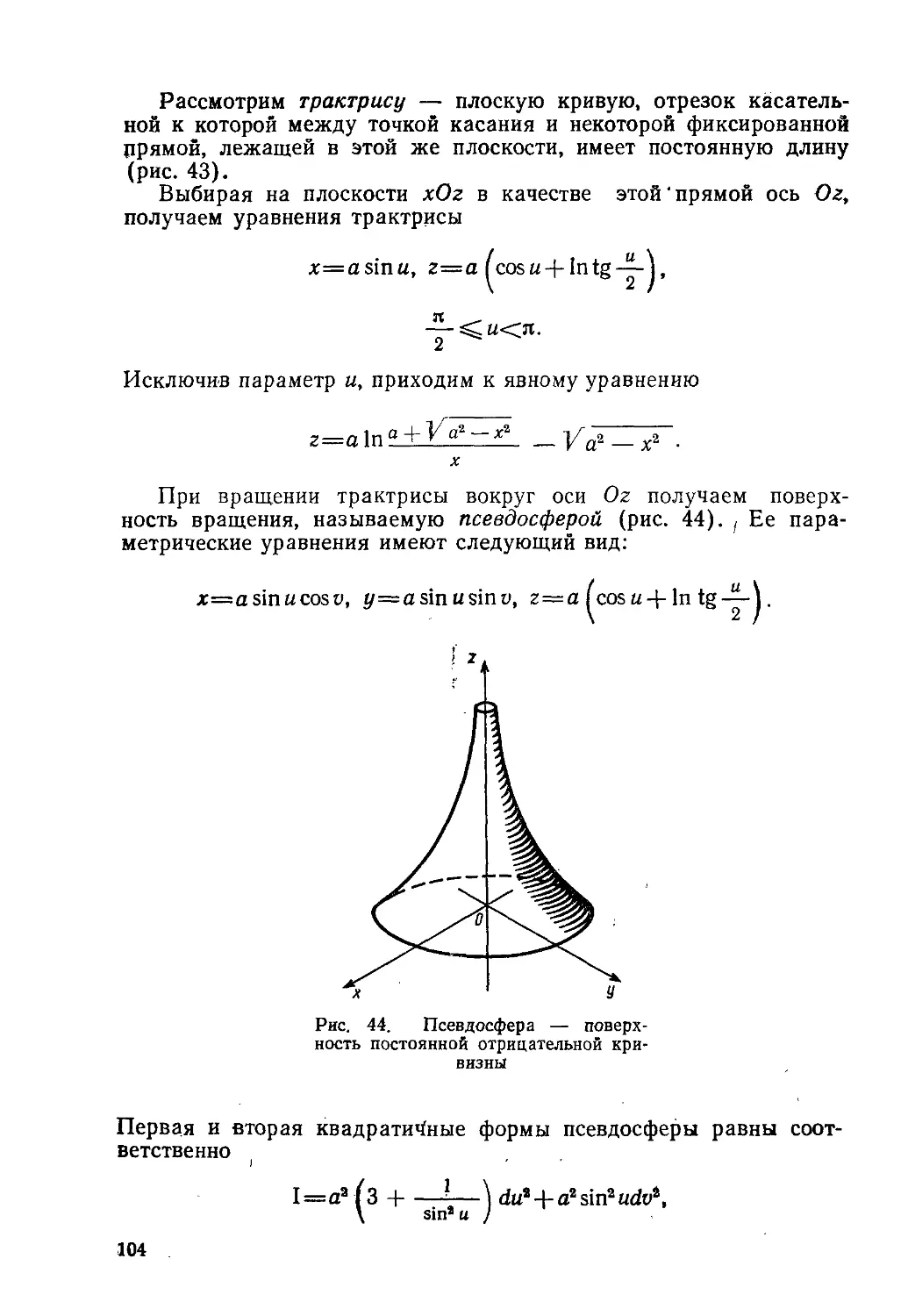
/




















Author: Позняк Э.Г. Шикин Е.В.
Tags: математика геометрия дифференциальная геометрия издательство мгу теория кривых и поверхностей
Year: 1990



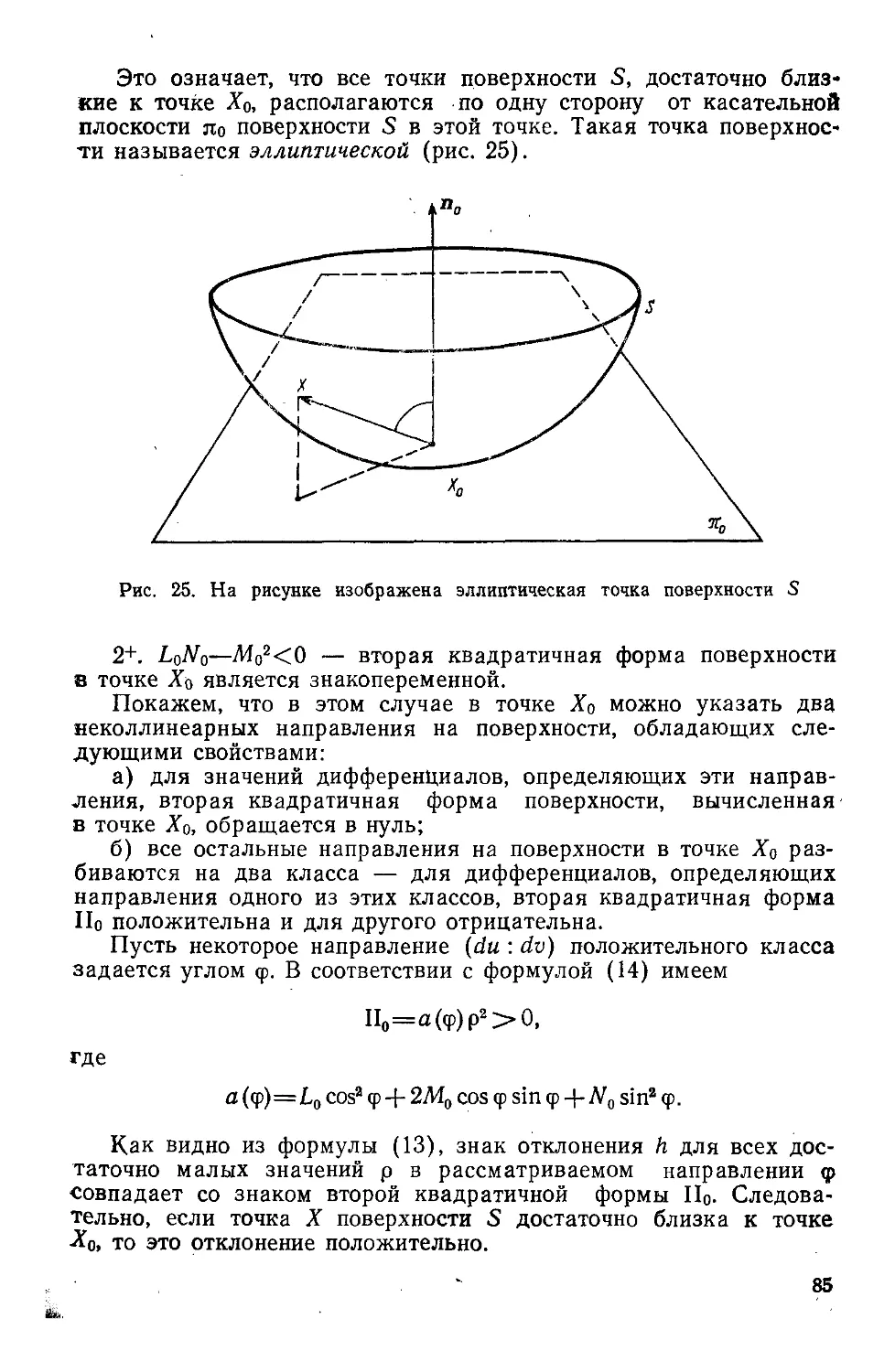
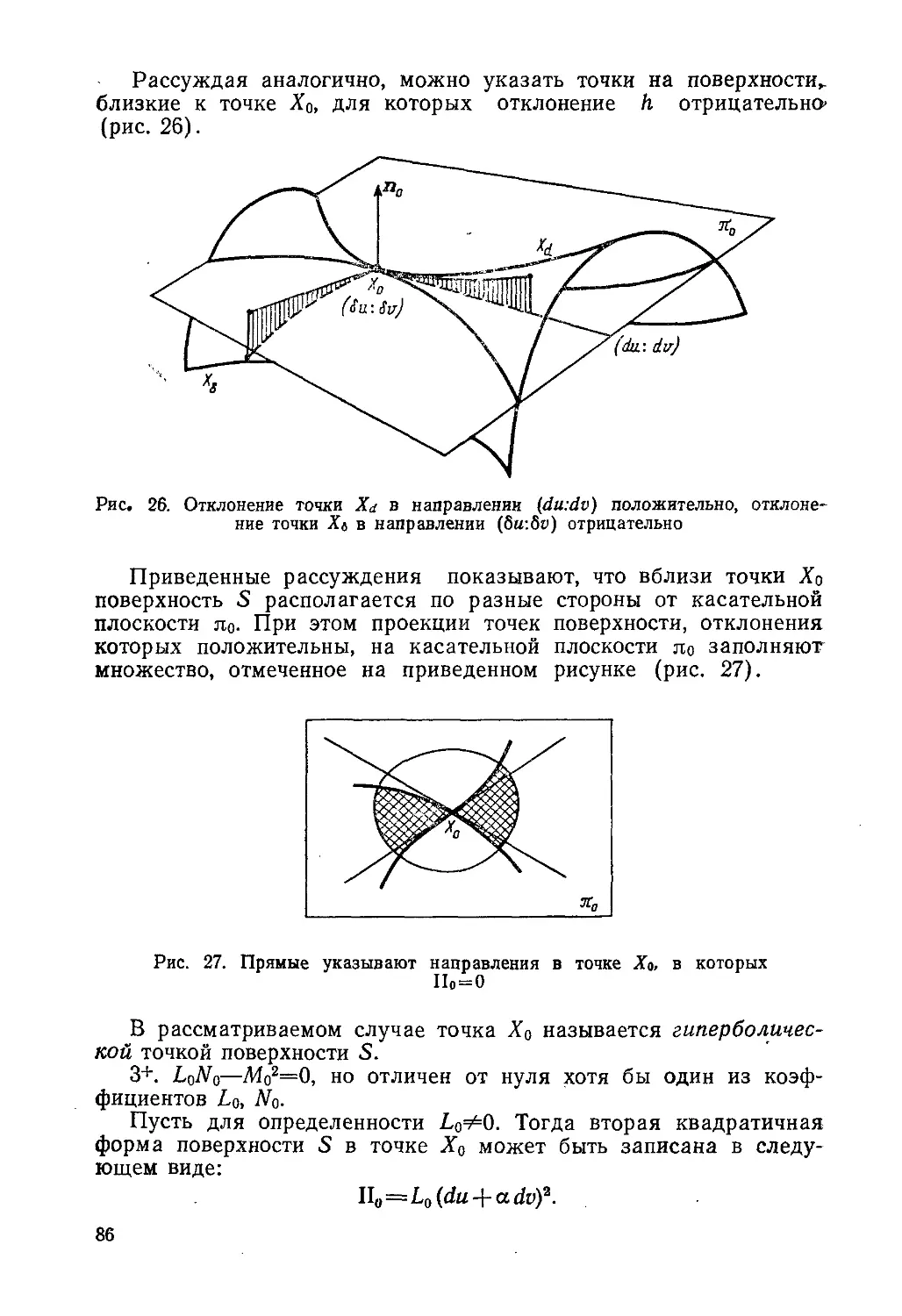
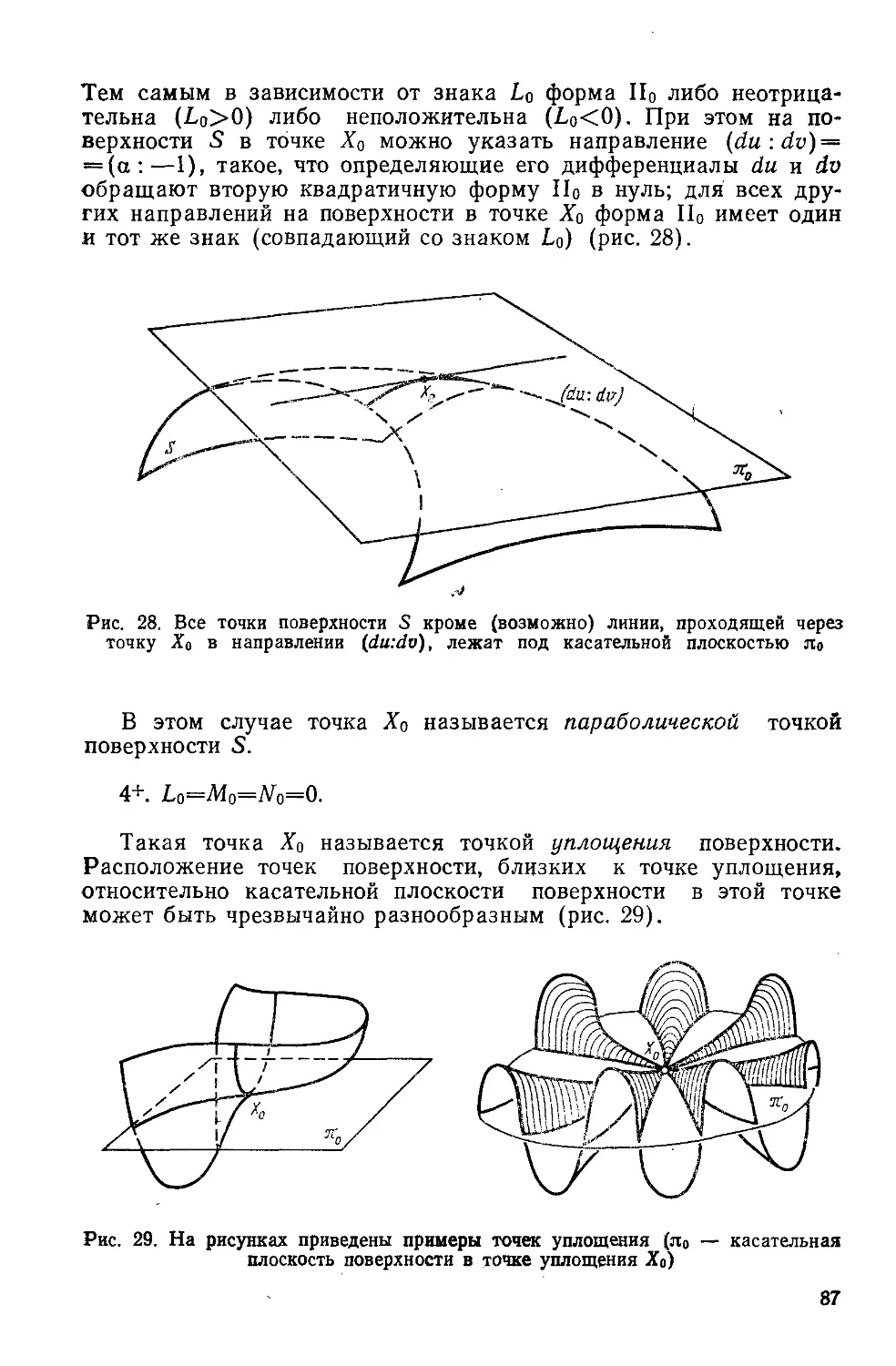
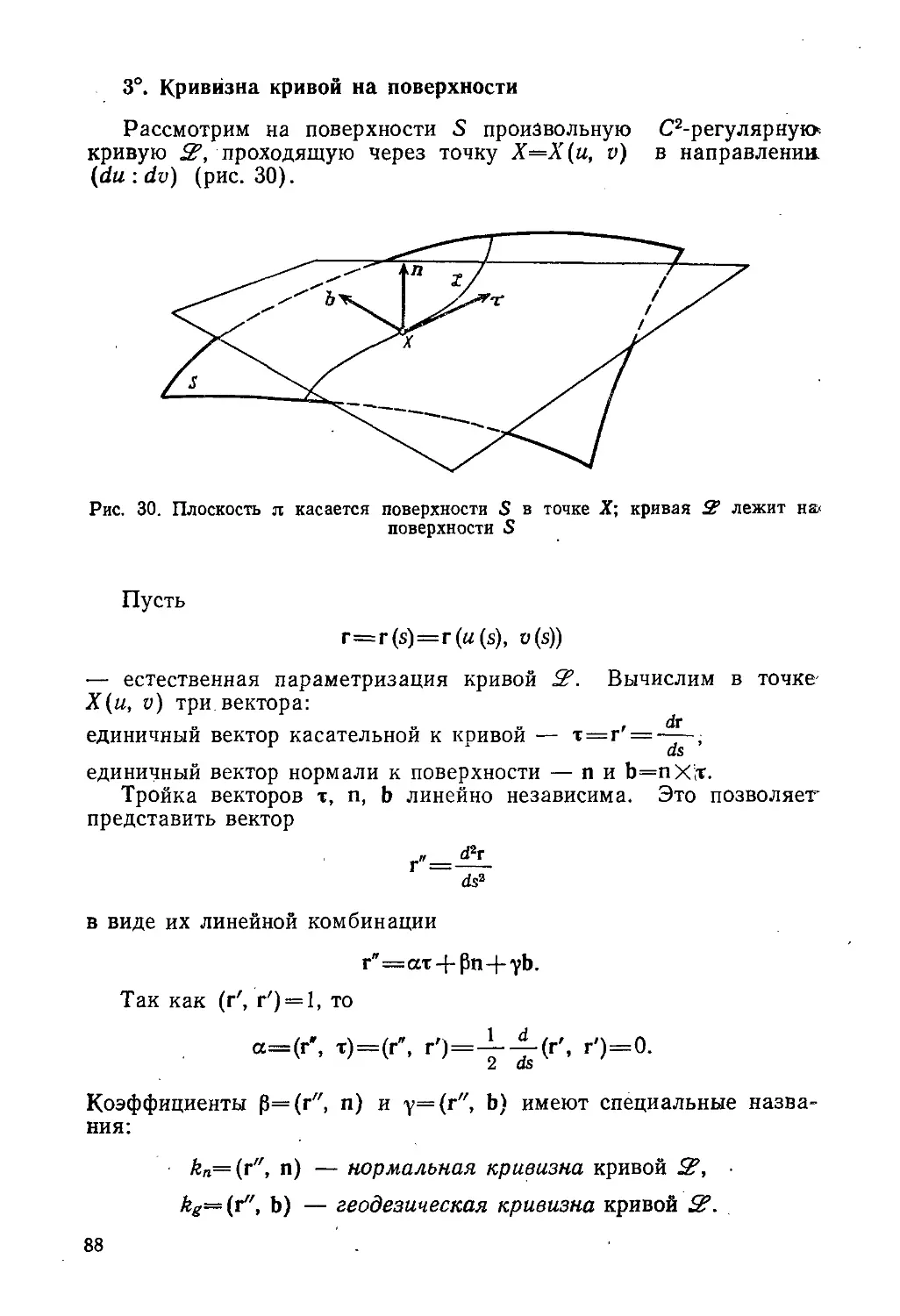
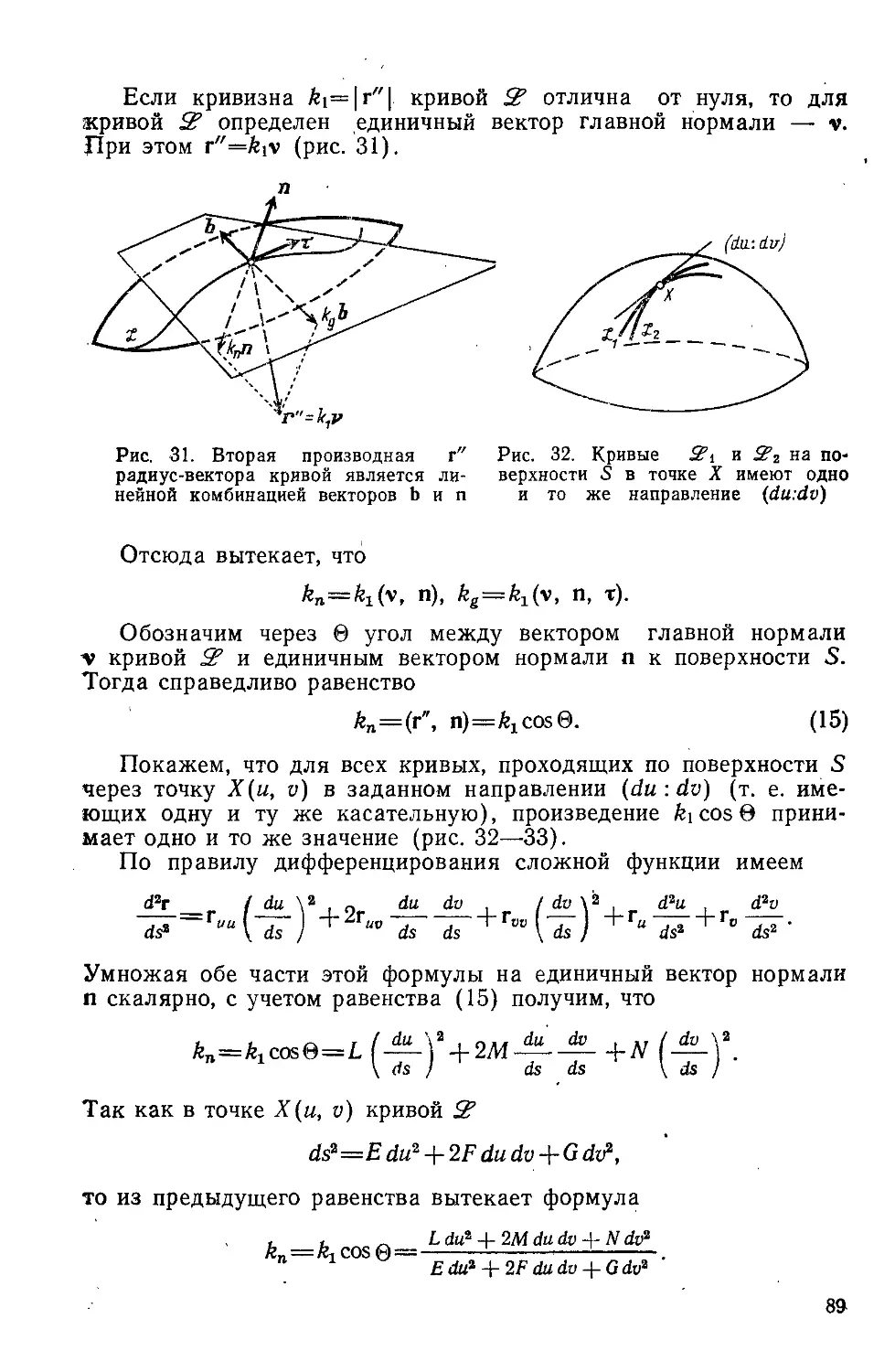
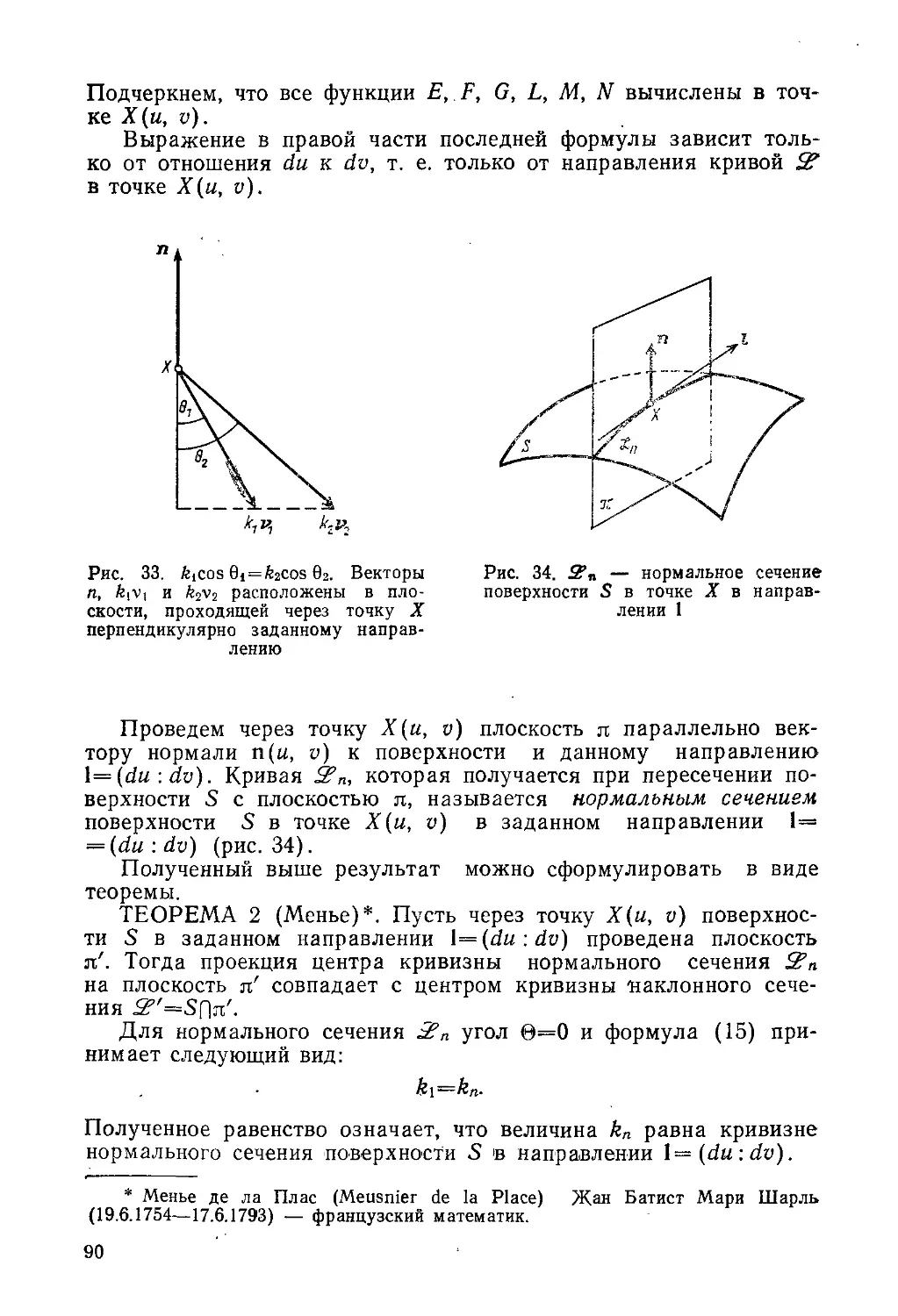
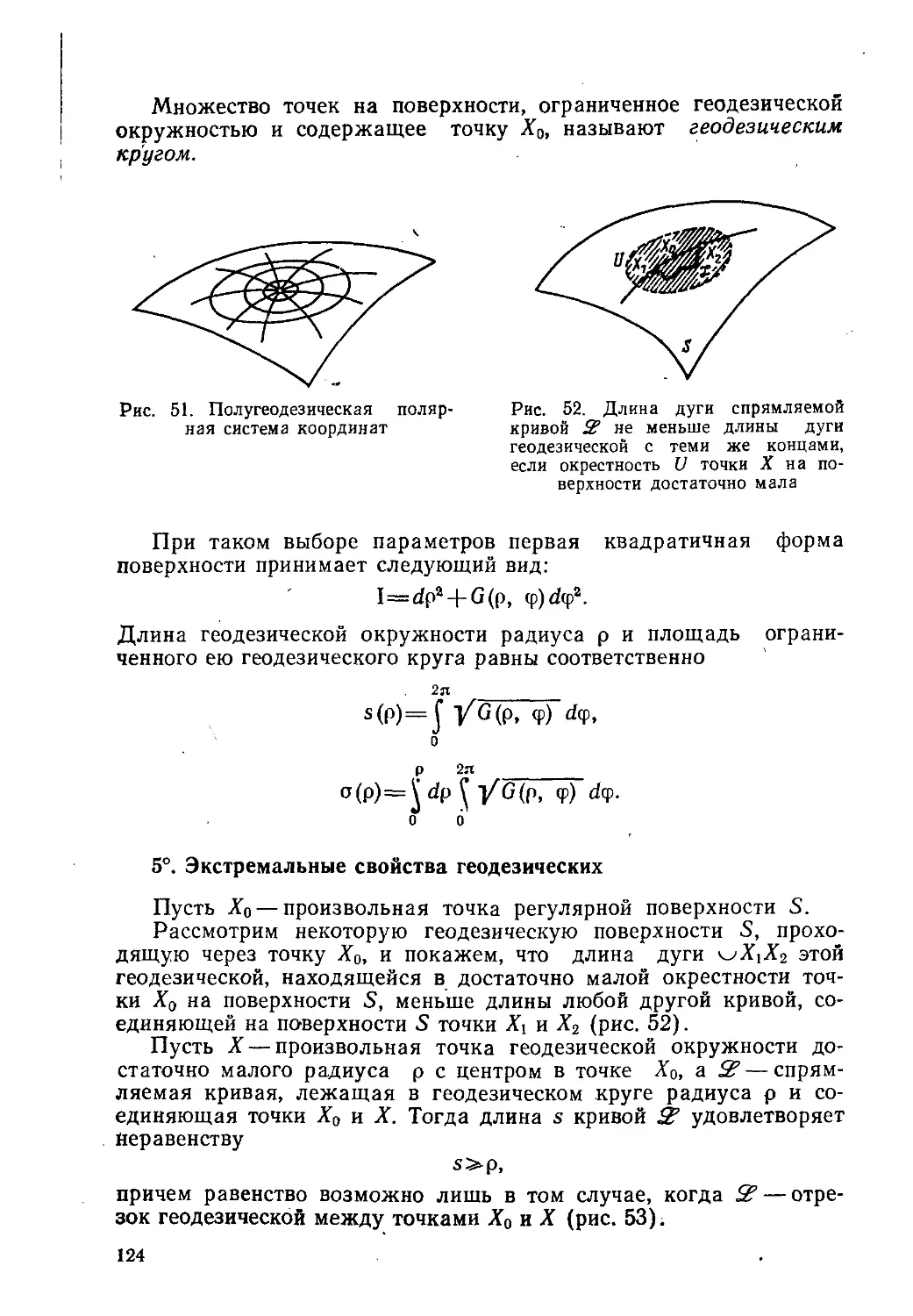
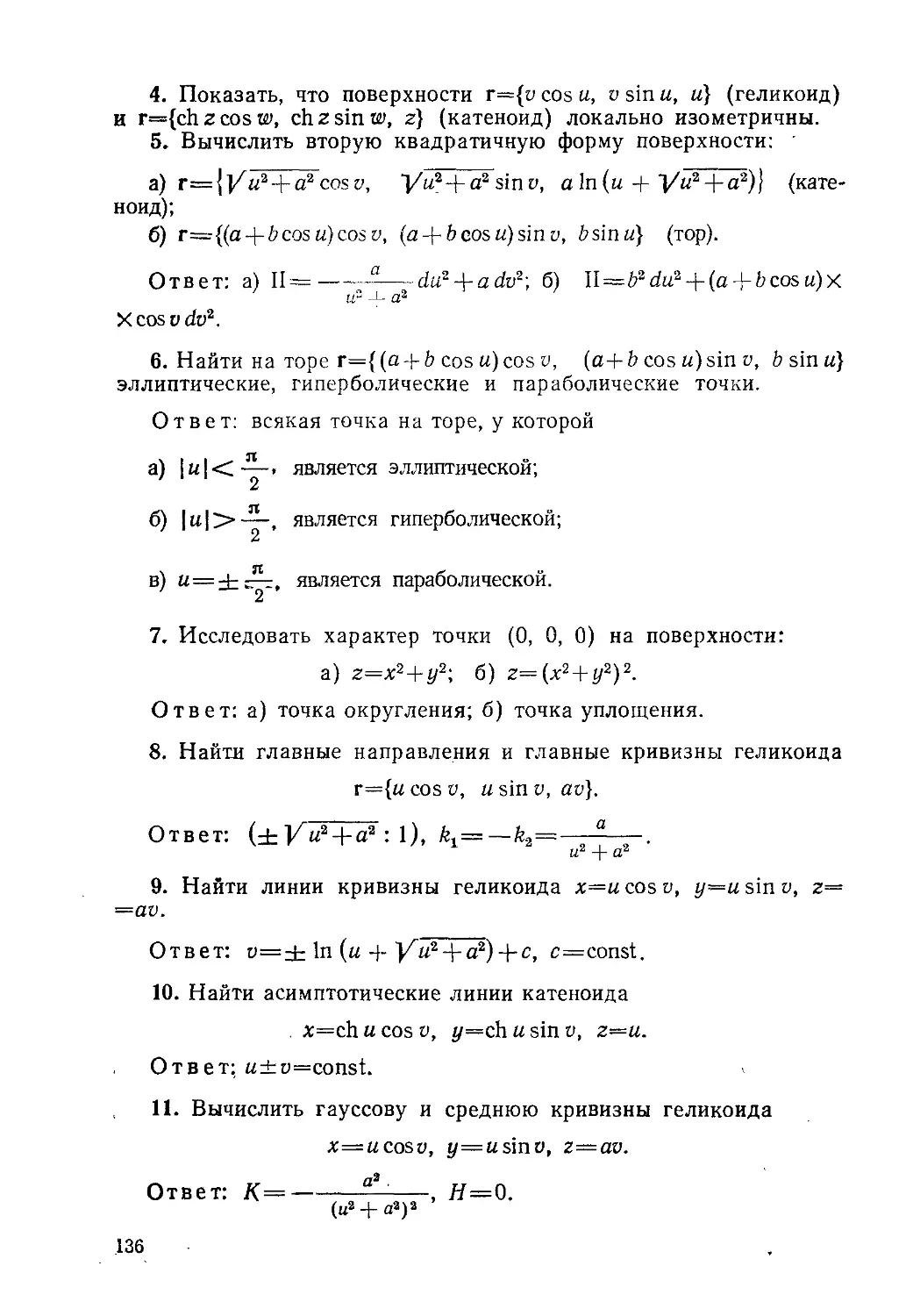
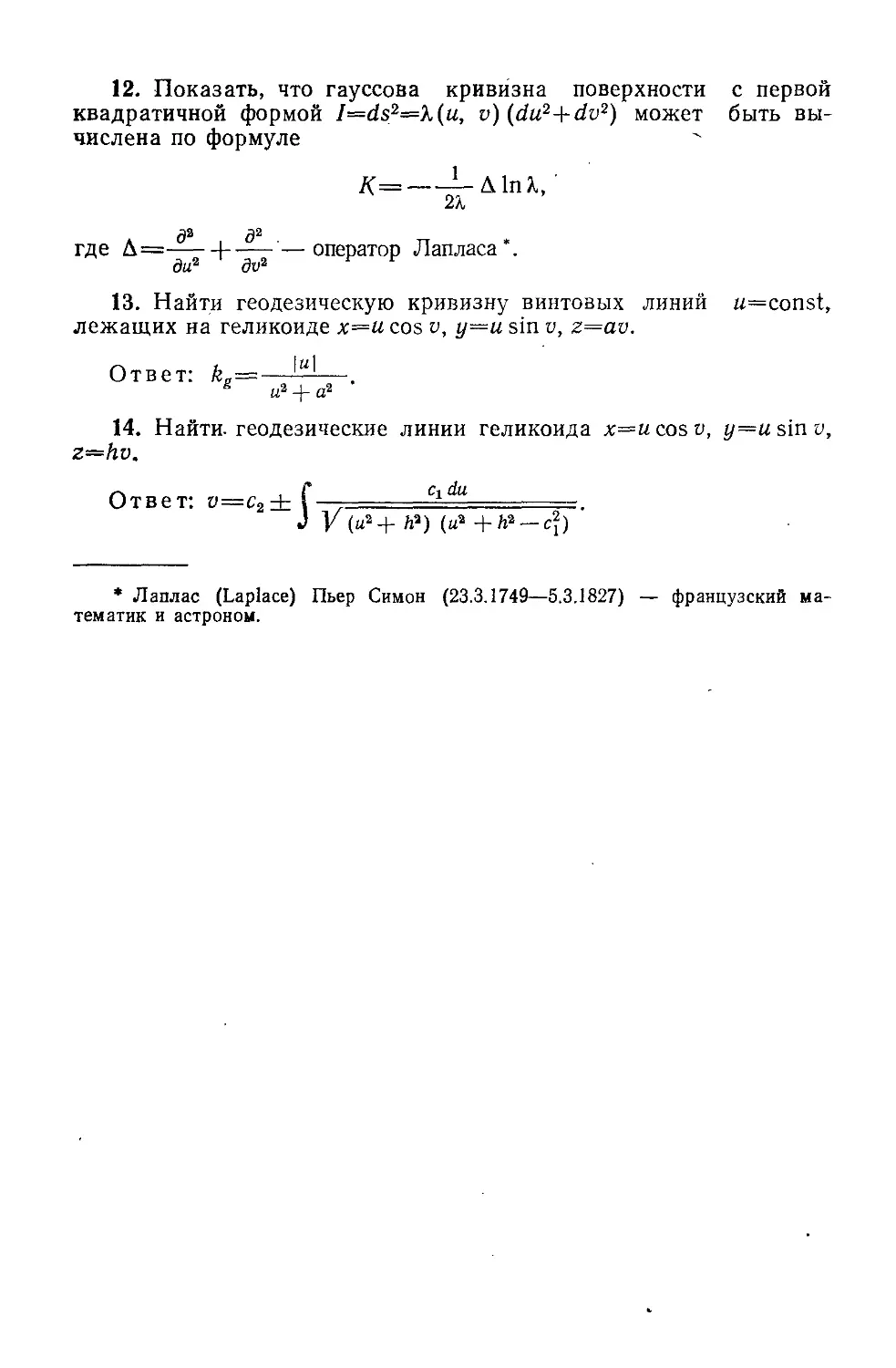
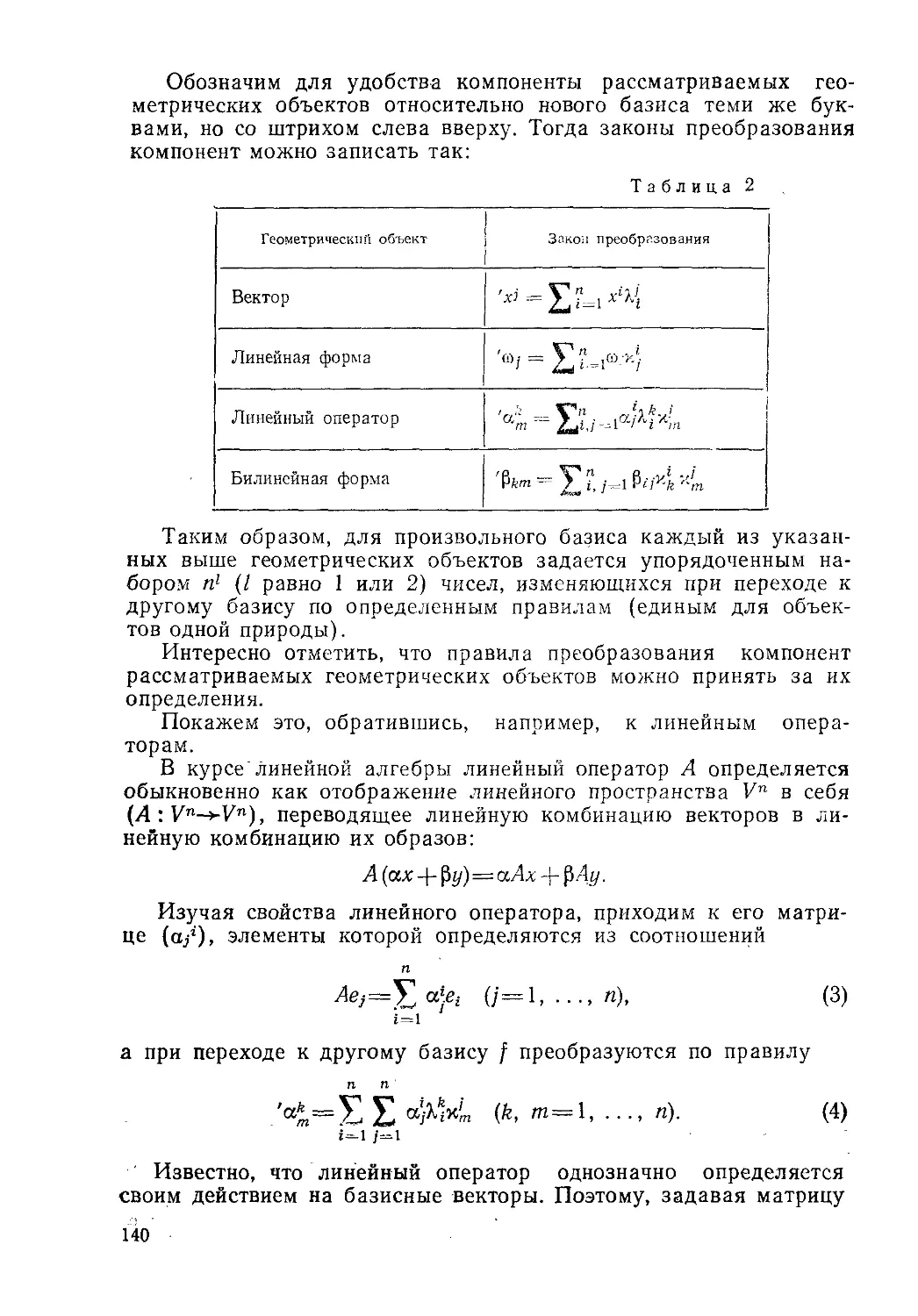
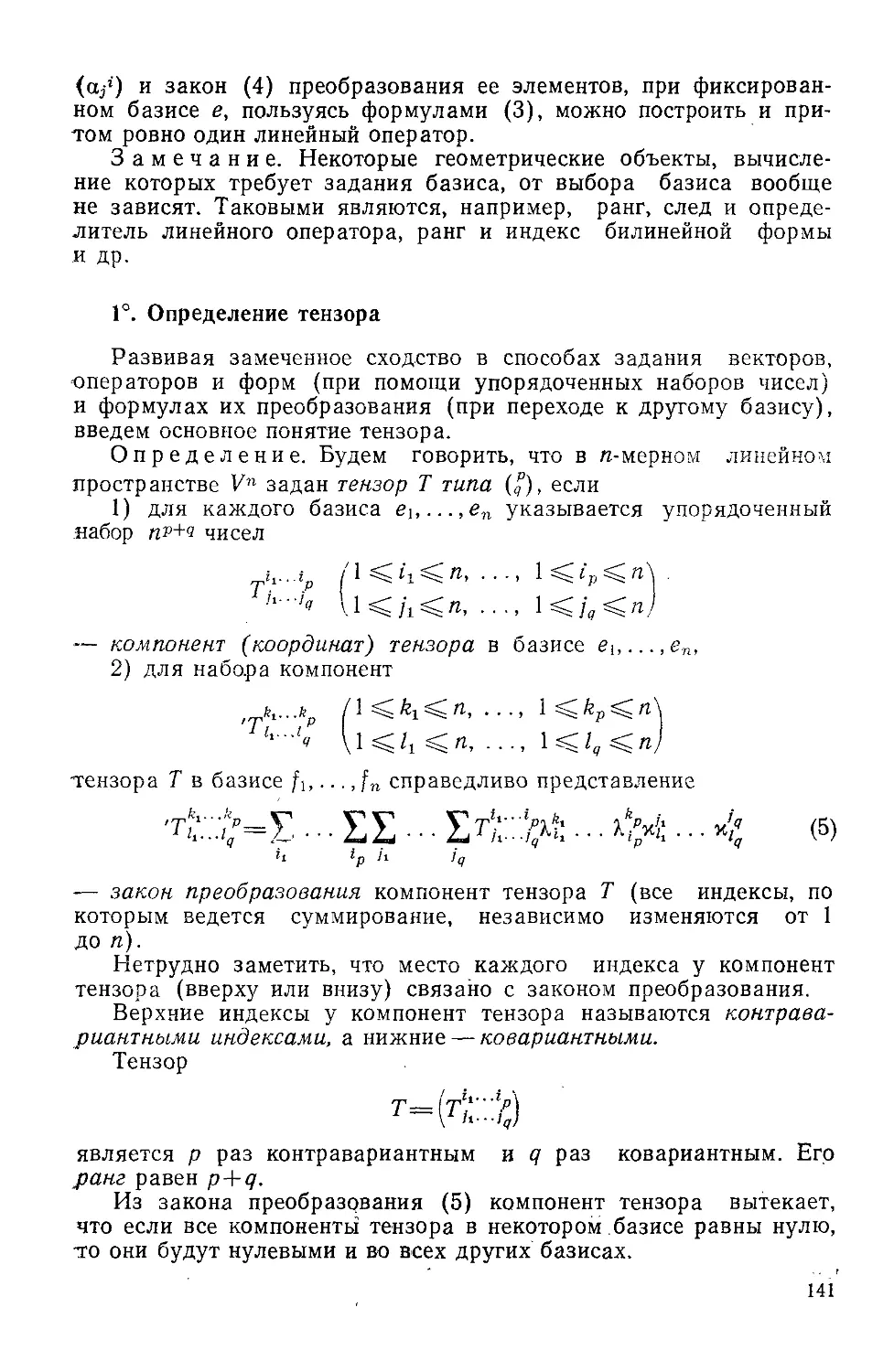
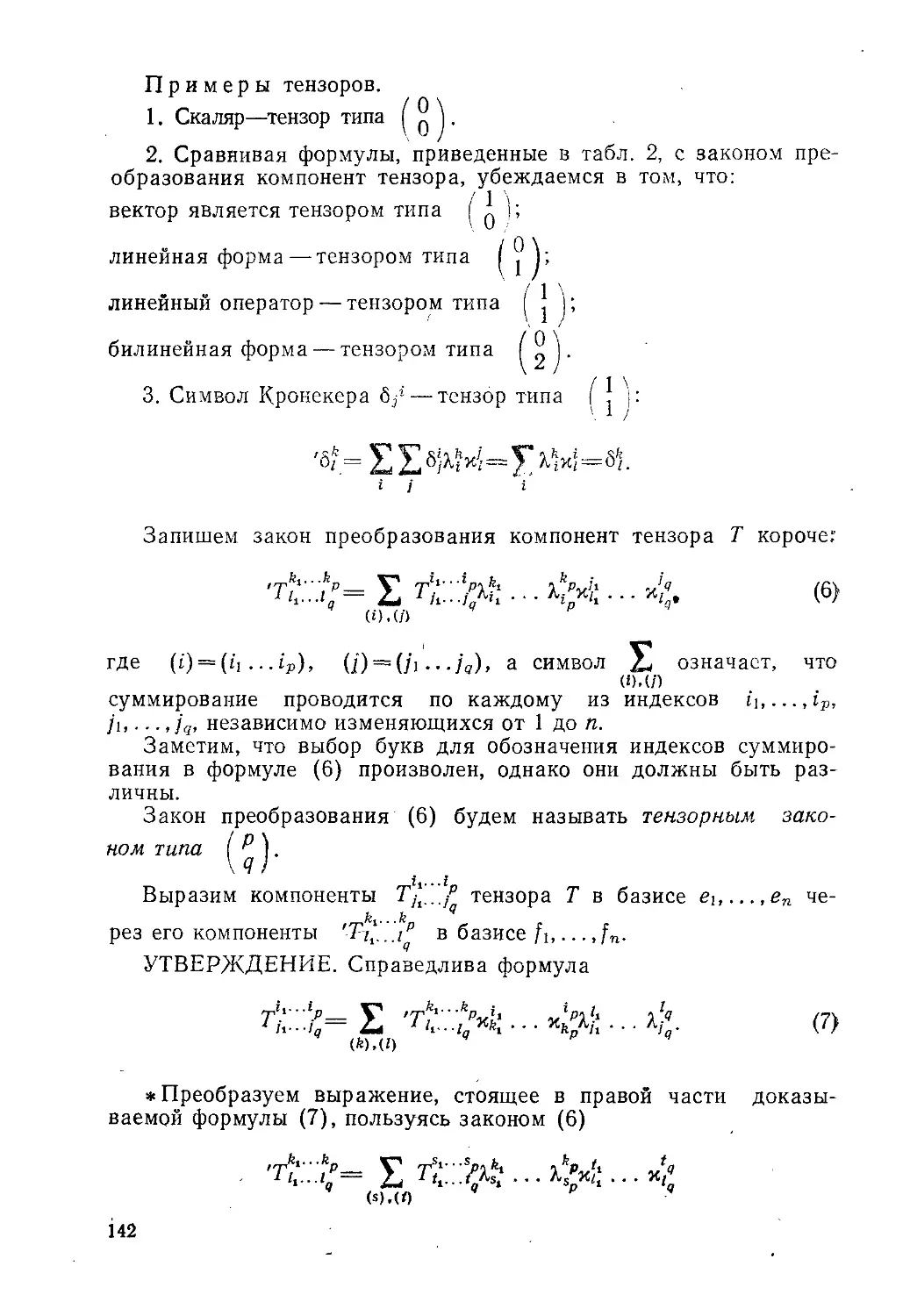
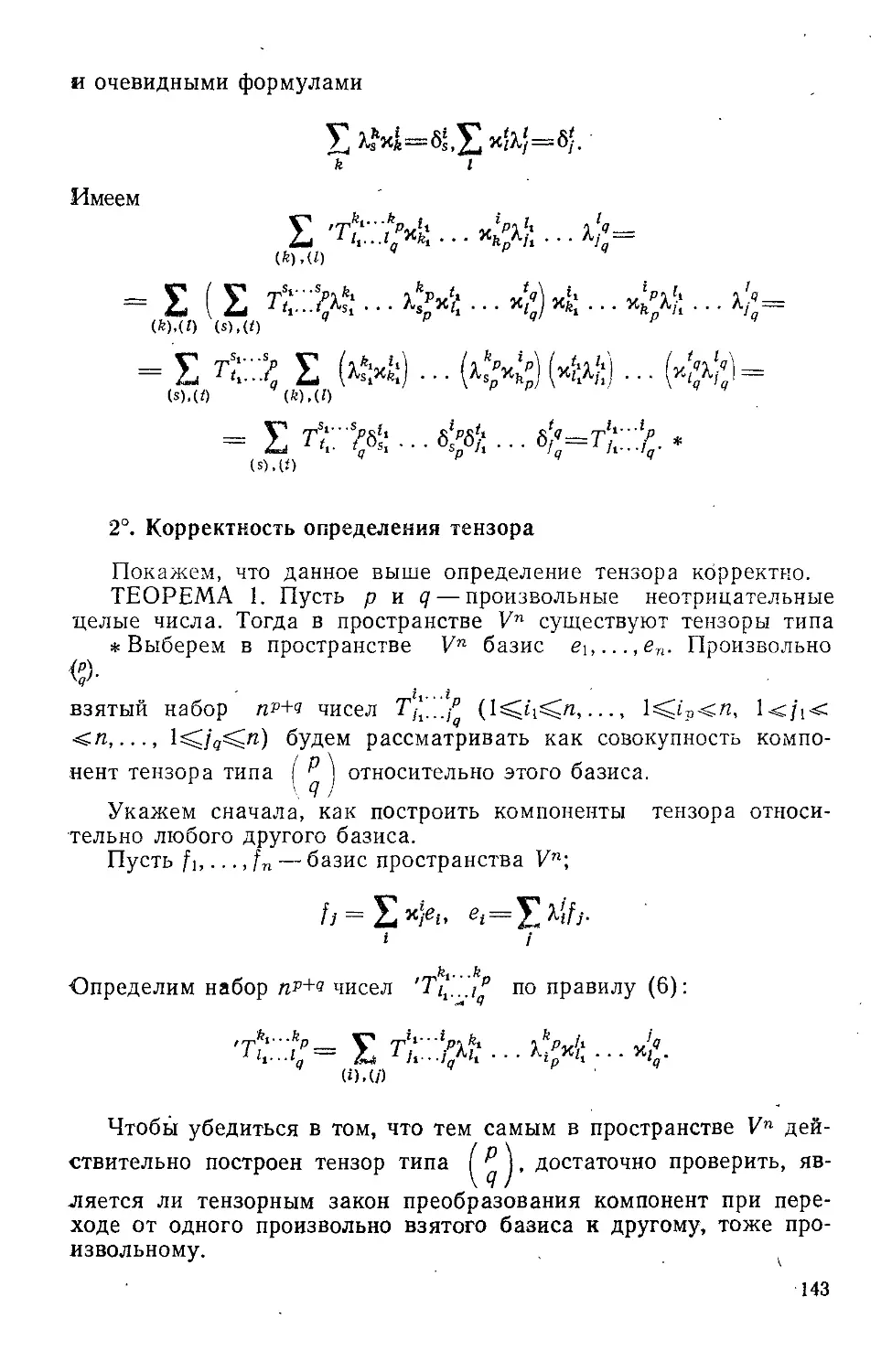
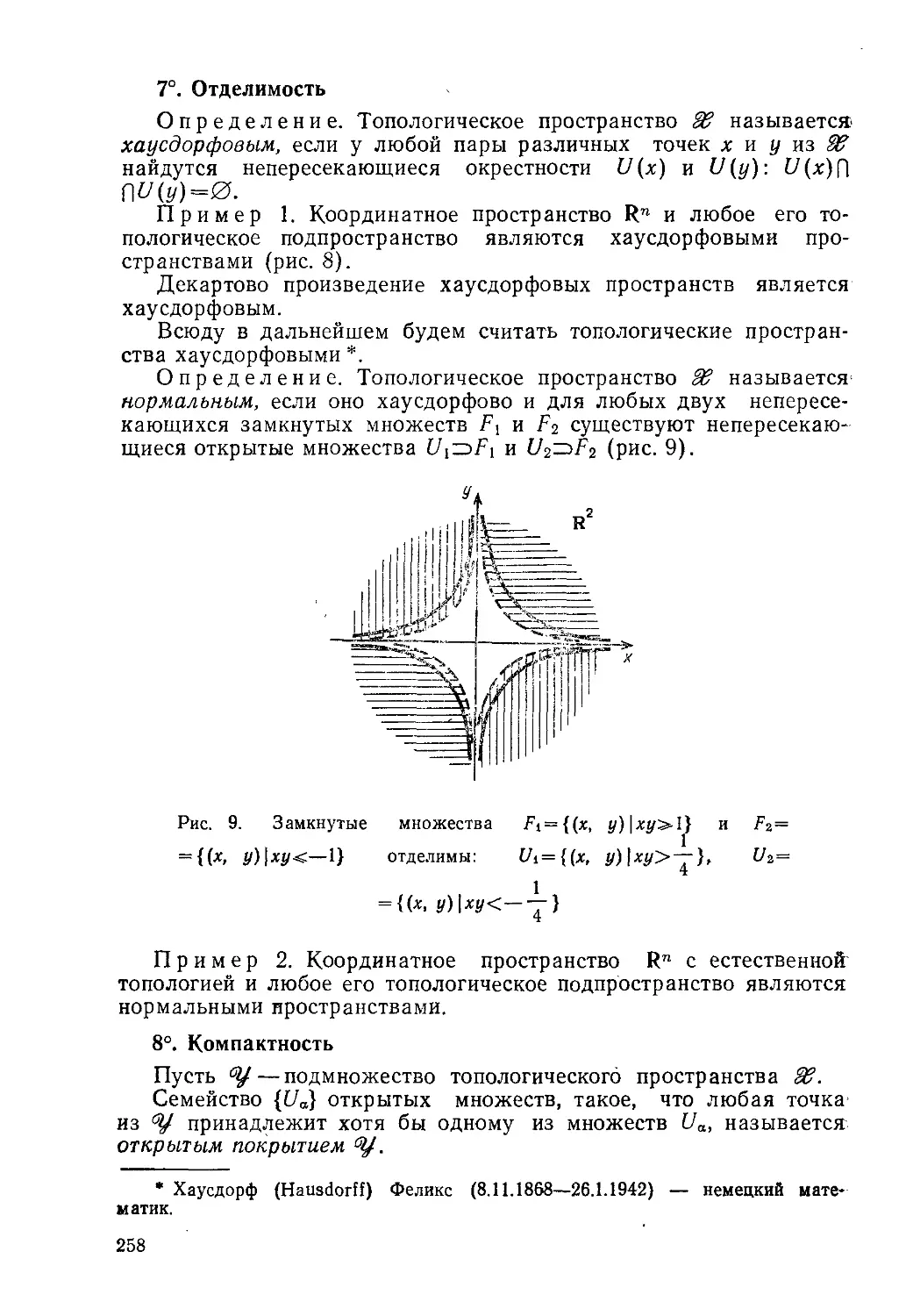
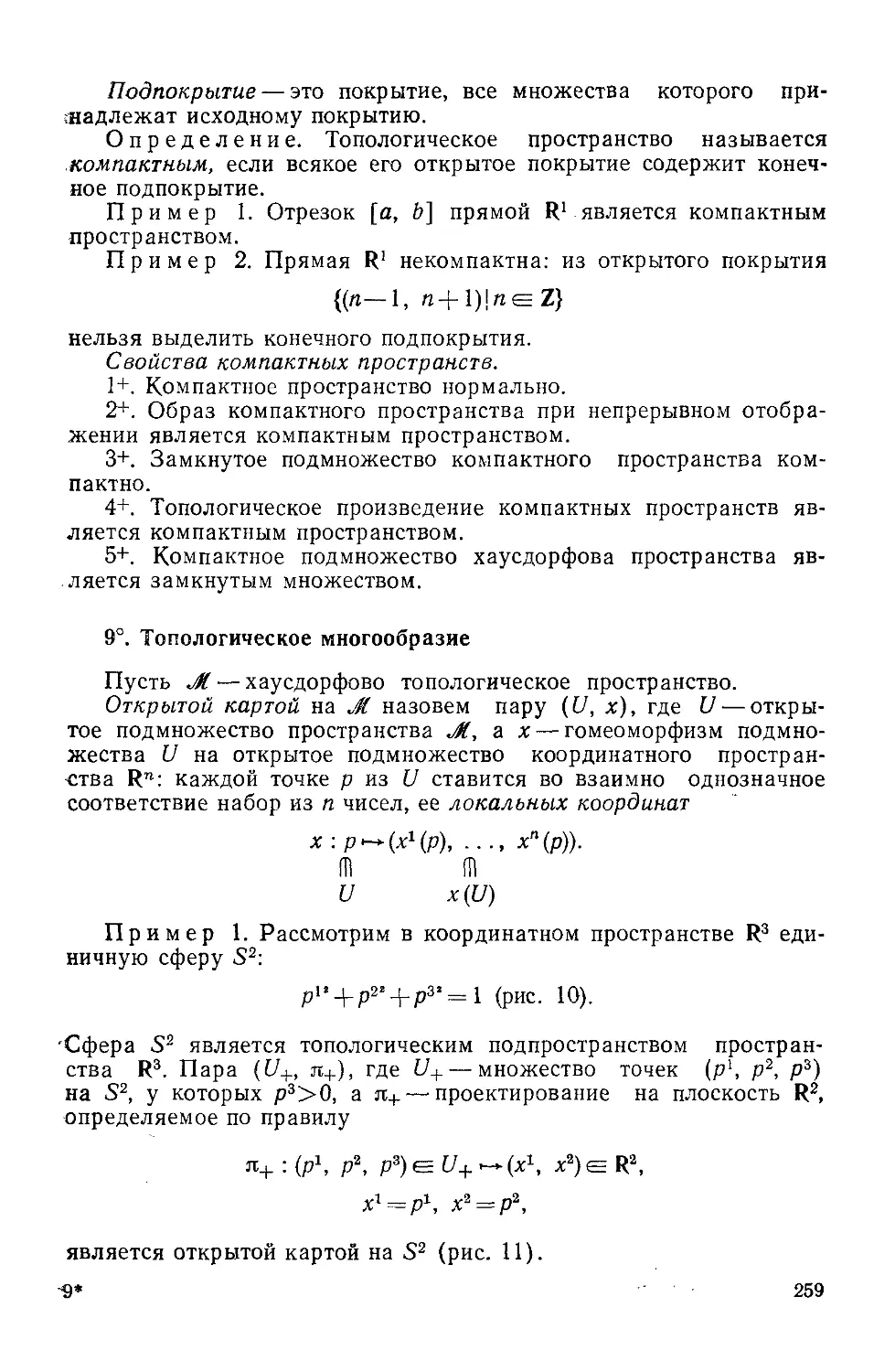
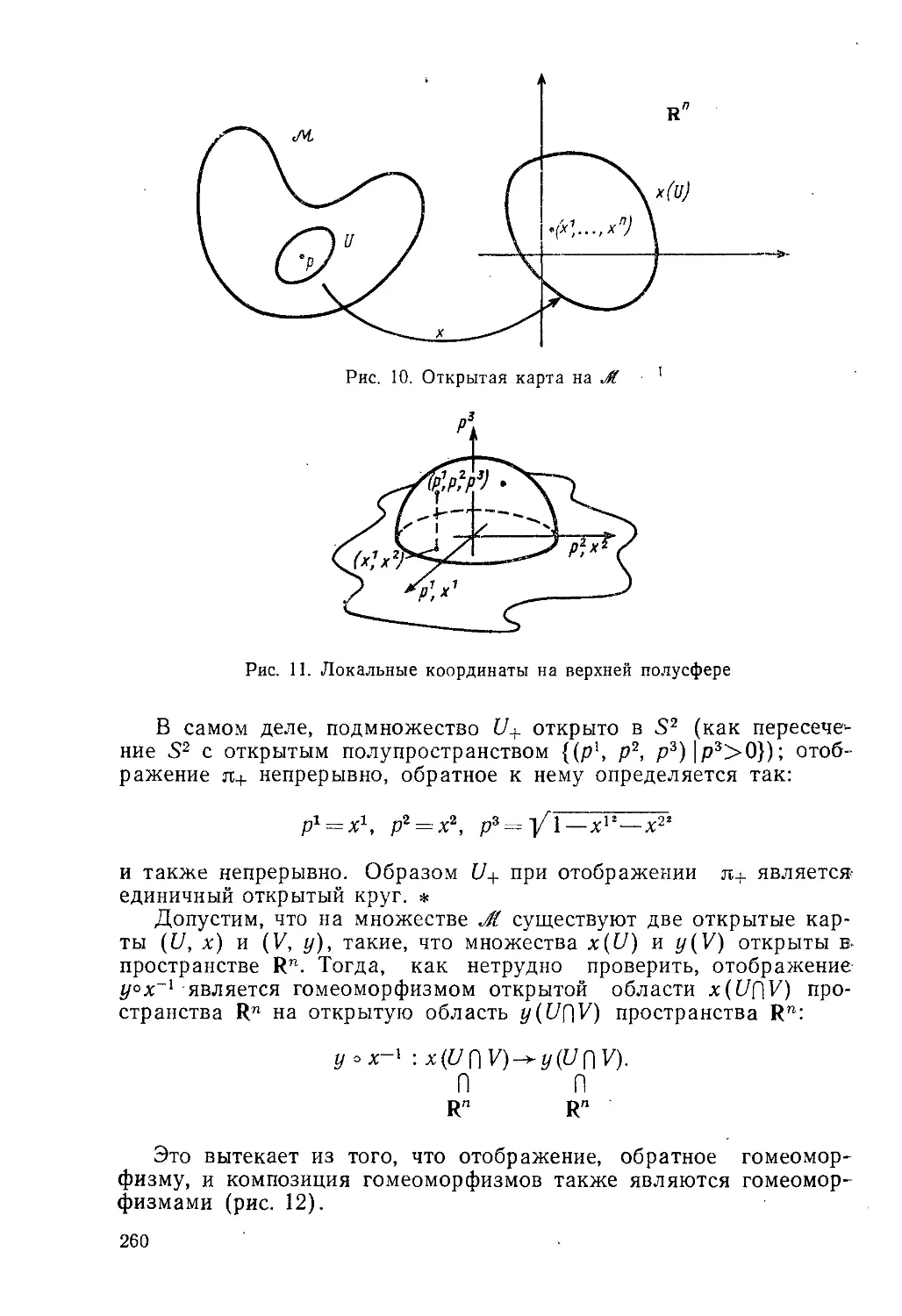
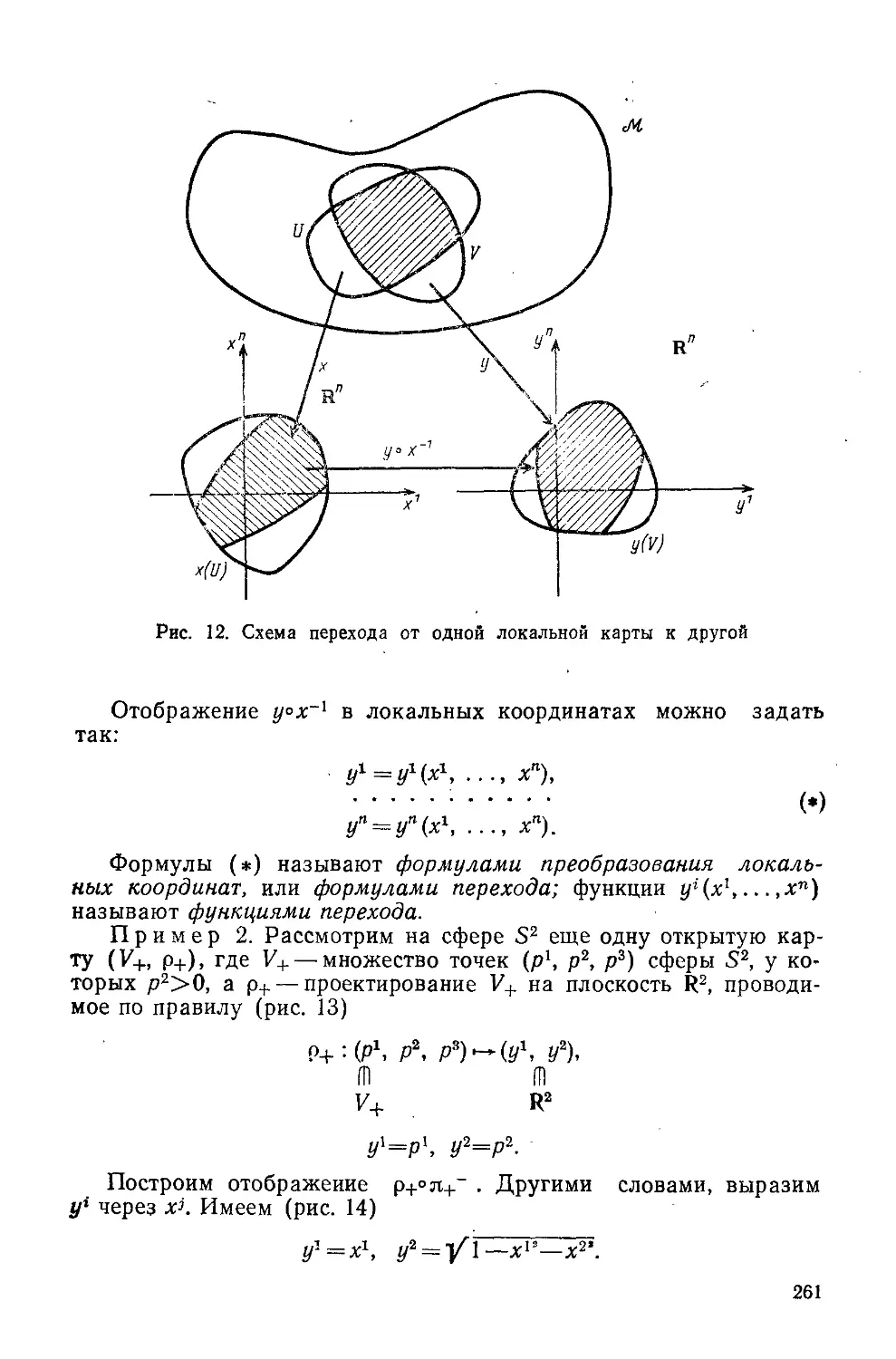
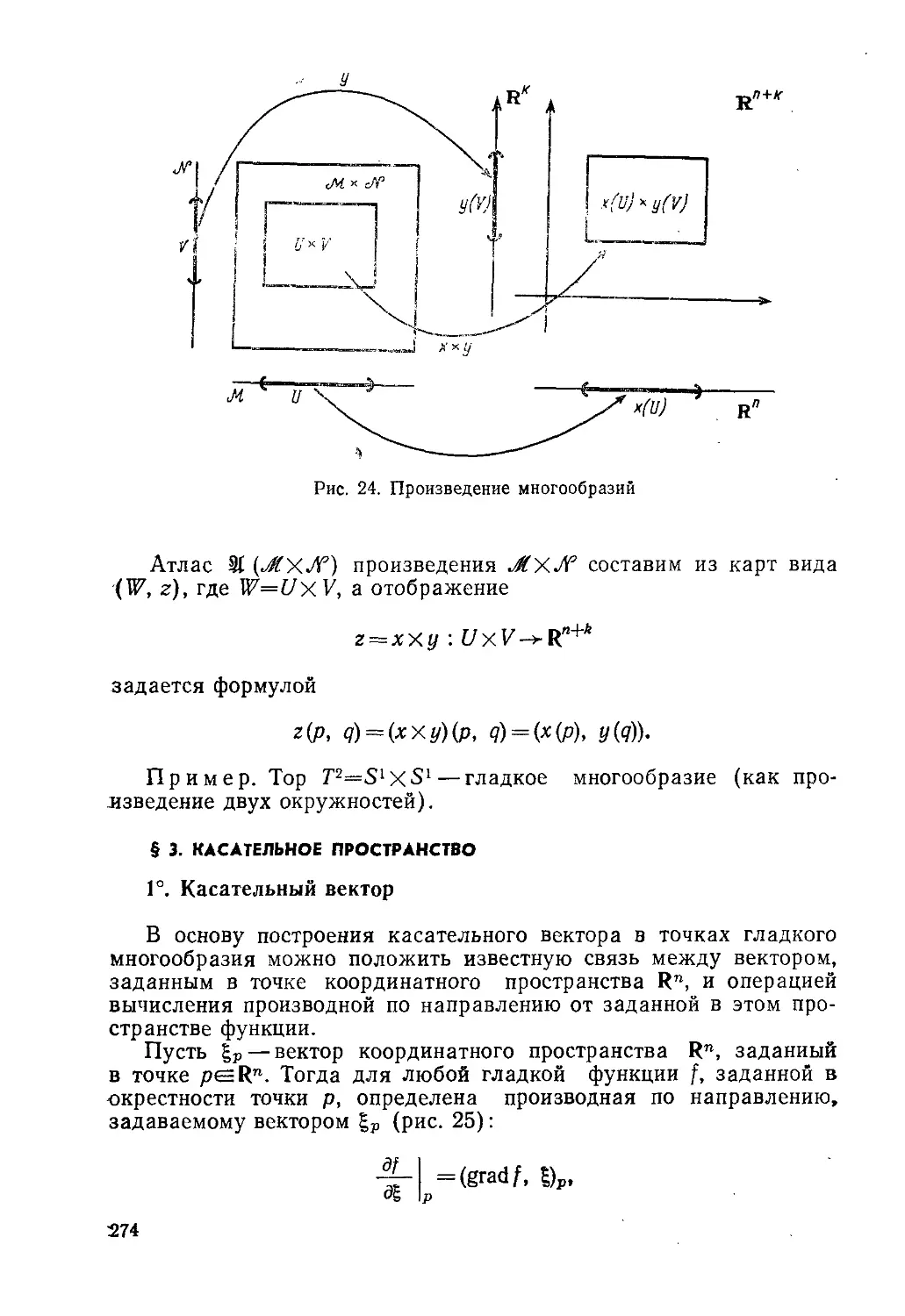
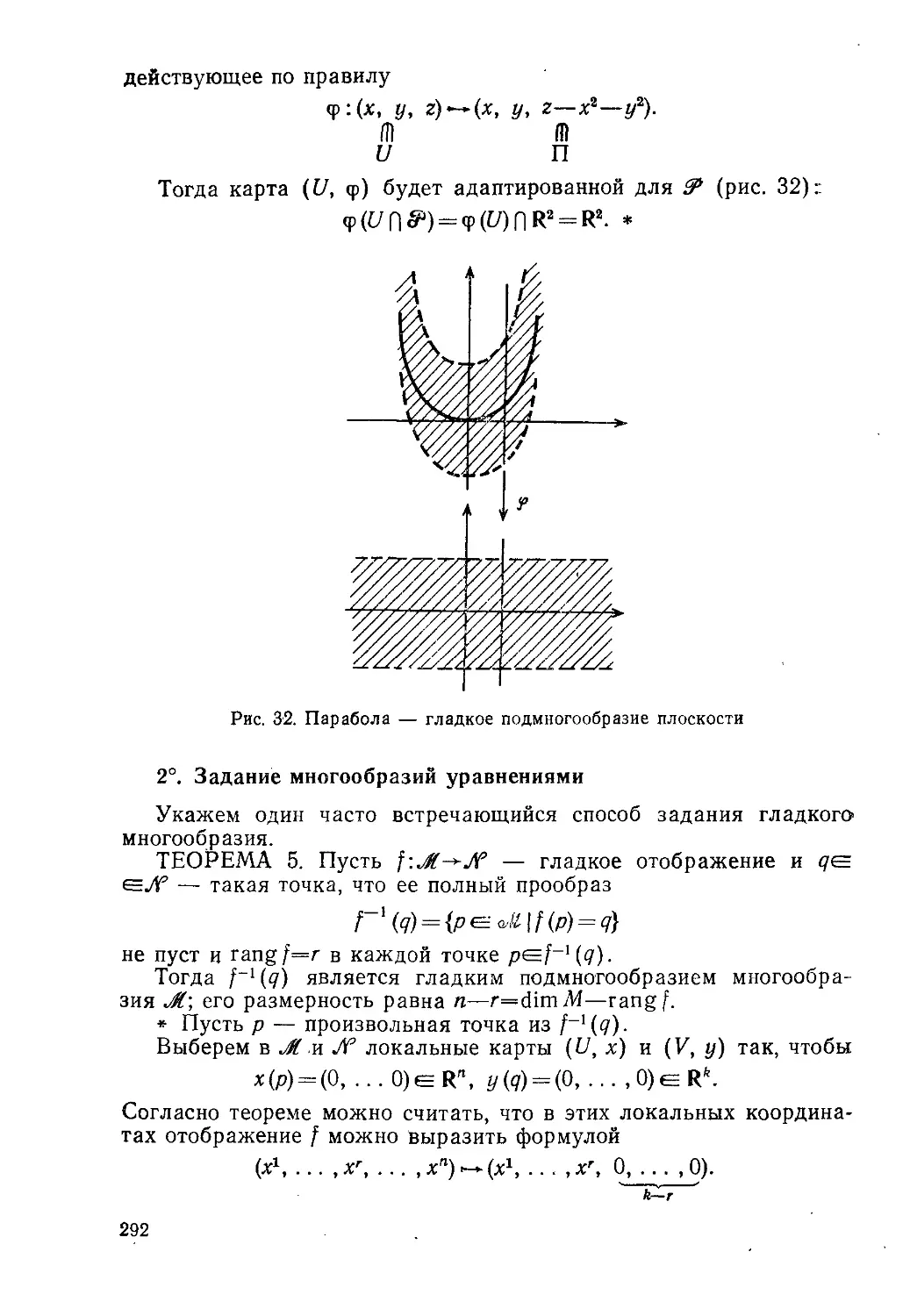
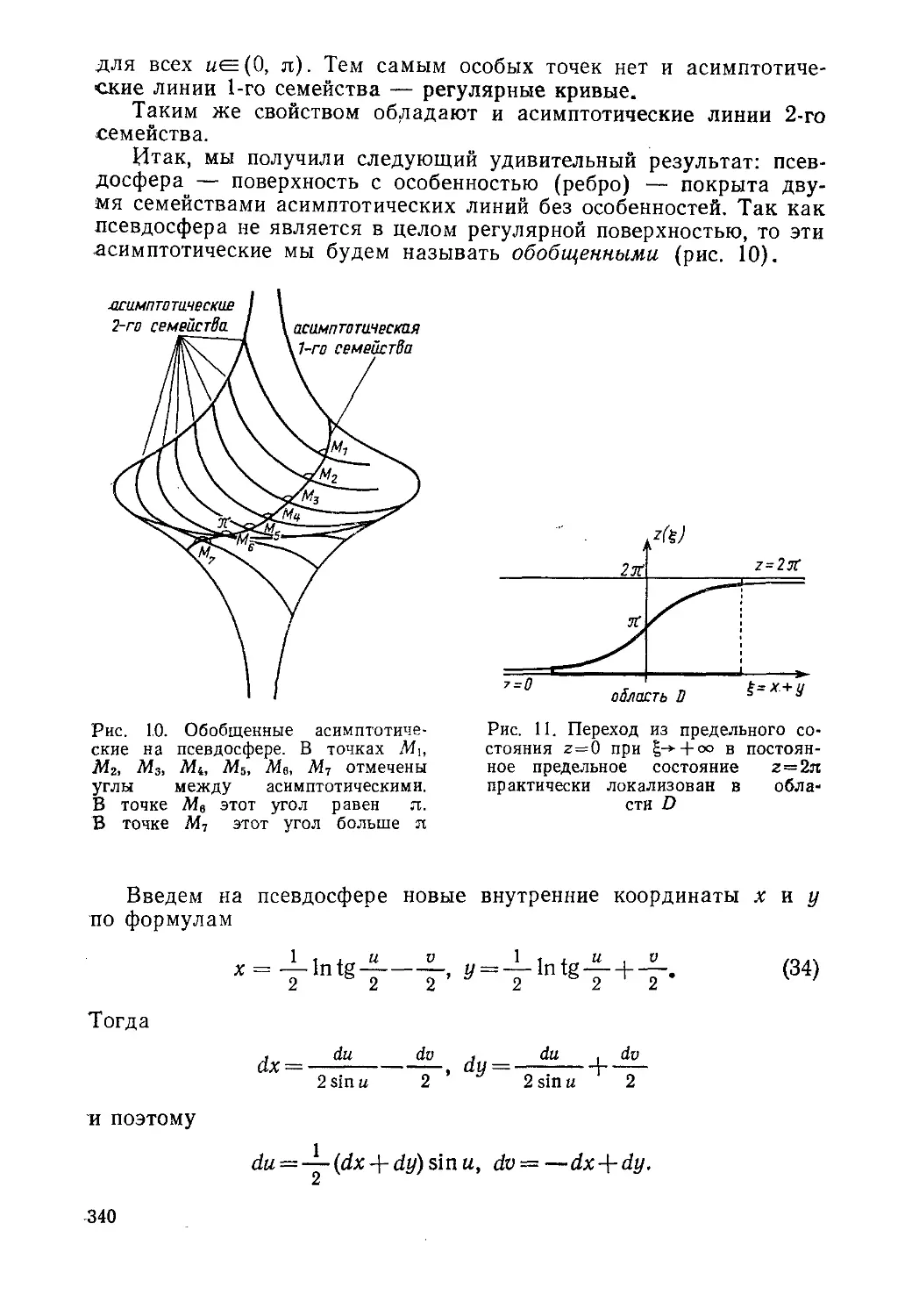
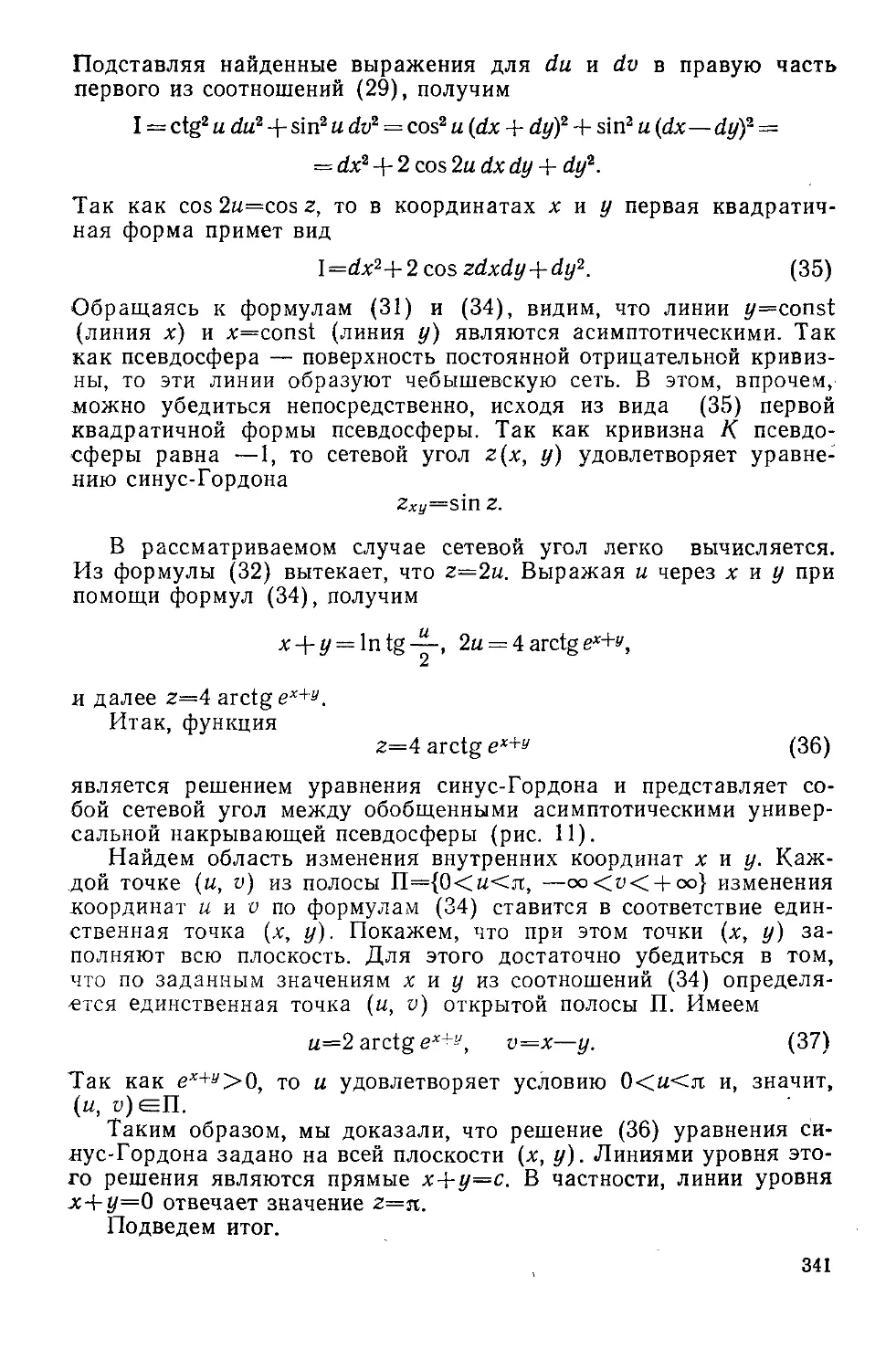
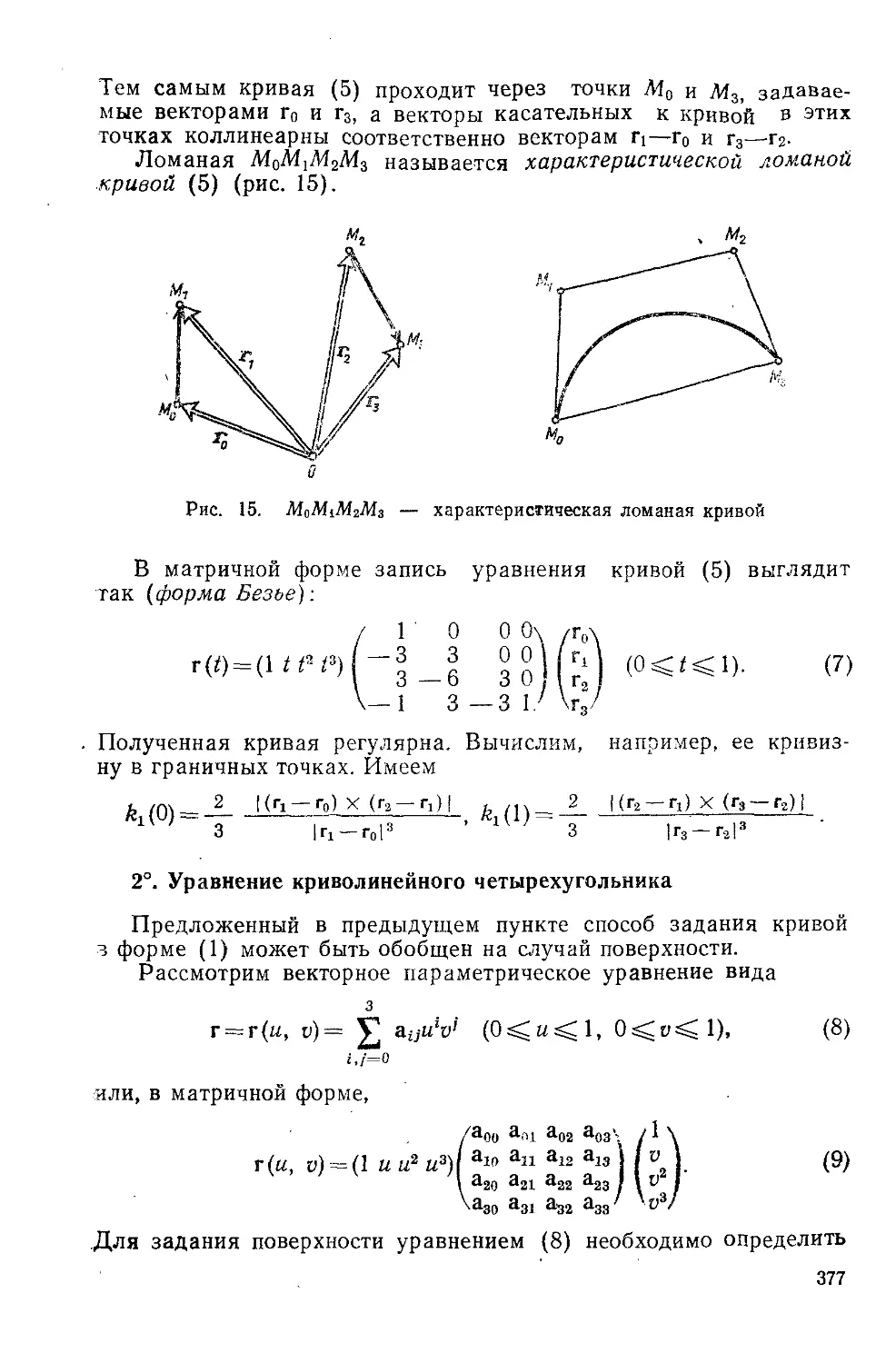
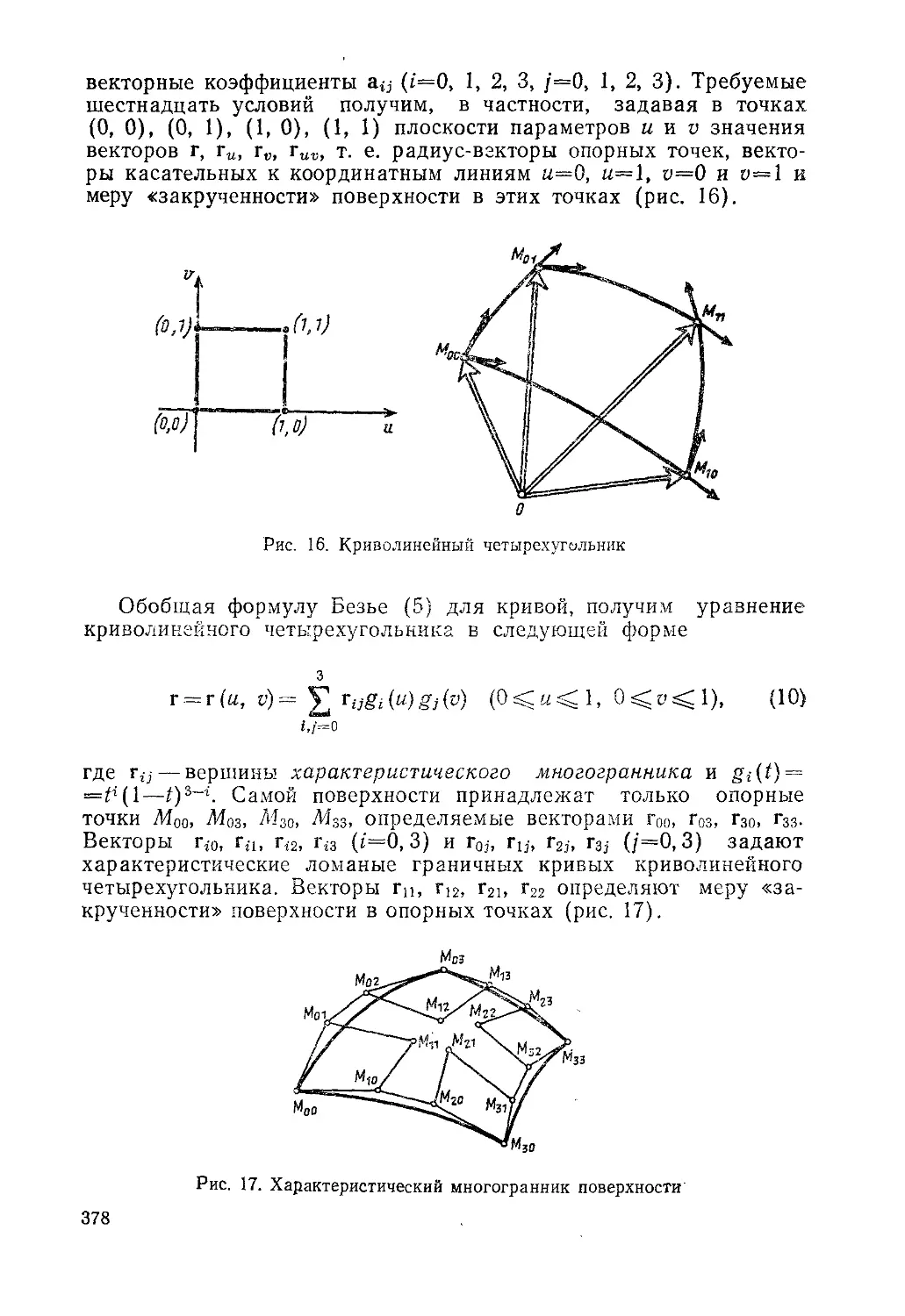
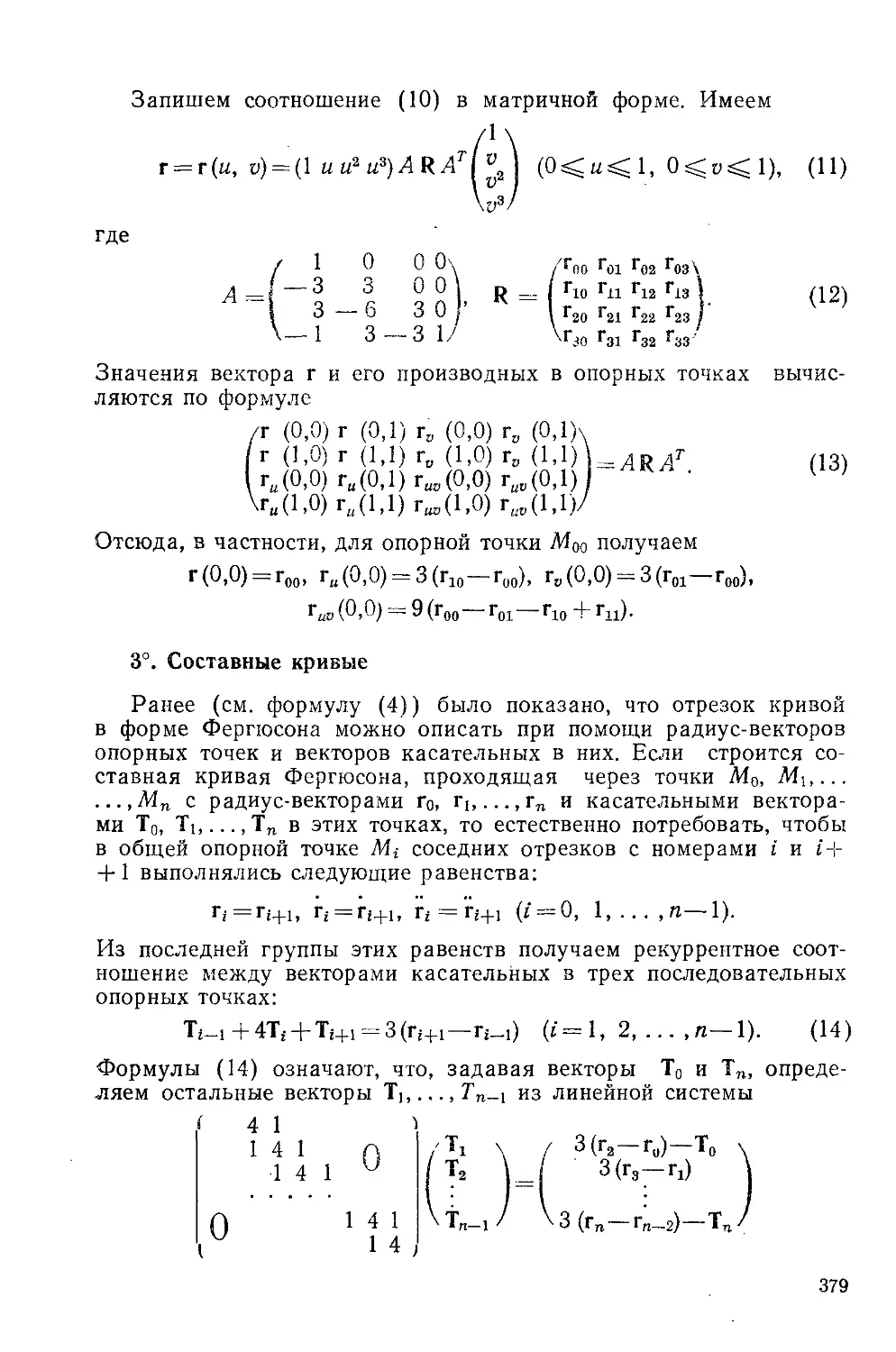
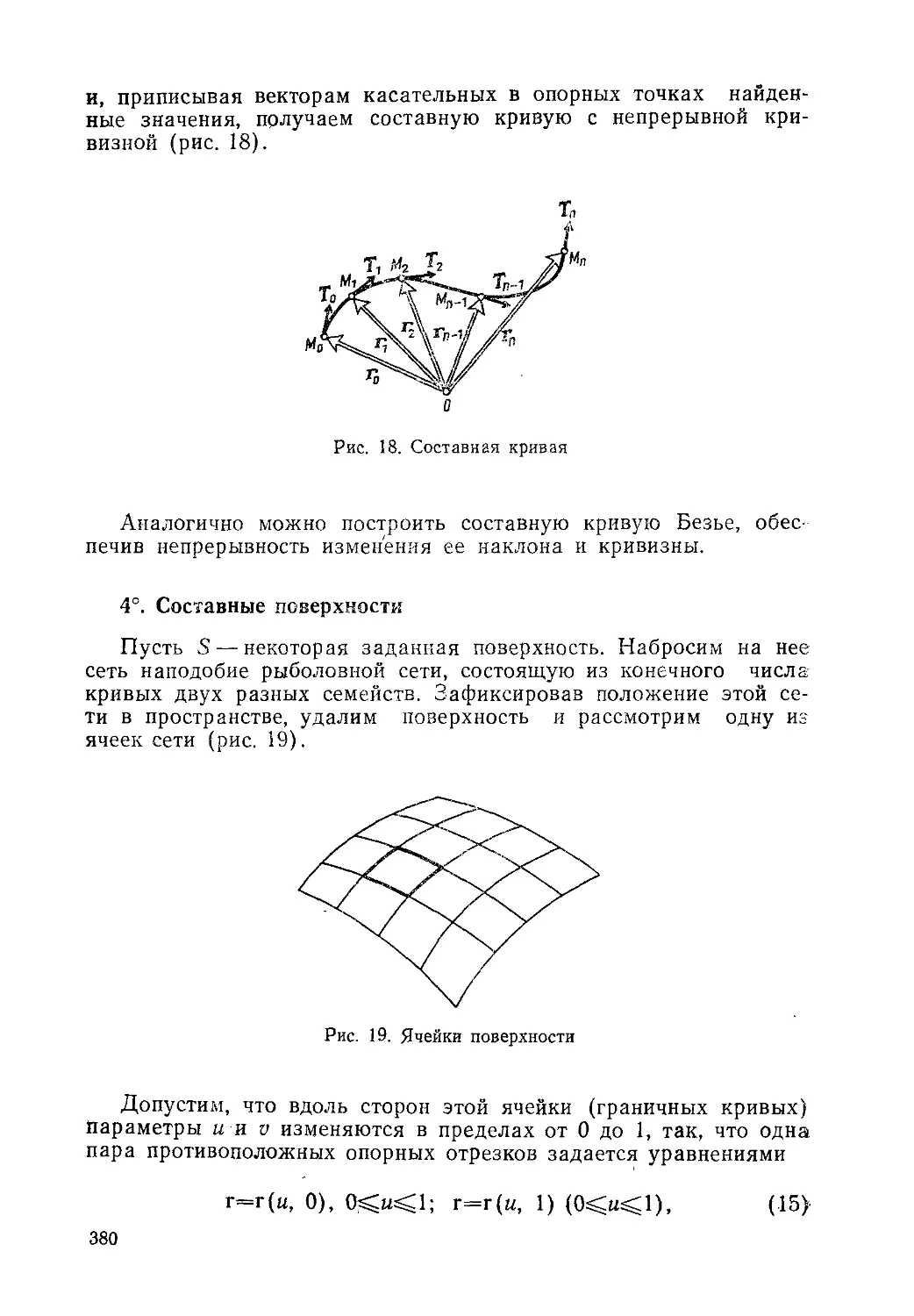
Text
Э.Г.Позняк, Е.В.Шикин
ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ: ПЕРВОЕ ЗНАКОМСТВО
М.: Изд-во МГУ, 1990. 384 с.
Книга знакомит с основными понятиями теории кривых и поверхностей,
элементами тензорного исчисления, римановой геометрии и гладких
многообразий, а также с некоторыми их приложениями в математике, физике,
технике. Материал подробно иллюстрирован примерами и рисунками.
Книга рассчитана на математиков-прикладников, физиков, механиков,
инженеров. Предполагается знакомство читателя с аналитической геометрией,
линейной алгеброй, дифференциальным и интегральным исчислением.
Оглавление
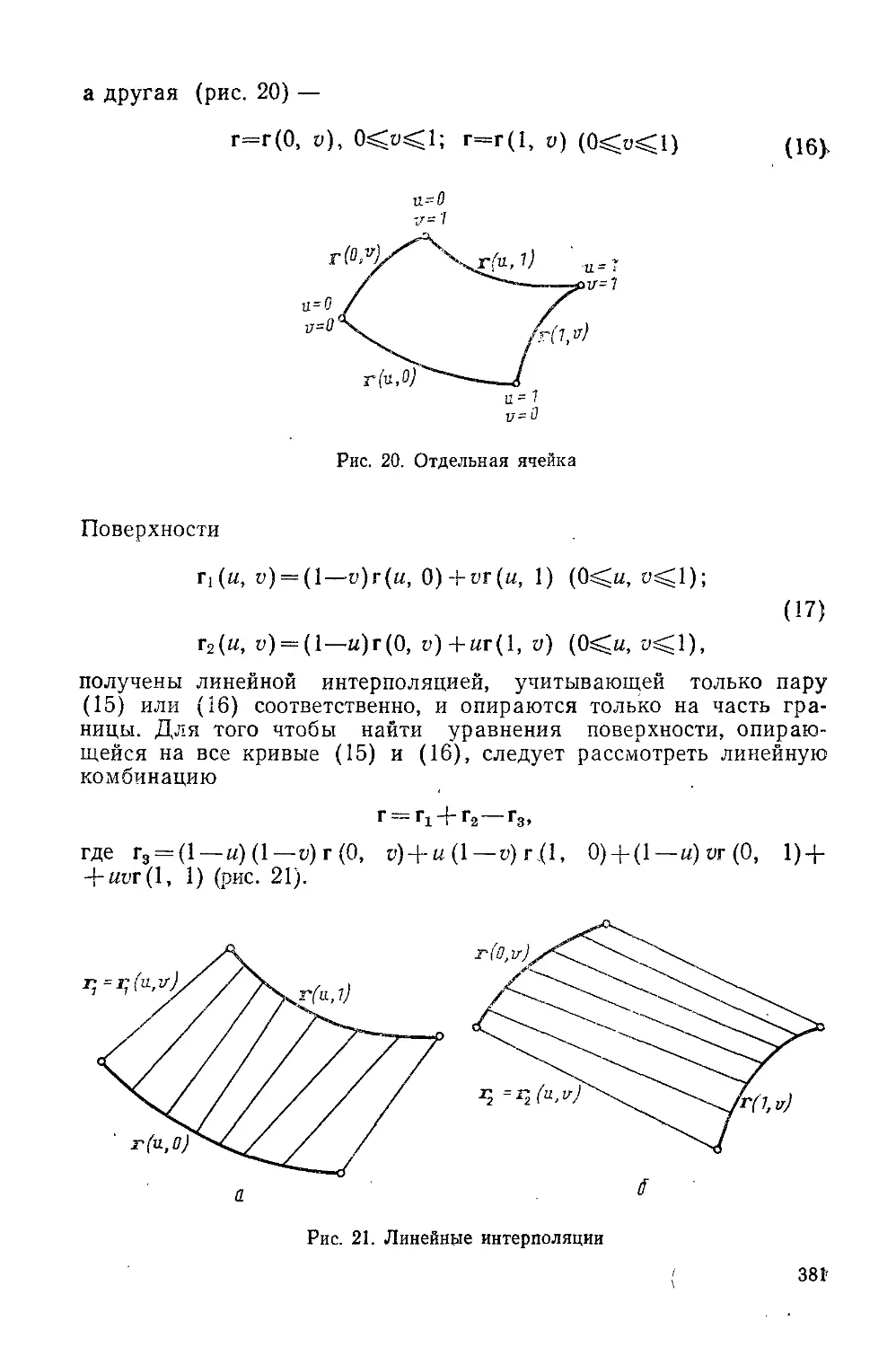
Предисловие 6
Глава 1. ТЕОРИЯ КРИВЫХ 8
§ 1. Понятие кривой: простая плоская кривая, плоские кривые, задаваемые 8
параметрически, пространственные кривые, кривая как линия
пересечения поверхностей, кривая как годограф векторной функции
§ 2. Гладкие и регулярные кривые: касательная к кривой, гладкие кривые, 16
дифференцирование и интегрирование векторных функций,
достаточные условия гладкости кривой, регулярные кривые
§ 3. Длина дуги кривой: определение и основные свойства, достаточные 22
условия спрямляемости
§ 4. Соприкасающаяся плоскость: определение соприкасающейся 28
плоскости, достаточные условия существования соприкасающейся
плоскости, главная нормаль и бинормаль кривой, основной триэдр
§ 5. Кривизна и кручение. Формулы Френе: кривизна кривой, кручение 31
кривой, формулы Френе, вид кривой вблизи данной точки,
натуральные уравнения кривой
§ 6. Соприкосновение кривых: понятие порядка соприкосновения, 41
достаточные условия соприкосновения, соприкасающаяся
окружность, эволюта и эвольвента плоской кривой
Сводка основных понятий, формул, фактов 50
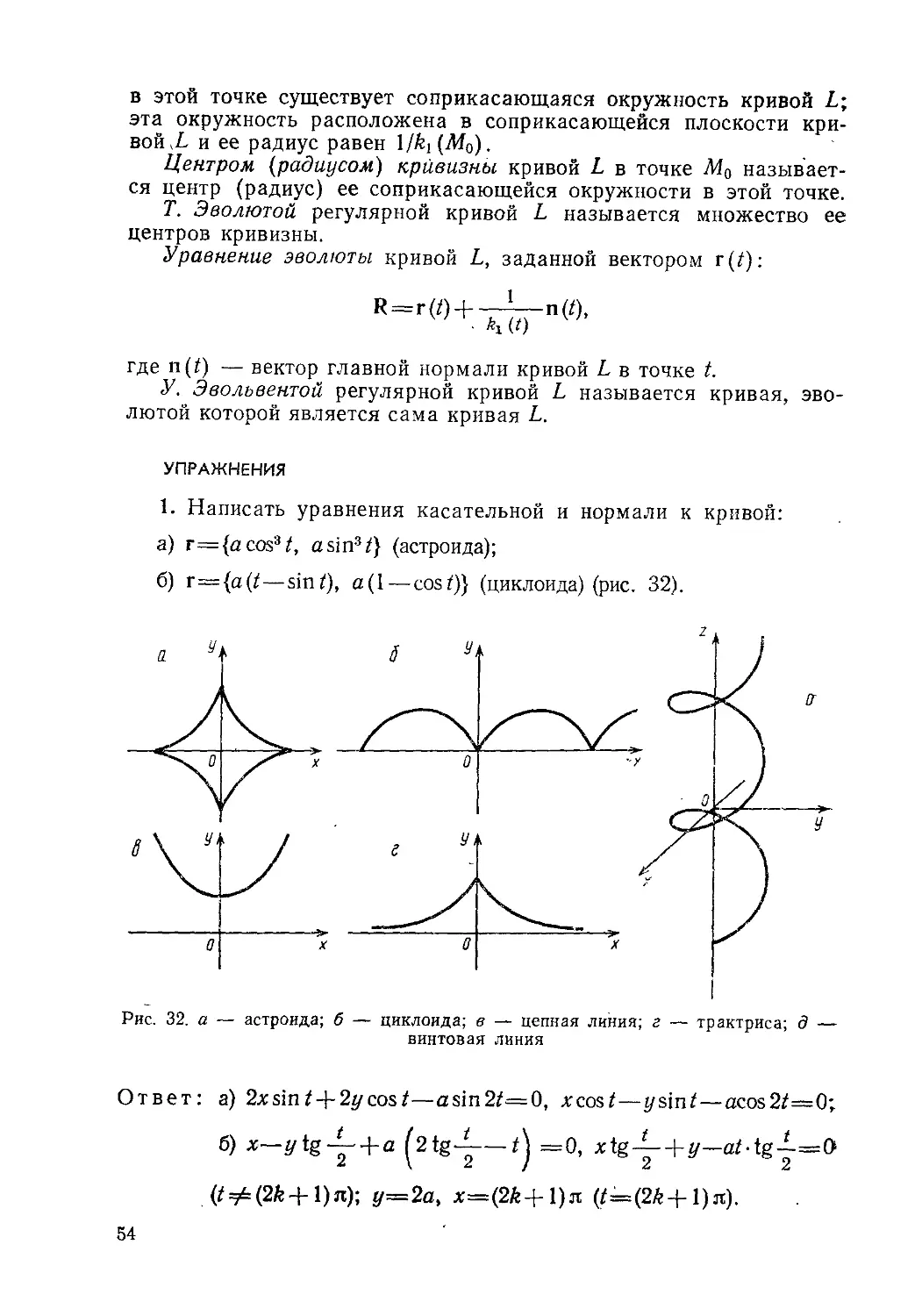
Упражнения 54
Глава 2. ТЕОРИЯ ПОВЕРХНОСТЕЙ 59
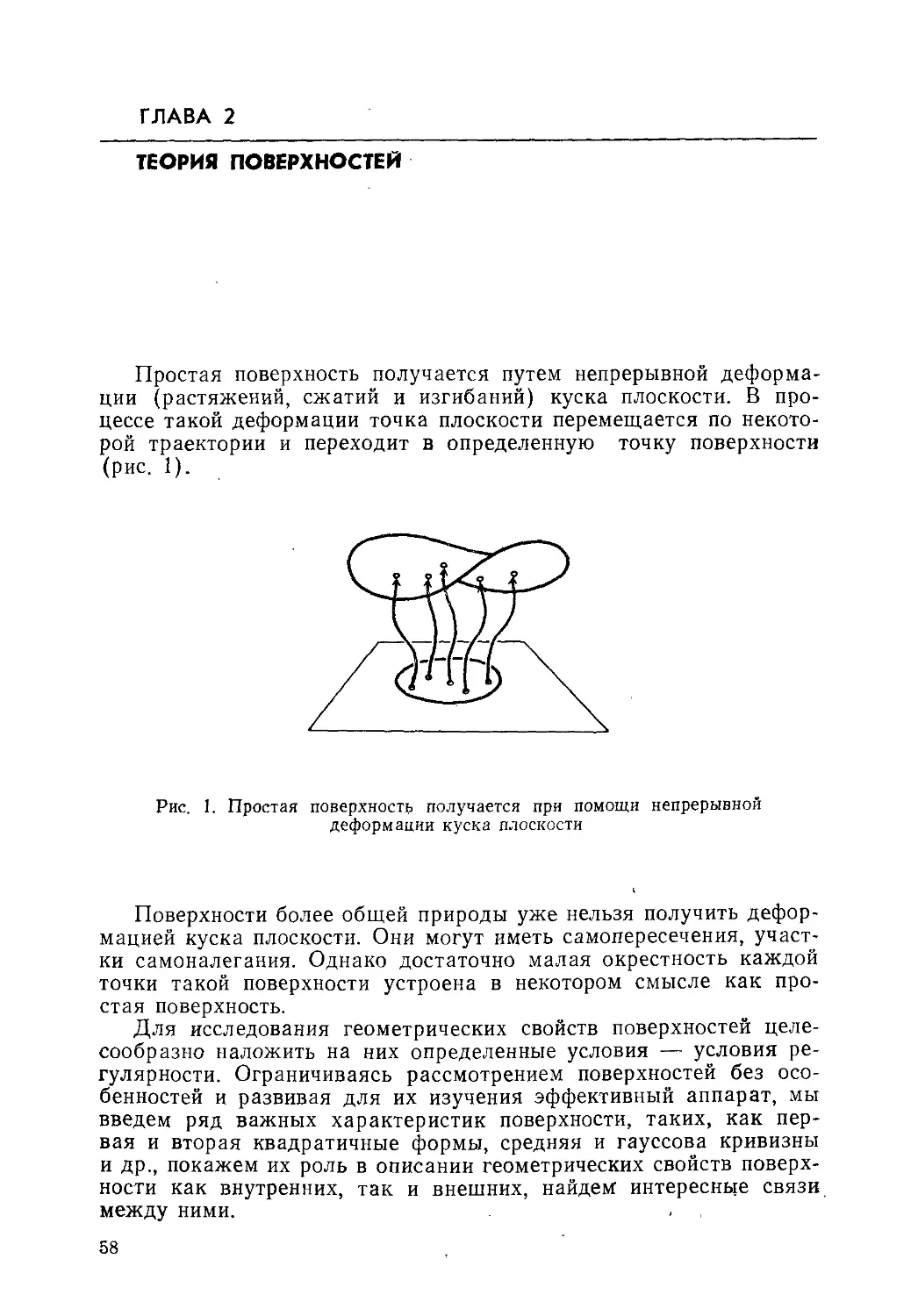
§ 1. Понятие поверхности: плоские области, простая поверхность, 58
локально простая поверхность, общая поверхность
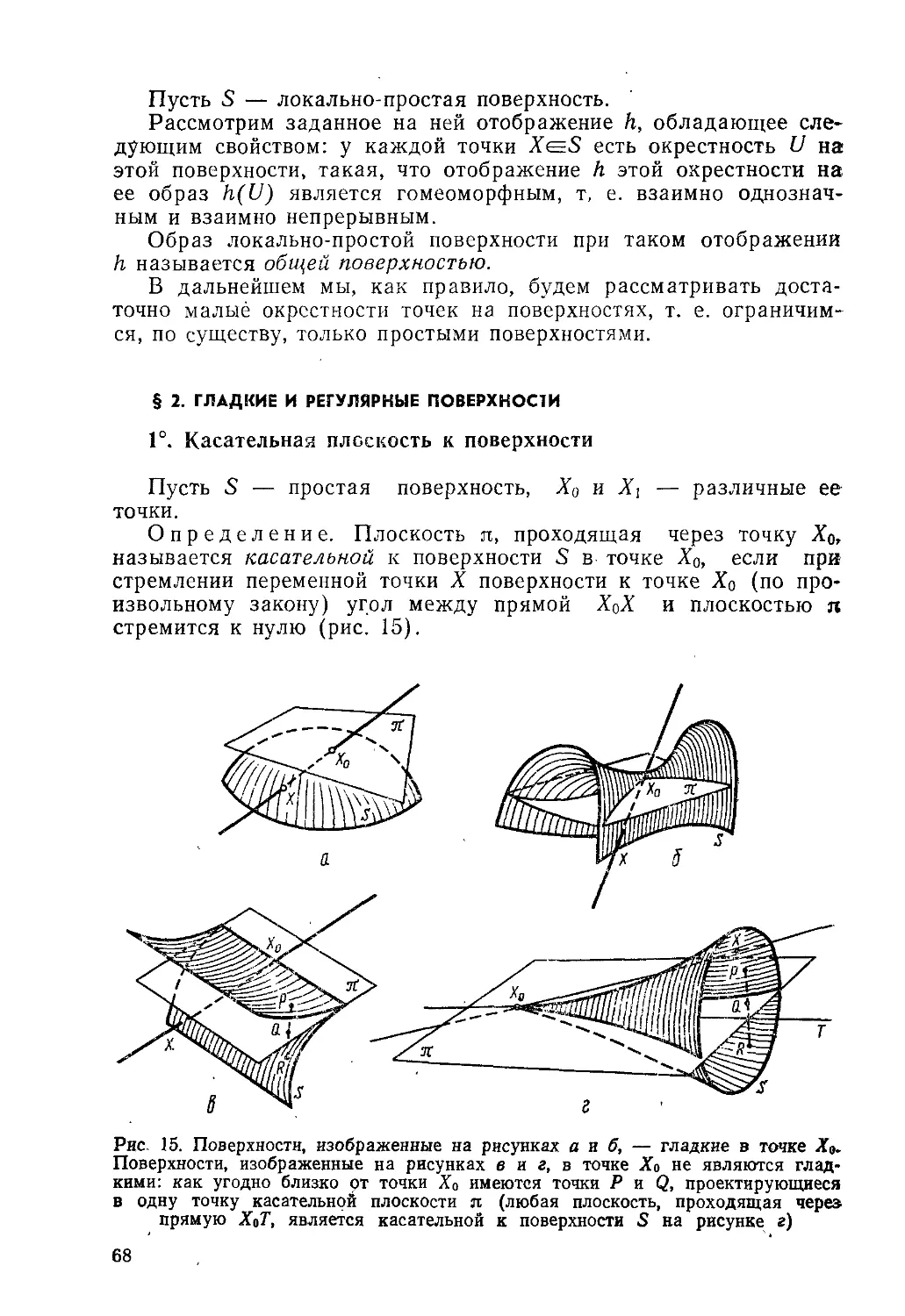
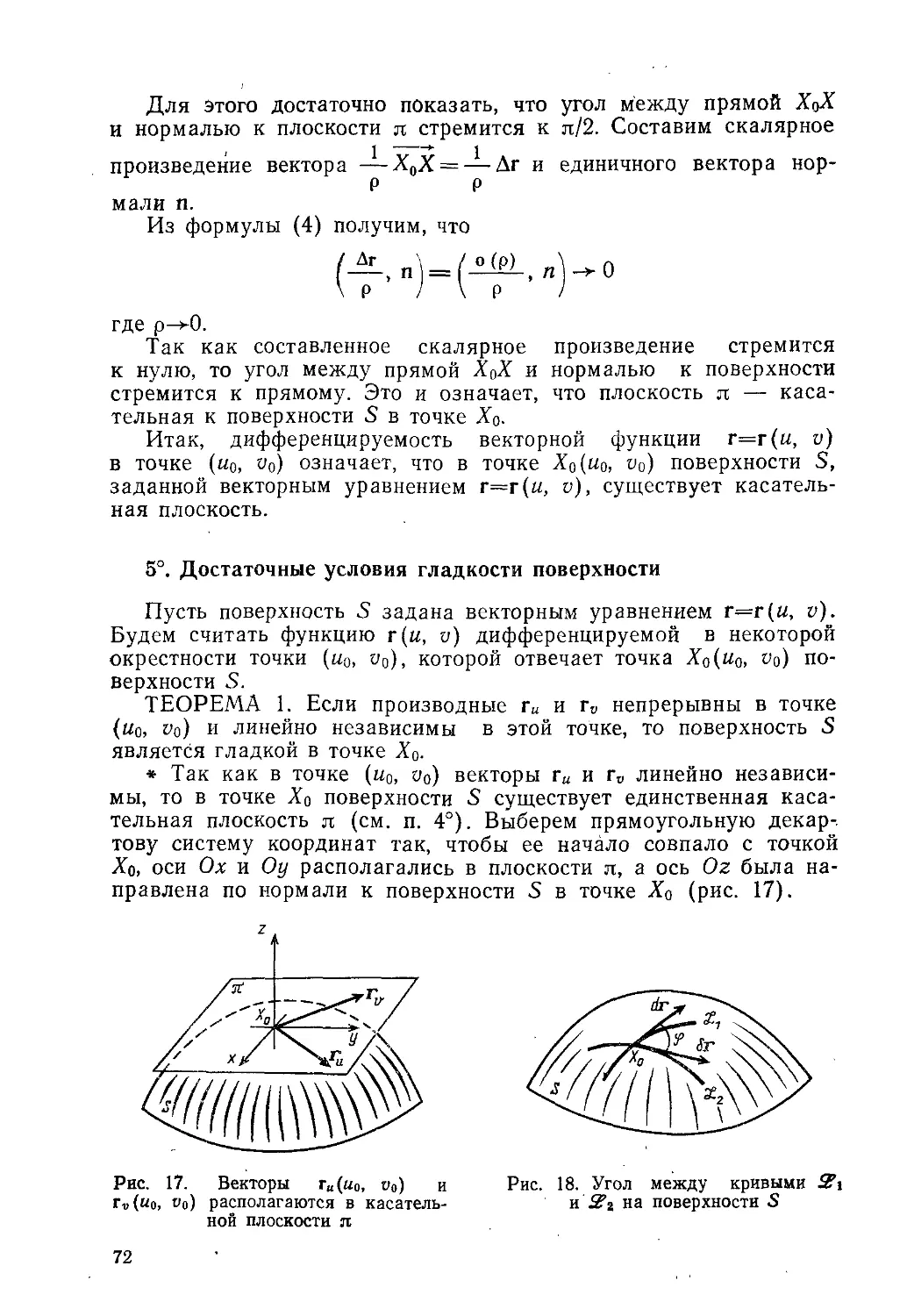
§ 2. Гладкие и регулярные поверхности: касательная плоскость к 68
поверхности, гладкие поверхности, дифференцирование и
интегрирование векторных функций двух аргументов,
дифференцируемость векторной функции и касательная плоскость,
достаточные условия гладкости поверхности, регулярные
поверхности
§ 3. Первая квадратичная форма поверхности. Измерения на поверхности: 74
первая квадратичная форма поверхности, длина кривой на
поверхности, угол между кривыми на поверхности, площадь
поверхности, внутренняя геометрия поверхности, изометричные
поверхности
§ 4. Вторая квадратичная форма: определение второй квадратичной 81
формы, классификация точек регулярной поверхности, кривизна
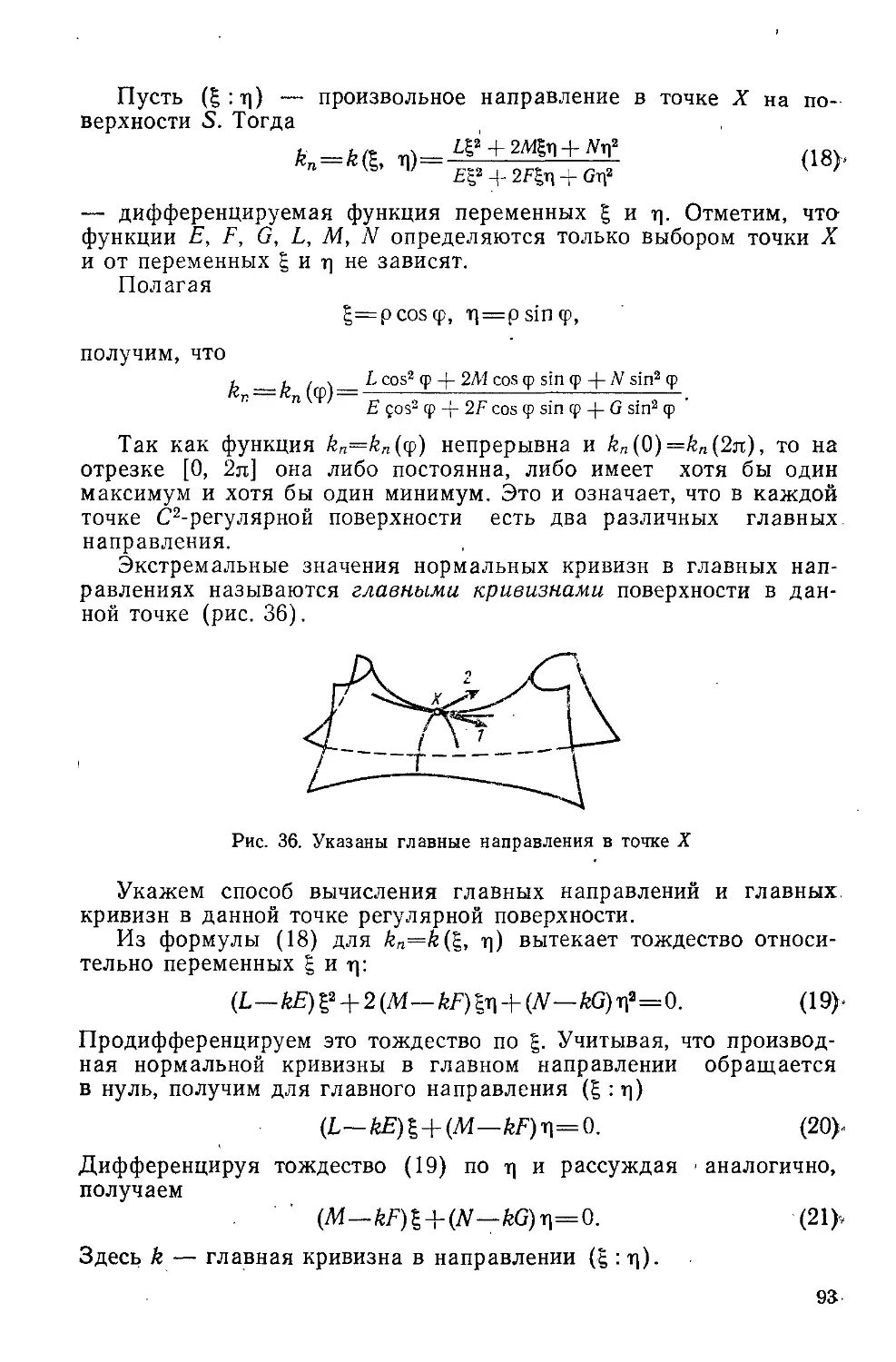
кривой на поверхности, индикатриса Дюпена, главные кривизны,
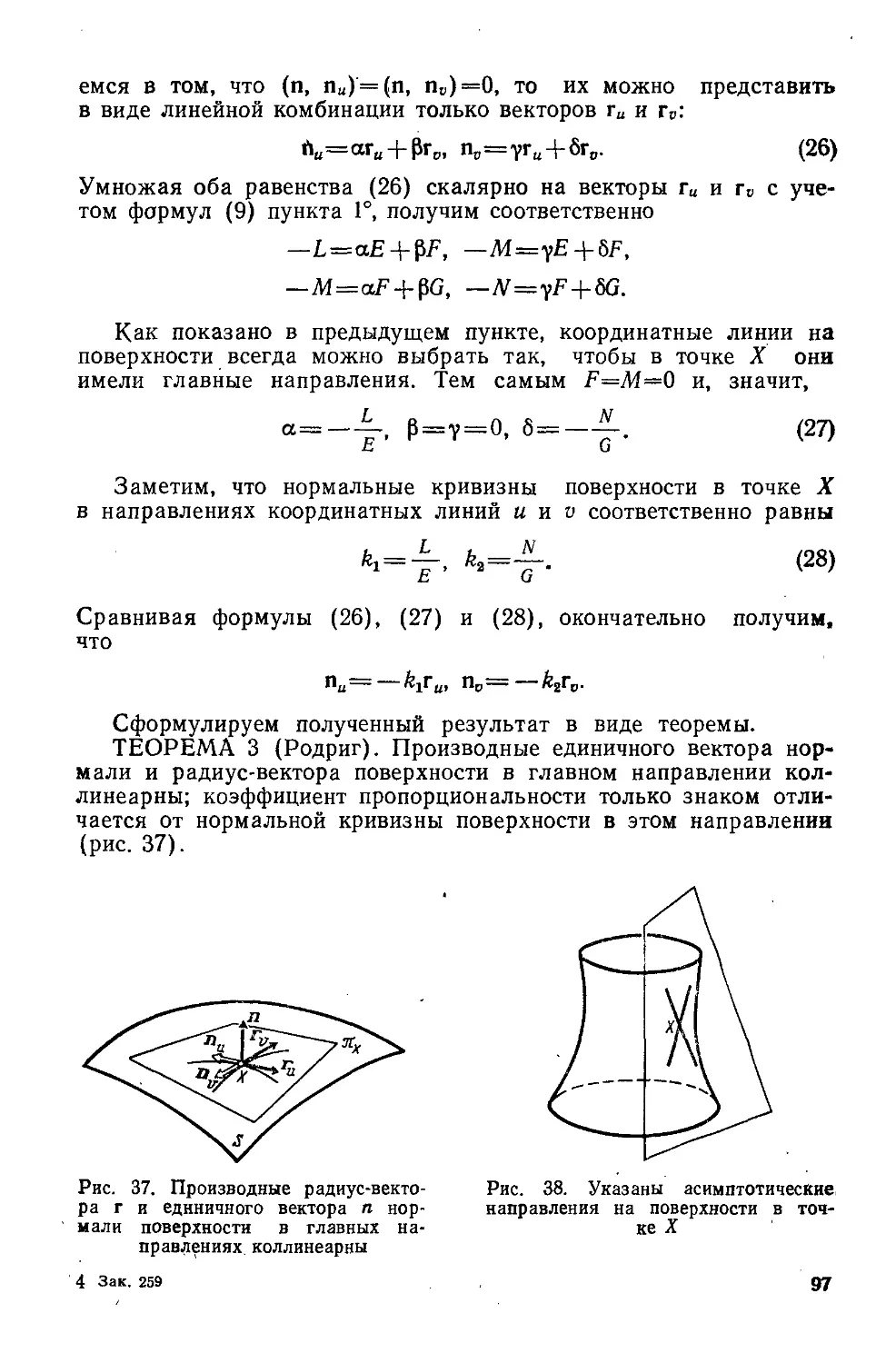
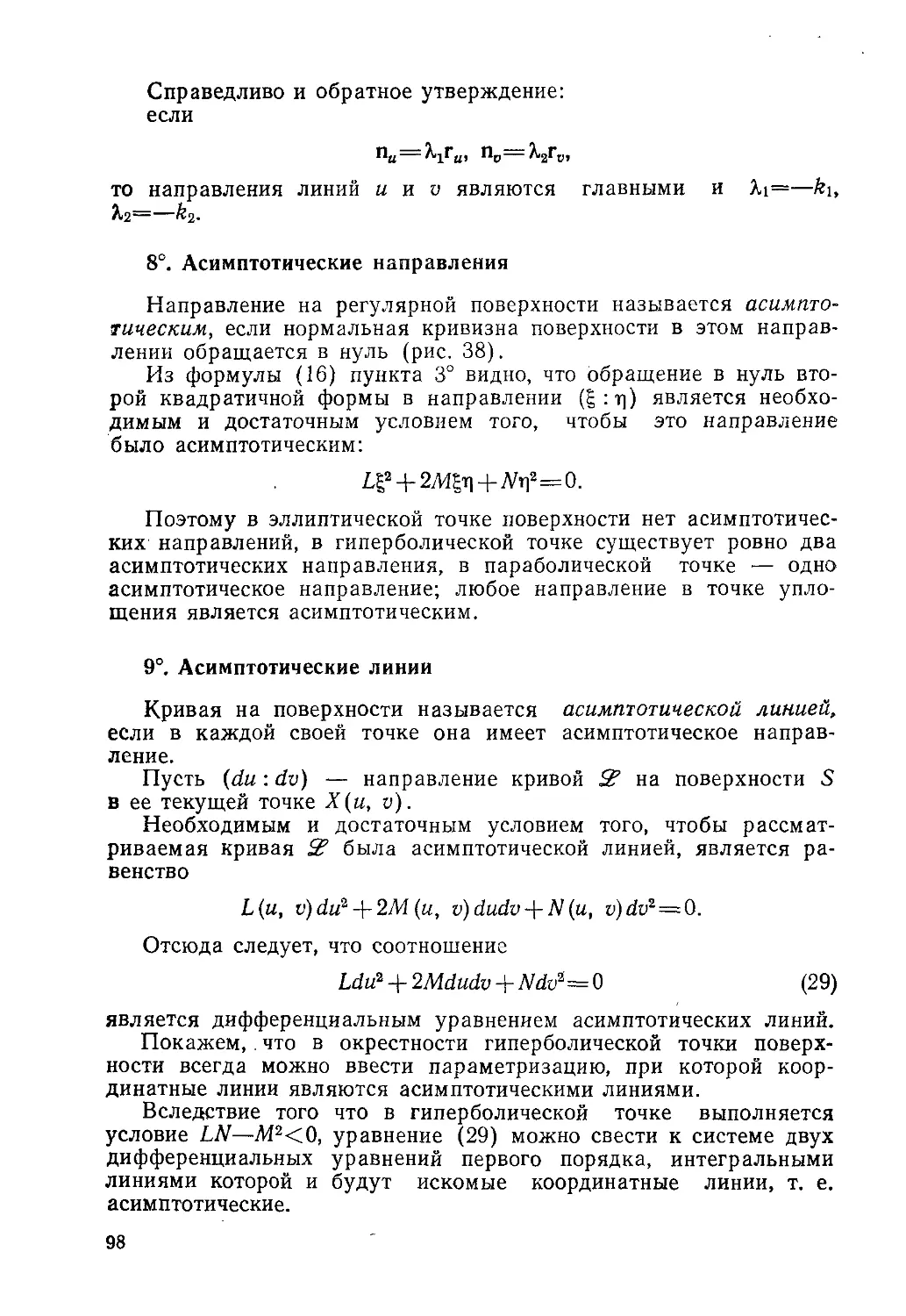
линии кривизны, формула Родрига, асимптотические направления,
асимптотические линии, формула Эйлера, средняя и гауссова
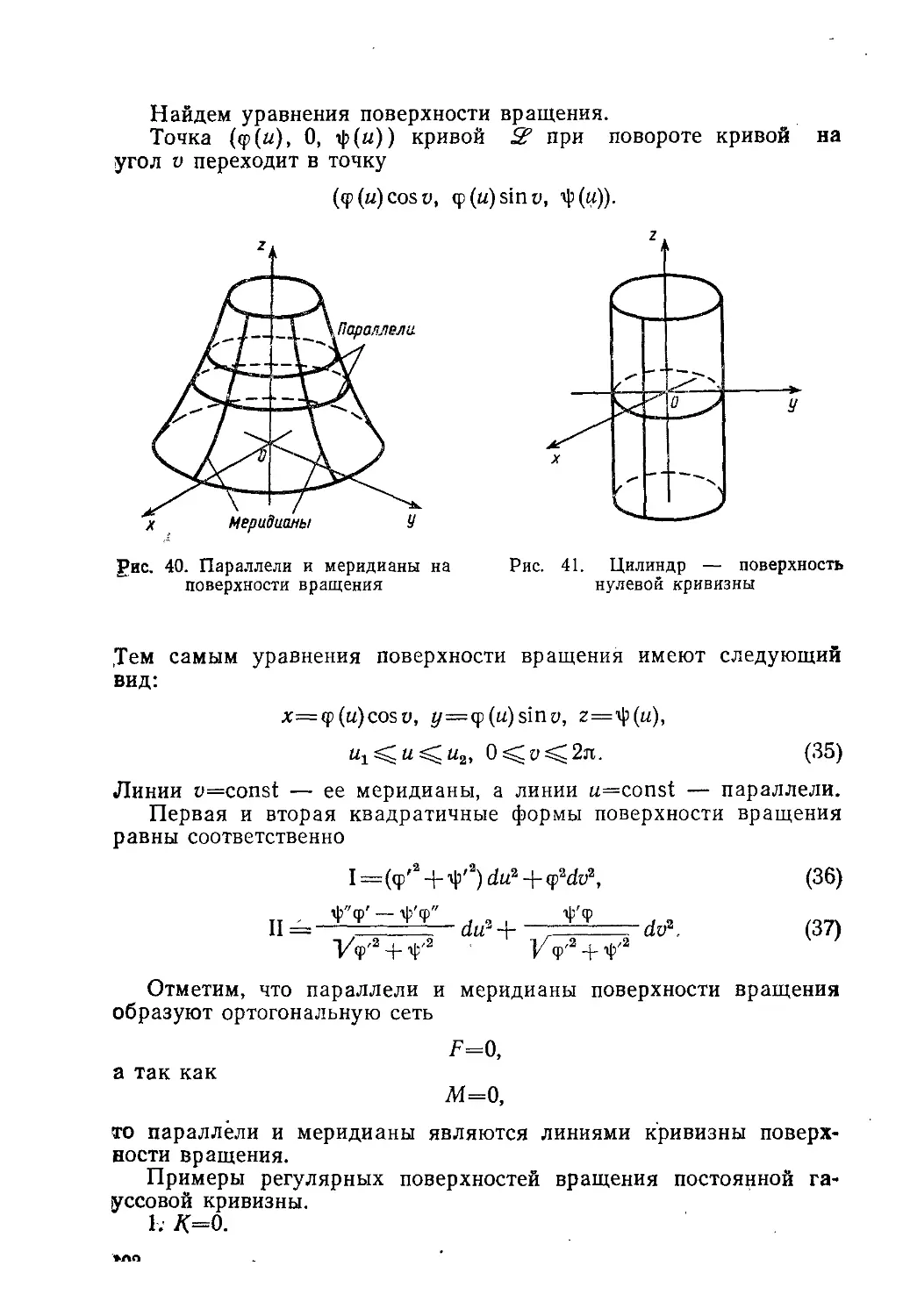
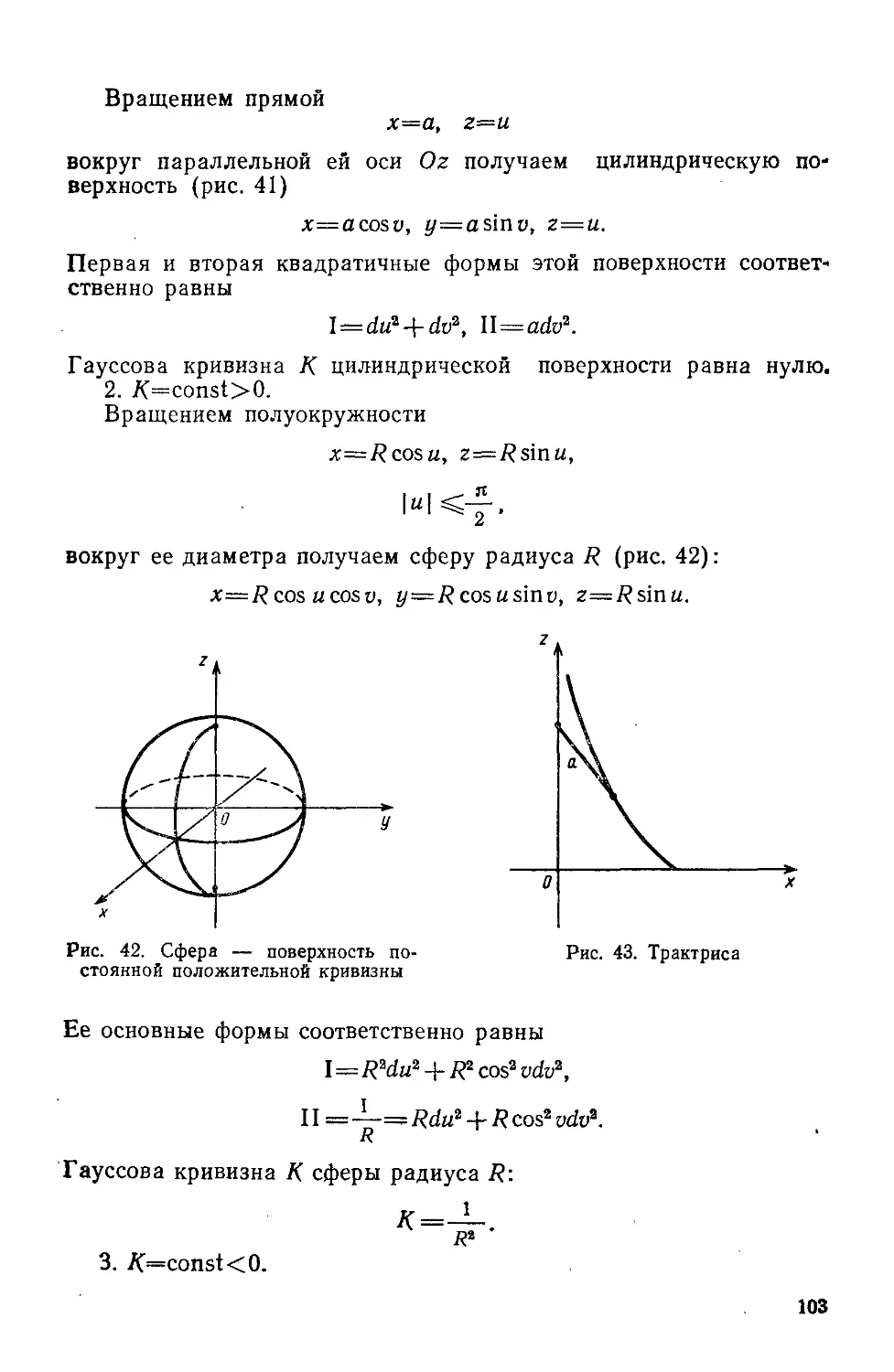
кривизны, поверхности вращения
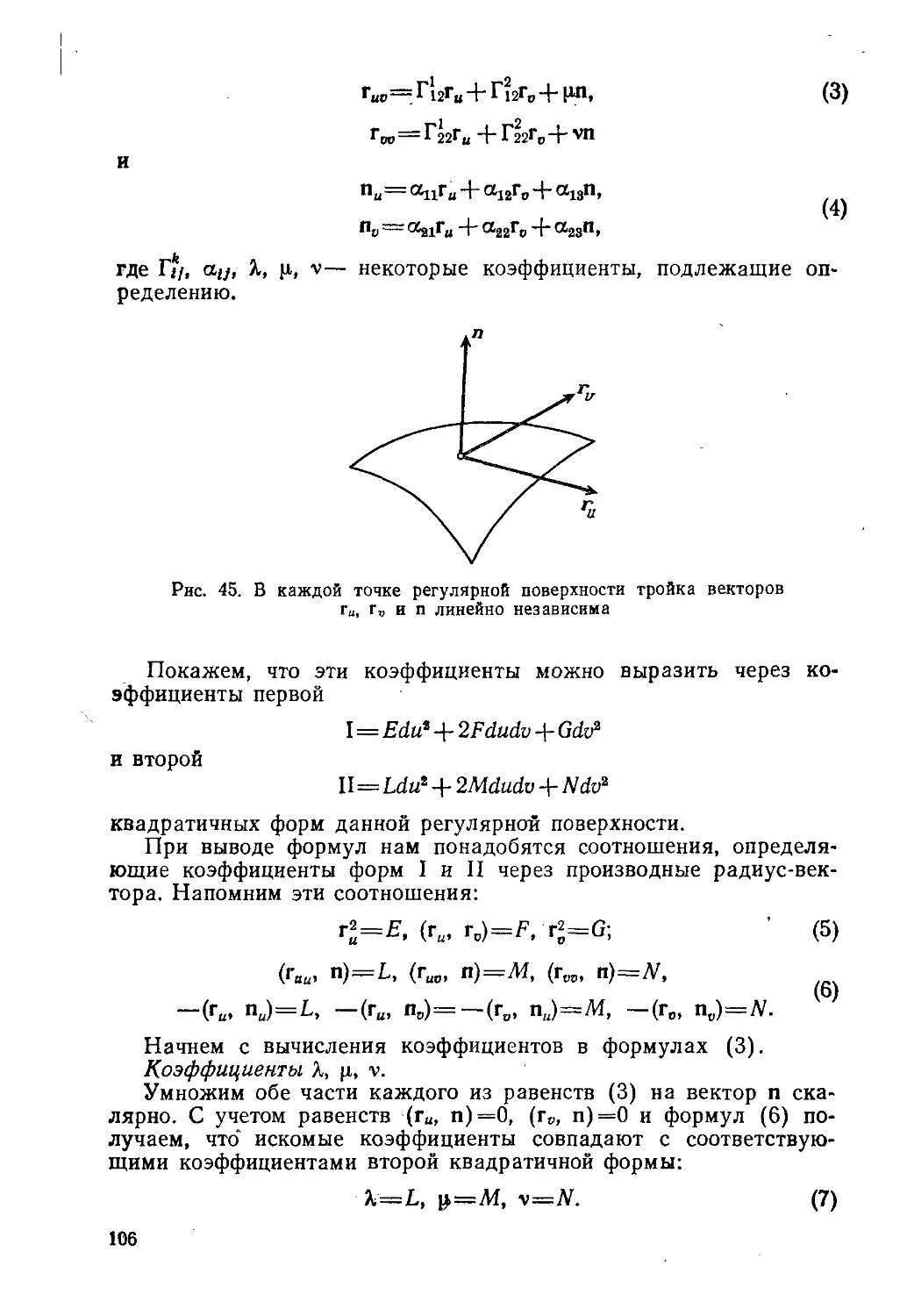
§ 5. Основные уравнения теории поверхностей: деривационные формулы, 105
основные уравнения теории поверхностей, теорема Бонне
§ 6. Внутренняя геометрия поверхности: геодезическая кривизна кривой 117
на поверхности, геодезические линии, полугеодезические
координатные системы, полугеодезические полярные координаты,
экстремальные свойства геодезических, поверхности постоянной
кривизны
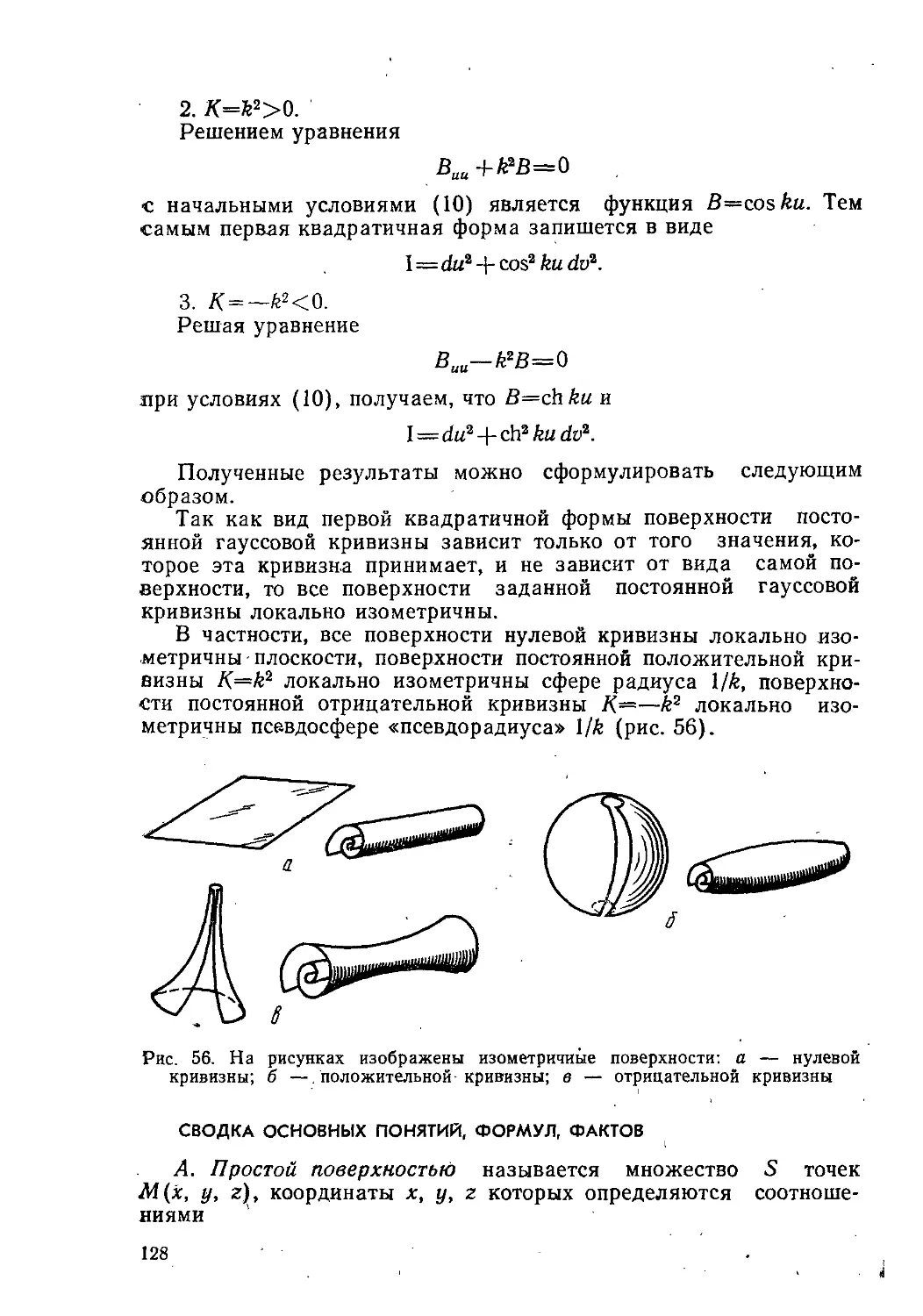
Сводка основных понятий, формул, фактов 128
Упражнения 135
Глава 3. ОСНОВЫ ТЕНЗОРНОГО ИСЧИСЛЕНИЯ (АППАРАТ 138
РИМАНОВОИ ГЕОМЕТРИИ)
А. Линейное (векторное) пространство 138
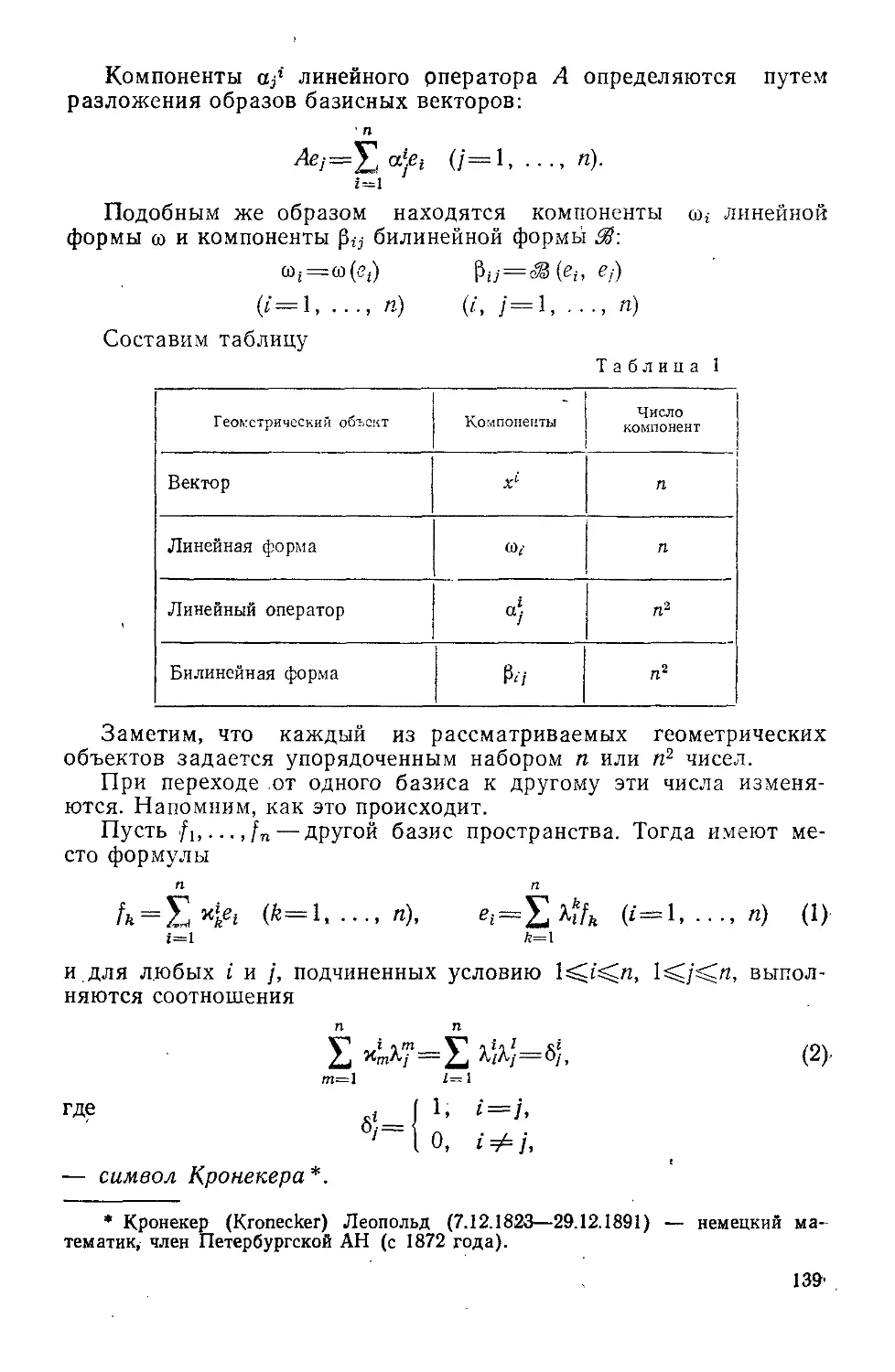
§ 1. Понятие тензора: примеры, определение тензора, корректность 138
определения тензора, равенство тензоров
§ 2. Алгебраические операции над тензорами: определение 145
алгебраических операций над тензорами, правило суммирования,
теорема об алгебраических операциях над тензорами, операции над
кососимметричными тензорами, внешние формы
§ 3. Метрический тензор: метрическая структура линейного пространства, 158
опускание и поднятие индексов
Б. Аффинное (точечное) пространство 162
§ 4. Тензоры в точечных пространствах: точечное пространство, 162
аффинные координаты, тензоры в точечном пространстве
§ 5. Тензорное поле 167
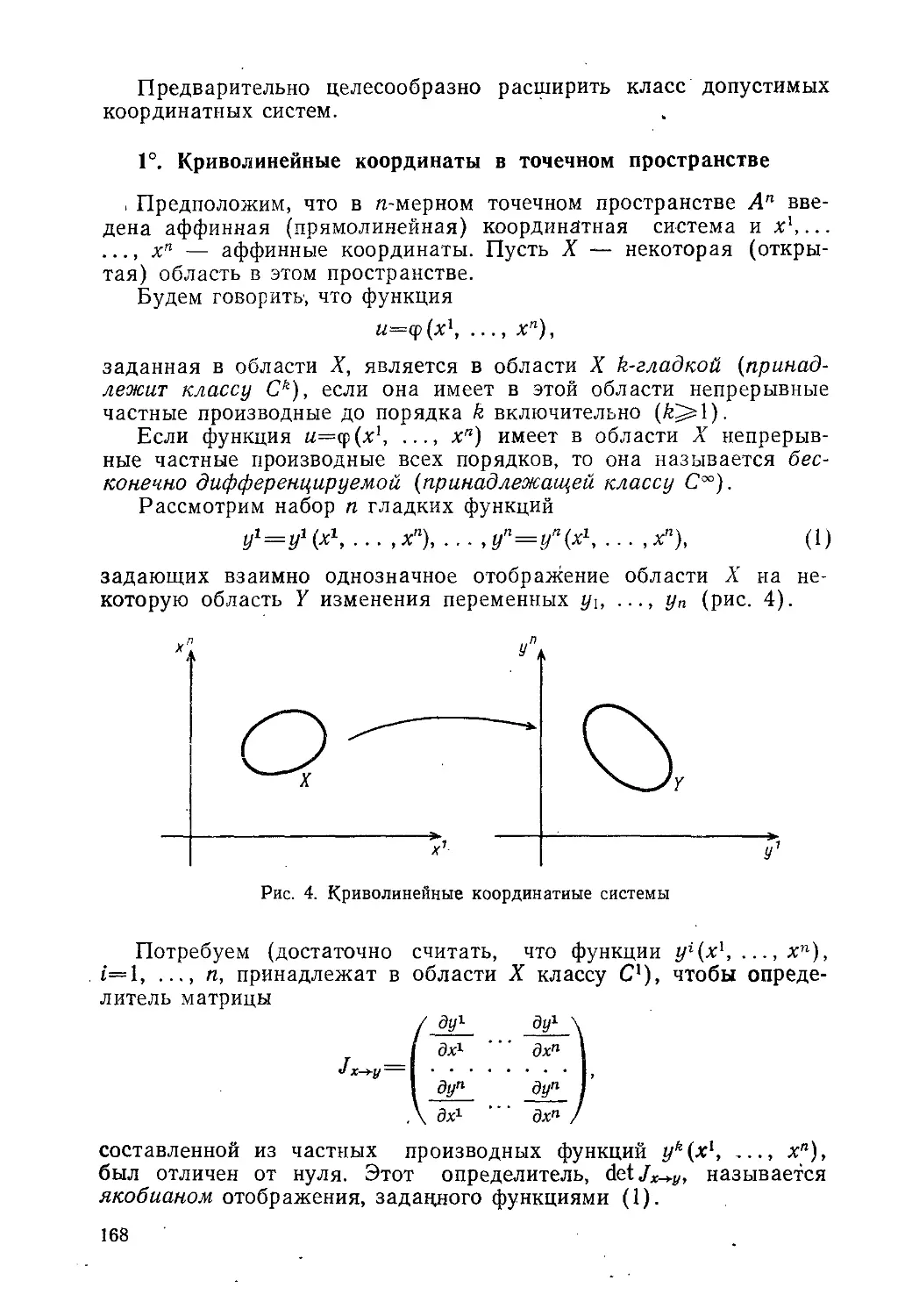
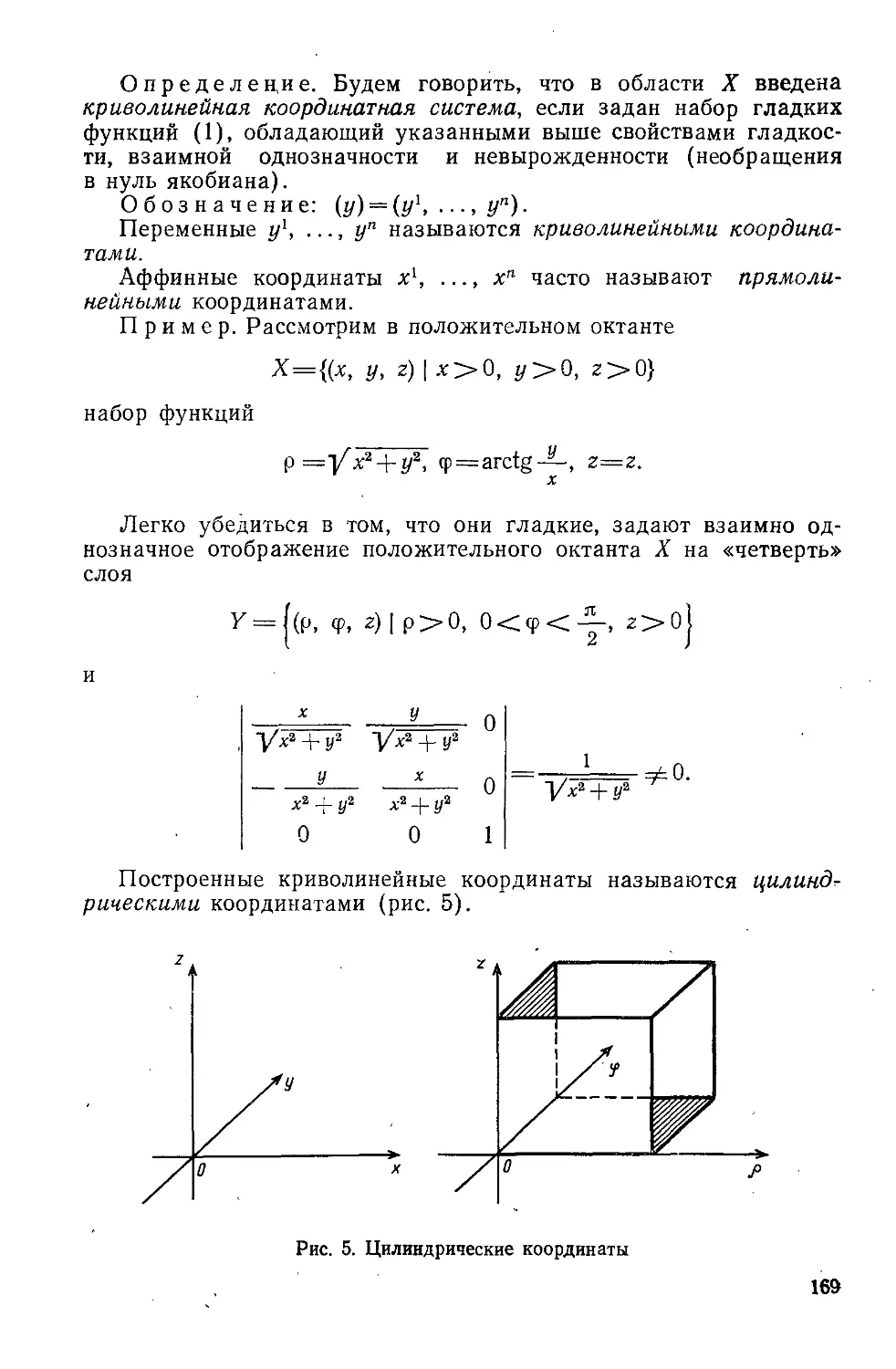
§ 6. Криволинейные координаты: криволинейные координаты в точечном 167
пространстве, тензоры в криволинейных координатах, о способе
задания тензорного поля
§ 7. Метрический тензор в точечном пространстве: метрический тензор в 178
криволинейных координатах, длина дуги гладкой кривой,
вычисление объема
§ 8. Символы Кристоффеля: определение, специальные системы 183
координат, символы Кристоффеля 1-го и 2-го рода
§ 9. Ковариантное дифференцирование: определение операции 189
ковариантного дифференцирования, свойства операции
ковариантного дифференцирования, тензор Римана — Кристоффеля
типа
ковариантное дифференцирование и метрический тензор,
тензор Римана — Кристоффеля типа
В. Арифметическое (координатное) пространство
§ 10. Тензоры в координатном пространстве: координатное пространство,
преобразования координат, понятие тензора, основные
алгебраические операции над тензорами, метрический тензор в
координатном) пространстве, символы Кристоффеля и операция
ковариантного дифференцирования, тензор Римана — Кристоффеля
Упражнения
Глава 4. РИМАНОВА ГЕОМЕТРИЯ
§ 1. Риманово пространство: определение римановой метрики, примеры
199
199
римановых пространств
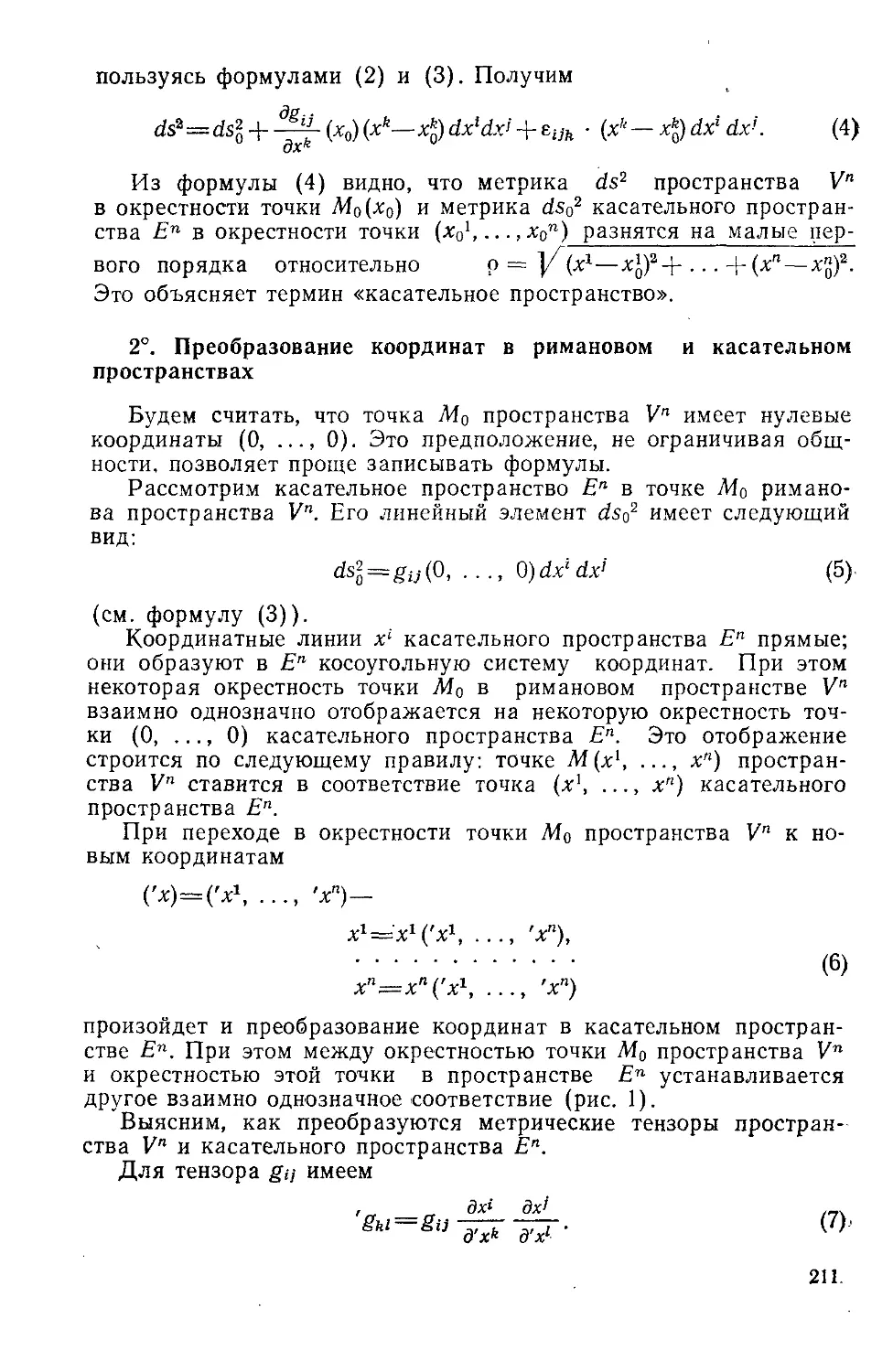
§ 2. Первоначальные сведения о римановой геометрии: касательное
пространство, преобразование координат в римановом и касательном
пространствах, локально нормальные координаты, каноническое
разложение метрического тензора
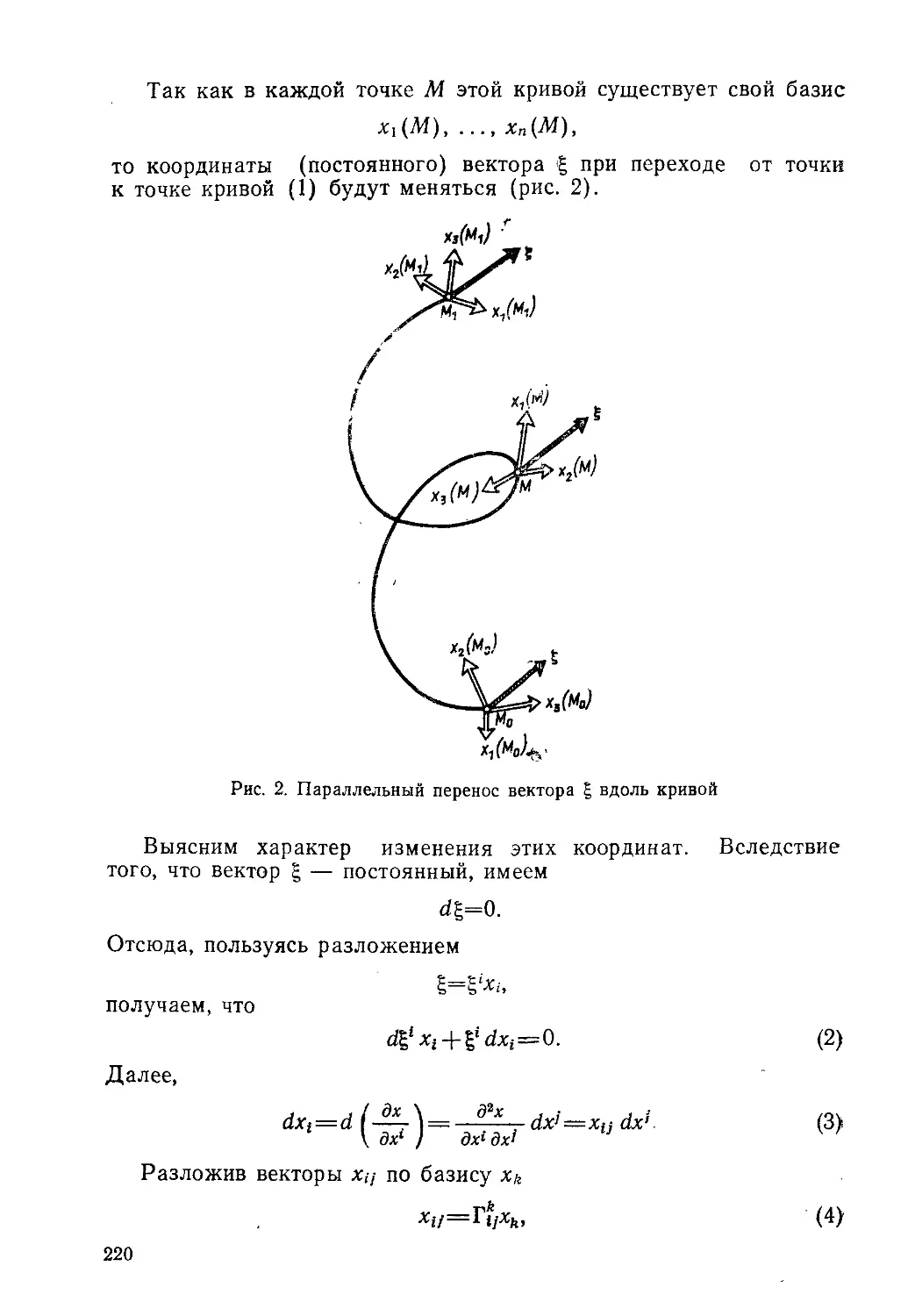
§ 3. Параллельный перенос векторов и тензоров: параллельный перенос
векторов в евклидовом пространстве, векторы в римановом
пространстве, параллельный перенос векторов в римановом
пространстве, параллельный перенос тензоров, абсолютный
дифференциал и абсолютная производная, техника абсолютного
дифференцирования, еще раз о параллельном переносе тензоров,
параллельный перенос некоторых важных тензоров
§ 4. Геодезические линии в римановом пространстве: геодезические как
линии постоянного направления, канонический параметр,
геодезические как экстремали
§ 5. Специальные системы координат в римановом пространстве:
римановы координаты, полугеодезические координаты
Сводка основных понятий, формул, фактов
Упражнения
Глава 5. ГЛАДКИЕ МНОГООБРАЗИЯ
§ 1. Некоторые понятия топологии: топология координатного
пространства, топологическое пространство, топологическое
подпространство, непрерывное отображение, гомеоморфизм,
топологическое произведение, связность, отделимость,
компактность, топологическое многообразие
§ 2. Гладкие многообразия: основное определение, гладкие функции,
разбиение единицы, произведение гладких многообразий
§ 3. Касательное пространство: касательный вектор, касательное
пространство
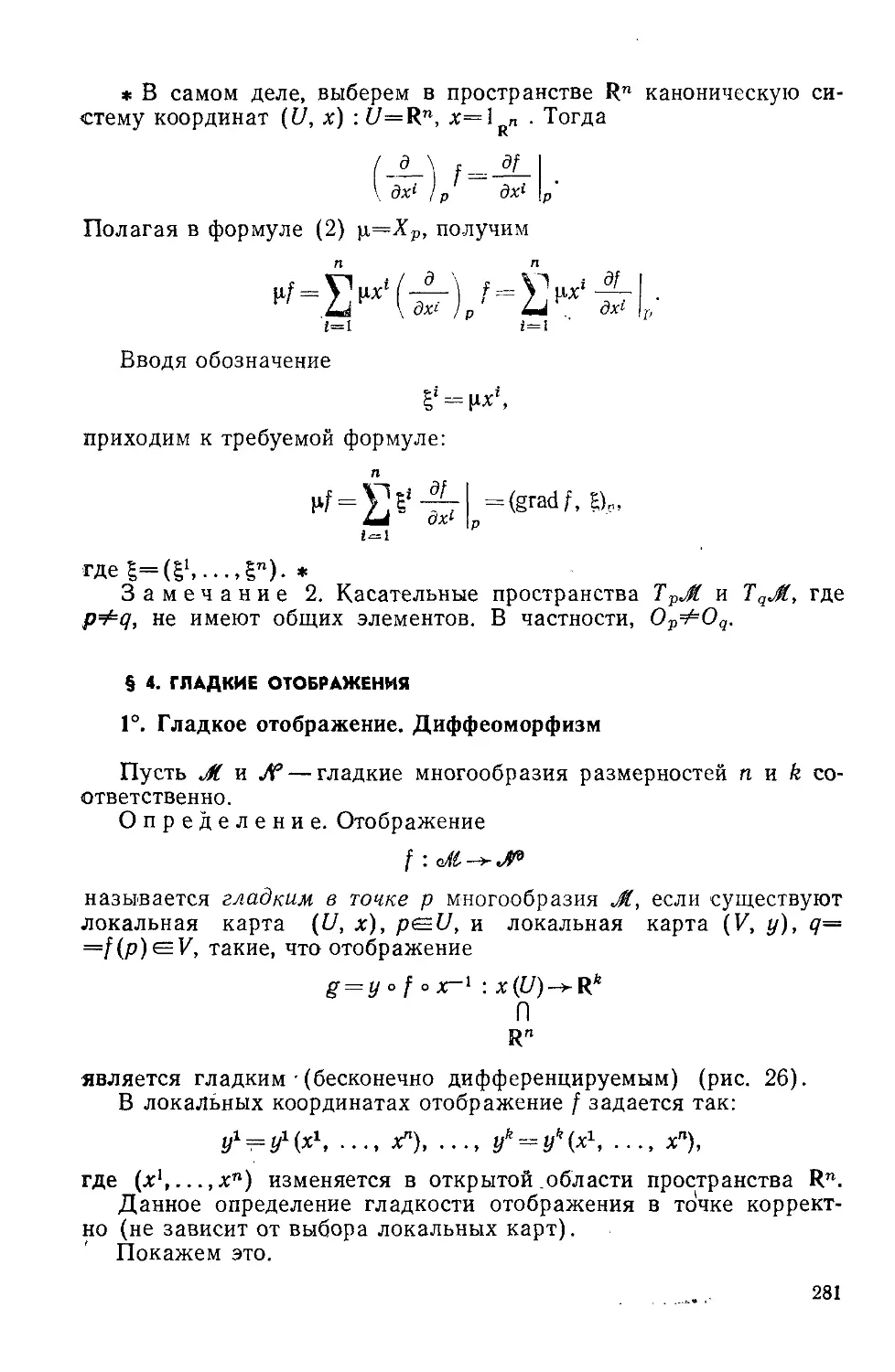
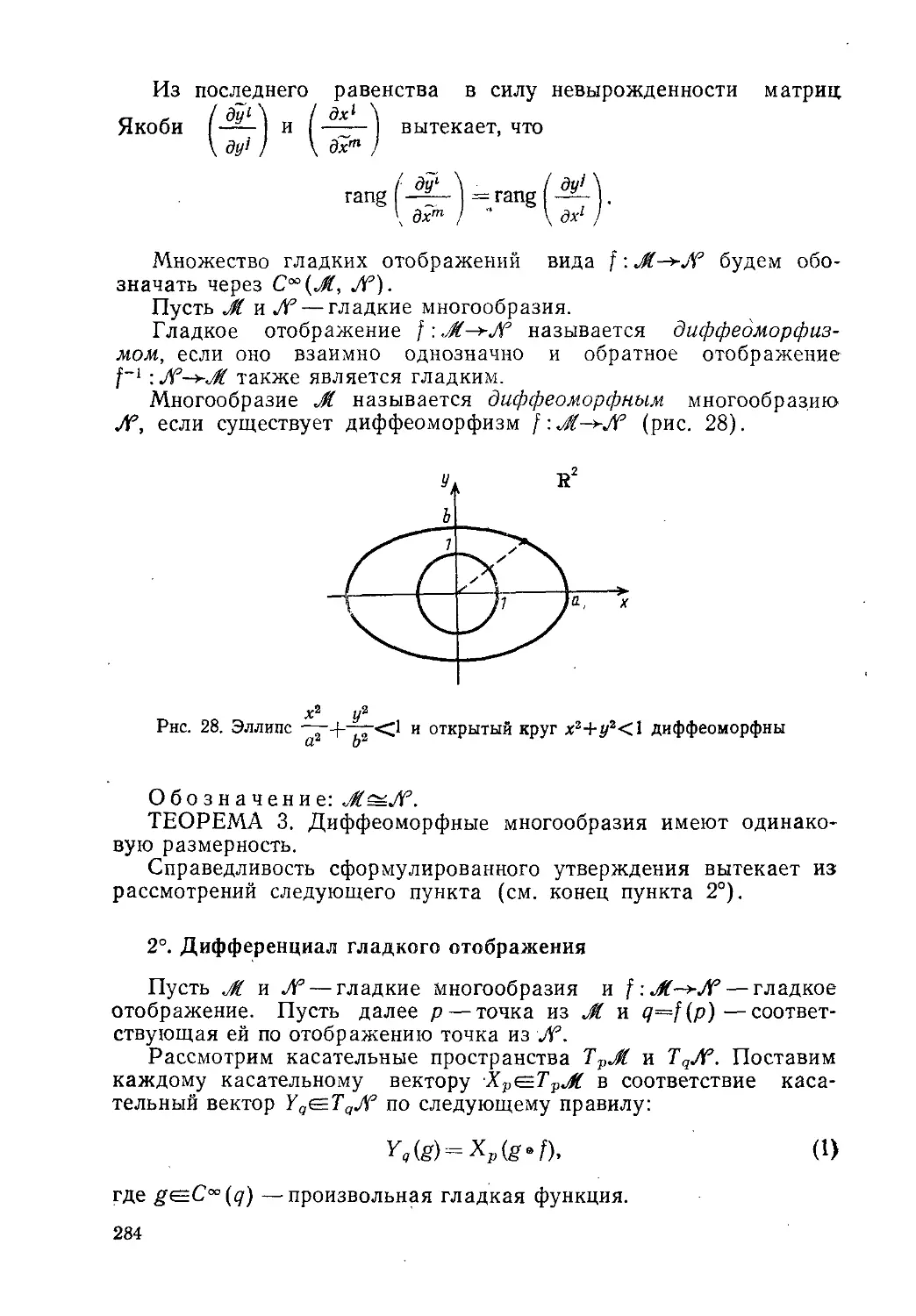
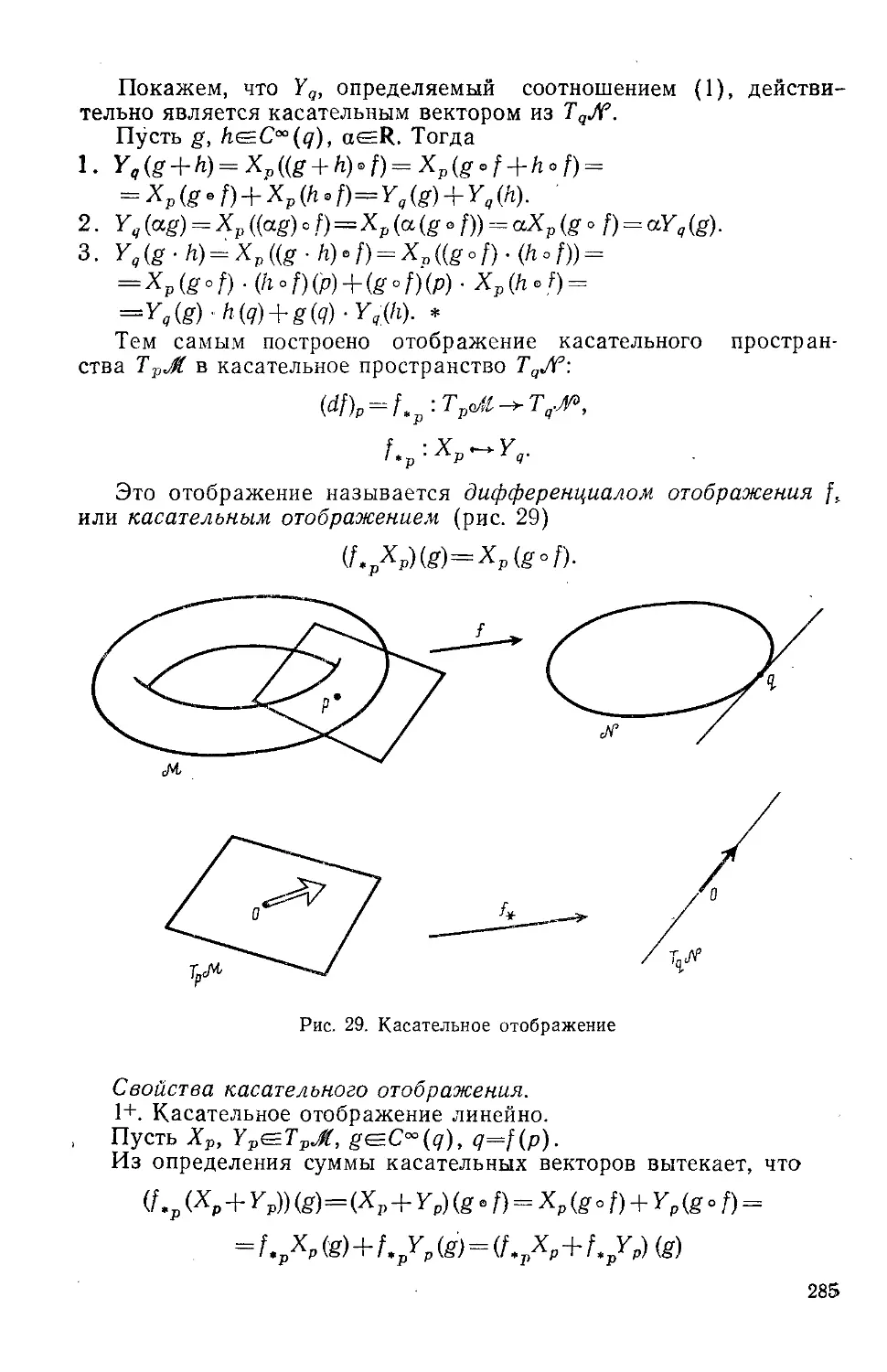
§ 4. Гладкие отображения: гладкое отображение, диффеоморфизм,
205
207
207
209
219
232
238
245
247
249
250
265
274
281
дифференциал гладкого отображения, ранг гладкого отображения
§ 5. Подмногообразия: гладкие подмногообразия, задание многообразий 290
уравнениями
§ 6. Векторные и тензорные поля: определение тензорного поля, риманова 294
метрика, внешние дифференциальные формы на многообразии
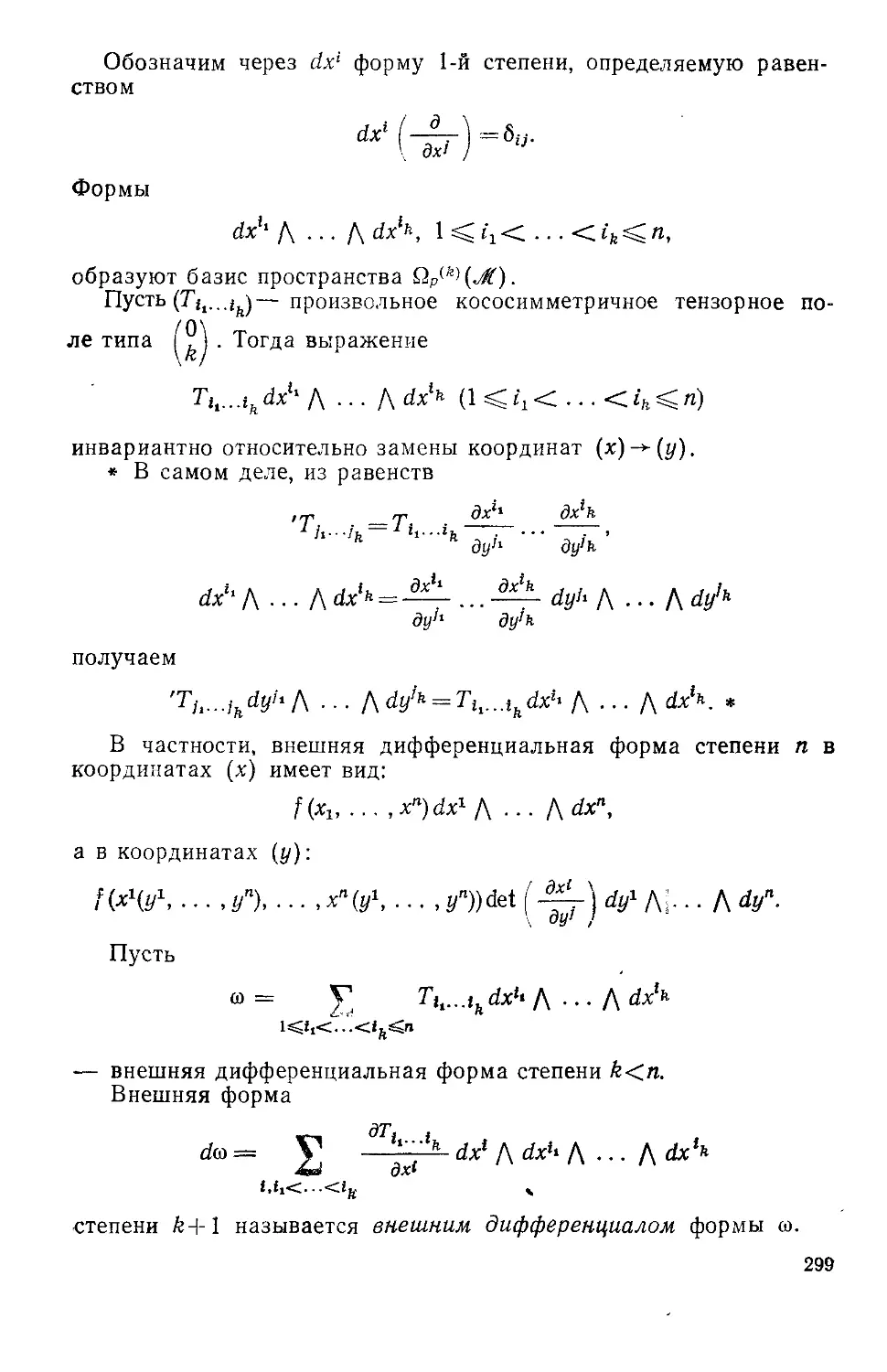
§ 7. Интегрирование по многообразию: ориентация многообразия, 300
многообразие с краем, интеграл от дифференциальной формы по
гладкому многообразию, формула Стокса
Сводка основных понятий, формул, фактов 308
У пражнения 311
Глава 6. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ДИФФЕРЕНЦИАЛЬНОЙ 312
ГЕОМЕТРИИ
§ 1. Движение материальной точки: закон движения материальной точки, 312
скорость и ускорение, движение точки в поле сил, движение точки в
параллельном поле сил, движение точки в центральном поле сил,
движение в поле сил тяготения, движение заряженной частицы в
электромагнитном поле, движение заряженной частицы в
постоянном электромагнитном поле
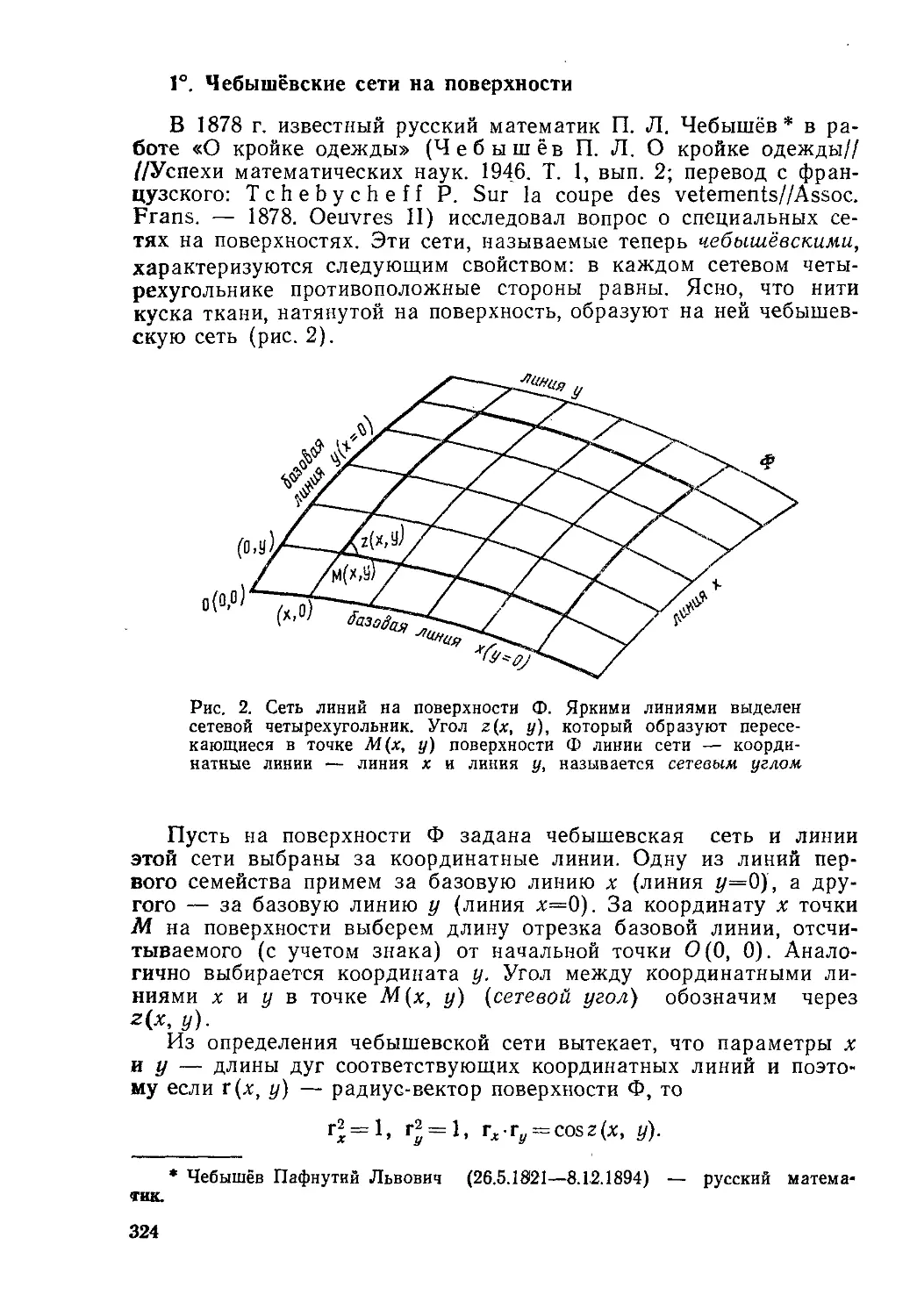
§ 2. Некоторые приложения теории поверхностей отрицательной 323
кривизны: чебышевские сети на поверхности, изометрические
погружения плоскости Лобачевского в евклидово пространство Е3,
доказательство теоремы Гильберта о, невозможности в евклидовом
пространстве Е3 полной плоскости Лобачевского, доказательство
существования регулярного решения уравнения синус-Гордона на
всей плоскости, геометрическая интерпретация произвольных
решений уравнения синус-Гордона, понятие солитонных решений
дифференциальных уравнений, физическая интерпретация
поверхностей постоянной отрицательной кривизны
§ 3. Основные операции векторной алгебры и векторного анализа в 348
тензорных обозначениях: метрический тензор евклидова
пространства, операции опускания и поднятия индексов,
ортонормированные базисы в пространстве Еп, дискриминантный
тензор, ориентированный объем, векторное произведение, двойное
векторное произведение, расходимость вектора, оператор Бельтрами
— Лапласа, оператор Бельтрами — Лапласа в криволинейных
координатах
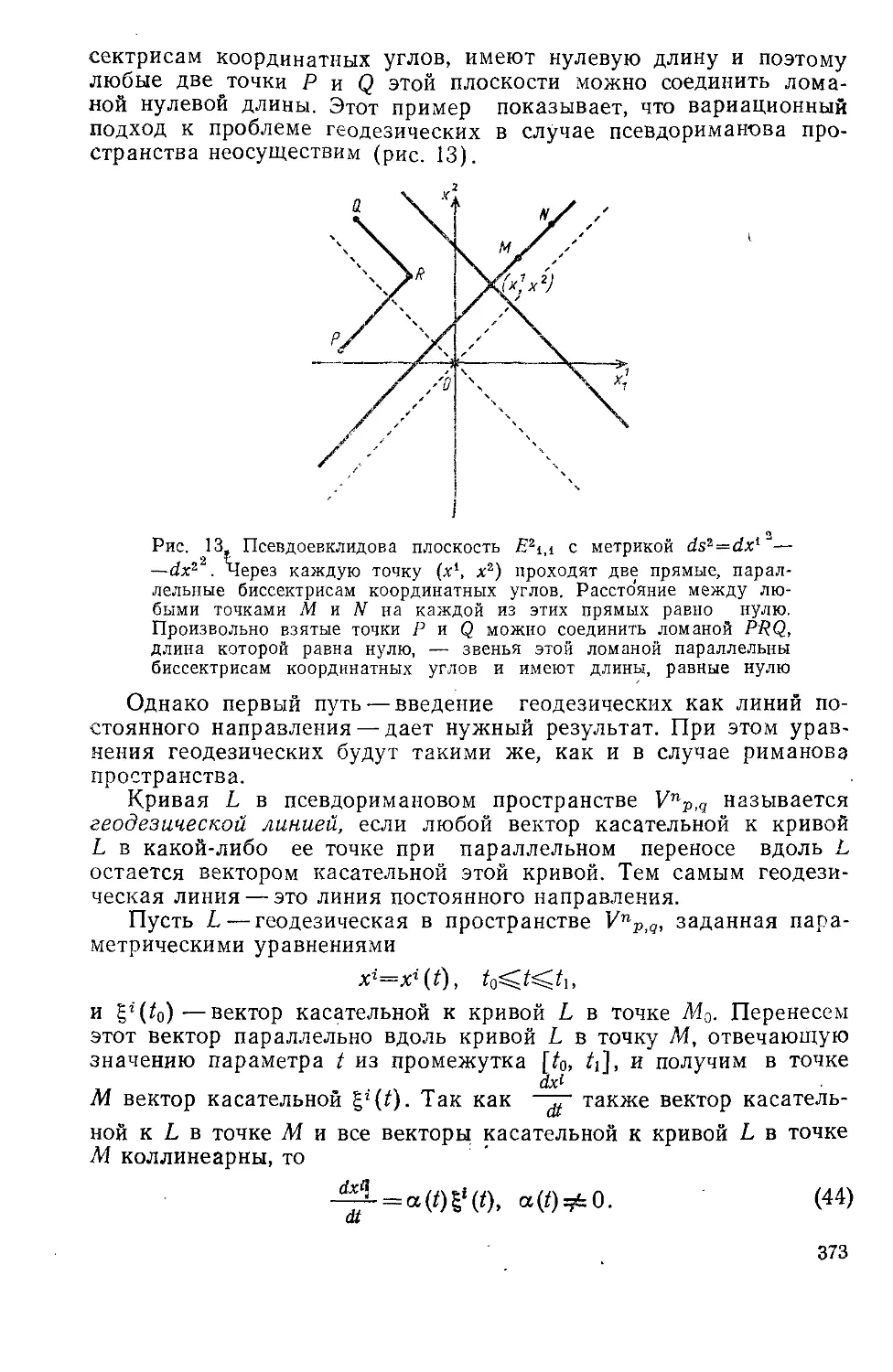
§ 4. Псевдоевклидово и псевдориманово пространства: понятия 359
псевдоевклидова пространства и метрического тензора
псевдоевклидова пространства, галилеевы координаты,
преобразования Лоренца, пространство Минковского,
преобразования Лоренца в пространстве Минковского,
псевдориманово пространство, метрический тензор псевдориманова
пространства
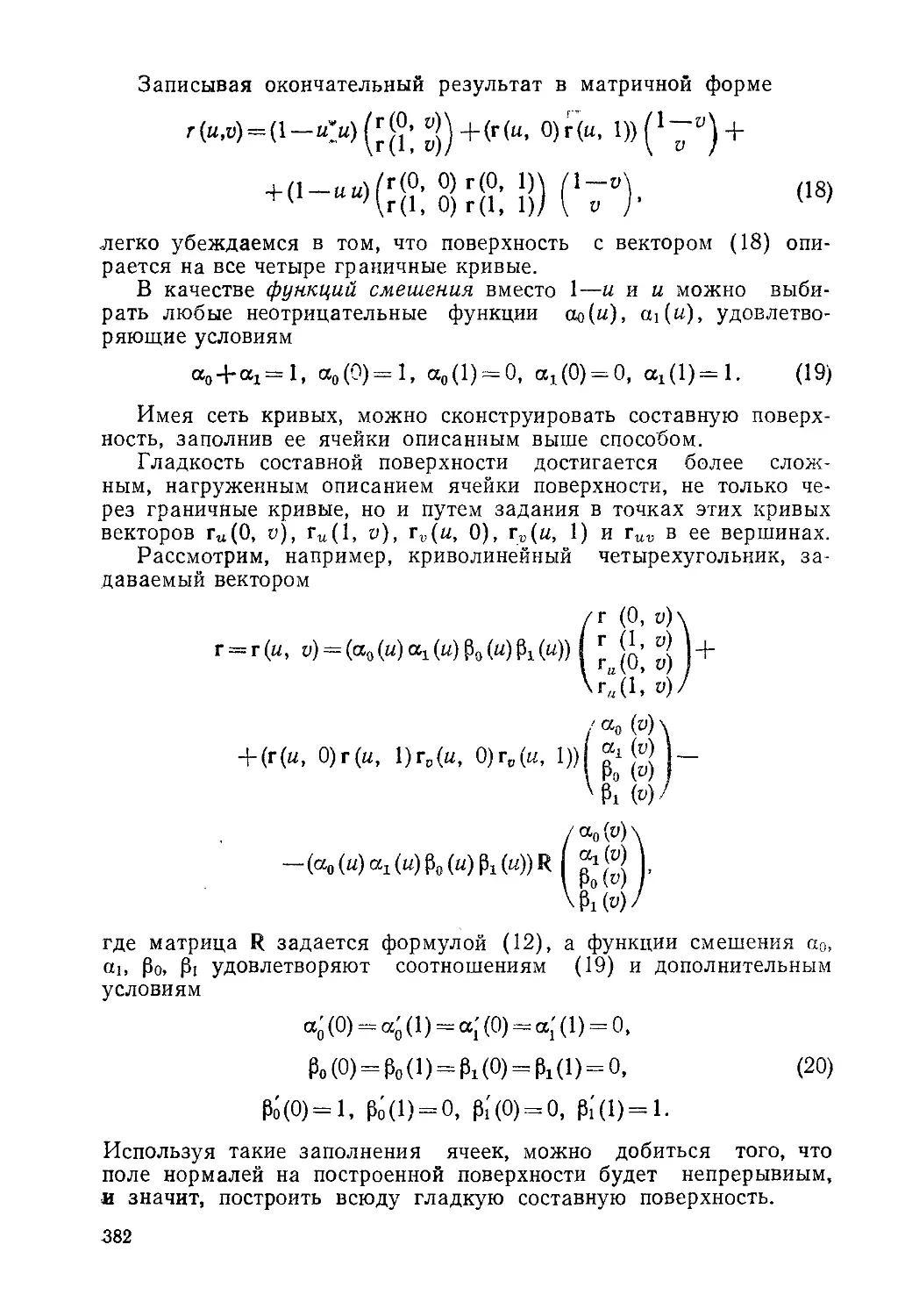
§ 5. Проектирование кривых и поверхностей: уравнение отрезка кривой, 375
уравнение криволинейного четырехугольника, составные кривые,
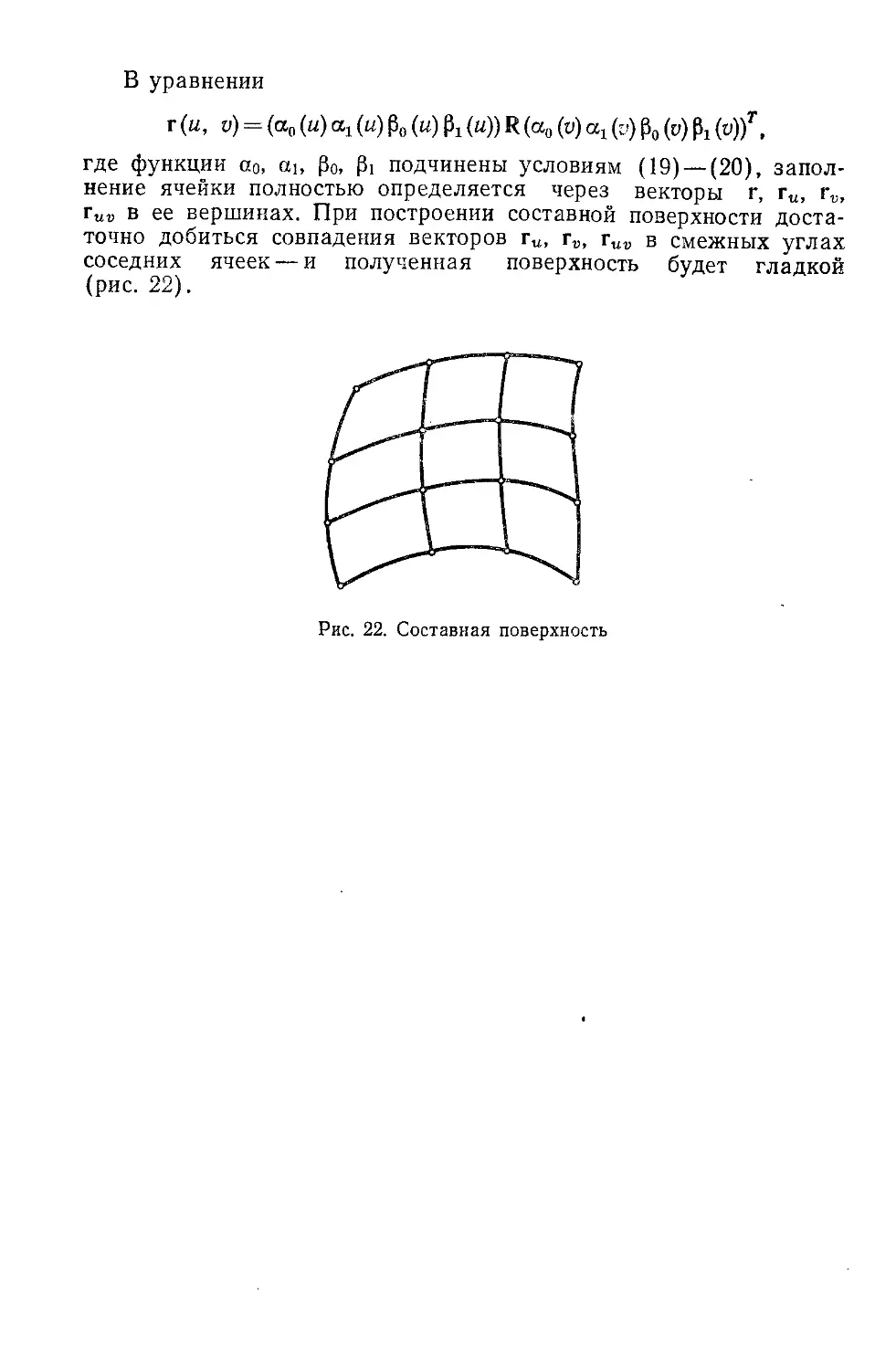
составные поверхности
Литература
384
От первых истинных и доступных познанию на-
чал постепенно продвигайся при помощи истин-
ных заключений, как это явствует из математи-
ческих наук, называемых арифметикой и гео-
метрией, то есть числа и меры.
Леонардо да Винчи
...Добытые теоремы наведут нас на мысль о
других, более общих, которые будут группиро-
ваться вокруг них, подобно тому, как кристалл
растет в растворе.
Анри Пуанкаре
Предисловие
Первоначальным побудительным мотивом к написанию книги
послужила договоренность о подготовке совместного советско-че-
хословацкого учебного пособия по дифференциальной геометрии
для студентов, обучающихся по физическим, техническим и инже-
нерным специальностям, вычислительной и прикладной математи-
ке. Здесь вряд ли стоит касаться причин, по которым от планиро-
вавшегося авторского коллектива в написании книги приняла уча-
стие только советская сторона. Но, говоря о начале работы, нель-
зя не вспомнить наших чехословацких коллег, контакты с которы-
ми на этапе формирования структуры будущей книги оказались
весьма полезными.
Отсутствие книги, которая сочетала бы достаточную строгость
изложения с наглядным описанием истоков вводимых понятий и
связей между ними, давно уже ощущалось обоими авторами, ве-
дущими преподавание на физическом факультете и факультете вы-
числительной математики и кибернетики Московского универси-
тета. Цель книги — дать последовательное, доступное для перво-
го знакомства и вместе с тем по возможности строгое изложение
современных начал дифференциальной геометрии, заполнить про-
бел, существующий в учебной литературе такого уровня доступ-
ности и широты охвата материала. Сказанным, в частности, объ-
ясняется название книги.
Книга рассчитана на широкий круг читателей, осознавших не-
достаточность того минимума геометрических сведений, которые
предоставляет им обязательная учебная программа по математи-
ке. Это потребовало апробации подготавливаемых материалов пе-
ред достаточно представительной аудиторией. В течение ряда лет
параллельно с работой над книгой была прочитана серия спе-
циальных курсов, охватившая в итоге все ее разделы. В числе слу-
шателей были студенты факультета вычислительной математики
и кибернетики Московского университета, студенты ряда москов-
ских вузов, а также слушатели вечернего специального отделе-
ния vфакультета ВМиК (инженерный поток). Окончательно кни-
6
га сложилась в ходе чтения этих лекций и многочисленных об-
суждений.
Книга включает в себя теорию кривых и поверхностей, основы
тензорного исчисления, элементы римановой геометрии и глад-
ких многообразий, некоторые приложения дифференциальной гео-
метрии. Первые пять глав строятся по одинаковой схеме: введение
основных понятий, пояснение их простыми примерами и рисунка-
ми, разбор связей между введенными понятиями, доказательство
нескольких основных теорем. Завершают главу краткая сводка
основных понятий, формул, фактов (в третьей главе такой свод-
кой является раздел В) и небольшая подборка упражнений с от-
ветами. В последнюю, шестую, главу отнесены приложения об-
сужденных в предшествующих главах понятий к некоторым за-
дачам математики, физики, техники. В целом эта глава носит ил-
люстративный характер, и далеко не везде в ней доказательства
проводятся подробно, а зачастую и отсутствуют вообще.
Охватывая достаточно большой материал, книга сравнительно
невелика по объему. При изложении используемся в основном
классический аппарат дифференциального и интегрального исчис-
ления в обычном объеме, аналитической геометрии и векторной
алгебры, линейной алгебры и дифференциальных уравнений.
В книге много иллюстраций. По мнению авторов, это делает ма-
териал более доступным, помогает более глубокому усвоению об-
суждаемых явлений.
Конечно, книга не свободна от недостатков. Некоторые раз-
делы можно было изложить полнее и шире, отыскать более вы-
разительные приложения, рассказать о той важной роли, которую
играют геометрические модели в различных областях естество-
знания и техники. Авторы будут весьма признательны за любые
высказанные замечания.
Первая, четвертая и шестая главы, а также § 1—3 второй гла-
вы написаны Э. Г. Позняком; третья и пятая главы, а также § 4—
6 второй и § 5 шестой глав написаны Е. В. Шикиным.
Литература, которой пользовались авторы при написании
книги, а также некоторые книги для дальнейшего изучения ука-
заны в конце. Ссылки на другие источники, в том числе на статьи
в отечественных и зарубежных научных журналах, даны непо-
средственно в тексте.
Начало и конец доказательств утверждений и решений раз-
бираемых в книге задач отмечаются символом *.
Авторы считают своим приятным долгом выразить свою бла-
годарность:
коллегам, обсуждения с которыми были весьма полезны на
всех этапах работы над рукописью;
слушателям лекций, общение с которыми, несомненно, по-
влияло на окончательный отбор материала, последовательность
и доступность изложения;
друг другу за постоянно возобновляемое стремление к взаимо-
пониманию.
7
ГЛАВА 1
ТЕОРИЯ КРИВЫХ
Наглядно кривую можно представить как след точки, движу-
щейся по плоскости или в пространстве. Кажется совсем неслож-
ным дать этому наглядному представлению простое математиче-
ское описание, например определить кривую как непрерывный
образ отрезка. Однако существуют примеры, подвергающие такой
подход серьезному испытанию: непрерывный образ отрезка может
заполнять, в частности, целый квадрат.
Для определения кривой мы изберем следующий путь. Снача-
ла введем понятие простой кривой, затем более общее понятие
кривой, заданной параметрически. Чтобы привлечь к изучению
свойств введенного класса кривых аппарат дифференциального ис-
числения, накладываем на кривые ряд дополнительных ограниче-
ний геометрического характера. Полученный класс гладких кри-
вых будет обладать свойствами, хорошо согласующимися с на-
глядными представлениями. Дальнейшие ограничения приводят
нас к регулярным кривым. Для этих кривых определяются такие
важные скалярные характеристики кривой, как кривизна , и кру-
чение. Привлекая их к изучению локального строения кривых,
мы получаем целый ряд полезных фактов и соотношений.
§ 1. ПОНЯТИЕ КРИВОЙ
1°. Простая плоская кривая
Пусть функции <р(0 и ф(/) аргумента (параметра) t непре-
рывны на сегменте [а, р].
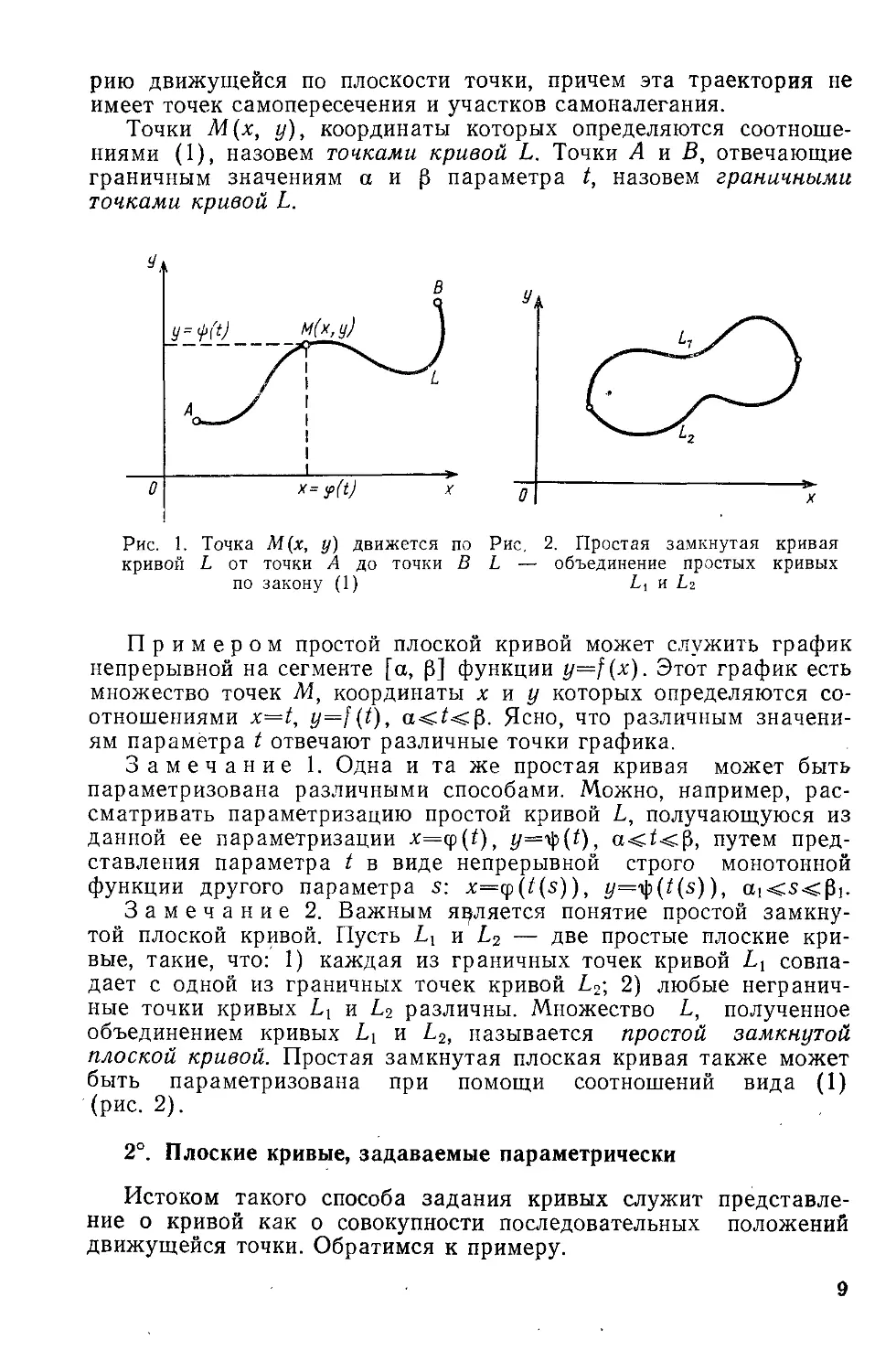
Рассмотрим множество L точек М(х, у), координаты х и у ко-
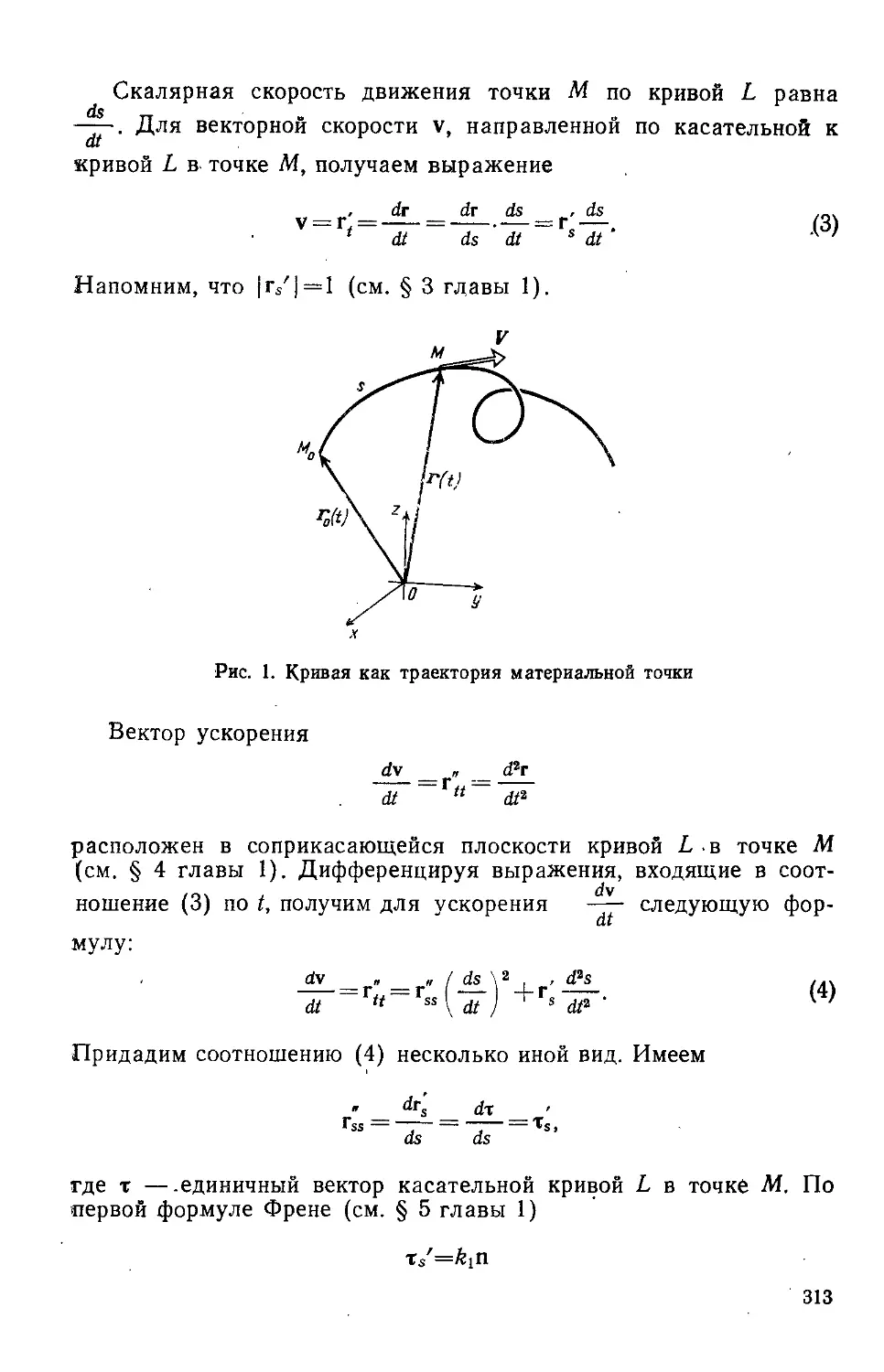
торых определяются соотношениями (рис. 1)
x=tp(i), у=ф(/), (1)
Множество L будем называть простой плоской кривой, если
различным значениям параметра t из сегмента [а, р] отвечают
различные точки этого множества.
Будем говорить также: «соотношения (1) определяют простую
плоскую кривую L» и «простая плоская кривая L параметризова-
на при помощи соотношений (1)». 1
Если считать параметр t физической величиной •— временем,
то простую плоскую кривую можно представлять как траекто-
8
рию движущейся по плоскости точки, причем эта траектория не
имеет точек самопересечения и участков самоналегания.
Точки М(х, у), координаты которых определяются соотноше-
ниями (1), назовем точками кривой L. Точки А и В, отвечающие
граничным значениям аир параметра t, назовем граничными
точками кривой L.
по закону (1) L, и Lz
Примером простой плоской кривой может служить график
непрерывной на сегменте [а, р] функции y=f(x). Этот график есть
множество точек М, координаты х и у которых определяются со-
отношениями х=/, y=f(t), а<Т<р. Ясно, что различным значени-
ям параметра t отвечают различные точки графика.
Замечание 1. Одна и та же простая кривая может быть
параметризована различными способами. Можно, например, рас-
сматривать параметризацию простой кривой L, получающуюся из
данной ее параметризации х=(р(£), z/=^(f), ас/ср, путем пред-
ставления параметра t в виде непрерывной строго монотонной
функции другого параметра s: x=cp(t(s)), г/=ф(^(х)), ai<s<Pi.
Замечание 2. Важным является понятие простой замкну-
той плоской кривой. Пусть Lx и Ь2 — две простые плоские кри-
вые, такие, что: 1) каждая из граничных точек кривой Lx совпа-
дает с одной из граничных точек кривой А2; 2) любые негранич-
ные точки кривых и различны. Множество L, полученное
объединением кривых Lx и А2, называется простой замкнутой
плоской кривой. Простая замкнутая плоская кривая также может
быть параметризована при помощи соотношений вида (1)
(рис. 2).
2°. Плоские кривые, задаваемые параметрически
Истоком такого способа задания кривых служит представле-
ние о кривой как о совокупности последовательных положений
движущейся точки. Обратимся к примеру.
9
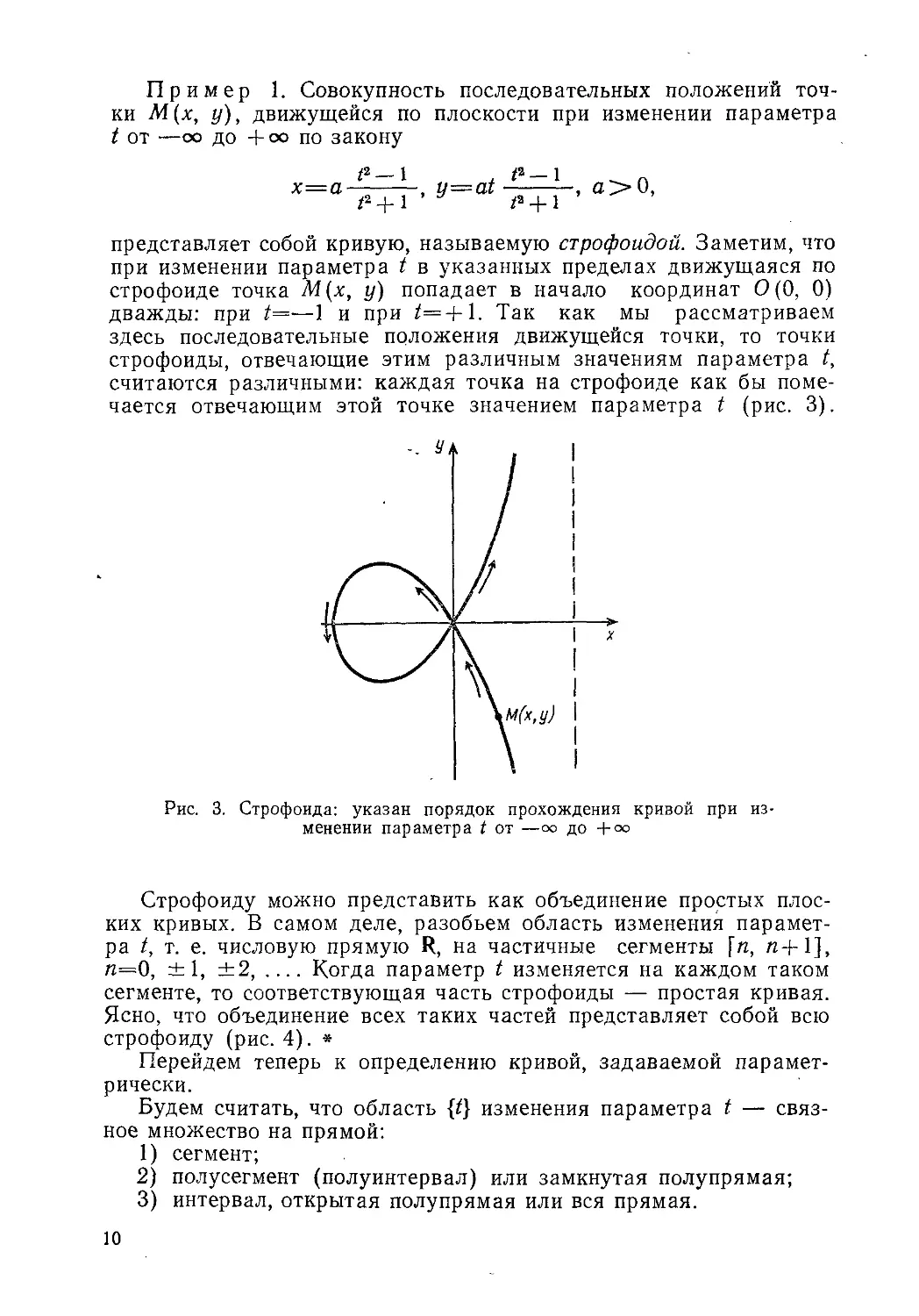
Пример 1. Совокупность последовательных положений точ-
ки М(х, у), движущейся по плоскости при изменении параметра
t от —оо до +оо по закону
/2 — 1 , /2 — 1 _ „
х=а--------, y=at-------, а>0,
/2 + 1 * /« + 1
представляет собой кривую, называемую строфоидой. Заметим, что
при изменении параметра t в указанных пределах движущаяся по
строфоиде точка Л4(х, у) попадает в начало координат 0(0, 0)
дважды: при t=—1 и при /=4-1. Так как мы рассматриваем
здесь последовательные положения движущейся точки, то точки
строфоиды, отвечающие этим различным значениям параметра t,
считаются различными: каждая точка на строфоиде как бы поме-
чается отвечающим этой точке значением параметра t (рис. 3).
Рис. 3. Строфоида: указан порядок прохождения кривой при из-
менении параметра t от —сю до 4-оо
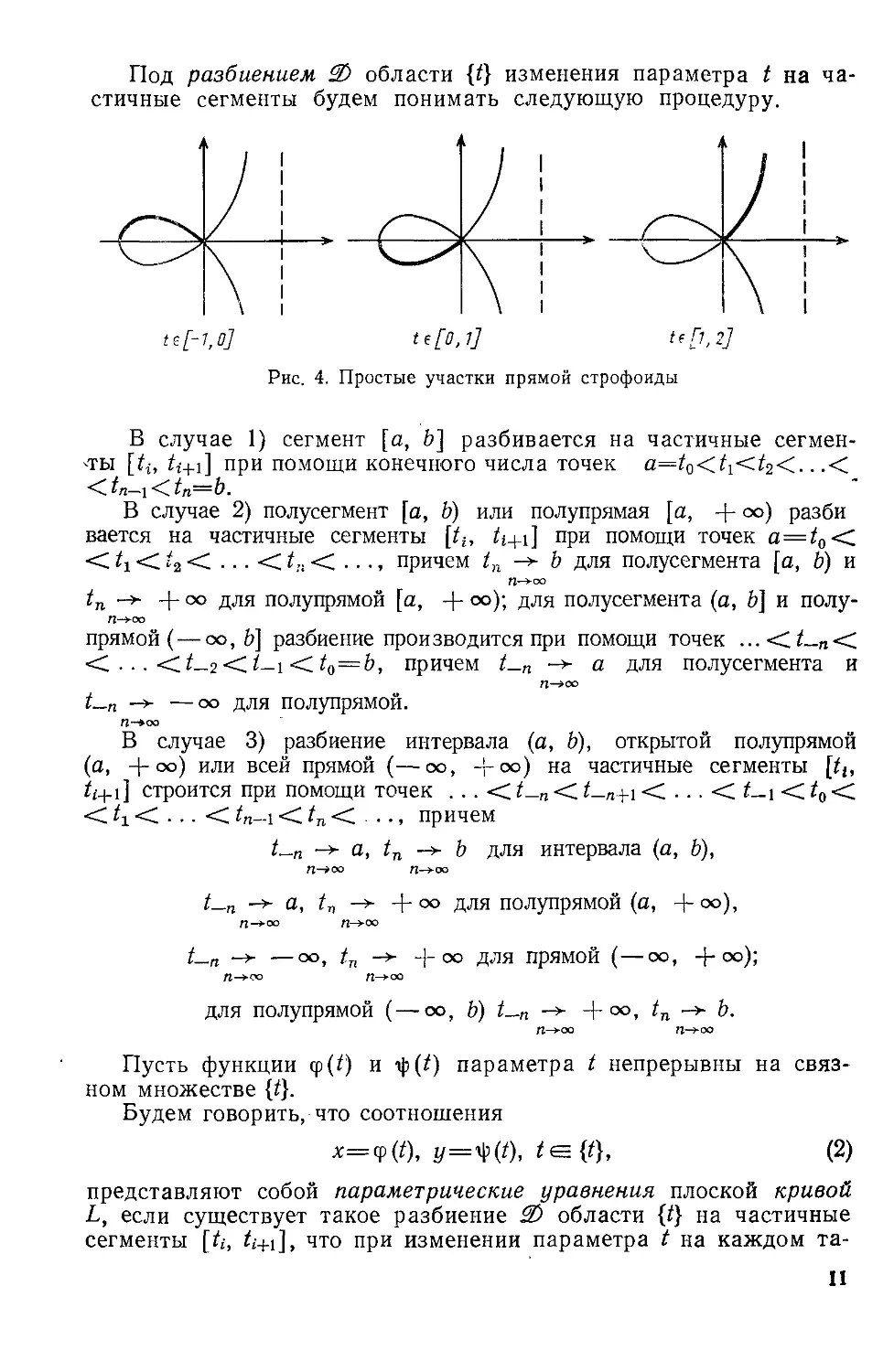
Строфоиду можно представить как объединение простых плос-
ких кривых. В самом деле, разобьем область изменения парамет-
ра t, т. е. числовую прямую R, на частичные сегменты \п, «4-1],
«=0, ±1, ±2, .... Когда параметр t изменяется на каждом таком
сегменте, то соответствующая часть строфоиды — простая кривая.
Ясно, что объединение всех таких частей представляет собой всю
строфоиду (рис. 4). *
Перейдем теперь к определению кривой, задаваемой парамет-
рически.
Будем считать, что область {/} изменения параметра t — связ-
ное множество на прямой:
1) сегмент;
2) полусегмент (полуинтервал) или замкнутая полупрямая;
3) интервал, открытая полупрямая или вся прямая.
10
Под разбиением S) области {/} изменения параметра t на ча-
стичные сегменты будем понимать следующую процедуру.
Рис. 4. Простые участки прямой строфоиды
В случае 1) сегмент [а, Ь] разбивается на частичные сегмен-
ты ^г+i] при помощи конечного числа точек a=t0<ctl<t2<.. .<
tn— 1 tn—b.
В случае 2) полусегмент [а, Ь) или полупрямая [а, + оо) разби
вается на частичные сегменты [/;, /цд] при помощи точек a=t0<2
<Zti<Zt2<Z <.t..<. причем tn -> b для полусегмента [а, b) и
П->оо
tn -> 4-ос для полупрямой [а, + оо); для полусегмента (а, &] и полу-
М—>оо
прямой (—оо, &] разбиение производится при помощи точек
< ... <zt9=b, причем t-n -> а для полусегмента и
ГС-ьоо
t—n -> —оо для полупрямой.
В случае 3) разбиение интервала (а, Ь), открытой полупрямой
(а, + оо) или всей прямой (—оо, H-оо) на частичные сегменты [£ь
Л-+1] строится при помощи точек . .. < t_n < . < t—\ < t0 <Z
</!<...< tn-i <Ztn<Z .причем
-> a, tn -> b для интервала (a, b),
n-^oo П-+ОО
t-n -> a, tn + оо для полупрямой (a, +°o),
H->0O n->OO
t—n -> —oo, tn -> + оо для прямой (—оо, + оо);
П->оо n-*oo
ДЛЯ полупрямой (--OO, ft) t—n -> + оо, tn -> b.
П->оо fl—>oo
Пусть функции <p(0 и ф(/) параметра t непрерывны на связ-
ном множестве {О-
Будем говорить, что соотношения
x=V(t), y=4>(i), t е= (2)
представляют собой параметрические уравнения плоской кривой
L, если существует такое разбиение Ф области {/} на частичные
сегменты [&, Ач-i], что при изменении параметра t на каждом та-
II
ком сегменте соотношения (2) определяют простую плоскую кри-
вую. Сама кривая L и есть объединение всех указанных простых
кривых (с учетом их возможных самопересечений и самоналега-
ний) при условии монотонного изменения параметра t по множе-
ству {^}.
При этом говорят, что кривая L задана параметрически при
помощи соотношений (2).
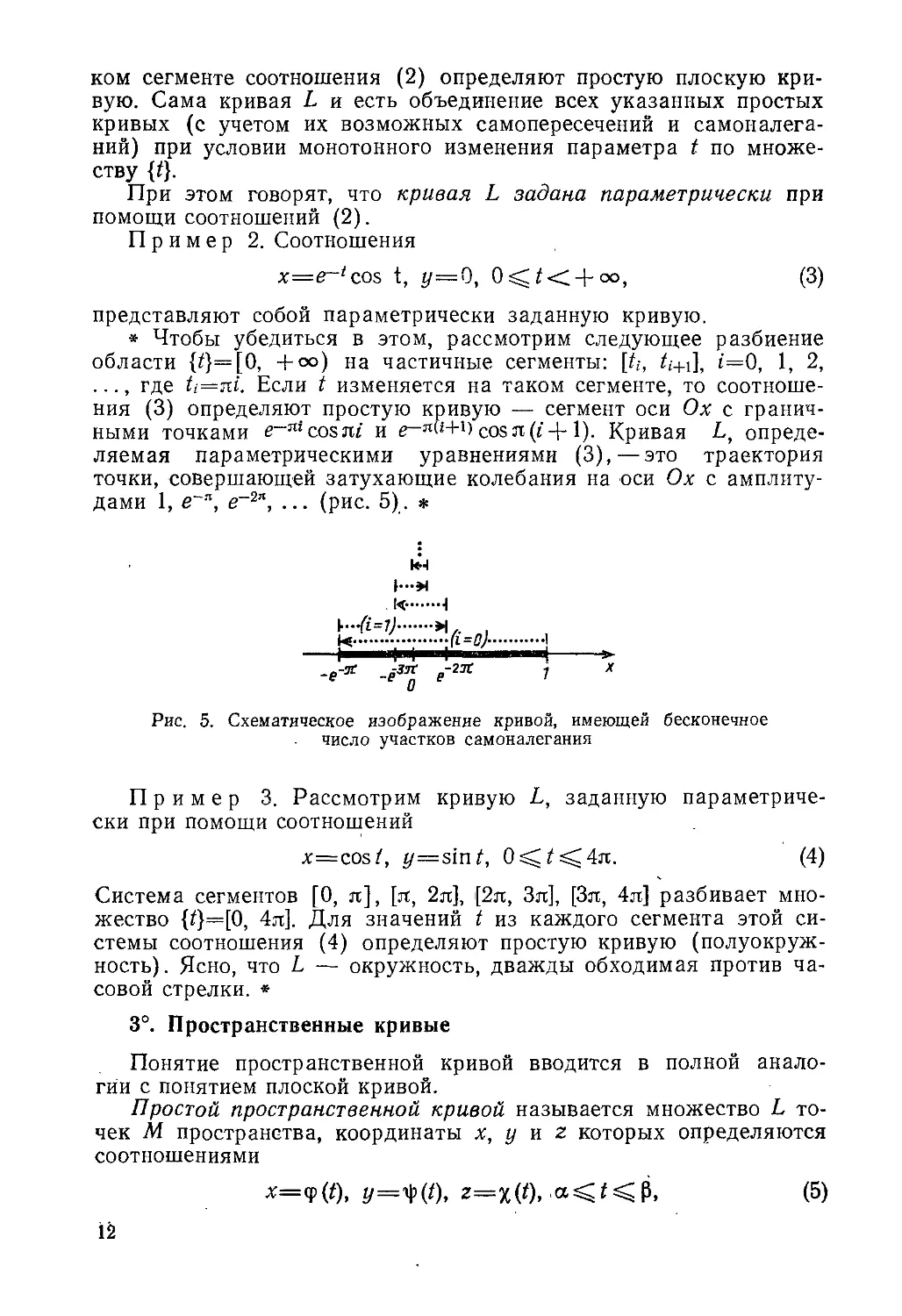
Пример 2. Соотношения
x=e~/cos t, г/=0, 0^/<4-оо, (3)
представляют собой параметрически заданную кривую.
* Чтобы убедиться в этом, рассмотрим следующее разбиение
области {/}=[0, +оо) на частичные сегменты: [ft, i=0, 1, 2,
..., где Если t изменяется на таком сегменте, то соотноше-
ния (3) определяют простую кривую — сегмент оси Ох с гранич-
ными точками е~ягсозл7 и е—лич-1) cos л (г 4-1). Кривая L, опреде-
ляемая параметрическими уравнениями (3), — это траектория
точки, совершающей затухающие колебания на оси Ох с амплиту-
дами 1, е~я, е~2я, ... (рис. 5). *
к-1
1-М
!<•.1
I—/М....И,. ,
Г...п С*.........—-
-е'л -ё3* е'2* 1 х
Рис. 5. Схематическое изображение кривой, имеющей бесконечное
число участков самоналегания
Пр и м е р 3. Рассмотрим кривую L, заданную параметриче-
ски при помощи соотношений
x=cos/, z/=sint, 0^/^4л. (4)
Система сегментов [0, л], [л, 2л], [2л, Зл], [Зл, 4л] разбивает мно-
жество {0=[0, 4л]. Для значений t из каждого сегмента этой си-
стемы соотношения (4) определяют простую кривую (полуокруж-
ность). Ясно, что L — окружность, дважды обходимая против ча-
совой стрелки. *
3°. Пространственные кривые
Понятие пространственной кривой вводится в полной анало-
гии с понятием плоской кривой.
Простой пространственной кривой называется множество L то-
чек М пространства, координаты х, у и z которых определяются
соотношениями
*=ф(0> z=%(0, (5)
12
где <p(Z), ф(0, х(0 — функции, непрерывные на сегменте [а, р],
если различным значениям параметра t из сегмента [а, р] отвеча-
ют различные точки этого множества.
Используя понятия простой пространственной кривой и раз-
биения связного множества {t} изменения параметра, приходим
так же, как и в случае плоскости, к понятию пространственной
кривой, задаваемой параметрическими соотношениями вида (5)
при условии монотонного изменения параметра t на множест-
ве {/}•
Соотношения (5) называют параметрическими уравнениями
пространственной кривой.
Замечание. В n-мерном евклидовом пространстве Еп кри-
вые определяются при помощи соотношений
*2=Фг(0, ••• ,^п = Фп(0.
где параметр t изменяется на некотором связном множестве {О,
а функции cpi(t) непрерывны.
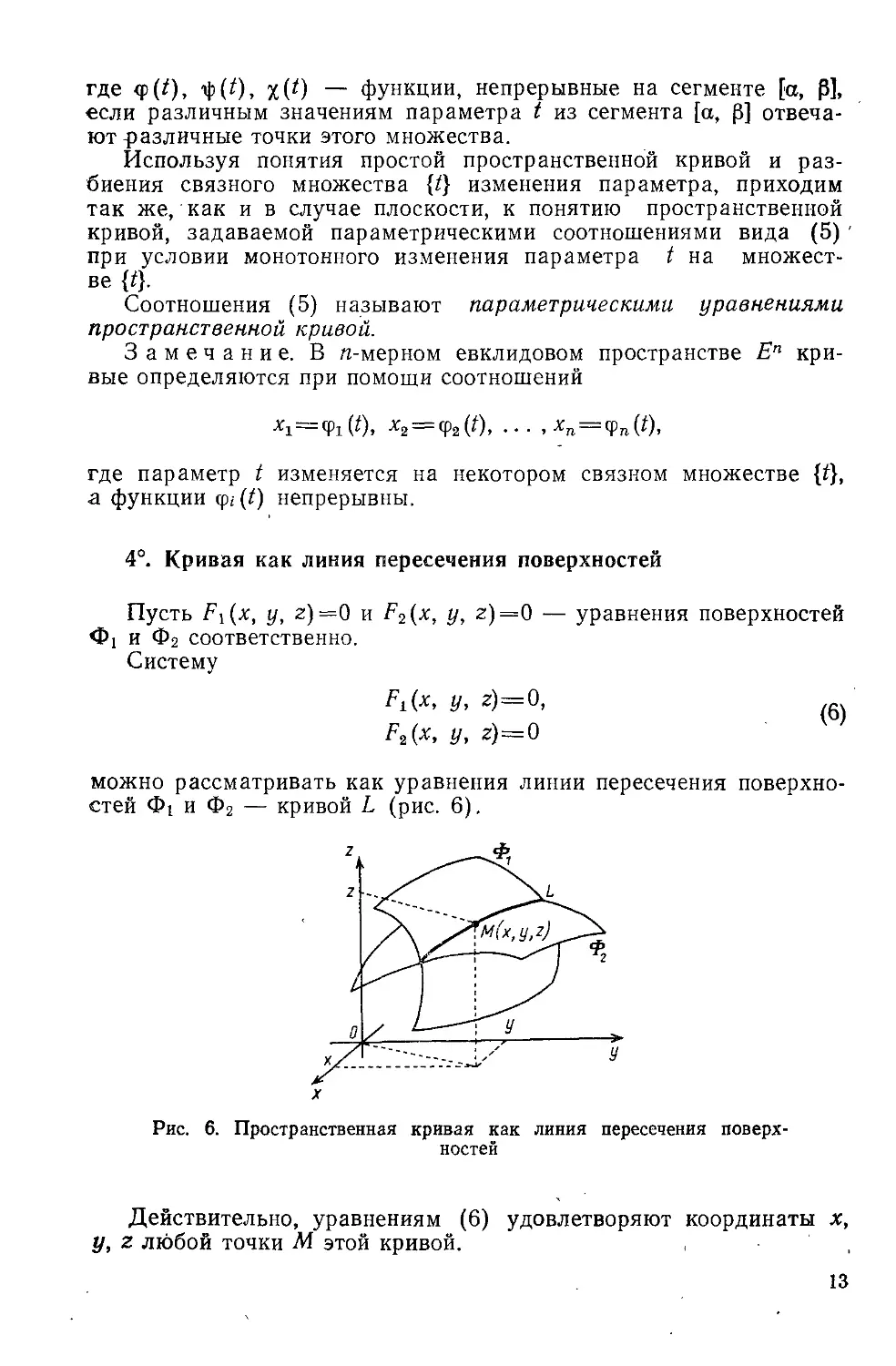
4°. Кривая как линия пересечения поверхностей
Пусть Fx(x, у, z)=0 и F2(x, у, z)=0 — уравнения поверхностей
Ф1 и Ф2 соответственно.
Систему
Fi(x, у, z)=0,
F2(x, у, z)=0
(6)
можно рассматривать как уравнения линии пересечения поверхно-
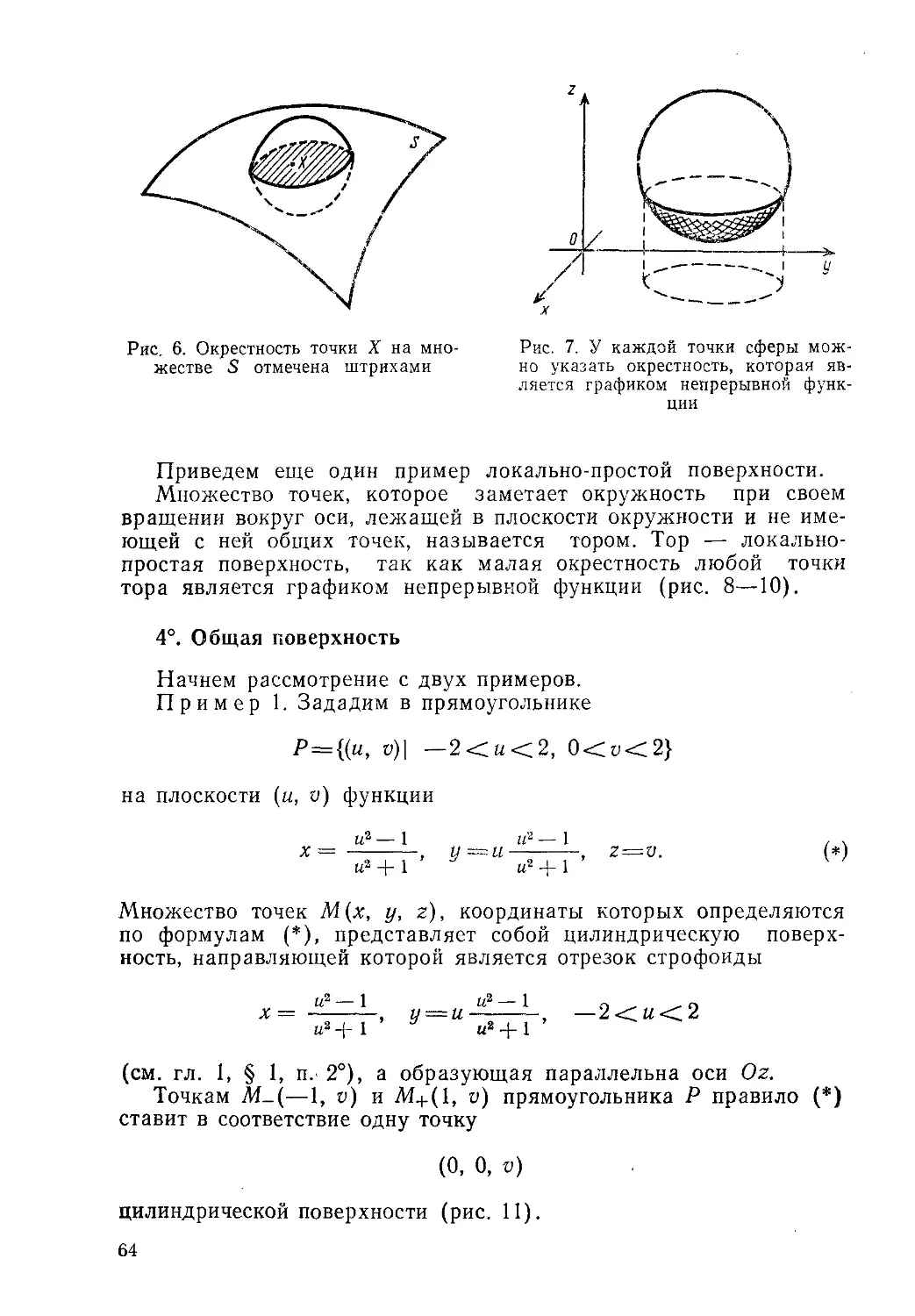
стей Ф1 и Ф2 — кривой L (рис. 6).
Рис. 6. Пространственная кривая как линия пересечения поверх-
ностей
Действительно, уравнениям (6) удовлетворяют координаты х,
у, z любой точки М этой кривой. , ,
13
Если разрешить систему уравнений (6) относительно, напри-
мер, у и z, т. е. найти у и z как функции х:
у=ф(х), z=%(x),
(это возможно в некоторой окрестности точки М кривой L при ус-
ловии
dF.
ду дг =#0
дР2 dF2
ду дг
в самой точке М) и затем выбрать х за параметр t, то мы полу-
чим параметрические уравнения кривой
x=t, y=ty(t),
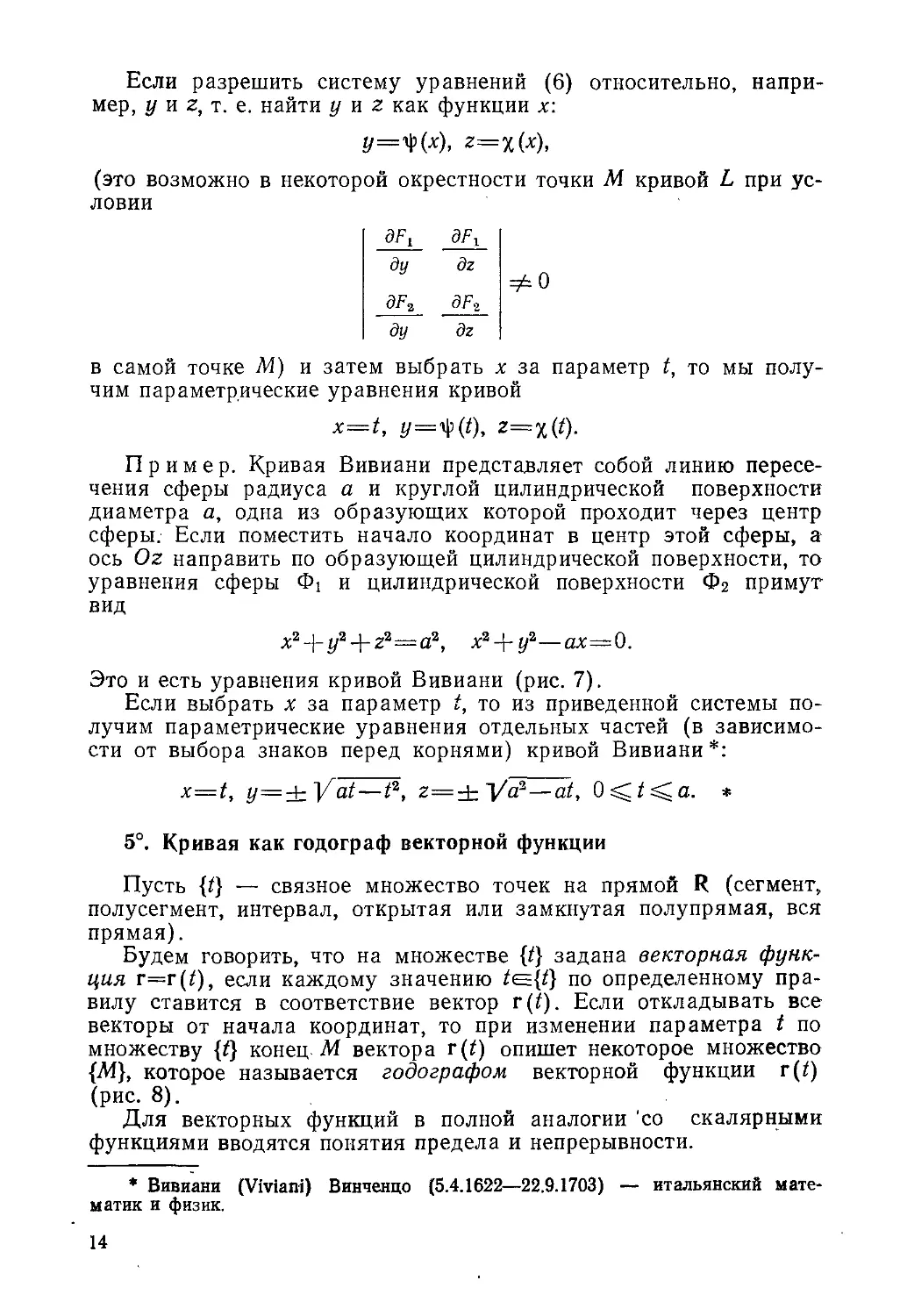
Пример. Кривая Вивиани представляет собой линию пересе-
чения сферы радиуса а и круглой цилиндрической поверхности
диаметра а, одна из образующих которой проходит через центр
сферы. Если поместить начало координат в центр этой сферы, а
ось Oz направить по образующей цилиндрической поверхности, то
уравнения сферы Ф( и цилиндрической поверхности Ф2 примут
вид
x2-\-y2 + z2=a2, х2 + у2—ах—0.
Это и есть уравнения кривой Вивиани (рис. 7).
Если выбрать х за параметр t, то из приведенной системы по-
лучим параметрические уравнения отдельных частей (в зависимо-
сти от выбора знаков перед корнями) кривой Вивиани *:
x=t, y=±Vat—t2, z=±y'£z2—at, 0^/^a. *
5°. Кривая как годограф векторной функции
Пусть {(} — связное множество точек на прямой R (сегмент,
полусегмент, интервал, открытая или замкнутая полупрямая, вся
прямая).
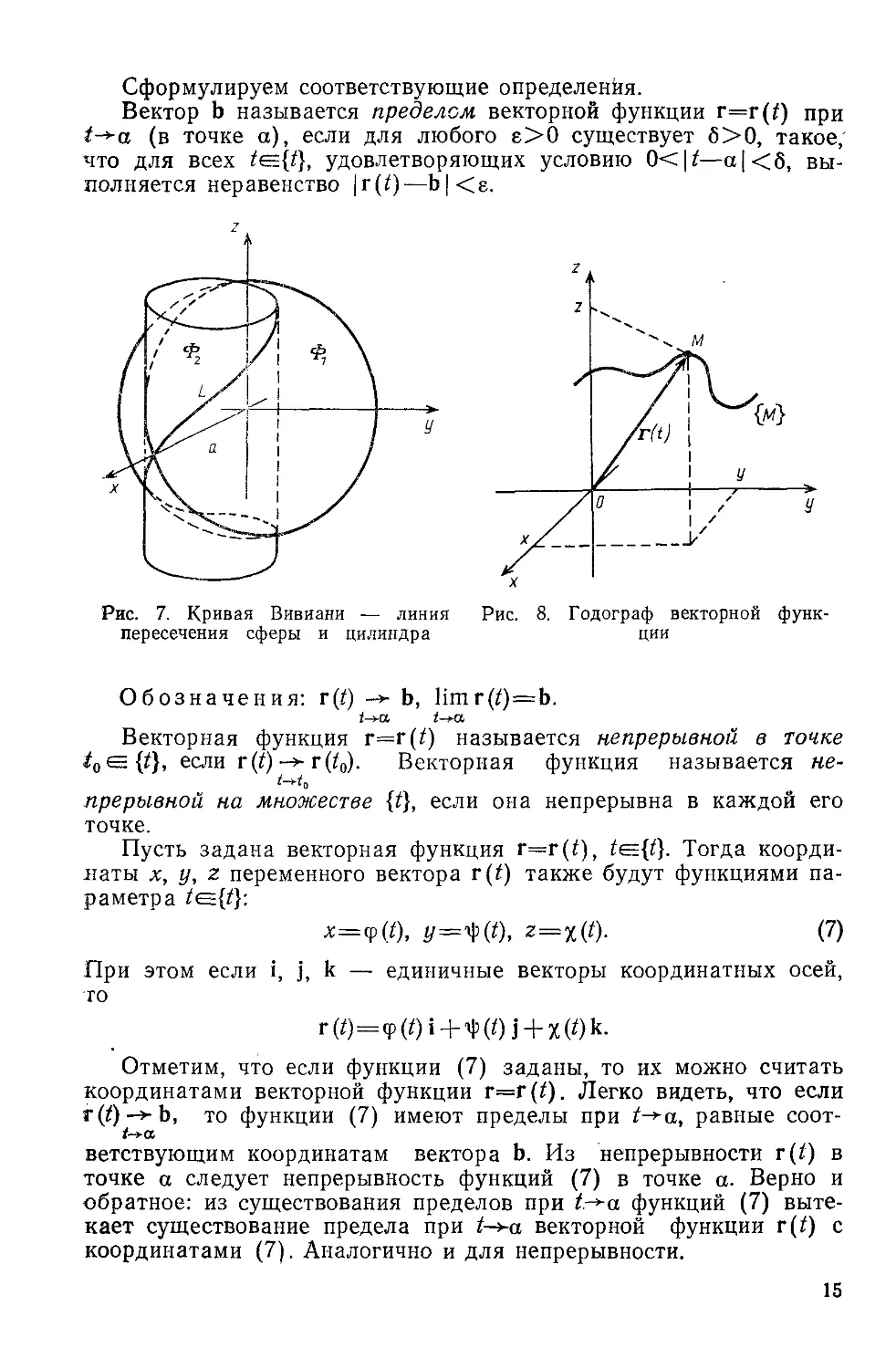
Будем говорить, что на множестве {(} задана векторная функ-
ция r=r(t), если каждому значению по определенному пра-
вилу ставится в соответствие вектор г((). Если откладывать все
векторы от начала координат, то при изменении параметра t по
множеству {(} конецМ вектора r(t) опишет некоторое множество
{М}, которое называется годографом векторной функции r(t)
(рис. 8).
Для векторных функций в полной аналогии 'со скалярными
функциями вводятся понятия предела и непрерывности.
* Вивиани (Vivian!) Винченцо (5.4.1622—22.9.1703) — итальянский мате-
матик и физик.
14
Сформулируем соответствующие определенья.
Вектор b называется пределом векторной функции r=r(t) при
t^-a (в точке а), если для любого е>0 существует б>0, такое,
что для всех удовлетворяющих условию 0<|/—а|<б, вы-
полняется неравенство |г(/)—Ь|<е.
Рис. 7. Кривая Вивиани — линия
пересечения сферы и цилиндра
Рис. 8. Годограф векторной функ-
ции
Обозначения: r(f) -+ b, limr(/)=b.
Векторная функция г=г(/) называется непрерывной в точке
t0^{t}, если г(£)->г(^0). Векторная функция называется не-
прерывной на множестве {t}, если она непрерывна в каждой его
точке.
Пусть задана векторная функция r=r(£), te^{t}. Тогда коорди-
наты х, у, z переменного вектора г(£) также будут функциями па-
раметра
х=<р(0, г/='Ф(О» z=X(0- (7)
При этом если i, j, k — единичные векторы координатных осей,
го
г(0=ф(0*+'Ф(0 i + x(Ok-
Отметим, что если функции (7) заданы, то их можно считать
координатами векторной функции r=r(t). Легко видеть, что если
г(7)->Ь, то функции (7) имеют пределы при t^a, равные соот-
<->а
ветствующим координатам вектора Ь. Из непрерывности r(f) в
точке а следует непрерывность функций (7) в точке а. Верно и
обратное: из существования пределов при tr+a функций (7) выте-
кает существование предела при Л->а векторной функции г(/) с
координатами (7). Аналогично и для непрерывности.
15
УТВЕРЖДЕНИЕ. Если векторные функции r(t), R(Z) и ска-
лярная функция непрерывны, то функции r(/)±R(O,
%(/)г(/), (r(Z), R(0), r(Z)xR(O также непрерывны.
* Докажем, например, непрерывность функции (r(Z), R(/)).
Пусть <р(0> Ф(^)> Х(0 — координаты векторной функции г(/)
и Ф(0, ЧЧО. Х(?) — координаты векторной функции R(Z). Тог-
да
(r(0, R(O)=<p(/)Q(/)+i|3(Z)T(/)4-x(/)X(O.
Так как из йепрерывности скалярных функций следует непрерыв-
ность их произведения и суммы, то из последнего равенства мож-
но заключить, что скалярное произведение (r(/), R(/)) непрерыв-
но. *
Пусть г=г(0 — непрерывная на сегменте [а, 0] векторная
функция. В случае, когда различным значениям параметра t из
этого сегмента отвечают различные значения векторной функции,
ее годограф — простая кривая. Можно говорить также, что кри-
вая, заданная параметрически при помощи соотношений (7), яв-
ляется годографом векторной функции г=г(/) с координатами (7).
Иными словами, параметрическое и векторное задания кривой
равносильны.
Мы будем использовать следующую терминологию: «.кривая L
задана векторной функцией г=г(/)» или «r=r(Z) — вектор кри-
вой L».
§ 2. ГЛАДКИЕ И РЕГУЛЯРНЫЕ КРИВЫЕ
1°. Касательная к кривой
Пусть кривая L задана параметрическими уравнениями
х=ф(0, z=X(0, ^{0 (!)
(функции <р(0, Ф(0, Х(0 непрерывны на множестве {0). Обозна-
чим через Мо точку кривой L, отвечающую значению to парамет-
ра, а через М — точку кривой L, отвечающую значению t пара-
метра из некоторой окрестности значения t0. Ясно, что М->М0,
если t-^to.
Прямая М0Т называется касательной к кривой L в точке Мо,
если при М->М0 меньший угол 9 между этой прямой и перемен-
ной прямой М0М стремится к нулю (рис. 9).
2°. Гладкие кривые
Кривая L называется гладкой в точке Мо, если в этой точке
существует касательная к кривой L и некоторая окрестность точ-
ки Мо на кривой L однозначно проектируется на эту касательную.
Точки кривой, в которых она не является гладкой, называют-
ся особыми (рис. 10).
16
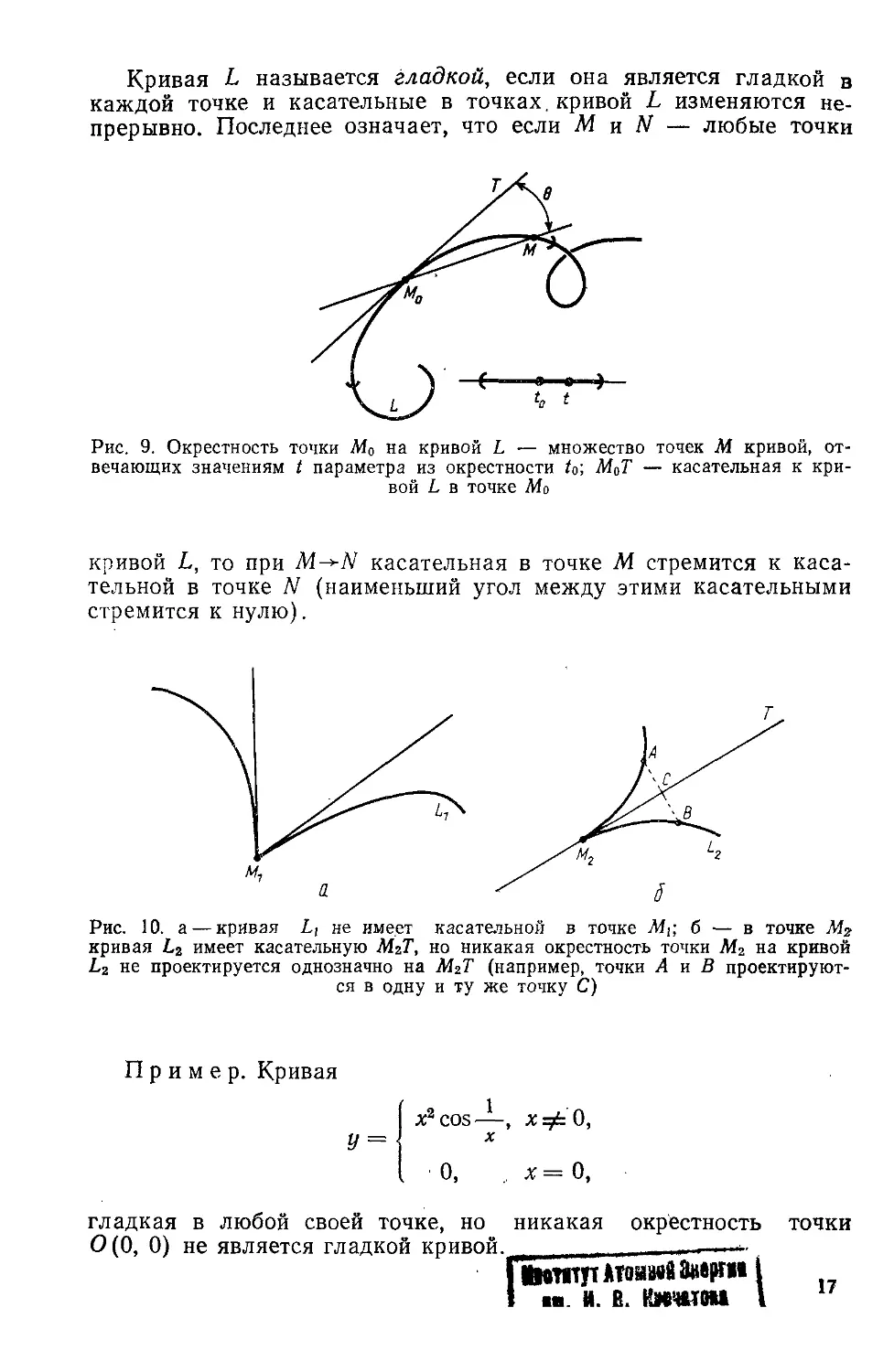
Кривая L называется гладкой, если она является гладкой в
каждой точке и касательные в точках, кривой L изменяются не-
прерывно. Последнее означает, что если М и N — любые точки
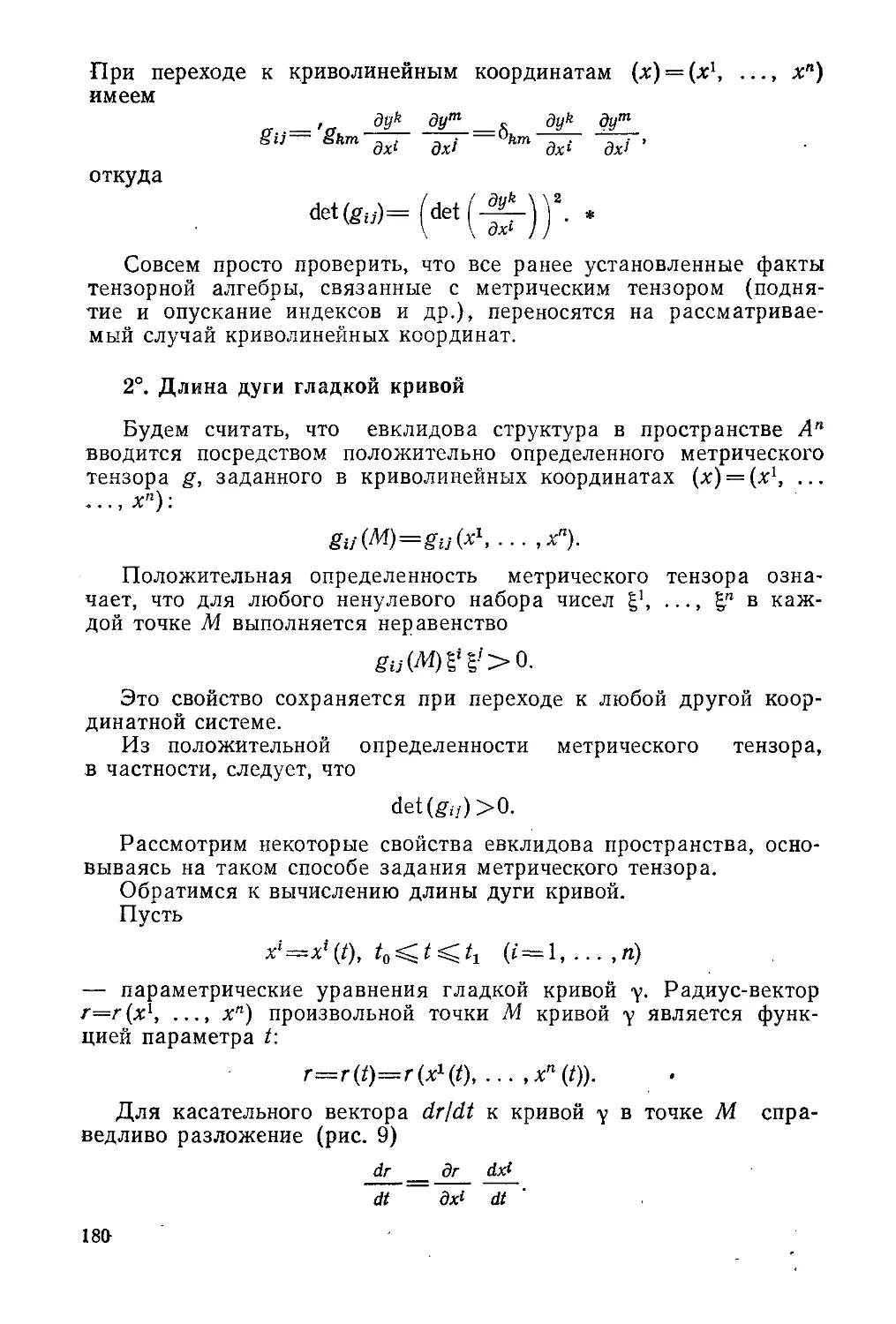
Рис. 9. Окрестность точки ЛГ0 на кривой L — множество точек М кривой, от-
вечающих значениям t параметра из окрестности to; М0Т — касательная к кри-
вой L в точке Мо
кривой L, то при M^-N касательная в точке М стремится к каса-
тельной в точке N (наименьший угол между этими касательными
стремится к нулю).
Рис. 10. а — кривая Lt не имеет касательной в точке б — в точке Мг
кривая Z.2 имеет касательную М2Т, но никакая окрестность точки М2 на кривой
L2 не проектируется однозначно на М2Т (например, точки А и В проектируют-
ся в одну и ту же точку С)
Пример. Кривая
x2cos—, х=£0,
X
0,
х = О,
гладкая в любой своей точке, но
0(0, 0) не является гладкой кривой.
никакая окрестность точки
!И®шпАТОиаваЗие₽Г111
I и. в. кхшгои I
У =
3°. Дифференцирование и интегрирование векторных функций
Пусть векторная функция r(t) определена на множестве {/}.
Говорят, что векторная функция r(t) имеет производную в точ-
ке t, если существует предел
lim r(^ + AZ)—r(Z)
Д?->-0 Ы
Обозначения: т' (t).
di
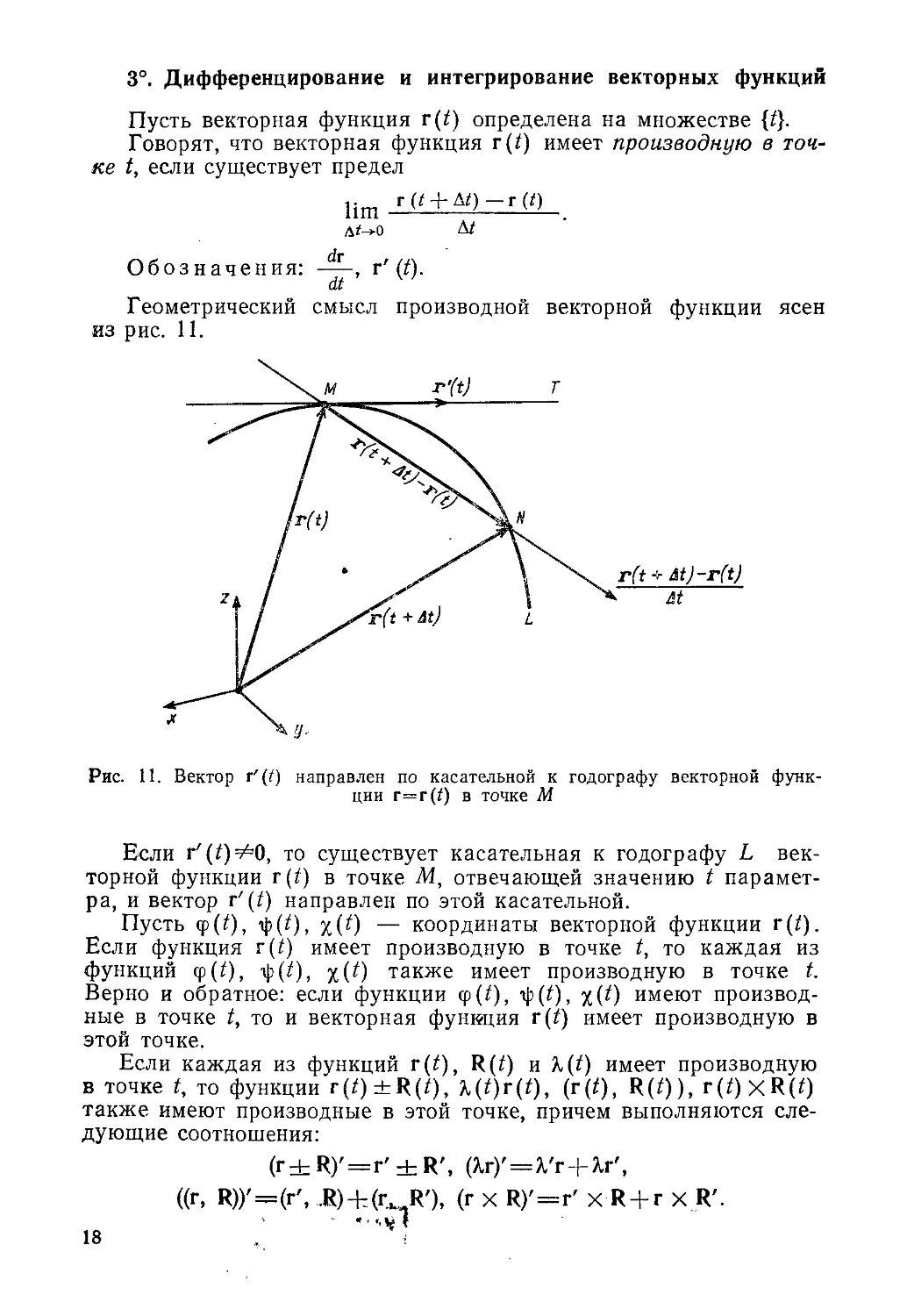
Геометрический смысл производной векторной функции ясен
из рис. 11.
Рис. 11. Вектор г'(?) направлен по касательной к годографу векторной функ-
ции г=г(^) в точке М
Если г'(^)¥=0, то существует касательная к годографу L век-
торной функции r(Q в точке М, отвечающей значению t парамет-
ра, и вектор г' (/) направлен по этой касательной.
Пусть <р(0, ф(0, х(0 — координаты векторной функции r(t).
Если функция г(0 имеет производную в точке t, то каждая из
функций ф(0, Ф(0, %(0 также имеет производную в точке t.
Верно и обратное: если функции <р (0, Ф(0, х(0 имеют производ-
ные в точке t, то и векторная функция г(0 имеет производную в
этой точке.
Если каждая из функций r(0, R(0 и Х(0 имеет производную
в точке t, то функции r(/)±R(£), (r(Q, R(/)), r(f)XR(f)
также имеют производные в этой точке, причем выполняются сле-
дующие соотношения:
(г -4- R)'=г' ч- R', (%г)Л=Л/г-|- %г',
((г, R))'=(r', ,R)+_(r. R'), (г х R)'=r' х R + r x R'.
’ ’ •v *
18
Производная векторной функции r'(t) называется второй про-
изводной векторной функции r(t). Аналогично определяются тре-
тья и последующие производные.
Вторая и третья производные обозначаются соответственно че-
рез r"(t) и Для производных п-го порядка обычно исполь-
зуются обозначения (t) или
Если <р((), ф((), х(0 — координаты векторной функции г(/),
то
Н") (/)—tpW (t) i 4- ф(г1) (t) j + (i) k. (2)
Если у векторной функции r(t) существуют и непрерывны все
производные до порядка п включительно, то пишут г(/)еСп.
Пусть функция rfzjEC'1"1 в некоторой окрестности точки to и
существует производная г<га)(/0). Тогда для r(t) справедлива фор-
мула Тейлора*-.
г(0=r(Zo) + г' (Q(t-Q + -1-г"(/0) (t-Q2 + ...
• • • 4-Vr(n)^)(Z-Zo)n + o^-W, (3)
п!
где вектор o((t—t0)n) имеет более высокий порядок малости, чем
{t—t0)n, т. е.
|о ((* —М")1 . 0 -
(t — to)n м,
Формула (3) получается так. Разложим координатные функции
<р(/), ф((), %(0 вектора г(() по формуле Тейлора с остаточным
членом в форме Пеано**:
фЮ=ф(^)+ф,(^)(^-^)+4г ф" (*о) (*—А>)2 + • • •
• • • +-Т- Ф(п) Ш-кУ + о ((t-t0)n),
п\
Ф(()=Ш)+Оо) (*-Ч)Н— Оо)(*-*о)2+ • • •
• • • + 4г ^(n) (Q (t-tQy + о ((/ -ш.
x(0=x(A))+%'(W-A))+-^- x'(Qtf-Q2+ • • •
• • • + -4 x(n) v-w+0 (tf-W-
nl
* Тейлор (Taylor) Брук (18.8.1685—29.12.1731) — английский математик.
** Пеано (Peano) Джузеппе (27.8.1858—20.4.1932) — итальянский мате-
матик.
19
Умножая первое соотношение на орт i, второе — на орт j, тре-
тье — на орт к, складывая и используя формулы (1) и (2), полу-
чим разложение (3).
Интеграл Римана r(t)dt для векторной функции г(£),
а
определяется как предел интегральных сумм
п
Z—1
при шах А^->0 (а=/0<^< А^ = /г— ti-\,
|г—любая точка сегмента [^-ь /,]).
Свойства интеграла.
₽ ₽ ₽
1+. (г(/) + R(/))dt=\> r(t)dt + R(t)dt.
а а а
2+. j г (0 dt=j (Ф (t) i + ф (t) j + х (О k) dt =
a a
₽ ₽ ₽
= (j ф (t) dt} i + (j Ф(/) dt} j 4- (j x (0 dt} k.
a a a
P у P
3+. r(t)dt=^f(t)dt+^r(t)dt (a<y<P).
a a f
₽ ₽
4+. %r (t)dt=‘k r (t)dt (%—число).
5+. Если г—постоянный вектор, то
₽ ₽ ₽ . ₽
(г, R(Z))dt=[r, JR(t)dt}, r x R(/)t#=r x R(0 dt.
a a a a
т
6+. Cr (£)d/=r(r).
dx J
a
4°. Достаточные условия гладкости кривой
ТЕОРЕМА 1 (достаточные условия гладкости в точке). Пусть
кривая L задана векторной функцией r=r(t), имеющей в некото-
рой окрестности значения непрерывную производную r'(t),
причем г'(^о)=/=О. Тогда кривая L является гладкой кривой в точке
Л40, отвечающей значению to. '
20
* Касательная MQT к кривой L в точке Мо существует в силу
того, что г'(^о)¥=О (см. и. 3°). Поэтому достаточно показать, что
некоторая окрестность точки Мо на кривой L однозначно проек-
тируется на эту касательную.
Предположим, что это не так. Тогда существуют две различ-
ные последовательности ^о> tk t0, такие, что разности
г(//')—г(//) ортогональны вектору r'(t0). По формуле Тейлора
(3) с центром разложения tk при п=1 имеем
Г (6г) = Г (tk) “Ь Г' (tk) (tk -tk) + О (tk tk).
Вычитая r(tk'), получим следующее выражение для разности:
Г (tk) — Г (t'k) = Г ' (tk)(t’k — t'k) + о (t'i — tk).
Умножим последнее равенство скалярно на r'(t0'). Учитывая свой-
ства о-символа и ортогональность разности r(tk")—r(tk') вектору
г'(^о), после несложных преобразований получим, что
(г' (t'k), г' (t>))(t"k — tk)=o (tk—i'k)-
Так как г'(/о)¥=О и r'(tk') ->r'(i0) при tk'-^to, то левая часть по-
следнего равенства есть O(th"—tk ), в то время как правая —
o(tk"—tk). Полученное противоречие есть следствие предположе-
ния, что никакая окрестность точки А40 на кривой L не может
быть однозначно спроектирована на касательную в точке Af0.
Тем самым в точке Мо существует касательная к кривой L и
некоторая окрестность точки Мо на кривой L однозначно проек-
тируется на эту касательную. Значит, кривая L гладкая в точке
7И0. *
ТЕОРЕМА 2 (достаточные условия гладкости кривой). Пусть
кривая L задана векторной функцией г=г(/), имеющей не-
прерывную производную r'(Q. Если г'(/)¥=0 для любого t^{t},
то кривая L гладкая.
* Поскольку г'(/)¥=(), то согласно теореме 1 кривая L являет-
ся гладкой в любой своей точке. Из условия и непрерыв-
ности r'(t) следует непрерывность касательной к кривой L. Зна-
чит, L — гладкая кривая. *
5°. Регулярные кривые
Пусть гладкая кривая L задана векторной функцией г=г(/).
Если r(t)^Cn, п^2, то кривая L называется регулярной кривой
(кривой класса Сп).
Достаточные условия регулярности кривой.
Для того чтобы заданная векторной функцией г=г(£), t<^{t},
кривая L была регулярной, достаточно, чтобы на множестве {?}
изменения параметра были выполнены следующие условия: r(t)^
^Сп, пл>2, и г'(£)^0.
21
Эти условия вытекают из достаточных условий гладкости (тео-
рема 2) и определения регулярности.
Замечание. Если производная r'(t) непрерывна и r'(Z0)¥=
¥=0, то г'(/)¥=0 в некоторой окрестности значения t0. Если, кроме
того, r(t)^Cn, п^>2, на множестве {/}, то в окрестности точки Мо,
отвечающей значению t0, кривая L регулярная. Тем самым усло-
вия r(Z)eC”, л>2, и являются условиями локальной ре-
гулярности кривой.
§ 3. ДЛИНА ДУГИ КРИВОЙ
1°. Определение и основные свойства
Пусть L — простая кривая, r=r(Q, ас/<р,
вектор.
Разобьем сегмент fa, (3] на части точками
ее радиус-
ов— ty tn—1 tn— р.
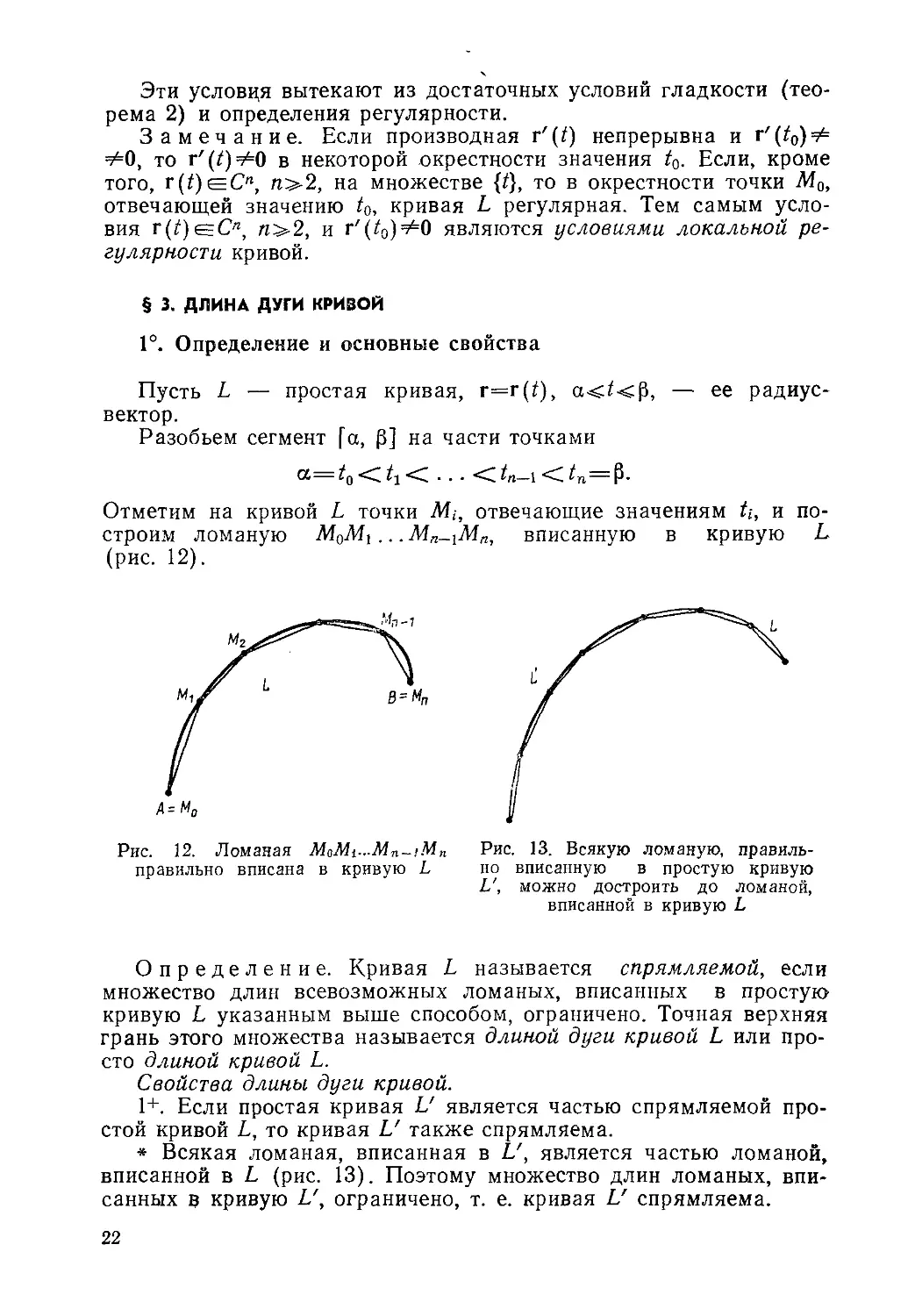
Отметим на кривой L точки Mi, отвечающие значениям 6, и по-
строим ломаную MoMt.. .Mn-iMn, вписанную в кривую L
(рис. 12).
Рис. 13. Всякую ломаную, правиль-
но вписанную в простую кривую
L', можно достроить до ломаной,
вписанной в кривую L
Рис. 12. Ломаная
правильно вписана в кривую L
Определение. Кривая L называется спрямляемой, если
множество длин всевозможных ломаных, вписанных в простую
кривую L указанным выше способом, ограничено. Точная верхняя
грань этого множества называется длиной дуги кривой L или про-
сто длиной кривой L.
Свойства длины дуги кривой.
1+. Если простая кривая L' является частью спрямляемой про-
стой кривой L, то кривая L' также спрямляема.
* Всякая ломаная, вписанная в L', является частью ломаной,
вписанной в L (рис. 13). Поэтому множество длин ломаных, впи-
санных в кривую L', ограничено, т. е. кривая L' спрямляема.
22
Ясно, что длина дуги кривой L' меньше длины дуги кривой
L. *
2+. Если простая кривая L разбита точкой N на спрямляемые
части L' и L", то кривая L спрямляема и для длин s(L'), s(L")
и s(L) дуг кривых L', L" и L выполняется соотношение
s(L') + s(L")=s(L).
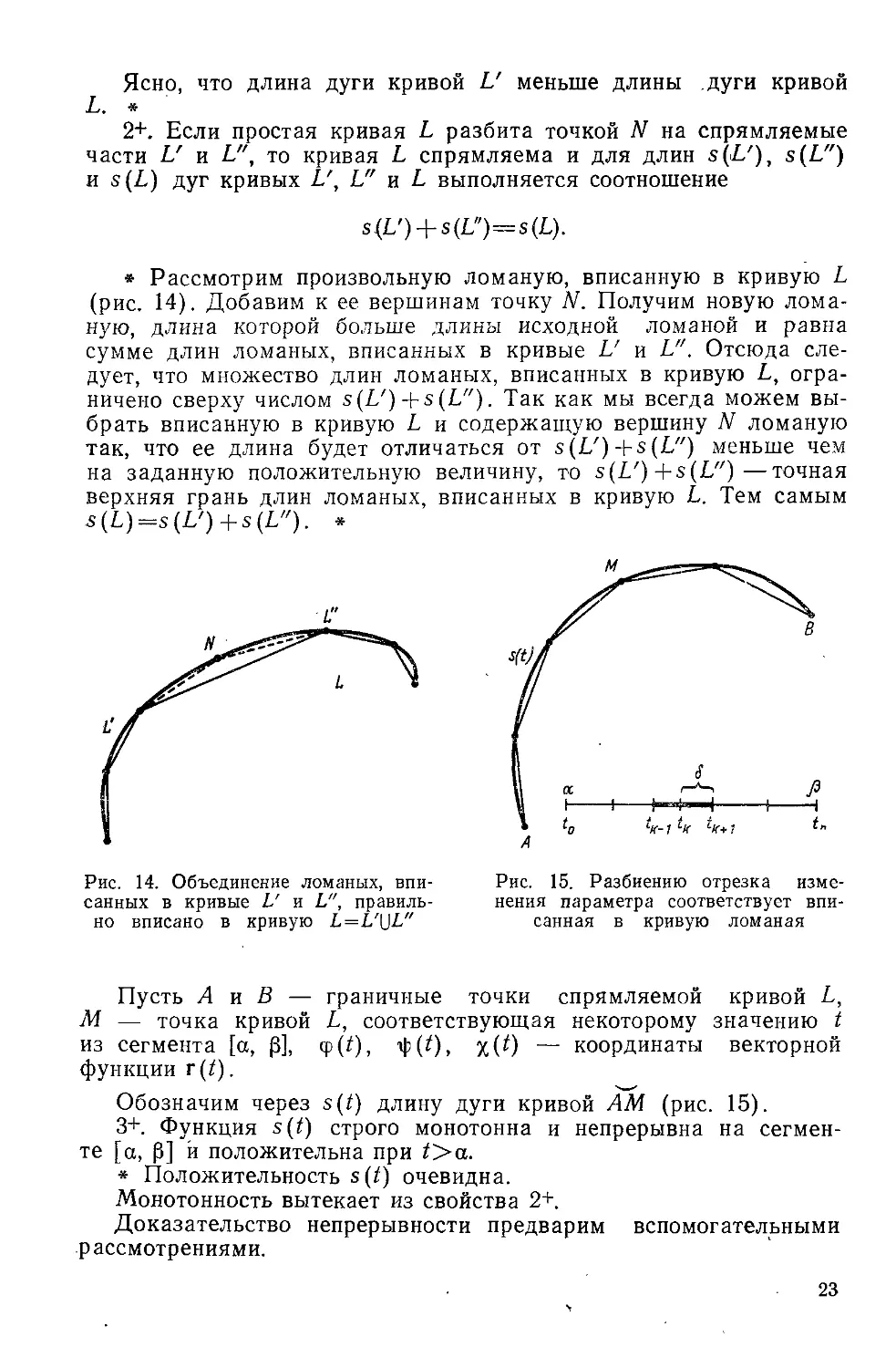
* Рассмотрим произвольную ломаную, вписанную в кривую L
(рис. 14). Добавим к ее вершинам точку N. Получим новую лома-
ную, длина которой больше длины исходной ломаной и равна
сумме длин ломаных, вписанных в кривые L' и L". Отсюда сле-
дует, что множество длин ломаных, вписанных в кривую L, огра-
ничено сверху числом s(Z/)+s (£/')• Так как мы всегда можем вы-
брать вписанную в кривую L и содержащую вершину N ломаную
так, что ее длина будет отличаться от s(£/)+s(T") меньше чем
на заданную положительную величину, то s(L') +s(L")—точная
верхняя грань длин ломаных, вписанных в кривую L. Тем самым
s(L)—s(L') +s(L"). *
Рис. 14. Объединение ломаных, впи-
санных в кривые L' и L", правиль-
но вписано в кривую L=L'[)L"
Рис. 15. Разбиению отрезка изме-
нения параметра соответствует впи-
санная в кривую ломаная
Пусть А и В — граничные точки спрямляемой кривой L,
М — точка кривой L, соответствующая некоторому значению t
из сегмента [а, р], ф(/), ЧЧО. %(0 — координаты векторной
функции г(/).
Обозначим через s(£) длину дуги кривой AM (рис. 15).
3+. Функция s(t) строго монотонна и непрерывна на сегмен-
те [а, р] й положительна при t>a.
* Положительность s(t) очевидна.
Монотонность вытекает из свойства 2+.
Доказательство непрерывности предварим вспомогательными
рассмотрениями.
23
а) Пусть s — любое положительное число. Из, определения
длины дуги вытекает существование вписанной в кривую L лома-
ной, длина которой отличается от длины кривой L меньше чем
на е/2. Естественно рассматривать ломаную, имеющую точку М
одной из своих вершин.
Ясно, что и длина части этой ломаной, вписанной в кривую
AM, отличается от ее длины s(t) меньше чем на е/2.
Конечно, длина любого звена рассматриваемой ломаной отли-
чается от длины стягиваемой ею дуги меньше чем на е/2.
б) Длины звеньев ломаной со свойством а) можно считать
меньше е/2. Действительно, из свойства равномерной непрерывно-
сти координат <р(0, ф(0> х(0 радиуса-вектора r(t) кривой L на
сегменте [а, р] вытекает, что по данному е>0 найдется такое по-
ложительное число б, что при разбиении сегмента [а, р] на частич-
ные сегменты [Д_ь 6], i=l, 2, ..., п, с длинами меньше б колеба-
ния функций <р(0, ф(0, х(0 на каждом частичном сегменте
[^•_ь ti\ будут меньше е/(2фЗ). Тогда длина i-ro звена ломаной
будет меньше &I2:
/[ф (/г-)-ф (/г_,)]2 + [ф (^)-ф(^_1)]2 + [X&)-% (^i)F < е/2.
в) Рассмотрим ломаную со свойствами а) и б). Дуга, стя-
гиваемая произвольным звеном этой ломаной, имеет длину, мень-
шую е. В самом деле, по свойству а) длина такой дуги отличает-
ся от длины стягивающего ее звена меньше, чем на е/2, а по свой-
ству б) длина любого звена меньше е/2.
Докажем теперь непрерывность функции s(t).
По данному е>0 построим ломаную со свойствами а), б), в)
и соответствующее этой ломаной разбиение сегмента [а, р]. Пусть
точка М на кривой L отвечает значению /=/*. Обозначим через
б наименьшую из длин сегментов [/*—i, t], [/, 6ж]. Если 0<А/<б,
то s(t)<s(t+ At) <s(tk+\). Отсюда вытекает, что
0< s (t + At)—s(t) <s(/ft+1)—s(/)<e,
так как длина дуги, стягиваемой звеном ломаной, меньше е.
Случай —б<Д/<0 рассматривается аналогично.
Таким образом,
\s(t + At)—s(OI <е,
если только |Д^|<6.
В силу произвольности выбора точки М на кривой L непрерыв-
ность функции s(t) на сегменте [а, р] доказана. *
Пусть S — длина кривой L. Вследствие того что функция s=
=s(/) на сегменте [а, р] строго возрастает от нуля до S и непре-
рывна, на сегменте {О, S] существует строго возрастающая и не-
прерывная функция t=t(s). Это означает, что параметр t на
спрямляемой кривой есть строго монотонная и непрерывная функ-
ция длины дуги s. Отсюда следует, что на спрямляемой простой
кривой в качестве параметра может быть выбрана длина дуги $.
24
Такая параметризация спрямляемой кривой называется натураль-
ной или естественной, а параметр $ (длина дуги) —натуральным
параметром.
Задача. Доказать, что для спрямляёмости простой кривой L
необходимо и достаточно, чтобы функции <р (/), ф(/), х(0 были
функциями ограниченной вариации.
Замечание. Понятие длины дуги можно ввести и для кри-
вых, заданных параметрически. Длина дуги такой кривой по опре-
делению равна сумме длин простых кривых, из которых она со-
ставлена, при условии, что эта сумма ограничена. И в этом слу-
чае длина дуги может быть параметром на кривой.
2°. Достаточные условия спрямляемости
ТЕОРЕМА 3. Пусть простая кривая L задана векторной функ-
цией г(/) =ф(05 + Ф(0j + x(O^> а<Т<р. Тогда если функции
ф'(0, ФЧО, хЧО непрерывны на сегменте [а, р] то кривая L
спрямляема и длина ее дуги может быть вычислена по формуле
(3 _________________₽
зЦИф'\о+ф'2(О+х'2(О^==| |г'(01^- (1)
а а
* Пусть 1(2)) — длина вписанной в кривую L ломаной, отве-
чающей разбиению 2) сегмента [а, р] на частичные сегменты
ti\ точками а=^о<^1<-•-<^-i<^=₽- Имеем
I (®)=f /{ф (/г)-ф (^-i)}2 + {Ф (^)~Ф (6-1)}2 + {х (h) ~ X (W)}a=
1=1
=% д^, (2)
г=1
где t'l, t’l, t'i' Zf], = —
(для разностей в фигурных скобках мы применили формулу ко-
нечных приращений).
Так как функции tp'(t), ф'(0> хЧО непрерывны на сегменте
[а, р], то они ограничены по абсолютной величине некоторой по-
стоянной С. Поэтому из формулы (2) вытекает, что
0</(®)<CV3(p-a),
т. е. множество длин ломаных, вписанных в кривую L, ограниче-
но. Тем самым L — спрямляемая кривая.
Перейдем к обоснованию формулы (1). Предварительно запи-
шем выражение для интеграла в этой формуле следующим об-
разом:
25
0 ₽ __________________
j I r' (/) I dt= $ /ф'2 (t) + r2 (0 + X'2 (0 dt =
a a
n *i-------------------
$ v/(w,s(o+x,2(^=
= f (X)4V£Hx^)A^, (3)
i=l
где ti] (для интегралов под знаком суммы мы восполь-
зовались формулой среднего значения).
Сравним интеграл 1г'(01 dt и длину ломаной 1(0). Из соот-
a
ношений (2) и (3), воспользовавшись неравенством
I а\ + ... 4- йп—Ь\ + ... + Ьп | sC I й-i—Ьх | + • • • + I ап—Ьп j,
получаем, что
₽
| j |г'(0| ^-/(0)|<
a
<£ i^r(o) +Ф'2й)+7Ж) -/ф'2(О)+^'2(4)+х'2(о")| дос.
г=1
{|ф'(0)-ф'(0)| + 1Ф'(7г)-Ф'(6')! + 1х'(0)-х'(0')1} АО.
i=i
Пусть s>0 — данное число. По свойству равномерной непре-
рывности функций ф7(0, 'Ф/(0, 7.' (0 из последнего соотношения
следует, что для всех достаточно мелких разбиений сегмента
[а, р] выполняется неравенство
Р
| j ;r'(oi^-/(<Z))|<s. (4)
a
Так как S — точная верхняя грань множества {1(0)}, то среди
длин 1(0), отвечающих достаточно мелким разбиениям сегмента
[а, р], найдутся такие, для которых справедливо неравенство (4)
и неравенства
0<S—/(®)<е. (5)
Равенство (1) вытекает из соотношений (4) и (5) в силу про-
извольности е. *
26
СЛЕДСТВИЕ 1. Пусть выполнены условия теоремы 3 и t —
любая точка сегмента [а, р]. Тогда длина.s(t) дуги AM, где М —
точка кривой L, соответствующая t, равна
t
s(Z)=jj |r'(T)| dr. (6)
а
Из формулы (6) получаем важный вывод.
СЛЕДСТВИЕ 2. Пусть г'(^)=/=0. Тогда существует функция /=
=/(s), обратная функции s=s(i) и дифференцируемая столько
же раз, сколько и функция r(Q.
* Это следует из правила дифференцирования обратных функ-
ций. Например, первая производная
dt _ 1 _ 1
ds ds |г' (t) |
dt
d2t
выражается через первую производную вторая - через
г' (t) и г"(/) и т. д. *
Таким образом, если L — регулярная кривая класса Ck, то при
переходе к натуральному параметру $ она также будет регуляр-
ной кривой класса Ch.
Замечание. Если длина дуги кривой выбрана за параметр,
т. е. t—s, то |r'(s) |=1 (r/2(s) = l) и вектор г"($) ортогонален век-
тору r'(s).
* Действительно, в рассматриваемом случае
Дифференцируя равенство r'2(s) = l, получим, что
(r"(s), r'(s))=0. Последнее означает, что векторы r'(s) и r"(s)
ортогональны. *
Приведем формулу для длины дуги графика гладкой функции
У=Цх), acx^b:
ь __________________________________
V 1 +f’2 (x)dx.
а
Дифференциал дуги.
Из формулы (6) дифференцированием по верхнему пределу t
интеграла получаем, что
s' (0= I г' (01 = ^<р'2(О + Ф'2 (0+х,2(0-
Отсюда, учитывая, что
s’ (t)dt=ds, <р' [t)dt—d((>, ty’(t)dt= dty, (t)dt=d%,
27
приходим к формуле для дифференциала дуги
dsi=dx2 + dyi + dzi.
§ 4. СОПРИКАСАЮЩАЯСЯ ПЛОСКОСТЬ
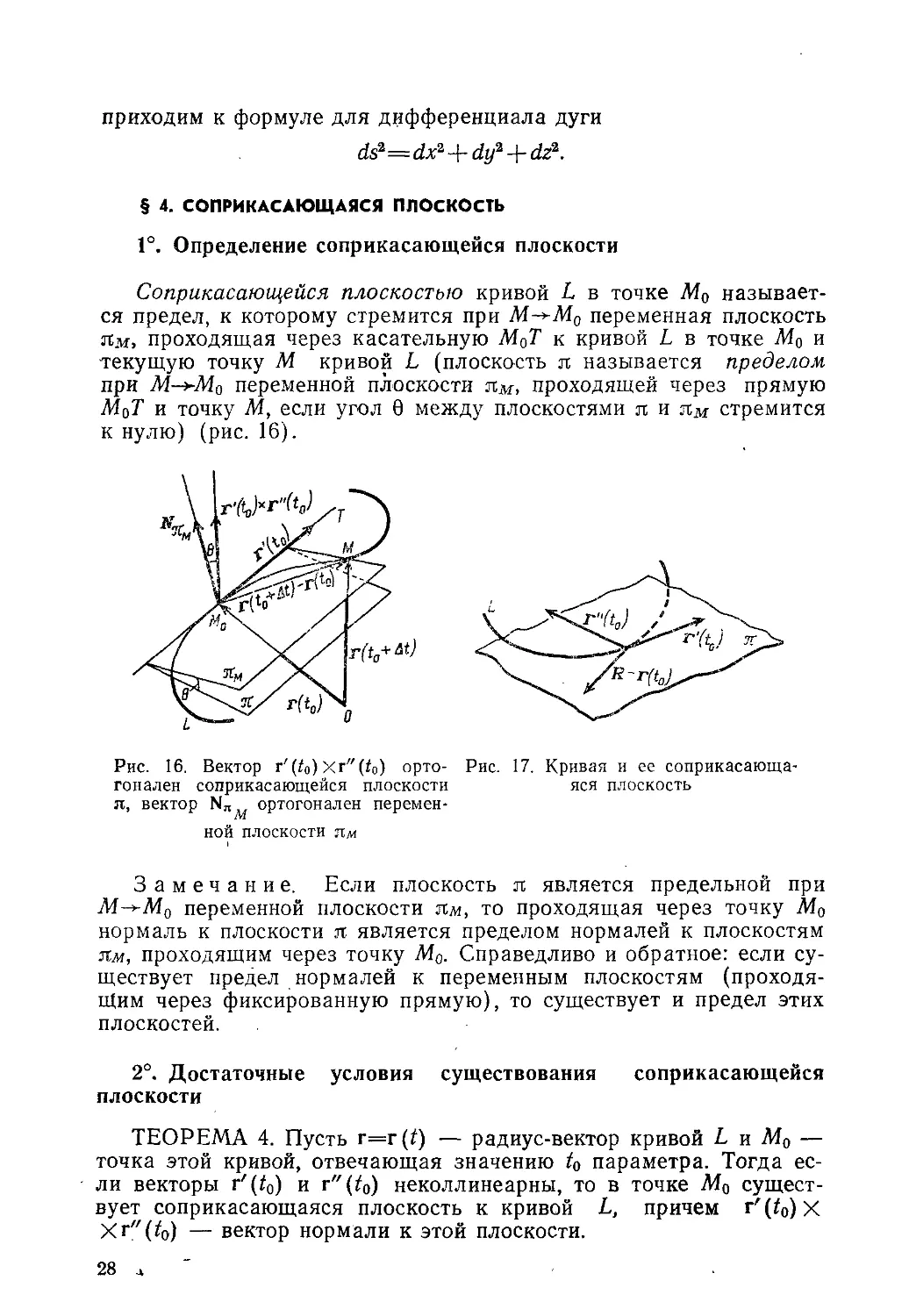
1°. Определение соприкасающейся плоскости
Соприкасающейся плоскостью кривой L в точке Мо называет-
ся предел, к которому стремится при М-^М0 переменная плоскость
Ли, проходящая через касательную М0Т к кривой L в точке Af0 и
текущую точку М кривой L (плоскость л называется пределом
при М-^-Мо переменной плоскости Лм, проходящей через прямую
М0Т и точку М, если угол 0 между плоскостями л и лм стремится
к нулю) (рис. 16).
Рис. 16. Вектор r'(/o) Xr"(f0) орто-
гонален соприкасающейся плоскости
л, вектор ортогонален перемен-
ной плоскости ям
Рис. 17. Кривая и ее соприкасающа-
яся плоскость
Замечание. Если плоскость л является предельной при
переменной плоскости лм, то проходящая через точку Мо
нормаль к плоскости л является пределом нормалей к плоскостям
ям, проходящим через точку Мо. Справедливо и обратное: если су-
ществует предел нормалей к переменным плоскостям (проходя-
щим через фиксированную прямую), то существует и предел этих
плоскостей.
2°. Достаточные условия существования соприкасающейся
плоскости
ТЕОРЕМА 4. Пусть r=r(t) — радиус-вектор кривой L и Мо —
точка этой кривой, отвечающая значению t0 параметра. Тогда ес-
ли векторы г'(/о) и г"(/0) неколлинеарны, то в точке Af0 сущест-
вует соприкасающаяся плоскость к кривой L, причем г'(£0)Х
Хг"(А)) — вектор нормали к этой плоскости.
28 а
* Покажем, что вектор
N"m r' (Zo) X (г & + А0-г О
нормали к переменной плоскости ям имеет при М-+Мо пределом
вектор г'(t0) Xг"(4)¥=0. Согласно замечанию предыдущего пункта
предельный вектор и будет вектором нормали к соприкасающейся
плоскости л.
Проведем некоторые преобразования вектора нормали к
плоскости ям. По формуле Тейлора имеем
г (t0 + А/)—г (/0)=r' (t0) М + -j- г" (to) AZ2 + о (AZ2).
Поэтому
г' (to) X (г (t0 + AZ)—г (ta))=-№ {г' (to) X г" (t0) + а (А/)}, (1)
где a(AZ)->0 при АС+0.
Поделим обе части соотношения (1) на — Ы2. Переходя к
пределу при АС^О, т. е. при М-^М0, получим, что
NnM=r' (Q X r"(Q+a(A0 г' (t0) X г" (/0). *
Д/->0
Замечание. Соприкасающейся плоскости можно придать и
механический смысл. В начале главы мы говорили о том, что па-
раметрическое (а следовательно, и векторное) задание кривой L
может быть интерпретировано как закон механического движения
точки по траектории L. Тогда r'(Z) — вектор скорости движущей-
ся точки, а г"(t) — вектор ее ускорения. Оба этих вектора рас-
положены в соприкасающейся плоскости (r'(t)xr"(t) — вектор
ее нормали). А так как определение соприкасающейся плоскости
не зависит от выбора параметризации (инвариантно), то эту плос-
кость можно рассматривать как плоскость ускорений: при любом
законе движения точки по кривой L вектор ее ускорения r"(t)
расположен в одной и той же плоскости — соприкасающейся
плоскости к кривой L в точке M(t). .
Пусть R — вектор произвольной точки соприкасающейся плос-
кости л. Тогда векторы R—r(Z0), г'(/0), r"(Z0), будучи отложены
от точки M(t0), расположатся в соприкасающейся плоскости я
(рис. 17). Поэтому их смешанное произведение будет равно нулю:
(R-r(^), г'(t0), г" 0=0. (2>
Формула (2) — уравнение соприкасающейся плоскости кри-
вой L в точке Л40.
29>
Запишем уравнение (2) в координатах.
Если х, у, z — координаты вектора R, а <р(£), ф(0> х(0 — ко-
ординаты вектора г (£), то соотношение (2) можно записать так:
х—ф(*о) у—Ш) х(А>)
ф'(^о) Wo) x'(Q
Ф"(*о) Wo) Х"(А>)
3°. Главная нормаль
и бинормаль кривой. Основной триэдр
Любая прямая, проходящая через точку М кривой L перпен-
дикулярно касательной к кривой L в точке М, называется нор-
малью кривой L в точке М.
Нормаль, расположенная в соприкасающейся плоскости кри-
вой L в точке М, называется главной нормалью, а нормаль, пер-
пендикулярная этой соприкасающейся плоскости, —• бинормалью.
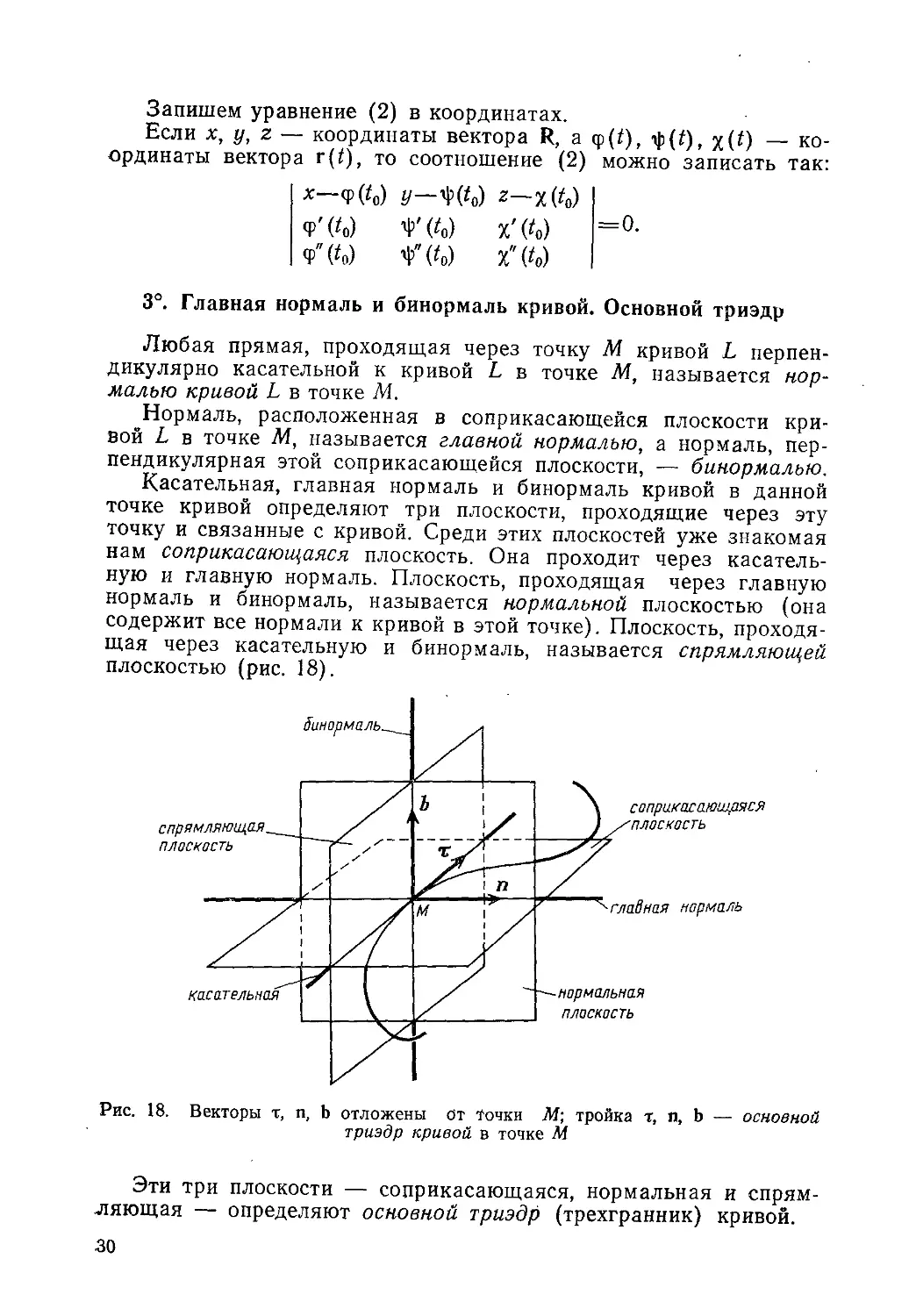
Касательная, главная нормаль и бинормаль кривой в данной
точке кривой определяют три плоскости, проходящие через эту
точку и связанные с кривой. Среди этих плоскостей уже знакомая
нам соприкасающаяся плоскость. Она проходит через касатель-
ную и главную нормаль. Плоскость, проходящая через главную
нормаль и бинормаль, называется нормальной плоскостью (она
содержит все нормали к кривой в этой точке). Плоскость, проходя-
щая через касательную и бинормаль, называется спрямляющей
плоскостью (рис. 18).
Рис. 18. Векторы т, n, b отложены от Точки М; тройка т, я, b — основной
триэдр кривой в точке Af
Эти три плоскости — соприкасающаяся, нормальная и спрям-
ляющая — определяют основной триэдр (трехгранник) кривой.
30
Пусть т, n, b — тройка единичных попарно ортогональных
векторов, отложенных от точки М и направленных соответствен-
но по касательной, главной нормали и бинормали. Ориентация
этих векторов обычно выбирается следующим образом: вектор т
сонаправлен с вектором г', конец вектора и лежит в той полуплос-
кости соприкасающейся плоскости (с границей по касательной),
куда указывает вектор г". Вектор b выбирается так, чтобы тройка
т, и, b была правой.
Впрочем, в зависимости от рассматриваемого вопроса возмож-
ны и другие ориентации векторов т, п, Ь.
Задача. Составить уравнения касательной, главной норма-
ли и бинормали кривой, а также нормальной и спрямляющей
плоскостей.
§ 5. КРИВИЗНА И КРУЧЕНИЕ. ФОРМУЛЫ ФРЕНЕ
1°. Кривизна кривой
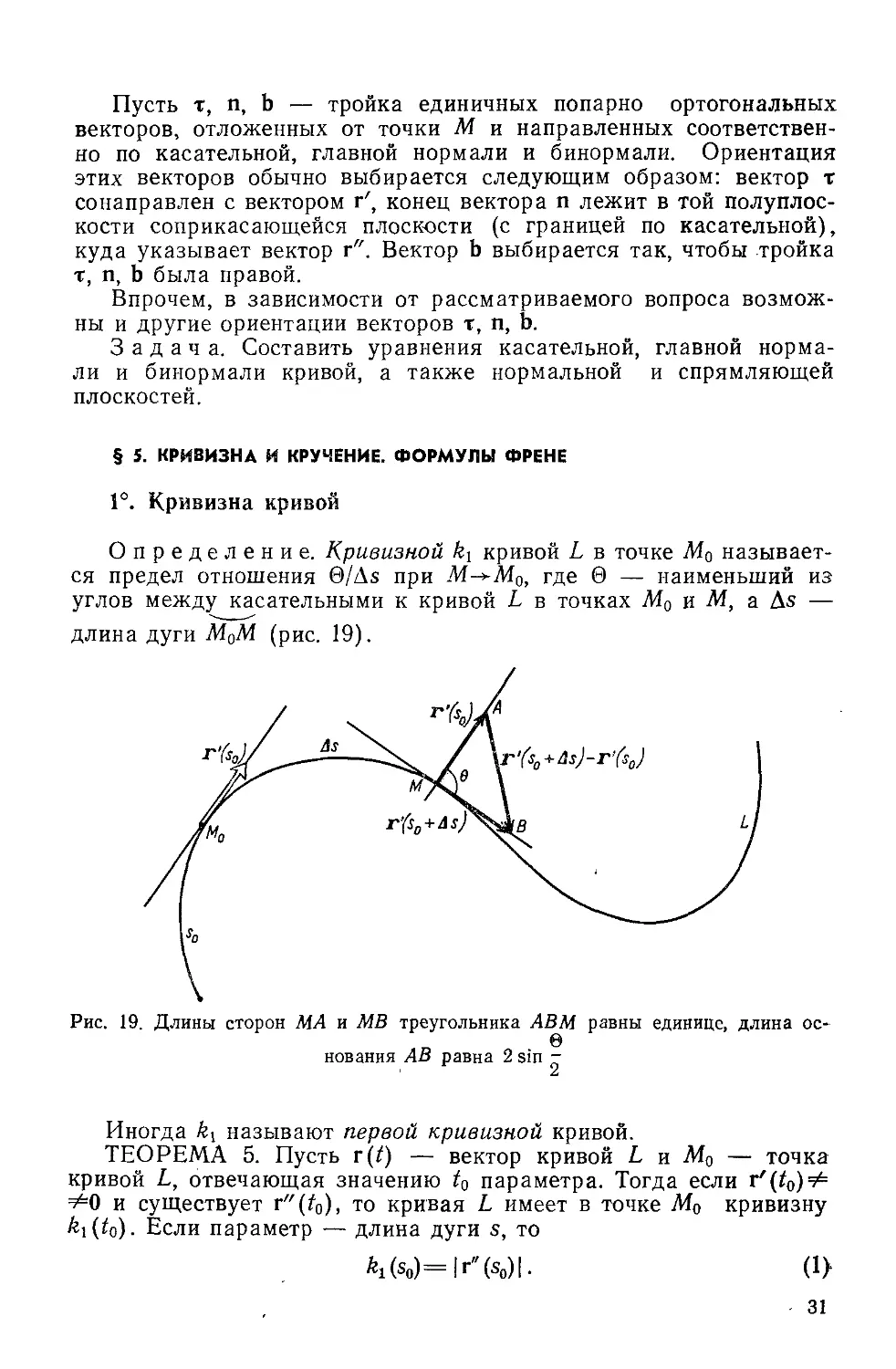
Определение. Кривизной k{ кривой L в точке Л40 называет-
ся предел отношения 0/As при М-+Мо, где 0 — наименьший из
углов между касательными к кривой L в точках Л40 и М, a As —
длина дуги М0М (рис. 19).
Рис. 19. Длины сторон МА и МВ треугольника АВМ равны единице, длина ос-
0
нования АВ равна 2 sin -
Иногда k\ называют первой кривизной кривой.
ТЕОРЕМА 5. Пусть r(t) — вектор кривой L и Мо — точка
кривой L, отвечающая значению t0 параметра. Тогда если г'(/0)^
=5^=0 и существует г"(^0), то кривая L имеет в точке Мо кривизну
&1(^о). Если параметр — длина дуги s, то
fel(so)=|r"(so)|. (1>
31
Для произвольной параметризации
k1(to)=
|г'(Ml3
* Пусть параметр — длина дуги s. Тогда |r'(s) | = 1 (см. заме-
чание пункта 2° § 3). Поэтому
| г' (s„ + As)—г' (s0) | = 2 sin -у.
(2)
Отсюда получаем, что
в
1 sin— „
|г' (s0 + As) — г' (so) | = 2 О
As 6. As
Т
Перейдем в последнем равенстве к пределу при М->~М0. Так
как и As—>-0 и 0—>0, то предел левой части существует и равен
|r"(So)|. Значит, существует и предел правой части £i(s0).
Таким образом, кривая L имеет в точке Л40 кривизну, и фор-
мула (1) обоснована.
Вспоминая, что
i = |r-W| = Vr-^
(см. формулу (6) пункта 2° § 3), для произвольной параметриза-
ции имеем
, dr dr ds _ dr
dt ds dt ds Г ’
Дифференцируя г' еще раз no t, получим, что
„ d2r ,2 . dr (г', г")
г =-------------------------- г 4---• .
ds2 ds ' Yr'2
Возведем обе части последнего равенства в квадрат.
, , dr d2r
Учитывая ортогональность векторов ------ и —- и равенства
ds ds2
[ d2r \2 ,2 ( dr \2 ,
\ dsa / \ ds /
приходим к соотношению
откуда
k2= г'2 ' г"2~ (г>> г")а |г' х г"|а
1 (г'2)3 |г')в
После извлечения квадратного корня получаем формулу (2). *
32
Замечание 1. Если векторы г' и rz/ неколлинеарны, то, как
видно из формул '(1) и (2), &i¥=0. И наоборот, если &1=#0, то’век-
торы г' и г" неколлинеарны.
Кривизна плоской кривой, заданной параметрическими урав-
нениями x—x(t), y=y(t), вычисляется по формуле
Ь \Х’У”-Х”У'\
(хл + у'2^2
Кривизна графика функции y=f(x) может быть найдена по
формуле
k-_____\г\___
1 (1 + /'2)3/2>
Замечание 2. Иногда кривизне плоской кривой приписы-
вают знак. Обычно его связывают с направлением вращения ка-
сательной к кривой по отношению к оси Ох: если это вращение
против часовой стрелки, то &i>0, если по часовой стрелке, то
&i<0. При таком подходе знак кривизны кривой — графика функ-
ции y=f(x) —совпадает со знаком второй производной f". Поэто-
му
Г
К1~(1+Л2)3/2’
Непосредственными вычислениями можно показать, что кри-
визна прямой равна нулю, а кривизна окружности радиуса R рав-
на 1/7?.
Верно и обратное: если кривизна кривой равна нулю, то эта
кривая есть связное множество на прямой, а если кривизна плос-
кой кривой равна положительной постоянной а, то эта кривая —
дуга окружности радиуса 1/а.
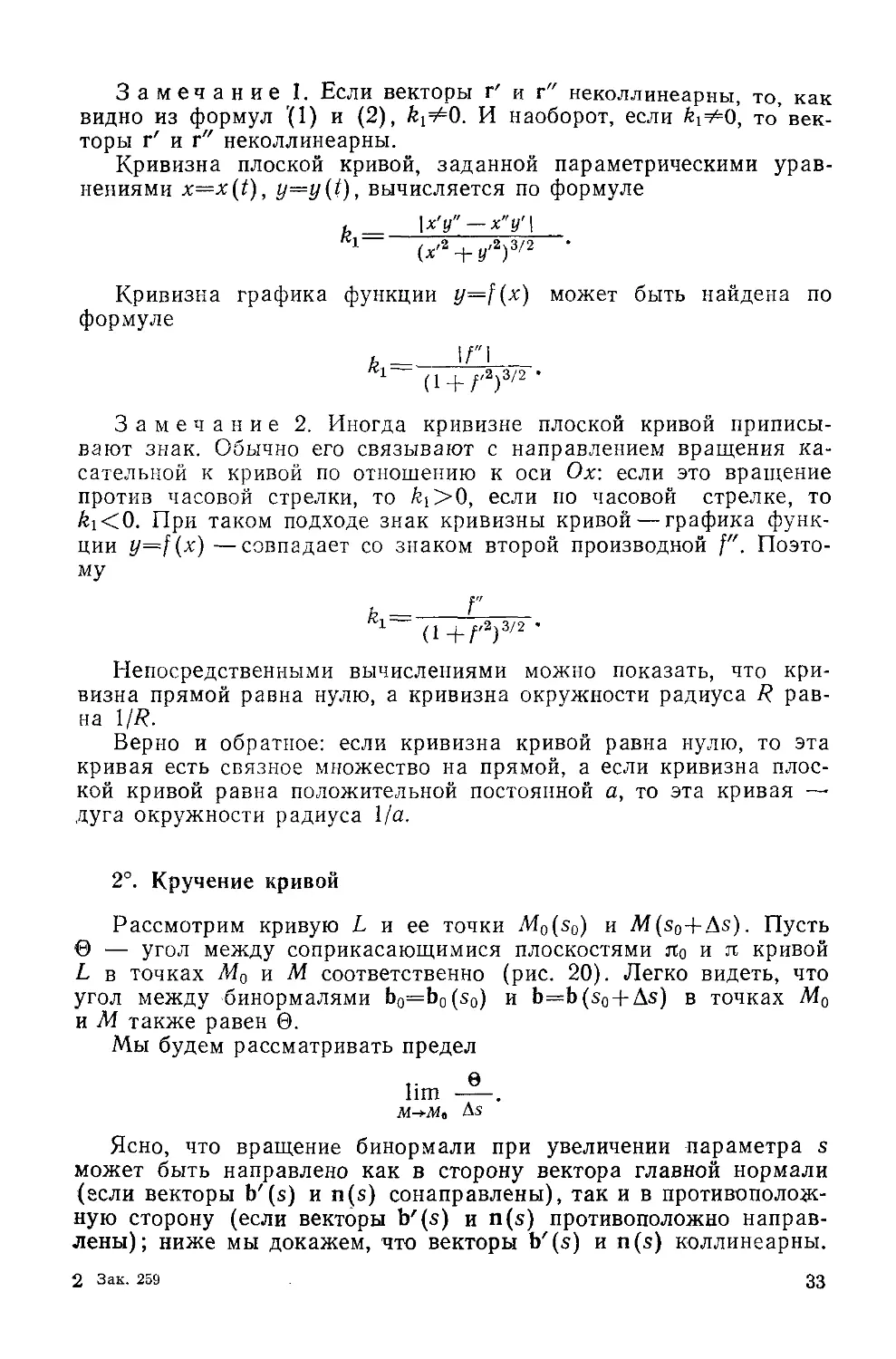
2°. Кручение кривой
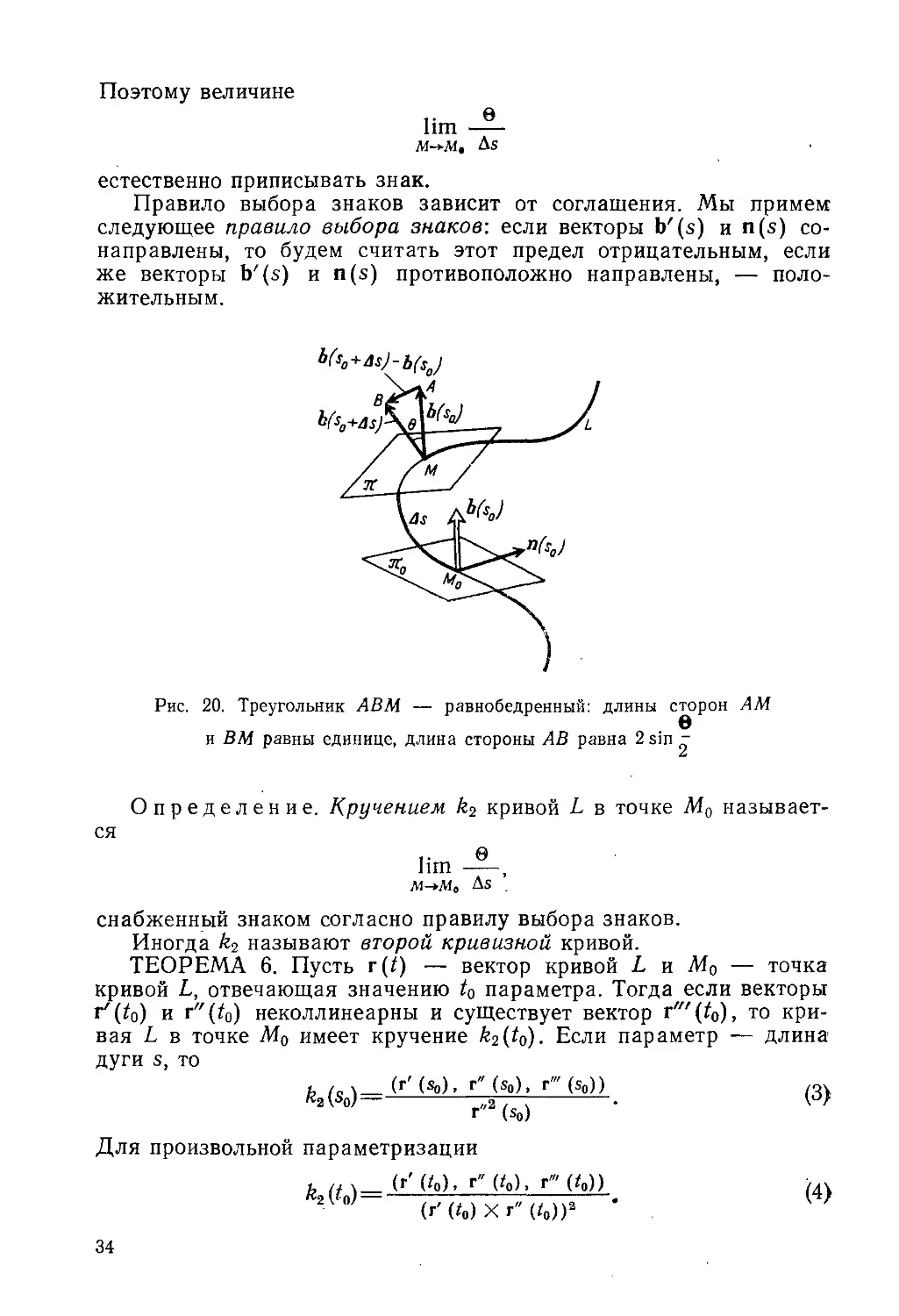
Рассмотрим кривую L и ее точки Мо($о) и M(s0+As). Пусть
0 — угол между соприкасающимися плоскостями л0 и л кривой
L в точках Мо и М соответственно (рис. 20). Легко видеть, что
угол между бинормалями b0=b0(s0) и b=b(s0 + As) в точках Мо
и М также равен 0.
Мы будем рассматривать предел
1- ©
lira --.
As
Ясно, что вращение бинормали при увеличении параметра s
может быть направлено как в сторону вектора главной нормали
(если векторы bz(s) и n(s) сонаправлены), так и в противополож-
ную сторону (если векторы b'(s) и n(s) противоположно направ-
лены); ниже мы докажем, что векторы bz(s) и n(s) коллинеарны.
2 Зак. 259 33
Поэтому величине
1- ©
lim -----
М-+М, &S
естественно приписывать знак.
Правило выбора знаков зависит от соглашения. Мы примем
следующее правило выбора знаков-, если векторы b'(s) и n(s) со-
направлены, то будем считать этот предел отрицательным, если
же векторы bz(s) и n(s) противоположно направлены, — поло-
жительным.
Рис. 20. Треугольник АВМ — равнобедренный: длины сторон AM
6
и ВМ равны единице, длина стороны АВ равна 2 sin -
Определение. Кручением k2 кривой L в точке Мо называет-
ся
г ©
игл -------------------------,
м->м„ As .
снабженный знаком согласно правилу выбора знаков.
Иногда k2 называют второй кривизной кривой.
ТЕОРЕМА 6. Пусть г(() — вектор кривой L и Мо — точка
кривой L, отвечающая значению t0 параметра. Тогда если векторы
г7(t0) и г"(t0) неколлинеарны и существует вектор г"'(to), то кри-
вая L в точке Мо имеет кручение k2(t0). Если параметр — длина
дуги s, то
k2 fa) - (r'(So)’ r"(So)’ r",(So))
Г"2 (So)
(3)
Для произвольной параметризации
k x (/ (to), r" (to), r"’ (t„))
(r' (t0) X г" (t0))2
(4>
34
* Пусть параметр — длина дуги s. Так как векторы r'(s0) и
r"(s0) неколлинеарны, то по непрерывности они неколлинеарны и
в некоторой окрестности точки Л40. Возьмем точку М кривой L из
этой окрестности. Согласно теореме 4 в точках Л40 и М существу-
ют соприкасающиеся плоскости кривой, а следовательно, и бинор-
мали b0=b(s0) и b=b(s0 + As). Имеем
0
Sin--
1 b (So + As) - b (So) | 2 _ 0 .
As 0 As ’
2
При M-^M0 и As->0 и 0->O. Поэтому предел левой части послед-
него равенства существует и равен |b''(s0)|. Значит, существует
предельное значение правой части. Нетрудно видеть, что оно рав-
но (50)
Таким образом,
| b' (s0) | = | k2 (s0) |. (5)
Выше, при формулировке правила выбора знаков, мы пользо-
вались коллинеарностью векторов Ь'(з0) и n(s0). Докажем,
что векторы Ь''(х0) и n(s0) всегда коллинеарны. Для
этого достаточно убедиться в том, что вектор b' (s0)
ортогонален векторам b(s0) и t(s0) (напомним, что п=ЬХт).
Вектор Ь'(з0) ортогонален вектору Ь(з0), так как из равенства
Ь2=1 вытекает, что (Ь', Ь)=0.
Покажем, что вектор b'(s0) ортогонален вектору t(s0). Так как
вектор г'(зо) — единичный и направлен по касательной, то
r'(s0)=r(s0). Вектор r"(s0) ортогонален вектору r'(s0) и лежит в
соприкасающейся плоскости (см. замечание пункта 2° § 4). Тем са-
мым, вектор т'(3о)=г,/(5о) коллинеарен (даже сонаправлен) век-
тору n (s0), т. е. т'(sa) X n (s0) =0.
Дифференцируя равенство Ь=тХп, получим, что Ь'=тХп'. Та-
ким образом, вектор b'(s0) ортогонален вектору t(s0).
Итак, векторы Ь' и п коллинеарны. Отсюда и из формулы (5)
согласно правилу выбора знаков следует, что Ь'=—k2n и, далее,
k2—— (b', и). (6)
Подставляя в формулу (6) выражения для векторов и и Ь':
получим, что
ь ; (г', г", г'")
2*
35
^=4-+Лг',
ds2 г'2
Таким образом, кривая L в точке Мо имеет кручение, и фор-
мула (3) обоснована. -
Для произвольной параметризации имеем (дифференцирование
по t отмечается штрихами):
dr __ г'
ds 1/ ,2
у г
d3r _ г'"
ds3 ”
где А, В, С — некоторые скалярные величины. Подставляя полу-
ченные выражения для производных
dr d2r <й-
ds ’ ds2 ’ ds3
в числитель дроби формулы (3) и вспоминая, что
d2r \2_ (г' х г")2
ds2 ) г'6
после несложных вычислений получим формулу (4). *
Замечание. Кручение кривой измеряет скорость отклоне-
ния этой кривой от ее соприкасающейся плоскости. Для плоской
кривой #2=0. Верно и обратное: если кручение кривой всюду
равно нулю, то кривая плоская.
3°. Формулы Френе *
ТЕОРЕМА 7. Пусть L — С3-регулярная кривая, $ — длина
дуги кривой L, t=t(s), n=n(s), b=b(s) — векторы основного три-
эдра, #i(s) и k2(s) — кривизна и кручение кривой L. Тогда спра-
ведливы соотношения
т' = #,п,
п' = — kjT + #2Ь, (7)
Ь'= —#2п.
Соотношения (7) называются формулами Френе.
* Так как т=г' (s), т'=г"(з) и вектор г" сонаправлен с векто-
ром п, причем |г" | =#! (см. формулу (1)), то т'=#1П. Первая фор-
мула Френе доказана.
Третья формула была получена нами в процессе доказательст-
ва теоремы б.
Для обоснования второй формулы продифференцируем равен-
ство п=Ьхт. Имеем
п'=Ь' ХтфЬ X т' = —#2п X т + #1Ь X п= —#хт4-#2Ь. *
* Френе (Frenet) Жан Фредерик (7.2.1816—12.6.1900) — французский ма-
тематик.
36
4°. Вид кривой вблизй данной точки
Поместим начало координат в данную точку Л40 кривой L, так
что r(s0)=O. Тогда по формуле Тейлора с центром разложения в
точке so=O имеем
г (s)=г' (0) s + — г" (0) s2 + — г(0) s3 + о (s3). (8)
2 6
Преобразуем правую часть этой формулы, используя векторы т,
п, Ь, взятые в точке so=O. Так как г'(0)=т, г" (0)=т'=^1п, rw(0)=
= &i'n—^т + ^гЬ, то, подставляя эти выражения в формулу (8),
получим
r(s)i=sfs----т + / П ““ s3b И-о (s3). (9)
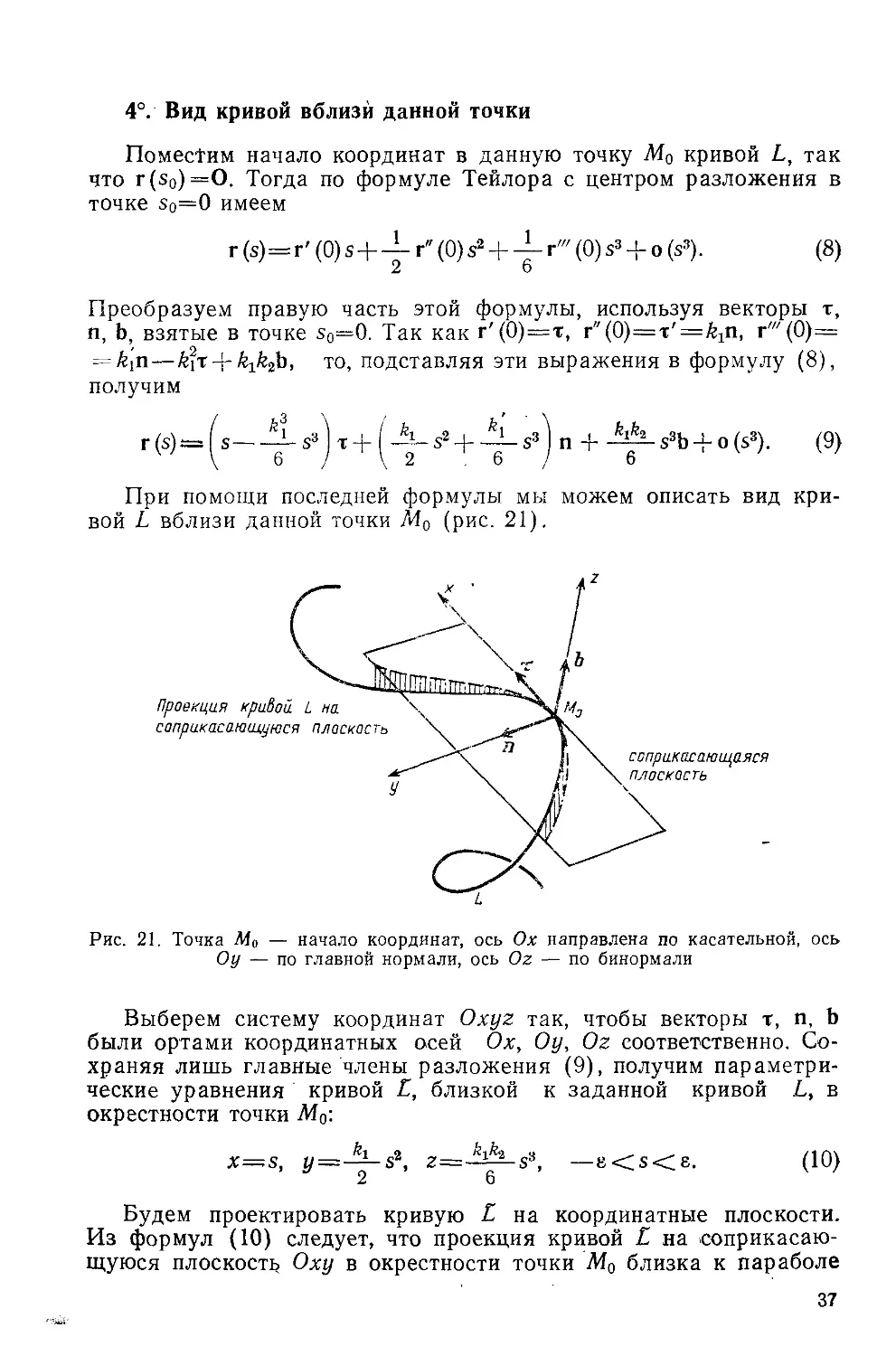
При помощи последней формулы мы
вой L вблизи данной точки 2И0 (рис. 21).
можем описать вид кри-
Рис. 21. Точка Af0 — начало координат, ось Ох направлена по касательной, ось
Оу — по главной нормали, ось Oz — по бинормали
Выберем систему координат Oxyz так, чтобы векторы т, n, b
были ортами координатных осей Ох, Оу, Oz соответственно. Со-
храняя лишь главные члены разложения (9), получим параметри-
ческие уравнения кривой L, близкой к заданной кривой L, в
окрестности точки Мо:
X = S, у —-A-s2, ? = s3, —e<s<s. (10)
Будем проектировать кривую L на координатные плоскости.
Из формул (10) следует, что проекция кривой £ на соприкасаю-
щуюся плоскость Оху в окрестности точки Мо близка к параболе
37
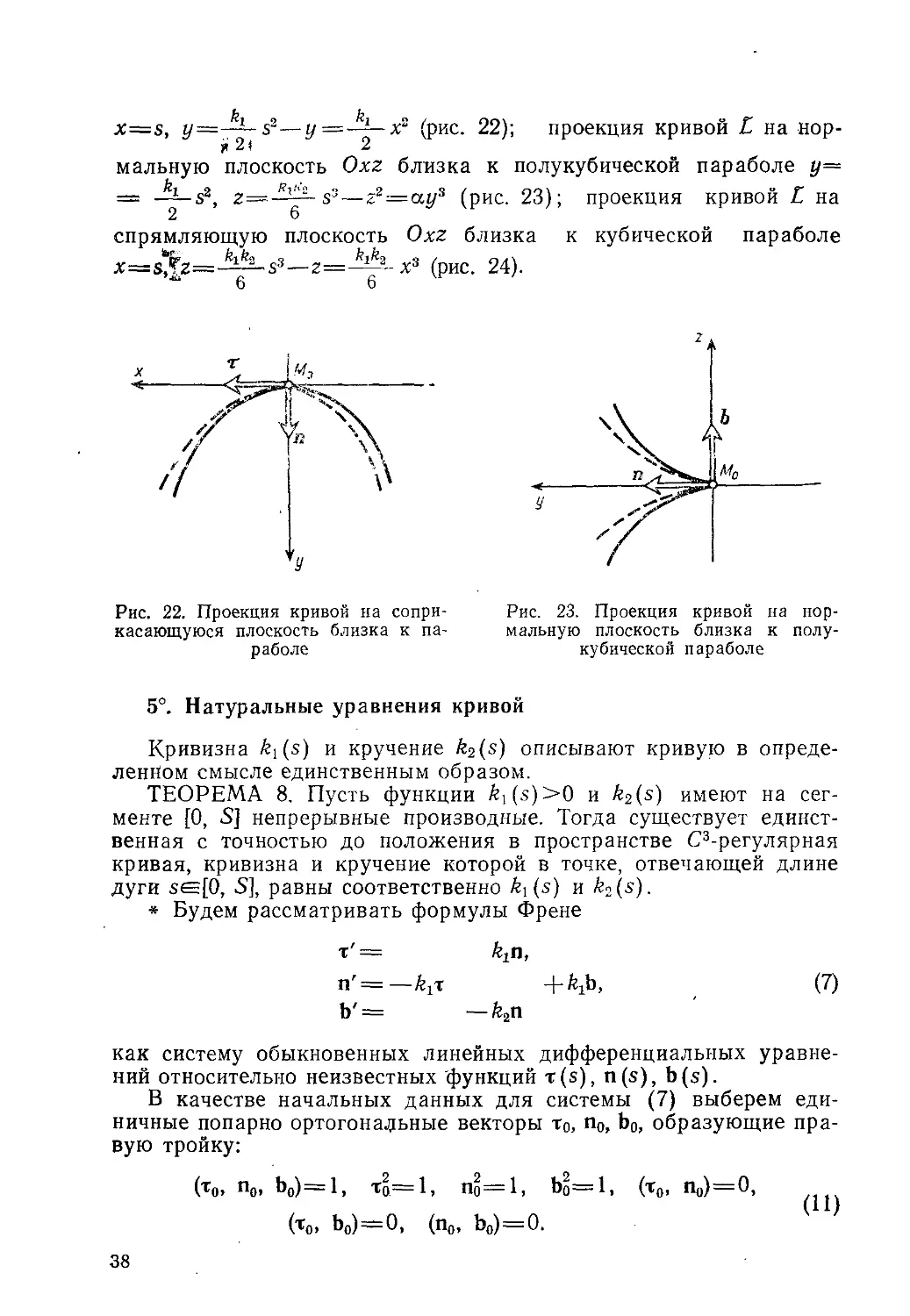
x=s, y—^-s2—y=—-x2 (рис. 22); проекция кривой £ на нор-
мальную плоскость Oxz близка к полукубической параболе у=
= -^-s2, s”—z2=ay3 (рис. 23); проекция кривой £ на
спрямляющую плоскость Oxz близка к кубической параболе
z=-1A-x3 (рис. 24).
’*• 6 6
У
Рис. 22. Проекция кривой на сопри-
касающуюся плоскость близка к па-
раболе
Рис. 23. Проекция кривой на нор-
мальную плоскость близка к полу-
кубической параболе
5°. Натуральные уравнения кривой
Кривизна ki(s) и кручение А2(«) описывают кривую в опреде-
ленном смысле единственным образом.
ТЕОРЕМА 8. Пусть функции йД5)>0 и k2(s) имеют на сег-
менте [О, S] непрерывные производные. Тогда существует единст-
венная с точностью до положения в пространстве С3-регулярная
кривая, кривизна и кручение которой в точке, отвечающей длине
дуги se[0, 5], равны соответственно kx (5) и k2(s).
* Будем рассматривать формулы Френе
т' = k±n,
п' =—k±x +k1b, (7)
b' = — fe2n
как систему обыкновенных линейных дифференциальных уравне-
ний относительно неизвестных функций t(s), n(s), b(s).
В качестве начальных данных для системы (7) выберем еди-
ничные попарно ортогональные векторы т0, п0, Ьо, образующие пра-
вую тройку:
(т0, п0, Ьо)=1, То=1, По=1, Ьо=1, (т0, по)=0,
(То, Ьо)=О, (По, Ьо)=О.
38
При сформулированных условиях согласно теореме существо-
вания и единственности решения задачи Коши * для системы обык-
новенных дифференциальных уравнений существует единственное
решение t(s), n(s), b(s) системы (7) класса С1 на сегменте
[О, S], удовлетворяющее начальным условиям
т(О)=то, n(O)=no, Ь(О)=Ьо.
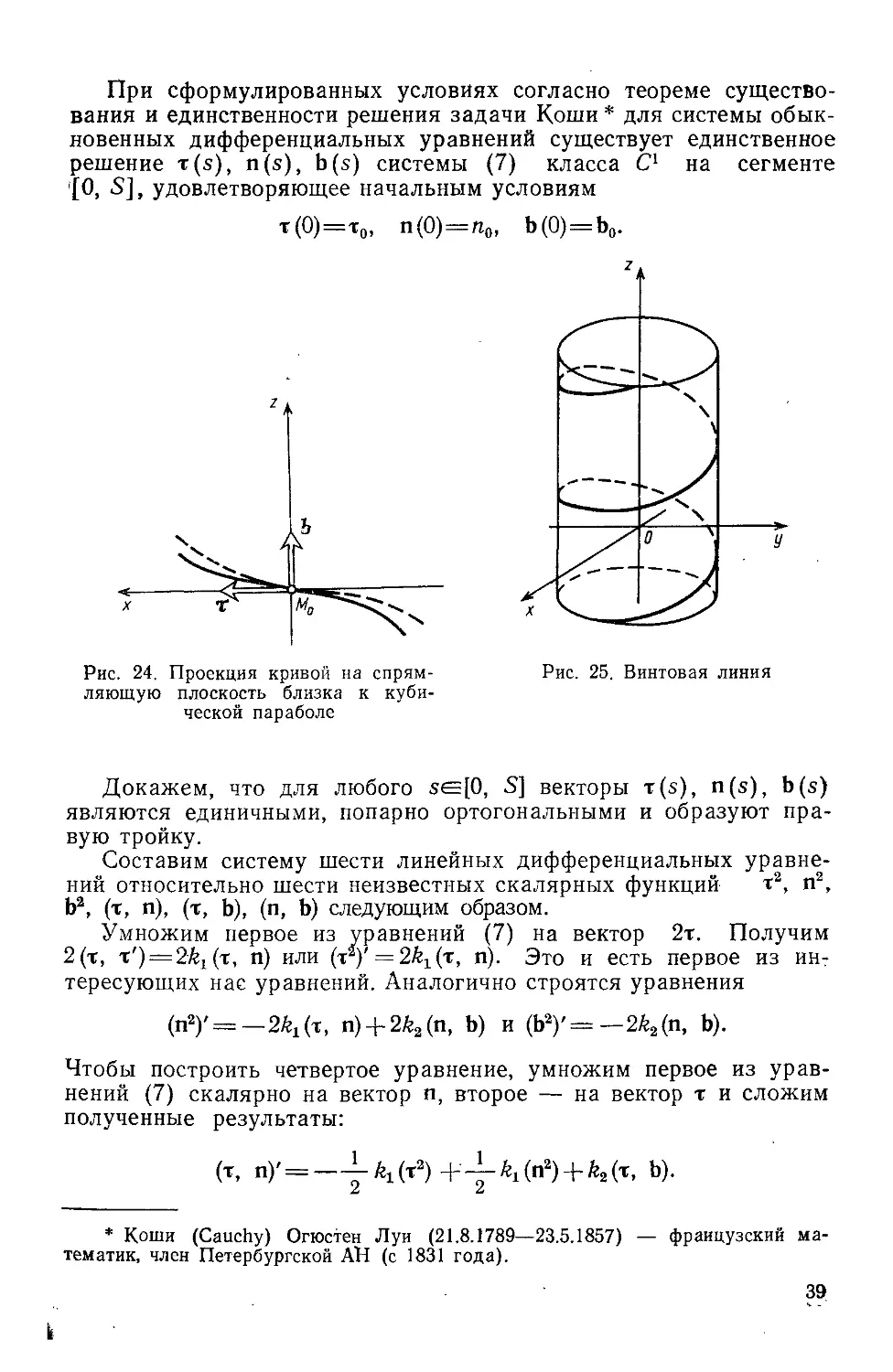
Рис. 24. Проекция кривой на спрям-
ляющую плоскость близка к куби-
ческой параболе
Докажем, что для любого se[0, S] векторы t(s), n(s), b(s)
являются единичными, попарно ортогональными и образуют пра-
вую тройку.
Составим систему шести линейных дифференциальных уравне-
ний относительно шести неизвестных скалярных функций т2, и2,
Ь2, (т, п), (т, Ь), (п, Ь) следующим образом.
Умножим первое из уравнений (7) на вектор 2т. Получим
2(т, т') = 2^1(т, п) или (т2)' = 2&г(т, п). Это и есть первое из ин-
тересующих нас уравнений. Аналогично строятся уравнения
(п2)' = —2^(1, п) + 2£2(п, Ь) и (Ь2)'==—2£2(п, Ь).
Чтобы построить четвертое уравнение, умножим первое из урав-
нений (7) скалярно на вектор п, второе — на вектор т и сложим
полученные результаты:
(т, и)' = —kr (т2) + -у- kY (п2) + k2 (т, Ь).
* Коши (Cauchy) Огюстен Луи (21.8.1789—23.5.1857) — французский ма-
тематик, член Петербургской АН (с 1831 года).
39
Аналогично строятся оставшиеся два уравнения
(т, b)'=— k2(x, п)4-^(0, Ь) и (п, Ь)' =----~-А2(п2) +
+ b).
Полученная система шести уравнений является следствием си-
стемы (7). Поэтому набор функций
t2 = t2(s), n2 = n2(s), b2=b2(s), (т, n)=(t(s), n(s)), (x, b) =
=(t(s), b(s)), (n, b)=(n(5), b(s))
является ее решением и, кроме того, удовлетворяет условиям
(11). Этой же системе и начальным условиям (11) удовлетворяет
набор
т2 = 1, п2=1, b2= 1, (т, п)=0, (т, Ь)=0, (п, Ь)=0,
Вследствие того что начальные условия однозначно определяют
решение системы, получаем
r2(s)=I, n2(s)=l, b2(s)= 1, (t(s), n(s))=O, (t(s), b(s))=O,
(n(s), b(s)) = O.
Это означает, что векторы t(s), n(s), b(s) единичные и по-
парно ортогональные. Поэтому их смешанное произведение равно
(t(s), n(s), b(s))=±l.
Поскольку это произведение непрерывно и равно +1 при s=0, то
оно равно +1 при любом se[0, S], Тем самым векторы t(s), n(s),
b(s) образуют правую тройку.
Рассмотрим кривую L с радиус-вектором
S
r(s)=J x(a)d<j.
о
Так как |r'(s) | = |т($) | = 1, то $ — длина дуги кривой L.
Найдем кривизну и кручение этой кривой. Используя первое
из соотношений (7), по формуле (1) для кривизны имеем
|г"(8)| = |т'(5)|=^(8).
Кручение вычислим по формуле (3), используя соотношения (7)
и только что полученную формулу
(г', г", г"') _ (t, fein, ^п + М') _
г"2 kj
(т, feiti, fejn-f-fe^b) (т, п, b)
40
Итак, кривизна и кручение кривой L в точке, отвечающей ее
длине дуги s, равны соответственно ki(s) и k2(s).
Докажем теперь, что если кривизна и кручение некоторой
другой кривой L равны k\ (s) и k2(s), то она отличается от кривой
L только положением в пространстве.
Переместим кривую L в пространстве так, чтобы ее векторы
т, п, b при s=0 совпали с векторами т0, п0> Ьо кривой L. Убедимся,
что перемещенная кривая L* и кривая L совпадают.
Векторы t*(s), n*(s), b*(s) кривой L* являются решениями
системы (7) (для кривой L* это формулы Френе) с начальными,
данными т0, п0, Ьо. По теореме единственности имеем
r*(s)—t(s), n*(s)=n(s), b*(s)=b(s).
Поэтому r* (s)=r'(s) (r* (s)=t* (s) =т (s) = r'(s)), а так как r*(0) =
= r(0), TO r’(s)sr(s). *
Замечание 1. Функции (s) и k2(s) могут быть заданы и
на другом множестве, например на полупрямой [0, сю) или на
прямой (—сю, сю).
Замечание 2. Систему соотношений
kr=kx(s}, k2 — k2(s)
называют натуральными уравнениями кривой. Согласно доказан-
ной теореме кривая определяется натуральными уравнениями од-
нозначно с точностью до положения в пространстве.
Пример. Найти кривизну и кручение винтовой линии
r(t)={acost, as'mt, bt} (рис. 25).
* Так как г'2 = а2 + Ь2, (г' х r")2 = a2(a2 + b2), (г', г", г"')='а2Ь, то
ki=—-----------------------, k2 =--------,
а2 + Ь2 а2 + Ь2
т. е. кривизна и кручение у винтовой линии постоянны.
Этим свойством обладают только винтовые линии. *
§ 6. СОПРИКОСНОВЕНИЕ КРИВЫХ
1°. Понятие порядка соприкосновения
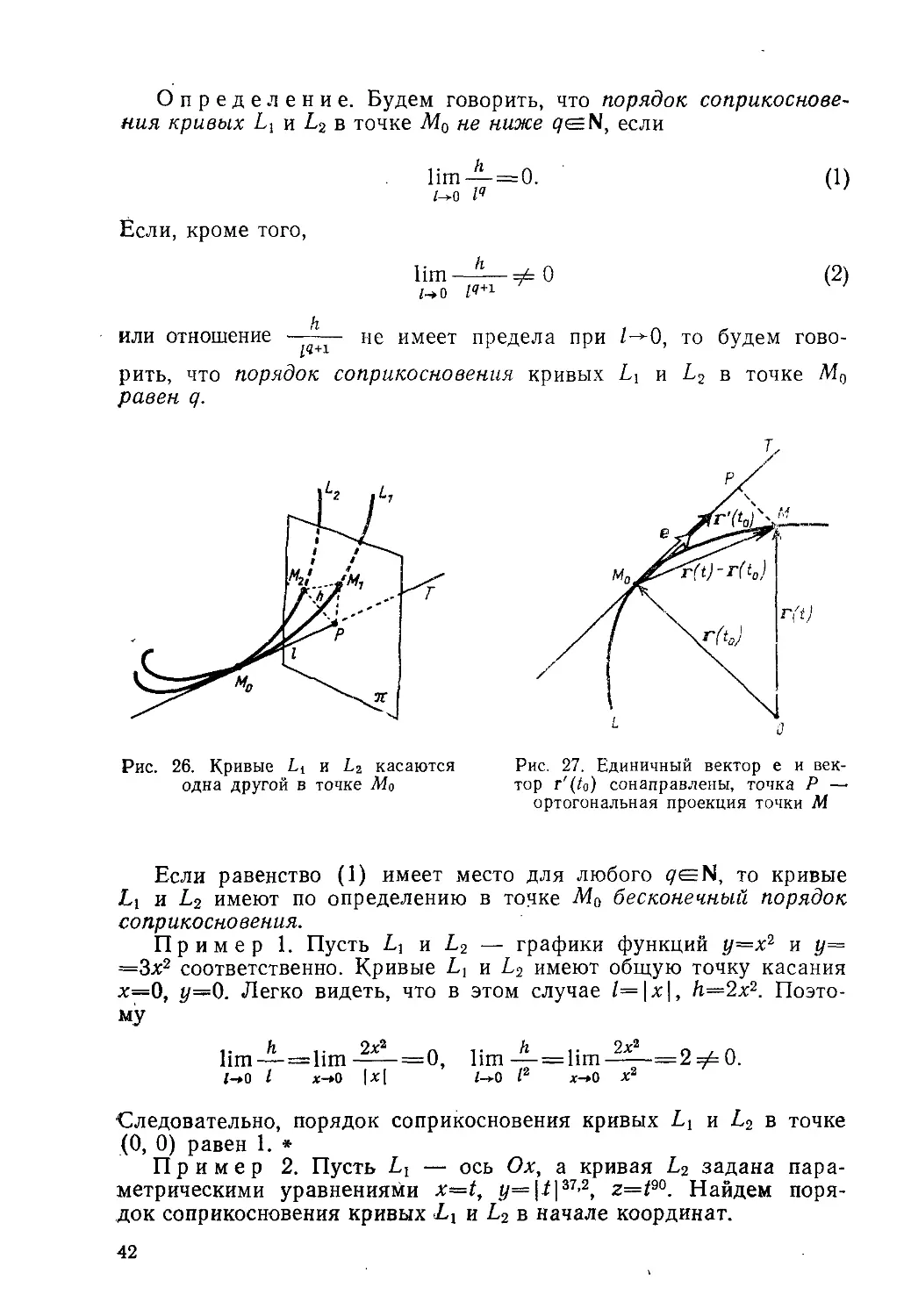
Рассмотрим кривые Lj и L2, проходящие через общую точку
Мо, гладкие в этой точке и имеющие в ней общую касательную
М0Т. Возьмем на прямой М0Т точку Р, близкую к точке Мо, и
проведем через точку Р плоскость л, перпендикулярную М0Т. Эта
плоскость пересечет кривые Li и Ь2 в точках и М2 соответ-
ственно (мы ограничиваем наши рассмотрения теми окрестностя-
ми точки Мо на кривых Lt и L2, которые однозначно проектиру-
ются на касательную М0Т). Обозначим через I длину отрезка
М0Р, а через h — длину отрезка tWitW2 (рис. 26).
41
Определение. Будем говорить, что порядок соприкоснове-
ния кривых и L2 в точке Мо не ниже z/eN, если
Нт—=о. (в
1-+0 Z’
Если, кроме того,
lim—-—0 (2)
z-»o /?+1
h
или отношение не имеет предела при /-*0, то будем гово-
рить, что порядок соприкосновения кривых L| и 12 в точке Мп
равен q.
Рис. 26. Кривые Li и Л2 касаются
одна другой в точке Мц
Рис. 27. Единичный вектор е и век-
тор г'(to) сонаправлены, точка Р —•
ортогональная проекция точки М
Если равенство (1) имеет место для любого zyeN, то кривые
L\ и L2 имеют по определению в точке Ма бесконечный порядок
соприкосновения.
Пример 1. Пусть и L2 — графики функций у=х2 и у=
=3х2 соответственно. Кривые Lx и L2 имеют общую точку касания
х=0, у=0. Легко видеть, что в этом случае 1= |х|, /i=2x2. Поэто-
му
lim —= lim=0, lim — = lim-^—=2=^0.
z-»o I x-»o |x| z-»o P x->0 x2
Следовательно, порядок соприкосновения кривых Lt и L2 в точке
(0, 0) равен 1. *
Пример 2. Пусть Lr — ось Ох, а кривая L2 задана пара-
метрическими уравнениями x=t, y=\i\37’2, z=t90. Найдем поря-
док соприкосновения кривых Lx и L2 в начале координат.
42
* Имеем l=:\t\, i74’2+i180 =И37-2]Л + |/1105’8. Поэтому
lim—=lim | И °’2 V1 + 111105,8 =0.
z->o Z37 >z->o
Так как предел отношения
не существует (он равен беско-
нечности), то порядок соприкосновения кривых А] и Ь2 в точке
(0, 0) равен 37. *
Пример 3. Пусть — ось Ox, а Ь2 — график функции
1
е Iх!’
х^= 0,
х = 0.
Покажем, что кривые и Ь2 имеют в начале координат бесконеч-
ный порядок соприкосновения.
* В рассматриваемом случае /=|х|, h—e 1*1. Так как для
любого geN
lim—=lim
z->o lq x-»0
то наше утверждение справедливо. *
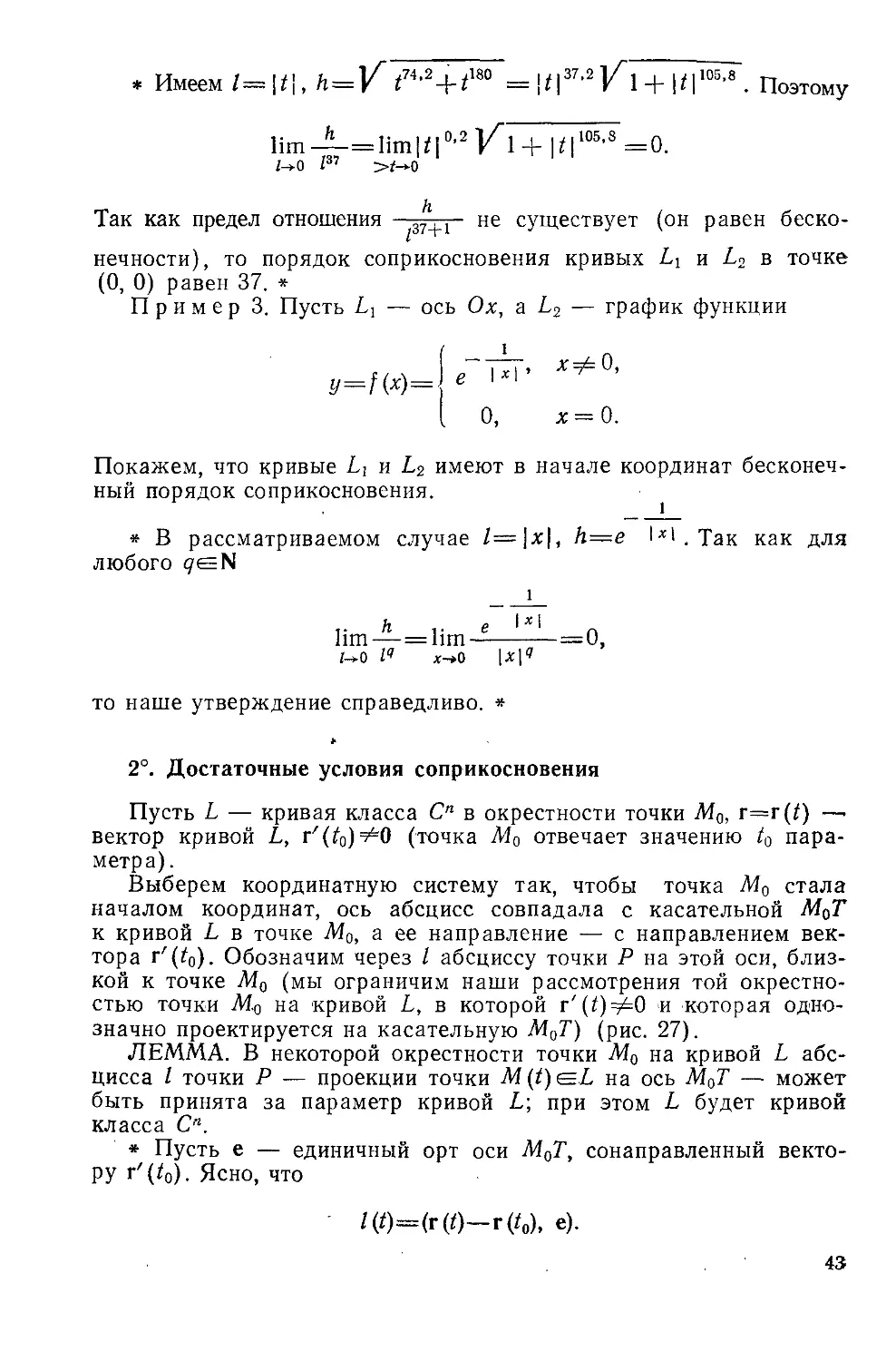
2°. Достаточные условия соприкосновения
Пусть L — кривая класса Сп в окрестности точки Мо, r=r(t) —>
вектор кривой L, r'tto^O (точка Мо отвечает значению /0 пара-
метра).
Выберем координатную систему так, чтобы точка Мо стала
началом координат, ось абсцисс совпадала с касательной М0Т
к кривой L в точке Мо, а ее направление — с направлением век-
тора r'(Z0). Обозначим через I абсциссу точки Р на этой оси, близ-
кой к точке Мо (мы ограничим наши рассмотрения той окрестно-
стью точки М.о на кривой L, в которой r'(Z)^=O и которая одно-
значно проектируется на касательную М0Т) (рис. 27).
ЛЕММА. В некоторой окрестности точки Мо на кривой L абс-
цисса I точки Р — проекции точки на ось М0Т — может
быть принята за параметр кривой L-, при этом L будет кривой
класса Сп.
* Пусть е — единичный орт оси М0Т, сонаправленный векто-
РУ Г'(М. Ясно, что
/(/)=(!• (0-г(/0), е).
43
Отсюда
dl
dt
(г'(0, е)^=О
в некоторой окрестности точки Мо. Следовательно, в этой окрест-
ности l=l(t) — строго монотонная функция, имеющая обратную
t=t(l). Поэтому абсцисса I может быть принята за параметр на
кривой I. Из явного вида функции /(/) следует, что это функция
того же класса гладкости, что и г(/). Поэтому и скалярная функ-
ция принадлежит классу Сп.
Таким образом, выбирая I за параметр на кривой L, полу-
чаем, что векторная функция г (/)=г (/(/)) принадлежит тому же
классу гладкости, что и векторная функция r(Z). *
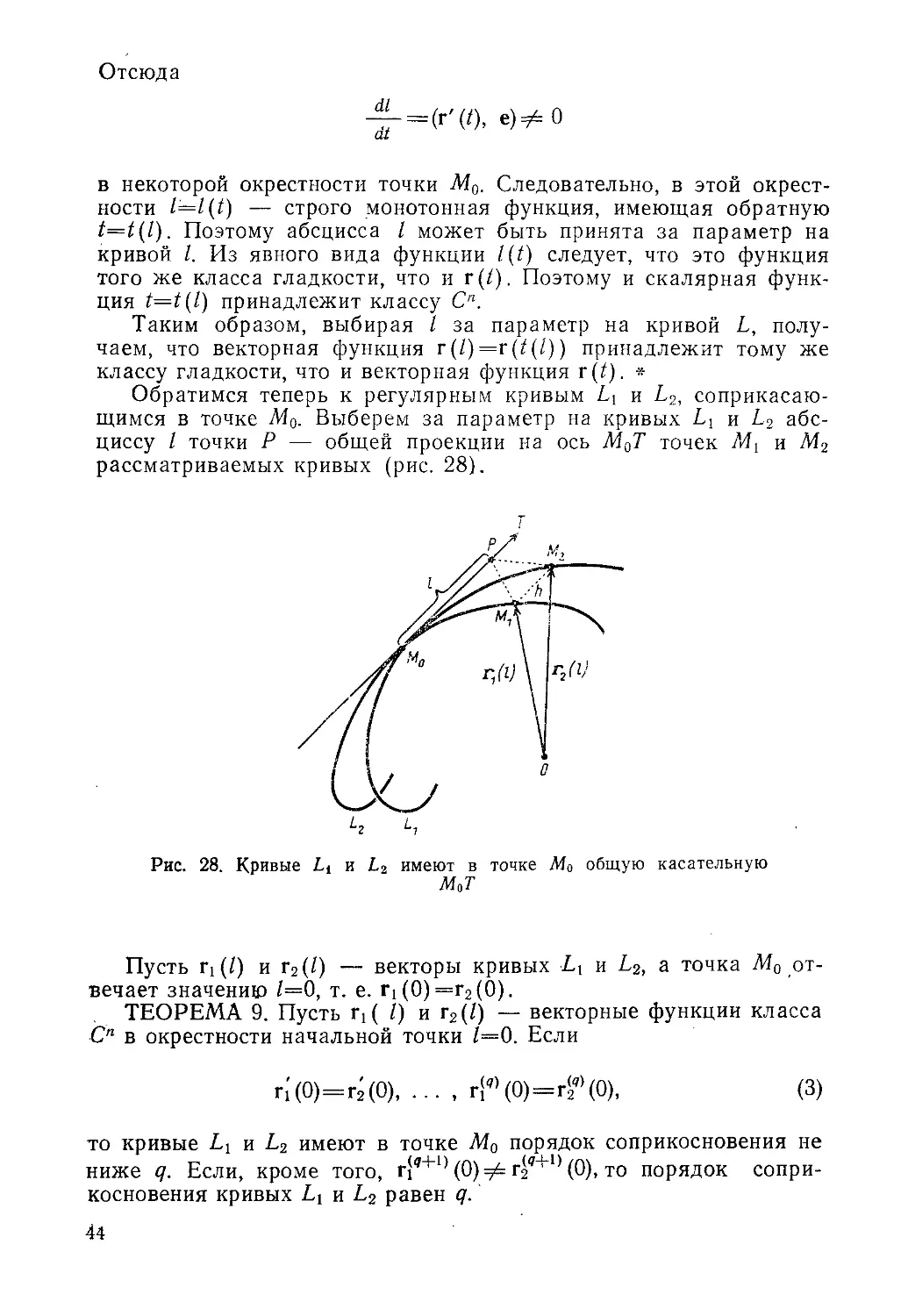
Обратимся теперь к регулярным кривым Л, и Т2, соприкасаю-
щимся в точке Мо. Выберем за параметр на кривых L[ и Л2 абс-
циссу I точки Р — общей проекции на ось МаТ точек и М2
рассматриваемых кривых (рис. 28).
Рис. 28. Кривые Lt и L2 имеют в точке Мо общую касательную
МаТ
Пусть и (/) и г2(/) — векторы кривых Lx и Ь2, а точка Мо от-
вечает значению 1=0, т. е. Г](0)=г2(0).
ТЕОРЕМА 9. Пусть п( /) и г2(/) — векторные функции класса
Сп в окрестности начальной точки 1=0. Если
п(0)=г2(0), ... , г^(0)=г^(0),
(3)
то кривые и Ь2 имеют в точке Мо порядок соприкосновения не
ниже q. Если, кроме того, ri?+1) (0)=^ г2?+1) (0), то порядок сопри-
косновения кривых Л1 и L2 равен q.
44
* Докажем сначала первую часть теоремы. Для этого иссле-
дуем предел
В данном случае h — длина отрезка равная |г2(£)—гД0 |.
По формуле Тейлора для разности г2(/)—п (Z) с центром разло-
жения 1=0 имеем
г2(0-Г1(0={гг(0)-г1(0)} + {г;(0)-г1'(0)}/+ ...
q\ 2 ‘
Первая разность в фигурных скобках равна нулю, поскольку
Л40 — общая точка кривых и L2 — отвечает значению 1=0. По
условию теоремы (см. (3)) равны нулю и остальные выражения
в фигурных скобках. Поэтому
/1=|г2(/)-г1(/)|=о(/’).
Обращаясь к интересующему нас пределу (1), получаем, что
lim —=lim-^- = 0. -
г-,0 lq ?->o
Таким образом, при выполнении условий (3) порядок сопри-
косновения кривых L] и Т2 в точке Мо не ниже q.
Перейдем к доказательству второй части теоремы, где наряду
с соотношениями (3) выполняется неравенство п +1) (0)=^ Г2<’+1) (0).
Вновь обращаясь к формуле Тейлора, получаем
г2(/)-Г1 (0 = . 1 {г^+1) (0)- г?+1) (0)} + о(/’+1).
\Ч и- */•
Отсюда следует, что
lim—=0 и lim—-—=# 0.
I” i-ю lq+1
Это означает, что порядок соприкосновения кривых Lt и L2 в точ-
ке Мо равен q. *
Замечание. Если п(/) и г2(/) — векторные функции клас-
са С°° в окрестности 1=0, и для любого выполняется равен-
ство
ri(’)(0)=ri‘’)(0)) Г1(0)=г2(0),
то кривые Li и L2 имеют в точке Мо -бесконечный порядок сопри-
косновения.
45
* Действительно, в этом случае
h
lim — =
л-»о
для любого q. *
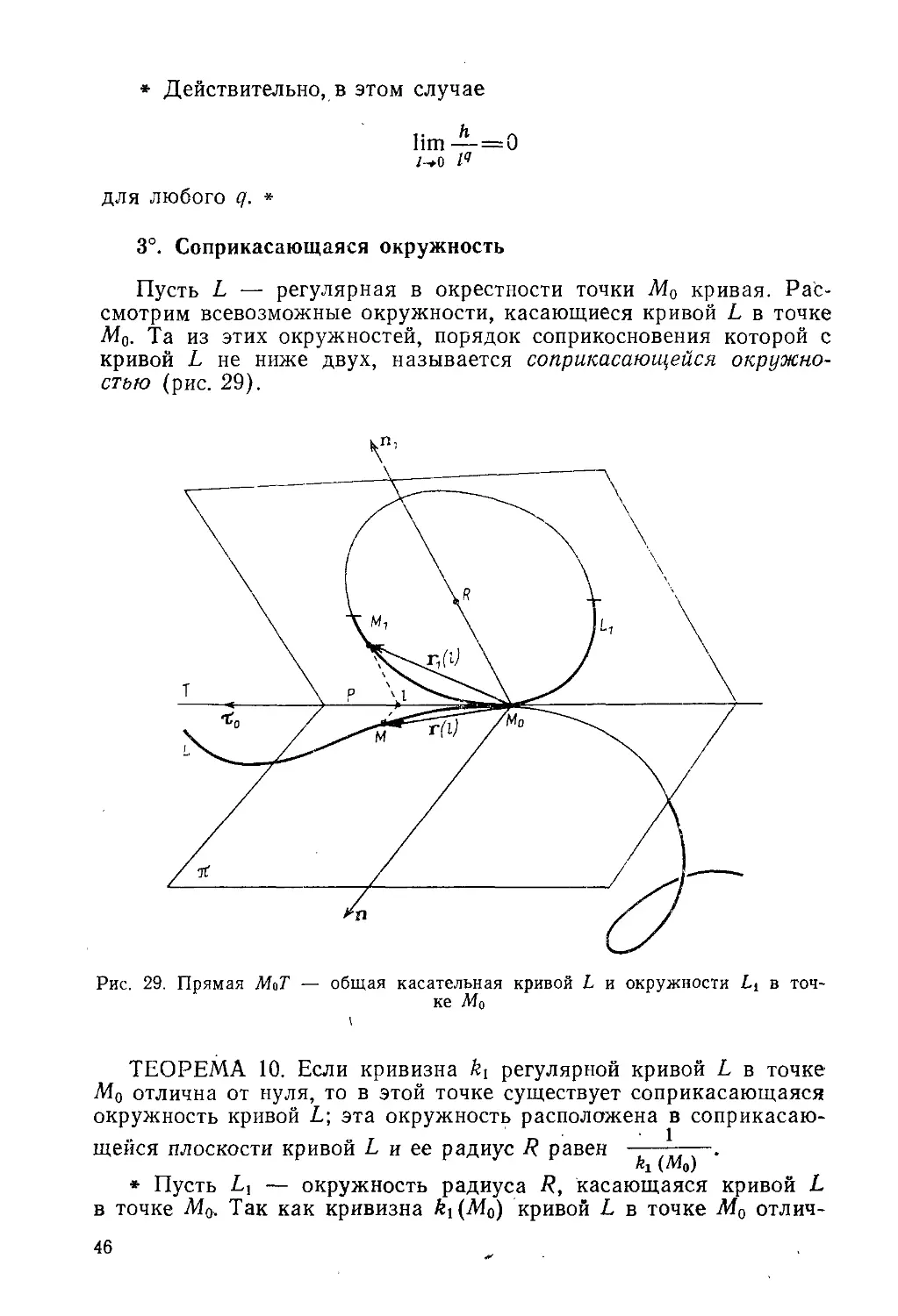
3°. Соприкасающаяся окружность
Пусть L — регулярная в окрестности точки Мо кривая. Рас-
смотрим всевозможные окружности, касающиеся кривой L в точке
Мо. Та из этих окружностей, порядок соприкосновения которой с
кривой L не ниже двух, называется соприкасающейся окружно-
стью (рис. 29).
Рис. 29. Прямая М»Т — общая касательная кривой L и окружности L, в точ-
ке ЛГо
ТЕОРЕМА 10. Если кривизна регулярной кривой L в точке
Мо отлична от нуля, то в этой точке существует соприкасающаяся
окружность кривой Е; эта окружность расположена в соприкасаю-
щейся плоскости кривой L и ее радиус R равен -—.
«1 (Мо)
* Пусть — окружность радиуса R, касающаяся кривой L
в точке Мо. Так как кривизна &i(Mo) кривой L в точке Мо отлич-
46
на от нуля, то у L в этой точке существует соприкасающаяся
плоскость л.
Введем единичные векторы: общей касательной кривых L и
А] в точке Af0—т0 и главных нормалей п и П] соответственно.
За параметр на кривых L и Lt возьмем абсциссу I точки Р —
общей проекции точек Af и рассматриваемых кривых на каса-
тельную М0Т. Векторы кривых L и Llf отложенные от точки Мо,
обозначим соответственно через r(Z) и rj(Z).
Подсчитаем производные г'(0), г"(0) и и (0), гДО). Вычисление
производных Г1 (0) и п(0) не представляет затруднений, так как
для полуокружности, касающейся кривой L в точке Мо, — части
кривой Lt вектор rx (Z) имеет вид
.Поэтому
П(0)=т0, п(0)=—пх.
(4)
Для упрощения вычислений производных г'(0) и г"(0) выбе-
рем сначала за параметр на кривой L длину дуги s, отсчитывае-
мую от точки Л40 и возрастающую в направлении, определяемом
вектором То- Тогда r=r(s) и
Z(s)=(r(s), т0).
(5)
Воспользуемся следующими формулами:
-----=-------- . ------ Г ([Д = -------------- I ------ | --------. -------
dl ds dl---------------dl2 ds2 \ dl / ds di2
Так как при Z=0 длина дуги s=0, то отсюда вытекает, что
ds I
dl |/=о’
ds \2
(6)
ds2 s—о
dl / |z=o
ds s=o dl2 |z=o
Из ТОГО, ЧТО--------— X и
ds
= ^х(Л1)п, при s=0 получаем, что
dr
ds s=o
(7)
(здесь ki (Л40) — кривизна кривой L в точке ЛГ0). Остается вычис-
лить
ds I d?s
— и ----------
dl |z=o dl2 1^,0
47
Из формулы (5) имеем
откуда
dl /dr \
---— I ---> то I >
ds-\ ds---)
(8)
Дифференцируя равенство (8), получим, что
(9/
Положим в формулах (8) и (9) /=0 (s=0). Согласно равенствам
(7) находим, что
ds I
dl |z==o
d2s
dl2 i—о
= 9.
Подставляя все найденные значения в правые части соотноше-
ний (6), получаем нужные нам выражения для г'(0) и г"(0):
г'(О) = то, r"(O)=MMo)n.
(Ю)
Для того чтобы окружность Li была соприкасающейся для кри-
вой L в точке Af0, согласно теореме 9 достаточно выполнения со-
отношений
г'(0)=п(0), г"(0)=п(0).
Первое из этих соотношений выполняется вследствие того, что
оба входящих в него вектора равны (см. формулы (4) и (10)).
Второе выполняется в случае, если п=П! и
R =----------- (напомним, что (Мо) 0).
(Л40)
Итак, соприкасающаяся окружность в точке Мо кривой L су-
ществует; вследствие равенства п=П[ она расположена в сопри-
касающейся плоскости кривой L, и ее радиус R равен *
Замечание 1. Если кривизна kl(Mo)=O, то согласно вто-
рой из формул (10) г"(0)=0. Обращение в нуль производной
г/ДО) возможно лишь в случае, когда окружность Li «вырожда-
ется» в касательную М0Т. Значит, если кривизна кривой L в точ-
ке Мо равна нулю, то соприкасающаяся окружность в точке М$
кривой L «вырождается» в прямую линию.
48
Замечание 2. Пусть L — С2-регулярная кривая и ее кри-
визна fei отлична от нуля. Тогда если г(£) — вектор кривой L,
то центр соприкасающейся окружности в точке М кривой, отвеча-
ющей данному значению параметра t, определяется вектором
Гц=г(0Ч---------п, (11)
(Л-1) 7
где п — вектор главной нормали кривой L в точке М.
Центр и радиус соприкасающейся окружности называются
центром и радиусом кривизны кривой.
Радиус R кривизны кривой определяется формулой
4°. Эволюта и эвольвента плоской кривой
Пусть L — С2-регулярная плоская кривая, кривизна \М) ко-
торой отлична от нуля в каждой точке М.
Определение. Эволютой кривой L называется множество
ее центров кривизны. Сама кривая L по отношению к своей эво-
люте называется эвольвентой (рис. 30).
Рис. 30. Эволюта — множество
центров кривизны N кривой L
(эвольвенты). Радиус Р кривизны
кривой L равен
Если r(t) — вектор кривой L, kx — кривизна кривой L, то со-
гласно формуле (И) ее эволюта определяется формулой
гц=г(04
1
fei(M)
где п — вектор главной нормали кривой L.
Пример. Найти эволюту эллипса.
* Пусть r(/)={acos/, 6sin/}, 0</<2л — вектор эллипса, а>
>6.
49
После несложных вычислений получим (рис. 31)
... (а2—Ь2 », Ь2 — а2 . .л
Гц (t)= 1------cos3t, -------sin® 11.
( a b f
Таким образом, эволюта эллипса представляет собой удлинен-
ную астроиду. *
СВОДКА ОСНОВНЫХ ПОНЯТИЙ, ФОРМУЛ, ФАКТОВ
А. Простой кривой называется множество L точек М(х, у, z)
пространства, координаты х, у, z которых определяются соотно-
шениями
х=<р(/), x=ty(f), (#)
если функции <р(0, ф(0, х(0 непрерывны на отрезке [а, (3] и раз-
ным значениям параметра t из отрезка [а, р] отвечают разные
точки множества L. Соотношения (*) называются параметриче-
скими уравнениями кривой L.
Б. Множество L точек М (х, у, z), координаты х, у, z которых
определяются соотношениями (*), называется простой замкнутой
кривой, если функции <р(0, ф(0, х(0 непрерывны на отрезке
[а, р],
<р(а)=<р(Р), ф(а)=ф(Р), х(а)=%(Р)
и разным значениям параметра t из полуинтервала [а, р) отвеча-
ют разные точки множества L.
В. Вектором кривой L называется векторная функция
г(0=<р(01 + ф(0) + х(Ок, а'<^р.
Г. Касательной к кривой L в точке Af0 называется прямая М0Т,
меньший из углов которой с переменной прямой М0М (Л-1—точка
кривой L) стремится к нулю при Af->Af0. Уравнение касательной
к кривой L, заданной вектором г(0, в точке Мо, отвечающей зна-
чению параметра 0:
R=r(0)+Xr' (0),
R — вектор произвольной точки касательной.
Д. Кривая L называется гладкой в точке Мо, если в этой точ-
ке существует касательная к кривой L и некоторая окрестность
точки Л10 на кривой L однозначно проектируется на эту касатель-
ную.
Кривая L называется гладкой, если она является гладкой в
каждой своей точке и касательные в точках кривой L изменяются
непрерывно. . 1
Достаточные условия гладкости кривой: если на множестве из-,
менения параметра t вектор г(0 кривой L имеет непрерывную
50
производную r'(t) и r'(t)¥=O, то кривая L является гладкой
кривой.
Е. Гладкая кривая L называется регулярной кривой (кривой
класса Сп), если ее вектор r(t) имеет непрерывные производные
всех порядков до /г>2 включительно.
Достаточные условия регулярности кривой-, если на множестве
изменения параметра t вектор г(/) кривой L имеет непрерывные
производные всех порядков до п>2 включительно и г'(7)=^0, то
кривая L является регулярной кривой.
Ж. Простая кривая L называется спрямляемой, если множе-
ство длин всевозможных ломаных, правильно вписанных в кри-
вую L, ограничено. Точная верхняя грань этих длин называется
длиной кривой L.
Достаточные условия спрямляемости кривой-, простая кривая
L спрямляема, если ее вектор г(£), всюду на отрезке [a, PJ
имеет непрерывную производную г'(/). Длина S спрямляемой кри-
вой L вычисляется по формуле
₽
S=S(L)= f jr'(t)\dt.
a
3. Параметризация спрямляемой кривой называется нату-
ральной (естественной), если в качестве параметра взята длина
ее дуги.
И. Плоскость л, проходящая через точку Мо, называется пре-
делом при М-+Мо переменной плоскости лм (также проходящей
через точку Л40), если меньший из углов между этими плоскостя-
ми стремится к нулю, когда М-+Мо.
Соприкасающейся плоскостью кривой L в точке Мо называет-
ся предел, к которому стремится переменная плоскость лм, про-
ходящая через касательную М0Т к кривой L в точке Мо и текущую
точку М кривой L, при условии, что
Достаточные условия существования соприкасающейся плоско-
сти: регулярная кривая L, заданная вектором r(t), имеет в точке
Мо, отвечающей значению t0 параметра, соприкасающуюся плос-
кость, если в точке t0 векторы г'(^0) и г"(/0) неколлинеарны.
Уравнение соприкасающейся плоскости кривой L, заданной
вектором r(t):
(R—r(f0), r'(/0), r’O=0,
R — вектор произвольной точки соприкасающейся плоскости.
К. Нормалью кривой L в точке Мо называется любая прямая,
проходящая через точку Мо перпендикулярно касательной к кри-
вой L в точке Мо.
Главной нормалью кривой L в точке Мо называется нормаль,
лежащая в соприкасающейся плоскости кривой. L в точке Л1о.
Бинормалью кривой L в точке Af0 называется нормаль, перпен-
дикулярная соприкасающейся плоскости кривой L в точке Af0.
51
Л. Нормальной плоскостью кривой L в точке Л40 называется
плоскость, проходящая через главную нормаль и бинормаль кри-
вой L в точке Мо.
Спрямляющей плоскостью кривой L в точке Мо называется
плоскость, проходящая через касательную и бинормаль кривой L
в точке Мо.
М. Кривизной регулярной кривой L в точке М называется чис-
ло kh равное пределу отношения 0/As при (здесь 0 —
меньший из углов между касательными кривой L в точках Мо и
М, a As — длина дуги М0Л4).
Кривизна регулярной кривой L, заданной вектором r(t), вы-
числяется по формуле
k (t)—. |г'(0 Хг" (П|
|г'(0 13 ’
а в случае натуральной параметризации r=r(s) —
^(s)=|r"(s)|.
Кривизна kx плоской кривой, заданной параметрическими урав-
нениями х—ср(О, У=^^), вычисляется по формуле
k — <РУ ~
1 (Ф'2 + Ф'2)3/2'
Кривизна ki графика функции y=f(x) вычисляется по фор-
муле
k - f”
1 (1+/'2)3/2'
Н. Кручением (второй кривизной) кривой L в точке Мо назы-
вается число k2, равное пределу отношения 0/As при Af->Af0
(здесь 0 — меньший из углов между соприкасающимися плоско-
стями кривой L в точках Л40 и М, As — длина дуги М0М; угол 0
считается положительным, если наблюдатель, помещенный в точ-
ку Мо, видит вращение переменной соприкасающейся плоскости
при М-+Мо против часовой стрелки, и отрицательным, если по
часовой стрелке).
Кручение k2 регулярной кривой L, заданной вектором г(^), при
условии, что векторы r'(Z) и г" (t) неколлинеарны, вычисляется по
формуле
k (r'(Q, г»(0, r'"(Q)
2U (г' (t) х г" (i))> ’
а в случае натуральной параметризации r=r(s) —
Jr' (з), г"(з), г'" (S))
(г"(з))2
fea(s)
-52
О. Формулы Френе:
dt , dn , . , , db ,
= ЩП, ——kxX-\-kjO, =—R2n
ds---------------------------ds-ds
(здесь r — единичный вектор касательной, n — единичный вектор
главной нормали, b — единичный вектор бинормали).
П. Если функции ^i(s)>0 и k2(s) имеют на отрезке [О, S] не-
прерывные производные, то существует единственная с точностью
до положения в пространстве кривая класса С3, кривизна и кру-
чение которой в произвольной точке, отвечающей длине дуги s<=
е[0, S], равны ^i(s) и k2(s) соответственно. Уравнения
^(s), k2=k2(s), O^s^S,
называются натуральными уравнениями кривой.
Р. Порядок соприкосновения в точке Мо гладких кривых Ц и
Ь2 с общей касательной М0Т по определению не ниже q (q — на-
туральное число), если
lim—=0 (**)
/->0 Р
(здесь h — длина отрезка МХМ2, концы и М2 которого лежат
на кривых L) и L2 соответственно и проектируются на касатель-
ную МйТ в общую точку N, I — длина отрезка М0У).
Порядок соприкосновения кривых Lj и Ь2 в общей точке Мо по
определению равен q (q — натуральное число), если выполнено
условие (**) и либо
либо отношение hjl^ не имеет предела при /->0. Кривые Д и Ь2
имеют в общей точке Л40 бесконечный порядок соприкосновения,
«ели условие (**) выполняется для любого натурального q.
Достаточные условия соприкосновения кривых: регулярные
кривые Li и Ь2, заданные векторами г^/) и г2(/) соответственно,
имеют в общей точке Мо, отвечающей значению /=0, порядок со-
прикосновения не ниже q, если
П(0)=Г2(0), .... r1<’)(0)=ri’)(0);
«ели, кроме того,
г<?+1)(0)^г^+1>(0),
то порядок соприкосновения кривых L] и Ь2 равен q.
С. Соприкасающейся окружностью кривой L называется ок-
ружность, порядок соприкосновения которой с кривой L не ниже
Двух.
Достаточные условия существования соприкасающейся окруж-
ности: если кривизна k} кривой L в точке Мо отлична от нуля, то
53
в этой точке существует соприкасающаяся окружность кривой L-,
эта окружность расположена в соприкасающейся плоскости кри-
вой Л и ее радиус равен l//Ji(Af0).
Центром (радиусом) кривизны кривой L в точке Л40 называет-
ся центр (радиус) ее соприкасающейся окружности в этой точке.
Т. Эволютой регулярной кривой L называется множество ее
центров кривизны.
Уравнение эволюты кривой L, заданной вектором г(1):
R-r(/) + -A—п(/),
' «1 (t)
где п(/) — вектор главной нормали кривой L в точке t.
У. Эвольвентой регулярной кривой L называется кривая, эво-
лютой которой является сама кривая L.
УПРАЖНЕНИЯ
1. Написать уравнения касательной и нормали к кривой:
а) г={a cos3/, a sin3/} (астроида);
б) г={а(/—sin/), а(1 — cos/)} (циклоида) (рис. 32).
Рис, 32. а — астроида; б — циклоида; в — цепная линия; г — трактриса; д —
винтовая линия
Ответ: а) 2хsin/ + 2уcos/—asin2/=0, xcos/—ysin/— acos2/=0;
6) x—ytg~ + a (2tg-^—/
=0, xtg-y + г/—a/-tg~=O
(Z=£(2& +1)я); y=2a, x=(2Z>4-l)n (/=(2^-f-1)n).
54
2. Вычислить длину кривой:
а) г - {a cos3t, a sin31}, О t T (астроида);
6) y=ach —, O^Cx^CX (цепная линия);
a
в) x—acost, y—asint, z=bt, Q^.t^.T (винтовая линия).
Ответ: a) s=-^-sin2T; 6) s=ash—; в) s=V a2 + &2 T.
' 2 a
3. Написать уравнения касательной, нормальной плоскости,
бинормали, соприкасающейся плоскости, главной нормали и
спрямляющей плоскости винтовой линии r={acos/, a sin/, bt}.
Ответ:
г={a cos/—uasvat, a sin / + иа cost, b(t-}-u}},
ах sin /—ay cost—bz+&t=O,
r={acos/ + «fesin/, asin/—ubcost, bt-}-au},
bxsin t—by cos / + az—abt=Q,
r={(a + w)cos/, (a + a)sin/, bt},
xcost-\-ysmt-\-bz—(a-}-b2f) — 0.
4. Вычислить кривизну плоской кривой:
a) r={acos3/, asin3/}, О^/<-^- (астроида);
б) y=ach— (цепная линия).
а
Ответ: a) k,=---------; б) k,——
За sin 2t у2
5. Вычислить кривизну и кручение кривой:
a) r={acost, asin/, bt}-, б) r={cos3/, sin3/, cos2/}.
Найти основной триэдр.
Ответ: а) fe,=--------, fe2—-----~,
a2 + b2 a24-62
{a sin t a cos t b 1 , , . , „ч
Va2 + &2 ’ Va2 + 62 Va24-b2 J 1 ’
, ( b sin t b sin t a 1
D= b---, ----......—, -- It
( 1/ a2 b2 "[/ a2 + b2 1/ a2 + b2 J
55
б) fex=—в—, k2=—-—,
25 sin 2/ 25 sin 2/
{ 3 3 4 1
-----cos/, —sin/,-----к n={sin/, cos/, 0}.
5 5 5 J
b= f— cos/,----— sin/,--—I.
I 5 5 5 J
6. Найти естественную параметризацию кривой:
r(/)={acos/, a sin/, bt}.
Ответ:
{s s s
a cos , a sin—. ' , b —. .-
Va2 + &2 Va2 + 63 ya2 + i!
7. Составить натуральные уравнения кривой
r={ach/, ash/, at}.
Ответ: ky =--------,
2a2 4- s2
k2 = —---------.
2a2 + s2
8. Проверить, что формулы Френе можно записать в виде
dr
ds
где д=£2т + &1П.
dn , ,, <fb , ., ,
— = d X n, ---------------=d X b,
ds ds
9. Найти соприкасающуюся окружность кривой
г= 1/ — /2, 2—/, /3
2
в точке (0, 2, 0).
Ответ:
2=0.
10. Найти соприкасающуюся окружность эллипса
= 1: а) в точке (а, 0); б) в точке (0, Ь}.
х2___. у2
а2 Ь2
a2 — b2 \ 2 . 2 bl
----- +f2=—
a----a?
11. Найти порядок соприкосновения параболы у2=2рх и ок-
ружности (х—р)2+у2=р2 в точке (0, 0).'
a2 — b2 \2 _ _a«_
b J ~ b2 *,
56
Ответ: 3.
12. Найти эволюту кривой:
a) x=ach/, y=asht (гипербола);
б) x = alntg-^- + ac°s/, У=а sin /(трактриса).
Ответ: а) х= д - ch3/,'i/=—i-^-sh3/; б) у—ach —.
а b а
13. Найти эвольвенты окружности х2+у2=а2.
Ответ: x=a(cos/ + (/—Qsin/), ^=a(sin/—(/—Qcos/),
где С — параметр семейства эвольвент.
ГЛАВА 2
ТЕОРИЯ ПОВЕРХНОСТЕЙ
Простая поверхность получается путем непрерывной деформа-
ции (растяжений, сжатий и изгибаний) куска плоскости. В про-
цессе такой деформации точка плоскости перемещается по некото-
рой траектории и переходит в определенную точку поверхности
(рис. 1).
Рис. 1. Простая поверхность получается при помощи непрерывной
деформации куска плоскости
Поверхности более общей природы уже нельзя получить дефор-
мацией куска плоскости. Они могут иметь самопересечения, участ-
ки самоналегания. Однако достаточно малая окрестность каждой
точки такой поверхности устроена в некотором смысле как про-
стая поверхность.
Для исследования геометрических свойств поверхностей целе-
сообразно наложить на них определенные условия — условия ре-
гулярности. Ограничиваясь рассмотрением поверхностей без осо-
бенностей и развивая для их изучения эффективный аппарат, мы
введем ряд важных характеристик поверхности, таких, как пер-
вая и вторая квадратичные формы, средняя и гауссова кривизны
и др., покажем их роль в описании геометрических свойств поверх-
ности как внутренних, так и внешних, найдем интересные связи
между ними.
58
§ 1. ПОНЯТИЕ ПОВЕРХНОСТИ
1°. Плоские области
Множество точек М(х, у) на плоскости Оху, координаты х и
у которых удовлетворяют неравенству
(х—a)2 + (y—b)2<r2, (1)
называется открытым кругом радиуса г с центром в точке А (а, Ь).
Пусть D — множество точек на плоскости.
Точка М множества D называется его внутренней точкой, ес-
ли существует открытый круг с центром в этой точке, целиком ле-
жащий в D.
Множество точек на плоскости, каждая из которых является
его внутренней точкой, называется открытым множеством.
Примерами открытых множеств могут служить: сам открытый
круг, внутренняя часть треугольника, внутренняя часть квадра-
та и т. п.
Открытое множество D называется (линейно) связным, если
любые две его точки соединить простой кривой S так, чтобы
gczD.
Точка N называется граничной точкой множества D, если в
любом открытом круге с центром в точке N содержатся как точ-
ки, принадлежащие множеству D, так и точки, ему не принадле-
жащие.
Совокупность всех граничных точек множества D называется
его границей.
Обозначение: dD.
Пример. Окружность
(х—а)2 + (у—Ь)2 = г2
является границей открытого круга (1).
Множество D=D\jdD называется замыканием множества D.
Оно состоит из внутренних и граничных точек множества D.
Пример. Замыканием открытого круга (1) является круг
(Х-аУ + (у-Ь)2^г2.
Множество точек на плоскости называется ограниченным, ес-
ли существует круг, которому принадлежат все точки этого мно-
жества.
Простая замкнутая кривая S7' разбивает плоскость на два
множества, одно из которых (D) ограничено. Кривая S является
границей множества D. Будем говорить также, что множество D
охвачено замкнутой кривой S (рис. 2).
Связное множество D точек на плоскости называется одно-
связным, если для любой простой замкнутой кривой, принадле-
жащей множеству D, охватываемое ею множество также принад-
лежит D.
59
Рис. 2. Область D односвязна
Открытое односвязное множество точек на плоскости будем на-
зывать плоской областью.
2°. Простая поверхность
Пусть D — ограниченная плоская область и D — ее замы-
кание.
' Введем на плоскости координатную систему (и, v). Пусть х,
у, z — прямоугольные декартовы координаты точек в трехмерном
евклидовом пространстве Е3.
Зададим на множестве D три непрерывные функции
х—<р(и, v), y=ty(u, v), z=^(u, v),
—
(и, v) е D.
и предположим, что функции (2) обладают следующим свойством.
Свойство А. Если (и', v') и (и", v") — различные точки мно-
жества D, то точки М'(х', у', z') и М"(х", у”, z") пространства
Е3, координаты которых вычислены по формулам (2)
х' = ф(ц', v'), y'=ty(u' v'), г'=%(и', v’),
x"=(p(u", v"), y"=^(u", v"), z"=^x(W, v"),
также различны.
Определение. Множество S точек М(х, у, z), координаты
х, у, z которых определяются соотношениями
х=ф(и, v), у=Ц(и, V), 2=х(и, V),
(3)
(u, п) е D,
где функции <р, ф и % в замыкании D области D обладают свойст-
вом А, называется простой поверхностью.
Множество точек М (х, у, z) с координатами
X=<p(u, и), у=$(и, v), г=ъ(и, V),
(4)
(ц, v) е dD,
60
— образ границы dD области D — называется границей простой
поверхности S.
Обозначение: dS.
Пример. Рассмотрим на плоскости параметров (и, и) пря-
моугольник
Р = {(и, и)| —1<ц<2, |п|<1}.
Зададим в прямоугольнике Р три функции
1 — и3
1 + и2 ’
y = v, Z—U
и2 — 1
и2 + 1
(*)
Эти функции непрерывны и разным точкам («', v') и («", v")
прямоугольника Р соответствуют разные точки М' и М", коорди-
наты которых вычисляются по формулам (*). В этом совсем не-
трудно убедиться, когда v'^v". При v'=v", и'=£Д, и''=£\ сказанное
вытекает из того, что
Множество точек пространства Е3, координаты которых опре-
деляются соотношениями (*), имеет довольно сложный вид
(рис. 3). Это объясняется тем, что в замкнутом прямоугольнике
/’={(«, п)| — 1^ы^2, 1}
Рис. 3. Пример непростой поверхности
вертикальным отрезкам и=—1 и м=1 соответствует одно и то же
множество точек на поверхности:
Х=0, --1 у «С 1, z—0.
Соотношения (3) называют параметрическими уравнениями
простой поверхности S; и и v — параметры. Говорят также, что
простая поверхность S задается параметрически.
61
Пусть i, j и к — орты координатных осей. Тогда задание по-
верхности S при помощи формул (3) равносильно заданию одной
векторной функции
r = r(w, v)~tp(u, f)j+x(u> г>)к, (5)
•определенной в области D.
Если простая поверхность S задана соотношением (5), то го-
ворят, что поверхность S задана векторным уравнением-, вектор-
ную функцию г=г(ц, и) называют радиус-вектором или просто
вектором поверхности S.
Примеры простых поверхностей.
1. Пусть
z=f(x, у)
— функция, непрерывная в замыкании D ограниченной открытой
области D. Тогда ее график — множество точек
{М(х, у, z)\ z=f(x, у), (х, y)<=D}
— простая поверхность S.
Параметрические уравнения этой поверхности имеют вид
х=и, у —v, z=f(u, v).
Все эти функции непрерывны в замкнутой области D и различ-
ным точкам (и', и') и (н", и") из D отвечают различные точки
-М'(х', у', z') и М"(х", у", z") поверхности 3 (рис. 4).
Рис. 4. График непрерывной функ-
ции — простая поверхность
х
Рис. 5. Цилиндрическая поверх-
ность со спиралевидной направляю-
щей
Замечание. Процесс непрерывной деформации куска плос-
кости в простую поверхность можно проиллюстрировать на рас-
смотренном выше примере.
«2
Обратимся к семейству поверхностей, зависящих от параметра
t — параметра деформации:
х=и, y—v, z=tf(u, v),
(и, v)^D, 0^/^ 1.
При изменении параметра t от 0 до 1 область D (кусок плоскости)
подвергается непрерывной деформации: при t=Q имеем плоскукх
область D, а при /=1 — рассматриваемую простую поверхность S.
2. Пусть
Р—{(и, и)|0<ц<;4л, 0<о<1}
— открытый прямоугольник на плоскости (м, о).
Набор функций
x—ucosu, y=usmu, z=v
задает в пространстве £3 простую поверхность (рис. 5).
Одна и та же простая поверхность может иметь разные пара-
метрические представления.
Например, уравнения
х=и, y—v, z = У R2—и2—v2
(u2 + v2<R2) '
и уравнения
х—Rcos и coso, t/=7?coswsinu, z=7?sinu
(0<п$Сл/2, 0<о^2л)
задают одну и ту же простую поверхность — верхнюю полусферу
радиуса R с центром в начале координат.
3°. Локально простая поверхность
Пусть S — множество точек евклидова пространства Е3, X —
точкй из S.
Окрестностью точки X на множестве S будем называть пере-
сечение (общую часть) множества S и открытого шара с центром
в точке X (рис. 6).
Определение. Связное множество S в пространстве Е3
называется локально-простой поверхностью, если у каждой точки
этого множества есть окрестность, представляющая собой прос-
тую поверхность.
Пример. Сфера — локально-простая поверхность: малая
окрестность каждой точки сферы является графиком непрерывной
функции (в подходящей системе координат) и поэтому представ-
ляет собой простую поверхность. Однако вся сфера простой по-
верхностью не является (рис. 7).
63-
Рис. 6. Окрестность точки X на мно-
жестве S отмечена штрихами
Рис. 7. У каждой точки сферы мож-
но указать окрестность, которая яв-
ляется графиком непрерывной функ-
ции
Приведем еще один пример локально-простой поверхности.
Множество точек, которое заметает окружность при своем
вращении вокруг оси, лежащей в плоскости окружности и не име-
ющей с ней общих точек, называется тором. Тор — локально-
простая поверхность, так как малая окрестность любой точки
тора является графиком непрерывной функции (рис. 8—10).
4°. Общая поверхность
Начнем рассмотрение с двух примеров.
Пример 1. Зададим в прямоугольнике
Р={(и, г)| —2<м<2, 0<и<2}
на плоскости (м, и) функции
и2 — 1 и2 - - 1
х —--------, у—и-----------
..9II 1 ’ ..911
z=v.
Множество точек М(х, у, z), координаты которых определяются
по формулам (*), представляет собой цилиндрическую поверх-
ность, направляющей которой является отрезок строфоиды
И2 — 1 U2 — 1
--------------, у — и----------------------
..Я I » ’ ** ..ft t 1
(см. гл. 1, § 1, п. 2°), а образующая параллельна оси Oz.
Точкам 7И_(—1, г) и Л1+(1, п) прямоугольника Р правило (*)
ставит в соответствие одну точку
(0, 0, v)
цилиндрической поверхности (рис. 11).
64
Рис. 8. Тор как поверхность,
образованная вращением окружности
Рис. 9. У каждой точки тора можно указать окрестность, которая
(в некоторой системе координат) является графиком непрерывной
функции
Рис. 10. Часть плоскости, сфера и тор с конечным числом отверстий являются
локально простыми поверхностями (края .отверстий поверхностям не принад-
лежат)
3 Зак. 259
Рис. 11. Образы точек М- и Л1+
при заданном отображении совпа-
дают
Рис. 12. Общая поверхность с ли-
нией самопересечения
Тем самым рассматриваемая поверхность имеет линию само-
пересечения — прямолинейный отрезок
х=0, у=0, z=v, |t»| <2.
Выделим достаточно малую окрестность точки М~ (ка-
рие. 11 она заштрихована вертикально) и рассмотрим соответ-
ствующее ей по правилу (*) множество точек S_. Ясно, что раз-
ным точкам (и', v') и (и", v") из окрестности U_ соответствуют
различные точки S-. Это означает, что S_ — простая поверхность
(рис. 12).
Аналогично, выбирая достаточно малую окрестность U+ точки
М+, получаем простую поверхность S+.
Тем не менее никакая окрестность точки X на множестве S
простой поверхностью не является (рис. 13).
Таким образом, поверхность S, задаваемая соотношениями
(*), локально-простой поверхностью не является. Это более об-
щая поверхность.
Пример 2. Пусть G — цилиндрический пояс. Поверхность
S расположена внутри пояса G и имеет участок самоналегания
ABCD (рис. 14).
Стрелками указано, каким путем поверхность S получается
из цилиндрического пояса G. При этом некоторый участок ниж-
ней части цилиндрического пояса перейдет в нижнюю сторону
участка самоналегания, а некоторый участок верхней части ци-
линдрического пояса перейдет в верхнюю сторону участка само-
налегания.
Ясно, что поверхность S не локально-простая, а более общая
поверхность.
Приведенные примеры показывают, что существуют поверх-
ности, которые устроены довольно сложно.
66
Рис. 13. Никакая окрестность точки
X не является простой поверхно-
стью
Рис. 14. Общая поверхность с об-
ластью самоналегания
Пусть А и В — некоторые
— отображение одного из них
подмножества пространства Е3 и
в другое:
h : А-+В.
То, что отображение h переводит точку X множества А в точку У
множества В, обозначается так: Y=h(X), При этом точка У на-
зывается образом точки X, а точка X — прообразом точки У.
Отображение h : А-+В называется взаимно однозначным, если
1) различные точки Xi и Х2 множества А отображаются в раз-
личные точки У1=/г(Х1) и Y2=h(X2) множества В и
2) для каждой точки У множества В можно найти точку X
множества А, такую, что h(X) — Y.
У взаимно однозначного отображения h существует обратное
отображение h~\ посредством которого каждая точка У множест-
ва В отображается в свой (единственный) прообраз X.
Отображение h : А^-В называется непрерывным в точке X
множества А, если для любой последовательности точек Хп мно-
жества А, расстояния которых до точки X стремятся к нулю,
d(Xra, Х)->0, соответствующая последовательность образов
h(Xn) из множества В обладает свойством
d(/l(Xn), Й(Х))^О.
Отображение h : А^-В называется непрерывным на множестве А,
если оно непрерывно в каждой точке этого множества.
Взаимно однозначное и непрерывное отображение h : А->-В,
обратное к которому /г-1 также непрерывно, называется гомео-
морфным отображением множества А на множество В.
Образ плоской области при гомеоморфном отображении —
простая поверхность.
3* 67
Пусть S — локально-простая поверхность.
Рассмотрим заданное на ней отображение h, обладающее сле-
дующим свойством: у каждой точки X^S есть окрестность U на
этой поверхности, такая, что отображение h этой окрестности на
ее образ h(U) является гомеоморфным, т, е. взаимно однознач-
ным и взаимно непрерывным.
Образ локально-простой поверхности при таком отображении
h называется общей поверхностью.
В дальнейшем мы, как правило, будем рассматривать доста-
точно малые окрестности точек на поверхностях, т. е. ограничим-
ся, по существу, только простыми поверхностями.
§ 2. ГЛАДКИЕ И РЕГУЛЯРНЫЕ ПОВЕРХНОСТИ
1°. Касательная плоскость к поверхности
Пусть S — простая поверхность, Хо и Xt — различные ее
точки.
Определение. Плоскость л, проходящая через точку Хо,
называется касательной к поверхности S в точке Хо, если при
стремлении переменной точки X поверхности к точке Хо (по про-
извольному закону) угол между прямой Х0Х и плоскостью л
стремится к нулю (рис. 15).
Рис. 15. Поверхности, изображенные на рисунках а и б, — гладкие в точке Z».
Поверхности, изображенные на рисунках в и г, в точке Хо не являются глад-
кими: как угодно близко рт точки Хо имеются точки Р и Q, проектирующиеся
в одну точку касательной плоскости л (любая плоскость, проходящая черев
прямую ХоТ, является касательной к поверхности S на рисунке г)
68
2°. Гладкие поверхности
Простая поверхность S называется гладкой в точке Хй, если
в этой точке существует касательная плоскость л к 'поверхности
S и некоторая окрестность точки Хо на поверхности S однозначно
проектируется на плоскость л.
Точки, в которых нарушается гладкость поверхности, принято
называть особыми.
Простая поверхность'S называется гладкой, если она является
гладкой в каждой точке и касательные плоскости изменяются
непрерывно.
Последнее означает, что если X и Y — точки поверхности S
и лх и лу — касательные плоскости к поверхности S в этих точ-
ках, то при X->Y имеем лх->лу.
Прямая, проходящая через точку Хо гладкой поверхности S
и перпендикулярная касательной плоскости к поверхности S
в этой точке, называется нормалью к поверхности S в точке Хо.
3°. Дифференцирование и интегрирование векторных функций
двух аргументов
Выше (см. п. Г § 1) мы отмечали, что простую поверхность
можно задавать при помощи векторной функции двух аргументов.
Это означает, что при изучении свойств поверхностей таким функ-
циям отводится значительная роль. Введем для векторных функ-
ций в полной аналогии со скалярными функциями двух перемен-
ных понятия предела, непрерывности, дифференцируемости и ин-
тегрируемости.
Пусть г=г(и, v) — векторная функция, заданная в плоской
области 3).
Будем говорить, что функция г=г(ц, у) имеет пределом век-
тор b при (и, v)->-(uo, Vo), если
|r(u, и)—Ь|->0, когда |и—ц0| + |ц—и0|->-0.
Обозначение: lim г (и, v)=b.
(u,o)->(u0,oe)
Функция r=r(u, v) называется непрерывной в точке (uQ, vo),
если
lim г (и, v')=r(u0, v0).
(u,o)->(u„o„)
Для векторной функции вводятся понятия частных производ-
ных в точке
Если
_=lim г (Ц + Да, у) — г (и, у)
ди Ли
dr __ jim т(и, v + Лу) — г (и, у)
ди до-»о До
69
r=r(u, v)=ix(u, v)-2jy(u, v) + kz(u, v),
то' векторы ги и га равны соответственно
ги — *хи + jyu +
Гу iXy Ц- jyv-\~kzv.
Функция г (и, и) называется дифференцируемой в точке (и, v),
если ее полное приращение
Ar=r(u + Au, ифАп)—г (и, v)
для произвольных Au, Av можно, представить в виде
Ar=r„(u, v)Au + r0(u, ц)Аифо(р), (1)
где вектор о(р), Р = У Au2 + Av2 , удовлетворяет условию
1- I о (р) I л
hm ————=0.
р-*о р
Если векторная функция г (и, v) дифференцируема в каждой
точке области 2D, то говорят, что г(u, о) дифференцируема в об-
ласти 2D.
Главная линейная часть ruAu+r0Av приращения дифференци-
руемой векторной функции г (и, и) называется ее дифференциа-
лом — dr. Если и и v — независимые переменные, то можно счи-
тать Au=du, Av=du, так что
dr=ruAu + r0Av—rudu-\-rvdv. (2)
Формула Тейлора для функции г (и, v) с центром разложения
в точке (и, v) с остаточным членом в форме Пеано может быть
записана так:
Ar=dr+-~d2r+-^-d3r+ ... -[--ЬйГг+оф"), (3)
где dr определяется равенством (2), а
м I д л I д . V*) I д А , д , \С*>
dkr=[----Au Н-----Au r= ------du -4---dv} r.
\ du dv J \ du dv /
Например, при k=2 получаем
d3r— (—— du-\-~^— dvYr= ( ——dwa-j-2 —-—dudv-\—-—dv2 \ r=
\ du dv / \ du2 dudv dv2 )
=du2 + 2 -- r dudv + dv2=ruudu2 + 2r uvdudv + rTOdv2.
du2 dudv dv2 ““ “° 00
Интеграл no области Gcz3) от векторной функции г (и, v) мож-
но ввести при помощи соотношения
70
{ Г r (u, v) dudv=i Их (и, и) dudv + j z/ (и, v) dudv + к C t z (u, v) dudv.
"g g g g
4°. Дифференцируемость векторной функции и касательная
плоскость
Пусть г=г(ц, v) — векторное уравнение простой поверхности
S. Иными словами, S — годограф векторной функции г (и, v),
т. е. множество концов всех векторов г (и, v), откладываемых от
начальной точки 0(0, 0).
Будем считать, что эта функция дифференцируема в точке
(«о, fo)- Обозначим через Хо точку поверхности S, отвечающую
(«о, ^о), а через X — точку, отвечающую (и, v).
По условию дифференцируемости векторной функции r(w, v)
в точке («о, fo) имеем
Х0Х = Дг—r(w, v)—r(un, f0)=r„(«0, v0)Xu-\-rv(u0, и0)Дц + о(р), (4)
где р=]Л Ди2 +Ди2 и '° ' -> 0 при р->0 (рис. 16).
Р
Рис. 16. При Дг->-О угол между прямой Х0Х и вектором п стремится к я/2
Отложим векторы ги(ы0, ц0) и rv(uQ, v0) от точки Хо (считая,
что по крайней мере один из этих векторов ненулевой) и прове-
дем через точку Хо плоскость л, содержащую векторы ги и г„.
Если векторы ru и гс коллинеарны, то рассмотрим какую-либо из
плоскостей, проходящих через точку Хо и эти векторы.
Убедимся в том, что л — касательная плоскость к поверх-
ности.
71
Для этого достаточно показать, что угол между прямой XqX
и нормалью к плоскости л стремится к л/2. Составим скалярное
произведение вектора — Х0Х = —Дг и единичного вектора нор-
Р Р
мали п.
Из формулы (4) получим, что
Дг \ /о (р) \ п
----, п = ( —, п -> О
Р / \ Р /
где р-Д).
Так как составленное скалярное произведение стремится
к нулю, то угол между прямой Х0Х и нормалью к поверхности
стремится к прямому. Это и означает, что плоскость л — каса-
тельная к поверхности S в точке Хо.
Итак, дифференцируемость векторной функции r=r(u, v)
в точке (и0, Vo} означает, что в точке Х0(и0, v0) поверхности S,
заданной векторным уравнением г=г(и, v), существует касатель-
ная плоскость.
5°. Достаточные условия гладкости поверхности
Пусть поверхность 5 задана векторным уравнением r=r(«, v).
Будем считать функцию г (и, и) дифференцируемой в некоторой
окрестности точки (и0, и0), которой отвечает точка Xo(wo, ^о) по-
верхности S.
ТЕОРЕМА 1. Если производные ги и г„ непрерывны в точке
(«о, z?o) и линейно независимы в этой точке, то поверхность 5
является гладкой в точке Хо.
* Так как в точке (и0, и0) векторы ги и г0 линейно независи-
мы, то в точке Хо поверхности S существует единственная каса-
тельная плоскость л (см. п. 4°). Выберем прямоугольную декар-,
тову систему координат так, чтобы ее начало совпало с точкой
Хо, оси Ох и Оу располагались в плоскости л, а ось Oz была на-
правлена по нормали к поверхности S в точке Хо (рис. 17).
Рис. 17. Векторы ги(и0, оо) и
гДио, оо) располагаются в касатель-
ной плоскости л
Рис. 18. Угол между кривыми
и ЗЕ г на поверхности S
72
Пусть х(и, v), у (и, v), z(u, v) — координаты вектора г (и и)
в выбранной системе координат. Тогда ’
ru X г0 =
Уи zu
Уи
2Ц Хи
хв
%и Уи
Хи Уи
Первые две координаты этого вектора в точке («о> оо) обраща-
ются в нуль:
О, О,
хи Уи
Xv Уи
(«О. »о)
Так как векторы ги и г0 неколлинеарны и непрерывны в точке
(«о, оо), то
Хи Х0 z Q
Уи Уи
в некоторой окрестности этой точки.
Обратимся теперь к параметрическим уравнениям поверхности
S. Имеем ,
х — 'х(и, v), у=у(и, v), z=z(u, v). (5)
При наших требованиях и полученных выше выводах для пер-
вых двух уравнений (5) выполнены все условия разрешимости от-
носительно и и v, так что в некоторой окрестности точки (0, 0)
плоскости л (координатной плоскости хОу) существуют функции
и=и(х, у), v=v(x, у), (6)
имеющие непрерывные производные в точке (0, 0). Мы можем
перейти к новым параметрам х и у, подставляя функции и(х, у)
ц v(x, у) в формулы (5).
В результате получим, что в некоторой окрестности точки
(0, 0) плоскости л поверхность S будет задаваться параметри-
ческими уравнениями:
х = х, у = у, z=z(u(x, у), v(x, y))=z(x, у),
т. е. поверхность S будет графиком функции z=z(x, у).
Последнее означает, что в некоторой окрестности точки Хо по-
верхность S однозначно проектируется на касательную плоскость
л и является поэтому гладкой в этой точке. *
Достаточное условие гладкости поверхности.
Для того чтобы поверхность S, заданная векторным уравне-
нием г=г(«, и), была гладкой, достаточно, чтобы функция
г (и, v) имела непрерывные производные ги и rv в области зада-
ния параметров и в этой области гиХгс¥=О.
* Действительно, в этом случае обеспечивается гладкость по-
верхности S в каждой точке, непрерывность же касательных
плоскостей к поверхности S вытекает из непрерывности векторов
г« и гу. *
73
6°. Регулярные поверхности
Поверхность S, заданную векторным уравнением
г=г(и, и), (и, w)ea0,
будем называть Ск-регулярной, если в области задания парамет-
ров Z) функция r(w, г) имеет непрерывные производные порядка
k(k"^2) и во всех точках области 3) выполняется неравенство
гиХга=#О.
§ 3. ПЕРВАЯ КВАДРАТИЧНАЯ ФОРМА ПОВЕРХНОСТИ. ИЗМЕРЕНИЯ
НА ПОВЕРХНОСТИ
1°. Первая квадратичная форма поверхности
Пусть S — гладкая поверхность, r=r(u, и) — ее векторное
уравнение и гиХга#=О.
Первой квадратичной формой поверхности S называют выра-
жение
I=dr2. (1)
Запишем это выражение подробнее. Имеем
dr=rudu-\-rvdv, dr2—Гцс/и22 (гц, rp) dudv + r^cfo2,
откуда
I = r„dw2 + 2 (гц, r0) dudv + r^to3. (2)
Выражение (2) в каждой точке поверхности S представляет
собой квадратичную форму от дифференциалов du и dv.
Первая квадратичная форма является знакоположительной,
так как ее дискриминант
г«г„—(г„, г0)2 =(ги х г0)2 > 0 и г2и > 0.
Для коэффициентов первой квадратичной формы часто ис-
пользуют следующие обозначения:
г«=Д, (ru, rv)=F, r2—G.
Так что выражение (2) для формы I можно переписать в виде
l=Edu2 + 2Fdudv + Gdv2, (3)
где EG—Р >0.
2°. Длина кривой на поверхности
Кривую 2 на поверхности S с векторным уравнением г=
=г(«, и) можно задать следующим образом.
74
Пусть u=u(/), и=и(О — функции параметра t, Тог-
да векторная функция
r(0=r(w(0, v(t))
определяет кривую, расположенную на поверхности S.
Это позволяет рассматривать соотношения
u=u(f), v—v(t)
как уравнения кривой S на поверхности S.
Пусть S — гладкая кривая на поверхности S. Вычислим дли-
ну $(0 этой кривой между точками X(t0) и X(t). Так как r(t) =
=r(u(t), и(0) — векторное уравнение кривой S, то дифферен-
циал дуги этой кривой можно выразить так:
ds= |dr| = |г' (u(f), v(t))\dt = yrdr2=yrI — V^Ей’’ -\-2Fu'v' -\-Gv'* dt,
откуда
s(0= $ /Т
«(X„.X)
или, более подробно,
s (/)=J P Eu’‘ 2Fu'v' + Gv'* dt. (4)
/о
3°. Угол между кривыми на поверхности
Пусть гладкие кривые Si и St лежат на поверхности S
с векторным уравнением r=r(w, п) и пересекаются в некоторой
точке Ло-
Вектор
dr=rud« + r0 dv
лежит в касательной плоскости к поверхности S в точке Хо
(рис. 18). Значения дифференциалов du и dv можно выбрать так,
чтобы он был вектором касательной к кривой S\ в точке Х<>.
Достаточно взять
du=u' (t^dt, dv=v'(t0)dt
(здесь u=u(t), v=v(t) — уравнения кривой S\ на поверхности
S).
Аналогично строится вектор бг — вектор касательной к кри-
вой Si в точке Хо, отвечающий значениям дифференциалов би,
8v функций, определяющих кривую S2:
бг=гиби + гоби.
75
Поэтому
CO S Ф
(dr, 6г)
V^V^ ’
(5)
Так как
dr2=Е du2 + 2F du dv + G du*,
fir2—E 8u2 + 2F 8u 8v+G fiv2,
dr fir=(ru du + r0 dv) (r„ 8u + r0 8v)=
=r2 du 8u + (ru, r0) (du 8v + dv 8u) + r2 dv 8v=
~Edu8u-\-F (du 8v + dv 8u) -\-Gdv 8v,
то формулу (5) можно переписать следующим образом:
Е du би + F (du бу + dv 6u) + G dv 8v
COS ф = — . . (6)
VE du2 + 2F dudv + Gdv2 ^E 8u2 +2F 8u8v + G 8v*.
Пример. Найдем угол между координатными линиями и
и V.
Для линии и (меняется лишь и; r=const) имеем следующие
значения дифференциалов: du и dv=0; для линии v: 8и=0 и 8v.
По формуле (6) получаем, что
F du 6v Е
COS ф = —7=--, — = ,— .
Уёл? Vg 8v2 Veg
Из последнего соотношения видно, что если семейства линий
и и v образуют ортогональную сеть, то
F=0
в каждой точке поверхности. Справедливо и обратное.
Замечание. Вектор dr=rud«+rt,du задает направление
на поверхности в точке Хо. Это направление часто обозначают
так (du : dv).
4°. Площадь поверхности
Пусть поверхность S определяется радиус-вектором
г=г(и, v),
причем параметры и и v изменяются в области Я) плоскости
(«. V).
Разобьем область на части прямыми линиями и=и,, v=vk,
параллельными координатным осям и и. v соответственно
(рис. 19). Ясно, что линиями r(ut, v) и г (и, vk) будет разбита
на части и поверхность S. Выделим в области 3) произвольный
четырехугольник S)tk. На поверхности S ему отвечает криволи-
нейный четырехугольник Sik. Последний мало отличается от па-
76
криволинейный
Рис. 19. Разбиению области изменения параметров соответствует разбиение
поверхности
раллелограмма П,* со сторонами, определяемыми векторами
vk)Aui=ru\ui, rv(ui, vk)=rviXvk.
Этот параллелограмм лежит в касательной плоскости к по-
верхности S в точке X(ut, vk). Его площадь Gtk равна
| г„ Д«г X r0 \vh | = | гц X г01 Xut Xvk.
Возьмем за приближенное значение площади криволинейного
четырехугольника S,* площадь щ* параллелограмма П,*, а за
приближенное значение площади поверхности S сумму
IX
всех таких параллелограммов.
Естественно определить площадь поверхности S как предел а
сумм при стремлении к нулю величин Дщ и Ди*.
При условии непрерывности производных ги и г0 этот предел
о существует и равен
ЭД [ruxrp|dudu.
Итак, по определению площадь о поверхности равна
о = \\\ru/.rv\dudv. (7)
Запишем формулу (7) в несколько ином виде. Воспользуемся
следующими преобразованиями:
IГиXГоI = V|ruxrv|2 = VIru|^|r0|2sin2 ср —
—V^r2—(|rj|ro|cos<p)2 = V ifr2—(гц, rj2.
77
Так как r^=E, (ru, rv)=F, r^=G, то окончательно получим
|ruxr0|=r£G-F2.
Поэтому формулу (7) можно записать так:
о = ]/rEG—F2 dudv.
(8>
Рассмотрим случай, когда поверхность S представляет собой
график функции z=f(x, у), заданной в области 3) (рис. 20). По-
ложим и=х, v=y. Радиус-вектор поверхности г(х, у) имеет вид
г(х, у)=(х, У, f(x, у))-
Рис. 20. Вычисление площади графи-
ка функции
Отсюда
гЛ=(1, 0, Л), г,=(0, 1, fy),
E=r2x = l+f2x, G=r2=l + f2y, F=(rx, ry)=fjy,
EG-P=l+f2 + f2.
Поэтому площадь о поверхности S — графика функции z=
=f(x,y) — можно вычислять по формуле
а = ^Vl+fx + fydxdy.
Пример. Вычислим площадь сферы радиуса R (рис, 21).
Параметрические уравнения сферы имеют следующий вид:
x=Rcosvcosu, y=Rcosvsinu, z—Rsinv,
®= f(w, и)|0^ 2л, —’
78
Путем простых вычислений найдем
г„=(—7? cos vsin и, 7? cos и cos и, 0),
r0=(—7? sin v cos w,—R sin v sin u, R cost»),
£=r2 =7?2cos2u, G=r2=R2, F=(ru, ro)=0,
)/EG—F2—R2 cos v,
л
2л “
o = \\)/£G—F2dudv=R2 | du cosvdv=4nR2.
0 Tt
~2
5°. Внутренняя геометрия поверхности. Изометричные поверх-
ности
Мы убедились, что, зная первую квадратичную форму поверх-
ности, можно вычислять длины кривых на поверхности, углы
между кривыми и площади областей на поверхности. В самом
.деле, в формулы (4) для длины дуги, (6) для косинуса угла
.между кривыми и (8) для площади области на поверхности вхо-
дят лишь коэффициенты Е, F и G первой квадратичной формы.
Поэтому если известна первая квадратичная форма поверхности,
можно исследовать геометрию на поверхности, не обращаясь к ее
уравнениям, а лишь используя ее первую квадратичную форму.
Совокупность геометрических фактов, относящихся к поверх-
ности, которые можно получить при помощи ее первой квадратич-
ной формы, составляет так называемую внутреннюю геометрию
поверхности.
Поверхности, имеющие одинаковые первые квадратичные фор-
мы и потому имеющие одинаковую внутреннюю геометрию, на-
зываются изометричными.
Пример. Пусть поверхность S задана параметрическими
уравнениями (рис. 22)
х—и, y=dnu, z—v.
Это цилиндрическая поверхность с синусоидой в качестве нап-
равляющей. Вычислим векторы ги и г0. Имеем
гц = (1, cos«, 0), г„=(0, 0, 1),
поэтому
Е—r2 = l +cos2w, G=r2==l, F—(ru, го)=0.
Следовательно,
ds2=(1 4- cos2 и) du2 + dv2. (9)
79
Введем новые параметры X и У по формулам
Х= § VI +e°s2(£d£, Y=v.
о
Тогда первая квадратичная форма поверхности S примет вид
ds2=dX2+dY2.
Мы видим, что в новых переменных X и У первая квадратична®
форма рассматриваемой цилиндрической поверхности совпадает
с первой квадратичной формой плоскости (X, У) и поэтому внут-
ренняя геометрия этой поверхности совпадает с внутренней гео-
метрией плоскости (X, У).
Геометрически это свойство понятно: синусоидальный цилиндр
получается изгибанием (деформацией без сжатий и растяжений)
обычной плоскости. При такой деформации внутренняя геометрия
не изменяется.
Вообще если поверхность Si получается из поверхности Sz
путем изгибания, то внутренние геометрии этих поверхностей сов-
падают.
80
§ 4. ВТОРАЯ КВАДРАТИЧНАЯ ФОРМА
1°. Определение второй квадратичной формы
Основным объектом наших рассмотрений в этом параграфе-
будет С2-регулярная поверхность S, заданная радиус-вектором
r=r(u, и), (и,
В каждой точке такой поверхности помимо единичного векто-
ра нормали
И = ГцХГц — ГиХГ» /JY
iruxr„| Veg-f*
определен и второй дифференциал радиус-вектора
сРг=rau du24- 2гuv du dv 4- rvv dv2 4- ru d2u 4- r„ d2v. (2)
Второй квадратичной формой поверхности S называется ска-
лярное произвздение векторов d2r и п:
II — (d2r, n)=(rUB, n)du24-2(rB0, n)dudv4-(rTO, n)do2. (3>
Нетрудно видеть, что в каждой точке поверхности S форма (3)
является квадратичной формой относительно дифференциалов du
и dv.
Для коэффициентов второй квадратичной формы приняты обо-
значения
Ь=(гВв, п), Л4=(гц0, п), ^=(гоВ, п), , (4>
что позволяет записать ее в следующем виде:
II=Ldu2 + 2Mdudv + Mdv2. (5)
Укажем еще несколько способов вычисления коэффициентов
L, М и N второй квадратичной формы поверхности.
Заменяя в формулах (4) единичный вектор нормали п его вы-
ражением (1), получим, что
f __ (fuu> Гв, Гр) Д|-_ (full. ги, Гр) ДГ (Гцр, Ги, Гр) (gy
/EG — Е2 ’ /EG —Е2./ Д/EG —Е2 '
(здесь использовано тождество
(а, Ьхс)=(а, Ь, с)).
Так как векторы dr=rudu 4- rvdv и п ортогональны (первый лежит
в касательной плоскости поверхности, а второй — вектор нор-
мали) —
> (dr, п)=0,
то
d(dr, п)=0.
81
Отсюда вытекает равенство
(d2r, п)=—(dr, dn), (7)
которое дает еще один способ представления второй квадратич-
ной формы:
П = —(dr, dn)= — (r„, njdz?—((ru, nv) + (r0, nj)dudv—(r0, njdu2. (8)
Отсюда же можно получить новые формулы для вычисления
коэффициентов L, М и N. Впрочем, удобнее продифференциро-
вать по и и по v очевидные равенства
(гы, п)=0, (г0, п)=0.
Воспользовавшись соотношениями (4), получаем, что
Л=—(ru, nJ, N=— (r0, nJ,
M= — (r„, nj=—(r„, nJ.
Покажем, что вторая квадратичная форма является весьма
эффективным средством исследования геометрических свойств
регулярной поверхности.
2°. Классификация точек регулярной поверхности
Пусть S — регулярная поверхность и г=г(м, v) — ее радиус-
вектор.
Выберем на поверхности S некоторую точку Хо=Х(и0, vq) и
рассмотрим плоскость ло, которая касается поверхности S в этой
точке.
Отклонение произвольной точки X поверхности S от плоскости
л0 определим формулой
й=(г(Х)—г(Х0), п0), (10)
где п0 — единичный вектор нормали к поверхности в точке Хо.
Это отклонение, взятое по абсолютной величине, равно расстоя-
нию от точки X до плоскости ло. Отклонение положительно, если
точка X и конец вектора п0 лежат по одну сторону от плоскости
ло, и отрицательно, если эти. точки лежат по разные стороны от
плоскости ло (рис. 23).
Обратимся к формуле (10).
Разность г(Х)—г(Хо) допускает следующее представление:
г (X)—г (X0)=ru (Хо) (ы—«о) + П (*о) fa—Ц>) +
{г ии (Хо) («—«о)2+2гад (Хо) (и—и0) (о—о0)+г00 (Хо) (и—и0)2)+о (р2),
(11)
где
о(Р2) ) о
Р2
£2
при
р=/(u—u0)2 + (v—y0)2 -*• 0.
Умножим обе части равенства (11) скалярно на в
Тогда, положив
du=u—и0, dv=v—v0,
получим, что
h — — (Lo du2 + 2A4o du dv + No dv2) + о (p2).
Отметим, что коэффициенты L0=L(X0), Mo=M(Xo)-
=N(X0) в формуле (12) вычислены в точке Хо.
Таким образом, мы получили для отклонения h сл
представление:
й = Yn°+°(pa)’
где через По обозначена вторая квадратичная форма пс
ти, вычисленная в точке Хо, и о(р2)/р2->0 при р->0.
Используем полученную формулу (13) для изучения
поверхности S вблизи точки Хо.
Как известно из курса линейной алгебры, свойства
тичной формы во многом определяются знаком ее дискр®
Вычислим дискриминант второй квадратичной формы
LoNo—Mo=L (Хо) (Х0)~Мг (Хо)
в точке Хо. Возможны следующие случаи.
1+. L0Nq—Xfo2>0 — вторая квадратичная форма п°?
в точке Хо является знакоопределенной.
Зафиксируем в точке Хо некоторое направление на поверхнос-
ти; для определенности (du : 0).
Тогда любое другое направление на поверхности в точке Хо
можно задавать при помощи угла <р, который оно образует с выб-
ранным направлением (du : 0) (рис. 24).
Рис. 24. Угол <р отсчитывается против часовой стрелки, если смотреть со сто-
роны вектора нормали
Положим
du—Р COS ф, 4/и=р5Шф.
Тогда
II0=(L0 cos2 ф-f- 2Л4О cos ф sin ф + ^s*n2 ф) I’2- (14)
Нетрудно показать, что
| Lo cos2 ф + 2Л4О cos ф sin ф 4- No sin2 ф | а0,
где постоянная
-j-1Ъ + NoI - Д/Т(L°+ N^-(LoNo~M20)
и в силу условия LqN — М02>0 положительна.
Таким образом, неравенство
|IIol>a0P2
выполняется независимо от выбора угла ф.
Так как порядок стремления к нулю при р->0 второго слагае-
мого о(р2) в правой части формулы (13) выше двух, то из пос-
ледней оценки можно сделать следующий вывод.
Отклонение h сохраняет знак (совпадающий со знаком вто-
рой квадратичной формы По) для всех достаточно малых значе- Л
ний р независимо от выбора направления на поверхности. 1
84
Это означает, что все точки поверхности S, достаточно близ-
кие к точке Хо, располагаются по одну сторону от касательной
плоскости по поверхности S в этой точке. Такая точка поверхнос-
ти называется эллиптической (рис. 25).
Рис. 25. На рисунке изображена эллиптическая точка поверхности S
2+. L0N0—Л402<0 — вторая квадратичная форма поверхности
в точке Хо является знакопеременной.
Покажем, что в этом случае в точке Хо можно указать два
неколлинеарных направления на поверхности, обладающих сле-
дующими свойствами:
а) для значений дифференциалов, определяющих эти направ-
ления, вторая квадратичная форма поверхности, вычисленная
в точке Хо, обращается в нуль;
б) все остальные направления на поверхности в точке Хо раз-
биваются на два класса — для дифференциалов, определяющих
направления одного из этих классов, вторая квадратичная форма
По положительна и для другого отрицательна.
Пусть некоторое направление (du : dv) положительного класса
задается углом ф. В соответствии с формулой (14) имеем
По=а(ф)р2>0,
где
а (ф)=Л0 cos2 ф + 2Л40 cos ф sin ф + No sin2 ф.
Как видно из формулы (13), знак отклонения h для всех дос-
таточно малых значений р в рассматриваемом направлении ф
совпадает со знаком второй квадратичной формы По. Следова-
тельно, если точка X поверхности S достаточно близка к точке
Хо, то это отклонение положительно.
85
Рассуждая аналогично, можно указать точки на поверхности,,
близкие к точке Хо, для которых отклонение h отрицательно
(рис. 26).
Рис. 26. Отклонение точки Xd в направлении (du:dv) положительно, отклоне-
ние точки Xt, в направлении (6и:6а) отрицательно
Приведенные рассуждения показывают, что вблизи точки Хо
поверхность S располагается по разные стороны от касательной
плоскости по. При этом проекции точек поверхности, отклонения
которых положительны, на касательной плоскости ло заполняют
множество, отмеченное на приведенном рисунке (рис. 27).
Рис. 27. Прямые указывают направления в точке Хо, в которых
По=О
В рассматриваемом случае точка Хо называется гиперболичес-
кой точкой поверхности S.
3+. L0N0—Mq2=0, но отличен от нуля хотя бы один из коэф-
фициентов Lo, No.
Пусть для определенности L0^=Q. Тогда вторая квадратичная
форма поверхности S в точке Хо может быть записана в следу-
ющем виде:
По=Lo (du + a dv)2.
86
Тем самым в зависимости от знака Lo форма По либо неотрица-
тельна (Ло>О) либо неположительна (Л0<0). При этом на по-
верхности S в точке Хо можно указать направление (du:dv) =
= (а:—1), такое, что определяющие его дифференциалы du и dv
обращают вторую квадратичную форму По в нуль; для всех дру-
гих направлений на поверхности в точке Хо форма По имеет один
и тот же знак (совпадающий со знаком Lo) (рис. 28).
Рис. 28. Все точки поверхности S кроме (возможно) линии, проходящей через
точку Хо в направлении (du:dv), лежат под касательной плоскостью л»
В этом случае точка Хо называется параболической точкой
поверхности S.
4+. Ло=Л1о=Л/'о=О.
Такая точка Хо называется точкой уплощения поверхности.
Расположение точек поверхности, близких к точке уплощения,
относительно касательной плоскости поверхности в этой точке
может быть чрезвычайно разнообразным (рис. 29).
Рис. 29. На рисунках приведены примеры точек уплощения (л0 — касательная
плоскость поверхности в точке уплощения Хо)
87
3°. Кривизна кривой на поверхности
Рассмотрим на поверхности S произвольную С2-регулярнук>
кривую S, проходящую через точку Х=Х(и, v) в направлении.
(du : dv) (рис. 30).
Рис. 30. Плоскость л касается поверхности S в точке X; кривая 2 лежит нах
поверхности S
Пусть
r=r(s)=r(u(s), o(s))
— естественная параметризация кривой 3?. Вычислим в точке-
Х{и, v) три вектора:
единичный вектор касательной к кривой — т=г'
dr
ds
единичный вектор нормали к поверхности — пи Ь=пХ;т.
Тройка векторов т, п, b линейно независима. Это позволяет
представить вектор
ds2
в виде их линейной комбинации
г"=ат4-Рп4-уЬ.
Так как (г', г') = 1, то
а=(г', т)=(г", г')=0.
Коэффициенты р=(г", п) и у=(г", Ь) имеют специальные назва-
ния:
kn=(r", п) — нормальная кривизна кривой S,
V=(r". Ь) — геодезическая кривизна кривой S’.
88
Если кривизна &i=|r"| кривой 3? отлична
кривой 3 определен единичный
При этом r"=&iv (рис. 31).
л
ОТ нуля, ТО ДЛЯ
вектор главной нормали — v.
Рис. 31. Вторая производная г"
радиус-вектора кривой является ли-
нейной комбинацией векторов b и п
Рис. 32. Кривые и на по-
верхности S в точке X имеют одно
и то же направление (du:dv)
Отсюда вытекает, что
kn=k1(v, n), feg=fe1(v, п, т).
Обозначим через 0 угол между вектором главной нормали
v кривой 3 и единичным вектором нормали п к поверхности S.
Тогда справедливо равенство
kn=(r", n)=^1cos0. (15)
Покажем, что для всех кривых, проходящих по поверхности S
через точку Х(и, и) в заданном направлении (du : dv) (т. е. име-
ющих одну и ту же касательную), произведение k\ cos 0 прини-
мает одно и то же значение (рис. 32—33).
По правилу дифференцирования сложной функции имеем
d2r _ dv , ( ^v \2 , d2u . d2v
ds2 uu \ ds / “° ds ds vv \ ds / “ ds2 ° ds2
Умножая обе части этой формулы на единичный вектор нормали
п скалярно, с учетом равенства (15) получим, что
, t. гъ г [ du \2 , п.. du dv . / dv \2
£n=£1cos0=L -—) 4-2Л1-— ----------\-N .
\ ds } ds ds \ ds /
Так как в точке Х(и, v) кривой 3
ds2=E du2 + 2F dudv + G dv2,
то из предыдущего равенства вытекает формула
, , _ L du2 + 2Л1 dudv + N dv2
kn — k, COS 0 —---!.
E du2 + 2F du dv G dv2
89
Подчеркнем, что все функции Е, F, G, L, М, N вычислены в точ-
ке Х(и, v).
Выражение в правой части последней формулы зависит толь-
ко от отношения du к dv, т. е. только от направления кривой S’
в точке Х(и, v).
Рис. 33. feicos 01 = fe2cos 02. Векторы
п, kiVt и k2v2 расположены в пло-
скости, проходящей через точку X
перпендикулярно заданному направ-
лению
Рис. 34. З’п — нормальное сечение
поверхности S в точке X в направ-
лении 1
Проведем через точку Х(и, v) плоскость л параллельно век-
тору нормали n(u, и) к поверхности и данному направлению
\=(du:dv). Кривая S\, которая получается при пересечении по-
верхности S с плоскостью л, называется нормальным сечением
поверхности S в точке Х(и, v) в заданном направлении 1=
= (du-.dv) (рис. 34).
Полученный выше результат можно сформулировать в виде
теоремы.
ТЕОРЕМА 2 (Менье)*. Пусть через точку Х(и, v) поверхнос-
ти S в заданном направлении \=(du:dv) проведена плоскость
л'. Тогда проекция центра кривизны нормального сечения S\
на плоскость л' совпадает с центром кривизны наклонного сече-
ния S?'=S[\n'.
Для нормального сечения угол 0=0 и формула (15) при-
нимает следующий вид:
. ^1=^п.
Полученное равенство означает, что величина kn равна кривизне
нормального сечения поверхности 5 в направлении \=(du:dv).
* Менье де ла Плас (Meusnier de la Place) Жан Батист Мари Шарль
(19.6.1754—17.6.1793) — французский математик.
90
Проведенные рассуждения дают основание назвать величину
&п нормальной кривизной поверхности S в данной точке X и
в данном направлении 1:
kn = kn(X, 1).
Если направление в точке поверхности задано, то нормальная
кривизна kn в этом направлении (du : dv) может быть вычислена
по формуле
_ II _ L du2 + 2М dudv-\-N dv2
I Е du2 + 2F du dv -|- G dv2
(16)
4°. Индикатриса Дюпена*
Зафиксируем на регулярной поверхности S, заданной радиус-
вектором г=г(н, v), произвольную точку Х(и, v). Пусть ki —
нормальная кривизна поверхности в этой точке в некотором нап-
равлении 1.
Построим в точке Х(и, v) касательную плоскость л поверх-
ности S и отложим в этой плоскости от точки X в направлении 1
отрезок длины
Множество концов этих отрезков называется индикатрисой
Дюпена поверхности S в точке X.
Выясним, что представляет собой индикатриса Дюпена.
Введем на касательной плоскости прямолинейные координаты,
приняв точку X за начало координат, а векторы ги и ги — за ба-
зисные векторы координатных осей g и соответственно.
Пусть т) — координаты одной из точек индикатрисы Дюпе-
на, отвечающей некоторому направлению \=(du-.dv). Тогда
gru+Tp=^- Ги^ + Гр^ (17)
УШ lrudu-f-rvdvl
Ясно, что
g: T]=du : dv.
Поэтому из формулы (16) для нормальной кривизны вытекает,
что
k . _ Lga + 2Algr] + М]2
1 El2 + 2F^+G^2
* Дюпен (Dupin) Пьер Шарль Франсуа (6.10.1784—18.1.1873) — француз-
ский математик.
91
Возводя обе части равенства (17) в квадрат, получим, что
Eg2+ 2/^ + 0^=-J—.
|Я/1
Из сравнения последних двух соотношений заключаем, что
| Lt2 + 2М%ц + Ntf | = 1.
Таким образом, индикатриса Дюпена представляет собой:
эллипс — в эллиптической точке (LN—М2>0),
пару сопряженных гипербол — в гиперболической точке
(LN—Л42<0),
пару параллельных прямых — в параболической точке
(LN—М2=0, Л2 + Л''М0) (рис. 35).
Рис. 35. Индикатриса Дюпена в эллиптической (а), гиперболической (б) и па*
раболической (в) точках
5°. Главные кривизны
Как видно из формулы (16), нормальная кривизна поверхнос-
ти в данной точке зависит от выбора направления на поверх-
ности.'
Направление на поверхности называется главным, если нор-
мальная кривизна в этом направлении достигает экстремального
значения.
Покажем, что в каждой точке С2-регулярной поверхности най-
дется не менее двух различных главных направлений.
оо
Пусть :т|) — произвольное направление в точке X на по-
верхности S. Тогда
М £S2 + 2F^ + Gn2
(18>
— дифференцируемая функция переменных g и ц. Отметим, что-
функции Е, F, G, L, М, N определяются только выбором точки X
и от переменных g и ц не зависят.
Полагая
g=pcoscp, r|=psin<p,
получим, что
___k , ,__L cos2 ф 2Л1 cos ф sin ф -|- N sin2 ф
r' п Е {os2 ф + 2F cos ф sin ф -|- G sin2 ф
Так как функция йп=й„(ср) непрерывна и йп(0)=йл(2л), то на
отрезке [0, 2л] она либо постоянна, либо имеет хотя бы один
максимум и хотя бы один минимум. Это и означает, что в каждой
точке С2-регулярной поверхности есть два различных главных
направления.
Экстремальные значения нормальных кривизн в главных нап-
равлениях называются главными кривизнами поверхности в дан-
ной точке (рис. 36).
Рис. 36. Указаны главные направления в точке X
Укажем способ вычисления главных направлений и главных,
кривизн в данной точке регулярной поверхности.
Из формулы (18) для kn=k(^, ц) вытекает тождество относи-
тельно переменных g и -гр
(L—kE) g2 + 2 (М—kF) gT] + (N—kG) т]а=0. (19)-
Продифференцируем это тождество по g. Учитывая, что производ-
ная нормальной кривизны в главном направлении обращается
в нуль, получим для главного направления (g :т])
(L—kE)l + (M—kF)r\=0. (20).
Дифференцируя тождество (19) по т] и рассуждая > аналогично,
получаем
(М—kF)t + (N—kG)x\=Q. (21>
Здесь k — главная кривизна в направлении (g : т|).
93
Будем рассматривать полученные соотношения (20) — (21) как
систему линейных алгебраических уравнений относительно неиз-
вестных | и т|. Эта система имеет ненулевые решения, так как
в данной точке регулярной поверхности всегда есть главные нап-
равления.
Из этого вытекает, что
L—kE M—kF
M—kF N—kG =°’
Вычисляя определитель, получим квадратное уравнение для
искомой функции k:
k2 (EG—F2)— k(EN—2FM+GL) + LN—M2=0. (22)
Проведенные выше рассуждения позволяют утверждать, что
уравнение (22) имеет вещественные корни k\ и kz, которые и яв-
ляются главными кривизнами. Эти корни либо различны, kr^kz,
либо совпадают, ki=k2.
Рассмотрим оба случая.
1+ Уравнение (22) имеет два различных корня k\ и k2.
Этим корням отвечают на поверхности два различных главных
направления (gi : гр) и (g2: Ц2), определяемых из систем
(Ь-^Б)^ + (М-^)т]г=0,
0 = 1, 2) (23)
(M-kJ^ + kN-kiG^^Q.
Покажем, что если направления координатных линий на по-
верхности в некоторой точке совпадают с главными направлени-
ями, то в этой точке коэффициенты F и М обращаются в нуль.
Пусть направления координатных линий —(gi : 0) и (0 : тр) —
главные. Тогда из системы (23) вытекает, что
L—ktE=0, M—kjF^Q,
M—k2F=0, N—k2G=Q.
Из второго и третьего равенств вследствие того, что ki^kz, зак-
лючаем:
Заметим, что в рассматриваемом случае кривизны k} и k2
можно найти из следующих формул:
2+. Уравнение (22) имеет совпадающие корни: ki=k2=k.
Покажем, что в этом случае каждое направление на поверх-
ности в данной точке является главным.
94
Так как в точке регулярной поверхности всегда есть два раз-
личных главных направления, то система (20)^-(21) должна
иметь два линейно независимых решения. Это возможно лишь
при выполнении равенств
L—kE—0, M—kF—0, N—kG=0.
Отсюда вытекает, что
L=kE, M=kF, N=kG
и, следовательно,
kn=k
(см. формулу (18)).
Тем самым нормальная кривизна поверхности в данной точке
постоянна (не зависит от направления) и, значит, каждое нап-
равление является главным. *
Точками на поверхности, для которых каждое направление яв-
ляется главным, могут быть либо точки уплощения (k=0 — нор-
мальная кривизна поверхности в каждом направлении в такой
точке равна нулю), либо эллиптические точки (k>0), называе-
мые в данном случае точками округления или омбилическими
точками.
Пример. Все точки плоскости являются точками уплоще-
ния, все точки сферы являются точками округления.
. ' Из соотношения M = Fk видно, что если координатные линии
на поверхности в данной точке ортогональны (Л=0), то и Л4=0.
Подведем некоторые итоги.
В каждой точке регулярной поверхности имеются взаимно ор-
тогональные главные направления.
Если направления координатных линий на поверхности сов-
падают с главными направлениями, то
F=M=0.
Верно и обратное: если Е=Л1=0, то, как следует из формулы
(18), координатные линии пип имеют главные направления.
6°. Линии кривизны
Кривая на поверхности, направление которой в каждой точке
совпадает с главным направлением на поверхности в этой точке,
называется линией кривизны.
Для того чтобы дифференциалы du и dv определяли главное
направление (du:dv), необходимо и достаточно, чтобы выполня-
лись соотношения
(L—kE) du+(M — kF) dv=0,
(M—kF) du + (AT— kG) dv = 0,
где k — кривизна нормального сечения в направлении (dw.dv).
95-
Исключая k, получим, что
(LF—ME) du2 + (LG—NE) dudv+(MG—NF) dv2=0. (24)
Формула (24) также дает необходимое и достаточное условие
того, чтобы направление (du : dv) было главным.
Запишем ее в более симметричной форме:
dv2 —dudv du2 =0. (25)
Е L F G M N
Равенство (25) можно рассматривать как дифференциальное
уравнение линий кривизны.
Покажем, что в окрестности каждой точки X, не являющейся
точкой уплощения или точкой округления, поверхность можно
параметризовать так, что координатные линии будут линиями
кривизны.
Запишем дифференциальное уравнение линий кривизны ко-
ротко так:
Adu2-'r~2Bdudv-'r~Cdv2—0. (*)
Так как все достаточно близкие к точке X точки поверхности
также имеют ровно два главных направления, то квадратный
трехчлен
Л + 2ВХ + СХ2
в каждой из них будет иметь два вещественных корня, что воз-
можно лишь в случае, если
АС—В2<0.
Это позволяет записать уравнение (*) в виде системы дифферен-
циальных уравнений первого порядка:
Adu + (В + У В2—AC) dv=0,
Adu + (B—yrB2—AC)dv=Q. (**)
Интегральные кривые системы (**) являются искомыми коорди-
натными линиями на поверхности, т. е. Линиями кривизны.
7°. Формула Родрига*
Пусть и и v — криволинейные координаты в окрестности точ-
ки X на поверхности S. Так как производные пц и п0 единичного
вектора "нормали п к поверхности S в точке X параллельны .ка-
рательной плоскости лх (дифференцируя равенство п2=1, убежда-
* Родриг (Rodrigues) Бенжамен Олинде (16.10.1794—26.12.1851) — фран-
цузский математик.
. ,96
емся в том, что (n, nu) = (n, по)=0, то их можно представить
в виде линейной комбинации только векторов ги и гв:
rtu=aru + §r0, пв=угц4-бг0. (26)
Умножая оба равенства (26) скалярно на векторы гц и г0 с уче-
том формул (9) пункта Г, получим соответственно
—L=aE + $F, —M—yE-\-SF,
—M—aF + ₽G, —N—yF + SG.
Как показано в предыдущем пункте, координатные линии на
поверхности всегда можно выбрать так, чтобы в точке X они
имели главные направления. Тем самым F=M=0 и, значит,
«=“’ 6=-4. (27)
с О
Заметим, что нормальные кривизны поверхности в точке X
в направлениях координатных линий и и v соответственно равны
= k2^. (28)
Сравнивая формулы (26), (27) и (28), окончательно получим,
что
Пи= — ^ги, По=—Й2Г0.
Сформулируем полученный результат в виде теоремы.
ТЕОРЕМА 3 (Родриг). Производные единичного вектора нор-
мали и радиус-вектора поверхности в главном направлении кол-
линеарны; коэффициент пропорциональности только знаком отли-
чается от нормальной кривизны поверхности в этом направлении
(рис. 37).
Рис. 37. Производные радиус-векто-
ра г и единичного вектора п нор-
мали поверхности в главных на-
правлениях коллинеарны
Рис. 38. Указаны асимптотические,
направления на поверхности в точ-
ке X
4 Зак. 259
97
Справедливо и обратное утверждение:
если
то направления линий и и v являются главными и Xi=—ki,
Х.2=-k%-
8°. Асимптотические направления
Направление на регулярной поверхности называется асимпто-
тическим, если нормальная кривизна поверхности в этом направ-
лении обращается в нуль (рис. 38).
Из формулы (16) пункта 3° видно, что обращение в нуль вто-
рой квадратичной формы в направлении (£:ц) является необхо-
димым и достаточным условием того, чтобы это направление
было асимптотическим:
££24-2Лф1+М12=0.
Поэтому в эллиптической точке поверхности нет асимптотичес-
ких направлений, в гиперболической точке существует ровно два
асимптотических направления, в параболической точке — одно
асимптотическое направление; любое направление в точке упло-
щения является асимптотическим.
9°. Асимптотические линии
Кривая на поверхности называется асимптотической линией,
если в каждой своей точке она имеет асимптотическое направ-
ление.
Пусть (du: dv) — направление кривой S на поверхности S
в ее текущей точке Х(и, у).
Необходимым и достаточным условием того, чтобы рассмат-
риваемая кривая Z была асимптотической линией, является ра-
венство
L(u, v)du2 -\-2М (и, v) dudv-фN(и, v)dv2 — Q.
Отсюда следует, что соотношение
Ldu2 -ф 2Mdudv -ф Ndv-= О (29)
является дифференциальным уравнением асимптотических линий.
Покажем, . что в окрестности гиперболической точки поверх-
ности всегда можно ввести параметризацию, при которой коор-
динатные линии являются асимптотическими линиями.
Вследствие того что в гиперболической точке выполняется
условие LN—М2<0, уравнение (29) можно свести к системе двух
дифференциальных уравнений первого порядка, интегральными
линиями которой и будут искомые координатные линии, т. е.
асимптотические.
98
Выясним, какой вид принимает вторая квадратичная форма
в точке, координатные линии в которой имеют асимптотические
направления.
Из того, что направления {du : 0) и (0 : dv) асимптотические,
вытекает, что L=N=Q. Поэтому
Il = 2Mdudv.
Свойства асимптотических линий.
1+. Если на поверхности расположена прямая, то она непре-
менно является асимптотической линией.
* Это вытекает из того факта, что нормальное сечение поверх-
ности в направлении, задаваемом этой прямой, совпадает с ней
самой. *
2+ Касательная плоскость поверхности в каждой точке асимп-
тотической линии является ее соприкасающейся плоскостью.
* Возможны два случая.
а) Кривизна асимптотической линии £ в точке X отлична от
нуля.
Тогда касательная плоскость лх поверхности в этой точке
параллельна векторам dr и dr2 (последнему в силу равенства
(d2r, n)=Ldu2-\-2Mdudv-\-Nd^ — 0).
б) Если кривизна кривой Z в точке X равна нулю, то указан-
ное свойство остается справедливым вследствие того, что в этом
случае всякая плоскость, содержащая касательную к кривой Z
(а значит, и касательная плоскость лх), является соприкасаю-
щейся плоскостью кривой %. *
10°. Формула Эйлера*
Возьмем на регулярной поверхности S произвольную точку X.
Без потери общности можно считать, что координатные линии
в точке X на поверхности S имеют главные направления и орто-
гональны. Это означает, что в точке X первая и вторая квадра-
тичные формы поверхности S задаются формулами
I=Edu2 + Gdu2, \\ = Ldu2-^Ndv\
этой точке вычисля-
а главные кривизны k\ и /г2 поверхности 5 в
ются так:
В рассматриваемом случае формула для
ны kn=k{'Et, т|) поверхности в направлении
следующий вид:
нормальной кривиз-
(д : т]) принимает
* Эйлер (Euler) Леонард (15.4.1707—18.9.1783) — швейцарский матема-
тик.
4*
99
Обозначим через <р угол, который направление (5: я) обра-
зует с направлением (|: 0) координатной линии и. Тогда
Е В G Г)
COS Ср —- — Sincp —---------
K^’ + GT)2 y^+Gn2
Обозначая fe(g, tj) через &(<р), получим формулу Эйлера для
нормальной кривизны поверхности в произвольном направле-
нии ср:
&(ф)=&гсо52<р4~/г251па<р. (30)
Из формулы Эйлера видно, что для вычисления нормальной
кривизны поверхности в произвольном направлении достаточно
знать ее главные кривизны в рассматриваемой точке.
11°. Средняя и гауссова кривизны
При изучении свойств регулярных поверхностей широко ис-
пользуются понятия средней кривизны поверхности и гауссовой
кривизны.
Пусть k\ и k2 — главные кривизны регулярной поверхности
в данной точке.
Средней кривизной Н поверхности в данной точке называется
полусумма ее главных кривизн
Н=-|-(^ + ^). (31)
Гауссовой кривизной К поверхности называется произведение
ее главных кривизн
k2. (32)
Поскольку главные кривизны поверхности удовлетворяют со-
отношению
fea (EG—F*)—k (EN—2FM + GE) + LN—Л12=0,
то, используя свойства корней квадратного уравнения, получаем
для средней кривизны Н и гауссовой кривизны К следующие
формулы:
2 EG — F2 ' f
(34)
EG — F2
Укажем некоторые свойства средней и гауссовой кривизн по-
верхности.
100
Из формулы Эйлера (30) вытекает, что
2л
С fe(<p)d<p=/7
2Л J
О
и
-L^)+k^ + ^=H
(соотношения в определенной степени оправдывают название Н).
Из формулы (34) видно, что знак гауссовой кривизны К
совпадает с дискриминантом второй квадратичной формы. По-
этому
К>0 в эллиптических точках,
К<0 в гиперболических точках,
К=0 в параболических точках и в точках уплощения^
12°. Поверхности вращения
Поверхностью вращения называется поверхность, которую за-
метает плоская кривая при своем вращении вокруг оси, лежащей
в плоскости этой кривой.
Рассмотрим на плоскости хОг кривую S, заданную уравнени-
ями (рис. 39)
х=<р(и), г=ф(и),
щ и и2.
Рис. 39. Поверхность вращения
При вращении кривой 3? вокруг оси Oz получаем поверхность
вращения S. Линии пересечения поверхности вращения S с плос-
костями, содержащими ось вращения Oz, называются меридиана-
ми поверхности вращения, а с плоскостями, ортогональными оси
Oz, — параллелями (рис. 40).
101
Найдем уравнения поверхности вращения.
Точка (<р(ы), 0, -ф(ы)) кривой 3? при повороте кривой на
угол v переходит в точку
(<р (u) cos v, <р (и) sin v, ф(и)).
Рис. 40. Параллели и меридианы на
~ поверхности вращения
Рис. 41. Цилиндр — поверхность
нулевой кривизны
,Тем самым уравнения поверхности вращения имеют следующий
вид:
x=(p(u)cost>, y=q(и)sinu, z=ty(u),
(35)
Линии u=const — ее меридианы, а линии u=const — параллели.
Первая и вторая квадратичные формы поверхности вращения
равны соответственно
I=(<p'2 + ip'2)duz + q)2du2, (36)
тт . Уф' — Ф'ф" , , . Ф'ф , „
II =----- ~ du3 + dv2.
Уф'2 + У > W + r2
(37)
/2
Отметим, что параллели и меридианы поверхности вращения
образуют ортогональную сеть
F=0,
а так как
Л4=0,
то параллели и меридианы являются линиями кривизны поверх-
ности вращения.
Примеры регулярных поверхностей вращения постоянной га-
уссовой кривизны.
1. Л=0.
Вращением прямой
х=а, z=u
вокруг параллельной ей оси Oz получаем цилиндрическую по-
верхность (рис. 41)
x=acosv, y=asinv, z=u.
Первая и вторая квадратичные формы этой поверхности соответ-
ственно равны
I = du2-]-dv2, 11 = adv2.
Гауссова кривизна К цилиндрической поверхности равна нулю.
2. /C=const>0.
Вращением полуокружности
x=Rcosu, z=Rsinu,
। । л
и ::C—.
2
вокруг ее диаметра получаем сферу радиуса R (рис. 42):
x—Rcos ucosv, y=Rcosusinv, z=R sin и.
Рис. 42. Сфера — поверхность по-
стоянной положительной кривизны
Ее основные формы соответственно равны
I=R2du2 4- R2 cos2 vdv2,
11 =—= Rdu2 + R cos2 vdv2.
R
Гауссова кривизна К сферы радиуса R-.
К=—.
R2
3. /(=const<0.
103
Рассмотрим трактрису — плоскую кривую, отрезок касатель-
ной к которой между точкой касания и некоторой фиксированной
прямой, лежащей в этой же плоскости, имеет постоянную длину
(рис. 43).
Выбирая на плоскости хОг в качестве этой‘прямой ось Ог,
получаем уравнения трактрисы
x=asinu, г—a (cosu-f-Intg-у-j,
л
—
2
Исключив параметр u, приходим к явному уравнению
z—a In а + /а2-х2 _/а2_х2 .
X
При вращении трактрисы вокруг оси Oz получаем поверх-
ность вращения, называемую псевдосферой (рис. 44). t Ее пара-
метрические уравнения имеют следующий вид:
x=asinucoso, a sin u sin о, z—a (cos и-\- In tg — 1.
Рис. 44. Псевдосфера — поверх-
ность постоянной отрицательной кри-
визны
Первая и вторая квадратичные формы псевдосферы равны соот-
ветственно
I—а2 ( 3 4----?— \ dua 4- a2 sin2 udv2,
\ sin* и )
104
n=fl-----2~^ц du2-}-a----M
i/"3+_4_ r~
V sin* и У sin4 и
Гауссова кривизна К псевдосферы постоянна и равна:
К=-~.
а*
(38)
§ 5. ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ ПОВЕРХНОСТЕЙ
В этом параграфе для регулярной поверхности будут получе-
ны формулы, являющиеся в известном смысле аналогом формул
Френе в теории пространственных кривых.
Ранее было показано, как по заданной поверхности можно
вычислять ее первую и вторую квадратичные формы. Здесь же
мы попытаемся выяснить, в какой степени первая и вторая квад-
ратичные формы определяют поверхность. Более точно — будут
найдены условия на заданные квадратичные формы
Edu2 + 2Fdudv И- Gdv2 (1)
и
Ldu2 И- 2Mdudv И- Ndv2, (2)
выполнение которых обеспечивает существование и единствен-
ность поверхности с первой квадратичной формой (1) и второй
квадратичной формой (2).
1°. Деривационные формулы
Пусть
г=г(и, о), (u,
— радиус-вектор С2-регулярной поверхности S. В каждой точке
такой поверхности векторы
образуют линейно независимую систему. Поэтому любой вектор
можно представить в виде их линейной комбинации. Это относит-
ся и к производным по и и v самих векторов ги, г0 и п (рис. 45).
Рассмотрим, в частности, разложения по векторам ги, го и п
их производных
Giui ^uoi П>о» nu, По.
Имеем
rua = rhru 4- Г] 1Г0 4* Ап,
105
Гио=Г12Ги+ Г12Г0-|- РЛ, (3)
Гоо = Г22Ги + Г22Го + vn
пц=О11ГВ+а12г0 4- а13п,
(4)
п0=®21Ги + а22г0 4- а23п,
где Г?/, аг/, К, ц, v— некоторые коэффициенты, подлежащие оп-
ределению.
Рис. 45. В каждой точке регулярной поверхности тройка векторов
гИ1 г„ и п линейно независима
Покажем, что эти коэффициенты можно выразить через ко-
эффициенты первой
I—Edu9 + 2Fdudv 4- Gdv2
и второй
11=Ldu9 4- 2Mdudv 4- Ndv2
квадратичных форм данной регулярной поверхности.
При выводе формул нам понадобятся соотношения, определя-
ющие коэффициенты форм I и II через производные радиус-век-
тора. Напомним эти соотношения:
Г2=£, (ru, rp)=F, r2=G; ’ (5)
(rBa, n)=L, (ru0, n)=M, (rOT, n)=N,
(b)
—(ru, nu)=L, —(r„, n0)= — (ro, nu)=M, — (r„, n0)=AL
Начнем с вычисления коэффициентов в формулах (3).
Коэффициенты %, p, v.
Умножим обе части каждого из равенств (3) на вектор п ска-
лярно. С учетом равенств (га, п)=0, (г», п)=0 и формул (6) по-
лучаем, что искомые коэффициенты совпадают с соответствую-
щими коэффициентами второй квадратичной формы:
X=L, v=N. (7)
106
Коэффициенты Г?/.
Умножим скалярно обе части первого из равенств (3) сначала
на вектор ги, а затем на вектор га. С учетом формул (5) получим
соответственно
(ruu,ru)=r}1E + r?1F,
(rua, ru)=r}1F + rf1G.
Скалярные произведения в левых частях соотношений (8) опре-
деляются через производные коэффициентов первой квадратичной
формы:
(raa, га)=~Е„, (ruu, rB)—Fu—(9)
Первое из этих равенств получается после дифференцирования
по и обеих частей равенства ги2=Е. Чтобы убедиться в справед-
ливости второго, достаточно продифференцировать по и равенст-
во (ги, га)=/’ и по v — равенство ги2=Е:
а затем исключить произведение (гаа, га).
Разрешая уравнения (8) относительно неизвестных Гц и Гц,
с учетом формул (9) получим, что
г|'=4г
* ' 2 2 > (10)
(-^euf+fue-±ebeY
где W=EG—F2>0.
Применяя тот же прием ко второму и третьему уравнениям
(3), вычислим остальные коэффициенты Г*,:
Г*2=— ebg—-guf\,
rf2=— GUE----EjA,
W \ 2 u 2 j’
A22^~(—^GuG + FbG—^G'f\, (11)
W \ Л i, J
r*22=^(-±-GBE-FoF+±-GBF\
Отметим, что коэффициенты Гцк (они называются символами
Кристоффеля) выражаются только через коэффициенты 'первой
квадратичной формы Е, F, G и их первые производные.
Обратимся теперь к вычислению коэффициентов ац в форму-
лах (4).
107
Продифференцировав тождество
п2=1
по и и по и, получим, что
(пи, п)=0, (п0, п)=0.
Это означает, что векторы пи и п0 ортогональны нормальному
вектору п и, следовательно, параллельны касательной плоскости
поверхности в рассматриваемой точке. Поэтому в формулах (4)
CCi3 = CC23 = O.
Умножим обе части соотношения
пв=ацГв+а12г0
скалярно на ги и на rv. С учетом формул (6) получим соответ-
ственно
—L=anE + a12F, —M=anF-[-rt12G.
Отсюда вытекает, что
MF — LG LF—ME
а,,—----------. а12=--------
IF W
Аналогично из соотношения
ПО ®21*"и Н- ^22^0
вычисляются коэффициенты ct2i и 022:
NF — MG ~ _ MF — NE
а21- ~ > К22---------
Таким образом, мы показали, что производные векторов ru, гв
и п линейно выражаются через векторы ru, rv и п, причем коэф-
фициенты в этих разложениях зависят только от коэффициентов
первой и второй квадратичных .форм поверхности и их производ-
ных.
Сказанное относится к производным радиус-вектора и единич-
ного вектора нормали поверхности любого порядка.
2°. Основные уравнения теории поверхностей
Если S — С3-регулярная поверхность, то справедливы равен-
ства
(гВВ)о==(*'Во)В» (^ио)о== (Гоо)а<
(14)
(пВ)о=(по)В.
Каждый из пяти векторов гвв, ГВо, Гоо,Пв, По, входящих в фор-
мулы (14), можно представить в виде линейной комбинации век-
106
торов ru, го и п. Причем, как доказано в предыдущем пункте,
коэффициенты в этих разложениях известным образом определя-
ются через коэффициенты первой и второй квадратичных форм
поверхности и производные этих коэффициентов.
Остановимся на этом подробнее.
Рассмотрим разность
®1(f uu)o (f uo)u •
Заменяя векторы ruu и ruv их разложениями по формулам (3),
получим, что
Вх={(Г11)о—(Г}2)и> ги + {(Гн)0 - (Г?2)и) г0 +
+ (Ьр—М и) п—Г}2гии + (Ги — Г?2) гиа 4- ГцГда—Мпи + Nnc.
Вновь используя деривационные формулы (3) и (4), перепишем
последнее соотношение в следующем виде:
Bl = Р11Ги + Р12Г0 + Р13П> (15)
где
Рц = (Г} 1)0 — (Г12)ц + Г?] Г22-Г12Г12 + «211 — ацМ,
р12=(Ги)0-(Г12)„ + rhr?2-rj2r?i + Г?1 Г222-(Г?2)2 + «22Л -а1еМ, (16)
р13=LO—MU + rhAf-lU + VnN -Г?2М.
В силу первого из равенств (14) вектор В! тождественно ра-
вен нулю:
Вр-О.
Отсюда и из линейной независимости векторов ги, rv и п вытека-
ет, что коэффициенты в разложении (15) необходимо равны
нулю:
Рп=0, Pi2=0, Р1з=О-
Применяя тот же прием к разностям
В2 = (г ио)о — (гоо)и
и
Вз = (Пи)0—(П0)и,
приходим к разложениям
В^РпГи+РйГр + Р,^ »=2, з, (17)
коэффициенты р1;- в которых известным образом выражаются че-
рез Г//*, а,-/ и L, М, N. (Читатель без труда сможет вывести их
самостоятельно таким же способом, как были получены формулы
(16) для коэффициентов 0ц, 0i2 и 0i3).
Все коэффициенты в разложениях (17) равны нулю.
109
Как и раньше, это следует из равенств
В2 = О, В;, = О
и линейной независимости векторов ги, г„ и п.
Итог наших рассуждений коротко можно сформулировать сле-
дующим образом:
₽г> = 0, i, j=\, 2, 3. (18)
Не предъявляя формул для всех коэффициентов 01;- явно (как
можно судить по соотношениям (16), они достаточно громоздки),
укажем путь дальнейшего исследования системы (18).
Заменив коэффициенты Гцк и ау в выражениях для 0ц через
коэффициенты Е, F, G, L, М, N первой и второй квадратичных
форм при помощи формул (8) — (И), несложно убедиться в том,
что только три из девяти равенств (18) независимы.
Именно, одну и ту же формулу дают четыре условия:
011=0 , 012 — 0 , 021 = 0 , 022 = О.
Еще по одной формуле получается из условий
01з~О> 0з1=::=О
и
023 = 0, 032 — 0
соответственно. Условие
0зз=О
выполняется тождественно.
После простых, хотя и достаточно громоздких, преобразований
этим трем формулам удается придать следующий вид (читателю
полезно проделать соответствующие вычисления, чтобы убедить-
ся, в частности, в отсутствии опечаток):
ЕЕ Е
LN — М2________1_ “ ° 1_ ( д EV—JFU_______д Fv — Ga 1
EG — F2 tfW2 г г и г v 2/й7 ( dv У W ди У W |
G Gu Gv
(19)
(формула Гаусса*)-,
2W (LB-MU) - (EN-FM + GL) (Ео -Fu) +
eeul
F FaM
GGUN
* Гаусс (Gauss) Карл Фридрих (30.4.1777—23.2.1855) — немецкий мате-
матик.
ИО
2W (M, - NU)-(EN—FM + GL) (F0-Gu) +
E E„ L
F F„M
GGBN
(20)
{формулу Петерсона—Кодацци*), W=EG—F2.
Первая из приведенных формул — формула (19) — несет
в себе содержание основной теоремы Гаусса (theorema egregi-
um): кривизна регулярной поверхности
LN — M3'
Л =---------
EG — F2
может быть выражена только через коэффициенты первой квад-
ратичной формы поверхности и их производные.
3°. Теорема Бонне**
Предположим выполненными следующие условия.
В некоторой односвязной открытой области Я) (рис. 46) на
плоскости параметров и и v заданы две квадратичные формы:
Edu2 + 2Fdudv + Gdv2 (I)
Рис. 46. Односвязная область изменения параметров и и о
т. е. в каждой точке области Я) определены функции
Е—Е(и, v), F—F(u, и), G—G(u, v), (21)
L=L(u, v), v), N=N(u, v) (22)
* Петерсон Карл Михайлович (25.5.1828—1.5.1881) — русский математик;
Кодацци (Codazzi) Дельфино (7.3.1824—21.7.1873) — итальянский математик.
** Бонне (Bonnet) Пьер Оссиан (22.11.1819—22.6.1892) — французский ма-
тематик.
Ill
Наложим на эти функции ряд ограничений,
1. Потребуем, чтобы всюду в области 3) первая из квадратич-
ных форм
Edu2 + 2Fdudv+Gdv2
была положительно определенной.
- 2. Будем считать, что в каждой точке области 3) функции
(21) — (22) связаны формулами Гаусса—Петерсона—Кодацци
(19) — (20), при этом и сами функции и их производные, входя-
щие в формулы (19) — (20), непрерывны всюду в области 3).
Тогда имеет место следующее утверждение.
ТЕОРЕМА 4. Существует регулярная поверхность, для кото-
рой заданные формы (I) и (II) являются соответственно первой
и второй квадратичными формами. Формами (I) и (II) эта по-
верхность определяется однозначно с точностью до положения
в пространстве.
Тем самым утверждается, что при выполнении условий 1 и 2
в области 3) можно построить векторную функцию
r=r(u, v), (u, v)^S5,
такую, что
dr2=Edu2 И- 2Fdudv + Gdv2
и
(d8r, n)~Ldu2-\-2Mdudv-\-Ndv2,
где
n = T“ X Гр
I Га X го |
Причем если а, b и с — произвольные векторы (векторы b и с
неколлинеарны), то условиями
r(“o, »о)=а, ru(u0, t»0)=b, г„(и0, v0)~с,
где («о, По) — некоторая точка области 3), эта векторная функ-
ция определена однозначно.
* Существование. Прежде всего, пользуясь формулами (8) —
(11) п. 1°, вычислим по коэффициентам Е, F, G, L, М, N задан-
ных квадратичных форм (I) и (II) коэффициенты Г*/ и ai}.
Для решения поставленной задачи построим вспомогательную
систему дифференциальных уравнений, линейных относительно
неизвестных функций т),
l„=rte+rbi+ic,
£о=Г{£ + Г?211 + М£.
11»
(23)
Ча = Г*2^ + Г?гЧ +
' Ло = Г22^ + Г22'П + ЛГ?>
5и=«115 + «124»
5О = “215 + “22П
(несомненная связь уравнений системы (23) с деривационными
формулами Вейнгартена* (3) — (4) не случайна).
Построенная система (23) обладает следующим замечатель-
ным свойством: равенства
(г}^+1£)0=(г}2£+гй+т,
(Г|25 + r?2tl + Ш,=(Г225 + Г^ + NQU, (24)
(“115 + ®12Tl)o= («215 + а22Ч)и
выполняются тождественно в силу уравнений (23).
Чтобы убедиться в этом, достаточно провести требуемые диф-
ференцирования и, заменив появляющиеся в результате производ-
ные векторных функций £, т| и £ по формулам (23), воспользо-
ваться формулами Гаусса—Петерсона—Кодацци (19) — (20).
Тождественное выполнение равенств (24) означает, что для
системы (23) соблюдены условия интегрируемости.
Из теории дифференциальных уравнений известно, что в этом
случае система (23) имеет и притом единственное решение при
заданных начальных значениях неизвестных функций.
Выберем три вектора £0. 'По и 5о так, чтобы они образовывали
правую тройку и в некоторой фиксированной точке (и0, и0) об-
ласти Я) выполнялись равенства
5о=£(«0, о0), (5о. 'По)=^(«о. »о). no=G(«0, По).
(25)
(5о. 5о)=О, (Чо, go)=O, й=1.
Пусть
5=5 («, о), П=П(“. п). ?=?(«. о) (26)
— решение системы (23), удовлетворяющее выбранным началь-
ным условиям
5(«0, Оо)=5о, п(«о, Ц)).=По> 5(«о, По)=5о- (27)
Так как для решения (26) системы (23) выполняется равенства
50 Пи»
* Вейнгартен (Weingarten) Юлиус (25.3.1836—17.6.1910) — немецкий ма-
тематик.
Г13
то найдется векторная функция
r=r(u, v), (28)
для которой
ru=L г0=П.
Эта векторая функция может быть вычислена, например, сле-
дующим образом:
г=г(и, и)=г(и0, o0) + j£(u. v)du-\-r\(u, v)dv
i
(криволинейный интеграл берется вдоль гладкой кривой I, цели-
ком лежащей в области 3) и соединяющей точки (uo, fo) и
(u, V)).
Покажем, что поверхность, задаваемая радиусом-вектором (28),
имеет первую и вторую квадратичные формы, соответственно рав-
ные заданным формам
Edu2 -ф 2Fdudv + Gdv2 и Ldu2 -ф 2Mdudv + Ndv2.
Чтобы убедиться в справедливости равенства
dr2 = Edu2-\-2Fdudv-\-Gdv2, (29)
достаточно в силу соотношения (9) проверить, что
12=Е, Ы=Е, t)2=G.
Преобразуем уравнения системы (23) к удобной для дальней-
ших рассмотрений форме.
Умножим их поочередно на векторы т] и g. Из полученных
при этом восемнадцати скалярных соотношений путем простей-
ших преобразований приходим к двенадцати, которые можно рас-
сматривать как систему дифференциальных уравнений для ска-
лярных величин
1г, П2, ?2, (I, П), (I, Р, (Я, £)• (30)
Приведем часть из этих двенадцати уравнений:
[|а]ы=2Г}1^ + 2Г?1(|, n) + 2L(£, g),
[^=2Г}2|2 + 2Г?2(|, 1)) + 2М(§, g),
[(I, п)]в=г}2|а-нг11+-г?2)(1, П)+Г?1П2+М (I, g)+L(i), g),
4)]0=rU2-Hr}2+r^, тО+Г^+Л^, g)+M(7], g).
Похожую структуру имеют и остальные восемь уравнений.
Непосредственной проверкой можно убедиться в том, что за-
мена в уравнениях (31) величин (30) на
Е, G, 1, F, 0, 0 (32)
114
соответственно обратит каждое из уравнений (31) в тождество.
Это относится и к восьми другим уравнениям.
Обратимся к соотношениям (25) и (27). Набор (32), как и
набор (30), в точке (и0, и0) области S) принимает значения
& По, 1, (§о, Но), 0, 0
соответственно.
Из того, что наборы (30) и (32) имеют одинаковые начальные
значения, в силу единственности решения системы (31) выте-
кает, что эти наборы совпадают тождественно:
g2=£, = £2=1> n)==F^ (|> g) = 0( (Т)) g)=0. (33)
Первое, второе и четвертое тождества (33) обеспечивают
справедливость равенства (29).
Тем самым первая квадратичная форма поверхности с радиус-
вектором (28) совпадает с формой (I).
Чтобы убедиться в совпадении второй квадратичной формы
поверхности (28) с формой (II), обратимся к оставшимся тож-
дествам (33):
(I, £)=0, (п, Р=0, g2=l. (34)
Переписав их в несколько иной форме
(г„, £)=0, (г0, g)=0, g2=l,
видим, что вектор £ является единичным вектором нормали по-
верхности (28). При этом в силу условий, наложенных на началь-
ные значения £0, т)0 и £0, тройка г„, г„ и £ правая и
£__ Гц X Гр
I Ги X Г„ I
Следовательно, коэффициенты второй квадратичной формы
построенной поверхности равны соответственно
(L, Р, (U £Н(Пц, £), (Пи. £)
Умножая обе части каждого из первых четырех уравнений систе-
мы (23) скалярно на вектор £ и принимая во внимание равенства
(34), получаем, что
(L, g)=L, (|0, g)=(7]„, g)=M, Ч, g)=JV.
Это означает, что вторая квадратичная форма рассматривае-
мой поверхности (2) имеет вид
(d2r, Q=Ldu2 + 2Mdudv + Ndv2
и тем самым совпадает с заданной формой (II).
На этом доказательство существования регулярной поверхно-
сти с заданными первой и второй квадратичными формами за-
канчивается.
Ц5
Единственность. Покажем, что построенная выше поверхность
единственна с точностью до положения в пространстве.
Пусть и S2 — поверхности, заданные векторами rf (u, и) и
r2(u, v) ((и, ц)е$), у которых в соответствующих точках совпа-
дают первые квадратичные формы и вторые квадратичные фор-
мы. Отметим на каждой из этих поверхностей по точке, отвечаю-
щей набору параметров unv:
и=и0, v=v0, (u0,
Параллельным переносом одной из поверхностей (если это
необходимо) можно добиться совпадения отмеченных точек.
Считая, что точка Хо, отвечающая набору параметров (ио, v0),
общая для обеих поверхностей, повернем одну из них так, чтобы
в общей точке Хо совпали единичные векторы нормалей к этим
поверхностям. При этом, конечно, совпадут и касательные плос-
кости поверхностей в точке Xq.
Ясно, что проведенные действия не изменят квадратичных
форм поверхности, перемещаемой в пространстве. Это обеспечи-
вается тем, что при параллельном переносе поверхности и при ее
повороте сохраняется взаимное расположение производных ра-
диус-вектора и единичного вектора нормали.
Считая, что в общей точке Хо поверхности Si и S2 имеют об-
щую нормаль, повернем одну из поверхностей вокруг этой норма-
ли так, чтобы в точке Хо совпали направления соответствующих
координатных линий поверхностей, скажем, линий и=и0. Тогда
направления координатных линий v=v0 совпадут автоматически
вследствие того, что углы между направлениями координатных
линий определяются коэффициентами первой квадратичной фор-
мы и в точке Хо у обеих поверхностей они одинаковы.
Пусть
г=г1(и, о), г=г2(«, п)—
радиус-векторы поверхностей S! и S2 соответственно после опи-
санных перемещений. Это означает, что в точке (и0, v0) выполня-
ются равенства
ri («о. »о)=г2(«о, ^). (35)
Г1,и(и0> vo)~ r2.u(U0, voh П,о(мо> vo)~r2,o(uo< uo)>
(оо)
п1(“о. Ц>)=п2(и0, о0).
Обратимся к системе (23).
Каждый из наборов
g=n>((, П=Г1,о> £=п1
и
§==r2tU, T|==Jl2,o,
является решением этой системы. Так как в силу условий (35) —
116
(36) эти решения совпадают в начальной точке (иа, v0), то вслед-
ствие единственности решения системы (23) они равны тождест-
венно: ,
Г1,и(«> У) = Г2.и(и, о), Г1,о(и. о) = Г2,о(и, о).
Отсюда вытекает совпадение дифференциалов
dr^u, v)=drz(u, v)
и равенство
гг (и, и)=г2(и, и) + с.
Полагая в нем и=и0, v=v0, в силу условия (35) получим, что
с=0.
Следовательно,
Г1(и, о)=г2(ы, о). *
§ 6. ВНУТРЕННЯЯ ГЕОМЕТРИЯ ПОВЕРХНОСТИ
Так называется раздел геометрии, в котором изучаются свой-
ства поверхности, зависящие только от длин кривых на поверхно-
сти. Как показано в § 3 этой главы, для регулярных поверхностей
это свойства,' определяемые первой квадратичной формой. Тем
самым объектами внутренней геометрии поверхности являются
длина кривой на поверхности, угол между кривыми на поверхно-
сти, площадь области на поверхности, гауссова кривизна поверх-
ности.
Здесь мы рассмотрим новые объекты внутренней геометрии
поверхности.
1°. Геодезическая кривизна кривой на поверхности
Как было показано в § 4, п. 3°, геодезическая кривизна kg
кривой S’ в данной точке поверхности S может быть вычислена
по формуле
kg—(kv, т, п),
где т и v — единичные векторы касательной кривой S’ и главной
нормали соответственно, k — кривизна кривой S’, п — единичный
вектор нормали к поверхности S.
Векторы т и kv можно выразить через производные радиус-
вектора
г=г(0
кривой S’ при помощи следующих формул:
dr __. rt
ds I rj Г
(см. гл.' 1, § 5).
117
С учетом этих соотношений формулу для геодезической кри-
визны kg можно записать так:
Если
r=r(u, v)
— радиус-вектор поверхности S и
u=u(t), v=v(t)
— параметрические уравнения кривой £ на поверхности $, то
r(0=r(u(i), v(0)-
Вычислим производные радиус-вектора кривой £, пользуясь
последним соотношением. Имеем
П = гиН/ + ад, (2>
г«
^ии (u'i)2 + 2г„ри^ + гто (гу)2 + ruutt + гоп«. (3)
Применяя к производным ruu, ruv, rvv в правой части равенства
(3) деривационные формулы (3) § 5, получим для Ttt" следующее
выражение:
г«=(ы« + Л)г„ + (и«+В)г04-Сп. (4)
Здесь
А — Г п (и,)2 + + Г22 (vt)2,
В = Г^(и;)2 + Г212и'^ + Г222^)2, (5)
C^Liu^ + Mutv't + Niv't)2.
Формулы (1), (2) и (4) позволяют найти для геодезической
кривизны kg новое выражение
kg^=[(uii + A)v't-(vtt + B)ut] . (6>
| rf Is
Отсюда, замечая, что
| r't | = V Е (щ)2 + 2Fu’tvi + G (у/)2
и
(ru, r0, n)= (ru,r0, = |ru x Гр|_уЁёЗГрГ
\ I Г« А Гр I /
118
получим следующую формулу:
kg——.. --EG F =— {(utt + Г1ци< + Г}2щг>< + r^uj2) v't —
у Eut + 2Fut vt + Gvt
— (Ptf + TnUf + + Г22^ ) Ut}. (7)
Так как символы Кристоффеля выражаются только через ко-
эффициенты первой квадратичной формы, то то же справедливо
и для геодезической кривизны kg кривой на регулярной поверх-
ности.
Тем' самым геодезическая кривизна кривой на поверхности яв-
ляется объектом внутренней геометрии поверхности.
2°. Геодезические линии
Кривую на поверхности называют геодезической линией, если
геодезическая кривизна этой кривой обращается в нуль в каж-
дой ее точке.
ТЕОРЕМА 5. Кривая S на поверхности S является геодези-
ческой в том и только в том случае, когда главная нормаль в
каждой точке кривой S, где ее кривизна отлична от нуля, совпа-
дает с нормалью к поверхности S в этой точке.
* В самом деле, из формулы
kg—k(v, г', п)
для геодезической кривизны кривой S вытекает, что в предполо-
жении
0, k =^=- О,
имеем
(v, г', п)=0.
Так как векторы и и v, кроме того, ортогональны вектору г'=т,
то отсюда заключаем, что эти векторы коллинеарны.
Обратное очевидно. *
ТЕОРЕМА 6. Через любую точку регулярной поверхности во
всяком направлении проходит геодезическая, и притом ровно
одна.
* Существование. Выберем в произвольной точке Хо(ио, и0) на
поверхности S некоторое направление (р : q).
Пусть
u=u(Z), v=v(t)—
решение системы дифференциальных уравнений
u"f4-A=:6, a'z-|-B=0, " (8)
119
где функции А и В определяются по формулам (5), удовлетво-
ряющее начальным условиям
u(t0)=u0, ut(ta)=p,
v(t0)=v0, t»;(/0)=g-
Кривая S на поверхности S, задаваемая уравнениями
u=u(Q, u=v(/),
имеет нулевую геодезическую кривизну, так как
-j- Av't—Bu't—(u"tt 4- A) v't—(v"tt + В) u' — 0.
Это означает, что кривая 2? является геодезической.
Таким образом, геодезическая на поверхности, проходящая
через заданную точку Ло(«о, Ро) в произвольном направлении
(р : q), построена.
Перейдем к доказательству единственности (рис. 47).
Рис. 47. Направлению на плоскости изменения параметров соответ-
ствует направление на поверхности
Допустим, что через точку Х0(и0, о0) в направлении (р : q) на
поверхности S проходят две геодезические и 2?2.
Без ограничения общности можно считать, что q=£Q. Это поз-
воляет выбрать координату, и за новый параметр и перейти к
иному заданию кривых и Зг’-
v=v1(u), v=v2(u).
При этом будут выполняться соотношения
Vi(u0)=v0, -^-(u0)=—, i=l, 2.
du q
Приравнивая геодезическую кривизну кривой S’,-, i=I, 2, к ну-
лю, получим, что
+ В=0, i = l, 2.
du* . du
120
Легко видеть, что функции
»=»!(«), v—va(u)
являются решениями одного и того же дифференциального урав-
нения
—о" + Av'—В—О
при одинаковых начальных условиях и, значит, тождественно
равны:
О1(и)=эо2(и).
Таким образом, в некоторой окрестности точки Х0(и0, v0)
кривые S'i и З’г совпадают.
Из приведенных рассуждений вытекает, что кривые и SS
совпадают всюду. *
Пример 1. Прямые линии и только они являются геодезиче-
скими на плоскости.
Пример 2. Окружности больших кругов (большие окружно-
сти) и только они являются геодезическими на сфере (рис. 48).
Ряс. 48. Большие окружности — геодезические на сфере
* В этом можно убедиться как непосредственными вычисле-
ниями, так и путем следующих рассуждений.
Большая окружность является геодезической, так как ее кри-
визна, обратная радиусу сферы, в каждой точке отлична от ну-
ля, а главная нормаль совпадает с нормалью к поверхности. Из
того, что большую окружность можно провести через каждую
точку во всяком направлении, в силу доказанной выше единствен-
ности заключаем, что других геодезических на сфере нет. *
3°. Полу геодезические координатные системы
Определение. Координатная система на поверхности на-
зывается полугеодезической, если координатные линии различ-
ных семейств попарно ортогональны и одно из семейств состоит
из геодезических линий.
121
Покажем, что на регулярной поверхности S в достаточно ма-
лой окрестности любой ее точки X можно ввести полугеодезиче-
скую систему координат.
Пусть Z — произвольная гладкая кривая на поверхности S,
проходящая через точку X. Проведем через каждую точку кри-
вой Z, достаточно близкую к точке X, геодезическую линию, об-
разующую с кривой Z в точке пересечения прямой угол.
Построенное семейство геодезических линий поверхности S,
ортогональных кривой Z, зависит от одного параметра (напри-
мер, длины дуги кривой Z, отсчитываемой от точки X) и обла-
дает следующим свойством: через каждую точку достаточно ма-
лой окрестности U точки X на поверхности S проходит ровно од-
на геодезическая семейства.
Второе семейство координатных линий состоит из ортогональ-
ных траекторий построенных геодезических.
Кривая 3? (она принадлежит второму семейству) называется
базой полугеодезической координатной системы. Часто в качестве
базы полугеодезической системы координат выбирают геодезиче-
скую линию (рис. 49).
Рис. 49. Бйза S’ и ортогональные к
ней геодезические
Рис. 50. Отрезки Х0Х^ и Xo'Xi' гео-
дезических, ортогональных кривой
S’, имеют равные длины
Принимая кривые первого семейства геодезических за коор-
динатные линии u=const, а их ортогональные траектории за ко-
ординатные линии u=const, получим, что первая квадратичная
форма поверхности S в окрестности U имеет вид
/=ds2=Edu2 + Gdv2.
Полагая в уравнении геодезических
u"v'—и" и' Av' — Ви' = 0
y=const, получим, что
В=0.
Отсюда и из формул (10) — (11) § 5 для символов Кристоффеля
вытекает, что
rh=-----L -^-=0.
2 G
Тем самым коэффициент Е зависит только от переменной и.
122
Вводя вместо и новый параметр
и = ]/Е (х) dx,
о
можно еще более упростить первую квадратичную форму:
1= du2G(u, v)dv2.
Положим
V = К8(0, у) dy.
о
Тогда в новых координатах (й, v) первая квадратичная форма
примет следующий вид:
I = du2 + G (и, v)dv2,
причем
6(0, и)=1.
Для линий y=const получаем, что
“2 ~ ~
s= du --- и2—и1.
и1
Отсюда вытекает, что ортогональные траектории семейства гео-
дезических отсекают на геодезических линиях дуги равной длины
(рис. 50).
Замечание. В случае, когда база й=0— геодезическая ли-
ния, вдоль нее выполняется равенство
8~=о.
4°. Полугеодезические полярные координаты
Пусть Хо — произвольная точка поверхности S. Рассмотрим
семейство геодезических линий, исходящих из точки Хо во всевоз-
можных направлениях. Зафиксируем одно из этих направлений.
Обозначим через ср угол, образуемый геодезической линией, про-
ходящей через точку X, с этим направлением.
Ортогональные траектории построенного семейства отсекают
на всех геодезических дуги равной длины, считая от точки
Тем самым каждая из линий p=const второго семейства, обойдя
вокруг точки Хо, возвращается в исходную точку (рис. 51).
Замкнутые кривые p=const называются геодезическими
окружностями на поверхности S радиуса р с центром в точке Хо.
123
Множество точек на поверхности, ограниченное геодезической
окружностью и содержащее точку Хо, называют геодезическим
кругом.
Рис. 52. Длина дуги спрямляемой
кривой Z не меньше длины дуги
геодезической с теми же концами,
если окрестность U точки X на по-
верхности достаточно мала
Рис. 51. Полугеодезическая поляр
пая система координат
При таком выборе параметров первая квадратичная форма
поверхности принимает следующий вид:
I=dpa + G(p, <p)d<p2.
Длина геодезической окружности радиуса р и площадь ограни-
ченного ею геодезического круга равны соответственно
2л ________
s(p)=J VG(P, ф) dtp,
О
O(p)=J dp J ]/G(p, ф) dtp.
о 6
5°. Экстремальные свойства геодезических
Пусть Хо — произвольная точка регулярной поверхности S.
Рассмотрим некоторую геодезическую поверхности 3, прохо-
дящую через точку Хо, и покажем, что длина дуги этой
геодезической, находящейся в достаточно малой окрестности точ-
ки Хо на поверхности S, меньше длины любой другой кривой, со-
единяющей на поверхности S точки Xi и Х2 (рис. 52).
Пусть X — произвольная точка геодезической окружности до-
статочно малого радиуса р с центром в точке Хо, a Z — спрям-
ляемая кривая, лежащая в геодезическом круге радиуса р и со-
единяющая точки Хо и X. Тогда длина s кривой £ удовлетворяет
неравенству
s>p,
причем равенство возможно лишь в том случае, когда £— отре-
зок геодезической между точками Хо и X (рис. 53).
124
Введем в этом геодезическом круге полугеодезические поляр
ные координаты р, <р. Пусть
Р=Р(О. Ф=ф(0
— уравнения кривой S,
р(/9)=0; р(^)=р, Ф&)=ф.
Рис. 53. Геодезическая является локально кратчайшей
Так как длину дуги кривой S требуется оценить снизу, то
естественно ограничиться рассмотрением кривых, не имеющих са-
мопересечений. Тем самым можно считать, что
р(0>0
при t>tQ.
Если S— гладкая кривая, то для ее длины s получаем сле-
дующую оценку.
s=J /p'a(Z) + G(p(O, Ф(0)ф'2(0
к Л
' > \j 1р'(01^> | J р'(0^ |=Р-
t.
Если S не есть отрезок геодезической, заключенный между
точками Хй и Xi, то на некотором отрезке [//, t2'J из интервала
изменения параметра (t0, ti) выполняется условие <р'(/)=/=0. По-
этому первое из неравенств в приведенной оценке является стро-
гим.
Равенство возможно лишь в случае, когда cp(/)=const, т. е. ко-
гда S — геодезическая, идущая из точки Хо в точку X.
Выберем на поверхности S окрестность U точки X, столь ма-
лой, чтобы она допускала введение полугеодезических полярных
координат с полюсом Хо. -
Возьмем на геодезической So (ее уравнение в выбранной си-
стеме координат — <p=<po=const) произвольную точку X, лежа-
щую в окрестности U.
Любая кривая S, соединяющая точки Хо и X, либо содержит-
ся в геодезическом круге радиуса р0 и тогда
। «>ро,
125
либо выходит за пределы этого круга. В последнем случае
$ >ро,
так как
Пример сферы показывает, что экстремальное свойство геоде-
зических носит локальный характер (рис. 54).
Рис. 54. Кривая S целиком лежит в геодезическом круге (а), кривая
S пересекает геодезическую окружность, на которой лежит точка X, в отлич-
ной от нее точке Y (б)
В самом деле, рассмотрим на сфере любые две точки А и В,
де являющиеся концами одного диаметра. Большая окружность,
проходящая через эти точки, определена однозначно и разбива-
ется ими на две дуги разной длины. Обе дуги, однако, являются
геодезическими с концами А и В (рис. 55).
Рис. 55. Длина дуги АпВ больше длины дуги АтВ
Установленное выше локальное экстремальное свойство геоде-
зических позволяет получить их уравнения методами вариацион-
ного исчисления. Именно, геодезические линии являются экстре-
малями функционала длины дуги
J— V Eu'2 + 2Fu'v' + Gv'2dt.
t.
126
* В самом деле, уравнения Эйлера для этого функционала
имеют вид
-JL(L„,)-Lo=0, -^(£5,)-£,=0,
at at
где
L=L(ti, v, и', v')=V E(u, v) и'2 + 2F (и, v)u'v'+G(u, v)v'2.
Отсюда путем прямых вычислений получаем уравнения геоде-
зических
и" + А=0, v" + B=0
(ср. формулы (8) пункта 2°). *
6°. Поверхности постоянной кривизны
Проведем через произвольную точку X регулярной поверхно-
сти S геодезическую £ и построим в некоторой окрестности U
точки X полугеодезическую систему координат с базой £.
Как показано в пункте 3°, в этих координатах первую квадра-
тичную форму поверхности S в окрестности U можно привести к
следующему виду.
+ v)dv*, (9)
где
В(0, п)=1, В„(0, и)=0. (10)
При такой параметризации гауссову кривизну К. поверхности
S можно вычислить по формуле
К=--(И)
(см. формулу (19) пункта 2° § 5).
Таким образом, функция В должна удовлетворять дифферен-
циальному уравнению
BUU + KB = Q. (12)
Выясним, какой вид имеет коэффициент G=B2 первой квадра-
тичной формы поверхности в случае, когда ее кривизна посто-
янна.
Для этого нужно проинтегрировать уравнение (12) при на-
чальных условиях (10).
Рассмотрим все три возможности.
1. к=о.
Тогда Вии=0 и функция В тождественно равна единице. Пер-
вая квадратичная форма имеет вид
' I — du2 -|- dv2.
127
2. K=fe2>0.
Решением уравнения
B„e+A?B=O
с начальными условиями (10) является функция B—cosku. Тем
самым первая квадратичная форма запишется в виде
I = du2 + cos2 ku dv2.
3. K = —k2<Q.
Решая уравнение
Buu-k2B=0
при условиях (10), получаем, что B=chku и
I = d«2 + ch2&U£fo2.
Полученные результаты можно сформулировать следующим
образом.
Так как вид первой квадратичной формы поверхности посто-
янной гауссовой кривизны зависит только от того значения, ко-
торое эта кривизна принимает, и не зависит от вида самой по-
верхности, то все поверхности заданной постоянной гауссовой
кривизны локально изометричны.
В частности, все поверхности нулевой кривизны локально изо-
метричны • плоскости, поверхности постоянной положительной кри-
визны K=k2 локально изометричны сфере радиуса 1/k, поверхно-
сти постоянной отрицательной кривизны /(=—k2 локально изо-
метричны псевдосфере «псевдорадиуса» 1/k (рис. 56).
Рис. 56. На рисунках изображены изометричиые поверхности: а — нулевой
кривизны; б —. положительной кривизны; в — отрицательной кривизны
СВОДКА ОСНОВНЫХ ПОНЯТИЙ, ФОРМУЛ, ФАКТОВ
А. Простой поверхностью называется множество S точек
М(х, у, г), координаты х, у, г которых определяются соотноше-
ниями
128
Х=ф(ц, о), у = ^(и, о), z=%(u, v), (*)
(и, V) е= ®
(здесь 3)— ограниченная плоская область), если функции ср (и, и),
ф(ц, v), х(и, v) непрерывны в_замыкании 3) и разным точкам
(и', v') и (и", v") замыкания 3) отвечают разные точки М' и М",
координаты х', у', z’ и х", у", z" которых вычислены по форму-
лам (*).
Границей простой поверхности S называется множество dS
точек М(х, у, z), координаты х, у, z которых вычисляются по
формулам (*) при условии, что точка (и, и) принадлежит грани-
це дЗ) области 3).
Соотношения (*) называются параметрическими уравнения-
ми простой поверхности S. ‘
Б. Вектором (радиус-вектором) поверхности S называется
векторная функция
г=г(и, к)=ф(«, и)5 + ф(«, v)j + %(u, п)к,
(и, V)€E S).
В. Окрестностью точки X на множестве S трехмерного евкли-
дова пространства Е3 называется пересечение множества 3 и от-
крытого шара с центром в точке X.
Локально-простой поверхностью называется связное множест-
во в пространстве Е3, у каждой точки которого есть окрестность,
представляющая собой простую поверхность.
Г. Плоскость л называется касательной плоскостью к поверх-
ности S в точке Хо, если плоскость л проходит через эту точку и
при стремлении переменной точки X поверхности S к точке Хо
угол между прямой Х0Х и плоскостью л стремится к нулю.
Д. Простая поверхность S называется' гладкой в точке Хо, ес-
ли в этой точке существует касательная плоскость к поверхности
и некоторая окрестность точки Хо на поверхности S однозначно
проектируется на эту плоскость.
Простая поверхность называется гладкой, если она является
гладкой в каждой точке и касательные плоскости этой поверхно-
сти изменяются непрерывно.
Достаточные условия гладкости поверхности: если частные
производные ru(u, и) и rv(u, и) вектора г (и, и) поверхности S не-
прерывны в области 3) задания параметров и и v и всюду в этой
области ГиХГц^О, то поверхность S является гладкой в обла-
сти 3.
Е. Прямая, проходящая через точку Хо гладкой поверхности
5 перпендикулярно касательной плоскости поверхности S в этой
точке, называется нормалью поверхности в точке Хо; если г (и;
v) —вектор поверхности S, то
|гоХго|
— единичный вектор ее нормали.
5 Зак. 259 1 29
Ж. Поверхность 3, заданная вектором г (и, и), называется
Ск-регулярной, если в области 3) задания, параметров векторная
функция г (и, v) имеет непрерывные частные производные всех
порядков до включительно и всюду в области 3) выполняет-
ся неравенство г^Хт^О.
3. Первой квадратичной формой гладкой поверхности S, за-
данной вектором г (и, и), называется выражение
I = dr2=E du?-\-2F dudv+Gdv2,
где E=ru2, F=(ru, rv), G~rv2— коэффициенты первой квадратич-
ной формы.
И. Длина кривой S, лежащей на гладкой поверхности 3 с.
векторным уравнением г=г(ц, и), вычисляется по формуле
s(^i)==j Х^Еи1' + 2Fu'v' + Gv' \u=u{t)dt,
t, ^(0
где «=«(/), v=v(t) —уравнения кривой S на поверх-
ности 3.
Угол ср между кривыми S’i и Si, лежащими на гладкой по-
верхности и пересекающимися в точке Хо, вычисляется по формуле
cos __ -EW] (0) u2(0)f ' (0) ^2 (°) + “2 (°) f 1 (°)) Н-Gfj (0) t'2 (0)
VEu[ (0)a + 2F«j (0) vj (0) + Gv' (0)= /Ф)? + 2F«T(°) v2 (0)4-Gv'2 (0)e
(здесь u=Ui(0, v=vl(t) и u=«2(0, v=v2(t)—уравнения кривых
S’i и S’o на поверхности; точке Xo соответствуют нулевые значе-
ния параметров; коэффициенты Е, F, G вычислены в точке Хо)
Площадь о гладкой поверхности S, заданной вектором г=г(«,
v), (u, v)^3), вычисляется по формуле
o=o(S)= VEG—F2 dudv.
Площадь графика функции z=f(x, у), (х, у)еЗ), вычисляется
по формуле
° = ^V^ + fl + fy dxdy.
X. Второй квадратичной формой регулярной поверхности 3.,
заданной вектором г (и, v), называется выражение
II=(d2r, п)=—(Jr, dri)—Ldu2~F2Mdudv-\-Ndv2,
где
=_ Ги* Гр) ______ (Гцр, Гц, Г0) (Гур, Гц, Гц)
~ yEG — F^ ’ Д/fg — F2 ’ ~ /£G — F2
130
-— коэффициенты второй квадратичной формы, п — единичный
вектор нормали к поверхности 3.
Л. Точка Хо регулярной поверхности 3 называется эллиптиче-
ской, если дискриминант второй квадратичной формы поверхно-
сти 3 в этой точке положителен: LN—2И2>0.
Точка Xq регулярной поверхности называется гиперболиче-
ской, если дискриминант второй квадратичной формы поверхно-
сти в этой точке отрицателен: LN—Л12<0.
Точка Хо регулярной поверхности 3 называется параболиче-
ской, если LN—Л12=0, но £2 + А'2¥=0.
Точка Хо регулярной поверхности 3 называется точкой упло-
щения, если все коэффициенты второй квадратичной формы по-
верхности 3 в этой точке равны нулю: A=Af==X=0.
Л1. Сечением поверхности S в точке X и в направлении 1 на
поверхности называется плоская кривая, которая получается
при пересечении этой поверхности плоскостью л, проходящей че-
рез точку X параллельно вектору 1.
Сечение поверхности 3 называется нормальным, если плос-
кость л проходит через нормаль поверхности 3 в точке X.
Нормальной кривизной kn поверхности 3 в точке X и в на-
правлении 1 называется кривизна нормального сечения поверхно-
сти 3 в этой точке и в этом направлении.
Нормальная кривизна kn поверхности в направлении ! и кри-
визна k наклонного сечения поверхности в этом же направлении
связаны равенством fen=fecos0, где 0 — угол между плоскостями
Соответствующих сечений (формула Менье).
Нормальная кривизна kn поверхности 3, заданной вектором
r(u, v), в направлении (du:dv) вычисляется по формуле
___ II _ L du- 2М du dv -' N dv"
п~ I ~~~Edu2 + 2Fdiidv-'rGdv^'
Н. Направление на регулярной поверхности называется глав-
ным, если нормальная кривизна поверхности в этом направлении
достигает экстремального значения.
В каждой точке регулярной поверхности существует не менее
двух главных направлений.
Экстремальные значения нормальных кривизн в главных на-,
правлениях называются главными кривизнами поверхности в дан-
ной точке.
Точка на поверхности, в которой каждое направление являет-
ся главным, может быть либо точкой уплощения (kn=0) либо
эллиптической точкой округления (&n=const>0).
О. Кривая на поверхности 3, направление которой в каждой
ее точке совпадает с главным направлением на поверхности 3 в
этой точке, называется линией кривизны.
г.*
131
Дифференциальное уравнение линий кривизны:
dv2 —dudv du2
Е F G
L M N
В окрестности каждой точки поверхности S, не являющейся ни
точкой уплощения ни точкой округления, поверхность S можно
параметризовать так, что координатные линии будут линиями
жривизны.
Теорема Родрига. Производная единичного вектора п норма-
ли поверхности и производная вектора г поверхности, вычислен-
ные в главном направлении, пропорциональны; коэффициент про-
порциональности только знаком отличается от соответствующей
главной кривизны.
П. Направление на регулярной поверхности называется асим-
птотическим, если нормальная кривизна поверхности в этом на-
правлении обращается в нуль.
Кривая на поверхности называется асимптотической линией,
если в каждой своей точке эта кривая имеет асимптотическое на-
правление.
Дифференциальное уравнение асимптотических линий:
L du2 + 2Mdudv + N dv2=0.
В окрестности гиперболической точки поверхности можно ввести
параметризацию, при которой координатные линии будут асимп-
тотическими линиями этой поверхности.
Прямая, лежащая на регулярной поверхности, является ее-
асимптотической линией.
Касательная плоскость поверхности в каждой точке асимпто-
тической линии является ее соприкасающейся плоскостью.
Р. Нормальная кривизна поверхности S в 'точке X вычисляет-
ся по формуле Эйлера
k (ср)=fej cos2 ср + sin2 ф,
где k\ и ki — главные кривизны поверхности S в точке X, а ф —
угол с главным направлением, соответствующим главной кривиз-
не ki.
С. Средней кривизной Н поверхности называется полусумма
ее главных кривизн
2 v 2 EG — F2
Гауссовой кривизной К поверхности называется произведение
ее главных кривизн
132
Т. 'Деривационные формулы' Вейнгартена поверхности, задан-
ной вектором г(и, и):
гов=Г11Ги + Г п rp+Ln,
гво = Г] 2ГЫ + Г12ГР + Л1п,
1"ор— Г22ГО~Ь Г22Г0 Afa,
ПИ «цГи 4"
Пр = ОС21Ги 4~ ®22*"и>
где п =—... °------единичный вектор нормали поверхности,
у EG — F2
pl _EaG — 2FUF + EBF p2 __ — EUF 4- 2FUF — EBE
11— 2 (EG — F2) ’ '1— 2 (EG — F*)
rl EBG — GUF „2 GUE — EBF
2 (EG — F2) 2(EG — F2)
rl —GUG -4 2F„G — GVE r2 GBE — 2FBF-\-GuF
1 22 -------------•---, 1 22--------------—*“
2 (EG— F2) 2(EG — F2)
— символы Кристоффеля,
_ MF — LG ~ _ LF — ME
OC-i т 11 , OC-t л — — •“.
EG — F2 EG—F2
NF — MG MF — NE
EG — F2 EG — F2
E, F, G и L, M, N — коэффициенты первой и второй квадра-
тичных форм.
У. Основные уравнения теории поверхностей:
формула Гаусса —
LN — M2 _ 1 E F G Eu Fu Gu EB FB GB
EG — F2 4 (EG — F2)2
1 ! EB — FU \ FB -G
2VEG — F2 Ц Д/EG — F2 Jb \ yEG — F2 )и
формулы Петерсона—Кодацци:
2(EG-F^(LB-Ma)
—{EN~FM+GL){Ev—Fu) +
2(EG-F2)(MP-^)
—(EN—FM + GL)(FB—GU) +
E Eu L
F Fu M =0,
G Gu N
E Ev L
F FB M =0.
G GB N
133
Ф. Теорема Бонне. Пусть в односвязной области Z на плоско-
сти параметров и и v заданы квадратичные формы
(I) Еdu2 + 2Fdu dv—Gdv2 и (II) Ldu2jr2Mdudv + Ndv2,
первая из которых является положительно определенной, и коэф-
фициенты этих форм связаны соотношениями Y. Тогда сущест-
вует регулярная поверхность, для которой заданные формы (I) и
(II) являются соответственно первой и второй квадратичными
формами. Эта поверхность определена однозначно с точностью
до положения в пространстве.
X. Геодезической кривизной kg кривой Z на поверхности 3
называется
feg=(fev, т, и),
где т и v — единичные векторы касательной кривой Z и главной
нормали соответственно, k — кривизна кривой Z, и — единичный
вектор нормали поверхности 3.
Геодезическая кривизна кривой на поверхности, заданной
вектором г(н, и), вычисляется по формуле
, Т/£0 -- F‘l ,, „ . nl Т‘ I T-l ! < i -pl t
kg — .((u Г)iи -pi 12U v +Г220 )o —
И Eu' + 2Fu'vr + Cv'
— (v"+ ГДи'2-- Г^и'с' + rl2f'2)W},
где' u—u(t), v=v(t)—уравнения кривой Z на поверхности,
— символы Кристоффеля (Т),
Ц. Кривая на регулярной поверхности называется геодезиче-
ской линией, если геодезическая кривизна этой кривой обращает-
ся в нуль в каждой ее точке.
Кривая Z на поверхности 3 является геодезической линией в
том и только в том случае, когда главная нормаль в каждой точ-
ке кривой Z, где ее кривизна отлична от нуля, совпадает с нор-
малью поверхности 3 в этой точке.
Через любую точку регулярной поверхности во всяком на-
правлении проходит геодезическая, и притом только одна.
Экстремальное свойство геодезических: длина любой спрям-
ляемой кривой Z на поверхности 3, соединяющей достаточно
близкие точки Ху и Х2 поверхности 3, не меньше длины дуги гео-
дезической линии, соединяющей эти точки.
Ч. Координатная система на поверхности называется полугео-
дезической, если координатные линии различных семейств попар-
но ортогональны и одно из семейств состоит из геодезических ли-
ний. На регулярной поверхности в достаточно малой окрестности
любой ее точки можно ввести полугеодезическую систему коор-
динат. Первая квадратичная форма в полугеодезических коорди-
натах и и v имеет вид
ds2 = du2-\-G(u, v)dv2.
131. - ' •
УПРАЖНЕНИЯ •
1. Составить уравнения касательной плоскости и нормали к
геликоиду (рис. 57)
r={t;cosu, vsinu, ku}.
Ответ; fee sin u—kycosu-rvz—kuv=Q,
R={o cos«4-/fesinu, usinu—tkcosu, ku+tv}.
Рис. 57. a — геликоид; 6
катеноид; в — тер
2. Вычислить первую квадратичную форму поверхности:
а) г={v cos и, и sin u, ku} (геликоид);
б) r={(a-]-bcost>)cos и, (a-j-bcost»)sin и, &sint>)(TOp)(a> b~).
Ответ: a) I=(v2 3+k2)du2+dv2; б) (a + b cos v)2du2 + b2dv2.
3. Для поверхности, заданной вектором r={t> cos и, v sin и, ku},
найти: а) площадь криволинейного треугольника O^f^sh и, 0^
б) длины сторон этого треугольника; в) углы треуголь-
ника.
Ответ: a)-i-(u;j+sh2u0); б) и0, shu0, V2shu0;
ч Л л л
' 2 ’ 4 ’ 4 ’
135
4. Показать, что поверхности г={п cos и, v sin и, и} (геликоид)
и r={ch z cos w, ch z sin w, z} (катеноид) локально изометричны.
5. Вычислить вторую квадратичную форму поверхности:
а) г=\Уu2 + a2cosv, ~l/u2-{-a2 sinv, a in (u 4- 1/^2 + a2)} (кате-
ноид);
6) r={(a + &cosw)cosу, (a 4-6cosu)sinv, bs'mu} (тор).
Ответ: a) 11=-------~—du2-}-adv2; 6) lI~b2du2-\-(aJrbcosu)'X.
f/2 _1_ /7.2
Xcosndo2.
6. Найти на торе r={(a + & cos u)cos n, (a+ b cos u) sin v, bsinu]
эллиптические, гиперболические и параболические точки.
Ответ: всякая точка на торе, у которой
а) 1ы|<—. является эллиптической;
2
б) |и|>—, является гиперболической;
в) является параболической.
7. Исследовать характер точки (0, 0, 0) на поверхности:
a) z=x2 + y2; б) z— (х2 + у2)2.
Ответ: а) точка округления; б) точка уплощения.
8. Найти главные направления и главные кривизны геликоида
r={ucosn, и sin v, аи}.
Ответ: (±Уи2 + а2 : 1), fe1==—fe2=
и2 + а2
9. Найти линии кривизны геликоида х=и cos v, у=и sin v, z=
=av.
Ответ: o=± In (u 4- )/ы2 4-a2) + c, c=const.
10. Найти асимптотические линии катеноида
x=ch и cos v, y=ch и sin v, z=u.
Ответ: u±o=const.
11. Вычислить гауссову и среднюю кривизны геликоида
x=ucosy, y—usinv, z=av.
Ответ: К=
(и2 4- а2)2
, Я=0.
.136
12. Показать, что гауссова кривизна поверхности с первой
квадратичной формой Z=ds2=X(«, v) (du2+dv2) может быть вы-
числена по формуле
К=------— Д1пХ,'
2л
д2 д2
где Д=------1---— оператор Лапласа*.
ди2 dv2
13. Найти геодезическую кривизну винтовых линий u=const,
лежащих на геликоиде х=и cos v, у=и sin и, z=av.
и l«l
Ответ: £„=———.
g и2 + а2
14. Найти, геодезические линии геликоида х=и cos v, у—и sin v,
z=hv.
, Г Ci du
Ответ: v=с2± I ; .
J У (и2-j- h2) (и2 +h2 — с2)
* Лаплас (Laplace) Пьер Симон (23.3.1749—5.3.1827) — французский ма-
тематик и астроном.
ГЛАВА 3
ОСНОВЫ ТЕНЗОРНОГО ИСЧИСЛЕНИЯ
(Аппарат римановой геометрии)
Приступая к изучению нового понятия, не всегда целесообраз-
но рассматривать его сразу в максимальной общности. Часто
оказывается разумным начать с простых, но вместе с тем и до-
статочно общих ситуаций. Перенос установленных фактов в по-
следовательно усложняющиеся обстоятельства позволяет, разви-
вая полученные сведения вглубь и вширь, одновременно решать
две задачи: 1) более глубокого усвоения открытых ранее свойств,
2) расширения области применимости разработанных методов.
Именно так мы и поступим при изложении основ тензорного
исчисления. Основное понятие тензора вводится первоначально в
линейном (векторном) пространстве, где строятся и изучаются
алгебраические операции над тензорами. Затем мы обращаемся
к изучению тензоров в точечном (аффинном) пространстве, отне-
сенном сначала к прямолинейным, а потом и к криволинейным
координатам. Переход к криволинейным координатам усиливает
эффективность построенного аппарата и раздвигает область его
применения, в частности позволяет ввести важную операцию ко-
вариантного дифференцирования. Завершающим шагом является
построение основ тензорного анализа в арифметическом (коорди-
натном) пространстве.
А. ЛИНЕЙНОЕ ВЕКТОРНОЕ ПРОСТРАНСТВО
§ 1. ПОНЯТИЕ ТЕНЗОРА
0°. Примеры
В курсе линейной алгебры значительное внимание уделяется
изучению таких геометрических объектов в линейных простран-
ствах, каковыми являются векторы, линейные операторы, линей-
ные и билинейные формы. Фиксируя в n-мерном линейном про-
странстве Vn базис 61,..., еп, мы ставим в соответствие каждому
из этих объектов (вектору, линейной форме, линейному операто-
ру, билинейной форме) упорядоченный набор чисел — его коор-
динат (компонент).
Координаты х’ произвольного вектора х определяются путем
его разложения по базису е= (ei... еп):
п
X = £ X^i.
i=l
138
Компоненты а/ линейного оператора А определяются путем
разложения образов базисных векторов:
' п
(/=1,
Z—1
Подобным же образом находятся компоненты и,- линейной
формы со и компоненты билинейной формы
рг; = с®(ег, е7)
(г = 1, ..п) (i, j=l, п)
Составим таблицу
Таблица 1
Геометрический объект Компоненты Число компонент
Вектор X1 п
Линейная форма (0/ П
Линейный оператор а/ п2
Билинейная форма п2
Заметим, что каждый из рассматриваемых геометрических
объектов задается упорядоченным набором п или п2 чисел.
При переходе от одного базиса к другому эти числа изменя-
ются. Напомним, как это происходит.
Пусть /1...fn — другой базис пространства. Тогда имеют ме-
сто формулы
п п
fk = ^Hkei (k=l, П), (i=l,...,n) (1)
i=l k=l
и для любых i и /, подчиненных условию выпол-
няются соотношения
п п
S ^7=% (2)-
т=1 1=1
— символ Кронекера*.
* Кронекер (Кгопескег) Леопольд (7.12.1823—29.12.1891) — немецкий ма-
тематик, член Петербургской АН (с 1872 года).
139-
Обозначим для удобства компоненты рассматриваемых гео-
метрических объектов относительно нового базиса теми же бук-
вами, но со штрихом слева вверху. Тогда законы преобразования
компонент можно записать так:
Таблица 2
Геометрический объект Закон преобразования
Вектор 'xj=E"=i
Линейная форма
Линейный оператор
Билинейная форма 'Vkm. = ]£ £ '''т
Таким образом, для произвольного базиса каждый из указан-
ных выше геометрических объектов задается упорядоченным на-
бором п1 (I равно 1 или 2) чисел, изменяющихся при переходе к
другому базису по определенным правилам (единым для объек-
тов одной природы).
Интересно отметить, что правила преобразования компонент
рассматриваемых геометрических объектов можно принять за их
определения.
Покажем это, обратившись, например, к линейным опера-
торам.
В курсе линейной алгебры линейный оператор А определяется
обыкновенно как отображение линейного пространства Vn в себя
(Д : Vn->-Vn), переводящее линейную комбинацию векторов в ли-
нейную комбинацию их образов:
А (ах + $у)=аАх + рДу.
Изучая свойства линейного оператора, приходим к его матри-
це (а/), элементы которой определяются из соотношений
п
Ле7 = Е a}ei (/=1, •••>«), (3)
i=1
а при переходе к другому базису f преобразуются по правилу
п п ‘
Е (fe, т==1, .. ., п). (4)
i^l /=1
Известно, что линейный оператор однозначно определяется
своим действием на базисные векторы. Поэтому, задавая матрицу
140
(а/) и закон (4) преобразования ее элементов, при фиксирован-
ном базисе е, пользуясь формулами (3), можно построить и при-
том ровно один линейный оператор.
Замечание. Некоторые геометрические объекты, вычисле-
ние которых требует задания базиса, от выбора базиса вообще
не зависят. Таковыми являются, например, ранг, след и опреде-
литель линейного оператора, ранг и индекс билинейной формы
И др.
1°. Определение тензора
Развивая замеченное сходство в способах задания векторов,
операторов и форм (при помощи упорядоченных наборов чисел)
и формулах их преобразования (при переходе к другому базису),
введем основное понятие тензора.
Определение. Будем говорить, что в n-мерном линейном
пространстве Vn задан тензор Т типа (р), если
1) для каждого базиса е\,...,еп указывается упорядоченный
набор пр+з чисел
— компонент (координат) тензора в базисе е\,...,еп,
2) для набора компонент
,т^...кр /1 ..., 1
\ 1 О П, . . . , 1 О Iq О П)
тензора Т в базисе ., fn справедливо представление
Й ip Н 1Ч
— закон преобразования компонент тензора Т (все индексы, по
которым ведется суммирование, независимо изменяются от 1
до п).
Нетрудно заметить, что место каждого индекса у компонент
тензора (вверху или внизу) связано с законом преобразования.
Верхние индексы у компонент тензора называются контрава-
риантными индексами, а нижние — ковариантными.
Тензор
является р раз контравариантным и q раз ковариантным. Его
ранг равен p + q.
Из закона преобразования (5) компонент тензора вытекает,
что если все компоненты тензора в некотором базисе равны нулю,
то они будут нулевыми и во всех других базисах.
141
Примеры тензоров.
1. Скаляр—тензор типа ( q j •
2. Сравнивая формулы, приведенные в табл. 2, с законом пре-
образования компонент тензора, убеждаемся в том, что:
/ 1 ''
вектор является тензором типа ( q Ь
линейная форма—тензором типа (
линеиныи оператор — тензором типа j ]>
билинейная форма — тензором типа
3. Символ Кронекера 6/— тензор типа f | V
1 /
z / i
Запишем закон преобразования компонент тензора Т короче:
(6)
(О, (Л
где (i) = (й ... ip), -]а)> а символ означает, что
(!).(/)
суммирование проводится по каждому из индексов й,...,гР,
/1,.. ,,jq, независимо изменяющихся от 1 до п.
Заметим, что выбор букв для обозначения индексов суммиро-
вания в формуле (6) произволен, однако они должны быть раз-
личны.
Закон преобразования (6) будем называть тензорным зако-
ном типа | Р ).
\Я /
Выразим компоненты тензора Т в базисе ei,...,en че-
k,...k
рез его компоненты в базисе Л,..., fn.
УТВЕРЖДЕНИЕ. Справедлива формула
S Ж,(7)
(fe).(O ’
* Преобразуем выражение, стоящее в правой части доказы-
ваемой формулы (7), пользуясь законом (6)
<s>.(0 ₽ ’
i42
и очевидными формулами
У %SM=6L^
k I
Имеем
S тЬ>1:...
(ft),(О
= Е (Е Tt' W «У -(:•
(ft),(О (s).(O
= Е Е (М ••• (»^:'=
(s).(0 (ft),U) Р _
= Е •
(s).(i)
2°. Корректность определения тензора
Покажем, что данное выше определение тензора корректно.
ТЕОРЕМА 1. Пусть р и q — произвольные неотрицательные
целые числа. Тогда в пространстве Vn существуют тензоры типа
* Выберем в пространстве V” базис ei,...,en. Произвольно
<?)•
взятый набор пр+ч чисел Т^\\}р
будем рассматривать как совокупность компо-
I ? I относительно этого базиса.
7)
нент тензора типа
Укажем сначала, как построить компоненты тензора относи-
тельно любого другого базиса.
Пусть fi,..., fn — базис пространства V";
i /
kt. k
•Определим набор пр+q чисел 'Ti.jp по правилу (6):
(«).(/)
Чтобы убедиться в том, что тем самым в пространстве Vn дей-
ствительно построен тензор типа , достаточно проверить, яв-
ляется ли тензорным закон преобразования компонент при пере-
ходе от одного произвольно взятого базиса к другому, тоже про-
извольному.
143
Пусть и gi,...,gn—два произвольных базиса про-
странства Vn;
fi=^vkjgk-
i k
k ...k ~
Компоненты относительно базиса определим
по формуле (6), а компоненты ₽ относительно базиса
gi....gn по следующему правилу:
С::."’= S %'. w
(*),(/)
где ст?— элементы матрицы перехода от базиса е к базису g, а
Т{т — элементы обратной матрицы:
е1=Е^т-
j т
Покажем, что указанный тензорный закон ('типа сохра-
няется и при переходе от компонент 7\...г к компонентам
"C"smp.
S*’ V
Прежде чем подставлять в правую часть формулы (8) выра-
жение (7) для заметим, что
Теперь уже нетрудно увидеть, что
•е:?= Е ( S
= S E (4«?)
(fe).(O («).(/) .
E.^kf...kn m mn t l„
w.c/)
Замечание. На практике для задания тензора; как прави-
ло, используют именно этот прием: относительно выбранной ко-
ординатной системы (часто естественным образом приспособлен-
ной к рассматриваемой задаче) задаются компоненты тензора и
указывается его тип. Закон преобразования позволяет находить в
случае необходимости компоненты тензора в любой другой коор-
динатной системе.
144
3°. Равенство тензоров
Определение. Тензоры Т и S называются равными, если
они имеют один и тот же тип и все их компоненты относительно
какого-либо базиса соответственно равны.
Обозначение: T=S.
Остановимся на этом подробнее. Пусть
— компоненты тензоров Т и 3 относительно базиса е\еп. Ра-
венство T=S означает, что
= 8\1-гр
if-iq
для всех й,..., ip, ji,..., jg, удовлетворяющих условию
1 , 1 1 А п> • • • > 1
а в остальном произвольных.
Из закона преобразования компонент тензора вытекает, что
указанное свойство сохраняется при переходе к любому другому
базису: если 'Т^ - ^р и 'S^^p— компоненты равных тензоров Т
и 3 относительно базиса Л..fn, то
для любых k\,..., kp, li,, lq, подчиняющихся условию
/7 < п,
1 sC К П, ... , 1 kp П, 1 li :С п, ... , 1 lq п.
Определение. Тензор U называется противоположным
тензору Т, если он имеет тот же тип и в некотором базисе вы-
полняются равенства
U
ii
ЛР
'!ч
Ясно, что при переходе к другому базису указанное в опреде-
лении свойство сохраняется.
Определение. Тензор, все компоненты которого равны ну-
лю, называется нулевым тензором.
Отметим, что компоненты нулевого тензора равны нулю в лю-
бом базисе.
§ 2. АЛГЕБРАИЧЕСКИЕ ОПЕРАЦИИ НАД ТЕНЗОРАМИ
1°. Определение алгебраических операций над тензорами
Введем несколько операций над тензорамй. Доказательство
того, что в результате каждой из этих операций получается тен-
зор, будет дано в 3°.
145
1+. Линейная комбинация тензоров. Пусть
— тензоры типа а и ₽ — произвольные числа. Тогда линейная
комбинация
[7=aT + pS
с компонентами
и^-л.р=^аГ‘--лр + ^‘--лГ'
также есть тензор типа j •
2+. У множение тензоров. Пусть
Т = (Т1Глр\
V ' ‘!q]
— тензор типа и
S =
— тензор типа ( j. Положим
If.1" \р1р+г--1р+ь = T/‘-"ipSip+r-Jp+h.
^х' ’ ql q+\'' '!q+m h-- - Iq tq+i- • 'Jq+m
Тогда
\ l*"‘lq+ml
— тензор типа называемый произведением тензора T на
тензор S.
Обозначение: U=T®S.
Отметим, что в общем случае
Т®5^5®Т.
3+. Транспонирование тензора. Пусть
Т = (Т1.1' ля]
— тензор типа гДе
А. Рассмотрим перестановку чисел вида
G==M ...r...s...q\
\1 ...s...r...qj
<i переставляет местами только числа г и s (,l^r<s^n).
146
Положим
Тогда Т=(Т1.1"лр , .)—тензор типа (р
Будем говорить, что тензор Т получен транспонированием тен-
зора Т по двум нижним индексам (r-му и s-му).
Здесь заданный упорядоченный набор чисел заменяется дру-
гим упорядоченным набором, составленным из тех же чисел. При
этом переупорядочение заданного числового набора проводится
по единой схеме для каждого базиса пространства.
Б. Операцию транспонирования можно определить для любо-
го числа нижних индексов.
Рассмотрим перестановку
1 ’ у
(1) ... о(г?) /
На наборе (ji.. ./д) перестановка о действует по правилу
11 jq j
/о(1) • • /СТ(<7) /
или, что то же, а(/х ... /й)=(/а(1) ...
Будем говорить, что тензор Т с компонентами
получен из тензора Т транспонированием по нижним индексам
при помощи перестановки о.
В. Операция транспонирования тензора по верхним индексам
определяется аналогично.
Г. Операция транспонирования тензора при помощи переста-
новки индексов разных типов (верхних и нижних) не определена.
4+. Свертывание тензора. Пусть
Т = [Т11--лр\
— тензор типа ( Р j, где р 1, q 1. Положим
Л - Ь- •4п-1Лп+Г '/|7
= т1у лк-11 гк+г лр ц- 4- - -
11 ' Inn 1'' 1 I*" lm-1 n lm+Г "Iq'
147
Тогда
*.ь+г ••*«>)
— тензор типа ,
называемый сверткой тензора T по &-му
верхнему и m-му нижнему индексам.
5+. Симметрирование и альтернирование.
А. Определение. Тензор называется симметричным (по
нижним индексам), если каждый тензор, получаемый из него
транспонированием по любым двум нижним индексам, совпадает
с ним.
Примером симметричного тензора типа % может слу-
жить симметричная билинейная форма.
Пусть
— тензор типа j • Положим
Si'"l.p = Т1.':''lp.. = -1- VГ1::' 1р., (А)
(а)
(суммирование ведется по всевозможным перестановкам индек-
сов /1,
Тогда
5=
\ /1---lq!
— тензор типа ( j, симметричный по нижним индексам.
Определение. Операция (А) построения симметричного
тензора S называется симметрированием тензора Т по нижним
индексам.
Б. Определение. Тензор называется кососимметричным
(по нижним индексам), если каждый тензор, получаемый из него
транспонированием по любым двум нижним индексам, противо-
положен ему.
Пусть
у _
\ й - iq / ।
— тензор типа j • Положим
- v Ssigno7J«A> (Б>
«Л
(суммирование ведется по всевозможным перестановкам индек-
сов /1...jg).
ns:
Тогда
А = (Л'.-М
— тензор типа Р^, кососимметричный по нижним индексам.
Определение. Операция (Б) построения кососимметрично-
го тензора А называется альтернированием тензора Т по нижним
индексам.
В. Симметрирование и альтернирование тензора по верхним
индексам определяется аналогично.
Г. Симметрирование и альтернирование тензора можно про-
водить и по части индексов.
2°. Правило суммирования
На пути к овладению техникой обращения с индексами и для
упрощения выкладок полезно правило сокращенного суммиро-
вания.
Рассмотрим, например,,следующее выражение:
f ^bL
/=1
Отметим, что индекс суммирования / встречается дважды.
Опуская в этом выражении знак 2, запишем его так:
Л'М.
Условимся считать, что повторение буквенного индекса (в дан-
ном случае индекса /) будет указывать на то, что по этому ин-
дексу ведется суммирование от 1 до п (даже при отсутствии зна-
ка суммы). Поэтому последнее выражение нужно понимать так:
AfBi=AiBk~h ...
Правило сокращенного суммирования. Если в некотором вы-
ражении какой-нибудь буквенный индекс повторяется (встреча-
ется дважды), то по этому индексу проводится суммирование от
1 до п. Если таких индексов несколько, то суммирование прово-
дится по каждому из них. Знак суммы при этом опускается.
Например, выражение G1^ следует понимать так:
/->ik 'V' f^ik
Ciik=y^ £aCi,k'
Из формулы
Л/$=£ Л^=Л!^
149
вытекает, что обозначения индексов суммирования не играют ни-
какой роли — при замене индекса j на индекс I результат не из-
меняется:
Л^=Л|в1.
Индексы i и k в последнем соотношении, в отличие от индек-
сов суммирования j и I, называются свободными.
Запишем закон преобразования (1), применяя правило со-
кращенного суммирования:
= Th-ip^ . _. ^РХЛ ... х/^ (1)
В правой части этой формулы суммирование проводится по
дважды повторяющимся индексам й,..., ip, ji,jq.
3°. Теорема об алгебраических операциях над тензорами
ТЕОРЕМА 2. В результате каждой из алгебраических опера-
ций 1+—5+ над тензорами вновь получаются тензоры.
1+. Линейная комбинация тензоров одного типа -является , тен-
зором.
* Компоненты тензоров Т и S типа j изменяются по оди-
наковому закону. Запишем этот закон преобразования и для тен-
зора Т и для тензора 5. Имеем
т**”> =
Ж.
^lq H--!q ip lq
Умножая обе части первой формулы на число а, второй — на чис-
ло р и складывая, получаем, что
= ... хМ ... (2)
q h--lq ip lq
где
H"-lq
'Uk.1--fp=a'T^ -ktP + P'S?*’ •
H-iq H-lq
Формула (2) показывает, что компоненты геометрического объек-
та U при переходе от одной координатной системы к другой из-
меняются по тому же правилу, что и компоненты у Т и S,—/По-
тензорному закону типа j. Это означает, что
[7=аТ + рЗ
— тензор типа *
150
2+. Произведение любых двух тензоров является тензором.
♦ Перемножая соотношения, описывающие законы преобразо-
вания тензоров
Т-типа (? \ :
,T^. kp = . . K’q
У -лч 1Р ‘‘ iq
n S - типа
,Skp+1'"k.p+m = St.p+1".'l.p+mXkP+1 .. . Ткр+т’>11'ч+1 . .. >t,'p+r,
lq+l"'lq+r iq+l'"iq+r ‘p+1 ‘p+m lq+i lq+r’
получаем, что
... lkP+m^
ll"'lq+r ‘‘'q+r ‘ ‘p+m '*
V.\^r
lq+r
(3)
где
[Jlyl0+m — 7^7‘"гр5^+1"'1.Р+гп,
}x'"!q+r 1q+l'"lq+r
’ик‘--Ьр+т='Т^-- fp'Sk,p^-^'".
ll"'lq+r ll---‘q ‘q+l'"‘q+r
Формула (3) означает, что компоненты геометрического объекта
U при переходе к новой координатной системе изменяются по
тензорному закону типа *
Доказательство свойств 3+ и 4+ проведем для тензоров типа
Несмотря на то, что это весьма частный случай, ограничения
общности, по существу, не возникает. Сказанное следует из того,
что в алгебраических операциях 3+ и 4+ активно участвуют ровно
два индекса* — либо одного типа (свойство 3+) либо разных ти-
пов (свойство 4+).
3+. Транспонирование
по нижним индексам
тензора типа
.приводит к тензору типа
* Рассмотрим тензор,
T=(Tlrs)
-типа 2 ) ’ Положим
rri
гттЕ / rrtk frpk
= * Im== * ml •
* Любую перестановку можно представить как результат конечного числа
транспонирований по двум индексам.
151
Компоненты тензора Т преобразуются по правилу (1):
tL = rrsikM.
Пользуясь тем, что выбор букв для обозначения суммирования
не йлияет на сумму, поменяем в последней формуле г и s места-
ми. Тогда
Поменяв теперь местами I и т, получим
Л k S f
* ml — *
и, значит,
/rrik _rr\l nk Г S
/ im — i rs&t X/Xm.
Последнее означает, что
— тензор типа 2 ) ' *
4+. Свертка тензора типа ( J является тензором типа
(Р~1\ q
\Я— О’
* Пусть
T=(T'rs)
— тензор типа 2 ) ’ Положим
Tr—Tsrs, 'Т^’Тип.
Вновь прибегая к правилу (1), получим:
'ТТт =
Воспользуемся тем, что
Тогда
'ТТт = = Ы
и, значит, 'Ti=TrKri.
Тем самым Т=(ТГ)—тензор типа j. *
Хорошим упражнением на пути овладения индексным форма-
лизмом является проведение доказательства свойств 3+ и 4+ в об-
щей ситуации—для тензора
п---14Г
152
При этом полезно иметь в виду, что любое, транспонирование
тензора можно представить как последовательное исполнение
транспонирований только по двум индексам.
5+. Симметрирование (альтернирование) тензора типа ( Р )
дает симметричный (кососимметричный) тензор типа •
* Обе операции проводятся по следующей схеме.
А. Находятся все тензоры, получающиеся из заданного транс-
понированием (по нижним индексам). Их число равно q\
Б. Составляется линейная комбинация найденных тензоров:
1) при симметрировании все q! тензоров умножаются на +1;
2) при альтернировании с коэффициентами +1 берутся толь-
ко тензоры, полученные из заданного транспонированием при по-
мощи четных перестановок нижних индексов (число таких тен-
зоров равно остальные тензоры берутся с коэффициента-
ми — 1.
Так как транспонирование тензора не изменяет его типа (свой-
ство 3+), то построение указанных линейных комбинаций воз-
можно.
В. Построенная линейная комбинация делится на число сла-
гаемых q\
Остается убедиться в том, что транспонирование полученного
тензора либо не изменяет его (при симметрировании) либо ме-
няет на противоположный (при альтернировании).
5) При транспонировании тензор 5 преобразуется в равный
ему вследствие того, что эта операция изменит только порядок
слагающих его тензоров.
А) При транспонировании тензор А преобразуется в противо-
положный вследствие того, что изменится не только порядок сла-
гающих его тензоров, но и знак перед каждым из них. *
Замечание. Симметрирование не изменяет симметричного
тензора. При альтернировании симметричного тензора получает-
ся нулевой тензор. Альтернирование сохраняет кососимметричный
тензор. Симметрирование обращает его в нулевой тензор.
4°. Операции над кососимметричными тензорами
В этом пункте мы будем рассматривать ковариантные косо-
симметричные тензоры.
Все компоненты кососимметричного тензора Т'=(Т/1.../) при
q>n, где п — размерность пространства Vn, равны нулю в силу
определения кососимметричности.
Рассмотрим кососимметричный тензор
Т=(Гщ../п)
типа 0 и покажем, что все его отличные от нуля компонен-
ты с точностью до знака совпадают друг с другом.
153
В самом деле, компоненты, у которых совпадают хотя бы два
индекса, равны нулю в силу кососимметричности тензора. Если
же индексы /ь попарно различны, то вследствие той же ко-
сосимметрии
_ . / 1 2 ... п
Tk!,...in=^ \ . . . Р12...Л-
\ /1 12 • • • 1п /
Пример 1. Пусть Т=(Т/1/г/з)—трижды ковариантный косо-
симметричный тензор в трехмерном пространстве V3. Тогда 21 из
27=33 компонент равна нулю, а оставшиеся совпадают либо с
Т12з(?23Ь Т312), Либо С — Тцз(Тз21, Т213, Лзг)-
В общем случае только п\ из общего числа пп компонент мо-
гут быть отличны от нуля. Половина из них равна Ti2...n, а дру-
гая — Т12...п.
Нетрудно проверить, что сумма кососимметричных тензоров
одного типа и произведение кососимметричного тензора на число
снова являются кососимметричными тензорами.
Тем самым совокупность кососимметричных тензоров типа
/ 9 j образует линейное пространство. Его размерность равна
ckn.
В частности, размерность пространства кососимметричных
тензоров типа равна 1.
Этот же факт легко вытекает из того, что у тензоров типа
I I ровно одна существенная компонента — Лг-.п и, значит,
/ 0 s
любые два кососимметричных тензора типа I j пропорцио-
нальны.
Для кососимметричных тензоров можно ввести еще одну опе-
рацию — внешнее умножение.
Определим внешнее произведение двух ковариантных косо-
симметричных тензоров
Г=(ТЛ.:./а) и 5 =
по следующему правилу:
а) сначала построим тензорное произведение U=T®S с ком-
понентами
и,- , =Th -S: , ;
Jq+r 'q+r*’Jq+r
б) затем проальтернируем его, т. е. построим тензор V—A(U)
с компонентами
2 Si§n ° U>aW-• ioto+r) =
(ч)
Sia{q+lj - ia{q+r)
(o)
154
(здесь суммирование ведется по всевозможным перестановкам
а= / 1 • • q <7+1 • • q+r \
I о(1) ... o(q) a(q + l) ... o(q + r) )
чисел 1, ... , q, q+l, ... , q+t).
Полученный кососимметричный тензор V называется внеш-
ним произведением тензора Т на тензор S.
Обозначение: T/\S.
Пример 2. Пусть Т=(7\) и S=(Sj2)—тензоры типа Тогда
V=T/\S—кососимметричный тензор типа его компоненты V/j,
вычисляются по правилу
Введенная операция обладает следующими свойствами:
1+. 5ДТ=(—1)?'TAS.
2+. (T/\S)/\U=T/\(S/\U).
Последнее свойство позволяет опускать скобки и писать про-
сто T/\S/\U.
* 1-е свойство вытекает из того, что
/ 1 ... q 7 + 1 ... q + г \
sign ч ч =
о(1) . . . 0(7) o(q+ 1) . . . o(q + r) !
i nor I 1 • • r r +1 .../-J- <7 \
=(—Design *
k 0(7+1) . . . 0(7 +r) o(l) . . . 0(7) /
При доказательстве 2-го свойства для простоты ограничимся
рассмотрением тензоров типа ( •
* Пусть T=(TZ1), S=A), £/=(t//s).
Тогда С=Т f\S— дважды ковариантный кососимметричный тен-
зор с компонентами
a D=S/\U — дважды ковариантный кососимметричный тензор с
компонентами
D^^lSjPj-SiPp].
Вычисляя далее компоненты тензоров A=(T/\S)/\U и В=ТД
Д (5Д U), получим соответственно
155
О
B^-^-Vr^iJJi-T^U^T^lJ^-
о
-T^U^T^JJs-T^JJ^.
Нетрудно заметить, что Ajlhh—Bjll2h для любых /ь j2, j3. *
Замечание. Можно определить внешнее произведение лю-
бого конечного числа сомножителей.
Пример 3. Пусть 0(1>, ... , Q{1)— заданные тензоры типа fjj
и ®(,) = ao0(/), где ац—числа, 1 = 1, ... ,1. Тогда
оМ) Д ... Д cD(6=det(a/y)0(1) Л • • • Л ©(°. (*>
* Формула («) легко вытекает из того, что
0(Л) л • • • Л 0(/;)=sign (1 • • 1} 0(1) Л • • Л 0(/)
\h • • в /
и
det(a;j)=y sign Р { ) alh ... aZ/ *
(<j) \ к • • • ]i /
Замечание. С контравариантными кососимметричными
тензорами можно поступать совершенно аналогично.
5°. Внешние формы
С ковариантными кососимметричными тензорами тесно связа-
ны полилинейные кососимметричные формы.
Полилинейную (k-линейную) форму определим как функцию
k векторных аргументов, линейную по каждому аргументу:
а(х1, ... , hxm + \iym, ... , xk)=Ka(x1, ..., хт, ... , хк) +
+ ра(хъ ... , ут, .. . , xfe), т=\, ..., k.
Полилинейная форма называется кососимметричной, или
внешней, если при перестановке местами любой пары аргументов
она изменяет свой знак на противоположный:
®(Xlt ..., Хт, ..., Хг, ... , Xft)=—©(Xj/. .. , xh .... хт, .... xh).
Пусть ei,...,en — базис пространства Vn,
xl — ^leh' • • • > xh= ^keik
— произвольные векторы.
156 <
Тогда
®(хъ , х^^...^ ...
где о>г1...гй=®(ег1, ... , eih).
Нетрудно заметить, что ®г1...г —компоненты кососимметрич-
ного
*
ства
тензора типа
в базисе elt..., еп.
В самом деле, пусть /ь... ,fn — еще один базис простран-
Vn. Раскладывая векторы Xi,...,xh по этому базису
Xi = ^fh, ... , Xft = T]/V/ft,
получим, что
®(%!, .... Х^'а^...^ ...
где .... fih).
Сравнивая последние два выражения для co(xi,... ,Xh), с уче-
том формул Нг—tV'x; получаем
Верно и обратное. Пусть (7\ t )—кососимметричный тензор
/ 0 \ т
типа ( I • 1огда
1\.л$ &
— внешняя 6-форма.
Пример. Положим в последнем выражении k=n. Как было
установлено в предыдущем пункте, для попарно различных индек-
сов i’i,... ,in имеют место равенства
. / 1 • • п \ „
7\...i=Slgn Т12...П-
\ ii in /
Поэтому
1\..л$ • . £"=T12...n£sign (' 1 • • • " W . . .
(а) \ li • • Г ii /
gl • •• Н?
— Т12...П ......... *
Пусть <р— внешняя 6-форма и ф— внешняя Z-форма. Тогда
определена (6+/)-форма
(<р ® ф)(хх, хк, Xfc+1, ..., Xi) = <p(xX1..., xft)-4>(xft+i, ... , xk+i),
которая внешней формой, вообще говоря, уже не является.
157
Однако если подвергнуть произведение ф®ф процедуре аль-
тернирования (сходной с операцией альтернирования, определен-
ной для тензоров в пункте Г), то форма, получаемая в результа-
те, будет уже внешней.
Для й-линейной формы a(xi,..., xft) альтернирование опреде-
ляется так:
[«](%!, ... , хй)=-А-^2паа(хг„ ...', xift).
(Ст)
Подвергнув форму ф®ф этой процедуре, получим внешнюю
(k+l)-форму
ф А Ф=[ф®Ф1-
Тем самым внешнее произведение внешних форм ср и ф опре-
деляется так:
(ф A Ф)(-И- • • , xk~\ /)=—;—Цг ¥’sign<т<р(^tJ, .... xt ) х
(Рт?)1 LA *
(ст)
Ясно, что внешнее произведение форм является внешней формой.
Свойства внешнего умножения.
1+. (Хф) Л ф = я? Д (лф) = л(ср Д ф), лей.
2+. (ф-!-ф) А Х=Ф Л Х + Ф А X-
з+. ф А Ф =(—Ф А ф-
* Равенство
<p(xlt ... , лф)ф (%*+!, ... , хА+г)=ф(л-&+ь . .. , ^+/)ф(х1, ... , xh)
сохранится и после альтернирования
(ф А ФЖ- • • • , *й, Xk+l, • • • , xk+i) =
=(ф А ф) (*4-1- • • • - *1- • • • - *fe)-
Переставляя местами аргументы в правой части, получим
(ф Л Ф) (*1, • • • . *4-1- • • , Xk+l)=
==(—1)и(ФАф)(*1> ••• > хь */+ь , *Ж- *
4+- (фЛФ)Лх=фЛ(ФЛх).
§ 3. МЕТРИЧЕСКИЙ ТЕНЗОР
1°. Метрическая структура линейного пространства
Пусть на векторах пространства Vn задана билинейная форма
g(x, у), симметричная, g(y, x)=g(x, у), и невырожденная: для
любого ненулевого вектора х можно указать вектор у, такой, что
g(x, у)^0.
158
Зафиксируем эту форму и положим
{х, y)=g(x, у). (1>
Тем самым каждой паре векторов х и у ставится в соответствие
число <х, г/>, определяемое по правилу (1).
В случае, когда g(x, у) — симметричная билинейная форма,
полярная положительно определенной квадратичной форме, про-
странство Vn наделяется новой дополнительной структурой и
превращается в евклидово пространство, в котором <х, у> пред-
ставляет собой скалярное произведение векторов хну.
Пусть ei,...,en — базис пространства Vn. Рассмотрим сово-
купность компонент
gii={el, е}).
Ясно, что g=(gij)—тензор типа (2)’ ПРИ пеРех°Де к Другому
базису числа ga изменяются по правилу:
'gkm = gli^In.
Назовем тензор g (ковариантным) метрическим тензором или,
кратко, метрикой.
Пример. Найдем закон преобразования det(g'ij) при перехо-
де к другому базису.
При изменении базиса числа gij преобразуются по правилу:
ghrr. ~ g
Если считать номером строки в матрица?: (gij), ('gb,,) первый ин-
декс, в матрице (х*)— нижний индекс, а в матрице (хД)— верх-
ний индекс, то это правило можно записать в матричной форме
следующим образом:
Так как при умножении матриц их определители также пере-
множаются и
det(x*)=det(x'(),
то в результате получим
det('gfim)=(det(xy)2det(^ij). *
Если
х=лЛ?;, у=у,е},
то
{х, y}=gijXiyl.
Из курса линейной алгебры известно следующее утверждение.
159
ТЕОРЕМА 3. Билинейная форма g(x, у) невырождена в том
и только в том случае, когда det (gtj) =/=0.
Тем самым в любой координатной системе возможен переход
от матрицы (go) к обратной матрице. Обозначим компоненты
обратной матрицы через gij.
Тогда
gikgki=8i> gikgM=8i-
УТВЕРЖДЕНИЕ. (g-P)—тензор типа т- е-
= (2)
♦ Достаточно показать, что матрица 'gst, определяемая форму-
лой (2), является обратной к матрице
'gst=gij^’f
Имеем
'gsm'gmt = (gii^T') (gkl^t) = g!!gkl^lt Km)=g(igkl^i^ =
= (g'’gjl) = d'Z-xJ = = 6/.
Аналогично проверяется равенство
'gtmgms=$. *
Тензор называется контравариантным метрическим тензором.
2°. Опускание и поднятие индексов
В случае, когда в пространстве задана метрика, появляется
возможность переводить ковариантные индексы в контравариант-
ные и наоборот. Тем самым принципиальное различие между ни-
ми как бы исчезает.
Пусть g= (go) — метрика пространства Vn. Рассмотрим Ten-
зор У—_
типа где р^ 1. дующему правилу. Тензор типа м0Жн0 построить по сле-
(3)
т. е. сверткой произведения метрического тензора gij и исходного
тензора Т.
Правило (3) называется опусканием верхнего индекса i\.
160
Аналогично вводится правило поднятия нижнего индекса jr.
(4)
УТВЕРЖДЕНИЕ. Если опустить индекс, а затем поднять его,
то получится исходный тензор.
* Поднимая у тензора, стоящего в левой части формулы (1),
индекс й, получаем
Ясно, что опустить (поднять) можно любой верхний (нижний)
индекс.
Примеры.
(1). Пусть g(x, у)=<.х, у>—обычное скалярное произведение.
Компоненты тензора xi типа можно использовать как (кон-
травариантные) координаты вектора
Рис. 1. Ковариантные и контравариантные координаты вектора
♦
Опуская индекс, получаем
xi=giiXi = (ei, e3}xi = (ei, х'е})-={еь х).
Таким образом, опускание индекса у координаты xj вектора х
приводит к скалярной проекции этого вектора на вектор базиса.
Это ковариантная координата вектора х (рис. 1).
Заметим, Что
{х, y^gijrfy^g^Xtyj.
6 Зак. 259
161
(2) Тензор Л=(Л/) типа можно рассматривать как ли-
нейный оператор в пространстве Vn. Если задана метрика то
верхний индекс можно опустить:
Aij—gikAj
Тем самым получается тензор типа определяющий били-
нейную форму
Л(х, у)—АцХ‘у> = xigikAkjyi—{x, Ay).
Обратно: поднятием индекса у тензора типа можно по-
строить линейный оператор. *
Мы уже отмечали, что место индексов (вверху или внизу) и
порядок их расположения при задании тензора существенны. По-
этому при проведении операции опускания (или поднятия) ин-
декса возникает естественный вопрос: на какое место следует по-
ставить опускаемый индекс? Обычно поступают так: места индек-
сов, верхних и нижних, нумеруются в совокупности.
(2 \ ki
2), (7\) и занумеруем
его индексы следующим образом: 1-й индекс — ковариантный,
2-й и 3-й — контравариантные, 4-й — ковариантный. Это можно
записать так:
ГГ\, kl .
ii.J.
Таким образом, если 2-й индекс стоит вверху, то 2-е место снизу
остается пустым. Тогда, поднимая или опуская индекс, мы ставим
его на заготовленное свободное место. Опуская, например, 3-й ин-
декс, получаем
Т. k.. гту . km.
i.lj —glm* i- j •
Б. АФФИННОЕ (ТОЧЕЧНОЕ) ПРОСТРАНСТВО
§ 4. ТЕНЗОРЫ В ТОЧЕЧНЫХ ПРОСТРАНСТВАХ
В предыдущих параграфах этой главы мы ввели понятие тен-
зора и рассмотрели некоторые свойства тензоров в n-мерном ли-
нейном пространстве. В практических задачах чаще приходится
иметь дело с пространствами несколько иной природы — аффин-
ными, или точечными, пространствами. Поэтому представляется
естественным обобщить понятие тензора на случай точечных про-
странств.
162
1°. Точечное пространство
Начнем с примера.
Из курса аналитической геометрии известно, как упорядочен-
ная пара точек трехмерного пространства определяет направлен-
ный отрезок, а вслед за ним и вектор. При этом от любой точки
пространства можно заданный вектор отложить. Векторы можно
складывать и умножать на произвольные числа. Множество всех
векторов образует трехмерное линейное (векторное) простран-
ство.
Таким образом, отправляясь от пространства, элементами ко-
торого являются точки, мы строим новое пространство, элемента-
ми которого являются векторы. Заметим это.
Рассмотрим непустое множество А, элементы которого будем
называть точками и обозначать прописными латинскими буква-
ми Л4, N, О, Р, Q, R,... Каждой упорядоченной паре точек М. и N
поставим в соответствие вектор г из линейного пространства Vn.
Обозначение: r=MN.
Точка М называется началом вектора MN, а точка N — кон-
цом вектора MN.
Потребуем выполнения следующих условий.
i. Для любой точки О из множества А и любого вектора г из
пространства Vn можно указать единственную точку М, такую,
что г=ОМ; если точка О фиксирована, то тем самым между век-
торами из пространства Vn и точками из множества А устанавли-
вается взаимно однозначное соответствие.
2. Для любых трех точек Р, Q, R выполняется равенство
(рис. 2)
PQ + QR + RP=0.
Рис. 2. Аксиомы точечного пространства
Тогда множество А называется п-мерны'м аффинным, или то-
чечным, пространством и обозначается так: Ап.
Ясно, что пространство, изучаемое в курсе аналитической гео-
метрии, удовлетворяет этим условиям (и=3).
2°. Аффинные координаты
Определение. Координатным репером в пространстве Ап
называется совокупность
{О; ei...еп},
6*
163
составленная из некоторой точки О пространства Ап и базиса
в1, . . . , вц
пространства Vn.
Выбор точки отсчета О позволяет связать каждую точку М
пространства Ап с ее радиус-вектором ОМ.
Разложим вектор ОМ по базису е\,...,еп-.
—. п
ОМ=У х1е-г. (1)
И-ллЛ
г=1
Аффинными координатами точки М относительно заданного
репера {О; ei,...,en} будем называть координаты х1,...,хп ее
радиус-вектора ОМ (рис. 3).
Рис. 3. Координатный репер
По предложенному выше правилу каждой точке пространства
Ап ставится во взаимно однозначное соответствие упорядоченный
набор чисел — координаты этой точки.
Таким образом, заданием координатного репера в простран-
стве Ап вводится система координат — аффинная координатная
система.
Рассмотрим в пространстве Ап другой координатный репер
{О; Раскладывая радиус-вектор ОМ той же точки М
по базису fi..fn —
__> п
OM=Y ykf^ (2)
fe=i
находим ее координаты у\...,уп в координатной системе, опре-
деляемой репером {О; Л,..., fn}.
Построим формулы, связывающие' координаты х1, ...,хп и
у1....уп произвольной точки М.
Пусть
п
п).
i=l
164
Из формул (1) и (2) получаем, что
и, далее,
k
(3)
п п п
z=l k=l i-Л
В силу единственности разложения вектора по базису отсюда вы-
текает, что
xi = Y ^yk <t==1’ ’ ’ ’ ’")• (4)
Аналогичным рассуждением, выражая векторы е,- через век-
торы fh —
ei=Y %ktfh (z = l,...,n),
k=l
из равенства (3) получаем, что
(k= \, ... ,п). (5)
i=i
Напомним, что элементы матриц (хьг) и (Zift) связаны соотноше-
нием
п п
i=i г Л
где 6йт — символ Кронекера.
Таким образом, при переходе от координатной системы, опре-
деляемой репером {О; еь ..., еп}, к координатной системе, опре-
деляемой репером {О; координаты произвольной точки
М преобразуются так же, как и координаты ее радиуса-вектора,
т. е. по правилу (4) или равносильному ему правилу (5).
Замечание. Если при переходе от одной координатной си-
стемы к другой начало отсчета изменяется, то координаты точки
М преобразуются так:
*/* = £^г + Р*, (k=l, . .. ,п), xi=YiKkyk + ai (l'=1....«)
j=i
(здесь а1,..., а" и Р1,..., Р"— координаты точки, начала отсчета
одной координатной системы относительно другой).
165
3°. Тензоры в точечном пространстве
Введем понятие тензора в n-мерном точечном пространстве.
Определение. Будем говорить, что в n-мерном точечном
пространстве Ап задан тензор Т типа если:
1) для каждого координатного репера {О; щ, ...,еп} указы-
вается упорядоченный набор пр+'J чисел
1 и, . . ., 1 ip п>
— компонент (координат) тензора (относительно координатной
системы, определяемой репером {О; eit...., еп});
2) для набора компонент
i'pki--kp
1 kr ;'С п,..., 1 с; kp п,
1 /х ;'С п,..., 1 iq -с п.
тензора Т относительно координатной системы, определяемой, ре-
пером {О; fi,..., fnJ, справедливо представление
T^-fp= . . . 1W1 . . . и'я
H-!q ч h ‘q
— закон преобразования компонент тензора Т.
Сравнивая данное определение с определением тензора в ли-
нейном пространстве (пункт 1° § 1), замечаем, что первое может
быть получено из второго формальной заменой слова «базис» на
слова «координатный репер». Поэтому, хотя тензор и определен
теперь в более общей ситуации, совсем просто убедиться в том,
что все ранее введенные понятия и операции переносятся на слу-
чай точечного пространства, а все доказанные ранее утверждения
остаются в силе. Это относится и к корректности определения
(способа введения) тензора, и к алгебраическим операциям над
тензорами, и т. п.
Остановимся коротко на том, как определяется метрическая
структура точечного пространства.
На векторах пространства Ап (т. е. на векторах связанного с
ним линейного пространства Vn) задается симметричная невы-
рожденная билинейная форма g(x, у), при помощи которой вво-
дится скалярное произведение векторов
{X, y}=g(x, у).
Тем самым точечное пространство Ап наделяется новой, допол-
нительной структурой.
В случае, когда g(x, х)—положительно определенная квад-
ратичная форма, Ап превращается в евклидово точечное про^
странство.
166
§ 5. ТЕНЗОРНОЕ ПОЛЕ
Значительный интерес представляет случай, когда тензор из-
меняется от точки к точке.
Определение. Будем говорить, что в n-мерном точечном
пространстве Ап задано поле тензора
Т — (Т1.1'' М типа (Н, или
тензорное поле, если в каждой точке Л'1 этого пространства задан
определенный тензор типа
Т^-гР==Гд"г.Р(2И).
(1)
Отметим, что тензорное поле может быть задано и не во всем
пространстве, а только на некотором его подмножестве.
Если в пространстве Ап введена координатная система, то
формулу (1) можно записать так:
7<-Л>=Г‘-' гр (х1, . .. ,хп),
где х1,...,хп — координаты точки М.
Все введенные выше операции тензорной алгебры легко пере-
носятся на случай тензорных полей.
Алгебраические операции над тензорными полями определя-
ются как операции над тензорами этих полей, производимые от-
дельно в каждой точке М области задания.
Например, складывая тензорные поля
/1-• iq it-‘‘1q
одного типа в каждой точке М их общей области задания, полу-
чаем
Ji---Jq Ji-‘-Jq ii
Ясно, что в результате этой операции вновь получается тен-
зорное поле того же типа.
Подобным же образом на тензорных полях вводятся операции
умножения, транспонирования и свертывания, поднятия и опус-
кания индексов и др.
§ 6. КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
В приложениях часто возникают задачи, в которых более
удобными оказываются не рассматриваемые до сих пор прямоли-.
нейные координатные системы, а криволинейные.- Для того чтобы
в таких задачах можно было эффективно пользоваться разраба-
тываемым здесь тензорным аппаратом, необходимо вновь обоб-
щить само понятие тензора с сохранением возможно большего
числа установленных свойств (лучше — всех!).
167
Предварительно целесообразно расширить класс допустимых
координатных систем.
1°. Криволинейные координаты в точечном пространстве
, Предположим, что в n-мерном точечном пространстве Ап вве-
дена аффинная (прямолинейная) координатная система и х1,...
хп — аффинные координаты. Пусть X — некоторая (откры-
тая) область в этом пространстве.
Будем говорить, что функция
и=ф(х1, ..., хп),
заданная в области X, является в области X k-гладкой (принад-
лежит классу Ск), если она имеет в этой области непрерывные
частные производные до порядка k включительно (£^1).
Если функция ы=<р(х', ..., хп) имеет в области X непрерыв-
ные частные производные всех порядков, то она называется бес-
конечно дифференцируемой (принадлежащей классу С°°).
Рассмотрим набор п гладких функций
yi=y'(x\... ,хп),...,уп=уп(х\... ,хп), (1)
задающих взаимно однозначное отображение области X на не-
которую область У изменения переменных у<, ..., уп (рис. 4).
Потребуем (достаточно считать,
i=l, ..., п, принадлежат в области
что функции у*(х\ ..., хп),
X классу С1), чтобы опреде-
литель матрицы
составленной из частных производных функций ук(х', х"),
был отличен от нуля. Этот определитель, detj*-^, называется
якобианом отображения, заданного функциями (1).
168
Определение. Будем говорить, что в области X введена
криволинейная координатная система, если задан набор гладких
функций (1), обладающий указанными выше свойствами гладкос-
ти, взаимной однозначности и невырожденности (необращения
в нуль якобиана).
Обозначение: (у) = (у1, ..., уп).
Переменные у1, ..., уп называются криволинейными координа-
тами.
Аффинные координаты х1, ..., хп часто называют прямоли-
нейными координатами.
Пример. Рассмотрим в положительном октанте
Х={(х, у, а) | х>0, у>0, 2>0}
набор функций
p=]/xa + z/2, <p=arctg—, z=z.
Легко убедиться в том, что они гладкие, задают взаимно од-
нозначное отображение положительного октанта X на «четверть»
слоя
У = |(р, ф, z)|p>0, 0<ф<-^-, 2>0
. . х -- -.... У —о
V-V2 + у2 У%2 + у2
-------У--------х~~ о
X2 + у2 X2 + у2
О О 1
0.
Построенные криволинейные координаты называются цилинд-
рическими координатами (рис. 5).
Рис. 5. Цилиндрические координаты
169
Важное замечание. Из того, что якобиан отоб-
ражения, задаваемого функциями (1), отличен от нуля во всех
точках области X, вытекает, что отображение
xi=x1(t/1, • • • ,УП), ,хп=хп(у\ ... ,уп), (2)
обратное к заданному, является гладким в соответствующей об-
ласти Y изменения переменных у1, ..., уп.
Продифференцируем тождества
yk=yk(x1(y1, .. . ,уп), . . . ,хп(у1, .. . ,yn)) (k=l,
по у> (j=l, п). Согласно правилу дифференцирования слож-
ной функции получаем
Так как
то
дх>
dyi
S- (k, j—\, . . . ,ri).
Полученные равенства можно
переписать в матричном виде
х~»у Jу-+х 1
где / — единичная матрица.
Тем самым
j y-*X== J Х--У
и, значит,
det Jy^x— ^0>
Таким образом, переход (2) от криволинейной системы коор-
динат (z/) = (z/1, ..., уп) к исходной прямолинейной (х) = (х1, ...
..., хп) удовлетворяет тем же условиям гладкости, взаимной од-
нозначности и невырожденности (якобиан не равен нулю), что и
переход (1) от прямолинейных координат (х)-(х1, ..., хп) к кри-
волинейным (у) = (у1..уп).
Пусть (z) = (z1, ..., zn) — другая криволинейная координат-
ная система в области X и
' z^z1^1, ... ,хп)...2n=zn(x\ ... ,хп). (3)
Соответствующую область изменения переменных z\ ..., zn обо-
значим через Z.
170
Посредством формул (1) и (3) каждой точке М из области X
поставлены в соответствие два набора ее криволинейных коор-
динат у1, ..., уп и z1, ..., гп.
Тем самым между областями У и Z устанавливается соответ-
ствие. Это соответствие является взаимно однозначным. Функции
z> = z>'(x1(y1, .. . ,уп), . . . ,хп(у1, ... , у")) (/=1,...,п) (4)
гладко зависят от переменных у1....уп.
Покажем, что определитель матрицы
, __/ дг> \
^г~\д^ )
отличен от нуля.
Согласно правилу дифференцирования сложной функции из
соотношений (4) получаем
dyk LA dxi dyk
i—1
Запишем эти n2 соотношений в матричном виде. Имеем
Jу->-2:== JX-+Z ’ JЦ-+Х-
Так как
jу-¥Х == J х-»-у,
то отсюда следует, что
det Jx-+y
Таким образом, переход (в области X) от одной криволиней-
ной системы координат (у) = (у\ ..., уп) к другой (z) = (z!, ...
..., zn) удовлетворяет тем же условиям гладкости, взаимной од-
нозначности и невырожденности (необращения в нуль якобиана),
что и переход от прямолинейных координат (х) = (х1, хп)
к криволинейным (#) = (*/'..уп).
Укажем достаточное условие того, чтобы система гладких
функций
yk=yk(x1, ... ,хп) (fc=l,...,n) (5)
задавала криволинейную координатную систему.
УТВЕРЖДЕНИЕ. Пусть
det JО
всюду в области X. Тогда у каждой точки М из области X су-
ществует открытая окрестность, в которой набор функций (5)
задает (локальную) криволинейную координатную систему.
171
Этот факт, известный как теорема о неявной функции, дока-
зывается в курсе математического анализа.
Пользуясь формулами (2), заменим координаты х‘ в разло-
жении
OM—x^i
радиус-вектора точки М. В результате получим формулу, выра-
жающую радиус-вектор г=ОМ произвольной точки М из области
X через ее координаты у1, ..., уп:
г=х1(у1, . .. ,yn)eit (6)
или, короче,
г=г(у\ ... ,уп).
Продифференцируем равенство (6) по переменной yk:
dr дх1 , , дх11 ,, , х
----=——вт + ...H е„ (й=1, .. . , п).
дук dyk dyk
Совокупность векторов
дг дг
ду1 ’ ’ ’ ’ ’ дуп
линейно независима. Это следует из того, что определитель мат-
рицы, составленной из координат этих векторов в базисе ei, ...
..., еп —
, __/ dxi \
\д^ Л
отличен от нуля.
2°. Тензоры в криволинейных координатах
Рассмотрим область X пространства Ап, в которой введена
система криволинейных координат (^) = (х1, ..., хп).
С криволинейной координатной системой естественно связаны
кривые, называемые координатными кривыми или координатными
линиями.
Координатные линии определяются так: i-я координатная ли-
ния (i-линия) — это кривая, вдоль которой изменяется лишь од-
на из координат — хг; все координаты, кроме i-й, остаются неиз-
менными.
Например, в случае цилиндрических координат ф-линия —
р=р0—const, <р, z~z0— constj
— дуга окружности (рис. 6).
Все координатные линии аффинной системы координат явля-
ются прямыми.
172
Рис. 6. Открытой дуге соответствует интервал
Последовательно полагая i равным 1, п, получаем, что
через каждую точку XI области X проходят п гладких кривых —
координатных линий заданной системы координат (рис. 7).
Рис. 7. Координатные линии
Рис. 8. Координатный репер
Радиус-вектор г точки М можно записать так:
г=г(х‘..........................хп).
дг
Частная производная ------ вектора-функции г=г(х1, ..., хп), вы-
дх1
численная в точке М, является касательным вектором к i-й коор-
динатной линии — х‘-линии. Так как векторы
дх1 дхп
линейно независимы, то в каждой точке М можно рассматривать
координатный репер
М-, ~(М),
/4 vl
^<4
173
Тем самым задание в области X криволинейных координат
влечет естественное появление в каждой точке М из области X
вполне определенного координатного репера ——, ... , 1
I дх дх" j
(рис. 8).
При переходе к другим криволинейным координатам («/) =
= (у1, .уп) в точке М возникает другой координатный репер
( ду1 дуп J
Воспользуемся тем, что в некоторой окрестности точки М ко-
ординаты х1, хп можно выразить через координаты у1, уп
посредством гладких функций
х1=х1(у1, . . . ,уп), ... ,хп—хп(у1, ... ,уп).
Тогда для векторов рассматриваемых реперов выполняются соот-
ношения
п
дг " дг дх1
дук dxl дук
1=1
(&=1,... , п).
Подчеркнем, что все величины, входящие в эти равенства, вычис-
ляются в точке М.
Сравним полученные формулы с соотношениями
(k=l, ... ,п),
j=i
связывающими базисные векторы двух аффинных координатных
реперов (см. § 4, 2°. Аффинные координаты). Полагая
е — fk = дг (t, k—1, ... ,ri),
1 dxi ’ dyk ’ h
получаем, что
п
«I dxi
L ду* 1
и, значит,
dxl г
-------= ^ь
dyk----k
(г, k— 1, ... , п).
приведенных
Поменяв в
получим соответственно
п
дг ___VI дг
дхс ~2j dyk
ft=i
рассуждениях (х) и (у) местами,
(i = l,...,n)
dxi ' 7
174
и
(i, /г=1, ... ,n).
Подмеченная аналогия позволяет дать новое, более общее оп-
ределение тензора (тензорного поля) применительно к произ-
вольным криволинейным координатам.
Определение. Тензорным полем типа называется гео-
метрический объект, задаваемый в каждой криволинейной систе-
ме координат (х) = (х1, ..., хп) набором пр+р гладких функций
преобразующихся при переходе к другой координатной системе
(у) = (у‘, .... уп) по следующему правилу:
t'pK-.-kp 'pit--ip dykl dykP dx’1 dx’g
dxit ••• dxip gyl, dylq
1 kL n, . . . , 1 kp n, 1 If. n, ... , 1 lq П,
— тензорному закону типа j.
Отметим, что вычисление величин, расположенных в обеих
частях каждого из пр+р равенств, каждый раз проводится в од-
них и тех же точках.
Нетрудно проверить, что все введенные выше понятия и ус-
тановленные ранее факты переносятся на этот более общий
случай.
Остановимся, например, на описании удобного на практике
способа задания тензора и обосновании его корректности.
3°. О способе задания тензорного поля
Для того чтобы задать тензорное поле (во всем пространстве
или в некоторой области), часто пользуются следующим при-
емом: указываются тип тензорного поля и его компоненты отно-
сительно какой-то одной координатной системы.
Такой способ задания тензорного поля удобен.
Покажем, что он является вполне корректным.
* Пусть, например, в некоторой области X пространства вве-
дена система координат (х) = (х1....хп). Набор пр+р гладких
функций
... ,
......
175
будем рассматривать как совокупность компонент тензорного
поля типа относительно этой координатной системы.
Укажем сначала, как строятся компоненты поля относительно
любой другой координатной системы.
Пусть (у) = (у1, ..., уп) — произвольная координатная систе-
ма в области X. Компоненты
> (/, ... , уп),
* я
1 ... ,1
1 /1 П, . . . , 1 lq П,
определим по следующему правилу:
irpk1...kp_^ii...ip_dy^_ dykp дх>* дх'я
11"'!Ч qx4 &х1р Qyk gyl д
О)
(здесь все величины вычислены в одной и той же произвольно
выбранной точке М области X).
Чтобы убедиться в том, что тем самым в области X действи-
тельно построено тензорное поле типа К], достаточно проверить,
является ли тензорным закон преобразования компонент при
переходе от одной произвольной системы координат к другой,
тоже произвольной.
Пусть (z/) = (z/1.уп) и (z) = (z!....zn) — две любые ко-
ординатные системы в области X. Компоненты ’Т^'^р относи-
тельно координатной системы (у) определяются по формуле (1),
а компоненты "ТгХ"гя
Si...s9
относительно координатной системы (z) —
по следующему, аналогичному, правилу
"71''* " гр_'рпц---тр dzri dzrP дх*1 дх* я
Sl...sq— У-..iq ••• dzSq
Покажем, что тензорный характер ^приведенного закона пре-
образования сохранится и при переходе от компонент
* "я
к компонентам
St'"S4
Выразим сначала компоненты Тг*"'р
1°. Определение тензора). Умножая обе
величину
через 'T^ 'ktP (ср. § 1,
части формулы (1) на
дх”1» дхтр ду*1 ду1ч
dykl dykp дх*1 дх*ч
И суммируя ПО ki, . . ., kp, II, . . . , lq ОТ 1 ДО П, ПОЛуЧИМ
t,pkt...kp дх"1' дх^р ду*1 ду*я
1*"1я difr dtfp дх*1 дх*ч
176
' _____'pii-' ip / dyki \ / dx^p dykp \ *
\ d/‘ dx*1 ) "\ д/p dx*p )
X ( ^X>1 d^4
\ dy*1 dx*1 / \ dylq dx*q /
Так как
dxm dyk __ dxm _$n
dyk dx1 dxi 1 ’
dxi dy! ____ dxi ____&
dy1 dx* dx*
то из последней формулы вытекает, что
грт1-..тр___ ,rpkl...kp dV”p dy11 dylg
ll"lq dykt “• dykp g^ ••• gxtq •
Прежде чем подставлять полученное для
тр выражение
*л
в формулу (2), заметим, что
dzr dxm ___ dzr dy1 dx* _ dy1
dxm dyk dyk ’ dx* dzs dzs
Теперь уже нетрудно подсчитать, что
ггрг^.^Гр______rrpkl...kp / dz?1 dx?*11 \
s,...sg— dxmi dykt J---
dzrp dxmp \ / dy11 dx*1
dxmp dykp / \ dx*1 dzS1
/ dylq dx*g
\ dx*q dzsq
__,^kl...kp dzri dzrP dy11 dylg
11"лч dykt Qykp gz4 gzsq
Пример. Пусть
T=(Th...ln)
— ковариантный кососимметричный тензор. Если среди индексов
/ь ..., jn компоненты есть повторяющиеся, то эта компо-
нента равна нулю. Если же индексы /1...jn попарно различны,
то
„ . /1 2 ... п \ _
Ui h • • • Ini'
Кососимметричные тензоры типа где п — размерность
пространства, при замене координат
У1=У1 {х1, ... ,хп), 1 = 1,...,п,
177
преобразуются по правилу
'T12...„==T12...„det (-Jv
\ dyk
В самом деле, по определению имеем
дх’п
дуп
'Т12...п
дх11
sign О-—
ду1
(а)
дх'1
~д^ "
дх1п \ ™ < I / дх1 \ rrt
-т— Т12...п =det —— \112...„. *
дуп j \ dyk /
§ 7. МЕТРИЧЕСКИЙ ТЕНЗОР В ТОЧЕЧНОМ ПРОСТРАНСТВЕ
1°. Метрический тензор в криволинейных координатах
Как уже отмечалось выше (см. § 4), евклидово пространство
получается из точечного при помощи дополнительного введения
метрики. Введение метрики сводится к заданию дважды ковари-
антного метрического тензора g, компоненты gu которого относи-
тельно произвольного координатного репера {О; щ........еп} вы-
числяются по формуле
= е}).
Рассматривая тензор в криволинейных координатах (х) =
= (х1, ..., хп), естественно относить его в каждой точке М к со-
ответствующему локальному реперу
I дх1 дхп
где г=г(х', хп) — радиус-вектор точки М. Тогда компоненты
„ л дг
gii метрического тензора g будут связаны с векторами -----, ...
дг
" ' дхп
следующими формулами:
\ дх1 oxi f
(1)
Из формул (1) видно, что компоненты метрического тензора
являются функциями точки
giAM^giAx1.......Xя) (2)
и при переходе к новым криволинейным координатам (у) =
— (у1, .... уп) изменяются по тензорному закону типа
, __ дх1 dxi
sfem gii ь , т • v*z
dyk dym
178
Отсюда, в частности, вытекает закон преобразования det (gu):
( f r\^ \ \ 2
det('gftro)= (det(——)) det (gi}).
\ \ dyk } )
Остановимся на формулах (2) подробнее.
Напомним, что задание метрики (метрического тензора) в то-
чечном пространстве производится следующим образом. Во всем
пространстве в некоторой прямолинейной координатной системе
вводится набор и2 чисел gtj, обладающий свойствами
1) симметричности, gji=gu,
и
2) невырожденности, det (go) ¥=Q;
компоненты 'gkm относительно любой другой прямолинейной ко-
ординатной системы вычисляются по тензорному закону типа
^2^. Подчеркнем, что в каждой точке пространства тензор g
один и тот же, т. е. компоненты тензора g относительно рассмат-
риваемой координатной системы одни и те же в каждой точке.
В то же время, рассматривая компоненты этого постоянного
тензора g относительно произвольной криволинейной координат-
ной системы, мы получаем согласно формуле (2), что каждая
его компонента от точки к точке изменяется. И значит, постоян-
ный тензор g=(gtj) в криволинейных координатах будет воспри-
ниматься как тензорное поле.
Пример 1. Если компоненты метрического тензора gij трех-
мерного пространства в прямоугольной декартовой системе коор-
динат записать в виде матрицы
/1 0 0\
IO 1 0 !>
\0 0 1/
то при переходе к цилиндрическим координатам р, <р, z получим
/1 0 0\
0 р2 О )-
\0 О 1/
а к сферическим г, ф, 0 —
а ° 0 \
10 г2 0 1.
\0 0 г2 sin2©/
Пример 2. Пусть метрический тензор задан в прямоуголь-
ной декартовой системе координат (у) = (у\..., уп). Тогда все его
компоненты определяются так:
gkm—8km-
179
При переходе к криволинейным координатам (х) = (х’, хп)
имеем
„ дУк дУт—к дУк дУт
gii- Skm dxi dxi -Ofem dx. dxi ,
откуда
det(gf7)= (det Г. *
\ \ dx1 ) /
Совсем просто проверить, что все ранее установленные факты
тензорной алгебры, связанные с метрическим тензором (подня-
тие и опускание индексов и др.), переносятся на рассматривае-
мый случай криволинейных координат.
2°. Длина дуги гладкой кривой
Будем считать, что евклидова структура в пространстве Ап
вводится посредством положительно определенного метрического
тензора g, заданного в криволинейных координатах (х) = (х1, ...
..., хп):
,хп).
Положительная определенность метрического тензора озна-
чает, что для любого ненулевого набора чисел g1, ..., Ё," в каж-
дой точке М выполняется неравенство
Это свойство сохраняется при переходе к любой другой коор-
динатной системе.
Из положительной определенности метрического тензора,
в частности, следует, что
det (§„•) >0.
Рассмотрим некоторые свойства евклидова пространства, осно-
вываясь на таком способе задания метрического тензора.
Обратимся к вычислению длины дуги кривой.
Пусть
х' = хг(0, (1 = 1,...,га)
— параметрические уравнения гладкой кривой у. Радиус-вектор
г=г(хг, ..., хп) произвольной точки М кривой у является функ-
цией параметра t:
r—r(t)=r(x1(t),...,xn(t)).
Для касательного вектора dr/dt к кривой у в точке М спра-
ведливо разложение (рис. 9)
dr dr dx1
dt дх{ dt
180
Аналогично, рассматривая вдоль кривой у дифференциал dr
радиус-вектора при бесконечно малом смещении вдоль у, полу-
чаем
dr=—dxl.
Рис. 9. Касательный вектор кривой и координатный репер
Вычислим скалярные квадраты этих векторов. С учетом фор-
мул (1) имеем
dr \2____/ dr
dt ) \ dt '
dr \____ / dr Sr i dxl dxi ___ dxl дх!
dt I \ dxl ' dxi I dt dt dt dt
dr2=(dr, dr} = gijd.^dx’.
Длина дуги кривой у между точками Afo(^o) и Afi(Zi) определя-
ется формулой
и, значит,
s=
dxl (jxj
~X~ dt-
dt dt
(4)
MoAfi
Таким образом, если в области X в криволинейных координа-
тах (х) = (х\ ..., х") задан метрический тензор gi/(x1, ..., х"),
то длину произвольной гладкой кривой можно находить по одной
из формул (4). Функции gfj(x’, ..., х”) вычисляются здесь на
кривой у и, значит, зависят от t;
181
Из формулы (4) вытекает, что
ds = | dr | = У giJdxidxl
или, что то же самое,
ds2—gij(x1, . .. ,)dt)dxidxi. (5)
Тем самым квадрат дифференциала длины дуги при произ-
вольном бесконечно малом смещении по любой кривой есть
квадратичная форма от дифференциалов dx* криволинейных ко-
ординат— дифференциальная квадратичная форма.
Замечание. Вид квадратичной формы (5) инвариантен от-
носительно преобразований криволинейных координат. Это легко
вытекает из закона преобразования (3) ее коэффициентов и фор-
мулы для дифференциалов
dx^dyb—. (6)
dyk
Важное замечание. По самому способу задания метри-
ческого тензора ясно, что, переходя к прямолинейным координа-
там, мы получим, что все его компоненты постоянны, т. е. не из-
меняются от точки к точке. Если же просто задать тензор типа
f 0 ), никак не связывая его с геометрией самого пространства,
\& /
а лишь подчинив требованиям симметричности и невырожденнос-
ти (положительной определенности), то при переходе к прямо-
линейной системе координат такого эффекта может и не наблю-
даться.
Пусть в области изменения переменных х1, хп заданы п?-
функций gij=gii(x1, ..., хп), таких, что gij=gn и det (§,-/) ¥=0.
Сформулируем следующий вопрос.
Существует ли в точечном пространстве Ап область X, в кото-
рой х1, ..., хп можно принять за криволинейные координаты, по-
требовав дополнительно, чтобы функции gu(x\ хп) были ком-
понентами метрического тензора относительно этой координатной
системы, другими словами, чтобы при переходе в этой области
к прямолинейным координатам компоненты тензора‘g стали пос-
тоянными?
В общем случае ответ на этот вопрос отрицателен.
В дальнейшем (см. § 2 главы 4) мы установим содержатель-
ные условия на дважды ковариантный симметричный невырож-
денный (положительно определенный) тензор, выполнение кото-
рых необходимо и достаточно для того, чтобы этот тензор был
метрическим тензором точечного евклидова пространства. Дру-
гими словами, будут сформулированы необходимые и достаточ-
ные условия на функции guix1, ..., хп), при выполнении кото-
рых область X, обладающая вышеуказанным свойством, сущест-
вует.
182
3°. Вычисление объема
Пусть в n-мерном евклидовом пространстве задана некоторая
кубируемая область У. В прямоугольных декартовых координатах
(«/) = («/', .уп) ее объем вычисляется при помощи п-кратного
интеграла по формуле
J dy1 ... dyn.
у
При переходе к другой координатной системе (x) = (x!, ..., хп),
этот интеграл преобразуется так:
у.. dyr... dyn = ^.. | det dx1... dxn.
Y X
Воспользуемся примером 2 пункта Г. Имеем
ldet
| \ дх1 /I
Тем самым объем заданной области в произвольных криволиней-
ных координатах вычисляется по формуле
v= 5 (gtj) dx1. . . dxn,
* x ‘
где X — область изменения координат х1, хп, соответствую-
щая заданной.
§ 8. СИМВОЛЫ КРИСТОФФЕЛЯ *
1°. Определение
Пусть в области X пространства Ап введена координатная
система (х) = (х', хп).
Произвольная точка М области X определяется своим радиус-
вектором
r^rix1, ..., хп).
В точке М естественно возникает репер
[М; ....
( дх1 дхп J
Вычислим в точке М вторую производную ее радиус-вектора
__— = &L (xi хп\
dxi dxi ' дх‘дх> (
* Кристоффель (Christoffel) Эльвин Бруно (10.11.1829—15.3.1900) — не-
мецкий математик.
183
Ясно, что полученный вектор можно представить в виде линейной
комбинации векторов —
dxk
(1)
дх1 dxi dxk
Легко видеть, что коэффициенты Г*у- в этом разложении сим-
метричны:
ГГ/=Г^.
В силу произвольности выбора точки М можно заключить, что
соотношение (1) справедливо в любой точке области X.
Пусть («/)== (г/1, ..., уп) — другая координатная система в об-
v 1 лл dr dr 1 „
ласти л и {/И;----, ..., -----I— соответствующий координат-
( dy1 dyn J
ный репер. Рассуждая как и выше, получаем, что
= (2>
dy1 dym dyP
Найдем правило, по которому при переходе от координатной
системы (х) к координатной системе (у) по коэффициентам Гг*
можно вычислить коэффициенты Т?т.
Продифференцируем* векторную функцию
г=г (х1, ...., хп)
по у1 (/=1, ..., /г), считая ее сложной функцией переменных
г/1, ..., уп. Имеем
dr dr dxi
д I д i д I
dy1 dx1 Qyi
и, далее,
d2r _________ d / dr dx1 \ ___ gzr gxi gxj gr gzxt
dy1 dy" dym \ dxi gyi gxi gxi gyi gym gxi gyi gym ‘
Преобразуем полученное выражение. Заменим в первой труп-
Q2r
пе слагаемых каждый вектор ---------- его выражением (1). Тогда,
dx1 dx>
изменяя индекс суммирования во второй группе получим
д2г __/ph dxi gxj gzxk \ gr
dy1 dym \ dy1 dym dy1 dym / dxk
Так как
dr dr dyP
dxk dyP dxk
184
то окончательно имеем
<Э2г __/р^ дх1 дх> д2х1{ \ дуР дг
ду1 дут \ 1' ду1 дут ду1 дут / dxk дуР '
Сравнивая последнее равенство с формулой (2), в силу един-
ственности разложения вектора по базису получаем
,рр _ / pft дх1 dxi . d2xk \ дур . .
lm \ !/ dyl dym -T" dyl dym ) dxk ' ' ‘
Формула (4) представляет собой закон преобразования ко-
эффициентов Гу. В общем случае этот закон не является тен-
d2xk -
зорным, так как вторая производная д t д т необязательно рав-
на нулю.
2°. Специальные системы координат
В дальнейшем нам понадобятся координатные системы, в ко-
1 торых коэффициенты Гу обладают некоторыми полезными свой-
ствами.
А. Покажем, что в окрестности произвольной точки М всегда
можно выбрать криволинейные координаты так, чтобы коэффи-
циенты Гу в этой точке обращались в нуль:
Г-/(М)=0.
Пусть (х) = (х1, ..., хп) — криволинейные координаты, задан-
ные в окрестности фиксированной точки М.
Для простоты вычислений будем считать, что точка М имеет
нулевые координаты: х‘(Л1)=0, 1=1, ..., п.
Введем в окрестности точки М новые координаты (у) =
= (у\ ..., уп) посредством следующих формул:
(5)
Ясно, что р/(Л1)=0 (/=1, ..., п).
Запишем формулы (4) в удобном для последующего виде:
,рР дхР _______________дх<- dxi d2xi
1т дуР ~ 11 ду1 дут + ду1 дут ' '
, дхР
(достаточно умножить обе части на ------ и просуммировать по
Р)-
дхР д2хР
Вычислим в точке М значения производных .---- и ------.
дуР дуР dys
Продифференцируем равенства (5) по у?:
=%>- 4-Г?т(Л1)^Ут + У1^)=&р------Х-(Г^т(М)ут + ШМ)у1).
185
Отсюда в силу симметричности коэффициентов Г*/, Гд=Г*/,
получаем, что
~===6’-Г*от(Л1)гЛ (7)
дуР
Найдем выражение для вторых производных.
Имеем
= (М)6”=-ЩЛ1). (8)
дуР dys
Полагая в формулах (7), (8) г/'=0, получаем, что в точке М
-^(М)=6’р,
дуР дуР dys
Рассмотрим равенства (6) в точке М. При подстановке в них
найденных выражений для производных приходим к следующим
формулам:
Tfm (М) (М) IX (М).
Отсюда с учетом свойств символа Кронекера 6/ получаем, что
Tfm (М)=Шм)-ШАГ)=о. *
Б. Покажем, что в окрестности произвольной точкй М всегда
можно выбрать систему координат (х) так, что величины
rx=-V а+r?nk+-A- а (9)
dxk дх‘ дхт
в точке М равны нулю:
г^(М)=о.
Пусть (х)==(х1, ..., х") — координаты, заданные в окрестнос-
ти точки М; х'(Л1)=0 (t=l, ..., п).
Введем новые координаты (у) при помощи следующих фор-
мул:
xq==yq--(10)
lo
Нетрудно проверить, что в точке М
-^-’(М)=61, -^-(^=0, (П)
дук dyk ду1 dyk ду1 дут 3
Вновь обратимся к формулам (6) преобразования символов
Кристоффеля rktj.
Найдем производную —— от левой и от правой частей соот-
дук
ношения (6):
186
левая часть
д / ,pp dxq \ ___/ d'rfm \ gxq gixq
dyk \ lm dyP / \ dyk / dyP lm dyP dyk ’
правая часть
1
dxk 3
dxL 1 3
dVqk, 1
dxm 3
Vnkl(M).
d /г?- &xi ^xl I d2x<> \f ^-ti 'j dxr dx* dxi
dyk \ г/ dy1 dym dy1 dym / \ dxr / dyk ' dy1 dym
У / d2xi dxi , dx1 g-xj \ ffJxq
lI' \ dy1 dyk dym dy1 dym dyk / dyk dy1 dym
Рассматривая последние два равенства в точке М и учиты-
вая формулы (И), получаем, что
—^-(М)
dyk
Аналогично находим
д'Г^
dyn
Складывая последние три соотношения и замечая, что
rU=rz%A=n.«,
приходим к требуемому равенству
ТЙ%(Л1)=-^- Т/т(Л1) + -^ Т’ИМ) + -^-'Г^(2И)=0. *
dyk dy1 dym
3°. Символы Кристоффеля 1-го и 2-го рода
Пусть в области X задан метрический тензор g. Тогда коэф-
фициенты Г*г;(Л1) в разложении (1) можно выразить через его
компоненты ga(M).
Чтобы получить указанный явный вид, умножим обе части
равенства (1) на вектор
Пользуясь тем, что
dr
скалярно.
I dr dr \
\ dxk ’ gxi / Skl
(12)
получаем
d*r
dxi dxi
тт)=^гЬ-
dx1 /
(13)
187
Обозначим для удобства правую часть последней формулы
через Г/, if.
(14>
и найдем для Г/, ij явное выражение.
Дифференцируя обе части равенства (12) по переменной х’п,
получаем, что
/ дг d2r х / д2г дг у dgkt
\ дхь- ’ дх1 дхт / \ dxk дхт ’ дх1 I дхт
или, с учетом формул (13) и (14),
Г/г,/т 4“ а т ‘
дхт
Соотношение (15) справедливо для любых k, I и т, заклю-
ченных между 1 и п.
Чтобы найти нужные нам явные выражения, поступим следу-
ющим образом.
Последовательно придавая тройке (k, I, т) в формуле (15)
значения (i, /, q), (j, q, i) и (q, i, j), получим соответственно
Г|,ЙтГ/,!« . d8U dx^ '
Г 1 4- Г . dSjq
1 1 1 1 <7, Il dxi
dg„-
Lq.ij r^i.qj dxi
Прибавляя к первому равенству второе и отнимая третье,
с учетом симметричности . коэффициентов Г), ц по индексам i и /
находим, что
г.. =_L( dSii ] д8^ д8а )
!'lQ 2 \ дхЯ dxi dxi )
Остается выразить Гкц.
Обратимся к формулам (14). Пользуясь тем, что
gmlglk = ^m,
имеем
гг;,=г^=г^т/^й=г/>г^й.
Отсюда, полагая в равенстве (16) /=/, q=j, получаем
рА __ 1 glk / , д&Н । dgjl_dgjj 1
2 “ \ dxi dxi dx‘ )'
(16)
(17)
188
Верно и обратное. Для величин Г*ц, введенных по формулам
(17), выполняется закон преобразования (4). В этом нетрудно
убедиться путем прямых вычислений.
Определение. Коэффициенты Г/,iq, вычисленные по фор-
муле (14), называются символами Кристоффеля 1-го рода, а ко-
эффициенты Г*ц, определяемые формулой (17), — символами
Кристоффеля 2-го рода.
Замечание. Пусть (x) = (x!, ..., хп) — прямолинейные ко-
ординаты. Тогда компоненты ga метрического тензора не зави-
сят от выбора точки М (постоянны) и, значит,
Из формул (16) и (17) видно, что в этом случае символы
Кристоффеля обращаются в нуль:
rf>=0, Гм/=0. *
Выше (в 2°. Специальные системы координат) было показано,
что в окрестности произвольной точки М можно ввести криволи-
нейные координаты (х) = (х1, ..., хп) таким образом, что симво-
лы Кристоффеля вычисленные в этих координатах, в самой
точке М обращаются в нуль:
Г?(М)=0.
Из формулы (14) вытекает, что в этих координатах также и
Гщ/(Л1)=0.
Отсюда, пользуясь равенством (15), получаем, что
§ 9. КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ
1°. Определение операции ковариантного дифференцирования
Пользуясь символами Кристоффеля, введем важную операцию
ковариантного дифференцирования V.
Сформулируем сначала основные требования к этой операции.
1. В прямолинейных координатах операция ковариантного
дифференцирования Vь должна совпадать с обычной операцией
,, д
дифференцирования ----.
dxk
2. Операция ковариантного дифференцирования V должна
быть тензорной: есди Т — тензорное поле, то V7 также тензор-
ное поле.
189
Определим эту операцию:
А. Если Т — тензор типа q т. е. гладкая функция
f=f (х1, ..., хп), то
= (k=l,...,n).
dxk
Б. Если Т — тензор типа q то
В. Если Т — тензор типа ® j, T=(Tj), то
уЛ=-^-гдто.
дх’1
И вообще:
Г. Если Т=—тензор типа J, то
тк:::^+га?/;г.:^+...
р/ ..т1-1 л.р
— Ljik1 11г...!ч -—Ч^1 /I-•
(1)
Убедимся в том, что для введенной операции (А—Г) сформу-
лированные выше требования выполнены.
Справедливость 1-го требования легко следует из того, что
в прямолинейных координатах g'iy=const и, значит, rfti/=O (см.
§ 8, 2°. Специальные системы координат).
Покажем, что эта операция является тензорной (2-е требова-
ние).
ТЕОРЕМА. Ковариантная производная
тензора 7’/*^’/^ типа )
* Составим
является тензором типа ( ।
по формуле (1) и вычислим
д т'1.1"г.р
дхт
пользуясь равенством
•гр__,rpkt - bp дх11 дх1р ду11 ду9
1‘" 4 l,‘ "lq dykl ' ' ' дуР дх'1 ' ' ' дх’о ’
(2)
190
Тогда получим, что
vm^::.i,p=A+B(i1)+... +B(iP)+c(/1)+... +с(/?),
я д [i'rk'"'kp\ дх*1
где А =---------\'Ti /р —г-
дхт 1 ч> дуЪ
дуЧ
дх’ч ’
дУ * । гй т^' :1р
дх‘ч +^т1^->ч
(3)
(4)
(для индексов i2, ip соответствующие слагаемые В(1’2),...
В(ip) имеют аналогичный вид),
с^с^'т]::^
ду
дх1р д ( ду1 dyq r^i -Ap
ду p dxk дх11 / дх'ч Ч
(для индексов /2, ..., jq соответствующие слагаемые С2, ...» С9
имеют аналогичный вид).
Преобразуем эти величины.
Запишем выражение для А несколько по-иному. Имеем
__ д дх1 ду4 dys
dyS \ dykt dxiq dxm •
Обратимся теперь к выражению (4) для Вь
Пользуясь равенством
д dxil _ дУ1 dys
dxm dykl dykldys дх"1
и формулой (2), получим, что
D ,rpki • kp д2х11 дх12 дуЧ dys .
1 Л ki s kt ' / tn ‘
ду dys ду dx ox
! TV, ,Tkk2- -kp dxi дх2 дуЧ
+ im dyk dyk‘ ''' dx‘q '
Заменив индекс суммирования в первой группе. (k\-^k), преобра-
зуем Bi к следующему виду:
__/ д^х1 dys . pt] дх1 \ ,rr<kk‘---kp дх* дуя
1 — \ dykdys ~д^+ im~d^J il -’4
Воспользуемся законом преобразования символов Г*,/, записав
его так:
рр дх1* ду3 _______pij dxi d2xi dys
ks дур dxm ~~ lm дук ’’’ dyk dys dxm '
191
Тогда
В f-nkll'rkk‘ - ko dxil ду1 ду< №
£>г— 1*S J Ь k, ••• , i. axm •
dy dy dx 4 ox
Подобным же образом можно убедиться в справедливости
формулы
>ri ,rrk^-kp дх1' дх1г dy4 dys
Cl— Lps 1 fet k2 i dxm '
4 dy dy dx 4 ox
Заменяя A, Blt Bp, Ct, Cq в формуле (3) их новыми
выражениями и вынося за скобки общий во'всех р + q+l суммах
множитель
дх*' ду4 : dys
dyki ' ’ ’ dx’4 дхт ’
получим, что
Vs^i -.г kt
ду
ду" dys
' ’ дх<р дх™ ’
(5)
где
5.
__ д | I I ,рйр,т-А-
Vs Тц.. .1,=-^- Т11-..1ЯР+ ГьТд.. ,iq»+... + lks 1,^..^ —
__'г/ 'Т,й?"’йр______________'Г;- 'Tkt
1ns 1 lb - iq • 1/(?s
— ковариантная производная, составленная в координатах (у)
по общей схеме (1).
Формула (5) позволяет сделать следующий вывод: ковариант-
ная производная Vm^c/) тензорного поля типа ( Р ) изменя-
(6)
ется по тензорному закону типа I
Тем самым число ковариантных индексов увеличивается на
единицу. Отсюда и название операции — ковариантное диффе-
ренцирование. *
2°. Свойства операции ковариантного дифференцирования
Посмотрим, как введенная операция преобразует линейную
комбинацию тензоров и произведение тензоров.
Справедливы следующие формулы:
1+- v*
192
где Л и р—произвольные постоянные.
2+ г? (т11'Лр ^1р+1'Лр+г\— (гу 7^*"л,р] <?’.р+г ?₽+' _|_
• — h—iq) ‘>l4+1- -lq+k +
-1_Тг-1"Л.Р (г? C'P+V.'p+A
'/‘•"If \vn\r-IMI-
1-е свойство следует из определения операции V. Достаточно
записать выражения для ковариантных производных тензоров Т
и 5, умножить полученные соотношения на % и у. соответственно
и сложить результаты. *
Докажем второе свойство.
* Положим
и^:Лг>+^Т^Лр-^р+1"1Р^. (7)
'* -p+fe 11 ‘q lq+1 ‘q+k ' ’
Тогда по определению операции V получаем
V7 77г.*”‘.Р+'- —(J I1.1 "ЛР+Г) I Г?« z//a ”.'p+r I _|_r.iP+7/r.I”!P+'’-lI
дх1П \Uh-lq+h) -+ ЬлгЛ'л -lq+k + ••• +
ri. i!1'."лр+г __vi. jf.' "lP+r .
1 hmUit„..jq+h ... L lq+km^h...iq^h_ll.
Отсюда с учетом формулы (7) вытекает требуемое:
г? (т1-1"Лр^гр+1"Лр+г\_(-Л—Т1'"л-р\ <?!.р+1"гР+г4-
Vm If-lq lq+i'"!q+k! у Qxm h-!qj iq+i"'Jq+k
_i_ тг.’"'г.Р ( d <?'p+1”'.lP+r\ j- (r?« r“2 ".!P-k -Lr^PT'.1' '?-!11 v
h-'4 gxm \+r -’q+h ) + !l---lq + • h...iq
v егр+1'“гр+г i t'*'"'p fr?p+ie”p+a'' гР+г i r^p+rc'p+i" ’р+к-^Х
Iq-n-J'iq+h. ' i‘"iq \ im !q+r^q+k ' ' ' ' ' iq+1" 'iq+k I
__(vi. _i_ i_r/ т1'"лр .'l ^.p+1'"‘p+r_________
• • • -t1H-!q_1l) °lq+1-lq+k -
__Tl.l"'l.P Ivi. q>lp+Vlp+r 1 _|_ TV Q'.P+l”’?P+r __
!>----!q \ iq+im^llq+f • -iq+h' ' ’ ' iq+km *q+1"'1 q+k-11)
3+.
Приведенную фо’рмулу следует понимать так: в левой части
свертывание производится после дифференцирования, а в пра-
вой — до дифференцирования.
* Начнем с левой части. Имеем
7 Зак. 259
193
Сумма отмеченных курсивом слагаемых равна нулю (они раз-
личаются только обозначениями индексов суммирования). Это
позволяет записать левую часть рассматриваемой формулы в сле-
дующем виде:
Вглядимся в первую часть полученной формулы.
Она представляет собой ковариантную производную от свер-
нутого тензора Ts/,’ .. составленную по общей схеме (1). «
3°. Тензор Рк мана*—Кристоффеля типа (* )
\ О /
Построим при промощи введенной операции ковариантного»
дифференцирования один важный геометрический объект — спе-
циальный тензор ранга 4.
Пусть Т‘ — векторное поле. Вычислим его вторую ковариант-
ную производную VfeViT‘. Пользуясь правилами Б и Г, получим
+ът’')=-^ (-£L+r;-r')+
+ г₽4 ~ + Г‘р7^ =
\ дх1 / \ дхР )
- I. _ьгг дТР
dxkdxl dxft 41 pk дх1
дхР dx!i
Переставляя индексы k и I местами, найдем выражения для
производной V/VkTl и составим разность:
VhVi^!' —VzVhT’4 =(VhVz—V/Va)^-
Учитывая симметричность коэффициентов Гкц по нижним ин-
дексам, после несложных преобразований получим:
(<9Г^ Г' \
дх1 /
Введем следующее обозначение: <
Г?" + ВД-Г^. (8>
дх* дх1
* Риман (Riemann) Георг Фридрих Бернхард (17.11.1826—20.7.1866) — не-
мецкий математик.
194 '
Тогда предыдущую формулу можно записать так:
. (9)
УТВЕРЖДЕНИЕ. R1..—тензор типа
qfU \о /
* Согласно определению операции ковариантного дифферен-
цирования левая часть равенства (9) представляет собой тензор
типа Обозначим его через А1кг.
Alki=^k\t — \i\k) т1.
Тем самым
Akl — RqklTQ
и в новых координатах (у)
/ д! f Ы 'тт
^rs— *xmrs 1
Из того, что Ali—тензор типа (Q), получаем
го/ 'тм ni 'то ду‘ дх,{ дх1
t\mrs 1 — Kqkl I _
дх1 дуг dys
Преобразуем последнее равенство, пользуясь формулой
rpm pg дУт
~ дх<> ’
Имеем
dxk dx‘
W ~ду$
г nJ 'T’q ^,1 spa dyi
*mrsl ~TT ~r
dxq dx1
Отсюда вытекает, что
(' nJ дУт ni дУ' dxk
Kmrs—— t\qkl —
\ dxq dx1 dyr
Полученная формула справедлива
поля Tq и, значит, представляет собой тождество.
В силу произвольности поля Tq имеет место следующее ра-
венство:
дх‘ \ рч__о
dys /
для любого векторного
,n! ду™
i\mrs ' .
dxq
^ktJyL^L^L=Q,
dxi dyr dys
dxq
Умножим обе части на и, просуммировав по q, получим
dx1 дуг ду3 dyf
7*
195
Перенесем вычитаемое в правую часть:
<Ю>
дx^ ду‘ дуг ду‘
Найденная формула показывает, что действительно яв-
ляется тензором типа *
Укажем простейшие свойства тензора Rlqkt, вытекающие непо-
средственно из его определения (8):
1+. R^qkl =—R'qlk.
2+. R!qkl + Rklq~\~ Rjqk — 0.
4°. Ковариантное дифференцирование и метрический тензор
Рассмотрим некоторые свойства операции ковариантного диф-
ференцирования для случая, когда задан метрический тензор gtj
и коэффициенты Г*// вычисляются по формулам (14) § 8.
УТВЕРЖДЕНИЕ.
= (и>
* Убедимся сначала в справедливости первого из равенств,
предъявленных в утверждении.
По определению операции Vk имеем
~ ^kgaj — Г^,р.
0ХК
Подставим в правую часть этой формулы выражения для
через компоненты метрического тензора:
pfe. _. 1 „km ( dgtm . dgjm_dgjj \
4 2 ё \ dxi “I dxi dxm J
Пользуясь тем, что
лР=б|,
получаем
v ~ ,_ dSH 1 „am „ , ( I dSkm dgik \
чьём— ; v V” Sai 1 ---—
dxk 2 \ dxk dxl dxm J
1 „в; „ I dgji , dgki dgjk \_
~sp Si^~^+—i ~^rj-
_ dgjj__1 / dgj} . dgjk dgik \
dxk 2 \ dxk dxl dxi )
__L { dSii । dgth dgik \ __q,
2 \ dxk dxi dxl /
196
Перейдем теперь к доказательству второго равенства. Так как
+ Г/й—Г/й=О,
dxk
то из равенства
$=gmjgmi
получаем, что
о=V»$=Vfc (gmjgmi)=(Vkgmj) gmi + gmj (\'kgmi)^=gmj (\'kgmi).
Отсюда вследствие невырожденности gmj вытекает требуемое
*
Из того что ковариантная производная метрического тензора
равна нулю, в частности, следует, что для любого тензорного
поля
Т = (Т\'"л.р\
выполняются равенства
(12)
Равенства (12) означают, что операция ковариантного диф-
ференцирования перестановочна и с операцией поднятия индексов
и с операцией опускания индексов.
5°. Тензор Римана—Кристоффеля типа
Положим
Rmqlil gmi^-qM- (13)
ТЕОРЕМА 2. Справедлива следующая формула:
Rmqkl = gpr ГтйГ^Ч-
, 1 / d2gmt d2gqk d2gmh d2gq[ \
2 \ дхчдхк dxmdxl дх^йх1 dxmdxk J'
* Пользуясь определением (8) тензора R‘qki, запишем форму-
лу (13) подробнее. Имеем
RmqM = gmi (-Й~4?-) +£иГР*Г&-1Ш). (I5)
\ дх* дх1 /
197
Первую группу слагаемых в правой части равенства (15) можно
записать так:
gml \ dxk
ту-)VF &пЛ+
dx1 / dxk dx1
। pi dgmi T-i dgtni _
' iqk~^
dp i pi dgtni pi dgtnf
l dxl Im.qk + lqk dxl lql dxk .
_ d г
~-~^Ym’ql
Расписав разность
d -p- dp
с учетом формулы (16) из § 8 подробно, получим
d г г
-^T^.ql дх1 Im.qk-
__ 1 / dzgmi । d2ghq d2gq[
2 \ dxkdxP dxmdxl dxkdxm
(16)
d2ghm \
dxqdxl / ’
Преобразуем теперь вторую группу слагаемых из формулы
(15), прибавив к ней разность
г* dgmi dgtni
lqk dx‘ ql dxk
из соотношения (16). Имеем
— tri rP W ГР \ i r' dgmi г-i dgmi _________
gmi\k pkl ql 1 рм W“T 1-1 Ql —
г vP г VP i T'P dgmp pp dgmp
— 1 m,pk»- ql 1 т,рй qk + * qk ~~i-’1 ql -----
dx1 dxk
dgmp ____
— Г?/ Гт, р/г
Гт'р1 dir J-
___ ’рР Г 1 { dgmk । dgmp _ dgpk \_ dgmp 1 _
~ 2 \ дхР ’Г dxk дхт ) dxk J
__рР Г 1 / dgml । dgmp dgpi \ dgmp j __
qk[ 2 \ dxP ’r dx1_dxm )_dx1 J
=r?ft vp,ml - rpqlrp,mk =gpr (Trml rpk-vrmk vpi).
Собирая полученные выражения, убеждаемся в справедливос-
ти сформулированного утверждения
D _ 1 / d2gmi d2gqk d2gqi d2gmk \
mqM 2 \ dxPdxk dxmdxl dxkdxm dxqdxl ) ’’’
+^5(Гт/г^-г^г?рг). *
198
Из доказанной формулы вытекает следующий неожиданный
вывод.
В случае, когда координатная система (х) = (х', хп) яв-
ляется прямолинейной, компоненты gtj метрического тензора —
постоянные числа. Тем самым их производные равны нулю. Отсю-
да следует, что вычисленные по ним символы Кристоффеля так-
же равны нулю. Таким образом, компоненты тензора Римана—
Кристоффеля в прямолинейных, а значит и в любых других коор-
динатах, нулевые. Это позволяет сформулировать следующее ут-
верждение.
ТЕОРЕМА 3. Тензор Римана—Кристоффеля точечного евкли-
дова пространства является нулевым.
В. АРИФМЕТИЧЕСКОЕ (КООРДИНАТНОЕ) ПРОСТРАНСТВО
§ 10. ТЕНЗОРЫ В КООРДИНАТНОМ ПРОСТРАНСТВЕ
В предыдущих разделах А и Б мы последовательно разраба-
тывали аппарат тензорного исчисления, исходя из наглядных и
геометрических соображений и используя аналогию. При этом
замеченные факты часто удавалось переносить на новую, более
общую ситуацию, расширяя тем самым область применимости
развиваемых методов.
В этрм разделе мы еще раз поступим подобным же образом:
будем рассматривать изложенное выше как наводящие соображе-
ния для создания более абстрактных конструкций, причем так,
чтобы установленные выше факты (точнее, их прямые аналоги)
оставались справедливыми. Поэтому материал, помещаемый
в этом разделе, нужно рассматривать двояко: с одной стороны,
как сводку введенных понятий и установленных фактов, а с дру-
гой — как последовательное, хотя и краткое, изложение основ
тензорного исчисления в координатном пространстве.
1°. Координатное пространство
Точкой будем называть любой упорядоченный набор
(х1, .... хп) из п вещественных чисел. Множество всевозможных
таких наборов назовем п-мерным координатным пространством.
Обозначение: R".
Точки пространства R" будем обозначать прописными латин-
скими буквами — М, .N, ... Запись М(х', ..., хп) означает, что
точка М отвечает набору (х1, ..., х"). В этом случае числа х1,
i=l, ..., п, называются координатами точки М.
Пусть е — некоторое положительное число.
Определение. Множество точек N(y\ ..., уп), для кото-
рых
(х1-у1)2+...+(хп-уп)2<г2,
называется ^-окрестностью точки Affx1, ..., хп).
199
Определение. Множество X точек из Rn называется отк-
рытым, если для каждой точки М этого множества можно ука-
зать ее е-окрестность, целиком принадлежащую множеству X.
Открытое связное множество будем называть областью.
Окрестностью точки М называется любое открытое множество,
содержащее эту точку.
2°. Преобразования координат
Пусть X — некоторая область пространства R". Рассмотрим
в ней набор п функций
у1=уЦх1, ... ,х"), ... ,уп=уп(х\ ... ,хп). (1)
Потребуем выполнения следующих условий гладкости.
1. Функции у‘=у‘(х1, ..., хп), 1=1, ..., п, имеют в области
X непрерывные первые производные (/= 1, ... ,п).
дх>
2. Определитель матрицы Якоби
(ду1 ду'- \
дх1 ''' дхп I
............I
дуп дуп J
дх1 ''' дхп )
всюду в области X отличен от нуля.
3. Отображение области X на соответствующую область У
изменения переменных у\ ..., уп, задаваемое соотношениями (1),
является взаимно однозначным.
Тем самым в области X вводится новая координатная систе-
ма: точке М из X ставится в соответствие другой набор п чисел
у\ .... уп.
Эти числа также будем называть координатами точки М.
Ясно, что при сформулированных условиях гладкости соотно-
шения (1) можно разрешить относительно х1, ..., хп:
х^х^у1, ... ,уп) (t = l, ... ,п).
В дальнейшем мы будем рассматривать преобразования коор-
динат (1), только подчиненные условиям гладкости.
3°. Понятие тензора
Определение: Тензорным полем типа называется гео-
метрический объект, задаваемый в каждой координатной системе
(*) —(х'> • ••• хп) упорядоченным набором пр+о гладких функций
200
преобразующихся при переходе
(у) = (у\ > Уп) по правилу
Z‘” ч '*•••'? дх^
к другой координатной системе
дукр дх’1 дх’ч
дх[р ду11 ду1ч
1 CJ kt П, . . . , 1 i-C kp tC п, 1 :'С к п, • • . 1 < Л
— тензорному закону типа
Можно показать, что для задания тензорного поля во всем
пространстве или в некоторой области достаточно указать тип
тензорного поля и его компоненты относительно какой-то одной
координатной системы.
4°. Основные алгебраические операции над тензорами
1+. Линейная комбинация тензоров: если
тензоры типа ( " I, то их линейная
Т= 1 :".р
\ н -’q
комбинация
U—aT^^S
с компонентами
U1'
lq h-'-iq r li - lq
н
тензорJrnna (Р
тензор
йрт
3+.
также есть
2+. Умножение тензоров: если T'=^7’'.‘" '.pj и S==^S‘‘" *^ — тен-
зоры типа и соответственно, то их произведением является
U—TfaS типа (р + Ь'] с компонентами
\q+m)
i/ii--W=r.1'J.pS!p+i-Jp+ft.
1*‘“1д+т li-'-lq 1 Q+i‘"1q+m
Транспонирование тензора: будем говорить, что тензор Т=
лр) типа [ Р), <7^2, получен из [тензора Т—[Т1*"л.р\ типа
транспонированием по нижним индексам при помощи перестанов-
ки о, если его компоненты вычисляются по правилу
Т1У лр =Гу:лр. .
Н---lq <Hh--lq.
(здесь а — некоторая перестановка чисел (1....q):
о
"(Л)
V
СТ(<7)Л
201
на наборе (д, jq) перестановка а действует так: а(]\, ... , jq)=
— (jam • • • ;
Транспонирование по верхним индексам определяется анало-
гично.
4+. Свертывание тензора-, если Т— (Т1.'" ’р)—тензор типа [р), 1,
q^l, то тензор Т==||,Тг.‘”'гЛ-1'?!+1-'"гр ) типа (Р JV компоненты ко-
торого вычисляются по правилу
Ч+г- 'р —t
Н” 'im-1 Лп+Г’ 'iq йщ-l *m~~^m+l‘ "iq
называется сверткой тензора T по fe-му верхнему и m-му нижне-
му индексам.
5+. Симметрирование и альтернирование тензора-, если Т=
=(Т1У"1.р\—терзор типа [ Р ), то операции построения тензоров S=
= (S'-1" 'pj и Л = ^Л'.‘"’'р'| типа по правилам
iSi,...ip = r4..T
(h-lq) q\ Ц *Hh--lq><
w
=-Ly signаГ'::лр..
h-..lq lli-lj q\ Li & CT('‘-'A)
(a)
называется симметрированием и соответственно альтернировани-
ем тензора Т по нижним индексам.
Аналогично определяются операции симметрирования и аль-
тернирования тензора по верхним индексам.
5°. Метрический тензор в координатном пространстве
Зададим в области X координатного пространства R" дважды
ковариантный тензор g=(gij), компоненты gtj которого, вычис-
ленные в координатах (х) = (х1, ..., хп), подчиняются условиям:
1) симметричности, gip=gu, и
2) положительной определенности (невырожденности,
det (gtj)>0).
Из закона преобразования
, __ дх* dxi
ghm — gij —
вытекает, что эти ,условия сохраняются при переходе к любым
другим координатам.
Назовем этот тензор g метрическим тензором, или метрикой.
Совершенно так же, как и в пунктах Г и 2° § 3, вводятся
операции поднятия и опускания индексов произвольного тензора,
дважды контравариантный метрический тензор и т. п.
202
По аналогии с формулами пунктов 2° и 3° § 7 можно опре-
делить длину дуги произвольной гладкой кривой
i = \, ... ,п:
Г т Г dxi dxi
s = \ V Sa dt
Jr dt dt
*0
и объем v произвольной области
v—J ... lAlet (gu) dx1.. . dxn.
6°. Символы Кристоффеля и операция ковариантного диффе-
ренцирования
По заданной метрике g=(gij) определим символы Кристоф-
феля 1-го рода:
г = 1 ( d8th [ д8}к dgii \
’г/ 2 \ дх> dxi dxk J
и символы Кристоффеля 2-го рода:
Г?. — 1 / dgu dgji dgq \
d 2 \ dxi dx1 dx1 /'
Нетрудно убедиться в том, что введенные символы Кристоф-
феля не являются тензорами. Например, при переходе к новым
координатам символы Кристоффеля 2-го рода изменяются по пра-
вилу
,рр fyk dx1 Qxi \ dyP
lm \ ** dy1 dym dyldym / dxk
Рассуждая так же, как и в пункте 2° § 8, можно показать,
что:
А) у каждой точки М существуют окрестность и координаты
в ней, такие, что
г£(Л1)=о,
Б) у каждой точки М существуют окрестность и координаты
в ней, такие, что величины
Г9 d , d j d
Mm — ~ 1 lm + ' „ T 1 m»T~1 kl
dxk dx1 dx^
в точке M равны нулю:
Г^(Л1)-0.
203
Пользуясь символами Кристоффеля Г*/, введем важную операцию
ковариантного дифференцирования если Т —тензор типа
то тензор \Т типа компоненты ’/р которого вы-
числяются по формулам
v.Tiy -iP=-^—Til-••Ь’ + Г'1 Т"‘--:1р+ ... 4-Г1р—
дх^ tk li---Jq [ft lf‘iq
1 Иг-'-lq q
называется ковариантной производной тензора Т.
Операция ковариантного дифференцирования обладает следу-
ющими свойствами:
1+. V (Z7’+|iS)=ZV7’+|_iVS, где А и ц — постоянные;
2+. V(7’®5)=V7’®S+r®VS;
3+. sp(VT)=V(sp Т)
(здесь sp Т — свертка тензора Г);
4+ Vg=0 (здесь g — метрический тензор).
7°. Тензор Римана—Кристоффеля
А. Тензор типа
\ О /
При помощи символов Кристоффеля можно построить тензор
R=(Rlqki) типа компоненты которого вычисляются по сле-
дующему правилу:
лг' аГ'
D* __ Я1 Qk । yi ур yi ур
Hqkl ~~~д7к----+ Lpklql — ipllqk.
Б. Тензор типа
Положим
Rmqhl ёгп!^як1 •
Тогда справедлива следующая формула:
D __ 1 t d2gmi d2gqh d2gmk _ d2gqi \
mqhl 2 \ дхЧдхк "I дхтдх1 дх^дх1 дхтдхк J
+gp,(r^r;*-r£ftr;z).
Компоненты тензора Римана—Кристоффеля обладают следую-
щими легко проверяемыми свойствами:
1 "*”• Rmqkl Rqmhl-
Rmqhl Rmqlk'
З”’"- Rmqhl ==Rklmq-
204
Введем еще два геометрических объекта, определяемых мет-
рическим тензором gtj и тензором Римана—Кристоффеля R^m.
Определение. Тензор типа с компонентами
Rqh—Rqki
называется тензором Риччи*.
Легко видеть, что тензор Риччи симметричен.
Определение. Полная свертка тензора Риччи с контрава-
риантным метрическим тензором
R = g"kRqll
называется скалярной кривизной.
Согласно факту, отмеченному в пункте 6°, в окрестности про-
извольно взятой точки М можно указать такую координатную
систему (х), что в точке М
г£(М)=0.
В такой системе координат компоненты тензора Римана—
Кристоффеля в точке М вычисляются по следующей формуле:
Ятчы (^)=v Чг£т + •
2 \ дхчдхк дхтдх1 дх^дх1 дхтдхк )
УПРАЖНЕНИЯ
(2\
oj. Покажите, что набор
л2 чисел Sa, задаваемый условием
определяет тензор типа
2. Покажите, что набор п2 чисел Л/, такой, что
T^V1
— скаляр для любых контравариантных тензоров U и V типа
^0^, определяет тензор типа (О).
3. Покажите, что для любого тензора типа I qJ справедливо
соотношение
rplj |
* Риччи-Курбастро (Ricci-Curbastro) Грегорио (12.1.1853—7.8.1925) —
итальянский математик.
205
4. Покажите, что для любого тензора типа
„ справедлива
О /
соотношение
о о
5. Покажите, что тензор Л/, удовлетворяющий условию
T^U^O.
для любого контравариантного вектора U‘, является кососиммет-
ричным.
6. Покажите, что
Тт81' = Т^8™^Т1т8^
для любых тензоров Т= (Tij) и S=(S‘I).
7. Покажите, что
где g=det(g!7).
8. Покажите, что
9. Покажите, что если 7’[й'1=0, то
V hT- = — (7? 1/g) -J- -L Тп — g <’1
Vg dxk У ^~r 2 il dxi *
10. Покажите, что
VmRikl + VlRimk + \hRPi'lm =0.
11. Покажите, что
12. Покажите, что
ГЛАВА 4
РИМАНОВА ГЕОМЕТРИЯ
Рассказанное в предыдущей главе, обдумывание введенного
там понятия метрического тензора и его свойств, некоторые
другие наблюдения приводят нас к довольно естественному воп-
росу: нельзя ли, задав произвольно дважды ковариантный сим-
метричный невырожденный тензор, связать с ним определенную
геометрию наподобие евклидовой геометрии.
Оказывается, это вполне возможно — задание произвольной
метрики позволяет построить вполне содержательную геометрию.
Основным объектом этой главы являются римановы простран-
ства. В этих пространствах, геометрия которых может весьма
существенно отличаться от геометрии евклидовых пространств,
возникают содержательные понятия, устанавливаются глубокие
связи между ними, доказываются интересные теоремы. Часть по-
лучаемых свойств удивительным образом оказывается уже знако-
мой из главы 2, посвященной теории поверхностей, что еще более
подчеркивают взятые оттуда поясняющие примеры.
Отличие римановых пространств от евклидовых часто оказы-
вается весьма значительным. Впрочем, евклидовы пространства
сами являются частным случаем римановых (когда тензор Рима-
на—Кристоффеля тождественно равен нулю).
И еще об одном. Привлекаемый к изложению этой главы гео-
метрический язык позволяет глубже осмыслить формулы, полу-
ченные в конце предыдущей главы.
§ 1. РИМАНОВО ПРОСТРАНСТВО
1°. Определение римановой метрики
Пусть {Af} — открытое множество из пространства R". Рас-
смотрим во множестве {А1} поле симметричного тензора
.. ,хп),
где х1, хп — координаты точки М. Подчиним поле gij сле-
дующему требованию:
квадратичная дифференциальная форма
gtjdx'dx' (1)
(квадратичная форма от дифференциалов координат) в каждой
точке множества
207
1) невырождена и
2) имеет постоянную сигнатуру (нормальный вид квадратич-
ной формы (1) не зависит от выбора точки из множества {Л4}).
Форму (1) обозначают через ds2:
ds2—gijdxidxl (2)
и называют линейным элементом.
При этом говорят, что форма (2) определяет в открытом мно-
жестве {Л4} риманову метрику. Поясним, что под этим понима-
ется.
Рассмотрим в области {АД гладкую кривую L, определяемую
параметрическими уравнениями
x' = xl (t), (z = l, ... , п).
Длину кривой L определим посредством соотношения
S=V У (3)
JF dt dt
Таким образом, при помощи линейного элемента (2) в области
{АД можно вычислять длины кривых.
Это и означает, что форма (2) определяет метрику в области
{А4}.
Впервые такой способ введения метрики был предложен Ри-
маном в 1854 г.
Множество {АД точек из пространства R", в котором введена
риманова метрика, называется п-мерным римановым пространст-
вом. Будем обозначать его через Vn.
Тензор gu, определяющий риманову метрику, называется мет-
рическим тензором риманова пространства.
В римановых пространствах можно построить содержательную
геометрию — риманову геометрию. Эти пространства находят
широкое применение в механике и физике.
Обычно римановыми пространствами называют пространства,
в которых метрика определяется положительной формой (1).
Если же форма (1) является знакопеременной, то пространство
называют псевдоримановым.
Мы ограничимся подробным рассмотрением римановых прост-
ранств с положительно определенной формой.
2°. Примеры римановых пространств
Пример 1. Рассмотрим в пространстве R" относительно за-
данной системы координат (x) = (x‘..хп) тензор
„ ( 1 при z = /, '
gii=8i}={ F ’
( 0 при i ф j.
208
Тогда
dsa=dx12+ ...+dxn\ (4>
Риманово пространство с линейным элементом (4) называется
п-мерным евклидовым пространством.
Обозначение: Еп.
Пример 2. Зададим в области
х12 + ... + х"2 < а3
поле тензора
Тогда
^s2 _ 4 (dx1 + ... + dx” )
/ 1 _ X1* + ... + x»2 у ’
\ а2 )
Риманово пространство с линейным элементом (6) называется
п-мерным пространством Лобачевского*.
Обозначение: Ln.
Замечание. Если исходить из аксиоматического определе-
ния пространства Лобачевского, то можно доказать, что метрику
в нем можно ввести по формуле (6).
§ 2. ПЕРВОНАЧАЛЬНЫЕ СВЕДЕНИЯ О РИМАНОВОЙ ГЕОМЕТРИИ
1°. Касательное пространство
Условия регулярности. Рассмотрим в области {44} поле тен-
зора gi/ix1, ..., хп). Каждая компонента этого поля представ-
ляет собой функцию точки М (х1, ..., х"). Потребуем, чтобы в об-
ласти {44} функции gu в данной системе координат имели непре-
рывные первые и вторые производные: gij(xl, ..., хп)^С2.
При переходе в области {44} от координат (х) = (х1, ..., х")
к координатам (,х) = ('х1, ..., 'хп) посредством преобразований
х1=х1('х1, . .., 'хп), i
...................................... (О
хп=хп('х1, ..., ’хп) j
функции
gu(x)=gij(x1, ..., хп)
* Лобачевский Николай Иванович (1.12.1792—24.2.1856) — русский мате-
матик.
209-
перейдут в функции
'giA'x)=gij(xl('x\ гхп), хп('х1, .... 'х")).
Будем считать выполненными следующие условия:
1) функции (1) имеют в области изменения переменных
'х1, ..., 'хп непрерывные третьи частные производные по всем ар-
гументам;
2) якобиан
отображения, задаваемого правилом (1), отличен от нуля во
всех точках области изменения переменных 'х1, ..., 'хп;
3) отображение (1) обратимо.
Тогда, как известно из курса математического анализа, функ-
ции gi/('x) также будут обладать непрерывными вторыми. част-
ными производными по всем аргументам.
Перейдем к определению касательного пространства.
Пусть М0(х10, . .., xty— некоторая точка риманова пространст-
ва Vn с метрическим тензором gu(x\ хп). Разложим каждую
компоненту метрического тензора, пользуясь формулой Тейлора*
с центром в точке Мо. Получим
. . ., хп)=ёи(хх0, л$ +
+ -^Г<х0’ хо)(хк—+ х*), (2)
где
ег-А->0
при
р^^х1—х')2 + ... 4-(хп—х")2->0,
т. е. e.ijk=o(l).
Определение. Евклидово пространство Еп с линейным
элементом
dsl = gu (xb > • • • > хо)dxl dx' (3)
называется касательным евклидовым пространством в точке
-Л4о(-«о)=-Мо(хо1, ..., Хо") риманова пространства V".
Запишем выражение для линейного элемента
d&=gij(x\ ..., хп)дх1дх’,
* Тейлор (Taylor) Брук (18.8.1685—29.12.1731) — английский математик.
210
пользуясь формулами (2) и (3). Получим
ds2—ds% + (х0) (xk—х*) dxldx' + е;Л • (хк — х§ dxl dx!. (4)
Из формулы (4) видно, что метрика ds2 пространства V"
в окрестности точки Л4о(^о) и метрика ds02 касательного простран-
ства Еп в окрестности точки (Хр1,..., х0") разнятся на малые пер-
вого порядка относительно о = [/(х1—х’)2 + ... + (хп — х£)2.
Это объясняет термин «касательное пространство».
2°. Преобразование координат в римановом и касательном
пространствах
Будем считать, что точка Мо пространства Vn имеет нулевые
координаты (0, ..., 0). Это предположение, не ограничивая общ-
ности, позволяет проще записывать формулы.
Рассмотрим касательное пространство Еп в точке Мо римано-
ва пространства Vn. Его линейный элемент ds02 имеет следующий
вид:
ds^-g^O, Q)dxldx' (5)
(см. формулу (3)).
Координатные линии х‘ касательного пространства Еп прямые;
они образуют в Еп косоугольную систему координат. При этом
некоторая окрестность точки Мо в римановом пространстве Vn
взаимно однозначно отображается на некоторую окрестность точ-
ки (0, ..., 0) касательного пространства Еп. Это отображение
строится по следующему правилу: точке М (х1, ..., х”) простран-
ства Vn ставится в соответствие точка (х1, ..., х”) касательного
пространства Еп.
При переходе в окрестности точки Л1о пространства Vn к но-
вым координатам
('х)=('х1, ..., 'хп)~
х^хЧ'х1, ..., 'хп),
................................... (6)
Х"==ХП('х1, ..., ’хп)
произойдет и преобразование координат в касательном простран-
стве Еп. При этом между окрестностью точки Мо пространства Vn
и окрестностью этой точки в пространстве Еп устанавливается
другое взаимно однозначное соответствие (рис. 1).
Выясним, как преобразуются метрические тензоры простран-
ства V" и касательного пространства Еп.
Для тензора gq имеем
211.
Рис. 1. На рисунке касательное пространство Е2 в точке Мо риманова прост-
ранства V2 изображено в виде касательной плоскости к поверхности V2. Точке
Л1(х*, х2) на V2 отвечает точка (х1, х2) на Е2
Введем следующее обозначение:
С>Х1’ I ;
---- = Х?
d'xk |м0 k
и предположим, что преобразование (6) переводит точку
Мо (0, .... 0) в себя, т. е.
х‘(0, ..., 0)==0, 1 — 1, .... п.
Тогда формула (7) в точке Мй может быть записана так:
'gki (0, • • • > 0) =gu (0, ..., 0) x‘xj (8)
или, короче,
о о . .
'gkl=gii^'l.
Тем самым в касательном пространстве Еп координаты х1 преоб-
разуются по формулам
хг' = х|'х* (4 = 1, п), (9)
т. е. в касательном пространстве происходит линейное преобразо-
вание координат с матрицей (х*‘)-
Матрица (х*‘) этого линейного преобразования невырождена,
так как
det(x£)=det I ^0.
' k' \ d'xk mJ D ( х1.........'х") |м.
Правые части преобразований (9) координат пространства
Еп представляют собой линейные члены разложений функций
х^х^'х1, гХп), 1 = 1,..., п,
.212
по формуле Тейлора:
х^'х1, .'х") =х|'х* +о (j^'x12-l-'x"1).
Замечание. Преобразование (9) можно рассматривать как
простейший вид преобразований координат в пространстве Vn.
В этом случае преобразование координат в пространстве Уп и со-
ответствующее ему преобразование координат в касательном про-
странстве совпадают.
3°. Локально нормальные координаты
Определение. Координаты (х‘) в римановом пространстве
Vn называются нормальными в точке Мо(О, ..., 0) или локально
нормальными, если
о
gu=gij\Ma=gii(0, 0)=6i7, (10)
Справедливо следующее утверждение.
ТЕОРЕМА 1. В окрестности каждой точки риманова простран-
ства можно ввести координаты, нормальные в этой точке.
* Доказательство теоремы разобьем на два этапа.
А. Покажем сначала, как можно выбрать систему координат
('х'), чтобы в точке Мо выполнялись условия (10).
Обратимся к невырожденным линейным преобразованиям
вида (9). Метрический тензор в точке Мо изменяется по следую-
щему правилу:
о о . .
’gki^gii^i-
Из курса линейной алгебры известно, что для любой положитель-
0
но определенной симметричной матрицы (§»/) можно указать
невырожденное линейное преобразование с матрицей (х&9, при-
водящее эту матрицу к единичной (6,3):
о . .
Б. Будем считать, что условия (10) выполнены, т. е. исходные
о
координаты (х‘) в окрестности точки Мо таковы, что gij=8ij.
Укажем преобразование координат (х'), сохраняющее равен-
ства (10) и обеспечивающее выполнение условий (11).
Обратимся к формулам (5) пункта 2 § 8 главы 3, записав их
применительно к принятым здесь обозначениям. Имеем
х*='х{---l-rkl(M0)'xk'x‘. .(12)
213
Убедимся в том, что преобразование (12) сохраняет равенст
ва (10). В самом деле,
и поэтому
0 ° . • . ,
'ghl=gifi^Wl=^ (И)
В пункте 2 § 8 главы 3 было показано, что преобразование
координат (12) обеспечивает в точке Ма выполнение равенств
'17т(О=0 (15)
(см. А).
Из формул (14) и (15) пункта 2 § 8 главы 3 вытекает, что
в точке Мо обращаются в нуль и символы Кристоффеля 1-го
рода:
T?,Zm(Mo)=O (16)
и первые производные метрического тензора:
Итак, в точке Мо в системе координат ('х) выполняются ус-
ловия
о
’gij=8ij>
О
d'Sij _
д'хк
0.
Тем самым система координат ('х) является нормальной
в точке Mq. *
Замечание. Пусть (х) = (х\ ..., хп) — система координат
в пространстве Vn, нормальная в точке Л4о(О, ..., 0). Тогда раз-
ложение компонент gii(xl, ..., хп) метрического тензора по ло-
кальной формуле Тейлора с центром в точке Мо имеет следую-
щий вид:
^(х1, .хп)=6а+-1--^7 xkxl-\-Eijklxkxl, (17)
2 дхк дх1 Мо
где гиы-ь-О при (х1, ..., хя)->-(0, ..., 0).
Из разложения (17) следует, что если система координат яв-
ляется нормальной в точке Мо, то отображение окрестности точки
Afo в пространстве Vn на окрестность этой точки в касательном
пространстве Еп обладает следующим свойством: ds2 отличается
от ds02 на малые второго порядка относительно р=угх1’-|- ... Ц-х"1.
214
4°. Каноническое разложение метрического тензора
Выбор в римановом пространстве Vn координат, нормальных
в данной точке Мо, удобен тем, что в малой окрестности этой
точки метрика пространства Vn отличается от метрики касатель-
ного пространства Еп на малые второго порядка относительно р.
Естественно возникает вопрос: нельзя ли выбрать координатную
систему так, чтобы метрики ds2 и ds02 пространств Vn и Еп отли-
чались на малые более высокого порядка относительно р (выше
второго)?
Оказывается, в общем случае такой выбор невозможен.
Покажем, что является препятствием к этому.
Естественно ограничиться рассмотрением координатных сис-
тем, нормальных в точке Мо, так как только в них
Если бы координатная система с искомым свойством нашлась,
то тогда, согласно разложению (17), в точке Мо имели бы место
равенства
dxk дх1 м.
Согласно формуле (19) пункта 5 § 9 главы 3 все компоненты
Rmqhi тензора Римана—Кристоффеля в точке Мо обращались
бы в нуль. Однако легко привести примеры римановых прост-
ранств, для которых этот тензор не равен нулю. В частности,
тензор Римана—Кристоффеля пространства Лобачевского не ра-
вен нулю ни в одной точке.
Приведенные рассуждения наводят на мысль о том, что в не-
которых координатных системах, определенным образом связан-
ных с заданной точкой Мо, разложение компонент gu метрическо-
го тензора пространства V" по формуле Тейлора должно иметь
специальный, канонический вид, в котором члены второго поряд-
ка малости относительно р должны быть как-то связаны с ком-
понентами Rijki тензора Римана—Кристоффеля в точке Mq.
ТЕОРЕМА 2. Пусть Vn — произвольное риманово пространст-
во и Мо — заданная точка пространства Vn. Тогда существует
координатная система (х‘), нормальная в точке Мо и такая, что
разложение компонент ^/(х1, хп) метрического тензора про-
странства Vn по формуле Тейлора с центром в точке Мо имеет
следующий вид:
1 0
gkA*1, •••. ---~ EmklqXmX1-^ О (р2), (18)
□
___________ о
где р = у х>!+ ... +хп\ a Rmhiq—компоненты тензора Римана—Крис-
тоффеля, вычисленные в точке Мо(0, .. ., 0):
о
Rmklq^^ Rmhiq (®> • • •> 0)«
215
* Пусть (х‘) — нормальные координаты в точке Мо, х1(М0)~
=0. Покажем, как малым изменением координат (х‘) перейти
к новым нормальным в точке Af0 координатам ('х1'), в которых
справедливо каноническое разложение вида (18).
Обратимся к формулам (10) пункта 2 § 8 главы 3, записав их
применительно к используемым здесь обозначениям. Имеем
х1 = ’х1-~П1т(Мй)'хк'х‘'хт, (19)
18
где
rk=-/-rL+^-r^+-^riz. (20)
дх'- дх‘ дхт
Убедимся в том, что система координат ('х) также является
нормальной в точке Мо-
Достаточно показать, что
'^lM0=6ftZ, 4^- =0. (21)
д хт
Рассмотрим тождества
, __ dxi gxj
Ski о/ ь >
d х* д х
д §kl dgtj ?дхР dxi} dxi .
d'xm dxP d'xm d’xk d’x1
. / 62x£ dxi . dxi d2xi \ (9,2\
+ \ d’xk ffxm d'x1 ‘ d’xk ' d’x1 d’xm )'
Так как система координат (х‘) нормальна в точке Мо, то
= 0.
Мо
, s dgu п
-г-г- —0.
dxP м0
Непосредственными вычислениями несложно убедиться в спра-
ведливости равенств
dxc I ____________________ j d2x£
d'xk |м0"~ k’ d’xk d'x1
Рассматривая теперь соотношения (22) в точке Мо, получаем
формулы (21).
В. 2° § 8 главы 3 было показано, что преобразование коорди-
нат (19) обеспечивает выполнение равенств
TL,(M0)=0 (23)
(см. Б).
Кроме того, из формул (21) вытекает, что в точке Мо все
символы Кристоффеля равны нулю:
Т?/(Л4о)=О. (24)
216
Вычислим в точке 4 компоненты 'Rqikm тензора Римана—
Кристоффеля:
г/7 и1т и 1 Ik . ,ге? ,рр ,гр ,гр
*xlkm— '' . “_7 “„ Г * pk * 1 pm 1 Ik
д xk д хт
(см. формулу (8) пункта 3 § 9 главы 3).
В силу условия (24) получаем, что
° й'Г? й'Г9
'Rqlkm='R?km =_^L(M0)-----------(25)
д'хк д хт
Переставляя в последней формуле индексы I и т местами, най-
дем
О ffVq а'гЧ
'Rqmki=—^(M0)--^-(M0).
д xk д х‘
Распишем соотношение (23) подробно:
д’хк
(4)4
^4mk
д'х1
(4)4
д'хт
(4)
(26)
(27)
О =
(см. формулу (20)).
Складывая последние три равенства и учитывая симметрич-
ность символов TV, получаем важную формулу
ST17 1 0 0
(4)=4 (^%m 4- '^/)- (28)
д хк 3
о
Умножим обе части равенства (28) на fgpq и, просуммировав
по q, с учетом формулы (13) пункта 5 § 9 главы 3 получим
о <эт? 1 0 0
'gpq (M0)=-^('Rplhm + 'Rpmhl). (29)
Чтобы преобразовать левую часть соотношения (29), рассмот-
рим тождество
z _. ^1т д /,р , д gp<l /ол\
Spq ,, . ~ . ( 1 p,lm) 1 Im . , (3U)
4 д хк д’хк д'хк
где
Тр,Im — 'gpq'Fbn.
Заменим в формуле (30) символ Тр, im его выражением
_____ 1 / Spl . & gpm Sim \
p.Zm— 2 д,хт д,х{ д,хр j
и проведем необходимые дифференцирования.
217
Отнеся полученное соотношение к точке Л1о и учитывая ра-
венства (21), найдем для формулы (29) следующее выражение:
! о о о 1 ° 0
g pl,mk~)~ gpm,Ik glm,pk) = ~^~( Rplkm^ Rpmkl)- (31}
Здесь использовано удобное обозначение
0 d2'g„,
(Ч).
Меняя в равенстве (31) индексы k и р местами и учитывая
свойство симметричности тензора Rmqkt’.
Rmqkt Rhlmq
(см. пункт 5° § 9 главы 3), получим
1 о О О 1 0 0
2 ( gkl,mp~^~ gkm,Ip g lm,k/) 3 ( Rpmkl "Ь (32}
Обратившись к формуле (19) пункта 5 § 9 главы 3, запишем
о о
в точке Мо выражения для компонент 'Rpikm и 'Rpmu'-
о । о о о о
Rpikm 2 ( gpm,lk~^~ gfk,pm gpk,lm glm.pk)'
0 j 0 0 0 0
Rpmkl ~ g ( gpl,mk~^~ gmk.pl gpk.ml gfrn.pk)'
Сложив эти равенства, сгруппируем нужным образом производ-
ные в правой части. Имеем
0 0 О | о о о
Rplkm^T Rpmkl — gpk.lm^ -^('gpm ,lk + Spl ,mk glm,pk)
j 0 0 0
2 ( glk,pm~^~ gmk,pl gml.pk)'
Отсюда с учетом формул (31) и (32) получаем
о о о 1 0 0
Rplkm^ Rpmkl gpk,lm~) "^{Rplkm^ Rpmkl)~)~
। 0 0
H T~( Rpmkl Rpikm)-
Теперь уже нетрудно увидеть, что
о 1 0 0
gpk,lm~ Z~( Rpikm Rpmkl)- (3°}
Так как построенная координатная система ('х) является нор-
мальной в точке Л40, то для компонент метрического тензора
218
работает формула (17). Запишем эту формулу в удобном для
нас виде:
1 0
'gpd'x1, .... ’xn')=6pk + — 'gpk'lm'x!,xm + o(c>!!).
о
Подставим сюда выражение (33) для производных 'gPk, im- Полу-
чим
, о о
'gpk('X\ 'ХП) = 8рк--('Rplkm + '^pmhl)'xl'Xm + 0(p2).
О
Так как
О ( о
'RPiiim'xl'xrn-='Rpmk['xl'xm,
то окончательно имеем
1 0
'gpk('x\ 'xn)=8pk-------~'RPihm'x''xm + o(p>). *
ВАЖНЫЙ ВЫВОД. Характерным свойством евклидова про-
странства является наличие такой системы координат, относи-
тельно которой метрический тензор в каждой точке равен
Из проведенных рассуждений следует, что если тензор Rmkiq
не нулевой, то в римановом пространстве нельзя найти систему
координат, в которой его метрический тензор был бы равен бйд.
Более того, только что доказанная формула (18) канонического
представления метрического тензора показывает, что тензор Rmniq
можно рассматривать как меру отклонения риманова пространст-
ва Vn от евклидова Еп. Поэтому обычно говорят, что тензор Ри-
мана—Кристоффеля характеризует искривленность риманова про-
странства, и называют его тензором кривизны.
§ 3. ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРОВ И ТЕНЗОРОВ
1°. Параллельный перенос векторов в евклидовом простран-
стве
Пусть (х‘) — криволинейные координаты в /г-мерном евкли-
довом пространстве Еп. Радиус-вектор точки М из пространства
Еп обозначим через х (О — начальная точка). Векторы
X/ = (г = 1, . .., п)
dxi 7
образуют в точке М базис. Этот базис зависит от точки, т. е. от'
координат х1, ..., хп.
Рассмотрим в пространстве Еп некоторый вектор g. Будем пе-
реносить вектор g параллельно самому себе вдоль кривой ЛГ0ЛТ),
заданной параметрическими уравнениями
xl=xl(t) (i=l, ..п). (1)
219
Так как в каждой точке М этой кривой существует свой базис
xJAl)..........................хп(Л4),
то координаты (постоянного) вектора £ при переходе от точки
к точке кривой (1) будут меняться (рис. 2).
Хз(Мч)
Рис. 2. Параллельный перенос вектора g вдоль кривой
Выясним характер изменения этих координат. Вследствие
того, что вектор g — постоянный, имеем
dg=O.
Отсюда, пользуясь разложением
получаем, что
dgXi + Г</х; = 0. (2)
Далее,
dxt=d (— —д х dx>—Xijdx'. (3)
\ dxl ) dxt дх> l} v '
Разложив векторы хц по базису х*
хг/=Г|/хЛ, (4)
220
из формулы (3) найдем, что
dxi = rijxkdxi. (5)
Преобразуем равенство (2).
В первой группе слагаемых заменим индекс суммирования
i на k\ во второй группе заменим дифференциалы dxt их выра-
жениями (5). В результате получим
(< + r?g'dx')xft=0.
Вследствие линейной независимости векторов х* все коэффи-
циенты в последнем разложении равны нулю:
dlk=-Vkigdxi (£=1,...,п). (6)
Рассмотрим полученные соотношения (6).
Входящие в них величины Г*г/ Уже знакомы нам (см. формулу
(1) пункта 1 § 8 главы 3). Это символы Кристоффеля 2-го рода.
Их называют также коэффициентами связности — они связыва-
ют координаты g‘ вектора g в точке (х1, ..., х") с координатами
g‘ + dg' этого вектора в близкой точке (x' + dx1, xn+dxn).
Соотношения (6) представляют собой систему обыкновенных
дифференциальных уравнений, в которых неизвестными являются
координаты g‘(/) вектора g, параллельно переносимого вдоль
кривой, Интегрируя эту систему, находим координаты
g’(^) вектора g в произвольной точке M(t) кривой Л1о^1 (в базисе
MW)))-
В дальнейшем соотношения (6) мы будем называть уравнения-
ми параллельного переноса вектора.
Замечание. При переходе к другой криволинейной системе
координат система (6) уравнений параллельного переноса век-
тора изменяется. Будут меняться и символы Кристоффеля. Харак-
тер их изменения подробно освещен в § 8 главы 3 (см. 1°). Там
же (3° § 8) получены формулы, по которым символы Кристоф-
феля Г*,/ 2-го рода и символы Кристоффеля Г*, ij=gkiTlii 1-го
рода выражаются через компоненты метрического тензора gy.
По мере необходимости мы будем пользоваться этими форму-
лами.
2°. Векторы в римановом пространстве
Ранее уже отмечалось, что произвольное риманово простран-
ство отличается от евклидова, является более общим. Поэтому
естественно обсудить вопрос о том, что понимать под вектором
в таком пространстве.
Поступим следующим образом. Зададим в данной точке
Af0(xx» ..., хп) риманова пространства Vn п чисел g1.....g".
Будем считать эти числа координатами вектора g в точке Л40.
221
с каждой х'-линией (это прямая в
1/“
которого равна |е;| = ' gu, а угол
вычисляется по формуле
____ (е>, е;}
Сразу же возникает вопрос: в каком базисе числа g1, g" яв-
ляются координатами вектора g?
Для ответа на этот вопрос воспользуемся понятием касатель-
ного пространства.
Мы знаем, что если gij(xl, хп) — метрический тензор про-
ооо
странства Vn, то gij=gi/(x\ хп)— метрический тензор ка-
сательного пространства Еп риманова пространства Vn в точке
Мо. Тем самым в пространстве Еп налицо прямолинейная косо-
угольная система координат с началом в данной точке Мо:
Еп) связан вектор eit длина
Ф<7 между векторами щ и в/
о
gu
УТ УТ'
Из теории поверхностей (глава 2) мы знаем, что измерения
на поверхности проводятся при помощи первой квадратичной
формы
I = ds2 = giidxu + 2gridx1 dx2 + gzsdx^ — gjj dxl dx',
t. e. поверхность представляет собой двумерное риманово прост-
ранство V2.
Рис. 3. На рисунке изображена поверхность, представляющая со-
бой двумерное риманово пространство V2
Касательную плоскость к поверхности в точке Мо можно рас-
сматривать как касательное пространство Е2 в точке Мо прост-
ранства V2 (рис. 3). Координатные линии х1 и х2 на Е2 — каса-
тельные прямые в точке Мо к координатным линиям х1 и х2 на
222
1 W
V2. Векторы в! и в2 направлены соответственно по линиям х1 и
х2 на Е2, причем
1/~ 0
tai = v £11, tai = V gw, *2)=£12,
а угол ф между этими векторами определяется по формуле
Вернемся к общему случаю.
Пусть ei, ..., еп — базис в касательном пространстве Еп. Тог-
да по заданным числам g1, ..., g" определяется вектор
?=Bta+---+g%=gta,
расположенный в пространстве Еп. Так что вектор g имеет коор-
динаты g‘ в базисе е,.
Перейдем в пространстве Vn к другим координатам
х' = х1^х\ 'х") (t = l, п).
Базисные векторы et касательного пространства Еп в точке ЛЬ
преобразуются по формулам
ta=M (fe=l,...,n), (7)
где
; |
а1ь =--
д'хк |м0
Наряду с формулами (7) имеются также и формулы
ег='<уХ (Z=l,...,«), (8)
- , , , ь d’xk' I
перехода от базиса ek к базису с-,, где а;=-— .
дх1 |м0
Пользуясь формулами (8), получим
= (9)
С другой стороны,
5=ГЧ- (10)
Из соотношений (9) и (10) получаем формулы, связывающие
координаты zgfe и & вектора g:
(fe-1, п). (11)
Аналогично выводятся формулы перехода от 'gfe и g‘:
0 = 1, •••,«)• (12)
223
Определение. Вектором, g в точке Л10 риманова пространства
Vn называется упорядоченный набор п чисел g1, ..., g" — коор-
динат вектора g, преобразующийся при переходе от координат-
ной системы (х‘) к координатной системе ('xk) по формулам (11)
и (12), где
; dxi I , h d'xk I
а‘ =----- , a; =-------
d'xk |m0 дх1 |m0
Геометрически вектор g можно представлять себе как обыч-
ный вектор в касательном пространстве Еп.
3°. Параллельный перенос векторов в римановом пространстве
Рассмотрим в пространстве Vn кривую MoMi, соединяющую
точки Мо и Mi и заданную параметрическими уравнениями
х* = х1(Г) (/0^^^^), (t' = l,...,n). (13)
Пусть в точке Л40 пространства Vn задан вектор g. Определим
-операцию параллельного переноса этого вектора в пространстве
Vn вдоль кривой MoMi.
В основу этого определения можно положить следующие гео-
метрические соображения.
В § 2 этой главы мы уже отмечали, что в окрестности точки
Л1о риманово пространство Vn отличается от касательного к нему
в этой точке евклидова пространства Еп на малые второго поряд-
ка (относительно размеров рассматриваемой окрестности). Это
обстоятельство наводит на мысль о том, что малый параллельный
перенос вектора g по направлению (dx1, dxn) в простран-
стве Еп можно рассматривать так же, как параллельный пере-
нос вектора g в этом же направлении в пространстве V". (Упоря-
доченный набор дифференциалов координат (dx1, .... dxn) —
вектор, тензор типа пространстве Еп: при переходе к но-
вым координатам 'х1 эти дифференциалы преобразуются по тем
же формулам (И), что и векторы в Еп или в V":
d'x1— dxl- (dxk— 'a\dxk.)
dxk k >
Иными словами, уравнения (6) можно рассматривать не толь-
ко как уравнения параллельного переноса в пространстве Еп, но
и как уравнения параллельного переноса вдоль кривой (13) в ри-
мановом пространстве Vn.
Отметим, что ряд дальнейших рассуждений подтверждает
правильность такого геометрического подхода к определению па-
раллельного переноса в римановом пространстве.
224
Определение. Уравнения
d^-T^dx' (14)
называются уравнениями параллельного переноса вектора
— (I1, £") в римановом пространстве Vn.
Эти уравнения представляют собой систему обыкновенных
дифференциальных уравнений, в которых неизвестными являются
координаты ^(t) вектора £, параллельно переносимого вдоль кри-
вой MoMi, заданной в пространстве Vn параметрическими урав-
нениями (13).
4°. Параллельный перенос тензоров
Операция параллельного переноса векторов в римановом про-
странстве важна в следующем отношении. Пусть в пространстве
Vn задано векторное поле. Возникает естественный вопрос: как
сравнивать векторы этого поля в различных точках пространства
Vn, в частности в близких точках? Дело в том, что возможность
сравнения в близких точках позволит ввести понятие дифферен-
циала векторного поля в римановом пространстве Vn как главной
линейной части приращения.
Такое сравнение проводится при помощи параллельного пе-
реноса. Вектор gi в точке Mi можно сравнить с вектором £2 в точ-
ке М2 следующим образом.
Перенесем вектор g2 из точки М2 в точку Mt параллельно
вдоль кривой ЛГ2Л11. Получим в точке Mt два вектора: gi и g2*.
Разность g2*—g| будем рассматривать как результат сравнения
Векторов gi и |2 в точках Mi и Л42.
Ясно, что результат параллельного переноса вектора $2 в точ-
ку Mt зависит от кривой AfjAl2. Впрочем, о способе ее выбора
можно договориться.
Пусть в пространстве Vn задано тензорное поле.
Для сравнения тензоров этого поля в разных точках прост-
ранства Vn необходимо ввести операцию параллельного перено-
са тензоров.
Обратимся к описанию соответствующей процедуры.
Перенесем базисные векторы касательного пространства Е",
определенные заданной системой координат (х‘) в данной точке
М, параллельно в близкую точку М'. Рассмотрим в точке М' тен-
зор с теми же компонентами относительно параллельно перене-
сенного базиса, что и у тензора в точке М.
В точке М' естественно возникают два базиса:
1) базис, параллельно перенесенный в точку М', и
2) базис, определяемый в точке М' заданной системой координат
(х‘).
Преобразуем первый из этих базисов во второй. При этом пре-
образованию подвергнутся и компоненты тензора. Будем рассмат-
8 Зак. 259
225
ривать приращения компонент тензора, получаемые в результате
описанной процедуры как приращения его компонент при парал-
лельном переносе.
Пусть et — базис касательного пространства Еп в точке М,
определяемый системой координат (%') в окрестности точки М
пространства Vn (см. 2°), и 5* — какой-нибудь другой базис в Еп,
причем
(k = i, ...,ri).
/2\
Рассмотрим в точке М тензор Т типа К) с компонентами
Timil относительно базиса в,. Пусть 'Trspq — компоненты тензора
Т в базисе £*. Тогда
(15)
где
Из соотношений (15) получаем, что
(16)
Пусть векторы ..., параллельно переносятся вдоль не-
которой кривой L в пространстве Vn и М — произвольная точка
этой кривой.
Определение. Будем говорить, что тензор Т переносится
параллельно вдоль кривой L, если в каждой точке M^L его ком-
поненты 'Trspq сохраняют постоянное значение относительно па-
раллельно переносимого базиса £*, т. е.
'TPQS= const. (17)
Другими словами, в параллельно переносимом базисе мы
имеем один и тот же тензор.
Свойство (17) будет сохраняться для любого базиса, ибо
по свойствам параллельного перенесения векторов матрица пере-
хода от одного базиса к другому при параллельном переносе не
изменяется.
Вычислим дифференциалы левой и правой частей равенства
(16) в точке М.
С учетом соотношений (17) получим
<&'Т™ + dT^. (18)
Так как векторы переносятся параллельно, то, согласно
формуле (14), имеем
(19)
Будем считать, что базис в точке М совпадает с базисом
е*, определяемым в этой точке системой координат х‘. Тогда
'Т^ТУп,, Е1=61. (20)
226
Последнее соотношение позволяет записать формулы (19) ко-
роче:
d&=-Tlkpdxk. (21)
Подставим найденные выражения (20) и (21) для
и d^pl в равенство (18). Имеем
- npdxkTprl-= - rlkrdxkTi’T^dxkTym + dT%.
Перегруппировав слагаемые в последнем соотношении и из-
менив обозначения некоторых индексов суммирования, получим
d^=(-rlpT?/-npT^ + ПХ' + I'M) dxk. (22)
Это формула для дифференциалов компонент тензора Т типа
/2\ ,
<21 ПРИ паРаллельном переносе — формула параллельного пе-
реноса тензора.
Для общего случая — тензора типа — формула парал-
лельного переноса тензора имеет следующий вид:
+r£A;:V'''+IXX>‘- (23)
5°. Абсолютный дифференциал и абсолютная производная
Пусть на кривой
x‘=x‘(t)
в римановом пространстве Vn задано тензорное поле T(t). Будем
/2\
считать для определенности, что это поле типа
Перейдем из точки кривой х‘(0, отвечающей значению t па-
раметра, в точку xl(t+dt), отвечающую значению t+dt, и найдем
в ней тензор заданного поля Т (/) с компонентами
Т''(/ + Л) = ^(0 + ^(0-
Здесь мы пренебрегли малыми высшего порядка относительно
dt, заменив приращения функций их дифференциалами.
Отметим, что Trsi!(t) и
T^ + drUt^r^t + dt)
— тензоры в разных точках пространства V" и в разных базисах.
При смене координат (х£) эти базисы преобразуются по-разному
и поэтому сравнение Trsij(t) и (t+dt) не имеет смысла.
Другое дело, если предварительно перенести параллельно тен-
зор Т из точки t+dt в точку t вдоль рассматриваемой кривой.
8*
227
Тогда оба тензора будут заданы в общей тачке t и, значит,
в одном и том же базисе. Это позволит сравнить эти тензоры
покомпонентно. Вычитая из параллельно перенесенного в точку t
тензора T(t+dt) тензор T(t) и рассматривая главную часть раз-
ности, получим абсолютный дифференциал DTrsll{t) тензора
Т,?Ф).
Проведем соответствующие рассуждения.
Пусть Tlrs — результат параллельного переноса тензора
Trs‘i(t+dt) из точки t + dt в точку t. Это означает, что и обратно:
тензор Trsii(t + dt) получается из тензора Tlr's(t) путем параллель-
ного переноса последнего из точки t в точку t+dt.
Согласно формуле (22) для Tlr’s тогда получим
T’^t+dt) ^^+dfirls=firi +
(24)
Для сокращения записи указание на то, что величины вычисля-
ются в точке t, опущено.
Из приближенного равенства
Tritt+dt^ri+dT^
и соотношения (24), заменяя с принятой степенью точности
нз выражения в фигурных скобках на T^Ht), получаем, что
f" ri + dTiU^ipT^UT^T^-TirT^-T^r'p} dxk. (25)
Определение. Абсолютным (ковариантным) дифференциа-
лом DTrs'i называется главная линейная часть приращения
TlJs—TlrS тензора T(t+dt), параллельно перенесенного в точку
t, и тензора T(t), взятого в этой точке.
Таким образом, согласно формуле (25),
DT^dT^A- {ПрТЙ + dxk.
Для общего случая — тензора типа — имеет место ана-
логичная формула
<26>
Формула (26) справедлива для тензорного поля Т, заданного
на произвольной кривой х1=х1(1) риманова пространства Vn.
Допустим, что тензорное поле Т типа задано во всем про-
странстве Vn и — его компоненты в локальном базисе,
определяемом координатной системой (%')•
228
В этом случае формула (26) работает на любой кривой х;=
=х’’(0> причем в этой формуле dTf’1?—дифференциал функции
i t q
Т*'.р от переменных х1, хп, a dxk — дифференциалы пе-
/1-• -Jq
ременных.
Учитывая, что
•• , dT'-fP
dTl.l 'i.p=—dxk,
dxk
запишем формулу (26) по-иному:
- > dxk,
VR h --iQ
(27)
где
1g
_д_Т1у.Л
dxk 11 'Iq
pi, , p ip Tit. Л m_
lkm1 h-. !q ’ -km1 k-. jq
__Г'" 'Th- -ip _ __pm 'pii - ip
kh mj2...iq ____kj^ h-.-iq^m-
Выражение
V^Jp,
/,-• iq
(28)
определенное соотношениями (27) и (28), называется абсолют-
ной, или ковариантной, производной тензора Т по аргументу xk.
В § 8 главы 3 было доказано, что ковариантная производная
тензора типа представляет собой тензор типа
УТВЕРЖДЕНИЕ. Абсолютный дифференциал тензора
Т*'?—тг'"1.р типа вновь является тензором.типа И).
(/) h--iq \q) r \qj
Доказательство вытекает из формулы (27), если заме-
тить, что правая часть
представляет собой свертку тензора
/f • iq
типа
и тензора dxk типа
/1\
кО/
229
6°. Техника абсолютного дифференцирования
Покажем, что абсолютный дифференциал линейной комбина-
ции тензоров и абсолютный дифференциал произведения тензоров
вычисляются по правилам, известным из курса математического
анализа:
1+.
d hr-• ЛР+цз;*- •»=мт*- • >+pds1- -л.р,
где Л и р — произвольные постоянные.
2+
й(Т1--лр S^--^\==(DTi' --i.p\-Sl!,-- ^rTi.l - ip .
\ h-'-lq \ ‘-'‘q! ’-"lq \
Привлекая формулу (27) и пользуясь свойствами операции
ковариантного дифференцирования (2° § 9 главы 3), получаем:
1 о (М£:£+ ^)-v. (^+^)*“-
2 - Ddx"=
-№ ';) • <'<>“+ ^ГГХ"=
stУ+П (DStX')
Формула дифференцирования свернутого тензора
(D7t::y 1Й=°(^:":)
доказывается аналогично:
(ГГ--лр\ \^=(^кТ{--л.р\ СС» dxk =D
‘-‘ql l/i=s \ й h -’ql |/t=s VR \ s]2...iq) \ sit-.-lq)
7°. Еще раз о параллельном переносе тензоров
Мы подошли к понятию абсолютного дифференцирования тен-
зоров геометрическим путем. В основу были положены привычные
идеи введения понятий производной и дифференциала скалярного
и векторного полей.
Можно поступить и несколько иначе, встав на формальный
путь. Именно, можно ввести абсолютный дифференциал тензор-
ного поля при помощи формулы (26), развить технику абсолют-
ного дифференцирования, а затем определить параллельное пере-
230
несение тензора Т‘.‘”*р вдоль произвольной кривой посредством
/!•• -lq
условия
DT**-'p=0.
/1- -1 q
Тем самым тензор, заданный в каждой точке некоторой кри-
вой, параллельно переносится вдоль нее, если абсолютный диф-
ференциал этого тензора в любой точке данной кривой равен
нулю.
Такой формальный подход к понятию параллельного переноса,
разумеется, равносилен нашему прежнему подходу. Он имеет ряд
преимуществ, особенно при проведении выкладок. Например, лег-
ко убедиться в справедливости следующего утверждения.
ТЕОРЕМА 3. Линейная комбинация и произведение парал-
лельно переносимых тензоров переносятся параллельно.
* Пусть тензоры Т\> "\р и s*1"k'---------
вдоль заданной кривой, т. е. в каждой ее точке
переносятся параллельно
Е)Т1'- лр = 0, DSf
Тогда и их произведение
K-.lqk.-.lt q
•
переносится параллельно:
DU=D{TS)^=DT S + T • DS—Q. *
8°. Параллельный перенос некоторых важных тензоров
А. Абсолютный дифференциал метрического тензора grs ри-
манова пространства Vn равен нулю в любой точке этого прост-
ранства.
* Воспользуемся тем, что
(см. формулы (11) пункта 4 § 9 главы 3).
Из формулы (27) вытекает, что
Dgrs=Q.
Таким образом, метрический тензор представляет собой в про-
странстве Vn поле параллельных тензоров. *
Б. D8* =0,
где 6/ — символ Кронекера.
231
В силу формулы (27) достаточно вычислить ковариантную
производную Vfe6/‘. Имеем
6/+ГИ-пр/бр=it-rjHo.
В. Абсолютный дифференциал контравариантного метричес-
кого тензора g1’ равен нулю:
= 0.
Г. При параллельном перенесении векторов и rf вдоль дан-
ной кривой их скалярное произведение не изменяется.
Имеем
D (<g, т)))=D =Dg^ + gijDgrf + gtfcDtf=0.
Так как gi&(\! — инвариант ^тензор типа и потому об-
разует скалярное поле, то его абсолютный дифференциал равен
обычному дифференциалу.
Поэтому
т. е.
<£, const.
§ 4. ГЕОДЕЗИЧЕСКИЕ ЛИНИИ В РИМАНОВОМ ПРОСТРАНСТВЕ
1°. Геодезические как линии постоянного направления. Кано-
нический параметр
Определение. Кривая L в римановом пространстве Vn
называется геодезической, если любой вектор касательной к L
в какой-либо ее точке при параллельном переносе вдоль L оста-
ется вектором касательной к L.
Пусть L — геодезическая линия в пространстве Vn, заданная
параметрическими уравнениями
х‘=х'(^),
и вектор касательной к L в точке Мо, определяемой зна-
чением t0 параметра. Перенесем этот вектор параллельно вдоль
геодезической L в точку М, определяемую значением t парамет-
dx^
ра. Получим в точке М вектор касательной Так как-------------
dt
также вектор касательной к L и все векторы касательной к L
в точке М коллинеарны, то
-^=а(0£‘(0, (1)
dt
причем а(0#=0.
232
Поставим следующий вопрос: нельзя ли выбрать на геодези-
ческой L новый параметр т=т(О так, чтобы вектор касательной
—— в каждой точке кривой L получался параллельным пере-
dx
т d-xi I 1
носом вдоль L вектора ----- ?
dx |т=т0
Ответ положительный: такой параметр можно выбрать всегда.
Покажем это.
Введем параметр г посредством следующей формулы:
т. е.
Тогда
т=Л a(t)dt,
dx= a(t) dt, dt 1
dx a (t)
dxi _ _ dxi dt 1 dxi
dx dt dx a it
(2)
Воспользовавшись соотношением (1), получаем, что
dxt
dx
VW-
Так как g‘(Z) — вектор касательной к геодезической L, получен-
ный параллельным переносом вдоль L вектора £фо), то получен-
ное равенство означает следующее: при таком выборе параметра
„ , „ dxi т
т на геодезической L вектор касательной --- к L получается па-
dx
раллельным переносом вдоль L какого-то вектора касательной
dxi ।
dx |т=т0
Определение. Параметр г, для которого векторы каса-
dxi '' '
тельных ---- образуют вдоль геодезической поле параллельных
dx
, dxi
векторов (вектор ---- переносится параллельно вдоль геодези-
dx
ческой), называется каноническим параметром.
Замечание. Если т — канонический параметр, то т*=Дт+
+ В (Л¥=0 и В — постоянные) также является каноническим
параметром. В самом деле,
dx1 dxi dx 1 dxi
dx* dx dx* A dx
~ dx1
Это означает, что вектор --------- также переносится параллельно
dx*
вдоль геодезической — он получается из параллельно переноси-
мого вдоль геодезической вектора — умножением на постоян-
dx
ную -1-.
233
Таким образом, если геодезическая существует, то на ней
можно выбрать канонический параметр.
Докажем следующее утверждение.
ТЕОРЕМА 4. Из каждой точки М риманова пространства
Vn по заданному в этой точке направлению исходит единственная
геодезическая линия.
* Пусть
хг = х' (г)
:— параметрические уравнения искомой геодезической линии,
причем параметр т является каноническим.
dxi
Это означает, что вектор -- переносится параллельно вдоль
dr
искомой геодезической, т. е. удовлетворяет соотношениям
d-^=—Г-/—(fe=l,...,n) (3)
dx dx
(см. формулы (14) § 3).
Равенства (3) можно записать также в следующей, эквива-
лентной, форме:
d2xk rk dxl dxi
—~7~(fe=1’ ••• >n)- (4)
dx2 dx dx
Соотношения (4) представляют собой систему обыкновенных
дифференциальных уравнений, заданных в некоторой области
пространства Vn.
Действительно, Vn рассматривается нами как область ариф-
метического пространства А'\ в которой задана метрика ds2=
=giIdxidxi. При помощи этой метрики в каждой точке области
определяются функции Г*,/, представляющие собой, таким обра-
зом, функции координат х1,..., хп.
Определение. Соотношения (4) называются (дифференци-
альными) уравнениями геодезических.
По условию теоремы нам заданы: точка М и направление
в этой точке.
Пусть а1 — координаты точки М, а Ы — координаты вектора,
определяющего направление в точке М:
хг|т=То=а\ -^-1 = (5)
dx |т=т0
Из курса дифференциальных уравнений известно, что система
(4) при начальных данных (5) имеет в некоторой окрестности
точки М единственное решение х‘=х‘(т).
Тем самым в пространстве Vn определяется единственная кри-
вая, исходящая из точки М по заданному в этой точке направле-
нию (более точно, вектор касательной в точке М совпадает
dx
234
с заданным вектором Ь‘). В каждой точке построенной кривой
„ dxi
векторы касательной ------ удовлетворяют соотношениям (3),
dx
т. е. переносятся вдоль этой кривой параллельно.
Последнее означает, что кривая хг'=хг'(т) геодезическая. *
Геометрический смысл канонического параметра.
Покажем, что длина дуги геодезической представляет собой
канонический параметр.
В самом деле, если за параметр на геодезической принята
„ dx*
длина дуги s, то длина вектора касательной ------- будет равна
ds
единице: квадрат длины этого вектора равен
dxi dxl
Qii , ,
ds as
a так как ds2=gijdx‘dx', то
dxi
ёи ~
ds
dxi
ds
1.
При параллельном переносе векторов сохраняется их скаляр-
ное произведение (8° § 3). В частности, сохраняется скалярный
квадрат вектора и, значит, его длина.
Параллельно перенесем вдоль геодезической касательный
вектор единичной длины. В результате, согласно определению
геодезических и отмеченного выше свойства сохранения длин век-
торов при параллельном переносе, получим касательный к геоде-
зической вектор единичной длины.
Таким образом, вектор
—— параллельно переносится
вдоль
геодезической и, значит, длина дуги s — канонический параметр.
Нетрудно проверить, что если s — канонический параметр,
то любой другой канонический параметр т будет связан с $ соот-
ношением x=As + B, где А=#0 и В — постоянные.
Предъявленное линейное преобразование можно интерпрети-
ровать как изменение масштабной единицы и сдвига начала от-
счета. Поэтому параметр т можно рассматривать как длину дуги,
измеряемую при помощи новой масштабной единицы.
2°. Геодезические как экстремали
Уравнения Эйлера*.
Пусть кривая L соединяет в римановом пространстве Vn точки
Л10 и Mi и
хг=х1 (/),
(6)
* Эйлер (Euler) Леонард (15.4.1707—18.9.1783)—швейцарский математик,
член Петербургской ДН (с.1726 по 174L г. и с 1766 г.).
235
— ее параметрические уравнения, причем точке Мо отвечает зна-
чение t параметра, равное to, а точке —t—t\.
Рассмотрим семейство кривых Ле, зависящих от малого (чис-
лового) параметра е и функций ы‘:
X‘ = X‘(t, 8)=Х1 (0-f-8(O* (to^t^ij)-, (7)
функции (о'=(о‘(х1, ..., хп) обращаются .в нуль при t=t0 и t=t\:
О, ©‘1^=0. (8)
Ясно, что кривые LE также соединяют точки Л10 и Мь
Обратимся к функционалу
J(e)=J(хе)= j ф(х*, ... ,хп, х1, ... , xn)dt, (9)
(о
•г dxi
где х рассматривая его на кривых (8).
Разлагая J(е) по формуле Тейлора с центром в точке е=0,
получим, что
J (8)-J(0) = 8 J [ <0* + 0?] (/) dt + 0(8),
(о
где
• t да>{ :
(О* =---------- х',
дх1
дх1 dx‘
(0=-^(хЧ0> . .. • ,xn(t), x\t), ... ,х"(0).
dxi дх1
Величина
8J = С сог4--^о? ] (0dt
J [ дх1 dxi J v ’
to
(10)
называется первой вариацией функционала (9).
Интегрируя второе слагаемое в правой части формулы (10) и
учитывая условия (8), получим, что
— (1 (t)<jdt.
dt \ dxi I Г '
(И)
Говорят, что функционал (9) стационарен на кривой L, если
его вариация б/ равна нулю для всех <о‘ при достаточно малых е.
236
Кривая L называется в этом случае экстремалью функционала
(9).
УТВЕРЖДЕНИЕ. Кривая L является экстремалью функцио-
нала (9) в том и только в том случае, когда на L выполняются
соотношения
— = o (г = 1,...,п). (12)
dt \ дх1 / дх1
Соотношения (12) называются уравнениями Эйлера.
ТЕОРЕМА 5. Экстремалями функционала
s^Vgiiwwdt (1з)
Jr at at
*0
являются геодезические линии.
Другими словами, геодезические линии являются кривыми
•стационарной длины.
* Построим уравнения Эйлера для функционала (13).
Так как в рассматриваемом случае
<р (х1, ... , хп, х1, ... , хп) = Vgij (х1, ... , х”) х1х’,
то
дф = 1 dgtj -t-j = 1 dgi} -i -j
dxk 2V^xi dxk 2— &Xk
dt
-77- = — 1 ~ (gifikX1 + gijxWk) =
dxk 2VgijXixi
= —7— (gkjX! + gtkX1) = gkjX'
ds ds
2---- --------------------
dt dt
Подставляя найденные значения для и в левые ча-
dxk dxk
сти уравнений Эйлера (12) и производя необходимые преобразо-
вания, получим
/ • / ^2s \
| gux! + x!xk-------------—------— x!xk ] —5— — 0.
I dxk ds 2 dxl I ds
' dt ' dt
Пользуясь тем, что
г/., yiyk __1_ / dgjt , dgik dgih \ 'j‘k_
2 \ dx* dxi dx1 )
237
L (xi'x* -h x'xk—^- x’xk
4 \ dx* dx! dxi
x‘x !-~-^ShL xixkt
dx* 2 dxi
din
после умножения на получим
cPs
cPxi , r dx> dxk dxi dt2 n ,]ЛЛ
= (14)
di
Умножая соотношения (14) на gil и суммируя по i, с учетом тож-
деств .
giSgil=#i, = г)л
приходим к формуле
d2s
d2x! । г1 dxi dx* dx1 dt2 n
—T" 1 ; b ~*~* • - — -- V.
dt2 di dt dt ds
~dT
Если перейти от (произвольного) параметра t к длине дуги s
(канонический параметр), то окончательно получим
+ = (15)
ds2 ' ds ds
Таким образом, экстремалями функционала (13) являются
геодезические линии. Так как этот функционал — длина дуги, то
геодезические представляют собой линии стационарной длины. *
Замечание. Можно доказать, что любой достаточно малый
отрезок геодезической является кратчайшей среди всех спрям-
ляемых кривых, соединяющих его концы.
§ 5. СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ В РИМАНОВОМ
ПРОСТРАНСТВЕ
1°. Римановы координаты
Возьмем в римановом пространстве Vn некоторую точку
Мо(хо, ..., %"). Выбрав ее за начальную, проведем по всем на-
правлениям из этой точки геодезические. В качестве параметра
на каждой исходящей из точки Л40 геодезической выберем длину
дуги s, которую будем отсчитывать от точки Мо.
Параметрические уравнения каждой такой геодезической,
х1=хг(з),
238
определяются как решение системы уравнений геодезических
сРхк pfe dxi dx?
ds2 ds ds
(16)
при начальных условиях
x‘Is=o—x‘, —— —t.1 (i— 1, ri) (17)
ds s=o
(напомним, что длина вектора g* равна 1).
Каждой точке М на геодезической, отвечающей начальным
данным (17), ставится в соответствие п чисел
= (18)
где s — длина дуги MqM этой геодезической.
Определение. Числа у\ определяемые формулами (18),
называются римановыми координатами точки М; точке Мо отве-
чают нулевые римановы координаты: уо’ = О.
Отметим, что римановы координаты у1—это координаты век-
тора М0М' в касательном пространстве Еп в точке Мо простран-
ства Vn. При этом указанный вектор имеет длину, равную s, а
его направление в пространстве Еп определяется единичным век-
тором с координатами которому он и коллинеарен.
Докажем, что в римановом пространстве Vn вблизи точки Ма
введенные нами величины у* действительно можно рассматривать
как координаты точек.
Для этого нужно показать, что каждому упорядоченному на-
бору достаточно малых чисел у1,..., уп отвечает только одна точ-
ка М из некоторой окрестности точки Л40 пространства Vn.
Итак, пусть набор чисел у* задан. Рассмотрим в касательном
пространстве Еп в точке Мо точку М' с координатами у* (см. 1° и
2° § 2) и вычислим по обычным формулам 'евклидовой геометрии
длину s вектора М0М'. Затем, пользуясь формулами (18), най-
дем координаты & единичного вектора, коллинеарного вектору
М0М'.
По этим данным строим начальные условия (17) и из уравне-
ний (16) определяем геодезическую, проходящую через точку
.Мо, и точку М на ней так, что длина дуги М0М равна $.
Точка М имеет координаты х1,...,хп. Таким образом, из на-
ших рассуждений вытекает, что
xi=xi(y1, yn)(i=l,..., п). (19)
Из известных теорем теории дифференциальных уравнений
следует, что функции (19) как решения системы (16) будут не-
прерывны вместе с первыми производными.
Остается убедиться в том, что из соотношений (19) можно
найти у1 как функции от х\ т. е. разрешить уравнения (19) от-
239
иосительно у\ Для этого достаточно доказать, что в некоторой
окрестности точки Мо
detJu^x=D(xl' Ф0. (20)
У D (у1........
-/' i
Вычислим -—. С учетом формул (18), (19) имеем
dS
dx<- dxi dyi дх1 .
_ - — - - g .
as ду’ as dy>
Согласно условиям (17) в точке Af0 (s = 0)
dxi I
ds |s=o
Отсюда и из соотношений (21) получаем, что в точке А40 вы-
полняются равенства
Так как последнее соотношение справедливо для любого век-
тора g’, то дх1 I г.; =6/. dyl |s=o
Поэтому D^--’.xn\ I =detpqi =1^0. D (у1, .... yn) |м> \ dyl /|s=o
Отсюда dx^ и из непрерывности функций -у вытекает, что не-
равенство (20) выполняется в некоторой окрестности точки Л10.
Итак, мы доказали, что в некоторой окрестности произвольной
точки риманова пространства Vn можно ввести римановы коор-
динаты.
Свойства римановых координат.
1+. Пусть точка Мо — начало системы римановых координат
(у*). Тогда уравнения геодезической, исходящей из точки Af0 и
имеющей направляющий вектор £*, имеют вид
У1=&.
(22)
Равенства (22) достаточны для того, чтобы yi были римано-
выми координатами с началом в точке
В самом деле, из условий (22) вытекает, что = —— — на-
ds
чальный касательный вектор (в точке Мо), и поэтому римановы
координаты, построенные по способу, описанному выше, совпа-
дут с у*. , ,
240
2+ Функции'//’== g!'s удовлетворяют дифференциальным урав-
нениям геодезических
d2yk ph dyi dyl
ds2 ds ds
Отсюда и из равенств
dyc _ei d2yl _ Q
, d s ’ d s2
получаем, что
1Ш'=о.
Умножая эти соотношения на s2 и используя формулы (22), убеж-
даемся в том, что
Г11У1У!=О. (23>
Равенства (23) выполняются в каждой точке и представляют
собой достаточные условия того, чтобы у'- были римановыми ко-
ординатами.
Замечание. Если в точке Л40 метрический тензор
£о!м.=6о,
то римановы координаты называются нормальными координа-
тами.
3+. Вид линейного элемента в римановых координатах. Огра-
ничимся случаем, когда римановы координаты являются локаль-
но нормальными (см. пункт 3° § 2). Обозначим их через (х1,...
...,хп). Тогда, как доказано выше, разложение компонент мет-
рического тензора gkgix1...хп) по формуле Тейлора с центром
в точке Мо (0,..., 0) будет иметь следующий вид:
1 °
gk<l(xl> x',)=8k<l---+
О
о
(здесь RmMg— компоненты тензора Римана—Кристоффеля в точ-
ке Мо, р=угх1'+ ... +хп‘, третье слагаемое о(р2)—компоненты
тензора типа порядок малости которых относительно р вы-
ше второго).
Таким образом, линейный элемент в римановых координатах^
нормальных в данной точке Л40, можно записать так:
ds*= Мм— 4- RmkiQ^x + О (р2) dxk dx".
Полученная формула удобна в различных приложениях.
24/
2°. Полугеодезические координаты
Рассмотрим в римановом пространстве Уп гиперповерхность
Vn-1, определяемую параметрическими уравнениями
х1=х1(и\ .... u"-1) = л). (24)
Потребуем, чтобы ранг матрицы
был равен п—1 (это требование гарантирует независимость функ-
ций (24)).
Построим в каждой точке гиперповерхности Vn~l касательные
пространства Еп к объемлющему пространству Vn.
Пусть М=М (и1,..., un-1)—точка гиперповерхности Vn~l.
Введем на гиперповерхности V"-1 координатные линии.
Если и1 изменяется, а и2,..., и"-1 фиксированы, то соотноше-
ния (24) определят на гиперповерхности V"-1 кривую—(коорди-
натную) линию и1; касательный вектор к u’-линии расположен в
дх^~ дхп
касательном пространстве Еп и имеет координаты —-, .. ., ----.
ди1 ди1
Аналогично вводятся координатная линия и2,..., координат-
ная линия ип~1 и касательные векторы к ним.
Обратимся к матрице (25). Ее строки — координаты постро-
енных касательных векторов к линиям и*. Из того, что ранг мат-
рицы (25) равен числу этих векторов, вытекает, что построенные
векторы линейно независимы (рис. 4).
Линейную оболочку Еп~1 этих векторов можно рассматривать
как касательное пространство к гиперповерхности Vn~l.
В касательном пространстве Еп построим нормаль гр к про-
странству Еп~1 в точке 440. В направлении тр проведем из точки
М в римановом пространстве Vn геодезическую — геодезическую,
ортогональную к гиперповерхности И"-1.
Проделаем подобное построение в каждой точке гиперповерх’-
ности.
Рассмотрим точку М* риманова пространства Vn, расположен-
ную вблизи гиперповерхности Vn~l. Через эту точку проходит и
притом ровно одна геодезическая, ортогональная Vn-1. Предполо-
жим для определенности, что это геодезическая, исходящая из
точки М.
Обозначим через s длину дуги ММ* этой геодезической. Тогда
набор (и1,..., un~l, s), где и1..ип~1—координаты точки М,
можно рассматривать как координаты точки М* в пространстве
V".
Докажем это.
242
Рис. 4. Полугеодезическая координатная система
Из наших рассуждений следует,. что каждому набору чисел
и1,..., и”-1, 5 отвечает точка М* риманова пространства V71 и,
значит, ее координаты х1, ...,хп будут функциями u1,..., u"-1, s:
х1=х1(и\ ..., и"-1, s) (г = 1, п), (26).
причем при s = 0 эти функции совпадают с функциями (24).
Рассмотрим определитель
дхг дхп
ди1 ди1
дх1 дхп
dun~i ’ ’ ’ дип~1
дх1 дхп
ds ds
При s=0 его строки представляют собой координаты векторов,,
касательных к линиям и1,...,и"-1 гиперповерхности Vй""1 (пер-
вые п—1 строк), и вектора гр, ортогонального подпространству
Е71-1 (последняя строка). Эти п векторов линейно независимы.
Поэтому определитель (27) при 5=0 отличен от нуля.
В силу непрерывности частных производных функций (26)
этот определитель будет отличен от нуля в некоторой области
пространства V71, содержащей гиперповерхность' V””1.
Следовательно, в этой области (и1,..., un~l, s) являются ко-
ординатами в римановом пространстве V71.
(27).
243;
Построенные координаты называются полугеодезическими ко-
ординатами с базой Vn-1.
Свойства полугеодезических координат.
1+. Вид линейного элемента в полугеодезических координатах.
Будем обозначать полугеодезические координаты и1,.. •, un~l,s
<с базой следующим образом: х1.....х"-1, хп. Подчерк-
нем еще раз, что координатные линии хп — геодезические, пара-
метр хп вдоль которых — длина дуги. Эти геодезические пересе-
кают координатные гиперповерхности хп = const под прямым уг-
лом.
Пусть М — произвольная точка в окрестности базы Уп~г. Обо-
значим через
dx=(dx1, ..., dxn-i, dxn)
вектор смещения из точки М вдоль координатной линии хп. Ясно,
что
dx1 = ... =dxn~l = 0, dxn 0. (28)
Вектор смещения
бх=(бхх, ..., бх"-1, бхп)
из точки М по гиперповерхности xn=const обладает следующим
свойством:
бхп=0. (29)
Так как координатные линии хп ортогональны гиперповерхностям
xn=const, то скалярное произведение векторов dx и бх должно
быть равно нулю:
gijdx1бх' = 0.
Отсюда согласно формулам (28), (29) получаем
£п16х’ dxn+ ... +gn,n-i бхп—1 dxn=0.
Вследствие того, что dx”¥=0, а бх1,..., бхп-1 произвольны, при-
ходим к равенствам
gnl = 0> • • • У gn,n—l — 0.
Запишем теперь общее выражение линейного элемента dsz=
—gudx^xi для смещения вдоль координатной линии xn=s. Так
как в этом случае dx!= ... =dx"-1=0 и dxn = ds, то
ds2 — gnndxn‘=gnndsi.
Тем самым
gnn= 1 •
244
Таким образом, линейный элемент ds2 в полугеодезической си-
стеме координат х1,...,хп-1, хп с базой Уп-1 имеет следующий
вид:
ds2=gijdxi dx1 + dxn’ (/, j=l, n—1).
2+ Эквидистантные гиперповерхности. Пусть Vn-1 — гиперпо-
верхность в римановом пространстве Vn. Проведем через произ-
вольную точку М гиперповерхности У"-’ ортогональную - ей гео-
дезическую и отложим на этой геодезической от точки М отрезок
длины а. Поступим так с каждой геодезической, ортогональной
гиперповерхности Vn~', и рассмотрим множество концов постро-
енных отрезков. Это множество является гиперповерхностью
* *
V"-1 пространства Vn. Гиперповерхность У”-1 называется экви-
дистантной по отношению к заданной гиперповерхности Vn~~!.
Замечание. Так как от каждой точки гиперповерхности на
ортогональной ей геодезической можно отложить два отрезка од-
ной и той же длины, то в результате предложенного построения
получится два множества, разделенных гиперповерхностью Vn~l.
Каждое из них будет гиперповерхностью, эквидистантной по от-
ношению к Уга-1.
Справедливо следующее свойство эквидистантной гиперповерх-
ности У"-1. Любая геодезическая, ортогональная гиперповерхно-
сти Vn~!, будет ортогональна и эквидистантной ей гиперповерхно-
сти У”-1.
Фактически это свойство было установлено еще в самом нача-
ле этого пункта, когда речь шла о построении полугеодезических
координат. Построенные там координатные гиперповерхности
xn=const, эквидистантные по отношению к базе У"-1, пересекают
геодезические, ортогональные гиперповерхности Vn~l, под пря-
мым углом.
Укажем одно свойство эквидистантных поверхностей в трех-
мерном евклидовом пространстве £3.
Пусть V2 — замкнутая выпуклая регулярная поверхность. От-
ложим на нормалях к поверхности У2 (это геодезические в про-
странстве Е3, ортогональные поверхности V2) во внешнюю ciopo-
ну отрезки постоянной длины а. Концы этих отрезков образуют
эквидистантную поверхность V2 по, отношению к заданной V2.
Площади S и S поверхностей V2 и V2 связаны соотношением
S = S + 4na2.
Доказательство предоставляется читателю.
Это равенство обобщается на многомерный случай.
СВОДКА ОСНОВНЫХ ПОНЯТИЙ, ФОРМУЛ, ФАКТОВ
А. Поле симметричного тензора gi,(М) (х1,.. ,,х"), за-
данное на открытом множестве {М} пространства Rn, определяет
'245
на нем риманову метрику ds2=gijdxidx\ если эта дифференци-
альная форма положительно определена.
Множество {М} точек из пространства Rn, в котором введена
риманова метрика, называется п-мерным римановым простран-
ством.
Б. n-мерное евклидово пространство с линейным элементом
dsQ=gij(xl0, ..., x’^)dxidxl называется касательным евклидовым
пространством в точке М0(х’, ..., х£)/г-мерного риманова про-
странства с линейным элементом ds2=ga(x1,...,xn)dxidxi.
В. Координаты (х1, ...,х") в римановом пространстве называ-
ются нормальными в точке Мо(0,..., 0), если
Яо1м0=^7(0, .... 0)=6.7, =>(0, .... 0)=0.
дхк м0 дхк
Г. Каноническое разложение метрического тензора: в любом
n-мерном римановом пространстве для всякой его точки Мо суще-
ствует координатная система (х1,... ,хп), нормальная в точке Мо.
и такая, что разложение компонент ^(х1,.... х") метрического
тензора этого пространства по формуле Тейлора с центром в точ-
ке Мо (0,..., 0) имеет вид
gkq(x\ ..., x-)=8kq—L RmhIq(0, ..., 0)xmxi+o(xI‘+...+x'’2).
О
Д. Уравнение параллельного переноса вектора g= (g1, :
— Г^г dx1.
Е. Абсолютный дифференциал тензора типа j:
где
। __ГР-Tll'."lp _ __rPTI.i"'.p
• • • h-.-lq 1 kld ml2...Iq 1 klql !t..
— абсолютная производная тензора.
Ж.
где X и ц — произвольные постоянные.
р st)=И:. sf.i+
246
_Ji...t
Tii--iqV
3. Говорят, что тензор
параллельно переносится вдоль
кривой L, если вдоль этой кривой имеет место равенство
Линейная комбинация и произведение параллельно переносимых
тензоров переносятся параллельно.
Dgi}—0, Пб{=0, Dgli=Q.
При параллельном перенесении векторов g и т] вдоль кривой их
скалярное произведение <g, т]> не изменяется.
И. Кривая L в римановом пространстве называется геодези-
ческой, если вектор касательной к L в какой-либо ее точке при
параллельном переносе вдоль L остается вектором касательной.
К. Параметр т, для которого векторы касательной обра-
зуют вдоль геодезической поле параллельных векторов (вектор
-dxi - переносится параллельно вдоль геодезической), называет-
dr
ся каноническим параметром.
На любой геодезической в качестве параметра можно выбрать
канонический.
Из любой точки риманова пространства по заданному направ-
лению в этой точке исходит единственная геодезическая.
Дифференциальные уравнения геодезических:
d2xk . „ь dx1 dxi
~ ' т— | A i i ~ ~ - О -
dr2 dr dr
т — канонический параметр, в частности длина дуги геодезиче-
ской.
Экстремалями функционала
1/ su—-------r-dt
Jr dt dt
io
являются геодезические линии.
Любой достаточно малый отрезок геодезической является
кратчайшей среди всех спрямляемых кривых, соединяющих его
концы.
УПРАЖНЕНИЯ
1. Вычислить площадь круга радиуса г на: а) евклидовой
плоскости; б) сфере радиуса R>nr\ в) плоскости Лобачевского.
Ответ:
а) яг2; б) 2nR2 i 1—cos
; в) 2л (chг—1).
247
2. Вычислить’общее число независимых компонент тензора Ри-
мана—Кристоффеля при: а) п = 2; б) п=3; в) n=k. Ответ: а) 1;
б) 6; в) k2(k2—1)/12.
3. Вычислить компоненты тензора Римана—Кристоффеля для
плоскости Лобачевского.
Ответ: T?i2ia = ^aiia==^aiai= ^1221= det
(Sa — компоненты метрического тензора плоскости Лобачевско-
го), остальные компоненты тензора Римана—Кристоффеля рав-
ны нулю.
4. Описать геодезические линии следующих римановых про-
странств: а) евклидовой плоскости; б) двумерного тора; в) дву-
мерной сферы; г) плоскости Лобачевского.
ГЛАВА 5
ГЛАДКИЕ МНОГООБРАЗИЯ
В курсе математического анализа вводятся и систематически
изучаются такие важнейшие операции над функциями одной и
нескольких переменных, как дифференцирование и интегрирова-
ние. Их свойства хорошо известны. В приложениях часто прихо-
дится рассматривать функции, заданные на множествах более
сложной природы, чем прямая, плоскость или п-мерное коорди-
натное пространство Rn. В этих случаях знакомый аппарат диф-
ференциального и интегрального исчисления напрямую уже, как
правило, не работает. Однако идеи, лежащие в его основании, до-
пускают обобщение и развитие, столь необходимые в подобных
ситуациях. Возникает то, что иногда принято называть анализом
на многообразиях. При этом, конечно, отталкиваются от извест-
ных фактов математического анализа.
Чтобы как-то пояснить возникающие проблемы, обратимся к
простому примеру.
Пусть на сфере задана некоторая функция. Специально под-
черкнем, что функция задается в точках сферы и ни в одной точ-
ке, на этой сфере на лежащей, она не определена. Уже здесь, на
этом примере, можно увидеть и трудности, которые возникают
при попытках непосредственного перенесения основных операций
математического анализа, и пути их преодоления.
Если функция задается на плоскости, то для изучения ее
свойств естественно ввести на всей плоскости прямоугольную де-
картову систему координат и далее работать с этой функцией
как с функцией двух переменных известными методами. На сфе-
ре подобной единой координатной системы просто нет. Правда,
можно ввести координатную систему локально, в окрестности
каждой точки. Однако введение локальных координат — опера-
ция неоднозначная, даже в одной окрестности их можно вводить
многими способами. Соответственно каждый раз будут возникать
новые функции, и в какой мере свойства этих функций будут свя-
заны между собой, далеко не ясно.
Нельзя не сказать и о другом подходе. В ряде случаев удается
( продолжить заданную функцию на большее множество. Естест-
венно, это продолжение зависит и от исходного множества и от
заданной функции.
Например, для сферы
x2+«/2+z2=l
249
таковым множеством может служить содержащий ее шаровой
слой
1—е<х2 + г/2 + г2<: 1
где е>0 и достаточно мало.
На этом большем множестве у новой функции можно найти
необходимые производные, а затем рассматривать их значения
только в точках сферы.
Но при таком подходе возникает естественный вопрос: на-
сколько полученные результаты будут зависеть от способа про-
должения функции на большее множество?
Еще один вопрос: можно ли заданную функцию проинтегриро-
вать по сфере, и если можно, то как это сделать? Разумеется, от-
вет на него нужно искать на путях сведения этой задачи к обыч-
ному кратному интегрированию. Но и здесь нужно разобраться с
локальными координатами.
Пытаясь найти удовлетворительные ответы на поставленные
вопросы, мы поступим следующим образом. Сначала введем и
изучим класс тех множеств (более сложных, чем координатное
пространство Rn), на которых будут проводиться основные рас-
смотрения (гладкие многообразия). Затем перейдем к описанию
класса функций на этих множествах, для которых будет строить-
ся новый аппарат (гладкие функции и гладкие отображения).
Далее попробуем ввести операции дифференцирования и интегри-
рования. Естественно, следует стремиться к тому, чтобы в рас-
сматриваемый класс множеств вошло и пространство Rn, а раз-
виваемые понятия и операции приводили в этом случае к извест-
ным результатам, пусть даже и в несколько непривычной форме.
Конечно, абсолютно все сохранить не удается: у пространства
R”, как и у любого другого множества, есть свои, только ему
присущие свойства. Поступаясь деталями, мы будем стараться
сохранить главное. Следует, однако, иметь в виду, что одно и то
же хорошо известное понятие может допускать различные обоб-
щения (разумеется, связанные между собой). Все зависит от то-
го, от каких сторон рассматриваемого явления мы будем отталки-
ваться и в каком направлении вести эти обобщения.
§ 1. НЕКОТОРЫЕ ПОНЯТИЯ топологии
Мы начнем изложение с короткого рассказа о некоторых ос-
новных топологических понятиях, ограничиваясь описанием толь-
ко тех фактов, которые будут использоваться в дальнейшем, и
опуская доказательства.
1°. Топология координатного пространства
Введем в n-мерном координатном пространстве Rn важный
класс подмножеств — открытые множества — и изучим некоторые
их свойства.
250
Начнем с определений.
Напомним, что расстояние между точками р=(р\... ,рп) и
(<?',..., qn) пространства R" определяется формулой
/п
S (рг —<7?.
Пусть г>0некоторое число.
Множество
Вп(р, r) = {q<=Rn\ \q-p\<r}
называется п-мерным открытым шаром радиуса г с центром в
точке р.
' Подмножество б координатного пространства Rn называется
открытым множеством, если для каждой точки р из б можно
указать открытый шар с центром в этой точке, целиком лежа-
щий в б.
Простейшим примером открытого множества является само
координатное пространство (рис. 1).
Рис. 1. Открытый круг — открытое Рис. 2. Открытый угол с верши-
множество на плоскости ной О
Пустое множество 0 будем считать открытым по определе-
нию.
Класс открытых множеств обладает следующими легко про-
веряемыми свойствами: его элементами являются
1+. Все пространство.
2+. Пустое множество.
3+. Пересечение двух открытых множеств.
4+ Объединение любого числа открытых множеств.
2°. Топологическое пространство
Обратимся теперь к общему случаю.
Пусть Зв — произвольное множество. Его элементы будем на-
зывать точками.
251
Обозначим через
?r = {Ua}
семейство его подмножеств Ua, подчиненное следующим услови-
ям: семейству ЗГ принадлежат
1. Само множество 38.
2. Пустое множество 0.
3. Пересечение двух множеств из семейства .
4. Объединение любого числа множеств из семейства 8Г.
Семейство подмножеств с указанными свойствами всегда су-
ществует, и как правило, не одно.
Определение. Семейство 8Г подмножеств множества 38,
удовлетворяющее условиям 1—4, называется топологией, на мно-
жестве 38.
Множество 38 вместе с семейством ЗГ называется топологиче-
ским пространством и обозначается через {33, 3~), часто просто
через 33.
Пример 1. Открытые множества из пункта 1° задают топо-
логию в пространстве R"; она называется естественной.
Множества Ua из семейства ЗГ называют открытыми множе-
ствами (по аналогии с рассмотренным выше случаем ^=R").
Пример 2. Введем на плоскости R2 топологию, отличную от
естественной.
Пусть О — фиксированная точка R2 и Zi, 12— лучи, исходящие
из точки О. Часть плоскости, лежащую между лучами Ц и I2, ис-
ключая точки на самих лучах, будем называть открытым углом
с вершиной О (рис. 2).
Открытым назовем всякое множество, которое можно пред-
ставить в виде объединения открытых углов с вершиной О.
Нетрудно проверить, что тем самым на плоскости R2 вводится
топология; она называется конической. *
Другой важный класс множеств образуют замкнутые множе-
ства.
Определение. Подмножество F топологического простран-
ства 33 называется замкнутым, если его дополнение 33 \F от-
крыто.
Пример 3. Множество
R+ = {(p1, .... pn)eRn|p">0}
является замкнутым подмножеством пространства R”: его допол-
нение
{(р\ ..., pn)eRn|p"<0}
открыто. !
Свойства замкнутых множеств.
1+. Пустое множество 0 замкнуто.
2+. Само множество 38 замкнуто.
3+. Объединение двух замкнутых множеств замкнуто.
4+ Пересечение любого числа замкнутых множеств замкнуто.
252
Пусть QJ — произвольное подмножество топологического про-
странства ЗВ.
Рассмотрим всевозможные содержащиеся в нем открытые мно-
жества. Их объединение (оно является открытым множеством),
называется внутренностью множества
Обозначение: int
Пересечение всевозможных замкнутых множеств, содержащих
(оно также является замкнутым), называется замыканием
множества °у. _
Обозначения: с1<^,
Множество
дУ = с.\<У \ int?/
называется границей множества
Пример 4. Рассмотрим на плоскости R2 множество
^ = {(Р\ Р2)|0<р1< 1, 0<р2^ 1}.
Тогда
int?/ = {(p1, р2)|0<р1< 1, 0<р2< 1}
— открытый квадрат,
cl?/ = {(p1, р2) 10 р15^ 1, 0<p2sC 1}
— замкнутый квадрат, границу
ОАВС (рис. 3). *
д°у образуют стороны квадрата
Рис. 3. Множество Z ни открыто
ни замкнуто
Рнс. 4. Определение непрерывности
функции
Пусть х — произвольная точка топологического простран-
ства ЗВ.
Определение. Окрестностью точки х называется всякое
открытое множество, содержащее эту точку.
Открытое множество является окрестностью каждой своей
точки.
253
3°. Топологическое подпространство
Пусть 36— топологическое пространство и — непустое под-
множество 36.
Топология пространства 36 определяет некоторую топологию
на множестве
Определение. Топологией на множестве ^/, индуцирован-
ной топологией пространства 36, называется совокупность мно-
жеств вида где U— открытое множество в пространстве 36.
Подмножество °Ц<^.36, снабженное так построенной (индуци-
рованной) топологией, называется топологическим подпростран-
ством топологического пространства 36.
Пример. Рассмотрим в координатном пространстве Rn под-
множество
Sn~\p, r) = {q<= R"|\р—<7| —г}
— (п—1)-мерную сферу радиуса г с центром в точке р. Сфера
5п-1(р, г) является топологическим подпространством простран-
ства Rn; топология на ней индуцируется естественной топологией
координатного пространства R".
4°. Непрерывное отображение. Гомеоморфизм
Непрерывное отображение является естественным обобщением
непрерывной функции.
Пусть 36 и — топологические пространства и f — отображе-
ние пространства 36 в пространство
/: 36^-
Определение. Отображение ^-.Зб-^Ц- называется непре-
рывным в точке х из 36, если для любой окрестности V точки f(x)
в пространстве 36 найдется окрестность (7 точки х, такая, что
Z(t7)<=V.
Отображение / называется непрерывным, если оно непрерыв-
но в каждой точке пространства 36.
Пример. Пусть ^’ = R1, <y=R1 (прямая R1 наделена естест-
венной топологией).
Обычное определение непрерывности функции у=/(х) в точ-
ке х:
для любого е>0 найдется б=б(е)>0, такое, что для всякого
t, подчиненного условию
х—8<Кх + 8,
выполняется неравенство
/(х)—е</(/)</(х) + е
— равносильно данному определению (рис. 4). *
254
Простейшим примером непрерывного отображения топологи-
ческого пространства ЗВ на себя является тождественное отобра-
жение:
: ЗВ —>•Ж, lsc(x) = x.
Свойства непрерывных отображений.
1+. Отображение ]\ЗВ-^-аУ- непрерывно тогда и только тогда
когда прообраз любого множества, открытого в открыт в ЗВ.
2+. Отображение f: ЗВ-^Ц непрерывно тогда и только тогда,
когда прообраз любого множества, замкнутого в <у, замкнут
в ЗВ.
3+. Композиция g°f: 3B^>-3j непрерывных отображений f-.SB^-
-+0/ и является непрерывным отображением:
g°f'-X~ g(f (х)).
ж X
Особое значение имеют непрерывные отображения, у которых
существуют и непрерывны обратные отображения.
Пусть ЗВ и — топологические пространства и отображение
^\ЗВ-^-!У- обратимо, т. е. существует отображение
-,У-^Ж,
такое, что
ГМ=к /оГ' = Ь-
Определение. Будем говорить, что топологическое про-
странство ЗВ гомеоморфно топологическому пространству если
оба отображения
f-1 -у-^Ж
непрерывны.
Обозначение: ЗВ^Ц- (читается: ЗВ гомеоморфно <У).
В этом случае отображения f и f~l называются гомеоморфны-
ми отображениями, или гомеоморфизмами (рис. 5).
Пример. Координатное пространство R” гомеоморфно от-
крытому шару В"=ВИ(О, 1).
Соответствующие гомеоморфизмы задаются так: отображение
формулой
X
1+1*1 ’
или, подробнее,
255
Рис. 5. Квадрат ABCD гомеоморфен
окружности
Рис. 6. Открытый круг на плоскости
R2 можно представить в виде объ-
единения бесконечного числа пря-
моугольников со сторонами, парал-
лельными координатным осям, —
произведений интервалов (откры-
тых множеств из S?=R' и из =
= R‘)
отображение
формулой
или, подробнее,
5°. Топологическое произведение
Пусть <2? и У—топологические пространства. Декартово произве-
дение ЗСу.У определяется как совокупность всевозможных пар (х, у),
где х е <2? и у У.
Введем во множестве ЭСлУ топологию, связав ее с топологиями
в 38 и в У. Это семейство элементами которого являются
объединения декартовых произведений открытых множеств из прост-
ранств 38 и У. Типичным представителем семейства цГ^хэ1 является
множество вида
U
аеЛ
где множества Ua открыты в 38, а множества Va открыты в
для любого а из множества индексов А.
256
Определение. Декартово произведение наделенное
описанной выше топологией, называется топологическим произве-
дением пространства ЗВ на пространство .
Пример 1. Пусть j?7=R1, C^ = R1 (Rl — прямая с естествен-
ной топологией). Тогда ^’X^=R1XR1 = R2 — плоскость с естест-
венной топологией (рис. 6).
Пример 2. Топологическое произведение 7'2=S1X51, где
<S1=Si (0, 1)—окружность единичного радиуса с центром в О,
называется тором (рис. 7).
Рис. 7. Тор — топологическое про-
изведение двух окружностей
Рис. 8. Точки х и у отделимы
6°. Связность
Определение. Топологическое пространство ЗВ называется
(линейно) связным, если для любых его точек х и у существует
непрерывное отображение
f:[0,
такое, что /(0)=^ и /(1)=у.
Пример 1. Координатное пространство R” (линейно)
связно.
Пусть х и у — точки из R".
Соответствующее отображение
/: [0, l]->Rn
задается так:
f(t)=(l — t)x + ty, OsC^l. *
Свойства (линейно) связных пространств.
1+. Образ (линейно) связного множества при непрерывном
•отображении (линейно) связен.
2+ Топологическое произведение (линейно) связных про-
странств (линейно) связно.
Пример 2. Окружность S1 (линейно) связна—любые две
ее точки можно соединить дугой.
Тор Т2 (линейно) связен как топологическое произведение
двух (линейно) связных множеств — окружностей.
9 Зак. 259 2 57
7°. Отделимость
Определение. Топологическое пространство 38 называете»
хаусдорфовым, если у любой пары различных точек х и у из 38
найдутся непересекающиеся окрестности [7(х) и U(y)' £7(х)П
(W(y)=0.
Пример 1. Координатное пространство R" и любое его то-
пологическое подпространство являются хаусдорфовыми про-
странствами (рис. 8).
Декартово произведение хаусдорфовых пространств является
хаусдорфовым.
Всюду в дальнейшем будем считать топологические простран-
ства хаусдорфовыми *.
Определение. Топологическое пространство 38 называется
нормальным, если оно хаусдорфово и для любых двух непересе-
кающихся замкнутых множеств Fx и Т2 существуют непересекаю-
щиеся открытые множества U^Fi и U2zz>F2 (рис. 9).
Рис. 9. Замкнутые множества £1={(х, j/)|xy>l} и F2=
= {(х, У)\ху<— 1} отделимы: Ui={(x, у)\ху> — }, U2=
= {(х. у)\ху<— у }
Пример 2. Координатное пространство R" с естественной
топологией и любое его топологическое подпространство являются
нормальными пространствами.
8°. Компактность
Пусть ‘V — подмножество топологического пространства 38.
Семейство {СЦ открытых множеств, такое, что любая точка
из принадлежит хотя бы одному из множеств (7а, называется
открытым покрытием
* Хаусдорф (Hausdorff) Феликс (8.11.1868—26.1.1942) — немецкий мате-
матик.
258
Подпокрытие — это покрытие, все множества которого при-
надлежат исходному покрытию.
Определение. Топологическое пространство называется
компактным, если всякое его открытое покрытие содержит конеч-
ное подпокрытие.
Пример 1. Отрезок [а, Ь] прямой R1 является компактным
пространством.
Пример 2. Прямая R1 некомпактна: из открытого покрытия
{(п—1, «+ 1)1 ne Z}
нельзя выделить конечного подпокрытия.
Свойства компактных пространств.
1+. Компактное пространство нормально.
2+. Образ компактного пространства при непрерывном отобра-
жении является компактным пространством.
3+. Замкнутое подмножество компактного пространства ком-
пактно.
4+. Топологическое произведение компактных пространств яв-
ляется компактным пространством.
5+ Компактное подмножество хаусдорфова пространства яв-
ляется замкнутым множеством.
9°. Топологическое многообразие
Пусть v# — хаусдорфово топологическое пространство.
Открытой картой на Л назовем пару (L7, х), где U — откры-
тое подмножество пространства Л, а х— гомеоморфизм подмно-
жества U на открытое подмножество координатного простран-
ства Rn: каждой точке р из U ставится во взаимно однозначное
соответствие набор из п чисел, ее локальных координат
х : р^(хЦр), .... хп(р)).
ГО ГО
U x(U)
Пример 1. Рассмотрим в координатном пространстве R3 еди-
ничную сферу S2:
Р12 + Р22 + Р32 = 1 (рис. 10).
'Сфера S2 является топологическим подпространством простран-
ства R3. Пара (U+, л+), где U+ — множество точек (р1, р2, р3)
на S2, у которых р3>0, а л+— проектирование на плоскость R2,
определяемое по правилу
л+ : (р1, р2, р3)е »—* (х1, х2)е R2,
Х1 = Р1, Х2=Р2,
является открытой картой на S2 (рис. И).
9*
259
Рис. 11. Локальные координаты на верхней полусфере
В самом деле, подмножество U+ открыто в S2 (как пересече-
ние S2 с открытым полупространством {(р1, р2, р3) |р3>0}); отоб-
ражение л+ непрерывно, обратное к нему определяется так:
р1 = х1, р2 = х2, р3 = ]/1—х12—х22
и также непрерывно. Образом U+ при отображении л+ является»
единичный открытый круг. *
Допустим, что на множестве Л. существуют две открытые кар-
ты (U, х) и (V, у), такие, что множества x(t7) и y(V) открыты в-
пространстве R”. Тогда, как нетрудно проверить, отображение
р°х-1 является гомеоморфизмом открытой области x(L7GV) про-
странства R" на открытую область y(U(]V) пространства R”:
рдг' : х(£/П V)-+y(Uft V).
П П
R” R"
Это вытекает из того, что отображение, обратное гомеомор-
физму, и композиция гомеоморфизмов также являются гомеомор-
физмами (рис. 12).
260
Рис. 12. Схема перехода от одной локальной карты к другой
Отображение у°х~' в локальных координатах можно задать
так:
у1 =у1(х1, ..., хп),
................. (•)
уп = уп(х\ ..., хп).
Формулы (*) называют формулами преобразования локаль-
ных координат, или формулами перехода; функции у’хп)
называют функциями перехода.
Пример 2. Рассмотрим на сфере S2 еще одну открытую кар-
ту (У+, р+), где V+ — множество точек (р1, р2, р3) сферы S2, у ко-
торых р2>0, а р+ — проектирование V+ на плоскость R2, проводи-
мое по правилу (рис. 13)
о+ : (р1, р2, р3) — (у1, у2),
m (п
V+ R2
Ух=р', У2=Р2.
Построим отображение р+°л+_ . Другими словами, выразим
у* через х\ Имеем (рис. 14)
у'=х\ у2 = /1—X1’—X2’.
261
Рис. 13. Локальные координаты на правой полусфере
Рис. 14. Преобразование локальных координат на сфере
Аналогично строится карта (1^+> £+) : W+— множество точек
S2, у которых р1>0,
: (р1, р2, р3)~(г\ г2),
Z^=fF, z2 = p3. *
262
Пусть А — конечное или счетное множество.
Топологическое пространство Л будем называть п-мерным то-
пологическим многообразием, если найдется набор открытых
карт (Ua, ха), аеД, такой, что:
1) для любого а из множества индексов A xa(Ua) является
открытым подмножеством пространства Rn;
2) Jt=UasAUa.
Такой набор карт называется атласом топологического много-
образия (рис. 15).
Рис. 15. Топологические пространства, не являющиеся топологическими много-
образиями
Обозначение: (Л).
Если ([7О, ха) и ([7е, хр)—произвольные карты из атласа SI
топологического многообразия Л, то отображение
х& ° х-1 ха (Ua f) U&) хр (Ua 0 U&)
п л
D'1 Р'1
непрерывно; оно отображает открытую область пространства R"
на открытую область пространства Rn.
Пример 3. Сфера S2 представляет собой двумерное тополо-
гическое многообразие: атлас сферы образуют шесть карт
(1/±, л±), (У±, р±), (^±, £±);
здесь [7_ — множество точек S2, у которых р®<0,
л_ : (р1, р2, р3)-^(х\ ха),
m m
[/_ R2
x1 = p1, x2 = p2
.Карты (V_, p_) и (W7-, g_) определяются аналогично. *
Пример 4. Множество R2x2 невырожденных матриц второ-
го порядка с вещественными элементами является четырехмер-
263
ным топологическим многообразием. Это вытекает из того, что
множество
Q — {(ап, а12, а21,
®2г) I *^11*^22 *^12*^21 Q}
открыто в R4, а отображение Ягх2 на Q, определяемое по пра-
вилу
(Ч1 а12\ а12> а21( а22)1
\«21 “22/
является гомеоморфизмом. *
Одно и то же топологическое многообразие имеет много раз-
личных атласов.
Пример 5. Рассмотрим в пространстве Rn+1 n-мерную сферу
Sn — множество точек р=(р1......р”+1), координаты р1,... ,pn+l
которых удовлетворяют равенству
rt-f-1
E(p?=i-
i=l
Пара (Sn\A\ nN), где N=(0......О, 1)—северный полюс, а
jtjv — стереографическая проекция из N на пространство Rn,
определяемая по правилу
Лдг: р = (р1, ..., рп+1)‘->-(х1, ..., хп),
х‘ — —0’ —1 > • • •» л)>
1 — рМ-1 v , » /.
является открытой картой на Sn (рис. 16).
Рис. 16. Стереографическая проек-
ция (из «северного» полюса)
В самом деле, подмножество Sn\JV открыто в Sn (как дополне-
ние к замкнутому множеству — точке N). Отображение п» непре-
рывно; обратное к нему определяется так:
264
п
i-S*1’
pk =----, pn+l =-----------5=1- Z>=1....n
1 + 3 x/* 4-jSx*’
/=1 i=l
и тоже непрерывно. Ясно, что лл-(Sn\ ?V) = Rn.
Рассмотрим на Sn еще одну открытую карту —(S^XS, ns),
где S=(0, —1)—южный полюс, a ns — стереографическая
проекция из S на пространство R”:
% ’• РНЛ • •, P"+I)-*(У1, • • •. Уп),
ti=l....п)
и ns(Sn\S) = Rn (рис. 17).
Карты (5"\Л\ «2^) и (SKVS, ns) образуют атлас сферы Sn.
Тем самым сфера Sn — «-мерное топологическое многообразие.
При п=2 получаем еще один атлас для двумерной сферы S2
(состоящий из двух карт): (S2\A\ nN) и (S2\5, ns).
Построим отображение т. е. выразим yi через х1’.
Подставляя в равенство
4+4=2 (t-=i.........п)
х‘ у1
выражение для р* через х\ после простых вычислений получаем,
что
У‘ =—4------ (/ = 1, • •., п) •
2 Ч)2
i=l
§ 2. ГЛАДКИЕ МНОГООБРАЗИЯ
1°. Основное определение
Пусть Л— п-мерное топологическое многообразие и 31—ат-
лас многообразия Л. Возьмем в атласе Ж две любые карты
(U,x) и (К у).
Определение. Координатное преобразование
:x(U[}V)-+y(U{]V)
п п
Rn R"
называется гладким, если описывающие его функции перехода
ух=у1{хг, ..., хп), ..., уп = уп(х1, ..., хп)
265
имеют в открытой области x([7QV) непрерывные частные произ-
водные всех порядков (бесконечно дифференцируемы, принад-
лежат классу С°°) и якобиан
det
ду‘ \
dxk ]
отличен от нуля.
Это позволяет утверждать, что и координатное преобразова-
ние х°у~] также будет гладким, т. е. соответствующие функции
перехода
х1=х1(у1, ..., уп), хп = хп(у1, ..., уп)
будут иметь в области у (URY) непрерывные частные производ-
ные всех порядков.
Определение. Будем говорить, что л-мерное топологиче-
ское многообразие Л имеет гладкую структуру, если существует
атлас 31 многообразия, обладающий следующими свойствами:
1) для любых двух карт из 31 соответствующее координатное
преобразование является гладким;
2) атлас 31 максимален.
Разъяснение. Под максимальностью атласа 31 понимает-
ся следующее.
Пусть (W, г)—открытая карта, такая, что для любой карты
(U, х) из атласа 81 преобразование
z.x-1 : x(U W)
п Л
R” R”
является гладким. Тогда карта (W7, z) также принадлежит ат-
ласу 31. *
На практике для того, чтобы убедиться в том, что многообра-
зие имеет гладкую структуру, достаточно проверить только вы-
полнение условия 1. Это вытекает из того, что любой атлас мож-
но дополнить, притом единственным образом, до максимального.
Подобное дополнение строят при помощи всевозможных допу-
стимых карт.
Определение. Карта (W, z) называется допустимой для
данного атласа 31, если для любой карты (U, х) из 31 отображе-
ние
zox-1 :
П П
Rn R"
является гладким.
В дальнейшем, когда это потребуется, будем считать, что до-
пустимая карта принадлежит заданному атласу.
Пример. Рассмотрим на прямой R1 атлас, состоящий из од-
ной карты (R1, х), где х : р'^х'—р'—тождественное преобразо-
266
вание. Открытая карта (R1, у), где у:р1'-*у1=(р1)3, не является
допустимой. Координатные преобразования имеют вид
соответственно. Первая из этих функций имеет непрерывные част-
ные производные всех порядков, у второй нет в нуле даже пер-
вой производной.*
Замечание. В приложениях встречаются случаи как глад-
кой структуры порядка k (функции перехода у*—у1(х\..., хп)
(1=1,..., п) имеют в области задания непрерывные частные про-
изводные до порядка k включительно, принадлежат классу Cft),
так и аналитической структуры (функции yi=yi(x1,...,xn) (i=
= 1,...,п) являются аналитическими, принадлежат классу Са).
Определение, n-мерное топологическое многообразие,
имеющее гладкую структуру, называется п-мерным гладким мно-
гообразием.
Иногда, чтобы уточнить порядок гладкости, говорят о многооб-
разии класса С°°, или класса Ск, или класса Са.
Можно сказать и так: гладкое многообразие — это топологиче-
ское многообразие, у которого все координатные преобразования
являются гладкими.
Пример 1. Координатное пространство Rn является п-мер-
ным гладким многообразием: атлас состоит из одной открытой
карты (Rn, lRn), где lRn : Rn->-Rn— тождественное отображе-
ние. *
Пример 2. Сфера Sn из пространства Rn+1 является п-мер-
ным гладким многообразием: соответствующий атлас состоит из
двух карт (Sn\./V, nN) и (S^XS, ns).
Проверим это:
1) (Sn\A0U(S”\S) = Sn;
2) функции перехода
У' = -^-— (/ = 1, .... п),
i=l
описывающие отображение л^л-1, имеют в Rn\(0...........0) не-
прерывные частные производные всех порядков. *
Пример 3. Множество R2X2 невырожденных вещественных
матриц второго порядка — четырехмерное гладкое многообра-
зие. *
Пусть Л— гладкое многообразие и й— атлас Л. Карту
(С/, х) из 31 часто называют локальной картой на многообразии,
или локальной координатной системой на Л.
Если p^U и х(р) = (х1(р),...,хп(р)), то область U называют
координатной окрестностью точки р, а числа х1(р),... ,хп(р)—
локальными координатами точки р.
267
Пусть р — произвольная точка п-мерного гладкого многообра-
зия Jt. В атласе 31 всегда найдется карта (17, х), такая, что U —
координатная окрестность ’ точки р. Не ограничивая общности,
можно считать, что
1) х(р) = (0.0);
2) x(U) —открытый шар пространства Rn с центром в точке
(0..0).
Покажем это.
1. Пусть (V, у), p<=V,— карта из 31 и
гр(р)=а* (г*=1,.
Построим новое отображение (рис. 18)
х: V->R"
Рис. 18. Точка р имеет нулевые локальные координаты
по правилу
х=т°у,
где т: Rn-*Rn — сдвиг, определяемый формулой
^(у1, ..., уп) = (х1, .... х") = (у1—а1, ..., уп—а")
2. Пусть (V, х), реУ,— карта из 31 и х*(р)=0, (i=l,...,n).
268
Так как точка О=(0, ...,0) принадлежит открытой области
лс(Е) пространства Rn, то существует' открытый шар Вп(0, г) с
центром в этой точке, целиком лежащий в х(Е). Его прообраз U=
=х-1(Вп(0, г)) — открытое множество .многообразия Л
(рис. 19). *
Рис. 19. Указанной окрестности точки р соответствует шар в пространстве R”
Пара (17, х) —открытая карта многообразия Л, обладающая
«свойствами 1—2 и допустимая для заданного атласа 91. *
Таким образом, в случае необходимости всегда можно счи-
тать, что атлас 91 «-мерного гладкого многообразия Л состоит
из карт ([7, х), таких, что х([7) —«-мерный открытый шар про-
странства Rn с центром в начале координат (при этом можно
считать, что радиус этого шара один и тот же для всех карт
мз 91).
2°. Гладкие функции
Пусть на гладком многообразии Л задана функция
/=: »«->R,
т. е. каждой точке р многообразия Л по определенному правилу
ставится в соответствие число u=f(p).
Пусть р — заданная точка.
Возьмем локальную карту ((7, х) * так, чтобы p^U. Тогда с
заданной функцией f(p) можно связать обычную функцию от п
перемейных х1,..z.,xn, областью определения которой является
открытая карта x(U) координатного пространства R".
” Всюду в дальнейшем мы будем рассматривать только локальные карты,
допустимые для заданного атласа.
269
Эта функция строится по следующему правилу:
ф(хг, хп) = (/° х~1)(х1, хп),
где (х1...xn)ex((7)czR” (рис. 20).
Рис. 20. График функции f, заданной
на сфере, в локальных координатах
Ясно, что построенная функция зависит от выбора локальной
карты (U, х).
Пусть (V, у), pf=V,— другая локальная карта.
Поступая по описанному выше правилу, получим функцию
ФО/1...yn)=(f ° у~х)(у\ , уп),
где (у1, z/n)ey(V)cRn.
Если потребовать, чтобы функция <р имела в открытой обла-
сти x(U) пространства Rn непрерывные частные производные
всех порядков, т. е. чтобы (р(х1,...,хп)еС“, то и функция
ф (г/1 уп) в области (у°х~х) (f7f]V) пространства Rn будет при-
надлежать классу С°°.
Покажем это.
Из соотношения
ф = / о y~'=(f О ДГ-1) О (х □ ^г-1) ==ф о(х ° У~х),
справедливого в открытой области (у°х-1) (t7QV), и того факта»
что и функция <р и координатное преобразование х°у~1 принадле-
жат классу Сх, вытекает, что функция ф как композиция функ-
ции ф и координатного преобразования х°у~х также имеет в об-
ласти (t/°x-1)([/(") Ю непрерывные частные производные всех по-
рядков. *
270
Определение. Функция f, заданная на гладком многообра-
зии Jt, называется гладкой, если для любой точки р из Л можно
указать локальную карту (U, х), такую, что p^U и функция
<р=/°х—1 имеет в открытом множестве x(U) пространства R" не-
прерывные частные производные всех порядков.
Множество всех гладких функций на многообразии Л будем
обозначать так: С°°(Л).
Множество С°°(Л) обладает следующим легко проверяемым
свойством: если f и g— функции из С°°(Л), то f+g и f-g также
принадлежат С°°(Л).
Если функция f задана не на всем многообразии, а лишь на
некотором его открытом подмножестве W, то совершенно анало-
гично можно ввести понятие гладкой функции на W и множество
Наконец, будем обозначать через С°°(р), где р — фиксирован-
ная точка многообразия Л, совокупность функций, обладающих
следующим свойством: f^C°°(p), если существует открытая
•окрестность U точки р, в которой функция f является гладкой.
Отметим, что для разных функций из С°°(р) такие окрестно-
сти, вообще говоря, различны.
Пример. Пусть р — произвольная точка гладкого многооб-
разия Л, (U, х) —содержащая ее карта. Тогда каждой точке q
из U ставится в соответствие п чисел х1 (<?),... ,х"(7). Тем самым
на множестве U задаются п функций.
Возьмем одну из них, например i-ю:
и покажем, что хг'еС°°(Г/).
В соответствии с определением имеем
<р(х1, ..., хп) = (х'° х-1)(хх, ..., хп) = х1.
Нетрудно заметить, что эта функция имеет непрерывные частные
производные всех порядков:
.а все производные порядка выше первого равны нулю. *
3°. Разбиение единицы
Пусть Л — гладкое многообразие.
Носителем функции
f : —> R,
заданной на многообразии Л, называется замыкание множества
точек р из Л, в которых f(p)=#O.
271
Обозначение: suppf.
Пример 1. Рассмотрим функцию
( / 1
exp--------------
h(X) = { \ (х2— а2)2
I О,
|х|< а,
[ х | а,
заданную на прямой R1 (рис. 21). Она имеет непрерывные част-
ные производные всех порядков (является гладкой на R1), ее но-
ситель совпадает с отрезком [—а, а]. *
Рис. 21. Бесконечно дифференцируе-
мая финитная функция
Рис. 22. Так располагаются множе-
ства покрытия и носители функций,
дающие разбиение единицы
Пример 2. Пользуясь предыдущим примером, нетрудно по-
строить гладкую на R" функцию g: Rn->-R, носитель supp g кото-
рой совпадает с «-мерным замкнутым шаром
В"(0, а) = {(р1..p”)eRn||pKa}.
Достаточно положить
gtx1____x'l) = h((x1)a+-..+(xn)2)- *
Пусть {Ui} — открытое покрытие многообразия Л.
Определение. Система гладких функций
Фг- : -> R
называется (гладким) разбиением единицы, подчиненным покры-
тию {Ui}, если она обладает следующими свойствами:
1) для всех р из Л и для любого i;
2) supptpidf/j для любого i;
3) 2»фг(р) = 1.
ТЕОРЕМА 1. Пусть Л — гладкое многообразие и 51=
={(£/<, Xi)} — атлас на Л. Тогда существует гладкое разбиение
единицы, подчиненное покрытию {Ui} (рис. 22).
272
* Доказательство проведем для случая, когда Л компактно.
Поэтому можно считать, что атлас состоит из конечного числа
карт. Кроме того, для любой карты (I7{, Xi) из 31 множество
Xi(Ui) —«-мерный открытый шар В" (О, Ь) с центром в точке О и
радиусом Ь.
Выберем а<Ь так, чтобы множества х^1(Вп(О, а)) также по-
крывали Л (рис. 23).
Рис. 23. Построение одного элемента разбиения единицы
Положим
fi(p)={
Я(*/(р)), если pt=Uu
О , если p£Ui.
Функции Л(Р) обладают следующими свойствами:
1) О^Л(р)^1;
2) xf1 (В" (О, а)) = supp ft с Ut-,
3) Г(Р) = ХЛ(Р)>О;
i
4) fi — гладкие функции на многообразии Л.
Поэтому функции
образуют требуемое разбиение. *
4°. Произведение гладких многообразий
Пусть Л и — гладкие многообразия размерностей п и k со-
ответственно.
Введем на топологическом произведении Л'А/С гладкую
структуру.
Построим атлас 31
Пусть (£7, х)—произвольная карта из атласа $1 (Л) и
k(V, у)—произвольная карта из атласа 31 (Л3) (рис. 24).
2^3
Атлас 91 (л^ХЛ9) произведения ^"ХЛ9 составим из карт вида
(W, z), где. W=U^V, а отображение
г = хху : [7х V->R”+*
задается формулой
г(р, ?) = (хху)(р, ?) = (х(р), у (<?))•
Пример. Top T2=S1xS1—гладкое многообразие (как про-
изведение двух окружностей).
§ 3. КАСАТЕЛЬНОЕ ПРОСТРАНСТВО
1°. Касательный вектор
В основу построения касательного вектора в точках гладкого
многообразия можно положить известную связь между вектором,
заданным в точке координатного пространства R”, и операцией
вычисления производной по направлению от заданной в этом про-
странстве функции.
Пусть — вектор координатного пространства Rn, заданный
в точке peRn. Тогда для любой гладкой функции f, заданной в
окрестности точки р, определена производная по направлению,
задаваемому вектором gp (рис. 25):
4-1 = (grad f, Юр,
оё 1р
274
или в координатах
Будем называть ее производной гладкой функции f по векто-
ру g в точке р и обозначать через gpf.
Рис. 25. Вектор £ задает направление в каждой точке р
Таким образом, по заданному вектору на множестве С°°(р)
гладких функций в окрестности точки р определена операция
: C~(p)-R.
проводимая по указанному выше правилу
Ъ Ш—W-
Эта операция обладает следующими свойствами:
1+- (/ + §) = %pf + lPg-
2+ gp(af) = ay.
: 7 3+. lp(f-g) = lpf-g(p) + f(p)-lPg
(здесь f и g — произвольные функции из множества С°°(р), а —
число).
Замечание. Интересно отметить следующий факт (позже
мы докажем это).
Пусть p:C°°(p)-*R— некоторое отображение, подчиненное
требованиям:
1*. v(f+g)=ii(f)+p(g)-
2*. р (af)==a\i (/), а—число. (*)
з*. p(f-g)=p(f)-g(p) + f(p)-p(g)-
275
Тогда существует, и притом ровно один, вектор g, такой, что
V = H(f)
для любой функции f из множества С!ХХр).
Такое взаимно однозначное соответствие между векторами из
Rn и отображениями со свойствами (*) позволяет как бы отож-
дествить вектор и операцию вычисления производной гладкой
функции по этому вектору.
Одновременно сделанное наблюдение открывает возможность
введения касательного вектора в точке гладкого многообразия.
Определение. Касательным вектором в точке р многооб-
разия Л называется правило
Xp:C°°(p) + R,
которое каждой функции f из множества С°°(р) ставит в соответ-
ствие число Xpf и обладает следующими свойствами:
1+. xP(f+g)=xPf+xPg.
2+. Xp(af) = aXpf.
3+. Xp(f-g) = Xpf-g(p) + f(p)-Xp(g)
{здесь f, g^Cx(p), aeR).
Пусть Xp — касательный вектор, a£R — произвольное число.
Покажем, что
Хр(а) = 0.
* Из соотношений
ХР(1) = ХР(1-1) = ХР(1)1 4-1-ХР(1) = 2ХР(1)
получаем, что
Хр(1) = 0.
Отсюда
Xp(a)==Xp(a-l) = aXp(l) = a-0 = 0. *
2°. Касательное пространство
Множество всех касательных векторов в точке р гладкого мно-
гообразия Л обозначим через ТРЛ. Это множество непусто: ему
принадлежит нулевой вектор Ор — нулевое отображение
op-.f~o.
Определим на множестве ТРЛ операции сложения касатель- '
ных векторов и умножения касательного вектора на число.
Пусть Хр, УР^ТРЛ, f^C°°(p) и aeR. Положим
(ХР+УР)/ = ХР/+УРД
(aXp)f = aXpf.
276
Нетрудно проверить, что и сумма Xp+Yp касательных векто-
ров Хр и Yp, и произведение аХр касательного вектора Хр на
число а также являются касательными векторами.
Тем самым множество ТРЛ превращается в вещественное
линейное пространство. Его называют касательным простран-
ством гладкого многообразия Л( в точке р.
Найдем размерность касательного пространства ТРЛ.
Пусть ((7, х) —локальная карта (система координат) и ре
е(7. Тогда для любой функции f^C°°(p) можно построить обыч-
ную бесконечно дифференцируемую функцию ф=/°х~‘, опреде-
ленную на открытом подмножестве x(U) пространства Rn * *.
Вычисляя частные производные функции ф по переменным
х1, ...,хп, получим
-^?ф(х(р)) = -^?(/ о X-1) (1 = 1...П).
дх1 дх1 Х(р)
Тем самым каждой функции f^Cx(p) ставится в соответствие
п чисел:
' dxi 4 'Up,’ дх" 4 1х(р)
Вывод: выбор системы локальных координат определяет в
касательном пространстве TPJ( п векторов, действующих по пра-
вилу
dxt
, 7 = 1, ..., п.
х(р)
Эти векторы принято обозначать так:
Имеем
Пример. Пусть z=<p(x\...,хп)—обычная функция п пере-
менных. С каждой производной по направлению £= (g1,..., |п):
= si I кп dtp = Vhi dtp
dg S dxi -r • • • f - dxn Li* dxt
i=l
естественно связан оператор дифференцирования
п
_d . _d I _i_gn d d
dg dxi dxra b dxi •
, j=i
* Строго говоря, дело обстоит несколько иначе. Из условия f^C°° (р) вы-
текает существование окрестности V точки р, в которой функция f является
гладкой. Поэтому функция <р=/=х-1 является бесконечно дифференцируемой
в области jc(Z7nV).
277
ТЕОРЕМА 2. Векторы
5Х = — , 5П = —
\ дх1 /р \ дхп /р
образуют базис касательного пространства ТрЛ.
Доказательство опирается на следующий простой факт.
ЛЕММА. Пусть функция <р(х*,... ,хп) определена в открытом
шаре пространства Rn с центром в точке (0,..., 0) и имеет в
этом шаре непрерывные частные производные всех порядков, т. е.
принадлежит классу С°°.
Тогда существуют функции <р, (х) класса С00, такие, что
ф(х) = ф(О) + У]х|фг(х), Фг(О) = -^(О). (О
дх‘
i=l
* Проведя в тождестве
1
Ф (х1, ..., хп) = ф (0, ..., 0) + J ф (/х1, ..., txn) dt
о
дифференцирование под знаком интеграла, получим
п
ф(хг......хп) = ф(0, ..., 0)+ Ш1.................х").
i=l
Функции ф,- определяются равенствами
фДх1, .... хп)= (уу^х1,
J дх1
о
., txn)dt
и также принадлежат классу С00 в рассматриваемом шаре.
Ясно, что фДО, ..., 0) = —у(0, ..., 0). *
Обратимся к доказательству теоремы.
* Покажем сначала, что касательные векторы
5i= f—) , ..., 5П=(-М
\ дх1 ) р \ дхп / р
порождают все касательное пространство ТРЛ.
Пусть Xp^TpJt. Без ограничения общности можно считать..
что локальная карта (U, х) обладает следующими свойствами:
1) х’(р)=0, i=l..п;
2) x(U),— открытый шар в Rn.
Заменяя в формуле (1) ф на получим
п
f(q) = f(p)+Y^fdq),
278
где q — произвольная точка из U и
А(р) = 77(/ох-')(х(р)).
дх*
Перейдем к непосредственному вычислению Xpf. Имеем
Xpf=XP (ПрН^Ш) = Хр(/(р)) +^(Хрх‘Л(р) + х'(р)ХрА) =
t=t 1=1 ;
= о + (Хрх*. Л (р) + О • Xpf О = £ Хрх‘А (р) =
1=1 1=1
4J oxi |ж(р)
1=1
Таким образом,
п
Х^ЯХ^)/ ®
1в1
Отсюда в силу произвольности функции feC°°(p) заключаем, что
x’=Sxs(£)=Sxs<>.- (3>
i=l i™l
Покажем теперь, что векторы
di=(~M . .... дп=( —
\дх')р \ дхп ) р
линейно независимы.
Пусть
Е а^=°Р-
t=i
Тогда
п п
0 = 0^1 = (£«'<>,) х/= (£«' ) х<-
1=1 1=1
= У, а‘ VT ° (р))-
4U дх*
1=1
279
Но
(х' °х~1)(х(р)) = х<
и
dxi
Поэтому
п
О = У а'6; = а1'.
г=1
Таким образом, <Э[,..., дп — базис TvjH. *
СЛЕДСТВИЕ. dimTpjr=dimjr.
Выбирая другую локальную карту (У, у), peV, получаем еще
один базис касательного пространства
/ д \ [ д \
\ ду1 }р' ' ’ \ дуп Jp'
Векторы этого базиса выражаются через векторы базиса —г
\ dxi ] р
= 1, ..., п, по формуле
п
/ д \ VI дх’ / / I д \ ...
— =7jTT^^ ТТ • (4>
\ dyl ) р ду1 \ дх> ) р
/=1
Покажем это.
Пусть Тогда
(-/г') f = тг ° У~‘) = тт ° ° <х 9 ^~1))<у <р» =
\ dyi Jp dyl dyi-
п
= ° (Р))• -т- ° У-1) (У (р)) =
dxi dyi
п
=Етг(х(/Нтг) f-
1шЛ dyl \ dxi j р
Отсюда в силу произвольности функции f получаем формулу
(4) . *
Впрочем, формулу (4) можно получить и непосредственно из
разложения (3), полагая в нем
Замечание 1. Пусть ^=Rn и ц — некоторое отображение
со свойствами (*) пункта Г, т. е. y,eTpRn. Тогда в Rn сущест-
вует, и притом ровно один, вектор g, такой, что
p/ = (grad/, ЭР.
280
* В самом деле, выберем в пространстве R” каноническую си-
стему координат (U, х) : t/=Rn, x=lRn • Тогда
/ д \ f ___ df I
\ дх{ / р дх1 |р
Полагая в формуле (2) ц.=ХР, получим
И/ = V н*г (} f = У] Р-х* ту I •
\ дх1 / р дх1 |р
г=1 $=1
Вводя обозначение
£г = рхг,
приходим к требуемой формуле:
п
= УЬг ~Г71 = (grad f’
dxt- L
1^=Л
где £=(£',...,gn). *
Замечание 2. Касательные пространства ТРЛ и TqM, где
p=£q, не имеют общих элементов. В частности, Op=£Oq.
§ 4. ГЛАДКИЕ ОТОБРАЖЕНИЯ
1°. Гладкое отображение. Диффеоморфизм
Пусть ЛС и Л° — гладкие многообразия размерностей п и k со-
ответственно.
Определение. Отображение
f :
называется гладким в точке р многообразия Л, если существуют
локальная карта (U, х), p^U, и локальная карта (V, у), q=
=f(p)^V, такие, что отображение
g = y°f :x(t/) + R*
А
R"
является гладким • (бесконечно дифференцируемым) (рис. 26).
В локальных координатах отображение f задается так:
^^^(х1, ..., хп), ..., yk = yk(x1, ..., хп),
где (х1,...,*”) изменяется в открытой области пространства Rn.
Данное определение гладкости отображения в точке коррект-
но (не зависит от выбора локальных карт).
Покажем это.
281
Рис. 26. Описание гладкого отображения в локальных координатах
* Пусть (U, х), p^U, и (V, у), q = f(р)eV,—две другие локаль-
ные карты. Отображение
g = y ° f °x~l
также является бесконечно дифференцируемым. В самом деле, в
области (хох-1) (0(]U) имеем
g = y° f о х~1=-(у ° trl)° (У ° f ° х~') ° (х ог-‘)=
= !Г1)° g °(х ьхг-1).
Отображения
У ° У~1 y(VnV)-^y(V[}V)
fl n
R* R*
и
x о x~' : x(Uf\U)-+x(U[}U)
n fl
Rn Rn
бесконечно дифференцируемы по условию, наложенному на мно-
гообразия Л и Л3, отображение g принадлежит классу С00 по
определению.
Тем самым отображение g как композиция бесконечно диф-
ференцируемых отображений является бесконечно дифференци-
руемым. *
282
Отображение f называется гладким, если оно гладкое в каж-
дой точке р многообразия Л (рис. 27).
Запишем последнее равенство в локальных координатах.
Имеем
g Уг = У1(х1....хп) (i = l, ..., fe).
Продифференцируем у* по хт, заметив, что
У ° У~1 У1 = У1(У\ , У*) (t = l, ..., fe);
g yi = yi(x\ xn) (/=1....n);
x о x~l xl—xl(i?,..., xn) (/ = 1, ..., n).
По правилу дифференцирования сложной функции получаем
(1 = 1, ..., k; т = 1, . . ., ri),
ду1 _ yi V! дУ1 дУ! дх‘
дхт Lk dyi дх1 дхт
/=1 1-1
или, в матричной форме,
ду1 дх1 ду1 дхп ду1 ду1 ду1 dyk ду1 дх1 ду1 дхп дх1 дх1 дх1 дхп
dyk dyk dyk dyk dyk dyk 'дхп dx"L
дх! дхп ду1 dyk дх1 дхп дх1 дхп
283
Из последнего равенства в силу невырожденности матриц
ст к I ду1\ I дх1'\
Якоби —— и —— вытекает, что
\ dyi / \ дхт /
/ ду1 \ / ду> \
rang —— — rang —— .
\ дхт / " \ дх1 /
Множество гладких отображений вида f: Я-+Я будем обо-
значать через Л3).
Пусть Я и J?— гладкие многообразия.
Гладкое отображение ]\Я^-Я называется диффеоморфиз-
мом, если оно взаимно однозначно и обратное отображение
f-1 : Я-+Я также является гладким.
Многообразие Я называется диффеоморфным многообразию
Л3, если существует диффеоморфизм (рис. 28).
диффеоморфны
Обозначение: Я^Я.
ТЕОРЕМА 3. Диффеоморфные многообразия имеют одинако-
вую размерность.
Справедливость сформулированного утверждения вытекает из
рассмотрений следующего пункта (см. конец пункта 2°).
2°. Дифференциал гладкого отображения
Пусть Я и Л3 — гладкие многообразия и '(.Я-^Я’— гладкое
отображение. Пусть далее р — точка из Я и q=f (р)—соответ-
ствующая ей по отображению точка из Л3.
Рассмотрим касательные пространства ТРЯ и ТдЯ. Поставим
каждому касательному вектору ХР^.ТРЯ в соответствие каса-
тельный вектор по следующему правилу:
Yq(g)=Xp(g>f), (О
где g^C°°(q) —произвольная гладкая функция.
284
Покажем, что Yg, определяемый соотношением (1), действи-
тельно является касательным вектором из TqJf.
Пусть g, h^C°°(q), aeR. Тогда
1 - Yq(g + h)=Xp((g + h)°f)=Xp(g°f + h<>f) =
= Xp(gef)+Xp(hBf)=Yq(g) + Yq(h). '
2 • Yq (ag) = Xp ((ag) о f) = Xp (a (g о /)) = aXp (g » /) = aYq(g).
3 . Yq(g-h) = Xp((g-h)'f) = X„((gof).(hof)) =
= Xp(gof) . (h°f)(p)+(g°f)(p) Xp(h°f) =
—Yq(g)-h(q)-Yg(q)-Yq(h). *
Тем самым построено отображение касательного простран-
ства ТРЛ в касательное пространство ТЧЖ:
(df)p = f,p: TpM^Tq.JF,
f.p--XP~Yr
Это отображение называется дифференциалом отображения f,
или касательным отображением (рис. 29)
(f./P)te)=XPW),
Рис. 29. Касательное отображение
Свойства касательного отображения.
1+. Касательное отображение линейно.
Пусть Хр, Yp^TpJt, g<=C°°(q), q=f(p).
Из определения суммы касательных векторов вытекает, что
(f.p(Xp+yp))(gr)=(Xp+yp)(gef) = Xp(gof) + yp(gof) =
= f.pXp(g)+f,/p(g) = (f.pXp+f.pyp) (g)
285
Тем самым
t.p^p+Yp) = f.pXp + f.Yp.
Аналогично доказывается, что
/.p(aXp) = af.pXp (aeR). *
2+. Пусть (U, х), p^U, и (V, у), q^V,— локальные карты
многообразий Л и Л3 соответственно и
/ д \ ( д \ / д \ / д \
\ дх1 /р \ дхп /р \ ду1 )g \ dyk )д
— базисы касательных пространств ТРЛ и ТдЛ.
В локальных координатах отображение {•.Л'+Л’ описывается
набором функций
у1 = у1(х1, ... ,хп), ... ,yk = y,t(x1, ... ,хп).
Если касательный вектор ХР^ТРЛ имеет координаты g1,
а касательный вектор Уд^ТдЛ\ соответствующий ему, — коорди-
наты тр,..., то соотношение (1) можно записать так:
3+. Пусть 1 м'.Л-^Л— тождественное отображение. Тогда
касательное отображение
(1л«)«р = 1грл : Тр<Л-+ТР<Л
также является тождественным.
* Имеем
((Ь)-р хр /=хр а о ь)=xpf=(iv.xp) f. ♦
4+. Пусть Л, Л и Q,— гладкие многообразия, ^'.Л-^Л1 и
— гладкие отображения, р^Л, q=f(p)^.JY, r=g(q)^(?.
Тогда
(^°/).р = ^«/.р.
♦ Пусть /геС°°(г). Из определения касательного отображения
вытекает, что для любого Хр из ТРЛ
((g-b,pXP)h = Xp(h.(g. /)) = Хр ((/i о g). f) =
= (f.pXp)(/ieg) = ((g.Zf,p)Xp)/i.
Отсюда в силу произвольности h получаем требуемое. ♦
286
5+ Пусть f -.Л-+Jf — диффеоморфизм.
Тогда
— изоморфизм касательных пространств и
(Г'РГ'=(Г\}М.
* Пользуясь свойствами 3+ и 4+, получаем, что
^•р ° f It'Kp)'*’’
(Г\Кр) ° f,p=(Г1 e /).р=(Ы.р = 1 трм. *
Так как размерность гладкого многообразия Л совпадает с
размерностью касательного пространства ТРЛ, то из свойства
5+ вытекает, что размерности диффеоморфных пространств
равны.
3°. Ранг гладкого отображения
Определение. Рангом гладкого отображения f: в
точке р^Л называется размерность образа касательного про-
странства ТРЛ при касательном отображении f*P:
rangpf = dimf,p(7>^).
Из курса линейной алгебры известно, что размерность образа
линейного пространства при линейном отображении равна рангу
матрицы этого отображения.
Тем самым
£ / dyi \
rangp f = rang -М .
\ dxi jx(p}
Пример. Ранг проекции л: S2->R2, определяемой по пра-
вилу
р2, р3) —(р1, р2),
равен
( 2, если р3 #= О,
rangjt = {
( 1, если р3 = 0.
Пусть {.Л-^Л’— гладкое отображение и р — точка из Л.
Если
rangp/=r,
то существует окрестность U точки р, такая, что для любой точ-
ки q из U выполняется неравенство
rangef>r.
287
Если rangg /=rangp f для любой точки q из U, то говорят, что
гладкое отображение f имеет в окрестности U постоянный ранг.
ТЕОРЕМА 4. Пусть гладкое отображение имеет в
окрестности точки р многообразия постоянный ранг г. Тогда
существуют локальные карты (U, х), p^U, и (V, у), q—f(p)&V,
в которых отображение f допускает представление вида
уэ/.х-1:^1, ... ,хп)~(у\ ... ,уг, 0, ... ,0)
ш m
R" R*
♦ Выберем локальные координаты (U, х) и (V, у) так, чтобы
х(р)=0, у(у)=О.
В этих координатах отображение f записывается как (рис. 30)
Рис. 30. Гладкое отображение ранга 1
или, подробнее,
yi — yl(x1, ... ,xn)
По условию можно считать, что всюду в U
rang f=r,
288
т. е. в окрестности x(U) точки О матрица Якоби
ду1
dxi
содержит ненулевой минор порядка г.
Перенумерацией координат х’, у* всегда можно добиться того,
чтобы
ду1
дхг
Рассмотрим отображение ср некоторой окрестности точки Ое
eR" в пространство Rn, определяемое по правилу
Ф:(х1, ... ,х")-♦(у1, ... ,yr, хг+1,\... , хп),
или, подробнее,
и1 = у1 (х1, .,. , xn) (i = 1, ... , г),
г? = х' (г = г+1, ... , п).
Матрица Якоби этого отображения
дх1 ''' дхг
дуг
дх1
не вырождена. По теореме о неявной функции можно указать
окрестность точки 0, в которой отображение ф является обрати-
мым. Отображение h=g°qrl имеет вид
У* = и‘ (i = l, .... ,г),
y^ytfu.1, ... ,ип) (i = r + 1, ... ,k)
дуг+
диг+
dyk
дип ,
10 Зак. 259
289
— его матрица Якоби. Так как ранг отображения h (как и ранг
g) в окрестности точки О равен г, то в этой окрестности выпол-
няются равенства
4=0, z=r+l,...,fe; j=r+l, . . . ,п.
дш
Следовательно, для i>r функции уЦи\ ... ,ип) на самом деле
зависят только от первых г координат и1,..., иг, т. е.
у1(и1, ... , ип) = у‘ (и1, .... иг).
Обратимся теперь к пространству R?.
Рассмотрим отображение ф некоторой окрестности точки Ое
eR1; в пространство Rfe, определяемое по правилу
Ф: (у1, , ук) (у1, ... ,yr, yr+l~yr+i (у1, ... , уг), ... , ук—
—уЧу1, ... , у')),
или, по-иному,
z’ = у\ i=\, . . . ,г,
zi = yi—'yt(y1, • • • .Уг), i = r+\, ... ,k.
Матрица Якоби этого отображения
г
г’1- 0
0 '1
k—r
не вырождена. Поэтому ф является координатным преобразова-
нием в точке q.
Переходя от координатных систем х на Л и у на Л3 к коорди-
натным системам и и z соответственно, получаем, что отображе-
ние f представляется новой функцией
zl = ul (t = l,...,r),
z1 = 0 (/ = г Ц- 1, . . . , k). *
§ 5. ПОДМНОГООБРАЗИЯ
1°. Гладкие подмногообразия
Пусть — непустое подмножество «-мерного гладкого много-
образия Л, р — точка из Л3.
290
Локальная карта (U, х), p^U, многообразия М называется
адаптированной (приспособленной) для Л’, если найдется k,
такое, что
где R' = {(х1, ... , хп) е= R'1 | х*+> = ... = хп = 0} с R".
Если в каждой точке подмножества Ж существует локальная
карта, адаптированная для Л5, и число k не зависит от выбора
этой точки, то Л5 называется k-мерным гладким подмногообра-
зием гладкого многообразия <Л. Подмногообразие Л" является
,%-мерным гладким многообразием (рис. 31).
Пример 1. Подпространство R^czR" координатного про-
странства R" является его гладким подмногообразием: для вся-
кого множества V, открытого в Rft, найдется открытое множество
t/czR?1, такое, что V={7f)Rft.
Пример 2. Если в определении адаптированной карты по-
ложить k=n, то получим, что всякое открытое подмножество
гладкого многообразия является его гладким подмногообразием.
Пример 3. Параболоид вращения &
z = x° + y\
— гладкое подмногообразие пространства R3.
* Пусть
С7 = {(х, у, z)e R3|x2 + y2 — 8<Z<X2 + y2 + 8},
где 8>0.
Введем отображение
Ф: (7->П = {(х, у, г) е R31—8<г<;8},
10*
291
действующее по правилу
<р:(х, у, z) —(х, у, г—х2—у*).
dl ID
и п
Тогда карта (U, <р) будет адаптированной для ZP (рис. 32):
<p(t/n^) = T(t/)nR2 = R2- *
Рис. 32. Парабола — гладкое подмногообразие плоскости
2°. Задание многообразий уравнениями
Укажем один часто встречающийся способ задания гладкого
многообразия.
ТЕОРЕМА 5. Пусть — гладкое отображение и
еЛ5 — такая точка, что ее полный прообраз
Г1 (q)={p^^\f(p)=4}
не пуст и rang f=r в каждой точке p^f~l(q).
Тогда является гладким подмногообразием многообра-
зия его размерность равна п—r=dimAf—rangf.
* Пусть р — произвольная точка из f~x(q).
Выберем в Л и J? локальные карты (17, х) и (V, у) так, чтобы
х(р) = (0, ... 0) f= Rn, у (q) = (0, .... 0) е Rfe.
Согласно теореме можно считать, что в этих локальных координа-
тах отображение f можно Выразить формулой
(х1, ... ,хг, ... ,хп)~(х1, .. . ,хг, 0, ... ,0).
~k~r
292
Перенумеруем координаты в пространстве R":
(х1, .'.. ,хг, хг+*, ... , х”) (х"-^1, ... ,хп, х1, ... ,хп~г).
Тогда отображение f в окрестности точки р будет описываться
формулой
(х1, ... ,х', ... ,х")(xn~r+i, ... ,хп, 0, ... ,0).
k—г
Отсюда получаем: множество f~'(<7) локально можно задать
системой уравнений
хп-г+1 = о, ... , х” = 0.
Следовательно, — гладкое подмногообразие размерно-
сти п—г. *
Пример 1. Рассмотрим функцию f: R3->R, определяемую
формулой
f(x, у, г) = г—х2—у2.
Полный прообраз
Г'(0) = {(х, у, z)\z—x2—y2 = 0}
непуст и
rang/ = rang(—2х, —2у, 1)=1
в каждой его точке.
Тем самым z=x2+y2 — двумерное подмногообразие простран-
ства R3. *
Вообще регулярная линия (поверхность) второго порядка яв-
ляется одно-(дву-) мерным подмногообразием плоскости (трехмер-
ного пространства).
На практике наиболее часто встречаются подмногообразия ко-
ординатного пространства R". При помощи доказанной теоремы их
можно задавать как поверхности уровня функции п переменных
или как пересечения таких поверхностей.
Пример 2. Пусть f: R"->-R — гладкая функция и
grad f = ( ... , —— j 0
6 \ дх1 дхп)
во всех точках /-1(<7).
Тогда, если множество
^(х1,... ,х”) = 7
непусто, то оно представляет собой (п—1)-мерное гладкое много-
образие (гиперповерхность пространства Rn). *.
Пример 3. Пусть
?(х\ х2)=х1г + х2\ /2(х3, х4) = х3* + х<
293
Рассмотрим систему
| х12 + х22=1,
( хз2 + х42=1.
Вследствие того, что
rang
Зх1 2х2 О
О 0 2х3
О
2х*
2,
эта система описывает двумерное многообразие в пространстве
R4 (тор Клиффорда). *
Вообще пусть fm (m<_ri) — функции п переменных,
с1, ..., ст — некоторые постоянные. Если множество решений
Л* системы
f\x\ ... ,хп) = с\... ,fm(x\... ,хп) = ст
непусто и
rang | I = т
в каждой точке из Л6”, то — (п—т)-мерное гладкое подмного-
образие пространства R".
§ 6. ВЕКТОРНЫЕ И ТЕНЗОРНЫЕ ПОЛЯ
1°. Определение тензорного поля
Пусть — n-мерное гладкое многообразие.
Определение. Будем говорить, что на Л задано тензорное
поле Т типа если в каждой точке р многообразия для любой
локальной карты (U, х), p^U, указан упорядоченный набор
nr+s чисел
гр i, .Лг Й О, • К
. . . , 1 n
который при переходе к другой координатной карте (V, у), p^V,
преобразуется по правилу
,pk1...kr_ pit...ir dykl dykr dxil dx’s
h - is gxii дхгг dyli dyls
Можно сказать и по-иному.
Тензорным полем Т типа на гладком многообразии Л на-
зывается правило, которое с каждой точкой р многообразия Л
связывает тензор типа , заданный в касательном пространст-
ве ТРЛ.
294
Формула (1) представляет собой запись этого закона в локаль-
ных координатах.
Тензорное поле Т, компоненты ТгУ л.г которого принадлежат
классу С°° (р) для любой точки р из Л, называется гладким тен-
зорным полем на многообразии Л.
Совокупность всех гладких тензорных полей на многообразии
М типа будем обозначать через <Й(еЛ£)-
Элементы множества ®1(о/;з) = ®о(^) называются векторны-
ми полями (рис. 33).
Рис. 33. Векторное поле
Рис. 34. g — вектор смещения
Пусть —векторное поле на Л и Хр — его значе-
ние в некоторой точке р из Л. В локальных координатах (С, х)
вектор ХР задается набором п чисел ..., £п, который при пере-
ходе к другим локальным координатам (V, у) в соответствии с
правилом (1) преобразуется так:
= gm или gm = zgfe (2)
dxm b ” dyk * v ’
Замечание. Сравнивая формулу (2) с правилом (4) пунк-
та 2° § 3, замечаем наличие тесной связи между касательным век-
тором Х’р как линейным отображением /еС°°(р) —>-XpfeR и векто-
ром Хр как сужением векторного поля X в точку р.
2°. Риманова метрика
Задать на гладком многообразии Л риманову метрику — это
значит задать на многообразии Л гладкое тензорное поле (gy)
типа ^2^, обладающее следующими свойствами:
1) поле (gti) симметрично, ёа=ёп',
2) поле {gij) положительно определено.
Покажем, что на всяком гладком многообразии такая метри-
ка всегда существует.
295
* Пусть — атлас многообразия Л, (L\O), 'Х(а)) — карта из
% и
Х(в): (Р1, . • • , р") — (Х(а) (р), • • . , Х(а) (Р))
Ф (П
uw R"
— соответствующее координатное отображение.
В пространстве Rn в координатах (х’(а), ..., хп(а)) задаем ка-
кую-нибудь метрику, например каноническую:
Пусть {<₽(«)} — гладкое разбиение единицы, подчиненное покры-
тию {С/(а)}. Положим
а
Тензорное поле (gu) является гладким, симметричным и поло-
жительно определенным. *
3°. Внешние дифференциальные формы на многообразии
Пусть
z = /(x) = /(x1, ... ,х")
— гладкая функция, заданная в пространстве R", х0 — точка
из Rn.
Из курса математического анализа известно, что дифференци-
ал f(x) в точке Хо есть линейная функция векторов смещения от
этой точки.
Пусть ?=(V, •••>?") — вектор смещения. Тогда
d/xoa)=^-(Xo)l1+...+^?-(Xo)r (1)
дх1 дхп
Сами координаты х1, ..., хп точки х из R" можно рассматри-
вать как гладкие функции. Поэтому в каждой точке пространст-
ва R" определены дифференциалы dx1, ..., dxn этих функций:
=~ ?+...+4? .. •+44 г=
дх1 дх1 дхп
= 0-^+... + 1 • V+-..+0-r = F (г-1, ... ,П).
Тем самым
dx1, ... , dx"
— линейные формы (рис. 34).
296
Линейной формой будет и любая их комбинация T/dx*.
1=1
Записывая формулу (1) несколько по-иному:
dfXo (g) = -£ (х0) dx\® + . • • + (х0) dx" ©,
дх1 дхп
ИЛИ
dfx, = -%- (%о) dx1 + . . . + (х0) dx",
дх1 дхп
замечаем, что в линейном пространстве £21*' линейных форм в
точке Хо формы dx1, ..., dx" образуют базис.
Внешнее произведение форм dx11, ... , dx‘h описывается сле-
дующей формулой:
(dx^A ... Adx'ft)^,... ,у =
(2)
Внешней дифференциальной k-формой ю назовем выражение
вида
«^...^dxn А • • • [\'dxlh,
где (го^.. — кососимметричное тензорное поле типа
Пример 1. Внешняя дифференциальная 2-форма в простран-
стве R3 имеет вид
(o23dx2 A dx3 + co31dx3 A dx' + a^dx1 A dx2. *
Внешним дифференциалом от внешней дифференциальной
/г-формы со называется внешняя (^+1)-форма d®, определяемая
по правилу
АО, t , S
da (х) =-------(x)'dx* A dxil /\ ... f\dxh-
dxi
Пример 2. Внешний дифференциал от линейной формы
и = ©jdx1 + M2dx2+® dx3
равен
dco = f-^J-dx1 + dx2 + dx3} /\ dxx +
\ dxi дхз дхз ; ''
+ (dx1 + dx3 + dx3} /\ dx2 +
\ dxi дх2 дх3 ] II
297
+ ^Ldx1 + ——^—dx2 + dx* Д dx3 =
\ dx1 dx* dx* ] '
= dx2 Л dx2+ C-------dx2 /\ dxx +
\ dx* dx3 j \ dx3 dx1 /
/ d^----dx2^
\ dx1 dx* j ''
Внешний дифференциал 2-формы из предыдущего примера ра-
вен
f-^ + —+ -^Uxx Д^2 Л dx3. *
\ Зх1 dx* dx3 )
Пусть Ж — n-мерное гладкое многообразие. Зафиксируем точ-
ку р^Ж.
Полилинейная кососимметричная функция ср от k касательных
векторов Хь Xk из касательного пространства ТРЖ называет-
ся внешней формой степени k.
Если векторы Хь ..., Xk линейно зависимы, то вследствие по-
лилинейности и кососимметричности имеем
<P(*i, . ..,Xh) = 0.
В частности, не существует ненулевой внешней формы степе-
ни выше n=dim^.
Совокупность внешних форм степени k в точке р многообразия
Ж образует линейное пространство QP(A)(^). Оно конечномерно.
Введем операцию внешнего умножения внешних форм при по-
мощи равенства
(Ч>Л«(Х,.......Х„ Хц.,......Х,) =
=—•— VsignP •.Ч+1 ••*+'') X
(& + /)! jU 1*+1 • • • 1&+1 /
а
X <p(Xip . . . , . . . , х,£+р.
Из определения вытекает, что
<р Л “Ф=(— 1)*ЧЛф-
Пусть (U, х), p^-U, — локальная карта и
д д
dx1 ’ ’ dxn
— соответствующий базис касательного пространства ТРЖ (за-
данный в этой карте единичными векторами пространства R",
направленными по координатным осям).
298
Обозначим через dx‘ форму 1-й степени, определяемую равен-
ством
dx1
\ дх> )
Формы
dx1' Д ... Д dx1*, 1 -Д Д < ... < ik оД п,
образуют базис пространства (.>#).
Пусть )—произвольное кососимметричное тензорное по-
/'0\ 'Г
ле типа , I . Тогда выражение
\ К I
Th...ifldxil Д ... Д dx** (1 Д< • • • < ДО)
инвариантно относительно замены координат W -Чу).
* В самом деле, из равенств
,гр ____гр дх4 dxlk
dxl'f\... /\dxl* = -^ ...-^1 dyh Д ... I\d^
dy11 dy-k
получаем
'Ч.-д/У^Л /\dy!* = Tii,,.ihdxtt Д ... /\dx**. *
В частности, внешняя дифференциальная форма степени п в
координатах (х) имеет вид:
... ,xn)dxL Д ... /\ dxn,
а в координатах (у):
W- ... , у").......хЦу\ ... , О det f dyi/\... Д dyn.
\ ®у] /
Пусть
<0 = v Tit...ihdx^ Д ... Д dx1*
— внешняя дифференциальная форма степени &<п.
Внешняя форма
d<i>= У —*~у ft dx{ /\ dxl‘ Д ... Д dx1*
степени &+1 называется внешним дифференциалом формы w.
299
§ 7. ИНТЕГРИРОВАНИЕ ПО МНОГООБРАЗИЮ
1°. Ориентация многообразия
Пусть Л — гладкое многообразие.
Определение. Карты (U, х) и (V, у) многообразия Л
называются согласованными, если якобиан координатного преоб-
разования
у^у^х1, ... ,хп) (i = l,... ,п)
положителен —
det (^>0.
\ &xi /
Атлас многообразия называется ориентированным, если любые
две его карты согласованы.
Многообразие называется ориентируемым, если у него есть
ориентируемый атлас.
ТЕОРЕМА 6. Если связное многообразие ориентируемо, то
оно допускает ровно две ориентации (рис. 35).
Рис. 35. Ориентируемое многообразие допускает ровно две ориен-
тации
Выбор одной из ориентаций делает многообразие ориентиро-
ванным.
Примером ориентируемого многообразия может служить
сфера S2. Атлас из карт (S2\M, л.у) и (S2"AS, —л8) ориентирован:
якобиан координатного преобразования
—;---г, У =-----s---г
+х* «1 +ха
положителен —
, >0.
(х! + Xs )*
Примером неориентируемого многообразия является, на-
пример, лист Мебиуса.
УТВЕРЖДЕНИЕ. Если многообразие ориентируемо, то любой
его атлас можно сделать ориентированным.
300
2°. Многообразие с краем
Чтобы определить многообразие с краем, достаточно дословно
воспроизвести определение обычного многообразия, заменяя коор-
динатное пространство R" замкнутым полупространством
R+ = {(A • .«"М" | х">0}.
Гладкая структура на многообразии с краем определяется так
же, как и на обычном многообразии. Следует лишь уточнить по-
нятие гладкости отображения на полупространстве R+".
Пусть /:Rg.->R — непрерывная функция и ,roeRL Если х0 =
= (хо, ... , xg)—внутренняя точка полупространства Rg_, xg>0, то
«охраняется обычное определение производной. Если же х0 = (х’, ...
.... Хо-1, 0), то (х0) определим так:
дх1
£«......*Г'. 0) =
/(Хр, ...х‘...xg 1,0)—/= (xg, ... , xg, ... , xg ‘, 0)
xi-x*
дх" ( °’
(1 = 1........п— 1),
f (х[, ... , xg"1, х") — /(Xq, ... , xg-1, 0)
im ---------------------------------------------------
Если введенные (односторонние) производные непрерывны в
полупространстве R+, то будем говорить, что f — функция клас-
са C1(R4-). Аналогично определяются классы гладкости C2(Rg_),...
... ,с°°да.
Отображение
у1 = у1(х\ ... ,хп) (z = l, ... ,k) С
называется гладким на полупространстве R+, если у1 е С°°(Rg.)
для любого г= 1, ..., k.
Пусть (U, х) — локальная карта многообразия с краем Л и
р<=и.
Точка р называется внутренней точкой многообразия с краем
Л, если хп(р)>0, и граничной точкой, если хга(р)=0. Такое раз-
биение не зависит от выбора локальной карты.
Множество граничных точек многообразия с краем называется
-его краем.
Обозначение: дЛ.
Если дЛ=<2), то приходим к прежнему понятию многообразия.
Край дЛ является гладким (п—1)-мерным многообразием.
301
Достаточно в качестве атласа (дЖ) взять набор карт (t/R
[\дЖ, (х1, х"1)), где (U, (х1, х")) — карта из 91 (J#):
координатный гомеоморфизм отображает О’цдЖ на x(t/)nRo"-1t
а замена координат как ограничение замены координат многооб-
разия Ж остается гладкой.
Пример 1. Верхняя полусфера = Л?2 П R^— гладкое мно-
гообразие с краем. Край = —окружность экватора
(рис. 36).
Рис. 36. Ориентация полусферы од-
нозначно определяет ориентацию
края
Рис. 37. Пример ориентированного
многообразия
Пример 2. Кр|аем замкнутого шара В3 является сфера S2.
ТЕОРЕМА 7. Край дЖ ориентируемого многообразия Ж так-
же является ориентируемым многообразием (рис. 37).
» Пусть (е/ll) = {(U, (х1, ... ,хп'~1> хп))} — ориентированный атлас
многообразия и $1 (д<М) = {(U RcW, (х1, ... , xn-i))}—атлас его края
д<М. Покажем, что атлас ^.(дМ) является ориентированным (рис. 38).
Пусть (U, (х1, ... ,хп~1, х")) и (У, (у1, ... ,уп~\ уп))—две карты
из атласа 91 (а41) и
у1 = у* (х1, ... , х"), i - 1, ... , п,
Рис. 38. Ориентация полусферы и ориентация ее граничной окружности
302
— соответствующее координатное преобразование. Матрица Яко-
би этого преобразования имеет вид
/ <>ус \
. dxi )
( ду1 ду1 ду1
дх1 дх"-1 дх"
ду"-1 дУ'1 ду"'1
дх1 дх"-1 дх"
дуп дуп дуп
дх1 ' дх""1 дх" j
По определению края многообразия координата уп = 0 в точках
пересечения (U П д&<) П (V П = (U П V) fl Поэтому в этих точках
дуп ’дуп
дх1 дх"-1
Тем самым
ду1
дх1
ду1
дх"-1
ду1
дхп
ду'1
дх1
ду""1
дх"-1
ду"'1
дхп
дуп
дхп
Из этого соотношения
из того, что
дуп
дхп
ду1
дх1
ду1
дх"-1
ду"'1
дх1
ду*-1
дх""1
вытекает:
О
О
и
det )
\ дх* )
дуп
дхп
Но так как в пересечении UQV х">0, «/">0, то
дуп
дхп
Таким образом,
ду1 ду1
дх1 ’ ' дх""1
дуп 1 дуп~1
дх1 ’ ” дх'*-1
и, значит, атлас Э1 (dyd) является ориентированным. *
303
Ориентация края дЛ, задаваемая построенным в теореме ат-
ласом, называется ориентацией, согласованной с ориентацией мно-
гообразия Л.
3°. Интеграл от дифференциальной формы по гладкому много-
образию
Пусть Л — n-мерное гладкое ориентируемое многообразие и
Ф — внешняя дифференциальная форма на Л степени п.
Будем считать, что форма <р имеет компактный носитель. Это
означает, что замыкание множества точек многообразия Л, в кото-
рых форма <р отлична от нуля, компактно.
Определим интеграл от формы ф по многообразию Л.
Предположим сначала, что носитель формы ср содержится в об-
ласти определения U локальной карты (U, х). Тогда в локальных
координатах (х1, ..., хп) форма ф запишется так:
Ф = / (х1, ... , хп) dx1 /\ ... Д dxn.
♦
По определению положим
Ф = | J / (х1, ... , х") dx1 .. dxn.
М x[U}
Это определение не зависит от выбора локальной карты в сле-
дующем смысле.
Пусть (V, у) — другая локальная карта, такая, что эиррфс:
czV. Тогда в координатах (у1, ..., у”) форма ф принимает следу-
ющий вид:
Ф = / (X1 (у1/. • • , у")-х"(У\ ... ,Уп)) det W Л . . . /\dyn.
\ dyk )
Согласно правилу замены переменных в кратном интеграле при
условии
J = det(—^>0
имеем
С ... p(x)dxx... dxn= Г ... Сf(x(y))Jdy1... dyn.
x(U) v(V)J
Перейдем теперь к общему случаю.
Пусть {(Ua, ха)} — ориентированный атлас многообразия Л.
Рассмотрим гладкое разбиение единицы {фа}, подчиненное покры-
тию {С7О}.
Положим по определению
J Ф= J (К'М Ф = Е $ Ф“ф
. (напомним,, что фа=0 вне Ua).
304
4°. Формула Стокса
Эта формула связывает интеграл по многообразию с интегра-
лом, взятым по его границе. Как частные случаи она включает в
себя такие известные формулы классического анализа, как фор-
мула Грина, формула Стокса, формула Гаусса — Остроград-
ского.
ТЕОРЕМА 8. Пусть Ж — n-мерное ориентированное многооб-
разие с краем дЖ, <р — внешняя дифференциальная форма степе-
ни п—1 с компактным носителем. Тогда
^Ф = (—1)п рФ
д<М аМ
(ориентация края дЖ согласована с ориентацией многообразия
Ж}.
* Пусть {Ui} — покрытие многообразия Ж координатными
окрестностяим Ui и {ф,} — подчиненное этому покрытию разбие-
ние единицы. Так как носитель формы <р компактен, то он пере-
секается лишь с конечным числом N носителей функций ф/. Тем
самым
Ф=Ф1+ • +фЛГ,
где ф1=ф1<р.
Отсюда следует, что
^ф = £ ^фь рф = £ рфг.
дМ 1=1 дМ М i=l М
Из последних двух равенств видно, что формулу Стокса доста-
точно доказать для случая, когда ьиррф целиком лежит в коор-
динатной окрестности Ui.
Пусть х1, ..., хп — локальные координаты в 17; и
Ф = У (— 1)/-1 ajdx1! Д ... Д dx1-1 Д dxi+i Д ... Д dxn
/=1
(функции а, имеют компактные носители). Тогда
п
л^д... ^dxn.
dxl
/=1
Без ограничения общности можно считать, что x(t/;)=R+",
т. е. что функции а/ определены в полупространстве R+n (рис. 39).
Так как обе части доказываемого равенства линейны относи-
тельно интегрируемых форм, то достаточно рассмотреть форму
вида
Ф — (— 1)/-’ adx1 Д ... Д dxi-1 /\ dxi'+1 Д ... Д dxn,
305
Рис. 39. Координатной окрестности U соответствует открытое полупространст-
во R+n
где а(х\ ..., хп) — функция с компактным носителем, определен-
ная в полупространстве R^.
Тогда
d<p = -^rdx1 Д ... Д dx1 Д ... Д dxn.
дх>
Рассмотрим два случая.
1. ]'<п. Ограничение формы <р на край дЯф = R£~* равно ну-
лю вследствие того, что x"=0 и, значит, dxn—0. Поэтому
J Ф = о.
1
к0
С другой стороны,
Переходя к повторному интегралу, получаем
ОО ОО ОО 00
f dtp — С ... f С dx1... dx'~l dx’+l ... dxn C -^-dxl.
J J J J J dxi
Dn —00 -OO 0 —oo
R+
Так как функция a(x{, ..., xn) имеет в R+n компактный носи-
тель, то
Поэтому
J d<p = 0.
пп
R+
306
2. j=n. Имеем
ср — (— I)"-1 а(х1, ... , хп)dx1 (\ ... Д dxn-1
и
d<p = -уу (х1, ... , хга) dx1 Д . .. Д dxn~l Д dxn.
Поэтому
= — ... а(хх, ... , хп~’, tydx1... dxn~l = (— l)n J <p.
—OO ---OO Dn—1
Ko
Пример 1. Пусть К — компактное множество на плоскости
R2 с гладкой границей — кривой дК. Если
Ф = Р(х, y)dx + Q(x, y)dy,
где Р и Q — гладкие функции в некотором открытом множестве
U, содержащем К, то
И —^~]dx/\dy= \Pdx±Qdy
J J \ дх dy ) J
К дК
(формула Грина) *.
Пример 2. Пусть М — ориентированная гладкая поверх-
ность в R3, — компактное множество с гладкой границей.
Обозначим координаты в пространстве R3 через х, у, z. Если
<р = Pdx + Qdy 4* Pdz,
* Грин (Green) Джордж (14.7.1793—31.3.1841) — английский математик
и физик.
307
тде Р, Q, R — гладкие, функции переменных х, у, z в окрестности
К, то
JJ \ ду дг / \ дг дх /
К
----— \ dx д dy = Г pdx -j- Qdy 4- Rdz
\ дх dy ) J
дК
{формула Стокса *).
Пример 3. Пусть К — компактное подмножество простран-
ства R3, граница дК которого — гладкая поверхность в R3. Если
q = Ady Д dz-\-Bdz /\ dx-j-Cdx Д dy
— 2-форма, коэффициенты А, В, С которой — гладкие функции
переменных х, у, z в окрестности К, то
к
= Ady Д dz + Bdz Д dx + Cdx /\ dy
к
{формула Гаусса — Остроградского **).
СВОДКА ОСНОВНЫХ ПОНЯТИЙ, ФОРМУЛ, ФАКТОВ
А. Открытой картой хаусдорфова топологического простран-
ства М называется пара {U, х), где U — открытое подмножество
пространства М, а х — гомеоморфизм подмножества U на откры-
тое подмножество координатного пространства Rra: каждой точке
p^U ставится в соответствие набор из п чисел, ее локальных ко-
ординат:
х:р>-*{х1(р),...,хп{р)).
Хаусдорфово топологическое пространство М называется
п-мерным топологическим многообразием, если найдется, конеч-
ный или счетный, набор открытых карт (Ua, ха), такой, что
1) xa(Z7a) является открытым подмножеством пространства
R" для любого а;
2) М=1Ш.
Этот набор карт называется атласом топологического многообра-
зия М.
* Стокс (Stokes) Джордж Габриель (13.8.1819—1.2.1903) — английский
математик и физик.
** Остроградский Михаил Васильевич (24.9.1801—1.1.1862) — русский ма-
тематик и механик.
308
Б. Говорят, что n-мерное топологическое многообразие имеет
гладкую структуру, если существует атлас многообразия, облада-
ющий следующими двумя свойствами:
1) для любых двух карт (Ua, ха) и (Ut, хе) из этого атласа
координатное преобразование
-'“Р ° 1 ’ П ~*" Х& (Ua П
является гладким (принадлежит классу С°°);
2) этот атлас максимален.
n-мерное топологическое многообразие, имеющее гладкую
структуру, называется п-мерным гладким многообразием (много-
образием класса С°°).
(Карта (U, х) из атласа гладкого многообразия М называется
локальной картой на многообразии М, или локальной системой
координат на М.
В. Функция f, заданная на гладком многообразии М, называ-
ется гладкой (принадлежащей классу С°°(Л4)), если для любой
точки р^М можно указать локальную карту (U, х), такую, что
p^U и функция <p=fox-1 имеет на открытом подмножестве x(U)
пространства Rra непрерывные частные производные всех поряд-
ков.
Функция f называется гладкой в точке р (f^C°°(p)), если су-
ществует открытая окрестность U точки р, в которой функция f
является гладкой.
Г. Носителем suppf гладкой функции f, заданной на гладком
многообразии М, называется замыкание множества точек много-
образия М, в которых эта функция отлична от нуля.
Д. Пусть М — гладкое многообразие и {(Ui, xi)} — его атлас.
Тогда существует гладкое разбиение единицы, подчиненное по-
крытию {Ui}, т. е. найдется набор гладких функций cpbM-’-R, об-
ладающих следующими свойствами:
1) 0«рг<1;
2) supp ф,-с:Ui\
3) 2гфг(р) = 1.
Е. Касательным вектором в точке р гладкого многообразия М
называется правило Хр: C°°(p)->-R, которое каждой функции
f^C'x(p) ставит в соответствие число Xpf и подчиняется следую-
щим условиям:
1) Хр(/ + ^) = Хр/ + Х^; 2) Хр(а/) = аХр/;
3) Xp(f.g) = Xpf.g{p) + f(p)-Xpg,
где f, gt=C°°(p), aeR.
Ж. Множество ТРМ всех касательных векторов в точке р мно-
гообразия М, на котором определены операции сложения (Хр +
+ Yp)f=Xpf+ Ypf, и умножения на число, (aXD)f=aXpf, называется
касательным пространством гладкого многообразия М в точке р.
Размерность касательного пространства совпадает с размерностью
многообразия М.
309
3. Отображение f гладкого «-мерного многообразия М в глад-
кое ^-мерное многообразие N называется гладким в точке р^М,
если существуют локальная карта (U, х), p^U, многообразия
М и локальная карта (V, у), q—f(p)^V, многообразия jV, такие,,
что отображение
g^yofox-1 : x(U)cRn-+Rk
является гладким (бесконечно дифференцируемым).
Отображение называется гладким, если оно является гладким
f:M-+N в каждой точке многообразия М.
И. Гладкое отображение f:M^N называется диффеоморфиз-
мом, если оно взаимно однозначно и обратное отображение'
f-'-.N-t-M также является гладким.
К. Многообразие М называется диффеоморфным многообра-
зию N, если существует диффеоморфизм В этом случае
dim Af=dimM.
Л. Дифференциалом гладкого отображения f (касательным,
отображением') в точке р^М называется отображение
q = f(p),
определяемое по правилу f, : Хр ТрМ -~Yq^ TqN, где Yq (g) =
— Xp(g°f) и g’e=C°°(<7)—произвольная гладкая функция.
М. Рангом гладкого отображения в точке р^М назы-
вается размерность образа касательного пространства при каса-
тельном отображении : rangp f = dim f,p (TpM).
H. Непустое подмножество N «-мерного гладкого многообра-
зия М называется его k-мерным гладким подмногообразием, если
для каждой точки p^N существует локальная карта (U, х), p&U,
такая, что x(U('\N)==x(U))']Rk.
О. Пусть f:M^N — гладкое отображение, полный прообраз
точки q^N—f-}(q)={p^M\f(p)=q} непуст и rangf=r в каждой
точке p^f~l(q). Тогда является гладким подмногообразием
многообразия М, его размерность равна «—r=dimAf—rang/.
П. Тензорным полем Т типа на гладком многообразии
М называется правило, которое с каждой точкой р^М связывает
тензор типа , заданный в касательном пространстве ТРМ.
Тензорное поле Т называется гладким, если его компоненты
принадлежат классу С°°(р) для любой точки реЛТ
Р. На всяком гладком многообразии можно задать риманову
метрику — гладкое тензорное поле g типа компоненты
gii которого симметричны, gij=gn, и квадратичная форма
gijdx'dx’ положительно определена.
310
УПРАЖНЕНИЯ
1. Доказать, что график гладкой функции z=/(x, у), заданной
на всей плоскости, является гладким многообразием.
Указание: атлас состоит из одной карты.
2. Доказать, что окружность является гладким многообразием,
3. Является ли гладким многообразием плоская замкнутая ло-
маная?
4. Доказать, что тор является гладким многообразием. По-
строить атлас тора.
5. Показать, что на сфере нельзя задать атлас, состоящий из
одной карты.
6. Вычислить ранг отображения /:R2^R2, f(x, у) = (х, 0).
Ответ: 1.
7. Доказать, что пространства Rra и Rft, &¥=л, не диффеоморфны.
8. Доказать, что окружность является гладким подмногообра-
зием плоскости.
9. Доказать, что отображение, которое каждой точке тора ста-
вит в соответствие единичный вектор внешней нормали тора в этой
точке, является гладким.
Указание: записать явные формулы для координат вектора.
10. Задать риманову метрику на торе.
ГЛАВА 6
НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ДИФФЕРЕНЦИАЛЬНОЙ
ГЕОМЕТРИИ
Приложения веденных понятий и установленных выше фактов
весьма многообразны. Поэтому вполне естественно желание ав-
торов дать какое-то представление об их применениях, рассказать
о роли и месте геометрических подходов и методов в решении раз-
личных задач. Мы остановимся лишь на некоторых приложениях,
не требующих к тому же чрезмерного привлечения дополнительных
материалов.
В этой главе приводятся некоторые приложения теории кривых
к задачам механики и физики, изучаются геометрические свойства
решений разнообразного в своих применениях уравнения. синус-
Гордона, приводится тензорное описание некоторых алгебраиче-
ских и дифференциальных операций, дается определенное пред-
ставление о псевдоевклидовом и псевдоримановом пространствах,
рассказывается о некоторых типичных задачах вычислительной
геометрии.
§ 1. ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
1°. Закон движения материальной точки. Скорость и ускорение
Рассмотрим движение материальной точки по некоторой кри-
вой L. Пусть s — длина дуги кривой L, отсчитываемая от точки
Мо (начальное положение материальной точки на кривой L).
В качестве параметра разумно выбрать время t, которое отсчиты-
вается от момента 10. В этот момент t0 материальная точка нахо-
дилась в начальном положении Мо (рис. 1). Пусть в момент t
материальная точка находится в точке М кривой L. Обозначим
через г(^) вектор ОМ. Тогда закон движения точки М по кривой
L можно записать так:
г=г(0. (1)
Если x(f), y(t), z(t) — координаты точки М, то векторное соотно-
шение (1) равносильно следующим трем соотношениям:
x=x(0, z=z(t), (2)
которые представляют собой параметрические уравнения кри-
вой L.
312
Скалярная скорость движения точки М по кривой L равна
——. Для векторной скорости V, направленной по касательной к
at
кривой L в точке М, получаем выражение
, dr dr ds , ds
V = Г, =------------------------- г ----,
’ dt ds dt s dt
.(3)
Напомним, что |r/| = l (см. § 3 главы 1).
Рис. 1. Кривая как траектория материальной точки
Вектор ускорения
dv « d2r
— г, =—--
dt----------------п dt2
расположен в соприкасающейся плоскости кривой L .в точке М
(см. § 4 главы 1). Дифференцируя выражения, входящие в соот-
ношение (3) по t, получим для ускорения ----- следующую фор-
di
мулу:
dv п п
dT~r<'-‘rss
(4)
Придадим соотношению (4) несколько иной вид. Имеем
dx
ds ds
тлр т —.единичный вектор касательной кривой L в точке М. По
первой формуле Френе (см. § 5 главы 1)
Тз =Й[П
313
(здесь kt — кривизна кривой L, п — единичный вектор главной
нормали). Это позволяет записать соотношение (4) так:
dv ____ d2s
dt ~~ at2
(5)
Формула (5) дает разложение ускорения движущейся
d2s
точки на тангенциальную составляющую т (составляющую по
/ ds х 2
касательной) и нормальную составляющую ( —) (составляю-
щую по главной нормали).
Отметим, что
таком движении,
dv
янна, вектоп ---
1 dt
s
в этом случае = 0 и поэтому из формулы (5) вытекает, что
при равномерном движении по кривой, т. е. при
ds
когда скалярная скорость — движения посто-
направлен по главной нормали. Действительно,
(6)
Мы видим, что при равномерном движении ускорение на-
правлено по вектору п, а длина ускорения пропорциональна кри-
визне kx кривой (коэффициент пропорциональности равен квадра-
ту скалярной скорости, которая постоянна).
2°. Движение точки в поле сил
Движение материальной точки может происходить под воз-
действием внешних сил — поля сил, а также и под воздействием
внутренних сил.
Так, например, заряженная частица в магнитном поле дви-
жется под воздействием внешних сил. При этом оказывается, что
для такого движения
ds , d2s А
— = с = const и ------------= 0.
dt dt2
Как мы уже отмечали, в этом случае ускорение
найдено по формуле (6) и
--- может быть
dt
dv
di
= kt С2.
Справедливо и обратное утверждение: если под воздействием
поля сил точка движется по кривой L так, что ее ускорение в лю-
314
бой момент времени направлено по главной нормали, то движе-
ние происходит с постоянной скалярной скоростью.
Действительно, из формулы (5) следует, что в этом случае
Запишем уравнение движения материальной точки. Наиболее
общий случай — когда сила F, действующая на точку, зависит от
расположения точки в пространстве, т. е. от вектора г((), от ско-
dr ,
рости — и от времени t.
dt
Таким образом,
F = F (г, —,
\ dt )
Так как согласно закону Ньютона * произведение массы m точки
d2r
на ускорение равно действующей на точку силе, то вектор-
ное уравнение движения материальной точки имеет вид
m—-=F г, —, (7)
dt2 \ dt ]
3°. Движение точки в параллельном поле сил
В случае, если действующая на точку сила F параллельна по-
стоянному вектору а, получаем
F = ’-(r.~> ‘Р-
В этом соотношении X (г, —, —некоторая скалярная функ-
\ <и /
ция, представляющая собой на кривой L — траектории движу-
щейся точки — вполне определенную функцию времени t.
Запишем векторное уравнение движения (7) для рассматри-
ваемого случая. Учитывая формулу (8), получим
m = % f г, —, t j а. (9)
Л2 \ dt )
Интегрируя равенство (9) по t, найдем
t
пг——rn — | = afx(r, —, t] dt. ' (10)
dt dt |/=/0 J \ dt j
to
* Ньютон (Newton) Исаак (4.1.1643—31.3.1727) — английский математик,
физик, механик, астроном.
315
Вводя обозначения
dr I
vo = — ’
dt
r, —, dt,(
dt )
и проводя интегрирование формулы (10), приходим к соотноше-
нию
t
тг (/)—тг (/0)—mvot = а § <р (/) dt.
^0
(11>
Выражая отсюда r(t)y получаем закон движения точки в па-
раллельном поле сил
t
r(t) = r(to) + vot + — [<p(t)dt.
т J
(12>
Из формулы (12) можно сделать следующий вывод: траекто-
рия точки, движущейся под воздействием параллельного поля
сил, расположена в плоскости, параллельной векторам v0 и а.
Эта плоскость проходит через конец вектора г(/0).
С физической точки зрения установленный факт очевиден. Дви-
гаясь в параллельном поле сил, точка должна находиться в плос-
кости, параллельной этому полю сил, — нет воздействий, которые
могли бы вывести точку из такой плоскости. Вектор скорости в
начальный момент времени равен v0. Поэтому движение должно
проходить в плоскости, параллельной векторам v0 и а. Формула
(12) дает точную характеристику движения.
4°. Движение точки в центральном поле сил
Пусть поле сил F имеет вид
F = %fr, —, /)г,
\ dt /
(13)
где Л — скалярная функция.
Такое поле сил называется центральным. В случае централь-
ного поля сил движение точки происходит так, что в любой мо-
мент времени линия действия силы, приложенной к переменной
точке, проходит через одну и ту же точку (начало координат).
Найдем некоторые качественные характеристики траектории
точки, движущейся под воздействием центрального поля сил.
Согласно правилу (13) закон движения (7) имеет вид
316
Умножая обе части этого соотношения векторно на г и учитывая»,
что гХг=О, найдем
т (— хг] =0,
\ dt2 )
или, иначе
гх—= 0. <14>
dt2
Отсюда вследствие соотношения
d / dr \ dr dr d2r d2r
— rx — =—X--------hrx—- = rx——
dt \ dt j dt dt dt2 dt2
получаем, что
т. e.
rx—= C. (15>
dt
Умножим обе части соотношения (15) скалярно на вектор г.
С учетом равенства (г, —, = О получим
(С, г)=0.
Таким образом, мы видим, что траектория точки, движущейся
под воздействием центрального поля сил, расположена в плоско-
сти, перпендикулярной вектору С.
Итак, любая траектория точки, движущейся под воздействием
центрального поля сил, — плоская кривая.
Справедливо следующее утверждение (теорема Алъфана*):
если любая траектория материальной точки, движущейся в по-
стоянном (не зависящим от времени) поле сил, представляет со-
бой плоскую кривую, то это поле сил является центральным.
5°. Движение в поле сил тяготения
Поле сил тяготения имеет вид
f = -p-L-, (16). .
г3
где ц — постоянная, г=|г|.
Докажем, что под воздействием сил тяготения точка движет-
ся по коническому сечению — эллипсу, гиперболе или параболе.
* Альфан (Halphen) Жорж Анри (30.10.1844—21.5.1889) — французский
математик.
317
Уравнение движения для поля (16):
d2r г
т-----= —и —.
dt2 г3
(17)
Умножим обе части этого уравнения скалярно на вектор
dr
dt
По-
лучим
/' dr d2r \ 1 / dr
---, --- i = —P- — Г, —
\ dt dt2 r3 \ dt
(18)
В силу очевидных равенств
/dr d2r \ \ d / dr / dr \ Id
\ dt di2 ) 2 dt \ dt J [ di J 2 dt
формула (18) преобразуется к следующей:
1
d / dr \2
m —„ —
dt \ dt J
[x dr2
ra dt
2li
d
dt
(19)
Так как поле сил тяготения представляет собой центральное си-
ловое поле ^F =—то согласно пункту 4° движение мате-
риальной точки будет происходить в некоторой плоскости. Выбе-
рем координатную систему Oxyz так, чтобы это движение проис-
ходило в плоскости z=0.
Переходя к полярным координатам
и замечая, что
x=pcoscp, t/=psincp
г = (х, у, 0} = {pcos<p, psincp, 0}, r = p,
вычислим координаты вектора —. Имеем
dt
dr f dp dtp dp . , dtp n
— = —— cos<p—p —sin<p, ——sin<p + p—— cos<p, 0
dt [ dt dt dt dt
и поэтому
( dT V — ( dp V I p2 / d<p \2
\ dt ) \ dt / ' \ dt ) '
.2
Это позволяет переписать соотношение (19) в следующем виде:
d
т —
dt
Интегрируя последнее уравнение по t, получим
-±-V + p2
dt ) \ dt ) p
(20)
где A — постоянная интегрирования.
318
В предыдущем пункте, разбирая вопрос о движении точки в
центральном поле сил, мы доказали, что
гхА=с. (21)
dt
Заметим, что при нашем выборе координатной системы вектор С
направлен по оси Oz (движение происходит в плоскости Оху и,
значит, векторы г и — расположены в этой плоскости). Так как
г = {х, у, 0},
dr ___I dx
dt ~ { dt
*L, ol
dt Г
то формулу (21) можно записать так:
dy dx „
х —----у-----= С,
dt dt
где С=|С|.
В полярных координатах это соотношение записывается сле-
дующим образом:
= c (22)
Выражая отсюда и подставляя найденное выражение в ра-
венство (20), получим
и далее
f V == — д- 2^.. _*_21. (23)
\ dt ) т т р р2
/ Щ '.2 р4
Из соотношения (22) находим (—I = ——.Это позволяет пере-
\ dtp / С2
писать формулу (23) в следующем виде:
где Ci и С2 — некоторые постоянные
G = — f — )2> Сг = —5— (А + .
\ тС } тС2 \ т ] /
Из последнего соотношения получаем, что
319
Решение этого дифференциального уравнения можно записать так
— = С3 + ]/С2 cos(<p—<p0)
Р
(<Ро — произвольная постоянная, а постоянная С3 вычисляется по
Ci и С2 известным образом).
Полученная формула представляет собой полярное уравнение
конического сечения с фокусом в полюсе.
6°. Движение заряженной частицы в электромагнитном поле
Рассмотрим движение заряженной частицы массы т с зарядом
е в пространстве под воздействием электрического поля Е и маг-
нитного поля Н.
На точку действуют следующие силы: еЕ — электрическая си-
ла, — сила, действующая на точку по закону Лорен-
с \ dt /
ца * * (с — скорость света).
Поэтому векторное уравнение движения имеет вид
т
d2r
dt2
еЕ + —(MX—V
с \ dt /
(24)'
Умножим обе части равенства (24) скалярно на вектор и
получим
Так как ~ = v (v—скорость частицы) и (-|yi2==v2’ то найденное
соотношение примет вид
— (mv2) = e(E, v).
Отсюда следует, что если электрическое поле Е равно нулю, то
скалярная скорость частицы v постоянна. В этом случае время t
можно заменить параметром, пропорциональным длине дуги s тра-
ds
ектории. Действительно, v =— и если v=v0, то s—v0(t—10) т. е.
dt
t =--S + t0.
VO
Проанализируем теперь случай, когда Е=О и магнитное поле
Н создается единственным магнитным полюсом. Эту ситуацию
можно представить себе так. Пусть имеется магнит со слабой на-
пряженностью Н магнитного поля. Тогда вблизи одного из полю-
* Лоренц (Lorentz) Хендрик Антон (18.7.1853—4.2.1928) — голландский
• физик и математик.
.320
сов магнита магнитное поле фактически будет создаваться этим
близким магнитным полюсом.
Расположим начало координат в этом полюсе. Тогда
Н= — k
Р3
где k — постоянная, р=г.
Предложенное выражение для магнитной напряженности Н ес-
тественно: в рассматриваемом случае поле Н будет центральным
и его структура будет такой же, как и структура поля тяготения
из пункта 5°.
Векторное уравнение движения имеет вид
d2r , / dr \ 1
т —- = —k г х— —
dt2 \ dt ) р3
Так как
, 1 , , dr dr ds dr
t — — S + t0, --------=------•— = 0O---------,
v0 dt ds dt ds
d2r ____ d / dr
dt2 ~ dt \ dt
d I dr \ ds 2 d2r
ds \ ds ) dt ds2
то векторное уравнение движения можно записать в следующей
форме:
где р. =---^2- = const.
Умножим обе части соотношения (25) векторно на г и, при-
влекая формулу для двойного векторного произведения, получим
d / dr \ 1 ( а dr г dr2 1 1 dr г dp d / г \
ds \ ds / р3 I ds 2 ds j р ds р2 ds ds \ p /
Отсюда после интегрирования no s приходим к соотношению
/ dr , \ г .
и. — Хг I =-----------------------------(-а,
\ ds / р
где а — постоянный вектор.
Умножая обе части последнего равенства скалярно на вектор
г, получим
р+(а, г)=0. (26)
В этом соотношении г — радиус-вектор движущейся точки, р —•
длина вектора г, так что г=ре, где е — единичный вектор, сона-
правленный вектору г. Заменяя в формуле (26) вектор г на ре и
сокращая затем на р, получим
(а, е)=— 1.
11 Зак. 259
321
Так как а — постоянный вектор, а е — единичный, то последнее
равенство можно переписать в следующем виде:
| а | cos<p=—1,
где <р — угол между векторами а и е.
Заметим, что угол <р — постоянный. Следовательно, постоян-
ным будет и угол между векторами а и г. Это означает, что тра-
ектория движущейся точки расположена на круговом конусе с
осью а и углом раствора 2 (л—<р).
Задача. Доказать, что траектория точки является геодезиче-
ской линией конуса — кривой, которая при развертывании конуса
на плоскость разворачивается в прямую.
7°. Движение заряженной частицы в постоянном электромаг-
нитном поле
Пусть электрическая Е и магнитная Н напряженности постоян-
ны, т. е. имеют одно и то же значение в любой момент времени и
в любой точке пространства.
Векторное уравнение движения частицы имеет вид
т-^- = 8Е + И |Нх^)-еЕ-!-И4(Нхг)
dr \ dt ) dt
Хе и ц — постоянные). После интегрирования получим
т — = 8Е/ + р(Нхг) + С. (27)
dt
Выберем систему координат Oxyz так, чтобы ось Oz была со-
направлена вектору Н, а ось Оу была ортогональна векторам Е
н Н. Тогда
Е=(£ь 0, £3), Н=(0, 0, Яз),
н векторное соотношение (27) в координатах запишется так:
т = tEJ + \iHsy + Clt
at
т^- = рН3х + С2, (28)
dt
m — = eEst 4- C3.
dt
Дифференцируя первое из уравнений (28) по t и используя вто-
рое, получим,что
— = —а3(х + р),
где а = - и р—постоянная.
т
322
Положим и=х + р. Это позволит переписать предыдущее соот-
ношение в следующем виде:
Интегрируя это уравнение и вновь заменяя и на х+р, получим
х——р + А sin(a/+a). (29)
После подстановки найденного выражения для х во второе из
уравнений (28) и последующего интегрирования имеем
у=—qt + b—A cos (at+a). (30)
Наконец, из последнего уравнения (28) находим
z=M2W+t. (31)
Закон движения частицы задается формулами (29) — (31). Ее
движение можно представить так: частица движется по окруж-
ности
х = A sin (at + ос), у = А cos (at + a),
центр которой перемещается по кривой, определяемой параметри-
ческими уравнениями
х=—р, у =—qt\rb, z = W24-v/4-t. (32)
При этом окружность все время остается параллельной плоско-
сти Оху.
Если <7=0 и Z=0, то формулы (32) представляют собой урав-
нения прямой, параллельной оси Oz, и частица движется по вин-
товой линии.
§ 2. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ТЕОРИИ ПОВЕРХНОСТЕЙ
ОТРИЦАТЕЛЬНОЙ КРИВИЗНЫ
В этом параграфе мы познакомимся с геометрическими мето-
дами исследования уравнения
д2г
------------------------------= sinz,
дх ду
(1)
широко известного под названием уравнения синус-Гордона. Про-
исхождение этого уравнения связано с геометрическими исследо-
ваниями. Об этом мы подробнее расскажем ниже. Уравнение си-
нус-Гордона встречается в различных задачах естествознания. Мы
познакомимся с некоторыми применениями этого уравнения в фи-
зике.
И*
323
1°. Чебышевские сети на поверхности
В 1878 г. известный русский математик П. Л. Чебышев* в ра-
боте «О кройке одежды» (Чебышев П. Л. О кройке одежды//
//Успехи математических наук. 1946. Т. 1, вып. 2; перевод с фран-
цузского: Tchebycheff Р. Sur la coupe des vetements//Assoc.
Frans. — 1878. Oeuvres II) исследовал вопрос о специальных се-
тях на поверхностях. Эти сети, называемые теперь чебышёвскими,
характеризуются следующим свойством: в каждом сетевом четы-
рехугольнике противоположные стороны равны. Ясно, что нити
куска ткани, натянутой на поверхность, образуют на ней чебышев-
скую сеть (рис. 2).
Рис. 2. Сеть линий на поверхности Ф. Яркими линиями выделен
сетевой четырехугольник. Угол z(x, у), который образуют пересе-
кающиеся в точке М(х, у) поверхности Ф линии сети — коорди-
натные линии — линия х и линия у, называется сетевым углом
Пусть на поверхности Ф задана чебышевская сеть и линии
этой сети выбраны за координатные линии. Одну из линий пер-
вого семейства примем за базовую линию х (линия г/=0), а дру-
гого — за базовую линию у (линия х=0). За координату х точки
М на поверхности выберем длину отрезка базовой линии, отсчи-
тываемого (с учетом знака) от начальной точки 0(0, 0). Анало-
гично выбирается координата у. Угол между координатными ли-
ниями х и у в точке М (х, у) (сетевой угол) обозначим через
z(x, у).
Из определения чебышевской сети вытекает, что параметры х
и у — длины дуг соответствующих координатных линий и поэто-
му если г(х, у) — радиус-вектор поверхности Ф, то
Гх=1’ Г£ = 1> Гл-Гу = СО5 2(х, у).
* Чебышев Пафнутий Львович (26.5.1821—8.12.1894) — русский матема-
тик.
324
Следовательно, первая квадратичная форма поверхности Ф для
выбранной внутренней системы координат х и у имеет вид
I = dsi = dx2 -ф 2 cos zdxdy + dy2. (2)
Напомним, что
Е = г2 = 1, F = г,ги = cos z, G — г,2 = 1. (3)
Верно и обратное: если первая квадратичная форма поверхно-
сти имеет вид (2), то сеть координатных линий х и у является че-
бышевской.
Итак, для того чтобы сеть линий х и у на поверхности была
чебышевской, необходимо и достаточно, чтобы первая квадратич-
ная форма этой поверхности имела вид (2).
Найдем уравнение для сетевого угла z(x, у) чебышевской сети.
Подсчитаем кривизну К поверхности Ф при помощи форму-
лы (19) § 5 главы 2, замечая, что по этой формуле кривизну по-
верхности можно вычислить, если известны лишь коэффициенты
Е, F и G первой квадратичной формы. Полагая в формуле (19)
и—х и v=y и используя формулы (3), получим, что
W = EG—F2 = 1—cos2z = sinaz,
EU = EX = O, Ev = Ey=0,
Fa = Fx=smz-zx, F0=Fy—-sinz-zy, (4)
Gu—Gx = 0, GD = Gy = 0.
Из формул (4) следует, что в определителе третьего порядка, рас-
полагающемся в правой части соотношения (19), первая и третья
строки равны, и поэтому этот определитель равен нулю. Тем са-
мым
„__ 1 ( д Еу — Ех д Fy —
~ гУ’сп’зу VW дх Vw J*
Отсюда, вновь привлекая формулы (4), получаем нужное нам
уравнение для сетевого угла Z:
zxy=—К sin z. (5)
Эта формула посредством несложных преобразований вытекает
из формулы для сетевого угла, приведенной Чебышевым в цити-
рованной выше работе. Сравнивая формулу (5) и уравнение (1),
видим, что уравнение для сетевого угла переходит в уравнение си-
нус-Гордона при К=—1. Тем самым с геометрической точки зре-
ния решение уравнения синус-Гордона связано с задачей построе-
ния чебышевских сетей на поверхностях, гауссова кривизна К
которых равна —1. Более того, каждому решению уравнения си-
нус-Гордона на такой поверхности отвечает чебышевская сеть.
325
2°. Изометрические погружения плоскости Лобачевского в ев-
клидово пространство Е3
Плоскость Лобачевского определяется системой аксиом Лоба-
чевского, отличающейся от системы аксиом Евклида лишь аксио-
мой о параллельных. У Лобачевского аксиома о параллельных ут-
верждает, что через точку вне данной прямой можно провести по
крайней мере две прямые, не пересекающие данную.
Введем на плоскости Евклида прямоугольную декартову сис-
тему координат (х, у). Линейный элемент евклидовой плоскости
в этой координатной системе имеет вид
ds2=dx2 + dy2, (6)
а гауссова кривизна Ке линейного элемента (6) равна нулю:
Ке^О. (7)
В этом можно легко убедиться при помощи формулы (19) § 5
главы 2.
На плоскости Лобачевского можно ввести полугеодезическую
систему координат (х, у) так, что
ds2 = dx2 + e2kxdy2, (8)
где fe=const. (Этот вопрос разобран в книге Н. В. Ефимова *
«Высшая геометрия» (М.; Л., ОГИЗ ГИТТЛ, 1945).
Вычислим гауссову кривизну Кл плоскости Лобачевского, вос-
пользовавшись формулой (11) § 6 главы 2 (см. также формулу
(9) этого параграфа). Вновь считая и=х, v=y, получим
Таким образом, плоскость Лобачевского имеет постоянную гаус-
сову кривизну
Kn=~k2.
В частности, если k—1, то
Кл==-1. (9)
Обычно считают, что кривизна плоскости Лобачевского рав-
на — 1.
Обратимся теперь к вопросу об изометрическом погружении
плоскости Лобачевского в евклидово пространство Е3.
Пусть задана плоскость Лобачевского, т. е. двумерное рима-
ново многообразие (см. главу 4. Риманова геометрия), линейный
элемент которого задается формулой
ds2=dx2+e2xdy2. (10)
Эта формула получается из формулы (8) при k=\.
* Ефимов Николай Владимирович (31.5.1910—12.8.1982) — советский ма-
тематик.
326
Для решения вопроса о том, существует ли поверхность в про-
странстве Д3, первая квадратичная форма которой задается соот-
ношением (Ю), обратимся к § 5 главы 2. В параграфе исследова-
лась следующая задача. Пусть даны две квадратичные формы
Edx2 + 2Fdxdy + Gdy2 и Ldx2+2Mdxdy+Ndy2.
Существует ли поверхность Ф, для которой эти формы будут со-
ответственно первой и второй квадратичными формами? Оконча-
тельный вывод приведенных там рассуждений состоит в следую-
щем: если коэффициенты Д, F, G, Д, М, N этих форм связаны со-
отношениями Гаусса и Петерсона — Кодацци (формулы (19) и
(20) § 5 главы 2), то такая поверхность Ф существует и, с точ-
ностью до положения в пространстве, единственная (теорема Бон-
не, 3° § 5 главы 2).
Мы поставили перед собой другую задачу. Нам дана лишь
первая квадратичная форма (форма (10)). Тем самым коэффици-
енты Д, Д, G — известные функции, а коэффициенты L, М, N вто-
рой квадратичной формы неизвестны. Требуется найти в про-
странстве Д3 поверхность Ф, первая квадратичная форма которой
совпадает с заданной. Эта задача называется задачей об изо-
метрическом погружении в трехмерное евклидово пространство
абстрактно заданной двумерной метрики.
Для решения поставленной задачи можно поступить так: будем
рассматривать уравнения Гаусса и Петерсона—Кодацци как со-
отношения, которым удовлетворяют неизвестные L, М и N. Если
из этих уравнений удастся найти Д, М и N, то возникнет следую-
щая ситуация. Мы будем располагать известными функциями Д,
F, G и найденными Д, М, АГ, причем все они связаны соотношения-
ми Гаусса — Петерсона — Кодацци. Согласно теореме Бонне су-
ществует поверхность с данной первой квадратичной формой
(формой (10)) и второй квадратичной формой с найденными ко-
эффициентами Д, М и N.
Займемся исследованием этого вопроса для случая плоскости
Лобачевского (плоскости Л2).
Конечно, можно было бы поступить стандартным способом —
обратиться к какому-нибудь из линейных элементов плоскости
Л2, например к ds2, определяемому формулой (10), составить урав-
нения Гаусса и Петерсона — Кодацци, в которых коэффициенты
Д, М и N будут неизвестными функциями, и попытаться как-то
охарактеризовать решения этой системы. Но этот путь непростой,
поскольку мы не имеем никакой дополнительной информации о
неизвестных функциях Д, М и N. Поэтому мы поступим по-друго-
му. Представим себе, что в пространстве Д3 есть поверхность Ф,
внутренняя геометрия которой представляет собой геометрию Ло-
бачевского (напомним, что понятие внутренней геометрии обсуж-
далось в § 6 главы 2). Некоторая информация о поверхности Ф
уже у нас имеется: ее гауссова кривизна отрицательна — Кл==
=—1. Так как гауссова кривизна равна отношению дискриминан-
тов второй и первой квадратичных форм поверхности (см. форму-
327
лу (34) § 4 главы 2) и дискриминант первой формы положителен,
то знак дискриминанта второй формы совпадает со знаком гаус-
совой кривизны. В рассматриваемом случае этот знак отрицате-
лен и поэтому на поверхности Ф можно ввести параметризацию,
при которой координатные линии будут асимптотическими линия-
ми поверхности (см. 9° § 4 главы 2). Выберем на поверхности Ф
такую параметризацию и обозначим ее параметры через и и v.
В этом случае вид первой квадратичной формы — ее коэффици-
енты Е* (и, v), F*(u, v) и G*(u, v) — пока нам явно неизвестен,
зато коэффициенты L и М равны нулю. Так как
„ , LN — М2
то с учетом Т=еО, N=0 имеем
M2=E*G*—F*2.
Подставляя значения Е = 0, М = ~/E*G*—F*2, N = Q в уравне-
ния Петерсона — Кодацци (формулы (20) § 5 главы 2), после не-
сложных преобразований получим следующую систему соотноше-
ний:
F'E*—E’Gu = 0,
(И)
G*E’—F'G*U = O.
Эту систему можно рассматривать как линейную однородную си-
стему относительно неизвестных Ev* и Gu*. Так как определитель
А системы (11) удовлетворяет условию
A = E’G‘—f2>0,
то эта система имеет только нулевое решение
е;=о, g;=o
и, следовательно,
Е*=Е*(и), G* = G*(v).
Введем новые параметры х и у по формулам
х = J -/ВЧо) da, у= jj /С^ф) dp.
о о
При таком преобразовании параметров имеем
dx2—E*du2, dy2—G*dv2
и, далее,
ds2=dx2+2 cos zdxdy + dy2, (12)
где z(x, у) — сетевой угол координатной сети. (Если ds2=dx2+
328
+2F*dxdy + dy2, то F*—cosz, где z — угол между координатными
линиями.)
Мы можем сделать теперь важный вывод: если внутренняя гео-
метрия поверхности Ф представляет собой геометрию Лобачев-
ского, то сеть асимптотических линий на этой поверхности явля-
ется чебышевской сетью (в 1° было установлено, что если линей-
ный элемент поверхности имеет вид (12), то сеть координатных
линий будет чебышевской).
Отметим еще одно обстоятельство. В проведенных рассужде-
ниях мы исходили из предположения, что поверхность Ф имеет
гауссову кривизну К= — 1. Но тогда для сетевого угла z(x, z/)
семейства асимптотических линий поверхности Ф, образующих че-
бышевскую сеть, имеет место уравнение синус-Гордона (1).
Таким образом, с геометрической точки зрения решения урав-
нения синус-Гордона либо определяют сетевой угол z(x, у} чебы-
шевской сети на плоскости Лобачевского, либо определяют сете-
вой угол семейства асимптотических линий на поверхности, внут-
ренняя геометрия которой представляет собой геометрию Лоба-
чевского.
3°. Доказательство теоремы Гильберта о невозможности в ев-
клидовом пространстве Е3 полной плоскости Лобачевского
В конце прошлого и в начале нынешнего века Д. Гильберт*
занимался одним из важнейших вопросов естествознания — осно-
ваниями геометрии. Он детально исследовал проблему аксиомати-
ческого построения геометрии. Геометрия строилась им без обра-
щения к каким-либо реальным объектам. Точки, прямые и плос-
кости не определялись, их свойства описывались аксиомами — ис-
ходными положениями, из которых логически выводились свойст-
ва различных геометрических фигур.
Известно, что планиметрия Евклида** и сферическая геометрия
представляют собой соответственно внутреннюю геометрию плос-
костей и сфер евклидова пространства. Примеры поверхностей по-
стоянной отрицательной кривизны — поверхности вращения, по-
лученные Ф. Миндингом ***, — не имеют на регулярных своих час-
тях внутреннюю геометрию, совпадающую с геометрией частей
плоскости Лобачевского, но имеют и особенности: ребра, острия
и, главное, в целом не представляют полной плоскости Лобачев-
ского. В 1901 г. Гильберт в работе «О поверхностях постоянной
гауссовой кривизны» (Гильберт Д. Основания геометрии. М.;
Л., ОГИЗ, 1948) рассмотрел вопрос о существовании в простран-
стве Е2 полной без особенностей плоскости Лобачевского и дока-
зал, что в пространстве £3 не существует полной и регулярной по-
* Гильберт (Hilbert) Давид (23.1.1862—14.2.1943) — немецкий математик.
** Евклид (Ev»cXei6T]O (ок. 340 — ок. 287. до н. э.) — математик эпохи
эллинизма.
*** Миндинг (Minding) Фердинанд Готлибович (Эрнсе Фердинанд Адольф)
(23.1.1806—13.5.1885) — русский математик.
329
верхности, внутренняя геометрия которой представляет геометрию
полной плоскости Лобачевского (рис. 3).
Доказательство Гильберта основано на анализе свойств реше-
ний уравнения синус-Гордона. Ниже приводится доказательство
Гильберта о невозможности в пространстве £3 полной плоскости
Лобачевского.
Рис. 3. Поверхности Миидинга постоянной отрицательной кривизны: а — «фо-
нарики»; б — «катушки»; в — псевдосфера
Пусть в пространстве Е3 имеется полная регулярная поверх-
ность Ф, внутренняя геометрия которой является геометрией Ло-
бачевского. Будем считать, что гауссова кривизна К поверхности
Ф равна —1 (если гауссова кривизна поверхности равна отрица-
тельной постоянной —k2, то путем подобного преобразования про-
странства всегда можно добиться того, чтобы кривизна преобра-
зованной поверхности была равна —1). На поверхности Ф воз-
никает чебышевская сеть асимптотических линий. Эта сеть в це-
лом имеет такую же структуру, что и декартова сеть на евклидо-
вой плоскости: любые две линии сети из разных семейств пересе-
каются (в декартовой сети любая линия х пересекается с любой
линией у). Отметим, что такое свойство справедливо не для каж-
дой сети (рис. 4).
Поскольку чебышевская сеть асимптотических устроена в це-
лом как декартова сеть на плоскости, мы будем в дальнейшем
330
Рис. 4. Пример сети на плоскости, обладающей основным свойством декарто-
вой сети локально, но не обладающей этим свойством в целом. Эта сеть стро-
ится так. На плоскости проводится семейство параллельных прямых ..., —1, О,
1, 2, 3, ..., на одинаковом расстоянии друг от друга. Затем берется шаблон —
Кривая, расположенная, например, между параллельными прямыми 1 и 2, для
которой эти прямые являются асимптотами. Этот шаблон путем параллельного
переноса в полосе между прямыми 1 и 2 образует часть линий первого семей-
ства. Прямые .... —1, 0, 1, 2, ... также причисляются к первому семейству. Ана-
логично строится второе семейство (линии второго семейства обозначены пре-
рывистыми линиями). В окрестности произвольной точки М любые две линии
сети из разных семейств пересекаются (основное свойство декартовой сети),
но выделенные на рисунке стрелками линии первого и второго семейств не пе-
ресекаются
иллюстрировать наши рассуждения на декартовой плоскости па-
раметров х и у (рис. 5).
Сетевой угол z{x, у) между асимптотическими линиями х и
у удовлетворяет условию
0<2<л. (13)
Действительно, в каждой точке поверхности отрицательной кри-
визны существует два различных асимптотических направления,
угол между которыми как раз и равен углу z. Поскольку асимп-
тотические направления различны, угол z между ними не может
быть равен ни нулю ни л. '
Таким образом, если в пространстве £3 имеется полная поверх-
ность Ф отрицательной гауссовой кривизны К=—1, то на этой
331
поверхности возникает чебышевская сеть асимптотических линий,
устроенная в целом как декартова сеть на плоскости, причем сете-
вой угол z этой сети удовлетворяет уравнению синус-Гордона (1)
и условию (13).
Рис. 5. Две любые линии 1-го и 2-го семейств чебышевской сети
пересекаются. Из точек отрезка [0, х] базовой линии х проведем
все линии 2-го семейства и на каждой из них отложим дугу одной
и той же малой длины у. Концы отложенных отрезков образуют
линию 1-го семейства, близкую к базовой и пересекающую произ-
вольно выбранную линию 2-го семейства. Повторяя описанную
процедуру достаточное число раз, дойдем до произвольной линии
1-го семейства. Тем самым произвольно выбранные линии из 1-го
и 2-го семейств чебышевской сети пересекаются
Гильберт показал, что на всей плоскости параметров х и у
не существует решения уравнения (1), удовлетворяющего условию
(13). Это, очевидно, и доказывает невозможность в пространстве
Е3 полной плоскости Лобачевского.
Итак, предположим, что на всей плоскости (х, у) существует
решение z(x, у) уравнения (1), удовлетворяющее условию (13).
Частная производная zx(x, z/)=£0, ибо из того, что zx = Q сле-
довало бы zxy = 0 и далее в силу уравнения (1) sin 2=0, т. е. ли-
бо 2=0 либо 2=л, что противоречит условию (13).
Без ограничения общности можно считать, что zx(Q, 0)>0 (слу-
чай 2Х(О, 0)<0 рассматривается аналогично). Поэтому существует
такое а>0, что на отрезке [0, За] (рис. 6)
zx(x, 0)>0.
Ясно, что
т— min z,(x, 0)>0.
xeio.M
332
Рис. 6. Полуполоса П={а^х^
<52а, у>0} и полуполоса П1 =
= {0«х<За, </»0}
Рис. 7. На участке тасгся—та
выполняется неравенство sin Z2»
»sin ma>0
Таким образом,
zx(x, 0)^m>G, x e [0, За]. (14)
Согласно условию (13) sinz>0 на всей плоскости (х, у) и, в
частности, в полуполосе
П1 = {0 х За, у 0}.
Так как (zx)y=sin2>0, то функция zx(x, у) монотонно возрастает
при возрастании у в полуполосе Пь Тем самым вследствие нера-
венства (14) имеем
2х(х, z/)>m (15)
для всех (х, у) еП|.
Интегрируя неравенство (15) по х от нуля до а при любом
фиксированном у>0, получим
z(a, y)>z{a, у)— z(0, у)>та. (16)
После интегрирования неравенства (15) по х от 2a до За
z(3a, у)—z(2a, y)>ma. (17)
С учетом условия z(3a, у)<л приходим к оценке
z(2a, у)<л—та: (18)
В полуполосе П1 z(x, у) является возрастающей функцией по
х — ее производная положительна (см. (15)). Поэтому в полупо-
лосе П={а^х^С2а, z/>0} выполняются соотношения
та^г(х, у)^л~та. (19)
Выберем а так, чтобы та было меньше л/2. Тогда для значений
2, удовлетворяющих условию (19), имеем (рис. 7)
sin z>sin(ma) >0.
333
Отсюда и из уравнения (1) получаем, что для всех точек (х, у)
полуполосы П справедливо неравенство
sin (та).
Интегрируя это неравенство сначала по у от 0 до некоторого У>
>0, а затем полученное неравенство по х от а до 2а, приходим к
соотношению
z(2a, У) >аУ sin (ma). (20)
Если взять
a sin (та) ’
то из этого соотношения получается, что в некоторой точке (х, у)
полуполосы П имеет место оценка
z(x, у)>л,
которая противоречит условию (13).
Утверждение Гильберта о невозможности в пространстве пол-
ной плоскости Лобачевского доказано.
Замечание. В самом начале проведенных рассуждений мы
предположили, что в пространстве Е3 существует полная регуляр-
ная поверхность, внутренняя геометрия которой является геомет-
рией Лобачевского. Это предположение следует уточнить. Предва-
рительно сделаем некоторые пояснения. Представим себе обычный
бесконечный цилиндр в пространстве Е3. Его можно рассматри-
вать как поверхность, полученную склеиванием граничных прямых
бесконечной полосы. Но этот же цилиндр можно рассматривать
как евклидову плоскость, бесконечное число раз намотанную на
цилиндр. При этом говорят, что евклидова плоскость является уни-
Рис. 8. а — бесконечная полоса на плоскости; б — цилиндр, полученный склеи-
ванием граничных прямых; в .— евклидова плоскость, бесконечное число раз
намотанная на цилиндр
334
версальной накрывающей цилиндра. Понятие универсальной на-
крывающей можно ввести для любой поверхности. В рассужде-
ниях этого пункта имелась в виду именно универсальная накры-
вающая поверхности (рис. 8).
4°. Доказательство существования регулярного решения урав-
нения синус-Гордона на всей плоскости
Рассмотрим следующую задачу: на плоскости (х, у) найти
функцию z(x, у), удовлетворяющую уравнению синус-Гордона (1)
zxy=sin z
и дополнительным условиям на координатных осях
z(x, 0) = ф(х)<ееС\ z(0, //) = ф(//)еС\ <р(О) = ф(О). (21)
Решение задачи (1), (21) было получено Л. Бианки*.
Докажем существование решения задачи (1), (21). Она экви
валентна задаче построения решения интегрального уравнения
х v
z(x, £/) = ф(х) + Ф(//)—ф(0)+И sinzdxdy. (22)
о о
Рассмотрим следующую итерационную последовательность:
х у
z„+1 = ф (х) + ф (у)—ф (0) + J J sin z„ dx dy,
о о
(23)
z0(x, у) = 0, zr(x, у) = (р(х) + ^(у)~ф(0).
При имеем
5 ?
|zn+1—\j|z„—zn—i\dxdy
о о
(24)
(здесь х>0 и у>0; для других значений х и у рассуждение про-
водится аналогично). Из того, что zo=0, |sin zx | <1, получаем
X у
о о
ху
(И)2 ’
(25)
Проведем далее рассуждения по индукции.
При п=1 для разности zn+1—zn справедлива оценка (25).
* Бианки (Bianchi) Луиджи (18.1.1856—6.6.1928) — итальянский матема-
тик.
335
Предположим теперь, что для некоторого п>1 выполнено не-
равенство
1 ^71 Zn—)
(x?/)n~* l
Цп-1)!)2 ’
(26)
и покажем, что для разности zn+l—zn имеет место аналогичная
оценка.
Заменяя в правой части неравенства (24) \zn—zn_x | на
I)!)2 (СМ' (26)), получим, что
| zn+i — zn | С С —-----dx dy = .
1 + J J ((п-1)!)2 (п!)2
о о
Тем самым мы можем утверждать справедливость оценки (26)
для любого п>1.
Отсюда вытекает равномерная сходимость последовательности
z.t(x, у) на всей плоскости. Предел z(x, у) этой последовательно-
сти является решением интегрального уравнения (22). Посредст-
вом стандартных рассуждений доказывается, что эта функция
имеет г непрерывных производных на всей плоскости и поэтому
представляет собой решение задачи (1), (21).
Замечание 1. Задача (1), (21) имеет единственное реше-
ние.
Замечание 2. В пункте 3 этого параграфа было доказано,
что на всей плоскости (х, у) не существует решения z(x, у) урав-
нения синус-Гордона, удовлетворяющего условию 0<£<л. Поэто-
му любое решение z(x, у) этого уравнения на всей плоскости обя-
зательно будет принимать значения, кратные л.
5°. Геометрическая интерпретация произвольных решений урав-
нения синус-Гордона
Для уяснения геометрических свойств решений уравнения си-
нус-Гордона на всей плоскости рассмотрим конкретный пример —
псевдосферу. Это поверхность, получаемая вращением трактрисы
вокруг ее асимптоты. Трактриса характеризуется следующим свой-
ством: это плоская кривая, длина отрезка касательной которой от
точки касания до некоторой прямой постоянна. Выберем прямую
за ось OZ, а постоянную положим равной 1. Тогда параметриче-
ские уравнения трактрисы в системе координат (X, Z) можно за-
писать так:
X = sin«, Z = lnctg-|—cosu, 0<«<л,
а параметрические уравнения псевдосферы будут иметь следую-
щий вид:
336
X = sinucosy, _ .
0<и<л,
Y = sinwsin v,
— oo < ц < + oo.
Z = Inctg----COSM,
(27>
Значениям 0<u<— отвечает верхняя полость псевдосферы, значе-
ниям —нижняя полость, а значению м = -^—ребро воз-
врата (Z=0) (рис. 9). Поскольку v — угол поворота плоскости.
Рис. 9. Псевдосфера
(X, Z), в которой лежит трактриса, и при вращении этой плоско-
сти вокруг оси OZ этот угол изменяется от —оо до +оо, то плос-
кость (X, Z) совершает бесконечно много оборотов и, значит, па-
раметрические уравнения (27) представляют собой параметриче-
ские уравнения бесконечной обмотки псевдосферы — ее универ-
сальной накрывающей.
Отметим важное обстоятельство: функции, входящие в пара-
метрические уравнения (27), в области задания параметров и и
v представляют собой аналитические функции. Однако для регу-
лярности поверхности этого недостаточно: рассматриваемая по-
верхность имеет особенность — ребро возврата, отвечающее зна-
п
чению и — Для объяснения обратимся к частным производ-
ным функций X, Y, Z, определяемых формулами (27). Имеем
337
Xa = coswcosn, Xo=—sin и sin у,
KB = cosusint>, KD = sin u cost;,
(28)
cosa и
sin и
ZV = Q.
При u = — и любом v получаем, что
Х„=0, Уи=0, Zu=0,
т. е. радиус-вектор r(u, v) поверхности имеет при и
п
2
равную
дулю производную ги. Тем самым гихги=О в точках ребра
л
и =-----
2
(это условие будет выполняться при любом другом вы-
боре параметров на псевдосфере).
Вычислим первую и вторую квадратичные формы псевдосферы.
Имеем
I = ds2 = ctg2 и du2 + sin2 и dv2,
II = [ ctg и |du2—sinu|cosujda2
(29)
'(значения ctg и и cos и берутся по абсолютной величине, что отве-
чает выбору внешней нормали псевдосферы и для верхней и для
нижней ее полостей).
Эти формулы справедливы для всех значений параметров, кро-
л
:ме и~~^-
Кривизна псевдосферы равна —1.
Асимптотические линии определяются из соотношения 11=0.
Вытекающие из него уравнения
—-----dy = 0, —+dy = 0 (30)
sin и sin и
справедливы для всех значений
я, включая и = Интегрируя
и, заключенных между нулем и
эти дифференциальные уравне-
ния, получаем уравнения асимптотических линий псевдосферы:
1-е семейство: Intg-^—v=clt
2-е семейство: lntg-~-4-y = c2.
(31)
Л
В частности, для и = — из соотношений (31) находим:
V=Ci, v=c2.
Тем самым параметр v может принимать любые значения. Точка,
338
(л 'j
—, vj, принадлежит одновременно и асим-
птотической линии 1-го семейства и асимптотической линии 2-го се-
мейства.
Вычислим угол z между асимптотическими линиями разных
семейств. Из соотношений (30) получаем для асимптотических на-
правлений следующие выражения:
(dtii;dvi) = (sin и: 1) (1-е семейство),
(du2:dv2) = (sinu:— 1) (2-е семейство).
Подставляя найденные выражения в формулу
__ Е du-! du2 + F (dut dv2 + du2 dvi) -f- G dv2
"j/E du? 2F d^ dv! + G dv? j/E du?, + 2F du2 av2 + G du?
получим, что
cos z=cos 2u. (32)>
При u~~ (ребро псевдосферы) из этой формулы вытекает, что
cos z=cos л=—1,
т. е. z=n. Значит, в точках ребра асимптотические линии разных
семейств касаются друг друга. Асимптотические линии касаются
также и ребра возврата псевдосферы (убедитесь в этом сами).
Построим параметрические уравнения асимптотических линий,
ограничившись подробным рассмотрением линий 1-го семейства,
(для 2-го вычисления проводятся аналогично)
Из соотношений (31) для асимптотических 1-го семейства име-
ем: y = lntg-^ с±. Подставляя это значение для v в параметри-
ческие уравнения псевдосферы (27), получим
X = sin и COS In tg -’
У = sin и sin ( Intg -Cj j, (33)'.
Z = Inctg-^—cos и.
Кривая (33) является регулярной для всех значений параметра
и, 0<и<л, включая и значение и = —, отвечающее ребру псев-
досферы. В самом деле, функции X, Y, Z аналитичны в интерва-
ле (0, л). Что же касается особых точек, то простые вычисления
показывают, что
Х2и + У2и + г2и=1+с1ёги>0
339-
для всех ue(O, л). Тем самым особых точек нет и асимптотиче-
ские линии 1-го семейства — регулярные кривые.
Таким же свойством обладают и асимптотические линии 2-го
семейства.
Итак, мы получили следующий удивительный результат: псев-
досфера — поверхность с особенностью (ребро) — покрыта дву-
мя семействами асимптотических линий без особенностей. Так как
псевдосфера не является в целом регулярной поверхностью, то эти
асимптотические мы будем называть обобщенными (рис. 10).
асимптотические
2-го семейства.
асимптотическая
1-го семейства
Рис. 1.0. Обобщенные асимптотиче-
ские на псевдосфере. В точках Mt,
Mz, М3, Mt, M5, Ms, M7 отмечены
углы между асимптотическими.
В точке Ме этот угол равен л.
В точке М7 этот угол больше л
Рис. 11. Переход из предельного со-
стояния z=0 при g-*+oo в постоян-
ное предельное состояние 2=2л
практически локализован в обла-
сти D
на
по
Введем
формулам
псевдосфере новые
внутренние координаты
х и у
х
= -J-lntg— ’
2 2
1 , . и . v
2 ’
(34)
Тогда
dv
. du
dx —------------------,
2 sin и 2
. du . dv
dy =--------------
a 2sinu 2
и поэтому
du — -^-(dx-Ydy)smu, dv ——dx + dy.
340
Подставляя найденные выражения для du и dv в правую часть
первого из соотношений (29), получим
I = ctg2 u du2 + sin2 u dv2 = cos2 u (dx + dy)2 + sin2 u (dx—dy)2 =
= dx2 + 2 cos 2u dx dy + dy2.
Так как cos 2u=cos z, то в координатах x и у первая квадратич-
ная форма примет вид
I=dx2+2 cos zdxdy+dy2. (35)
Обращаясь к формулам (31) и (34), видим, что линии £/=const
(линия х) и x=const (линия у) являются асимптотическими. Так
как псевдосфера — поверхность постоянной отрицательной кривиз-
ны, то эти линии образуют чебышевскую сеть. В этом, впрочем,
можно убедиться непосредственно, исходя из вида (35) первой
квадратичной формы псевдосферы. Так как кривизна К псевдо-
сферы равна —1, то сетевой угол z(x, у) удовлетворяет уравне-
нию синус-Гордона
2xy=sin z.
В рассматриваемом случае сетевой угол легко вычисляется.
Из формулы (32) вытекает, что z=2u. Выражая и через х и у при
помощи формул (34), получим
х + у — In tg 2и = 4 arctg ех+у,
и далее z=4 arctg ех+у.
Итак, функция
2=4 arctg ех+у (36)
является решением уравнения синус-Гордона и представляет со-
бой сетевой угол между обобщенными асимптотическими универ-
сальной накрывающей псевдосферы (рис. 11).
Найдем область изменения внутренних координат х и у. Каж-
дой точке (и, и) из полосы П={0<п<л, —оо<и< + оо} изменения
координат и и v по формулам (34) ставится в соответствие един-
ственная точка (х, у). Покажем, что при этом точки (х, у) за-
полняют всю плоскость. Для этого достаточно убедиться в том,
что по заданным значениям х и у из соотношений (34) определя-
ется единственная точка (и, v) открытой полосы П. Имеем
и=2 arctg ех'-'\ v=x—у. (37)
Так как ех+у>0, то и удовлетворяет условию 0<и<л и, значит,
(и, и)еП.
Таким образом, мы доказали, что решение (36) уравнения си-
нус-Гордона задано на всей плоскости (х, у). Линиями уровня это-
го решения являются прямые х+у=с. В частности, линии уровня
л+у=0 отвечает значение 2=л.
Подведем итог.
341
На всей плоскости (х, у) построено аналитическое решение
(36) уравнения синус-Гордона. Это решение можно интерпрети-
ровать как сетевой угол z(x, у) сети обобщенных асимптотических
линий на универсальной Закрывающей псевдосферы. В проведен-
ных рассуждениях мы исходили из заданной поверхности — псев-
досферы, а затем построили решение уравнения синус-Гордона.
Можно поставить такой вопрос. Пусть на всей плоскости (х, у)
задано регулярное решение уравнения синус-Гордона (используя
метод, предложенный Бианки, таких решений можно найти бес-
конечно много). Согласно теореме Гильберта это решение обяза-
тельно принимает значения, кратные л. Можно ли указать в про-
странстве Е3 такую поверхность постоянной отрицательной кри-
визны К=—1 (возможно, с особенностями; они будут отвечать
значениям z=kn), сетевой угол z(x, у) сети обобщенных асимпто-
тических линий на которой совпадает с этим решением? Если это
так, то найденную поверхность вместе с сетью обобщенных асим-
птотических линий и сетевым углом можно рассматривать как од-
ну из возможных геометрических интерпретаций решений уравне-
ния синус-Гордона.
Ответ на поставленный вопрос утвердительный: каждому реше-
нию уравнения синус-Гордона можно поставить в соответствие та-
кого рода поверхность (см.: Позняк Э. Г. Геометрическая ин-
терпретация регулярных решений уравнения zzy=sinг//Диффе-
ренциальные уравнения. 1979. Т. 15, № 7. С. 1332—1336).
Отметим, что указанная геометрическая интерпретация реше-
ний уравнения синус-Гордона помогает уяснению сути некоторых
физических процессов.
6°. Понятие солитонных решений дифференциальных уравнений
В физике солитонами называются нелинейные волны, распро-
страняющиеся с постоянной скоростью и с не изменяющимся во
времени профилем. Для этих волн имеет место такой характер
взаимодействия, при котором наблюдается лишь сдвиг фаз взаи-
модействующих волн.
Введем понятия, нужные для дальнейшего изложения. Пусть
f(u, v, zu, z0, ...)=0 (38)
— дифференциальное уравнение относительно неизвестной функ-
ции z=z(и, ц). Решение этого уравнения вида
z(и, u)=Zj-(g), —kv, £=const, (39)
называется бегущей стационарной волной. Это автомодельное ре-
шение заданного уравнения. (Решение уравнения называется ав-
томодельным, если фактически оно представляет собой функцию
одной переменной. В рассматриваемом случае такой переменной
является —kv. Если уравнение допускает автомодельные ре-
342
тения, то при помощи замены переменных оно, как правило, сво-
дится к обыкновенному дифференциальному уравнению.)
Уединенной волной zST(g) называется локализованная бегущая
стационарная волна, т. е. волна, переход которой из одного по-
стоянного предельного состояния в другое (возможно, и в то же
самое) практически полностью локализован.
Примером уединенной волны может служить построенное вы-
'ше решение
z=4 arctg ех+у
уравнения синус-Гордона
Zxy=sin z.
Солитоном, будем называть решение уравнения (38) в виде
уединенной стационарной волны Zst, которая при взаимодействии
с другими такими же волнами асимптотически сохраняет свои
форму и скорость.
Таким образом, если z(u, v) — решение уравнения (38), со-
стоящее только из уединенных волн при больших отрицательных
значениях времени
N
z(u, v) = ^,zST(^), v-+— оо, & = u—fyv, kj = const,
i=i
то такие уединенные волны будут солитонами, если единственным
результатом их взаимодействия при н->-+оо может быть лишь фа-
зовый сдвиг. Иными словами, и при н-> + оо решение z(u,- v)
имеет вид
N
z(u, V) ~ ^zST(lj), и->+оо, «—kjv + Sj, 67- = const.
/=i
Величины б/ представляют собой фазовые сдвиги уединенных ста-
ционарных ВОЛН ZST.
Отметим, что решение, представляющее собой композиционное
состояние нескольких солитонов, называется многосолитонным ре-
шением. (Подробное исследование солитонных решений уравнения
синус-Гордона можно найти в книге: Новиков С. П. Теория со-
литонов: метод обратной задачи. М.: Наука, 1980).
Перечислим некоторые из физических явлений, в которых воз-
никает уравнение синус-Гордона.
1. Распространение ультракоротких импульсов в двухуровне-
вых резонансных средах.
2. Динамика блоховских стенок в ферромагнитных кристал-
лах.
3. Некоторые задачи нелинейной электродинамики.
4. Эффект Джозефсона.
5. Распространение колебаний в механических линиях передач.
343
6. Некоторые задачи единой теории элементарных частиц.
7. Распространение дислокаций в кристаллах.
8. Некоторые задачи акустических взаимодействий.
7°. Физическая интерпретация поверхностей постоянной отри-
цательной кривизны
Предлагаемый ниже геометрический подход — физическая ин-
терпретация поверхностей постоянной отрицательной кривизны,
равной —1, предложенный А. Г. Поповым (см.: ПоповА. Г. Гео-
метрический подход в некоторых задачах, связанных с уравнени-
ем sin-Гордона: Автореф. канд. дис. М., 1988), будет рассмотрен
на примере явления 1 приведенного перечня.
Основная идея заключается в следующем. Поверхности посто-
янной отрицательной кривизны, равной —1 (ПОК-1), используют-
ся в качестве фазовых поверхностей, описывающих эволюцию фи-
зического процесса, задаваемого уравнением синус-Гордона. Фа-
зовая поверхность представляет собой аналог фазового простран-
ства в классической механике — каждая точка фазовой поверх-
ности полностью характеризует состояние исследуемых физических
величин для соответствующих значений координат фазовой по-
верхности.
Фазовую ПОК-1, отвечающую решению z(x, у) уравнения си-
нус-Гордона, обозначим через Ф[з]. Пусть Н{(х, у)} — область
допустимых значений параметров х и у функции z(x, у). Каждой
точке (х, у)^Н отвечает точка Р{х, г/)*=Ф[г]. При изменении па-
раметров (х, у)^Н, связанных с изменением физического процес-
са, меняется радиус-вектор гн(х, г/) поверхности Ф[г], описывая,
вообще говоря, некоторую кривую Ан — фазовую траекторию
(Анс=Ф[г]). Ясно, что Ан определяет исследуемый процесс.
Пусть Ан — регулярная кривая, так что гн(х, у) представляет
собой достаточное число раз дифференцируемую функцию. Воз-
можны следующие случаи:
1) АвсФ[г, k — целое, т. е. Ьн располагается на регу-
лярной части поверхности Ф[г],
2) Ан=Ф[2, z=kn], т. е. Ан совпадает с особенностью Ф[г]
(например, с ребром, как на псевдосфере).
Поповым сформулирован следующий принцип описания эволю-
ции физической величины.
Пусть физическая величина z(x, у) удовлетворяет уравнению
синус-Гордона. Тогда в качестве фазовой поверхности для описа-
ния ее эволюции может быть использована соответствующая ре-
шению z(x, у) ПОК-1 Ф[2]. При этом выполняется следующее:
а) если z(x, y0)¥=kn, то z(x, y)^kn, у-^оо; (40)
б) если z(x, уо)=кл, то z(x, y)=kn
для любого у.
(41)
344
Иллюстрацией применения этого принципа могут служить так
называемая теорема площадей в явлении распространения ульт-
ракоротких импульсов в двухуровневых резонансных средах и эф-
фект самоиндуцированной прозрачности.
Перейдем к описанию этих явлений.
В двухуровневой резонансной среде атомы могут находиться
только в двух энергетических состояниях — нижнем (основном)
с энергией Е, и верхнем с энергией Е2 (£,2>Д1)- Распространение
ультракоротких импульсов длительностью 10“9... 10~12 с в резо-
нансной среде имеет ряд специфических особенностей: для воз-
никающих процессов оказываются несправедливыми модели, ос-
нованные на линейной теории дисперсии (для малых интенсивно-
стей) или на скоростных уравнениях переноса излучения (некоге-
рентное взаимодействие). Характерной особенностью описываемо-
го процесса является то, что релаксационные явления (соударе-
ния, спонтанное излучение) не успевают разрушить фазовую па-
мять системы, вследствие чего поляризация среды становится не-
линейной функцией амплитуды и фазы распространяющегося элек-
тромагнитного импульса.
Рис. 12. а — исходное состояние; б — инвертирование среды; в — индуциро-
ванное излучение
При распространении ультракороткого импульса в двухуров-
невой резонансной среде атомы этой среды, находящиеся в нижнем
энергетическом состоянии Е[, под воздействием переднего фронта
импульса переходят в верхнее состояние с энергией Ег, вследствие
чего среда становится полностью инвертированной. Под действием
оставшейся части импульса атомы, перешедшие в верхнее энерге-
тическое состояние, начинают индуцированно излучать, и при этом
полученная ими энергия возвращается обратно распространяю-
щемуся импульсу. В результате энергия, передаваемая квантовой
системе, отбирается обратно, вследствие чего восстанавливается
первоначальная форма импульса. Подобное явление возможно
вследствие того, что длительность импульса меньше времени ре-
лаксации и поэтому инвертирование среды и индуцированное из-
лучение происходят раньше релаксационных процессов, которые
могли бы нарушить когерентность взаимодействия (рис. 12).
Для моделирования процесса распространения ультракоротко-
го импульса в двухуровневой резонансной среде следует задать
345
уравнения Максвелла * для описания электромагнитного импуль-
са и квантовый (двухуровневый) ансамбль атомов для описания
среды.
Представим поле распространяющегося ультракороткого им-
пульса как
$(х, y) = S*(x, y)cosW, Чг = юг/—хх +<р(х, у),
где х — координата, у — время, <5* — амплитуда, <р — фаза,
х(х, 0, 0) — волновой вектор. Тогда дипольный момент системы
можно записать в виде
Р0(х, y) = pi(x, y)cosT+P2(x, i/)sinT,
где Р} — реактивная составляющая (описывает вклад в диспер-
сию), Р2 — активная составляющая (определяет вклад в погло-
щение света средой).
Для рассматриваемой задачи система уравнений Максвелла
приводится к эквивалентной системе
/A(0+_€_W
ду ду ' (42)
+ Л+-Гп,
ду \ ду J h
... S* р
ду h
dg* т] dg* 2л<вЛ\)
дх с ду т]с
\ с / \ дх с ду ) т]с
(см.: Полуэктов И. А., Попов Ю. М., Ройтберг В. С. Эф-
фект самоиндуцированной прозрачности // Успехи физических на-
ук. 1974. Т. 114, № 1. С. 97—131; Caudrey Р. J., Gibbon J. D.r
Eilbeck J. C., Bui lough R. K. Exact multisoliton solutions
of the self-induced transparency and sine-Gordon equation // Phys.
Rev. Lett. 1973. V. 30, N 6. P. 237—238; M с C a 11 S. L„ H a h n E. L.
Self-induced transparency//Phys. Rev. 1969. V. 183, N 2. P 457—
485).
В уравнениях (42) приняты следующие обозначения: п — раз-
ность заселенностей нижнего и верхнего энергетических состоя-
ний, Ato=o)—<о21 (юг! — частота перехода), No — число частиц
в единице объема, г] — нерезонансная часть коэффициента пре-
ломления.
* Максвелл (Maxwell) Джеймс Клерк (13.6.1831—5.11.1879) — английский
физик.
346
В случае
<р(ы, и)=0 (-43)
система (42) допускает точное интегрирование. Условие (43) опре-
деляет так называемый случай отсутствия фазовой модуляции.
Введем вектор
£ = /.Pi., _Рг_( ~
\ И И
Это позволяет записать первые три уравнения системы (42) в сле-
дующем виде:
— = QxR, Я(Д<о, х, —оо) = (0, 0, 1), (44)
ду
где Q=(—, 0, Aw'j—вектор угловой скорости.
\ h /
Поясним физический смысл вектора R. В отсутствие импульса
атомы находятся в нижнем энергетическом состоянии R(0, 0, 1).
Полная инверсия соответствует повороту вектора R на угол л.
Пренебрежение релаксацией означает, что вращение вектора R
заканчивается до того, как успевают сказаться релаксационные
эффекты.
В случае точного резонанса, Д<в=0, уравнение (44) легко ин-
тегрируется:
Рг — 0, Ра = цзшф, п = созф. (45)
При этом угол поворота ф определяется так:
ф(Х, £/) = -£- С $-(х, ₽)d₽. (46)
h J
—оо
Полный поворот равен
4-00
О(х) = ф(х, 4-оо) = -У- С g* (х, 0)d0. (47)
й J
—оо
Величина Ф(х) называется площадью импульса.
Четвертое уравнение' системы (42) в случае ю=ю21 с учетом
формул (45) заменой переменных
г1~ ао*> т2 — сац у], а0—
сводится к уравнению синус-Гордона
й*ф . ,
-----— = sin ф
дха
347
При подробном рассмотрении системы (42) относительно вели-
чины Ф(х) выявляется следующая закономерность:
— = — — sin Ф, (48)
dx 2 '
определяющая изменение площади ультракороткого импульса
(см.: Lamb G. L. jr. Analytical description of ultrashort optical
pulse propogation in a resonant medium//Rev. Mod. Phys. 1971. V. 43,
N 2. P. 99—124). Величина — коэффициент поглоще-
ния слабого монохроматического поля частоты и.
Из последней формулы нетрудно получить соотношение
tgT = tgJTexp(—(49)
выражающее содержание «теоремы площадей» (здесь Фо — на-
чальная площадь импульса).
Из уравнения (48) вытекает, что если начальная площадь им-
пульса Ф0=£л (£ — целое), то импульс должен распространять-
ся в рассматриваемой среде без изменения площади. Такое явле-
ние получило название эффекта самоиндуцированной прозрачно-
сти. Если же начальная площадь Фо^Ьт, то, как видно из форму-
лы (49), площадь импульса стремится в процессе своей эволюции
к стабильному значению kn,.
Из соотношений (46), (47) видно, что при достаточно больших
временах у функция ф и площадь импульса Ф бесконечно близки.
Поэтому для величины Ф справедливы положения (40), (41) сфор-
мулированного принципа. При этом положение (41) соответствует
эффекту самоиндуцированной прозрачности, а положение (40) ка-
чественно выражает «теорему площадей» (стремление площади
импульса к значению, кратному л).
§ 3. ОСНОВНЫЕ ОПЕРАЦИИ ВЕКТОРНОЙ АЛГЕБРЫ
И ВЕКТОРНОГО АНАЛИЗА В ТЕНЗОРНЫХ ОБОЗНАЧЕНИЯХ
1°, Метрический тензор евклидова пространства
В этом пункте мы напомним некоторые известные факты (см.
§ 3 главы 3), не всегда придерживаясь принятых там обозначений.
Пусть в n-мерном линейном пространстве Vn задана билиней-
ная форма А(х, у), симметричная (А{у, х)=А(х, у)) и невы-
рожденная (для любого вектора х=#0 можно указать такой вектор
у, что А(х, у)^=0). Потребуем также, чтобы билинейная форма
А (х> У) была полярной для некоторой положительно определен-
ной квадратичной формы. Определим в пространстве Vn опера-
цию скалярного умножения для любых двух векторов х и у сле-
дующим образом:
<х, уУ=А(х, у). (1)
В этом случае пространство V" наделяется метрической структу-
348
рой и превращается в евклидово пространство Еп со скалярным
произведением (1).
Пусть в1, ..., еп — базис пространства Еп. Тогда тензор g ти-
/0\
па I 2}с координатами
£<7=<е.-, еу> (2)
называется (ковариантным) метрическим тензором пространства
Еп. Ясно, что
gu=gii. (3)
Если (х?) — матрица перехода от базиса еп к базису
fi, fn, то координаты 'gkm тензора g в базисе fk связаны с ко-
ординатами gtj этого тензора в базисе е, соотношениями
Напомним (см. § 3 главы 3), что det(g//) преобразуется по пра-
вилу
det ) = (det (х'))2 det (gf.). (5)
Так как билинейная форма А(х, у) по условию не вырождена, то
det(gij) #=0. Из соотношения (5) вытекает, что det('<7fem) отличен
от нуля в любом базисе /*. Поэтому в любом базисе возможен пе-
реход от матрицы (gif) к обратной матрице, компоненты которой
обозначим через g1'. В § 3 главы 3 было доказано, что (g‘‘) —
тензор типа (о) ’ ^т0 означает’ чт0 если (^,s) — матрица пере-
хода от базиса fk к базису е,, то
Матрица ('gst) является обратной к матрице ('gst).
Замечание. Тензор g‘i называется (контравариантным)
метрическим тензором евклидова пространства Еп. Этот тензор
симметричен, g^g1*.
Контравариантный метрический тензор естественно обозна-
чить тем же символом g, что и ковариантный, а величины g‘> и
gn рассматривать соответственно как контрвариантные и кова-
риантные координаты одного и того же тензора g.
2°. Операции опускания и поднятия индексов
Пусть А — тензор типа с координатами A£‘...ip. Пока-
жем, например, как проводится операция поднятия индекса и
при помощи метрического тензора g. Воспользуемся его контрава-
риантными координатами g‘>. Свернем произведение тензоров g
и Л по индексу / у тензора g и по нижнему индексу q у тензора
Л ‘Я о
А, т. е. построим тензор с координатами Й'1а-Лаг,...гр. Заменяя ин-
34»
деке i на й, обозначим полученные координаты через Л,.../р .
Таким образом,
л:.:.|/=г‘*ал\...?р.
Полученное соотношение наглядно показывает, что у тензора А
при помощи тензора g действительно поднимается индекс. Опера-
цию поднятия индекса можно проводить несколько раз, привлекая
для этого различные нижние индексы заданного тензора.
Операция опускания индекса при помощи метрического тензо-
ра определяется аналогично. Опуская, например, верхний индекс
kq, получаем
Пример 1. Мы ввели тензор gli при помощи матрицы
обратной матрице (gij) ковариантного метрического тензора. Это
означает, что
giag«i=&il,
где 6/ — символ Кронекера.
Попробуем опустить у тензора оба индекса при помощи ко-
вариантного метрического тензора gij. В результате получим
дважды ковариантный тензор gif.
gu = gtag^ga&-
Преобразуем последнее выражение, используя равенство (6) и
свойства символа Кронекера:
gii = giagifig^ = gia (gifig^) = giatfj = gii-
Таким образом, тензор gij получается из тензора g‘! путем
опускания обоих верхних индексов при помощи ковариантного мет-
рического тензора.
Точно так же и тензор g‘' можно получить из тензора gij пу-
тем поднятия обоих нижних индексов при помощи контравариант-
ного метрического тензора.
Это и позволяет рассматривать величины gij и gi! как кова-
риантные и контравариантные координаты одного и того же тен-
зора — метрического тензора g.
Пример 2. Ковариантные и контравариантные координаты
векторов. Скалярное произведение векторов в координатах. ,
Пусть Xi — ковариантные координаты вектора х. Тогда х‘==
=giaxa — контравариантные координаты вектора х.
При помощи ковариантных и контравариантных координат
векторов можно специальным образом записать выражения для
скалярного произведения векторов. Пусть х, и у* — координаты
векторов х и у, соответственно ковариантные и контравариантные.
350
Пусть eit ..., еп — базис в пространстве Еп, относительно кото-
рого и берутся координаты рассматриваемых векторов. Имеем
х=хаеа, y=yeef.
Используя свойства скалярного произведения и соотношение (2),.
получим
(х, у) = (хаеа, у%) = (еа, х“г/₽ = gafixay^ = х&у0.
Тем самым
<х, у)=х^. (7>
Формула (7) является первой из формул векторной алгебры, за-
писанная при помощи тензорных обозначений.
3°. Ортонормированные базисы в пространстве Еп
Из курса линейной алгебры известно, что матрицу (gi;) сим-
метричной билинейной формы А(х, y)=gi/X‘yj можно привести к
диагбнальному виду. Обратимся к билинейной форме А(х, у), вве-
денной в пункте 1. При сформулированных там предположениях
выражение
А(х, у)=<х, yy^gij^y'
дает скалярное произведение векторов х и у, а коэффициенты gtf .
представляют собой скалярные произведения базисных векторов
et и е/:
gii=(ei, е/Х
Приведем эту билинейную форму к диагональному виду. Тогда
в новом базисе 'е,
(0, 1=0= J,
1 (8)
11,»—j.
Базис 'щ, ..., 'еп, удовлетворяющий условиям (8), называется
ортонормированным. В частности, в этом базисе скалярное произ-
ведение векторов х и у с координатами х‘ и у' будет равно
п
<*. i/>=SxV, (9>
i=l.
а квадрат длины вектора х может быть вычислен по формуле
п
(х, х) = 2 (%г)2- О0}
Обратимся к линейным преобразованиям пространства, при ко-
торых ортонормированный базис переходит в ортонормирован-
ный. Такие преобразования называются ортогональными.
351
Пусть L — ортогональное преобразование и еи ..., еп — орто-
нормированный базис. Тогда Lei, • • •, Ееп также ортонормирован-
ный базис. Возьмем в пространстве Е произвольный вектор х и
рассмотрим его образ — вектор' X=Lx.
Вектор X в базисе Le, имеет такие же координаты, что и век-
тор х в базисе е,-. В самом деле, если х—х1е,, то
X=Lx‘eI=x‘Le.. (11)
Так как Leit ..., Len — ортонормированный базис, то для ска-
лярного произведения векторов и для квадрата длины вектора
справедливы формулы (9) и (10).
Пусть X=Lx и Y=Ly. Тогда
п
(X, Y} = xlxk (Leit Lek) =х1ук81к = ^ Х1у* = {х, у)
i=l
И
(X, X} = xixk{Lel, Leh) = xixk6ih=Yt(xi)2={x, х).
i-=l
Таким образом, при ортогональных преобразованиях длины
“векторов не изменяются и сохраняется скалярное произведение:
(X, У) = (х, у), (X, Х) = (х, х).
4°. Дискриминантный тензор
Рассмотрим тензор типа где п — размерность
пространства, кососимметрический по любым двум индексам. Яс-
но, что любая координата этого тензора в данном базисе
может быть найдена по формуле
0 , если среди индексов ilt i2, ..in
е.; . — ( хотя бы два совпадают; (12)
(—l)slgn<Tei2...n, если все индексы различны.
Здесь показатель sign о равен 0 или +1 в зависимости от четно-
сти или нечетности перестановки о= (Мг• • • Li).
Пусть в заданном ортонормированном базисе ei, е2, ..., еп
fil2-..n=l. (13)
Тогда, согласно правилу (12), определены все координаты
кососимметрического тензора в выделенном базисе. Этот косо-
симметрический по любым двум индексам тензор будем называть
дискриминантным тензором, а его координаты в базисе 'elt ..., 'еп
обозначать через .
352
В соответствии с правилом (12) для вычисления координат
тензора в базисе 'eit 'е2, 'еп достаточно знать значе-
ние координаты 'С12...Л.
Пусть B=(V) — матрица перехода от базиса et, е2, ..., еп к
базису '^i, 'е2, ..., 'еп. Тогда, используя равенство (13), получим,
что
= • • • ^nn6b...ifl = S12...nS(—l)SignaXi* . . . =
(<Ц
= det (If) = det В. (14)
Пусть 'gij — координаты метрического тензора в базисе
гв\, 'е2, , 'еп и 'G=('gtj) — матрица этого тензора. Тогда
'G=B4B,
где I — единичная матрица тензора gij в выделенном ортонорми-
рованием базисе 61, е2, ..., еп.
Поэтому
det 'G = det Вт • det I • det В = (det В)2.
Отсюда, согласно формуле (14), получаем, что
'^12...п — i l^det'G. (15)
Знак (+ или —) в формуле (15) совпадает со знаком опреде-
лителя матрицы перехода от базиса еь е2, еп к базису 'еь
'е2, ..., 'еп.
Назовем заданный ортонормированный базис еь е2, ..., еп, в
котором выполняется равенство (13), правым. Все базисы про-
странства Еп, определители матриц перехода к которым положи-
тельны, также назовем правыми, а базисы, определители матриц
перехода к которым от этого заданного базиса отрицательны, на-
зовем левыми. Будем говорить в этом случае, что пространство
Еп ориентировано.
Итак, для координаты ci2...n дискриминантного тензора в бази-
се е1( е2, ..., еп получено выражение
Ci2...n=± ]/detG,
где G — матрица метрического тензора g в базисе elt е2, ..., еп.
Знак плюс отвечает правому базису, а знак минус — левому.
5°. Ориентированный объем
Рассмотрим в ориентированном евклидовом пространстве аф-
финную систему координат — фиксированную точку О и базис
eit...,en. Координаты точки М суть координаты вектора ОМ в
базисе 6], ..., еп. ,
12 Зак. 259
353
Пусть
х, х, ..., х (16)
— упорядоченная линейно независимая система из п векторов
пространства Еп.
Множество всех точек М пространства Еп, определяемое соот-
ношениями
—> 1 2 п
ОМ — а1х-\-а2х + ... + алх,
О5С1, 0 а2 1, О 1,
называется п-мерным параллелепипедом в пространстве Еп, натя-
нутом на векторы (16).
Ориентированным объемом n-мерного параллелепипеда назы-
вается число
12 п 1, 2. л.
V = V(x, х, .. x) = Ci1i2...xiixii ... х\ (18)
где — координаты дискриминантного тензора в базисе ех, е2, ..
1.2 п.
еп, а х'», х‘2, хг"— контравариантные координаты векторов
1 2 п
х, х, ..., х в этом базисе.
Название «ориентированный объем» объясняется тем, что если
векторы (16) образуют правый базис, то У>0, а если левый, то
У<0.
При п=3 ориентированный объем, вычисляемый по формуле
(18), представляет собой объем параллелепипеда, натянутого на
12 3 12 3
векторы х, х, х, взятый со знаком « + », если тройка х, х, х—
правая, и со знаком «—», если эта тройка левая, и следователь-
1 2 3
но, равен смешанному произведению векторов х, х, х.
6°. Векторное произведение
При помощи дискриминантного тензора можно получить тен-
зорное выражение для векторного произведения двух векторов в
пространстве Е3. Такая запись векторного произведения широко
используется для проведения вычислений в криволинейных коор-
динатах.
Пусть Cijk — координаты дискриминантного тензора в базисе
Сь е2, е3 пространства £3. Рассмотрим тензор cljk=gimcmjk. Тогда
координаты z‘ вектора z=[x, у] в базисе еь е2, е3 можно записать
в следующем виде:
? = с%х/«Л (19)
Убедиться в этом совсем нетрудно. С формальной точки зрения
выражение в правой части формулы (19) представляет собой
354
тензор типа ^^,т. е. z‘ можно рассматривать как контрава-
риантные координаты вектора. Поэтому достаточно проверить,
что zl — координаты вектора z=[x, у] в каком-то определенном
базисе (для ортонормированного базиса эта проверка проводится
•особенно просто, и мы предоставляем ее читателю).
Естественно поставить вопрос об обобщении понятия векторно-
го произведения на многомерный случай. Это можно сделать гео-
метрически, но более простой путь — воспользоваться формулой,
обобщающей формулу (19).
1 2 п—1
Пусть х, х, ..., х — векторы в пространстве Еп. Определим
координаты zi векторного произведения
1 2 п— 1
z=[x, X,. . . . , X ]
1 2 n—1
векторов х, х, ..., х при, помощи соотношений
1 2 п—1.
2г=сЛ г xW1... X ’п-1.
В этой формуле — координаты дискриминантного
П *
тензора в пространстве Еп с поднятым первым индексом, а х'»,
2 п— lj 1 2
х*2, ..., х "-1—контравариантные координаты векторов х, х, ...
п— 1
.. ., х соответственно.
7°. Двойное векторное произведение
Чтобы получить тензорное выражение для координат двойного
векторного произведения [a, [b, d]] векторов a, b, d, воспользуемся
формулой
[a,[b, d]]=b<a, d>—d<a, b>. (20)
При помощи формулы (19) и выражения ёцх1у! для скалярного
произведения произвольных векторов х и у формулу (20) можно
записать в следующем виде:
cuakclmnbmdn = bighrakdn—d!ghmakbm. (21)
Заменим в первом слагаемом bigknakdn правой части этой форму-
лы Ь‘ на Ьт&т, а во втором слагаемом dl на dn6‘n. Это позволит
записать формулу (21) так:
(22>
Так как полученное соотношение (22) справедливо для любых
векторов a, b, d, то оно представляет собой тождество относитель-
12*
355
но координат qk, bm, dn этих векторов. Поэтому для любых i, kr
mt п имеет место равенство
(23>
Пусть z‘ — координаты двойного векторного произведения
[а, [b, d]]. Тогда согласно формулам (20) и (21)
zl=clklcmnakbmdn.
При помощи этого соотношения и равенства (23) получаем тен-
зорное выражение для координат двойного векторного произве-
дения [a, [b, d]]:
При помощи операции ковариантного дифференцирования мно-
гие формулы анализа, имеющие широкие применения в геометрии,
физике и механике, можно записать в инвариантном относительно
преобразования координат виде. Приведем некоторые из этих
формул.
8°. Расходимость вектора
Пусть Т1 — контравариантные координаты векторного поля Т
в n-мерном римановом пространстве. В пункте 1 § 9 главы 3 была
введена операция ковариантного дифференцирования векторного
поля, определяемая формулой
v‘T-u+r«r/- '
Свертку тензора VkTl называют расходимостью векторного
поля Т и обозначают через div Т.
Тем самым
div Т = + Г/уТЛ (24)
Для того чтобы привести формулу (24) к более удобному для
использования виду, проведем предварительно некоторые вычис-
ления.
Положим
g=det (g,7),
где gij — координаты метрического тензора в координатах (х) =
= (х\ ..., хп). Непосредственным дифференцированием нетрудно
убедиться в справедливости формулы
dxk дхк
356
С учетом этой формулы получим, что
T.i 1 ,, г д , д д 1
г«=тг us“r
2 дхл g oxk
Тогда
div 7^ 1 _±.(у§Тк1 (25)
V S dxk
Относительно прямоугольных декартовых координат х, у, z в
трехмерном евклидовом пространстве £3 формула (25) принимает
обычную форму
- дТх , дТу дТ
div Т = —— 4----1---
дх ду дг
где Тх, Ту, Тг — координаты вектора Т относительно соответству-
ющих осей.
9°. Оператор Бельтрами — Лапласа
Для любой гладкой функции f, заданной в открытой области
риманова пространства, ее градиент grad/ определяется как век-
тор, ковариантные и контравариантные координаты которого вы-
числяются по формулам
^ = VT=Vi/: (26)
дх1
И
Т l = §ik-~=§ik^f==Vf
dxk
соответственно.
Дифференциальный оператор, ставящий в соответствие каждой
гладкой функции расходимость ее градиента, называется опера-
тором Бельтрами * — Лапласа.
Обозначение: A=divgrad.
С учетом формул (25) — (27) имеем
Д/ = div grad / = V Д v7)=-Л=- (VgV'f) =
Vg dxi
= 1
Yg dx1 ( gxk j
(28)
* Бельтрами (Beltrami) Эудженио (16.11.1835—18.2.1900) — итальянский
математик.
357
В случае трехмерного евклидова пространства Е3 и прямоуголь-
ных декартовых координат х, у, z формула (28) совпадает с обыч-
ной формулой для оператора Лапласа:
d*f d*f d*f
дх* ду* дг* '
10°. Оператор Бельтрами — Лапласа в криволинейных коор-
динатах
В приложениях часто оказывается полезным выражение опера-
тора Бельтрами — Лапласа в ортогональных системах коорди-
нат, т. е. в случае, когда линейный элемент риманова пространст-
ва имеет вид
ds2=gn(dxv)2 + .. . + gnn(dxn)2.
Тогда оператор Бельтрами — Лапласа можно записать так:
_ 1_____у, д / / gu- • £;—i ig^+i ,t-H -grin dt \
Vgn-- -gnn dxi \ у gii }
i=l
Величины Hi, определяемые формулами
Hi = Vga, -4 = 1, .. n,
называются коэффициентами (параметрами) Ламе*. Введение
коэффициентов Ламе позволяет записать последнюю формулу сле-
дующим образом:
... HnLi dxi \ Hi 'dxi Г
j=i
где выражение Hi... Hi... Hn следует понимать так:
... . Hi-iHi+i ...нп.
В случае пространства Е3 для сферических г, ср, 0 имеем
ds2 = dr2 + г2 sin2 0 dtp2 4- г2 dQ2
и, значит,
= _ ^L+_J---------«-ЫпвАТ
r* dr \ dr / r* sin2 0 d<p2 r* sin 0 dQ \ dQ /
Для цилиндрических координат г, ср, z получаем соответственно
ds2 = dr2 + r2drf2 + dz2
и Af- 1 g / 1 1 I d*f
r dr \ r dr I r* dcp* dz*
* Ламе (Lame) {Габриель (22.7.1795—1.5.1870) — французский математик
и инженер.
358 <
§ 4. ПСЕВДОЕВКЛМДОВО И ПСЕВДОРИМАНОВО ПРОСТРАНСТВА
Псевдоевклидово и псевдориманово пространства широко ис-
пользуются в специальной теории относительности (СТО) и в об-
щей теории относительности (ОТО). Мы введем понятия этих про-
странств и обсудим их простейшие свойства, коснувшись проблем
СТО и ОТО лишь в малой степени. Этим проблемам посвящена
обширная литература, к которой мы будем отсылать читателя по
мере развития изложения.
1°. Понятия псевдоевклидова пространства и метрического тен-
зора псевдоевклидова пространства
Пусть V — n-мерное линейное пространство. Пусть А(х, у) —
невырожденная симметричная билинейная форма, полярная зна-
копеременной квадратичной форме. Значение А (х, у) билиней-
ной формы на векторах х и у будем называть скалярным произве-
дением векторов х и у и обозначать через <х, у>. Конечно, наиме-
нование «скалярное произведение» условно: в данном случае не
выполняется четвертая аксиома обычного скалярного произведе-
ния в евклидовом пространстве. В зависимости от выбора векто-
ра х выражение
А (х, х) =<х, х>
может принимать как положительное, так и отрицательное и даже
нулевое значения. Это связано с тем, что квадратичная форма
А (х, х) в рассматриваемом случае не является знакоположитель-
ной. Тем не менее термин «скалярное произведение» является об-
щепринятым и мы будем им пользоваться.
Введем понятие псевдоевклидова пространства.
Псевдоевклидовым пространством называется n-мерное линей-
ное пространство V, в котором скалярное произведение <х, уУ век-
торов х и у задано посредством невырожденной симметричной би-
линейной формы А(х, у), полярной знакопеременной квадратич-
ной форме:
<х, уУ=А(х, у).
Число п называется размерностью псевдоевклидова пространства.
Пусть еь е2, . • , еп — базис пространства V и (gy) — матри-
ца формы А(х, у) в этом базисе
gti=A (et, ej)=<ei, е,У.
Если х‘ и у1' — контравариантные координаты векторов х и у, то
А(х, y)=giixiyi=<x, уУ. (1)
Величины gij представляют собой координаты тензора типа ( £ ) ’
Этот тензор будем называть ковариантным метрическим тензором
псевдоевклидова пространства. \
359
Известно, что матрицу (gij) симметричной билинейной' формы
путем выбора некоторого нового базиса можно привести к диаго-
нальному виду. В силу невырожденности формы А (х, у) и знако-
переменное™ формы А (х, х) этот базис можно выбрать так, что
координаты метрического тензора в этом базисе будут равны ну-
лю при i¥=j и единице или минус единице при i=j. Число р поло-
жительных и число q отрицательных диагональных элементов не
зависит от способа приведения матрицы билинейной формы к диа-
гональному виду, и в силу ее невырожденности p + q=n.
Проведенные рассуждения объясняют обозначение ЕпРЛ, при-
нятое для n-мерного псевдоевклидова пространства.
Перейдем к обсуждению вопроса об измерении длин векторов
в псевдоевклидовом пространстве.
Определим квадрат длины, вектора х с координатами х‘ в про-
странстве Enp,q с метрическим тензором при помощи соотноше-
ния
s2(x)=giixiyi. (2)
Согласно формуле (1) имеем
s2(x)=<x, х>. (3)
Так как квадратичная форма А(х, х) является знакопеременной,
то можно указать ненулевые векторы с положительным квадра-
том, длины, с отрицательным квадратом длины и с нулевым квад-
ратом длины. Чтобы в качестве меры длины векторов получать
лишь вещественные числа, за длину вектора принимают следую-
щую величину:
о (х) = sign s2 (х) • | s2 (х) |. (4)
2°. Галилеевы* координаты. Преобразования Лоренца
В псевдоевклидовых пространствах важную роль играют систе-
мы координат, в которых квадрат интервала (так называют квад-
рат длины вектора х) имеет вид
Р п
s2(x)= £(х')2— £ (х')2. (5)
i-1 i=p+l
Такие системы координат называют галилеевыми.
Преобразования координат, сохраняющие для квадрата интер-
вала s2(x) выражение (5), называются преобразованиями Ло-
ренца.
* Галилей (Galilei) Галилео (15.2.1564—8.1.1642) — итальянский физик,
механик, математик,, астроном.
360
3°. Пространство Минковского*. Преобразования Лоренца в
пространстве Минковского
Пространство £41,з называется пространством Минковского.
В СТО это пространство рассматривается как пространство собы-
тий и представляет для физики особый интерес.
Нумерация координат векторов в пространстве Минковского
обычно начинается с нуля. Таким образом, согласно формуле (5),
квадрат интервала s2(x) в пространстве £4i,3 записывается так:
s2 (х) = (Х0)2 —(х1)2 —(Х2)2 —(Х3)2. (6)
Ненулевой вектор х будем называть времениподобным, если
о(х)>0, пространственноподобным, если о(х)<0, и изотропным,
если а(х) =0.
Докажем следующее
УТВЕРЖДЕНИЕ. Множество концов всех времениподобных
векторов, начала которых совпадают с произвольной фиксирован-
ной точкой псевдоевклидова пространства, образует конус.
* Пусть х — времениподобный вектор и А=#0 — произвольное
вещественное число. Если хг' — координаты вектора х, то Ах* —
координаты вектора Ах и, значит,
s2 (Ах) = gtj (Ах1) (AxJ) = №gijXlx! = A2s2 (х).
Поэтому вектор Ах также времениподобен:
sign s2 (Ах) = sign s2 (х).
Так как конус — это множество концов всех векторов Ах, А¥=0,
приведенных к общему началу (х — произвольный вектор из не-
которого множества векторов пространства V), то утверждение до-
казано. *
Совершенно аналогично устанавливается, что и множество всех
концов пространственноподобных векторов с общим началом, и
множество всех изотропных векторов образуют конусы.
Конус времениподобных векторов принято обозначать симво-
лом Т (от англ, time — время), а конус пространственноподобных
векторов — символом S (от англ, space — пространство).
В физике координата х° отождествляется с выражением ct,
где с — скорость света, a t — временная переменная, х1, х2, Xs
называются пространственными переменными.
Обратим внимание на структуру конуса Т времениподобных
векторов в пространстве Минковского. Этот конус распадается на
две связные открытые компоненты Т+ (конус будущего) и Т~ (ко-
нус прошлого). Конус S пространственноподобных векторов яв-
ляется связным множеством.
Остановимся на множествах Т+ и Т~ подробнее. Рассматривая
вектор х как перемещение в пространстве £41,з, можно считать, что
* Минковский (Minkowski) Герман (22.6.1864—12.1.1909) — немецкий ма-
тематик и физик.
! 361
это перемещение характеризуется временным Ы=хй1с и простран-
ственным Аг={х1, х2, х3} перемещениями. Времениподобные векто-
ры х определяются условием s2(x)>0. Ясно, что в этом случае
|Дг|/|Д/| <с. Если при этом А^>0, то для перемещения х полу-
чается неравенство 0<|Аг|/Д£<е. Такое перемещение по опреде-
лению принадлежит множеству Т+ и может рассматриваться как
перемещение материальной частицы «в будущее». Если Д£<0, то
перемещение х принадлежит множеству Т~ и может рассматри-
ваться как перемещение частицы «в прошлое» (в физике так ин-
терпретируется движение античастиц).
Проведенные рассуждения объясняют наименования: конус бу-
дущего для множества Т+ и конус прошлого для множества Т~.
Займемся теперь преобразованиями Лоренца в пространстве
Минковского Е41.з.
Пусть ei — базис, связанный с галилеевой системой координат
в псевдоевклидовом пространстве Е41,з. В этом случае квадрат ин-
тервала s2(x) имеет вид (6) и поэтому матрица (gij) метрическо-
го тензора пространства Е41,з запишется так:
/1 0 0 0\
у__/-’)_/0—1 0 0|
0 0_j о -
\0 0 0 —1/
Перейдем к новой галилеевой системе координат с базисом 'et
и выясним условия, которым должны удовлетворять коэффициен-
ты X? матрицы В перехода от базиса е, к базису 'ei. Имеем
Ч = (8)
Воспользуемся теперь тем обстоятельством, что матрица ('g-j)
метрического тензора в базисе также имеет вид (7). Так как
'^ = <4, ’е;)=^{еа, = (9)
то, полагая, например, i=0, /=0 (напомним, что индексы i, j, а,
₽ пробегают значения 0, 1, 2, 3) и обращаясь к матрице (7), при-
ходим к соотношению
з
(%°0)2-£O=i. (Ю)
а=1
Аналогичным способом из соотношений (9) и (7) получаются еще
две серии уравнений, связывающих коэффициенты М матрицы пе-
рехода от базиса е, к базису 'ее.
з
л 0 л о л а л а __ <.
AoAfl— J ЛоАр= U,
£1 (11)
з
вд=[ -J;
а=1 k 1 г
362
Соотношения (10), (11) можно записать в матричной форме.
Для этого наряду с матрицей B=(V) рассмотрим матрицу В*,
которая получается из матрицы В путем изменения знаков у эле-
ментов трех последних столбцов и последующего транспонирова-
ния. Тогда соотношения (10), (И) можно записать так:
(12)
где / — матрица (7). Полученная формула представляет собой
аналог соответствующей формулы для матрицы С ортогонального
преобразования евклидова пространства, записанной в ортонорми-
рованном базисе: СТС=1.
Так как detB*=—det В и det/=—1, то det(5*B)=— (detB)2=
——1, т. е.
detB=±l. (13)
Обозначим через L совокупность всех общих преобразований
Лоренца пространства Минковского и выделим из этих преобра-
зований те, которые переводят каждый вектор из конуса будуще-
го Т+ в вектор, также принадлежащий Т+. Совокупность таких
преобразований обычно называют преобразованиями Лоренца
пространства E\z и обозначают символом At.
Выделим еще два подмножества из класса общих преобразо-
ваний Лоренца — так называемые собственные преобразования
Лоренца L+, для которых detB=+l, и несобственные преобразо-
вания Лоренца, для которых det 5=—1.
Примером несобственного преобразования Лоренца является
отражение относительно всех трех пространственных осей:
Пусть В — матрица произвольного несобственного преобразо-
вания, а Р— матрица только что рассмотренного отражения. Яс-
но, что произведение произвольного несобственного преобразова-
ния Лоренца и отражения будет собственным преобразованием.
Его матрица
В'=РВ. (14)
Так как
р2==рр=/> (15)
то
В=РВ'.
Таким образом, всякое несобственное преобразование Лорен-
ца является произведением некоторого собственного преобразова-
ния с матрицей В' и отражения с матрицей Р.
Отметим еще один класс преобразований Лоренца
(пересечение подмножеств Lt и L+) и найдем те преобразования
из этого класса, которые не изменяют координаты х2 и х3. Для
этого достаточно описать преобразования двумерного псевдоев-
> 363
клидова подпространства с координатами х° и х1, квадрат интер-
вала длины в котором вычисляется по формуле (х0)2—(х1)2.
Для рассматриваемого случая формулы (10), (11) запишутся
так:
(^)2-(^)2=1,
%Jx} = 0,
(16)
(Х?)а-(Х1)2==-1.
Полагая Ло/%о = ₽, найдем отсюда выражения для коэффициентов
№ матрицы В преобразования базисных векторов е0, elt е2, е3 в
базисные векторы 'е0, 'eb 'е2, 'е3:
— /1_рг- yi-^’ У1 —[З2 — V1-P
Знак в этих формулах выбирается из условия принадлежности
преобразования классу Lf. -
Окончательные формулы преобразования координат имеют
•следующий вид:
, „ Х° — Вх1 , , X1 — Вх° ,2 2 , „
Х° = , Г=-„—Ik-, х2 = х2, х3 = х3.
У1-Р2 /1 — р2
(17)
Для выяснения физического смысла полученных формул пе-
репишем их, полагая
x° = ct, хг = х, х2 = у, хъ = г, 'x° = ct', х1 = х', ’х2 = у', хА = г'.
Здесь, как обычно, с — скорость света в вакууме, t — время, х,
у, z — пространственные координаты. Итак,
t — — X
с
,, с. i — Вс/ 4- х , ,
t = - =-, х =——-, у — у, z =z.
уТ — В2 У1 — р2 v а
(18)
Физический смысл постоянной £.
Допустим, что точка М в системе координат (Г, х', у', г') не-
подвижна. Это означает, что время t' изменяется, а простран-
ственные координаты х', у', z' неизменны. Как ведет себя точка
М относительно координатной системы (t, х, у, г)? Найдем диф-
ференциалы соотношений (18). Так как dx'=dy'=dz'=Q, то из
формул (18) получим, что
0 = .-.Рс£+Д 0 = dy, 0=^dz.
Vl-p2 ’
Поэтому
— = 0С, -^- = 0, — = 0.
dt dt di
364
Таким образом, всякая точка М, неподвижная в системе коор-
динат (f, х', у', z'), движется относительно системы координат
(t, х, у, z) с постоянной скоростью п = 0с = в направле-
нии оси Ох. С такой же скоростью движется и вся система (f,
х', у', 2<) относительно системы (t, х, у, z).
Итак, р=п/с, где v— скорость движения координатной систе-
мы (t, х, у, z). Так как скорость v любого движущегося тела
меньше скорости света с, то 0<п<с. Поэтому 0<р< 1.
Заменяя в формулах (18) 0 на —, получим
Формулы (19) называются формулами Лоренца. Они характери-
зуют переход от одной инерциальной системы координат (t, х, у,
z) к другой инерциальной системе (t', х', у', z') и широко исполь-
зуются в физике.
4°. Псевдориманово пространство. Метрический тензор псевдо-
риманова пространства
В § 1 главы 4 мы уже говорили о понятии псевдориманова
пространства. Напомним приведенные там рассуждения.
Пусть {Л1} — открытое множество пространства Ап. На этом
множестве {Л4} задается поле симметричного тензора ga(M) =
—gijix1,... ,хп). При этом выполняются условия: квадратичная
дифференциальная форма
gi^MjdxAlxi (20)
в каждой точке множества {Л4}
1) невырождена;
2) имеет постоянную сигнатуру, т. е. нормальный вид квадра-
тичной формы (20) не зависит от выбора точки из множества
W
При помощи формы (20) введем на множестве {Л1} метрику,
положив
ds2=gijdxidxK (21)
Выражение (21) для ds2 называют линейным элементом, а тен-
зор Sv — метрическим тензором.
Если форма (21) является положительно определенной, то го-
ворят, что на множестве {Л4} введена риманова метрика; множе-
ство {/И} в этом случае называется римановым пространством.
Если же форма (21) является знакопеременной, то говорят, Что
365
на множестве {Л4} введена псевдориманова метрика и множества
{Л4} в этом случае называют псевдоримановым пространством.
Римановы пространства рассматривались в главе 4. Там был
построен аппарат для их изучения, были введены важные объек-
ты и понятия. В этом пункте мы укажем, каким образом можно
исследовать псевдоримановы пространства.
Исследование псевдоримановых пространств важно, в частно-
сти, потому, что они широко используются в общей теории отно-
сительности. Мы будем вести изложение по аналогии с построе-
нием теории римановых пространств.
1. Касательное пространство. Разложим каждую компоненту
метрического тензора ga(xl,..., хп) по формуле Тейлора в
окрестности точки М0(х01,... ,хоп) <^Vnp,q (здесь Vnp,q — псевдо-
риманово пространство: индекс п указывает его размерность, ин-
дексы р и q — соответственно число положительных квадратов и
число отрицательных квадратов в нормальном виде квадратичной
формы (20)). Имеем
gt^x1, ... ,xn) = gtjl(x10, ... ,х") +
+ -J4xo- • • • хо) (^—Хо) + £1Л (xk~хо)’ (22>
где e.ijk -* 0 при р = (х1—xg)2 + • • + (х"—Xq)2 0.
Псевдоевклидово пространство EnPiq с линейным элементом
ds20 = gu(х>, ... ,х")dx'dx' (23)
называется касательным псевдоевклидовым пространством в точ-
ке A4o(x0)=Mo(x01.......хоп) псевдориманова пространства 1/пр,д.
Формулы (21) — (23) позволяют записать линейный элемент
ds2 пространства Vnp,q в следующем виде:
ds2 = ds2 4- -уу- (х0) (х*—xg) dxLdx‘ (xk—xg) dxldx!. (24).
Из формулы (24) видно, что метрика ds2 псевдориманова про-
странства Vnp,q в окрестности точки Л4о(хо) и метрика ds$2 каса-
тельного псевдоевклидова пространства Enp,q в окрестности этой
же точки разнятся на малые первого порядка относительно р =
= /(x1-xJ)2+ ... +(х"-хЗ)2.
Замечание. То, что линейный элемент (23) представляет
собой метрику псевдоевклидова пространства Enp,q, непосред-
ственно вытекает из определения псевдрориманова пространства.
2. Преобразование координат в псевдоримановом и касатель-
ном псевдоевклидовом пространствах. Пусть точка Мъ<=УпР1Ч
имеет нулевые координаты. Тогда линейный элемент ds02 каса-
тельного пространства EnPiq имеет следующий вид:
ds2 = gu (0, .... 0) dx'dx1. (25)
366
Некоторая окрестность точки Мо псевдориманова простран-
ства Vnp,q отображается взаимно однозначно на некоторую
окрестность этой же точки касательного псевдоевклидова про-
странства Enp,q по правилу: точке М (х1.....Xn)<=VnPi(/ ставится
в соответствие точка касательного пространства EnPtq с коорди-
натами х1,..., х".
Перейдем к новым координатам 'х=('х1.....'хп):
Х1 = Х1(’Х1, _ ,'ХЯ),
................................... (26)
хп = хп('х1, ... , 'хп).
При этом преобразование координат произойдет и в касательном
пространстве. Отметим, что в результате между окрестностью
точки Мо в пространстве Vnp,q и окрестностью этой же точки в
пространстве Enp,q устанавливается другое взаимно однозначное
соответствие.
Как преобразуются метрические тензоры пространств Vnp,q и
£np,g? Имеем
Положим
<3%1' I }
d’xk
Считая, что преобразование (26) переводит точку Мо(0........0) в
себя, т. е. что
х1 (0, .... , 0) = 0, i = 1.п,
•формулу (27) можно записать в следующем виде:
'^/(0, ...,0) = ^(0, ...,О)Х|Х/, (28)
или, короче,
, ° ° i j
gki^gijKkdi.
При преобразовании координат (26) в касательном простран-
стве ЕпРЛ происходит линейное преобразование координат с мат-
рицей (x’fe):
х1 = х| ’xk (i = 1, ... , n). (29)
Матрица (х’ь) не вырождена, так как
det (х‘) = det ( I
4 \ d’xk Im.
D (x1, ... , Xя)
D (’x1, ... , ’xn)
=#0.
367
Правые части формул (29) — преобразований координат каса-
тельного пространства Епр,д— представляют собой линейные чле-
ны в разложениях функций ,
х^хЧ'х1.......zxn) (t = l,...,n)
по формуле Тейлора:
х1 ('х1, ... , ’хп) = xl 'xk + o (V'x1 + ... + 'хп ).
3. Локально нормальные координаты в псевдоримановом про-
странстве
Определение. Координаты (х’) в псевдоримановом про-
странстве называются нормальными в точке Л1о(О,..., 0), или ло-
кально нормальными, если
gu = gtjIм. =^;(0, ... ,0) =
1, г = /=l, ... ,p',
— 1, i = j = p + 1.....n;
0,
(30)
и
= =0- (31)
да* |M0
Справедливо следующее утверждение-.
В окрестности каждой точки псевдориманова пространства
можно ввести координаты, нормальные в этой точке.
Доказательство сформулированного утверждения проводится
в полной аналогии с доказательством теоремы о возможности
введения в окрестности каждой точки риманова пространства ко-
ординат, нормальных в этой точке (см. пункт 3° § 2 главы 4),
Остановимся поэтому только на основных этапах доказательства.
Сначала обосновывается, что невырожденным линейным пре-
образованием координат вида (29) можно добиться того, что в
точке Л4о будут выполняться соотношения (30). Далее указыва-
ется такое преобразование координат, при котором сохраняются
соотношения (30) и обеспечивается выполнение условий (31).
Отметим, что при завершении доказательства нужно восполь-
зоваться формулами главы 3, приспособив их для рассматривае-
мого здесь случая.
Детали рассуждений оставляем читателю.
4. О тензоре кривизны (тензоре Римана—Кристоффеля) для
псевдориманова пространства
Как было установлено выше, в окрестности данной точки Мо
псевдориманова пространства VnPlQ можно выбрать локально
нормальные координаты так, что разложение метрического тен-
зора по формуле Тейлора с центром в точке Л40(0,..., 0.) имеет
вид
. £„(x1,...,x") = Sy+O(p«), (32)
368
где
1, i = /=l, ... ,р;
— 1, i — j = p +1, . • • , n;
0» i=^=j‘,
(33>
и p = Kx12 + ... -f- x"2.
Напомним, что в случае риманова пространства было получе-
но похожее выражение для компонент метрического тензора
gutx1,... ,хп)==6и + О(р2),
и, главное, детально выяснена структура слагаемых О(р2).
Опуская подробности рассуждений (они вполне аналогичны
тем, что были проведены в § 2 главы 4), запишем окончательные
выражения для компонент метрического тензора §ц(х\.,.,хп)
пространства Vnp,q в некоторой системе координат, нормальной в
данной точке Мо:
guix1, ... ,хп)=8„------J- Riijmxlxm + o(p2)
О
о
(здесь Riijm — координаты тензора Римана—Кристоффеля для
данной точки Мо и в указанной системе координат (х1,
5. Параллельный перенос векторов в псевдоевклидовом про-
странстве
Пусть (хг)—криволинейные координаты в псевдоевклидовом
пространстве Enp,q. Обозначим через х радиус-вектор точки М с
началом О. Векторы
х' = (i = 1, ... , п)
dxi
образуют базис пространства EnPtq в точке М.
Пусть постоянный вектор § переносится в пространстве Enp,q
параллельно (параллельный перенос в линейном пространстве
Епр>д, снабженном вполне определенной метрикой, определяется
обычно) по кривой M0Mi:
х1 = х1({), (< = 1, . •. ,'п). (34)
в каждой точке М кривой (34) есть базис
х1 (М),...,хп(М).
Поэтому координаты (постоянного) вектора £ будут меняться.
В каждой точке кривой имеем
^ = 0,
d&Xi + ^dxi = 0, dx; = d (\ = —d-x- dx1 — x^dx1. (35)
\ dxt j dx^x>
369
Разлагая вектор Хц по базису Xk
xij = ^iixki
•с учетом формул (35) получим
dxi — Vt/x^x1.
Используя эти соотношения и одну из формул (35), найдем
(^ + rUW)xft = 0.
Отсюда в силу линейной независимости векторов xh имеем
dtf=—Vtjgdx1'. (36)
Величины входящие в формулу (36), уже знакомы нам. Это
символы Кристоффеля 2-го рода (см. формулу (1) § 8 главы 3).
Их называют также коэффициентами связности — они связывают
координаты g1' вектора g в точке (х\...хп) с координатами g’+
+dg’ этого вектора в близкой точке (x' + dx1.xn + dxn).
Соотношения (36) представляют собой систему обыкновенных
дифференциальных уравнений, неизвестными в которых являются
координаты g’(Z) вектора g, параллельно переносимого вдоль
кривой (34). Интегрируя эту систему, получим координаты g’(Z)
вектора g в произвольной точке M(t) кривой (34) в базисе
Соотношения (36) называются уравнениями параллельного
переноса вектора.
6. Векторы в псевдоримановом пространстве
Векторы в псевдоримановом пространстве вводятся в полной
аналогии с введением векторов в римановом пространстве.
Пусть Vnp,g — псевдориманово пространство с метрическим
о о
тензором gij(.xi, • • • ,хп), Л40(х1, ... ,хп)— некоторая его точка,
ЕпРЛ— касательное псевдоевклидово пространство в точке Мо с
о оо
метрическим тензором ga = ga (х1, ... ,хп).
Пусть ..., еп — базис в пространстве Еп^>,д> связанный с ко-
ординатами х1,...,хп. Тогда по заданным в точке Мо числам
g1,...,gn определяется вектор
g=g1e1+---+£4l = B4
в пространстве ЕпРу<1. Вектор g мы будем называть вектором в
псевдоримановом пространстве Vnp,q в данной точке Мо.
Перейдем в пространстве Vnp,q к новым координатам
хг=х* ('х1, ... , 'х") (i = 1, ... , п).
370
Тогда базисные векторы е< пространства Епр,д преобразуются по
формулам J
'еи — etal, k ~ 1, .,, г п, (37у
где al — ?? I . Ясно, что
й d’xk |л10
ei = Чаг 2 = 1> • • ,п, (38)
Сравнивая выражения
^е^'е'а^^'а^^
и
5=^4,
получим формулы преобразования координат и вектора g:
’t^’af (fe=l, ... ,п). (39)
Аналогично получаются и формулы
= (1 = 1---п). (40)
При помощи формул (39), (40) можно дать такое определе-
ние вектора в псевдоримановом пространстве:
вектором g в точке Л4о псевдориманова пространства Vnp,g на-
зывается упорядоченный набор п чисел g1, ...,,£п— координат
вектора g, преобразующийся при переходе от координатной си-
стемы (х2) к координатной системе ('xk) по формулам (39), (40),
в которых
, Эх* | , k d'xk I
k d'xk |м, 2 dxi |Mo
7. Параллельный перенос векторов в псевдоримановом про-
странстве
Пусть точки Л40 и Mi пространства Vnp,g соединены кривой
ЛМЛ:
х2=х2(О, (1=1.....п). (41)
Пусть g — вектор в точке Л40 пространства Vnp,q.
Уравнения
d^=—rki^dxi (42)
называются уравнениями параллельного переноса вектора g=
= (gl,... , gn) в псевдоримановом пространстве Vnp,q.
Система (42) представляет собой систему обыкновенных диф-
ференциальных уравнений, в которых неизвестными являются ко-
ординаты вектора g, параллельно переносимого вдоль кри-
371
вой (41), а символы Кристоффеля Г^- вычисляются в точках
этой кривой.
8. Параллельный перенос тензоров
Дословно повторяя рассуждения пункта 4° § 3 главы 4, мож-
но получить уравнения параллельного переноса тензоров в псев-
доримановом пространстве.
Будем говорить, что тензор Т переносится параллельно вдоль
кривой L пространства Vnp,g, если в каждой точке М кривой L
его компоненты сохраняют постоянные значения относительно
параллельно переносимого вдоль этой кривой базиса.
Запишем общую формулу параллельного переноса тензора Т
/ г'
типа ' I:
; ’ рЦ • • / r-Z, ртЦ;. Ц j— i ? pit - • .1 у рп I
J if-l's ( km km h---is '
4- с Г1:лг, +... +1?. Ти--Лг 'j dxk.
' kJ, 1 1 kjs
9. Абсолютный дифференциал и абсолютная производная
Абсолютным (ковариантным) дифференциалом тензора Т на-
зывается главная линейная часть приращения тензора T(t+dt),
параллельно перенесенного в точку М(1), и тензора T(t), взятого
в этой точке.
Например, для тензора Т1^ типа формула для абсолютно
го дифференциала имеет следующий вид:
DT% = dT’s + {Г1Р Л? + rip rfpTii - ris 7%) dxk.
Мы не выписываем формулу для общего случая, отсылая читате-
ля к пункту 5° § 3 главы 4. Там же читатель найдет формулы для
вычисления абсолютной (ковариантной) производной тензора.
Отметим в заключение, что абсолютный дифференциал мет-
рического тензора g-ц псевдориманова пространства Vnp,q равен
нулю. Тем самым метрический тензор пространства VnP,q обра-
зует в нем поле параллельных тензоров.
10. Геодезические линии в псевдоримановом пространстве
Геодезические линии в римановом пространстве были введены
нами двумя способами — как линии постоянного направления и
как экстремали функционала длины (кривые минимальной, дли-
ны, соединяющие две заданные точки).
В случае псевдориманова пространства ввести геодезические
как экстремали не представляется возможным. Для пояснения
обратимся к частному случаю — псевдоевклидовой плоскости £2i,i.
Линейный элемент ds2 плоскости Е21Л задается формулой
ds2=dxl*—dx2*. (43)
Обратимся к координатной плоскости (х1, х2), считая, что на ней
введена метрика (43). Тогда отрезки прямых, параллельных бис-
372
сектрисам координатных углов, имеют нулевую длину и поэтому
любые две точки Р и Q этой плоскости можно соединить лома-
ной нулевой длины. Этот пример показывает, что вариационный
подход к проблеме геодезических в случае псевдориманова про-
странства неосуществим (рис. 13).
Рис. 13f Псевдоевклидова плоскость £21д с метрикой ds2-dx'~—
—dx2 . Через каждую точку (х1, х2) проходят две прямые, парал-
лельные биссектрисам координатных углов. Расстояние между лю-
быми точками М и У на каждой из этих прямых равно нулю.
Произвольно взятые точки Р и Q можно соединить ломаной PRQ,
длина которой равна нулю, — звенья этой ломаной параллельны
биссектрисам координатных углов и имеют длины, равные нулю
Однако первый путь — введение геодезических как линий по-
стоянного направления — дает нужный результат. При этом урав-
нения геодезических будут такими же, как и в случае риманова
пространства.
Кривая L в псевдоримановом пространстве Vnp,g называется
геодезической линией, если любой вектор касательной к кривой
L в какой-либо ее точке при параллельном переносе вдоль L
остается вектором касательной этой кривой. Тем самым геодези-
ческая линия — это линия постоянного направления.
Пусть L — геодезическая в пространстве Vnp,g, заданная пара-
метрическими уравнениями
хг=х2(0-
И ё’(^о)—вектор касательной к кривой L в точке (Ио- Перенесем
этот вектор параллельно вдоль кривой L в точку М, отвечающую
значению параметра t из промежутка |7о, и получим в точке
М вектор касательной Так как также вектор касатель-
ной к L в точке М и все векторы касательной к кривой L в точке
М коллинеарны,то
^1 = а(0^(0, а(0=#0. (44)
at
373
Возникает естественный вопрос: нельзя ли выбрать на геодезиче-
ской L новый параметр т=т(£) так, чтобы вектор ----- в каждой
dx
dxi I -у
ее точке получался параллельным переносом вектора ------- ?
dt |т=т0
Покажем, что это возможно.
Параметр т введем при помощи соотношения
т= \ a(f)dt,
т. е.
/Ут
dx = a(t)dt, -—- = &
Отсюда и из формулы (44) получаем, что
d.r£ _ dx<- (Ц 1 d.v‘
dx dt dx a dt
Ho £*(£)—вектор касательной к геодезической L, полученный па-
раллельным переносом вдоль нее вектора £’(/0). Поэтому послед-
нее равенство означает, что вектор касательной ------- получается
dx
параллельным переносом вдоль геодезической L какого-то векто-
„ dxi |
ра касательной -----
dx | т=т0
Параметр т, для которого векторы касательных --------- образу-
dx
ют вдоль геодезической поле параллельных векторов, называется
каноническим. Ясно, что если т — канонический параметр, то и
т*=Лт+В (Л¥=0 и В — постоянные числа) также является кано-
ническим параметром.
Итак, если геодезическая существует, то на ней можно вы-
брать в качестве параметра канонический параметр.
Справедливо следующее утверждение-.
из каждой точки псевдориманова пространства по заданному
в этой точке направлению исходит единственная геодезическая
геодезической
линия.
* Пусть хг=х*(т)—параметрические уравнения
~ dxt
и т — канонический параметр. Тогда вектор --- вдоль искомой
dx
геодезической (х’(т)—неизвестные функции) переносится па-
раллельно и, значит,
d = \dxl (k=l, ... ,n).
\ dx / \ dx ) v ’
Запишем последние соотношения в эквивалентной форме, поде-
лив обе части на dx\
d2xk pt dx1 dx!
dx2 dx dx
(45)
374
Соотношения (45) представляют собой систему обыкновенных
дифференциальных уравнений, заданных в некоторой области из-
менения переменных х1,...,хп — координат в пространстве VnP:9.
В этой области задан метрический тензор gij и, следовательно,
— известные функции.
Соотношения (45) называются дифференциальными уравне-
ниями геодезических.
По условию заданы точка М и направление b в этой точке.
Пусть а* — координаты точки М, а Ь{ — координаты вектора Ь:
х‘|т=т,==аг, =Ь1. (46)
ат |т=т0
Из теории обыкновенных дифференциальных уравнений извест-
но, что система (45) при начальных данных (46) имеет един-
ственное решение хг=х’(т).
Итак, в псевдоримановом пространстве Vnp,q определяется
единственная геодезическая, исходящая из точки М в заданном
направлении Ь. *
На этом мы завершаем изложение некоторых фактов теории
псевдоримановых пространств. Они во многом похожи на римано-
вы пространства. Но есть и существенные различия. Кое-где мы
подчеркивали их. Главное отличие связано с измерением длин —
в псевдоримановых пространствах имеются реальные кривые ну-
левой длины.
§ 5. ПРОЕКТИРОВАНИЕ КРИВЫХ И ПОВЕРХНОСТЕЙ
Использование параметрического способа задания кривых и
поверхностей в прикладных задачах часто оказывается удобным
во многих отношениях. Освобождая от привязки к какой-то опре-
деленной системе координат, это упрощает вычисления, построе-
ние графических изображений на экране дисплея, весьма полезно
при конструировании достаточно гладких составных кривых и по-
верхностей по заданному остову.
В этом параграфе мы коротко остановимся на некоторых под-
ходах к конструированию кривых и поверхностей, отсылая чита-
телей за подробностями к книге А. Фокса и М. Пратта «Вычисли-
тельная геометрия. Применение в проектировании и на производ-
стве» (М.: Мир, 1982).
1°. Уравнение отрезка кривой
Пусть Л40 и Mi — фиксированные точки пространства Е3 с ра-
диус-векторами г0 и и соответственно. Зададим в этих точках не-
нулевые векторы То и Ti и попробуем провести через точки Mi и
Мо какую-нибудь кривую, касательные векторы которой в точках
Мо и Mi совпадали бы с заданными векторами (рис. 14).
375
Рис. 14. То'=аоТо, Ti—HiTi-, а — при а0>1 и ai>l кривая L' является более
полной, чем кривая L; б — ai=l
Рассмотрим кривую L, заданную радиусом
г=г(О=ао+/а1 + ^2а2+^а3 (1)
и потребуем, чтобы выполнялись следующие условия:
г(О) = го> г (1) = Г1, г(О) = То, г(1) = Т1. (2)
Находя векторные коэффициенты а0, аь а2, а3 из вытекающих из
условий (2) соотношений
а0 = г0, а0 + а1 + а2 + а3 = г1, а^Т^ aj + 2а2 + За3 = Тг,
получим
а0 — г0, а8 — То, а2— 3(rj г0) 2То Тх, а3 — 2(r0 r^-J-To-J-Tj. (3)
Подставим выражения (3) для векторов а0, аь а2, а3 в формулу
(1) и запишем полученные соотношения в следующей матричной
форме (форме Фергюсона):
/ 1 0 0 0, /г0\
J (4)
\ 2—2 1 1/ XTjZ
Кривая с радиусом (4) является искомой. Ясно, что вид этой
кривой существенно зависит от направлений и длин касательных
векторов в опорных точках.
При перегруппировке слагаемых многочлен (1) можно запи-
сать в виде
г = г(0 = (1— /)3г0Ч-3/)1— 03г1Ч-3/2(1— /)г2-Н3г3 (0</<1) (5)
(достаточно положить а0 = г0> а1 = 3(г1—г0), а2 = 3(г2—2rj4-r0), а3 =
= г3—Згг + Зг!—г0). Из формулы (5) получаем, что ,
г(О) = го, г(1) = г8, г(О) = 3(Г1-го), г(1) = 3 (т8—-г2). (6)
376
Тем самым кривая (5) проходит через точки Л10 и Л43, задавае-
мые векторами г0 и г3, а векторы касательных к кривой в этих
точках коллинеарны соответственно векторам п—г0 и г3—г2.
Ломаная M0M]Af2M3 называется характеристической ломаной
кривой (5) (рис. 15).
Рис. 15. MoMiMzMs — характеристическая ломаная кривой
В матричной форме запись
так (форма Безье):
уравнения кривой (5) выглядит
/10 0 0\ /г0\
г(0 = (1ИЧ3) -3 3 0 0 /гД (0<^1). (7)
1 О --- U О U j I Г 2 I
1 3 — 3 1/ \г3/
. Полученная кривая регулярна. Вычислим, например, ее кривиз-
ну в граничных точках. Имеем
/Qj _. I (Г1 — го) X (г2 — Г1) I 1 \ 2 I (г2 г1) X (г3 гг) I
И ' 3 )Г1_Го|з ’ 11 3 |г3-г,)3
2°. Уравнение криволинейного четырехугольника
Предложенный в предыдущем пункте способ задания кривой
з форме (1) может быть обобщен на случай поверхности.
Рассмотрим векторное параметрическое уравнение вида
r = r(u, t>)= aijUlv' (OsgCusgC 1, OsgCosgC 1), (8)
i,i=o
или, в матричной форме,
г (и, v)~(l и и2 и3)
(9)
Для задания поверхности уравнением (8) необходимо определить
377
векторные коэффициенты ац (i=0, I, 2, 3, /=0, 1, 2, 3). Требуемые
шестнадцать условий получим, в частности, задавая в точках
(О, 0), (0, 1), (1, 0), (1, 1) плоскости параметров и и v значения
векторов г, ru, rv, ruv, т. е. радиус-векторы опорных точек, векто-
ры касательных к координатным линиям u=0, и=1, ц=0 и v—1 и
меру «закрученности» поверхности в этих точках (рис. 16).
Рис. 16. Криволинейный четырехугольник
Обобщая формулу Безье (5) для кривой, получим уравнение
криволинейного четырехугольника в следующей форме
г = г(и, v)= rijg^ujgjiv) (OsCmsC 1, 0^ц<1), (10)
/,/=0
где Гц — вершины характеристического многогранника и gi(t) =
—/’(1—03~С Самой поверхности принадлежат только опорные
точки ЛТоо, М03, М30< Л133, определяемые векторами г00, г03, г30, г33.
Векторы Г;о, ГП, Гу2, ri3 (1=0,3) и гОз-, Гц, r2j, Г33 (/=0,3) задают
характеристические ломаные граничных кривых криволинейного
четырехугольника. Векторы Гц, Г]2, г2], г22 определяют меру «за-
крученности» поверхности в опорных точках (рис. 17).
Рис. 17. Характеристический многогранник поверхности
378
Запишем соотношение (10) в матричной форме. Имеем
/1 \
r = r(u, v) = (l и и2 u3) A R Л । j (O^Cu^Cl, O^o^Cl), (11)
\V3'
где
/1 0 0 0\ /Г00 Г01 Г02 гоз\
А —/ — 3 3 0 0 । р _- । гю Гц Г12 Г13 I <'124
3—6 3 О ’ г20 г21 г22 г23 • v ’
J I \ £Д} Lk La аО I
\ 1 3 3 17 \rj0 г31 г32 г33-
Значения вектора г и его производных в опорных точках вычис-
ляются по формуле
/г (0,0) г (0,1) г0 (0,0) г0 (0,1)\
г (1,0) г (1,1) г„ (1,0) г0 (1,1) \ ЛКЛг (13)
ru(0,0)ru(0,l)ruo(0,0)ru„(0,l) • ’
4(1,0) г„(1,1) г„о(1,0) г„0(1,1)7
Отсюда, в частности, для опорной точки Л400 получаем
г(О,О) = гоо, г„(О,О) = 3(г1о—г00), го(0,0) = 3(г01—г00),
гип (0,0) = 9 (г00—г01—г10 + ги).
3°. Составные кривые
Ранее (см. формулу (4)) было показано, что отрезок кривой
в форме Фергюсона можно описать при помощи радиус-векторов
опорных точек и векторов касательных в них. Если строится со-
ставная кривая Фергюсона, проходящая через точки Л40, Mi,...
...,Мп с радиус-векторами г0, гь...,гп и касательными вектора-
ми То, Ti,...,Tn в этих точках, то естественно потребовать, чтобы
в общей опорной точке Mi соседних отрезков с номерами i и i+
+ 1 выполнялись следующие равенства:
гг=гг+1, гг = гж, гг = гг+1 (1 = 0, 1).
Из последней группы этих равенств получаем рекуррентное соот-
ношение между векторами касательных в трех последовательных
опорных точках:
Тг_1+4Тг + Тг+1 = 3(гж—П—i) (i = 1, 2,...,п—1). (14)
Формулы (14) означают, что, задавая векторы То и Тп, опреде-
ляем остальные векторы Т),...,7’п_1 из линейной системы
4 1
1 4 1
1 4 1
3(г2-г0)-Т0
З(г3—п)
3 (гп—гп_2)—тп
379
и, приписывая векторам касательных в опорных точках найден-
ные значения, получаем составную кривую с непрерывной кри-
визной (рис. 18).
Рис. 18. Составная кривая
Аналогично можно построить составную кривую Безье, обес-
печив непрерывность изменения ее наклона и кривизны.
4°. Составные поверхности
Пусть S —некоторая заданная поверхность. Набросим на нее
сеть наподобие рыболовной сети, состоящую из конечного числа
кривых двух разных семейств. Зафиксировав положение этой се-
ти в пространстве, удалим поверхность и рассмотрим одну из
ячеек сети (рис. 19).
Рис. 19. Ячейки поверхности
Допустим, что вдоль сторон этой ячейки (граничных кривых)
Параметры и и v изменяются в пределах от 0 до 1, так, что одна
пара противоположных опорных отрезков задается уравнениями
r=r(u, 0), O^u^l; r=r(u, 1) (O^M^l),
(15>
380
а другая (рис. 20) —
г=г(0, у), O^y^l; г=г(1, у) (O^y^l)
(16).
Рис. 20. Отдельная ячейка
Поверхности
Г] (и, у) = (1—y)r(w, 0) + уг(и, 1) (О^ы, у^1);
(17)
г2(ы, у) = (1—и)г(0, у)+иг(1, у) (O^u, ys^l),
получены линейной интерполяцией, учитывающей только пару
(15) или (16) соответственно, и опираются только на часть гра-
ницы. Для того чтобы найти уравнения поверхности, опираю-
щейся на все кривые (15) и (16), следует рассмотреть линейную
комбинацию
г==г1 + г2—г3,
где г3 = (1 — и)(1—у) г (0, у)4-ц(1 — у)г.(1, 0) + (1—и) уг (0, 1) +
+ иуг(1, 1) (рис. 21).
Рис. 21. Линейные интерполяции
38f
Записывая окончательный результат в матричной форме
r(u,t>) = (l— yj)+(r(u, 0)r(u,
+ (1 — uu)(r(-Q' °)r<0’ (18)
+ U Цг(1, 0) r(l, 1)/ v )’ '
легко убеждаемся в том, что поверхность с вектором (18) опи-
рается на все четыре граничные кривые.
В качестве функций смешения вместо 1—и и и можно выби-
рать любые неотрицательные функции ао(«), ai(u), удовлетво-
ряющие условиям
a0 + ai=l. ao(O)=l, ao(l) = O, at(0) = 0, ajl^l. (19)
Имея сеть кривых, можно сконструировать составную поверх-
ность, заполнив ее ячейки описанным выше способом.
Гладкость составной поверхности достигается более слож-
ным, нагруженным описанием ячейки поверхности, не только че-
рез граничные кривые, но и путем задания в точках этих кривых
векторов ги(0, у), ги(1, у), г„(п, 0), rv(u, 1) и ruv в ее вершинах.
Рассмотрим, например, криволинейный четырехугольник, за-
даваемый вектором
/г (0, ц)\
Г = г(щ y) = (a0(u)a1(u)₽0(u)₽i(u)) I J jj’ ) +
\r“(L v)/
/ “о (у) \
+ (r(u, 0)r(u, l)r0(u, 0)ro(u, 1)) “1 —
\ Ро I
' Pi (у) /
/ССо(0\
-(аоМаЛиШаШчОК ,
\₽х(у)/
где матрица R задается формулой (12), а функции смешения а0,
«1> ₽о, Pi удовлетворяют соотношениям (19) и дополнительным
условиям
a'(0) = a'(l)==a'(0) = a1'(l) = 0,
₽о(0) = ₽о(1) = ₽1(0) = ₽1(1) = 0, (20)
₽о(О) = 1, ₽о(1) = О, ₽[(0) = 0, р[(1) = 1.
Используя такие заполнения ячеек, можно добиться того, что
поле нормалей на построенной поверхности будет непрерывным,
я значит, построить всюду гладкую составную поверхность.
382
В уравнении
г (и, v) = (а0 (и) ccj (и) ₽о (и) Pi («)) R («о (у) «1 (у) ₽e (v) pi (у))Г ,
где функции ао, си, 0о, Pi подчинены условиям (19) — (20), запол-
нение ячейки полностью определяется через векторы г, ru, rv,
ruv в ее вершинах. При построении составной поверхности доста-
точно добиться совпадения векторов ru, г„, rui) в смежных углах
соседних ячеек — и полученная поверхность будет гладкой
(рис. 22).
Рис. 22. Составная поверхность
Литература
1. Аминов Ю. А. Дифференциальная геометрия и топология кривых. — М.:
Наука, 1987.
2. Дубровин Б. А., Новиков С. П., Фоменко А. Т. Современная гео-
метрия. Методы и приложения. — М.: Наука, 1986.
3. Ефимов Н. В. Еысшая геометрия. — М.: Наука, 1971.
4. Ильин В. А., Позняк Э. Г. Линейная алгебра. — М.: Наука, 1986.
5. Ландау Л. Д., Лифшиц Е. М. Теория поля. — М.: Наука, 1973.
6. Милнор Дж., Уоллес А. Дифференциальная топология. Начальный
курс. — М.: Мир, 1972.
7. М и щ е н к о А. С., Фоменко А. Т. Курс дифференциальной геометрии н
топологии. — М.: Изд-во Моск, ун-та, 1980.
8. Погорелов А. В. Дифференциальная геометрия. — М.: Наука, 1974.
9. Рашевский П. К. Риманова геометрия и тензорный анализ. — М.: Нау-
ка, 1967.
10. Ши кин Е. В. Линейные пространства и отображения. — М.: Изд-во Моск,
ун-та, 1987.
11. ЭйзенхартЛ. П. Риманова геометрия. — М.: ИЛ, 1948.
Научное издание
ПОЗНЯК Эдуард Генрихович
ШИКИН Евгений Викторович
ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ. ПЕРВОЕ ЗНАКОМСТВО
Зав. редакцией Н. М. Глазкова
Редакторы Р. Д. Солод, Т. В. Властовская
Художественный редактор Ю. М. Добрянская
Переплет художника В. Б. Гордона
Технический редактор Н. И. Смирнова
Корректоры Н. В. Рыбакова, Н. А. Можева
ИВ № 3671
Сдано в набор 16.02.90 Подписано в печать 10.01.91.
Формат 60X90/16 Бумага тип. № 2
Гарнитура литературная Высокая печать
Усл. печ. л. 24,0 Уч.-изд. л. 23,07
Тираж 8600 экз. Заказ 259 Изд. № 1199
Цена 3 р. 50 к.
Ордена «Знак Почета» издательство Московского университета.
103009, Москва, ул. Герцена, 5/7.
Типография ордена «Знак Почета» изд-ва МГУ.
119899, Москва, Ленинские горы