






















































































































































































































































































































Text
Г. Я. ЛЮБАРСКИЙ
ТЕОРИЯ ГРУПП
И ЕЕ ПРИМЕНЕНИЕ
В ФИЗИКЕ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1958
АННОТАЦИЯ
В книге дается систематическое изложение
теории представлений групп, изучаются пред-
ставления групп, играющих важную роль в
физике, и на этой основе рассматриваются
различные применения теории представлений в
теоретической физике.
Книга рассчитана на студентов старших курсов-
физических факультетов университетов, на
аспирантов и научных работников.
ОГЛАВЛЕНИЕ
Предисловие 6
Глава I. Элементы теории групп 7
§ 1. Группа (7). § 2. Подгруппа (9). § 3. Изоморфизм и
гомоморфизм групп (11).
Глава II. Некоторые конкретные группы 13
§ 4. Группа перестановок (13). § 5. Группа вращений (15).
§ 6. Полная ортогональная группа (19). § 7. Евклидова группа (20).
§ 8. Точечные группы (22). § 9. Точечные группы первого рода (23).
§ 10. Точечные группы второго рода (26). § 11. Группы
трансляций (29). § 12. Сингонии (31). § 13. Симметрия кристаллов (37).
Глава III. Теория представлений групп 41
§ 14. Представление группы (41). § 15. Эквивалентные
представления (43). § 16. Функционал усреднения (45). § 17. Приводимые
представления (46). § 18. Неприводимые представления и свойства
ортогональности (49). § 19. Теорема полноты (54). § 20. Теория
характеров (56).
Глава IV. Операции с представлениями групп 60
§ 21. Произведение представлений (60). § 22. Сопряженное
представление (63). § 23. Вещественные представления (65).
§ 24. Произведение групп (67). § 25. Симметризованные степени
представлений (68). § 26. Фактическое разложение приводимого
представления на неприводимые (72).
Глава V. Представления некоторых групп . 77
§ 27. Представления группы перестановок Sn (77). § 28.
Неприводимые представления точечных групп (80). § 29.
Представления групп трансляций (83). § 30. Представления
пространственных групп (86).
Глава VI. Малые колебания симметричных систем 95»
§ 31. Главные координаты и собственные частоты (95). § 32.
Симметрические координаты (97). § 33. Выражение функции Лаг-
ранжа в симметрических координатах (100). § 34. Колебательное
представление (104). § 35. Пример. Молекула СНС13 (108).
Глава VII. Фазовые переходы второго рода I'll
§ 36. Постановка задачи (111). § 37. Активные представления (117)..
§ 38. Пример (122).
4 ОГЛАВЛЕНИЕ
Глава VIII. Кристаллы 141
§ 39. Звук в кристаллах (141). § 40. Электронные уровни в
кристалле (145). § 41. Тензоры в кристаллах (147).
Глава IX. Бесконечные группы 151
§ 42. Специфические особенности бесконечных групп (151).
§ 43. Элементы теории групп Ли (157). § 44. Инфинитезимальное
представление группы Ли (167).
Глава X. Представление группы поворотов, группы вращений и
полной ортогональной группы . . 170
§ 45. Неприводимые представления группы поворотов Z (170).
§ 46. Классификация неприводимых представлений группы
вращений (171). § 47. Матричные элементы неприводимых
представлений (177). § 48. Свойства неприводимых представлений группы
вращений (182). § 49. Произведение представлений группы
вращений (186). § 50. Спинорная алгебра (188). § 51. Тензорная
алгебра (194). § 52. Представления полной ортогональной группы (199).
§ 53. Двузначные представления точечных групп (201).
Глава XI. Коэффициенты Клебша — Гордана и коэффициенты
Рака 203
§ 54. Вычисление коэффициентов Клебша — Гордана (203).
§ 55. Свойства коэффициентов Клебша — Гордана (211). § 56.
Коэффициенты Рака (215).
Глава XII. Уравнение Шредингера 224
§ 57. Законы сохранения (224). § 58. Классификация состояний
(233).
Г л а в а XIII. Уравнения, инвариантные относительно евклидовой
группы движений пространства .* 236
§ 59. Шаровые функции со спином (236). § 60, Уравнения,
инвариантные относительно группы евклидовых движений
пространства (239). § 61. Пример (244).
Глава XIV. Поглощение и комбинационное рассеяние света. . . 247
§ 62. Квантовомеханическое введение (247). § 63. Правила отбора
для поглощения света атомами и молекулами (250). § 64.
Комбинационное рассеяние света атомами и молекулами (2о6).
Глава XV. Представления группы Лоренца 259
§ 65. Группа Лоренца (259). § 66. Инфинитезимальные операторы
группы Лоренца (261). § 67. Классификация неприводимых
представлений группы Лоренца (263). § 68. Произведение
неприводимых представлений группы Лоренца (265). § 69.
Комплексно-сопряженные представления (267). § 70. Спинорная алгебра (269).
§ 71. Тензорная алгебра (271). § 72. Представления полной группы
Лоренца (275).
Глава XVI. Релятивистски-инвариантные уравнения 278
§ 73. Волновая функция (278). § 74. Релятивистски-инвариантные
уравнения (280). § 75. Функция Лагранжа (286). § 76. Законы со-
ОГЛАВЛЕНИЕ 5
хранения (289). § 77. Спин (294). § 78.
Релятивистски-инвариантная операция инверсии времени и теорема Паули (297). § 79.
Уравнение Дирака (300).
Глава XVII. Ядерные реакции 305
§ 80. Матрица рассеяния (305). § 81. Угловое распределение
продуктов ядерной реакции (309). § 82. Угловое распределение
продуктов ядерной реакции (продолжение) (310).
Приложения 314
I. Характеры неприводимых представлений групп перестановок
S4, S& Sq и S7 (314). II. Характеры неприводимых представлений
точечных групп • (316). III. Двузначные представления точечных
групп (317). IV. Пространственные группы (318). V. Коэффициенты
Рака (343).
Указатель литературы 345
Предметный указатель 350
ПРЕДИСЛОВИЕ
Предлагаемая книга представляет собой обработку курса лекций,
читавшихся автором в течение ряда лет в Харьковском
университете им. А. М. Горького. Книга предназначается для физиков,
специализирующихся в области теоретической физики. Ее цель —
подробно и последовательно изложить в возможно меньшем объеме те
сведения из теории представлений конечных и непрерывных групп,
которые наиболее важны для применений, рассмотреть группы,
представляющие интерес для теоретической физики и, наконец,
продемонстрировать принципы применения в теоретической физике
абстрактных понятий и теорем теории представлений. В конце книги
помещены таблицы, дающие подробное описание двухсот тридцати
пространственных групп, и таблицы характеров некоторых групп.
Книга снабжена значительным количеством задач.
У читателя предполагаются знания основ линейной алгебры
в объеме первых двух глав книги И. М. Гельфанда «Лекции по
линейной алгебре».
Несмотря на появление в недавнее время статьи И. М.
Гельфанда и 3. Я. Шапиро о представлениях группы вращений и статьи
М. А. Наймарка о представлениях группы Лоренца, автор включил
в настоящую книгу главы, посвященные этим вопросам. Это сделано
для удобства читателя и для сохранения цельности книги.
В заключение автор хочет поблагодарить Н. Я. Виленкина,
И. М. Гельфанда, М. Г. Крейна и Е. М. Лифшица за внимание
к его работе и ряд полезных советов. Автор признателен также
О. В. Ковалеву, замечания которого помогли устранить ряд ошибок.
ГЛАВА I
ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП
§ 1. Группа
Группой называется всякое множество О элементов, в котором
выполняются следующие четыре условия:
1. На множестве определено групповое действие—«умножение»,
ставящее в соответствии каждой паре элементов fug некоторый
элемент h из этого же множества; это записывается так:
fg = h.
Элемент h называется произведением элементов / и g, а сами
элементы / и g — сомножителями. Заметим, что произведение двух
сомножителей зависит, вообще говоря, от их порядка, так что
элементы fg и gf могут отличаться друг от друга.
2. Умножение ассоциативно: если /, g и h — три произвольных
элемента, то произведение элемента / на элемент gh должно
равняться произведению элемента fg на элемент h:
f(gh) = {fg)h.
3. Множество- G содержит единичный элемент et т. е. такой,
что, каков бы^ни был элемент/gG, имеет место соотношение
ef = fe=f.
4. Вместе с любым элементом / множество содержит элемент/"1,
юбратный данному, т. е. такой, что
/-!/ = //-! = «.
Если число элементов труппы конечно, то группа называется
конечной; в противном случае группа называется бесконечной. Число
элементов конечной группы называется ее порядком.
Если умножение обладает-свойством коммутативности, т. е. для
любой пары элементов fug имеет место равенство fg — gft то
группа называется коммутативной или абелевой.
Приведем несколько примеров групп.
8
ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП
[ГЛ. I
1. Совокупность всех поворотов пространства вокруг некоторой
фиксированной оси образует группу. Произведение двух поворотов на углы а и р
определяется как результирующий поворот (на угол а -\- р).
Заметим, что два поворота пространства, одинаковым образом
перемещающие все его точки, считаются тождественными. Поэтому, в частности,
не различаются повороты на углы 0, zh 2тс, ± 4тс, ... Роль единицы в группе
поворотов играет поворот на угол, равный нулю. Взаимно-обратными
являются два поворота в противоположных направлениях на один и тот же
угол.
2. Совокупность радиусов-векторов всех точек трехмерного пространства
образует группу относительно сложения по правилу параллелограмма.
Единицей группы служит нуль-вектор. Взаимно-обратными элементами группы
являются равные по величине и противоположно направленные векторы.
Вообще, всякое линейное пространство является группой относительно
сложения.
3. Совокупность всех поворотов пространства вокруг всевозможных
осей, проходящих через фиксированную точку О, образует группу,
называемую группой вращения. Произведение gxg2 двух поворотов gt и g%
определяется как поворот, который претерпевает пространство, если сначала
осуществить поворот g^t а затем, дополнительно, поворот gt.
4. Результат параллельного переноса пространства и последующего его
вращения вокруг некоторой точки называется движением пространства.
Под произведением gtg% двух движений пространства gt и g2
подразумевают результирующее движение, причем сначала следует произвести
движение g%, а затем gt. Совокупность всех движений пространства образует
группу — группу движений.
5. Совокупность всех неособенных линейных операторов, действующих
в некотором линейном пространстве, образует группу относительно
обычного умножения операторов. Роль единицы в этой группе играет единичный
оператор.
6. Всякую перестановку п предметов можно записать с помощью
символа ( "" ), который означает, что предмет, находившийся да
\т^ 77*2 • • • тп'
перестановки на первом месте, после перестановки оказывается на месте
с номером mlt предмет, занимавший- второе место, в результате
перестановки перемещается на место с номером т2 и т. д. Произведение gtg2 двух
перестановок gt и g2 определяется как перестановка, получающаяся, если
сначала произвести перестановку g^ а затем перестановку gx. Так, например,. •
/1 2 3 4\ /1 2 3 4\ /1 2 3 4\
\2 4 3 lj'll 4 2 з] = \2 1 4 3/'
Совокупность всех перестановок п предметов образует группу. Эта группа
называется группой перестановок, или симметрической группой, и
обозначается символом Sn.
7. Совокупность всех действительных чисел образует группу
относительно сложения, взятого в качестве группового действия. Единицей группы,
является число нуль.
Элемент g называется сопряженным элементу /г, если найдется
такой элемент х группы, что xgx~1 = h. Очевидно, что g
сопряжен g. Если g сопряжен /г, то и /г сопряжен g, так как из xgx~l = h
следует, что g== х~хпх = x~1h(x~l)~1. Если g сопряжен /г, то и g-L
сопряжен к"1. Если g сопряжен /г, и/г сопряжен/, то g сопряжен/*
§ 2] подгруппа 9"
так как из xgx~l = h и yhx~l=f следует, что / = yxgx~ly~l =
= yxg(yx)~\
Объединяя все взаимно-сопряженные элементы в один класс,,
мы получим разбиение всей группы на классы сопряженных
элементов.
Отметим, что класс элементов, сопряженных е, состоит лишь
из е, так как хех~г = е; у коммутативной группы каждый класс
содержит по одному элементу, так как xgx~l = g.
Задача I. Доказать, что группа не может содержать нескольких
различных единичных элементов.
Задача II. Проверить, что элемент, обратный произведению fg, есть
произведение g~lf~l-
3 ад а ч a III. Доказать, что если хфу (х и у — элементы некоторой
группы G), то и xf=£yf(f£G).
Задача IV. Доказать, что у каждого элемента группы есть только
один обратный ему элемент.
§ 2. Подгруппа
Подгруппой называется всякое подмножество группы, если оно
в свою очередь является группой относительно того же группового
действия.
Приведем примеры подгрупп.
1. Целые числа в группе действительных чисел.
2. Повороты вокруг оси OZ в группе вращений.
3. Перестановки, оставляющие неподвижными определенные предметы
в группе перестановок.
4. Совокупность всех вращений вокруг центра куба, которые совмещают
куб с самим собой, очевидно, образуют группу. Эта группа является
подгруппой группы вращений.
5. Множество, состоящее только из одного элемента — единицы группы,
является тривиальной подгруппой всякой группы.
Подгруппы конечных групп обладают одним замечательным
свойством. Порядок (т. е. число элементов) подгруппы конечной группы
является делителем порядка группы (теорема Лагранжа).
Из этой теоремы следует, например, что группа* порядок
которой есть простое число, не имеет никаких подгрупп, кроме
тривиальной.
Для доказательства теоремы Лагранжа введем понятие смежных
классов. Пусть Gx есть подгруппа группы G, состоящая из
элементов е, gu g2i ..., и а — какой-либо элемент группы G. Левым
смежным классом подгруппы Gv порожденным элементом а,
называют совокупность элементов
ае — a, agu ag2t .. .
Будем сокращенно обозначать левый смежный класс, порожденный
элементом а, символом aGv
Аналогично определяются правые смежные классы.
10
ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП
[ГЛ. I
Ясно, что число элементов в каждом смежном классе равно
порядку подгруппы.
Смежный класс, порожденный элементом е, совпадает с самой
подгруппой Gv Возьмем теперь какой-либо элемент a£G, не
входящий в подгруппу Gv Если смежные классы eGx = Gx и axGx не
исчерпывают всей группы G, то выберем элемент а2, не
содержащийся в этих классах, и образуем еще один класс a2G2. Поступая
таким образом, мы получим в конце концов некоторый набор левых
смежных классов
Gv a1G1, a2Glt ..., aj_tGl9 (а)
которые в своей совокупности исчерпывают всю группу G (т. е.
каждый элемент группы G содержится хотя бы в одном из этих
классов). Покажем, что смежные классы (а) не пересекаются, т. е. не
имеют общих элементов.
Предполагая противное, мы сможем написать:
ял#1 = ад> (&. gz^Ou /<ft<7—1).
Отсюда следует, что
ak = aiS2Sil^aiGv
Так как это противоречит выбору элемента aki то тем самым
утверждение доказано. Итак, все элементы группы распределяются
по j классам (а). Поэтому общее число элементов группы равно
произведению числа классов на число элементов в каждом из них.
Число j различных смежных классов подгруппы Gx называется
ее индексом.
Важным примером подгрупп являются так называемые
циклические подгруппы, которые образованы всеми целыми
положительными и отрицательными степенями какого-либо элемента а группы G.
Если группа не бесконечна, то не все степени ат различны;
скажем, ат = апу где для определенности т> п. Тогда ат~п = е, т. е.
существует такая положительная степень k, что ак = е. Пусть
наименьшее из всех таких чисел &.есть р\ тогда аР = е. Элементы
е, а, а2, ..., а?"1 все различны и исчерпывают циклическую
подгруппу.
Приведем два примера циклических подгрупп.
1. Подгруппа поворотов пространства вокруг фиксированной оси на
углы 0°, 60°, 120°, 180° и 240°.
2. Подгруппа всех целых чисел в группе действительных чисел
(групповое действие — сложение).
Задача I. Доказать, что элементы, обратные элементам левого
смежного класса некоторой подгруппы, образуют правый смежный класс той же
подгруппы (правый смежный класс Gxa подгруппы Gx определяется как
совокупность всех элементов вида g^ (g^ £ Gx)).
§ 3] ИЗОМОРФИЗМ И ГОМОМОРФИЗМ ГРУПП 11
Задача II. Любой элемент а группы, возведенный в степень порядка
группы, равен единичному: а = е (указание: воспользоваться теоремой
Лагранжа).
Задача III. Пересечение двух подгрупп (т. е. совокупность их общих
элементов) является подгруппой.
§ 3. Изоморфизм и гомоморфизм групп
Взаимно-однозначное соответствие между элементами двух групп
F и G
f+~-*g (g£G9f£F)
называется изоморфным, если из любой пары соотношений
Л«--►&. Л<—►& (Л, fz€F; ft, g2£G)
вытекает соотношение
ЛЛ «—► ftft-
Группы, между элементами которых можно установить изоморфное
соответствие, называются изоморфными.
Всякая алгебраическая теорема, установленная применительно
к некоторой группе О, автоматически распространяется на все
группы, изоморфные G. Именно этим оправдывается введение
понятия изоморфизма групп. Можно сказать, что с точки зрения теории
групп изоморфные группы одинаковы.
Приведем два примера изоморфных групп.
1. Группа симметрии прямой треугольной пирамиды С3г> изоморфна
группе SQ перестановок каких-либо трех предметов. Действительно, каждый
элемент g группы CBv совершает некоторую перестановку вершин
треугольника, лежащего в основании пирамиды. Обозначим эту перестановку через Рд.
Легко видеть, что соответствие g<—> Рд является изоморфным.
2. Корни /2-й степени из единицы ооразуют группу относительно
умножения. Эта группа изоморфна группе поворотов вокруг оси OZ на углы
<Р£ = (& = 0, 1, ..., п — 1). Изоморфизм этих групп устанавливается
с помощью соответствия <f& <—> егс?к (& = О, 1, 2, ..., п — 1).
Группа G называется гомоморфной группе F, если каждому
элементу g£ G можно поставить в соответствие некоторый элемент
/ £ F таким образом, что из соотношений
gx-*f» g2-*fz
вытекает:
ftft -»/1/2 (ft. g% € G; fu h 6 /*)•
Гомоморфное соответствие двух групп отличается от изоморфного
отсутствием требования взаимной однозначности. Изоморфизм, таким
образом, является частным случаем гомоморфизма.
12 ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП [ГЛ. I
Приведем примеры гомоморфных групп.
1. Группа целых чисел гомоморфна группе поворотов шестигранника:
е, С6, Cg, Cg, Cg, Cg. Гомоморфизм устанавливается с помощью соответствия
2. Группа S3 перестановок трех предметов гомоморфна группе,
состоящей из двух чисел 1 и —1 (групповое действие — умножение).
Гомоморфизм устанавливается с помощью соотношений
(! 2 зЬ1, (2 з iH- (з \ D-*1'
/1 2 Зч /1 2 3\ /1 2 3\
(2 1 зГ-1' li з г)"*-1' 1з 2 ih~L
Задача I. Доказать, что все группы, состоящие из трех элементов
изоморфны между собой.
Задача II. Пусть х — фиксированный элемент некоторой группы С?.
Доказать, что соответствие
устанавливает изоморфное отображение группы G на самое себя.
ГЛАВА II
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
§ 4. Группа перестановок
Начнем изучение группы перестановок Sn с анализа отдельной
перестановки s. Если в результате перестановки s предмет,
стоявший на k-ы месте, перешел на место с номером тк, то удобно
говорить, что перестановка s переводит число k в число тк.
Записывается это так: sk — mk. Разобьем с помощью перестановки s
совокупность чисел 1, 2, ..., я на отдельные циклы. С этой целью
выберем совершенно произвольно какое-либо число т0^.п,
напишем ряд чисел
Щ> Щ = sm0f т2 = smu .. ., тр = smp_x (a)
и оборвем его, как только последнее написанное нами число тр
окажется равным одному из выписанных ранее чисел. При этом все
числа
т0, тг, тъ .. ., тр^ ф)
будут различными. Следовательно, различными будут и числа
ти тъ ..., mpi так как они получаются из чисел ф) в результате
перестановки s. Отсюда вытекает, что число тр равно т0, т. е.
smp = щ. (р
Соотношения (а) и (?) показывают, что если расположить числа ((3)
в вершинах правильного р-угольника, то действие перестановки 5
на эти числа можно наглядно представить в виде поворота этого
многоугольника на угол — . Поэтому совокупность чисел ф)
называют циклом. Число р называется длиной цикла.
Взяв какое-либо из чисел 1, 2, ..., nt не вошедшее в цикл ф),
мы можем построить второй цикл. Этот процесс можно
продолжать, пока не будут исчерпаны все п чисел.
Ясно, что если указано разбиение чисел 1, 2, ..., п на циклы
и порядок следования чисел в каждом цикле, то тем самым.задана
14
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. И
перестановка s. Поэтому перестановку s можно записать в виде
s=(m0i ml9 ..., тр_х) (n0t nv ..., nq_1) ... (/0, lv ..., /r_i)>
т. е. в виде произведения циклов.
Если какое-либо число переходит под действием перестановки 5
само в себя, то оно образует цикл из одного числа. Такие циклы
принято опускать при записи перестановки в виде произведения
циклов.
В качестве примера запишем перестановки
/1 2 3 4\ /1 2 3 4\ /1 2 3 4\
Sl~\2 1 4 з)9 *2~V3 1 4 2Г *~Л1 4 3 2)
в виде произведения циклов
st = (12) (34), 52 = (1342), s3 = (24).
Укажем теперь простой способ вычисления перестановок х$х~1
(x£Sn)9 сопряженных перестановке s. Для этого заметим, что если
перестановка s переводит число т1 в тъ то перестановка xsx~x
переводит число хт1 в число хтг\
xsx"1 (xttii) = xsm1 == хт^
Это означает, что любая пара чисел mv пьъ следующих друг за
другом в одном из циклов перестановки s, переходит под действием
перестановки х в пару чисел хтг, хт2, которые являются соседями
в одном из циклов перестановки xsx'1. Отсюда следует правило:
для вычисления перестановки xsx*1 следует представить s в виде
произведения циклов и заменить затем в циклах все числа т
числами хт. Например, если $ = (124) (36); х — (26) (3415), то
xsx~1 = (56l)(42).
Произведем разбиение группы перестановок Sn на классы
сопряженных элементов и определим число этих классов. Предварительно
заметим, что порядок циклов при записи перестановки безразличен.
Условимся располагать циклы в порядке убывания их длин. Общее
количество чисел, входящих во все циклы данной перестановки
(включая и циклы, состоящие из одного числа), равно я. Поэтому
каждой перестановке 5 соответствует разбиение числа п на сумму
невозрастающих целых чисел, равных длинам циклов перестановки s.
Так, например, перестановкам slf s2, s3 отвечают разбиения: 4 = 2 + 2,
4 = 4, 4 = 2+1 + 1.
Сформулированное выше правило составления сопряженной
перестановки xsx'1 показывает, что взаимно-сопряженным
перестановкам соответствует одинаковое разбиение числа п. Наоборот, если
двум перестановкам st и s2 соответствуют одинаковые разбиения
числа я, то эти перестановки сопряжены. Чтобы в этом убедиться,
достаточно подписать перестановку s2 под перестановкой st и взять
в качестве х перестановку, переводящую каждое число из верхней
строки в находящееся под ним число нижней строки.
§ 5]
ГРУППА ВРАЩЕНИЙ
15
Таким образом, каждый класс сопряженных перестановок
группы Sn состоит из всех тех перестановок, которым соответствует
одно и то же разбиение числа /г. Количество qn классов
сопряженных элементов группы Sn равно числу различных разбиений. Для
п — 2, 3, 4, 5 имеем #2=2> ?s = 3, ?4 = 5, ?б—7-
В заключение укажем на один способ построения подгрупп
группы Sn. Пусть f = f(tlt t2i ..., tn) — некоторая функция п
переменных. Sn можно рассматривать как группу перестановок
аргументов этой функции. Легко видеть, что те из перестановок группы Snt
которые не изменяют вид функции /, образуют подгруппу.
Тем самым каждой функции/^, t2i ..., tn) сопоставляется
некоторая подгруппа группы Sn. Особо важную роль играет так
называемая альтернативная подгруппа Ant отвечающая функции
f(tu h*..-. *»)= VL(k—tk).
г<к
Функция / представляет собой произведение всевозможных
разностей ti — tki взятых по одному разу с тем или иным знаком. Любая
перестановка аргументов либо не изменяет этой функции, либо
меняет только ее знак. Первые перестановки называются четными
(они образуют подгруппу Ап), вторые — нечетными. Произведение
двух перестановок одинаковый четности есть четная перестановка.
Произведение перестановок различной четности есть нечетная
перестановка.
Задача I. Доказать, что число четных и нечетных перестановок
в группе Sn одинаково и что, следовательно, индекс альтернативной
подгруппы равен двум.
Задача II. Доказать, что четность перестановки п предметов равна
(—l)w~w, где т — число циклов, на которые распадается перестановка.
§ б. Группа вращений
Элементами группы вращений, которую мы будем обозначать
через /?, являются всевозможные вращения пространства,
оставляющие неподвижными некоторую фиксированную точку О. Каждое
вращение можно характеризовать единичным вектором к,
направленным вдоль оси вращения, и углом а, на который производится
поворот. Поэтому мы будем обозначать вращения через С&(а). Заметим,
что угол а отсчитывается в направлении, которое является
положительным относительно к.
Произведение двух вращений С&2 (а2) Сих (<*i) определяется как
результирующее вращение Cfc(a). Это означает, что если
произвольный вектор г переводится вращением СлДс^) в вектор г', а вектор г'
в результате вращения С^^г) переходит в вектор г", то
произведение Cfc(a) переводит вектор г в вектор г". Формулы,
выражающие Л и а через к19 ax и к2, а2, весьма громоздки, и мы не будем
их приводить.
16
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Пусть Cfc(a) — произвольное вращение. Элементарный
геометрический расчет показывает, что оно переводит вектор г в вектор
г'= Ch(v)r = k(kr)(\—cos a) -\- r cos a -\-[k, r] sin a. (5,1)
Зта формула значительно упрощается, если угол поворота 8а мал
и можно пренебречь величинами порядка 8а2. Вводя обозначения
Ъг = г'—г и 8a==£8a, мы получим из (5,1) в этом приближении
Sr = [8a, г] или г/ = г + [8«, г]. (5,2)
Каждое вращение определяется с помощью трех параметров.
В качестве этих параметров можно взять числа
a1 = a&1, a2 = dk2l a3 = a&3,
являющиеся проекциями вектора o.k на оси координат. Очень удобно
взять в качестве параметров, характеризующих вращения, так
называемые углы Эйлера 6, ср и ф. Для определения этих углов введем,
ломимо неподвижной системы координат XYZ, подвижную систему
£, т], С, связанную с вращаемым
пространством. Прямую, вдоль
которой пересекаются плоскости XOY и
£От], назовем осью узлов (рис. 1).
Положительным направлением на
оси узлов будем считать
направление вектора n = [ez, e^] (ег и
£с—единичные векторы,
направленные вдоль осей OZ и ОС).
Обозначим через 6 угол между осями OZ
и ОС (0<; 0<;?г). Угол между осью
узлов и осью 0% обозначим через ср,
угол между осью узлов и осью
ОХ—через ф. Положительные от-
рис. 1 стрелками. Вращение, харак-
ср и ф, мы будем обозначать
Рис. 1.
счеты углов ср и ф указаны на
теризуемое углами Эйлера
через g*(0, ср, ф). Это вращение может быть представлено в виде
произведения трех поворотов: поворота С3(ср) вокруг оси OZ,
поворота Сх(6) вокруг оси ОХ и поворота С3(ф) вокруг оси OZ, т. е.
g(b, ср, ф) = С3(ф)С1(0)С3(ср). (5,3)
Рис. 2 иллюстрирует это соотношение. На нем изображено
положение подвижной системы координат после вращений С3 (ср)
(рис. 2, а) и Сх ф) С3 (ср) (рис. 2, б)\ окончательное положение
£3 (ф) £а (6) С3 (<р) изображено на рис. 1.
Каждое вращение g можно рассматривать как линейный
оператор, переводящий вектор г в вектор г'=gr *). Вычислим матрицу
*) В тех случаях, когда вращение рассматривается как оператор, мы
будем обозначать его g (аналогично, если вращение обозначено другой
буквой).
§ 5]
ГРУППА ВРАЩЕНИЙ
17
оператора g в естественном базисе, состоящем из ортов ev e2, е3,
направленных вдоль осей ОХ, О К, OZ. Ясно, что для поворотов
С3(<?) и С3(ф) вокруг оси OZ эта матрица имеет следующий вид:
/cos ср — sin ср 0\ /cos ф — sin ф
С3(ср)= sincp coscp О J, С3 (ф) = 1 sin ф созф
\ 0 0 1/ \ 0 0
Матрица поворота Сх(6) вокруг оси ОХ очевидно, равна
/10 0
d (6) = I 0 cos 6 — sin
\0 sin 6 cos I
Матрица произвольного вращения g(b, ср, ф) получается согласно (5,3)
перемножением этих трех матриц. Произведя вычисление, мы
получим:
'cos <р cos ф — cos 6 sin cp sin ф — sin ср cos ф — cos 0 cos ср sin ф sin ф sin 0"^
sin ф cos cp -f- cos 8 jos ф sin <p — sin cp sin ф + :os 8 cos cp cos ф — cos ф sin 0
i sin <p sin 0 cos <p sin 0 cos 0
(5,4)
В последнем столбце матрицы (5,4) стоят координаты вектора ет.
Мы видим, что задание углов 0 и ф вполне определяет вектор е?т.
i*Z
а;
б)
Рис. 2.
Поэтому 0 и ф можно рассматривать также, как координаты точки
(конца вектора е{) на единичной сфере. Если обозначить
сферические координаты этой точки через 0 и ф, то, как легко видеть,
1=6, ф = ф + ~.
(5,5)
Выясним, как разбивается группа вращений на классы
сопряженных элементов. Для этого найдем все вращения Cfcl(ax),
сопряженные произвольному фиксированному вращению Cfc(a).
18
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Согласно определению сопряженных элементов, вращение C^fei)
может быть представлено в виде
Chx(di)=gCh(a)g'l9
где g— некоторый элемент R. Обозначим через а,ц матрицу
вращения Cfc(a) в базисе ег, е2, £3- Легко видеть, что в базисе
ej = gej (У=1, 2, 3) эта же матрица изображает вращение Cfcl(ax).
Действительно,
С*, (а0 < = *С* (а) ГЦ = gCfc (а) е, = ga^ = atf.
Заметим, что матрица вращения однозначно определяет угол, на
который производится это вращение, и расположение оси вращения
относительно базисных векторов. Поэтому угол ах равен углу a
и вектор kx имеет в базисе ej те же координаты, что и вектор k
в базисе ву Это означает, что вектор kx получается из вектора k
путем вращения g. Итак, ax = a, k1 = gk и
gCh(a)g-* = Cgh(a). (5,6)
Полученное соотношение показывает, что каждый класс
сопряженных элементов состоит из поворотов на один и тот же угол a
(0<!a^2ir) вокруг всевозможных осей.
Так как при вращениях пространства сохраняются длины
векторов и углы между ними, то скалярное произведение двух векторов
в результате вращения также не изменяется, т. е. (г, r1)=^(gri grx).
Это означает, что вращения представляют собой унитарные
операторы. Как известно, определитель любого унитарного оператора
в трехмерном действительном пространстве равен либо +1, либо —1.
Вращениям соответствуют только те унитарные операторы, у
которых определитель равен единице. Действительно, поворот на угол,
равный нулю, является единичным оператором; определитель его
равен единице. Отсюда в силу соображений непрерывности
определитель любого поворота также равен единице.
Итак, каждое вращение представляет собой унитарный оператор
с определителем, равным единице. Можно показать, что и, наоборот,
всякий унитарный оператор в трехмерном действительном
пространстве с определителем, равным единице, является вращением.
Если в качестве группового действия взять обычное умножение
операторов, то совокупность всех унитарных операторов в
действительном трехмерном пространстве, имеющих определитель, равный
единице, образует группу. Эта группа изоморфна группе вращений.
Скажем несколько слов о другой трактовке группы вращений,
которая в ряде случаев оказывается предпочтительней. Воспользуемся
тем, что унитарные матрицы можно рассматривать как
преобразования координат неподвижных векторов при вращениях системы коор-
§ 6]
ПОЛНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
19
динат. Если орты новой системы координат е\ выражаются через
орты старой системы координат посредством соотношений
то координаты неподвижного вектора преобразуются по закону
*; = *Л <*)*<•
Таким образом, одну и ту же унитарную матрицу можно
рассматривать либо как вращение g пространства, либо как
вращение g~l системы координат. Иными словами, группа унитарных
матриц с определителем, равным единице, изоморфна не только
группе вращений пространства, но и группе вращений системы
координат. В силу этого изоморфизма обе последние группы носят общее
название группы вращений.
Задача I. Используя матрицу (5,4), проверить, что
^(8, ср,ф) = С3(7С + ф)С1(-0)С3(7С + ?).
Задача II. Показать, что вращения g(6, ср, ф) и g(6, те — <|/, % — <р)
взаимно обратны.
Задача III. Показать, что в группе вращений коммутируют между
собой только те вращения, которые производятся вокруг одной и той же
оси.
§ 6. Полная ортогональная группа
Преобразование пространства, переводящее каждый вектор г
в вектор —г, называется инверсией. Инверсию обычно обозначают
через /. Таким образом, 1г = — г *). Отсюда следует, что инверсия
коммутирует со всеми вращениями:
Ig = gt- (6,1)
Ясно также, что Р — е. Определитель оператора инверсии равен —1.
Если ко всем элементам группы вращений R присоединить
всевозможные произведения Ig(g(zR), то получится группа.
Действительно,
gi- Ig* = I' gig2> Igi • Ig2 = ffiSb. Ig • Ig"x = e.
Эта группа называется полной ортогональной группой. Будем
обозначать ее через W. Элементы группы W, не являющиеся
вращением, называются элементами второго рода; вращения называются
элементами первого рода. Определитель матрицы, соответствующей
любому элементу второго рода, равен —1. Напомним, что для
элементов первого рода этот определитель равен 1.
Выясним геометрический смысл элементов второго рода. Прежде
всего ясно, что произведение /С&(тс) есть зеркальное отражение
*) В тех случаях, когда инверсия рассматривается как оператор, мы
бУДем обозначать ее I.
20
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
в плоскости, перпендикулярной к вектору k. Обозначим его через ск.
Отсюда следует, что произвольный элемент второго рода
1Си (те + а) = 1Си (те) Ск (а) = chCh (а)
есть произведение поворота вокруг некоторой оси на зеркальное
отражение в плоскости, перпендикулярной к этой же оси. Такое
произведение называется зеркальным поворотом и обозначается
через Sfc(a). Таким образом, полная ортогональная группа состоит
из всевозможных поворотов и зеркальных поворотов.
Произведем разбиение группы W на классы. Пусть h = Ig—
элемент второго рода, а g— элемент первого рода. Используя (5,6),
получим:
hCh(z)h-1 =IgCh(z)g-lI=Cgk(z) = C-hh(z),
т. е.
hCh((x)h'1 = C-hh^) (h€W,h£R). (6,2)
Подобным же образом получаем соотношения
hSk (a) /Г1 = S-hh (a), gSh (a) g"1 = Sgk (a). (6,3)
Из (6,2) и (6,3) следует, что совокупность всех поворотов на один
и тот же угол образует класс и что совокупность всех зеркальных
поворотов на один и тот же угол также образует класс.
§ 7. Евклидова группа
Всякое перемещение пространства можно задать с помощью
векторной функции а (г), определяющей перемещение а точки с радиусом-
вектором г.
Функция а (г) должна быть такой, чтобы расстояние между любой
парой точек не изменялось в результате их перемещения.
Под произведением двух перемещений пространства понимают
результирующее перемещение. Совокупность всех перемещений
образует относительно этого произведения группу. Эта группа
называется евклидовой группой. Мы будем обозначать ее через П.
Полная ортогональная группа является, очевидно, подгруппой
евклидовой группы. Другой важной подгруппой П является группа
трансляций. Трансляцией называют такое перемещение пространства,
при котором перемещения всех точек одинаковы. Мы будем
обозначать трансляции символом ta, где а — общее перемещение всех точек
пространства. Ясно, что
ta • tb = ta+b- (JЛ)
Из этого равенства следует, что группа трансляций, а также любая
ее подгруппа, изоморфна некоторой векторной группе, т. е. группе,
состоящей из векторов с векторным сложением в качестве
группового действия.
§ 7]
ЕВКЛИДОВА ГРУППА
21
Всякий элемент g группы П может быть представлен в виде
произведения поворота или зеркального поворота г0 вокруг
произвольной точки О на некоторую трансляцию ta\
g = tJo »еП). (7,2)
Для доказательства выберем совершенно произвольно точку О и
обозначим через О' точку, в которую переходит О при
перемещении g. Рассмотрим теперь перемещение t-ag> где а—вектор,
проведенный из точки О в О'. Ясно, что под действием перемещения
t-ag точка О остается неподвижной. Поэтому tZ g является
поворотом или зеркальным поворотом rQ вокруг точки О. Это
доказывает соотношение (7,2).
Можно получить еще более наглядное представление об
элементах группы П. Для этого рассмотрим сначала случай, когда
Легко видеть, что при перемещении taCu{^) (# _|_ *) существует
неподвижная точка Ох и поэтому *аС*(а) является поворотом с!!)(а)
вокруг этой точки. Если трансляция ta не параллельна оси
вращения k, то ее можно представить в виде ta = tbtCi где b\\k и c±_k.
Тогда taCk(oL) = hteCh(a) = tbCh(а) и мы получаем произведение
поворота вокруг оси на трансляцию вдоль оси. Такое перемещение
называется винтовым, а ось, скользящая при этом движении вдоль
самой себя, называется винтовой осью.
С помощью аналогичных рассуждений можно показать, что
произведение taSh((x) (<хф 0) является зеркальным поворотом вокруг
некоторой точки и что taSh(0) есть произведение отражения в
некоторой плоскости ofc на трансляцию вдоль этой плоскости.
Такое перемещение называется скользящим отражением, а
плоскость ofc — плоскостью скольжения.
Таким образом, евклидова группа состоит из поворотов,
зеркальных поворотов, трансляций, винтовых перемещений и
скользящих отражений.
В заключение приведем, опуская элементарное доказательство,
следующие два тождества:
gtag'1 = tSa> *аГ0*-а=Г0 + а> (7,3)
.где g — произвольный элемент группы П, ga — вектор,
получающийся из а в результате перемещения g, rQ—какой-либо поворот
или зеркальный поворот вокруг точки О, О + а — точка, в
которую переходит О при трансляции а.
22
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
§ 8. Точечные группы
Всякая подгруппа полной ортогональной группы называется
точечной группой. Точечные группы, не содержащие зеркальных
поворотов, называются группами первого рода. Все остальные
точечные группы — группами второго рода.
Если поворот вокруг некоторой прямой С содержится в данной
точечной группе G, то прямая С носит название оси группы G.
Рассмотрим точечную группу G первого рода, имеющую только
одну ось С. Если число элементов такой группы равно я, то ее
обозначают через Сп. Все элементы группы Сп представляют собой
повороты вокруг оси С. При возведении любого элемента группы Сп
в п-ю степень получается единичный элемент (см. задачу 2 § 2).
Поэтому группа Сп может содержать только повороты вокруг оси С
на углы
О * £.2, .... 2^(«-1). (8,1)
п п п
Число этих поворотов равно п, поэтому все они входят в группу Сп
и исчерпывают ее.
Поворот на наименьший угол — вокруг оси Сп обозначают
через Сп. Все остальные повороты являются степенями Сп. Поэтому
элементы группы Сп можно записать в виде
£> Lnt Ln, . . ., L,n . \yi<£)
Подчеркнем, что группы Сп (п=2, 3, ...) являются, циклическими.
Для того чтобы отличать повороты Сп и Сй\ целесообразно
рассматривать ось Сп как направленную прямую, т. е. различать на
ней положительное и отрицательное направления.
Пусть G— произвольная группа, а С—какая-либо ее ось.
Совокупность всех поворотов вокруг оси С из группы О образует (вместе
с единичным элементом) подгруппу группы О. Эта подгруппа,
очевидно, представляет собой группу Сп. В соответствии с этим ось С
группы G обозначают через Сп и называют осью я-го порядка.
Ось Сп группы G называется двусторонней осью, если повороты Сп
и Си являются взаимно-сопряженными. В противном случае ось Сп
называется односторонней.
Для того чтобы ось Сп была двусторонней, необходимо, чтобы
в группе G содержался поворот на 180° вокруг какой-либо оси,
перпендикулярной к оси Сп, или чтобы группа G содержала
зеркальный поворот вокруг оси Сп. Это непосредственно вытекает из
формул (5,6) и (6,2).
Две оси Сп и Сп группы О называются эквивалентными, если
поворот Сп сопряжен повороту Сп или повороту Сп1- Легко видеть,
§ 9]
ТОЧЕЧНЫЕ ГРУППЫ ПЕРВОГО РОДА 23
что условием эквивалентности осей Сп и Сп является наличие в группе G
элемента, переводящего ось Сп в ось Сп.
Задача I. Доказать, что зеркальные повороты S (а) и S (— а) вокруг
двусторонней оси сопряжены друг другу.
Задача II. Пусть С и О — две эквивалентные оси группы G.
Доказать, что зеркальный поворот S (а) вокруг оси С сопряжен повороту S' (а)
(или S' (— а)) вокруг оси С.
§ 9. Точечные группы первого рода
Перечислим все точечные группы первого рода.
1. Наиболее простыми после групп Сп являются группы Dn.
Группа Dn состоит из всех поворотов, совмещающих правильную
я-угольную призму саму с собой. Она имеет одну ось я-го порядка Сп
и п перпендикулярных к ней осей второго порядка. Эти оси
обозначают через ии и2, и3, .. ., ип. Угол между двумя соседними осями а
равен —. Таким образом, группа Dn содержит единичный элемент,
(п—1) поворот вокруг оси Сп на углы, кратные —, и п
поворотов на 180° каждый вокруг осей второго порядка, т. е. всего
элементов. Благодаря наличию осей второго порядка ось Сп
в группе Dn является двусторонней. Поэтому повороты Сп и Сп~
взаимно сопряжены. Если п — четное число, то повороты вокруг
оси Сп разбиваются на (-5-+ l) классов:
| «_! IL+i ) «.
\£{* \СП1 Сп J, ..., [Сп , Сп ) , Сп'
Если п — нечетное число, то эти же повороты разбиваются на п^
\е} 9 [С-п* Сп ), . .., ^ Сп , С и ) •
Оси иг, и3, иь, ... эквивалентны между собой, так как они
переклассов:
■>A
водятся друг в друга при поворотах Сп (*=1, 2, 3, ...)• Точно
так же эквивалентны между собой оси и2, uv ue, .... Заметим еще,
что ось ип_1 при повороте Сп совмещается с осью иг и потому
эквивалентна ей. Отсюда следует, что при п нечетном все оси
второго порядка эквивалентны между собой, а повороты вокруг них
составляют один класс. При четном п повороты ии и2, и3, ..., ип
распадаются на два класса {иг, и3, ..., ип_х} и {u2i uv ..., ип}.
Обозначая через q(Dn) число классов сопряженных элементов
группы Dn, получаем из приведенных рассуждений
?.Фп) = у + 3 (я —четно), q{Dn)==1l±^ (n — нечетно). (9,1)
2. Группа Т (группа тетраэдра) состоит из всех поворотов,
совмещающих тетраэдр сам с собой.
24
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Группа Т содержит четыре оси третьего порядка и три оси
второго порядка. Оси третьего порядка проходят через вершины
тетраэдра (одна из них изображена на рис. 3). Будем обозначать их
через С{г\ С[2\ С33) и С34). Оси второго порядка
соединяют середины непересекающихся ребер.
Обозначим эти оси через и12) и13 и ии. Таким
образом, группа Т, кроме единичного элемента,
содержит четыре поворота на 120°, четыре
поворота на 240° и три поворота на 180°, т. е. всего
двенадцать элементов. Оси с[г) (/=1. 2, 3, 4)
являются односторонними. Все они эквивалентны
Рис. 3.
как повороты
в оси
ьз »
сТ
#12»
И
И U
и
cf* соответ-
друг другу, так
переводят ось Сз
ственно. Оси и12, ихъ и ии также эквивалентны, так как они
переходят друг в друга при поворотах вокруг осей С^. Отсюда
следует, что двенадцать элементов группы следующим образом
разбиваются на четыре класса сопряженных элементов:
{«}, {<#>}, {di)2}, {«и}- (9,2)
3. Группа О (группа октаэдра) состоит из всех поворотов,
совмещающих куб сам с собой. Она содержит три оси четвертого
порядка Cl1}, Ci2) и ci3), четыре оси третьего порядка С?\ С32), C33)
и шесть осей второго порядка
С4
«12.
Оси
«23> UU> «41> «26 И U37 (рИС. 4).
четвертого порядка соединяют
середины противоположных граней.
Положительные направления на них выбраны
так, чтобы они образовывали право-
винтовую систему. Оси третьего
порядка проходят через
противоположные вершины. Будем считать, что они
направлены от вершины с большим
номером к вершине с меньшим. Оси
второго порядка соединяют середины
противоположных ребер.
Кроме единичного элемента, группа О содержит три поворота
на 90°, три поворота на 180° вокруг осей четвертого порядка, три
поворота на 270°, четыре поворота на 120°, четыре поворота на 240°
и шесть поворотов на 180° вокруг осей второго порядка, т. е. всего
24 элемента.
Легко видеть, что все оси одного и того же порядка
эквивалентны между собой. Кроме того, оси четвертого и третьего порядка
являются двусторонними. Поэтому разбиение элементов группы О
на классы имеет следующий вид:
{«}. {Cf.cm {СП №СИ. {««}. (9,3)
Рис. 4.
§ 9]
ТОЧЕЧНЫЕ ГРУППЫ ПЕРВОГО РОДА
25
4. Группа Y (группа икосаэдра) состоит из всех поворотов,
совмещающих самого с собой пентагональный додекаэдр, т. е.
двенадцатигранник с правильными пятиугольными гранями. Число ребер
этого многогранника равно 30, а число вершин — 20, В этом легко
убедиться, если заметить, что на каждую грань приходится в
среднем по 5/2 ребер и 6/3 вершин. Группа икосаэдра состоит из шести
осей пятого порядка С(5г) (*=1, 2, ..., 6), соединяющих середины
противоположных граней, 10 осей третьего порядка, соединяющих
противоположные вершины, и 15 осей второго порядка,
соединяющих середины противоположных ребер.
Группа икосаэдра содержит, помимо единичного элемента, 24
поворота вокруг осей пятого порядка, 20 поворотов вокруг осей третьего
порядка и 15 поворотов вокруг осей второго порядка, т. е. всего
60 элементов. Все одноименные оси эквивалентны друг другу. Оси
пятого и третьего порядков являются двусторонними. Поэтому группа
икосаэдра распадается на пять классов:
{е}, {СМ)4}. {СР.СР}, {(%>, С?2}, [($>). (9.4)
Можно показать, что рассмотренные группы исчерпывают набор
конечных точечных групп первого рода. Существуют, однако, две
бесконечные группы первого рода (кроме группы вращения). Это —
группы Соо и Deo- Группа Соо представляет собой группу всех
поворотов вокруг фиксированной оси. Эта группа коммутативна. Группа
Deo состоит из всех поворотов вокруг фиксированной оси OOf и
поворотов на 180° вокруг всех осей, перпендикулярных к оси ОО'.
В заключение приведем таблицу (см. табл. 1).
Таблица 1
Точечные группы первого рода
1 руина
Сп
Dn
Число
элементов
п
2п
Т | 12
i
1 °
1 Y
24
60
Число классов
п
у + 3 при л = 2&
п 1 Q
-—~ при п = 2k -f 1
4
5
5
Число осей разных порядков
второго
п
3
6
15
третьего
—
4
4
10
четвертого
—
—
3
пятого
—
—
—
- 1 6
i
шестого
—
—
—
—
о
1
1
—
—
— !
26
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
§ 10. Точечные группы второго рода
Продолжим обзор точечных групп. Обратимся к группам
второго рода.
1. Группа S2n состоит из степеней зеркального поворота
S2n = S(— J. Она содержит 2п элементов: е, S2n> S\n> •••> Si"'1.
Четные степени S2n образуют подгруппу, совпадающую с группой
Сп. S2n является циклической группой.
2. Группа Cnh состоит из поворотов и зеркальных поворотов
вокруг фиксированной оси ООг на все углы, кратные углу —. Она
содержит, таким образом, 2п элементов:
Скп и chCk« = ,s(^.) (k = 0, 1, 2 я_1).
Здесь оЛ означает отражение в горизонтальной плоскости, т. е.
плоскости, перпендикулярной к оси Cw. Группа Cnh коммутативна.
Каждый ее элемент сам по себе образует класс.
3. Группа Cnv есть группа симметрии правильной я-угольной
пирамиды. Она содержит одну ось я-го порядка Сп, совпадающую
с высотой пирамиды, и п «вертикальных» плоскостей аи о2, . .., ont
проходящих через ось Сп (иными словами, отражения в этих
плоскостях содержатся в группе Cnv).
Если п — нечетное число, то каждая
такая плоскость проходит через
одно из ребер пирамиды и делит
на две равные части
противоположную боковую грань. Если п — четное
число, то половина этих плоскостей
проходит через
взаимно-противоположные ребра, а вторая
половина— через середины
противоположных граней (рис. 5).
Группа Cnv содержит 2п элемен-
>2, ..., ап. Группа Cnv изоморфна
группе Dn. Действительно, каждый элемент группы Cnv совершает
некоторую перестановку вершин основания пирамиды. При этом
разным элементам группы Cnv соответствуют разные перестановки.
Точно такие же перестановки над вершинами основания совершают
повороты из группы Dn. Если поэтому сопоставить друг другу те
элементы групп Cnv и Dn, которые совершают одинаковую
перестановку вершин, то мы получим изоморфное соответствие
Рис. 5.
тов: £, Си, Cm
С ft
п'
ок+1+-+ик+1 (k = 0, Ь, 2, .... га —1). (10,1)
§ Ю]
ТОЧЕЧНЫЕ ГРУППЫ ВТОРОГО РОДА
27
В силу изоморфизма групп Cnv и Dn число элементов и классов
у них одинаково, поэтому
q(Cnv) = % + 3 (n четно), q(Cnv)=^^- (n нечетно). (10,2)
4. Группа Dnh есть группа симметрии правильной я-уголькой
призмы. Она содержит 2я элементов группы Cnh, n горизонтальных
осей и19 иг, ..., ип второго порядка и п вертикальных плоскостей
°i, а2> • • •» °п» проходящих через эти оси, т. е. всего 4/г
элементов.
Отражения в вертикальных плоскостях оь о3, ...
взаимно сопряжены друг другу, так как эти плоскости
переходят друг в друга при поворотах Сп- Точно
так же сопряжены между собой плоскости о2, о4, ...
Отражение оп сопряжено о2. Если п — нечетное число,
то оп — аг и, следовательно, зх—о2. Поэтому при
нечетных значениях п все отражения в вертикальных
плоскостях образуют один класс; если п четно, то они
разбиваются на два класса [а19 о3, ..., ow_i},
и2> и4>
оп}. Эти же рассуждения применимы и к по-
kzy
Рис. 6.
воротам вокруг осей иг, и2, . . •, ип, которые
составляют один класс, если п нечетно, и два, если п четно.
Ось Сп является двусторонней. Поэтому повороты вокруг оси Сп
разбиваются на классы так же, как и в группе Cnv$ т. е.
\с Гп~1\ \с2 Гп~2)
Точно так же разбиваются на классы зеркальные повороты
опСп (А=1, 2, ..., п). Вспоминая (10,2), получим:
яФпн) = п+1Ъ (п четно), q (Dnh) = n + 5 (п нечетно).
(Ю,3)
б. Группа Dnd. Представим себе две одинаковые я-уголь-
ные правильные призмы, приставленные друг к другу основаниями
и повернутые одна относительно другой
на угол — (рис. 6). Группой симметрии
такого тела и будет группа Оы. Груп-
па Dnd содержит одну
зеркально-поворотную ось S2n порядка 2п, п вертикальных
плоскостей av о2, . . ., аП9 проходящих через
ребра призм, и п горизонтальных осей
второго порядка ul9 u2, ..., иП9 проходящих
через точки пересечения я-угольников, ограничивающих основания
призм (рис. 7).
При повороте их плоскость <зх переходит в плоскость <з2.
Поэтому отражения во всех вертикальных плоскостях составляют один
класс. С другой стороны, при отражении в плоскости с2 ось щ
переходит в ось и2. Поэтому повороты вокруг всех горизонтальных
Рис. 7.
28
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
/
осей также образуют один класс. Ось S2n является двусторонней.
Степени S2n образуют (я-f-l) класс
{е}> \52п, S2n }, ..-, \S2r1 > S2n Ь {52rt).
Общее число классов в группе Dnd равно /г + З
q{Dnd) = n + Z. (10,4)
6. Группа Td есть группа симметрии ^тетраэдра. Она
содержит в качестве подгруппы группу Т. Кроме двенадцати элементов
группы Т, группа Td содержит шесть плоскостей
°i2. °1з> °и> °2з> °24> °34 (Рис- 8) и п0 два зеркаль-
ных поворота 54 и Si вокруг каждой из трех осей
второго порядка. Более подробно эти зеркальные
повороты мы будем обозначать s£2\ 5з12)3, Si13),
с(13) 3 с(23) с(23) 3
04 > 04 , 04
Итак, группа Td содержит 24 элемента: четыре
р 8 поворота на угол 120°, четыре поворота на угол 240°,
три поворота на 180°, шесть зеркальных поворотов
на углы 90° и 270°, шесть отражений в плоскости и единицу
группы. Все оси являются двусторонними, одноименные оси
эквивалентны. Поэтому разбиение на классы имеет следующий вид:
{«}, {СЧ\ СГ}, {«<}, {Sf>, Sf)3}, М- (Ю.5)
Итак, группа Td распадается на пять классов.
7. Г р у п п a Th получается из группы Т путем прибавления
инверсии и произведений инверсии на все элементы группы Т.
Произведение инверсии на поворот С3 есть зеркальный поворот
вокруг оси С^1} на угол 300°, т. е. IC$) = S$)b. Подобным же
образом /Сз1)2 =5б1). Итак, все четыре оси третьего порядка
превращаются в зеркально-поворотные оси шестого порядка; это дает
восемь новых элементов. Произведение / на поворот на 180° дает
отражение в плоскости, перпендикулярной к оси поворота. Это
дает нам еще три плоскости о12, о13, о14. Таким образом, общее
число элементов группы Th равно 24.
Разбиение на классы имеет следующий вид:
{*}.№. №*}, {«!*}. {I}. №. {sP:}, {<>«}. (iof6)
8. Группа Oh есть группа симметрии куба. Помимо 24
элементов группы О, она содержит еще отражения в трех плоскостях
av o2, о3, параллельных граням куба, отражения в шести
плоскостях, проходящих через диагонали противоположных граней,
инверсию, восемь зеркальных поворотов S^, S^5 (/=1, 2, 3, 4) вокруг
осей Сзг) и шесть зеркальных поворотов вокруг осей С^\ Cf\ C43)
на углы 90° и 270°. Таким образом, группа Oh содержит 48 эле-
§ 11]
ГРУППЫ ТРАНСЛЯЦИЙ
29
ментов. Эти элементы распределяются между двенадцатью классами.
Шесть классов — такие же, как и в группе О. Остальные шесть
получаются из первых путем умножения на инверсию. Таким образом,
q\Oh)=\2. (10,7)
9. Группа Уп есть группа симметрии правильного
двенадцатигранника с пятиугольными гранями. Она содержит все элементы
группы Y и все произведения этих элементов на инверсию. Поэтому
число элементов группы Yh равно 120, а число классов—10.
Этими исчерпываются все конечные группы второго рода (см.
табл. 2). Путем предельного перехода из групп Cnh и Сш можно
получить группы Cooh и Coov. Группы Dnh и Dnd «в пределе»
переходят в одну и ту же группу, которую принято обозначать через D^.
Таблица 2
Точечные группы второго рода
Группа
$2»
Cnh
\ £■»!>
Dnh
Dnd
Та
Th
Oh
1 Ih
Число элементов
2л
2л
2л
4л
4л
24
24
48
120
Число классов
2л 1
2л 1
-л- + 3 при n = 2k
—?р- при л = 2k + 1
л+ 10 при n = 2k
л + 5 при л = 2k + 1
л + 3
5
8
12
10
§ 11. Группы трансляций
Как уже упоминалось, трансляцию ta можно мыслить просто как
вектор а, а группу трансляций — как группу векторов с векторным
сложением в качестве группового действия. Мы будем часто
пользоваться этой точкой зрения.
30
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Если все векторы группы векторов параллельны друг другу,
то группа называется одномерной, если они параллельны одной и
той же плоскости, группа называется двумерной; если среди
векторов группы найдется тройка некомпланарных векторов, то группа
называется трехмерной.
Группа векторов называется дискретной, если существует
положительное число d такое, что всякий не равный нулю вектор группы
длиннее d.
Структуру трехмерных дискретных векторных групп выясняет
следующая теорема:
Теорема I. Пусть § — трехмерная дискретная группа
векторов. В § содержится три вектора аъ а^, аъ таких, что
всякий вектор a£_S может быть представлен в виде
а = тхах-\-тгаг-\-тъаъ {тъ тг, т3 = 0, ztl, +2, •..)•
Векторы ах, аг, и аъ называются основными векторами группы §.
Доказательство. Возьмем произвольно какие-либо два не
параллельных друг другу вектора Ъх и Ъг из группы §. Плоскость,
проходящую через эти векторы, обозначим через Р. Обозначим
через di^of вектор минимальной длины, параллельный вектору bv
Рассмотрим теперь все векторы группы §, которые лежат в
плоскости Р9 но не параллельны вектору ах. Возьмем из них те
векторы, которые имеют минимальную проекцию на прямую,
перпендикулярную вектору ах. Один из этих векторов обозначим через а2.
Легко видеть, что, кроме векторов 0, ах, а2 и ах-\-аг, ни один
вектор группы § не оканчивается внутри или на границе
параллелограмма, построенного на векторах ах и а2.
Рассмотрим теперь векторы группы §', не лежащие в
плоскости Р. Возьмем из них те векторы, которые имеют минимальную
проекцию на перпендикуляр к плоскости Р. Один из этих векторов
обозначим через аъ. Легко видеть, что конец каждого вектора
группы Ш лежит либо вне параллелепипеда Q, построенного на
векторах ах, а2, я3> либ° совпадает с одной из вершин этого
параллелепипеда.
Разложим какой-либо вектор а£§ по векторам а19 аг, а3:
Обозначим через [|а] наибольшее целое число, не превышающее |х.
Ясно, что вектор а0 = [рх] ах + [|х21 #2 + 1Ы а* содержится в группе §.
з
Поэтому вектор а—а0 = 2 {|Ч—Ы ) #г также содержится в группе §.
*=i
Числа {ц—[jij меньше единицы. Если хотя бы одно из них неравно
нулю, то вектор а — а° лежит внутри параллелепипеда Q. Так как
это невозможно, то мы приходим к заключению, что коэффициенты
Pi» P2» Рз являются целыми числами. Это завершает доказательство
теоремы.
§ 121
сингонии
31
Параллелепипед Q, построенный на основных векторах ai9 а2) а,г
называется основным параллелепипедом или элементарной
ячейкой. Из приведенного доказательства вытекает следующая теорема:
Теорема II. Одно из ребер основного параллелепипеда может
быть направлено вдоль любого вектора б^сГ. Одна из граней
основного параллелепипеда, проходящая через это ребро9 может
проходить через любой вектор &2£|Г. Любой параллелепипед,
связанный указанным образом с векторами Ь} и Ь2 и имеющий
минимальный объем, является основным.
Из теоремы I вытекают два следствия.
Следствие I. Объем параллелепипеда, построенного на любой
тройке не компланарных векторов rv г2, гъ из группы Ш, не
меньше объема V0 основного параллелепипеда.
Доказательство. Представим векторы ri в виде гг = Cikak.
Объем параллелепипеда со сторонами гг, r2) rs равен | (/"i 1^2гз1) U
Подставляя сюда выражения векторов гг (/=1, 2, 3), получим:
V = | 2 Сг{С2кС31 (ах \акаг]) I =
= ^0
Za СцС2кС3\гт
i, Л, I
= V0\Det(Cik)\
Так как согласно теореме I все числа С\к — целые, то определитель
равен некоторому целому числу. Следствие I доказано.
Следствие II. Объемы всех основных параллелепипедов
данной группы равны между собой.
Это непосредственно вытекает из следствия I.
§ 12. Сингонии
Всякий поворот или зеркальный поворот, который переводит
любой вектор векторной группы § в какой-либо вектор этой же
группы, называется элементом симметрии группы §. Совокупность
всех элементов симметрии группы § образует некоторую точечную
группу К, называемую группой симметрии векторной группы ff.
Если у двух векторных групп §х и сГ2 одна и та же группа
симметрии, то говорят, что группы §х и §2 принадлежат одной и
той же сингонии. Таким образом, под сингонией (или системой)
понимают совокупность всех векторных групп, имеющих одну и ту же
группу симметрии. Мы покажем сейчас, что существует всего семь
сингонии, соответствующих группам 52, С2Л, D2h, D3h, DAh9 D%h
и Oh. Эти сингонии называются триклинной (52), моноклинной (C2h)t
ромбической или ортогональной (D2h), ромбоэдрической или триго-
^нальной (D3d), тетрагональной или квадратной (D^),
гексагональной (D^) и кубической (Oh).
Пусть § — какая-либо векторная группа, а К—ее группа
симметрии.
32
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Так как наряду с каждым вектором а£§ группа § содержит
также вектор —а, то ясно, что среди элементов группы К имеется
инверсия.
Выясним, какие оси симметрии может иметь группа К. Пусть
Сп (п = 2, 3, ...) — одна из осей группы К. Обозначим через а£3*
какой-либо вектор, не параллельный оси Сп. Вектор Спа0 — а0,
очевидно, не равен нулю и перпендикулярен к оси Сп. Обозначим
через е самый короткий из векторов группы JT, перпендикулярных
к оси Сп. Ясно, что вектор Сп£ + Сп е, параллельный е, имеет
длину, кратную е и не превышающую 2е. Поэтому
Cnfi-\-Cn1e = ane (а„ = —2, —1, 0, 1, 2).
С другой стороны, Cw£-|-Cn e=2cos—е. Итак,
2 cos — = <xn.
Полагая aw = —2, мы получим п = 2; если aw = —1, то я = 3.
Подобным же образом значениям <хп = 0 и ап = 1 соответствуют
п = 4 и п = 6. Значению aw = 2 не соответствует никакое я, этот
случай невозможен. Таким образом, группа К может иметь оси Сп
только 2-го, 3-го, 4-го и б-го порядков. В плоскости,
перпендикулярной к оси Сп, лежит по меньшей мере один вектор группы О.
Установим еще одно свойство группы /С.
Лемма. Если группа К содержат подгруппу Сп{п > 2), то
она содержит и подгруппу Cnv.
Доказательство. Прежде всего выберем специальным
образом три основных вектора группы /£. В качестве аг возьмем самый
короткий из векторов, лежащих в плоскости Р,
перпендикулярной к оси Сп. В качестве аг
возьмем вектор Спах (это можно сделать, так
как если бы внутри параллелограмма со
сторонами av a2 помещался какой-либо вектор
a'^JT, то хотя бы один из четырех
векторов а', аг — а', а2 — а', ах-\-а2 — а" был бы
короче вектора ах (рис. 9)). Выбор третьего
базисного вектора аъ для нас безразличен. Представим его в виде
a3 = « + P(a||Cw, pJLCn). Разность векторов Спаг— а3 = Сп$ — (3
перпендикулярна к оси (или равна нулю) и принадлежит группе SF.
Поэтому она может быть представлена в виде
Cwp — р = т^аг-\-тгаг (ти т2 = 0, ±1, ...)•
Подействуем на это равенство поворотом С^1
Р — С« !р = mfiu1^ + m2av
§ 12]
сингонии
33
Вычтем полученное равенство из предыдущего
фР+ С„ *р — 2р = (щ — w2) «1 — щСп Хах + ю2а2.
Так как Cwp + C^1g = awp(a^ = 2cos^j и аналогичное равенство
имеет место для вектора av то последнему равенству можно
придать следующий вид:
(<хп — 2) р = (/»! — <vttx — tft2) ax + (mt + /и2) a2. (12,1)
Рассмотрим случай п = 4. Тогда из (12,1) следует:
^ = « + -2tfu-«i--^±^"«2 (« = 4). (12,2)
Обозначим через ov отражение в плоскости, проходящей через ось С4
и вектор av Ясно, что aya1 = a1, vva2 = — а2 и o^a3 = a34-
-f (m1-\-m2)a2.
Таким образом, все три основных вектора при отражении av не
выводятся из группы |Г. Это означает, что av содержится в группе /С.
Так как элементы С4 и ov порождают группу С4<у, то утверждение
леммы для случая п = 4 доказано.
Аналогичным образом рассматриваются случаи я = 3 и п = 6.
Если просмотреть список всех точечных групп, то легко
установить, что только семь групп, а именно 52, C2h, D2hi D3h, D4V DQh
и Oh обладают следующими свойствами:
1) они содержат инверсию;
2) они не содержат осей 5-го, 7-го и более высоких порядков;
3) вместе с осью 3-го, 4-го или 6-го порядков они содержат
также и плоскости, проходящие через эти оси.
Поэтому существует только семь сингонии.
Перейдем теперь к классификации векторных групп,
принадлежащих одной и той же сингонии.
Две векторные группы, принадлежащие одной и той же
сингонии, называются однотипными, если одна из них может быть
переведена в другую с помощью непрерывной деформации; при этом
в процессе деформации симметрия векторной группы должна быть
не ниже, чем симметрия групп данной сингонии.
Мы покажем, что существует 14 типов векторных групп, и
выясним, как эти типы распределяются по сингониям.
~ Заметим, что тройка базисных векторов вполне определяет тип
векторной группы §, поскольку она определяет саму группу §.
Векторные группы, принадлежащие триклинной сингонии,
имеют один и тот же тип. Это вытекает из того, что триклинная
34 НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ [ГЛ. II
сингония допускает любые деформации. Этот тип обозначают
символом IV
Рассмотрим остальные сингонии.
Моноклинная сингония C2h. Всякая векторная группа &г
принадлежащая этой сингонии, имеет двумерную подгруппу,
лежащую в плоскости ah. Для того чтобы в этом убедиться, возьмем
два произвольных вектора Ьх и Ь2 группы сГ, не лежащих в одной
и той же вертикальной плоскости. Векторы bx-\-<shbx и b2-\-ahbz
лежат в плоскости <Jh и не параллельны друг другу.
В связи с этим условимся- выбирать два основных вектора at
и а2 в плоскости ah.
Представим третий основной вектор в виде аъ = я-\-$ (я||£'2>
§±_С2). Ясно, что С2я3 — а3=С$— Р = — 2{5 есть вектор,
лежащий в плоскости ah. Поэтому его можно представить в виде
2$ — mla1Jt-m2a2. Итак, вектор а3 равен сумме л + ~ аг-+-^-а2.
Воспользуемся тем, что от вектора аъ можно отнять любую
целочисленную комбинацию пхах-\-п2а2 и полученную разность принять
за третий основной вектор. Выберем аъ так, чтобы числа тг и тг
не превосходили единицы и были неотрицательны. Мы получим
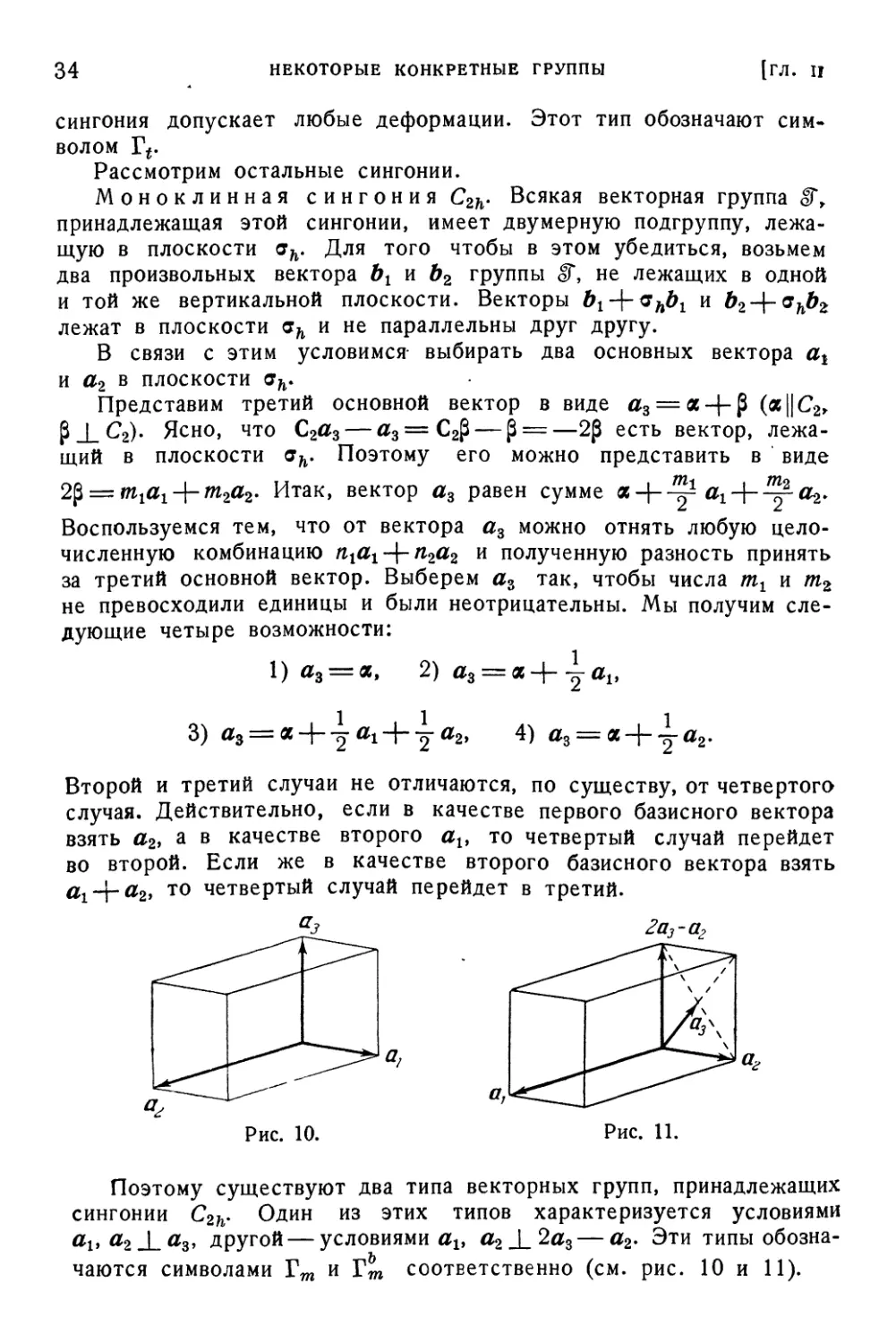
следующие четыре возможности:
1) а3 = а, 2) az = *+^au
3) а3 = а + -5-я1 + ja2i 4) а3 = « + ^а2-
Второй и третий случаи не отличаются, по существу, от четвертого
случая. Действительно, если в качестве первого базисного вектора
взять а2) а в качестве второго ах, то четвертый случай перейдет
во второй. Если же в качестве второго базисного вектора взять
#i + a2> т0 четвертый случай перейдет в третий.
Рис. 10. Рис. 11.
Поэтому существуют два типа векторных групп, принадлежащих
сингонии C2h. Один из этих типов характеризуется условиями
#1>#2.1.Яз> другой — условиями aXi a2_]_2as — а2. Эти типы
обозначаются символами Тт и ТЬт соответственно (см. рис. 10 и 11).
§ 121
сингонии
35
Заметим, что у типа»Гш шестерка векторов z±:alt ±а2, ±а3
инвариантна относительно всех элементов группы С2Ь. У типа Тш
эта шестерка векторов не является инвариантной. Роль инвариантной
шестерки векторов играют у групп типа Гш векторы z+zax, ±a2,
=+=(2а3 — Яг)- Объем параллелепипеда, построенного на векторах аи_
а2 и 2а3— л2, вдвое больше объема элементарной ячейки. Конец
вектора а3 лежит в центре одной из граней этого параллелепипеда.
В центре противоположной грани лежит конец вектора а3-\-аг.
Центры остальных четырех граней параллелепипеда не совпадают
с концами векторов рассматриваемой группы. В соответствии
с этим, Тт называется типом с центрированными основаниями.
Тип Тт называется простым.
Произведя подобный разбор остальных пяти сингонии, легко
получить все 14 различных типов групп трансляций (см. табл. 3).
Сингония D2h осуществляется четырьмя типами групп Г0, Го, Го
и Го- Типы Г0 и Го вполне аналогичны типам Тт и Гш. Для того
чтобы наглядно представить себе тип Го» возьмем шестерку векторов:
z±zav ±а2, ±(2а3 — ах— а2) (рис. 12), инвариантную относительно
2а3-а,
/
у/*
\ у
<Ы
"В*
/
/
/
2а3~«1
2а2-а,
Рис. 12.
Рис. 13.
группы D2h. Параллелепипед, построенный на векторах av a2 и
2а3 — ах— я2, имеет объем, вдвое больший объема элементарной
ячейки. Конец вектора а3 находится в центре этого параллелепипеда.
Поэтому тип Го называется обьемноцентрированным. У типа Го
инвариантную шестерку векторов образуют векторы z±zax,
±(2а2— ах), dz(2a3— ах) (рис. 13). Объем параллелепипеда,
построенного на векторах аи 2а2—aXi 2а3— av в четыре раза больше
объема элементарной ячейки. Все грани этого параллелепипеда
Центрированы. Поэтому тип Го называется гранецентрированным.
Из остальных типов нуждается в пояснении только тип г£. Роль
шестерки инвариантных векторов играют в группах типа г£ векторы
^(#1 + 02), — (ai — йг) и ±(2я3—ах— а2). У куба, построенного
Типы векторных групп
Таблица 3
со
Сингония
Триклинная
Моноклинная
Ромбическая
Тетрагональная
Ромбоэдрическая
Гексагональная
Кубическая
^
C?h
Dth
D,h
Dsd
D6d
On
Тип
Основные векторы
простой Г^ | любые
простой Гш
03 X ах, а2
с центрированными основа- 1 \ 1
ниями Тът J аз — "J а21 alf а2
простой Г0
с центрированными основа-
Ч ниями Т\
объемноцентрированный rjj
гранецентрированный г£
простой Tq
объемноцентрированный Г!!
простой rf?l
простой Г^
простой Гс
гранецентрированный г£
01 X 02 -L 0з -L 0i
а3 — -^ 02 X аъ а2, ах JL а2
0з — y (а± + а2^ -1- a±i a* а± •*- а2
01 X <*2 — у ai -1- аз— у ai -1- ai
01 X 02 JL 0з -L 01, «1 = а2
01 X 02 JL 0з —^ (01 + 02> JL 01» #i = «2
0102 — у » ^1 — «2, 03 — у (01 — 02> JL 01, 02
0102 — "7Г» #1 = #2» 03 X 01» 02
01 X 02 JL 03 X 01» #i = а2 — #3
01X02-103 2 (al+a2)i-al> al=a2 I 03—^2" (al+a2) I ^
объемноцентрированный Tvc | ах±а2_1а3-~± (0i+02)±0i, а^а,1 а3—I («гН**> I =
1
Т=- а1
1
§ 13]
СИММЕТРИЯ КРИСТАЛЛОВ
37
на векторах а1-\-а2> &\ — #2» 2а3 — ах—а2, центрированы все
шесть граней (рис. 14).
Будем называть сингонию А подчиненной сингонии 5,
А<=В,
если:
1) группа симметрии сингонии А является подгруппой группы
симметрии сингонии В]
2) каждый тип сингонии В может быть с помощью сколь угодно
малой деформации основных векторов переведен в один из типов
сингонии Л. "Д1 i
Таблица 3 показывает," что за одним
исключением выполнение первого условия
влечет за собой выполнение второго уело-
2*з-а,-
/ь
0>.
'<*2
1\
l
7
с=>л
Рис. 14.
Рис. 15.
>*
вия. Исключение представляет случай Л = 0ЗЙ, B = D6h.
Действительно, если подвергнуть основные векторы типа Th достаточно малой
деформации, то они не смогут удовлетворить условию
аъ — -j (аг — а2) J_ #i>
обязательному для основных векторов типа ГгЛ. На рис. 15
изображена схема подчинения сингонии.
§ 13. Симметрия кристаллов
Говоря о кристалле, мы не будем учитывать его границ,
предполагая кристалл занимающим все пространство. Такой подход
оправдывается тем, что многие физические свойства кристаллов не
зависят от размеров кристалла и его формы.
Две точки кристалла или два направления в кристалле называются
эквивалентными, если все их физические и геометрические свойства
одинаковы после усреднения по времени (предполагается, что
кристалл находится в равновесном состоянии).
Рассмотрим все те элементы евклидовой группы, которые
переводят каждую точку кристалла в эквивалентную ей и каждое
направление в кристалле в эквивалентное ему. Совокупность всех этих
элементов образует группу, называемую группой кристалла. Всего
существует 230 различных кристаллических групп. Эти группы
называют также пространственными группами. Они были открыты
Е. С. Федоровым (1895 г.) и несколько позже Шёнфлисом.
38
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
Для группы кристалла характерным является наличие трехмерной
дискретной подгруппы трансляций $\ Сингония и тип подгруппы §
называются сингонией и типом кристалла.
Рассмотрим теперь симметрию направлений в кристалле.
Совокупность всех поворотов и зеркальных поворотов, которые
переводят каждое направление в ему эквивалентное, образует точечную
группу F, характеризующую симметрию направлений. Элементы
группы F не обязательно принадлежат группе симметрии кристалла,
так как от них не требуется, чтобы они переводили все точки
кристалла в им эквивалентные.
Группу F можно охарактеризовать следующим образом. Всякий
элемент g группы кристалла G можно представить в виде (7,2)
g = *ar-
Совокупность всех элементов г, соответствующих элементам g*,
образует точечную группу. Эта точечная группа есть не что иное,
как группа направлений F.
Все кристаллы, имеющие одну и ту же группу направлений,
образуют один кристаллический класс. Всего существует, как мы
сейчас увидим, 32 группы направлений и, следовательно, 32
кристаллических класса.
Заметим, что всякий элемент группы F является в то же время
элементом группы К (К — группа симметрии группы трансляций).
Действительно, если г — какой-либо элемент группы F, a av аъ
а3 — тройка основных векторов группы ©Г, то rav гаъ гаг также
являются векторами группы |Г, так как в противном случае
операция г нарушила бы эквивалентность направлений. Поэтому F
содержится в К- Так как у семи групп, характеризующих различные
сингонии, существует ровно 32 подгруппы, то число различных
кристаллических классов равно 32. Приведем эти 32 класса:
в,, 02, Cqu, С%, C^fo C^v* *-S2> L/2h> *^4> ^2Ф C±,
Wt>» Qifr» ^4> ^4ft' ^3> ^6» ^3v» ^3> ^Bd1 ^3fr> ^ЗЪ,'
^6> Qu» C6v9 £*в» £W Т, Tft, Тф О, Oh.
Кристаллический класс F относят к сингонии /С, если
1) группа К содержит группу F;
2) ни одна сингония Kit подчиненная сингонии /С, не содержит
группу F.
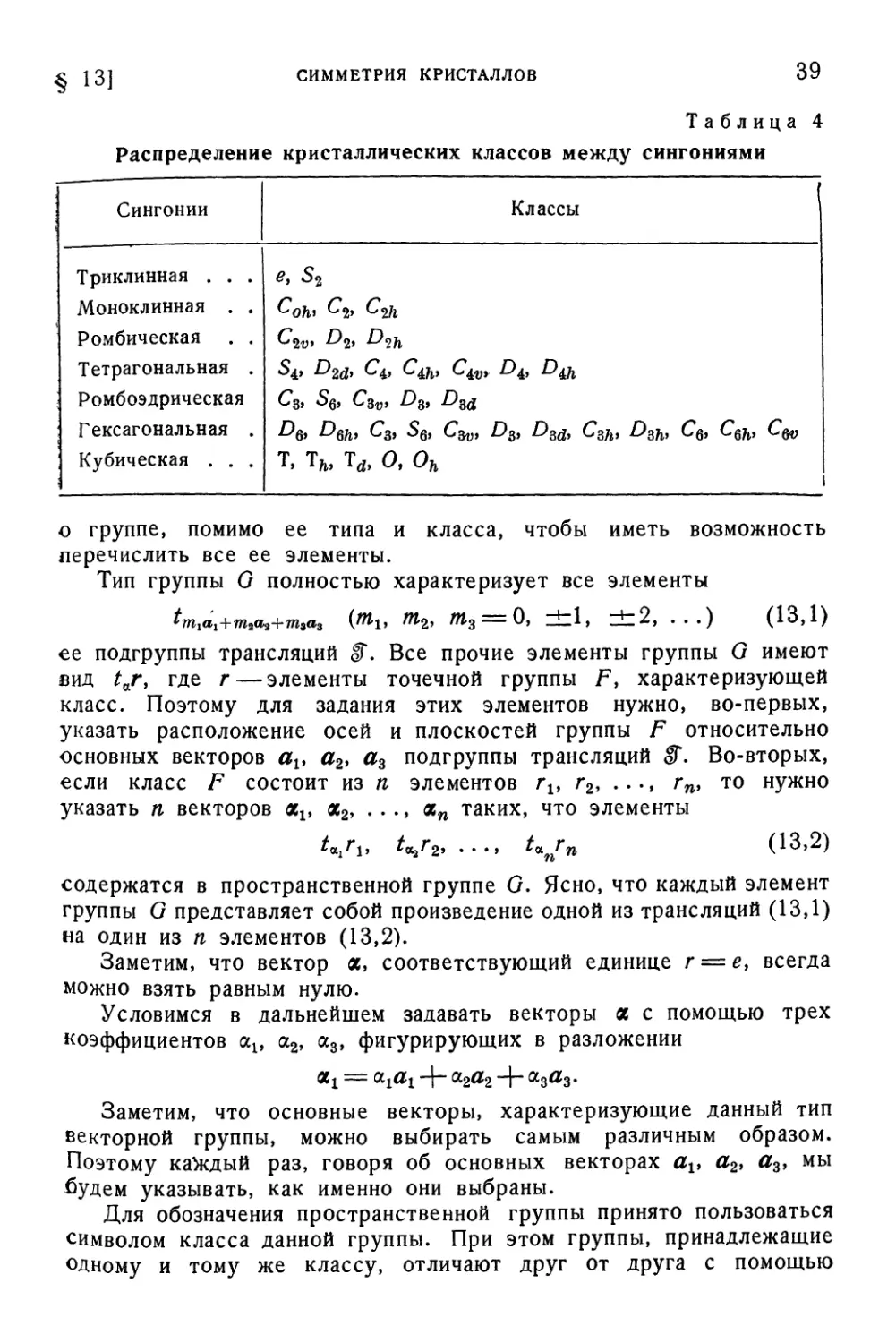
В соответствии с этим определением 32 кристаллических класса
распределяются между семью сингониями так, как показано в
таблице 4.
Итак, каждая пространственная группа О принадлежит одному
из 14 типов и одному из 32 классов. При этом тип группы в
значительной мере ограничивает ее класс. Выясним, что нужно знать
л 13] СИММЕТРИЯ КРИСТАЛЛОВ 39
Таблица 4
Распределение кристаллических классов между сингониями
Сингонии
Триклинная . . .
Моноклинная . .
Ромбическая . .
Тетрагональная .
] Ромбоэдрическая
] Гексагональная .
J Кубическая . . .
Классы
е, 52
(*Ohi Qi» ^2/i
C%vi ^b ^2h
S±> &2Ф Q> Q&> Сш Dh D^
^3» ^6> C$V> ^3» ^dd
^6> DqIh Q> «$6» Csv> ^3» ^Sdy Csh* &Sh
T, Th) Td, 0, Oh
f
» C$i C^ Cqv
о группе, помимо ее типа и класса, чтобы иметь возможность
перечислить все ее элементы.
Тип группы О полностью характеризует все элементы
^«j+WaC^+maaa (Щ> Щ> Щ = 0> ±*> ±2, ...) (13,1)
ее подгруппы трансляций §. Все прочие элементы группы G имеют
вид £ttr, где г — элементы точечной группы F, характеризующей
класс. Поэтому для задания этих элементов нужно, во-первых,
указать расположение осей и плоскостей группы F относительно
основных векторов av a2, аъ подгруппы трансляций |Г. Во-вторых,
если класс F состоит из п элементов гг, г2, . .., rni то нужно
указать п векторов ах, а2, . . ., ап таких, что элементы
*«/i. ^r2» • •> **пгп (13,2)
содержатся в пространственной группе О. Ясно, что каждый элемент
группы G представляет собой произведение одной из трансляций (13,1)
на один из п элементов (13,2).
Заметим, что вектор а, соответствующий единице г = е, всегда
можно взять равным нулю.
Условимся в дальнейшем задавать векторы а с помощью трех
коэффициентов а1э а2, а3, фигурирующих в разложении
«j = а^ + а2а2 + а3а3.
Заметим, что основные векторы, характеризующие данный тип
векторной группы, можно выбирать самым различным образом.
Поэтому каждый раз, говоря об основных векторах av a2, а3, мы
будем указывать, как именно они выбраны.
Для обозначения пространственной группы принято пользоваться
символом класса данной группы. При этом группы, принадлежащие
одному и тому же классу, отличают друг от друга с помощью
40
НЕКОТОРЫЕ КОНКРЕТНЫЕ ГРУППЫ
[ГЛ. II
верхнего индекса. Таким образом, символ С\п обозначает одну из
групп класса С4Л.
В приложении дается описание всех 230 пространственных групп.
В заключение заметим, что если взять в кристалле произвольную
точку О и произвести над ней все трансляции группы §, то
полученная таким образом совокупность точек называется решеткой
Браве, а сами точки—узлами решетки Браве.
Ясно, что группа симметрии группы трансляций есть в то же
время группа симметрии решетки Браве.
Параллелепипед, построенный на любой тройке основных
векторов группы трансляций кристалла, называется кристаллической
ячейкой.
ГЛАВА III
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
§ 14. Представление группы
Если рассмотреть наиболее существенные применения, которые
нашла себе теория групп в физике, то окажется, что в подавляют™
большинстве случаев для приложений используются результаты,,
составляющие один из разделов теории групп, именно, теорию*
представлений.
Теория представлений изучает гомоморфные отображения
произвольной группы на всевозможные группы линейных операторов.
Значение теории представлений связано с тем обстоятельством, чт0*
подобные отображения возникают «сами собой», при рассмотрении
задач, обладающих той или иной симметрией.
Мы будем говорить, что задано представление Т группы О
в некотором линейном пространстве L, если каждому элементу g
группы G отвечает оператор T(g) в пространстве L так, что ПРИ
этом произведению элементов группы отвечает произведение
операторов, т. е.
тыты = Т(?1&). (14>*>
Размерность пространства L называют размерностью
представления. Группа может иметь как конечномерные, так и
бесконечномерные представления. Мы, однако, будем изучать только первые*
Рассмотрим некоторые примеры представлений.
1. Пусть частица, находящаяся во внешнем поле U (г), имеет
отрицательную энергию Е. Волновая функция <|> (г) такой частицы удовлетворяет, как
известно, уравнению Шредингера
Ч(г)+-^[£-г/(г)] + (г) = а (14>2>
Совокупность всех решений этого уравнения при фиксированной энергии Е
образует линейное пространство LEi размерность которого равна кратности
вырождения уровня Е
Предположим, что поле U (г) обладает некоторой пространственной
симметрией. Обозначим через G совокупность всех поворотов и
зеркальных поворотов пространства, которые не изменяют поля U (г), т. е.
удовлетворяют условию
U(gr)~U(r) (g£G).
42 ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП [ГЛ. III
Рассмотрим в пространстве LE операторы T(g)(g£G), определенные
равенством
T(£H(r) = Hg-ir). (14,3)
♦
Покажем, что функция ф (g-V) является решением уравнения (14,2).
Действительно,
^ = ^(r) + ^[E-U(r)]^(r)==^(g-ir) + ^[E-^U(g^r)]^(g^r)^
= Аф (g-V) + ^[E-U (г)] <|/ (g-ir).
Следовательно, операторы Т (g) (g £ G) переводят каждую функцию из
пространства LE в это же пространство.
Проверим теперь, что Т (g{) T (g2) = T (gig^)- Для этого введем
обозначение
Т(*2Жг) = + (*2-^) = ф2(г).
Имеем:
Т (^i) т (S2) + С) = т (Si) +2 С) = *г (вГ'г) =
= Ф (g2~ V1') = + ((«А)"1'") = т (eiSz) Ф С)-
Итак, сопоставляя каждому элементу симметрии g £ G оператор Т (g),
определенный равенством (14,3), мы получаем представление группы 5 в
пространстве волновых функций LE.
2. Рассмотрим группу трансляций пространства вдоль оси Oz. Пусть
L—произвольное одномерное пространство. Сопоставим трансляции на
величину z оператор умножения на число е№* в пространстве L, где k —
некоторое фиксированное число. Соответствие
является, как легко проверить, представлением группы трансляций.
3. Если элементами группы G являются линейные операторы в некотором
линейном пространстве L, то соответствие
g+g (14,4)
можно рассматривать как представление группы G. Иными словами, группа G
образует представление самой себя. Разумеется, помимо представления (14,4),
группа G может иметь и иные представления.
В качестве важного примера можно указать на точечные группы (см. § 8).
Элементы точечных групп представляют собой линейные операторы
в трехмерном пространстве, и поэтому каждая точечная группа образует
представление самой себя. Это представление мы будем называть
векторным. Размерность векторного представления равна трем.
4. Пусть G — произвольная группа. Сопоставим каждому ее элементу g
единичный оператор Е в некотором пространстве L
Мы получим представление группы G. Это представление называется
единичным.
Часто говорят, что пространство L преобразуется по
представлению Т группы G, подразумевая под этим,- что операторы T(g)
представления Т определены в пространстве L.
15] ЭКВИВАЛЕНТНЫЕ ПРЕДСТАВЛЕНИЯ 43
§ 15. Эквивалентные представления
Одна из задач теории представлений состоит в перечислении
всех возможных представлений данной группы. При решении этой
задачи существенную роль играют два понятия: понятие
эквивалентности представлений и понятие приводимости представления.
Настоящий параграф посвящается эквивалентности представлений.
Если известно какое-либо представление Т группы в
пространстве Z,, то нетрудно построить сколько угодно новых
представлений группы G. Для этого следует произвольно выбрать какой-либо
неособенно линейный оператор А, переводящий векторы из L в какое-
либо пространство Lx того же числа измерений (в частности, Lx
может совпадать с L) и сопоставить элементу g£G вместо
оператора T(g) оператор
Tk(g) = XT(g)k-\ (15,1)
действующий в пространстве Lv
Нетрудно проверить, что соответствие g-^Tji(g) является
представлением группы G. Действительно,
Та (g1 • g2) = AT (gx • g2) A"1 = AT (gl) T (g2) A"1 =
= AT Ы A-!AT (g2) A"1 = TA Ы TA (ft).
Всякие два представления группы G, связанные соотношением типа (15,1),
называются эквивалентными. Все представления, эквивалентные
данному, эквивалентны между собой. Поэтому все представления
данной группы Q распадаются на классы взаимно-эквивалентных
представлений. Если известно хотя бы одно представление из
данного класса, то без труда может быть получено любое другое
представление из этого же класса.
Тем самым задача нахождения всех представлений сводится
к более узкой задаче нахождения всех взаимно-неэквивалентных
представлений.
Так как из каждого класса эквивалентных представлений
достаточно выбрать для дальнейшего изучения только по одному
представителю, то естественно попытаться сделать этот выбор наиболее
рациональным образом.
В настоящей главе рассматриваются только те группы, у которых
каждое представление эквивалентно некоторому унитарному
представлению (т. е. представлению Т, у которого все операторы T(g)
унитарны). При изучении этих групп можно ограничиться
рассмотрением только унитарных взаимно-неэквивалентных представлений.
К таким группам относятся, в частности, все конечные группы.
Иными словами, имеет место следующая теорема.
Теорема. Каэкдый класс эквивалентных представлений
конечной группы содержит унитарные представления.
44
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
[ГЛ. III
Доказательство. Будем исходить из некоторого
представления Т из данного класса, действующего в пространстве L.
Доказательство разобьем на два этапа.
1) Сначала определим новое скалярное произведение в
пространстве L так, чтобы все операторы T(g) оказались относительно него
унитарны. Этим свойством обладает скалярное произведение [х, у}г
определенное следующим образом:
{x)y}^^r^(T(h)xtT(h)y) (xfy£L),
h£G
где круглые скобки (л:, у) означают старое скалярное произведение^
а N — число элементов группы. Легко проверить, что выражение
{х, у] удовлетворяет всем требованиям, предъявляемым к скалярному
произведению (линейность и неотрицательность).
Далее,
{T(g)x,T(g)y}=±%(T(h)T(g)x9T(h)T(g)y) =
= ^^(T(hg)x9T(hg)yy
h£G
Так как hg при'фиксированном g пробегает вместе с h£G все
элементы группы, то
^ 2 (Т {hg) х, Т (hg)y) = ± J (Т (Л) х, Т {К)у) = {*, у),
h£G h£G
что и доказывает унитарность операторов T(g) относительно нового
скалярного произведения.
2) Пусть теперь ег, еъ .. ., es — какой-либо базис, ортонормиро-
ванный относительно старого скалярного произведения, a e'v e'v..., ers—
базис, ортонормированный относительно нового скалярного
произведения. Зададим оператор А согласно правилу Ае, = е,r(j = U
2, . . ., s). Ясно то, что (х, у)={Ах, Ау]. Действительно, если х=^е$
и y = rljep то
{Ах, Ау} = {^, ne'j}=lini = (x9y). (15,2)
Построим представление
ТЖ(^) = А-1Т(^)А.
Используя (15,2), получаем:
(ТА (g-)*, TL(g)y) = (A-lT(g)Ax9 А"1Т(йА.у) =
= {T(g)Ax, T.(g)Ay} = {Ax, Ay} = (x,y).
Таким образом, представление Та(#) унитарно, что-* и доказывает
наше утверждение.
§ 16]
ФУНКЦИОНАЛ УСРЕДНЕНИЯ
45
В следующем параграфе эта теорема обобщается применительно
к некоторым бесконечным группам.
Задача. Пусть Т(^) и Ti (g)— два эквивалентных представления
группы G. Представление Т (g) действует в пространстве Z,, представление
Ti(^) действует в L\. Пусть е^ еь ..., е$ — произвольный базис в L.
Показать, что в Li можно выбрать базис
ег, *2, ..., е8
таким, образом, чтобы матрицы операторов T^(g) в этом базисе совпадали
<: матрицами операторов T(g) в базисе еь е^...у е8 (тем самым переход
от одного эквивалентного представления к другому равносилен переходу от
одного базиса к другому).
§ 16. Функционал усреднения
Если каждому элементу g группы G сопоставлено некоторое
действительное или комплексное число ср (g*), то говорят, что на
группе задана функция ср. Рассматривавшееся в предыдущем
параграфе выражение (T(g)x9 T(g)y) представляет собой пример
функции на группе. Функции ср (t) действительного переменного t также
можно рассматривать как функции на группе, поскольку
совокупность всех действительных чисел образует группу со сложением
в качестве группового действия.
Периодические функции можно трактовать так же, как функции
на группе поворотов плоскости XOY вокруг оси OZ. Действительно,
если, например, период функции /(6) равен 2тс, то число 0 можно
отождествить с поворотом вокруг оси OZ на угол 8.
Если группа G конечна, то нетрудно построить так называемый
функционал усреднения М (ср) для функций на группе G.
Функционалом усреднения М (ср) называется линейный
функционал, обладающий следующими свойствами:
1) если cp(g-)>0 при всех g£G, то М(ср)>0;
2) если cp(g*)=l при всех g£G, то М(ср)=1;
3) если срх (g) = ср (g . ti) и cp2(g-) = cp(/z • g), где h — любой
элемент группы G, то М (срх) = М (ср2) = М (ср).
Легко видеть, что на конечной группе функционал
усреднения М (ср) можно задать следующим образом:
Проверим только третье свойство. Имеем:
9t<* 9^0 g£G
Этот же метод легко обобщается на некоторые бесконечные группы.
Так, для группы поворотов плоскости XOY вокруг оси OZ можно
46
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
[ГЛ. III
положить:
о
(ср (G) — периодическая функция G).
В случае группы вращений сферы вокруг ее центра
функционал Ж (ср) задается равенством
2тс 2- г.
0 0 0
Здесь 0, ф! и ф2 — углы Эйлера.
Заметим, что не у всех групп существует функционал
усреднения *).
При доказательстве теоремы § 15 был использован функционал
усреднения М (ср) для построения нового скалярного произведения.
Это построение опиралось только на указанные ранее три свойства,
общие всем функционалам усреднения. Поэтому приведенное в § 15
доказательство автоматически переносится на все группы, обладающие
функционалом усреднения.
§ 17. Приводимые представления
Введение понятия эквивалентных представлений позволило свести
задачу перечисления всех представлений к нахождению только
неэквивалентных представлений.
Подобно этому разделение представлений на так называемые
приводимые и неприводимые еще более сужает поставленную задачу,
сводя ее к нахождению одних только неприводимых представлений.
Это тем более существенно, что именно неприводимые
представления обладают целым рядом специфических свойств, обусловливающих
их ценность в приложениях и облегчающих их нахождение.
Представление Т группы G в пространстве L называется
приводимым, если в L существует хотя бы одно нетривиальное
подпространство Ll9 инвариантное относительно всех операторов T(g)(g£ О)**).
В соответствии с этим представление Т группы G в пространстве L
называется неприводимым, если в L не существует ни одного
*) В частности, он отсутствует у группы Лоренца и у группы
действительных чисел. Более подробно об этом см. в § 42.
**) Напомним, что подпространство Z,j линейного пространства L
называется инвариантным относительно некоторого оператора А, если этот
оператор, действуя на векторы из подпространства Lb переводит их в
векторы, принадлежащие этому же подпространству L\.
кх £ Lb если х £ Lt.
Все подпространства пространства L, кроме самого L и нуль-пространства
называются нетривиальными подпространствами.
§ 171
ПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ
47
нетривиального подпространства Lu инвариантного относительно
всех операторов T(g) (g£G).
Заметим, что в силу этого определения все одномерные
представления являются неприводимыми.
В качестве примера приводимого представления можно указать
векторное представление группы Dn. Действительно, трехмерное векторное
пространство распадается на два инвариантных относительно труппы D^
подпространства: одномерное, состоящее из всех векторов, направленных
вдоль оси OZ, и двумерное, состоящее из всех векторов, расположенных
в горизонтальной плоскости.
Выясним некоторые свойства приводимых представлений. Пусть Т
есть приводимое представление группы G в некотором пространстве L.
Пространство L содержит нетривиальное инвариантное
подпространство, которое мы обозначим через Lv Каждый вектор из Lx под
действием операторов T(g) (g£G) переходит в векторы из этого же
пространства. Поэтому в пространстве Lx можно определить
операторы %(g) (g£G) с помощью соотношений
T1(g)x = T(g)x (x£Lug£G). (17,1)
Оператор Txig), определенный таким образом, очень тесно связан
с оператором T{g)9 но не равен ему, хотя бы потому, что
оператор Tx(g) определен только в пространстве Lx, в то время как
оператор T(g) определен в пространстве L, имеющем большее
число измерений.
Чтобы подчеркнуть это своеобразное соотношение между
операторами Tt(g) и T(g), будем говорить, что оператор T(g)
индуцирует в инвариантном подпространстве Lx оператор Tx(g)>
определенный равенством (17,1); оператор Tt(g) будем называть
индуцированным.
Ясно, что соответствие g —>Tt(g) является представлением
группы G в подпространстве Lx. Будем говорить, что приводимое
представление Т(^) индуцирует в инвариантном
подпространстве Lx представление Tx(g). Индуцированное представление Tt
является унитарным, если унитарно индуцирующее представление Т.
Значение индуцированных представлений заключается в том,
что они в своей совокупности полностью характеризуют то
приводимое унитарное представление, которое их индуцировало. Для того
чтобы это показать, воспользуемся следующей простой теоремой.
Теорема I. Пусть Т—унитарное приводимое
представление группы G в пространстве L, a Lx— инвариантное
подпространство. Тогда ортогональное дополнение к Lx — подпрострая-
Imeo L2 — также инвариантно.
Доказательство. Пусть x£Lx, y£L2. Тогда T~l (g) x £ Lx
и-(Т"1 (#•) *, у) = 0. С другой сторону, (T~l'(g)x, y) = {x) T(g)y).
Поэтому T(g)yJ_x, т. е. T(g)y£L2, и теорема доказана. Итак,
если пространство L преобразуется по некоторому приводимому
48
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
[ГЛ. III
унитарному представлению, то оно расщепляется на два взаимно-
ортогональных инвариантных подпространства Lx и Z,2,
L = LX + L2.
Обозначим через Тх и Т2 представления, индуцируемые в этих
подпространствах приводимым представлением Т.
Так как каждый вектор z £ L может быть однозначно представлен
в виде суммы векторов из Z,x и L2
z^xAry (x£Lv y£L2)9
то задание представлений Тх и Т2 полностью определяет
представление Т. Именно, имеет место очевидное равенство
Т<*)*==Т1<*)* + Т1(«).у.
Если представления Т, Тх и Т2 находятся между собой в
указанной связи, то говорят, что представление Т расщепляется на
представления Тх и Т2. Представление Т называют также суммой
представлений Тх и Т2.
Если хотя бы одно из представлений Тх или Т2 приводимо,
то его можно в свою очередь разбить на два представления меньшей
размерности. Продолжая этот процесс, мы неизбежно придем
к неприводимым представлениям, если исходное представление было
конечномерным.
При этом пространство L окажется разложенным на сумму
взаимно-ортогональных инвариантных подпространств
Z, = Z,(1) + L(2)+ ... +Z,(W), (17,2)
каждое из которых преобразуется по некоторому неприводимому
представлению группы G.
Если среди подпространств* (17,2) имеется несколько, скажем,
тч подпространств, преобразующихся по представлениям,
эквивалентным одному и тому же неприводимому представлению *„,
то будем говорить, что представление xv содержится в приводимом
представлении Т тч раз. Если ни одно из подпространств (17,2)
не преобразуется по данному представлению xv, то говорят, что
представление tv не содержится в представлении Т.
Приведенные рассуждения доказывают следующую важную
теорему.
Теорема II. Всякое приводимое унитарное конечномерное
представление распадается на унитарные неприводимые
представления и может быть из них составлено (т. е. является
их суммой).
Значение этой теоремы состоит в том, что она сводит задачу
нахождения всех представлений к задаче отыскания только
неприводимых представлений.
§ 18] неприводимые представления и свойства ортогональности 49
Заметим в заключение, что если в качестве базиса в
пространстве L взять совокупность базисных векторов инвариантных
подпространств (17,2), то матрицы, соответствующие операторам T(g),
принимают квазидиагональный вид.
Задача. Доказать, что если представление Т^ эквивалентно
представлению Tj, aTg^ Т2, то Tj + Т2 ^ Tj -f- T2 (символу означает эквивалентность).
§ 18. Неприводимые представления и свойства ортогональности
Как уже указывалось, неприводимые представления обладают
рядом специфических свойств, которые делают их очень ценными для
различных приложений и облегчают их нахождение. В этом параграфе
исследуются свойства неприводимых представлений. Начнем с леммы.
Лемма. Если представление t(g) (g£G) группы G неприво-
димо, то всякий линейный оператор А, коммутирующий со всеми
операторами t(g) (g£G), кратен единичному. Иными словами,
из соотношений
4(glA = At(g)(g€G) (18,1)
вытекает равенство
А = ХЕ,
где X— некоторое число, а Е— единичный оператор.
Доказательство. Как и всякий линейный оператор в
комплексном пространстве, оператор А имеет по крайней мере одно
собственное число. Обозначим его через X, а подпространство
собственных векторов оператора А, соответствующих числу X,
обозначим через Lv Таким образом, имеем:
Ад: = Хл:, если x£Lv (18,2)
Ясно, что подпространство Lx не пусто (в противном случае число X
не было бы собственным). Покажем, что подпространство Lx
инвариантно. Пусть х — произвольный вектор из Llt a x(g) — один
из операторов неприводимого представления. Вычислим вектор Ах (g) x.
С помощью (18,1) и (18,2) получаем:
At (g)x = t (g) Ax = x (g) lx = Xx (g) x.
Таким образом, вектор t{g)x является собственным вектором
оператора А и соответствует собственному числу X. Иными словами,
вектор t(g)x содержится в Lv что и доказывает инвариантность Lv
Так как представление х неприводимо, то инвариантное
подпространство 1г должно быть тривиальным. Не будучи пустым, оно
совпадает со всем пространством L:LX = L. Равенство (18,1) можно
теперь переписать в виде Ajc==Xjc, если x£L, т. е. А = ХЕ, что
и завершает доказательство.
Введем теперь чрезвычайно важное понятие функций,
порождаемых представлениями.
50 ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП [ГЛ. III
Пусть Т—какое-либо (приводимое или неприводимое)
представление группы G размерности 5 в некотором пространстве L. Выберем
в L какой-либо базис и сопоставим с его помощью каждому
оператору T(g) (g£G) соответствующую ему матрицу*)
Т«(*) (t,b=l9 2, ..., s; g£Q). (18,3)
Получаемые таким образом матричные элементы (18,3) составляют
совокупность s2 функций на группе. Эти функции удовлетворяют
важным алгебраическим соотношениям
T«feA) = ST«fe)T»te). (18,4)
i = i
непосредственно вытекающим из основного свойства
представления T(gh) = T(g)T(h).
Скалярным произведением двух функций на группе ср (g) и ty(g)
называется выражение
(?.Ф) = ^Ц?(*)Ф(Й- (18,5)
Функции cp(g-) и ty(g) называются ортогональными, если их
скалярное произведение **) равно нулю.
Теперь можно сформулировать первую теорему ортогональности.
Теорема I. Неприводимое представление х размерности $
порождает $2 взаимно-ортогональных функций
*ik(g) (*.*=1. 2, ...f s).
При этом
(tik> Ъ'к1) = у bu'hh' • (18,6)
Доказательство носит несколько искусственный характер.
С помощью совершенно произвольного линейного оператора В,
действующего в том же пространстве Z,, в котором определены
операторы представления х (g), строим оператор А по формуле
А-^2т(/г)Вт(/г-*).
*) Напомним, что матрица А^9 соответствующая оператору А (при
фиксированном выборе базиса еь е%,..., е8\ определяется как совокупность
8 8
коэффициентов в тождествах Аеь = 2 A%kev При этом, если х = 2 *квк
a s
и у = Ах = 2 У&> то У* = 2 АЫХЬ*
i=\ г=1
**) Приводимые ниже рассуждения легко переносятся на случай
бесконечных групп, имеющих функционал усреднения. В частности, скалярное
произведение следует определить, положив (<f, ф) = М {<р, ф}.
& 181 НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ И СВОЙСТВА ОРТОГОНАЛЬНОСТИ 51
Проверим, что оператор А коммутирует со всеми операторами x(g)
(g-gO). Имеем:
T»)A=^St^)T(A)Bt(A"1)e^S,B(fir*)B,B(*"l)-
h£G h£G
Пользуясь свойством инвариантности суммы относительно замены
h^+g-i-h (§ 16, свойство 3), находим:
*(*) А = ^2* (А) Вт (*-*«) =
h£G
= 37 S x {h) Bx {h~l) x (g) = Ах {g)'
h£G
Согласно первому свойству неприводимых представлений это
означает, что оператор А кратен единичному оператору. Итак,
1^х(/г)Вх(/г-1) = ЦВ)£,
h£G
где X—число, зависящее от выбора оператора В. Перейдем от
равенства операторов к равенству матричных элементов
37 2т*{h) в^к {П'1]=х (В) 8« *}- (18*7>
Поскольку оператор х(/г) унитарен, то ^&(й"1) = Трй.(/г) и
(*««. VB«P = X(B)8i*- (18>8)
Для вычисления л (В) положим в (18,7) i = k и просуммируем по /
обе части равенства:
MB) 5 = 1 ^ *pi (и"1) *г« (А) Stt? = 1 ^ V (0 В.р = 8«?В«р = Satt.
й£(? h£G
Выберем теперь оператор В так, чтобы
1, если <х = р и j3 = (7,
"^ \ 0 при всех остальных значениях а, [3.
Тогда ЦВ)= — 8рд и равенство (18,8) переходит в
Ыр> 4q) — jbufip<Ipq>
что и составляет содержание теоремы.
*) В дальнейшем мы будем опускать знак суммы при суммировании по
Дважды встречающимся индексам, если это не может привести к
недоразумениям.
52
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
[ГЛ. III
Если группа О имеет порядок N, то максимальное число линейно
независимых функций на группе равно N. В качестве примера N
линейно независимых функций можно указать семейство функций,
определяемых соотношениями
<P<(g*) = *i* (i,k=l9 2, ..., АО. (18,9)
Так как взаимно-ортогональные функции линейно независимы, то
s*<.N.
Первую теорему ортогональности дополняет вторая теорема
ортогональности.
Теорема II. Функции т$(#-), порожденные неприводимым
представлением tll), ортогональны функциям т$^ (g), порожденным
любым другим неэквивалентным неприводимым представлением т<2>:
(*8.*&/) = '°- (18Д0)
Доказательство первой теоремы ортогональности существенно
опиралось на тот факт, что оператор А, коммутирующий со всеми
операторами t(g) неприводимого представления, равен ХЕ.
Поэтому прежде чем приступить к доказательству второй теоремы
ортогональности, следует выяснить, что можно сказать об
операторе, удовлетворяющем соотношениям
*<1>(г)А = Ат<2>(£) (g£G)9 (18,11)
где ^lHg) и х(2)(§*) — операторы двух неприводимых представлений.
Ответ на этот вопрос дает
Лемма Шура. Пусть *(*> и т<2) — два неэквивалентных
неприводимых представления группы О. Операторы тО) (g)
действуют в пространстве Llf операторы t2(g)—в пространстве L2.
Если линейный оператор А, переводящий векторы из L2 в Lv
удовлетворяет соотношениям (18,11), то он равен нулю.
Доказательство. Рассмотрим сначала случай, когда
размерность sx пространства Lx больше размерности s2 пространства L2.
Обозначим через MdLl область значений оператора А, т. е.
совокупность векторов xx£Llt которые могут быть представлены в виде
хг = Ах2 {x2^L2).
Нетрудно видеть, что М образует инвариантное подпространство.
Действительно,
*0) (g)хх = td) (g) Ax2 = Ах(2) (g)x2£M.
Следовательно, подпространство М либо совпадает с Lu либо
состоит только из нуль-вектора. Размерность подпространства М
не превышает s2 и потому меньше, чем sv M поэтому не может
совпадать с Lx и, следовательно, состоит только из нуль-вектора.
Это и означает, что оператор А равен нулю.
с 18] НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ И СВОЙСТВА ОРТОГОНАЛЬНОСТИ 53
Если размерности пространств Lx и L2 одинаковы, т. е. sl = s2r
то оператор А должен быть особенным (ибо в противном случае
представления Ф) и х® эквивалентны). Поэтому размерность
подпространства М меньше, чем sv Отсюда вытекает равенство нулю
оператора А совершенно так же, как и в случае sx > s2.
Пусть, наконец, sx < s2. Оператор А в этом случае является
особенным. Обозначим через NaL2 подпространство, состоящее из
тех векторов x2£L2i которые переводятся оператором А в нуль,
Ал;2 = 0 (Хгб АО-
Размерность N не равна нулю, так как оператор А является
особенным. С другой стороны, пространство N инвариантно
относительно операторов tW(g). Действительно,
Ах(2) (g)x2 = ф)(g) Ax2 =0 (*2 £ АО,
т. е. t(2)(g)x2£N, если x2£N. В силу неприводимости
представления т<2) инвариантное подпространство N должно совпадать со
всем пространством L2. Это и означает, что оператор А равен нулю.
Лемма Шура, таким образом, доказана.
Теперь можно провести доказательство второй теоремы
ортогональности совершенно аналогично доказательству первой теоремы
ортогональности.
Доказательство теоремы II. Пусть В—произвольный
линейный оператор, переводящий векторы из пространства L2 в
пространство Lv Построим оператор
который, как легко видеть, удовлетворяет соотношению x^(g)A =
= AtW(g) (g£G) и, следовательно, равен нулю. Выберем
оператор В так, чтобы
{1, если <х = р и р = <7,
О, если <х ф р или р Ф q.
Тогда из равенства нулю оператора А следует:
ff 2 ^ (А) ■# (*-»> = <>.
h£G
Так как zW(h-1) = t№(k), то последнее равенство можно переписать
в виде (tW, т(2Л = 0. Теорема, таким образом, доказана.
Задача I. Показать, что единице группы соответствует при
неприводимом представлении единичный оператор.
Задача II. Доказать, что у абелевых групп все неприводимые
представления одномерны.
Задача III. Представить произвольную функцию на группе в виде
линейной комбинации функций семейства (18,9).
54 ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП [ГЛ. III
Задача IV. Пусть Т — приводимое представление группы (7,
действующее в пространстве L. Пусть L^czzL — инвариантное подпространство,
преобразующееся по неприводимому представлению т. Доказать, что если
некоторый оператор В коммутирует со всеми операторами Т (g), то
подпространство BZ,!, состоящее из всех векторов вида Ъх1 (xt (j L^y является
инвариантным и преобразуется по представлению т.
Задача V. Пусть х (g) (g£G) — унитарное неприводимое
представление. Доказать, опираясь на первую теорему ортогональности, что базис
еь еъ ..., е8
ортонормирован, если все операторы т (g) (g £ G) выражаются в этом базисе
унитарными матрицами.
Задача VI. Пусть т (g) (g£G) и эквивалентное ему представление
Ti (g) = Ат(^) А"1 унитарны и неприводимы. Оператор А нормируем так,
чтобы DetA= 1. Опираясь на задачу I § 15 и предыдущую задачу, доказать
что оператор А унитарен.
§ 19. Теорема полноты
В предыдущем параграфе было показано, что функции *$(g),
порождаемые неэквивалентными неприводимыми представлениями,
взаимно ортогональны (в смысле § 18). Теперь мы докажем
следующую теорему:
Теорема полноты. Совокупность функций
•№(g) (a=l, 2f ...f q; l,k=l, 2, ..., sa), (19,1)
порождаемых всеми неэквивалентными неприводимыми
представлениями, полна в пространстве всех функций на группе.
Приведем эквивалентную формулировку этой теоремы.
Всякая функция ср (g) на конечной группе G может быть
разложена в сумму
<p(g)=2<&42<*). (ВД
а, г, к
Заметим, что если самый факт возможности такого разложения
доказан, то коэффициенты С&- легко находятся по формулам
<$ = *„(<?,■$). (19,3)
Доказательство теоремы полноты. Сопоставим
каждому элементу g группы оператор R(g*), определенный равенством
К(*ЖА) = Ф(А*) (tf.AGG) (19>4)
(функция ty(hg) рассматривается как функция от h и потому, вообще
говоря, отличается от функции ф(/г)). Обозначим ф (hg) = ср (/г) и
вычислим R(g"i)cp(/z) (g*i£G). Имеем:
R (ft) Ф (hg) = R (gx) с? (/г) = ср (hgi) = ф (hglg) = R (gig) ф (*)•
£ |9] ТЕОРЕМА ПОЛНОТЫ 55
Полученное равенство показывает, если учесть (19,4), что R(g*i)R(g*) =
= R(g*ig")> т- е' что соответствие g*->R(g") является представлением
группы. Это представление называется регулярным представлением.
Регулярное представление, как и вообще всякое представление
конечной группы, можно разложить на неприводимые
представления. Это означает, что пространство всех функций на группе Lf
распадается на подпространства
каждое из которых преобразуется по некоторому неприводимому
представлению хИ группы G.
Обозначим через
?(«>, ср(«), ..., ?(«> (19,5)
базис в одном из этих подпространств La (a=l, 2, ..., р). Так
как любая функция cp(g-) на группе G может быть разложена по
функциям вида (19,5), то для доказательства теоремы полноты
достаточно показать, что любая функция (19,5) представима в виде
суммы (19,2). Чтобы это сделать, выберем произвольно одну из
функций (19,5) срИ(/г) и подействуем на нее оператором R(g*). Мы
получим:
С другой стороны, по определению оператора R (g-) имеем
R (g) <?¥> (Щ = <pW (%). Поэтому
Полагая здесь h = e9 получим:
^(er)=StS(er)?Pw-
Функция cp(a)(g-) представлена в виде (19,2), и теорема полноты
доказана.
Итак, функции, порождаемые всеми неприводимыми
представлениями, образуют ортогональный базис в пространстве Lf. Поэтому
число этих функций равно размерности Lf. Размерность
пространства Lf равна N (N — порядок группы G). С другой стороны,
общее число функций, порожденных неприводимыми представлениями,
равно сумме квадратов размерностей этих представлений. Отсюда
следует, что
s! + 4+ ••■ +sl = N, (19,6)
т- е. сумма квадратов размерностей всех неприводимых
неэквивалентных представлений равна порядку группы (теорема Бернсайда).
56
ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП
[ГЛ. III
§ 20. Теория характеров
В этом параграфе рассматриваются так называемые характеры
представлений. Введение этого понятия в теорию представлений
оказалось чрезвычайно плодотворным. Причины, в силу которых
характер является ценным математическим инструментом, можно
отчасти усмотреть из приводимых ниже свойств характеров.
Характером % (g) представления Т (g) называется сумма
диагональных элементов матрицы, соответствующей в каком-либо базисе
оператору T(g*). Нетрудно проверить, что произвол в выборе базиса
пространства Z, в котором действуют операторы T(g*), не
отражается на величине характера x(g*)-
Выясним некоторые свойства характеров.
1. Характеры эквивалентных представлений совпадают. Это
свойство устанавливается непосредственным вычислением. Пусть Т
и Т'— два эквивалентных представления. Они связаны соотношением
Т' (g) = AT(g-) A~ . Характер у/(g) представления Т' (g) равен
г ig) = т« (g)=,4iaTae (g) л^ = 8аРтаР (g) = таа (g) = х {g).
2. Характеры неприводимых неэквивалентных представлений
ортогональны между собой. Это непосредственно вытекает из
ортогональности любых матричных элементов неэквивалентных
неприводимых представлений. Из ортогональности характеров
неприводимых неэквивалентных представлений следует, в частности, их
линейная независимость.
3. Скалярный квадрат характера неприводимого
представления равен единице. Действительно,
8 8 S
г, ft = l *=1 г = 1
Последние два свойства характеров неприводимых представлений
можно выразить одним соотношением
(Х(0,х(*)) = 8«. (20,1)
4. Характер приводимого представления 1(g) равен сумме
характеров всех неприводимых представлений *М (g)t которые
содержатся в T(g) (считая каждое представление столько раз,
сколько раз оно содержится в T(gO). Это непосредственно
вытекает из возможности записи матриц Tik(g) в квазидиагональном
виде (см. § 17). Обозначим через тч число, показывающее, сколько
раз содержится в представлении Т неприводимое представление t<v),
имеем, следовательно,
Z(*) = 2»,Xwte)- (20,2)
с 20] ТЕОРИЯ ХАРАКТЕРОВ 57
5. Числа mv, показывающие, сколько раз входят в
представление Т неприводимые представления xW, определяют представление Т
с точностью до эквивалентности. С другой стороны,
соотношение (20,2) можно разрешить относительно /rcv. Для этого умножим
скалярно обе части (20,2) на y(v). В силу ортонормированности
характеров получаем при этом
»*v = (x,X(v)). (20,3>
Таким образом, характер %(g) приводимого представления позволяет
найти числа т^ и, следовательно, определить Т с точностью до
эквивалентности. Иными словами: два представления, имеющих
одинаковые характеры, эквивалентны.
Заметим, что хотя формула (20,3) непосредственно позволяет
выяснить, на какие неприводимые представления распадается
данное приводимое представление, она не дает никаких указаний
относительно метода разбиения пространства на инвариантные взаимно-
ортогональные подпространства, преобразующиеся по этим
неприводимым представлениям. Такой метод будет указан в § 26.
6. Равенство (20,2) позволяет указать очень удобный критерий
неприводимости представления. Действительно, из (20,2) следует,
что
(X. X) = (2 »,XW, 2 **'Х("^ = 2 ml (20,4)
Поэтому, если представление приводимо, то скалярный квадрат
его характера больше единицы.
7. У взаимно-сопряженных элементов характеры равны
X(g) = X(xgx~l) (g,x£G). (20,5}
Действительно,
х(^-')=2тй(^->)= 2 TiawT,?(?)Tpi(r')=
i = l U «, P = l
= 2 §a?Ta? (g) = 2 Taa (g) = X (g).
a, 0 = 1 ' r a=l
Эта свойство характеров означает, что они, собственно говоря,,
являются функциями классов сопряженных элементов. Иными словами,
чтобы определить характер элемента g, достаточно указать лишь
класс К9, которому принадлежит этот элемент. Таким образом,,
можно написать:
X(g) = l(Kg).
8. -Совокупность характеров всех неприводимых
представлений является полной в линейном пространстве функций,
определенных на классах сопряженных элементов.
58 ТЕОРИЯ ПРЕДСТАВЛЕНИЙ ГРУПП [ГЛ. III
Докажем это. Пусть f(g) — произвольная функция классов. Это
означает, что для любой пары элементов g и h имеет место тождество
f(h~igh)=f(g) (gr, А£0).
Разложим функцию f(g) по функциям T^(g"), порожденным всеми
неприводимыми представлениями:
it к, v
Подставляя сюда h~lgh вместо g*, находим:
f(g)= 2 Ci^(A"lgA)= 2 СЙЦхйСА-Оха^^^А).
tf, fc, v г, fc, v a, {3
Усредним обе части этого равенства по h
г, к, v a, 3 &£<?
Остается вычислить величину
^ S $ (Л"') $ (А) = 1 2 32(A) $ (А) = (т^Й, т£>) = i 8„„8tt.
Подставляя это в выражение для /(g*), находим:
><*> = 2 г, с^ 2 ^ <*> -Si с« *(,) <*>•
что и завершает доказательство.
Следствие. Число q различных неприводимых
представлений разно числу классов сопряженных элементов,
9. Из полноты совокупности характеров всех неприводимых
представлений следует так называемое второе соотношение
ортогональности характеров. Чтобы прийти к нему, полезно
использовать следующее положение, доказываемое в линейной алгебре:
Если q2 величин /*(/, &=1, 2, ..., q) удовлетворяют
«соотношениям ортогональности» по нижнему индексу
y,flJi = hj, (20,6)
a-l
§ 20] теория характеров 59
то они удовлетворяют подобному же соотношению и по верхнему
индексу
2Л/Г = »№ (20,7)
а=1
Рассмотрим теперь р2 величин
£ = УмС№(*а) (*, a=l, 2, ..., q),
где ptt есть число элементов в классе /С*. В силу (20,1) они
удовлетворяют соотношению (20,6). Следовательно, они удовлетворяют и
соотношению (20,7), которое можно записать в виде
я.
У^Ю^Щ = ^Ку (20.8)
Это равенство носит название второгэ соотношения ортогональ*
поста характеров.
ГЛАВА IV
ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП
§ 21. Произведение представлений
Пусть Тх, Т2 и Т3 — какие-либо представления некоторой
группы О. Если характер представления Т3 равен произведению
характеров представлений Тх и Т2
xefe) = xite)xate) (г€0. (21,1)
то представление Т3 называется произведением представлений Тг
и Т2.
Это записывается так:
т3 = тххт2.
Ясно, что произведение представлений не зависит от порядка
сомножителей. Подчеркнем, что существование представления Т3,
характер которого удовлетворяет соотношению (21,1), отнюдь не
является само собой разумеющимся. Ниже, однако, будет доказано,
что произведение характеров любых двух представлений какой-либо
группы О совпадает с характером некоторого представления
группы G. Иными словами, будет доказано, что можно перемножать
любую пару представлений одной и той же группы.
Рассмотрим два важных примера произведения представлений.
Пусть Lx и L2 — пространства, преобразующиеся по
представлениям Тх и Т2 группы G; е^\ е$\ ..., е^ — базис в пространстве Ьг;
42), 42) 4? — базис в пространстве Z,2; T$(g)— матрица
оператора life) (g"£G); T$ (g) — матрица оператора T2(g").
Рассмотрим формально линейное пространство L размерности
Si • s2, в котором базис состоит из всевозможных произведений
*(М2) (1=1,2,...,*; ft=l,2 sj). (21,2)
Под действием элемента g£G вектор е^ переходит в вектор
^i(g)e?) = ^T^(g)e^\ а вектор еф — в вектор T2(g)e$> =
§ 21]
ПРОИЗВЕДЕНИЯ ПРЕДСТАВЛЕНИЙ
61
= 2 Тр2л (g) eT- В соответствии с этим положим, что вектор е(ре^}
переходит под действием элемента g" в вектор
Т (?) *W = (Т, (^) rf») (Т, (у) ef) = 2 Т'1] fe) T$ fr) е^>. (21,3)
Соотношение (21,3) ставит в соответствие каждому элементу g"£G
линейный оператор T(g)t определенный в пространстве L. Легко
видеть, что операторы T(g") удовлетворяют соотношению T(gi)T(g£=
= T(gig2) (giy g2£G) и» следовательно, соответствие g->T(g)
является представлением группы G. Размерность этого
представления равна произведению размерностей представлений Тх и Т2.
Вычислим характер представления Т. Имеем, используя (21,3),
X (?) = 2 2 TiV (?) TiS (?) = Xi (?) X2 (?)• (21,4)
Соотношение (21,4) показывает, что представление Т является
произведением представлений Тх и Т2*).
Из рассмотренного примера вытекает, что, каковы бы ни были
лредставления Тг и Т2 некоторой группы G, существует
представление Т3 группы G, являющееся произведением представлений 1\ и Т2.
Перейдем теперь ко второму примеру. Рассмотрим
совокупность L всех линейных операторов, переводящих векторы из
пространства Ьг в пространство L2. Эта совокупность образует
линейное пространство размерности sx • s2, поскольку каждый оператор
может быть представлен в виде матрицы, имеющей sx столбцов и s2
строк.
Сопоставим теперь с помощью некоторого элемента g каждому
оператору A£Z, оператор Ag£Lt определяемый равенством
А|Г = Т£(г)АТ1(вг1). (21,5)
Соответствие А-*А^ является линейным. Обозначим через T(g)
оператор, осуществляющий это соответствие,
Т(?)А = А,. (21,6)
Непосредственная проверка показывает, что операторы T(g)
ig£G) образуют представление Т группы G.
Вычислим характер этого представления. Для этого выберем
в качестве базиса в L совокупность операторов вида
^ х=Чг\т Q; mzj; 2;;;;; *2')
-*) Можно определ ить произведение представлений Tt и Т2 как
представление Т, построенное в рассмотренном примере. Такое определение
эквивалентно приведенному выше.
62 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IV
и вычислим матрицу оператора T(g)A(2, ft). Имеем
(T(g) A(i* % = (T2(g) A(i' ^TJg-i))»^
Поэтому
a, 0
Отсюда характер ^(g-) представления Т равен
х(^)=2 2т8Ч?)тШ(^-1),
xte) = xife-1)X2(^). (21,7)
Рассмотрим некоторые следствия, вытекающие из (21,7). Если
в качестве представления Т2 взять единичное представление, то
соотношение (21,7) примет более простой вид
Мы видим, что наряду с представлением T1(g)> характер которого
равен Xi(g)> группа G имеет представление, характер которого
равен XiCg""1)- Такое представление называется сопряженным
представлению 1\ и обозначается IV Свойство сопряженности является
взаимным.
Соотношение (21,7) показывает, что представление Т, по
которому преобразуются операторы, переводящие векторы из про*
странства Lx в пространство L2 (см. формулы (21,5) и (21,6)),
является произведением представления Т2 на представление Tv
Рассмотрим более подробно случай, когда представления Тх и Т^
являются неприводимыми представлениями хх и т2. Для того чтобы
произведение хх X **2 содержало единичное представление, нужно,
чтобы существовал такой оператор А, который не изменяется под
действием операторов Т (g): T (g) А = А. По определению (21,5),
(21,6) это означает, что 'C2(g')A'C1(g~1) = А или
t2(g)± = ^i(g)-
Согласно лемме Шура этот оператор равен нулю, если
представления хг и т2 неэквивалентны. Если же представления хх и х2
эквивалентны, то согласно лемме § 18 оператор А кратен единичному,
т. е. определен с точностью до множителя.
Приведенные рассуждения доказывают следующую теорему.
Теорема. Произведение двух представлений хх X *2
содержит единичное представление в том и только том случае,
если представления хх и х2 эквивалентны.
§ 22] СОПРЯЖЕННОЕ ПРЕДСТАВЛЕНИЕ 63
Задача I. Доказать, что произведение неприводимого представления
на одномерное неприводимо.
Задача II. Доказать, что взаимно-сопряженные представления имеют
одинаковую размерность.
Задача III. Пустьjlt т^ и т3—какие-либо три неприводимых
представления группы G, а %ь т2 и т3 — сопряженные им представления.
Доказать, что если имеет место хотя бы одно из следующих трех
соотношений ^
1) xt содержится в т2 X *&
2) т2 содержится в %t X ^з>
3) тз содержится в ix X т2,
то имеют место и остальные два.
Задача IV. Доказать, что представление х, сопряженное
неприводимому представлению -с, р свою очередь неприводимо.
Задача V. Доказать, что произведение двух неприводимых
представлений размерности s± и s2 ($j > 52) не может содержать представления
размерности меньшей, чем —.
Задача VI. Если каждый элемент g группы G сопряжен своему
обратному g-1, то каждое представление группы G сопряжено самому себе.
§ 22. Сопряженное представление
Если нам известны матрицы Tik(g) некоторого представления Т,
то матрицы сопряженного представления можно вычислить по
следующей простой формуле:
%к(Е) = ^ы(Г1)- (22,1)
Непосредственная проверка показывает, что матрицы Tik(g)
образуют представление; характер матрицы Tik(g)равен T^(g~ 1) = ^(g-i).
Это означает согласно определению, ч*то матрицы (22,1) являются
матрицами представления, сопряженного представлению Т.
Обозначим через L и L пространства, в которых осуществляются
взаимно-сопряженные неприводимые представления * и х.
Базисы пространств L и L: ev е2, . . ., es и еи e2t . .., es>
выбранные таким образом, чтобы им отвечали матрицы
Тлф и fik(g) = Tu(g-i)t
называются взаимно-контравариантными базисами.
В § 21 было доказано, что произведение неприводимого
представления т на сопряженное ему представление х содержит ровно
один раз единичное представление. Так как совокупность всех сумм
вида
8
2 <W» (22,2)
i, k~l
(64 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IV
преобразуется по представлению х X *» то коэффициенты Cik можно
подобрать таким образом, чтобы сумма (22,2) была инвариантна
относительно элементов g группы G.
Докажем непосредственным вычислением, что такой инвариантной
суммой является выражение
2*<*< = lnv. (22>3)
Л4меем:
S 8 8 ^
* (?) X * (?) 2«Л = 2 2 ^«г (§*) *«р fe"1) *«*р =
1 = 1 1 = 1 а, 3 = 1
S 3
а, 3 = 1 а=1
С контравариантным базисом связано еще одно инвариантное
^выражение. Пусть al9 a2i ..., а8 — координаты какого-либо
вектора а в пространстве Z,, пусть Ъи Ь2> ---, Ь8— координаты
некоторого вектора b в пространстве Z. Тогда сумма
2Mi = inv (22,4)
i = l
инвариантна относительно одновременной замены вектора а
вектором a/ = T(g*)a и вектора b—вектором b = T(g)b. Иными
словами, имеет место равенство
8 3
2a**i=2fli*/-
* = 1 i=l
Для доказательства заметим, что a'i = Tik(g)ak и ^ = Тй(^)&г =
= Tw(gp-1)ft|. Отсюда
8^8 8 8
г = 1 г, й;, Z = l fc, I к~\
Это эквивалентно соотношению (22,4).
Если пространство Z,, на котором определено некоторое
представление Т группы G, состоит из функций, то функции, комплексно-
сопряженные функциям из Z,, преобразуются по так называемому
комплексно-сопряженному представлению. Операторы JT (g) этого
представления определяются равенством
ВДф = Т(^Уф (ф£1). (22,5)
Легко видеть, что операторы T(gO действительно образуют
предоставление. Если фх, ф2, ..., ф8 — базис в пространстве Z,, то фх,
§ 23) ВЕЩЕСТВЕННЫЕ ПРЕДСТАВЛЕНИЯ 65
<ь2, .... ^s образуют базис в пространстве сопряженных функций Z.
Вычислим матрицу оператора T(g) в этом базисе. Имеем:
й; = 1
т. е.
(ВД^Тцф. (22,6)
Отсюда следует, ^что-характер комплексно-сопряженного
представления определяется формулой
Ш=~Ш)- (22,7)
Заметим, что, если представление Т унитарно, то сопряженное ему
представление Т л комплексно-сопряженное представление Т
совпадают.
§ 23. Вещественные представления
Пусть нам надо некоторое неприводимое представление группы G
в пространстве L. Если в этом пространстве можно выбрать базис
таким образом, чтобы матрицы всех операторов были
вещественными, то мы будем говорить, что представление х вещественно.
В ряде случаев весьма важно знать, вещественно ли данное
представление. В этом параграфе мы получим простой критерий,
позволяющий ответить на этот вопрос.
Характер вещественного представления является вещественным
числом. Поэтому представления с невещественным характером
безусловно не являются вещественными представлениями.
Сделаем еще одно простое замечание. Если представление х
вещественно, то
лг2^2) = дг £хп(£2) = дг 2 *«*(*)*«(£) = # 2Тл(8Р)**«(«)•
g£G д\ г д\ г, к д\ i% к
Вспоминая первую теорему ортогональности, мы можем написать:
77 2 х (§*2) = 77 2т8л8**=1,
g£G g; г, к
где 5 — размерность представления т. Таким образом, для
вещественных представлений имеет место соотношение
Докажем, что это соотношение имеет место только для
вещественных"*'представлений* и поэтому может служить необходимым и
достаточным признаком вещественности.
66 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ, IV
Пусть х— некоторое представление с вещественным характером.
Очевидно, что характер комплексно-сопряженного представления х
равен характеру, х и, следовательно, тих эквивалентны
'c(^) = Axl^)A-1. (23,2)
Без ограничения общности представление х можно считать унитарным.
При этом и представление х тоже будет унитарным. Вспоминая
задачу VI § 18, мы можем считать, что оператор А тоже унитарен
Переходя к комплексно-сопряженным величинам, получим из (23,2):
^(g) = Ax(g)AZl. (23г3)
Подставим (23,3) и (23,2):
x(g) = AAx(g)ArTA~\
или
ААх (g) = t(g) AA,
т. е. оператор АА коммутирует со всеми операторами
неприводимого представления. Согласно лемме § 18 это означает, что
АА = Х£ или
А = ХА*.
В матричных обозначениях это можно записать так: Aik = \Ak^
Сопоставляя это равенство с равенством Aki = \Aikf находим, что
\ = ± 1. Итак,
А = ±А* = ±А-\ Aik = ±zAki. (23,4)
Вычислим теперь сумму
дГ S X (g>2) = jj S т** ^) 4i №'
g£G g\uk
Из (23,2) следует, что ^ik^) = ^Aiax^{g)(A"l)Bk. Подставляя* это
а, 0
выражение в последнюю сумму и пользуясь ортогональностью
матричных элементов, получим:
_1_
N
g£G «.Р,*,А g^G
1
■ S X (g2) = J] (А !)Э* Лга ^ S Та? (ёГ) TjM ^ =
а, Р, г, A g£G
= 2 (A_1^ А** Т °а& ^ = Т S (А_1)г' kAik =
а, Р, г, к i, к
5 -J
i, ft
§ 24]
ПРОИЗВЕДЕНИЕ ГРУПП
67
Мы видим, что если имеет место равенство (23,1)» то выполняется
условие __
А = А~\ (23,5)
Покажем, что при этом представление х вещественно. С этой целью
введем в рассмотрение унитарный оператор В = А2 такой, что В2 = А
и в = В~1 (используя соотношение (23,5), можно доказать, что такой
оператор существует). С помощью оператора В построим
представление
эквивалентное т. Имеем:
x1fe) = FT^)B = Bx^)B^1 = BAx(^A-1B-1 = B-4(^)B,
т. е. т1 = т1. Итак, условие (23,5) является необходимым и
достаточным для вещественности представления т. Если представление т
с вещественным характером не является вещественным, то А = — А"1
и
^2*&2) = -1.' (23,6)
§ 24. Произведение групп
Группа G называется прямым произведением или произведением
двух своих подгрупп Gx и G2, если
1) каждый элемент g группы G может быть представлен, и
притом единственным образом, в виде произведения
g\gb
где первый сомножитель принадлежит подгруппе Gv а второй — 02;
2) элементы, принадлежащие подгруппе Gx, коммутируют с
элементами подгруппы 02.
Заметим, что подгруппы Gx и G2 не предполагаются
коммутативными.
В качестве примера можно указать на группу Cnh, которая
является произведением подгруппы Сп ка подгруппу oh. Другим
примером может служить полная ортогональная группа, являющаяся
прямым произведением группы вращений на группу инверсии.
Произведение двух групп Gx и G2 обозначают через Gx X 02-
Каждое представление Т (gx) (gx£Gx) группы Gx можно
естественным образом дополнить до представления всей группы G. Для
этого достаточно сопоставить каждому элементу g2£G2 единичный
оператор, а произведению gxg2 в соответствии с этим оператор T(gy).
Точно так же каждое представление Т (g2) группы G2 можно
рассматривать как представление всей группы G.
68
ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП
[ГЛ. IV
Перемножая представление группы Gt (рассматриваемые в
указанном смысле как представления всей группы G) на представления
группы 02, получим новые представления группы G.
Если перемножить, таким образом, неприводимое представление
подгруппы Gx и неприводимое представление подгруппы G2> то
получится неприводимое представление группы G.
Задача I. Доказать последнее утверждение для конечных групп.
Задача II. Доказать, что, перемножая неприводимые представления
подгрупп С/* и G2, можно исчерпать все неприводимые представления
конечной группы.
Задача III. Доказать, что каждый класс сопряженных элементов
группы G состоит из всевозможных произведений элементов одного из
классов группы Gx на элементы одного из классов группы G2.
§ 25. Симметризованные степени представлений
В этом параграфе мы рассмотрим один общий метод разбиения
пространства, преобразующегося по я-й степени представления Т
группы G, на инвариантные подпространства. Представления,
которые индуцирует в этих инвариантных подпространствах
представление Т\ называются симметризованными степенями представления Т.
Мы вычислим характеры симметризованных степеней
представления Т.
Пусть Lv L2l ..., Ln — некоторые линейные 5-мерные
пространства, преобразующиеся по одному и тому же представлению Т
группы G. Произведение всех этих пространств L = Lx X ^2 X • • X Ln
преобразуется по представлению Tw. Обозначим через е*
(а= 1, 2, ..., s) базисные элементы в пространстве Lk(k = 1, 2, ..., ri).
Элементы
^...е = ^42) ... *<я) (а, (3, ..., е=1, 2, ..., s)
образуют базис в пространстве L.
Произвольный элемент пространства L можно представить в виде
Ах? ...е^ар ... е*
Пусть Р—какая-либо группа перестановок п предметов. Каждой
перестановке р£Р можно сопоставить линейный оператор р в I,
положив
рАф ... e^otf ... е = Ар [ар ... е^оф ... е> (25,1)
где р[aj3 ... г] есть совокупность индексов, которая получится, если
над индексами а, [3, ..., г произвести перестановку р.
Легко видеть, что операторы р образуют представление группы Р
в пространстве L. Обозначим это представление через Тр.
Пусть х— какое-либо неприводимое представление группы Р,
содержащееся в Тр. Обозначим через L0 сумму всех неприводимых
£ 25] СИММЕТРИЗОВАННЫЕ СТЕПЕНИ ПРЕДСТАВЛЕНИЙ 69*
подпространств из L, которые преобразуются по представлению х
группы Р.
Ортогональное дополнение к Z,0 обозначим через L1.
Подпространства L0 и L1 инвариантны относительно всех операторов Тп (g)
(g£G). Это вытекает из утверждения задачи IV § 18, если учесть,
что операторы р и Тп (g) коммутируют между собой.
Выбирая в качестве х различные неприводимые представления,
входящие в представление Тр, мы получим разбиение пространства L
на инвариантные относительно группы G подпространства.
Обозначим через T°(g) (g£G) представление, индуцируемое
в подпространстве L0 представлением Tw. Вычислим характер x°(g)
представления T°(g). Для простоты мы будем считать, что
представление х содержится в представлении Тр ровно один раз. Однако
выражения (25,5) и (25,9) для характера x°(g")> которые мы получим
ниже, справедливы в том случае, когда т содержится в Тр несколько
раз.
Введем в рассмотрение прямое произведение групп G и Р.
Обозначим через x(Pg)> 1°(Pg) и X}(Pg) характеры элемента pg в
пространствах Z,, L0 и L1. Ясно, что
X (Pg) = X°(Pg) + Xx {Pg)- (25,2)
Характер x°(Pg) Равен
X°(pg) = Ь (P) T° (g)]u = 'h} (p) Tji (g). (25,3)
Характер */}{pg) можно вычислить по аналогичной формуле
l1 (Pg) = [Т1 (Р) Т1 (g)]n = T]k {р) Tii (g), (25,4)
где.Тх(Р) и Т1^) — операторы, соответствующие элементам р и g
в подпространстве L1. Подставляя (25,3) и (25,4) в (25,2), получим:
X (Pg) = 4j (P) T?< {g) + Tz1, (р) Т\г (g).
Умножим обе части этого равенства на х°(Р) и усредним его по
группе Р. Вспоминая соотношения ортогональности, найдем:
WZ %7APg)¥(i)=-^X0(g), (25,5)
где s0 — размерность представления х, а х°(Р) — характер этого
представления.
Нам осталось вычислить характер х (Pg)- Подействуем
оператором Tp(p)Tn(g) на базисный элемент eap...e:
Тр (р) Тп (g) е# .... = Тр (р) Ta,a (g) ТЭФ (g) ... Те,е (g) e«i ....,=
= T«ip(«} (g) Tpp$)(g) . .. T.ip(t) (g) eav ... es (25,6)
:( 2 '
\aa«2 • • • v-ql
70 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IV
где /7(a), рф), ..., p(s) — индексы, которые в результате
перестановки р становятся соответственно на место а, р, .. ., s.
Из равенства (25,6) следует, что
X<Pg) = 2 T*pto(g)TteV)(g)--T.p(.)(g> (25,7)
сф ... e
Для вычисления этой суммы разобьем перестановку р на циклы
р(аЛ ... а*) ... (TlT2 ••• Т«.)
и расположим в соответствующем порядке сомножители
*(/*)= 2 ••• 2 т«л(£)т«л&)---'Чл •••
•••Т№(?)Т№(^)...ТГ (g-) =
■ ■■( 2 TTlTi(g)T№(^)...TT Т1(^л.
\TiT« ■ • • Tg * J
Суммы, стоящие в скобках, легко вычисляются:
2 Taja,(g)т^(§•)... Taga,(§•) = 2т«,в1 (g«o = x(g*).
Поэтому
x (Pg) = x te*1) x (gq>) ■ • ■ x teM. (25>8)
где ^(g-) — характер представления T(g*).
Подставляя это выражение в соотношение (25,5), получим
окончательно:
Х° <*) = -jr 2 №) * <**> X ^3) • • • х (***). (25,9)
где <7t, <72, ..., #с— длины циклов перестановки р.
Рассмотрим более подробно важный частный случай, когда
группа Р представляет собой группу всех перестановок п
предметов, т. е. является симметрической группой Sn.
В этом случае все перестановки, имеющие одинаковые длины
циклов, принадлежат одному и тому же классу сопряженных
элементов. Всем таким перестановкам соответствуют в сумме (25,9)
одинаковые слагаемые. Обозначим через {rlqlr2q2 • • • *\9\>} класс,
состоящий из перестановок, у которых имеется rv циклов длины qv r2
циклов длины qz и т. д. Число перестановок, содержащихся в классе
с 25] СИММЕТРИЗОВАННЫЕ СТЕПЕНИ ПРЕДСТАВЛЕНИЙ 71
{rlq1r2Q2---r^}, равно ——^ —— . Поэтому в случае
' Г "1 '2* "2 • • • ' v* ' vv
p=Sn формулу (25,9) можно переписать в виде
о, л - . V Xr' Cg*')/' (gga) • • • У.г» (g«0 Yn f - - . - roi r2510)
Суммирование происходит здесь по всевозможным различным
разбиениям числа п
n = r1ql + r2q1^r ... -hrv<7v
{два разбиения /г = г^ + r2q2 + . .. + г А и * = ri^ + г2?2 + • • •
...+г^ считаются одинаковыми, если после подходящей
перестановки слагаемых имеют место равенства гг = г'г, qx = q'v...
..., rv = r', <7v = qr\. Если P = Sn и представление х является
единичным, то представление Т° называется симметрической п-й
степенью представления Т:
Т° = [ Т\п.
Характер этого представления определяется согласно (25,10)
выражением
Полагая здесь » = 2, 3, 4 и 5, получим:
XI 2(^=уХ(^)2+у5С2(^). и13^)=у5С(^)+1х(^)5С(^)+уХ3(^).
Ш4(^)=|х(^)+4х(^3)х(^)+4х2(^2)+4х^2)х2(^)-ЬйХ4^),
(25,12)
№ (*)= | X («*) + т X (*') X (?) + -J- X fe8) X <«*) Ч-g- X (?3) X2 (g) +
+■§■ x2 te2) x (?) -h к x (?2) x3 (?)+m x5 (§)•
Если P=Sn и в качестве х взять представление, ставящее в
соответствие каждой четной перестановке единичный оператор Е, а
каждой нечетной перестановке оператор —Е, то представление Т°
называется антисимметрической я-й степенью представления Т:
Т°={Т}П.
72 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IV
Характер этого представления определяется согласно (25,10),
выражением
{*}•<*> = 2 <- ir-^^y^-^. (25,13)
Полагая здесь и = 2, 3, 4 и 5, получим:
(xl2te)=y*2(^~4* te2)> (х}3 <«г)=4х (е3)—§■ х tf)z(g)+iх3 («г),
{у.}4 (*>=—^ xte4)+y x te3) х(*)ч4 х2 te2)-| х &2)х2(£)+й х4 (г).
{х}5 (g)= -j x te5) - i x te4) x (*)j- | x (g3) x te2) + ■§■ x (£3) x2 (er)+
+ -gr X2 te2)X fe) — йX (**) X3 fc) + 4Г <*)-
Задача I. Доказать, что если T = T1 + T2, то [V] = [Trf2 + [Т2]2 -f-
+ Ti X Т2 и {Т}2 + {Т±}* + Ti X Т2 + {Т2}«.
§ 26. Фактическое разложение приводимого представления
на неприводимые
Для успешного применения теории представлений групп к
различным прикладным вопросам часто оказывается необходимым
произвести разложение приводимого представления на входящие в него
неприводимые представления. В настоящем параграфе излагается
метод, позволяющий производить такие разложения.
Напомним некоторые относящиеся к этому вопросу факты.
Если Т есть приводимое унитарное представление группы G„
действующее в пространстве Z, то пространство L можно
разложить на сумму инвариантных взаимно-ортогональных подпространств
I^ + Z-2+...+I,, (26,1>
каждое из которых преобразуется по одному из неприводимых
представлений
*i. *2. .... *« (26,2)
группы G. Инвариантные подпространства, преобразующиеся по
неприводимым представлениям, будем называть неприводимыми
подпространствами. Разложение пространства L на неприводимые
взаимно-ортогональные подпространства называют полным
разложением пространства L.
Поставленную задачу теперь можно сформулировать так: найти
все полные разложения (их может быть бесконечно много)
пространства Z,, преобразующегося по приводимому представлению Т.
§ 26] ФАКТИЧЕСКОЕ РАЗЛОЖЕНИЕ ПРИВОДИМОГО ПРЕДСТАВЛЕНИЯ 7£*
Подчеркнем, что все неприводимые представления (26,2) группы Q
считаются известными. Более того, мы будем считать, что каждое
из неприводимых представлений задано в матричной форме
V(g)=W«?(g)} (*. Р=1. 2, .... Sf j=l, 2, ..., q). (26,3><
Хотя одно и то же представление можно задать в виде разных,.,
но, разумеется, эквивалентных матричных представлений, нам будет -
удобней при решении поставленной задачи фиксировать сделанный
выбор (26,3) матричных представлений.
Рассмотрим более подробно какое-нибудь полное разложение*
(26,1) пространства L. Неприводимые подпространства,
фигурирующие в этом разложении, целесообразно разбить на классы, отнеся*
к у-му классу те подпространства, которые преобразуются по
представлению y(j— 1, 2, .. ., q). Ясно, чтоу-й класс содержит столько
неприводимых подпространств, сколько раз представление т^ входит
в представление Т.
Напомним, что число т^ показывающее, сколько раз
представление tj входит в представление Т, определяется формулой (20,3)
«i = (X. lj) t/=l, 2, .... ?) (26,4)-
и, следовательно, одинаково для всех полных разложений
пространства Z,.
Неприводимые подпространства, составляющие у'-й класс,
обозначим через
LjV Lj2, ..., Ljmj. (26,5)
В каждом из этих подпространств выберем ортогональный базис
таким образом, чтобы оператор Т (g) изображался в каждом из этих
подпространств выбранной заранее матрицей (26,3), т. е. чтобы,
имели место соотношения
t(g)efrb= Sty* (£)**.* . (t*=l. 2,...f ms\ y=l, 2,..., q\
k=l, 2, ..., Sj)\ (26,6)»
здесь
**i*G*=l. 2, ..... mfi y=l, 2, ...,?; k=l, 2, ...,Sj) (26,7).
— базисный вектор с номером k из неприводимого
подпространства LJr
Выбранный таким образом базис будем называть каноническим.
Еще раз подчеркнем^ что в равенстве (26,6) коэффициенты tjllt(gy
не зависят от индекса \i. Это является результатом согласованного
выбора базисов в подпространствах одного класса.
Метод, который мы используем для решения задачи о
фактическом разложении приводимого представления, /базируется на
следующей лемме.
74 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IV
Лемма. Оператор
P* = ^2W*)T(*) (/=1.2, ...,?) (26,8)
оставляет неизменными базисные векторы е^х (jx=l, 2, ..., ту,
у=1,2, ..., <7) и обращает в нуль все остальные базисные
векторы.
Доказательство получается простой проверкой.
Действительно, используя (26,8) и (26,6), имеем:
8J
*&'** = ]? 2 TJn (?) Т (?) *д* = rf S Ti" ^ 2 Ъ'1к (g) е>'*1 =
ЙГ€<^ 9^0 1 = 1
v 1 ^
= 5i 2 ^ 77* 2 т'и ^ T'"z* te)•
1 = 1 0£G
'Отсюда с помощью теорем ортогональности находим:
что и доказывает лемму.
Так как все базисные векторы е^к взаимно ортогональны, то
доказанную лемму можно сформулировать еще и так:
Оператор Pj является оператором проектирования на
подпространство Ер представляющее собой линейную оболочку
векторов
ejiv ej2v ej3i> • • •» ejmji-
Поскольку оператор проектирования Pj известен, то нетрудно найти
и подпространство Ер на которое он проектирует все векторы из
пространства L. Для этого достаточно взять т$ произвольных
^векторов из L
Х\> Х%, • • • > Хт .
3
к подействовать на них оператором Рр Полученные векторы
yi=Pj*i (/= 1. 2 mj) (26,9)
лежат в подпространстве Ej и, как правило, линейно независимы.
Если же, однако, они случайно окажутся линейно зависимыми, то
следует заменить некоторые из векторов х{ другими векторами х'г*
Во всяком случае, если
#1> #2» • • • f #$
§ 26] ФАКТИЧЕСКОЕ РАЗЛОЖЕНИЕ ПРИВОДИМОГО ПРЕДСТАВЛЕНИЯ 75
•есть произвольный базис в пространстве L, то линейная оболочка 5
векторов Ь< = Р& (/=1,2, ...,*)
«совпадает с подпространством Ej.
Итак, из пространства L можно фактически выделить все
подпространства Ej(j = 1, 2, .. ., q), причем знание подпространств
£jy.(\i'= 1> %> ..., mfj не является необходимым для этой цели.
Более полную характеристику подпространства Ej дает
следующая теорема.
Теорема. Если Lj— какое-либо инвариантное
подпространство пространства L, преобразующееся по неприводимому
представлению tj, U
&li &2> • • • > &б .
.есть канонический базис в Lj, то вектор ег содержится в
подпространстве Ej.
Наоборот, если ег есть произвольный вектор из
подпространства Ej, то существует неприводимое подпространство Lj, и
притом только одно, содержащее этот вектор и
преобразующееся по представлению tj. Вектор ех совпадает при этом
с первым вектором канонического базиса в пространстве Lj.
Доказательство первой части теоремы. Повторяя выкладки,
приведенные в доказательстве леммы, убеждаемся в том, что вектор ех
инвариантен относительно оператора Pj. Это и означает, что ex£Ej.
Доказательство второй части теоремы. Если вектор et
содержится в Ej, то он может быть представлен в следующем виде:
т.
{обозначения те же, что и в лемме, с^ — комплексные числа). Наряду
с вектором ех введем в рассмотрение векторы е2, ег, ..., е6. с
помощью равенств
то
** = 2 V*^ (*=1.2, ..., Sj), (26,11)
& которых коэффициенты с^ заимствованы из соотношения (26,10).
Легко убедиться в том, что линейная оболочка векторов
ei> еъ •••> ез. образует неприводимое пространство, а сами
векторы ек играют роль канонического базиса в этом пространстве.
Действительно, имеем:
т . т. 8.
0 0 3
Т(г) ек = 2 ^Т (g) е5^к = 2 <> 2 bik (g) efri =
a=l p. = l l—\
= 2 Tj7fc (g) 2 с ej г = 2 тда (g) e,.
1=1 (1=1 r 1=1
76 ОПЕРАЦИИ С ПРЕДСТАВЛЕНИЯМИ ГРУПП [ГЛ. IVT
Наконец, вектор ех не может принадлежать двум различным»
неприводимым подпространствам Lx и L2, так как их пересечение^,
являясь инвариантным подпространством и не совпадая ни с Llt,
ни с L2) должно быть пусто.
Теорема доказана полностью.
Существуют простые формулы, связывающие векторы ек
(k=2, 3, ..., Sj) с вектором e1£Ej. Они имеют следующий вид:
ek=Pjkelf (26,12)
где
и непосредственно вытекают из теоремы ортогональности.
Теперь нетрудно осуществить произвольное разложение
пространства Z,, преобразующегося по приводимому представлению Т-
Для этого следует:
1) выяснить, сколько раз входит в представление Т каждое
неприводимое представление Zj группы G; полученные числа т^
дадут нам размерности подпространств Ef
2) найти с помощью операторов Р^ (см. (126,8)) все
подпространства Ej, имеющие положительную размерность ntj > 0;
3) в каждом из подпространств Ej (ntj > 0) выбрать совершенна
произвольным образом ортогональный базис
Ч?п> е№> ejsu -, ejm v (26,13>
«/
4) применяя формулу (26,12) поочередно к каждому из век-
торов (26,13), построить неприводимые подпространства,
содержащие эти векторы; полученные таким образом подпространства
взаимно ортогональны и преобразуются по представлению if в cobq-
купности они дают полное разложение подпространства L.
Заметим, что произвол, который допускается пунктом 3,
совершенно достаточен для того, чтобы указанным методом могли быть
получены все полные разложения пространства L.
Задача I. Обозначим через Lj сумму всех подпространств Ljly
Lj*>, ..., Ljm., преобразующихся по одному и тому же представлению ij.
Доказать, что оператор
является оператором проектирования на подпространство Lj. Этот оператор-
удобен тем, что для его построения достаточно знать только характер iAg)>
представления %j.
Задача П. Пусть et иД два взаимно-ортогональных вектора из Ef
Доказать, что неприводимое подпространство, содержащее вектор еь
ортогонально неприводимому подпространству, содержащему вектор /i.
ГЛАВА V
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
§ 27, -Представления группы перестановок Sn
Все неприводимые представления симметрической группы могут
быть найдены с помощью так называемых схем Юнга. Не
останавливаясь на доказательстве некоторых утверждений, мы приведем
описание этого метода.
Рассмотрим все возможные разбиения числа п на положительные
целые слагаемые. Два разбиения, отличающихся только порядком
слагаемых, будем считать одинаковыми. Поэтому в каждом
разбиении можно располагать слагаемые в невозрастающем порядке.
Каждому разбиению соответствует так называемая схема Юнга,
которая представляет собой набор клеток, расположенных по
строкам. Число строк равно числу слагаемых в разбиении; число клеток
в первой строке равно первому слагаемому в разбиении; число
клеток во второй строке равно второму слагаемому и т. д. Общее
число клеток равно, разумеется, числу я. На рис. 16 изображены
схемы Юнга, соответствующие пяти „__т_п__1
возможным разбиениям числа 4. 1.11 1 1 г—.
Сопоставим теперь каждой схеме 4 i—г—i H
Юнга некоторое представление сим- ill'] ] | ] fj м
метрической группы Sn. Для этого [_J I 1 1 U LJ
рассмотрим какую-либо схему Юнга j+; г+z £+/+/ /+/+/+/
и перенумеруем в произвольном р lfi
порядке все ее клетки.
Группу Sn можно рассматривать теперь как совокупность всех
перестановок клеток схемы Юнга. Обозначим через р все те
перестановки/ которые оставляют каждую клетку в той строке, на
которой она находилась до перестановки. Подобным же образом
обозначим через q все те перестановки, которые сохраняют в
указанном смысле столбцы рассматриваемой схемы Юнга. Ясно, что
совокупности р и q перестановок для различных схем Юнга
различны.
78
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
[ГЛ. V
Введем в рассмотрение функцию <р (s) (s£Sn) на симметрической
группе Sn, которую определим следующим образом:
О, если элемент 5 не равен
одному из произведений
вида qp\
bqt если s = qp\
cp(s) =
здесь bq есть четность перестановки q *).
Рассмотрим теперь комплексную линейную оболочку L функций
<tt(s) = <t(st) (s,t£Sn)
и определим на этих функциях линейные операторы т(г) (r£ Sw)„
положив
Так как по определению cpf (sr) = cp (srt) = yrt (s), то операторы
т(г) (r£Sw), действуя на функции из Z,, не выводят их из L. Ясно,
что операторы т(г) удовлетворяют условию *с (>ч) *с (г2) = *с (/у*2)
(rlfr2£Sn) и, следовательно, образуют представление группы Sn~
Приведенная конструкция ставит в соответствие каждой схеме
Юнга некоторое представление. Можно доказать, что получаемые
таким образом представления неприводимы и что представления,,
соответствующие различным схемам Юнга, неэквивалентны.
Число различных схем Юнга равно числу различных
разбиений я. Этому же равно число сопряженных классов группы Sn иг
следовательно, число всех неприводимых представлений группы Sn.
Поэтому схемы Юнга позволяют найти все неприводимые
представления группы перестановок 5П.
В качестве примера рассмотрим представление группы 53,
отвечающее схеме Юнга
Совокупность перестановок /?, сохраняющих строки, состоит из
.двух элементов: е и (13). Совокупность q также состоит из двух
элементов: е и (12).
Легко вычислить все произведения вида qp:
ее = е, *(13) = (13), (\2)е = е, (12)(13) = (132).
Следовательно, функция ср($), соответствующая рассматриваемой
схеме Юнга, равна +1 на перестановках е и (13), —1 на пере-
*) Иными словами, bq равно + 1, если q — четная перестановка, и —\г
если q — нечетная перестановка.
§ 27] ПРЕДСТАВЛЕНИЯ ГРУППЫ ПЕРЕСТАНОВОК 79>
становках (12) и (132), нулю на всех остальных перестановках.
Функцию cp(s) можно записать «табличным» образом (см. табл. 5).
Таблица 5
Функция <? ($)
S
*<*)
е
1
(12)
— 1
(23)
0
(13)
1
(123)
0
(132)
— 1
Теперь нетрудно построить остальные пять функций. Они задаются'
таблицей 6.
Таблица 6»
ФУНКЦИИ ?12(S), <Р23(*), *1з(*)» <?1П<$)> 9132 (*)
<Р 12 (S)
<?ж (*)
Ti3(s)
<Р 123 ($)
<Р 132 ($)
е
— 1
0
1
0
— 1
(12)
1
0
1 ~~1
0
1
(23)
— 1
0
—-1
(13)
0
— 1
1
— 1
0
(123)
1
— 1
0
— 1
1
(132)
0
1
— 1
1
0
Среди построенных таким образом функций есть только две
линейно независимые. В качестве этих функций можно взять,
например, функции (d(s) и cp12(s). Остальные функции выражаются-
через них следующим образом:
<Pl3=?f CPl32=CPl2, ?23 = ?123 = ? — ?12-
Эти равенства полезны тем, что позволяют записать первые столбцы
матриц представления. Для того чтобы записать эти матрицы
полностью, заметим, что
*(12)<р12=<р(12) (12)=<р,
*(23) <р12= ср(23) (12) = срш= с?12,
*(13)<р12= —<р —<р12,
<с(123)ср12=ср,
х (132) ср12 == — срх — ср12^
:fSO
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
[nu v
.Итак, матрицы представления группы 53, соответствующего схеме
.Юнга (2--J-1), в базисе y(s), ^(s), имеют следующий вид:
<i3>~(iz!> ^~(z\ 0} <132>~(Г!>
*<Схемы Юнга сокращенно обозначают символами типа 43, 2, 3, 2, I5,
и т. д., символ 43, 2 означает схему Юнга, у которой три строки
из четырех клеток и одна строка из двух клеток; 3, 2, I5 означает
-схему Юнга, содержащую одну строку из трех клеток, одну строку
из двух клеток и пять одноклеточных строк.
В приложении приведена таблица характеров неприводимых
представлений групп 5^, 55, S6 и 57.
§ 28. Неприводимые представления точечных групп
1. Группы Сп и S2n- Группа Сп является абелевой группой.
Поэтому все ее неприводимые представления являются одномерными,
.я число их равно порядку группы, т. е. /г. Пусть т— одно из
неприводимых представлений этой группы. Так как хп (Сп) — х (с«) =
.= х(е)=\, то t(Cn) принимает одно из значений
2jzik
е п (k = Q, 1, ..., п — 1).
Таким образом, мы получаем все п неприводимых представлений
труппы Сп
2гЛкт
ч{<%) = е~Г' (£, т = 0, 1, ..., п—\). (28,1)
Группа S2n изоморфна группе С2п- Поэтому ее представления
могут быть найдены по формуле
tk(S?n) = e~~^r (k,m = 09 1, ..., 2n— 1). '(28,2)
2. Группы Dn и Ст. Метод, с помощью которого мы
найдем неприводимые представления группы Dni очень часто
применяется при отыскании представлений. Поэтому мы изложим его по
возможности подробно.
Пусть т— некоторое неприводимое представление группы Dni
я L — пространство, в котором действуют операторы
представления х. Рассмотрим теперь те операторы, которые в представлении х
§ 28] НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ ТОЧЕЧНЫХ ГРУПП 81
соответствуют элементам подгруппы Сп группы Dn. Ясно, что эти
операторы
*(е),*(Сп)9ч(с2п)9 ..., x(cV)
образуют некоторое представление группы Сп. Если это
представление приводимо, то его можно расщепить на неприводимые
представления. Иными словами, пространство L можно разложить на
подпространства Lv L2, ..., каждое из которых преобразуется по
одному из неприводимых представлений подгруппы Cw. Так как
все неприводимые представления группы Сп одномерны, то и
подпространства Lv L2t ... также одномерны. Обозначим через ev
e2i ... единичные векторы, лежащие соответственно в Ll9 L2i ...
По самому определению вектора ех он преобразуется под
действием оператора t(Cn) по одному из представлений (28,1) группы
2izik
х(Сп)е1 = е » ег.
Введем в рассмотрение вектор е[ = *ЫЛе1. Легко видеть, что
х (и^ е[ = ъ (и^ т (и^ ег = х (и*) ег = х (е) ех = ех
, (Ся) е[ = * (С„) * («,) в1 = * (СЛ) «, = х (BlC-») е, =
Последние два равенства показывают, что векторы ег и е[
преобразуются друг через друга под действием операторов t(u{) и х(Сп).
Так как всякий элемент группы Dn может быть представлен в виде
Сп или с\ии то линейная оболочка векторов ех и е[ инвариантна
относительно всех операторов представления т. Это значит, что
пространство L совпадает с линейной оболочкой векторов ех и е'у Если
2шк 2izik
е п Фе » , (28,3)
то векторы ег и е'х линейно независимы и представление двумерно.
Матрицы, соответствующие в базисе ег и е\ операторам t(Cn) и
х (ах)9 имеют следующий вид:
(2%ik к
е~ 0 \ /0 1\
^ . *(«!) = (, J- (28,4)
О « » /
Положение существенно изменяется, если неравенство (28,3) не
выполняется. При этом каждый из векторов ех — е'х и ех-\-е\
инвариантен относительно всех операторов представления т. Поскольку
82 ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП [ГЛ. V
представление х неприводимо, то это означает, что один из этих
векторов равен нулю. Таким образом, если k = О или & = -~- (что
возможно только в случае четных я), то х(иЛе1 = е'1 = ev либо
ъ(и1)е1= — е19 и мы получаем для каждого из этих случаев два
одномерных представления
*~ (Сп)ег
Итак, если п четно, то группа Dn имеет п — 2 двумерных
представления, определяемых соотношениями (28,4), и четыре
одномерных представления (28,5). Если п нечетно, то число двумерных
представлений равно п—1, а одномерных — двум.
Группы Cnv изоморфны группам Dn и имеют поэтому те же
представления.
3, Группы Cnh> Dnh, D2n+if а- Группа Cnh является прямым
произведением группы Сп на группу ah = Coh. Неприводимые
представления Cnh получаются путем умножения неприводимых
представлений группы Сп на неприводимые представления группы C0h
(группа Coh изоморфна группе С2).
По этой же причине нет нужды специально отыскивать
представления группы Dnh, являющейся прямым произведением групп DnXCoh>
и группы D2w+lf d = D2n+1 X /•
4, Группы D2nd. Рассуждая так же, как и в случае группы Dn>
находим, что группа D2nd имеет 2п—1 двумерных представлений,
определяемых соотношениями
(%гк %
е^ О \ /О 1\
о Г*»/ ч '
и четыре одномерных представления
'Со (Sin) = 11 т0 (S^n) = 1» *2я (Sin) = — 1» т2п0$4га) ~ * >
*o"(°l)=l. ^(01) = — 1, ^2"пЫ=1, ^(0г) = —1.
5, Группы Т, О, Тй. Приведем таблицы характеров
неприводимых представлений этих групп (см. табл. 7).
Первый вертикальный столбец как в левой, так и в правой части
таблицы 5 содержит символ группы и обозначения неприводимых
представлений. В одной строке с символом группы стоят символы
элементов группы. Коэффициент, стоящий перед символом элемента
2xik
е п е1
2кгк
x+(ul)el=el (*=0, -J),
= е~еи ^-(и1)е1 = — е1 (* = 0, |).
(28,5)
§ 29] ПРЕДСТАВЛЕНИЯ ГРУПП ТРАНСЛЯЦИЙ 83
Таблица 7
Характеры неприводимых представлений Т, О и Td
т
*1
*2
тз
4
е
1
1
1
3
зс2
1
1
1
— 1
4С3
1
3
3
0
<
1
3
3
0
О
T1
Т2
тз
ч
*5
е
е
1
1
2
3
3
8С3
8С3
1
1
— 1
0
0
set
зс2
1
1
2
— 1
— 1
6С2
1
— 1
0
1
— 1
6С4 1
6S
1
— 1
0
— 1
1
группы, указывает на число элементов группы, сопряженных
данному элементу.
Чтобы от характеров перейти к представлениям, заметим, что
представление т4 группы Т является векторным представлением. То
же можно сказать о представлении х4 группы Td и представлении х6
группы О. Представление хб группы Td равно произведению
векторного представления т4 на любое из представлений х2, т3.
Представление х4 группы О равно произведению представления хб на любое
из представлений х2, х3.
Двумерное представление х3 группы Td определяется равенствами
/ 2izi
\ О в 3
Группы Th и Ой являются произведениями групп Т и О на группу /.
Мы не выписываем неприводимых представлений групп У и Yh9
так как они, насколько нам известно, не встречаются в прикладных
вопросах.
В приложении приведена таблица характеров неприводимых
представлений наиболее часто встречающихся точечных групп.
§ 29. Представления групп трансляций
Найдем всевозможные представления группы трансляций. Пусть
&— группа трансляций, пусть av a2, аъ — тройка основных векторов
этой группы. Всякое неприводимое представление х группы Ш
одномерно в силу коммутативности группы трансляций. Поэтому опера-
тори т(£)(££|Г) являются просто числами. Обозначим
*(4) = ei U=i. 2, 3). (29,1)
*s (°и)
-с ;>
84
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
[ГЛ. V
Ясно, что трансляции а = тхах + т2а2 + щаъ соответствует оператор
х(^) = еГ1бГаеГ8. (29,2)
Таким образом, тройка чисел 6lf 02, 03 вполне определяет
неприводимое представление. Задавая различные тройки чисел 0Х, 02, 03, мы
получим все неприводимые представления группы трансляций.
Представление будет унитарным, если все три числа 8lf 02 и 03 равны
по модулю единице.
Вместо чисел 0Ь б2, 03 удобно использовать для характеристики
неприводимого представления вектор ft, определяемый условиями
Oj = eikaj (;=1, 2, 3). (29,3)
Легко видеть, что, решая уравнение (29,3) относительно ft, мы
получим:
з
*= 2й"21пbjbJ-\-n1b1^-n.2b2-+-n3bs (nv n2i n3 = 09 z±:l, ...),
(29,4)
где
1 («i[a2, а3])' z (ai[a2, a3]) ' 3 (а1[аъа3])К tJ
— так называемые основные векторы обратной решетка. Любая
целочисленная линейная комбинация этих векторов называется вектором
обратной решетки. Мы видим, что вектор ft определен с точностью
до произвольного вектора обратной решетки. Иными словами, двум
векторам kt и ft2, которые отличаются на вектор обратной решетки,
отвечает одно и то же неприводимое представление группы
трансляций. Мы будем говорить, что такие векторы эквивалентны друг
другу, и писать kx = k2.
Формула (29,2) может быть переписана в новых обозначениях
X{ta)=eiha. (29,6)
Представление, определяемое этой формулой, назовем
представлением т&.
Совокупность всех векторов ft, каждый из которых нельзя
укоротить, добавляя к нему какой-либо вектор обратной решетки,
называется первой зоной Бриллуэна или просто зоной Бриллуэна.
Если вектор ft короче всех ему эквивалентных векторов, то он
лежит внутри зоны Бриллуэна, если же среди векторов,
эквивалентных ft, нет ни одного вектора короче ft, но есть векторы, равные
по длине ft, то вектор ft лежит на границе зоны Бриллуэна. Отсюда,
в частности, следует, что среди векторов, лежащих внутри зоны,
нет ни одной пары эквивалентных векторов. Наоборот, каждый вектор,
конец которого лежит на границе зоны Бриллуэна, эквивалентен
одному или нескольким векторам, тоже принадлежащим границе зоны.
§ 29] ПРЕДСТАВЛЕНИЯ ГРУПП ТРАНСЛЯЦИЙ 85
Для нахождения зоны Бриллуэна данной группы трансляций
полезно иметь в виду следующее замечание.
Пусть Ъ — какой-либо вектор обратной решетки. Рассмотрим
две плоскости Р+ и Р~ 9 перпендикулярные к Ъ и отстоящие от
начала координат на расстоянии -^Ь (рис. 17). Ясно, что у любого
вектора k, пронизывающего плоскость Я+, имеется эквивалентный
ему более короткий вектор kx = k— 6. Поэтому вектор k не может
принадлежать зоне Бриллуэна, которая, таким образом, целиком
умещается в слое между плоскостями Р+ и Р". Выбирая в
качестве b другой вектор обратной решетки, мы получим другой слой,
Рис. 18.
Рис. 19.
который также содержит зону Бриллуэна. Пересечение всех таких
слоев совпадает с зоной Бриллуэна.
Рассмотрим для примера плоскую группу трансляций а =
= mxa2-^-m2a29 причем положим, что ах = а2 и угол между
векторами ах и а2 равен -^ (рис. 18). Если через е обозначить единич-
о
ный вектор, параллельный вектору [аи а2], то основные векторы
обратной решетки можно записать в виде 61 = 2тс * ^е*, ,
b2 = 2izr-±j—^Цг-« Легко видеть, что bx = b2 и угол между Ъх и 62
\d\ [cl%, e\)
су
равен -^-. Взяв b = bXi мы получим полосу / (рис. 19). Положив
b = b2, мы получим полосу //. Наконец, выбор b = bl-\-b2 приведет
нас к полосе ///. Все остальные возможные значения Ъ приводят
к полосам, содержащим заштрихованный шестиугольник, который,
таким образом, и является зоной Бриллуэна рассмотренной группы
трансляций.
- Задача I. Показать, что группа симметрии обратной решетки совпадает
с группой симметрии исходной группы трансляций.
Задача II. Показать, что зона Бриллуэна симметрична относительно всех
элементов симметрии группы трансляций.
86
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
[ГЛ. V
§ 30. Представления пространственных групп
В этом параграфе производится классификация неприводимых
представлений пространственных групп и рассматривается задача
о разложении приводимого представления пространственной группы.
Пусть G— пространственная группа, а Т — некоторое
представление G в пространстве L. Представление Т можно рассматривать
как представление подгруппы сГ всех трансляций из группы G. При
этом оно распадается на одномерные представления группы |Г.
Каждое такое представление характеризуется вектором к. Обозначим
через
«1, «2> • • • R<j
векторы, характеризующие представления группы сГ, содержащиеся
в представлении Т. Набор этих векторов называется звездой
представления Т.
Покажем, что звезда инвариантна относительно всех элементов
группы G. Пусть вектор et£L преобразуется по представлению kv
Рассмотрим вектор Т (g-) ех £ Z, (g-£ G). Имеем:
Т (g T (g) ег = Т (tag) ег = Т (gtg-la) ег = Т (g) T (tg.la) ег =
= ег(*,, g-^T(g) et = ei<**• «>Т (g) ег (fa£8). (30,1)
Таким образом, если вектор ех преобразуется при трансляции
по представлению kv то вектор T(g)e1 преобразуется по
представлению gkv Мы видим, что звезда представления Т содержит
наряду с вектором kx все векторы gkx (g£G). Каждый вектор
звезды представления переводится любым элементом пространственной
группы в вектор, также принадлежащий звезде.
Линейная оболочка всех векторов Т^)ег(££ G, ex£L) образует
подпространство, инвариантное относительно группы G. Поэтому,
если представление Т неприводимо, то это подпространство
совпадает со всем пространством L и все векторы звезды представления
могут быть получены из вектора kx с помощью операций g£ G.
Звезды, обладающие тем свойством, что любые два вектора звезды
могут быть получены один из другого с помощью операций g£G,
называются неприводимыми. Таким образом, звезда неприводимого
представления неприводима (обратное утверждение неверно).
Неприводимая звезда полностью определена, если известен хотя бы один
ее вектор k. Поэтому неприводимые звезды можно обозначать
символом {£}.
Звезда приводимого представления состоит из одной или
нескольких неприводимых звезд.
Возьмем какой-либо вектор k звезды представления Т и
обозначим через Lh подпространство тех векторов из Z,, которые
преобразуются по представлению *cfc группы трансляций.
§ 30] представления пространственных групп 87
Линейная оболочка подпространств Lhl которые соответствуют
векторам k, принадлежащим одной неприводимой звезде, инвариантна
относительно группы G. Представление, индуцируемое в этой
оболочке представлением Т, имеет, очевидно, неприводимую звезду.
Итак, каждое представление с приводимой звездой легко
разбивается на представления с неприводимыми звездами. Всякое
неприводимое представление имеет неприводимую звезду. Поэтому для
классификации неприводимых представлений, так же как и для
разложения приводимых представлений на неприводимые, достаточно
рассматривать только представления с неприводимыми звездами.
В дальнейшем мы будем предполагать, что представление Т
имеет неприводимую звезду.
Для анализа представления Т введем в рассмотрение подгруппу
Gk ^ G, состоящую из тех элементов g, которые либо не изменяют
вектор к, либо изменяют его несущественно, прибавляя к нему
какой-либо вектор обратной решетки. Подгруппу Gh называют
группой вектора к, В силу соотношения (30,1) подпространство Lh
инвариантно относительно подгруппы Gfc. Представление группы Gk)
по которому преобразуется Lh9 называется малым представлением.
Мы будем обозначать малое представление через Т&.
Покажем, что вектор к и малое представление Т& однозначно
определяют представление Т, если оно имеет неприводимую звезду.
Придадим вектору к индекс 1, а остальные векторы звезды
обозначим через к2, кг, ..., й0. Выберем из группы G каким-либо
образом (а—1) элементов g2, gz, .... ga так, чтобы
g2ftx = k2, g3#i = к3, ..., gakt = ka. (30,2)
Если eip, e§\ ..., еМ— некоторый базис в подпространстве L^,
то векторы
4i)=Tfe)e(i!)> 4л=т(в»^ «i?-T(«iK^ <30'3)
образуют базис в подпространстве Lh,(j=2t 3, ..., а). Объеди-
няя векторы (30,3), соответствующие всевозможным значениям у,
мы получим базис в пространстве L. Найдем с помощью этого
базиса операторы T(h) (h£G).
Пусть kj—один из векторов звезды, под действием элемента h
он переходит в некоторый, вообще говоря, другой вектор звезды,
скажем kj>,
hkj = k f.
Составим произведение h° = g7,1hgj. Действуя элементом h° на
вектор fcv мы получим:
h^ = gjMigfc = gy'hk. = gj}k., = kv
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП [ГЛ. V
т. е. элемент h° принадлежит подгруппе GkV Вычислим T(h)e(J),
используя соотношение h=gjrh°gr1. Имеем:
Т (A) eW = Т (gjl) Т (АО) Т (^-i) «Си = Т (^) Т (А°) е« =
= Tfe,){Tfci(AO)^/a)={Tfci(AO)}(i/(/0.
Итак,
Т(А)^)={ТЛ](АО)}^е(Я. (30,4)
Мы видим, что малое представление Tfcl, действительно, однозначно
определяет представление Т группы G, если звезда Т неприводима.
Если малое представление Tfc унитарно, то унитарно и
представление Т.
Если малое представление Tfc неприводимо, то неприводимо и
представление Т, и наоборот.
Подчеркнем, что для классификации неприводимых
представлений пространственной группы достаточно двух индексов k и /?,
где k — векторный индекс, определяющий звезду представления,
а р — номер неприводимого представления thp группы Gk. Для
разложения приводимого представления Т достаточно разложить
представление группы Gfc на неприводимые представления хкр.
Мы не будем останавливаться на простом, но несколько
громоздком доказательстве этих утверждений.
Рассмотрим более подробно представления Тк группы Gh. Любой
элемент g этой группы можно представить в виде произведения
g = tj (30,5)
некоторой трансляции a = a(g-) на поворот или зеркальный поворот
r = r(g) вокруг некоторой точки О. Точку О мы выберем на
пересечении возможно большего числа осей (простых или винтовых)
и плоскостей группы Gk. Совокупность всех элементов r(g) (g£Gh)
образует точечную группу, которую мы обозначим через Gk-
Сопоставим каждому элементу г (g) оператор
г (g) -> t (r) = Th(g) e~ih« (g = tar). (30,6)
Это соответствие является однозначным, несмотря на то, что одному
и тому же элементу г отвечает бесконечное множество различных g.
Операторы T(r) (r£Gh) вполне определяют представление Th(g)
и, как мы сейчас увидим, удовлетворяют одному простому
соотношению. Пусть gl = talrl9 g2 = t<hr2 (gv g2£Gh). Произведение glg2
может быть записано в виде
glg2 = ^«/А/2 = *a»+*««/lr2 *)•
*) Поворот (или зеркальный поворот) г следует отличать от радиуса-
вектора г.
§ 30] представления пространственных групп 89
Поэтому
Т (/уъ) = Tfc(glg2) е~^> «i+'л) =
= Tfc Ы TfcЫ в'1 {h' *-* ('Г1**) = t (г,) Т(г2) «Ч'-'Г1* Ч
(30,7>
По определению группы Gfc элемент г"1 либо не изменяет
вектор к, либо переводит его в эквивалентный вектор путем
прибавления некоторого вектора Ьх обратной решетки
г1-1* = * + 61.
Подставляя это выражение для t~lk в (30,7), получим:
Т (гг) Т (r2) = t (rxr2) eib&. (30,8)
Введем понятие нагруженного представления. Если каждому
элементу г некоторой группы сопоставлен оператор Т(г), причем
Т (гг) Т (г2) = Т (ггг2) ф (г1$ г2), (30,9)
где ф(гх, г2) — некоторая функция, то такое соответствие будем
называть нагруженным представлением. Если ф=н1, то
нагруженное представление превращается в обычное представление.
Соотношения (30,6) и (30,8) показывают, что обычные представления Ть
пространственной группы Gh тесно связаны с нагруженными
представлениями точечной группы Gfc. Прежде чем идти дальше,
отметим два важных частных случая, в которых нагруженное
представление (30,8) сводится к обычному представлению.
1. Все векторы a(g) (g£Gh) содержатся в подгруппе
трансляций оГ группы О. В этом случае все скалярные произведения 6ха2
кратны 2тс и множитель eib^ = 1.
2. Элементы группы Ок не изменяют вектор k: r~1k = k. При
этом все векторы Ьг = 0 и е*ь1*а=1. Этот случай имеет место,
в частности, тогда, когда вектор k лежит внутри зоны Бриллуэна.
Действительно, вектор v~lk при этом тоже лежит внутри зоны
Бриллуэна и эквивалентен вектору k. Между тем внутри зоны
Бриллуэна не существует ни одной пары различных эквивалентных
векторов. Поэтому r~1k = k.
Из соотношения (30,6) следует, что каждому неприводимому
представлению х^ группы Gfc соответствует неприводимое нагруженное
представление той же размерности ър группы Gfc. Индекс р можно
рассматривать как номер нагруженного представления точечной группы Gh.
Если Tfc — приводимое представление, то для того, чтобы разло-
жит-ь его на неприводимые представления, достаточно разложить
нагруженное - представление Т(г) на неприводимые нагруженные
представления хр(г). Разумеется, в тех случаях, когда нагруженные
90 представления некоторых групп [гл. v
представления превращаются в обычные, нет никакой
необходимости рассматривать их как нагруженные представления.
Нахождение неприводимых нагруженных представлений точечных
групп производится весьма просто в каждом конкретном случае.
В § 38 на двух примерах иллюстрируются методы нахождения
нагруженных представлений. Что касается разложения приводимого
нагруженного представления на неприводимые, то оно производится
не сложнее, чем в случае обычных представлений. Для того чтобы
выяснить, как именно это делается, рассмотрим кратко некоторые
свойства нагруженных представлений.
Понятия эквивалентности, приводимости и неприводимости
непосредственно переносятся на нагруженные представления. Каждое
нагруженное представление эквивалентно унитарному, если \ty(rl9 r2)\=l.
Это условие выполняется в интересующем нас случае (30,8).
Справедливость этого утверждения доказывается совершенно так же,
как и для обычных представлений. Пээтому всякое нагруженное
приводимое представление распадается на сумму неприводимых
представлений.
Функция ф(гх, г2) должна удовлетворять функциональному
уравнению
«K'i. 'УзЖ^. rB) = ty(rlt г2)$(гхг2, г3), (30,10)
которое немедленно получается из сравнения следующих двух
тождеств:
Т (гг) Т (г2) Т (г8) = Т(гх) Т (г2г3) ф (г2, г8) - Т (гхг2г3) ф (г2, г8) ф(rlf гЛ),
Т (гх) Т (г2) Т (г8) = Т (Г1г2) Т (г8) ф (rlf г2) = Т (гхг2гг) ф (rxr2t г3) ф(гх, г2).
Если иметь в виду это уравнение, то легко проверить, что оператор
А=2и/-,1г-1)т^ВТ(г"1)' (30,11>
где В — произвольный оператор, коммутирует со всеми операторами
нагруженного представления. Отсюда для унитарного неприводимого
представления размерности 5 получается соотношение ортогональности
jt 2] x*fe W ^й^ ф {r\-ij = Т8"'8**" <30>12)
Вывод этого соотношения чрезвычайно похож на вывод
соотношения ортогональности в обычной теории представлений. Совершенно
аналогично получается соотношение ортогональности для
неэквивалентных неприводимых представлений
7? Ъ^(г)Ж^Щ^~к*«'^и: (30,13)
§ 30] ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННЫХ ГРУПП 91
Отсюда вытекают соотношения ортогональности для характеров
неприводимых представлений
^SzW<^<r>f^W = V C30.14)
Число /яа, показывающее, сколько раз неприводимое
представление с характером ^(а) (г) содержится в приводимом представлении
с характером ^(г), равно
г
Если известны все неприводимые нагруженные представления хр
точечной группы Ол, то легко выяснить, сколько раз произвольное
представление Т& группы 6fc содержит неприводимое
представление хНр. Из формул (30,6) и (30,15) следует, что
*p = ^2fc<*)xwW*-ifrre) (£ = '«>•)• (золе)
г
Если среди нагруженных представлений данной группы есть
хотя бы одно одномерное представление %, то между нагруженными
представлениями хр и обычными представлениями хр существует
простая связь
*p(r) = X(r)*p(r). (30.17)
немедленно вытекающая из определения (30,9).
Однако в ряде случаев у группы может не быть ни одного
одномерного нагруженного представления (напомним, что среди
обычных представлений всякой группы всегда имеется по крайней
мере одно одномерное представление, а именно, единичное
представление). В связи с этим возникает очень существенный для теории
кристаллов вопрос, в каких случаях группа G& не имеет
одномерных представлений хн. Не имея возможности исчерпывающе решить
здесь этот вопрос, мы приведем следующий простой критерий:
если пространственная группа G имеет хотя бы одну
нетривиальную винтовую ось или плоскость скольжения и содержит инверсию,
то можно выбрать вектор k так, чтобы все представления xh группы Gh
были многомерными.
Докажем справедливость этого критерия. Пусть gi£G — какой-
либо винтовой поворот или отражение со скольжением. Обозначим
через Ь один из тех векторов обратной решетки, которые не
изменяются под действием элемента gx. Выберем в качестве вектора k
вектор -^b\ k^-cyb. Ясно, что gtk = k и \k=—k = k — b. Эти
92
ПРЕДСТАВЛЕНИЯ НЕКОТОРЫХ ГРУПП
[ГЛ. V
соотношения показывают, что элементы ^ и / входят в группу G&.
Запишем теперь gx в виде произведения
где г — какой-либо поворот или зеркальный поворот вокруг центра
инверсии. Вычислим произведение gxIg^lI
Если бы у группы Gfc существовало одномерное представление
тк = х, то мы получили бы:
**<*. *о = х (У = X (ftfcf1/) = X (?,) X О X (ft"1) X (/) = 1.
т. е.
в1(л,2«)== i: (30,18)
Если g-x есть винтовое вращение, то вектор а имеет компоненту
вдоль винтовой оси, причем эта компонента не входит в подгруппу
трансляций. Поэтому 6а Ф 2пт (яг = 0, zt 1, ...) и равенство (30,18)
не может иметь места. Если gx есть плоскость скольжения, то
компонента вектора а в этой плоскости не содержится в подгруппе
трансляций. Поэтому вектор Ъ можно выбрать так, чтобы Ь&ф2ът
(m = Qt dzl, =+r2, ...) и мы видим, что равенство (30,18)
невозможно и в этом случае. Полученное противоречие показывает, что
одномерные представления группы Gh в рассматриваемом случае
отсутствуют.
В заключение параграфа найдем критерий вещественности
неприводимого представления х пространственной группы G.
В § 23 был получен критерий вещественности произвольной
конечной группы. Для того чтобы его можно было применить
к пространственным группам, содержащим бесконечное множество
элементов, необходимо предварительно сделать одно замечание.
Будем пока считать, что векторы ft, составляющие звезду
представления, рациональным образом выражаются через основные
векторы обратной решетки
* = S6i+F&a + ?63(»i=0.ztl,=t2) .. .;Л=1.2. .. .-,/=1,2.3).
PI РЧ РЪ
При этом количество различных операторов х (g) (g£G) конечно.
Эти операторы образуют группу Gx и одновременно представление
этой группы. Так как группа Gj конечна, то к ней можно
применить критерий вещественности. Вычислим сумму, фигурирующую
в этом критерии,
5 = Sz(S*) (30Л9)
9
§ 30] представлени пространственных групп 93
(суммирование производится по всем тем g£G, для которых one»
раторы x(g) различны). Для этого запишем x(g2) B ВИДе
и подставим в (30,19). Мы получим, изменяя порядок суммирования,
У неприводимой звезды {к} все векторы k равноправны. Поэтому
все слагаемые, стоящие под знаком суммы по у, равны между
собой и, следовательно,
S = o22(*<g4*i **). (30,20)
где о — число существенно различных векторов в звезде {к}.
Учтем теперь, что (*(g*)eL ф = 0, если g2kx^kx (см. (30,4)).
Поэтому суммирование в (30,20) можно производить только по тем
элементам g, квадрат которых содержится в группе вектора kv
С другой стороны, если g*£Gki, то 2('с(£"2)ф *J) = Хл, fe2)- Эти
два обстоятельства позволяют записать сумму (30,20) в виде
Полученную формулу можно значительно упростить, если
принять во внимание, что каждый элемент g группы G равен
произведению
g z= *т1а1+тъОъ+тааа"'
некоторой трансляции tmial+m^au+m3a3 на один из п элементов
hv h2, ..., hn (30,21)
{п — число элементов точечной группы G).
Ясно, что
g = *mial+rnia2+m3aa-hb.(mlal+m2au+maaa)"'
И
у (&2) == e*(fci» waa1+W2aa+W3a3+^ibai+W2haa+w3ha3)y (h2).
Перепишем теперь 5 в виде
Л р* р*
S = o 2 Xfc (Л2) 2 2 2 e*(fcl+h" Л» «л+^^+я»»»»). (30,22)
В первой сумме суммирование производится по тем элементам h из
(30,21), квадрат которых содержится в группе Gu,- Внутренняя
94 представления некоторых групп [гл. v
сумма по mv т2 и т3 представляет собой произведение трех
прогрессий, знаменатели которых равны соответственно
qt = eifo+h-1^, а})9 д^ _ giCfcj+h"1*,, ъ)% д„ _ ^ifa+h-1*» «з). (30,23)
Легко видеть, что q^ = q^ = q^=l. Поэтому сумма по т19
т2> тъ в (30,22) равна ргр2р3, если q1 = q2=q3= 1; если же хотя бы
одно из трех чисел qv q2, q3 отлично от единицы, то сумма равна
нулю. Поэтому
S = GPlp2ps 2 XkShl)>
где суммирование производится по тем элементам из (30,21),
которые обращают в единицу числа ql% q2t qz.
Легко, однако, видеть, что числа (30,23) одновременно
обращаются в единицу в том и только в том случае, если
*1 + h-1*1 = 0,
или, что то же самое,
hkx= — kv (30,24)
Заметим, что из этого условия вытекает соотношение h2£Gkr
Окончательно для 5 получается следующее выражение:
где N=-npxp2pz — число элементов группы Qv
Применяя критерий вещественности, получим:
1, если х вещественно;
0, если х не эквивалентно х;
-1, если х эквивалентно х, но не
вещественно;
суммирование производится здесь по тем элементам (30,21),
которые переводят вектор kx в вектор, эквивалентный — kv
Полученный критерий остается в силе и для неприводимых
представлений с произвольной звездой. Это следует из соображений
непрерывности, если учесть, что в произвольной близости любого
вектора k0 имеется вектор k с рациональными координатами, группа
которого совпадает с группой вектора k0.
ГЛАВА VI
МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ
§ 31. Главные координаты и собственные частоты
Решение задачи о малых колебаниях механической системы
может быть значительно упрощено, если система обладает той или
иной симметрией. Это упрощение достигается путем применения
методов теории представлений.
Мы будем рассматривать системы, состоящие из конечного
числа точек. Условно будем называть такие системы молекулами^
а точки — атомами. Число атомов в молекуле обозначим через п.
Если молекула выведена из состояния равновесия, то
положения ее атомов можно характеризовать п радиусами-векторами
rj(j=l9 2,..., я), каждый из которых мы условимся проводить
из равновесного положения соответствующего атома.
Радиусы-векторы rj(J = 1, 2, . .., п) в своей совокупности
характеризуют отклонение всей молекулы. Это отклонение мы
обозначим через г, так что г есть совокупность п трехмерных векторов
и поэтому может рассматриваться как вектор в Зя-мерном
пространстве. Это пространство мы будем называть пространством
отклонений молекулы и обозначать через М.
Если все атомы молекулы колеблются по гармоническому закону
с одной и той же частотой и фазой
rj = dj cos (u>t + a),
то такое движение называется главным колебанием. Главное
колебание характеризуется, таким образом, набором амплитуд aj и
частотой о). Как известно из механики, всякое движение системы,
совершающей малые колебания, можно представить в виде
Ъп
Га = 2 Akuj COS (CO^ + OCfc), (31,1)
ft=l
т. е. в виде суперпозиции Ъп главных колебаний
r* = ajfcos(co^ + afc) (j=U 2, ..., Ъп). (31,2)
Коэффициенты Ак и aft определяются из начальных условий.
96 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
Частоты
u)lf 0)2, . . ., 0)3п»
с которыми совершаются главные колебания, называются
собственными частотами системы.
Равенства (31,1) и (31,2) можно переписать в виде
-.akcos(ukt-\-<xk),
з?г
2 Лкак cos (w^ + afc)
fc=i
(г*, a&, r£Af).
Будем говорить, что вектор a*£M характеризует главное
колебание с частотой щ.
Рассмотрим случай, когда несколько различных главных
колебаний имеют одну и ту же частоту.
Всякая суперпозиция таких колебаний
г = (SfAjfl*) cos (at + a)
в свою очередь является главным колебанием с той же частотой
(штрих над знаком суммы означает, что сумма берется только по
.главным колебаниям с частотой со). Отсюда следует, что
совокупность векторов, характеризующих главное колебание с данной
частотой, образует линейное подпространство Мш в пространстве М.
Размерность пространства Мш называется кратностью частоты со.
Ясно, что пространство М является суммой подпространств М^,
соответствующих различным собственным частотам о>.
Обозначим через G группу симметрии неподвижной молекулы
в состоянии устойчивого равновесия.
Каждый поворот (или зеркальный поворот) g из группы G
переводит выведенную из равновесия молекулу одной конфигурации
в некоторую, вообще говоря, другую конфигурацию. При этом
вектор г, характеризовавший отклонение молекулы до поворота,
переходит в результате поворота в некоторый вектор гд.
Если ввести в рассмотрение линейные операторы T(g)(g£ G),
. определяемые равенством
1(g) г = г0,
и сопоставить каждому элементу g оператор T(g-): g*->T(g-), то мы
получим представление группы G, называемое механическим
представлением. Характер механического представления принимает только
действительные значения.
Если в пространстве М определить скалярное произведение,
„положив
(ги г2) = ^\г^)
§ 32]
СИММЕТРИЧЕСКИЕ КООРДИНАТЫ
97
(здесь (К1), гФ)— обычное скалярное произведение), то все
операторы механического представления окажутся унитарными, так как
относительное расположение двух отклонений молекулы гх и г2 не
изменяется при одновременном повороте.
Весьма существенно, что каждое из подпространств Мш
инвариантно относительно операторов T(g*)(g*£ G). Это следует из того,
что при одновременном повороте или зеркальном повороте всех
атомов их относительное расположение не изменяется. Поэтому, если
до поворота молекула совершала главное колебание с частотой со,
то после поворота все атомы молекулы будут продолжать колебаться
с той же частотой.
Обозначим через Тш представление группы G, по которому
преобразуется подпространство Мш. Если представление Тш приводимо,
то его можно разложить на неприводимые представления. В
соответствии с этим подпространство Мш можно разложить на
неприводимые подпространства
m(0=mL1)+mL2)+ ... + м<?.
Выбирая в каждом подпространстве Мш базис
а\Л, <#>..... aW
и объединяя все такие базисы, мы получим базис в пространстве М.
Каждый вектор построенного базиса характеризует некоторое
главное колебание.
Таким образом, мы получаем Ъп главных колебаний, каждое из
которых относится к одному из неприводимых представлений группы G.
Тем самым главные колебания классифицируются по неприводимым
представлениям группы G.
§ 32. Симметрические координаты
С помощью теории представлений можно • существенно упростить
вычисление собственных частот и нахождение главных колебаний.
Это упрощение достигается путем введения так называемых
симметрических координат. Если функцию Лагранжа молекулы выразить
в симметрических координатах, то она, вообще говоря, распадается
на несколько «элементарных функций Лагранжа», каждая из которых
зависит лишь от части обобщенных координат. Это, как
правило, существенно облегчает нахождение малых колебаний
молекулы.
В этом параграфе мы покажем, как, зная все неприводимые
представления группы G, найти симметрические координаты.
Для того чтобы можно было пользоваться теорией
представлений, расширим формально действительное пространство М до
соответствующего комплексного пространства Мс, которое состоит из
98 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
всевозможных выражений вида r1-\-ir2{rl9 r2£M). Два элемента
>*i + *'r2 и ri — *r2(ri> гг£Щ будем называть
комплексно-сопряженными. Те элементы Мс, которые содержатся в М, будем называть
вещественными. Операторы T(g) доопределим на комплексных
элементах, положив
Т (g) {г, + ir2) = T (g) гг + Л? (g) rt.
Из этого определения следует, что
T(g)r = T(g)r, (32,1)
где черта означает переход к комплексно-сопряженному вектору.
Легко видеть, что распространенные таким образом на
пространство Мс операторы Т^) по-прежнему осуществляют представление
группы G.
Разложим пространство Мс на неприводимые подпространства
МС = М1 + М2+ ... +Мв. (32,2)
Пусть Mi—одно из таких подпространств. Ясно, что комплексно-
сопряженное подпространство Мг также является неприводимым
подпространством. Поэтому подпространства Мг и Мг либо совпадают,
либо не имеют ни одного общего вектора (кроме нуль-вектора).
В первом случае, когда Мг = Мг, в Мг существует
действительный базис. В самом деле, пусть е\у eL ..., е[ —какой-либо базис
1 z °i
в Mj = Mj. Образуем 2sx вещественных векторов
ак = Re е{ = I (e{ + е{)9 bk = Im e{ = I (e\ —Jk) (32,3)
(ft=l, 2, ..., Sl),
принадлежащих Mj. Каждый вектор а из Мг можно представить
в виде линейной комбинации векторов (32,3)
= 2 СкРк = 2"2 Ск (а*к +/6*)'
а
к к
Поэтому среди векторов (32,3) существует вг линейно
независимых векторов. Они и образуют вещественный базис в Mj.
Во втором случае, когда Мг Ф Mj, сумма подпространств
Мг + Мг имеет 2sz измерений. При этом все векторы (32,3) линейно
независимы.
Если представление ха, по которому преобразуется
подпространство Mi, невещественно, то первый случай не может иметь места.
В самом деле, если Mz = Mj, то в Mj существует вещественный
базис, в котором все операторы представления ха выражаются
с помощью вещественных матриц.
§ 32] симметрические координаты 99
Условимся в этом случае разложение (32,2) производить таким
образом, чтобы вместе с подпространством Мг оно содержало и
сопряженное подпространство Мг. Базис
pi рь /Л
*V *2> ' ' '» &8i
подпространства Мг будем считать комплексно-сопряженным базису
pi pi pi
cv е2, . . ., е^
подпространства Мг:
4 = 4 (*=1. 2> •••■ **)• (32,4)
Если представление та, по которому преобразуется
подпространство Мг, вещественно, то возможны оба случая: Мг = Мг и
щ ф Щ. В первом случае в пространстве Мг существует, как мы
показали, вещественный базис. Во втором случае мы разобьем
сумму Мг + М на два подпространства
Мг + Шг = Мг + Мь
где Мг — линейная оболочка векторов al = ^(e]c-\-e]c)i
Мг'—линейная оболочка векторов 6Л = -^-(^—е{). Каждое из этих
подпространств преобразуется по одному и тому же представлению та.
В самом деле, в силу (32,1) имеем, например:
п п _ ч
Итак, Мг и Мг являются неприводимыми подпространствами,
имеющими вещественные базисы. Мы видим, что и в случае Мг ф Мг
возможно такое разбиение пространства Мс, при котором все
подпространства Мг, преобразующиеся по вещественным представлениям,
имеют вещественные базисы.
В дальнейшем мы будем предполагать, что (32,2) является именно
таким разбиением. Таким образом, мы будем считать, что у
подпространств, преобразующихся по вещественному представлению,
базис состоит из вещественных векторов.
Введем обозначения
Я1к(г) = (г, е\) (ft=l, 2, ..., *г; /=1, 2, ..., q). (32,5)
Набор Ъп чисел qlk{r) вполне характеризует отклонение г и потому
может служить набором обобщенных координат. Построенные,
таким образом, обобщенные координаты называются симметрическими.
100 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
§ 33. Выражение функции Лагранжа в симметрических
координатах
В приближении теории малых колебаний потенциальная энергия
молекулы является однородной квадратичной функцией обобщенных
координат. Выразим ее в симметрических координатах
U = \ S**W*(0^(0*)- (ЗЗЛ)
klk'V
При поворотах g£G (как и вообще при любых перемещениях
молекулы как целого) потенциальная энергия не изменяется, так как
не изменяются расстояния между атомами. Это обстоятельство
существенно ограничивает возможные значения коэффициентов bw
Для того чтобы убедиться в этом, подставим в (33,1) T(g)r = rg
вместо г
U = \ S *"*'** {Г9) £' <Г*>' ^33'2)
klk'V
Заметим, что
Я{(гд) = (гд, e[) = (I(g)r, e\) = (r, T{g)e[)^
= (г, 2 zlm (g) егЛ = S %lm (g) qlm (r),
\ т / т
и перепишем (33,2) в виде
U = -J 2 z*km te)х*'я»' (S) blkk' Чт (г) qlm' (г).
klmk'Vm'
Левая, а следовательно, и правая часть этого равенства не зависит
от g£G. Поэтому, производя усреднение по g и вспоминая
свойства ортогональности матричных элементов неприводимых
представлений, получим:
У = "2 £d ~ ***' Чт (Г) Яш' (Г) §fc&' §WW §аос'
klmk'Vm'
(а — номер неприводимого представления, по которому преобразуется
подпространство Мг\ s* — его размерность).
Обозначая
^516** = 6"'' (33'3>
к
получим окончательно:
а 2, Г£а W
*) Такой вид потенциальной энергии следует из ее вещественности.
§33] ВЫРАЖЕНИЕ ФУНКЦИИ ЛАГРАНЖА В СИММЕТРИЧЕСКИХ КООРДИНАТАХ 101
Запись /, V £ а означает, что каждое из подпространств Мг и
Мг преобразуется по неприводимому представлению иа группы G.
Обратим внимание на две особенности выражения (33,4)
потенциальной энергии U в симметрических координатах:
1) потенциальная энергия равна сумме квадратичных форм #а(г),
из которых каждая зависит только от симметрических координат,
связанных с каким-либо одним неприводимым представлением та
группы G;
2) квадратичная форма иа(г) в свою очередь распадается на se
квадратичных форм
а«* = ПЦЛ'*т< (»=1. 2 S.)
с совершенно одинаковыми коэффициентами.
Аналогичный вид имеет выражение кинетической энергии Т
в симметрических координатах
а Н'£а W
Поэтому и функция Лагранжа L=T—U имеет следующий
простой вид:
L= 2М?«. qm), (33,5)
a, m
где
К (Qm> Яш) = ^ 2 Кг ?«?т — V <4 О" С33'6)
ZZ'£a
Выражение (33,5) для функции Лагранжа поддается дальнейшему
упрощению, если представление Т содержит невещественные
представления. Пусть ха — одно из таких представлений. Пусть Mj—
неприводимое подпространство, преобразующееся по представлению xtt,
а Мг — комплексно-сопряженное подпространство. Координаты qlm(r)
и Я1ш(г) комплексно-сопряжены при действительных отклонениях
£(Г) = £Й" («=1.2 V. ^€М) (33,7)
в силу (32,4). Выпишем сумму двух элементарных функций
Лагранжа, связанных с этими координатами
ЬАЯт> qm) + ^(qm, qm) = Y ^ (aH'?L^ — ЬП'#т#пЬ +
Г, !>€"«
102 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
Учитывая (33,7), эту сумму можно переписать при действительных
отклонениях так:
Итак, вместо суммы двух элементарных функций мы получили одну
элементарную функцию.
Ввиду того, что функция Лагранжа принимает при
действительных отклонениях только вещественные значения, коэффициенты
Aiv=aiv+avT и Biv = bii<+bvl
можно считать эрмитовыми. Это означает, что
Avl = AlVi BVi = Blv. (33,8)
Итак, каждому вещественному представлению ха
размерности sa соответствует sa элементарных функций Лагранжа
с одинаковыми коэффициентами. Каждая из этих элементарных
функций зависит от оа вещественных симметрических координат
(оа — число, показывающее, сколько раз представление ха
содержится в Т).
Каждой паре комплексно-сопряженных невещественных
представлений ха и ха размерности s0 соответствует 5а
элементарных функций Лагранжа. Каждая из этих функций зависит от оа
невещественных симметрических координат.
Общее число координат, от которых зависит функция Лагранжа,
равно Зп, если каждую невещественную координату считать за две
координаты.
Для вычисления собственных частот нужно привести каждую
элементарную функцию Лагранжа La(qmi дт) = 1^ш к сумме
квадратов
а
L*m= ^-^(iQjU2 — «>lj\Qjm\2)>
где Qjm — некоторая линейная функция от симметрических
координат q*
^ т
'а
<&» = 2c?tfL (зз,9)
Коэффициенты С]г не зависят от т, так как элементарные
функции Лагранжа с одинаковым индексом а и различными индексами т
§ 33] ВЫРАЖЕНИЕ ФУНКЦИИ ЛАГРАНЖА В СИММЕТРИЧЕСКИХ КООРДИНАТАХ 103
имеют одинаковые коэффициенты. По этой же причине числа jiaj
и a)0j не зависят от т. Подставляя (32,5) в (33,9), получим:
Qjm = (r, Jj^4J = (r, в?ж), (33,10)
где
ъ]т = 2 Cjiem. (33,11)
Набор векторов
4> %* ••> s5sa (33,12)
преобразуется по тому же представлению ха, что и векторы
е\, е\, ..., е\ . Это следует из того, что коэффициенты С^ не
зависят от т.
Если представление ха вещественно, то вещественны и числа Qjm.
В этом случае элементарная функция Лагранжа равна
г \1 raj /na2 2 na2 \
а координаты Qjw называются главными.
Если представление xa невещественно, то числа Qjm являются
комплексными. Вводя обозначение
Qjm = Qjml + LQjm2>
перепишем Lam в виде
j = i
В этом случае главными координатами являются Qjml и Q^m2- Всего
мы получаем, таким образом, Ъп главных координат.
Из уравнений Лагранжа следует, что если все главные
координаты, кроме одной, скажем Qjmi* равны нулю, то молекула
совершает главное колебание с частотой a)a^.
Отсюда следует, что частота a)aj вырождена 5а-кратно, если
представление ха размерности sa вещественно. Если представление ха
невещественно, то частота a)ay вырождена 2$а-кратно.
Итак, каждому вещественному представлению ха размер-
ности 5а, если оно содержится в Т <за раз, соответствует оа
частот, каждая из которых вырождена s^-кратно; каждой паре
невещественных представлений ха и та размерности sa
соответствует оа частот, каждая из которых вырождена 2э(к-кратно.
104 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
Мы видим, что, разлагая представление Т на неприводимые,
можно узнать кратности собственных частот молекулы.
Покажем, что для фактического вычисления коэффициентов aw
и Ьц'у характеризующих элементарную функцию Лагранжа 1йШ> нет
необходимости находить все симметрические координаты.
Оказывается достаточным определить только те аа векторов е\ (/£а),
которые соответствуют представлению ха.
Действительно, пусть функция Лагранжа молекулы задана в
декартовых координатах xj, y$, Zj (У=1, 2, ..., п). Будем
предполагать, что все базисные векторы еш ортонормированы. Тогда
произвольное отклонение г молекулы можно представить в виде
г = 5 а1 е1 .
1У гп
С другой стороны, это же отклонение можно записать и так:
п
г = 2 (х tp+jvA+*Л>»
где I —такое отклонение молекулы, при котором ji-й атом имеет
единичное смещение в направлении оси ОХ, а все остальные атомы
не смещены; аналогичный смысл имеют отклонения ] и А^.
Приравнивая оба эти выражения для г и умножая скалярно
полученное равенство на / , находим:
Таким же образом получаем соотношения
У и. = 2 Ят {е1т> УД z* = 2 Ят {emt А ).
h m l»m
Если подставить эти выражения в функцию Лагранжа, а затем
положить равными нулю все симметрические координаты, кроме ql
(/£а), то получится элементарная функция Lal. Очевидно, что
можно сначала положить в выражениях для х^, у^ и z^ все qlm
равными нулю, кроме q\ (/£a), а затем подставить полученные
таким образом выражения
^=2?i(4, V). У^ = 1>я\{е\,й), ^=2Vi(ei, К) (33>13)
^ 1£* 1£а 1£«
в функцию Лагранжа.
§ 34. Колебательное представление
С точки зрения теории малых колебаний молекулы шесть
координат из общего числа Ъп являются паразитическими, так как они
соответствуют перемещениям молекулы как единого целого без
изменения взаимных расстояний между атомами. В приближении теории
34] КОЛЕБАТЕЛЬНОЕ ПРЕДСТАВЛЕНИЕ 105
малых колебаний этим координатам соответствуют «частоты»,
равные нулю. Естественно, что эти «частоты» и соответствующие им
главные координаты не представляют никакого интереса и должны
быть как можно ранее исключены из рассмотрения.
Займемся сначала поступательными отклонениями молекулы.
Каждое такое отклонение ааМ характеризуется тем, что смещения
всех атомов ri(a) равны между собой,
ri(a) = rk{a) (t, A=l, 2, ..., я).
Совокупность всех таких отклонений образует трехмерное
подпространство, которое мы будем обозначать через П.
Подпространство П инвариантно относительно всех операторов T(g)
механического представления.
Поэтому, для того чтобы избавиться от трех координат,
описывающих поступательное перемещение молекулы, достаточно
рассматривать механическое представление не во всем пространстве Мс>
а в ортогональном к П дополнении.
Подобным же образом исключим три координаты, описывающие
повороты молекулы как целого. Отклонение, связанное с
поворотом молекулы вокруг некоторой оса 00' на малый угол ср,
выражается формулой
где 9 — вектор, направленный вдоль положительного направления
оси поворота и равный по величине углу поворота, а /?$ — радиус-
вектор г-го атома в положении равновесия, проведенный из точки О.
Так как каждое малое вращение характеризуется с помощью
этой формулы вектором 9» т0 совокупность всех вращений
молекулы как целого образует в приближении теории малых колебаний
трехмерное линейное пространство. Будем обозначать это
подпространство через 2.
Подпространство 2—инвариантно относительно всех
операторов T(g) механического представления.
Поэтому подпространство М', являющееся ортогональным
дополнением в пространстве Мс к сумме поступательного и вращательного
подпространств, есть инвариантное подпространство. Размерность
пространства М' равна Ъп — 6. Представление Т', индуцируемое
механическим представлением в подпространстве М', будем
называть колебательным представлением.
Характер yf колебательного представления связан с характером у
механического представления следующим очевидным соотношением:
Xig) = X' fe) + Xnte) + X2(£), (34,1)
где Хд(§*) и Xq(S) — характеры представлений, индуцируемых
механическим представлением в подпространствах П и 2 Вычислим
характер %' колебательного представления. Для этого определим
106 МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
X» Хп и Xs' Выберем в качестве базиса в пространстве Мс
введенные на стр. 104 отклонения
*m> Jm> km (/»=li 2 л).
Рассмотрим отклонение T(g)im> Так как при отклонении im была
смещена только одна точка (точка с номером т)> то при
отклонении Т (g)im тоже смещена только одна точка — та, в которую под
действием операции g переходит точка т. Поэтому, обозначая
номер этой последней через т!, можем написать: ф
Т (g) im = Ыт, + руж, + Tftw,. , (34,2)
Сравнивая это соотношение с тождеством
замечаем, что в столбце, соответствующем базисному вектору im
отличны от нуля только три матричных элемента
TW*w О?*)» Tjm'bn (£)' T*m'*w (#)"
Поэтому, если /л7 =£ #*, то диагональный элемент этого столбца
равен нулю и может не приниматься во внимание при вычислении
следа матрицы T(g). Итак, при вычислении следа матрицы T(g)
следует учитывать только те атомы, узлы которых, т. е. положения
равновесия, остаются на месте под действием операции g.
Пусть g=.C^ есть поворот на угол ср и узел атома т
неподвижен относительно этой операции. Если направить ось OZ вдоль
оси вращения, то равенство (34,2) примет следующий вид:
Т (С9) im = cos ср im + sin cp jm.
Следовательно, диагональный элемент в строке, которая
соответствует базисному вектору imt равен cos ср. Действуя оператором
поворота Т(С?) на векторы jm и кш, получим:
Т(СТ) = — smcp/w + coscpyw, T(C?) *„=**.
Соответствующие диагональные элементы равны coscp и 1. Таким
образом, сумма диагональных элементов,, стоящих в трех столбцах,
соответствующих частице т, равна l-f-2coscp. Очевидно, что весь
след матрицы Т(СФ) равен
X(CJ = nc(1+2 coscp), (34,3)
где п0 есть число атомов, узлы которых остаются неподвижными
при операции поворота Сг
§ 34] КОЛЕБАТЕЛЬНОЕ ПРЕДСТАВЛЕНИЕ 107
Если операция g есть зеркальный поворот 5? на угол ср и узел т
неподвижен относительно 59, то для подсчета характера х(^<р)
следует исходить из тождеств
T(Sf)/w = cos?*»4-sta<p7m,
Т (S9)jm = — sin ср J^ + cos cp/w,
которые немедленно приводят к формуле
Х(5Ф) = М—1+2со$<р), (34,4)
где п8 — число атомов, узлы которых остаются неподвижными при
зеркальном повороте.
Вычислим характер ХпОг)- ^ля этого выберем в пространстве П
в качестве базиса отклонения г, j, k, где г — отклонение, при
котором все атомы смещены на единицу длины в направлении
оси ОХ, аналогичный смысл имеют отклонения У и ft. Ясно, что
эти три базисных вектора преобразуются друг через друга как
три взаимно-ортогональных вектора в евклидовом трехмерном
пространстве. Поэтому характер хп (#) определяется формулами
ХП (СJ = 1 + 2 cos ср, хп 0V = - 1 + 2 cos ср. (34,5)
Обратимся теперь к представлению в подпространстве 2. Для
вычисления характера этого представления введем в
подпространстве 2 базис срж, сру, срг. Здесь срж означает поворот на единичный
(малый) угол вокруг оси ОХ\ соответствующий смысл имеют
базисные векторы сру и ср2. Если g = C9 есть поворот молекулы на угол ср
вокруг оси OZ> то, как легко видеть, отклонения ср^, сру, ср2
преобразуются так же, как три единичных взаимно-ортогональных вектора
в евклидовом пространстве, т. е. по формулам
Поэтому
Т (С9) ср,, = срж cos ср + Чу sin ср,
Т (С,) ср^ = — ср,, sin ср + ср^ cos ср,
Т(С,)ср2=срг.
Xa(C9)=l+2cos<p.
К
(34,6)
Под действием отражения в плоскости XOY поворот ср2, очевидно,
не изменяется, а повороты срж и ср^ меняют свое направление:
т(°*ог) **=="- ?*»
Т(°даг) ?, = —?*.
108
МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ
[ГЛ. VI
Поэтому
Так как Sy=aJ[okCf99 то, объединяя эти формулы с (34,6), находим;
Т(SJ ?т> = — Vx COS ср — <?у Sin cp,
Т (5?) <?у = Фа? sin cp — <?у COS cp,
Т(59)ср2=ср2.
Х2 (59) = 1 — 2 cos ср = - Хп (5,). (34,7)
§ 35, Пример. Молекула СНС13
Рассмотрим малые колебания молекулы СНС13. Группой
симметрии её является С3гг Напомним, что С3г, состоит из шести
элементов: е, С3, С\, olf o2 и о3. По формулам предыдущего параграфа
определяем характеры хм(£)> Хп^)> Z2 (g) и X'(gO- Получаем табл. 8.
Таблица 8
Характеры хм» Хп» Х2 и х'
Таблица 9
Характеры неприводимых
представлений группы C3v
Csv
*м
>п
*Q
X'
£
15
3
3
9
Г Г2
0
0
0
0
о1а2с3
3
1
— 1
3
Csv
*i
t*
*В
е
1
1
2
С С2
1
1
— 1
а1а2а3
1
— 1
3
Т аб лица 10
Анализ представлений
Tv. Ттт. То И Т'
*м>
Рядом для удобства помещена таблица 9 характеров всех трех
неприводимых представлений группы CSv* С помощью формулы (20,3)
вычисляем, сколько раз содержится
каждое из неприводимых
представлений в представлениях Тм, ТП,Т2 и Т'.
Получаем таблицу 10.
Из последнего столбца этой
таблицы видно, что молекула СНС13 имеет
три невырожденные частоты и три
двукратно вырожденные частоты. Из
этого же столбца таблицы 10 видно,
что в процессе решения задачи о малых
колебаниях придется решить два
характеристических уравнения третьей
степени.
Приступим к нахождению симметрических координат.
Пространство М' распадается на три одномерных подпространства, преоб-
т1
т2
™з
Тм
4
1
5
Тд
1
0
1
т2
0
1
1
Т'
3
0
3
35]
ПРИМЕР. МОЛЕКУЛА CHCI,
109
разующихся по единичному представлению, и три двумерных,
преобразующихся по представлению Хз- Обозначим эти пространства
через Мх, М2, М3 и М4, Мб, М6. Базисные векторы в первых трех
пространствах легко найти непосредственно; так как они не
изменяются при всех движениях группы CZv9 то соответствующие им
отклонения обладают полной симметрией равновесной молекулы.
Рис. 20.
Эти отклонения изображены на рис. 20, причем смещения выбраны
так, чтобы все три отклонения были ортонормированы.
Подчеркнем, что геометрическая сумма смещений всех атомов
равна нулю в каждом из этих отклонений, как оно и должно быть,
так как все они перпендикулярны к подпространству П.
Для вычисления коэффициентов элементарной функции Ла-
гранжа Lx следует в полную функцию Лагранжа подставить
согласно (33,13) следующие выражения:
■£«••
X, =■
1
2 УЗ
1_
2УЗ~
7(3)
х4 = 0,
Л
= 0,
гГ. Л =
:4-Я(3).
<7(3). Ja = -i?(3).
Построим теперь векторы е^\ е\ и ef\ С этой целью выпишем
первые диагональные элементы матриц двумерного представления
группы C3v
■ffte)
а2
а3
1 .1 .1, _± _±
2 2 2 2
ПО МАЛЫЕ КОЛЕБАНИЯ СИММЕТРИЧНЫХ СИСТЕМ [ГЛ. VI
Оператор Рх (см. (26,8) >, следовательно, равен
Pi=y(E + T(a1) —1Т(С3)-1Т(02)-1Т(03)[,
Применим его к трем произвольным отклонениям из W. Возьмем
отклонения аи а^ и а3, изображенные на рис. 21.
Рис. 22.
Числа аир следует подобрать так, чтобы момент всех
смещений у вектора Рха2 равнялся нулю. Это равносильно условию
ортогональности Рха2 подпространству 2. Теперь остается
ортонормировать три вектора Р^, Рха2 и Рха3 и получить, таким образом,
векторы е{?\ ef и еф (рис. 22).
ГЛАВА VII
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
§ 36. Постановка задачи
Как известно, у кристаллов существует два типа фазовых
переходов. Фазовые переходы первого рода сопровождаются поглоще-
рнием или выделением скрытой теплоты, фазовые переходы второга
хода происходят без подобного выделения или поглощения и
сопровождаются скачкообразным изменением теплоемкости, коэффициента
теплового расширения и других производных от термодинамических
величин.
Общая термодинамическая теория фазовых переходов второго
рода была разработана Л. Д. Ландау [х]. Он показал, в частности,
что изменение симметрии кристалла играет существенную роль
в этих переходах и что далеко не всякое изменение симметрии
кристалла может иметь место при фазовых переходах второго рода.
Е. М. Лифшиц [4] подробно рассмотрел кристаллы и выяснил, какие
изменения класса кристалла могут сопровождать фазовый переход
второго рода.
В настоящей главе частично излагаются работы I1»4] и
рассматривается метод расчета возможных изменений симметрии кристалла.
Симметрию кристалла можно охарактеризовать с помощью
функции плотности р(л;, у, z), определяющей вероятность р(л:, у, z)dV
нахождения частицы в объеме dV\ если кристалл состоит из частиц
нескольких сортов, то необходимо ввести несколько функций р^, по
одной функции на каждую частицу.
В дальнейшем мы будем говорить об одной функции р(лг, у, z),
имея в виду, что в случае необходимости под р можно
подразумевать многокомпонентную функцию.
Совокупность всех преобразований координат, оставляющих
функцию р инвариантной, образует пространственную группу
кристалла.
Изменение давления р и температуры Т влечет за собой, вообще
говоря, изменение функции р. При фазовом переходе второго рода
плотность изменяется непрерывно, однако таким образом, что
симметрия кристалла до и после перехода различна.
112 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
У замкнутой системы, т. е. у системы, не взаимодействующей
ни с какими внешними телами, состоянию термодинамического
равновесия соответствует, как известно, максимум энтропии. Если система
не является замкнутой, но находится в некоторых фиксированных
внешних условиях, то в состоянии термодинамического равновесия
достигает экстремума не энтропия, а некоторая другая
термодинамическая функция.
В интересующем нас случае, когда фиксированы температура и
давление внешних тел, такой функцией является так называемый
термодинамический потенциал, равный
F = E— TS + pV,
тде £, 5 и V — энергия, энтропия и объем единицы массы. В
состоянии равновесия термодинамический потенциал принимает наименьшее
значение. Принцип минимальности термодинамического потенциала
означает, что при фиксированных давлении и температуре
плотность р должна быть такой, чтобы выражение
F = F(Pi 7\ р)
-было минимальным. Этот принцип позволяет проследить, как
изменяется вид функции р при изменении р и Т.
Пусть р0, Т0 — какая-либо точка на линии фазовых переходов
второго рода. Обозначим через р0(х, у, z) плотность кристалла при
р = р0, Т=Т0. Группу симметрии р0(*> у, г) обозначим через G.
Рассмотрим точку pt T, близкую к точке р0, Г0, и обозначим
плотность кристалла в этой точке через р(л;, у, z). Так как при
фазовом переходе второго рода плотность изменяется непрерывно, то
можно написать:
р(*, у, z) = p0(x, у, 2)-f-8p(x, yt z),
где 8р стремится к нулю, когда р, Т-+р0, Г0.
Подействуем на функцию Ьр(г) всевозможными элементами
труппы G. Мы получим инвариантное семейство функций SpCg"-1/*)
{g£G). Линейная оболочка всех этих функций образует
пространство Z, преобразующееся по некоторому представлению группы G
Расщепляя это пространство на инвариантные неприводимые
подпространства Lj и выбирая в каждом из них произвольный орто-
нормированный базис срф) (ft=l, 2,..., Sj), мы получим базис
в пространстве L.
Функцию 8р(г) можно, как и всякую функцию из L, разложить
тю элементам указанного базиса
8p(r) = 2<Vp<*>(r). (36,1)
Если представление tj, по которому преобразуется
подпространство Lj, не вещественно, то функции cp(ft) принимают невеществен-
§ 36]
ПОСТАНОВКА ЗАДАЧИ
113
Ные значения. В этом случае мы объединим функции <pW с
комплексно-сопряженными функциями и обозначим через ^ + ^
представление, по которому преобразуется 2^- функций {ср№, ср(*)1
Представление tj-\-t*j мы будем называть физически-неприводимым.
Можно считать, что в выражении (36,1) для 8р суммирование
производится по неприводимым вещественным представлениям и по
физически неприводимым представлениям. При этом ввиду
вещественности 8р коэффициенты Cjk при комплексно-сопряженных
функциях ср(?) (г) в свою очередь комплексно сопряжены.
При изменении р, Т изменяется 8р, а вместе с ним изменяется
пространство L и базисные функции ср(&)(г). Таким образом,
функции cpt*)(r) зависят от р, Т.
Учитывая малость 8р, можно разложить термодинамический
потенциал в ряд
Ф(/>. Т9 р) = Ф(р, Г, р0) + Ф!(р, Т, Ро, 8р) + Ф2(р, Г, Ро,8р) +
где Фг — линейный функционал относительно 8р, а Ф2 и Ф3 —
функционалы второй и третьей степени. Используя (36,1), получим:
Фх(Л Т. ро, 8p) = 2cifc©1(pi Т. р0, ср(/)(г)),
Ф2(А Т. р0, 8р)= 2 СрРГк.Ф2(р9 Т, ро. cpW(r), <р«'>(г)).
Термодинамический потенциал Ф, разумеется, инвариантен
относительно любого поворота системы координат. Если произвести
преобразование системы координат с помощью одного из элементов
группы G, то функции (f(p (j — фиксировано, А=1, 2, ..., Sj)
преобразуются друг через друга. Согласно (36,1) это линейное
преобразование функций срф) можно трактовать как линейное
преобразование коэффициентов Cjk.
Итак, при поворотах координат с помощью элементов группы G
коэффициенты Cjk преобразуются по физически неприводимым
представлениям группы G, а потенциал Ф остается инвариантным. Отсюда
следует, что Ф может зависеть только от инвариантных комбинаций
коэффициентов Cjk.
Среди линейных функций от Cjk есть только один инвариант С°0,
т. е. коэффициент при функции срО, инвариантной относительно всех
преобразований группы G. Поэтому
Фх(р. Т. р0, 8р) = С?Ф1(р, Г, ро, <pg).
Инварианты второго рода имеют следующий вид:
aJ
. SI С* Р.
к =1
114 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
Поэтому функционал Ф2 можно представить в виде
j ft
В точке /?0, Т0 все коэффициенты Cjk равны нулю, так как Sp = 0.
Воспользуемся теперь тем, что всякое изменение
коэффициентов Cjk может только увеличить потенциал Ф; это означает, как
легко видеть, что при р = р0, Т=Т0 коэффициент Ф1 = 0, а все
коэффициенты Aj(p, T) неотрицательны:
Л* (А)> 7'о)>0.
Если бы, однако, все коэффициенты Aj были строго положительны,
то они оставались бы такими и в некоторой окрестности Q точки.
/?0, Т0 и, следовательно, в этой окрестности все коэффициенты Cjk
равнялись бы нулю и симметрия кристалла была бы одинаковой во
всех точках Q. Это противоречит предположению о том, что точка
/?0, Т0 лежит на кривой фазового перехода второго рода. Итак,
хотя бы один из коэффициентов Aj(p0, T0) (у Ф 0) равен нулю.
Если точка /?0, Т0 не лежит на пересечении двух или нескольких
линий фазовых переходов второго рода, то, вообще говоря, только
один из коэффициентов, скажем А^р^ Г0), равен нулю
А (А). 7,о)=0, (36,2)
а остальные положительны. Действительно, уравнение (36,2) можно
рассматривать как уравнение линии фазовых переходов. Если бы
в точке /?0, Г0 обращалось в нуль несколько коэффициентов А^ то
точка /?0, Г0 лежала бы на пересечении нескольких линий фазовых
переходов.
Равенство (36,2) означает, что, как правило, коэффициент Аг(р, Т)
при переходе точки р, Т через линию фазовых переходов изменяет
свой знак. По ту сторону линии, где Ах > 0, все коэффициенты
Cjk = 0 (/ ф 0) и плотность р имеет ту же симметрию, что
плотность р0 в точке pQi Г0. По другую сторону линии фазовых
переходов плотность имеет следующий вид:
p(r) = Po(r) + Sc1Jfc<pi*)(r),
к
где функции cpW (r) преобразуются по некоторому неприводимому
вещественному представлению T = Tt или физически-неприводимому
представлению Т = х1-г-х*.
В дальнейшем для краткости мы будем опускать индекс 1 так, что
*i = *> Clk = Cki cp(fe) = cpft.
Группа симметрии кристалла после фазового перехода G' есть
подгруппа G, состоящая из тех ее элементов, которые не изме-
§ 36]
ПОСТАНОВКА ЗАДАЧИ
115
няют плотность р. Для того чтобы найти группу G', необходимо
знать коэффициенты Ск. Между тем не все наборы значений
возможны для коэффициентов Cft, так как не каждый возможный набор
значений обращает в минимум термодинамический потенциал.
Рассмотрим этот вопрос более подробно.
Термодинамический потенциал Ф имеет с точностью до членов
пятого порядка следующий вид:
Ф = Ф0 + Ф2(С,; р, Г) + Ф4(С,; р, П
где Ф0 не зависит от Q, Ф2 — полином второй степени относительно
коэффициентов Cit Ф4 — полином четвертой степени. Члены третьей
степени отсутствуют в этом разложении, так как наличие этих
членов приводит к сдвигу точки фазового перехода.
Функции ср^ можно считать вещественными, так как каждое
физически-неприводимое представление вещественно. Поэтому они
образуют базис, который контравариантен самому себе. Как уже
говорилось, можно считать, что под действием элементов группы G
преобразуются не функции cpif а коэффициенты С{. Эти
коэффициенты также образуют контравариантный самому себе базис.
Поэтому единственный квадратичный инвариант имеет следующий
вид:
«MCi! А Т)=А2(р, Т)2 С\
(коэффициенты Q вещественны). На симметрию функции р влияют
только отношения коэффициентов Q. Поэтому мы будем считать»
что коэффициенты нормированы:
При такой нормировке изменение потенциала Ф связано в
рассматриваемом приближении только с членами четвертой степени. Эти
члены представляют собой некоторую линейную комбинацию
инвариантов четвертой степени. Поэтому для определения возможных
значений коэффициентов Q следует найти все инварианты четвертой
степени, которые можно построить из коэффициентов С*.
Покажем теперь, что далеко не всякое представление может быть
ответственно за понижение симметрии кристалла при фазовом
переходе второго рода.
Прежде всего необходимо, чтобы в разложении Ф отсутствовали
члены третьей степени относительно С^. Для того чтобы разложение
термодинамического потенциала не содержало членов третьей
степени, необходимо, вообще говоря, чтобы из них нельзя было
составить инвариант. В терминах теории представлений это означает»
что представление [Т]3 не содержит единичного представления.
Далее, если в выражении для плотности заменить коэффициенты Ск
некоторыми медленно меняющимися функциями координат, то
плотность р не будет соответствовать кристаллу, так как она потеряет-
116 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
свойство периодичности. Из устойчивости кристаллического
состояния следует, что термодинамический потенциал всего кристалла,
рассматриваемый как функция от производных -^ (/=1, 2, 3),
принимает наименьшее значение, когда все производные -^ равны
нулю. Для этого необходимо, чтобы интеграл от Ф по объему
кристалла не содержал слагаемых, линейно зависящих от
производных -з— • Заметим что, если представить Ф в виде
кЛ
+ 1^гг(р.Т)[Скд-^-Ск^] +
к,к',1
+ 2w.r,[c,l^+c,.g+....
ft,»', г
то после интегрирования получим:
f<t>dV = f<Z0(j>,t,C)dV-\-
k,k',l
Так как термодинамический потенциал всего красталла инвариантен
относительно всевозможных преобразований координат, то в правой
части последнего равенства могут стоять только те слагаемые,
которые инвариантны относительно всех элементов группы G. Таким
образом, для возможности фазового перехода, связанного с
представлением Т, необходимо, чтобы в линейной оболочке выражений
вида
Скд-^-Ск,Щ (/=1, 2, 3; Л, А'=1, 2, ...,*)
не было ни одного инварианта. Это означает, что
антисимметрический квадрат {Т}2 не должен содержать ни одного неприводимого
представления, которое входило бы в векторное представление
группы G.
Полученные два условия весьма сужают совокупность возможных
изменений симметрии при фазовых переходах второго рода. В
следующем параграфе производится подробный анализ этих условий.
§37]
АКТИВНЫЕ ПРЕДСТАВЛЕНИЯ
117
§ 37, Активные представления
В предыдущем параграфе было показано, что изменение
симметрии кристалла при фазовых переходах второго рода может быть
связано только с теми неприводимыми вещественными
представлениями Т = х и теми физически-неприводимыми представлениями
I = т-+-**, которые удовлетворяют двум условиям:
1) {Т}2 не имеет с векторным представлением ни одного общего
представления,
2) [Т]3 не содержит единичного представления.
Такие представления мы будем называть активными.
Представления, не удовлетворяющие хотя бы одному из условий 1), 2), назовем
пассивными.
Выясним, как узнать, удовлетворяет ли данное представление
условию 1).
Напомним, как строится базис, преобразующийся по
неприводимому представлению х группы О.
Пусть kx — один из / векторов звезды К представления х,
a Gx— группа этого вектора. Обозначим через
*ш *i2> •• •> els, (37,1)
те базисные векторы, которые при трансляциях ta£G умножаются
на eikia. Линейная оболочка этих векторов Lx инвариантна
относительно всех операторов х (gi)(gi£ Ох). Представление t(14g*i)(g*i€ Oi)
группы Gv по которому преобразуется пространство Lv является
неприводимым.
Как известно, каждый вектор звезды К можно получить из
вектора kv действуя на kx тем или иным элементом группы G. Выберем;
произвольно /— 1 элементов группы G
gl2> gl3> • • • » Sll
таким образом, чтобы
giA = *i (./ = 2, з, .... /)•
Если положить
*teij)eim = ejm (У = 2, 3, ..., /; т=1, 2, . .., $), (37,2)
то совокупность I векторов ejm и образует базис представления х.
Если представление х вещественно, то среди векторов звезды К
найдется вектор, скажем £2> эквивалентный вектору — k{i
(т. е. к2 = — kx-\-b, где Ъ — один из векторов обратной решетки).
Ясно, что у векторов kx и k2 одна и та же группа симметрии G1 = G2,
Рассмотрим теперь представление {х}2. Базис пространства,
преобразующегося по этому представлению, состоит из векторов
CjmGj'm' ev'm'Gjm>
118
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VII
где Cjm—базис, однотипный базису ejm. Звезда К2
представления {х}2 состоит из всевозможных векторов вида kj-\-ky (kj и
ky—векторы звезды К представления х). Если среди этих векторов нет
нуль-вектора, то представление {х}2 заведомо не имеет общих
представлений с векторным представлением, так как звезда
последнего содержит только нуль-вектор. Таким образом, вопрос о
выполнении условия 1) остается открытым только для тех представлений х,
звезды которых содержат наряду с каждым вектором kj и вектор kjit
эквивалентный вектору — ky Если х— такое представление, то
звезда /С2 представления {х}2 распадается на две звезды. Одна из
них содержит только нуль-вектор, другая — все остальные векторы.
В соответствии с этим представление {х}2 распадается на два
представления Т0 и Тх, причем только Т0 может иметь общие
представления с векторным представлением группы G.
Базис представления Т0 состоит из векторов
Pjmm' = ejma3\m' — ej1m^jm U ^C Л)> (37,3)
где jx— номер того вектора звезды К, который эквивалентен
вектору— ky Если каждый вектор kj эквивалентен вектору — ky то
j = j\ и индекс j пробегает в (37,3) I значений; если же Ь$ф — ky
то ]ф}х и индекс j пробегает только -~ I значений.
Для того чтобы представление Т0 имело хотя бы одно общее
представление с векторным представлением, необходимо и
достаточно, чтобы сумма
5 = W 2 Хо (g) У (?) (S = tJ€ О) (37,4)
(Хо и У — характеры представления Т0 и векторного представления V,
N— порядок группы F) была положительна.
Обозначим через Xojig) вклад в выражение для характера Xo(g)>
который вносится базисными векторами Pjmm'U—фиксировано).
Можно написать:
Хо(в)= 2 Xojig)-
j < h
Подставляя эту сумму в (37,4), мы получим:
s=7s 2 2 xoj(g)V(g) (g=tjeo).
KJxfZF
Так как все векторы kj звезды К совершенно равноправны, то все
слагаемые, стоящие под знаком внешней суммы, равны друг другу.
Поэтому
5 ~ 2 Xoi (g) V (8) (g = '«/€ О)- (37,5)
fZP
§ 37] АКТИВНЫЕ ПРЕДСТАВЛЕНИЯ 119
Если элемент g переводит вектор kx в вектор gku не
эквивалентный ни вектору kv ни вектору — kv то Xoi(g) = ®- Поэтому
в (37,5) остаются только элементы g^Gx и элементы g,
переводящие вектор кх в вектор — kv
S~ 2 Xoi(g)V(g) (g=tJ£G). (37,6)
fkx = ±hl
Рассмотрим отдельно два случая.
1. Пусть — kx = kv В этом случае суммирование в (37,6)
производится по элементам группы дг
S = J? Szoife)^(?)i
а базисные векторы р\шт/ имеют следующий вид:
Pimm' = Cim^lm' — £lw'°lm-
Ясно, что Xox(g) является в этом случае характером
представления {т(х)}2 группы Gv Поэтому
Xoi(g-) = 4{tX(1)(^)]2-Z(1)(^)}
И
S = ml£ {^(gW-X^ig^Vig) (* = *■/£ d). (37,7)
2. Пусть — ki^kz. В этом случае сумму (37,6) можно переписать
в виде
5 = ^2 bi <*>V & + Xoi (gi2g) V (Й2в)}, (37,8)
где g = t*f£G1, g12k1 = k2.
Векторы pimm/ записываются так:
plmW = £lma2m' — e2m'°\m-
Для вычисления Xoiig) и Xoi(g"i2g") наД° выяснить, как
преобразуются базисные векторы pimw под действием элементов g и gi%g-
Имеем:
* (g") *im = ^m (g) в1л, T (gl2g) в1ш = ч(пт (g) Чп,
** (g) *2т' = * (ggu) еШ' = * (g«) * (gUggu) *1W = *$т' iguggu) *2п'»
* (gl2g) *2m/ = * (guggiz) C\m' = *{п'т' (gnggn) *ln'-
Отсюда следует, что
* (g) Pimm' = 4m (g") 4'т' GriVggtt) Plnn',
* (S"l2g*) Pliw»/ = — 4т (g) 4^m/ (guggto) Plu'n-
120 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
Теперь легко вычислить Xoiig) и Xoiteizg")'-
7.01 (?) = *%т (?) ^/«х (ёиёёи) = Х(1) (?) X(1) (g^ggi*)'
Z01 (?12?) = — ^m (£) TWW/ (g12ggi2> = — X(1) (gl2ggl2g)-
Подставляя эти выражения в сумму (37,8), мы получим:
5 = w 2 {х^^Ч?^1?^
tei2*i=—*i, g^o, g = tj£(ii). (37,9)
Если представление т вещественно и—кх = къ то базисные
векторы е2т преобразуются по представлению ъ(2\
комплексно-сопряженному представлению tW. Так как
то в этом случае у}1) (g^gg^) = Х*Х) (?) и сумма (37,9) принимает
следующий вид:
5=2^S {h/(1)(?)l2^^)-X(1)(?i2?^2^)V^12^)}. (37,10)
Итак, для того чтобы неприводимое представление т
удовлетворяло условию 1), необходимо и достаточно, чтобы равнялась нулю
сумма (37,7), если — kt==ku или сумма (37,9), если—kx=k2*
Если представление т вещественно, то в этом критерии можно
заменить сумму (37,9) суммой (37,10). Если звезда представления z
не содержит вектора, эквивалентного вектору—ku то
представление заведомо удовлетворяет условию 1).
Теперь нетрудно выяснить, когда физически-неприводимое
представление Т = ъ-\- ъ* удовлетворяет условию 1).
Согласно задаче I § 25 представление {Tj2 равно сумме трех
представлений:
Для того чтобы {Т}2 не имело общих представлений с
векторным представлением, необходимо и достаточно, следовательно, чтобы
каждое на трех представлений {т}2, {V}2 и т X ъ* обладало этим же
свойством.
Рассмотрим представление тХ^* группы G. Согласно задаче III § 21
у него и у векторного представления V имеются общие
представления лишь при условии, что т содержится в т X V. Звезда
представления т X V такая же, как и у представления т. Поэтому
достаточно рассмотреть малые представления группы вектора ku связанные
с представлениями т X V и т. Если t^^^XV, то x^XV, и
наоборот. Согласно той же задаче соотношение т^ £ т^1) X V озна-
с 37] АКТИВНЫЕ ПРЕДСТАВЛЕНИЯ 121
чает, что у представлений tW X ^(1)* и V имеется по крайней мере
одно общее представление. Это в свою очередь означает, что сумма
s° = ik 2 lx(1)te)l2vfe) (^1=7^) (37'n>
положительна. Итак, необходимым и достаточным критерием
отсутствия у тХ^ и V общих представлений является равенство нулк>
суммы (37,11).
Заметим, что представление т*1) X ^1}* обязательно содержит
единичное представление группы Gv Поэтому, если группа GL
такова, что ее векторное представление содержит единичное
представление, то Т = т + т* пассивно. Перечислим те группы Gx,
векторное представление которых не содержит единичного
представления, т. е. группы, не оставляющие неподвижным ни одного вектора.
Из тридцати двух групп, характеризующих кристаллические классы,
этим свойством обладают двадцать две группы:
^sdi Csiv D3fv CQhi D6, D%hi T, Th> Td, O, Ok.
Каждая из этих групп имеет в качестве подгруппы одну из
следующих пяти групп:
Q, Д>, Sv D3, Csh. (37,12)
Поэтому представление Т = т + т* может быть активным только
при условии, что вектор кх звезды невещественного представления х
инвариантен относительно хотя бы одной из подгрупп (37,12).
В частности, представление Т = т-)-'с*!: пассивно, если все
элементы группы Gx оставляют вектор kx строго неподвижным.
Каждый вектор kt=£0, лежащий внутри зоны Бриллуэна, короче любого
эквивалентного ему вектора. Поэтому группа Gx такого вектора
оставляет его строго неподвижным и не содержит ни одной из
подгрупп (37,12). Это означает, что векторы звезды всякого активного
представления Т = т + т* достигают границы зоны Бриллуэна.
Если сумма S0 равна нулю, то следует проверить, не имеют ли
представления {т}2 и V общих представлений (аналогичная проверка
Для представления {т*}2 излишня, так как оно сопряжено
представлению {т}2, а V — вещественное представление). Иными словами,
следует проверить, удовлетворяет ли представление т условию 1).
Несколько выше мы подробно объяснили, как это делается.
В заключение приведем без доказательства два полезных правила,
относящихся к вещественным представлениям при условии, что
— к1~ k2.
1. Если среди элементов группы G имеются инверсия I или
пРЪизведение tj, а векторное представление группы Gx содержит
единичное представление, то t пассивно.
122
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VII
Из этого правила вытекает, что в случае Т = т,—k1==zk2
представление Т может быть активным только при условии, что
вектор кх инвариантен, по крайней мере относительно одной из
следующих четырех групп:
D2, 54, D3, Сш. (37,13)
В самом деле, если из тридцати двух точечных групп выделить те,
которые не содержат инверсии и не имеют среди своих подгрупп
ни одной из четырех групп (37,13), то окажется, что векторные
представления этих групп содержат единичнре представление.
2. Если векторы звезды представления ъ лежат внутри зоны
Бриллуэна и не равны нулю, то представление ъ пассивно.
Что касается условия 2), то для его выполнения достаточно,
чтобы звезда представления т не содержала ни одной тройки
векторов kj, kj't kj», сумма которых эквивалентна нулю:
Если существует одна или несколько троек таких векторов,
то следует вычислить характер уг представления, по которому
преобразуется совокупность всех элементов вида
еЭтеУт'еэ"т« (kj + kj' -f- kj" = 0),
и составить сумму
Если этъ сумма положительна, то представление Т пассивно',
если же эта сумма равна нулю — представление Т
удовлетворяет условию 2).
§ 38. Пример
Рассмотрим в качестве примера кристаллы с пространственной
группой C\h. Пользуясь результатами предыдущего параграфа, найдем все
активные представления группы C\h, а затем выясним, какие изменения
симметрии кристалла могут быть связаны с этими представлениями.
Группа С^ принадлежит тетрагональной сингонии £>4,, ее решетка
Бравэ объемноцентрированного типа Г£. Основные векторы решетки а^ а2, а3
удовлетворяют условиям (см. приложение II, таблица класса C±h):
аг = а2 = а3, а^ + а2 J. а2 + а3 J. а3 + at.
Каждый элемент группы С\^ представляет собой произведение
Трансляции tni1ai+rn,a2+rn3aAmV М2> ШЪ = °' ± !' ' ' *) На 0ДИН И3 слеДУЮЩИХ ВОСЬМИ
элементов:
е, 54, С\ Si taah, tj, taC» t£l (38,1)
где
3 11
<* = j a± + -j- a2 + j a3. (38,2)
§ 38] пример 123
Векторы аъ а2, аз преобразуются друг через друга под действием
элементов S4, Q и ah группы направлений С4^ следующим образом:
S4#l ~ — а1 — а2 — аз> ^^а2 = а& ^4а3 === #1
С4ах = — а3, С4а2 = а± + а2 + а3, С4а3 = — а2,
*ftfll = — Я* a&<*2 = — ЯЬ Сфъ = ^1 + ^2 + «3-
Векторы обратной решетки согласно (29,5) равны
Они преобразуются под действием элементов 5 , С4, С4 и аЛ
следующим образом:
$4^1 = — ^2> S462 = 63 — ^2> $4^3 = 61 — #2,
C4^i = &! — 63, С4^2 = 5i, С463 "= Ь± — Ь2;
вл^1 = #з — #2» ал&2 = #з — bi, a^3 = 63. (38,33
Найдем звезды возможных активных представлений. Начнем со звезд,
у которых каждый вектор kj эквивалентен вектору — kj. Из условия
kj = — kj следует, что 2fy=0, т. е. с точностью до эквивалентности kj
принимает одно из следующих восьми значений:
"2 ьь у ^2» -g" ^з» у (&1 + &*)» у (Pi + &з)>
С помощью соотношений (38,3) легко находим, что вектор ~<гЬ\ не
изменяется (существенно) только при инверсии. Это») означает, что точечная
группа G^ вектора -^ Ъ± есть Q = /. Действуя поочередно на вектор -^ Ь±
восемью элементами (38,1), мы получим звезду Кь состоящую из четырех
векторов:
*i1>=sJ*ci) = 4(*l + *8). b\~cf
Вектор -с?Ъъ не изменяется при инверсии, повороте С\ и отражении
в плоскости ah. Это означает, что точечная группа этого вектора есть С2&.
Звезда /(2, содержащая вектор -^ #3, состоит из двух векторов:
124 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VIr
Вектор -у (&! + &2 + Ьг) инвариантен относительно всех элементов
группы G. Поэтому он сам по себе образует звезду /С3;
A(3) = |(6i + 62 + &8) (Gi3) = Qft).
То же относится и к вектору t№ = 0.
Теперь займемся векторами k. ф—&.. Так как группа C\h содержит
инверсию, то согласно предыдущему параграфу вектор kj ф — kj звезды
активного представления должен быть инвариантен относительно хотя бы
одной из групп (37,13): D2, S4, D& С3&- Из этих четырех групп только 54
содержится в С^ъ,- Поэтому нам остается найти векторы, инвариантные
относительно зеркального поворота S4.
Представим искомый вектор в виде
k = fi-i^i + ц2&2 + Рз&з-
Так как вектор k определен с точностью до произвольного вектора
обратной решетки, то без ограничения общности можно положить:
— -J < Pi> V-* Рз> <"2" • (38'4>
Согласно (38,3) вектор S4& равен
S4& = Н-8^1 — (Н-1 + Р2 + Н-8> &2 + Р2&3-
Разность
й _ s4fc = <н-± — fx3) &х + (^ + 2fx2 4- fig) ь2 4- (fx3 — fi2) b3
должна быть равна одному из векторов обратной решетки. Это означает,
что числа fxt — fx3, ^ 4-zja2 + Рз» Рз— Рз являются целыми. Принимая
во внимание условие (38,4), мы заключаем, что \х± = {л3, fx3 = jjl2 и 4^ = — 1,
0, 1, 2. Таким образом, получаются четыре решения:
a) Pi = р2 = Рз = т , б) р! = р2
в) р! = pa = р3 == 0, г) р.х = р2
Решения в) и г) приводят к уже найденным векторам k^ и k^\
Оставшиеся решения дают нам два вектора:
М5) = | <*1 + *>2 + »3)> 45) = - *i5).
образующих неприводимую звезду Ку Точечная группа G^ вектора kf*
есть S4. Перечислим теперь все неприводимые представления, имеющие
одну из найденных пяти звезд. С этой целью найдем нагруженные
представления точечных групп
Uf> = C, <5Р-Сда 6?>-C№ Й^С4,и^>==5,
Звезда {Л^, 40' 41}» 4^}• Точечная группа G[{) = С- вектора k[l>
содержит два элемента. Поэтому набор ее нагруженных представлений
= ^ = -7.
1
= Рз = -J >
3 38]
ПРИМЕР
125
исчерпывается двумя одномерными представлениями. Для того чтобы их
найти, вычислим нагрузку ф (/, /). Имеем:
ф(/, /) = * V ! ! ' = /.
Отсюда следует, что х (/) х (/) == /х (/2) = /, и мы получаем два
нагруженных представления точечной группы 6^ вектора k^ (см. табл. 11).
Звезда \k{?\ k^}. Точечная группа С?(2)
- ■ [ 1 г l J * Таблица 11
Нагруженные
представления группы G^
ky есть С2.. Она состоит из четырех
элементов и поэтому имеет либо четыре
одномерных нагруженных представления, либо одно
двумерное. Вычислим нагрузку ф (/гь /г2)
{hih2 € Сы). Для этого заметим, что
Г1А(2)_А(2) = _6з> а-1*(2)_Л(2) = 0,
Поэтому
«I» (/, /) = + (/, ад) = * (С|, аЛ) = в"26°<" = -1.
Все остальные значения ф равны единице.
Из тождества
* Ы* (Л = х Ы) = х (/аЛ) = - хЛ (/) х (вЛ)
следует, что одномерные представления отсутствуют. Группа
-единственное неприводимое представление, которое мы обозначим через т^
Размерность х^ равна двум.
Если х^ рассматривать как представление подгруппы С
является обычным представлением. При естественном выборе базиса матрица
оператора х^ совпадает с одной из следующих трех матриц:
iff
е
1
1
/
%г
-е~\
-2h
U — J' U 1/' V 0 — l)"
Последние две матрицы следует отбросить, так как они коммутируют
со всеми матрицами. Поэтому
П 0\
1&
("*> =
О — 1
А/-1Ч /а В\
Обозначим х^' (/) = ( ] и воспользуемся тождеством
H"<W(/>—4V>4'V»)-
Л1ы получим;
или
V—Т — */ \—т */'
т. е. ос = 0, 5 = 0. Так как, кроме того, [х^(/)]2 = —£, то
/0 р\/0 Р\ /Рт 0ч=_х1 0ч
\т оЛт о; Vo pT; \о i)>
126
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VII
т. е. ру = — 1. Без ограничения общности можно положить р = 1, y =— !•
Итак,
Теперь легко вычислить матрицу
Собирая полученные таким образом операторы, составим таблицу
/ ол С\
#><А)
О Ul) (J_!) О
Звезда {k3}. Для нахождения нагруженных представлений точечной
группы С\ = Сш предварительно вычислим величину ег 'Л~ к к ' *' (см.
табл. 12).
Таблица 12
Вычисление ^(A-W-^U
h
Л-1^(3)_Л(3)
^(ft-W-^U)
е
0
1
s,
-2»!
— 1
С2
°4
-2бз
1
sl
-2Й2
— 1
аь
Ьъ-Ъ^-Ьъ
— 1
/
-Ъ^-Ъъ-Ьъ
— 1
Q
-#1+&2-&з
1
С3
4
Ьх-ь^-ьА
1
Числа, стоящие в последней строке этой таблицы, показывают, что
нагрузка <|/ (/гх, /г2) равна — 1, если hx = S^ Sj, ад, f и k2 = С4, С4, а^, Л
Для всех остальных пар элементов нагрузка равна единице.
Из сопоставления двух равенств
^> (/) *?> (С4) = -Ч1' CQ. Н!) (Сд) t|!> (/) = t (/C4) (38,5>
следует, что у группы С4^ нет одномерных представлений с
рассматриваемой нагрузкой. Поэтому группа С4Л имеет два двумерных представления.
Пусть х — одно из этих представлений. Если рассматривать его как
представление подгруппы С4, то оно вырождается в обычное представление
и поэтому может быть разложено на одномерные представления группы С4
(см. табл. 13).
Оператор ^(Cf\ коммутирует со всеми операторами т (ti)(h£CJi). Это
означает, что он кратен единичному оператору. Поэтому имеется две
возможности:
1) Чс*)вС i)» при этом *(С*)==(о -i):
2) 4CD = (~l _i). при этом Ц^)^ _°).
§ 38]
ПРИМЕР
127
Теперь нетрудно найти оператор х (/). Из (38,5) следует, что х (/) т (С4) =
д- ___ х (С4) х (/). Подставляя сюда хЛ(/) = ( J э получим:
/« — Р\ / а р\ Таблица 13
Тф е. а = О, Ь == 0. Равенство
х (/) х (/) = — х (е) показывает, что
pY = — 1. Без ограничения общности
мы можем положить р = у = /. Итак,
0 Л
Неприводимые представления
группы С4
i«-a
Умножая оператор х (/) на ранее
найденные операторы, получим два
двумерных представления (см. табл.
14).
1 Q
ч
ч
1 ^з
Ч |
е
1
1
1
1
^
1
— 1
/
— /
С2
°4
1
1
— 1
— 1
с\
— 1 j
— /
Таблица 14
Нагруженные представления группы д(3*
Звезда {кФ = 0}. Нагруженные представления группы C±h совпадают
с обычными представлениями, так как k^ = 0. Поэтому группа имеет
восемь неприводимых представлений (см. табл. 15).
Звезда \k^\ £^}. Как видно из (38,1), элементы точечной группы S4
содержатся в C\h. Поэтому нагрузка ф равна единице, и нагруженные
представления вырождаются в обычные представления группы S4. Приведем
для удобства таблицу этих представлений (см. табл. 16).
Итак, мы обнаружили семнадцать неприводимых представлений:
4b Чъ х2> х31> х3^ х41> х42> х43> х44> х45> х46> х47> X4S; х51> х52> х53> х54-
Выясним, какие из этих представлений вещественны, и объединим попарна
комплексно-сопряженные представления.
Прежде всего ясно, что представления
х41> Х42> Х43> Х44
вещественны, а представления х45, х47 и х46, х^ попарно объединяются в
физически-неприводимые представления
х45 + х47> х46 + х48- ,
Для того чтобы исследовать остальные представления, выпишем матрицы
соответствующих им малых представлений (см. табл. 17).
128
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VII
of)
X(D
Х11
г(1)
х12
Таблица 15
Неприводимые представления группы C±h
Чх
42
Чз
Ч*
Чъ
Чб
4i
х48
е
S,
— 1
С2
°4
— 1
SJ
— 1
X
— 1
/
— 1
с,
— 1
г3
— /
Таблица 16
Неприводимые представления
группы 54
HV
*а
Х53
х(1)
Х54
е
1
1
1
1
*4
1
— 1
/
— /
С2
°4
1
1
— 1
— 1
S3
4
1
— 1
— /
/
Таблица 17
Неприводимые представления групп векторов
k[l\ kf\ k*\ kf
tj
1 —1
1 1
of)
Ф
e
C)
tJ ten cl
а з a J) с d
Gf)
X51
X(D
X52
x(l)
X53
x^
X54
£
1
1
1
1
*4
1
— 1
/
— /
r2
c4
1
1
— 1
— 1
sl
1
— 1
— /
/
§ 38]
пример 129
Продолжение табл. 17
<?Р>
S,
С2
а Л
t I t С,
а а 4
* С3
"°31
gx.?3( : dl: ас: йог; °)г::)
Из приведенных таблиц сразу видно, что представления тп, т12 и t32
являются вещественными. Действительно, в этих представлениях
вещественные матрицы соответствуют всем поворотным элементам и всем трансляциям.
Воспользуемся теперь критерием вещественности представлений
пространственных групп (см. § 30). Применим его к представлениям x5i, ~52>
x53i *Г)4. Из восьми элементов группы направлений четыре элемента: /, ah,
С4, С\ — переводят вектор kf^ в —kf\ Квадраты соответствующих
элементов пространственной группы tj, t^n, tJOit tjO\ равны е, taj+ ,
t C2 t ' C2
Составим таблицу характеров этих элементов в малом представлении
(см. табл. 18).
Таблица 18
Характеры малых представлений
y(l) yd) yd) И yd)
Л51' Хб2» *53 и Л54»
yd) 7(1)
е
1
1
«!+««
— 1
— 1
t С2
1
t С2\
— i
i
Мы видим, что сумма характеров у каждого из четырех представлений равна
нулю. Это означает, что ни одно из представлений не эквивалентно своему
сопряженному. Для того чтобы получить физически-неприводимые
представления, следует попарно объединить комплексно-сопряженные
представления
т51 + *53> х52 + х54-
Применяя этот же критерий к представлениям т2 и т81, убеждаемся в том,
что они вещественны.
Таким образом, мы получили четыре физически-неприводимых
представления и девять неприводимых вещественных представлений:
Х11> Чь Чу т31> Чъ т41> т42> ^43» *44> т45 + х47> т46 + т48'> ^51 + т53> *52 + ^54-
Выясним, какие из этих представлений являются активными. Ясно, что
представления со звездами Кь Къ> Кг и Кь удовлетворяют условию 2), так
как никакая тройка векторов, входящих в любую из этих звезд, не дает
сунму, эквивалентную нулю. Что касается представлений с нулевой звездой,
то т41 не удовлетворяют условию 2), а остальные семь представлений
удовлетворяют этому условию.
130 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VI
I
Рассмотрим теперь условие 1). Начнем с представления xtl. Так как это»
представление вещественно и вектор k\ эквивалентен вектору — k\% то
следует пользоваться" критерием (37,7). В данном случае под знаком суммы стоят
два слагаемых, соответствующих элементам е и S4, / = 4, N = 8. Значения
характеров У$ (е)9 XiV(«54) и In {^1) берем из таблицы 11 и убеждаемся,,
что сумма (37,7) равна нулю. Это означает, что представление ти активно.
Таким же образом находим, что и представление т12 активно.
Рассмотрим представление т2. Оно вещественно, векторы kf^ и —kf^
эквивалентны. Поэтому следует пользоваться критерием (37,7). Замечая, что<
('/)'=*> СлГ='«,+«, . <38>6>
и пользуясь таблицей 11, легко находим, что сумма (37,7) равна двум и,,
следовательно, представление т2 пассивно. *
Совершенно так же убеждаемся в том, что представление т31 пассивно,,
а т32 активно. При подсчете суммы (37,7) полезно иметь в виду
соотношения (38,6) и
Что касается представлений т42, т43 и z^, то они активны. В самом деле*
они одномерны, а из одномерного представления, очевидно, нельзя построить
антисимметрический квадрат.
Представление т45 + *47 активно. В самом деле произведение т45 X Чт
есть единичное представление и не содержится в векторном представлении,
группы C\ht Поэтому нужно лишь проверить, что представление т4б
удовлетворяет условию 1). С этой целью вычисляем сумму (37,7) и убеждаемся
в том, что она равна нулю.
Таким же способом находим, что и представление t46-(-t48 активно.
Рассмотрим, наконец, представления т51 + тГ)з и т52 + х54. Проверим,
удовлетворяет ли представление т условию 1). Так как k^ ф — kf\ то теперь
следует пользоваться критерием (37,9). В качестве элемента g12 можно
взять tj.
Вычисление суммы (37,9) можно расположить в виде таблицы (см-
табл. 19).
Таблица 19
Вычисление суммы (37,9)
g
*£?<*>
gnSSu
ШЫее*)
g^ggllg
4V (SnggvS)
V(g) = -V(gi2g)
е
1
е
1
е
1
3
6
s,
1
/ 5
— /
/ С2
— /
— 1
2/
С2
°4
1
t С2
М 1 ь4
— 1
ta1 + a3
— 1
— 1
2
°4
1
t S3
/
t С2
i
— \
— 2i
§ 38] пример 131
В последней строке стоит вклад элемента g в сумму (37,9). Легко
видеть, что эта сумма положительна. Это означает, что представление т51,
а вместе с ним и представление т51 -f- -Cpg, пассивно.
Совершенно так же убеждаемся в том, что представление т52 + ~?4 пас"
сивно.
Итак, у группы С^ есть восемь активных представлений:
^11» ~П> т3?5 V' х43> х44> х45 + х47> х46 + т43-
Выясним какие изменения симметрии кристалла связаны с этими
представлениями.
Начнем с одномерных представлений:
х42> т43> х44>
имеющих нулевую звезду. В результате фазового перехода второго рода
плотность р принимает следующий вид:
Р = Го + ci<Pi (г),
где функция <fi (г) преобразуется по одному из этих представлений. Так
как № = 0, то при всех трансляциях функция yt не изменяется. Это
означает, что все трансляции группы С4Й входят в группу G' симметрии
кристалла после фазового перехода. Объем элементарной ячейки решетки Бравэ
при этом не изменяется. Что касается поворотных элементов, то при
фазовых переходах, связанных с представлением т4«, функция ^ не изменяется
под действием элементов £аС4, С4, taC\ и изменяет свой знак под действием
элементов S4, S\, t^g и tj. Это означает, что группа симметрии G'
состоит из всех трансляций tma +W2aa+Wa. и их произведений на элементы
^аС4, С4, taC 4.
Группа G' принадлежит, таким образов, классу С4, который содержится
в сингонии Dtl. Тип группы G' есть Г£. Согласно таблице групп класса С
/в
(см. приложение IV) G = С4.
Итак, представление т42 свйзано с переходом
Таким же образом находим переходы, связанные с представлениями т4Я и
<ч*-<&(* = *„> Cth-+Sl(T=*u).
Обратимся к двумерным представлениям t45-|-t47 и t^-ft^. В
результате фазового перехода, связанного с представлением т45 -f ^47 функция р
приобретает следующий вид:
Р = Ро + с±п + с<яъ
где (f1 преобразуется по представлению т45, а <р2 преобразуется по
сопряженному представлению. Так как плотность р принимает только веществен-
. ные значения, то ct = с% и срх = <р2. Согласно таблице 15 сумма
cin + ЪЪ = 2 Re сгу t
132 ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
не изменяется под действием элемента t^h и изменяет свой знак под
действием элемента С\. Поэтому элемент t^a, входит в группу G', a элемент С\
не входит. Рассмотрим элемент £аС4. Под его действием сумма переходит в
fci?i — tetf% = —2 Im C±n-
Если предположить, что Re Ci'fi = — Im Ci?i, то получится, что функция срх
только постоянным множителем отличается от вещественной функции. Это,
однако, невозможно, так как представление т45 невещественно. Таким
образом, элемент £аС4 не содержится в группе G'. Группа G' принадлежит
поэтому классу Cs = ал. С помощью таблиц пространственных групп
определяем, что G' = С\.
Итак, представление т45 -\-т47 связано с переходом
<ч*-С* (Т=т46 + т4?).
Таким же образом находим, что представление t4e + 'C4S связано с
переходом
Cth+Sl (Т=т46 + т48).
Рассмотрим теперь двумерное представление т32. Плотность р после
фазового перехода принимает такой вид:
Р = Ро + ctft + с2<р2>
причем функции <рх и ?2 преобразуются по представлению т32. При
трансляция* tmlai+nhai+ma3 каждая из этих функций умножается на
Если сумма т± -\- т2 + ^з является четным числом, то плотность р не
изменится. Поэтому группа Gf содержит все трансляции вида
'тл+иыш- т3«3 i"h + т2 + Щ = 0, ±: 2, ± 4, ± 6, ...).
В качестве основных векторов" подгруппы трансляций можно выбрать
три взаимно-перпендикулярных вектора
а'г=а2+ав, а2=аг+аг9 а'3 = а1 + а2(а[= а2, а3'|С4).
Объем ячейки, построенной на этих векторах, вдвое больше объема ячейки
до фазового перехода.
Найдем теперь поворотные элементы группы G'. Для этого, как было
показано в предыдущем параграфе, следует построить из коэффициентов с$
все линейно независимые инварианты четвертой степени.
, В качестве первого шага разложим представление [т32р на
неприводимые представления.
Звезда представления [%>]2 состоит из одного вектора 2k^\
эквивалентного нулю. Поэтому [т3«>]2 можно рассматривать как представление группы
направлений F. Характер этого представления легко посчитать, пользуясь
формулой (25,12). Так, например,
хыг Сл) = Т& Ы + т *« ((W) =
~UT2 /-32 Va. + aJ — е = *•
§ 38] пример 133
Вычисляя таким образом характеры остальных поворотных элементов и
отождествляя их с элементами группы направлений Qft, получим следующую
таблицу:
cih
X[*„,]»
е S, С\ Si <h I С, с\
3—13—11111
Мы видим, что
[Ч<№ = 41 + 42 + х43-
Линейные комбинации функций yj, cpacp2, ср|, преобразующиеся по этим
представлениям, можно найти с помощью оператора (26,8). Простой подсчет
приводит к выражениям
¥? — ч1 ?? + ?2> ЬЪ
Таким же образом, очевидно, преобразуются и величины
с\ с2> С1 ~Г" с2> с1с2*
Так как представления т41, т42 и т43 вещественны и унитарны, то
квадраты этих величин инвариантны
[с\ — cff = inv, (c\ + С2)2 = inv, c\cl = inv.
Легко видеть, что третий инвариант линейно выражается через первые
два. Поэтому общий вид функции Ф4 таков:
Ф 5 = Bl (РЛ (с? + 4? + В, (Р, IT) {с\ - elf.
Нам нужно найти минимум этого выражения при условии с1+с2==^ Ясно,
что при £2(/?, Г)> О этот минимум достигается, если
с± = ± с2.
Если же В2 (р> 7)< 0, то минимум достигается при
с± = О или с2 = 0.
Если В2 (/?, 74) = 0, то для определения ct и с2 необходимо рассмотреть члены
более высокой степени в разложении термодинамического потенциала. Мы
не будем рассматривать этот случай, так как его можно считать практически
невозможным.
Если cj = с«, то р = Ро + ^i (?1 + Ъ)- Сумма yt -f- 92 под действием
элементов группы С\п преобразуется следующим образом (см. таблицу
представления т32 на стр. 129):
s, с\ si *„«д tj tact ф(
3
a^4
T32 (g) (П + <f2) j — Ъ + Чг-П — Ъ Ъ—П — Ъ — 9i ¥* + ?i ¥1 — Ъ — П + Ъ
Мы видим, что сумма срх -)- ср2 остается инвариантной при операциях
с С?
134 ФАЗЭВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА [ГЛ. VII
Группа (У принадлежит в рассматриваемом случае классу С2&- Она имеет
плоскость скольжения, ее решетка не центрирована. Эти свойства
однозначно определяют G' как группу C\h.
Таким же образом находим, что и при с^ = — с^ группа Gr совпадает
Если Сц = 0, то плотность р инвариантна относительно операций ta C\,
/а+аС4 и ta€\. Группа G' в этом случае равна С\. Такой же результат
получается и в случае с2 = 0.
Итак, с представлением т32 могут быть связаны следующие фазовые
переходы:
сш "-* C2h> c*h -* Q (т = хз2)*
Рассмотрим, наконец, представления zn и т12. Прежде всего выч'ислим ма-
трицы, соответствующие элементам C\h в этих представлениях. Исходя из
тождеств
4 1 — 2 * 4 1 — КЪ * 4 1 — 4 »
положим:
Введем далее обозначения:
* (gn) *i = e2, -с (^1з) *i = % * (£u) *i = ei (* = Tib xu)»
где ^i — вектор, преобразующийся по представлению t^K Найдем матрицу
элемента S4 в базисе е^ еъ е6) е^ Имеем:
т (S4) e, = ev т (S4) е2 = t (S4) x (S4) «г = x (CJ) e, = *,,
* (5J *з = ' (5<)* (CD«i = T (5D «x = «4. ' (S4) *4 = x (SJ t (Sj) *, = ev
Итак,
/0 0 10,
,сч .100°
0 0 0 1
lo i о o/
(38,7)
Матрица элемента £a/ находится несколько сложней. Имея в виду
тождество /&2==&2, вычислим произведение
4
Полученное равенство можно переписать в виде
Теперь легко вычислить вектор ~ (tj) £2
*{tj) в2 = X (gn) Т (t-a,) -С (tj) Т-1 (g12) £2 = Т (£i2) -С (г?-аО * (*«,/) *1 = 3= *2-
§ 38]
ПРИМЕР
135
Подсчитывая таким же методом векторы х (tj) ^Зит (tj) eA, находим матрицу,
соответствующую элементу tj\
*(/«/) =±
N'u. ^12)
(38,8)
{верхний знак берется для представления хи, нижний — для
представления Х12).
Комбинируя (38,7) и (38,8), получим все остальные матрицы
представлений хи и х12:
/0001
0 0 10
^(ta4) = ±
(т = xllf х12).
(38,9)
Плотность р после перехода, связанного с одним из этих представлений
имеет следующий вид:
Р = Ро = Cl<f 1 + С2ср2 4" СзУз + С4?4»
причем функции ylf cp2, ср3 и <р4 принимают Голько вещественные значения.
Так как функция р вещественна, то вещественны и коэффициенты С\9 с2, с3, с*.
Выясним, какие наборы значений возможны для коэффициентов с19 с2,
<з» с4. С этой целью найдем все инварианты четвертой степени, которые
можно построить из cv c2, с3, с4. В качестве первого шага рассмотрим
представление [х]2.
Базис этого представления состоит из двенадцати функций:
w2.№ 0 = 42)> wa (* = *(3))
<в скобках указан вектор Л, характеризующий представление подгруппы
трансляций, по которому преобразуются базисные функции). Мы видим, что
звезда представления [х]2 состоит из трех звезд К& звезды /С2 и звезды К%>
Проанализируем представления, связанные с этими звездами.
136
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VI!
Звезда Ка- Зная представление т (см. (38,7)—(38,9), легко определить
2222
матрицы, по которым преобразуются функции <рр ср2, ср3, <р4.
T*(S4) =
т4 (**/) =
Выпишем характеры представления Т4
I e S,
С\ Si t„a
«"h tJ *cA *£\
/4 4 0 0 0 0 4 0 0
и разложим, используя формулу (20,3), Т4 на неприводимые представления:
Т4 = х41 + х43 + х46 + т48-
С помощью оператора (26,8) легко найти линейные комбинации
<Р2 + ?1+J1 + ?1 ?1—^1—?1 + ^ ??— ^2+^i —^ *1+'*2-'*8 + *4
преобразующиеся соответственно по представлениям т41, т43, т46 и т^. Мы
получаем, таким образом, три инварианта четвертой степени:
(<Я+4+ч1+?1У, (??-^-?!+?i)2. W-flf+W-tiY-
Аналогичные выражения, составленные из коэффициентов съ с2, с3 и с4
И + 4 + ^ + ф2. (^-4-^ + с1> (с?-с24)2 + (4-с|)2 (38,10)
также являются инвариантными.
Рассмотрим теперь функции, относящиеся к звезде Къ
W* Ч>24>4» ?1?2. 9394- (38,11)
Они преобразуются по представлению т2, так как у звезды /С2 нет других
четырехмерных представлений. С помощью (38,7) — (38,9) легко убедиться
в том, что все матрицы представления т2 в базисе (38,11) вещественны. Это
означает, что базис (38,11) сопряжен самому себе, так как
представление [и]2 унитарно. Поэтому единственный инвариант, квадратичный
относительно функции (38,11), имеет следующий вид:
^3 + ^1+^2 + ^!-
В соответствии с этим инвариантом является также выражение
с\с\+ с\с\+ с\с\-\- c\c\.
(38,,12)
§ 38] пример 137^
Рассуждая таким же образом, легко получим, что из коэффициентов
можно построить только один инвариант четвертой степени:
с\с\ + с\с\. (38,13>*
Из (38,10), (38,12) и (38,13) следует, что
Ф^В1(с1 + с1 + с1 + с1У + В2(с^4^с1+с1У +
+ Bs [(с\ - elf + (с\ - сЩ + Б, {с\с\ + с\с\ + с\с\± с\$ +БЪ (с\с\ +44) ..
Найдем минимум этого выражения при условии
c\+4+ci+ci=i.
Для этого перепишем Ф4 в виде
Ф4 «=Д,(1_2у-2г)*+В, [(2* + у+*-!)« + (>-*)*]+
+ В^у + г){\-у-г) + Въ[х(\-х-у-г) + уг] + сотХ,
где
х = с\> у = 4> г=сз> 1 — х—у—г — 4-
Для отыскания минимума выражению Ф4 удобно придать следующую форму;-
*4 = (В, —у Я») [(2* + У + г -1)2 - 4уг] +
+ О- + *)• (- -у Въ + 4S2 + В3 - В4) + (у + г) {- 4В2 + В4 + j B5)+const.
Рассмотрим отдельно две возможности.
1. £3 — "т^5^^* ^Ри Л1°бых фиксированных значениях у иг
величина х определяется из условия
(2х + у + г — 1)2= min.
Ясно, что этот минимум равен нулю и достигается при
х = "2 О — У— *)•
Далее, при фиксированном значении суммы у -\- г произведение уг
должно быть максимальным. Иными словами, должно иметь место равенства
у = г.
Учитывая последние два соотношения, перепишем Ф4 в виде
Ф4 = 4 (4В2- ВА) у* + 2{— 4В2+ ВА + 1 В,) у + const
или
Ф4 = 4 (4В2 - В4) (у _ Уо)2 + const.
138
где
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[гл. vn
I - 1
^2—^- At —"g- #5
Тсли 4£2 — ВА > 0, то
У =
[ 0 при у0 < О,
уо при 0<у0<-2",
~2 ПРИ 2"<Уо.
Если же 4£2 — £4 < 0, то
У =
1 ^. 1
2" ПРИ Уо < -j,
О при уо > -j •
-Мы получили, таким образом, три возможных случая:
1)у = г = 0, д: = у, т. е. с2 = с3 = 0, С! = ±с4,
2) у = г = -х-, д: = 0, т. е. c* = ±zcs, ct = с4 = О,
3) У = г,
1
1 -I- -4- •
Х ^ Т ~~ У* Т' 6* С2 = ± С3, Ci = ± С4.
2. £3 j£5<0. При фиксированных значениях у и г минимум'Ф4
.достигается при максимальном значении (2х-\- у -\~ z — I)2, т. е. при
л: = 0 и л: = 1 — у — г.
В любом из этих случаев функция Ф4 равна
Ф4 = (Яз-4 Въ)[(у + г-\)*-4уг] +
Н-(у + г)«(4Я2 + Яв-Я4-1я6) + (у + ^^
Ясно далее, что при фиксированном значении суммы у -f- г
произведение уг должно быть минимальным. Эго означает, что либо у = 0, либо г = 0.
Подставляя в Ф4г = 0, получим:
Ф4 = (452 + 2ВВ - £4 -1 £5) (У - yi)2 + const,
згде
У1:
— 2Я2 — В3 + у ^4 + ~2 Въ
4B2 + 2Bs-B4-±Bb
.§ 38] пример 139
Если 4В2 + 2BS — В4 -1 Вь > 0, то
,-jJ
!4-"2 5»
(
при
при
при
<о,
У1<0.
0<yi<l.
1<У1.
то
1 при У1<^-,
Если же 4В2 + 2ВЪ — Д
J 0 при у2> -.
Мы получили еще восемь возможных случаев:
4) д: = 0, у = 0, z — О, т. е. сх = с2 = с3 = О,
5) х = О, у =£ 0, г = О, т. е. с± = с3 = О,
6) х = О, у = 1, г = 0, т. е. ct = с3 = с4 = О,
7) л: = 0, у = 0, z Ф О, т. е. Ci = с2 = с4 = О,
8)л: = 0, у = 0, <г=1, т.е. с± = с2 = с4 = О,
9)л:=1, у = 0, г = 0, т.е. с2 = с3 = с4=0,
10) д:= 1 — у, у=£0, г = 0, т.е. с3 = с4 = 0,
11) jc = 1 — г, у = 0, г=£0, т.е. с2 = с4 = 0.
Зная коэффициенты сь с2, с3, с4, нетрудно определить группу симметрии
кристалла. Рассмотрим, например, случай с\ = с4, с2 = с3 = 0. Функция плот-
иости р имеет при этом следующий вид:
Р = ?о + сх (<Pi + п)-
При трансляциях ^1в1+т1ва+тавз функция ?1 умножается на
== ( U S
* функция ср4 умножается (—i)w*+™3# Отсюда следует, §что плотность р
we изменяется только при трансляциях вида
tw1ai + waa3+?n3aj
= 0, ±2, ±4,...; т2 + ^з = 0, ±2, ±4,...).
Ясно, что эти услозия уменьшают в четыре раза плотность узлов решетки
£>равэ. Поэтому объем элементарной ячейки решетки Бравэ увеличивается
* четыре раза.
В качестве трех основных векторов можно взять
а^ = а2 + #31 а2== 2#i» ^з == — ^аз*
Лектор а( перпендикулярен к векторам а2 и а3. Векторы а2 и а3 имеют
°Динаковую длину и составляют одинаковый угол с av
140
ФАЗОВЫЕ ПЕРЕХОДЫ ВТОРОГО РОДА
[ГЛ. VII
Найдем теперь поворотные элементы, не изменяющие функцию р. Если
рассматриваемое представление есть ти, то согласно формулам (38,7), (38,8)
и (38,9) получаем:
53
°4
a h
t I
Кс,
а 4
tc\
*и (g) (П + П)\
<?ч + ъ п + п ъ + ъ —п + п п — п —п — ъ — ?2-
Отсюда вытекает, что
Х11 (С4) (*1 + **) = *1 + ?4> Т11 ('«,+ Л) (*1 + *4> = *1 + *4«
Мы видим, что в рассматриваемом случае группа G' принадлежит классу С2д,
имеет плоскость скольжения, а решетка Бравэ группы Gf центрирована*.
Эти свойства однозначно определяют G/ как группу C\h*
Если Ci = — с4, с2 = с3 = 0, то получается такой же результат.
Итак, в случае 1) представление тц связано с фазовым переходом
Г6 ~*Г6
(Г=*п)-
Решетка Бравэ переходит из типа Г!! в тип Г^, а объем элементарной
ячейки учетверяется.
Производя подобным образом исследование всех остальных случаев, мы
получаем таблицу 20.
Таблица 20
Фазовые переходы, связанные с представлениями
тп и х12
Случай
G'
Объем
элементарной ячейки
1
Г6
4
2
Г6
4
3
Г6
8
4
sl
2
5
S1
^2
4
6
S1
^2
2
7
S1
^2
4
8
SJ
2
9
S\
2
10
s1
^2
4
11
^2
4
Такие же фазовые переходы связаны с представлением»-,^»
ГЛАВА VIII
КРИСТАЛЛЫ
§ 39* Звук в кристаллах
Целью настоящего параграфа является рассмотрение тех
особенностей звуковых волн в кристаллах, которые связаны с
кристаллической симметрией.
Мы будем пользоваться некоторыми результатами главы VI.
Хотя эти результаты были получены в предположении, что группа
симметрии есть конечная точечная группа, они, тем не менее,
справедливы и в тех случаях, когда группа симметрии является
пространственной группой. Кратко сформулируем эти результаты.
1. Пространство Мс всех отклонений системы от равновесного
положения можно разбить на неприводимые относительно группы
симметрии G подпространства Mj таким образом, что любой
вектор s любого из этих подпространств характеризует некоторое
главное колебание. Напомним, что главным колебанием механической
системы называется такое ее движение, при котором все точки
колеблются с одной и той же частотой по гармоническому закону.
В комплексной форме главное колебание описывается соотношением
г = ее*«* (г£Мс), (39,1)
где аз — частота колебания, а е — вектор, характеризующий данное
главное колебание.
В случае точечных групп индекс j пробегает конечное множество
значений, в случае пространственных групп множество значений
индекса j является континуальным.
2. Все главные колебания, связанные указанным образом с одним
и тем же неприводимым подпространством Mj, имеют одну и ту же
частоту.
Используем первое из этих свойств для классификации главных
колебаний кристалла. Рассмотрим одно из подпространств М^-
пространства Мс. Обозначим через tkp неприводимое представление
Пространственной группы G, по которому преобразуется М^. Век-
ТоР k является одним из векторов звезды этого представления,
^Дискретный индекс р характеризует неприводимое представление ър
142
КРИСТАЛЛЫ
[гл. vur
группы Gfc вектора k. Обозначим через sp размерность
представления Хр и через
все существенно различные векторы звезды представления ъкр.
В подпространстве М^- можно выбрать базис гкрг (k = kv къ . . .,,
fcv; /=1, 2, ..., 5p) так, что при трансляциях ta^G вектор гкр1
умножается на eika
^P(ta)^Pi = eikaskpl) (39,2>
а под действием элементов группы Gk векторы ekpi (к, р
фиксированы, /=1, 2, ..., sp) преобразуются друг через друга по
представлению ip группы Uu- Таким образом, каждый базисный
элемент £кр1> а вместе с ним и. соответствующее главное колебание
кристалла характеризуются тремя индексами к, р и L Пара
индексов к и р характеризует неприводимое представление tkp группы G„
с которым связано данное главное колебание. Индекс к сам по себе
характеризует представление подгруппы трансляций $ cz G и
называется волновым вектором.
Два главных колебания, имеющих одинаковый волновой вектор-
и различные значения р или /, называются различно
поляризованными. Таким образом, пара индексов /?, / характеризует
поляризацию колебания. Помимо волнового вектора и поляризации,
существенной характеристикой главного колебания является частота со.
Выясним физический смысл вектора к. Для этого разобьем'
мысленно кристалл на кристаллические ячейки так, чтобы начало;
координат, выбранное произвольно, оказалось внутри одной из'ячеек,*
При этом внутри каждой кристаллической ячейки окажется конец
одного и только одного вектора а из группы трансляций |Г. Таким
образом, все кристаллические ячейки можно «перенумеровать» с
помощью векторов группы трансляций. Обозначим через N число
атомов, которые в положении равновесия находятся в одной
кристаллической ячейке. Перенумеруем атомы так, чтобы любые два
атома, положения равновесия которых могут быть совмещены с
помощью трансляции из группы сГ, имели одинаковый номер. Такие
атомы естественно называть эквивалентными. Обозначим через гап
(taCZof, п=\, 2, ..., N) отклонение атома с номером я,
находящегося в кристаллической ячейке а. Отклонение г кристалла
характеризуется набором векторов гап.
При трансляции taf^§ атом, находившийся в ячейке а — а',
перейдет в ячейку а, сохранив свой номер. Поэтому отклонение г',
получающееся из отклонения г в результате трансляции кристалла,
на вектор а\ характеризуется набором векторов
an а—а'п'
§ 39]
ЗВУК В КРИСТАЛЛАХ
145.
Если отклонение г совпадает с отклонением екрЬ то согласно (39,2)
Сопоставляя последние два равенства, получаем:
га>п = e-ika'r0n (п = 1, 2, .. ., N, ta>a §). * (39,3>
Таким образом, главное колебание гкрг представляет собой
дискретный аналог плоской волны, а вектор к играет роль волнового
вектора.
Рассмотрим теперь все отклонения кристалла, удовлетворяющие
условию (39,3) (вектор к фиксирован). Очевидно, что совокупность
таких отклонений образует ЗЛ^-мерное подпространство
пространства Мс. Это подпространство мы обозначим через М&. Число
линейно независимых главных колебаний с данным волновым
вектором к равно размерности Мк, т. е. равно ЗАЛ Обозначим через
<М*). М*). ...» ^N(k) (39,4)
частоты, отвечающие этим главным колебаниям. Частоты (39,4)^
являются периодическими функциями вектора к, причем периодами
служат векторы обратной решетки.
Совокупность значений, принимаемых a)t(ft\ называется первой:
полосой частот, ю2(к) — второй полосой частот и т. д. Э™
полосы могут, вообще говоря, перекрываться. Наибольшее и
наименьшее значения u)v(fc) (v=l, 2, ..., 3N) называются краями
полосы. Ясно, что на краях полосы выполняется условие
Если механическое представление Ты содержит некоторое неприво--
димое представление Т/^, то sp (sp — размерность представления хрУ
главных колебаний с волновым вектором й0, отвечающих этому
представлению, имеют одинаковую частоту. Это непосредственно
вытекает из сформулированного в начале параграфа второго свойства
малых колебаний. В этом случае говорят, что sp полос
соприкасаются при k = kQi а соответствующая этим колебаниям частота $р
кратно вырождена.
Таким образом, для того чтобы выяснить, соприкасаются ли
несколько полос при некотором значении волнового вектора Аг,
следует определить, содержит ли механическое представление 7\t
хотя бы одно многомерное представление ъкр. Число ткр1
показывающее, сколько раз представление ъкр пространственной группы G
содержится в представлении 7М, определяется формулой (30,15)
ты>=-щ; 2 xfc^)x^r)«-i(fc're)M^=^€oft)) (39,5x
144
КРИСТАЛЛЫ
[ГЛ. VIII
тде Nk— порядок точечной группы дк вектора к, %р— характер
^нагруженного представления ър этой же группы, хк— характер
-представления группы Gk вектора к, индуцируемого механическим
представлением в подпространстве М*,.
Характер Х&(£*) —Х&(^аг) определяется по формуле
Xj'«r) = (1+2 cosy) 2 *„*<*», если г = С(<р), (39,6)
Xh<tf) = (— 1+2 cos ср) ^пае*\ если r = S(<p). (39,7)
Здесь па обозначает число атомов внутри нулевой кристаллической
\ячейки, которые под действием элемента tar£Gk) не изменив своего
номера, перешли в кристаллическую ячейку #(а£|Г).
Формулы (39,6), (39,7) совершенно аналогичны формулам (34,3),
434,4).
Если группа Gkl не имеет одномерных малых представлений, то
при к = кг каждая полоса частот обязательно соприкасается с одной
,или несколькими соседними полосами.
Отметим одно следствие, вытекающее из формул (39,5), (39,6)
и (39,7). Представим себе, что вектор к изменяется непрерывно
и притом так, что его группа Gk остается неизменной. При этом
в формулах (39,5), (39,6) и (39,7) изменяются только множители
£-i(fc,r«) и eiha Hj следовательно, число ткр изменяется непрерывно.
Это, однако, означает, что число ткр не изменяется вовсе, так как
оно является целым числом.
В главе о малых колебаниях было показано, что вектор ekpit
комплексно-сопряженный вектору ekpif характеризует главное
колебание, имеющее ту же частоту, что и колебание ehpi. Поэтому, если
векторы гкрг и гкрг не принадлежат одному и тому же
неприводимому подпространству Mj, то мы получаем некоторое
дополнительное совпадение частот, не учтенное в предыдущих рассуждениях.
Заметим, что если векторы гкрг и ekpi принадлежат одному и
тому же неприводимому пространству М/, то в пространстве 1VL/
существует вещественный базис
гкр1 + Zkpl у t (£fcpZ Zkpl) •
Поэтому подпространство Mj преобразуется по вещественному
представлению хкр.
Отсюда следует, что каждому невещественному представлению tkp
соответствует пара (или несколько пар) подпространств М^ и М^.
Частоты со, связанные с подпространствами Mj и Mj, одинаковы.
Таким образом, невещественному неприводимому
представлению хкр размерности 5 соответствует 25-кратно вырожденная частота.
Вещественные представления легко отличить от невещественных
*с помощью критерия § 30.
§ 40] электронные уровни в кристалле 145
В заключение параграфа упомянем о разделении ЗЛ/ частот u>v(£)
и соответствующих им главных колебаний на акустические и
оптические.
Акустическими называются те три частоты, скажем о)х(^), о)2(£)
и щ(к)у которые при k-^О стремятся к нулю. Все остальные 3N — 3
частоты и соответствующие им колебания называются оптическими.
Покажем, что при k = 0 три частоты обращаются в нуль. Для
этого заметим, что подпространство Мл=о содержит среди прочих
перемещений три линейно независимых трансляции всего кристалла
как целого. Потенциальная энергия при таких перемещениях остается
постоянной. Поэтому три частоты, соответствующие этим
перемещениям, равны нулю.
§ 40. Электронные уровни в кристалле
Настоящий параграф посвящен классификации состояний
электронов в кристалле. Мы будем исходить из так называемой одно-
электронной теории, которая заменяет взаимодействие электронов
кристалла некоторым эффективным полем. Таким образом, эта
теория рассматривает каждый электрон кристалла как электрон,
находящийся в заданном внешнем потенциальном поле U(r). Поле
U (г), разумеется, обладает той же симметрией, что и кристалл.
Волновая функция ф(г), описывающая стационарное состояние
такого электрона с энергией Е, удовлетворяет уравнению Шре-
дингера:
^Дф + (Е—(/(г))ф = 0. (40,1)
В § 14 было показано, что совокупность LE всех решений
уравнения Шредингера является линейным пространством, которое
преобразуется по одному из представлений Те группы симметрии
потенциальной энергии. Разложим пространство LE на
неприводимые подпространства Ьщ. Индексы k и р указывают на
неприводимое представление thp, по которому преобразуется Lhp. В каждом
подпространстве Lhp выберем базис
фад (k = klt k2i ..., ka\ /=1,'2, ..., sp), (40,2)
где kv k2) ..., k0 — векторы, образующие звезду представления xhp,
a sp — размерность представления tpi связанного с thp.
Функции ^крг выбраны так, что при трансляциях ta£oT они
умножаются на eiha:
TE(ta)^hpl = e^hpl. (40,3)
Совокупность всех таких функций образует полную систему. Любая
волновая функция электрона в кристалле является суперпозицией
этих функций.
146
КРИСТАЛЛЫ
[гл. viii
Индексы k, р характеризуют то представление пространствен-
ной группы G, с которым связана функция tyhpL. Индекс к
указывает на соответствующее представление группы трансляций S и
называется квазиимпульсом электрона.
Из соотношения (40,3) следует, что функция cpfc^ = tykpie~ihr
не изменяется при трансляциях ta из группы |Г. Иными словами,
функция cpfcitf является периодической функцией. Поэтому волновая
функция tyupi может быть представлена в следующем виде:
tybPi(r)=<?HPi(r)eihr. , (40,4)
Мы видим, что волновая функция tyhpi представляет собой
некоторую обобщенную плоскую волну, которая получается из обычной
плоской волны, если заменить постоянную амплитуду
периодической функцией срл^.
Из соотношения (40,4) следует, что волновая функция ф^
является решением следующей краевой задачи:
Найти внутри кристаллической ячейки функцию, удовлетворяю:
щую уравнению Шредингера (40,1) и краевому условию: функция
tyhpie~ihr вместе со своей нормальной производной принимает
одинаковые значения в соответственных точках противоположных граней
кристаллической ячейки.
Собственные числа Е этой задачи образуют дискретный набор
значений
ВД*). £|(*)> •..> Еп(к) (40,5)
являющихся периодическими функциями квазиимпульса к. Когда к
пробегает все возможные значения, Еп(к) пробегает некоторое
множество значений, которое называется я-й полосой
энергетического спектра. Различные полосы энергетического спектра могут,
вообще говоря, перекрываться. На краях каждой полосы имеет
место равенство»
Если при некотором значении квазиимпульса k=-k^ нескольким
различным волновым функциям электрона соответствует одна и
та же энергия Е, то говорят, что несколько энергетических полос
(40,5) соприкасаются при k = k0.
Такое соприкосновение может быть следствием симметрии
кристалла. Действительно, пусть ^pi— волновая функция, отвечающая
уровню энергии E(k0). Все волновые функции, принадлежащие
тому же неприводимому подпространству LhoP, что и tykpu отвечают
этому же уровню энергии. В пространстве LhoP есть sp линейно
независимых функций с тем же квазиимпульсом k0, что и у функции
tyhopi- Поэтому, если размерность sp представления хр точечной
группы Gfcj больше единицы, то при k = k0 соприкасаются sp
§ 41]
ТЕНЗОРЫ В КРИСТАЛЛАХ
147
энергетических полос. Наоборот, если группа 6^ имеет только
одномерные представления, то приведенные рассуждения не дают
основания ожидать соприкосновения полос при к = к0.
Если подгруппа G^ не имеет одномерных представлений *c^t
то каждая энергетическая полоса соприкасается в точке k — k0
с одной или несколькими соседними энергетическими полосами.
Такое явление «принудительного» соприкосновения имеет место,
в частности, у всех кристаллов, группа которых содержит
инверсию и хотя бы одну нетривиальную винтовую ось или плоскость
скольжения. Это вытекает из сделанного в § 30 замечания об
отсутствии у таких групп одномерных представлений *сл при
некотором выборе вектора к.
Существует еще одна причина, приводящая к вырождению
энергетических уровней. Действительно, если волновой функции tyhPi(r9t)
отвечает некоторая энергия Е, то и комплексно-сопряженной
функции tyhpi(r* —t) отвечает та же энергия. Это непосредственно
вытекает из уравнения Шредингера.
Из равенства (40,4) следует, что функция tykpi отвечает
состоянию с квазиимпульсом —к. Поэтому, если векторы к и —к
отличаются друг от друга лишь несущественно и линейная оболочка
функций tykpi (к, р фиксированы, /=1, 2 sp) не совпадает
с линейной оболочкой функций уНрг, то в точке к имеет место
соприкосновение 2sp полос (а не sp полос, как можно было бы
заключить, если не учитывать вырождения, связанного с симметрией
относительно знака времени).
Легко видеть, что линейные оболочки функций tyhpi и ^hpi
(2=1, 2 sp) не совпадают друг с другом, если представление
rhp не является вещественным.
§ 41. Тензоры в кристаллах
Такие физические свойства кристаллов, как теплопроводность,
электропроводность, упругость и др., характеризуются с помощью
тензоров *). Хорошо известно, что наличие у кристалла симметрии
направлений приводит к некоторым зависимостям между
компонентами тензора. Эти зависимости остаются в силе при любом
физическом воздействии на кристалл, если оно не влияет на симметрию
направлений в кристалле. Таким образом, симметрия кристалла
приводит к тому, что не все элементы тензора независимы.
Если тензор при некоторых перестановках его индексов не
изменяется или умножается на —1, то это обстоятельство может
дополнительно уменьшить число независимых компонент тензора.
*) Тензорами называются величины, которые лри вращениях пространства
преобразуются по /2-й степени векторного представления; число п называется
Рангом тензора. "* '--„- —
1-48
КРИСТАЛЛЫ
[ГЛ. VIII
Результаты, полученные в § 25, позволяют легко определять
число независимых компонент тензора с учетом симметрии его
индексов и симметрии среды.
Рассмотрим более подробно этот вопрос. Пусть F — точечная
группа симметрии направлений анизотропной среды. При всяком
повороте или зеркальном повороте g£F совокупность всех
возможных тензоров т-то ранга преобразуется по представлению \т группы
F (V — векторное представление группы F). Так как под
действием преобразований g£F все направления кристалла переходят
в эквивалентные направления, то тензор А%_шВ> характеризующий
данный кристалл, не изменяется при всех перемещениях g^E.
Иными словами, тензор Л2р..., преобразуется по единичному
представлению группы F. Предположим, что единичное представление
группы F содержится в тензорном представлении к раз. Это
означает, что среди тензоров /я-го ранга есть к линейно независимых
тензоров
инвариантных относительно группы Z7. Всякий другой тензор,
инвариантный относительно группы Ft представляет собой линейную
комбинацию тензоров (41,1). В частности,
Л^...е = ^)...8 + сД2р)...е+ ... +сИ(5}....-
Мы видим, что задание к параметров си с2 ск вполне
определяет тензор Лар...е. Это и значит, что среди компонент тензора
-Д2р... в е^ть ровно к линейно независимых компонент.
Итак, тензор А%,т,ш имеет столько линейно независимых
компонент, сколько раз единичное представление группы F содержится
в ее тензорном представлении \т. Это число равно
ff£F
где N — порядок группы /\ a x(g) — характер векторного
представления группы F. Он равен
Х(Св) = 1+2со8<р. Z(S9) = -l+2cos<p. (41,3)
Заметим, что если вместо тензора мы имеем дело с псевдотензором,
то к следует вычислять по формуле
* = -]Jr 2 Xm(fiT)si&ner- signg=| * 8~С*' (41,4)
При выводе формулы (41,2) мы не учитывали возможной симметрии
тензора А%шш,9 относительно перестановок его индексов. Если такая
§41]
ТЕНЗОРЫ В КРИСТАЛЛАХ
149
симметрия имеет место, то формула (41,2), вообще говоря,
становится неверной.
Поэтому следует рассмотреть случай, когда компоненты тензора
Л° не изменяются при некоторых перестановках его индексов.
Совокупность всех таких перестановок образует некоторую группу Я.
Очевидно, что тензор Л° следует искать теперь только среди таких
тензоров т-го ранга, которые симметричны относительно
перестановок Я. Подпространство таких тензоров мы обозначим через Lp.
Это подпространство инвариантно относительно группы F и
преобразуется по представлению T°(g*). Характер этого представления
равен (см. (25,9))
^°^ = Ж 2 K^Oxfe*) ' ' ' Х^). (41.6)
где Np — порядок группы Я, % — характер векторного
представления группы F, определяемый по (40,3), a lv /2 lf — длины
циклов перестановки /?£Я. Тензор Л«р...е имеет столько линейно
независимых компонент, сколько раз представление Т° содержит
единичное представление группы F. Это число согласно (20,3)
равно
* = 4"Sz°^>- (41'6)
Предположим теперь, что тензор Л° не изменяется при всех
четных перестановках индексов из группы Я и умножается на — 1
при всех нечетных перестановках из Я. Обозначим через L?L\
подпространство всех таких тензоров. Характер представления, по
которому преобразуется это пространство, определяется формулой
(см. (25,9))
X°-i<*) = T7 S I" ^WOxGr'2) • • • xfety (4Ь7)
где [р] — четность перестановки \р. Число k в этом случае равно
* = ж2х°-1<вг)- <41'8>
g£F
Рассмотрим некоторые конкретные примеры.
1. Тензор диэлектрической постоянной е^. Этот тензор
симметричен относительно своих индексов zilt = s.ki. Группа Р состоит из
двух перестановок: е и (1, 2). Формула (41,5) принимает в этом случае
следующий вид:
150 кристаллы [гл. via
Более подробно это можно записать в виде
Х° (С,) = -у (1 + 2 cos ?)* +1 (1 + 2 cos 2Т),
X°(S*) = 4 (~ 1 +2 cos ?>2 + Т (1 + 2 C0S 2^
Если кристалл принадлежит классу C^Vi то согласно (41,6) получаем:
k = \ {/° («) + X» (Ся) + 2Хо (So)} = 3,
т. е. тензор диэлектрической постоянной в кристалле класса C2v имеет три
независимые компоненты.
Подобным же образом можно рассмотреть другие кристаллические
классы.
2. Тензор упругости X^jw. Тензор упругости симметричен
относительно перестановок (12), (34), (13), (24) и их произведений. Таким
образом, группа Р состоит в этом случае из восьми перестановок:
е9 (12), (34), (13) (24), (12) (34), (14) (23), (1423), (1324).
В соответствии с этим характер x°(g) равен
Х° <*) = 7 <Х4 (g) + Ч (£2) X2 (g) + ЗХ2 k2) + 2х (£4)}- (41,9)
Рассмотрим какой-либо кристалл класса £>2. Группа D2 имеет четыре
элемента: е, С2, ul9 u2. Согласно формуле (41,9) имеем:
Х°(*) = j(3*+2-32 + 3.32 + 2.3) = 21,
xo(C2)»xO(ttl)==xo(tt2) = ^.((_1)4 + 2.3(-l)2 + 3.32 + 2.3) = 5.
Подставляя эти значения в формулу (41,6), получим:
* = 1(21 + 5 + 5 + 5) = 9,
т. е. тензор ^упругости в кристалле класса Z)2 имеет девять независимых
компонент.
ГЛАВА IX
БЕСКОНЕЧНЫЕ ГРУППЫ
§. 42. Специфические особенности бесконечных групп
Приступая к изучению бесконечных групп, целесообразно
выяснить, какие из результатов, полученных при рассмотрении конечных
групп переносятся в том или ином виде на бесконечные группы.
Остановимся вкратце на трех основных теоремах, относящихся
к представлениям конечных групп.
Теорема I. Каждое представление конечной группы является
неприводимым или распадается на сумму неприводимых
представлений.
Эта теарема вскрывает структуру приводимого представления
и лежит в основе всех или почти всех приложений теории
представлений. Кроме того, она делает обозримой совокупность всех
представлений данной группы, сводя ее, по сути дела, к совокупности
только неприводимых представлений.
Представляется чрезвычайно трудной задача разобраться во всех
представлениях группы, у которой некоторые приводимые
представления не распадаются на неприводимые.
Так как унитарное представление всякой группы почти
автоматически распадается на неприводимые представления, то доказательство
теоремы I сводится в основном к установлению того замечательного
факта, что каждое представление конечной группы эквивалентно
некоторому унитарному представлению (см. § 15).
Этот последний факт вытекает из того, что для каждой
конечной группы G можно построить функционал усреднения функций
на группе («см. § 16).
Итак, при доказательстве теоремы I конечность группы была
использована только для построения функционала усреднения.
Поэтому, переходя к изучению бесконечных групп, естественно
начать с вопроса о существовании функционала усреднения функций
"а группе.
Для того чтобы приобрести некоторую ориентировку в этом
вопросе, рассмотрим один пример. Возьмем группу всех целых
чисел
А=0. ±1, ±2, ... (42,1)
152
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
и попытаемся определить функционал усреднения, положив
оо
Ж(ср)= 2 ?(»)• (42,2)
П--00
При этом, однако, результат усреднения функции ср(я)=1 не
только не равен единице, но вообще лишен смысла. Более того,
ни один характер рассматриваемой группы вида
У(п) = е*™ (42,3)
не поддается усреднению, так как ряд (42,2) при <р = X расходится.
Поэтому использование функционала (42,2) не дает возможности
доказать разложимость приводимых представлений, составленных
из нескольких одномерных представлений (42,3).
Единственный плодотворный способ определения функционала
усреднения на группе целых чисел дается соотношением
к
При таком определении имеем:
М (1) = 1, М (eian) = О, М (eian • ё*™) = Ьтп.
Таким образом, функционал (42,4) можно применять к характерам
одномерных представлений и к их произведениям. Тем не менее —
и в этом заключается существеннейшее отличие рассматриваемой
группы от любой конечной группы—функционал М можно
применять далеко не ко всем функциям группы (42,1). Так, например,
функции
ср(я)=я, ср(д)=д2, ср(я) = е-п
усреднению не поддаются.
Обозначим через L тот класс функций, которые поддаются
усреднению с помощью функционала (42,4).
Напомним, что при доказательстве теоремы об эквивалентности
всякого представления унитарному мы применяли функционал
усреднения к скалярному произведению вида (T(g)x, T(g)y), т. е., по
сути дела, к произведению матричных элементов оператора T(g)>
Поэтому с помощью функционала М удается доказать
разложимость только тех представлений, у которых попарные произведения
матричных элементов поддаются усреднению или, что то же,
содержатся в классе L.
Используя аппарат так называемых периодических функций,
можно показать, что такими представлениями являются все
представления, матричные элементы которых ограничены.
К счастью, в приложениях встречаются главным образом такие
представления, поэтому вопрос о разложимости приводимых пред-
§ 42] СПЕЦИФИЧЕСКИЕ ОСОБЕННОСТИ БЕСКОНЕЧНЫХ ГРУПП 153
ставлений группы целых чисел можно считать решенным. Следует,
однако, иметь в виду, что представления группы целых, чисел
не исчерпывается представлениями с ограниченными матричными
элементами. Легко построить представление с неограниченными
матричными элементами. Для этого рассмотрим две функции:
ср0(/г)=1,
<Pi (п) = п,
и сопоставим каждому целому числу k оператор Т*, определенный
равенствами
Tfc<p0 (п) = ср0 (п + k) = cp0 (п),
Тй^ (п) = срх (п + К) = срх (п) + &сро (я).
Совершенно очевидно, что матрица оператора Тк имеет следующий
вид:
Мы видим, что не все ее матричные элементы ограничены.
Представление, осуществляемое операторами Т& (& = 0, it: 1, . . .),
является приводимым, так как функция ср0 инвариантна относительно
всех операторов Tfe. Тем не менее оно не разлагается на сумму
двух инвариантных одномерных подпространств, так как уравнение
% Но + PTiI = Ь Ио + P<Pil
имеет, как легко видеть, только одно решение X=l, j3 = 0. Это
не противоречит сделанным ранее утверждениям, так как матрица
оператора Тк имеет один неограниченный матричный элемент.
Положение вещей, с которым мы столкнулись в этом примере,
типично для всех бесконечных групп; для каждой группы G можно
определить функционал усреднения, однако класс L функций,
поддающихся усреднению с помощью этого функционала, далеко не
исчерпывает всех функций на изучаемрй группе. В соответствии
с этим, удается доказать разложимость не всех приводимых
представлений группы. .
Впрочем, в приложениях большей частью встречаются унитарные
приводимые представления, для которых вопрос о разложимости
на неприводимые представления всегда решается в положительном
смысле.
Теорема II. Матричные элементы двух неприводимых
неэквивалентных представлений конечной группы взаимно орто-
гоналъны.
Доказательство этой теоремы опиралось на лемму Шура и на
использование функционала усреднения. Лемма Шура справедлива
для всех групп, как конечных, так и бесконечных. В этом
легко убедиться, просмотрев ее доказательство. Поэтому теорема
154
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
ортогональности справедлива в случае бесконечных групп только для
тех представлений, у которых произведения матричных элементов
поддаются усреднению.
Что касается ортогональности матричных элементов, относящихся
к одному и тому же неприводимому представлению, то здесь,
помимо операции усреднения, было использовано предположение
об унитарности рассматриваемого представления. Как мы видели,
это предположение всегда выполняется для представлений, у которых
попарные произведения матричных элементов усредняемы. Таким
образом, и здесь все сводится к возможности применять к
рассматриваемому представлению функционал усреднения. Следует
заметить, что в приложениях часто вместо соотношений ортогональности
можно использовать непосредственно лемму Шура, которая имеет
значительно большую общность.
Теорема III. Каждая функция на конечной группе может
быть представлена в виде суммы матричных элементов всех
неприводимых представлений, взятых с соответствующими
коэффициентами.
Доказательство этой теоремы опиралось на теорему I. Поэтому
и теорема III не может быть автоматически перенесена в теорию
бесконечных групп.
В течение последних десятилетий были достигнуты серьезные
успехи в обобщении в той или иной форме теоремы III на
бесконечные группы. Эти успехи связаны в основном с именами
математиков Петера и Вейля, Хаара, Понтрягина, Неймана, Гельфанда
и Райкова.
Не имея возможности охарактеризовать методы, использованные для
обобщения теоремы III, попытаемся сформулировать некоторые из
полученных результатов. Для этого разделим все бесконечные группы на две
категории: дискретные группы и непрерывные группы. Группа G называется
непрерывной, если множество ее элементов образует так называемое
топологическое пространство. Это означает, что каждому элементу g £ G ставится
в соответствие бесконечное число подмножеств FaG, называемых
окрестностями элемента g. Это соответствие должно удовлетворять некоторым
-естественным условиям, на которых мы не будем останавливаться *).
Для иллюстрации понятия окрестности рассмотрим группу вращений R.
Путь g = Ch (?) есть поворот на угол <р вокруг некоторого вектора
k(\k\ — \). Произвольно выбирая два положительных числа et и е?,
рассмотрим множество FBSi, состоящее из всех поворотов Cftr(<p'), для которых
выполняются неравенства
\*-*\<*ь 1*-*'1<Ч.
Каждое такое множество Ft4 является окрестностью поворота Cfc(<p).
Придавая числам е± и е2 различные значения, мы получим бесчисленное
множество окрестностей элемента Cft(<p).
*) Точное определение непрерывной группы можно найти в книге
Л. С. Понтрягина «Непрерывные группы».
§ 42] СПЕЦИФИЧЕСКИЕ ОСОБЕННОСТИ БЕСКОНЕЧНЫХ ГРУПП 155
Функция f(g) на группе G называется непрерывной на элементе gi£G,
если для каждого положительного числа Ь существует такая окрестность F
элемента gi, что для всех элементов g из F выполняется неравенство
\f(g)-f(gi)\<t (g£F). '
Непрерывная группа G называется компактной, если каждая функция /(g),
непрерывная на всех элементах группы G, является ограниченной.
Так, например, группа всех действительных чисел х (—оо<л:<оо)
не компактна, так как существуют непрерывные, но не ограниченные
функции f(x) (скажем f(x) = х).
Наоборот, группа поворотов вокруг фиксированной оси компактна.
Компактной является также и группа вращений. Группа Лоренца не является
компактной.
Заметим тут же, что класс L поддающихся усреднению функций
включает в себя все непрерывные функции, если группа G компактна.
Для компактных групп справедлива следующая теорема:
Теорема IV. Пусть G — компактная группа, a f(g) (g£G) —
произвольная непрерывная функция. Тогда функцию f(g) можно
аппроксимировать с произвольной точностью е > О конечными суммами вида
2 2 Ф$(е) (п=1,2,...х
Здесь <p$(g) — матричные элементы, порождаемые неприводимым
представлением tj группы G.
Ясно, что эта теорема является обобщением приведенной выше
теоремы III.
Гельфанд и Райков, отказавшись от требования компактности
непрерывной группы и заменив его более слабым требованием так называемой
локальной компактности *), сумели установить следующее положение:
Теорема V. Если группа G является локально-компактной, то
она имеет достаточное количество неприводимых унитарных
представлений в бесконечномерном гильбертовом пространстве.
Выражение «достаточно много» следует понимать в том смысле, что,
каков бы ни был элемент gl9 существует неприводимое представление х (g)
такое, что т (gt) Ф Е.
В соответствии с этой теоремой Гельфанд и Наймарк нашли все
унитарные бесконечномерные представления группы Лоренца и некоторых
других локально-компактных групп.
Видоизменения, которые испытывают рассмотренные три теоремы
в теории бесконечных групп, связаны, как уже указывалось,
с отсутствием у бесконечных групп универсального функционала
усреднения.
Этим, однако, не исчерпываются особенности теории бесконечных
гРУпп. Не ставя перед собой задачу сколько-нибудь подробно
осветить этот вопрос, мы ограничимся рассмотрением одной наиболее
важной для физики особенности теории представлений непрерывных
групп.
*) Группа G называется локально-компактной, если каждая
непрерывная на ней функция ограничена в каждой окрестности любого элемента
g € G. Группа всех действительных чисел является, согласно этому
определению, локально-компактной группой. Группа Лоренца также является
локально-компактной.
156
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
Если рассматривать всевозможные непрерывные функции,
определенные на группе G, то среди них могут оказаться многозначные
функции. Подчеркнем, что ни у дискретных, ни, тем более, у
конечных групп многозначные функции не возникают иначе, как
искусственным путем механического объединения нескольких однозначных
функций в одну многозначную.
Наоборот, у непрерывной группы может встретиться
непрерывная многозначная функция, которая не может быть без нарушения
непрерывности сделана однозначной «насильственным путем», Tf е.
путем отбрасывания лишних значений у каждого элемента g£G>
В качестве примера можно привести функцию
f(6) = A
на группе поворотов. Так как каждый поворот на угол 0 можно
рассматривать и как поворот на угол 6-[~2тг, то функция
принимает для поворота на один и тот же угол два значения:
/l(0) = /2 „ /8(6) = *f 2 =_/f2.
Если отбросить второе значение, то функция /(6) стала бы
разрывной в точке 0 = 0 = 2 тс.
Группы, у которых существуют непрерывные многозначные
функции, называются многосвязными.
Рассмотренный пример показывает, что группа поворотов является
многосвязной. Группа вращений также является многосвязной. В этом
проще всего убедиться, рассмотрев, например, функцию
/[C*(cp)l = sin|,
которая, безусловно, является непрерывной, если ее трактовать как
двузначную функцию. Всякая попытка рассматривать эту функцию
как однозначную осуществляется ценой превращения ее в
разрывную функцию.
Наличие у некоторых непрерывных групп многозначных
функций позволяет ожидать, что некоторые непрерывные представления
у этих групп являются многозначными. Мы увидим впоследствии,
что группа вращений, например, имеет бесчисленное множество
двузначных представлений. Эти представления нельзя игнорировать
хотя бы потому, что они играют важную роль в некоторых
физических приложениях. С другой стороны, на них нельзя
автоматически переносить теоремы, справедливые для обычных однозначных
представлений.
Для преодоления этой трудности мы воспользуемся тем
обстоятельством, что каждая многосвязная группа G является
гомоморфным образом некоторой односвязной группы Gv Группу Gt
можно выбрать таким образом, чтобы ни одна ее односвязная
С 43] ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП ЛИ 157
подгруппа не имела группу G своим гомоморфным образом.
Выбранная так группа Gx называется универсальной накрывающей группой.
Доказательство существования у каждой многосвязной группы
универсальной накрывающей группы выходит за рамки настоящей
книги.
Рассмотрим в качестве примера группу поворотов. Для нее
универсальной накрывающей группой является односвязная группа
всех действительных чисел. Гомоморфизм задается соотношением
jc-^6=jc —2тгГ~-1*) (—оо<д:<со, 0<6<2тс).
Оказывается, что каждое непрерывное представление группы G
{в том числе и каждое многозначное представление) можно
рассматривать как однозначное непрерывное представление универсальной
накрывающей группы Ох; представления группы G, получаемые
таким образом, исчерпывают все непрерывные представления группы G.
Если представление х группы G ставит в соответствие каждому
элементу группы G т различных операторов, то представление т
называется т-значным.
Обозначим через
hlt A2. • • • (а)
элементы группы Gv переходящие при гомоморфизме в единицу
группы G. Предположим, что число таких элементов конечно
и равно п.- Тогда группа G называется п~связной. Если в
некотором представлении хг группы Gx элементам (а) соответствует п
различных операторов, то в соответствующем представлении х группы G
единице будет соответствовать п различных операторов.
Представление будет я-значным.
Если элементам (а) в представлении xt соответствует т
различных операторов (т < я), то, как легко показать, число т является
делителем числа п. Поэтому если группа G имеет /я-значное
представление, то число т является делителем числа п.
В частности, если число п является простым, то все
непрерывные представления группы G являются либо однозначными, либо
я-значными.
§ 43. Элементы теории групп Ли
Среди непрерывных групп важную роль играют так называемые
группы Ли**). Особое место, занимаемое этими группами,
обусловлено тем, что группы Ли, с одной стороны, представляют
собой достаточно обширный класс групп, охватывающий важнейшие
"* *) Символ ^— означает целую часть от числа ^—.
**) Софус Ли (1842—1899) — норвежский математик, одним из первых
обративший внимание на класс групп, получивших впоследствии его имя.
158
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
непрерывные группы, которые встречаются в геометрии,
математическом анализе и физике, с другой же стороны, каждая группа Ли
удовлетворяет целому ряду жестких требований, которые делают
возможным применение для ее изучения методов теории
дифференциальных уравнений.
Непрерывная группа G называется группой Ли, если каждый ее
элемент g£G может быть задан с помощью конечного числа
параметров. Минимальное число параметров, достаточных для этой цели,
называется размерностью группы Ли.
Дадим более строгое определение группы Ли. Пусть G —
некоторая непрерывная группа. Рассмотрим какую-либо окрестность V единицы
этой группы. Предположим, что с помощью т вещественных
параметров аь а2, ..., аш можно задать любой элемент окрестности V таким
образом, что
1) различным наборам значений параметров аь а2, ..., ат соответствуют
различные элементы g из V;
2) при непрерывном изменении параметров элемент g изменяется
непрерывно, и наоборот, при непрерывном изменении элемента g непрерывно
изменяются и характеризующие его параметры;
3) если элементы gb g2 и g±g2 лежат в окрестности V, то параметры
произведения gig% являются непрерывными и дифференцируемыми
функциями от параметров сомножителей.
При выполнении перечисленных условий группа G называется
группой Ли.
Группа R вращений является группой Ли, так как каждый
поворот может быть охарактеризован тремя параметрами, скажем углами
Эйлера (см. § 5). Поскольку эти параметры независимы в том смысле,
что каждый из них может изменяться, в то время как остальные
два остаются без изменения, то число измерений группы вращений
равно трем.
Другим важным примером является группа Лоренца. Это — группа
преобразований, испытываемых согласно теории относительности
пространственно-временными координатами х, у, z, t при переходе
от одной инерциальной системы к другой. Размерность группы
Лоренца равна шести, так как для исчерпывающей характеристики
взаимного движения двух инерциальных систем нужно шесть
параметров: три проекции скорости начала координат второй системы
отсчета относительно первой и три угла, характеризующих
поворот осей второй системы координат относительно первой.
Пусть G есть некоторая группа Ли размерности т и
ах, а2, ..., <хт (43,1)
— набор т параметров, характеризующих элементы этой группы.
Условимся выбирать эти параметры так, чтобы единице е группы G
соответствовали нулевые значения параметров.
В дальнейшем мы будем интересоваться только теми
представлениями Т группы G, операторы которых являются
дифференцируемыми функциями параметров olv <x2> ..., ат. Более точно это озна-
§ 43]
ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП ЛИ
159
чает следующее. Так как задание параметров (43,1) однозначно
определяет элемент группы, то оператор T(g) можно рассматривать
как функцию от параметров (43,1):
T(g) = T (alf oj, ..., ат) = Т (а). (43,2)
Выберем произвольно базис в пространстве L, в котором действуют
операторы T(g) (g£ О), и сопоставим с его помощью оператору T(g)
матрицу Tik(g) (i, k= 1, 2, ..., s). Каждый матричный элемент Tik(g)
в свою очередь является функцией от параметров (43,1).
Будем называть представление Т дифференцируемым, если все
матричные элементы
T«(alf a2 <хт) (/, к = 1, 2, ..., s)
являются дифференцируемыми функциями от параметров группы
Otj, 0^2» • • • » aw
Оператор, изображаемый матрицей
gTft (a)
будем называть производной от оператора Т(а) по параметру а^
и обозначать через
ат(«)
до.
Пусть Т — дифференцируемое представление группы в
пространстве L. Введем фундаментальное понятие инфинитезимальных
операторов. Инфинитезималъным оператором 1$, соответствующим
параметру <xj, называется производная от оператора T(g) no о^, взятая
при g = е, т. е. в точке ах = а2 = ... = aw = 0.
Заметим, что при вычислении оператора lj можно до
дифференцирования положить все параметры <*£(&=£/) равными нулю.
Таким образом, представление T(g) имеет т
инфинитезимальных операторов, т. е. число инфинитезимальных операторов равно
размерности группы.
Рассмотрим в качестве примера векторное представление т группы
вращений. Каждый поворот будем характеризовать тремя
параметрами: ах, а2, а3, которые определим следующим образом.
Сопоставим произвольному повороту g вектор, направленный по
положительному направлению оси поворота и равный по величине углу
поворота. Ясно, что такой вектор однозначно характеризует
поворот g. Поэтому три его проекции на оси координат можно выбрать
в качестве параметров группы. Именно их мы и возьмем в качестве ах>
а2,~сс3. Для вычисления оператора \х достаточно
продифференцировать оператор t(aj 0, 0) по olv Так как вращение g£R
с параметрами ах, 0, 0 является поворотом вокруг оси ОХ
160
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
в положительном направлении на угол а19 то в обычном декартовом
базисе оператор t(oLlf О, 0) изображается матрицей
*(«1, 0, 0)
Отсюда
и, следовательно,
Вводя обозначения
/1 0 0>
е11==(о 0 0), е12 = |0 0 0), £21 = [ 1 0 0 ), ... ,(43,3)
\0 0 0.
перепишем последнее равенство в виде
Ii = е32 —г23- (43>4)
Отсюда круговой перестановкой индексов получаем выражения для
остальных двух инфинитезимальных операторов:
Ь = si3 — £3i» 1з = £21 — £12- (43,5)
Разумеется, эти соотношения можно было бы получить
независимо от соотношения (43,4) прямым вычислением.
В известной мере роль инфинитезимальных операторов
вскрывается следующей теоремой.
Теорема I. Пусть Т и Т^ — два представления группы G,
действующих в одном и том же пространстве L, и пусть они
имеют одинаковый набор инфинитезимальных операторов, тогда
представления Т и Тх совпадают.
Доказательство. Для доказательства этой теоремы
покажем, что инфинитезимальные операторы 11(у=1, 2, ..», т)
однозначно определяют операторы T{g) (g(zG)> С этой целью выберем
совершенно произвольно вектор x£L к введем обозначение
y(g) = T(g)x. (43,6)
Ясно, что вектор у (g) является функцией (и притом
дифференцируемой) параметров о^(у=1, 2, ».., w). Если нам удастся
определить эту функцию, то в силу произвольности вектора х тем самым
с 43] ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП ЛИ 161
будут определены все операторы T(g). Покажем, что y(g)
удовлетворяет некоторой системе дифференциальных уравнений,
коэффициенты которой зависят только от инфинитезимальных
операторов и которая имеет единственное решение.
С этой целью заменим в последнем равенстве элемент g
элементом g~x и подействуем на обе части полученного равенства
оператором Т(/г) (&£G). Мы получим:
T(h)y(g-*) = T!(h)T(g-i)xT(hg-i)x=y(hg-1)- (43,7)
Если обозначить
hg'1=f9
то равенство (43,7) можно переписать в виде
rC(fg)y(g-1)=yif)- (43,8)
Обозначим через а$(/), ^(g) и OL{(fg) параметры, характеризующие
элементы /, g и fg. Так как задание параметров оц(/) и ^(g)
(i=\, 2, ..., т) однозначно определяют элементы/ и gt то они
определяют и их произведение fg, а следовательно, и параметры
сц (fg). Последние, таким образом, являются функциями 2т
параметров а*(Д <x{(g)
«i (fg) = Ъ t*i (/). а2 (/)• • • •. а™ (/); «1 («Г), а2 (gr), ..., ат (£) ]. (43,9)
Ясно, что вид функций ср$(/=1, 2, ..., яг) определяется
исключительно способом задания умножения на группе G и выбором
параметров <xif характеризующих элементы группы, и не зависят от
рассматриваемого представления Т.
Продифференцируем теперь соотношение (43,8) по <xj(f)(j=l9
2, ..., т) при фиксированном элементе g:
т
у дТ (fg) d9i (fg) _ ду (/)
&dH(fg) d«j(f)y™ )"daJ(f)'
% — 1
и положим g=f~K Тогда производные -^—L?i перейдут в
соответствующие инфинитезимальные операторы и мы получим:
dy(f)
daj(f)
= ^ц(/)иУ(Л. (43,10)
5«<'>™ЭД- -•• <43'И>
где введено обозначение
dn(fg)\
К системе дифференциальных уравнений первого порядка (43,10)
можно присоединить вытекающее из соотношения (43,6) начальное
условие
у(е) = х
162
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
или, если заменить элемент е соответствующим ему набором
параметров,
у(0, 0, .... 0) = *. (43,12)
Рассмотрим сначала первое из уравнений (43,10), положив в нем
а2 = а3 = . . . = <хш = 0. Получим:
dy(4'0d'a;-0) = ^iSil{a1, 0, .... 0)4у(а1( 0 0).
i = l
Это уравнение вместе с начальным условием (43,12) однозначно
определяет функцию
jf(alf 0, ..., 0) = F1(a1). (43,13)
Выпишем теперь второе из уравнений (43,10), положив в нем
a3 = a4= . . . =aw = 0,
т
Лу1(«1,«»0....,0) ^g 5e(ai> a2( 0 0)/^(а1( а2, 0, .'.:. 0).
г = 1
Величину ах можно рассматривать здесь как некоторый
параметр, так как дифференцирование по ах отсутствует. Мы получили
обыкновенное дифференциальное уравнение с начальным
условием (43,13). Оно однозначно определяет функцию y(<xlt a2, 0, . . ., 0) =
= F2 (ax, а2).
Продолжая это рассуждение, убеждаемся в том, что система
уравнений (43,10) вместе с начальным условием (43,12) однозначно
определяет функцию y(g)-
Следовательно, инфинитезимальные операторы lj(J = 1, 2, ..., т),
построенные с помощью представления Т, в свою очередь
однозначно определяют это представление. Теорема I доказана.
Следует подчеркнуть, что при доказательстве теоремы фактически
показано, как по инфинитезимальным операторам построить
представление Т. Тем самым задача нахождения представлений Т
сводится к нахождению соответствующих инфинитезимальных
операторов.
Эта последняя задача значительно облегчается теоремами II и III.
Теорема II. Инфинитезимальные операторы \j(j = 1,2, . .., т),
соответствующие какому-либо представлению Т группы G,
удовлетворяют следующим перестановочным соотношениям:
т
Щ — 1*1,- = 2ед> (43,14)
где постоянные Сф не зависят от выбора представления Т.
Доказательство немедленно вытекает из рассмотрения системы
уравнений (43,10). Заметим, что это система уравнений заведомо
£ 43] ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП ЛИ 163
разрешима: ее решение дается функцией (43,6). Поэтому должно
выполняться необходимое условие разрешимости системы (43,10),
гарантирующее равенство вторых производных -г—^— = -^—-—.
Покажем, что это условие эквивалентно соотношениям (43,14).
С этой целью вычислим -г—j—. Имеем, опуская аргумент / у
параметров 9.1 {i= 1, 2, ..., т),
т
Меняя порядок индексов j и k, получаем:
m m
5^-2¥1^+ 2 ^(/)%(/)м^(/)=
г = 1 J г,г'=1
Приравняем теперь полученные выражения для смешанных
производных
fj ■5i.*(/)5tf(/)[IiIi'-Ii.li]^a)= Ё(^-ё)^(/>
г, г'=1 г = 1 ^ J '
и положим здесь f=e. Тогда, учитывая соотношение 5у(е) = 8^
и начальное условие (43,12), получим:
В силу произвольности вектора л: из этого векторного равенства
вытекает равенство операторов
т
Ijlfc I&I; = ^ Сifoil,
г = 1
где коэффициенты
не зависят, разумеется, от выбора представления Т. Теорема II
Доказана.
164 БЕСКОНЕЧНЫЕ ГРУППЫ [ГЛ. IX
Из соотношения (43,15) видно, что коэффициенты С^к
антисимметричны относительно двух последних индексов
Cijk = — Cikj (/, £, 7=1, 2 т). (43,16)
Прежде чем переходить к теореме III, получим вспомогательное
тождество
?Sij(fg) dHm^Sik(f)' (43,17)
о
которое будет использовано при доказательстве этой теоремы.
Рассмотрим произведение fggiif, gt gi^O) и обозначим fg = h
и ggx = hx\ тогда справедливо равенство hg1=fhv Следовательно^
<Рг(а(/г), a(g1)] = cPi[a(A а(/гх)] (а (/г) ~ах (/г), а2(/г), ..., аш(/г)).
(43,18)
Кроме того, можно написать
«j (A) = <Pj [*(/). afe*)l и ai(Ai) = <PiIa(e). аЫ1-
Продифференцируем теперь (43,18) по aft(/), предполагая элементы g
и gi фиксированными. Получим:
Sm d^j(hgl) dyjjfg)^ flMAi)
Положим в этом тождестве gl = (fg)~1 = ЬГХ и, следовательно,
A1 = ggpi = /"1. Вспоминая определение (43,11) матрицы 5(/),
получим тождество (43,17).
Теорема III. Если какие-либо линейные операторы
Aji A2» • • •, Aw,
определенные в некотором пространстве L, удовлетворяют тем
же перестановочным соотношениям
т
АЛк — AkAj = 2 CijuAi, (43,19)
«шо и инфинитезимальные операторы \ъ 12, ..., 1т, то
операторы Aj являются инфинитезимальными операторами
некоторого действующего в L представления Т группы О.
Доказательство опирается на тот известный факт,, что для
разрешимости системы уравнений
dy(g)
da-
J i = l
^SyAtyig) (43,20)
§ 43]
ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП ЛИ
165
условие совпадения смешанных производных
является не только необходимым, но и достаточным. Так как это
условие имеет вид (43,19), то система (43,20) имеет решение, и
притом единственное, соответствующее начальному условию у(е) = х,
где х — произвольный вектор из L. В силу линейности системы (43,20)
оператор Tx(g), ставящий в соответствие вектору х вектор y(g),
TUg)x = y(g)
является линейным. Покажем, что соответствие g-+T±(g) является
представлением группы G. Для этого достаточно установить
соотношение Tx(gh) = Tx(g)T(h) для любой пары элементов g, h
группы G. Это соотношение, если его применить к вектору х,
принимает следующий вид:
y(gh) = Tk(g)y(h),
и означает, что вектор y(gh), рассматриваемый как функция от g
при фиксированном /г, также является частным решением системы
дифференциальных уравнений (43,20), но удовлетворяет другому
начальному условию
То, что последний факт действительно имеет место, совершенно
очевидно. Поэтому остается только проверить, что y(gh)
удовлетворяет уравнениям (43,20).
С этой целью вычислим / , , . Имеем:
дч (g)
т т
ду (gh) _ у ду (gh) дП (gh) у d?s(gfi)s fW. (riv
8 = 1 j,8 = l
Используя только что полученное тождество (43,17), находим:
Итак, функция y(gh) удовлетворяет уравнению (43,20) и,
следовательно, операторы T&.(g) дают представление группы О.
Найдем в заключение инфинитезимальные операторы, связанные
с этим представлением. Имеем:
<*ГА(£)
<>*j(g)
х =
dy(g)
d*j(g)
= S SV (S) А*у (g) L=e = Ajx.
{ = 1
166 БЕСКОНЕЧНЫЕ ГРУППЫ [ГЛ. IX
Мы видим, что инфинитезимальные операторы, порожденные
представлением Та, совпадают с операторами А. Это завершает
доказательство теоремы III.
Значение теорем II и III состоит в том, что они устанавливают
эквивалентность задачи разыскания инфинитезимальных операторов
всевозможных представлений и задачи разыскания всевозможных
совокупностей операторов
Aj_i A2» • • •» A^j,
удовлетворяющих заданным соотношениям коммутации (43,14).
Три теоремы настоящего параграфа сводят к этой последней
задаче задачу разыскания всевозможных дифференцируемых
представлений группы G.
Заметим в заключение, что если Т и Т — два сопряженных
представления, а еи е2 es и ev еъ ..., es—взаимно-контра-
вариантные базисы, то матрицы инфинитезимальных операторов I
и I относительно этих базисов связаны соотношением
Uk = — hi- (43,21)
Если Т—представление, комплексно-сопряженное представлению Т
то инфинитезимальный оператор I может быть определен
соотношением
!ф = 1ф. (43,22)
В соответствии с этим матричные элементы инфинитезимальных
операторов I и I в комплексно-сопряженных базисах связаны
соотношением
(0« = Т«. (43,23)
Задача I. Найти перестановочные соотношения для
инфинитезимальных операторов группы вращения.
Задача II. Показать, что всякий оператор А, коммутирующий со всеми
оператррами некоторого представления группы Ли, коммутирует со всеми
инфинитезимальными операторами этого представления. Показать, что
обратное утверждение также справедливо.
Задача III. Пусть Т± и Т2— два представления группы Ли,
действующих в пространствах Lx и L2. Пусть
1</>, 1^, .... $ (*=1, 2)
— инфинитезимальные операторы, связанные с представлением Tf(/=1, 2).
Обозначим через Et и Е2 единичные операторы в пространствах L^ и £2.
Доказать, что инфинитезимальные операторы Jt, J2, ..., Jm, связанные
с произведением представлений TiXT2, действующим в пространстве Z^X^»
имеют следующий вид:
Jj^lg^ + EjiP (* = 1, 2, .... т).
§ 44] ИНФИНИТЕЗИМАЛЬНОЕ ПРЕДСТАВЛЕНИЕ ГРУППЫ ЛИ 167
Задача IV. Доказать, что инфинитезимальные операторы унитарного
представления являются антиэрмитовыми/т. е. удовлетворяют соотношениям
«X—■*-
Наоборот, если все инфинитезимальные операторы представления Т являются
антиэрмитовыми, то представление унитарно.
Задача V. Пусть g (аь а2, ..., ат) — элемент группы Ли. Доказать,
что
dT(g-i)
дч
dT(g)
д«к
= -1*.
Задача VI. Доказать, что пространство Z,, преобразующееся по
неприводимому представлению группы Ли, не имеет ни одного нетривиального
подпространства, инвариантного одновременно относительно всех инфините-
зимальных операторов рассматриваемой группы.
§ 44. Инфинитезимальное представление группы Ли
Пусть Т есть некоторое представление группы G в линейном
пространстве L размерности s. Совокупность всех линейных
операторов, действующих в пространстве L, образует линейное
пространство L2 размерности s2. Каждому элементу" g£ G можно сопоставить
в пространстве L2 оператор T2(g*), определенный равенством
Tz(g)A = T(g)AT(r1)-
Как показано в § 21, операторы T2(g) осуществляют в
пространстве L2 представление группы G, эквивалентное произведению
представления Т на сопряженное ему представление Т
т2 = тхт.
Пусть группа G является группой Ли размерности т, а 1х,
h* •••> Im —ее инфинитезимальные операторы. Каждый из
операторов \к (k=\, 2, ..., т) можно рассматривать как элемент
пространства ZA
Обозначим через IczL2 линейную оболочку всех инфинитезималь-
ных операторов группы G.
Теперь можно сформулировать основную теорему настоящего
параграфа.
Теорема. Линейная оболочка I инфинитезимальных
операторов представления Т группы G образует в L2 инвариантное
подпространство относительно представления Т2 = ТХТ-
Представление группы G, индуцируемое в I, не зависит от выбора
представления Т, если только размерность I равна
размерности т группы G.
Представление, индуцируемое в подпространстве /, называется
инфинитезималъным.
168
БЕСКОНЕЧНЫЕ ГРУППЫ
[ГЛ. IX
Изучение инфинитезимального представления оказывается
полезным при нахождении неприводимых представлений группы Ли,
а также при решении ряда прикладных вопросов. В квантовой
механике инфинитезимальные операторы выступают в роли операторов,
отвечающих тем или иным физическим величинам. Поэтому
представляет интерес характер их преобразования под действием
элементов группы G; сформулированная теорема показывает, что эти
операторы преобразуются по инфинитезимальному представлению.
Доказательство. Начнем с инвариантности
подпространства /. Для доказательства инвариантности подпространства /
достаточно проверить, что все операторы
TteOUTte"1) (g£G; k=l9 2, ..., m)
содержатся в /.
Так как по определению 1к
rr^)hT(g^) = ^){T(g)T(f)T^-^ef (44,1)
то естественно рассмотреть более подробно выражение
Введя обозначение
b = gfg~l.
можем написать:
■«wir'>-2S
dT(h)d**{gtg-i)
d*kf ysJS ^Jdaj(h) dak(f)
Подставляя в это равенство f=et получим в силу (44,1) и (44,2)
т
1(fllilf ' Ztda^h)^ d«k{f) \f
т. е.
где
\f=e
Т2 (g) lk . T (g) I*T (gr-i) = 2 Cjk (g) ljt (44,3)
i=i
c^)=-^rrW (44'4)
Соотношение (44,3) доказывает инвариантность подпространства /.
Коэффициенты Cjk(g) вполне определяют оператор T2(g) в
подпространстве /. Как показывает равенство (44,4), эти коэффициенты
не зависят от выбора представления Т.
44] ИНФИНИТЕЗИМАЛЬНОЕ ПРЕДСТАВЛЕНИЕ ГРУППЫ ЛИ 169
Если операторы 1^ (/= 1,2 т) линейно независимы в
пространстве L2, то они образуют базис подпространства /. В этом
случае коэффициенты Cjk(g) не просто определяют оператор T2(g*),
а являются матричными элементами этого оператора, который,
таким образом, не зависит от выбора представления Т. Теорема
доказана полностью.
Задача I. Обозначим через Jl9 J2, ..., Jm набор инфинитезимальных
операторов, связанных с инфинитезимальным представлением. Доказать
формулу
Jfclj = Ыэ — Ijh-
Задача II. Доказать, что инфинитезимальное представление группы
вращения эквивалентно векторному представлению.
ГЛАВА X
ПРЕДСТАВЛЕНИЕ ГРУППЫ ПОВОРОТОВ, ГРУППЫ ВРАЩЕНИЙ
И ПОЛНОЙ ОРТОГОНАЛЬНОЙ ГРУППЫ
§ 45. Неприводимые представления группы поворотов Z
Группой поворотов Z называется подгруппа группы вращений,
состоящая из всевозможных поворотов вокруг оси OZ.
Так как группа Z коммутативна, то все ее неприводимые
представления одномерны (см. задачу II § 18). Найдем непрерывные и
дифференцируемые неприводимые представления группы Z. Пусть
^(ср) есть характер какого-либо, быть может, и многозначного
представления группы Z. Тогда в силу одномерности представления
можем написать:
х(<р)х(ф)=х(<р+ф) (—°°<ср» ф<°°).
Дифференцируй это равенство по ф и полагая затем ф = 0,
получим:
х(?)х'(0)=х'(?).
Отсюда следует, что х (?) =е?г • Число m = i%'(0) называют
индексом найденного представления, характер представления с
индексом т будем обозначать через Хт(?)- Таким образом, мы имеем:
Xm(<?) = *-im<?- (45,1)
Если индекс т — целое число, то представление Хш однозначно.
В противном случае мы получаем многозначное представление.
Группа Z имеет, таким образом, континуум неприводимых
представлений. Представления с действительными индексами являются
унитарными, все остальные не унитарны.
Инфинитезимальный оператор, соответствующий углу ср, равен
_--™ _ — .т г]0ЭТ0Му
е-ът<?
<р=о
1<рет — iffiem.
Задача. Найти произведение двух неприводимых представлений
группы Z с индексами mt и т2.
§ 46] НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ 171
§ 46. Классификация неприводимых представлений
группы вращений
Прежде чем приступить к отысканию неприводимых
представлений группы вращений, перечислим некоторые установленные ранее
факты.
1. Характер векторного представления определяется формулой
X(C,)=l+2cos?; (a)
здесь С? = С (ср) обозначает поворот вокруг какой-либо оси на
угол ср.
2. Параметры группы вращений можно ввести следующим
образом. Сопоставим каждому повороту вектор, направленный вдоль
оси поворота в сторону, откуда поворот кажется происходящим
в положительном направлении, и равный по величине углу поворота.
Проекции этого вектора на оси координат обозначим через ах, а2
и а3, а сам поворот обозначим через ^[а^ад]. Полученные таким
образом числа ах, а2 и а3 могут служить параметрами группы
вращений.
3. Инфинитезимальные операторы, соответствующие параметрам
ах, а2 и а3, определяются в векторном представлении матрицами
(см. (43,4), (43,5))
*1 = £32 823» *2 = £13 £31» *3 = S21 £12- (б)
4. Инфинитезимальные операторы векторного представления,
а значит, и любого другого представления удовлетворяют
следующим перестановочным соотношениям:
I^ — I^^ [I1I2] = I3, [I2l3] = Ii, [I3Il] = l2- (В)
5. Инфинитезимальное представление группы вращений
эквивалентно векторному представлению. При этом роль базисных
векторов /, j и k играют соответственно операторы 1х, 12 и 13.
6. У группы вращений существует функционал усреднения. Если
воспользоваться углами Эйлера 0, ср и ф, то функционал
усреднения можно записать в виде
Ж(/)=8^| J |/(6,?,ф)8!пв*6Жрйф. (г)
Группа вращений является компактной группой, поэтому каждое
непрерывное однозначное представление этой группы имеет эквивалентное себе
унитарное представление. Оказывается, что у группы вращений универсальная
накрывающая группа также компактна, поэтому этим же свойством обладают
и неоднозначные представления группы вращений.
, Перейдем теперь к отысканию неприводимых представлений
группы вращений, которые мы будем считать унитарными в
соответствии со сделанным замечанием.
172
ПРЕДСТАВЛЕНИЯ ГРУПП
[ГЛ. X
Пусть D(g) (g£R) есть некоторое неприводимое представление
группы вращений, действующее в 5-мерном пространстве Z,, и пусть
1Х, 12 и 13 — порожденные этим представлением инфинитезимальные
операторы.
Представление D(g) является в то же время представлением
группы Z поворотов вокруг оси OZ. Так как все неприводимые
представления группы Z одномерны, то представление D,
рассматриваемое как представление группы Z, разбивается на 5
одномерных представлений. Соответствующие этим представлениям
одномерные подпространства можно охарактеризовать, выбрав в каждом
из них по вектору. Таким образом, мы получаем ортогональную
совокупность s векторов emi, em%i
Здесь т19 т2
т*
обозначают индексы представлений группы Z. Операторы D[0, 0, а3],
соответствующие всевозможным поворотам вокруг оси OZ,
изображаются в этом базисе следующим простым образом:
D [0, 0, а3]
о
о
О
о
ю
о
(46,1)
Подобную же процедуру произведем с инфинитезимальными
операторами, введя в рассмотрение операторы
А1 = Л1 —12, А_! = Л1 + 12, А0 = 13,
(46,2)
преобразующиеся под действием поворотов вокруг оси OZ по
неприводимым представлениям группы Z с индексами 1,—1 и 0.
Согласно равенству (46,2) имеем:
Ао^я
1зЧ=-^
(v=l, 2, ..., s)
(46,3)
(46,4)
(46,5)
[А0А*] = — ikkk (& = 0, ±1),
[А1А_1] = 2/А0.
Рассмотрим теперь вектор кхет^ Легко видеть, что если он не
равен нулю, то он преобразуется по произведению представлений
группы Z с индексами 1 и т^ Действительно,
IsAi^Wv = ^ihem„ + [I3AJ ет^ =
= — ьт^кхет^ — 1кхеш
■ — i(wv+l) кхе,
т,.
Точно так же вектор к-хет^ если только он не равен нулю,
преобразуется по представлению группы Z с индексом т^—1 (v=l,
, ..., 5).
с 46] НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ 173
Обозначим через j наибольшее из чисел ти т2> -.., ms и через
#.£L — вектор (или один из векторов), преобразующийся по
представлению группы Z с индексом j.
Построим последовательно векторы
e^i = A_i^, ej_2 = A_xej_u ..., e^r = А_^_г+1, . .. (46,6)
Среди этих векторов имеется не более 5 отличных от нуля.
Действительно, все не равные нулю векторы е3-_к (& = 0, 1, . ..)
линейно независимы и даже ортогональны, так как преобразуются
по неэквивалентным неприводимым представлениям группы
поворотов Z. Если г — число отличных от нуля векторов (46,6), то
tj-r+i — последний не равный нулю вектор и
е^г = А_^_г+1 = 0. (46,7)
Подпространство Lri состоящее из всевозможных линейных
комбинаций взаимно-ортогональных векторов
ejt ej_u . .., ej_r+l9 (46,8)
инвариантно относительно оператора А_х в силу соотношений (46,6)
и (46,7). Оно инвариантно и относительно оператора А0 в силу
соотношений (46,3), которые применительно к векторам (46,8)
записываются в виде
A0ek = — ikek (& = /, У—1, ..., У —г+1). (46,9)
Рассмотрим теперь векторы, получающиеся в результате
применения оператора Ах к векторам (46,8). Прежде всего имеем А!^ = 0,
так как в противном случае в пространстве L существовал бы
вектор Axej Ф 0, преобразующийся по представлению группы Z с
индексом У+1, что невозможно в силу выбора индекса у. Далее,
имеем:
Ai^-i = A1A_1^ = A.xA^ + IAxA^x] e5. (46,10)
Первое слагаемое в правой части этого равенства есть нуль.
Второе слагаемое согласно (46,5) равно 2iA0ej=2jej. Равенство (46,10)
принимает следующий простой вид:
*&-1 = Щ. (46,11)
Теперь нетрудно вычислить вектор А1е^_2- Имеем:
Ах^_2 = AxA^i^x = A.1A1^_1 + 2/Vi-i = 2У^-1 +2 (У— 1) *i-i.
т. е.
А^.2 = 2(2У— \)ej_v
Легко видеть, что, последовательно вычисляя векторы Ахе$_ъ,
Ai^-_4, ..., мы получим соотношения вида
Ai*w = >WWi (m = j, j—l, . ..,У — r-f-1), (46,12)
174
ПРЕДСТАВЛЕНИЯ ГРУПП
[ГЛ. X
где Хп — некоторые числа. Значения \j, \j_u X^_2 нами Уже найдены:
xi=°. lj_t = 2jt Xi-2=2(2y—1).
Равенства (46,12) показывают, что подпространство Lr инвариантно
не только относительно операторов А0 и А_х, но также и
относительно оператора Ах. Это означает, что подпространство Lr
инвариантно относительно всех трех инфинитезимальных операторов 1х,
12 и 13 и, следовательно, относительно всех операторов
рассматриваемого представления D(g) группы вращения. Поэтому Lr
совпадает со всем пространством L, число r = s и векторы (46,8)
образуют базис в пространстве L. Равенства (46,6), (46,9) и (46,12)
определяют операторы A_i, A0 и Ах. Остается выяснить, какие
значения может принимать число j и числа \т для того, чтобы
определенные этими равенствами операторы удовлетворяли
необходимым перестановочным соотношениям. Как только эта задача будет
решена, мы получим возможность перечислить все неприводимые
дифференцируемые представления группы вращений, придавая j и \ш
разрешенные совокупности значений.*
Нетрудно видеть, что соотношения (46,4) удовлетворяют при
любом выборе чисел \ш и j.
Для того чтобы операторы Aq, А_х и Ах, определенные
равенствами (46,6), (46,9) и (46,12), удовлетворяли также и
перестановочному соотношению (46,5), должны выполняться следующие
равенства:
2™ = *™.! — lm (m = j, у—1, ..., У — 5+1),
О = Аге^8 = ^_s^_s+1.
К этому следует присоединить условие
выражающее тот факт, что в представление D не входит ни одно
представление группы поворотов с индексом, большим чем j.
Итак, мы получили систему разностных уравнений
*m-l —*m=2l» (46,13)
вместе с дополнительными условиями
Х< = 0, V-8 = 0. (46,14)
Решая уравнение (46,13) с учетом первого из условий (46,14)
находим:
\п = ]и+1) — т(»1+1). (46,15)
Поэтому для выполнения второго условия (46,14) необходимо и
достаточно, чтобы
46] НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ 175
Число j может быть, таким образом, любым целым или полуцелым
числом (т. е. половиной нечетного числа).
• Проведенное рассуждение показывает, что каждое из значений
числа j
7=0, 1, 1, у, 2, ... (46,16)
определяет, и притом единственным образом, представление группы
вращений; размерность этого представления равна 5=27+1.
Отсюда следует, что с точностью до эквивалентности группа
вращений имеет ровно по одному неприводимому представлению
каждой размерности.
Неприводимое представление группы вращений удобно
характеризовать числом 7» называемым его весом.
Размерность 5 представления веса j равна
5=27+1. (46,17)
Представление группы вращений веса j принято обозначать через Dj.
Используя формулу s = 27 + 1, можно переписать
соотношение (46,1) в виде
elJa* ... 0
D,[0, 0, а3] =
0 ... е-1!**)
(46,18)
Заметим, что матрицы, соответствующие в базисе (46,8)
операторам Dj[olv 0&2, а3] унитарного представления D^, не являются
унитарными, поскольку этот базис хотя и ортогонален, но не
нормирован. Так как часто бывает более удобно иметь дело с унитарными
матрицами, то целесообразно произвести нормировку базиса (46,8)»
Пусть векторы
е'т = *тет (»=-У. —/+Ь .... Л (46,19)
образуют нормированный базис. Для вычисления коэффициентов ]хт
проще всего воспользоваться результатом задачи IV § 43, в силу
которого необходимым и достаточным признаком унитарного
представления является антиэрмитовость всех его инфинитезимальных
операторов. В нашем случае это означает, что операторы Яи Пг
и Я3 являются эрмитовыми. Поэтому оператор А*, сопряженный
оператору Ах, равен
а!=л1+12=а.1
и
^m(em+v em+i)=z \^lem* em+l) — (em* A-l^w+l) ==z (em> em)>
176 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Учитывая соотношение (46,19), получаем отсюда:
1
т. е.
fbw+l
Н-м»
'чтг
I H-m+112 I H-m
Фаза нормирующих множителей совершенно произвольна. Если взять
в качестве \ьт (m = —у, ..., j) положительные числа, то
последнее равенство можно переписать в виде
^ = V\n = VjU+l)-m(.tn+\).
Выразим операторы А_х, А0 и Ах в новом базисе. Используя
соотношения (46,6), получаем:
IVVm = А-1ет = ет-1 = Рт-1ет-и
т. е.
л-1ет— рш em-U
или, окончательно,
А_х4 = Vj(j+l) — rn(m— l)efm^. (46,20)
Подобным же образом находим:
A1e'm = Vj(j+\) — т(т+\) е'т+1 ,.ЙОП
(m = —j9 ..., у), (46,21)
Aq^w = — imem.
nf nr nf
Будем называть базис
e'-j> e'-j+i e) (46,22)
каноническим базисом. Он состоит из ортонормированных
векторов е'т(т=—у, ..., Д каждый из которых осуществляет
неприводимое представление группы Z индекса т. Операторы Ael, Ао и Ах
определяются в каноническом базисе формулами (46,20) и (46,21).
Инфинитезимальные операторы связаны с операторами А_х, А0 и Ах
соотношениями
li = S-<Ai + A-i). l» = -j(Ai —A-i)' 'з = Ао- (46,23)
Если ввести обозначения
fli = VVU+l) —ю(«—1). (46,24)
то соотношения (46,20) и (46,21) можно переписать в виде
A_tem = (xJmem-u Ао^ =—irnemy Aiem = c4n+i^m+i (46,25)
(штрих над em_v em и ет+1 опущен).
§ 47] МАТРИЧНЫЕ ЭЛЕМЕНТЫ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ 177
В заключение подчеркнем, что в настоящем параграфе произведено
перечисление всех неприводимых представлений J)j(j = 09 ^-, 1, . ..)
группы вращений и найдены матрицы инфинитезимальных
операторов в так называемом каноническом базисе.
Кроме того, приведенные в этом параграфе рассуждения
доказывают следующую теорему.
Теорема. Пусть \v I2, 13 — три произвольных оператора,
определенных в некотором пространстве L и удовлетворяющих
перестановочным соотношениям
[М2] = 1з> [Уз] = 11, [Mi] = l2.
Обозначим через А1 = /11 —12, A_1 = /I1-|-l2, A0 = I3. Тогда
1) среди собственных векторов оператора А0 найдется
вектор ej такой, что Atej = 0;
2) собственное число j, отвечающее вектору ej, является
целым или полуцелым]
3) векторы ej и векторы ej_v ej_2, ...» e_j, построенные
с помощью рекуррентных соотношений
A_i^w = 1/7(7+1) — т(т— 1) ет_^ (m = j, j — I, ..., — 1 -j- 1),
преобразуются следующим образом под действием операторов Аг
и А0:
Aiew = V7(y+l) — т(т+\) em+v
Кет = — *тет-
В следующем параграфе будут вычислены матрицы Dj(g) в
каноническом базисе.
Задача. Показать, что
I2 = I? + li+^ = A2-i(A1Al1 + A-1A1) = ->;(7 + l)E, (46,26)
где Е — единичный оператор.
§ 47. Матричные элементы неприводимых представлений
В настоящем параграфе мы вычислим матричные элементы
неприводимого представления D^- как функции от углов Эйлера 6, ср, ф.
Определим прежде всего зависимость Му(0, ср, ф) от углов ср
и ф. Из тождества (5,3) ^(6, ?, ф) = С3 (ф)С1(6)С3 (ср) следует, что
Я$(в. ?. Ф) = ^Шсз(ф))^(С1(6))^)(С3(ср)).
Вспоминая, что матрица, соответствующая повороту вокруг оси OZ\
имеат вид (46,18), можно написать:
D{A (С» (ф)) = hme-m9 D# (Сз (ср)) = Ъп1е-х*.
178 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Подставляя эти выражения в предыдущее равенство, получим:
D® (9, ср, ф) = е~*™+ЩРы<5 (б), (47,1)
где
Pjcij(V) = Di{)(Cim (47,2)
Отсюда следует, что
Pia9j(0) = biu- (47>3)
Для определения функций Ркг ?(0) выведем дифференциальное
уравнение, которому удовлетворяют матричные элементы D^y(0, ср, ф).
Сопоставим каждому элементу h группы вращений оператор t (h)t
действующий на матричные элементы D^i(g) (g£R):
i{h)D$(g) = D${gh). (47,4)
Так как D$ {ghj=t- D$h(g)Dmi (h)> то последнее равенство можно
переписать т^к:
Hh)D&(g) = D<£i(h)DJ&(g).
Отсюда видно, что семейство функций D{m(g) (k фиксировано,
/7t = —j, ..*, j) инвариантно относительно всех операторов t(h)
{h£R). В базисе ет = D& (g) оператору t(h) соответствует
матрица Dill (И). Это означает, что операторы t(h) образуют
представление Dj группы вращений, а функции D%m(g) (т——/, ...,,/)
играют роль канонического базиса.
Вычислим инфинитезимальные операторы этого представления*
Возьмем в качестве вращения h поворот вокруг оси ОХ на угол <xv
Равенство (47,4) можно при этом переписать в виде
t fa 0 0] D$ (6, ср, ф) = />й>(6 fa), ср fa), <]>fa)), (47,5)
где 6 fa), ср fa)' Ф(а0 — углы Эйлера, характеризующие
произведение вращений gh. Дифференцируя тождество (47,5) по ах и полагая
затем ах = 0, получим:
,(Я/« . ...x_dD$ d*l*i>\ . <*4'?<Mai)| , dD^d+fa)
ii^(e.T.t) = -3f-^T
ai:=0 <*<Р ^1
«1 = 0 д+ д«1
Мы видим, что инфинитезимальный оператор 1Х является оператором
дифференцирования:
. _d6fa) д . dcp fa) ^ , <fyfa) а a7fiv
Вычислим входящие сюда производные *, ^ , уа*'. Для
этого воспользуемся тождеством
ftk(Ofa). Т fa)» *fa)) = ^s(^ ?. 4>)^s*fa 0 0), (47J)
S 47] матричные элементы неприводимых представлений 179
где gik(®> ?» Ф) — известная нам матрица (5,4). Полагая здесь / = 3,
£ = 3, получим:
cosQ(<x1) = —g32(Q, <Р. ♦)sina1+grg3(e, cp, ^)cosax.
Дифференцируя это соотношение по ах и полагая затем а1 = 0,
найдем:
1^6(^)1
— sin(
да{
«!=<>
— ^З2(е> ?. ф) = —sin 8 cos ср.
«,=0
= cos ср. Полагая в (47,7) i = 3,
а» («i)l
Отсюда следует, что ^
£ = 2, найдем подобным же образом, что и\к"1}\ =—ctgOsincp
дч 1«1=0
1 и о ^ф (al) I sin ?
Наконец, взяв *=1, # = 3, получим, что V 1/\ = -г-|-.
(/«1 lai-o Sin °
Операторы 12 и 13 могут быть подсчитаны этим же методом.
В результате получаются следующие выражения:
. д . л . д , sin ф д
. д , 0 d , cos ф д
0Ф ' COS 6 dty
1з =
<Эф*
От операторов 1х, 12, 13 легко перейти по формулам (46,2) к
операторам А_х, А0, Ах:
А-1 = ^('^—c«g6
а . 1 д
ду ""*" sin 0 dty
)■
Al=e_i,p(^+Ctge
1 д
d? sin в дф
)•
(47,8)
Применим теперь общие соотношения (46,20) (46,21) к нашему
случаю. Получим:
eiilm-«gB
1 д
д? n sin 6 <ty / fcm ~"
= V> (/ + 1) — «(» — 1) D$»-u
(47,9)
(47,10)
180 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. х
Подставим сюда выражение (47,1) для D^:
{дЬ~ '!^^)p^j=-iVjU+i)—m{nt+l)Pktm+1.y
В частности,
(А jcosb-k\p _
\дЬ sintt )^kJJ — v*
Общее решение последнего уравнения имеет следующий вид:
^jyfi(9) = cfcsin/-*|cos^+*y (k = — У. .... У). (47,11)
Для определения всех остальных функций Ркт j обратимся к
первому рекуррентному соотношению (47,10). Если сделать замену
переменных
т-к т+к
cos в = р. />»*,, (в) = (1— й* 2 (1+ji)" " <Ъ»<Р0. (47,12)
то это рекуррентное соотношение примет следующий простой вид:
^«-1 = -^7т/- ' , 1Г^. (47,13)
У 7 0 + 1) — m(m — 1) rfji.
Отсюда следует, что
4k»(p) = — ( ' ~77^Г*МЕ)- (47-14)
Ц УУ(/+1)-Жл-1) И
Функцию ^ легко посчитать с помощью (47,11):
«W (1*) = ск2~* (1 — р/-* (1 + l*)i+*.
Подставляя это выражение в (47,14) и используя (47,12), получим:
f_/u->» т~к т+к, -я
^,i(6) = ^"J- ( } -О-р) -2 (1+1*)" 2 X
Ц ула+1)-л(я-1)
Х^^-КГ-^Г^! +р/+*Ь (47,15)
Неизвестные пока .коэффициенты ск должны быть' определены из
УСЛОВИЯ Fjchj» (0)=1 (см. (47,3)).
*Имеем:£
j l(-U)J-\l+,,.)-**
P»,'i(6) = Cfe2"> ,,л ~' "^' X
П УУС/+1)-я(я-1)
X^rK1-^"*(1+J»)/+*].
§ 47] МАТРИЧНЫЕ ЭЛЕМЕНТЫ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ 181
Полагая здесь 0 = 0, |х=1, получим:
Н YjU + l)-n(n-l)
Отсюда следует, что
Н /Уи+1)-л(«-1)
си — ( О (;-_й)!
Подставляя это выражение в (47,15), получим окончательно:
(-l)*-*f»-» -/~(J-*)'(J + '")'
*W<e>- 2,(/_А), К (;- + ,)!(/_т)! X
X(l— ц) 2 (1+1*) 2 X
X -^ [(1 -1»)'"* (I +^'+ft] (1* = cos 6). (47,16)
Функции Dkm(®> <pi ф) называются обобщенными сферическими
функциями у'-го порядка.
Итак, мы доказали, что матричные элементы
где функции Pjcm j(®) определяются соотношением (47,16).
Приведем вычисленные по формулам (47,1) и (47,16) матрицы
представлений Dx и Dt:
Т
Dx(b, ср, ф) =
J_ei(cv+<o)(i_L_cos0) jLe^sine ie*(*-9)(l+cos6) )
2 v -г / y2 2 • ' I
£=*<*sin6 cos 6 £=e-**sine
/2 /2
--Lei(-*+9)(l—cos 6) ^— i?-*Vsine J-*-*(<H<p)(l-|-cos6)
2 v 1^"2 2
£4(6, Ср, ф):
2
/ >+*>cosl -*>-*> sin |
182 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Из соотношения (47,16) следует, что функции Р0> -т; j(®)
пропорциональны присоединенным функциям Лежандра
P™(cos0) = -4-sin™0 dm+J . (cos2 6 — 1)'. (47,17)
Именно, имеет место соотношение
Po.-m;Jm = i-^yr^r^.pf(cosb). (47,18)
Поэтому матричные элементы Dq, -m(9> rf) пропорциональны
сферическим функциям
DL _«(в. «p) = r»yr^^j- у^(в, ср). (47.19)
Задача I. Доказать с помощью соотношения (46,26), что функции РЙШ) ,•
удовлетворяют дифференциальному уравнению
*Ркт.1 , , *p*m.j , Г,- , 1Ч /«2-2mAcos8 + ft2-j
—ЗвН- + ^в^Н"+ [; (; + 1) iffi*5 J^»./ = 0-
Задача II. Показать, что
Pkm,j(*) = (~ 1 Г~к Рщ, j (6).
Задача III. С помощью (46,25) и (47,9) показать, что
^01±ctge|- + iinTw)D^(9,%+)=D^(8,9^)A^-
§ 48. Свойства неприводимых представлений группы вращений
Выводы, полученные в двух последних параграфах, позволяют
ответить на ряд вопросов, относящихся к неприводимым
представлениям группы вращений.
Выясним прежде всего, все ли неприводимые представления
группы R являются однозначными. Для этого напомним, что! углы
Эйлера б, ср и ф, характеризующие вращения, изменяются в пределах
О<;0<;?г, 0 <; ср ^ 2тс и 0 ^ ф ^С 2тс. При этом вращения g(0, 0, ф)
и g*(0, 2тг, ср) совпадают между собой; подобным же образом
совпадают вращения g*(0, ср, 0) и g*(0, ср, 2тс). Если матрицы
представления Dj удовлетворяют условиям D^(0, 0, ф) = ^(0, 2тс, ф) и
D^(0, ср, O) = D^(0, ср, 2тс), то мы имеем дело, очевидно, с
однозначными представлениями, в противном случае представление D^ не
является однозначным. Согласно формуле (47,1), мы можем написать:
d$(0. 2*. ф) = <гшгя$(е. о, ф).
/Ж(в, ср, 2и) = е-2я*ЭД(6, ср. 0).
г 48] СВОЙСТВА ПРЕДСТАВЛЕНИЙ ГРУППЫ ВРАЩЕНИЙ 183
Числа I и k являются целыми или полуцелыми одновременно с
числом У- Поэтому, если вес представления j есть целое число, то
представление однозначно. Если же представление имеет полуцелый
вес, то вращениям g*(0, 0, ф) соответствуют два оператора =tDj(0, 0, ф).
Отсюда следует, что и всякому другому вращению соответствуют
два оператора ztiD^g"). Таким образом, представления с целым
весом являются однозначными, представления с полуцелым весом —
двузначными.
Мы видели, что произведение двух вращений с углами Эйлера б,
ср, ф и 0, те — ф, те—ср равно единице. Поэтому произведение
D-(0, ср, ф)^(0, тс — ф, 1С — ср) равно единичному оператору Е, если
представление Dj однозначно. В случае двузначного представления
это произведение равно либо Е, либо — Е:
D,(6, ср, ф)^(в, *—ф, тс— ср) = ±Е.
Выясним, какой знак следует взять в правой части этого равенства.
Переходя к матричным элементам и используя (47,1), напишем:
J
2 Г1 (**+WPWf i (8) *-* (»*-**+»»-**>ЯйМ (8)= it hm-
Устремим здесь угол 0 к нулю, имея в виду, что Ркг j(Q) = §дя-
Мы получим:
е—2пгт ==. -+- \ 9
Так как мы рассматриваем полуцелые значения у, то 2т является
нечетным числом и в правой части последнего равенства следует
взять знак минус. Таким образом,
Dj(0» ¥• <WDi(6> * — Ф. *—<p)=*2lci->E. (48.1)
Рассмотрим теперь операцию перехода к сопряженному
представлению. Так как взаимно-обратные вращения g и g~l
осуществляют поворот на один и тот же угол (вокруг противоположных
осей), то они сопряжены друг другу. Поэтому (см. задачу VI § 21)
каждое представление группы R сопряжено самому себе. Имея это
в виду, можно следующим образом сформулировать теорему § 21
применительно к группе вращений:
Произведение двух неприводимых представлений Dj и Dy
с различным весом (j' ф J') не содержит единичного представления.
Квадрат каждого неприводимого представления Dj содержит
ровно один раз единичное представление.
Найдем в пространстве^, в котором действуют операторы Dj(g),
базис
e-J9 е-э+i eJ. (48,2)
контравариантный каноническому базису.
184 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Оператор Dj(g) в силу унитарности изображается в этом базисе
матрицей, которая комплексно сопряжена матрице оператора Dj(g)
в каноническом базисе *). Поэтому инфинитезимальные операторы
также изображаются комплексно-сопряженными матрицами. Легко
видеть, что при этом в силу соотношений (46,2) матрицы
операторов Aq, A+i, А_х в контравариантном базисе комплексно сопряжены
матрицами операторов соответственно —А0, —А+1, —А_х в
каноническом базисе. Учитывая это, получаем из (46,20) и (46,21):
Аге™ = —|/у(у4-1) — т(т — \)е™~\ \
А_1е™=— VjU+ \) — m{m+\)e™+\ [ (48,3)
A0em=imem. J
Последнее равенство показывает, что индекс вектора ет равен — т.
Поэтому можно написать:
e™=4me_m(m = —j j; |Тж|= 1).
Подставляя это выражение в (48,3), получаем:
A_1e_m=-1f±VjU+D — 'n(m+\)e_m_1.
1т
Сравнивая это соотношение с соотношением (46,20), находим, что
Yw+1 = — fm и> следовательно, Ym = const (— \у'~т. Поэтому векторы
e™=(-l)j-me_m (m=-J9 —j+l ;) (48,4)
образуют базис, контравариантный каноническому базису.
Будем называть компоненты вектора a£L в каноническом базисе
ковариантными компонентами и обозначать их через
а™ (— УО<у).
Компоненты этого же вектора в контравариантном базисе (48,4)
будем * называть контравариантными компонентами и обозначать
их через ат (—j-tCm^j). Таким образом,
а=атет = (— \)j~mame_m.
Из этого равенства видно, что между ковариантными и
контравариантными компонентами вектора в пространстве Lj существует
простая связь:
а_ж=(—1)'-*а»». (48,5)
*) Отсюда следует, что векторы контравариантного базиса (48,2)
совпадают с комплексно-сопряженными векторами исходного базиса (46,22), если
для последних определена операция перехода к комплексно-сопряженному
вектору.
§ 48] СВОЙСТВА ПРЕДСТАВЛЕНИЙ ГРУППЫ ВРАЩЕНИЙ 185
Обозначим через fm канонический базис в некотором пространстве Л^,
преобразующемся по представлению D^. Согласно § 22 имеют место
соотношения
5 з
2 *™/m = lnv. 2 a™bm = inv. (48,6)
С помощью равенств (48,4) и (48,5) эти соотношения можно
переписать в виде
2 (-iy'-we_m/m=inv, 2 (-l)j-ma_mbm=im. (48,7)
Применительно к пространствам L\ и Lx эти соотношения принимают
"2
следующий вид:
e_if]_ — ej_/_I = inv' a_lAl — a\b_i_=inv9 \
2222 "22T2 } (48,8)
e_lf1 — e0f0-{-eJ_l = mi1 a_1b1 — a0b0-+-a1b_1 = mv. J
Нетрудно установить связь между векторами канонического базиса
в трехмерном евклидовом пространстве и ортами *, j и ft. Прежде
всего ясно, что можно положить
так как оба эти вектора не изменяются при поворотах вокруг оси OZ.
Далее, согласно (46,25) имеем:
^A-i^o = V^e-u А^о = V~2elm
С другой стороны,
А_1* = (Я1 — 12) ft = — (/./+/). А1* = (Я1 + 12)* = — lj-\-i.
Сравнивая эти соотношения, находим:
*-i = —y^C + tf). *o = k. ex = -±=(l — lj). (48,9>
В соответствии с этим координаты %_и- ?0, £t в каноническом базисе
равны
е-1 = у=-(-*-И.у). ?о = *. 1г = уъ(х + 1у). (48,Ю>
Если подставить эти выражения в (48,8), то получится:
«/+j[/, + ftft/ = inv
и
«Л + a А + аЛ = inv.
• о i\
-i oj
'0 0
0 —1
л о
»
г
0
0.
186 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Последнее соотношение выражает хорошо известное свойство
инвариантности скалярного произведения двух трехмерных векторов.
Соотношения (48,7) удобно записывать в виде
gkmfikfm = inv, gkmakbm = inv, (48,11)
где введена матрица
gkm = (-l)j-mh,-m- (43,12)
Эту матрицу иногда называют метрическим тензором. Для J = -x
матрица gltm равна
8кт~( ? ]), (48,13)
для j = 1 она равна
£*т~|0 -1 0 1. (48,14)
\1 0 0/
В естественном базисе эта матрица согласно (48,9) равна единичной
матрице
g*» = hm- (48,15)
В заключение заметим, что характер Xj(<?) поворота вокруг
оси OZ на угол ср в представлении Dj равен
Xi(9)= >g-^= V ,2' % (48,16)
Это непосредственно вытекает из формулы (46,18) для
оператора Dj[00a3]. Полученная формула (48,16) справедлива, разумеется,
для поворота вокруг любой оси, так как повороты на один и тот же
угол вокруг различных осей сопряжены друг другу.
Задача I. Показать, что в силу (48,1) и унитарности матрицы D^kl(g)
имеет место соотношение «
Задача II. Опираясь на (48,4), показать, что
DL(g)==(-Vk-miOJ-Jc-m(gy
§ 49. Произведение представлений группы вращений
При решении ряда прикладных вопросов оказывается полезным
разложить на неприводимые представления произведение двух или
нескольких неприводимых представлений группы вращений. В
настоящем параграфе решается задача о таком разложении.
§ 49] ПРОИЗВЕДЕНИЕ ПРЕДСТАВЛЕНИЙ ГРУППЫ ВРАЩЕНИЙ 187
Рассмотрим произведение двух представлений D^ и D^. Для
этого обозначим через
e-j> e-j+i *j
канонический базис в пространстве Lj, в котором действуют
операторы представления D^, и через
— канонический базис в пространстве Lyt в котором действуют
операторы представления Dp.
Базис пространства L$Y^Lyt в котором действует
представление DjXD/» состоит из векторов
e-jf-y* e_jf_r+lt .... e4fyt
e-j+if-j'> e-j+i/-j'+i» •••» e~j+ifj'*
ejf-j'> ejf-f+i ejfy-
(49,1)
Каждый из векторов (49,1) преобразуется по неприводимому
представлению группы Z. При этом вектор e-jf-f преобразуется по
представлению с индексом —j—/, векторы e_jf_j'+1 и e_j+1f_y —
по представлению с индексом —j—/+1 и вообще
вектор emf^ преобразуется по представлению с индексом т-\-т'.
Ясно, что векторы, расположенные в таблице (49,1) на одной
диагонали, преобразуются по представлениям группы Z с одним и
тем же индексом.
Предположим для определенности, что j^.j'. Выясним, сколько
раз в представлении D^-XIty» рассматриваемом как представление
группы Z, содержится представление индекса т ^ 0. Обозначим
это число через ср (т). Из (49,1) видно, что
( 0, если m>j-\-j'9
?(») = { У+/ + 1— т> если/—;<«<;+/, (49,2)
I 2/+1, если 0<w</— j.
Учтем теперь, что каждое неприводимое представление группы
вращений веса (А^>/я содержит ровно одно представление группы Z
индекса т, а представление веса |х < т не содержит ни одного
представления индекса т. Поэтому ср (т) равно числу неприводимых
представлений с весом jx^ту содержащихся в представлении D> X
X Dj'. Разность
ср (т) — <р(т-\- 1),
188
ПРЕДСТАВЛЕНИЯ ГРУПП
[гл. х
очевидно, равна числу представлений веса р = т, содержащихся
в представлении D^Xlty- Из (49,2) следует, что
10, если m>j-+-j\
1, если f—j^m^j'+j,
0, если 0<;/я<У—у.
Иными словами, если У</, то представление D,- X D/ содержит
по одному разу представления с весами
\><=j'—j> j'—j+l j'+j
и не содержит никаких иных неприводимых представлений.
Ясно, что при j > У в приведенном утверждении следует
поменять местами j и j'. Следующая формулировка объединяет оба
случая:
Произведение Dj X Ц/' двух неприводимых представлений
группы вращений с весами j и f содержит по одному разу
неприводимые представления D^ (|х = | j —/ |, \]—/ | -|- 1, . . ., j-\-f)
и не содержит никаких иных неприводимых представлений.
Таким образом, справедлива формула
j+i'
0,Х^= 21 DK (49,3)
Из этой формулы вытекает, что произведение двух двузначных
представлений есть однозначное представление.
Задача. Доказать, что произведение D. X D.- X D • содержит |один
раз единичное представление D0, если наибольшее из чисел /, j1 и j2 не
превосходит суммы двух других, и не содержит единичного представления
в противном случае.
§ 50. Спинорная алгебра
В различных областях физики и математики важную роль играют
величины, которые при вращении пространства преобразуются
линейным образом или, в частности, остаются инвариантными. В
качестве примеров таких величин можно указать скалярные величины
(расстояние между двумя точками пространства, угол между двумя
прямыми, потенциальная энергия точки в центрально-симметричном
поле, температура в данной точке пространства и пр.), векторы
(радиус-вектор точки, сила взаимодействия между двумя точками,
скорость точки, однородные линейные полиномы относительно
координат х, у, z и пр.), тензоры второго ранга (тензор инерции,
тензор проводимости и пр.) и много других величин.
Возможные значения каждой такой величины образуют некоторое
линейное пространство (например, возможные значения скалярной
§50|
СПИНОРНАЯ АЛГЕБРА
189
величины заполняют одномерное действительное или комплексное
пространство, значения векторной величины образуют трехмерное
векторное пространство и т. п.).
Каждое такое пространство Z,, естественно, порождает некоторое
представление группы вращений.
Рассмотрим это утверждение более подробно. Пусть произведено
некоторое вращение g£R (R — группа вращений). Тогда каждый
элемент х из L переходит в некоторый, вообще говоря, другой
элемент хд£Ь, причем соответствие
как уже говорилось, является линейным. Таким образом, каждому
вращению g£R, естественно, сопоставляется линейный оператор Т (g),
определяемый равенством
Т (g) х = хд.
Так как два последовательных вращения g и gx физически
эквивалентны результирующему вращению gxgf то элемент x9lg, в
который переходит х под действием вращения g^g", совпадает с
элементом T(jgx)xg:
отсюда следует, что
и, следовательно, соответствие g->T(g) является представлением
группы вращений.
Итак, исходя из пространства L и учитывая физическую природу
его элементов, мы пришли к представлению Т. Будем называть Т
представлением, порожденным или связанным с пространством L.
Будем также говорить, что элементы из пространства L преобразуются
по представлению Т.
Если некоторая физическая величина преобразуется при
вращениях линейным образом, то она преобразуется по некоторому
представлению Т группы вращений. Классификация величин по
представлениям группы вращений оказывается очень целесообразной
с точки зрения физики. Эта классификация лежит в основе спинор-
ной и тензорной алгебры.
Введем теперь важное понятие спиноров. Спинором веса j *)
называется всякая физическая величина, которая при вращении
пространства преобразуется по неприводимому представлению D?-
группы /?.
Согласно этому определению спинор веса 0 есть скаляр,
веса 1—вектор, веса 2, как будет показано, — симметричный
*) Этот термин не является общераспространенным.
190 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
тензор и т. д. Волновая функция электрона в нерелятивистском
приближении является спинором веса -~-. Спиноры веса -~- мы будем
называть просто спинорами, как это обычно и делается.
Спинором ранга п называется всякая физическая величина,
преобразующаяся по представлению D*?, которое является я-ой степенью
Т
представления Di группы вращений.
Т
Условимся о выборе базиса в пространстве спиноров я-го ранга.
Обозначим через Z.(1>. Z.(2). .... L(n> п пространств, элементы
которых суть спиноры (веса -т-Н. Перемножение этих двумерных
пространств дает пространство L спиноров ранга п. В каждом из п
пространств Z,(fe)(A=l, 2 п) выделим канонический базис
W. Л. (50,1)
2 2
Составляя всевозможные произведения типа
е.. . = efef ef (lk = ±l). (50,2)
мы получим базис в пространстве L. Элементы этого базиса
преобразуются по формуле
1(g) е., , =a.A(g)0L44 a,, (g)e.. ,, (50,3)
где *j4(g) = D$(s) (у. i = ±Y> g£R).
Ясно, что в каждом пространстве спиноров я-го ранга
(независимо от их физической природы) можно выбрать базис, однотипный
с базисом (50,2)*).
Элементы такого базиса условимся по-прежнему обозначать
через е.. { , хотя они не обязательно выражаются формулой (50,2).
Соотношение (50,3) при этом остается в силе. Каждый спинор А
ранга п можно представить в виде линейной комбинации базисных
элементов
*!» г*> ...» *п=± ~2
1 *Л— </*»*■—*я
*) Если в двух пространствах L и Ц заданы два эквивалентных
представления ТиТ'и базисы
ev e2 ..., еп и е[, е2, ..., еп
в этих пространствах выбраны так, что каждому элементу g £ G
соответствует в представлениях Т и Т' одна и та же матрица, то эти базисы
называются однотипными.
§ 50]
СПИНОРНАЯ АЛГЕБРА 191
Координаты A{i { преобразуются при вращениях по закону
\ч... in=««л. • • • \лЛ* - v (5М)
т. е. так же, как и произведения координат п спиноров первого
ранга. Ясно, что всякие 2п чисел, преобразующиеся при
вращениях по закону (50,4), являются координатами некоторого спинора.
Поэтому совокупность таких 2п чисел является спинором.
Рассмотрим два основных действия со спинорами: умножение
и свертку. Умножая спинор ранга т с координатами А. . . , на
спинор ранга п с координатами В. . , , мы получим спинор С
J1J2 • • • Jft
ранга т-\-п с координатами
С ... . =А.4 . В . . . (50,5)
Числа С действительно являются компонентами спинора (т-\-п)-го
ранга, так как они преобразуются так же, как и произведения
компонент т-\-п спиноров первого ранга.
Свертка спинора А{^,,,г- по индексам 1Х и /2 состоит в
переходе от этого спинора к спинору
А, . . =g А. ... , , (50,6)
ранг которого равен т—2; матрица g\ i определена равенством (48,13).
Проверим, что числа А^..^ действительно являются
компонентами спинора. Для этого заметим, что числа g..A.. . пре-
образуются по тому же закону, что и числа g. . А.В%СХ . .. Fi
Где Л, В, С, . . , F— спиноры первого ранга.
Согласно соотношению (48,11), произведение &..А.В. инва-
риантно и, следовательно, эти числа преобразуются как произведения
компонент da...Fi (т — 2) спиноров первого ранга, т. е. как
компоненты спинора (т—2)-го ранга.
Свертку спинора Л*^...* можно производить по любой паре
его индексов. Операцию свертки можно разбить на две
элементарные операции: операцию подъема индекса, т. е. перехода к
компонентам
т
А** —о- л
и операцию упрощения, т. е. суммирования компонент с
одинаковыми значениями индексов ix и 12
а Л
С помощью матрицы g можно поднять несколько или даже все
индексы спинора.
Поднятые индексы называются контравариантными в отличие
от ^расположенных внизу индексов, которые называются ковариант-
ными.
192 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Теорема. Спиноры п-го ранга, координаты которых
симметричны по всем своим индексам, образуют инвариантное под-
пространство, преобразующееся по неприводимому представлению
1
группы вращении веса j =-~ п.
Значение приведенной теоремы связано с тем, что она позволяет
в простой форме записать матрицы представлений любого веса, если
1
известны матрицы представления веса -у.
Доказательство теоремы вытекает из следующих трех
замечаний. Во-первых, подпространство U спиноров n-го ранга,
имеющих симметричные по всем индексам координаты, инвариантно
относительно всех операторов представления Dl. Действительно, если
Т
е = А^ц ... ineiiU • • • in
есть такой спинор и g£R, то спинор
*&1 (g) * = Аьч ... «Я<УА (g) « jA (£)••• «уп(g) 4,h ... jn
2
имеет координаты
вм* -jn = Льч... in4A te) *w, (£)••• 4nin te).
также симметричные по всем индексам. Отсюда следует, что
подпространство L' порождает некоторое представление Т группы вращений
Во-вторых, спинор я-го ранга е\ \ \ , очевидно, входит в про-
Т~2 '"~2
странство V и осуществляет представление группы Z индекса -^ я.
Отсюда следует, что представление Т содержит по крайней мере
1
одно представление с весом, не меньшим -^п.
Наконец, в-третьих, размерность подпространства I! равна л+1.
Действительно, если известны координаты
2 2 •■* 2 2 2 2 •*" 2 2 2 '" 2
спинора из Z/, то известны все его координаты.
Поскольку размерность V равна п-\-\, то представление Т не
может содержать представлений Dj с весом j > -~ . Значит, оно
содержит ровно одно представление Dn и не содержит никаких дру-
"211
гих представлений. Иными словами, T = DW , что и доказывает тео-
рему.1
§50]
СПИНОРНАЯ АЛГЕБРА 193
Очень простая реализация пространства U получается, если
отождествить спиноры е{\\ е(|\ . .., е(Р и спиноры е{\, е(*\ е{п)±,
IT 2 ~2" 2 ~~2~
т< е. положить
и = е(*\, v=e(P (k = 1, 2, . .., п). (50,7)
2 2
Тогда базис в пространстве U принимает следующий простой вид:
ип> un-iVt uuu9 uvn~x, vn. (50,8)
Инвариантность пространства Z/ относительно вращений при таком
определении очевидна. Ясно, далее, что каждый из спиноров
цп-к^ч (/5 = 0, 1, ..., п) осуществляет неприводимое представление
группы Z, индекс которого равен k — -~ . Отсюда получается, что Z/
есть пространство спиноров веса /=—я, а базисные спиноры (50,8)
отличаются от спиноров канонического базиса самое большее
числовым множителем
em = Pmu1+mv>-m. (50,9)
Для вычисления коэффициентов рш подействуем на обе части
равенства оператором А_х. Используя формулу (46,20) и результат
задачи III § 43, получаем:
У/ач-1)—»(»—i)e»_t=pw(y+«)«i+w-v-wA_1e=
= Ы U + ») «>+-V-»+1 = -p*-U + т) ет_х.
vm-\
Отсюда
_ ,/~у(>+1) —д(ж —1) _ ,/>-
*» = [(J + myiU-myiT- (5°Л0)
Формулы (50,9) и (50,10) дают простую связь между спинорами
веса j и спинорами веса ~^-.
В частности, канонический базис векторного представления Dt
выражается следующим образом через спиноры е i и ег.
~Т 1
e-i = e2_u e0 = Y2e^ieu e1 = e\. (50,11)
2 2 2 2
194
ПРЕДСТАВЛЕНИЯ ГРУПП
[ГЛ. X
§ Б1. Тензорная алгебра
Тензором п-то ранга (я = 0, 1, 2, ...) называется всякая
физическая величина, которая при вращении пространства преобразуется
по представлению D?, т. е. по я-й степени векторного
представления.
Согласно этому определению тензор нулевого ранга есть скаляр,,
тензор первого ранга — вектор. Представление D? называется
тензорным представлением я-го ранга. Характер у* тензорного
представления равен характеру векторного представления, возведенному
в п-ю степень:
Z?(C(<p)) = (l+2cos<p)n. (51,1)
В пространстве тензоров я-го ранга обычно выбирают базис»
который преобразуется при вращениях как произведение
W...«? = ett...<. (51,2)
базисных элементов пространства Lv При этом в качестве базиса-
пространства Лг выбирают вещественный ортогональный базис
еи е2, ez. (51,3)
Каждый тензор я-го ранга А задается в базисе (51*2) или в
однотипном с ним базисе Ъп координатами Л^-2...$
■А<А...
'ЧЧ ---г
Ясно, что произведение двух тензоров рангов шип есть тензор
ранга (т-\-п). Координаты этого тензора получаются в результате
перемножения координат перемножаемых тензоров.
Над каждым тензором А ранга выше первого можно произвести
операцию свертки, вполне аналогичную операции свертки над
спинорами. Нужно лишь иметь в виду, что в качестве матрицы gkm
следует взять единичную матрицу (см. (48,15))
ёкт = °кт-
Поэтому операция свертки тензоров сводится к операции упрощения*.
т. е. к операции перехода от тензора Л^,-,... * к тензору Л^...< „
В результате свертки тензора по какой-либо паре индексов
получается тензор, ранг которого на две единицы меньше ранга
исходного тензора.
Если ранг тензора А равен двум, то в результате свертки мы
получим число, равное сумме его диагональных элементов.
г 51) ТЕНЗОРНАЯ АЛГЕБРА 195
Тензорное представление D? является приводимым, если я> 1.
Пользуясь формулой (49,3), легко находим, что
D^Do + Di+Ds,
D3 = D1X(D0 + D1 + D2) = D1 + (D0 + D1 + D2) +
+ (D1 + Da + D3) = D0 + 3D1 + 2D2 + D8
и т. д. Результаты подобных подсчетов для п = 1, 2, 3, 4, 5 и 6
сведены в таблицу 21.
Таблица 21
Произведения представлений группы вращений
Di
d;
| D;
1 D>
1 d»
D?
Do
0
1
1
3
6
15
Dt
1
1
3
6
15
36
D2
0
1
2
6
15
40
D3
0
0
1
3
10
29
D4
0
0
0
1
4
15
D5
0
0
0
0
1
5
D6
0
0
0
0
о 1
1
2
Рассмотрим более подробно соотношение Di = D0 + Dx-f-D2. Это
соотношение означает, что произведение L\ X L\ двух пространств
Lx и Z,2» преобразующихся по представлению Dx, может быть
разложено на сумму трех взаимно-ортогональных подпространств
tixL'^Lo + ^ + Lz,
преобразующихся по представлениям D0, Dx и D2. Обозначим через
ai> #2» аз и ^ь ^2» ^з вещественные ортогональные базисы в про-
странствах L\ и Li. Тогда совокупность девяти величин
а^ aib2 a>\bz
афх агЪг афъ (51,4)
агЬг a3b2 а3Ь3
образует базис в пространстве L\ X £2, преобразующемся по
представлению Dx X D2. Мы уже знаем, что сумма
е0 = ахЪх -(- a2b2 + а3Ъ3
инвариантна относительно вращений пространства и потому
осуществляет единичьое представление DD, содержащееся в произведении
196 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ. X
Di X Dx. Заметим, что коэффициенты элемента е0 образуют
единичную матрицу (e0)ik. Поэтому одномерное подпространство L0 состоит
из всех тех элементов, координаты которых образуют матрицу,
кратную единичной матрице.
Для выделения представления Dx из Dx X Di заметим, что согласно
перестановочным соотношениям для инфинитезимальных операторов
выражения
Мз 'з*2» Ml Мз и Il*2 Ml
преобразуются при вращениях как операторы Ilf I2 и 13. Так как
эти операторы образуют базис однотипный с базисами а19 а2, аъ
и bl9 b2, b3i то мы приходим к выводу, что линейная оболочка Lx
элементов
vx = афъ — a3b2, v2 = аъЬх — афъ, vz = афг — а2Ь1
преобразуется при вращениях по представлению Dt. Поэтому
элементы vi9 v2i v3 и все прочие элементы из L{ могут рассматриваться
как трехмерные векторы.
Возьмем теперь произвольный вектор x=^xiai из пространства l[
, _ ft
и произвольный вектор y=yfy из пространства L\ и составим их
произведение
з
*у= 2 ^М-
Проекция этого произведения на подпространство Lx cLi X ^ь
являющаяся вектором, называется векторным произведением векторов х
и у. Для того чтобы убедиться в том, что это определение
совпадает с известным определением векторного произведений, вычислим
какую-нибудь координату этого произведения. Имеем:
(ху)1 = ( 2 xcffiib^ vl)= 2 xiyj{aibpa2b3 — azb2) =
\i,j=i J i>j=i
= 2 x^i (^'2^-3 — M^) = *2Уг — *зУ2>
что доказывает сделанное утверждение.
Возьмем произвольный элемент из Lt
Ti (а2^з — афг) + Т2 (аФх — я А) + Тз (аА — агь\)-
В базисе (51,4) этот элемент изображается следующей матрицей
координат:
О Тз — Тг\
— Тз 0 Tl 1 (51,5)
Т2 —Ti О/
Мы получили общий вид антисимметричной матрицы третьего порядка.
Таким образом, подпространство Z^cLiX^i» преобразующееся
§51]
ТЕНЗОРНАЯ АЛГЕБРА
197
по представлению Dx, состоит из всех элементов пространства L[ X £i»
координаты которых образуют антисимметричные матрицы. Иными
словами, антисимметричные тензоры второго ранга можно
рассматривать как векторы.
Теперь нетрудно выделить пятимерное подпространство Lv Если
1 «12 °
«2i «22 «2з ] (51,6)
^3i а32 аз3;
—- матрица элемента из L2, то в силу ортогональности
подпространств L0i Lx и L2 должны выполняться условия
«п + «22 + «зз=0
и
ТЗ («12 — «2l) + Т2 («31 — «13) + Tl («23 — «32) = 0.
Так как последнее условие выполняется при любых значениях чисел
Ti» 72 и 7з> т0 имеют место равенства
«12 = «21> «13==«31> «23 = «32-
Полученные соотношения показывают, что матрица (51,6) имеет
равный нулю след и является симметричной матрицей. Пространство
всех элементов, имеющих такие матрицы, пятимерно и совпадает
с подпространством L2.
Обратим теперь внимание на первый столбец таблицы 21,
указывающий на число линейно независимых тензоров данного ранга,
не изменяющихся при вращениях пространства. Таблица показывает,
что существует только один такой тензор второго ранга—это
единичный тензор bik или, что то же, тензор
i, Л = Г
Точно так же существует только один тензор третьего ранга,
не изменяющийся при вращениях пространства.
Проще всего найти этот тензор, если заметить, что он содер-
_ ///
жится в произведении пространства Lx на пространство L\ . Таким
образом, этот тензор имеет следующий вид:
vlc1-\-v2c2 + vzcz =
аг а2 а3 \
h Ь2 Ъъ
I С\ с2 С3 i
ГДе ci> с2, сг — естественный базис в пространстве L\
198 ПРЕДСТАВЛЕНИЯ ГРУПП [ГЛ.
Полученный определитель можно переписать в виде
ai а2 аз
Ъх Ь2 Ьъ
где
Hkl—
= 2и гтаФкс1>
г, к, Z = l
0, если i = k, или 1 = 1, или k = l\
1, если перестановка \lk[) четна;
1 /123\
— 1, если перестановка \,k[) нечетна.
Таким образэм, тензор третьего ранга еш инвариантен относительно
вращений. Все инвариантные тензоры третьего ранга равны реш,
где р — численный коэффициент.
Итак, мы располагаем двумя инвариантными тензорами: тензором
второго ранга bik и тензором третьего ранга еш.
Составляя всевозможные произведения типа
*ilfilm> *гк*1тУпр> *ik4mn> EiklEmnp> • • • »
мы будем получать инвариантные тензоры высших рангов. Так,
например, тензоры
^ikhm> Kl^km и 4mKl
образуют набор линейно независимых инвариантных тензоров
четвертого ранга. Этот набор является полным, так как согласно
таблице 21, представление Di, по которому преобразуются тензоры
четвертого ранга, содержит единичное представление только три
раза. В теории инвариантов доказывается следующая
фундаментальная теорема.
Теорема. Каждый инвариантный тензор Т.. ..#i четного
ранга п равен сумме тензоров вида
8Ч*«А'«зЧ- • ^4i-i4i' (51,7)
где числа alf a2, . ., <хп суть написанные в произвольном порядке
числа 1, 2,. .., п.
Каждый инвариантный тензор TilU...in нечетного ранга п
равен сумме тензоров вида
£; ; ,• 8,- х . . . h х . (51.8)
Эта теорема чрезвычайно облегчает поиски инвариантных
тензоров данного ранга, сводя их к выделению из тензоров вида (51,7)
или (51,8) нужного количества линейно независимых тензоров.
* 52] представления полной ортогональной группы 199
Задача I. Тензор ^ыг^тпр является инвариантным тензором шестого
ранга. Представить его в виде суммы тензоров вида hj^ij *{,..,.
Задача IL Разложить тензоры e^£Zmn и гтгШт на сумму
произведений тензоров bqp.
§ 52. Представления полной ортогональной группы
После того как найдены все неприводимые представления группы
вращений /?, не составляет никакого труда перечислить все
неприводимые представления полной ортогональной группы W. Для этого
достаточно воспользоваться следующим простым рассуждением.
Пусть х (h) (h£W) — какое-либо неприводимое представление
группы W. Так как инверсия / коммутирует со всеми элементами
группы W, то оператор х (/) должен коммутировать со всеми
операторами х( К) (h £ W). Поэтому в силу леммы § 18 оператор х(/)
кратен единичному оператору
т(/) = >.Е.
Так как Р — е, то Х2= 1 и
х(7) = Е или т(/) = — Е. (52,1)
Представление х группы W является в то же время представлением
группы вращений /?cW. Представление х, рассматриваемое как
представление группы вращений, также неприводимо, так как
каждый оператор х(/г) либо совпадает с одним из операторов
представления группы вращений (если h£R), либо отличается от него
знаком (если h£R).
Итак, представление t(g)(g£R) является неприводимым
представлением группы вращений и совпадает с одним из
представлений Dj
*<g) = l>jig) te€ Я). (52,2)
Используя это соотношение и (52,1), получаем:
%{h) = x(g)x(l) = + Djig) {g = hI£R). (52,3)
"Формулы (52,2) и (52,3) полностью определяют представление т(/г).
Если j — целое число, то различный выбор знака в (52,3)
приводит к двум разным представлениям группы Wt которые мы будем
обозначать через
D/ и DJ (у = 0, 1, ...).
Эти представления являются однозначными.
Несколько иное положение получается, если/ — полуцелое число.
В этом случае каждому элементу g£ R отвечают два оператора Dj(g),
отличающиеся только знаком. Поэтому и каждому элементу h = gl
будут отвечать те же два оператора независимо от выбора знака
200
ПРЕДСТАВЛЕНИЯ ГРУПП
[ГЛ. х
в формуле (52,3). Поэтому полная ортогональная группа имеет
только одно представление, соответствующее данному полуцелому
значению у. Это представление мы будем обозначать, так же, как
и представление группы /?, символом D^.
Итак, полная ортогональная группа имеет по два однозначных
представления D* и DJ" каждого целого веса и по одному
двузначному представлению D^- каждого полуцелого веса.
Представления D/ и D/, рассматриваемые как представления
группы вращений, эквивалентны одному и тому же представлению D^.
Формула (52,3) показывает, что спиноры целого веса j могут
вести себя по-разному относительно группы W: одни из них не
меняются . при инверсии, другие изменяют свой знак. Это означает,
что с точки зрения группы W оказывается целесообразной
дальнейшая классификация спиноров. Принято называть просто спинорами
спиноры нечетного веса, если они меняют свой знак при инверсии,
и спиноры четного веса, если они не меняют свой знак при
инверсии. В соответствии с этим спиноры называются псевдоспинорами,
если они при инверсии, имея нечетный вес, не меняют свой знак
или, имея четный вес, меняют свой знак:
((— \)п еп> если еп—спинор,
1еп= {
[(—\)п+1еп, если еп— псевдоспинор.
Представление Df веса 1 называется векторным, а
представление Di+ — псевдовекторным. Скаляр не меняет свой знак при
инверсии, а псевдоскаляр — меняет. Поэтому единичное
представление, порождаемое скаляром, обозначается через D+.
Представление, эквивалентное произведению нечетного числа
псевдовекторных представлений и любого числа векторных,
называется псевдотензорным представлением соответствующего ранга*
Для спиноров полуцелого веса подобного разделения не
существует. Оно не существует также для спиноров нечетного ранга.
Рассмотрим теперь вопрос о произведении неприводимых
представлений группы W. Произведение двух однозначных
представлений D/ и Dp определяются очевидными формулами
J+J'
d/xd;, = d7xd7= 2 d*+>
Произведение однозначного представления на двузначное также
очевидным образом разлагается на неприводимые двузначные пред-
(52,4)
§ 53] ДВУЗНАЧНЫЕ ПРЕДСТАВЛеНИЯ ТОЧЕЧНЫХ ГРУПП 20Г
ставления:
j+j'
D|XD,v= 2 Dj(7=0, 1, .../ = 1,|, ...). (52,5).
Несколько сложней обстоит дело с произведением двух
двузначных представлений. Это произведение является однозначным
представлением и определяется одной из следующих двух
взаимно-исключающих формул:
i=\j-j'\
D,XD,,= 2 Df.
Какая из этих двух формул справедлива — зависит в каждом,
конкретном случае от способа составления произведения
представлений (ясно, что двузначные представления можно перемножить
двумя различными способами).
Задача I. Показать, что ог-# является тензором, е^—* псевдотензором..
Задача II. Определить число линейно независимых тензоров третьего
ранга, все координаты которых являются псевдоскалярами.
§ 53, Двузначные представления точечных групп
Каждую точечную группу G можно рассматривать как подгруппу
полной ортогональной группы W. Пусть D — какое-либо двузначное
представление W. Каждому элементу группы W это представление
ставит в соответствие два оператора. В частности, каждому
элементу g£G соответствуют два оператора
g-+±D(g). (53,1)
При этом для любой пары элементов gv g2 выполняется одно из
двух соотношений:
D(?i)Db) = Dte) или D^D^^-D^).. (53,2).
Соответствие (53,1) при условии (53,2) называется двузначным
представлением группы G. Двузначное представление не является
представлением в строгом смысле этого слова, так как каждому
элементу g группы G соответствует не один, а два оператора.
Двузначные представления точечных групп представляют
значительный интерес с физической точки зрения. Это связано с тем,
что при всевозможных движениях пространства из группы О
спиноры нечетного ранга (например волновые функции электрона)^
преобразуются по двузначному представлению.
Каждое двузначное представление группы G можно рассматривать
как обычное представление некоторой вспомогательной группы Gu
202
ПРЕДСТАВЛЕНИЯ ГРУПП
[ГЛ. X
имеющей вдвое больше элементов и называемой поэтому двойной
группой.
Такой вспомогательной группой Gx является группа матриц
Dx(6, ср, ф) =
/ |(?+Ф) е . 4-<ф-«р) . е
' е2 cos— —ie2 sin~o
; (53,3)
. -«(?-Ф) . е —s-Ст+Ф)
"2 С1Птг * 2 ^^2"
\—iez " " sin-^г е * " cos
тде тройка чисел (6, ср, ф) принимает всевозможные значения,
соответствующие элементам точечной группы G. Так как углы ср и ф,
соответствующие некоторому повороту (или зеркальному повороту),
определены лишь с точностью до целого кратного 2ic, то каждому
элементу g соответствуют две матрицы D i (б, ср, ф), отличающиеся
"2
друг от друга только знаком. Обозначим одну из этих матриц
через g+i а другую — через g*-. Ясно, что совокупность 2я матриц
{g+> £*-} (g*^ О) образует группу. Ясно, далее, что всякое
двузначное представление группы G является однозначным
обыкновенным представлением построенной указанным образом двойной
группы Gx *).
Итак, каждое двузначное представление точечной группы G
можно рассматривать как обычное представление двойной группы Gl9
состоящей из двумерных матриц.
Условимся для определенности понимать под g+ ту матрицу
— (6, ср, ф), которая получится, если в качестве ср и ф взять углы,
лежащие в интервале О^ср, ф < 2ic.
В приложении приведена таблица характеров двузначных
представлений некоторых точечных групп.
(1 3
j = y , -о*»
5 \
~о > • • • I группы матриц D l (0, <р, ф) является однозначным. Если мы огра-
Т
шичимся рассмотрением только тех поворотов g, которые содержатся
.в группе О, то это представление останется, разумеется, однозначным.
ГЛАВА XI
КОЭФФИЦИЕНТЫ КЛЕБША—ГОРДАНА И КОЭФФИЦИЕНТЫ
РАКА
§ 54, Вычисление коэффициентов Клебша—Гордана
В § 49 мы выяснили, на какие неприводимые представления
разлагается произведение D^x X ^2 двух неприводимых представлений
группы вращений R. Теперь мы фактически произведем это
разложение и изучим свойства возникающих при этом коэффициентов
Клебша — Гордана.
Пусть еш(—Ji^Cm^ j\) — канонический базис в пространстве Llt
преобразующемся по представлению D^. Векторы канонического
-базиса в пространстве L2, которое преобразуется по
представлению D^, обозначим через fm(—Л<^<^Л)-
Рассмотрим теперь произведение этих представлений.
Базис в пространстве Lx X ^2» в котором действует это
представление, состоит из (2у\ -f- 1)(2/2 +1) векторов emJmi (—у\< /»i</i;
—Л^^г^Л)- По доказанному в § 49 пространство 1гХЦ
разлагается на сумму инвариантных подпространств, в которых
действуют неприводимые представления с весами j(\j\—Л|^У<^
<^Л+Л)- Канонические базисы в этих подпространствах
обозначим через g^, где значок наверху указывает на вес неприводимого
представления, действующего в данном подпространстве.
При фиксированном т каждый из векторов g^(\j\—JW^CJ^C
•<Л+Л) является собственным вектором А0 в пространстве Lx X Ц>
отвечающем собственному значению —1т. Поэтому векторы g$
представляют собой линейные комбинации тех базисных векторов
£mjrn^ которые являются собственными векторами А0 с тем же
собственны м значением, т. е. в^/т—т^
Положим
Вт= 2 Uxh^xrn2\jm\emjm^ (541)
Числа UJ2rnim2\Jm) называются коэффициентами Клгбша —
Гордана. Мы получим явное выражение для этих коэффициентов и
У£хано.вшй некоторые их свойства.
204 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI
Канонический базис g^ определен лишь с точностью до
множителя, зависящего от j и равного по модулю единице. Поэтому
соотношения (54,1) недостаточно для однозначного определения
коэффициентов Клебша — Гордана. Для устранения этой
неоднозначности мы введем дополнительное условие
UiJ2Ji»h\№)>Q- (54>2>
Это условие, вообще говоря, не симметрично относительно чисел уг
и У2. Поэтому целесообразно отличать друг от друга базисные
векторы
gm = gm = 2 ихкЩЩ])^) emjm,
И
gml= S (МгЩЩМ^епч/т*- (54,3).
Так как коэффициенты Клебша — Гордана связывают между собой
два ортонормированных базиса, то матрица, составленная из этих
коэффициентов, является унитарной, т. е.
2 (МгЩЩ I Jm) U\J2^im2 | У "О = hr Ьшт'. (54,4)
mx
Заметим, что в формуле (54,4) можно опустить черту, означающую-
переход к комплексно-сопряженной величине, поскольку, как
выяснится ниже, все коэффициенты Клебша — Гордана действительны..
Разрешая соотношения (54,1) относительно emJm^ мы получим:.
ет/пн = 2 Ud zmim2 \]Щ + nk)gml+nb. (54,5>
Коэффициенты Клебша — Гордана равны нулю, если сумма j\ -f-
-|~у2+У не является целым числом или если не выполняется условие
\J\— Jz\<j<ji+U (54,6),
Числа jlt j2 и j входят в это условие симметрично. Действительно,,
(54,Ь) есть условие существования треугольника со сторонами j\r
j2 и у. Таким образом, если никакой треугольник не соответствует
числам ух, у2 и У» то Ud2ntinl2\JM') = Q-
Для того чтобы упростить вычисление коэффициентов Клебша—
Гордана, мы воспользуемся одним вспомогательным приемом.
Введем в рассмотрение пространство L, преобразующееся па
неприводимому представлению веса У(|УХ—у2| ^У^Уг+Уг)- Пусть
hm(—J^Cm^CJ) — канонический базис в пространстве L.
Вспоминая (§ 48), что произведение двух неприводимых представлений
с весами j' и j содержит представление веса 0 только при условии
у/=у, заключаем, что произведение пространств Lxy^Lzy^L
содержит ровно одно подпространство, преобразующееся по аеириводи-
,« 54] ВЫЧИСЛЕНИЕ КОЭФФИЦИЕНТОВ КЛЕБША ГОРДАНА 205
мому представлению веса 0. Из § 48 мы знаем, что вектор а° =
-- j
==(27 + 1) 2 2 (—О' mgmh-m лежит в этом пространстве. Норма
вектора а0 равна единице. Подставляя выражение (54,1) для
вектора gim и заменяя /й на —т, получаем отсюда:
а°= 2 u(j1j2jmim2m)emJm2hmy (54,7)
где
"> UiJ2Jmim2m) = :Г7-!-— ОУъЩЩ \] — т). (54,8)
V 2/ + 1
Мы видим из (54,7), что коэффициенты u(jlj2jmim2m) являются
координатами единичного инвариантного вектора а0 из пространства
Lx X £2 X £ в базисе emJmJim. Это свойство определяет
коэффициенты u(j1j2jmlm2m) с точностью до множителя, равного по
модулю единице и не зависящего от mv m2 и т. Заметим, что пары
чисел j\mu j2m2 и j3m2 входят в это определение симметрично.
Поэтому коэффициенты u{jij2jmim2m) не изменяются по
абсолютной величине при любых перестановках пар j\mu j2m2 и jm.
В § 55 этот вопрос будет подробно рассмотрен.
Для дальнейшего нам понадобится соотношение
(—l)j+mu(JiJ2Jj\m2m)^ 0, (54,9)
которое вытекает из (54,2) и определения (54,8).
Для того чтобы с помощью равенства (54,7) вычислить
коэффициенты uij^jm^zm), следует найти в явной форме вектор а0.
Это удается легко сделать, если реализовать пространства Lv L2
и L с помощью спиноров.
Пусть {uvvl}) {u2, v2] и {и, v)—канонические базисы в трех
пространствах, преобразующихся по представлениям веса -~-.
Построим пространство Lv положив (см. § 50)
^'-Uh + mJHh-rmY.) Ml Vl ' (54Л0)
Подобным же образом построим базисы в пространствах L2 и L:
t —Г Ш» irj,.
hm = f (Ш -Vui+mV-m.
.+m«-.Ji-»»i
(54,11)
206 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. ХИ
Пространство Lx X L2 X £ можно теперь рассматривать как
совокупность линейных комбинаций векторов вида
В частности, в Lx X ^2 X £ содержится вектор
(UoV — UV2)J+Ji~Jl(uV1 — и&))+*1~Л\и&2 — «2<'l)i, + ii-i.
Этот вектор инвариантен, так как инвариантен каждый из его
сомножителей, и мы можем написать:
я°=Р(Л> Л. J)(tt2v—uv2)Hj*-jlX
X (uvx — ulv)j+jl~h(u1v2 — u2v^k~\ (54,12>
где р — нормирующий множитель.
Вычисление модуля коэффициента р (весьма громоздкое)
приводит к следующему результату:
|р(Л> Л. J)\ =
= Г (2Л)К2А)1(2У)1 ]Т .54 13v
Ш2+;-У1)!0+А-У^(Л+У2-ДЧЛ+Л + ; + 1)и ' ^*.ю>
Сравнивая полученное для вектора а0 выражение (54,12) с
выражением (54,7), мы вычислим коэффициенты u(jj2jmxm2m).
Подставляя (54,10) и (54,П) в (54,7), находим:
а°= 2 и (JiJ2Jmim2m) X
v Г_^ (2/i)l (2/Q1 (2fl! IF
A L(A + щу (Л - %)! (h + «»)! 0» - я»)' U + »)! О' — «)U
X «l1+mi-yi''-m,^'2+'nV22-'na«-''+mt;j-m. (54,14>
С другой стороны, раскрывая скобки в (54,12), получим:
ао=р J] (-1)а1+аз+ах'
а4, а2> а
у (У? + У —Л)? О" + А — >)! (Л + Л —./')! у
«i! (У* + У—Ух — «i)! «2! (У + ;'i—У? — *«>)!«! 0i + У? — У —«У
у ^^Ч^-^ + ^-аа^^-^ + ^+аа-а^
Суммирование производится здесь по всем значениям ах, а2 и си
для которых аргументы факториалов являются целыми
неотрицательными числами. Произведем замену индексов суммирования в
полученном выражении:
(xl = z-\-j — jl—m2i a2 = z-{-j—j2-\-mlr a3 = z.
§ 54] ВЫЧИСЛЕНИЕ КОЭФФИЦИЕКТОВ КЛЕБША ГОРДАНА 20?
Получим:
(fi=pUi+j—Ji)4J+Ji—MUi+j2—j)ix
х ^.-^-«V+V-* x 2 (~1)г [г!{jl + J2-J- z)\ X
z
X (z + J—Ji — щУ- X (Л+ «2 — <z)! X^
X {z+j — J2 + m1)lUi — ml — z)\\^ (54,15)
Приравнивая коэффициенты в равенствах (54,14) и (54,15), находим:
и ииУщщт) =
= (_l)2i-i1-i.+m1-«ip (y2 + y _Л), (у+7i _Л)! (у1 + Л_Л, Х
1
v Г (А + mi)! (А — ait)! (Л + т*)1 (А — m?)i (У + т)! (/ — т)1 ] 2
Л1_ <2Л)! (2Л)! (2/)! J Л
у V (=£
^ ^J^! (А+А—У—г)\ (г+з—к—щу 0*2 + /я,—г)! (*+;'—A+*wi)! (Л—™i— *)*
(54,16)
(tf^ + Wa + w^O)-
Нам осталось определить аргумент числа р так, чтобы
выполнялось условие (54,9). При подстановке в (54,16) ml = j1 сумма в пра--
вой части (54,16) сводится к одному слагаемому, которое
положительно. Отсюда
(_iri-«+2j-i,+«,p>0 и р = |р|(_1)Л-/-Л
(мы воспользовались тождеством Щ-\- т2-\-т= 0 и учли, что*
mi = Ji)- Подставляя это выражение для р и используя (54,13)*.
получаем окончательно:
uUJ2Jfnim2m) =
~{ } L (A+A+/+1)! Л
X(/i + «i)l(7i — ^ЖЛ+^ЖЛ— m2)\(j-\-m)l(j — m)l]2 X
Х2(-1)Ч*КЛ+Л — 7 — z)l(z + j — A — «2)'X
- Х(Л + «2 — 2)!(2+У—Л + жОКЛ — «i — 2)!]"1 (54,17>
(m1 -+- «2 + m = 0).
'208 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI
Отсюда, вспоминая связь (54,8) между коэффициентами
u(jlJ2Jmim2m) и коэффициентами Клебша — Гордана, находим:
'<jj2mlm2\jm) =
X (Л + лчЛСЛ — »1)КУг + »2)КЛ— »2)иУ + »)1(У — «)Ч 2 X
(-1)*
Xi^!(/V
+/,—У—г)! (*+/-/t—m2)! OVf m«—*)'• (•?+/—Л+mi)! (А — %—г)\
г
(т = т1-\-т2). (54,18)
Заметим, что псд знаком суммы z пробегает неотрицательные
•целые числа не меньшие, чем m2-{-Ji—j и j2—j— т1 и не
большие, чем Л-{-Л—j, 1г~\-Щ и у'х — тх. Поэтому число слагаемых
в (54,18) превышает на единицу наименьшую из девяти сумм:
j2 — m2, h + щ. j2—J\+J> У + «. j — m, Л+У—h.
У i + к — J. h + Щ> Л — Щ •
Приведем значения коэффициентов Клебша — Гордана в некоторых
наиболее важных частных случаях. Используя общую формулу (54,18),
легко находим:
■<JJJi«h I У«) = (j-m)\ X
v № + 1) (h + У -Л)! (2/i)! (к - пи,)\ (J + Ш)\ (j - т)ЦТ ,-. , q. „.
^l(h+h+j + iy-U+Ji-h)Hii+h-j)Hh + m2)i\ ^'1У' >
(m=j1-irm2),
ЧУ1У2 —Am, | jm) = (/+w), X
v Г(2/ + 1) (Л + j -НУ- (2Л)! (Л + ЩУ U + «)» О' - тЩТ -. оп
А Wi+h+J + ^Ui+h-JVUi-h+JYUi-mtfii ' ^°*^u'
(» = — Л + ^г).
<Ух/*«1»2|У1+У2») =
_ Г (2Ji)'- (2Д)1 (; + и)1 (У-«)1 IT ' ,-, оп
_ L (2У)! (А + яц)1 (А - тО! у, + яц)! <Д - m2)! J ^>zl;
Ш« — m I 00) = ^== • (54^22)
*) В этой и последующих формулах следует считать тт = 0, если
^ — целое отрицательное число.
ВЫЧИСЛЕНИЕ КОЭФФИЦИЕНТОВ КЛЕБША ГОРДАНА
209
§541
Весьма важным является случай, когда вес одного из
перемножаемых представлений равен 1. При фиксированных значениях
/2;>1 и т2 числа j и т пробегают значения j = j2 — 1. Л» Л+Ь
Гп = т2 — 1»
т9
*я2+1 (разумеется, если какое-либо из чисел
щ.— 1, т2 или т2-\г 1 превосходит по модулю у, то оно не является
возможным значением т). Так как наименьшее из чисел Л+У—Л
и j\-\-J2—J не превосходит единицы, то сумма (54,18) в
рассматриваемом случае содержит не более двух слагаемых. Результаты
подсчета удобно расположить в виде матрицы
{\j2mxm2\jm)=.
J2
7 = Л—1
\У (2/
—m+l)(j2—m)
(2у2 + 2)(2у2 + 1)
Ги,+т+1)0\-т+\)
/■
Ui+m+1) (h—m) /"(/
27. (Л+ 1) "
/и
(Л+1) (2/2+1) _УЛ(Л + 1)
_г+т+1)(Л+/и)
I / (Л + го?) (Л — тг)
К (2Л + 2)(2/, + 1)
У«(2Л + 1)
2ЫЛ + 1)
■/
г^ШШ,/ O'g—^+l)0'r-"0
2Л(2/, + 1)
7^=—1
wt = 0,
mj = 1.
(54,23)
С помощью формул (54,19) и (54,20) составляем подобную ма-
1 , . 1
трицу и для случая jx = -^ , )2 > ^
= Л +
ь
1
-J2 о*
("2 hmxm2\jm} =
h — m + -7T
/;2 + ™ + у!/ 7
2/, 4-1 У
"2 |/ J* + m + ~2
~ У 2;2+1
j2 — m +
1
171л =
1
2 '
(54,24)
1
m1 = j.
2/2+1 Г 2/2+1
Приведем без доказательства еще одно соотношение:
(ЛЛоо|уо) =
Я-Г Л! Г(2;+1) (^-2А)! (£—2А)1 (^—2ЛЧТ
1 ' (I-Л)! (£_/,)! (А-У)! Г
Ю, если L нечетно;
(£ + 1)!
Г-
если L четно,
(54,25)
здесь положено L=j\-\-j2-\-j.
В заключение параграфа сделаем одно замечание, относящееся
к сферическим функциям.
210 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. ХЦ
Если подействовать на обе части равенства (54,5) оператором,,
соответствующим вращению h, то получится соотношение
2 Djir (h)Dj*, (h)e rf r =
= 2 Ud 2m\m2 I Jm\ + Щ) ^тщ+пь (h)gL
j, m
Подставляя сюда выражения для g^m из равенства (54,1) и
приравнивая коэффициенты при е >f ', находим:
Djl, {h)Dh> {h) =
т^т^ ' m2m2 '
= 2 (ЛЛ«1»г | У«1 -+- mi) Шг^тг I M + «г) ££- + ' (A).
(54,26).
Если в качестве вращения h взять поворот на угол 6 вокруг-
оси ОХ, то получим:
Р
т
'т 1 (9> Рт'т 1 <9> = 2 (ЛЛ«1«£ I .Ml + «г) X
^Wj, J1 W2w2, ^2 j
X (ЛЛзд | M + m2) Pm'i+m>x+mv i (8). (54,27>,
Задача 1. Доказать с помощью (54,27) следующие тождества:
- ] ^ /г(2у1+1)(2;2 + 1) . . .
= г- ^ у 2/4-1 У)\Нт\тч I J*») X
Xai;2OO|jO)KiM(0, cp) (m = m1 + m2)>.
у. (6у)у. (6 y):=(-1)mi 'У2 г/'(2А + 1)(2;2+ТУ
J= I^i—Л I
X Uih — mim21 jm) (АЛОО |;0) К^ (6, у) (яг = т2 — mt)>
Задача II. Доказать тождества:
= ( V'2wim2 \1т')>
= 2 Dh> <A~') (Л Vv>41 у «') =
/ "*2m2
m. — ?M-*«- \ i л * i /
w — тлт,
Г"2
£ 55] СВОЙСТВА КОЭФФИЦИЕНТОВ КЛЕБША ГОРДАНА 211
§ 55. Свойства коэффициентов Клебша — Гордана
В предыдущем параграфе мы установили, что коэффициенты
u(JiJ2Jmim2m) Должны обладать определенной симметрией
относительно своих аргументов. Рассмотрим теперь этот вопрос более
подробно.
Будем исходить из формул (54,12) и (54,14). Используя соотно-
шение р = |р|(—l)J*-J-Ji9 перепишем (54,12) в виде
дО = ( \)h-j-ji | р | (U2V UV2)3+h~h X
X (и^х — uxv)$+h-fc (uxv2 — u2vx)3i+h-o. (55,1)
Это выражение показывает, что при замене величин jv j2, j, uv vx,
u2, v2, u, v величинами j2, /\, j, u2, v2, ux> vx, ut v вектор а0
умножается на (—\)h+h~j. Легко видеть также, что замена jvJ2>J>ui>
vv u2, v2, и, v-+j, j2, jx, и, v, и2, v2, uv vx приводит к
умножению вектора а° на (— 1)Д+Л+^. Символически это можно записать так:
(1, 2)а° = (— I)ji+J*-Ja°9 )
(1, 0)аР=(—iy»+*+/a°. J (55,2)
Имея в виду эти соотношения, произведем замену (1, 2) в
равенстве (54,14). Мы получим, изменяя обозначения индексов
суммирования:
(_ 1 )i,+*-iflo _ 2 и {j2jxjm2mxm) X
v Г (2А)1(2А)(2;)1 IT v
А L(A + Щ)1 (Л - гпг)\ (;2 + щ)\ (;2 - щ)1 (j + m)\ (j — т)\\ А
Сравнивая это равенство с равенством (54,14), находим:
« (J2JJ^2mim) = (— 1)*+*-.* и ихЫщщт)- (55,3)
Таким же образом, производя замену (1,0) в равенстве (54,14),
получим:
« UJ2Ji^m2mi) = (— 1)*+*+'" и UJ2Jmlm2m), (55,4)
Комбинируя (55,3) и (55,4), можно получить еще три соотношения,
которые мы не будем выписывать.
Из равенства (54,12) и (54,14) вытекает еще одна группа
соотношений симметрии. Действительно, если произвести в (54,12) замену
ui* vl9 u2t v2i ut v->vx, ux> v2, u2t v, и, то вектор a° перейдет
212 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ> XI
в вектор (—l)h+J*+3a°. Поэтому из равенства (54,14) следует, что
(_ 1 y\+j>+j а0 = ^ и UJJmim2^) X
wi1+m3+w=0
V Г (2;i)!(2/a)!(2;)! IT v
A LOi + ЩУ Oi - *i)l 0*2 + nu)\ (h — rn2)\ (j + m)\ (j - m)\ J A
Производя здесь замену индексов суммирования /ях-> — т1э
/я2-*— Щ* т>-* — т> и сравнивая полученное выражение с (54,14),
найдем еще одно^ соотношение
и UiJJ — т1 — т2 — т) = {—\ y«+*+J и иМщщт)- (55,5)
Комбинируя его с ранее найденными соотношениями, получим еще
пять соотношений.
Вспоминая связь (54,8) между коэффициентами u(j1j2jm1m2m)
и коэффициентами Клебша — Гордана, мы можем переписать (55,3),
(55,4) и (55,5) в виде
иигЩЩ I jm) = (— 1 )*+*-■* ШгЩЩ I У«).
(//2 — МЩ I Л — »l) = ( — 1 )h + Ш2 ]/ Щ^Т (ЛЛ»1»2 I У»).
(ЛЛ — m1 — m2\j — m) = (—\ )b+h-i {jlj2mlm2 \ jm.
В этих формулах положено т = тх-\-т2. Комбинируя
соотношения (55,6), можно получить еще восемь соотношений симметрии.
Отметим, что из (55,6) непосредственно вытекают следующие
«правила отбора»:
иигЩЩ\№) = ^ если 2j\ — j нечетно; \
(ЛЛОО|уО) = 0, если Л Ч-Л-Ь/ нечетно. J (55J)
Первое из равенств (55,6), можно переписать в обозначениях (54,3)
следующим образом:
Заметим еще, что с помощью (55,6) можно придать равенству
(54,4) следующий вид:
2 КккЩгп2\]т) (][]2т[т2 \jm) = 2/+* 8. .,8 ,. (55,9)
Между коэффициентами Клебша — Гордана существует целый ряд
рекуррентных соотношений. Мы получим их, исходя из равенства
54,1): £т = 2 (ЛЛ^1^21/^) WW и используя услэвие (54,2) -
(55,6)
о 55] СВОЙСТВА КОЭФФИЦИЕНТОВ КЛЕБША ГОРДАНА 213
J]ля того чтобы получить первое рекуррентное соотношение,
подействуем на (54,1) преобразованием Ах(см. (46,25))
aJm+igm+i"= 2 (МъЩЩ \Jm) {ami+ieWl+i/i», + aw,+i«ifi1/m1+i}.
Левая часть этого равенства может быть записана в виде
Сравнивая коэффициенты при emJm% в левой и правой частях,
находим рекуррентное соотношение
flii+i ШгЩПг I У« + 1) =
= «т, (ЛЛ^1 — 1 «21 У«) + ай, (МгЩЩ — 1 | У/»)- (55,10)
Подобным же образом действуя на равенство (54,1)
преобразованием A_i, получим второе рекуррентное соотношение
<4 иЛъЩЩ \jm—\) =
= «w,+i Uih^\+ lm2 |У/и)-г-аЙ,+1 Ud2,mim2+ 1 |У^)- (55,11)
Третье рекуррентное соотношение легко получить, исходя из
(54,12) и (54,14). Согласно этим равенствам мы можем написать:
= 5 т^3'8^ ub+miv4*-m*uh+m*vJ*-m*uJ+mvJ-w9 (55,12)
где
чЗМ z= 1 V
1 "Wam p (jj2j) ^
v Г (2у1)!(2Л)!(2;)1 4
А L (Л + Щ)* (к - т±)\ (к + т9)\ (Л - щ)\ (j + m)\ (j -т)\\ А
X и иМщщт). (55,13)
Воспользуемся теперь тождеством
(u2v— uv^i+h-b {wox— ttiVy+h-b (uxv2 — u2v^)3i+h-j =
./ ./ / ./ ./ ./
= (u2v — uv2)j +ii~ * (uvx — u,vf + Ji h {u<o2 — и2^+J'2 j X
// Jt .rr Jt rr j/
U[+J"=jy Jo+f2=J2, f+r=J).
jr ft M .rr rr jt rr jt jt
~X(u2v—uv2y +32'^(uv1 — u1v)3 +il~ii(u1vi — atvrfl+i*~1
214 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI
Если все показатели, встречающиеся в этом тождестве,
положительны, то его можно переписать с помощью (55,12) в таком виде:
t»i+w2+w = 0
./ J .' J t J / ./ t J r .r r j t
= Z Т'уй1 vx u2 v2 и v X
t t t тлт0ш
t t / ' шхтг
ff ft ft ft ft Jf Jt ft Jft ft Jff ft Jfl tf
,'r 'i .'i ч " JI ." ii ," ii if n ri i
^ зхз2з hJrm\ l\-m\ ^2+w2 Ч~тг * +m * ~m
X 2л ч и ft #и л v\ a2 V2 и v
tt n it хтлт<>т х
it it it % тлт<>
w1 +w1 +ш =0 l
Приравнивая в этом равенстве коэффициенты при члене
получаем:
./ ./ ./ jt » j*
-fhid = 2 Т ' i 'Т " " "• (55,14)
t tt
>w2+w2=m2,
т' +mr, = m
Пусть j^CJi-\-j2—1- Тогда можно положить jfl=j/2 = -jt
j' = Q9 и мы получим:
ii .1.1.
1 т^т 1 1 1 л i 1 1 '
Т"2-° ««-I^+I"1
+ T2i2i T \ \ • (55.16)
Вспоминая определение коэффициентов ^ w at можно придать этому
равенству вид рекуррентного соотношения
~ 2 U;i+A~;)(A+;2+; + i)J V1 Y* —T^1-"2 да*+
_i L ! /m\ l Г (A — Mi) (Л + m,) ]2 v
"+" 2 | •/OT j 2 LO'i + к -J) (Л + к + j + 1) J X
Х(Л —-J./2—§-»i + -2-«2—5-|./Л)* (55,16)
.§ 56]
КОЭФФИЦИЕНТЫ РАКА 215
В заключение приведем без доказательства четвертое
рекуррентное соотношение
f (j+m+l) U—rn+l)(j+j\+h+\) (y+;t-/0-fl) (у+у,—yt+l) (j\+j*—У)]7
1 (; + i)2(2; + i)(2y + 3) J х
j_ А (А +1) —Л (Л +1) + ; (у +1) m,, , т т , . , ,
Н ;(; + !) U\J<Lmim21У») -h
1
, rO'+*0 (У — "*) U+h —Л) (;+Л — /о) (Л + h —Я-i) (Л+Л+J +1)i7ч,
"П" ;2(2y-i)(2/+i) J x
X и^гЩЩ | У — 1 /») = 0. (55,17)
§ 56. Коэффициенты Рака
:|При рассмотрении ряда вопросов квантовой механики естественно
возникают так называемые коэффициенты Рака. Для того чтобы
дать их алгебраическое определение, воспользуемся следующей
системой обозначений.
Пусть Ljlt Ljit Ljo, . . .—пространства, преобразующиеся по
представлениям D^, D^, D^, . .. группы вращений. Произведение
пространств Ljt X h* можно разложить на неприводимые
подпространства, которые мы будем обозначать символами WM; здесь
(ЛЛ) есть число, пробегающее значения \j\—у 21, \j\—,/21 —|— 1, ...
- • •» Л+Л- Ясно что
jl+j*
Подобным же образом неприводимые подпространства, на
которые распадается произведение LUM X Lj2, мы будем обозначать
через DUMh]. Эта форма записи удобна тем, что она указывает на
происхождение рассматриваемого пространства. Так, например,
IttM*)UM\ означает пространство, преобразующееся по
представлению веса [(jij2) (j$J\)\ и содержащееся в произведении пространств
LUM х Ш*М.
Рассмотрим теперь два различных вида разложения пространства
^з\ X £/2 X Lj3 на неприводимые подпространства:
LSl X LU X Iи = 2 LUM X Lj9 - 2 WM Al.
им им ium эл
h x lu x h> = h x 2 ^ш = 2 №{Ш].
UM UMUiUMl
Построим канонические базисы в подпространствах LWMJA и
LtiiU*Ji)]a Пусть ет, fm и hm — канонические базисы в Ljlt L^ и L^.
Обозначим через g^* и gfy векторы канонического базиса в про-
216 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI
странствах ЦМ*> и £(ЛЛ) (у12=(ЛЛ)« У23 —С/гУз))- Векторы
канонического базиса в ZJtf Ja) 4 1 обозначим через g(£») ^ (у = [(ЛЛ) У31).
Индекс у указывает здесь на вес представления, по которому
преобразуется базис gfy^K заключенный в скобку индекс /12 частично
характеризует происхождение этого базиса. Индекс Л2=(ЛЛ)
поставлен слева от у, потому что в произведении Z,(u&) X ^jd
подпространство Z,(ui») играет роль левого сомножителя. В соответствии
с этими соображениями векторы канонического базиса пространства
jJJiUMl мы 5удем обозначать через g^*^-
Вспоминая определение коэффициентов Клебша — Гордана, мы
можем написать:
Исключая из этих формул векторы gfy, мы получим:
g{mi)J = 2 и^гЩЩ 17i2«i2) UnJbmi2mz IУ*0 emJn4hm.A. (56,1)
Подобным же образом можно написать:
gj™ = 2 игкЩЩ | Лз^аз)Ли,**»» (5б>2)
И
*£«■)= 2 (ЛЛ^»» !./»)«„,*£,• (56'3>
Векторы gffl™> являются собственными векторами операторов I
и А0, отвечающими собственным значениям —У(У+1) и —Ш
соответственно. Всякий собственный вектор из Z^X^-гХ^з
операторов I2 и А0, отвечающий тем же собственным значениям, является
линейной комбинацией векторов g^™) (j и т фиксированы; | j—jt |<!
^Лз^^ЧуЛ)- В частности, таким образом могут быть выражены
векторы gi&*)J
g{^J = 2 < j\J2 с/12) ЛУIЛУ2У3 (У23) У > sL{k^ (56>4>
Входящие в это выражение коэффициенты <jj2 (У12) УзУ IУ1У2У3 (Угз) У>
не зависят от т. В этом проще всего убедиться, подействовав на
обе части последнего равенства оператором А_х или Ах.
Теперь можно определить коэффициенты Рака W (УхЛУУз» У12У23)
с помощью равенства
У (2/И+1) (2/23+1)
с 56] КОЭФФИЦИЕНТЫ РАКА 217'
Из определения коэффициентов Рака легко вытекает их связь-
с коэффициентами Клебша — Гор дана.
Действительно, из (56,2) и (56,3) следует:
fm9hms = 2j UlJzm2mZ !У23^2з)^«г1»
hi
*т А = 2 {ккъЩЩъ I jm) giiJ23\
Отсюда вытекает, что
emjmjlm* = 2 (УгЛ^г^з I У'23^23) (АкзЩЩз I Jm) gm Ы.
h&> j
Подставляя это выражение в (56,1), мы найдем:
gm*)Q = 2 и^ЩЩ I Уи^Чг) и^г^пЩ | У») X
X Шъ™>гЩ |Лз«2з) (71723^1^231 /^)ffm (Лв).
Отсюда, сравнивая с (56,4), получаем:
2 ИхкЩЩ 17i2^i2) (7127з^12^з 1У"0 X
X (727з^2^з |7*2з^2з) (7i723wiw23 (У'"*) ==:
= V < 7*i7*2 (Лг)УзУ [ЛЛЛ (Угз)У > =
= V V"(27i2+ 1)(272з+0 W (ЛЛУУз; Л2Л3). (56,6>
Это соотношение показывает, что коэффициенты Рака
действительны.
Формуле (56,6) можно придать более симметричный вид,, если
просуммировать обе ее части по т в пределах от —j до / и
разделить на 2у-|т1- Левая часть при этом не изменится, поскольку
она, как было показано, не зависит от т, и мы, обозначая, индекс-
суммирования т через — /я4, получим:
V V&J12+ 1)(27*23+ IWUlJdj*. J12J23) =
= 2/~+~1 S (7*i7*2^i^217*12^12) (7*127*3^12^317 — /и4) X
X {ЫъЩЩ I Лз^2з) UiJ2zmimiz 1У — /»*)• (56,7)>
Из формулы (56,7) следует, что коэффициенты
(7i7*2 (712)7'з7 IУ1У2У3 (7*2з)У)
равны нулю, если хотя бы одной из троек чисел
У1У23У; УгУзУгз» У1У2У12» У12У3У
218 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI
не соответствует, какой-либо треугольник или если ни одна из сумм
к +Лз +/. к +Л +Лз, к -Л-к +Л2. /12 +Л +У
не является целым числом.
Полученная связь между коэффициентами Рака и Клебша —
Гордана позволяет перенести свойства симметрии коэффициентов Клебша—
Гордана на коэффициенты Рака. Для того чтобы это сделать,
удобно придать формуле (56,7) еще более симметричный вид,
заменив в ней коэффициенты Клебша — Гордана коэффициентами
иихккЩЩЩ) (см- § 54)-
При этом мы получим:
* VW (kkJU У12У23) =2 (—1 )'и+*+да*-те'а и'пкМиЩПЦ) X
X и (кккгЩЩЩ + Щ) "> (кккь^ЩЩ + Щ) X
X и (kj23j/mlm2 + /7t3w4). (56,8)
Под знаком суммы здесь стоит произведение четырех функций.
Число ]х входит в качестве аргумента во второй и четвертой
множители. Мы это обозначим, написав j\—[2, 4]. Легко видеть,
что j2~[2, 3]. /з — [ 1. 3] и /~[1. 4] (если положить j = j%
J12 — [1> 2] и j23—[3, 4]. С помощью этих обозначений любой из 24
перестановок чисел 1, 2, 3 и 4 можно сопоставить перестановку
шести чисел jv j2, у3, у, у12, j23- Так, перестановка (12) переводит
пару чисел [2, 4] в [1, 4]; в соответствии с этим (12) переводит к в J-
При каждой такой перестановке слагаемые под знаком суммы (56,8)
либо не изменяются, либо меняют свой знак согласно
соотношениям (55,3) и (55,4). Поэтому каждая из указанных 24 перестановок
аргументов коэффициентов Рака равносильна умножению на 1 или — 1.
Проведем вычисления, соответствующие перестановке (12). Имеем:
wujbhU Л2Л3) = 2 (-1/***.-"*—* х
X и (кгккЩ + ЩЩЩ) "> ШъкгЩЩЩ + Щ) X
X и (ккк >,ЩЩЩ + /тс4) и UkJ1m1m2 -f- тгт^
С помощью соотношений (55,3) и (55,4) перепишем это в виде
w uhhk* Л2Лз) = S (-1 )il2+^+m-" *• х
т!+m2 + т»з -г гаК=о
X и(к]2к2т1П12Щ + п1А)(— \)3l+h+3"u (кгк]Щ + тгЩЩ)- X
X (- 1)>"+л+'и {кккьЩЩЩ + ю4) (— 1)"Л.+Л+Л х
X в (ЛЛаМ^г + ^з^4) (— 1)Л+Л§+У.
Собирая вместе все степени — 1 и учитывая, что
0*1 + я*2 + ^з ~Ь Щ — О»
4c 56] КОЭФФИЦИЕНТЫ РАКА 219
получим:
/ 2\2 {ji +h +ju) +fa +J2<+2j+2^ + wii-m3_ / •. ч fa +fa+m,-w2
Отсюда, если вспомнить (56,8) видно, что
W UhhU Л2Л3) = ^ UJzJU ЛаЛз)- (56,9)
Таким же способом, используя подстановки (34), (14) и (13), мы
придем к тождествам
WUJJU Ji2Jto) = WU2JJJ\ ji2J2s) =
= (— l?u+ju-h-j'WUJiduJ*\ ЛУ)- (56,10)
Комбинируя между собой соотношения (56,9) и (56,10), можно
сюлучить все 24 соотношения симметрии (включая в это число и
^тождественное соотношение).
Приведем некоторые тождества, непосредственно вытекающие
из определения коэффициентов Рака.
Из унитарности матрицы (jj2 (ji2) jj \ jJJ, (j2i) j) следует
тождество
2 UJ-2 Uit)JzJ\hJJz (Лз)7) (ЛЛ O'^JJlJJzJi (Лз)Л = 8, -
j& эпэ\г
«(так как элементы этой матрицы действительны, то в этой формуле
нет необходимости писать знак комплексного сопряжения).
Вспоминая определение коэффициентов Рака, получаем отсюда
5(2Лг + 1)(2У„+1)^(ЛЛ//з; УиЛз) X
X W (JJzJU А/и) = 8, ,' • (56.11)
Для получения второго тождества введем в рассмотрение
векторы giUn) и p*l£13^' и напишем два тождественных соотношения
(см. (56,4)):
*#bW = 2 (ЛЛ (ЛО УзУIЛЛЛ (У«) У) «,£Мм).
J13
#' = 2 (ЛЛ (Лз) ЛУ! ЛЛЛ (Уда)У) ^°',2)-
Согласно (55,8) мы можем написать:
Л 0*13) / 1 \J2+jlS-j'Uli)J „U 2l) J / 1 \jl+J2~j* „Uii)J
220 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XU
Из последних пяти соотношений вытекает, что
=(- \t+h-i» 2 UzhUzdhJ\hhhu^J)x
т. e.
X (ЛЛ С/21ШI ЛЛУз (Уш) J) Uih (/») /a/1 МЛ (Л2) У) ^4(Лз) -
Сравнивая это равенство с (56,4), получаем:
Uih Ua) JsJ I JiJd» U23) Л =
= 2 (_ Db+b-t-h-b-J»-* (ЛЛ (у21)У3/ |У2ЛУ3 (УШ)У) X
X UihUi6)J2J\JihJ2(h2)J) (hi=h* У2з = Ува)- (5б,12>
Переходя в этом соотношении к коэффициентам Рака, мы
получим следующее тождество:
WUJJU У12У23) = 2(- l)*+ia+J*it+it+ia+i-(2Ja+l)X
X W UJJU Л2Л3) ^ (У1/3/Л; ЛзЛз)- (56.13>
Для получения третьего тождества
WUiJJU JmJu)wUihJJ-M> J'i2Jm) =
= 2 (2Лз+ 1) W (ЛЛЛ23Л; У«Лз) X
• X W U1J2JU У123Л34) ^ (ЛУ3Л34Л; ЛзУ'34) (56. H>
рассмотрим произведение четырех пространств L = L^ X £?2 X
X ^а X Ljt, преобразующихся по представлениям с весами jv j2, j$
и jv Пространство L можно разложить на неприводимые, подпра-
странства следующими пятью способами:
I _ V 1$кШШ*} _ V £{fJi САЛИЛ} _
= 2 Z,^'1 [(^'8>^} = 2 L& и* {Ш]У = 2 L[UM (Ш].
Обозначим через gWiA)AlAf g-[A(AA)lA, grA [(AA)AI, g-A ШЛА)]
и g-KAAMAA)] векторы канонических базисов в подпространствах
L{[UMJz}ji}t L{U:(JM\j<}t ^{АКААШ} ^{AlACAA)]} 1\Ш%){Ш\%
* gg] КОЭФФИЦИЕНТЫ РАКА 221
Эти векторы связаны между собой следующими соотношениями:
ШША = 2 <ЛЛ (7i2) ЛУш I ЛЛЛ (Лз) Унз) tf& w>w,ii-
1^Ыз)] Л = 2 (ЛЛз Um)Jdtw I ЛЛзЛ (Л*) Лги) ^К^Ч С66-1 б>
У-334
^ кал) л] = 2 (ЛЛ (Лз) ЛЛ*1 ЛЛЛ U id J*u) ей Ut {Ш]
U12 = (ЛЛ). Лз = (ЛЛ). Лад = КЛЛ^ ЛЬ
У1234 = {1Л (ЛЛ)1Л) = {Л [(ЛЛ)ЛШ
и
^КЛАШ Л = 2 (Л2Л Um)Jdau IЛ2ЛЛ UsdJm*) «*#,Л) °'J,)I.
^1 (56,16)
jVJMUJd] = 2 UJ*<Jtt)JuJltu\JJdu (/284) Лш> gf'(^>< •
,?231
Исключая из равенств (56,15) векторы gr[£ tfrfe)] А и ^К^'^Ч
получим:
?КЛЛ)Л] Л = e S (ЛЛ Uiz)JJm I ЛЛЛ '(Лз) Лаз) X
X (У1/23 (Уш) Jdnu 1У2У23У4 (7234)71234) X
X (ЛУз (Лз)ЛЛз41ЛУзЛ (ЛЛЛм) *&i*<W
Подобным же образом из (56,16) получаем:
гШ.)Л1 Л = 2 (ЛаЛ (Уш) ЛЛ234|Л2ЛЛ Uz J Jim) X
X (ЛЛ UiJJsdm* 1ЛЛЛ4 (Л3ОЛ234) g{j"' №ЛМ-
Сравнивая последние два равенства, мы найдем:
(У12Л (У12з)ЛЛгз41Лг/зЛ U34) J1234) X
X (ЛЛ (Л2) J34 Jim I ЛУ2Л4 U234)Jl2u) =
= 2 (ЛЛ (Л2)ЛЛ2з |ЛУгУз (Лз)Л2з> X »
X (Л/23 (712з)ЛЛ234 |ЛЛзЛ Ul3i)Jl234t) X
X (У2У3 (Угз)ЛЛз4 IУ2У3У4 (Уз^Угз*)-
Вспоминая определение (56,5) коэффициентов Рака, мы видим,
^то это равенство эквивалентно соотношению (56,14).
222 КОЭФФИЦИЕНТЫ КЛЕБША ГОРДАНА И КОЭФФИЦИЕНТЫ РАКА [ГЛ. XI.
Как показал Рака, коэффиценты W UiJiJJz* У12У23) могут быть
вычислены по следующей формуле:
_ у (- i)g+*+*+*+* (г +1)! д (AM?) A IjnhJ») А (;Д;Ч;) a QW*7)
^ (г — 7i — к — 7i2)I (* — к — к — квУ (z—ji — 7?з—7 )•' (г —/12—7з—Л1 А
Х (Л + У. + Уз +У-*)! (Л + Уз + Ук+Ум-г)! (Л + У + М + Иг-г)\' (56-17)"
где
*w-r*+,-y;t;7;''.r'""'f- <5W8>
Сумма в (56,17) берется по тем значениям £, которые не меньше»
чем числа
Л+Л+Лг. Л+Л+Лз. Л+Угз+У и У12+У3+Л
и не больше чисел
Л+Л+У+Л. Л+Л+Л2+У23 и у2+У+Л2+Лз-
Поэтому число слагаемых в (56,17) на единицу превышает
наименьшую из следующих двенадцати разностей:
У +Л —7i2. Ji + J —Лз. Л+Л —Лз> Л + Л — Лг- |
Л + Лз — Л» Л + Лг — Л» Уз + Лг—У>з> У1+У23—Jiz* \ (56,19>
У +У23 — J г» У +У12 —Уа. У2 + У12 —Ур У2+У23 —Уз- 1
Если хотя бы одна из этих разностей равна нулю, сумма (56,17>
сводится к единственному слагаемому. Пусть, напримерт jl2 =71+72*
тогда с помощью (56,17) легко находим:
W UihJU h + У2У23) =
= [(2У1)!(2У2)!(У1+Л + У + Л+1),.(Л+Л+У-Уз)^Х
х (л+л+л—ужу+ум—У1ЖУ8+У23—у2)а2 х
X [(2Л + 2Л+1)КУ+Уз—Л—У2ЖЛ+У -Лз)1Х
Х(Л+У2з—У)КЛ+У+7^+1)!(Л+Л--АзКХ
X (Л+У23—Ув)КЛ + У2з + ^+ 1)1 2 • (56.20)-
Все остальные случаи сводятся к этому, если использовать
соотношения .симметрии.
Если хотя бы один из аргументов W равен нулю и W Ф 0, то
среди остальных аргументов найдется пара, одинаковых, и можно,-
КОЭФФИЦИЕНТЫ РАКА 223-
§561
следовательно, воспользоваться формулой (56,20). Пусть, например,
/ =0 и W ф 0. Тогда jx—jl2 и у23 = уз. Применяя соотношение
(56,20), мы получим:
W V\0Ju ЛЛ) = 1(2Л +- 1 ):(2Л + 1 )12 • (56,21)
С помощью соотношений симметрии можно получить отсюда
выражения для коэффициентов Рака в случае равенства нулю любого
другого аргумента.
Значения всех коэффициентов Рака для jl2 = — и 1 приведены ■■
в приложении.
В заключение выведем одну формулу, которая играет важную
роль при рассмотрении ядерных реакций (см. § 80—82). Умножая
обе части (56,6) на (ЛЛз^^з!//^) и суммируя по / от \j\—Лз!'
до Л+Лз получим:
X (ЛЛ^г I ЗхгЩг) (ЛЛ^г^з 1Лз^2з) =
= 0^№\Jm)=W{Ши у12Лз).
^(2У12 + 1)(2Лз + 1) UlJ2JHi Jl2j2*>
Теперь, используя первые два соотношения (55,3), придадим
этой формуле следующий более симметричный вид:
2 (— 1 )Ji+m* ихЛгЩгЩ I Jnt) (ШгЩЩ | Лз"*2з) X
77fc2
X UJi2»h — ти IЛ — т\) =
а (_ !/*+*-*.+*.-*w,/^;^»!^^ V (ЛЛУЛ; Л2Лз). (56,22) ,
V (2/12 + 1) (2;2з+1)
Заметим, что суммирование в левой части можно формально
распространить на индексы т12 и т.д> так как при этом в левой части. ;■
не появится дополнительно ни одного отличного от нуля слагаемого- -
ГЛАВА XII
УРАВНЕНИЕ ШРЕДИНГЕРА
§ 57. Законы сохранения
В этой главе рассматриваются некоторые общие методы изучения
^квантовомеханической системы, обладающей той или иной симметрией.
Начнем с установления связи между группой, характеризующей
^симметрию квантовомеханической системы, и законами сохранения,
имеющими место для данной системы.
Как -известно, в наиболее важных случаях состояние
квантовомеханической системы, состоящей из п частиц, характеризуется ее
волновой функцией
Ф = Ф(Гь г2 rn,t). (57,1)
Волновая функция удовлетворяет уравнению Шредингера
|$=НФ> (57,2)
где Н — некоторый линейный оператор, не содержащий производных
7по времени, называемый оператором Гамильтона. Конкретный вид
оператора Н для нас сейчас безразличен. Заметим только, что при
изменении внешних условий изменяется и оператор Н.
Так как оператор Н не содержит производных по времени, то
задание волновой функции ф в некоторый момент времени t = t0
ф (ги гъ ..., rnt t0) = %(rl9 r2, ..., rn)
однозначно определяет функцию ф во все последующие и
предыдущие моменты времени.
Значения, принимаемые волновой функцией, могут быть либо
числами, либо элементами некоторого линейного о-мерного
пространства Л. В последнем случае, выбирая в Л ортонормированный
базис, можно записать вектор-функцию (57,1) в виде совокупности с
^компонент
Ф/С* гг% . .., гЯ1 t) (j= 1. 2, ..., о). (57,3)
с 57] законы сохранения 225
Уравнение (57,2) в этом случае может быть записано в виде
Существенную роль в квантовой механике играет скалярное
произведение (ср, ф) двух волновых функций ср и ф, которое определяется
следующим образом:
(<Р> Ф) = Г S Ъ (rv г* '*• О Ф/С"1. г2 гп, 0 drx drt... drn.
J i?x (57,5)
Каждой физической величине а соответствует согласно
квантовой механике некоторый линейный оператор А; при этом выражение
трактуется как среднее значение величины а в состоянии ф. Так
как среднее значение каждой физической величины в любом
состоянии является во всяком случае действительным, то оператор А,
соответствующий физической величине, должен быть эрмитовым.
В частности, должен быть эрмитовым оператор Гамильтона Н, так
как согласно квантовой механике он соответствует энергии системы.
Таким образом,
04». ф) = (ф. Щ). (57,7)
Если волновая функция ф является собственной функцией
оператора А
Аф = Хф, (57,8)
то согласно квантовой механике в состоянии ф физическая
величина а имеет совершенно определенное значение X. Разумеется,
в этом случае среднее значение величины а также равно X.
Уравнение Шрединкера (57,2) будем называть инвариантным
относительно некоторого оператора g, если всякое решение ф этого
Уравнения переходит под действием оператора g в функцию
Ф' = Я#. (57,9)
которая также удовлетворяет уравнению Шредингера *)
7TF = Hf. (57,10)
Совокупность всех таких операторов образует группу. Эта группа,
а также любая ее подгруппа называются группой уравнения (57,2).
*) Если волновая функция ф, помимо уравнения Шредингера, должна
Удовлетворять некоторым граничным условиям, то мы потребуем, чтобы
Функция ф' = g(j, также удовлетворяла этим условиям.
226 УРАВНЕНИЕ ШРЕДИНГЕРА [ГЛ. ХИ
В дальнейшем мы будем предполагать, что операторы g являются
линейными и коммутируют с операцией дифференцирования по
времени:
В этом случае можно утверждать, что операторы g коммутируют
с оператором Гамильтона. Действительно, подставляя (57,9) в (57,10)
и используя (57,11) и (57,2), получим:
Итак,
Hg<|> = gH<{>, (57,12)
если ф — волновая функция, т. е. какое-либо решение уравнения
Шредингера (57,2). Из последнего соотношения вытекает, что и
оператор g*, сопряженный оператору g, также коммутирует с
оператором Н:
Поэтому эрмитовы операторы
gi=^(8 + t) и 82=^f(g — g*)
также коммутируют с оператором Н:
Hgi<|> = giH<|> и Hg2^ = g2H^. (57,13)
Покажем, что эти операторы соответствуют сохраняющимся фига*
ческам величинам. Под этим подразумевается следующее:
1) если в некоторый момент времени t = t0 среднее значение
оператора gx равнялось
?i = fei<K'a). Ш) (Ф. Ф)=1.
то и в любой другой момент времени среднее значение оператора ft
будет равно qx\
2) если в некоторый момент времени t = t0 волновая функция ф
являлась собственной функцией оператора gx
то и в любой другой момент она будет собственной функцией этого
оператора.
§57]
ЗАКОНЫ СОХРАНЕНИЯ
227
Для доказательства вычислим производную -Tfigity* 40- Имеем:
= (/&Нф, ф)+ <&<!>. Шф) = /(^Нф, ф) — /(ЯГхф. Нф) =
= ц»1нф, Ф)—i(HSlqi. ф) = о.
Это доказывает первое утверждение.
Рассмотрим функцию
<f(rv г2. .... гй, 0 = grf(r1,r2, . ... гп, О — 4>CV /-2» ---. гп, 0.
Она удовлетворяет уравнению Шредингера и обращается в нуль
при t — t0. Поэтому волновая функция ср тождественно равна нулю
во все моменты времени. Это означает, что
g$(rv г2, .... гп, Ъ = Ц(г19 г2, .... гд, О-
Факт существования сохраняющейся физической величины носит
название закона сохранения этой величины, ^аждому элементу группы
уравнения Шредингера соответствует некоторый закон сохранения'
(именно, закон сохранения «комплексной» физической величины
g1-j-/g2)- Ясно, однако, что не все эти законы независимы. Так,
закон сохранения величины f = gh вытекает из законов сохранения
величин g и h. Поэтому возникает вопрос, как выделить из всех,
законов сохранения, доставляемых нам группой уравнения
Шредингера, некоторое, по возможности небольшое, число законов
сохранения так, чтобы остальные законы сохранения вытекали из них.
Этот вопрос особенно актуален для непрерывных групп *), которые
приводят к континуальному множеству законов сохранения.
Мы рассмотрим с этой точки зрения только группы Ли и
установим справедливость следующей теоремы.
Теорема. Пусть группа операторов G уравнения
Шредингера есть группа Ли размерности т. Пусть ах, а2, . . .,
аш—параметры группы G, а 1Х, 12, ..., \т — инфинитезимальные
операторы, соответствующие этим параметрам. Тогда
1) каждый инфинитезимальный оператор соответствует
некоторой сохраняющейся физической величине-,
2) все законы сохранения, связанные с элементами группы G,
являются следствием т законов сохранения, связанных с т инфи-
нитезимальными операторами.
Эта теорема показывает, что с точки зрения законов сохранения
можно полностью игнорировать группу G и учитывать только ее
инфинитезимальные операторы, как это часто и делается в курсах
квантовой механики.
) Для конечных групп он рассмотрен А. В. Соколовым и В. П. Широ-
ковским [А, 6].
228 УРАВНЕНИЕ ШРЕДИНГЕРА [ГЛ. XII
Доказательство теоремы. Продифференцируем тождество
gH* = Hg<|> (g£G) (57,14)
по параметру <Xj (j=l, 2, ..., т) элемента g и положим затем
g = e. Получим:
1,Н<|» = Н1/|>. (57,15)
Это доказывает первую часть теоремы. Для доказательства второй
части покажем, что из условий (57,15) вытекают условия (57,14).
С этой целью перепишем уравнения (43,10) в виде
т
•Э77 8Ф=25ц(г)1Лф С8Г€0). (57,16)
3 *=1
где ф— произвольная функция. Подставляя в (57,16) вместо ф
функцию #ф, получим:
т
■gjTgH*=2|Sy(g)IfgHf (57,17)
Применим к обеим частям равенства (57,16) оператор Н и
воспользуемся перестановочными соотношениями (57,15)
т
-^Hg<i> = 26V(g)IiHgf
J t»l
Вычтем полученное равенство из (57,17)
т
■£- (gH—н?) t=2 s« &) ii (gH - Hg) ф.
* г = 1
Таким образом, функция
X(g) = feH —Н?)ф
удовлетворяет системе уравнений
т
J <-l
и очевидному начальному условию
х(е) = (еН —Не)ф = 0.
Повторяя рассуждения, подобные рассуждениям § 43, легко
убеждаемся в том, что функция x(g) тождественно равна нулю. Это
завершает доказательство теоремы.
Рассмотрим некоторые применения этой теоремы.
§57]
ЗАКОНЫ СОХРАНЕНИЯ
229
j. Пусть К—квантовомеханическая система, находящаяся в
постоянных внешних условиях. Все моменты времени для такой системы
физически равноправны. Поэтому, если ф(£) есть какая-либо
волновая функция системы /С, т. е. какое-либо решение уравнения Шре-
дингера (57,2), то все функции
ф (t + а) (— оо < а < оо)
также будут удовлетворять уравнению Шредингера. Итак, в
рассматриваемом случае группа операторов Т(а), определяемых
равенством
Т(а)ф(0 = ф(* + а) (—сю<а<оо),
представляет собой группу уравнения Шредингера. Эта группа
является однопараметрической группой Ли. Единственный инфини-
тезимальный оператор, связанный с этой группой, имеет
следующий вид:
1Ф(о=^т(«жо|в=о=^+4=0=т-
Закон сохранения, связанный с однородностью времени, называется
законом сохранения энергии, в соответствии с этим в квантовой
механике оператор
- ! А
i i dt
называется оператором энергии. Множитель h введен для того,
чтобы оператор имел размерность энергии.
2. В качестве второго примера рассмотрим систему К*
находящуюся в однородных внешних условиях^ Это означает, что
потенциальная энергия системы не изменяется при перемещении ее «как
целого» в пространстве. В частности, такой системой является
всякая замкнутая система.
Если
Ф(г1в г2. ..., rn. t)
— какая-либо волновая функция системы К, то функция
Ф(г! + я. г2 + я. ..., rn-+-a, f)
также будет волновой функцией рассматриваемой системы. Это
является непосредственным следствием однородности пространства.
Таким образом, совокупность операторов Т(а), определяемых
Равенствами
т(яЖ>-1, r2f ..., гя. *) = Ф(Г1 + *. г2 + я, ..., гй + *. 0.
образует группу G уравнения Шредингера. Эта группа — группа
параллельных переносов — является трехпараметрической группой Ли.
й качестве параметров можно взять проекции
av a2 и а3
230
УРАВНЕНИЕ ШРЕДИНГЕРА
[ГЛ. ХЦ
вектора а. Этим параметрам соответствуют три инфинитезимальных
оператора Ix, 12 и 13 и, следовательно, три закона сохранения,
называемые, как известно, законами сохранения проекций импульса.
Вычислим инфинитезимальные операторы Ilf I2 и 13. Имеем:
Щ(гг. г2, . .., rn, t) = ~T(a)^(rv г2, .... гп, О
а=0
Итак,
дхх ' дх2 "• " " " "• дхп '
a=Q
ii
cbfj *^ d*2 ' ' ' ' >^ ^Xw
Подобным же образом находим, что
I*
д , д
Операторы
дг-± ' дг2 # " " dzn
Рх—yli, Р2 — уЬ» ^3 — т'3
называются операторами проекций импульса.
3. Рассмотрим, наконец, квантовомеханическую систему,
находящуюся в центрально-симметричном поле с центром в некоторой
точке О.
Для простоты предположим сначала, что система состоит из одной
частицы и поэтому волновая функция системы
ФС. О
зависит только от одного радиуса-вектора г и времени t.
Кроме того, для наглядности будем считать, что значения,
принимаемые волновой функцией ф(г, t), суть векторы. Таким образом,
в каждый данный момент t волновая функция ф(г, t) образует
некоторое векторное поле: каждой точке с радиусом-вектором г
ставится в соответствие вектор ф(г, t). Будем представлять себе
вектор ф(г, t) отложенным от точки г. Конец этого вектора находится
в точке rf' = r-\-ty(r, t). Произведем вокруг центра О какой-либо
поворот g пространства вместе с волновой функцией ф(г, t). Это
означает, что мы одновременно поворачиваем точку приложения г
вектора ф, переводя ее в точку gr, и поворачиваем вектор ф,
переводя его в вектор gф. Вектор gф отложен от точки gr, конец
вектора gф совпадает с точкой grf.
§571
ЗАКОНЫ СОХРАНЕНИЯ 231
В результате такого поворота мы получим новую функцию
ф'(г, t). В силу сферической симметрии внешних условий функция
и/(г, t) также будет удовлетворять уравнению Шредингера. Таким
образом, оператор Т (g) (g(zR), переводящий волновую функцию ф
в волновую функцию ф', принадлежит группе уравнения Шредингера.
По построению функции ф' она удовлетворяет условию
V(gr,t) = t&(r9t).
Y(r, t) = t$(g-\ rt)9 (57,18)
или
Т(^)ф(г. 0 = 8Ф(8Г-1г, t). (57,19)
Если волновая функция зависит от радиусов-векторов нескольких
частиц, то при вращениях пространства она преобразуется, очевидно,
следующим образом:
T(g)<K/i, r2. ...,rn. t) = g<Hg~1rv g~lr2. .... g-irn, О-
Наконец, если значения волновой функции суть не векторы, а
элементы более общего линейного пространства L, преобразующегося
по некоторому представлению S группы вращений, то последнее
равенство принимает следующий вид:
Т(§Ж>*1> г2, .... rn. t) = S(g)t?(g~irv g-ir2. ..., g-Vn, 0- (57,20)
Совокупность операторов T(g") образует, разумеется, представление
группы вращений /?. Вычислим инфинитезимальные операторы \х,
ly, lz, соответствующие параметрам <хх, ау и а2, группы вращений.
Начнем с вычисления оператора \z. Положим в последнем равенстве
£ = £•[0 0 otg], т. е. возьмем в качестве элемента g поворот вокруг
оси OZ на угол а2. Вводя цилиндрические координаты pft, zk, срл
(fc=l, 2, ..., я), перепишем соотношение (57,20) в
рассматриваемом случае в виде
Т[0 0 а2]ф(рх, zv срх; р2, г2, ср2; ...; pn, *п, cpn; *) =
= S[0 0 аг1ф(р1? zv срх — а5; р2, <г2, ср2 —аг; ...; pn> *n, cpw —а2; 0.
Дифференцируя это равенство по as и полагая затем аг = 0, получим
п
12ф(гх, г2, ..., гяГ/) = Сф(г1, г2, ..., гп, 0 — S"|r-
Здесь через 12 обозначен инфинитезимальный оператор,
соответствующий параметру as в представлении S.
Вводя эрмитовы операторы
п
J, = /AI,. S» = tttf, Мг = -/б2^-. (57.21)
fc-i *
232
УРАВНЕНИЕ ШРЕДИНГЕРА
[ГЛ. XII
перепишем последнее равенство в виде
'*Ф = (8, + М,)ф. (57,22)
Физическая величина, изображаемая эрмитовым оператором J2,
сохраняется, так как оператор iz только постоянным множителем ih
отличается от инфинитезимального оператора 12 группы уравнения Шре-
дингера. Эта физическая величина называется проекцией полного
момента на ось OZ.
Равенство (57,22) показывает, что проекция Jz полного момента
на ось OZ слагается из двух величин: величины S2, называемой
проекцией спина на ось OZ, и величины Мг, называемой проекцией
орбитального момента на ось OZ. JT?
Оператор Ss зависит от представления S, по которому
преобразуется пространство L значений волновой функции. Наоборот,
оператор М2 не зависит от представления S. В том частном случае,
когда волновая функция ф является скаляром, представление S является
единичным, оператор S2 равен нулю, а оператор проекции
орбитального момента М2 совпадает с оператором проекции полного момента Js.
Таким образом, различие между операторами Мг и Js возникает
только в тех случаях, когда пространство L преобразуется по
представлению группы вращений более сложному, чем единичное
представление.
Оператор М2 может быть записан в декартовых координатах
в виде
*=-«J;j*»£--*4> (57-23)
Совершенно аналогично приходим к проекциям полного момента
системы на две другие оси координат
JX = SX + MX, J1/ = S!/ + M!/, (57,24)
где
Sx = lblx, Sy = ihly,
М* = -//>2(у*4.-^)' Mk = -ihti(z*Tk~-Xklk)'
Таким образом, мы получили три закона сохранения 5Х, Зу и J2»
связанных с изотропией пространства.
Заметим в заключение, что перестановочные соотношения для
введенных операторов немедленно получаются из перестановочных
соотношений для инфинитезимальных операторов. Действительно,
ijy—у*=- & ал - ¥*)=- п=»■».•
Подобным же образом можно получить остальные перестановочные
соотношения, например
Му1Аг — M9tAy = iMAx, S^S^ — S^SZ = ihSy.
* 58] классификация состояний 233
§ 58. Классификация состояний
Пусть G— какая-либо группа уравнения Шредингера. В
предыдущем параграфе было показано, что наличие группы О влечет за
собой существование законов сохранения. Теперь мы увидим, что
волновые функции естественно классифицируются по неприводимым
представлениям этой группы.
Совокупность всех волновых функций, рассматриваемых в
некоторый момент t0, образует линейное пространство Z,,
преобразующееся по некоторому представлению Т группы G. Разлагая Т на
неприводимые представления, мы расщепляем пространство L на
неприводимые инвариантные подпространства. В каждом из этих
подпространств можно выбрать базисные функции. Любую волновую
функцию можно мыслить как суперпозицию этих базисных функций.
С другой стороны, каждая базисная функция принадлежит тому или
другому неприводимому представлению группы G. Таким образом,
базисные функции можно классифицировать по неприводимым
представлениям группы G.
Эта классификация не представляла бы, пожалуй, никакого
интереса, если бы не то обстоятельство, что если волновая функция <|>
в некоторый момент t0 преобразуется по некоторому
неприводимому представлению группы G, то во все последующие моменты
она преобразуется по этому же представлению.
Докажем это утверждение. Пусть L0 — некоторое неприводимое
инвариантное относительно группы G подпространство, а фМ, .. .
..., фМ — какой-либ базис в этом подпространстве. Под действием
элементов g£G функции ^\ ..., ф^8) преобразуются друг через
друга:
Обозначим через ф*1), ..., ф(«) волновые функции (т. е. решения
Уравнения Шредингера), равные в момент t = tQ соответственно
функциям ф(1), ..., фОз). Введем в рассмотрение функцию
ф = Т(£)ф<*> — 2 т№(£)ф<*>.
Эта функция удовлетворяет уравнению Шредингера (так как каждое
слагаемое правой части удовлетворяет этому уравнению) и при t = t(y
обращается в нуль. Отсюда следует, что функция ф = 0, что и
доказывает-наше утверждение.
Рассмотрим теперь^ какую-либо квантовомеханическую систему К,
находящуюся в поле с центральной симметрией. 'В этом случае
234
УРАВНЕНИЕ ШРЕДИНГЕРА
[ГЛ. XII
в качестве группы G можно взять либо группу вращений /?, либо
группу поворота Z вокруг некоторой фиксированной оси OZ.
В первом случае волновые функции ф можно классифицировать
по неприводимым представлениям ОДу=0, -у, 1, у, ... J группыt
вращений. Если j— вес представления, по которому преобразуется
функция ф, то говорят, что система К в состоянии ф имеет момент j
(в единицах h).
Во втором случае волновые функции классифицируются по
неприводимым представлениям tm группы поворотов Z. Индекс
представления т совпадает с собственным значением проекции момента
на ось OZ, если система К находится в состоянии ф,
преобразующемся по представлению хш.
Рассмотрим теперь случай, когда система К состоит из двух
подсистем Кх и К2, причем в момент времени t — t0 взаимодействие
между системами пренебрежимо мало и каждая из подсистем имеет
свою волновую функцию. Обозначим эти функции через фх и ф2
и предположим, что функции фх отвечает момент jv а функции
ф2 — момент j2. Волновая функция всей системы ф = фхф2 может быть
разложена по волновым функциям еру, отвечающим определенному
значению момента всей системы К. Легко сообразить, что эта
разложение содержит только конечное число членов. Действительно,
произведение ф = фхф2 преобразуется по произведению
представлений Djl X Dif = 0,Л_Л| +Dii,-Al+i4- • .. +Dj1+jf. Поэтому
функция ф записывается в виде суммы
Ф = Ма = 9\ *,-* | + % л-л |+1 +•••-+- 9il+it-
Согласно квантовой механике это означает, что измерение момента
системы К может привести только к одному из следующих значений:
1Л— Л|. 1Л— Л 1-Й- •••> Л-Ьл
(теорема сложения моментов).
Если функции фх и ф2 отвечают определенным значениям т1 и Щ
проекции момента на ось OZ, то, так как ^iX^5 = tmi+ms,
волновая функция системы ф = ф1ф2 отвечает значению т1-\-т2
проекции момента на ось OZ.
Если система Кх находится в состоянии с моментом j\ и
проекцией момента mv а состояние системы К2 характеризуется
значениями j2 и т2, то нетрудно вычислить вероятность найти систему К
в состоянии с моментом j(\j\—Л1^0^Л+Л)-
В самом деле, функция tyt является вектором канонического
базиса efe пространства, преобразующегося по представлению группы
£ 58] классификация состояний 235
вращений веса j\. Подобным же образом функцию ф2 можно
рассматривать как вектор efa . Поэтому (см. § 54) произведение ф = ф1<|>2
представимо в виде
Ф = 2 (ЛЛ«1«2 | >*1 + «2) <+«,• (58> D
где (}\}гт\тг I .Mi ~~Ь ^2) — коэффициенты Клебша — Гордана. Из
последнего равенства следует, что вероятность найти систему К
в состоянии с моментом j равна
Wj = | иЛъЩЩ I Mi -h mz) I2-
ГЛАВА XIII
УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ
ГРУППЫ ДВИЖЕНИЙ ПРОСТРАНСТВА
§ 59. Шаровые функции со спином
Если в каждой точке пространства задано значение некоторой
физической величины W (температуры, скорости, тензора деформаций
и т. п.), то говорят о поле величины W. В качестве примера можно
указать поле скоростей и давлений в гидродинамике,
электромагнитное поле в электродинамике, электронное поле в квантовой
электродинамике и т. д.
Поля подразделяют на скалярные, векторные, тензорные, спи-
норные и более сложные поля. Так, температурное поле является
скалярным, поле скоростей — векторным, электронное поле в
нерелятивистском приближении — спинорным, поле деформаций —
тензорным. В основе этой классификации лежит поведение величины W>
взятой в любой фиксированной точке, при вращениях вокруг этой
точки. Мы видели в § 50, что если при этих вращениях компоненты
величины W преобразуются друг через друга линейно, то они
преобразуются по некоторому представлению Т группы вращений. Если
T = D0, то поле называется скалярным, если T = Di—спинорным»
1
если Т —Dx — векторным, если T = Df — тензорным. Если
представление Т совпадает с неприводимым представлением Ds, то мы будем
говорить о спинорном поле веса 5. В общем случае произвольного
представления Т мы будем говорить о Т-поле. Т-поле может быть
представлено в виде суммы спинорных полей, если представление Т
приводимо.
При вращении g вокруг начала координат поле W(r) переходит
в поле W (г), равное
xV'(r) = T(g)W(g~ir) (59,1)
(ср. (57,19)).
Рассмотрим совокупность всех спинорных полей одного и того же
веса s на сфере единичного радиуса. При вращениях вокруг начала
координат эти поля преобразуются друг через друга в соответствии
с формулой (59,1), по некоторому бесконечномерному представлению*
с 59] шаровые функции со спином 237
Это представление может быть разложено на неприводимые
конечномерные представления Dj. Спинорные поля веса s, преобразующиеся
по неприводимому представлению веса У, называются шаровыми
функциями со спином s порядка J. Те спинорные поля, которые
образуют канонический базис, называются основными шаровыми
функциями; мы будем обозначать их следующим образом:
ХЛГ..С) (И = 1).
В частности, если s = О, то с точностью до постоянного множителя
основные шаровые функции совпадают с обычными сферическими
функциями К>дг(0. ср).
Поставим задачу найти явный вид всех шаровых функций со
спином 5 порядка У. При этом мы выясним, какие представления Dj
и сколько раз содержатся с бесконечномерном представлении, по
которому преобразуется совокупность всех спинорных полей веса s,
рассматриваемых на единичной сфере.
При вращении g вокруг начала координат функция Xjm s nePe"
ходит в функцию
j
r'jM, e <г> = 2 r dJm>m (S) Хлг. s С)-
ж ——j
С другой стороны, согласно (59,1) имеем:
X/ir, в (г> = Ds (S") Х/лг, s te~lr)*
Сопоставляя эти два равенства, получим:
Ds (*> *JM, s (^"lr) = 2 DM'M (S) XjM\ в W'
или
X/jr.. (T'r) = J D^,M (g) D8 (£-») XjMI>, (r). (59,2)
Положим в этом соотношении r = k, где k — орт, направленный
вдоль оси OZ, и возьмем в качестве вращения g поворот С3(а)
вокруг оси OZ на произвольный угол а. Мы получим, вспоминая,
woDi.jr(c,(«))=W-**«.
Хлг.. (*) = «-**•&. (С, (- «)) Хгж. в (*)•
Переходя в этом равенстве к компонентам, находим:
Хйг..**)^^-" "#*..(*>• (« = — 5. — «4-1 *)•
Отсюда следует, что
ХУлг.в(*) = 0' если м=£т- (59>3)
238 уравнения, инвариантные относительно евклидовой группы [гл. хщ
Это соотношение показывает, что если в (59,2) положить r = fc>
g~l = h, hJfe = r и перейти к компонентам, то получится:
Х?л..С-)= Д! ^ж(А"г)^. №}&..,(*) (59,4)
М = — с
(hfe = r, o = min(s, J)),
если У—s—целое число; если же У—5 — полуцелое число, то все
члены в правой части (59,2) обращаются в нуль после подстановки
г = й. Это означает, что порядок шаровых функций является
целым или полуцелым числом одновременно с их весом.
Мы видим, что задание (2а-|-1) чисел XjM 8(k) однозначно
определяет все функции yJM g(r). С другой стороны, простая проверка
показывает, что при любом выборе этих чисел функции,
определяемые равенством (59,4), являются шаровыми функциями со спином $
порядка У. Отсюда вытекает, что среди шаровых функций со
спином s существует (2a-f-l) линейно независимых инвариантных
семейств, каждое из которых преобразуется при вращении
пространства вокруг начала координат по представлению Dj, если
У—s—целое число.
Из (59,4) следует, что всякое спинорное поле веса s,
преобразующееся при вращениях вокруг начала координат по
представлению Dj-, имеет следующий вид:
а
Х7м,8С)= S «£>)0U'(A)D£.jr(A-1)
М' = — а
(59,5)
(hk = r, o = min(s, У)),
где и^ (г) — произвольные функции.
Формуле (59,4) можно придать более
удобный для применений вид. С этой целью
рассмотрим на единичной сфере триэдр, одна
из осей которого (УС, направлена по вектору г, а две другие оси
0'% и О'т]— по касательным к меридиану и параллели в точке г
(рис. 23). Если сферические координаты вектора г равны б и ср,
то вращение /г, поворачивающее оси триэдра OXYZ параллельно
осям триэдра O'StjC, характеризуется эйлеровыми углами 6Х = вг
<Pi = —f. «h = <P-T-2:
* = *(*. -Т'¥ + т)-
Введем в рассмотрение в пространстве значений величины *F базис:
<*=De(*)*m (» = — S, — S+1. ..., S),
Рис. 23.
§ 60] УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ 239
где е>т — канонический базис. Ясно, что базисные векторы е^
образуют канонический базис относительно осей 0'£т]С. Мы будем
называть его местным базисом. Обозначим через ty™M s(r) координаты
функции XJMfS(r) в местном базисе е'т. Координаты ty™M g легко
выражаются через Х/ж,8:
м
Подставляя сюда выражение (59,4) для функций у^ 8, находим:
Фйг..<г> =
[DJ,T(h~1)y^ (k\ если I/л К а,
( 0, если | т | > о,
Это соотношение можно переписать в виде
Фйг, в (в. Т) = «У.' (- 0Ш+Ж ^Р«дг. J (9) (| т |< о), (59,7>
где ufs — произвольные константы.
Таким образом, в местном базисе шаровые функции со спином s
выражаются через функции PmMtj{\ nt |<! о).
Всякое спинорное поле ЧР" веса s, преобразующееся по
представлению Dj, является согласно (59,7) линейной комбинацией
следующих полей:
Фйг. s (г) = и% (г) (- 0Ш+ЛГ ет* • Pw„,, (6)
(|/я|<с Ж = —У, — У+-1, ..., 7). (59,8)
§ 60. Уравнения, инвариантные относительно группы
евклидовых движений пространства
Всякая система уравнений, описывающая какой-либо процесс
в пустоте или в безграничной однородной изотропной среде, должна
иметь одинаковый вид в любой прямоугольной системе координат.
Мы попытаемся найти общий вид таких уравнений в предположении,
что они линейны. Что касается поля Ф(г), описывающего
рассматриваемый процесс, то мы будем считать его некоторым Т-полем
(см. § 59). Иными словами, значения функции № принадлежат
некоторому р-мерному пространству Z,, которое преобразуется по
представлению Т группы вращений вокруг начала координат.
Без ограничения общности можно считать, что система уравнений,
определяющая компоненты функции ЧР\ содержит производные толька
первого порядка. В самом деле, этого всегда можно достичь,
рассматривая некоторые первые производные как самостоятельные
компоненты.
240 УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ [ГЛ, ХЩ
Для простоты мы будем считать, что производные по времени
в уравнении не содержатся. Такие «укороченные» уравнения
получаются, когда ищут решения вида
ЦТ (г, *) = \F (/•)**<
Таким образом, мы будем рассматривать уравнения
^И^ + ^+^П&Н**» (/=1,2 р). (60,1)
где фл— компоненты функции W.
В силу однородности пространства коэффициенты Л$, Л$|, Л$
не зависят от координат.
Выясним, какими должны быть эти коэффициенты для того,
чтобы система уравнений (60,1) была инвариантна относительно
вращений.
Для этого условимся прежде всего о выборе компонент tyk. Разобьем
пространство L на неприводимые подпространства. Каждое из
неприводимых подпространств будем обозначать символом LQn, где индекс $
указывает на вес представления Ds, по которому преобразуется
подпространство L8%t а индекс п нумерует различные подпространства,
преобразующиеся по одному и тому же представлению Ds.
Канонический базис в L8n обозначим через
*8п,т (m = —S. —S+L .... S). (60,2)
В соответствии с этим компоненты функции *F обозначим через х^
так, что
W= У! уте
s, m, n
Целесообразно также ввести дифференциальные операторы
1 У2 \ дх^ ду) ° дг У2\дх^ ду J v
которые преобразуются при вращениях пространства так же, как и
координаты в каноническом базисе (см. (48,10)).
Уравнения (60,1) можно теперь переписать в виде
, ^J , Ивят, s'w'm'^-lXjT's'"+" Атт, s', п'. т'доУ.™8' Ч~
• + А&ш. в'п'ш'ЯЦ = *>£• (60.4)
Учтем теперь, что 3(2s-f-l) величин
§ 60] уравнения, инвариантные относительно евклидовой группы 241
(S'n' фиксированы, m' = —s't —s' + l s') преобразуются по
произведению представлений Di X IV- Если s' = s—1, st &-+-1,
т0 существует линейная комбинация этих величин
2 (U>/»' \sm)dv$a,9 (60,5)
которая преобразуется при вращениях так же, как и ^™. В силу
инвариантности уравнения (60,4) его левая часть должна состоять
только из сумм вида (60,5). Поэтому каждая система уравнений,
инвариантная относительно вращений, имеет следующий вид:
2 2 \п, .,„. 2, (1 s'^tn' | sm) д х-;, = чХ-, (60,6)
причем коэффициенты А8п, 8>п' совершенно произвольны. Подчеркнем,
что либо все индексы s являются целыми, либо все они являются
полуцелыми.
Часто бывает полезно переписать систему уравнений в
сферических координатах. Для этого нужно совершить не только замену
АЛЛ
дифференциальных операторов д^ операторами -д—, -™-, -г-, но и
сделать переход от координат у%8 в каноническом базисе к
координатам ф™8 в местном базисе (см. § 59). Координаты ^ и <|>J£
связаны между собой соотношением
«W-^MjC» (* = *(«. —J. *+£))
или
Х^С-) = ^,;,(А)^(г). (60,7)
Аналогичным соотношением связаны друг с другом операторы
d„ = D^(A)d^ (60,8)
где
(расположение осей 0'£т)С указано на рис. 23).
Производные по S, т], С легко выразить через производные по
г> О, ср. Именно
A_±jL д — ! ^ JL_A
<Э$ — г <Э6 ' d-rj r sin 6 дер ' д^ ~ дг'
Поэтому
7-/2V d8^sin8d?y dr /- У^ 2 V дв sin в а? У
(60,9)
242 УРАВЙЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ [ГЛ. Х1Ц
Подставим в уравнения (60,6) выражения (60,7) и (60,8) для ут
и др. Мы получим:
2 Ля,8'«' 2 О s'pnt | sw) D^r (A) d^D^/p/ (/г) ф#вг =
р
или
= *!&. (60.10)
С помощью второго тождества задачи II § 54 внутреннюю сумму
можно записать в виде
2 (i*V«t I sp) D^ (й-1) <?;.ds;v щ $v,
рЛр'>го', w2
ИЛИ
£ (IsYp-v? I V){ <Й$?' -+-| tfv [D*' (/T'K-D8' <*)],_„, , }.
Вспоминая результат задачи HI § 47, легко находим, что
tf (А"1) д± г D8' Щ =* -1= [А8,', - / dg BAS'].
где All, Ао, А? —операторы (46,25). Кроме того» ясно, что
d0D8(h) = 0.
Теперь можно следующим образом переписать уравнение (60,10):
2 а*..'»' Кь'—ip+i Up)k^v+
p' J
+ (ls'Op | sp) d*|£... -f- (1/1/, — 11 sp) [di^rj +
+77f S tf:-' (A-» -'c[s eA°\-u /11 =*
Подставим в это уравнение значения (46,25) матричных
элементов операторов Aii, Ао , А?:
V Аап,.,,, \(ls/~'р +т'"> L(1 + -L1+
,J™. 1 г/2 L Ue^sinfld?
+{W0p\Sp)±qp, i+(i^-llv)r/jL_
-тет^- (р-1)^в)«г;+^у^ }=«♦»,• (60Л1)
§ 60] УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ 243
Мы получили общий вид системы уравнений, инвариантной
относительно евклидовой группы движений, в сферических
координатах.
Рассмотрим совокупность всех решений, удовлетворяющих этой
системе при некотором фиксированном значении х. Ясно, что эта
совокупность образует некоторое линейное пространство.
Обозначим его через Z,a. Пространство Lx инзариантно относительно всех
вращений вокруг начала координат и, следовательно, преобразуется
по некоторому представлению этой группы. Расщепим пространство Lx
на неприводимые подпространства и обозначим одно из них
через Z,j. Индекс J указывает на то, что Lj преобразуется по
представлению Dj. Обозначим через
VjM(r) (М = — У, — У+1, ,.., J)
поля, играющие роль канонического базиса в пространстве Lj.
Вспоминая выводы, полученные в предыдущем параграфе, мы можем
написать:
4йг. па (г) - «£ ш (г) (- сГ+ж*ш*Рщм. j (В). | т |< о,
$м,т(г) = 0, \т\>а (a = mln(s.j)).
где $гм,т — компоненты поля Wjm в местном базисе.
Мы видим, что угловая зависимость функций 4v#(r) получается
из общих соображений и не зависит от конкретного вида
уравнений (60,11).
При подстановке Ф^ = ФЗаг,я« в уравнение (60,11) все
множители, зависящие от углов, должны взаимно сократиться, а сами
уравнения станут обыкновенными дифференциальными уравнениями.
Таким образом, задача отыскания полей ^«/^(г) сводится к
нахождению функций и™ na(r), удовлетворяющих системе обыкновенных
дифференциальных уравнений.
Производя фактически подстановку <|>™=4%rf п8 в уравнении (60,11),
мы получим с помощью рекуррентных соотношений (47,10)
следующую систему обыкновенных дифференциальных уравнений:
1* -Г"'~У?""" K»r.b+tv.*.v]+
s'n' v
+ <^.nv]} = ^.„S. (6°.12)
244 УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ [ГЛ. ХЩ
§ 61. Пример
Рассмотрим в качестве примера уравнения Максвелла
rot Е=—Н, — rottf= —£ (61,1\
С С '
для электромагнитного поля с частотой о>.
Электромагнитное поле в данной точке характеризуется двумя векторами
Е(г) и #(г). Поэтому шестимерное пространство L значений доля ч?
распадается в данном случае на два неприводимых подпространства Ьц и £12,
каждое из которых преобразуется по векторному представлению Dle Индекс 5
принимает, таким образом, только одно значение s = 1, и мы будем в
дальнейшем его опускать. Индекс п пробегает два значения п = 1, 2.
Роль компонент электрического поля в каноническом базисе играют
величины
£-1 = — Z"r^ (Ех + 1&у)* Е0 = Ег, El = Гг= (Ех — *ЕуУ
Аналогичный вид имеют компоненты магнитного поля в каноническом базисе
Н-1 = — -г=(Нх-\-1Ну\ Н0=Нг, Ht = -^(Hx — lHy).
Нетрудно переписать уравнения Максвелла в новых обозначениях. Так,
например, получаем:
!!L Н± = ^ (Нх - 1Ну) = -1- (rot, Е - / rot,, E) =
ее у 2
1 / дЕ9 дЕу дЕх bEz \
у 2 \ ду дг дг ду J
т. е.
дгЕо-доЕ^^Н^ (61,2)
Подобным же образом можно получить остальные пять уравнений. Однако
для нахождения коэффициентов A8rii8rnf, фигурирующих в уравнении (60,6),
достаточно одного лишь уравнения (61,2). В самом деле, сравнение (60,6)
с (61,2) показывает, что
Л21 "" » (1110|11) ~~ Y со
(индексы s = s' = 1 опущены). С другой стороны, из уравнений Максвелла
(60,1) непосредственно видно, что
Ли = Л22 = 0, Л12 = — Ап.
Зная коэффициенты Аппг, нетрудно записать уравнения Максвелла в форме
(60,11), т. е. в сферических координатах. Фигурирующие в (60,11)
компоненты поля в местном базисе — <|^3 имеют простой физический смысл:
4-Г1 у=(Ео + 1Е^, ^ = ЕГ ф}-^^-££,).
§ 61]
ПРИМЕР
245
где Еп Ев* Еу, Нг, Н%, Н^ — проекции векторов £, Н на сферические орты
Поставим задачу найти электромагнитные поля, преобразующиеся по
представлению Dj группы вращений. Для определенности будем считать,
что /!> 1-
Используя результаты предыдущего параграфа, мы можем
компоненты ^м, ns такого поля записать в виде
Фйг. п. = «" ns (П (- 1)т+Ыеа*РтМ, , (в) (т = -1, 0,1).
При этом функции и™П8 = и™ удовлетворяют уравнениям (60,12), которые
в рассматриваемом случае принимают следующий вид:
_i(^ZEpXB;+„r,) +
dul
dr
-l
du7 * о) _-
—- = — Uo t
dr с 2
l/2Z±n(_„.+„r,) = f4
i(/Z<Z+I„.+„,)
г-—7Bi"
—j—= —«»•
Исключая из этих уравнений функции и^ и и\, получим систему из
четырех уравнений:
1 , Г/(/+1) с
r]"i"
"г""1 -^^'-[^ ^—yj"i ^"^~2^
в1' ' д1 I Г/(У+1> с М1Д> •/(■/+!) с -i_0
1 г х ' L 2г2 (о с J 2 2r2 to 2
"1-7и1~"1 2г* "5" Т.Г2 +—2?2—^"2 ~а
Положим теперь
(61,3)
U = й2 * + U\ + й1 * + UV V = U2l — и\ — Ux l + «{,
,-1 I „1
4«i.
1 _i_ „1 «-i_i_ „1
р = и2 1 + и\ — иг А — в{, q = — u2 1 + «2 — их 1 + и1\
246 УРАВНЕНИЯ, ИНВАРИАНТНЫЕ ОТНОСИТЕЛЬНО ЕВКЛИДОВОЙ ГРУППЫ [ГЛ. XIII
Склады&ая асе четыре уравнения (61,3), найдем:
г ^1 г2 <» с J
Подобным же образом получаем еще три уравнения:
«--7-«+>-0.
Мы видим, что существуют два типа волн: и, уф§> р> д = 0 и и> i/=0,
/?, #=^=0. Вычислим функции и, I/. Исключая и, находим:
- 2 , , /ю* /(/4-1) —2\
Мы получили уравнение вида
общее решение которого выражается с помощью функции Бесселя Jn(x)
и функции Неймана Nn (x) следующим образом:
где ct и с2 — произвольные постоянные (см. Янке и Эмде, «Таблицы
функций», Гостехиздат, 1948).
В нашем случае y=1, а =— -у, р = —, я = /4--<г. Таким образом,
Если точка г = 0 входит в рассматриваемую область, то коэффициент с2
следует положить равным нулю, так как функция Неймана N \ обра-
j+j
щается в нуле в бесконечность.
Теперь нетрудно вычислить и функцию и.
Система уравнений, которым удовлетворяют функции р и qf ничем не
отличается от только что рассмотренной системы. Поэтому
где с3 и с4 — произвольные постоянные.
ГЛАВА XIV
ПОГЛОЩЕНИЕ Ц КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА
§ 62. Квантовомеханическое введение
Квантовая теория излучения света существенно использует тот
факт, что энергия взаимодействия между веществом (атомом,
молекулой, кристаллом) и электромагнитным полем весьма мала. Это
позволяет в нулевом приближении рассматривать поле и вещество
независимо друг от друга и говорить о фотонах и стационарных состояниях
вещества. Учет энергии взаимодействия в первом приближении
обнаруживает возможность перехода вещества из одного стационарного
состояния в другое. Эти переходы сопровождаются появлением рли
исчезновением одного фотона и представляют собой поэтому те
элементарные акты, из#которых слагаются процессы излучения и
поглощения света веществом.
Если Ei и Ef — энергии стационарных состояний вещества до
и после перехода и £^ < Ef% то частота v поглощенного кванта
равна v = -jr(Ef — Ej), где h — постоянная Планка. Это соотношение
используется для экспериментального изучения энергетических
уровней стационарных состояний вещества.
Согласно теории воамущений вероятность перехода в единицу
времени пропорциональна квадрату матричного элемента энергии
взаимодействия, соответствующего начальному и конечному
состояниям. В интересующем нас случае матричный элемент энергии
взаимодействия пропорционален интегралу*)
/ f/J «iV^i. |Л<|у А. (62,1)
гДе ej и rj — заряд и радиус-вектор /-й точки поглощающей системы
(атома, молекулы, кристалла), ф$ и ty— волноцые функции этой
системы до и после поглощения света, k — волновой вектор
поглощенного фотона, п — единичный вектор, параллельный
электрическому полю фотона, Vf — градиент, относящийся к координатам
*) См. [1], стр. 120, формулы (3), (За).
248 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА [ГЛ. XIV
у'-й частицы, интегрирование производится по всем координатам
поглощающей системы.
Если интеграл (62,1) равен нулю при всех значениях k и п, то
переход ф$ -> <[у, сопровождающийся поглощением одного фотона,
не осуществляется. В этом случае говорят, что уровни Е^ и Ef не
комбинируют между собой (относительно поглощения). Ниже будет
показано, что наличие запрещенных переходов является следствием
симметрии системы.
Рассмотрим более подробно матричный элемент (62,1) в
предположении, что поглощающей системой является атом. Мы будем
считать, что энергия поглощенного фотона hw недостаточна для
вырывания электрона, т. е. по порядку величины не превосходит
Z—(Ze— заряд ядра атома, а — «радиус» атома). Из неравенства
hm^Z— следует, что ka^Z -й = ур? (&=--» с—скорость света).
Таким образом, для атомов с небольшим зарядом ядра Z можно
с большой точностью положить ei1ta = 1.
Волновые функции ф$ и fy практически равны нулю для тех
значений координат электрона, которые превышают размеры атома.
Поэтому в интеграле (62,1) можно заменить множитель е%Нтз
единицей, после чего получится:
'"*/fy *WT- (62'2)
/s(S'
Это приближение становится неудовлетворительным, если
выражение (62,2) равно нулю. В этом случае следует разложить eihr в ряд
e*»*=\+ikr — ^(tof-\- ...
и удержать первый неисчезающий после интегрирования член. Таким
образом, мы получим матричный элемент перехода в виде
Поглощение, определяемое формулой (62,2), называется дипольным
поглощением. Поглощение, определяемое формулой (62,3),
называется мулыпиполъным поглощением. Если m=l, то поглощение
называется квадруполъным.
Формулы (62,2) и (62,3) справедливы и для молекул. В
следующем параграфе мы выясним, в каких случаях симметрия атома или
молекулы приводит к тому, что выражение (62,2) или выражение
вида (62,3) оказываются равными нулю.
Рассмотрим теперь так называемое комбинационное рассеяние,
т. е. процесс, заключающийся в том, что атом (молекула или
кристалл), поглощая фотон энергии йо>, переходит из состояния с энер-
§621
КВАНТОВОМЕХАНИЧЕСКОЕ ВВЕДЕНИЕ
249
гией Ei в состояние с энергией Ef и одновременно испускает фото»
с энергией йо>. Частота со испущенного фотона связана с часто*
той «>о поглощенного фотона соотношением
£о)0 + Е{ = йо) + Ер
выражающим закон сохранения энергии. Если воспользоваться обо-
Щ — Ei
значением -L—щ— = v, то последнее равенство можно переписать в виде
О) = О)0 V.
Опыт показывает, что атом, находящийся в стационарном
состоянии, не может, вообще говоря, перейти в результате этого процесса
в любое другое стационарное состояние. Те пары состояний, между
которыми возможен указанный переход, называются
комбинирующимися. Уровни энергии, соответствующие этим состояниям, также
называются комбинирующимися. Если какие-либо два уровня не
комбинируются друг с другом, то это часто является следствием
симметрии атома (молекулы или кристалла). Для того чтобы иметь
возможность подробно исследовать это явление, выпишем матричный*
элемент Н'\ соответствующий переходу из состояния ф4 в
состояние фу» при комбинационном рассеянии:
и' и' _1_/У и' К}( ИА1Н1Е t HAllHIIF \
2%hc*
ЛПошп)/и%еУ1*-^Г<Чп&.
(62,'4>
(х У со0(о
где [х — масса покоя электрона, k0 и k — волновые векторы
поглощенного и испущенного фотонов, л0 и п — единичные векторыг
направленные параллельно электрическому полю поглощенного и
испущенного фотонов, $п—волновая функция конечного состояния
вещества (атома, молекулы или кристалла), <|>Wj — волновая функций
начального состояния, ЕПо = Е0— ck0 — Eit En = E0 — Ег — ckt EUjt.
Ei и Еп — энергия вещества в начальном, промежуточном и
конечном состояниях. Матричные элементы Hai, Нал» Hif> Hiif
определяются формулами
= /Ф»о S Ч (V*"'. »o) tn/t.
j
Hai =
Haii =
HlF =
HIIF~
— V"2^3
J
у о) t
(62,5)
250 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА [ГЛ, XIV
Суммирование в (62,5) производится во всем зараженным частицам,
составляющим атои» молекулу или крнсталд.
Если комбинационное рассеяние вроисходит на атомах или
молекулах, то множители eikr и e~ikr несущественно отличаются от
единицы и формулу (62,4)» (62,5) можно переписать в более простом
виде:
"*=i /Щ / MS W' «•) к* и т-д- )
Заметим, что если в результате комбинационного рассеяния
энергия атома или молекулы изменяется, то матричный элемент И'г равен
нулю. В дальнейшем мы всегда будем предполагать, что имеем дело
именно с таким случаем.
§ 63. Правила отбора для поглощения света атомами
и молекулами
Найдем условия, достаточные для того, чтобы матричный элемент
fb%(eM.n)fyd*. (63,1)
о
характеризующий интенсивность дипольного излучения (и
поглощения), обратился в нуль. Иными словами, выясним, как находить неком-
бинирующиеся между собой относительно поглощения уровни энергии.
Обозначим через g какое-либо преобразование координат,
оставляющее инвариантным гамильтониан поглощающей системы.
Совокупность всех таких преобразований образует группу.
Обозначим через G какую-либо подгруппу этой группы.
Зафиксируем проекции nxt пу и пг вектора п и произведем
в интеграле (63,1) замену переменных, соответствующую какому-либо
преобразованию координат g из группы G. Величина интеграла (63,1)
при такой замене, разумеется, не изменится. Это означает, что
интеграл (63,1) либо преобразуется по единичному представлению
группы G, либо равен нулю.
С другой стороны, мы знаем, что функции ф$ и <|у можно
рассматривать как элементы некоторых линейных пространств L{ и Lf,
которые преобразуются по представлениям Г$ и Tf группы G. Сумма
SfyY/ преобразуется по векторному представлению V группы О.
Вследствие этого интеграл (63,1) преобразуется под действием
элементов G по представлению Тi X V X Ту. Поэтому, если
представление Тг X V X Т* не содержит единичного представления, то ин-
Л 63] ПРАВИЛА ОТБОРА ДЛЯ ПОГЛОЩЕНИЯ CR1TA 251
теграл (&3,1) равен нулю и переход ф*^*<|у * рассматриваемом
приближении запрещен.
Согласно § 2! для того, чтобы представление f $ X V XTf
содержало единичное представление, необходимо и достаточно, чтобы
произведение V X Т^ содержало хотя бы одно представление,
вводящее в Т;, т. е. чтобы
VXTrnT,*0.
Этому критерию удобно придать несколько иную форму:
ЪХУПТ^О (63,2)
(см. задачу III § 21).
Если условие (63,2) не выполняется, то переход ф$ -* <|у запрещен.
Рассмотрим некоторые следствия на правила (63,2).
1. В качестве группы G можно взять группу R всех вращений
атома или молекулы как целого. Если начальное состояние имело
полный момент jt то на языке теории групп это означает, что
функция ф| преобразуется по представлению Dj группы вращений.
Векторное представление V, по которому преобразуется сумма 23 *Л»
есть представление Dx. Согласно (49,3) имеем:
DiXD1 = Di-1+Di + Di+b
если У>- 1.
Поэтому конечное состояние фх должно отвечать моменту/, /-*- 1
или быть суперпозицией состояний, из которых по крайней мере одно
отвечает моменту jt j±l. Таким образом, при поглощении одного
фотона полный момент атома или молекулы (в единицах h) должен
измениться на единицу или остаться неизменным.
2. Сузим группу G до группы поворотов вокруг некоторой
оси OZ. Пусть в начальном состоянии проекция полного момента
на ось OZ равна М. Это означает, что функция <|^ преобразуется
по представлению т^ группы поворотов Z с индексом М. Векторное
представление V распадается на три представления группы Z:
Поэтому согласно § 45 получаем:
Это означает, что при поглощении фотона проекция полного момента
на ось OZ может либо не измениться, либо измениться на ±1.
3. Расширим группу О до полной ортогональной группы. Если
волновая функция ф$ при инверсии умножается на ztl, то это
означает, что она преобразуется по представлению D+. Векторное
представление полной ортогональной группы есть DT* Согласно (52,4)
имеем:
», X Df = Dj"-i + D/ + D7+f, DJ X Df = D/-i + D+ -1- D/+1.
252 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА [ГЛ. XIV
Отсюда следует, что характер инверсии в результате поглощения
фотона изменяется на противоположный.
4. Рассмотрим малые колебания атомов (или ионов) в молекуле.
Благодаря тому, что эти колебания мало отражаются на состоянии
электронов молекулы, можно считать, что атомы (ионы) молекулы
колеблются в заданном внешнем поле электронов. Возьмем группу
симметрии этого поля в качестве группы G.
Найдем полную систему стационарных состояний колеблющейся
молекулы, определим, какие представления группы О связаны с ее
уровнями энергии, и укажем затем способ отыскания запрещенных
переходов.
Воспользуемся главными координатами Qj, Q2, . •.. Qaa, Qi> Q2. . .
.... QP , ... Координаты, имеющие одинаковый верхний индекс, под
действием элементов группы О преобразуются друг через друга по
некоторому неприводимому представлению х этой группы. Среди
представлений ха, тр, ... могут быть и эквивалентные. В главе VI
был указан способ, позволяющий найти представления х«, Тр, ...
В приближении малых колебаний уравнение Шредингера
распадается на sa + 5P+ ... обыкновенных дифференциальных уравнений*)
*+3 , 2«*. ( »vW
где [ха и (оа — приведенная масса и собственная частота,
соответствующие при классическом рассмотрении главной координате QJ.
Эти уравнения имеют не возрастающие на бесконечности решения
только для следующих значений Е":
E* = En = h(»Jm+±\ (т = 0, 1, 2, . ..)- (63,3)
Нормированные функции, соответствующие этим значениям энергии,
равны
где Нт(х){т = 0, 1, ...) — полиномы Эрмита.
Волновая функция молекулы равна произведению всех найденных
функций:
здесь Q обозначает совокупность всех координат Q« Q|, ..., а v —
совокупность всех индексов т^ tij, ...
*) По поводу этого уравнения, а также формул (63,3) и (63,4) см. [3Ь
§ 63] ПРАВИЛА ОТБОРА ДЛЯ ПОГЛОЩЕНИЯ СВЕТА 253
Энергия колебательного движения, соответствующая этой
волновой функции, равна
i=i i-i
8Р . \
л = 2 л* • • • 1 •
i=l /
Отсюда следует, что кратность вырождения уровня £W)W,... равна
числу способов, которыми можно удовлетворить равенствам
Til ^=- ^j tf^, # г== ^j /ty, . . .
при фиксированных значениях т, п, ... с помощью произвольных
целых чисел /я^, я^, ...
Выясним, по какому представлению группы G преобразуется
произведение ¥[^.(Q?)- Согласно соотношению (63,4) оно
преобразуется так же, как и функция
s«
j-i п
(индекс а при координате Qj здесь опущен). Каждое такое
произведение является полиномом степени т относительно переменных Qj.
Эти полиномы вполне определяются*"своими старшими членами
*«
П О?* (63,6)
Поэтому функция (63,5) преобразуется по тому же представлению,
что и произведение (63,6). Легко видеть, однако, что это
последнее преобразуется по симметризованной т-й степени
представления х«, т. е. по представлению [xa]w. Поэтому представление Ттп..,,
по которому преобразуются все волновые функции, отвечающие
энергии Emrittt9 является произведением представлений
КГ X hpf X • •. (63,7)
Таким образом, если молекула в результате поглощения света
переходит из состояния с энергией Етп,,, в состояние с энер-
гией Ет/п/тя9, то представления Т$ и Т^, связанные с начальным
и конечным состояниями, определяются по формуле
254 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА [ГЛ. XIV
Применяя критерий (63*2), легко определим, какие переходы
запрещены в рассматриваемом приближении.
Рассмотрим в качестве примера молекулу СН3, обладающую
группой симметрии Czw Напомним, что групна Civ имеет шесть
элементов: е, С3, С\> а19 о2, о3, которые разбиваются на три класса:
[е], {С3, С2} и {од, о2, о3}. Характеры трех неприводимых пред.
ставлений А, В и Е этой группы представлены в таблице 22.
Таблица 22
Характеры неприводимых представлений
группы Csv
Сзи
A = xx
В = т2
Е=т3
€
1
1
2
С3, С3
1
1
— 1
а1> а2> а3
1
— 1
0
Легко видеть, что векторйое представление V состоит из двух
неприводимых представлений А и Е:
V = A + E-
Представления А, В и Е перемножаются следующим образом:
А2 = А, АВ = В, АЕ = Е,
В2 = А, ВЕ = Е, Е2 = А + В + Е.
Из этих формул вытекает, что если представление Т$ содержит Е,
то переход ф{-*Ф* разрешен. Действительно, произведение EXV =
= EXA + E2==zE-(~A + B содержит все неприводимые
представления группы Csv- Поэтому всякое неприводимое представление,
содержащееся в Tft входит также в произведение Тг- X V и
условие (63,2) выполняется. Таким же образом можно показать, что
переход разрешен, если представление Т^ содержит Е. Если ни одно
из представлений Т$, Т^ не содержит представления Е, то для
возможности перехода необходимо, чтобы Т^ и Т^ оба содержали
представление А или чтобы Т^ и Tf оба содержали представление В.
Таким образом, переход запрещен только в том случае, когда одно
из представлений Tif Tf содержит только представления А, а ДрУ"
гое — только представления В. Выясним, в каком случае представление
(63,8)
т,=кГхкГ х-..
§ 63] ПРАВИЛА ОТБОРА ДЛЯ ПОГЛОЩЕНИЯ СВЕТА 255
содержит только представление А, Из формул (63,8) следует, что
для этого среди представлений
не должно быть ни одного, содержащего Е.
Поэтому ни одно из представлений тт, т^, ... не должно
совпадать с Е*),
Итак, если представление Т* не содержит Е, то оно является
одномерные представлением и совпадает с А или В. Обозначим
через *i сумму квантовых чисел, соответствующих колебаниям,
антисимметричным относительно плоскостей ох, о2, а3 (эти колебания
преобразуются по представлению В). Ясно, что
Т* = А, если %{ четно, и Т% — В, если -ц нечетно.
Обозначим через х^ сумму тех же квантовых чисел в конечном
состоянии, тогда
Т^ = А, если *f четно, и Т^ = В, если %f нечетно.
Поэтому, если х4 и х^ имеют различную четность, то переходы
между невырожденными уровнями запрещены. Иными словами,
запрещенными являются переходы между невырожденными уровнями,
волновые фуйктХйи которых имеют различную симметрию
относительно отражений в вертикальных плоскостях оь о2, о3. Остальные
переходы разрешены.
Скажем несколько слов о квадрупольном поглощении.
Согласно (62,3) матричный элемент, соответствующий квадрупольному
излучению, имеет вид
J *«(2*iV(*rj)-,l)«ly*c-
*) Число k, показывающее, сколько раз представление Е содержится
в представлении [Е]71, равно согласно (20,3)
Согласно формуле (25,8) получим:
k = 7 2 1УГ—ГГ {2Г1+Га+ '••^-Xri(^1)--Xrr(cfr)}.
Так как характер любого элемента не превосходит размерности
представления, то фигурные скобки, стоящие в правой части последнего равенства
неотрицательны. Скобка, соответствующая специальному распределению
числа п =* п • 1, имеет вид 2™ — у* CQ) = 2» — <— \)п > 0 и, следовательно,
положительна. ЙоэтЪму k > 0 и представление {Е]« содержит £.
256 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА [ГЛ. XIV
Выражение 2fyV^(fc/j) преобразуется по квадрату векторного
представления V2. Если в качестве группы G взята группы вращений
то
V2 = D? = D0 + D1-hD2.
Это означает, что при квадрупольном поглощении момент
поглощающей системы либо не изменяется, либо изменяется на zt 1,^2.
Если в качестве группы G взять группу поворотов, то
V2 = (x-1 + x° + T1)2 = x-2 + 2x-1 + 3x° + 2t1-hx2.
Поэтому проекция момента на ось OZ при переходе из состояния ^
в состояние i]y изменяется на ±1, ±2 или не изменяется вовсе.
§ 64. Комбинационное рассеяние света атомами и молекулами
Обозначим через G какую-либо группу преобразований
координат, которые оставляют инвариантным гамильтониан атома или
молекулы.
Рассмотрим, как преобразуются произведения матричных
элементов HaiHif и HaiiHuf под действием элементов g£G.
Все волновые функции ф, отвечающие данному энергетическому
уровню Е, преобразуются друг через друга по некоторому
представлению Т группы G. Поэтому, если в интегралах сделать замену
Беременных, соответствующую преобразованию g£G9 то
функция фПо перейдет в линейную комбинацию функций
Ттп (g) W
Каждая компонента вектора 2*^ преобразуется по векторному
лредставлению V. Наконец, волновые функции промежуточных
состояний tyn. перейдут в функции
фл,= 7$, <*•)<]>„,. (64,1)
Так как, однако, по всем промежуточным состояниям производится
суммирование, причем выбор этих состояний несуществен при
условии, что волновые функции промежуточных состояний ортонормиро-
ваны, то преобразование (64,1) не изменяет величины суммы и его
можно игнорировать.
Отсюда следует, что сумма (62,4) преобразуется по
представлению Т° X V X V X Т = Т° X V2 X Т, где Т — представление,
отвечающее конечному состоянию, а V2 — тензорное представление.
Рассмотрим некоторые частные случаи.
1. Возьмем в качестве G группу всех вращений атома или
молекулы как целого. Если начальное состояние имело момент у, то
представление T°=D^. Тензорное представление группы вращений есть
£ 64] КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА АТОМАМИ И МОЛЕКУЛАМИ 257
V2 = Dx X Dx = Do+Di-HV Поэтому Т° X V2=D^ X (Do-HM-Da) =
= 3Dj + 2D^_14-2Dj+14-D^_2 + D^+2- Отсюда следует, что полный
момент атома или молекулы после комбинационного рассеяния может
принимать значения J, /=1=1, j±2.
2. Сузим группу вращений до группы поворотов вокруг
некоторой оси OZ. Пусть в начальном состоянии проекция полного
момента на ось OZ равна М. Это означает, что функция ф$
преобразуется по представлению Xм" группы поворотов Z. Тензорное
представление группы поворотов равно
у2 = (х-1 + х° + х1)Х(^-1 + ^0 + ^1)=^-2 + 2^-1 + Зх° + 2х1 + х2.
Поэтому проекция полного момента на ось OZ может иметь после
комбинационного рассеяния только значения Ж, М±\, М±2.
3. Если расширить группу О до полной ортогональной группы,
то легко убедиться в том, что четность волновой функции
относительно инверсии не изменяется в результате комбинационного
рассеяния.
4. Рассмотрим малые колебания атомов (или ионов) в молекуле.
Возьмем в качестве G группу симметрии эффективного поля,
создаваемого электронами молекулы (см. пример 4 § 63). Мы видели,
что колебательные энергетические уровни молекулы определяются
соотношением
£«w • • = тЬ<аг -f- пЬы2 + ...,
а соответствующие этим уровням представления группы^/ равны
T=cc1rxwnx...
* «Поэтому для того, чтобы обнаружить запрещенные при
комбинационном рассеянии переходы, нужно разложить тензорное
представление группы G на неприводимые представления и умножить
его на представление Т°. Если произведение Т° X V2 не будет иметь
ни одного общего неприводимого представления с представлением Т^,
то соответствующий переход запрещен.
Особенно просто выглядит это правило, если одно из состояний,
например начальное, соответствует основному (невозбужденному)
состоянию молекулы, а другое — состоянию с т=\ и я = 0, ...
Переход
Фоо...-*Фю...
будет запрещен, если представление хх не содержится в тензорном
представлении. В этом случае говорят, что уровень £10... не является
активным относительно комбинационного рассеяния. Заметим, что
Уровень £20. .. и более высокие уровни f^o... могут быть при
этом активными.
258 ПОГЛОЩЕНИЕ И КОМБИНАЦИОННОЕ РАССЕЯНИЕ СВЕТА ГЛ. XIV
Рассмотрим в качестве примера молекулу СНС13. Группа симметрии этой
молекулы есть C%v, Она имеет три неприводимых представления (см. § 63,
табл. 22). Характер тензорного представления равен квадрату векторного
представления и определяется таблицей 23.
Таблица 23
Характер тензорного представления
группы Сзг,
Csv
X
е
9
С С2
0
а1> а2> а3
1
Разлагая тензорное представление V2 на неприводимые представления,
получим:
V2 = 2A + B + 3E.
Мы видим, что тензорное представление в рассматриваемом случае
содержит все неприводимые представления. Поэтому все уровни энергии
молекулы СНС13 являются активными относительно комбинационного
рассеяния.
ГЛАВА XV
ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
§ 65. Группа Лоренца
По терминологии, принятой в теории относительности,
совокупность трех прямоугольных координат х, у, z и времени t
называется событием, «происшедшим» в точке х, у, z в момент времени t.
Числа х9 у, z и t называются четырехмерными координатами
события.
Согласно специальной теории относительности координаты одного
и того же события в различных инерциальных системах координат
выражаются друг через друга линейным образом, и притом так, что
интервал
Sab = Vc2(tA—tB) — (XA—xB)Z — (yA—yB)2 — (zA—ZB)2
между любыми двумя событиями А (хд, у^, Za> tj.) и В (xBiyBi %в> tB)
одинаков во всех этих системах.
Для того чтобы прийти к понятию группы Лоренца, следует
выделить из всех инерциальных систем совокупность тех систем,
начала которых в некоторый момент времени совпадали, и принять
этот момент за начало отсчета времени во всех этих инерциальных
системах. В дальнейшем, говоря об инерциальных системах, мы
будем подразумевать именно такие системы.
Ясно, что событие с координатами (0, 0, 0, 0) в одной из
инерциальных систем имеет те же координаты в любой другой инер-
Циальной системе. Поэтому зависимость между координатами
некоторого события в различных инерциальных системах является
не только линейной, но и однородной. Обозначим матрицу,
осуществляющую переход от координат в системе К к координатам
в системе К' через <Хц(К'К), так что
*'«*=ау(К**)*/ С 7 = 0, 1, 2, 3; J (6W)
Х0 = Ct, Xi = X, Л?2 = y\ X$ = Z). J
260 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
Если в системе К' координаты того же события обозначить
через л^(7 = 0, 1, 2, 3), то можно написать:
хг = *ч (К"К) х, и х'{ = ан {К"К') х'..
Из этих равенств и из (65,1) следует, что
а„ (К'К) = аи (Г/СО *ц(К'К). (65,2)
Мы видим, что матрицы а образуют группу относительно
обычного матричного умножения. При этом
а (КГК) = а (КГК) а (КК). (65,3)
Эта группа называется полной группой Лоренца. Мы будем
обозначать ее буквой J&.
Полная группа Лоренца имеет в качестве подгруппы так
называемую собственную группу Лоренца. Она получается если из всех
инерциальных систем выделить только левые (или только правые)
системы координат. Операторы, соответствующие переходам из одной
левой системы в другую левую систему, образуют, очевидно, группу.
Эта группа и называется собственной группой Лоренца (или просто
группой Лоренца) и обозначается через jg?v
В полной группе Лоренца содержится оператор инверсии I,
определяемый равенствами
\х =— х, \у =—у, \z =— z, \t — t. (65,4)
Этот оператор осуществляет переход из произвольной системы К
в неподвижно с ней связанную систему К'', оси которой направлены
в стороны, прямо противоположные осям системы /С Ясно, что
квадрат оператора инверсии равен единичному оператору. Оператор I
изображается матрицей
ЛООО
(0—1 0 0
1 I 0 0—1 0
\0 0 0—1
Приведем в явном виде матрицу <xik для одного важного
частного случая. Пусть система К' имеет оси, параллельные осям
системы К, и движется относительно последней со скоростью V,
направленной параллельно оси ОХ. Как известно, формулы
перехода в этом случае имеют следующий вид:
(65,5)
ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ ГРУППЫ ЛОРЕНЦА
261
§ 9б1
называются преобразованиями Лоренца. Согласно (65,6) матрица <хш
в этом случае равна
*»<У) =
1
/1-Р2
Р
Р
Vi-Р»
о о
о о
П-Р2
0
0
Vi-P*
0 1 0
0 0 1
(р-э-
(65,7)
Группа Лоренца Jgx является группой Ли. В качестве
параметров этой группы можно выбрать три проекции скорости системы Кг
относительно системы К и какие-либо три параметра,
характеризующие поворот, который надо произвести над осями системы К9
чтобы они стали параллельны одноименным осям системы /С'.
Таким образом, общее число параметров в группе Лоренца Jg?l равно
шести.
§ 66. Инфинитезимальные операторы группы Лоренца
Имея в виду использовать инфинитезимальный метод Ли для
разыскания всех неприводимых конечномерных представлений группы
J2?lt найдем перестановочные соотношения для инфинитезимальных
операторов этой группы.
Условимся о выборе параметров. Оператор а (/С/С) зависит
исключительно от относительного движения систем отсчета К и /С'.
Это движение можно полностью задать, указав три проекции аж,
ayi olz «вектора» поворота системы К' относительно системы К и
три проекции vx, vy) vz скорости v начала системы К' в
системе /С.
Инфинитезимальные операторы, соответствующие шести
параметрам ах9 а , а„ §х
—-Y°L Q vy
[32 = —, мы обозначим через
■1» *2> 1з> Jl» «»2> ^З"
Так как элементы группы Лоренца являются операторами
в четырехмерном векторном пространстве, то они сами по себе
образуют представление группы Лоренца. Это представление
называется векторным.
Легко вычислить оператор ix в векторном представлении. Для
этого продифференцируем выражение (65,7) по р и положим [3 = 0.
М
ы получим:
Ji
0—100
— 1 0 0 0
0 0 0 0
0 0 0 0
= — е,
01"
г10>
(66,1)
262
ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
[ГЛ. XV
где цк(1у k = Q, 1, 2, 3) — матрица, у которой элемент, стоящий
на пересечении 1-й строки и /г-го столбца, равен единице, а все
остальные элементы равны нулю.
Производя в (66,1) круговую перестановку индексов 1, 2, 3,
получим:
^2 = е02 е20> «Ь = S03 e30- (66,2)
Для вычисления 1х будем исходить из соотношений
х' = х, у =_у cos а-)-2 sin a, zf = — у sin а + z cos а, £' = £ (66,3)
между координатами события в системе К и системе К',
повернутой относительно К на угол а вокруг оси Ох. Из (66,3) следует,
что матрица aife, соответствующая такому повороту, равна
1
0
0
0
1
0
0
0
cos a
0
0
sin a
0 0 —sin a cos a
Дифференцируя это равенство по a и полагая затем a = 0, получим,
что \г = г2г— е32. Выражения для 12 и 13 можно теперь получить
с помощью круговой перестановки. Таким образом, мы находим:
'l = е23 е32> *2=е31 е13> *3 = 812 е21- (66,4)
С помощью выражений (66,1), (66,2) и (66,4) легко находим все
перестановочные соотношения:
[I1J1] = [I2J2] = [I3J3] = 0,
[I1J2] = — J3» [Уз! — — Ji>
H1J3]=j2, [i2Ji]=j3.
[iii2]=—13. [Мз]=—ii.
[J1J2] = 1з> [«Уз! = 'i>
[Mil=—j2.
[I3J2] = Ji,
[J3Jil = b.
(66,5)
Наряду с операторами Ife, Jft (k=\, 2, 3), удобно пользоваться
операторами
Au = —yOk + U*). Bft = — yd* — Uk) (k= 1,2,3). (66,6)
Перестановочные соотношения для этих операторов имеют особенно
простой вид:
[А,А*] = е,иА„ [В^В*1 = в,йВ„ [А^В*] = 0 (66,7)
(J, k, 1=1, 2, 3);
они вытекают из перестановочных соотношений (66,5).
§ 67] КЛАССИФИКАЦИЯ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ ГРУППЫ ЛОРЕНЦА 263
Подчеркнем, что перестановочные соотношения, которым
подчиняются операторы А&(&=1, 2, 3), такие же, как и у инфинитези-
мальных операторов группы вращений. То же относится и к
операторам Bfc.
§ 67. Классификация неприводимых представлений
группы Лоренца
Для отыскания всевозможных неприводимых представлений
группы Jg^ достаточно найти все реализации операторов lki Jk
(k=l, 2, 3), удовлетворяющие перестановочным соотношениям (66,5).
Эта задача равносильна построению операторов А*, Ък (k= 1, 2, 3),
удовлетворяющих значительно более простым перестановочным
соотношениям (66,7). Для построения этих операторов целесообразно
использовать теорему § 46.
Пусть L — линейное пространство, преобразующееся по
некоторому неприводимому представлению х группы Лоренца. Введем
обозначения
А+ = iAx — А2, A_ = /A1-f-A2, A0 = A3,
В+ = /Bj—В2» В_ = /В1 —|— В2,
2» Ао — А3, 1
2» B0 = B3. J
(67,1)
Согласно теореме в L есть вектор е такой, что
B0e = Qet \Ъ+е = 0, (67,2)
где Q—некоторое целое или полуцелое число. Обозначим через Lq
подпространство всех тех векторов из L, которые удовлетворяют
условию (67,2). Это подпространство инвариантно относительно
операторов А+, А_, А0, так как они коммутируют с операторами
В+, В_, В0. Поэтому в подпространстве Lq существуют векторы
'*>(/>=-я — р+1 р—\:р\ р=о, if 1,...),
которые под действием операторов А+, А_, А0 преобразуются
по формулам
а л рл _ а л р ~ .. 1
(67,3)
(67,4)
(67,5)
B+epq = <xq+iem+i , B0epq = — iqepq. (67,6)
p
A-CpQ = <xpep-.iQt A+epQ =
Ao^= — ipepQ.
Построим теперь векторы
' tpq(p = — P P\ q = -
c помощью рекуррентных соотношений
В_£де = CCq е<р^-\
Согласно терреме имеем:
р \
<*p+lup+lQ> 1
/
-Q, .... Q)
264 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
Если к равенствам (67,3) применить оператор (В)^~д» то мы получим:
р р
А_£рд = (Хрвр^ iq, A + Cpq = ap+i£p+ \qt
A-oepq === lPepq •
Формулы (67,5), (67,6) и (67,7) показывают, что линейная оболочка
векторов (67,4) инвариантна относительно операторов А&, Вк.
Поэтому она совпадает с пространством L. Векторы (67,4) образуют
в L базис, а соотношения (67,5), (67,6), (67,7) полностью
определяют операторы А±, А0, В±, В0 в пространстве L.
Мы видим, что инфинитезимальные операторы вполне определены,
если заданы числа Р, Q. Следовательно, каждой паре чисел
Р> QyP, Q=0, -я, 1, ... J отвечает неприводимое представление
группы Лоренца, и притом только одно. Мы будем обозначать это
представление через Xpq. Размерность представления tpg равна
(2Р+ 1) (2Q —|— 1). Единственным одномерным представлением группы
Лоренца является х^. Пару чисел Я, Q мы будем называть весом
представления Трд. Базис (67,4) называется каноническим.
Можно показать, что представление xpq является однозначным,
если P-{-Q есть целое число. Если же P + Q—полуцелое число,
то представление Xpq двузначно.
В заключение скажем несколько слов о бесконечномерных
неприводимых представлениях группы Лоренца, найденных И. М. Гель-
фандом и М. А. Наймарком.
Каждое неприводимое бесконечномерное представление х (k0kx)
группы Лоренца ^х определяется двумя индексами k0 и kv Индекс kQ
может принимать все целые или полуцелые значения
fto=0.±-5-f ±1
индекс kx может принимать все значения, в том числе и комплексные.
Однако, если разность kx — k0 является целым числом, то
описываемое представление вырождается в конечномерное. Мы будем
считать в дальнейшем, что разность kx—k0 не равна целому числу.
В пространстве L, в котором действуют операторы
представления т (&0, ^х), выберем базис
?v(p=k.k— 1. ..., —*;А=|*оИ*о1 + 1. •••)
и определим с помощью этого базиса инфинитезимальные операторы
группы Лоренца. Нам будет удобнее вместо инфинатезимальных
операторов \г> Jz (/ = 1,2,3) задать следующие шесть операторов:
Н° = 1Х; Н+ = 13 + /12, Н" = 13 — Д2,
F°=— Jls F+ = — J3 — /J2. F" = —J3 + iJ2.
(67,7)
§ 68] ПРОИЗВЕДЕНИЕ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ ГРУППЫ ЛОРЕНЦА 265
Неприводимое представление t (k0, kt) определяется формулами
н* £=- V(k+P+ \)(к—Р) 1*„.
2F4 = - V (А + Р) (А — Р) Я*?!"1 -+-М4 +
+ У(* + р+1)(Л —Р+1) s*+4+1 •
2*f4 = V(b-\-P)(b + P—l) B4_1+V(A + P)(A-P+1)-44-1+
+ /(* — P + 1)(A — P + 2)5ft+4U,
2ff_5p = Vr(A — /»)(* — p — 1)B4+!-V(A+P+1)(A — P)^4+i-f-
+ /(ft+ p + !)(* + ;,-|-2) B*+4:1.
где
*<* + !)• B*~l/ m/m_I
2**i_ » _ / (*2-feS)(*2-*i)
Пары чисел &0, ftx и —&0, —kx определяют эквивалентные
представления. Во всех остальных случаях мы получаем неэквивалентные
представления.
Представление t(k0, kx) унитарно, если kx чисто мнимо или
если k0 = 0 и kx вещественно. Нетрудно убедиться, что в этих
случаях операторы \к> }к антиэрмитовы, что свидетельствует об
унитарности представления (см. задачу IV § 43).
§ 68. Произведение неприводимых представлений
группы Лоренца
Рассмотрим произведение двух неприводимых представлений tp Q
и Тр2д группы Лоренца и разложим его на неприводимые
представления.
Обозначим через #£*& и v*&* канонические базисы в
пространствах Lx и L2t преобразующихся по представлениям хРп и *Pq*
Произведения u%Q*v**Q* образуют базис в произведении этих про-
странств.
Рассмотрим сначала случай Ql = P2 = 0. Напомним, что
CuPlQlvp*Q* — (CuPlQl) vp*Q* 4- uPlQl (CvPiQi)
где С — любой инфинитезимальный оператор или линейная
комбинация, таких операторов. С помощью этой формулы легко убедиться
в том, что матрицы операторов А0> А±, В0, В± совершенно одинаковы
в базисе ePq и в базисе UpS • Voq. Это .означает, что произведение
(68,2)
266 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
представлений ^ X *0q эквивалентно представлению xPQ.Базис u*bflQ
однотипен базису еРщ
»$"%=*%• (68Л)
Этот результат сводит задачу разложения произведений общего
типа к задаче разложения произведений *р0Х*р^о и тоа X \п • Эти
разложения производятся буквально так же, как и разложения
представлений Dpl X Dp2 группы вращений. Поэтому можно сразу
написать:
Связь между базисными векторами выражается с помощью
коэффициентов Клебша — Гордана:
4о= 2 (PiPtPiPt\Pp)*%o*?$.'
e0q = 2 (QlQ2?l<72 I Q<7) «Ofc ' «Oft • ,
Теперь легко перемножить представления tpQ и TpQ . Имеем:
tp^ X 'Ср^ = *pi0 X ^og, X ^pa0 X *<>£ = 2j 'CpQ X 2j 'c^ —^ytpQ,
т. e.
iP0X^= 2 *p0- (68,3)
Из этой формулы следует, что произведение xpQ X *Рп содержит
единичное представление в том и только том случае, когда Рх — Р%
и Q1 = Q2, т. е. когда перемножаемые представления эквивалентны.
Векторы epq канонического базиса в подпространстве Lpq,
преобразующемся по представлению xpq, выражаются через u^l?lV^q*
следующим образом:
«£? = 2 (PiP*pip* I pp) (QiQtfiiz I Qq) <#Kt • (68-4)
Pl+Pi^P, «1 + 02 = 3
Это следует из соотношений (68,1) и (68,2). В силу унитарности
коэффициентов Клебша — Гордана равенство (68,4) можно
переписать в виде
ififa&b = 2 (Р1Р2Р1Р21 PP) (QiQrfift1 Qq) е% (68,5)
(P = Pi + P2> <7 = <7i + <72)-
Формулы (68,3) и (68,4) полностью решают задачу разложения
произведения представлений.
с 69] КОМПЛЕКСНО-СОПРЯЖЕННЫЕ ПРЕДСТАВЛЕНИЯ 267
Рассмотрим некоторые следствия из полученных соотношений.
Пусть L„tt^ и ri^nv**Q* — два произвольных вектора из про-
J Р1Ч.1 Р1Ч.1 'РйЦ* РйЧ2 *
странств Lx и Z,2. Вектор ^м^ра%ир^^^ можно представить в виде
iPlq^m,um!vm' =yS ^Ъ CWi A I РР)(ЯгЯгЯгЯг I Яч) *« •
Отсюда следует, что выражения
<£?= 2 (PiP2PiP2\Pp)(QiQ2gi42\Q4),iMlrlMz (68,6)
являются координатами некоторого вектора из пространства,
преобразующегося по представлению тр^.
Приведем важный частный случай формулы (68,4), который
получается, если положить Рг = р2, Q1 = Q2, P = Q=0:
*оо= 2 (РхРхРхРг I 00) (Q1Q1q1q2 | 00) u™v™\
Вспоминая выражение (54,22) для (Р1Р1Р1Р2 | 00), получим:
2 (- 1)Р+,?-р-94И_3 = inv. (68.7)
p>q
Аналогично из соотношения (68,6) следует:
2 (- О"49-*-Vl-,-a = i"v. (68,8)
В заключение выясним связь между представлениями группы
Лоренца и группы вращений.
Группа вращений является подгруппой группы Лоренца. Поэтому
каждое представление группы Лоренца является в то же время
представлением группы вращений. Рассмотрим с этой точки зрения
представление тро. У этого представления операторы Вх, В2 и В3
равны нулю и, следовательно, А& = — \к (Л = 1, 2, 3; см. (66,6)).
Собственные числа оператора 13 принимают значения —Р Р.
Это означает, что представление тро, рассматриваемое как
представление группы вращений, эквивалентно представлению Dp. Таким же
образом убеждаемся в том, что представление Xoq эквивалентно Dq.
Поэтому представление xpQ = хро X %п эквивалентно представлению
DPXDg= 2 Di
\P-Q\<J<P+Q
группы вращений.
§ 69. Комплексно-сопряженные представления
Рассмотрим представление, комплексно-сопряженное представле-
Нию тР£. Обозначим его через x*PQ. В комплексно-сопряженном
базисе матрицы инфинитезимальных операторов комплексно
сопряжены матрицам соответствующих инфинитезимальных операторов
268 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
исходного представления
(I*)fcZ = hb (3*)kl = hi-
Опуская индексы матриц, получаем отсюда:
1 77
Ал = — -j (I* + ih) = — у (U — ^fc) = Bfe,
В* = — -J (Ц — U*) = — у (t + * Jft) = Afe.
Далее,
а*_ = /а!+а£ = ж1 + в2 = —ш1+в2 = —в+.
Подобным же образом можно вычислить операторы А+, В_, В+.
В результате получим следующие соотношения:
А0=Во, А_ = —В+, А+ = —В
-I
В0 = Ао, В_ = —А+, В+ = —А_. j
(69,1)
Обозначим через epq канонический базис в пространстве Llt
преобразующемся по представлению xpQ. Комплексно-сопряженные
векторы epq образуют базис в пространстве L, преобразующемся
по представлению t*pQ. С помощью равенств (67,5), (67,6) и (67,7)
легко выяснить, как действуют операторы (69,1) на векторы ерг
После простых вычислений получаем:
Ao^pq — Щер1> &-epq— &q+lepq+l» ™+epq— &qepq-l> J
n*- ■ - »• - * - n* - P ■ (69,2)
ttoepq — ipepq> o-epq =— <xp+iep+iq> o+epq— —ZpeP-iq- J
Первый столбец показывает, что векторы ерд являются собственными
векторами операторов А<> и Во- Поэтому они с точностью до
множителя совпадают с векторами канонического базиса ti_q_p
epq =z ^pqu-q-pA
Мы видим, что первый индекс пробегает (2Q-f-l) значение,
а второй — (2Р~\-\) значение. Поэтому представление *
эквивалентно представлению х^р:
Определим коэффициенты \pq с помощью второй пары равенств (69,2).
Имеем:
A — Bpq — hpqA — U—q — р — hpqCL—qU-.q-.it — р —
Q — Q n
— —&q+lepq+l— —ад+1^+1й-д-1, -р
§ 70]
И
СПИНОРНАЯ АЛГЕБРА
В — втю — Луп01Э — U _0_-о — Aw/0t_oW_
269
*pq-
*pqJ-
-q-p-
кми
-p-1
P P
— — %p+lep+l, q = — Zp+lbp+lqU-q, -p-\ .
Отсюда следует, что
pq _
Итак, окончательно,
B«+i
««
• — 1.
-pg
P3"
__/ i\Q+P-q-Pt
_p±L — _i
7 =r— i^+p"g-pw
(69,3)
(69,4)
(69,5)
Вспоминая соотношения (68,7) и (68,8), получаем отсюда:
p>q
P>q
§ 70, Спинорная алгебра
Собственная группа Лоренца в отличие от группы вращений
имеет два двумерных представления Ti и х i. Двумерные
векторы, преобразующиеся по этим представлениям, называются
спинорами первого /ti \ и второго /х Л рода. Векторы канонического
базиса в пространстве спиноров принято сокращенно обозначать
следующим образом:
е 1 = е,.
(70,1)
2 "2
Выпишем для справок формулы, определяющие действие
операторов А0±, В0± на эти векторы:
A0*i = —-j^i.
^o±e-i = \±ei =
А ел = е
-г
Bo±«-i = Bo±ei = °.
B+'_-, = ei.
(70,2)
: и $ = iiiv, i
} (70,5)
270 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
Компоненты спиноров обозначают соответственно через ?_i» £
В теории спиноров существенную роль играют соотношения
е\и-\—0_101 = inv> ei^_i —e_i^i =inv, j
Ь{П-1 — Li4i = inv- 5i4-i—?-i7li=inv- j
которые являются частными случаями равенств (68,7) и (68,8). Если
ввести в рассмотрение матрицу
то соотношения (70,3) можно переписать в виде
^z^ = inv' **&'
Всякий элемент пространства, преобразующегося по
представлению /4i \тЧъ \\т\ называется спинором ранга т1-\-т2- Так,
например, элемент, преобразующийся как произведение
является спинором ранга Ъ-\-2. Его принято обозначать следующим
образом: е11шт1\{»
При буквенных обозначениях индексов спинора ранга т1-\-тг
точек над буквами не ставят; вместо этого первые тх индексов
обозначают буквами ах, а2, а3 aWl, а остальные т2 индексов —
буквами plf (32, • • •» EW
Произведение двух спиноров рангов т1-\-т2 и пх-\-пг является
спинором ранга (/Ях + яО + Оиг-Ьяг)- Поэтому, если
С*^...^, РА...рп
С
г г
«l"* *•• a-m"
х-2 ... -мг, нхн2 ••• Hwr
являются коэффициентами двух спиноров, то их произведения
С
t t
a1a0 ... a
1*2 ••• *m' plp2 ---Pn и1*2 -V plp2 '•' <V
ala2 '•• amala2 •'• am" M2 ••' VlV" V
являются коэффициентами спинора ранга (/ю + /ю') +(я+ /&')•
§711
ТЕНЗОРНАЯ АЛГЕБРА
271
Помимо умножения спиноров, существует операция упрощения
спиноров. Рассмотрим ее. Пусть С*^ ... а рд ... рп— какой-либо
спинор (т-\-п)-го ранга. Он преобразуется так же, как
произведение двух спиноров первого ранга и спинора {{т — 2)-\-п}-го
ранга
Поэтому выражение
преобразуется так же, как и выражение
#v%M«»c«.... «м,Э,... Ря = inv ' с«з... %> &... эп.
т. е. как спинор ранга {(т— 2)-\-п). Переход от спинора
Са, ..-«m.Pi •-•?« к СПИН0РУ С*...»^...^ называется упрощением
спинора по индексам alt a2. Упрощение можно производить также
по любой другой паре индексов а или любой паре индексов [3.
В результате упрощения ранг спинора уменьшается на две единицы.
Матрицу gia называют метрическая тензором. Между
спинорами Cai...a ,р,...р и векторами, преобразующимися по
представлению хтп, имеется простая связь, устанавливаемая следующей
теоремой.
Теорема. Подпространство спиноров Со,... « , р,... р »
симметричных относительно всех перестановок индексов av . . ., <хт
и относительно всех; перестановок индексов рх j3w,
преобразуется по представлению хтп.
Доказательство проводится так же, как и в § 50.
§ 71. Тензорная алгебра
Подобно тому как спиноры (т-\-п)~го ранга строятся на базе
представлений Х\ и х i, тензоры п-го ранга строятся с помощью
У ° ° 7
четырехмерного векторного представления. Рассмотрим это
представление более подробно. Легко видеть, что как представление
группы вращений оно распадается на Dx и D0 в соответствии
с разделением координат четырехмерного вектора на три
пространственные и одну временную. Так как ни одно из этих подпространств
(х, у, zt 0) и (0, 0, 0, t) не инвариантно относительно группы
Лоренца, то векторное представление неприводимо и, следовательно,
совпадает с представлением t\ \ *).
„ ~2~2
*) Два других неприводимых четырехмерных представления х3 и х 3
— о о —
u 2 2
не могут совпадать с векторным представлением хотя бы потому, что они
являются неприводимыми представлениями группы вращений.
272
ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
[ГЛ. XV
Установим связь между каноническим базисом е \ \ предста-
±Т±Т
вления Xi 1 и «естественным» базисом
ТТ
е0 = (\ О 0 0), *!=(() 1 0 0), е2 = (0 0 1 0), е3 = (0 О 0 1).
(71.1)
С этой целью найдем в естественном базисе какой-нибудь общий
собственный вектор операторов 13 и J3.
С помощью формул (66,2) и (66,4) запишем:
Мо = 0' Is*i = — е2* he2 = ev Мз = °»
•*3^0 == eZ> ^Zel == ^Ze2 :== ^» ^ZeZ=== e0'
Отсюда следует, что
13 (е2 — 1ег) = i (е2 — lex), J3 (е2 — iex) = 0
и
А0 (е2 — Mi) = —-21(е2 — iei)' Во (е2 — **i) = — -5"1'(е2 — **i)-
Сравнивая эти соотношения с формулами (67,6), (67,7), мы видим,
что вектор е2 — iex параллелен вектору е\ \. Поэтому положим
ТТ
e±±=yf(e2 — iei\
Применяя к этому равенству операторы А_ и В_, легко выразим
остальные векторы канонического базиса через векторы
естественного базиса. В результате мы получим:
е_2_1 = г^т Vе* + е^> e-L I= ~^rw (е° + *з)»
2 2 У Z 2 2 У Z
e}__±,=yf (— ео+*з). ej_I=yf(— ^i+е2)-
(71,2)
Запишем также выражение для векторов естественного базиса через
векторы канонического базиса:
,=-Т^(Ч1+Ч4> eo=-^('4^"44)-1
(71,3)
Таким образом, переход от естественного базиса к
каноническому осуществляется по формуле
ег = Pi, klekl>
§-71]
где
1
p=?f
/ = 0
0
! t-
\—ц
0
ТЕНЗОРНАЯ
/
0
0
—/
1
т
1
0
0
1
2 3
0
—/
—/
0
АЛГЕБРА
1 A-I
2
л—!-
k = —
i £ = —
»
1
2 '
1
2 '
'-*
<=-!
'-7
' — 4
273
(71,4)
Дадим теперь определение тензора #-го ранга.
Тензором п-го ранга называется каждый элемент пространства Ln,
преобразующегося по представлению t\ x группы Лоренца. Базис
пространства Lnt однотипный базису
0U2)
еъе
Piclh*
»
(А = 0, 1, 2,3; /=1.2 л).
будемТназывать естественным базисом и обозначать через
*aa-..iv (71'5)
Каждый тензор e = CPlPi.., p ePiJh„.p вполне определяется
совокупностью своих координат
Cpiih.-.pn» (71 ,о)
которую также называют тензором n-го ранга. Обозначим через
*ik(g) (g€J2?v *. ft = Of 1, 2, 3) матрицу оператора ъ±±(£)
2 2
в естественном базисе. Ясно, что под действием оператора т7! i (g)
ТТ
векторы естественного базиса пространства Ln преобразуются по
формуле
**^)е9*...9п = *£рх(& ••
(71,7)
в соответствии с этим, координаты тензора xwi i(g)e выражаются
[2 2"
через координаты тензора е по формуле
(71,8)
Наоборот, всякая совокупность 4W чисел, преобразующаяся при
переходе -к новой системе координат по формуле (71,8), представляет
собой тензор я-го ранга. Поэтому произведение двух тензоров
рангов тип является тензором ранга т-\-п.
274 ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА [ГЛ. XV
Введем теперь операцию упрощения тензоров, аналогичную
упрощению спиноров. Будем исходить из инвариантности выражения
*IAe_I _1 — *i._±e_I±— e-±±uL-.L~^~e-±-.±u±±~inY'
2 2 v2 2 22 22 2222 2222
С помощью векторов, составляющих естественный базис, это
соотношение можно переписать в виде
*о«о — *itfi — е2а* — езаз ~ 4ike\uk = inv»
где
/10 0
= |0 — 1 0
Tife~~(o о —1
\0 О О
Отсюда следует, что
и
Переходя в этом тождестве к обратным матрицам, получим:
Равенство (71,10) иногда бывает полезно переписать в виде
Рассмотрим теперь выражение ^цСт...р и выясним, как оно
преобразуется при преобразовании группы Лоренца. Имеем согласно
(71,11)
Таким образом, совокупность 4W~ чисел
Tik^ikl ... р
преобразуется как компоненты тензора (п — 2)-го ранга. Переход
от тензора я-го ранга Сш...р к тензору 4ikCikl называется
прощением тензора по индексам /, k. Совершенно аналогично
производится упрощение тензора по любой другой паре индексов.
(71,9)
§ 72] ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ ЛОРЕНЦА 275
§ 72. Представления полной группы Лоренца
В этом параграфе мы найдем все конечномерные представления
полной группы Лоренца. При решении этой задачи нам понадобятся
перестановочные соотношения между оператором инверсии и
операторами А0±, В0±. Для их вывода удобно воспользоваться
равенством
1а(0 0 0 vx0 0)l'l = a(0 О 0 — ^0 0). (72,1)
Смысл этого равенства заключается в том, что компоненты
скорости v в системах К и К'= \К равны по величине и,
противоположны по знаку. Формально равенство (72,1) легко получить,
перемножая матрицы (65,5) и (65,7).
Если операторы т (g) (g £ J3?) осуществляют какое-либо
представление группы jg?9 то из соотношения (72,1) следует, что
т(/)т(0 0 0*^0 0)х(/"1) = х(0 0 0 —1^0 0).
Дифференцируя это равенство по vx и полагая затем 1^ = 0,
получим:
t(/)J1t(r1) = -Ji.
Так как все направления в пространстве равноправны, то мы
можем написать:
•е (Г) 4* (Г1) = — J* (к = 1, 2, 3). (72,2)
Заметим, что оператор т (/) коммутирует с инфинитезимальными
операторами \к (&= 1, 2, 3):
*V)\Arl)=\k9 (72,3)
так как оператор инверсии коммутирует со всеми вращениями. Из
равенств (72,2) и (72,3) следует, что
* W А**-1 (/) = В„ <с (/) В*-1 (/) = А, (72,4)
и
•в(/)Ао±^(Л = В0±. t(/)B0±'C-40 = Ao±. (72,5)
Пусть х— какое-либо неприводимое представление группы Jg.
Рассматриваемое как представление подгруппы jg?v оно содержит
по меньшей мере одно неприводимое представление *zp этой
подгруппы. Обозначим через Нх подпространство, преобразующееся
по представлению хрд. Пусть epq(— P^p^P, — Q<?<Q) —
кaнoничecкий базис в Hv Рассмотрим векторы
Имеем:
\ет = V"1 W ви = *~х(Л В0еи = — tys-* (/) epq = — /^
ш
276
ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
[ГЛ. XV
ВУ = — ipe' .
"О pq У П
Производя подобные вычисления, получим в результате:
" Be' — ine' В e' — ap <?' В e' = oPe' . ! * '
Соотношения' (72,6) показывают, что подпространство Яь
являющееся линейной оболочкой векторов *' преобразуется по
представлению xQP, причем роль канонического базиса играют векторы
%>=<*=^ о v <72-7>
Линейная оболочка 2(2Я+1)(2Q+1) векторов e^q и aqp
инвариантна относительно элементов собственной группы Лоренца. Кроме
того, в силу равенств
*(Фр<1 = ^р и *№w = e9<r <72'8)
вытекающих из (72,7), эта оболочка инвариантна также
относительно оператора инверсии. Поэтому она инвариантна относительно
полной группы Лоренца и, следовательно, совпадает с
пространством L, в котором действует представление т. Рассмотрим теперь
отдельно два случая.
1. Рф(}- В этом случае представления tp(2 и 'с.р неэквивалентны
и, следовательно, векторы epq и aqp линейно независимы. Поэтому
бни образуют базис в пространстве L. Этот базис будем называть
каноническим базисом. Оператор х(7) определяется равенствами (72,8).
Представление х мы будем обозначать через tp =t р.
Размерность представления tpQ(P^Q) равна 2(2Р + 1)(2Q4~ 1)-
Рассматриваемое как представление собственной группы Лоренца, оно
распадается на представления xpQ и х„р.
2. p = Q. Теперь уже нельзя утверждать, что векторы epq и aqp
образуют линейно независимую систему векторов. Наоборот, легко
показать, что
-- uqp = ztz eqp,
Чтобы это показать, рассмотрим совокупность векторов
v% = um±epq (—%P<P. q<P)i
Согласно формулам (67,3) и (72,6) имеем:
Aovpq — — IpVpi* А+#^ = CLp+\Vp+\qS А_<У]^ = <XpVp-\q
и аналогичные формулы для операторов В0 * Кроме того,
вспоминая (72,8), мы видим, что
* \(1) Vpq = ъ£Г)' (им d^epq) = eqv ± aqp = ±\v&
§ 72) представления полной группы лоренца 277
Обозначим через Н+ линейную оболочку векторов v+ и через #_ —
линейную оболочку векторов ir^. Полученные соотношения
показывают, что подпространства Н+ и Н_ инвариантны относительно
всех элементов полной группы Лоренца. Поэтому либо Н+ = L
и #_ = 0. либо #_ = /, и #+ = 0. В первом случае up2 = epq и
*{I)epq=eqp. Во втором случае upq = — ep(l и * (/) *от = — *др.
Таким образом, существуют два различных представления т+ и Тр
группы Лоренца, каждое из которых, если его рассматривать как
представление собственной группы Лоренца, совпадает с
представлением -Срр. Оператор, соответствующий в этих представлениях
инверсии, определяется равенствами
Размерность представлений т£ и Хр равна (2Я+1)2.
Представление т+ называется скалярным, представление т~ —
псевдоскалярным; величины, преобразующиеся по этим
представлениям, называются скалярами и псевдоскалярами. Представление *с~
называется векторным в соответствии с тем, что по нему
преобразуются обычные векторы четырехмерного пространства — времени
представление т* называется* псевдовекторным. Соответствующие
величины называются векторами и псевдовекторами.
Величины, преобразующиеся по представлениям (*,t)w (*il)nt
называются тензорами (т~\-п)-то ранга. Легко видеть, что Лс~)2 = Лс+)2.
Поэтому существует только два вида тензоров я-го ранга: одни
преобразуются по представлению (^,tY\ вторые — по представлению
т+Лс-у1"1. Последние называются псевдотензорами в отличие от
величин первого типа, которые называются просто тензорами.
Заметим еще, что *-х ** = *? и т+ Х*1± = 'С1±- Если
рассматривать скаляр как тензор нулевого ранга, то можно
сформулировать следующее очевидное правило: произведение двух
псевдотензоров является тензором, произведение тензора на псевдотензор
является псевдотензором.
ГЛАВА XVI
РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ
§ 73. Волновая функция
Согласно классической теории элементарных частиц (электронов,
различных сортов мезонов и др.) состояние всякой свободной
элементарной частицы можно характеризовать с помощью волновой
функции ф(л;)==ф(л;0, хи лг2, лг3). Функция ф может иметь одну,
несколько или даже бесконечное множество компонент. Если число
ее компонент конечно, то мы будем обозначать его через о.
С помощью волновой функции строится функция Лагранжа частицы
как некоторый квадратичный функционал
1 = 1(40.
Вид этого функционала для различных частиц, вообще говоря,
различен. Интеграл от функции ЛагранмСа по всему четырехмерному
пространству — времени называется,, действием S. Согласно теории
имеет место принцип наименьшего, действия, в силу которого
волновая функция удовлетворяет уравнению 85 = 0. Это уравнение
сводится к системе линейных однородных дифференциальных
уравнений, которые всегда могут быть приведены к виду
^*?Г.+ *«Ф* = 0 (Л *=1. 2 о; У = 0. 1.2,3). (73,1)
В силу однородности пространства и времени, коэффициенты Aik
и y.ik не зависят ни от координат, ни от времени.
С помощью функции Лагранжа можно выразить энергию и
импульс частицы (или их средние по времени значения) через
волновую функцию ф.
В механике и электродинамике величины, характеризующие
движение материи (скорость, энергия, электрическое и магнитное поля
и др.), принимают в различных системах координат различные
значения. В полном соответствии с этим состояние элементарной
частицы характеризуется в различных системах координат
различными волновыми функциями. Весьма существенно, что
преобразование, которое испытывает волновая функция при переходе от одной
§ 73]
ВОЛНОВАЯ ФУНКЦИЯ
279
системы координат к другой, является линейным. Более подробно
это означает следующее. Рассмотрим какую-либо точку, скажем
х===:у = z = 0, t = 0. Пусть К! — какая-либо система координат,
начало которой в момент времени £ = 0 совпадало с началом
исходной системы /С. Если обозначить через <)/ компоненты волновой
функции в системе К', то линейный характер преобразования
выражается равенствами
ф;(0, 0, 0, 0)=Tik(g)b(0. 0, 0, 0). (73,2)
Здесь TiJc(g) — квадратная матрица, имеющая о строк и столбцов,
g — элемент полной группы Лоренца, соответствующий переходу от
системы К к системе К'-
Докажем, что матрицы Tik(g) (g£L) осуществляют
представление полной группы Лоренца. Для этого введем в рассмотрение еще
одну систему координат К", начало которой также совпадало
с началом системы К в момент £=0. Обозначим через gx переход
от системы К! к системе К" и через h переход от системы К
к системе К". Тогда по определению группы Лоренца имеем h=^gxg.
С другой стороны, для компонент Щ волновой функции в системе К"
мы можем написать равенства
Сопоставляя эти два соотношения с (73,2), мы получим:
ТЫ/О^Ту^Т^), т. е. Tfe) = T(?1)Tfe).
Это равенство показывает, что набор о чисел tyi(x) (/==1,2, ..., о)
при фиксированном х можно рассматривать как компоненты
некоторого вектора ф(лг) из о-мерного пространства Е,
осуществляющего представление Т полной группы Лоренца.
Разумеется, выбор координат вектора ф неоднозначен: изменяя
базис в пространстве Е, мы перейдем от старых координат к новым,
являющимся линейными комбинациями старых. Весьма естественным
и удобным для приложений является выбор базиса, связанного с
разложением пространства Е на неприводимые подпространства
я=2 £«• (7з>з)
х, s
Здесь х— неприводимое представление группы L, по которому
преобразуется подпространство £TS. Индекс s служит для
нумерации подпространств, преобразующихся по одному и тому же
представлению х. Выделим теперь в каждом пространстве Ех8
канонический базис £TS> г == £TS> м. Совокупность всех векторов eXSfl
образует базис в Е. '
Координаты фт8>г, связанные с этим базисом, мы и будем в
дальнейшем использовать в качестве компонент волновой функции.
280 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
§*74, Релятивистски-инвариантные уравнения
В силу принципа эквивалентности всех инерциальных систем
уравнение поля (73,1) должно иметь одинаковый вид (и,
следовательно, одинаковые коэффициенты) во всех инерциальных системах
координат. Уравнения, обладающие этим свойством, называются
релятивистски-инвариантными. В настоящем параграфе выводится
общий вид таких уравнений.
Прежде всего заметим, что поскольку коэффициенты
уравнения (73,1) не зависят от координат х, у, z, t, то инвариантность
его в одной только точке, скажем (0, 0, 0, 0), влечет за собой
инвариантность во всех точках. Поэтому мы будем рассматривать
левую часть уравнения (73,1) только в точке (0, 0, 0, 0).
Для простоты мы будем считать, что матрица v.ik имеет
обратную. В этом случае без дополнительного ограничения общности
можно положить xift—x8ife (* =£ 0). Таким образом, мы рассмотрим
систему
4*Ц+*Ь = 0> (74,1)
или в новых обозначениях
^'*'1':-ЪГ- = — *Ь81- (74,2)
Рассмотрим сначала, какие требования налагает инвариантность
относительно собственной группы Лоренца jg?t. Выясним, как преобра-
зуются числа —т при переходе от одной инерциальной системы
координат к другой. Согласно (73,2) имеем:
^=ч'I(*)^•4=v,*)"'''(')~йГ•
Мы видим, что 4о чисел ^8 (т', s' фиксированы)
преобразуются как координаты из пространства, осуществляющего
представление т' X *i 1-
¥ 2"
Если представление x'X'Ci i не содержит представления х, то
2~1F
никакая линейная комбинация величин —^ не преобразуется, так
же как фт8г. Поэтому те уравнения системы (74,2), которые в
правой части содержат ф-^ (т фиксировано), не содержат в левой части
производных ?'*'1' , если х не содержится в x'X^i i-
§ 74] релятивистски-инвариантные уравнения 281
Будем называть представление х' зацепляющимся с
представлением х, если произведение х' X * i 1 содержит т. Теперь можно
II
следующим образом сформулировать полученный результат: если
представление хг не зацепляется с представлением т, то все
коэффициенты A*gW8,v равны нулю.
Из сказанного вытекает вывод: если представление х содержится
в Т, то в Т содержится хотя бы одно из зацепляющихся с х
представлений. Действительно, в противном случае левые части
уравнений (74,2), соответствующих данному х, не содержали бы ни одного
слагаемого и мы пришли бы к абсурдному выводу, что фТ8^ = 0.
Если представление хг зацепляется с х, то произведение х/ X * i 1
7 "г
содержит представление х только один раз, как это следует иа
формулы (68,3). Поэтому с точностью до множителя, не зависящего
от / и 1\ при фиксированных х' и s' существует только один набор
линейных выражений
Piw • ^j~ (/=1.2 «,), (74,3)
которые преобразуются так же, как и набор компонент фтвГ
(/=1, 2, ..., 5Т). Поэтому релятивистски-инвариантные уравнения
могут быть записаны в виде
z'a'l'j j
причем коэффициенты ZxSxv произвольны, если не требовать
инвариантности уравнения относительно инверсии.
Согласно формуле (68,3) два представления Xpq и Xp'q> являются
зацепляющимися друг с другом, если \Р — Р'|=-уИ \Q — Q'\ = -~.
Иными словами, с представлением т= pq зацепляются четыре
представления
^+!Ь*£' Vive-I' 'рЧ'9+J ''"W
если Р Ф О, Q ф 0. С представлением т0# (Q =£ 0) зацепляются только
Два представления хх i, ti i. Аналогично этому с предста-
7,<?+7 "2^-^
влением Хр0 (Р Ф 0) зацепляются представления х i i и х i i *
Наконец, с единичным представлением Xqq зацепляется только одно
представление ti i.
Если два представления х и х' сцеплены, то суммы индексов
Этих представлений Я + Q и Р' -\-Qf являются одновременно либо
Целыми, либо полуцелыми числами.
282 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
Вычислим коэффициенты P{u,v - Мы видели, что операторы ^Д.
(У=0, 1, 2, 3) преобразуются как компоненты 4-вектора в
естественном базисе. Используя матрицу (71,4) перехода от естественного
базиса к каноническому, легко получить операторы
-ч . д . д jiii . д , . д
д 1 1=и Ьз—» д_1,± = *з М з~>
-у—£ ^i ' дх2* 2' 2 dx0 ^з
(74,5)
которые преобразуются так же, как компоненты вектора в
каноническом базисе. Выражение (74,3) можно теперь переписать в виде
Piwv ^-^P^rdmn^a.v. (74,6)
Согласно (68,4) коэффициенты P™v равны
РТт = (-j Я'»// Яр) (-j Q V | Qq), (74,7)
где Я, Q — вес представления х\ Р', Q' — вес представления т',
/?, ^ — индексы базисного вектора фт8г; //, qf — индексы базисного
вектора <|ve'r-
Подставляя в (74,4) выражение (74,6) и используя (74,5) и (74,7),
получим:
P'Q'8'p'q'
2 ^^{(1я'^'1^)(т^Ь'1^)(-^-|+а^)+
)'8'p'q'
Ц\р'\р'\Рр){^'~У^я){-1^+^)+
Ц)[р>-\1,\Рр){^У\0Я){1^+1£)1+
+ (Ip'-^4Pp)(^Q'-^'lQ,)(f-4+ai)}x
X tyPWVq'+vtypQsn = О- (74'8>
Входящие сюда коэффициенты Клебша — Гордана были вычислены
в § 54. Подставляя найденные там значения в (74,8), находим
§ 74] РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ 283
окончательно:
p^8,^(2P' + l)(2Q' + l) (' \ ^^-Г2дчг ~г </-г2;^
+ *Фр^я = 0. (74,9)
где p,= sign(P— Р') и v = sign(Q— Q')*).
Если в этом уравнении положить х = 0, то оно, разумеется,
останется релятивистски-инвариантным.
Отметим некоторые свойства симметрии коэффициентов Piwr . Из
равенства (74,7) следует, что P™$v% не изменяется при замене P+ZQ,
P'^±Q't p+Zq, pf^tq\ mt^n. Это можно записать так:
Р%?т = РТт"г>> <74>10)
где t = tP(?, т^Тдр, / — (ps)q), 7~(?. /?) и т. д. Если в (74,6)
подставить явные выражения (74,5) для дшп и затем приравнять
коэффициенты при производных *— , то получится:
_£^_ £ 1 _1__L -Li.
П\ /р 2 ~2 /р2 2
JDO
/>2
tZtT
/P 2 2 /p2 2
_J_ 1 J^ J_
P 2 2 1 D2 2
2 2 I /D2 2
\ (74.11)
p3 /p 2 2 _l/p2 2
Произведем в этих равенствах замену и->х, т'-^т', l->l, /'->/' и
учтем симметрию коэффициентов P%*v\ мы получим:
p°,wr = -p^P, Р^.Г=Р17?Т, ^ = 1,2.3). (74,12)
Далее, коэффициенты Клебша — Гордана обладают следующим
свойством (см. (55,6)):
(ЛЛ — ml — m2\j — m) = (—\f+j*-j (Jljzm1mz \ jm).
') Sign л: = 1, если л: > 0, и sign jc = — 1, если х < 0.
^a7+t*« = 0 ft = «i» <*>*»)
284 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
Поэтому
Обращаясь опять к равенствам (74,11), находим отсюда
PU,_r = (-ir-p^'-«PSt,r (« = o. 1). |
яи.-г = -(-1)Р'-Р+е'-*/4т (Р = 2. 8). J ( }
Для дальнейшего нам понадобится одно общее соотношение
между коэффициентами А\и уравнения (74,1). В силу релятивистской
инвариантности этого уравнения функция ф^ = Ты (g) fy должна
удовлетворять уравнению
дх
или
^tkTKl{i)-^-j-xTa(g)^=0. (74.14)
С другой стороны, уравнение (74,1) можно переписать в виде
Заменяя здесь / на / и умножая на Тц(&), получим:
ти (g) aU# (g) it*.+*ти*?г=о;
Сравнение этого равенства с (74,14) показывает, что
или, опуская матричные индексы,
T(g-1)A"T(g) = A\(g). (74,15)
В частности, при ^ = О
T(g-^)A^(g) = A^(g).
Продифференцируем это равенство по (За? = -£ и положим затем g* = £-
Учитывая (66,1), получим:
— J1A° + A°J1=— A1.
Ввиду эквивалентности осей xt у и z можно написать более
общее соотношение:
А*=рлА°]=ЛлА° — A°Jfc (ft=l. 2, 3). (74,16)
§ 74] РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ 285
Выясним теперь, при каких условиях уравнение (74,1) инвариантно
относительно инверсии.
Напомним, что оператор инверсии переводит всякий базисный
вектор eTpq, преобразующийся по представлению х = xpQ
собственной группы Лоренца, в базисный вектор и~ , преобразующийся по
представлению x = xQp. Если P=Q, то представление х
эквивалентно представлению х. В этом случае оператор инверсии
определяется равенством lexpq = exqp или равенством \expq = — eTqp. Отсюда
следует, что пространство Е волновых функций содержит одинаковое
число подпространств, преобразующихся по представлениям тих.
Условимся нумеровать их таким образом, чтобы подпространства Еха
и Е~8, имеющие один и тот же номер s, переходили друг в друга
под действием инверсии. Таким образом, если х ф х, то
\в = е~ *
tspq х 8qp
Если же х = х, то, очевидно,
*e-z8pq == e-zsqp*
или
^•zspq == e?sqpr
Этим трем равенствам можно придать одинаковую форму:
le,sM=slenxexW*
если ввести обозначение
1, если х = хро, Рф Q,
sign х = sign x =
1,
1.
если
если
т = т+
t = Xp
(74,17)
(74,18)
Соотношение (74,15), как это следует из его вывода, должно
иметь место и при g = I, если уравнение (74,1) инвариантно
относительно инверсии пространства. Так как а00(/)=1, ап (/) = а22 (I) =
= а33(/) = — 1, то при g = I и у = 0, 1, 2, 3 соотношение (74,15)
сводится к
Л'1к°1 = А0ш Г1Ак1 = — А] (ft=l, 2. 3). (74,19)
Иными словами, для инвариантности уравнения (74,1) относительно
инверсии необходимо и достаточно, чтобы матрицы А0
коммутировала с оператором инверсии, а остальные три матрицы А1, А2 и А3
антикоммутировали ,с ним.
Выясним, как сказываются условия (74,19) на коэффициентах Z8£ •
Заметим, что последние три равенства (74,19) вытекают из условия
А°1 = IА0. * Действительно, в § 72 было показано, что оператор
286 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [гл. XVI
инверсии антикоммутирует с инфинитезимальными операторами Jx, J2, j #
Поэтому
A*I = (J*AO —A0Jfc)I = —I(JftAo_AojJfc) = _iA* (ft=l, 2, 3).
Рассмотрим условие A°I = IA°. Применяя обе части этого
операторного равенства к базисному вектору ех8г и учитывая (74,17),
получим:
signxA°^sT = IA^Tsr
Так как A°eXd = Z%*xPX4*xiex'H4't то отсюда следует:
sign xZ? ~Р? р ~ 7е?ё,р = sign х Zx4PxTxAVf'
Приравнивая коэффициенты при е^8,р и учитывая, что, р\\р~~=^
= — P%v-a* находим следующее условие инвариантности
уравнения (74,1) относительно инверсии:
sign %Z%*~ = - sign x'Z*:*. (74,20)
§ 75. Функция Лагранжа
Согласно теории элементарных частиц, функция Лагранжа
элементарной частицы имеет следующий вид:
1 = -(Г*^4-, ф) + х(ф. ф). (75,1)
где ф—волновая функция частицы, Г (& = 0, 1, 2, 3) — о-мерные
матрицы. Выражение (ср, ф) есть билинейная форма, которую можно
представить в виде _
(ср. ф) = В<#й (75,2)
(по индексам /, у подразумевается суммирование от 1 до о).
Выясним, какими должны быть матрицы Тк и коэффициенты Вц
для того, чтобы функция Лагранжа была инвариантной и чтобы
принцип наименьшего действия
85 = 8 Г L dx0 dxx dx2 dx3 = 0
был эквивалентен уравнениям (74,1).
Вычислим 85. Имеем:
hS = hfLd*x='
—fillet' *)+{ткй- s*)+*№ *)+х(*' М^
§ 75] функция лагранжа 287
где Тк —матрица, сопряженная матрице Г* относительно
билинейной формы (75,2) *).
Первый интеграл в правой части последнего равенства равен
нулю, если 8ф обращается в нуль вне некоторого объема в
четырехмерном пространстве—времени, и мы получаем:
Ввиду произвольности 8ф отсюда следует:
(г^++ч)=о.
Из этих соотношений вытекают дифференциальные уравнения (74,1),
если билинейная форма (75,2) невырождена **) и если
Итак, мы видим, что только те дифференциальные уравнения (74,1)
могут быть следствием принципа наименьшего действия, у которых
коэффициенты-матрицы А являются антиэрмитовыми относительно
билинейной формы (75,2):
А**= — А*. (75,3)
Рассмотрим теперь условие инвариантности функции
Лагранжа (75,1)- Заметим, прежде всего, что выражение Тк-~- =
= Ак—— преобразуется так же, как и функция ф. Это обеспечи-
дхк
вается релятивистской инвариантностью уравнения (74,1). Поэтому,
если операторы Ак выбраны так, как указано в предыдущем
параграфе, то для инвариантности функции Лагранжа достаточно, чтобы
билинейная форма (75,2) была инвариантной.
Запишем форму (75,2) более подробно в виде
(ср, ф)= 2 STejtvr<PT«riVeV-
Компоненты 4VsT преобразуются по представлению,
сопряженному х\ Поэтому (см. § 69) из произведений вида <pTSz4VsT (*• *'
фиксированы) можно составить инвариантное выражение только в том
*) Иными словами, каковы бы ни были о-мерные векторы ? и ф, имеет
место равенство (Г*<р, 40 = (ср, ГА*ф).
**) Форма (?, 40 называется невырожденной, если для любого вектора
¥ =£ 0 можно подобрать такой вектор ф, чтобы (ср, 40 ф 0.
288« РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [гл. XVI
случае, когда ъ' = х. Подчеркнем, что функции ср и ф должны
преобразоваться по одному и тому же представлению не только
собственной, но и полной группы Лоренца.
В § 69 было показано, что таким инвариантным выражением
является сумма
p,q ™
Поэтому инвариантную билинейную форму можно представить в виде
(ср, ф) = 2 2 Bw> 2 ^SJ^ (75,4)
где коэффициенты 5T8d' совершенно произвольны.
Условием невырожденности формы (ср, ф) является существование
для каждого us такого s£, чтобы
В^.фО. (75.5)
Для того чтобы действие 5 принимало только вещественные
значения, форма (ср, ф) должна быть эрмитовой, т. е. удовлетворять
условию (ф, ср) = (ср, ф). Поэтому коэффициенты Вх86* обладают
свойством эрмитовости
J#W'e = #we'. (75,6)
Рассмотрим в заключение условие инвариантности формы, (ср, ф)
относительно инверсии. Учитывая соотношение (74,17), получаем:
а?, щ = 22 в„. 2 а^ОФ)^
• €>0 Pf Ч
х 88' р, q *^
Изменяя обозначения индексов суммирования, найдем:
(Icp, 1ф) = 2 S ^ 2 ^spq^Tf
х as' pt q Jr± **
Отсюда следует, что инвариантность формы (ср, ф) относительно
инверсии эквивалентна требованию
"Равенство (75,4) определяет невырожденную инвариантную
относительно полной группы Лоренца эрмитову форму, если
коэффициенты Вы* удовлетворяют условиям (75,5), (75,6) и (75,7), а^в
остальном совершенно произвольны.
*) Напомним, что если т = тр^, то под т мы подразумеваем
представление tqTk
§ 76]
ЗАКОНЫ СОХРАНЕНИЯ
289
§ 76. Законы сохранения
Эквивалентность всех инерциальных систем обусловливает
наличие по крайней мере одиннадцати законов сохранения в любой
релятивистски-инвариантной теории. Не все эти законы независимы друг
от друга. Так, например, постоянство рх, ру и Mz является
следствием постоянства pz, Мх и Му (р — импульс замкнутой системы,
М — ее момент).
Попытаемся выяснить, какую форму принимают-эти законы для
поля ф, характеризуемого уравнением (74,1) и представлением Т.
С этой целью вычислим, как преобразуется поле ф при переходе
от одной инерциальной системы к другой.
Начнем с трансляций. Если система К' получилась из К путем
трансляции ta (a — четырехмерный вектор), то координаты одного
и того же события в этих системах связаны между собой
соотношением
x'i = Xi — ai- С76»1)
Поэтому волновая функция ф(л:) переходит в системе К' в
функцию ф' {x')t равную
ф'(*0 = ф(*) = ф (*'+«)• (76,2)
Группа трансляций является, очевидно, четырехпараметрической
группой. В качестве ее параметров естественно выбрать компоненты
вектора а, характеризующего трансляцию ta. Вычислим инфините-
зимальные операторы Yk (& = 0, 1, 2, 3), соответствующие этим
параметрам. Соотношение (76,2) можно переписать в виде
Т (а) ф (*') = *(*' + *)•
Дифференцируя это равенство по ак и полагая затем а = 0,
получим:
У*Ф(*0 = ^Р- (76,3)
Рассмотрим теперь «повороты» в четырехмерном пространстве —
времени, т. е. преобразования из полной группы Лоренца. Связь
между координатами х'к и хк одного и того же события в системах
отсчета К' и К выражается формулой
х'к = Ч1(К'К)хг. (76,4)
Вычислим функцию <]>'(*') в системе К'> в которую переходит
заданная в К волновая функция ф(д:). Для этого рассмотрим какую-
либо точку х°и в системе /С. Координаты этой же точки в системе К'
равны
x% = axi(K'K)jP (76,5)
290 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ'УРАВНЕНИЯ [ГЛ. XV*
Введем теперь^ две вспомогательные системы ^отсчета К0 и к'0г
которые получаются из систем К и К с помощью^трансляций
?!=*!—*», &;=*;-*?'. (76,6)
Формулы перехода от /С0 к /С^ имеют следующий вид:
Они получаются, если из соотношения (76,4) вычесть (76,5). Обо.
значим через ф°(£) и ф0'(£') волновые функции в системах /С0 и *Ао»
Согласно (76,2) и (76,6) можно написать:
ф?(0) = ф«(*°). ^'(°) = fi«)- (76.7).
Связь между величинами ф?(0) и ф?7 (0) имеет следующий вид:
♦</(0) = Tii(/T/C)*S(0) (76,8)
по определению (73*2) представления Т.
Объединяя равенства (76,7) и (76,8) и опуская индекс нуль,
получим:
^(х') = Т^(К'К)Ь(х). (76,9)
Обозначим через h тот элемент группы Лоренца, который
осуществляет переход от системы К к системе К'. Так как hx = x\ та
последнее равенство можно переписать в виде
tf(xO = Tw(A)<fc(A-V) (76.10)
ИЛИ
Тх (А) ф (О = Т (Л) (Л" V). (76Л 1)
Мы видим, что представление Тх, по которому преобразуется полеф,
не совпадает, вообще говоря, с представлением Т. В качестве
простого примера, иллюстрирующего подобное положение вещей»
приведем векторное поле/(/*) = г, которое остается инвариантным пра
вращениях системы координат вокруг ее начала, в то время как,
значение этого поля в любой фиксированной точке г преобразуется
при вращениях вокруг этой точки по векторному представлению D%
группы вращений.
Пусть М — какой-либо оператор' из группы трансляций или
полной "группы Лоренца, переводящий функцию ф в ф' по формуле (76,2)
или* (76,10). Волновое уравнение (74,1), которому удовлетворяет,
функция ф, мы запишем в векторной форме: ' ~ - г •
§ 76J законы сохранения 29Х
В силу эквивалентности всех инерциальных систем этому же
уравнению удовлетворяет функция ф' = Мф
А*^Мф + *Мф = 0.
Из этих двух равенств вытекает важное соотношение
^(А*Мф,ф) = 0. (76,12)
Действительно, так как А** = — Ак, то
^<А*Мф. ф) = (А^Мф, ф) + (А*Мф,^) =
= — х (Мф, ф) 4-х (Мф. ф) = 0.
Оператор М пробегает континуальное множество операторов,
соответствующих всевозможным трансляциям и преобразованиям из
полной группы Лоренца, и мы получаем бесконечное множество
соотношений вида (76,12). Однако не все они независимы. Для того
чтобы получить конечное число соотношений вида (76,12), из
которых вытекали бы все остальные, перейдем от операторов М к инфи-
нитезимальным операторам.
Если продифференцировать равенство (76,12) по одному из
параметров as, от которых зависит оператор М, то получится:
jL(A*Is<M) = 0, (76,13)
где Is — инфинитезимальный оператор, соответствующий параметру as.
Добавим к (76,13) соотношение
д^(*А^.ф) = 0. (76,14)
которое получается, если в (76,12) положить М = /Е (множитель i
добавлен для того, чтобы выражения (/А*ф) ф были вещественными).
Если речь идет о группе Лоренца, то, как легко показать, из.
соотношений (76,13) и (76,14) вытекают все соотношения (76,12).
В случае полной группы Лоренца к равенствам (76,13) и (76,14)
следует добавить еще одно:
д^(А*1ф. ф) = 0. (76,15)
где I означает оператор инверсии.
Соотношения (76,13 , (76,14) и (76,15) называются законами
сохранения. Им можно придать вид уравнения непрерывности
*E + dIvy=0. 476,16)
292 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
где
р = 1(А°1ф. ф), Л = (АЧф. ф) (*=1. 2, 3), (76,17)
I — любой инфинитезимальный оператор, единичный оператор или
оператор инверсии.
В интегральной форме соотношение (76,16) имеет вид
•tffpdv = -fj<ta. (76,18)
V S
Таким образом, величины (А*1ф, ф) (й=1, 2, 3) можно
рассматривать как компоненты потока величины — (А°1ф, ф).
Заметим еще, что, устремив в (76,18) V и 5 к бесконечности,
мы получим:
С 9dV = const (76,19)
Рассмотрим более подробно законы сохранения, связанные с
группой трансляций. Согласно (76,3) соотношения (76,13) можно
записать в виде
&(*•£• ♦)-"•
Вводя обозначения
7-H = Re/(A*^.<|>), (76,20)
мы получим:
^S- = 0. (76,21)
Величины Tw (&, / = 0, 1, 2, 3) образуют тензор, называемый
тензором плотности энергии — импульса. Равенство нулю четырехмерной
дивергенции этого тензора выражает закон сохранения энергии
и импульса.
Для того чтобы убедиться в том, что величины Тад образуют
тензор, произведем переход от системы отсчета К к системе
отсчета /С'. Учитывая (74,15), получим:
T^r = Re//A^^фЛ=Re(iA^T(^)|i, Т (*) ф) «г, ф =
= «п (g) Re (Я? (g'1) А* Т {g) ^. ф) =
= а,7 (g) ак.к (g) Re (iAk g-, ф) = аГ1 fe) аЛ/Лф Tw>
что и доказывает тензорный характер величин Tw.
Рассмотрим теперь законы сохранения, связанные с собственной
группой Лоренца. Для того чтобы получить эти законы в наиболее
§ 76]
ЗАКОНЫ СОХРАНЕНИЯ
293
симметричном виде, целесообразно изменить выбор параметров,
характеризующих элементы группы Jg>v
Запишем общее преобразование Лоренца в виде
*; = ^ + ТлвЛвхв, (76,22)
где Чгк — матрица (71,9), а гк8— параметры, характеризующие данное
преобразование. Эти параметры связаны условием
Если гк8— малые величины, то с точностью до величин высшего
порядка малости последнее условие означает, что
4s — — esk-
Таким образом, число независимых параметров ек8 равно, как и
следовало ожидать, шести. В качестве этих параметров можно принять
какую-либо независимую шестерку чисел sk8. Соответствующие этим
параметрам инфинитезимальные операторы обозначим через 1к8. Ясно,
что
hk=-hs (А. * = 0, 1, 2, 3).
Согласно § 44 выражение T(^_1) lksT(g) является линейной
комбинацией инфинитезимальных операторов 1к/8/, причем коэффициенты,
стоящие при Ife/8/, не зависят от представления Т. Подсчитав эти
коэффициенты для векторного представления *z\ \ , мы получим со-
отношение
Т (g-1) lka Т (g) = akk, (g) ам, (g) W (ge J2Ti). (76,23)
справедливое для любого представления Т собственной группы
Лоренца.
Операторы \ks связаны с операторами Iz, Jz (/= 1, 2, 3)
следующим образом:
Ii2=—*з» 'гз == — 'i» 'si = — h>
*01 = ^1» *02 == «*2» *03 == ^З*
В этом легко убедиться непосредственным вычислением.
Вычислим теперь, как действует инфинитезимальный оператор 1Ав
на волновое поле ф(лг). Для этого продифференцируем равенство
(76,11) по параметру гк8 элемента /г"1 и положим затем h=e. Мы
получим, согласно задаче V § 43,
dyidzk8(h ')
где \к8 и 1А8 — инфинитезимальные операторы, связанные с
представлениями Тх и Т, y=h~1x. Вычислим
дУг 1
(76,24)
Тг-е
294 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
Будем исходить из тождества
Дифференцируя его по zksiji~l), получим:
дуг
Подставляя это выражение в (76,24), найдем:
Йвф (*) = 1Лвф (х) — (ъкх8 — Ьахк) £[-. (76,25)
Теперь можно записать шесть законов сохранения, связанных с
группой Лоренца _2V Согласно (76,13) имеем:
1?=0' (76-26>
где
*э
=' (А^ф. Ф) + i (7i.** — ?»*.) (А'Ц • *) • (76-27)
Числа 3jks образуют тензор третьего ранга. Это немедленно
вытекает из соотношений (74,15) и (76,23). Тензор Jjk8 называется
тензором плотности момента. Он антисимметричен относительно
второго и третьего индексов
**, = -Ъл' С76'28)
Соотношение (76,26) выражает закон сохранения момента в
релятивистски-инвариантной форме.
Тензор момента состоит из двух слагаемых:
+ Мт. (76,29)
Первое слагаемое называется тензором плотности спинового
момента, второе — тензором плотности орбитального момента.
Закон сохранения, соответствующий инверсии, имеет, очевидно,
следующий вид:
§£: (А*1ф (Хо. — *i. — *2- — *з)- Ф(*о. xi> хъ *з))=°-
Он называется законом сохранения частности.
§ 77. Спин
Понятие спина тесно связано с нерелятивистским понятием
момента. Как известно, компоненты lx, Jy, iz вектора плотности
момента / совпадают с компонентами J023, J031 и J012 четырехмерного
тензора плотности момента.
;§ 77] спин 295
Учитывая (76,27), можно написать:
4 = i (А01„ф. ф) + /.у (A» g, ф) - tz (A" g, ф). (77,1)
Соответствующие равенства для Jy и У2 получаются из (77,1) путем
круговой перестановки х, у, z.
Поэтому вектор плотности момента можно записать в виде
j = S + M, (77,2)
где
S = (A0^, ф), М = (А°[грЦ9 ф) (77,3)
и
»*=7|* (*=1.2. 3; P = l-j£). (77,4)
Вектор 5 называется плотностью спинового момента частицы,
вектор Л1 — плотностью орбитального момента, если функция ф
нормирована так, что
/(А°ф, ф)<Я/=1. (77,5)
Заметим, что условие (77,5) выполняется во все моменты времени,
если оно выполнялось в некоторый начальный момент времени. Это
следует из равенства (76,19).
В соответствии с принятым в этом параграфе нерелятивистским
подходом мы будем рассматривать представление Т как
представление группы вращений R. Если g£R есть вращение, то из (74,15)
следует, что
T{g-*)APT(g) = A? <££/?). (77,6)
Обозначим через Е0 совокупность всех векторов из Е, которые
переводятся оператором А0 в нуль:
А<>ф = 0 (ф ££<>)•
Из соотношения (77,6) вытекает, что подпространство £0 инвариантно
относительно группы вращений. Обозначим через Т0 представление
группы вращений, по которому преобразуется Е0. Выделяя из Т
представление Т0, мы получим:
Т = Т0 + Тв.
Подпространство, преобразующееся по представлению Ts, обозначим
через Ег.
Запишем ф в виде ф = ф0-|-ф1 (фоб^о» <WG£i)- Имеем:
5 = (А°*ф, ф) = (А°^ф1, ф) = — (зфь А°ф) =
= -И1.А0ф1)=(А°^..ф1). - (77,7)
296 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [гл-. XVI
Итак, в выражение для плотности спинового момента входит только
составляющая ^ волновой функции ф. Поэтому оператор и можно
заменить оператором ах, связанным с представлением Ts.
Оператор <зг называют оператором спина, оператор [г, р] —
оператором орбитального момента.
Если представление Ts содержит (один или несколько раз) только
одно неприводимое представление ър группы вращений, то вес Р
представления т~ называется спином рассматриваемой частицы. Если
представление Т8 содержит неприводимые представления различных
весов Р19 Ръ . .. , Рк> то эти веса естественно рассматривать как
возможные значения спина частицы *).
Если волновая функция ф принадлежит одному из неприводимых
подпространств E.czElt то говорят, что спин частицы в
состоянии ф равен Р, где Р — вес представления т, по которому
преобразуется подпространство £т.
Пусть волновая функция ф является плоской волной с четырех
мерным импульсом р, т. е.
Ф (х) = %е1?* (рх = А)*о — A*i — Р2Х2 — Рз*з)- (77>8)
Рассмотрим те плоские волны
ф(Аг) = ф0в*Р^о, (77,9)
у которых рг = р2 = /?з = 0- Подставляя это выражение в
уравнение (74,1), получим:
(/А% + х)ф0 = 0. (77,10)
Обозначим через Е(р0) подпространство, состоящее из всех тех
векторов ф0, которые удовлетворяют уравнению (77,10). Легко видеть»
что подпространство Е (р0) инвариантно относительно всех
вращений. Действительно, учитывая соотношение (77,6), получим:
(tA0Po + *)T(g)y0=T{g)(lA*p0 + *)%=<i (g£R).
Разобьем подпространство Е(р0) на неприводимые
подпространства. Пусть ф0 принадлежит одному из таких подпространств £"*
(т = тр). Тогда волновая функция (77,9) характеризует состояние
частицы, в котором значение спина равно Р, а четырехмерный
импульс равен (/?0, 0, 0, 0). Так как подпространство Ех имеет
(2Я-|-1) измерений, то, следовательно, существует (2Я-|- 1) линейно
независимых состояний с данным импульсом и данным значением Р
спина.
*) Следует, однако, отметить, что до настоящего времни не обнаружены
частицы с переменным спином.
§ 78] ОПЕРАЦИЯ ИНВЕРСИИ ВРЕМЕНИ И ТЕОРЕМА ПАУЛИ 297
§ 78. Релятивистски-инвариантная операция инверсии
времени и теорема Паули
Как известно, уравнения механики инвариантны относительно
инверсии времени, т. е. замены t на —t. Уравнения электродинамики
rot £=-__-, rot Я=__ + _р«,,
div E= 4*p, div H= О, F= e£ + 7 1*ВД
инвариантны относительно замены
t-+ — t9 E-+E, Н-+ — Н,
также содержащей инверсию времени.
Поставим задачу найти общий вид релятивистски-инвариантной
линейной операции
*-► — *, ф-*Мф, (78,1)
содержащей инверсию времени.
Пусть волновая функция ф в системе отсчета К переходит в ф'
в системе К'
ф' = Т(«. 0)ф (78,2)
(вектор а характеризует поворот системы К относительно К*
v—скорость начала координат К! относительно системы К), В силу
релятивистской инвариантности операции (78,1) функция Мф должна
переходить в системе К в функцию Мф'. После инверсии времени
вектор а не изменился, а скорость v изменила направление на
противоположное, поэтому
Мф' = Т(«. — *)Мф.
Подставляя сюда ф' из (78,2), получим:
МТ(а, *) = Т(«. — *)М. (78,3)
Дифференцируя это равенство по параметрам собственной группы
Лоренца, находим:
MI*=IAM, MJfc = — 4M (A=l. 2, 3). (78,4)
Из формул, связывающих операторы АА, ВА с операторами lk, Jk
(&=lf 2, 3), вытекает теперь, что
AftM = — 1 (Ifc + Uk) M = — \ М (Ifc — U$= MB*,
т- е. А&М = MBft. ьТак же получается соотношение В&М = MAft.
Далее,
A+M = (/A! —A2)M = M(/B1 —B2)=MB+i
А_М = МВ_, А0М = МВ0, В±М=МА±, В0М=МА0<
(78,5)
"298 РЕЛЯИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [гл. XVI
Пусть фт8рд — одна из компонент волновой функции ф, отвечающая
-базисному вектору ex8pq представления х = тр, группы Лоренца:
Ф = 2 tyxapqex8pr
Согласно (78,5) имеем:
A0MeTSpa = MB0*TSM = — tyMeTepg,
B0MeT8pg = МАо*Т81>д = — ip№ex8pq.
Мы видим, что вектор MeTspg преобразуется как и^р, где и~ "—
вектор канонического "базиса в представлении х= xQp
9ЛеЧря = 'кмичр- (78>6)
Для определения коэффициентов \pq подействуем на это равенство
операторами А+ и В+. Так как А+М = МВ+, то tAB+eX8pq = \pqA+u~
или
\+\ pq+lU7q+lp \q*q+\U^q+\p*
Отсюда следует, что /^pq+i — ^pqt T* e* числа hpq не зависят от д.
Они не зависят и от /?, в чем легко убедиться, подействовав на
обе части равенства (78,6) оператором В+. Итак, \pq = \. Поэтому
из соотношения (78,6) следует, что линейный оператор М,
удовлетворяющий условию (78,4), имеет вид
m^^^Wvw <78'7>
тде Mcg'g — совершенно произвольные коэффициенты. Применяя
оператор М к функции ф, получим:
т. е.
(Щ\т = ^^'Ь^Р- (78-8>
Выясним, можно ли подобрать таким образом коэффициенты Мх$8'9
чтобы релятивистски-инвариантное уравнение (74,4) было
инвариантным и относительно инверсии времени. Подставляя в левую часть
равенства (74,4) вместо функции фтвг(*о» -^1» хг> хъ) функцию
2^Х83'Ф^,'Т(— *о. xi> хг> *з)
8'
и используя соотношения
siSn ^?,'« = — *№ *'2т'8Ча
К.П'=-^г?Р' PL-v-P^v (/=1.2.3).
§ 78] ОПЕРАЦИЯ ИНВЕРСИИ ВРЕМЕНИ И ТЕОРЕМА ПАУЛИ* 299
легко находим, что уравнение (74,4) инвариантно относительно
инверсии времени, если
Мх88г = МхЪаа* и sign *iWt = — sign 4MX* (78,9)
для любой пары сцепленных представлений.
Так как всякая замкнутая цепочка сцепленных представлений
всегда состоит из четного числа представлений, то условие (78,9)
никогда не является противоречивым. В дальнейшем мы будем
считать его выполненным. Кроме того, мы положим, что все
коэффициенты Мх равны
Мх = ±1.
Проследим, как изменяется плотность заряда р = е(А°ф, ф) и
плотность энергии частицы е = (А°^р-, ф) при инверсии времени.
Имеем согласно (75,4)
Мр = е (А°Мф, Мф) = е 2 В%м. (А°Мф)Х8г (Щ)ъ.р =
XJS'l
•zss'l
s"l"
Заменяя здесь t, / на t, / и имея в виду, что £., = £- ,
^ ~3o ZS8 »
A°^iw = — A\lT*s»i» • получим:
Мр = - е 2В„.МгЩКе1?8'Н^рЬ?1 =
Z3S'l8"l" '
= -е^В (ao^^TZm^. (78,10)
Вычислим произведение MzM~ = sign *zMx sign тМ-. Так как при
переходе от какого-либо представления т к сцепленному с ним т'
величина sign ъМх изменяет свой знак, то, очевидно,
произведение МхМ~ равно
где v — число шагов, которые необходимо совершить для того,
чтобы перейти от представления т к представлению т. При каждом
шаге индекс Р изменяется на -^-. Поэтому число необходимых шагов
является четным, если Р — Q целое число, и нечетным, если Р — Q —
полуцелое число. Иными словами, v—четное число, если спин
частицы целый, и v — нечетное число, если спин частицы'нецелый.
Вынося постоянное произведение МхМ~ за знак суммы (78,10),
получим:
Мр = (—l)v+1p- (78,11)
300 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [гл. XVI
Совершенно аналогично получаем:
Ме = (— l)vs.
Из этих равенств вытекает теорема Паули.
Теорема Паули. Плотность энергии частицы с полуцелим
спином может принимать как положительные, так и
отрицательные значения.
Плотность заряда частицы с целым спином может
принимать как положительные, так и отрицательные значения.
§ 79. Уравнение Дирака
Если рассмотреть релятивистски-инвариантные уравнения, которым
удовлетворяет волновая функция, преобразующаяся по
представлению Т = Ti + т 1, то мы получим уравнения Дирака для электрона.
~2 ° ° Т •
Прежде всего найдем вид этих уравнений. Для этого
воспользуемся формулой (74,9). В рассматриваемом случае каждое из
неприводимых представлений, содержащихся в Т, входит в Т по одному
разу. Поэтому индекс s, который нумерует подпространства,
преобразующиеся по одному и тому же представлению, не нужен в
рассматриваемом случае. С представлением ъ\ сцеплено только одно
представление т i. С представлением т i также сцеплено только
одно представление. Поэтому суммирование по Р', Q', s' в нашем
случае отпадает. Индексы, характеризующие компоненты волновой
функции, целесообразно упростить. Мы положим:
2 2 22 22 22
Положим теперь в (74,9) Я = ~, Q = 0, Я' = 0, Q' = \, P = \ '
qz=0. Мы получим следующее уравнение:
ir2ziooi{H£+3GF>-i -(-'^+'2^)*i }+«fc=°-
Подобным же образом получаем остальные три уравнения:
7^„4{('и;+'£)*-| -('JS+^)*i }+'♦- = °-
7?«.H,{(-i|l+^)t-1-('^+'4i)*) + ti-0-
Mii.{(-'Ei+-,«)»r--('4+4)*}+,*-'-a
§ 79]
УРАВНЕНИЕ ДИРАКА
301
Условие
дает:
(74,20) инвариантности уравнения относительно инверсии
^ool = -2oIIo-
Поэтому мы положим Z\ 1= —|/~2,
У ~2
о Но
2 2
= У~2 и
получим
следующую систему уравнений:
<Эф_. <Эф_. <Эф.
— I —т 1 -з Ь *
д+.
<Эф
dxi
СЬГо
- 1
— I
дх1
дхъ
, (Эф-! . (Эф;
«Li = o.
дф дф
дх0 ' длго ' Т1
<*W
дх3 д*! длг2 ' Т"
= 0,
<Эф.
Таким образом,
следующий вид:
А° =
дЛГо
длг0 дхъ ' т1
(79,1)
матрицы операторов А (7 = 0, 1, 2, 3) имеют
А2 =
■г
0
о/
А» =
А3 =
(79,2)
— 1. 1.
(строки и столбцы отвечают следующему порядку индексов:
-i. 1).
Для того чтобы получить уравнения Дирака в обычной форме
ГДе Ye Yi- Y2> Y3 — матрицы Дирака:
Yo =
-Т.=
1 0
0 1
0 0-
0 0
0 0
0 0
0 1
— i 0
0
0
-1
0
0
/
0
0
0
0
0
— 1
— р
0
0
0/
Тг =
Ys =
0
0
0
— 1
0
0
— 1
0
0
0
0
1
0
0
■ 1
0
1
0
0
0
0
1
0
0
1\
0
0
о/
-°\
0 |
о/
302 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
достаточно перейти от компонент ф^, ф1§ ф_ j, ф^ к их линейным
комбинациям:
С?1=Ф-1+Ф-1» ?2 = — tl — *!• Т8 = —Ф-1+t-f' T4 = *l— Ф^
(79,3)
Построим теперь инвариантную билинейную форму (75,2).
Согласно формуле (75,4) в рассматриваемом случае она имеет
следующий вид:
(ср, *) = Bio(?i*i +T-i+-i) + B0i(Ti ti+T-iLi)-
Условие эрмитовости (75,6) означает, что В \ = В \. Что же
°Т °2
касается условия инвариантности относительно инверсии (75,7), то
оно сводится к равенству В i = В\ . Несложная проверка показы-
0 Y Т °
вает, что матрицы Ак являются антиэрмитовыми относительно
инвариантной формы, как оно и должно быть.
Итак,
(?. Ф) = СР1Ф1 + Т^1Ф_1 + Т1^1+Т_1Ф_1. (79,4)
Рассмотрим некоторые свойства электрона, вытекающие из
уравнений (79,1) и вида инвариантной формы (79,4).
Представления ^i и т i, рассматриваемые как представления
~2 ° ° Т
группы вращений, совпадают с представлением ti. Это соответ-
2~
ствует тому, что спин электрона равен -^-. Далее, согласно (76,14)
четырехмерный вектор тока электрона равен Л=ЦААф, ф), или
в компонентах:
p=7^=T{l*1|2+|4'-il2+l<i'il2+l4'-il2b
Л = |Ф-1Р-|Ф1|*-|Ф-1|г+|Ф1|а-
По формуле (76,20) вычислим плотность энергии
= Im{.
^-х+а^ + ^Г^+Т^ч
§ 79]
УРАВНЕНИЕ ДИРАКА
30$
В частности, если волновая функция соответствует
стационарному состоянию, т. е. имеет следующий вид:
ф = ф°С-жГх» *2. xz)eiEx°,
то из последней формулы следует:
г = Ер.
Таким образом, Е играет роль энергии, приходящейся на единицу
плотности.
С помощью формул (76,20) и (76,27) можно вычислить
остальные компоненты тензора энергии импульса, а также все компоненты
тензора момента. Мы, однако, не будем на этом останавливаться.
Построим оператор спина.
Для этого, прежде всего, нужно отделить от пространства Е
подпространство Е0 тех векторов, которые переводятся в нуль
оператором А0 (см. § 77). Однако оператор А0 не является
особенным (его определитель равен единице), и подпространство Е0
отсутствует. Компоненты оператора спина равны, следовательно,
— ilv —i\2 и —ils,
где 11э 12 и 13 — инфинитезимальные операторы, связанные с пред*
ставлением T = Ti 4-х i.
2 2
Выпишем в явном виде оператор проекции спина на ось OZ
»з = — lh =
1
2
0
0
t °
0
1
2
0
0
0
0
1
2
0
0
0
0
1
2
Отсюда следует, что в состояниях
равна —15"» а в состояниях
проекция спина на ocbrOZ
1
проекция спина равна -~~.
304 РЕЛЯТИВИСТСКИ-ИНВАРИАНТНЫЕ УРАВНЕНИЯ [ГЛ. XVI
Рассмотрим теперь те решения системы уравнений (79,1),
которые имеют вид плоской волны:
Подставляя это выражение в (79,1). получим:
4-1+ (Л, —/>,Ж1+0>1 —Wi=0.
*Фг + (/>! + ^2) Ф_ i + (Р0 + /»8) Ф i = 0,
(Ро + ^)Ф-1+(—Л + Ш+ хФ-1 ==0-
-(Р, + ^Ф_Х+ (Р0-^Ф1+ ^i^0
Определитель этой системы должен быть равен нулю:
I x
0
Ро + Рз
I — Л — *А
Раскрывая определитель, получим уравнение
(р1-р1-р22-р1-*2У-=о.
Таким образом, если состояние электрона описывается плоской
волной, то между его энергией р0 и импульсом р = 1р\-\-1РгЛ-кръ
существует простая зависимость
Из этого соотношения следует, что величина х равна энергии покоя,
т. е. энергии электрона, импульс которого равен нулю.
0 Po — Pz Pi — iPi
* Pi -И>2 Ро + Рз
— Pi + ipz * 0
Ро —Рз ° *
ГЛАВА XVII
ЯДЕРНЫЕ РЕАКЦИИ
§ 80. Матрица рассеяния
В настоящей главе рассматриваются некоторые общие свойства
ядерных реакций типа A-\-P = B-\-Qt связанные с изотропией
пространства. При этом не делается никаких предположений
относительно характера ядерных сил.
Рассмотрим столкновение двух частиц А и Р (под частицей мы
подразумеваем либо элементарную частицу, либо ядро). В
результате столкновения может образоваться одна или несколько частиц.
Мы ограничимся случаем, когда образуются две частицы В к Q.
Такой процесс принято обозначать следующим образом:
A-\-P = B-\-Q. (80,1)
Разумеется, одно лишь указание на сорт частиц В и Q,
получившихся в результате реакции, отнюдь не характеризует ее
исчерпывающим образом. Для полной характеристики реакции необходимо
определить волновую функцию W системы B-\-Q в зависимости от
волновой функции W системы А-\-Р.
В силу линейности уравнения Шредингера \F' линейно зависит
от №. Поэтому, если ввести ортонормированный базис 4?j в
пространстве W-функций и базис W' в пространстве функций W, то
координаты C'j функции ЧГ (W = 2 Сг^'р выразятся через
координаты Cj функции \F (ЧГ == 2 C/Jfy) c помощью некоторой матрицы S:
Cr=^SrjCj. (80,2)
j
Матрица 5 полностью характеризует реакцию (80,1) и называется
матрицей рассеяния.
Изотропия пространства налагает на коэффициенты матрицы
весьма существенные ограничения *). Ниже мы найдем общий вид
матрицы 5, совместимый с изотропией пространства, и получим
*) Подобно тому как симметрия кристаллов налагает известные
ограничения на тензоры, характеризующие его физические свойства (см. § 41).
306
ЯДЕРНЫЕ РЕАКЦИИ
[ГЛ. XVII
некоторые следствия, относящиеся к угловому распределению
продуктов реакции.
Займемся построением базиса Wj. Прежде всего заметим, что до
столкновения (т. е. в период, когда частицы А и Р настолько
удалены друг от друга, что энергией их взаимодействия можно
пренебречь) гамильтониан системы можно записать в виде
Н = H^i + Нр + Нкин»
где Н^— гамильтониан частицы А в системе отсчета, в которой
покоится центр масс частицы А; соответствующий смысл имеет Нр;
НКин — гамильтониан двух материальных точек с массами, равными
массам частиц Л и Р. В системе отсчета, где покоится центр масс
частиц А и Р, Нкин имеет, как известно, следующий вид:
Пкин — 2jl дг2,
где (л — приведенная масса частиц А и Р, г = гАР—вектор,
соединяющий частицы Л и Р. Волновую функцию *Pj можно искать в виде
¥>=4а. (80.3)
причем
(Н^ + НР)ф = 8ф, НкинХ = £х,
где е — сумма внутренних энергий частиц А и Р в состоянии ф,
а Е— кинетическая энергия относительного движения этих частиц.
Полная энергия Епош равна
£долн === £ "т" ^ •
Всевозможные стационарные функции ф двух изолированных
частиц можно классифицировать с помощью индексов s, m8 и а,
где 5 — суммарный спин частиц А и Р, т8 — проекция спина на ось OZ,
а — совокупность всех остальных квантовых индексов, необходимых
для полной классификации функций ф. Эта совокупность индексов
выбирается так, чтобы при поворотах системы координат значение а
не изменялось.
Итак, ф = ф8М8а- Функцию х можно характеризовать с помощью
энергии Е, орбитального момента I и его проекции тг на ось OZ.
Как известно*), функция ^, соответствующая энергии Е,
моменту I и проекции момента тр имеет в сферических
координатах г, 0 и ср следующий вид:
*) См., например, [*], часть 1, § 33.
§ 80] МАТРИЦА РАССЕЯНИЯ 307
где k=y ■— волновой вектор, Z i (kr) — некоторая цилиндри-
ческая функция полуцелого порядка / —|—^-, Ylm(§, ср) — сферическая
функция. При больших г нормированная функция у приближенна
равна
Хв^С. 9- <P) = ppfe-*ryh-i(e- *> (*гЭ>*+-5-). (80.4)
Умножая ф^ на з^ , получим функции
*> = ^«ув = Ф^^Хл»,- С80'5)
Эти функции образуют полную ортонормированную систему.
Состояния 4f'j системы B-\-Q выбираются .совершенно аналогично:
qr'. = W', /., ,,,=<[>', , ,у, ,,, (80,6)
где
x*4*=;w^4(6,<p) (*v»*'+t)- <80'7>
Выясним теперь, каков общий вид матрицы рассеяния в
выбранном базисе (80.5), (80,$).
Функция tysm a преобразуется при вращениях пространства по
неприводимому представлению Ds, функция %lm Е преобразуется
по неприводимому представлению Dj. Поэтому базисная
функция W8m im~E преобразуется по представлению Ds X Df> которое,
вообще говоря, приводимо.
С помощью коэффициентов Клебша — Гордана функцию W8m im~E
можно представить в виде суммы функций, каждая из которых
преобразуется по одному из неприводимых представлений группы
вращений:
Z (в1т8тг I JM) QjMdrt. (80,8)
81 j,m
где
QjMai*E= 2 (slm8ml\JM)WsmsimfE' (80,9)
та, тг
Заметим, что суммы в (80,8) и (80,9) не являются, собственно
говоря, двойными, так как коэффициенты (slm8mr\JM) отличны
от нуля только при условии т8-\-т1 = М.
Обозначим через &'*,***0п* '*" функции, связанные с W, , , , ,
и ж s ь a sl s msl тгл Е
равенствами, аналогичными равенствам (80,8) и (80,9).
Предположим, что система до столкновения находилась в
состоянии QjmsIolE- При этом полный момент системы равнялся у
308 ЯДЕРНЫЕ РЕАКЦИИ [ГЛ. XVII
а проекция полного момента на ось OZ равна М. Так как полный
момент J и его проекция М в силу изотропии пространства
сохраняются, то после реакции система должна иметь тот же полный
момент и ту же величину его проекции. Поэтому волновая
функция W после столкновения должна иметь следующий вид:
2 Asl«E, a'l'a'E'QjMa'l'v'E' (80,10)
s'l'a'E'
(по индексам J и М суммирование не производится!).
Здесь AjfaEi8*i*a*E — некоторые коэффициенты, вычисление
которых невозможно без знания ядерных сил.
Если произвести произвольный поворот g системы координат,
то функция Qjmsue перейдет в функцию 2^ж'м(^) Yjm'sUE- Подоб-
М'
ным же образом изменится и функция W. Поэтому в новой системе
координат реакция ЧР*—ИГ' имеет следующий вид:
XJ ^M'M(g) QjM'al*E-+ 2 АжхЯ, sT«'E'Dm'M (g) QjM'u'l'v'E'*
M' M's'Vol'E'
Разумеется, такая же реакция может произойти и в старой
системе координат ввиду равноправности всех систем координат.
С другой стороны, из (80,10) в силу линейного характера связи
между *F и W следует, что
^J Dtf'M(g) QjMal*E-+ S DM'M(g) AsiaE, вТа'в2«Ш'вТа'Я'.
M' M's'l'a'E'
Сравнивая два последних равенства, находим, что
AJM AJM' AJ
т. е. коэффициенты Л87а#, а'Гл'Е* не зависят от индекса М. Выразим
матрицу рассеяния через коэффициенты Л^а#, 8'Г*'Е'-
Используя линейный характер связи между волновыми
функциями до и после столкновения, мы можем написать:
2j (slmsml\JM)QJMsi«E'^
s l j,m
-> 2 (&т*Щ | LM) 2 Ail«E, 9'V*'E'&JM8T*'E' =
J, M a'l'a'E*
= S №*щ I m л£*. s>i>«'e> (s'i'mx i jm) чг;'. ,.
• 7. rt T?. <vn <**»_ о *
JMs l а Е ш^т-.
^8т01т-1*Е
Это равенство показывает, что коэффициент S /S/J f , # мат-
г 8 m8l Wjoc E
рицы рассеяния равен
sZrirHyE' = 2 (*'».»* I ли) 4U ..,.„.*, (•/'»>; I ^)- (80-1 *>
8 ( J ^ Ж
§ 81] УГЛОВОЕ РАСПРЕДЕЛЕНИЕ ПРОДУКТОВ ЯДЕРНОЙ РЕАКЦИИ
309
С формальной точки зрения эта формула выражает матрицу
с двенадцатью индексами через матрицу с девятью индексами.
Таким образом, учет изотропии пространства значительно
сокращает число известных параметров, характеризующих ядерную
реакцию.
§ 81• Угловое распределение продуктов ядерной реакции
Пусть волновая функция №', характеризующая состояние частиц В
и Q после столкновения, равна
Ф= У, C'''r, ,qr' ,.
, , г г г , 8 тЛ т7а Е s ml т7* Е
i ml w,a Е
V шг
°8 " "Ч *
(81,1)
Предположим, что нас интересуют только те реакции, в
результате которых частицы В и Q оказываются в состоянии с
определенным значением а и произвольными s', т,'^ /', тгх (величина Е'
однозначно определяется значениями остальных индексов). Тогда
волновую функцию W можно согласно (80,6) заменить функцией
г г г t г t
8 тЛ 7»7 а Е
\jr' = V С'< > > * > >WF>
*a Li ami т7а Е s
s msl m^
= -^Vf '•У1С ... ...Y. .(6, cp)(*r»/ + !).
rYk'~ 8 m8* ~ 8 m8l т1Л E l ml \ "^ 2 /
I m1
Поэтому на больших расстояниях угловое распределение р(0, ср)
потока интересующих нас частиц равно
2^Г. (81,2)
'(8.?) = /
У1 с'» ' ' ' ' 4'» ' 'К' »(в, ф)
^ 8 msl Wj а Е т8 mgoi I m^ ч т/
\a mgl mj
Здесь интегрирование производится по всем внутренним коорди
натам частиц В к Q. Учитывая ортонормированность функций ф
8 т^а
получим:
,(в. ср>=2
8 т0
2 d. >< . fvrY. г (в, ср)
Г-, s та1 т7а Е I т,к т/
1*1 *
Подставим сюда выражение коэффициентов С' через
коэффициенты С
р(в. ?)=2 I 2 / 2 ssylr/E.. ,с , ,\у, -(6, ?)
smgj J тДв*^*, 8 1 ) 1
Если до столкновения система, состоящая из частиц А и Р,
находилась в состоянии с определенным спином 5 и проекцией
310
ЯДЕРНЫЕ РЕАКЦИИ
[ГЛ. XVII
спина ms, то в последней формуле исчезает суммирование по 5
и ms и мы получаем:
,(е.ч>)=2' ^ "am*lmi"E - " " u2
Pswg'
2 sr*lrrE,,,r у ,(9)(p)
(81,3)
Предположим теперь, что мы имеем дело не с одной частицей Л
и одной частицей Р, а с потоком частиц Л, падающим на мишень,
состоящую из большого числа частиц В.
Выясним, какой вид должно иметь угловое распределение
частиц Q, если как в падающем пучке, так и в мишени все
направления спинов частиц встречаются одинаково часто (полностью
деполяризованные пучок и мишень).
Ясно, что для получения углового распределения в этом случае
следует усреднить выражение (81,3) по всем возможным значениям 5
и тя:
p(e^)=-2^2iirSI 2 5i
+ <
^8гпЛ'т1аЕ
: >** } < < rC y r ,
8 т I т,а Е IwijOiE I m-.
п X гпЛгп^
(в.?)
(81,4)
(s0 = m*K[sA. sp]).
На практике обычно волновая функция, описывающая
относительное движение падающих частиц Р, есть плоская волна eikr.
Если ось OZ направить по вектору к, то каждая частица будет
находиться в состоянии с тг = 0. Поэтому в дальнейшем мы будем
полагать тг = 0 и опускать суммирование по тг. Вспоминая
формулу (80,11), перепишем (81,4) в виде
Р(6, Ср):
2s0 + :
ТТ^Т*ТТ2| 2 (slm,0\JM)X
п I тЛт^М
X Кип, егМ^'К^Щ^О^г'т', ^ ^ (81'5>
Суммирование по /й| и М является здесь чисто формальным, так
как при Мфт8 или tn'^mg — m'8 выражение, стоящее под. знаком
внутренней суммы, обращается в нуль. Однако дальнейшие выкладки
оказываются более простыми, если сохранить суммирование по гп^и М.
§ 82. Угловое распределение продуктов ядерной реакции
(продолжение)
В сумме (81,5), дающей угловое распределение частицы Q, от
индексов т8, т'8, т!г и М зависят только коэффициенты Клебша—•
Гордана и сферические функции.
Если, изменив порядок суммирования, вынести за знак суммы
по т8, т'8, тгг и М в<ре множители, не содержащие этих индексов,
§ 82] УГЛОВОЕ РАСПРЕДЕЛЕНИЕ ПРОДУКТОВ ЯДЕРНОЙ РЕАКЦИИ 311
то останется сумма, не зависящая от характера ядерных сил. Мы
вычислим эту сумму и, таким образом, существенно упростим
полученное в предыдущем параграфе выражение для углового
распределения.
Сумму (81,5) можно переписать в виде
8,8 lAl^l^JJ^
х <WW4*> i. lv *'• *'• ';• J> Ji)> (82.i)
где
K(s. I, lv s',l',l'v J', Jx) =
= 2 (slms° | Щ (slims° | J\M\) (s'l'Kmi |JM) x
msmlmsmlmllMMl
X №Wi| 'A) Y,'m'(b, ср)Кгцг(6. Т). (82,2)
Приступим к вычислению К(sf /, lv s't /', /[, У, УЛ. В качестве
первого шага заменим произведение сферических функций линейной
комбинацией сферических функций:
(-ip*
-ei (/f/'ooi/o)
(см. задачу 1 § 54). Мы получим:
K(s, I, lv s', I', l\, J, 7j) =
= J/ s 1 K^e- ^TfTT x
X J! (slms0\JM)(sl1ms0\J1Ml)X
X J] (—\)т1\8ГЩт'г\ЗМ)Х
m8mimU
x (^«XiKi^OC^'' — wi>i|>)- (82>4a)
Преобразуем сумму по я^., m'v m'n так, чтобы к ней можно
было применить формулу (56,22). Для этого, используя свойства
312 ЯДЕРНЫЕ РЕАКЦИИ [ГЛ. XVII
симметрии (55,6) коэффициентов Клебша — Гордана, напишем:
(s'l'm'jn{ | JM) = (— \)e'+l'-J{l'tfm{m'B \ Ж).
Подставляя это выражение во внутреннюю сумму и заменяя (—l)wu
г t г
на (—1) 1 8 = (—1) 1 8, получим:
(- \f>-*'~J+v 2 г(-1Л(/[Г —«^(^(/Vi^XK^X
Применяя формулу суммирования (56,22), находим:
l/(2/;+i)(2/+i) V1 w
Подставляя в (82,4) вместо внутренней суммы это выражение,
получим:
M<fli^/W=/*4,sR1i)(- i)s+*[-2J-J' x
X 2 (— l^'(slmaO\JM)(sllmfi\J1M1)(JlJ—MlM\jm). (82.5)
in JlfJIf^
Для вычисления внутренней суммы по mst Mt Mx перепишем
коэффициенты Клебша — Гордана в виде
(slm801 JM) = (- !)•+*-'+•+*. |/^±1 (Л - Л1*в1 /0),
(sl.mO | УЖ) = (- l)-+,i+«».-1 |/"-^у (*/i«« — Жх | /х0).
После подстановки этих выражений внутренняя сумма
приобретает следующий вид:
(_ ^W+e+21-j, J] (— l)-^-Jl(/s —Mms|/0)X
«nJtfJf-
8 1
Согласно формуле (56,22) это выражение равно
(l-l)*+J'-',/~2fr+T,„
2/i
1\2s+JW /"0/.J.1 .
§ 82] УГЛОВОЕ РАСПРЕДЕЛЕНИЕ ПРОДУКТОВ ЯДЕРНОЙ РЕАКЦИИ 313
Подставляя его в (82,5), получим окончательно:
K(slls'l'l'JJ\-(- l)'i+2J->'-8 1 л/ (2/'+1)(2Л + 1)'
V* . (/(/'00170)07,00 I/O)
X 2 ^o(6)Vl 'y^J }W{J^jV\ tywyjjs; Jlx) (82,6)
i г^Н-
суммирование no w исчезло, так как при тф§ коэффициент
(jlx — т0\Ю) обращается в нуль).
Формулы (82,1) и (82,6) дают самый общий вид углового
распределения, если проекция орбитального момента падающих частиц
равна нулю. Коэффициенты Л зависят от характера ядерных сил,
а коэффициенты С — от вида волновой функции, характеризующей
относительное движение частиц Л и Р.
Из полученного выражения для К(s, /, lv s't I', /[, У, /Л вытекают
некоторые следствия. Прежде всего, видно, что угловое
распределение не зависит от угла ср, т. е. является аксиально-симметричным.
Для того чтобы получить второе следствие, предположим, что
в падающей волне играют роль только те компоненты, которым
соответствует орбитальный момент /<^/о(^о=0, 1, 2, ...). Тогда
в (82,1) суммирование по / и /t можно производить от 0 до /0.
Если у>2/0, то j>h-\-l и коэффициент (у, /х00|/0) обращается
в нуль. Это означает, что в (82,6) суммирование по j можно
производить в пределах от 0 до 2/. Угловое распределение р(0)
оказывается в этом случае линейной комбинацией полиномов Лежандра
степени не выше 2/0. Поэтому р(б) само является полиномом от cos 9
степени не выше 2/0.
Этот вывод ^чрезвычайно важен при обработке
экспериментальных данных, полученных при наблюдении ядерных реакций.
ПРИЛОЖЕНИЯ
I. ХАРАКТЕРЫ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ
ГРУПП ПЕРЕСТАНОВОК S* 5б, 56 и S7
Группа S4
Схемы
Юнга
1 4
I4
1,3
1 п
Классы
И \ 12, 2
1
1
3
1
1
— 1
1
6
1,3
1
1
0
8
22
1
1
— 1
3
4 |
1
— 1
— 1
б ;
Схемы
Юнга
22
13,2
п
Классы |
И
2
3
. 1
12,2
— 0
1
6
1,3
1
— 1
8
22
2
1
3
4
0
— 1
6
Число п перестановок, содержащихся в каждом классе, указано в последней
строке таблицы.
Группа S5 щ
Схемы
Юнга
5
15
4,1
3,2
3,12
1,22
13,2
п
Классы
15
1
1
4
5
6
5
4
1
13,2
1
— 1
2
1
0
— 1
— 2
10
12,3
1
1
1
— 1
0
— 1
1
20
1,22
1
1
0
1
— 2
1
0
15
1,4
1
— 1
0
— 1
0
1
0
30
2,3
1
— 1
— 1
1
0
1
1
20
5
1
1
— 1
0
1
— 1
— 1
24
Группа 56
[Схемы
Юнга
1 6
1»
5,1
2,14
4,2
22,12
4,12
3,13
32
23
3,2,1
1 п
Классы
16
1
1
5
5
9
9
10
10
5
5
16
1
14,2
1
— 1
3
— 3
3
— 3
2
— 2
1
— 1
0
15
13,3
1
1
2
2
0
0
1
1
— 1
— 1
— 2
40
12,22
1
1
1
1
1
1
— 2
— 2
1
1
0
45
12,4
1
— 1
1
— 1
— 1
1
0
0
— 1
1
0
1,2,3
1
— 1
0
0
0
0
— 1
1
1
1
0
90 | 120
1,5
1
1
0
0
— 1
— 1
0
0
0
0
1
23 | 2,4
1
— 1
— 1
1
3
— 3
— 2
2
— 3
3
0
144 | 15
1
1
— 1
— 1
1
1
0
0
— 1
— 1
0
90
32
1
1
— 1
— 1
0
0
1
1
2
2
— 2
40
6
1
— 1
— 1
1
1
— 1
о
0
120 [
ПРИЛОЖЕНИЯ
315
со
RJ
С
с
>>
3
Клас
t^.
-^
СО
ю
CN
СО
С<3
СО
г—1
Я
СО
~
•**
CN
r-t
«5
1.2
ю
со
1—1
СО
(N
е*
■^
г—1
ее
г~|
СО
"*~
1—1
<N
ю~
1—1
«>
r-t
S га
Схем
Юнг
,__
г^
1_н
,_
,__
,_
r-t
^
,
1—4
^
^
t^.
^
г_
1
г-
1
,
,__
1
,_
г—1
г—1
1
-
1—4
1
г—1
1
1
1
г»
t_H
1
1
г-
1
,
1
О
о
о
о
~
1-н
CN
CN
СО
ТР
СО
6.1
г—1
,__
г-
,__
1
о
о
о
о
г—1
,_
1
1
CN
1
CN
СО
тр
1
1
СО
of
о
о
r-t
CN
,__
1
,__
1
1
о
(N
г—1
]
О
о
<М
<N
со
тр
5,2
о
о
г—1
1
CN
,__
1—1
1
1
о
(N
1
1
|
О
о
CN
(М
СО
1
1
тр
ел
я"*
г_ц
О
__.
1
О
о
СО
1
СО
1
о
1
,_
т_ц
1
СО
ю
ю
lO
^
1—4
1
о
Г—1
1
о
о
Т—1
1
СО
о
,_
r-t
1
1—4
1
СО
ю
1
1
ю
r-t
СО"
о
Г—1
—
1
г—«
1
о
(М
о
о
г—«
1
1
,__
(N
1
(М
1_н
1
1
тр
тр
4.3
о
г—«
1
Г—1
1—4
1
о
<N
о
о
1
,
1
1
CN
CN
1_н
1
1
гр
1
1
^р
т—«
ее*
о
1
о
,
1
,__
г—«
1
1
г_
r-t
о
,
1
,
1
t_H
[
1
^
1
1
ю
ю
со
4,2,
о
о
1_н
1
Г—1
1
,_
1
1
t_H
г—1
1
о
г_
^
г_
1
1
,
1
1
ю
1
1
ю
СО
ез
1
о
о
(N
о
(N
о
о
о
о
о
^р
1
(N
о
о
(N
eft
4,1
о
Г—1
1
Г-,
Г—1
о
о
т_^
1
СО
1
-
Г—1
1
^
СО
1
1
Г—1
^
сч
^
ем"
со
о
,
г-и
1
^
о
о
1
СО
г-
г_
1
Г—1
,
СО
1
1
г_
1
1
^
(N
ез
3.2
О
Й
о
(N
тр
504
о
<М
о
S
о
00
(М
о
3
ю
о
3
ю
о !
CN
тр
О
(N
Ю
О
о
ь-
CN
с
316 ПРИЛОЖЕНИЯ
II. ХАРАКТЕРЫ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ
ТОЧЕЧНЫХ ГРУПП
С?к
C^v
D2
Ч
Ч
ч
ч
е
е
е
1
1
1
1
с,
с\
Сг
1
— 1
1
— 1
Ч
ч
«1
1
— 1
— 1
1
•с
°2
а<1
1
1
— 1
— 1 !
с3
ч
ч
ч
е
1
1
1
С3
1
2%г
е "3
4«*
е 3
С2
1
4ici
в 3
2тсг
^3
с, = /
с,
\С8 = а
ч
ч
е
е
е
1
1
J
с,
а
1
— 1
\Cv
Ds
Ч
ч
ч
е
е
1
1
2
Сп
С3
1
1
— 1
°v
и
1
— 1
0
к
ч
ч
ч
ч
ч
Тб
е
1
1
1
1
1
1
с,
1
— 1
2iu
е 3
4ni
в3
ici
^
5**
е 3
С2
1
1
4тсг
* В
2itt
е 3 1
2тсг
«Ч
4тсг 1
* 31
С3
1
— 1
1
1
— 1
— 1
к
1
1
2гсг
«3
4яг
е 31
4я*
* 1
2гсг|
е 3
С5
1
— 1
4гс*|
*Ч
2тег'|
е Ч
5я< |
' I
яг |
«3
I
к
Г4
Ti
т2
тз
Ч
е
е
1
1
1
1
с,
S,
1
— 1
/
— /
С2
°4
Сг
1
1
— 1
— 1
1 сз
С4
S3
°4
1
— 1
— Л
г
1 D«
^6ю
ч
Ч
ч
ч
ч
Т6
е
е
е
1
1
1
1
2
2
С3
С3
1
1
— 1
— 1
2
— 2
г:2
с2
с3
— 1
— 1
1 с6
s6
— 1
— 1
— 1
и1
а1
и
1
— 1
1
— 1
0
0
и2
а2
1
— 1
— 1
1
0
0
С^
D*
Du
Ч
ч
ч
ч
ч
е
е
е
1
1
1
1
2
с,
с,
с2
1
1
1
1
— 2
Ci
Q
Si
1
1
— 1
— 1
0
ч
и±
и
1
— 1
1
— 1
0
°2
#2
а
1
— 1
— 1
1
0
ПРИЛОЖЕНИЯ 317
7
т
ч
**
тз
1 ч
е
1
1
1
3
и
1
1
1
— 1
с„
1
2ici
в 3
4яг
е 3
0
г:2
°3
1
4яг |
* 8
2кг |
* s
о I
0
Та
T1
Т2
Ч
4
ч
е
е
1
1
2
3
3
^3
с,
1
1
— 1
0
0
с\
и
-1
1
2
— 1
— 1
w
а
1
— 1
0
1
— 1
С*
s*
1
— 1
0
— 1
1
III. ДВУЗНАЧНЫЕ ПРЕДСТАВЛЕНИЯ ТОЧЕЧНЫХ ГРУПП
D2
т/
е+
2
е-
— 2
Q±
0
и2±
0
И2±
0
к
2„ifc™
« я
2*i*H
13 1
«— 2 > 2 '••••" 2
Дз
•«1
т2
/
! тз
е+
1
1
2
е~
— 1
— 1
— 2
Г? С2
<-з+> °з-
— 1
— 1
1
Г Г2
°з-> °з+
1
1
— 1
и+
/
— /
0
/ 1
— /
i
0 J
^в
1 /
1 *•
*+
2
2
2
£_
i i i
to to to
Q±
0
0
0
Г Г2 1Г2 Г
°3+> ь3-|°3-!-, и8-
1 .
1
— 2
— 1
— 1
2
Г Г5
Уз-
-Уз"
0
С6+, С6_| а±
-Уз
0
0
0
0
и±
0
0
0
D,
е+
to to
е- | С2±
— 2
— 2
0
0
^4+> Q-|^4+» Q:-
У"2-
-У2-
-V2
а±
0
0
/
и±
0
о
1 т
х1
/
т2
1 ъ
е+
2
2
2
е-
— 2
— 2
— 2
1 Сз+
1
2«г
в3
4тсг
* 3
С2
— 1
4яг
-« 8
2 it»
-*3
с.-
— 1
2яг
-« 3
4тег
-в 3
CJ-
1
4М
в 8
2тег
« 3
^2± |
0
0
0 |
I °
1 ъ
е+ | £_ |^з+» С%_\С%+9 С3_
2
2
4
— 2
— 2
~4
1
1
-1
— 1
— 1
1
Г2 \С Сь
°4± IW + > W-
0
0
0
-V2
0
С± + , Q-l £*2±
-/2"
Y2
0
0
0
0
318
ПРИЛОЖЕНИЯ
IV, ПРОСТРАНСТВЕННЫЕ ГРУППЫ
Триклинная сингония
Класс Cq. Класс содержит одну группу cj, состоящую только из
трансляций. Группа принадлежит типу Tt.
Класс S2 = С{. Класс содержит одну группу S], состоящую из
трансляций и произведений трансляций на инверсию. Группа принадлежит типу Г^.
Класс съ = Ся,
Моноклинная сингония
Группа
С1
С2
8
с4
Тип
rw
аЛ
000
у00
000
loo
Расположение основных векторов
и
*А
°3 1
wmt
^Щ||ШР*© 1
°> "г
Тройки чисел 000, -^ 00 означают коэффициенты alt а2, а3 вектора
а == atai + а2Оъ + а8а3,
определяющего трансляцию £а, на которую нужно умножить ал для того,
чтобы получить элемент ta ал соответствующей пространственной группы.
Так как единице группы всегда соответствует вектор а = 0, то в этой
и всех последующих таблицах столбец, отвечающий единице, опущен.
ПРИЛОЖЕНИЯ 319
Класс Сj
Группа
С1
и2
Г2
С2
С3
и2
Тип
гм
с2
0
0
0
0
0
0
0
1
2
0
Расположение основных
векторов
а,^^
1
/i
/
\2
Т\ °г
Сг
V^*
^*г
а'
Класс C2ft
320 ПРИЛОЖЕНИЯ
Ромбическая сингония />2л
Класс C2v
Группа
С1
^2v
С2
^2v
°2t>
с4
^2v
С5
^2v
С6
^2v
С7
^2v
^2V
С9
и 2v
^2v
^2v
С12
^2v
Г1*
U2t>
Тип
Го
Г6
С2
000
оо~
000
■g-00
к
U»
1 1 1
2 2 2
Но
2 2 U
000
оо 1
000
ч
000
000
оо 1
^00
>
М
•g-00
joo
W
000
000
001
а2
000
ool
оо 1
000
оо I
ooi
000
о^-о
•U
•Т7
000
оо 1
оо 1
Расположение основных
векторов
*
OiA
t/ft &
К 1
'-> '4 1
*&,
л ■ 1
;
о>
-»\ _ .» *Г7—
5«с 7
ПРИЛОЖЕНИЯ
321
Продолжение
Группа
Тип
Ч
а2
Расположение основных
векторов
'2V
Г1Ь
°2г>
Мб
^2v
с17
^2v
000
000
000
000
000
оо~
111
2 2 2
000
оо I
111
2 2 2
4
£^ "'
^19
'2v
if
000
00
000
olo
000
1
00
У~20
с2«
с21
^22
^2г>
000
000
000
000
oil
2 2
000
^^~
I^H—LJ^
Нхх
рн
1— (
l£
-,-*1
./- 1^ 1
§
•
^Jo
т 6
С?; *?
322
ПРИЛОЖЕНИЯ
Класс D2
Группа
D\
D\
D\
Dl
Dl
Dl
Тип
Г0
"1
000
000
Ho
2 2
Ho
2 2
00 T
000
000
000
Ho
2 2 U
«o
■ 000
1 1
°T"2
000
000
000
000
44
c,
! 000
oo -I
000
14
00 y
000
000
000
2 U 2
Расположение основных
векторов
/и,
1;
и,
4
4
/
а,
"*
Cz
Л
й< " ' /V
Ъ
и'^
*^
"\
пчУ
^и
а.
и.
и2
аз I
\0г
>'
' ^\
> //
U2
аз
в,
Класс Dvh. Каждый элемент группы D4b принадлежит подгруппе £>2
или является произведением инверсии на элемент из £>5. В соответствии
с этим каждая пространственная группа класса D«b содержит в качестве
подгруппы одну из пространственных групп класса D«. Поэтому для
характеристики пространственных групп класса D^ вполне достаточно указать
соответственную группу из класса D2 и выписать вектор а, соответствующий
инверсии.
ПРИЛОЖЕНИЯ
323
Группа
D\n
»ln
л3
U2h
»\п
»\h
D\*
Dln
Л8
u2h
Л9
u2h
Л10
U2h
U2h
Л12
U2h
Л13
U2h
U2h
Л15
U2h
Л46
U2h
Тип
Го
.. „
Подгруппа
класса <
о,
D\
D\
D\
D\
__ .. , ^-
/
000
1 1 1
2 2 2
6o i
u°
000
Ho
loo
°y°
000
1 1 1
2 2 2
O-i-0
00-g-
H»
hi
000
t!»
_
Расположение основных
векторов
i
&г иг
324
ПРИЛОЖЕНИЯ
П родолжение
Группа
Л17
и2П
Л18
и2Ь
Л19
u2h
Л22
Л21
и21г
Л22
u2h
Л23
Л24
U2h
Л25
Л26
^2А
Л27
Я*
Тип
Г«
г{ !
rS
Подгруппа
класса
0»
D\
D\
D\
D\
D\
I
000
*>
000
00 у
±T«
1 1 1
2 2 2
000
111
4 4 4
000
±T»
000
Ho
2 2 u
Расположение основных
векторов
S 2
ia9
13 I
и/
а,
^
Ь
/т
<ь
—•К
v
—*7
Я,
/А.
и? из |
аг
Ц?
^^
•J. <
Ч
>£
/
Г
^
^"-ч
<&
*' 1
^ 1
ПРИЛОЖЕНИЯ
Тетрагональная сингония DAh
325
Класс С^
Группа
С1
С2
4
с*
4
с4
4
с5
4
с6
Тип
Г*
гг>
Q
000
«»!
oo-i
001
000
3 1 1
4 4 2
С2 1
4
000
ool
000
000
000
000
с3
000
«4
00 1
001
4
000
3 1 1
4 4 2
Расположение основных
векторов
-
/
%
4;
аз
_^
,
\с*
AW-
"'"' J
\ i -у
1 1 "^
'во
*,
Класс S4
Группа
°4
S2
4
Тип
г«
г3
S4
000
000
Расположение основных векторов
А
т
J
* l
«3
"Л ^
п
и2
А
1*
1 \' у
ь1/
1 \ >
"ч^
'Г/
*'
а3
326
ПРИЛОЖЕНИЯ
Расположение основных
векторов
СО
I о*
1 ^
1 с*, -н
1 еч «+
"*
и
Тип
Группа
^
v^
/о
/4
"* 1<
\ х «*
ус
-1* ° -1С
о о
g-|<N © ^|N
О | —|о
О О
8-|<N 8 -|<N
О О - |<М « |CN
8 8 8 8
О О О О
8 8 8 8
О О — |<N - |СМ
8 8 g 8
^
т
\\?^
\
Нсч о
^|см
, «— 1см |
^ |СМ ' ^н |СМ
О Н<" О
О | О
ч~^ о
8 ~" 8
^|см
1 ^ |СМ ,
О Ч<* о
О | О
Нем
о о Н<"
О О 0
о о g
о о о
о о о
о о о
о о 4е*
8 S g
о
-и
-|<м
-|«N
О
-|<N
-и
о
о
8
О
4<N
О
о
и и и и
S> 5S S>
и и о
9
00 <*
^ X*
\V
щ
JV
1
1
г 1
ч
1НГЧ
шшшк
/ :\V
^
14
V5M
о о
g -|см g -|см
° ^ ° ^|СМ
О .-н |СМ «— |СМ
g -|см ^|^ roi^
Ч^ со|^ ^|гг
о о
8 нем 8 -h
° ^|см ° ^|см
О -н |СМ ^ |СМ
8 Н<м ~|^ со К
H<N С0|^ -К
1— |СМ ^ |СМ
о о , ,
о g н* Ч*
со |^ со |т^
о о о о
о о о о
о о о о
!-• |СМ ,-1 |СМ
о о '
со \тр со |^
о о о о
ПРИЛОЖЕНИЯ
327
О
я
о
о
о
Г£
<\)
Гг1
о
ч
о
ш
о
CU
о
н
*
<L>
m
<о* tf
§ "Г -I-
|(N
-К
СО \тр
-|<N
-|*
СО |rt<
СО «*
О
О
о
. |см
-|«N
-|*
со |^
i T:"-
ь _
|(N
|«N
l<N
О i
g -к
CO |rt<
со
О
О
о
о
о
о
8 8
О О
о
о
о
8 §
О О
о
8
8 8
О О
-•с
с
>>
о.
и
328
ПРИЛОЖЕНИЯ
о
я
°§
CD С^
« 2
« S
So
§ м
о
«^ tf
о
о
о
о Н<* -
О
О
о
-см
о «—
О
8
О —
-1^ _
О
° г-|СМ
Нем ^
г-< |см ^
о
о
о
4.N
8 _
о —
l«N ~
О
о
о
° Н<" ^
со
с
О
о
о
I О —
- см ,
о о
о о
о о
о
о
о
о
о
о
о
о
о
о
о
о
, О —
- см
1 *-« сч _
8
о
о
о
о
8
8 8
о о
8 8
О О
с
с
>>
о.
U
•в -в -в -в
Q Q Q Q
•в "в
t- <м ос см
приложения 329
3
я
ш
о
Я
° и»
°§
CD Си
к о
я £
vj £>
ж ю
о
ч
о
Он
о
о
о
О
о
о
СО I-*
-In
g -l«N
g _|<N
О
о
о
CO \тр
О
о
о
-|<N
СО |^
со г*
со
СО
с
К
8 ~|CN
О
о
о
о
о
о
-In
СО |т*<
о
о
о
8
о
о
о
с
Си
Q Q
Q Q
330
ПРИЛОЖЕНИЯ
X
ие основны
оров
5 ю
о
аспо
а
•*
СО
"^
a
_
3
СО тЛ
О
"*
о
Тип
со
с
(X
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
с*
о
-|<N
4<N
о
-|ом
о
Н<*
~ |см
о
н<*
Н^
о
о
о
о
8
о
о
о
0* *Г
со |"^f
о
о
-и |СМ
о
о
^ I"*
о
о
о
о
о
СО |^
о
о
-и
о
о
Н4*
о
о
СО |^
-|<N
-к
о
~|cM
^|ом
со |^
8
о
о
-h*
8
£-
\
^;
/
к
VX
.*>
• -ь
^|см
о
о
8
о
r-|CN
r-и |СМ
— [см
о
о
о
о
о
о
Нем
-|сч
1— |СМ 1-» |СМ
8
о
о
о
о
о
о
8
1— |СМ 1— |СМ
о
о
о
о
^
ч.
— 1^
8
!-• |СМ
о
о
со |^
8
g
с^
-|^
8
-|еч
8
со |т*<
о
о
-Н*
Н<*
-|см
Г-4 |СМ
r-|<N
-|еч
со Irf
-|<N
-|<N
О
-|<N
-|<N
— 1-*-
8
-l<N
8
со |^
8
^Су
1-Н «#
Q
N тЛ
Q
ее «*
Q
*# -#
Q
ю --
Q
«с -#
Q
Г- тЛ
Q
tf sT
rv
<^_
"
\
/
. /
\ /
"""*/\V
J\,
г?\
& W
'<$
о
О I-l.
-« Icm
о '
о
о
О i
8 -1*
~|<N
8 -I«n
о
^.|см
со |т*<
a1
8 8
О О
Нем
о
8 Н*
со |-*
5> <»
О
ос тн а •* 1-н ги
Q Q Q
ПРИЛОЖЕНИЯ 331
Класс D±h
1 Группа
1 #»
j Dl
Л3
h
&*
&*
»l
»l
ol
Л9
D10
и±гь
Л13
Mi
Л15
Л17
Л18
Л19
Л20
... 4Л
Тип
г<г
г;
Подгруппа
класса
^2*
^
^
л2
л9
u2h
Л12
л13
Л10
u2h
П\п
Я\н
»\п
^4
Л9
Л12
uih
Л13
л ю
Л25
^2й
Л26
Л28
Л27
•
0
000
00 -i.
000
00 I
000
°4
000
00 i-
00 —
2
000
00 7
000
00 —
000
00 -i
000
000
000
ooi
оо|
Расположение основных
векторов
т
к
*з
ъ^
щ
Щш
/а, ^
Ч
аг
в
—Л _р
h \ /7
1 \
J v '
г4*''
р^
*' 1
va»
^з
332 ПРИЛОЖЕНИЯ
Ромбоэдрическая сингония D3d и гексагональная сингония DGh
Класс С3
Группа
С1
^3
С2
^3
у->3
<?3
с*
Тип
г*
Ггй
С3
000
оо!
ooi
000
с2
°3
000
ooi
oof
000
Расположение основных |
векторов \
i^3 \
\аз ;•
|
Чг \
jty^20° ' [
1
ъ
а'
ч
^
\С3
/
ь
<Ь
1
Класс S6
Группа
S1
S2
Тип
гл
Гг/г
5б
000
000
Расположение основных векторов
i
г*
^
^ I
^/^20°
а'
"'lt\
*/
С*
\ *
\ \
V
/^
.-%
д-?
ПРИЛОЖЕНИЯ
333
'*
{
j
i
I
t
о
<->
cd
Ы'
и
оложение основнь
векторов
с
G3
а.
со
-м
a
a
<N CO
<J
со
U
S
H
cd
>->
«? *
О
8
О
О
о
8
о
°
°
л
>—t
fH СО
^
V*
_^____ Г сч.
К"----^:
\\
V^
д
^
S °
S с
о о
CN |С0 .-н |С0
О О
о о
г-и |С0 СМ |С0
о о
о о
1-» |со см |со
8 8
СМ |со !-• |со
2 °
о о
со со ю со
Q Q
Ф«?
*
о
о
о
8
О
о
о
о
о
о
о
о
о
о
л
t-,
ci со
Q
о
о
о
см \то
о
о
~\со
о
о
-|«
о
о
см |со
о
о
«■* со
Q
1 *
У
л
о
о
о
г-|СО
о
о
см |со
о
о
см |со
о
о
н«
8
^
^-^\^ >• '
tf
\jf I
tf /
*
8
О
О
О
о
о
о
о
о
о
о
о
о
о
л
*»
и,
с© со t» со
Q Q
334
ПРИЛОЖЕНИЯ
Ч
s*
X
3
я
основ
OB
положение
вектор
<->
се
| а.
ь
t>
О
ем-со
О
со
U
с
s
н
со
с
с
>>
с
U
^ ,, ["7
«■Sftj
О -|<N -
§ 8
о ^h
§ §
о о
о о
о о
о о
о о
о о
>-
» » "
i-i 10 СОМ ,
» « 1
,
о~
,
^д
' \л
i*N
\
* ^ у
о' -И
8 8
о -1<м
§ 8
О H<N
8 8
О О
О О
о о ^
Я Я
о о
о о
^
— -— - -
^
^
" Л^С*"~У^
Нем
° t
^ |см
-ы
<^
g -IN
о о
8 8
О О
. ГЭ О
О О
л
-.__
га »' . s> га
сч ^ «# во ,, ю со ее во
.
o\
ПРИЛОЖЕНИЯ 335
Класс Dsd
Группа
Ям
*>\а
D5
я6
Тип
Г/,
1\
Trh
Подгруппа
класса
S1
°6
S1
^6
S1
^6
4
S2
S2
сз
000
00-1
000
со!
000
1 1 1
2 2 2
Расположение основных
векторов
^ К
бЬ
1
1
У
1
o3i
t ■ 1
р f
L^
Cs [
(
^а, ^ |
°Jk\ Y3 1
•ИР
^
*М / ■
Класс Сзл
Группа
Г1
°зл
-
Тип
г*
Подгруппа
класса
С3
3
сл
000
Расположение основных
векторов
i
i
С;*?0,
Сз
^аз
'
?2 \
ШР^
336
ПРИЛОЖЕНИЯ
Класс D
*ъ
Группа
Тип
Подгруппа
класса
°h
Расположение основных
векторов
Я»
D
3h
'3v
000
000
000
000
-*~а*
*~а, °ь
Класс Cq
Группа
С1 1
6
С2
6
с3
6
съ
с6
К л а с
Группа
С1
Г2
• Тип
Гь
с CQh
Тип
г*
Q |
000
007Г
00т
2
оо|
001
«4
Подгруппа
класса
^3/1
*
Г1
Г1
°6 1
000
oof
k
оо4-
0
00х
оо 4-
оо-|-
с3
°6
000
°°т
Расположение основных
векторов
^
Vs
1 аг
Расположение основных
векторов
А
т
а'А^
% 1
аг
Ш^ \
ПРИЛОЖЕНИЯ 337
Класс CQv
Группа
Г1
! с2
! ci
с4
Тип
\
/
Подгруппа
класса
с1
с6
г:6
°i
000
°4
000
ool
Расположение основных
векторов
Л
ка3
>
3?
Класс Z)6
Группа
^
^
*5
Dt
u6
D6
Тип
г„
Подгруппа
класса
Се
С1
Г2
с3
с4
с5
г6
%
000
000
000
000
000
000
Расположение основных
векторов
V
щ^-
&
V^
\щ 1
Класс DQh
Группа
Dl
Dl
Dl
D\h
Тип
г*
Подгруппа
класса
S1
°6
с.
000
000
оо 1
•оЦ
*1
000
001
000
°4
а4
000
001
00 7
000
!
Расположение основных !
векторов
о,
\ьГ~
,а3
\
.-,.--,„ &
•«•у U^
338
Класс Т
ПРИЛОЖЕНИЯ
Кубическая сингония 0%
Группа
Тип
Подгруппа
класса
Расположение основных
векторов
Т1
•pi
т3
рЬ
ч
с
D\
Я4
D*
000
000
000
000
000
-^
Ц' а,
^и>
°з/
Ъ
/
\
\
f3
v^
*н
ПРИЛОЖЕНИЯ
339
Класс Th
Группа
Тип
Подгруппа
класса
Dm
°i
Расположение «основных
векторов
1 h
1 h
1 h
ч
ч
Я15
u2h
D2S
u2h
Г)21
U2h
D2b
и2П
D24
и2П
000
000
000
000
000
000
iG? C9j
urSa,
000
000
000
000
*~u*
000
000
000
000
б а.
340
ПРИЛОЖЕНИЯ
Класс Td
Группа
т'
т^
п
Тип
Г°
Ч
К
Подгруппа
класса
Т
Т1
т1
Т2
т2
т3
al
000
111
2 2 2
000
1 1 1
2 2 2
000
1 1 1
2 2 2
Расположение основных
векторов
*\ % \
jV^
\/б1
уГ
1 Q
ЩУа,
t
а2&
'и,
'* %
/я
а
Q*
2
и,/.
4А
/
*| > "
^ иг
?/
Ъ
?
Су
IN^
Уп\
ит/у^^] \
&
"as
Y'
ПРИЛОЖЕНИЯ
341
Класс О
Группа
Тип
Подгруппа
класса
Т
Расположение основных
векторов
о1
о2
о6
о7
0s
о*
о5
о8
ч
к
Т1
7з
000
111
2 2 2
111
4 4 4
111
4 4 4
000
111
4 4 4
000
00-1
Щ^Ц
%~иг
С1
и2
игУ
\\ \Ь
<1/
/\ v
<?/
> !'\
А
342
ПРИЛОЖЕНИЯ
Класс Oh
Группа
Тип
Подгруппа
класса
О
Расположение основных
векторов
о\
oi
01
о*
ol
01
о\
о\
о\
01°
к
с
о1
о1
о2
о2
о3
о3
о4
о4
о5
о8
000
ill
2 2 2
111
2 2 2
000
0,^4
Q-
yS
\С*
Г4^
{ -(3- -
i
J3
/V
000
111
2 2 2
000
111
2 2 2
4^4 ^3j
000
00 i-
» У,
V. КОЭФФИЦИЕНТЫ РАКА
/i = A+-
k = h
и«=л+-
._, vj.+J.-л Г(Л + Л + ^ + 2)(/1 + Л-1 + 1)12-
• u L(2/1+l)(2/2 + 2)(2/2 + l)(2/2 + 2)J
(-1Г
/1+j,-£ Г(^-^1 + Л+1)(^ + Л-Л)1^
1(2/!
)(2/! + l)(2/2+l)(2/2 + 2)J
I h = /2 —
^1+л_£ Г (Z.+/1-/2 + l)(£-/1 + /?) Ti
1 *' L(2/1 + l)(2/1 + 2)(2/2)(2/2 + l)J
(-1)'
L 2/i (2Л+1) (2/2) (2/2 + l) J
"(Wy?; 1^)
/2 = /2 + i
/i = /i + i
,_i уЛ+iW r(I + /i + -/2 + 3)(I + /i + /2 + 2)(-I + /1 + /2 + 2)(-I + /i + /2+l)]¥
1 ' L 4(2/i + 3)(/1+l)(2/i + l)(2/2 + 3)(/2 + l)(2/2+l) J
/1 = Л
/_, уЛ+л-J Г(£ + Л + Л + 2)(-1 + /1 + Л + 1)(£--/1 + Л + 1)(£ + -/1-Л)-|2-
1 ' L 4/1(2/1+l)(/t+l)(2/2+l)(/2 + l)(2/2+3) J
/, = /,-1
/1 /.+J.-b Г(* + Л —ЛИ*+ Л-Л + 1) (£ — ■/!+ Л +2) (£—Л+ Л +Ola"
1 ' L 4(2/i+l)(2/1-l)(/i)(/2 + l)(2/2+l)(2/2 + 3) J
344
ПРИЛОЖЕНИЯ
*
о
О
а
-г
****
\
ч~
/*~Ч
Ч"
+
1
/—Ч
+
1
Ч*
+
/—Ч
+
Ч"
1
Ч1
+
/—Ч
СМ
+
+
<
+
^
/—Ч
1—4
+
Ч4
СМ
"W
/—Ч
+
5
-Г
/—V
СО
+
см
/—Ч
+
+
ч4
СМ
** i
^1
^
1
+
*"»
/—Ч
т
1
'-'
+
Ч4
11
**""*
Г"
/—Ч
т—•
+
1
/—Ч
т—•
+
94
^
ч1
+
/—Ч
+
ч]
<
1
ч
ь?
+
S
>
к,
1
1
V».
i
~\с*^
т—•
+
5
2
+
СМ
+
<
2
■s ]
>
•
">
"
1 -|«
^-ч
,-"ц
+
Ч*
+
-7
1
^
/—Ч
Ч4
1
Ч1
+
ч*
+
+
1
/—Ч
+
Ч"
+
ч1
+
-J
/—Ч
+
Ч" 1
>w'
^*
+
Ч1
О)
S
7
ч*
см
w
+
1 1 1
1 1
1 1
*■*
+
•^
>—ч
7
1
~
i
ч1
и
*"ч» 1
1 1
1
Ч"
II
1 ****
-I*»
/—V
+
Ч*
|
1
ч1
1 +
! »-)
1 "W
см4
+
Ч4
1
ч*
+
^J_
/—ч
7
Ч4
+
1
>*•
/—ч
ч4
+
ч1
1
^
У-"Ч
+
ч-
см
^^
*?
X
7
sf
СО
+
ч4
см
+
+
ч*
' t I
Ч
1
+
*Х
*—•
1
w
"*
+
Ч*
II
^н
*"""'
HJN
>—s
1
Ч"
+
4J
.-и
^
1
Ч"
+
^_
1^
+
Ч1
1
ч*
+
/—V
+
<
+
ч*
+,
7
1
ч*
^
/—V
+
Ч"
2J.
5
/—V
+
ч;
/—V
+
Ч1
СМ
ч*
• »
1
Ч
^
+
Ч
X-N
1
W
<
II
■^
*"""'
-|«
*—<
1
Ч"
1 +
ч*
+
1
1
4s
+
чг
+
1
J^
+
ч1
+
^
+
Ч4
+
ч1
+
^J,
7
Ч"
см
/—S
<
/—Ч
+
Ч"
W
/—Ч
1
1
<
см
/—Ч
ч;
+
ч*
см
■ >
1
ь
+
*"■»
^-s
7
1
^
1
ч"
II
^
*"**
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
(в алфавитном порядке)
А. МОНОГРАФИИ, УЧЕБНИКИ И ОБЗОРЫ ПО ТЕОРИИ
ПРЕДСТАВЛЕНИЙ ГРУПП
1. Ван-дер-Варден Б. Л., Метод теории групп в квантовой механике,
ДНТВУ, Харьков, 1938.
2. В е й л ь Г., Классические группы, их инварианты и представления, ИЛ,
М., 1947.
3. М у р н а г а н Ф., Теория представлений групп, ИЛ, М., 1950.
4. Понтрягин Л. С, Непрерывные группы, Гостехиздат, 1954.
5. Смирнов В. И., Курс высшей математики, т. III, ч. 1, Гостехиздат,
1949.
6. Соколов А. В. и Широковский В. П., Метод теории групп
в квантовой физике твердого тела, УФН 60, вып. 4, стр. 617, 1956.
7. Bhagavantam S., Venkatarayudi Т., Theory of groups and
its application to physical problems, Andhra University, 1948
8. В о e r n e r H., Darstellungen von Gruppen, Berlin, J. Springer 1935.
9. W e у 1 H., Gruppentheorie und Quantenmechanik, Leipzig, 1928.
10. Wigner E., Gruppentheorie und ihre Anwendungen auf die
Quantenmechanik und Atomspektren, Braunschweig, 1931.
В. ЛИТЕРАТУРА, ОТНОСЯЩАЯСЯ К ОТДЕЛЬНЫМ ГЛАВАМ
К главе I
1. Баумгартнер Л., Теория групп, ОНТИ, М. —Л., 1934.
2. Курош А. Г., Теория групп, Гостехиздат, М. — Л., 1944.
3. Ш м и д т О. Ю., Абстрактная теория групп, ОНТИ, М. — Л., 1933.
4. Speiser A., Die Theorie der Gruppen von endlicher Ordnung, Berlin,
J. Springer, 1927.
К главе II
1. Белов Н. В., Структурная кристаллография, АН СССР, М., 1951.
2. Б par г У. Л., Кристаллическое состояние, ОНТИ, М. — Л., 1938.
3. Г е л ь ф а н д И. М. и Ш а п и р о 3. Я., Представления групп вращений
трехмерного пространства и их применения, § 1, УМН, 10, вып. 3, 1955.
4. Делоне Б., Паду ров Н., А л е кс а н д ро в А., Математические
основы структурного анализа, ОНТИ, М.—Л., 1934.
5. Л а нд а у Л. Д. и Л и ф ш и ц Е. М., Квантовая механика, Гостехиздат,
М.— Л., 1948.
6. Ландау Л. Д. и Лифшиц Е. М., Статистическая физика,
Гостехиздат, М. —-Л., 1951.
346
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
7. Т а в г е р Б. А. иЗайцев В. Н., О магнитной симметрии кристаллов
ЖЭТФ 30, 564, 1956.
8. Федоров Е. С, Симметрия и структура кристаллов. Основные работы
АН СССР, М., 1949.
9. Шубников А. В., Симметрия, АН СССР, М. —Л., 1940.
10. Ш у б н и к о в А. В., Атлас кристаллографических групп симметрии, АН
СССР, М. —Л., 1946.
11. Burkchardt J. J., Die Bewegungsgruppen der Kristallographie, Basel,
1947.
12. Sc hoenf lies A., Theorie der Kristallstructur, Berlin, 1923.
13. S p e i s e r A., Die Theorie der Gruppen von endlicher Ordnung, Berlin,
J. Springer, 1927.
К главам HI и IV
1. Ван-дер-Варден Б. Л., Современная алгебра, ч. I и*Н, Гостехиздат,
М. —Л., 1947.
2. К о м п а н е е ц А. С, О нахождении колебательных обертонов
многоатомных молекул, ЖЭТФ 10, 1175, 1940.
3. Ш мидт О. Ю., Абстрактная теория групп, ОНТИ, М. — Л., 1933.
4. Frobenius, Sen u r J., Berliner Berichte 186, 1906.
5. L i 111 e w о о d, The theory of group characters and matrix represantations
of groups, Oxford, Clarendon Press, 1950.
К главе V
1. Ландау Л. Д. иЛифшицЕ. М., Квантовая механика, Гостехиздат,
М. —Л., 1948.
2. Н е г г i n g С, Character tables for two space groups, Journ. of Franklin
Inst. 233, 525, 1942.
3. Herring C, Effect of time-reversal symmetry on energy bands of
crystals, Phys. Rev. 52, 361, 1937.
4. L i 111 e w о о d, The theory of group characters and matrix represantations
of groups, Oxford, Clarendon Press, 1950.
5. Rutherford D. E., Substitutional analysis, Edinburgh, 1948.
6. Seitz F., Ann. of Math., 37, 17, 1936.
7. Wintgen G., Zur Darstellungstheorie der Raumgruppen, Math. Ann. 118,
195, 1941.
8. Z i a - ud - D i n, The characters of the symmetric group of order 11, Proc.
Lond. Math. Soc. (2), 39, 200, 1935.
9. Z i a - ud - D i n, The characters of the symmetric group ot order 12, 13, Proc.
Lond. Math. Soc. 39, 347, 1935.
К главе VI
1. Волькенштейн М. В., Эльяшевич Н. А., Степанов Б. И.,
Колебания молекул, Гостехиздат, М. — Л., 1949.
2. К о м п а н е е ц А. С, О нахождении колебательных обертонов
многоатомных молекул, ЖЭТФ 10, 1175, 1940.
3. Л а н д а у Л. Д. и Лифшиц Е. М., Квантовая механика, Гостехиздат,
М. —Л., 1948.
4. Ландау Л. Д. и Пятигорский Л. М., Механика, Гостехиздат,
М. —Л., 1940.
5. Barriol J., Applications de la theorie des groupes a Tetude des
vibrations moleculaires et cristallines, Paris, 1947.
6. Rosenthal J. E., Murphy G. H., Group theorie and the vibrations
of polyatomic molecules, Rev. Mod. Phys. 8, 317, 1936.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
347
К главе VII
1. Л а н д а у Л. Д., Фазовые переходы второго рода, Sow. Phys. 11, 545, 1937.
2. Ландау Л. Д. и Лифшиц Е. М., Статистическая физика, Гостех-
издат, М. —Л., 1951.
-3. Левич В. Г., Введение в статистическую физику, Гостехиздат, М. — Л.,
1954.
4. Лифшиц Е. М., К теории фазовых переходов второго рода, ЖЭТФ 11,
255, 269, 1941.
К главе VIII
1. Борн М. и Гепперт-Мейер, Теория твердого тела, ОНТИ, М. — Л.,
1938.
2. Г е р м а н В. Л., Некоторые теоремы об анизотропных средах, ДАН 48,
55, 1945.
3. Ферми Э., Молекулы и кристаллы, ИЛ, М., 1947.
4. Barriol J., Applications de la theorie des groupes a Tetude des vibrations
moleculaires et cristallines, Paris, 1947.
5. В о u с k a r t L. P., Smoluchowskj R., Wigner E., Theory of
Brilloin zones and symmetry properties of wave functions in crystals, Phys.
Rev. 50, 58, 1936.
•6. D б r i n g W., Z e h I e r V., Gruppentheoretische Untersuchung der Elec-
tronenbander im Diamantengitter, Ann. der Phys. 13, 214, 1953.
7. Elliot R., Theory of the effect of spin-orbit coupling on magnetic
resonance in some semiconductors, Phys. Rev. 96, 266, 1954.
8. H e r r i n g C, Role of low-energy photons in thermal conduction, Phys.
Rev. 95, 954, 1954.
9. H e r r i n g C, Effect of time-reversal symmetry on energy bands of
crystals, Phys. Rev. 52, 361, 1937.
10. Herring C, Accidental degeneracy in the energy bands of crystals, Phys.
Rev. 52, 365, 1937.
11. Jahn, Zeitschr. d. Kristallographie 98, 191, 1937.
12. Par m enter R. H., Symmetry properties of the energy bands of the zine
blende structure, Phys. Rev. 100, 573, 1955.
К главе IX
1. Ч е б о т а р е в Н. Г., Теория групп Ли, Гостехиздат, М. — Л., 1940.
2. Эйзенхарт Л. П., Непрерывные группы преобразований, ИЛ, М.,
1947.
К главе X
1. Виленкин Н. Я., К теории «присоединенных Асферических функций
ДАН 111, 742, 1956.
2. Г е л ь ф а н д И. М. и Ш а п и р о 3. Я., Представления группы
вращений трехмерного пространства и их применения, УМН 10, вып. 3, 1955.
3. Bell D. С, Group theory and crystall lattices, Rev. Mod. Phys. 26, 311.
4. L i 111 e w о о d, The theory of group characters and matrix represantations
„.of groups, Oxford, Clarendon Press, 1950.
5. Opechowski W., Sur les groupes cristallographique «doubles», Physica
7, 552, 1940.
348
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
К главе XI
1. Biedenharn L. С, В 1 a 11 J. M., Rose M. E., Properties of Racah
coefficients, Rev. Mod. Phys. 24, 249, 1952.
2. Racah G. Theory of Complex Spectra I, II, Phys. Rev. 61, 186, 1942; 62,
438, 1942.
К главе XII
1. Б л о х и н ц е в Д. И., Основы квантовой механики, Гостехиздат, М. — Л.,
1949.
2. Ландау Л. Д. и Лифшиц Е. М., Квантовая механика, Гостехиздат,
М. —Л., 1948.
К главе XIII
1. БерестецкийВ. Б., ДолгиновА. 3., Мартиросян К. А.,
Угловые волновые функции частиц со спином, ЖЭТФ 20, 527, 1950.
2. Г е л ь ф а н д И. М. и Шапиро 3. Я., Представления группы вращений
трехмерного пространства и их применения, УМН 10, вып. 3, 1955.
3. П е т р а ш е н ь Г. И., Динамические задачи теории упругости в случае
изотропной сферы, Уч. зап. ЛГУ 114, вып. 17, 1949.
К главе XIV
1. Гайтлер В., Квантовая теория излучения, Гостехиздат, М. — Л., 1940,
2. Д а в ы д о в А. С, Теория поглощения света в молекулярных
кристаллах, Изд. АН УССР, Киев, 1951.
3. Ландау Л. Д. и Лифшиц Е. М., Квантовая механика, Гостехиздат,
М. —Л., 1948.
4. С a b a n n e s J., Introduction a l'etude de I'effet Raman dans les cristaux,
Rev. Scient. n° 3205, fevrier 1942.
5. Placzek G., Rayleigh Streuimg und Raman Effect, Handb. der Radiologie
IV/2, Leipzig, 1934.
6. T i s с a, Zur Deutung der Spectren Mehratomiger Molekule, Zeits. Phys.
82, 48, 1933.
К главе XV
1. Гельфанд И. М. и Наймарк М. А., Унитарные представления
классических групп, Труды Матем. ин-та им. Стеклова 36, 1950.
2. Гельфанд И. М. и Наймарк М. А., Унитарные представления
группы Лоренца, Изв. АН СССР, матем. 11, 411, 1947.
3. Наймарк М. А., Линейные представления группы Лоренца, УМН 9,
4, 19, 1954.
4. Румер Ю. Б., Спинорный анализ, ОНТИ, М.— Л., 1936.
5. В a d e W. L., J e h I e H., An introduction to spinors, Rev. Mod. Phys. 25,
714, 1953.
6. W i g n e r E. P., On unitary represantations of inhomogeneous Lorentz
group, Ann. of Math. 40, 149, 1939.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
349'
К главе XVI
1. Ахиезер А. И. и Берестецкий В. Б., Квантовая электродинамика>
Гостехиздат, М., 1953.
2. ГельфандИ. М. и Яглом А. М., Общие релятивистски инвариантные
уравнения и бесконечномерные представления группы Лоренца, ЖЭТФ
18, 703, 1948.
3. Г е л ь ф а н д И. М. и Яглом А. М., Теорема Паули для общих
релятивистски инвариантных уравнений, ЖЭТФ 18, 1096, 1948.
4. Г е л ь ф а н д И. М. и Я г л о м А. М., Зарядная сопряженность для
общих релятивистски инвариантных уравнений, ЖЭТФ 18, 1105, 1948.
5. Паули В., Релятивистская теория элементарных частиц, ИЛ, М., 1947^
К главе XVII
1. Л а н д а у Л. Д. и Л и ф ш и ц Е. М., Квантовая механика, Гостехиздат,
М. —Л., 1948.
2. В 1 a 11 J. M., The angular distribution of scattering and reaction cross-
sections, Rev. Mod. Phys. 24, 208, 1952.
ПРЕДМЕТНЫЙ
УКАЗАТЕЛЬ
Алгебра спинорная 269 и д.
— тензорная 194 и д., 271 и д.
Базис в пространстве спиноров 190
— канонический 73
представления группы
вращений 176
Базисы пространства взаимно-кон-
травариантные 63
Векторы обратной решетки 84
основные 84
— основные группы векторов 30
Вес неприводимого представления
группы вращений 175
Вращение пространства 15
, матрица оператора вращения
17
, произведение вращений 15
Вычисление сопряженных
перестановок 14
Группа 7
— абелева 7
— бесконечная 7
— векторная (группа векторов) 29
и д.
, векторы основные 30
, группа симметрии ее 31
-, двумерная 30
дискретная 30
одномерная 30
, параллелепипед основной 31
, сингония ее 31
, тип ее 33, 35, 36
, — гранецентрированный 35, 36
, — объемноцентрированный 35,
36
, — простой 35, 36
трехмерная 30
, элемент симметрии 31
, ячейка элементарная 31
— векторов см. Группа векторная
Группа вращений 15 и д.
— евклидова 20 и д.
—, единичный элемент 7
— икосаэдра (Y) 25
— коммутативная 7
— конечная 7
, порядок ее 7
, представление регулярное 55
— кристалла 37
— Ли 158
, размерность ее 158
— Лоренца 260
— —, законы сохранения 294
, инфинитезимальные операторы
261, 262
, полная 260 и д.
, представление векторное 261
— —, представления неприводимые
263
собственная 260
— многосвязная 156, 157
— накрывающая универсальная 157
— направлений кристалла 38
— октаэдра (О) 24
— перестановок 13 и д.
— полная ортогональная 19 и д.
, классы сопряженных
элементов 20
, элементы второго рода 19
, — первого рода 19
— произведение групп 67, 68
—, разбиение на классы
сопряженных элементов 9
— симметрии кристалла 38
векторной группы 31
куба 28, 29
правильной w-угольной призмы
27, 29
тетраэдра 28
— точечная 22
второго рода 22, 26 и д.
Cnh 26, 29
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
351
Группа точечная второго рода Cnv
26, 29
£>па 27, 29
Dnh (группа симметрии
правильной w-угольной призмы)
27, 29
Q, (группа симметрии
куба) 28, 29
71. (группа симметрии
тетраэдра) 28
Th 28
Ун 29
первого рода 22, 23 и д.
икосаэдра (У) 25
октаэдра (О) 24, 25
тетраэдра (Т) 23, 25
Dn 23, 25
Сп 22, 25
— трансляций 20, см. также Группа
векторная
— уравнения Шредингера 225
—, элемент обратный 7
, сопряженный данному 8
Группы гомоморфные 11
— изоморфные 11
— первого рода бесконечные 25
— пространственные 37 и д., 318 и д.
сингония гексагональная 332
и д.
— кубическая 338 и д.
— моноклинная 318 и д.
— ромбическая 320 и д.
— ромбоэдрическая 332 и
— тетрагональная 325 и д.
— триклинная 318
Длина цикла перестановки 13
Законы сохранения 227, 229, 230, 232,
289, 292, 294
Звезда представления 86
неприводимая 86
Звук в кристаллах 141 и д.
, края полосы частот 143
Зона Бриллуэна 84
Инверсия времени 297 и д.
— пространства 19
, определитель ее 19
Индекс подгруппы 10
Класс левый смежный подгруппы 9
— правый смежный подгруппы 9
Классификация представлений
неприводимых группы вращений 171 ид.
— состояний 233 и д.
Классы кристаллические 38
— сопряженных вращений 18
■ перестановок 15
элементов 9
полной ортогональной
группы 20
— эквивалентных представлений
группы 43
Колебание атомов молекулы главное
—, нахождение 97
СНС13 108 и д.
Координаты симметрические 97
— события четырехмерные 259
Коэффициенты Клебша — Гордана 203
, свойства 211 ид.
— , связь с коэффициентами
Рака 217
— Рака 216, 342
, вычисление 222
, свойства 218 и д.
, связь с коэффициентами
Клебша—Гордана 217
Кристалл 37 и д.
—, группа его 37 и д.
—, — направлений его 38
—, — симметрии его 38
—, направления эквивалентные 37
—, тензор диэлектрической
постоянной 149
—, — упругости 150
Матрица оператора вращения 17
— представления сопряженного 63
— рассеяния 305 и д.
— унитарная 19
Матрицы представлений
неприводимых группы вращений 177
Направления в кристалле
эквивалентные 37
Оператор вращения 18
— Гамильтона 224
— индуцированный 47
— инфинитезимальный 159, 160
— унитарный 18
— энергии 229
Операторы инфинитезимальные
группы Лоренца 261, 262
— проекций импульса 230
Ось точечной группы 22
двусторонняя 22
односторонняя 22
, порядок ее 22
— узлов 16
Отражение скользящее 21
352
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Параллелепипед основной группы
векторов 3
Перестановка нечетная 15
—, цикл ее 13
— четная 15
Переходы фазовые первого рода
111
второго рода 111
Плоскость скольжения 21
Поглощение света дипольное 248
квадрупольное 248, 255
мультипольное 248
Подгруппа 9
—, индекс ее 10
—, левый смежный класс ее 9
— перестановок альтернативная 15
—, правый смежный класс ее 9
—циклическая 10
Подпространство неприводимое 72
— топологическое 154
Подчинение сингоний 37
Поле векторное 236
— скалярное 236
— спинорное 236, 238, 239
— тензорное 236
— физической величины 236
Полоса частот звука в кристалле
143
, края ее 143
— энергетического спектра кристалла
146
, соприкосновение полос
146, 147
Порядок группы конечной 7
— шаровой функции 237, 238
Правила отбора для поглощения света
атомами и молекулами 250 и д.
Представление группы 41
активное 117
векторное 42
дифференцируемое 159
единичное 42
, звезда его 86 и д.
индуцированное 47
инфинитезимальное 161 и д.
колебательное 105
, характер его 105
конечной 151, 153, 154
регулярное 55
Ли инфинитезимальное 167
и д.
малое 87
механическое 96
лг-значное 157
нагруженное 89 и д.
неприводимое 49
пассивное 117
Представление группы полной
ортогональной векторное 200
псевдовекторное 200
псевдотензорное 200
, порожденное пространством
189
, произведение представлений 60
и д.
, размерность его 41
сопряженное 62, 63 и д.
, матрица его 63
, степень его
антисимметрическая и-я 71
, симметрическая п-я 71
— — точечной 42
унитарное 43
физически-неприводимое 113
, характер его 56
Представления групп вещественные
65
, критерий вещественности
67
— — зацепляющиеся 281
~- — компактных 155
— — локально компактных 155
— — неприводимые 47
— — приводимые 46
— — пространственных 86
— — точечных двузначные 201 и д.,
317
— неприводимые 80 и д.
— — трансляций 83 и д.
— — эквивалентные 43
— группы вращений неприводимые
171
— , базис кононический 176
— , вес 175
— , матрицы 177 и д.
— , произведения 186 и д.
— , свойства 182 и д.
— , связь с представлениями
группы Лоренца 267
— — Лоренца неприводимые 263,264
— бесконечномерные 264
— , произведение 265 и д.
— комплексно-сопряженные
267
— полной 275
— псевдоскалярные 277
— , связь с представлениями
группы вращений 267
— скалярные 277,
— — перестановок 77 и д.
— неприводимые 77
— — поворотов неприводимые 170
— — полной ортогональной
неприводимые 199 и д.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
353
Произведение вращений пространства
— групп 67, 88
— представлений 60 и д.
группы вращений 186 и д.
— функций на группе скалярное 50
— элементов группы 7
Производная оператора 159
Пространство отклонений молекулы
95
Псевдоспинор 200
Псевдотензоры 277
Разбиение группы на классы
сопряженных элементов 9
Разложение приводимого
представления на неприводимые 72
— пространства полное 72
Размерность группы Ли 158
— представления 41
Распределение продуктов ядерной
реакции 309 и д.
Рассеяние света комбинационное 248,
256
Расщепление представления 48
Решетка Браве 40
, узлы ее 40
Свертка спинора 191
, операция подъема индекса 191
, — упрощения 191
— тензора 194
Свойства коэффициентов Клебша —
Гордана 211 ид.
— неприводимых представлений
группы вращений 182 и д.
Связь между представлениями группы
Лоренца и группы вращений 267
Симметрия кристаллов 37 и д.
Сингония гексагональная 31 и д.,
332 и д.
— квадратная 31 и д.
— кубическая 338 и д.
— моноклинная 31 и д., 34, 318 и д.
— ортогональная 31 и д.
— ромбическая 31 и д., 320 и д.
— ромбоэдрическая 31 и д., 332 и д.
— тетрагональная 31 и д., 325 и д.
— тригональная 31 и д.
— триклинная 31 и д., 318
Событие 259
—, координаты его четырехмерные
Соответствие элементов двух групп
изоморфное 11
Соприкосновение энергетических
полос кристалла 146, 147
Состояния атома комбинирующиеся
Спин 294 и д.
Спинор веса J 189, 200, 269
— индексы ковариантные 191
—, — контравариантные 191
—, ранг 190, 270
—, свертка его 191
—, умножение спиноров 191
—, упрощение 271
Способ вычисления сопряженных
перестановок 14
Степени представлений симметризо-
ванные 68 и д.
Степень представления
антисимметрическая 71
симметрическая 71
Столкновение двух частиц 305
Сумма представлений 48
Схема Юнга 77 и д.
Тензор 294
— диэлектрической постоянной
кристалла 149
— метрический 271
—, ранг 194, 273
—, свертка 194
—, упрощение 274
— упругости кристалла 150
Тензоры 277
— в кристаллах 147 и д.
Теорема Бирсайда 55
— Паули 300
— полноты 54
Теория представлений 41
— характеров 56 и д.
Теплопроводность кристалла 147 и д.
Точечная группа, представление ее 42
Трансляция 20, 21, 29 и д.
Умножение спиноров 191
Упругость кристалла 147 и д.
Уравнение Дирака 300 и д.
— Шредингера 224
инвариантное относительно
оператора 225
, группа его 225, 229
Уравнения инвариантные
относительно вращений 240
— Максвелла 244
— релятивистски-инвариантные 280
Уровни электронные в кристалле 145
Функции на группе, произведение
скалярное 50
— шаровые 237
основные 237
, порядок 238
354
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Функционал усреднения функций на
группе 45
бесконечной 151, 152
Функция волновая 278
— Лагранжа 286 и д.
в симметрических координатах
101 и д.
— многозначная на группе
бесконечной 156
— на группе 45, 161
; , функционал усреднения 45
Характер представления 56
колебательного 105
, свойства 56, 57
Характеры неприводимых
представлений групп перестановок 314 и д.
точечных 316
Цикл перестановки 13
, длина его 13
Частоты собственные молекулы 104
системы 96
, вычисление 97 и д.
Число независимых компонент
тензора кристалла 148
Эквивалентность представлений 43
и д.
Электропроводность кристалла 147
и д.
Элемент группы единичный 7
, обратный данному 7
сопряженный данному 8
Ячейка элементарная группы
векторов 31
Любарский Григорий Яковлевич
ТЕОРИЯ ^ГРУПП И ЕЕ ПРИМЕНЕНИЕ В ФИЗИКЕ
Редактор М. М. Горячая
Техн. редактор Е. А. Ермакова
Корректор Я. С. Цветкова
Сдано в набор 8/IX 1958 г.
Подписано к печати 10/ХН 1958 г.
Бумага 60x92/16. Физ. печ. л. 22,25. Усл. печ. л. 22,25.
Уч.-изд. л. 22,37. Тираж 5000. Т-11575.
Цена книги 13 р. 20 к. Заказ 3512.
Государственное издательство физико-математической
литературы
Москва, В-71, Ленинский проспект, 15
Типография № 2 им. Евг. Соколовой
УПП Леисовнархоза.
Ленинград, Измайловский пр., 29.