересечения ее со
сферами \\х\ — s}. При этом для ограничения уравнений Эйлера на поверх-
ность уровня гамильтониана мы имеем следующую картину (см. рис. 9.3):
• С < s < А;
§ 9.7. Интегрируемые гамильтоновы системы
247
Рис. 9.3. Интегральные траектории уравнений Эйлера (Н = -)
• стационарные точки уравнений Эйлера есть в точности
(О, ±\/Б, 0) и (0,0, ±л/С) и они отвечают вращениям тела вокруг осей
инерции (при этом s = Д В, С, соответственно;
• пересечение сферы {\х\ = s} и поверхности уровня X = {Я — ^}
а) гомеоморфно окружности при s ^ Д Б, С,
б) состоит из пары стационарных точек при s = А,С,
в) образовано парой стационарных точек и парой сепаратрис, соединя-
ющих эти точки, при s = В.
Из этой картины легко следует, что вращения вокруг осей инерции,
отвечающих максимальному и минимальному моментам инерции (А и С)
— устойчивы, а вращение вокруг оси, отвечающей моменту инерции В —
неустойчиво.
4. Интегрируемые случаи в динамике твердого тела. Так как урав-
нения движения тяжелого твердого тела около неподвижной точки и урав-
нения Кирхгофа гамильтоновы относительно скобки Ли-Пуассона на е(3)*,
то они редуцируются на общие поверхности уровня двух казимиров алге-
бры е(3):
h=p2 = PÎ Л-vi +Р§> h=ps = Mipi + М2р2 + МзРз.
Эти поверхности (при ρ φ 0) диффеоморфны кокасательному расслоению
к двумерной сфере S2, a симплектическая форма есть
ω = ω0 + sF,
248
Глава 9
где cjo — каноническая симплектическая форма на кокасательном расслое-
нии, a F — замкнутая 2-форма на S2 («магнитное поле») (см. § 9.6). Один
первый интеграл на этом четырехмерном симплектическом многообразии
нам уже известен — это гамильтониан. Поэтому для интегрирования уравне-
ния достаточно знать еще один независимый первый интеграл. Оказывает-
ся, что такой интеграл существует только при очень специальных значениях
параметров, входящих в гамильтониан.
Известны три знаменитых интегрируемых случая:
а) Случай Эйлера-Пуансо:
х<э=Уо = zo = 0, т. е. 1(р) = О
(тело закреплено в центре тяжести). В этом случае Η — Η (Μ) и динамика
вектора M описывается обычными уравнениями Эйлера на алгебре 50(3).
Очевидно казимир этой алгебры является необходимым дополнительным
интегралом:
б) Случай Лагранжа-Пуассона:
А = В, х0=Уо = 0
(тело осесимметрично, и неподвижная точка находится на оси симметрии).
В этом случае гамильтониан инвариантен относительно вращений вокруг
оси симметрии. Это действие пуассоновское и имеет очевидный линейный
интеграл, порождающий его — момент относительно оси симметрии:
/ = М3.
в) Случай Ковалевской:
А = В = 2С, y0 = z0 = 0.
Дополнительный интеграл имеет вид
/ = (a2Ml + а2М2 - 2allPl)2 + (2а2МгМ2 - 2ahp2)2,
где 2<2i = 2α2 = as = а, или в обозначениях, принятых в аналитической
механике:
/=(/+д2+с7)2 + (2м + сУ)2) с=».
Последний случай был найден Ковалевской при доказательстве следу-
ющей теоремы (доказательство этой теоремы изложено в [19]):
§ 9.7. Интегрируемые гамильтоновы системы
249
• три указанных выше случая — это все такие (общие) интегрируемые
случаи уравнений движения тяжелого твердого тела около неподвиж-
ной точки, что решения являются однозначными мероморфными функ-
циями времени, как комплексного параметра.
Здесь мы называем интегрируемый случай общим, когда задача инте-
грируема всюду (при всех возможных значениях начальных данных).
Другие общие интегрируемые случаи для этой задачи неизвестны, но
существуют интересные частные случаи интегрируемости. Это — например,
г) случай Горячева- Чаплыгина:
А = В = 4С, уо = *ο·
На нулевой поверхности уровня 12 = ps (т.е. при 5 = 0) задача имеет
дополнительный первый интеграл:
/ = а2М3(М2 + М2) + hp3 = Cr(p2 + q2) + mgx^'\
где а = a\ — ü2 = A~l\
д) случай Гесса:
2/o = 0, хол/МВ - С) + г0Л/С(А - В) = 0.
Функция
/ = iiMi + 12М2 = mg(Ax0p + Cz0r)
не сохраняется при движении: 1^0 почти всюду. Однако при / = 0
мы имеем 1 = 0. Таким образом, задача интегрируема на поверхности
уровня {/ = 0}, где функция / является первым интегралом только на этой
поверхности.
Подробный разбор этих и других, более частных, случаев вместе с яв-
ными формулами для решений в алгебраических функциях дан в книге [19].
Для уравнений Кирхгофа тоже известны три общих интегрируемых
случая: Кирхгофа, Клебша и Стеклова. Аналог теоремы Ковалевской для
этих уравнений не установлен.
Литература
по дифференциальной геометрии и топологии
[1] Дубровин Б.Α., Новиков СП., Фоменко А.Т. Современная геомет-
рия. Часть I. Геометрия поверхностей, групп преобразований и полей.
Часть И. Геометрия и топология многообразий. — Москва: Наука,
1986.
[2] Дубровин Б.Α., Новиков СП., Фоменко А.Т. Современная геомет-
рия. Часть III. Методы теории гомологии. — Москва: Наука, 1984.
[3] Ефимов Н. В. Высшая геометрия. — Москва: Наука, 1978.
[4] Зейферт Г., Трельфалль В. Топология. — Ижевск: Регулярная и хаоти-
ческая динамика, 2001.
[5] Новиков С. П. Топология. — Москва-Ижевск: Институт компьютерных
исследований. 2002.
[6] Новиков С. П., Тайманов И. А. Современные геометрические методы
и поля. — Москва: МЦНМО, 2005.
[7] Погорелов A.B. Дифференциальная геометрия. — Москва: Наука,
1969.
[8] Тайманов И. А. Лекции по дифференциальной геометрии.
I. Кривые и поверхности. — Новосибирск: НГУ, 1998;
П. Риманова геометрия. — Новосибирск: НГУ, 1998;
III. Дополнительные главы. — Новосибирск: НГУ, 1999.
по другим университетским курсам
[9] Александров П. С. Курс аналитической геометрии и линейной алге-
бры. — Москва: Наука, 1969.
10] Арнольд В. И. Математические методы классической механики. —
Москва: Наука, 1974.
11] Зорич В. А. Математический анализ. — Москва: Наука, 1981.
12] Колмогоров А. Н., Фомин С. В. Элементы теории функций и функци-
онального анализа. — Москва: Наука, 1976.
Литература
251
[13] Мальцев А. И. Основы линейной алгебры. — Москва: Наука, 1970.
[14] Понтрягин Л. С. Обыкновенные дифференциальные уравнения. —
Москва: Наука, 1969.
[15] Решетняк Ю. Г. Курс математического анализа.
Часть I. Книги 1 и 2. - Новосибирск: ИМ СО РАН, 1999;
Часть И. Книга 1. - Новосибирск: ИМ СО РАН, 2000;
Часть II. Книга 2. - Новосибирск: ИМ СО РАН, 2001.
к «Дополнительным главам»
[16] Арнольд В. И., Козлов В. В., Нейштадт А. И. Математические аспек-
ты классической и небесной механики. — Москва: УРСС, 2002.
[17] Гельфанд И.М, Минлос P.A., Шапиро З.Я. Представления группы
вращений и группы Лоренца. — Москва: Физматгиз, 1958.
[18] Годунов С. К., Михайлова Т. Ю. Представления группы вращений и
сферические функции. — Новосибирск: Научная книга, 1998.
[19] Голубев В. В. Лекции по интегрированию уравнений движения тяже-
лого твердого тела около неподвижной точки. — Москва: Гос. изд-во
технико-теоретической литературы, 1953.
[20] Динамические системы — 4. Под ред. В. И. Арнольда и С. П. Новикова.
Серия "Современные проблемы математики. Фундаментальные на-
правления." Том 4. - Москва: ВИНИТИ, 1985.
[21] Дирак П.A.M. Принципы квантовой механики. — Москва: Наука,
1979.
[22] Желобенко Д. П. Компактные группы Ли и их представления. — Моск-
ва: Наука, 1970.
[23] Ландау Л. Д., Лифшиц И. М. Квантовая механика. — Москва: Наука,
1989.
[24] Ландау Л. Д., Лифшиц Ε. Μ. Теория поля. — Москва: Наука, 1988.
[25] Понтрягин Л. С. Непрерывные группы. — Москва: Наука, 1973.
[26] Постников М.М. Группы и алгебры Ли. — Москва: Наука, 1982.
[27] Фаддеев Л. Д., Якубовский O.A. Лекции по квантовой механике для
студентов-математиков. — Ижевск: Регулярная и хаотическая ди-
намика, 2001.
Предметный указатель
Алгебра Ли 158
— Пуассона 214
— групповая 176
— с делением 163
Аннулятор 218
Атлас 70
База расслоения 97
База топологии 67
Бианки тождество 109
Бинормаль 17
Вариация гладкая 47
Вектор касательный 73
Векторное поле 98
Вложение 76
Гамильтона оператор 194
— функция 192, 193
Гамильтониан 192, 193
— приведенный 230
Гамильтонова система 193
Геликоид 145
Генератор 160
Геодезическая 44
— магнитная 205
Гомеоморфизм 70
Гомоморфизм алгебр Ли 159
— групп Ли 159
Группа GL(n, С) 153
— SO(n) 151
— SU(n) 156
— Ли 148
линейная 150
матричная 150
— Пуанкаре 125
— линейная 170
— ортогональная 0{п) 20
— полная линейная GL(n) 149
— унимодулярная SL(n) 151
— унитарная U(n) 154
Действие группы 120
свободное 225
транзитивное 120
— пуассоновское 226
Динамическая система 46
Диффеоморфизм 72
Дифференциал Хопфа 139
— квадратичный 139
Длина кривой 12
Изометрия 120
Импульс 202
Интеграл движения 207
— от функции 84
Интеграл потока 46
Казимира функция 214
Катеноид 63
Кватернион 163
Клейна бутылка 78
Ковариантная производная 42, 94
Ковектор 79
Коммутатор в алгебре 158
— в группе 157
Компакт 69
Комплексификация представления 174
Контактная форма 222
Координаты геодезические 111
— канонические 206
Предметный указатель
253
— конформно евклидовы 131
— локальные 22, 27, 70
— полугеодезические 52, 113
— сферические 53
Край многообразия 77
Кривая 11
— бирегулярная 17
— гладкая 12
— интегральная 46, 87
— регулярная 12
Кривизна гауссова 33
— геодезическая 54
— кривой 17
— плоской кривой 15
— поверхности главная 32
нормальная 32
— связности 104
— секционная 107
— скалярная 108
— средняя 33
Кристоффеля символы 35, 94
Кручение кривой 19
Лагранжа функция 49
Лагранжиан 49
Лапласа оператор 133
Лапласа-Бельтрами оператор 133
Лежандра преобразование 205
Мера 183
— Хаара 184
— инвариантная 183
Метрика 67
— Шварцшильда 128
— индуцированная 92
— псевдориманова 93
— риманова 92
Многообразие гладкое 71
— дифференцируемое 71
— замкнутое 77
— контактное 222
— конформно евклидово 131
— ориентированное 74
— ориентируемое 74
— пуассоново 192
— риманово 92
— с краем 77
— симплектическое 199, 201
— топологическое 70
Множество замкнутое 67
— открытое 67
Момента отображение 226
Направление асимптотическое 34
— главное 32
Нормаль к кривой 17
Нормальное сечение 30
Носитель деформации 61
Окрестность 68
Орбита действия 224
Ориентация 74
Отображение гладкое 72, 77
— дифференцируемое 72
— непрерывное 68
— регулярное 75
— унитарное 154
— экспоненциальное ПО
Параллельный перенос 98
Параметр конформный 131
— натуральный 13
Паули матрицы 164
Первый интеграл 46, 207
Площадь поверхности 29
Поверхность замкнутая 59
— минимальная 61
— ориентированная 59
— ориентируемая 59
— регулярная 26
Погружение 76
Подгруппа однопараметрическая 159
Подгруппа Ли 148
Подмногообразие 22, 74
Подпокрытие 69
Покрытие 69
— открытое 69
254
Предметный указатель
Поле вариации 47
— векторное 41, 81
гамильтоново 198
параллельное 44
— тензорное 80
Поток 46
Представление 169
— вещественное 169
— комплексное 169
— конечномерное 169
— коприсоединенное 217
— неприводимое 170
— ортогональное 169
— присоединенное 217
— регулярное 176
— точное 170
— унитарное 169
Преобразование Галилея 125
— Лоренца 126
— каноническое 213
— линейное 149
— ортогональное 20
Произведение тензорное 81
— эрмитово 154
Производная Ли 88
— вариационная 202
Пространство Лобачевского 123
— Минковского 93, 124
— вещественное проективное 167
— гиперболическое 123
— евклидово 11
— касательное 23, 73
— кокасательное 80
— компактное 69
— конфигурационное 201
— линейно связное 69
— метрическое 67
— однородное 120
— односвязное 86
— представления 169
— псевдоевклидово Rk,n 93
— расслоения 97
— связное 69
— топологическое 67
— фазовое 46, 202
приведенное 230
расширенное 221
— хаусдорфово 69
Пространство-время 124
Радиус кривизны 15
Разбиение единицы 90
— симплициальное 56
Расслоение 97
— векторное 97
— касательное 45, 82
— кокасательное 82
Расстояние 11, 50
Репер Френе 14, 17
Связность аффинная 44, 94
— симметричная 44, 100
— согласованная с метрикой 44, 100
Сечение расслоения 98
Симплектическая форма 199, 201
Симплектический лист 214, 215
Симплектоморфизм 226
Скобка Ли-Пуассона 208
— Пуассона 192
Слой расслоения 97
Степень представления 169
Структурная группа расслоения 97
Структурные константы 159
Сфера 22, 71
— с ручками 59
Тензор 80
— Римана 103
— Риччи 108
— кососимметрический 82
— кривизны 103
— метрический 92
— энергии-импульса 128
Теорема о неявной функции 21
— об обратной функции 27
Тождество Лейбница 192
— Якоби 158
Предметный указатель
255
Топология 67
— индуцированная 67
Тор 78
Треугольник геодезический 60
Уравнение Бельтрами 134
— Гейзенберга 195
— Шредингера 194
Уравнения Вейнгартена 36
— Гамильтона 192
— Гаусса 35
— Гаусса-Кодацци 37
— Ньютона 192
— Френе 15
— Эйлера-Лагранжа 49, 191, 201
— Эйнштейна 127
— деривационные 36
— кривой натуральные 16, 19
— нулевой кривизны 104
Форма вторая квадратичная 30
— дифференциальная замкнутая 83
точная 83
— объема 84
— первая квадратичная 29
Функционал действия 47
Функциональная независимость 223
Функция гармоническая 134
— гладкая 22, 72
— непрерывная 68
— центральная 181
Фурье базис 173
— коэффициенты 174, 186
— преобразование 188
— ряд 174, 186
Характер представления 172
Характеристика 218
Эйлерова характеристика 57
Экстремаль функционала 48
Энергия 202
— кинетическая 204
— потенциальная 191
Якобиан 21