/



















































































































































































































































































































































Author: Радзиевский В.Г. Сирота А.А.
Tags: электротехника радиолокация разведка
ISBN: 5-93108-067-8
Year: 2004




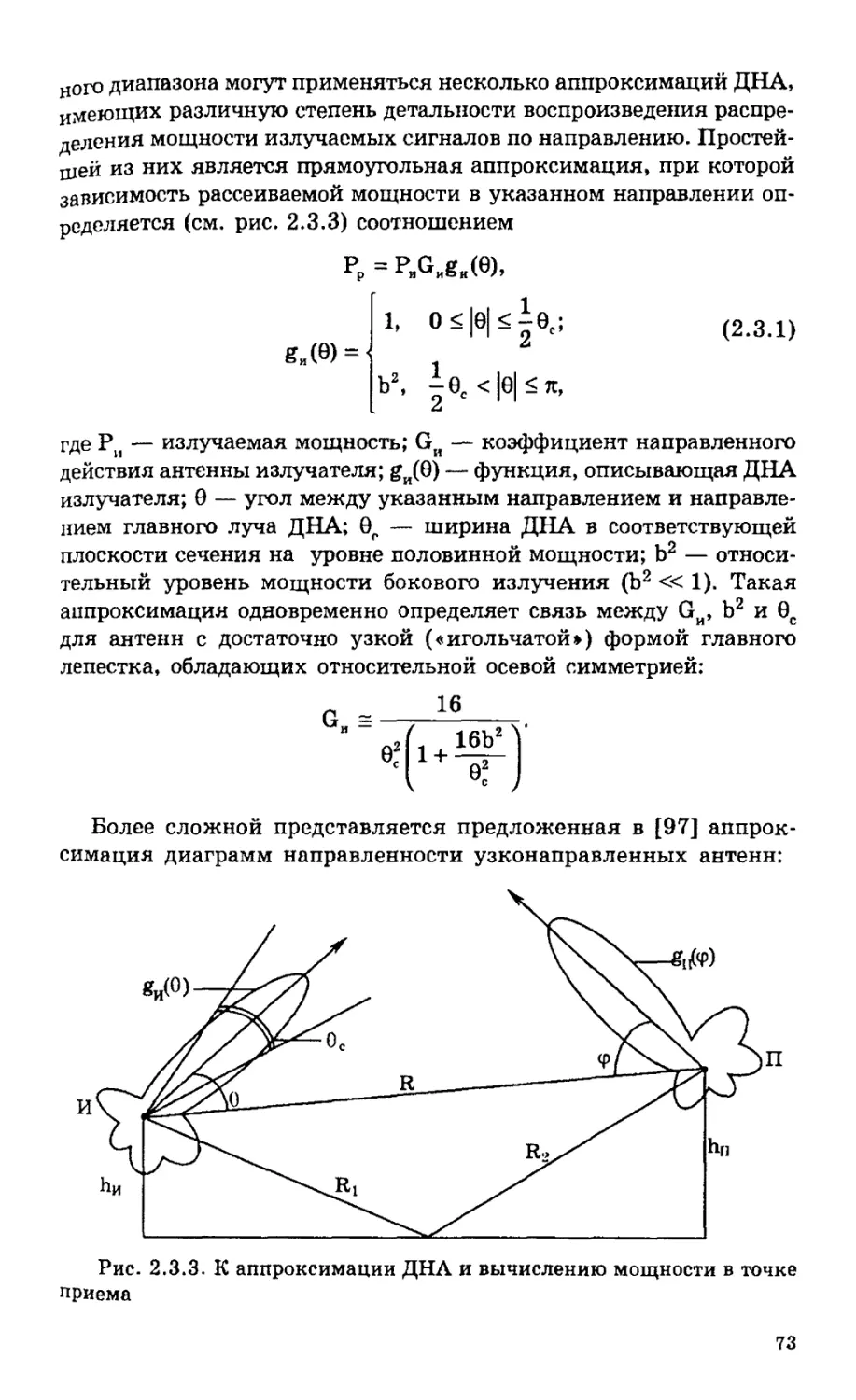
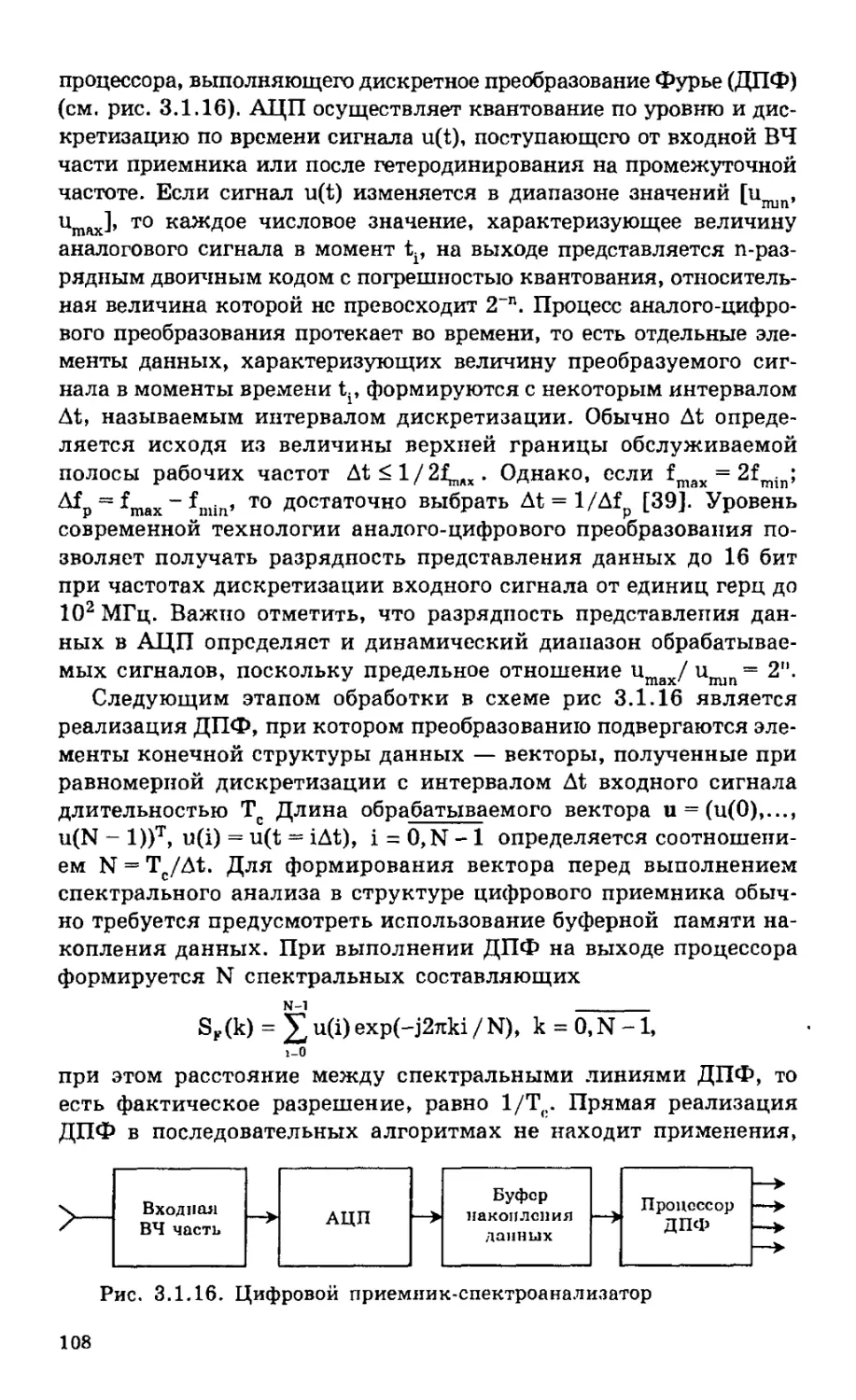
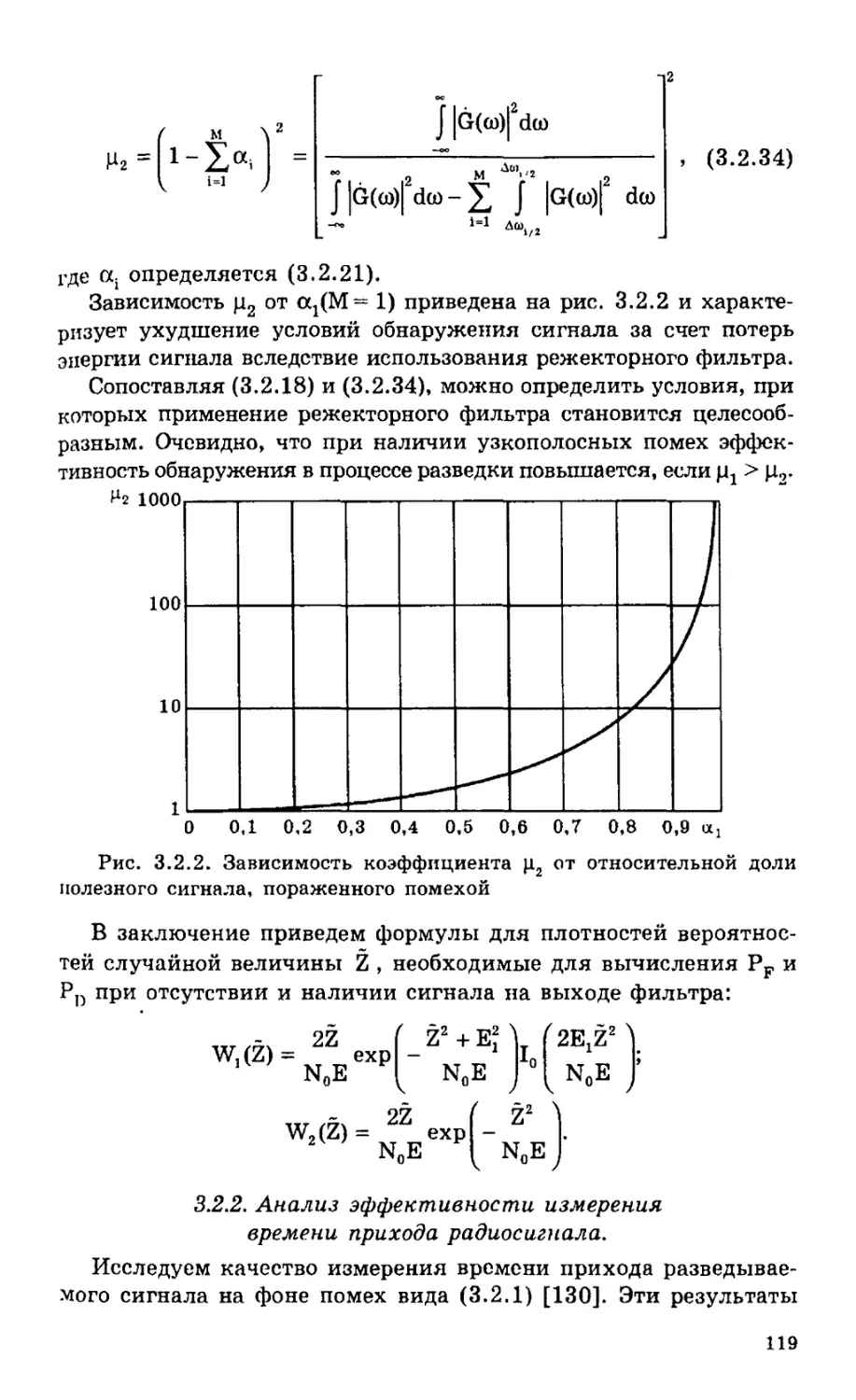
Text
В.Г. Радзиевский
А.А. Сирота
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
РАДИОЭЛЕКТРОННОЙ
РАЗВЕДКИ
В.Г. Радзиевский, А.А. Сирота
Теоретические основы
радиоэлектронной разведки
Издание 2-е,
исправленное и дополненное
Издательство «Радиотехника»
Москва 2004
УДК 621.396.96
Р15
ББК 32.95
Рецензент:
чл.-корр. РАН В.И. Борисов
Радзневскнн В.Г., Сирота А.А.
Р15 Теоретические основы радиоэлектронной разведки.
2-е изд, испр. и доп. (1-е издание «Информационное
обеспечение радиоэлектронных систем в условиях кон-
фликта») - М.. «Радиотехника», 2004 - 432 с., ил
ISBN 5-93108-067-8
С системных позиций излагаются вопросы, включающие описание
принципов моделирования сложной радиоэлектронной обстановки,
синтеза и анализа алгоритмов и устройств первичной обработки сигна-
лов, вторичной и третичной обработки информации при радиоэлск-
тронной разведке в однопозициопньтх и многопозиционных системах
Рассматриваются методы статистического описания отраженных от
объектов сигналов, электродинамического моделирования характери-
стик рассеяния и излучения объектов на базе томографической и опти-
ко-голографической обработок электронных полей Обсуждаются реали-
зационные основы информационного обеспечения с применением эле-
ментной базы современной радиоэлектроники
Для студентов по направлению подготовки бакалавров и маги-
стров «Прикладная математика и физика», а также для научных ра-
ботников и аспирантов, занимающихся разработкой и применением
радиоэлектронных средств
ISBN 5-93108-067-8
УДК 621.396.96
ББК 32.95
© Издательство “Радиотехника”, 2004
ВВЕДЕНИЕ
В современных условиях функционирование любых технических
систем характеризуется наличием различного рода конфликтных
взаимодействий. По сути дела, участие систем в конфликте опреде-
ляет не только их облик, по и оказывает существенное влияние на
принимаемую техническую политику создания новых систем, раз-
витие информационных технологий и элементной базы. Один из
главных вопросов, всегда возникающих в связи с исследованием
конфликтных взаимодействий систем в гражданской и военной сфе-
рах, заключается в оценке потенциальных возможностей достижения
успеха сторонами — участниками конфликта. В этом плане вряд ли
можно ожидать создания закопченной теории «решения» конфлик-
та. Скорее можно говорить о возможности появления синтетичес-
кой методологии, задающей структурную основу исследований по
отдельным аспектам и проблемам и позволяющей получить резуль-
тирующие закономерности конфликта. Одной из таких проблем, во
многом определяющей ход и исход конфликта, является проблема
информационного обеспечения участников конфликта сведениями,
необходимыми для эффективного управления и применения ими
своих материальных, энергетических, боевых и пр. ресурсов.
В настоящей книге рассматривается проблематика информаци-
онного обеспечения радиоэлектронных комплексов и систем, кото-
рые участвуют в конфликте в соответствии с их целевым назначе-
нием как основные или вспомогательные средства, определяющие
действия сторон. К числу таких средств фактически относятся все
существующие системы радиосвязи и передачи данных, радиолока-
ционные средства и системы, системы и комплексы радиопротиво-
действия, ипформационно-управляющие системы и т.д. Все они,
объединяясь в сложные коалиции с каждой стороны, становятся
участниками информационного радиоэлектронного конфликта, яв-
ляющегося важной составной частью общего конфликта «действий».
Информационный конфликт есть процесс борьбы за информа-
цию, в рамках которой стороны реализуют самые разнообразные
мероприятия по ее «разрушению», «искажению», «скрытию» и
«извлечению» при конфликтном взаимодействии систем, осуществ-
ляемом посредством передачи и приема излучений в спектре элект-
ромагнитных волн. В этом плане основой информационного обеспе-
3
чения являются радиоэлектронные системы извлечения информа-
ции. Их главная задача обеспечить активное вмешательство в дей-
ствия противоборствующей стороны путем добывания сведений о
наличии и состоянии тех или иных ее элементов (средств, систем,
комплексов). К классу систем извлечения информации относятся, в
основном, радиолокационные системы активного зондирования, а
также системы радиоэлектронной (радиотехнической и радио) раз-
ведки, которые иногда еще называют системами пассивной радио-
локации.
Естественно, что понятие информационного обеспечения яв-
ляется более широким и охватывает процесс получения любой
необходимой информации, позволяющей повысить качество уп-
равления действиями и поведением сторон — участников конф-
ликта. К такой информации относятся данные картографирова-
ния, радионавигации и точного времени, радиоконтроля, мони-
торинга окружающей среды и т.п. Однако именно радиоэлект-
ронные системы извлечения информации играют решающую роль
при обеспечении действий всех остальных радиоэлектронных ком-
плексов и систем в динамике информационного конфликта.
Основное внимание авторы данной книги сосредоточили на ши-
роком круге вопросов, связанных с методологией исследования сис-
тем радиоэлектронной разведки. Кроме того, учитывая важность
действий по скрытию (искажению) информации, добываемой сторо-
нами в ходе конфликта, дополнительно рассмотрена такая важная
составляющая информационного обеспечения, как построение ста-
тистических описаний и электродинамическое моделирование про-
странственных характеристик рассеяния и излучения обьектов. Спе-
цифика исследований и результатов в данных областях отражена в
известной литературе [26, 31, 55, 98, 112], однако возможности при-
менения современных "методов теории радиосистем, новых инфор-
мационных технологий и элементной базы, обеспечивающих про-
движение в этих направлениях, в настоящее время раскрыты в не-
достаточной степени. Существующие закономерности функцио-
нирования систем радиоэлектронной разведки отличаются
многофакторностью, наличием сложной входной радиоэлектронной
обстановки и существенным возрастанием уровня априорной нео-
пределенности относительно условий и параметров информацион-
ного взаимодействия по сравнению со всеми другими радиоэлект-
ронными системами. Характерной является тенденция к использо-
ванию в средствах радиосвязи и радиолокации, являющихся объек-
тами разведки и создающих входное воздействие, сложных видов
сигналов, адаптивных и скрытных режимов работы. В этом плане
важнейшее значение имеет рассмотрение вопросов моделирования
систем радиоэлектронной разведки и противостоящих им радиоиз-
лучающих объектов информационного взаимодействия. В книге боль-
шое внимание уделяется вопросам статистического имитационного
моделирования таких систем, а также моделирования средств и си-
стем радиолокации и радиосвязи с целью получения необходимых
данных, определяющих источники внешних воздействий и радио-
электронную обстановку в целом.
Структурная основа представленного в книге материала опира-
ется на функциональную декомпозицию информационного конфлик-
та и последующую декомпозицию процесса радиоэлектронной раз-
ведки. В соответствии с этим книга разбита на пять глав.
В первой главе рассматриваются особенности информационного
конфликта в радиолокации и радиосвязи и уточняется роль ин-
формационного обеспечения в этом процессе. Дается системная
трактовка целевых функций, возлагаемых на радиотехническую
разведку и радиоразведку.
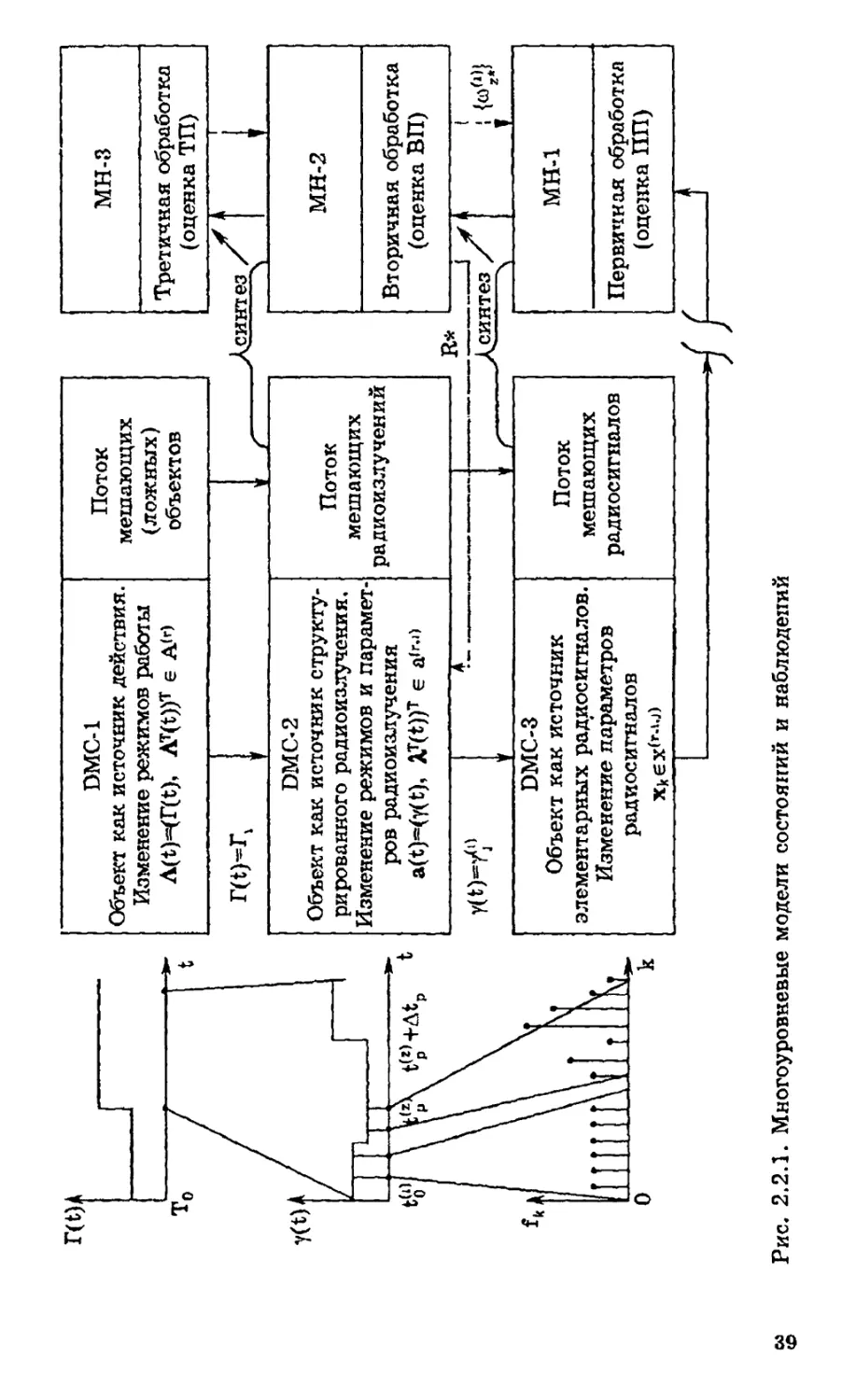
Во второй главе рассматриваются вопросы моделирования про-
цесса извлечения информации как основы синтеза и анализа систем
радиоэлектронной разведки в ходе их системотехнического проек-
тирования. Вводятся многоуровневые модели состояний и наблюде-
ний радиоизлучающих объектов информационного взаимодействия,
которые позволяют провести дальнейшую декомпозицию процесса по-
лучения информации об объектах и обосновать содержание основных
этапов реализуемой в подобных системах обработки. Важное место в
этой главе занимают материалы, посвященные принципам статисти-
ческого имитационного моделирования систем и внешней среды, фор-
мирующей на их входе типовую радиоэлектронную обстановку.
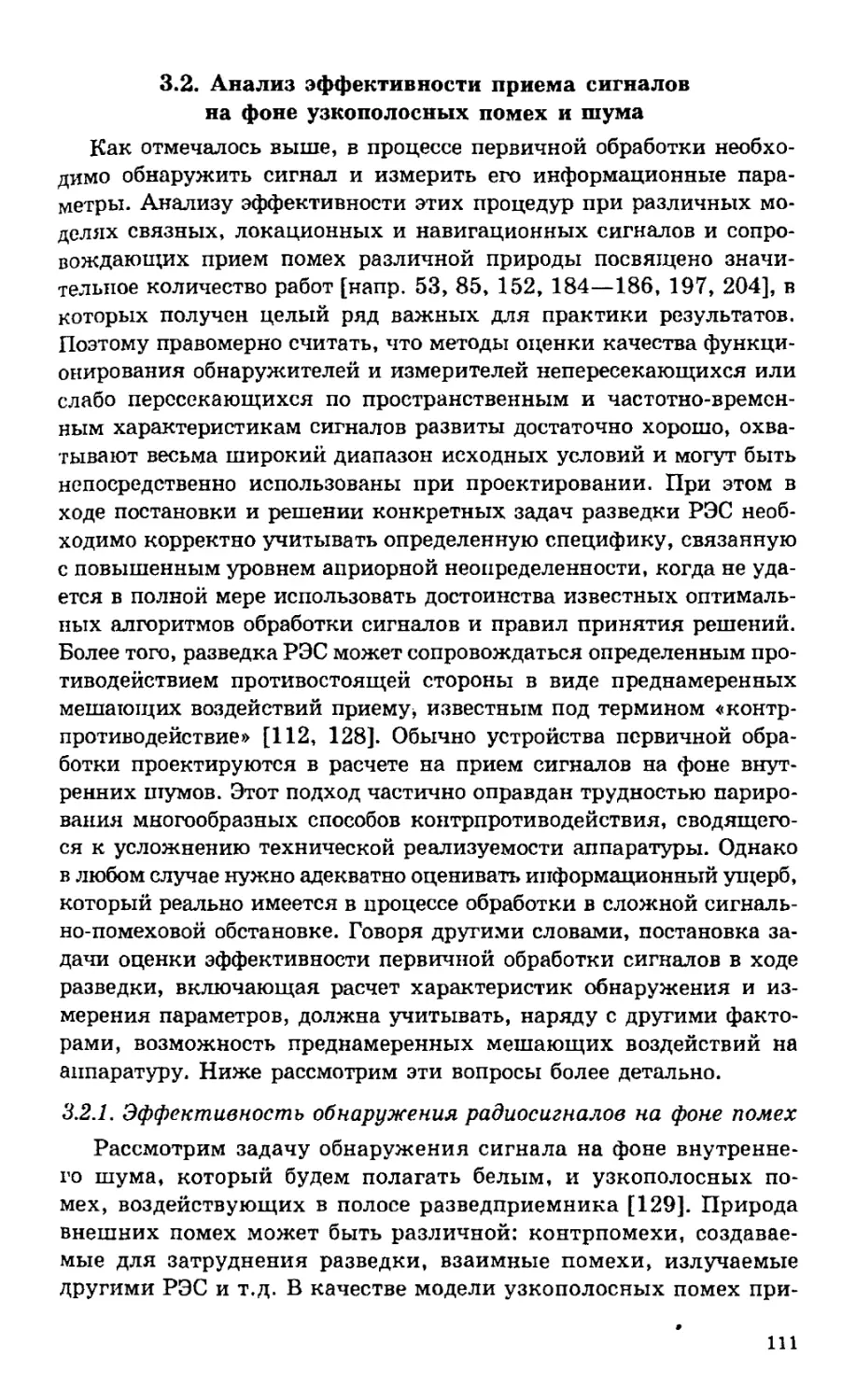
В третьей главе рассматривается первичная обработка сигналов
в средствах радиоэлектронной разведки, являющаяся важнейшим
этапом общего процесса извлечения информации. Здесь большое
внимание уделяется как известным схемам построения приемоана-
лизирующей аппаратуры общего назначения, так и результатам
исследований оригинальных схем и алгоритмов, ориентированных
на реализацию основных функциональных операций приема сигна-
лов, включая сигналы источников повышенной скрытности работы
и сверхширокополосные сигналы. Рассматриваются возможности ис-
пользования для этих целей современной элементной базы функци-
ональной электроники и цифровой техники обработки сигналов.
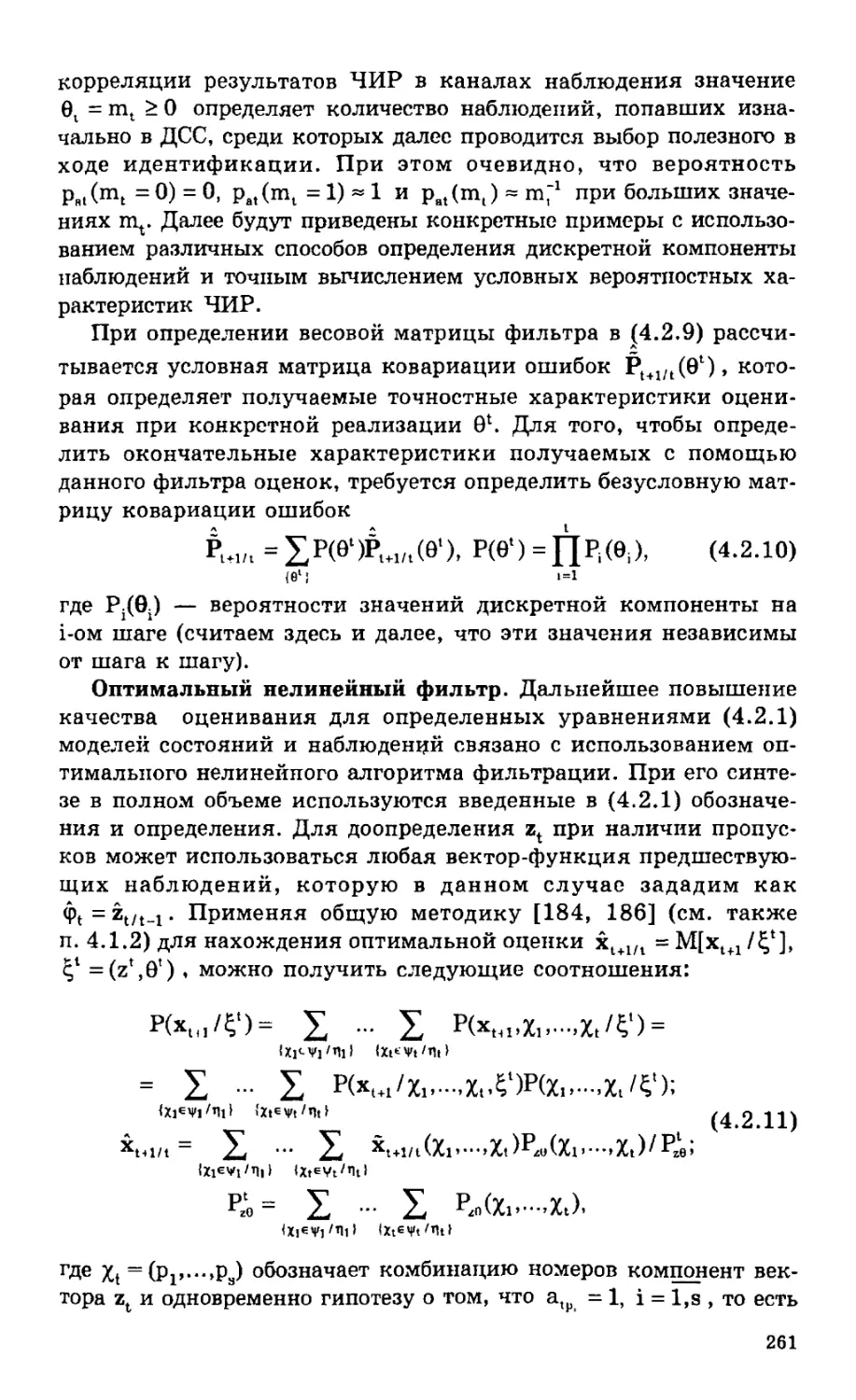
Четвертая глава в полном объеме посвящена рассмотрению этапов
вторичной и третичной обработки измерительной информации, полу-
чаемой по результатам первичной обработки. При этом внимание ак-
центируется на проблеме «разделения» входного потока данных, су-
ществование которой не позволяет обеспечить восприятие каждого ис-
точника в отдельности и принципиально влияет на облик алгоритмов
обработки информации. В данном случае эти алгоритмы синтезируют-
ся с учетом неизбежных потерь (пропусков, появления ложных на-
блюдений) первичной обработки при обнаружении, измерении пара-
метров сигналов и последующей селекции первичных наблюдений, обес-
печивающей разделение входного потока. Проводится достаточно де-
5
тальное исследование различных аспектов решения задач обработки
информации с учетОхМ этих факторов. Рассматриваются конкретные
примеры решения задач вторичной и третичной обработки примени-
тельно к условиям возникновения сильно перекрывающихся по пара-
метрам входных потоков сигналов, имеющим место при функциони-
ровании однопозиционных и мпогопозициоппых систем.
В пятой главе рассматриваются разнообразные методы матема-
тического и физического моделирования процесса информационно-
го взаимодействия при использовании радиолокационных систем
активного зондирования, позволяющие получить априорную инфор-
мацию, необходимую для обоснования характеристик различных
радиоэлектронных систем, участвующих в информационном конф-
ликте. Сюда вошли вопросы построения статистических описаний
эффективной поверхности рассеяния объектов, результаты исполь-
зования томографического метода при определении тонкой струк-
туры отраженных от целей сигналов и пр. Отдельно рассматривают-
ся методы оптико-голографического моделирования диаграмм об-
ратного рассеяния целой и диаграмм направленности антенн радиоло-
кационных средств, что имеет значение для обоснования характеристик
противостоящих им других радиоэлектронных систем.
При подготовке настоящего издания авторами предпринята попыт-
ка достижения компромисса между желанием представить свои ори-
гинальные результаты и стремлением систематизировать материал и
сохранить методическое единство изложения. Поэтому часть из пред-
ставленных материалов (глава 1, п.п. 2.1, 3.1, 4.1) носит обзорный и
постановочный характер, что позволяет читателю, нс знакохмому с дан-
ной областью, получить начальные сведения. Другие разделы книги
требуют определенной подготовки и знания основ современной теории
оптимального приема, теории оптимальной фильтрации, статистичес-
кой теории пространственно-временной обработки сигналов и методов
имитационного моделирования на ЭВМ. Предложенная библиография
позволяет при необходимости восполнить имеющиеся пробелы.
Первое издание книги, вышедшее в 2001 г. под названием «Ин-
формационное обеспечение радиоэлектронных систем в условиях
конфликта», быстро разошлось и получило положительную оценку
специалистов. Данное издание предпринято в основном по инициа-
тиве редакции издательства «Радиотехника». В процессе доработки
книги также принято решение об изменении ее названия с целью бо-
лее конкретного определения рассматриваемой предметной области.
Авторы считают своим долгом выразить глубокую признательность
члену-корреспонденту РАН, доктору технических паук профессору Бо-
рисову В. И., взявшему па себя труд по рецензированию рукописи.
Авторы также выражают благодарность всем коллегам по совмест-
ной работе, оказавшим существенную помощь при подготовке и офор-
млении материалов настоящего издания, и будут благодарны читате-
лям за все критические и конструктивные замечания и пожелания.
6
1. РАДИОЭЛЕКТРОННЫЕ СИСТЕМЫ
В УСЛОВИЯХ КОНФЛИКТА
1.1. Конфликт радиоэлектронных систем. Общие положения
Исследования конфликта систем определяют одно из важней-
ших направлений современной науки и техники [57]. В после-
днее время особенно актуальны исследования конфликта инфор-
мационных систем и, в частности, радиоэлектронных информа-
ционных систем. Таковыми являются системы, в которых радио-
электронная аппаратура выполняет основные функции, связанные
с различного рода преобразованиями информации. Далее в ос-
новном рассматриваются именно эти системы, поэтому термин
«информационные» будет часто опускаться. Как известно [17,
53], радиоэлектронные системы (PC) по своему назначению де-
лятся на следующие основные классы: системы передачи инфор-
мации; системы извлечения информации; системы разрушения
информации; системы радиоуправления. Кроме того, рассматри-
ваются комбинированные радиоэлектронные системы или радио-
электронные комплексы (РЭК), в состав которых входят две или
более PC перечисленных классов. Дальнейшая классификация
PC (РЭК) связана с реализацией системного подхода, направлен-
ного на упорядоченное представление знаний о свойствах изучае-
мых объектов по выбранным классификационным признакам.
При этом выделяют [116] общие и специальные свойства PC.
Современные PC обладают рядом общих свойств и качеств
больших и сложных систем. Основными из них являются [116]
следующие:
четко выраженная целенаправленность PC, то есть наличие
совокупности целей (целевых задач), определяющих желаемые
результаты, которые должны быть получены в процессе ее фун-
кционирования;
большое количество и разнообразие объектов искусственного
и естественного происхождения, с которыми взаимодействует PC
и, следовательно, разнообразие решаемых ею целевых задач (мно-
гофункциональность);
7
большие масштабы зоны действия и контура связей с вне-
шними объектами, размещаемыми на земной, водной поверхно-
сти, в воздушном и космическом пространстве;
разветвленность структуры и пространственная распределенность
элементов PC (многопозиционность системы), приводящие к слож-
ности процессов преобразования информации и управления PC,
необходимости создания и использования многоуровневых вычис-
лительных структур и сетей информационного обмена данными;
эволюционный характер процессов создания и модернизации,
многоэтапность жизненного цикла, осуществляемых с непрерыв-
ной коррекцией принимаемых технических и технологических ре-
шений на основе последних достижений науки и техники, что в
целом позволяет говорить о PC как о развивающихся системах.
Одновременно PC характеризуются рядом специфических
свойств, которые позволяют выделить их в отдельный класс слож-
ных систем. Основные из них определяются следующими осо-
бенностями, на основе которых могут быть выделены соответ-
ствующие классификационные признаки.
1. Целевое назначение PC всегда связано с решением задач
обеспечения информационного взаимодействия (воздействия) по-
требителя с интересующими объектами на основе извлечения,
формирования, передачи, приема, преобразования и обработки
информации.
2. Информационное взаимодействие, то есть взаимное влия-
ние, приводящее к изменению информационных состояний объек-
тов и PC, осуществляется, как правило, бесконтактным спосо-
бом на основе электромагнитных и других полей, выполняющих
функцию переносчика информации и распространяющихся че-
рез разъединяющую объекты и PC физическую среду. При этом
осуществляется модуляция некоторых параметров сигналов, из-
лучаемых и распространяемых одной из сторон в спектре элект-
ромагнитных волн, полезными сообщениями. Полученные сооб-
щения могут зарождаться внутри объектов PC и, соответствен-
но, вносятся в излучение искусственным способом с помощью
специальных устройств модуляции. При таком способе взаимо-
действия, как правило, реализуется информационный обмен
между его участниками. В другом распространенном варианте
полезная информация получается непосредственно в процессе вза-
имодействия зондирующих электромагнитных волн с объектами
(эффекты отражения, поглощения, переотражения). При этом
осуществляется естественная модуляция параметров излучаемых
сигналов, что позволяет в PC получить интересующую информа-
цию о состоянии объектов. Возможны и другие способы взаимо-
действия, включая и контактные.
3. Влияние внешней среды, содержащей большое количество
разного рода объектов, включая и не относящиеся к сфере интере-
сов PC, приводит к возникновению помех, нарушающих информа-
ционное взаимодействие. Необходимость борьбы с помехами есте-
ственного и искусственного происхождения определяет необходи-
мость реализации специальных мер защиты и оказывает существен-
ное влияние на структуру PC и алгоритм ее функционирования.
4. Облик PC и реализуемые в ней способы защиты от помех
определяются характером информационного взаимодействия си-
стемы с объектами. Можно выделить три типа такого взаимо-
действия [116]: согласованное, индифферентное, конфликтное.
Согласованное информационное взаимодействие подразумевает
единство целей, возникающих при функционировании PC и объек-
тов взаимодействия. Оно характеризуется наличием достаточно
полных сведений об условиях, параметрах и характеристиках
возникающих физических каналов передачи информации, рас-
пространяемых в них сигналов и способах кодирования переда-
ваемой полезной информации. Данная ситуация характерна для
систем радиосвязи и радиоуправления.
Индифферентное информационное взаимодействие реализуется
в ситуации «безразличия» участвующих в нем объектов по отно-
шению к процессу получения информации об их состояниях в
PC. При этом уровень априорной неопределенности по сравне-
нию с предыдущим случаем возрастает. Индифферентность наи-
более типична для систем мониторинга окружающей среды, не-
которых систем радиолокации и др., относящихся к классу PC
извлечения информации.
Конфликтное информационное взаимодействие отличается
наличием антагонизма целей сторон — участников взаимодей-
ствия. Конфликтный характер приводит к еще большему уров-
ню априорной неопределенности относительно параметров и ха-
рактеристик возникающих каналов передачи информации, а так-
же используемых в них сигналов. Это, как правило, связано с
реализацией одной из сторон (обеими сторонами) специальных
мероприятий по скрытию или искажению информации, призван-
ных затруднить работу другой стороны. Данная ситуация харак-
терна, например, для функционирования систем радиопротиво-
действия и радиоэлектронной разведки, относящихся к классам
PC разрушения и извлечения информации.
В современных PC и РЭК часто реализуется сразу несколько
типов информационного взаимодействия.
5. Важнейшей особенностью, определяющей один из классифи-
кационных признаков PC, является уровень сложности в сущест-
вующей системной иерархии. Остановимся на этом подробнее.
Известно [99], что иерархическое описание систем может осу-
ществляться различными способами. Во всех них используется
родовое понятие — уровень иерархии, имеющее различный смысл
в зависимости от способа описания и отражающее, в общем слу-
чае, расположение частей и элементов целого в порядке от выс-
шего к низшему. Существует три основных типа иерархии: 1) на
основе выделения страт — уровней абстрагирования (аспектов)
при описании системы; 2) па основе выделения слоев — уровней
сложности принимаемых решений при достижении глобальной
цели; 3) на основе выделения эшелонов или уровней в организа-
ционной структуре системы, имеющей четко выраженные семей-
ства управляющих и подчиненных элементов. Для описания ре-
альных систем обычно используется сочетание различных спо-
собов задания иерархии.
При рассмотрении вопросов синтеза и анализа сложных сис-
тем обычно проводится их функционально-структурная деком-
позиция па системы низшего уровня, которые называют подсис-
темами и которые, в свою очередь, обладают функциональной
целостностью, выполняя определенные операции, обеспечиваю-
щие достижение общей цели. Дальнейшая декомпозиция подси-
стем приводит к образованию многоуровневой иерархии, кото-
рая предполагает не только разделение систем, подсистем и т. д.
на части, но и использование различных аспектов описания си-
стемы, понимания ее как объекта материального мира. Приме-
нительно к рассматриваемому в книге кругу вопросов удобно
ввести пять уровней такой иерархии: уровень комбинированных
PC или РЭК; уровень PC, принадлежащих к одному из выделен-
ных в начале классов; уровень подсистем; уровень технических
устройств или функционально законченных модулей; уровень
схемных элементов, являющихся в данном случае предельными
единицами иерархического описания. При этом на верхнем уровне
рассматривается процесс функционирования РЭК как объекта
хозяйственной деятельности, боевого или обеспечивающего бое-
вые действия комплекса в сфере военного противоборства и т. п.
Следующий уровень используется для описания процесса смены
внутренних состояний РЭК в смысле выполнения входящими в
него PC основных обеспечивающих операций. Уровень подсис-
тем позволяет описывать процессы преобразования информации
в системах. Уровень технических устройств одновременно пред-
полагает описание преобразований сигналов — носителей инфор-
мации. Низший уровень является уровнем описания физичес-
ких процессов, протекающих в схемных элементах системы.
6. Объекты, с которыми осуществляют информационное вза-
имодействие PC, могут быть естественного и искусственного про-
10
исхождения, простыми и сложными. В последнем случае речь
идет о взаимодействии PC с другими системами, как информа-
ционными радиоэлектронными, занимающими различные уров-
ни в выделенной иерархии, так и с системами более общего на-
значения.
Таким образом, наличие у PC общих и специфических свойств
позволяет положить в основу их системной классификации сле-
дующие признаки [116]:
уровень сложности (иерархии) PC и ее подсистем (элементов);
место базирования (земля, море, воздушное, космическое про-
странство);
тип и разнообразие объектов информационного взаимодействия
(естественного, искусственного происхождения, простые, сложные);
способ информационного взаимодействия (контактный, бес-
контактный, информационный обмен, зондирование);
характер информационного взаимодействия (согласованное,
индифферентное, конфликтное);
цели информационного взаимодействия (передача, разруше-
ние, извлечение информации и др.);
общие структурные характеристики (централизованная, де-
централизованная, одпопозициопная, многонозиционная);
стадия разработки (этап жизненного цикла).
В рамках круга рассматриваемых вопросов дальнейшая конкре-
тизация облика PC связана с понятием конфликта радиоэлектрон-
ных систем, так как, по нашему мнению, именно участие или не-
участие системы в конфликте определяет ее основные черты.
Будем рассматривать конфликт как процесс взаимодействия
объектов (систем), далее называемых сторонами, имеющих явно
противоположные цели и стремящихся достигнуть несовместимых
состояний. Такое определение, возможно, не является всеобъем-
лющим, но отвечает специфике рассматриваемого далее класса PC.
В современных условиях в конфликтные взаимоотношения
вовлекаются не отдельные средства, а целостные сложные систе-
мы, решающие согласованный ряд задач в интересах достиже-
ния поставленных целей [51]. Отдельные элементы таких сис-
тем не являются независимыми, а дополняют и взаимно «по-
могают» друг другу. В этом плане конфликтное взаимодей-
ствие противостоящих сторон приобретает все характерные
черты сложного коалиционного конфликта — столкновения
двух коалиций, каждая из которых представлена совокупнос-
тью элементов, стремящихся к упреждающему решению по-
ставленных перед ними задач, в том числе и путем прямого
вмешательства в процесс функционирования элементов про-
тивостоящей стороны [51].
11
Основные идеи теории конфликта состоят в построении сис-
темной модели, связывающей объекты и факторы, участвующие
в конфликте, и направленной на установление закономерностей
рационального поведения сторон в конфликте. Основой построе-
ния математической модели конфликта является концептуаль-
ная модель или содержательная схема конфликта, определяю-
щая цели и задачи сторон, используемые для их количественно-
го описания показатели эффективности и ограничения, возмож-
ные связи элементов противоборствующих систем в статике. В
самом общем виде такая схема представлена на рис. 1.1.1. Рас-
смотрим ее обоснование подробнее.
Радиоэлектронные системы, как уже отмечалось, относятся к
категории целенаправленных сложных систем. В рамках выде-
ленной иерархии на самом верхнем уровне — уровне РЭК они
функционируют в соответствии с глобальной целью информаци-
онного взаимодействия, задаваемой некой надсистемой высшего
уровня. В качестве такой надсистемы могут выступать государ-
ство, ведомство, а в сфере военного противоборства, например,
любая система (комплекс) огневого поражения или боевая часть.
Такая надсистема определяет для РЭК перечень целевых задач
(функций), формулируемых на вербальной основе и содержащих
ключевые термины, обозначающие объекты и существо инфор-
мационного взаимодействия. Далее эти задачи, как некоторым
образом выделенные части деятельности, которые должны быть
реализованы в процессе функционирования РЭК, будем назы-
вать внешнеобусловленными задачами. Обычно их дополняют
количественными характеристиками, определяющими те или
иные качества системы (РЭК), для которых вводятся внешнеси-
стемные требования в виде границ допустимых значений. Эти
требования задаются, прежде всего, для вектора показателей ка-
чества (эффективности) выполнения внешнеобусловленных за-
дач К > К*, а также других существенных для надсистемы пара-
метров Q < Qo. Среди последних обычно фигурируют стоимост-
ные, энергетические и массогабаритные. Разделение на показа-
тели качества и параметры связано с тем, что первые, как
правило, зависят от условий функционирования системы, тогда
как вторые — инвариантны относительно этих условий. Будем на-
зывать совокупность внешнеобусловленных задач и внешнесистем-
ных требований внешнесистемными характеристиками РЭК.
Общая цель, определяемая назначением РЭК, будет достигну-
та и внешнеобусловленные задачи будут успешно решаться, если
* Здесь и далее использование знака неравенства для векторных
величин означает выполнение соответствующих неравенств для всех
компонент.
12
со
Управление
действиями
стороны А
Иформационное
обеспечение
управления
и применения
боевых элементов
Надсистема
А
Боевые
элементы
стороны А
Система
управления
РЭК А,
Система
извлечения _
информации
РЭК А.
Нарушить (исключить)*
функционирование В >
Нарушить (исключить)
функционирование Л
Надсистема
В
Управление
действиями
стороны В
Боевые
элементы
стороны В
Иформационное
обеспечение
управления
и применения
боевых элементов
РЭК Aj I
РЭК А;
Обеспечить нарушений
(устойчивость) функцио
пирования РЭК В, (AQ/
|рэкв,
РЭК Bj
Система
управления
РЭК В
Система
разрушения
(защиты)
информации
РЭК А,
Обеспечить нарушение
(устойчивость) функцио-
нирования РЭК Лх (В,)
Система
разрушения
(защиты)
информации
РЭК
Система
извлечения
информации
РЭК В,
Рис. 1.1.1. Общая схема конфликта
средства их реализации в виде совокупности входящих в РЭК
радиоэлектронных систем выполняют определенные функцио-
нальные операции информационного обеспечения. Будем назы-
вать их внутриобусловленными задачами РЭК. Перечень внут-
риобусловленных задач должен быть достаточным для функцио-
нального покрытия каждой из внешнеобусловленных задач и их
совокупной поддержки. По отношению к каждой из внутриобус-
ловленных задач определяется перечень внутрисистемных част-
ных показателей эффективности и других параметров систем РЭК,
для которых определяются соответствующие требования > Ki0,
<^<<^,1= 1,2,... Таким образом вводятся внутрисистемные ха-
рактеристики, объединяющие задачи и их количественные опи-
сания, которые, в свою очередь, выступают в качестве внешне-
системных по отношению к PC, входящим в состав РЭК. Забегая
несколько вперед, следует отметить, что, последовательно прой-
дя подобную декомпозицию задач по отношению ко всем выде-
ленным уровням иерархии описания радиоэлектронных систем,
можно получить в терминологии [6] так называемое обобщенное
дерево функций системы.
Конкретное содержание впутриобусловленных задач тесно свя-
зано и во многом определяет структурные характеристики сис-
тем различного уровня (РЭК, PC и т.д.), то есть их состава и
связей между элементами. Задание структурных характеристик
не всегда может быть проведено на основе сугубо формальных
приемов, например, методов теории статистических решений.
Оно часто связано с творческим анализом физической, техничес-
кой, информационной сущности процесса функционирования рас-
сматриваемой системы и опирается на опыт создания систем ана-
логичного назначения, то есть решения задач системотехничес-
кого проектирования в данной и смежных областях науки и тех-
ники.
Вернемся теперь к рассмотрению общей схемы конфликта.
Участвующие в нем надсистемы — стороны А и В стремятся
нарушить или исключить функционирование противоборствую-
щей стороны. Под нарушением функционирования будем пони-
мать снижение уровня показателей эффективности системы до
заданного предела, например, уменьшение дальности действия,
увеличение времени передачи полезного сообщения и т. п. Изве-
стно, что исход конфликта во многом [82] определяется способ-
ностью той или иной стороны к упреждающему добыванию све-
дений о своем сопернике, введению его в заблуждение относи-
тельно собственных действий, надежностью и эффективностью
применения активных средств воздействия на противника, спо-
собностью к прогнозу ситуации и приспособлению в условиях
14
преднамеренно усиливаемой противоборствующей стороной не о*
пред елейности. Целевая направленность действий сторон в кон-
фликте определяет и состав его участников — это средства (сис-
темы) управления, средства добывания, обработки, накопления
и передачи информации о противостоящей стороне (средства ин-
формационного обеспечения) и средства активного воздействия —-
боевые элементы надсистем.
Ввиду исключительной важности влияния указанных факто-
ров на ход и исход конфликта и в соответствии с функциональ-
ной декомпозицией облика надсистем, в современных условиях
целесообразно выделить самостоятельную составную часть кон-
фликта — информационный конфликт (ИК). ИК по существу
есть процесс «борьбы» за информацию, основная цель которого
состоит в нарушении управления противоборствующей стороны
и поддержании устойчивости своего управления. Эта цель реа-
лизуется путем пассивного или активного (скрытие, защита, раз-
рушение информации) вмешательства в процесс получения све-
дений о своей стороне посредством затруднения нормального
функционирования средств добывания и передачи информации
другой стороны, а также нейтрализации противопоставленных
ею активных средств информационного противодействия. При
этом основными и обязательными участниками ИК [51] являют-
ся PC, решающие задачи добывания и передачи сведений о про-
тивостоящей стороне, то есть, по сути, системы разведки, отно-
сящиеся к классу систем извлечения информации. Активные
средства противодействия и контрпротиводействия, в своей со-
вокупности объединяемые в системы разрушения информации и
оказывающие непосредственное влияние на исход ИК, являют-
ся, тем не менее, сугубо исполнительными элементами. В своем
функционировании они практически полностью зависят от воз-
можностей систем извлечения информации, которые выявляют
наличие и оценивают текущие состояния элементов систем про-
тивоборствующей стороны, а затем выдают целеуказание своим
активным элементам. Пассивные средства противодействия, обес-
печивающие защиту и скрытие информации, ориентированы на
использование данных о текущем состоянии сторон в меньшей
степени. Согласованность действий сторон в ИК предполагает
организацию управления средствами и системами извлечения и
разрушения (защиты) информации, которое выделяется в само-
стоятельную основную систему. К числу вспомогательных средств,
участвующих в ИК, относятся элементы систем передачи данных,
обеспечивающих информационный обмен для каждой из сторон.
Основные и вспомогательные средства и системы каждой из
сторон образуют коалиции, решающие свои задачи в интересах
15
достижения единых целей. Общность содержания и взаимосвя-
занность действий участников коалиций в условиях ИК объеди-
няет их в радиоэлектронные комплексы, которые являются со-
ставными радиоэлектронными частями надсистем. В соответствии
с этим обобщенная структура РЭК — участников ИК в составе
надсистем представлена на рис. 1.1.1, где просматривается оче-
видное подобие структуры РЭК ранее выделенной структуре над-
систем. Следует только отметить, что PC извлечения информа-
ции не только обеспечивает управление и применение PC разру-
шения информации своего РЭК, но является одновременно час-
тью общей (и не обязательно радиоэлектронной) системы инфор-
мационного обеспечения действий сторон, в том числе и непо-
средственного применения их боевых элементов.
Представленная схема конфликта является типовой схемой
двустороннего симметричного простого конфликта. Она не ис-
черпывает всего многообразия ситуаций. Часто, например,
встречается ситуация несимметричного двустороннего конф-
ликта, когда одна из сторон реализует меры как активного,
так и пассивного характера, тогда как другая сторона реали-
зует только пассивные стратегии информационного взаимодей-
ствия. Возможен и многосторонний конфликт, в который вклю-
чается множество участников с каждой стороны. В этом плане
необходимо отметить, что в рамках конфликтующих надсис-
тем может содержаться не один, а несколько разнородных по
объектам и задачам информационного взаимодействия РЭК.
Именно с этим связана дальнейшая детализация их структур-
ных характеристик.
Концептуальная феноменологическая модель конфликта яв-
ляется основной для построения различного рода математи-
ческих моделей. В настоящее время это направление исследо-
ваний ИК активно развивается [51, 57, 182, 207]. При этом
весьма плодотворным является подход, основанный на пост-
роении моделей динамики конфликта, что естественно следу-
ет из доминирующей стратегии действий — стремления полу-
чить упреждающие по времени сведения о противоборствую-
щей стороне. Одним из возможных аппаратов, позволяющих
получить вероятностно-временные описания динамики конф-
ликта, является аппарат теории марковских и полумарковс-
ких процессов.
Рассмотрим в качестве примера вариант простого конфликта
[143, 150], в котором в качестве одной из сторон выступает РЭК
а другой — РЭК Вр Задача, решаемая АР состоит в поиске,
обнаружении и оценке координат в фазовом пространстве (то
есть, по сути, разведке) цели — надсистемы В. Считается, что
16
если Ai обнаружила и оценила состояние В, то боевые элементы
А поражают В с вероятностью, близкой к единице, то есть дей-
ствия Ai полностью предопределяют исход конфликта. Задача В.
при этом состоит в противодействии усилиям Ар что также пред-
полагает поиск и обнаружение в соответствующем фазовом про-
странстве Aj и затем создание для нее активных мешающих воз-
действий, например, радиопомех. При этом сторона Аа предпо-
лагает наличие II и ее возможные действия и может рефлексив-
но предпринимать, в связи с этим, некоторые меры (только
пассивного характера) по уклонению от воздействия помех со
стороны Bj. Уход А. из-под воздействия помех возвращает для
нее ситуацию режима поиска В, а для В^ соответственно —
начала поиска Ai (далее для упрощения записей индексы i и j
опускаем).
В основе построения модели динамики конфликта лежит пер-
воначально задание графа основных и вспомогательных состоя-
ний, показанных на рис. 1.1.2 сплошными и штриховыми лини-
ями. Основное состояние SA выигрыша стороны А означает факт
обнаружения и оценки координат В с помощью РЭК А в преде-
лах отведенного для этого интервала времени [0,t] и является
поглощающим. Основное состояние SR выигрыша стороны В оз-
начает, что на интервале [0,t] В не обнаружена. Начальное со-
стояние конфликта обозначено S(). Вспомогательные состояния
Sp S2, S3 означают, соответственно, события следующего харак-
тера: РЭК А обнаружен В и определено его состояние в соответ-
ствующем фазовом пространстве; поставлены помехи РЭК А; РЭК
А ушел из-под воздействия помех па основе применения той или
иной меры помехозащиты. Аналитически такой конфликт мо-
жет быть описан на основе, следующего общего соотношения для
полумарковских процессов [181]:
ck (t) = £ Ррк J ср (т)сорк (t - т) <1 т,
р-0 о
где ck(t), к = 1,п — плотности переходов в состояния; Ррк, 0)pk(t) —
переходные вероятности и плотности вероятности времени пере-
хода из состояния р в к. Кроме того, вводится среднее количе-
ство переходов в состояние ck(t) и вероятность пребывания в
состоянии ck(t)
ck(t) = jCk(T)dT, Ck(t) = J[1 - £PpkWpk(t - T)]Cp(T) dT,
0 0 P=0
Wpk(t) = j(opk(t) d t, к t=r LD--p
0
Рис. 1.1.2. Граф состояний ди-
намики конфликта
t
«ок(t) = «ок ООН ~ J«oPCO dr],
о
Для поглощающих состояний
ck(t) = ck(t). Указанные харак-
теристики могут определяться
на основе статистических харак-
теристик переходов, которые
первоначально известны для
каждой из сторон в отдельнос-
ти. Для этого вводится опера-
ция конфликтного обуславлива-
ния, в соответствии с которой
определяются плотности вероят-
ности «упреждения» — дости-
жения цели компонентами А
раньше, чем В осуществит свое
противодействие, и наоборот:
«оР(й =<%(t)[l-J<ool[(T) dT].
О
Некоторое усложнение при описании конфликта возника-
ет, когда требуется учесть последствие, что в рассматривае-
мом примере означает, что поиск целей после постановки по-
мех и ухода из-под их воздействия зависит от ранее достигну-
тых результатов поиска. Учесть этот фактор можно, если вве-
сти нестационарные во времени статистические характеристики
переходов [141].
Окончательное решение задачи исследования конфликта в виде
вероятностно-временных характеристик выигрышей сторон мо-
жет быть получено либо в аналитическом виде (для упрощенных
ситуаций [181]), либо путем моделирования процесса на основе
соответствующих уравнений. Дальнейшее развитие данного под-
хода к описанию ИК связано с рассмотрением ситуации, когда в
условиях конфликтного взаимодействия после выигрыша одной
из сторон (в смысле упреждения своего «противника») другая
сторона не прекращает своих действий и первая может «поки-
нуть» состояние выигрыша, а в общем случае может «посещать»
это состояние неоднократно [82, 207]. В данном случае в каче-
стве основных характеристик конфликта следует признать фи-
нальные вероятности пребывания систем в состоянии выигры-
ша, для вычисления которых вводятся конфликтно обусловлен-
ные плотности вероятности времени пребывания сторон в состо-
яниях выигрышей [207].
В заключение следует подчеркнуть, что в рамках рассмот-
ренного примера элементарного информационного конфликта
следует выделить важность последующего анализа «вложен-
18
ного» подпроцесса «разведка» — «активное помеховое воздей-
ствие» — «уход из-под воздействия помех». Поскольку, как
уже отмечалось, функционирование систем разрушения ин-
формации, реализующих создание помеховых воздействий,
всецело зависит от содержания добываемой о противоборству-
ющей стороне информации, очевидно, что определяющую роль
в процессе исследования ИК играет анализ возможностей сис-
тем извлечения информации в виде вероятностно-временных
характеристик решения возлагаемых на них внешнеобуслов-
ленных задач.
1.2. Особенности информационного обеспечения конфликта
при функционировании радиолокационных систем
Описание типового конфликта систем в радиолокации бази-
руется на рассмотренной в п. 1.1 схеме. Здесь, в качестве основ-
ных конфликтующих сторон (надсистем) выступают [17, 26, 153]
комплексы управляемого оружия наземного и воздушного бази-
рования (зенитно-ракетные комплексы, авиационные комплек-
сы перехвата, авиационные ударные комплексы и др.). В каче-
стве радиоэлектронных систем, участвующих в информацион-
ном конфликте и обеспечивающих применение управляемого
оружия в составе надсистем, выступают радиолокационные сис-
темы (РЛС) различного назначения, системы радиотехнической
разведки (СРТР), системы радиопротиводействия (СРПД) — со-
здания активных радиопомех РЛС, системы радионавигации,
средства снижения заметности (ССЗ) и другие пассивные сред-
ства защиты, средства и системы контрпротиводействия [17, 26,
55, 103, 104, 139, 153]. Возможны различные комбинации пере-
численных элементов и образование конфликтующих коалиций,
функционально оформленных с каждой стороны в РЭК с общей
системой управления (СУ), снабженной своими элементами сис-
темы передачи информации (СПИ).
Рассмотрим типовой вариант конфликта в радиолокации [17,
26], когда с одной стороны (А) действует наземный комплекс
управляемого оружия, а с другой стороны (В) — летательный
аппарат, преодолевающий пространственную зону ответственно-
сти комплекса. При этом типичной является ситуация использо-
вания комплекса полуактивного самонаведения [17], показан-
ная на рис. 1.2.1. В его состав входят следующие средства и
радиоэлектронные системы: РЛС поиска и захвата цели на со-
провождение (РЛСХ); РЛС сопровождения и подсвета цели (РЛС2);
радиолокационная головка самонаведения (РЛГС); системы пе-
редачи данных целеуказания и наведения (СПИ3 2). В рамках
ИК им противостоят размещенные на летательном аппарате
19
Рис. 1.2.1. Схема взаимодействия радиосистем для информацион-
ного конфликта в радиолокации
объекты: система радиотехнической разведки (СРТР*); систе-
ма радиопротиводействия (СРЩЦ), а также средства снижения
заметности. Совмещенные с целью СРТР, СРПД объединяются в
РЭК, в состав которого входит также общая СУ. Основное назна-
чение РЭК состоит в «самоприкрытии» цели на основе создания
радиопомех и других мер защиты. Объектами разведки и проти-
водействия в данном случае являются все радиоэлектронные си-
стемы наземного комплекса, но, главным образом, его РЛС и
РЛГС. Помимо рассмотренных систем, для обеспечения «при-
крытия» цели могут применяться функционирующие в выне-
сенной точке системы (СРТР2, СРПД2), которые «помогают» РЭК,
размещенным на летательных аппаратах. В ходе ИК в РЛС, под-
вергающихся действию радиопомех, осуществляются меры по-
мехозащиты (ПЗ) с целью ухода из-под воздействия, которые, в
основном, сводятся к смене режимов излучения и параметров
зондирующих сигналов. Кроме того, для защиты РЛС от внеш-
него воздействия могут применяться специальные источники кон-
трпомех (КП), которые воспроизводят сигналы, близкие но па-
раметрам к основному, «отвлекают» противостоящие средства и
системы и переводят воздействие на себя. Основные каналы ин-
формационного взаимодействия сторон показаны на схеме
рис. 1.2.1 сплошными, а вспомогательные — штриховыми ли-
ниями.
20
Таким образом, ИК в рассмотренной типовой ситуации явля-
ется сложным и многоаспектным. Он характеризуется не только
участием нескольких разнородных по назначению и условиям
применения PC. Существенным также является то, что в зоне
действия сторон, участвующих в конфликте, функционирует боль-
шое количество других радиоэлектронных объектов, излучения
которых непреднамеренно воздействуют на радиоэлектронные
элементы взаимодействующих надсистем и существенно затруд-
няют их работу. Особенно сильно этот фактор влияет на функцио-
нирование систем РТР, которые должны на общем фоне обеспе-
чить выявление излучений РЛС стороны А, на данный момент
времени являющихся главными объектами информационного
взаимодействия.
Как уже отмечалось, для достижения целей сторон в ИК важ-
ную роль играют системы извлечения информации, то есть, в
данном случае, РЛС с одной стороны и СРТР с другой. При этом,
если вопросам функционирования радиолокационных систем по-
священо достаточно много работ, то вопросы синтеза и анализа
систем радиотехнической разведки в условиях сложного ИК по
ряду причин затронуты не так полно. Такие системы являются
основой информационного обеспечения действий одной из сто-
рон (в данном случае РЭК, воздействующих на РЛС) в конфлик-
те, во многом определяя его ход и исход. Поэтому далее именно
эти PC становятся объектом подробного рассмотрения.
Рассмотрим схему взаимосвязей PC в рамках РЭК, представ-
ленную на рис. 1.2.2. Здесь E(t) = (E^(t),...,E^(t))T— обобщен-
ный вектор параметров совокупности источников радиоизлуче-
ния (ИРИ), которые потенциально могут находиться в информа-
ционном взаимодействии с РЭК (EJt) — вектор параметров i-ro
ИРИ). Вектор E(t) определяет радиоэлектронную обстановку (РЭО)
в зоне действия комплекса. Совокупность ИРИ создает резуль-
тирующее электромагнитное поле радиосигналов SM(E,rA,t), где
гА — радиус-вектор точек пространства в системе координат сто-
роны А. Соответственно на входе СРТР формируется результи-
рующее электромагнитное поле входных сигналов Sn(E,£,rB,t),
где £ — вектор, описывающий искажающее влияние среды рас-
пространения и помехи; гв — радиус-вектор точек пространства
в системе координат стороны В. На выходе СРТР формируется
вектор результатов принимаемых решений о наличии и состоя-
нии РЛС — объектов информационного взаимодействия сторо-
ны A - R^t), который передается в СУ, а также вектор R2(t),
передаваемый в СРПД непосредственно и содержащий информа-
цию о некоторых параметрах состояний объектов, обеспечиваю-
щую формирование эффективных радиопомех. Система управле-
21
Рис. 1.2.2.
стем РЭК
Схема взаимодействий основных радиоэлектронных си-
няя с учетом возможности получения данных RB(t) от внешних
источников (например, от CPTP0 вырабатывает основной век-
тор управляющего воздействия Y^t), базирующегося на целеу-
казании СРТР и передаваемого в исполнительную систему ра-
диопротиводействия, а также передает данные Y2(t) о принятых
управленческих решениях в систему разведки. На основе полу-
чаемой извне информации СРПД формирует совокупное помехо-
вое воздействие Un(E,rB,t), в результате чего на входах прием-
ных модулей PC стороны А формируется электромагнитное поле
Un(E,T|,rA,t), гдеТ| — искажения, связанные с прохождением через
среду распространения.
Очевидно, что в обще^м случае получить аналитическое реше-
ние уравнений, описывающих процессы, происходящие в РЭК в
ходе ИК, не представляется возможным. Поэтому должна осу-
ществляться дальнейшая декомпозиция модели его функциони-
рования на основе детального рассмотрения составляющих ра-
диоэлектронных систем и, прежде всего, системы радиотехни-
ческой разведки.
В ходе такой декомпозиции, как было отмечено в п. 1.1, требу-
ется, прежде всего, определить внешнесистемные характеристики
СРТР как основного элемента РЭК и системы информационного
обеспечения конфликта в целом. С учетом обобщения результатов
ранее выполненных работ [26, 55, 97, 112, 125] и схемы взаимосвя-
зей рис. 1.2.2 типовой перечень внешнеобусловленных задач и внеш-
несистемных требований для СРТР представлен в таблице 1.2.1.
22
Таблица 1.2.1
Типовой перечень внешнесистемных характеристик
№ п/п Формулировки внешпеобусловленных задач Основные внетпнесистемные требования
1 Разведка заданного перечня ИРИ или объектов размещения ИРИ по главному и/или боко- вому излучению их антенн для типовых условий функциониро- вания комплекса в информаци- онном конфликте (RtnR2nRB) Перечень классов и типов ИРИ — объектов информацион- ного взаимодействия. Границы частотной и простран- ственной области расположения объектов информационного вза- имодействия, Дальность развед- ки по главному и боковому из- лучению {R} >R0.}?*a. Массога- бариты и энергопотребление М <м Э <3^ р ро’ Р ро
2 Выявление факта излучения опасного ИРИ по принадлежно- сти к определенному классу, типу, режиму работы, местопо- ложению и слежение за измене- нием параметров его состояния в динамике конфликта (RtnRB) Допустимый уровень вероятно- сти {Pj и времени {Tj < принятия правиль- ных решений при заданном уровне вероятности ошибки вто- рого рода Рдо
3 Измерение заданного перечня параметров сигналов и харак- теристик ИРИ с целью опреде- ления приоритета по степени опасности при выборе объектов радиопротиводействия (режим излучения, дальность, ракурс и т.п.) (R,) Перечень параметров и харак- тсристик {Yip j =l,nyi},L=1. До- пустимый уровень ошибок из- мерения параметров и характе- ристик Чу j =
4 Измерение заданного перечня параметров сигналов ИРИ с це- лью качественного создания по- меховых воздействий (частота, ширина спектра и т.п.) (R2) Перечень параметров и характе- ристик {niJ( j = l.nlli^.I. Допус- тимый уровень ошибок измере- ния параметров Чпу 5 J =
При этом просматривается определенная детализация, так как за-
дачи п.п. 2—4 раскрывают содержание п. 1.
Существенным фактором, оказывающим влияние на требова-
ния к СРТР, является предлагаемый способ ведения разведки по
боковым или главным лепесткам диаграмм направленности ан-
тенн (ДНА) РЛС. Это, в свою очередь, связано со способом при-
менения средств радиопротиводействия. Так, в ситуации «само-
23
прикрытия» часто достаточно выявлять излучения РЛС по пер-
вым и главным лепесткам ДНА, а в ситуации прикрытия объек-
тов из зоны (см. рис. 1.2.1) требуется обеспечить выявление бо-
кового излучения РЛС в достаточно широком секторе углов от-
ворота главного луча ДНА. Если учесть необходимость упрежде-
ния по времени при реализации мешающих воздействий по
отношению к моменту облучения прикрываемой цели главным
лучом ДНА (во многих современных РЛС обнаружение может
производиться всего по нескольким и даже по одному зондирую-
щему импульсу), то способ разведки по боковому излучению ста-
новится основным.
Характерными видами зондирующих радиоизлучений, исполь-
зуемых в РЛС по основному назначению, являются импульсные,
квазинепрерывные и непрерывные излучения. В рамках этих
видов излучений в современных радиолокационных системах ре-
ализуются скрытные и адаптивные режимы работы, использу-
ются сложные сигналы с амплитудной, частотной и фазовой мо-
дуляцией [50, 55]. Например, для импульсных сигналов типич-
но использование режимов быстрой (от импульса к импульсу)
перестройки частоты (БПЧ) и других параметров (периода сле-
дования, длительности), а также широкополосных и сверхширо-
кополосных сигналов. Другим важным направлением повыше-
ния конфликтной устойчивости современных РЛС является при-
менение специальных мер снижения и адаптивного управления
мощностью излучения, а также антенных систем с низким уров-
нем бокового излучения. Общей характерной особенностью яв-
ляется способность РЛС к быстрой смене режимов излучения
под влиянием внешних воздействий. Уже упоминалось об ис-
пользовании специальных источников маскирующих и имити-
рующих коятрпомех с целью изменения режима функциониро-
вания противостоящего РЭК в выгодном для себя отношении.
Необходимо еще раз подчеркнуть, что перечисленные способы и
приемы направлены, прежде всего, на нейтрализацию системы
извлечения информации противостоящей в информационном
конфликте стороны.
1.3. Особенности информационного обеспечения конфликта
при функционировании систем радиосвязи
Типовой конфликт систем в радиосвязи [15, 16, 55] реализу-
ет, на первый взгляд, более упрощенную схему взаимоотноше-
ния сторон. Она фактически является схемой двустороннего не-
симметричного ИК, в котором одна из сторон (А), а именно: срод-
ства и системы радиосвязи (передачи информации), предприни-
мает только меры пассивного характера с целью уклонения от
24
вмешательства второй стороны (В). В качестве этой второй сто-
роны выступает РЭК, в состав которого входят система радио-
разведки (СРР), система радиопротиводействия и система управ-
ления. Целевое назначение РЭК состоит в нарушении функцио-
нирования систем радиосвязи и/или их отдельных элементов,
которое проявляется в исключении или задержке передачи сооб-
щений между органами управления общей надсистемы А. Пас-
сивный характер действий стороны А в данном ИК не означает,
конечно, что активные элементы других ее компонент не могут
воздействовать в обратном направлении и что это воздействие
никак не зависит от функционирования систем радиосвязи. Даже
из приведенного в п. 1.2 примера видно, что успех применения
наземного комплекса управляемого оружия стороны А во мно-
гом зависит от нормального функционирования элементов своей
системы передачи информации. В то же время, в большинстве
случаев по отношению к рассматриваемому конфликту «система
радиосвязи — РЭК» процесс активного вмешательства стороны
А как результат реакции на активные действия В является дос-
таточно опосредованным и можно ограничиться рассмотрением
только пассивных действий стороны А.
Из сказанного, однако, не следует, что в данном случае общая
ситуация, складывающаяся для стороны В в связи с вступлением в
информационный конфликт, является более простой. Напротив,
есть все основания считать, что условия функционирования и зада-
чи, которые она должна решать, будут в целом не менее сложны-
ми, чем в предыдущем случае. Это объясняется прежде всего тем,
что при весьма высокой насыщенности радиоэлектронной обста-
новки излучениями средств радиосвязи их основные характерис-
тики в рамках каждого класса систем передачи информации в це-
лом похожи. Можно ожидать, что в зоне ответственности стороны
В могуч’ функционировать до нескольких десятков, а то и сотен
ИРИ с близкими характеристиками. Естественно, что все они не
могут быть объектами воздействия и требуется выделить несколь-
ко наиболее важных, нарушение работы которых приведет к мак-
симальному ущербу для стороны А. Другими словами, возникает
специфика определения объекта информационного взаимодействия
на «сером» фоне радиоэлектронной обстановки, создаваемой боль-
шим количеством однотипных ИРИ.
На рис. 1.3.1 представлена схема информационного взаимо-
действия систем для конфликта в радиосвязи, где показана зона
расположения ИРИ систем радиосвязи стороны А и РЭК сторо-
ны В. ИРИ, расположенные в зоне, могут принадлежать несколь-
ким большим классам систем радиосвязи коммерческого и/или
военного назначения (КВ, УКВ радиосвязь, радиорелейная связь
25
Рис. 1,3,1. Схема взаимодействия радиосистем для информацион-
ного конфликта в радиосвязи
и т.п.). Но в рамках каждого класса таких источников может
быть множество, при этом они образуют фактически сетеподоб-
ные структуры, состоящие из узлов связи (УС) и отдельных
средств, соединенных радиолиниями (РЛ). При этом на каждом
УС могут находиться совокупности ИРИ, принадлежащие раз-
ным классам систем радиосвязи (один и более для каждого класса).
Общая структура РЭК стороны В [16] и взаимосвязи основ-
ных PC, входящих в него, в целом повторяют ранее рассмотрен-
ные в п. 1.2. Его общее целевое назначение состоит в нарушении
функционирования наиболее важных радиолиний различных
систем радиосвязи, реализующих информационный обмен меж-
ду органами управления надсистемы А. При этом существенное
значение имеет принцип, по которому определяются приоритет-
ные радиолинии — объекты информационного воздействия со
26
стороны РЭК в ИК. В наиболее простом случае они выбираются
исходя из принадлежности ИРИ системы радиосвязи к опреде-
ленной частотно-пространственной зоне. Более сложным пред-
ставляется случай, когда определение объекта связано с его при-
надлежностью к определенному узлу связи или даже конкрет-
ной радиолинии, связывающей различные УС. В соответствии с
этим в таблице 1.3.1 представлен примерный перечень внешне-
обусловлеппых задач и требований к ним, характеризующих
информационное обеспечение рассматриваемого типа конфлик-
та и представленных в порядке определенной детализации. Пред-
ложенные формулировки внешнеобусловленных задач носят до-
статочно общий характер и могут существенно уточняться в за-
висимости от условий применения РЭК. Так, в ряде случаев как
Таблица 1.3.1
Типовой перечень внешнесистемных характеристик
п/п Формулировки внешнеобусловленных задач Основные внешнесистемные требования
1 Разведка заданного перечня объектов - радиолиний различ- ных систем радиосвязи, обеспе- чивающих информационный об- мен между органами управления надсистемы A (Rj n R,nRn) Перечень объектов {О^=1 ин- формационного взаимодей- ствия. Границы частотно-про- странственной области распо- ложения объектов информаци- онного взаимодействия. Даль- ность разведки {R, > . Массогабариты и энергопотреб- ление М < М , Э < Э Р Р'1 р ро
2 Выявление излучений и измере- ние заданного перечня парамет- ров сигналов и характеристик приоритетных объектов инфор- мационного взаимодействия по их принадлежности к зонам, уз- лам связи и радиолиниям, обес- печивающим информационный обмен между органами управле- ния надсистемы А. Слежение за изменением состояний ИРИ в ди- намике конфликта (Rx n RJ Допустимый уровень вероят- ности и времени {Щ <Toi}^ принятия правиль- ных решений при заданном уровне вероятности ошибки второго рода Р . Перечень па- ра метров и характеристик {Yy, j = l,n>J1L=1. Допустимый уровень ошибки измерения
3 Измерение заданного перечня параметров сигналов ИРИ с целью качественного создания помеховых воздействий (RJ Перечень параметров {Пи, j = l*nri}Jl1. Допустимый уровень ошибок измерения j = l-n.X,
27
самостоятельная формулируется задача выявления УС и всех
входящих в них ИРИ.
Основными видами радиосигналов, используемых в совре-
менных системах передачи информации, являются непрерыв-
ные и импульсные сигналы с различными способами модуля-
ции и закрытия полезной информации, в том числе и на осно-
ве излучения широкополосных сигналов. Сочетание способа
модуляции и способа закрытия определяет «вид передачи»
полезной информации, которых в настоящее время насчиты-
вается до нескольких десятков. Одной из характерных тен-
денций является использование режимов программной пере-
стройки частоты (ППРЧ) от посылки к посылке и режимов
адаптивной перестройки частоты (АПРЧ) и других парамет-
ров как реакции на воздействие помех. Кроме того, в совре-
менных системах радиосвязи и распределения данных допус-
кается коллективное использование общего диапазона частот
несколькими источниками. Важно отметить, что с позиций
усложнения условий ведения разведки эти тенденции в целом
повторяют имеющиеся для ИК в радиолокации,
Обобщая в целом материалы настоящей главы, еще раз отме-
тим роль радиоэлектронных систем извлечения информации, на
основе которых может быть обеспечено воздействие на объекты
противоборствующей стороны в ИК. По отношению к современ-
ным системам и комплексам радиолокации и радиосвязи такое
воздействие может быть реальным и эффективным только в слу-
чае, если оно имеет выборочный, «точечный» в рамках множе-
ства радиоизлучающих объектов характер, что определяет по-
вышенные требования к информационному обеспечению конф-
ликта, «ядром» которого являются системы радиоэлектронной
разведки.
28
2. МОДЕЛИ ИНФОРМАЦИОННОГО
ВЗАИМОДЕЙСТВИЯ И ФУНКЦИОНАЛЬНАЯ
ДЕКОМПОЗИЦИЯ ПРОЦЕССА ИЗВЛЕЧЕНИЯ
ИНФОРМАЦИИ
2.1. Роль и место моделирования в общей технологии синтеза
и анализа радиоэлектронных систем
PC, как и любая сложная система, определяется тремя основ-
ными категориями: элементы, отношения, свойства. Однознач-
ное и полное задание этих категорий фактически определяет
систему: ее целевое назначение, структуру, качества. Рассмотре-
ние возможных способов формализованного описания систем
однозначно связано с понятием модели. Модель (лат. «мера»)
это объект-заменитель объекта-оригинала, обеспечивающий изу-
чение наиболее существенных в интересующем нас аспекте
свойств оригинала и, наоборот, позволяющий абстрагироваться
от его несущественных, в рамках данного рассмотрения, свойств.
При математической формализации описания систем различают
два подхода [176]: структурный, в рамках которого основное вни-
мание уделяется анализу внутренних свойств и состояний систе-
мы, и функциональный, при котором сосредотачиваются на иссле-
довании внешних проявлений системы как преобразователя «вход—
выход», а сама система рассматривается как «черный ящик».
Введем некоторые понятия и определения. Бинарным отно-
шением R на множествах произвольной природы X, Y называет-
ся подмножество декартова произведения этих множеств
R с X х Y. Если пара элементов х е X, у е Y такова, что (х, у) е R,
то этот факт обозначают следующим образом: xRy. Для бинар-
ных отношений важным является наличие или отсутствие сле-
дующих свойств: рефлексивности xRx; симметричности
xRy —> yRx; транзитивности xRy n yRz —> xRz. По аналогии
вводится также понятие n-арного отношения как подмножества
декартова произведения и множеств.
Пусть имеется семейство множеств {Хр i е IJ, где I — мно-
жество целочисленных индексов. Тогда в соответствии с теоре-
29
тико-множественным подходом [99, 116] общая система S опре-
деляется как n-арное отношение на этом семействе S ст Xnx...xXin.
Данное общее определение в зависимости от того, каким содер-
жанием наделяются множества Хр i е 1п, позволяет получить опи-
сание системы в соответствии с тем или иным подходом. Ис-
пользуем понятие универсума, под которым будем понимать ба-
зовое множество, содержащее все элементы какой-либо предмет-
ной области. Пусть М — универсум элементов; Т — универсум
отношений между ними; V — универсум свойств, реализуемых
на этих элементах. Тогда система S определяется как
S er MxTxV = WxV, (2.1.1)
где W « МхТ — универсум структурных характеристик или струк-
тур. Элементы V есть, по сути, параметры системы, обеспечива-
ющие необходимый уровень детализации описания элементов и
связей между ними (то ость внутрисистемные характеристики).
Очевидно, что определение S с WxV соответствует ранее введен-
ной в п. 1.1. терминологии.
Точно также введенное выше общее определение позволяет
перейти к реализации функционального подхода [99, 116]. Для
этого достаточно определить X как множество входных объек-
тов, a Y — выходных объектов. Тогда система определяется как
бинарное отношение S cz XxY. Часто при этом используется оп-
ределение системы на основе отображения или функции
S: X Y; f: X —> Y, (x,y)eS у == f(x).
то есть такого типа бинарного отношения, для которого при
любых xgX, y^Y, y2eY выполняются xSyt n xSy2 yx = y2.
Вернемся теперь к исходному определению системы (2.1.1).
Будем называть вариантом построения системы пару (w, v), wgW,
vgV, to есть некоторый упорядоченный набор данных, характе-
ризующих ее структуру и параметры. Будем считать, что в обла-
сти ответственности исследователя система конкретно определе-
на, если задан вариант (w, v) и обозначать этот факт следующим
образом: Swv = S(w,v)eS.
Совокупность задач, возникающих в связи с исследованием слож-
ных систем, разбивается на два класса: анализ и синтез систем.
Задача анализа состоит в изучении свойств системы, если за-
даны: характеристики внешней среды, а также любых структур-
ных и параметрических неопределенностей и возмущений в виде
упорядоченного набора данных (OgQ, структура we W и парамет-
ры veV варианта системы SwveS, оценочное отображение вида
К: SxQ —> U11, где Un — множество значений оценочной функ-
ции, описывающей набор из п показателей эффективности. Тог-
да в ходе анализа изучение свойств системы сводится к расчету
30
значений u=s(ur...,un)TeUn как функции K(Swv,co) = K(w,v,co).
Таким образом, задача анализа задана, если известна тройка
Задача синтеза заключается в выборе оптимальных, в извест-
ном смысле, структуры и/или параметров при заданных харак-
теристиках внешней среды и налагаемых ограничениях. Ее по-
становка предполагает определение:
множества характеристик внешней среды, описывающего в
общем случае любые возмущения внешнего и внутреннего ха-
рактера;
ресурсные (физические) ограничения, определяемые отобра-
жением Q: S -> Нт и уровнем удовлетворения hoe Hm (Н1П — мно-
жество, каждый элемент которого содержит набор из ш внешних
параметров системы);
критериальные ограничения, определяемые отображением К:
SxQ -> U11 и отображением KQ: Q —> Un;
правило предпочтения RH в виде бинарного отношения поряд-
ка («быть лучше») на Un, обладающее свойствами рефлексивно-
сти, транзитивности и антисимметричности.
Если такая совокупность <W, Q, h0, К, Ко, Rn> задана, то
задача синтеза формируется как задача нахождения варианта
S^vveS такого, что для любых cogQ и SwvgS
Q(S’WX) < h0; K(S;X ,(D) > K0(cd); (2.1.2)
где в данном случае обозначения >, < определяют бинарные от-
ношения порядка на Un и Н,п, обеспечивающие выполнение со-
ответствующих неравенств для всех компонент векторных вели-
чин. Множество 8Д с S, 8Д = {Swv, Q(SWV) < h0, Swv e S} называ-
ется множеством допустимых систем. Множество
Scn с 8Д, Sc;i - {SWV,K(SWX,со) > К0(ш), cog Q, Swv е Эд} называ-
ется множеством строго допустимых систем.
Для подавляющего большинства сложных систем решение
задачи синтеза в постановке (2.1.2) не может быть получено на
основе одной формально определенной операции оптимизации.
Поэтому в ходе реального синтеза применяется системный под-
ход, одна из основных идей которого состоит в сочетании нефор-
мальных (эвристических) приемов, направленных на расчлене-
ние процесса решения сложной проблемы на отдельные состав-
ляющие, по при этом таким образом, чтобы по возможности
учесть связи между ними и сохранить целостное представление
о системе. Рассматривая этот вопрос более детально, можно ут-
верждать, что в рамках системного подхода при решении задач
синтеза обычно руководствуются следующими принципами и
приемами [53, 116].
31
1. Сочетание декомпозиции, композиции и иерархичности.
Декомпозиция представляет собой разъединение системы на
части с последующим самостоятельным рассмотрением частей.
В ходе декомпозиции связи между элементами рассекаются та-
ким образом, чтобы минимальным образом нарушались их ос-
новные свойства, при этом вводятся такие эквиваленты этих свя-
зей, которые позволяют перейти к отдельному рассмотрению
частей системы. Декомпозиция является мощным и, зачастую,
главным приемом исследования, так как решить задачу систе-
мотехнического синтеза одновременно для всех частей системы
не удается.
Композиция представляет собой процесс объединения различ-
ных элементов системы с целью рассмотрения их как единого
целого. Это обратный декомпозиции процесс, имеющий целью
рассмотрение системы с более общих позиций. Часто компози-
ция проводится после декомпозиции и исследования системы (син-
теза и анализа) по частям с целью восстановления представле-
ния о системе в целом и получения интегральных выводов о
результатах решений, принятых для выделенных элементов. При
этом может образовываться несколько циклов «декомпозиции —
композиции».
Иерархичность, как уже было сказано, предполагает выделе-
ние нескольких уровней рассмотрения системы, имеющих раз-
личную степень абстракции, сложности, приоритетности и на-
ходящихся вследствие этого в соподчиненных отношениях. Про-
ведение декомпозиции обычно приводит к появлению иерархич-
ности при рассмотрении системы, а проведение композиции — к
ее снятию.
2. Выделение нескольких этапов создания системы, позволя-
ющих представить процесс ее синтеза как динамический, после-
довательно развивающийся во времени. Каждый такой этап ха-
рактеризуется более глубоким познанием системы и происходя-
щих в ней процессов и фиксирует скачкообразное снижение уров-
ня априорной неопределенности относительно облика создаваемой
системы.
3. Всестороннее рассмотрение взаимодействия системы с внеш-
ней средой, включая взаимоотношения с обществом и природой,
обмен полезной и мешающей информацией с другими система-
ми, влияние внешних физических воздействий и условий функ-
ционирования (температура, влажность, радиация и т.п.). Все-
стороннее рассмотрение основных видов взаимодействия внутри
системы между ее элементами (функционального, информаци-
онного, энергетического, конструктивного и др.). Реализация
данного принципа так же, как и предыдущих, тесно связана с
32
проведением декомпозиции и введением иерархического описа-
ния системы.
4. Сочетание различных методов и подходов и, прежде всего,
математических, численных методов исследования систем с эв-
ристическими, реализующими творческий подход и неформаль-
ные приемы, опирающиеся как на всю сумму знаний, накоплен-
ных в данной предметной области, так и на интуицию исследо-
вателя. Учет предыстории развития данного класса систем по-
зволяет вводить в действие решения, которые ранее в силу тех
или иных причин были признаны непригодными, но на очеред-
ном витке развития пауки и техники, появления элементной
базы с принципиально новыми возможностями становятся пер-
спективными и эффективными. Можно утверждать, что почти
все важные этапы развития информационных радиоэлектронных
систем связаны с совершенствованием элементной базы.
5. Учет возможности изменения исходных данных и даже со-
держания решаемой задачи в ходе многоэтапного процесса со-
здания системы. Отсюда вытекает необходимость обеспечения
по возможности большей универсальности системы, а также раз-
рабатываемых в ее рамках подсистем и функционально закоп-
ченных модулей при вариации исходных данных в широких
пределах.
Перечисленные принципы составляют основу эволюционной
технологической схемы процесса реального синтеза сложной си-
стемы. Она базируется на введении иерархии слоев — уровней
процесса принятия решений в условиях априорной неопределен-
ности [99], в рамках которых фиксируются промежуточные па-
раметры решения общей задачи по частям:
1) слой выбора (генерации) множества неопределенностей и аль-
тернативных стратегий, в рамках которого задается дискретно-не-
прерывное множество вариантов системы и исходных данных
G : So = {Sflwv, va g V ,w g Wa,ч g QJ;
2) слой обучения или адаптации, задачей которого является
сужение множества неопределенностей за счет изучения внеш-
ней среды и на котором фактически проводится анализ каждого
из альтернативных вариантов системы
А : {K(S^ ,соД Q(S^), Sewv б8„ ш,е
3) слой самоорганизации, на котором окончательно выбира-
ются варианты, исследованные на нижестоящих уровнях, так,
чтобы по возможности приблизиться к глобальной цели
R : K(S“vv,coR)——>opt, Sawv е 8СД> со, е Qn.
2—2357
33
Иерархию процессов принятия решений упрощенно иллюст-
рирует схема рис. 2.1.1. Фактически она реализует решение за-
дачи синтеза «через анализ», что достаточно широко использу-
ется в практике исследования сложных систем различного на-
значения. Здесь с привлечением эвристики при генерации мно-
жества альтернатив дальнейшая детализация процесса принятия
решений по синтезу осуществляется на основе стратификации
системы, т.е. выделения различных уровней абстрагирования при
ее описании, а также временных этапов создания системы. При
этом осуществляется проекция [99] многослойного процесса при-
нятия решений на последовательно детализируемый и уточняе-
мый облик системы, где переход на каждый этап сопровождает-
ся переходом на новую страту, имеющую более низкий уровень
абстракции (см. рис. 2.1.1). Выделяемые здесь уровни обычно
соответствуют: общему концептуальному представлению систе-
мы во взаимодействии с другими элементами надсистемы (комп-
лекса) и внешней средой; функциональному представлению сис-
темы в виде совокупности взаимосвязанных подсистем, наделен-
ных характеристиками «входа-выхода»; рассмотрению системы
и подсистем как совокупности технических устройств (модулей),
обеспечивающих согласованное преобразование сигналов и ин-
формации в соответствии с функциональными задачами подсис-
Рис. 2.1.1. Иерархическая схема “синтеза через анализ”
34
тем; схемотехническому представлению устройств, подсистем и
системы в целом в виде совокупности единиц элементной базы.
Соответственно в ходе основных этапов, являющихся классичес-
кими этапами системотехнического проектирования [53], осу-
ществляется концептуальный, функциональный, технический и
конструктивный синтез.
Таким образом, в схеме рис. 2.1.1 реализуется итерационная
процедура, где на каждом шаге обеспечивается уточнение ис-
ходных данных и решений, принятых на предыдущих шагах.
При этом с вышестоящих страт на нижестоящие передаются ис-
ходные данные и ограничения для проведения синтеза па ниже-
стоящих, где проводится дальнейшая декомпозиция системы.
Наоборот, с нижестоящих на вышестоящие страты передается
информация о возможных, то есть функционально, технически
или технологически реализуемых в условиях этих ограничений
вариантах. Нижестоящие уровни являются как бы своеобразны-
ми генераторами альтернатив при уточнении решений, ранее
принятых при исследовании на вышестоящих стратах, при пе-
реходе на каждый новый этап. Здесь проводится композиция и
снова исследуется поведение системы в более глобальных аспек-
тах, но уже при конкретных знаниях о свойствах ее элементов.
Представленная схема позволяет проиллюстрировать ключе-
вую роль моделирования в процессе создания и исследования
систем, так как введенная иерархия страт является фактически
иерархией моделей [99]. Проведение оценки вариантов в много-
слойном и многоаспектном процессе принятия решений направ-
лено на исследование поведения этих вариантов в условиях су-
ществующих неопределенностей и возмущений и реализуется
через статистическое моделирование. Математическое и, в частно-
сти, статистическое имитационное моделирование является уни-
версальной и мощнейшей синтетической методологией исследо-
вания сложных систем. Не случайно в некоторых источниках
понятия «системный анализ» и «моделирование систем» отож-
дествляются.
Остается открытым вопрос о роли строгих математических ме-
тодов при проведении исследования системы и ее элементов в рам-
ках рассматриваемой схемы синтеза. Ответ на этот вопрос может
быть получен, если вернуться к исходному определению дискрет-
но-непрерывного множества альтернативных вариантов системы
(подсистемы и т.д.) в многослойной иерархии принятия решений.
Учитывая, что при задании структурных характеристик важную
роль играет эвристический подход, а также с учетом самого опре-
деления понятия структуры, можно предположить, что дискрет-
ная компонента при формировании исходного множества альтер-
35
натив определяется именно наличием конечного числа вариантов
структур (множество Wa = {wal,...,waN}). Множество параметров си-
стемы в большинстве случаев носит условно (при фиксированной
структуре) непрерывный характер Va = {Val,...,VaN}, где Va- — под-
множества параметров каждого варианта структуры системы. Кон-
кретное задание структурных характеристик открывает возмож-
ность проведения более строгого синтеза алгоритмов обработки ин-
формации и оптимизации параметров для основных элементов при
частично определенном облике системы (подсистемы и т.п.). Дан-
ная логика получила отражение в известной постановке задачи «дис-
кретного выбора систем» [53], предусматривающей проведение сле-
дующей последовательности действий:
1) задание (в простейшем случае путем перебора) конечного
числа вариантов структурных характеристик системы, частично
определяющих ее облик;
2) синтез оптимальных (квазиоптимальных) алгоритмов об-
работки для элементов системы, то есть отыскание наилучших,
в известном смысле, алгоритмов преобразования сигналов и ин-
формации в рамках каждого из вариантов облика системы;
3) обоснование оптимальных значений параметров системы и ее
элементов на основе анализа параметрических зависимостей раз-
личного рода показателей эффективности алгоритмов обработки;
4) выбор из конечного числа исходных вариантов оптималь-
ного или допустимых вариантов, имеющих соответствующие
структуры, оптимизированные на этой структуре алгоритмы об-
работки и параметры элементов системы.
Важное место в данном процессе играет статистический син-
тез оптимальных алгоритмов обработки сигналов и информации,
который осуществляется по отношению к тем предельным эле-
ментам системной иерархии, когда уже возможна строгая фор-
мализованная постановка задачи такого синтеза. После проведе-
ния последнего появляется возможность «усечения» оптималь-
ных алгоритмов на рациональной основе с целью получения ап-
паратурно-ориентированных квазиоптимальных алгоритмов.
Проведение оптимизации параметров предполагает получение
зависимостей для частных показателей эффективности решения
внутриобусловленных задач, то есть зависимостей для компо-
нент вектора Kj, i=l,2,... от значений компонент vae Vftj при фик-
сированном waje Wa, а затем и показателей качества выполнения
внешнеобусловленных задач K(waj,vfl,a>a) и внешних параметров
ресурсных ограничений Q(waj,va). Только после этого могут быть
определены оптимальные и допустимые значения внутренних па-
раметров системы, в результате чего получают содержательное
наполнение внутрисистемные характеристики варианта.
36
2. 2* Базовые модели состояний и наблюдений объектов
информационного взаимодействия как основа структурно*
параметрического синтеза систем
Как отмечалось ранее, привлечение строгих методов при про-
ведении синтеза рассматриваемого класса PC и, в первую оче-
редь, статистического синтеза алгоритмов обработки сигналов и
информации, являющихся ядром алгоритмического обеспечения
системы, возможно при частично определенной структуре пос-
ледней. В этом плане очевидным является стремление сформи-
ровать типовой облик такой системы на основе анализа и обоб-
щения ее внутрисистемных характеристик, то есть фактически
продолжить функционально-структурную декомпозицию до уров-
ня подсистем. Как показывает опыт, для проведения подобного
анализа требуется раскрыть особенности поведения объектов
информационного взаимодействия в динамике ИК и вытекаю-
щие из них внутриобусловленные задачи, которые должны ре-
шать основные элементы PC. Обобщая результаты первой гла-
вы, на качественном уровне можно в целом выделить следую-
щую специфику процессов РТР и РР:
большое количество разнородных по своим характеристикам
классов и типов сложных радиоэлектронных объектов разведки,
причем эти характеристики имеют определенную иерархию опи-
сания поведения объектов, где каждый уровень имеет существен-
но отличающийся временной и/или пространственный масштаб;
наличие па входе современных PC интенсивных потоков, пред-
ставляющих смесь перекрывающихся по частотно-временным
параметрам последовательностей сигналов и помех, порождае-
мых различными ИРИ, что приводит к отсутствию возможности
однозначной селекции и разделения входных потоков и воспри-
ятия первичной измерительной информации при приеме сигна-
лов по каждому источнику в отдельности;
соответственно многоальтернативный и многоуровневый харак-
тер решений, которые должны приниматься в ходе РТР и РР при
выявлении объектов, причем решения, принимаемые на каждом
нижестоящем уровне процесса обработки сигналов и информации
при оценке соответствующих по уровню параметров состояний
объектов, не только обеспечивают принятие решений на вышесто-
ящем уровне, но и имеют самостоятельное значение;
наличие связи между принимаемыми в PC решениями и пос-
ледующими изменениями состояний объектов информационно-
го взаимодействия (воздействия) в ходе ИК.
Данную специфику требуется учесть при обосновании общей
модели информационного взаимодействия. Последняя, как сле-
37
дует из общей теории радиосистем, должна состоять из двух вза-
имосвязанных моделей: модели состояний объектов и модели
наблюдений этих объектов в PC.
2.2,1. Динамическая многоуровневая модель состояний
Динамическая модель состояний (ДМС) должна содержать
достаточно полное, но, в то же время, обозримое и систематизи-
рованное описание радиоэлектронного объекта информационно-
го взаимодействия в терминах интересующих параметров и ха-
рактеристик. С учетом сложного характера объектов в данном
случае естественно ввести иерархически структурированное опи-
сание [141, 142]. При этом наиболее адекватным приемом пост-
роения ДМС представляется проведение последовательной стра-
тификации, то есть выделения нескольких уровней описания
объекта, сопровождающейся расширением пространства состоя-
ний. Обычно [141, 142] в статике и динамике рассматривают три
таких уровня (страты):
уровень описания объекта во всей совокупности его действий —
режимов работы по основному назначению и процесса смены
режимов работы;
уровень описания объекта как источника структурированных
радиоизлучений и процесса изменения режимов и параметров
этих излучений;
уровень описания объекта как источника элементарных ра-
диосигналов (импульсов, посылок) и процесса перестройки па-
раметров элементарных сигналов.
Выделенные на различных уровнях процессы имеют суще-
ственно различный временной масштаб изменения состояний и
их параметров. Например, для ИК в радиолокации примерный
порядок временных интервалов, в пределах которых проявля-
ются изменения состояний объекта, определяется соответствен-
но для этих уровней следующими значениями: 10...103с; 0,1...10 с;
0,0001.„О,01 с. Стратификацию ДМС каждого объекта естественно
проводить «сверху вниз», то есть по направлению от вышестоя-
щих уровней к нижестоящим. В качестве примера рассмотрим
типовую схему построения ДМС для ИК в радиолокации, кото-
рая представлена на рис. 2.2.1. В качестве объекта в данном
случае может выступать РЭК, состоящий из группы РЛС, обес-
печивающих функционирование одного комплекса управляемо-
го оружия [17] (РЛС обнаружения, наведения, целеуказания;
РЛС сопровождения цели и т.п.) или одной многофункциональ-
ной РЛС. Для ИК в радиосвязи в качестве объекта может рас-
сматриваться группа ИРИ одного узла связи или конкретной ра-
диолинии.
38
<0
Рис. 2.2.1. Многоуровневые модели состояний и наблюдений
В соответствии с изложенным для некоторого r-го объекта в
качестве ДМС верхнего уровня (ДМС-1) естественно рассматри-
вать вероятностно-временной сценарий смены режимов работы
(поиск и обнаружение цели, захват цели на сопровождение, со-
провождение цели, оценка координат и параметров траектории
цели [17]). Эти режимы будем называть основными состояниями
объекта, определяя их зависящим от времени вектором
A(t) = (Ht), AT(t))T g A'r) a U(rr) xU(Ar’,tG T(r),
где r(t)e Ulrr) ={Г1,...,ГК }— величина, принимающая дискрет-
ный ряд значений, соответствующих основным состояниям;
A(t) е и^г) — вектор непрерывнозначных параметров, описываю-
щих совокупный объект в каждом режиме работы; А(г) — бинар-
ное отношение па множествах Ujr), U^r), задающее связь Г и Л.
В число компонент Л можно включать все необходимые характе-
ристики объекта, среди которых всегда присутствуют координа-
ты ИРИ совокупного объекта. При этом следует отметить, что
каждому Г = Г\ g U(rr> в общем случае соответствует некоторое
подмножество значений Л е U(Ar? с UAr), i = l,Nr . Одно из основ-
ных состояний, например, Г1 выделяется для ситуации, когда
объект не функционирует (режим «радиомолчания»). В качестве
начальных условий по отношению к некоторому моменту време-
ни TQ е Т(г) будем рассматривать вероятностные законы
Рп=РДг(Т0)=Г.), РГ.(Л)=РГ(Л/Г(ТО)=Г.), i = l,Nr.
Очевидно, что ДМС-1 приобретает необходимую полноту, если
удается провести описание динамики изменения A(t). Такое опи-
сание в общем случае определяется моделью общей динамичес-
кой системы (ОДС) [176], задаваемой оператором вида
A(t) = Q(A(To),H^o,V‘n,t) (2.2.1)
где — реализации воздействий на объект контролируе-
мого и стохастического характера. Достаточно адекватно при пря-
мом имитационном моделировании поведение объекта может быть
описано на основе модели агрегативной системы [142] как част-
ного случая ОДС. Для агрегата характерно задание пространства
основных дискретнозначных и дополнительных непрерывнознач-
ных параметров состояний. Основные состояния изменяются во
времени скачкообразно, причем каждому основному состоянию
соответствует свое подмножество дополнительных состояний. В
[141] показана возможность получения вероятностно-временных
характеристик переходов или вероятностей пребывания в основ-
ных состояниях Pri(t) в рамках графо-аналитической модели ИК.
Фрагмент такой модели для работы РЛС в режиме поиска и об-
наружения, по сути, представлен в п. 1.1. В подобных моделях
проводится расширение пространства состояний на основе рас-
40
смотрения эффектов, отображающих последовательность нару-
шения и восстановления нормального функционирования РЛС в
условиях противодействия. В этом случае определение Pri(t) тре-
бует задания для каждого i-ro режима работы вероятности ухода
из-под воздействия помех на основе реализуемых мер ПЗ [141].
Эти характеристики в общем случае также могут включаться в
ДМС-1.
В наиболее простом варианте динамика основных состояний
может быть описана на основе логико-временного сценария, до-
полненного диапазонами возможных значений времени пребы-
вания в том или ином режиме при наличии и отсутствии проти-
водействия. При имитационном моделировании розыгрыш соот-
ветствующих интервалов времени может проводиться на основе
равновероятного или усеченного гауссовского законов распреде-
ления. Оказывается, что в большинстве случаев этого достаточ-
но для получения вполне конструктивных результатов.
Следующий этап построения ДМС связан с рассмотрением
объекта на более низком уровне как источника структурирован-
ного радиоизлучения [141]. При этом для каждого i-ro режима
работы определяется динамическая модель состояний (ДМС-2),
каждое из которых в целом характеризует конкретный режим
излучения (вид передачи для средств радиосвязи). Параметры
такого состояния по аналогии представим составным вектором
a(t) = (y(t),XT(t))Te a(r0 cu^’xuj'0, tc t(r,i) cT(r\
где y(t)e u^rl) = {y}0,\} — индекс режима излучения, прини-
мающий дискретный ряд значений в рамках i-ro основного со-
стояния; X(t) g u(xr,1) — вектор непрерывнозначных параметров
радиоизлучения таких, например, как среднее (центральное) зна-
чение несущей частоты, периода следования сигналов, диапазо-
ны перестройки частоты и периода и т.п.; а(га) — бинарное отно-
шение на множествах значений иД, иД, определяющее связь
У и X. Каждое У - е иД* определяет подмножество и^Л) с и(г,°
значений X, j = 1 ,nrj. Это, в частности, может означать, что в зави-
симости от у может изменяться размерность и физический смысл
вектора X. Одно из состояний, например yjl), соответствует ситуа-
ции, когда в данном режиме работы радиоизлучение отсутствует.
Задаются также вероятностные законы Р^° - Pr(y(tob = yj° / Г =
РДХ) = Р/Х/у^Д = у-1),Г = ГрА), j = l,nn по отношению к моменту
времени . Их вид свидетельствует о том, что начальные
распределения для параметров состояний ДМС-2 определяются
реализуемым состоянием ДМС вышестоящего уровня.
Для описания динамики изменения параметров состояний в
Данном случае можно воспользоваться моделью динамической
41
системы со скачкообразным изменением структуры [69]. При этом
для индекса структуры у вводится марковская или полумарков-
ская модель изменения состояний, а для вектора X используется
уравнение вида
= Ф'Ж t) + G<”(A, t)u(t), (2.2.2)
at
где u(t) — центрированный вектор возмущений; Ф^С), G(rf() —
преобразующие функционалы, зависящие от индекса структу-
ры. Как известно, уравнение (2.2.2) описывает изменения век-
торного процесса марковского типа.
Характерной особенностью процесса информационного взаи-
модействия объекта и PC является цикличность обращения к
анализу состояний — параметров радиоизлучения, причем по
окончании каждого цикла принимаются те или иные решения от-
носительно создания помеховых воздействий. Учет этих факторов
позволяет провести детализацию модели. Определим границы цик-
лов в виде интервалов времени + Atpz)], Р = 1,2,..., в преде-
лах которых значения y(t)=yp можно считать постоянными [141,
142]. Тогда для описания динамики состояний ар = (урАр)т на
данном уровне удобно пользоваться уравнениями в дискретном
времени для вероятностей переходов у и разностными уравнени-
ями для X:
Pr(Y₽.!/Y₽) = XWi/Yp,Rd)P(Rd/Yp). XRa =
a=i d=i (2.2.3)
-Ф^(АДр) + &(;)(АДр)ир, p-1,2,...,
где Rd — величины, принимающие значения 0 или 1 и отражаю-
щие результаты действий по разведке и созданию помех на пре-
дыдущем цикле. Индекс (у) в уравнениях для Хр, как и ранее в
(2.2.2), означает, что для каждого режима излучения или при
изменении режима излучения от шага к шагу реализуется опре-
деленная структура уравнений, задаваемая функционалами
Фру,(), GpY)(). В простейшем случае для т=2 знание R^ 1 (R2= 0)
отражает ситуацию, когда PC вскрыла радиоизлучение объекта,
что обеспечило реализацию радиопротиводействия в РЭК, aR^O
(R2= 1) — ситуацию, когда объект не обнаружен и не определе-
ны параметры его состояния, что соответственно исключило воз-
можность активного вмешательства в его работу. Естественно,
что круг описываемых таким образом ситуаций может быть рас-
ширен.
Конкретный вид уравнений (2.2.3) устанавливается режимом
излучения, который, в свою очередь, зависит от режима работы,
условий функционирования объекта и используемых мер поме-
42
хозащиты. Последние в большинстве случаев реализуют псевдо-
случайную или рефлексивную перестройку параметров радиоиз-
лучения или переход в более защищенный режим. Часто встре-
чается скачкообразное изменение параметров по детерминиро-
ванному закону. В качестве примера можно привести уравнение,
описывающее изменение несущей частоты пачки радиоимпульсов,
которая для некоторых типов РЛС может изменяться от одного
цикла обзора пространства к другому
FP+1 =УЛ+(1-Yp)(F;°, + 5F₽); С1=С> Р=0,1,2,...,
где Fp — несущая частота пачки радиоимпульсов; F(p>— цент-
ральная частота при наличии перестройки; 8Fp — возмущение
частоты при наличии перестройки; ур — случайный коэффици-
ент, определяющий переход из режима отсутствия перестройки
(ур=1) в режим с перестройкой (ур=0).
Наиболее низкий и, соответственно, детальный уровень зани-
мает динамическая модель состояний (ДМС-3), в которой описы-
ваются быстрые изменения параметров элементарных радиосиг-
налов (импульсов, посылок) в рамках каждого р-го цикла и кон-
кретно реализуемого режима излучения ур - . Такая модель
вводится для ИРИ с импульсным излучением, имеющим преры-
вистый во времени характер (РЛС, средства радиосвязи с ППРЧ
и пр.). Дискретное время этой модели удобно привязать к мо-
ментам излучения или прихода < t(pz) < tkp), k = 1,2,... очеред-
ного сигнала внутри р-го цикла [141]. С учетом того, что измене-
нием режима излучения в пределах цикла можно пренебречь,
для описания объекта на каждом уровне достаточно использо-
вать только вектор вепрерывпозначпых параметров
xk g x<r,iJ\ к = 1,2,...,
где x(r'bj) — множество значений для r-го объекта в i-ом режиме
работы и j-ом режиме излучения. Задана также начальная плот-
ность распределения pr(xj / а) = P^Xj /ур = у^0, Хр), вид которой
свидетельствует о том, что она является условной относительно
значений параметров состояния ДМС верхнего уровня. Уравне-
ние, описывающее изменение состояний в рамках ДМС-3, во
многих случаях при фиксированном а можно записать в виде
Уравнения для марковской последовательности
xk+1 = Фк(а-Хк) + ёк(а-хк)ик. к = 1,2,...,
где ф^О, gk() — векторные функционалы, вид которых зависит
от реализуемого режима излучения и непрерывнозначной ком-
поненты параметров состояний вышестоящей ДМС. Конкретная
структура разностного уравнения существенно зависит от нали-
43
чия и вида быстрой перестройки параметров элементарных ра-
диосигналов и, прежде всего, частоты и периода следования. В
таблице 2.2.1 приведены разностные уравнения, описывающие
изменения частоты fk и времени излучения (прихода) сигналов
tk для распространенных режимов радиоизлучения РЛС. В обо-
значениях табл. 2.2.1: f£0) — среднее значение несущей частоты
при быстрой перестройке; Afk — регулярная составляющая при-
ращения частоты; 8fk — возмущение несущей частоты с равно-
вероятным законом распределения и размахом Af; t£0) — посто-
янное временное запаздывание регулярной составляющей импуль-
сной последовательности; Тк — среднее значение периода следо-
вания; 8tk — возмущение периода следования с равновероятным
законом распределения.и размахом Др
Таким образом, общая динамическая модель состояний (см.
рис. 2.2.1) представляет собой многоуровневую систему иерар-
хически вложенных моделей, описывающих процессы измене-
ния параметров состояний радиоэлектронных объектов и излу-
чаемых ими радиосигналов во времени и/или пространстве. Связи
между моделями различных уровней являются связями прямого
действия и распространяются «сверху вниз», отражая реализуе-
мое управление процессом функционирования объекта. В стати-
стическом смысле это означает, что структура уравнений, опи-
сывающих динамику состояний на каждом уровне, и начальные
условия к ним, задаются состояниями, определяемыми в рам-
ках моделей вышестоящих уровней и имеющими существенно
более медленную динамику изменения.
К модели состояний каждого объекта целесообразно привя-
зать соответствующую модель мешающего фона, создаваемую
как специальными источниками контрпомех, так и другими
объектами, параметры радиоизлучений и сигналов которых мо-
гут находиться в диапазонах значений параметров ДМС данного
объекта. Такой мешающий фон будем называть характерным ме-
шающим фоном объекта. Для его описания также удобно вво-
дить многоуровневую модель, которая показана на рис. 2.2.1 и
имеет «примыкающий» к ДМС вид.
2.2.2. Многоуровневая модель наблюдений
Второй компонентой базовой модели информационного взаи-
модействия для рассматриваемого класса PC является модель
наблюдений (МН). Она реализует формализованное описание
многоэтапного процесса добывания и обработки информации при
оценке состояний рассматриваехмого объекта. Многоэтапность
процесса объективно вытекает из того, что сам объект информа-
ционного взаимодействия является сложным и динамика его
44
Таблица 2.2.1
Уравнения, описывающие распространенные виды
быстрой перестройки
№ п/п Режим излучения Форма записи уравнения k= 1, 2, ...
1 Регулярная импульсная последовательность f = f ^k+1 ^к* k+1 к’ tkn = t[0,+kTk; tk * = tk + Tk; или к‘1 к к’ х(0) _ 4.(0). гр _ гр Ч-Н ” Ч » Ты=Т„.
2 Последовательность с псевдослучайной быстрой перестройкой частоты 4.,=ff’+5fk; M[8fk] = 0; С1=40’; M[8fk] = Д2/12.
3 Последовательность с пе- рестройкой частоты по линейному закону 4и ~ 4 + д4; Afk+l = Afk, к # m n, m - целое; Afkll = -Afk, k-m n, n = l,2,...
4 Последовательность с поочередной сменой двух частот = ^k + A^k’ Afk4=-Afk.
5 Последовательность с быстрой псевдослучай- ной перестройкой пери- ода следования от пре- дыдущего момента излу- чения 4-1 = tk + Tk + 8tk; M[8tk] = 0; Tk->=Tk; M[8tk] = Д^/12.
6 Последовательность с быстрой псевдослучай- ной перестройкой пери- ода следования от сред- него момента излучения tk, i = t‘°’ + kTk + 8tk; M[8tk ] = 0; C=t(k0); M[8tk] = Д2г/12. Tkn=Tk;
7 Последовательность с поочередной сменой двух периодов tk-^t.+a^’+d-aJT'4»; Tk'j = Tkl>; ak.2nll=0; T'2’ = Tk2); ak=2n = !•
функционирования описывается разнородными процессами, име-
ющими различную скорость протекания. Кроме того, содержа-
ние внешнеобусловленных задач разведки, вытекающих из тре-
бований обеспечения управления РЭК и создания помеховых
воздействий в ИК на основе оценки различных параметров со-
стояний объекта, определяет необходимость соответствующей
45
структуризации МН. Весьма важным фактором является уже
упоминавшаяся проблема «разделения», которая при наличии
интенсивных смешанных потоков сигналов на входе PC приво-
дит к невозможности однозначного отнесения каждого сигнала
к одному и тому же объекту. Поэтому можно ожидать, что реа-
лизация более длительных по времени этапов обработки целых
совокупностей сигналов позволит за счет накопления информа-
ции в определенном смысле «вытянуть» результирующую эф-
фективность PC и парировать возникающие при односигналь-
ных наблюдениях ошибки и неоднозначности.
В соответствии с этим можно утверждать [141], что общая
модель наблюдений также должна быть иерархической, много-
уровневой, где вводимые уровни отражают определенные этапы
или подпроцессы обработки входных сигналов и информацион-
ных потоков данных. Каждый такой уровень естественно проти-
вопоставить некоторому уровню общей модели состояний объек-
та информационного взаимодействия таким образом, чтобы в рам-
ках реализуемого этапа обработки проводилась оценка парамет-
ров состояний соответствующей частной модели ДМС, как это
показано на рис. 2.2.1.
Будем называть этап обработки, реализующий обнаружение
и оценку (измерение) параметров элементарных радиосигналов,
этапом первичной обработки (ПО). Соответствующую модель на-
блюдений (МН-1), описывающую процесс получения первичной
измерительной информации относительно состояний объекта,
определяемых ДМС-3, будем называть моделью наблюдений пер-
вичных параметров (ПП). Этап обработки совокупности (после-
довательности) наблюдений первичных параметров, реализуемый
в интересах оценки параметров структурированных радиоизлу-
чений (т.е. параметров состояний объекта, описываемых ДМС-2),
будем называть этапом вторичной обработки (ВО), а соответству-
ющую модель процесса получения результатов ВО — моделью
наблюдений вторичных параметров (ВП). Наконец, последний
этап определения режимов работы и вскрытия объекта в целом
на основе совокупности наблюдений ВП будем называть третич-
ной обработкой (ТО). При необходимости на данном уровне мож-
но ввести соответствующую модель наблюдений (МН-3) третич-
ных параметров. Исходя из этих определений возможно также,
хотя и несколько искусственно, определить параметры ДМС-1,2,3
как, соответственно, ненаблюдаемые третичные, вторичные и
первичные парахметры, а задачи, решаемые в ходе ПО, ВО, ТО,
как задачи оценки ненаблюдаемых ПП, ВП, ТП.
В отличие от ДМС детализацию общей МН целесообразно про-
водить «снизу вверх», т.е. от модели наблюдений ПП к модели
46
наблюдений ВП и далее. Это есть следствие того, что при состав-
лении МН вышестоящих уровней существенное значение имеет
учет реальных возможностей и результатов действий над данны-
ми, которые предоставляются в соответствии с обработкой ни-
жестоящих уровней.
Таким образом, рассмотрим сначала модель наблюдений,
получаемых в ходе первичной обработки сигналов (МН-1). При
ее обосновании будем пользоваться рядом следующих предпо-
ложений.
1. Информационное взаимодействие с объектом, в результате
которого формируются первичные наблюдения, осуществляется
посредством анализа входного потока радиосигналов. При этом
над каждым сигналом выполняется совокупность системных
операций первичной обработки (обнаружение, оценка парамет-
ров, различение, идентификация и др.), объединенных общим
термином «прием» сигнала. Считаем, что каждый сигнал на входе
PC может быть порожден не более, чем одним ИРИ и, с другой
стороны, от каждого ИРИ может быть принято неизвестное слу-
чайное число сигналов.
2. Описание процесса анализа входного потока сигналов пред-
полагает задание n-мерного пространства первичных наблюде-
ний. Структура этого пространства определяется конкретным
набором первичных датчиков и соответствующим перечнем из-
меряемых первичных параметров сигналов. Обозначим это про-
странство как Z(n\ имея в виду, что
Z(n) = Z^’ x...xZ^‘, +... + nN =n, N>1,
где z’ 0 — пространство размерности Hj > 1 измеряемых i-м дат-
чиком параметров, в число которых входит и время прихода
сигналов. Если датчики однородны, как это бывает в случае ис-
пользования многопозиционных PC, то
Z(,,) = Z^'’x...xZ^’, n0N = n.
3. Наблюдения проводятся в рамках так называемых циклов,
каждому из которых отводится область пространства наблюдений
Ч₽ = ЧР1 x...X(DjpK cZ|n|, р = 1,2,..,,М,
где р — индексу очередного цикла. Область cozp определяется исходя
из некоторых априорных по отношению к р-му циклу сведений
относительно текущих параметров состояний объекта и соответ-
ствующих значений наблюдаемых первичных параметров сигна-
лов. Будем называть ее областью возможных значений (ОВЗ). Ти-
пичный вариант задания ОВЗ определяется следующим образом:
= ЧрхЧрх(оар,
47
где cotp : [tpl), tpx) + Atpx) ]— интервал времени; cofp : [^x‘,^x> + Afp”] —
диапазон частот; соар : [ocp2\ocpz) + Aapz)] — сектор угловых направ-
лений прихода сигналов.
4. В рамках каждой из областей cozp может быть получена
совокупность наблюдений £kp = (zkp,kp), zkp = {zp...,zkp}, zA g cozp
(здесь и далее по тексту главы символ * означает конкретно нео-
пределенный индекс), порождаемая совокупностью принятых
сигналов. В их число входят не только сигналы (сигнал), порож-
даемые интересующим r-м объектом, но и сигналы мешающего
фона. Если сигнал является «полезным», то есть относится к
интересующему объекту информационного взаимодействия, а его
состояние в рамках ДМС-3 определяется m-мерным вектором
х„ е х(ггл), то порождаемое этим сигналом наблюдение гЛ связа-
но с х* случайным оператором вида
z+ = hjxj + v., h. : х<г’*,е) —> Z(n),
где у* — центрированный вектор ошибок измерения наблюдае-
мых ПП с независимыми в дискретном времени значениями.
Для наблюдений, порождаемых сигналами мешающего фона,
могут быть предложены различные модели [142], которые далее
будут рассмотрены.
Дальнейшая детализация МН-1 связана с рассмотрением уп-
равления или рациональной организации процесса получения
первичных наблюдений в интересах проведения вторичной обра-
ботки. Это фактически предполагает использование информа-
ции о возможных изменениях состояний объекта, добываемой в
ходе реализации этапа ВО, при формировании текущих облас-
тей пространства наблюдений.
Пусть изменение параметров излучаемых объектом сигналов
в рамках ДМС-3 определяется стандартным уравнением вида
xk,i = ф(а,хк) + гк(а,хк)ик, Xj-pCxj/a), (2.2.4)
где а — вектор неизвестных параметров, имеющих как дискрет-
нозначные, так и непрерывнозначные компоненты и определяю-
щих структуру уравнения и начальный закон распределения.
Для а известно априорное распределение рг(а). Компоненты а
есть параметры состояний структурированного радиоизлучения
объекта, определяемые в рамках вышестоящей ДМС-2.
Рассмотрим характерный пример. Пусть реализуется (п. 2.2.1)
уравнение для импульсной последовательности с быстрой пере-
стройкой периода вида
4н=4; 4.1 =tk+T + Y3tk, y = o;i, к = 1,2,...,
тогда под а можно понимать вектор а ** (y,fptpT)T, где Т — среднее
значение периода следования. Поскольку величина Т как компо-
48
цента а является постоянной величиной, то ее также удобно вклю-
чить в состав вектора состояний хк = (tk,fk,Tk)T как компоненту,
изменяющуюся в соответствии с уравнением Tk!1 ;=Тк-Т1 = Т. Та-
кой прием позволяет получить в дальнейшем ряд преимуществ,
так как фактически теперь непрерывнозначные компоненты а оп-
ределяют только начальные значения для хк:
p(X1/a) = 5[x1-(t1,^,T1)T].
Будем считать, что объект является наблюдаемым в области
0)zp, если вектор а принадлежит некоторой области значений соар.
Это характеризует факт наличия в зоне ответственности PC из-
лучающего объекта с параметрами сигналов, порождающих на-
блюдения в cozp. Тогда можно записать выражения для априор-
ной и апостериорной вероятности наличия объекта в соар
<р = J pr(a)da; лгр =J pr(a/zkp,kp)da. (2.2.5)
Как следует из (2.2.5), апостериорная вероятность наличия
сигналов интересующего объекта на входе PC при наблюдениях
в области cozp определяется апостериорной плотностью вероятно-
сти вектора а, которая позволяет одновременно получить оцен-
ку параметров структурированного излучения в соответствии с
тем или иным критерием в ходе вторичной обработки. Такая
плотность может быть записана в следующем виде [142] (индекс р
для упрощения записи опускаем):
рг (а / zk, к) = У, рк (zk / %., к - s, а)р(а, х., к - s) / p(zk, к) =
<х.>
= У, Р. (z*’ / Xs»a)Pk-s (z2k'* / Xs )p(Xs > к - s / a)pr (a) / p(zk, к), (2.2.6)
lx. I
p(zk,k) - 7r°p(zk,k/ag coft) + (1 -7C°)p(zk,k/aё oa),
где xs =(ip...,is)— комбинация порядковых номеров наблюде-
ний в общей совокупности zk, обозначающая частную гипотезу
о том, что только эти наблюдения среди к полученных при-
надлежат объекту; Xk-s — комбинация оставшихся номеров на-
блюдений xs uXk-8 =(1,---Д); zx”,z*k4 — совокупности наблюде-
ний для комбинаций Х8» Хк-9» a pe(zXe /%3,а), Pk_g(z*k"/хз) — их
функции правдоподобия; p(xs, k-s/a) — априорная вероятность
получения комбинации xs из s полезных наблюдений одновре-
менно с k-s мешающими.
Таким образом, основными составляющими при вычислении
апостериорных вероятностных характеристик на основе (2.2.6)
являются априорные вероятности частных гипотез выпадения
49
тех или иных комбинаций номеров полезных и мешающих (лож-
ных) наблюдений в получаемой совокупности, а также функции
правдоподобия совокупностей полезных и мешающих наблюде-
ний, условных относительно вектора параметров а, задающего
структуру и начальные условия для уравнения состояний (2.2.4).
Возможности вычисления всех составляющих в (2.2.6) подробно
рассмотрены в [142]. Следует только отметить, что функции прав-
доподобия полезных наблюдений в (2.2.6) для рассмотренных
моделей состояний и наблюдений в общем случае могут быть
записаны в следующем виде:
p,(zx” /Х,.а) = П₽Ч ,,Хз.а);
(2.2.7)
p(zit / ,..., zlt,,а) = Jp(zi( / xt)p(xt / zh,..., z4 t, х.. a)dxt.
Это означает, что необходимой функциональной операцией
при вычислении апостериорных плотностей вероятности в (2.2.6)
является вычисление апостериорных условных плотностей веро-
ятности очередного вектора полезных наблюдений zx и текущего
вектора состояний хА ДМС-3, то есть, по сути, оценивание zx, хА
для различных гипотез о значениях а. Такие оценки, получен-
ные по всем предшествующим наблюдениям, входящим в соот-
ветствующую комбинацию, будем обозначать £>/Л_р \/г_Р
В целом полученные соотношения отражают общий подход
[5, 49, 214] к решению задач оценки параметров динамических
объектов (обнаружения и траекторного сопровождения в фазо-
вом пространстве) в условиях наличия потоков'мешающих сиг-
налов и статистической неопределенности относительно моделей
изменения состояний. Его главная особенность состоит в необхо-
димости перебора большого количества частных гипотез при
группировании совокупностей наблюдений по их принадлежнос-
ти объекту. Количество частных гипотез катастрофически рас-
тет с ростом количества наблюдений. Поэтому в интересах полу-
чения квазиоптимальных алгоритмов обработки используется ряд
приемов, связанных с организацией наблюдений на рациональ-
ной основе и обеспечивающих сокращение числа рассматривае-
мых гипотез.
Первый из таких приемов обеспечивает перевод исходного мно-
жества значений а-соа в дискретное множество б)я = {а4, i = 1, Na} с
соответствующей заменой при задании уравнений (2.2.4). Это
позволяет в исходном выражении для апостериорной вероятнос-
ти (2.2.5) перейти от интегрирования по непрерывнозначному
вектору к суммированию апостериорных_вероятностей дискрет-
ных значений а,: = рг(«Ц /zk,k), i = l,Nn . Как уже отмеча-
50
лось, вектор а = (уДт)т имеет дискретнозначную и непрерывноз-
начные компоненты. Классический подход в этой ситуации пред-
полагает проведение равномерной дискретизации [186] или, что
больше подходит к рассматриваемой задаче, введение процеду-
ры «завязки» или предварительной оценки непрерывнозначных
компонент а по небольшому количеству наблюдений. Такая про-
цедура эффективно реализуется в уже рассмотренной на приме-
ре ситуации, когда непрерывнозначные компоненты а включа-
ются в состав вектора хк текущих состояний и неопределен-
ность относительно а в (2.2.4) и в (2.2.7) остается только в
параметрах начального распределения р(х1/а). Если, напри-
мер, начальная плотность распределения хг имеет гауссов-
ский вид, то р(хт/а) = N(xp Xj/0(a), Р1/0(а)), где х^а) = 1 — век-
тор среднего значения, определяемый непрерывнозначными ком-
понентами а; Р1/0(а) — условная матрица ковариации. В ходе
«завязки» в каждой комбинации в (2.2.6) выделяется началь-
ная комбинация фиксированной длины d - \gd и основная ком-
бинация — (pc,(vgd ° Фе =%8,d + e = s) . Можно показать, что при
определенных условиях существует процедура предварительной
оценки, позволяющая при истинности комбинаций yd предста-
вить X = X(zVd) + V(d), где Х() вектор-функция, компоненты ко-
торой определяют предварительные оценки компонент X; V(tJ) —
погрешность такого представления. Тогда, если области лока-
лизации каждой из апостериорных плотностей p(X/zv,l,vgd) су-
щественно меньше области локализации априорной плотнос-
ти (см. рис. 2.2.2), при интегрировании в (2.2.5) можно полу-
чить [142]
= C0£pr(ai)EPe(z9e /<Р.Л)Х
i-1 i--l
xPk./<ре)р(фс,к. -e/aj, (2.2.8)
N,
XPr(a1) = 7tr> L 1 = 4,, k. =k-d,
‘=1 Hf.vd I
где pr(aj — вероятности гипотез относительно истинности ком-
бинаций и получаемых на их основе предварительных оценок
at = (y,,X(zV1,)t)t , образующих при соответствующем упорядочи-
вании множество й)а; с0 — нормирующий множитель. Очевид-
но, что (2.2.8) по форме совпадает с выражением для апостери-
орной плотности (2.2.6), если а принимает внутри исходного
множества сен дискретный ряд значений с тем только отличием,
что множество имеет переменный состав и формируется по
51
результатам наблюдений в ходе процедуры «завязки», а интег-
рирование в (2.2.5) заменяется суммированием. Кроме того, при
таком переходе определенным образом (см. рис. 2.2.2) трансфор-
мируется начальная плотность р(х, /а^ ,которая по сравнению с
исходной, фигурирующей в (2.2.4),(2.2.7) плотностью р(х1/а),
несколько расширяется за счет внесения дополнительной погреш-
ности предварительной оценки [184]. Далее можно вернуться к
обозначениям (2.2.6), считая, что а принимает дискретный ряд
значений а = ар i = l,Na , а все непрерывнозначные параметры,
которые требуется оценить в ходе ВО, включены в состав векто-
ра состояний х*.
Следующими важными составляющими основного выражения
(2.2.6) являются функции правдоподобия pk_s(z*k”/%а) совокуп-
ностей «оставшихся» наблюдений, принадлежащих мешающе-
му фону. Выражения для них в строгом виде можно получить на
основе вычисления функций правдоподобия совокупного потока
наблюдений других источников сигналов (как объектов, так и
не объектов информационного взаимодействия) и перебора боль-
шого количества гипотез о разбиении полученной совокупности
наблюдений на комбинации по их принадлежности этим источ-
никам, что является неоправданно громоздким и практически
нереализуемым. Поэтому для упрощения вычисления апостери-
орных вероятностных характеристик в (2.2.6) вводится обобщен-
ное статистическое описание совокупности наблюдений при ус-
Рис. 2.2.2. Иллюстрация процедуры формирования множества на-
чальных гипотез в процессе «завязки»
52
довии, что они не принадлежат выявляемому объекту. При этом
все другие источники считаются мешающими по отношению к
процессу информационного взаимодействия с данным объектом.
Такой подход рассматривался в известных работах, например
[5], как обеспечивающий одно из возможных приближений при
синтезе алгоритмов обработки аналогичного назначения. В ка-
честве обобщенного статистического описания «оставшихся» на-
блюдений распространено их представление как реализаций пу-
ассоновского потока точек. В нашем случае с учетом возможно-
сти получения в области О)г с Z(n) наблюдений, принадлежащих
источникам разной природы, следует использовать модель нео-
днородного случайного точечного процесса. Тогда, если интен-
сивность мешающего потока равна p(z), то вероятность выпаде-
ния ровно k-s точек с параметрами, лежащими в малых интер-
валах + Д^),...,^_e.zJk+ Azjkn), Xk-« = (jj jk-s) , равна
С учетом условия нормировки можно получить
Рк-з(2Хк
(2.2.9)
При такой модели мешающих наблюдений выражение для апос-
териорной вероятности я(г° с дискретными значениями вектора
параметров а может быть представлено в виде
*г = 1Х’> = Lii(zx,,x,)x ££1i(zx’.xa)+1
1=’ (Xs> Li=1<ZBl
li(zx’>Xs) =
Pr(a,)P,(zX’/X,,ai)p(X,>k-s/ai)
(l-<) ПиК) J MO) dz р(%0,к/ай coa)
- t=1
то есть состоит из сумм обобщенных отношений правдоподобий
гипотез относительно истинности отдельных комбинаций % . От-
метим, что каждое из этих слагаемых не зависит от наблюде-
ний, не входящих в данную комбинацию.
Здесь следует заметить, что для априорных вероятностей ком-
бинаций в [142] вводится следующее представление:
P(xa.k-s/a) = pra(s) P^(i,,k-i,),
53
где pra(s) — условная (при заданном а) вероятность получения s
наблюдений от r-го объекта; Р^О — условная вероятность вы-
падения it ”1, ...,k-is наблюдений, порождаемых другими ис-
точниками в промежутках между s наблюдениями r-го объекта.
Эти вероятности можно рассчитать строго аналитически. При
использовании обобщенной модели потока мешающих наблюде-
ний типа (2.2.9) нетрудно показать, что комбинации с фиксиро-
ванными s будут примерно одинаковы, что фактически сводит
процедуру их задания к расчету pra(s).
Очередной этап упрощения выражений для апостериорных
вероятностей (2.2.6) связан с рассмотрением возможности сокра-
щения огромного количества частных гипотез о принадлежнос-
ти объекту различных комбинаций наблюдений. При этом об-
щим подходом для аналогичных по существу задач обработки
является сокращение количества частных гипотез на основе ис-
ключения «маловероятных» и объединения «близких» комбина-
ций наблюдений [49]. При реализации данного подхода, прежде
всего, используется принцип последовательного, по мере поступ-
ления текущей информации, группирования наблюдений в ком-
бинации. В противном случае теряется смысл проводимых ме-
роприятий по снижению объема перерабатываемой информации.
Наиболее распространенным приемом в этом плане является за-
дание порогового значения 3t для условной плотности распреде-
ления очередного наблюдения z. , включаемого в комбинацию,
P(z4 / Zj ,..., Zj 1, а}) > 3t на каждом шаге при вычислении (2.2.7).
Это фактически приводит к образованию на каждом шаге t = 1, Sj
так называемых индивидуальных динамических стробов сопро-
вождения (ДСС) как некоторой элементарной области , пере-
мещающейся в coz. Здесь si — предельное число шагов, которое
может быть выполнено для i-ой гипотезы. Центр ДСС (в [49]
используется термин «зона связи») определяется для симмет-
ричной плотности текущей экстраполированной на один шаг
вперед оценкой полезного наблюдения , а размеры и кон-
фигурация — значением 5t и видом условной плотности распре-
деления. Тогда отбраковка «маловероятных» комбинаций фак-
тически сводится к реализации процедуры селекции наблюде-
ний по принадлежности к ДСС в ходе первичной обработки. На-
блюдения, не попавшие в ДСС, исключаются из обработки. При
проведении такой селекции в каждом ДСС 0)^ на каждом шаге
может оказаться несколько т. > 0 наблюдений, среди которых
может быть одно полезное и несколько мешающих. В этом слу-
чае применяется процедура идентификации, заключающаяся в
отборе по определенным признакам наиболее информативного
наблюдения из числа попавших в текущий ДСС, что фактически
54
реализует подход, направленный на объединение «близких» ком-
бинаций» Ситуация mt = 0 соответствует пропуску полезного на-
блюдения и отсутствию ложных наблюдений.
Важно отметить, что в процессе формирования ДСС и прове-
дения соответствующей селекции процедура индивидуального
сопровождения объекта в пространстве наблюдений осуществля-
ется в соответствии с различными исходными гипотезами отно-
сительно значений а = а1? i = 1,ЫЯ. В процессе такого сопровож-
дения в области возможных значений вырезаются при пере-
8,
мещении ДСС отдельные подобласти (обычно и
<i> 1-1
(О на соседних шагах не пересекаются). При этом общая сово-
купность наблюдений = (zk,k) в u)z разбивается на ряд сово-
купностей £kl = (z\kk), попавших в вырезаемые в сог подоблас-
ти — частные ОВЗ }. В разные совокупности могут вхо-
дить одни и те же наблюдения, то есть между собой со(Д i = 1,N„
могут частично пересекаться. Одновременно можно показать, что
при вычислении лг для выбранной модели потока мешающих
наблюдений апостериорные вероятности =pr(ai/zk,k) в(2.2.6)
с точностью до сомножителя, одинакового для всех л(г°, i = l,Nft ,
не зависят от наблюдений, не попавших в о)*0 .
Изложенные подходы при вычислении апостериорных вероят-
ностных характеристик параметров состояний объекта по сово-
купности первичных наблюдений, то есть, фактически, при вто-
ричной обработке дают основу для синтеза соответствующего
алгоритма, если задан критерий, определяющий структуру ре-
шающего правила, оперирующего с апостериорными характери-
стиками. Однако на данном этапе рассмотрения общей МН весь-
ма важным представляется то, что выявлены некоторые прин-
ципы организации процесса обработки совокупностей наблюде-
ний, которые, в частности, определяют введение специальных
операций первичной обработки (например, селекции и иденти-
фикации в ДСС) и позволяют уточнить исходную модель первич-
ных наблюдений.
Таким образом, для каждой i-ой гипотезы относительно зна-
чений вектора неизвестных постоянных параметров а = ai урав-
нения состояний ДМС-3 (2.2.4) и для каждого t-ro излученного
сигнала, принадлежащего объекту, на основе имеющейся к дан-
ному шагу информации о параметрах состояния объекта и излу-
чаемого им сигнала (априорной или апостериорной) формирует-
ся элементарная область (индивидуальный ДСС) cz , опре-
деляющая область возможных значений очередного «полезного»
наблюдения, порожденного t-ым сигналом. При этом фактичес-
ки осуществляется сопровождение гипотетических последователь-
55
ностей наблюдений, для каждой из которых в соответствии с
гипотезой о структуре уравнения состояний в области о)2 форми-
руется траектория, описываемая перемещающимся от шага к
шагу центром ДСС. Его размеры в общем случае также изменя-
ются от шага к шагу. С учетом наличия потока мешающих сиг-
налов в (0z в ходе первичной обработки необходимо реализовы-
вать не только классический набор системных операций обнару-
жения и измерения параметров сигналов, но и процедуру селек-
ции по принадлежности наблюдений индивидуальному ДСС, а
также процедуру идентификации — выбора полезного наблюде-
ния из числа попавших в ДСС. Результаты выполнения совокуп-
ности определенных выше операций при формировании каждо-
го наблюдения в присутствии потока мешающих сигналов будем
называть частными информационными решениями (ЧИР) пер-
вичной обработки,
В соответствии с изложенными особенностями рациональной
организации процесса первичной обработки общая МН-1, опи-
сывающая процесс получения первичных наблюдений при со-
провождении гипотетических последовательностей для совокуп-
ности гипотез, определяемых множеством соя = {ар i = l,Nft}, фор-
мализуется на основе уравнений стандартного вида [49, 84, 141]
zj1’ = A? ’(ht(xt) + vt) + +w"’)+
А'1’ +В‘" + С'П =1, i = i?N., t = l,2,..., <2-2-10)
где — получаемое на t-ом шаге в области наблюдение;
А(Д В^, С<°— случайные величины, характеризующие резуль-
таты ЧИР и принимающие значения 0 или 1 в случае получения
на t-м шаге сопровождения объекта в ДСС полезного (А*0 = 1),
ложного (В[° = 1), пропуска наблюдения (С*0 = 1); 2*^ — услов-
ная (для гипотезы а = af) оценка — прогноз полезного наблюде-
ния zt = ht(xt) + vt, полученная по совокупности t -1 предшеству-
ющих наблюдений и определяющая центр сформированного к
данному шагу ДСС со<1) с u)z; vt — вектор погрешности измере-
ния первичных параметров полезного сигнала (нормальной оцен-
ки); w*l) — вектор отклонения ложного наблюдения (аномаль-
ной оценки) от центра ДСС. При этом получается на осно-
ве соответствующей условной оценки и может, например,
записываться в виде ^/t-i = . Если C(tn =1и реализуется
ситуация отсутствия наблюдений в ДСС на данном шаге, то про-
изводится доопределение наблюдений точкой, лежащей в цент-
ре текущего ДСС. Статистические описания результатов ЧИР
задаются в общем случае вероятностями единичных значений
Р^(а), рв?(а), рсЛа) Для С[°, которые зависят от коп-
56
кретных значений а. Представленная форма записи уравнений
МН-1 (2.2.10) является достаточно универсальной разновиднос-
тью модели наблюдений с «загрязнением», широко рассмотрен-
ной в известных работах по теории оптимальной фильтрации
[60, 84, 186].
Как уже отмечалось, процедура обработки совокупности пер-
вичных наблюдений, полученных в каждом из основных цик-
лов, называется процедурой вторичной обработки. Синтез алго-
ритма вторичной обработки проводится на основе пары ДМС-3 —
МН-1 и его результаты тесно связаны с предположениями отно-
сительно структурных и статистических характеристик объекта
и процесса наблюдений на соответствующих уровнях. Следую-
щий уровень общей модели наблюдений связан с интерпретаци-
ей результатов вторичной обработки и с аналогичной по сути
детализацией модели наблюдений вторичных параметров (МН-2)
с учетом принципов рациональной организации процесса ВО в
интересах проводимой на вышестоящем уровне третичной обра-
ботки.
Прежде всего, следует определить структуру пространства
вторичных наблюдаемых параметров. Как следует из проведен-
ного выше анализа, в ходе ВО в каждом цикле производятся
оценки составного вектора состояний ДМС-2 а = (у,Хт)т. Они
формируются на основе решения задач выбора наиболее вероят-
ных или правдоподобных гипотез О(1): а — at и получения соот-
ветствующих условных оценок i=l,Na, каждая из кото-
рых дает оценки непрерывнозначных компонент исходного век-
тора а, включенных в состав х*. В любом случае для различных
вариантов построения алгоритма ВО можно считать, что в ре-
зультате обработки совокупностей первичных наблюдений в пос-
ледовательности основных циклов cozp, р = 1,2,... будет получен
поток наблюдений ВП, которые теперь, в отличие от предыду-
щего случая, будут сгруппированы по циклам. При этом в каж-
дом из циклов может быть получено Lp пар оценок
?pd,ZpYd, d = l,Lp, р=1,2,..., которые обладают определенным
уровнем достоверности. В число этих оценок входят как истин-
ные, так и ложные оценки (псевдооценки), получаемые в ре-
зультате ошибок, допущенных в ходе обработки, или порождае-
мые другими ИРИ с близкими по своим структурным свойствам
радиоизлучениями. Каждую из истинных оценок непрерывноз-
начных параметров удобно представить в виде ZpYi = HpY)Xp + Vp,
где HpY) — оператор связи для вектора непрерывнозначных пара-
метров состояний ДМС-2 (см. рис. 2.2.1), a Vp — вектор по-
грешностей такой оценки. Величина Ypw — есть оценка дискрет-
ной величины, определяющей реализуемый режим излучения в
57
модели состояний ДМС-2. Как видим, в основном структура про-
странства наблюдений ВП повторяет структуру пространства на-
блюдений ПП с тем основным отличием, что на уровне ВО до-
полнительно появляется дискретная компонента наблюдений.
При дальнейшей детализации МН-2 следует исходить из того,
что на вышестоящий уровень последующей (третичной) обработ-
ки поступает поток данных, полученных в ходе вторичной обра-
ботки, проводимой в нескольких циклах анализа. Будем счи-
тать, что объект является наблюдаемым в течение всего процес-
са информационного взаимодействия, если вектор параметров А
ДМС-1 принадлежит некоторой области ОЛ, причем, если Ag ,
то вектор ар = (урДр)те сопр, р = 1,2,..., и объект является наблю-
даемым в каждом из циклов. Тогда можно по аналогии с (2.2.5)
записать выражения для априорной и апостериорной вероятнос-
ти наличия объекта А в При этом, однако, возможны два
варианта.
Первый из них предусматривает реализацию «сквозной» мо-
дели наблюдений для последующего синтеза алгоритма третич-
ной обработки. В рамках этого варианта на вышестоящий уро-
вень передается вся информация, получаемая на нижестоящих
уровнях, которые в этом случае «лишены права» делать какие-
либо выводы относительно ее полезности и достоверности. Кон-
кретно это означает, что в качестве наблюдений здесь использу-
ются непосредственно совокупности £kp =(zKp,kp), р = 1,2,...,М
первичных наблюдений, полученные в нескольких циклах ана-
лиза, и, соответственно, вычисляются вероятности
П® = J Pr(A) dA, Пг = J РДА/^1,...,^4) dA. (2.2.11)
Щ Ид
Тогда, как показано в [142], выражение для Пг представля-
ется в виде
11 =П"П» _ Г .
r J,rll“rp>“rp J - , , . u“p’
p-) ш,г Pr^Zk,»Kp/
pr(a„) = pr(ap/ Skl.AeQA); (2.2.12)
pr(zkp ,kp) = Jpr(zkf ,kp,ap /£*’, ...,£kp' )dap.
Это означает, что фактически для вычисления апостериор-
ных вероятностей наличия объекта и плотности вероятности век-
тора А в «сквозном» варианте необходимо производить вычисле-
ние апостериорных вероятностей ftrp для каждого цикла в соот-
ветствии с изложенным выше подходом. При этом в качестве
априорных плотностей распределения параметров состояний &г(ар)
58
используются определенные к данному шагу апостериорные плот-
ности распределения вектора ар, пересчитываемые по традици-
онной схеме на один шаг вперед с учетом вероятностей переходов
и разностных уравнений динамики состояний ДМС-2 (см. (2.2.3)).
При этом ОВЗ 0)2р, р = 1,2,... фактически могут формироваться на
основе получаемых апостериорных данных о значениях а, имея
в ввиду, что в общем случае определена связь соар и О)2р.
Другой вариант предусматривает переход к реализации ква-
зиоптимальной обработки упрощенного характера, что естествен-
но связано с трансформацией МН. При этом в основе лежит си-
туация, когда на уровень третичной обработки поступает поток
оценок (наблюдений) вторичных параметров, имеющих некото-
рый пороговый уровень достоверности. Тем самым, в отличие от
«сквозного» варианта, обеспечивается относительная независи-
мость обработки между уровнями и сокращается объем взаимно
передаваемой информации. В качестве исходной совокупности
наблюдений ВП в данном случае рассматривается совокупность
={{?P.ipZpd, d = l,Lp}, р=1,М}, на основе которой должна
рассчитываться апостериорная вероятность
Пг = J Pr(A/EM)dA (2.2.13)
щ
с использованием апостериорной плотности Рг(А/Ем), что пред-
полагает одновременно проведение оценки вектора параметров
А ДМС-1. Очевидно, что повторяя проведенный для предыдуще-
го уровня обработки анализ, направленный на преобразование
процесса получения (2.2.13) с введением отбора комбинаций на-
блюдений, организацией процедуры «завязки» и формирования
множества дискретных значений QA : {Aj,i = 1,NA} » проведени-
ем селекции наблюдений и сопровождения гипотез в ДСС, мож-
но получить [141] аналогичные по виду (2.2.10) уравнения на-
блюдений ВП для МН-2
Z<" = А<”(Н<% + Vp)+ Bp’(Zp/P-i +W<i’) + C<i>Zp.-p-1,
а;," + в"’ + Ср’ = 1, у; 6 и;гл i = £nL р = 1.2,..., (2,2‘14)
где все обозначения по смыслу совпадают с ранее введенным для
МН-1. Следует аналогично отметить, что при формировании ДСС
в пространстве наблюдаемых ВП и проведения оценок соответ-
ствующих параметров а = (уДт)т в ходе ВО с учетом связи обла-
стей значений юар и (jozp, р = 1,2,..., практически может быть обес-
печено формирование областей возможных значений первичных
параметров, определяющих текущие циклы анализа.
59
Синтез алгоритма третичной обработки в данной постановке
может быть проведен на основе пары ДМС-2 — МН-2 с тем толь-
ко отличием, что дополнительно в рамках ДМС-2 можно учесть
и влияние активных воздействий на объект, формируемых по
результатам оценки состояний объекта на предыдущих циклах
(см. (2.2.3)). Для этого, как уже отмечалось, требуется устано-
вить вероятностные характеристики действий по разведке и со-
зданию помех, которые жестко связаны с вероятностными ха-
рактеристиками ЧИР, принимаемых на предыдущем уровне (вто-
ричной) обработки и описываемых выведенными в (2.2.8) вели-
чинами А™, Вр\ Ср° [141,142].
Рассматривая особенности этапа третичной обработки, следу-
ет отметить, что его существо состоит, прежде всего, в комплек-
сировапии данных, полученных при выявлении разнородных
ИРИ, образующих объект, или при выявлении разнородных ре-
жимов работы, если объект является многофункциональным РЭК.
Это означает, что в ходе третичной обработки параллельно или
последовательно во времени должны определяться параметры со-
стояний ДМС-1, описываемые векторам А, которые в большин-
стве случаев проявляются в создании контрастных по своим па-
раметрам радиоизлучений и радиосигналов. Это определяет не-
обходимость организации процесса первичной и вторичной обра-
ботки в различных областях возможных значений первичных и
вторичных наблюдений, а также третичной обработки в соответ-
ствии с возможными значениями А, отвечающим различным
основным состояниям. Получаемые при этом данные относительно
реализуемых основных состояний комплексируются, то есть оп-
ределяется их принадлежность одному объекту, а затем они ис-
пользуются для выявления этого объекта в целом.
Таким образом, общая МН также представляет собой много-
уровневую систему моделей, описывающих процессы получения
и прохождения информации при реализации той или иной обра-
ботки в PC. Связь между моделями различных уровней осуще-
ствляется «снизу—вверх» при передаче апостериорной инфор-
мации, отражающей результаты обработки на нижних уровнях,
и «сверху—вниз» при формировании областей возможных зна-
чений наблюдений, в которых проводится обнаружение сигналов и
структурированных радиоизлучений с оценкой параметров состоя-
ний, определенных на соответствующем уровне общей ДМС.
В своей совокупности многоуровневые ДМС и МН составляют
базовую модель информационного взаимодействия для проведения
синтеза и анализа общего алгоритма обработки сигналов и инфор-
мации. В ходе проведенного рассмотрения фактически на качествен-
ной основе показана возможность декомпозиции модели информа-
60
ционного взаимодействия по вертикали и горизонтали, которая
открывает возможность декомпозиции процедуры синтеза общего
алгоритма обработки и проведения раздельного синтеза алгорит-
мов для выделенных уровней. При этом обеспечивается возмож-
ность вложения получаемых на нижестоящих уровнях результа-
тов частных информационных решений на основе введения стати-
стических характеристик получения полезной или ложной инфор-
мации, а также отсутствии информации (пропуска) при отработке
гипотез относительно структуры и параметров моделей, описываю-
щих изменения состоянии объектов.
Другим, на наш взгляд, важным результатом проведенного
анализа является то, что он позволяет заложить структурную
основу для последующей функциональной декомпозиции PC и,
прежде всего, сформировать перечень внутриобусловленных за-
дач и внутрисистемных требований для технических характери-
стик подсистем и частных показателей эффективности решения
этих задач. Примерный перечень внутрисистемных характерис-
тик PC, вытекающий из существа приведенного рассмотрения,
представлен в таблице 2.2.2.
В заключение следует отметить, что в PC должна быть реали-
зована обработка информации в интересах оценки состояний не
одного, а нескольких разнородных объектов, для каждого из ко-
торых построение базовой модели информационного взаимодей-
ствия может иметь свою специфику. Например, может оказать-
ся, что для многих типов объектов, когда нет ярко выраженных
основных состояний ДМС-1, достаточно ограничиться рассмот-
рением только двух уровней ДМС и МН и, соответственно, про-
ведение третичной обработки не требуется. Для некоторых ти-
пов объектов, например для ИРИ с непрерывным излучением,
отсутствует необходимость введения уровня ДМС-3.
2.3. Имитационное моделирование радиоэлектронных систем
в условиях конфликта
В ряду существующих методов моделирования сложных сис-
тем важнейшую роль играет имитационное моделирование (ИМ)
на ЭВМ или цифровое моделирование [176]. В основе ИМ лежит
замена реальной физической системы (процесса) ее приближен-
ным отображением в виде математической модели, моделирую-
щего алгоритма и соответствующего программного обеспечения,
в своей совокупности реализующих воспроизведение на ЭВМ
интересующих аспектов функционирования исходной системы.
Важно подчеркнуть, что ИМ это не теория, а синтетическая ме-
тодология решения проблемы исследования сложной системы,
опирающаяся на эксперимент с цифровой моделью реальной си-
61
Таблица 2,2.2
Примерный перечень внутриобусловленных задач
и внутрисистемных требований
п/п Формулировки внутриобусловленных задач Внутрисистемные требова- ния (перечень наименований технических характеристик и частных показателей эффективности)
1 Первичная обработка сигналов: обнаружение и измерение первич- ных параметров сигналов (парамет- рическая селекция), ноимпульсное (поэлементное) распознавание (идентификация) сигналов Чувствительность приемни- ков сигналов. Пропускная способность приемников по потоку входных сигналов. Точность измерения первич- ных параметров сигналов. Ве- роятностные характеристики обнаружения и распознава- ния сигналов
2 Вторичная обработка информации: разделение (селекция) смешанного потока результатов измерения пер- вичных параметров сигналов; сопро- вождение объектов в пространстве первичных наблюдений в соответ- ствии с гипотезами относительно структуры и параметров радиоизлу- чений; оценка гипотез и параметров состояний структурированных ра- диоизлучений по совокупности пер- вичных наблюдений; распознавание типов (классов) источников радиоиз- лучений по вторичным наблюдаемым параметрам Вероятностно-временные ха- рактеристики разделения входного потока и выделения последовательностей сигна- лов различных источников. Вероятностно-временные ха- рактеристики бессрывного со- провождения. Точность и до- стоверность оценки вторич- ных параметров. Вероятнос- тные характеристики распоз- навания. Пропускная способ- ность аппаратуры вторичной обработки по потоку радио- излучений
3 Третичная обработка информации: разделение (селекция) смешанного потока наблюдений вторичных па- раметров; сопровождение объектов в пространстве вторичных наблюде- ний в соответствии с гипотезами от- носительно основных состояний объекта; оценка гипотез и комплек- сирование информации, получаемой при выявлении основных состояний; распознавание объектов по третич- ным наблюдаемым параметрам Точность и достоверность оцен- ки третичных параметров. Ве- роятностно-временные харак- теристики выделения основ- ных состояний. Вероятностные характеристики вскрытия объектов
62
стемы. К настоящему времени известно большое количество ра-
бот [17» 25, 59, 116, 171], посвященных вопросам имитационно-
го моделирования сложных систем и PC в частности. С учетом
полученных результатов следует отметить ряд характерных осо-
бенностей моделирования функционирования PC РР и РТР в
условиях конфликта.
1. Высокая степень связанности с моделями радиоэлектрон-
ных и нерадиоэлектронных систем (надсистем), в интересах ко-
торых создаются и функционируют рассматриваемые PC. Это
определяет необходимость достаточно полного учета на уровне
исходных данных пространственно-временных характеристик
динамики конфликта надсистем, в которых PC выполняют ос-
новные функции по информационному обеспечению активных
действий и противодействий.
2. Статистический, вероятностный характер моделей, исполь-
зуемых при описании PC. Данная особенность есть прямое след-
ствие вероятностного характера процессов, происходящих в PC
в ходе конфликтного информационного взаимодействия, и. преж-
де всего, наличия элементов случайности при изменении состоя-
ний объектов взаимодействия, а также наличия помех в кана-
лах передачи (утечки) информации.
3. Необходимость полномасштабного воспроизведения радио-
электронной обстановки и насыщенного потока сигналов на вхо-
де PC, которые создаются большим количеством разнородных
источников радиоизлучений; часть из них является объектами
информационного взаимодействия, а другая часть создает меша-
ющий фон. При этом практически отсутствует возможность мо-
делирования процессов взаимодействия с каждым источником в
отдельности, так как входные потоки сигналов от разных источ-
ников имеют сильное перекрытие по частотно-пространственно-
временным параметрам.
С учетом этих особенностей рассмотрим основные принципы
разработки цифровых имитационных моделей рассматриваемо-
го класса PC.
2.3Л. Общая схема метода Монте-Карло применительно
к исследованию радиоэлектронных систем.
Основные принципы разработки имитационных моделей
Существо ИМ состоит в воспроизведении процесса функцио-
нирования PC во взаимодействии с внешней средой с целью оп-
ределения необходимого спектра показателей эффективности для
исходных данных, задающих вариант построения системы. Оче-
видно, что с учетом вероятностного характера исследуемого про-
цесса воспроизведение одной или небольшого количества реали-
63
заций не позволяет сделать обоснованные выводы относительно
свойств PC. Поэтому исследование систем на ИМ часто связыва-
ют с реализацией метода Монте-Карло, в основе которого лежит
осуществление следующих действий [59, 176]:
проведение большого количества одинаковых по исходным
данным актов имитации процесса функционирования PC во вза-
имодействии с внешней средой;
формирование на этой основе соответствующего количества
независимых реализаций случайных величин, характеризующих
те или иные исходы функционирования PC в смысле решения
внешнеобусловленных задач;
усреднение и другая обработка формируемых совокупностей
реализаций случайных величин с целью получения статистичес-
ки значимых выводов относительно значений показателей эф-
фективности PC.
При имитации большого количества независимых реализа-
ций исходных величин, характеризующих «хорошие» и «пло-
хие» исходы процесса функционирования системы, искомые по-
казатели эффективности (вероятность, точность и т.п.) обычно
оцениваются как средние значения по полученным эксперимен-
тальным данным. Поэтому математические основания метода
Монте-Карло определяются законами больших чисел и предель-
ными теоремами теории вероятностей [59].
В соответствии с изложенным общая структурная схема ИМ,
предназначенная для изучения свойств PC (варианта PC), пред-
ставлена на рис. 2.3.1. В рамках представленной схемы необхо-
димо выделить следующие основные части модели: модель внеш-
ней среды — радиоэлектронной обстановки, формируемой мно-
жеством объектов информационного взаимодействия (ОИВ) при
наличии соответствующих каналов передачи информации (КПИ);
модель алгоритмов обработки и преобразования сигналов и ин-
формации в PC; модуль, отвечающий за проведение предвари-
тельной обработки, запоминание и накопление результирующих
данных имитационного эксперимента; модуль формирования
итоговых результатов оценки показателей эффективности PC,
определения их статистической значимости и документирования.
Первые три из выделенных частей общей модели на рис. 2.3.1
обрамлены общим циклом по числу независимых реализаций
испытания n = 1,NM при одних и тех же исходных данных. Внут-
ри цикла по реализациям организован цикл по числу шагов
k = 1, Км или точек на временной оси в пределах временного
интервала, отведенного для однократного воспроизведения про-
цесса функционирования PC. Наконец, внутри последнего цик-
ла организуется цикл по числу ОИВ i - 1,1м , в рамках которого
64
II
a
НАЧАЛО
Имитация функционирования i-ro ОИВ в к-ый
момент времени и КПИ между ОИВ и PC
Формирование результирующего поля «ход-
ного воздействия всех ОИВ (накопление дан-
ных при и учет взаимного влияния)
Имитация
_ внешней
среды и КПП
Имитация функционирования PC в части обработки и
преобразования сигналов и информации на k-ом шаге
k>K4(tk>TM)
Предварительный анализ результатов функционирования PC
в п-ой реализации. Накопление результатов ИМ (подсчет
«хороших» и «плохих» исходов)
Формирование итоговых результатов моделирования.
Запись информации на носители и документирование
[ КОНЕЦ |
Рис. 2.3.1. Общая схема имитационного моделирования PC
3 - 2357
6J
в каждой реализации и для каждого момента времени имитиру-
ется (с определенной степенью абстракции) процесс функциони-
рования объекта и КПИ между объектом и PC. Одновременно в
этой части модели проводится формирование результирующего
входного воздействия от всей совокупности ОИВ путем накопле-
ния данных входных воздействий, полученных от каждого ОИВ
в отдельности, и последующего их преобразования с целью уче-
та взаимного влияния при обработке в PC. Необходимость введе-
ния этого модуля определяется тем обстоятельством, что суще-
ствуют эффекты взаимного влияния (наложения) процессов ин-
формационного взаимодействия, если в PC они осуществляются
одновременно для нескольких объектов. Прежде всего эффекты
взаимного наложения проявляются в процессе приема сигналов
при первичной обработке в PC. Учесть эти эффекты можно, если,
зная особенности построения PC, ввести некоторые функциональ-
ные эквиваленты потерь первичной обработки, возникающие при
наложении сигналов по времени прихода, частоте, направлению
и другим параметрам. Таким образом, сначала необходимо сфор-
мировать неискаженную входную совокупность сигналов (их
модельных эквивалентов) от всех ОИВ, затем провести их про-
верку на взаимное наложение по том или иным параметрам с
учетом принципов построения приемников PC и, наконец, осу-
ществить имитацию возникающих искажений входных данных,
поступающих на последующую обработку в PC. Фактически это
означает, что в какой-то части имитация первичной обработки
выносится в модель внешней среды. Это, как будет показано в
дальнейшем, оправдано еще и тем, что учет характеристик пер-
вичной обработки PC в части реальной возможности восприятия
информации от тех или иных объектов позволяет существенно
сократить объем вычислений при моделировании радиоэлектрон-
ной обстановки, создаваемой большим количеством ИРИ.
Поведение системы при ИМ воспроизводится на некотором
отрезке времени [0,Тм]. Воспроизведение времени в любой ИМ
связано с заданием «модельного времени». Оно требуется для
синхронизации последовательности событий, происходящих в
модели системы, и организации «квазипараллелизма» при ими-
тации одновременного функционирования основных элементов
системы. В силу дискретного характера функционирования ЭВМ,
а также скачкообразного характера изменения состояний эле-
ментов систем, текущее время в ИМ задается путем дискретного
приращения временных отрезков. При этом выделяют два ос-
новных способа задания модельного времени [176]: способ «At»,
при котором приращение (продвижение во времени) осуществ-
ляется с фиксированным интервалом At; способ «Дг», при кото-
66
ром в моделирующем алгоритме приращение модельного време-
ни производится в момент наступления очередного события, зак-
лючающегося в изменении состояния любого из элементов внеш-
ней среды или системы. В первом случае в схеме рис. 2.3.1 цикл
точек на временной оси tkll = tk + At достаточно организовать
как обычный цикл от 1 до Км = TM/At, а во втором случае точки
на временной оси определяются приращением случайного ин-
тервала тк между событиями, заключающимися в скачкообраз-
ном изменении состояний: tkU = tk + тк. При построении ИМ воз-
можна также и комбинация способов «AtxAz». Выбор способа
модельного времени весьма важен с позиций рационального ис-
пользования вычислительного ресурса ЭВМ, достижения требуе-
мой точности моделирования и сложности моделирующего алго-
ритма. Во многом этот выбор определяется характером функци-
онирования ОИВ. Так, например, при исследовании PC РТР для
конфликта в радиолокации, где большинство ИРИ работает в
импульсном режиме излучения сигналов, более эффективным
представляется использование способа «Az», а для исследования
PC РР и конфликта в радиосвязи, где большая часть ИРИ излу-
чает непрерывные сигналы, предпочтительным представляется
использование способа «At».
Как уже отмечалось, целью моделирования PC (в данном слу-
чае PC РТР или РР) является получение оценок внешне- и внут-
рисистемных показателей эффективности для различных вари-
антов построения системы, технических характеристик ее от-
дельных элементов и условий функционирования. Учитывая на-
личие большого количества элементов в составе PC, сложность и
разномасштабность во времени процесса разведки разнородных
объектов, необходимость достаточно детального воспроизведения
радиоэлектронной обстановки, создаваемой большим количеством
ИРИ, возникает проблема придания процессу исследований обо-
зримого характера. При этом важнейшей задачей является зада-
ча анализа закономерностей влияния обработки, реализуемой на
различных уровнях МН, на общую результирующую эффектив-
ность системы. Поэтому при разработке ИМ в конкретной ситу-
ации целесообразно использовать следующие принципы и под-
ходы, вытекающие как из известных рекомендаций [17, 25, 116],
так и из проведенной в п. 2.2 декомпозиции процесса информа-
ционного взаимодействия.
1. Принцип функционального моделирования, в соответствии
е которым в ходе разработки ИМ сосредотачиваются на наиболее
существенных особенностях построения системы и ее элементов,
обеспечивающих оценку ее качества в интересующем исследова-
теля на данном этапе аспекте. При этом моделирование отдель-
67
ных элементов может проводиться независимо. Получаемые точ-
ностные, вероятностные и временные характеристики реализуе-
мых на этих элементах процедур обработки сигналов и инфор-
мации используются далее для описания их функциональных
эквивалентов при анализе результирующей эффективности сис-
темы. В частности, при декомпозиции процесса разведки удобно
использовать введенную иерархию внутриобусловленных задач
с выделением подсистем первичной, вторичной, третичной обра-
ботки, обеспечивающую вложение результатов частных инфор-
мационных решений, принимаемых на каждом уровне, в исход-
ные статистические описания процесса обработки на вышестоя-
щем уровне. При этом естественным образом обеспечивается опре-
деление частных показателей эффективности функционирования
отдельных подсистем и модулей, имеющих самостоятельное зна-
чение и оказывающих одновременно существенное влияние на
интегральную эффективность.
2. Выделение основных типопредставителей PC и их отдель-
ных элементов и разработка для них унифицированных имита-
ционных моделей, обеспечивающих перекрытие максимально
возможного набора вариантов структуры построения PC. В рам-
ках функционально разделенных по объектам PC и их основных
подсистем всегда может быть выделено несколько крупных мо-
дулей, имеющих общность по решаемым задачам и используе-
мым для их оценки частным показателям. Для подсистемы, на-
пример, первичной обработки имеется достаточно широкий, но,
в то же время, ограниченный набор вариантов построения при-
емных устройств. В еще большей степени унификация моделей
может быть достигнута по отношению к подсистемам вторичной
и третичной обработки информации. При таком подходе, когда
уже создан необходимый набор унифицированных моделей, ос-
новная нагрузка в ходе исследований связана с проведением адек-
ватной настройки режимов работы этих моделей и варьировани-
ем основными техническими характеристиками исследуемых
элементов PC. В то же время, не следует исключать в ряде слу-
чаев необходимости разработки уникальных моделей.
3. Выделение основных типопредставителей радиоэлектрон-
ных объектов информационного взаимодействия для PC, отли-
чающихся общностью основных режимов работы и излучения
сигналов, и проведение для них независимой оценки эффектив-
ности PC на основе усечения модели радиоэлектронной обста-
новки по принципу: объект + характерный фон. Данный подход
позволяет наиболее адекватно учесть динамику смены состоя-
ний объекта при радиопротиводействии в ходе конфликта и мо-
жет быть реализован путем формирования радиоэлектронной
68
обстановки в частотном поддиапазоне (секторе по направлению
прихода сигналов), совпадающем с границами диапазона рабо-
чих частот рассматриваемого типопредставителя. Полученные
результаты при таком «усечении» РЭО должны увязываться с
возможностями системы по пропускной способности.
4. Рациональное сочетание методов имитационного модели-
рования и аналитических, а также численных математических
методов исследования вариантов PC на эффективность. После-
дние целесообразно использовать там, где требующий опреде-
ленных затрат процесс имитации может быть заменен расчетом
частных показателей качества выполнения отдельных операций
обработки сигналов и информации с последующим использова-
нием полученных результатов при проведении интегральных
оценок в рамках функционального подхода. В качестве приме-
ров характеристик, которые достаточно просто рассчитываются
на основе законченных аналитических выражений, можно при-
вести такие, как: вероятности и дальности обнаружения объек-
тов по главному и боковому излучению; рабочие зоны по про-
странству, в пределах которых обеспечивается требуемые веро-
ятности обнаружения; вероятности распознавания типов объек-
тов (в основном для радиолокационных систем) на основе данных
о возможных диапазонах значений основных параметров сигна-
лов и излучений и т.д. Проведение оценок расчетным путем не
только имеет самостоятельное значение, но и позволяет избе-
жать непродуктивных действий при постановке имитационных
экспериментов. Так, например, оценка предельной дальности
обнаружения ИРИ и рабочих зон системы в пространстве в зави-
симости от чувствительности приемников позволяет быстро «на-
строить» исходные энергетические характеристики приема сиг-
налов при последующей имитации PC. В то же время, следует
отметить, что полностью отказаться от имитационного модели-
рования пе представляется возможным и, прежде всего, из-за
существования уже упомянутой проблемы «разделения», кото-
рая определяет необходимость изучения потерь при воздействии
на PC смешанного входного потока сигналов от многих ИРИ.
В соответствии с изложенными подходами на рис. 2.3.2 пред-
ставлен типовой облик информационной системы моделей и ме-
тодик (ИСММ), обеспечивающей оценку вариантов построения
PC. ИСММ выполнена по блочно-модульному принципу и пред-
ставляет собой совокупность связанных аналитических расчет-
ных методик и программных модулей имитации элементов PC,
использующих общую базу данных и управляемых в процессе
Диалога оператора с ЭВМ. ИСММ состоит их двух основных час-
тей, одна из которых (выделенная штриховыми линиями) отве-
69
Рис. 2.3.2. Структурная схема системы моделей и методик
чает за формирование и моделирование внешней среды, в кото-
рой функционирует система, а другая за моделирование самой
системы. На каждом уровне модели обработки, реализуемой в
PC, выделены модули, отвечающие за имитацию соответствую-
щих алгоритмов (слева), и модули, отвечающие за проведение
аналитических или численных расчетов отдельных частных по-
казателей эффективности (справа). При необходимости рассмот-
рения многопозиционной системы модули имитации первичной
и вторичной обработки размножаются по числу точек простран-
ственного расположения элементов PC. Структура ИСММ позволя-
ет проводить как сквозное моделирование всей системы, так и выч-
ленение отдельных модулей, отвечающих за оценку частных и про-
межуточных показателей эффективности выполнения отдельных
функциональных операций обработки сигналов и информации.
70
2.3.2. Моделирование радиоэлектронной обстановки
Важнейшей и весьма затратной составляющей общей ИСММ
является имитационная модель радиоэлектронной обстановки. Она
должна отражать результаты функционирования большого (до
Ю3.Л04) количества ИРИ в пределах весьма протяженных облас-
тей на поверхности земли и в воздушном пространстве в плане их
результирующего воздействия на PC. Конечным результатом рабо-
ты ИМ РЭО должно являться формирование реализаций потока
сигналов на входе приемника (нескольких приемников при нали-
чии многопозиционпости) PC с учетом условий ее функционирова-
ния и основных технических характеристик. При построении мо-
дели РЭО целесообразно, помимо уже рассмотренных в п. 2.3.1,
реализовать ряд приемов, направленных на рациональное исполь-
зование вычислительного ресурса при ИМ.
Одним из основных способов придания модели РЭО обозримо-
го и управляемого характера является выделение нескольких
уровней сложности при описании динамики функционирования
ИРИ, их расстановки на местности, а также перемещения в про-
странстве. Целесообразно выделить три таких уровня.
Первый из них предполагает моделирование нескольких наи-
более важных объектов информационного взаимодействия в со-
ответствии с предложенными в п. 2.2.1 принципами построения
динамических моделей состояний, в полном объеме учитываю-
щими динамику смены режимов работы и режимов излучения,
в том числе и под воздействием радиопомех противоборствующей
стороны. Расстановка таких объектов на местности и задание
траекторий их перемещения в пространстве осуществляется в
соответствии с конкретными характеристиками реализуемого в
рамках конфликта эпизода. Для конфликта в радиолокации в
качестве таких детально воспроизводимых объектов рассматри-
ваются многофункциональные РЛС или группировка специали-
зированных РЛС, обеспечивающих применение одного комплек-
са управляемого оружия. Для конфликта в радиосвязи — это
радиолинии и сети связи, для которых прежде всего требуется
воспроизводить временную последовательность и структуру ра-
диоизлучений в ходе радиообмена данными.
Второй по степени детальности и сложности уровень модели-
рования при имитации РЭО предполагает воспроизведение боль-
шой совокупности разнородных источников, не являющихся при-
оритетными ОИВ для данного конкретного эпизода или вообще
относящихся к классу мешающих объектов, но, тем не менее,
находящихся в зоне ответственности PC. Последнее замечание
весьма существенно, так как наличие таких ИРИ может оказать
заметное влияние на эффективность PC и затруднить выбор ос-
71
новных объектов на этапах вторичной и третичной обработки
информации. Тем не менее, в данном случае вполне допустимо
отказаться от детального воспроизведения динамики функцио-
нирования этих ИРИ и их расстановки в соответствии с опреде-
ленной конфигурацией на местности. Можно вполне ограничиться
случайным розыгрышем режимов работы и режимов излучения,
а также случайной расстановкой ИРИ в соответствии с извест-
ной для каждого типа (класса) плотностью размещения в преде-
лах зоны ответственности системы. Соответствующий розыгрыш
может проводиться либо для каждой реализации процесса ими-
тации по схеме рис. 2.3.1, либо в рамках каждой реализации
для каждого из циклов анализа РЭО, введенных при описании
модели наблюдений.
Наконец, наиболее упрощенный характер носит имитация РЭО
в части так называемого «мирового фона», то есть воспроизведе-
ния потока сигналов, находящихся вне зоны ответственности PC.
В данном случае вполне может быть использована модель много-
мерного неоднородного пуассоновского потока с заранее рассчи-
танной для данных условий приведенной интенсивностью выпа-
дения точек в пространстве первичных наблюдений. Использо-
вание обобщенной модели «мирового фона» особенно важно для
исследования задач, связанных с анализом конфликтного ин-
формационного взаимодействия радиоэлектронных систем в ра-
диосвязи и, прежде всего, в нижних участках частотного диапа-
зона (КВ связь и, частично, УКВ связь) [71].
Следующий прием, обеспечивающий сокращение затрат при
ИМ РЭО, связан с выборочным по степени детальности воспро-
изведением тонкой пространственной структуры сигнальных
полей с учетом основных эффектов влияния подстилающей по-
верхности, трассы распространения, влияния отражений и пере-
отражений в условиях сложного рельефа местности. Как прави-
ло, эти факторы рассматриваются на уникальных моделях с це-
лью получения на их основе статистических и функциональных
эквивалентов, которые затем могут использоваться при модели-
ровании РЭО и соответствующих ошибок и искажений, возника-
ющих при обработке сигналов в PC. В то же время, и при моде-
лировании совокупности ИРИ возникает в ряде случаев необхо-
димость учета такого рода факторов, когда они имеют значение
для результатов обработки интенсивных смешанных потоков
сигналов. В этом плане центральное место занимают вопросы мо-
делирования диаграмм направленности антенн передающих уст-
ройств и алгоритмов изменения ориентации антенн в динамике
функционирования ИРИ. В частности, для средств радиолокации
и средств радиосвязи с направленными антеннами высокочастот-
72
ного диапазона могут применяться несколько аппроксимаций ДНА,
имеющих различную степень детальности воспроизведения распре-
деления мощности излучаемых сигналов по направлению. Простей-
шей из них является прямоугольная аппроксимация, при которой
зависимость рассеиваемой мощности в указанном направлении оп-
ределяется (см. рис. 2.3.3) соотношением
рр = p„G„gK(e),
(2.3.1)
где Ри — излучаемая мощность; GH — коэффициент направленного
действия антенны излучателя; gH(9) — функция, описывающая ДНА
излучателя; 0 — угол между указанным направлением и направле-
нием главного луча ДНА; 0Г — ширина ДНА в соответствующей
плоскости сечения на уровне половинной мощности; Ь2 — относи-
тельный уровень мощности бокового излучения (b2 « 1). Такая
аппроксимация одновременно определяет связь между Ои, Ь2 и 0С
для антенн с достаточно узкой («игольчатой») формой главного
лепестка, обладающих относительной осевой симметрией:
G . -7-16-
и 4^
2 V
Более сложной представляется предложенная в [97] аппрок-
симация диаграмм направленности узконаправленных антенн:
Рис. 2.3.3. К аппроксимации ДНА и вычислению мощности в точке
приема
73
g»(0) =
exp[-2,78(0/0c)2],
O,O625/(0/0e)p,
ec < |e| < n,
(2.3.2)
где Ц — коэффициент, изменяющийся от 2 до 1 в зависимости от
степени «засоренности» позиции ИРИ местными предметами.
Представленные аппроксимации (2.3.1), (2.3.2) определяют
фактически только средний уровень мощности бокового излуче-
ния. Если же требуется учесть статистический характер боково-
го излучения, то в указанном направлении мощность излучения
может разыгрываться как случайная величина, распределенная
по логарифмически нормальному закону относительно среднего
значения mb = 20 1g b с дисперсией Gb порядка 3...7 дБ [97]. Если
дополнительно требуется учесть тонкую структуру боковых ле-
пестков диаграммы направленности при вращении (сканирова-
нии) антенны, то на средний уровень бокового излучения можно
наложить реализацию случайного процесса с интервалом корре-
ляции по оси направлений, соизмеримым с шириной главного
лепестка ДНА [97].
Наиболее точным и детальным является использование уни-
кальных аппроксимаций ДНА, отвечающим конструктивным осо-
бенностям построения конкретных объектов, например РЛС с
фазированными антенными решетками или средств радиосвязи
с заданной геометрической конфигурацией элементарных излу-
чателей. Такие ДНА рассчитываются заранее и закладываются в
модель РЭО в виде специальных таблиц данных. Таким образом,
имея для каждого ИРИ аппроксимацию формы ДНА как функ-
цию угла между направлением ориентации главного луча и на-
правлением на точку приема (рис. 2.3.3) и задавая зависимость
ориентации главного луча от времени, то есть фактически функ-
цию 0(t), в имитационной модели РЭО с различной степенью
детальности воспроизводится поток измеряемых и принимаемых
сигналов с учетом тонкой пространственной структуры ДНА.
Еще один важный способ рационализации процесса имитаци-
онного моделирования связан с использованием при формирова-
нии РЭО конкретных технических характеристик исследуемых
PC, определяющих реальную возможность восприятия радиоиз-
лучений тех или иных ИРИ. Прежде всего должны учитываться
факторы энергодоступности и радиовидимости ИРИ, а также ча-
стотный диапазон и диапазон направлений приема сигналов ан-
тенной системой PC. Фактически, если абстрагироваться от эф-
фектов приема побочных излучений антенной системой PC, учет
перечисленных факторов позволяет существенно сократить пе-
речень типов и общее количество ИРИ каждого типа, функцио-
нирование которых должно воспроизводиться в ходе имитаци-
74
онного моделирования РЭО. При этом после расстановки всех
ИРИ в зоне ответственности PC отсекаются те из них, у которых
мощность сигналов в точке приема не превышает заданного по-
рогового уровня чувствительности приемника, частота излучае-
мых сигналов не попадает в заданный диапазон рабочих частот
системы или, наконец, они находятся вне зоны приема, ограни-
ченной рабочим сектором направлений прихода сигналов и ду-
гой радиуса радиогоризонта. При расчете уровня мощности сиг-
налов на входе приемника PC используется известное соотноше-
ние (см. рис. 2.3.3)
р = РпДи£и(е)Дпеп(<р)^
г (4nR)2
(2.3.3)
r|e““’R,
где в дополнение к уже введенным величинам Gn — коэффици-
ент направленного действия антенны приемника PC; gn(<p) —
функция ДНА приемника; ф — угол между направлением ори-
ентации главного луча приемника и направлением на источник
излучения; Хи — длина волны излучаемого радиосигнала; Г| —
коэффициент потерь при рассогласовании излучаемого сигнала
и приемного тракта по поляризации и другим характеристикам
тракта (обычно Г| <0,5); R — расстояние от излучателя до при-
емника. Экспоненциальный множитель в (2.3.3) определяет за-
тухание мощности излучения в атмосфере [50] с коэффициентом
(х3 [км-1], известным из справочной литературы. Соотношение
(2.3.3) выполняется для условий распространения радиоволн в
свободном пространстве без учета отражения от подстилающей
поверхности и интерференции прямого и отраженного радиоиз-
лучения. Если требуется учесть эти и более тонкие эффекты вли-
яния подстилающей поверхности, то для функций ДНА £и(0),
gn(<p) дополнительно вводятся эквивалентные интерференцион-
ные множители, изменяющиеся в зависимости от угла места на-
правления на приемник (передатчик) по известным формулам
[50]. В случае, если антенны излучателя и приемника располо-
жены низко над поверхностью земли (hH< Хи, hn< Хп), учет ин-
терференционных множителей приводит к изменению мощнос-
ти излучения в зависимости от дальности по закону 1/R4 в соот-
ветствии с известной формулой Б. А. Введенского [71].
Расчет дальности радиогоризонта, определяющей условия
приема прямого (без отражений и переотражений) излучения,
определяется также по известной формуле
Rr = 4,12(ТМм] + ТКМ). (2-3.4)
Тогда для определения невозможности приема сигналов прямо-
го радиоизлучения необходимо оценить выполнение условия
R > min(Rr,maxRJ,
75
где maxR3 — максимальная дальность энергетической доступно-
сти, определяемая из (2.3.3) для минимального значения
^c-^cmin* Здесь Pcmin — минимальный пороговый уровень мощ-
ности, воспринимаемой приемником PC, называемый чувстви-
тельностью приемника. Величину maxR3 можно определить сле-
дующим образом:
max R3
'Ри^и^и^иЛ
16*2pcmin
Расчет чувствительности для конкретного варианта построе-
ния приемника PC проводится по формуле [50]
Pcmin=m*Pm, РШ=ЫО Д4р, Nu = кТ0(Кга+ТЛ/То-1), (2.3.5)
где nip — коэффициент различимости — превышения порогово-
го уровня мощности сигнала над уровнем шума; No — спект-
ральная плотность мощности приведенного ко входу шума ан-
тенны и приемника; Afnp — ширина полосы пропускания прием-
ного тракта или отдельного частотного канала приемника до де-
тектора; k^l,38-10 23 Дж/К — постоянная Больцмана;
То = 290 К — стандартная (комнатная) температура в градусах
Кельвина; ТА — естественная шумовая температура антенны в
градусах Кельвина; Кш — коэффициент шума приемника. У со-
временных радиоэлектронных средств типичная результирующая
плотность мощности собственных шумов в дециметровом и сан-
тиметровом диапазонах составляет примерно No= 1О-2оВт/Гц [24].
Помимо рассмотренных соотношений при оценке возможнос-
ти информационного взаимодействия по фактору энергетичес-
кой доступности могут использоваться и другие соотношения,
учитывающие тонкие эффекты, например, возможность приема
отраженного от ионосферы радиоизлучения (эффект так называ-
емой «пространственной радиоволны») [50, 71].
С учетом всех перечисленных особенностей и принципов по-
строения структурная схема ИМ РЭО может быть представлена
в виде, показанном на рис. 2.3.4 Данная схема отражает состав
модели и примерный порядок выполнения основных процедур
обработки и формирования данных при воспроизведении РЭО. В
ней, помимо уже известных модулей, следует выделить две ос-
новные части: статическую часть модели и динамическую часть
модели.
Статическая часть реализует всю подготовительную работу для
генерации потока сигналов на входе PC с заданными техничес-
кими характеристиками. При этом она решает следующие зада-
чи: расстановку ОИВ и других ИРИ на местности и в простран-
76
Рис. 2.3.4. Структурная схема модели РЭО
77
стве с учетом возможности их перемещения; расчет функций
ДНА ИРИ на основе используемых аппроксимаций; установку
режимов работы, режимов излучения и номинальных значений
(диапазонов значений) параметров сигналов, а также их пере-
счет для точек приема с учетом влияния трассы распростране-
ния. В рамках статической части модели выделяются две груп-
пы процедур формирования исходных данных для генерации
потоков сигналов: для имитации функционирования ОИВ и для
имитации ИРИ, являющихся для данного эпизода мешающими.
В первом случае расстановка ИРИ, входящих в перечень объек-
тов, осуществляется в соответствии с заданной геометрической
конфигурацией эпизода и рассчитываются достаточно детальные
аппроксимации ДНА, учитывающие тонкую структуру боковых
лепестков. Динамика функционирования и перемещения ОИВ,
включая смену режимов работы, режимов излучения, перестрой-
ку параметров сигналов, управление сканированием антенны и т.п.,
задается структурированными моделями в соответствии со схемой
построения ДМС п. 2.2.1. Во втором случае (для ИРИ «необъек-
тов») реализуются упрощенные аппроксимации ДНА. Розыгрыш
их расстановки на местности, включаемых режимов работы и из-
лучения, ориентации антенн, номинальных значений параметров
сигналов осуществляется по случайному, как правило, равноверо-
ятному закону. Подготовительная работа в рамках статической части
модели может осуществляться один раз для каждой реализации
ИМ в рамках общей схемы исследований рис. 2.3.1 или независи-
мо для каждого внутреннего цикла анализа РЭО.
Динамическая часть модели на основе всей совокупности ис-
ходных данных, формируемых в статической части, осуществ-
ляет непосредственную генерацию потоков сигналов на входе PC.
Результирующей поток создается в результате суперпозиции не-
зависимо формируемых потоков сигналов, поступающих от ОИВ
и мешающих ИРИ, а также обобщенного фонового потока меша-
ющих сигналов. При этом сигнал, поступающий от каждого ис-
точника, описывается специальным дескриптором, содержащим
значения всех его параметров (частоты, длительности, амплиту-
ды, направления прихода, времени прихода и др.), пере-считан-
ных по отношению к точке приема, а также содержащим при-
знаки принадлежности сигнала конкретному источнику, режи-
му работы, режиму излучения. По мере поступления сигналов с
помощью специальной процедуры проводится их упорядочива-
ние и расстановка по времени прихода и, тем самым, формиро-
вание результирующего потока сигналов в пределах каждого
цикла анализа РЭО. Если проводится исследование многопози-
ционной PC, то такие потоки формируются для каждой точки
78
приема с соблюдением взаим-
ных задержек по времени
прихода сигналов на каждый
приемный пункт. Для прове-
дения оценки интенсивности
потока сигналов, мощность
которых превышает уровень
чувствительности приемника
PC, в динамической части
модели предусмотрен специ-
альный модуль.
В качестве примера эксп-
луатации ИМ РЭО, построен-
ной по указанным принци-
пам, на рис. 2.3.5 представ-
лены данные по оценкам ин-
Рис. 2.3.5. Интенсивности потоков
импульсных сигналов РЛС
тенсивности потоков сигна-
лов, создаваемых типовой группировкой РЛС военного и граж-
данского назначения [81, ИЗ] в различных поддиапазонах
частот. Оценки проводились для квадратной зоны ответствен-
ности PC размером 300x300 км2 при расположении PC на вы-
соте 5 км над поверхностью земли (см. рис. 1.2.1 п. 1.2). Ан-
тенна приемника PC считалась ненаправленной (Gn= 1). По-
лученные данные представлены в виде зависимостей интен-
сивностей потоков ц [с"1] от чувствительности Pcmin [Вт]. Их
анализ показывает, что типовая РЭО является достаточно насы-
щенной, а уровень суммарной интенсивности потока сигналов в
целом достигает величины порядка 5-106 с"1, что в основном совпа-
дает с приведенными в [81, ИЗ] данными с учетом корректировки
зоны размещения ИРИ по условиям прямой радиовидимости.
79
3. ПЕРВИЧНАЯ ОБРАБОТКА СИГНАЛОВ
3.1. Функциональная декомпозиция первичной обработки.
Приемоанализирующая аппаратура общего назначения
В соответствии с проведенной в 2-ой главе структуризацией про-
цесса обработки сигналов и информации в PC РТР и РР выделен
этап первичной обработки, предусматривающей решение ряда внут-
риобусловленпых задач, объединенных общим термином «прием
сигналов». Соответствующим образом в рамках PC может быть
выделена подсистема первичной обработки сигналов (ППОС), несу-
щая основную функциональную нагрузку по решению задач при-
ема и состоящая из совокупности технических устройств — первич-
ных датчиков, соединенных в соответствии с принятым алгорит-
мом обработки. На вход ППОС поступает поток сигналов: радиоим-
пульсов, излучаемых РЛС, и/или элементарных посылок сигналов
средств радиосвязи. На выходе — формируется поток наблюдений
первичных параметров в виде сгруппированных по каждому при-
нятому сигналу упорядоченных наборов данных, содержащих ре-
зультаты измерения параметров сигналов в соответствующем фор-
мате. Типовой перечень данных, вырабатываемых на выходе ППОС
по каждому принятому сигналу, обычно содержит измерения его
несущей частоты (f), длительности (т), амплитуды (и), времени при-
хода (t), направления прихода в азимутальной и угломестной плос-
костях (<р), признак наличия и вида внутриимпульсной модуляции
(ъ) и т.п. Таким образом, в рамках ППОС осуществляется класси-
ческий набор системных операций «обнаружения—различения—
оценивания» параметров сигналов ИРИ — радиоэлектронных
средств (РЭС) различного назначения[184, 191]. Кроме того, в рам-
ках ППОС решается ряд специфических задач, связанных с функ-
ционированием PC в составе РЭК, о которых далее будет сказано
подробнее.
Функциональная декомпозиция первичной обработки по ре-
шаемым задачам представлена на рис. 3.1.1. Связи между от-
дельными задачами — функциональными операциями первич-
ной обработки отражают последовательность их выполнения и
80
влияния получаемых резуль-
татов на выполнение последу-
ющих задач.
В схеме рис. 3.1.1 выделе-
ны операции обнаружения и
оценивания параметров сигна-
лов (для удобства задача раз-
личения, связанная с опреде-
лением параметров, принима-
ющих дискретные значения,
отдельно не показана). Опера-
ции обнаружения и оценива-
ния параметров сигналов мо-
гут осуществляться как раз-
дельно (данный вариант пока-
зан на схеме рис. 3.1.1), так и
совместно. В последнем случае
реализуются двухфункцио-
На следующий этап
Рис. 3.1.1. Функциональная де-
композиция первичной обработки
нальные решающие правила
[184, 191]. Кроме того, в ходе первичной обработки может осу-
ществляться параметрическая, чаще всего частотно-простран-
ственная селекция сигналов. Термин «селекция* означает про-
цедуру проверки принадлежности сформированного по резуль-
татам обнаружения и оценивания наблюдения к некоторой обла-
сти пространства первичных наблюдений (z е со2А или z <2 cdzJ.
Последняя задается либо исходя из априорных сведений о воз-
можности наличия в ней наблюдений, принадлежащих интере-
сующей группе (типу, классу) ИРИ, либо в соответствии с сфор-
мированным к данному моменту времени индивидуальным ди-
намическим стробом сопровождения конкретного ИРИ. Прове-
дение селекции позволяет осуществить прореживание потока
первичных наблюдений и исключить из дальнейшей обработки те
из них, которые заведомо не принадлежат объектам разведки.
Другими специальными операциями, которые могут осуще-
ствляться в ходе ПО, являются распознавание и идентификация
наблюдений. Остановимся подробнее на терминологии, связан-
ной с решением задач распознавания, идентификации и т.п. Как
известно [184], задача распознавания состоит в определении при-
надлежности данного объекта (наблюдения) одному из заранее
выделенных классов объектов в соответствии с имеющимся эта-
лонными описаниями. Кроме того, для определения сходных по
смыслу задач часто используются термины «идентификация*,
«отождествление», «классификация». Задача идентификации в
нашем понимании состоит в определении принадлежности объек-
81
та к некоторому классу объектов без указания на его принад-
лежность к каким-либо другим классам («он — не он»). Задача
отождествления состоит в определении принадлежности двух
объектов одному классу, в том числе и в случае, если эталонное
описание этого класса отсутствует («один и тот же» — «разные»).
Наконец, задача классификации состоит в определении числа
классов и их эталонных описаний на основе имеющейся сово-
купности объектов. Естественно, что при построении описаний
классов требуется проводить разбиение общей совокупности по
принадлежности объектов выделяемым классам.
Распознавание при ПО обычно осуществляется в тех случаях,
когда имеется возможность определить объект информационно-
го взаимодействия по особенностям тонкой структуры единич-
ного сигнала, импульса, посылки. Такие особенности могут оп-
ределяться либо индивидуальными, «паразитными» искажени-
ями внутриимпульсной структуры сигналов данного экземпляра
ИРИ, либо уникальными особенностями функций внутриимпуль-
сной модуляции, присущими данному типу ИРИ. При этом пред-
полагается, что возможно предварительно сформировать эталон-
ные описания тех экземпляров ИРИ, которые требуется опреде-
лять непосредственно в ходе конфликта. Данный подход реали-
зует достаточно модную в свое время концепцию поимпульсного
поэкземплярного распознавания, основная направленность ко-
торой состоит в попытке существенно сократить время приня-
тия решений при РТР и РР и сделать его соизмеримым с време-
нем обработки одного импульса (одной посылки), а также уйти
от решения проблемы разделения интенсивного входного пото-
ка, являющегося суперпозицией потоков сигналов от многих
ИРИ. Сегодня уже очевидна определенная ограниченность этой
концепции, связанная с трудностями формирования эталонных
описаний, которые были бы устойчивы в условиях перестройки
основных параметров радиоизлучений. Тем не менее, данный
подход может применяться в ряде ситуаций и потенциально обес-
печивает высокие достоверность и быстродействие обработки.
Кроме того, к первичной обработке по смыслу можно отнести
операцию идентификации первичных наблюдений при выборе
полезного из совокупности наблюдений, попавших в индивиду-
альный ДСС, формируемый в ходе вторичной обработки по мере
накопления информации. Такая операция уже ранее рассматри-
валась в п. 2.2.2 при обосновании модели наблюдений и может
реализовываться на этапе ПО, если соответствующим образом
организована структура общего алгоритма обработки.
Процедуры отождествления и классификации в ходе обработ-
ки выполняются в основном в рамках многопозиционных сис-
82
тем и далее будут рассматриваться в соответствующих парагра-
фах, посвященных особенностям функционирования многопози-
ционных PC.
Еще одна весьма специальная операция ПО реализует запоми-
нание (запись) и воспроизведение сигналов и связана с функциони-
рованием PC в составе РЭК радиопротиводействия. Основное на-
значение данной составляющей обработки состоит в обеспечении
возможности использования информации о впутриимпульсной
структуре принимаемых сигналов для создания на этой основе энер-
гоемких, согласованных радиопомех. Достоинство данного подхо-
да состоит в том, что при обеспечении системы радиопротиводей-
ствия исходной информацией (см. рис. 1.2.2) не проводится изме-
рение частоты и других параметров сигналов, а при генерации ак-
тивных помеховых воздействий используются «копии» ранее
принятых и записанных сигналов ИРИ, относящихся к объектам
воздействия. Решения на использование таким образом получен-
ной информации о сигналах принимаются после проведения обра-
ботки, позволяющей определить принадлежность сигналов к ОИВ.
Такая обработка может осуществляться как в полном (включая
первичную, вторичную, третичную обработку), так и в ограничен-
ном объеме. Например, решение на воспроизведение ранее запи-
санного сигнала может приниматься по результатам только пер-
вичной обработки и, в частности, поимпульсного распознавания.
Остановимся подробнее на рассматриваемой далее проблема-
тике разработки ППОС и ее элементов, реализующих введенные
функциональные операции ПО.
В данном случае, как и во многих других, всегда можно вы-
делить главное направление, связанное с общим улучшением
традиционных характеристик аппаратуры приема и анализа сиг-
налов. Очевидно, что это направление в PC рассматриваемого
класса развивается совместно с аналогичными разработками для
PC другого назначения. Общность принимаемых технических и
технологических решений при этом определяется прежде всего
новыми возможностями, предоставляемыми элементной базой
современной радиоэлектроники.
В то же время, нельзя не отметить и определенную специфи-
ку требований к аппаратуре ПО в части решения задач обнару-
жения—оценивания. Она определяется увеличением общего про-
цента средств радиолокации и радиосвязи, использующих меры
ПЗ, реализующие быструю перестройку основных параметров
сигналов и, прежде всего, частоты, а также уже отмеченной тен-
денцией наличия на входе PC интенсивных, смешанных потоков
сигналов, порождаемых большим количеством источников. Все
это означает, что общей крупной проблемой при создании совре-
83
менных PC РТР и РР в интересах достижения требуемых време-
ни и достоверности принятия решений является обеспечение
беспоискового по частоте и направлению прихода поимпульс-
ного (поэлементного) приема сигналов. При этом должны со-
храняться необходимые уровни чувствительности обнаружения
и точности измерения основных параметров сигналов, что всту-
пает в противоречие с требованиями по частотной широкополос-
иости аппаратуры приема и анализа. Немалую роль начинают
также играть вопросы обеспечения помехоустойчивости приема
в связи с взаимным влиянием сигналов разнородных ИРИ, при-
нимаемых в общей полосе частот. Это приводит к необходимости
проведения анализа возможностей предлагаемых схем построе-
ния аппаратуры при наличии мощных нестационарных и струк-
турно-организованных помех.
Вторая группа проблем, возникающих при создании приемных
устройств современных PC, связана с необходимостью привлече-
ния для анализа сигналов и радиоизлучений ранее нетрадицион-
ных для данной области характеристик, а также с необходимостью
обработки новых видов сигналов. Поэтому авторы сочли необходи-
мым в материалах данной главы отдельно рассмотреть вопросы
поляризационной обработки, а также вопросы приема так называ-
емых сигналов повышенной скрытности и сверхширокополосных
сигналов. Сигналы повышенной скрытности имеют большую базу
(до 10б) и являются обычными длинноимпульсными и широкопо-
лосными сигналами при малой излучаемой мощности, что затруд-
няет их обнаружение обычным приемником PC. Более нетрадици-
онной является задача приема сверхширокополосных сигналов,
являющихся сигналами чрезвычайно малой длительности, распро-
страняющихся без ярко выраженной несущей. В рамках этого же
круга вопросов находятся исследования, посвященные проблема-
тике задач запоминания и воспроизведения сигналов, а также по-
импульспого распознавания.
3.1.1. Типовые схемы построения
приемоанализирующей аппаратуры
Построение ППОС во многом определяется реализуемыми прин-
ципами поиска сигналов по частоте и направлению при их обнару-
жении. Это связано с тем, что наиболее громоздкая часть приемоа-
нализирующей аппаратуры (антенны, фидеры, ВЧ-фильтры и т.п.),
обеспечивающая конкретные режимы приема сигналов, в своем
конструктивном исполнении определяется поддиапазонами частот
и секторами направлений, в пределах которых обеспечивается од-
новременный прием сигналов различных ИРИ. В соответствии с
этим обобщенная структурная схема ППОС и PC в целом представ-
84
лена на рис. 3.1.2, где выделены основные модули ППОС: модуль
определения частоты (МОЧ); модуль определения направления
(МОН); модуль измерителей параметров сигналов (МИПС). Связи
между МОЧ и МОН могут осуществляться различным образом, как
напрямую, в рамках схем, обеспечивающих определенную интег-
рацию процедур обнаружения — определения частоты и направле-
ния прихода сигналов, так и через МИПС, когда по результатам
функционирования МОЧ или МОН организуется наведение друго-
го модуля по соответствующему параметру. В рамках МИПС реа-
лизуется измерение полного набора первичных параметров сигна-
лов, включая, естественно, частоту и направление прихода. При
этом логика функционирования и подключения МИПС к соответ-
ствующим каналам зависит от принятого в ППОС алгоритма про-
смотра отдельных диапазонов частот и секторов направлений. В
общем случае МИПС состоит из набора измерителей частотно-вре-
менных и пространственных параметров радиосигналов, обнару-
живаемых в каналах приема по частоте и направлению. На выходе
МИПС формируются оцифрованные результаты измерений, сгруп-
пированные по каждому принятому сигналу.
Основными техническими характеристиками ППОС, позво-
ляющими сравнивать различные варианты построения, являют-
ся: чувствительность приемников; ширина полосы частот одно-
временного приема; сектора направлений одновременного при-
ема сигналов по азимуту и углу места; пропускная способность
по потоку обрабатываемых сигналов; динамический диапазон
амплитуды принимаемых сигналов в односигнальном и много-
сигнальном режиме; точность и разрешающая способность изме-
рения основных первичных параметров сигналов и, прежде все-
го, частоты и угловых координат. Разрешающая способность
характеризует возможность раздельного наблюдения и проведе-
ния соответствующих измерений близких по данному параметру
сигналов.
Рис, 3.1.2. Обобщенная структурная схема ППОС и PC в целом
85
Возможные варианты построения приемника, реализующие
различные схемы организации взаимодействия МОЧ и МОН,
представлены на рис. 3.1.3.
Прежде всего, здесь представлены варианты поискового по
частоте приемника, имеющего перестраиваемую по частоте уз-
кую полосу приема Afp = Afc (Afc — ширина спектра разведывае-
мых сигналов), и беспоискового (многоканального) приемника,
обеспечивающего одновременный прием сигналов различных ИРИ
в относительно широкой полосе частот Afp » Afp (схемы «а», «б»).
В этих схемах отсутствует возможность определения направле-
ния прихода сигналов: антенно-фидерное устройство (АФУ) реа-
лизует либо ненаправленный прием сигналов, либо прием сиг-
налов в широком секторе направлений прихода. Здесь следует
оговорить, что используемое часто понятие «беспоискового» по
частоте приема является относительным. В большинстве случа-
ев технически реализуется прием сигналов только в некотором
диапазоне частот, имеющем фиксированную ширину полосы ча-
стот, границы которого могут перестраиваться в соответствии с
заданной логикой просмотра общего рабочего диапазона частот
PC. Поэтому можно полагать, что на практике на самом деле
зачастую реализуется комбинированный поиско-беспоисковый
(последовательно-параллельный) просмотр пространства наблю-
Рис. 3.1.3. Типовые схемы построения приемников: а) поисковый по
частоте без определения направления: б) беспоисковый (многоканальный)
по частоте без определения направления; в) поисковый по направлению и
поисковый или беспоисковый по частоте; г) беспоисковый по частоте с
узкополосным МОН, наводимым по частоте; д) многоканальный по на-
правлению с независимым поисковым или беспоисковым определением
частоты; е) беспоисковый по частоте и направлению с реализацией функ-
циональной обработки. Р — схема регистрации, обеспечивающая грубое
(с точностью до канала) или точное определение частоты и направления
86
дений на частотной оси. Следующий вариант (схема «в») реали-
зует сочетание поиска по направлению со схемами поискового
или беспоискового по частоте приемников («а», «б»). Поиск по
направлению здесь осуществляется путем вращения или скани-
рования узконаправленной антенны в заданном секторе. Поло-
жение антенны в данный момент времени с точностью до шири-
ны главного луча ДНА автоматически определяет оценку направ-
ления прихода принимаемого сигнала, для которого далее тем
или иным способом определяется частота. Вариант, представ-
ленный схемой «г», реализует часто используемый подход, ког-
да при беспоисковом (многоканальном) режиме определения ча-
стоты осуществляется настройка узкополосного пеленгатора, ре-
ализующего либо фазовый, либо амплитудно-фазовый методы оп-
ределения направления на основе функциональной обработки
сигналов, принимаемых элементами антенны. Очевидно, что та-
кая схема приближается к реализации беспоискового по частоте
и направлению приемника в случае, если решается задача обра-
ботки потока неперекрыващихся во времени импульсных сигна-
лов и время настройки пеленгатора много меньше длительности
этих сигналов. Следующий вариант приемника (схема «д») яв-
ляется многоканальным, беспоисковым по направлению прихо-
да с использованием набора узконаправленных антенн, перекры-
вающих в совокупности заданный сектор направлений, к выхо-
ду каждой из которых подключен поисковый или беспоисковый
по частоте приемник. Каналы приема по направлению функцио-
нируют относительно независимо, однако в ходе фиксации на-
правления может осуществляться дополнительная обработка,
заключающаяся, например, в выборе номера канала, где сигнал
па данной частоте имеет максимальную амплитуду. Данная схе-
ма в принципе позволяет перейти к реализации полностью бес-
поискового приема, однако является слишком громоздкой и не
обеспечивает высокой точности определения направления. На-
конец, последняя схема в представленном ряду вариантов пост-
роения приемника ППОС реализует беспоисковый по частоте и
направлению прием сигналов на основе функциональной обра-
ботки, обеспечивающей совместную оценку частоты и направле-
ния прихода сигнала. Для ее реализации применяют специаль-
ные технологии создания малогабаритных многоканальных по
частоте приемных устройств аналогового или цифрового типа,
которые далее будут рассматриваться подробно.
Введенная классификация вариантов построения приемников
раскрывает возможные способы организации взаимодействия МОЧ
и МОН и позволяет теперь перейти к более детальному рассмотре-
нию принципов построения этих модулей, которые могут быть ре-
87
ализованы в представленных на рис. 3.1.3 схемах. Приведенные
варианты построения приемоанализирующей аппаратуры в основ-
ном известны и подробно описаны в [26, 50, 93, 209, 219, 220].
Поэтому ниже дается их краткое, качественное описание.
Поисковый по частоте приемник панорамного типа. Дан-
ный приемник в простейшем случае представляет супергетеро-
дин, перестраиваемый в диапазоне рабочих частот PC [93]. Его
структурная схема представлена на рис 3.1.4.
Обнаружение сигналов и определение их частоты происходит
следующим образом. При перестройке частоты гетеродина сигнал
принимается фактически в узкой полосе частот шириной Afnp, оп-
ределяемой характеристиками частотно-избирательной части при-
емника (шириной полосы пропускания в статическом режиме Af
и скоростью перестройки у), и далее поступает на детектор и видео-
усилитель. Схема регистрации осуществляет определение частоты
на основе анализа выходного сигнала с учетом данных о реализуе-
мой в данный момент времени частоте гетеродина. При медленной
перестройке, когда AfCT/y » 1 , эквивалентная ширина полосы про-
пускания равна Afnp = AfCT. При этом точность определения часто-
ты (максимально возможное отклонение измеренного значения от
истинного) составляет половину ширины полосы пропускания
5fm = 0,5AfCT. Увеличение скорости перестройки ведет к потере точ-
ности измерения частоты и к снижению чувствительности приема,
так как при этом фактически увеличивается ширина эквивалент-
ной полосы пропускания, а точность определения частоты опреде-
ляется величиной 5fmax = 0,5Afnp. Оценить этот эффект можно еле-'
дующим образом [209]. При воздействии на вход приемника уз-
кополосного непрерывного сигнала и при AfCT/y«l на выходе
видеоусилителя формируется импульсный сигнал, длительность
которого определяется соотношением т = Д£ст/У- При больших у с
уменьшением AfCT уменьшается т, что равноценно увеличению
Af или увеличению у при прежнем значении AfCT. В общем же
случае соотношение между Afnp и AfrT определяется закономер-
Рис. 3.1.4. Структурная схема перестраиваемого приемника пано-
рамного типа
88
костью вида Af^p = Af£ + const у2 / Afc2T. Стремление повысить раз-
решающую способность приемника вызывает желание уменьшить
статическую полосу пропускания частотно-избирательной час-
ти. При этом существует оптимальное сочетание величины AfCT
для заданной у, когда можно получить минимальную динами-
ческую полосу пропускания Afnp. Эти величины определяются
соотношениями [93]
опт = (0,60...0,66)^, Д4рмия =(0,8...0,9)Ту.
Заметим, что величина у связана с величиной общей полосы
частот обзора Afp и величиной времени обзора Тр соотношением
у = Afp/Tp. Поэтому требования по чувствительности, точности и
разрешающей способности находятся в противоречии с требова-
ниями по полосе частот и времени обзора. Это является одним
из главных недостатков данного типа приемников. Иначе обсто-
ит ситуация, когда такой приемник функционирует при диск-
ретной настройке частоты, например, в рамках пеленгационных
каналов схемы обработки «г» рис. 3.1.3. В данном случае прояв-
ляются все основные достоинства такого приемника, связанные
с его высокой частотной избирательностью.
Беспоисковый по частоте приемник многоканального типа.
Другой классической схемой, широко используемой в практике
создания ППОС PC [26, 209], является схема многоканального
приемника-измерителя частоты, представленная на рис. 3.1.5.
89
Данный приемник обычно состоит из общей ВЧ части, гетеро-
дина и смесителя, преобразующих входные сигналы в область про-
межуточных частот. Далее диапазон промежуточных частот разде-
ляется системой фильтров на ряд элементарных поддипазонов ши-
риной Aflip = Afp/Np, а затем параллельно для каждого канала эле-
ментарного поддиапазона осуществляются стандартные операции
усиления на промежуточной частоте, детектирования и усиления
низкочастотных сигналов. Схема регистрации проводит обнаруже-
ние сигналов на выходе каждого канала и регистрацию частот об-
наруживаемых сигналов. Точность измерения частоты в такой схе-
ме естественно определяется максимальной ошибкой 5fln z 0,5Afnp.
В реальных устройствах характеристики частотной избирательно-
сти каналов могут существенно отличаться от прямоугольных. Это
ухудшает точностные характеристики схемы определения частоты
при воздействии мощных сигналов, которые при этом могут давать
отклик, если их частота лежит вне полосы пропускания данного
капала. Это приводит к необходимости проводить логическую об-
работку сигналов, снимаемых с соседних каналов.
Однако главный недостаток подобной схемы построения при-
емника — се громоздкость. Требования повышения точности,
разрешающей способности и ширины полосы обзора по частоте
находятся в противоречии с ограничениями по массогабаритным
характеристикам приемника. Один из возможных вариантов
разрешения этого противоречия связан с реализацией схемы
матричного приемника [26].
В матричном приемнике весь заданный рабочий диапазон ВЧ
части шириной Af разбивается на Мр поддиапазонов с шириной
полосы Afi = Afp/Mp. Частоты настройки фильтров Ф1Г..Ф1М
(см. рис. 3.1.5) сдвинуты одна относительно другой на величину
полосы пропускания так, что они в совокупности перекрывают всю
рабочую полосу Afp. Далее имеется Мр гетеродинов, обеспечиваю-
щих трансформацию частот сигналов на выходе каждого фильтра
к значениям промежуточной частоты в пределах общего диапазона
шириной Afp Таким образом, исходный рабочий диапазон частот
[fmin, fmin+ Afp] преобразуется в менее широкий диапазон частот
[fnl, ful+ AfJ. Таких преобразований может быть несколько, в ре-
зультате чего сигналы, поступающие на вход приемника, «сгоня-
ются» в относительно узкую полосу, где далее проводится их обна-
ружение замыкающей многоканальной схемой обработки. Для ис-
ключения неоднозначности при определении частоты в каждой сту-
пени преобразования используется система индикаторов,
позволяющая определить реализуемое сочетание задействованных
каналов первой и всех последующих ступеней. Точность измере-
ния частоты в таком приемнике определяется шириной полосы про-
90
зрачности фильтров последней ступени Afnp = Af X/N , При этом для
достижения одинаковой точности определения частоты при том же
рабочем диапазоне в матричном приемнике по сравнению с обыч-
ным многоканальным требуется в Мр раз меньше фильтров.
Практика показывает, что матричные приемники представ-
ляют собой достаточно сложные устройства и имеют ряд недо-
статков, связанных с проблемой устранения неоднозначности.
Поэтому на современном этапе, учитывая возросшие возможнос-
ти по миниатюризации основных конструктивных элементов
приемников и реализаций интегрированной функциональной
обработки сигналов, взоры исследователей возвращаются к клас-
сической схеме многоканального беспоискового приемника.
Беспоисковый приемник с функциональной обработкой сиг-
налов при измерении частоты. Приемники данного типа осно-
ваны на применении частотных различителей (дискриминато-
ров), выходной эффект которых связан функциональной зависи-
мостью с частотой одиночного входного сигнала. Условием их
нормальной работы является несовпадение сигналов входного
потока по времени. Классической схемой построения является
схема приемника с мгновенным измерением частоты (МИЧ) в
широкой полосе рабочих частот [209]. Приемник способен обес-
печивать высокую точность измерения частоты при плотности
потока входных импульсов, для которой сохраняется малая ве-
роятность их перекрытия по времени. Структурная схема МИЧ-
приемника представлена на рис. 3.1.6.
В ней ВЧ сигнал» разделяясь на два идентичных сигнала, посту-
пает в два канала: с линией задержки и без нее. Поскольку сдвиг
фазы сигнала при известном времени задержки t зависит от часто-
ты Ду = 2я£тз, то на выходе фазового коррелятора (возможно ис-
пользование другого типа фазового детектора) формируется два
видеосигнала, пропорциональные синусу и косинусу Ду. Далее эти
сигналы оцифровываются и производится обнаружение и измере-
ние частоты входного сигнала. Точность измерения частоты опре-
деляется как относительная величина соотношением 5f/f = 5у/Ду,
где 5f — ошибка измерения частоты, а 5у— ошибка измерения
Рис. 3.1.6. Структурная схема МИЧ-приемника
91
фазы. При этом ширина рабочего диапазона однозначного измере-
ния частоты зависит от выбранных граничных значений измеряе-
мой разности фаз, кратных я, и будет, соответственно, обратно про-
порциональна величине задержки. Поэтому для расширения рабо-
чего диапазона частот требуется уменьшить время задержки, что
одновременно приводит к снижению точности и разрешающей спо-
собности приемника. Преодоление данного противоречия основы-
вается на использовании многоканальных приемников с несколь-
кими линиями задержки, настроенными на однозначное измере-
ние частоты в различных участках рабочего диапазона [209, 219].
МИЧ-приемники обладают предельно малым временем обнару-
жения и измерения частоты, широким рабочим диапазоном и доста-
точно малогабаритны. Следует отметить и их недостатки: это отно-
сительно низкая чувствительность и необходимость существенного
усложнения аппаратуры для обеспечения возможности определе-
ния частоты нескольких перекрывающихся по времени сигналов.
Приемники комбинированного типа. На наш взгляд, к тако-
му типу приемников относится приемник со сжатием, представ-
ляющий собой супергетеродинный приемник со сверхбыстрой
перестройкой частоты и функциональной обработкой сигналов,
реализуемой специальным фильтром сжатия. Приемник обеспе-
чивает вероятность перехвата, которая обычно бывает у широ-
кополосных и высокочувствительных приемников, и, кроме того,
обладает способностью разделять сигналы, близкие по частоте,
как это делает узкополосный супергетеродин. Принцип его рабо-
ты заключается в следующем (см. рис. 3.1.7).
Гетеродин сканирует всю рабочую полосу Afp за время Т ,
меньшее, чем длительность самого короткого из подлежащих
перехвату импульсов. На выходе смесителя при этом формиру-
ется импульсный сигнал с линейной частотной модуляцией
(ЛЧМ), который подается на фильтр сжатия (дисперсионную
линию задержки). Наличие линейной зависимости времени за-
держки сигнала тз в фильтре от его частоты приводит к тому,
что задержка низкочастотных составляющих будет больше за-
держки высокочастотных составляющих. Результатом этого яв-
Рис. 3.1.7. Структурная схема приемника со сжатием
92
дяется сжатие импульса на выходе фильтра, причем форма им-
пульса отражает Фурье-преобразование входного сигнала, а ре-
зультирующая задержка зависит от частоты. Если на входе при-
сутствует несколько сигналов с различными частотами, то на
выходе появляется последовательность импульсов, расстояние
между которыми определяется разностью соответствующих час-
тот. Непрерывный сигнал приемник будет преобразовывать в
импульсный с фиксированной длительностью.
Эквивалентная полоса пропускания приемника на промежу-
точной частоте, определяющая уровень собственных шумов, равна
примерно Afnp=l/AT, где ДТ — время задержки сжимающего
фильтра. Благодаря этому, приемник имеет высокую вероятность
перехвата, характерную для широкополосных приемников, и од-
новременно высокую чувствительность. Практические ограни-
чения возможностей приемника связаны с требованиями обеспе-
чения высокой скорости перестройки и линейности закона моду-
ляции гетеродина. Кроме того, ограничены разрешающая спо-
собность и динамический диапазон приемника из-за наличия
боковых лепестков выходных сигналов, а также точность изме-
рения времени прихода сигналов, которая не может быть луч-
ше, чем величина времени сканирования. Существует большое
количество модификаций приемника со сжатием, направленных
на улучшение его характеристик.
Таким образом, в рамках МОЧ может быть реализована любая
из рассмотренных схем построения приемных устройств, которая в
каждом конкретном случае выбирается исходя из предъявляемых
к ППОС требований и имеющихся ограничений.
Рассмотрим теперь возможные принципы построения МОН в
рамках выделенных па рис. 3.1.3 вариантов приемников. Иног-
да данный модуль еще называют пеленгационным устройством
или просто пеленгатором.
Пеленгационные устройства PC РР и РТР функционируют со-
вместно с МОЧ и должны обеспечивать измерение направления
на ИРИ в азимутальной и угломестной плоскости с максимально
возможным быстродействием и высокой точностью в широком
диапазоне частот. В рамках схем рис. 3.1.3 можно выделить два
основных подхода к определению направления в ППОС.
Первый из них реализует использование узконаправленных
антенн в поисковом или беспоисковом режиме, к выходу кото-
рых могут подключаться МОЧ в различных вариантах исполне-
ния (схемы «в», «д» рис. 3.1.3). Определение направления в та-
ких схемах осуществляется непосредственно по факту обнару-
жения сигнала на выходе канала обработки по существующей
ориентации перемещающейся антенны (в поисковом режиме) или
93
по ориентации одной из совокупности антенн, к которой под-
ключен данный канал обработки (в беспоисковом режиме). Точ-
ность определения направления в подобных схемах определяет-
ся половиной ширины диаграммы направленности антенны
5фш = 0,5фс. Естественно, что высокая точность пеленгования в
беспоисковом режиме в данном случае может быть обеспечена с
помощью большого количества антенн, что существенно ограни-
чивает возможности такого подхода. Не останавливаясь далее па
особенностях функционирования подобных схем построения
ППОС, рассмотрим подробно второй подход, который базирует-
ся на реализации функциональной обработки сигналов (ампли-
туд и/или фаз сигналов) на выходе нескольких неподвижных
антенн, являющихся элементами общей антенной системы при-
емника. Классическими примерами реализации данного под-
хода являются схемы амплитудного и фазового пеленгатора
[50, 80].
Амплитудный приемник-пеленгатор. Принцип действия та-
кого пеленгатора основан на использовании зависимости ампли-
туды сигнала на выходе приемного тракта от направления при-
хода при известной форме результирующей диаграммы направ-
ленности антенны, состоящей из нескольких элементов. Класси-
ческая схема построения амплитудного пеленгатора [50] пред-
ставлена на рис. 3.1.8.
В данной схеме применяется антенна, формирующая две пе-
ресекающиеся ДНА, имеющие равносигнальное направление,
совпадающее с осью антенны. Если направление на ИРИ лежит,
например, в азимутальной плоскости и отклонено от равносиг-
нального на угол ф, то различие амплитуд сигналов на входе
приемных каналов определяется функциями G/ф), О2(ф) и яв-
ляется мерой угла рассогласования. Далее в схеме рис. 3.1.8 в
каждом канале проводятся стандартные операции гетеродини-
Рис. 3.1.8. Структурная схема амплитудного пеленгатора
94
рования, усиления, детектирования. В схеме регистрации в каж-
дом конкретном случае могут вычисляться функции вида
АДф) =
в,(ф)
G2(<p)
А2((р) = In
Gj(<P)
с2(ф)
А3(ф) =
О1(ф)-О2(ф)
G, (ф) + G2 (ф)
В последнем случае, например, реализуется схема суммарно-
разностного способа амплитудного пеленгования, в которой зна-
чения функции Аз(ф) в некотором диапазоне значений [cplllin, <Pmax]
позволяют определять угол ср однозначно на основе практически
линейной зависимости.
Ошибки при реализации амплитудного способа пеленгования
возникают прежде всего из-за неидентичности амплитудных ха-
рактеристик каналов приема сигналов, включая и искажения
формы реальных ДНА. Так для схемы суммарно-разностной об-
работки ошибка определения (р в линейной части Аз((р) опреде-
ляется соотношением 5ср = 8а/А'(ср), где 8а — ошибка измерения
амплитуды сигналов на выходе приемника. Необходимо также
отметить, что рассмотренная простейшая схема имеет сравни-
тельно ограниченный сектор однозначной работы. Для повыше-
ния чувствительности приема и обеспечения ее работы в одно-
сигнальном режиме вся обработка проводится в относительно
узком, перестраиваемом поддиапазоне частот, причем, как уже
отмечалось, настройка па этот поддиапазон может осуществляться
по управляющим сигналам МОЧ (схема «г» рис. 3.1.3). Для бес-
поискового определения направления в широком секторе углов
азимутальной плоскости в амплитудном пеленгаторе может быть
увеличено количество элементов антенной системы, а для рабо-
ты одновременно в амплитудной и угломестной плоскостях осу-
ществляется установка этих элементов в перпендикулярных осях.
Очевидно также, что реализация работы ППОС с амплитудным
пеленгатором в беспоисковом по частоте режиме требует введе-
ния большого числа частотных каналов с соответствующим ус-
ложнением функциональной обработки выходных сигналов.
Фазовый приемник-пеленгатор. Классическая схема фазово-
го пеленгатора [50, 80] представлена па рис. 3.1,9.
Рис. 3.1.9. Структурная схема фазового пеленгатора
95
Здесь также имеется как минимум два канала приема с дву-
мя разнесенными на некоторое расстояние d элементами антен-
ны. При этом сигналы на выходе элементов имеют разность фаз,
связанную с направлением прихода ср радиоволны (для плоско-
стной задачи) соотношением Ду = (27td/XH)cosip.
Радиоприемный тракт фазовых пеленгаторов, как правило,
строится по супергетеродинной схеме, включающей перестраи-
ваемый гетеродин, смесители и усилители промежуточной час-
тоты, а также ограничители, используемые для уменьшения
влияния неодинаковости и нестабильности усиления сигналов в
каналах. Фазометр или фазовый детектор обеспечивает измере-
ние разности фаз в каналах, которая в схеме регистрации преоб-
разуется в выходной сигнал пеленгатора. Использование пере-
страиваемого по целеуказанию МОЧ гетеродина обеспечивает
настройку пеленгатора по полосе частот принимаемых сигналов,
а узкополосность схемы обработки позволяет увеличить отноше-
ние сигнал-шум и обеспечить односигнальный режим работы.
Погрешность определения направления связана с погрешнос-
тью измерения разности фаз соотношением 8<р = —5\|/A.if/27rd sin ср,
из которого видно, что точность определения угла будет тем выше,
чем больше отношение базы антенны d к длине радиоволны Хп.
В то же время, увеличение отношения d/XH приводит к неодно-
значности измерений, для устранения которых в реальных уст-
ройствах увеличивают количество элементов антенной системы.
Это обеспечивает разрешение неоднозначности, но вызывает до-
полнительные трудности, связанные с возникновением взаимно-
го влияния элементов, искажающего структуру поля в раскрыве
антенны, и усложнением обработки. Все эти факторы, а также
влияние неидентичности каналов приемных трактов приводят к
систематическим ошибкам измерения разностей фаз и направле-
ний прихода сигналов, устранение которых и составляет основ-
ную проблему при использовании фазовых пеленгаторов.
Элементы антенн фазовых пеленгаторов обычно размещают
так, чтобы их фазовые центры находились на заданных расстоя-
ниях друг от друга, а раскрывы располагались в одной плоско-
сти. В большинстве случаев в антенной системе используют сла-
бонаправленные элементы, обеспечивающие обзор заданного сек-
тора по направлению в беспоисковом режиме. Для исключения
поиска по частоте, как и в предыдущем случае, можно предло-
жить реализацию многоканальных по частоте схем с соответ-
ствующей функциональной обработкой сигналов.
Таким образом, нами рассмотрены основные известные схе-
мы построения МОЧ и МОН первичной обработки сигналов.
Можно заметить, что отдельные элементы ранее функционально
96
выделенного модуля измерения параметров сигналов входят в
состав рассмотренных схем. Кроме того, в состав МИПС входят
элементы измерения временных, амплитудных и других пара-
метров сигналов, а также измерители характеристик внутриим-
пульсной модуляции стандартного исполнения.
3.1.2. Использование современной элементной базы
функциональной электроники и цифровой техники
обработки сигналов
Современные достижения науки и техники в области элемен-
тной базы позволяют рассчитывать на создание основных моду-
лей ППОС с требуемыми характеристиками. Здесь, как уже от-
мечалось, главное направление разработок состоит в реализации
принципов построения беспоисковой приемоанализирующей ап-
паратуры, а также обеспечении выполнения отдельных функци-
ональных операций первичной обработки с новыми возможнос-
тями. При этом следует выделить технику аналоговой обработки
сигналов (прежде всего, акустооптоэлектронику, акустоэлектро-
пику, магнитоэлектронику) и технику цифровой обработки сиг-
налов. Рассмотрим их применение с учетом определенных в
п. 3.1.1 принципов построения ППОС.
Акустооптоэлектрониая техника обработки сигналов. При-
менение акустооптоэлектронной (АОЭ) техники обработки сиг-
налов в ППОС позволяет создать малогабаритные беспоисковые
по частоте и направлению приемники с высокими характеристи-
ками по точности и разрешающей способности [50, 151, 209,
227]. Использование таких приемников становится особенно эф-
фективным в условиях постоянно возрастающей плотности по-
тока входных сигналов ИРИ и применения при их излучении
быстрой перестройки частоты.
Классической схемой, положившей начало исследованиям в
области применения АОЭ-техники в РТР и РР, является схема
акустооптического приемника на ячейке Брэгга, представлен-
ная на рис. 3.1.10.
Данная схема по сути реализует принцип построения много-
канального по частоте приемника-спектроанализатора. В ней
входной сигнал после переноса на промежуточную частоту в по-
лосе Af поступает через пьезоэлектрический преобразователь на
вход АО-модулятора, представляющего собой оптически прозрач-
ный кристалл ниобата лития или диоксида теллура. При этом в
кристалле возникают упругая бегущая акустическая волна, со-
здающая переменный вдоль направления ее распространения
коэффициент преломления. АО-модулятор освещается когерент-
ным лазерным лучом, падающим под углом Брэгга по отноше-
4--2357
97
Рис. 3.1.10. АОЭ-приемник в обычном и интегральном исполнении
нию к направлению распространения акустической волны. В
результате взаимодействия со средой кристалла световой пучок
отклоняется и фокусируется на линейке фотодетекторов, реали-
зуемой, например, на приборах с зарядовой связью (ПЗС). От-
клонение лазерного излучения пропорционально частоте вход-
ного радиосигнала. Таким образом, в схеме обеспечивается опре-
деление частоты нескольких сигналов в широкой полосе анали-
за. Рассмотренная схема фактически реализует многоканальную
по частоте фильтрационную обработку или спектральный ана-
лиз с пространственным интегрированием в ходе вычисления пре-
образования Фурье входного сигнала. Одним из недостатков по-
добной схемы является ограниченность длительности обрабаты-
ваемых сигналов (десятки микросекунд), что связано с ограничен-
ностью размеров апертуры АО-модулятора. Возможен также другой
подход, который реализует спектральный анализ с временным ин-
тегрированием [52] на основе накопления отклика на данной час-
тоте в интегрирующей линейке фотодетекторов. Это позволяет об-
рабатывать сигналы большой длительности (десятки миллисекунд).
Дальнейшее развитие данная схема получила на' основе ис-
пользования гибридных и монокристаллических схем в интег-
ральном исполнении (рис. 3.1.10). При этом лазер, ячейка Брэг-
га и фоточувствительные элементы размещаются на одной плос-
кой подложке и такая схема в целом имеет габариты порядка
единиц см2. Выполняются также исследования, конкретно на-
правленные на совершенствование принципов обработки сигна-
лов с использованием АОЭ-техники при построении беспоиско-
вых по частоте приемников ППОС [209, 219]. Использование
АОЭ-приемников на ячейках Брэгга нашло широкое примене-
ние в создаваемой аппаратуре РТР и РР. Например, в [209] опи-
сан разведприемник фирмы «Siemens», имеющий диапазон ра-
бочих частот 2,6...3,1 ГГц, ширину полосы рабочего диапазона
частот 500 МГц, динамический диапазон 35 дБ.
98
Большой интерес вызывают возможности построения АОЭ-прием-
ников беспоисковых как по частоте, так и по направлению [74,
144, 224]. Здесь главным фактором, обеспечивающим решение
проблемы, является многоканальность АО-модулятора по часто-
те и возможность компоновки нескольких акустических преоб-
разований в общей двумерной плоскости, через которую пропус-
кается когерентное световое излучение. Схема обработки, реа-
лизующая одновременное определение пеленга и частоты, впер-
вые предложена Ламбертом [224]. В ней (см. рис. 3.1.11) сигналы,
принимаемые элементами антенной решетки, поступают на мно-
гоканальный по числу элементов антенной решетки АО-модуля-
тор. Когерентный пучок света от лазера, предварительно расши-
ренный системой линз, освещает модулятор и дифрагирует на
ультразвуковых волнах, распространяющихся в последнем. Да-
лее осуществляется фокусировка светового излучения в плоско-
сти регистрации f, (р. При этом по оси f отклонение пятна диф-
ракции первого порядка пропорционально частоте входного сиг-
нала. С другой стороны, распределение света дифракционных
пятен вдоль оси ср пропорционально диаграмме направленности
антенной решетки, фазированной в данном направлении, и по-
ложение максимума распределения соответствует направлению
прихода сигнала. Регистрация результатов работы приемника
осуществляется с использованием матрицы ПЗС-фотоприемни-
ков. Помимо рассмотренной схемы беспоискового определения
частоты и направления известны схемы, реализующие ампли-
тудный способ пеленгования в соответствии с рассмотренной в
п. 3.1.1 схемой, но с использованием в каналах обработки сигна-
лов антенных элементов многоканальных по частоте малогаба-
ритных АОЭ-прием ников. Еще один вариант [144] реализует оп-
ределение направления на
основе измерения относи-
тельной задержки сигналов,
поступающих с выхода двух
разнесенных антенных эле-
ментов, путем вычисления
взаимно корреляционной
Функции сигналов в много-
канальном по частоте АОЭ-
приемнике-корреляторе.
Рассмотрим теперь воз-
можности АОЭ-техники
для выполнения отдельных
Функциональных операций
первичной обработки. К их
Рис. 3.1.11. Схема определения ча-
стоты и пеленга
99
числу относятся операции вычисления корреляционной функ-
ции и свертки, а также запоминания и воспроизведения сигна-
лов. Остановимся подробно на способах корреляционной обра-
ботки, которая реализуется в интересах решения задач обнару-
жения и измерения относительной задержки сигналов (в том
числе и для пеленгования), а также распознавания сигналов и
представляет самостоятельный интерес.
Известны два основных способа акустооптической корреля-
ции сигналов [52, 227]: с пространственным и с временным ин-
тегрированием. Простейшие схемы, поясняющие принципы по-
строения реализующих их устройств, дапы на рис 3.1.12
В АОЭ-корреляторе с пространственным интегрированием [52,
227] входные сигналы поступают на два модулятора, в которых
акустические волны распространяются во встречных направле-
ниях. Коллимированный световой пучок от лазера, проходя че-
рез каждый модулятор, создает дифрагированный поток, кото-
рый фокусируется на чувствительную поверхность фотодетекто-
ра. Недифрагированный свет устраняется диафрагмой. Интер-
ференция когерентных дифрагированных пучков приводит к
появлению на выходе безынерционного фотодетектора сигнала
на частоте, являющейся суммой частот сигналов sr(t) и s2(t). Этот
сигнал обычно выделяется фильтром, стоящим на выходе фото-
детектора. Для одновременно поданных на входы импульсных
сигналов, длительность которых нс превышает временную апер-
туру Т модуляторов, устройство вычисляет свертку
D/2
и.их (t) = j Sj (z - vt)s2 (vt - z)dz,
D/2
где D — апертура оптической системы; v — скорость акустичес-
ких волн в модуляторах. Для того, чтобы данное устройство мог-
ло вычислить взаимную корреляцию импульсных сигналов, один
из них должен быть инвертирован во времени.
Рис. 3.1.12. АОЭ-корреляторы с пространственным и временным
интегрированием
100
В АОЭ-корреляторе с временным интегрирование можно об-
рабатывать сигналы с длительностью, существенно превышаю-
щей временную апертуру модуляторов. Оптическая схема уст-
ройства сконструирована так [52], что изображения акустичес-
ких волн, являющихся пространственной копией фрагментов
сигналов s1(t), s2(t), находящихся в апертуре оптической систе-
мы, проектируются в плоскость, где размещается линейка ква-
зиточечных фотодетекторов. Диафрагма, расположенная в час-
тотной плоскости оптической системы, задерживает недифраги-
рованный световой поток. Распределение интенсивности света
вдоль z-оси линейки фотодетекторов с точностью до постоянных
составляющих будет иметь вид
U,HX(z,t) = ci +с2 + ^Res1(t--)s2(t + --T,),
2 v v
где s^t), s2(t) — аналитические сигналы, соответствующие дей-
ствительным Sj(t), s2(t); тз — задержка сигнала в апертуре моду-
лятора. Тогда, проводя накопление этого отклика во времени с
помощью, например, ПЗС-элементов, получим, что третье слага-
емое фактически дает на выходе взаимно корреляционную фун-
кцию сигналов в укороченном вдвое временном масштабе т = 2z/v.
Известно множество модификаций схем обработки, реализую-
щих принцип временного интегрирования. Одна из них, напри-
мер, использует один модулятор для первого входного сигнала,
тогда как второй модулирует непосредственно интенсивность
исходного лазерного излучения [52]. Это позволяет снизить уро-
вень постоянной составляющей светового потока, освещающего
линейку фотодетекторов, и увеличить динамический диапазон
коррелятора.
Рассмотренные схемы иллюстрируют применение АОЭ-техни-
ки для реализации отдельных функциональных операций пер-
вичной обработки. Пример ее использования для решения зада-
чи запоминания—воспроизведения сигналов будет далее отдель-
но рассмотрен в п. 3.7. Фактически же можно говорить о воз-
можностях АОЭ-техники по выполнению широкого набора ал-
гебраических операций над сигналами и данными, что породило
новое нетрадиционное направление создания специализирован-
ных акустооптоэлектронных вычислительных процессоров, об-
ладающих сверхвысоким быстродействием и параллелизмом об-
работки информации [52].
В то же время, нельзя не отметить и ряда недостатков, объек-
тивно присущих акустооптоэлектронике как технической осно-
ве создания ППОС. Они заключаются в относительно низком
Динамическом диапазоне АОЭ-приемников и корреляторов, на-
101
личии ограничений по диапазону рабочих частот, достаточно
жестких требованиях по технологии изготовления и настройке
отдельных акустооптических элементов. В целом о возможнос-
тях данного направления создания устройств первичной обра-
ботки в сравнении с другими перспективными направлениями
можно судить по данным сводной таблицы 3.1.1.
Акустоэлектронная техника обработки сигналов. Другой изве-
стной альтернативой при создании устройств и отдельных элемен-
тов функциональной обработки для ППОС является использование
акустоэлектронной (АЭ) техники. В ее основе лежат эффекты воз-
буждения и распространения поверхностных или объемных акус-
тических волн в твердом теле под воздействием входных радиосиг-
налов [105, 175]. С использованием этих эффектов могут быть реа-
лизованы многоканальные модули полосовых фильтров, фильтры
сжатия и дисперсионные линии задержки, корреляторы и устройства
запоминания—воспроизведения. Далее будут в основном рассмат-
риваться устройства с использованием поверхностных акустичес-
ких волн (ПАВ). Типовой облик полосового фильтра на ПАВ пред-
ставлен на рис 3.1.13. Фильтр размещается на плоской подложке,
на которой нанесены два встречно-штыревых преобразователя
(ВШП) — входной и выходной, состоящих из групп идентичных
электродов. Подложка, часто еще называемая звукопроводом, обыч-
но представляет собой плоскую пластину, состоящую из тонкого
(до 1 мм) пьезоэлектрического кристалла. Если ко входному ВШП
приложено переменное напряжение, то вследствие пьезоэлектри-
ческого эффекта в звукопроводе возникают акустические волны. В
результате на выходном ВШП появляется сигнал, зависящий от
расстояния и конфигурации его электродов, а также от скорости
распространения ПАВ. Для анализа сигнала длительности Тс фильт-
ром с центральной частотой f0 требуемое число электродов выходно-
го ВШП должно быть равно 2f0Tc. Частотная характеристика тако-
го фильтра близка к функции вида sin|(w- со0)ТС /2[/|(w- соо)ТС / 2|,
то есть имеет полосу пропускания порядка 1/Тг» Огибающая им-
пульсной характеристики имеет трапецеидальную форму, прибли-
жающуюся к прямоугольной. При размещении на общей подлож-
многоканальные блоки
полосовых фильтров с
относительно малыми
габаритами. Тем самым
реализуется многока-
нальная схема построе-
ния беспоискового по ча-
стоте приемника с обра-
боткой на ПАВ [175].
ке совокупностей ВШП получаются
Рис. 3.1.13. Полосовой фильтр на ПАВ
102
Другим известным вариантом использования АЭ-техники при
реализации рассмотренных выше схем приема является приме-
нение в приемнике со сжатием дисперсионных линий задержки
на ПАВ. Здесь в качестве устройства сжатия ЛЧМ сигнала ис-
пользуется линия задержки [105, 175, 209], которая имеет струк-
туру, показанную на рис. 3.1.14. В ней период расположения
электродов выходного ВШП зависит от положения вдоль оси
подложки. Если ко входному ВШП приложить импульс малой
длительности, то вдоль выходного ВШП со скоростью v распро-
страняется волновой пакет. В каждый момент времени частота
выходного напряжения зависит от расстояния между электрода-
ми в месте расположения распространяющегося импульса. Та-
ким образом, частота заполнения выходного импульса зависит
от времени. При изменении периода расположения электродов
от Lj до Ь2 частота выходного сигнала линейно изменяется от
f1 = v/Ц до f2 = v/L2, а его длительность соответствует величине
vT, где Т время распространения ПАВ по подложке. Таким обра-
зом, дисперсионная линия задержки имеет импульсную харак-
теристику, по виду инвертированную во времени по отношению
к сигналу с линейной частотной модуляцией, изменяющей час-
тоту от до f2 (см. рис. 3.1.7). Поэтому если такой сигнал, полу-
чаемый в схеме приемника со сжатием путем внесения ЛЧМ
модуляции, подать на линию задержки, на выходе будет полу-
чен отклик малой длительности с соответствующей частоте сиг-
нала задержкой по времени.
Схема приемника со сжатием, основанная на использовании
дисперсионных линий задержки на ПАВ, нашла широкое при-
менение в системах РТР и РР. Например, в [175] описан разве-
дывательный приемник-спектроанализатор с шириной рабочей
полосы 100 МГц, частотным разрешением 100 КГц и временем
анализа 20 мкс. Для сравнения можно указать, что в многока-
нальном спектроанализаторе параллельного типа с такими ха-
рактеристиками потребовался бы блок из 1000 фильтров, а ис-
пользование поискового анализатора панорамного типа увели-
чило бы время анализа до 10 мс [175].
Наличие непосредст-
венной связи между гео-
метрией ВШП и импуль-
сной характеристикой
устройств на ПАВ позво-
ляет конструировать раз-
личные функциональные
преобразователи сигна-
лов: согласованные филь-
о-
Вход
о—
—о
Выход
—о
Рис. 3.1.14. Дисперсионная линия
задержки па ПАВ
103
тры, конвольверы (устройства вычисления свертки), взаимно кор-
реляционные устройства и устройства запоминания сигналов ре-
циркуляторного типа. В корреляторах на ПАВ относительная
задержка входных сигналов осуществляется при их встречном
распространении; перемножение достигается за счет нелинейных
эффектов, а интегрирование выполняется в области взаимодей-
ствия ПАВ с системой распределенных по подложке электродов.
Необходимо отметить, что для техники обработки сигналов на
ПАВ, как и для АОЭ-техники, свойственны ограничения по дли-
тельности обрабатываемых сигналов (десятки микросекунд), оп-
ределяемые реализуемой длиной подложки и скоростью распро-
странения акустических волн. Одним из перспективных вариан-
тов в этом плане является реализация устройств с временным
интегрированием, основанных на реализации гибридных техно-
логий ПАВ/ПЗС [154].
При создании устройств запоминания и воспроизведения сиг-
налов используют различные эффекты взаимодействия электри-
ческих сигналов и ПАВ. Например, в [105] описаны способы,
основанные на облучении поверхности диэлектрика электрон-
ным лучом. При этом в присутствии ПАВ на поверхности обра-
зуется распределение статического заряда, соответствующее зна-
чению амплитуды ПАВ. Если через некоторое время подается
второй электронно-лучевой импульс, то возбуждается новая пара
ПАВ, одна из которых соответствует исходному сигналу, а дру-
гая его обращенной во времени копии [105]. Хорошие результа-
ты при построении устройств запоминания также дает сочета-
ние техники ПАВ и ПЗС [154].
Оценивая в целом направление, связанное с использованием
техники ПАВ при создании приемоанализирующей аппаратуры
ППОС, следует отметить, что данная элементная база является наи-
более продвинутой в плане отработки технологий изготовления и
промышленного использования. Ее недостатки также хорошо из-
вестны: это ограниченный частотный диапазон работы устройств,
малая длительность обрабатываемых сигналов, наличие значитель-
ных потерь мощности, вносимых при обработке из-за затухания
ПАВ при распространении. Основные характеристики реализован-
ных в настоящее время устройств на ПАВ представлены в табл. 3.1.1.
Магнитоэлектронная техника обработки сигналов. Все маг-
нитоэлектронные (МЭ) элементы и устройства аналоговой обра-
ботки радиосигналов основаны на использовании явлений фер-
ромагнитного резонанса (ФМР). Согласно современным представ-
лениям электроны и атомы обладают взаимно связанными меха-
ническими и магнитными моментами (спинами). Если ферритовый
материал (типичный представитель — железоиттриевый гранат
104
(ЖИГ)) поместить в постоянное магнитное поле Н, намагничи-
вающее его до насыщения, то спины ориентируются вдоль на-
правления поля, и имеет место свободная прецессия (вращение)
спинов вокруг направления поля с частотой ФМР wp.
Устройства функциональной электроники, основанные на яв-
лении ФМР, можно условно разделить на два класса: спинколе-
бательные и спинволновые. К первому классу устройств отно-
сятся хорошо известные ЖИГ-фильтры, генераторы, волновод-
ные элементы и др., использующие образцы монокристаллов
ферритов эллипсоидальной или сферической формы малых раз-
меров. В таких элементах резонансные колебания спинов под
воздействием электромагнитного возбуждающего поля устанав-
ливаются одновременно в полном объеме, при этом эффекты вол-
нового распространения энергии проявляются на высоких час-
тотах и имеют существенные потери.
Более интенсивно в последнее время проводятся исследования
спинволновых процессов в образцах ферритов, геометрические раз-
меры которых хотя бы в одном направлении много больше длины
волны, соответствующей частоте ФМР. Такие образцы ферритов
имеют вид монокристаллических пленок. В этом (см. рис. 3.1.15)
случае импульс возмущения спиновой системы, вызванный, на-
пример, током входного сигнала в электродах проводника (входно-
го преобразователя), расположенного рядом с ферритовым матери-
алом, передается от одного спина (магнитного диполя) к другому.
При этом в феррите распространяется магнитостатическая волна
(МСВ), которая испытывает сравнительно малые потери при рас-
пространении, в том числе и на высоких частотах (до десятков
гигагерц). Если приложить к ферриту электроды выходного преоб-
разователя-проводника, то на выходе схемы может быть получен
определенным образом преобразованный сигнал. Таким образом,
МСВ представляют собой медленно распространяющиеся электро-
магнитные волны (с преимущественной компонентой магнитного
поля) в ферритовых пленках, нанесенных на немагнитную под-
ложку и помещенных в постоянное магнитное поле. В зависимости
от взаимной ориентации магнитного поля и пленки в ней могут
распространяться как
поверхностные, так и
объемные МСВ. Всем
типам волн присуща
дисперсия. Вследствие
малости длин МСВ (де-
сятки—сотни мкм) не-
обходимые эффекты
при обработке радиосиг-
Рис. 3.1.15. Типовая конструкция пре-
образователя сигналов на МСВ
105
налов достигаются в малых по объему образцах материалов (поряд-
ка 2—3 см3).
На основе эффектов взаимодействия МСВ могут быть реализо-
ваны различные типы элементов и устройств ППОС: блоки полосо-
вых фильтров многоканальных по частоте приемников; дисперсион-
ные линии задержки для приемников со сжатием; устройства сверт-
ки и корреляции [1, 68], а также запоминания и воспроизведения
(п. 3.7). Представленная на рис. 3.1.15 конструкция является ха-
рактерной для основных типов устройств обработки сигналов на
МСВ. Для входных и выходных преобразователей используются
микрополосковые, меандровые, встречно-штыревые и др. структу-
ры. Следует отметить, что устройства, основанные на использова-
нии МЭ-техники, обладают рядом достоинств по сравнению с ранее
рассмотренными АОЭ и АЭ (см. табл. 3.1.1) приборами, главное
из которых состоит в возможности их непосредственного исполь-
зования на частотах до 20 ГГц и более. В качестве недостатков
МЭ-устройств следует отметить ограничения по относительной по-
лосе рабочих частот, по длительности и задержке обрабатываемых
сигналов, наличие проблемы устранения температурной неста-
бильности.
Цифровая техника обработки сигналов. В основе использова-
ния цифровой техники для обработки в ППОС лежат возможности
выполнения любых, сколь угодно сложных, функциональных опе-
раций над дискретизированными по уровню и времени цифровыми
эквивалентами принимаемых сигналов. При этом принципиальные
ограничения по характеристикам цифровых устройств обработки
связаны в основном с быстродействием выполнения основных эле-
ментарных операций, разрядностью представления данных и объе-
мом памяти, требуемым для хранения перерабатываемых в цифро-
вом виде данных. До недавнего времени цифровая техника исполь-
зовалась в основном при построении измерителей параметров сиг-
налов в ППОС. В последнее время, в связи с бурным развитием
элементной базы цифровой техники, постоянно наращивающей свои
возможности по быстродействию, миниатюризации, использованию
структур обработки данных параллельного типа и т.п., появились
реальные возможности ее применения для создания основных мо-
дулей ППОС в практически полном объеме.
Как и ранее, рассмотрим сначала принципы построения при-
емной аппаратуры ППОС, обеспечивающей обнаружение и опре-
деление частоты сигналов с использованием цифровой техники
в качестве основы выполняемой обработки.
Для реализации цифрового приема сигналов в заданной полосе
частот сигналов в аппаратуре обязательным является наличие двух
основных устройств: аналого-цифрового преобразователя (АЦП) и
106
Таблица 3.1.1
Сравнительные характеристики устройств первичной обработки сигналов
с применением перспективной элементной базы
Элементная база Обобщенные характеристики устройств (спектральный анализ, корреляция, запоминание-воспроизведение) Основные недостатки
Верхняя граница диапазона рабочих частот (без гетеродини- рования), МГц Динами- ческий диапазон, дб Ширина полосы бес- поискового (многоканаль- ного) по часто- те приема, МГц Ширина поло- сы пропуска- ния элементар- ного канала (разрешение по частоте), МГц Длительность обрабатываемых сигналов при запоминании и корреляции, мкс Плотность размещения частотных каналов при интеграль- ном исполне- нии, ед/см*
АОЭ-техяика 5000 35...45 500...2000 0,06 и более до 50 (пр. интЛ (вр. инт.) десятки Ограниченный динамический диапазон
АЭ-техника 2000 40...50 100...500 1 и более до 50 (пр, интЛ lO8...!^ (вр. инт.) единицы Ограниченный частотный и динамический диапазон
МЭ-техника 40000 50...60 200...1000 5 и более до 20 единицы Ограничения длительности и задержки обрабатывае- мых сигналов
Цифровая техника 100 80...100 100 неогр. неогр. сотни Ограниченный частотный диа- пазон и шири- на полосы ана- лиза
процессора, выполняющего дискретное преобразование Фурье (ДПФ)
(см. рис. 3.1.16). АЦП осуществляет квантование по уровню и дис-
кретизацию по времени сигнала u(t), поступающего от входной ВЧ
части приемника или после гетеродинирования на промежуточной
частоте. Если сигнал u(t) изменяется в диапазоне значений [umjn,
umftx], т0 каждое числовое значение, характеризующее величину
аналогового сигнала в момент tp на выходе представляется п-раз-
рядным двоичным кодом с погрешностью квантования, относитель-
ная величина которой не превосходит 2“п. Процесс аналого-цифро-
вого преобразования протекает во времени, то есть отдельные эле-
менты данных, характеризующих величину преобразуемого сиг-
нала в моменты времени t., формируются с некоторым интервалом
At, называемым интервалом дискретизации. Обычно At опреде-
ляется исходя из величины верхней границы обслуживаемой
полосы рабочих частот At <1/2^^. Однако, если fmax = 2fmin;
Afp ~ ^max ~ ^min’ то Достаточно выбрать At = l/Af [39]. Уровень
современной технологии аналого-цифрового преобразования по-
зволяет получать разрядность представления данных до 16 бит
при частотах дискретизации входного сигнала от единиц герц до
102 МГц. Важно отметить, что разрядность представления дан-
ных в АЦП определяет и динамический диапазон обрабатывае-
мых сигналов, поскольку предельное отношение umax/ итш = 2й.
Следующим этапом обработки в схеме рис 3.1.16 является
реализация ДПФ, при котором преобразованию подвергаются эле-
менты конечной структуры данных — векторы, полученные при
равномерной дискретизации с интервалом At входного сигнала
длительностью Тс Длина обрабатываемого вектора u = (u(0),...,
u(N - 1))т, u(i) = u(t ~ iAt), i = 0,N - 1 определяется соотношени-
ем N = Tc/At. Для формирования вектора перед выполнением
спектрального анализа в структуре цифрового приемника обыч-
но требуется предусмотреть использование буферной памяти на-
копления данных. При выполнении ДПФ на выходе процессора
формируется N спектральных составляющих
N-1 _______
SF (к) = £ u(i) exp(-j2Ttki / N), к = О, N -1,
1-0
при этом расстояние между спектральными линиями ДПФ, то
есть фактическое разрешение, равно 1/Т(,. Прямая реализация
ДПФ в последовательных алгоритмах не находит применения,
Рис. 3.1.16. Цифровой приемник-спектроанализатор
108
так как вычисления по приведенной выше формуле требуют при-
мерно N2 операций сложения и умножения. Поэтому на практи-
ке широко применяется метод быстрого преобразования Фурье
(БПФ), в котором объем вычислений имеет порядок Nlog2N опе-
раций сложения и умножения. В настоящее время, учитывая
растущие возможности элементной базы цифровой техники, мож-
но ожидать, что использование БПФ позволит обеспечить прове-
дение спектрального анализа сигналов в полосе частот до 100 МГц.
Следует также отметить, что для обеспечения непрерывности
обработки сигналов в цифровом приемнике схемы рис. 3.1.16
должен быть реализован анализ перекрывающихся по времени
входных реализаций (в идеале смещение должно составлять один
такт интервала дискретизации).
Другой возможной альтернативой построения беспоискового
многоканального по частоте приемника с цифровой обработкой
сигналов является использование блока цифровых полосовых
фильтров, перекрывающих заданную полосу анализа частот.
Такие фильтры могут быть с конечными и бесконечными им-
пульсными характеристиками. Они имеют высокую стабильность
параметров, любые самые разнообразные формы амплитудно-
частотных и фазо-частотных характеристик, не требуют настрой-
ки и легко программируются [39]. Однако до настоящего време-
ни, в силу ограничений по быстродействию выполнения опера-
ций над данными, они уступают по возможностям параллельной
обработки сигналов в широкой полосе частот процессорам БПФ.
Описанные принципы обработки нашли применение при со-
здании приемников РР в диапазонах частот КВ и УКВ радиосвя-
зи. В [225, 226] описаны различные варианты построения циф-
ровых приемников для диапазона частот 10 кГц — 30 МГц, из-
готавливаемых фирмой «Thomson». Для реализации совместно-
го беспоискового определения частоты и направления в этих
приемниках в рамках фазового метода пеленгования использу-
ются два и более каналов обработки сигналов с элементов антен-
ной системы, в каждом из которых установлен процессор БПФ,
обеспечивающий частотное разделение сигналов. Спектральные
компоненты сигналов, полученные в различных каналах, срав-
ниваются и после их функциональной обработки вычисляется
пеленг на ИРИ. Достижимые характеристики цифровых прием-
ников такого типа имеют значения: инструментальная ошибка
определения направления — 1...2"; разрешающая способность по
частоте — 102...103 Гц; динамический диапазон до 100 дБ.
Общий перечень функциональных операций над сигналами,
выполняемых на основе цифровых устройств, достаточно ши-
рок, а технические принципы их реализации хорошо известны
109
[35, 39]. Устройства вычисления взаимно корреляционной фун-
кции, свертки, запоминания (записи) и воспроизведения сигна-
лов и т.п. реализуются в любой модификации и с любыми до-
полнительными возможностями предобработки, адаптации и
управления. Практически неограничены их возможности по дли-
тельности обрабатываемых сигналов и времени запоминания. Да-
лее в п.п. 3.7 и 3.8 возможности цифровой техники для решения
отдельных задач обработки сигналов будут рассмотрены подробно.
Для обработки сигналов в ППОС перспективным также пред-
ставляется использование нейросетевых технологий. В последние
годы результаты исследований по этому направлению активно
внедряются в практику создания самых разнообразных устройств,
систем анализа и преобразования данных. Нейронные сети и
реализуемые на их основе нейропроцессоры фактически явля-
ются вычислительными системами нового поколения, в которых
программирование алгоритма заменяется его обучением. На наш
взгляд, наиболее эффективно применение аппарата нейронных
сетей в задачах обработки сигналов в тех случаях, когда отсутству-
ет возможность формализации обрабатываемых данных или реали-
зация оптимального алгоритма, базирующегося на построении ста-
тистических моделей сигналов и помех, вызывает практические
затруднения. Один из характерных примеров использования ней-
росетевой обработки в ППОС приведен далее в п. 3.3.
Основные характеристики цифровой техники, представленные
в табл. 3.1.1, свидетельствуют о ее высоких возможностях по дина-
мическому диапазону, частотному разрешению, временным пара-
метрам обрабатываемых сигналов. Однако ограничения по диапа-
зону рабочих частот и полосе частот анализа сигналов сдерживают
ее применение в ППОС, функционирующих в участках частотного
диапазона свыше 100 МГц. Одновременно следует отметить, что в
настоящее время активно происходит совершенствование элемент-
ной базы цифровой техники (n-МОП и k-МОП технологии,
GaAs-технологии, криоэлектронные технологии) в направлении
миниатюризации элементарных процессоров сигналов и повыше-
ния их быстродействия. Одновременно развиваются технические
принципы создания высокопроизводительных вычислительных
систем обработки данных с применением нетрадиционных архи-
тектур параллельной обработки. Идея параллельной обработки ле-
жит в основе всех перспективных разработок таких систем (кон-
вейерно-векторные и систолические системы, мультипроцессоры с
распределенной и общей памятью, машины потоков данных и вол-
новые системы) [35]. Можно ожидать, что существующие тенден-
ции совершенствования цифровой техники предоставят новые воз-
можности ее практического использования.
110
3.2. Анализ эффективности приема сигналов
на фоне узкополосных помех и шума
Как отмечалось выше, в процессе первичной обработки необхо-
димо обнаружить сигнал и измерить его информационные пара-
метры. Анализу эффективности этих процедур при различных мо-
делях связных, локационных и навигационных сигналов и сопро-
вождающих прием помех различной природы посвящено значи-
тельное количество работ [напр. 53, 85, 152, 184—186, 197, 204], в
которых получен целый ряд важных для практики результатов.
Поэтому правомерно считать, что методы оценки качества функци-
онирования обнаружителей и измерителей непересекающихся или
слабо пересекающихся по пространственным и частотно-времен-
ным характеристикам сигналов развиты достаточно хорошо, охва-
тывают весьма широкий диапазон исходных условий и могут быть
непосредственно использованы при проектировании. При этом в
ходе постановки и решении конкретных задач разведки РЭС необ-
ходимо корректно учитывать определенную специфику, связанную
с повышенным уровнем априорной неопределенности, когда не уда-
ется в полной мере использовать достоинства известных оптималь-
ных алгоритмов обработки сигналов и правил принятия решений.
Более того, разведка РЭС может сопровождаться определенным про-
тиводействием противостоящей стороны в виде преднамеренных
мешающих воздействий приему> известным под термином «контр-
противодействие» [112, 128]. Обычно устройства первичной обра-
ботки проектируются в расчете на прием сигналов на фоне внут-
ренних шумов. Этот подход частично оправдан трудностью париро-
вания многообразных способов контрпротиводействия, сводящего-
ся к усложнению технической реализуемости аппаратуры. Однако
в любом случае нужно адекватно оценивать информационный ущерб,
который реально имеется в процессе обработки в сложной сигналь-
но-помеховой обстановке. Говоря другими словами, постановка за-
дачи оценки эффективности первичной обработки сигналов в ходе
разведки, включающая расчет характеристик обнаружения и из-
мерения параметров, должна учитывать, наряду с другими факто-
рами, возможность преднамеренных мешающих воздействий на
аппаратуру. Ниже рассмотрим эти вопросы более детально.
3.2.1. Эффективность обнаружения радиосигналов на фоне помех
Рассмотрим задачу обнаружения сигнала на фоне внутренне-
го шума, который будем полагать белым, и узкополосных по-
мех, воздействующих в полосе разведприемника [129]. Природа
внешних помех может быть различной: контрпомехи, создавае-
мые для затруднения разведки, взаимные помехи, излучаемые
другими РЭС и т.д. В качестве модели узкополосных помех при-
111
мем стационарные гауссовские случайные процессы [185]; такая
модель, по-видимому, может рассматриваться как наиболее уни-
версальная.
Итак, положим, что при гипотезе Но наблюдаемая реализа-
ция имеет вид
м
x(t) = n(t) + £Pi(t), (3.2.1)
1=1
где n(t) — реализация гауссовского белого шума с односторон-
ней спектральной плотностью No; Pi(t), i = l,M — реализация
независимых узкополосных гауссовских случайных процессов с
корреляционными функциями K^tg- tp и, соответственно, спек-
тральными плотностями G.(cd).
При наличии сигнала, т.е. при гипотезе Нр имеем
м
x(t) = s(t) + n(t) + £ Pi (t), (3.2.2)
1=1
где s(t) = aA(t)cos[o)0t + (p(t) - ф] — полезный сигнал, a — ампли-
туда, ф — случайная начальная фаза, распределенная равномер-
но на интервале [0, 2л], A(t), ф(1) описывают законы амплитуд-
ной и фазовой модуляции, t е [0,Т], Т — интервал наблюдения.
Если для проверки гипотезы Нг против альтернативы Но ис-
пользуется алгоритм, оптимальный только при наличии белого
шума, обнаружитель должен вырабатывать величину [184]
М = ехр
( аа2
["2No;
f 2aZ"
•w
т
где а = j A2(t)dt.
о
Положим, что для сигнала со случайной начальной фазой без-
размерный коэффициент а = const и включим его в функцию
A(t). Это соответствует тому, что, в частности, при а = 1 величи-
w Е .
М = ехр I,
No .
1
на а/2 = Js2(t)dt = Е,, где Е — энергия сигнала. Тогда
W
где С — постоянная, а огибающая Z = Vx2 + Y2 ,
(3.2.3)
т
X = Jx(t)A(t)cos[o)0t + q>(t)] dt; (3.2.4)
о
т
Y = j x(t)A(t) sin[wot + <p(t)] dt. (3.2.5)
0
112
Случайные величины X и Y являются нормально распреде-
ленными. Первые два момента этих величин, т.е. mX(Y), aX(Y)
при наличии и отсутствии сигнала равны
mx(H0) = mY(H0) = 0; m^H,) = Ecosip; myfHJ = Esinip; (3.2.6)
= Оу = - (N0E + Ok ).
л i 2v
(3.2.7)
здесь
<*K
м и
£ f J Ks (t2 -1,)A(t>)A(t2) cos[o)0 (t2 -1,) + (Ptt,) - <p(t 2)] dt,dt2.
i=l 0 0
(3.2.8)
Несложно убедиться, что величины X и Y статистически незави-
симы, так как функция корреляции между ними приближенно
равна нулю. Поэтому плотности вероятностей случайной вели-
чины Z при наличии сигнала будут определяться законом Райса
2Z ( Zz + E2 |
Wt(Z) =-------rexp---------- Io
N0E + o2 P| N0E + Ox I °
а при отсутствии сигнала — законом Релея:
2ZE
N0E + о2к ,
(3.2.9)
W2 (Z) ----exp [---------—-
N0E + o2 [ N0E + o2K J
Соответственно, согласно критерию Неймана—Пирсона по за-
данной вероятности ложной тревоги
(3.2.10)
P.-jw.Wdz-j^^-exp
h0 =h/7(N0E + o2K)/2,
Z2 '
N0E + ct2k>
— П,
dz = е 2
(3.2.11)
определяется порог h0, связанный с ним порог h и вероятность
правильного обнаружения PD
PD =JwT(Z) dZ= Jvexp
h h0
v +-------г
N0E + g2
2
dV.
(3.2.12)
Последняя формула, как известно [185], является частным
случаем табулированной функции
113
2 + z2
—— I0(zv)dv,
Q(z, u) = j v exp -
u <
Io — модифицированная функция Бесселя нулевого порядка.
Рассчитаем отношение сигнал-шум на выходе обнаружителя.
По определению [184]
2 (т, -т0)2
1 а2
где т, = ^тх(Н,) + m^Hj); т0 = 0; ст2 = =о^
В результате получаем
(3.2.13)
2 .. 2E2
Q' N0E + a2'
Из (3.2.12) следует, что этот параметр полностью определяет
качество обнаружения сигнала, т.е. величину PD. Параметр
H^qJ/q?. (3-2.15)
гДе Qo==2E/N0, характеризует ожидаемое снижение качества
обнаружения сигнала разведприемником вследствие воздействия
узкополосных помех. Используя (3.2.8), имеем
JjjK,(t2-МА(МА(МСО8К(*1 -t2) + <p(t1)-<p(t2)] dt,dt2
И1 =l + 2zLoo.
(3.2.14)
N0E
(3.2.16)
В соответствии с теоремой Винера—Хинчина выразим корре-
ляционные функции узкополосных помех через их спектраль-
ные плотности мощности, т.е.
КДЬ, -tj) = — j Rj(co)exp[jco(t2 - tj] doo. (3.2.17)
2n
Используя комплексные огибающие сигнала, т.е. представле-
ния S(t) = A(t)eJ<₽(1), несложно убедиться, что
-tJA(tJA(t2)cos[o)0(tt -12) + <p(t,)- <p(t2)] dt2dt2 =
0 0
= ^-j j {К;(й))е’“(ъ t,,S(t1)S(t2)ei“"(tl dt1dt2dw +
+ -J-J J JRs(<o)eJn,<t“ ‘’’ададе J<Mt’ l2) dt,dt2dco =
114
= -Mr((o) |g(-<
4л J U
|2
co-(%)
где G(co) — спектральная плотность комплексной огибающей
сигнала.
Таким образом, окончательно имеем
м. Г< .9 > .9.
<o-
.(3.2.18)
E
M’=1+taN,
Замена пределов интегрирования по времени бесконечными
оправдана тем, что вне интервала [0,Т] сигнал тождественно ра-
вен нулю.
Допустим, что спектральные плотности мощности сопровож-
дающих процесс разведки узкополосных помех имеют прямоу-
гольную форму
где I(x) =
N
R,(a>) = ^ I
Ч. ~ м
дч
Ч,
Дщ
(3.2.19)
1, |x| < 1/2
0,
; N — спектральная плотность узкополос-
|x| > 1/2 ’
ной помехи, co0i — центральная частота помехи.
Подставим (3.2.19) в (3.2.18) и преобразуем последнее к виду
Hl =l + £b,ai
(3.2.20)
где
b, =N5/No;
J R/co) |G(-co-
Ч =------------------
4kE
-Ц), *Лч/2 г
J |G(-w-(o0
1 -Atn, /2
2
4лЕ
(О-
I 1 Чи ~Л(О| /2_________________________
2 4лЕ
Сделав замену переменных CDj = -со - соо в первом интеграле и
со2 == со -• со0 во втором интеграле, полагая, что coOi» соо и пересчи-
тав пределы интегрирования, получаем
115
Лц/2
j |G(cd,)|2 + |G(-2coo -со,
а - 1 -^4/2 L
' 2
4лЕ
AO),/2
। -Au>|/2____________________________
2 4rcE
Так как для узкополосных сигналов спектр огибающей на
удвоенной частоте примерно равен нулю, а
Е = Js2(t) dt » | J |G((O)|2 dco,
то окончательно приходим к выражению
Arc,/2
j |G(co)|2 dco
& _ ~A^/2_____________
j |G(cd)|2 dco
(3.2.21)
Величина Ц характеризует отношение помеха-шум для i-ro по-
мехового воздействия, а — относительную долю энергии по-
лезного сигнала, пораженного помехой.
Зависимости от bT — N3/No при количестве внешних источни-
ков М - 1 и различных значениях приведены на рис. 3.2.1. Как
и следовало ожидать, с ростом интенсивности внешней помехи, а
также с увеличением относительной доли помеховой компоненты в
спектре сигнала качество обнаружения заметно падает.
Для парирования действия помехи на входе обнаружителя
может включаться режекторный фильтр, настраиваемый на ча-
а=0.8 s
а=0,1 а=( 3,01
у _
10 20 30 40 50 60 70 80 90 Ъ,
Рис. 3.2.1. Зависимость коэффициента р от отношения спектраль-
ных плотностей помехи и внутреннего шума
116
стотные параметры узкополосных помех o)0i, До)г Для помех вида
(3.2.19) передаточная функция фильтра должна выбираться как
Т*Т z \ 1 1 V1 т I — О) |
H(jco) = 1--У I --------------------- +1
2 if]_ I До), I
СОо< + СО
< А“- 1
(3.2.22)
При включении режекторного фильтра обнаружителем будет
формироваться видоизмененная величина, т.е.
Z = Vx2+Y2. (3.2.23)
Здесь
т
X = Jx(t)A(t) cos[co0t + <p(t)] dt; (3.2.24)
О
т
Y = Jx(t)A(t)sin[co0t + <p(t)] dt. (3.2.25)
0
При отсутствии сигнала x(t) = n(t), а при его наличии
x(t) = s(t) + n(t), где s(t) — отклик режекторного фильтра на при-
нимаемый узкополосный полезный сигнал. Будем считать, что после
прохождения фильтра несущая частота сигнала не изменяется и
сигнал остается узкополосным, т.е. s(t) = A(t)cos[o)0t + $(t) - у], где
— случайная начальная фаза.
Для моментов гауссовских случайных величин X и Y при
отсутствии сигнала имеем:
mz(Ho> = 0: = 4 - <4 = ^NoE.
При наличии сигнала величина дисперсии, очевидно, сохра-
няется. Уточним величину математического ожидания
InZ(H,) “ + mY(U1) ‘
Учтем, что
т
m* = j s(t)A(t) cos[(D0t + (p(t)] dt ~
0
1
2
т
J A(t) A(t) cos[(p(t) - <p(t)] dt cos \|/ +
о
1
-f- —
2
т
J A(t)A(t) sin[<p(t) - <p(t)] dt sin \j/;
о
т
= J s(t)A(t)sin[coot + <p(t)] dt ~
о
1
2
т
JA(t)A(t) cos[<p(t) - <p(t)] dt sin\j/ -
о
(3.2.26)
(3.2.27)
1
2
т
j A(t)A(t) sin[<p(t) - <p(t)] dt cos \|/.
о
117
Имея в виду два последних соотношения, получаем
1 T ~ ♦ т *
m| = m2. + m2 = — JS(t)S(t)dt JS(t)S(t)dt. (3.2.28)
2 о 0
Используя спектральное представление, (3.2.28) можно пере-
писать
как
1
j G(to) G(to)do) j G(to)G(to)d(0 =
- M ~ . .9 M *
1
2
1
2 (2л)2 1 1 -
2 d(0 JlG^PX^-OwJdw, <3-2'29)
д М
где учтено, что G(cd) = 0(о))^НпОсо), а передаточная функция
НиОсо) получена из (3.2.22) переносом спектра с частот (DOi±(D на
частоты О), т.е. заменой высокочастотного режекторного фильт-
ра его низкочастотным эквивалентом [9]. Ориентируясь на пере-
даточную функцию (3.2.22), видим, что Hn(jco) = Hii(jco). Тогда
(3.2.29) преобразуется следующим образом:
^2
пь
1 1
2 (2л)2
М 7 I • 2
У f |G(w)| Нц0(о) d(O
= Е?.
(3.2.30)
Отношение сигнал-шум на выходе блока обнаружения раз-
ведприемника, включающего режекторный фильтр, характери-
зуется величиной
2 _ mU) 2Е2 gg
<4 NoE ц2'
Отсюда параметр
q2 _ 2EN0E _ Е2
2 q| No 2Е2 Е2
(3.2.31)
(3.2.32)
показывает снижение эффективности обнаружителя за счет ис-
пользования режекторного фильтра. С учетом (3.2.30) эта же
величина может быть представлена в виде
М2 =
j |G(co)|2dto
У j|G(w)|2HIi(jco) doo
(3.2.33)
Если в (3.2.33) подставить функцию фильтра в виде (3.2.22), то
118
2
J |G(w)|2d(O
i/2
(3.2.34)
где cxi определяется (3.2.21).
Зависимость ц2 от 1) приведена на рис. 3.2.2 и характе-
ризует ухудшение условий обнаружения сигнала за счет потерь
энергии сигнала вследствие использования режекторного фильтра.
Сопоставляя (3.2.18) и (3.2.34), можно определить условия, при
которых применение режекторного фильтра становится целесооб-
разным. Очевидно, что при наличии узкополосных помех эффек-
тивность обнаружения в процессе разведки повышается, если > ц2.
Рис. 3.2.2. Зависимость коэффициента ц2 от относительной доли
полезного сигнала, пораженного помехой
В заключение приведем формулы для плотностей вероятнос-
тей случайной величины Z , необходимые для вычисления PF и
Рп при отсутствии и наличии сигнала на выходе фильтра:
W,(Z) =
2Z
N0E
exp
f Z2+E2
I N»E )
( 2EjZ2 \
°[noe J
w2(Z)
2Z
exp
N0E
Z2
noe;
3.2.2. Анализ эффективности измерения
времени прихода радиосигнала.
Исследуем качество измерения времени прихода разведывае-
мого сигнала на фоне помех вида (3.2.1) [130]. Эти результаты
119
необходимы для определения характеристик местоположения
ИРИ с помощью многопозиционных систем, например, разно-
стно-дальномерного типа.
Согласно [184], если используется алгоритм, оптимальный
только при наличии гауссовского белого шума, то оценка макси-
мального правдоподобия может быть найдена как положение аб-
солютного максимума величины
, ( Е \ Г 2Z ) р_
L = exp 1в =С10
I )
Следуя [85], представим величины X и Y в виде
X = Sc (т0,т)соз<р + 8а (x0,x)sin(p + Nc;
Здесь:
Y = Sc (х0,х)зтф-8я(х0,х)созф + М,,.
(3.2.35)
(3.2.36)
1
Sr (x0,x) = —|а(1,х0)А(1,х)соз[ф(1,х0)-ф(1,х)](11; (3.2.37)
Nfl о
Ss(x0,x)= * jA(t,x0)A(t,x)sin[^p(t,T0)^(t,T)]dt (3.2.38)
0
— сигнальные составляющие в квадратуре;
ТГ м
Л и т м
Nc(r)= -J n(t) + (t) A(t,x)cos[(D0t + (p(t,r)jdt;
No о L ы J
(3.2.39)
N,(x) =
и
J n O') + X Pi (t) A (t, sin [coot + ф (t, x)J dt
0 o L i=1 J
ТГ
(3.2.40)
2Z )
М
2
— шумовые составляющие выходного сигнала; т0 — истинное зна-
чение информационного параметра т — времени прихода сигнала.
Для принятых моделей гауссовских узкополосных помех и шума
статистические характеристики шумовых составляющих равны
(Nc(x))=(N.(x)) = 0;
(NcCxJNc^)) = <N.(x1)N,(x2)> = Sc(x„x2) + Bc(xltx2);
(Nc(x,)N.(x2)) = (Ns(x1)Nc(x2)) = 0; (3-2.41)
(N^(x)) = (N:(x)) = Sc(x) + Bc(x),
где
Л 2M г г
Вс (Xj, х2) = -5- £ J J Ki (t2 -1,) A(t,, хг) A(t2, x2) cos[(00 (t, -12) +
Nq i’l о 0
+ф^1, Xt) - Ф(12, x2 )]dtjdt 2.
Из (3.2.37) и (3.2.38) непосредственно следует, что
120
Sc^.Tz) = S«(T2,T1); S.(TVT2) = -S3(T2,T,);
Sc(t,t) = Q(t); S„(t,t) = O.
Перепишем выражения для квадратурных компонент выходно-
го сигнала следующим образом:
Х(т) = F(t0, т) соз[ф - Ф(т0, т)] + Nc(t); 2
Y(t) = F(t0, т) sin[cp - Ф(т0, т)] + Ns(t),
здесь
F(t0,t) = (то’т) + ^ (то>т) “ огибающая узкополосного процес-
са с квадратурами Sr (т0,т) и S, (т0,т); Ф(т0,т) = arctg .
(W)
Используя свойства сигнальных составляющих, имеем
F(t1,t2) = F(t2,t1); F(t,t) = Q(t).
Так как время прихода — неэнергетический параметр, то
F(tl,t2) = F(Tj -т2) = F(t2 -tJ
и функции Sc(TnT2)> F(TnT2) имеют абсолютный максимум в
точке = т2 = т0.
Вычислим отношение сигнал-шум на выходе измерителя. Для
пикового значения этой величины можно записать:
[maxF(TltT2)]^t2=Ij = [maxFCCpT,)]2^ = Sc2(t,t) =
<n:(t)> <N2(t)) (N^))
г 1 т у
________________о______________J__________________
1 т О м ТТ
-MA2(t,T)dt + -J-£JjK((t2 -taAftpTWt^x (3.2.43)
^о О Nq i=1 о о
т (2E/No)2
xcos[(D0(t! -t^ + cpttpTj-^tz.TXJdtjdtj 2E/N0 + Вс(т)
2E/N0 ,
1 + Bc(t)/(2E/N0)
Согласно [85], выражение для дисперсии оценки параметра в
первом приближении определяется формулой
(3.2.44)
&2
здесь е2 -1/q2; n, =[dN, (т) / dt]t=to; g2 = d ?
121
производных и ус-
dS„(T0,T) t
dr
(3.2.45)
Nj (т) = Nc (t)[Sc (т0, t) cos ф + Ss (т0, t) sin cp] +
+N, (T)[Sr (т0, t) sin (p - S„ (t0 , r) cos q>];
Sc(T0)T) = Sc(T0,T)/q^; S,(T0,j)=S,(T0,r)/q’; Nc(t) = Nc(T)/q0;
N,(t) = N»(T)/q0; F(tpt2) = F(T1,T2)/qg; q« = 2E/N0 = max{q2}.
В результате вычислений, включающих расчет произведения
N1(t1)N1(t2) > определения соответствующих
реднения, получаем
<П?) = T^-[Sc(T1,T2) + Br(T1,T2)]-2^uSl
ЭТ1Эт2 Эт2
+[Вс(т1(т2)-1]
k dT км
где
А 2 м тт
Bs (тх, т2) = — У J J Ks (t2 -1,) A(tJ, T1) A(t2, t2 ) sin[coo (t j -12>+
No О О
+ Ф(11,т1)-ф(12,т2)]а11а12;
Вс (т,, т2) = Во (т,, т2) / q„; В, (Т), т2) = Bs (Т), т2) / q2.
Соответственно для величины g2 имеем
Si
(3.2.46)
Несложно убедиться, что
о d2
(3.2.47)
Таким образом, для узкополосного сигнала со случайной на-
чальной фазой, принимаемого на фоне М источников внешних
помех и белого шума приемником, рассчитанным только на внут-
ренний шум, дисперсия оценки параметра определяется соглас-
но (3.2.44) с учетом (3.2.45) и (3.2.46). Если внешняя помеха
отсутствует, то (3.2.44) переходит в известную формулу [85]
I Э2 - 1
----
^Эт2 q0
dS, (т0,т)
dr
(3.2.48)
Величина проигрыша в точности оценки может характеризо-
ваться отношением
122
Yi =D(^/t0,<p)/D0(Tm/T0,(p) =
d2Sc(r„-r)
dr2
dS,(r0-r) 2
dr
2 ЭВя(г,,т2) dSs(r0-r)L d2Sc(r0-r) 1 FdS,(T0-r)
+ q2 3r2 dr J j dr2 q2 dr
(3.2.49)
Перейдем к спектральному представлению сигнала, для чего
используем спектральные представления величин, входящих в
(3.2.49). Применяя, как и выше, понятие комплексной огибаю-
щей сигнала, теорему Винера-Хинчина и обобщенную формулу
Ре лея, получаем
1 М ''
Вс(г, >тг) = (t2 -1,)S(t,,r,)S(t2,T2)ej“*“1-“,dt1dt2 +
i=l 0 0
+^SnK‘(t* -t1)S(t1,Tl)S(t2,r2)e-i'^‘'-l2)dt1dt2 =
^0 i=l 0 0
M “ Г ♦
£jRi(co) G(-<o-(b0,t1)G(-co-<o0,t2) +
2nN2u1^ L
+G(w-coo,r,)G((»-(»O)t2) dec:
Э2Ве(г„т2) = _1Л jJ 3S(t, r,)3S(t2 r2) dt
N^Po at, at2 1 2
v гfrr a _<• \as(t, -r,) as(t2 -r2)-
n2^JJ 142 at,
1 м 7 Г
= J (co+co0)2G(m»-co0^1)G(-o-w0,t2) +
ZTIINq
+(co-w0)2G(<j}-(fn),T,)G(co-CDa,T2) dec;
a2Sc(T„r2) = 1 |dS(t-T,)dS(t-r2)dt| 1-'rrdS(t-T,)dS(t-T2)dt =
Эт,ат2 2N0 J dt dt 2N0 J dt dt
1 a и и и и
= ттг1с°2 G(co,t1)G(cd,t2) + G(co,t1)G(co,t2) doo;
4nN0 i L
123
dSs(T0-T) _ 1 rdS(t-T)
dz ~*2Noj; dt
^iNoJ 0
1
4nN0
j (0 G(co,T)G(co,T0)-i-G((o,T)G(co,r0) dco.
При вычислении производных от функции S(t-x) использова-
лась замена переменных t-x = x, при этом
dS(t-x)/dt =-dS(t -т)/dr ♦ Кроме того [202], учитывалось, что
преобразование Фурье п-ой производной функции S(t) есть ум-
ноженное на (jco)n преобразование самой S(t), т.е.
В точке тг = т2 — т0 в результате непосредственной подстановки
имеем
1 М « г 2 2
jRi(co)[|G(-a)-(D0)| + |G(co-co0)|
dco;
Э2Вс(т„т2)
Эт,Этг I®
1
2nN2 i.j
ЭВс(Т1,т2)
Эт2
XjRi(co) (со+ con)2|G(-co-
+ (со- соо)2 |G(co- соо)|2 dco;
У J Ri(co) (co-coo)|G(co-coo)|2 +
- 1 С
+ ((o+co0)|G(-(o-co0)|2 dco;
1
м z
I*» 2nN2',?!
d2Sc(T0-T)
Эг I*»
dSa(T0-T)
Эт I®
------— [ co2 |G(co)|2 dco;
2*No£ 1 1
—-— [ co|G(co)| dco.
2kN01 1 1
Положим, что внешние помехи имеют спектральную плот-
ность мощности (3.2.19). Тогда, используя результаты предыду-
щих вычислений, а также рассуждения, как и при выводе
(3.2.21), можно записать
^Р^/уф),^ ЛЫ,с
Y1 Р0(тт,т0,ф) £n0 "
(3.2.50)
где
( 1 \2
-------------- [ co|G(co)I2 dco -
[2nN0q2 1 1 ” J
=
Д а>, /2 Л(ц / 2
j со2 |G(co)|2 dco+ j |G(co)|2 dco
-Да), / 2 -A(i\ / 2
124
- у J <»|G(co)|2 dco / J О)2 |G(co)|2 dco-
27cWoqo / -~
-2 j co|G(co)|2 dco
-Асц /2
- / «X» \2
---------Г [ co|G(co)|2 dco .
Из анализа (3.2.50) ясно, что величина зависит от формы
принимаемого сигнала, а также от параметров помехи NP Дс^ и от
числа помеховых источников М. При отсутствии внешней помехи
£. = 0 (-» 0); если ширина спектра помехи До), как минимум рав-
на ширине спектра сигнала или превышает его (в пределе Деойос),
то учитывая равенство 4лЕ = j |G(co)|2 dco, убеждаемся, что £. —> 1.
Теперь допустим, что на входе измерителя времени прихода
разведываемого сигнала включен режекторный фильтр с пере-
даточной функцией, определяемой (3.2.22). Как и для случая
обнаружителя, на выходе фильтра будет формироваться видоиз-
мененная огибающая сигнала S(t0,t), т.е. на вход приемника
поступает сигнал вида
x(t) = s(t,T0) + n(t).
Выходная статистика аналогична (3.2.35), т.е.
Z = VX2+Y2, (3.2.51)
где
X = 8с(тп, т) cos ф, + S„(T0, т) sin ф, + Nc (т);
Y =§(.(т0,'с)8Н1ф1 -ёДТц.^созф, +Ns(t);
1 т ”
SC(TO,T) = — jA(t,T0)A(t,T)cos[(p(t,T0) — ф(1, r)]dt;
No о
1 т
S,(t0, т) = — J A(t, x0)A(t, t) sin[<p(t, т0) - ф(Ъ, т)] d t;
wo о
2 Tr
Nf (t) = — J n(r) A(t, t) cos[co0t + <p(t, т)] d t;
Nq 0
N„(t) = -y- j n(r)A(t, t) sin[co0t + <p(t, т)] d t.
N<) 0
Прежде чем перейти к анализу точности измерения парамет-
ра сигнала с помощью квадратурного приемника с режекторным
фильтром, убедимся, что наличие последнего не вносит измене-
ние в положение максимума, по которому и производится от-
счет. Сигнальная функция может быть представлена как
125
F(M = 78с(т0Л) + ^(т0,т).
Так как первые производные по t и т с точностью до знака совпа-
дают, то фактически необходимо доказать следующее равенство:
dF(T0,T)/dT = -dF(r0, t) / dt = 0. (3.2.52)
Искомая производная равна
dt 7Sc(t) + S*(t) I dt dt
(3.2.53)
т i
0
при этом, как и выше
sc (t) = -J- J S(t) S(t)dt +} S(t)S(t)dt ;
[о о
jS(t)S(t)dt-jS(t)S(t)dt •;
i Lo
ja^ds(t)
о
0
Js(t)® dt
dt Jo dt
dSc(t) _ 1 '
dt 2N0 I;
dS,(t)_ 1
dt 2Noj
0 at 0 dt
Заметим, что производная по т (или по t) может браться толь-
ко от функции S(t), ибо функция S(t) = S(t, т0) от т не зависит.
Теперь вычислим выражение в фигурных скобках (3.2.53). Убеж-
даемся, что
dt dt 4tcNo
-j j G(co)G(co)dco j coG(co)G(co)d(» >,
j J G(cd) G(co)dco j coG(o)) G(co) dco -
(3.2.54)
при этом знаменатель (3.2.53) отличен от нуля. Спектр комп-
лексной огибающей сигнала после прохождения режекторного
фильтра G,(co) = G(co)Hu(jco). Поэтому после подстановки для
(3.2.54) имеем
A,.,dSc(t) Д dS,(t) 1
йеW — j. —' + —77— - л ТТг 1
dt dt 4nN0
xj co|G(co)|2 Hii(jco)dco- j J |G(co)|z Hii(jco)do) J co|G(w)|2 H^jcojdcok 0,
(3.2.55)
j J" |G(co)|2 Нпбсо)с1сох
126
еслиНи(И = НпОо)) (3.2.22).
Итак, условие (3.2.52) в рассматриваемом случае выполняется.
Запишем выражение для дисперсии оценки искомого пара-
метра. Исходя из (3.2.44) и учитывая, что узкополосные помехи
режектируются, получим
d2Sc(T-T0)
D(T„,/T0,(p) = -A-
Чо
+ £s,(t-t0)
ат
2 I2
(3.2.56)
+ v-S,(t-t0)
ат
d?
d2Sr(t-T0)
dx2
Выполним повторное дифференцирование сигнальной
ющсй Sc(t). Тогда
составля-
d2Sc(t)_ 1 т
dt 4,1,1 о 0
-1
” 4tcN0 _
= —J
2N„ i dt dt2
j co2 G(co) G(co) + G(co)G(co) dco.
dt2
dt -
(3.2.57)
Используя (3.2.22), перепишем (3.2.57) в виде
d2Sc(t) ____1
dt2 2nN0
Аналогично
Ао^ / 2
J со2 ]G(co)]2 dco - У, | со2 |G(co)|2 dco >.
i=l -AiOj/2
(3.2.58)
dS,(t)=_ 1
dt2 2nN0
- м 2
JcoG(co) dco-^ J co G(co)2 dco >.
— i=l -A«x/2
(3.2.59)
Подставляя в (3.2.56) формулы (3.2.58) и (3.2.59), а также ранее
полученные для d2Sc(x0, x)/dx2, dS9(x0, x)/dx, получаем D(xm / x0,<p).
Проигрыш в точности оценки времени прихода из-за наличия
режекторного фильтра по сравнению со случаем отсутствия уз-
кополосных помех можно определить следующим образом:
(3.2.60)
где
Ац /2
| со2 |G(co)|2 dco -
-Аси, /2
——j- j co|G(co)|2 dco J co|G(co)|2 dco +
N07tq0 -ЛШ./2
J co|G(co)|2 dco -
127
1
2N0nq*
4Ц/2 1
J co|G(<o)|2 dco
-ЛЦ/2
1
2NonQo
( oo \2
j co|G(co)|2 dco
/
Сопоставляя (3.2.50) и (3.2.60), видим, что наличие режектор-
ного фильтра оправдано, если у1 > у2. В противном случае из-за
частичной потери энергии полезного сигнала режекция может
лишь ухудшить качество измерения времени прихода. Как и
следовало ожидать, при отсутствии внешних помех параметр — 0
(Да\ = 0, фильтр отсутствует); наоборот, если ширина спектра
помехи равна или больше ширины спектра полезного сигнала и
последний фильтром полностью режектируется (До^—><*), значе-
ние > 1, а величина проигрыша у2 стремится к бесконечности.
Если оцениваемый параметр содержится только в огибающей
узкополосного сигнала A(t), а фазовая модуляция отсутствует,
то в (3.2.50) и (3.2.60) члены вида Jco|G(co)|2 dco равняются пулю.
В этом частном случае результаты для проигрыша в точности
оценки параметра совпадают с полученными в [62].
В качестве примера рассчитаем характеристики потерь в точ-
ности оценки времени прихода колебаний для систем распреде-
ления тактической информации с множественным доступом при
временном разделении [75] при воздействии на разведприемник
узкополосной помехи и внутреннего шума. Излучаемый сигнал
представляет собой радиоимпульс, заполненный последователь-
ностью с модуляцией несущей частоты соо минимальным сдви-
гом частоты Q = л/2Т. Так как закон сдвига в процессе радио-
разведки неизвестен, то измеритель может рассчитываться на
прием элементарного дискретного сигнала бинарной последова-
тельности, описываемого выражением вида
f28 1
s(t) = +а exp —y-t2 exp [j(co0 ± Q)j,
Tu I
где а — амплитуда; т — длительность элементарного сигнала.
Поэтому, наряду с многоканальностью по частоте, парирую-
щей случайный для наблюдения закон перестройки несущей 0)0,
необходимо в каждом частотном канале предусмотреть четыре
подканала, парирующие скачки частоты модуляции и фазы
± л. Положим, что корреляционная функция помехи может ап-
проксимироваться следующим образом:
K(t2 -tj = К(т) = о2е-<хт2 cosoyc,
128
здесь -Ja/п = Д^ — ширина спектра помехи; о2 = — дис-
персия помехи. Тогда, предварительно рассчитав величины, вхо-
дящие в (3.2.49), представим проигрыш в точности оценки вре-
мени прихода как
2а(2а + р2) + р2Л2
No 71 + р2/2а L (2а + Р2)2
1 Nx 1
Yi =1 + —----------
ехр
О.2
2(2а + р2)
где параметр 0 = ^/2,8 /ти характеризует ширину спектра огиба-
ющей сигнала. Зависимости величины потерь от ширины спек-
тра помехи при различных отношениях помеха-шум приведены
на рис. 3.2.3 и характеризуют снижение точности измерения
времени прихода сигнала рассматриваемой системы связи. При
расчетах принято: Q = 1,25 МГц, 0 = 8,4*106.
Рис. 3.2.3. Зависимость величины потерь от ширины спектра помехи
Таким образом, полученные соотношения позволяют оценить
как потенциальные возможности измерения времени прихода
радиосигнала, так и потери в качестве измерения при воздей-
ствии помех внешних источников, препятствующих процессу
разведки. Возможность режекции помеховых воздействий дол-
жна предварительно увязываться с сопутствующей для прицель-
ных по частоте помех потерей энергии разведываемого сигнала,
ухудшающей точность измерения информационного параметра.
3.2.3. Анализ эффективности измерения частоты
и направления прихода радиосигнала
При способах местоопределения РЭС на основе триангуляции,
а также в задачах распределения ограниченного ресурса проти-
водействия по пространственным секторам необходимо с высо-
кой точностью определять направления прихода сигналов, излу-
чаемых различными источниками. Обычно эта процедура сопро-
вождается и определением несущей частоты сигнала, являющейся
важным информационным параметром.
Среди применяемых на практике измерительных устройств
наибольшее распространение получили два типа: устройства, в
5- 2357
129
которых предварительно оценивается несущая частота, а затем
эта информация используется для оценки направления прихода
сигнала, и устройства, в которых оценка несущей частоты и пе-
ленгация выполняются совместно. Первый тип аппаратуры обыч-
но реализуется на основе традиционной элементной базы радио-
электроники, например, с помощью матричных измерительных
приемников, второй — на основе элементов функциональной и
цифровой электроники, в частности, акустооптоэлектроники,
процессоров БПФ и т.д.
В реальных условиях радио- и радиотехнической разведки
недостаточное знание структуры принимаемых сигналов не все-
гда позволяет получить потенциальные характеристики оценки
искомых параметров [74, 210]. Поэтому для определения воз-
можных потерь необходимо проанализировать качество совмест-
ных и несовместных оценок несущей частоты и направления
прихода сигнала как при оптимальной, так и неоптимальной
обработке, когда формы огибающих полезного и опорного сигна-
лов отличаются [133].
Рассмотрим сначала разведприемник, в котором оценки несу-
щей частоты и направления прихода проводятся совместно. При-
нимаемый антенной сигнал
s(t,z,ao,4.q>o) = S t — sina0 exp
I c I
i Z I
j ~2tc-4 sina0 + q>0 k
I c J
(3.2.61)
где а0, f0 — истинные значения угла прихода и несущей часто-
ты; ф0 — случайная начальная фаза; z — пространственная ко-
ордината; S(t) — комплексная огибающая радиосигнала.
Если сигнал принимается на фоне белого гауссовского шума с
нулевым средним и пространственно-временной корреляционной
функцией K(tn t2,Zj,z2) - ~N0X05(tj - t2,z3 - z2), дисперсия co-
вместпых оценок частоты и направления прихода [210]
82 =----------------; (3.2.62)
2q2(2re)2(42T2 + F2T2 + F2L2 sin2 a0 / с2)
82 = T2+L2sin2a0/c2 ; (3.2.63)
a 2q2(2n)2(^2T2 + F2T2 + F2L2 sin2 a0 /c2)L2 cos2 a0 /с2
где F2 = jf2|S(f)|2df/J|S(f)|2df; T2 = jt2 |S(t)|2 dt/j|S(t)|2 dt - сред-
0 0 0 0
неквадратические ширина спектра и длительность сигнала;
130
L2 = J z2 |l(z)| dz/j|l(z)| dz — нормированный второй момент апер-
о о
турной функции |I(z)|2; q2 = J j|l(z)|2 |S(t)|2 dzdt/X0N0 — энерге-
o о
тическое отношение сигнал-шум; X0 = c/f0 .
Детализируем предыдущее рассмотрение для случая совмест-
ной оценки параметров при квазиоптимальной обработке сигна-
ла, т.е. при различных формах огибающей полезного и опорного
сигналов. Допустим, что ожидается сигнал
* I Z I I Z I
s(t, z, f, а, ф) = V t—sin а expn 2nft-2n-sina + ф >,
I с 1 I с 1
(3.2.64)
причем форма огибающей V(t) отличается от истинной S(t) •
Применяя известную методику [85] для расчета дисперсий со-
вместной оценки неэнергетических параметров, находим харак-
теристики точности рассматриваемой пространственно-времен-
ной измерительной системы
о
Э^ + А д «ii + A A
at,at, 11 21 at, э«, 21 “aa.at,
+ A
a2GN
Эа.Эа,
1 2 Ja0.t
(3.2.65)
2 1 .2
— A ./Vi9
[D|2 L
94l + a A -^a-
Sfjdf, 12 22 3fj3a2
+ A2 '
22 Эа,Эа2
* 2-la0.li>
д j.^tL
22 12 aa,df2
(3.2.66)
где |D| — определитель матрицы с элементами
dik = l = (f, a)T; Aik — алгебраические дополне-
ния этого определителя;
GN{fl,a1,^,a2} = SN{fl,a1,4>a2}cos{q>d(^,a1,^,a2) +
"*"Фн(^2’ ®2» ^)> ®о) ~ Фь'(А’®1> *^о)}-
При этом комплексные функции Sd() и SN() определяются
из соотношений
131
Sd(f,a) = —7— f [|l(z)|2 S| t --sina0 |V| t --sina |x
NoVr Iе ) I c J
xexp<j2jT (f-4)t--(fsina-fsina0) dzdt;
c
SN(f1,a1>4,a2) = —Jf|l(z)|2 vTt--sina, jvj t--sina2 jx
LT \ c J \ C J
z
xexp^j2n (fj-fjH—(f] sinctj - 4 sina2) idzdt,
c
где <pd(). (pNC) — аргументы, a SdC) и SN(-) — модули этих функ-
ций. Нетрудно убедиться, что в рассматриваемом случае
= Э2Фм/Э1Ам =0; <pd|b| =ipN|1_| =0 и поэтому
d2GN/Э1|Э1к|Ы() = 32SN/31,31^,.
Используя последнее равенство, в результате вычислений получа-
ем формулу для дисперсий совместных оценок частоты и пеленга
_2 = 2q2[(Fd2 + ^2)Т2 + FdL2sin2 an/с2 + F^2L2 sin2 a0/с2]. 2
f (гд^ХЗ^ГХ+Т^+Г^в^ао/с2)2
_2 ; 2q2[T2^2 sin2 a0 + Td (F2 + 42)c2/L2 +
d (2qdX2n)2(Td Fd + TdX + Fd2L2 sin2 a0 / c2)2 x (3 2>68)
i +2TdF2 sin2 a0 + F2L2 sin2 a0 / с2]
xcos2a0
где Fd2 = jf2S(f)V(f)df/|S(f)V(f)df;
0 0
T2 = jt2S(t)V(t)dt/js(t)V(t)dt; q2 - jJ|i(z)|2S(t)V(t)dzdt/N0l0;
0 0 00
параметры Fj,Tv2,q2 определяются по формулам, аналогичным
используемым для вычисления F2, Т2, q2 с заменой 8() на V();
V(f) — комплексный спектр огибающей опорного сигнала.
В частном случае, когда S(t) = V(t), (3.2.67), (3.2.68) преоб-
разуются в (3.2.65), (3.2.66).
Теперь рассмотрим второй тип измерительного устройства, в
котором сначала производится оценка несущей частоты, а затем
эта оценка f используется при определении пеленга ИРИ. Как и
в предыдущем случае, определим точности оценок при совпаде-
нии форм огибающих принимаемого и опорного сигнала, а затем
при их рассогласовании.
Как и ранее, оценка направления прихода, как неэнергети-
ческого параметра, будет несмещенной [85]. Если учесть, что
132
d^/ao.")^0^, = d4>N(«0>«)/d«|a=U(, =0, то исходная формула для
расчета дисперсии принимает вид
92SN (cq,ос2)/ Эа,Эа2
(32Sd (a,a0)/da2 )2
(3.2.69)
где функции
Sd(a,a0) = —-— Г [|i(z)| S|t--sina0 jsft - —sina |x
LT \ C / \ C J
xexpn
z *
2itQt - 2n-(f sina - f0 sina)
c
dzdt;
Z . 1
-sma2 x
c j
SN (oq, a2) = —— j J|i(z)|2 S11 - - sin at |s| t -
^0^0 LT \ C / \
x exp < j2n - (sin a2 - sin ar )f dzdt,
I c J
а функции <pdC), <pN(’) являются их аргументами; Q = f -f0 — рас-
стройка по частоте между опорным и полезным сигналами. В
результате получаем, что дисперсия оценки угла прихода сигна-
ла при условии, что f — несущая частота сигнала,
2 . ____________________F2+f2___________________
2q2(2n)2Lz(F2 + f2-0,5(2n)2f2T2Q2)2 cos2 a0/с2 ’ (3’2,70)
Положим, что оценка несущей частоты f является случай-
ной величиной с плотностью вероятности W(f). Считая, что ве-
личина ошибки f-f0 мала относительно f0, представим (3.2.70)
тремя первыми членами ряда Тейлора в окрестности точки f0
a2(a/f) =__-___+____—____(f-f )4- (2л) Т £q +l(f _f ys
1 ' F2+f2 (F2+f2/ o) (F2+f2)2 * o}’
Используя последнюю формулу и учитывая, что (W(f)df = 1;
о
J(f-f0)W(f)df =0; j(f-f0)2W(f)df = o2 , получаем
0
(3.2.71)
о
= ?a2(a/f)W(f)df = - +1] of
jaka/i)Wki) 2q2(2n)2L2(F2+f2)cos2a0/c2-
В частном случае, когда nj: = 0, (3.2.71) преобразуется в извест-
ную формулу для дисперсии оценки угла прихода при точно из-
вестной несущей частоте сигнала. В случае рассогласования оги-
бающих полезного и опорного сигналов по форме условную дис-
персию также можно вычислить по (3.2.69), где
133
2 г г I * |2 * f Z i • ' Z i
Sd(a,a0) = ——J j|l(z)| S t--sina0 V t--sina x
™(Ao LT \ c / \ C J
2n(f -f0)t — 2тс—(f sina-f0 sina0)
c
xexp<j
dzdt;
I z * I
xexp<-j2n-f(sina1 -sina2) fdzdt.
c
Применяя, как и выше, разложение в ряд Тейлора, получа-
ем формулу для дисперсии оценки направления прихода сиг-
нала
, 2q2(F2+f2)c2
ad (2q2)2(2rt)2L2Cos2a0(Fd2+f2)2
2q2[(2n)2f2Td2(Fd2 + f2) + (F2 + f2)] c2a2 (3.2.72)
(2qd)2(2n)2L2 cos2 a0(Fd +f2)3
В частном случае, когда V(t) = S(t), (3.2.72) преобразуется к
(3.2.71).
В разведприемниках для оценки частоты находят широкое
применение многоканальные измерители. В этом случае имеет
место определенное ухудшение точности определения несущей
частоты, обусловленное фиксированной шириной А частотного
канала. Поскольку в данном случае рассматриваются надежные
оценки несущей частоты, то можно считать, что эти оценки рас-
пределены по гауссовскому закону, и формула для расчета дис-
персии принимает вид [85]
df «0,8ofA. (3.2.73)
Подставляя (3.2.73) в (3.2.71), (3.2.72), получаем соответству-
ющие выражения для оценки угла прихода в таких измеритель-
ных устройствах.
В качестве иллюстративного примера рассмотрим оценку не-
сущей частоты и направления прихода ЛЧМ сигнала с гауссовс-
кой огибающей. Пусть антенная система представляет собой эк-
видистантную М-элементную антенную решетку с расстоянием
между элементами d = Хо/2. Для такой антенны L2 = d2(M2- 1)/12.
Тогда для устройства, осуществляющего совместную оценку не-
сущей частоты, и угла прихода сигнала, дисперсии оценок f и (X
будут
134
2._ f02d+//i6)____________>
f 2q2 (2тг)2 [B2(l +16 / n2B2) / 256] 4-
(3.2.74)
* +/dJ(M2 -1) sin2a0/192 + B2(l + 16n2B2)/16/ ’
ЗВ2(1 + 16/л2В2)/4/+ dq(M2-l)sin2 a0
2q2(2n)2d2(M2-l)[B2(l + 16/n2B2)/256 + y2d2(M2-l)x
x sin2 a0 /192 + В2 (1 +16 / n2B2) /16/ ] cos2 a0 ’
(3.2.75)
где d0~ d/X0; y-Af/f0 — относительная ширина спектра сигна-
ла; В — база сигнала.
Если используется измерительное устройство, в котором пред-
варительно оценивается несущая частота, то дисперсия оценки
угла прихода
2 = 2 (2л)2В2(1 + 16/л2В2)/16/+1 о2
G“ a“° + 2q2(2n)2dg(M2-l)cos2 a0(l + //16)2/12'1* ’ (3.2.76)
где Пдо = 12/[2q2(2n)2do(M2 -l)cosa0] —дисперсия оценки угла
прихода при точно известной частоте.
Рассматривая случай квазиоптимальной обработки ЛЧМ-сиг-
нала с гауссовской огибающей, допускаем, что используется опор-
ный сигнал с прямоугольной огибающей. Тогда (3.2.67), (3.2.68)
преобразуется к виду
</d
v2 Y B2f2 fVd2
-4- + (М2 -1) sin2 a0 +
319B- I 12/ 1,22 106B4
+TZr^do(M2 -Dsi^ao
144
9 ( tV
>/<l,16q2 (2пГ 11,53 • 10~4 + - -- +
V ' I 20,5/
n ,2
+ Y_° (M2 -1) sin2 a0
3828B2 0
(3.2.77)
B4
|B2 sin2 a0 +11 + —
12/ 123 J 12j35/d2(M2-l)
/d2 sin4 a0
144
—2
®red ~
(M2 -1) г/51< 16q2 (2n)z cos2 a0 (1,53 10"4 + (3.2.78)
В + -~d°— (M2 -1)sin2 a01
20,5/ 3828B2 °l
135
Для случая несовместных оценок (3.2.72) детализируется:
а2 =ст-’ । (2п)2В2(1 + //12)/20,5у2 + (1 + у2/319В2)
“d l,16q2(2n)2d2(M2-l)cos2a0(l + y2/319B2)3/12 \2 ’
(3.2.79)
я =___________________1 + //12________________
“d” 1,16q2(2n)2d2(M2 - l)cos2 a0(l + у2/319В2)/12‘ <3-2-80)
Результаты численных расчетов, согласно (3.2.73)—(3.2.80),
при f0 = 1 ГГц, а0 = 45\ М= 10, q2= 50, у = 10“3 для различных
значений базы сигнала представлены на рис. 3.2.4—3.2.6 для
Са, град
10 11 Ю10 10‘9 10 "8 10-7rafy
Рис. 3.2.6 I fo J
Рис. 3.2.4—3.2.6. Зависимости сред-
неквадратической ошибки измерения
направления прихода от дисперсии из-
мерения частоты радиосигнала
устройств с совместной
оценкой частоты и направ-
ления прихода сигнала
(кривые 1) и с предвари-
тельной оценкой несущей
частоты (кривые 2). Пунк-
тиром изображены зависи-
мости для случая, когда
огибающие опорного и по-
лезного сигналов совпада-
ют, сплошной линией —
для случая рассогласования
огибающих по форме. Из
анализа этих зависимостей
следует, что измерители
систем РРТР, осуществля-
ющие совместное определе-
ние частоты и направления
прихода сигнала, оказыва-
ются более эффективными,
чем аналогичные устрой-
ства с предварительной
оценкой частоты. Различия
в эффективности измерений
возрастают с увеличением
базы сигнала. В частном
случае, когда В = 1, потен-
циальные характеристики
измерений оказываются
практически одинаковыми»
Увеличение базы сигнала
непосредственно влияет на
качество измерений при
136
совместной оценке частоты и направления прихода сигнала, в
отличие от измерений с предварительной оценкой несущей час-
тоты. Это объясняется тем, что в устройствах с совместной оцен-
кой частоты и направления прихода осуществляется близкая к
оптимальной пространственно-временная обработка сигнала. Если
сигнал сложный, то оценивается пеленг для каждой составляю-
щей частотного спектра и при формировании оценки направле-
ния прихода используется вся имеющаяся информация. В то же
время в устройствах с предварительной оценкой несущей часто-
ты характер пространственно-временной обработки существенно
отличается от оптимального; в ряде случаев для получения удов-
летворительных характеристик оценки пеленга при разведке
сложного сигнала требуется высокая точность определения не-
сущей частоты.
Если в процессе измерений имеют место помеховые воздей-
ствия процессу разведки, аналогичные рассмотренным в 3.2.2,
то снижение эффективности определения частоты и направле-
ния прихода сигнала описывается такими же общими законо-
мерностями, как и для случая определения времени прихода
сигнала.
3.3. Оценка влияния рассеяния радиоволн антенными
системами пеленгаторов на точность измерения направления
на источник излучения. Пример нейросетевого алгоритма
обработки сигналов при пеленговании
При разработке пеленгаторов для расчета реально достижи-
мой точности определения направления на источник излучения
необходимо учитывать рассеяние радиоволн в антенной системе.
За счет взаимных переотражений между элементами конструк-
ции антенны, корпусом носителя, подстилающей поверхностью
наряду с пространственно-временным гауссовским шумом созда-
ется коррелированная по раскрыву помеха, снижающая потен-
циальную точность (п. 3.2.3) измерения угловых координат. Для
выявления искажений пространственной структуры принимае-
мых в процессе разведки электромагнитных волн рассмотрим
решение задачи дифракции поля для типовых антенных систем
современных пеленгаторов [140]; для определенности будем счи-
тать, что антенны рассчитаны на диапазон 30... 1200 МГц.
Положим, что сканирование пространства по азимуту осуще-
ствляется в пределах 360°, поэтому антенные системы пеленга-
торов выполнены в виде решеток N несимметричных электри-
ческих вибраторов, размещенных равномерно на окружности
X
радиуса Ro =-------— , где X — длина облучающей волны. При
4sin (л/N)
137
выбранном значении Ro размер базы пеленгационных пар ан-
тенн не превышает Х/2 и антенная система имеет потенциаль-
ную разрешающую способность [155]. Считаем также, что ре-
шетки расположены в плоскости XOY непосредственно на беско-
нечной идеально проводяхцей поверхности, антенные нагрузки
подключены в точке закрепления вибраторов на носителе (z == 0)
для устранения набегов фаз радиоволн, отраженных от плоско-
сти; сопротивления нагрузок комплексно сопряжены с входным
сопротивлением одиночного вибратора Zbx [180]. Элементы ре-
шетки развязаны по электрическим цепям; приемные каналы
пеленгаторов работают в линейном режиме и имеют одинаковые
коэффициенты передачи, поэтому дополнительные набеги фаз
всех сигналов в приемниках равны и фазы принимаемых радио-
сигналов соответствуют фазам токов в точках подключения ан-
тенных нагрузок. Поле решетки удовлетворяет условию излуче-
ния на бесконечности [180] и граничным условиям на поверхно-
сти системы параллельных вибраторов [19]. Направление при-
хода радиосигнала определяется, преимущественно, фазовым
методом, поскольку погрешность амплитудного метода в диапа-
зоне 30... 1200 МГц для данного типа антенн с учетом октантных
систематических ошибок достигает 3...50 при размещении пеленга-
тора в свободном пространстве в отсутствие многолучевого распро-
странения радиоволн. Если амплитудный пеленгатор расположен
на носителе, то оценка направления прихода радиосигнала может
смещаться на 5... 15° относительно истинного значения [155].
Систематическая погрешность пеленгования определяется
путем сравнения истинных угловых координат ИРИ и их значе-
ний, вычисленных по фазовым задержкам принимаемых радио-
волн при распространении к антеннам пеленгационных пар. Фазы
сигналов вычисляются как аргументы комплексных токов в ан-
тенных нагрузках. Расчет плотности тока на поверхности антен-
ной решетки осуществляется с использованием системы интег-
ральных уравнений Халлена с регулярным точным ядром [19]
для параллельных электрических вибраторов
N Зо
У j (z “ z')dz' = Cnl coskz + Cn2sink|z|-
m=l-b
2k . , , (3.3.1)
-j ттг [In (0)Z„ sink |z| - Sn (z)] sin p;
W Knm(z- z') = j Jo (л/k2 - anm )Ho - V anm)cos 5Z x
xcos^z'(k2- — ядро интегрального уравнения [19]; Cnl и Cn2 —
константы, определяемые из условия обращения в нуль тока на
138
концах n-го вибратора (n=l...N); к=2к/Х — волновое число;
1и
S„(z) = j Em(z') exp(k|z-z'|)dz' — функция возбуждения n-го эле-
мента решетки; En(z) = exp[-jk(x„ sinPcos6 + yn sin|Jsin9 + zx
xcosP)]— комплексная амплитуда облучающей волны в месте
расположения n-ого вибратора; xn = Ro cos[2n(n-l)/N];
yn = Ro sin[2n(n -1)/N] — координаты п-го вибратора в плоско-
сти раскрыва антенной решетки; anm ~ а0 + dnm, а0 и 10 — радиус
поперечного сечения и длина вибратора; Wo = 120л — волновое со-
противление свободного пространства; dmn = 2Rosin(rc |n - m|/N) —
расстояние между антенными элементами; Jo(...) — функция Бес-
селя первого рода нулевого порядка, Н^2)(...) — функция Ханке-
ля второго рода нулевого порядка; Л — знак комплексного сопря-
жения. При размещении антенной решетки в свободном простран-
стве нижний предел интегрирования в (3.3.1) равен нулю вслед-
ствие отсутствия зеркального отражения волн от плоскости.
Для решения системы (3.3.1) методом Крылова—Боголюбова
[180] амплитудно-фазовое распределение тока аппроксимирова-
но конечной последовательностью кусочно-постоянных функций
с весовыми коэффициентами 1^ (р = 1...2М), где М — число ин-
тервалов разбиения вибратора. При этом интегральные уравне-
ния преобразуется в систему линейных алгебраических уравне-
ний с матричным оператором Фредгольма
(3.3.2)
где {А™1}— матрица обобщенных импедансов;
пт _ пт av<2M)Sin(k(z1v-Zp))-a^sin(k(z;-z([,2M)))
sin(k|zi-z,p2M)D
4z£Y
2
. 2jcZb>, j.
рм
sin k zt -
Zp 2
sin
sin
k z;-z«
4zM\l
__p_
2
-i-sin kz*-z“
AzM 'll
m M nZp
” zv 2
139
1 Гт nm „пттпшх
— LLvp ~Jk(Bvp -rvp Lvp)“
ZP
к2 2
л z/^inm л nmnnm . /„nm\ тлт\ .
-у (Чр -2rvp Bvp + (rvp J Lvp) +
k3
i /тлпт n„nnip»nm । п/пт\2ппт /пт\3т nm\ 1
exp(-jkrnm) fT(Uvp ~3 vp Cv₽ 3( vp ) Bvp vp ) L'p)J
4n 1 приапт<5Дгр;
Azp
C
(kAzp Y
2 ,
E-+jk^Fv7
&
Lnvp=ln
rpnm
Avp
при anm > 54zp;
= Дгр;
Cnm
vp
/ д \3
2 yst. j +3Azv(zp-z“)2
Dnm=A7a2 I \ ________
^Vp AZpanm +
1 pp-z?
120 [ r™
Enm
vp
9 nm
4rvp
_1( _Az^
40 2r"m
I vp
'p
( ~n
3-30 _E--v-
C
+ 35
zm — zn
p V
nm
Xvp
140
, 1 [ Azp
40[2<pm
„nm
rvp
+ 35
m _ n
'p
nm
rvp
jj Azp
401 2r““
_nrr.
r-> J
1 f Az
nm x p
vp 60 2rT
C=7a2nni+(Z”-Z;);
(v,p = 1...2M);
y” — вектор-столбец эквивалентных потенциалов
. • 2л ojq /_пч S^z*)sin[k(z"-zM)] + S^z“)sm[k(z"--z*)]
Т" V sin(k|z«-z: 1) f
В результате решения (3.3.2) вычислены комплексные токи в
нагрузках, и с использованием полученных результатов рассчи-
тана погрешность пеленгования ИРИ, обусловленная переотра-
жением поля между антенными элементами. На рис. 3.3.1 при-
ведена зависимость абсолютного значения систематической ошиб-
ки измерения азимута прихода облучающей волны от электри-
ческого радиуса решетки при 10 == Х/4 и а0 = Х/40; на рис. 3.3.2 —
зависимость ошибки пеленгования от электрической длины виб-
ратора для случая, когда расстояние между ближайшими антен-
нами равно Х/2. В дальнейших расчетах длина и радиус попе-
Рис. 3.3.1. Зависимости ошибок пеленгования от электрического
радиуса решетки
141
Рис.3.3.2. Зависимости ошибки пеленгования от электрической
длины вибратора
речного сечения вибратора выбирались из условия обеспечения
минимальной действующей высоты hmin антенного элемента, при
которой решетка имеет наибольший коэффициент усиления и
малую реактивную составляющую входного сопротивления в ди-
апазоне рабочих частот пеленгатора. Согласно [155], в диапазоне
30... 100 МГц минимальная действующая высота вибратора дол-
жна составлять 110 мм, поэтому длина вибратора принимается
равной 260 мм, а радиус поперечного сечения 10 мм; в диапазо-
не 100...400 МГц hmin^ 640 мм при 10« 240 мм и а0= 10 мм; в диа-
пазоне 400... 1200 МГц hrnin = 800 мм при 10= 145 мм и а0= 10 мм.
Зависимость систематической ошибки пеленгования от углово-
го положения ИРИ представима функцией с периодом л/N. Ана-
лиз показал, что в диапазоне 30...100 МГц погрешность измерения
направления прихода сигнала определяется, в основном, отраже-
нием падающих радиоволн от плоскости и лежит в пределах
Р = (1,5...2)с. Максимальная ошибка оценки пеленга с учетом рас-
сеяния поля на антенной решетке из 5... 16 элементов, располо-
женной в свободном пространстве, не превышает 1,5". Увеличение
погрешности пеленгования ИРИ при размещении антенной решет-
ки на проводящей плоскости обусловлено возрастанием ошибки
измерения разностей фаз принимаемых радиосигналов вследствие
интерференции облучающего поля и электромагнитных волн, не-
реизлученных плоскостью на антенные элементы. При наличии
проводящей плоскости в диапазоне 100...400 МГц погрешность
пеленгования достигает 4 , в диапазоне 400...1200 МГц — (4,5...5)";
при размехцении антенной решетки в свободном пространстве сис-
тематические ошибки измерения линии положения излучателя
снижаются соответственно до 3,5е и 4е.
На рис. 3.3.3—3.3.5 приведены графики зависимостей погреш-
ности пеленгования от направления прихода облучающей волны
142
a)
6)
Рис. 3.3.3. Зависимости ошибок пеленгования от направления при-
хода волны (N=5)
б)
Рис. 3.3.4. Зависимости ошибок пеленгования от направления при-
хода волны (N=8)
143
Рис. 3.3.5. Зависимости ошибок пеленгования от направления при-
хода волны (N=16)
для решеток из 5, 8 и 16 антенных элементов, расположенных в
свободном пространстве (рис. 3.3.3а — 3.3.5а) и на бесконечной
идеально проводящей плоскости (рис. 3.3.36 — 3.3.56); в диапазо-
не 30... 100 МГц кривые имеют вид штрих-пунктирных линий, в
диапазоне 100...400 МГц — штриховых линий, в диапазоне
400...1200 МГц — сплошных линий. Как отмечалось, радиус попе-
речного сечения вибратора равен 10 мм, длина — соответственно
260 мм, 240 мм, 145 мм для рассматриваемых диапазонов.
Теперь рассмотрим эквидистантную кольцевую антенную ре-
шетку из 9 вертикальных несимметричных вибраторов с емкос-
тными нагрузками в виде тонких металлических дисков, функ-
ционирующую в диапазоне 30...100 МГц в секторе углов O...36O0.
Диски обеспечивают компенсацию реактивной составляющей
входного сопротивления вибраторов [48], при этом улучшается
качество согласования антенной системы с приемным устрой-
ством пеленгатора в широкой полосе частот. Будем считать, что
решетка, как и в предыдущем случае, расположена па идеально
проводящей плоскости, также имитирующей поверхность кор-
пуса носителя пеленгатора (вертолета, автомобиля и т.п.); длина
вибратора 10 = 245 мм, радиус поперечного сечения Ьо=1О мм;
радиус диска а0 = 200 мм; один из вибраторов помещен в центре
решетки, а остальные на окружности радиуса Ro = 1,5 м. Расчет
144
комплексных токов IBn(zH) в нагрузках, подключенных в точках
z n = l,N0 , с учетом переотражения радиоволн в антенной ре-
шетке осуществлялся путем решения интегральных уравнений
Фредгольма первого рода с регулярным ядром, полученных из
условий излучения на бесконечности и граничных условий для
системы несимметричных вибраторов с дисками на торцах [48]
No
Z JlBn(Z') Gnm(z-z',Rnm)dz' + Anm(z) > =
И=1 О
= j^{Sm(z) + Ira(z)WHsin(k|z|)}, (-]0 < z < 10);
Wo
No a2 7 .
£ / !... <Z')G nm (Z - Z'> rnm )dz'| z-),, + Bnn. )
= 0,(0 < rnm < anni)
(3.3.3)
Anra(z) = Jj0(bnm^2coS(7k4? z) Cnm©
0
Bnn>(rnra) = jj1(rnro^) CJira(O
0
CnniQ=7pIw(p)J1(^p)dp;
где Gnm(z - z', rnm) — ядро интегрального уравнения, функция
Грина для системы тонких параллельных вибраторов [19]; Sm(z) —
функция возбуждения m-го вибратора; 1дп(г) — плотности токов
на поверхностях дисков; WH — импеданс антенной нагрузки,
равный комплексно сопряженному входному сопротивлению
вибратора; J01(...) — функции Бесселя первого рода нулевого и
первого порядков.
В результате решения (3.3.3) методом моментов найдены токи
в нагрузках антенных элементов. На рис. 3.3.6 приведен пример
распределения действительных и мнимых частей токов в антен-
ных нагрузках, вычисленного путем решения (3.3.3), (сплош-
ные линии) и распределения действительных и мнимых частей
токов в антенных нагрузках, вычисленного без учета взаимного
переизлучения радиоволн кольцевой решеткой с центральным
этементом, расположенной в свободном пространстве (штрихо-
вые линии) для частоты 100 МГц. Как следует из полученных
145
Рис. 3.3.6. Распределения токов в антенных нагрузках
результатов, рассеяние поля антенной системой и корпусом ее
носителя искажает амплитудно-фазовое распределение токов в
антенных нагрузках и приводит к значительной погрешности
пеленгования — 3...3,5° для данного диапазона частот и до 10° в
диапазонах частот свыше 400 МГц.
Итак, приведенные результаты могут рассматриваться как
объективно существующие ограничения на точность угломерно-
го метода при определении направления на излучатель фазовым
способом. Рассеяние поля корпусом объекта, на котором распо-
лагается пеленгатор, и другими отражателями приводит к воз-
растанию систематической ошибки измерения координат, при
этом величина этой ошибки для наблюдателя случайным обра-
зом меняется для разных частот и направлений прихода разве-
дываемого сигнала. Точность местоопределения ИРИ может быть
повышена за счет калибровки пеленгатора, основанной на оцен-
ке линии положения известного (реперного) излучателя [155], а
также путем корреляционной обработки принятых колебаний
при сравнении их с опорными, поступающими с определенных
направлений, то есть вычисления наименьшего среднеквадрати-
ческого отклонения линии положения пеленгуемого излучателя
по отношению к фиксированным значениям пеленгов [218]. Од-
нако при этом существенно увеличивается массив фиксирован-
ных значений пеленгов и комплексных токов, которые требует-
ся запомнить в качестве опорных, возрастает время обработки и
объем вычислений.
В работе [164] для повышения точности и быстродействия
пеленгатора был предложен способ обработки сигналов на выхо-
дах элементов эквидистантной антенной решетки на основе ис-
пользования нейронной сети с обучением [194] в условиях апри-
орной неопределенности относительно статистической структу-
ре
pbi систематических ошибок. Как оказалось, данный способ по-
зволяет получить достаточно емкую, адаптивную вычислитель-
ную процедуру для определения пеленга ИРИ. Адаптация ней-
ронной сети может проводиться на основе данных, полученных
в ходе натурных экспериментов или решения модельной задачи
дифракции радиоволн для антенной системы и ее носителя. При
этом нейрокомпьютеры способны реализовать любой алгоритм
обработки информации с той особенностью, что его программи-
рование заменяется в данном случае обучением нейронной сети.
Следует отметить, что обоснование нейросетевых алгоритмов во
многом базируется на реализации эвристического и эмпиричес-
кого подходов при задании архитектуры нейронной сети, а так-
же правил и параметров обучения. Поэтому в большинстве слу-
чаев нельзя заранее сказать, что полученный вариант алгоритма
обработки является наилучшим, и требуется проведение опреде-
ленного количества вычислительных экспериментов, подтверж-
дающих его достаточность.
В связи с изложенным при использовании любой многоэле-
ментной антенной системы конкретного типа, возникает задача
построения функционала общего вида Y = F(X), связывающего
направление прихода радиоволны Y = (а, |3)т с входным вектором
X = (A1,B1,...,An ,Bn )т, компоненты которого содержат значения
действительных Ат и мнимых Вт частей токов, наводимых па-
дающей радиоволной в нагрузках антенной системы пеленгато-
ра, состоящей в общем случае из No элементов. Исходными данны-
ми для ее решения в условиях отсутствия адекватной статистичес-
кой или функциональной модели возникающих искажений слу-
жат массивы значений вектора X : {X^k : п = 1,N; k = l.K; j = 1, J}
для фиксированного набора частот f и направлений Y = (an, |Зк)т,
выбираемых в пределах рабочего диапазона частот и сектора
направлений пеленгатора с некоторой дискретностью.
Будем для определенности рассматривать плоскостную зада-
чу определения пеленга па ИРИ в азимутальной плоскости при
(3 = 0. При анализе различных вариантов в [164] предложена ар-
хитектура нейронной сети, формально реализующая способ “при-
ведения” многоэлементной антенной решетки к некоторой иде-
альной пеленгационной паре невзаимодействующих ненаправ-
ленных антенн фазового пеленгатора. Архитектура сети, струк-
тура нейронов и преобразование выхода сети имеют вид, пока-
занный на рис. 3.3.7. Сеть является трехслойной, с полными
связями и сигмоидальными активационными функциями ней-
ронов [194]. Каждый нейрон сети дополнительно наделен обуча-
емым смещением. Первый (входной) слой сети состоит из 2N0
нейронов, на которые подаются нормированные значения дей-
147
1
нейронной сети
Рис. 3.3.7. К описанию нейронной сети
ствительных и мнимых частей комплексных токов в нагрузках
антенных элементов, используемых для приема сигналов
д Rel (z„m) ~ Iml (z„ ) „ —
ni I т / N 7 ’ и ’
JZMM2 JZMM2
V т=1 V т=1
где IBm(z) — ток в m-ом антенном элементе; zHm — координата точ-
ки подключения нагрузки. Второй (скрытый) слой содержит в об-
щем случае М > 2N0 нейронов. Третий (выходной) слой состоит из
двух нейронов, которые для заданного направления прихода ра-
диоволны в азимутальной плоскости а должны в идеале выдавать,
как это показано на рис. 3.3.7, выходной вектор = (а,Ь)т, где
а = cos a; b « sin а — компоненты Y£\ изменяющиеся в пределах
от -1 до 1. Такое задание “выхода” обеспечивает сохранение масш-
таба данных, распространяемых по сети, и весьма удобно с пози-
ций обучения. Условно архитектуру такой сети определим обозна-
чением 2NoxMx2. Для ее обучения целесообразно использовать ал-
горитм обратного распространения ошибки [194] с введением эле-
мента инерции, при котором величина коррекции веса нейрона на
р+1-ом шаге обучения Aw п пропорциональна величине коррек-
ции этого веса на предыдущем р-ом шаге Awp, Awp+1 = Т]SIN + yAwp,
где IN — уровень входного, связанного с корректируемым весом w,
сигнала нейрона, 8 — коэ4>фициент, вычисляемый при обучении.
При проведении последующих экспериментов коэффициент скорос-
ти обучения т] задавался равным 0,7, коэффициент инерции 8 — 0,9.
Исходными данными для обучения и исследования эффектив-
ности сети являются общая выборка в виде множества значений
“входов” X = {Х£} : а = 1,360; j = 1,15} (дискретность а для опреде-
ленности задавалась равной Г) и требуемых “выходов” Y={Y^)}.
148
Она может произвольным образом разбиваться на обучающую вы-
борку X = {Х^}, Y = {Ya} и рабочую (тестирующую) выборку
X = {Х^}, Y = {Yrt}. При подаче на вход сети вектора Х^ на выхо-
де сети вычисляется оценка Ya =(а,Ь)г, а затем и оценка пеленга
а ~ arctg b/a . На этапе обучения, зная истинное значение а и со-
ответствующее значение требуемого выхода сети Y„Q) = Ya = (a,b)T,
после получения оценок Ya, а производится проход сети в обрат-
ном направлении с исходной ошибкой, вычисляемой на основе раз-
ности Y^o) - Ya. На этапе тестирования сети вычисляется непосред-
ственно оценка CKO a = 7(a“&)2 > полученная путем усреднения
по ансамблю реализаций предъявляемых направлений.
В качестве примера рассмотрим задачу построения алгоритма
пеленгования для антенной решетки с емкостными нагрузками,
комплексные токи в которых описываются выражением (3.3.3).
Для антенной системы данного типа рассматривалась нейрон-
ная сеть с архитектурой 16x16x2. В ходе исследования точност-
ных характеристик сети при определении пеленга было проведе-
но три группы численных экспериментов.
В первой группе экспериментов оценена погрешность пелен-
гования и определялась ее зависимость от интервала дискрети-
зации по частоте при формировании обучающей выборки X из
исходного множества данных X в отсутствие собственных шу-
мов пеленгатора. Сформированы четыре обучающие выборки
X1={X^>:a = l,360; j = 1Д5},
Х2 = {Х^> : а = 1,360; j = 1,3,5,7,9,11,13,15},
Х3 = {Х^; а = 1,360; j = 1,4,7,10,13}, Х4 = {Х^ : а = 1,360; j = 1,6,11},
соответствующие различным интервалам дискретизации исходно-
го множества данных X по частоте, а также рабочие выборки
Xt =Xj , Х{ =X\Xit i = 2,4. Таким образом, при данном порядке
формирования обучающих и рабочих выборок определяется влия-
ние величины интервала дискретизации диапазона частот (5, 10, 15
и 25 МГц) при формировании исходных данных, используемых
для обучения алгоритма обработки, на его результирующую эф-
фективность при предъявлении входных данных, не участвовав-
ших в обучении. В ходе проведения эксперимента были получены
результаты, представленные в табл. 3.3.1 (“Эксперимент I”). В строке
“Обучение” обозначены выборки, на которых проходило обучение.
Значения СКО оценок пеленгов при тестировании сети на Обучаю-
щих и рабочих выборках обозначены соответственно а и о.
Следующая Группа экспериментов имела цель определить
погрешность пеленгования и ее зависимость от интервала дис-
149
Таблица 3.3.1
Результаты вычислительного эксперимента
Обучение Эксперимент I Эксперимент II
Х1 Х2 Х3 Х4 X, Х2 Х3 X. Х5 X, х,
9-ти - (J, град элем. у 0,19 0,19 0,22 0,22 0,21 0,44 0,60 0,57 0,97 0,62 0,37
решет- « ка ст‘ г₽ад 0,19 0,37 0,43 2,16 0,21 0,43 0,59 0,94 2,51 5,57 12,78
3-х =, т О, град элем. 0,29 0,39 0.40 0,40 0,37 0,55 0,85 0,49 0,78 0,54 0,35
решет- - ка °-град 0,29 0,50 0,83 2,31 0,37 0,88 0,95 1,13 3,33 7,17 15,23
кретизации по направлению при формировании обучающей вы-
борки X из исходного множества данных X в отсутствие соб-
ственных шумов пеленгатора. Обучающие выборки
Xi={X(aj>:a = n Да + 1, п = 0,1,2,...; j = М5}, Да<= 2’, 10', 20", 30\
50°, 70е, 90° соответствовали различным интервалам дискретиза-
ции исходного множества^ данных X по направлению, а рабочие
выборки задавались как \ = Х\Х,, i = 1,7 . Полученные резуль-
таты представлены в табл. 3.3.1 (“Эксперимент П”).
При проведении третьей группы экспериментов исследовалось
влияние собственных шумов в антенной системе на погрешность
пеленгования и определялась зависимость погрешности пеленгова-
ния от величины отношения уровня сигнала к шуму. Нейронная
сеть обучалась на выборках Х1,...,Х4 и тестировалась на рабочих
выборках Х1,...,Х4, сформированных для условий первого экспе-
римента, за исключением того, что элементы исходного множества
данных X были предварительно искажены реализацией гауссовс-
Рис. 3.3.8. Зависимости СКО определе-
ния пеленга от отношения сигнал-шум на
выходе антенной системы
кого шума. На рис.
3.3.8 приведены
зависимости СКО опре-
деления пеленга для
обучающей (сплошная
линия) и рабочей
(штриховая линия) вы-
борок от отношения
сигнал-шум q на выхо-
де антенной системы
после обучения на вы-
борке Х3. Из приведен-
ной зависимости следу-
ет, что при отношении
сигнал-шум 15...20 дБ
погрешность пеленго-
150
вания составляет величина порядка 6... 10’. Полученные оценки
влияния искажений исходных данных» вызванных шумами, опре-
деляют необходимость реализации отношения сигнал-шум не ме-
нее 30 дБ на выходе антенной системы. Поэтому при обучении сети
по значениям токов при измерении пеленгов на реперные источни-
ки в ходе натурного эксперимента необходимо использовать проце-
дуру статистического усреднения значений входных сигналов ал-
горитма обработки таким образом, чтобы обучение нейронной сети
проводилось только по систематическим искажениям распределе-
ния токов в нагрузках.
По аналогичной схеме были проведены исследования ошибок
пеленгования при использовании антенной системы в виде ре-
шетки из трех вертикальных симметричных вибраторов с дли-
ной плеча 125 мм, расположенных в вершинах равностороннего
треугольника на расстоянии 1,5 м друг от друга. Значения ком-
плексных токов, соответствующих фиксированным направлени-
ям прихода радиоволн, определялись путем решения интеграль-
ного уравнения Халлена для решетки вибраторов [111]. Нейрон-
ная сеть имела архитектуру 6x12x2. Результаты экспериментов
для данной антенной системы также приведены в табл. 3.3.1.
Как следует из этих результатов, предложенный алгоритм об-
работки обладает хорошими аппроксимирующими свойствами при
восстановлении функционала “вход”—“выход”, если интервалы
дискретизации по частоте и направлению при обучении не пре-
восходят соответственно 10 МГц и 10°. Он позволяет существен-
но (в 5... 10 раз) снизить систематическую ошибку пеленгова-
ния, обусловленную вторичным переизлучением элементов ан-
тенны и корпуса носителя, при реализуемых на практике интер-
валах дискретизации исходных обучающих данных по частоте и
направлению в сравнении с оценками направления на ИРИ [155],
получаемыми без учета такого рода эффектов.
Дальнейшее развитие данный подход нашел в работе [165],
где исследовались возможности нейросетевых алгоритмов обра-
ботки в интересах совместного определения азимута и угла мес-
та ИРИ при многолучевом распространении и рассеянии поля
антенной системой радиопеленгатора. Показано, что при рацио-
нальном выборе способа обучения аппроксимирующие возмож-
ности нейронных сетей позволяют применять предложенный
подход для пеленгования источника в выделяемых секторах и
поддиапазонах рабочих частот.
Выполненный анализ свидетельствует о возможности постро-
ения эффективных нейросетевых алгоритмов обработки сигна-
лов на выходе антенных систем пеленгаторов, для которых тре-
буется весьма незначительный вычислительный ресурс. С уче-
151
том современных возможностей создания аналоговых и цифро-
вых специализированных процессоров обработки данных парал-
лельного типа, можно ожидать, что такие алгоритмы обеспечат
определение направления на источник радиоизлучения практи-
чески в реальном масштабе времени.
3.4. Эффективность приема частично
поляризованных сигналов на фоне помех
Наряду с традиционными методами пространственно-времен-
ной обработки, используемыми для оптимизации процессов пе-
редачи и приема сигналов при наличии помех, при разработке
различных РЭС весьма широко используются методы, основан-
ные на поляризационных свойствах электромагнитных волн.
Выигрыш в эффективности, полученный при поляризационной
обработке, оказывается в ряде случаев не меньшим, чем для ча-
стотно-временной или пространственно-временной обработок. Так,
при близких спектрально-временных характеристиках полезных
и мешающих воздействий и при близких направлениях, с кото-
рых поступают полезный и мешающий сигналы, возможности
пространственно-временной обработки падают. В то же время
наличие поляризационных различий в сигналах и помехах по-
зволяет добиться значительного улучшения качества приема.
С позиций информационного обеспечения конфликта необхо-
димо учитывать несколько обстоятельств. Во-первых, наличие
дополнительной информации о поляризационной структуре по-
лезного сигнала позволит более точно выявить принадлежность
РЭС к определенному типу; во-вторых, при одновременном при-
еме двух ортогонально поляризованных колебаний за счет более
полного учета различий в сигналах и помехах улучшатся энер-
гетические характеристики и, как следствие, качество обнару-
жения и измерения информативных параметров сигналов. По-
этому в процессе разведки, когда априорная информация о по-
ляризационной структуре сигналов зачастую отсутствует, необ-
ходимо ориентироваться на прием, исключающий неоправданные
потери за счет несогласованности поляризаций антенны и при-
нимаемой в общем случае частично поляризованной волны.
Анализ принципов построения, режимов работы и техничес-
ких характеристик основных классов РЭС — объектов разведки,
показывает, что в подавляющем большинстве в средствах связи,
радиолокации и радионавигации используются сигналы с поля-
ризацией простого вида, т.е. с линейной, круговой и эллипти-
ческой. Состояние излучаемых сигналов может изменяться в
процессе функционирования РЭС путем управления поляриза-
ционными параметрами, включая их непрерывное или дискрет-
152
ное изменение в зависимости от условий сигнально-помеховой
обстановки. Преднамеренные или непреднамеренные помехи
обычно имеют случайную поляризацию, когда вектор электри-
ческого поля описывает в пространстве фигуру случайной фор-
мы, меняющуюся во времени. В частных случаях могут созда-
ваться прицельные по поляризации помехи, т. е. помехи, состо-
яние поляризации которых совпадает с излучаемыми (переотра-
женными) сигналами имеющими поляризацию простого вида.
3.4.1. Обнаружение эллиптически поляризованного сигнала
Будем рассматривать сигналы, создаваемые на раскрыве ан-
тенны точечным источником электромагнитного излучения. Под
сигналами будем понимать напряженность электрической состав-
ляющей поля, имеющей векторную структуру
x(t) = k1x1(t) + k2x2(t), (3.4.1)
где kp к2 — единичные орты, xjt) = st(t) 4- n^t), (i = 1,2) или
Xj(t) = njt); sjt), n^t) — ортогональные компоненты соответствен-
но полезного сигнала и шума.
Положим, что компоненты вектора s.(t) являются узкополосны-
ми радиосигналами s^t) = a^tJcosfojQt + cp(t) - cpj. Здесь at — амп-
литуды, ср. — начальные фазы, A(t), <p(t) — законы амплитудной и
фазовой модуляции. Воспользовавшись для определенности орто-
гонально-круговым разложением эллиптически поляризованной
волны [117], при котором поляризационная структура полезного
сигнала полностью определяется коэффициентом эллиптичности К
и углом ориентации О эллипса поляризации К « (аг - а2)/(а1 4- а2),
0 = 0,5(4)! ” Фа)» перепишем сигнал s(t) = (&!(t), s2(t))T в виде
s(t) = a1sc(t)cosq>1 + а^/Овтф^ (3.4.2)
где
( 1 — К V
sc(t) = A(t) cos[(o0t + <p(t)], —— cos[coot + (p(t) + 20] I ;
\ 1 + К j
( i—к V
ss(t) = A(t) зш[а^ + <р(0], -—— sin[coot + cp(t) + 20] .
\ 1 + К I
Допустим для определенности, что начальная фаза (рх сигнала (3.4.2)
случайна и распределена равновероятно на интервале [0,2л], при
этом величина О « const. Правомерность такого допущения выте-
кает из анализа принципов излучения поляризованных радиосиг-
налов, когда используется единый задающий генератор колебаний
с последующим формированием поляризационной структуры сиг-
нала с помощью стандартных радиоэлектронных устройств [72].
Поскольку сигнал s(t) характеризует поляризационную струк-
туру принимаемой волны в плоскости, перпендикулярной паправ-
153
лению ее распространения, то поляризационная структура сигна-
ла, формируемого в антенне, зависит от направления прихода вол-
ны: амплитуды ортогональных компонент будут определяться про-
екциями вектора s(t) на направления приема в элементах антенны.
Можно показать [137], что значения поляризационных параметров
сигнала при этом преобразуются следующим образом:
Ко = [Ао + Во - V(A0 +В0)2-С*]/Со;
exp{j20o} = (Bo-A^-jPo)^^-]^},
7(Ао+В0)2-С*
где Ао = (1 + К2) + cos20(l - К2); Во = ((1 + К2) - cos20(l - K2)]cos2P;
Со = 4Kcosp; Do = 2sin2O(l - K2)cosP; a, [J — угловые координаты
источника излучения.
Будем считать, что большинство помеховых воздействий ес-
тественного и искусственного происхождения аппроксимирует-
ся двумя моделями: источники узкополосного стационарного
шума и источники белого шума. Помеха, как и полезный сиг-
нал, имеет векторный характер, т.е.
n(t) = (n/t), n2(t))\ (3.4.3)
Компоненты n^t) будем считать стационарными и стационарно свя-
занными случайными нормальными процессами со средними зна-
чениями, равными нулю <п*(1)> = 0, и корреляционной матрицей
K(t) [<11^1)11.(1 + т)>] = [К»(т)], (i,j = 1,2). При этих предположе-
ниях коэффициент эллиптичности и угол ориентации эллипса по-
ляризации шума будут случайны, а статистические характеристи-
ки этих параметров полностью определяются заданием матрицы
К(т). Если ввести значения: р0(т) = К1}(т) / — коэффициенты
корреляции; — спектральная плотность мощности помехи в i-том
канале, и положить рп(т) = р22(т) = р (т); р12(т) = р21(т) = цр(т), то
корреляционную матрицу K(t) можно представить в виде
К(т) - p(T)N , (3.4.4)
где р(т) — функция, характеризующая статистические связи меж-
ду помеховыми напряжениями, a Nn — матрица, описывающая
корреляционные соотношения между поляризационно-ортогональ-
ными компонентами в предположении плоского волнового фронта.
Эта матрица может быть представлена следующим образом
Nx
mTnX n2 ]’ (3-4-5)
N = Nr + N2. Для полностью поляризованной помехи ц = 1, при
частичной поляризации 0 < ц < 1, а при ц = 0 и = N2 помеха
полностью неполяризована.
N = —
п N
154
Если в качестве модели некоррелированной помехи принима-
ется белый шум, то матрица (3.4.5) становится диагональной
м _ 1 NO1 О
No[ О No2]’ (3,4,6)
No = N01 + No2, N01, N02 — спектральные плотности мощности
шума в ортогональных по поляризации каналах. Для полностью
деполяризованного шума Nol N02 = N0/2 и Nm 1/2, где I —
единичная матрица.
Поляризационная структура помехи и шума может быть оха-
рактеризована поляризационными параметрами, введенными по
аналогии с коэффициентом эллиптичности сигнала и в ортого-
нально-круговом базисе разложения представляемыми в виде
тл _ \[^2 . тг _ >/^01 а/^02
I--I----’ I---- I-----
Ж+М лЖГ+аМГ
Эти параметры будут использоваться в дальнейшем при ана-
лизе влияния помехи на эффективность обработки.
Рассмотрим задачу обнаружения эллиптически поляризован-
ного сигнала. На первом этапе анализа считаем, что применяет-
ся оптимальный приемник, т. е. устройство, оптимальное в смыс-
ле критерия, использующего отношение правдоподобия. Соглас-
но [118], для сигнала (3.4.2) и помехи с корреляционной матри-
цей (3.4.5) приемник должен вырабатывать величину
R = VX2+Y2. (3.4.7)
Здесь
т т т т
х = JJx(ti)n(t]>t2)s^(t2)dt1dt2; Y = jJx(t1)i](t1,t2)s^(t2)dt1dt2,
0 0 0 0
где T](tpt2) — матрица, определяемая из решения интегрального
уравнения
1
jK(t1,t)n(t>t2)dt = 5(tj -t2)I. (3.4.8)
о
Воспользовавшись для определенности критерием Неймана—
Пирсона, определим вероятности ложной тревоги PF и правильно-
го обнаружения PD, для чего найдем распределение величины R.
Согласно (3.4.7), R является модулем вектора, компоненты X и Y
которого — случайные нормально распределенные величины, а пер-
вые два момента этих величин в отсутствие сигнала равны
<Х> = <Y> = 0; <Х2> = <Y2> - q; <XY> = 0;
i—к fi—kY
["Пц(^1’Ц)2- cos20T]12(tj,t2)+ 1 - — I T|22(t1,t2)]x
1 + K 11 + К )
о о
xA(t t )A(t2 )cos[w0 (t, -12) + <p(t!) - <p(t2 )]dtjdt2.
155
Следовательно, в отсутствие полезного сигнала величина R рас-
пределена по закону Релея. Полагая, что обнаружение произво-
дится путем сравнения выходного сигнала приемника с порогом
h, для вероятности ложной тревоги имеем
PF = expC-h2^). (3.4.9)
При наличии сигнала на входе приемника
<Х> = a:q cos ср, <Y> = atq sin<pl
Соответственно для' вероятности обнаружения находим
ОО f X
Р» = J uexp -U *q° I0(u7q7)du, (3.4.10)
J-2]nPK \ )
здесь 10(х) — модифицированная функция Бесселя нулевого по-
рядка.
Величину q0 = a2q по аналогии с одномерным случаем можно
интерпретировать как отношение сигнал-шум на выходе опти-
мального приемника. Эта величина входит в (3.4.9), (3.4.10) так
же, как отношение сигнал-шум в одномерном случае, и полнос-
тью определяет качество приема.
Поскольку качество приема полностью определяется величиной
qn, рассмотрим выражение, описывающее qn, более подробно, для
чего положим, что время наблюдения Т много больше времени кор-
реляции помехи и сигнал за пределами интервала [0,Т] равен нулю.
Решая систему уравнений (3.4.8) с помощью преобразования Фу-
рье аналогично одномерному случаю, получим
1—к fi—кУ
4о =а1[Ч1+2—— q12cos20 + —q2], (3.4.11)
1 + IX. I l + ll I
где обозначено:
41 8л Д K22((o)a(co)d(o; (3.4.12)
412 = _ 1 8л J K12(co)a(co)d(o; (3.4.13)
42 =1 ( 8л Д Kn^aC^dw; (3.4.14)
а(со) = [|А(й+со0)|2 + | А(со -w0)|2]/[Kn(w)K22(a>) -Kj2(co)],
где К^(со) (i,j = 1,2) и А((о) — преобразования Фурье для K^ft),
A(t).
Введем обозначения: а2 =а2 +а2 — величина, пропорциональ-
ная суммарной мгновенной мощности ортогональных компонент
сигнала. Так же, как и в (3.4.4), положим, что рп(т) = р22(т) = Р(т)
156
[117]. Тогда с учетом (3.4.12)—(3.4.14) формула (3.4.11) примет
вид
= 2 ,(1 + К2,)а2 (1 + К2)(1 -ь К2) + у(1 - К2 )(1 - K2n ) cos 2Q - 4KKN
q° 4 N (1-KN)2(1 + KN)2(1 + K2)
(3.4.15)
где q' = qj = q2» Y^qW и q', q'2 получены из (3.4.12)—(3.4.14)
путем замены К^(т) на рм(т).
Для определения потенциальных возможностей поляризаци-
онной обработки уточним условия, когда отношение сигнал-шум
и, следовательно, вероятность обнаружения PD максимальны. Эти
условия свяжем с нахождением таких значений параметров Ко,
0О в процессе приема, когда q^K^Oq) > qo(K,0). Таким образом,
речь идет о подстройке приемника обнаружения в зависимости
от структуры помехового воздействия.
Поскольку величины К и KN по модулю не превосходят еди-
ницу, то из (3.4.15) следует формула для оптимального значе-
ния угла ориентации эллипса поляризации:
0, если у > 0;
л/2, если у <0.
Подставляя в (3.4.15) значение 0 = 0О и решая уравнение
dq0/dKK=Kn =0 при условии d2q0/dK2K=Ko < 0 , находим оптималь-
ные значения коэффициента эллиптичности полезного сигнала:
_ lyjd-K^-V/d-K2)2 + 4К^
“о -
©о =
(3.4.16)
(3.4.17)
2Kn
Анализируя (3.4.16), (3.4.17), заметим, что из определения ве-
личины у следует sign у = sign р12(т). Итак, знак коэффициента
взаимной корреляции помеховых компонент определяет наибо-
лее вероятный угол ориентации случайного эллипса поляриза-
ции, причем при р12(т) > 0 наиболее вероятным значением угла
ориентации помехового эллипса является 0N = 0, а при
р12(т) <0 — значение 0N = я/2. Соотношение (3.4.16) означает,
что оптимальный угол ориентации поляризационного эллипса
полезного сигнала должен выбираться таким, чтобы большая ось
этого эллипса была перпендикулярна наиболее вероятному по-
ложению большой оси эллипса поляризации помехи. Из (3.4.17)
кроме количественных соотношений между амплитудами орто-
гональных компонент сигнала и помехи следует, что знак опти-
мального коэффициента эллиптичности Ко должен быть таким,
чтобы направление вращения вектора s(t) было противоположно
направлению вращения вектора n(t). Величины Ко, 0О, как ясно
из (3.4.15), получены в предположении, что мощность принима-
157
емого сигнала постоянна. Значит, увеличение отношения сиг-
нал-шум достигается лишь за счет перераспределения мощности
полезного сигнала между его ортогональными составляющими.
При оптимальном выборе величин К, 0 максимальное значе-
ние отношения сцпт = qo(Ko,0o) зависит от параметров у и KN,
характеризующих поляризационную структуру помехи. Так как
получение зависимости qonT = f(y,KN) затруднено в общем слу-
чае, рассмотрим более частный случай, положив, как в (3.4.5),
р12(т) = цр(т). Тогда у ——q'= Чо(1“Ц2) * Здесь q^ имеет смысл
отношения сигнал—шум для какого-либо одного компонента сиг-
нала при условии, что амплитуда этого компонента и дисперсия
соответствующего компонента помехи равны единице. В этих
предположениях формула (3.4.15) принимает вид
= , a2 1 + K2 (l + K2)(l + K2)-pcos20(l-K2)(l-K2)-4KKN
40 q°Nl-g2 (1-Kn)2(1 + Kn)2(1 + K)2
(3.4.18)
Подставляя в (3.4.18) значения 0Q (3.4.16) и KQ (3.4.17), получим
а2
Qonr =2qo—Q(KN,)1).
(3.4.19)
Зависимости Q от KN при фиксированных ц приведены на
рис. 3.4.1. Графики построены в предположении, что суммарная
мощность компонентов помехи фиксирована, поэтому измене-
ние отношения сигнал-шум обусловлено изменением корреля-
ции между компонентами и перераспределением суммарной мощ-
ности помехи между ними. Величина Q(KK, ц) имеет абсолют-
ный минимум при KN = 0, ц
-0,8 -0,4 0 0,4 0,8 Kn
Рис. 3.4.1. Зависимости ве-
личины Q от поляризационных
параметров помехи
О, т. е. условия приема наименее
благоприятны, если помеховые
компоненты некоррелированы и
имеют одинаковую мощность.
Анализ структуры приемника,
определяемой из (3.4.7), показы-
вает, что для его построения не-
обходимо существенно усложнить
аппаратурную реализацию. Кро-
ме того, априорные знания ряда
параметров сигналов в большин-
стве ситуаций маловероятны. По-
этому рассмотрим более простые
схемы приемников с поляризаци-
онной обработкой, которые ока-
зываются достаточно близкими к
оптимальному по основным пока-
158
зателям качества. Исходя из сущности основных функциональных
операций, выполняемых в оптимальном приемнике частично по-
ляризованных сигналов, можно предложить следующую схему су-
боптимального приемника, изображенную на рис. 3.4.2. Здесь 1 —
поляризационный расщепитель на две ортогональные компонен-
ты; 2 и 2' — аттенюаторы с коэффициентами затухания и а2;
3 — фазовращатель со сдвигом фаз 5; 4 — сумматор, выход которо-
го соединен со входом стандартного разведприемника 5. Введение
аттенюаторов дает возможность использовать компоненты прини-
маемого сигнала с учетом мощности помехи в каждом канале, а
фазовращатель, с одной стороны, позволяет компенсировать сдвиг
фаз между компонентами полезного сигнала с целью наилучшего
сложения, а с другой стороны, при наличии взаимной корреляции
между компонентами помехи, частично компенсирует ее влияние.
Рис. 3.4.2. Блок-схема субоптимального приемника с поляризацион-
ной обработкой
Можно убедиться, что выражение для отношения сигнал-шум
на выходе рассматриваемого субоптимального приемника имеет вид
,а21 + К2
q0, = Ч-------тх
01 N 1 + К2
х (l + Ka)2B1+2(l-Ka)2B2cos(5 + 50) + (l~Kn)2B3
(1 + Ка)2 (1 + Кк )2 + 2(1 - К2 )(1 - К2 )р cos 5 + (1 - KN )2(1 - Кга)2 ’
(3.4.20)
где Ки = (04 - а2)/(а1 + а2); = (1 + К)2; В2 = (1 - К2)2; В3 = (1 - К)2;
80 = -20. Положим, что корреляция между ортогональными ком-
попентами помехи отсутствует, т.е. ц = 0. Тогда из (3.4.20) не-
посредственно получаем, что отношение сигнал-шум будет мак-
симально при условии
8 = 5 =-8 = 20. (3.4.21)
опг О v 7
Подставляя это значение в (3.4.20) и максимизируя полученное
таким образом q01=q01
dq^/dKa = 0, имеем
v 2(1 + К2 )(1 - К2)2 ± J4(l-K2)2(l-K2)4 + D2
=----------------------------------------
€. по К_, т.е. решая уравнение
^опт
aonTj 2
D-4KN(1-K2)2
(3.4.22)
159
где D = (1 - K)2(l + KN)2 - (1 + K)2(l - KN)2. Знак в формуле
(3.4.22) должен выбираться из условия обеспечения абсолютно-
го максимума величины q01. Определив оптимальный параметр
Ка для оптимальных значений затуханий аттенюаторов о^ и а2,
запишем
1 — К
— гл/ Х ОПТ , _ .
0^2 опт ОЦ опт J К > (3.4.23)
где сс1опт — произвольная величина. Но учитывая, что аттенюа-
торы входят в оба поляризационно-ортогональных канала и, зна-
чит, 0ц < 1, a2 < 1 и что чувствительность разведприемника огра-
ничена, следует выбирать а10||Т возможно ближе к единице, но и
в то же время, чтобы а2опт -
В некоторых случаях может оказаться возможным дальней-
шее упрощение структуры поляризационной обработки, а имен-
но использование простого суммирования ортогональных ком-
понент. При исключении этапа “весовой” обработки = a9 = 1,
8 = 0. Тогда выражение для отношения сигнал-шум непосред-
ственно вытекает из (3.4.20) при Ка = 0, 8 = 0. На основе (3.4.20)
несложно также проанализировать схему с переключением ор-
тогональных каналов, т.е. когда и а2 принимают значения 0
и 1 в зависимости от положения коммутатора.
Сопоставление помехозащищенности трех схем субоптимальной
поляризационной обработки сигналов, т.е. схемы с “весовым” сум-
мированием, с простым суммированием и с коммутацией каналов
для одинаковых условий, как и можно было ожидать, свидетель-
ствует в пользу первой схемы; лишь в небольшом количестве част-
ных случаев, вероятность которых на практике невелика, эти спо-
собы обработки могут оказаться примерно эквивалентными.
Определенное развитие изложенных вопросов теории статисти-
ческой обработки частично поляризованных радиосигналов приме-
нительно к системам обнаружения с пространственно-временной
обработкой в настоящее время достигнуто в работах [95, 119, 135,
138]. Объективные предпосылки этих исследований связаны с тех-
нологическими достижениями в создании антенн, выполненных в
виде решетки, в узлах которой размещены элементы для приема
двух поляризационно-ортогональных составляющих поля с после-
дующей их оптимальной или субоптимальной обработкой. В ре-
зультате было установлено следующее. При наличии на входе раз-
ведприемника помехи типа пространственно-временного белого
шума оптимальной является согласованная обработка сигнала, ко-
торая для узкополосных в пространственно-временном смысле сиг-
налов разделяется на выполняемые в произвольной последователь-
ности поляризационную, пространственную и временную обработ-
160
ки. Существо поляризационной обработки, как уже отмечалось
выше, заключается во взвешенном суммировании мощностей по-
ляризационно-ортогональных компонент сигнала с компенсацией
их фазового сдвига. Обработка сигнала на фоне дополнительного
внешнего мешающего воздействия (типа белого шума или узкопо-
лосного) процессу разведки в совокупности с аддитивной помехой
типа пространственно-временного белого шума разделяется на вре-
менную и пространственно-поляризационную; последняя заключа-
ется в компенсации мешающего сигнала путем вычитания резуль-
тата согласованной пространственной обработки с весовым коэф-
фициентом, определяемым энергетическими и поляризационными
характеристиками, а также зависящим от пространственной кор-
реляции источников полезного и мешающего воздействий, из ре-
зультата согласованной пространственно-поляризационной обработ-
ки сигнала. При этом в общем случае, в том числе для узкополос-
ных в пространственно-временном смысле сигналов, разделение
пространственной и поляризационной обработок не осуществляет-
ся. При наличии на входе мешающих воздействий от нескольких
источников и некоррелированных помех оптимальная обработка
осуществляется с учетом отмеченных особенностей, а также взаим-
ной пространственной корреляции помеховых источников; при ее
отсутствии компенсация воздействия от каждого источника выпол-
няется независимо. Эффективность поляризационной обработки сни-
жается с увеличением числа источников помех; аналогичный эф-
фект имеет место и для пространственно-временной обработки в
условиях нескольких помеховых сигналов. Исследование этапа
пространственной обработки адаптивными методами показало, что
проведенная на первом этапе поляризационная обработка может
существенно ускорить последующий процесс адаптации. Это ока-
зывается особенно важно для малых углов рассогласования направ-
лений прихода сигнала и помех, когда скорость сходимости алго-
ритмов адаптации оказывается невысокой.
3.4.2. Измерение информационных параметров
эллиптически поляризованного сигнала
Найдем оценку произвольного параметра сигнала 1 с учетом
поляризационных свойств последнего, причем анализ, как и в
[106, 136], проведем для наиболее реального (для практики раз-
ведки) случая с помощью неоптимального приемника [85].
Итак, пусть на вход приемного устройства поступает смесь
x(t) = s(t,10) + n(t), t е [0,Т], (3.4.24)
Здесь, как и в (3.4.2),
s(t,l0) = a01sc(t,l0)cos(p01 + a01s,(t,l0)sincp01; (3.4.25)
6- -2357
161
sc(t,l0) = A(t,l0) cosv(t,l0),
L_^cos[v(t,l0) + 2©0] | ;
1 + Ko J
1 — к V
se(t,l0) = A(t,l0) siny(t,l0), ——Asin[v(t,lo) + 20o] ;
\ 1 + K° >
V(t,l0) = co0t + <p(t,l0).
Вектор помехи n(t) аналогичен (3.4.3).
Согласно [85], приемник должен образовывать выходной сиг-
нал, пропорциональный логарифму отношения правдоподобия
М(1) = lnI0[R(l)]-ijs(t,l)vT(t,l) dt, (3.4.26)
2 о
R(l) — модуль случайного процесса на выходе линейной части
приемного устройства
R(l) = Jx(t)vT(t,l) dt,
О
(3.4.27)
v(t,l) — вектор опорного сигнала гетеродина, который можно
представить аналогично (3.4.25)
v(t,l) = а^,. (1,1)0089! +a1v4(t,l)sin<p1; (3.4.28)
Г 1 — К V
vc(t,l) = V(t,l) cosVi(t,l), --cos(Vi(t,l) + 20] ,
I 1 + К I
v,(t,l) = V(t,l)| siny/t,!), ^•sin[y1(t,l) + 20H ,
\ 1 + Ik j
V1(t,l) = CDot + <pJ(t,l),
V(t,l), (p(t,l) — законы амплитудной модуляции, К, 0 — поляри-
зационные параметры опорного сигнала.
Неоптимальность рассматриваемого приемника заключается
в отличии вектора опорного сигнала v(t,l) от оптимального
vonT(t,l), который согласован со структурой полезного сигнала и
помехи и удовлетворяет уравнению
jK(t,t2)vL(t2,D dt2 =sT(t,l).
О
Будем считать, что рассогласование имеется только по поля-
ризационным параметрам сигнала — коэффициенту эллиптич-
ности К и углу ориентации эллипса поляризации 0.
При надежной оценке параметра сигнала, когда имеет место
существенное превышение уровня сигнала над помехами, вы-
ходной эффект можно преобразовать к виду
162
M(l) = z G(1O,1)-^GC(1,1)1 + N(1).
ZiZ
(3.4.29)
Здесь
G(1j,12) = [G^(l1,l2) + Gj(l1,l2)]1'2; (3.4.30)
r!H2!| = Mwt-l.WAU] dt;
G,(1V12)J 2 Jo [sin]
x=i+HrHlcos2(0° -q); Y=i+? Llsin2(0» ~0);
1 + Ko 1 + К 1 + Ko 1 + К
N(l) =
(3.4.31)
V/t.l) = Vtt.l^cosbhOU) + x(l) + У - <P1L
cos[v, (t, 1) + x(l) + у + 20 - ф, ]
x(l) = arctgG,(l0,l)/Gc(l0,l); у = arctgY/X.
В (3.4.31) aj =aj + az2 =a^ ч-а*.,, т.е мощности эллиптически по-
ляризованных принимаемого и опорного сигналов полагаем рав-
ными. Шумовая функция N(l) (3.4.31) на выходе приемника об-
ладает следующими статистическими свойствами:
<N(1)> - 0;
<N(11)N(12)> = G/l^lJcostx/lpip + х(12) - хо?];
где G1(11,12) = [G2S(1„12) + Gjc(l1,l2)] 1/2;
Gir(l„l2)\
G1S(1P12).
____
i-kY
l + K
й - к Y
+K22(tnt2)H-4
I 14- К J
ГТ
J J K-п (tj ,t2) 2K12(tt ,t2)
0 0-
cos 20 +
1 + K
cos
sin
k [Vi (^i ♦ 1]) Vi (t*2
2
X1(l1,l2) = arctg[Gls(ll,l2)/Glc(l1,l2)J,
163
где K^tptg) — элементы корреляционной матрицы K(tpt2).
Пусть оценка параметра осуществляется по положению мак-
симума выходного сигнала приемника М(1), т.е. оценка являет-
ся решением уравнения [dM(l)/dl]lm = 0. Учитывая предположе-
ние о достаточно большой величине отношения сигнал-шум, что
обычно выполняется в процессе разведки, оценку в первом при-
ближении можно искать в виде [85]
• <3-4-32)
z I dl / al |_ Ji
Тогда статистические характеристики оценки — смещение и дис-
персия запишутся следующим образом:
<1т-1о> =Т0-10, (3.4.33)
а2(» =
I d2
dljd^ Jj
(3.4.34)
Если оцениваемый параметр неэнергетический, т.е. отношение
сигнал-шум не зависит от параметра L оценка является несме-
щенной, а выражение для дисперсии упрощается, при этом
1 ТГлГ G1 ) cosfri (1i - U + Х<12 - io ) - Xdi -UP
n dl.alo v
^(D = -i-L-J--------------—----------------------------111.
» H
^[GO-1.)]
1 0
(3.4.35)
Рассмотрим последнее выражение несколько подробнее. Если
положить К = Ко = ±1, KN = 0, то (3.4.35)совпадает с известной
формулой для дисперсии оценки [96]. Действительно, при
К = Ко = ±1 принимаемый и опорный сигналы имеют круговую по-
ляризацию совпадающего направления вращения и в процессе при-
ема участвует один канал. Если К ±1, а Ко +1, то дисперсия
оценки стремится к бесконечности, т.е. в случае поляризационного
рассогласования приемника оценки не существует. В другом част-
ном, но практически интересном случае, когда сигналы линейно
поляризованы, т.е. К = Ко & 0, величина дисперсии оценки будет
зависеть от разности углов ориентации (фазового сдвига) принима-
емого и опорного сигналов.
Детализируем выражение (3.4.35) для оценки неэнергетичес-
кого параметра эллиптически поляризованного сигнала при его
164
приеме на фоне частично поляризованной помехи с корреляци-
онной матрицей (3.4.5). Можно убедиться [132], что
о2(1) = £(K,Ko,0,0o,Kn)gJ(1), (3.4.36)
где
^(K,Ko,0,0o,KN) =
______________(1 + К2)(1 + Ко)2П1(Ко,0о,м,Кк)____________.
(1 + К)2(1 + Ко)2 + 2(1 - К2)(1 - К2) cos2(0 - 0О) + (1 - К)2(1 - К0)2 ’
X 1 + 2Ц
(1-KN)2(1-KO)2
(1 + Kn)2(1 + K0)2
q2(1) — дисперсия оценки параметра в случае одноканальной
(временной) обработки.
Таким образом, (3.4.36) представляет собой произведение двух
сомножителей: один из них характеризует изменения дисперсии за
счет поляризационной обработки, второй — за счет временной об-
работки. Зависимости а^(1) для различных неэнергетических па-
раметров сигнала содержатся в литературе [напр., 85] Так, рассмат-
ривая в качестве примеров оценку времени прихода, длительности
импульса и смещения частоты, имеем, соответственно
~ a V2k , Л
где Qo =------, а параметр у характеризует форму огибающей
2yN
сигнала.
Основной интерес с позиций изучения эффективности поля-
ризационной обработки представляет анализ зависимостей
f;(K,Ko,0,0o,KN) при различных значениях поляризационных па-
раметров принимаемого, опорного и помехового сигналов, которые
иллюстрируются графиками рис. 3.4.3. Здесь принято: К = Ко;
О = 0О; KN - 0; 0,25; 0,5; 1,0; ц = 0 (кривые 1—4); KN = 0; 0,5; 1,0;
ц = 0,8 (кривые 1—3); сплошные кривые соответствуют 0 = 0,
пунктирные — 0 = ±я/2. Из рассмотрения кривых видно, что в
общем случае дисперсия оценки информационного параметра по
сравнению с имеющей место при одноканальной временной обра-
ботке уменьшается. Уровень этого уменьшения зависит от соотно-
шения поляризационных параметров полезного, опорного и меша-
ющего сигналов, степени поляризации помехи и распределения ее
мощности по поляризационно-ортогональным компонентам. В час-
165
Рис. 3.4.3. Зависимости величины ^(K,Ko,0,0o,KN) от поляризаци-
онных параметров сигналов и помех
тности, при отсутствии корреляции компонент помехи уменьше-
ние дисперсии в зависимости от соотношения мощностей помехо-
вых компонент может составить от нескольких единиц до несколь-
ких десятков раз; с ростом коэффициента корреляции уменьше-
ние дисперсии еще более возрастает.
В заключении данного раздела отметим, что из-за громоздкости
статистического описания собственно поляризационных парамет-
ров частично поляризованной волны синтез и анализ оптимальных
и близких к ним по качеству алгоритмов измерения наталкивается
на вычислительные трудности. Поэтому в задачах разведки, где
оценка поляризационных параметров оказывается желательной,
можно ориентироваться на двухэтапную процедуру, включающую
оценивание амплитуд и фаз (разности фаз) ортогональных компо-
нент и последующий расчет искомых характеристик.
3.5. Эффективность приема сверхширокополосных
сигналов на фоне помех
Стремление к повышению информативности радиосистем при-
водит к расширению частотного диапазона РЭС, так как количе-
ство информации, передаваемой в единицу времени, прямо про-
порционально полосе используемых частот. Альтернативой это-
му может являться увеличение времени передачи информации,
но, например, в радиолокации время наблюдения за целью все-
гда ограничено, поэтому проблема полностью не снимается. В
последнее время все больший интерес проявляется к сверхширо-
кополосным сигналам (СШПС) [4, 21, 65—67, 201]; имеются дан-
ные о разработке экспериментального образца РЛС с СШПС и
его успешных испытаниях [203, 211].
Применительно к основным задачам радиолокации примене-
ние таких сигналов позволяет получить ряд очевидных преиму-
166
ществ: повышается разрешающая способность по дальности и
скорости; отраженный от цели сигнал несет не только интег-
ральную информацию, но и данные об отдельных элементах
объекта; устраняются интерференционные провалы в диаграмме
направленности антенны при наблюдении за целью под низким
углом места, поскольку полезный и переотраженный от поверх-
ности сигналы разделяются во времени; растет помехозащищен-
ность в условиях наблюдения в дипольных отражателях, так как
ЭПР цели в малом импульсном объеме обычно превышает ЭПР
пассивной помехи; значительно возрастает конфликтная устой-
чивость при воздействии активных помех, ибо при большой
скважности РЛС с СШПС по средней мощности сопоставимы с
обычными РЛС с узкополосными сигналами, а по импульсной
превосходят их в десятки тысяч раз, при этом средняя мощность
шумовой помехи, как наиболее универсальной, для эффективно-
го воздействия также должна повыситься в десятки тысяч раз,
что не всегда реально. СШП технологии, судя по [201], будут
находить применение и для систем радиосвязи; уже в настоящее
время отмечается возможность создания персональных систем
связи и датчиков малой дальности.
Применение СШПС связано с существенным изменением прин-
ципов построения радиоэлектронной аппаратуры. Непригодными
оказываются большинство элементов и узлов узкополосной техни-
ки излучения, преобразования и приема сигналов. В первую оче-
редь это относится к резонансным устройствам: мостам, циркуля-
торам, усилителям, большинству согласующих устройств и т.д. Как
правило, преобразование частоты при формировании и приеме сиг-
налов невозможно. При приеме импульсных СШПС нано- и субна-
носекундной длительности не осуществляется их детектирование.
Своеобразие новых методов обработки особенно ярко проявляется
при создании импульсных РЛС с СШПС — используются нетради-
ционные методы ударного возбуждения антенн или широкополос-
ных электронных приборов, при приеме производится стробоско-
пическое масштабно-временное преобразование СШПС. Согласно
[4, 20, 63, ПО, 203, 211 и др.], разработка специальных электрон-
ных приборов такого типа уже ведется.
Для разграничения (классификации) РЭС по занимаемой ими
полосе частот воспользуемся определением относительной поло-
сы частот
Л (^верх ^нижн) /(^верх ^нижн)’
В соответствии с этим определением системы или сигналы, имеющие
П^0,01, относятся к узкополосным, 0,01 < q < 0,25 — к широкопо-
лосным, а 0,25 < Т| < 1 — к сверхшироколосным. Возможно, некото-
167
рые физические обоснования для границ между основными типами
сигналов могли бы быть более убедительными, ибо интерпретация
систем типа СПШ все-таки остается достаточно свободной* Например,
утверждение, что система с относительной полосой т] - 0,24 является
широкополосной, а не сверхширокополосной, несколько противоре-
чит сложившимся инженерным представлениям.
В теоретическом плане отказ от традиционного допущения об
узкополосности Af/f0 « 1, f0 — центральная частота сигнала,
приводит к необходимости описания таких сигналов как функ-
ций времени без выделения огибающей и фазы и соответственно
без использования комплексных моделей сигналов. Разумеется,
не должно исключаться применение спектрального анализа, ко-
торый может эффективно использоваться с учетом ряда возни-
кающих особенностей. При обработке СШПС нужно учитывать,
что поле таких сигналов в точке наблюдения не разделяется на
произведение двух сомножителей, один из которых зависит от
времени и описывает форму сигнала, а другой от пространствен-
ных координат и связан с диаграммой направленности антенны,
так как форма СШПС зависит от направления излучения.
Определенный интерес для задач разведки представляет анализ
типовых СШПС, используемых в радиолокации: видеосигнала, од-
нопериодного и многопериодного сигналов [4, 21, 67, 201].
Видеосигналы представляют собой импульс, у которого от-
сутствует несущая частота. Спектр этого сигнала располагается
преимущественно в области низких частот. Так, для импульса
длительностью 3,3 нс 90 % всей энергии сигнала находится ниже
частоты 200 МГц. Однопериодный сигнал может рассматривать-
ся как сигнал на низкой частоте, при этом длительность сигнала
равна одному периоду несущей частоты. При длительности однопе-
риодного импульса 3,3 нс, несущей частоте 300 МГц около 90 %
энергии сигнала приходится на полосу от 200 МГц до 450 МГц.
Для повышения средней мощности излучения видеоимпульса или
однопериодного сигнала может осуществляться его кодирование,
позволяющее повысить значение коэффициента заполнения им-
пульсов. Многопериодный сигнал состоит из нескольких перио-
дов несущей частоты. Для узкополосного сигнала с относитель-
ной полосой 1 % сигнал будет содержать 100 периодов несущей
частоты. Для СШПС, имеющих относительную полосу 25 % и
более, в одном импульсе будет содержаться 4 и менее периодов
несущей частоты.
Выполненные расчеты при типовых технических характерис-
тиках РЛС с СШПС и достижимых уровнях чувствительности
приемников РТР подтверждают возможность энергетического
обнаружения таких сигналов, при этом требуемое соотношение
168
дальности разведки и дальности действия РЛС Dpa3B > 1,2 DpjIC
может быть выполнено.
Учитывая ряд существенных отличий и особенностей СШПС,
ниже более детально рассмотрим основные задачи статистичес-
кого синтеза и анализа эффективности обнаружения и измере-
ния информационных параметров сигналов в процессе РТР, вклю-
чая алгоритмы высокоточного местоопределения.
3,5Л. Эффективность обнаружения сверхширокополосных
сигналов на фоне узкополосных помех и шума
В соответствии с [146] положим, что, как и в (3.2.1), при
гипотезе Но наблюдаемая реализация
м
x(t) = n(t) + £pi(t), (3.5.1)
i=l
а при гипотезе Н. —
м
X(t) = Sp(t) + n(t) + XPi(t). (3.5.2)
i=l
Здесь:
Sp(t) = £s[t-(k-g)0-X] (3.5.3)
k=0
— последовательность СШПС; s(t) — описывает форму одного
импульса; О — значение периода следования импульсов; X —
время прихода сигнала; параметр ц определяет точку последова-
тельности, с которой связано ее время прихода X. Так, при ц = О
величина X представляет собой время прихода первого импульса
последовательности, при ц = (Р-1)/2 — время прихода середи-
ны последовательности, а при ц - Р -1 — время прихода после-
днего сигнала последовательности.
Если используется алгоритм, оптимальный при наличии только
белого шума, обнаружитель должен вырабатывать величину [184]
n Р-1Т
Ц =T7-£(x(t)s[t-(k-)l)0-X]dt. (3.5.4)
No k=cS
Поскольку Lj (3.5.4) является гауссовской случайной вели-
чиной, для вероятностей ложной тревоги PF и правильного обна-
ружения PD можно записать
(3.5.5)
(3.5.6)
где Ф(х) = -1= [ exp(-t2/2)dt — интеграл вероятности; тР о? —
72л Д
169
математическое ожидание и дисперсия случайной величины
(3.5.4), когда верна гипотеза 11^1 = 0,1). Воспользовавшись для
определенности критерием Неймана—Пирсона, найдем из (3.5.5)
значение порога
h = m0 +о0агсФ(1-Рр). (3.5.7)
Здесь агсФ(х) — функция, обратная интегралу вероятности Ф(х).
Тогда для вероятности PD получаем
Рп=1-Ф — агсФ(1-Рр)-Ц! ,
(3.5.8)
где
(3.5.9)
(m, -m0)2
41 2
— отношение сигнал-шум на выходе обнаружителя.
Учитывая предполагаемую статистическую независимость
узкополосных стационарных гауссовских случайных процессов
p.(t), а также то, что СШПС последовательности (3.5.3) не пере-
крываются, для моментов случайной величины L} в отсутствие
сигнала находим
о 2
о0 =q“ +Qp,
(3.5.10)
где
9Р 7
Ч2=ТГ fs2(t)dt (3.5.11)
No L
— отношение сигнал-шум при приеме последовательности (3.5.3)
на фоне белого шума, а
Р М оо оо
=ТГЕ J /Ki(t2-t1)s(t1)s(t2)dt1dt2 (3.5.12)
0 i = l -ов -ео
— составляющая дисперсии случайной величины (3.5.4), обус-
ловленная действием внешних помех, K^tg-tj) — корреляци-
онные функции узкополосных помех p,(t). Полагая далее, что
верна гипотеза Нр при наличии сигнала имеем
m1=q2; о2=о2. (3.5.13)
Подставляя (3.5.10) и (3.5.13) в (3.5.9), находим отношение сиг-
нал-шум на выходе обнаружителя при воздействии на разведп-
риемник узкополосных помех
q12=^H4 = q2/Xi- (3.5.14)
q +пр
Согласно (3.5.8), при о0 = эффективность обнаружения PD пол-
ностью определяется величиной отношения сигнал-шум (3.5.9).
Поэтому параметр *
170
2
Z1=Vi+<w <з-5-15)
41
показывает снижение эффективности обнаружения последова-
тельности СШПС (3.5.3) вследствие воздействия узкополосных
помех. Используя (3.5.11) и (3.5.12), последнюю формулу мож-
но переписать как
2 У, J j* (t2 — t j )s(t! )s(t2)dtлdt2
Хх =1 + ТГ :-----------------• (3.5.16)
0 J s2(t)dt
Выразим потери в эффективности обнаружения, используя спек-
тральное представление. Если спектральные плотности узкопо-
лосных помех имеют прямоугольную форму вида (3.2.19), а кор-
реляционные функции выражаются через спектральные плотно-
сти мощности как (3.2.17), то
Xi=l + Zbivi- (3.5.17)
i=l
где
VN/N,;
J |S(co)| dco
у. = °^'2-------- (3.5.18)
j|S(w)|2 dco
О
— относительная доля энергии СШПС в полосе частот, поражен-
ной i-ой помехой; S(co) — спектр сигнала s(t).
Допустим, что на входе обнаружителя включен режекторный
фильтр с передаточной функцией вида (3.2.22). Тогда на выходе
обнаружителя будет формироваться величина
L2 =^£|х(адк-(к-ц)0-Х]йк. (3.5.19)
No к«оо
Здесь x(t)=n(t) при отсутствии сигнала, и x(t) - sp(t) + n(t) при
наличии сигнала. Для моментов гауссовской случайной величи-
ны Ь2 при отсутствии сигнала
mo=0;a2=q2, (3.5.20)
где q2 определяется из (3.5.11). Соответственно при наличии сиг-
нала можем записать
2Р 7
rnj = * J s(t)s(t)dt; а2 = q2, (3.5.21)
^0
171
здесь s(t) — отклик режекторного фильтра на одиночный СШПС
s(t). Тогда, используя (3.5.9), для отношения сигнал-шум на вы-
ходе обнаружителя (3.5.19) находим
*12
Чг = J s(t)s(t)dt • q“2 = —
LN0 i I X2
(3.5.22)
Параметр
2 OO oo
X2 = = j s2(t)dt/ J s(t)s(t)dt
Я2 °c -00
(3.5.23)
показывает снижение эффективности обнаружения последова-
тельности СШПС (3.5.3) вследствие применения режекторного
фильтра. Используя спектральное представление, (3.5.23) мож-
но переписать как
Х2 =
J S(co)'2 dco/ j:S(co)12 H(j<o)d<o
.0 0
(3.5.24)
Подставляя в (3.5.24) передаточную функцию фильтра (3.5.22),
имеем
( м V2
Х2= •
(3.5.25)
2
Очевидно, применение режекторного фильтра повышает эффектив-
ность обнаружения СШПС на фоне узкополосных помех, если > Хг*
Как и для случая обнаружения узкополосных радиосигналов
(п. 3.2.1), потери обусловлены двумя причинами. Во-первых, при
прохождении через режекторный фильтр СШПС теряет часть энер-
гии. Во-вторых, форма сигнала s(t) после фильтра отличается от
формы исходного сигнала s(t), для которого обнаружитель являет-
ся оптимальным при наличии только белого шума.
Отметим, что формально зависимости (3.5.17) и (3.5.25) анало-
гичны зависимостям (3.2.20) и (3.2.34), соответственно, хотя физи-
ческое содержание параметров vi и оказывается различным.
3.5.2. Анализ эффективности измерения информационных
параметров сверхширокополосных сигналов
При разведке РЛС с СШПС важное значение приобретает из-
мерение времени прихода и периода следования. Зная эти пара-
метры, можно определить местоположение источника излуче-
ния, а также, в случае необходимости, скорость и высоту полета
над землей его носителя.
Следуя [188, 190], будем полагать, что для получения оценок
времени прихода X и периода следования О используется алгоритм
максимального правдоподобия, синтезированный в предположении,
что сигнал принимается только на фоне гауссовского белого шума.
172
Используя результаты [62], для модели входного воздействия (3.5.2)
приведем полученные в этой работе общие выражения для диспер-
сий квазиправдоподобных оценок этих параметров, которые совпа-
дают с оценками максимального правдоподобия при p(t) = 0. Опус-
кая промежуточные выкладки [62], можно записать
D^O)-^. (3.5.26)
Здесь:
2 = No Р2-l + 12[(P-l)/2 + |i2]2, q2 = No 6
* 2F0 2Р(Р2-1) ’ е 2F0 Р(Р2-1)
— дисперсии оценок максимального правдоподобия при нали-
чии только белого шума, a Fo = j [ds(t) / dt]2 dt. Величина
5. =1 + ^-X J j ^dt,dt2/F0 (3.5.2?)
No dt1 dt2
показывает проигрыш в точности оценок времени прихода и пе-
риода повторения СШПС вследствие наличия узкополосной по-
мехи. Если помеха имеет спектральную плотность мощности
(3.2.19), то
м
8j =1 + 2^^, (3.5.28)
J-1
где
Ь,=М;/М0; k,= * j' со2|S(co)|2dco/]co2|S(co)|2dco. (3.5.29)
о
При использовании режекторного фильтра с передаточной
функцией (3.2.22) величина потерь определяется как
( м у2
= 1-Xki ' (3.5.30)
\ 1=1 /
Использование фильтра оправдано при 81 > 52.
В случае поимпульсного распознавания по сигнальным при-
знакам определенный интерес представляет нахождение оценок
параметров каждого СШПС последовательности как при извест-
ных, так и при неизвестных значениях времени прихода и пери-
ода следования сигналов [145].
Наблюдаемую на фоне аддитивного гауссовского белого шума
последовательность СШПС запишем в виде
Г-1
8p(Uo,0oJo) = £s[t-(k-M)0-Mo]. (3-5.31)
к-о
где 1 = (1р...,1р)т — вектор неизвестных параметров, подлежа-
щих оценке.
173
Для расчета потенциальной точности совместных оценок неиз-
вестных параметров необходимо найти сигнальную функцию [85]
2 тг
S(X1,X2,01,02,11,12) = — JsF(t,X1,01,l1)sP(t,X2,02,l2)dt. (3.5.32)
^0 о
Считаем, что интервал наблюдения [0,Т] больше длительности всей
последовательности (3.5.31), величина скважности последователь-
ности не менее 2, так что отдельные импульсы СШПС не перекры-
ваются; аргументы функции (3.5.32) удовлетворяют условию
|Xj-Х2 4-(0i-02)(к-ц)| < -02) для всех к = 0,N-1. Тогда,
подставляя (3.5.31) в (3.5.32), получаем
S(X1,X2,01,02,li Д2)= , Х2,01,02 Дг Д2); (3.5.33)
k=i
®к(^1 Лг»®1>®2 Д1 Дг) - Js[t “(к -ц)01 -ХДДх
N0 0 (3.5.34)
xs[t-(k-|i)02-Х212].
Поскольку рассматривается регулярный случай [191], отдельные
сигналы последовательности предполагаются непрерывно диффе-
ренцируемыми по t и по всем 1., i = 1, р . Поэтому потенциальная
точность оценки всех неизвестных параметров характеризуется
корреляционной матрицей совместно-эффективных оценок
K = F-1, (3.5.35)
при этом информационную матрицу Фишера F представим в виде
блочной (клеточной) матрицы
ГА в] „ Гв/
RT п ; В= R > (3.5.36)
A = [Akn] =
B,=(Bn) =
( 32S
a^al^
a2s
a2s
ЭХ.^02
d2S
a2s
B2=(B2i) =
D = (D4) =
32S
— векторы-строки;
( a2s 1
!
k,n = 1,2, i,j = l,p •
Все производные от сигнальной функции вычисляются при
Xi = Х2 = ®i “ ®2 = ®о» h = ^2 = Выполнив необходимые под-
становки и дифференцирование, находим
174
D = -P(DU); a =
2 irdsctjo)]2^. n 2 Tfras(t,i0) as(t,i)
nJl dt J No{[ at dlj
dt;
u
n 2 Tf as(t.i) ds(t,i) I
° X'J 31,
u -Ho
Положим вначале, что время прихода и период следования
последовательности (3.5.31) априори известны. Тогда, вычерки-
вая в информационной матрице Фишера первые две строки и
первые два столбца, обращая полученную матрицу согласно
(3.5.35), для корреляционной матрицы совместно-эффективных
оценок параметров 1 получаем
K0(l) = D“l = Р’1К1(1),
(3.5.37)
где
K1(l) = [Dij]-1 (3.5.38)
— корреляционная матрица совместно-эффективных оценок па-
раметра при приеме одного СШПС последовательности (3.5.31).
Найдем теперь точность оценок параметров 1 при неизвест-
ном значении периода следования последовательности импуль-
сов. Воспользовавшись формулой Фробениуса [36] для информа-
ционной матрицы Фишера (3.5.46) с вычеркнутыми первой стро-
кой и первым столбцом, корреляционную матрицу совместно
эффективных оценок параметра 1 можно записать в виде
K0(l) = [D-B'2B2/A22]’1.
После необходимых подстановок имеем
КЙ(1) = Р'1Щ1, (3.5.39)
где
Н0 =[a;,Qr1{Rij(-irj -R^RJF1; (3.5.40)
ст2 = — дисперсия эффективной оценки параметра 1. одного
СШПС последовательности (3.5.31), когда значения остальных
параметров вектора 1 известны; Rti = -В; /л/Пна — коэффициент
корреляции между оценками времени прихода и параметра 1к
одного сигнала, когда значения остальных р ~ 1 априори извест-
ны; Rjj — коэффициент корреляции между оцен-
ками параметров и 1. одного сигнала, когда значения осталь-
ц _(p-i)/2
ных р - 2 известны; R = ---------—-------------—— — коэф-
{(Р2 -1) /12 + [(Р -1) / 2 - ц]2 }1/2
175
фициент корреляции совместно-эффективных оценок времени
прихода и периода следования последовательности (3.5.31), ког-
да все параметры I каждого СШПС априори известны [190].
Положим далее, что неизвестно время прихода X, но известен
период следования. Вновь применяя формулу Фробениуса к мат-
рице Фишера без второй строки и без второго столбца, находим
искомую корреляционную матрицу оценок
KJ1) = [D-B?B1/A11]1,
и после подстановок получаем
КХ(1) = Р1НХ1, (3.5.41)
где
Нх =[G;1Gj1{Rij(-l)i+j — RtjRti }]-1. (3.5.42)
Сопоставляя (3.5.37) и (3.5.39), можно определить потери в
точности совместно-эффективных оценок параметров 1 вследствие
незнания периода следования последовательности. В частности,
если Rti = 0, i = 1,р , т.е. все оценки параметров 1 каждого СШПС
некоррелированы с оценкой времени прихода, то Ко(1) = К0(1) и
потери в точности отсутствуют. Тот же результат получаем при
R = 0, при этом оценки времени прихода и периода следования
некоррелированы. Это условие выполняется, когда ц = (R - 1)/2,
т.е. априори известное время прихода последовательности (3.5.31)
отсчитывается от середины. Сопоставляя (3.5.37) и (3.5.41), убеж-
даемся, что при Rti = 0 Ко(1) = Кх(1) и потери в точности оценок
вследствие незнания времени прихода отсутствуют. Поскольку
коэффициент корреляции |R| < 1, то из сопоставления (3.5.40) и
(3.5.42) следует, что незнание времени прихода приводит к бо-
лее значительным потерям в точности оценок параметров 1, чем
незнание периода следования.
Если неизвестны как время прихода, так и период следова-
ния, корреляционная матрица совместно-эффективных оценок
параметров 1 имеет вид
Кхо(1) = Р-1Нх-‘, (3.5.43)
где
Hle=(D-BrA-‘B].
После подстановок находим, что Н? 0 = (3.5.42). Следователь-
но, если априори неизвестны период следования и время прихода
последовательности, то потери в точности оценок параметра 1
СШПС будут такими же, как и в случае, когда неизвестно только
время прихода.
Конкретизируем полученные формулы для часто встречаю-
щихся на практике значений р =1,2. Согласно [190], при оценке
одного параметра последовательности СШПС (3.5.31) с априори
176
известными значениями времени прихода и периода следования
дисперсия эффективной оценки равна
Gq=g2/P.
Здесь о2 — дисперсия оценки при приеме одного СШПС. Если
априори неизвестен период следования, то для дисперсии оцен-
ки из (3.5.39) имеем
=0-/(1-^^).
Если же неизвестно время прихода сигнала или — время прихода
и период следования, то, как следует из (3.5.41), (3.5.43), диспер-
сия эффективной оценки параметра СШПС запишется в виде
Проигрыш в точности оценки в обоих случаях будет зависеть от
значений коэффициентов R,Rtl.
В качестве полезного примера найдем с использованием по-
лученных соотношений оценку параметров последовательности
импульсов вида
s(t,oc,to) =
bexp(-at) sin cot,
О,
t > 0, b = const
t<0.
(3.5.44)
Такие импульсы и их последовательности часто используются в
качестве моделей СШПС. Действительно, один из способов форми-
рования этих сигналов заключается в ударном возбуждении пас-
сивной излучающей структуры очень коротким импульсом или
ступенчатым сигналом с очень коротким фронтом [4]. Частотную
характеристику многих пассивных излучающих структур можно
аппроксимировать характеристикой резонансного контура с малой
добротностью. Анализ сигнальной функции (3.5.33) показывает,
что при d = со/а < 10 наибольший ее побочный максимум имеет
относительное значение не более 0,5. Будем считать, что такой уро-
вень достаточен для однозначного измерения времени прихода им-
пульса (3.5.44). Условие d < 10 требует, чтобы добротность конту-
ра, эквивалентного пассивной излучающей структуре, была не бо-
лее 5...6. В частности, согласно [4], когда d > 15...20, импульс (3.5.44)
уже не является сверхширокополосным.
Выполнив необходимые вычисления для выбранного типа
сигнала и подставляя результат в (3.5.37), находим дисперсии
оценок параметров ос и св при известных остальных параметрах
последовательности
, 4N0oc3(l + d2)3 2 = 4NQa3(l + d2)3
oa Pb2d2(6 + 3d2+d4)’ Ow Pb2(2 + 3d4+d6) (3,5'45)
Потери в точности оценок параметров вследствие наличия неиз-
вестных параметров зависят от коэффициентов корреляции Rti,
Rjj> которые для параметров а и со имеют вид
177
RtI = Rta = -ТГ1+^)/[2(бТз<12 +d4)];
Rt2 = RtM = -d2 7(l + d2)/[2(2 + 3d4+d6)]; (3.5.46)
Rn = RaM = (3 - d2) I V(6 + 3d2 + d4)(2 + 3d4+d6).
Используя (3.5.45), (3.5.46), можно найти потери в точности
оценок параметров а и со импульса (3.5.44) в зависимости от
степени параметрической априорной неопределенности при при-
еме последовательности (3.5.31), а также в зависимости от пара-
метра а, определяющего степень его относительной широкопо-
лосности. Анализ показывает, что незнание параметров последо-
вательности СШПС может привести к увеличению дисперсий
оценок (3.5.45) параметров сигнала а и со в 3...6 раз.
Итак, потери в точности совместно-эффективных оценок па-
раметров СШПС определяются коэффициентом корреляции оце-
нок периода следования и времени прихода последовательности,
а также коэффициентами корреляции оценок каждого из неиз-
вестных параметров сигнала и его времени прихода.
3.5.3. Анализ эффективности определения местоположения
источника сверхширокополосных сигналов
Как уже отмечалось, при приеме СШПС не удается раздельно
осуществить процедуры пространственной и временной обработ-
ки сигналов; более того, не могут быть использованы общепри-
нятые понятия огибающей и фазы. Это обстоятельство необхо-
димо учитывать при обосновании принципов измерения простран-
ственного положения источников излучения [147], так как тра-
диционные методы амплитудной, фазовой и амплитудно-фазовой
пеленгации оказываются неприменимы.
Сначала найдем точность определения угла прихода сигнала.
Для этого используем двухпозиционную приемную антенну, по-
казанную на рис. 3.5.1. В точке М с полярными координатами
(R0,a0) расположен источник СШПС, а в точках с координатами
(-L/2, 0) и (L/2, 0) — первый и
второй измерители времени
прихода сигнала. При Ro » L
разность хода Дг = г1 - г2 =
= с(Х01 - Х02) = Lcosa0, где Х01 и
Рис. 3.5.1. Двухпозиционная
приемная антенная система СШПС
Хо2 — моменты прихода СШПС
на приемники; с — скорость све-
та. Заменяя истинные значения
моментов XOi прихода сигналов
на их оценки X(i = 1,2), для оцен-
ки углового положения получаем
178
a = arccos(ArZL), (3.5.47)
где Ar = c(X2 — оценка разности хода. Обозначим а2Лт — дис-
персия оценки разности хода. Полагая, что оценка разности хода
обладает высокой апостериорной точностью, так что « L/2, для
дисперсии оценки угла прихода, аналогично [179], можно записать
о2 = адг/L2sin2a0. (3.5.48)
Если на вход измерителя поступает аддитивная смесь гауссовского
белого шума с односторонней спектральной плотностью No и сигнала
s(t) и для оценки времени прихода используются два приемника
максимального правдоподобия, то дисперсия оценки разности хода
Стдг1 = 2с2о2 ; здесь о2 — дисперсия оценки времени прихода [85].
Тогда для дисперсии оценки угла прихода сигнала получаем
a2 = 2c2g2 /L2 sin2 а0. (3.5.49)
Представим сверхширокополосный сигнал в виде
s(t) - af(t/T), (3.5.50)
где а — амплитуда сигнала, функция f(x) описывает форму од-
ного импульса, т — длительность импульса. Подставляя (3.5.50)
в формулу для и2 [85], а последнюю в (3.5.49), находим, что
дисперсии оценки угла прихода и разности хода, соответствен-
но, определяются выражениями
/ т> \2
=2 -тЧ /q2A2sin2a0; a2rl = 2R2/q2A2. (3.5.51)
I 1j J
Здесь:
q2 = 2a2r/N0 = 2E/N0 — отношение сигнал-шум для одного
СШПС; Е = j s2(t)dt — энергия сигнала; А2 = j [3f(x)/0x]2dx —
безразмерный параметр, зависящий от формы сигнала; Rs =ст —
пространственная длина одного СШПС.
Известно [77, 179], что при оценке направления прихода уз-
кополосного радиосигнала точность оценки угла определяется
отношением длины волны к базе измерителя; чем это отношение
меньше, тем выше точность оценки угла прихода. Как следует
из (3.5.51), при оценке угла прихода СШПС вместо длины вол-
ны в формулу входит пространственная длина Rs, при этом чем
меньше отношение пространственной длины СШПС к базе изме-
рителя, тем выше точность оценки угла прихода такого типа
сигнала.
Как правило, СШПС обладают большой пиковой мощностью
[4, 21], однако их длительность обычно очень мала, так что от-
ношение сигнал-шум при обработке одиночного импульса часто
оказывается недостаточным для обеспечения требуемой для вы-
179
сокоточного местоопределения погрешности оценки времени при-
хода. В большинстве практических приложений могут исполь-
зоваться последовательности СШПС
р-i
sr (t, X) = £ s(t - kG),
k=0
(3.5.52)
где период повторения О обычно во много раз превосходит дли-
тельность импульса т. Согласно [85], при обработке последова-
тельности (3.5.52) с известным периодом повторения О диспер-
сия оценки максимального правдоподобия времени прихода, а
следовательно и дисперсии оценок разности хода и угла прихода
уменьшаются в Р раз. При незнании параметра О [190] необхо-
димо подставить ot2 в выражение для дисперсии оценки макси-
мального правдоподобия времени прихода сигнала при обработ-
ке последовательности СШПС. Тогда для дисперсий оценки угла
прихода и разности хода получим
(р \2/ Р-1А
<,=2 1 + 3^4 |/Pi2q2 sin2 а„;
P + 1J (3.5.53)
ст2 -2с2<т2(0 2с fl + 3^^^ V 2^s
^-2с<мо0)- р (1+3р+1 J-q^p(1+3p+i)
Сопоставляя выражение для дисперсии оценки угла прихода
последовательности из Р СШПС с известным периодом повторе-
ния и (3.5.53), находим, что проигрыш в точности оценки угла
прихода вследствие незнания периода повторения О равен
^ = 1 + 3 — . (3.5.54)
Согласно (3.5.54), проигрыш в точности оценки угла прихода
из-за незнания периода повторения изменяется от q = 2 при Р = 2
до £ = 4 при Р»1. Таким образом, для последовательности
СШПС, содержащей 10—15 импульсов, незнание периода повто-
рения приводит к увеличению дисперсии оценки угла прихода
примерно в 4 раза.
Полученные результаты могут трактоваться как исходные для
определения местоположения источника радиоизлучения. Сна-
чала рассмотрим триангуляционную систему с базой В. В этом
случае по краям системы должны располагаться двухпозицион-
ные измерители углов (рис. 3.5.1.). Если по-прежнему выполня-
ется условие В2 « R2, то, согласно [77]. среднеквадратическую
ошибку местоопределения ИРИ можно выразить через диспер-
сию а2 оценки угла прихода двухпозиционной системой. Под-
ставляя (3.5.51) в выражение для оТг, получаем среднеквадрати-
ческую ошибку местоопределения излучающего объекта триан-
гуляционной системой при обработке одного СШПС (3.5.50)
180
oTrl = 2RSR2/Aqsin2 cx0LB. (3.5.55)
Согласно (3.5.55), среднеквадратическая ошибка местоопределения
убывает с уменьшением пространственной длины Rs СШПС и с
увеличением базы В триангуляционной системы и базы L каждой
из двухпозиционных систем измерения угла прихода сигнала. Если
обрабатывается последовательность СШПС (3.5.52) с известным
периодом повторения О, то среднеквадратическая ошибка местооп-
ределения aTr2 =aTrl/VP. Наконец, при обработке последователь-
ности (3.5.52) с неизвестным периодом повторения О получаем
2RsR2
aTr3 - ГТ . 2 Г (3.5.56)
VPqAsin a0LB Ц Р + 1 )
т.е. незнание периода повторения О приводит к увеличению сред-
неквадратической ошибки местоопределения в раз.
Для определения местоположения источника радиоизлучения
может также использоваться разностно-дальномерная (гиперболи-
ческая) система, например, с равными базами В, расположенными
под произвольным углом Г. В этом случае необходимо применение
трех измерителей времени прихода СШПС с соответствующей син-
хронизацией. Согласно [77], среднеквадратическую ошибку aCR ме-
________________________________________ 2
стоопределения источника можно выразить через дисперсию Пдг
оценки разности хода в гиперболической системе. Тогда, следуя
обозначениям [77] и вводя по аналогии утлы и у, подставляя
(3.5.51) в общее выражение для aGB, для среднеквадратической
ошибки поимпульсного местоопределения будет
Rq / \ I 2 ( 4^1 1
aCH1 = r_cosec(y)Jcosec T1 + cosec
qA>/2 V (2 J
,2 V2
2
(3.5.57)
Если обрабатывается последовательность из Р сигналов, величи-
на oGB1 уменьшается в >/р раз, т.е. aGB2 = oGB1/VP , а если пери-
од повторения О неизвестен, то
aGB3
Rs / oP-l^l 2(4*2
2—cosec(y)J 1 + 3 cosec +cosec
qAV2P VI P + 1JL I2 J I2
(3.5.58)
Считая, для определенности, что Г = п/2, получаем
oGD1=4RX/B2Aq(l + sin2a0)1/2;
°ОВ2 =асв1/л/Р; (3.5.59)
a - 4R°R* |(1 + 3Р-Ч
°ВЯ “ В2 VPAq(l+ sin2 0,)1'2 Н Р +1)
181
На рис. 3.5.2 приведены зависимости ошибок местоопределе-
ния aGB2 для системы с взаимно-перпендикулярными базами (пун-
ктирная линия) и аТг2 (сплошная линия) от базы В для трех
разных значений длительности импульса (т = 1; 2; 3 нс) . Видно,
что при использовании триангуляционной системы и сопостави-
мых размерах баз В ошибка определения координат оказывает-
ся значительно больше, чем при использовании разностно-даль-
номерной системы.
от базы триангуляционной и разностно-дальномерной системы
Итак, в основе измерений местоположения ИРИ с СШПС ле-
жит определение времени прихода сигнала. В отличие от излу-
чения ИРИ узкополосных сигналов при триангуляции требуется
четыре измерителя, по два на каждой позиции. Учитывая более
высокую точность определения местоположения, а также воз-
можность применения меньшего числа измерителей при соот-
ветствующем навигационно-временном обеспечении их синхро-
низации, можно предположить, что в перспективе системы ги-
перболического типа найдут более широкое применение.
3.5.4 Анализ эффективности измерения частотных
характеристик сверхширокополосных сигналов
Следуя [148], допустим, что короткоимпульсный сигнал, пред-
ставляющий собой в частном случае СШПС, имеет следующие
частотные параметры: Ц — минимальная частота спектра; Q2 —
максимальная частота спектра; у=(Ог+С12)/2 — центральная
частота спектра; Q = Q2“Qj— ширина спектра сигнала. Поло-
жим также, что спектр принимаемого СШПС имеет вид
(3.5.60)
182
В (3.5.60) функция g(oo) (в общем случае комплексная) опи-
сывает форму спектра СШПС в полосе частот ©eJOpOJ. Со-
гласно (3.5.60) СШПС описывается выражением
8(1,оро2) f g((jD)exp(jwt)dca (3.5.61)
Полагаем, что сигнал (3.5.61) наблюдается на фоне гауссовс-
кого белого шума n(t) с односторонней спектральной плотнос-
тью No. Тогда логарифм функционала отношения правдоподо-
бия запишется как [85]
о г г
L(Qj Д22) = — Jx(t)s(t,Qj,Q2)dt--J s^t,^, £22 )dt. (3.5.62)
No 0 No 0
Здесь x(t) = s(t,Q01 ,Q02) + n(t) — реализация наблюдаемых данных
на интервале времени [0;Т]. В соответствии с определением [85]
оценки максимального правдоподобия (ОМП) минимальной
и максимальной Q2 частот спектра СШПС (3.5.61) определяют-
ся следующим образом:
(QPQ2) = argsupL(QpQ2). (3.5.63)
Выразим (3,5.62) через спектр сигнала (3.5.60). Второе слага-
емое с помощью теоремы Парсеваля представим в виде
Js2(t,QpQ2)dt = — J |g(w)|2 do. (3.5.64)
Последнее соотношение получено в предположении, что вре-
мя наблюдения Т много больше длительности СШПС (3.5.61),
так что пределы интегрирования в левой части (3.5.64) можно
заменить на бесконечные. Подставляя (3.5.61) в первое слагае-
мое в правой части (3.5.62), имеем
Т - т
jx(t)s(t,Q1,Q2)dt = — jdt J g(co)x(t)exp(ja)t)da). (3.5.65)
о 2л 0 П1
т
Обозначая x(w) = jx(t)exp(-ju)t)dt— текущий (выборочный)
о
спектр наблюдаемых данных, перепишем (3.5.65)
Т 1
|x(t)s(t,Q1,Q2)dt = — J g(co)x(co)d(D. (3.5.66)
о 2те
Подставляя (3.5.64) и (3.5.66) в (3.5.62), для логарифма фун-
кционала отношения правдоподобия получаем выражение
L(QpQ2) = —— J g(o>) x(co)do) - ——- j ]g(aj)|2dco. (3.5.67)
183
Для расчета характеристик оценок (3.5.63) представим (3.5.67)
в виде
L(QX. Q2) = L2 (Qi) + L2 (Q2) , (3.5.68)
где
nf
L,(Q1) = -4- J[2g(co)x(co)d(o-|g(co)I2]d(o; (3.5.69)
2rcN0 £2i
L2(Q2) = -i- J [2g(<o)x((o)dw-|g(a))|2]dco, (3.5.70)
2eN0 Qf
Qf — произвольное фиксированное значение частоты из интервала
• в частности, можно выбрать Qr = [Qlmnx + Q2n,J/2 .
Как известно [185], гауссовские спектральные меры на неце-
рекрывающихся частотных интервалах ортогональны. Поэтому
слагаемые в (3.5.68) случайные процессы Lj(Qj) и L2(Q2) будут
статистически независимыми. В результате ОМП (3.5.63) мини-
мальной и максимальной частот спектра СШПС можно перепи-
сать как
Qi = arg sup Ц (Q;), Q, e [Qiram,Q,maJ , (3.5.71)
где Q. . , Q. — минимальное или максимальное значения оце-
нок крайних частот.
Введем в рассмотрение максимальное отношение сигнал-шум
f) Т -| ^2п»«
Чп. = Js2(t,Qlmjn;Q2mnx)dt= J g(0))'da>
N01 nNo
(3.5.72)
для принимаемого сигнала. Будем полагать эту величину настоль-
ко большой, что ОМП (3.5.63) обладают высокой апостериорной
точностью.
Чтобы найти в этих условиях характеристики оценки макси-
мальной частоты спектра П2 СШПС, представим (3.5.70) в виде
суммы [85] сигнальной и шумовой функций
L2(Q2) = S2(Q2,Q02) + N2(Q2), (3.5.73)
где
S2(Q2,Q02) =< L2(Q2) >, N2(Q2) = L2(Q2)-<L2(Q2)>. (3.5.74)
Подставляя в (3.5.74) реализацию наблюдаемых данных x(t)
и выполняя усреднение, получаем для сигнальной функции
S.(n„n.2)=-i- f JlgWl’du. (3.5.7S)
о ц о ц
Определим далее выражения для корреляционной функции
шумовой компоненты (3.5.74). Учитывая, что <N2(Q2)>=0,
можно записать
184
B2(Q12,Q22) -< N2(Q12)N2(Q22) >. (3.5.76)
Здесь Q12 и Q22 — различные возможные величины максималь-
ной частоты спектра, которые принимают значения из интерва-
ла [^2min *^2maxl *
Подставляя в (3.5.74) реализацию наблюдаемых данных x(t) ,
а затем полученное — в (3.5.76) и выполняя усреднение, нахо-
дим
- mmfQ12 4122 >
B2(Q12,Q22)= * J g(co)'2dw. (3.5.77)
HN0 Or
При достаточно больших значениях отношения сигнал-шум
характеристики ОМП определяются поведением (3.5.73) в ма-
лой окрестности истинного значения параметра Q02. Поэтому
для расчета потенциальной точности оценки максимальной часто-
ты спектра СШПС достаточно исследовать поведение сигнальной
(3.5.75) и корреляционной (3.5.77) функций в малой окрестности
точки Q02. С этой целью обозначим A-Q2~Q02, A1 = Q12-Q02,
Д2 = Q,>2- П02. Используя эти обозначения, перепишем (3.5.75) и
(3.5.77) в виде
1 llQ4-min(0A) .j Л+О0
S2(Q2,Qn) = -i- J |g((o)|2d(D ———— J |g(w)|2d(o; (3.5.78)
Qo i mintAj A,)
B2(Q12,Q22) = —j "|g(0))|2da>. (3.5.79)
Qf
В условиях высокой апостериорной точности оценки [А| « П02,
Aj « Q02, А2 « Q02. Поэтому разложим (3.5.78), (3.5.79) в ряд
по степеням малых параметров A, min(0,A) min(ApA2) и ограни-
чимся использованием членов, содержащих лишь первые степе-
ни малых параметров. В результате получаем следующие при-
ближенные выражения:
1 1 0—0
S2(Qz,Q02) - * j g(co)2dco+ ; G2[min(0,Q2-Q02)- 2 °2];
(3.5.80)
B2(Q12>Q22) = -vr J |g(<o)|2dco+—J-G2min(Q12-Q02,W22-Qo,).
hN0 nN0
(3.5.81)
где G2 = g(Q02) . Как следует из (3.5.81), в малой окрестности
точки Q02 логарифм функционала отношения правдоподобия
(3.5.73) является гауссовским случайным марковским процес-
185
сом диффузионного типа. Используя (3.5.80) и (3.5.81), анало-
гично [186], находим коэффициенты сноса и диффузии локаль-
но-марковского случайного процесса (3.5.73)
К21= —^-G2J °2 <Q°2 , К2, =—G2. (3.5.82)
21 2rcN0 2 [-1, Q2 > Qo2 22 rtN0 2 '
Решая уравнение Фоккера-Планка-Колмогорова с коэффици-
ентами (3.5.82) при соответствующих начальных и граничных
условиях [191], применяя метод локально-марковской аппрок-
симации, получаем асимптотическое выражение для дисперсии
ОМП Q2 максимальной частоты Q02 спектра СШПС
D(Q.) = 104ДМ° (3.5.83)
Аналогичным образом определяется и дисперсия ОМП Q,
минимальной частоты Q01 спектра сигнала:
0(0,) = 104*2N° , (3.5.84)
Gj
где G, = |g(Q0l)|.
Согласно [123], распределения оценок (3.5.71) даже асимпто-
тически не являются гауссовскими. Поэтому выражениями
(3.5.83), (3.5.84) для дисперсий оценок надо пользоваться с оп-
ределенной осторожностью. Действительно, если ввести норми-
рованную ошибку оценок (3.5.71)
-Q0i)/j2D(Q,)/13 , (3.5.85)
то распределение случайной величины (3.5.85) имеет вид
- Яхр(-И)
V Л я J
Свойства Т-распределения (3.5.86), которые нужно применять
при расчете доверительных вероятностей для (3.5.71), рассмот-
рены в [123].
Используя ОМП минимальной и максимальной частот спект-
ра QjH Q2, получаемые из (3.5.63) или (3.5.71), можно найти
186
оценку Q ширины полосы частот и оценку центральной часто-
ты спектра v СШПС. Также можно найти и характеристики
этих оценок. Действительно, в соответствии с определением оцен-
ку ширины спектра можно выразить через оценки минимальной
и максимальной частот Q ~ Q2 . В силу статистической неза-
висимости случайных процессов (3.5.69) и (3.5.70) ОМП и
Q, также статистически независимы. Это позволяет выразить
дисперсию оценки ширины спектра через дисперсии оценок ми-
нимальной и максимальной частот спектра сигнала:
D(Q) = D(Q1) + D(Q2) . (3.5.87)
Подставляя (3.5.83) и (3.5.84) в (3.5.87), получаем выраже-
ние для дисперсии оценки ширины спектра СШПС
D(Q) = 104n2N2(Gj + G24)/GjG42. (3.5.88)
Для оценки центральной частоты v СШПС можно использо-
вать выражение v = (Q2 + £2,)/2 , что соответствует определению
центральной частоты. В силу статистической независимости оце-
нок минимальной и максимальной частот спектра для диспер-
сии оценки центральной частоты спектра СШПС имеем
D(v) = [D(Qa) + D(Q2)] / 4 . (3.5.89)
Тогда после подстановок (3.5.83) и (3.5.84) в (3.5.89) получаем
D(v) = 26ti2N2(GJ + G2)/GjG4. (3.5.90)
Таким образом, получив дисперсии оценок минимальной и мак-
симальной частот спектра, можно затем на их основе определить
дисперсии оценок ширины спектра и центральной частоты СШПС.
При оценке ширины спектра СШПС нужно иметь в виду то
обстоятельство, что основная энергия таких сигналов сосредото-
чена в области низких частот. Поэтому рассмотрим характеристи-
ки оценок основных частотных параметров СШПС с линейно изме-
няющимся амплитудным спектром. Очевидно, что Go = (G, + G2)/2 .
Обозначим k = G2 /G] — параметр, характеризующий наклон вер-
шины амплитудно-частотного спектра (АЧС) сигнала. При k < 1
спектр является спадающим с ростом частоты. Для сигнала, об-
ладающего таким АЧС, выражение для дисперсии оценки мини-
мальной частоты (3.5.84) принимает вид
. {з.о.si.
Соответственно для дисперсии оценки максимальной частоты
можно записать
nrai-13"!N"(1 + k)< о-л
D(!y-~2^-----------' (3'5 92)
187
Наконец, для дисперсий оценок ширины спектра и централь-
ной частоты СШПС имеем
(3.5.93)
(3.5.94)
V } 8Gjk k '
В случае прямоугольной формы спектра СШПС дисперсии
оценок получаем, полагая в (3.5.91)—(3.5.94) к = 1, т. е.
Dr(Qj = Dr(Q2) = 104 лХ /GJ;
Dr(Q) = 4Dr(v)-52K2Nj/GJ.
Здесь Dt — дисперсия оценок при прямоугольной форме АЧС
сигнала.
В ряде задач определенный интерес представляет оценка вли-
яния узкополосной помехи на точность измерения ширины спек-
тра СШПС [149].
Положим, что СШПС s(t) наблюдается на фоне гауссовского
белого шума n(t) с односторонней спектральной плотностью No
и стационарной узкополосной центрированной гауссовской по-
мехи P(t) с корреляционной функцией Kp(t2-t1). Используя
представление спектра СШПС
S(jco) = J s(t)cxp(-j(jot)dt, (3.5.95)
обозначим
z = max S(joo). (3.5.96)
Ширину спектра СШПС (3.5.95) будем характеризовать экви-
валентной полосой частот
Q = j S(j(jo) 2d(o/max S(jco)2 - j S(jco)2do)/z2. (3.5.97)
Для того, чтобы получить форму записи СШПС, содержащую
в явном виде эквивалентную полосу частот (3.5.97), используем
функцию
h(x) = S(jxQ)/z, ‘ (3.5.98)
где S(jxQ) — спектр СШПС (3.5.95). Функция (3.5.98) нормиро-
вана таким образом, что
max|h(x)| = 1, j |h(x)fdx = 1
188
и описывает форму спектра СШПС с единичной эквивалентной
полосой частот. Используя эту функцию, представим спектр
СШПС (3.5.95) в виде
S(jco) = zh(o)/Q). (3.5.99)
Отсюда получаем выражение для СШПС, в которое явно вхо-
дит эквивалентная полоса частот (3.5.97)
s(t) ss(t,Q) = — (h(—)exp(jwt)dw. (3.5.100)
2it Д Q
Считаем, что в течение интервала времени [0;Т] наблюдается
реализация
x(t) - s(t, Qo) 4- n(t) + P(t), (3.5.101)
где Qo — истинное значение ширины полосы частот, a n(t), p(t)
статистически независимы. Если корреляционная функция
Kp(t2-t1) или соответствующая спектральная плотность G^(a>)
узкополосной помехи (3(f) априори неизвестны, то для оценки
эквивалентной полосы частот Qo сигнала (3.5.95), (3.5.100) мож-
но использовать алгоритм максимального правдоподобия [85],
синтезированный без учета наличия узкополосной помехи. При
воздействии только гауссовского белого шума логарифм функ-
ционала отношения правдоподобия запишется в виде [85]
L(Q) = — J x(t)s(t, Q)dt —— Js2 (t,Q)dt. (3.5.102)
No о No0
где s(t.Q) определяется из (3.5.100).
Реализация наблюдаемых данных x(t) (3.5.101), кроме бело-
го шума, содержит узкополосную помеху p(t). Поэтому оценка
Q = argsup L(Q) (3.5.103)
не является оценкой максимального правдоподобия эквивалент-
ной полосы частот СШПС. Эту оценку можно назвать квазиправ-
доподобной, поскольку она совпадает с оценкой максимального
правдоподобия при |3(t) = 0 . Для определения характеристик
квазиправдоподобной оценки (3.5.103) представим (3.5.102) в виде
суммы сигнальной составляющей и шумовых функций
L(Q) = S(Q) + N(Q) + N3(Q) (3.5.104)
Здесь
S(Q) js(t, Q)s(t, Qo )dt - J s2 (t, Q)dt = S(Q0, Q) - S(Q, Q) / 2
^0 0 ^*0 0
— сигнальная составляющая,
2
S(Q, ,□,) = — Js(t,Q,)s(t,Q2)dt (3.5.105)
No о
— сигнальная функция (функция неопределенности),
189
2 г
N(Q) = —jn(t)s(t,Q)dt (3.5.106)
No о
— шумовая функция, обусловленная воздействием гауссовского
белого шума,
Np(Q)= Jp(t>(t,Q)dt (3.5.107)
Nq о
— шумовая функция, обусловленная действием узкополосной
помехи. Шумовые функции (3.5.106), (3.5.107) являются реали-
зациями статистически независимых гауссовских процессов и
обладают двумя первыми моментами
<N(Q)>=<Np(Q)>=0, <N(Qi)Np(Q2)>=0, <N(QI)N(fi2)>=S(Q1,Q2),
4 тт
< Np (Q, )Np (Q2) >= B(Q,, Q2) = J J Kp(t2 -1, )s(t,, Q, )s(t2,02 )dt,dt2.
^0 о 0
A (3.5.108)
Согласно (3.5.103) квазиправдоподобная оценка Q эквива-
лентной полосы частот СШПС Qo может быть найдена из реше-
ния уравнения
=0. (3.5.109)
Решая уравнение (3.5.109) методом малого параметра [85] и
ограничиваясь первым приближением для ошибки измерения
эквивалентной полосы частот СШПС, получаем выражение
AQ - Q - Qo -[dN(Q) + --p(Q-l ст2,. (3.5.110)
0 dO dO
L.
Здесь
СТ2, = ~d2S(Q1.fl2)~ -1 (3.5.111)
— дисперсия эффективной оценки эквивалентной полосы час-
тот,'которая в условиях высокой апостериорной точности совпа-
дает с дисперсией оценки максимального правдоподобия [85].
Далее полагаем, что время наблюдения Т много больше длитель-
ности импульса СШПС; в этом случае пределы интегрирования
в (3.5.105) и (3.5.108) можно заменить на бесконечные. Перехо-
дя в (3.5.105) к спектральному представлению СШПС (3.5.99),
ддя сигнальной функции получаем выражение
190
z2
co
(3.5.112)
U -О. \ J / \ i I
Подставляя (3.5.112) в (3.5.111) и выполняя дифференциро-
вание, находим дисперсии оценки максимального правдоподо-
бия эквивалентной полосы частот СШПС
с2 = nN0Q2/ Jco3
2
dS(jtl)) , - Q / п 2
—-— dco = Qj / q-y2.
(3.5.113)
Здесь:
q2 = s2(t)dt = J |S(jco)|2dco
(3.5.114)
— отношение сигнал-шум для принятого сигнала, а
ah«dx
(3.5.115)
— параметр, определяющий зависимость эффективной оценки
эквивалентной полосы частот от формы спектра СШПС (3.5.95).
Выражение (3.5.113) позволяет выяснить зависимость диспер-
сии оценки от параметров СШПС и отношения сигнал-шум.
Однако, расчет дисперсии оценки по формуле (3.5.113) не все-
гда удобен, так как предполагает предварительное определение
величин (3.5.96), (3.5.97), (3.5.114), (3.5.115) и функции (3.5.98),
что может привести к вычислительным трудностям. Поэтому
приведем еще одну форму записи дисперсии эффективной оцен-
ки эквивалентной полосы частот СШПС, которая в ряде задач
позволяет упростить расчеты. Для этого в (3.5.112), (3.5.113)
подставим функцию h(x) из (3.5.98). После замены переменной
интегрирования имеем:
dS(joo)
dco
dco[max|S(jco)|]4
(3.5.116)
2 Г 2
V = J X2
В этой формуле дисперсия эффективной оценки непосредствен-
но выражается через спектр СШПС (3.5.95).
Найдем далее смещение и дисперсию квазиправдоподобной
оценки (3.5.103) эквивалентной полосы частот СШПС. Усредняя
(3.5.110), находим, что квазиправдоподобная оценка несмещен-
ная: < ДО >= 0 . Соответственно, для дисперсии квазиправдопо-
добной оценки можем записать, аналогично [85]
191
Увдвд)
sq^q
+ N2 J jKf/tz M
1,1 о <-
dsCtpQ) ds(t2,Q)
dQ dQ
dtjdtj;
► x (3.5.117)
• Ц.
<12S(Q1,Q2)
^H13Q2
Используя (3.5.111) и (3.5.113), преобразуем (3.5.117) к виду
а2=(£%, (3.5.118)
где
Оа N2 11 15 2 ’ L dQ dQ
dtjdt2 (3.5.119)
и характеризует проигрыш в точности квазиправдоподобной оцен-
ки эквивалентной полосы частот по сравнению с точностью оцен-
ки максимального правдоподобия вследствие наличия узкопо-
лосной стационарной гауссовской помехи. Избежать вычисле-
ния двойного интеграла в (3.5.119) можно, если перейти к спек-
тральному представлению. Действительно, получаем
No 1 dco 1 dco
(3.5.120)
Найдем величину проигрыша в точности оценки эквивалент-
ной полосы СШПС (3.5.120) для частного случая узкополосной
помехи с прямоугольной спектральной плотностью
G^co) =
N JcOo-aH/cOo+a?
2 Qfi QH
L k ₽ / v f У
(3.5.121)
где N — величина спектральной плотности узкополосной поме-
хи; Qp — ширина полосы частот, а соо — центральная частота;
I(x) = 1 при |х| < 1/2 и 1(х) = 0 при [х| > 1/2 . Подставляя (3.5.121)
в (3.5.120), находим проигрыш в точности оценки эквивалент-
ной полосы частот СШПС
% = 1 + оск .
(3.5.122)
Здесь a = N/Nft — отношение Спектральных плотностей узкопо-
лосных помех и белого шума, а
k = J со2
dS(jco)
dco
2
dco/ J co2
dS(jco)
da)
(3.5.123)
2
da).
192
Как следует из (3.5.123), проигрыш в точности квазиправдо-
подобной оценки эквивалентной полосы частот СШПС будет мини-
мальным, если помехой поражен участок [со0 - / 2; соо + / 2]
спектра СШПС с малой скоростью изменения, то есть участок с
малым значением модуля производной спектра |dS(jco)/dcoj.
3.6. Особенности приема и обработки
сигналов радиоэлектронных средств
в режиме повышенной скрытности работы
Среди основных мер помехозащиты РЭС получает применение
режим повышенной скрытности работы, основным способом реа-
лизации которого является снижение эпергодоступности излуче-
ния для приемников разведки за счет применения длинноимпуль-
сных и широкополосных сигналов пониженной мгновенной мощ-
ности. При организации соответствующей оптимальной обработки
таких сигналов обеспечивается требуемая дальность действия РЭС
по основному назначению. К числу основных особенностей, кото-
рые необходимо учитывать при обосновании принципов их приема
в процессе разведки, относятся: наличие на входе приемника одно-
временно с энергетически скрытыми сигналами потока мешающих
сигналов относительно большой мощности; наличие априорной нео-
пределенности относительно структуры и параметров этих сигна-
лов. Эти особенности в определенной степени затрудняют непос-
редственное использование известных методов оптимальной обра-
ботки сложных сигналов [29] при реализации процедур обнаруже-
ния, измерения параметров и распознавания. Прямое же повышение
чувствительности приемоанализирующей аппаратуры в ее тради-
ционном исполнении приведет к резкому увеличению общего пото-
ка принимаемых сигналов и, значит, к неоправданной перегрузке
процессоров вторичной обработки.
Прежде чем рассматривать принципы построения приемни-
ков скрытых излучений, основанные на реализации квазиопти-
мальной обработки сигналов и использовании возможностей со-
временной элементной базы, оценим эффективность способов
приема таких колебаний [144]. Так как при этом нельзя в пол-
ной мере воспроизвести согласованную обработку, аналогичную
осуществляемой в разведываемом РЭС, будем считать, что для
частичного парирования скрытия излучения должно осуществ-
ляться накопление принимаемых сигналов по времени, частоте
и пространству.
В условиях априорной неопределенности относительно струк-
туры энергетически скрытых сигналов их обнаружение возмож-
но с использованием энергетического способа приема [29], суще-
ство которого заключается в приеме слабого сигнала в полосе
7 -2357
193
Afc, соответствующей ширине его спектра, квадрировании и сколь-
зящем интегрировании в течение интервала времени Тс, равного
длительности сигнала. Оценим эффективность энергетического
приемника, когда на его входе присутствует аддитивный шум и
поток мешающих импульсных сигналов большой мощности. В
этом случае входное колебание имеет вид
N
x(t) = s(t) + n(t) + £ui(t), t'<t<t'+Tt., (3.6.1)
где s(t) = aA(t)cos[2n:f()t + <p(t)] — полезный сигнал типа (3.2.2);
n(t) — шум с дисперсией в полосе частот канала обработки
Afс; u(t) = 0iFicos(2nfot + Ац1 + (pOi) — импульсные мешающие
сигналы с амплитудами F., начальными фазами ф0], расстройка-
ми по частоте Ао^ относительно центральной частоты со0, случай-
ными длительностями « Тг и временами прихода t., определя-
ющими параметр 0i
=
1, < t <
0, t < ti5 t > t| +ти i =1,N.
Число мешающих импульсных сигналов N определяется плот-
ностью их потока X, причем распределение величины N может
быть аппроксимировано пуассоновским законом [62]. В качестве
показателя, характеризующего эффективность обработки сигна-
лов в энергетическом приемнике, используем выходное отноше-
ние сигнал-шум аналогично (3.2.13), т.е.
= т[у(О / Н, ] - m[y(Q / Но ] (3 6 2)
Ч’ь‘к olyCn/H,]
t'+Tf
где y(t') = j x2(t)dt — выходной отклик; m[y(t')/H.] — математи-
ческое ожидание y(t') для гипотез присутствия Нх и отсутствия Но
сигнала (i = 1,2); - дис-
персия отклика приемника при наличии сигнала.
Заметим, что при определенном рассогласовании характерис-
тик энергетического приемника с параметрами принимаемого
сигнала величина цвых в отсутствии импульсных помех опреде-
ляется следующим образом [29, 144]:
fqL) 2AfcTcPT~ = ( g2BX1 рцлг
Jo о АГТ’ » <=ЛГС Vl + 2q2/ (3.6.3)
V Д Решс 1с. +2q2, 1 -тД V Чвх1
\ AfcTc Чвх1
где Af*, Т/ — ширина спектра и время интегрирования, отлича-
ющиеся в общем случае от реально существующих значений Afc,
194
Т для сигнала s(t); рЕ = Е*/Е — отношение энергии сигнала на
выходе энергетического приемника к его истинной энергии Е;
q^xl = E/q2Tc — входное отношение сигнал-шум. Из формулы сле-
дует, что при отсутствии рассогласования рабочие характерис-
тики приема сигналов с большой базой значительно улучшают-
ся. Рассогласование по параметрам Afc, Тс порядка 50 % приво-
дит к падению qBMX на 20—30 %. Поэтому необходимо предус-
мотреть многоканальный по частоте прием с гибкой перестрой-
кой полосы пропускания результирующего канала [144].
Возвращаясь к (3.6.2), оценку входящих в выражение величин
для (3.6.1) проведем на основе приближенного представления
м.. г N
y(t') = XAt 8(Ч)+п(Ч)+£и,(Ч)
k=l L i=l
(3.6.4)
где At^l/(2Afc) — интервал временной дискретизации;
Ме = Tc/At. Применимость представления (3.6.4) при анализе энер-
гетического приемника следует, в частности, из результатов [29].
Обозначим вектор параметров a = (ti,x1,F1,<p0i,Ao)i, i = l,N)T, ха-
рактеризующий конкретную реализацию мешающего потока
импульсных сигналов в интервале времени [t',t' + Т ] и в полосе
частот [-Afc/2 + f0, f0 + АГг/2]. Тогда
m[y(t') / Ц 0] = £ P(N)J y(N,a)P(n/N,a)P(a/N.H, 0)dadn =
N-0
= j^P(N) fm[y(t')/a,N,H10JP(a/N,HIO)da;
N=0
m[y2(t')/ H, ] = £ P(N)Jm[y2(tz) / a,N,Ц] P(a /N, Hj )da.
N-0
где n
m[y(t')/a,N,H0] = oflTc + Z^/2;
N
m[y(t') / a.N, ] = E + + £ Р,\ / 2;
1=1
N
m[y2(t)/a,N,Hl] = E+c^ + 2Eo2Tc +2£j’\E/2 +
i=l
N NN
+2£ Р2Т^ТС / 2 + 2Ест2 / Afc + I Afc +£ £ F2^ / 4 +
i=l i=l j=l
N N I
+4X Z<4Af-) + 4E£ Z(4AfeTc). E = - a2Tc
i=l i=l 2
— условные моменты y(t') относительно реализации потока ме-
шающих сигналов; P(n/N,a) — описывает закон распределения
195
реализации n(t); P(a/N,H1 0) — закон распределения вектора а;
P(Nj — закон распределения числа импульсных сигналов N. Со-
отношения (3.6.5) определяют принятую в дальнейшем последо-
вательность действий при вычислении искомых моментов, со-
гласно которой сначала проводится усреднение по множеству ре-
ализаций аддитивного шума при детерминированном входном
сигнальном воздействии, а затем усреднение по параметрам реа-
лизации потока мешающих сигналов. Считая амплитуды и дли-
тельности мешающих импульсных сигналов независимыми, имеем
т[у(Г)/Ы,Н0] = <J2T„ +NmPmt /2;
m[y(t')/N,H,] = E + g*Tc +NmPm,/2;
m[y2(t')/N, Hj ] = E2 + <T2 + 2Ect2Tc + ENmPmt + o2TcNmpmt +
+2Ea2 /Afc +<Tr / Afc +N(DP + m2)(Dt + m2)/4 +
+N(N - l)m2m2/4 + CT2NmpmI/Af(. + ENmPmt /(AfcTc),
где mp = m[F2]; Dp = m[(F2 - mp)2]; тт = т[т]; DT = т[(т - mT)2] —
средние значения и дисперсии квадрата амплитуды и длитель-
ности мешающих сигналов.
После усреднения по N окончательно получим выражение для вы-
ходного отношения сигнал-шум энергетического приемника
v = 1 ______________________д2х1(2А£Д)1;2___________________
^2 Ji + 2qLi + 2qL2mД + 2q2xlq2x2mrX + q*x ср 2(Dt + m2)XAfr
(3.6.6)
где Qbx2 = mp /(2of) — отношение сигнал-шум для мешающих
сигналов; q*x ср 2 = (Dp + тр)/(4п^). Нетрудно видеть, что при X = О
(3.6.6) преобразуется в известное выражение [29] для выходного
отношения сигнал-шум энергетического приемника (правая часть
формулы (3.6.3)).
Анализ (3.6.6) показывает, что наличие потока мешающих
импульсных сигналов в полосе приема энергетически скрытых
сигналов приводит к существенному снижению эффективности
энергетического приемника, что требует исключения таких сиг-
налов при qax2 » 1. Фактически при этом должна осуществлять-
ся режекция участков входной реализации по времени или по
частоте, либо одновременно по времени и по частоте. Применяя
описанную выше методику расчета моментов выходного откли-
ка энергетического приемника при наличии потока импульсных
сигналов, можно показать, что при режекции по времени, на-
пример, путем запирания входа интегратора приемника на вре-
мя ~ ттах,равное максимальной длительности импульсной по-
мехи, выходное отношение сигнал-шум равно
196
0.ВЫХ ГТ I F ГЧ (3*6.7)
V2 ^l + 2qL +[At2mUfc(l + qt.) J/(l-AtmX)
При AtmX « 1 и Atm « Tc эффективность работы приемника бу-
дет близка к эффективности его работы в условиях отсутствия
мощных импульсных помех.
Наряду с энергетическим способом приема рассмотрим взаимо-
корреляционный способ приема сигналов, при котором во время
обработки вычисляется взаимно корреляционная функция для ре-
ализаций смеси скрытых сигналов и шума, принимаемых либо в
разные моменты времени, либо одновременно в разнесенных точ-
ках пространства. В общем случае при наличии полезного сигнала
на входе значение амплитуды на выходе взаимокорреляционного
приемника в точке максимума выходного отклика будет
f b'l’v
y(t') = j Xj(t)x2(t)dt, t'<t<t' + Tc, (3.6.8)
t'
Nia
где xu(t) = s(t) + n12(t) + U12(t), U12(t) = ^uil2(t) — две в общем
i=l
случае разные реализации потока импульсных сигналов, описы-
ваемых (3.6.1); n. 2(t) — аддитивные шумы на входах приемни-
ка, имеющие одинаковую дисперсию а* .
Оценим эффективность такого способа приема при прежнем
описании характеристик потока мешающих сигналов. Необхо-
димо разделить ситуации, когда выполняется взаимокорреляци-
онпая обработка сигналов, принимаемых одновременно в раз-
личных точках пространства, либо в одной точке пространства в
различные моменты времени [144].
В первом случае обеспечивается некоррелированность шумов n^t)
и n2(t) в каналах приемника, в то же время с точностью до постоян-
ной разности фаз выполняются равенства U^t) = U2(t); Nj = N2.
Применяя аналогичную изложенной методику расчетов, можно
показать, что выходное отношение сигнал-шум для взаимокорре-
ляционного приемника связано со входным соотношением
<х= ______________________qL(2AfcTc)1;2___________________
V1 + 2qLi + 2q2x2mtX + 2q2xiq.x2mA + 2qt ср 2(DT + m2)Ufc
(3.6.9)
Из сравнения (3.6.6) и (3.6.9) следует, что рассматриваемый спо-
соб обработки является более эффективным, чем энергетичес-
кий: разница в выходном отношении сигнал-шум составляет
примерно V2 раз. Проведение временной режекции импульс-
197
ных помех позволит повысить выходное отношение сигнал-шум,
которое в этом случае определяется как
а' = qL,[(l-Atml)2AfcTc]1/2
71 + 2Ч^ 42At2mUf^J/(l-AtmX) ’ ' ' )
Сопоставление (3.6.7) и (3.6.10) показывает, что для такого типа
взаимокорреляционного приемника влияние потока мешающих
импульсных сигналов оказывается существенно меньшим, чем
для энергетического приемника.
Во втором случае приема в одной точке пространства в разные
моменты времени U/t) U2(t); Nj *N2. Выражение для выход-
ного отношения сигнал-шум отличается от (3.6.9) и имеет вид
, = чЖУ'8
71+2ci2xi +2q.xiq2x2mi?l+2qL2mA (3‘6Л1)
Как следует из анализа последней формулы, взаимокорреляци-
онный способ приема в одной точке пространства с разнесением
по времени в условиях мешающих импульсных сигналов оказы-
вается более помехоустойчивым, чем предыдущий. Тем не менее
его эффективность также недостаточна и требуется режекция
мешающих сигналов. При ее выполнении
, = д*х1[(1-2АУ)2ДГДГ'2
, ,ЫХ 71 + 2q2xl +[4At^Aftq:xl]/(l-2AtmX) ’ (3>6Л2)
Соотношение (3.6.12) несколько отличается от (3.6.10), что объяс-
няется разным характером статистики числа “вырезаемых1’ участ-
ков входной реализации (Nx = N2 Для (3.6.10), Nx N2 для (3.6.12)).
На рис. 3.6.1, 3.6.2 приведены графики зависимостей qBbIX от
qBxl при осуществлении режекции по времени для энергетичес-
кого и взаимокорреляционного способов приема, оцениваемых
(3.6.7) и (3.6.10), соответственно. Считалось, что плотность по-
тока мешающих импульсных сигналов Х = О...1О4 имп/с прихо-
дится на полосу частот Afc— 50 МГц при длительности принима-
емого сигнала Тс = 20 мкс (база сигнала В = AfcTc — Ю4), а
Atm = 5 мкс. Анализ графиков показывает, что эффективность
взаимокорреляционного способа приема оказывается выше, при-
чем это особенно проявляется при малых qBX1.
Проведенный анализ позволяет сформулировать основные прин-
ципы разведки сигналов в режиме повышенной скрытности излу-
чений РЭС. Во-первых, динамический диапазон приемника дол-
жен быть разбит па поддиапазоны приема сильных и слабых сиг-
налов, в которых обработка осуществляется по разному. Разбиение
определяется заданием стандартного порога обнаружения сильных
198
Чных» дБ
20 0 6 10
ЧкхЬ ДБ
Рис.3.6.1. Зависимость вы-
ходного отношения сигнал-шум
от входного при энергетическом
приеме
Ч»х1> дБ
Рис.3.6.2. Зависимость выход-
ного отношения сигнал-шум от
входного при взаимокорреляцион-
ном приеме
сигналов (обычно 14...20 дБ) над уровнем собственных шумов, ис-
ходя из значений чувствительности к сигналам, излучаемым РЭС в
обычных режимах. Слабые сигналы, принимаемые в нижнем уча-
стке динамического диапазона, обрабатываются с помощью допол-
нительной аппаратуры. Во-вторых, специальная обработка слабых
сигналов должна проводиться на основе накопления входной реа-
лизации по времени, частоте, пространству, т.е. процедур квазиоп-
тимальной корреляционной или фильтрационной обработки. При
этом при наличии потока относительно мощных мешающих узко-
полосных импульсных сигналов должна обеспечиваться временная
и частотная режекция или бланкирование сильных сигналов, зат-
рудняющих прием и обработку слабых сигналов. И, наконец, в
третьих, частичная априорная неопределенность относительно па-
раметров принимаемых сигналов должна преодолеваться на основе
многоканальных по частоте и другим параметрам приемных бло-
ков, которые могут создаваться на основе перспективной элемент-
ной базы радиоэлектроники. Автокорреляционный способ приема
слабых сигналов наиболее просто осуществляется с помощью энер-
гетического приемника или радиометра, взаимокорреляционпый
способ — при разнесении точек приема в пространстве, либо по
времени. При наличии возможности предварительной записи раз-
ведываемого сигнала при больших отношениях сигнал-шум и ис-
пользовании его как эталонной копии в условиях малых отноше-
ний сигнал-шум можно реализовать квазиоптимальный корреля-
ционный способ приема.
Итак, в аппаратуре разведки слабых сигналов предполагается
выполнение различных функциональных операций (фильтрации,
вычисления взаимно корреляционной функции, записи и воспро-
199
изведения) применительно к сигналам с большой шириной спек-
тра и длительностью с реализацией многоканальности по час-
тотно-временным параметрам. Поэтому, например, для энерге-
тического приемника основным элементом должен являться блок
полосовых фильтров или спектроанализатор сигналов, снабжен-
ный соответствующими элементами обработки выходных откли-
ков фильтров, обеспечивающими коммутацию элементарных
каналов шириной полосы 8f в общую полосу приема шириной
Afr [144]. Для взаимокорреляционного и квазиоптимального кор-
реляционных приемников основными будут многоканальный по
времени прихода и частоте коррелятор и устройство записи и
воспроизведения сигналов.
Определенный интерес с позиций технической реализации мо-
жет представлять один из возможных способов построения энер-
гетического приемника разведки слабых сигналов на основе мно-
гоканальных, широкополосных акустооптоэлектронных спект-
роанализаторов [22, 144]. Анализ показывает, что такой вари-
ант построения приемника достаточно привлекателен в плане
обеспечения оперативной перестройки параметров накопления
по времени и частоте, а также совместной частотно-временной
режекции мешающих сигналов, контрастных по своим характе-
ристикам разведываемым энергетически слабым сигналам. Оп-
ределенное развитие этой схемы связано с принципом адаптив-
ного управления порогом обнаружения при обеспечении фикси-
рованного уровня ложной тревоги PF на основе текущего анали-
за числа и суммарной площади “пораженных” мешающими
сигналами участков в частотно-временной области. Одновремен-
но с накоплением по времени на выходе каждого частотного ка-
нала независимо от типа используемого многоканального спект-
роанализатора проводится подсчет числа Kfi, i = l,nf участков
длительностью St и шириной полосы в спектральной области 8f,
исключаемых из процесса накопления, а затем проводится теку-
щая корректировка порога принятия решения с учетом резуль-
татов суммирования числа “пораженных” и выброшенных уча-
стков во всех частотных каналах. Можно убедиться, что значе-
ние порога при этом приближенно рассчитывается по формуле
2
Ь(0 = §-[В - Snop(t') + ф-‘(1 - PF),/B -Snop(t')], (3.6.13)
где В — база сигнала; Snop (t') = 8t6f^Kfl — общая площадь «по-
i=i
раженных» помехой участков в пределах текущей частотно-вре-
менной области накопления; nf — число элементарных частот-
ных каналов АОЭ-спектроанализатора, коммутируемых в поло-
200
су Afe- На рис. 3.6,3 приведены
типовые зависимости вероятно-
сти обнаружения PD от плотнос-
ти потока мешающих импульс-
ных сигналов для обычной мно-
гоканальной схемы энергетичес-
кого приемника — 1 и для схемы
с адаптивным управлением поро-
га — 2. Видно, что эффективность
обработки при адаптации суще-
ственно увеличивается, так как
скрадывается составляющая
флуктуации выходного отклика,
обусловленная случайным харак-
тером процесса частотно-времен-
ной режекции.
Рис. 3.6.3. Зависимость веро-
ятности обнаружения от плотнос-
ти потока мешающих импульсных
сигналов
3.7. Устройства запоминания и воспроизведения
радиосигналов
Существующие устройства записи (запоминания) и воспроиз-
ведения сигналов можно условно разделить ца два типа — ана-
логовые и цифровые. Рассмотрим принципы и наиболее важные
особенности работы этих устройств, среди которых, как наибо-
лее отвечающие характеру анализируемых задач, выделим ана-
логовые устройства с акустооптоэлектронными элементами и с
элементами на магнитостатических волнах, а также цифровые
устройства, обеспечивающие высокую точность воспроизводимых
параметров сигналов при практически неограниченном времени
их запоминания.
3.7,1, Аналоговые устройства запоминания и воспроизведения
сигналов
Сначала кратко остановимся на принципах работы акустооп-
тоэлектронных устройств данного типа, функционирующих в
диапазонах частот от нескольких десятков МГц до нескольких
ГГц. Предпосылки для создания таких малогабаритных блоков
имеются благодаря большой разнице в скорости распростране-
ния акустических и электромагнитных колебаний. Так, для осу-
ществления задержки сигнала длительностью 1 мкс требуется
отрезок коаксиального кабеля в несколько сотен метров; такая
же задержка с помощью акустической линии достигается на уча-
стке длиной 0,5 см. Акустические линии задержки обычно ис-
пользуются в качестве элементов с фиксированной задержкой.
Для получения непрерывно регулируемой задержки наиболее
201
перспективным было признано направление создания устройств
на основе взаимодействия луча лазера с акустическими колеба-
ниями[52, 216» 228], а для воспроизведения сигнала — оптиче-
ское гетеродинирование акустического сигнала в любой произ-
вольный момент из интервала задержки [215].
Следуя этой работе, принципиальная схема акустооптоэлектрон-
ного устройства задержки изображена на рис. 3.7.1. Радиосигнал
вводится в акустическую линию с помощью электроакустического
преобразователя, превращаясь в акустический эквивалент. На нем
происходит рассеяние света, т.е. сигнал накладывается на луч ла-
зера, проходящего сквозь линию задержки. Далее сигнал вновь
выделяется с помощью фотоприемника, переходя в форму элект-
рического колебания. Время задержки определяется расстоянием
между входным электроакустическим преобразователем и точкой
пересечения луча лазера с акустическим сигналом, разделенным
на скорость распространения акустических колебаний в теле ли-
нии задержки. Это расстояние может изменяться либо путем пере-
мещения линии задержки относительно луча лазера, либо путем
сканирования луча вдоль самого стержня. При взаимодействии
акустического сигнала в линии задержки с лучом лазера часть луча
дифрагирует в пространстве, как это происходит при падении све-
та на обычную дифракционную решетку. Так как дифракционная
решетка (акустический сигнал) движется, частота дифрагирован-
ного лазерного луча оказывается смещенной; оказалось, что допле-
ровский сдвиг частоты дифрагированного луча лазера точно равен
частоте акустического сигнала. Поэтому для того, чтобы воспроиз-
вести радиосигнал, часть энергии светового луча частотой fCB, пада-
ющего на тело линии задержки, должно попадать на фотоприем-
ник вместе со смещенным по частоте дифрагированным лучом с
частотой fPB + fp. Фотоприемник работает в режиме оптического ге-
теродинирования, образуя на своем выходе сигнал разностной час-
тоты, совпадающей с ис-
Радиосигнал
Рис. 3.7.1. Схема акустооптоэлектрон -
ного устройства обработки сигналов
ходным сигналом, вводи-
мым в акустическую ли-
нию задержки.
Время задержки в по-
добных схемах обычно
составляет единицы мик-
росекунд и определяется
длиной стержня линии
задержки, при этом отме-
чаются нежелательные
отражения акустического
импульса от концов стер-
202
жня. Для увеличения времени задержки и устранения отражении
было предложено обе торцевые грани сделать слегка непараллель-
ными [215]. Так, при соответствующей обработке стержня линии
задержки можно достичь сравнительно большого интервала изме-
нения времени задержки при использовании короткого стержня.
Например, стержень из плавленого кварца длиной 2,54 см позво-
ляет получить время задержки до 20 мкс, что соответствует пято-
му прохождению акустического импульса.
Воспроизведение сигналов на низких (fp <100 МГц) и высо-
ких (fp >100 МГц) частотах отличается способом реализации оп-
тического гетеродинирования. На низких частотах угол дифрак-
ции обычно мал, поэтому допускается использование простой
схемы гетеродинирования, когда угол сходимости опорного луча
с помощью линзы выбирается больше угла дифракции, т.е. на
апертуре фотоприемника имеет место перекрытие двух лучей и
антенным эффектом фотоприемника можно пренебречь. На вы-
соких частотах, как известно [18], эффективное рассеяние ла-
зерного луча происходит, если угол его падения на акустичес-
кую волну частотой f удовлетворяет условию Брэгга
. 1 X 1 Хг
sm0R =-----=------fn, (3 7 1)
2 Л 2 V р 1 ’
где X и Л — длины оптической и акустической волн соответствен-
но, V — скорость распространения акустического колебания. На
рис. 3.7.2 изображена одна из возможных схем акустооптоэлект-
ронпого устройства запоминания и воспроизведения высокочастот-
ного радиосигнала, в которой используется явление брэгговского
рассеяния. Одним и тем же лазером с помощью оптической систе-
мы формируются два луча. При распространении акустической
Рис. 3.7.2. Схема запоминания и воспроизведения сигналов на вы-
соких частотах
203
волны по стержню снизу вверх часть луча 1 дифрагирует в направ-
лении луча 2 и ее частота увеличивается до значения fCB 4- f , а
другая часть луча 2 дифрагирует в направлении луча 1, при этом ее
частота уменьшается до значения fCR_fp- Если фотоприемник по-
местить в зону одной из пар лучей, например в первую, то осуще-
ствится гетеродинирование дифрагированного луча, отличного на
частоту радиосигнала f от опорного луча, имеющего частоту fCB.
Для конфигурации лучей и положения фотоприемника, показан-
ного на рис. 3.7.2, энергия первого луча, играющего роль опорно-
го, должна выбираться достаточной для превышения над уровнем
дробового шума детектора. Остальная часть энергии луча лазера
должна использоваться при формировании второго луча так, что-
бы энергия дифрагированного луча с частотой fCB - f оказалась мак-
симальной. Учитывая достигнутые значения дифракционной эф-
фективности для основных типов используемых кристаллов, по-
нятно, что энергия дифрагированного луча будет намного меньше
по сравнению с энергией луча, не претерпевшего рассеяния. В экс-
периментах, описанных в [215], применялись кристаллы из ниоба-
та лития, концевая поверхность которых действует как собствен-
ный преобразователь, либо в качестве электроакустических преоб-
разователей применялись тонкопленочные элементы из сульфида
кадмия. Оптические приемники представляли собой кремниевые
диоды p-i-n типа. Положительные результаты по запоминанию и
воспроизведению сигналов при работе устройства на высоких час-
тотах были получены в диапазоне от 250 до ЗОЮ МГц.
Теперь рассмотрим один из способов запоминания и воспро-
изведения частоты радиосигналов на основе ждущего генератора
с запаздывающей обратной связью, содержащего линию задерж-
ки и шумоподавитель на магнитостатических волнах (МСВ) [107].
Впервые принципиальная возможность создания таких устройств
была отмечена в [213], при этом практически важной является
осуществимость работы элементов на МСВ в диапазоне частот от
единиц до нескольких десятков гигагерц [28, 33].
Способ запоминания несущей частоты радиоимпульсов с исполь-
зованием генератора с запаздывающей обратной связью, находяще-
гося в исходном состоянии в ждущем режиме и запускаемого разве-
дываемым сигналом, частоту которого и нужно воспроизвести, из-
вестен [56]. При этом генератор возбуждается на собственной часто-
те, ближайшей к несущей частоте входного импульса. Максималь-
ная ошибка запоминания частоты в таком устройстве не превышает
половины интервала между собственными частотами, равного
М = 1/тд, где тз — время задержки в линии задержки. Однако в
подобных устройствах частота генерируемых колебаний довольно
быстро переходит с частоты входного радиоимпульса на собствеп-
204
ную частоту 0)макс, соответствующую максимуму амплитудно-час-
тотной характеристики цепи обратной связи, т.е. устанавливается
наиболее выгодный в энергетическом отношении режим колебаний.
Из-за малой длительности запоминания частоты, ограничиваемой
нарастанием колебаний на других собственных частотах, такие уст-
ройства на практике применяются довольно редко. Если вместе с
линией задержки использовать шумоподавитель, то процесс запо-
минания частоты может принять весьма устойчивый характер.
Рассчитаем характеристики генератора с шумоподавителем на
МСВ, включая определение условий его возбуждения и нахожде-
ние решения дифференциальной задачи для оценки длительности
и точности запоминания и воспроизведения частоты радиосигнала.
Принципиальным отличием рассматриваемого устройства от изве-
стных [9] является наличие в цепи обратной связи шумоподавите-
ля на МСВ, для которого характерна нелинейная амплитудная ха-
рактеристика и частотная избирательность [28, 213].
Нелинейная амплитудная характеристика обеспечивает суще-
ственно больший коэффициент передачи для сильных сигналов,
чем для слабых. Частотная избирательность шумоподавителя при-
водит к тому, что при расстройке между одновременно присут-
ствующими сильным и слабым сигналами, превышающей опре-
деленную величину 8f0, сильный сигнал практически не влияет
на подавление слабого. Результаты экспериментальных исследо-
ваний шумоподавителей на МСВ показывают, что в этом случае
на амплитудно-частотной характеристике прибора, снятой для
слабого сигнала, на частоте сильного входного сигнала образует-
ся «всплеск» шириной AfK~8f0. Отмеченная особенность позво-
ляет представить эквивалентную схему шумоподавителя в виде
последовательного соединения нелинейного безинерционного эле-
мента с соответствующей амплитудной характеристикой и узкопо-
лосного фильтра с полосой AfK, средняя частота которого совпадает
с несущей частотой сильного сигнала. Величина AfK определяется
шириной спектра сильного сигнала Afc и параметром AfK0
Afc, Afc>AfK0;
где AfK0 — минимально возможная полоса, определяемая пара-
метрами шумоподавителя и составляющая примерно 10...20 МГц
[28, 213].
Эквивалентная схема всего генератора в режиме работы с до-
статочно сильными сигналами состоит из усилителя и цепи об-
ратной связи, включающей последовательно соединенные кон-
тур и LC-линию с потерями (рис. 3.7.3). При этом подразумева-
ется, что суммарная комплексная передаточная характеристика
AfK
Рис» 3.7.3. Эквивалентная схема генератора с шумоподавителем
на МСВ
равна произведению соответствующих характеристик контура и
линии, для чего между ними включается повторитель напряже-
ния в качестве развязывающего устройства. Идеальный генера-
тор напряжения UB отображает внешнее воздействие в виде ра-
диоимпульса длительностью тв
UBsin<obT, 0<т<тв;
Можно показать, что нормированные параметры введенного кон-
тура определяются для заданных безразмерной резонансной час-
тоты сок, добротности QK и волнового сопротивления рк контура
следующим образом:
m
С COKq V 4Q2 ’
A 1 ;р_Ь = J_,
Ч V 4Qk r “Qx
— соответственно полные индуктивность,
где q = Vn/m; L, C, R
емкость и сопротивление потерь линии; LK, Ск, RK — аналогич-
ные параметры контура.
Для определения условий самовозбуждения рассматриваемо-
го генератора необходимо знать комплексную передаточную ха-
рактеристику Koc(j(D) цепи обратной связи
KJja))^ Kk(j(d) K(jco). (3.7.2)
где KK(jco) и К (jco) — соответственно комплексные передаточ-
ные характеристики контура и линии с нагрузкой RH. Из
рис. 3.7.3 следует, что
1
1 - o>2LKCK + j<oCKRK
(3.7.3)
206
Выражение для K4(j(D) определяется из решения линеаризо-
ванной дифференциальной задачи для генератора па LC-линии
без контура
ychy+p(a + X)chy’ (3.7.4)
/о>Ло2 +a2 -со2 |<о7<о2 + а2+ со2
где у- ip + jv; <р = J----------; v = J;
V z у Z
P = p/RH; р — волновое сопротивление линии без потерь;
р = R/p — нормированные потери в линии.
Подставляя выражения (3.7.3) и (3.7.4) в формулу (3.7.2),
после преобразований получаем
к a + jb
K"^“’ = o + jd’ ,3-7'5»
где а =<р, b = у;
с = (1 - co2mn)[ch(p((pcosy - cousin у) + shq>(apcos\|/ - у sin у)] -
-(DmpafchqXy cos V + aP sin V) + sh(p(q)sin ф + a>P cos у)];
d = compa[ch(|)(q)cos у - cop sin y) + shq>(ap cos у - у sin у)] +
+(1 - (O2mn) [chcp(vp cos у + оф sin y) + shq>(4> sin V + cos V)] •
Амплитудно-частотную и фазочастотную характеристики цепи
обратной связи запишем в виде t-----------
12 . 12
КоД<о) = |Кос0(о)| = Д^;
V с + a
л / х . bc-ad
«^(aO^arctg------—.
ac + bd
При произвольном значении RH собственные частоты О)п и би-
фуркационный параметр Кмип определяются численными метода-
ми: собственные частоты — из трансцендентного уравнения
Фог(С0) = (2п 4- 1)тс, (3.7.6)
а бифуркационный параметр — из равенства
Кмкнп= VK»
Ждущему режиму работы рассматриваемого генератора соот-
ветствует амплитудная характеристика жесткого типа, началь-
ный участок которой формируется амплитудной характеристи-
кой шумоподавителя на МСВ. Согласно [9], характеристика же-
сткого типа может быть аппроксимирована полиномом не ниже
пятой степени. Поэтому, полагая, что усилитель инвертирует фазу
колебаний, используем аппроксимацию сквозной амплитудной
характеристики неполным полиномом пятой степени
ияых =“klU8K “k3URX +k5UBXl (3.7.7)
где коэффициенты kp k3, — положительные числа.
207
На рис, 3.7.4 приведены полученная экспериментально сквоз-
ная амплитудная характеристика цепи «усилитель — шумопо-
давитель» и аппроксимирующая зависимость (кривые 1 и 2 со-
ответственно); ошибка аппроксимации не превышает 10 %.
Для данной аппроксимации выражение для амплитуды первой
гармоники колебаний частоты соп на входе усилителя имеет вид
V 5кб
Анализируя это выражение, можно определить амплитудное ус-
ловие возбуждения рассматриваемого генератора
к3>кяо, (3.7.8)
где к30 = V40k5(KM„Iin-k,)/3 — минимально необходимый для
возбуждения коэффициент к3 при заданных кх и к5. Величина
внешнего воздействия ивх1, необходимая для возбуждения коле-
баний в рассматриваемом генераторе, равна
|зк,+ J9kU20k,k5
юк5 - <3-7-9)
и вычисляется из условия равенства нулю модуля крутизны ам-
плитудной характеристики.
Таким образом, выражения (3.7.6), (3.7.8), (3.7.9) определя-
ют условия возбуждения исследуемого генератора.
Сформулируем дифференциальную задачу для рассматривае-
мого генератора. Эта задача может быть представлена в следую-
щем виде:
Эи(у,т) = Эу i/ \ 9J(y -арЗ(у,т)-р— ctT 0<y<l; (3.7.10)
dJ(y,T) _ Эу 1 du(y,T) p Эт 0<y<l; (3.7.11)
J(y>4=1 = !-[и(у,х)| -ub(t)]; 0<у<1; P y (3.7.12)
d2u(y,T) i тоаЭи(у’т) _1_ i , (<7 —
Эт2 + mpa y-0 +и^У’Чм) ~ y=0
= -k1[u(y,T)|v 4 -uB(T)]-k3[u(y,T)|y=1 -ub(t)] 3 + (3.7.13)
+к5[и(у,т)|^1 -uB( л)]5;
и(У’Ч=о = = 0, 0<y<l; (3.7.14)
j(y,r)L = L ’ /Itm) = 0, 0<y£l. (3.7.15)
208
Здесь (3.7.10) и (3.7.11) — те-
леграфные уравнения для
LC-линии с потерями с безраз-
мерными временем т = t / vLC
и координатой у == х/1, где 1 —
длина линии.
Граничное условие (3.7.12)
характеризует влияние нагруз-
ки на конце линии (у = 1). Гра-
ничное условие (3.7.13) отра-
жает влияние нелинейной ам-
плитудной характеристики
(3.7.7) и контура на LC-линию.
При этом входное сопротивле-
ние эмиттерного повторителя
предполагается бесконечно
большим.
Рис. 3.7.4 Амплитудная харак-
теристика цепи усилитель—шумопо-
давитель
Аналитическое решение дифференциальной задачи вида
(3.7.10)—(3.7.15) до сих пор не получено. Поэтому был исполь-
зован численный метод решения дифференциальных уравнений
в частных производных: метод сеток [37]. Из-за отсутствия уни-
версальных методов исследования сходимости нелинейных раз-
ностных схем контроль полученных результатов осуществляли
при использовании дополнительной информации о решении [183].
В данном случае использовались рассчитываемые аналитичес-
кие значения собственных частот, амплитуды колебаний в уста-
новившемся режиме, минимально необходимых коэффициента
усиления усилителя и амплитуды внешнего воздействия.
Применяемые в дальнейших вычислениях погонные парамет-
ры линии выражаются следующим образом:
л (со) -К1(<о) т p^KjCco) - К» D гКДсоЖг(<о)р
L/л f Lg , XVa ---------—--- ,
0) 7K*(co)-K*(co)
где KJco) — дисперсионная зависимость МСВ; К2(со) — коэффи-
циент затухания МСВ.
Для того, чтобы оценить влияние шумоподавителя на работу
исследуемого генератора, необходимо сравнить результаты мо-
делирования с этим элементом и без него. Работа генератора без
шумоподавителя моделировалась при добротности контура
QK==1...2, что соответствует случаю ограниченной полосы уст-
ройства. При моделировании генератора с запаздывающей об-
ратной связью с шумоподавителем предполагалось, что узкопо-
лосный контур (QK > 1) формируется на частоте сильного входно-
209
го сигнала. Из описания шумоподавителя видно, что одной из
основных его характеристик является различие величин вноси-
мых потерь для слабых и сильных сигналов, согласно [28, 213],
составляющее для типовых элементов 10...30 дБ. Данному пара-
метру в модели соответствует величина добротности контура QK.
Параметры шумоподавителя выбирались таким образом, чтобы
вносимые потери для сильного сигнала обеспечивали выполне-
ние амплитудного условия возбуждения, а большие в QK раз по-
тери для слабого сигнала — не обеспечивали.
При моделировании использовались следующие основные ис-
ходные данные. Считалось, что применяется линия задержки на
прямых объемных МСВ. Значения параметров устройства выби-
рались типовыми: т3 — 0,2 мкс; р ==• 50 Ом; К2(со) = 5 дБ/см. При
этом рассчитанные значения остальных параметров и коэффи-
циентов составили L = LO1 = 10“5 Гн; С = С01 = 4-10"9 Ф; а = 3,82;
R = RQ1 - 191 Ом; 1 = 1,06 см; Р = 1. Амплитуда внешнего воздей-
ствия соответствовала условию возбуждения генератора (3.7.9),
длительность тв — условию тв > т3, а частота О)в для случая без
шумоподавителя — условию 0)в^0)макс.
На рис. 3.7.5, 3.7.6 представлены результаты моделирования
генератора без шумоподавителя, где показаны рассчитанные вре-
менные зависимости напряжения на входе ивх и выходе ивых ли-
нии и амплитудный спектр последнего в разные моменты време-
Напряжение па входе ивх и выходе ивых
моменты времени для генератора без ШП
линии и его спектр в разные
210
ни при малом запасе по усилению (к3/к30 = 1,5), Анализ резуль-
татов моделирования генератора без шумоподавителя позволяет
сделать следующие выводы.
Процесс установления колебаний имеет многочастотный ха-
рактер, в результате которого происходит изменение частоты
колебаний с сов = 9 рад на соугт = сомпкп= 20,6 рад. Основными фак-
торами, влияющими на длительность и характер процессов ус-
тановления колебаний, являются запас по усилению и амплиту-
да внешнего воздействия, причем наиболее существенным явля-
ется первый фактор. Так, при малом запасе по усилению много-
частотный процесс довольно быстро переходит в одночастотный
на частоте соуст = сомакс. При этом длительность запоминания тзап
частоты сов, определяемая временем нарастания колебаний на
других (кроме сов) собственных частотах до уровня 50 % от амп-
литуды в установившемся режиме Ауст, составляет 40...60 пери-
одов установившихся колебаний Туст. При большом запасе по
усилению амплитуды других спектральных составляющих нара-
стают еще быстрее (тзап = 15...40 Тугг), и длительность такого мно-
гочастотного процесса составляет сотни Т . Амплитуда внеш-
него воздействия UB незначительно влияет на характер процесса
установления колебаний: при увеличении UB примерно на поря-
док тзап возрастает на 10...15 %.
Таким образом, небольшая длительность запоминания часто-
ты (десятки Т ), ограничиваемая нарастанием колебаний на
других собственных частотах, не связанных с частотой входного
импульса, не позволяет эффективно использовать генератор с
запаздывающей обратной связью без шумоподавителя для запо-
минания частоты сигналов.
На рис. 3.7.7 приведены основные результаты моделирования
генератора с шумоподавителем при наличии запаса по усилению
1,5. Как указано выше, в этом случае О)в = со = сомакс =21 рад и в
течение всего процесса установления в спектре колебаний преобла-
Рис. 3.7.7. Напряжение на входе н>х и выходе и*ых линии и его спектр
Для генератора с ШП
211
дает составляющая этой частоты. Следовательно, в данном случае
наблюдается одночастотный процесс установления колебаний на
частоте сов = О)уст при практически неограниченной длительности ее
запоминания. Поскольку полоса пропускания цепи обратной связи
в данном случае сравнительно узкая и условия возбуждения вы-
полняются лишь для одной собственной частоты шмакс> то запас
по усилению практически не влияет на процесс установления
колебаний.
Таким образом, рассматриваемое устройство с элементами на
МСВ может использоваться для длительного запоминания час-
тоты разведываемого радиосигнала.
3.7.2. Цифровые устройства записи и воспроизведения сигналов
Достижения в области элементной базы цифровой техники по-
зволили создать принципиально новый тип устройств первичной
обработки, а именно: цифровые устройства записи и воспроизведе-
ния сигналов (ЦУЗВ). Они могут применяться для высокоточного
анализа внутриимпульсной структуры сигналов, в качестве фор-
мирователей согласованных с принимаемыми сигналами помехо-
вых воздействий, а также при реализации корреляционной и вза-
имно корреляционной обработки как источники опорных сигна-
лов. Наибольший эффект при использовании ЦУЗВ по сравнению
с аналоговыми устройствами достигается при обработке сигналов
со сложными видами внутриимпульсной модуляции и большой дли-
тельностью. Немалое значение имеет возможность неограниченно-
го времени хранения записанных сигналов и внесения дополни-
тельной модуляции любого вида при их воспроизведении.
Типовая [81] схема построения ЦУЗВ представлена на рис. 3.7.8.
В ней входной сигнал, перенесенный предварительно на промежу-
точную частоту, подается на АЦП. Иногда перед АЦП производит-
ся сжатие динамического диапазона входных сигналов с помощью
схем АРУ и ограничение их спектра. АЦП может быть амплитуд-
ного или фазового типа, то есть реализующим квантование по уровню
текущей амплитуды или фазы сигнала. Запоминающее устройство
(ЗУ) обеспечивает запоминание, хранение и выдачу массивов дан-
ных, отображающих отсчеты записанной реализации входного сиг-
Рис. 3.7.8. Схема построения ЦУЗВ
212
нала, в соответствии с командами блока управления. При выдаче
записанных данных в прямом или обратном порядке по отноше-
нию к порядку их поступления они подаются на цифро-аналого-
вый преобразователь (ЦДЛ), формирующий на выходе аналоговый
сигнал, схожий но своей структуре с исходным. Вносимые ошибки
записи и воспроизведения зависят от разрядности АЦП и ЦАП и
частоты дискретизации сигналов по времени. Разрядность и пре-
дельная частота дискретизации входного сигнала по времени опре-
деляются применяемой технологией изготовления АЦП. В этом
плане некоторые преимущества имеют АЦП фазового типа, для
которых разрядность при той же точности записи с учетом фикси-
рованного диапазона значений фазы может быть установлена су-
щественно меньшей, чем для АЦП амплитудного типа; в них, по-
мимо точности, требуется обеспечить существенный динамический
диапазон обработки входных сигналов. Так, в [81] описаны вари-
анты фазовых АЦП для ЦУЗВ, обеспечивающие обработку сигна-
лов на частотах до сотен мегагерц с уровнем паразитных составля-
ющих на выходе устройства порядка -20...-30 дБ. Длительность
запоминаемых сигналов при фиксированной частоте дискретиза-
ции определяется объемом памяти ЗУ и в реализованных образцах
составляет сотни микросекунд.
Пусть на входе ЦУЗВ в некоторой полосе частот
[f0-Afp/2,f0 4- Afp/2] действует полезный сигнал u(t) с шириной
спектра Afc < Afp в присутствии аддитивного гауссовского шума n(t)
с корреляционной функцией а2р(т)сов(2тг£0т):
s(t) = u(t) + n(t) = A(t)cos[2nft + v(t)] + n(t), 0 < t < Tc, (3.7.16)
где A(t) — амплитудная (АМФ), a \y(t) — фазовая (ФМФ) модулирую-
щие функции сигнала; f — частота сигнала, отличающаяся в об-
щем случае от центральной частоты ЦУЗВ. Ограничимся случаем
сильного сигнала q(t) = A(t)/ а > 5 . Тогда смесь сигнала и шума в
(3.7.16) можно представить [115] в виде результирующего сигнала
s(t) = A(t)cos[2jtf0 +Yp(t)], yp(t) =2rcfct + \y(t) + m(t), (3.7.17)
где Ap(t), yp(t) — АМФ и ФМФ результирующего сигнала с уче-
том расстройки fc =f - f0 относительно частоты f0; m(t) — рас-
пределенная по гауссовскому закону флуктуация фазы с нуле-
вым средним и дисперсией a2(t) = l/q2(t). Введем также описа-
ние сигнала (3.7.17) относительно частоты f0 на основе квадра-
турных составляющих
s(t) = vc(t)cos2rcf0t- v„(t)sin2nfot, vC8(t) - Ap(t)cos(sin)yp(t) =
= ur 4(t) + nr 4(t) = A(t)cos(sin)[2Trfct + y(t)] + nc я (t),
где nc s(t) — центрированные независимые гауссовские случай-
ные процессы с корреляционной функцией а2р(т). Выделение со-
ставляющих vc s(t) может проводиться на основе известных схем
213
квадратурной обработки [115] или реализации специального спо-
соба оцифровки входного узкополосного сигнала [25].
В рамках введенных описаний можно определить два основ-
ных класса ЦУЗВ. В первом из них осуществляется выделение и
запись модулирующих функций АМФ и ФМФ входного сигнала
или одной только ФМФ, если, как это часто бывает, АМФ имеет
примерно прямоугольную форму. Полученная информация за-
тем используется для воспроизведения сигнала путем модуля-
ции некоторого гармонического колебания в виде
sb(t) = Ah(t)cos[2rtf0 + Yb (t)]> о < t < Tc,
где Ab(t), V|fb(t) — восстановленные АМФ и ФМФ. Здесь можно
различать ЦУЗВ с нулевой (f0 0) и ненулевой (f0 Ф 0) опорной
частотой. В ЦУЗВ с нулевой опорной частотой проводится выде-
ление и оцифровка квадратурных составляющих входного сиг-
нала, а затем и вычисление АМФ и ФМФ — A (t), Vp(t) по изве-
стным формулам цифрового детектирования [25]. В ЦУЗВ с не-
нулевой опорной частотой квантование и дискретизация сигна-
ла осуществляется не прямым образом, а путем обработки пол-
ной фазовой модулирующей функции <p(t) = 2Trfot + yp(t) с после-
дующей компенсацией составляющей опорной частоты [163].
ЦУЗВ данного типа целесообразно использовать, если информа-
ция о форме АМФ и ФМФ необходима не только для последую-
щего воспроизведения, но и для целей анализа внутриимпульс-
ной структуры и распознавания сигналов.
Принцип действия ЦУЗВ второго типа основан на выделении
квадратурных составляющих vc g(t), 0 < t < входного сигнала, их
оцифровке и записи в виде дискретных сигналов
vcdsd(k), k = 0,N-l. После записи может проводиться независи-
мое воспроизведение квадратурных составляющих на основе циф-
ро-аналогового преобразования дискретных сигналов в двухканаль-
ной схеме в виде непрерывных сигналов усЬ.йЯ’ Далее,
используя гармонический сигнал с частотой f0, в обратном порядке
восстанавливают исходный сигнал на основе преобразования вида
sb(t) = vcb(t)cos2rcf0t - vsb(t)sin2rcf0t, 0 <t <TC.
При анализе вариантов построения ЦУЗВ основное значение
имеет оценка характеристик качества воспроизведения сигна-
лов в зависимости от основных технических характеристик: ко-
личества уровней квантования или разрядности представления
данных; частоты или интервала дискретизации по времени; ши-
рины полосы частот устройства; динамического диапазона; объема
резервируемой для хранения сигналов памяти. В качестве физи-
чески понятного показателя качества работы ЦУЗВ естественно
рассмотреть коэффициент корреляции Ке исходного, полезного
214
u(t) и восстановленного sb(t) сигналов при условии равенства их
энергий Е. Для ЦУЗВ первого типа выражение для Кс можно
представить в виде
К= =Re^ I A(t)Ab(t)exp[j(2refct + >|r(t)-Yb(t))]dt.
ZE До
Рассмотрим ситуацию, когда сигналы имеют прямоугольную
форму АМФ Ab(t) = A(t) я Am, 0 < t < Те, и реализуется ЦУЗВ фа-
зового типа. Тогда нетрудно видеть, что усредненный по ансамб-
лю коэффициент взаимной корреляции можно приближенно
представить в виде
2 9
K- = 1-2“2Al? (3-7Л8)
где — средпеквадратическая (СКО) ошибка цифрового пред-
ставления результирующей ФМФ
= т J MUVp(t)- Vb(t)]2 }dt.
*с О
Для ЦУЗВ второго типа запишем выражение для коэффици-
ента корреляции следующим образом:
к« = jk(t)vtb(t) + u,(t)vrt(t)]dt
и, соответственно, получим для КР формулу
------------------- £2 + £2 02
Ке =1-2(2Е/Тс)-(2Е/Тс)’ (3.7.19)
где е*м — СКО цифрового представления квадратурных состав-
ляющих
e^=ljM{[vC8(t)-vcbBb(t)]2}dt.
О
Введенные показатели в первом приближении определяют
относительный уровень неискаженной части сигнала и, соответ-
ственно, уровень паразитных составляющих при затратах мощ-
ности на воспроизведение и последующее излучение сигнала.
Более тонкий анализ качества ЦУЗВ предполагает оценку уров-
ня внеполосных паразитных составляющих в спектре воспроиз-
водимого сигнала и искажений формы взаимно корреляционной
функции сигналов.
Если ограничиться введенными показателями, то задача оцен-
ки качества ЦУЗВ, как следует из приведенных соотношений,
сводится к расчету СКО цифрового представления сигналов и
случайных процессов при записи. При этом можно воспользо-
ваться известными результатами [7, 34], а, кроме того, прибли-
215
женной методикой [173], основанной на анализе вероятностных
характеристик пересечений уровней квантования и обладающей
тем преимуществом, что она позволяет достаточно просто прово-
дить анализ ошибок для нестационарных процессов, а также
сигналов квазидетерминированной формы.
В общем случае любой сигнал ^(t), 0 < t < Tf при анализе СКО
цифрового представления рассматривается как реализация некото-
рого случайного процесса. Преобразование сигнала при оцифровке
удобно разбить на два этапа. Сначала рассматривается процедура
квантования по уровню, в результате которой ^(t) преобразуется в
квантованный сигнал ^K(t) = xi, xi - Да/2 <^(t) < xi + Аа/2,
i = l,M, где xi — значение уровня квантования амплитуды, а
Да — интервал между соседними уровнями. Затем рассматрива-
ется процедура дискретизации по времени, в результате которой
формируется заданный на конечном интервале дискретный сиг-
нал £g(k) = ^K(kAt), k = 0,N-l, At=Tc/N. Оценка СКО цифрово-
го представления проводится по отношению к результату вос-
становления исходного сигнала в виде непрерывного сигнала ^b(t),
О < t < Тс на основе любого из возможных методов интерполяции
[25]. Для получения гарантированных значений ошибок целесо-
образно рассмотреть метод ступенчатой несимметричной интер-
поляции, при котором представляется £b(t) = £p(k) = £K(kAt),
kAt < t < (k + l)At, k-0,N-l. Тогда CKO цифрового представле-
ния можно представить в виде суммы трех составляющих
e2=^jM{K(t)-^b(t)]2}dt =
о
Т 'Г
= ^-jM{[^(t)-^(t)]2}dt + ^- jM{[^(t)-^(t)]2}dt +
ic 0 lc 0 (3.7.20)
M{K(t)-Ut)][Ut)4h(t)]}dt = 82 + е2 + 2eK(t,
характеризующих СКО квантования по уровню, СКО дискрети-
зации по времени и коэффициент корреляции погрешностей кван-
тования и дискретизации. Далее проводится анализ каждой из
составляющих в (3.7.20) [163, 173]. При этом известно, что для
случая равномерного расположения уровней квантования с ин-
тервалом Afl величина е* -Да/12. Для ошибки дискретизации в
естественном для условий работы ЦУЗВ предположении, что
вероятность пересечения более чем одного уровня на интервале
дискретизации близка к нулю, показано [173], что
Z1C i“l 0 Z /
216
где Х.(х., т) — среднее число пересечений уровня квантования xi
исходным сигналом ^(т) в момент времени т, а — среднее число
пересечений всех уровней на интервале [0,Тс]. Анализ соотноше-
ний для третьей составляющей суммарной СКО [173] показывает,
что она имеет небольшие значения и ею в большинстве случаев
можно пренебречь. Если условие малости вероятности пересечения
более одного уровня квантования на интервале дискретизации не
выполняется, то для оценки зависимости £2 от Да проводится “сши-
вание” зависимости (3.7.21) с предельным при Дй -> О уровнем
ошибки. Его значение определяется ошибкой дискретизации ис-
ходного сигнала в отсутствие квантования, рассчитываемой на ос-
нове соотношений, приведенных, например, в [25].
Использование аппарата теории пересечений позволило легко
применить данный подход для решения задач анализа ошибок
цифрового представления квазидетерминированных сигналов, а
также их модулирующих функций, в том числе и для нетради-
ционных способов выделения ФМФ [173]. Возможно и распрост-
ранение подхода для анализа ошибок оцифровки нсдифференци-
руемых случайных процессов. При этом следует воспользовать-
ся введенным в [185] приближением для вероятности пересече-
ния уровня на основе задания правосторонней производной
корреляционной функции процесса в нуле.
В качестве примера рассмотрим задачу определения качества
записи и воспроизведения ЦУЗВ первого типа с нулевой опор-
ной частотой, в котором реализуется квантование ФМФ ЛЧМ
сигнала с интервалом Ду = 2л/Му, где М^ — количество уровней,
приходящихся на диапазон значений фазы [-л,л]. ФМФ входной
смеси имеет вид yp(t) = 2л£с1 + Qt2 + m(t), где Q лДГс/Тспри боль-
ших индексах модуляции. Квантование фазы может осуществ-
ляться на основе фиксации знаков (при Д^ = л/2) или уровней
амплитуды квадратурных составляющих (при меньших значе-
ниях Д^). При записи ФМФ сильного сигнала величина Х,г/Тс в
(3.7.21) оценивается выражением
тс
2п _ fit
------ С + —
АД о л
—Af{
2Д„
(3.7.22)
dt =<
где fp = fc 4- Afr/2 = f + Afc - f0 — расстройка средней частоты сиг-
нала относительно центральной частоты ЦУЗВ. Тогда оконча-
тельно при условии At < 1/ fmaxMv , где f uax = fр 4- Afc/2, можно
записать, например, для |fp|<Afc/2
217
82 ~ —— + — uAt A Af
v 12 4 * c
Af.
\2
>
(3.7.23)
1 + 4
Приведенные соотношения показывают, что при фиксированной
разрядности АЦП и выборе достаточно большой частоты дискре-
тизации СКО цифрового представления ФМФ определяется в
основном ошибкой квантования по уровню. При этом для мало-
разрядных АЦП фазового типа можно добиться предельной точ-
ности записи и воспроизведения сигналов.
С использованием (3.7.18) или (3.7.19) и выражений для СКО
цифрового представления сигналов могут быть получены пара-
метрические зависимости характеристик качества воспроизведе-
ния от технических характеристик ЦУЗВ.
На рис. 3.7.9 представлен пример таких зависимостей для
рассмотренного варианта ЦУЗВ, полученных с использованием
выражений (3.7.18), (3.7.23). На рис. 3.7.9а представлены со-
вмещенные зависимости Ке, е2 от f при различных Afc, а на
рис. 3.7.96 — зависимости от А^ при различных А£г и фиксиро-
ванной f = 0 (все частотные характеристики даны в МГц). Зна-
чения At и отношения q *= Am/a задавались, соответственно, рав-
ными 0,0125 мкс и 10. Представленные зависимости свидетель-
ствуют о том, что в отсутствие расстройки частоты сигнала отно-
сительно центральной частоты ЦУЗВ при Av < л78 достигаются
приемлемые значения Ке >0,9 . Следует еще раз отметить, что
зависимости получены при использовании упрощенной методи-
ки и ряда ограничений, которые могут быть преодолены, если
Рис. 3.7.9. Зависимости для характеристик качества работы ЦУЗВ
218
при расчете CKO дискретизации воспользоваться более точными
соотношениями, учитывающими предельный уровень ошибки при
Дм —> 0 и фиксированном At.
3.8. Поимнульсное распознавание сигналов
Как ранее отмечено в п. 3.1, один из возможных способов
повышения информативности PC РТР и РР связан с реализаци-
ей поимпульсного распознавания (ПР) ИРИ по тонкой структуре
излучаемых сигналов и, в частности, по форме законов их внут-
риимпульсной модуляции. Эти особенности могут определяться
как индивидуальными (паразитными) свойствами внутриимпуль-
сной структуры сигналов, так и объективно присущим данному
типу источников законом внутриимпульсной модуляции. Реали-
зация ПР сигналов ИРИ при устойчивом характере особеннос-
тей топкой структуры по отношению к реализуемым в ИРИ ме-
рам ПЗ (перестройке частоты, перестройке периода следования
импульсов и т.п.) позволяет обеспечить практически мгновенное
выявление интересующего объекта.
Оставляя в стороне организационно-технические аспекты по-
лучения эталонных описаний и использования результатов ПР,
рассмотрим основные варианты построения устройств, реализу-
ющих такую обработку на рациональной основе.
Решение задачи ПР в интересах РТР и РР может осуществлять-
ся в двух постановках: как задачи многоальтернативного распозна-
вания принимаемого сигнала в смысле его отнесения к одному из L
ранее выявленных экземпляров или типов ИРИ при наличии соот-
ветствующих эталонных описаний; как задачи идентификации
«он — не он», когда при анализе входного потока требуется выде-
лять сигнал, относящийся к одному ранее выявленному ИРИ, для
которого имеется исходное эталонное описание.
В техническом плане можно выделить три основных подхода
к решению задачи ПР, отличающихся прежде всего способом
измерения (выделения) характеристик внутриимпульсной струк-
туры и их использования как признаков ПР. Первый из них
основан на применении специальных аналоговых измерителей
характеристик внутриимпульсной структуры. Па выходе таких
измерителей формируются видеоимпульсы сложной формы, ха-
рактеризующие закон изменения некоторого параметра в преде-
лах длительности импульса. В качестве основных признаков ПР
в этом случае наиболее часто используются форма огибающей
амплитуды A(t), закон изменения частоты f(t), форма огибаю-
щей амплитудно-частотного спектра W[co(t)], развернутой во вре-
мени. Каждый видеоимпульс затем подвергается аналого-циф-
ровому преобразованию и в виде вектора отсчетов подается на
219
решающее устройство, где сравнивается с ранее записанными
эталонами. Обобщенная структурная схема устройства, реализу-
ющего данный подход, представлена на рис. 3.8.1. Для выделе-
ния означенных характеристик в качестве измерителей можно
использовать детектор огибающей радиоимпульса, узкополосный
частотный дискриминатор, анализатор спектра на дисперсион-
ной линии задержки и т.п. На вход всех устройств подается сиг-
нал, предварительно перенесенный на промежуточную частоту.
Следует отметить, что в условиях быстрой смены частоты при
реализации данного подхода наибольшую информативность имеют
характеристики A(t) и W[co(t)], процедура выделения которых
инвариантна значению несущей частоты.
Существо второго подхода также состоит в определении фор-
мы законов изменения впутриимпульсных параметров. Однако
здесь эта процедура осуществляется после оцифровки входного
сигнала путем вычисления отсчетов АМФ и полной ФМФ с по-
мощью специализированных цифровых устройств. Структурная
схема устройства ПР при такой обработке представлена на
рис. 3.8.2. Оцифровка сигнала проводится либо непосредственно
на промежуточной частоте, либо после его переноса на нулевую
Рис. 3.8.1. Структурная схема устройства ПР с выделением формы
законов внутриимпульсной модуляции на основе аналоговых измерителей
Рис. 3.8.2. Структурная схема устройства ПР с реализацией циф-
рового способа выделения АМФ и ФМФ
220
частоту и выделения квадратурных составляющих. Далее прово-
дится вычисление законов изменения внутриимпульсных харак-
теристик в дискретные моменты времени, а затем и сравнение
вектора отсчетов с эталонным описанием. Вычисляемые функ-
ции Ap(tk), Vp(tk), k = 0,N-l полностью характеризуют тонкую
внутриимпульсную структуру, а также начальную фазу и набег
фазы за счет смещения частоты относительно центральной час-
тоты канала обработки. Поскольку последние составляющие ФМФ
являются неинформативными и мешающими для ПР, то они
должны быть скомпенсированы с помощью специальной обра-
ботки.
При третьем подходе к построению устройств ПР реализуется
квазиоптимальная корреляционная обработка радиосигнала, ос-
нованная на использовании эталонной «копии» и вычислении ее
функции взаимной корреляции со вновь принятым сигналом (см.
рис. 3.8.3). Для формирования эталонной «копии» осуществля-
ется предварительная запись ранее принятого сигнала в ЦУЗВ,
который затем воспроизводится в качестве опорного сигнала кор-
релятора. При обнаружении сигнала в каком-либо частотном
канале приемника этот канал с помощью коммутатора подклю-
чается ко входу коррелятора, на другой вход которого подается
сигнал с выхода ЦУЗВ. Коррелятор может быть цифрового или
аналогового типа, например, на основе АОЭ-устройств с времен-
ным интегрированием. Главным преимуществом данного подхо-
да является то, что здесь реализуется обработка сигнала в це-
лом, что позволяет добиться близких к потенциально достижи-
мым характеристик распознавания. Одновременно следует отмс-
тить возникновение определенных сложностей при перестройке
частоты вновь принятого сигнала по отношению к частоте ранее
записанного сигнала. Это связано с тем, что, в отличие от пре-
дыдущих схем обработки, где используются в основном инвари-
антные к перестройке частоты признаки распознавания, в дан-
ном случае требуется либо
знать сетку возможных частот,
либо проводить поиск и наве-
дение устройства по частоте.
Ограничимся далее рассмот-
рением первых двух подходов,
в рамках которых задача ПР
сводится к задаче распознава-
ния сигналов сложной формы
в присутствии в общем случае
коррелированных шумов и
флуктуаций.
Рис. 3.8.3. Структурная схе-
ма устройства ПР корреляционно-
го типа
221
3.8.1. Распознавание сигналов сложной формы при неполном
(неточном) учете корреляционной структуры шума
Рассмотрим задачу ПР по форме законов внутриимпульсных
параметров сигналов ИРИ (далее будет просто употребляться тер-
мин “форма сигналов”) как задачу обработки сигналов (видеоим-
пульсов» выделяемых аналоговым измерителем), поступающих от
L экземпляров ИРИ: s^t) = m^t) + n^t), i = l,L, 0<t<Tc. Здесь
mДt) — детерминированная составляющая формы; n^(t) — реализа-
ция гауссовского шума с корреляционной функцией о2р(т), описы-
вающего в общем случае флуктуации формы принимаемого сигна-
ла различного характера. При цифровой обработке в рамках схемы
рис. 3,8.1 любой видеосигнал s*(t) описывается вектором отсчетов
х* = (s^t0),...,s*(tN_1))T. Статистические описания множества сигна-
лов определяются векторами математических ожиданий Ш; = M[xJ,
i = 1,L и матрицей ковариации С = ||o2p(|i ~ j| At)||. Рассматривает-
ся случай простой функции потерь и одинаковой для всех экземп-
ляров ИРИ априорной вероятности появления сигналов. Будем
также считать, что в ходе обучения может быть получена предста-
вительная выборка наблюдений_сигналов каждого ИРИ, и погреш-
ностями при задании mi5 i = 1,L , если решается задача индивиду-
ального (поэкземплярного) распознавания, можно пренебречь. В
противном случае форма сигналов и соответствующие ей rrr, i = 1,L
считаются известными, исходя из имеющихся данных о внутриим-
пульсной структуре сигналов распознаваемых типов ИРИ.
При приеме сигналов на фоне коррелированных шумов поме-
хоустойчивость зависит не только от энергии, но и от формы
сигналов [100, 108]. Это, в частности, приводит к задаче отыска-
ния оптимальной формы используемых в процессе информаци-
онного взаимодействия сигналов при заданной корреляционной
структуре шума [108]. В то же время, при синтезе алгоритмов
приема не всегда возможно осуществить оптимальную обработ-
ку из-за отсутствия достоверной информации о корреляционной
структуре шума или невозможности ее полного учета в условиях
ограничений по сложности алгоритмов.
В данном параграфе рассматриваются вопросы оценки потерь,
возникающих при использовании особого класса квазиоптималь-
ных алгоритмов обработки, в той или иной степени не учитыва-
ющих корреляционную структуру шума. Особенность получен-
ных результатов состоит в том, что они определяют характерис-
тики потерь при конкретно не заданной форме сигналов и нала-
гаемых на нее достаточно общих ограничениях. В известной
литературе аналогичного рода результаты получены только для
случая полностью определенной формы сигналов [78].
222
Временное представление. В рамках введенного статистичес-
кого описания оптимальное решающее правило отнесения вход-
ного вектора х к одному из ИРИ имеет вид
1 = argmin[(x-m1)TC’1(x-mi)]: xes/t), (3.8.1)
i
при этом вероятности ошибок при попарном приеме как грани-
цы элементов матрицы ошибок в мпогоальтернативпой ситуа-
ции [199] имеют вид
сц, =|[(mi -mj)TC-’(mi -т^.(3.8.2)
Li
Рассмотрим класс квазиоптимальных алгоритмов обработки,
не полностью, в силу отмеченных выше причин, учитывающих
корреляционную структуру шума. Такие алгоритмы в общем
случае характеризуются тем, что вместо истинной матрицы ко-
вариации в решающем правиле структуры (3.8.1) используется
некоторая отличная от нее положительно определенная симмет-
ричная матрица К. В этом случае вероятность ошибки при по-
парном приеме можно получить в виде [171, 172]
р; = и,=----”> (3.8.3)
2[(т; -т/К’СК ’(т, -т()]2
Соотношение величин Р“ и Р*, определяющее потери, однозначно
связано с величинами ос., [}^, являющимися функциями квадра-
тичных форм матриц относительно вектора разности а - mi -
Для оценки потерь, возникающих при пренебрежении корреля-
ционной структурой, целесообразно абстрагироваться от конк-
ретного вида а в условиях неопределенности и многообразия
возможных форм сигналов. При этом можно воспользоваться
некоторыми результатами теории матричных неравенств [11,
12]. Для проведения соответствующего анализа величины
и р.., введя вектор b = К 2а и матрицу В-К 2СК 2 , предста-
вим в виде
_i 1
а'К 2К 2а
'ч 1
( 1 л 1 -1 V
2 а'К 2К 2СК 2К 2а
ьь
2(ЬТВЬ)2
(3.8.4)
223
После выполнения характеристического ортогонального пре-
образования [11, 12, 199], задаваемого матрицей Н, выражения
(3.8.4) удобно переписать следующим образом:
1 1
1 / N-1 V N-l /N-1
aii ’ Р» = Хск/2 УЛкск ,
^^к=0 J к=0 \^к=0
1 (3.8.5)
с-Ссо,...,^)7 =НЬ = НК 2а ,
где Хк, k-0,N-l — собственные числа матрицы В в порядке
возрастания. С учетом (3.8.4) и (3.8.5) в [177] получен ряд нера-
венств для с^. и и, соответственно, для и Рк , имеющих
достаточно общий характер и позволяющих рассмотреть обозри-
мые частные случаи.
В качестве основного ограничения на множестве векторов
разности а в [171] рассматривалось условие постоянства значе-
ния вероятности ошибки оптимального алгоритма = const. При
этом вектор а образует гиперэллипсоид в многомерном простран-
стве, определяемый уравнением ааСча = const • В этом случае
получены следующие неравенства для Р^ и 5Р^ = Рк -Р°:
а" = min^ - - тахр«=а«;
b =±eu0±euN.j b = ±цик, k = O,N-1
О - тт6Р;! < 8R < maxSR - Фо
a J } a J
2aij V^O^N-1
^0 + -1
-Ф0(а^); (3.8.6)
b=±puk, k = 0,N’l b = ±eu0±euN_1
7
8 = 2aij/(X“1 +Xn_i)2, р = 2а^2 , k=0.N-l.
В (3.8.6) uk, k-0,N-l — собственные векторы матрицы В.
В качестве другого ограничения для множества векторов а
рассматривалось условие постоянства энергии вектора разно-
сти eN = ата = const. В этом случае удалось получить следую-
щие оценки: ___ ___________
О = ттЦ - Ру) < ау - Ру£ тах(а0 - рц) < | й 1 - f
" ______ " 2 v vo Ло + ЛМ-1 J
b = ±puk, k = 0,N-l
(3.8.7)
0 = minSPy < 5Py < maxSPy < Фо
b = ±puk, k = 0,N-l
224
где v0 — минимальное собственное число матрицы С. Необходи-
мо отметить, что оценки потерь на основе выражений (3.8.6)
являются точными в том смысле, что существует вектор а, = К2Ь*,
b. = ±eu0 ieu^ , для которого в (3.8.6) выполняется знак равен-
ства и величина бР^ достигает своего граничного значения. В то
же время, оценки вида (3.8.7) являются приближенными, так
как равенство для верхней границы потерь достигается здесь
только в вырожденном случае К - С и 5Р^ = 0.
Помимо вероятностных потерь, естественным условием оцен-
ки которых является равенство энергий сигналов при расчете
вероятностей ошибок приема, на основе исходного представле-
ния (3.8.4) могут быть получены и оценки энергетических по-
терь. Их удобно представить в виде отношения амплитуд сигна-
лов kj/k2, при котором оптимальная и квазиоптимальная обра-
ботка обеспечивает равенство = Р- . Нетрудно видеть, что если
положить а = к^а0 в выражении для и а = к2а0 в выражении
для и применить соответствующие аналоги неравенств (3.8.6)
при условии а.. = р.., то можно получить следующий результат:
I. = min(kj /к2) < кх /к2 < max(k; /к2) = 1.
^o+^n-i а°
В качестве примера на рис 3.8.4 представлены результаты
оценки вероятностных и энергетических потерь для случая
К = о21, когда при обработке, как это часто бывает на практике,
полностью игнорируют корреляционную структуру шума. Соот-
ветствующий квазиоптимальный алгоритм реализует выбор
объекта по минимуму квадратичной меры близости входного
сигнала и эталона
Рис. 3.8.4. Зависимости для вероятностных и энергетических потерь
* 2357
225
При этом Хк = vk, к = 0,N -1, где vk — собственные числа мат-
рицы С. На рис. 3.8.4а дапы зависимости Pj- от отношения вре-
мени корреляции шума к длительности сигнала Тк/Те для раз-
личных видов р(т):
1-р(т) = ехр(-у т); 2 -р(т) = схр(-у т) cos сот; 3-р(т) = ехр(-ут2)
при Р° = 0,01. На рис. 3.8.46 даны соответствующие зависимости
для энергетических потерь. Представленные результаты свидетель-
ствуют о наличии значительных потерь при распознавании видео-
сигналов по форме в условиях наличия коррелированного шума.
Как известно, оценка достижимой помехоустойчивости, вы-
бор информативных подпространств и их размерности в задачах
такого рода проводится на основе расчета вероятностей ошибок
приема сигналов. В этом случае, если корреляционная структу-
ра шума задается матрицей К вместо истинной, но неизвестной
при проведении расчетов матрицы С, при оценке вероятностей
ошибок вместо (3.8.3) используется соотношение
р." =Фо(Фч). Фи -т/К'ЧтГ-тр]. (3.8.9)
Ci
Различия при определении реально достижимой вероятности
Р£ по отношению к Р? определяются различием величин и
для которых можно ввести величину относительного откло-
нения =(фц - . В [171] для данной задачи получены не-
равенства следующего вида:
Хо -1 = тш0„ <0iS <тах0у = xLt "1. (3.8.10)
Фо ХоЧ =minP* <Р^ <тахР* <Ф0 хЛ<Рц » ),
где хк > к = 0, N -1 — собственные числа матрицы СК 1. При рас-
считанном значении вероятности ошибки Р^ на основе (3.8.9) ре-
ально достигаемые ошибки могут быть как больше Р^ , так и мень-
ше Р,- , оставаясь, тем не менее, в пределах, определяемых (3.8.10).
Отметим, что выполняется равенство А = СК-1 =К2ВК 2. Это оз-
начает, что матрицы А и В являются подобными и, следовательно,
Хк = Хк, к - 0,N -1. Отсюда следует, что реальные потери при при-
еме сигналов и погрешности при определении вероятности ошибок
при неточном (неполном) в такой же степени задании корреляци-
онной структуры шума фактически определяются спектром соб-
ственных чисел отношения матриц С и К.
В терминах теории оптимального приема рассматриваемая по-
становка относится к задаче приема полностью известного сигна-
ла. В [159] аналогичные по смыслу результаты получены для зада-
226
чи приема сигналов со случайной начальной фазой. Очевидно так-
же, что данные результаты можно использовать для анализа по-
терь при оценке параметров сигнала, например, времени прихода.
Рассмотрим теперь задачу поимпульсной идентификации сиг-
нала s(t) = m(t) + n(t), 0 < t < Тс. Предположим, что на этапе обу-
чения имеется возможность получения Мр реализаций вектора
отсчетов x = (s(t0), и, соответственно, эталонного век-
тора тх =------£Xi Известно, что
Р 11 (Т2
M[m„] = m; Ст = М[(тх -т)(тх -т)Т] = —!-С0, Со = ||p(|i-j|4t)||,
ivip
где с2 — дисперсия шума (флуктуаций формы сигнала) на этапе
обучения. На этапе принятия решения для входной реализации
х дисперсия шума of может отличаться от of, поэтому матрица
ковариации вектора х - шх имеет вид
Решающее правило при идентификации интересующего сигнала
в присутствии потока сигналов других ИРИ имеет в общем слу-
чае вид
Н01: р2(х) = (x-mx)TK‘1(x-mx) < р2, (3.8.11)
где К — некоторая положительно определенная симметричная
матрица, в общем случае отличающаяся от Сх; р2 — пороговое
значение для махаланобисова расстояния р2(х).
Следует также ввести вероятности ошибок I и II рода
Yi = Р(р2(х) > р2 /HJ; ₽2 - Р(р2(х) < р2 /Но).
Известно [12, 199] , что для матриц К'1 и С’1, как положительно
определенных матриц, может быть найдено линейное преобразова-
ние Н, которое производит их одновременную диагонализацию и
приводит квадратичные формы относительно этих матриц к виду
‘ Х-1 N-1
е’К-с = d’d = X di; с’С.'с = <I X d =£ dix.
k=0 k=0
где с = x ~ mx; d — Нс; X — диагональная матрица, элементами
которой являются собственные числа %k, k = 0,N-l матрицы
СХК“Х. Тогда можно оценить моменты величины р2(х) = стК‘1с
для гипотезы Н1 (поступление интересующего сигнала) следую-
щим образом:
N 1 N-1
шп =М[р2(х) /Н,] = ст2! =М[(р2(х)-шп)7Н1] = 2£хк-
к-0 к-0
227
При больших N закон распределения статистики р2(х) можно
аппроксимировать гауссовским. Для оценки погрешности такой
аппроксимации воспользуемся теоремой Берри—Эсеена [23], со-
гласно которой для функции распределения суммы независимых
N
случайных величин А = £ Xi , каждая из которых имеет нулевое
i=l
среднее и конечный третий абсолютный момент, выполняется
( - А --
sup|FN(x)-®(x)|<c0l3N, 13N = a3/af N 2,
X
\ /
N N
«2 =N'1£m[x?]>0, a3 =N-1£m[|x?|]<~,
i=l i=l
где Fn(x) — функция распределения величины (Na2)”1A; Ф(х) —
стандартная гауссовская функция распределения; 13 N — ляпунов-
ская дробь; с0 — константа, значение которой для данного случая
определяется как с0 = 0,8. Полагая А = р2(х) - mlp имеем
1 n N-1 9 N-1
N i=0 i=0
Отсюда окончательно получим
Ы-1
зир|Ры(х)-Ф(х)|<3,4- 3 — • (3.8.12)
х /N-1 NT 2 < 1
Sx? f N
J
Таким образом, при достаточно больших N для определения
ошибки первого рода можно пользоваться соотношением
Yi =1-Ф[(рз-т11)/о11], (3.8.13)
При оценке вероятности Р2 предположим, что вектор х при-
надлежит мешающему ИРИ. Пусть форма сигнала этого ИРИ
представляется вектором т' Ф т , тогда, вычисляя моменты ста-
тистики р2(х), можно получить следующее выражение:
₽2 =ф[(Рв -т00), сг00], (3.8.14)
N-1
m00 = £xk + (m'-m)TK’1(m'-m);
к=0
N-1
стоо =2£хк +4(m'-m)1K’1CxK“1(m'-m).
к=0
Дальнейший анализ выражений типа (3.8.13), (3.8.14) прове-
дем при К = » т0 есть ПРИ рассмотрении квазиоптимального
228
алгоритма, не учитывающего корреляционную структуру шума
и реализующего вычисление квадратичной меры близости. Пусть
для определенности о2 = =о2, Как и ранее, абстрагируемся от
конкретного вида вектора разности а = т' - т . Для этого пред-
ставим eN = ата в виде
Т Тс
en = ^E0(i -г0), r0 = j m'(t)m(t)dt, Ео = J m'2(t)dt = j m2(t)dt,
*C ^0 0 0 0
где r0 — нормированный коэффициент корреляции формы сиг-
налов. Тогда для у* и Р2, учитывая известные неравенства для
квадратичных форм матриц, можно получить
Yj=l —Ф
pg-a+M’^vok,
k-0
I ——
ра+м;1)2^^
V k=0
N-l
(1 + M;1) 2$>:kY;-2qN(l-r0)
V k=0
2(1 + М;1)2^ v2k + 8(1 + M’1)2qN(l -r^v^
k=0
где vok, k = 0,N -1 — собственные числа матрицы Co; q = E0/Tcq2 —
имеет смысл отношения сигнал-шум на входе устройства иденти-
фикации.
Таким образом, и для задачи идентификации сигналов ана-
лиз на основе аппарата матричных неравенств позволяет полу-
чить результаты, позволяющие абстрагироваться от конкретной
формы сигналов.
Спектральное представление. В ходе синтеза алгоритмов циф-
ровой обработки часто возникает необходимость выбора рацио-
нального представления получаемых после аналого-цифрового
представления дискретных сигналов, заданных на конечных ин-
тервалах. Одновременно возникает потребность в сравнительной
оценке преимуществ временного или спектрального представле-
ния сигналов, а также в выборе конкретного вида спектрального
разложения с позиций получения наилучшей эффективности ал-
горитмов цифровой обработки. Ниже эти вопросы рассматрива-
ются в интересах решения задачи ПР по форме сигналов. При
этом теоретически обоснованы и оценены преимущества спект-
рального представления сигналов при использовании дискрет-
ных спектральных преобразований различных видов и реализа-
ции квазиоптимальных алгоритмов ПР.
229
Как отмечалось ранее, задача ПР ИРИ по форме сигналов сво-
дится к задаче распознавания в пространстве многомерных корре-
лированных признаков — отсчетов формы сигналов во времени. В
то же время, в теории распознавания образцов известны [199] хо-
рошо проработанные методы декорреляции признаков, основанные
на использовании оптимального при данной модели шума декорре-
лирующего преобразования (ОДП), которое позволяет реализовать
оптимальный алгоритм в пространстве новых некоррелированных
признаков. Основным недостатком ОДП является большое время
его выполнения и зависимость вида ортогональных функций раз-
ложения от статистической структуры флуктуаций формы сигна-
лов, что часто затрудняет его использование в реальных условиях.
Поэтому целесообразно попытаться заменить ОДП каким-либо дру-
гим универсальным ортогональным преобразованием, которое, воз-
можно, обладает несколько худшими декоррелирующими свойства-
ми, но более эффективно в вычислительном отношении. К числу
таких преобразований можно отнести дискретные спектральные
преобразования (ДСП) Фурье, Уолша, а также другие преобразова-
ния обобщенного базиса Виленкина—Крестенсона [187], для кото-
рых известны хорошо проработанные методы реализации «быст-
рых» преобразований. Идея замены ОДП на ДСП и использования
их как частично декоррелирующих исходное признаковое простран-
ство преобразований была впервые предложена в [172]. В основе
такой замены лежит сходство формы ортогональных функций ОДП
и разложений ДСП Фурье и Уолша (с точностью до числа перемен
знака функций одного порядка) для большинства видов корреля-
ционных функций шума.
Таким образом, главным преимуществом замены “оптималь-
ного” декоррелирующего преобразования “приближенными” дис-
кретными спектральными преобразованиями является значитель-
ное повышение быстродействия распознавания за счет реализа-
ции последних на основе “быстрых” алгоритмов. Оценим эффек-
тивность такой замены путем анализа характеристик алгоритмов
распознавания, реализованных в различных признаковых про-
странствах. Исходным является оптимальное решающее прави-
ло (3.8.1) в пространстве вектора отсчетов формы сигналов х и
квазиоптимальное решающее правило (3.8.8), полностью не учи-
тывающее корреляцию отсчетов при временном представлении.
После выполнения ОДП, задаваемого матрицей Q, оптимальное
решающее правило в пространстве новых некоррелированных
признаков у = Qx имеет вид
l = argmin[(y-qi)TA‘1(y-qi)]: х,уе Sj (t),
‘ (3.8.15)
у = Qx, q, = Qnij, A = QCQT.
230
В (3.8.15) Л — диагональная матрица, элементами которой яв-
ляются собственные числа исходной матрицы ковариации во
временной области С. Отметим, что по вероятностным характе-
ристикам правило (3.8.15) совпадает с (3,8.1).
Для оценки эффективности использования вместо ОДП любо-
го ДСП предлагается рассмотреть сходное по операционной струк-
туре с (3,8.15) решающее правило, реализованное в простран-
стве спектральных коэффициентов таким образом, чтобы по вре-
мени принятия решения оно отличались бы только временем
выполнения ОДП и ДСП. Такой подход позволяет легко срав-
нить эти алгоритмы в вычислительном отношении, а в дальней-
шем оценить их вероятностные характеристики. Аналогичное
(3.8.15) по операционной структуре решающее правило, осно-
ванное на использовании некоторого ДСП, определяемого мат-
рицей преобразования G, и реализованное в пространстве спект-
ральных коэффициентов, имеет вид
1 = argmin[(z-g1)TE“1(z-g1)'|: x,ze s,(t),
1 (3.8.16)
z = Gx, g; = Gm,, E - diagD, D = GCGT.
В (3.8.16) E — диагональная матрица, элементами которой яв-
ляются дисперсии спектральных коэффициентов, a D — матрица
ковариации спектральных коэффициентов. Решающее правило
(3.8.16) является квазиоптимальным, так как опо основано на пол-
ном пренебрежении корреляционной структурой флуктуаций спек-
тральных коэффициентов используемого разложения (матрица D
заменяется матрицей Е). В этом смысле оно сходно с квазиопти-
мальным решающим правилом (3.8.8), реализованным во времен-
ной области и полностью не учитывающим корреляционную струк-
туру флуктуаций исходных отсчетов формы сигналов. Поэтому
анализ вероятностных характеристик (3.8.8) также целесообразно
привлечь к оценке эффективности замены “ОДП—ДСП”.
Таким образом, выделено три одинаковых по операционной
структуре решающих правила (3.8.8), (3.8.15), (3.8.16), которые
отличаются наличием и видом предварительно выполняемого
преобразования, причем для ОДП и различных ДСП время вы-
полнения преобразования Тпр будет разным.
При сравнении рассматриваемых алгоритмов принятия реше-
ний по вероятностным характеристикам заметим, что для веро-
ятности ошибки попарного распознавания с использованием оп-
тимального решающего правила с учетом ортогональности пре-
образований Q и G выполняется
F>° =Ф0(аД а. =|(a’1C-’a)^|(dl'A-1d)^ =l(e1D-’eA
Li Li Li
d = - Qj = Qa, e = g, - gj = Ga.
231
Отсюда следует, что замена ОДП — ДСП в вероятностном
смысле эквивалентна замене оптимального алгоритма распозна-
вания (аналогичного по структуре (3.8.1)), реализованного в про-
странстве коэффициентов ОДП у, квазиоптимальным алгорит-
мом (3.8.16), полностью не учитывающим корреляционную струк-
туру флуктуаций в спектральной области. В связи с изложен-
ным, эффективность замены “ОДП — ДСП” можно оценить на
основе представленных выше выражений для потерь при фикси-
рованной вероятности ошибки оптимальных решающих правил.
При этом максимально возможные вероятности ошибки для ре-
шающих правил (3.8.8) и (3.8.16) определяются соотношениями
(3.8.17)
Vo+v^ JK0+KN4
\ / \ /
где v0, vN_t и к0, KN1 — соответственно собственные числа мат-
1
риц С и Е 2DE 2.
Выражения (3.8.17) позволяют получить соотношения для
нижней границы вероятности правильного распознавания ансам-
бля из L РЭС при использовании различных видов квазиопти-
мальных решающих правил, не учитывающих корреляционную
структуру шума во временной и в спектральной области, и оце-
нить эффективность замены “ОДП — ДСП”
Р*12 >1-(Ь-1)Р^12. (3.8.18)
Исследования в этом направлении проведены в [172,174]. Конк-
ретно рассматривались ДСП Фурье и Уолша, как наиболее распро-
страненные в практике цифровой обработки сигналов. На рис. 3.8.5а
232
в качестве примера представлены зависимости вероятностей Рпкр1,2
от отношения Тк/Т при L = 5, р(т) = ехр(-у|т|) (1 — соответствует
зависимости для Р^1; 2F — зависимости Рпр при использовании
ДСП Фурье; 2W — зависимости Ркр2 при использовании ДСП Уол-
ша). Из приведенных зависимостей следует, что ДСП обладают де-
коррелирующими свойствами, которые особенно сильно проявля-
ются при значениях Тк/Тс <0,1. Как следует из рис. 3.8.5а, при
замене оптимального алгоритма (3.8.15), основанного на использо-
вании ОДП, квазиоптимальными алгоритмами (3.8.16), основан-
ными на использовании ДСП, достоверность распознавания умень-
шается не более, чем на 3—7 % для преобразования Фурье, и не
более, чем на 5—12 % для преобразования Уолша. В то же время,
достоверность решающего правила (3.8.8) аналогичной операцион-
ной структуры, реализованного во временной области, будет значи-
тельно меньше (примерно на 15—30 %).
Таким образом, теоретически показано преимущество спектраль-
ного представления формы сигналов перед временным. Основной
смысл этого преимущества состоит в том, что за счет наличия де-
коррелирующих свойств ДСП квазиоптимальные алгоритмы обра-
ботки, реализованные в спектральной области, имеют более высо-
кую достоверность, чем квазиоптимальные алгоритмы аналогич-
ной операционной структуры, реализованные во временной.
Следующим этапом оценки эффективности использования ДСП
в алгоритмах ПР ИРИ по форме сигналов является анализ веро-
ятностно-временных характеристик принятия решений. В его
основе лежит определение времени, необходимого для принятия
решения при использовании одинаковых по операционной струк-
туре алгоритмов (3.8.8), (3.8.15), (3.8.16), отличающихся лишь
наличием или видом предварительно выполняемого ортогональ-
ного дискретного преобразования. Время принятия решений для
данного класса алгоритмов (при использовании в (3.8.16) ДСП
Фурье и Уолша) определяется соотношениями [174]
T12W,2F.O = TL2W.2F.O
U=0; T2pw=(Nlog2N)tc; (3 8Л9)
С = (Nlog2 N)(tc + ty); Т° = N(N + l)(tc + ty),
гДе TJ^2^0, T^'2^0 — время принятия решений и время выпол-
нения дискретного преобразования, соответственно: для квазиоп-
тихмального алгоритма (3.8.8) во временной области; для квазиоп-
тимального алгоритма (3.8.16) при использовании ДСП Уолша; для
квазиоптимального алгоритма (3.8.16) при использовании ДСП
фУрье; для оптимального алгоритма (3.8.15) при использовании
ОДП; tp, t — время выполнения операций сложения и умножения
233
в используемом процессоре обработки. На основе представленных
соотношений (3.8.19) и соотношений (3.8.17), (3.8.18) могут быть
получены зависимости достоверности распознавания от времени при
использовании различных видов дискретных преобразований. Та-
кие зависимости, соответствующие условиям расчета зависимостей
рис. 3.8.5а, представлены на рис. 3.8.56. При проведении расчетов
выбиралось соотношение ty = 5tc [174] и tc = 1 мкс. Из представлен-
ных результатов следует, что при реализации квазиоптимальных
алгоритмов простейшей структуры, ДСП Фурье, проигрывая ДСП
Уолша по времени выполнения, обеспечивает несколько более вы-
сокую достоверность распознавания. Одновременно оба эти преоб-
разования обеспечивают значительно более высокую достоверность
распознавания по сравнению с исходным временным представле-
нием сигнала.
Таким образом, предложенный подход позволяет построить
зависимость вероятности распознавания от времени, в которой
отдельные точки соответствуют правилам принятия решения
одинаковой операционной структуры, отличающимся только на-
личием и видом предварительно выполняемого дискретного спек-
трального преобразования. На основе таких зависимостей мож-
но определить необходимость использования преобразования и
выбрать его вид в условиях ограничений по сложности и быстро-
действию алгоритма ПР. В качестве эффективных преобразова-
ний следует рассматривать ДСП Фурье и Уолша, а также другие
экономные в вычислительном отношении преобразования, вхо-
дящие в систему функций Виленкина—Крестенсона [187].
3.8.2. Совместное поимпулъсное распознавание и оценивание
параметров сигналов на основе последетпектпорного анализа
фазовой модулирующей функции
Как уже упоминалось выше, второй возможный подход к ре-
шению задачи ПР по форме законов изменения внутриимпульс-
ных параметров основывается на непосредственном выделении
дискретных функций Ap(tk), yp(tk), описывающих АМФ и ФМФ,
с помощью цифровых специализированных устройств. При ис-
пользовании АМФ особых отличий в реализации алгоритма ПР
по сравнению с ранее рассмотренными не возникает. При ис-
пользовании для этой цели ФМФ возникает некоторая специфи-
ка, связанная с особенностями ее выделения в интересах реше-
ния задачи ПР. Являясь по сути квазиоптимальной, последетек-
торная фазовая обработка при решении задачи ПР позволяет
получить ряд преимуществ, связанных с удобством формирова-
ния и корректировки эталонов сигналов, отсутствием необходи-
мости жесткой нормировки входных сигналов по амплитуда
234
возможностью компенсации дестабилизирующих факторов, свя-
занных с перестройкой частоты сигналов.
Рассмотрим задачу ПР двух сигналов
Sj(t) = A(t)cos[(a)0 + Q)t + (pj(t) + 0] + n(t), i = l,2, 0<t<Tc.
Здесь Q — случайный сдвиг несущей частоты со — 2rcf сигнала
относительно центральной частоты канала приема = 2rcf0; 0 —
случайная начальная фаза; (p^t) — фазовая модулирующая фун-
кция известного вида; n(t) — гауссовский шум с дисперсией Q2,
действующий в полосе частот канала. При сильном сигнале пол-
ную фазу сигнала, выделяемую на выходе цифрового фазового
детектора [115], можно представить в виде
Vp(t) = Qt + 0 + cp.(t) + u(t), 0<t<Tc;
И, : <p.(t) = cp1(t), vp(t) = vpl(t); (3.8.20)
H2 : <p,(t) = ip2(t), Vp(t) = yp,(t),
где u(t) — фазовый шум, распределенный по гауссовскому закону с
дисперсией D(t) - о2 (t) = l/q2(t), q2(t) = A2(t)/o2. Таким образом,
задача ПР в данном случае сводится к задаче распознавания фазо-
вого видеосигнала yp(t). Для проведения дальнейшего анализа про-
цесса цифровой обработки введем векторы х, (рх 2, t, е, и, компо-
нентами которых являются^__________Xb=\pp(tk); <Pi 2k ~ Ф1,г(Ч);
tk = At(k-l); ek = 1; uk = u(tk), k = 0,N -1. Из анализа (3.8.20) сле-
дует, что рассматриваемая задача сводится к задаче совместного
оценивания параметров и распознавания (различения) гипотез. При
этом параметры Q и 0 являются мешающими (неинформационны-
ми) для задачи распознавания. В соответствии с общими принци-
пами адаптивного приема сигналов [184, 186] решение задачи дол-
жно базироваться на оценке параметров Q и 0 и последующей об-
работке сигналов, при реализации которой используются условные
относительно оцениваемых значений параметров законы распреде-
ления сигналов. С учетом характера решаемой задачи алгоритм
обработки сигналов на выходе детектора полной фазы в дискрет-
ном времени можно представить в соответствии со структурной
схемой рис. 3.8.6. При осуществлении процедуры оценки часто-
ты и начальной фазы сигналов с «условно» известной ФМФ (ре-
ализуемой схемой рис. 3.8.6) несмещенные оценки Q и 0 мо-
гут быть получены в канале I для гипотезы ЕЦ и в канале II —
Для гипотезы Н2, тогда как в канале II для гипотезы Нх и в кана-
ле I для гипотезы Н2 будут получены смещенные оценки Q + 8Qt 2
и 0 + 50,2. Рассмотрим процедуру измерения частоты и начальной
фазы при правильной и ошибочной компенсации ФМФ.
Пусть априорные сведения о £2 и 0 задаются их дисперсия-
ми относительно нулевого среднего RQ и Ro. При правильной
235
Рис. 3.8.6. Структура алгоритма совмест-
ного измерения частоты, начальной фазы и
распознавания ИРИ по ФМФ
компенсации ФМФ на
входе измерителей
схемы рис. 3.8.6 дис-
кретный сигнал име-
ет вид zk- Qtk+0+uk,
k = 0,N-l, где пара-
метры Q и 0 можно
считать распределен-
ными по равномерному
закону в пределах со-
ответствующих диапа-
зонов значений. Счита-
ем, что значения uk в
дискретном времени
независимы. В этом случае квазиоптимальным (оптимальным в
классе линейных) измерителем Q и 8 будет двумерный фильтр
Калмана [157, 186]. Возможен синтез и оптимального измерите-
ля параметров [186] в этих условиях, однако он имеет более слож-
ный вид и при N -> сю его оценки будут сходиться к оценкам,
получаемым на основе линейного фильтра. Поэтому определе-
ние Q и 0 предлагается производить на основе уравнений вида
к =Дк-1+(РХ/0к)(2к-Мк-1).
Дк—(^к>®к) ’ hk=[tk,l]; 0~0N_r
Здесь Рк — матрица ошибок; Dv = D(tv) — дисперсия uk,
k = 0,N-l- Рассмотрим случай Dk ~D, k = 0,N-l, который ха-
рактерен для сигналов с прямоугольной формой АМФ. Тогда
выражения для элементов Рк , определяющих ошибки оценива-
ния Q и 0, можно получить в виде
At2 „ 2 ,ч . At2(k2 -l)2b0 -1
12 ’ 4(1+ Ье) ] ;
3At2(k-l)2 Г’.
D /1 2
Рп~77 + +
К X
D
Р22 =Г11 + Ь'
k
D L к \
Р12 ₽21 — V d + be)
К. I
® 2[6an + At2(2k-l)(k-l)]J ’
At^k-Dl At^^r1
2
At(k-l) 3
an = D/kRn, be = D/kRe.
Полученные соотношения при к — N-1 определяют нормальные
ошибки оценки частоты и начальной фазы. В случае, если ФМФ
компенсируется неправильно (в канале II для гипотезы Нт или в
канале I для гипотезы Н2), появляются аномальные или смещен-
ные оценки. При этом подаваемый на вход измерителя сигнал zk
236
для гипотез 2 имеет вид zk = ±ак 4- Qtk + О + uk, где ак = <р1к - ср2к .
Уравнение для текущих и результирующих смещений при этом
записывается следующим образом:
8Й2 + (PXr/Dk)(±ak -hk8^),
8ц’к2 = (8Q’k2, 501к2)т; 8Q12=8Q« ; 8©1Д =3©’^.
Для проведения последующего анализа удобно представить
оценки частоты и фазы, получаемые с помощью фильтра Калма-
на, как взвешенные суммы вида
N-1 _ N-1
Q = aTz = £akzk; О = pTz = £ |3kzk.
k=0 k-0
Коэффициенты a, p могут быть легко получены, если перепи-
сать уравнение фильтрации в разомкнутом виде [184]. Тогда,
анализируя схему рис. 3.8.6, можно ввести некоторое линейное
преобразование, описывающее процесс фильтрации и последую-
щее вычитание составляющей Qt + 0e в каждом канале обра-
ботки, осуществляемые до процедуры распознавания. Назовем
это преобразование — преобразованием компенсации и предста-
вим соответствующую обработку в виде
(У1 _<Pi) = AK(x-(Pi), i = 1,2, Ак = I-taT ~ерт,
где Ак — матрица введенного линейного преобразования; у* —
вектор дискретного сигнала, представляемого для сравнения с
эталоном в соответствующем канале обработки.
Матрицу ковариации флуктуаций сигнала х при случайном
характере изменения параметров Q и 0 на входе преобразования
компенсации можно записать следующим образом:
С = М[(х - ф; )(х - <р; )т ] = DI + RQttT + ReeeT, i = 1,2.
Отсюда можно найти выражение для матрицы ковариации сигнала
при выполнении гипотезы Ht после преобразования компенсации
Ск = АкСА'£ = DAkA£ + RnAKttTAj + ReAKeeTA£. (3.8.21)
Анализ свойств матрицы Ск показывает, что при ап -> 0, Ье -> О
сигнал yt в соответствующем канале обработки при выполнении
гипотезы Ht практически полностью очищается от линейной со-
ставляющей Qt + 0е • При этом преобразованием, описываемым Ак,
осуществляется разбиение исходного пространства сигналов на два
непересекающихся подпространства, соответствующих линейной и
нелинейной составляющей полной ФМФ, и отображение входного
сигнала в то из них, в котором отсутствует проекция неинформа-
ционной составляющей, обусловленной сдвигом частоты и началь-
ной фазой. Второй результат, который может быть получен из ана-
лиза свойств преобразования Ак, заключается в возможности оценки
237
соотношения гауссовских и негауссовских составляющих в выход-
ном сигнале. Энергия негауссовской составляющей, обусловленная
негауссовским видом априорных законов распределения RQ и Ое,
определяется следом матрицы RQAKttTА£ + ReAKee‘ А^ в (3.8.21),
а энергия гауссовской составляющей — следом матрицы DAkA£ .
При малых aQ и ЬА независимо от априорных законов распределе-
ния параметров относительное соотношение энергии гауссовских и
негауссовских составляющих флуктуаций на выходе преобразова-
ния имеет порядок /eng - (N - 2)/2 .
В рамках рассмотренного статистического описания (почти
гауссовские, коррелированные флуктуации) дискретных сигна-
лов, полученных после преобразования компенсации, общая
структура алгоритма распознавания, как и ранее, может быть
представлена решающим правилом вида
(У1 -ф1)тК’1(у1 -<pt)<(y2 -ф2)тК"’(у2 -Ф2), (3.8.22)
где К — неотрицательно определенная матрица, с некоторой степе-
нью точности описывающая ковариацию компонент векторов уг 2 и
в общем случае не равная истинной матрице ковариации этих ком-
понент. Вероятности ошибок для (3.8.22) с учетом того, что
У12 = у2д + 8Qt + 8©е, для гипотез Н] 2 могут быть получены в виде
Рк =Рк =ф
Г12 Г21 ^0
атАкК-1АКа
ЗСа'А^К ’СкК 1Ака),/2
, а = <р, -<р2. (3.8.23)
В качестве конкретных вариантов рассмотрим алгоритм
(3.8.22) при К = Ск, являющийся оптимальным в рамках стати-
стического описания сигналов уг 2, и квазиоптимальный алго-
ритм принятия решений простейшей структуры по квадратич-
ной мере близости при К = I. На рис. 3.8.7а представлен пример
расчета зависимостей вероятности ошибок для двух этих алго-
ритмов от отношения сигнал-шум q = D4. При проведении рас-
четов задавались различные интервалы априорных значений сдви-
га частоты и начальной фазы, границы которых выбирались из
условий Ди = ±ТС ^/SR^, Д0 = i^/SRg , что соответствует равномер-
ному виду априорных законов распределений этих параметров.
Расчеты проводились для ФМФ вида ф12(0 = ±Атф sin(2rcnt/Tc)
при n = 0,5, N = 16, Тс = 1 мкс. Зависимости 1 соответствуют
случаю К = Ск; зависимости 2 — случаю К = I. При Атф = 0,25
величина девиации частоты разностной ФМФ a(t) = ф1(0-ф2(1)
равна 0,25 МГц. На рис. 3.8,76 представлены зависимости Рк2 от
выбиравшейся одинаковой (2Д = 2ДП = 2Д0) величины априорного
интервала значений параметров Q и 0 при фиксированном q = 3.
Представленные результаты свидетельствуют, что при увеличе-
нии Д разница между эффективностью рассматриваемых алго-
238
Рис. 3.8.7. Зависимости для вероятностей ошибок при распознава-
нии по ФМФ
ритмов уменьшается, что объясняется уменьшением доли кор-
релированных составляющих флуктуаций в структуре фазовых
сигналов после преобразования компенсации.
Для подтверждения полученных теоретических результатов
был поставлен эксперимент, в ходе которого полностью имити-
ровался весь описываемый выше процесс обработки для сигна-
лов с быстрой (от импульса к импульсу) перестройкой частоты.
Центральная частота канала обработки задавалась fQ — 30 МГц,
а ширина полосы частот Afp = 20 МГц. Оценка эффективности
алгоритмов ПР проводилась методом статистических испытаний,
причем шум, действующий в полосе анализа, воспроизводился
на основе стандартных алгоритмов, предложенных в [25]. Ре-
зультаты моделирования, представленные на рис. 3.8.7 отдель-
ными точками, совпали с результатами эксперимента с высокой
степенью точности. Полученные результаты теоретического ана-
лиза и эксперимента являются показательными для оценки воз-
можности использования предлагаемого подхода к решению за-
дач ПР, так как при отношениях сигнал-шум q > 5 может быть
достигнута высокая (порядка 0,9—0,95) вероятность распозна-
вания экземпляров и типов ИРИ, отличающихся формой внут-
риимпульсного закона фазовой или частотной модуляции при
сравнительно небольшой (порядка 0,25—0,5 МГц) величине раз-
ности девиации частоты модулирующих функций.
239
4. ВТОРИЧНАЯ И ТРЕТИЧНАЯ
ОБРАБОТКА ИНФОРМАЦИИ
Обоснование введения этапов вторичной и третичной обработки
проведено во второй главе книги. Дальнейшая конкретизация этих
этапов связана с функциональной декомпозицией ВО и ТО и пост-
роением реализующих их алгоритмов обработки информации. При
этом сначала должен быть проведен синтез и анализ алгоритмов
общего вида, опирающихся на введенные динамические модели
состояний и наблюдений, а также известные подходы теории ста-
тистических решений и теории оптимальной фильтрации парамет-
ров динамических систем [184, 186, 191]. Затем можно перейти к
конкретным примерам реализации алгоритмов обработки инфор-
мации в однопозиционных и многопозиционных системах. При
рассмотрении этих вопросов в настоящей главе основное внимание
уделяется этапу вторичной обработки, введение которого является
обязательным практически для всех современных PC, функциони-
рующих в условиях насыщенной радиоэлектронной обстановки. В
этих условиях принципиально отсутствует возможность однознач-
ной селекции и разделения входного потока и восприятия первич-
ной измерительной информации по каждому ИРИ в отдельности.
Проблема «разделения» приводит к появлению в каналах наблю-
дения пропусков сигналов и образованию ложных (мешающих)
наблюдений, что требует проведения в ходе ВО накопления инфор-
мации с целью парировать нежелательные эффекты, возникающие
при ПО, и обеспечить требуемый уровень достоверности выявле-
ния ИРИ. Таким образом, при функционировании PC действуют
достаточно сложные и противоречивые закономерности, связываю-
щие внешние условия, технические характеристики приемоанали-
зирующей аппаратуры и результирующую эффективность. В дан-
ном случае трудно претендовать на построение общей теории опти-
мальной обработки информации: слишком много неопределенных
факторов оказывает воздействие на функционирование PC. Среди
таких факторов, например, следует отметить наличие на входе PC
потока сигналов с неизвестными параметрами, излучаемых неиз-
вестным количеством ИРИ. Поэтому при проведении последующих
240
обоснований часто будут присутствовать элементы эвристики. В то
же время, для отдельных процедур обработки информации возможно
проведение строгой оптимизации реализующих их алгоритмов или
получение квазиоптимальных алгоритмов, обладающих основны-
ми чертами оптимальных.
4.1. Общая схема алгоритма вторичной обработки
информации и методические основы синтеза
частных процедур
4.1.1. Функциональная декомпозиция вторичной обработки
Вторичная обработка совокупности первичных наблюдений
£>k = (zk,k), полученных в области о)2 на данном цикле анализа, опи-
рается на определение теоретической апостериорной вероятности
наличия объекта в соответствующей области ооа пространства со-
стояний яг и апостериорной плотности распределения параметров
состояний рг(аДк). Детальное рассмотрение основных приемов,
реализуемых при вычислении апостериорных вероятностных ха-
рактеристик состояния объектов информационного взаимодействия
и обеспечивающих придание процессу ВО обозримого характера,
проведено в п. 2.2.2. Следует только напомнить, что они предус-
матривают проведение процедуры «завязки» или предварительной
оценки параметров состояний по небольшому количеству наблюде-
ний, которая по сути формирует дискретное множество альтерна-
тивных гипотез d)a = {О(,): а = ар i = l,Na} с априорными вероят-
ностями Р (0^) = рг(а^, для которых теперь должно проводиться
вычисление апостериорных вероятностей = Pr(O(1) /^k), i = l,Na .
Для каждой i-ой гипотезы далее осуществляется сопровождение
гипотетических последовательностей наблюдений в индивидуаль-
ных динамических стробах, образующих перемещающиеся в 0)2
элементарные области возможных значений с cdz , t = l,si , по
отношению к которым проводится селекция наблюдений. При этом
исключаются маловероятные комбинации наблюдений» которые не
участвуют в вычислении вероятностей я(1), i = 1,N . Следует отме-
тить, что отбраковка маловероятных комбинаций наблюдений про-
водится и при формировании множества б)а (наблюдения проверя-
ются на принадлежность одному ИРИ), и в этом смысле эти под-
процессы ВО функционально связаны.
Отметим также, что для широкого круга ситуаций дискрети-
зация исходного непрерывнозначного множества значений вектора
состояний а фактически приводит к образованию множества на-
чальных условий юх = {х}*/0 = х1/0(аД =Р1/0(аД i = 1.NJ, со-
держащего, как минимум, начальные оценки параметров излу-
чаемых последовательностей сигналов, описываемых уравнени-
241
ями (2.2.4), и их матрицы ковариации. В состав компонент не-
прерывнозначного вектора параметров сигналов х* (параметров
текущих состояний ДМС-3) при этом включаются и подлежащие
уточнению непрерывнозначные вторичные параметры, которые
в пределах отведенного цикла анализа являются постоянными
(см. п. 2.2.2). Поэтому далее множество <ЬП (или о>х) будет иног-
да называться множеством начальных гипотез. Введем дополни-
тельно гипотезу О(0) : а £ (оп, имеющую априорную вероятность
Рг(О(0)).
Для вторичной обработки в рамках введенной статистичес-
кой модели наблюдений основными задачами являются выявле-
ние (обнаружение) ИРИ, оценка и прогнозирование параметров
его радиоизлучения по совокупности наблюдений, получаемых в
(oz. Как известно [5, 191], любая процедура обработки наблюде-
ний содержит две основных составляющих: формирование апос-
териорных плотностей вероятности ненаблюдаемого процесса и
построение подмножеств апостериорных плотностей, непосред-
ственно определяющих правила принятия решения. При этом
формирование апостериорных плотностей никак не связано с ис-
пользованием функций потерь и является общей составляющей
всех алгоритмов обработки наблюдений. Напротив, определение
решающих правил однозначно связано с заданием конкретного
вида функции потерь при обработке. В этом плане всегда возни-
кают определенные трудности, которые вытекают из невозмож-
ности логично обосновать выбор единственной функции потерь
[5]. В такой ситуации целесообразно использовать решающие пра-
вила, которые по своей структуре были бы близки к синтезиру-
емым на основе распространенных критериев принятия реше-
ний. К числу последних относятся, например, критерий макси-
мума апостериорной вероятности при различении гипотез, кри-
терий минимума среднеквадратической ошибки при оценке
пепрерывнозначных параметров и т.п. Для задачи обнаружения
объектов целесообразно воспользоваться подробно обсуждаемой
в [5] схемой, которая основана на введении пороговых значений
для апостериорных вероятностных характеристик наличия объек-
та в рассматриваемой области пространства состояний. Ее обо-
снование, в частности, вытекает из результатов [14], где показа-
но, что для достаточно широкого класса функций потерь опти-
мальная процедура решений сводится к сравнению с порогом
функционала от апостериорной характеристики входного пото-
ка сигналов.
В соответствии с изложенным подходом, типовые решающие
правила, базирующиеся на вычислении вероятностей лг и
л(г°, i = l,Na , можно представить в виде
242
обнаружение — оценивание
N- N- . .
пт = >7Trg
i-1 i-1
различение — оценивание
Nx
j = arg max л'*’ -> х.,._г = ХХ/.^л'0;
i i=0
j = arg max л'1’ -» x»,.., = xl’/.-p
(4.1.1)
(4.1.2a)
(4.1.26)
л*1’
= Р(^к/Ои,)Рг(О(П)/
£ P£k / o(i’ )Pr (O(i)) + P(£“ / O(0) )Pr (O(0))
x'/’.-i ~ Jx,P(x, /£k,O(1,)dx..
Вариант (4.1.1) реализует байесовский алгоритм принятия
решений, когда потери из-за ошибок обнаружения не зависят
от оценок и значений оцениваемых параметров и использует-
ся квадратичная функция потерь для оценок при правильном
обнаружении [191]. Вариант (4.1.2а) обеспечивает получение
байесовских совместных оценок для аддитивной функции по-
терь П„ = П° +с(х.;<_1 -х.)т(х./._1 -х.), где П^П, i* j, П° =0,
i - 0,Na и отличается от предыдущего тем, что отказ от прове-
дения оценки при принятии решения об отсутствии объекта
не производится. Вариант (4.1.26) реализует частичную опти-
мизацию двухфункционального решающего правила [191] при
заданной структуре правила различения и использовании квад-
ратичной функции потерь в отсутствие ошибок различения.
Более упрощенный подход, приводящий к часто используе-
мым на практике процедурам [197], состоит в независимой оценке
частных гипотез, получаемых при определенной дискретизации
исходного множества о>а. При этом область coz разбивается на No
непересекающихся областей в каждой из них с вероятнос-
тью, близкой к единице, можно предположить появление на-
блюдений не более, чем одного объекта рассматриваемого типа с
соответствующим параметром состояния а=ар i = l,Na . В ре-
зультате фактически реализуется процедура многоканального об-
наружения-оценивания, причем в каждом канале наблюдения
рассматривается простая гипотеза 0^ наличия наблюдений ИРИ
против альтернативы О(0’}. Соответствующее решающее правило
при этом может иметь следующий вид:
L, =Р($к‘/О'°)/Р(^/0^) > Loi -кх./^ =х1У._1: (4.1.3)
X?/..! = jx.P(x.Z^.O^dx,,
где £ki =(zk’:,ki) — совокупность наблюдений, полученных в обла-
сти Ц — функционал отношения правдоподобия; LOi — порого-
243
вое значение, определяемое, например, из допустимого уровня
ошибок первого или второго рода. В качестве (о<1) в соответствии с
результатами и. 2.2.2 удобно использовать частные области воз-
9i
можных значений <4° = 0 . Они получаются при сопровожде-
t=i
нии гипотетических последовательностей наблюдений и перемеще-
нии элементарных ДСС со^, t = 1,2... в общей ОВЗ со2. Следует только
отметить, что формируемые таким образом частные ОВЗ в общем
случае могут перекрываться, поэтому (4.1.3) имеет смысл приме-
нять в ситуациях, когда такое перекрытие отсутствует или оно не-
значительно. В противном случае следует вернуться к процедурам
оценки гипотез на основе всей совокупности наблюдаемых данных,
подобным (4.1.1). Вариант независимого принятия решений отно-
сительно различных начальных гипотез отвечает естественным по-
требностям практической реализуемости алгоритмов и в целом яв-
ляется адекватным функциональным задачам, которые требуется
решать в ходе данного этапа обработки. В дальнейшем будем, в
основном, ограничиваться рассмотрением алгоритмов принятия
решений, подобных (4.1.3).
Проанализируем подробнее исходную постановку задачи об-
работки совокупности наблюдений ИРИ в частной ОВЗ. Пусть
изменение параметров излучаемых сигналов, определяемых т-
мерным вектором xt, для гипотезы 0^ описывается в дискрет-
ном времени уравнением состояний, имеющим стандартный вид
xt+1 = (xt)+gt (xt)ut, xx ~ {х(;/0, p‘;i}. (4.1.4)
В качестве наблюдений в частной ОВЗ рассмотрим наблюде-
ния, поступающие при сопровождении гипотетической последова-
тельности (для гипотезы О^) и проведении всей предварительной
первичной обработки (обнаружения, селекции, идентификации в
ДСС). Такие наблюдения структурируются в соответствии с изло-
женными в п. 2.2.2 особенностями рациональной организации пер-
вичной обработки при обосновании МН-1 и описываются уравне-
ниями, имеющими в частном случае вид (2.2.10). В более общем
случае [158, 169] каждое наблюдение, получаемое в результате всей
предшествующей обработки в рамках фиксированного шага сопро-
вождения гипотезы с индексом t, представим составным вектором
=(z^,0^)T . Здесь zt е с — вектор размерности п, образу-
ющий непрерывнозначную компоненту наблюдения, a 0t е 0- —
некоторая сопутствующая дискретная компонента наблюдений. Та-
ким образом, в процессе сопровождения гипотетической последо-
вательности наблюдений для гипотезы 0^ будет получена совокуп-
ность =(zki,0ki),zk’ - (z^,...^),©^ =(0<l1),...,0(k1)) из kj наблюде-
244
ний (в данном случае si = кА). Далее для упрощения записей индекс
i опускаем и рассматриваем простую гипотезу Ох против альтерна-
тивы О0. Значения непрерывнозначной компоненты наблюдения zt
с учетом возможных результатов частных информационных реше-
ний предшествующей (первичной) обработки определяются в об-
щем случае на основе уравнений следующего вида:
где I — единичная матрица; Ар Bt, Ct — диагональные матрицы со
случайными ненаблюдаемыми элементами а^, b^, си, характери-
зующими результаты ЧИР и принимающими значения 0 или 1 в
случае получения от s-ro первичного датчика полезной (ate = 1),
ложной (bts = 1), пропуска (с^ = 1) компоненты результирующего
наблюдения; zt/l — линейная или нелинейная оценка — прогноз
полезного наблюдения zt, получаемая по совокупности t,(0 < t. < t)
предшествующих наблюдений и определяющая центр очередного
элементарного ДСС cozt с coz; (pt — некоторая известного вида ли-
нейная или нелинейная вектор-функция совокупности предшеству-
ющих наблюдений zt4> компонентами которой доопределяется zt в
ситуации возникновения пропуска; vt — вектор погрешности изме-
рения наблюдаемых первичных параметров полезного сигнала; wt —
вектор отклонения ложного наблюдения от центра ДСС.
Статистические описания элементов матриц At, Bt, Ct в (4.1.5) в
общем случае определяются для гипотез О2 0 вероятностными закона-
ми где 5s = 1 при ate = 1; Sa = -1 при bu = 1; 8S = О
при cto = 1, s = 1,п. Считаем, что значения элементов матриц At, Bt,
Ct независимы от шага к шагу в дискретном времени. Для дальней-
шего рассмотрения также удобно ввести диагональные матрицы
Р<10’ =M[AJ, Р£°> = M[Bt], Р"°> = M[Ct],
Р£0’ +Рв'0) +РГ’ =1. t = 1,2,..., (4Л-6)
элементами которых являются соответствующие вероятности
единичных значений = М[аь/О10], р^я0) = M[bts/О10],
Pcti0) = M[ct9 /О10], s = 1,п . Предположим, что при выполнении ги-
потезы Ох матрицы Р£> >0, t = 1,2,..*, то есть являются положи-
тельно определенными (здесь и далее использование символов
> и > для матриц связано с понятием положительной и нео-
трицательной определенности). Это означает, что в данном слу-
245
чае >0, s = l,n, t = 1,2,.,., и все первичные датчики информа-
тивны. Для гипотезы О0, напротив, будем считать, что р^ = 0,
s = l,n, t = 1,2,....
Как уже отмечалось, в общем случае имеется еще и дискретная
компонента наблюдении 0t, t = 1,2,... . Она представляет собой оп-
ределенным образом структурированную дополнительную инфор-
мацию, сопутствующую процессу получения основных непрерыв-
нозначных параметров при сопровождении последовательности
наблюдений в соответствии с гипотезой Ог Важно отметить, что
данная информация в большинстве случаев не связана со значени-
ями вектора состояний xt, а лишь в вероятностном смысле влияет
ца предположения о возможных результатах ЧИР, принимаемых в
ходе предшествующей обработки. При использовании в процессе
наблюдений дискретной компоненты вводятся соответствующие
условные вероятностные характеристики ЧИР Pt(1,0)(81,...,8n/Эе),
P^0)(9t) = M[At/9t], P^O)(0t) = M[Bl/91],P',lo>(9t) = M[Cl/et] для
гипотез О: и О0. Относительно последовательности 0t можно пред-
положить, что она в общем случае является марковской с извест-
ными вероятностными характеристиками переходов и начальным
распределением, Конкретно дискретная компонента наблюдений
может характеризовать наличие или отсутствие пропусков в от-
дельных каналах наблюдения (тогда фактически 0t = Ct), количе-
ство непрерывнозначных наблюдений, первоначально полученных
в ДСС, среди которых в ходе идентификации проводится выбор
одного полезного (0t = mt), а также другие данные, характеризую-
щие условия получения результирующего вектора первичных на-
блюдений zt.
Уравнения (4.1.5) являются уравнениями наблюдений общего
вида, для которых нужно разделять две принципиально отличаю-
щиеся ситуации. Первая из них связана с «дружным» поступлени-
ем полезной информации во всех компонентах вектора первичных
наблюдений и, соответственно, с дружным возникновением лож-
ных наблюдений и пропусков во всех первичных датчиках (кана-
лах наблюдения). Такая ситуация наиболее характерна для усло-
вий функционирования однопозиционных систем. При формаль-
ном описании процесса получения наблюдений эта ситуация отра-
жается в (4.1.5), если вместо матриц использовать скалярные
величины At = a1I, Bt = btI, Ct = ctI, описываемые, соответственно,
вероятностями единичных значений pftt, pbt, prt. Другая ситуация
определяется возможностью одновременного получения полезной,
ложной информации, а также возникновения пропусков в различ-
ных компонентах результирующего вектора наблюдений на дан-
ном шаге. Она наиболее характерна для многопозиционных сис-
тем, в которых датчики функционируют относительно независимо.
246
Именно этот, более общий случай требует введения матричной фор-
мы записи для результатов ЧИР в (4.1.5).
Следует также сделать ряд замечаний относительно способа
задания оценки zt/t в (4.1.5), являющейся центром текущего
ДСС. Наиболее распространенный вариант связан с использова-
нием оценки по всем предшествующим наблюдениям, получен-
ным в ходе сопровождения гипотетической последовательнос-
ти. Тогда обычно zt/t = zt/tel . Другой крайний случай
реализуется в ситуации, когда задается zt/t -zt/0 =ht(M[xt]) , то
есть при сопровождении последовательности в рамках данной
начальной гипотезы используется априорный ДСС, траектория
перемещения которого не зависит от наблюдений. Возможны и
другие, промежуточные варианты. Для многопозиционных сис-
тем способ формирования ДСС, определяющий используемую
оценку zt/t , во многом зависит от реализуемой в PC схемы вза-
имосвязей между распределенными датчиками подсистемы пер-
вичной обработки сигналов и модулями вторичной обработки
информации.
Будем считать, что процедуры формирования ДСС и иденти-
фикации полезных наблюдений заданы заранее и область cozt од-
нозначно-определяется всеи_предшествующей совокупностью на-
блюдений t = 1,к- Тогда для реализации алгоритма
ВО с использованием решающего правила (4.1.3) необходимо оп-
ределить функции правдоподобия гипотез относительно наблю-
дений =(zk,0k)
P(zk, 0к / Oj 0) = P(zk / Gk, 0,0 )Р(0к / Ог 0) (4.1.7)
и апостериорные условные плотности распределения параметров
полезного сигнала с экстраполяцией на один шаг вперед
P(zt / z-’, 0*, 0,0) = j P(zt I xt, et, Oj 0 )P(xt I z-1,01-’, 0,0)dxt, (4.1.8)
которые одновременно определяют оценки xt/t_x, z^^ , получае-
мые при сопровождении гипотетической последовательности для
гипотезы OJOj0).
Таким образом, с учетом проведенного рассмотрения можно
предложить схему функциональной декомпозиции вторичной
обработки информации в виде, представленном на рис. 4.1.1.
Здесь по функциональному назначению выделены основные про-
цедуры или подпроцессы обработки информации, содержание
которых непосредственно вытекает из структур рассмотренных
выше решающих правил. По существу схема рис. 4.1.1 реализу-
ет известную схему (см. п. 2.1) многослойного процесса приня-
тия сложных решений в соответствии с иерархией: «генерация
альтернатив — анализ — выбор». Следует также отметить ее
247
Рис. 4.1.1. Функциональная декомпозиция вторичной обработки
схожесть со схемой обработки наблюдений в радиолокационных
системах при траекторном сопровождении объектов в статисти-
чески неопределенных ситуациях [5].
Наличие обратной связи в схеме рис. 4.1.1 с уровня анализа
(оценки) множества начальных гипотез к уровню их генерации
характеризует возможность коррекции действий на нижнем уров-
не по результатам обработки, реализуемой на верхних уровнях.
В этом плане важной является реализация принципа постепен-
ного «сужения» областей пространства наблюдений coz, где про-
изводится «завязка» гипотез, по мере накопления информации.
Он, в частности, может формулироваться следующим образом:
любое новое наблюдение, попавшее хотя бы в один из ранее сфор-
мированных ДСС, не порождает новой начальной гипотезы. Тем
самым обеспечивается постепенный переход системы в стацио-
нарный режим сопровождения последовательностей сигналов
ИРИ в пространстве наблюдений.
Прежде чем теперь перейти к оптимизации выделенных про-
цедур вторичной обработки информации, следует, на наш взгляд,
напомнить некоторые известные результаты теории оптималь-
ной фильтрации параметров динамических систем, которые бу-
дут использоваться в ходе дальнейшего рассмотрения.
248
4.1.2. Некоторые положения теории оптимальной фильтрации
в дискретном времени
Классическая постановка задачи фильтрации в дискретном
времени формулируется следующим образом. Заданы два урав-
нения: уравнение состояний объекта, описывающее изменение
вектора ненаблюдаемых параметров вместе с соответствующими
начальными условиями, и уравнение наблюдений, описывающее
процесс получения наблюдаемых (измеряемых) параметров
Xk+i=<k(xk) + gkuk, Х1~Р(Х1); zk =hk(Xk) + vk, (4.1.9)
где uk, vk — шумы возмущений и наблюдений. Требуется по
полученной за к моментов времени совокупности zk = (zp...,zk)
рассчитать апостериорную плотность P(xkll/zk) и получить оп-
тимальную, в общем случае нелинейную оценку xk41/k по к пред-
шествующим наблюдениям. Известно, что для нахождения хк11/к
должен быть сначала задан критерий оптимальности. Здесь и
далее в качестве такого критерия будем рассматривать критерий
минимума средней квадратичной ошибки оценивания, что опре-
деляет [157, 186] соотношение для оценки в виде
xk+1/k = Jxk+ip(xk4/zk)dXk+i =M[Xk+,/zk]. (4.1.10)
Общая методика [184, 186] нахождения апостериорной плот-
ности P(xk_1/zk) базируется на одном из вариантов формулы Бай-
еса и описывается уравнениями для апостериорных плотностей
распределения вероятности
P(Xk+1 / zk) = j P(Xkt] / Хк ,zk )Р(Хк / zk )dXk;
. k. P(Xk/zk-1)P(zk/Xk,Zk-1)
P(Xk/zk)= v k p(^ ^.1) k-------(4.1.11)
P(zk / zk-1) = j P(xk / zk~’ )P(zk / Xk, zk~’ )dXk
С учетом вида уравнений состояний и наблюдений (свойство мар-
ковости процессов) можно записать
Р(Хки / Хк, zk) = Р(Хк+1 / Хк); P(zk / Хк, Zk~l) = P(zk / Хк).
В этом случае, если известна начальная плотность для
хг ~ Р(х1 /z°) = Р(хг) , приведенные соотношения (4.1.11) позво-
ляют на рекуррентной основе получить выражение для текущей
апостериорной плотности и, соответственно, общее решение за-
дачи фильтрации в дискретном времени. Следует отметить, что
в общем случае не обязательно, чтобы шум наблюдений был бе-
лым. Для применения излагаемой в [184, 186] теории достаточ-
но, чтобы объединенная последовательность {xk,zk} была марков-
ской или представляла собой компоненту марковской последо-
вательности большей размерности.
249
Рассмотрим один важный пример конкретизации (4.1.9). Пусть
фк(хк) = Фкхк и \(хк) = *Чхк- Пусть также законы распределения
шумов uk, vk и начального вектора х} являются гауссовскими
uk ~N(uk,0,qk); vk ~ N(vk,0,Rk); х, - N(xpx1/0,P1/0),
где qk,Rk,P1/0 — матрицы ковариации uk, vk, xp x1/0 — началь-
ная оценка x} Данный случай соответствует постановке задачи
оптимальной линейной фильтрации [157, 186], решение кото-
рой определяет структуру алгоритма обработки информации в
виде линейного относительно последовательности наблюдений,
рекуррентного фильтра оценивания текущих значений ненаблю-
даемых параметров, часто еще называемого фильтром Калмана.
Для оптимальной линейной оценки здесь и далее будем исполь-
зовать обозначение xk+1/k. Решение в общем случае может быть
получено на основе последовательного применения полученных
соотношений (4.1.11) для многомерных гауссовских плотностей
и их интегрирования. При проведении таких преобразований
используется известное соотношение интегрального преобразо-
вания гауссовских многомерных плотностей, которое определя-
ется [157] следующим образом. Пусть х и z два гауссовских век-
тора, причем
Р(х) = N(x,mx, Рх); P(z/x) = N(z, hx, R,),
где h — матрица соответствующей размерности. Тогда плотность
распределения
P(z) = jN(z,hx,R2)N(x,mx,Px)dx = N(z,hmx,hPxhr +RX).
Однако возможно использовать и другой подход. Прежде всего,
необходимо отметить, что плотность P(xk^/zk) при высказанных
предположениях также должна иметь гауссовский вид
P(xk„ Zzk) = N(xktl,xk+1/k,Pkil/k), где Pkt]/k — матрица ковариации
xk+i относительно условного среднего хк+1/к. Действительно, каж-
дый вектор zk есть сумма двух независимых гауссовских величин
hkxk и vk. Поэтому плотность совокупности {xk_pzk} является со-
вместно гауссовской. Известно также, что и условные плотности
совместно гауссовских величин P(xk_pzk) = P(xkll/zk)P(zk) являют-
ся гауссовскими, что и подтверждает выдвинутое утверждение от-
носительно вида P(xk+1/zk) [184]. Для проведения последующего
анализа теперь можно использовать известную теорему о нормаль-
ной корреляции и ее следствия [61, 157, 186, 205], которые форму-
лируются следующим образом.
Теорема. Для гауссовских векторов 0,^ оптимальная оценка в
виде условного среднего М[0/£] вектора 0 по £ и матрица ошибок
А = М[(0 - М[0/£])(0 - М[0/£])т] задаются соотношениями
250
М[е/у = M[0] + R4R^-M[!j]), Д = Ro,, -R^X-
Ruu = M[(9-M[9])(9-M[9])1'];
R^ = M[(9-M[9])(Jj-M[ij])T];
R4=M[£-M[!j])(!j-MK])T].
Следствие 1. Пусть 0 и случайные гауссовские векторы, а
Gk — некоторая совокупность условий, тогда
M[9/i;,Gk] = M[9/Gk] + RG^RGEt(4-M[!j/Gk]);
Да = М[(9 - М[9/ Gk])(9 - М[9 / Gk ])т ] = Roee - R^R^R^,
RGoe = M[9-M[9/Gk])(9-M[9/Gk])'r];
Rra==M[(9-M[9/Gk])(^-M[VGk])T];
R0£« =M[(£-M[lj/Gk])(!j-M[!j/Gk])1]-
Следствие 2. Пусть 8 = x^j, ^z^z1*, Gk = (z1,...,zi_1,zi+1,...zk) .
Тогда в рамках доказательства теоремы [205] можно получить, что
^lZi(Xk+l ~ Xk+l/k) ^4Xk+l/k(Xk+l — Xk+l/k) ] =
Xk<i/k = M(xk+i,Gk] = М[хк+]/z ].
Данное следствие иногда еще носит название леммы об ортого-
нальном проецировании. Оно свидетельствует о том, что ошибка
оценивания хк+1 в статистическом смысле ортогональна любому
из наблюдений, по которым была получена оценка, а также, со-
ответственно, и самой оптимальной линейной оценке, являю-
щейся взвешенной суммой этих наблюдений.
На основе теоремы о нормальной корреляции, а также ее след-
ствий может быть получено решение задачи оптимальной линей-
ной фильтрации без проведения интегральных преобразований в
соответствии с (4.1.11). Пусть известна оценка xk/k4 = M[xk/zk4]
и матрица ковариации оценки Рк/к_г =М[(хк -х^^Ххк -хк/к_1)т]
на (к - 1)-ом шаге. Тогда оценка хк/к с учетом вновь поступившего
на к-ом шаге наблюдения имеет вид
хк/к “ М[хк/z ] = хк/к_1 + Wk(zk — zk/k_j), Wk = VkUk ;
zk/k-] = M[zk / zk4 ] = M[(hkxk + vk) / zk4 ] = hkxk/k_x;
Vk = M[(xk-xk/k_])(zk -zk/k_J ] = Pk/k_1hk; (4.1.12)
Uk — M[(zk — Zk/k_j )(zk — Zk/k_1 ) ] = hk^k/k-lbk + ^k >
^k/k = M[(xk -xk/k)(xk -xk/k) ] = Pk/k_-| - VkUk Vk .
Отсюда окончательно получим уравнения для оценки xk+1/k в
рекуррентном виде
251
*кн/к =M[<Kxk+gkuk)/z'I] = <|)i[Xk/k; (4.1.13)
^k+l/k = M[(xktl
Xk+t/k)(Xk+l Xk+l/k )T]=Vk/AT+gkqkgk-
Для первого шага значения х1/0 и Р1/о определяются начальными
условиями к задаче оптимальной линейной фильтрации. Приве-
денные соотношения (4.1.13) дают решение этой задачи в виде ре-
куррентного фильтра Калмана [157, 186]. Помимо свойств линей-
ности и рекуррентности оценки данное решение обладает свойством
независимости матрицы ковариации Pk41/k и, соответственно, весо-
вой матрицы Wk от наблюдений. Это, в свою очередь, позволяет
рассчитывать все коэффициенты в уравнении фильтрации заранее,
что иногда существенно ускоряет обработку в реальном времени.
В случае невыполнения двух главных условий постановки
задачи оптимальной линейной фильтрации, то есть условий ли-
нейности операторов фкС) и hk(-) и гауссовского вида законов рас-
пределения возмущений и начального вектора, строгое решение
задачи фильтрации дается на основе общей методики (4.1.11).
При этом получаемый оптимальный фильтр будет нелинейным
и существенно более сложным в реализации. Тем не менее, и в
этом случае существует возможность получения квазиоптималь-
ных оценок простого вида, сопоставимых по объему вычислений
с классическим фильтром Калмана.
Такие возможности, например, базируются на использовании
следующей леммы.
Лемма. Пусть а, Р — пара случайных векторов, а d,P — пара
гауссовских случайных векторов с аналогичными первыми и
вторыми моментами
М[а] = М[а], М[Р] = М[р];
М[аат] = М[аа‘], М[рр7] = М[р^т], М[арт] = М[арт].
Пусть также 1(b) линейная функция вектора b такая, что
1(b) = M[d/p = b], то есть описывает оптимальную оцепку d по
р. Тогда 1(Р) является оптимальной линейной оценкой а по р.
Доказательство приведено в [205]. Оценка 1(Р) часто еще на-
зывается условным математическим ожиданием в широком смыс-
ле и обозначается 1(0) = М[а/р]. Тем самым подчеркивается, что
эта величина, обеспечивая получение оптимальной в классе ли-
нейных оценки, вообще говоря, не является строго оптимальной
оценкой, которая определяется как классическое условное сред-
нее М[а/р] * М[а/р].
Данная лемма имеет важное значение, так как она формально
позволяет использовать результаты теоремы о нормальной корреля-
ции для случая, когда законы распределения случайных величин в
моделях состояний и наблюдений не являются гауссовскими.
252
В случае, если в уравнениях состояний и наблюдений реали-
зуются нелинейные преобразования типа фк(хк), hk(xk), то наибо-
лее распространенным приемом получения сопоставимых оце-
нок является проведение текущей линеаризации этих операто-
ров [157, 186]. При этом на каждом шаге проводится их разло-
жение в окрестности текущей оценки xk/k_1. Например, при
нелинейности hk(xk) уравнение наблюдений в (4.1.11), будет
иметь вид
zk = hk) + Ahk (хк - x,,^) + vk,
где
Ahk
9hM
К,
— матрица частных производных первого по-
рядка вектор-функции h(xk) в точке xk/vl. Теперь на каждом
шаге можно ввести новый вектор наблюдаемых параметров
4 =zk_hk(xk,k_,) + Ahkxk/k_1 =Ahkxk+vk.
Отсюда видно, что на данном шаге для вектора z'k можно запи-
сать уравнение наблюдения, аналогичное по структуре ранее ис-
пользованному. Далее можно по приведенной выше схеме вы-
числить все матричные коэффициенты алгоритма фильтрации,
который в известной литературе называется квазилинейным или
расширенным [157, 184]. Однако поскольку эти коэффициенты
уже зависят от xk/k^» то некоторые свойства, присущие чисто
линейному фильтру, теряются. У расширенного фильтра весо-
вая матрица и матрица ковариации теперь зависит от реализа-
ции предшествующих наблюдений (в силу зависимости Ahk от
xk/k i) и их нельзя рассчитать заранее. Свойство рекуррентности
получаемой оценки тем не менее сохраняется.
Еще одно важное расширение круга задач, решаемых метода-
ми оптимальной фильтрации, связано с так называемой адап-
тивной постановкой, которая определяется заданием уравнений
состояний и наблюдений в виде [87, 184]
xk+i =<K(a.xk) + gk(a)uk, zk = hk(a,xk) + vk,
uk~P(uk/a); vk~P(vk/a), x1~P(x1/a), (4.1.14)
где a — вектор неизвестных постоянных параметров уравнений
состояний и наблюдений, для которого известен закон распреде-
ления Р(а) на непрерывнозпачном множестве значений 0)а. Су-
ществует достаточно большое количество специальных методов
решения задачи адаптивной фильтрации [87, 184], использова-
ние которых возможно при внесении некоторых ограничений в
постановку (4.1.14). Однако наиболее общим подходом является
реализация метода разделения. Его существо заключается в на-
хождении условных оценок
253
xkrt/k(a) = Jxk+1P(xkll /zk,a)dxk+1 = M[xk41 /zk,a],
а также апостериорных законов распределения а и функциона-
лов правдоподобия
P(a/zk) = P(zk/a)P(a)/P(zk), P(zk) = JP(zk/a)P(a)da.
Тогда оптимальная оценка xk+1/k находится путем усреднения
оптимальной условной оценки
Xk+)/k = Jxk+1/k(a)P(a/zk)da.
Вычисление оценки значительно упрощается, если непрерыв-
нозначное множество значений а : соа можно заменить дискрет-
ным множеством значений Ла. Такая замена может быть реали-
зована, например, путем введения равномерной сетки значений
а с достаточно малым шагом дискретизации [184, 186] или ка-
ким-либо другим способом [126, 142].
Пусть теперь параметр а принимает дискретный ряд значе-
ний a==ai с вероятностями pai, i = l,Nn и для фиксированного
значения а статистические модели состояний и наблюдений под-
чиняются всем условиям постановки задачи оптимальной линей-
ной фильтрации. Тогда выражение для хки/к может быть полу-
чено в законченном и простом аналитическом виде [87]
Xk+i/k = X *k+l/k (ai /ai >P-i Z S Р<2“ 1 a< )Pai ’
1=1 1=1
P(zk/a;) = JjN(zt ,htxt/t ^аДР,,^)); (4.1.15)
t-1
P7t (ai) = Ut (aj) = ht (a, )Pt/t_T (ai ) + Rt (a;),
где xt/t_t(a.), Pt/t 1(aJ — оптимальная условная линейная оцен-
ка и ее матрица ковариации, вычисляемые па основе соотноше-
ний типа (4.1.13) при а = а..
Приведенные результаты по объему и содержанию являются
кратким и существенно упрощенным изложением известных
результатов теории оптимальной фильтрации. Тем не менее, они
являются достаточным основанием для проведения последующего
рассмотрения, направленного на распространение этих резуль-
татов для характерных условий функционирования PC, когда
принципиально отсутствует возможность поступления на вход
алгоритмов фильтрации однозначно полезной и очищенной от
ложных (мешающих) наблюдений информации.
254
4.2. Синтез алгоритмов фильтрации
в условиях наличия пропусков и ложных наблюдений
Одной из основных процедур, которые требуется реализовать
в ходе вторичной обработки, является процедура фильтрации —
оценивания параметров сигналов ИРИ. Процесс изменения этих
параметров описывается ранее введенными ДМС, а процесс на-
блюдения — МН специального вида, учитывающими возмож-
ность получения как полезной, так и ложной (мешающей) ин-
формации, а также возникновения пропусков информации в ком-
понентах вектора наблюдений, подаваемого па вход алгоритма
фильтрации. Первоначально решение задачи синтеза алгорит-
мов фильтрации рассмотрим для исходной постановки, опреде-
ляемой парой ДМС—МП вида
Xl(1 =<kxt+gtut, xt ~N(x1,x,/0>P1/0); (4.2.1)
zt = At(htxt + vt) + Bt(zt/t# + wt) + Ct^t, 9tE0x,
где все обозначения соответствуют ранее введенным при описа-
нии (4.1.5) обозначениям. Относительно конкретных статисти-
ческих свойств входящих в (4.2.1) случайных величин сделаем
ряд следующих предположений. Вектор xt является m-мерным,
а вектор возмущений в уравнении состояний имеет размерность
г и является гауссовским с параметрами M[uJ = 0, M[ut,u^] = qt,
t = 1,2,... . Вектор шумов измерения при полезном наблюдении
vt является гауссовским с параметрами MfvJ = 0, M[vt,V'r] = Rp
а вектор отклонения ложного наблюдения wt — негауссовским с
параметрами M[wt] = 0, M[wt,wJ^] = St, t = 1,2,... . Будем по ана-
логии обозначать закон распределения wt ~ H(wt,0,St), что одна-
ко не означает, что его вид определяется только первыми двумя
моментами. Предполагаем также, что шумы up v^, wk некорре-
лированы между собой, а также с элементами матриц At, Bt, Ct
и Xj при любых i, j, k, t. Статистические описания матриц At,
Bt, Ct определяются безусловными вероятностными характерис-
тиками P1(8p...,8n), PAt, PBt, PCt или условными относительно
значений дискретной компоненты 0t вероятностными характе-
ристиками Pt(Sp...,8n/Gt), PAt(9t), PBt(9t)’ pcJ0t>-
В рамках определенных таким образом статистических моде-
лей рассмотрим альтернативные варианты построения алгорит-
мов фильтрации, обеспечивающих оценку значений текущего
вектора состояний.
Оптимальный линейный фильтр. Простейший вариант пост-
роения алгоритма оценивания текущего вектора состояний реа-
лизует оптимальный в классе линейных фильтр. Методика син-
теза такого рода фильтров основывается на теореме о нормаль-
ной корреляции и лемме о возможности распространения резуль-
255
татов теоремы на случай негауссовского характера распределе-
ния входящих в уравнения состояний и наблюдений случайных
величин [84, 90, 205]. Переобозначим в уравнениях состояний и
наблюдений х1/0 = х1/0, Р1/о =Pi/o> zl/t =zl/t , <pt =<pt, подчеркивая
линейный характер обработки, реализуемой в данном случае.
При этом оптимальная в классе линейных оценка xt+1/t = M[xt^1 /z' ]
(дискретная компонента наблюдений здесь не учитывается), то
есть условное в широком смысле математическое ожидание х1+р
определяется выражениями
xt+l/t ~ + Wt(zt —
zt/t-i = M[zt/z ] = PAthtxt/t_1 + PBtzt/u + Pct<pt; (4.2.2)
Wt = VtU;\ Vt Ut =M[vt<];
pl+1/t = M[etXJ=-vurvj^’+g^g;1;
~ Xt ~ Xt/t-J > =Zt ~
Они отличаются от стандартных выражений (4.1.12) только ви-
дом обновления и оценки zt/l4 , которая получается при подста-
новке в выражение для M[zt /z^1] уравнения (4.2.1) для zt с уче-
том результатов проверки па выполнение леммы об ортогональ-
ном проецировании.
При выводе итоговых выражений для матриц Vt, Ut и Wt
целесообразно предварительно конкретизировать способ доопре-
деления последовательности наблюдений при наличии пропус-
ков. Смысл искусственного приема доопределения состоит в том,
чтобы обеспечить инвариантность процедуры фильтрации по от-
ношению к ситуации возникновения пропусков в отдельных ком-
понентах вектора наблюдений и, тем самым, реализовать основ-
ное преимущество линейного фильтра — возможность априорного
расчета весовой матрицы Wt, t = 1,2.. . Очевидно, что в данном
случае вектор <pt должен быть линейной функцией предшествующих
наблюдений. Для проведения дальнейшего рассмотрения целесо-
образно сформулировать следующее утверждение.
Утверждение 4.2.1. При фиксированной матрице Vt и различ-
ных U' > Uf > 0 (в смысле неотрицательной определенности раз-
ности Ut - Uf) на t-ом шаге процедуры фильтрации выполняется
Р'+1/1 > P'1/t. Диагональные элементы P'1/t при этом будут всегда
меньше соответствующих диагональных элементов P'+1/t.
Как известно [157], если квадратная пхп матрица А>0, то
для любой mxn матрицы В выполняется ВАВт>0. Поскольку
из U' >U[>0 следует, что (Uf)-1-(U') 1 >0, то выполняется
ШЧг>лмТ,
а с учетом (4.2.2) и само утверждение.
256
Утверждение 4.2.2. Оптимальным доопределением при
наличии пропусков по отдельным компонентам наблюдений яв-
ляются соответствующие компоненты вектора
Pct) + РвЛ/u)• (4.2.3)
Очевидно, что в силу линейного вида зависимости (pt от
zp...,zt и леммы об ортогональном проецировании матрица Vt
не зависит от , то есть от способа доопределения.
Известно также [184, 186], что минимизация диагональных
элементов Ut достигается при минимизации следа апостериор-
ной, условной относительно zt-1 и, следовательно, (pt матрицы
U(t7>($t) = M[vtVt’ /zt-1]. Отсюда можно найти для нее условия ми-
нимума следа H($t) = trU(tz)(9t), вычисляя частные производные
по компонентам <pt = (фп,...,ф1п)т и приравнивая их нулю
ЭН А —
-— = 0, s = l,n.
При этом получим
___ <К. =(M[atsz;e/zl-1] + Pbtszte)/(l-pcts),
где z^, s = l,n — компоненты вектора z“ =htxt, a zt4 — компо-
ненты вектора zt/te. Отсюда, учитывая ограничение линейности
<pt относительно наблюдений, получим в строгом виде доказа-
тельство (4.2.3). Подставляя ф’ в приведенное в (4.2.2) выраже-
ние для zt/t_j , получим результат zt/l.4=<pj, который, вообще
говоря, можно было бы получить и из естественных соображе-
ний, не прибегая к дифференцированию.
Таким образом, выражения для матриц Vt, Ut в соответствии
с (4.2.2), (4.2.3), выполняя соответствующие подстановки, мож-
но получить в виде [158, 169]
Vt =M[etetrh'1'A't1’], U^U'0,
и»’ =М[ТА1вИ,цХв]. U12’ =М[ТЛ.вхАт_в];
1Г’>=м[ТА,Л1Хв1. и<4) =м[тА_1)ХЛт.в];
U(tS) =M[AtvtvM, U<6) =M[B,wtwX];
TA+„ = (I-PCtr1PAl(At +Bt), TA_B = (I-Pft)-1(PBtAt-PAtBt);
Ш = h,xt-h,xt/t_1, Xt =htxt-zt,u.
При этом элементы матриц Vt, U^, i = 1,6 определяются сле-
дующим образом:
Vtij =petjM[ElAj/atj], = atijpJtipaljM[gtiptj];
Pnti Pfltj
(4,2,4)
Pfltij
u(?? = Ot {
utlj I
1-Prti-Pcij+Pcti, (l-Pcli)(l-pMj)
9 2357
257
xMfruXtj / au ] Pbti(l-Prtj) +
_____PbtiPbtj_____
(1-Pcti)(l-Pctj)
MfZ.iXt/bJ pati(l-pctj)};
(4.2.5)
C = < =alUp8J^^M[Mtai/aJ-b^M[Mtixtj/bl.]];
1-Pctj 1-Pclj
uu? =PatiiM[vt.vtt/al|)alj], u’®? =PbtijM[wtiwlj/bli,blj];
Patij = P(ati = 1, ati = 1), pbtlJ = P(b„ = 1, bt) = 1);
p . = P(c = 1 c =1) a = ^~Pcti ~paj +pcUj)
Обозначения вида M[ /atJ, М[ /bt ] и т.п» определяют услов-
ные средние вида M[/at = 1], М[ /bt =1]. На основе (4.2.4),
(4.2.5) могут быть получены выражения для Vt, Ut в конкрет-
ных случаях. Одно из возможных упрощений реализуется в ча-
сто встречающейся на практике ситуации, когда возникновение
пропуска какой-либо компоненты полезного наблюдения обус-
ловлено чисто энергетическими факторами условий приема сиг-
налов и не связано со значениями xt. При этом выбор полезного
наблюдения в ходе идентификации при наличии в ДСС несколь-
ких наблюдений проводится по дополнительной информации или
признакам, не связанным со значениями zt (например, по той
же амплитуде сигнала). Тогда можно считать, что элементы мат-
риц Ар Bt некоррелированы с элементами матриц vtv^, vtv^, wtw^.
Если эти ограничения выполняются, то имеют место следующие
упрощенные выражения:
vtij = pntjM[£tigtj], ]|vtu||=vt = Pt/l.XPAt;
ud/ = P^i₽X |rt? = ]|| = htPt/t_K;
Uu? = Puj- P^Patj)^’ > ||rt'ij’ = M[XtlXtjI = PH. ;
A = pEAC - M[Vuvtj]|| = Rt; (4-2.6)
C = P^AC. ||rw = MlWtiWjll = St;
= A =0- Pw =p(cu =°- cu =0)- P-ti =P.ti/(l-P«i);
P^j =р(ан =1> ati =l/cti =0, ctJ =0);
р°щ=Р(Ьй=1, Ьц=1/си=0, ctj=0).
258
Если последовательность значений элементов матриц A*, Bt
независимая в дискретном времени, то (4.2.6) можно получить
из более общих соображений [84, 90].
Рассмотрим некоторые частные случаи. Пусть, например,
zt/t =zt/t_1 =htxt/t-1, то есть формирование ДСС в процессе со-
провождения гипотетической последовательности проводится по
всей совокупности предшествующих наблюдений. Тогда для мат-
рицы At в (4.2.6) имеем достаточно простое выражение
ut = (patij (n'j’ + ) + Pbtijfty} I • (4.2.7)
Пусть теперь имеется полная коррелированность результатов
частных информационных решений при получении компонент
наблюдений от различных датчиков, то есть pati = pHtj ” Patij = Put>
Pbti — Phtj ” Pbtij — Pbt > Pcti — Pctj ~ Pctjj — Pct 5 i, j = 1,П. • ТоГДВ Bbipa-
жения для матриц Vt, Ut принимают вид
V = Pat Pt /1-1 ht >
2 (4.2.8)
Ut = -P^htPt/t-X + PatRt + pbtst + .
1-Pc. 1 - Pet
В частности при pat = 1 (4.2.8) преобразуется в соотношения
для линейного фильтра Калмана.
Таким образом, на основе полученных выражений в конкрет-
ных случаях могут быть рассчитаны линейные фильтры, опти-
мальные в рамках статистической модели (4.2.1). Их главной
особенностью является присутствие в выражениях для весовых
матриц безусловных вероятностных характеристик ЧИР, реали-
зуемых в ходе предшествующей обработки. Следует отметить,
что полученные алгоритмы в соответствии с результатами п. 4.1.2
являются оптимальными в классе линейных, когда не только
закон распределения ложных наблюдений является пегауссовс-
ким, но также и законы распределения начального вектора со-
стояний, шумов возмущений вектора состояний и шумов при
полезных наблюдениях являются негауссовскими.
Очевидно, что в рамках предложенной статистической модели
возможно улучшение оценок, получаемых на основе линейного
фильтра. Это предполагает использование различного рода нели-
нейных алгоритмов фильтрации, а также дополнительной инфор-
мации, содержащейся в дискретной компоненте наблюдений.
Условно линейный фильтр. Данный класс алгоритмов филь-
трации занимает промежуточное место между оптимальными
линейными и нелинейными алгоритмами и обеспечивает эффек-
тивное использование дискретной компоненты наблюдений без
существенного усложнения обработки. При этом для (4.2.1) реа-
лизуется оценка xt l/t = M[xttl / zl ,0г J, которая является нелиней-
259
ной относительно последовательности 9t и условно линейной при
фиксированной реализации 0l= (0p...,9t) относительно последо-
вательности zt, t = l,2.Переобозначим в уравнениях состоя-
ний и наблюдений i1/0 = х1/0, Р1/о = Р1/0, zl/lt =zt/l<, =фи под-
черкивая условно линейный характер обработки, реализуемой в
данном случае. При получении xt+1/t значения 9t на каждом шаге
используются для расчета условных вероятностных характерис-
тик частных информационных решений, то есть вероятностей
Pt(8l,...,5n/9t) и матриц PAl(0t), PBt(9t), Pci(9t), а затем и расче-
та рекуррентного фильтра по приведенной выше методике (соот-
ношения (4.2.2)—(4.2.6)). В дискретной компоненте 9t естествен-
ным образом содержится информация о наличии пропусков в
каналах наблюдения. Это означает, что всегда можно ввести век-
тор T|t = (1 -ctl,...,1 -ctn)T и представить 0t =(Хт,Т|т)т, где X —
вектор, содержащий другие данные дискретной компоненты на-
блюдений. При этом очевидно, что
Pct(Ot) = Ct, PAt(0t) + PBt(9t) = I-Ct.
Поэтому уравнения для данного типа алгоритмов фильтра-
ции записываются в следующем виде:
Xt.vt +wt(0t)(zt(4.2.9)
W,(ol) = vteu;e, vw =M[£teXAt/e,l=i1.1(01',KPAt(et);
U^MIv^V^/el, UteU‘eUte = Ute;
pl+1/t(6’) = <hAM.1(0l-,)-Wl(0t)uteWlT(0,)]<Kr+gtqtgt;
z.a-1 ~ i>
где Ut4e — псевдообратная матрица, ненулевые элементы которой
являются элементами матрицы, обратной по отношению к матри-
це ковариации ненулевых компонент вектора обновления, то есть
тех, где отсутствуют пропуски. Важно отметить, что в данном слу-
чае зафиксированы статистические параметры модели наблюдений
в тех же значениях, что и при рассмотрении оптимального линей-
ного фильтра с тем только отличием, что при формировании цент-
ра очередного ДСС здесь используются оценки zt/t соответствую-
щего класса. По существу алгоритм фильтрации (4.2.9) реализует
оценивание значений вектора состояний с “пульсирующим” харак-
тером изменения элементов весовой матрицы W(0l). Вносимое ей
усиление увеличивается или резко уменьшается, если наблюдае-
мые значения 9t характеризуют увеличение или снижение диаго-
нальных элементов матрицы PAl(9t), то есть вероятностей того, что
полученный на данном шаге вектор zt является полезным. Как
простейший пример можно привести ситуацию, когда при жесткой
260
корреляции результатов ЧИР в каналах наблюдения значение
0t - mt > 0 определяет количество наблюдений, попавших изна-
чально в ДСС, среди которых далее проводится выбор полезного в
ходе идентификации. При этом очевидно, что вероятность
pat(mt = 0) = 0, pat(mt = 1) »1 и pat(mt) ~ т"1 при больших значе-
ниях пц. Далее будут приведены конкретные примеры с использо-
ванием различных способов определения дискретной компоненты
наблюдений и точным вычислением условных вероятностных ха-
рактеристик ЧИР.
При определении весовой матрицы фильтра в {4.2.9) рассчи-
тывается условная матрица ковариации ошибок РнШ(01), кото-
рая определяет получаемые точностные характеристики оцени-
вания при конкретной реализации 04 Для того, чтобы опреде-
лить окончательные характеристики получаемых с помощью
данного фильтра оценок, требуется определить безусловную мат-
рицу ковариации ошибок
Дпп =£Р(0‘Д+1/1(0*), Р(6‘) =npi(ei)> (4.2.10)
{е1} i=i
где Р^) — вероятности значений дискретной компоненты на
i-ом шаге (считаем здесь и далее, что эти значения независимы
от шага к шагу).
Оптимальный нелинейный фильтр. Дальнейшее повышение
качества оценивания для определенных уравнениями (4.2.1)
моделей состояний и наблюдений связано с использованием оп-
тимального нелинейного алгоритма фильтрации. При его синте-
зе в полном объеме используются введенные в (4.2.1) обозначе-
ния и определения. Для доопределения zt при наличии пропус-
ков может использоваться любая вектор-функция предшествую-
щих наблюдений, которую в данном случае зададим как
Применяя общую методику [184, 186] (см. также
п. 4.1.2) для нахождения оптимальной оценки xt+1/1 - M[xt+1 /£*],
= (г\0*) , можно получить следующие соотношения:
Р(Х1(Л*)= £ ... X Р(хш,х],...,х1/^,) =
= £ z P(xt+1/x1,-.xt4l)P(x„-Ixl/^);
txievi'ni} /nt > (4 2 11)
^ni/t = S ** X xt+1/t(Xi,)Pzu(Xi»”»Xt)/Pze>
p^= z - z pz„(xi.-.Zt).
<X]€Vj/ni} (Xte¥t/nt>
где Xt ==(Pp---»Ps) обозначает комбинацию номеров компонент век-
тора zt и одновременно гипотезу о том, что atp - 1, i = l,s , то есть
261
что в соответствующих компонентах и только в них получены по-
лезные наблюдения; yt = (j1,...,je) обозначает комбинацию номе-
ров компонент (каналов наблюдения), в которых не произошли
пропуски T]tj. =1-%, =1, i = l,e; xl+l/t = M[xt+1 - »Xt] ~
оптимальная линейная оценка по совокупности предшествующих
наблюдений при фиксированной реализации 01 и условии истинно-
сти последовательности комбинаций Px0(Xi»Xt) — весо-
вой коэффициент, пропорциональный апостериорной вероятности
P(Xi,...,Xt истинности Xp*”,Xt на всех предшествующих ша-
гах. Введем теперь комбинацию pt = (г^...,^) номеров компонент
zt, для которых предполагается, что btr =1, i = l,d, то есть в
этих компонентах получены ложные наблюдения (XtpHt = 0,
XtU^t =Vt> d = e-s), а также комбинацию (pt = (fp—.fn_0) номе-
ров компонент, для которых r|tf = 0, 1 = 1,п-е , что означает на-
личие пропусков в соответствующих каналах наблюдения
(VtLK =(1,2,...,п)).
Обозначим %' =(Xi,-,Xt)> V* =(Vi,. -,Vt), П‘=01i» .,nt)- ТогДа
для весовых коэффициентов в (4.2.11) можно записать следую-
щие выражения [169]:
Р(Х* ^‘) = Р(Х1Л‘) W) - Р2о(х‘)/Р*. (4.2.12)
РЖ) = Р(Х‘,9* ,z‘) = P(O')P(xl,zl/0‘) =
= p(e,)HP(x,,z1/xi'1,zl-1,e‘) =
i=l
= P(0t)flP(XiWv, (x”’). i\(xi_,))x
i~l
xHd(zp , zM>, SPi)5(z9i -z9 ),
где zx., zp , — векторы, состоящие из компонент zlt i - l,t,
номера которых входят в комбинации zx. (х’Ч)> z , z—
линейная для zz и нелинейные для z^, z оценки, формируемые
из соответствующих компонент векторов zi/i_1(x1’1) = hixi/i_1(x1"1),
zi/ia, Фр Pzz (Xwl), Su — соответствующие матрицы ковариации.
Вероятности P(Xi /fy) рассчитываются на основе выражений для
Pi(81,...,8n/Gi). Полученные соотношения по виду совпадают с
приведенными в п. 4.1.2 для адаптивного разделенного фильтра
с тем отличием, что при расчете весовых коэффициентов здесь
используются негауссовские плотности вероятности Hd(-) Соот-
ношения (4.2.11), (4.2.12) должны быть дополнены соотношени-
ями для условной матрицы ковариации ошибок нелинейной оцен-
ки xt+1/t
262
Pt+1/t(^) = M[EtX1/^] =
= X [₽t+i/t(xt)+'<lti(xt)<i(xl)]pze(xl)/p;e,
{/еу‘/пЧ
K[T1(Xt) = xt+i/t-xt+1/t(x')l
где Pt+i/t (x ) — матрица ковариации ошибок условной линейной
оценки xt+1/t(xf) • Усредняя последнее выражение по оконча-
тельно получим выражение для безусловной матрицы ковариа-
ции оптимальной нелинейной оценки:
Р.+1/. = /Р1+ш(ОР(т' =А1ИП+В1.1/„ (4.2.13)
А..ш=£Р(е‘) X Р(х'/е1)Р.,ш(/);
Bt,m=Xp(e’) X
{«’} {х'су‘/О1}
P(Xl/et) = flP(Xi/0i)-
i=l
Смысл соотношении (4.2.13) заключается в следующем. Матри-
ца At+J/t есть среднее матриц ковариации оптимальных линей-
ных оценок, проводимых по всем возможным комбинациям по-
лезных наблюдений за t шагов. Матрица Bt+1/t характеризует
среднеквадратичное смещение оптимальной оценки xt+1/t по от-
ношению к оценке, получаемой с помощью линейного фильтра
xt-i/t(Xt) ПРИ истинной (реально состоявшейся) совокупности
полезных наблюдений, действительно входящих в X*- Получение
в явном виде матрицы At4M представляет собой хотя и громозд-
кую в вычислительном отношении, но вполне разрешимую зада-
чу. Получение матрицы Bt+1/t связано с большими трудностями
и, следовательно, точностные характеристики оптимального не-
линейного фильтра в виде матрицы Р окончательно могут
быть определены только методом статистических испытаний.
Однако, исходя из общих свойств оптимальных линейных и не-
линейных оценок [60, 186], а также с учетом (4.2.13), могут
быть получены границы, позволяющие проводить сравнитель-
ный анализ алгоритмов фильтрации различных классов. Эти
границы определяются следующей цепочкой неравенств:
tr Pt+i/o - Pt+i/t -Pt+i/t - tr Pt+i/t - tr At+1/t > tr Pt(J1/t.(4.2.14)
В (4.2.14) pt и At+1/t определяют верхнюю и нижнюю грани-
цы для Pt+1/t и представляют собой схожие по виду матричные
структуры, которые могут быть рассчитаны точно и использова-
ны, в частности, для оценки точностных характеристик нели-
263
нейного фильтра. Матрица Pt(^1/t здесь определяет точностные
характеристики оптимального линейного (калмановского) филь-
тра, функционирующего в идеальных условиях, т.е. при факти-
ческом отсутствии пропусков и ложных наблюдений. Цепочка
неравенств (4.2.14) определяет фундаментальные пределы для
точностных характеристик оценивания при использовании мо-
делей состояний и наблюдений (4.2.1) и позволяет проводить
сравнительный анализ различных по сложности и быстродей-
ствию альтернативных вариантов построения алгоритмов обра-
ботки информации. Кроме того, на основе (4.2.13), (4.2.14) мо-
жет быть сформулировано одно важное утверждение.
Утверждение 4.2.3. Ошибки оценивания параметров в усло-
виях получения в отдельных каналах (первичных датчиках) с
определенными вероятностями ложных наблюдений будут все-
гда больше, чем в ситуации, когда вместо этих наблюдений с
теми же вероятностями будут получены пропуски.
Для доказательства проведем в выражении для At+Vt перегруп-
пировку слагаемых
Al.1/t=XP(Ot) £ Pw/t(Xt)P(Xt/0t) = Xp(Xt)Pt+i/t(Xt).(4.2.15)
{вч <х*>
Выражение (4.2.15) совпадает по виду с выражением (4.2.10) для
р — матрицы ошибок рекуррентного условно линейного фильт-
ра, если проводить расчет при В( = 0, А1 = I - Ct, PAt - I - Ра, то
есть в ситуации, когда вместо каждого из ложных наблюдений
происходят пропуски. При этом следует учесть, что возникает
соответствие для множеств совокупностей {G1} о {rf} {х1} и
для каждой конкретной совокупности выполняется
Р(е‘) = р(п1) = Р(х‘) (Р(в:) = Р(тАП Р(Г/тГ) = 1).
Аналогичное по смыслу утверждение может быть доказано и по
отношению к обработке, реализуемой с использованием оптималь-
ного в классе линейных фильтра. Важность полученных соотноше-
ний и выводов определяется возможностью проведения количествен-
ного анализа влияния ложной информации или отсутствия инфор-
мации (скрытия объекта) при проведении вторичной обработки в
PC. При этом следует отметить, что полученные верхняя и нижняя
границы для матрицы ковариации ошибок оптимального нелиней-
ного алгоритма фильтрации будут тем ближе друг к другу, то есть
будут тем точнее отражать потенциально достижимые характерис-
тики оценивания, чем более информативной является дискретная
компонента наблюдений. Это и понятно, если учесть, что значения
0t, t = l,2,... выступают в роли своеобразного указателя наличия
ложных наблюдений и, в пределе, при повышении информативно-
сти дискретной компоненты могут полностью исключить их про-
никновение на дальнейшую обработку. Этот предельный случай,
264
когда вместо ложных наблюдений с теми же вероятностями на входе
фильтра возникают пропуски, и отражает нижняя граница, опре-
деляемая матрицей At+1/t в (4.2.14). В качестве иллюстративного при-
мера на рис. 4.2.1 представлены зависимости, отражающие типичные
закономерности изменения точностных характеристик оценивания
параметров с использованием рассмотренных классов фильтров при
изменении вероятности pbt3 = pb, s - l,n, t = 1,2,... получения ложно-
го наблюдения для различных значений pct4 = рс> s = l,n, t = 1,2,...
вероятности пропуска. Подобные зависимости для конкретных за-
дач оценивания различных параметров получены, например, в [126,
165]. На рис. 4.2.1 величина р характеризует отношение следа мат-
рицы ковариации ошибок оценивания с использованием различ-
ных фильтров к следу априорной матрицы ковариации оценивае-
мого параметра. Величина р(о) = trPt(^/t /trPt+1/0 определяет ниж-
нюю границу ошибки оценивания в условиях отсутствия пропус-
ков и ложных наблюдений, которая могла бы быть получена на
основе фильтра Калмана. Зависимости 2 и 3 соответствуют верхней
p(2)=trf»t+1/t/trPt+1/0 И нижней р(3» =trAt+m/trPt+1/0 границам
ошибки оценивания для нелинейного фильтра, причем р(2) одно-
временно характеризует точностные характеристики условно ли-
нейного фильтра. Наконец, зависимости 1 характеризуют измене-
ние ошибки, получаемой с использованием линейного фильтра
p(I) = trPL„. /trR . Отметим, что для рп = 0 все зависимости при
i4X/l 1Ч1/и С
рь —> 0 сходятся в одной точке,
тогда как при рс = 0,2 характе-
ристики линейного фильтра от-
личаются от характеристик ус-
ловно линейного и нелинейного
фильтров, которые всегда в том
или ином виде используют ин-
формацию о наличии пропусков.
Следует еще раз отметить, что
проведение подобного сравни-
тельного анализа имеет смысл в
тех случаях, когда для всех клас-
сов фильтров статистические ха-
Рис. 4.2.1 Типовые зависимо-
сти для точностных характеристик
различных классов фильтров
рактеристики модели наблюде-
ний зафиксированы в одних и
тех же значениях.
Квазилинейный (расширенный) фильтр. В данном случае
несколько отойдем от рассматриваемой в предыдущих случаях
модели наблюдений и будем считать, что в (4.2.1) полезное на-
блюдение связано с вектором состояний нелинейным операто-
ром, то есть z(to> =ht(xt). Для определенности будем считать, что
265
zt/t> = Zt/t. =ht(xt/t-i) > где_ xt/t4 — полученная на предыдущем
шаге оценка (х1/0 =хпо> Р1/о = PVO). Представим z’0 в виде
z';’ «ЬДх^ + ДЬДх, (4.2.16)
где Aht — матрица частных производных (якобиан) нелинейного
преобразования в точке х1М-1 (см. п. 4.1.2). Тогда, введя новый
вектор наблюдений
zt — zt “ht(xt/t_1) + Ahtxt/t_1,
получим, что для z' уравнение наблюдений с учетом равенства
At + Bt + Ct = I записывается следующим образом:
< = At(Ahtxt +vt) + Bt(Ahtxt/t_1 + wt) + CtAhtxt/t.1, (4.2.17)
то есть будет иметь сходный с (4.2.1) вид. Это означает, что для
(4.2.17) может быть теперь применена рассмотренная выше ме-
тодика расчета линейного или условно линейного фильтров. Од-
нако, поскольку в данном случае требуется на каждом шаге про-
водить линеаризацию оператора z(to)=ht(xt) после получения
оценки и рассчитать весовые матрицы фильтра заранее не
удается, следует рассматривать только условно линейный фильтр.
Уравнения для такого фильтра имеют рекуррентный вид и окон-
чательно записываются следующим образом:
xul/t =<h[xt„.1+Wt(e‘)«-K,t.1)]. Wt(0') = VteUt+e;
Vt0 = M[Et£^htA^] = (4.2.18)
ute=M[v;v;T/0‘], ul9=КIк = Patij(0t)i£”+pbtij(0t)^>>
||r‘”| = AhtPt,t_,Ah?+Rt, ||r^|| = St;
pt+1/^0‘)=<h[^/t_1(0‘-1)-wt(0‘)utewtT(0‘)]^+gtqtg?’;
Zt/t-i = ^btxt/t_1, vt = zt — — zt — ht(xt/t_j),
palij(et) = P(ati=i, atj = i/et), pbtij(et) = P(btl^i, bt)=i/et).
В (4.2.18) весовая матрица W^G1) и, соответственно, матри-
ца ковариации ошибок зависят как от реализации дискретной,
так и от реализации непрерывнозначной компоненты наблюде-
ний. Поэтому для определения точностных характеристик полу-
ченного фильтра необходимо проводить усреднение условной
матрицы Р1Иа(01) относительно реализаций входной последова-
тельности наблюдений. Это можно сделать при статистическом
моделировании процесса обработки. Кроме того, можно восполь-
зоваться результатами [186], в основе которых лежит использова-
ние характеристик эквивалентной линейной задачи фильтрации.
266
4.3. Анализ характеристик устойчивости алгоритмов
фильтрации в условиях наличия пропусков и ложных
наблюдений
До сих пор решение задачи оптимальной фильтрации базиро-
валось на допущении о том, что функциональные преобразова-
ния в моделях состояний, равно как и вероятностные характе-
ристики фигурирующих там случайных величин, априорно из-
вестны точно. Однако на практике неизбежны те или иные откло-
нения от принятой при синтезе идеальной модели. Соответствующие
исследования, направленные на анализ устойчивости алгорит-
мов фильтрации, условий их расходимости и пр., проведены в
ряде известных работ [157, 186]. Так как в данной работе основ-
ное внимание уделяется задаче фильтрации в условиях пропус-
ков и ложных наблюдений, решение которой опирается на зада-
ние вероятностных характеристик предшествующей предвари-
тельной (первичной) обработки, возникает необходимость спе-
циально рассмотреть влияние отклонения этих характеристик
от расчетных на точность оценивания параметров при фильтра-
ции. Кроме того, поскольку фильтрация в ходе вторичной обра-
ботки проводится в рамках процесса сопровождения гипотети-
ческих последовательностей наблюдений в индивидуальных ди-
намических стробах возможных значений этих наблюдений, то
требуется в этом же ключе рассмотреть такую весьма важную
характеристику, как вероятность срыва сопровождения по ре-
зультатам фильтрации.
4,3.1, Условия робастности алгоритмов фильтрации
по отношению к статистике поступления полезных
и ложных наблюдений
Оптимальные фильтры сигналов, которые могли бы достаточ-
но эффективно работать при возможных отклонениях характерис-
тик сигналов и шумов в заданных границах, называют робастными
(стабильными, устойчивыми к отклонениям) [186]. Основной иде-
ей робастного синтеза алгоритмов обработки более общего вида яв-
ляется использование минимаксного подхода, основанного на вы-
боре такой модели входных воздействий, при которой синтезиро-
ванный для нее алгоритм обеспечивает наименьшее значение рис-
ка при наихудших (в классе допустимых) воздействиях на вход.
Один из известных результатов, полученный в этом плане в [186],
может быть сформулирован следующим образом. Пусть в задаче
линейной фильтрации начальная матрица ковариации Р и мат-
рицы qt, Rt ковариации шумов возмущений и наблюдений извест-
ны не точно, а заключены в заданных интервалах Pmin < Р < Ргоах,
Яши, s 4t Чтох. Rmin S Rt < Rm„ • Тогда линейный фильтр Кал-
267
мана, рассчитанный при наибольших значениях P1/0=Pmnx,
qt = qmax, Rt = Rmax > является робастным, так как при входном
воздействии с лучшими в указанных диапазонах параметрами он
обеспечивает меньшую обобщенную дисперсию ошибки оценива-
ния по сравнению с расчетной.
Рассмотрим условия робастности для полученного в п. 4.2 оп-
тимального линейного фильтра, описываемого уравнениями
(4.2.2)—(4.2.6), при отклонении реальной статистики поступле-
ния полезной и ложной информации от предполагаемой [167].
Аналогичная по постановке задача может быть рассмотрена и
для условно линейного фильтра.
Пусть реальная статистика поступления на вход полезных и
ложных наблюдений отличается от той, которая задается при
проведении синтеза в соответствии с (4.2.6), причем
M[At] = PAt = PAt + Д1, M[BJ = p;t = PBt - Д1, 0 < Д < min pbti,
1
где Д — скалярная величина, определяющая приращение веро-
ятностных характеристик ЧИР. В соответствии с известной об-
щей постановкой [186] нахождение робастного фильтра Fo на
множестве {F} возможных вариантов фильтров в данном случае
определяется условием
Fn : min maxtrP'
U {F} Л
где trPt'+1/t — след истинной матрицы ковариации ошибок в ре-
альных условиях.
Утверждение 4.3.1. Если M[zt/t ] = htM[xt], t = 1,2,..., то при
любых Рд1 PAt,P't * PBt оценка xt+1/t является несмещенной:
M[xt+]/t] = M[xt41].
Для доказательства подставим величину zt, определяемую
уравнением наблюдений (4.2.1), в (4.2.2) с учетом (4.2.6). В ито-
ге нетрудно получить следующее уравнение:
M[xt+1/j=<k{M[xt/t_j+wt(p;t+p;)[(i-pct)-1p;tx
x(htM[xt] - M[zt/U ]) + (!- РС1)-’ PAt(htM[xt/l_J - ])]}.
Отсюда из несмещенности оценки на t-ом шаге следует ее несме-
щенность на t+1-ом (М[х1/0] = M[xJ по определению).
Утверждение 4.3.2. Пусть на t-ом шаге р;=рЛ.+дь
PBt = Pm—Д1, причем для определенности вероятности pati = ря,
Pbti = Рь» i = 1»п Для всех каналов наблюдения одинаковы. Пусть
также при нарушении статистики поступления полезной и лож-
ной информации совместные попарные вероятности ЧИР опре-
деляются в рамках корреляционной модели соотношениями
268
P«t4 =C1P.(l-p’) + (Pa)2;
p'„0ti-c2(p° + Д0)(1-р° -до)+(р° +A0)2; (4.3.1)
0 < Cu <1, p° b = pa b /(pa + pb), До = Д/(pn + pb),
где c1 2 — коэффициенты корреляции событий ati = 1, atj *= 1.
Тогда, если выполняются условия утверждения 4.3.1, а также
с1 =с2 =с, 0<Д0 <с/(1-с) + 1/[(1-с)(п-1)], (4.3.2)
то соотношение между реально получаемой матрицей ковариации
ошибок и расчетной определяется неравенством P'n/t < Puv.- Эт0
означает, что фильтр с гарантированными вероятностями поступ-
ления полезной информации является робастным и в диапазоне
значений Z^, определяемом (4.3.2), выполняются условия робаст-
ности для оптимального в классе линейных фильтра (4.2.2).
При проведении доказательства сначала получим общее урав-
нение для P'^1/t. Для этого невязку в уравнении для xt/l^ в (4.2.2)
представим в виде
vt = v'+5vt,
=(I-Pct) + РВД/П),
5vt = A0(htxt/t_1 *“Zt/tf), Pct = Pct.
Обратим внимание на свойства несмещенности оценок xt/t_p z1/t_j
и статистической ортогональности соответствующих им ошибок
оценивания к предшествующим наблюдениям. Тогда, выполняя ряд
очевидных преобразований при вычислении , получим
Pt'.m - WtVj -Wt(Au -BJWM +gtqtgL
Au = (I-Pct)(A0P;t’Ut +и1Р-’Д0) + и1; (4.3.3)
вц =u;+A*(prt. -KP^X), u; =M[vytT],
Отсюда доказательство утверждения фактически сводится к
доказательству неотрицательной определенности матрицы
Си = Au - Ви. В указанных при формулировке утверждения усло-
виях выражения для элементов Си представляются в виде
+ + 1и=4г(1-р’б) + 4г(1-Р«Л (4-3.4)
Pati Patj Pali Patj
где — обозначения элементов матриц, введенные при
описании (4.2.6). Отметим, что при выводе (4.3.3), (4.3.4) часть
ограничений утверждения не учитывалась, поэтому условие
Сц > 0 определяет робастность исходного фильтра в более общей
постановке. Для нахождения, в свою очередь, условий неотри-
269
цательной определенности Cu воспользуемся известной теоремой
[12], согласно которой матрица, элементы которой являются
произведениями соответствующих элементов положительно оп-
ределенных матриц, также является положительно определен-
ной. Если одна из этих матриц неотрицательно определена, то,
как следствие доказательства теоремы, вытекает, что общая мат-
рица будет неотрицательно определена. Учитывая, что rt(J,5,6), р^-
в (4.2.6) есть элементы положительно определенных матриц ко-
вариации случайных величин, требуется далее доказать неотри-
цательную определенность матриц Т = nt 5j •, L = ( . Введем в
действие исходные ограничения на вид элементов матриц PAt,
PBt и величин Paty, P^j , тогда при подстановке с: = с2 = с в (4.3.1)
для элементов Т, L получим
t,i = До, i = l,n, tu — с(Д0 + Дд) —Л,, i * j, i,j = l,n;
l£j =2Д0(1-р°)/р®, i = l,n, j = l,n.
Отсюда сразу следует, что L неотрицательно определена. Для
матрицы Т необходимо рассмотреть два случая. Если Ц > О, i j,
то есть До <с/(1- с), то Т можно представить в виде суммы диа-
гональной матрицы с элементами, равными (До + Ду)(1-с) > 0 , и
неотрицательно определенной матрицы с одинаковыми элемен-
тами, равными с(Д0 + До) -До > 0 . Отсюда следует неотрицатель-
ная определенность Т в этом случае. Если же < 0, i^j и
с/(1-с)<Д0, то условие неотрицательной определенности Т мо-
жет быть сформулировано в виде
п
tu =Д0 >£|1у| = -(п-1)Дос + (п-1)Д?(1-с). (4.3.5)
Неравенство (4.3.5) получено на основе известных оценок [12]
для областей локализации собственных чисел действительных
п
матриц и обеспечивает условие неотрицательнос-
ти этих чисел д/Гя Т. Из (4.3.5) вытекает основное неравенство
(4.3.2) для абсолютной области значений До, обеспечивающее
доказательство утверждения 4.3.2.
Таким образом, можно сформулировать правило нахождения
робастного фильтра при возможном изменении вероятностных ха-
рактеристик ЧИР как фильтра, синтезированного при наимень-
ших значениях вероятностей поступления полезных наблюдений,
если только их отклонение от реальных не превышает границ, оп-
ределенных (4.3.2). Далее, воспользовавшись результатами [186]
относительно свойств робастности линейных фильтров с неточно
задаваемыми матрицами ковариации ошибок и шумов, можно по-
270
казать, что на всех следующих шагах, если только выполняются
условия утверждения 4.3.2, свойство робастности сохраняется. Сле-
дует также отметить, что для более общего случая, когда вероятно-
сти Pat,,Pbti, i = 1,п не одинаковы, нахождение в явном виде облас-
тей становится более сложным, так как недиагональные эле-
менты t- и область Од значений До теперь зависят от p°ti, p°ti. Для
п ~ 2, например, получено, что область Од гарантированно опреде-
ляется неравенством p°tl + p°t2 + До - 1 • При этом остается требова-
ние сохранения корреляционной структуры результатов ЧИР от
разных каналов наблюдения.
Анализ полученных данных позволяет сделать ряд, на первый
взгляд, неочевидных выводов. Прежде всего, следует отметить, что
условия робастности рассматриваемых фильтров зависят от раз-
мерности пространства наблюдений и от степени корреляции ре-
зультатов ЧИР в разных каналах. Так, например, если все первич-
ные датчики функционируют жестко коррелированно в смысле
результатов ЧИР и с = 1 в (4.3.1), то указанное свойство достигает-
ся при любых 0 < До < Рь. Так же при п = 2 и любых с условие
(4.3.2) выполняется при любых Д^ В то же время, уже при п = 3
возможны ситуации, когда повышение вероятности поступления
полезных наблюдений от каждого канала по сравнению с расчет-
ным значением может, по крайней мере в соответствии с формаль-
ными результатами утверждения 4.3.2, привести к снижению точ-
ности оценивания. Для подтверждения последнего положения в
сочетании с теоретическими оценками на основе (4.3.3) проводил-
ся машинный эксперимент. В качестве модели исходного процесса
состояний при этом рассматривалась модель разделимого марковс-
кого случайного поля, часто используемая в работах при описании
изображений. В [212] задача фильтрации такого поля в шумах све-
дена к задаче фильтрации случайной последовательности. При этом
вводится расширение вектора состояний в виде строки поля, задан-
ного на двумерной сетке, который при этом изменяется в соответ-
ствии с уравнением
Xt+J =ГХХ( +(l-rx2)5V^ut, V^T =|4И||>
где гх = ехр(-аДх),гу =ехр(-аДу) коэффициенты корреляции сб-
седних элементов поля по осям х, у при интервалах дискретизации
Дх, Ду . Вектор наблюдений в ходе модельного эксперимента также
формировался в виде строки (n = m, ht = I) наблюдаемого в шумах
поля при Rt = ||^-*|, г7 = ехр(-а7Ду). В качестве центра ДСС в
(4.2.1) использовалась оценка zt/tt =2^^ =htxt/t-1. Для ложных
наблюдений матрица ковариации задавалась в виде St = 0*1. При
этом считалось, что в каждом элементе строки наблюдаемого поля
271
независимо от других (с = 0 в (4.3.1)) с вероятностями ра = р°, рь = р°
может быть получена либо полезная, либо ложная компонента на-
блюдения (пропуски не рассматривались).
Результаты проведенных расчетов и модельного эксперимен-
та, выполненного для соответствующих условий, представлены
на рис. 4.3.1 в виде расчетных зависимостей величины
pt = trP'+1/t/trPJ/0 , характеризующей точность получаемых оце-
нок вектора состояний, от величины Д - До для различных п = 5
(рис. а) и п = 10 (рис. б), ра, oz. Данные моделирования в отдель-
ных точках имели достаточно высокое совпадение с расчетны-
ми. Анализ полученных зависимостей действительно показыва-
ет наличие критического значения Д, превышение которого при-
водит к увеличению pt. При этом такое значение тем ближе к
границе Дк = (п-1)“1, определяемой (4.3.2), чем более домини-
рующую роль в выражениях для матрицы Си (4.3.3), (4.3.4) иг-
рает матрица ковариации шума наблюдения Rt, который в дан-
ном примере задавался сильно коррелированным. Это означает,
что информативность каждого наблюдаемого элемента поля в от-
дельности невелика и при повышении вероятности получения
полезной компоненты по сравнению с расчетной общая корреля-
ционная структура вектора наблюдений нарушается в такой сте-
пени, что характеристики синтезированного фильтра в реаль-
ных условиях ухудшаются.
Таким образом, полученные результаты позволяют проводить
количественный анализ характеристик синтезированного линей-
ного алгоритма фильтрации в зависимости от задаваемой и реа-
лизуемой статистики поступления полезной и ложной информа-
Рис. 4.3.1. Зависимости точностных характеристик линейного фильтра
от величины отклонения реальной статистики поступления полезных и
ложных наблюдений от предполагаемой
272
ции в компонентах результирующего вектора наблюдений. При
этом установлены условия, обеспечивающие робастность фильт-
ра с гарантированным значением вероятности поступления по-
лезной компоненты наблюдений в каждом канале, из которых
следует, что данное свойство достигается в большинстве практи-
чески значимых случаев. В то же время, следует отметить, что в
ряде ситуаций при больших размерностях пространства наблю-
дений возможно снижение точности оценивания при повыше-
нии реальной достоверности первичных наблюдений по сравне-
нию с расчетной. Это требует проведения анализа допустимых
диапазонов изменения вероятностных характеристик ЧИР на
основе полученных соотношений.
4.3.2. Анализ вероятностных характеристик срыва
при сопровождении гипотетических последовательностей
наблюдений
Одной из основных характеристик устойчивой работы рассмот-
ренных в п. 4.2 линейных и условно линейных фильтров является
вероятность бессрывного сопровождения гипотетических последо-
вательностей наблюдений. В процессе такого сопровождения ре-
зультаты текущего оценивания параметров состояний ИРИ исполь-
зуются при формировании перемещающихся в пространстве дина-
мических стробов или индивидуальных областей возможных зна-
чений наблюдений cozl, t = 1,2,... . Частота возникновения срыва
существенно зависит от относительного содержания полезной и ме-
шающей информации во входном потоке данных, а также от соот-
ветствия реальной и закладываемой в процессе синтеза фильтров
статистик поступления полезных и ложных наблюдений [160]. По-
этому потребовалось найти методику расчета вероятностных ха-
рактеристик срыва в зависимости от перечисленных факторов.
Исходные статистические описания и уравнения для алгоритма
фильтрации соответствуют введенным в п. 4.2 (выражения
(4.2.1)—(4.2.6)). Для упрощения выкладок, не снижая общнос-
ти подхода, рассмотрим далее ситуацию, когда последователь-
ность непрерывнозначных наблюдений, поступающих на вход
линейного фильтра, имеет вид
zt = at(htxt + vt) + bt(zt/t_j +wt) + ctzt/t_1,
Zm-i at+bt+ct=l, t = l,2,..., (4.3.6)
где at, bt, ct — скалярные величины, характеризующие результаты
частных информационных решений первичной обработки с жестко
коррелированными для компонент zt исходами, имеющими веро-
ятности pet, pbt, pct. Весовые матрицы оптимального линейного филь-
тра определяются в этом случае выражением (4.2.8) при
273
Pzt =htPt/t_1hJ (zt/t = htxl/t_1), что в результате позволяет полу-
чить следующие уравнения:
= + Wt(zt — (4.3.7)
Wt =pQtPt/tX[Pat(htPt/l^ + Rt) + phtStF1.
Выражения (4.3.7) по виду совпадают с приведенными в [84],
с тем только отличием, что в выражении для Wt имеет место
pHt + pbt < 1. Как уже отмечалось, в общем случае реальная ста-
тистика поступления полезных и ложных наблюдений отлича-
ется от предполагаемой и определяется вероятностями
p't, pbt, p't- Тогда, подставляя в уравнение для фильтра (4.3.7)
выражение для вектора наблюдений (4.3.6) с учетом реальных
вероятностей p't, pbt, p't и выражая xt+1/t, xttl через xt/t р xt,
можно получить уравнение, описывающее эволюцию действи-
тельной матрицы ковариации оценки
Pt+l/t = M[Et+iEf+1 ] = M[xt+i/tXt4.1/t] + M[xl+1xt+1] — M[xt+1xt+1/t] -
—M[xl+1/txt+1] = <^[Pt/t-1 — pat(Pt/t_1h1 Wt + WthtPt/t_1) + (4,3.8)
-FputWt(htP1'/t_Jh?' + Rt)WtT + p'blWtStWtT](|(r+gtqtg^.
Нетрудно видеть, что при p't=pnt, pbt = pht (4.3.8) переходит в
выражение, описывающее эволюцию матрицы ковариации опти-
мальной оценки в (4.2.2). Для проведения дальнейшего рассмотре-
ния целесообразно также записать уравнение для эволюции векто-
ра ошибки оценивания et = xt - хшч, которое имеет вид разностного
уравнения первого порядка со случайными коэффициентами
£1Ч =at[<K(I-Wtht)el -<RWtvt + gtut] +
+М<&е. +gtut] + cl[<he, + gtut]. (4.3.9)
Основным показателем, характеризующим устойчивую работу
фильтра в процессе сопровождения последовательности наблюде-
ний, является вероятность отсутствия срыва за t шагов. Под бес-
срывной работой фильтра будем понимать событие Et, заключаю-
щееся в том, что вектор ц. = z-0> = hixi ни разу
не выйдет за пределы области со,, при i = 1,t • Фактически это озна-
чает, что вектор полезных наблюдений ни разу не выйдет за преде-
лы ДСС. Тогда для вероятности события Et+1 с учетом того, что
условная плотность вероятности P(pt+1 /£t+J• = 8(pt+1 по“
лучим следующие выражения:
P(Et+1) = P(eul/Et)P(Et), (4.3.10)
P(et+1/Et) = JJ P(g[+1>elU/Et)dgt+Idet+, = J P(eul/Et)deul;
P(El+1 / E.) = J P(el+1 /et,Et )P(et / E, )det,
274
где etJ.j — событие, заключающееся в том, что |it+1 е co2(t+1) или,
что эквивалентно, в том, что ht41£tll е coz(t+1), Так как Et = Et_tQet,
то для P(£t / Et) в итоге имеем
P(£t/Et) = P(el/ElJP(el/et,Et4)/P(et/EtJ. (4.3.11)
Очевидно, что P(et /et,Et^) = 1 при ht£t е o>2t и P(et /£t,Et_j) = 0 в про-
тивном случае. Это значит, что P(et/Et) в (4.3.10) представляет со-
бой усеченную плотность распределения вероятности на области
o)€t, определяемой условием ht£t е cozt. Совокупность выражений
(4.3.10), (4.3.11) является достаточной для рекуррентной оценки
вероятности бессрывной работы фильтра за t шагов. Для проведения
дальнейших выкладок конкретизируем вид плотности P(et+1/et,Et).
С учетом (4.3.9), а также ранее введенных обозначений для пара-
метров и законов распределения случайных величин в моделях со-
стояний и наблюдений (4.2.1), эту плотность запишем в виде
P(et+)/et,Et) = p'tN(et+1,Actet,BrtRtB^ + gtqfg’) + з
+p,btH(et4,<ket,BctStB£Tl+g1qtg^) + p;iN(et414el,gtqlg?’)/
Art=<h(I-Wtht), Brt=4Wt.
Здесь также следует отметить, что в (4.3.12) значения вероятно-
стей p't, Pbt, p't должны соответствовать условиям устойчивой
работы фильтра, то есть условиям, когда вектор полезных на-
блюдений попадает в ДСС.
Предположим теперь, что на t-ом шаге плотность распределе-
ния вероятности P(et/Et_1) имеет вид
P(£t / ) = X p(8l )Ut (£t, О.Р^ (81)),
где {81} — множество всевозможных комбинаций для единичных
значений случайных величин ар bu ср 1 = 1, t — 1 на предыдущих
t - 1 шагах, записываемых в соответствии с имевшими место исхо-
дами bi?..., ct_p) в виде последовательности
81 =(81 = = -1,...,8ь1 =0); р(81) — веса этих комбинаций;
Ut (£t ,0,Pt/t4(8Ь)) — условные относительно 81 и в общем случае
негауссовские плотности распределения Et, причем
M[Et /81] = 0, M[Et£^/8l] = Р1/1Ч(8г). Покажем, что такой же вид со-
храняется и для плотности P(eM/Et) на (t+l)-OM шаге. Из (4.3.11)
для плотности P(et/Et) получается следующее соотношение:
P(Et / Е,) = X г(5*)р(8‘ )U; (et, 0, Р’t(8‘)) / £ г (8f )р(8‘),
IS'l is1!
U;(Et,0,Pt“,t ,(8’)) = Ul(et)0,Pt,t.I(5’))/r(8‘);
r(S') = J Ut(£t,0.Pt/t /8'WdE,,
275
где P't/t-iCS1) — матрица ковариации усеченной плотности рас-
пределения UJ(et,O,Pt*/t4(81)). Выполнив дальнейшие преобразо-
вания в соответствии с (4.3.10), получим, что выражение для
плотности P(et+1/Et) имеет вид
P(et4 / Et) = £ р; r(8* )р(8’ )Ut+J (et+1, О, Pt+1/t (81,1)) +
{54
+£p;tr(8t)p(8‘)Ut(I(etn,0,Pul/l(8t,-l)) + <4-ЗЛЗ>
{84
+£ p'rtr(8' )р(8‘ )Ubl(el4,0,Pt+1/t (81,0)).
{54
Матрицы ковариации в плотностях распределения для всех трех
слагаемых под знаком суммы получаются из матрицы Р’^ДЗ1)
на основе выражения (4.3.8), если подставить в него:
=1- Pbt =Pct =° при расчете Р1+ш(8‘,1); Pbt =1, p'at = p'ct =0
при расчете Pt+1/t(8',-l); p't =1, p't =р'Ь( =0 при расчете
Р1+ш(8\0). Эти ситуации фактически отражают эволюцию мат-
рицы ковариации оценки соответственно при поступлении на вход
фильтра полезного наблюдения, ложного наблюдения, возник-
новении пропуска. Проводя в (4.3.13) соответствующие переобоз-
начения множеств комбинаций
А"’.{5',1); А™ -(У,-1|; А“ -(S‘,0);
A,„=<y‘l = A!”UA“;UA'“,
получим следующие выражения для плотности P(et+1/Et) па
(t+l)-0M шаге:
P(et+1/Et) = £ p(8t+1)Ut+1(£l+1,0,Pt+1/t(8t+1)), p(8,+1) = pltr(8l)p(8l),
{5U4
где p't — вероятности исходов at = 1, bt == 1, ct = 1, соответству-
ющие последнему элементу комбинации 81П. Таким образом, на
(t-Fl)-oM шаге выражение для плотности P(et+1/Et) имеет вид,
аналогичный выражению для плотности P(et/Et l), и его можно
считать доказанным методом индукции. Одновременно отсюда
получим, что вероятность бессрывной работы фильтра за (t+1)
шагов имеет вид
P(Et+i) = £ r(8t+1)p(8‘+l) = £ (Пр;)(Пг(8‘)). (4.3.14)
{51*1} {5l*4 i=l i=l
где р'; — вероятности исходов а. = 1, b. - 1, с. - 1 для комбина-
ции 8t+1, а 81 cz 8t+1 текущая комбинация исходов. Каждая ком-
бинация 8t+1 фактически соответствует частной линейной дина-
мической системе (ЧЛДС) с негауссовскими возмущениями и мат-
ричными коэффициентами, определяемыми выражением (4.3.9)
276
при подстановке в него конкретных значений исходов
а. =1, =1, Cj =1, i = l,t + l Для данной комбинации. При этом
в (4.3.14) общая вероятность бессрывной работы представляет
собой взвешенную сумму условных вероятностей бессрывного
функционирования различных ЧЛДС
t+i
Р(Е1М/8‘+,) = Пг(П
1=1
В строгом виде выражения для частных плотностей
U] (EjjOiPi/j.jfS’)) с целью расчета вероятностей невыхода фазового
вектора ЧЛДС ei за пределы областей coei, i = l,t +1 получить весь-
ма затруднительно и требуется использование определенных при-
ближений. В [160] предложено условные вероятности P(Et+1/8t+1)
для ЧЛДС рассчитывать по приближенному алгоритму, согласно
которому каждая плотность иДер0,Рин(8*)) аппроксимируется
гауссовским, а плотность Ue(e?,0,P1e/J_1(31)) —усеченным гауссовс-
ким законами распределения на области о)е.. Метод гауссовской
аппроксимации базируется на возможности интегрального прибли-
жения любой функции распределения вероятности функцией гаус-
совского закона с совпадающими моментами. Подобный подход при-
менялся в ряде работ [69, 70] при аналогичном по существу анали-
зе явлений срыва и захвата для динамических систем в непрерыв-
ном времени и показал высокую точность получаемых результатов.
Гауссовское приближение предполагает использование при расчете
только первых и вторых моментов, то есть в данном случае сово-
купностей матриц {Р^.Дб1)} и {Ц'^СЗ1)}, а также вероятностей
{rtS1)} на каждом шаге i = l,t +1. Поэтому приведенных выше соот-
ношений достаточно для расчета совокупности вероятностей
{P(Et+1/8й1)} и суммарной вероятности P(Et+1). Следует также от-
метить принципиальную возможность использования других мето-
дов аппроксимации распределений вероятности при решении дан-
ной задачи, например, метода ортогональных разложений, что при-
водит к необходимости получения более сложных уравнений, опи-
сывающих эволюцию моментов высших порядков.
Существенной особенностью проведения расчетов в соответствии
с (4.3.13), (4.3.14) является то, что число всевозможных комбина-
ций 8l+1 и соответствующих им ЧЛДС растет по закону 3\ что
ограничивает применение этих выражений при больших t. В такой
ситуации целесообразно осуществлять скользящее усреднение ве-
роятностей {P(Eld/8t+1)}, имеющих одинаковые фрагменты ком-
бинаций З111 на h < t последних шагах, используя известное свой-
ство «забывания» предыстории для алгоритмов динамической филь-
трации и экстраполяции. В результате возможно существенно ог-
раничить количество рассчитываемых вероятностей бессрывного
277
функционирования ЧЛДС. Для получения в соответствии с рас-
сматриваемым подходом такой усредненной оценки Ph(Et+1) иско-
мой вероятности необходимо проводить скользящее усреднение ко-
вариационных матриц {Pt+1/t(8t+l)}. Пусть на t-ом шаге со скользя-
щим усреднением рассчитано 3h матриц ковариации, множество
которых обозначим {Pth/t_l(8h+1)}, и, соответственно, 3h весовых ко-
эффициентов р'(8ь+1), где 8h+1 — комбинация, описывающая h ис-
ходов для величин ai,, i==t — h,t — 1. Пусть также вероятность
Ph(Et) определяется соотношением
Ph(Et) = X Pt(5ht,)rl(8h+1))
,6h,, (4.3.15)
r‘(5h+1)= J Uj‘(et,0,Ptha.1(8htl))det.
(0£t
Тогда для получения вероятности Ph(Et+1) необходимо выпол-
нить следующие преобразования, понимая под символом * один
из трех исходов at = 1, bt = 1, ct ~ 1 на t-ом шаге и, соответствен-
но, под сочетанием обозначений 8h,* — комбинации, которые
учитывают этот исход:
pt+1(5h,*) = plt[rt(l,8h)pt(l,5h) + rt(-l,5h)p‘(-l,8h) + rt(0,5h)pt(0,5h)];
(4.3.16)
^(1/t(8h,*) = p;t[r‘(l,8h)p‘(l(5h)l*;i’/t(l(5h,*) +
+rt(-l,8h)pt(-l,5h)Pt,;;I/t(-l>8h,*)+rt(O,5h)pt(O,5h)Plh:i;t(O,8h,*)]Zpttl(8h,*);
Pum(^8\*) = 0JIT;t1(^8h)-aJIT/t1(^8h)h^ + W^^.1(*,8h)-
-WJht^t/^8h)K+RJ^r] + btWtSX,}<l)T+gtqlg;r,
где P^-j^.S11) — матрицы ковариации усеченных распределений
Uih(et,O,Pt°;J‘_1(*,8h)). Вводя обозначения множеств комбинаций
Af” ={8’',1}, A(h2’ = {8h,-l}, Af,3’ = {8h,0}, получим, что в результа-
те преобразований (4.3.16) рассчитывается вся требуемая для
определения Ph(Et+1) совокупность весовых коэффициентов
{р1*1^*1*1)} и матриц для множества комбинаций
Ah = A^ljA^IjA^ . Нетрудно видеть, что полученный алгоритм
отличается от алгоритма (4.3.14) тем, что вместо матрицы
Р1/о = Р1/0, являющейся стартовой для (4.3.14), в данном случае
рассчитывается совокупность матриц {Pthll/t(8h<1)}, для которых
стартовой является некая усредненная на (t“h+l)-0M шаге мат-
рица, близкая к действительной матрице ковариации ошибок
оценивания Ptz_h+1/l_h, вычисляемой на основе (4.3.8).
В качестве примера использования предлагаемой методики
можно привести результаты [160], где рассматривалась задача
определения вероятности бессрывпой работы линейного фильт-
ра при сопровождении регулярной импульсной последователь-
278
ности сигналов в присутствии хаотического потока мешающих.
Уравнения состояний и наблюдений последовательности опреде-
лялись соотношениями
хм =фХр Xj =(ti,Ti)T, Ф= J J ;
zi =ai(t> + + + wi) + citi/i_1, ht =[1 0],
где tj — истинное время прихода i-ro импульса; — период следо-
вания импульсов; t}/i_r— прогнозируемое на один шаг вперед вре-
мя прихода. Под отсутствием срыва понимается событие, заключа-
ющееся в том, что Jtj - tizi .J < Aei /2, i = l,k , где APi — ширина ДСС
по времени прихода, выставляемого относительно центра строба
i = l,k . Закон распределения величины погрешности измере-
ния времени прихода полезного сигнала задавался гауссовским с
дисперсией R, одинаковой на всех шагах. Закон распределения
величины отклонения ложного наблюдения wi задавался равномер-
ным в пределах ДСС. Величина Ан задавалась на всех шагах одина-
ковой и равной Ае1 = Ас = nc V6R, пг = 4;6; i = l,k . При этом дис-
персия ул равна Sj = S = Ар /12, i = l,k . Начальный вектор х1/0 оп-
ределялся в ходе «завязки» траектории сопровождения последова-
тельности на основе сопоставления измеряемых моментов прихода
начальной пары импульсов t(}> и следующим образом:
х1/0=фх0/0, х0/0 =(t(H2),t(H2) -t^)7 . При этом матрица ковариации
Pl/о = | Pij || с учетом ошибок измерения времени прихода начальной
пары импульсов определяется элементами pn = 5R, р12 = р21 = 3R,
р22 =2R [160].
Для расчета вероятности бессрывного сопровождения при ис-
пользовании рассматриваемого класса фильтров на основе (4.3.14)—
(4.3.16) в гауссовской и усеченно-гауссовской аппроксимации соот-
ветствующих плотностей распределения необходимо получить со-
отношения для преобразования элементов ковариационных мат-
риц при усечении. В данном примере такие соотношения получены
для матрицы ковариации двух случайных величин с дисперсиями
of, of и коэффициентом корреляции г при симметричном относи-
тельно своего среднего усечении одной из них
У. ____
^=<5*(1-2ре 2 /л/2лР0);
.__
r2°2 =of(l-2r2pe 2 /<2лРо); (4.3.17)
/__
ri°2 =г21 = о1о2г(1-2ре 2 / л/2лРе),
где Ри — вероятность попадания исходных величин в область
усечения; р = — параметр усечения. Выражения (4.3.17)
279
получены с использованием известного представления двумер-
ного гауссовского закона бесконечным рядом по произведениям
ортогональных полиномов Чебышева—Эрмита [185].
С учетом (4.3.17) был реализован алгоритм расчета вероятно-
сти бессрывной работы фильтра в зависимости от числа шагов
сопровождения. Он исследовался при различных соотношениях
между задаваемыми при синтезе двумерного фильтра вероятнос-
тями ЧИР и вероятностями, описывающими реальную статисти-
ку поступления на его вход полезной и ложной (мешающей) ин-
формации. Результаты расчетов с применением этого алгоритма
представлены на рис. 4.3.2а в виде зависимостей вероятности
бессрывной работы от числа шагов при разных сочетаниях веро-
ятностей р. = ря„ Ph = Pbi, р' = р';, p'b=Pb,, i = l,к, которые при
фиксированных размерах ДСС устанавливались постоянными на
всех шагах. Первая их указанных цифр каждой зависимости
определяет значение предполагаемой вероятности поступления
полезного наблюдения рп, а вторая — значение реально имею-
щейся вероятности р' . Характер зависимостей свидетельствует
о существовании участков насыщения, после которых при даль-
нейшем увеличении числа шагов вероятность Р(Ек) существенно
не уменьшается. Это объясняется тем, что происходит снижение
дисперсии прогноза времени прихода полезного наблюдения от-
носительно фиксированных размеров ДСС. Из представленных
зависимостей также следует, что при отличиях в значениях ра и
р' (зависимости 3,4 и 5,6) вероятность срыва может существен-
Рис. 4.3.2. Зависимости для вероятности бессрывной работы фильтра
280
но увеличиться. На рис. 4.3.26 представлены зависимости веро-
ятности Р(Ек) от р' при фиксированных значениях pR и различ-
ных значениях пс, характер которых также свидетельствует о
наличии определенных потерь при недостоверном задании ста-
тистики поступления полезных наблюдений.
Одновременно проводились расчеты вероятностей Р(Ек) мето-
дом «скользящего» усреднения, использование которого позво-
ляет существенно сократить время вычислений при больших к.
Для рассматриваемого примера получено, что при к = 10... 15 вре-
мя, затрачиваемое на вычисление Ph(Ek) при h = 5 на основе
(4.3.15), сокращается с десятков минут до десятков секунд. При
этом погрешность вычисления Ph(Ek) по отношению к Р(Ек) не
превосходит 1 %. Кроме того, для проверки достоверности ре-
зультатов, рассчитываемых по приведенной аналитической ме-
тодике, проводился модельный эксперимент, в ходе которого в
полном объеме имитировался описываемый процесс обработки.
Поток мешающих импульсов моделировался в виде пуассоновс-
кого потока, интенсивность которого однозначно [160] опреде-
ляет вероятности р', р^ (см. также п. 4.4). Результаты модели-
рования, представленные па рис. 4.3.2 отдельными точками, сви-
детельствуют о высокой степени их совпадения с результатами
расчетов и о применимости гауссовского приближения. В целом
анализ устойчивости, проведенный на примере задачи сопровож-
дения и оценки параметров импульсной последовательности,
показывает, что использование фильтров, рассчитанных на адек-
ватное восприятие определенной доли мешающей информации,
позволяет повысить достоверность обработки и снизить вероят-
ность срыва на 25...50 % по отношению к обычным фильтрам,
синтезированным для идеализированных условий работы.
В заключение следует отметить, что решение задач аналогич-
ного содержания при большей размерности вектора наблюдений
может быть основано на предложенных в [69] аппроксимациях
многомерного закона распределения совокупности случайных
величин, описывающих динамику функционирования стохасти-
ческих систем.
281
4.4. Вероятностные характеристики частных
информационных решений при формировании
результирующего вектора наблюдений
Как теперь очевидно, при синтезе алгоритмов рекуррентной
фильтрации с целью оценки вторичных параметров и обеспече-
ния устойчивого сопровождения гипотез возникает необходимость
адекватного задания условных и безусловных вероятностных
характеристик ЧИР при формировании результирующих наблю-
дений по данным предшествующей первичной обработки. Такие
характеристики фактически реализуют описание связей между
различными уровнями или этапами обработки (в данном случае
первичной и вторичной) и оказывают существенной влияние на
ее общую эффективность. При этом в большинстве практически
значимых случаев достаточно определить гарантированные зна-
чения вероятностей получения полезной и ложной (мешающей)
информации, а также возникновения пропуска в каналах на-
блюдения при формировании последовательности значений не-
прерывнозначного вектора, подаваемой на вход фильтра при со-
провождения данной гипотезы.
Очевидно также, что возникает необходимость детального опи-
сания конкретных вариантов задания дискретной компоненты
наблюдений 0t = (Х^,Т|^)т. Такие варианты непосредственно свя-
заны со способами организации процесса получения результиру-
ющего вектора первичных непрерывнозначных наблюдений в ходе
сопровождения гипотетических последовательностей, формиро-
вания ДСС и проведения соответствующей селекции, а также
выбора полезного наблюдения среди общей совокупности попав-
ших в ДСС. При этом имеются существенные отличия в спосо-
бах формирования первичных наблюдений и задания их диск-
ретной компоненты для однопозиционных и многопозиционных
систем.
Остановимся на трех типовых вариантах [161] организации
процесса получения результирующих наблюдений, представлен-
ных на рис. 4.4.1. Они реализуют: совместную обработку сигна-
лов в однопозиционной системе (вариант «а»); децентрализован-
ную обработку в многопозиционной системе (вариант «б»); цент-
рализованную обработку в многопозиционной системе (вариант
«в»). Рассмотрим эти варианты в отдельности.
Совместная обработка в однопозиционной системе. В дан-
ном случае имеется в виду, что все первичные датчики объеди-
нены и каждое из непрерывнозначных наблюдений вырабатыва-
ется по общему для всех его компонент сигналу. Такой сигнал
является либо полезным (s), либо принадлежит потоку мешаю-
щих сигналов интенсивности ц. В результате обнаружения и
282
а) б) в)
Рис. 4.4.1. Варианты организации процесса получения первичных
наблюдений при сопровождении гипотез
измерения параметров сигналов на t-ом шаге сопровождения
гипотетической последовательности в индивидуальном ДСС cozt
получают совокупность из mt >0 наблюдений z(tmt), кото-
рая устанавливается на основе проведения процедуры селекции-
проверки принадлежности всех вновь поступающих наблюдений
области U)2t. Далее проводится идентификация, реализующая
процедуру выбора одного, предпочтительно полезного наблюде-
ния из общего числа попавших в ДСС. Таким образом, во всех
компонентах результирующего вектора zt в исходном уравне-
нии наблюдений (4.1.5) одновременно с вероятностями Pftt(0t),
Pbt(0t), или Pat* Pbt’ Pct появляется либо полезная, либо
ложная информация, либо информация отсутствует.
Известны различные подходы к формированию апостериор-
ных ДСС, из которых наиболее распространенные базируются
на следующих способах проведения селекции:
п
z(t*’e4t: П(|2« -2t>| S Azt,).
где Azti — доверительный интервал для i-ой компоненты вектора
наблюдений, a zti — i-ая компонента вектора оценки ;
z(t*’ е : р = «’ - )т Pj (zf ‘ ) < pg,
где Pn — матрица ковариации полезного вектора наблюдения, а
pg — граничное значение махалапобисова расстояния. В первом
283
случае ДСС имеет форму гиперкуба объемом V7tn| = , а во вто-
ром — гиперэллипсоида объемом V7tn) = V^, V7tn) = J dz.
В качестве дискретной компоненты наблюдений 0t, определя-
ющей условия, при которых получен результирующий вектор
непрерывнозначных наблюдений, в данном случае естественно
рассмотреть величину mt. В более упрощенном варианте исполь-
зуется [158, 169] величина гц, характеризующая отсутствие про-
пуска (r|t = 1 при mt Ф 0 ) или возникновение пропуска (T|t = О
при mt = 0) на данном шаге процесса сопровождения. Пусть по-
ток мешающих наблюдений в u)zt описывается моделью пуассо-
новского случайного точечного процесса [161]. Тогда для закона
распределения величины mt (индекс t далее для упрощения за-
писей опускаем) можно получить следующее выражение:
Pe(m) = [mp0 + (l-p0)|iV'n’]^^y—(4.4.1)
т!
где р0 — вероятность непропуска полезного наблюдения на данном
шаге, которая определяется как произведение р0 ~ Р^Рсея* Здесь
РоСн — вероятность обнаружения и надежного измерения парамет-
ров сигнала, а рсел — вероятность селекции — невыхода вектора
полезного наблюдения за границы ДСС (обычно рсел = 1). При р0 = 1
в (4.4.1) устанавливается Р8(ш = 0) = 0. Для 9 = тп соотношения для
условных вероятностей ЧИР pa(m) = P(5! - l,...,8n =1/т),
рь(т) = Р(Зг = -1,...,8п =-1/т), рс(т) = Р(81 = 0,...,8п =0/т) име-
ют следующий вид:
р„(т) = [1 - А(т)]тр0Р1(т)/[тр0 4-(1 — p0)pVz(n’]: (4.4.2)
рь(т) = [1 - А(т)] [rnp0(l - Р,(т)) + (1 - Po)pVr ]/[тр0 + (1 - Po)pVr'];
[ 0, т > 0;
р(т) = Д(т), Д(т) = <
[ 1, т = 0,
где Pj(m) — вероятность правильной идентификации при нали-
чии в ДСС ровно m > 0 наблюдений, одно из которых является
полезным. Для конкретизации процедуры идентификации рас-
смотрим два типа решающих правил (РП): рандомизированное
РП, обеспечивающее получение границы достоверности предше-
ствующей обработки, и РП ,основанное на вычислении меры бли-
зости всех наблюдений к прогнозируемому центру ДСС.
При использовании рандомизированного РП выбор полезного
наблюдения производится случайным образом. При этом опре-
деляется нижняя граница для Pj(ni)
Pr(m)>ni4, т>0 (4.4.3)
284
и, соответственно, для ра(т) в (4.4.2). Усредняя выражения для
условных вероятностей в (4.4.2) по ш с учетом (4.4.1) и (4.4.3),
получим выражения для безусловных вероятностей, одновременно
определяющих абсолютную нижнюю границу достоверности ПО, в
виде
ра >p0(l-e‘Q)/u, pb £l-p0(l-e"u)/u-(l-p0)e"u,
pc=(l-P0)e-u, и = цУп’. (4’4Л)
Выражения (4.4.4) при малых и дают гарантированные оцен-
ки, которые могут использоваться для синтеза робастных алго-
ритмов фильтрации при реализации любых процедур идентифи-
кации и любых возможных способов задания формы ДСС.
Рассмотрим теперь классическое для подобных ситуаций [84]
РП с вычислением махаланобисова расстояния наблюдений
z(j), j = l,m от центра ДСС z . В данном случае оно записывается
следующим образом:
i = argmin[p = (z(j) -z)'1’?"’^ -z) < рв].
j
В этом случае для вероятности Pz(m) можно [84] записать
Р/т^М
Р<П)(2) = М[1-
1
рселГ(п/2)2п/2
(4.4.5)
где Р(п)(2) — вероятность правильной идентификации полезного
наблюдения в присутствии одного мешающего в n-мерном при-
знаковом пространстве. Неравенство в (4.4.5) получено с исполь-
зованием неравенства Йенсена для выпуклой вниз функции [205].
На основе (4.4.5) можно аналогично получить законченные
выражения для безусловных вероятностей ЧИР, и в этом случае
р. гр.»-"1-”'™, Pl £1-Рое-""-1,"“”-(1-ро)е-,
Р. =(1-р0)е"“, u = pV“,
Отметим, что выражение для ра ранее приведено в [84] без обо-
снования перехода (4.4.5).
В случае, если в качестве дискретной компоненты наблюде-
ний используется только информация о возникновении пропус-
ка наблюдения на очередном шаге, то условные вероятности оп-
ределяются соотношениями
Р.01) = Пт^—, Рь(П) = Пт£2!— , Р<_(Л) = 1-т|>
1 - Рс 1 “ Рс
285
где ра, рь, рс — рассчитываемые на основе соотношений типа
(4.4.4), (4.4.6) безусловные вероятности.
Децентрализованная обработка в многопозиционной систе-
ме. Данный вариант также является достаточно распространен-
ным и занимает промежуточное место по отношению к вариан-
там организации процесса получения результирующего вектора
наблюдений, представленным на рис. 4.4.1 а, в. Для него харак-
терно независимое функционирование разнесенных в простран-
стве датчиков, каждый из которых первоначально формирует
наблюдение по схеме рис. 4.4.1а. Компоненты результирующего
вектора наблюдений образуются путем объединения данных,
получаемых в каждом датчике и переданных на некоторый цен-
тральный элемент РС. При этом эти данные проверяются на со-
вместимость, для чего реализуется их отождествление по некото-
рому опорному признаку или параметру а. Первичный параметр
а может являться как информационным, то есть используемым
далее при оценивании вторичных параметров последовательностей
наблюдений в ходе фильтрации, так и сопутствующим, используе-
мым только для отождествления данных.
Рассмотрим следующую типовую модель формирования на-
блюдений для данного варианта организации обработки. Пусть
для t-ro шага процесса сопровождения, определяющего общий
временной подцикл анализа, на входе первичных датчиков (ка-
налов наблюдения) присутствует полезный сигнал (s) в совокуп-
ности с мешающими сигналами, порождаемыми потоками с ин-
тенсивностями рр] = 1,N , где N — количество датчиков. Тогда в
каждом первичном датчике могут быть получены совокупности
наблюдений zjj’ е wai, i = l,mt р j = 1,N , где cozt. — проекция об-
щего ДСС на соответствующие оси параметров, измеряемых j-ым
датчиком (% с; coztl х...хcoztк ). Считаем, что реализации пото-
ков мешающих сигналов в пределах областей локализации ДСС
отдельных датчиков независимы и процедура обнаружения и
измерения параметров полезного сигнала в датчиках осуществ-
ляется с независимыми исходами. Тогда можно считать, что в
результате проведения всех процедур по схеме рис. 4.4.1 каж-
дый первичный j-ый датчик независимо от других вырабатывает
на t-ом шаге общего процесса обработки единственное непрерыв-
нозначное наблюдение (ztj, octj)r, а также индикатор r|t. = 1(0)
наличия или отсутствия информации. Здесь ott. — значение ис-
пользуемого параметра отождествления, выделенного для удоб-
ства в отдельную компоненту наблюдения. Пусть также п0, раз-
мерность каждого вектора ztj, j = 1,N, равна 1 и n = N, т.е. ре-
зультирующий вектор непрерывнозначных наблюдений форми-
руется в виде zt = (ztl,...,ztn)1 . Вероятности получения полезной
286
и ложной информации от каждого датчика, а также пропуска
имеют значения patJ, pblj, pttj, j = l,n.
Известно большое количество процедур отождествления [61,
98], которые могут быть использованы для формирования ре-
зультирующего вектора (zt, 0t) в схеме обработки рис. 4.4.16 и
которые в той или иной степени основаны на использовании ста-
тистических характеристик распределения ошибок измерения
параметров сигналов. В данном случае, с учетом возможности
неполного заполнения компонент результирующего вектора, удоб-
но рассмотреть процедуру попарного отождествления наблюде-
ний, получаемых от различных датчиков [158]. При этом диск-
ретная компонента наблюдений 0t определяется матрицей вида
(далее для упрощения записей индекс t опускаем)
0 = 1Ы1’ vH=rli. i = bn; ij = l,n, i* j,
где величины X.. и принимают значения 0 или 1, отражая ситу-
ацию попарного несоответствия или соответствия информации,
получаемой в i-ом и j-ом канале наблюдения при ее отождествле-
нии (проверке па противоречивость по выбранному опорному при-
знаку). Иногда удобно 0 представить в виде составного вектора
0 = (ХТ, Т]т)т, X = (Х12,... Д1П Д23,...Д2п,...Д(п_])п)т, ц - (П1,...,Т|п)т ин-
дикаторов отождествлений и пропусков.
Наблюдение за конкретным значением 0 позволяет пересчи-
тать вероятностные характеристики ЧИР на каждом шаге. При
этом сначала по формуле Байеса рассчитываются все возможные
условные вероятности
Р(81>...,8П/0) = [ЦР(81)]Р(0/81,...,5П)/Р(0),
i=* (4-4.7)
Р(9)= £ Р(51,...,5П,0))
1*1 Л)
а затем и используемые при расчете весовой матрицы условно
линейного фильтра на основе соотношений типа (4.2.9) вероят-
ности вида
ра|(0) = Р(8, =1/0) = X ...5n/0);
(6 Vi}
pbj(0) = P(8i =-l/0) = X ИЗ,.......=-l,...,8n/e>;
IS, j*i}
p,j1(0) = P(8i =l,8j = 1/0)= X
P*>
pbij(0) = P(8t = -1,8, = -1/0) = (4.4.8)
= £ P(81,...,81=-l,...,8j=-l,...,8n/0).
(6, p*i p*i(
287
Рассмотрим типовую статистическую модель отождествле-
ния [158], согласно которой вероятности попарного отожде-
ствления полезных наблюдений, получаемых в разных кана-
лах, за счет выбора допуска на значения сравниваемого опор-
ного признака устанавливаются практически равными едини-
це: р(Хь = = l,...,3n) = 1. Одновременно можно
считать, что отождествление наблюдений, не принадлежащих
одному источнику, производится с малой вероятностью
Р(Ч = 1/3,..8,=1....= -l,...,8n)==
= p(Xij=l/81„..,8i=-l,...t8j=-l,...,8n) = pa «1.
Такие условия выполняются, когда, например, отождествле-
ние проводится по опорному признаку а (обычно в данном слу-
чае используется частота сигналов), значения которого для всех
мешающих сигналов, попадающих в ДСС каждого датчика на
данном шаге, распределены случайным образом внутри диапазо-
на значений а, ширина которого Да много меньше среднеквадра-
тичной ошибки измерения этого параметра.
Рассмотрим для примера случай, когда в многопозиционной
системе имеется два (п=2) пространственно разнесенных первич-
ных датчика. Пусть значения а для всех наблюдений, попадаю-
щих в ДСС, распределены равномерно в общем диапазоне
coft : amtn + АхЪ а измерения а проводятся с погрешностью,
распределенной по некоторому закону, имеющему нулевое среднее
и дисперсию сф Значения а для полезных наблюдений, получен-
ных по общему сигналу в различных каналах (первичных датчи-
ках), считаются с точностью до погрешности измерения одинако-
выми. Для ложных наблюдений с учетом локальной независимос-
ти реализаций потоков мешающих наблюдений в ДСС значения а,
полученные в различных каналах, можно считать независимыми.
Для п == 2 при отсутствии пропусков в обоих каналах наблюдения
отождествление в простейшем случае проводится по правилу
pn =|a,-а2| >< 8П-> %,2 = 0;1,
где 8а =па>/2оа; по=2...3 — целочисленная величина, опреде-
ляющая размеры допуска при сравнении наблюдений. Тогда не-
трудно видеть, что при aa « Да
р(Х12 =1/81 =1,82 =1) «1;
28 '
р(Х12 = 1/8, =1,82 =-1) = ра =—2-;
р(Х12=1/81=-1,82=-1) = ра=^-.
288
Отсюда, с учетом общих выражений (4.4.7), (4.4.8), получим
окончательно соотношения для искомых условных вероятностей
Ря1Ра2 + Pni PbjP<
Pm(0) = 7^(1-ПР + П1ПЛ2 ,, 1„ п
1-Pci р(\2 =1>П1 =1,Т|2 =1)
PaiPb/1-Pj
+Г|1П2(1 " М ------14 ’
р(^12 — 0>Л1 — ” 1)
Pbi(l-PCj)Pg
PbiW = ^!2-(l-n)) + ll1112^2 п . , 1Ч
1-р„ р(Х12=1,п1=1,л2=1)
ч ч Pbi(l-Pcj)d-Pa)
+П1П2 (1 - л12) —-—J— -------—,
р(^12 ~ — 1»Л2 — 1)
pci(0) = 1- T]it 1 = 1,2;
PalPa2
(4.4.9)
Ра1г(®) - П1П2^12 п - - -ч’
р(Х,12 =1,Т|1 =1,п2 =1)
Рь1г(®) — П1П2^12
РыРьгРа
р(Х12 =1,Т|1 = 1,п2 = 1)
+11 Л2(1 - Л19)-PblML.Pa)--------
12 u р(Х12=О.П1=1,П2-1)’
PU12 =1-П1 =1>П2 =1) = Ра1Ра2(1-Р«) + (1-Ре1)(1-Рс2)Ра;
p(Xi2 =0,11i =1,П2 =l) = [(l-Pcl)(l-Pc2)-PaiPa2](l-Pa)-
Из (4.4.9) следует, что использование информации о значени-
ях 0 приводит к изменению условных вероятностных характерис-
тик ЧИР по отношению к априорным, то есть первоначально имею-
щимся для каждого отдельного канала наблюдения. В ситуации,
когда данные от разных каналов наблюдения отождествляются,
условные вероятности получения полезных наблюдений во всех
компонентах результирующего вектора резко повышаются и, на-
против, при наличии противоречивой информации, когда дан-
ные не совпадают, резко падают. Если информативность проце-
дуры отождествления достаточно_велика, то есть рп —» 0 , то, как
нетрудно видеть, pai(0) —> 1. i = 1,2. Следует также отметить, что
если усреднить условные вероятности в (4.4.9) по 0, то получен-
ные безусловные вероятности совпадают с исходными вероятно-
стями pai,pbi, i = 1,2 , при этом безусловные вероятности попар-
ных исходов ра12 - ра]ра2, рЬ12 = рЬ1рЬ2.
Рассмотрим теперь случай трехпозиционной (п^З) PC. При от-
сутствии пропусков во всех каналах наблюдения (Л1^П2==т1з=1) отож-
дествление проводится попарно для всех комбинаций каналов
10-2357
289
Pa=|«i-«j|x8o -> 4 =0;l, i = l,3, j >i.
В этом случае, представляя условные вероятности значений
индикаторов отождествлений как произведения вида
р(Х|2 Д13 ,Х23 / , 32, S3) = р(Х12 /8, ,82,83)р(Х13 / 5j ,52,83 Д12)х
Хр(^23 / ’ 8з > ^12 ’ ^13 )’
можно, например, получить следующие характерные соотношения:
Р(Х12 = 1,Х13 = 1,Х23 = 1/8, = 1,32 = 1,83 = 1) = 1;
P(^i2 = 1А13 = 1Агз = = 1,32 = 1,83 = —1) = рараа;
р(Х12 =1Д13 = 1,Х23 = 1/5, = 1,52 = —1,83 =-1) = PQPaa,
р(^12 = 1А13 = 1’^23 ~ 1/51 = = —1,83 = —1) = РаР(Ш,
где раа — вероятность вида р(Х23 = 1 /8,,S2,83,X,2 = 1,Х13 =1) для
случая, когда хотя бы одна из величин 82, 83 не равна единице.
При равномерном законе распределения погрешности измерения
а эта вероятность имеет величину, равную 0,75, а при гауссовс-
ком законе — величины порядка 0,80...0,85. Анализируя таким
образом все возможные исходы для компонент X = (Х12,Х13,Х23)’! ,
можно получить набор типовых выражений
P(8j = 1,83 = 1,83 = 1/Х12 =1,Х13 =1,Х23 =l,T|i =М2 ^Пз =1) =
_ ______________Рп]Ра2РяЗ____________.
Р(^12 = 1Лз “ 1А23 =^»Л1 “1,^2 =1’Пз “1)
Р(81 - 1,82 = 1,83 = -1 / Х12 = 1, Х13 = 1, Х23 = 1,П1 = 1,р2 = 1,Пз = 1) =
_ ___________Р»1 Ра2РьзРаРпа_________.
Р(^12 ~ ^’^13 = = 1»Л1 ~ 1» Пг = 1>Пз —
P(8j = 1,32 = 1,83 = -1 / х12 = 1Л13 = 1,Х23 = О,Из = М2 = 1,Пз = 1) =
=Р,11РагР|нРа(1 ~ Ра«).
Р(^12 = = 1>^2з = 0,П1 = 1,Лг = 1’Лз =
Р(5, = 1,52 = 1,53 = -1/Х]2 = 1Д13 = 0Л23 = 0,п, = 1,П2 = 1,^ = 1) =
=Ра1Ра2Р|,з[1-Ра(2-Раа)1.
^(^•12 = ^>^13 = 0>^гз = = 1»Пг ~ 1’Т|з = 1)
P(5j =1,52 =-1,53 =-1/Х12 =1Д13 =1Д23 =1,п, = 1,П2 =1,Пз =D =
2
„РпРьгРьзРцРпо, ю}
^(^12 ~ 1’^13 1>^23 ~ — ~ 1,Пз
Р(8Т = 1,82 =-1,83 =-1/Х12 =1,Х13 =1,Х23 =0,П1 = 1,П2 =1.Пз =1) =
_ ___________Ра1Р1|2РьзРсх(1 ~ Pftg)_.
Р(Х]2 — 1Л13 = IA23 = = 1» Пг ~ =
290
P(8j = 1,82 = -1.8, = -1/Л12 = 1Л13 = ОЛз = = 1.П2 Мз = 1) =
__________Ра1Рь2РьзРд[1 Р«(2 Рад)] ______.
Р(Х,2 = 1Д13 = 0Д23 = О,Л! = 1,П2 = 1,Т|з = 1) ’
P(8j = 1,82 = -1,83 = -1/Х12 = 0Д13 = 0Д23 =0,^! =1,112 =1.П3 =1) =
_ Ра1Рь2Рьз{1-ЗРП[1-Рп(2-РЦа)]-ЗРд(1-Рд)-р^РЯа}
P(^i2 = 0,Х13 = 0Д23 = O,T|i = 1,т|2 — 1,Пз = 1)
Р(8, = -1,82 = -1,83 = -1/Х12 = 1Д13 = 1Д23 =0,11! =1,112 = 1,11з =D =
_____________РыРь2РъзРд(1 ~ Рад)_________.
Р(Х12 = 1,Х]3 — 1А23 = 0,Т|| - 1,Т|2 = 1,Т|з = 1)
Р(б! = —1,32 = -1.83 = -1/Х12 =1А13 =0.Х23 =0,11! =1.112 = 1,11э =1) =
=_________PblPb2Pb3Pa[l-Pa(2-P»a)]_______.
Р(Х12 = 1Д13 = 0Д23 = О,и, = 1.ц2 = 1,т|3 = 1) ’
Р(83 =-1,82 = -1,83 = -1/Х12 = 0Д13 = 0Д23 =0,11, =1,112 =1,11з =D =
= Pi,iPb2Рьз{1-3рп[1-ра(2~р№п)]-3рп(1-рп)-ряраа(
Р(^-12 = О А13 =0Д2ч =0,11! =1’112 = 1,11з = 1)
На основе соотношений (4.4.10) с учетом (4.4.7), (4.4.8) полу-
чаются все необходимые_конечные выражения для вероятностей
Pai(O), Ры(0), Рс1(6), i = l,3, Pnij(0), Pbij(O), i.j = 1.3, i*j в форме,
аналогичной (4.4.9), а также выражения для Р(0) = Р(Х,Г|) как
условия нормировки для всех Р(8И 82, 83 /0) с одинаковыми 0.
При этом, например,
P(Xl2 = 1, Х13 = 1, Х23 = 1, T|i = 1, 112 =1- Пз = 1) =
= Ра1Ра2РяЗ +(PalPa2Pb3 + Ря1Рь2РяЗ + Рь1Ра2Раз)Р«Раа + (4.4.11)
+(PalP|,2Pb3 + PblPa2Pl>3 + PblPb2Pa3)PaPag РыРьгРьзРаРад’
В случае, если хотя бы один из индикаторов г|н i = 1,3 равен
0, то есть произошел пропуск в одном из каналов наблюдения,
соотношения для условных вероятностных характеристик ЧИР
в трехпозициопной системе определяются соотношениями (4.4.9)
для двухпозиционного случая.
Описанная методика расчета вероятностных характеристик
ЧИР при формировании результирующего вектора наблюдения
для децентрализованной обработки нс претерпевает принципи-
альных изменений в случае, если используются более сложные
правила отождествления.
Централизованная обработка в многопозиционной системе. В
данном случае, как и в предыдущем, после обработки сигналов в
каждом первичном датчике па t-ом шаге сопровождения гипотети-
291
ческой последовательности наблюдений получаются совокупности
z^go)^, j =l,n (o)7t c(Dztlx...xo)zt„). Здесь также удоб-
но представить каждое неирерывнозначное наблюдение в виде пары
(z(t1l),a(un)T с выделением параметра, используемого для отождеств-
ления a(t-} е соа. Все ранее сделанные предположения относительно
условий функционирования датчиков, также условия локальной
независимости реализаций потоков мешающих сигналов на входах
различных первичных датчиков и, соответственно, их наблюдений
в O)zt j — 1, п остаются в силе.
Основное отличие этой схемы обработки (рис. 4.4.1в) от предше-
ствующей состоит в том, что в данном случае не проводится иден-
тификация полезного наблюдения в рамках каждого капала пер-
вичных наблюдений, а все полученные от разнесенных первичных
датчиков совокупности наблюдений передаются на центральный
элемент PC. После этого проводится отождествление этих данных
и формируется общая совокупность многомерных наблюдений, ко-
торая далее предъявляется для идентификации с целью оконча-
тельного выбора результирующего вектора, подаваемого затем на
вход алгоритма фильтрации. Таким образом, окончательный вы-
бор полезного наблюдения в данном случае реализуется только
после объединения и анализа всей информации, получаемой в раз-
личных первичных датчиках на данном шаге сопровождения.
Процедура отождествления может быть реализована различным
образом; в том числе она может выполняться совместно с процеду-
рой идентификации. В общем случае процедура отождествления
заключается в проверке принадлежности каждой возможной це-
почки измерений параметра отождествления (ai11,,...,a(n‘n))T, ij g l,mJ
некоторой области с Rn (индекс t, как и ранее, теперь опуска-
ем). Одним из удобных на практике вариантов с учетом возможно-
сти возникновения неполных цепочек является проведение всевоз-
можных попарных сравнений наблюдений. При попарном сравне-
нии наблюдений используется некоторая мера близости
pet(cxVi>,сХрр>). Общая цепочка при этом считается отождествленной,
если отождествляется все пары j,p =l,n, j^p- В случае, когда a
является одномерной величиной, используется простейшая мера
близости pft = jcXj”' = na\/2aft. При этом область за-
дается границами
«min ^«jp ^«ти>+Д«. |«j - «р | 5 . ЪР=1.П.
Таким образом, в ходе обработки может быть получено:
mj п > 0 векторов наблюдений z, - (z^1’соответствую-
щих отождествленным цепочкам (aj*1a(nln>)T с полностью за-
полненными и отождествленными компонентами; m >0
векторов размерности п-1 с одной незаполненной компонентой,
292
где = (j,jn J — комбинации номеров каналов, наблюдения
от которых вошли в результирующие векторы и т.д. Теперь следу-
ет конкретизировать процедуру формирования результирующего
вектора в ситуациях, когда полного совпадения не произошло
(mj п = 0) и получены совокупности векторов с отождествленными
компонентами меньшей размерности. В этом случае могут быть
использованы различные стратегии. Например, в [161] предложе-
но отдавать приоритет для совокупностей векторов, предъявляе-
мых далее для идентификации, отвечающих отождествленным це-
почкам максимальной длины с одинаковыми номерами компонент.
Соответствующим образом проводится выбор совокупностей векто-
ров наблюдений сокращенной размерности для заполнения остав-
шихся компонент, которые предъявляются к идентификации не-
зависимо. При тх - 0, например, может возникнуть несколько
взаимоисключающих вариантов предъявляемых совокупностей,
каждый из которых содержит m 5 векторов с п-1 отождествлен-
ными компонентами и in. одномерных наблюдений, полученных в
j-ом оставшемся канале 0П\|/и-1 =0). В этой ситуации требуется
проводить выбор одной из таких совокупностей, исходя, например,
из условия max или путем случайного розыгрыша по равно-
вероятному закону. Дискретная компонента наблюдений в подоб-
ных схемах обработки определяется структурой образованных
совокупностей векторов и отражает в общем случае количество
полученных при отождествлении цепочек различной длины. При
п = 3, например, значения 0 можно структурировать в виде
6 = (m123,(m12,m3),(m13,m2),(m23,m1))T . Анализ условных и безус-
ловных вероятностных характеристик ЧИР при таком задании 0
приобретает достаточно громоздкий характер [161]. Поэтому далее
ограничимся упрощенным вариантом, когда в качестве 0 использу-
ется величина , определяющая общее количество отождеств-
ленных векторов размерности п, предъявляемых к идентифика-
ции. При ш1 п == 0 будем считать, что вероятностные характерис-
тики ЧИР определяются реализацией независимой для каждого
j-oro первичного канала процедурой выбора полезного наблюдения
из совокупности € (Оф i = l,m , которое потом используется для
замещения соответствующей компоненты результирующего векто-
ра. Соответствующие вероятностные характеристики при незави-
симой обработке в каждом канале, рассчитываемые на основе соот-
ношений типа (4.4.3)—(4.4.6) при различных р0, обозначим
Paj’Pbj’Pcj’ J - 1,п • Такой алгоритм формирования результирующе-
го вектора является оценочным в том смысле, что позволяет полу-
чить гарантированные значения вероятностных характеристик ЧИР.
Как и ранее для случая однопозиционной системы, следует сна-
чала ввести модель случайного точечного процесса или потока то-
293
чек отождествленных векторов в области (о^ . При этом без суще-
ственного ограничения общности будем считать, что потоки меша-
ющих наблюдений в областях (02j одинакового размера
Vzj = Vz, j = 1,п имеют одинаковые интенсивности gj = Ц, j = 1,п, в
проекции на ось параметра отождествления в области
0)а ' [amin,amin + Да] равные X = pVz/Au. Непропуск полезных на-
блюдений по результатам обнаружения и селекции во всех первич-
ных датчиках происходит независимо с одинаковой вероятностью
р0. Введем также случайный вектор о = (ор...,оп)т, где о* = 1 при
непропуске полезного наблюдения в j-ом канале (р0 = Р(о. = 1)) и
о. = 0 в противоположном случае.
Рис. 4.4.2. К обоснованию
характеристик потока точек
отождествленных векторов (о —
полезные наблюдения; х — ме-
шающие)
В рассматриваемой ситуации
можно допустить (см. пример
рис. 4.4.2 для п = 2), что при
8а « Ди поток точек в со^ за вы-
четом точки, возникающей при
отождествлении полезных наблю-
дений, выпадение которой носит
квазидетерминированный харак-
тер, является ординарным и в нем
практически отсутствует послед-
ствие.
Тогда условную относитель-
но вектора о вероятность вы-
падения точки такого потока
в малой окрестности вектора
(a1,...,an)TE можно пред-
ставить в виде [161]
Ap(ap...,an) = X(n’(o)Aa1,...,Aan,
Х("’(о) = £Г '‘ £ (Цо^/У'0, е)е1У, (4.4.12)
i=0 e J j=l
где — объем области u)^; X(n)(o) — имеет смысл интенсив-
ности потока точек, соответствующих отождествленным векто-
рам, содержащим в своих компонентах хотя бы одно ложное
наблюдение. Суммирование в (4.4.12) проводится по всем воз-
можным комбинациям номеров первичных каналов наблюдения
различной длины. Величина для различных i принимает
значения: V<0)=l; V‘n =Да; У‘2)=25аДа; У<3)=352Да и т.д. Для
представленного на рис. 4.4.2 примера
X,2)(o) = V+ —о,+ —о2.
Да ' Да
294
Отметим, что если параметр а определить как время появления
сигнала и пересчитать интенсивность Vn)(o) в (4.4.12) на единую
временную ось, то при ot =0. i = l,n соответствующая величина
Хо =X(n)(o)V^n)/Art равна интенсивности потока совпадений п
последовательностей импульсов с длительностью 5а [156]. При
выдвинутых предположениях для закона распределения потока
точек с интенсивностью Х(л)(о), определяемой (4.4.12), в [161]
предложено воспользоваться пуассоновской моделью. Тогда со-
отношение для условного закона распределения числа точек все-
го потока mj п запишется в виде
P(mi n/o) = PJ‘n)(m1 п-кп), Kn=JJoj=0;l,
p<n>(m) = (*(П>(О)УГГ c-^.(Q)Vr- (4-4,13)
x m!
При этом безусловный закон распределения числа точек оп-
ределяется схожей по смыслу с (4.4.1) формулой
P(mln)= Z Р(т, п/о)р‘(1-р0Г‘, e = £Oi. (4,4.14)
{n, .nJ i=l
Выдвинутые предположения относительно свойств случайно-
го потока точек отождествленных многомерных наблюдений и
возможность аппроксимации закона распределения числа точек
пуассоновской формулой проверялись в ходе имитационного мо-
делирования. На рис. 4.4.3 представлены типовые теоретические
и экспериментальные распределения, полученные для трехпозици-
онной системы при фиксированном значении величины 25аХ, ха-
рактеризующей среднее ко- Р(щ 123)
личество точек мешающего
потока в каждом датчике на
элементарном интервале зна-
чений параметра отождеств-
ления, равном 25гГ Проведен-
ные оценки показывают, что
соотношения (4.4.13), (4.4.14)
обеспечивают хорошую апп-
роксимацию реальных рас-
пределений при 25(Д < 0,5 .
Рассмотрим теперь выра-
жения для условных вероят-
ностных характеристик ЧИР
при выбранном варианте за-
дания дискретной компонен-
ты наблюдений:
Р(П112з)
! 25аХ=0,25, ро=1,О
28ал=0,25, ро=0,9
1П123
012345678 1П123
Рис. 4.4.3. Типовые теоретические
и экспериментальные (пунктир) распре-
деления количества точек отожде-
ствленных векторов
295
P(8t,...,8n/6) = [1-A(m1 n)]P(81,...,8n/m1 n>0) +
+A(mi n)P(81,...,8n/m1 n =0). (4>4Л5)
В (4.4.15) первое слагаемое определяет закон распределения
при условии, что имеется п > 0 отождествленных и предъяв-
ляемых к идентификации в многомерном пространстве векторов
наблюдений, а второе — закон распределения при условии, что
m1 п = 0, то есть когда решения по выбору результирующего
полезного наблюдения принимаются независимо для каждой
компоненты в отдельности. Второе слагаемое определяется дос-
таточно просто на основе исходных условных вероятностей неза-
висимых ЧИР p^bjcj =P(5j/oi =1;0), j = l,n следующим образом:
P(81,...,8n/m1 n=0)= X p'(l-p0)n-4’(81,...)8n/o,m1 „ =0)х
хРСт! „ = 0/о)/Р(т: п =0), e = X°i! tA л 1Я.
j=i (4.4.16)
P(81)...,8n/o,m1 n=0) = nP(8j/oj);
j-1
P(mln=0)= £ pJ(l-p0)n-£P(mi n=0/o).
<<h on)
Суммирование в (4.4.16) происходит по всем возможным зна-
чениям ор...,оп с учетом того, что P(5j =l/0j-0) = р^ =0,
P(5j =0/Oj = 1) = pij =0 , а также, что все ор j = 1,п не могут од-
новременно быть равными единице; при этом
Р(т1 = О/Oj = 1,...,оп = 1) = 0 и, соответственно, всегда
Р(81 = 1,...,8п = 1/mj п = 0) = 0. Для п=2, например, из (4.4.16)
следует
Р(81=1,82=-1/ш12=0) =
= PiiPb2Po(1-Po)p(mi2 =°/oi =1, о2 =0)/Р(т12 =0);
?(§! = -1,82 =-1/т12 =0) =
= [P?,lPb2Po(l — Р0)Р(т12 =0/Oj =1,О2 =0) +
+Ръ1Ръ2(1-Ро)РоР(т12 =0/о1 =0'°2 =l) + PbiPw(l-Po)(l-Po)x
хР(Ш12 =0/oj =0,о2 =0)]/Р(и119 =0);
Р(81=1,82=0/т12=0)=' (4.4.17)
= PliP:2Po(l“Po)p(mi2 =0/о1 =1>°2 =0)/Р(т12=0);
P(8t =-1,32 =0/т12 =О) = [рь1р°2рп(1-Ро)Р(т12 =0/о1=1,о2=0) +
+PblPe2(1-Po)(1-Po)P(mi2 =0/о1 =0>°2 =о)]/р(т12 =0);
Р(81=0,82=0/т12=0) =
= р:1р‘2(1-р0)(1-р0)Р(т12 =0/ot =0.о2 =0)/Р(т12 =0)
296
Рассмотрим теперь первую составляющую в (4.4.15), пред-
ставляя ее в виде
P(81,...,5n/m1 п)= У P(8j...8п/о,т, п)х
xP(m, „/oJp'U-poH/Ptm, „), т, п>0;
Р(81,....5п/о,т1 п)= У P(5I,...,8n/o,mXt,m1 п)х
xP(m, n/o,mZr)P(mZr/o)/P(mt n/o),
где mx = mx (8lt...,8n) — количество отождествленных векторов,
при выборе которых в ходе идентификации может быть получен
одинаковый в смысле значений 8Х,...,5П результат. При этом но-
мера 3А = 1, общим количеством, равным г, образуют комбина-
цию %г = (ер...,ег). При п=2 и ох = о2 = 1:
тх (1,1) = 1; 0 <mx (l,-l) <m1 n-l; 0 < mz (-l,-l) < хщ n-l,
а при o1 = 1, o2 = 0:
mx(l,l)-0; 0 < mXr(l-l) < mr n;
0 < mx (-1,-1) < 1гц n; mx (-1,1) = 0.
Для условных интенсивностей и законов распределения чис-
ла таких точек, а также всех оставшихся точек в (4.4.18) можно
записать
X'rnl(o) = Vn)(o)-X(;''(o), Х‘”,(о) = (Пов))Г-г/У^, гсп;
Р(п\ n/o,mz ) =
Р(тъ /о) =
^’(m, п
Р^’Ст, п
кпД(тх,
4>х>
-к„), г = п;
-mXr -кп), г < п;
-1), г -п;
(4.4.19)
0 < тх < т, п - кп, г < п; 0 < т* < 1, г = п.
Далее следует конкретизировать тип решающего правила,
используемого в процедуре идентификации.
Рассмотрим сначала по аналогии с ранее исследованным вари-
антом обработки рис. 4.4.1а рандомизированное РП с выбором на-
блюдений из исходного гиперкуба wz. В этом случае получаем
Кп
——, г = п;
Р(8,..5n/о.т^.т, п) = -
П1Х
(4.4.20)
297
Отсюда следует, что при использовании пуассоновской фор-
мулы для распределения числа точек в (4.4Л 9) вероятность в
(4.4.18) может быть рассчитана для г < п как среднее отношения
mxr / mi п в бернуллиевской схеме испытаний
Р(5,.Vo.m, п)= £
т. =0
кут-(1-у)’
т1 п-кп ' V *'
(4.4.21)
n_~Kn у==
т, . У’ 7
—-, r<n, т, „>0.
(о)’
Из (4.4.21) в частности следует, что при кп = 0, г < п, то есть
когда требуется оценить вероятности ЧИР, отражающие появле-
ние в каких-либо каналах ложных наблюдений, они определя-
ются простым отношением интенсивности потока точек, дающих
интересующую комбинацию 8р...,8п, к интенсивности суммар-
ного потока точек отождествленных векторов. Соотношения
(4.4.18)—(4.4.21) позволяют рассчитать в окончательном виде
условный вероятностный закон P(81,...,8n/m1 п). Так, например,
для п = 2 получим
Р(5, = 1,52 =l/m12) = —PoP(m)2/Oj =1,о2 =1)/Р(т12);
т12
Р(8, - 1,82 = -1/т12) -
= )р;Р(т„/о, =1.0, =1) +
А 4- 2А/ Да
+ ~<2Х^А~Ро(1-Ро)Р<т12/о1 =1,о2 =0)]/Р(т12); (4.4.22)
А + А/ Да
P(51=-l,S2=-l/m12) =
= [(^^)(гг^—ЫР(т12/01 =1,о2 =1)] +
т12 А +2А/Да
X2 X2
+ ТГ—ПТ" Ро (1" Ро)Р(т12 / о, = 1, о2 = 0) + г,-—л- (1 - р0) р0 х
А + А / Д а А + Л / Да
хР(т12/о, = 0,о2 =1) + (1-р0)2Р(т12/о1 =0,о2 =0)]/Р(т12).
Далее, усредняя по 1гц п в соответствии с представлением
(4.4.15), а также соотношениями (4.4.13), (4.4.14), можно полу-
чить выражения и для безусловных вероятностных законов ЧИР.
При значительных р0 и ХДа здесь можно ограничиться усред-
нением по п только первой составляющей в (4.4.15)
P(81,...,8n/m1 п > 0), так как вклад второй составляющей в этом
случае будет невелик.
298
В частности, на основе введенных моделей найдено выражение
для безусловной вероятности получения полезной информации од-
новременно от всех каналов наблюдения — разнесенных в про-
странстве первичных датчиков РС. Эта вероятность определяет аб-
солютную нижнюю границу достоверности первичной обработки
при формировании результирующего вектора наблюдений в виде
x(n)=yx'
P(8j = 1,...,8П =!)>₽) =pS(l-e-xWv?>Xu,>V;in’,
(4.4.23)
С’ /У1’.
i=0
Отметим, что соотношение (4.4.23) по форме напоминает со-
отношение (4.4.4), полученное ранее для варианта организации
обработки в однопозиционной РС.
При использовании в ходе идентификации РП на основе поиска
минимума меры близости (махаланобисова расстояния) отожде-
ствленных векторов к центру области (0г получение аналогичных
соотношений несколько усложняется. В данном случае, считая, что
идентификация проводится в признаковом пространстве результи-
рующего вектора ze R11, можно получить соотношения для вероят-
ности в (4.4.18) при Oj = 1, j = 1,п (кп = 1) в виде
п-1__ mXJ
Р(81,...Д/о,т1 „)> X ППЕРхГ^)] х
ПоП0*'»-1
хР(тл,....тХп1/о1т1 „) = ^j , r = X6i=n:
n-1__
P(81,...,8n/o,m1 n)> X ПП[рГ;’(2)] x
UmX0J. J} )=0
х[1-Р;п-г’(2)ГгР(тxo,...,nix /о.т, n) =
(4.4.24)
x<p"> =xyiXpr'i)<2)/v«)> 4’”=yr/v‘r),
J=o
n-1
XXmx. =m> n-1.
J-0 {Xj}
где ^(pn) имеет смысл интенсивности потока точек (векторов), отож-
дествленных и правильно идентифицированных как ложные (име-
ющие ложные компоненты) в присутствии полезного вектора;
p^n-j>(2) — вероятности правильной идентификации полезного на-
блюдения в присутствии одного ложного для признаковых подпро-
299
странств размерности n-j, j — 0,n —1, полученные, например» в
виде (4.4.5). Номера компонент вектора наблюдений каждого тако-
го подпространства образуют комбинацию у , являющуюся до-
полнением к комбинации Xj : XjlJVn-j =(1,-..п). Для
того, чтобы учесть уменьшение числа точек потока при исполь-
зовании в качестве ДСС гиперэллипсоида, требуется в получен-
ных выражениях при степенях j ввести коэффициент
kj = V]pn“J) / , гдеУ^ — объем гиперэллипсоида в соответ-
ствующем подпространстве; V!en-J) — объем гиперкуба.
Для ситуации, когда кп = 0, аналогичные соотношения могут
быть в общем случае получены путем понижения размерности
п
задачи до величины п' = ^о, <п и сведения ее к случаю, опи-
сываемому (4.4.24)? Принтом условные вероятности должны
рассчитываться по отношению к числу точек иц п = гщ п - т* ,
где тХг — число точек, для которых номера компонент в комби-
нации хг = (eiг<п соответствуют номерам_каналов, где
получены полезные наблюдения, то есть ое = 1, j = 1,г. Такие точ-
ки обеспечивают одинаковый результат в смысле получаемых зна-
чений 8р...,8п при выборе полезного вектора в ходе идентифика-
ции. Однако более простым способом расчета вероятностей для слу-
чая, когда не все oj =1, j = l,n, является использование, как га-
рантирующих, соотношений, полученных ранее для рандомизиро-
ванного РП. Такой подход оправдан тем, что наличие хотя бы одной
ложной компоненты в полученном после отождествления векторе
резко снижает влияние всех остальных компонент на получение
правильного результата при идентификации.
После расчета условных вероятностных характеристик ЧИР на
основе (4.4.24) и подобных ему выражений далее для рассматрива-
емого типа РП с учетом (4.4.13)—(4.4.15) может быть получен бе-
зусловный закон распределения Р(8р...,8п). В данном случае также
следует привести выражение для вероятности получения полезной
информации одновременно во всех компонентах результирующего
вектора наблюдений, определяющее уровень достоверности первич-
ной обработки данных в многонозиционной РС:
P(S, = 1,...,5П =1) >Р„ = PSe-v'v-',
„-1 (4.4.25)
Х<")= ^Г-^[1-Р^>(2)]/У^,
J=o lx i
где имеет смысл интенсивности потока точек отождествлен-
ных векторов, содержащих ложные наблюдения в своих компо-
нентах и ошибочно принятых за полезные в ходе идентифика-
ции. Укажем на схожесть (4.4.25) с выражением (4.4.6), полу-
300
ченным для однопозиционной PC (при n = 1 они эквивалентны).
Отличие заключается в том, что в данном случае требуемся за-
дать интенсивности потока точек отождествленных векторов и
провести расчет вероятностей правильной идентификации наблю-
дений в пространствах различной размерности.
Результаты экспериментальной проверки соотношений (4.4.23)
и (4.4.25), определяющих потенциальную достоверность обра-
ботки при формировании результирующего вектора наблюдений
в многопозиционной системе,
получены методом имитацион-
ного моделирования и пред-
ставлены на рис. 4.4.4. Здесь
для трехпозиционной PC [161]
даны теоретические зависимо-
сти вероятностей Рг и Рп от ве-
личины 25иХ. Последняя ха-
рактеризует среднее количе-
ство мешающих наблюдений в
каждом датчике, приходящих-
ся па элементарный интервал
значений параметра отождеств-
ления размером 25а. Зависимо-
сти получены при различных
значениях р0 и значении вели-
чины pft = 25а/Да = 0,1. Отдель-
ными точками показаны экспе-
Рис. 4.4.4. Зависимости для ве-
роятностей получения результиру-
ющего вектора наблюдений с полез-
ными компонентами
риментальные данные, характеризующие адекватность использо-
ванных при расчете моделей для выбранных диапазонов значений
параметров потоков мешающих сигналов.
Таким образом, с той или иной степенью приближения нами
получены соотношения для расчета вероятностных характеристик
ЧИР при использовании распространенных вариантов организации
обработки в однопозиционных и много позиционных системах.
4.5. Квазиоптимальные решающие правила проверки гипотез
Рассмотрим теперь более конкретно решающие правила про-
верки гипотез на основе совокупностей наблюдений, получае-
мых в частных ОВЗ при сопровождении гипотетических после-
довательностей. Такие решающие правила являются важными
составляющими общего алгоритма вторичной обработки, реали-
зуемого в соответствии со схемой рис. 4.1.1. Как следует из ре-
зультатов п. 4.1.1, процесс принятия решений для проверки
каждой исходной начальной гипотезы базируется на вычисле-
нии функций правдоподобия вида
301
P(zK,ek /о10) = iV /е’‘,о10)Р(ек /о10),
которые могут быть представлены как произведения функций
правдоподобия совокупности непрерывнозначных наблюдений zk
при фиксированной совокупности наблюдений дискретной ком-
поненты 9к и функции правдоподобия только совокупности 0к
для гипотез Ог и О0. Исходная статистическая модель наблюде-
ний при этом определяется уравнением (4.1.5).
Рассмотрим сначала функции правдоподобия непрерывнознач-
пых наблюдений. Учитывая, что
P(zk / 0k, 0,0) = P(zk / zk'*, ek, О110 )P(zk’1 / 0k-’, О, о) =
k
= ПР(г1/2,-’,0,,О1Л);
t-1
P(zt/z* ‘ДО^) = JP(zt/Xl,0,,O10)P(xt/z*-1,©’ \O10)dxt
и используя обозначения, введенные при описании соотношений
(4.2.11), (4.2.12) для оптимального нелинейного фильтра, мож-
но записать следующие выражения:
P(zt/xt,el,o1) = i £ P(Xt/et)N(zXt,z‘7,RXt)x
xHd(zMt, zPi, SPt)5(z9i-z^), z‘J=htxt; (4.5.1)
P(xt/z‘-I,0-1)O1)= У N(xt,xl/t.)(X,-l);Pt„ ЛГ’Я^Р-
Тогда, опираясь на приведенные в п. 4.1.2 соотношения для ин-
тегрального преобразования свертки гауссовских распределений,
получим
P(zt/z'-1,0l,O1)= £ мр £ P(xt/ot)x
{/“’et/"’ /if г} *70 <Vt /Th J
xN(zXt> zXt(x“1)Tzxt(Xt’1))H,l(z„t)zMt,SJlt)5(z9t -z9t) =
= у W)
AW,)’
P(zt= P(zt/0t,Oo) = H„(zw,z¥t,S„,)5(z„ -z„);
Zu.-Ax1’1) = htx./t-1<X”’)> Я.(X‘ ‘) = htPt,l4 (X’-1 )h?’ + R, •
Отсюда окончательно можно записать следующие выражения:
P(zk/ok,Oj) = -= X P(xk,zk/0k,Oj) = X П[Р(х./е1)х
J <ХКе\|Л/Пк} <Хкеук/Пк} t-1
xN(zXt,zX|(/-),Р1Х1(Х’ )5(Zqi -zj]; (4.5.3)
(4.5.2)
302
P(zk/e\ 0c)=nH,(zMt,zMi,s„)5(z. -ij.
t=l
Выделим частный случай, когда результаты ЧИР при пер-
вичной обработке в РС жестко коррелированы, то есть во всех
компонентах вектора zt одновременно получаются либо полез-
ные, либо ложные наблюдения, либо информация отсутствует.
Тогда основные соотношения для функций правдоподобия удоб-
но записать в следующем виде:
P(zt/x,0,O0 = pJ11l’(00N(z,z(l“,IR0 + p,b1t)(00H(z,zt/l>,S0 +
+p”>(ei)5(zt-9t);
P(xl/zl-1,0t'1,O1) = _ , £
P(zt/z'"1,0',O1)= £ [pl?(6t)N(z,!zt/t_1(x,-1),P7.t(X,'1)) +
’ey* ’/if ’}
+pL;40t)H(zt,zl/t.,St) + p")(01)5(zt-9t)]S^P;
P(zt /z'^O'A) = p<M)H(zt A/t. A) + p^0t)5(zt -ф0;
pk
Р(гк/0к,О,) = -Ц-= У P(Xk,zk/0k,O1) =
1 P(0k) 17 (4.5.4)
+(1 -X.)p'>i(®t)H(zl ,zt/t. ,St) + p<”(0t)5(zt -$0];
P(zk/0k,Oo) = PJ[p<h®)(00H(z,zl/t ,S0 + p‘®,(005(zl-ф0];
P(”(00=P(Xt =V0,.O0, P(M,(0t) = P(X. = 0/0,00;
p<1t,(00 = P(Vt =0/0,00;
p<°>(00 = P(yt = 1/0,00, Pct’(6t)= P(Vt =0/0,00;
p‘,t,(00 = P(.lt’(X,nt =0) = 0; p")(00 = p<b1t’(X,nt =0) = 0;
Pci>(O0 = p”1)(X1,'Ht =0) = l; pff(00 = p{,?(X,ilt =1) = 1;
pT(6t) = p'?,(x,nt=0)=i.
В (4.5.4) все обозначения в целом соответствуют ранее используе-
мым при описании (4.5.1)—(4.5.3) с тем только отличием, что на
каждом шаге комбинации yt, состоят из одного элемента, при-
нимающего значения 0 или 1. При этом совокупности
характеризуют номера шагов — моментов дискретного времени,
303
то есть комбинации номеров наблюдений, где не произошли про-
пуски \|Л 1 = (е1,...,ег), и комбинации номеров наблюдений
£t-1 = (f1?...,fs), s<r , по которым формируются оценки в предпо-
ложении, что только эти наблюдения являются полезными.
Анализ приведенных соотношений показывает, что вычисление
функций правдоподобия непрерывнозначных наблюдений типа
P(zk/Gk,O1) требует перебора большого количества частных гипо-
тез, соответствующих всевозможным комбинациям наблюдений,
получаемым на различных шагах и в различных компонентах ре-
зультирующего вектора на каждом шаге. По объему вычислений
процесс получения этих функционалов сопоставим с процессом
получения оценок на основе оптимального нелинейного фильтра
(4.2.11), (4.2.12) и является весьма затратным. Очевидно, что в
практическом плане использование подобных соотношений в ре-
шающих правилах имеет смысл тогда, когда процесс фильтрации
и сопровождения в схеме рис. 4.1.1 производится на основе сопос-
тавимых по объему вычислений алгоритмов. Поэтому при исполь-
зовании линейного или условно линейного фильтра целесообразно
ввести определенные приближения, позволяющие упростить вы-
числение функций правдоподобия. Одно из таких приближений
связано с гауссовской аппроксимацией апостериорного закона рас-
пределения хг Так, при использовании условно линейного фильт-
ра (4.2.9), можно ввести
P(xt/z^e^Oi) = N(xt
Тогда, например, для случая, описываемого (4.5.4), получим
к *
P(zk/ek,o,) = n[pl1»(et)N(zt,htitzl_1.hlplzt.1hJ’+Rl)+
t=l
+Рь?(0t)H(zt4t/t.,St) + p“’(0, )8(zt -$,)],
что позволяет существенно упростить вычисления, избежав при
этом перебора огромного количества комбинаций наблюдений.
Приведенные выражения для функций правдоподобия могут
использоваться в решающих правилах различной структуры, пред-
ставленных в п. 4.1.1, в том числе и в решающих правилах, осно-
ванных па вычислении обобщенного отношения правдоподобия
(4.1.3) для наблюдений, полученных в частных ОВЗ при проверке
гипотез О1 и О0. Возникающие при этом трудности заключаются не
только в необходимости проведения вычислений громоздких функ-
ционалов, но и в сложности аналитического расчета вероятност-
ных характеристик РП — ошибок первого и второго рода в зависи-
мости от используемых значений порога принятия решений. Фак-
тически можно говорить о применении для этих целей только ста-
тистического моделирования процесса обработки, что также требует
304
больших затрат при обосновании решающих правил. В связи с этим»
есть все предпосылки остановиться на использовании в решающих
правилах проверки простых гипотез только дискретной компонен-
ты наблюдений. Это безусловно упрощенный, но, одновременно,
практически значимый подход к организации подпроцесса приня-
тия решений при оценке начальных гипотез в рамках общего про-
цесса вторичной обработки.
Рассмотрим функции правдоподобия дискретной компоненты
наблюдений
Р<ек/о1(,) = ПР(е,/о10).
t=l
Построение решающих правил на их основе требует задания
конкретных вариантов определения Gt =(Х^,Т|,г)т, к числу кото-
рых прежде всего можно отнести рассмотренные в п. 4.4. Здесь
следует остановиться на двух типовых РП, пригодных для ис-
пользования в ходе ВО как в однопозиционных, так и в многопо-
зиционных системах.
Первое из таких РП основано на использовании в качестве
дискретной компоненты данных о наличии пропусков наблюде-
ний на всех шагах сопровождения гипотетической последова-
тельности в ДСС. Рассмотрим конкретно вариант однопозицион-
ной РС, для которой положим 0t = Т||. Такого типа РП в различ-
ных модификациях широко используются при обработке радио-
локационной информации и, в частности, при обнаружении
цифровых бинарных сигналов [5]. В данном случае основная ста-
тистика в виде отношения правдоподобия имеет вид
г к-г
Р(п‘/о,) 1Р(1-р";)1П'д: ,,L
”"Р(рк/0“>’[П<^Р»;)1Пр:?
1=1 1=1
где 1 - р£0) — вероятности непропуска на г шагах, где зарегист-
рированы значения Г| =1, j = 1,г; р^0) — вероятности пропуска
на тех шагах, где зарегистрированы значения T|d = 0, i = l,k - г .
Известно [5], что если вероятности р^0) =р(с10), t = l,k являются
одинаковыми на всех шагах, что соответствует ситуации, когда
размеры ДСС не изменяются в процессе сопровождения, то алго-
ритм принятия решения на основе статистики Ц может быть
представлен в виде
In Ln0-k In (р‘”/р'°>)
Г><Г' In [(1-р»’)/(1-рГ)]-1п (p^’/p'0')- (4>5-5)
305
Такой алгоритм фактически реализует сравнение числа непро-
пусков г с порогом гс. При этом выражения для вероятностей
ошибок первого и второго рода имеют вид
к к
Yn=l-ZCk(P^)k*‘(l-P^)t> Рп = ZCUpD^d-Pc0’)1- (4.5.6)
t=rf t=r,
При расчете ошибок на основе (4.5.6) возможно использование
различного рода асимптотических приближений для вероятнос-
тей выпадения исходов но бернуллиевской схеме. Они подробно
рассмотрены в [5], где также даны рекомендации по выбору по-
рога гс при заданных р*10) и к. Другой возможной разновиднос-
тью РП, основанных на использовании информации о значениях
9t =T|t, t = 1,2,..., является правило подсчета числа q пропусков
“подряд” и сравнения его с некоторым заранее заданным поро-
гом. По превышению порога qr гипотетическая последователь-
ность может сниматься с сопровождения, что особенно эффек-
тивно в ситуациях, когда заранее не задано фиксированное чис-
ло шагов или время, отводимое для процесса обработки данной
последовательности. Расчет вероятностных ошибок для подоб-
ных алгоритмов проводится на основе суммирования вероятнос-
тей всевозможных комбинаций исходов, содержащих qr и более
последовательно произошедших пропусков.
Рассмотрим теперь алгоритм принятия решений, основанный
на использовании в качестве дискретной компоненты данных о
количестве наблюдений в ДСС на всех шагах сопровождения
гипотетической последовательности 0t =mt, t = l,k (как и ранее,
рассматривается однопозиционная PC). Используемая при этом
статистика, как следует из результатов п. 4.4, в простейшем слу-
чае определяется следующим образом:
P(mlt/Q1) .
m P(mk/O0) fjpe'°'(mt) m” (4-5.7)
P‘1)(ml) = [pom, + (1 - ,
(mt)!
Далее РП (4.5.7) можно преобразовать следующим образом:
In Lra =£ln [1 + —] + k ln(l-po)xco = ln Lm0. (4.5.8)
Очевидно, что, зная законы распределения P„I0)(mt), при фик-
сированном пороге с0 можно численно рассчитать соответствую-
306
щие данному РП законы распределения статистики для гипотез
О1 и О0 и вероятности ошибок первого и второго рода. Однако
для алгоритма типа (4.5.7) можно воспользоваться упрощенным
приемом формирования РП и оценки его вероятностных харак-
теристик, если учесть, что при ограниченных значениях pVzn)
вероятности P0(10)(mt) быстро приближаются к нулю с ростом
mt. Пусть, например, pVzn) <1. Тогда можно предположить, что
вероятность Р^1)(т1 >2)= I^(mt) = O, то есть появление в ДСС
более двух наблюдений маловероятно. При этом (4.5.7) преобра-
зуется в следующее РП:
Ti(о^ ~ а0) + г2(а2 - а0) >< с0 - ка0,
(4.5.9)
а _lnS2ffi>0. а -,пЧ2®>0
" рГ рГ(о) РГ(1) р™(2) ’
где гг г2 — результаты фиксации числа шагов, на которых в
ДСС получено, соответственно, одно или два и более наблюдений
(г1+ г2 = г). Фактически (4.5.9) определяет область Qr(k,c0) зна-
чений Гр г2, для которых lnLm >с0. Форма этой области также
зависит от соотношения значений к и а0, ар а2. Например, если
к >с0/а0, к к >с0/а2, то область Qr(k,c0) имеет вид, пока-
занный на рис. 4.5.1. В общем случае РП в виде (4.5.9) реализу-
ют схожий с (4.5.5) алгоритм, с тем только отличием, что теперь
отдельно проводится фиксация количества шагов, на которых в
ДСС получено одно, два, три и т.д. наблюдений. При этом при-
нятие решений осуществляется по результатам проверки при-
надлежности полученного вектора с целочисленными компонен-
тами некоторой области в двух- или более мерном пространстве.
Для (4.5.9) по аналогии можно записать выражения для вероят-
ностей ошибок
{(г, г2)тса,}го -Г1 -Г2 •
Р.„ = Z ~Г7~г[Ре*”(о)]г"[РГ,(1)Г,^О,(2)]\
{(г, г>,)гЛ !г2!
r0 =к-г1 -г2.
Таким же образом могут быть получены вероятностные ха-
рактеристики РП и при использовании данных наблюдения вы-
падений значений величины mt высших порядков.
Анализируя представленные РП, опирающиеся на использова-
ние типовых вариантов задания дискретной компоненты наблюде-
ний для однопозиционной РС, нетрудно видеть, что аналогичную
307
<Xi -(Хо
Рис. 4.5.1. Геометрия расположе-
ния области принятия решений
структуру будут иметь РП,
основанные на ранее рас-
смотренных вариантах зада-
ния 0t для многопозицион-
ных систем. При их обосно-
вании необходимо восполь-
зоваться предложенными в
п. 4.4 приближениями для
вероятностных законов рас-
пределения дискретной
компоненты наблюдений.
Так, при организации цен-
трализованной схемы обра-
ботки в рамках многопози-
ционной РС, выражения
для решающих правил и их вероятностных характеристик по
форме повторяют (4.5.7)—(4.5.10) с тем только отличием, что в
данном случае требуется использовать полученные выражения для
интенсивностей потока точек отождествленных векторов и соот-
ветствующих законов распределения Р(т1 П/О1 0).
Таким образом, рассмотрены подходы к обоснованию струк-
турных составляющих — процедур обработки, реализующих ос-
новные подпроцессы общего процесса вторичной обработки ин-
формации. С учетом повторяемости вида моделей состояний и
наблюдений на различных уровнях общей модели информаци-
онного взаимодействия, введенной во второй главе кииги, полу-
ченные результаты могут быть использованы и при обосновании
алгоритмов обработки информации для этапа третичной обра-
ботки. Очевидно, что теперь представляется интересным рассмот-
реть конкретные примеры реализации алгоритмов вторичной и
третичной обработки информации в рамках аппаратурно-ориен-
тированных принципов построения соответствующих подсистем.
4.6. Вторичная и третичная обработка информации
в однопозиционных системах
Основным результатом проведенного выше анализа является
обоснование общей структуры алгоритма, реализуемого в рам-
ках подсистемы вторичной, а по аналогии — и подсистемы тре-
тичной обработки информации. Следующим шагом является его
детализация па основе аппаратурно-ориентированных принци-
пов построения для типовых примеров решения задач обработки
информации в однопозиционных РС.
Рассмотрим общие принципы построения и конкретные алго-
ритмы вторичной и третичной обработки информации при реше-
308
нии задач выявления ИРИ с импульсными сигналами, образую-
щими на входе РС смешанный входной поток высокой интенсив-
ности. Такие задачи возникают при обработке сигналов РЛС [97,
113], а также при обработке сигналов средств радиосвязи с ППРЧ
[15, 16].
Прежде всего, с позиций современных возможностей органи-
зации параллельных вычислений и создания на этой основе вы-
сокопроизводительных систем обработки данных [35], следует
остановиться на реализации принципа сочетания “независимо-
го” и “комбинированного” подходов к построению общего алго-
ритма выделения ИРИ, являющихся объектами информацион-
ного взаимодействия. Первый подход непосредственно вытекает
из результатов п. 2.2, согласно которым алгоритм распадается
на совокупность независимо функционирующих многоуровневых
алгоритмов “поиска” или “обнаружения” ИРИ с заданными ди-
намическими моделями состояний в присутствии характерного
мешающего потока сигналов. В каждом из таких алгоритмов по
результатам наблюдения потоков данных на различных уровнях
отрабатывается версия о наличии на входе РС радиоизлучения,
описываемого конкретной ДМС. При этом в максимально воз-
можной степени учитываются априорные данные, определяю-
щие особенности поведения объектов данного типа. При обра-
ботке могут непосредственно вычисляться апостериорные веро-
ятностные характеристики наличия объекта с перебором всех
возможных комбинаций наблюдений (см. п. 2.2) или при соот-
ветствующем “усечении” оптимальных алгоритмов — реализо-
вываться квазиоптимальные алгоритмы, имеющие структуру, по-
добную описанной в п. 4.1. Соответственно все основные состав-
ляющие общего процесса обработки (завязка, сопровождение, оце-
нивание параметров и пр.) организуются так, чтобы исключить
заведомо не соответствующие данному объекту начальные гипо-
тезы. Реализация “независимого” подхода в силу естественного
параллелизма обрабатываемого потока данных предполагает ис-
пользование мультипроцессорных вычислительных устройств с
общей или распределенной памятью. Альтернативным вариан-
том “независимому” является “комбинированный” подход, пред-
полагающий обобщение априорных сведений по группам объек-
тов и соответствующее объединение индивидуальных алгорит-
мов в унифицированный алгоритм, реализующий селекцию и
разделение последовательностей наблюдений, а также оценку их
параметров в соответствии с обобщенными исходными данными.
При этом дополнительно должна быть выделена процедура рас-
познавания типов ИРИ по параметрам, оцененным в ходе вто-
ричной и третичной обработки. Реализация комбинированного
309
подхода допускает использование общего процессора обработки
данных. Платой за достигаемое при этом упрощение организации
процесса обработки является увеличение числа ложных оценок па-
раметров и снижение общей достоверности выявления интересую-
щих объектов. На разных уровнях обработки, то есть в данном
случае на уровнях ВО и ТО, степень «независимости» может быть
различной. Для примера на рис. 4.6.1 представлена схема органи-
зации процесса обработки информации с реализацией комбиниро-
ванного алгоритма на уровне ВО и независимого алгоритма на уровне
ТО. Здесь на вход подсистемы вторичной обработки информации
поступает поток дескрипторов первичных параметров (ДПП), каж-
дый из которых представляет собой сгруппированный по принято-
му сигналу вектор наблюдений, с представлением компонент в не-
обходимом формате. Аналогично па вход подсистемы третичной
обработки поступает поток сформированных в результате работы
комбинированного алгоритма ВО дескрипторов вторичных па-
раметров (ДВП), который теперь разделяется и поступает на «не-
зависимые» алгоритмы ТО для различных объектов.
Другой важный принцип организации процесса обработки
информации связан с рациональным использованием измеряе-
мых параметров сигналов и радиоизлучений при проведении се-
лекции и разделения потоков данных. Рассмотрим его на приме-
ре организации ВО. Здесь из всего перечня измеряемых первич-
ных параметров следует выделить «основные», которые являют-
ся наиболее информативными с позиций решения задачи разде-
ления потока и непосредственно
Рис. 4.6.1. Схема организации
процесса обработки
участвуют в этом процессе, и
«сопутствующие», предъявля-
емые для оценки соответству-
ющих ВП по результатам раз-
деления. К числу основных
обычно относятся частотно-
временные параметры сигна-
лов, а также параметры угло-
вого положения излучающих
ИРИ. Разделение потока дан-
ных по «основным» парамет-
рам базируется на формирова-
нии стробов — областей в про-
странстве наблюдений в соот-
ветствии с исходными гипоте-
зами о наличии на входе пос-
ледовательностей сигналов той
или иной структуры и провер-
ки попадания вновь поступа-
зю
ющих ДПП в эти стробы» то есть на их селекции и установлении
принадлежности к тем или иным гипотетическим последователь-
ностям. Формируемые стробы в общем случае являются динами-
ческими, изменяющими свои размеры и положение по результа-
там накопления данных в ходе сопровождения и оценки вторич-
ных параметров гипотетических последовательностей. Однако с
целью повышения быстродействия процедуры разделения целе-
сообразно для некоторой части основных параметров ввести так
называемые стационарные стробы с фиксированными граница-
ми, определяющими соответствующие области в пространстве на-
блюдений. На основе введения подобных стробов проводится пред-
варительная сортировка входного потока данных и распределе-
ние их по элементам памяти процессора, соответствующим вы-
деляемым областям. Важно отметить, что подобная сортировка
может быть реализована на основе ассоциативного принципа,
который подразумевает, что информация, заложенная в самих
наблюдениях, является признаком, по которому определяются
адреса соответствующих элементов памяти. В простейшем слу-
чае при сортировке по одному параметру а(0<а<атях) для
каждого конкретного наблюдаемого значения ан вычисляется при-
знак ia, определяющий соответствующий адрес массива данных
ia = entier(aH/8a) + l, R(ia) := R(ia) + 1,
где 8a — величина, определяющая дискретность установления гра-
ниц стационарных стробов по данному параметру; R(ia) — текущее
количество дескрипторов, распределенное в данную область. Вели-
чина 8а устанавливается таким образом, чтобы разброс измеряе-
мых значений а для конкретного ИРИ за счет собственной неста-
бильности и погрешностей, вносимых ППОС, не превышал 8a. С
целью исключения расщепления последовательностей при сорти-
ровке границы стробов можно дополнительно расширить и устано-
вить с перекрытием. Обычно при сортировке используется не один,
а несколько основных параметров, что несколько усложняет про-
цедуру ассоциативного определения принадлежности наблюдений
соответствующим многомерным областям.
По результатам предварительной сортировки проводится на-
копление ДПП в элементах (областях) памяти, для каждой из
которых реализуется процедура окончательного разделения с
использованием данных о структурных свойствах последователь-
ностей и с привлечением для этой цели оставшихся “основных”
параметров. На данном этапе в полном объеме реализуется вто-
ричная обработка полученной в каждой области совокупности
данных по схеме рис. 4.1.1. При этом процесс разделения бази-
руется на селекции в динамических стробах сопровождения ги-
потетических последовательностей.
311
ДПП
Алгоритм прсдварителъ
ной сортировки
Алгоритм разделения
потока ДПП
и опепкиВП
Алгоритм
; оконечной
обработки
g.8
ж С1
колы
Алгоритм
разделения
и оценки ВП
для области
В1
i/Области
гнаконло
ния ДПП
______Ни
Формиро -А
ванио ДВП -у
Распознана
нис типов
по ДВП
а
g | g
а ° §
Рис. 4.6.2. Структурная схема организации процесса вторичной об-
работки
В соответствии с изложенными принципами структурная схема
организации процесса вторичной обработки может быть представ-
лена в виде, показанном на рис. 4,6.2. Здесь в состав основных
компонент вектора наблюдений (дескриптора первичных парамет-
ров) включены измеренные в ППОС значения: несущей частоты
(fH); длительности импульса (тн); направления прихода в азиму-
тальной плоскости (аи); времени прихода (tn); амплитуды (ин) и др.
При ассоциативной сортировке используются параметры f ,
т , ан, причем размеры стационарных стробов для сортировки
потока данных по частоте устанавливаются исходя из макси-
мально возможного диапазона быстрой перестройки частоты от
импульса к импульсу. Разделение последовательностей для каж-
дой из областей накопления данных проводится на основе про-
цедур сопровождения и оценивания параметров гипотетических
последовательностей по наблюдениям fH и 1н. После принятия
решений относительно выдвинутых гипотез и оконечной обра-
ботки совокупности данных, полученных в цикле анализа, фор-
мируются выходные ДВП. При реализации комбинированного
подхода отдельно выделяется процедура распознавания типов
ИРИ по ДВП.
4.6.1. Разделение и оценка параметров
импульсных последовательностей
Рассмотрим в качестве типового примера реализации изло-
женных выше подходов решение задачи разделения смесей им-
пульсных последовательностей с оценкой их параметров.
Выделение регулярной последовательности в присутствии ха-
отического потока импульсных сигналов. Данная задача часто воз-
никает при ВО в однопозиционных PC, а алгоритм обработки, обес-
печивающий ее решение, является стандартным элементом более
сложных алгоритмов. Рассмотрим случай, когда в соответствии со
схемой рис. 4.6.2 для разделения после предварительной сортиров-
ки используются частотно-временные параметры наблюдений, по-
312
падающих в данную область. Пусть априори известно, что частота
выделяемой последовательности определяется диапазоном значе-
ний cof : [fmin, finax ], период следования импульсов может находить-
ся в диапазоне значений <ar : [Tmm,TmBX], Тпшк -Tmin < Tmin . Кроме
того, известна вероятность робн обнаружения и измерения первич-
ных параметров каждого импульса последовательности, а также
интенсивность потока мешающих импульсов pt на временной оси.
Величина ц интенсивности потока в частотно-временной области
при этом равна ц = fnun).
Для регулярной импульсной последовательности с отсутстви-
ем быстрой перестройки параметров уравнение состояний запи-
шем в виде
Xk+l=Xk’ Xk = (Ч )’Г^к X) ’ к =1,2,...,
где tk0) = t0 — постоянное запаздывание последовательности на
временной оси (0<t0 <Tmax): Тк = Т, fk = f — значения периода
следования и несущей частоты.
Наблюдения проводятся в области coz = cotxcof, cot :[0,ta] , где
tft — время анализа, отводимое на решение задачи. В качестве
компонент вектора наблюдаемых параметров z = (t ,fн)т рассмат-
риваются измеряемое время прихода (tH) и частота (fH) каждого
импульса, при этом для полезного наблюдения
z^hA+Vk, hk =
> vk=(vlk,vfk)'1;
M[vkvkr] = Rk = R = ‘
k = l,2,...
Реализация процедуры завязки осуществляется на основе со-
поставления пар импульсов, принимаемых в пределах интерва-
ла времени [O,tJ, t3 < tA, по значениям fH, t . При этом формиру-
ется множество начальных оценок сох = {Хпо»Р1/о> * = пара-
метров гипотетических последовательностей
xi?o “Tj’q, fi/o)T’ (4.6.1)
=t_r, C =t„r-t„p> f,% = 0,5(f„p +fHr);
^i/o < t3, T//Q g car, e , 1^ - fiir| < 5f = nf \/2of,
где p, r - порядковые номера сопоставляемых наблюдений в общей
совокупности, полученной за время анализа; nf = 2...3 — параметр
отождествления пар импульсов по частоте. Считая, что результаты
измерений tH, некоррелированы, для начальных матриц ковари-
ации ошибок можно записать следующее выражение:
313
По мере формирования начальных оценок разворачивается
процесс сопровождения гипотетических последовательностей в
ДСС, который описывается совокупностью уравнений наблюде-
ний стандартного вида
z(k” =ak(hkxk+vk) + bk(hkx,ki/\_1 +4i)) + ckhkx*;i’k,, i = l,N„, (4.6.2)
где символ - обозначает, что в данном случае текущая оценка,
определяющая центр ДСС, формируется на основе процедуры
линейной фильтрации. С целью упрощения обработки размеры
индивидуальных ДСС последовательностей целесообразно уста-
навливать фиксированными, начиная с первого шага сопровож-
дения. При этом для со^к площадь ДСС определяется величиной
V7<2’ = AtjXAfp Atj =2ntV6CTt, АД =2nf>/ij5af, n(f =2...3.
Процессы завязки в соответствии с (4.6.1) и сопровождения в
соответствии с (4.6.2) иллюстрируются рис. 4.6.3. Для проведе-
ния синтеза алгоритмов линейной фильтрации и проверки гипо-
тез проводится расчет гарантированных значений вероятностей
ЧИР, которые в данном случае будут на всех шагах сопровожде-
ния одинаковыми
P(nl) >p0(l-e',1V‘2 )/pV7<2), р’,1’ =l-p‘1,-(l-p0)e’MV"'I
р‘п =(1-р0)е‘рУ'г; (4.6.3)
р<°’=0, p^l-e^2’, р*0) = e~MV;2'.
Здесь, как и ранее, считается, что Ро^Робн- Соответственно
алгоритм линейной фильтрации для каждой начальной гипоте-
зы имеет вид
Ak+i/k
Wk=p"’Pk/k-1.
^k+l/k = ^k/k-1 — PL ^k^k^k/k-l’ $ =
= x^1+Wk(Z^-hkx^k_1),
X(plnhkPk/k X + p^R + p^S)’1, (4.6.4)
’at2/12 о
о af2/i2
При проверке гипотез относительно истинности той или иной
сопровождаемой последовательности использовалось решающее
правило (4.5.5). Оно основано па подсчете числа непропусков г
за к шагов сопровождения после завязки и сравнении его с поро-
гом гс. Величина к может быть задана фиксированной для всех
оцениваемых гипотез, тогда kTmax <ta -t, , либо переменной, оп-
314
ределяемой максимально возможным количеством шагов, кото-
рое получается за оставшееся после «завязки» время. При зада-
нии порога принятия решения можно использовать соотноше-
ние г, = (1 - р1/’) - p(cn (1 - р‘п) / к [5].
На рис. 4.6.4а представлены полученные методом имитаци-
онного моделирования характерные зависимости вероятности вы-
деления истинной последовательности от вероятности полу-
чения полезного наблюдения в ДСС на каждом шаге сопровож-
дения последовательности р0 при различных к. При изменении
U1/О
центр ДСС, Л полезные наблюдения; х мешающие наблюдения
Фильтр для поел,
с перестройкой Т
”L4J’rZ * ^2
3 слой селекции
1 слой селекции
Фильтр для
регулярных
поел.
2 слой селекции
Фильтр для поел,
с перестройкой f
4 слой селекции
Фильтр для поел
с перестройкой
ТИ f
z=(t„JH)T
Рис. 4.6.3. Иллюстрация процедур завязки и сопровождения
а) б)
Рис. 4.6.4. Зависимости для характеристик достоверности выделе-
ния импульсной последовательности
315
р0 в соответствии с (4.6.3) изменяется и логика принятия реше-
ния rp/k, что при выбранном способе задания порога приводит к
немонотонному характеру получаемых зависимостей. Величина
Р практически мало зависит от интенсивности потока мешаю-
щих сигналов. Однако при задании последней, отличающейся от
реально возникающей интенсивности потока, значения Рл сни-
жаются на 5... 10 % за счет увеличения вероятности срыва со-
провождения последовательности. На рис. 4.6.46 представлены
зависимости другой характеристики — среднего количества вы-
деляемых ложных последовательностей Np от величины
qu =MtT0. Величина То = Troin + (Тгоах -Тга1П)/2 определяет среднее
значение периода последовательности. При этом величина q ха-
рактеризует среднее количество мешающих импульсов, прихо-
дящихся па один полезный. При малых значениях (примерно
Np<O,l) Np одновременно характеризует вероятность получе-
ния ложной последовательности при обработке наблюдений в
области сог = согхсог. Зависимости на рис. 4.6.46 даны для раз-
личных р0, of при fTnax - fmin = 1 и фиксированном ta = 10То (к = 5).
Величина t в эксперименте задавалась равной 0,4ta. Получен-
ные зависимости показывают, что для достоверного выделения
последовательности отводимое время анализа должно составлять
величину порядка 8... 10 периодов следования.
Зависимость для af —»на рис. 4.6.46 определяет условия,
когда частота фактически исключается из процедуры селекции
и разделения. При этом, если 0 < qp < 5 , то величина Рл одновре-
менно изменяется от 0,85 до 0,80. Эти результаты свидетель-
ствуют о возможности алгоритма обеспечить выделение последо-
вательности на основе только ее структурных свойств при совпа-
дении частоты, направления прихода сигналов и других пара-
метров с параметрами сигналов мешающего потока.
Для оптимизации основных параметров и режимов рассмот-
ренного алгоритма ВО можно воспользоваться некоторыми рас-
четными соотношениями. Прежде всего, следует оценить требу-
емое время завязки. Для этого сначала определим вероятность
завязки по m-тому импульсу последовательности, который по-
тенциально может быть принят в пределах цикла анализа. Не-
трудно видеть, что эта вероятность определяется рекуррентным
соотношением
Pm=Pm-1(l-Po) + Pm-2Po(l-Po)> Р1=0, Р2=Р^. (4.6.5)
Далее можно получить закон распределения времени прихо-
да m-ого импульса относительно начала цикла, который при рав-
новероятном законе распределения значений периода в преде-
лах области сот подчиняется выражениям
316
Wm(t) =
(m-1) >mT„
о,
1 1 *
— In------------,
AT (m-l)Tnnn
I m t ,
—[In-------In------——],
AT1 m-1 (m-l)Tmax
0,
О < t < (m-l)Tmin;
(m - l)Tmin < t < mTmin;
mTmin <t<(m-l)Tmax;
(m-l)Tmax <t<mTroaK;
mT,n„x < t,
(4.6.6)
Wm(t) =
(m-1 )Tmax 5rnTm n
o, 0 < t < (m - l)Tmin;
ln'(---TrF- ’ (m "1)T™ < 1 -(m " 1)T™
AT (rn-l)Tmin
1OI (m - l)Tmax < t < mTmin;
Xo - —- In —, mT < t < mT ;
0 AT mTmin
0, mTmax < t,
Xo = “(lnTmjx -lnTmin), AT = Tmax -Tmin.
Отсюда окончательно имеем закон распределения и среднее вре-
мени завязки последовательности t3
t1 = £(mTo-O,5)Pm.
m-1 m~l
Зависимость значений t3, нормированных к То, от р0, полу-
ченная на основе (4.6.6)» представлена на рис. 4.6.5 сплошной
линией. Анализируя (4.6.5), также можно установить, что вероят-
ность завязки по первым четырем импульсам
Рт<4 = Р2 + Рз + Р< = Зр* - 2р®
в пределах рабочих значений р0 >0,9 имеет значение, равное
0,972, что позволяет рекомендовать соответствующий выбор
t3 = 4Т0 (при этом t3 = 1,846Т0). Исходя из представленных сооб-
ражений, можно определить выражение для вероятности выде-
ления последовательности в следующем виде:
Pq =(3ро-2ро)(1-уп), (4.6.7)
где у рассчитывается на основе соотношения (4.5.6). Использо-
вание (4.6.7) позволяет оценивать величину Р с погрешностью,
не превышающей 5 %.
317
Рассмотрим теперь возможности аналитической оценки ста-
тистических характеристик выделения ложных последователь-
ностей, Для этого сначала определим среднее количество N об-
разуемых в процессе завязки ложных начальных гипотез при
сопоставлении пар импульсов только мешающего потока. Как
нетрудно видеть, величина N в зависимости от времени завязки
определяется следующими уравнениями:
AN(t) = <
(4.6.8)
О
О,
2\ (t~Tmin),
^max ^min
2—25f— т
“t r r ' max min7’
Lmax *min
t<Tmi •
Tmin<St<Tmax;
Т
max
где величина AN(t)dt задает среднее приращение количества
образуемых гипотез на элементарном интервале времени. Отсю-
да, если t3 > Tmax, окончательно получим
N = l4f 2^f AT(t.-Tmnx+0,5 AT).
При этом величину среднего количества выделяемых ложных пос-
ледовательностей Np можно приближенно оцепить выражением
N^N₽„, (4.6.9)
Рис. 4.6.5. Зависимость сред-
него времени “завязки” от вероят-
ности непропуска единичного им-
пульса
где |} рассчитывается на основе
соотношений (4.5.6). Представ-
ленная на рис. 4.6.46 расчетная
зависимость Np = Npn при гг = 4.
к = 5 (штриховые линии) под-
тверждает достаточную точность
получаемых на основе (4.6.9)
оценок.
Некоторое превышение рас-
четных значений по сравнению
с экспериментальными данными
при больших qu объясняется тем,
что в ходе эксперимента прояв-
ляется влияние введенного в ал-
горитм условия исключения за-
вязки по импульсам, которые по-
падают хотя бы в один из ранее
сформированных ДСС. Поэтому
общее количество формируемых
318
начальных гипотез при q^ > 5 оказывалось меньше расчетного.
Для определения величин N, Np в условиях наличия последова-
тельности полезных сигналов можно воспользоваться выраже-
ниями (4.6.8), (4.6.9), если пересчитать интенсивность потока
наблюдений, участвующих в образовании ложных гипотез, сле-
дующим образом: p' = pt +роб,Д0 * так как в (4.6.6) есть сред-
нее количество импульсов последовательности, излучаемых в еди-
ницу времени. Кроме того, следует учесть возможность завязки
пары импульсов, один из которых принадлежит последователь-
ности, а другой — потоку мешающих импульсов в ситуации,
когда мешающий импульс попадает в окрестность одного из
двух соседних импульсов последовательности. При этом для
данной гипотезы последующее сопровождение и принятие ре-
шений проводится в основном по полезным импульсам после-
довательности. С учетом этого определение Np в данном слу-
чае предлагается проводить по следующей формуле:
N^NK+d-YnX/8^1 »
где N',0'— пересчитанные для р' значения соответствующих
величин. Такая оценка позволяет определять значения с
погрешностью, не превышающей 25...30 %, при значениях
qp <10 (штриховая зависимость па рис. 4.6.46 в качестве при-
мера для af —> со ).
Разделение последовательностей с различными видами бы-
строй перестройки параметров от импульса к импульсу. Дру-
гой типовой задачей, решаемой в ходе ВО, является задача раз-
деления смешанного потока сигналов (импульсов, элементарных
посылок), образуемого при одновременном воздействии на вход
приемника нескольких последовательностей с различными ви-
дами быстрой перестройки частотно-временных первичных па-
раметров. Для определенности рассмотрим ситуацию, когда в
данной области пространства наблюдений, сформированной в
соответствии с процедурой предварительной сортировки, возмож-
но появление последовательностей с четырьмя наиболее распро-
страненными режимами излучения. К их числу относятся: ре-
жим излучения без перестройки частоты и периода следования
импульсов (к = 1); режим излучения с перестройкой периода сле-
дования (к = 2); режим излучения с перестройкой частоты (к =* 3);
режим излучения с перестройкой частоты и периода (к = 4). При
задании уравнений состояний, учитывающих возможность на-
личия той или иной перестройки, могут быть рассмотрены раз-
ные варианты (см. п. 2.2.1). Далее, не теряя общности подхода,
будем отталкиваться от уравнений состояний вида
319
110 0'
0 10 0 0
xk.l = 0 0 0 1 xk + Y284 , xk = (tk,Tk,fk,fk0))T, k = l,2
0 ° ° 1 0
(4.6.10)
Уравнения (4.6.10) описывают введение режимов излучения при
задании значений вектора у = (Yi,y2)T следующим образом:
к=1 : у=(0,0)т; к-2 : у-(1,0)т; к =3 : у = (0,1)т; к =1 : у - (1,1)т,
Средние значения fk0) - f, Tk = Т частоты и периода последователь-
ностей принадлежат диапазонам cof и сот. Возмущения 5fk и 6tk
равномерно распределены в интервалах значений [-0,5Afm,0,5Afm]
и [-0,5Atm,0,5Atin]. Соответственно wr : [fmin -0,5Afm, fmax +0,5AfJ
и : [Tn,in -0,5Atm, Tmnx + 0,5AtnJ, где величины f^, fmax и Tmin,
Tmax определяют диапазоны средних значений частоты и периода.
Считаем, что первичные наблюдения, как и ранее, накапли-
ваются в области coz = cot xcof, то есть z ==(tH,fH)T. Связь полезного
наблюдения с вектором состояний определяется следующим об-
разом:
4” =Кхк+vk> hk
о
о
о
о
M[vkvJ = R =
Формирование множества начальных оценок сох, как в предыду-
щем примере, может осуществляться на основе простейших проце-
дур сопоставления пар импульсов по частотно-временным и пр.
параметрам. При этом необходимо учитывать, что каждая участву-
ющая в этом пара импульсов может принадлежать последователь-
ности с любым из четырех введенных режимов излучения. Следо-
вательно, как это видно из сформулированных выше принципов
обработки, процесс сопровождения гипотетической последователь-
ности и оценки ее вторичных параметров для каждой начальной
оценки Хрр, 1 -l.N3 должен осуществляться в четырех вариантах
с учетом структурных свойств радиоизлучения при реализации
возможных видов перестройки. Для определения множества гипо-
тез сох = = 1,4, i = l,Na} может использоваться следую-
щая процедура:
Л(‘Л) _ /гО к) гпН к) гПл) f(0)(i к)\Г
х1/о - хН/о » 4/о >4/0 >4/о > >
=t„r +(t,.r -tHp), T'-> =t„r -tnp> f'^’ =o,5(flir + f„p);
320
*1/0 - 4/0 ’ h/0 -Г3’ Al/0 *= U'T’ Al/0 “ 4/0 ШР
|f„r-fHP|s5f =nfV2of ->K = 1;2;3;4;
|L -M > 8f, |f..r -f..P| < Afm + 8f -> к = 3:4.
При этом начальные матрицы (корреляция ошибок измере-
ния времени и частоты не учитывается) задаются в виде
6 At* + у. —— ’ 12 0 0
p(i.K) _ р(к) _ *1/0 — *1/0 — За* + у. 2о* 1 11 12 ‘ 0 At* + у, —- 1 12 0 2 0 + Y2 8 0 О, Af* ~+т2 — 2 2 24
0 0 *> £1 2 + Y2 Af* 24 Or Af* —+y2—“• 2 2 24 .
Процесс поступления наблюдений при сопровождении гипо-
тетических последовательностей описывается уравнениями вида
(4.6.2). Проведение текущих оценок на основе алгоритмов
линейной фильтрации осуществляется стандартным образом с
использованием четырех групп фильтров, имеющих различные
весовые матрицы в соответствии с введенными моделями состоя-
ний и наблюдений последовательностей. Однако в данном слу-
чае возникает определенная специфика формирования ДСС, свя-
занная с реализацией схемы оценки гипотез, обеспечивающей
формирование относительно непсресекающихся частных ОВЗ и
применение упрощенных решающих правил независимой про-
верки простых гипотез типа (4.1.3 ). При этом возможным вари-
антом организации процесса сопровождения и формирования ДСС
является следующий. Центр ДСС для каждой гипотезы, как и
ранее, определяется экстраполированной на один шаг оценкой
вектора полезного наблюдения = hkXk/k-i • Форма ДСС о£кк)
при выполнении условий Atm »Gt, Afni »<Jf описывается более
сложным образом, как это показано на рис. 4.6.3. Выполнение дан-
ных условий означает, что ДСС при сопровождении гипотез, пред-
полагающих наличие в последовательности того или иного вида
перестройки, должны устанавливаться существенно больших раз-
меров, чем это требуется для сопровождения гипотетических пос-
ледовательностей без перестройки. Конкретно, начиная с первого
шага, устанавливаются следующие размеры ДСС: для гипотез с
к == 1 V^2) = AtjXAf,, Atj =2nt\/6ot, Д£г - 2nfA/1^5gf; для гипотез с
к - 2 Vz(2> = At, х ДЕ, ДЕ, = 2nt J6of + Д^/б ~ ntAtmJo,66; для ги-
4 £ 1 м I» « 14» к 1П ▼ ' '
11—247
321
потез с к = 3 Vz(2) = AtjXAf2, Д^ =2пг>Д,5о2 + Д£2/8 ~nfAfm/V2,
для гипотез ск = 4 Vj2) = At2xAf2. Это означает, что в текущем
ДСС большого размера ио оси данного параметра можно без осо-
бых потерь изъять участок, соответствующий текущему ДСС
меньшего размера, если он устанавливается внутри большего.
Именно этот принцип формирования ДСС на первом шаге иллю-
стрирует рис. 4.6.3. По мере дальнейшей обработки центры ДСС,
обеспечивающие сопровождение различных гипотез, начинают
расходиться, а их размеры могут изменяться и форма оставляе-
мой части большого ДСС усложняется. При расчете вероятност-
ных характеристик ЧИР для фильтров, обслуживающих гипоте-
зы с различными значениями к, можно воспользоваться выра-
жениями типа (4.6.3) с соответствующей корректировкой значе-
ний р0 и V]2) .
Таким образом, при практической реализации данного под-
хода для каждой области пространства наблюдений, образуемой
после предварительной сортировки, должна быть организована
работа четырех групп фильтров, каждый из которых обеспечи-
вает сопровождение подмножества гипотетических последователь-
ностей с определенным видом перестройки. Селекцию вновь по-
ступающего дескриптора первичных наблюдений в ДСС различ-
ных групп фильтров целесообразно организовать в виде цепи
последовательных проверок принадлежности областям
N_ N„
ri,=LWA Me
i-l 1=4 i=l
где 2 3 определяются как объединения всех текущих ДСС,
порождаемых гипотезами с соответствующими значениями к.
Порядок проведения такой многослойной селекции иллюстри-
рует структурная схема алгоритма, представленная на рис. 4.6.3.
Фактически при подобной организации обработки прохождение
ДПП на следующую группу фильтров происходит только в том
случае, если он не попал ни в один из ДСС предыдущей группы.
Смысл предлагаемого принципа обработки состоит в том, что в
пространстве наблюдений последовательно изымаются участки,
в которых сопровождаются последовательности с определенной
степенью регулярности частотно-временной структуры, начиная
с последовательностей без перестройки параметров, затем после-
довательностей с перестройкой какого-либо одного параметра и
т.д. В результате в оставшихся участках, занимающих большую
часть области наблюдений, проводится поиск последовательнос-
тей с одновременной перестройкой частоты и периода следова-
ния. Предлагаемый порядок проведения селекции в ДСС обеспе-
чивает минимизацию времени обработки каждого ДПП и позво-
322
ляет разредить поток наблюдений регулярных последовательно’
стей, являющихся мешающими по отношению к процессу про-
верки гипотез о наличии последовательностей с быстрой пере-
стройкой одного, двух и более первичных параметров. Одновре-
менно восстанавливается возможность использования простей-
ших решающих правил для окончательного выбора гипотез, ос-
нованных на анализе бинарной логики пропусков наблюдений в
течение фиксированного количества шагов сопровождения. Сле-
дует заметить, что возможны различные модификации предла-
гаемого подхода. Одна из них, например, предусматривает вве-
дение запрета на прохождение ДПП, попавшего в малый ДСС
регулярной последовательности, только в те ДСС нижних слоев
селекции в схеме рис. 4.6.3, которые имеют с этой последова-
тельностью общую начальную оценку.
Оценка качества разделения последовательностей проводилась
методом имитационного моделирования в рамках общего алгорит-
ма ВО, объединяющего алгоритм предварительной сортировки по
параметрам fH, т , ан и алгоритм окончательного разделения после-
довательностей по параметрам fn, tH. В качестве показателей ис-
пользовались вероятность выделения последовательностей и от-
носительное среднее количество ложных последовательностей ,
выделяемых в пределах цикла анализа. Зависимости этих характе-
ристик от количества одновременно подаваемых на вход импульс-
ных последовательностей L, излучаемых с одного направления в
общей полосе частот с центральной частотой f, представлены на
рис. 4.6.6 сплошными линиями. При моделировании задавались
следующие исходные данные: tn - 10То; o)f : [f -0,5Afln,f + O.5Afm],
Afra = 0,02f; o>,. = [O,5To,l,5To], Atm = 0,15T, Те cor;
of =(0.005..,0,01)Afm; =(0,005...0.01)Atm; p0=0,9...1.
Представленные зависимости позволяют оценить предельную
эффективность разделения последовательностей с различными
видами перестройки только по их частотно-временным струк-
Рис. 4.6.6. Зависимости для характеристик разделения последова-
тельностей
323
турным свойствам. Их анализ показывает, что обеспечивается
достаточно высокая достоверность разделения последовательно-
стей по их структуре в отсутствие перестройки периода
(к^1;3): Pn>0,75, Np<0,2 при L<4. Для последовательнос-
тей с быстрой перестройкой периода (к = 2;4) с увеличением L
достоверность обработки естественнььм образом резко падает и
реально можно говорить о возможности разделения с некоторой
достоверностью не более, чем двух последовательностей. При од-
новременном поступлении на вход алгоритма четырех последо-
вательностей со всеми возможными видами перестройки вели-
чина Р составила значения 0,60...0,71 при Np =0,53 . Очевидно,
что в реальных условиях описываемая ситуация почти не возника-
ет и всегда имеется различие излучаемых сигналов по полосе зани-
маемых частот, направлению прихода и другим параметрам. В ка-
честве примера на рис. 4.6.6 штриховыми линиями показаны соот-
ветствующие зависимости для случая, когда направления прихода
сигналов последовательностей распределены случайным образом в
секторе углов размсрохм 6оа, где аа — ошибка измерения угла при-
хода, а полоса частот для выделяемой области пространства наблю-
дений определяется величиной 6Afm. Получаемые при этом харак-
теристики обработки свидетельствуют о резком повышении досто-
верности при наличии возможности предварительного разделения
потока в ходе сортировки. Еще более высокую достоверность мож-
но получить, если расширить перечень параметров, используемых
при завязке и формировании ДСС по результатам фильтрации, вклю-
чив в него, в частности, угловые координаты ИРИ.
Распознавание типов ИРИ в ходе вторичной обработки. При
реализации комбинированного подхода в рамках общего алго-
ритма ВО (рис. 4.6.2) выделяется процедура распознавания типа
ИРИ по оцененным значениям вторичных параметров, сгруппи-
рованным в соответствующий дескриптор. Конкретно вектор на-
блюдаемых ВП может быть сформирован, например, в виде
Z = (FH,TAYH,TH, AH.UH,KH)T , где компонентами выступают оценен-
ные в ходе вторичной обработки параметры последовательностей
(частота, длительность, период, направление, амплитуда, режим
излучения). Подробное рассмотрение алгоритмов распознавания
типов РЛС по измеренным параметрам излучаемых ими импуль-
сных последовательностей проведено в [97]. Наиболее информатив-
ными в этом плане являются параметры F11,TAYi1,T11,k1! . Параметр
Ан эффективно позволяет селектировать мешающие ИРИ, находя-
щиеся вне рабочего сектора РС. Параметр UH позволяет в совокуп-
ности с результатами распознавания типа по набору F.pTAY.pT.pK,,
практически достоверно определять принадлежность выделенной
последовательности главному или боковому излучению.
324
Для проведения синтеза алгоритмов распознавания типов РЛС
(или любого другого класса РЭС) задается перечень типов, которые
могут находиться в зоне ответственности системы {Н1, i — 1, LT}. Для
них считаются известными диапазоны возможных значений (то-
чечные значения) параметров радиоизлучений — компонент
N-мерного вектора Z, используемых в качестве признаков распоз-
навания, а также априорные вероятности появления излучений этих
типов в пределах цикла анализа:
Hs: Qj’’ : [Z^’^Zj20], ] = Щ P.pr(i), 1 = 1X7-
Диапазоны значений параметров в общем случае являются
разрывными и комбинируются в зависимости от реализуемого
режима излучения РЭС. Однако эта особенность не является прин-
ципиальной и с целью упрощения дальнейшего изложения ее
можно не учитывать. В случае, когда относительно параметров
радиоизлучений имеется информация только о диапазонах воз-
можных значений, естественно принять допущение о равноверо-
ятном виде их законов распределения внутри диапазонов, границы
которых дополнительно раздвигаются по отношению к исходным
на величину абсолютной погрешности измерения параметров. При
этом условное распределение для каждого i-ого типа имеет вид
W(Z/HJ =
О,
Zg Q'N),
где Q’NI — область значений ВП, определяемая как
QJNj =О<°х...хО^; AZ'1’= г'20-^И), j = l,N.
Соответственно, при известных априорных вероятностях по-
явления радиоизлучений типов может оцениваться апостериор-
ная вероятность каждого типа для полученного в ходе ВО век-
тора признаков распознавания Z. Для этого предварительно сле-
дует провести просмотр базы данных о типах РЭС и выявление
списка конкурирующих типов JT ={Н^...H]r :Zg p = l,r}.
После этого рассчитываются апостериорные вероятности
Pup,(ip) = Papr(i,1)W(Z/H.i)/£PS|,r(ip)W(Z/Hip)
р-1
и принимаются решения в соответствии с выбранным критерием.
Один из возможных вариантов реализации такого алгоритма осно-
ван па предварительном задании градаций (стробов) на осях значе-
ний параметров, используемых в качестве признаков распознава-
ния. Границы градаций определяются либо по точкам пересечения
диапазонов возможных значений компонент Z разных типов ИРИ,
либо путем выделения на осях значений признаков элементарных
325
интервалов одинаковой длины. Все это позволяет заранее рассчи-
тать вероятности попадания наблюдений ВП типа в области, фор-
мируемые при задании этих градаций
N ____
P£=v£’/n^4 Hlp6J?',ne=l,Re,
J=1
где V£> — объем заранее выделенной области в N-мерном призна-
ковом пространстве отвечающей определенной комбинации
градаций; — список Гпг типов ИРИ, попадающих в область по
значениям параметров своих радиоизлучений. Соответствующим
образом вычисляется и апостериорная вероятность Panp*s(ip) попада-
ния типа в эту область. Таким образом, можно сформировать таб-
лицу данных: «градации-объекты-вероятность». Далее, опираясь
на используемый критерий принятия решений, формируется алго-
ритм распознавания, определяющий правило определения типа ИРИ
при попадании вектора Z в область . В качестве такого крите-
рия можно использовать критерий максимума апостериорной ве-
роятности (максимума апостериорной вероятности среди приори-
тетного списка объектов). Кроме того, заслуживает внимания кри-
терий, реализующий рандомизированный выбор объекта в соответ-
ствии с весами, определенными апостериорными вероятностями по-
падания объектов в данную область, либо путем розыгрыша с оди-
наковой для всех номеров списка вероятностью РГд = 1 /гп?. При
оценке характеристик качества распознавания для этих критериев
рассчитывается матрица перепутывания типов. Для РП, реализую-
щего критерий максимума апостериорной вероятности, вероятность
принятия i-ro типа за k-ый описывается соотношением
1, к = argmaxPa7,(ip);
О, к * argmaxP”p’,(ip)-
Для РП с рандомизацией эта вероятность определяется сле-
дующим образом:
1
pik = £P"‘^i?=P?A(k); •
Аналогичным образом рассчитывается суммарная вероятность
ошибочного определения всех других типов как i-ый.
Таким образом, нами рассмотрены примеры построения основ-
ных алгоритмов, используемых в ходе вторичной обработки. При
объединении их в общий алгоритм на основе рассмотренной в п. 2.3
схемы имитационного моделирования процесса информационного
взаимодействия PC могут быть выявлены конкретные характерис-
тики, количественно определяющие возможности сторон в ходе ИК.
= Ik
326
В качестве примера рассмотрим конфликтное информационное вза-
имодействие РЛС обнаружения воздушной цели и РЭК, на кото-
рый возлагается задача самоприкрытия цели путем постановки
помех в момент ее облучения главным лучом ДНА РЛС [17, 50]. От
РС РТР, входящей в состав РЭК, требуется выделить радиоизлуче-
ние РЛС, то есть по результатам ПО и ВО выявить наличие им-
пульсной последовательности, определить ее параметры и тип ис-
точника. С учетом возможности смены параметров и режимов под
воздействием погдех выявление объекта должно проводиться по
боковому излучению и носить упреждающий характер по отноше-
нию к моменту облучения цели главным лучом ДНА РЛС в преде-
лах каждого периода облучения (см. рис. 4.6.7). При этом общую
эффективность выполнения этапов первичной и вторичной обра-
ботки в РС можно оцепить вероятностью упреждающего выявле-
ния радиоизлучения, записываемой следующим образом:
р„„ = Р. J Ч (^[1 - j Чбл (t }d t ]dt,
о о
где Рв — вероятность правильного определения объекта; о\(т) —
плотность вероятности времени выдачи целеуказания СРПД по
результатм РТР; conf>n(t) — плотность вероятности момента облу-
чения прикрываемой цели. Задавая coo61(t) = 1/Тобл, 0<t<To6jl,
где Тобп — период облучения, получим
Ряп =р. J <о.(т)(1-т/Тобл)ат = Р,(1-Т./То6,,),
о
где Тв = Jtcdb(t)cIt — среднее время разведки. Конечное выраже-
о
ние записано в предположении, что FB(To6n) = FB(oo) , где
t
FK(t) = JcDB(T)dT — вероятность того, что время разведки не пре-
0
высит t. Таким образом, из представленных соотношений следу-
MPBFB(t)
Рис. 4.6.7. Временная диаграмма конфликтного информационного
взаимодействия
327
ет, что при полномасштабном моделировании информационного
конфликта качество информационного обеспечения определяет-
ся зависимостью величины PBFB(t) от времени t = tft, затрачивае-
мого на проведение анализа входного потока сигналов с целью
выделения импульсных последовательностей бокового излучения
различных РЛС. Типовой вид подобной зависимости, получен-
ной в ходе имитационного моделирования алгоритма вторичной
обработки для обобщенной модели радиоэлектронной обстанов-
ки, описанной в п. 2.3.2, и доступных технических характерис-
тик ППОС РС, показан на рис. 4.6.7. Зависимость оценивалась
при уровне эквивалентной чувствительности приемника ППОС
Рэ = 1010 Вт в виде гистограммы, характеризующей распределе-
ние времени, затрачиваемого на проведение анализа с правиль-
ным исходом.
4.6.2. Определение координат источников радиоизлучения
в ходе третичной обработки информации
При обработке информации в однопозиционных РС может ре-
шаться задача определения координат ИРИ, что позволяет обеспе-
чить их привязку к групповому объекту или сопровождение в про-
странстве угловых координат одного многофункционального объек-
та, имеющего несколько контрастных режимов работы. Определе-
ние координат ИРИ в данном случае проводится в основном
угломерным способом при перемещении (смене позиций) РС и тре-
бует значительного времени. При этом осуществляется третичная
обработка информации, получаемой в последовательности органи-
зованных циклов анализа по результатам первичной и вторичной
обработки. Общая постановка задачи ТО, опирающаяся на опреде-
ление апостериорных вероятностных характеристик объектов ин-
формационного взаимодействия по результатам первичных и вто-
ричных наблюдений, дана в и. 2.2. Реализация квазиоптималыюго
подхода для этого этапа обработки информации в РС приводит к
возможности использования моделей наблюдений, которые факти-
чески повторяют вид моделей, используемых для синтеза алгорит-
мов этапа вторичной обработки. Поэтому можно считать, что изло-
женные ранее подходы и принципы построения алгоритмов обра-
ботки информации в полной мере подходят для обоснования конк-
ретных алгоритмов ТО. Здесь также, в том или ином виде, должны
быть реализованы процедуры «завязки», сопровождения и оцени-
вания параметров последовательностей наблюдений, а также при-
нятия решений при выборе наиболее правдоподобных гипотез. При
этом также следует учесть возможность предварительного разделе-
ния поступающего на вход алгоритма ТО потока дескрипторов вто-
ричных параметров. Весьма удобно проводить такое разделение,
328
например, по принадлежности
наблюдений ВП различным типам
ИРИ, если обеспечивается их дос-
таточная информативность как
признаков распознавания типов.
Рассмотрим задачу оценки
координат неподвижных одно-
типных ИРИ, равномерно рас-
полагающихся в пространствен-
ной зоне ответственности Qxy,
имеющей вид прямоугольника:
Рис. 4.6.8, Геометрия переме-
щения PC и области расположе-
ния ИРИ
Qxy-QxxQy; : [Xmin, Xmax];
QY : tYmin’ Ymaxb KflK ЭТ0 П0Ка3а“
но на рис. 4.6.8. В области QXY
могут находится L однотипных
ИРИ, излучающих в общем диа-
пазоне частот : [F , . F . + AFl.
г u min’ min J
Состояние каждого ИРИ будем
описывать вектором 1р = (Fp,Xp, Yp)T , где р — индекс цикла ана-
лиза входного поля радиосигналов, проводимого в одной из сме-
няемых позиций П PC в процессе перемещения. Координаты
позиций известны 11р : (Хр°\ Yp0)), р - 1,Р . Уравнение состояний
для Хр каждого ИРИ записывается в виде
^*p+i=^p} (4.6.11)
Пусть наблюдаемыми параметрами являются: частота FHp, из-
меряемая по отношению к истинному значению Fp с дисперсией
ошибки Ор, и направление прихода в азимутальной плоскости
(пеленг) Анр , измеряемое по отношению к истинному направле-
нию Ар с дисперсией ошибки сТд . Они образуют вектор полезно-
го наблюдения Zp0) - (FHp,AJip)T , компонентами которого являют-
ся оцененные в данной позиции PC значения параметров радио-
излучения источника
z;0’ = нр(хр)+vp, M[vpvp' ] = rp = [°* с
L V СТ
ЖИ-Р 0
|Л >’ [о aretg|(Y,-Y;”)/(X,-X'”)J
Решение задачи местоопределения при многократном пелен-
говании в условиях отсутствия мешающих наблюдений, то есть
однозначного разделения источников по параметрам радиоизлу-
чений, получено в ряде известных работ [77, 83]. Так при пелен-
говании из двух точек (при расположении начала координат на
329
рис. 4.6.8 между П1 и П2) оценка координат по двум измерени-
ям пеленга Аи1, Аи2 дается соотношением
X = -0,5dx sin(A„j + AH2)/sin(AH1 -А„2),
Y = dxsinAH1sinA„2/sin(AIll -Аи2), (4.6.12)
где dx — расстояние между точками пеленгования (база). При этом
круговая ошибка местоопределения и матрица ковариации оши-
бок определения координат записываются следующим образом:
°г ” ад cosec + R2 > (4.6.13)
РХУ =—Цт|Ы|’ ГИ =с> г12 = г21 =Ь, г,, =а;
ас — о 11
2 2 2
а = £cos2Ani / 0IR2, b = £cosAni sinAlti / о* R?, с = £sin2 AHi /и2 R2,
i=l i=l i=l
где R* o — расстояния от точек расположения РС до ИРИ; у —
угол между направлениями ИРИ —позиции РС. Круговая ошиб-
ка аг = y/Gx + Gy в (4.6.13) имеет минимальное значение
Grmin =0,91dxoA в ситуации, когда ИРИ находится на линии,
перпендикулярной к линии базы, на расстоянии Ro = O,365dx.
Для случая, когда количество снимаемых с различных позиций
пеленгов больше двух, выражения для оценок координат приве-
дены в [83]. Отметим, что элементы матрицы ковариации в
(4.6.13), определяющие форму и размеры эллипса рассеяния
ошибок, зависят от координат пеленгуемого источника.
Другим альтернативным подходом к решению задачи являет-
ся использование методов рекуррентной фильтрации. Их досто-
инством является то, что они позволяют учесть аномальные ошиб-
ки измерения параметров, а также влияние мешающих наблю-
дений при отсутствии возможности однозначного разделения ИРИ
по этим параметрам. Рассмотрим типовые примеры решения за-
дачи в этой постановке.
В первом случае будем считать, что каждый из сопровождае-
мых в пространстве наблюдений ИРИ полностью разделяется со
всеми остальными по совокупности наблюдаемых вторичных па-
раметров, однако имеются аномальные ошибки их измерения. В
этом случае может быть использована предложенная в [162] мо-
дель наблюдений в априорном динамическом стробе селекции.
Для нее уравнение наблюдений каждого ИРИ записывается сле-
дующим образом:
Zp =ap[Hp(lp) + Vp] + bp(Z„!l+Wp)+cpZp/p.1, (4.6.14)
330
где Zop = Zp/0 — центр априорного ДСС, в пределах которого рав-
новероятно распределены аномальные ошибки измерения парамет-
ров и который в данном случае не зависит от реализации. Границы
априорного ДСС по отношению к центру определяются возможны-
ми диапазонами значений наблюдаемых параметров (полоса час-
тот, сектор углов), в пределах которых проводится их измерение.
Как видно, (4.6.14) является частным случаем предложенного в п.
4.1.1 уравнения наблюдений (4.1.5) и все остальные обозначения
по смыслу здесь совпадают с ранее введенными. Вероятности полу-
чения полезного, ложного и пропуска наблюдения на каждом шаге
считаются известными и обозначаются рн, рь, рс. Используя рас-
смотренные выше подходы для синтеза алгоритмов в виде квази-
линейного или расширенного фильтра, выражение для оценки век-
тора состояний можно получить [162] в такой форме:
А.р+1/р — Xp/p-i + r|pWP(Zp — Zp/p—1), (4.6.15)
Wp=VpU;J, Vp = paPP/P iAHp;
U p=p„(AHpPp/p-iAHj + Rp) + pbSp +
+-^^[(Hp(Xp/p.])-Zop)(Hp(Xp/p.1)-Zop)1];
Pa +Pb
Pри/р = Pp/p-i — T|pWpVp, T|p = 1 — cp;
Zp/p-] =[pnHp(iP/P_])4-pbZop]/(pa +pb),
где ДНр = ДНр(Хр/р-1) — матрица частных производных опера-
тора Нр(Хр) в точке Xp/p-i. Еще один из возможных вариантов
[162] проведения оценок в указанных условиях основан на ис-
пользовании полностью линеаризованного фильтра, при синтезе
которого используется приближение
Нр(Хр) - Нр(М[Хр]) + ДНр(М[Хр])(Хр -М[Хр]).
Полученные алгоритмы анализировались методом имитаци-
онного моделирования. При этом начальная оценка задавалась
вектором Х1/о =(FO,XC,YC)T, где Fo, Хр, Yc — центральные значе-
ния диапазонов значений соответствующих параметров. Началь-
ная матрица Р1/о задавалась исходя из размеров области QXY и
возможного диапазона аномальных ошибок определения часто-
ты относительно Fo. При этом начальные дисперсии координат
определялись как:ст2Х0 =(Xmnx -ХП1|П)2/12; ст20 =(Ymax - Yrain)2/12.
Центр априорного ДСС устанавливался следующим образом:
Zup =(F0,A0p)l\ АОр = arctg[(Yc -Y<°’)/(X. -X<p°’)L а его границы
определялись диапазоном частот и сектором углов, обеспечиваю-
331
щим охват области расположения ИРИ. На рис. 4.6.9 приведены
зависимости для величины отношения pXY = (оХр + OypV(axo +c7yo)
обобщенной дисперсии оценки координат к величине априорной
обобщенной дисперсии распределения координат ИРИ в зоне ответ-
ственности PC. Зависимость 1 характеризует работу линеаризован-
ного фильтра; зависимость 2 — расширенного фильтра; зависи-
мость 3 — теоретически рассчитанную дисперсию ошибки для ли-
неаризованного фильтра. Геометрия перемещения PC при полу-
чении зависимостей определялась условиями Хр01 - dx(p -1),
YpO)=0, р = 1,5, dx = (Xmax-Xmin)/8. Анализ приведенных зави-
симостей показывает, что при малых pft характеристики линеа-
ризованного и расширенного фильтров практически совпадают,
тогда как при ра —> 1 последний обеспечивает более высокую точ-
ность оценивания. Отклонение характеристик линеаризованно-
го фильтра от теоретических объясняется погрешностями ли-
нейного приближения нелинейного оператора связи при выбран-
ных размерах области Оху. Важным свойством фильтров в апри-
орных ДСС является отсутствие срыва при сопровождении пос-
ледовательности наблюдений.
Более сложной является ситуация, когда отсутствует возмож-
ность однозначного разделения ИРИ по результатам оценки вто-
ричных параметров и возникает взаимное мешающее влияние
различных источников. В этом случае должна быть реализована
традиционная схема организации процесса обработки. Для про-
цедуры формирования начальных гипотез могут быть предложе-
ны различные варианты. Один из них предполагает проведение
предварительной оценки координат и частоты по наблюдениям,
полученным в двух соседних позициях и совпадающим по иден-
Рис. 4.6.9. Зависимости для от-
носительной дисперсии оценки
координат
тификационному параметру,
например, по той же частоте.
Для определения начальных
оценок и матрицы ковариации
ошибок оценок координат ис-
пользуются соотношения типа
(4.6.12), (4.6.13), а начальные
оценки частоты определяются
как среднее арифметическое
полученных наблюдений с со-
ответствующей дисперсией.
Другой вариант предполагает
реализацию процедуры форми-
рования начальных гипотез,
основанную на предваритель-
332
ном разбиении общей области ответственности на элементарные
области размером ДххДу , в каждой из которых возможно появ-
ление не более одного ИРИ данного типа. При таком разбиении
для каждой элементарной области задается центр (см, рис. 4.6.8)
с координатами (X^,Ye0))r, j = 1,NXY , который определяет исход-
ную начальную оценку. Размеры элементарной области определя-
ют элементы матрицы ковариации начальной оценки в задаче филь-
трации пхо = Дх/12, ауо =Ду/12. Начиная с первой позиции, по
каждому полученному наблюдению формируются начальные гипо-
тезы. При этом оценки частоты устанавливаются по значени-
ям FH, полученным в данном цикле анализа, а начальные оценки
координат (Х^рДро)7, i = l,NA<NXY пересчитываются из цент-
ров областей (Х(с , Y^)’1 , пересекаемых полученными пеленга-
ми, на основе уравнений для расширенного или линеаризован-
ного фильтра. По мере формирования начальных гипотез разво-
рачивается процесс сопровождения ИРИ в апостериорных ДСС с
центрами, определяемыми текущими оценками
Zp/p-i = i = 1,NA . Уравнения для оценок полностью
идентичны уравнениям для расширенного фильтра, описывае-
мого (4.2.18). Размеры ДСС целесообразно выбирать исходя из
элементов текущей матрицы ковариации ошибок прогноза по-
лезного наблюдения = ДН^Рр/р ДАНр0)7 + Rp, что предпола-
гает постепенное сужение формируемой области. При этом воз-
никает опасность срыва сопровождения, которая может быть ми-
нимизирована за счет адекватного выбора вероятностей получе-
ния полезной и ложной информации в процессе формирования
результирующих наблюдений. Процедура принятия окончатель-
ных решений при выборе гипотез относительно нахождения ИРИ
в той или иной элементарной зоне может осуществляться в про-
стейшем случае на основе подсчета числа непропусков за Р ша-
гов сопровождения или числа пропусков «подряд». Более слож-
ные решающие правила предполагают использование соотноше-
ний для функционалов правдоподобия с участием непрерывноз-
начных наблюдений.
Эффективность решения задачи ТО с оцениванием их коорди-
нат во многом зависит от селекционных возможностей парамет-
ров, используемых при сопровождении гипотетических последо-
вательностей в ДСС и окончательном разделении ИРИ в про-
странстве наблюдений. В данном примере она существенно зави-
сит от частотного режима излучения сигналов источниками.
Можно рассмотреть две основные ситуации. Для первой из них
отсутствует перестройка центральной частоты радиоизлучения,
которая измеряется как вторичный параметр в каждом цикле
анализа. Такая ситуация описывается приведенным выше урав-
333
нением состояний (4.6.11). При этом дисперсия характеризу-
ет ошибку измерения центральной частоты импульсной после-
довательности в каждом цикле анализа, которая может излу-
чаться либо в одночастотном режиме, либо в режиме БПЧ. Дру-
гая ситуация реализует перестройку центральной частоты (од-
ночастотного излучения или излучения с быстрой перестройкой)
от одного цикла анализа к другому. При этом информативность
данного параметра для разделения источников в пространстве
наблюдений резко падает.
Исследование характеристик алгоритма ТО с оценкой коор-
динат в данной постановке проведено в [127]. Его результаты
представлены на рис. 4.6.10. Здесь (рис. 4.6.10а) показаны зави-
симости величины pXY = (сХ1> +ауо) ♦ характеризующей
относительную погрешность местоопределения, и величины Р ,
характеризующей вероятность бессрывного сопровождения ги-
потез, от величины пА. На рис. 4.6.106 даны зависимости вели-
чины Np, относительного среднего количества выделяемых лож-
ных ИРИ, от количества источников L, излучающих в общей
полосе частот. Эти зависимости приводятся для различных зна-
чений относительной погрешности определения частоты при зна-
чениях вероятности получения полезного наблюдения по резуль-
татам вторичной обработки в каждом цикле Ро >0,9. Зависимо-
сти для pXY на рис 4.6.10а приводятся с указанием вероятностей
получения полезных и ложных наблюдений, реализуемых для
различных значений L и <jf/AF. Кроме того, на рис. 4.6.10а пун-
ктирной линией представлена зависимость Р для расширенно-
го калмановского фильтра, рассчитываемого без учета вероятно-
стных характеристик появления ложных наблюдений, которая
свидетельствует о том, что в этом случае достоверность обработ-
ки снижается. Штрих-пунктирные зависимости на обоих рисун-
Рис. 4.6.10. Характеристики алгоритма третичной обработки с оцен-
кой координат ИРИ
334
ках соответствуют ситуации, когда в источниках реализуется реф-
лексивная перестройка частоты от цикла к циклу, и в этом слу-
чае она как параметр селекции и разделения не информативна.
При моделировании задавался равновероятный закон распреде-
ления ИРИ в областях QXY и QF. Количество шагов в ходе сопро-
вождения, соответствующее сменяемым позициям РС, устанав-
ливалось равным 8. Результирующая база при использовании
всех позиций определялась пройденным РС расстоянием от X in
до Х1пах. Представленные результаты свидетельствуют о повыше-
нии точности местоопределения при разбиении общей зоны на эле-
ментарные области за счет снижения априорной неопределенности
для каждого из используемых алгоритмов фильтрации. Одновре-
менно следует отметить возможность получения в ходе обработки
большого количества ложных источников при наличии перестрой-
ки частоты в общем для всех ИРИ диапазоне, если не использовать
дополнительные параметры селекции и идентификации.
4.7. Вторичная и третичная обработка информации
в миогопозиционных системах*
Важное направление совершенствования информационного
обеспечения управления в гражданской и военной сферах связа-
но с созданием и использованием многопозиционных радиоэлек-
тронных систем (МРС) сбора и обработки информации с целью
оперативного и достоверного извлечения данных о состоянии
радиоизлучающих объектов внешней среды и происходящих в
них изменениях. К числу подобных МРС относятся системы пас-
сивной радиолокации и радионавигации, системы радиэлектрон-
ной разведки, системы мониторинга окружающей среды, охран-
ные системы различного пазначения [126]. Их главной особен-
ностью является возможность измерения широкого перечня час-
тотно-временных и пространственных параметров ИРИ и, прежде
всего, высокоточного определения координат па основе объеди-
нения информации, добываемой в пространственно разнесенных
пунктах системы. Условия функционирования МРС определя-
ются различными факторами, из которых наиболее значимые
связаны с наличием сложной, насыщенной разнородными ис-
точниками радиоэлектронной обстановки. Сигналы на входе МРС
могут быть различных видов: импульсные с быстрой или про-
граммной перестройкой частоты и периода следования; непре-
рывные и квазинепрерывные со сложными законами модуляции;
хаотические импульсные и шумовые помехи естественного и
* При подготовке материалов настоящего параграфа использованы
результаты машинных экспериментов, полученные Э. А. Кирсановым.
335
искусственного происхождения. С учетом этого общая целесооб-
разность использования МРС определяется возможностями по-
вышения качества информационного обеспечения на основе:
получения высокоточных данных об ИРИ и, прежде всего, о
координатах как информативных и инвариантных к примене-
нию мер помехозащиты и контрпротиводействия признаках их
выявления;
комплексировапия данных по разнородным ИРИ, функцио-
нирующим в разных диапазонах частот, для идентификации груп-
повых объектов информационного взаимодействия.
При измерении координат ИРИ в МРС могут быть использова-
ны различные способы. Традиционным является угломерный (три-
ангуляционный) способ [77] и его многочисленные модификации.
Его реализация в рамках МРС принципиально не отличается от
рассмотренной выше для одной перемещающейся РС. При исполь-
зовании одновременно нескольких позиций приема сигналов есте-
ственно повышается точность и достоверность определения коор-
динат ИРИ за счет возникновения при этом большей эквивалент-
ной базы пеленгования и возможности работы в синхронном режи-
ме. Однако, и в рамках такой МРС, как показывают известные
оценки, не удается достигнуть высокой точности местоопределе-
ния при достижимых ошибках определения угловых координат. В
связи с этим, требование высокоточного измерения координат дик-
тует [77, 126] применение в МРС разностно-дальномерного и раз-
ностно-доплеровского способов местоопределения. Реализация этих
способов связана с необходимостью осуществления синхронного
приема сигналов каждого ИРИ по боковому излучению разнесен-
ными в пространстве первичными датчиками, обладающими высо-
ким уровнем чувствительности. Использование высокочувствитель-
ных приемников приводит к увеличению интенсивности и степени
перемешивания входных потоков принимаемых сигналов и помех,
порождаемых различными ИРИ. Поэтому проблема «разделения»,
проявляющаяся в невозможности однозначного восприятия пер-
вичной измерительной информации по каждому источнику в от-
дельности, в данном случае еще больше усугубляется. Важно так-
же отметить, что при увеличении числа разнесенных в простран-
стве элементов МРС относительно маловероятно одновременное по-
лучение полезной измерительной информации от всех первичных
датчиков и, наоборот, типично получение противоречивых, т.е. не
отождествляемых по используемым признакам данных. Можно
сделать вывод, что при функционировании МРС действуют еще
более сложные и неоднозначные закономерности, связывающие вне-
шние условия, технические характеристики и результирующую эф-
фективность системы.
336
При реализации базового варианта разностно-дальномерного
способа (РДС) местоопределения минимально необходимая струк-
тура МРС имеет вид [77, 126], представленный на рис. 4.7.1.
Организационно МРС состоит из трех приемных пунктов (ПП) и
вынесенного или совмещенного с центральным ПП пункта сбора
и обработки информации (ПСОИ), связанных радиолиниями пе-
редачи данных и команд управления. Основными являются под-
системы первичной и вторичной обработки сигналов и информа-
ции, решающие традиционные задачи, а также подсистема тре-
тичной обработки информации, отвечающая в данном случае за
комплексирование данных, получаемых от разнородных ИРИ.
Принципы местоопределения одиночного источника с коор-
динатами (X,Y) на основе РДС иллюстрируются рис. 4.7.1 и под-
робно описаны в [77]. Местоположение ИРИ определяется на
основе измерения разностей дальностей или эквивалентных им
Рис. 4.7.1. Минимально необходимая структура МРС
337
разностей времени прихода излученного сигнала на приемные
пункты МРС как точка пересечения гиперболических линий по-
ложения равной разности
5t(12) = [7(Х-Х'О))2 +(Y-Y'0))2 -VX2 + Y2 + rI2]/с = const;
8t'32) =[J(X-X'0))2+(Y-Y‘0))2 -Vx2 + Y2 + r32]/c = const; (4.7.1),
r12 = ;(Х<0,)2+(^0’)2; r32 = 7(xd2+(yd2.
где c — скорость света. При этом обязательным является наличие
информации о собственных координатах приемных пунктов (для
(4.7.1) центральный пункт помещен в начало координат
Х^0’= О, У20) = 0 ). При однократном измерении задержек
5t(12). 5t(32) одиночного ИРИ в [77] получены выражения для оце-
нок его координат как решения обратных уравнений при г12 = г30
X = a1U + p1, Y = a2U + P2, (4’7-2)
ai =[81(Y<0) - Ytw)-(8, -82)(Y‘0) - Y<o))]/M;
a2 = [-8j (X<°> - X‘o>) + (8t - 82)(X2O) - X‘o,)]/M;
p, ={(Y«” - Y;”)^ -S2)2 -[(X30))2 _(X’°’)2]-I(Yr)2-(Yf0>)2]]-
-(Y30) - ^(0,)[82 -[(X(20’)2 -(X(10,)2]-[(Y'°’)2 -(Y,<0))2]]}/2M;
p2 = {(X<°> -ХГ)[8М(ХГ)2 -(xr”)2]-[(YD2 - (YD2]] -
-(X201 -X‘°’)[(8, -82)2 -[(X30>)2 -(X‘0,)2]-[(YD2 -(Yf»)2]]}/2M;
M = [(X«” - X'0,)(Y^ - Y;o)) -(Y<0> - Y‘0))(X<0> -X(t0))];
8j = 8t(12,c-7(x;°’ -X(2O>)2 +(Y1,n) - Y'01)2;
S2 = 8t<32)c - V(X^-X^)2+(Y<0,-Y<0’)2.
Величина U в (4.7.2), имеющая размерность дальности, явля-
ется корнем квадратного уравнения и определяется соотношением
и = (1 -а2 - а2)-1 [оч(Р, - Xj0’) + а2(р2 - Y,0’)] ±
(1 - а2 - а2)4 {[а/Р, - Х<0)) + а2(Р2 - Y<°>)] + (1 - а? - а|)х (4.7.3)
х[(р2-ХГ)2 +(р2-Y<°>)2]}.
При конфигурации зоны ответственности МРС, показанной на
рис. 4.7.1, в (4.7.3) используется знак «+».
Круговая ошибка определения координат при однократном
измерении задержек определяется соотношением
cosec у^ cosec2 (0,5^) + cosec2 (0,5у2), (4.7.4)
где as — ошибка измерения разности времени прихода сигнала;
у, V2 — углы, показанные на рис. 4.7.1. Минимальная ошиб-
338
ка достигается при = у2 =110°, у = +\у2) и ее значение
равно armin =0,92а8с [77].
Разностно-доплеровский способ местоопределения также ос-
новывается на организации приема излучаемого источником сиг-
нала в нескольких точках. Однако для его реализации обяза-
тельно наличие относительного перемещения ИРИ и приемных
пунктов, при котором в парах 1—2, 3—2, 1—3 измеряются раз-
ности частот (доплеровские сдвиги), пропорциональные разно-
сти относительных радиальных скоростей ИРИ в направлении
на приемные пункты. Эффективное использование разностно-доп-
леровского способа обеспечивается при высоких скоростях пере-
мещения ИРИ и/или носителей приемных пунктов и наличии
возможности длительного накопления сигналов с целью получе-
ния достаточной точности измерения частотных сдвигов. Поэто-
му его применение наиболее целесообразно для местоопределе-
ния источников с узкополосным непрерывным радиоизлучени-
ем. Формульные соотношения, описывающие характеристики раз-
ностно-доплеровского способа, приведены в [77].
Представленные выше выражения определяют решение зада-
чи местоопределения при однократных наблюдениях в условиях
раздельного восприятия ИРИ.
В случае, если эти условия не выполняются, возникают ошиб-
ки при отождествлении на ПСОИ данных, обеспечивающих оп-
ределение взаимных задержек — разностей времени прихода сиг-
нала на ПП, а также возможные ошибки другого характера. При
этом решить задачу местоопределения ИРИ при однократных
наблюдениях нс удается. Иллюстрация этого случая приведена
на рис. 4.7.1, где наличие двух источников, не разделяемых по
первичным параметров сигналов, приводит к статистической нео-
пределенности, проявляющейся в возникновении ложной засеч-
ки координат реально несуществующего ИРИ. В связи с этим,
требуется рассмотреть возможности вторичной обработки инфор-
мации в интересах повышения эффективности (точности и дос-
товерности) местоопределения в реальных условиях наличия на
входе приемных пунктов МРС насыщенной радиоэлектронной
обстановки, а также других факторов, приводящих к появле-
нию ложных наблюдений и аномальных ошибок.
4.7.1. Вторичная обработка информации
для источников импульсных сигналов
Источниками импульсных сигналов могут являться средства
радиолокации и радиосвязи различного назначения. Характер-
ным для условий их приема является то, что разные ИРИ излу-
чают сигналы малой длительности в полосе : [Flnln, Fmox ] с бы-
339
строй (программной) перестройкой частоты. Поэтому прием
таких сигналов должен осуществляться путем организации син-
хронных для всех приемных пунктов циклов анализа в час-
тотных поддиапазонах cofp:[fp,fp + At] cQF и интервалах време-
ни (0lp :[tp,tp +tj, р = 0,Р-1 (f0 =Fmin, t0 =0).
Первичная обработка сигналов в каждом из приемных пунк-
тов может выполняться в соответствии с функциональными схе-
мами, представленными на рис. 4.4.1 (п. 4.4) и соответствующи-
ми вариантам децентрализованной или централизованной обра-
ботки. В перечень измеряемых и передаваемых на ПСОИ пара-
метров импульсных сигналов обычно включаются [126] частота
fH, время прихода tH, длительность тн, пеленг ан и др. Параметры
f„, ти, ап используются для селекции и отождествления данных
на ПСОИ. При этом измерение ап фактически дает грубую оцен-
ку координат, которая позволяет определить принадлежность
источника пространственной зоне ответственности МРС. Пара-
метр tH, измеряемый по излученному некоторым ИРИ сигналу
во всех трех приемных пунктах, используется для точного опре-
деления координат на основе РДС, Если пеленг не измеряется,
то для пространственной селекции можно также использовать
значения взаимных задержек времени прихода сигнала на при-
емные пункты. Для этого осуществляется преобразование прямоу-
гольной области в пространстве координат (рис. 4.7.1) в область в
пространстве взаимных задержек 3t<12), 5t(32), имеющую более слож-
ную, но легко определяемую конфигурацию [127]. Таким образом,
в состав компонент результирующего вектора наблюдений, подава-
емого на последующую вторичную обработку, обычно входят пара-
метры z = (fy}• Основными характе-
ристиками ПО являются вероятность непропуска р0 полезных
наблюдений по результатам приема сигналов ИРИ и селекции
первичных наблюдений в каждом приемном пункте, а также сред-
неквадратичные ошибки измерения параметров af, at, и пр.
Цель вторичной обработки состоит в получении оценок пара-
метров импульсных последовательностей сигналов ИРИ, а так-
же высокоточных оценок их координат (Х,У)Т. При синтезе ал-
горитма ВО, как и ранее, должны учитываться неизбежные по-
тери полезной информации, возникающие в ходе обнаружения
и измерения параметров сигналов, селекции и отождествлении
первичной измерительной информации при формировании ре-
зультирующего вектора наблюдений в МРС. Общая структурная
схема алгоритма ВО в данном случае полностью совпадает с при-
веденной в п. 4.1 (рис. 4.1.1) схемой, полученной при функцио-
нальной декомпозиции этого этапа обработки. В нем должны
быть реализованы:
340
процедура «завязки» начальных гипотез, формирующая мно-
жество начальных оценок (засечек) координат и других пара-
метров о)х = {О'" : х{’/0, = l,Na
процедуры оценивания (фильтрации) параметров и сопровож-
дения гипотетических последовательностей наблюдений в ДСС
co<l/,t = l,2,...,i = l,Nn;
процедура определения апостериорных вероятностных харак-
теристик гипотез и принятия окончательных решений о нали-
чии источников с теми или иными параметрами структуриро-
ванных радиоизлучений.
Рассмотрим особенности реализации данной схемы обработки
применительно к решению задачи местоопределения ИРИ на
основе РДС. В качестве примера ограничимся рассмотрением
составляющей алгоритма ВО, отвечающей за оценку координат
ИРИ по результатам наблюдения только временных параметров
сигналов z = (tjf1),t^,,t(B3))T излучаемых импульсных последова-
тельностей. Для удобства будем считать, что значения ,
измеренные на ПП, сразу пересчитываются с учетом расстояний
между ПП г12, г32 в t’J* = t{Hn +r12/c, tj3) =t(H3) +r32/c. Будем счи-
тать, что частота сигналов всех ИРИ изменяется от импульса к
импульсу по псевдослучайному закону в полосе анализа cof ши-
риной Af и является сопутствующим по отношению к процессу
оценивания координат параметром, используемым для отожде-
ствления данных первичной обработки. При реализации алго-
ритма ВО следует рассмотреть два основных варианта, связан-
ных с исходным определением оцениваемого вектора состояний.
Первый из таких вариантов предполагает задание уравнения
состояний для каждой из излучаемых импульсных последова-
тельностей с включением в состав вектора состояний только вре-
uk = 8tk, k = l,2,..., (4.7.5)
где tk — время прихода сигнала на центральный (№ 2) ПП МРС;
Тк — регулярная составляющая периода следования, значение ко-
торой может находиться в диапазоне 0^ : [Tmin,Tmax] с центральным
значением То =Tmin+0,5ДТ, АТ = Tmax - Tmin; 8tk — составляющая,
описывающая быструю перестройку периода (M[5tk] = О,
MfSt^] =qk = qT = At 2/12); 8tk12>,8tk 2) — относительные задержки вре-
341
мени прихода сигналов на ПП. Тогда вектор полезного наблюдения
zk0) = (^ik»tik ’ *нк)Т описывается следующим случайным оператором:
zk0> = hkxk+vk,hk = h = M[vk] = O, M[vkvk] = Rk = J 1 1 1 1 = ООО V ° ° 1 1 1 0 0 0 0 i. 0 0 ; vk = v*. Vtk2 _vtk3 _ = 1,2,. ; (4.7.6)
o' 0 of , k
Формирование начальных гипотез в данном случае целесооб-
разно проводить путем отождествления всех принимаемых сиг-
налов по частоте* Если, например, измеренные значения
удовлетворяют условию
[|е -е| * 5rm[|e -е| * мпр -е| < м,
где 5f =nfV2af • то для уравнения (4*7.5) на основе соответству-
ющих измерений t^1?, t(H2J ,t/3J формируется начальная оценка в виде
xi/o Фхо/о* Рио — ФР0/0Ф >
f(2) °. 0 _ 2 -<
xo/o “ 5 X S « 1 * ; Я-0 = 0 ДТ2 12 0 0 2o, 0 (4.7.7)
_H* H* _ 0 2 <rt 2u,_
Процесс сопровождения гипотетических последовательностей
наблюдений на основе реализуемой рекуррентной оценки хк/к_,
осуществляется в соответствии с уже известными уравнениями
наблюдений вида
zk = Ak(hxk +vk) + Bk(^k/k_1 + wk) + C1ik/k.l,
где Ak, Bk, Ck — матрицы результатов ЧИР (Ak+ Bk 4- Ck = I).
Для определения центра и размеров ДСС используются соот-
ношения для текущей оценки и ее матрицы ошибок
zk/k-i = hxk/k~n f*zk ~bPk/k_jh л- R = |pxkij||.
Таким образом, в рамках данного варианта задания парамет-
ров состояний и наблюдений в интересах определения коорди-
нат сначала реализуется рекуррентная процедура оценивания за-
держек в процессе сопровождения гипотетической последователь-
ности с селекцией наблюдений в ДСС в соответствии с той или
иной гипотезой. После того, как такие оценки в пределах отве-
денного цикла анализа будут получены, предполагается их пере-
342
счет в координаты на основе (4.7.2). Накопление информации в
ходе процедуры фильтрации позволяет получить более точные
оценки координат по сравнению с однократными измерениями
задержек. Линейный вид операторов преобразования векторов
состояний и наблюдений позволяет использовать при проведе-
нии подобных оценок линейный или условно линейный фильт-
ры (4.2.2), (4.2.9).
Второй вариант алгоритма ВО базируется на задании вектора
состояний, непосредственно включающего в состав своих компо-
нент координаты ИРИ [127]. При этом уравнение состояний мож-
но представить в виде
(4.7.8)
где t(ku) — момент времени излучения сигнала данным ИРИ;
Xk+1 = Xk = X, Yk+1 = Yk = Y — координаты ИРИ; матрицы ф, g, а
также величина uk имеют тот же вид, что и в (4.7.5). При таком
определении вектора состояний вектор полезного наблюдения
zk0) =(tak,t,k,t1II3k))r задается с использованием нелинейного опе-
ратора
4°’ =Mxk)+vk,
hk(xk)
+ Tt(Xk, Yk) + —
с
tr + T2(Xk,Yk)
(4.7.9)
t<"> + T,(Xk,Yk) + ^
c
T1(Xk,Yk) = 7(Xk -ХГ)2 +(Yk - Yj10’)2 /с;
T2(xk, Yk) = V(Xk-X<0))2+(Yk-Yj°’)2/c;
T3(Xk,Yk) = #k -X!,01)2 +(Yk - Y<0’)2 /с.
Для формирования начальных гипотез в данном случае так-
же проводится отождествление сигналов по частоте, а затем
по измеренным значениям t(„lJ,t(u2),t(ц3? и оценкам соответствую-
щих задержек 5t^2) = t(HV - tj2), 5tJ32’ на основе соотно-
шений (4.7.2) определяются начальные оценки координат
(Хо/о, Y0/0)T . Тогда можно получить начальную оценку для
4% =С -T2(X0/0)Y0/0) и окончательно
343
х1/о=Фхо/о> Pvo =фРО/оФт+ечтет,
Х0/0 “ 4. (и) L0/0 Т Xq/0 у , Ро/о = Гц 0 Г21 0 дт2 12 0 Г12 Г13 ; (4.7.10)
0 Г22 0 Г23
_ Т0/0 _ _Г31 0 Г32 Г33_
rn
Г21
_Г31
Г12 Г13 о2 0 0 '
Г22 Г23 = Ah;,R(Ah;1)1’ = Ah.1 0 о2 0 (ДЬ;’)Т
Г32 Г33 _ 0 0 of
где Ah. — квадратная матрица, составленная из элементов мат-
рицы частных производных оператора связи hk(xk) вектора со-
IIЭЬ II
—М в точке х0/0 следующим
Рхм||
оОразом:
1 0 х-х*0) т/х.Л) Y-Y'0’
T,(XkIYk)
АЬк(хк) = ||ДЬй|| = 1 0 х-х(20) Y-Y201 ; (4.7.11)
т2(хкЛ) T2(Xk,Yk)
1 0 Х-Х'01 Y-Yf
Ahn T3(Xk,Yk) Ah13 Ah14 T3(Xk.Yk) j
Ah. Ah21 АЙ^з ^^24
_Ah31 АЬзз Ah34 -
Выражения (4.7.10), (4.7.11) реализуют решение обратной
задачи нахождения матрицы ковариации для начальной оценки
вектора состояний, получаемой в ходе «завязки» по измерениям
времени прихода сигнала ИРИ на ПП, для которых известна
матрица ошибок R.
Таким образом, в рамках данного варианта, в отличие от пре-
дыдущего, сначала осуществляется пересчет разностей времени
прихода в координаты, а затем реализуются текущие оценки
координат по наблюдениям, получаемым за несколько шагов
сопровождения гипотетической последовательности. Учитывая
нелинейный вид оператора связи, для проведения процедуры
оценивания требуется использование расширенного фильтра
344
(4.2.18)» При этом процесс сопровождения гипотетической пос-
ледовательности наблюдений на основе получаемой рекуррент-
ной оценки описывается уравнением
Zk = Ak[hk(xk) + vk] + Bk(zk/k_1 + wk) + 0^.,.
Для определения центра и размеров ДСС используются соот-
ношения
Zk/k-i -hktZk/k-j); Pzk — AhkPk/k-iAhk + R — ||pzkij||.
Следует отметить, что для обоих рассмотренных вариантов
процессы сопровождения последовательностей в ДСС осуществ-
ляются в пространстве наблюдаемых моментов времени прихода
сигнала на ПП МРС и по своей структуре идентичны. Их можно
представить на временной диаграмме рис. 4.7.2, где показаны
моменты времени прихода импульсов последовательности (о),
образующих начальную оценку и последующее формирование
центров ДСС zk/k4 = (zkl,zk2,zk3)T, для которых на временных осях
устанавливаются границы частных ДСС cozk р имеющих размеры
Atj = 2nt ^pzkii, i -1,3 . Мешающие по отношению к процессу вы-
деления данной последовательности импульсы обозначены сим-
волом «х».
Остановимся теперь на возможных вариантах процедур форми-
рования результирующего вектора наблюдений на каждом шаге
сопровождения последовательности. Первый из них — с децентра-
потетической последовательности
Лз t
345
лизованной обработкой (вариант «б» п. 4.4) в данном случае пре-
дусматривает, что в каждом i-ом ПП после проведения общей «за-
вязки» и формирования центра своего частного ДСС проводится
селекция наблюдений по их принадлежности выделенной элемен-
тарной области, а затем выбор предпочтительно полезного наблю-
дения на основе РП используемого типа. Далее полученные на дан-
ном шаге во всех ПП наблюдения передаются на ПСОИ, где прово-
дится их отождествление (здесь по частоте) и формируется резуль-
тирующий непрерывнозначный вектор наблюдений, подаваемый
на вход фильтра, а также дискретная компонента наблюдений
0k = (^L’Hk)7 ’ отображающая результаты проверки поступающих
данных на противоречивость. Использование подобной схемы об-
работки первичных наблюдений в МРС рассматриваемого класса
представляется несколько искусственным, так как при этом все
равно требуется передавать данные о текущих оценках zkj обратно
на каждый ПП. Реально ее использование имеет смысл в ситуаци-
ях, когда в системе имеется некоторая предварительно полученная
грубая оценка координат ИРИ (например, по данным пеленгова-
ния) и требуется получить более точную оценку на основе РДС. В
таком случае па каждом ПП может организовываться индивиду-
альное сопровождение последовательности наблюдений данного ИРИ
с передачей данных на центральный элемент системы. Тем не ме-
нее, анализ характеристик вторичной обработки для такой схемы
формирования результирующих наблюдений представляет интерес
[158]. В этой работе в ходе модельного эксперимента оценивались
точностные характеристики оценивания параметров при сопровож-
дении импульсной последовательности (при условии се достовер-
ной «завязки») в присутствии хаотического потока импульсных
мешающих сигналов с интенсивностью, одинаковой для всех ПП.
Перестройка частоты сигналов последовательности и мешающих
сигналов происходила по равновероятному закону в общем диапа-
зоне шириной Дг Геометрия расположения зоны ответственности
МРС в ходе экспериментов задавалась в соответствии с рис. 4.7.1.
При моделировании варьировалась вероятность р0 — непропуска
полезного сигнала на каждом шаге сопровождения в каждом ПП, а
также величина qg = ptT0, характеризующая среднее количество ме-
шающих импульсов, приходящихся на один полезный.
При сопровождении последовательности размеры ДСС от шага
к шагу считались фиксированными, а в процедуре идентифика-
ции наблюдений использовалось РП с выбором полезного наблю-
дения по минимуму расстояния до центра строба. Кроме того, в
эксперименте задавались: величины Tmax =Tmin -То; величина qT
исходя из значений Atm =О,15То; величина of/Af—103, а так-
же матрица ковариации Sk = S отклонений ложных наблюдений
346
от центра ДСС (для синтеза фильтров) в виде диагональной мат-
рицы с элементами /12, i = l,3 .
На рис. 4.7.3а представлены характеризующие относитель-
ные погрешности оценивания временных параметров вектора со-
стояний импульсной последовательности (4.7.5) зависимости ве-
личины pt = trPk^1/k /4а* от величины qg за к шагов работы филь-
тров. Зависимости 1 даны для калмановского фильтра, синтези-
рованного без учета потерь первичной обработки; зависимости
2 — для оптимального линейного фильтра, синтезированного с
использованием безусловных вероятностных характеристик ЧИР
(выражения (4.4.6) п. 4.4); зависимости 3 — для условно линей-
ного фильтра, синтезированного с учетом анализа логики соот-
ветствия или противоречия данных, получаемых от различных
ПП. В последнем случае расчет условных вероятностей ЧИР про-
водился на основе выражений (4.4.9) и (4.4.10). Важно отме-
тить, что величина qg=ptT0, отложенная на графиках по оси
абсцисс, однозначно пересчитывается в величину рь — вероятно-
сти получения ложного наблюдения на каждом шаге сопровож-
дения в каждом ПП (для различных ПП эти события независи-
мы). На рис. 4.7.36 представлены соответствующие вероятности
срыва последовательности в процессе ее сопровождения в ДСС,
которые свидетельствуют о существенно более высокой устойчи-
вости предлагаемых вариантов фильтров. Наконец, на рис. 4.7.Зв
представлены зависимости круговой ошибки местоопределения
после пересчета полученных в ходе фильтрации значений задер-
жек в координаты в соответствии с первым вариантом организа-
ции процесса обработки. Зависимости на рис. 4.7.Зв даны от
at [мкс] при размерах области расположения ИРИ а = b = 100 км,
в которой в ходе статистических испытаний его истинное место-
положение разыгрывалось по равновероятному закону.
а) б) в)
Рис. 4.7.3. Зависимости для характеристик оценки параметров при
сопровождении последовательности в присутствии хаотического пото-
ка мешающих сигналов
347
Следует также отметить, что при реализации алгоритма ВО
на основе расширенного фильтра с одновременной оценкой ко-
ординат в процессе сопровождения точностные характеристики
существенно не отличаются от приведенных, хотя несколько
увеличивается вероятность срыва.
Рассмотрим теперь случай, когда формирование результиру-
ющего вектора наблюдений осуществляется в соответствии с цен-
трализованной схемой обработки (вариант «в» п. 4.4). Данный
вариант является основным для МРС рассматриваемого класса и
предусматривает передачу на ПСОИ всей первичной измеритель-
ной информации, добываемой в ПП. При этом па каждом шаге
сопровождения гипотетической последовательности может фор-
мироваться несколько многомерных векторов наблюдений мо-
ментов прихода сигналов z^ = (t(/J,t(H2?,t{H3J)T , отождествленных
по измеренным на различных ПП значениям их частоты. После
этого проводится их селекция на принадлежность ДСС, имею-
щему в данном случае форму гиперэллипсоида (см. рис. 4.7.2), в
соответствии с алгоритмом
4’*е Чк: р=(4’ -4/к-1)т^к(4’ -4/k-i) р₽ >
а затем — идентификация полезного наблюдения в соответствии
с тем или иным РП (подробно см. п. 4.4).
Алгоритм ВО, в полном объеме реализующий все основные
процедуры обработки в соответствии с изложенной выше схе-
мой, также исследовался в ходе машинных экспериментов для
следующих условий: а = Ь = 10км; Д£ = 100МГц; а£ = 0,5МГц;
То = Tmi„ = ттах = 100 мкс; Atm = O,15To; о, =0,5 мкс;
tft = 1500 мкс. В данном случае в зоне ответственности с размера-
ми а ~ Ъ — 10 км располагалось несколько ИРИ и исследовалось
влияние загрузки общей полосы частот однотипными источни-
ками на эффективность их выделения и оценки параметров. Ре-
шающее правило при выборе гипотез о существовании тех или
иных ИРИ в реализованном алгоритме основывалось па подсче-
те г — числа шагов сопровождения, в которых были получены
результирующие наблюдения, состоящие из полностью отожде-
ствленных компонент
I о,
г = ><г-" е< =1 .
t=l (
Ч „ = 0;
mi „ >0.
(4.7.12)
Полученные в этом плане результаты представлены на рис. 4.7.4.
Здесь на рис. 4.7.4а представлены зависимости отношения
Pr =(^k+^k)/(o2o+o>20) обобщенной дисперсии оценки коорди-
нат, полученной за к = 10 шагов сопровождения, к дисперсии
оценки, полученной при однократных наблюдениях, от количе-
348
Рис. 4.7.4. Зависимости для характеристик алгоритма вторичной
обработки при централизованной схеме формирования результирую-
щих наблюдений
ства ИРИ — L, одновременно излучающих в общей полосе час-
тот. Сплошными линиями даны зависимости, полученные при
использовании условно линейного фильтра, а штриховыми ли-
ниями — зависимости, полученные при использовании линей-
ного фильтра, в котором не учитывается возможность возникно-
вения пропусков и ложных наблюдений. На рис. 4.7.46 даны со-
ответствующие зависимости для вероятности достоверного выде-
ления имеющихся ИРИ Ро. На рис. 4.7.4в даны зависимости
относительного количества выделенных ложных источников. Все
зависимости приведены при различных значениях вероятности
р0 непропуска полезного наблюдения в каждом ПП МРС на каж-
дом шаге сопровождения истинной гипотетической последова-
тельности. Анализ полученных результатов показывает, что ис-
пользование в ходе вторичной обработки оптимизированных по
отношению к возможным потерям первичной обработки алго-
ритмов рекуррентной фильтрации обеспечивает более высокую
достоверность выделения ИРИ и оценки их координат в услови-
ях полностью перекрывающихся по частоте входных потоков
сигналов разных источников. Из неприведенных па графиках
результатов эксперимента следует отметить резкое увеличение
вероятности срыва (до 2-х ... 3-х раз) при использовании класси-
ческого линейного фильтра вместо условно линейного, которое
косвенно проявилось в соответствующем снижении вероятности
Ро (незначительное увеличение вероятности Ро при увеличении
L для р0 — 0,9 объясняется естественным снижением при этом
вероятности Р(ш1 п=0/О1)). Также следует отметить, что при
реализации данного алгоритма ВО обеспечивается резкое сокра-
щение общего количества ложных засечек координат, получае-
мых при однократных наблюдениях и отвечающих реально не
существующим ИРИ. В среднем за счет вторичной обработки
349
количество ложных засечек координат снижается в 5 ... 10 раз
при выбранном для алгоритма пороговом значении числа непро-
пусков в (4.7.12) гс *= 0,8k.
Для оптимизации параметров и режимов алгоритма ВО по
аналогии с ранее рассмотренным алгоритмом разделения импуль-
сных последовательностей в однопозиционной РС (п. 4.6.1) мож-
но использовать некоторые расчетные соотношения. В данном
случае вероятность завязки по m-тому импульсу последователь-
ности, который потенциально может быть принят в МРС, опре-
деляется соотношением
P^Pod-Po)"”*. Ш = 1,2,... (4.7.13)
Введем величины 8tmin, 8tmax, определяющие диапазоны зна-
чений взаимных задержек 8tmin <St02321 <8tmnx (см. рис. 4.7.2)
при заданной геометрии зоны ответственности. Тогда среднее
время, затрачиваемое на завязку, можно оценить соотношением
t, = 8t + £O,5To(2m-l)p3(l-p3)ro-' = 8t + O,5To(2-p3)/p3, (4.7.14)
т=1
8t = 8t . +0,5At At, =8t -3tmill.
Если 8tmax « To, то первым слагаемым в (4.7,14) можно пренеб-
речь. Рассчитанная при этом зависимость t, от рс представлена на
рис. 4.6.5 (п. 4.6.1) штриховой линией. При р0 >0,9 обеспечива-
ется завязка с вероятностью порядка = 0,98 по первым трем
излученным импульсам. Таким образом, вероятность выделения
каждой последовательности описывается выражением
Р9 -р3[1 + (1-р3)(2-р3)](1-уД
Ye =1-£с’[Р'”(т1 п=0)]\ (4-7.15)
где P(1)(Hij п) — вероятность получения полностью отож-
дествленных векторов на каждом шаге сопровождения истинной
последовательности (п. 4.4),
Можно также оценить и вторую основную характеристику
процесса вторичной обработки — среднее количество выделяе-
мых ложных источников. Пусть суммарная интенсивность пото-
ка мешающих по отношению к процессу выделения данной пос-
ледовательности сигналов равна pt. Тогда при »Т0'1, с учетом
результатов п. 4.4 для характеристик потока отождествляемых
векторов, можно получить выражение для среднего числа обра-
зуемых ложных начальных оценок [126]
N(t,) = jAN(t)dt, 8tmax < t3 < tR, (4.7.16)
о
350
AN(t)dt =
(^)335?AfAtt
Af
0 < t < t3 -8tranx;
'(b-)3383Af(t3-t-8tmin), t3-8tm3x
Ar
<t<t -8t . ;
з min ’
0.
t -8t <t.
з umin —
Если при отождествлении используется еще и пеленг, то со-
ставляющая At3 в (4.7.16) позволяет учесть соответствующее су-
жение зоны при «завязке» до элементарной, величина которой
имеет порядок At3 где a(ru) — круговая ошибка место-
определения при пеленговании. Учитывая, что в реализованном
алгоритме ВО имеет место постепенное снижение интенсивности
порождающего начальные гипотезы потока, связанное с исклю-
чением из процесса «завязки» наблюдений, попадающих в ранее
сформированные ДСС, для окончательной оценки среднего ко-
личества выявленных ложных источников (ложных отметок ко-
ординат) целесообразно использовать следующее соотношение:
N₽ = N(t,)0e, N(t3) = (^)3 З83AfAt3 (t3 - 8tmax + At3 / 3),
Af
Po =XCUP(0)(mi =0)]k-)[l-P<o’(m1 n =0)]\ (4-7,17)
где P(0)(m1 n)— вероятность получения m1 n отождествленных
векторов на каждом шаге сопровождения ложной последователь-
ности.
Использование соотношений (4.7.13) — (4.7.17) применительно
к рассмотренным примерам позволяет [126] получить необходи-
мые предварительные обоснования при выборе режимов и пара-
метров настройки общего алгоритма вторичной обработки.
4.7.2. Особенности обработки сигналов и информации
для источников с непрерывным излучением
Если для импульсных сигналов при реализации РДС имеется
возможность измерения времени прихода на каждый ПП путем
фиксации их фронтов, то для сигналов с непрерывным излуче-
нием можно только непосредственно измерить взаимные задерж-
ки на основе вычисления взаимно корреляционных функций (ВКФ)
принимаемых на ПП и ретранслируемых на ПСОИ реализаций. В
данном случае аналогично могут возникать нежелательные эффек-
ты, обусловленные аномальными ошибками измерения задержек,
возникающими при превышении шумовыми выбросами сигналь-
ного максимума ВКФ. Парировать эти эффекты также следует на
основе вторичной обработки с проведением многократных паблю-
351
дений на основе алгоритмов рекуррентной фильтрации [166]. Для
их синтеза требуется задать соответствующие вероятности возник-
новения надежных и аномальных оценок для совокупности взаим-
ных задержек, измеряемых в МРС, а также их матрицы ковариа-
ции. При этом следует вернуться к детальному анализу основных
характеристик первичной обработки сигналов в МРС при реализа-
ции их взаимно корреляционной обработки. Для определенности
далее будем считать, что в ПП МРС осуществляется синхронный
прием сигналов узкополосным перестраиваемым приемником, что
обеспечивает восприятие каждого источника в отдельности.
Анализ характеристик первичной обработки. Обобщим при-
веденный в [73] вывод выражения для дисперсии оценки вре-
менной задержки непрерывных сигналов, соответствующей гра-
нице Рао—Крамера, на случай N-позиционной МРС. В такой си-
стеме можно измерить п = (N~l)N/2 различных задержек т.р
1 < i < N, i < j < N, N-l из которых являются линейно независи-
мыми. Среди всех комбинаций линейно независимых задержек
выберем задержки, измеряемые относительно первого ПП ть,
1 < i < N. Введем вектор истинных значений задержек z(c) с эле-
ментами Дь, l<i<N . Пусть в каждом ПП принимается и рет-
ранслируется на ПСОИ МРС аддитивная смесь сигнала и шума
xj(t) = s(t-Ali) + ni(t), l<i <N, 0<t<T„, (4.7.18)
где сигнал s(t) и шумы n/t), l<i<N -- вещественные, стацио-
нарные, центрированные, некоррелированные между собой гаус-
совские случайные процессы, причем Дп =* 0. Перейдем от вре-
менных реализаций (4.7.18) к их спектральным функциям
Fj (f) = j Xj (t) exp(-j2Ttft)dt, 1 < i < N.
Введем вектор спектральных функций F(f) = (F1(f),...,Fx(f))T.
Плотность распределения вероятности для этого вектора опреде-
ляется выражением [73]
P(F(f)/G(f)) = cpexp(-J/2), J= jF'T(f)G-,(f)F(f)df, (4.7.19)
где ср — функция определителя матрицы G(f), элементами кото-
рой являются спектральные плотности мощности
Gxх (f), 1 < i < N, 1 < j < N , * — знак комплексного сопряжения.
Так как шумы в различных ПП независимы, то
Gx.x,(f) = G99(f) + Gnn (f), 1 <i <N;
GXXj (f) = G(f) exp [ j2nf (ти - ru)];
Gxx (f) = G*X (f), l<i<N, i<j<N.
362
Поэтому определитель матрицы спектральных плотностей не
зависит от задержек. Кроме того, интеграл в показателе экспо-
ненты выражения (4.7.19) можно представить в виде суммы
J = + J2, где
J, = jf|W|2(l+ X G,s(f)/Gnn.(f)l/
— i=l j=l j*i >
’ Gn,n,(f)fl + f G.,(f)/G„knk(f)1 df;
I k=l )
J2 =-2 j Z Z Г|(П^)СЛ)ехрН2л£(тп -?„)]/ (4.7.20)
i=l j=i+l
N
/ Gn n (f)Gnn (f) l + £G„4(f)/Gnknk(f) df,
k=l
причем Jx также не зависит от задержек. Так как
F/OF^f) =TuGXiX(f), то максимально правдоподобные оценки
задержек времени прихода сигналов должны максимизировать
обобщенные ВКФ
= J G«,x (f)Wy(f)cxp(j27rf-r,j)df, 1 < i < N, j < j < N,
Wij(f) = G,s(f)/ Gn|ll (f)G„n(f) l + ^GM(f)/G„A(f) ,
k=l
где W^f) — обобщенная функция частотного взвешивания.
Нижняя граница Рао—Крамера для матрицы ошибок нормаль-
ной оценки задержек определяется как
МКтн-АнХ^-Д^ГЧ^’), l<i<N, l<j<N,
Э2
ЭД.-ЭД,
in(P(F(f)/G(f),z(‘’)) — информационная
где I(z'°’) = -M
матрица Фишера. Положив G (f) = G,s(f)exp[j2xf(Ali - Д1?)], с
учетом (4.7.20) получим
э2 т GJf) GJf)
ЭД.ЭЛ,, "l^^Gnini(f)Gn,n
exp (J2nf[(Дь - ти) - (Дп - т, j)])
X-------------------------— r Qt
l + XGs,(f)/Gnknk(f) |
( )
(4.7.21)
12 2157
353
В дальнейшем ограничимся рассмотрением спектров сигнала и
шумов, являющихся после переноса на нулевую частоту посто-
янными в диапазоне частот от -В до В Гц, то есть Gss(f) « и
G (f) = G , 1 < i < N , и равными нулю вне его. Тогда диспер-
сии нормальных ошибок измерения задержек и их корреляци-
онные моменты определяются следующим образом:
( N А
DHj =М[(тп-Дп)2] = 3 l + l/£qk l(q,+q1)/(87t2q1qiB3TH), 1 < i < N;
\ k=1 )
(4.7.22)
Knij =М[(ТИ -Aj(Tn -Дц)] = з[1 + 1/£Чк Wq.B’T,,),
\ k"] )
l<i<N, 1< j<N, i j,
где Qi =G8iJ/Glin — отношение сигнал-шум на входе приемника
i-ro ПП. Анализ полученных выражений свидетельствует о том,
что при Ч! = Qi, Qj = 0, 1< j<N, j^i выражение для дисперсии
оценки задержки совпадет с аналогичным соотношением, полу-
ченным в [73]. При qt = q. = q- коэффициент корреляции задер-
жек равен 0,5.
При оценивании задержек по максимуму ВКФ диапазон их воз-
можных значений ограничивается размерами временного окна по-
иска ±Т0, внутри которого могут возникать аномальные оценки с
равномерным распределением внутри окна. В [221] получено выра-
жение для вероятности аномальной ошибки на основе дискретного
представления ВКФ R(t) в М = 1 + 2Т0/Тс = 1 +4Т0В точках
т* = -То +iTc, 0 < i < М (при 4Т0В »1 М- 4Т0В ), где Тс — интер-
вал корреляции сигнала. При этом значения Rx = R(xi), 0<i<M
считаются статистически независимыми. Пусть одна из точек, на-
пример, тк - -То + кТс совпадает с истинной задержкой хк А. Тог-
да вероятность аномальной оценки равна [85, 221] PR =Р [Rt>Rk
хотя бы для одного т. Ф тк ]. Обозначим плотность распределения
ВКФ для RH - R(xk) и Rn = R(Tj), i соответственно как p„(R) и
pft(R). В этом случае получим
Pa=l- jpH(R„)
f'pa(R)dR
- M-l
dRH.
Плотности распределения PH(R) и pft(R) принимаются гауссовс-
кими. Допустим, что т - х12. С использованием результатов [13]
можно показать, что
M(RH) = Da> M[(R„-M(RH))2] = [(D4+Dni)(Ds+D112) + D2]/(2BTh),
M(R„) = 0; M[(R„ -M(R,))2] =[(D, +Dn,)(D, + D„2)]/(2BT„).
354
Сх / _ 2 1
j (2я)“'/2 exp — dy
I л I
dx,
где Ds и Dnj, Dn — дисперсии сигнала и шумов в первом и вто-
ром ПП. Тогда [221]
Р„=1- J (2я)'1/2 ехр ~(Х~А)~
(4.7.23)
А = 72BT„q!q2 /[q,q, + (1 + q,)(l + q2)]; С = ^1 + Ч1Ч2 /[d + Ч,)(1 + 42)J-
В [166] приведены зависимости вероятности аномальной ошиб-
ки от отношения сигнал-шум в первом канале при различных
значениях отношения сигнал-шум во втором канале для сигнала
при В=100 Гц, То=О,125 с и Тк=0,25 с» построенные на основе
(4.7.23). Анализ этих зависимостей свидетельствует о том, что
Ра = 0 при Qi > 1, q2 > 1 и Рй -» (М -1)/ М ~ 1 при qj —> 0 , либо
q2 —» 0 . Прием сигналов обычно осуществляется при qL = q2 » 1»
но в некоторые моменты времени отношение сигнал-шум в ка-
ких-либо из ПП может резко падать за счет воздействия на их
вход мощной помехи. Поэтому рассмотрим типичную для таких
ситуаций модель входной реализации с £-загрязнением
xI(t) = s(t-Ali) + (l-£i)nHi(t) + £inai(t), Et = 0;1, l<i<N, (4.7.24)
то есть будем считать, что с известной вероятностью рп при оче-
редном проходе анализируемой частоты сигнала ИРИ каждый
ПП независимо от других может быть кратковременно подавлен
мощной помехой (ей =1, Ря = 1). С вероятностью 1-рп такая поме-
ха отсутствует -0, Ра ~ 0) . Ввиду равномерности распределе-
ния аномальных ошибок измерения задержек внутри временных
окоп +TOi, 1 < i <N их дисперсии и корреляционные моменты оп-
ределяются выражениями
Dai = Т£/3, l<i<N, Kaij =0, l<i<N. 1< j<N, i* j. (4.7.25)
В заключение следует также предположить, что обнаружение
сигнала ИРИ (4.7.24) в каждом ПП и его ретрансляция на об-
щий пункт обработки МРС при каждом проходе перестраивае-
мым приемником рабочего диапазона частот происходит незави-
симо от других ПП с вероятностью р0.
Синтез и анализ алгоритмов вторичной обработки. Методика
синтеза алгоритмов фильтрации в многопозиционных системах
при наличии пропусков наблюдений и ложной информации нами
уже изложена. Без потери общности ограничимся, как и ранее,
рассмотрением случая неподвижного ИРИ. Тогда изменение т-
мерного вектора его состояний хк описывается уравнением
хк+1 “ хк* вектором состояний ИРИ здесь подразумеваются
либо его декартовы координаты xk =(Xk,Yk)4 , либо разности рас-
стояний путей прихода его сигналов на ПСОИ хк = (AR15...,ARn)T,
355
n = (N-l)N/2, то есть AR(1 = AR]; = сА1;, где c— скорость света,
i-1
e = (N-p-1) + (j-i), i < j < N, m = n. Начальное состояние за-
p=4 ж o A
дается вектором средних х1/0 и матрицей ковариации Р1/о . Обоб-
щенная модель наблюдений ИРИ, описывающая в дискретном
времени получаемую последовательность значений n-мерного век-
тора измеряемых разностей расстояний zk = (ARn..., ARn)T , опре-
деляется уже известными уравнениями вида
zk = Ak[hk(xk) + vk] + Bk[zk,k4 + wk] + Ckzk/k_p =hk(xk/k.1),
(4.7.26)
где выполняется hk(xk) = xk, xk/k_, = xk/kJ , zk/w = zk/k4 = xk/k^
и hk(xk) = (AR1(xk),...,ARn(xk))T, xk/k_, = xk/k4 , zk/k_7 = zk/k_j =
= (ARi(xk/k_1),...,ARn(xk/k_1))' соответственно при фильтрации
разностей расстояний и координат. В (4.7.26) vk — гауссовс-
кий шум измерения при полезном наблюдении (M[vkvk] ~ Rk),
a wk — вектор отклонения аномального наблюдения от центра
прогнозируемой на один шаг вперед области возможных зна-
чений задержек (ДСС) (M[wkwk] = Sk). Компоненты wk
распределены по равномерному закону в диапазоне значений
zki -Toi < wki < zki +Toi, 1 < i < n . Пусть измерения всех разностей
расстояний осуществляются с одинаковой среднеквадратичной
ошибкой oR. Тогда, принимая во внимание (4.7.22), (4.7.25), ко-
вариационные матрицы Rk и Sk определяются следующим обра-
зом: Rk = ||red||, red =Ср при i = s и j = q, иначе r,d =qr 12 при i = s
или j = q, иначе red ~ /2 при i = q или j = s, иначе = 0, где
e = + d = £(N-p-l) + (q-s), 1 <i, s<N, i,s<j,
p=i _ p=i
q < N; Sk = 3diag(HkPk,k^Hk + Rk) • Здесь Hk является единичной
матрицей порядка п при фильтрации разностей расстояний и Нк
есть матрица со строками [c)ARi(xk/k_1)/9X dARJx^.^/dY],
1 < i < п при фильтрации координат.
Применяя методику нахождения оптимальных в классе линей-
ных оценок или оценок на основе квазилинейного приближения,
получим уравнения для оценок xk+1/k при фильтрации разностей
расстояний или координат и их матрицы ошибок Pk+1/k в виде
Xkfl/k “Xk/k-l + Wk(zk “2^/k j), Wk = VkUk,
_ Vk=M[Ekvl’], Uk=M[vkvp;
ft1/k = M[£k+X+1] = Pk,k-1 - WkVkT; (4.7.27)
£k “ Xk "Xk/k-P Vk = Zk ” ^k/k-l,
356
где необходимость использования операции псевдообращения в
данном случае обусловлена вырожденностью матрицы Rk вслед-
ствие линейной зависимости компонент вектора наблюдений. Вы-
ражения для матриц Uk, Vk при подстановке (4.7.26) в (4.7.27)
имеют вид
vk =^XPar- Uk =u‘k” + u’2’, и'” =|u<7d||,
uk«( = P„A |rked|| = HjA/x-X + Rk! (4.7.28)
,J2) -n r(2) Ilr(2)ll- 4 •
Uked ~ PhecHkrd» ||1k<’d|| “ °k’
i-]
e = £(N-p-l)+(j-i), l<i<N, i<j<N;
p-i
d = £(N-p-l) + (q-s). l<s<N, s<q<N,
p=i
где РЛк=М[Ак] — диагональная матрица с элементами
Ра, =Ро(1"Ри)2’ Pfted^Pai при i = s и j = q, иначе
pdid =Ро(1-рп)я ПРИ i = s или j = q или i = q или j = s, иначе
P„.d=pL Pb.,i =PolPn-2pn(l-p„)l при i = s и j = q. иначе
Pbed =Po[l-(l-PI,)3-2pn(l-Pn)2] при i = s или j = q или i = q
или j = s, иначе pbe<) = Рд[р2-2рп(1-рп)]2. Синтезированный
фильтр является оптимальным линейным при фильтрации раз-
ностей расстояний или расширенным при фильтрации коорди-
нат и обладает свойством робастности по отношению к ситуации
возникновения пропусков и аномальных ошибок измерений.
Другим вариантом является фильтр, условный по отношению
к пропускам наблюдений. Для него i-я строка матрицы Нк вы-
числяется как Hki=[3ARi(xk/k.1)/3XaARi(xk/k.s)/aY] при cki = О
и Hki = [0 0] при cki = 1, 1 < i < п для случая фильтрации коорди-
нат. При фильтрации разностей расстояний Нк представляет со-
бой диагональную матрицу порядка п, i-й диагональный элемент
которой равен 1 при cki = 0 и 0 при cki=l. Задание элементов
матрицы Rk -||г0||, l<i<n, l<j<n осуществляется следующим
образом: при ckj = 0 и ckj = 0 вычисляются так же, как и для
оптимального линейного фильтра, если же cki = 1 или ckj = 1, то
ru = 0. Матрицы Vk и Uk задаются так же, как и для оптималь-
ного линейного фильтра при задании р0 = 1. Далее вычисления
производятся в соответствии е (4.7.27).
При оценке эффективности рассмотренных алгоритмов про-
водилось статистическое моделирование результатов работы трех-
позициошюй МРС. Зона ее ответственности с размерами сторон
а=5 км и Ь-*5 км располагалась на расстоянии d^5 км от МРС
357
(рис. 4.7.1). Истинные координаты при каждом испытании зада-
вались по равновероятному закону внутри зоны ответственнос-
ти. Начальная оценка вектора состояний и его ковариационной
матрицы определялась: при фильтрации координат центром и
размерами зоны х1/0 = хс = (Хс,Yr)T , Pi/o = Кс =||кц|| ,
кп = а2/12, к22 = Ь2/12, kJ2 =к21 = 0; при фильтрации разностей
расстояний как х1/0 - (AR1(xi),...,ARn(xc))T, P1/0=HkKcH£, где
Нк— матрица со строками [ЭДК/хс)/ЭХ ЭДВ/хс)/ЭУ], l<i<n.
Количество шагов фильтрации было задано равным 10. После
фильтрации разностей расстояний вычисление координат ИРИ
осуществлялось на основе соотношений (4.7.2). В качестве пока-
зателя эффективности сравниваемых алгоритмов была принята
среднеквадратичная ошибка определения места ог = + п2к .
На рис. 4.7.5а приведены зависимости ог от вероятности об-
наружения сигнала при различных рп, а на рис. 4.7.56 — от
вероятности подавления каналов помехой при различных р0. Кри-
вые 1, 2 и 3 соответствуют классическому калмановскому, опти-
мальному линейному и условно линейному фильтрам. Прямая 4
соответствует априорной среднеквадратической ошибке опреде-
ления места, равной корню квадратному из следа матрицы Кс.
Указанные зависимости получены при среднеквадратической
ошибке измерения разности расстояний, которая соответствует
ошибке измерения времени задержки а5=0,1 мкс. Анализ ре-
зультатов свидетельствует о значительном преимуществе фильт-
ров, учитывающих вероятностные характеристики пропусков и
аномальных ошибок наблюдений, в смысле точности местоопре-
деления (в среднем примерно в 2—3 раза) по сравнению с клас-
сическим фильтром Калмана. При вероятностях подавления ка-
нала, превышающих 0,35 и 0,25, для вероятностей обнаруже-
ния 1,0 и 0,6 соответственно он расходится, тогда как два дру-
Рис. 4.7.5. Зависимости ошибки местоопределения от вероятностей
непропуска сигнала и его подавления помехой
358
гих продолжают работать. Алгоритмы фильтрации в простран-
стве разностей расстояний и координат имеют примерно одина-
ковую эффективность. При отсутствии аномальных ошибок в
условиях только пропусков определенные преимущества по срав-
нению с оптимальным линейным фильтром имеет условно ли-
нейный фильтр, однако с увеличением рп их точностные харак-
теристики становятся практически одинаковыми. Полученные
результаты свидетельствуют о том, что при значениях вероятно-
сти пропуска сигналов в каналах обработки, не превышающей
0,1, и вероятности возникновения аномальных ошибок, не пре-
вышающей 0,05, оптимизированные алгоритмы вторичной обра-
ботки дают возможность определения координат с точностью, от-
личающейся от потенциально достижимой не более, чем на 10 %.
Кроме того, рассматривались характеристики определения ко-
ординат в условиях потерь первичной обработки при различном
числе позиций МРС. Соответствующие зависимости п от числа по-
зиций для наилучшего (условно линейного) фильтра приведены на
рис. 4.7.6. Зависимость 1 соответствует значениям вероятностей
р0 = 1 и рп = 0,2, зависимость
2 — р0 = 0,3 и рп = 0, зави-
симость 3 — р0 = 0,3 и
рп = 0,2. Позиции МРС рас-
полагались равномерно на
полуокружности, охватыва-
ющей зону ответственности и
имеющей радиус 5 км. Как
и следовало ожидать, при
увеличении числа ПП устой-
чивость функционирования
МРС по отношению к пропус-
кам сигналов и аномальным
ошибкам измерения задер-
жек повышается.
Рис. 4.7.6. Зависимости ошибки
местоопределения от количества при-
емных пунктов МРС
4.7.3. Третичная обработка информации
при комплексировании данных в многопозиционных системах
Одной из важнейших задач, которая решается в ходе третич-
ной обработки информации в МРС, является задача комплекси-
ровапия данных по разнородным ИРИ с целью выявления групп
территориально совмещенных источников. Основой ее решения
является использование координатной информации, полученной
в ходе вторичной обработки по каждому ИРИ, а сама задача
формулируется как задача автоматической классификации на
нсзаданное число классов следующим образом [168].
359
Пусть в зоне ответственности МРС присутствует L групп ИРИ с
координатами xri=(Xri, Yri)T , каждая из которых содержит
Np i = 1,L источников. Результатом наблюдения i-ой группы яв-
ляется подмножество оценок положения (координат, усредненных
в ходе ВО пеленгов, разностей времени прихода сигналов и т.п.)
ZN* = {Zp j = 1,Nj}, Zj = (Zj2,..., Zjn)1, n > 2, которые можно считать
приближенно распределенными по гауссовскому закону
N(Z}, H(xri), K7iJ) , где оператор H(xri) = zr отражает связь на-
блюдаемых параметров с вектором координат (H(xri) = Ixri в слу-
чае, если в качестве наблюдений используются результаты место-
определения ИРИ); — истинная матрица ковариации ошибок
измерения параметров положения j-ro ИРИ в i-ой группе. По ре-
зультатам наблюдения всех групп ИРИ формируется смешанное
___ I.
множество наблюдений Zv={Zft j = l,P}, P = ^Nj и множество
2 i-1 -
оценок матриц ковариации ошибок Кр ={Кр j = 1,Р}, где каждая
матрица Kj > полученная для соответствующего наблюдения Z., либо
определяется точно, если в ходе ВО реализуется линейный алго-
ритм оценивания, либо определяется с некоторой погрешностью и
зависит от наблюдений, если в ходе оценивания реализуются цх
нелинейные преобразования. Далее будем считать, что оценки К.
достаточно близки к истинной матрице ковариации ошибок для
соответствующего наблюдения.
Требуется разделить множество Zp на Q непустых непересека-
ющихся подмножеств (классов) как можно более
точно соответствующих реальным группам.
В настоящее время известно большое количество алгоритмов
автоматической классификации, которые могут быть использо-
ваны для решения указанной задачи. Существует также возмож-
ность ее решения человеком-оператором на основе визуального
анализа отображаемого тем или иным способом множества объек-
тов классификации (“поля засечек”). Поэтому потребовалось
провести объективный сравнительный анализ возможностей тех
или иных подходов для решения рассматриваемой задачи, осно-
вой которого являлись машинные эксперименты для тестовых
моделей формирования исходных ситуаций.
В ходе таких исследований рассмотрено несколько десятков
известных алгоритмов автоматической классификации (ААК), а
также алгоритмы человеко-машинной классификации (АЧМК),
которые целесообразно объединить в группы (с выделением наи-
более ярких представителей), реализующие различные подходы
к решению рассматриваемой задачи. Следует сразу отметить, что
общая задача классификации может быть условно разбита на
задачу определения числа классов и задачу классификации на
360
заданное число классов. В ряде известных алгоритмов реализу-
ются двухфункциональные решающие правила, в которых оцен-
ка числа классов и классификация осуществляются условно раз-
дельно, а в ряде алгоритмов эти процедуры реализуются одно-
временно и функционально не выделены. В соответствии с этим
принципом предлагается провести типизацию алгоритмов клас-
сификации координатной информации в режиме самообучения
в виде, представленном на рис. 4.7.7.
Первая большая группа ААК, представленных на рис. 4.7.7,
включает различные комбинации алгоритмов оценки числа клас-
сов и алгоритмов классификации на заданное число классов. Здесь
выделены три подгруппы алгоритмов оценки числа классов: ал-
горитмы кластерного типа, алгоритмы на основе параметричес-
ких и эвристических критериев выбора числа классов и непара-
метрические алгоритмы на основе восстановления и анализа плот-
ности распределения расстояний между объектами.
Для алгоритмов оценки числа классов кластерного типа ха-
рактерна реализация процедур попарного сравнения наблюде-
ний на основе мер близости с фиксированным порогом. В каче-
стве общей меры близости между наблюдениями для рассматри-
ваемой задачи естественно использовать величину
pCZpZj) = (ZS -Zj)r(Ri +Kj)-1(Zi -Z^. (4.7.29)
Если объекты Zi и Zj принадлежат одной группе ИРИ, то стати-
стика (4.7.29) приближенно имеет хи-квадрат распределение с
числом степеней свободы, равным размерности пространства
признаков. Поэтому для пространства координат пороговое рас-
стояние pg =Х^, при превышении которого объекты можно счи-
тать принадлежащими разным классам, равно квантилю хи-квад-
рат распределения с двумя степенями свободы, соответствующе-
му уровню значимости а. Как наиболее эффективные представи-
тели данной подгруппы алгоритмов оценки числа классов рас-
сматривались предложенные и подробно рассмотренные в [170]
алгоритмы “частичной” классификации, а также модифициро-
ванный алгоритм на основе максиминной кластерной процеду-
ры [193]. Суть последнего состоит в следующем. Среди множе-
ства объектов классификации определяются два максимально вза-
имоудаленных в смысле используемой меры близости (4.7.29)
объекта. Если расстояние между ними не превышает порог, то
устанавливается Q = 1 и работа алгоритма заканчивается. В про-
тивном случае найденные объекты назначаются центрами (пред-
ставителями) первых двух классов и устанавливается Q = 2. Да-
лее для каждого объекта определяется ближайший к нему центр
класса. Среди всех минимальных расстояний выбирается макси-
361
05
ьэ
г---------------------------------------------------------------------
| Алгоритмы автоматической классификации
Алгоритмы классификации с одно- временной оценкой числа классов
Алгоритмы определения числа классов и классифика- ции кластер- ного типа Параметриче- ские алгоритмы с уточнением числа классов в процессе клас- сификации Непараметри- ческие алго- ритмы опреде- ления числа классов и клас- сификации
Алгоритмы человеко-
машинной классификации
Алгоритмы
оценки чис-
ла классов
оператором
Алгоритмы оцен-
ки числа классов
и классификации
оператором
мальное (максиминное). Если максиминное расстояние не пре-
вышает порог, то работа алгоритма прекращается. Иначе соот-
ветствующий максиминному расстоянию объект назначается
центром нового класса и устанавливается Q == Q+1. Затем после-
довательность действий повторяется до тех пор, пока максимин-
ное расстояние не будет меньше заданного порога.
Вторая подробно рассмотренная подгруппа алгоритмов оцен-
ки числа классов объединяет алгоритмы, основанные на перебо-
ре возможных значений числа классов и поиске значения, удов-
летворяющего некоторому критерию. Существуют различные
критерии выбора числа классов [2, 92, 101], многие из которых
основаны на эвристических соображениях. В [101] для оценки
числа классов предлагается использовать ожидаемую вероятность
ошибочной классификации (ВОК). Здесь при последовательном
разделении множества объектов на Q=i2,3,... классов одним из
рассмотренных ниже методов классификации на заданное число
классов и вычислении для каждого Q значения критерия в каче-
стве оценки выбирают такое значение, которому соответствует
первый минимум ожидаемой ВОК. В [92] приведены результаты
сравнения нескольких эвристических критериев выбора числа
классов, лучшим из них признан критерий Калинского—Хара-
баша. Наиболее теоретически обоснованным является статисти-
ческий критерий Уилкса [2]. Здесь формируется статистика
vQq+l = -21n{L(Zp,Q)/L(Zp,Q + l)}. L(ZP.Q) = njSciN(Z,,Zci Д),
M i=l
где L(ZP,Q) — функция правдоподобия выборки наблюдений при
ее оптимальном разделении на Q классов; Pci — априорные веро-
ятности появления наблюдений i-ro класса; Zcj — полученный
центр i-ro класса. В случае истинности гипотезы Но : L = Q рас-
пределение функции сходится по вероятности к хи-квадрат рас-
пределению с числом степеней свободы, на единицу превышаю-
щим размерность пространства признаков. При последователь-
ной проверке гипотез Но и Ht : L > Q для Q = l,2,... наиболее
вероятным считается то значение числа классов, для которого
впервые выполняется соотношение vQ , где, например, для
пространства координат порог х« Равен квантилю хи-квадрат
распределения с тремя степенями свободы, соответствующему
уровню значимости а.
Непараметрические алгоритмы определения числа классов на
основе восстановления и анализа плотности распределения рас-
стояний между объектами [3] требуют, как правило, большого
объема выборок и довольно сложны в практической реализации.
Это ограничивает возможность их применения при решении рас-
363
сматриваемой задачи, для которой характерным является огра-
ниченный объем наблюдений от каждой группы ИРИ.
После определения числа классов на основе одного из рассмот-
ренных выше алгоритмов в ААК первой группы проводится окон-
чательное оптимальное разделение множества объектов классифи-
кации на Q классов. Строгое решение этой задачи, обеспечивающее
глобальный максимум при заданном критерии оптимальности, до-
стигается полным перебором всех возможных классификаций [58].
Но ввиду вычислительной сложности этой процедуры, как прави-
ло, используются локально оптимальные методы кластерного ана-
лиза или расщепления смесей распределений. В рамках такого под-
хода, в соответствии с результатами сравнения известных методов
кластеризации множества объектов на заданное число классов,
приведенными в [92], наиболее эффективным следует признать метод
Уорда, относящийся к числу агломеративных иерархических про-
цедур, и метод k-средних. Из числа параметрических методов рас-
щепления смесей распределений для разделения множества объек-
тов классификации на заданное число классов наиболее универ-
сальным является метод максимума правдоподобия [2, 101]. В со-
ответствии с этими методами были реализованы следующие
модифицированные процедуры классификации на заданное число
классов.
На начальном этапе работы процедуры по методу Уорда счита-
ется, что каждый объект является центром класса и текущее зна-
чение числа классов QT = Р. Обозначаются центры, ковариацион-
ные матрицы и мощности классов соответственно как Zcj, Kci и
Np ie {1,. .,QT}. Далее находится и объединяется ближайшая, в
смысле метрики p(Zci,Zl.j)NiN}/(К\ 4-N^, 1 < j, пара классов
Kci =(К;3+К*1)'1, N-N.+N’p QT = Qr-l.
Процедура поиска и объединения ближайших классов повто-
ряется до тех пор, пока текущее число классов не станет равным
заранее заданному QT = Q.
Реализованная процедура на основе метода k-средпих заклю-
чается в следующем. Заданное число Q наблюдений назначается
в качестве начальных центров классов. Каждый объект относит-
ся к тому классу, центр которого является для него ближайшим
в смысле метрики (4.7.29). Осуществляется пересчет центров
классов и их ковариационных матриц
zcl - £(кд
кс, = £(£,)'
1 < i < Q, (4.7.30)
364
где Z^, — соответственно j-ый объект, отнесенный до этого
к i-му классу, и его ковариационная матрица. Процедура клас-
сификации и пересчета повторяется до тех пор, пока координа-
ты центров классов не перестанут изменяться.
Реализованный алгоритм на основе метода максимума прав-
доподобия включает два циклически повторяющихся этапа: оце-
нивание и максимизацию. Отправляясь от начального прибли-
жения оценок центров и априорных вероятностей классов Zcj и
PQ=1/Np je{l, .-,Q}, вычисляют вероятности принадлежности
объектов к каждому из классов (этап оценивания)
q^P.NCZ^Z.,^)/^ P-NCZ^Z^K.), ic {1...Р}, je
j-i
Затем определяют новые значения оцениваемых параметров из
условия максимизации функции правдоподобия выборки (этап
максимизации)
Этапы оценивания и максимизации повторяются до сходимо-
сти итерационной процедуры. После этого осуществляется клас-
сификация объектов: объект относится к тому классу, вероят-
ность принадлежности к которому максимальна. Следует отме-
тить, что эффективность алгоритмов k-средних и максимума
правдоподобия существенно зависит от выбора начальных цент-
ров классов. Результаты экспериментов подтверждают вывод о
неэффективности случайного выбора центров [92]. Для их зада-
ния следует выбирать максимально удаленные объекты на осно-
ве максиминной кластерной процедуры.
В рамках второй большой группы ААК, реализующих клас-
сификацию с одновременной оценкой числа классов, в схеме
рис. 4.7.7 выделены три подгруппы алгоритмов: кластерного типа,
параметрические и непараметрические.
Алгоритмы первой подгруппы осуществляют классификацию
объектов и определение числа классов на основе задания меры
близости и фиксированного порога. К ним относятся различные
эвристические алгоритмы [2, 92]. Типовым представителем этой
подгруппы является алгоритм последовательного восстановления
центров классов, суть которого, с учетом специфики решаемой
задачи, заключается в следующем. Первое поступившее наблю-
дение считается центром первого класса и устанавливается
текущее значение числа классов QT = 1. При поступлении i-ro
наблюдения Zi определяется ближайший к нему в смысле мет-
рики (4.7.29) центр класса Zcj, 1< j <Q . Если pfZ^Z^) > pR , то
365
Z. назначается центром нового класса и QT = Q+1. Иначе осуще-
ствляется пересчет
zcl =zcj +(К/ -zcj). Kcj =(К/+ й-1)-1.
Параметрические процедуры совместной оценки числа клас-
сов и классификации [2, 114] требуют задания верхнего значе-
ния числа классов, с запасом мажорирующего его истинное зна-
чение. В процессе их работы происходит уточнение числа клас-
сов. Типичным представителем этой группы алгоритмов являет-
ся алгоритм адаптивного вероятностного моделирования (алго-
ритм SEM) [2]. Этот алгоритм, наряду с процедурами оценива-
ния и максимизации, реализованными в алгоритме максимума
правдоподобия, включает статистическое моделирование, в ходе
которого осуществляется корректировка числа классов.
Непараметрические процедуры осуществляют определение чис-
ла классов и классификацию объектов на основе восстановления
плотности распределения вероятности смеси наблюдаемых объек-
тов [32, 88]. Они, в силу их низкой эффективности при малых
объемах выборок наблюдений, далее не рассматриваются.
Помимо рассмотренных выше ААК в ходе исследований [168]
решалась задача разработки автоматизированного алгоритма
классификации с участием человека-оператора. В его основе ле-
жит реализация принципа максимально возможной поддержки
(со стороны ЭВМ) деятельности оператора, на долю которого ос-
тается выполнение наиболее трудно формализуемых функций,
направленных, прежде всего, на определение числа классов и
вероятных точек расположения центров классов — сгустков, об-
разующихся при отображении поля засечек «координат» на эк-
ране монитора (см. рис. 4.7.8). В соответствии с этим, для любой
точки Zei =xLi =(Xcl,Yd)1» указанной оператором на экране мо-
нитора в качестве центра i-ro класса, в предлагаемом алгоритме
автоматически рассчитываются размеры большой и малой полу-
осей возможного эллипса рассеяния и угол его ориентации
a(b) = V2 / >/а + С - (+)7( А - С)2 + 4В\ р - arctg[2B/(C - А)]/2,
где А = гп, В = г12=г21, С = г22 — элементы матрицы, обратной
матрице ошибок измерения параметров положения в данной точке
(см. п. 4.6.2). После этого на экране монитора отображается эллипс
с полуосями ka, kb (к — варьируемый параметр эллипса), углом
ориентации £ и центром в назначенной точке. Далее оператор мо-
жет изменять размеры эллипса, уменьшая или увеличивая значе-
ние его параметра к, с целью задания очевидных для него границ i-
го класса. Ориентация эллипса при этом не меняется. По оконча-
366
Рис. 4.7.8. Человеко-машинная процедура классификации
нии такой процедуры оконтуривания класса все засечки ИРИ, по-
павшие в назначенный оператором эллипс рассеяния, за исключе-
нием уже отнесенных к ранее сформированным классам, считают-
ся отнесенными к i-му классу. Оценка координат центра класса
далее уточняется автоматически в соответствии с (4.7.30). Затем
последовательность действий повторяется до тех пор, пока, по мне-
нию оператора, не будут выделены все группы ИРИ. Другой вари-
ант построения АЧМК предусматривает задание оператором толь-
ко числа и, возможно, центров классов. После этого осуществляет-
ся автоматическое распределение объектов по классам на основе
одного из рассмотренных выше методов классификации на задан-
ное число классов.
Для оценки эффективности рассмотренных алгоритмов осуще-
ствлялось статистическое моделирование результатов работы МРС
с угломерным и разностно-далыюмерным способами местоопреде-
ления. Для угломерной МРС были приняты следующие условия
моделирования. Пеленгаторная сеть состояла из двух ПП с базой
10 км. Зона ответственности МРС размером 10x10 км располага-
лась на расстоянии 5 км от линии базы. Для МРС с РДС приемные
пункты располагались в соответствии с геометрией рис. 4.7.1. По
равномерному закону генерировалось истинное число групп ИРИ
Le {2,...,10}. Затем равномерно генерировались координаты их
центров таким образом, чтобы расстояние между ближайшими цен-
367
трами было не менее 1 км. Число наблюдений в каждом классе
генерировалось по равномерному закону е {5,...,15}, ie{l,...,L}.
В приведенном на рис. 4.7.8 иллюстративном примере выявления
групп ИРИ оператором рассматривалась угломерная МРС при
аЛ = 2\ L = 10. Ошибки определения направления на каждый ИРИ
генерировались независимо для каждого ПП по гауссовскому за-
кону с одинаковой угловой ошибкой аА. Оценка эффективности
ААК осуществлялась как в пространстве пеленгов (задержек),
так и в пространстве координат, а АЧМК — только в простран-
стве координат.
Сначала сравнивались алгоритмы классификации объектов па
заданное число классов. В качестве общепринятого показателя их
эффективности использовался коэффициент Миркина—Реида [92]
=1-2Х Х1ао-Ч|/1Р<р-1)],
i-1 j-Hl
где ||ай|| и Ьь — матрицы смежности размером РхР, соответ-
ствующие истинному и полученному каким-либо алгоритмом раз-
биениям множества объектов классификации на классы. В соот-
ветствии с [102] а^ = 1, если в истинном разбиении i-ый и j-ый
объекты находятся в одном классе, и а.. ₽ 0, если они находятся
в разных классах. Аналогично вычисляется матрица Ьи для
своего разбиения. На рис. 4.7.9 приведены примеры зависимос-
тей значений коэффициента Миркина—Ренда от аЛ при класси-
фикации в пространстве координат в рамках угломерной МРС.
Кривая 1 соответствует методу Уорда, кривые 2,3 — методам Перед-
них и максимума правдоподобия при выборе начальных центров
на основе максиминной кластерной процедуры. В пространстве пе-
ленгов для всех рассматриваемых методов зависимости примерно
совпадают с кривой 1, поэтому на рис. 4.7.9 они не показаны. Ана-
Рис. 4.7.9. Зависимости показателя
Миркипа—Реида от ошибки определения
направления
лиз полученных ре-
зультатов свидетель-
ствует о том, что при
оЛ < 2° все алгоритмы
обладают практически
одинаковой эффектив-
ностью. При увеличе-
нии угловой ошибки
измерения пеленга ста-
новится ощутимо пре-
имущество метода Уор-
да. Метод к-средних
несколько уступает
методу Уорда по досто-
368
верности классификации, но зато значительно превосходит его и
метод максимума правдоподобия по быстродействию. Поэтому
ему было отдано предпочтение при выборе алгоритма классифи-
кации на заданное число классов.
Сравнивались также алгоритмы классификации на незаданное
число классов. В качестве основного показателя их эффективности
рассматривалась вероятность правильного определения числа клас-
сов P(Q = L). Кроме того, введены два других показателя качества
классификации, являющиеся альтернативой коэффициенту Мир-
кина—Ренда. Последний довольно трудно связать с ошибками пер-
вого и второго рода, используемыми при классификации в режиме
обучения. Несмотря на то, что при классификации в режиме само-
обучения эти ошибки не определены [88], введем их аналог. Рас-
смотрим матрицу распределения наблюдений по классам ||п^|| раз-
мером LxQ, в которой равен количеству объектов i-ой группы
ИРИ, отнесенных к j-му классу. Каждой группе ИРИ ставится в
соответствие тот класс, к которому отнесено максимальное количе-
ство объектов этой группы. Тогда средние вероятности правильно-
го и ложного отнесения объекта к группе ИРИ оцениваются как
1 L Q 1 L L
Рпп “—У maxn-./У пн, Р_о =1---У max n;i/У п...
На рис. 4.7.10а, б, в для ААК приведены соответственно за-
висимости P(Q=L), Рпо и Р,ю от ошибок измерений направления
прихода сигнала аА в угломерной МРС (зависимости 1) и разно-
Рис. 4.7.10. Характеристики
алгоритмов классификации при
обработке координатной информа-
ции
Н -2357
369
стей времени прихода сигналов а§ в разностно-дальномерной МРС
(зависимости 2). Штриховыми линиями даны зависимости, ха-
рактеризующие качество работы человека-оператора для угло-
мерной МРС. Приведенные зависимости 1 и 2 соответствуют луч-
шему из ААК первой группы с алгоритмом определения числа
классов на основе критерия Уилкса в пространстве координат
или пеленгов (задержек) при уровне значимости а = 1 %. Клас-
сификация на заданное число классов в данном случае осуще-
ствлялась на основе алгоритма k-средних с выбором начальных
центров на основе максиминной кластерной процедуры.
Анализ полученных зависимостей для P(Q=L) свидетельствует о
том, что для угломерной МРС при ошибках измерения пеленга
(5Л < 2° лучший из автоматических алгоритмов с определением числа
классов на основе критерия' Уилкса практически не уступает по
эффективности человеку-оператору. При аЛ > 2° вероятность пра-
вильного определения числа классов человеком-оператором выше,
чем для автоматических алгоритмов. Анализ зависимостей для Рпо
и Рто показывает, что и по этим показателям при больших ошиб-
ках пеленгования эффективность человеко-машинного алгоритма
классификации в целом превосходит эффективность ААК. Варьи-
рование в последних уровня значимости позволяет добиться луч-
ших значений величины Р , однако при этом резко возрастает ве-
роятность ложного отнесения наблюдений к классу, что в целом
характеризует более низкую эффективность ААК по сравнению с
оператором при аЛ > 2". По нашему мнению, это объясняется тем,
что ААК основаны на использовании гипотезы компактности [32,
101], согласно которой реальным классам соответствуют компакт-
ные подмножества (кластеры) в признаковом пространстве. При
увеличении угловой ошибки измерения пеленга свыше 2е эффек-
тивность ААК падает, так как гипотеза компактности в большин-
стве реализаций “поля засечек” при малых объемах наблюдений
перестает выполняться. Очевидно, что человек-оператор в процессе
принятия решений использует не только предположение о компак-
тности классов, но и другие, например, структурные характерис-
тики изображения “поля засечек”, что приводит для него к боль-
шей достоверности решения задачи классификации.
Одновременно следует отметить, что высокая точность место-
определепия, достигаемая в приведенных примерах в разностно-
дальномерной МРС, позволяет решить задачу с существенно бо-
лее высокой достоверностью только на основе автоматических
алгоритмов классификации без привлечения человеко-машин-
ных процедур.
370
5. МЕТОДЫ СТАТИСТИЧЕСКОГО ОПИСАНИЯ
И МОДЕЛИРОВАНИЯ ПРОСТРАНСТВЕННЫХ
ХАРАКТЕРИСТИК РАССЕЯНИЯ И ИЗЛУЧЕНИЯ
ОБЪЕКТОВ
Применительно к средствам и системам радиолокации дан-
ные о рассеивающих и излучающих свойствах объектов являют-
ся важной составной частью полномасштабного информацион-
ного обеспечения при анализе конфликтной устойчивости систе-
мы «РЛС — объект — средства защиты объекта» и ее отдельных
элементов. Будем считать, что при защите объекта может ис-
пользоваться набор средств, снижающих его радиолокационную
видимость (заметность), а также средства помеховых воздействий
на РЛС для полной или частичной маскировки или имитации
ложных представлений о положении и параметрах движения в
пространстве. Известно, что следствием снижения радиолокаци-
онной заметности объекта является, как правило, уменьшение
дальности обнаружения, а также ухудшение точности измере-
ния информационных параметров отраженного сигнала. Это по-
зволяет в конфликте «РЛС — объект с пониженной заметнос-
тью» получить определенные тактические выгоды для последне-
го, однако сложность уменьшения до требуемых значений эф-
фективной поверхности рассеяния (ЭПР) во всем используемом
в радиолокации диапазоне длин волн приводит к необходимости
одновременного помехового воздействия на РЛС. Учитывая на-
личие в современных образцах РЛС режима адаптивного изме-
нения мощности зондирующего сигнала в зависимости от скла-
дывающейся целевой и помеховой обстановки, обсудим две воз-
можные ситуации. Первая — средняя мощность излучения яв-
ляется максимальной и в процессе работы РЛС не регулируется,
что характерно для ранее разрабатываемых образцов радиолока-
ционной техники. Тогда, независимо от ЭПР объекта, дальность
разведки при информационном обеспечении создания помех бу-
дет определяться энергетическими параметрами излучаемого
сигнала РЛС и техническими характеристиками разведприем-
ника, входящего в состав РЭК защиты объекта. Вторая — мощ-
371
ность излучения в РЛС регулируется таким образом, что обеспе-
чивается уверенное обнаружение объекта с пониженной замет-
ностью на заданной дальности. Как следует из уравнения радио-
локации [179] при неизменности характеристик трассы распрос-
транения электромагнитной волны, вида сигнала и системы его
обработки уменьшение ЭПР объекта в N раз должно привести к
такому же возрастанию средней мощности зондирующего сигна-
ла, а это, в свою очередь, связано с увеличением дальности раз-
ведки источника радиоизлучения в VN раз. Итак, уменьшение
радиолокационной заметности объекта неизбежно будет сопро-
вождаться снижением скрытности РЛС и, значит, определенны-
ми потерями ее конфликтной устойчивости в рассматриваемой
системе «РЛС — объект — средства защиты объекта». Этот вы-
вод еще раз подтверждает важность изучения способов описания
и анализа излучающих и рассеивающих свойств объектов раз-
личного назначения.
Исследования рассеивающих свойств объектов сопровождали
все этапы становления и развития радиолокации. Действитель-
но, для создания стройных теорий обнаружения и измерения
параметров радиолокационных сигналов необходимо иметь адек-
ватные модели отражающих целей. По-видимому, одними из
первых моделей, которые в свое время нашли наибольшее при-
менение на практике, были три статистические модели Свер-
линга [177, 185], включая модель нефлуктуирующей цели и две
модели флуктуирующих целей. Из отечественных работ отме-
тим [117], в которой выполнено серьезное обобщение разнооб-
разных данных и сделан определенный шаг в развитии статис-
тических моделей радиолокационных сигналов. Однако эти опи-
сания являются далеко не исчерпывающими, поэтому изучение
рассеяния радиоволн на объектах в дальнейшем наращивается.
Работы по информационному обеспечению радиолокационной
заметности объектов продолжаются в двух основных направле-
ниях. Первое включает развитие теоретических методов расчета
дифракции и рассеяния радиоволн на телах простой и сложной
формы [18, 195, 208 и др.], второе — экспериментальное опреде-
ление радиолокационных характеристик (РЛХ) рассеяния, та-
ких как ЭПР и элементов поляризационных матриц на фиксиро-
ванных частотах [30, 72, 89]. В последние годы наряду с иссле-
дованием характеристик рассеяния, описываемых суммарной ве-
личиной ЭПР цели, получили развитие работы по изучению
откликов целей на импульсы с широкими полосами частот на
различных несущих частотах, а также на сверхкороткие (сверх-
широкополосные) видеоимпульсы [4, 80]. Так как форма лоци-
руемых объектов становится все более сложной, а при их созда-
372
нии применяются новые технологии и материалы с уникальны-
ми физическими свойствами, основным способом получения ин-
формации о характеристиках рассеяния все больше становятся
непосредственные измерения, подразделяющиеся на натурные
измерения и масштабное моделирование, которое может быть
электродинамическим, акустическим [30, 208].
Ниже основное внимание будет уделено изложению вопросов,
связанных с экспериментальными методами измерений. Резуль-
татом развития динамического метода измерений, когда дина-
мические РЛХ снимаются в процессе реальных полетов с ис-
пользованием специализированных измерительных радиолока-
торов, будет построение новых статистических моделей ЭПР,
являющихся достаточно универсальными, т.е. включающими в
себя большую совокупность известных моделей как частных. При
описании масштабного электродинамического моделирования на
телах, аналогичного по своей сути статическому методу измере-
ния ЭПР в натурных условиях, наряду с уже ставшими тради-
ционными способами определения интегральных и дифференци-
альных характеристик рассеяния на одной или нескольких фик-
сированных частотах, включая радиоголографические, основное
внимание будет уделено перспективному томографическому спо-
собу формирования радиоизображений как при плоском, так и
при сферическом фронтах облучающей объект волны. Одним из
достоинств томографического способа, определяющего перспек-
тивность его использования в дальнейшем, является возможность
получения радиоизображений по данным об интегральной вели-
чине ЭПР одновременно на многих частотах, а также относи-
тельная простота борьбы с вредными переотражениями от окру-
жающих предметов путем стробирования по дальности прини-
маемого сверхширокополосного колебания. Последнее обстоятель-
ство упрощает процесс измерений за счет снижения требований
к безэховым камерам, либо вообще отказа от них. Отметим, что
используемые на практике динамические диаграммы рассеяния
могут быть построены по статическим диаграммам, полученным
в ходе масштабного моделирования, при заданных законах дви-
жения исследуемого объекта. И, наконец, в заключении главы
рассматривается способ оптико-голографического моделирования
взаимосвязанных в ходе конфликта объемных диаграмм направ-
ленности приемо-передающих антенн РЛС и средств помеховых
воздействий, а также объемных диаграмм обратного рассеяния
объектов локации. Значимость этого вопроса, даже при расту-
щих возможностях современных ЭВМ, связана с сложностью
построения адекватных математических моделей оценок эффек-
тивности различной аппаратуры, когда необходимо с высокой
373
достоверностью воспроизводить пространственные характеристи-
ки излучения и переизлучения объектов типа ФАР, тел сложной
формы с покрытиями и без них и т.п.
5.1. Вероятностные модели флуктуаций мощности
радиолокационных сигналов
Основной характеристикой отражательной способности объек-
тов локации в радиодиапазоне является значение ЭПР [87, 177].
На практике, в процессе измерений стремятся обеспечить уве-
ренный прием отраженного от объекта сигнала, поэтому влия-
нием мешающего шума без значимых последствий для качества
оценок обычно пренебрегают. Измерение ЭПР объекта осуще-
ствляется на основе известного соотношения
Q <5 Р ( R 1
S = SiTp“ R* ’ (5.1.1)
Sr у
где S, Р, R и бэт, Рэт, R3t — соответственно, ЭПР, мощность и
дальность до исследуемого объекта и эталонного отражателя; ЭПР
эталонного отражателя считается известной с большой точнос-
тью. Из (5.1.1) видно, что оценка мощности отраженного сигна-
ла фактически эквивалентна оцениванию величины ЭПР.
Сначала рассмотрим распределение мощности сигнала [96,
117], являющееся распределением вероятностей модуля двумер-
ного вектора, ортогональные проекции которого распределены
по гауссовскому закону, коррелированы между собой и имеют
различные математические ожидания и дисперсии. Ниже будет
показано, что частными случаями этого распределения являют-
ся распределения Релея, Райса, Хойта, гамма, логарифмически
нормальное и др., поэтому исследуемый тип распределения ра-
нее часто назывался обобщенным. Мы пе будем придерживаться
этого названия, так как уже известны распределения, обладаю-
щие большими возможностями. Достаточно подробный анализ
перечисленных типов известных распределений по статистичес-
кому описанию РЯХ объектов, включая исследование оценок
среднего значения ЭПР, содержится в работах [46, 94, 96, 117 и
др.]. Однако, хотя эти модели и приводят к распределениям са-
мой различной формы, каждая из них в отдельности зачастую
не дает необходимой степени обобщения данных по флуктуаци-
ям сигналов для различных классов объектов.
Рассматриваемое распределение амплитуды а имеет вид [43]
W(a; А; В; Т) =-ехр
.al-BcosH7 а2
-А
374
XSEnIn
n=0
a2 В ]
о2 1-В2 Гп
a Vl-2Bcos2T + B2
a
1-В2
(5.1.2)
X
о + f1 + B
xcosn 2arctg ----
1-B
где Be [ОД]; Ae [0,оо];ЧН е [0,2л];
В = 7a2 + p2(l-a2); T = 2cp0 cp0 -arctgШу;
mx
P = arctg ; a = (o2-o2)/o2;
a
mx, mv ax, ay p — соответственно математические ожидания,
дисперсии и коэффициент взаимной корреляции квадратурных
гауссовских составляющих, !(•) — модифицированная функция
Бесселя n-го порядка.
Можно убедиться [44], что бесконечный ряд в (5.1.2) при не-
обходимости может быть сведен к интегралу в конечных преде-
лах на основе известной теоремы суммирования рядов Парсева-
ля [79], а именно:
У, EnIn (Zj )I2n (z2) cos ny = Io (Zj )I0 (z2) + - j f (t) cp( t )dt,
n=o n;
где
f(t) = yin(Zl)cosnYcosnt--[e7 n"tY” +e/,CJS<' °-2l0(z,)];
4
9(t) = XI2:.(z2)cosnt = |[e/=c,=’l/2+e 'lCU“,Z2-2I0(z2)].
n i 4
Тогда соответствующие выражения для плотностей вероятнос-
тей амплитуды и нормированной мощности можно записать как:
W(a) =
2а
ехр<
ог(1-В2)
a2[l-Bcos(2cp0 ~Р)]
о2(1-В2)
375
W ГР7) — — exn J— F - Bcos(2cp0 ft)]
( }~Ji^ I i-в2 i-в2
xJ-J[eI,C0Sl1f+t> + ez'lu,(lf-t>J [e’!t0St/2 + e’X2CO,t/2]dt.
Здесь’ z ~ a В z — о aa°
Я ’ 1 G2(l-B2)’ 2 O2
a/1 - 2B cos(2<p0 - P) + B2
1-B2 ’
; P' = a2/o2; P0'=a2/a2.
y = 2arctg
i+B. ( p
ГЗ‘Т'2
Следуя [185], анализ возможностей распределения (5.1.2) вы-
полним с точностью до первых четырех центральных моментов,
используя совокупность возможных значений коэффициентов
вариации V, асимметрии Рг и эксцесса Р2. Считается [200], что
такая точность является достаточной для решения большинства
практических задач.
Получим выражения для начальных и центральных момен-
тов квадрата амплитуды (мощности), подчиняющихся рассмат-
риваемому типу распределения. Воспользуемся представлением
а2 = х2 + у2 = + Т|2, где £ и Г] — статистически независимые квад-
ратурные составляющие, связанные с х и у ортогональным ли-
нейным преобразованием. Можно убедиться [47, 185], что мате-
матические ожидания (£п) и (т]п) гауссовских величин £ и г|
соответственно равны
„,m.V 1 (ai Т
£$ (n-2k)!k!^2m?
w=n!m: g (T^oik!
2mn j '
С учетом результатов [200] связь числовых характеристик
mx, ту , Oj зависимых (р Ф 0) квадратурных составляющих с
аналогичными характеристиками m^, тл независимых со-
ставляющих £ и Т| может быть представлена следующим образом:
о2 = о2 cos2 - + рохоу sinp + о2 sin2 - = - о2(1 + В);
2 2 2
а2 = а2 cos2 - - ро стv sin р + о2 sin2 - = - о2 (1 - В);
чу 2 х * 2 2
2 ( Р . pY . 2 2ч 2Г P'i 2 2*
гл, = m, cos — + т sin- =(т, +т. )cos фп — =ancos —;
5 х 2 у 2 ) I 2 I 2
376
2 ( . p pY
m. = -m, sm- + m, cos-
л x 2 ' 2
= (Щ2 + Шу)sin2 Фо -
p 2-2
2 Г®08Ш
Y
2 ‘
Для центральных моментов величины Р = а2 после вычислений
имеем:
Игр =(а<) “(а2)2 =(1 + В2)©4 +2агЭо +2o2a0Bcos4';
p3F = (а6) - 3<а4)(а2) + 2(а2)3 = 2ав(1 + ЗВ2) +
+ 6о4а2(1 + В2 +2Bcos'F);
ц4Р = (а8) - 4<а6 ><а2> + 6(а4)(а2)2 -3(а2)4 = 3о8(3 + 14В2 + ЗВ4) +
+ 12ова2 [3 + 7В2 + В(7 + ЗВ2) cos у] +12o4aJ (1 + В cos Т)2
и для коэффициентов вариации, асимметрии и эксцесса:
= 71 + В2 + 2А2(1 + Bcos У).
<Р> ~ 1 + А2
= Мзр _ 2[1 + ЗВг+ЗА2(1 +В2+2Bcos4')J
1Р ТЙ7 7[1 + b2 + 2A2(1 + Bcos40]3
(5.1.4)
(5.1.5)
4B2(1 + 2A2) + 2A2BcosT-A4(H-Bcos<p)2
ц2Р [ + [1 + B2 +2A2(1 + Bcos'P)]2
(5.1.6)
Результаты расчетов, проведенных по формулам (5.1.4)—
(5.1.6), представлены на рис. 5.1.1—5.1.3 в системах координат
Plp, vp и (32р, Vp для различных значений параметров В и Т Из
анализа графиков следует, что верхняя и нижняя границы обла-
сти существования распределения (5.1.2) характеризуются зна-
чениями В’1, У = 0 и В = 1, Т-л, соответственно. Изобража-
ющая точка распределения вероятностей мощности Р с ростом
значения параметра А перемещается справа налево и вниз по
прямой (В, Т =-const) по направлению к точке 0(0,0]. На
рис. 5.1.3. представлен также ряд используемых на практике
аппроксимаций распределения величины Р. Точки О, Р, N соот-
ветствуют гауссову, релеевскому и односторонне нормальному
распределениям, а кривые ОР и ON — распределениям Райса и
Хойта, соответственно. Заметим, что каждое из этих распреде-
лений является частным по отношению к распределению (5.1.2)
[96]. Здесь для сравнения представлены кривые для гамма- и
логарифмически нормального распределений мощности.
Сравнительный анализ областей существования вероятност-
ных моделей показывает, что при значении В = 1 распределение
охватывает все его частные случаи и может в ряде случаев, с
377
--------! --------2 --------з
Рис. 5.1.3
Зависимости коэффициента вариации от коэффициентов асимм
рии и эксцесса для гауссовских сигналов
378
точностью до коэффициентов вариации, асимметрии и эксцесса
являться одним из аппроксимирующих распределений. Равен-
ство В = 1 справедливо при условии а-1 или р = 1. Согласно
[198] в предельном случае р = 1 имеет место линейная зависи-
мость между квадратурами х и у ,т.е. у = тх + п, где т =tg 3/2;
n = а0 sin(cp0-p/2)/cosp/2; р = arctgVl - а2 / а * Тогда, учитывая
функциональную связь между величиной Р и гауссовскими ве-
личинами х и у, аппроксимирующее распределение мощности
W(P; р ** 1) можно представить в виде
(х/а2 -А2о2(1 - cos4?) /2 - х/а2о2(1 + cos
(7а2 - А2о2 (1 - cos Т) / 2 + л/а2о2 (1 + cos Т) / 2)2
Несложно убедиться, что распределение вероятностей W(P; а - 1)
эквивалентно распределению W(P; р - 1). Параметры А, В,
входящие в распределение (5.1.2), могут быть определены на
основе соответствующих преобразований (5.1.4—5.1.6) [42] по
данным экспериментальных измерений величин vp, р1р, р2р.
Аналогично определяются и параметры частных аппроксимиру-
ющих распределений. Параметры А, В, ЧН имеют конкретный
физический смысл, что несомненно удобно при анализе отража-
ющих свойств объектов, характеризуемых ЭПР.
Однако, как свидетельствует опыт применения этого распре-
деления при статистическом описании результатов измерений
для реальных объектов, адекватное представление во многих
случаях все-таки не достигается. Формальными признаками та-
кого несоответствия являются нарушения пределов для пара-
метров А, В. Ч7 диапазонов значений коэффициентов вариации,
асимметрии и эксцесса мощности отраженных сигналов, нали-
чие «хвостов», провалов, всплесков или многомодалыюсть полу-
ченных экспериментальным путем плотностей вероятностей.
Поэтому желательно синтезировать еще более универсальную
вероятностную модель флуктуаций амплитуды (мощности) нега-
уссовых сигналов, свободную от указанных недостатков.
Следуя [41], воспользуемся результатами анализа распреде-
ления (5.1.2), в том числе условий достижения предельных об-
ластей его существования на плоскости в координатах vp, р1Р и
379
Vp, P2P и максимальных значений коэффициентов vp, р1р, (32р.
Как уже отмечалось выше, такие условия имеют место при Be 1,
что эквивалентно условиям с2 = 0 (о2 0) или о2 = 0 (а* 0).
Поэтому максимальные значения коэффициентов vp, £1р, р2р
могут быть получены для физической модели цели в виде сово-
купности стабильного и флуктуирующего отражателей. При этом
отношение мощности отраженных от них сигналов A2g[0,o°)»
фазовый угол между векторами этих сигналов Т ^0 или Ч* = я, а
флуктуации амплитуды афл от нестабильного отражателя подчи-
няются одностороннему нормальному распределению. Последнее
является частным случаем m-распределения и при т = 1/2
тт Я 2т-1 / А
где 0 < афл < оо ; Г(т) — гамма-функция.
Можно убедиться, что значения коэффициентов распределе-
ния (5Л.8) vp, Р1р, Р2р с уменьшением параметра m монотонно
возрастают. Поэтому следует ожидать расширения областей су-
ществования вероятностной модели флуктуации амплитуды не-
гауссовых сигналов при переходе от ш = 1/2 к m -»0. В то же
время непосредственное использование (5.1.8) вместо односто-
роннего нормального распределения не позволяет получить в
явном виде выражение для плотности вероятности амплитуды
гипотетической модели, поэтому рассмотрим случай, когда m —> е,
где £ — сколь угодно малая положительная величина. Одновре-
менно воспользуемся известным [47] представлением гамма-функ-
ции для любых значений аргумента
n t П™’1
Г(т) = lim------—------------, n = 1,2.
n->~ m(m +1)... (m + n -1)
аф1пи»х
Тогда, учитывая нормировку J WCa^Jda,^ = 1, получаем но-
вое распределение амплитуды
VW
где а, , а._____— минимальное и максимальное значение ам-
фл min’ фл max
плитуды отраженного сигнала от флуктуирующего отражателя;
X=aw /а. ; а^ . > 0; а. <<*>; 0<Х<1. Соответствую-
фл min' фл max’ фл mm ’ фл max ’ J
щая (5.1.9) плотность вероятности мощности Рф1 имеет вид
W(P^) — 21п Р ’ Рфлпйп < Рфл < ^Флягах* (5.1.10)
380
В отличие от большинства известных однопараметрических
распределений амплитуды (мощности) сигнала распределения
(5.1.9), (5.1.10) являются элементарной рациональной функци-
ей переменной. Опираясь на (5.1.10), найдем выражение для
начальных и центральных моментов мощности
- Р 1-^2 _ р2
ГО1Р фп max 21п1/Х' т2р флта*41п1/Х’
-рз _р4 1-^8 <5Л-П)
т3р фл т,,х 61п1/Х ’ т4Н фл тах 81п1/Х
1-Х4 Г 1-Х2
41п1/Х 1 (1 + Х2)1п1/Х
МйН ~ 1ф1 тахМ2Р> МзР — Рфл т«хМзИ’ Щр — Рфл тахМлР ’ (5.1.12)
где
1-Х6 Г _9(1 -Х2)(1-Х4) +
61п1/х|/ 4(1-Х6)1п1/Х +
! 3(1-V)3 1 0 1-Х8 Г 8(1- X2)(l-V) |
2(1-X6)(lnl/X)2 ]’ 81nl/x|_ 3(1-Х8)1п1/Х
3(1-Х4)(1-Х2)2 3(1-X2)4
+ (1-X8)(lnl/X)2 2(1-Х8)(1п1/Х)3
Путем расчета коэффициентов вариации, асимметрии и экс-
цесса мощности Рф1 с использованием (5.1.11) и (5.1.12) можно
оценить потенциальные возможности распределения (5.1.10),
которое в [41] назвали Х-распределением. Анализ приведенных в
цитируемой работе данных свидетельствует о более широких
потенциальных возможностях Х-распределения по описанию
флуктуации мощности отраженных от объектов сигналов, осо-
бенно при vp >>/2, > 2\/2, р2Р >12 по сравнению с однопара-
метрическими распределениями Райса, Сверлинга, Накагами,
Хойта и др. Эти возможности оказываются сопоставимыми с
аналогичными для эмпирических распределений SL — Джонсо-
на и Пирсона [185], хотя в отличие от последних параметр X
имеет определенный физический смысл.
Для синтеза вероятностной модели, включающей регулярную
и флуктуационную составляющие мощности, используем стан-
дартное допущение о двухточечной физической модели объекта.
Возможность применения такой модели в большинстве случаев
оправдана тем, что стабильный и флуктуирующий отражатели
могут рассматриваться как результирующие эквиваленты соот-
ветственно нескольких стабильных и флуктуирующих отража-
телей в составе цели.
381
Примем, что квадратурные составляющие от флуктуирующе-
го отражателя являются независимыми, а их мощности подчи-
няются ^-распределению. Так как полная мощность является
суммой мощностей квадратурных составляющих Рх и Р , рас-
пределение ^фЛ(Рфл) определяется в виде свертки функций, т.е.
'^фл(Рфл)= j Wx(Px)W}[Py(Px)]dPx.
р
1 к min
Интегрирование для частного случая Хх = Xj = X,
Рх min — Рх max ~Pmin Дает
W<t,n(P<tuI) =
1 1 1
---------у----In
2(lnl/X)2 РИ
( Р
* фл
Р
\ mm
(5.1.13)
Воспользуемся известным представлением мощности суммарно-
го вектора в виде
Р = Р0 +Рфл + 2а0афлсозФ*, (5.1.14)
где Ро, Фо, а0 — детерминированные мощность, фаза и амплиту-
да сигнала от стабильного отражателя, Ф* = Ффл -Фо.
Условие плотности вероятностей \¥(Р/ФфЛ) с учетом (5.1.13),
(5.1.14) будет
2(1п1/Х)2 ^Р-Ро sin2 Ф* ±-УР-Р0 sin2 Ф* -а0 совФ*
(-------------------- х2
—Ь2вт2Ф‘/Х2 -ЬсовФ*/!
Р
х 1П1П
(5.1.15)
-In
I-------------------------- \2
I Р I
± /-------Ь2з1п2Ф’ -ЬсозФ* -1
V Р I
У max /
W L = 7P0/Pmax ; знак ± перед радикалом выбирается в зависи-
мости от соотношения между Рфл и Р0соз2Ф\ Используя (5.1.15),
можно записать выражение для распределения W(P)
w(P)= J" у^р/Ф’^ф^аФ’, (5.1.16)
Ф|П1П
при этом закон распределения плотности вероятностей фазы Ф*
определяется на основе закона W^)
382
а пределы изменения аргумента Ф — неравенствами:
Х^Ффя<1и 1 < tgd)^ <1/Х для 1-й и 3-й, -l^tgd^^-X и
-l/X<tgO^ <-1 для 2-й и 4-й четвертей единичной окружнос-
ти. Так как X > 0, функции WCP/Ф*) и АУ(Ф*) не являются не-
прерывными для диапазона Ф*е[0,2л]. Поэтому разбивая весь
диапазон на четыре интервала, на которых подинтегральные
функции в (5.1.16) непрерывные, применяя первую теорему о
среднем [79], результаты интегрирования на интервалах равной
длины можно записать в виде
4 ^miri к
w(P)=£w(P^01:) j w(0*k)d0;,
^min к
где Ф^к — некоторое фиксированное значение фазы для каждо-
го из интервалов. Учитывая идентичность функции ^г(ФфЧ) для
каждой четверти единичной окружности и равенство интерва-
лов интегрирования, получаем
W(P) = №l7w41'-
Здесь:
л/P-PoSin2 Ф’, (±^P-Posin2 Ф01 - а0 cos Ф^,)
хИп
(+7Р-Розш2ф;; -арСОбФ^)2
Pmin
-In
(+7р - Рр sin2 ф;, - а0 cos Ф^ )2
Р
max
где Ф^ =Ффл> -Фо ’ ПРИ i 4 перед радикалом выбирается знак
плюс, при 1 =2, 3 — знак плюс или минус в зависимости от соот-
ношения между величинами и Р0соз2Ф\
Рассмотренная вероятностная модель флуктуаций мощности
зависит от трех параметров формы X, L, Фо и трех параметров
масштаба Prin, Pmax> Ро« Анализ моделей, которые являются ча-
стным случаем (5,1.17), уступая ей незначительно по возможно-
стям статистического описания мощности, содержится в [41].
В работе [40] предложено отличающееся от (5.1.17) одномер-
ное распределение мощности Р сигнала в предположении, что
амплитуда флуктуирует в соответствии с Х-распределенисм (5.1.9),
а случайная фаза подчиняется «обобщенному» равномерному
закону. Распределение имеет вид
383
W(P) =
(2n-Ei-e2)
а(Ф>.х >ф;™„ - Ео. Фо)
---------1---------. для (Р-Р0)2>0;
Р-Ро
где
(2л-г, -е2)
^-^тях-Ф^ш.Фо^ДЛЯ (Р-Рп)2<0,
а(Ф;тах-Ф)т.п,ЕО.Фо) = arCtg
tg
<Ф,т„~ Фр
2
-arctg
fa[ ФДт'п ФО
g 2
Т(Ф,тах-Ф;тН.Ф0) = —
tg
1 1
<Ф)т.п-фО^ Ф)тах ~ФО Y
I 2 J [ 2 J
Ер е2 — параметры, позволяющие описать глубину флуктуаций
фазы, в том числе в доминирующем угловом секторе наблюде-
ния (ех £ е2); j = 1, 2, 3, 4.
На рис. 5.1.4, 5.1.5 в качестве примера, иллюстрирующего
возможности распределения (5.1.17), приведены области суще-
ствования распределения мощности негауссовых эхо-сигналов на
плоскости в координатах рхр, vp и р2р, vp для значений
Хе [1О10,1], Le [0,<*>), Фо = 0°, 45°, 90°. Здесь для сравнения на-
несены заштрихованные области существования распределения
(5.1.2) мощности гауссовых сигналов. Видно, что области суще-
ствования законов распределения мощности негауссовых сигна-
лов значительно превосходят соответствующие области для из-
вестных распределений.
В [45] методом моментов для вырожденного случая (Рх = const)
вероятностной модели (5.1.17) проведена оценка параметров фор-
мы и масштаба этого распределения. Эти параметры выражают-
ся через оценки средней мощности отраженного сигнала (Р) и
оценки коэффициентов vP, р1Г, Р2Г , получаемые непосредствен-
но в ходе экспериментальных исследований. В таблице 5.1.1 со-
держатся данные, зафиксированные при измерениях ЭПР совре-
менного реактивного самолета в натурных условиях. Цель облу-
чалась узкополосным зондирующим сигналом сантиметрового
диапазона длин волн. В ходе эксперимента самолет выполнял
радиальные заходы на измерительную РЛС и удалялся от нее
при постоянном угле места е= 10° (режимы 1, 2). Кроме того,
выполнялись аналогичные заходы на РЛС и от нее с одновре-
менными маневрами различных видов (режимы 3—6).
384
Зависимости коэффициента вариации от коэффициентов асиммет-
рии и эксцесса для негауссовских сигналов
Анализ полученных данных показывает, что численные зна-
чения оценок коэффициентов вариации, асимметрии и эксцесса
принадлежат области существования рассматриваемой вероят-
ностной модели; в то же время данные с порядковыми номерами
3, 5 пе могут быть описаны в рамках распределения (5.1.2). Ре-
зультаты оценки параметров формы и масштаба модели (5.1.17)
представлены в таблице 5.1.2.
С использованием полученных значений параметров был про-
веден расчет плотностей вероятностей мощности отраженных от
исследуемой цели сигналов, нормированных относительно сред-
него значения W(P/(P)). Соответствующие графики для всех
исследуемых режимов полета и ракурсов наблюдения объекта
локации представлены на рис. 5.1.6—5.1.11. Их анализ указы-
вает на наличие достаточно сложных зависимостей, имеющих
изрезанный и многомодовый характер.
Рассмотренные вероятностные модели флуктуации мощности
радиолокационных сигналов наряду с другими известными мо-
делями являются вполне адекватными для надежного статисти-
ческого описания РЛХ современных объектов сложной формы
при динамических методах измерений ЭПР в натурных услови-
385
Таблица 5.1.1
Экспериментальные оценки
характеристик отраженного сигнала
Режим полета/ракурс цели Усредненные числовые Интервал наблюде- НИЯ, с
характе эистики
<Р), ДБ Vp Р1Р ₽2Р
1/нос 29 0,8 1,6 7,4 20
2/хвост 31 0,7 1,3 5,2 20
3/нос 27 1,2 2,8 15,8 20
4/хвост 30 0,9 1,7 6,7 20
5/нос 33 1,72 3,4 28 5
6/хвост 32 0,95 2,4 11,3 5
Таблица 5.1.2
Результаты оценки параметров формы и масштаба
вероятностной модели
Режим полета/ракурс цели Параметры вероятностной модели Интервал наблюде- ния, с
X L2 Ф . О’ град Р ф*1 тяж р фл mln (р> Р» (Р) Р»||п ТрУ <р>
ДрГ
1/нос 1510-1 0,24 33 2,82 6,310-* 0,68 0,48 5 20
2/хвост 25-10'2 0,064 24 2,49 1,6 10-’ 0,16 0,13 3,15 20
3/нос 210~4 0,08 14 7,25 2,910 ’ 0,58 0,54 8,3 20
4/хвост 11 10’ 0,61 78 1,39 1,7'10‘4 0,85 0,034 4,4 20
5/нос 10 5 0,047 45 11,1 1,110 • 0,52 0,25 15 5
6/хвост 15-Ю1 0,12 18 5,0 1,110 s 0,62 0,57 6,7 5
ях. Достоинством этих моделей является замкнутая форма пред-
ставления распределений, а также вполне определенный физи-
ческий смысл соответствующих числовых характеристик.
5.2. Построение радиолокационных изображений объектов
на основе томографической обработки данных
многопозиционных измерений сверхширокополосных
сигналов
Необходимость увеличения частотного и пространственного ди-
апазонов измерений РЛХ непосредственно связана с выявлением
пространственной структуры рассеяния электромагнитного поля па
объекте локации. Расширение частотного диапазона измерений
позволит получить частотную зависимость интегральной ЭПР и
приводит к увеличению разрешающей способности по дальности;
расширение интервала возможных взаиморасположений измери-
тельного комплекса относительно объекта при применении различ-
ных способов пространственной обработки сигналов создает пред-
386
W(P/(P>)
W(P/<P))
Рис. 5.1.10
Рис. 5.1.11
Рис. 5.1.9
387
Экспериментальные зависимости плотностей вероятностей мощности отраженных сигналов
посылки для достижения высокого разрешения по поперечным
координатам. Совместное расширение обоих диапазонов измерений
позволит достигнуть результирующее пространственное разреше-
ние по поверхности объекта, которое в настоящее время трактует»
ся как его радиолокационное изображение.
При измерениях РЛХ пространственная структура падающего
на объект поля должна повторять структуру поля при реальном
наблюдении, т.е. иметь равномерный амплитудный и практически
плоский фазовый фронт. При измерениях в натурных условиях
эти требования обычно без труда выполняются. При масштабном
электродинамическом моделировании применяются специальные
методы фокусирования в ближней зоне, когда формируется облу-
чающее поле с требуемыми пространственно-временными и поля-
ризационными характеристиками [86]. При этом, если вместо це-
лого объекта рассматривать его небольшую часть, определяемую
элементом результирующего пространственного разрешения, дос-
тигаемого в результате обработки данных, требования к выполне-
нию условий дальней зоны снижаются [217].
Известно [4, 21, 65—67], что применение сверхширокополос-
ных сигналов (СШПС) является весьма перспективным путем
существенного повышения информативности измерений РЛХ.
Действительно, при использовании зондирующих сигналов пи-
косекундной длительности достигается высокое разрешение вдоль
исследуемого объекта. Если объект в процессе измерения РЛХ
вращается вокруг своего центра масс, то для каждого углового
положения имеется совокупность данных об отражающих свой-
ствах его элементов. Данные по каждому элементу разрешения
по дальности, закодированные в отраженном сигнале, можно
трактовать как интегральную проекцию отражения разрешае-
мого элемента в точке, причем траектория проецирования по-
вторяет конфигурацию фронта облучающей волны. Если изме-
рения выполняются в дальней зоне, то фронт волны является
плоским и значения проецируемой функции отражения лежат
на прямой, ортогональной направлению распространения вол-
ны; при измерениях в ближней зоне фронт волны может апп-
роксимироваться сферическим, а значения функции отражения
объекта проецируются в соответствующую точку по дуге окруж-
ности. Итак, когда функция отражения f(x,y) интегрируется по
траекториям, расположенным под разными углами, получается
набор значений наблюдаемой величины R, которая также выс-
тупает как функция двух переменных: угла облучения <р и рас-
стояния s, определяющего местоположение фронта облучающей
волны вдоль объекта (рис. 5.2.1). Иначе говоря, в процессе изме-
рений РЛХ вместо функции f(x,y), характеризующей распредс-
388
ление центров отражения по
объекту, получают функцию
R(s,<p) на множестве всех тра-
екторий (прямых, окружнос-
тей и т,д.), задаваемых интег-
ралами от f(x,y) вдоль этих
траекторий. Задача восстанов-
ления радиолокационного
изображения ставится так: по
известной функции R(s,cp) тре-
буется определить f(x,y). С ма-
тематической точки зрения не-
обходимо определить явную
формулу обращения, позволя-
ющего по функции R(s,<p) най-
ти f(x,y), или иначе — преоб-
Рис. 5.2.1. Схема измерения
радиотомограммы в ближней зоне
разование, обратное преобразованию Радона [192]. В этом и со-
стоит сущность томографического метода применительно к ис-
следованию РЛХ объектов [4, 91, 223].
5.2.1. Математическая модель формирования
и восстановления радиотомограммы
при сверхширокополосных измерениях
Будем исходить из того, что требования компактности изме-
рительных комплексов, трудность обеспечения плоского облуча-
ющего поля приводит к измерениям РЛХ в поле сферической
волны. При этом дальность г может выбираться таким образом,
что в пределах локальных источников отражения или при нали-
чии высокого пространственного разрешения по поперечной ко-
ординате облучающее поле считается плоским. Согласно [217]
этот принцип, например, используется при измерениях РЛХ
объектов электронным центром CELAR (Франция).
Снова обратимся к рис. 5.2.1, где: Lo — дуга окружности ради-
уса г, по которой перемещается излучатель и совмещенный с ним
приемник; Ц — дуга окружности радиуса r±s, где штриховкой
показан i-ый разрешаемый элемент по дальности вдоль объекта;
О' — положение излучателя (приемника); 0" — центр масс объек-
та; г — расстояние от излучателя (приемника) СШПС до центра
масс объекта; s — текущее расстояние от центра масс до i-ro разре-
шаемого по дальности элемента. Заменим вращение объекта вок-
руг центра масс перемещением излучателя и совмещенного с ним
приемника отраженного сигнала по окружности. Тогда в произ-
вольный момент времени излучатель занимает положение О' с ко-
ординатами х0, у0. В этом случае разрешаемые вдоль объекта эле-
389
менты имеют кольцевую форму, поэтому можно считать, что тра-
екторией интегрального проецирования значений функции отра-
жения f(x,y) является окружность (или ее часть). В исходной сис-
теме координат уравнение окружности радиуса r±s, описывающей
траекторию проецирования и учитывающее перемещение излуча-
теля по окружности радиуса г, имеет вид
[х - г(1 - cos <р)]2 + (у + г sin <р)2 = (г ± s)2.
Учитывая, что интеграл от заданной функции f(x,y) вдоль ок-
ружности равен интегралу по всей плоскости произведения этой
функции на 8-функцию, аргументом которой является левая часть
уравнения, для радоновского образа функции f имеем:
R(r ± s,<p) = J J f (х, у)8 _ Г(1 “ cos ф)Г + (У + г sin ср)2 - (г ± s)]dxdy.
(5.2.1)
Обозначим х - г(1 - cos <р) = х - х0 = х'; у 4- г sin (р = у + у0 = у'. Введем
систему полярных координат, связанных с системой координат
OX'Y', следующим образом: х' - р cos 0; y' = psin0. Тогда, сделав в
(5.2.1) замену переменных, интегрирование по двум переменным
можно свести к интегрированию по одной переменной
2гх
R(r±s,<p) = J Jf[pcos© + r(l-cos<p),psin0-rsin<p][8[p-(r±s)]]x
— о
2 ix
xpdpdO = J (г ±s)f [(г ±s)cos0 + r(l-cos(p),(r±s)sin0-rsin(p]d0.
° (5.2.2)
Рассмотрим связь между преобразованием Френеля функции
Радона и исходной функции отражения. Обозначим через
Еф(^,<р) — одномерное преобразование Френеля радоновского об-
раза (5.2.2) по переменной г', а через — двумерное пре-
образование Френеля от функции f(x,y). По определению [178J
R<t>(^,<p) = о>0 V2 jR(r',<p)exp[j(o2(r'-^)2] dr'; (5.2.3)
> о
Кф(^,^2) = 2“о j jf(x,y)exp{jo)2[(x-41)2 + (y-42)2]}dxdy, (5.2.4)
где сп0 — дополнительный параметр в преобразовании Френеля.
Подставляя (5.2.2) в (5.2.3), получаем
R« (£, <р) = ш0 -^2 j j r'f [г' cos 0 + r(l - cos <p), r' sin 0 - r sin <p] x
» » (5.2.5)
x exp [ jco2 (r' - £)2 ]d©dr'.
390
Перейдя в (5.2.4) к полярной системе координат и учитывая
якобиан преобразования, имеем:
Гф(^1Л2) ” 2(JOo f jpf[pcos0 + r(l-cos^),psin® ~rsin(p]x
о о
хехр{ j(Oo[(р cos 0 + г(1 - cos ф) - )2 + (р sin 0 - г sin Ф - ^2)2 В dpd®-
(5.2.6)
Полагая г' = р, сравнивая (5.2.5) и (5.2.6), нетрудно видеть, что
равенство функций Еф(^,ф) и имеет место при равенстве
функций Френеля в соответствующих интегралах свертки. Следу-
ет отметить, что функция Френеля, присутствующая в (5.2.5), за-
висит от одной переменной р и является одномерной, а в (5.2.6) —
двумерной и зависит от координат р и 0. Другими словами, равен-
ство функций о0л/2Кф(^,ф) и имеет место при условии:
(р-1;)2 = [р cos 0 + г(1 - соэф) - ]2 + (р sin0 — г sin ф — J;2)2. (5.2.7)
Раскрыв выражения в скобках, приравняв соответствующие чле-
ны при переменной р и члены без р, а также решая систему
уравнений относительно переменных и £2, получим
= 1;со50 + г(1-со5ф); - £sin0-rsinip. (5.2.8)
Используя последнюю формулу, условие равенства функций
КФ(^ф) и £ф(^,^2) можно записать в виде
(1)0л/2Еф(1;,ф) = £ф[1;со50+г(1-со5ф), £sin0-rsin<p]. (5.2.9)
Из рассмотрения (5.2.9) видно, что функция в левой части ра-
венства от 0 не зависит, следовательно и переменные
=^соз0 + г(1-созф); =Ьт0-гзтф могут принимать зна-
чения, которые также не зависят от 0. Здесь имеет место следую-
щее: при различных входящих в (5.2.5), будут иметься соответ-
ствующие (5.2.8) значения 0е [0,2л] и При этом пары и
будут соответствовать некоторым углам 0 из всей области их изме-
нения. Положив 0 = ф, каждому q будет соответствовать только
одна пара значений и что равносильно их однозначному опре-
делению. Перепишем (5.2.9), выбрав 0 = ф, следующим образом:
(о0л/2Кф(^,ф) = Гф[(^-г)со8<р+г; (^-г)зшф]. (5.2.10)
Выражение (5.2.10) представляет собой математическую фор-
мулировку теоремы о центральном сечении при измерении в
ближней зоне [134]. Ее физический смысл заключается в следу-
ющем. Преобразование Френеля радоновского образа, получен-
ное под углом ф, является сечением двумерного преобразования
Френеля неизвестной функции отражения объекта f(x,y) вдоль
линии, проходящей через центр вращения объекта в плоскости
с2 и составляющей угол ф с осью
391
С помощью этой теоремы может быть получена искомая фор-
мула обращения. Для этой цели запишем обратное преобразова-
ние Френеля от £ф(£р1и)> позволяющее восстановить исходную
функцию
f(x,y) = (л/2<о0)2 j j f»(5i.UexP{-j<«)#[(x-Q2 + (У-^)2]}^1^2-
Используя условия (5.2.8) и (5.2.10), вместо функции £ф(^Р£2)
подставим функцию Кф(£,ф) с одновременным переходом от ко-
ординат Е,2 к координатам ср. Тогда, учитывая якобиан пре-
образования, окончательно получим
2п<»
f (х, у) = (соо л/2 )3 j j (£ - г)Вф (£, ф) х
_______________________________________ (5.2.11)
хехр{-jco2 (7(х - r(l - cos ф)]2 + (у + г зшф)2 - £)2 }chpd£.
Из (5.2.11) следует, что для восстановления искомой функции
f(x,y) необходимо найти одномерное преобразование Френеля от
полученной в процессе экспериментальных исследований РЛХ фун-
кции R(r',cp) (5.2.2), а затем вычислить двойной интеграл.
Для выявления детальной структуры алгоритма, более удоб-
ного для вычисления на практике, представим (5.2.11) в виде
следующей последовательности операций:
1(р,ф) = («о V2)3 j($ - ГЖФ&Ф) exp[-j<o2 (р - S)2] d (5.2.12)
Г
f (х, у) = j - г(1 - cos ф)]2 + (у + г sin ф)2, ф| d ф. (5.2.13)
о
Обозначим: со = 2сОо(^-г) . (5.2.14)
Подставив (5.2.3) в (5.2.12), раскрыв показатели степени экс-
понент и делая соответствующую (5.2.14) замену переменных,
перейдем от преобразования Френеля к преобразованию Фурье
1(р,ф) == exp[-jcog(p - г)2] |coexp(jcop)x
° (5.2.15)
хj R(r', ф) exp [jcog (г' - г)2 ] exp(-jcor') d r'dco,
о
или воспользовавшись теоремой Бореля о Фурье-образе свертки
[178]
1(р,ф) = exp[-j<o2(p-r)2] jR(r,^)exp[jo^(r'-r)2]q(p-r')dr', (5.2.16)
о
где q(p) = Jcoexp(jcop)dco.
о
392
Процедуру замены переменной р на >Дх - r(l - cos ср)]2 +(y + sm<p)2
в функции 1(р,ф) можно рассматривать как некоторое правило,
позволяющее для конкретного угла ф функции одной перемен-
ной ставить в соответствие функцию двух переменных, при этом
функция как бы растягивается по плоскости х,у вдоль траекто-
рии проецирования, оставаясь постоянной вдоль каждого ради-
ального сечения. Такую процедуру замены, по аналогии с [192],
называют обратным проецированием, а ее результатом в этом
случае будут сглаженные обратные проекции. Совокупность опе-
раций, описываемых выражениями (5.2.13), (5.2.15) и (5.2.6),
можно рассматривать как алгоритм сглаживания и обратного
проецирования для ближней зоны.
Известно [183], что при расчете выражения типа (5.2.11), яв-
ляющегося уравнением Фредгольма 1-го рода, имеет место неус-
тойчивость результата, проявляющаяся при незначительных
вариациях исходных данных. Эта неустойчивость проявляется
при вычислении функции (5.2.12) из-за влияния Иф(^,ф), кото-
рая согласно (5.2.3) будет рассчитываться на основе измерений с
некоторой погрешностью функции Щг',ф). Устранение этого не-
желательного явления согласно [183, 192] возможно путем регу-
ляризации (5.2.12), т.е. введением в эту формулу стабилизирую-
щего множителя Wa(o), зависящего от параметра регуляриза-
ции а и по существу описывающего фильтр нижних частот опре-
деленной формы. Физическая суть стабилизирующего множителя
заключается в сужении класса возможных решений соответству-
ющего интегрального уравнения за счет регулируемого подавле-
ния тех участков частотного спектра сигнала, где имеются наи-
более сильные относительные искажения исходных данных. Как
правило, такие участки обусловлены ограниченной разрешаю-
щей способностью измерительной системы и находятся на кра-
ях, а также за пределами ее частотной характеристики. С уче-
том изложенного формулу обращения (5.2.11) в регуляризован-
ном виде можно записать как
2я о»
f(X, у) = (ч V2)3 J J W, [2«2G - г )}(£ - г)Еф(^<р)X
____°г_____.____________ (5.2.17)
xexp<-jto2 (7[х - г(1 - cos ф)]2 + (у + г sin ф)2 - £)2 >d <р d
Для оценки работоспособности полученных алгоритмов вос-
становления функции отражения рассмотрим некоторую тесто-
вую функцию
2
f (х,у) = у ехр{-[(х - Г - rm)2 + (У - ym)2p2]k (5.2.18)
m-1
393
в которой для определенности расчетов положим х^у^О;
х2 = у2 = 10; г = 50; [3 = 0,4» Подставляя (5.2.18) в (5.2.2), нахо-
дим
2
R(r',ф) = У. г'expHr'2 + (г cosф + xm)2 + (г sin ф + ym)2] Р2} х
m_1 ________________________ (5.2.19)
xlo [2г'р2 7(г cos ф + xm )2 + (г sin ф + ут )2 ].
Считая модуль аргумента модифицированной функцией Бесселя
нулевого порядка достаточно большим, воспользуемся извест-
е2 f 1 1
ным асимптотическим разложением [47] I0(z) ® г <1 + — + ... >.
V2nz I 8z J
Ограничившись одним членом ряда, представим (5.2.19) в виде
2 1 I г
к<г',ф) = £ Та. — охр[-(г'-ап1)2р2].
V
(5.2.20)
где аП1 = 7(r cos ф + xm)2 + (г sinф + ут)2 .
I—
Дх,у)
Результаты моде-
лирования процесса
восстановления с ис-
пользованием (5.2.20),
(5.2.3), (5.2.11) приве-
дены на рис. 5.2.2. От-
носительное отклоне-
ние значений восста-
новленной и исходной
функции оказывается
менее 1 %.
Если фронт облу-
чающей волны в про-
цессе формирования
и восстановления ра-
Рис 5.2.2, Резулх>таты моделирования
процесса восстановления тестовой функции
ственно воспользоваться результатами
диотомограммы ока-
зывается плоским,
можно непосред-
[192]. Формула обра-
щения описывается выражением
f(x,y) - J dip J |co|R(a),(p)exp[j2na)(xcos(p-h ysinip)]dco. (5.2.21)
о <*>
Согласно (5.2.21) для восстановления функции отражения f(x,y)
следует найти преобразование Фурье R(to,cp) ее радоновского образа
R(s,cp) и затем вычислить приведенный двойной интеграл.
394
5.2.2. Разрешающая способность
и экспериментальные исследования РЛХ объектов
при томографической обработке сигналов
Допустим, что качество разрешения деталей формируемого в
результате томографической обработки радиолокационного изоб-
ражения объекта связано с следующим допущением: в результа-
те процедуры обработки возможность раздельного наблюдения
центров отражения по объекту должна быть сопоставимой с дан-
ными сверхширокополосных измерений по дальности, т.е. ис-
ходная величина разрешения должна сохраняться в радиоизоб-
ражении объекта в любом направлении.
Предположим, что в процессе измерений удается наблюдать
две блестящие точки, удаленные друг от друга на расстояние
2х0. Допустим, что интенсивность отражения одинакова и равна
f0, а координаты точек равны (г-хо,О), (г + хо,О). Тогда восста-
навливаемая функция имеет вид
f (к, у) = f0 [8(х - г + х0)8(у) + 8(х - г - х0)8(у)]. (5.2.22)
Преобразование Френеля этой функции будет
U.-U = 2<оХ exp{ja)2[(^-г±х0)2 + !Ц}. (5.2.23)
В качестве стабилизирующей выберем функцию
W„[2<o2 - г )2 + ] = ехр • -^а2[(^ -г)2 + ^2] •. (5.2.24)
Найдем восстанавливаемую функцию, для чего используем
(5.2.11), подставив в него (5.2.10) с переходом от переменных
интегрирования ф к переменным ^2. Получаем:
flt(x,y) = 2(o2] j Wj2(o2^1-r)2+^] f,U)x
— (5.2.25)
хехр{->о[(х-^)2 +(y-^2)2]}d^ <Ц2.
Используя в (5.2.25) (5.2.23) и (5.2.24), имеем:
2л2
fu(x,y) = ^T-f0 exp^ ——у*[(х - г ± х0)2 + у2] [х
а а
а'
xexp{-j<o2[(x - г)2 + у2 -х2]}.
(5.2.26)
Несложно убедиться, что за счет выбора значения параметра со2
можно добиться такого снижения влияния экспоненциального
множителя, когда им пренебрегают. Поэтому в (5.2.26) останет-
ся сумма экспонент, характеризующая восстановленное томо-
графическое изображение объекта.
395
Для того, чтобы две блестящие точки различались, необходимо
в соответствии с критерием Релея выполнить условие [18, 192]
2(2л)3
а2
/
foexp
2л2
---Гх
а
<O,81fo
(2л)3
а2
(5,2.27)
2
О
При известном х0 из (5.2.27) следует искомое ограничение на
регуляризирующий параметр а, т.е.
а < хол>/-2/In0,405 - 1,5лх0. (5.2.28)
Неравенство (5.2.28) определяет взаимосвязь между минималь-
ным расстоянием 2х0, при котором в процессе томографической
обработки СШПС по критерию Релея будет обеспечиваться раз-
решение двух блестящих точек и требуемым для этого значени-
ем параметра а, характеризующего ширину частотной характе-
ристики измерительной системы.
Определим возможности раздельного наблюдения двух блес-
тящих точек (5.2.22) по дальности в случае однопозиционного
измерения. Если частотная характеристика измерителя ограни-
I/ \2
-а2 — /2?, то его импульс-
12к J
ная характеристика h(x) записывается следующим образом:
h(x) =— [ exp(-a2f2/2)exp(j2nfx)df =—^=ехр(-2л2х2/a2), (5.2.29)
2л 1 а<2л
где f = со/2л, а получаемая одномерная функция f(x) имеет вид
f(x) =
1
aV2n
ехр(-2л2х2 / а2) 0 f08(x - г ± х0)
= fp
ах/2л
2л z L х2
exp----Г(х-г±хо) ,
от
(5.2.30)
0 — знак свертки. Следовательно, разрешающая способность в
результате томографической обработки, характеризуемая (5.2.26),
не ухудшается. С другой стороны, в процессе реконструкции ра-
диолокационных изображений методами томографии, функция
отражения не будет лучше, чем ее аппроксимация, полученная
в условиях ограниченного частотного диапазона пространствен-
ного спектра.
Возможности построения радиолокационных изображений
объектов изучались с помощью лабораторной установки, основу
которой образует радиоимпульсный рефлектометр [134]. Струк-
турная схема установки приведена на рис. 5.2.3, где 1 — устрой-
ство управления и обмена информацией; 2 — устройство развер-
тки; 3 — генератор пикосекундных импульсов; 4 — передающая
396
антенна; 5 — приемная
антенна; 6 — стробоско-
пический преобразова-
тель; 7 — исследуемый
объект; 8 — координат-
но-поворотное устрой-
ство; 9 — ЭВМ. Излуча-
емый сигнал имеет вид
выраженного периода
синусоиды с длительно-
стью около 100 пс. От-
[радиоимпульсный рефлектометр ।
Рис. 5.2.3. Структурная схема экспе-
риментальной установки
раженный от объекта
сигнал регистрировался
в эквивалентном вре-
менном масштабе путем стробоскопического осциллографирова-
ния с индикацией результатов на ЭВМ. Имеющаяся антенная
система представляет собой два идентичных открытых рупора
специальной формы с раскрывом апертуры 7,5 см. Частотный
диапазон установки составляет 2... 18 ГГц, динамический диа-
пазон — 40 дБ. Для повышения отношения сигнал-шум приме-
няется режим накопления; обычно усреднению подвергались 256
реализаций в точке отсчета. Среднеквадратическое значение вре-
менной нестабильности излучаемых импульсов относительно син-
хроимпульсов примерно равняется 1 пс.
В качестве объекта в первом эксперименте выбирался метал-
лический цилиндр диаметром 10 мм и высотой 80 мм, располо-
женный вертикально на удалении 140 мм от центра оси враще-
ния координатно-поворотного устройства. При проведении вто-
рого эксперимента в качестве объектов использовались два ана-
логичных описанному цилиндра, один из которых располагался
в центре координатно-поворотного устройства, а другой нахо-
дился па удалении 70 мм. В обоих экспериментах расстояние
между фазовым центром антенны и объектом составляло около
600 мм. т.е. выполнялись условия измерения в сферическом поле.
Предварительные калибровки измерения осуществлялись на ме-
таллической сфере диаметром 100 мм с последующим сопостав-
лением данных с теоретическими результатами расчета частот-
ной характеристики образца. Число отсчетов по дальности рав-
нялось 512. Исходя из того, что требуемое число проекций
N >(л/2)М [54] в секторе углов 0...360" примерно равно 420 зна-
чений, дискрет угловых отсчетов должен составлять 0,85°.Одна-
ко из-за технических ограничений реальный дискрет угла соста-
вил 5°, а число отсчетов N = 71. Увеличение дискрета угловых
отсчетов, т.е. уменьшение частоты дискретизации приводит к
397
некоторому снижению разрешающей способности при восстанов-
лении радиотомографического изображения. Кроме того, как
показал анализ, качество восстановленного радиоизображения
будет существенно зависеть от пространственной неравномерно-
сти частотной характеристики антенной системы установки, на-
личие которой приводит к изменению формы отраженного сиг-
нала в зависимости от углового положения объекта.
На рис. 5.2.4, 5.2.5 в линиях равного уровня представлены ре-
зультаты восстановления соответствующих функций отражения. В
отличие от рассмотренного примера восстановления тестовой фун-
кции функция отражения реальных объектов представляет собой
некоторое пространственное распределение поля вторичного рассе-
яния в зависимости от местоположения локальных центров отра-
жения по отношению к ракурсу наблюдения. В частности, для про-
водящих цилиндров распределения будут повторять форму их по-
верхности, что и наблюдается на обеих рисунках. На рис. 5.2.5
имеет место изменение интенсивности восстановленной функции
отражения, которое обусловлено взаимным влиянием исследуе-
мых тел. Другой иллюстрацией возможностей томографическо-
го метода может являться радиоизображепие, приведенное в [222],
модели самолета. Частотный диапазон измерений также состав-
лял 2... 18 ГГц, измерения проводились многочастотным мето-
дом с шагом 10 МГц, угол наблюдения изменялся от 0 до 360
через 0,Г.
Приведенные результаты экспериментальных исследований
свидетельствуют о том, что с помощью методов томографии уда-
ется получить радиоизображения с адекватными формой и со-
стоянием поверхности объекта, а также достаточно наглядно
Рис. 5.2.5. Результат восста-
новления функции отражения
двух цилиндров
Рис. 5.2.4. Результат восста-
новления функции отражения од-
ного цилиндра
398
представить картину распределения элементов, вносящих наи-
больший вклад в рассеянное поле.
5.3. Оптико-голографическое моделирование
пространственных распределений электромагнитных полей
объектов в процессе их конфликтного взаимодействия
Сложность построения радиоэлектронных систем и комплексов,
многообразие стратегий противоборствующих сторон, участвующих
в конфликте, приводят к объективной необходимости развития
методов моделирования сложных систем и их основных элементов.
Основу моделирования радиоэлектронных систем и комплексов в
настоящее время составляют математические методы, при этом,
как отмечают специалисты в области системотехники [27], моде-
лирование порой превращается в автокаталитический процесс. Это
связано с тем, что наличие у разработчика модели хорошо развито-
го математического аппарата для описания структуры отдельных
подсистем, элементов и процессов функционирования позволяет
весьма точно моделировать эти части системы. Если математичес-
кое описание слабо поддается формализации или требует очень се-
рьезного усложнения модели, оно иногда недопустимо упрощает-
ся. На практике такое отношение к уровням и детальности описа-
ния отдельных подсистем и элементов при разработке моделей при-
водит зачастую к неожиданным результатам, которые проявляются
на этапах натурных испытаний и эксплуатации аппаратуры. По-
этому предпочтение отдается моделированию на высоком уровне
системности, когда показатели качества должны выбираться весь-
ма корректно.
Математическое моделирование, как уже отмечалось в преды-
дущих главах, является наиболее важной составной частью мето-
дологии исследования эффективности информационного обеспече-
ния систем и средств — участников радиоэлектронного конфлик-
та. Успех при реализации моделей зависит от решения трех состав-
ных проблем: многомерности, быстродействия и полноты априорной
информации. Из-за известных ограничений современных и перс-
пективных ЭВМ при цифровом моделировании стремятся к макси-
мальному упрощению модели в рамках заданных ограничений по
точности; обычно удается снизить объем модели на 3—5 порядков,
что не всегда, однако, является достаточным при моделировании
сложных радиоэлектронных систем. Поэтому при рассмотрении
задач синтеза и анализа таких систем наряду с математическим
определенное применение получает физическое моделирование. Пло-
дотворность методов физического моделирования особо наглядно
проявляется при имитации процессов информационного взаимо-
действия на уровне электромагнитных полей и высокочастотных
399
радиосигналов; в этом плане физическое моделирование является
тем более предпочтительным, чем ближе физическая природа ре-
ального явления и модели.
Сочетание методов математического и физического моделирова-
ния при исследовании эффективности PC является, по-видимому,
достаточно многообещающим, при этом весьма перспективным
направлением создания физических моделей информационных си-
стем является использование методов голографии и когерентной
оптики. Основными особенностями этих методов являются [18, 76,
124, 178]: адекватность природы реального пространственно-вре-
менного радиолокационного поля и его оптической модели; про-
стота выполнения типовых преобразований над электромагнитны-
ми полями; возможность одновременной параллельной обработки
информации по многим каналам; возможность создания малогаба-
ритных оптических и голографических запоминающих устройств с
объемом памяти 108 дв.ед./см2 и 1012 дв.ед./см2; возможность реа-
лизации оптимальных или близких к ним алгоритмов простран-
ственно-временной обработки сигналов.
Результаты проведенных в настоящее время исследований и
разработанная аппаратура по моделированию в оптическом диа-
пазоне диаграмм направленности СВЧ антенн [10, 86], диаграмм
обратного рассеяния целей [30, 38, 109] являются подтвержде-
нием широких возможностей методов голографии и когерентной
оптики при моделировании пространственных амплитудно-фа-
зовых распределений радиополей. Однако способы оптико-голог-
рафического моделирования сложных электромагнитных полей,
формируемых совокупностью взаимосвязанных источников из-
лучения и переизлучения в динамике изменения радиоэлектрон-
ной обстановки, практически не рассмотрены. Ниже предлага-
ется обсудить эти вопросы.
5.3.1. Модели пространственно-временных характеристик
излучения и рассеяния объектов
Анализ конфликтных ситуаций противоборства в радиолокации
позволяет остановиться на достаточно типовой системе взаимосвя-
занных радиоэлектронных объектов. В нее входят источники зон-
дирующих и помеховых колебаний, объекты радиолокационного
наблюдения, приемные устройства, средства пассивных помех, ис-
точники некоррелированного пространственно-временного шума.
Все они обладают пространственными диаграммами излучения,
переизлучения и приема. За основу для дальнейшего рассмотрения
выберем две типовые подсистемы, сочетание которых при необхо-
димости позволит образовать общую модель более сложных сис-
тем: «источник помехи — приемная часть РЛС» и «передающая
400
часть РЛС — цель (постановщик помех) — приемная часть РЛС»
Этим подсистемам соответствуют информационные пространствен-
ные каналы «передающая антенна средства помех — среда распро-
странения — приемная антенна РЛС» и «передающая антенна
РЛС — среда распространения — цель (постановщик помех) — сре-
да распространения — приемная антенна РЛС».
Для первого и второго типа информационных каналов сигна-
лы на выходе приемной антенны j-ой РЛС могут быть представ-
лены в следующем виде:
N(t) = JjF{nIli(t)Dlli(x2,t)}Dj(x3,t)dx3; (5.3.1)
ai)j
S(t) = JJF{F[sv(t)Dv(x1>t)]rx(x2>t)}D/x3>t)dx3, (5.3. 2)
ADj
где F — оператор преобразования Фурье; nni(t)Dni(x2,t) — про-
странственно-временное распределение поля в раскрыве антенны
i-ro средства помех; sx (t)Dv(x,,t) —пространственно-временное рас-
пределение поля в раскрыве передающей антенны v-ой РЛС;
I\(x2,t) — оператор рассеяния, характеризующий отражающие свой-
ства Х-ой цели (Х-го пассивного индивидуального средства защи-
ты); Dj(x3,t) — оператор, характеризующий апертурную функцию
приемной антенны j-ой РЛС; х; = {х1Руп,хп} i —1,2,3— системы
координат, связанные с элементами моделирования.
При составлении выражений (5.3.1) и (5.3.2) учтены резуль-
таты [8], согласно которым сигнал на выходе линейной антенны
с точностью до постоянного множителя может быть представлен
через компоненты поля в ее раскрыве при работе на передачу
Ёп Н, и через компоненты падающего поля Ё2, Н2
S.HX(t) = ReJjK[E2(t),H1(t)],n)-([EI(t),H2(t)],n)}ds> (5.3.3)
AD
где п — нормаль к раскрыву антенны, по поверхности ДБ кото-
рой проводится интегрирование, а квадратные и круглые скобки
соответственно обозначают векторное и скалярное произведение
векторов. Если пренебречь краевыми эффектами на поверхно-
сти антенны и учесть, что Н1 = [np EJ, Н2 = [п2, Е2], п} и п2 —
единичные векторы, ортогональные волновому фронту излучае-
мого и принимаемого поля, то предыдущую формулу с точнос-
тью до постоянной можно переписать следующим образом:
SBbIX(t) = RcJjE1(x,t)E2(x,t)dt, xgAD, (5.3.4)
AD
где Ej(x,t) — амплитудно-фазовое распределение при работе на
передачу (апертурная функция).
14--2Ъ7
401
Алгоритмы функционирования подсистем (5,3.1) и (5.3.2) мо-
гут быть реализованы в когерентной оптической системе. Поясним
это на примере информационного канала второго типа, как более
сложного. Нетрудно видеть, что используя последовательность го-
лограмм, освещаемых коллимированным пучком света с единич-
ной амплитудой Ео, а также линз, осуществляющих преобразова-
ние Фурье функций, описывающих поле на выходе соответствую-
щих голограмм, в плоскости фотоприемника получим
E1(^4) = F{F[E0Tlv(^1)t)T2v(^,t)]T3X(^,t)}T<j(^,t). (5.3.5)
Здесь: Tlv(^,t) = k1Sv(t); T2v(^,t) = k2Dv(x1,t); Т,, (£2,t) = k3rz(x2,t);
TjjGm.O = k4Dj(x3,t); T( ) — функция пропускания голограмм, яв-
ляющихся пространственным аналогом зондирующего сигнала,
амплитудно-фазового распределения поля передающей антенны,
цели, поля в раскрыве приемной антенны, kt(i =1,...,4) — посто-
янные коэффициенты масштаба.
Для сохранения фазовой информации, содержащейся в про-
странственном сигнале E^^t), фотоприемник должен работать
в режиме оптического гетеродинирования с дополнительным
опорным сигналом. Тогда ток фотоприемпика будет равен
I(t) = const JJ Г|(£з) | Ёо„ (£3, t) + E1 (£3, t)|2 dA, (5.3.6)
A
где r|(£3) — квантовый выход фотоприемника; А — его апертура.
Если принять Г|(£3) = const, что справедливо для фотоприемни-
ков с малой апертурой, а опорный сигнал Е (£а, t) представить в
виде плоской волны с единичной амплитудой, то для (5.3.6) имеем:
I(t) - const jj Е, (£3, t) Ео (^3, t)dt = constJJ Е1 (£3, t)dt. (5.3.7)
А Л
Подставляя в (5.3.7) выражение для Ё^д,t) (5.3.5) и сравни-
вая результат с формулой (5.3.2), можно видеть, что сигнал на
выходе когерентной оптической системы с точностью до несуще-
ственных постоянных совпадает с реальным сигналом приемной
антенны РЛС. Аналогичная ситуация, очевидно, имеет место и
для первого типа информационного канала при моделировании
процесса воздействия помех на РЛС.
В соответствии с изложенным, а также физическими принци-
пами функционирования, общий алгоритм моделирования рас-
сматриваемой системы имеет вид
/
(x10(t))= JjF{F[sv<x(xEa(t))Dva(x11t)]rva(x2,t) +
+nni«(t)Dni„(x2,t)} DJrt(x.,,t)dx3+N (t) ,
ши
(5.3.8)
402
где Nma(t) — некоррелированный шумовой фон; а — число ком-
понент вектора xz, равное числу моделируемых информацион-
ных каналов.
Функциональная схема оптической части модели, реализующая
алгоритм (5.3.8), представлена на рис. 5.3.1. В ее состав входят:
источник когерентного света 1; коллиматор 2; многоканальный
расщепитель светового потока 3; модулятор света 4; блок имитато-
ров радиосигналов и модуляторов света 5; блок голограмм поля
передающих антенн РЛС 6; расщепители светового потока 7, 14;
блоки дефлекторов 8, 10, 17; блоки голограмм полей целей 9 и
средств пассивных помех 11; блок имитаторов помех и модулято-
ров света 16; блок голограмм поля передающих антенн средств пред-
намеренных помех 18; блок формирования опорного (гетеродинно-
го) светового потока 19; сумматор частично когерентных полей 12;
блок голограмм поля приемных антенн РЛС 13; блок преобразова-
ния оптических сигналов в электрические 15.
Оптическая часть модели состоит из шести основных каналов:
канала формирования некоррелированного шумового поля (3—4—
12); канала формирования целевого (сигнального) поля (3—5—6—
7—8—9—12); капала формирования поля, создаваемого средства-
ми пассивных помех (3—5—6—7—10—11—12); канала формиро-
вания поля, создаваемого средствам^ активных помех (3—16—17—
18—22); канала формирования выходных сигналов приемных
антенн РЛС (13—14—15). Отличительной особенностью каналов
является различный вид выполняемых операций. Так, в первом и
пятом каналах осуществляется временная модуляция оптической
Рис. 5.3.1 Функциональная схема оптической части модели типо-
вой радиосистемы
403
несущей радиосигналом шумовым в первом канале и сигналом с
частотой, равным частоте моделирования, в пятом канале. Во вто-
ром и третьем каналах осуществляется формирование радиосигна-
ла с учетом диаграмм направленности антенн (ДНА) РЛС и диаг-
рамм обратного рассеяния (ДОР) целей и средств создания пассив-
ных помех, при этом происходит перемножение электромагнит-
ных полей, их Фурье-преобразование линзами, суммирование с
помеховыми сигналами и шумом. В шестом канале восстановление
голограмм поля приемных антенн РЛС осуществляется результи-
рующим сложным частично когерентным полем.
Предложенный метод моделирования [122] позволяет учесть не
только пространственно-временные характеристики излучающих
и рассеивающих элементов, но и обеспечить моделирование объек-
тивно существующей пространственной взаимосвязи всех таких
элементов. Взаимные пространственные перемещения объектов
могут имитироваться в оптической системе на основе двух, допол-
няющих друт друга, способов. Первый способ основан па неипвари-
антности положения восстановленного с голограммы изображения
относительно угла падения восстанавливающего светового потока,
благодаря чему в определенных пределах удается имитировать из-
менение углового положения лоцируемого объекта или источника
активных помех относительно РЛС. Второй способ основан либо на
использовании нескольких голограмм (библиотеки голограмм)
объектов, записанных при их различных угловых положениях, либо
динамических голограмм. Моделирование энергетических харак-
теристик сигналов (помех) может осуществляться на основе исполь-
зования управляемых модуляторов интенсивности или светофиль-
тров. Управление процессом оптического моделирования, в частно-
сти, выбором номера голограммы объекта или антенны, светофиль-
тра и т.п. должно производиться по командам управляющего
устройства.
5.3.2. Условия подобия электромагнитных полей в радио-
и оптических системах. Ошибки моделирования типовых
информационных пространственных каналов
Исследование условий подобия выполним для второго типа
рассмотренного в п. 5.3.1 информационного капала; полученные
результаты, как частный случай, будут справедливы и для пер-
вого типа канала. Для простоты представления математических
выражений рассмотрим случай моделирования линейных объек-
тов (антенны, цели) с использованием одномерных голограмм.
Используя для общности приближение Френеля [178] и изве-
стное соотношение для определения сигнала на выходе прием-
ной антенны РЛС [8], последний запишем в виде
404
«.их
(t) = Re< |jju1(x1,t)ii2(x2,t)u3(x3,t)x
.8 l.l>
xexp -j—— (x2—X])2 exp
. 21^
-j—— (x, -x2)2
2D2 3 2
dxldx2dx3
(5.3.9)
где Uj(xpt) — комплексное распределение поля в раскрыве пере-
дающей антенны РЛС; tx2(x2,t) — комплексное распределение
поля, отраженного от цели; u3(x3,t) — комплексное распределе-
ние поля в раскрыве приемной антенны РЛС; кр =*- 2л/Хр; Хр —
длина волны радиосигнала; S, L, D — области интегрирования
по апертуре передающей антенны, цели и приемной антенны;
Dj — расстояние между передающей антенной и целью; D2 —
расстояние между целью и приемной антенной.
Рассмотрим безлинзовухо оптико-голографическую модель
системы, состоящую из трех последовательно расположенных
голограмм, характеризующих пространственные амплитудно-
фазовые распределения полей передающей антенны, цели и при-
емной антенны. Используя, как и при записи (5.3.1), приближе-
ние Френеля, выходной ток фотоприемника разностной частоты
можно описать выражением
I(t) = ReJ.J.JuJ(x1,t)expj ^2
kPmi kPmi , k„ | kt,
dj R, R2 d2
I ГП V
4(“kPmi sin®! -k„sine2) + d-kv—j-
a
d?
xexpj T|2
ot2 x2
r —-1_ k —b-
0 2d2 p 2d,
kpm2 kpinl
da R3
. m,x, . В
" H-f1- -.d
V U3
xu3(x3,t)expj <;2
-i
2D10
k k
# + + n(~kpm2 sin 03-^8^04 ) +
1^4 j
-k„-^- +|k0-^- + k
0 2d, p 2d:
kpm2 k„m2
'5
exp
ф-а)2 u2(x2,t)x
exp -j
•? yj
k„ . k„
^(Y-P)2 x
L zu20 J
^5 ^5 d6
+ # + +^(-kpm3Sin05-
—-ko^-1+fko —+ kp —
-kosin06) + H-kp^X
d< dfi
\ о о
xdx^XgdXgd^drjd^dadpdy,
2d6
P 2d5
(5.3.10)
X
405
где m.(i = 1,2,3) — коэффициент сжатия i-ой голограммы;
ко “ 2л/Х0; Хо — длина световой волны; a^R^Oj (i = 1,....6) —
геометрические параметры, характеризующие условия записи и
восстановления голограмм.
Основной интерес при анализе голографического процесса пред-
ставляют плоскости фокусировки изображений. Эти плоскости,
согласно [38], находятся из условия равенства нулю суммы коэф-
фициентов при £2, ц2, £2 в экспоненциальных множителях соответ-
ствующих интегралов. Там же показано, что фазовые искажения в
восстановленном изображении отсутствуют, если при записи и ре-
конструкции голограммы используются плоские опорные волны,
т.е. R1 = R2 =... = R6 -> °°. С учетом сказанного имеем:
km? к
—Е—^- + —= 0;
+ —= 0;
d4
+ —= 0.
(5.3.11)
х,.
a,
kpm2
аз
кртз
«5
Отсюда нетрудно записать первую группу условий подобия, т.е.
> ) X
d2 = di^\; d.,=d3 7-4; = (5-3.12)
Xomj Xom2 Xom3
При равенстве нулю суммы коэффициентов (kpmsin©i -ko sin©i+1)
центры сфокусированных изображений будут лежать на оси моде-
ли. Приравнивая нулю последующие суммы коэффициентов при
переменных £, т|, получаем вторую группу условий подобия
d« ХЛт« [у d. Xnm9 de Xnm>
a= 2 0 ’x,;p= 4 ° 2x2;y= ® ° 3 x3. (5.3.13)
di 4 d3 \ ds 4
Таким образом, условия подобия электромагнитных полей в
радио и оптическом диапазонах при использовании системы пос-
ледовательно расположенных голограмм совпадают с условиями
подобия полей при использовании одиночной голограммы [10].
При соблюдении перечисленных условий, а также в предпо-
ложении, что размеры голограмм являются достаточно больши-
ми для осуществления предельного перехода от функции типа
sinc[x] к 5-функции, выражение (5.3.10) сводится к виду
a
I(t) = ReH J Jui
_s* т: в*
г • k-
2D10
---1 й, t u.
” 2 M2
MI
exp -j-^-(p-a)2 exp -j
-Tt х
M3 I
-^-(Y-P)2 dadpdy-,
^^20 J
(5.3.14)
3
406
где S’,L‘,D*— области интегрирования восстановленных распре-
делений поля элементов модели; =m1dblXn/dilp (i = 1,3,5) —
поперечный масштаб восстановленного распределения;
К zf а
——s х,-------
ltd, 1 М,
sinc[x] = sine
; аналогичным образом функция
sinc[x] определяется для второй и третьей голограмм.
Из анализа (5.3.14) следует, что при восстановлении оптичес-
ких голограмм в пространстве образуются измененные в Mi раз
«изображения» амплитудно-фазового распределения поля, соот-
ветствующие распределениям поля моделируемых объектов, при
этом каждая последующая голограмма помещается в поле, обра-
зованное предыдущей голограммой. Возникает вопрос, связан-
ный с согласованием масштабов голограмм с масштабами полей,
формируемых в оптической системе. Выполняя замену перемен-
ных а/Мг =Хр р/М2 =х2; у/Мя =хл, приравнивая коэффициен-
ты в соответствующих экспоненциальных множителях (5.3.9) и
(5.3.14) и решая полученные уравнения совместно, приходим к
равенству величин Мх = М2 = М3. Так как при отсутствии фазо-
вых искажений в восстановленных изображениях miM1 = l, то
из равенства поперечных масштабов следует, что каждая опти-
ческая голограмма должна быть сжата по сравнению с реаль-
ным объектом в такое же число раз, как и первая голограмма по
сравнению с апертурой передающей антенны РЛС, т.е. масшта-
бы всех голограмм должны быть равны.
Известный недостаток рассмотренного выше безлинзового моде-
лирования состоит в том, что расстояние до границы дальней зоны
оказывается слишком большим и необходимо увеличивать габари-
ты моделирующих установок. Используя полученные выше резуль-
таты, а также учитывая, что условие подобия полей в радио и оп-
тическом диапазонах для системы голограмма-линза имеют вид [10]:
m2X 1 1
для продольной координаты z-------- =-----;
z„ F
mA, z
для поперечной координаты х-х =--------— хо,
XPZP
где индексы “р” и “о” относятся, соответственно, к радио и опти-
ческому диапазонам, можно убедиться, что при расположении
моделируемых объектов в зоне Френеля коэффициент сжатия
оптической голограммы определяется следующим образом:
М>, )
407
где Di — расстояние от i-ro объекта до (1+1) объекта в радиосис-
теме; Aj — размер i-ro объекта; F — фокусное расстояние линзы.
В частном, на наиболее важном с практической точки зрения слу-
чае, когда моделируемые объекты расположены друг относительно
друга в дальней зоне, оптические голограммы должны размещать-
ся в фокальной плоскости линз, т.е. zo = -F. Поэтому условие подо-
бия по продольной координате Р = ЙдзХр/Хот2, Кдз— расстоя-
ние, соответствующее дальней зоне, совпадает с условием (5.3.12),
а по
ким
поперечной координате — х0
F
д з
с (5.3.13). Та-
образом, масштабы всех голограмм, как и для случая безлин-
зовой модели, оказываются равными и полностью определяются
выбранным масштабом первой голограммы.
Результаты анализа условий подобия электромагнитных по-
лей в радио и оптических системах при использовании несколь-
ких последовательно расположенных голограмм свидетельству-
ют о реальности согласования размеров голограмм и восстанов-
ленных пространственных амплитудно-фазовых распределений
поля; требования к синтезируемым по радиоголограммам объек-
тов оптических голограмм фактически не отличаются от техни-
чески реализуемых [напр. 10].
Теоретическое и экспериментальное изучение точности опти-
ко-голографического моделирования при использовании одиноч-
ных голограмм проведено в работах [10, 38, 76]. Эти результаты
являются достаточными, поэтому можно ограничиться следую-
щими замечаниями:
1. Ошибки, связанные с ограничением области измерения поля
на плоскости, проводимого в целях получения информации о радио-
голографических характеристиках объектов моделирования, могут
быть сделаны весьма малыми при незначительном увеличении раз-
меров области измерения по сравнению с размерами излучающей
(отражающей) апертуры тела (антенны, цели). Уменьшение оши-
бок дискретизации при измерениях достигается выбором интерва-
лов между отсчетами, которые могут превышать величину Х/2.
2. В зависимости от схемы голографической регистрации поля
и регистрирующей аппаратуры влияние ошибок измерения па-
раметров поля также становится незначительным. Разработан-
ные образцы аппаратуры для регистрации электромагнитных
полей СВЧ антенн в их раскрыве или зоне Френеля позволяют
проводить измерения в динамическом диапазоне до 40 дБ с по-
грешностью 0,2 дБ по амплитуде и 2—3" по фазе.
3. Существующая фотозаписывающая аппаратура, осуществ-
ляющая трансформацию радиоголограмм в оптический диапа-
408
зон волн, позволяет воспроизводить требуемый коэффициент
пропускания с максимальными отклонениями ±5 % в динами-
ческом диапазоне до 40 дБ.
4. Ошибки, вносимые оптической системой, связаны с тем,
что используемые элементы (коллиматоры, линзы, объективы и
т.п.) неидеальны по своим характеристикам из-за наличия абер-
раций. Однако при использовании высококачественной оптики
эта группа ошибок может считаться пренебрежительно малой.
5. Все светочувствительные элементы реагируют только на ин-
тенсивность поля в каждой точке апертуры. При этом происходит
усреднение интенсивности распределения по апертуре приемного
элемента, и его отклик отличается от истинного значения в точке
измерения. При оптимальном выборе параметров фотоприемника
(чувствительности и размера апертуры) ошибка преобразования
оптического сигнала в электрический аналог не превышает несколь-
ких десятых долей децибела в динамическом диапазоне до 40 дБ.
6. Экспериментальным путем установлено, что оптико-голог-
рафическое моделирование ДНА различных типов и ДОР мало-
размерных целей на моделях размером до 5 мм при достигнутом
уровне развития элементной базы в настоящее время осуществ-
ляется с ошибками, максимальное значение которых не превы-
шает нескольких дБ.
Проведенная классификация ошибок, а также анализ их физи-
ческой природы дают основания считать, что наиболее конструк-
тивным при определении точностных характеристик рассматрива-
емого типа моделирования является статистический подход. По
своей сущности задача анализа голографического процесса наибо-
лее близка к задачам, рассматриваемым в статистической теории
антенн [206].Пользуясь разработанными методами, можно убедить-
ся, что с увеличением пространственной частоты моделирования
дисперсия флуктуаций восстановленного с голограммы поля умень-
шается; величина дисперсии весьма существенно зависит от моде-
лируемого уровня боковых лепестков ДНА и ДОР целей. Для умень-
шения влияния случайных ошибок на качество моделирования
необходимо по возможности минимизировать радиусы корреляции
ошибок, так как при небольших радиусах вклад в величину дис-
персии флуктуации поля пропорционален их произведению на зна-
чения дисперсий ошибок амплитуд и фаз сигнала.
5.3.3. Принципы построения оптико-голографических
датчиков пространственных диаграмм излучения
и переизлучения объектов
Наряду с рассмотренной моделью типовых информационных
каналов, на практике могут найти применение более простые
409
автономные оптико-голографические устройства — датчики сиг-
налов антенн и целей, способные функционировать в составе
физико-математических (смешанных) моделей различного типа.
Обсудим возможные принципы построения таких устройств.
В основу метода моделирования антенн обзорных РЛС СВЧ ди-
апазона можно положить принципы голографической регистрации
амплитудно-фазового распределения поля в зоне Френеля или в
раскрыве антенны, трансформации этого распределения в оптичес-
кий диапазон, восстановления распределения поля с оптической
голограммы и преобразования его в дальнюю зону. Для изменения
положения ДНА в пространстве может, как отмечалось выше, ис-
пользоваться свойство голограмм, согласно которому положепие
восстановленного изображения объекта изменяется при изменении
угла падения на голограмму фронта волны восстанавливающего
источника. Тогда при условии выбора объекта в виде точечной цели,
пространственное положение которой в оптической системе задает-
ся определенным светочувствительным элементом матричного фо-
топриемника, в состав функциональной схемы датчика (рис. 5.3.2)
войдут: 1 — лазер; 2 — коллиматор; 3 — дефлектор; 4 — голограм-
ма поля антенны; 5 — линза, с помощью которой осуществляется
преобразование Фурье; 6 — матричный фотоприемник; 7, 11 —
коммутаторы для управления работой фотоприемника; 8 — усили-
тель; 9, 10 — преобразователи «аналог—код» и «код—аналог»; 12 —
вычислитель. К особенностям функционирования схемы относятся
процессы сканирования и считывания ДНА. Так, например, если
дефлектором 3 осуществляется изменение угла падения светового
потока на голограмму 4 в соответствии с законом движения ДНА
РЛС в пространстве, то в плоскости матричного фотоприемника 6
происходит сканирование светового потока, характеризующего про-
странственную ДНА. Считывание значений ДНА осуществляется
матричным фотоприемником, электрически соединенным с быст-
родействующими входным и выходным коммутаторами. Управле-
Рис. 5.3.2 Функциональная схема датчика ДНА обзорных РЛС
410
ние работой коммутаторов и дефлектора производится вычислите-
лем 12. Сигналы с вычислителя на дешифратор поступают через
преобразователь «код—аналог» 10. Входной коммутатор 11 пооче-
редно (в соответствии с траекторией движения целей) открывает
один или несколько (в соответствии с числом имитируемых целей)
светочувствительных элементов матричного фотоприемника. В ре-
зультате на выходе формируется электрический сигнал, пропорци-
ональный коэффициенту усиления ДНА для фиксированного угло-
вого положения целей. В зависимости от того, где выполняется
измерение радиоголограммы — в раскрыве антенны или в зоне
Френеля — схема восстановления пространственной ДНА будет раз-
ной. При измерении поля в зоне Френеля в результат измерения
входит квадратичная фазовая ошибка. Ее компенсация может быть
осуществлена введением в схему дополнительной корректирующей
линзы и выбором определенного расстояния между фотоприемни-
ком и фокальной плоскостью линзы.
В настоящее время в РЭС разных типов широко используются
антенные системы типа ФАР, позволяющие не только реализовать
электрическое сканирование луча, но и выполнить первичную об-
работку пространственно-временного сигнала непосредственно в
фидерном тракте антенны. Отмстим, что процесс функционирова-
ния ФАР во многом подобен голографическому процессу. Волновое
поле приходящего на решетку сигнала преобразуется в электричес-
кий сигнал. На втором этапе этот сигнал трансформируется в изоб-
ражение поля распределения ИРИ, т.е. происходит как бы преоб-
разование записи волнового поля в виде голограмм с последующим
восстановлением изображения. Следовательно, моделирование ДНА
ФАР может быть проведено на основе голографического метода, а
именно голографической регистрации сигналов, приходящих на
решетку, восстановления их в когерентной оптической системе и
трансформации в дальнюю зону. Процесс записи поля на голограм-
му может быть осуществлен известными способами, при этом со-
храняются все геометрические соотношения в пространстве рас-
пространения сигналов» учитываются конструктивные особеннос-
ти антенной системы и устройств, управляющих фазовым распре-
делением, так что процесс восстановления дублирует все особенности
поля ФАР. Запись голограммы должна производиться для каждо-
го фиксированного направления прихода волнового фронта. При
расположении голограмм в виде матрицы схема восстановления
ДНА антенны типа ФАР аналогично схеме рис. 5.3.2. При функ-
ционировании датчика изменяются лишь функции, выполняемые
дефлектором. В данном случае дефлектор должен последовательно
освещать элементарные голограммы, соответствующие определен-
ному положению луча решетки в пространстве.
411
Рассмотрим принципы построения оптико-голографических
датчиков следящих антенн моноимпульсного типа и антенн с
коническим сканированием луча.
Анализ работы РЭС моноимпульсного типа показывает, что
обработка принимаемого сигнала является существенно нелиней-
ной, причем эта нелинейность возникает в результате послеан-
тенной обработки. Оптическое моделирование преобразований не-
линейного типа является проблематичным, поэтому при голог-
рафическом моделировании целесообразно имитировать сигна-
лы лишь на выходе линейной части моноимпульсных РЭС, т.е.
на соответствующих выходах антенной системы. В основу моде-
лирования сигналов на выходе приемных антенн данного типа
может быть положен принцип, согласно которому сигнал на
выходе антенны представляют через компоненты поля в ее рас-
крыве при работе па передачу и через компоненты падающего
поля [122]. Для реализации способа в режиме поочередной рабо-
ты на передачу облучателей приемной антенны необходимо в
каждой плоскости произвести запись двух голограмм амплитуд-
но-фазового распределения поля в плоскости раскрыва. Одна из
голограмм должна соответствовать разностной, а другая - сум-
марной ДНА. Техническая запись голограмм с последующей их
трансформацией в оптический диапазон осуществляется по из-
вестным методикам, отличие состоит лишь в том, что радиого-
лограммы записываются поочередно при подключении источни-
ка сигнала сначала к суммарному, а затем к разностному выхо-
ду волноводного моста. Основным условием моделирования ан-
тенной системы всех РЭС моноимпульсного типа является разнос
в каждой плоскости двух голограмм на расстояния, в пределах
которых еще допустима линейная аппроксимация волнового
фронта, т.е. условие дальней зоны должно выполняться для сум-
марного размера системы из двух голограмм.
Очевидно, что рассмотренный способ применим к моделиро-
ванию ДНА не только суммарно-разностных РЭС моноимпульс-
ного типа, но и амплитудно-амплитудных, фазово-фазовых и
других. В связи с тем, что в настоящее время суммарно-разно-
стная обработка получила наибольшее применение, рассмотрим
принципы построения таких датчиков более подробно.
Один из вариантов оптико-голографического датчика сигналов
суммарно-разностных РЭС моноимпульсного типа представлен на
рис. 5.3.3. В его состав входят: 1 — лазер; 2 — коллиматор; 3 —
расщепитель светового потока; 4 — дефлектор; 5 — голограмма
поля цели; 6 — многоэлементная голограмма поля антенны; 7 —
полупрозрачное зеркало; 8 — многоканальный моноимпульсный
приемник; 9 — привод антенны; 10 — генератор шума; 11 — блок
412
Рис. 5.3.3. Функциональная схема имитатора сигналов суммарно-
разностных РЛС моноимпульсного типа
управления; 12, 14 — отражающие зеркала; 13 — оптический мо-
дулятор. Дефлектором 4 в соответствии с траекторией движения
цели осуществляется отклонение светового потока относительно
оптической оси. Этот поток, облучая голограмму поля цели 5, вос-
станавливает на ее выходе распределение поля, соответствующее
пространственной ДОР цели. После соответствующей фильтрации
этим распределением облучается голограмма поля антенны, вос-
станавливая суммарную и разностную ДНА. Считывание информа-
ции осуществляется многоэлемептным фотоприемником, работаю-
щим в режиме оптического гетеродинирования. При гетеродиниро-
вании направление опорного светового потока выбирается таким
образом, чтобы его угол падения совпадал с углом дифракции од-
ного из информационных потоков на выходе голограмм поля ан-
тенны. С выхода многоканального моноимпульсного приемника 8
преобразованный сигнал (сигнал ошибки по азимуту и углу места)
подается на вход модели привода антенны 9 и на блок управле-
ния 11, электрически соединенный со входом дефлектора; таким
образом пропорционально сигналам ошибки изменяется угол от-
клонения светового потока. В рассмотренной схеме изменение угла
падения света на систему голограмм с учетом антенных свойств
фотоприемников [64] физически эквивалентно перемещению цели
в ДНА. При сохранении постоянного направления падения опор-
ной световой волны и вариациях направления падения световой
волны на голограмму поля приемной антенны принципиально воз-
можно моделировать движение цели относительно РЭС с учетом
многолепестной структуры ДНА. Одновременно представляется воз-
можным моделировать и помеховые воздействия, что достигается
освещением поверхности фотоприемника наряду с сигнальным по-
413
меховым световым потоком, имеющим соответствующий угол при-
хода и плоский фронт волны.
Рассматривая принципы построения РЛС с коническим скани-
рованием луча, будем считать, что выходной сигнал датчика дол-
жен представлять видеосигнал, пропорциональный коэффициенту
усиления ДНА в зависимости от углового положения цели относи-
тельно равносигнального направления. Для простоты допустим, что
цель точечная, а задержка сигнала в зависимости от дальности до
цели вводится в электрическом тракте. Сущность способа модели-
рования заключается в интегрировании аналога амплитудно-фазо-
вого распределения передатчика, сканирования в плоскости фор-
мирования пространственной ДНА щелевой диафрагмой, смещен-
ной относительно оптической оси на расстояние, пропорциональ-
ное смещению облучателя антенны. Сканирование диафрагмы
осуществляется по закону механической развертки электрическо-
го луча и изменению сигнала ошибки рассогласования между теку-
щими угловыми координатами положения антенны и опорными
значениями программной траектории. Далее оптический сигнал пре-
образуется в электрический, последний перемножается с информа-
ционным радиосигналом и суммируется с помехой.
Один из упрощенных вариантов функциональной схемы датчи-
ка сигналов антенны с коническим сканированием представлен на
рис. 5.3.4. В состав схемы входят: 1 — лазер; 2 — коллиматор; 3 —
оптический модулятор света; 4 — голограмма поля антенны; 5 —
линза; 6 — щелевая диафрагма; 7 — фотоприемник; 8 — двухсте-
пенная платформа; 9 — генератор опорного напряжения; 10, 11 —
двигатели. В исходном положении щелевая диафрагма занимает
такое положение, при котором фотоприемник принимает немоду-
лированные по амплитуде сигналы — это равнозначно нахожде-
кРУ
Рис. 5.3.4. Функциональная схема имитатора сигналов антенны РЛС
с коническим сканированием
414
нию цели на равносигнальном направлении. Модуляция сигнала
частотой сканирования осуществляется вращением диафрагмы,
соединенной с генератором опорного напряжения. При изменении
углового положения цели решающее устройство выдает сигнал,
который после преобразования в аналоговую величину в преобра-
зователе «код—напряжение» воздействует на двигатели таким об-
разом, чтобы сканирующая диафрагма заняла исходное положе-
ние. Замыкание обратной следящей связи может осуществляться
через элементы реальной радиоаппаратуры или их модели.
Голографическое моделирование РЛХ целей является разновид-
ностью электродинамического моделирования, однако при этом
вместо модели исследуемой цели используют оптическую голог-
рамму, синтезированную на основе измерений амплитудно-фазо-
вых распределений поля, проводимых на специализированных ком-
плексах [38, 122]. Восстанавливая голограмму в когерентной опти-
ческой системе и производя считывание сформированной в опреде-
ленном масштабе пространственной амплитудно-фазовой ДОР,
можно получить электрический сигнал, пропорциональный значе-
нию ЭПР цели для определенного угла ее облучения. Изложенное
позволяет определить функциональную схему датчика сигналов ма-
лоразмерных целей, в состав которого входят (рис. 5.3.5): 1 — ла-
зер; 2 — коллиматор;
3 — дефлектор; 4 —
матрица голограмм; 5
— матрица фотопри-
емников. Управляя
углом падения свето-
вого потока на состав-
ную голографическую
Рис. 5.3.5. Функциональная схема имита-
тора сигналов малоразмерных целей
поверхность, можно
выбирать необходи-
мую информацию в
виде пространствен-
ной амплитудно-фазовой ДОР. Наряду с формированием простран-
ственных диаграмм на базе голографического метода можно осу-
ществить моделирование амплитудных и фазовых диаграмм рассе-
яния на каждой ортогональной поляризации. В этом случае вос-
произведение пространственных ДОР цели производится не по
одной, а по двум голограммам, которые можно считать квадратур-
ными за счет отличия друг от друга начальных фаз опорного сигна-
ла на л/2. В схеме датчика вводится второй квадратурный канал,
информация с которого считывается одновременно с информацией
первого канала, и далее вычисляется значение параметров ампли-
тудных и фазовых ДОР.
415
Литература
1. Адам Дж. Д. Аналоговая обработка сигналов с помощью СВЧ-фер-
ритов. - ТИИЭР, 1988, т. 76, № 2. - С. 73-86.
2. Айвазян СА., Бухштабер В.М., Енюков И.С., Мешалкин ЛД.
Прикладная статистика. Классификация и снижение размерности. —
М.: Финансы и статистика, 1989. — 607 с.
3. Апраушева Н.Н. Новый подход к обнаружению кластеров. — М.:
ВЦ РАН, 1993. — 65 с.
4. Астанин Л.Е., Костылев АА. Основы сверхшйрокополосных ра-
диолокационных измерений. — М.: Радио и связь, 1989. — 191 с.
5. Бакут ПА., Жулина Ю.В., Иванчук НА, Обнаружение движу-
щихся объектов. — М.: Сов. радио, 1980. — 288 с.
6. Балашов Е.П., Пузанков Д.В. Проектирование информационно-
управляющих систем. — М.: Радио и связь, 1987. — 256 с.
7. Баранов ЛА. Квантование по уровню и временная дискретиза-
ция в цифровых системах управления. — М.: Энергоатомиздат, 1990.
— 304 с.
8. Бурштейн Э.Л. О мощности, принимаемой антенной, при паде-
нии на нее неплоской волны. — Радиотехника и электроника, 1958, т.
3, № 2. — С. 186—191.
9. Баскаков С.И. Радиотехнические цепи и сигналы. — М.: Выс-
шая школа, 1988. — 446 с.
10. Бахрах ЛД., Курочкин А.П. Голография в микроволновой тех-
нике. — М.: Сов. радио, 1979. — 310 с.
11. Беккенбах Э., Веллман Р. Неравенства. — М.: Мир, 1965. —
276 с.
12. Веллман Р. Введение в теорию матриц. — М.: Наука, 1969. —
368 с.
13. Бендат Дж., Пирсол А. Прикладной анализ случайных дан-
ных. — М.: Мир, 1989. — 540 с.
14. Большаков ИА. Статистические проблемы выделения потока
сигналов из шума. — М.: Сов.радио, 1969. — 464 с.
15. Борисов В,И.. Зинчук ВМ.. Лимарев А.Е. и др. Помехозащищен-
ность систем радиосвязи с расширением спектра сигналов методом псев-
дослучайной перестройки рабочей частоты. — М.: Радио и связь, 2000.
— 384 с.
16. Борисов В.И., Зинчук ВМ. Помехозащищенность систем радио-
связи. Вероятностно—временной подход. — М.: Радио п связь, 1999.
— 252 с.
17. Борисов Ю.П., Цветное В.В. Математическое моделирование ра-
диотехнических систем и устройств. — М.: Радио и связь, 1985. — 176 с.
18. Ворн М., Вольф Э. Основы оптики : Пер. с англ. — М.: Наука,
1973. — 719 с.
19. Бриккер AM., Зернов Н.В., Мартынова Т.Е. Рассеяние электро-
магнитных волн приемной антенной из нескольких связанных вибра-
торов. — Радиотехника, 1992, № 3. — С. 18—21.
20. Бункин В.В., Гапонов—Греков А.В.. Месяц ГА. и др. Радиолока-
тор на основе СВЧ—генератора с релятивистским пучком. — Письма в
ЖТФ, 1992, т. 2, № 9. — С. 61—65.
416
21. Бункин Б.В., Кашин В А. Особенности, проблемы и перспекти-
вы субнаносекундных видеоимпульсных РЛС. — Радиотехника, 1995,
№ 4—5. _ с. 128—133.
22. Бухарин НА, и др, Акустооптические устройства обработки сиг-
налов с использованием приборов с зарядовой связью. Оптико—элект-
ронные методы обработки изображений / Под ред. Гуревича Г.А. — Л.:
Наука, 1982. — 186 с.
23. Бхаттачария Р.Н., Р. Ранга Рао, Аппроксимация нормальным
распределением и асимптотические разложения. — М.: Наука, 1982.
— 286 с.
24. Быков В.В. Критерий и возможности массового заградительного
радиоподавления РЭС в условиях высокой неопределенности их харак-
теристик. — Радиотехника, 2000, № 6. — С. 15—18.
25. Быков В.В, Цифровое моделирование в статистической радио-
технике. — М.: Сов.радио, 1971. — 328 с.
26. Вакин С А, Шустов Л.Н, Основы радиопротиводействия и ра-
диотехнической разведки. — М.: Сов.радио, 1968. — 448 с.
27. Ван Гиг Дж, Общая прикладная теория систем: В 2—х т.: Пер.
с англ. — М.: Мир, 1981, т. 1. — 336 с.; т. 2 — 736 с.
28. Вапнэ Г.М. Обзоры по электронной технике. Сер. 1, Электрони-
ка СВЧ, 1984. Вып. 8 (1060). — С. 2-9.
29. Варакин Л.Е. Системы связи с шумоподобными сигналами. —
М.: Радио и связь, 1985. — 364 с.
30. Варганов М.Е., Зиновьев Ю.С, и др. Радиолокационные характе-
ристики летательных аппаратов / Под ред. Тучкова Л.Т. — М.: Радио и
связь, 1985. — 236 с.
31. Вартанесян В А, Радиоэлектронная разведка. — М.: Воениз-
дат, 1991. — 254 с.
32. Васильев В.И. Распознающие системы. Справочник. — Киев:
Паукова думка, 1983. — 424 с.
33. Вашковский АВ., Зубков В.И.. Лебедь Б.М., Новиков Г.М. Узко-
полосная фильтрация СВЧ сигналов при возбуждении магнитостати-
ческих волн в пленках железоиттриевого граната. — Радиотехника и
электроника, 1985, т. 30, № 8. — С. 1513—1518.
34. Величкин А.И. Передача аналоговых сообщений по цифровым
каналам связи. — М.: Радио и связь, 1983. — 252 с.
35. Водях о АИ., Горнец Н.Н., Пузанков Д.В, Высокопроизводитель-
ные системы обработки данных. — М.: Высшая школа, 1997. — 304 с.
36. Гантмахер Ф.Р. Теория матриц. — М.: Наука, 1986. — 575 с.
37. Годунов С.К.. Рябенький ВС, Разностные схемы (введение в тео-
рию). — М.: Наука, 1977. — 340 с.
38. Гинзбург В.М., Степанов Б.М. и др. Голография. Методы и ап-
паратура. / Под ред. В.М. Гинзбург. Б.М. Степанова. — М.: Сов. радио,
1974. — 376 с.
39. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая об-
работка сигналов. — М.: Радио и связь, 1990. — 256 с.
40. Горкин Ю.С. Многопараметрическая вероятностная модель ра-
диолокационных сигналов для исследования отражательных характе-
ристик стационарных и маневрирующих целей. — Радиотехника, 1998,
К? 6. — С. 37—40.
417
41. Горкин Ю.С., Радзиевский В.Г. Вероятностная модель флуктуа-
ций амплитуды (мощности) радиолокационных негауссовых сигналов.
— Радиотехника, 1997, №6. — С. 73—80.
42. Горкин Ю.С.. Радзиевский ВТ. Исследование возможностей оп-
ределения параметров обобщенного распределения вероятностей амп-
литуды (мощности) гауссовских радиосигналов. — Известия вузов СССР
— Радиоэлектроника, 1985, т. 28, № 4. — С. 42—47.
43. Горкин Ю.С., Радзиевский В.Г. Исследование обобщенного рас-
пределения вероятностей мощности радиосигнала. — Радиотехника и
электроника, 1980, т. 25, № 11. — С. 2329—2333.
44. Горкин Ю.С., Радзиевский В.Г. Исследование обобщенной веро-
ятностной модели амплитуды сигнала. — Известия вузов СССР — Ра-
диоэлектроника, 1976, т. 19, № 12. — С. 83—85.
45. Горкин Ю.С.. Радзиевский В.Г. Исследование потенциальных
возможностей вероятностной модели флуктуаций мощности радиоло-
кационных негауссовых сигналов. — Радиотехника, 1997, № 6. —
С. 81—84.
46. Горкин Ю.С., Радзиевский В.Г. Исследование среднего значения
эффективной поверхности рассеяния объектов в реальном масштабе
времени. — Известия вузов СССР — Радиоэлектроника, 1977, т. 20,
№5. — С. 43—50.
47. Градиипейн И.С.. Рыжик И.М. Таблицы интегралов, сумм, ря-
дов и произведений. — М.: Наука, 1971. — 1108 с.
48. Гридин АЛ.. Кочин В.Н.. Нечаев Ю.Б.. Просвирин C.JI. Характе-
ристики короткого вибратора, нагруженного на вершине тонким ме-
таллическим диском. — Радиотехника и электроника, 1994, т. 39, № 8—
9. — С. 1285—1293.
49. Гриценко Н.С., Логинов В.П., Мальцев В.И. и др. Определение
параметров движения объектов в статистически неопределенных ситу-
ациях. — Зарубежная радиоэлектроника, 1988, № 2. — С. 3—29.
50. Гришин Ю.П., Ипатов В.П.. Казаринов Ю.М. и др. Радиотехни-
ческие системы / Под. ред. Ю.М. Казаринова. — М.: Высшая школа,
1990. — 496 с.
51. Губарев В А., Козирацкий Ю.Л., Шляхин В.М. Особенности мо-
делирования сложного коалиционного конфликта в условиях противо-
действия. — Радиотехника, 1997, № 6. — С. 43—46.
52. Гусев О.В., Кулаков С.В., Разживин Б.П.. Тигин Д.В. Оптиче-
ская обработка радиосигналов в реальном времени. — М.: Радио и связь,
1989. — 136 с.
53. Гуткин Л.С. Проектирование радиосистем и радиоустройств.
— М.: Радио и связь, 1986. — 288 с.
54. Даджион Д., Марсеро Р. Цифровая обработка многомерных сиг-
налов. — М.: Мир, 1988. — 488 с.
55. Демин В.Г!.. Куприянов А.И., Сахаров А.В. Радиоэлектронная
разведка и радиомаскировка. — М.: МЛИ, 1997. — 156 с.
56. Дихтяр В.В. Расчет автогенераторов с внешней запаздываю-
щей обратной связью в режиме запоминария частоты. — Радиотехника
и электроника, 1978, т. 23, № 3. — С. 525—534.
57. Дружинин В.В.. Конторов А.С.. Конторов Д.С. Введение в тео-
рию конфликта. — М.: Радио и связь. 1989. — 288 с.
418
58. Дюран Б.. Оделл П, Кластерный анализ. — М.: Статистика,
1977. — 128 с.
59. Ермаков С.М., Михайлов ГА. Статистическое моделирование.
— М.: Наука, 1982. — 296 с.
60. Ершов АЛ., Липцер Р.Ш. Робастный фильтр Калмана в дискрет-
ном времени. — Автоматика и телемеханика, 1978, № 3. — С. 60—66.
61. Жандаров А.М. Идентификация и фильтрация измерений со-
стояния стохастических систем. — М.: Наука, 1979. — 112 с.
62. Захаренко ГА., Трифонов А.П. Влияние узкополосных помех на
эффективность оценки параметров сверхширокополосных сигналов. —
Радиотехника, 2000, № 9. — С. 46—49.
63. Зернов Н.В., Меркулов Г.В. Антенны в режиме излучения (при-
ема) СШП сигналов. — Зарубежная радиоэлектроника. 1991, № 1. —
С. 84—91.
64. Зигман. Антенные свойства оптических гетеродинных фотопри-
емников. — ТИИЭР, 1966, т. 54, № 10. — С. 25—29.
65. Иммореев И.Я. Сверхширокополосная локация: основные осо-
бенности и отличия от традиционной радиолокации. — Электромаг-
нитные волны и электронные системы, 1997, т. 2, № 1. — С. 81—88.
66. Иммореев И.Я. СШП радары: новые возможности, необычные
проблемы, системные особенности. — Вестник МГТУ, 1998, № 4. —
С. 128—133.
67. Исследование объектов с помощью пикосекундных импульсов /
Под ред. В.Г. Глебовича. — М.: Радио и связь, 1984. — 256 с.
68. Исхак В.С. Применение магнитостатических волн: обзор. —
ТИИЭР, 1988, т. 76, № 2. — CL 86—104.
69. Казаков И.Е. Статистическая динамика систем с переменной
структурой. — М.: Наука, 1997. — 416 с.
70. Казаков И.Е., Лобатый АА. Вероятностный анализ сенсорного
автомата. — Автоматика и телемеханика, 1986, № 3. — С. 74—79.
71. Калинин А.И.. Черенкова Е.Л. Распространение радиоволн и
работа радиолиний. — М.: Связь, 1971. — 440 с.
72. Канарейкин Д.Б., Павлов Н.Ф.. Потехин ВА. Поляризация ра-
диолокационных сигналов. — М.: Сов. радио, 1966. — 440 с.
73. Картер Г.К. Оценивание когерентности и временной задерж-
ки. — ТИИЭР, 1987, т. 25, № 2. — С. 64—85.
74. Катков Б.Г, Точность совместной оценки частотных и простран-
ствен пых характеристик радиосигналов в оптимальном устройстве обра-
ботки. — Радиотехника и электроника, 1980, т. 25, № 4. — С. 265—268.
75. Клименко Н.Н., Кисель В.В., Гончар А.Н. Объединенная систе-
ма распределения тактической информации Джитидс. — Зарубежная
радиоэлектроника, 1988, № 5. — С. 85—96.
76. Кольер Р., Беркхарт К., Лин Л. Оптическая голография. — М.:
Мир, 1973. — 688 с.
77. Кондратьев В.С., Котов АФ., Марков Л.Н. Многопозиционные
радиотехнические системы / Под ред. В.В. Цветкова. — М.: Радио и
связь, 1986. — 264 с.
78. Коржик В.И., Финк Л.М.. Щелкунов К.Н. Расчет помехоустой-
чивости систем передачи дискретных сообщений. — М.: Радио и связь,
1981. — 232 с.
419
79. Корн Л, Корн Т. Справочник по математике. — М.: Наука, 1968.
— 720 с.
80. Коростылев А А, Клюев Н.Ф., Мельник ЮА. и др. Теоретичес-
кие основы радиолокации. / Под.ред. В.Е. Дулевича. — М.: Сов. радио,
1978. — 608 с.
81. Крылов В.В., Никашов К.Ю. Перспективы развития техники и
технологии систем радиоэлектронной борьбы. — Зарубежная радиоэлек-
троника, 1988, № 6. — С. 3—12.
82. Кузнецов А.С., Сохен М.Ю. Синтез гипотез поведения систем в
радиоэлектронном конфликте. — Радиотехника, 1997, № 6. — С. 3—8.
83. Кукес И.С.. Старик М.Е. Основы радиопеленгации. — М.: Сов.
радио, 1964. — 640 с.
84. Куликов Д.В., Экало А.В. Оптимальный линейный фильтр для
процедур оценивания с идентификацией измерений. — Автоматика и
телемеханика. 1986, № 3. — С. 80—87.
85. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на
фоне помех. — М.: Сов.радио, 1978. — 296 с.
86. Курочкин А.П. Антенные измерения—97. — Антенны, 1997,
вып. 1 (38). — С. 5—24.
87. Лайниотис Д.Г. Разделение — единый метод построения адап-
тивных систем. — ТИИЭР, 1976, т. 64, № 8. — С. 8—27.
88. Лапко А.В. Непараметрические методы классификации и их
применение. — Новосибирск: Наука, 1993. — 152 с.
89. Майзелъс Е.Н., Торгованов ВА. Измерение характеристик рас-
сеяния радиолокационных целей. — М.: Сов. радио, 1972. — 232 с.
90. Малютин Ю.М., Экало А.В. Применение ЭВМ для решения за-
дач идентификации объектов. — Л.: Изд—во ЛГУ, 1988. — 256 с.
91. Мансон Д.С. и др. Томографический подход к описанию прин-
ципа работы РЛС с синтезированием апертуры в режиме картографи-
рования поверхности земли. — ТИИЭР, 1983, т. 71, № 8. — С. 5—12.
92. Мандель ИД. Кластерный анализ. — М.: Финансы и статисти-
ка, 1988. — 176 с.
93. Мартынов ВА.. Селихов Ю.И. Панорамные приемники и ана-
лизаторы спектра. — М.: Сов.радио, 1964. — 408 с.
94. Мелитицкий В А., Радзиевский В.Г. Аппроксимация вероятно-
стных моделей огибающей сигнала in-распределением и его моделиро-
вание. — Известия вузов СССР — Радиоэлектроника, 1974, т. 17, № 4.
— С. 149—153.
95. Мелитицкий ВА., Радзиевский В.Г. Оптимальное амплитудное
обнаружение частично поляризованного сигнала на фоне частично по-
ляризованной помехи. — Радиотехника, 1975, т. 30, № 8. — С. 87—89.
96. Мелитицкий ВА., Радзиевский В.Г, Статистические характе-
ристики нестационарного нормального процесса и возможности его
моделирования. — Известия вузов СССР — Радиоэлектроника, 1973,
т. 16, № 8. - С. 82-89.
97. Мельников Ю.П. Методы оценки эффективности воздушной
радиотехнической разведки. — Изд. МО РФ, 1996. — 345 с.
98. Мельников Ю.П. Методы оценки эффективности отождествле-
ния информации от бортовой РЛС и станции радиотехнической развед-
ки. — Радиотехника, 1996, № 10, — С. 49—54.
420
99. Месарович M.t Мако Д„ Такахара И. Теория многоуровневых
иерархических систем. — М.: Мир, 1973. — 344 с.
100. Мидлтон Д. Введение в статистическую теорию связи. — М.:
Сов. радио, 1962. — 832 с.
101. Миленький А.В. Классификация сигналов в условиях неопре-
деленности. — М.: Сов.радио, 1975. — 328 с.
102. Миркин БТЧ Черный Л.Б. Об измерении близости между раз-
личными разбиениями конечного множества объектов. — Автоматика
и телемеханика, 1970, № 5. — С. 120—127.
103. Миронов ВА.. Радзиевский В.Г. Особенности навигационно-
временного обеспечения радиоэлектронных систем в условиях конф-
ликта. — Радиотехника, 1998, № 6. — С. 4—9.
104. Миронов В А.. Радзиевский ВТ. Помехозащищенность аппара-
туры радиоинерциальпого навигационного комплекса с адаптивной
антенной решеткой. — Радиотехника, 1999, №6. — С. 79—82.
105. Морган Д. Устройства обработки сигналов на поверхностных
акустических волнах. — М«: Радио и связь, 1990..— 416 с.
106. Нахмансон Г.С., Радзиевский В.Г. Оценка параметра стацио-
нарно поляризованного сигнала при приеме па фоне шума. — Известия
вузов СССР — Радиоэлектроника, 1973, т. 16, № 12. — С. 59—65.
107. Непринцев В.И., Радзиевский ВТ., Шабунин АЛ. Запомина-
ние частоты радиосигналов на основе генератора с элементами на маг-
нитостатических волнах. — Радиотехника и электроника, 1990, т. 35,
№ 19. — С. 1810—1816.
108. Нестерук В.Ф. Влияние формы сигналов на помехоустойчи-
вость их приема на фоне коррелированных помех при ограничении
пиковых значений. — Радиотехника и электроника, 1971, т. 16, № 11.
- С. 2098—2104.
109. Нечаев С.С., Понькин ВА.< Сорокин ЮА. Измерение радиоло-
кационных характеристик объектов в неплоском поле с компенсацией
реверберационных помех. — Радиотехника, 1997, № 6. — С. 85—88.
110. Осипов М.Л. Сверхширокополосная радиолокация. — Радио-
техника, 1995, № 3. — С. 3—6.
111. Остинский ОА.. Разинъков СИ. Исследование влияния диф-
ракции электромагнитных волн на элементах антенно-фидерной систе-
мы интерферометра на точность радиопеленгования. — Труды VI меж-
дународной научно-технической конференции «Радиолокация, навига-
ция, связь» — Воронеж, 2000, т. 3. — С. 1578—1584.
112. Палий А.И. Радиоэлектронная борьба. — М.: Воениздат, 1989.
— 350 с.
113. Партала А.Н.. Волков В.В., Стефанович А.В. Методы обработ-
ки сигналов в пассивных радиолокационных системах. — Зарубежная
радиоэлектроника, 1991, № 6. — С. 3—32.
114. Патрик Э, Основы теории распознавания образов. — М.: Сов.
радио, 1980. — 408 с.
115. Пестряков В.Б. Фазовые радиотехнические системы. — М.:
Сов. радио, 1968. — 468 с.
116. Петров А.В., Яковлев АА. Анализ и синтез радиотехнических
комплексов. — М«: Радио и связь, 1984. — 248 с.
421
117. Поздняк С.И., Мелитицкий В А, Введение в статистическую
теорию поляризации радиоволн. — М.: Сов. радио, 1974. — 479 с.
118. Поздняк С.И., Радзиевский В.Г., Трифонов А.П. Анализ опти-
мального приема эллиптически поляризованного сигнала. — Радиотех-
ника, 1972, т. 27, № 6. — С. 6—10.
119. Поздняк С.И., Радзиевский В.Г., Трифонов А.П. Оптимальный
прием случайно поляризованного сигнала на фоне нормальных шумов.
Теория и практика радиофизической информации. — Изд. Воронежс-
кого госуниверситета, 1971. — С. $—7.
120, Понькин ВА., Радзиевский В.Г. Об использовании голографи-
ческого метода при оптимальной пространственно-временной обработ-
ке сигналов. — Радиотехника и электроника, 1976, т. 21, № 4. —
С. 864—867.
121. Понькин ВА, Радзиевский В.Г. Пространственно-временная
обработка сигналов в многоканальных приемо-передающих системах.
— Радиотехника и электроника, 1984, т. 29, № 2. — С. 275—280.
122. Понькин ВА., Радзиевский В.Г., Семеняченко Л.З. О возмож-
ностях голографического метода при моделировании процесса радиоло-
кационного наблюдения. — Проблемы голографии (Межвузовский сбор-
ник научных трудов) — М.: 1975, вып. 6. — С. 91—102.
123. Прикладная теория случайных процессов и полей/ Под ред.
Васильева К.К., Омельченко В.А. — Ульяновск.: Ул ГТУ, 1995. — 262 с.
124. Престон К. Когерентные оптические вычислительные маши-
ны. Пер. с англ. — М.: Мир, 1971. — 400 с.
125. Радзиевский В.Г. Метод обоснования характеристик сигнало-
подобных излучений в конфликтной радиолокации. — Радиотехника,
2000, № 6. — С. 53—58.
126. Радзиевский В.Г., Сирота АА. Особенности функционирова-
ния и основные характеристики многопозиционных систем определе-
ния координат радиоизлучающих объектов. — Радиотехника. 1999, № 6.
— С. 62—68.
127. Радзиевский В.Г., Сирота АА.. Борисов ЮА. Оценка коорди-
нат источников измерений в многопозиционных радиотехнических си-
стемах при наличии смешанного входного потока сигналов и помех. —
Радиотехника, 1996, №6. — С. 43—49.
128» Радзиевский В.Г. Эффективность имитирующих помех РЛС
при наличии информации об их создании. — Информационный конф-
ликт в спектре электромагнитных волн (Приложение к журналу «Ра-
диотехника»), 1994. — С. 55—59.
129. Радзиевский В.Г.. Борисов О.В. Эффективность обнаружения
сигналов перспективных систем связи на фоне узкополосных помех и
шума. — Теория и техника радиосвязи, 2001, вып. 1. — С. 20—28.
130. Радзиевский В.Г., Борисов О.В., Голоскокова Л.Ш. Эффектив-
ность определения местоположения источника радиоизлучения па фоне
помех. — Радиотехника, 2001, № 6. — С. 52—57.
131. Радзиевский В.Г.. Голоскокова Л.Ш. Адаптивный прием про-
странственно—временного эллиптически поляризованного сигнала на
фоне помех внешнего источника и шума. — Радиотехника, 1996, № 6.
— С. 50—53.
422
132. Радзиевский В.Г.. Голоскокова Л.Ш. Анализ качества измере-
ния параметров пространственно—временного эллиптически поляризо-
ванного радиосигнала при приеме на фоне помех. — Радиотехника,
1997, № 6. — С. 58—61.
133. Радзиевский ВТ., Желтоухов О.В. Исследование точности из-
мерения частоты и направления прихода радиосигнала в информаци-
онных системах средств радиопротиводействия. — Радиотехника, 1992,
№ 7—8. — С. 6—12.
134. Радзиевский В.Г., Караваев МА. О получении радиолокацион-
ных изображений объектов на основе томографической обработки сворх-
широкополосных сигналов. — Радиотехника, 1998, № 6. — С. 32—36.
135. Радзиевский В.Г., Кононов А.Д. Оптимальное различение двух
стационарно поляризованных сигналов, прошедших магнитоактивную
среду. — Вопросы радиоэлектроники, сер. «Техника радиосвязи», 1973,
вып.* 1. — С. 143—152.
136. Радзиевский В.Г.. Мязитова Л.Ш. Оценка параметров про-
странственно-временного поляризованного сигнала при приеме на фоне
помех. — Известия вузов СССР — Радиоэлектроника, 1991, № 7. —
С. 79—83.
137. Радзиевский В.Г., Мязитова Л.Ш. Поляризационная обработ-
ка сигналов в многоканальных приемопередающих системах. — Ра-
диотехника и электроника, 1987, т. 32, № 3. — С. 634—637.
138. Радзиевский В.Г.. Мязитова Л.Ш. Прием эллиптически поля-
ризованного пространственно—временного сигнала при наличии помех,
создаваемых внешними источниками. — Известия вузов СССР — Ра-
диоэлектроника, 1987, т. 30, № 7. — С. 9—14.
139. Радзиевский В.Г., Неволин А.В. Исследование возможностей
скрытия самолетов от наблюдения активно—пассивными РЛС на осно-
ве совместного применения активных помех и средств снижения замет-
ности. — Оборонная техника, 1995, № 12. — С. 61—64.
140. Радзиевский В.Г.. Разинъков С.Н. Влияние рассеяния радио-
волн антенными системами пеленгаторов на точность измерения коор-
динат источников излучения. — Радиотехника, 2001, № 6. — С. 64—
68.
141. Радзиевский В.Г., Сирота А А. Базовые статистические модели
процесса радиотехнической разведки в ходе противодействия радиоло-
кационным средствам. — Радиотехника, 1992, № 1—2. — С. 24—31.
142. Радзиевский В.Г., Сирота АА. Особенности синтеза алгорит-
мов обработки информации при анализе состояния сложных радиоэлек-
тронных объектов противодействия. — Информационный конфликт в
спектре электромагнитных волн (Приложение к журналу «Радиотех-
ника»), 1994. — С. 4—13.
143. Радзиевский В.Г., Шляхин В.М. Устойчивость систем поис-
ка—обнаружения целей по отношению к используемым средствам мас-
кирующих и имитирующих помех. — Информационный конфликт в
спектре электромагнитных волн (Приложение к журналу «Радиотех-
ника»), 1994. — С. 28—29.
144. Радзиевский В.Г., Сирота АА.. Синегубов Н.Н. Исследование
путей создания информационных подсистем средств радиопротиводей-
423
ствия РЭС с энергетически скрытыми сигналами. — Информационный
конфликт в спектре электромагнитных волн (Приложение к журналу
«Радиотехника»), 1994. — С. 14—21.
145. Радзиевский ВТ., Трифонов ПА, Потенциальная точность оцен-
ки параметров последовательности сверхширокополосных сигналов. —
Радиотехника, 1999, Хс 6. — С. 69—72.
146. Радзиевский В.Г., Трифонов ПА. Влияние узкополосных по-
мех на эффективность обнаружения сверхширокополосных сигналов.
Труды VI международной научно-технической конференции «Радиоло-
кация, навигация, связь». — Воронеж, 2000, т. 1. — С. 321—329.
147. Радзиевский ВТ., Трифонов ПА. Эффективность определения
местонахождения источника сверхширокополосных сигналов. — Ра-
диотехника, 2000, № 6. — С. 39—42.
148. Радзиевский ВТ.. Трифонов ПА. Характеристики оценок час-
тотных параметров сверхширокополосного сигнала. — Радиотехника,
2002, № 10. — С. 58—62.
149. Радзиевский ВТ., Трифонов ПА. Влияние узкополосной поме-
хи на точность оценки ширины спектра сверхширокополосного сигна-
ла. Труды IX международной научно-технической конференции «Радио-
локация. навигация, связь». — Воронеж, 2003, т. 1. — С. 189—196.
150. Радзиевский ВТ., Шляхин В.М. Особенности совместного при-
менения маскирующих и имитирующих помех в условиях конфликт-
ной радиолокации. — Радиотехника, 1992, № 1—2. — С. 18—24.
151. Раздобудько В.В. Широкополосные акустооптические измери-
тели частотных и фазовых параметров радиосигналов. — Радиотехни-
ка, 2001, № 1. — С. 79-92.
152. Репин ВТ., Тартаковский Т.П. Статистический синтез при
априорной неопределенности и адаптация информационных систем. —
М.: Сов.радио, 1977. — 432 с.
153. Саблин В.Н., Викулов О.В., Меркулов В.И. Авиационные мно-
гопозиционные радиолокационные системы многоканального наведе-
ния. Разведывательно-ударные комплексы. — Зарубежная радиоэлектро-
ника, 1989, № 9. — С. 3—31.
154. Савченков В.С., Орлов В.С., Бондаренко В.С. Устройства обра-
ботки аналоговых сигналов на гибридных структурах ПАВ/ПЗС. — За-
рубежная радиоэлектроника, 1987, № 11. — С. 18—27.
155. Саидов В.С., Тагилаев А.Р., Алиев Н.М.. Асланов Г,К. Проекти-
рование фазовых автоматических радиопеленгаторов. — М.: Радио и
связь, 1997. — 160 с.
156. Седякин Н.М, Элементы теории случайных импульсных пото-
ков. — М.: Сов.радио, 1965. — 261 с.
157. Сейдж 3., Меле Дж. Теория оценивания и се применение в
связи и управлении. — М.: Связь, 1976. — 496 с.
158. Сирота АА., Борисов ЮА. Алгоритмы фильтрации при по-
ступлении ошибочных и противоречивых данных в каналах наблюде-
ния систем сбора и обработки информации. — Радиотехника, 1997,
№6. — С. 51—57.
159. Сирота АА. Анализ потерь при неполном учете корреляцион-
ной структуры шума в процессе приема сигналов со случайной началь-
424
ной фазой. — Известия вузов СССР — Радиоэлектроника, 1987, т. 30,
№ 3. — С. 82—84.
160. Сирота АА.. Бочарников В.И. Анализ вероятностных характе-
ристик срыва для линейных фильтров с предварительной селекцией
наблюдений. — Автоматика и телемеханика, 1991, № 4. — С. 27—35.
161. Сирота АА. Вероятностные модели формирования результи-
рующего вектора наблюдений в многоуровневых, многопозиционных
системах. — Радиотехника, 1998, №6. — С. 10—14.
162. Сирота АА. Оценка координат источников радиоизлучений
на основе фильтров с предварительной селекцией наблюдений. — Изве-
стия вузов СССР — Радиоэлектроника, 1990, № 12. — С. 26—30.
163. Сирота АА. Оценка средней квадратической ошибки цифро-
вого представления случайной модулирующей функции узкополосного
сигнала при квантовании и дискретизации фазы. — Известия вузов
СССР — Радиоэлектроника, 1988, т. 31, № 8. — С. 70—73.
164. Сирота А А., Афанасьев В.И., Высторобский С.Г., Разинъков С.Н.
Исследование нейросетевого алгоритма обработки сигналов многоэле-
ментной антенной решетки при пеленговании. — Радиотехника, 2001,
№ 6. — С. 69—73.
165. Сирота АА., Афанасьев В.И., Высторобский С.Г.. Разиньков С.Н.
Нейросетевые алгоритмы оценки угловых координат источников ра-
диоизлучения при многолучевом распространении и рассеянии поля ан-
тенной системой пеленгатора. — Антенны. 2002, вып. 7 (62). — С. 48—53.
166. Сирота АА., Афанасьев В.И., Кирсанов ЭА. Робастное оцени-
вание координат источника радиоизлучения в многопозиционной раз-
ностно-дальномерной системе при пропусках сигналов и аномальных
ошибках измерения взаимных задержек. — Радиотехника, 2001, № 6.
— С. 58—63.
167. Сирота АА., Условия робастности обобщенных алгоритмов
фильтрации по отношению к статистике поступления полезных и лож-
ных наблюдений. — Радиотехника, 2001, № 8. — С. 17—21.
168. Сирота АА., Афанасьев В.И., Кирсанов ЭА. Сравнительный
анализ возможностей человека-оператора и автоматических алгорит-
мов классификации координатной информации в режиме самообуче-
ния. — Радиотехника, 2000, № 10. — С. 79—85.
169. Сирота АА., Борисов ЮА. Границы для точностных характе-
ристик фильтров оценивания в условиях частичной скрытности наблю-
даемых объектов. — Синтез, передача и прием сигналов управления и
связи (Межвузовский сборник научных трудов), Воронеж, 1997, №4.
— С. 59—66.
170. Сирота АА., Кирсанов ЭА. Оценка числа источников радиоиз-
лучения в смешанной выборке наблюдений на основе принципа «час-
тичной» классификации. — Радиотехника, 2000, №» 6. — С. 43—48.
171. Сирота АА., Рог А.И. Анализ потерь при неполном учете кор-
реляционной структуры шума в цифровых алгоритмах приема сигна-
лов. — Проблемы передачи информации, 1985. т. 21, вып. 1. — С. 62—
67.
172. Сирота А А., РогА.И. Использование декоррелирующих свойств
дискретных спектральных преобразований при многоальтернативном
425
распознавании сигналов на фоне коррелированных шумов. — Известия
вузов СССР — Радиоэлектроника, 1983, т. 26, № 3. — С. 45—49.
173. Сирота ААЧ Рог А.И. Оценка среднеквадратической ошибки
цифрового представления случайных процессов методами теории вы-
бросов. — Радиотехника и электроника, 1983, т. 28, № 8. — С. 1596—
1601.
174. Сирота АЛ., Рог А.И., Тухватулин В.В., Хохлов Э.Н. Синтез
квазиоптимальных алгоритмов распознавания сигналов па фоне корре-
лированных шумов с использованием дискретных спектральных пре-
образований. — Радиотехника, 1984, № 9. — С. 58—81.
175. Соболь Н.В., Долбня Е.В., Кочемасов В.Н. Аналоговые
Фурье-процессы и их применение. — Зарубежная радиоэлектроника,
1983, № 4. — С. 47—69.
176. Советов Б.Я.. Яковлев СА. Моделирование систем. — М.: Выс-
шая школа, 1998. — 319 с.
177. Современная радиолокация / Пер. с англ, под ред. Кобзаре-
ва Ю.М. — М.: Сов.радио, 1969. — 704 с.
178. Сорока Л.М. Основы голографии и когерентной оптики. — М.:
Наука, 1971. — 616 с.
179. Сосулин Ю.Г. Теоретические основы радиолокации и радиона-
вигации. — М.: Радио и связь, 1992. — 304 с.
180. Справочник по антенной технике / Под ред. Бахраха Л.Д.,
Зелкина Е.Г. — М.: ИПРЖР, 1997, т. 1. - 248 с.
181. Сухоруков Ю.С. Динамика ситуационных конфликтов / В кн.
Дружинин В.В., Конторов А.С., Конторов Д.С. Введение в теорию кон-
фликта. — М.: Радио и связь, 1989. — С. 280—285.
182. Сухоруков Ю.С.. Шляхин В.М. Принципы моделирования ди-
намики взаимодействия сторон в условиях радиолокационного конф-
ликта. — Радиотехника, 1992, № 1—2. — С. 4—11.
183. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных
задач. — М.: Наука, 1986. — 287 с.
184. Тихонов В.И. Оптимальный прием сигналов. — М.: Радио и
связь, 1983. — 320 с.
185. Тихонов В.И. Статистическая радиотехника. — М.: Радио и
связь, 1982. — 624 с.
186. Тихонов В.И.. Харисов В.Н. Статистический анализ и синтез
радиотехнических устройств и систем. — М.: Радио и связь, 1991. —
608 с.
187. Трахтман AM., Трахтман ВА. Основы теории дискретных
сигналов на конечных интервалах. — М.: Сов.радио, 1975, — 208 с.
188. Трифонов A.IL, Беспалова М.Б. Эффективность сверхшироко-
полосного обнаружения и измерения дальности и скорости цели. Ра-
диотехника и электроника, 1997, т. 42, № 4. — С. 451—456.
189. Трифонов А.П., Беспалова М.Б. Квазиправдоподобпая сверх-
широкополосная оценка дальности и скорости. — Известия вузов СССР
— Радиоэлектроника, 1997, т. 40, № 10. — С. 25—34.
190. Трифонов А.П., Беспалова М.Б. Эффективность оценки вре-
менного положения и периода следования импульсов при наличии не-
информативных параметров. — Радиотехника и электроника, 1992,
т. 37, № 6. — С. 1014—1023.
426
191. Трифонов АЛ., Шинаков Ю.С. Совместное различение сигналов и
оценка их параметров на фоне помех. — М.: Радио и связь, 1986. — 264 с.
192. Троицкий И.Н. Статистическая теория томографии. — М.: Ра-
дио и связь, 1989. — 239 с.
193. Ту Дж., Гонсалес Р. Принципы распознавания образов. — М.:
Мир, 1978. — 412 с.
194. Уоссермен Ф. Нейрокомпьютерная техника. Теория и практи-
ка. — М.: Мир. — 203 с.
195. Уфимцев П.Я. Метод краевых волн в физической теории диф-
ракции. — М.: Сов.радио, 1962. — 242 с.
196. Фалькович С.Е., Пономарев В.И.. Шкварко Ю.В. Оптимальный
прием пространственно—временных сигналов в радиоканалах с рассея-
нием. — М.: Радио и связь, 1989. — 293 с.
197. Фалькович С.Е., Хомяков ЭЛ. Статистическая теория измери-
тельных радиосистем. — М.: Радио и связь, 1981. — 288 с.
198. Фельдман ЮЛ. Распределение амплитуды и фазы вектора,
проекции которого распределены нормально и корродированы друг с
другом (общий случай)* — Вопросы радиоэлектроники, серия ОТ, 1964,
вып. 1. — С. 3—7.
199. Фукуиага К. Введение в статистическую теорию распознава-
ния образов. — М.: Наука, 1979. — 368 с.
200, Хан Г., Шапиро С. Статистические методы в инженерных за-
дачах. — М.: Мир, 1969. — 396 с.
201. Хармут Х.Ф. Несинусоидальные волны в радиолокации и ра-
диосвязи. —- М.: Радио и связь. 1985. — 376 с.
202. Хелстром К. Статистическая теория обнаружения сигналов.
— М.: ИЛ, 1963. — 430 с.
203. Ширмам ЯД. О новых отечественных исследованиях по СШП
радиолокации. — Радиотехника и электроника, 1991, т. 36, № 1. —
С. 96—100.
204. [Пирман ЯД.. Манжос ВЛ. Теория и техника обработки ра-
диолокационной информации на фоне помех. — М.: Радио и связь,
1981. — 416 с.
205. Ширяев АЛ. Вероятность. — М.: Наука, 1980. — 576 с.
206. Шифрин Я.С. Вопросы статистической теории антенн. — М.:
Сов. радио, 1970. — 383 с.
207. III ляхин В.М. Обобщенный показатель устойчивости систем в
условиях их конфликтного взаимодействия. — Информационный кон-
фликт в спектре электромагнитных волн (Приложение к журналу «Ра-
диотехника»), 1994. — С. 31—35.
208. Штагер ЕЛ. Рассеяние радиоволн на телах сложной формы.
— М.: Радио и связь, 1986. --- 186 с.
209. Щербак В.И.. Водянин И.И. Приемные устройства систем ра-
диоэлектронной борьбы. —- Зарубежная радиоэлектроника, 1987, № 5.
— С. 50—60.
210. Юрьев АЛ. Точность совместной оценки несущей частоты и
направления прихода радиосигнала. — Радиотехника и электроника,
1972, т. 17, № 2. — С. 301—306.
211. Юшков В.Г., Бадулин Н.Н., Бацула АЛ. и др. Наносскундный
радиолокатор с временной компрессией СВЧ-импульсов передатчика.
427
— Электромагнитные волны и электронные системы, 1997, т. 2, № 6.
— С. 71—76.
212. Ярлыков М.С., Швецов В.И, Оптимальное нелинейное оцени-
вание гауссовских разделимых случайных полей в радиотехнических
задачах. — Радиотехника, 1997, № 1. — С. 48—56.
213. Adam J.D. IEEE Trans, 1980, v. MAG—16, № 9, — p.1168.
214. Bar-Shalom Y. Tracking methods in a multitarget environment.
— IEEE Trans. 1978, v. AC — 23, № 4. — P. 618—626.
215. Brienza M.J. Laser-acoustic signal processing. — IEEE Trans.
1969, July, IECI—16, № 1. — P. 62—69.
216. Brienza M.J., De Maria A.J. Continuously variable ultrasome-
optical delay line. — Appl. Phys. Letters, 1965, v. 7. — P. 71.
217. Coat anhay S.L., Gadenne Ph., Gaudon P. De laplus petite a la plus
grande: la mcsure de Surfases Equivalcntes Radar. — Colloque int. Radar.
— 1984, Paris, mai. — P. 21—24.
218. Hedges S, Triple-Channel Interferometer Radio Direction Finder
Minimizes Error-Source Effects. — Microwave System News, № 5, 1983,
— P. 77—101.
219. Hofmann C., Baron A, Wideband ESM Receiving System, part 1.
— Microwave Journal, 1980, v. 23, № 9. — P. 24—34.
220. Hofmann C., Baron A. Wideband ESM Receiving System, part 2.
— Microwave Journal, 1981, v. 24, Na 2. — P. 57—61.
221. lanniello J.P, Time delay estimation via cross-correlation in the
presence of large estimation errors. — IEEE Trans. 1982, v. ASSP-30,
N* 6, December. — P. 998—1003.
222. Malek G.M. Principles of High-Resolution Radar Based on
Nonsinusoidal Wales. IEEE Trans., 1989. v. EC—31. № 4. — P. 359—
368.
223. Knaell K.K., Cardillo G.P. Radar tomography for the generation
three-dimensional images. — IEEE Proc. Radar, Sonard-Navig. — 1995.
224. Lambert L., Arm., Aimette A. Electro-optical signal processor for
phased array antennas. — In: Optical and electro-optical information
processing / Ed. by J.T. Tippet et al. — Inst, of Techn. Press, Cambridge,
1965. — P. 715—748.
225. Multedo G. Les techniques d” interferometric utilisees dans les
radiogoniometres a THOMSON-CSF. — Revue technique THOMSON-CSF,
1987, v. 19, № 2. P. 249—286.
226. Spectrum monitoring station description. — H/V/UHF radio spect-
rum management and transmission control. THOMSON-CSF, 1983, mach.
— 22 p.
227. Spezio A.E., Lee J., Anderson G.W. Acousto-optics for systems
applications. — Microwave Journal, 1985. v. 28, № 2. — p. 155—163.
228. Van de Vaart H. Understanding solid-state delay lines. — Micro-
waves, 1966, № 7. — P. 18.
428
Оглавление
Введение.................................................... 3
1. Радиоэлектронные системы в условиях конфликта............ 7
1.1. Конфликт радиоэлектронных систем. Общие положения .. 7
1.2. Особенности информационного обеспечения конфликта
при функционировании радиолокационных систем......... 19
1.3. Особенности информационного обеспечения конфликта при
функционировании систем радиосвязи................... 24
2. Модели информационного взаимодействия и функциональная
декомпозиция процесса извлечения информации............... 29
2.1. Роль и место моделирования в общей технологии синтеза
и анализа радиоэлектронных систем.................... 29
2.2. Базовые модели состояний и наблюдений объектов инфор-
мационного взаимодействия как основа структурно-парамет-
рического синтеза систем............................. 37
2.2.1. Динамическая многоуровневая модель состояний . 38
2.2.2. Многоуровневая модель наблюдений.............. 44
2.3. Имитационное моделирование радиоэлектронных систем
в условиях конфликта................................. 61
2.3.1. Общая схема метода Монте-Карло применительно
к исследованию радиоэлектронных систем. Основные принци-
пы разработки имитационных моделей................... 63
2.3.2. Моделирование радиоэлектронной обстановки..... 71
3. Первичная обработка сигналов............................ 80
3.1. Функциональная декомпозиция первичной обработки.
Присмоанализирующая аппаратура общего назначения..... 80
3.1.1. Типовые схемы построения приемоанализирующей ап-
паратуры ............................................ 84
3.1.2. Использование современной элементной базы функцио-
нальной электроники и цифровой техники обработки сигна-
лов 97
3.2. Анализ эффективности приема сигналов на фоне узкопо-
лосных помех и шума .................................111
3.2.1. Эффективность обнаружения радиосигналов на фоне
помех ...............................................111
3.2.2. Анализ эффективности измерения времени прихода ра-
диосигнала...........................................119
3.2.3. Анализ эффективности измерения частоты и направле-
ния прихода радиосигнала.............................129
3.3. Оценка влияния рассеяния радиоволн антенными систе-
мами пеленгаторов на точность измерения направления на
источник излучения. Пример нейросетевого алгоритма обра-
ботки сигналов при пеленговании......................137
429
3.4. Эффективность приема частично поляризованных
сигналов на фоне помех...............................152
3.4.1. Обнаружение эллиптически поляризованного сигнала ...153
3.4.2. Измерение информационных параметров эллиптически
поляризованного сигнала..............................161
3.5. Эффективность приема сверхширокополосных сигналов
на фоне помех .......................................166
3.5.1. Эффективность обнаружения сверхширокополосных сиг-
налов на фоне узкополосных помех и шума..............169
3.5.2. Анализ эффективности измерения информационных
параметров сверхширокополосных сигналов..............172
3.5.3. Анализ эффективности определения местоположения
источника сверхширокополосных сигналов ...............178
3.5.4 Анализ эффективности измерения частотных характери-
стик сверхширокополосных сигналов.....................182
3.6. Особенности приема и обработки сигналов радиоэлект-
ронных средств в режиме повышенной скрытности работы..193
3.7. Устройства запоминания и воспроизведения радиосигна-
лов 201
3.7.1. Аналоговые устройства запоминания и воспроизведения
сигналов ............................................201
3.7,2. Цифровые устройства записи и воспроизведения сигна-
лов 212
3.8. Поимпульсное распознавание сигналов.............219
3.8.1. Распознавание сигналов сложной формы при непол-
ном (неточном) учете корреляционной структуры шума....222
3.8.2. Совместное поимпульсное распознавание и оценивание
параметров сигналов на основе последетекторного анализа фа-
зовой модулирующей функции...........................234
4, Вторичная и третичная обработка информации..............240
4.1. Общая схема алгоритма вторичной обработки информа-
ции и методические основы синтеза частных процедур....241
4.1.1. Функциональная декомпозиция вторичной обработки ...241
4.1.2. Некоторые положения теории оптимальной фильтрации
в дискретном времени..................................249
4.2. Синтез алгоритмов фильтрации в условиях наличия про-
пусков и ложных наблюдений............................255
4.3. Анализ характеристик устойчивости алгоритмов фильтра-
ции в условиях наличия пропусков и ложных наблюдений..267
4.3.1. Условия робастности алгоритмов фильтрации по отно-
шению к статистике поступления полезных и ложных наблю-
дений ...............................................267
4.3.2. Анализ вероятностных характеристик срыва при сопро-
вождении гипотетических последовательностей наблюдений ...273
4.4. Вероятностные характеристики частных информационных
решений при формировании результирующего вектора наблю-
дений ...............................................282
430
4.5. Квазиоптимальпые решающие правила проверки
гипотез .............................................301
4.6. Вторичная и третичная обработка информации
в однопозиционных системах............................308
4.6.1. Разделение и оценка параметров импульсных последо-
вательностей .........................................312
4.6.2. Определение координат источников радиоизлучения
в ходе третичной обработки информации ................328
4.7. Вторичная и третичная обработка информации
в многопозиционтгых системах..........................335
4.7.1. Вторичная обработка информации для источников им-
пульсных сигналов ...................................339
4.7.2. Особенности обработки сигналов и информации
для источников с непрерывным излучением..............351
4.7.3. Третичная обработка информации при комплсксиро-
вапии данных в многопозиционных системах ............359
5. Методы статистического описания и моделирования простран-
ственных характеристик рассеяния и излучения объектов.....371
5.1. Вероятностные модели флуктуаций мощности радиолока-
ционных сигналов.....................................374
5.2. Построение радиолокационных изображений объектов
на основе томографической обработки данных мпогопозицион-
ных измерений сверхширокополосных сигналов...........386
5.2.1. Математическая модель формирования и восстановления
радиотомограммы при сверхширокополосных измерениях....389
5.2.2. Разрешающая способность и экспериментальные иссле-
дования РЛХ объектов при томографической обработке сигна-
лов 395
5.3. Оптико-голографическое моделирование пространствен-
ных распределений электромагнитных полей объектов в про-
цессе их конфликтного взаимодействия .................399
5.3.1. Модели пространственно-временных характеристик из-
лучения и рассеяния объектов .........................400
5.3.2. Условия подобия электромагнитных полей в радио-
и оптических системах. Ошибки моделирования типовых ин-
формационных пространственных каналов................404
5.3.3. Принципы построения оптико-голографических датчи-
ков пространственных диаграмм излучения и переизлучения
объектов .............................................409
Литература.................................................416
431
Научное издание
Теоретические основы
радиоэлектронной разведки
Вячеслав Григорьевич Радзиевский,
Александр Анатольевич Сирота
Изд № 9. Сдано в набор 05.04 2004
Подписано в печать 29 06.2004
Формат 60x90 1/16. Бумага газетная
Гарнитура Book Old Style.
Печать офсетная. Печ л. 27
Тираж 600 экз Зак No 2Ъ7
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д 20/6
Тел./факс: 921-48-37; 925- 78-72, 925-92-41
E-mail: info.radiotcc.ru
www radiotec.ru
Отпечатано в ООО ПФ "Полиграфист”.
160001, г Вологда, ул. Челюскинцев, д. 3.