


































































































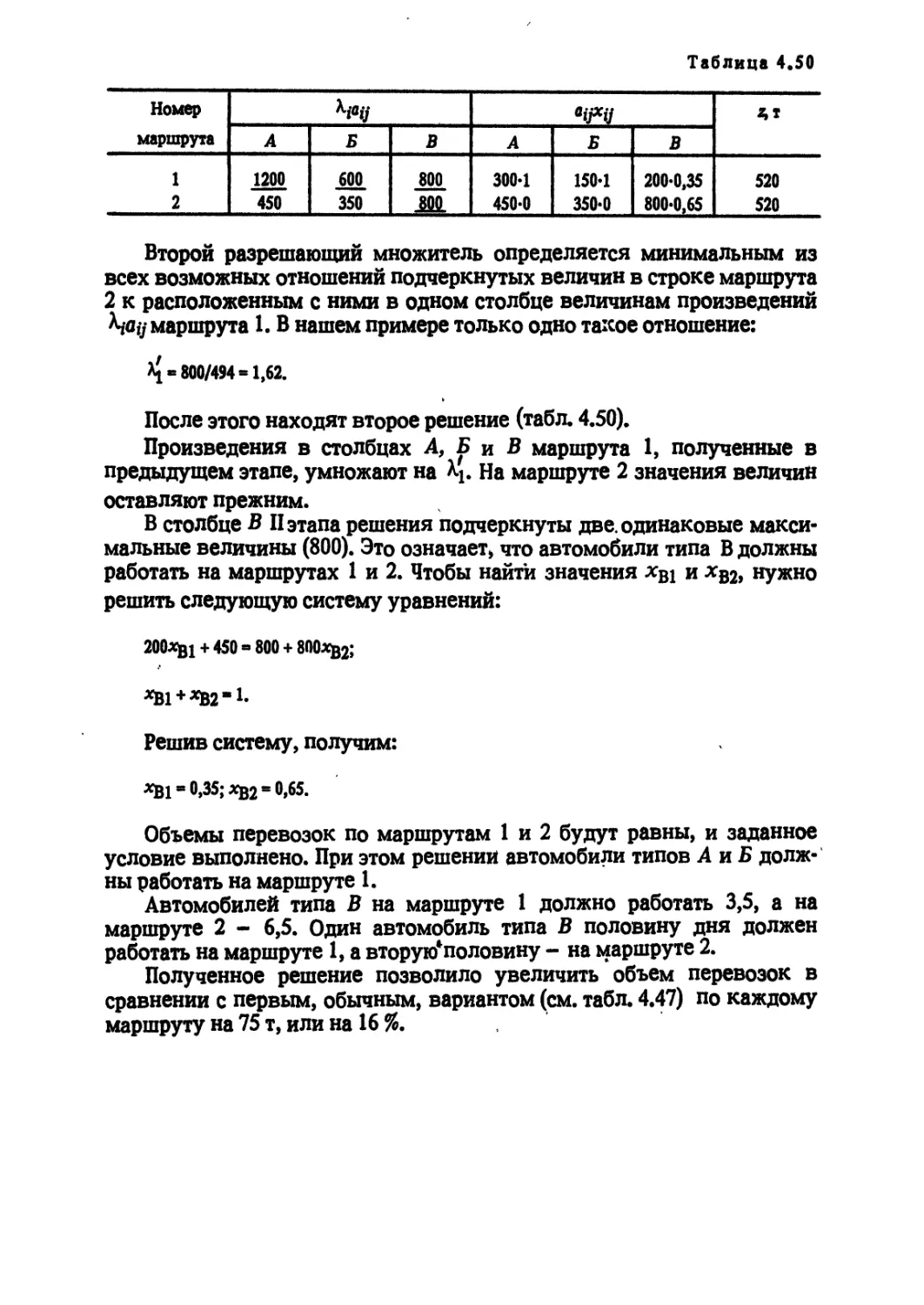
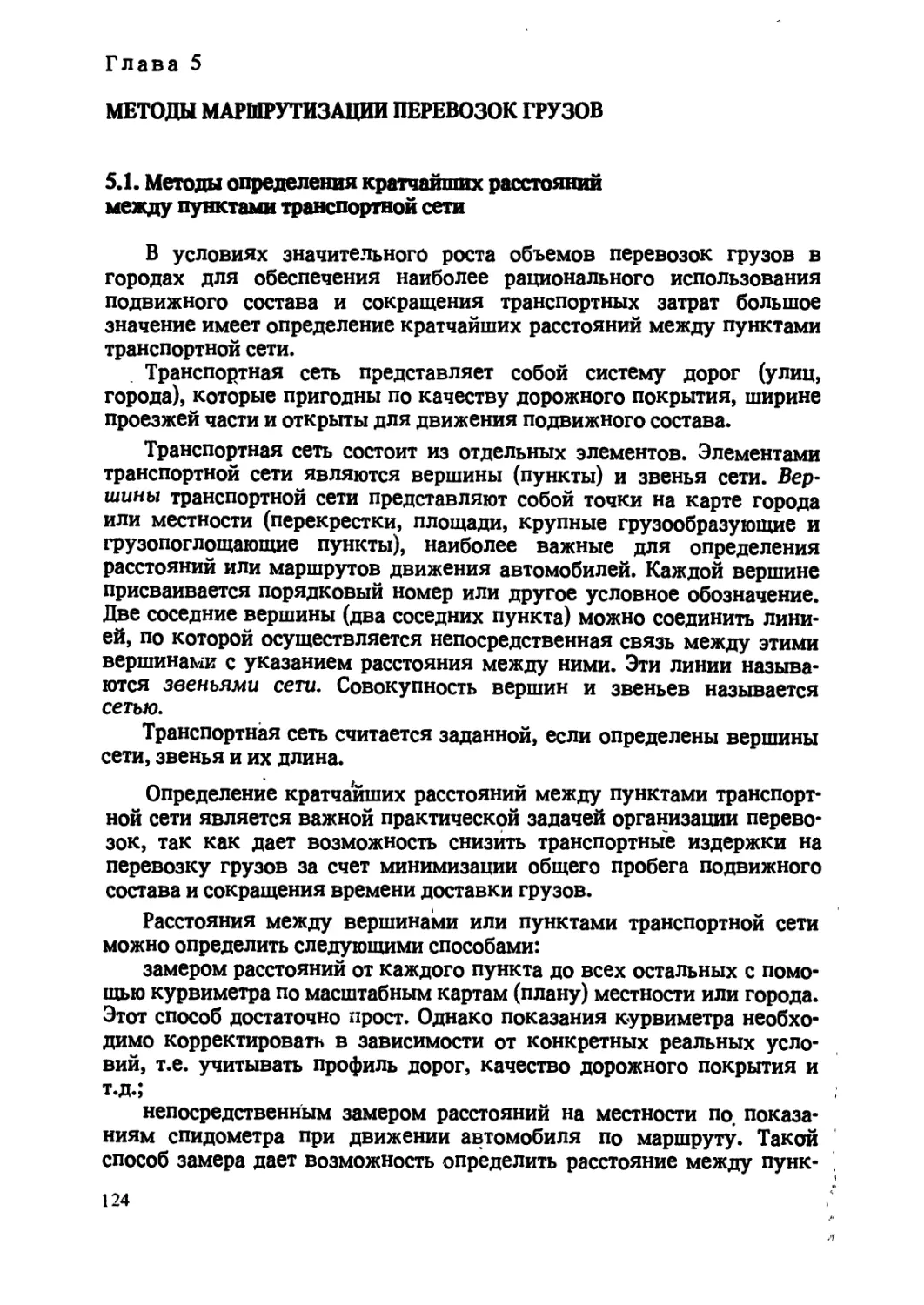




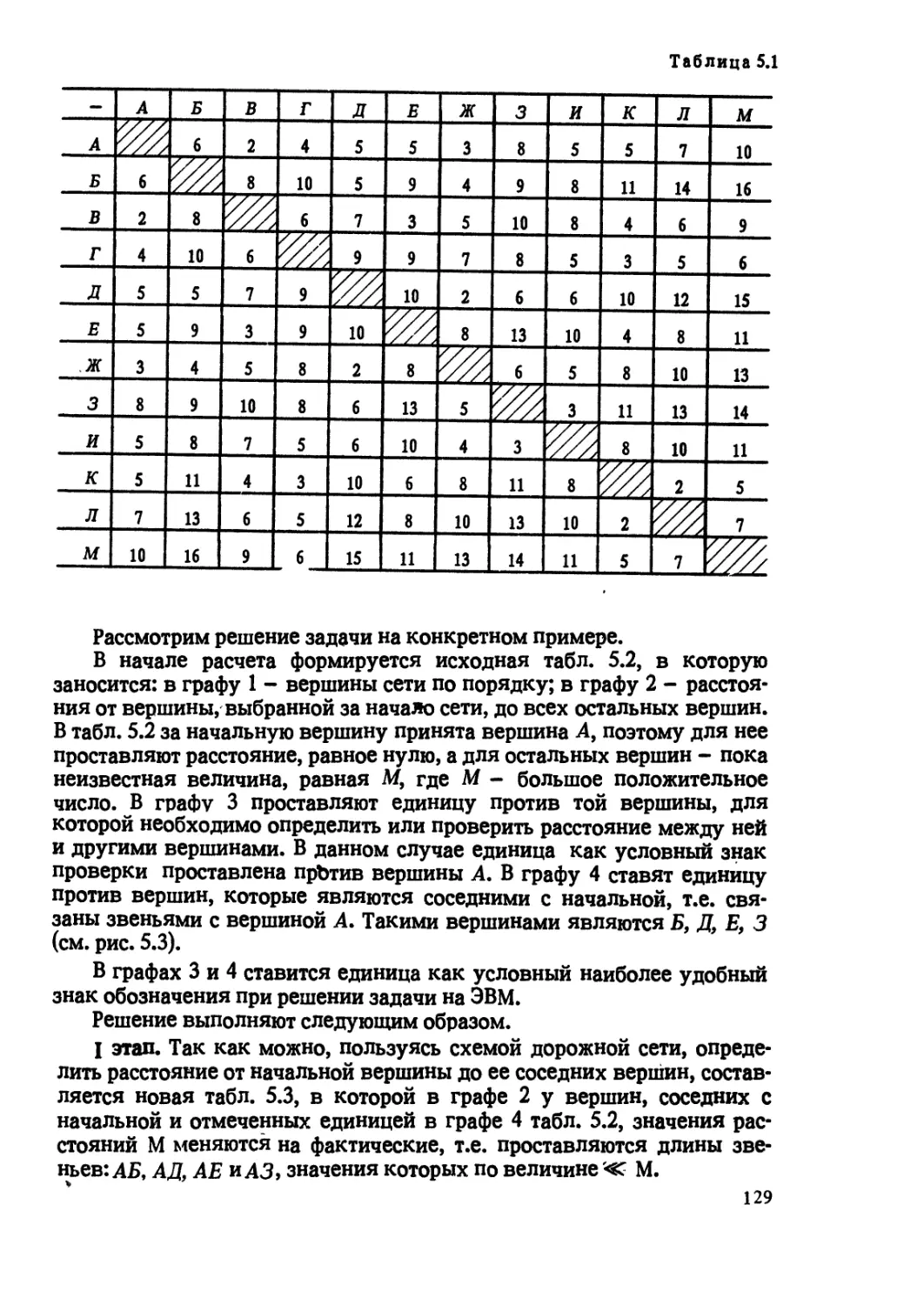
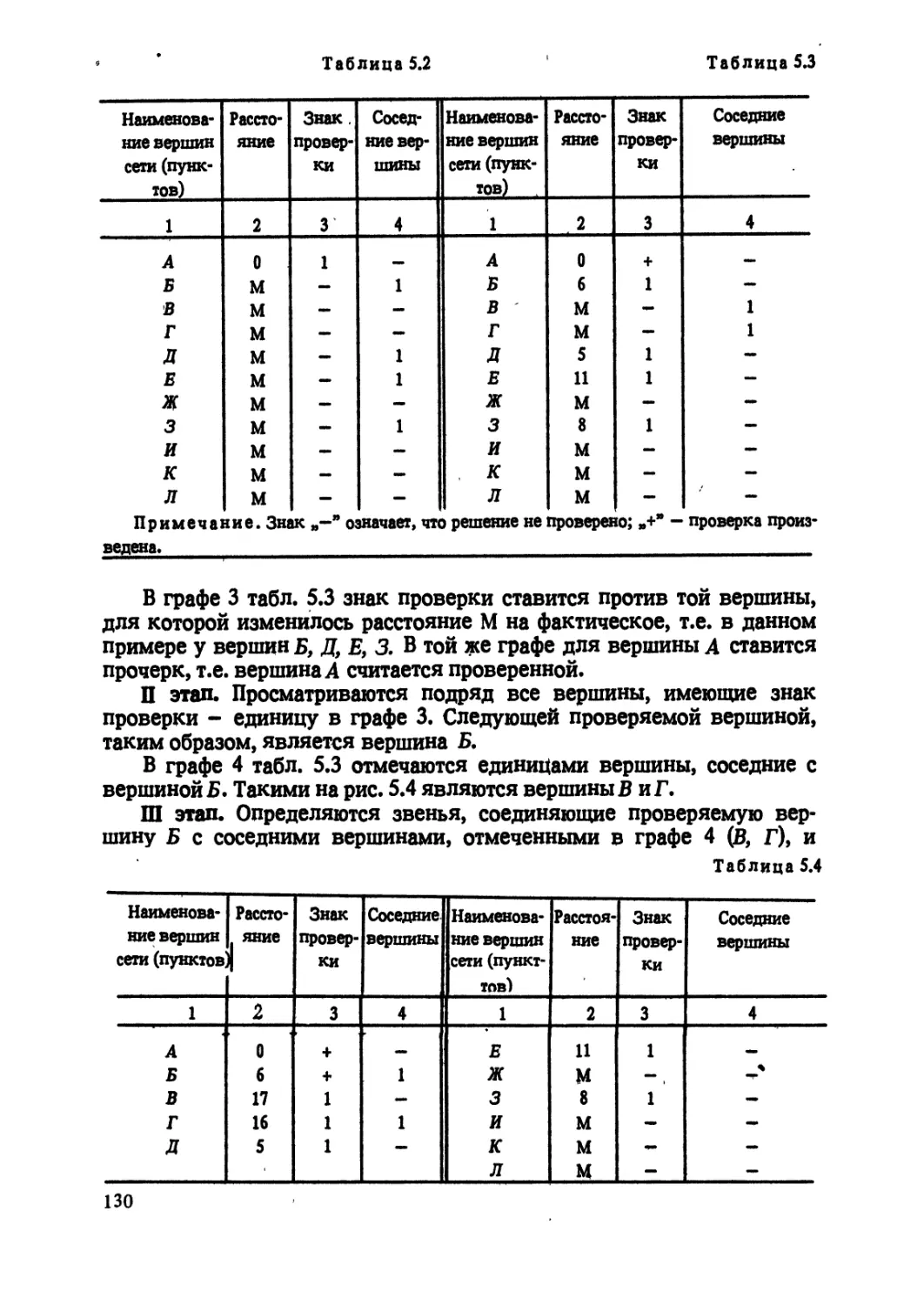






















































































































































Author: Кожин А.П. Мезенцев В.Н.
Tags: дорожный (безрельсовый) транспорт экономическое положение экономическая политика управление и планирование в экономике производство услуги цены математика экономика транспорт системы управления автомобильные перевозки.
ISBN: 5-277-01780-1
Year: 1994




А.П. КОЖИН
В.Н. МЕЗЕНЦЕВ
МАТЕМАТИЧЕСКИЕ
МЕТОДЫ
В ПЛАНИРОВАНИИ
И УПРАВЛЕНИИ
ГРУЗОВЫМИ
АВТОМОБИЛЬНЫМИ
ПЕРЕВОЗКАМИ
ИЗДАТЕЛЬСТВО • ТРАНСПОРТ •
А.П. КОЖИН
В.Н. МЕЗЕНЦЕВ
МАТЕМАТИЧЕСКИЕ
МЕТОДЫ
В ПЛАНИРОВАНИИ
И УПРАВЛЕНИИ
ГРУЗОВЫМИ
АВТОМОБИЛЬНЫМИ
ПЕРЕВОЗКАМИ
Рекомендовано к изданию
Государственным комитетом
Российской Федерации
повысшему образован ию
в качестве учебника для студентов
зысщих учебных заведений,
з бу чающихся по направлению
"Управление" специальности,
"Экономика и у правление
-ia транспорте"
МОСКВА "ТРАНСПОРТ" 1994
УДК 656.135.073:338
Кожин А. П., Мезенцев В. Н. Математические методы в планировании
и управлении грузовыми автомобильными перевозками: Учеб, для вузов. —
М.: Транспорт, 1994 — 304 с.
Рассмотрены вопросы оптимальной организации и управления грузо-
выми автомобильными перевозками в новых экономических условиях;
изложены методы линейного и динамического программирования, сетевого
планирования и управления, корреляционные методы и методы теории
массового обслуживания, применяемые при научных исследованиях и в
практике планирования работы и оптимизации перевозочного процесса
грузов на автомобильном транспорте.
Предназначен для студентов вузов, а также может быть полезен
практическим работникам автомобильного транспорта.
Ил. 47, табл. 160, библиогр. 11 назв.
Рецензенты: д-р техн, наук, академик АТ России С. А. Панов, канд.
техн, наук М. И. Борзов
Редактор Б. С. Столкова
Издание выпущено, в счет дотации, выделенной Комитетом Российс-
кой Федерации по печати.
3203050000-160 _
К имюм Е-и
ISBN
© A. IL Кожин, В. Н. Мезенцев,
1994
© Оформление и иллюстрации,
издательство „Транспорт”, 1994
ПРЕДИСЛОВИЕ
Эффективное планирование и управление производством невоз-
можно без применения современных разработок в науке и технике,
позволяющих находить из бесчисленного множества возможных
решений планово-экономических задач оптимальное. К таким науч-
ным разработкам относятся математическое моделирование произ-
водственных процессов и экономико-математические методы (ЭММ)
их решения, базирующиеся на законах линейной алгебры, математи-
ческого анализа, теории графов и математической статистики. Владе-
ние этими методами позволяет хозяйственникам в любых экономичес-
ких системах народного хозяйства без каких-либо существенных
материальных затрат найти оптимальное решение многих планово-
экономических задач, возникающих в конкретных условиях управле-
ния производством. Использование же современной электронно-
вычислительной техники позволяет сократить трудоемкость и время
таких решений.
Планово-экономические задачи автомобильного транспорта, как и
любой другой отрасли народного хозяйства, являются многофактор-
ными с большим количеством неизвестных. Модели решения таких
задач, как правило, представляют собой неопределенные системы.
Найти экстремум (максимум или минимум) таких задач помогают
математические методы, изложенные в настоящей работе. Авторы
стремились донести до читателя в доходчивой форме с цифровой
иллюстрацией наиболее распространенные в практике управления
работой автомобильного транспорта методы.
Несмотря на то что книга писалась для студентов вузов приме-
нительно к программе курса „Математические методы и модели в
организации и управлении автомобильным транспортом”, она может
быть полезна и для управленческих, плановых работников автомо-
бильного транспорта, а также работников некоторых других областей
деятельности, например, строительства, снабжения, программиро-
вания.
Глава 1
ХАРАКТЕРИСТИКА И МАТЕМАТИЧЕСКИЕ ОСНОВЫ
МЕТОДОВ ОПТИМИЗАЦИИ
1.1. Сущность и значение методов оптимизации
В плановых и организационно-экономических задачах, решаемых
на автомобильном транспорте, приходится учитывать большое коли-
чество факторов, условий, ограничений, изучить которые непосред-
ственно нет возможности. Поэтому при решении таких задач реальный
экономический процесс или явление заменяются моделями.
Модель - это аналог, макет или иной вид отражения наиболее
важных черт, свойств или результатов какого-либо процесса, системы
или явления. В экономике применяются главным образом матема-
тические модели, представляющие собой компактную формализован-
ную запись всей совокупности условий экономической задачи в виде
символов, индексов, уравнений, функций и других математических
выражений.
Преимущества математического моделирования перед другими
видами (графическим, аналоговым, механическим и т.п.) заключаются
в широком использовании математических моделей, низкой стои-
мости их создания, быстром получении результатов исследований,
возможности проведения расчетных экспериментов и проверки
правильности построения модели.
В процессе математического моделирования можно выделить
четыре основных этапа.
I этап. Постановка и формулирование проблемы или задачи. Это
наиболее ответственный этап в моделировании, поскольку от того,
насколько глубоко изучена сущность процесса и выделены его харак-
терные черты, как будет сформулирована цель решения и осуществ-
лена постановка задачи, зависит в конечном счете и результат реше-
ния.
П этап. Подготовка исходной информации, необходимой для
решения задачи. Здесь важно прежде всего установить показатель,
достаточно полно характеризующий качество экономического процес-
са и с помощью которого сравниваются и оцениваются различные
варианты решения и выбирается наилучший. Этот показатель и при-
нимается за критерий оптимальности. В качестве критерия в различ-
ных экономических задачах могут быть: максимальная прибыль,
минимальные издержки автотранспорта, минимальные приведенные
затраты на эксплуатацию подвижного состава и т.д. При построении
модели экономического процесса в качестве критерия оптимальности
4
выбирают показатель, который в данном случае является наиболее
важным.
Ш этап. Разработка экономико-математической модели и получе-
ние на ее основе соответствующего решения. При составлении матема-
тической модели следует отбирать самые существенные факторы, от
которых зависит выбор правильного решения задачи. Главное при
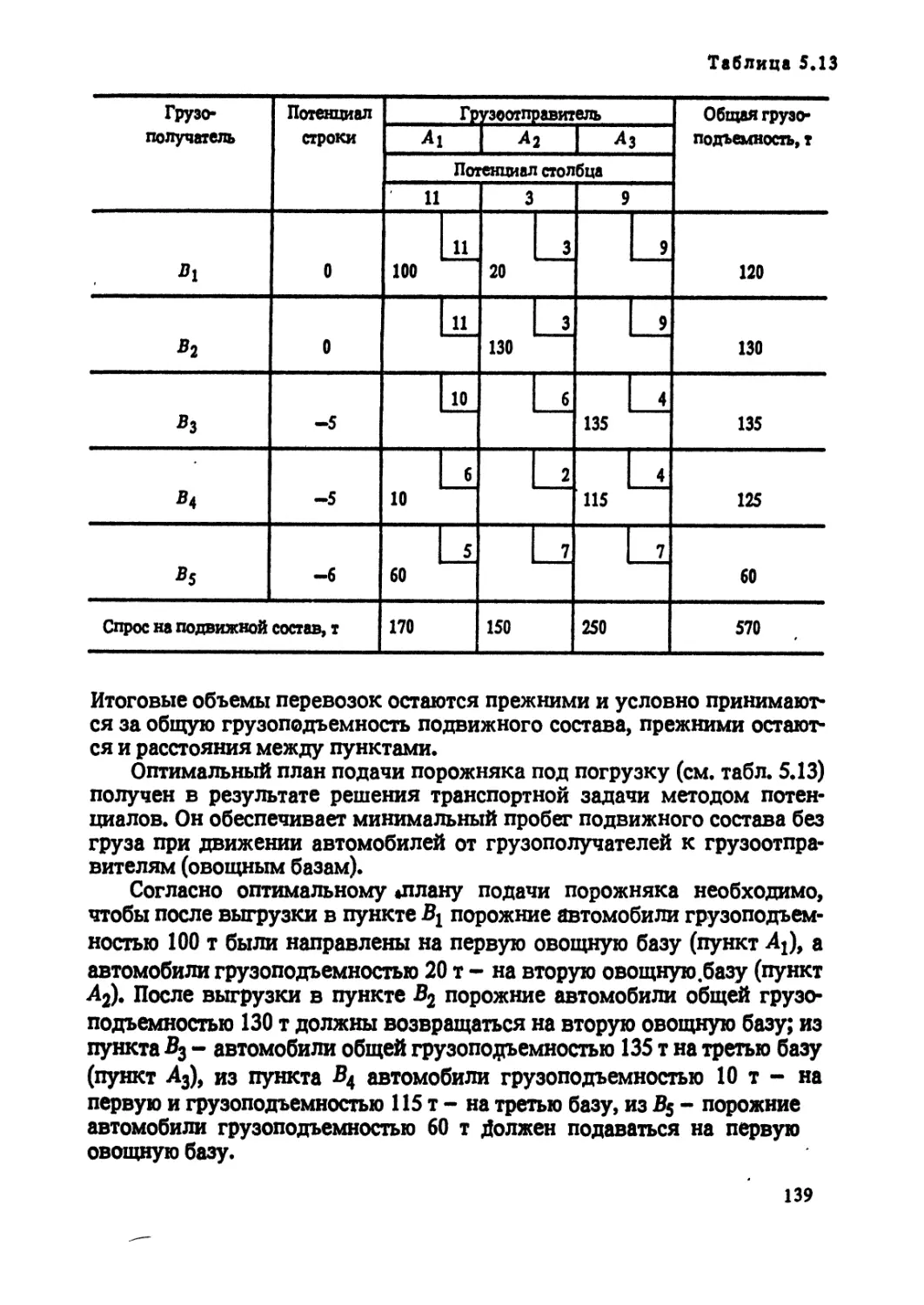
этом - избежать переусложнения или переупрощения модели. Модель
не должна быть сложнее, чем это требуется по заданной точности
исходных данных и требуемой точности результатов.
IV этап. Анализ и экспериментальная проверка степени адекват-
ности модели исследуемому экономическому процессу. Только после
такой проверки следует принимать окончательное решение. Лучшей
математической моделью считается та, которая позволяет получить
наиболее рациональное решение. Практическая реализация решения и
служит окончательным критерием качества созданной модели.
Рассмотрим процесс математического моделирования на простей-
шем примере.
1. Допустим, перед предприятием поставлена цель получить
наибольшую общую прибыль от производства двух видов изделий.
2. Изучение и анализ производства позволили установить, что
изделия изготавливают из материалов А и В, запасы которых ограни-
чены. Запасы материала А составляют 300 кг, материала £ - 200 кг. На
одно изделие первого вида расход материала А составляет 6 кг, мате-
риала В - 2 кг. На одно изделие второго вида расход материала А -
2 кг, материала В - 4 кг. От реализации одного изделия первого вида
будет получена прибыль 4 р., второго изделия -6 р.
3. При построении математической модели задачи рассуждаем
следующим образом. При ограниченных ресурсах материалов необ-
ходимо организовать производство двух видов изделий, количество
Которых следует определить. Обозначим через искомое количество
выпуска изделий первого вида, через Х2 * искомое количество выпус-
ка изделий второго вида.
Учитывая нормы расхода материалов на производство изделий,
запишем в математической форме условие общего расхода материа-
ла А
6*1 + 2x2.
Суммарный расход материала А не должен превышать имеющихся
ресурсов, т.е. должно соблюдаться условие:
6xj + 2x2 < зоо.
Аналогичное ограничение по использованию материала В:
2xi + 4x2 200.
5
По условию задачи необходимо найти такие значения Ху и хг,
которые обеспечат предприятию наибольшую прибыль. Суммарная
прибыль выразится величиной 4xi + 6x2, которую и нужно максими-
зировать.
Исходя из сути искомых переменных xj и Х2, устанавливаем, что
ни одна из них не должна быть отрицательной величиной, поскольку
производство продукции не может характеризоваться отрицательным
показателем. Условие неотрицательности переменных запишем как
Х1 > 0 и Х2 > 0.
С учетом всех перечисленных условий математическая модель
задачи выглядит следующим образом:
максимизировать целевую функцию 4xi + 6x2 -* max при ограниче-
ниях по ресурсам
6*1 + 2x2 * 300;
2*1 + 4x2 < 200
и переменным xi > 0; Х2 > 0.
Конечно, рассмотренная упрощенная модель далека от реальных
задач оптимального планирования на автомобильном транспорте.
Однако она является достаточно наглядной и позволяет рассмотреть
возможности и методику решения задач оптимизации, поскольку даже
в таком упрощенном примере существует множество вариантов
комбинаций производства изделий этих двух видов в различных
соотношениях.
Графическое решение данной математической модели изложено в
п. 2.1.
Математические методы оптимизации основаны на применении
теории математического программирования при решении планово-
экономических задач. Эти методы позволяют составить программу
(план), обеспечивающую оптимальное использование ресурсов. Обяза-
тельным условием при этом является наличие нескольких альтерна-
тивных решений задачи, из которых выбирается наилучший вариант.
Математическое программирование объединяет несколько видов
программирования: линейное, нелинейное, динамическое, целочис-
ленное, стохастическое, регрессионный анализ, теорию массового
обслуживания. Наиболее разработанными для применения в планово-
экономических расчетах являются методы линейного программиро-
вания.
Задачи линейного программирования прежде всего отличаются
тем, что они описывают линейные, пропорциональные зависимости
между рассматриваемыми величинами. Математическая модель
задачи линейного программирования включает в себя: линейную
целевую функцию» линейные ограничения на используемые ресурсы,
переменные величины.
6
Целевая функция строится на основе выбранного критерия опти-
мальности, в соответствии с которым решается вопрос о выборе опти-
мального варианта, путем сравнения различных возможных ва-
риантов.
. Ограничения определяют границы развития данной системы с
точки зрения необходимых для этого ресурсов.
Переменные величины - искомые задачи линейного программи-
рования. ,
Процесс решения задач линейного программирования многошаго-
вый и заключается в том; что по определенным правилам выбирается
начальный вариант решений, который затем с каждым последующим
шагом улучшается, и конечный итог - это получение наилучшего с
точки зрения критерия оптимальности решения, обеспечивающего
максимум или минимум целевой функции.
К задачам нелинейного программирования относятся такие, в
которых целевая функция или ограничения, а иногда то и другое
отражены в нелинейной форме, т.е. переменные в соответствующие
выражения входят в степени выше первой.
Динамическое программирование используется при решении
экономических задач, параметры которых изменяются во времени, т.е.
имеют динамический характер. Процесс решения таких задач распада-
ется на несколько этапов. На каждом этапе определяется оптимальное
решение для части неизвестных, которое и служит исходным условием
для определения оптимального решения следующего этапа. Оптималь-
ный план последнего этапа является оптимальным решением всей
задачи динамического программирования.
Целочисленность в математическом программировании означает
получение решения только в целых числах.
В стохастических моделях исходят из вероятностной трактовки
экономического процесса и его параметров, каждой входящей в
модель величине приписывается не одно какое-либо число, а указыва-
ются только вёроятностныйлакон распределения ее значения и харак-
теристики такого распределения (математическое ожидание, диспер-
сия и Т.П.).
Одним из методов, целиком базирующихся на теории вероят-
ностей, является метод корреляционного анализа. Корреляционный
анализ позволяет йсследовать взаимосвязи экономических показа-
телей и, что очень важно, оценить силу этой связи. При этом исходят
из того, что изучаемое явление имеет случайный, вероятностный
характер и подчинено соответствующим статистическим законам. С
помощью корреляционного анализа можно построить математическую
модель закономерности изменения основного Показателя в связи с
изменением факторов, на него влияющих. Эту закономерность назы-
вают регрессией, а анализ ее свойств - регрессионным анализом.
Методы теории массового обслуживания применяются там, где
возникает потребность в массовом обслуживании. Например, автомо-
бильные перевозки можно рассматривать как систему массового
обслуживания; работа пунктов погрузки Также основана на принци-
7
пах теории массового обслуживания и т.д. Общей особенностью задач,
связанных с массовым обслуживанием, является случайный характер
исследуемого процесса. Число требований на обслуживание и времен-
ные интервалы между их поступлением носят случайный характер, их
нельзя предсказать с однозначной определенностью. Однако в сово-
купности множество таких требований подчиняется определенным
статистическим закономерностям, количественное изучение которые
и является предметом теории массового обслуживания. Под качест-
вом обслуживания понимается своевременное обслуживание посту-
пивших в систему требований. Основными показателями эффектив-
ного обслуживания считаются длина очереди, время ожидания в
очереди, процент отказов в обслуживании, число простаивающих
аппаратов обслуживания. Перечень этих показателей дает представ-
ление о характере решаемых задач.
Сетевое планирование и управление является эффективным мето-
дом календарного планирования и управления. В качестве информа-
ционной динамической модели, отражающей процесс выполнения
какого-либо комплекса работ и его конечную цель, в системах СНУ
используют сетевой график, который позволяет получить, существен-
ные преимущества по сравнению с традиционными методами планиро-
вания и управления.
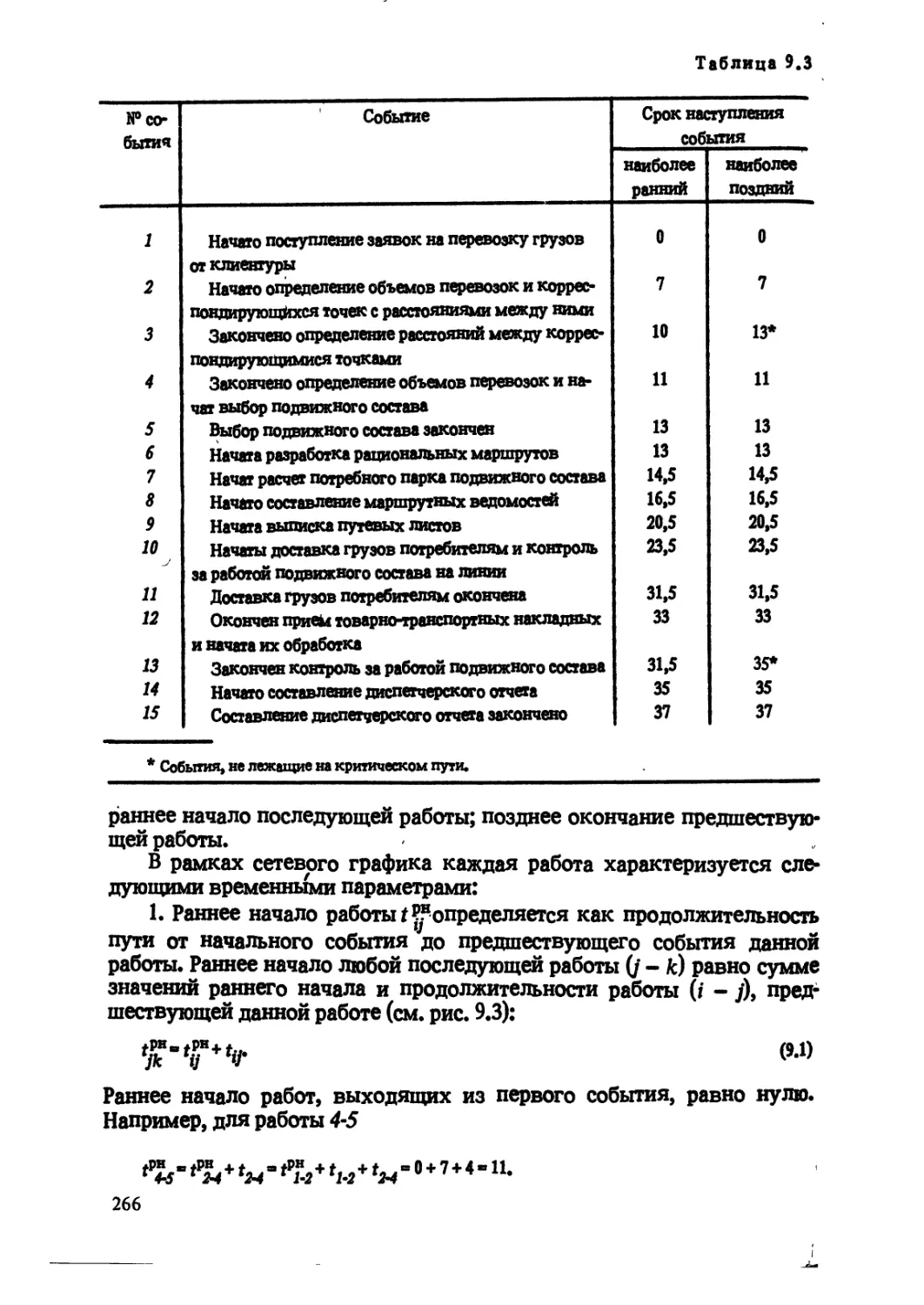
Сетевой график включает в себя только те работы, от которых
действительно зависит реализация проекта. Для каждой из работ
определены сроки и резервы времени. Работы, у которых нет резервов
времени, называют напряженными или критическими. Эти работы и
обусловливают общую продолжительность выполнения всего комп-
лекса работ. Особый контроль за выполнением критических работ
позволяет обеспечить своевременность выполнения проекта и даже
сокращение сроков за счет передачи части средств с ненапряженных
на критические работы. Выявление критических работ и оценка
резервов для некритических работ и составляют содержание сетевого
метода планирования и управления. ;
Математическую основу методов оптимизации составляют поня-
тия из линейной алгебры, сведения из теории выпуклых множеств и
линейных неравенств. Чтобы лучше понять математическую природу
изучаемых далее производственных задач в области организации и
планирования автомобильного транспорта, необходимо вспомнить
основные положения указанных дисциплин.
1J2. Основы матричного исчисления
Векторы. Основой экономико-математических исследований
является моделирование экономических процессов, т.е. формализо-
ванное описание содержания рассматриваемых производственных
задач. Запись выполняется в виде уравнений, неравенств с использо-
ванием цифр, букв, индексов, математических символов и т.п. Реше-
8
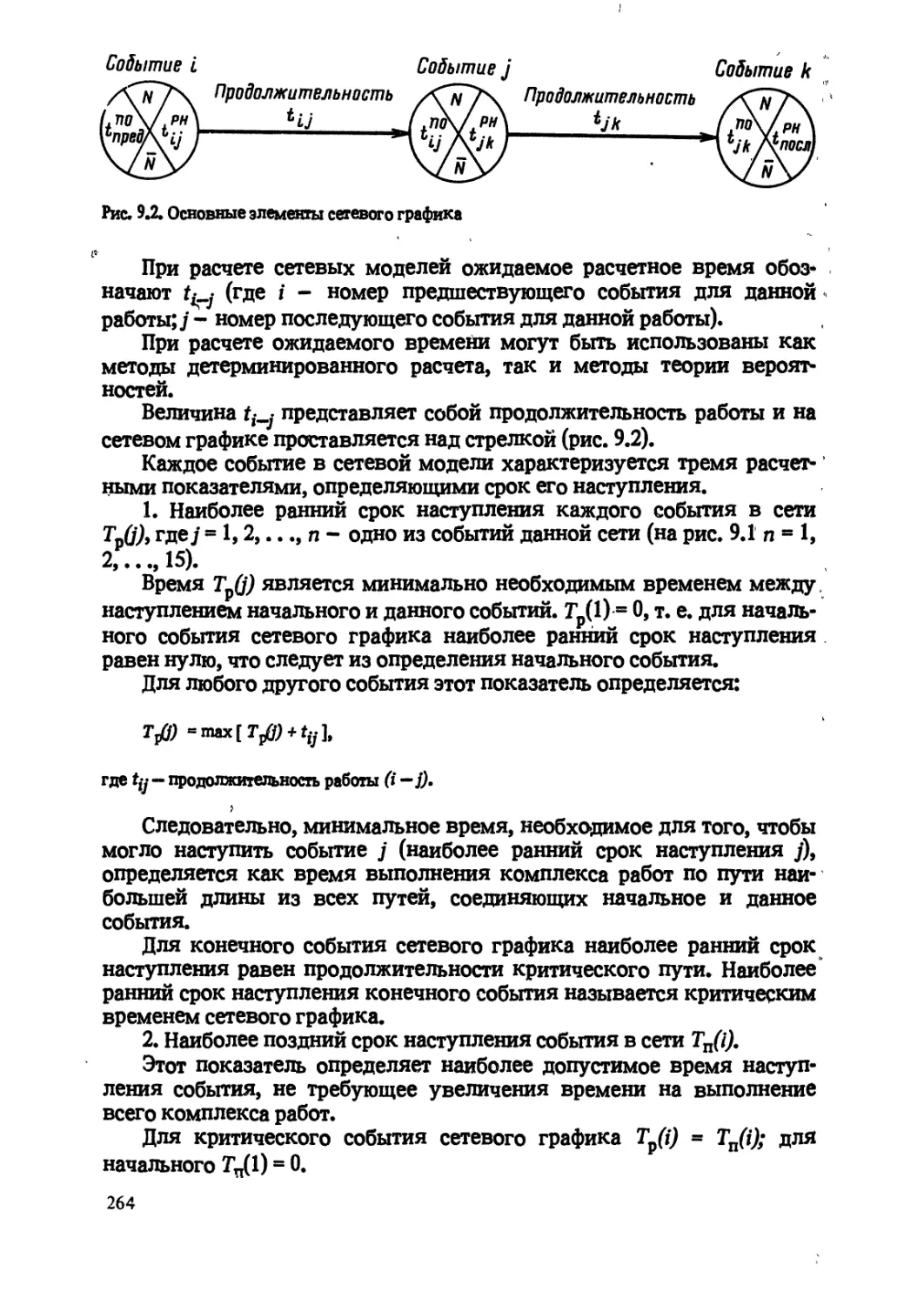
Рис. 1.1. Изображение вектора оНГ на плос-
костис координатами Xj и
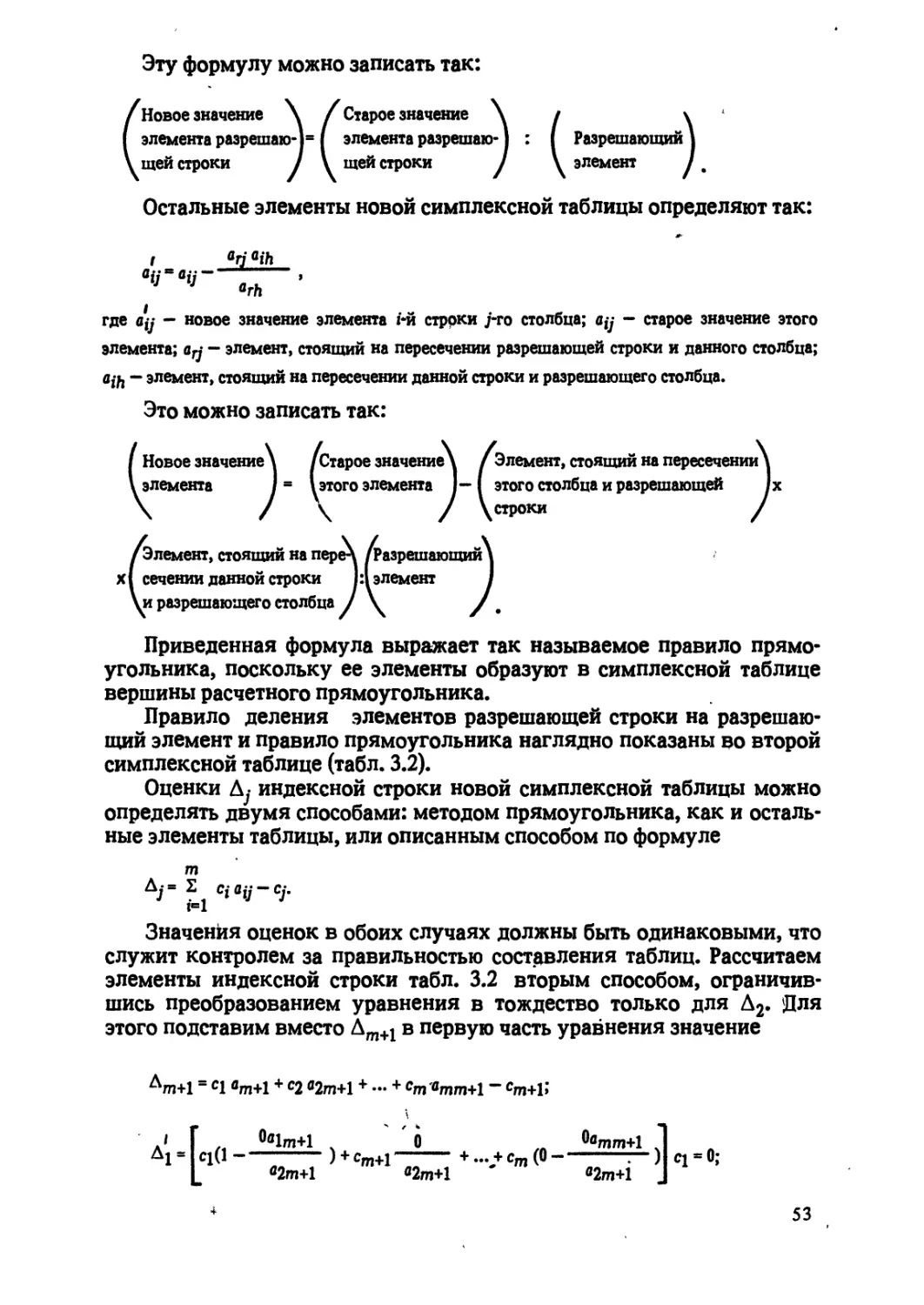
ние заключается в преобразовании уравнений и неравенств по прави-
лам математики и алгебры.
Исходным понятием экономико-математического исследования
является понятие множества. Множество - это совокупность различ-
ных объектов, называемых элементами множества. Запись а е А
означает, что элемент принадлежит множеству А. Запись А с В указы-
вает на то, чтсГ^ножество А содержится в множестве В.
Множество, включающее переменную %, в котором она может
принимать любое значение, называется областью изменения перемен-
ной* Например, запись а^х < Ь, отражает область изменения перемен-
ной х в действительных числах, где i - некоторый номер.
Если каждому значению переменной х соответствует одно значе-
ние другой переменной у, то у - есть функция от х и записывается она
так: у = f(x). Множество значений х, при которых функция принимает
определенное значение, является областью определения данной функ-
ции. В планировании и управлении, как правило, встречаются функ-
ции многих переменных. Совокупность областей изменения перемен-
ных определяет область допустимых решений функции. Это понятие
широко используется при графоаналитическом методе решения задач
математического программирования.
Основные положения линейного программирования доказыва-
ются на базе теории векторных пространств.
Вектором называется любая последовательность чисел, заданных
в определенном порядке: а ь а % ..., ап. Числа (i = 1, 2,..., п) называ-
ются компонентами (координатами) вектора; a i - первая компонента,
0 2 я" вторая и т.д. Число компонент вектора определяет его размер-
ность.
На плоскости, т.е. в двухмерном пространстве, каждая точка
задается двумя координатами (если задана система координат). Так,
точка М (рис. 1.1) задана двумя числами хь Х2~ расстояниями от осей
координат. Эти числа упорядочены, ибо х i и хз нельзя менять местами.
Таким образом, можно считать, что этой парой чисел задан вектор ОМ.
Следовательно, всякий вектор на плоскости определяется двумя
компонентами. По аналогии в трехмерном пространстве - тремя
компонентами, в n-мерном пространстве - п компонентами. В зависг
9
Рис. 1Л Сложение векторов по правилу
параллелограмма
мости от числа компонент вектор называется двухмерным, трехмер-
ным, п-мерным.
Векторами широко пользуются в экономике. Например, если
предприятие выпускает п видов продукции и предполагается изго-
товить продукцию первого вида в количестве ар второго вида - а 2
и т.д., то производственную программу (а1; ..., ап) можно рассматри-
вать как n-мерный вектор. Вектором можно выразить также грузо-
поток, его структуру, состав смеси, коэффициенты линейного уравне-
ния и т.п.
Над векторами можно производить арифметические действия:
сложение, вычитание и умножение.
Суммой двух векторов называется такой вектор, компоненты
которого получаются сложением соответствующих компонент слагае-
мых векторов.
Сложение двух векторов определяется правилом параллелограм-
ма (рис. 1.2):
а + Б - («1 + bj; ej + Ь2).
Аналогично выполняется сложение и над большим числом слагае-
мых векторов. В общем случае, чтобы получить сумму векторов,-
достаточно взять вектор, компоненты которого равны алгебраической
сумме соответствующих компонент слагаемых векторов.
Произведением вектора а (ау 0%..., ап) и числа к называется новый
вектор, в котором каждая компонента является произведением соот-
ветствующей компоненты на данное число, т.е.
ка = (kej, k«2 ken).
На плоскости умножения вектора на число можно представить как
„растяжение” („сжатие”, если к < 1) в к раз. Отсюда вытекают следую-
щие важные определения.
Линейной комбинацией векторов называется сумма произведений
этих векторов на постоянные числа. Система векторов считается
линейно зависимой, если хотя бы один из векторов можно выразить
через линейную комбинацию других векторов. Линейно независимой
является Система векторов, если ни один из заданных векторов не
может быть представлен в виде линейной комбинации остальных.
Другими словами, векторы линейно зависимы тогда и только тогда,
ю
когда их соответствующие компоненты пропорциональны. Отсюда
можно сделать вывод: система уравнений является определенной, т.е.
имеет решение, если векторы, составленные из коэффициентов при
неизвестных в уравнениях, будут линейно независимы.
Множество n-мерных векторов, для которого определены опера*
ции сложения векторов и умножения вектора на число, называется
n-мерным векторным пространством. Базисом этого пространства
является система любых п линейно независимых векторов. Всякий
другой вектор 3 пространства представляет собой линейную комбина-
цию базисных векторов Ьь Ьз,..., Ьп, т.е. а = kfa + кг bj+ ••• +
Следовательно, вектором а можно заменить один из векторов
базиса через коэффициенты разложения данного вектора по базису.
Например, если заменить базисный вектор Б; вектором а, то:
Посредством проведенных преобразований в базис введен вектор
а, выведен вектор Ь,- (вектор а разложен по базису). Повторяя этот
процесс, можно полностью перейти к новому базису. Техника пере-
хода к новому базису и выбора среди базисных решений оптимального
является основой симплексного метода решения задач линейного
программирования.
Понятие базиса играет важную роль, так как только на базисе
определяется решение уравнений, и среди этих решений находятся
оптимальные. Более подробно о базисе будет сказано дальше.
Матрицы. Экономическую информацию удобно представлять в
простой и краткой форме в виде таблиц.
Прямоугольная таблица m х п чисел, расположенных в определен-
ном порядке, называется матрицей. Числа являются элементами
матрицы. Каждый элемент характеризуется не только значением, но и
положением, т.е. номером строки и столбца, на пересечении которых
он находится. Это условие отражается двумя индексами при элементе,
из которых первый (0 означает номер строки, второй (/) " номер
столбца. Размер матрицы определяется общим числом элементов в
ней, т.е. m х п. Например, элемент ап матрицы А
(«и «и - ..«in
«21 «22 •••«2п
«mi «m2* •••amnl
находится на пересечении первой строки и второго столбца.
Между матрицей и вектором имеется четкая связь. Так, матрицу,
состоящую из одной строки (матрицу-строку), можно рассматривать
как вектор-строку, матрицу-столбец - как вектор-столбец. В целом
матрица представляет собой т»п-мерный вектор. Совпадают и многие
и
их свойства: так же как векторы, матрицы можно складывать, умно-
жать на число и перемножать матрицы между собой. Строки и столб-
цы матрицы могут быть линейно зависимы или линейно независимы,
можно провести также аналогию между элементарными преобразова-
ниями векторов, матриц, уравнений и т.п.
Матрица называется квадратной, когда число ее строк и столбцов
совпадает, т.е. при m = п. Элементы матрицы, для которых первые и
вторые индексы равны, образуют главную диагональ матрицы. Если в
квадратной Матрице элементы ее главной диагонали равны единице, а
остальные - нули, такая матрица называется единичной и обознача-
ется буквой Ь. Базисом системы линейных уравнений являются
переменные, из коэффициентов которых можно составить единичную
матрицу, т.е. базисной может быть переменная, которая имеет коэф-
фициент единицу и входит лишь в одно уравнение системы.
Если в матрице А заменить строки столбцами, то получим новую
матрицу Ат, называемую транспонированной по отношению к матрице
А.
(«11 «12**««1п \ / аИ fl21-'--flml \ 7
«21 °22 • • • fl2n> |,то4т = 1 «12 «22 —-«m2 I
«ml am2 •••imnl \ «in <б2п’-‘ '-'атп/ •
С системой линейных уравнений связаны две матрицы: основная
матрица системы и расширенная матрица. Элементами первой матрицы
являются коэффициенты при неизвестных в уравнениях системы, а
расширенная матрица образуется путем присоединения к первой
столбца свободных членов системы. Исследование и решение системы
линейных уравнений сводятся, по существу, к элементарным преоб-
разованиям системы строк ее расширенной матрицы.
При этом элементарными считаются следующие преобразования
матрицы:
замена ее строк столбцами с сохранением их номеров (транспони-
рование);
перестановка местами двух строк (столбцов);
умножение элементов строки (столбца) на произвольное, отлич-
ное от нуля, число;
прибавление элементов одной строки (столбца), предварительно
умноженных на любое, отличное от нуля, число, к соответствующим
элементам другой строки (столбца);
вычеркивание из матрицы нулевой строки (столбца).
Суммой двух матриц А и В одинакового размера называется
третья матрица С, элементы которой получаются сложением соответ-
ствующих элементов данных матриц, т.е. Су = ay + by.
Произведением матрицы А на число к является новая матрица,
каждый элемент которой получен умножением соответствующего
элемента матрицы А на число к, т.е. кА » (кау),
12
Произведение двух матриц А и В определяется только в том
случае, если число столбцов матрицы А равно числу строк матрицы В.
Элементы матрицы-произведения представляют собой сумму произве-
дений элементов i-й строки матрицы А на соответствующие элементы
/-го столбца матрицы В-.
«11
«21
«31
12 \ ' / >11 >12
«22 р I Ь21 Ь22
«32 / '
А хВ =
«11 >11 +«12 >21!«11 >12+ «12 >22
«21 ЬИ + «22 >21! «21 >12* «22 >22
«31 >11 + «32 >21! «31 >12 + «32 >22
Матрица-произведение имеет столько строк, сколько строк в
первом множителе, и столько столбцов, сколько их имеет второй
множитель.
В обычной алгебре числом, обратным числу а, называется такое,
которое при умножении на а дает единицу. Такое число единственное
и обозначается 1/в или а"1. Аналогичное понятие применимо и в
алгебре матриц.
Бели имеется матрица А, то обратной по отношению к ней является
матрица А'1. Их произведение дает единичную матрицу Е, т.е.
АхА-1-К
Например, если взять матрицы
(1 1 1 \ / з -з 1 \
1 2 3 I и A-i = I -3 5—2 1
13 6/ \ 1 ~2 1 /?
то легко проверить непосредственно, что их произведение равно
единичной матрице:
(1 ! 1 \
12 3
13 6/
(3 -3 1 \
-3 5 —2 ]
1-21/
(1 0 0 \
О 1 о )
0 0 1/
Обратная матрица находится различными способами-с помощью
определителей, путем элементарных преобразований, разделением
данной матрицы на блоки и т.п.
Рассмотрим способ обращения матриц путем элементарных преоб-
разований. Обратная матрица получается из единичной матрицы путем
преобразования ее строк таким образом, что прямая матрица перехо-
дит в единичную, а на месте единичной образуется обратная матрица.
Пример. Обратить матрицу
(1 2 3\
12 11
3 3 2/
13
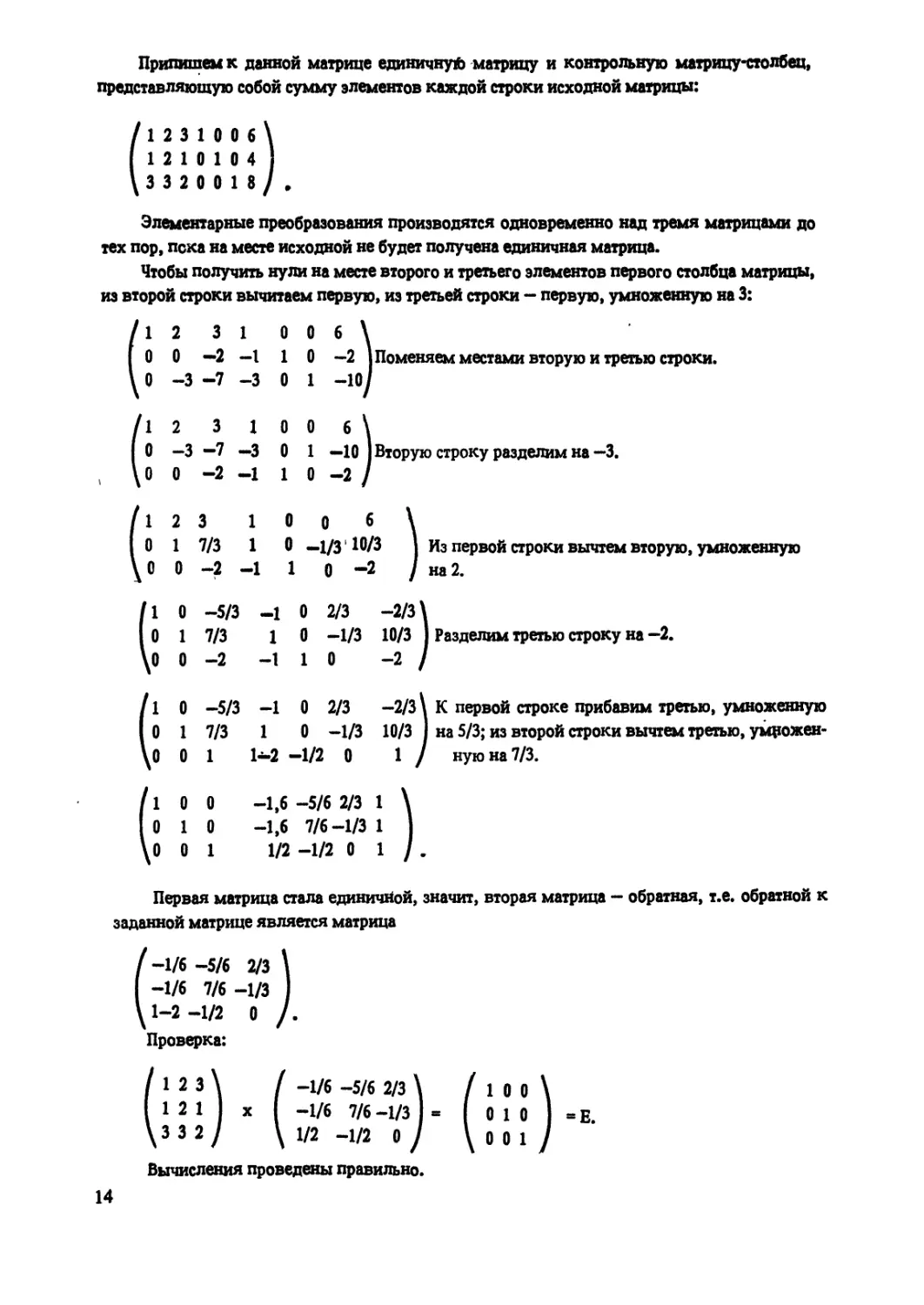
Припишем к данной матрице единичную матрицу и контрольную матрицу-столбец,
представляющую собой сумму элементов каждой строки исходной матрицы:
1231006
1210104
3320018
Элементарные преобразования производятся одновременно над тремя матрицами до
тех пор, пока на месте исходной не будет получена единичная матрица.
Чтобы получить нули на месте второго и третьего элементов первого столбца матрицы,
из второй строки вычитаем первую, из третьей строки — первую, умноженную на 3:
1 2 3 1 0 0 6 )
0 0 -2 -1 1 0 -2 I Поменяем местами вторую и третью строки.
0 -3 -7 -3 0 1 —10j
1 2 3 1 0 0 6
0 -3 -7 • -3 0 1 -10 I Вторую строку разделим на —3.
0 0 -2 . -1 1 0 -2 /
1 2 3 1 0 0 1 * 3 5 \
0 1 7/3 1 0 -1/3'10/3 1 Из первой строки вычтем вторую, умноженную
0 0 -2 -1 1 0 2 / на 2.
fl 0 -5/3 -1 0 2/3 -2/3’
0 1 7/3 1 0 -1/3 10/3 I Разделим третью строку на -2.
\° 0 -2 -1 1 0 -2 ,
fl 0 -5/3 —1 0 2/3 -2/3' \ К первой строке прибавим третью, умноженную
0 1 7/3 1 0 -1/3 10/3 1 на 5/3; из второй строки вычтем третью, уьдеожен-
\° 0 1 1—2 - -1/2 0 1 у 1 ную на 7/3.
11 0 0 -1,6 -5/6 2/3 1 \
0 1 0 -1,6 7/6-1/3 1 I
\° 0 1 1/2 -1/2 0 1 /
Первая матрица стала единичной, значит, вторая матрица — обратная, т.е. обратной к
заданной матрице является матрица
-1/6 -5/6 2/3
-1/6 7/6 -1/3
1-2 -1/2 0
Проверка:
1 2 3 \ / -1/6 -5/6 2/3 \ / 1 0 0 \
12 11 х -1/6 7/6 -1/3 I - I 0 10 I =Е,
3 3 2 / \ 1/2 -1/2 0 / \ 0 0 1 /
Вычисления проведены правильно.
14
Остановимся на примере использования обратной матрицы при
решении системы линейщох уравнений. Для облегчения понимания
решим обычное алгебраическое уравнение ах = Ь. Умножив это урав-
нение на число а-1, получим уравнение, эквивалентное данному:
а~1ах-а~1Ъ.
Так как
а-1в-1,тох“в-1Ь-Ь/в.
Пусть необходимо в матричной форме решить следующую систему
линейных уравнений:
2х1 + 2х2 + Зхз-14;
Xi- Х2“0;
—Xi + 2x2 + *3 “ в.
Запишем эту систему в матричной форме:
\( 2 2 3 \ / Xi \ / 14 \
11-1 а | X I Х2 | s I о I •
у-1 2 1 ] \хзу \ б ]
Решение системы уравнений сводится к нахождению матрицы-
столбцах из данного матричного уравнения.
Умножим обе части этого уравнения на матрицу, обратную матрице
коэффициентов при неизвестных:
/ f —4 —з\ / 2 2 3 \
11 -5 -3 ] X I 1 -1 О I
Д-1 6 4 / \ -1 2 1 /
Е (единичная матрица)
*1 \
*2
х3 I
6
х
14
О
б
х
откуда
/*1 \ / 1 —4 -3 \ / 14 \ / -4
I *2 I = I 1 ~5 -3 I х I О I -1—4
\*3/ \-164/ \ 6 / \ 10
T.e.xi = -4;х2 и ~4;хз ж 10.
Матрицы считаются равными, когда равны между собой их соот-
ветствующие элементы.
Определители. Каждой квадратной матрице соответствует некото-
рое число, вычисленное по специальным правилам, называемое ее
15
определителем (детерминантом). Определитель обозначают, заключая
в вертикальные линии его элементы:
elle12 —в1п
А “ e21e22 — e2n
enl вп2 — впп ,
Числа ay (i = j) являются элементами определителя, количество его
строк (столбцов) есть его порядок. Определители могут быть 2-го, 3-го,
..., л-го порядка.
Определения элементов строки, столбца, главной диагонади,
касающиеся матрицы, относятся в равной мере и к определителям. Но
не следует смешивать матрицу с определителем: матрица - это таб-
лица, над элементами которой можно производить алгебраические
действия, тогда как определитель - это число, полученное в резуль-
тате вычислительных операций с элементами матрицы в соответствии
с теорией определителей.
Приведем основные свойства определителей:
транспортирование матрицы не меняет ее определителя;
при перестановке двух строк (столбцов), матрицы знак ее опреде-
лителя изменится на противоположный;
определитель, соответствующий матрице, которая содержит две
одинаковые или пропорциональные строки (столбца), равен нулю;
общий множитель элементов строки (столбца) можно вынести за
знак определителя;
умножить определитель на число - значит, умножить на это число
все элементы какой-либо строки (столбца);
если к элементам некоторой строки (столбца) определителя
прибавить соответствующие элементы другой строки (столбца), умно-
женные на одно и то же число, то определитель не изменится;
если строки (столбцы) матрицы линейно зависимы, то ее определи-
тель равен нулю.
Определители применяются при исследовании и решении систем
линейных уравнений. Для этого необходимо уметь их вычислять.
Определители 2-го и 3-го порядков находятся непосредственно из
решения в общем виде соответствующих систем уравнений. Покажем
это.
Пусть задана система двух линейных уравнений с двумя неизвест-
ными
«nxi*ai2X2-ci,
«21x1 +022X2 “С2-
Чтобы уравнять коэффициенты при *2> умножим первое уравнение
на 022, а второе - на а^. Из первого уравнения вычтем второе:
<«11022~о12021)х1-ci 022-02012.
16
откуда
*1 “ <С1«22 -с2И12)/(аца22 “ а 12» 21)-
Затем уравняем коэффициенты при х\ и получим
«2 “ fc2«ll - С1в21)/(аца22 - О12®21)-
Знаменатель при вычислении переменных один и тот же и предс-
тавляет собой определитель 2-го порядка, т.е. число
alla21
= 611622 - 612 621'
612622
Числители также можно записать как определители 2-го порядка:
с1«12
с2в22
= <4 «22 “«2 «12 5
«11 «1
«21 «2
с1«11-с2«21>
тогда решение системы уравнений можно представить
*1“
«1«12
«2 «22
«11 «21
«12 «22
«11 «1
«21 с2
х2= -------------
«11 «21
«12 «22
Отсюда можно сформулировать общее правило решения системы
двух линейных уравнений с двумя неизвестными: каждая искомая
переменная равна дроби с одним и тем же знаменателем - определите-
лем 2-го порядка, составленным из коэффициентов при неизвестных;
числители - определители 2-го порядка, которые получаются соответ-
ственно заменой в определителе, составленном из коэффициентов при
неизвестных, первого или второго столбца столбцом свободных
членов.
Это правило справедливо и для системы трех линейных уравнений
с тремя неизвестными, только берутся определители 3-го порядка.
Вычисление определителя 2-го порядка не представляет труднос-
тей - это алгебраическая сумма произведения элементов определи-
теля, расположенных по главной диагонали, со знаком плюс, и произ-
ведения остальных двух элементов, взятых со знаком минус.
17
Рис. 1А Схема вычислений определителя 3-го порядка
Определитель 3-го порядка может вычисляться непосредственно и
содержит шесть членов, составленных из соответствующих произведе-
ний:
«11 «12 «13
«21 «22 «23 “ вП «22 «33 + «12 «23 «31+ «13 «21Л32 ” «11 «23 «32 “
«31 «32 «33
“«12 «21 «33 “«13 «22 «31-
Схема вычислений представлена на рис. 1.3.
Вычисление определителей более высоких порядков сопряжено с
большими трудностями.
Для упрощения расчетов применяют различные способы преобра-
зования определителей, используя их свойства. Опишем простой
метод вычислений, основанный на переходе от определителей задан-
ного порядка к определителям меньших порядков.
Если в определителе
□11... ац.
ап...ау.. •«In
«п1— ani' • • апп
вычеркнуть строку и столбец, на пересечении которых стоит, напри-
мер, элемент ау (т.е. i-ю строку и j-й столбец), то оставшиеся элементы
образуют определитель порядка на единицу меньше. Этот определи-
тель называется минором элемента ау и обозначается Му.
Например, минором для элемента аи в определителе 3-го порядка
«11 «12 «13
«21 «22 «23
«31 «32 «33
является определитель 2-го порядка
М12 =
«21 «23
«31 «33
Алгебраическим дополнением Ау элемента ау определителя
называется минор этого элемента, взятый со знаком плюс или минус,
18
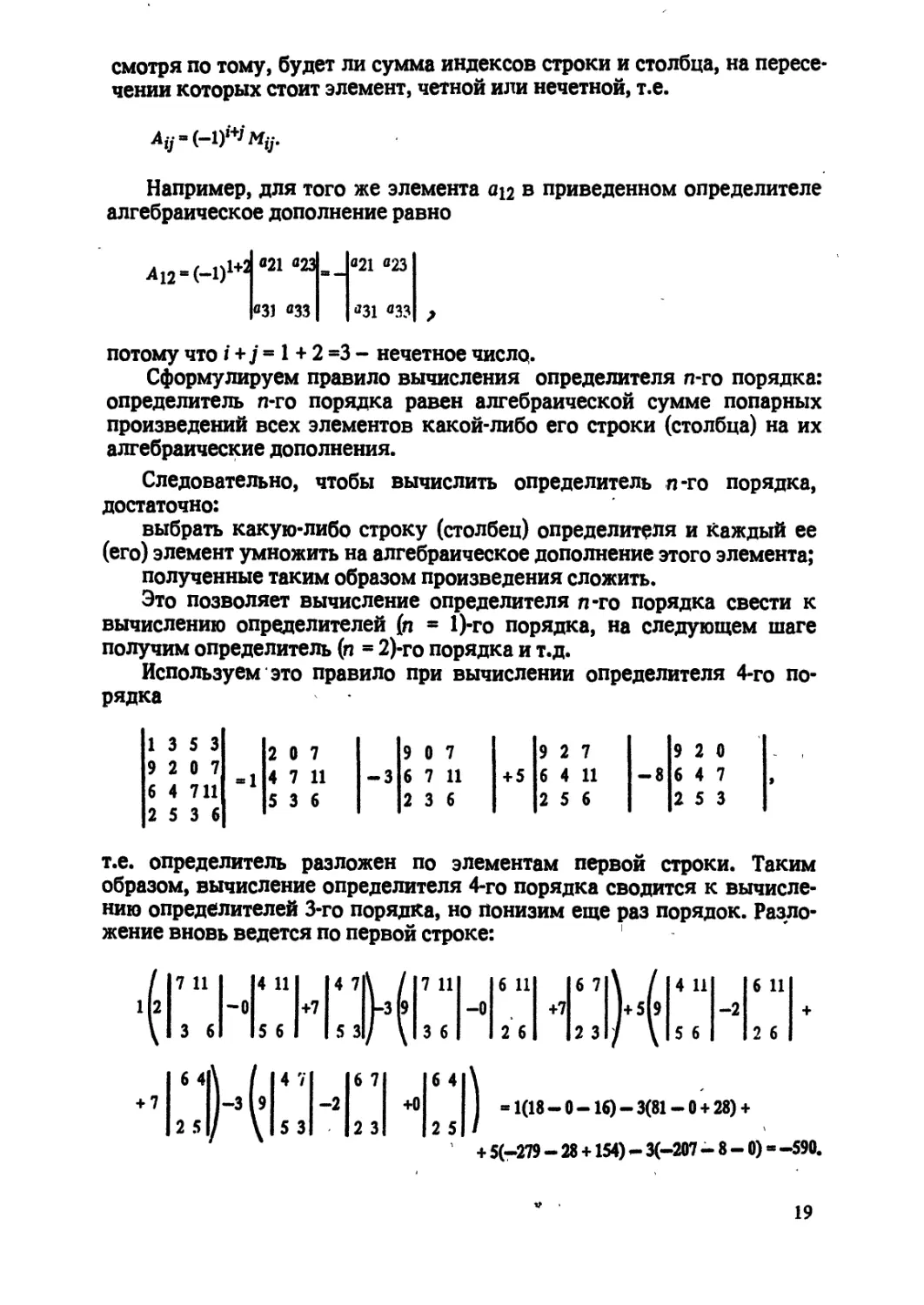
смотря по тому, будет ли сумма индексов строки и столбца, на пересе-
чении которых стоит элемент, четной или нечетной, т.е.
Например, для того же элемента од в приведенном определителе
алгебраическое дополнение равно
д12« (-1)1+2 «21 «23 т_ «21 «23
«31 «33 «31 «33
потому что i + j = 1 + 2 =3 - нечетное число.
Сформулируем правило вычисления определителя л-го порядка:
определитель n-го порядка равен алгебраической сумме попарных
произведений всех элементов какой-либо его строки (столбца) на их
алгебраические дополнения.
Следовательно, чтобы вычислить определитель л-го порядка,
достаточно:
выбрать какую-либо строку (столбец) определителя и каждый ее
(его) элемент умножить на алгебраическое дополнение этого элемента;
полученные таким образом произведения сложить.
Это позволяет вычисление определителя л-го порядка свести к
вычислению определителей (л = 1)-го порядка, на следующем шаге
получим определитель (л = 2)-го порядка и т.д.
Используем это правило при вычислении определителя 4-го по-
рядка
1 3
9 2
б 4
2 5
5 3
О 7
711
3 б
2
4
5
О 7
7 И
3 б
т.е. определитель разложен по элементам первой строки. Таким
образом, вычисление определителя 4-го порядка сводится к вычисле-
нию определителей 3-го порядка, но понизим еще раз порядок. Разло-
жение вновь ведется по первой строке:
+ 7
б 4
2 5
4 7
5 3
-2
6 7
2 3
=1(18 — 0 —16) —3(81 — 0 + 28) +
-3
+ 5(—279 - 28 +154) - 3(-207 - 8 - 0) « -590.
19
Поскольку исследование и решение систем линейных уравнений, с
которыми приходится встречаться в линейном программировании,
определяются прежде всего зависимостью между уравнениями систе-
мы, для характеристики системы можно использовать ее матрицу.
Матрицу можно разбивать на части (блоки) различными спосо-
бами, не нарушая взаимного порядка элементов. Полученные подмат-
рицы будут более низкого порядка, чем исходная матрица.
Каждой квадратной подматрице соответствует определитель того
же порядка, что и подматрица, называемый минором матрицы. Из
матрицы размером m х п можно составить миноры, порядок которых
не превышает меньшее из чисел m или п.
Наибольший порядок не равного нулю минора матрицы называется
ее рангом. Матрица имеет ранг г, если хотя бы один из ее миноров г-го
порядка отличен от нуля, а все миноры более высоких порядков
равны нулю. Так, ранг матрицы ,
/з 5 г\
\1 4 6 J
|3 51
равен двум, потому что минор 2-го порядка, например, J=6 # 0, а
миноров 3-го порядка составить нельзя.
(2 4 6 з\
5 3 7 2 1
4 8 12 6/
|2 4|
также равен двум, потому что, например,! $ J= -14 / 0, а все миноры
3-го порядка равны нулю, так как третья их строка пропорциональна
первой.
Ранг матрицы можно определить, используя свойство векторов.
Рангом матрицы называется максимальное число ее линейно незави-
симых строк (столбцов), рассматриваемых как векторы.
Оба определения ранга матрицы равнозначны, так как наивысший
порядок не равных нулю миноров матрицы равен максимальному
числу линейно независимых строк (столбцов).
Обратимся непосредственно к системе m линейных уравнений с п
неизвестными:
вП XI + «12*2 + • • ♦ + а1л хп °Ь\;
«21 *1 + «22 х2 +... + «2п хп =
«г»! <; + г хп'=Ьт.
Решением системы являются такие значения ху х2,..., хп, кото-
рые обращают каждое уравнение системы в тождество.
Если система уравнений допускает хотя бы одно решение, она
называется совместной. Если система имеет решение и притом единст-
20
венное, она называется совместной и определенной. Если система
имеет несколько или множество решений, она называется неопреде-
ленной. Несовместной называется система, которая не имеет решения,
т.е. противоречивая система.
Основной матрицей системы линейных уравнений является
матрица коэффициентов при переменных
«11 «12 • • • «1п \
e21«22---«2n |
aml ат2 • • amn I •
Если к этой матрице приписать столбец свободных членов, то
получим расширенную матрицу
/ 41 «12 • • • <Чп°1 \
/ «21 «22 • • • «2п&2 \
\ «ml «m2 • • • «тп &т / •
Система линейных уравнений характеризуется следующими
основными положениями.
Система уравнений совместна, если ранги матриц расширенной и
составленной из коэффициентов при неизвестных равны.
Совместная система имеет единственное решение, когда ранг
матрицы, составленный из коэффициентов при неизвестных, равен
числу неизвестных.
Совместная система линейных уравнений имеет бесконечное
множество решений, если число неизвестных больше ранга матрицы,
составленной из коэффициентов при неизвестных. Бесконечное число
решений существует и для систем, в которых число уравнений больше
числа переменных, т.е. m > п.
Если ранг расширенной матрицы больше ранга матрицы, составлен-
ной из коэффициентов при неизвестных, то система не имеет решений.
В большинстве экономических задач линейного программирова-
ния встречаются совместные, но не определенные системы линейных
уравнений, т.е. системы, которые имеют бесчисленное множество
решений. Из всех возможных решений, как правило, интересует наи-
лучшее или оптимальное решение.
Достоинство методов линейного программирования заключается в
том, что оптимальное решение определяется путем перебора не всех
возможных решений, а только незначительного их числа, так называ-
емых базисных решений. Число базисных решений конечно и не
больше числа сочетаний из m по п, т.е. с™, где m - число уравнений
системы; п - число переменных системы.
Базисным решением системы линейных уравнений считается
решение, в котором небазисным переменным даны нулевые значения.
21
Допустимым называется такое базисное решение, в котором вошедшие
в базис переменные являются неотрицательными. Допустимое реше-
ние, минимизирующее (или максимизирующее) целевую функцию,
называется оптимальным решением.
Ограничения задач линейного программирования могут быть
заданы в виде неравенств.
Несколько линейных неравенств, которые рассматриваются
совместно, образуют систему линейных неравенств. Определения
совместности, несовместности, определенности, неопределенности
и эквивалентности систем линейных неравенств формулируются точно
так же, как и соответствующие определения для систем линейных
уравнений.
Систему линейных неравенств всегда можно заменить системой
линейных уравнений, добавив к каждому неравенству дополнитель-
ное переменное с соответствующим знаком.
Решением системы неравенств является множество значений
переменных, которое одновременно удовлетворяет всем неравенст-
вам системы. Это так называемый многогранник решений. Решение
экономических оптимизационных задач представляет собой выпук-
лый многогранник (множество).
Множество точек является выпуклым, если все точки отрезка,
соединяющего две произвольные точки множества, принадлежат
этому множеству.
Условия задач линейного программирования определяются
следующей теоремой: множество точек, соответствующих допустимым
(или оптимальным допустимым) решениям общей задачи линейного
программирования, является выпуклым множеством.
1.3. Общая задача линейного программирования.
Двойственность задач
В оптимизационных задачах требуется достижение экстремаль-
ного (минимального или максимального) значения целевой функции
при выполнении условий, связанных с балансом производства и пот-
ребления, ресурсов и объемов производства, однозначным выбором
вариантов из множества возможных; учитываются и другие условия. В
настоящее время оптимизационные задачи реализуются в основном
методами линейного программирования.
Особенности задач линейного программирования заключаются в
следующем:
целевая функция и ограничения задачи выражены линейными
зависимостями (равенствами или неравенствами);
число зависимостей всегда меньше числа неизвестных (условие
неопределенности);
неотрицательность искомых переменных.
22
Общая форма записи задач линейного программирования в сокра-
щенном виде обычно выглядит так:
найти Ху >00=1.2.....л) при ограничениях типа
Д aU xi * М “ 2,..m);
п
п
2 ay Xj > bj,
j-1
которые минимизируют (или максимизируют) линейную форму
п
I = Л. cixi-
ri
Стандартной формой общей задачи линейного программирования
считается задача нахождения решений системы линейных уравнений в
неотрицательных числах, которые минимизируют линейную форму.
Стандартная форма задачи
«11 *1+ в12*2 +• • •+ ®lnxn= &15
^1*1 + «22’£2 + ••• + e2n*n=b2;
«ml *1 + «m2 *2 + • • •+ атп хп = ьт.
ху > О (J = 1,2.п).
При этих условиях
С1Х1 + С2^ + ... +СПХП“£ *ЯЦ
здесь q, <2,..., сп — коэффициенты целевой функции при переменных Xj.
В случае максимизации целевой функции L следует знаки при
переменных в целевой функции изменить на противоположные, и мы
вновь придем к задаче минимизации, т.е. одна задача сводится к
другой заменой L на—L, или maxL = - min(-L).
Например, задано
I = XI + 2x2 — *3 * так
Умножив коэффициенты целевой функции на -1, получим
L = -xi - 2x2 + *з П1*а Чтобы найти решение исходной задачи макси-
мизации, необходимо полученные значения переменных задачи мини-
мизации умножить на -1.
Любая совокупность х > 0, удовлетворяющая условиям задачи,
называется допустимым решением, а допустимое решение, миними-
23
зирующее (максимизирующее) целевую функцию L, называется опти-
мальным решением. *
При решении общей задачи линейного программирования в боль-
шинстве случаев ее стараются свести к канонической форме, наиболее
простой и удобной для решения. Каноническая форма' задачи харак-
теризуется тем, что все ограничения в ней заданы линейными уравне-
ниями, а сама система содержит базис.
Если ограничения задачи линейного программирования заданы
системой линейных неравенств вида
“11 *1 + “12 х2 + • • •+ “In хп * h;
«21Х1 + “22 х2 + • • •+ “2п хп * ь2;
“ml Х1 + “m2 х2 + • • • + атп хп с ьт
при условии bj > 0 (i = 1, 2,_, т), то она приводится к канонической
форме путем введения дополнительных переменных xn+i > 0 (i = 1,
2,..., m) в левую часть неравенств:
“11*1 + “12*2 + - •• + <Чпхп +Жп+1“Ь1;
«21XI + “22X2 + • • • + “2n *п+*п+2 =&#
“mlxl *“т2Х2 + • • • + “тп*п +хп+т ~ ^т
или сокращенно
п+т *
В- «« х; “ bi, i “ 1,2,..т, j = 1( 2,..., п, п +1, п + 2,..п + т;
j=l
условие неотрицательности переменных запишем
х. > о, j = 1,2.. п+1, п + 2,..., п + т.
Данная система уравнений представляет собой каноническую
форму задачи, а дополнительные переменные хп^ (i = 1, 2, . . . , т)
составляют базис. В целевую функцию дополнительные переменные
входят с нулевыми коэффициентами.
Если система ограничений задачи линейного программирования
задана уравнениями (см. стандартную форму), то к канонической
форме она приводится путем введения в каждое уравнение так назы-
ваемых искусственных переменных, которые и составят базис сис-
темы.
В случае если ограничения задачи выражены неравенствами вида
> (больше или равно), т.е.
п
•S, eV*J>bi’
Г1
24
в левую часть неравенств с коэффициентом - 1 вводятся неотрица-
тельные дополнительные переменные хп+ь хп+2, , хп+т и неравен-
ства преобразуют в эквивалентные уравнения, затем прибегают к
методу искусственного базиса.
Последние два случая подробно описаны в п. 3.4 гл. 3.
Каждой задаче линейного программирования соответствует
другая, называемая двойственной задачей линейного программирова-
ния. Исходная задача по отношению к двойственной называется
прямой. Решение двойственной задачи позволяет получить чрезвы-
чайно важные показатели для'анализа и экономической интерпрета-
ции исходной задачи.
Пусть прямая задача линейного программирования заключается в
определении значений Xj О О’ = 1, 2,..., п), минимизирующих линей-
ную форму
1(х) = «1 х1 + С2 Х2 + • • • + сп хп,
при условиях
«11XI + «12 Х2 + • • • + «1П хп > И;
«21 xi+«22*2 + --- + «2nxn> 62;
«тГж1'+«m2 «2+ «тп^п
Двойственная ей задача состоит в определении значений yi, у2,
... ,ут, максимизирующих линейную форму
2<у) = Ь1У1 + Ь2У2 + --- + ьтУт>
при условиях
<Ч1У1+«21У2 + --- + «т1Ут<<?1;
«12У1+ «22У2 + • • • + «т2Ут * с2>
«in У1 + «2п У2’+ •' •’ •’+ «тп Ут 4 Сп>
yi >0(i =1,2,..., т).
Прямая и двойственная задачи образуют пару задач, называемую в
линейном программировании двойственной парой. Вышеуказанные
две задачи являются двойственными симметричными задачами, в
которых условия как исходной, так и двойственной задачи заданы
неравенствами, причем переменные как одной, так и другой задачи не
могут быть отрицательными.
Несимметричные двойственные пары имеют место, например,
когда прямая задача записана в канонической форме (ограничения
заданы уравнениями), а также в случае отсутствия требований на
неотрицательность двойственных переменных. Если же прямая задача
имеет смешанную форму, т.е. часть ограничений является неравенст-
вами, а часть уравнениями, то в двойственной задаче на двойственные
25
переменные, соответствующие ограничениям-уравнениям, требование
неотрицательности не будет накладываться, а на двойственные пере-
менные, соответствующие ограничениям-неравенствам, - будут
накладываться.
Сравнивая прямую и двойственную задачи линейного программи-
рования, сформулируем основные правила составления математичес-
кой модели двойственной задачи.
1. Каждому i-му ограничению прямой задачи соответствует пере-
менная двойственной задачи yit которая называется двойственной
объективной оценкой. Число двойственных оценок равно числу огра-
ничений в исходной задаче.
2. Каждой переменной исходной задачи х/О' = 1, 2,..., п) соответ-
ствует ограничение двойственной задачи. Значит, в двойственной
задаче будет п ограничений.
3. Коэффициенты при переменных, стоящих в строках системы
прямой задачи, становятся коэффициентами при переменных в столб-
цах системы двойственной задачи.
Действительно, матрицы коэффициентов при переменных и в
прямой, и в двойственной задаче получаются друг из друга транспор-
тированием, т.е. заменой строк столбцами с сохранением их порядка
4. Знаки неравенств меняются на противоположные. Если в пря-
мой задаче содержатся неравенства типа >, то в двойственной -
наоборот, типа
5. Свободные члены неравенств системы ограничений прямой
задачи становятся коэффициентами целевой функции двойственной
задачи.
6. Правые части ограничений в двойственной задаче равны коэф-
фициентам целевой функции исходной задачи.
7. Требование минимизации целевой функции £(х) прямой задачи
заменяется требованием максимизации целевой функции L(y) двойст-
венной задачи.
Соответствие характеристик прямой и двойственной задач приве-
дено в табл. 1.1. 1
Основные теоремы двойственности в линейном программировании
следующие.
Теорема 1 (существования). Если задача линейного программиро-
вания и двойственная ей задача имеют допустимые решения, то обе
они имеют оптимальные решения и одинаковые значения целевых
функций.
Теорема 2 (двойственности). Если задача линейного программиро-
вания имеет оптимальное решение, то и двойственная задача имеет
оптимальное решение.
26 ' >
Таблица 1.1
Характеристика ' Задача
прямая двойственная
Переменная Число переменных Число ограничений Целевая функция Ограничения Область допустимых решений Наличие целевой функции! /=п i =m n S CiXj "*min J=1 Her £(x) неограничена Я i =m j=n m !(y) = S by/-* max 1=1 m Z ajiy^Cj . 1=1 L(y) неограничена Области допустимых реше- ний нет
Доказательство этих теорем можно найти в соответствующих руко-
водствах по линейному программированию.
Понятие двойственности широко используется в анализе задач
линейного программирования и их экономической интерпретации. В
результате решения задачи получаем два описания экономического
явления: одно математическое, другое, которое являясь двойствен-
ным первому, - экономическое. Экономическое описание содержит
специальные двойственные оценки каждого вида хозяйственных
ресурсов или технологических способов и являются важным инст-
рументом экономического анализа. Оценка показывает, насколько
изменится целевая функция, если количество ресурса изменить на
единицу. Они позволяют исследовать устойчивость оптимальной
величины критерия при возможных изменениях первоначальных
условий - ограничений, непосредственно дают информацию о послед-
ствиях изменения плана и эти последствия оцениваются без пересчета.
Свойства двойственности более детально рассмотрены в каждом
конкретном случае-в соответствующих разделах учебника по экономи-
ческой интерпретации задач линейного программирования.
Глава 2
ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД
2.1. Геометрическая интерпретация задач оптимизации
Графоаналитический метод основан на правилах аналитической
геометрии и поэтому его часто называют геометрическим методом.
Этим методом решают в основном задачи оптимизации с двумя пере-
менными Xi и хг, которые по смыслу экономических задач не должны
быть отрицательными, т.е. должно соблюдаться условие > 0 и
Х2 > 0. Уравнения xi = 0 и хг = 0 являются осями системы-декартовых
координат первого квадранта (рис. 2.1), поскольку xi и хг положите-
льны.
Уравнение xi = 0 представляет собой множество точек, лежащих на
оси координат хг. Для всех точек, расположенных справа от оси хг,
имеем xi > 0, а для точек слева от оси хг - xi < 0. Таким образом,
геометрическое место точек, описываемое неравенством xi > 0, предс-
тавляет собой полуплоскость, расположенную справа от оси хг- Назо-
вем эту полуплоскость областью допустимых значений и обозначим
штрихами.
Уравнение хг = 0 определяет ось xi, а неравенство хг > 0 - полу-
плоскость, расположенную выше оси хь Совместно условия xi > 0,
хг > 0 определяют точки первого квадранта.
Для дальнейшего рассмотрения геометрической интерпретации
задач оптимизации обратимся к примеру из п. 1.1 гл. 1.
Необходимо минимизировать функцию, т.е.
Их) - 4x1 + "* мах
при следующих условиях:
6x1+ 2*2 300;
2x1+ 4x2 200;
xi 0, хг s 0.
Рассмотрим уравнение 6xj + 2x2 ~ 300. Чтобы построить прямую,
описываемую этим уравнением, найдем две точки, лежащие на этой
прямой. При xi = 0 из уравнения прямой найдем 2хг = 300, откуда
хг = 150. Следовательно, точка А с координатами (0,150) лежит на
искомой прямой. При хг = 0 имеем 6xi = 300, откуда xi = 50, а точка D с
координатами (50, 0) также находится на искомой прямой. Через эти
две точки проводим прямую AD (рис. 2.2).
Линейное неравенство 6xi + 2хг 300 представляет собой полу-
плоскость, расположенную с одной из сторон от построенной прямой
Рис. XI. Графическое изображение уравне- Рис. Х2. Графический метод решения задачи
нийХ1»0их2“0 на максимум
6xi + 2xj = 300. Чтобы выяснить, с какой стороны от этой прямой
расположены точки искомой полуплоскости, подставим в неравенство
6xi + 2x2 < 300 координаты какой-либо точки, не лежащей на гранич-
ной прямой. Например, начало координат О = (0,0). Для него справед-
ливо неравенство 6*0 + 2*0 = 0 < 300. Это значит, что начало координат
лежит в области допустимых значений, которая находится слева от
прямой AD и на рис. 2.2 заштрихована.
Уравнение 2xi + 4хг = 300 построим по двум точкам. При xi = 0
4x2 = 200, откуда хг - 50. Тогда точка Е имеет координаты (0,50) и при-
надлежит искомой прямой. При Х2 = 0, 2xi ~ 200, точка С .находится на
данной прямой с координатами (100, 0). Подставив в неравенство
координаты точки С (0, 0), получим 2-0 + 4-0 = 0 < 200. Значит, начало
координат находится в области допустимых значений от прямой
2xi+ 4хз = 200.
Система ограничений задачи требует, чтобы планы (xi; хг) удовлет-
воряли всем четырем неравенствам, т.е. допустимые планы - точки
(xi; хг) должны одновременно находиться во всех четырех полуплос-
костях. Этому требованию отвечают только точки, расположенные
внутри и на границе многоугольника OEKD, который и является
многоугольником допустимых решений.
Вершинами многоугольника допустимых решений являются точки
О, Е, К, D, отрезки прямых ОЕ, EK, KD, OD - его ребра. Любая точка
многоугольника OEKD является планом задачи, удовлетворяя все ее
условия. Вершины многоугольника образованы пересечением двух
прямых и соответствуют опорным планам задачи, среди которых
находится и наилучший (оптимальный) план. Таким образом, опорных
планов будет столько, сколько вершин у многоугольника допустимых
решений.
29
Наглядное геометрическое представление можно получить и для
целевой функции Цх) • 4xi + 6x3. Зафиксируем какое-либо значение
целевой функции, например Цх) - 120. Уравнение 4xi + 6x2 - 120
определяет прямую, проходящую через точку В с координатами (xi=0;
хг = 20) и точку L с координатами (xi = 30; хг = 0). Отрезок BL лежит
внутри многоугольника OEKD. Следовательно, для всех планов
(точек) этого Отрезка значение целевой функции одинаково и равно
120. Придавая другие значения целевой функции, получим параллель-
ные прямые, которые называют линиями уровня целевой функции.
Перемещая прямую Цх) параллельно самой себе в одном направ-
лении, получим возрастание целевой функции, а в противоположном
направлении - ее убывание. В рассматриваемом примере передвиже-
ние прямой BL вправо определяет возрастание целевой функции,
которую мы максимизируем. Так поступают до тех пор, пока прямая
BL будет иметь хотя бы одну общую точку с многоугольником допус-
тимых решений OEKD. Из рис. 2.2 следует, что последней точкой,кото-
рую пересечет прямая уровня целевой функции, будет точка К. Это
значит, что точка К определяет оптимальный план задачи.
Направление возрастания, перпендикулярное линии уровня,
называется направлением наибольшего возрастания целевой функции
и определяет ее максимальный. прирост. Это направление можно
установить без построения линий уровня. Для этого необходимо на
осях xi и %г отложить отрезки, равные коэффициентам целевой функ-
ции, и по ним, как по координатам, построить вектор наибольшего
возрастания целевой функции. В математике его называют градиентом
и обозначают знаком grad. Градиентом для функции L(x) 4xi +6x2
будет вектор п 14; 6 | . Для удобства его построения увеличим
координаты, например, в 10 раз, т.е. п 140; 601. Построим градиент
целевой функции Цх), для чего соединим точку с координатами (40;
60) с началом координат. Линии уровня целевой функции строят
перпендикулярно направлению градиента.
Итак, тем или другим способом, установлено, что точка К опреде-
ляет оптимальный план задачи, значения переменных которого соот-
ветствуют координатам данной точки. Для установления координат
необходимо решить систему уравнений прямых, образующих эту
вершину:
+ 2*2 “300;
2*1 +4*2 “ 200.
Уравняем коэффициенты при хь умножив второе уравнение на 3,
и вычтем из второго уравнения первое. Получим Юхг = 300, хг = 30.
Подставив значение хг = 30 в любое из уравнений, например в первое,
определим значение хр
fci+2*-зо зоо,
30
откуда
feci - 300 — 60 - 240,
следовательно, = 40.
Таким образом, чтобы получить наибольшую прибыль, предприя-
тию необходимо выпускать 40 изделий первого вида и 30 изделий
второго вида. Максимальная прибыль при этом составит:
L(x)“4xi + в*2 “ 4’40 + 6'30 » 340 р.
На основе рассмотренного примера и геометрической интерпрета-
ции задачи оптимизации с двумя переменными можно сделать следую-
щие выводы:
1) в двухмерном пространстве область допустимых решений
представляет собой многоугольник;
2) каждой стороне многоугольника соответствует значение одной
переменной, равной нулю;
3) каждой вершине многоугольника допустимых решений соот-
ветствуют значения двух переменных, равные нулю;
4) каждому значению целевой функции соответствует прямая;
5) оптимальному решению задачи соответствует вершина много*
угольника, в которой целевая функция приобретает оптимальное
значение, при этом оптимальными переменными являются коорди-
наты этой вершины.
В общем случае задачи оптимизации имеют аналогичную геомет-
рическую интерпретацию. Множество планов задачи будет представ-
лять собой многогранник, вершины которого соответствуют опорным
планам. При решении задачи осуществляется переход от одной вер-
шины многогранника к другой с большим значением целевой функ-
ции до получения оптимального ее значения. Отметим, что эффектив-
ность методов оптимизации как раз и заключается в том, что перебор
вершин (итерация) ведется только в направлении наибольшего воз*
растения целевой функции. Поэтому рассматриваются не все вершину,
которых огромное количество, а только те, которые ближе к экстре-
мальной.
* При определении класса задач оптимизации и выборе метода ее
решения необходимо знать, выпукло или невыпукло множество
допустимых решений, линейная или нелинейная целевая функция.
По определению множество называется выпуклым, если для
любых двух его точек весь отрезок, соединяющий эти точки, принад-
лежит этому множеству. Примерами выпуклых множеств могут
служить, найример, отрезок (рис. 2.3, а), плоскость в виде круга (рис.
2.3, б), куб, параллелепипед, а также многоугольники (рис. 2.3, в, г),
которые целиком расположены по одну сторону от каждой из его
сторон, и др.
31
На рис. 2.4 изображены невыпуклые множества. В невыпуклых
множествах можно указать хотя бы две точки отрезка АВ, не принадле-
жащие рассматриваемому множеству.
Для решения задач оптимизации важно знать, кроме выпуклости
множества допустимых решений, является ли целевая функция
выпуклой или вогнутой или она не относится ни к тому, ни к другому
классу.
Функцию у ж Дх) одной переменной называют выпуклой, или
выпуклой вниз, если отрезок, соединяющий две произвольные точки
ее графика, целиком лежит выше графика/(х) (например, отрезок АВ
на рис. 2.5).
Функция у Дх) называется вогнутой или выпуклой вверх, если
отрезок, соединяющий две произвольные точки на графике этой функ-
ции, целиком лежит ниже графика у ® Дх) (например, отрезок CD на
рис. 2.6). Аналогичными свойствами обладают выпуклые и вогнутые
функции многих переменных.
Если множество допустимых решений является выпуклым, а
максимизируемая целевая функция выпукла вверх (или минимизи-
руемая выпукла вниз), то задача относится к классу выпуклого
программирования. Важным свойством таких задач является движе-
ние из области неоптимального плана, с непрерывным улучшением
значения целевой функции, до тех'пор, пока не будет получен опти-
мальный план.
Рассмотрим задачи максимизации функции у =fa) на отрезке [а, Ь]
для трех случаен; в случае максимизации выпуклой, вверх функции
У =fi (х) (рис. 2.7) при любой начальной точке отрезка [а, б], сдвигаясь
в сторону увеличения функции Д(х), мы всегда достигнем точки с, в
которой Л(х) принимает максимальное значение. Заметим, что произ-
водная функции Л(х) в точке с равна нулю.
В случае максимизации выпуклой вниз функции у Bffa) (рис. 2.8)
сдвиг в сторону увеличения функции будет приводить к разным
результатам в зависимости от положения начальной точки. Если
начальная точка находится на отрезке [о, с], где с - точка минимума (в
этой точке производная/г (х) равна нулю), то сдвиг в сторону увеличе-
ния /г(х) приведет в точку а. Но h(a) не является максимальной на
отрезке [а, Ь], так как fa) > Да), хотя fa) и является максимальной
для х, близких к а .(для некоторой окрестности точки а). Такие точки
называются точками локального максимума. Для функции, выпук-
лой вниз, точками локального максимума могут быть все крайние
точки множества допустимых решений. Например, если множество
допустимых решений задачи многогранник, то все его вершины могут
быть точками локального максимума.
Если функция произвольная (ни выпуклая, ни вогнутая), то точек
локального максимума (минимума) может быть еще больше, так как,
кроме крайних точек, могут появиться и внутренние точки локаль-
ного максимума (минимума). Например, на рис. 2.9 изображен
32
Рис. 2Л. Выпуклые множества
Рис. 2.4. Невыпуклые множества
Рис. 2.7. График выпуклой вверх функции и Рис. 2.8. График выпуклой вниз функции и
ее абсолютное максимальное значение ее абсолютное минимальное значение
33
Рис. 2.9. График функции и ее ряд локаль-
ных экстремальных значений: минимумов и
максимумов
график некоторой произвольной функции у - f(x), определенной на
этрезке [1; 10].
Функция имеет на отрезке [1; 10] три точки локального минимума
(%1 = 3; Х2 = 6, хз - 9) и две точки локального максимума (х< = 5, х$ » 8).
Задачи с многими точками локального максимума или минимума
называют многоэкстремальными. Их решение связано с перебором
точек локального максимума или минимума и такими понятиями, как
абсолютный максимум или абсолютный минимум функции. Вместо
термина „абсолютный” часто используют „глобальный”. Глобальный
максимум функции - есть ее наибольшее значение в области опреде-
ления, а глобальный минимум - наименьшее значение. Глобальный
максимум и глобальный минимум называют глобальными экстрему-
мами функции. На рис. 2.9 представлен график функции, глобальный
минимум которой равен 2 и совпадает с наименьшим из локальных
минимумов. Глобальный же максимум, равный 9, функция достигает в
точке х - 10 и он не совпадает с наибольшим из локальных максиму-
мов. Отсутствие свойства выпуклости множества допустимых реше-
ний также вызывает многоэкстремальность и усложняет решение
задачи.
В задачах линейного программирования область допустимых
решений является выпуклым множеством, а целевая функция (линей-
ная) является одновременно выпуклой вверх и выпуклой вниз.
Поэтому одинаково эффективно решается задача линейного програм-
мирования как на максимум целевой функции, так и на минимум. Как
было показано выше; задачи с нелинейной целевой функцией этим
свойством не обладают.
Если задача отыскания максимума выпуклой вверх
функции на выпуклом множестве решается хорошо, то задача
отыскания минимума этой же функции на том же множестве является
многоэкстремальной и решается плохо. И наоборот, если задача отыс-
кания.минимума выпуклой вниз функции решается хорошо, то задача
отыскания максимума этой функции решается плохо.
34
2.2. Решение задач на максимум и минимум целевой функции
Графоаналитический метод - один из простейших методов линей-
ного программирования. Он наглядно раскрывает сущность линейного
программирования, его геометрическую интерпретацию. Однако этот
метод имеет существенный недостаток: с его помощью можно решать
только те планово-экономические задачи, математическая модель
которых представляет собой систему с двумя или тремя неизвест-
ными. По этой причине в организации и планировании перевозок
автомобильным транспортом этот метод может быть применен для
решения очень узкого круга задач. Покажем особенности графоанали-
тического метода на примере решения некоторых задач.
Допустим, завод для производства двух видов продукции должен
последовательно использовать четыре разные группы оборудования,
имеющегося в следующих количествах: группы А - 24; группы В - 16;
группы С - 32 и группы D - 24 ед.
При существующей на заводе технологии на производство еди-
ницы продукции первого вида требуется 2 ед. оборудования группы А,
1 ед. группы В и 4 ед. группы С, Оборудование группы D в производ-
стве продукции первого вида не участвует^ или, иначе говоря, в
производстве продукции первого вида из оборудования группы D
участвует 0 ед., т.е. техническими коэффициентами продукции пер-
вого вида по отдельным группам оборудования будут соответственно
2,1,4,0. Техническими коэффициентами при производстве продукции
второго вида будут 2,2,0 и 4.
Известно, что единица продукции первого вида дает заводу
прибыль 4 р., а второго вида -6 р. Сколько единиц продукции каж-
дого вида должен производить завод, чтобы получить наибольшую
прибыль?
На первый взгляд кажется, что заводу лучше производить только
продукцию второго вида, так как она дает больше всего прибыли. Но
это неверно, поскольку объем ее производства при существующей
технологии ограничен наличным оборудованием. И если производить
только второй вид продукции, то часть имеющегося оборудования
может быть не использована, что дает заводу определенную потерю в
прибыли. Следовательно, нужно найти такой план по номенклатуре
производства продукции, при котором бы максимально использова-
лось имеющееся оборудование и достигалась наибольшая прибыль.
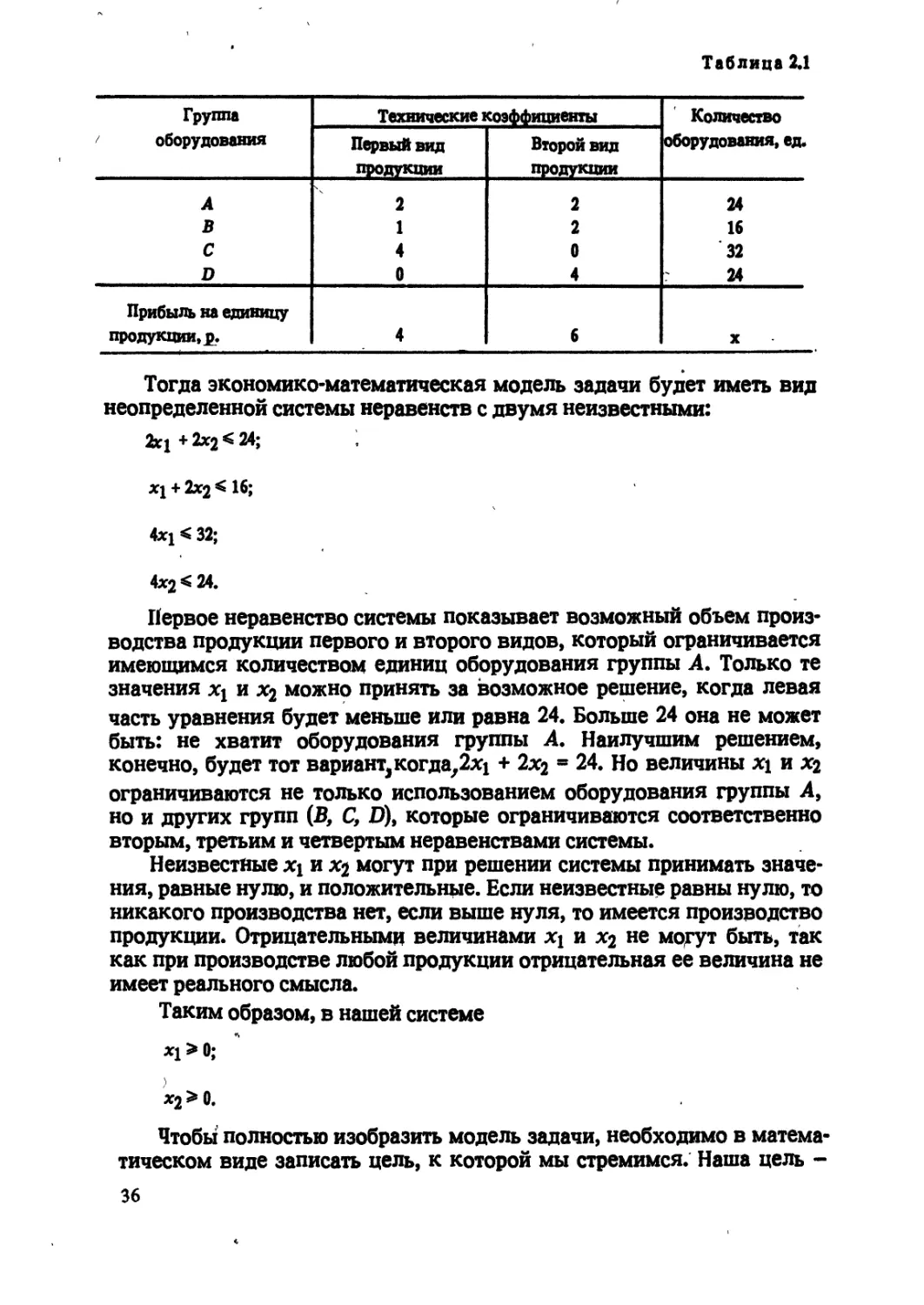
Запишем исходные данные задачи в Фооме табл. 2.1.
Неизвестными в данной задаче будут количества единиц продук-
ции каждого вида, которые должен производить завод, чтобы получить
максимальную прибыль. Следовательно, критерием оптимальности
решения является прибыль, и оптимальное решение будет получено
при таких значениях неизвестных, при которых критерий оптималь-
ности получит свое максимальное значение.
Обозначим через Ху хг количество единиц продукции соответст-
венно первого и второго видов, которое будет производить завод.
35
Таблица 2.1
Группа / оборудования Технические коэффициенты Количество оборудования, ед.
Первый вид продукции Второй вид продукции
А 2 2 24
В 1 2 16
С 4 0 32
D 0 4 24
Прибыль на единицу продукции, J>. 4 6 X
Тогда экономико-математическая модель задачи будет иметь вид
неопределенной системы неравенств с двумя неизвестными:
2к1+2х2<24;
xj + 2xj < 16;
4«1 < 32;
4*2 < 24.
Первое неравенство системы показывает возможный объем произ-
водства продукции первого и второго видов, который ограничивается
имеющимся количеством единиц оборудования группы А. Только те
значения xt и х^ можно принять за возможное решение, когда левая
часть уравнения будет меньше или равна 24. Больше 24 она не может
быть: не хватит оборудования группы А. Наилучшим решением,
конечно, будет тот вариант, когда, 2xj + 2хг = 24. Но величины xi и хг
ограничиваются не только использованием оборудования группы А,
но и других групп (В, С, D), которые ограничиваются соответственно
вторым, третьим и четвертым неравенствами системы.
Неизвестные xj и х^ могут при решении системы принимать значе-
ния, равные нулю, и положительные. Если неизвестные равны нулю, то
никакого производства нет, если выше нуля, то имеется производство
продукции. Отрицательными величинами х\ и х^ не могут быть, так
как при производстве любой продукции отрицательная ее величина не
имеет реального смысла.
Таким образом, в нашей системе
xi > 0;
*2 > 0.
Чтобы полностью изобразить модель задачи, необходимо в матема-
тическом виде записать цель, к которой мы стремимся. Наша цель -
36
Рис. ХЮ. Графическое изображение условий
залечи
это получение максимальной прибыли. В этом случае целевая функ-
ция будет иметь вид:
(4*1 + 6*2) max.
Это законченный вид модели.
Далее для решения задачи необходима прямоугольная координат-
ная сетка, на которой следует изобразить полученную математическую
модель задачи.
Отложим по оси абсцисс значениях], а по оси ординат - х2- Прове-
дем в этой системе координат прямую АА ь координаты точек которой
характеризуют максимальное использование оборудования группы А
(рис. 2.10), т.е. прямую, изображающую уравнение
2*1 +2*2 “24.
При пересечении осей координат прямая АА\ образует отрезок FL,
представляющий собой вектор условий или ограничений. Координаты
точек, образующих вектор, показывают программу производства
завода, при которой будет полностью использовано оборудование
группы А.
Вектор условий вместе с осями координат образует треугольник
OFL, в пределах которого расположены точки, координаты которых
позволяют , определить возможную программу производства завода,
когда оборудование группы А будет использовано неполностью,
например точка Р (xi = 2; хг = 8). Подставив значение х,- в уравнение,
получим 2-2 + 2-8 = 20.
Всего же оборудования группы А - 24. Таким образом, вектор FL и
координатные оси ограничили треугольное пространство OFL, коор-
динаты любой точки которого могут дать решение в пределах возмож-
ности использования оборудования группы А. Это так называемое в
математике выпуклое множество, в данном случае дающее возможное
решение. В рассматриваемой задаче это частный случай выпуклого
множества, представленного плоскостью, или область возможного
решения: за пределами вектора FL ни одна точка не может опре-
делить.своими координатами объем производства изделий первого и
второго видов. Если задать объем производства изделий первого и
37
Рис. 2.11. Графический метод решения
задачи составления оптимального плана по
номенклатуре производства продукции
второго видов координатами точек, лежащих за пределами треуголь-
ника OFL, то это производство будет или нереальным (отрицательны
объемы выпуска), или не будет обеспечено необходимым оборудова-
нием. Например, при программе, определенной координатами точки
Р1 (xj = 8; Х2 - 8), должно быть занято оборудование группы А: 2-8 +
+ 2-8 = 32 > 24.
При таком объеме и номенклатуре производства оборудования
группы А не хватит. В данном случае точка Р' лежит в области невоз-
можных решений.
Лучше всего было бы определить объем производства координа-
тами точек, лежащих на векторе ограничений, которые дали бы полное
использование оборудования группы А. Но это желание ограничивают
имеющиеся в системе неравенства, определяющие возможности
использования оборудования групп В, СиD.
Отложим на графике остальные прямые, соответствующие мак-
симальному использованию оборудования групп В, С, D (рис. 2.11).
Эти прямые образовали с ранее проведенной прямой (вернее ее
отрезком FL) некоторый многоугольник OKMNE, представляющий
собой геометрическое место точек, координаты которых определяют
возможный при данных условиях производства вариант плана выпус-
ка продукции по номенклатуре. Любая точка, лежащая за пределами
многоугольника OKMNE, своими координатами покажет невозмож-
ность выполнения такого плана, так как он не будет обеспечен необ-
ходимым производственным оборудованием (станками, установ-
ками, машинами, агрегатами и т.п.). Например, если зададим объем
производства координатами той же точки Р (xi = 2; х2 = 8), то завод не
сможет обеспечить выполнение задания из-за отсутствия необходи-
мого количества оборудования групп В и О:
2.2+ 2.8 = 20 >16;
0-2+ 4-8 «32 >24.
Оптимальное решение достигается при максимальном использо-
вании производственного оборудования. Оно определяется коорди-
38
натами точек, лежащих на границах многоугольника OKMNE, и, в
первую очередь, координатами точек, являющихся вершинами много-
угольника, так как координаты вершин многоугольника определяют
области возможного решения производственной программы, при
которой одна, две группы оборудования или более будут использо-
ваны полностью. Следовательно, зная координаты каждой вершины,
можно определить производственную программу по выпуску продук-
ции первого и второго видов, а затем с помощью целевой функции
найти величину прибыли, соответствующую программе, определяе-
мой координатами данной вершины многоугольника. При сравнении
значений прибыли по всем программам, определяемым вершинами
многоугольника, выявляется оптимальное решение.
В нашем примере вершина К имеет координаты 0 и 6, т.е. эта точка
определяет ту программу, при которой будет выпускаться только б ед.
продукции второго вида. Продукций же первого вида не будет произ-
водиться. При такой производственной программе завод получит
прибыль в 36 р. (4-0 + 6*6 = 36 р.).
Если программа будет принята в соответствии с координатами
точки М (4; 6), то прибыль составит 52 р. (4-4 + 6-6 = 52 р.); точки N (8;
4) - 56 р.; точки Е (8; 0) - 32 р. Таким образом, оптимальное решение
определяется координатами точки N. Программа, заданная координа-
тами этой точки (8 ед. продукции первого вида, 4 ед. - второго вида),
позволит получить заводу максимальную прибыль - 56 р.
По этой программе оборудование групп А, В и С будет использо-
ваться полностью, а группы D - 16 ед. Остальное оборудование этой
группы может быть загружено производством другой продукции.
Найти точку области допустймых решений, координаты которой
соответствуют оптимальному решению, можно и графическим путем.
Для этого целевая функция приравнивается к какому-либо числу (в
нашем примере - 12) и нд графике откладывают соответствующую ей
прямую, изображенную на рис. 2.11 пунктирной линией. Программа,
заданная координатами любой точки отрезка данной прямой, лежа-
щего в пределах области возможных решений, позволит получить
прибыль, равную 12 р. Возможность получения большей прибыли
имеется, так как полученная прямая лежит не на границе области
возможных решений, наиболее удаленной от начала координат. Строя
линии, параллельные первоначальной прямой (эти линии называются
линиями уровня доходности) и удаляющиеся от начала координат, т.е.
увеличивая значения целевой функции, можно найти такую парал-
лельную, которая будет касаться только одной вершины выпуклого
множества возможных решений. Координаты этой вершины и покажут
оптимальное решение.
Рассмотрим следующий пример. Для этого в условии предыдущего
примера поменяем величину прибыли, которую дает единица продук-
ции второго вида, с 6 на 8 р. Тогда целевая функция примет вид:
(4*1+ &2) ‘•пих-
39
Поделив коэффициенты при неизвестных на 4, получим
(*1 + 2x2) “шах.
Левая часть этой функции соответствует уравнению, определяе-
мому использование оборудования группы В. Следовательно, линия
уровня доходности совпадает на графике с линией BBlt и, таким
образом, две соседние вершины М и N многоугольника, лежащие на
прямой BBi, показывают одинаковые оптимальные решения. Но не
только вершины М и N дадут оптимальные решения, а и все точки
отрезка MN покажут те же самые решения. В этом случае имеется
бесчисленное множество альтернативных оптимальных решений, т.е.
по точкам отрезка MN можно будет задавать заводу программы,
различные по количеству выпускаемых деталей первого и второго
видов, при этом получая одну и ту же прибыль, в данном случае
равную 64 р. Определить единственное оптимальное решение при
заданных условиях невозможно без какого-либо дополнительного
ограничения.
В третьем примере необходимо приготовить смесь, в которой
вещества А содержалось бы не менее 12 ед., вещества В - не менее
24 ед., С - не менее 16 ед. Смесь можно приготовить из двух компонен-
тов. Цена первого компонента 8 р. за 1 кг, цена второго - 7 р. В 1 кг
первого компонента содержится вещества А 2 ед., столько же веще-
ства В и 1 ед. вещества С. В 1 кг второго компонента вещества А -
1 ед., В и С - по 4 ед.
Как приготовить смесь, чтобы ее цена была минимальной?
Запишем условие задачи в табл. 2.2.
Примем: *1 - количество килограммов первого компонента в
смеси;
Х2 - количество килограммов второго компонента в смеси. Тогда
экономико-математическая модель задачи будет иметь следующий
вид:
ограничения
2*1+ *2 * 12;
2x1+ 4x2 24;
xi + 4x2 * 16;
xi>0;x2>0;
целевая функция
($Х1 + 7x2) * min.
Как и в первых двух примерах, .система будет неопределенной с
базисом, равным двум. Но в отличие от предыдущих, эта задача
решается не на максимум, а на минимум.
40
Таблица 2.2
•Ч Вещество Количество единиц вещества в 1 кг компонентов Нижний предел количества содержания единиц вещества в смеси
первого второго
А 2 1 12
В 2 4 24
С 1 4 26
Цена 1 кг компонен- -1Ч2-. 8 7 X
Графическое решение задачи приведено на рис. 2.12. Область
возможных решений отсекается от начала координат ломаной линией
MKFN.
Линия LE является опорным планом, т.е. первоначальной линией
уровня доходности, соответствующей произвольно (в нашем примере
140 р.) взятому значению целевой функции. Перемещая линию уровня
доходности параллельно самой себе в направлении начала координат,
т.е. уменьшая значение целевой функции, будем получать возможные
решения с меньшими затратами. Последняя точка возможных реше-
ний, которой будет касаться линия уровня доходности, покажет
оптимальное решение. В данном примере это точка К с координатами
(4; 4). Следовательно, для приготовления смеси необходимо по 4 кг
Рис. 2.12. Графический метод решения
задачи составления смеси
Рис. 2.13. Графический метод решения
задачи на минимум и максимум
41
первого и второго компонентов. При этом затраты будут минималь-
ными - 60 р. (8-4 + 7 -4 = 60 р.).
Графоаналитическим методом можно определить максимальное и
минимальное значения целевой функции одновременно. Пусть тре-
буется найти минимальное и максимальное значения функции
L = 4«i + 6*2
при условиях
2xi + 2*2 * 12;
3x1 + х2 * 6;
2xi + 5,5x2 * И;
2xi < 10;
2х2 «9.
Переменные xi и хг положительны, поэтому множество точек (xi,
х2), являющееся допустимым решением, находится в первом октанте
(рис. 2.13).
Ограничения образуют выпуклый многоугольник решений ABODE.
Линейная форма L я 4xi + 6x2 представляет собой семейство парал-
лельных прямых. Одна из них пройдет через вершину А, что и дает
минимальное значение функции L. В вершине С целевая функция
достигает своего максимального значения.
Координаты точки A (xi = 1,5; хг = 1,5), точки С (xi и 1,5; хг = 4,5).
Следовательно, минимальное значение целевой функции
lmin = 2-1,5 + 6-1,5 -15,
максимальное
1шах=4,1>5 + 6-4,5-33.
Рассмотренные примеры графоаналитического метода решения
задач линейного программирования отражают сущность этого вида
математическогб программирования.
2.3. Применение графоаналитического метода на автомобильном
транспорте
Как уже отмечалось выше, возможности графоаналитического
метода ограничены: он позволяет решать только системы с двумя или
тремя неизвестными. Эта особенность обуславливает характер тех
задач, относящихся к области планирования и организации работы
42
Таблица 2.3
Марка автомобиля Количество автомобилей в колонне Всего автомобилей
для первого района для второго района
А 8 — 32
В 8 8 48
Г — 16 48
Общая грузоподъем- ность колонны, т 56 152 X
автомобильного транспорта, которые могут быть решены с его помо-
щью. Приведем несколько примеров таких задач.
Допустим, автотранспортному предприятию необходимо освобо-
дить из-под груза складские помещения клиента. Груз следует вы-
везти в два района колоннами автомобилей. Условия перевозки
требуют, чтобы в составе каждой колонны, предназначенной для
вывоза груза в первый район, было 8 автомобилей повышенной прохо-
димости марки А и 8 автомобилей общего назначения марки В; а в
колоннах для вывоза груза во второй район - 8 автомобилей общего
назначения марки В и 16 марки Г. Характер груза позволяет полностью
использовать грузоподъемность всех автомобилей. Каждая из колонн
может сделать за сутки одинаковое число ездок.
Парк подвижного состава автотранспортного предприятия (АТП)
состоит из 32 автомобилей марки А грузоподъемностью q = 3 т, 48 -
марки В, q = 4 т и 48 марки Г, q « 7,5 т.
Требуется сформировать оптимальное количество колонн, чтобы
быстрее закончить эвакуацию груза.
Запишем исходные данные примера в табл. 2.3.
Обозначим через Х] количество колонн, предназначенных для
перевозки грузов в первый район, а через х2 - во второй район. Тогда
математическая модель задачи будет иметь следующий вид:
(56xi + 152X2) - max;
8xi * 32’-
8xi+ 8х2 * 48;
16х2 < 48;
X] > 0; Х2 >0.
Целевая функция показывает, что чем больше будет суммарное
количество колонн, тем больше будет перевезено груза и, следовате-
льно, меньше затрачено времени на его вывоз.
43
Графическое решение задачи приведено на рис. 2.14.
Оптимальное решение определяется координатами точки F (3; 3).
Следовательно, нужно сформировать по три колонны для вывоза груза
в каждый район. При таком решении все автомобили марок В и Г
автотранспортного предприятия включены в состав колонн. Из общего
количества автомобилей типа А в колоннах будут работать только 24.
Остальные 8 автомобилей могут быть использованы на других перевоз-
ках.
Приведем пример более сложной задачи с тремя переменными,
которую можно решить графоаналитическим методом. Пусть ежед-
невно в город Поставляется одним видом транспорта 12 т картофеля из
трех колхозов: из первого колхоза по цене 4 р. за 1 т, из второго - по
цене 3 р., из третьего - по цене 1 р. Чтобы картофель в город был
доставлен своевременно, необходимо на погрузку 12 т затратить не
более 40 мин. Известно, что в первом колхозе уровень механизации
позволяет 1 т картофеля погрузить за 1 мин, во втором колхозе - за
4 мин, в третьем - за 3 мин. Производственные мощности этих колхо-
зов следующие: первый колхоз' должен ежедневно выделять для
поставки в город не более 10 т, второй - не более 8 т, третий - не
более 6 т. Как распределить заказы на поставку 12 т между колхозами,
чтобы общая стоимость доставленного в город картофеля была мини-
мальной?
Изобразим в пространстве множество допустимых планов. Из
условия неотрицательности переменных следует, что область решения
задачи заключена в первом октанте координат, как показано на
рис. 2.15.
Математическая модель задачи будет следующей:
минимизировать целевую функцию F = 4xi + 3xj + х$ при условиях:
xi > 0;
Х2 > 0;
хз>0;
Х1 + Х2 + хз«12;
*1 + 4*2 + 3*3 * 40;
xi < 10;
Х2<8;
хз< 6.
Условия ограничивают множество возможных решений задачи
прямоугольным параллелепипедом, образованным шестью плоскос-
тями:
*1 = 0; *2 = 0; *3 = 0; *1 = 10; Х2 = 8; хз - 6.
Если рассматривать точку вне этого параллелепипеда, то план,
соответствующий ей, невыполним, ибо будут превышены производ-
ственные мощности колхозов. Из условия XI + хг + хз в 12 следует, что
44
Рис. 2.14. Графический метод решения
задачи определения оптимального количе-
ства автоколонн для вывоза грузов
оптимальный план должен принадлежать части плоскости D2, D3,
ограниченной прямоугольным параллелепипедом. Итак (без учета
условия xi + 4х2 + Зх3 < 40), имеем многоугольник допустимых планов
Р1Р2Р^1^Рб. Накладываем последнее условие + 4Х2 + ЗХ3 < 40.
Точки, удовлетворяющие данному условию, лежат за плоскостью
45
EiB2E^ ближе к началу координат. Но плоскости Е^Е^ и D1D2D3
пересекаются по прямой М1М2- Таким образом многоугольник
P1P2P3N1N2P6 разделяется на две части, причем в точках одной из
частей (P4N1N2P5) последнее условие не выполняется. Следовательно,
множеством допустимых планов данной задачи линейного програм*
мирования является многоугольник Р^РзР^Рб, точки которого
удовлетворяют всем восьми условиям системы ограничений.
Воспользуемся критерием оптимальности: из множества точек
многоугольника Р1Р2Р3Р4Р5Р6 надо выбрать только те, координаты
которых обращают в минимум целевую функцию F = 4xi + Зхг + 1*з-
В теории линейного программирования доказано, что целевая
функция достигает своего минимального (максимального) значения в
крайних точках многдугольника допустимых планов. В данном случае
могут быть два пути отыскания нужных точек:
1) определяются координаты всех шести вершин многоугольника и
с помощью подстановки полученных координат вершин в F = 4xi +
+ Зхг + 1хз выбирается оптимальный план, соответствующий мини-
муму F;
2) вначале строится плоскость, описываемая уравнением целевой
функции 4xi + Зхг + 1хз = а, соответствующая какому-либо значению
функции, а затем определяется та вершина, которой эта плоскость
коснется первой при перемещении параллельно самой себе.
Проще, конечно, следовать первым путем. Расчеты показывают,
что оптимум достигается в точке Р4. Найдем ее координаты, решив
систему трех уравнений прямых, образующих данную точку:
хз « б;
Х1 + х2 + х3 “ 12;
xi + 4x2 + $х3 ~ 40;
'•Ф>;
2 1 2
Р4 = 4—-+3*5—+Ь6 = 13—р.
4 3 3 зр
Таким образом, в крайней точке целевая функция F = 4xj +
+ 3%2+ *з достигает минимального значения.
Экономическая интерпретация решения такова. Минимум общей
стоимости транспортировки 12 т картофеля, доставляемого в город,
2
получается, если из первого колхоза отправлять т> из второго -
5 — т, из третьего -6 т.
Глава 3
СИМПЛЕКСНЫЙ МЕТОЛ
3.1. Симплексный метод в общем виде
Одним из самых распространенных методов решения задач линей-
ного программирования является симплексный метод.
Свое название метод получил от слова „симплекс”, обозначаю-
щего простейший выпуклый многогранник, число вершин которого
всегда на единицу больше, чем размерность пространства. На плос-
кости (двухмерное пространство) симплексом является треугольник,
в трехмерном пространстве - четырехгранник и т.д.
Симплексный метод применяется в планировании ассортимента
выпускаемой продукции, оптимальной загрузки оборудования, в
решении технологических и транспортных задач, имеющих линейные
математические модели.
Идея симплексного метода состоит в следующем. Пусть задача
линейного программирования заключается в том, чтобы найти неотри-
цательные значения переменных xi, хг, х3> *4» которые обращают в
минимум линейную форму
х = 2хз _ 4*4
при условиях
xi + Зхз + 2*4 “
хг+*з+3x4 “ 12-
Систему ограничений можно решить относительно переменных xi и хг,
которые и будут составлять базис:
XI - 6 - (Зхз * 2*4):
хг » 12 - (хз + 3X4).
Исходя из условия неотрицательности переменных, имеем наи-
меньшее значение свободных и базисных' переменных xj « 6; хг • 12;
хз = 0; Х4 = 0, что является допустимым решением системы уравнений.
Значение целевой функции при этом базисе равно нулю.
Посмотрим, нельзя ли улучшить значение линейной формы, т.е.
уменьшить ее значение. Переменная хз входит в линейную форму с
положительным знаком, поэтому увеличивать хз нет смысла, так как
это привело бык увеличению L(x). Оставим хз равной нулю. Увеличе-
47
ние свободной переменной хд ведет к уменьшению Цх), поскольку хд
входит в линейную форму с отрицательным знаком.
Переменные системы связаны с системой линейных уравнений и
подчинены условию неотрицательности. В связи с этим увеличивать хд
неограниченно нельзя, так как, например, при хд = 4(х3 = 0) из первого
уравнения базисной системы xi = -2 < 0, т.е. при этом нарушается
условие неотрицательности переменных и решение становится недо*
пустимым. ' ’
Очевидно, чтобы найти максимально возможное значение хд,
обеспечивающее допустимое решение задачи, нужно составить отно-
шение свободных членов к положительным коэффициентам при хд и
из них выбрать наименьшее. Из первого уравнения исходной системы
это отношение равно 6 : 2 = 3; из второго - 12 : 3 4. Следовательно,
максимальное : значение хд, при котором решение систёмы остается
допустимым, равно 3. Тогда xi = 6 - (Зх3 + 2хд) = 6 - 6 = 0; хг = 12 -
- (х3+Зхд)=12-9 = 3. Поскольку только базис дает решение системы, то
хд следует принять за базисную переменную, заменив им xi. Итак,
новый базис - это хг и хд, а свободные переменные - х{ и х3. Новое
допустимое решение: xi = 0; хг = 3; хз = 0; хд = 3. Значение целевой
функции при новом базисе уменьшилось:
L(x) “ 2*з — Дхд = —12.
Переход к новому базису осуществляется на основе исключения новой
базисной переменной из всех уравнений, кроме одного, в которое эта
переменная должна входить с коэффициентом, равным единице.
Элементарными преобразованиями системы исключим из второго
уравнения х4:
xj + Зхз + Зх4 ~
х3 + х3 + Зхд = 12.
В исходной системе умножим второе уравнение на 2 и вычтем из него
утроенное первое уравнение. Получим новую эквивалентную преды-
дущей системы
Х1 + 3*3 + 2^4 = 6;
—Зх] 4 2x2 “ ^х3 ~ k
Разделив каждое уравнение на коэффициент при х4, получим:
1 з
~^х1+~^х3 + х4 = 3>
з
xi +X2-3X3---3.
48
Отсюда найдем новое базисное решение:
. 1 з
*4 = 3-~*]-—*3!
3
*2 = 3-“^*1 + 3*3-
При этом
1 3
1(х) - 2хз ~ 4*4 = 2*3 ~ 4(3 - —XI - —*з) = 2хз - 12 + 2xi + 6x3 = ~12 + 2*1 + 8x3 »
= -12. 2 2
Вспомогательные переменные хг и х3 входят в L(x) с положитель-
ными коэффициентами. Поэтому наименьшие возможные для них
значения: xi = 0; х3 = 0. В базисе х2 и jq линейная форма достигает
своего минимума, т.е. L(x)min = -12.
Следовательно, чтобы получить неотрицательные базисные реше-
ния системы линейных уравнений, надо процесс исключения неизвес-
тных вести так, чтобы свободные члены уравнений на всех этапах
процесса оставались неотрицательными. При этом следует руководст-
воваться следующим правилом:
в качестве новой базисной переменной принимается любая
свободная переменная, при которой есть хотя бы один поло-
жительный коэффициент; выводится из базиса переменная,
которая соответствует наименьшему отношению свободных
членов уравнений к соответствующим положительным коэф-
фициентам при вводимой в базис переменной. Такие преобра-
зования называются симплексными преобразователями.
Это очень важно, поскольку для нахождения частного неотрицате-
льного решения, отвечающего наибольшему возможному значению
какой-то одной свободной переменной при нулевых значениях других
свободных переменных, вместо определения области изменения
указанной переменной и подстановки ее наибольшего возможного
значения в общее решение достаточно принять эту переменную за
базисную и подвергнуть систему симплексному преобразованию,
перейдя к новому базису, что значительно упрощает расчеты.
Вычисления удобно производить с помощью симплексных таб-
лиц. Переход от одной таблицы к другой соответствует одной итера-
ции, т.е. переходу от одного базиса к другому, при этом значение
целевой функции уменьшается. За определенное число итераций
переходят к базису, для которого получают оптимальное (минималь-
ное или максимальное) значение целевой функции. Рассмотрим
симплексный метод в общем виде.
Общая задача линейного программирования заключается в мини-
мизации (максимизации) линейной формы, переменные которой
связаны между собой некоторой системой линейных уравнений и
подчинены условию неотрицательности.
49
Пусть необходимо минимизировать линейную форму
L(x)-С1Х1+С2Х2 + • • • +сп хп
при условиях (для наглядности нулевые и единичные коэффициенты в
уравнениях сохранены):
lxj + 0x2 +... + вхт +<»lm+i*m+l + - + eln*n“I’i;
Qxi + 1x2 + - + ®*m + e2m+l *m+l+ ••• + ®2n*n “
0*1+ 0x2 + •••+ lxm + <>mm+l *m+l+ •••+ emn *n “ 0m.
В данной системе уравнений уже имеется готовый базис, посколь-
ку каждое уравнение ограничений содержит неизвестную с коэффи-
циентом, равным единице, которой нет в других уравнениях, т.е. из
коэффициентов при переменных xi,X2, ...,xm можно составить единич-
ную матрицу.
Решим уравнения относительно базисных переменных
XI - Ь1 - («1т+1 хт+1 +... + <цп хп);
Х2 = Ь2 - («2т+1 *т+1+ - + «2п
хт ~ Ощ “ (втт+1 *т+1+ • • •+ отп хп),
а целевую функцию выразим через свободные переменные, подставив
в неё на место базисных переменных их выражения через свободные
переменные:
1(х) С161 + С2 62 + - + Ст bm - (q «1т+fC2 в2т+1 +... + ст amm+fym+l -... - (qein +
+ <?2 «2п + — + ст атп> хп + "•+ сп хп •
Переменные xi, хг, ..., хт, с помощью которых найден первый
базисный план, являются базисными, а остальные xm+i, хт+2> хп -
свободными. Базисных переменных должно быть всегда столько,
сколько уравнений в системе. Исходя из условия неотрицательности,
наименьшее значение свободных переменных равно нулю. Полученное
базисное решение системы уравнений и является ее первоначальным
допустимым решением, т.е. xi ~ bi, Х2 “= Ьг, ...» хт = bm, xm+i = 0, ...,
хп = 0.
Этому решению соответствует значение целевой функции
1(х) - ci Ь1+С2 Ъ2+...+ст ьт.
Первоначальное решение проверяется на оптимальность. Если оно
неоптимально, то путем введения в базис свободных переменных
находят следующее допустимое решение с меньшим значением целе-
вой функции. Для этого определяют свободную переменную, которую
необходимо ввести в базис, а также переменную, которую необходимо
50
вывести из базиса. Затем переходят от предыдущей системы к после-
дующей эквивалентной системе. Осуществляется это с помощью
симплекс-таблиц. Решение задачи продолжается до получения опти-
мального значения целевой функции.
Симплексные таблицы составляют следующим образом. Вверху
таблицы помещают все переменные х;, ....... и коэффициенты су, с
которыми соответствующие переменные входят в целевую функцию.
Первый столбец q состоит из коэффициентов целевой функции при
переменных, вошедших в базис. Затем следует столбец базисных
переменных и свободных членов уравнений. Элементы остальных
столбцов таблицы представляют собой коэффициенты при перемен-
ных, с которыми последние входят в систему уравнений. Таким
образом, каждой строке таблицы соответствует уравнение системы,
решенное относительно базисной переменной. В таблице показан и
вариант плана, который соответствует целевой функции при данном
базисе.
Нижняя строка таблицы называется индексной. Каждый ее эле-
мент (оценка) А /определяют
где су — коэффициенты при соответствующих переменных в целевой функции; zj—сумма
произведений коэффициентов целевой функции.при базисных переменных на соответст-
вующие переменные — элементы /то столбца таблицы.
Если ау - коэффициент симплексной таблицы i-й строки у-го
столбца, а с; - коэффициент целевой функции f-й базисной перемен-
ной, то
т
В первую симплексную таблицу (табл. 3.1) заносят первоначальное
допустимое базисное решение задачи:
Д1 = z\ — ci ci — ci “ 0;
Am’^m-cm-cm-cm = 0;
дщ+1 = Ч Чт+1+ с2 а2т+1+ - + ст ®mm+l “ ст+1!
. дл “ Ч в1л + с2 ®2л + •••+ ет атп “ ®л-
. Первым шагом в анализе первоначального допустимого базисного
решения является проверка его на оптимальность, заключающаяся в
отыскании в индексной строке таблицы наименьшей положительной
51
Таблица 3.1 ’
Ч Базисные перемен- ные cj С1 С2 .... ст СЛ1+1 .... сп
План Х1 х2 .... хт *т+1 .... хп
«1 *1 Ь1 1 0 .... 0 .... «1п
С2 *2 Ь2 0 1 .... 0 fl2m+l .... ®2п
ст хт ”б 0 .... Г ....
Индексная строка Ду-zy-cj L(x) 0 0 .... 0 дт+1 .... дл
оценки Ду. Допустим, что наименьшим положительным элементом
последней строки табл. 3.1 будет Дт+]. Если окажется несколько^
равных минимальных положительных элементов, то можно выбрать
любое из них. Если же в индексной строке положительных чисел нет,
то это значит, что получено оптимальное решение.
Столбец с наименьшей положительной оценкой в индексной
строке называется разрешающим, а переменная столбца должна
вводиться в базис.
Чтобы установить переменную, которая должна быть выведена из
базиса, определяют отношения свободных членов к положительным
элементам разрешающего столбца. Строка с наименьшим отношением
называется разрешающей, а переменная этой строки выводится из
базиса. Если окажется несколько равных наименьших отношений
свободных членов к коэффициентам разрешающего столбца, то сле-
дует брать отношение с наибольшим знаменателем.
Пусть минимальным из этих отношений будет i>2/a2m+b Следует
отметить, что если при какой-либо свободной переменной нет ни
одного положительного коэффициента а^, то решение системы будет
неотрицательным при любом положительном значении этой перемен-
ной, т.е. оно неограничено сверху.
Элемент таблицы, находящийся на пересечении разрешающего
столбца и разрешающей строки, называется разрешающим элементом.
В нашем примере это коэффициент а2т+1-
Итак, мы установили, что из базиса следует вывести переменную
хг, а вместо нее ввести переменную хт+р Для этого следует перейти от
первой симплексной таблицы ко второй. Преобразования таблицы
следует начинать с разрешающей строки 2
arj ~ arjl arh>
I
где arj — новое значение элемента разрешающей строки; arj — старое значение этого эле-
мента; агь — разрешающий элемент, т.е. элемент, стоящий на пересечении разрешающей
строки г разрешающего столбца h.
52
Эту формулу можно записать так:
Новое значение \ / Старое значение \
элемента разрешаю-)= | элемента разрешаю-
щей строки / \ щей строки у
Разрешающий
элемент
Остальные элементы новой симплексной таблицы определяют так:
t arj aih
a^—ZT'
Tj» ау - новое значение элемента i-й строки J-го столбца; ау - старое значение этого
элемента; arj - элемент, стоящий на пересечении разрешающей строки и данного столбца;
— элемент, стоящий на пересечении данной строки и разрешающего столбца.
Это можно записать так:
Элемент, стоящий на пересечении \
этого столбца и разрешающей 1х
строки /
(Элемент, стоящий на пер
сечении данной строки
и разрешающего столбца
Приведенная формула выражает так называемое правило прямо-
угольника, поскольку ее элементы образуют в симплексной таблице
вершины расчетного прямоугольника.
Правило деления элементов разрешающей строки на разрешаю-
щий элемент и правило прямоугольника наглядно показаны во второй
симплексной таблице (табл. 3.2).
Оценки Ду индексной строки новой симплексной таблицы можно
определять двумя способами: методом прямоугольника, как и осталь-
ные элементы таблицы, или описанным способом по формуле
m
Aj= S CiOy — Cj.
i=l
Значения оценок в обоих случаях должны быть одинаковыми, что
служит контролем за правильностью составления таблиц. Рассчитаем
элементы индексной строки табл. 3.2 вторым способом, ограничив-
шись преобразованием уравнения в тождество только для Д2. Для
этого подставим вместо Дт+1 в первую часть уравнения значение
Лт+1 = С1 ®т+1+ с2 «2т+1 + - + ~ ст+1!
J Г ч 0 ,Л J
Д1 ° q(1 ~ м >+ с"»+1 + •"*Ст {0“ „„ ; Я С1 ‘°:
I e2m+l ®2т+1 ®2т+1 J
4
53
ci Базисные перемен- ные ci Cl C2 ...
План xl x2 ...
byim+l J °°lm +1 e2m+l Л ^Irn+l 0- «2m+l
ci *1 h-' e2m+l
cm+l xm+l b2 e2m+l 0 e2m+l 1 e2m+l ...
cm xm m «2m+l J Qenwn+l «2m+i e2m+l ...
Индексная ст- рока AjsZj—су L (x) 0--^ e2m+l a 0- C2m+1 ...
Таблица 3.2
ст ст+1 ... cn
хт хт+1 ... xn
e2m+l Д2т-ЦД1т+1 e2m+l ... вь~ ЛЛ ' e2m+l
0 g2m+l
«2т+1 g2m+l e2m+l
1 0°тт+1 fl2m+l emm+l ’ в2т+1*Цпт+1 «2m+l ... a2namm+l «mn ~ e2m+l
q вДт+1 e2m+l / дт+1- g2m+l Api+l e2m+l ... . «2п Дт+1 Д»- e2m+l
J Г ч 1 /1
Д2Я|С1(О----------- ) + <тп+1-- +~ + <тп(О---------)| ~С2Я
[ °2т+1 ч а2т+1 02m+l J
lelm+l ч ,л lfl2m+l% lflmm+l4 ,л 1
=q (0 -------) + С2 (О --;—) +... + ст (О --) - cm+i (О -----
fl2m+l fl2m+l fl2m+l *2m+l
Аналогично
J I tolm+l ч О _ J
дт= ч(°- " ' )+ст+1 —— +-..+<тп(1- ) -<тп = 0;
I fl2m+l e2m+l fl2m+l I
A I f e2m+l elm+l 4 e2m+l
дт+1 s| C1 (alm+l *“ )+ cm+l АЛ + •••+ cm (amm+l *“
[ fl2m+l fl2m+l
e2m+l amm+l J
------------) - cm+l= cm+l “cm+l = °!
e2m+l J
.1 [ , e2nelm+l e2n e2nemm+l J
дп ” ci («In ~ --------- +cm+l~-----+ - +cm(emn ~-------------) ~ cn
L «2m+l a2m+l a2m+l J
e2n дт+1
Значения оценок совпали, значит, расчет второй симплекс-таблицы
выполнен правильно.
Переход к новому базису (составление новой симплексной таб-
лицы) осуществляется для улучшения имеющегося плана, а следова-
тельно, уменьшения значения целевой функции. Как же изменилась
целевая функция в результате проведенных преобразований?
Базисное допустимое решение во второй симплекс-таблице:
. ь2в1т+1 . ь2втт+1
*1 “ Ь1-----7Г-:-----’ *2 “ °! хт = Ьт-йя .
®2т+1 в2т+1
1>2
в2т+1
Исходное значение целевой функции (первая симплексная таб-
лица):
^Мисх “ Cl bl + «2 г>2 + - + ст Ьт-
Подставим новые значения переменных в формулу целевой функции:
,, , bi elm+l, .. ^2 emm+l , ,
ВДнов “ ci(bl - ) + ... + ст (Ът - —) - (ci «im+i + С2 в2т+1 +
e2m+l «2т+1
. ,bj
+... + ст атm+i)--- .
а2т+1
55
Так как
&2alm+l ,
(q~---------- ]
......
°2m+l
&2
(------ )<b2,
fl2m+l
то значение исходной целевой функции в новом базисе уменьшилось,
т.е.
J'WhoB <^*)исх*
Следовательно, в результате преобразований симплекс-таблицы по
алгоритму симплекс-метода достигнуто снижение целевой функции,
что и являлось целью задачи.
Сформулируем основные правила симплексного метода линейного
программирования (при решении задачи на минимум):
1) систему ограничений задачи линейного программирова-
ния необходимо решить относительно какого-либо базиса.
Выразить линейную форму (целевую функцию) через свобод-
ные переменные;
2) составить симплексную таблицу. Если в индексной
строке все элементы отрицательны, то базисное решение
оптимально. Задача решена;
3) если в индексной строке симплекс-таблицы есть поло-
жительные элементы, то столбец, соответствующий минималь-
ному из них, принимается за разрешающий. Составляются
отношения элементов столбца свободных членов к положи-
тельным элементам разрешающего столбца. Строка, соответст-
вующая минимальному из этих отношений, является разре-
шающей. Элемент таблицы, находящийся на пересечении
разрешающего столбца и разрешающей строки, называется
разрешающим;
4) переходить к новому базису следует, исключая из
старого базиса переменную, соответствующую разрешающей
строке, вводя вместо нее переменную, которая соответствует
разрешающему столбцу. Составляется новая симплекс-табли-
ца, соответствующая новому базису. Возвращаются к п. 2.
Решим симплексным методом уже знакомый пример.
Дана система
xi + Зхз+ 2x4 = 6;
хз + хз + 3x4 s 12.
56
Таблица 3.3
ci Базисные переменные ci 0 0 2 -4
План *1 *2 х3 *4
0 Х1 6 1 0 3 2
0 х2 12 0 1 1 3
Индексная строка L(x) = 0 0 0 -2 4
Среди неотрицательных решений системы найти то, которое
обращает в минимум линейную форму
L(x) “ 2хз*4*4.
Базисными переменными являются *i и х2. решим систему огра-
ничений относительно базисных переменных:
'/ Х1 = б-(3*з + 2х4);
х2 = 12-(х3 + Зх4).
Линейная форма останется без изменений, так как базисные
переменные в нее не входят.
Составим симплекс-таблицу (табл. 3.3).
Первое базисное решение х^ = 6, х2 = 12, х$ = 0, х4 = 0. При этом
линейная форма L(x) = 0.
Проверим, является ли полученное решение оптимальным. Для
этого вычислим оценки индексной строки
т
i-l
Д1 = 0-1 + 0-0 - 0 = 0;
Д2 = 0-0 + 0-1 -0 = 0;
Дз = 0-3 + 0-1-2—2;
Д4 = 0-2 + 0-3 - (-4) = 4.
В индексной строке есть одна положительная оценка, равная 4.
Это значит, что данное базисное решение не является оптимальным и
может быть улучшено введением в базис другой переменной из числа
свободных.
57
Таблица 3.4 ,
Ci 1 Базисные переменные ej 0 0 2 -4
План Х1 х2 х3 х4
*4 3 1/2 0 3/2 1
0 х2 3 -3/2 1 —7/2 0
Индексная строка L(x) = —12 —2 0 —8 0
Разрешающим является столбец, соответствующий переменной х».
Она и должна вводиться в базис.
Чтобы определить разрешающую строку, разделим свободные
члены на положительные элементы разрешающего столбца и выберем
из этих отношений минимальное. Оно равно 3 в строке, соответствую-
щей переменной хр Эта строка является разрешающей, а переменная
xi должна быть выведена из базиса. Разрешающий элемент - 2.
При построении второй симплекс-таблицы (табл. 3.4) преобразо-
вания начинаются с разрешающей строки, элементы которой делятся
на разрешающий элемент.
Остальные элементы новой симплекс-таблицы определяются по
правилу прямоугольника. Например, для клетки xi хг новый элемент
равен
Оценки индексной строки определяются
т
Е eiaij~cj>
Al = (—4) • “+0-(——) —0“—2;
Aj “ + 0*1 — 0 s 0;
3 7
ДЗ”(-4)-~+0-(—^-2--8;
Д4 ® (—4)4 + 0*0 — (—4) = 0.
Проверим правильность вычислений, для чего рассчитаем оценки
методом прямоугольника:
1'4 3*4
А1-0-— «-2; Д3 = (-2)_— =-8;
0'4 2*4
Д2 = 0 — = 0; Дл = 4——• = 0.
2*2
58
Значения оценок совпали, значит, вычисления выполнены пра-
вильно.
Отсутствие положительных элементов в последней строке таблицы
является признаком оптимальности решения. Следовательно, опти-
мальным является решение:
*1 “ 0; *2 “ 3; *з - 0; яд = 3.,
Минимальное значение целевой функции
L (х) - 2x3 - 4*4 - 2-0 - 4-3 = -12.
Решение задачи окончено.
г
3 J. Определение допустимого базисного решения
Чтобы приступить к решению задачи линейного программирования
симплексным методом, необходимо иметь допустимое базисное
решение. Для упрощения расчетов при составлении первого допусти-
мого решения ограничения задачи следует преобразовать таким
образом, чтобы они содержали как можно больше базисных перемен-
ных, т.е. переменных, которые входят только в одно из уравнений
системы и имеют коэффициент, равный единице. Это достигается
элементарным преобразованием системы или специальными вычисли-
тельными приемами. Рассмотрим вычислительные приемы.
Система ограничений задачи линейного программирования может
быть записана в трех основных формах.
1. Система записана неравенствами вида < (меньше или равно):
«11 *1 + «12 *2 + ••• + «1п *п 4 И;
«21 *1+ «22 *2 + •••+ «2п *п 4 ЬТ>
«т 1*1+«m2*2 + -+«mn *n ,
гдеЬ{ * 0 (i»1,2,
Тогда систему неравенств заменяют эквивалентной ей системой
линейных уравнений путем введения базисного количества (количе-
ство уравнений системы) дополнительных неотрицательных перемен-
НЫХХн+1,Хц+2,
Дополнительная переменная равна разности между правой и
левой частями неравенства:
* «11*1 +«12*2 + -+«ln*n+*n+l-bi;
«21*2+®22*2 + -+«2п*п+*п+2-Ь2:
»т 1 *1 + ®т2*2 + - + «тп *п +*п-нп = ьт •
59
Данная система представляет собой каноническую форму, а
дополнительные переменныеxn+i,xn+2, ...,хп+т составляют базис.
Если решить систему относительно дополнительных переменных,
то получим:
хп+1 “bl -(«11XI +«12X2 +... +«1„ х„);
хп+2 = Ьг - («21 xi + «22X2 +... + «2п хп);
хпип “bm~ (emi xi +«m2X2 +... + атп хп).
Базисными переменными являются xn+I (/= 1, 2, ..., m), а свобод-
ными переменными Xj (j = 1,2,..., n).
Полагая, что свободные переменные равны нулю: Xj - 0, получим
начальное допустимое базис ное решение:
хп+1 = bl,хп+2»&2> •••,хп+т ° ьт-
2. Ограничения задачи линейного программирования выражены
системой линейных уравнений:
«11XI + «12X2 +... + «1П хп - t>i;
«21 xi + «22 Х2 +... + «2п хп = ь21
«mlХ1 + «m2Х2 + - + «тп хп "ьт-
Не нарушая общности рассуждений, можно считать, что Ь,- > О
0= 1,2,..., л).
В этом случае исходное допустимое базисное решение можно
получить при помощи метода искусственного базиса. В уравнение
системы вводится базисное множество искусственных переменных
xn+i (/ = 1,2,..., т), которые связаны с переменными исходной системы
Xj (j = 1,2,..., п) соотношениями
*n+l" И - («11XI + «12X2 +... + «1п хп);
xn+2 “ Ь2 - («21 xi + «22 Х2 +... + «2п хпУ
хп+т («ml *1 * «m2 х2 + ••• + «тп хп).
Затем переходят к реальному допустимому базисному решению,
т.е. заменяют искусственные переменные в базисе на исходные пере-
менные. Очевидно, что если исходные переменные х(- (i = 1, 2, ..., л)
будут являться решением системы, то все вспомогательные перемен-
60
ные равны нулю. Чтобы добиться этого, необходимо минимизировать
вспомогательную линейную форму
F = хп +1+ *п+2 + •••+ *n+m>
т.е. возникает вспомогательная задача, для решения которой можно
использовать симплексный метод. Допуская, что свободные перемен-
ные xi = О, Х2 = 0,..., хп = 0, получим допустимое решение с базисными
искусственными переменными
хп+1 = Ы, хп+2 = Ъ2.хп+ш = ьт-
Затем симплексными преобразователями через некоторое число
итераций найдем базисное решение, которое дает минимум F. При этом
минимальное значение функции F может быть положительным или
равным нулю, поскольку функция представляет собой сумму неотри-
цательных переменных.
Если минимум F > 0, то вспомогательная задача не имеет допус-
тимого решения. 1
Если минимум F = 0, то искусственные переменные xn+i = О,
хп+2 = 0... = 0, а переменные xj, хг, .... хп образуют допустимое
решение исходной системы, и при этом среди них будет не более т
переменных, отличных от нуля. Именно этот случай и встречается при
решении большинства практических задач.
Если же в процессе решения F = 0, а некоторые из вспомогатель-
ных переменных остались в числе базисных, то в уравнениях, которые
содержат такие вспомогательные переменные, свободные члены
обязательно равны нулю, поскольку при достижении целевой функ-
цией своего минимума все базисные неизвестные обязаны равняться
своим свободным членам. В этом случае нужны дополнительные
преобразования, а именно: не учитывая последней строки симплекс-
ной таблицы, следует найти положительный элемент в строке вспомо-
гательных переменных, принять его за разрешающий и продолжить
затем решение как обычно.
Таким образом, при методе искусственного базиса, выполнив
минимизацию вспомогательной целевой функции F, убеждаются либо
в несовместимости исходной системы ограничений (тогда исходная
задача линейного программирования не имеет решения), либо в ее
совместности, после чего приступают к решению непосредственно
исходной задачи, заменив искусственную форму F исходной линейной
формой.
3. Ограничения задачи выражены неравенствами вида > (больше
или равно):
«11*1+ ei2x2 + — + ein*n>6V
021 *1 + «22 *2 + - + «2п хп * ЪЪ
«ml *1 + «m2 *2 + ••• + атп хп > Ът.
61
В этом случае в левую часть неравенств вводят неотрицательные
дополнительные переменные a^+i, Хп+2> хп¥т с коэффициентом -1. В
результате система неравенств заменяется эквивалентной системой'
уравнений
«11 *1 + «12 *2 + - + «1п *п~ *п+1 • h;
«21 *1+ «22 *2 + - + «2п хп - *п+2 “ Ъ;
«ml *1+ «m2 *2 + — + «тп хп ~ хп+т “ Ът.
Дополнительные переменные не могут быть приняты за базисные,
поскольку они входят в уравнения с отрицательными коэффициен-
тами. В этом случае для определения допустимого базисного решения
нужно воспользоваться уже известным методом искусственного
базиса.
Для решения задачи, в которой уже есть базис, нужно провести
примерно т итераций, а для решения задачи с полным искусствен-
ным базисом - около 2т итераций. Поэтому следует стараться начать
вычисления с минимальным числом искусственных переменных.
3.3. Экономическое содержание симплексного метода
Симплексным методом решают задачи максимизации и миними-
зации целевой функции. Методика решения их различна. Однако их
можно решать и по единому алгоритму симплексного метода, если
предварительно выполнить преобразования целевой функции. Так,
чтобы задачу на максимум решить по алгоритму симплексного метода
для задач на минимум, необходимо изменить знаки при переменных в
максимизируемой целевой функции на противоположные, тогда
maxL(x)- — min —L(x).
Мы же рассмотрим решение задачи линейного программирования
на максимум без преобразования целевой функции и изложим эконо-
мическое содержание симплексного метода на конкретном примере.
Рассмотрим условный пример. На предприятие по производству
запасных частей для автомобилей поступило три сорта материалов:
первого - 1200, второго - 300, третьего - 800 кг. Эти материалы могут
быть использованы для выпуска запасных частей трех видов.
На производство запасной части первого вида требуется 5 кг
материала первого сорта и 4 кг второго сорта. Материал третьего сорта
при производстве запасных частей первого вида не используется. На
производство одной запасной части второго вида необходимо израс-
ходовать материала первого сорта - 5 кг, второй сорт не используют и
62
третьего сорта - 2 кг. На единицу запасных частей третьего вида
расходуют материала первого сорта 2, второго - 3, третьего - 4,8 кг.
От реализации одной запасной части первого вида предприятие
получит 5 р. прибыли, второго вида - 8 и третьего вида -6 р.
Какое количество запасных частей каждого вида следует произво-
дить из имеющихся материалов, чтобы обеспечить предприятию
получение наибольшей прибыли?
Составим экономико-математическую модель задачи.
Обозначим объем производства запасных частей первого вида
через Ц, второго - третьего - Переменные х^, не могут
быть отрицательными, так как это противоречило бы их экономичес-
кому смыслу, поскольку объем производства не бывает отрицате-
льным. 4
Потребность в материале первого сорта составит
5*j+5*^ + 2*3.
Этот расход материалов не должен превышать их наличия, т.е.
1200 кг. Рассуждая аналогично, можно записать ограничение по рас-
ходу материалов второго и третьего Сортов соответственно:
4*1 + 3*3 <300;
2*2 + 4,8*3 <800.
Прибыль, полученная от реализации запасных частей, L(x) = 5jq +
+ 8*2 + 6х3.
Таким образом, задача сводится к определению значений х;, хц, х$
при условии, что
5*1 + 5*2 + 2*з < 1200;
4*1+3*з <300;
2*2 + 4,8*з <800;
*1 >0;*2 ^0;*з >0,
которые максимизируют линейную функцию
£(*) = 5*1 + 8*2 + 6*з«
Чтобы приступить к решению данной задачи симплексным мето-
дом, необходимо определить первое допустимое базисное решение.
Для этого неравенства преобразуют в равенства путем прибавления в
левую часть неравенств дополнительных переменных зд и с
63
I
коэффициентом, равным единице, и нулевыми коэффициентами в
целевой функции:
+ 5x2 + 2хз + Х4 « ^0;
(
4xi + Зхз + х5 = 300;
2x2 + 4,8хз + xg « 800;
xi > 0; Х2 0; хз 0; Х4 > 0; Х5 > 0; xg > 0;
I(x) - 5xi + 8*2 + 6*3 + 0*4 + 0x5 + 0*6max.
Дополнительные переменные рассматриваются как показатели
недоиспользования имеющихся материалов: первого сорта - *4,
второго - *5, третьего - х$.
Дополнительные переменные Х4, *5, Хб не способствуют увеличе-
нию прибыли, так как недоиспользованное сырье не участвует в
производстве. Поэтому в линейной форме L(x) эти переменные записы-
вают с коэффициентом прибыли, равным нулю.
При решении задачи относительно дополнительных переменных
возможны три случая. ___
Случай 1 - дополнительная переменная равна нулю (xn+f; i = Т, m).
Это значит, что при производстве используются все материалы (остат-
ков нет).
Случай 2 - дополнительная переменная больше нуля, т.е. материа-
лы используются неполностью, имеется остаток, который равен раз-
ности между запасами материалов и количеством израсходовайных
материалов. Например, по материалам первого сорта это условие
выражается:
*4 = 1200 - (5x1 + 3x2 + 2хз)-
Случай 3 - дополнительная переменная равна запасам материа-
лов, сырье используется неполностью, а основные переменные задачи
(xi, xi, хз) принимают нулевые значения. Например, по материалам
первого сорта это значит, что
Х4 «1200; xi = 0; х2 “ 0; хз а 0.
В задаче оказалось три уравнения и шесть переменных. Такая
задача имеет множество решений, среди которых нас интересует
единственное - то, которое обеспечивает получение максимальной
прибыли (оптимальное решение).
Решение задачи начинают с определения первого базисного допус-
тимого плана. За базисные переменные принимаются дополнительные
/ 64
переменные хь, х$, х& так как каждая из них входит лишь в одно
уравнение с коэффициентами, равными единице, которые образуют
единичную матрицу.
Чтобы получить первое допустимое базисное решение, уравнения
решают относительно базисных переменных:
хь = 1200 — (5xi+ 5x2 + 2*3):
Х5 « 300 — (4xi + Зхз);
xj « 800 - (2x2 + 4.8*з)-
Затем подставляют их значения в линейную форму L(x). Но в связи с
тем, что дополнительные переменные входят в линейную форму с
нулевыми коэффициентами, для базиса из дополнительных перемен-
ных она всегда равна нулю.
В нашем примере первым базисным решением является план:
xi = 0; хч = 0; хз = 0; хь = 1200; xs = 300; хв = 800, который является допус-
тимым, поскольку значения переменных удовлетворяют системе
уравнений, отражающей условия задачи, и они неотрицательны.
С экономической точки зрения полученное первое базисное
решение означает, что производство еще не начато и запасы материа-
лов находятся на складе. Предприятие никакой продукции не выпус-
кает (xi = 0; хг = 0; хз = 0) и, естественно, прибыли не имеет. Действи-
тельно, если подставить значения переменных в линейную форму, она
окажется равной нулю.
Далее, первое допустимое базисное решение улучшают путем
введения в него основных переменных задачи. Значение целевой
функции при этом увеличивается и в конечном итоге достигает макси-
мума. Это соответствует тому, что производство начато, а прибыль
предприятия увеличивается за счет включения в производство того
или иного вида продукции. На каждом этапе анализируется включе-
ние в производство только одного вида продукции, что соответст-
вует переходу к новому базису. Переход от одного базиса к другому
осуществляется с помощью симплексных таблиц по алгоритму симп-
лексного метода.
В первую таблицу заносится первоначальное допустимое базисное
решение (табл. 3.5). Метод составления симплексных таблиц нам уже
известен. Напомним только, что
с{ - коэффициенты линейной формы при переменных, вошедших
в базис;
су - коэффициенты линейной формы, включая и базисные перемен-
ные;
- оценка индексной строки, которая характеризует эффектив-
ность включения в план (базис) /й переменной и показывает, насколь-
ко изменится целевая функция на каждую единицу переменной.
65
Таблица 3.5
Ci Базисные переменные _ ci 5 8 6 0 0 0
План *1 *2 х3 *4 Х5 Хб
0 *4 1200 5 5 2 1 0 0
0 х5 300 4 0 3 0 1 0
0 800 0 2 4,8 0 0 1
Индексная строка ~ci 1(х)«0 -5 -8 -6 0 0 0
В последней строке таблицы оценка определяется по правилу!
элементы столбца с, умножаются на соответствующие
коэффициенты столбца, для которого определяется оценка,
полученные произведения суммируются и из этой суммы
вычитается значение коэффициента Су при данной переменной
в линейной форме.
Для столбца, соответствующего переменной xi, оценка составит
Д1 = 0-5 + 0-4 + 0-0-5 = -5;
для переменной xj
Д2 = 0-5 + 0-0 + 0-2-8 = —8;
для переменной хз
Д3- 0-2 + 0-3 + 0-4,8 -6 = -6.
Для базисных переменных (в табл. 3.5 это х», х$, xj) оценки всегда
равны нулю, так как эти переменные уже вошли в план и определять
их эффективность по отношению к плану не требуется.
Первым шагом в анализе первоначального допустимого базисного
решения является проверка его на оптимальность. Поскольку оценки
Ду характеризуют эффективность технологических способов по отно-
шению к сложившейся структуре производства, они же и являются
показателями оптимальности плана. Так, из первой симплексной
таблицы (табл. 3.5) следует, что если включить в план производство
продукции первого вида (xj), то на каждую единицу предприятие
получит 5 р. прибыли; второго вида (х2) - 8 р.; третьего вида (х3) -6 р.
Наибольшую прибыль в расчете на единицу продукции предприятие
получит при производстве продукции второго вида, которому в
индексной строке таблицы соответствует наибольшая по абсолютной
величине отрицательная оценка. Эту продукцию следует производить
в первую очередь.
66
Таблица 3.6
е1 Базисные переменные ci 5 8 6 0 0 0
План Х1 х2 х3 *4 х5 ХЬ
8 *2 240 1 1 0,4 0,2 0 0
0 х5 300 4 0 3 0 1 0
0 *6 320 2 0 4 —0,4 0 1
Индексная строка £(х) = 1920 3 0 -2,8 1,6 0 0
Следовательно, при решении задач линейного программирования
на максимум симплексным метолом проверка допустимого базисного
решения на оптимальность заключается в отыскании в индексной
строке симплексной таблицы наибольшей по абсолютной величине
отрицательной оценки (наименьшего отрицательного числа). Столбец
таблицы, соответствующий переменной с наибольшей по абсолютной
величине отрицательной оценкой, является разрешающим, а сама
переменная вводится в базис, что приводит к улучшению плана. Если
окажется несколько равных, наибольших по абсолютной величине
отрицательных оценок, в базис вводится.любая из соответствующих
переменных.
Если в индексной строке симплексной таблицы отрицательных
чисел нет, это значит, что план не может быть улучшен и получено
оптимальное решение, которому соответствует максимальное значе-
ние целевой функции. Решение задачи на этом оканчивается.
Базисных переменных должно быть столько, сколько уравнений в
системе ограничений. Поэтому, чтобы ввести новую переменную, надо
заменить ею какую-то из базисных.
Чтобы установить переменную, выводимую из базиса, составляют
отношения свободных членов (в симплексной таблице это столбец
„план”) к соответствующим положительным коэффициентам разреша-
ющего столбца (на ноль и на отрицательные числа не делят). Из этих
отношений выбирают наименьшее, так как оно определяет количество
продукции данного вида, которое можно произвести, исходя из огра-
ниченности недоиспользованных ресурсов (материалов). В производ-
стве - это так называемое узкое место при выпуске данной продук-
ции. Соответствующая строка является разрешающей, а базисную
переменную этой строки выводят из базиса, заменяя переменной
разрешающего столбца.
Элемент, стоящий на пересечении разрешающего столбца и разре-
шающей строки, принимается за разрешающий элемент.
В нашем примере (см. табл. 3.5) вместо переменной х* в план
следует ввести переменную Х2, разрешающий элемент - 5.
Переход к новому базису осуществляется преобразованием симп-
лексной таблицы и составлением новой (табл. 3.6).
67
Компоненты каждого столбца симплексной таблицы представляют
собой не просто числа, а являются коэффициентами замещения дан-
ным технологическим способом каждого из способов, включенных в
план. Так, компоненты вектор-столбца *2 (первая симплексная табли-
ца, табл. 3.5) показывают, что при включении в план производства
продукции второго вида интенсивность использования технологичес-
кого способа *4 уменьшится на 5 ед., интенсивность способа х$ не
изменится, интенсивность способа х$ уменьшится на 2 ед. При этом
прибыль предприятия увеличится на 8 р. Действительно, если обрати-
ться к условиям задачи, то установим, что на производство одной запас-
ной части второго вида тратится 5 ед. материала первого сорта, 2 ед.
материала третьего сорта; материал второго сорта при изготовлении
этих запасных частей не используется. При реализации запасных
частей втооого вида предприятие получит 8 р. прибыли.
Имея такую информацию, можно предсказать, что, исходя из
ограниченности материалов первого сорта, предприятие сможет произ-
вести всего 240 ед. (1200:5) запасных частей второго вида (наименьшее
из отношений свободных членов к положительным элементам разре-
шающего столбца) и получит от этого прибыль 1920 р. (8-240). При
изготовлении будет израсходовано все 1200 ед.(5-240) материалов
первого сорта и 480 ед. (2-240) материалов третьего сорта.
Убедимся в правильности таких рассуждений при разработке
нового плана производства (вторая симплексная таблица).
Преобразования симплексной таблицы начинаются с разрешающей
строки, для чего все элементы делятся на разрешающий элемент 5 и
заносятся во вторую симплексную таблицу (см. табл. 3.6).
Остальные элементы новой симплексной таблицы определяются по
правилу прямоугольника и правилу расчета оценок индексной строки.
Преобразованные элементы записываются в соответствующие клетки
второй симплексной таблицы.
Для сокращения расчетов следует иметь в виду следующее:
в новой таблице на месте разрешающего элемента всегда будет
единица, а остальные элементы разрешающего столбца - нули;
если в разрешающем столбце окажется нуль, то соответствующая
ему строка переписывается в новую симплексную таблицу без измене-
ний;
если в разрешающей строке имеется ноль, то соответствующий ему
столбец перейдет в новую таблицу без изменений.
В нашем примере во вторую симплексную таблицу перейдут без
изменений вторая строка, пятый (*5) и шестой (x$) столбцы.
В результате преобразований по алгоритму симплексного метода
получен новый допустимый базисный план:
х\ = 0; Х2 - 240; х$ = 0; Х4 = 0; х$ « 300; х$ « 320.
Экономический смысл его в том, что рекомендуется производить
запасных частей второго вида 240 ед. и предприятие получит от этого
68
Таблица 3.7
ci Базисные переменные ci 5 8 6 0 0 0
План xi х2 ХЗ Х4 Х5 хб
8 х2 208 1,2 1 0,24 0 —0,1
0 *5 60 5,5 0 0 0,30 1 -0,75
б хз 80 -0,5 0 1 -0,10 0 0,25
Индексная строка £(х) = 2144 1,6 0 0 1,32 0 0,7
прибыль 1920 р. При этом материалы первого сорта будут использо-
ваны полностью, остатки материалов второго и третьего сортов соста-
вят соответственно 300 и 320 ед., т.е. материалы второго сорта не
используются совсем, а материалов третьего сорта будет израсходо-
вано 480 ед. (800 - 320). Высказанные предположения подтверждаются,
расчетами.
Полученный план производства запасных частей не является
оптимальным при заданных условиях, так как в индексной строке
второй симплексной таблицы (см. табл. З.б) имеется отрицательная
оценка (-2,8), соответствующая переменной х$. Это значит, что план
может быть улучшен за счет производства запасных частей третьего
вида (разрешающий столбец хз), поскольку в результате производства
единицы продукции этого вида предприятие получит дополнительную
прибыль 2,8 р.
Наименьшее отношение свободных членов к положительным
элементам разрешающего столбца (320:4 = 80) соответствует базисной
переменной х$ (разрешающая строка). Разрешающий элемент 4. Следо-
вательно, для дальнейшего улучшения плана, представленного во
второй симплексной таблице, необходимо ввести в базис переменную
хз, а вывести xf,.
Заполним третью симплексную таблицу (табл. 3.7), используя
правило деления элементов разрешающей строки на разрешающий
элемент, правило прямоугольника и правило расчета оценок индекс-
ной строки. Столбцы, соответствующие переменным хз и *5> в новую
таблицу перейдут без изменений.
- В третьей симплексной таблице в индексной строке нет отрицате-
льных оценок. Следовательно, полученный план улучшен быть не
может и является оптимальным, линейная форма L(x) достигает своего
максимального значения. Оптимальное решение: xi = 0; хз = 208; хз -
= 80; Х4 = 0; xs = 60; хе = 0.
Экономический смысл оптимального решения таков: чтобы полу-
чить максимальную прибыль 2144 р., предприятие должно производить
запасных частей второго вида 208 ед., запасных частей третьего вида -
69
80 ед. Запасные части первого, вида производить нецелесообразно;
х$ « 60 означает, что 60 ед. сырья второго вида осталось неиспользован-
ным. Материалы первого и третьего видов используются полностью,
так как Х4 = 0, хе = 0, т.е. остатков этих материалов нет.
Полученное решение проверяют, подставляя значения перемен-
ных в систему симплексных уравнений:
5-0 + 5-208 + 2-80 + 0-1200;
4-0 + 3-80 + 60 = 300;
2-208 + 4,8-80 + 0 = 80;
£(«) = 8-280 + 6-80 = 2144.
Значения переменных удовлетворяют условиям задачи, следо-
вательно, решение правильно.
Ценную информацию представляют коэффициенты и оценки опти-
мального плана (см. табл. 3.7).
Компоненты основных переменных, не вошедших в план, показы-
вают, насколько следует изменить интенсивность вошедших в опти-
мальный план технологических процессов при необходимости введе-
ния в план производства единицы продукции по способу, который не
вошел в этот план.
Например, если по какой-либо причине предприятию потребуется
наладить производство запасных частей первого вида, то на каждую
единицу их производства необходимо сократить производство запас-
ных частей второго вида на 1,2 ед., расход материалов второго сорта
увеличится на 5,5 ед., производство запасных частей третьего вида
необходимо увеличить на 0,5 ед. От этого предприятие понесет убыток
1,6 Р-
Такое положение обусловлено следующим. Производство запас-
ных частей второго вида сократится на 1,2 ед., а каждая единица
приносит предприятию прибыль 8 р., значит, за счет сокращения
производства будет потеряно 9,6 р. (1,2-8) прибыли. Производство
запасных частей третьего вида увеличится на 0,5 ед., а каждая единица
дает предприятию 6 р. прибыли, следовательно, прибыль увеличится
на 3 р. При этом будет произведена и одна запасная часть первого
вида, от реализации которой предприятие получит 5 р. прибыли. В
итоге при производстве каждой запасной части первого вида пред-
приятие потеряет 1,6 р. (-9,6 + 5 + 3).
Исходя из ограниченности ресурсов второго сорта, предприятие
сможет произвести запасных частей первого вида около И ед. (60:5,5).
Общие потери прибыли при этом составят 176 р. (1,6-11).
Установим, почему на 5,5 ед. увеличится расход материалов
второго сорта. Эти материалы расходуются на производство запасных
частей первого и третьего видов (см. условие задачи). На одну запас-
70
ную часть первого вида расходуют 4 ед., а третьего вида - 3 ед.
материала второго сорта. Производство запасных частей первого вида
увеличится на единицу, третьего вида - на 0,5 ед. Общий расход
материала этого вида увеличится на 5,5 ед. (4 + 3*0,5).
По отношению к коэффициентам замещения для основных пере-
менных задачи можно сформулировать общее правило:
положительный коэффициент показывает, насколько сократится
интенсивность соответствующего технологического способа, вошед-
шего в базис, при введении в план производства единицы продукции
данного вида; отрицательный коэффициент показывает увеличение
интенсивности соответствующего технологического способа, вошед-
шего в базис, при включении в план производства единицы продукции
данного вида.
Для дополнительных переменных х^, х$, х$ (количество Недоис-
пользованных материалов соответственно первого, второго и третьего
сортов) коэффициенты замещения показывают, как следует изменить
интенсивность запланированных технологических способов при
дополнительном выделении единицы соответствующего сорта мате-
риала, чтобы получить изменение целевой функции на величину
оценки, указанной в индексной строке так, чтобы увеличить прибыль
предприятия на 1,32 р. При дополнительном выделении единицы
материала первого сорта хд необходимо * увеличить производство
продукции второго вида на 0,24 ед., сократить производство продук-
ции третьего вида на 0,1 ед., при этом высвободятся материалы вто-
рого сорта в количестве 0,3 ед.
При дополнительном выделении, например, единицы материалов
третьего сорта необходимо сократить на 0,1 ед. производство продук-
ции второго вида, увеличить расход (уменьшить запас) материалов
второго сорта на 0,75 ед. и увеличить производство продукции тре-
тьего вида на 0,25 ед. Прибыль предприятия от этого увеличится на
0,7 р. •
Следовательно, для дополнительных переменных положительный
коэффициент замещения показывает увеличение, а отрицательный -
уменьшение интенсивности соответствующего технологического
способа, вошедшего в план производства при дополнительном выде-
лении единицы сырья данного вида.
Оценки индексной строки для основных переменных, не вошед-
ших в оптимальный план, показывают, сколько прибыли пришлось бы
потерять, если была бы произведена единица продукции Соответст-
вующего вида. Для дополнительных переменных эти оценки показы-
вают, сколько единиц прибыли приносит единица материалов данного
вида при производстве продукции. Так, единица материалов первого
вида приносит предприятию 1,32 р., третьего вида - 0,75 р. прибыли.
Оценка для сырья второго вида равна нулю, это означает, что ресурсы
сырья второго вида не лимитируют производство, имеются его из-
лишки.
71
Следовательно, информация, содержащаяся в промежуточных и
последней симплексной таблицах, представляет значительную цен-
ность для проведения экономического анализа, прогнозирования
развития и управления автотранспортным производством.
3.4. Симплексный метод с искусственным базисом
В этом случае, если ограничения задачи линейного программиро-
вания заданы неравенствами типа > (больше или равно) или равенст-
вами, то для определения первого базисного допустимого решения
может использоваться метод искусственного базиса. В этом случае в
систему ограничений вводятся искусственные переменные, которые
принимаются за базисные и минимизируется дополнительная линей-
ная форма, представляющая собой сумму искусственных переменных.
Если в результате решения искусственные переменные станут свобод-
ными, а дополнительная линейная форма - равной нулю, то получено
первое допустимое базисное решение исходной задачи и можно прис-
тупать к решению задачи. Если же дополнительная линейная форма
больше нуля - задача не имеет допустимого решения, ее условия
противоречивы. Таким образом, при использовании метода искусст-
венного базиса вначале решают задачу по минимизации дополнитель-
ной линейной формы, а затем уже основную, в которой минимизи-
руют исходную линейную форму. Отметим, что вместо последователь-
ной оптимизации двух целевых функций (линейных форм) можно
рассматривать одну целевую функцию как сумму дополнительной и
исходной линейной форм. Это так называемая М-задача.
Свое название задача получила от того, что все искусственные
переменные вводят в целевую функцию с коэффициентом М. При
решении задачи на максимум М - это очень большое по абсолютной
величине отрицательное число, при решении задачи на минимум М -
это очень большое положительное число. При этом условии в оконча-
тельном варианте решения искусственные переменные всегда будут
равны нулю, поскольку при решении задачи на максимум в оптималь-
ный план не могут войти переменные, которые имеют в целевой
функции очень большие по абсолютной величине отрицательные коэф-
фициенты, так как это уменьшает функционал. И наоборот, при реше-
нии задачи на минимум наличие в функционале переменных с очень
большим положительным коэффициентом не уменьшает, а увеличи-
вает его.
Если во всех случаях применять один и тот же алгоритм симп-
лексного метода для решения задачи на минимум, т.е. в задаче на
максимум производить преобразования целевой функции, заменяя
знаки при переменных на противоположные, то под М понимают
положительное число, большее любого числа, с которым придется его
сравнивать.
72
Чтобы освоить методику решения задач линейного программиро-
вания с искусственным базисом, решим предыдущую задачу по макси-
мизации прибыли при изготовлении запасных частей по алгоритму
симплексного метода для задач на минимум. На этом же примере
изложим и суть метода скорейшего спуска.
В условия задачи предварительно введем ограничение, заклю-
чающееся в том, что предприятию поставлено условие выпустить
запасных частей первого вида не менее 20 ед., запасных частей второго
вида - не менее 150 ед. Данное ограничение выразится неравенствами
х1>20;х2>150.
Задача заключается в том, чтобы максимизировать, линейную
форму
1(х)« 5x1+ 8x2 + 8x3
при условиях
XI >20;
хг > 150;
5xi + 5x2 + 2хз < 1200;
4xi+ Зхз * 300;
2x2 + 4,8хз * 800;
xi, Х2, хз > 0.
Преобразуем неравенства в уравнения путем введения допол-
нительных переменных Х4 и х$ соответственно в левую часть первого и
второго неравенств с коэффициентом - 1 и переменных х«, xj, х$ с
коэффициентом 1 в третье, четвертое и пятое неравенства. Получим
Х1~Х4 = 2О;
Х2 — xs 150;
5x1+ 5x2 + 2хз + хб “ 1200;
4x1 + 3хз+Х7 = 300;
2x2 + “*>8хз + xj = 800.
Поскольку max L(x) = - min (-£(%)), поменяем знаки коэффициен-
тов целевой функции на противоположные и будем минимизировать
73
Таблица 3,8
Базисные переменные с] -5 —8 -6 0 0 0 0 0 0 0
План *1 *2 *3 *4 *5 Хб *7 Х8 *9 *10
м *9 20 1 0 0 -1 0 0 0 0 1 0
м хю 150 0 1 0 0 —1 0 0 0 0 1
0 *6 1200 5 5 2 0 0 1 0 0 0 0
0 Х7 300 4 0 3 0 0 0 . 1 0 0 0
0 Х8 800 0 2 4,8 0 0 0 0 1 0 0
Ду “ £ ““ Су Цх) М+5 М+8 б -М -м 0 0 0 0 0
эту функцию. В целевую функцию дополнительные переменные
войдут с нулевыми коэффициентами:
1'(х)= -5x1 - 8x2 “ 6х3 + 0*4 + + °*6 + 8x7 + Oxg.
Здесь Х4 означает избыток запасных частей первого вида в сравне-
нии с обязательным минимумом, равным 20 ед.; х$ - избыток запас-
ных частей второго вида над обязательным минимумом в 200 ед.;
*б, Х7, хе - количество недоиспользованных материалов соответствен-
но первого, второго и третьего сортов. Непосредственно за базисные
переменные могут быть приняты переменные Хб, xi и хе, всего же
переменных в базисе должно быть пять, т. е. недостает двух базисных
переменных.
Допишем их, введя, искусственные переменные х9 и х10 в первое и
второе уравнения. В целевую функцию переменные х9 и х10 войдут с
коэффициентом М - очень большое положительное число. Тогда
xi — *4 + *9 = 20;
Х2~Х5 + хю»150;
5xj + $*2 + 2.хз + хб = 1200;
4х1+3хз + Х7 я 300;
2x2 + 4>8хз + хе я 800;
l'(x)e -5xi “ 8x2 “ 8x3 + 0*4 + 0*5 + + 0*7 + Oxg + ^(*9 + *10)-
'Решим уравнения системы относительно базисных переменных
х9, *10» *б» хъ *8 и занесем это решение в симплексную таблицу
(табл. 3.8).
При решении задачи обычным способом для определения разре-
шающего столбца используются оценки индексной строки симплекс-
74
ной таблицы. При этом если задача решается на максимум, выбирается
наибольшая по абсолютной величине отрицательная оценка, если на
минимум - наименьшая положительная оценка. Переменная, соот*
ветствующая этим оценкам, вводится в базис; выводится из базиса
переменная, для которой отношение свободного члена к положитель-
ному элементу разрешающего столбца наименьшее. Такой способ
обеспечивает механический подход к решению задачи с большим
объемом вычислительной работы, так как иногда приходится выпол-
нять дополнительные итерации (переходы) в случае, когда введенную
в базис переменную в последующем приходится выводить из него.
Более рациональным является так называемый метод скорейшего
спуска, суть которого заключается в следующем. Для каждого столб-
ца, соответствующего переменной, не включенной в базис, определя-
ется оценка индексной строки Ду и минимальное отношение свобод-
ных членов к положительным элементам этих столбцов бу. Затем
определяется их произведение, т.е. произведение оценки на соответ-
ствующее минимальное отношение. Столбец, для которого это произ-
ведение будет наибольшим, принимается 39 разрешающий, соответ-
ствующая ему переменная вводится в базис. Из базиса выводится
переменная, соответствующая минимальному отношению свободных
членов к коэффициентам разрешающего столбца. Произведение Ду бу
показывает величину изменения целевой функции. Поэтому, чтобы
скорее достичь оптимума (скорейшего спуска), из произведений
выбирается наибольшее.
Для первой симплексной таблицы (см. табл. 3.8)
Д1-ЛГ+5, 61 = 20, Дх 61 = 20М+100;
= М + 8, 62 - 150, 62 = 150М + 1200;
Д3 « 6, 63 = 100, Д363 = 600.
Учитывая, что М очень большое положительное число, наиболь
шим произведением является Д2 о2. Следовательно, разрешающим
будет второй столбец, разрешающей строкой - вторая строка, разре-
шающий элемент равен единице. Следовательно, в базис вводится
переменная х2, выводится из базиса искусственная переменная хщ.
Отметим, что при выводе из базиса искусственной переменной она
полностью исключается из дальнейших преобразований, поскольку
возвращать ее снова в базис нет смысла.
Преобразования и переход к следующей симплекс-таблице произ-
водятся обычным способом. В результате получим табл. 3.9.
Во второй симплексной таблице (см. табл. 3.9)
Д1-М+5, 61 = 20, Д1 61 = 20М+100;
Д3 = 6, е3 = юо, Д3 е3 - 600;
Д5 = К, 65 « 90, Д3 65 « 720.
75
\
I
Таблица 3J
ci Базисные переменные cj -5 -8 “6 0 0 0 0 0 м,\
План Х1 х2 х3 *4 х5 х6 *7 *8 *9
М х9 ' 20 1 0 0 -1 0 0 0 0 1
-8 х2 150 0 1 0 0 -1 0 0 0 0
0 х6 450 5 0 2 0 5 1 0 0 0
0 *7 300 4 0 3 0 0 0 1 0 0
0 х3 500 0 0 4,8 0 2 0 0 1 0
-Cj Цх) М+5 0 6 -М +8 0 0 0 0
Наибольшим произведением является Л} 0р Переменная jq вводит-
ся в базис, выводится из базиса искусственная переменная х9, кото-
рая из дальнейшего решения исключается полностью.
В результате преобразований перейдем к табл. 3.10.
При переходе от третьей симплексной таблицы к четвертой в базис
вводится переменная х5, выводится из базиса переменная х$. Проведя'
необходимые преобразования, получим табл. 3.11.
В индексной строке табл. 3.11 только одна положительная оценка,
равная 2.8, соответствующая переменной х3. В этом случае не требует*
ся определять наибольшее произведение. В базис вводится перемен-
ная с положительной оценкой, т.е. переменная х3, выводится из базиса
переменная, которой соответствует наименьшее отношение свободных
членов к положительным элементам разрешающего столбца, в данном
случае это переменная х?.
После симплексных преобразований от четвертой таблицы перей*
дем к пятой (табл. 3.12). >
Таблица 3.10 ,
ci Базисные переменные ci -5 -8 -6 0 0 0 0 0
План Х1 х2 х3 х4 х5 х6 *7 *8
-5 х\ 20 1 0 0 -1 0 0 0 0
-8 х2 150 0 1 0 0 —1 0 0 0
0 х6 350 0 0 2 5 5 1 0 / 0
0 Х1 220 0 0 3 4 0 0 1 0
0 *8 500 0 ' 0 4,8 0 2 0 0 1
AJ=ZJ -<7 1(х) 0 0 6 5 8 0 0 * 0
76
Таблица 3.11
ci Базисные переменные ci -5 —8 —6 0 0 0 0 0
План Х1 х2 х3 *4 *5 *6 XI *8
-5 Х1 20 1 0 0 - 1 0 0 0 0
-8 х2 . 220 0 1 0,4 1 0 0,2 0 0
0 х5 70 0 0 0,4 1 1 0,2 0 0
0 Х1 220 0 0 3 4 0 0 1 0
0 *8 360 0 0 4 -2 0 -0,4 0 1
!j~ci -I860 0 0 2,8 -3 0 -1.6 0 0
В индексной строке табл. 3.12 оценки либо отрицательные, либо
равны нулю, все искусственные переменные выведены из базиса,
следовательно, получено оптимальное решение, в котором; xi = 20;
х2 = 190,67; xj = 73,33; х< = 0; х$ = 40,67; xf, = 0; xj = 0; xg = 66,68.
Линейная форма достигает своего минимума:
£(х) = -5x1 - 8x2 - бхз ’ “5'20 ~ 8-190 " 6’73>33 " -2065,3.
Поскольку в исходной задаче требовалось найти максимум целе-
вой функции, то у найденного минимума функции и (х) следует
изменить знак на противоположный, т.е.
max L(x) = -min (-!(*))я -min L(x) = -(-2065,3) ’ 2065,3 p.
Экономический смысл оптимального плана состоит в том, что
согласно ему рекомендуется произвести запасных частей первого вида
20 ед., второго - 190,67 (»191), третьего - 73,33 ед. (**73). Избытка
запасных частей первого вида не должно быть (хд = 0). Запасных частей
Таблица 3.12
ci Базисные переменные ci _ -5 -8 —6 0 0 0 0 0
План *1 х2 х3 *4 Х5 Х6 XI Х8
-5 Х1 20 1 0 0 —1 0 0 0 0
-8 х2 190,67 0 1 0 -2,33 0 0,2 -0,133 0
0 х5 40,67 0 0 0 -2,33 1 0,2 -0,133 0
-6 х3 73,33 0 0 1 1,33 0 0 0,33 0
0 *8 66,68 0 0 0 -5 0 —0,4 -1,33 1
2Z3 -2065,3 0 0 0 *-5,1 0 0 -0,93 ' 0
77
Таблица 3.13
ci Базисные переменные - ei 0 0 2 -4
План . *1 х2 *3 *4
0 *1 б 1 0 3 2
0 х2 12 0 1 1 4
Индексная строка 2с|-в/у-с;- = 0 0 0 —2 4
второго вида рекомендуется произвести на 40,67 ед. (»41) больше
установленного минимума в 150 ед. Значения х6 = 0 и х7 = 0 указывают
на то, что материалы первого и второго сортов используются полнос-
тью.. Остаток материалов третьего сорта составит 66,68 ед. При этом
предприятие получит максимальную прибыль 2065,3 р.
Проверим полученное решение. Для этого расчетные значения
переменных необходимо подставить в симплексные уравнения
20 - 0 + 0 = 20;
190,67 — 40,67 + 0 = 150;
5-20 + 5-190,67 + 2-73,33 + 0 = 1200;
4-20 + 3-73,33 + 0 = 300;
2-190,67 + 4,8-73,33 + 66,67 = 800.
Уравнения выполняются, следовательно, решение является,
правильным. Отметим, что незначительные погрешности вызваны
из-за округления числовых значений элементов симплексных таблиц.
В заключение отметим, что, применяя метод скорейшего спуска,
окончательное решение получено за четыре итерации. Для получения
этого же решения обычным симплексным методом необходимо шесть
итераций. Это свидетельствует о значительных преимуществах метода
скорейшего спуска, трудоемкость решения задачи в данном случае
сократилась на 50 %.
Вырождение в симплексном методе. Базисное решение называется
вырожденным, если значения одной или нескольких переменных
равны нулю.
। Рассмотрим пример, сформулированный в табл. 3.13.
Нужно минимизировать целевую функцию.
Полученное базисное решение (см. табл. 3.13) не является опти-
мальным, так как в индексной строке есть одна положительная оцен-
ка, равная 4 и соответствующая переменной хд. Эта переменная долж-
на вводиться в базис.
Определим обычным путем, какая из переменных х будет исклю-
чена из базиса. Для этого установим, для какого из значений х частное
от деления элементов столбца свободных членов на соответствующие
78
Таблица 3.14
Ci Базисные переменные cj 0 0 2 -4
План х\ х2 *3 х4
0 Х1 6:2 = 3 1:2 -1/2 0:2 = 0 3:2 = 3/2 2:2=1
0 х2 12:4 = 3 0:4 «0 1:4 = 1/4 1:4-1/4 4:4 = 1
элементы столбца х< будут наименьшими. В данном примере результат
не будет однозначным. Получено два одинаковых частных, которые
являются наименьшими, а именно: xi (6 : 2 = 3) и хг (12 : 4 = 3). Это и
является случаем вырождения, так как мы должны включить в базис
одну переменную хд, а вывести две: xj и х%, Тем самым базис из раз-
мерности, равной двум, „выродится” до размерности, равной единице.
Это обстоятельство не позволяет определить ключевую строку, что
затрудняет решение задачи.
В случае вырождения существует особая последовательность
перехода к новому базису. При этом важно решить, какую из двух
переменных (а их может быть и больше) следует исключить из базиса,
а какую (какие) оставить для следующего этапа решения. Поступают в
этом случае следующим образом.
По каждой строке, соответствующей переменной, которая должна
быть исключена из базиса, т.е. xi и xj, в направлении слева направо
имеющиеся элементы делят на элемент этой же строки, находящийся в
столбце переменной, которая должна быть введена в базис, т.е. хд.
Результаты от такого действия приведены в табл. 3.14.
Просматривая результаты вновь слева направо (важно не изменить
порядок х), определяют, где раньше появится алгебраически меньший
результат. Очевидно, это в строке хг, где 0:4 = 0. Это значит, что пере-
менная х2 должна быть исключена из базиса, а переменная xi остается
в базисе в следующем этапе. Следовательно, разрешающей строкой
будет строка х^, а разрешающим элементом будет 4.
Таким способом устраняют вырожденность в симплексном методе.
Глава 4
ТРАНСПОРТНАЯ ЗАДАЧА И МЕТОДЫ ЕЕ РЕШЕНИЯ
4.1. Распределительный метод и его модификации
Распределительный метод широко применяется при решении,
главным образом, различных транспортных задач (оптимальное
прикрепление потребителей груза к поставщикам, маршрутизация
перевозок грузов, распределение парка подвижного состава по АТП,
закрепление маршрутов за АТП и др.), поэтому его иногда называют
транспортным методом.
Прежде чем перейти к изложению алгоритма метода, познако-
мимся с особенностями транспортной задачи. Классическая транспорт-
ная задача заключается в нахождении оптимальных грузопотоков, т.е..
в оптимальном закреплении поставщиков однородного груза за потре-
бителями.
Экономико-математическая модель транспортной задачи в общем
виде выглядит следующим образом:
? ху Of (i 1,2
2 ху == bj G' = 1,2
' j
ttcyxy * min,
ij
где i — количество поставщиков; j — количество потребителей; <ц — ограничения по пред-
ложению; bj — ограничения по спросу; су — элементы целевой функции; ху — объем кор-
респонденции между i-й и /-и точками.
Критерием оптимальности в транспортной задаче может быть
минимум грузовой работы в тонно-километрах, затраты времени или
стоимость перевозки.
Рассмотрим конкретный пример транспортной задачи.
Пусть имеется три грузообразующих точки Д2, из которых
следует вывезти однородный груз четырем потребителям (Bi, В2, ®з>
В4) соответственно 400, 600 и 1000 т. При этом потребителю Bj необхо-
димо доставить 200 т груза, В2 - 400, В3 - 800 и В4 - 600 т.
Расстояния между грузоотправителями и потребителями указаны
в табл. 4.1. Методы определения кратчайших расстояний между пунк-
тами, приведенные в таблице, рассматриваются в п. 5.1.
Необходимо так закрепить потребителей груза за грузоотправите-
лями, чтобы общая транспортная работа была минимальной.
80
Таблица 4.1
Г рузообразуюшие точки Грузопоглощающие точки
Ь1 в2 Вз *4
Расстояние, км
А1 16 6 10 4
А2 8 2 12 14
А3 2 18 8 6
В этой задаче неизвестно количество груза, которое следует
перевозить от каждого отправителя конкретному потребителю.
Обозначим через х,у количество тонн груза, которое должно быть
перевезено от i-rb поставщика j-му потребителю. Тогда модель задачи
выразится следующей системой уравнений:
*11 + *12+*13 + *14 = 400 (1)
*21+*22 + *23+*24 = 600 (2)
*31+*32+*33+*34 = 1000 (3)
*11 + *21+ *31 = 200 (4)
*12+ *22 + - *32 + = 400 (5)
*13+ *23+ *33* = 800 (6)
*14* *24+ +Х34 = 600 (7)
Целевая функция будет представлять собой сумму произведений
расстояний на соответствующий объем перевозок груза, т :
(18*11 + 6X12 + 10*13 + 4*14 + 8*21 + 2*22 +12*23 + 14x24 + 2*31 +18*32 + 8*33 +
* 8*34) min-
Все неизвестные могут принимать положительные значения или
равняться нулю, т.е. x,j > 0.
Модель транспортной'задачи имеет следующие особенности:
выражается неопределенной системой линейных уравнений и,
следовательно, имеет бесчисленное множество возможных решений;
она совместна, т.е. имеет решение;
элементами матрицы системы являются единицы и нули;
система является линейно зависимой, так как любое ее уравнение
можно представить в виде линейной комбинации остальных уравнений.
81
Таблица <2
Грузообразующие точки Грузопоглощающие точки Итого по ВЫВО- ЗИТ Потен- циалы
*1 В2 Вз В*
А1 200 16 200 6 10 4 400 -16
Л2 8 200 2 400 12 14 600 -12
АЗ 2 18 400 8 600 6 1000 —8
Итого по вывозу, т 200 400 800 600 2000
Потенциалы 0 +10 0 +2
Например, если из суммы уравнений (1), (2), (3) вычесть суммы урав-
нений (4), (5) и (6), то получим уравнение (7);
число линейно независимых уравнений всегда на одно меньше
общего количества уравнений в системе, так как без любого одного
уравнения каждое оставшееся уравнение нельзя представить как
линейную комбинацию из других уравнений. Следовательно, базис
системы равен количеству уравнении за вычетом единицы. В нашем
примере базис равен 6(7 - 1 = 6);
целевая функция выражается линейной формой. Матрица целевой
функции - это матрица-строка, элементами которой могут быть
расстояния, время или стоимость перевозки.
Ввиду особенностей математической формы и постановки транс-
портной задачи линейного программирования для решения ее разра-
ботаны специальные методы, позволяющие из бесчисленного множе-
ства возможных решений найти оптимальное. Одним из таких методов
является распределительный, имеющий несколько разновидностей,
которые отличаются в основном способом выявления оптимального
решения.
Первый способ (Метод Хичкова). В табл. 4*2 записаны исходные
данные задачи. Расстояния между грузообразующими и грузопогло-
щающими точками проставлены в правых верхних углах клеток.
Строки отведены под грузообразующие точки, столбцы - под грузо-
поглощающие. В конце строки указаны ограничения по вывозу, в
конце столбца - ограничения по ввозу. Дополнительный столбец и
строка отведены для потенциалов. Эта таблица называется матрицей
распределительного метода.
Распределение груза по потребителям производится начиная с
грузоотправителя А^ и грузополучателя Bi, т.е. с клетки А^. Потреб-
ность в грузе потребителя Bi удовлетворяется полностью грузоотпра-
82
вителем Ay В клетку AjBj табл. 4.2 записывается объем потребления
грузополучателя Bi - 200 т. Оставшийся в точке Aj груз в количестве
200 т будет вывозиться потребителю В2. Но потребителю В2 нужно
завезти не 200, а 400 т груза. Недостающие 200 т груза можно ввозить от
грузоотправителя А2. Оставшиеся у грузоотправителя А2 400 т груза
можно вывезти в точку В$ и т.д. Рассуждая таким образом, распреде-
лим весь груз по потребителям.
В табл. 4.2 распределение груза по потребителям (закрепление
потребителей за грузоотправителями) выразится в заполнении клеток
41^1, 4jB2, А2В2, A2By А3В3, А3В4.
Условимся в дальнейшем называть клетки таблицы, в которых
отмечено количество груза, перевозимого от грузоотправителя к
данному грузополучателю, загруженными. Количество загруженных
клеток всегда должно равняться величине базиса, который будет
равен п + т - 1 (п - число строк таблицы; т - число столбцов). В
данном примере это условие соблюдено: 3 + 4-1 =6.
При нашем распределении груза по потребителям первой загру-
женной клеткой стала левая верхняя клетка А^ таблицы, остальные
загруженные клетки расположились по диагонали, соединяющей
левый верхний и правый нижний углы таблицы. Поэтому такой способ
первоначального закрепления грузополучателей за грузоотправите-
лями, а следовательно, способ первого заполнения таблицы, получил
название „диагональный метод”, или „метод северо-западного угла”.
Полученный таким способом план закрепления потребителей
груза за грузоотправителями является одним из возможных решений
задачи. При этом общая грузовая работа будет равна:
200-16 + 200-6 -I- 200-2 + 400-12 + 400-8 + 600-6 -16 400 т-км.
Однако нельзя сказать, является ли полученный вариант решения
оптимальным или нет. Чтобы ответить на этот вопрос, необходимо
выполнить следующие действия:
1. Во всех загруженных клеткдх получают нулевой потенциал.
Для этого по строчкам и столбцам табл. 4.2 к. расстояниям, прос-
тавленным в верхних правых углах клеток, прибавляют такие числа
(потенциалы), которые в сумме с расстояниями загруженных клеток
дают нуль (нулевой потенциал).
Например, чтобы получить в загруженной клетке'А^ нулевой
потенциал, нужно ко всем расстояниям строки Aj прибавить потен-
циал — 16(16 — 16 = 0).
. В загруженной клетке AjB2 нулевой потенциал получится в том
случае, если к ее расстоянию 6 и ранее прибавленному по строке Aj
потенциалу - 16 прибавить по столбцу В2 Потенциал + 10 (6 - 16 + 10 =
= 0) и т.д.
2. Определяют потенциалы для всех свободных клеток, т.е. нахо-
дят для каждой свободной клетки сумму указанного в ней расстояния
83
1, ь
с ранее полученными по загруженным клеткам потенциалами ее
строки и столбца.
При решении задачи на минимум оптимальный вариант
получается в том случае, когда во всех загруженных клетках
стоят нулевые потенциалы, а потенциалы всех свободных
клеток являются положительными величинами.
Если задача решается на максимум, то оптимальный
вариант получается тогда, когда во всех загруженных клетках
стоят нулевые потенциалы, а потенциалы всех свободных
клеток являются отрицательными величинами.
Наличие свободных клеток с отрицательными значениями потен-
циалов (при решении задачи на минимум) говорит об имеющихся
резервах, использовав которые можно получить лучший вариант
решения.
В первом варианте решения нашей задачи отрицательные потен-
циалы имеются в клетках А1В4, A2Bi, ^1®з> ^3^1 (табл. 4.3). Наиболее
потенциальной клеткой (клетка, имеющая наибольшее отрицательное
значение потенциала) будет клетка А1В4, потенциал которой равен,
-10.
Во втором шаге решения наиболее потенциальная клетка получает
загрузку. Это вызывает перераспределение загрузки клеток таблицы,
которое осуществляется следующим образом:
' 1. Проверяют, чтобы количество загруженных клеток в предыду-
щем шаге равнялось п + т - 1.
Если количество загруженных клеток меньше, чем п + т - 1
(случай вырождения), то недостающее число клеток получается путем
загрузки соответствующего количества свободных клеток нулями.-
Клетка, в которой будет проставлена загрузка, равная нулю, считается
загруженной.
2. Для наиболее потенциальной клетки А1В4 строится контур.
84
Контуром называется замкнутая ломаная линия, образованная
прямыми отрезками, углы соединений между которыми равны 90°.
Строится контур так, чтобы все углы, кроме одного, располагались
в загруженных клетках, а один угол находился в свободной, наиболее
потенциальной клетке.
При соблюдении этих двух правил для каждой свободной клетки
можно построить только один контур.
3. Определяют положительные (+) и отрицательные (-) углы
контура, считая, что первый положительный угол лежит в свободной
клетке, для которой строится контур, рядом с ним находятся отрица-
тельные углы, рядом с отрицательными - положительные и т.д.
Количество положительных углов всегда равно количеству отри-
цательных углов контура.
4. Выявляют наименее загруженную клетку, занятую отрицатель-
ным углом контура. Количество груза, указанное в этой клетке,
отнимается из всех клеток, занятых отрицательными углами контура,
и прибавляется во все клетки, занятые положительными углами.
В результате такого действия одна или несколько из ранее загру-
женных клеток становятся свободными, а наиболее потенциальная
клетка становится загруженной. Ранее загруженные клетки, которые
не оказались расположенными в углах контура, переносят в таблицу
(табл. 4.4) нового варианта закрепления потребителей груза за грузо-
отправителями без изменений.
В табл. 4.3 из всех клеток, занятых отрицательными углами кон-
тура, наименьшую загрузку имеет клетка - 200 т. Эти 200 т
вычитаются из клеток, занятых отрицательными углами контурами
прибавляются в клетки, занятые положительными углами. В резуль-
тате клетка А1В2 становится свободной, а наиболее потенциальная
клетка А^ получает загрузку в 200 т. Загрузка клетки А^, в кото-
Таблица 4.4
Грузообразу- ющие точки Грузопоглощающие точки Итого по выво- зу, т Потен- циалы
' В1 в2 в3 в4
Д1 200 16 б 10 200 4 400 -16
А2 8 400 2 200 12 14 600 -22
А3 2 18 600 8 400 б 1000 -18
Итого ПО ввозу, т 200 400 800 600 * 2000
Потенциалы 0 +20 +10 +12
85
рой нет угла контура, в новом варианте решения остается без измене-
ния (см. табл. 4.4).
Полученный таким образом новый вариант закрепления потре-
бителей за грузоотправителями, является возможным решением
задачи. При этом варианте общая транспортная работа
20046 + 2004 + 400'2 + 20042 + 600-8 + 400-6 = 14 400 t-км.
Это на 2000 т-км меньше, чем получено в первом варианте реше-
ния. Величину сокращения грузооборота можно определить и как
произведение количества груза, которое получила наиболее потенциа-’
льная клетка, на ее потенциал [200х(-10)] = - 2000 т-км.
Чтобы убедиться, является ли полученный вариант оптимальным,
следует повторить все действия, рассмотренные выше, т.е. нужно по
новым загруженным клеткам подобрать потенциалы строк и столбцов
и определить потенциалы для свободных клеток. Если вариант ока-
жется неоптимальным, то необходимо построить контур для новой
наиболее потенциальной клетки и найти лучший вариант решения.
Задача решается до тех пор, пока не будет найден оптимальный,
вариант.
Количество промежуточных решений зависит от сложности задачи.
В нашем примере второй вариант, как и первый, является неоптималь-
ным (табл. 4.5), оптимальный же вариант получен в результате тре-
тьего шага решения (табл. 4.6).
Оптимальность третьего варианта решения подтверждается тем, что
в свободных клетках таблицы этого варианта потенциалы являются
положительными величинами (табл. 4.7).
Объем грузовой работы при оптимальном решении:
4004 + 400-2 + 200-12 + 200-2 + 600-8 + 200-6 = И 200 т-км.
Второй способ (метод Креко). От рассмотренного выше этот способ
отличается приемом нахождения потенциалов для свободных клеток.
86
Таблица 4.6
Грузообразующие точки Грузопоглощающие точки Итого по ВЫВО- ЗУ,! Потен- циалы
*1 в3 *4
Л1 16 6 10 400 4 400 —4
А2 8 400 2 200 12 14 600 -10
А3 200 2 18 600 8 200 б 1000 -6
Итого по ввозу, т 200 400 800 600 2000
Потенциалы 44 +8 -2 0
На основании исходных данных задачи, так же как и при первом
способе решения, составляется таблица и делается по диагонали
первое распределение груза (табл. 4.8).
Определение оптимального решения начинается с построения
контуров для всех свободных клеток. Расстояниям, указанным в
клетках положительных углов контура, придается знак плюс, а
расстояниям отрицательных углов - знак минус.
Алгебраическая сумма расстояний, стоящих в клетках всех углов
контура, будет потенциалом свободной клетки.
Так, у контура свободной клетки А2В1 отрицательные углы будут
расположены в клетках AjBi, А2В2, положительные - в Ее
потенциал будет равен:
-16-2 + 8 + 6--4.
Таблица 4.7
Грузообразующие точки Грузопоглошающие точки Итого по ВЫВО- ЗУ,!
«1 *2 в3 54
41 16 10 4 400 0 400
а2 2 400 0 200 0 4 600
А3 200 0 20 600 0 200 0 1000
Итого поввозу,т 200 400 800 600 2000
87
Таблица 4.8
У контура клетки А^Ву отрицательные углы будут находиться в
клетках AiBi9 Д2В2, А3В3, положительные в ЛзВь Д2В3, AjB2. Потенциа-
лом этой клетки будет сумма:
-16 - 2 - 8 + 2 +12 + 6 = -6 и т. д.
Найденные таким путем потенциалы записывают в левых верхних
углах свободных клеток.
При решении задачи на минимум оптимальный вариант будет в
том случае, когда потенциалы всех свободных клеток станут положи-
тельными величинами. Если же есть отрицательные значения потен-
циалов, то выявляется наиболее потенциальная клетка (в нашем
примере такой клеткой будет клетка Л4В4) и по ее контуру (см. табл.
4.8), соблюдая указанные ранее правила, делают перераспределение
Таблица 4.9
Г рузообразующие точки Грузопоглощающие точки Итого по выво- зу, Т
»1 В2 в3 в4
41 200- 16 10 6 4 10 200 + 4 400
а2 -14 8 400 2 200 12 4 14 600
А3 -16 4- 2 20 18 8 4А0 6 1000
Итого ПО ввозу, т 200 400 800 600 200
88
Таблица 4.10
Грузообразующие точки Грузопоглощающие точки Итого по вывозу, т
Вл
А1 16 16 10 б 4 10 400 I4 400
А2 1 8 400 2 200 12 4 14 600
Л3 200 2 20 18 600 8 200 б 1000
Итого ПО ввозу, т 200 400 800 600 200
груза. С новым вариантам решения (табл. 4.9) производят те же дейст-
вия, что и с предыдущим, и так далее до получения оптимального
решения (табл. 4.10).
Третий способ (модифицированный распределительный метод -
МОДИ, или метод потенциалов). Условие задачи записано в табл. 4.11.
Первое распределение груза производится по диагональному методу.
Для оценки оптимальности решения подбираются потенциалы следую-
щим образом.
Потенциал для первой строки таблицы берется равным нулю.
Затем по расстояниям загруженных клеток подбираются потенциалы
для других строчек и столбцов таблицы так, чтобы расстояние каждой
Таблица 4.11
Грузооб- разующие точки Потен- циалы Грузопоглощающие точки Итого по выво- ЗУ, т
В1 «2 В3 *4
16 6 1
А1 0 ОПП 16 200 - 6 16 10 14 к 400
а2 ^*4 12 8 200 2 400 12 10 14’ 600
АЪ —8 8 2 —2 18 400 8 600 6 1000
Итого поввозу,т 200 400 800 600 2000
89
загруженной клетки равнялось сумме потенциалов строки и столбца,
в которых находится данная клетка:
ly-W. + Mj,
где Nf — потенциал строки; Mj—потенциал столбца.
Так, если для первой строки таблицы взят потенциал, равный
нулю, то потенциал столбца будет равен 16, так как разность между
расстоянием загруженной клетки AjBj и потенциалом первой строки
равна 16(16 - 0 = 16).
Потенциал второго с голбца будет равен 6(6 - 0 = 6), ибо расстоя-
ние загруженной клетки равно 6. Тогда потенциал строки А^
будет определен по расстоянию загруженной клетки AjBj и найден-
ному потенциалу столбца (2 - 6 = - 4).
Потенциал столбца Вз определяется через расстояние загруженной
клетки АзВз и найденный потенциал второй строки: 12 - (-4) = 16.
Таким же образом находят потенциалы строки Аз и столбца В4.
Если число загруженных клеток будет меньше, чем п + т - 1, то
потенциалы для некоторых строк и столбцов невозможно определить.
Чтобы устранить это препятствие, недостающее количество клеток,
как и в предыдущих способах, загружают нулями.
Загружать нулями следует те клетки, которые лежат на
пересечении строк или столбцов, не имеющих потенциалов, со
столбцами или строками, для которых уже определены. При
этом наиболее целесообразно выбрать из этих клеток такие, в
которых имеются наименьшие расстояния.
Клетки, загруженные нулями, рассматриваются как обычные
загруженные клетки'.
После того как будут найдены потенциалы, определяют их сумму
для каждой свободной клетки. Эти суммы указаны в верхних левых
углах свободных клеток.
При решении задачи на минимум оптимальный вариант будет
получен в том случае, когда в каждой свободной клетке сумма потен-
циалов не превышает указанного в ней расстояния. При решении
задачи на максимум - наоборот, когда сумма потенциалов превышает
расстояние.
Если оптимальное решение не получено, то выявляется клетка с
наибольшим потенциалом. Затем строится для нее контур с соблюде-
нием изложенных выше правил и по контуру делается перераспреде-
ление груза тем же путем, что и в предыдущих способах. Действия
повторяются до тех пор, пока не будет найден оптимальный вариант.
Клеткой, имеющей наибольший потенциал при решении
задачи на минимум, является клетка, у которой имеется
наибольшая разность между суммой потенциалов и расстоя-
нием, проставленным в клетке.
90
Таблица 4.12
В нашем примере такой клеткой является клетка А1В4 (см. табл.
4.11). Ее потенциал равен 10(14 -4 = 10).
Перераспределение загрузок по ее контуру дает новый вариант
решения задачи (табл. 4.12), который не является еще оптимальным. В
этом варианте наиболее потенциальной будет клетка А^В\. Ее потен-
циал равен 16 (18 - 2 = 16).
Перераспределение загрузки по контуру клетки А^В\ позволяет
найти оптимальное решение задачи (табл. 4.13).
Третий способ распределительного метода по сравнению с первым
и вторым является менее трудоемким. Количество арифметических
действий при этом способе решения задач меньше, чем при первых
двух.
Следует отметить, что при решении задач различными способами
распределительного метода, когда количество одинаковых наиболее
Таблица 4.13
Грузооб- разующие точки Потен- циалы Груаопоглощ ающие точки Итого по выво- зу,т
«1 ?2 В1 Вл
0 б 4
А1 0 0 16 -4 б б 10 400 4 400
л2 б б 8 400 2 200 12 10 14 600
A3 2 200 2 -2 18 600 8 200 1 б 1000
Итого по ввозу,т 200 400 800 600 2000
91
Таблица 4.14
потенциальных клеток будет больше одной, мы можем
получить равнозначные (альтернативные) по своей величине оптима-
льные решения, но с разными вариантами распределения загрузки-
Вырождение в задачах линейного программирования. Решение или
распределение является вырожденным, если в нем имеется менее
тп + п - 1 заполненных клеток, поскольку из-за недостатка заполнен-
ных клеток нельзя построить циклы пересчета для части свободных
клеток.
Для устранения вырождения необходимо количество заполненных
клеток довести до т + п - 1. Для этого среди свободных клеток выби-
рается ровно столько, сколько не хватает заполненных клеток до
т + п - 1 и в них помещают нулевые загрузки.
9 Выбор клеток для загрузки нулем удобно производить с помощью !
графа1, построенного по имеющемуся распределению. В таком графе
не все узлы будут связаны друг с другом, поскольку количество
ветвей в нем меньше m + п-1. Недостающие ветви графа и будут
соответствовать тем свободным клеткам, которые следует загрузить
нулем, это легко сделать. При построении графа ветви должны быть
направлены от поставщиков к потребителям.
Допустим, поставлена задача распределить обслуживание клиен-
тов между автобазами таким образом, чтобы суммарный пробег
автомобилей от автобаз до грузоотправителей был минимальным.
Наличие автомобилей в автобазах, потребность в них грузоотправите*-
лей, а также расстояния между пунктами указаны в табл. 4.14. В ней
пригедено также первоначальное решение, составленное способом
1 Греф т ЭТО набор точек, называемых узлами, которые связаны между собой
отрезками линий, называемых ветвями.
92
*з ________Ai вг Аг вз Аз вь а1 вг а2
'-“Г — -L .. —
в, * в1 ч
Рис. 4.1. Схема определения места нулевой загрузки
двойного предпочтения. Число заполненных клеток пять, что на
единицу меньше необходимого т + п-1 = 3 + 4- 1 = 6. Следовательно,
имеет место вырождение первоначального решения. Проверить такое
распределение на оптимальность нельзя, поскольку нет возможности
определить все потенциалы.
Для определения места нулевой загрузки построим граф, соответ-
ствующий вырожденному решению (рис. 4.1).
В общем графе узел -41 не связан с остальными узлами. Чтобы
получить недостающую связь, следует соединить ветвью узлы Ai и В»
На рис. 4.1 это обозначено пунктирной линией, указывающей точку, в
которую следует поместить нулевую загрузку, т.е. в клетку AiB2
необходимо поставить нуль. В результате число загруженных клеток»
увеличится до т + п-1, вырождение будет устранено.
После этого полученное решение можно проверить на оптималь-
ность с помощью потенциалов. Решение является оптимальным, так
как характеристики всех незанятых клеток положительны. Грузо-
отправители обслуживаются рациональным образом, общий пробег
автомобилей к ним минимален и равен
£(х) = М00 +1-200 + 4-300 + 2-200 + 3-100 = 2200 км.
Аналогично устраняется вырождение и в других случаях при
улучшении первоначального плана перевозок.
4.2. Способы составления первого допустимого
плана перевозок
В основе математических методов, применяемых при решении
транспортных задач, лежит принцип последовательного улучшения
плана, когда на первом этапе определяется первоначальное допусти-
мое решение, т.е. план, удовлетворяющий условиям задачи, а затем
этот план проверяется на оптимальность, если необходимо, улучша-
ется; полученный новый план снрва проверяется на оптимальность и
т.д. Этот процесс Продолжается до тех пор, пока не будет получено
оптимальное решение.
От того, насколько эффективно.составлено распределение перево-
зок в начальном плане, насколько близко начальное решение к опти-
мальному, зависит количество промежуточных итераций, необходимых
для достижения оптимального решения.
93
Таблица4.15
Суточное производство и потребность в кирпиче, т Расстояние от перевозки, км
Завод Объем произ- водства Строи- тельные площадки Потреб- ность в кирпиче Завод В1 В2 Вз «4 BS \
А1 100 В1 25 А1 15 12 16 21 18
42 300 В2 150 А2 15 22 22 14 12
АЗ 75 вз 100 Аз 10 5 17 б 10
А4 125 *4 в5 175 150 а4 б 13 18 22 18
Первоначальное распределение перевозок может быть получено ,
несколькими способами.
Рассмотрим на конкретном примере сущность и эффективность
некоторых из них. От четырех кирпичных заводов кирпич автомобиль*
ным транспортом доставляется на пять строительных площадок.
Необходимо определить план перевозок кирпича, при котором вели-
чина транспортной работы будет минимальной. Исходные данные
задачи приведены в табл. 4.15.
Способ северо-западного угла. Построение допустимого плана этим
способом начинается с верхней левой клетки и заканчивается в
нижней правой клетке матрицы. В клетки заносят максимально
возможную поставку, учитывая соотношение ресурсов поставщика и
спрос потребителя. Груз первого поставщика распределяется так, что
вначале удовлетворяются потребности первого ^потребителя, затем
второго и так до полного распределения всего объема грузов данного
поставщика. Затем переходят к распределению грузов второго постав-
щика и так до полного распределения объема грузов всех постав-
щиков. Бели спрос какого-либо потребителя превышает наличие груза
у поставщика, то недостающий спрос удовлетворяется за счет следую-
щего поставщика, т.е. расчет в этом случае ведется по столбцу.
Допустимый план перевозки кирпича на строительные площадки,
составленный способом северо-западного угла, приведен в табл. 4.16. В
плане полностью соблюдается условие по ввозу и вывозу кирпича,
количество заполненных клеток соответствует т + п - 1.
Суммарная транспортная работа по плану распределения, состав-
ленному способом северо-западного угла, равна
1(х) = 15-25 +12-75 + 22-75 + 22-100 +14-125 + 6-50 +10-25 +18-125 = 9675 t-км.
Этот способ прост, однако первоначально допустимое решение, как
правило, далеко от оптимального, поскольку заполнение клеток
матрицы идет механически без учета расстояния или стоимости пере-
возки.
94
д ,
. X.-. aw-’ u -
'.<Ц V 1 Таблица.4.16
Завод Строительная площадка Объем произ- водства, т
_В]_ Bl В4 В5
А1 25 15 75 12 16 21 18 100
А2 15 75 22 100 22 125 14 12 300
А3 10 5. 17 50 б 25 10 75
а4 6 13 18 22 125 18 125
Потребность в кир- пиче, т 25 150 100 175 150 600
Способ наименьшего элемента в матрице. Этот способ заключается,
в том, что максимально возможная поставка заносится в клетку с
самым минимальным элементом во всей матрице, затем выбирается
следующий по величине минимальный элемент (расстояние) и в эту '
клетку заносится величина поставки с учетом соотношения спроса и
ресурсов. Исходная программа перевозки кирпича на строительные
площадки, составленная способом минимального элемента в матрице,
приведена в табл. 4.17.
Функционал полученного решения:
L(x) = 6-25 +12-75 + 5-75 + 16-25 +18-75 +14-50 + 12-150 + 22-25 = 7625 т-км. / ,
1 (Таблица 4.17
Завод Строительная пЛс 1 1 j чцадКа Объем произ- водства, т
В1 Вд Вз В4 Вз
А1 15 75 12 25 16 21 18 100
а2 15 22 22 150 14 150 12 300
А3 10 75 5 17 б 10 75
а4 25 б 13 75 18 25 22 18 125
Потребность в кир- пиче, т 25 150 100 175 150 600
95
решение, более близкое к оптимальному, чем способ северо-западного
угла. В условии нашего примера общий объем транспортной работы
меньше на 2050 г км (9675- 7625 = 2050).
Способ наименьшего элемента в матрице целесообразно исполь-
зовать при решении небольших матриц, поскольку с увеличением
размера матрицы его применение затрудняется. В данном случае
хорошие результаты дает способ двойного предпочтения.
Способ двойного предпочтения. Он заключается в нахождении
минимального элемента в столбце и его проверке на минимальность
по строкё. Если этот элемент окажется наименьшим и по столбцу, и по
строке, то в данную клетку записывают максимально возможную
поставку, и все элементы данной строки или столбца из дальнейшего
рассмотрения исключают.
Если минимальный элемент в столбце не является минимальным в
строке, то временно этот столбец из рассмотрения опускают и перехо-
дят к следующему. После рассмотрения всех столбцов возвращаются к
пропущенным и операции повторяют. Так поступают до тех пор, пока
не будет получено базисное распределение.
Базисное распределение, полученное способом двойного предпоч-
тения, приведено в табл. 4,18.
Допустимое распределение, полученное способом двойного пред-
почтения, обычно не отличается от распределения способом минима-
льного элемента в матрице, что подтвердилось и в нашем случае:
загрузки клеток и функциональные элементы совпали.
Способ аппроксимации Фогеля. При этом способе первое допус-
тимое распределение является близким к оптимальному и по сути
является приближенным решением задачи.
96
При этом способе исходная матрица дополняется столбцом и
строкой разностей (табл. 4.19). Затем в каждой строке и каждом
столбце матрицы отыскивают два наименьших элемента и определяют
абсолютную разность между ними, которую, заносят соответственно
разности по строке в столбец разностей, разности по столбцам - в
строку разностей. Если две клетки в одной и той же строке или столб-
це имеют одинаковые значения элементов, то разность для этой строки
или столбца принимается равной нулю и также проставляется в
соответствующую строку или столбец.
Затем выбирают наибольшую величину разности независимо от
того, стоит ли она в столбце или строке разностей. В клетку с минима-
льным элементом в данной строке или столбце заносят максимально
возможную загрузку, учитывая при этом соотношение ресурса постав-
щика и спрос потребителя. Наибольшая разность зачеркивается. Если
окажется, что спрос потребителя полностью удовлетворен или ресурс
поставщика полностью исчерпан, в соответствующей строке или столб-
це разностей проставляется .буква „К” (конец) и данная строка или
столбец матрицы из дальнейшего рассмотрения исключается. После
заполнения клетки матрицы разности пересчитывают, и операции
повторяются вновь до тех пор, пока не будет составлена допустимая
программа распределения. При наличии двух одинаковых наибольших
разностей. загрузку записывают в клетку, которая имеет меньший
элемент по строке и столбцу. Такая клетка называется седловой.
Последние распределения можно сделать без вычисления разностей,
поскольку остается несколько незагруженных клеток, поставки в
которые очевидны.
1 Таблица 4.19
Завод Строительная площадка Объем произ- водства, т Столбец разнос- тей
В1 *2 вз ®4 В5
А1 15 12 16 21 18 100 3
А2 15 22 22 14 12 300 2
А3 X 10 X 5 X 17 75 б X 10 75 1К
А4 б 13 18 22 18 125 7
Потребность в кирпиче, т 25 150 100 175 150 600
Строка раз- ностей 4 7 1 8 2
97
Рассмотрим использование способа аппроксимации Фогеля для
составления допустимой программы перевозки кирпича на строитель»
ные площадки (см. табл. 4.19).
Наименьшие элементы первой строки (см. табл. 4.19) - это 12 в
клетке A^fy и 15 в клетке AjBp Разность между ними, равная 3, запи-
сывается в первую клетку столбца разностей. Аналогично находят
разности для остальных строк и столбцов. Наибольшая разность,
равная 8, находится в строке разностей по столбцу В4. Следовательно,
первой должна заполняться клетка в этом столбце с минимальным
элементом. Это клетка А3В4 с элементом, равным 6. В нее можно помес-
тить максимальную загрузку, равную 75 т, что соответствует объему
производства завода А3. Поэтому в столбце разностей по строке А3
записывается буква К, что означает конец вычислений по данной
строке, т.е. элементы данной строки в дальнейших расчетах не учиты-
вают. Клетки строки А3 можно отметить каким-либо значком, на-
пример х.
После этого разности пересчитывают вновь, и процесс заполнения
клеток матрицы повторяется. Для упрощения расчетов следует руко-
водствоваться следующим положением: если на предыдущем этапе
знак „К” проставлен в строке разностей, то следует пересчитывать
только показатели столбца разностей, показатели строки разностей
остаются без изменения. Если „К” стоит в столбце разностей, как в
нашем примере, то пересчитывают только показатели строки разнос-
тей, а показатели столбца разностей остаются без изменения, т.е. в
строке или столбце разностей, где появляется знак „К”, показатели не
пересчитывают. При появлении „К” одновременно в строке и столбце
разностей пересчитывают показатели как строки, так и столбца.
В данном случае „К” стоит в столбце разностей, поэтому на втором
этапе пересчитаны только показатели строки разностей, а в столбце
они оставлены прежними, процесс заполнения клеток матрицы повто-
ряется. Этапы расчетов по составлению первого допустимого плана
перевозок кирпича способом аппроксимации Фогеля представлены в
табл. 4.20.
Общая транспортная работа согласно полученному способом
аппроксимаций Фогеля допустимому решению составит
1(х) - 6-25 ♦ 12-50 +13.100 + 6-50 + 22-50 +14-100 + 6-75 +12-150 - 7600 т-км.
Статистический метод. Этот метод по сути является приближен-
ным методом решения транспортных задач и задач размещения произ-
водства. Метод заключается в определении „наиболее выгодных”
клеток матрицы задачи и их заполнении в определенной очередности.
Эффективность статистического метода состоит в том, что клетки
матрицы для заполнения определяют все сразу, а не последовательно
как обычно, что значительно упрощает решение, и во многих случаях
полученное распределение соответствует оптимальному решению.
98
Таблица 4.20
Завод Строительная площадка Объем произ* водства, т Столбец разнос* тей
*з «4 *5
X 15 50 12 50 16 X 21 X 18 100 3,4,4
А2 X 15 X 22 50 22 1 14 00 1 12 50 300 2,2,10,К
А3 X 10 X 5 X 17 7 6 5 10 г 75 1,К
а4 2 б 5 100 13 X 18 X 22 X 18 125 7, 6, 6, К
Потребность в кирпиче, т 25 150 100 175 150 600
* Строка разностей 7.1, мм. 2,б?К
f Основным положением статистического метода является следую*
щее. При перевозках в любом случае возникают какие-то минималь-
ные транспортные затраты, обусловленные общим расположением
поставщиков и потребителей и не зависящие от схем прикрепления.
Затраты сверх этого предела зависят от рациональности схемы прик-
репления поставщиков к потребителям, которые собственно и опре-
деляют эффективность общего решения. Поэтому необходимо сводить
к минимуму не общие транспортные затраты, а только вторую их
часть.
Относительные значения транспортных расходов определяются по
методу отклонения от средних. При этом для каждой строки и столб-
ца рассчитывают, средние затраты по доставке единицы продукции,
соответственно С,- и Q. Это и есть минимальные транспортные расходы
поставщика или потребителя, которые он понесет в любом случае, при
любом способе прикрепления поставщиков к потребителям. Если
вычесть соответствующие средние характеристики из каждого конк-
ретного значения транспортных затрат, проставленных в клетках
матрицы, то полученная разность будет отражать тольку ту часть
затрат, которая зависит от схемы прикрепления поставщиков к потре-
бителям. Они-то и служат показателем очередности использования
транспортных коммуникаций. Вначале заполняют клетки с большим
значением разности, чтобы избежать больших потерь.
Показатели очередности заполнения клеток исходной матрицы
рассчитывают так:
99
Таблица 4.21
где Су — транспортные затраты (расстояние) в клетке у; Q - средние транспортные затраты
п
2 Сн/п*, Cj — средние транспортные
1=1
f-й строки, которые определяют из выражения Q
т
затраты j-ro столбца, определяемые из выражения Cj - Z
Заполнение матрицы начинают с клетки с наибольшим по вели-
чине показателем очередности, поскольку это обеспечивает максималь-
ное приближение к минимально необходимым транспортным затратам.
При этом в клетку заносят максимально возможную поставку с учетом
соотношения спроса потребителя и наличия груза у поставщика.
Заполнение клеток продолжается до полного удовлетворения спроса
на транспортные услуги за счет наличных ресурсов.
Полученный статистическим методом исходный план перевозок
проверяют на оптимальность с помощью потенциалов и, если необхо-
димо, улучшают путем перемещения загрузок по замкнутому кон-
туру, как и обычно.
Основное преимущество статистического метода - это его прос-
тота, высокая эффективность, так как часто полученное распределе-
ние совпадает с оптимальным планом. Важным является также то, что
очередность использования транспортных коммуникаций остается
неизменной при любом изменении ресурсов и потребностей. Это дает
возможность заранее составлять таблицы очередности использования
транспортных коммуникаций и использовать их в оперативном плани-
ровании и управлении перевозками. t
Эффективность статистического метода рассмотрим на тоьГ же
примере доставки кирпича на строительные площадки. Условия
задачи даны в табл. 4.21.
100
Таблица 4.22
Завод Строительная площадка Средние по строкам
В1 В2 Вз В4 В5
<41 -12,9 (12) -17,4 (6) -18,65 (4) -11,15 (14) -12,9 (12) 16,4
а2 -13,5 (10) -8 (19) -13,25 (И) -18,75 (3) -9,5 (17) 17,0
А3 -11,1 (15) -17,6 (5) -10,86 (16) -19,35 (2) -14,1 (9) 9,6
Л4 -20,9 (1) -15,4 (8) -15,65 (7) -9,15 (18) -11,9 (13) 15,4
Средние по столб- цам И,5 13,0 18,25 15,75 14,5 __
Показатели очередности заполнения клеток матрицы приведены в
табл. 4.22. При их расчете вначале были определены средние значения
для каждого столбца и каждой строки. Например, для столбца Bi это
Сг = (15 + 15 + 10 + 6)/4 = 11,5; для строки А 4 С4= (6+13 + 18 + 22 +
+ 18)/5 = 15,4.
Тогда оценка очередности заполнения клетки Л4В1 такая:
<*41 = С41 ~ (С4 + Ci) = 6 - (15,4 +11,5) - -20,9.
Значение показателя очередности заполнения клетки А4В1, равное
20,9, оказалось наибольшим по абсолютной величине. Это значит, что
данная клетка должна заполняться в первую очередь, а затем клетки
А3В4, А2В4 (очередность заполнения клетки указана цифрой в скобках)
ит. д.
В клетку А4В1 заносят максимально возможную поставку 25, т.е.
потребность строительной площадки Bj в кирпиче полностью удовлет-
воряется кирпичным заводом Д4. Оставшаяся продукция этого завода,
равная 125 - 25 = 100 т, подлежит дальнейшему распределению. Оче-
редной является клетка АзВ4 с показателем 19,35. В нее заносят за-
грузку 75 т и т. д. до полного удовлетворения потребностей строитель-
ных площадок в кирпиче.
Полученное статистическим методом первоначальное распределе-
ние поставок кирпича, приведенное в табл. 4.21, обеспечивает объем
транспортной работы в 7800 т-км.
Проверка этого распределения показала, что оно не является
оптимальным и его следует улучшать.
101
4.З. Решение транспортных задач, имеющих некоторые
дополнительные условия
Задача с распределением резерва (спрос не равен предложению).
Если в задаче спрос потребителей меньше предложения поставщиков,
то задача решается следующим образом.
Составляется таблица по форме табл. 4.23, в которую вводится
фиктивный (несуществующий) потребитель. Его спрос равен разности
между суммами фактических величин предложения и спроса (2000 -
- 1400 = 600), т.е. 600 т. Для фиктивного потребителя отводится
дополнительный, четвертый столбец в таблице, куда и проставляют
потребность в 600 т груза.
Поскольку груз никуда не вывозится, то в углах клеток столбца
Вф ставят нули (можно и любые другие, но одинаковые величины).
Дальше задача решается обычным путем по алгоритму метода потен-
циалов (распределительного метода), рассматривая столбец Вф как
четвертый потребитель груза.
В данном случае задача решена с помощью способа аппроксимации
Фогеля и модифицированного распределительного метода.
Полученное решение, кроме оптимального закрепления потреби-
телей за грузоотправителями, показывает, что наиболее рационально,
с точки зрения транспортных затрат, иметь 400 т резервного запаса
груза у поставщика 41 и 200 т - у поставщика A j.
Аналогично решаются и задачи, в которых потребности в грузе у
грузопоглощающих точек выше, чем его имеется у грузоотправителей
(спрос превышает предложение). Только в этом случае для недостаю-
щего объема груза вводится фиктивная строка, клетки которой будут
Таблица 4.23
Грузообразующие точки Потен- пиалы Грузопоглощающие точки Итого по выво- зу, т Столбец разностей
«1 ъ «3 ВФ
0 2 6 0
А1 0 0 X 16 2 X 6 6 X 10 400 0 400 <,к
л2 0 0 X 8 г 2 400 2 6 X 12 200 0 600
АЗ 2 200 2 4 X 18 800 8 X 0 1000 14,№
Итого по вво- зу,? 200 400 800 600 204ML
Строка разностей 0,0,0, К
102
иметь нулевые элементы,, а ограничение по предложению равно раз*
ности между суммами фактического спроса и предложения.
Запрещение корреспонденции. В практике организации и плани-
рования работы транспорта могут возникнуть ситуации, когда в силу
каких-либо причин невозможно удовлетворить спрос потребителя Bj
поставками из А;, т.е. на корреспонденцию из А; и By налагается запрет.
Например, наложим запрет на перевозки груза от поставщика Аг
потребителю Вг (см. табл. 4.23). Чтобы решить задачу, достаточно
вместо реального элемента целевой матрицы, стоящего в клетке АзВг,
равного 2, поставить букву М, под которой подразумевается очень
большое число, больше любого наперед заданного числа, или поста-
вить какое-либо число, например 100, которое больше любого элемен-
та целевой матрицы, имеющегося в данной задаче.
Обязательная (директивная) корреспонденция означает обязатель-
ность поставки из точки А,- в точку By части или всего объема груза,
имеющегося в точке А/. В этом случае величина обязательной постав-
ки вычитается из суммы спроса By и суммы ограничения А{ и при
решении задачи не учитывается.
Например, из точки Аг нужно обязательно поставить 400 т груза в
Вз (см. табл. 4.23). Следовательно, при решении задачи ограничения
столбца Вз и строки Аг должны быть уменьшены на 400 т и будут
равны: для Вз - 400 т (800 - 400 = 400) и для Аг - 200 т (600 — 400 я 200).
При подсчете окончательного грузооборота обязательный объем
(400-8 = 3200 г-км) прибавляют к полученному оптимальному объему
грузооборота.
Планирование грузопотоков взаимозаменяемых продуктов произ-
водится после того, как их объем с помощью переводных коэффициен-
тов будет выражен в условных единицах.
Например, у поставщика имеются разные виды топлива: у Ai -
уголь; Аг - дрова и т.д., а потребителям безразлично, какое будет
поставлено топливо, только бы оно обеспечивало необходимые мощ-
ности их нагревательных устройств. Известно, что разное топливо
имеет различную теплотворную способность. Чтобы выразить все виды
имеющегося топлива в сопоставимых величинах,, нужно перевести егр
в условные единицы. Условные единицы топлива будут выражать
ограничения по спросу и предложению. Далее задача решается обыч-
ным путем.
Открытая модель распределительного метода возникает в тех
случаях, когда отсутствует какая-либо из групп ограничений - спрос
ЁЬу или предложение Ес,. Это означает, что любой потребитель может
взять всю сумму имеющихся у поставщиков материалов или, наобо-
рот, любой из поставщиков может удовлетворить спрос всех потреби-
телей данного материала.
Задача решается просто. Если отсутствуют ограничения по предло-
жению, то ограничения по спросу в каждом столбце таблицы перено-
103
сятся в клетки с оптимальным элементом целевой матрицы данного ,
столбца, а при отсутствии ограничений по спросу - в клетки каждой
строки.
Полученное решение всегда будет оптимальным.
Рассмотрим пример. Чтобы удовлетворить потребности в строите-
льном песке пяти потребителей В1г В2, В2, В4, В5, его можно добывать в
неограниченном количестве в любой из трех точек Aj, А2, A3. Потреб-
ность в сутки:
Вх - 300 т, В2 - 200, В3 = 400, В4 - 250 и В5 - 400 т.
Расстояния (элементы целевой матрицы) между потребителями и
возможными местами добычи песка указаны в правых верхних углах
клеток табл. 4.24.
Сколько в каждой точке нужно добывать песка и как спланиро-
вать грузопотоки, чтобы транспортная работа была минимальной?
Условия задачи занесены в табл. 4.24.
Переносим ограничения спроса по столбцам в клетки с минималь-
ными расстояниями А^Ву А2В2, А3В3, А&, А3В5. Таким образом, эти
клетки получают загрузку в 300 т; 200; 400; 250 и 400 т (табл. 4.25).
Поскольку загружались клетки с оптимальным значением элемен-
та целевой матрицы, то полученное в табл. 4.25 решение, с точки
зрения транспортной работы, будет оптимальным. При этом решении
добыча песка в точках А] и А2 должна быть равна соответственно 550 и
1000 т. В точке А2 добычу вести нерационально.
Открытая модель распределительного метода встречается при
решении задач определения оптимального размещения и мощности
автотранспортных предприятий, закрепления маршрутов за АТП,
размещения и мощности предприятий добывающей и обрабатывающей
промышленности, размещения и емкости складов и др.
Признаки наличия альтернативных решении в различных способах
распределительного метода. Возьмем задачу, условия которой запи-
саны в табл. 4.26, расстояние между точками Ai и В3 6 км вместо 10 км.
Остальные условия оставим прежними. Пользуясь методом МОДИ,
найдем оптимальное решение (табл. 4.26).
Объем грузовой работы при оптимальном решении равен 11 200
т-км. Однако в этой задаче имеется другое базисное оптимальное
решение с точно таким же объемом грузовой работы, но другим вариа-
нтом грузопотоков. Оно получится, если загрузить клетку А1Д3,
перераспределив загрузку в клетках AjB4, А3В3 и А3В4, учитывая
ограничения по спросу и предложению (табл. 4.27). Следовательно,
имеются два базисных оптимальных решения (табл. 4.26 и 4.27).
Переместив 400 т груза из клетки А3В3 в ранее свободную клетку
А1В3 и из клетки А1В4 — в клетку А3В4, мы получим другой вариант
оптимального решения (другой базис). При этом от первого перемеще-
ния было получено сокращение грузооборота на 400-2 = 800 т-км, а от
104
Таблица 4.24
Возможные поставщики песка Потребители песка Ч
*1 В2Х Вз В4 «5
А1 2 4 6 3 4
а2 5 3 8 5 4
А3 3 1 4 5 3
Ь1 300 200 400 250 400 1550
Таблица 4.25
Возможные поставщики ' песка Потребители песка а/
В1 «2 Вз В4 В5
А1 300 2 4 6 250 3 4 550
а2 5 3 8 5 4
А3 3 200 1 400 4 5 400 3 1000
300 200 400 250 400 1550
Таблица 4.26
Грузообра- зующие точки Потен- циалы Грузопоглощающие точки
В1 в2 Вз В4
2 -2 8 6
А1 -2 0 16 -4 6 6 6 400 4 400
А1 4 6 8 400 2 200 12 10 14 600
АЗ 0 200 2 —2 18 600 8 200 6 1000
—Л 200 400 800 600 2000
105
Таблица 4.27
Грузообра- зующие точки Потен- циалы Грузопоглощающие точки
В1 В2 Вз «4
2 -2 8 б
А1 —2 0 16 -4 б 400 6 4 4 400
А2 4 б 8 400 2 200 12 10 14 600
А3 0 200 2 -2 18 200 8 600 б 1000
- bi 200 400 800 600 2000
второго - увеличение на 800 т-км, т.е. грузооборот остался прежним, а
грузопотоки изменились. Потенциалы и их суммы для всех клеток
матрицы одинаковы.
Сохранить неизменными в табл. 4.27 потенциалы позволило то
обстоятельство, что в свободной клетке табл. 4.26 сумма потен-
циалов равна элементу целевой функции. Это же мы замечаем и для
клетки в табл. 4.26.
Следовательно, при решении задач модифицированным распреде-
лительным методом Наличие одного или нескольких альтернативных
оптимальных базисных решений можно обнаружить по равенству
суммы потенциалов с элементами целевой матрицы в одной или
нескольких свободных клетках.
Но если имеется хотя бы одно, альтернативное базисное решение,
то существует множество оптимальных решений. В этом нетрудно
убедиться, если в клетках 41Вз, А^МзВз й А3В4 изменить загрузку в
различных вариантах, не нарушая ограничений по спросу и предложе-
нию.
Признаками наличия альтернативного оптимального базисного
решения в первом (метод Хичкока) и втором (метод Креко) способах
решения задач распределительным методом являются нулевые суммы
потенциалов с элементом целевой матрицы (первый способ) и элемен-
тов целевой матрицы контура (второй способ) хотя бы в одной свобод-
ной клетке.
Распределительный метод достаточно прост, он позволяет решать
широкий круг различных задач как транспортных, так и связанных с
другими отраслями народного хозяйства. Существенным недостат-
ком этого метода является то, что им можно пользоваться только
тогда* когда имеем дело с однородными величинами (однородный
груз, однородный подвижной состав и Т.П.).
106
4.4. Методы с разрешающими элементами
Метод разрешающих слагаемых. Он относится к группе методов
условно-оптимальных планов. Как и распределительный метод, он
нашел применение при решении транспортных задач (планирование
грузопотоков, размещение парка подвижного состава по АТП, нахож-
дение рациональных маршрутов перевозки массовых грузов, закреп-
ление подвижного состава различных АТП за маршрутами). Алгоритм
метода был разработан учеными А. Л. Лурье и Ю. А. Олейником-
Оводом.
Приведем алгоритм метода разрешающих слагаемых на примере
оптимального закрепления отправителей за потребителями однород-
ного груза. Условия примера записаны в табл. 4.28.
При решении задачи методом разрешающих слагаемых в матрицу
вводят дополнительный столбец „Избыток (+), недостаток (~)” и
строку „Разрешающее слагаемое”.
Первоначальный вариант распределения загрузки в матрице
строится по следующему правилу: объем потребления по каждому из
грузополучателей, т.е. ограничение по столбцам матрицы, полностью
помещается в клетку с оптимальным значением целевого элемента
столбца, соответствующего индексу грузополучателя. Объем отправ-
ления по каждому из грузополучателей, т.е. ограничение по строкам
матрицы, во внимание не принимается.
Используя данные табл. 4.28, можно составить табл. 4.29.
Полученные значения (табл. 4.29) переносятся в матрицу (табл.
4.30).
Вариант распределения загрузки условен, так как в нем не
соблюдаются заданные ограничения по строкам матрицы. Довести
полученный вариант дЬ оптимального - значит с помощью формальных
Таблица 4.28
i J В1 В2 вз В4 А* В5 <4 Избыток (+), недо- статок (—)
А6 14 А 17 И 4 2 230
А7 19 22 15 5 7 280
А8 19 22 15 9 7 190
bi 90 160 80 170 200 700
Разрешающее гаемое ела-
107
Таблица 4.29
Столбцы матрицы Величина ограничения столбца Клетки столбца со значе- нием целевого элемента Величина загрузки клетки столбца
В1 90 А6®1; Сб1= 14 *61 =’0
в2 160 а6®2;с62 = 17 *62=160
вз 80 А(Рз'< с63 “10 *63 = 80
в4 170 *64=170
в5 200 А(?5'> с65 = 2 *65 - 200
правил решения методом разрешающих слагаемых получить в матрице
вариант распределения, который, соответствуя ограничениям по
строкам и столбцам, обеспечивал бы минимум транспортной работы.
При решении задачи методом разрешающих слагаемых число загру-
женных клеток в матрице не обязательно должно быть равно т + n-1
(в табл. 4.30 пять загруженных клеток), а объем транспортной работы
рассчитывается только для оптимального варианта.
Оптимальность полученного в матрице распределения оценивают
сравнением объема распределенной по каждой из строк матрицы
загрузки с ограничением этой строки. В ходе проверки строки подраз-
деляются на недостаточные, избыточные и нейтральные.
Если величина загрузки, записанная в строке по полученному
варианту распределения:
больше ограничения этой строки, то строка недостаточна; недоста-
точной строке присваивается знак минус, разность между суммарной
Таблица 4.30
1 Bl в2 в3 в4 в5 <И Избыток (+), недостаток (-)
А6 90 14 160 17 1 80 10 17( 4 ) 20( 2 ) 230
А1 19 22 15 5 7 280
Ав 19 22 15 9 7 190
bj 90 160 80 170 200 700
Разрешающее сла- гаемое
108
величиной, записанной в строке загрузки, и ограничением этой строки
с отрицательным знаком записывается в столбце „Избыток-недоста-
ток” в клетке, соответствующей недостаточной строке;
меньше ограничения этой строки, то строка избыточна; избыточной
строке присваивается знак плюс, разность между ограничением этой
строки и суммарной величиной, записанной в строке загрузки с поло-
жительным знаком, записывается в столбце „Избыток-недостаток” в
клетке, соответствующей избыточной строке;
равна ограничению этой строки, то строка нейтральна; в столбец
„Избыток-недостаток” в клетку, соответствующую нейтральной
строке, записывается нуль.
Полученное в матрице распределение загрузки при решении
методом разрешающих слагаемых:
оптимально, если все строки нейтральны, т.е. в столбце „Избыток-
недостаток” записаны только нули;
условно-оптимально (т.е. требует изменения), если имеются
избыточные и недостаточные строки, т.е. в столбце „Избыток-недос-
таток” записаны значения величин избытка и недостатка.
Нейтральные строки оцениваются как относительно избыточные
или относительно недостаточные, если в матрице одновременно
имеются недостаточные, избыточные и нейтральные строки.
Нейтральная строка относительно недостаточна, если недоста-
точная строка связана с нейтральной, и относительно избыточна, если
избыточная строка связана с нейтральной или если ни недостаточная,
ни избыточная строки не имеют связи с нейтральной.
Недостаточная или избыточные строки могут быть связаны с
нейтральной непосредственно и через другую относительно недоста-
точную или относительно избыточную строку. Относительно недоста-
точной строке присваивают знак минус и в последующих расчетах
оперируют как с недостаточной. Относительно избыточной строке
присваивают знак плюс и в последующих расчетах оперируют как с
избыточной.
При оценке нейтральных строк по относительному избытку или
недостатку важным является понятие „связь строк”. В матрице при
условно-оптимальном варианте распределения загрузки недостаточ-
ная (избыточная) строка связана с нейтральной, если имеется столбец,
в котором величина загрузки клетки недостаточной (избыточной)
строки больше нуля, а также если значения целевых элементов недос-
таточной (избыточной) и нейтральной строк равны.
В принципе строка i-й матрицы связана со строкой к, если имеется
столбец;, в котором Xij > 0; Су = с^- = су + Д,, где Д(- - разрешающее
слагаемое).
В матрице для каждого условно-оптимального варианта распре-
деления загрузки суммы избытков и недостатков в столбце „Избыток-
недостаток” по абсолютной величине должны быть равны. В каждом
последующем варианте распределения загрузки суммы избытков и
недостатков должны быть меньше (или равны, но не больше) величин
109
избытков и недостатков предшествующего варианта распределения.
Это служит одним из доказательств правильности решения. Величина
избытков и недостатков оптимального варианта равна нулю.
Используя данные табл. 4.30, можно составить табл. 4.31.
В полученном варианте распределения имеются недостаточная
строка А$ и избыточные строки Aq и Ag.
Z избытков Е недостатков • |470|.
Вариант условно-оптимален. Решение следует продолжить.
Условно-оптимальный вариант доводится до оптимального пере-
распределением загрузки в матрице. Для приближения условно-опти-
мального варианта к оптимальному при решении задачи методом
разрешающих слагаемых необходимо:
р рассчитать разности; 2) выбрать разрешающее слагаемое;
3) определить .новые значения целевых элементов клеток
недостаточных строк; 4) построить контур и перераспределить
по контуру загрузку в матрице.
Разности определяются по столбцам матрицы для загруженных
клеток недостаточных строк; величина их равна разности между
минимальным значением целевого элемента клетки столбца, распо-
ложенной в избыточной строке, и целевым элементом загруженной
клетки в этом же столбце. Значения разностей записывают в строке
„Разрешающее слагаемое” в клетке, соответствующей данному
столбцу.
В данном примере загруженные клетки недостаточной строки А(
расположены в каждом из столбцов матрицы. Разности рассчитывают
по каждому из столбцов (табл. 4.32, строка „Разрешающее слагаемое”).
Наименьшая из полученных разностей выбирается в качестве
разрешающего слагаемого. Если наименьших разностей* несколько,
величина разрешающего слагаемого определяется значением любой из
них. Разрешающее слагаемое не может быть равно нулю. В табл. 4.32
разрешающее слагаемое равно 1(1 < 5), записано в столбце В4 и обведе-
но кружком.
Разрешающее слагаемое прибавляют ко всем целевым элементам
недостаточных строк матрицы. Рассчитанные новые значения целевых
элементов клеток недостаточных строк условны и используются
только в процессе решения. В оптимальном варианте условные значе-
ния целевых элементов заменяют действительными значениями. В
примере разрешающее слагаемое прибавляют ко всем целевым эле-
ментам строки Ag. В недостаточной строке записывают новые значения
целевых элементов.
Приближение условно-оптимального варианта к оптимальному
производится перераспределением загрузки в матрице с помощью
контура. Правила построения и изображения контура в методе раз-
решающих слагаемых иные, чем в методах Креко, Хичкова и МОДИ.
Контур (табл. 4.33) - незамкнутая ломаная линия, состоящая из
отрезков прямых, расположенных друг к другу под углом 90“., Начало
контура - недостаток в столбце „Избыток-недостаток”, по абсолютной
но'
Таблица 4.31
Индекс строки матрицы Суммы величин загрузок по строке Ограни- чение строки Разность Избы- ток Недос- таток (-) Примечание
А6 90+160+80+170+ +200 - 700 230 700-230-470 —470 Недостаточная
Л7 0 280 280-0-280 +280 Избыточная
Л8 0 190 190-0-190 +190 Тоже
"Таблице 4.32
*1 *2 *3 *4 В5 <и Избыток (+), недостаток (-)
А6 90 14 160 17 80 10 170 4 L 200 230 -470
А1 19 22 15 5 L 280 +280
Аз I2L 22 15 9 L 190 +190
bJ 90 160 80 170 200 700
Разрешающее слагаемое 19—14- -5 22—17- -5 15-10» «5 4) 7-2- -5
Таблица 4.33
В1 *2 *3 *4 *5 ч Избыток (+), недостаток (-)
А6 L1 90 161 18 1 80 11 170 5 200 3 1 230 -470
А1 1 19 |_22 15 2 5 7 280 ±2£2
Л8 19 22 115. 9 | 7 190 +190
bi 90 160 80 170 200 700
Разрешающее сла- гаемое
Г11
величине больший нуля: | -| > 0, далее по недостаточной строке до
загруженной клетки, связанной с другой строкой по столбцу, через
который проходит связь, до связанной строки; по строке, связанной с
недостаточной, контур или замыкается на избыток в столбце „Избы-
ток-недостаток” (величина избытка должна быть больше нуля), или,
если замкнуть контур на избыток невозможно, процесс продолжается
до загрузки, связанной с другой строкой, и т.д., пока контур не замк-
нется на избыток, величина которого больше нуля, в столбце „Избы-
ток-недостаток”.
При построении контура очень важно правильно пользоваться
понятием „связь строк”. Если одна из строк имеет связь с несколь-
кими строками матрицы, появляется возможность построить одно-
временно несколько контуров и по каждому из них перераспределить
загрузку. Если в матрице ни одна из загруженных клеток недос-
таточных строк или строк, связанных с недостаточной (при невозмож-
ности замкнуть контур на избыток > 0), не имеют связи, контур пост-
роить невозможно. Операции повторяют: нейтральные строки пере-
оценивают по относительному избытку или недостатку, рассчитывают
новые значения разностей и из них выбирают разрешающее слагаемое;
определяют новые значения целевых элементов недостаточных строк.
Эти операции повторяют до тех пор, пока не появится возмож-
ность построить контур, т.е. пока у одной или одновременно у неско-
льких загруженных клеток недостаточной строки или связанных с ней
строк не появится связь.
Конфигурация контуров для перераспределения загрузки в
матрице при решении методом разрешающих слагаемых может быть
разнообразной (табл. 4.34).
Углы контура подразделяют на четные (2, 4, 6 и т.д.) и нечетные (1,
3, 5 и т.д.). Нечетные и четные углы контура чередуются и обозна-
чаются в числовом порядке начиная с единицы. Угол 1 контура (нечет-
ный) лежит в загруженной клетке недостаточной строки, с которой
началось построение контура. Далее по контуру следуют углы 2, 3 и
т.д.
Перемещение с помощью контура загрузки в матрице произво-
дится по следующему правилу: из величины недостатка) -| > 0, избыт-
ка + > 0, через которые прошел контур, и загрузок клеток, где распо-
ложены нечетные углы контура, выбирается наименьшая. Эта вели-
чина прибавляется в клетке, где лежат четные углы контура, и вычи-
тается из величины загрузок клеток, где расположены нечетные углы
контура, из избытка + > 0 и из абсолютной величины недостатка | -1 >
> 0, через которые прошел контур. В матрице появляется новый
вариант распределения загрузки. Следует оценить его оптимальность.
В примере (см. табл. 4.33) одна недостаточная строка А6 • Построе-
ние контура начинают от величины недостатка строки _46 в столбце
„Избыток-недостаток” |-470| > 0. В дальнейшем контур должен про-
должаться по строке до одной из загруженных клеток этой строки,
через которую недостаточная строка связана с другой строкой мат-
1 12
Таблица 4.34
Индекс загруженной клетки недо* статочной строки Величина загрузки клетки Ху Индекс столбца, в кото- ром расположена загруженная клетка Значения сц столбца в послед- нем варианте распределения загрузки Примечание
*61 = 90 *1 с$1«15 С71 = 19 «81 = 19 «61 *«71 «61 *«81 - Через клетку AgBj связь отсутствует
А6®2 х$2 s в2 оо -3 WWW II U II оо «62 *«72 «62 *«82 Через клетку AgBj связь отсутствует
4б®3 *63 = 80 Ъ «63 = 11 «73-15 «83 = 15 «63*«73 «63 *«83 Через клетку Аб®3 связь отсутствует
^4 , *64 = 170 в4 «64 = 5 С74 я 55 «84 = ® |«64 = «74"5
«64 *«84 Строка А. 5 связана со строкой Aq через клетки 4^
Аб®5 х$5« 200 ®5 «65 = 2 «75 = 7 «85 = 7 «65 *«75 , «65*«85 Через клетку А5В5 связь отсутствует
113
Таблица 4.36
рицы. Если в строке А6 такая клетка отсу .гтвует, контур построить
невозможно. Каждая из загруженных клеток строки Дб рассматрива-
ется отдельно и оценивается по наличию или отсутствию связи с
другой строкой матрицы (табл. 4.35).
Контур по строке продолжается до клетки А6В^, далее по
столбцу В4, через который проходит связь, до клетки А7В4, которая
расположена в избыточной строке Д7. Величина избытка строки
А') + 280 > 0.
Контур по строке А7 замыкается на избыток этой строки в столбце
„Избыток-недостаток”. Построение контура окончено. Нечетный угол 1
контура расположен в клетке А6В4, четный 2 - в клетке А7В4. Наи-
Таблица 4.37
i В1 в2 Вз в4 В5 Избыток (+), недостаток (-)
А6 14 17 50 10 4 180 2 230 0
А1 90 19 22 15 170 5 20 7 280 0
А6 19 160 22 30 15 9 7 190 0
bi 90 160 80 170 200 . 700 0
114
меньшая из величин (недостаток |—470] = 470, избыток 280, величина
загрузки клетки А6В4, где расположен нечетный угол контура) хм =
= 170 прибавляется в клетку д7В4 и вычитается от загрузки клетки
А6В4 (170-170), при этом клетка А6В4 становится незагруженной, а
также от избытка строки д7 (280-170 = ПО) и от абсолютной величины
недостатка строки (470-170 = 300). Получается новый вариант
распределения загрузки (табл. 4.36).
Описанные операции повторяются, пока в матрице не будет полу-
чен оптимальный вариант распределения загрузки.
Для варианта распределения, приведенного в табл. 4.36, следует
оценить строки по избытку и недостатку. Сравнением устанавлива-
ется: строка А6 - недостаточная, строки Д7 и д8 - избыточные, £ из-
бытков = £ недостатков = 13001. Распределение условно-оптимально:
13001 (см. табл. 4.36) < 470 (см. табл. 4.33). Решение правильно, процесс
решения следует продолжить.
По столбцам табл. 4.36 Blt в% В$ В$ рассчитываются разности.
Величина каждой из них, равная 4, является наименьшей (случай с
несколькими наименьшими разностями). Разрешающее слагаемое 4
прибавляется ко всем целевым элементам недостаточной строки Д6. В
строке д6 левее использованных целевых элементов записываются их
новые значения. По новым значениям с недостаточная строка Д6 имеет
связь со строками Д7 и д8: через клетку ^Bjc^ = с71 - с81 = 19); через
клетку Д6В2 (сй = с72 = с82 = 22); через клетку А6В3 (с<3 = с73 = с83 = 16);
через клетку а6В5 (c6S = с75 = с85 = 7). В матрице возможно одновремен-
но построить несколько контуров и по каждому из них распределить
загрузку. Различные варианты перемещения загрузок приведены в
таблицах 4.36; 4.37; 4.38; 4.39.
Все строки матрицы (табл. 4.37) нейтральны: £ избытков = £ недо-
статков = 0.
Вариант оптимален, Р = 7530 т-км.
115
Таблица 4.39
При заданных в табл. 4.28 условиях существует семь оптимальных
вариантов распределения загрузки, два из которых приведены в табл.
4.37 и 4.39 (значения с~ в оптимальных вариантах действительные).
Решение окончено.
Все строки матрицы (табл. 4.37) нейтральны: Z избытков =
= Z недостатков = 0. Вариант оптимален, Р = 7530 т-км.
В рассмотренном примере вследствие небольших размеров задачи
не удалось рассмотреть в полном объеме многообразие случаев,
которые могут возникнуть при решении с использованием метода
разрешающих слагаемых. Дополнительно применение этого метода
предлагается проследить на примере, приведенном в табл. 4.40.
ie3 пг=3
Определить вариант, для которого Р= X I сцхд * min. По задан-
1=1 /=1
ным в матрице (см. табл. 4.40) исходным данным строится перво-
начальный вариант распределения загрузки.
Таблица 4.40
i *1 в2 Вз <н Избыток (+), недостаток (-)
6 5 4» 35
а2 8 16 4 ' 7
А3 7 4 12 14
bJ 28 21 7 56
Разрешающее сла- гаемое
116
Таблица 4.41
i i " В В 2 В 3 <ч Избыток (+), недостаток (-)
А1 28 б 5 7 2 35 +0
а2 8 16 4 7 +7
А3 7 21 4 12 14 -7
ч 28 2 1 7 56 |7|
Разрешающее слагаемое
В матрице (табл. 4.41) строка А3 - недостаточная; Л2 - избыточная;
- нейтральная; £ избытков = Z недостатков = |71. Вариант условно-
оптимален. Нейтральную строку следует оценить по относительному
избытку или недостатку. Строка Aj не имеет связи ни с недостаточной
строкой A3U32 = 21 > 0; С32 * с12), ни с избыточной строкой А2 (в этой
строке отсутствуют загруженные клетки). Следовательно, нейтральная
строка А] оценивается как относительно избыточная; ей присваива-
ется знак плюс и в дальнейшем с ней оперируют как с избыточной
строкой. По столбцу рассчитывается разность. Так как разность
одна, то ее величина является разрешающим слагаемым и прибавля-
ется ко всем целевым элементам строки Аз,'в которой записываются
новые значения целевых элементов (табл. 4.42).
Таблица 4.42
i i — 51 В2 Вз Ч Избыток (+), недостаток (-)
А1 28 6 5 1 2 7 35 +0
А1 8 16 4 7 +7
А3 8 21 5 13 14 -7
bi 28 21 7 56 17|
Разрешающее слагаемое
117
Таблица 4.43
Построение контура начинается от величины недостатка строки 4з
в столбце „Избыток-недостаток” 171 > 0, далее по строке Аз до загру-
женной клетки А3В2 по столбцу fy, используя появившуюся связь
(х32 = 21 > 0; сз2 е од “ 5), до клетки А2В1. Замкнуть контур на строке
41 невозможно, так как величина избытка строки Ai равна нулю;
продолжить построение контура, используя загруженные клетки
строки Ai, также невозможно, так как связь со строкой 4г отсутствует
и через клетки 4iBi (хи = 28 > 0; сц¥ С21) и 41Дз (х^ « 7 > 0; С13 /сгз).
Таблица 4.44
i "—— «1 «3 в/ Избыток (+), недостаток (-)
Л1 28 3 8 2.. 7 2 7 3 4 35 —0
л2 41 8 16 4 . 4 7 +7
А3 10 11 7 21 1“ 14 -7
г
bJ 28 21 7 56 1’1.
Разрешающее слагаемое
118
Таблица 4.45
j i Bl в2 Вз <ч Избыток (+), недостаток (-)
А1 21 6 7 5 7 2 35 0
а2 7 8 16 4 7 0
А3 7 14 4 12 14 0
bi 28 21 7 56 0
Р - 287 т-км
Построение контура на данном этапе решения (см. табл. 4.42) невоз-
можно. Операции повторяются. Нейтральная строка Ai переоценива-
ется по относительному избытку или недостатку. На основе связи с
недостаточной строкой Аз(хзг = 21 > 0; сзз = сц в 5) нейтральная строка
Ai оценивается как относительно недостаточная, ей присваивается'
знак минус и в дальнейшем с ней оперируют как с недостаточной
(табл. 4.43).
Ио столбцам Bi, Bj, В3 матрицы (см. табл. 4.43) рассчитывают раз-
ности. Разрешающее слагаемое 2 прибавляют к целевым элементам
недостаточных строк 43 и Ар в которых записывают новые значения
целевых элементов (табл. 4.44). По данным матрицы (табл. 4.44) могут
быть построены два контура, перераспределение загрузки по каждому
из которых обеспечит получение оптимального варианта (табл. 4.45,
4.46). Значения в табл. 4.45,4.46 действительные.
Все строки этих двух таблиц нейтральны: S избытков = 2 недостат-
ков s 0. Варианты оптимальны. Решение окончено.
Метод разрешающих множителей. Этот метод является одним из
первых методов линейного программирования, разработанным и
опубликованным в 1939 г. советским ученым Л. В. Канторовичем.
Главная особенность задач, решаемых с помощью этого метода,
выполнение которого служит признаком получения оптимального
решения, - это наличие в их условии заранее заданной пропорции или
комплектности производимой продукции.
Приведем пример. Для перевозки грузов по двум маршрутам 1 и 2
могут быть выделены автомобили типов А, Б, В в следующем коли-
честве: А- 30, Б- 10, В- 10 ед. Сменная производительность одного
119
Таблица 4.46
j i В1 В2 в3 Избыток (+), недостаток (-)
А1 28 б 7 5 а 35 0
А2 8 16 7 4 7 0
А3 7 14 4 12 14 0
28 21 7 56 0
Р = 287 т-км
автомобиля типа А на маршруте 1 - 10; Б - 15; В - 20 т. На маршруте 2:
автомобиля типа А- 15; Б- 35; В- 80 т.
Необходимо так распределить автомобили, чтобы объем перево-
зок грузов по маршрутам был максимально возможным и одинако-
вым, т.е. чтобы объем перевозок груза Qi в тоннах по маршруту 1 имел
наибольшее значение и равнялся объему перевозок груза Q по марш-
руту 2.
В условии задачи указана пропорция:
01 = б2, или 01/02 ш1-
Возможное решение задачи можно получить, распределив автомо-
биля так, чтобы каждый тип автомобилей по маршрутам перевозил
одинаковое количество груза.
Обозначим через VK1 часть автомобилей типа К, выделяемых для
работы на маршруте 1. Тогда можно составить уравнения, выравни-
вающие производительность автомобилей на маршрутах, и определить
потребное их количество по каждому маршруту:
300УА1 = 450(1 - VA1);
150УБ1- 350(1 - УБ1);
200УВ1 = 800(1-VBi).
Система определенная: в ней три уравнения и три неизвестных. Ее
решение дано в табл. 4.47.
Это решение обычное. Оно позволяет по каждому маршруту
перевезти максимум 445 т груза. Однако это решение не является
оптимальным, в чем нетрудно убедиться, проанализировав табл. 4.48.
120
Таблица 4.47
Тип авто- моби- ля Уравнение, выравнивающее производительность авто- мобилей на маршрутах Доля автомоби- лей, работающих на маршрутах Количество автомобилей на маршруте Количество перевезенного груза на марш* те, т
1 2 1 2 1 2
А 300VA1 = 450(1-VA1) 0,6 0,4 18 12 180 180
Б 150VB1 = 350(1 -VBi) 0,7 0,3 7 3 105 105
В 200VB1 = 800(1-VBi) 0,8 0,2 8 2 160 160
Итого 445 445
Таблицу 4.48 построим так, чтобы автомобили в ней располагались
в порядке возрастания отношений их производительности по маршру-
ту 2 к маршруту 1.
Отношения затрат времени на перевозку грузов разными типами
автомобилей по маршрутам выражаются обратными отношениями
производительности. Сравнивая отношения
2/3 >3/7 >1/4,
можно убедиться, что автомобили типа А наиболее рационально
использовать на маршруте 1, а автомобили типа В - на маршруте 2.
Автомобили типа В распределить следует так, чтобы они могли урав-
нять объем перевозок по маршрутам 1 и 2.
Метод разрешающих множителей позволяет найти это решение с
помощью некоторых приемов, основанных на законах линейной
алгебры.
Пусть Хц - доля автомобилей j, которые выделяются для работы
на маршруте i; в(у - производительность j автомобилей на маршруте i.
Таблица 4.48
Маршрут Производительность одного автомобиля, т Производительность всех автомобилей, т Всего, т
А Б В А Б В
1 2 Отношение производитель- ности Отношение затрат времени 10 15 3/2 10/15= =2/3 15 .35 7/3 15/35= =3/7 20 80 4/1 20/80= «1/4 300 450 3/2 2/3 150 350 7/3 3/7 200 800 4/1 1/4 650 1600
121
Таблица 4.49
Номер маршрута \elj W 4Т
А Б В А Б В
1 740 370 494 3004 1504 200-0 450
2 450 350 800 450-0 350-0 8004 800
Тогда математическая модель задачи будет иметь следующий вид:
п
Sx/j-l(/=1,2,3, .... m);
т
г1 “ z2 “ ••• “ гт “ 2 *niax (1=1,2 п).
/
Разрешающий множитель для каждого маршрута
^i=P/Saij,
j
где Р - любое число (масштаб); 2 оу — производительность автомобилей на маршруте 1.
Примем Р= 1600. Тогда разрешающий множитель для маршрута 1
*! = 1600/650 = 2,47;
для маршрута 2
Х2 = 1600/1600 = 1.
Решение выполнено в табл. 4.49, 4.50. В табл. 4.49 зафиксирован I
этап решения, а в табл. 4.50 - II.
В табл. 4.49 в столбцах А, Б, В указаны произведения разрешающих
множителей на производительность автомобилей типа j, работающих
на маршруте i. В каждом столбце наибольшие значения произведений
подчеркнуты. Подчеркнутым произведениям во второй части таблицы
(ау, х,у) соответствует Ху - 1.
Таким образом, в I этапе решения все автомобили типов А и Б
выделены для работы на маршруте 1, а автомобили типа В - на марш*
руте 2. При этом объем перевозок грузов на маршруте 1 будет состав-
лять 450 т, а на маршруте 2 - 800 т. Такое решение не удовлетворяет
поставленной цели, следует добиться равенства объемов перевозок на
обоих маршрутах. Нужно продолжить решение.
Меньший объем перевозок получился на маршруте 1. Чтобы
уравнять его с объемом перевозок по маршруту 2, нужно снять часть
автомобилей типа В маршрута 2 и передать их на маршрут 1. Это
достигается с помощью второго разрешающего множителя Х[, который
рассчитывается только для маршрута 1 („отстающего”)*
122
Таблица 4.50
Номер маршрута W
А Б В А Б В
1 1200 600 800 3004 1504 200-0,35 520
2 450 350 800 450-0 350-0 800-0,65 520
Второй разрешающий множитель определяется минимальным из
всех возможных отношений подчеркнутых величин в строке маршрута
2 к расположенным с ними в одном столбце величинам произведений
^iOij маршрута 1. В нашем примере только одно такое отношение:
*(-800/494 -1,62.
После этого находят второе решение (табл. 4.50).
Произведения в столбцах А, Б и В маршрута 1, полученные в
предыдущем этапе, умножают на *(. На маршруте 2 значения величин
оставляют прежним.
В столбце В И этапа решения подчеркнуты две. одинаковые макси-
мальные величины (800). Это означает, что автомобили типа В должны
работать на маршрутах 1 и 2. Чтобы найти значения хв1 и хВ2, нужно
решить следующую систему уравнений:
200*Ь1 + 450 - 800 + 800дод
Решив систему, получим:
*31« 0,35; х&2 ® 0,65.
Объемы перевозок по маршрутам 1 и 2 будут равны, и заданное
условие выполнено. При этом решений автомобили типов А иБ долж-
ны работать на маршруте 1.
Автомобилей типа В на маршруте 1 должно работать 3,5, а на
маршруте 2 — 6,5. Один автомобиль типа В половину дня должен
работать на маршруте 1, а вторую‘половину - на маршруте 2.
Полученное решение позволило увеличить объем перевозок в
сравнении с первым, обычным, вариантом (см. табл. 4.47) по каждому
маршруту на 75 т, или на 16 %.
Глава 5
МЕТОДЫ МАРШРУТИЗАЦИИ ПЕРЕВОЗОК ГРУЗОВ
5.1. Методы определения кратчайших расстояний
между пунктами транспортной сети
В условиях значительного роста объемов перевозок грузов в
городах для обеспечения наиболее рационального использования
подвижного состава и сокращения транспортных затрат большое
значение имеет определение кратчайших расстояний между пунктами
транспортной сети.
Транспортная сеть представляет собой систему дорог (улиц,
города), которые пригодны по качеству дорожного покрытия, ширине
проезжей части и открыты для движения подвижного состава.
Транспортная сеть состоит из отдельных элементов. Элементами
транспортной сети являются вершины (пункты) и звенья сети. Вер-
шины транспортной сети представляют собой точки на карте города
или местности (перекрестки, площади, крупные грузообразующие и
грузопоглощающие пункты), наиболее важные для определения
расстояний или маршрутов движения автомобилей. Каждой вершине
присваивается порядковый номер или другое условное обозначение.
Две соседние вершины (два соседних пункта) можно соединить лини-
ей, по которой осуществляется непосредственная связь между этими
вершинами с указанием расстояния между ними. Эти линии называ-
ются звеньями сети. Совокупность вершин и звеньев называется
сетью.
Транспортная сеть считается заданной, если определены вершины
сети, звенья и их длина.
Определение кратчайших расстояний между пунктами транспорт-
ной сети является важной практической задачей организации перево-
зок, так как дает возможность снизйть транспортные издержки на
перевозку грузов за счет минимизации общего пробега подвижного
состава и сокращения времени доставки грузов.
Расстояния между вершинами или пунктами транспортной сети
можно определить следующими способами:
замером расстояний от каждого пункта до всех остальных с помо-
щью курвиметра по масштабным картам (плану) местности или города.
Этот способ достаточно прост. Однако показания курвиметра необхо-
димо корректировать в зависимости от конкретных реальных усло-
вий, т.е. учитывать профиль дорог, качество дорожного покрытия и
т.д.;
непосредственным замером расстояний на местности по. показа-
ниям спидометра при движении автомобиля по маршруту. Такой
способ замера дает возможность определить расстояние между пунк-
124
тами с большой точностью, „от ворот до ворот”, но он связан со значи-
тельными материальными и трудовыми затратами.
Если замеры производятся между несоседними, удаленными друг
от друга пунктами, то в таком случае от одного пункта к другому
может быть несколько путей следования, т.е. имеют место различные
варианты движения.
При использовании этих способов определения расстояний нельзя
быть уверенным в том, что выбранное расстояние между двумя пунк-
тами является кратчайшим. Этот недостаток особенно существен при
определении расстояний между значительно удаленными точками в
условиях густо разветвленной транспортной сети, т.е. в крупных
городах и экономически развитых районах.
Таким образом, задача определения кратчайших расстояний
между пунктами транспортной сети является задачей многовариант-
ной, которая имеет множество допустимых решений. Для нахождения
оптимального решения задачи применяются математические методы,
позволяющие осуществить решение как вручную, так и сиспользова-
нием современных ЭВМ.
Метод потенциалов. Определение кратчайших расстояний методом
потенциалов заключается в следующем. Начальной точке сети,' за
которую может быть принята любая из точек, присваивают потенциал,
равный нулю, после чего определяют потенциалы соседних с началь-
ной точкой вершин сети, из них выбирают наименьший и присваивают
соответствующей вершине, определяют потенциалы соседних с выб-
ранной вершиной точек, из всей совокупности потенциалов выбирают
наименьший, который проставляют у соответствующей вершины и т.д.
Выбранный потенциал определяет кратчайшее расстояние от началь-
ной вершины до данной, на рисунке эту связь отмечают стрелкой.
Полное решение задачи включает столько этапов, сколько вершин
включает транспортная сеть, поскольку каждый раз определяют
кратчайшие расстояния от начальной точки до остальных.
Пусть задана транспортная сеть (рис. 5.1). Ее вершины обозначены
буквами, а числа у звеньев показывают расстояния между соседними
вершинами.
Потенциалы рассчитывают
Vj-Vj+Zjy,
где »i — потенциал предшествующей (соседней) вершины; — длина звена, соединяющего
вершины) и/.
Отметим, что kj может быть не равно (например, в случае одно-
стороннего движения). В этом случае соответствующие точки сети
соединяют двумя звеньями с указанием направлений движения и
расстояний по каждому направлению (рис. 5.2).
125
Рис. 5.1. Схема транспортной сети
Рис. 5.2. Схема кратчайших расстояний для
точки А
На 1 этапе за начальную точку принята вершина А. Ее потенциал
равен нулю, т.е. уд » 0. Соседними к точке А являются вершины: Б, Ж,
И, Г, К, В, 3. Их потенциалы:
1VA-0;
9 »Б“ »д+ 1дб = () + 6"6;
3»ж“»А+/АЖ“0 + 3'3;
6 *и= *а+ ,аи”0+5=5;
4 »г “ »д + “ 0 + 4 » 4;
5 *К“ ”А+ 'аКп° + 5 = 5:
2 1®« »д + ,АВ“в + 2 = 2;
*3" *А 1 (АЗ**9 |,9“9 •
Из всех вычисленных потенциалов наименьшим является потен-
циал точки В, равный 2. Этот потенциал проставляют у вершины В на
рисунке в прямоугольной рамке и обводят контуром в расчетах,
чтобы к нему не возвращаться. У контура, начиная с точки А, простав-
ляют порядковый номер. На рисунке кратчайшую связь отмечают
стрелкой от точки А к точке В.
Затем определяют потенциалы точек Ей К, соседних к точке В:
7»Е = *В+^еш2 + 3 = 5;
Чсв *В* !дКя2*4°6 ь
Из совокупности потенциалов (кроме и vb> которые уже выбра-
ны) наименьший потенциал соответствует точке Ж и равен 3. Это число
126
проставляют у вершины Ж, отмечают кратчайшую связь от точки А к
точке Ж, расчетную формулу заключают в рамку и отвечают поряд-
ковым номером 3.
Потенциалы точек Б, Д, 3, И, рассчитанные через потенциал точки
Ж, равны
уБ",ж * 1 * to*3*4"7!
8»д-»ж+гжд=3+2=5;
п »з “ *ж + Ькз=3+5=8;
-Пг’^ж1 to"3*4"7
Из невыбранных потенциалов наименьший 4 соответствует точке
Г. Его присваивают этой точке и делают соответствующие отметки.
Используя потенциал точки Г, определяют значения потенциалов
для соседних с ней точек К, И, М
. Тц = Vp + /рц = 4н 5*= 9j
12»м“Т + /ГМ = 4 + 6 = 1°-
Следующий по значению потенциал, равный 5, характерен дл^
нескольких точек сети. В этом случае значение присваивают любой из
возможных вершин, например точке К. Этой же вершине соответству-
ют еще два потенциала 6 и 7, но поскольку их значения выше выбран-
ного, то их вычеркивают. Рассчитаем потенциалы для соседних с
точкой К вершин Л, Е, М
i0vn=»K+tai“5+2=7;
i|B*‘llK*frCE~5*e,ni
12»М = »К + *КМ = 5 + 5 = 10-
Такой же потенциал, равный 5, присваивают точкам И, Е, Д и
определяют потенциалы соседних с ними вершин
11»3 = »и + /из = 5 + 3 = 8 *!
»Б“УД | 7ДБ*5 |5"10»‘ "
+гЕБ+ ~
»3 = >Д + /Д3 '5 + 6 = 11.
Следующий по порядку потенциал присваивают точке Б. Он равен
б. Соседних с ней вершин без потенциалов нет, соответствующих
127
вычислений поэтому не выполняют.
Чтобы продолжить решение задачи,
рассматривают оставшуюся совокуп-
ность потенциалов. Наименьшим в
совокупности является потенциал 7
для точки Л. Потенциалы соседних к
ней точек уже рассчитаны, поэтому
никаких вычислений не производят,
а выбирают следующий потенциал из
уже рассчитанных. Это потенциал
точки 3. Причем этой вершине
соответствуют два одинаковых
потенциала, равные 8. Это значит, что
из начальной точки А в пункт 3
можно попасть двумя путями через
вершину Ж и вершину И с одинако-
вым расстоянием, равным 8 км.
Такое же положение характерно и
для Точки М, потенциал которой
равен 10. В эту вершину можно
попасть через пункт К и пункт Г с
одинаковым минимальным пробегом
- 10 км. Одинаковым по значению
потенциалам для одной и той же точки присваивают один порядковый
номер.
Потенциалы всех вершин определены, это значит, что найдены
кратчайшие расстояния от точки А к остальным вершинам транспорт-
ной сети. На рис. 5.1 они отмечены стрелками. Кратчайшая транс-
портная сеть может быть изображена отдельно, для точки А (рис. 5.3).
Затем переходят ко II этапу, выбирая за начальную точку любую из
вершин сети, кроме вершины А. С помощью потенциалов по описанной
методике определяют кратчайшие расстояния от этой точки к осталь-
ным точкам транспортной сети и так до тех пор, пока не будут опреде-
лены кратчайшие расстояния для всех точек сети. По результатам
вычислений составляют таблицу кратчайших расстояний в виде так
называемой „шахматки” табл. 5.1.
Автоматизированный способ определения кратчайших расстояний
между пунктами транспортной сети. Решение этой задачи с использо-
ванием ЭВМ производится по методу, получившему в литературе
название метода „метлы”.
Постановка задачи та же, что и в случае ее решения методом
потенциалов.
Задана транспортная сеть: ее вершины, звенья и их длина (рис.
5.3).
Определение кратчайших расстояний от пункта, принятого за
начало сети, до всех остальных ведется путем последовательного
составления однотипных таблиц.
128
Таблица 5.1
— А Б в Г Д Б Ж 3 И к Л М
А 6 2 4 5 5 3 8 5 5 7 10
Б 8 10 5 9 4 9 8 11 14 16
В 2 8 6 7 3 5 10 8 4 6 9
Г 4 10 6 9 9 7 8 5 3 5 6
д 5 5 7 9 10 2 6 6 10 12 15
Е 5 9 3 9 10 8 13 10 4 8 11
Ж 3 4 5 8 2 8 7//, 6 5 8 10 13
3 8 9 10 8 6 13 5 7//, 3 11 13 14
и 5 8 7 5 6 10 4 3 в 8 10 11
к 5 11 4 3 10 6 8 и ж 2 5
л 7 13 6 5 12 8 10 13 10 2 Ж 7
м 10 16 9 6_ 15 11 13 14 11 5 7 ж
Рассмотрим решение задачи на конкретном примере.
В начале расчета формируется исходная табл. 5.2, в которую
заносится: в графу 1 - вершины сети по порядку; в графу 2 - расстоя-
ния от вершины, выбранной за начало сети, до всех остальных вершин.
В табл. 5.2 за начальную вершину принята вершина А, поэтому для нее
проставляют расстояние, равное нулю, а для остальных вершин - пока
неизвестная величина, равная М, где М - большое положительное
число. В графу 3 проставляют единицу против той вершины, для
которой необходимо определить или проверить расстояние между ней
и другими вершинами. В данном случае единица как условный знак
проверки проставлена прЪтив вершины А. В графу 4 ставят единицу
против вершин, которые являются соседними с начальной, т.е. свя-
заны звеньями с вершиной А. Такими вершинами являются Б, Д, Е, 3
(см. рис. 5.3).
В графах 3 и 4 ставится единица как условный наиболее удобный
знак обозначения при решении задачи на ЭВМ.
Решение выполняют следующим образом.
I этап. Так как можно, пользуясь схемой дорожной сети, опреде-
лить расстояние от начальной вершины до ее соседних вершин, состав-
ляется новая табл. 5.3, в которой в графе 2 у вершин, соседних с
начальной и отмеченных единицей в графе 4 табл. 5.2, значения рас-
стояний М меняются на фактические, т.е. проставляются длины зве-
ньев: АБ, АД, АЕ и АЗ, значения которых по величине «с М.
' 129
Таблица 5.2
Таблица 5.3
Наименова- ние вершин сети (пунк- тов) Рассто- яние Знак. провер- ки Сосед- ние вер- шины Наименова- ние вершин сети (пунк- тов) Рассто- яние Знак провер- ки Соседние вершины
1 2 3 4 1 2 3 4
А 0 1 — А 0 + —
Б М — 1 Б 6 1 —
В м — — В М — 1
Г м — — Г м — 1
Д м — 1 Д 5 1 —
Е м — 1 Е 11 1 <—
Ж м — — Ж М — —
3 м — 1 3 8 1 —
И м — — И М — —
к м — — к М — —
л м — — л м — —
Примечание. Знак означает, что решение не проверено; „+* - проверка произ-
ведена;_______________________________________________________
В графе 3 табл. 5.3 знак проверки ставится против той вершины,
для которой изменилось расстояние М на фактическое, т.е. в данном
примере у вершин Б, Д, Е, 3. В той же графе для вершины А ставится
прочерк, т.е. вершина А считается проверенной.
П этап. Просматриваются подряд все вершины, имеющие знак
проверки - единицу в графе 3. Следующей проверяемой вершиной,
таким образом, является вершина Б.
В графе 4 табл. 5.3 отмечаются единицами вершины, соседние с
вершиной Б. Такими на рис. 5.4 являются вершины В и Г.
Ш этап. Определяются звенья, соединяющие проверяемую вер-
шину Б с соседними вершинами, отмеченными в графе 4 (В, Г), и
Таблица 5.4
Наименова- ние вершин сети (пунктов^ Рассто- I яние Знак провер- Соседние вершины Наименова- ние вершин Расстоя- ние Знак провер- Соседние вершины
ки сети (пункт- ток) ки
1 2 3 4 1 2 3 4
А 0 + — Е 11 1 —
Б 6 + 1 Ж М — * т
В 17 1 — 3 8 1 —
Г 16 1 1 И М —
Д 5 1 — К л М м — —
130
Рис. 5.4. График функции зависимости
выработки единицы подвижного состава от
коэффициента использования пробега
вычисляется длина этих звеньев (рВпБГ) как сумма расстояния,
указанного в графе 2 для проверяемой вершины Б, и расстояния
просматриваемого звена. Полученные результаты заносятся в новую
табл. 5.4 в графу 2 вместо чисел М у соответствующих вершин.
В графе 3 отмечаются единицами вершины, у которых расстояния
М заменены на полученные в результате расчета.
Следующей проверяемой вершиной по порядку является вершина
В. Для нее в графе 4 табл. 5.4 отмечаются соседние вершины Б и Г и
снова выполняется шаг 3.
Предыдущая вершина Б считается проверенной, поэтому знак
проверки 1 вычеркивается из строки Б (графа 3).
Аналогичные действия выполняются и для других проверяемых
вершин сети (пунктов).
В том случае, когда расстояние до какой-либо вершины было
определено раньше и уже занесено в таблицу, при новом' определении
расстояния для той же самой вершины полученное значение сравнива-
ется с предыдущим и в новую таблицу записывается меньшее значе-
ние.
Например, если в качестве проверяемой выбрана вершина Див
таблице 5.4 указано, что расстояние до этой вершины равно 5, то,
определяя расстояния от вершины Д до соседних с ней вершин Г и Е,
получим следующие значения звеньев:
ДГ-5 + 2 = 7;
ДЕ = 5 + 4»9.
Таким образом, расстояния от вершины Д до вершин Г и £ меньше,
чем указанные в табл. 5.4. Эти меньшие значения расстояний записы-
ваются в новую табл. 5.5.
Вершина Г, следуя по порядку, уже проверялась, но, поскольку
расстояние у этой вершины изменилось, против нее вновь ставится
знак проверки 1, и на следующем этапе расчеты проверяются заново
относительно этой вершины (т.е. снова проверяется вершина Г после
проверки вершины Д).
Так как проверяемой вершиной в результате расчетов опять
оказалась вершина Г, в графе 4 табл. 5.5 отмечаются вершины В, Д, Ж,
соседние с проверяемой, и расчеты продолжаются.
131
Таблица 5.5
Таблица 5.6
Наименова- ние вершин сети (пунктов) Расстоя- ние Знак провер- ки Соседние вершины Наименова- ние вершин сети (пунк- тов) Расстоя- ние Знак провер- ки Соседние вершины
1 2 3 4 1 2 3 4
А 0 + — . А 0 + +
Б 6 + — Б 6 + +
В 17 + 1 В 13 + +
Г 7 1 — Г 7 + +
Д 5 + 1 Д 5 + +
Е 9 1 — Е 9 + +
Ж м — 1 Ж 17 + +
3 8 1 — 3 8 + +
И м — — И 15 + +
К м — — К 20 + +
Л м — — Л 24 + +
Решение задачи методом „метлы” выполняют до тех пор, пока все
единицы (знаки проверки) не будут вычеркнуты из столбца проверки
(графа 3).
Окончательные результаты расчетов кратчайших расстояний от
начальной вершины А до остальных вершин сети представлены в
табл. 5.6.
Чтобы определить значения кратчайших расстояний от другой
вершины сети до всех остальных, данную вершину выбирают в качест-
ве начальной, и в исходной таблице в графе 2 задают расстояние,
равное нулю, остальным вершинам - расстояние М, и вновь выпол-
няют этапы 1,2кЗ.
Таким образом, общие положения решения задачи определения
кратчайших расстояний методом „метлы” сводятся к следующему:
1. Выбирается начальная вершина сети, расстояния от которой до
других вершин необходимо определить. В исходную таблицу записы-
вают расстояния: для начальной вершины - 0, для остальных вер-
шин- М.
2. Определяют длину звеньев, соединяющих начальную вершину с
соседними, и расстояния М заменяют в таблице на меньшие, фактичес-
кие (поскольку требуется найти кратчайшие расстояния между пунк-
тами сети).
3. Вершины сети проверяют последовательно сверху вниз и отме-
чают знаком проверки в таблице.
4. Значения расстояний, полученные в результате расчетов, зано-
сят в таблицу. Для каждой вершины из нескольких полученных
значений выбирают наименьшее расстояние.
5. Процесс решения (цикл) повторяют до тех пор, пока из таблицы
не будут вычеркнуты все знаки проверки для вершин сети.
132
6. Для определения кратчайших расстояний между всеми верши-
нами сети процесс решения повторяют сначала (пункты 1-5).
Если решение задачи данным методом выполняют вручную, то для
снижения трудоемкости вычислений составляют одну таблицу такого
типа, как в рассматриваемом примере, в которую вносят соответст-
вующие изменения.
Для большого числа вершин сети расчеты кратчайших расстояний
данным методом выполняют на ЭВМ.
Алгоритм решения данной задачи на ЭВМ достаточно прост и
позволяет рационально использовать оперативную память ЭВМ,
благодаря чему решение задачи для больших объемов исходной
информации (транспортные сети с большим количеством вершин)
выполняют достаточно быстро.
Решение задачи определения кратчайших расстояний между
пунктами транспортной сети динамическим методом рассмотрено в
п. 6.1 гл. 6.
5.2. Методы составления рациональных маршрутов
при перевозках массовых грузов
Грузовая работа единицы подвижного состава автомобильного
транспорта в тоннах выражается следующим образом:
*езд + *n-pv Р
где Тн - время наряда, ч; v - средняя техническая скорость движения, км/ч; Р - коэф-
фициент использования пробега; q — номинальная грузоподъемность, т; У — коэффициент
использования грузоподъемности; /езд — средняя величина пробега автомобили с грузом
за одну ездку, км; tn.p — время простоя под погрузочно-разгрузочными операциями за
одну ездку, ч.
Если принять
THVQ *V= а; /езд = *n-pv = /»
где a, Ъ, f — const ₽ = * (где х - аргумент), то Q (т) будет функцией аргумента х:
Q = ax/b + fx. !
Функция Q дробно-линейная. Ее графическое изображение пред-
ставлено на рйс. 5.4.
Следовательно, если ₽ -* шах, то Q “* шах. Поскольку Sq = ?>ZlQ
к./т, то при Q max Sq “* min, а также при ₽ -* max Sq -* min. Посколь-
ку SZ с увеличением Р возрастает в меньших размерах (Sq - себестои-
мость перевозки 1 т груза, к./т; EZ - сумма транспортных затрат, к.)?
₽в*г/*обв W + *x+/0)»
где /г - пробег автомобиля с грузом, км; /og - обилий пробег автомобиля, км; /х - пробег
автомобиля б$з груза во время работы на линии, км; /q - нулевой пробег, км.
133’
Таким образом, ₽ •* max, когда ♦max, (^ + 1о) * min. Последнее
условие с точки зрения организации транспортного процесса (выпол-
нение заданного объема транспортной работы при минимуме затрат)
определяет оптимальный вариант плана работы подвижного состава.
Чтобы достигнуть этого, нужно спланировать рациональные маршруты
движения подвижного состава, или, иначе говоря, провести маршру-
тизацию перевозок грузов.
Маршрутизация перевозок - это составление маршрутов движе-
ния подвижного состава или его порядка следования между коррес-
пондирующими точками.
По одному маршруту могут перевозиться различные грузы, кото-
рые должны удовлетворять следующему условию: их можно транспор-
тировать одним и тем же подвижным составом. Следовательно, марш-
рутизацию перевозок можно составлять только при наличии групп
грузов, требующихся для перевозки однотипного подвижного состава.
В связи с этим первый шаг работы по составлению рациональных
маршрутов заключается в классификации грузов, предъявленных к
перевозке, на группы, однородные с точки зрения возможности их
перевозки на одном и том же подвижном составе.
Маршруты составляются по каждой группе грузов.
Практика постановки и решения задач маршрутизации перевозки
грузов учитывает множество ограничений, вызываемых конкретными
условиями работы грузовых точек и автомобильного транспорта. К
ним относятся: заданное множество пунктов отправления и потреб-
ления груза, объемы грузооборота'поставщиков и потребителей груза,
характер грузов, время их доставки, структура и наличие парка
подвижного состава, размещение и мощность автотранспортных
предприятий, режим работы АТП и клиентуры, режим работы водите-
лей, ограниченная пропускная способность пунктов, минимально
допустимое значение целевой функции.
Многообразие ограничений в каждом конкретном случае потре-
бовало создания различных методов маршрутизации, в том числе и
эвристических,базирующихся на материалах опыта прошлых решений.
Последние используются главным образом вычислительными цент-
рами, обслуживающими автомобильный транспорт.
Большое число методов маршрутизации перевозки массовых
грузов, когда грузы перевозятся помашинными отправками, слож-
ность используемых алгоритмов не позволяют в объеме данной книги
привести их изложение. Читатель может познакомиться с ними в
работе [5]. Ниже на конкретном примере рассматриваются только два
относительно несложных метода маршрутизации, которыми можно
пользоваться при расчетах вручную, когда имеется незначительная
группа ограничений.
Рассмотрим пример. Торговые организации Б1, Bj, Бз> ^4, &5 могут
получать овощи с трех складов: на складе Aj - 100 т картофеля, 20 т
134
^)- АТП
ggx грузообразую-
sgy ~ щие точки
Рис. 5.5. Схема транспортной сети района перевозок овощей со складов в торговые органи-
зации
грузопоглощаю-
щие точки
репчатого лука, 50 т капусты; на складе Aj - 50 т картофеля, 100 т
репчатого лука; на складе Аз - 100 т картофеля, 150 т капусты.
Все три продукта являются грузами, перевозка которых может
осуществляться одним и тем же подвижным составом. Имеющиеся на
складах продукты требуются организациям в объемах, указанных в
табл. 5.7.
Схема транспортной сети района перевозок показана на рис. 5.5.
Кратчайшие расстояния между корреспондирующимися точками в
километрах указаны в табл. 5.8.
Требуется так организовать процесс перевозок, чтобы при мини-
мальных затратах был перевезен весь груз и коэффициент использо-
вания пробега подвижного состава имел максимально возможную в
данных условиях величину.
Таблица 5.7
Потребитель Вид груза, т Итого
Картофель Лук Капуста
В1 50 20 50 120
Б2 60 30 40 130
®3 40 25’ 70 135
Б4 80 25 20 125
б5 20 20 20 60
Итого 250 120 200 570
135
Таблица 5.8
Склад Потребитель груза
«1 «2 53 54 55
41 11 11 10 б 5
а2 3 3 б 2 7
АЗ 9 9 4 4 , Л '
Метод таблиц связей. Как правило, грузообразующие и грузопо-
глощающие точки, род груза, объемы перевозок и расстояния доставки
заданы условиями задачи. Перевозка овощей и картофеля может
производиться одним и тем же видом подвижного состава (автомобиль
ЗИЛ-130), следовательно, в этом отношении они образуют однородную
группу.
Оптимальные размеры и направления грузопотоков определяют по
каждому виду груза, затем составляют сводный план грузопотоков.
При этом задачу решают любым из известных способов.
В рассматриваемом примере необходимо решить три задачи при-
крепления потребителей к поставщикам: по картофелю, репчатому
луку и капусте. Рациональные грузопотоки определены по алгоритму
транспортной задачи методом потенциалов.
Оптимальный план перевозки картофеля представлен в табл. 5.9.
Минимальный объем транспортной работы, которую следует
выполнить при перевозке картофеля согласно оптимальному плану,
равен 11-50 + 11-10 + 3-50 + 4-40 + 6-20 + 5-20 = 1430 т-км.
Таблица 5.9
Овощная база Потенциал строки Потребитель Объем перевозок, т
51 В2 Вз 54 и
Потенциал столбца
11 11 б б 5
А1 0 к 50 1С 11 1 10 L 20 т 20 100
а2 -8 3 5С 3 1 . б L L 50
аЗ —2 9 9 40 4 1 L 60 L 100
СПРОС,! 50 60 40 80 20 250
136*
Таблица 5.10
Овощная база Потенциал строки Потребитель Объем перевозок, т
*2 L*3! *4 1»5
Потенциал столбца
1 1 4 0 5
Al 0 И 111 10 L L 20 20
Аг 2 20 3 L 30 25 б 25 0 100
Спрос, т 20 30 25 25 20 120
Таблица 5.11
Оптимальный план перевозки репчатого лука представлен в
табл. 5.10.
Минимальный объем транспортной работы при перевозке лука
составит 3*20 + 3*30 + 6*25 + 5*20 = 450 т*км.
Оптимальный план перевозки капусты представлен в табл. 5.11.
Минимальная транспортная работа, которую необходимо выпол-
нить при перевозке капусты, составит 11*30 + 9-20 + 9-40 + 4-70 + 4-20 +
+ 5*20 = 1330 т«км.
Сводный план грузопотоков (табл. 5.12) является суммой опти-
мальных планов перевозок по каждому из видов груза (картофелю,
луку и капусте). При этом объемы перевозок между одними и теми же
корреспондирующими пунктами суммируют, сумма спроса по каждому
потребителю должна соответствовать его общей потребности, а сумма
137
объемов перевозок должна соответствовать объему отправлений
овощных баз.
Сводный план характеризует прикрепление потребителей к
овощным базам по всем видам грузов, предъявленных к перевозке,
поэтому транспортная работа, которую необходимо выполнить соглас-
но этому плану, должна равняться сумме транспортных работ по видам
грузов
1430 + 450 +1330 = 11.80 + 3-20 + 940 + 11-10 + 3.80 + 9-40 + 6-25 + 4-110 +
+ 6*20 + 2-25 + 4*80 + 5*60 ® 3210 т-км
Отметим, что если в группе однородных по требованию к подвиж-
ному составу грузов встречаются грузы разного класса, то сводный
план грузопотоков составляют в так называемых расчетных весах.
Расчетную массу Qpac определяют делением объема перевозок в тон-
нах Офакт на средний коэффициент использования грузоподъемности
для данного класса груза Ти;
Орас " @факт^ ст •
Расчетная масса является единым измерителем и соответствует
общей номинальной грузоподъемности, необходимой для перевозки
всего объема грузов, что позволяет без труда определить потребное
количество подвижного состава, а также количество ездок по каждому
маршруту.
Оптимальный план подачи порожняка под погрузку определяют в
результате решения транспортной задачи, в которой поставщиками
являются пункты сосредоточения порожнего подвижного состава
(потребители грузов), а его потребителями - объекты, испытывающие
потребность в порожних автомобилях (овощные базы). В матрице
задачи (табл. 5.13) первые показаны по строкам, вторые по столбцам.
Таблица 5.12
Овощная база Потребитель Объем перевозок, т
S1 Вз *4 В5
>11 80 И 10 11 10 L 20 L 60 170
Лг 20 3 80 3 25 б L 25 L 150
Аз L» 20 40 9 110 4 L 80 L 250
Спрос,» 120 130 135 125 60 570
138
Таблица 5.13
Грузо- получатель Потенциал строки Грузоотправитель Общая грузо- подъемное», т
М | л2 1 м
Потенциал столбца
11 3 9
0 100 11 20 3 9 120
В2 0 И 130 3 9 130
в3 -5 10 6 135 4 135
в< —5 10 6 2 115 4 125
в5 **"6 60 5 7 7 60
Спрос на подвижной состав, т 170 150 250 570
Итоговые объемы перевозок остаются прежними и условно принимают-
ся за общую грузоподъемность подвижного состава, прежними остают-
ся и расстояния между пунктами.
Оптимальный план подачи порожняка под погрузку (см. табл. 5.13)
получен в результате решения транспортной задачи методом потен-
циалов. Он обеспечивает минимальный пробег подвижного состава без
груза при движении автомобилей от грузополучателей к грузоотпра-
вителям (овощным базам).
Согласно оптимальному «плану подачи порожняка необходимо,
чтобы после выгрузки в пункте порожние автомобили грузоподъем-
ностью 100 т были направлены на первую овощную базу (пункт Aj), а
автомобили грузоподъемностью 20 т - на вторую овощную.базу (пункт
Л2). После выгрузки в пункте В2 порожние автомобили общей грузо-
подъемностью 130 т должны возвращаться на вторую овощную базу; из
пункта Вз - автомобили общей грузоподъемностью 135 т на третью базу
(пункт A3), из пункта В4 автомобили грузоподъемностью Ют- на
первую и грузоподъемностью 115 т - на третью базу, изВ$- порожние
автомобили грузоподъемностью 60 т Должен подаваться на первую
овощную базу.
139
Метод совмещенных матриц. При этом методе подготовительный
этап остается тот же, что и при методе таблиц связей, однако сводный
план перевозки грузов и оптимальный план подачи порожнего под-
вижного состава заносят в единую матрицу (табл. 5.14), • т.е. таблицы
5. fl и 5. 8 совмещают (отсюда и название метода). При построении
маршрутов^весьма удобно, если числовые значения объемов перево-
зок и грузоподъемность порожних транспортных средств внешне
отличаются друг от друга, например в совмещенной матрице их запи-
сывают разными способами или разными цветами.
Совмещенные планы предыдущей задачи представлены в матрице
(см. табл. 5.14) В ней объемы перевозок обведены кружками, значе-
ния суммарной грузоподъемности не обведены, расстояния между
пунктами указаны в верхних правых углах клеток матрицы.
На I этапе решения выявляют маятниковые маршруты. Наличие в
клетке матрицы двух записей, грузоподъемности порожняка и объема
перевозок, свидетельствует о наличии маятникового маршрута. Объем
перевозок по маршруту соответствует меньшему из чисел клетки
матрицы. Так, запись в клетке А& (см. табл. 5.14) указывает на
наличие маятникового маршрута A\Bi - B\Ai с объемом перевозок
80 т. Всего составлено семь маятниковых маршрутов, которые приве-
дены ниже:
Маятниковый , Объем перевозок
маршрут по маршруту, т
80
А1В4-В4А1 10
60
А2В1-В1А2 20
A^2~bjA2 80
110
Aj/B^-B^ 80
Объемы перевозок по маятниковым маршрутам вычитают из
загрузок соответствующих клеток и составляют новую матрицу для
продолжения решения задачи (см. табл. 5.Й)). При решении практичес-
ких задач используют одну матрицу, стирай старые и записывая новые
числа непосредственно в таблице.
На II этапе составляют кольцевые маршруты. С этой целью строят
замкнутые контуры. Вершины контура должны находиться в загру-
женных клетках матрицы, значения загрузок у вершин контура
чередуются начиная с клетки, в которой помещен объем перевозок
(число, обведенное кружком), затем грузоподъемность порожнего
подвижного состава (необведенные числа), снова объем перевозок и
так далее до получения замкнутого контура. Каждый построенный
контур соответствует кольцевому маршруту. Объем перевозок по
маршруту соответствует меньшему из чисел у вершин контура. В табл.
140
Таблица 5.14
5.15 в качестве примера показан замкнутый контур, соответствующий
кольцевому маршруту - В4Л3 - А3В1 - с объемом перевозок
Ют.
При построении замкнутого контура сплошная линия соответст-
вует перевозке груза, пунктирная - подаче порожняка. В матрице
сплошные линии расположены горизонтально, пунктирные - верти-
кально. Объем перевозок по маршруту вычитается из величины
загрузок у вершин контура. Затем переходят к построению очеред-
ного маршрута и т.д. Построение рациональных маршрутов заканчи-
вается, когда все объемы перевозок и грузоподъемность порожнего
подвижного состава исчерпаны. Это должно происходить одновремен-
но, в противном случае - допущена ошибка. Всего составлено 4 коль-
цевых маршрута (табл. 5.16).
Как видим, получены те же маршруты, что и при решении задачи
методом таблиц связей. Однако метод совмещенных матриц менее
трудоемок, позволяет в ходе разработки анализировать характерис-
тики маршрутов и вносить необходимые изменения.
Таблица 5.15
141
Таблице 5*16
Номер марш* рута Кольцевой маршрут Объем пере- возок, т Коэффициент использо- вания пробега
8 9 10 11 А1B4 - В4А3 - А3В1 - В1Л1 Al^i—B2A2""^2®4"r®4^3e^L3®l"r®Ml А2В3—В3А3— А2В4 -В4А3 - А3В2 -В2А2 10 10 25 15 6 + 9 15 Л еА в—«0,50 6+9+4+11 30 ’ 11+2+9 Але> 11+3+2+4+9+11 ’ =0.682 6+4+9+3 2+9 2+4+9+3 “°’Ш
Выбор начального пункта маршрута. Порожний пробег подвиж-
ного состава при перевозке грузов по рациональным маршрутам
зависит от выбора начального пункта маршрута и автотранспортного
предприятия, которое будет выделять подвижной состав для работы.
На маятниковых маршрутах начало маршрута определено однозначно.
На кольцевых - число возможных вариантов соответствует числу
пунктов погрузки на маршруте.
К примеру проанализируем маршрут Ai-Bj - ~ ~ ДМз ”
- АзД -
На схеме маршрута движение без груза обозначено пунктиром и
указано значение соответствующего пробега. Варианты сочетания
пунктов первой погрузки и последней разгрузки и соответствующий
им порожний пробег на последнем обороте маршрута приведены в
табл. 5.17.
За начальный пункт маршрута рационально принять пункт Ai
(овощная база 1), так как при этом порожний пробег на последнем
обороте по маршруту будет наименьшим, равным 7 км (исключается
участок BiAi, равный 11 км). Сокращается порожний пробег каждого
автомобиля, работающего на маршруте.
В общем случае начальная точка кольцевого маршрута выбира-
ется таким образом, чтобы при возврате подвижного состава в гараж
на последнем обороте исключался самый длинный участок порожнего
пробега по маршруту.
Таблица 5.17
Начало маршрута Конец маршрута Порожний пробег на последнем обороте по маршруту, км
А1 *1 7
л2 В2 15
A3 в4 14
142
Нулевой пробег подвижного состава будет минимальным при
рациональном прикреплении маршрутов к автотранспортным
предприятиям.
Критерием при этом является минимальный прирост порожнего
пробега подвижного состава. Для маятниковых маршрутов этот
прирост равен нулевому пробегу.
Порожний пробег подвижного состава на последнем обороте по
кольцевому маршруту равен сумме порожних пробегов на звеньях
маршрута за вычетом участка, который не пройдет автомобиль, так
как из последнего пункта разгрузки он возвращается в автотранс-
портное предприятие. С учетом нулевого пробега общий порожний
пробег на последнем обороте по кольцевому маршруту равен:
Е4юр~ k+ 4)>
где 1Х — длина участка порожнего пробега по маршруту, который исключается на послед-
нем обороте при возвращении подвижного состава в гараж, км; Jp - нулевой пробег
подвижного состава в пункт первой погрузки и при возврате в гараж из пункта последней
разгрузки, км.
Поскольку сумма порожних пробегов на звеньях маршрута, ^4юр>
остается всегда постоянной, то минимизация происходит за счет
величины 1$ - I» которая характеризует прирост порожнего пробега на
кольцевом маршруте. Для оптимального прикрепления рациональных
маршрутов к автотранспортным предприятиям решается задача
прикрепления потребителей к поставщикам методом потенциалов.
Потребителями подвижного состава являются маршруты, его постав-
щиками - автотранспортные предприятия.
Условия такой задачи для рассматриваемого примера приведены в
табл. 5.18.
Таблица 5.18
АТП Маршрут Нали- чие авто- моби- лей, ед.
1 2 3 4 5 6 7 8 9 10 11
Mi 15 10 9 23 23 24 20 22 А1в1 19 Л1В1 27 Лзвз 23 А& 9
м2 19 20 25 11 7 16 17 22 АЛ 23 А1*1 11 AjPl 11 А2?2 4
м3 17 12 17 13 12 6 6 20 Л3В4 п а3^4 9 АзРз 9 аз»4 5
Спрос на автомо- били, ед. 3 1 2 1 2 3 2 1 1 1 1 18
143
Номера 11 рациональных маршрутов, которые получены в резуль-
тате проведенной маршрутизации перевозок овощей, указаны в
верхней строке табл. 5.18. Перевозку грузов осуществляют автотранс-
портные предприятия Mi, Л^, Mj, которые выделяют соответственно 9,
4, 5 автомобилей. Потребность в подвижном составе на маршрутах,
которая определена делением запланированного объема перевозок по
маршруту на производительность одного автомобиля на этом маршру-
те, проставлена в последней строке таблицы. В клетках матрицы для
маятниковых (1-7) маршрутов указан нулевой пробег, для кольцевых
(8-11) - порожний пробег на последнем обороте по маршруту с учетом
нулевых пробегов (S/nop + /о - 1Х) и участок порожнего пробега, кото-
рый исключается. Например, запись 22/AiBi в клетке Mi, 8 означает,
что при подаче автомобилей из автотранспортного предприятия Mi на
маршруте 8 общий порожний пробег на последнем обороте с учетом
нулевых пробегов составит 22 км. При этом исключается звено порож-
него пробега AiBi, т.е. маршрут следует начинать в пункте Ау а затем
заканчивать в Вр Табл. 5.18 служит исходной матрицей при решении
задачи.
Оптимальное прикрепление рациональных маршрутов к авто-
транспортным предприятиям, полученное в результате решения
задачи методом потенциалов, показано в табл. 5.19.
Автотранспортному предприятию Mi рационально обслуживать
маршруты 1, 2, 3, 4, 7, 8, 9; предприятию Afj - маршруты 4, 5,10; пред-
приятию Мз - 6, 7, 11. Маршрут 7 обслуживается двумя автотранс-
портными предприятиями: один автомобиль выделяет предприятие Mi
и один - предприятие М3. При этом порожний пробег на последнем
обороте по кольцевым маршрутам и нулевой пробег всех автомоби-
лей будут минимальными, 203 км в сутки:
15-3 +10-1 + 9-2 + 20-1 + 22-1 +19-1 +11-1 + 7-2 + 11-1 + 6-3 + 6-1 + 9-1 = 203 км.
В окончательном виде рациональные маршруты записываются для
каждого автотранспортного предприятия, которое будет выделять
подвижной состав, и выбранной начальной точки маршрута (табл.
5.20).
Расчет потребного количества подвижного состава по маршрутам.
При закреплении маршрутов за АТП необходимо знать потребное
количество подвижного состава на каждом маршруте. Такой расчет
приведен в табл. 5.21. Символы, приведенные в таблице, обозначают:
1об - общая длина маршрута, км; <пр - простой под погрузкой-разгрузкой за одну ездку,
ч; п — количество ездок по маршруту за оборот; v — средняя техническая скорость движе-
ния, км/ч; *об — время одного оборота, ч; Тп — планируемое время пребывания подвиж^
ного состава на маршруте, ч; N — целое число оборотов подвижного состава на маршруте,
N= Тп/ *об> при этом находится в пределах 1 < 0м/<П; - фактическое время
пребывания подвижного состава на маршруте, ч; Тф - faN; Ом ~ мощность грузопотока
144
Таблица 5.19
Номер маршрута Схема маршрута Объем перевозок по маршруту, т Число авто- мобилей на маршруте, ед. _
1 Mi — Aj-Bj — BjA j 80 3
2 Mj — А — BjA j 10 1
3 Mi-A^-B^Ai 60 2
4 M2-A2B1-B1A2 20 1
5 M2-^2®2^B242 80 2
6 М3 -4583-53x2 110 3
7 Ml -43B4-B4A3 МЗ-ЛЗВ4-В4АЗ 80 1/1
8 Ml - УЦВ4 - B4A3 - AjBj - Bpq 10 1
9 Ml - 41^2 - B2A2 - 42B4 - B443 - 43B1- -5141 10 1
10 М2 - 4^3 - 53^3 - ^3^2 " B2^2 25 1
И М3 - 4j52 - 53X2 - X2B4 - 54X3 15 1
145
Таблица 5.21
Номер маршруте За один оборот *об ®м /с N 1м Гн К Q У м Последний автомобиль
'об *пр п п*пр V
V ГФ
1 22 0,5 1 0,5 80 1,23 80 6 7,0 7,38 5,0 1,0 2,7 4 4,92
2 12 0,5 1 0,5 30 0,90 10 2 7,0 1,80 5,0 1,0 1,0 2 1,80
3 10 0,5 1 0,5 30 0,83 10 8 7,0 6,64 5,0 1,0 1,5 4 3,32
4 б 0,5 1 0,5 30 0,70 20 4 7,0 2,80 5,0 1,0 1,0 4 2,80
5 б 0,5 1 0,5 30 0,70 80 10 7,0 7,00 5,0 1,0 1,6 6 4,20
6 8 0,5 1 0,5 30 0,77 110 9 7,0 6;93 5,0 1,0 2,4 4 3,08
7 8 0,5 1 0,5 30 0,77 80 9 7,0 6,93 5,0 1,0 1,8 7 5,39
8 44 0,5 3 1,5 35 2,76 10 2 7,0 5,52 5,0 1,0 1,0 2 5,52
9 30 0,5 2 1,0 35 1,86 10 2 7,0 3,72 5,0 1,0 1,0 2 3,72
10 18 0,5 2 1,0 35 1,51 25 5 7,0 7,55 5,0 1,0 1,0 5 7,55
И 22 2 1,0 35 1,63 15 3 3L 4?89 1,0 1,0 3 4,89
на маршруте, т; 7 — средний, коэффициент использования грузоподъемности подвижного
состава; Ч — средняя грузоподъемность единицы подвижного состава, т;\М — потребное
количество единиц подвижного состава, М = 2м/чТ^; N1 — число оборотов последней
единицы подвижного состава, N' = Na, где а — дробная часть количества единиц подвиж-
ного состава (0 < а < 1); Тф — фактическое время пребывания последней единицы подвиж-
ного состава на маршруте, ч, Тф » t0$N'.
Расчёт пробегов подвижного состава по маршрутам. При выборе
начального и конечного пунктов маршрута производится закрепление
маршрутов за АТП путем решения задачи транспортного типа одним из
известных методов, например методом потенциалов. Критерием опти-
мальности в данном случае является нулевой и непроизводительный
пробег на последнем обороте движения автомобилей по маршрутам.
Для расчета показателей критерия оптимальности прежде всего
необходимо знать расстояния между АТП и грузовыми точками (табл.
5.22).
Расчет пробегов подвижного состава по маршрутам приведен в
табл. 5.23.
Таблица 5.22
АТП Грузообразующие и грузопоглощающие точки
А1 Л2 АЗ *2 53 «4 «5
Ml 2 10 12 13 13 U 8 7
м2 13 5 10 6 2 6 7 12
м3 9 5 3 8 7 3 3 8
146
Номер маршрута Номер участка Пробег с грузом за оборот, км
A{Bj tr
1 1 AlBi 11 11
2 1 AiB4 6 6
3 1 41в5 5 5
4 1 AjBl 3 3
5 1 А2Р2 3 3
6 1 4 4
7 1 1 4384 л1в2 4 • 11 4
8 2 3 АзРз A$1 6 9 26
9 1 AlB4 б 15
10 1 2 а^4 А3Р2 . 2 11
11 1 2 А2В3 A3B2 6 9 15
Таблица 5.23
Непроизводительный пробег за оборот, км hr lx+lor
hnr *xr t'x АТП
1 2 3 1 2 3
BlAi 11 11 0 15 19 17 15 19 17
B^Ai 6 6 0 10 20 12 10 20 12
BgAi 5 5 0 9 25 17 9 25 17
BlAi 3 3 0 23 11 13 23 11 13
B^Ai 3 3 0 23 7 12 23 7 12
ВчАч 4 4 0 24 16 6 24 16 6
В44з . В^Аг/ 4 3 4 0 15 20 23 17 7 6 12 20 38 17 22 6 27
B3A3 4 11 18 14 7 24 15 16 19 6 17 38 22 30 26 20 24
B4A3 4 15 11 20 15 17 19 6 17 31 19 28 23 17 21
В4А3 4 3 7 3 4 20 23 17 7 6 12 23 27 20 11 9 16
B3A3 B3A2 4 3 7 3 4 24 23 16 7 6 12 27 27 19 11 9 16
Таблица 5.24
сю
АТП Номер маршрута Количество под- вижного состава Пункты маршрута Последовательность прохож- дения пунктов маршрута Мощ- ность грузо- пото- ка, т Число оборотов Время работы маршрута Примечание
расчет- ное факти- ческое нача- льный конеч- ный N N' Тф Тф
Л** 1 2,7 3 А1 В1 А1В1ВМ1 80 6 4 7,38 4,92 + №2*
2 1,о 1 А1 В4 Л1В4В4Л1 10 2 2 1,80 1,80 + №1
3 1,5 2 А1 В5 41^541 60 8 4 6,64 3,32 + №9
8 1,0 1 А1 В1 4]В2в2^2^2вЗ
вз4з4зВ1В141 10 2 2 5,52 5,52
9 1,0 1 41 Bl A ^В^В^А^А^В jBjA j 10 2 2 3,72 3,72 + №3
10' 1,0 1 Аз В4 4383834243848443 25 5 5 7,55 7,55
Итого требуется подвижного состава 9 — 2 = 7
м2 4 1,0 1 А2 «1 4зВ1814з 20 4 4 2,80 2,80 + №5
5 1,6 2 а2 В2 43838342 80 10 6 7,00 4,20 + №4
. 11 1,0 1 а2 В2 42вЗвЗаЗаЗв2в2а2 15 3 3 4,89 4,89
Итого требуется подвижного состава 4 — 1 = 3
М3 6 2,4 3 А3 Вз 43B3B343 110 9 4 6,93 3,08 + №7
7 1,8 2 Аз В4 43848443 80 9 7 6,93 4,39 + №8
Итого требуется подвижного состава 5 — 1 = 4
+ № 2 означает, что четыре оборота по этому маршруту может сделать автомобиль, не полностью занятый на маршруте № 2.
Расшифровка маршрутов. При определении рациональных маршру-
тов названия различных корреспондирующих точек, АТП, показателей
записывают в зашифрованном виде. Для удобства чтения и реализации
маршрутов эту запись расшифровывают. Расшифрованные маршруты и
необходимые показатели записывают в маршрутную карту (табл. 5.24),
откуда их переносят в маршрутные ведомости, а затем в путевые
листы автомобилей, выделяемых для работ по этим маршрутам.
Анализ полученной карты позволяет определить оптимальные
показатели работы минимально необходимого количества единиц
подвижного состава.
Для перевозок 570 т груза при условиях, сформулированных в
нашем примере, потребуется не менее 14 ед. подвижного состава
грузоподъемностью 5 т. При этом минимально возможная транспорт-
ная работа будет равна 3210 т-км, пробег автомобилей с грузом -
642 км, общий пробег - 1284 км. Следовательно, математическая
методика составления рациональных маршрутов дала возможность
получить оптимальный коэффициент использования пробега, равный
0,5. Если же весь груз перевозить по маятниковым маршрутам, то
коэффициент использования пробега снизится до 0,41.
Работа подвижного состава по рациональным маршрутам, состав-
ленным с помощью методов математического планирования, дает
возможность сократить непроизводительный пробег до минимума и
тем самым позволяет перевозить грузы с меньшими транспортными
затратами.
5.3. Составление рациональных развозочно-сборных
маршрутов
При организации перевозок мелкопартионных грузов развозочный
маршрут имеет место, когда автомобиль, приняв груз у одного отпра-
вителя, развозит его нескольким получателям, оставляя у каждого
какую-то часть груза. Когда же приходится собирать груз у несколь-
ких отправителей и доставлять одному потребителю, то такой марш-
рут называется сборным. Если же одновременно автомобиль развозит
и собирает мелкие партии груза, то маршрут называется развозочно-
сборным. При организации таких перевозок возникает необходимость
определения рациональной последовательности объезда пунктов,
чтобы осуществить перевозки с минимальным пробегом. Количество
вариантов, как правило, велико, поэтому кратчайший маршрут сле-
дует выбирать, применяя математическую методику. Известно неско-
лько математических методов решения этой задачи: метод сумм,
бродячего коммивояжера, метод инверсий. Рассмотрим метод сумм,
который прост, однако дает лишь приближенное решение.
Решим условный пример методом сумм.
В точки Б, В, Г, Д, Е, Ж, 3, И, К, Л, М доставляется груз со склада
А. Из этих точек на склад А поступают грузы в количестве, указанном
149
Таблица 5.25
Рис. 5.6. Схема транспортной сети
Пункт Ввоз Вывоз Номер пункта
Б 5 5 4
В 3 10 10
Г ‘ 2 4 8
Д 4 6 5
Б 9 — 3
Ж 7 8 И
3 2 3 6
И 5 4 7
К 4 —- 9
Л 5 5 2
М 5 6 1
Итого 51 51 —
в табл. 5.25. Схема дорожной сети показана на рис. 5.6. Кратчайшие
расстояния на ней определены в предыдущем примере методом потен-
циалов. Вместимость одного автомобиля не более 30 ед. груза одно-
временно.
Следует организовать перевозку так, чтобы пробег подвижного
состава был минимальным. х
На схеме дорожной сети пункты нумеруются по концентрическим
окружностям (спирали) вокруг точки А по часовой стрелке, начиная с
наиболее удаленного (по кратчайшим расстояниям). В нашем примере
самой удаленной является точка М (см. табл. 5.1 кратчайших расстоя-
ний для точки А), ей присваивается первый номер, затем идут точки Л,
Е и т.д. Точке А присваивается нулевой номер. Номера точек зано-
сятся в табл. 5.25.
Решение задачи состоит из нескольких этапов.
На I этапе производится набор пунктов в маршруты. Для этого
составляется табл. 5.26 с номерами пунктов. Включаемые в маршрут
пункты в таблице вычеркиваются.
Набор пунктов маршрута № 1 начинается с включения в него
самого удаленного от точки А пункта 1, который заносят в табл. 5.27 с
указанием количества ввозимого и вывозимого груза. В табл. 5.26
номер включенного в маршрут пункта вычеркивается. Затем рассмат-
риваются звенья дорожной сети, связанные с этим пунктом.
Таблица 5.26
Номст пункта
Ж I Ж | Ж I 4 | S | 6 I 7 | X | X I я I ~Й
150
Таблице 5.27
Грузооборот пункта, шт. Пункт маршрута № 1 Итого
1 9 2 8 10 3
Ввоз 5 4 5 2 3 9 28
Вывоз 6 — 5 4 10 — 25
Таких звеньев в нашем примере два: 1-8 длиной б км и 1 - 9
длиной 5 км. Из этих звеньев выбирается наиболее короткое звено 1 -
9, и его вторая вершина включается в первый маршрут.
Далее рассматриваются звенья, связанные с ранее включенными в
маршрут пунктами 1 и 9, и вновь из этих звеньев выбирается звено
меньшей длины, вторая вершина которого включается в маршрут.
После включения в маршрут пунктов 1 и 9 в нашем примере
следует сравнить длину звеньев: 1 - 8, 9 - 8, 9 - 10, 9 - 2 и 9 - 3.
Наименьшую длину, равную 2 км, имеет звено 9-2. Следовательно,
пункт 2 будет третьим пунктом маршрута № 1.
Далее рассматривается звено 2-10 длиной б км. Из всех звеньев
выбирается минимальное. Это звено 9-8 длиной 3 км. Пункт 8 вклю-
чается в маршрут. В числе нерассмотренных остается звено 8-7
длиной 5 км.
Следующим выбирается звено 9-10 длиной 4 км, его вторая
вершина 10 включается в маршрут. Этот пункт соединен звеном с
пунктом Е, который еще не включен в маршрут, длина звена 10-3
составляет 3 км, т.е. меньше длины ранее рассмотренных звеньев,
поэтому пункт 3 сразу же включается в маршрут № 1.
Таким образом, пункты маршрута № 1 набраны, так как дальней-
шее их включение приведет к превышению грузовместимости автомо-
биля. Следовательно, в первый маршрут вошли пункты 1, 9, 2, 8,10, 3,
общее количество ввозимого груза 28 ед., вывозимого из пунктов
маршрута - 25 ед.
За начало нового маршрута принимается невычеркнутый пункт с
наименьшим номером. В данном случае это пункт 4, он первым вклю-
чается в маршрут № 2 (см. табл. 5.28). Затем рассматриваются звенья
4-5 длиной 5 км и 4 - 11 длиной 4 км. Меньшим является звено 4 - 11,
поэтому пункт 11 будет вторым пунктом маршрута № 2.
Далее сравниваются длины четырех звеньев 4-5,11-5,11- би
11-7. Наименьшую длину (4 км) имеет звено 11-5. Следовательно,
следующим в маршрут № 2 включается пункт 5.
Подключая к рассмотрению звено 5-6 длиной 6 км, выбираем
звено наименьшей длины. Это звено 11-7 длиной 4 км, пункт 7
войдет в маршрут. Этот пункт связан звеном с пунктом б, длина звена
наименьшая и составляет 3 км. Это значит, что следующим пунктом в
маршруте будет пункт 6.
Таким образом, все пункты в табл. 5.28 вычеркнуты, следовате-
льно, все они включены в маршруты. На этом набор пунктов в марш-
151
Таблица 5.28
Грузооборот пункта, шт. Пункт маршрута № 2 Итого
4 11 5 7 6
Ввоз 5 7 4 5 2 23
Вывоз 5 8 6 4 3 26
руты заканчивается. Учитывая вместимость кузова автомобиля,
пункты группируются по двум развозочно-сборнькм маршрутам
(табл. 5.27,5.28).
При наборе пунктов может оказаться, что какой-то пункт хотя и
находится на наименьшем расстоянии от ранее выбранных пунктов, но
не может быть включен в маршрут из-за того, что автомобиль не
сможет вместить весь груз, направляемый в данный пункт или выво-
зимый из него. В этом случае следует заменить этот пункт другим,
ближайшим к уже выбранным пунктам, но с объемом груза, который
может вместить автомобиль. Несмотря на некоторое увеличение
пробега автомобиля, это позволяет лучше использовать грузовмести-
мость автомобиля.
На II этапе определяют последовательность объезда пунктов
маршрута. Необходимо найти кратчайший путь объезда пунктов
маршрута, начиная с пункта 0 (склад А). Для этого строятся специаль-
ные матрицы расстояний между пунктами каждого маршрута (значе-
ния расстояний взяты из таблицы кратчайших расстояний, см. табл.
5.1). Матрица может быть симметричной (значения элементов над
главной диагональю равны значениям элементов под диагональю),
если на всех участках дорожной сети двустороннее движение, или
несимметричной, когда на каком-либо участке движение односторон-
нее. В нашем примере не указаны ограничения в движении по дорож-
ной сети, поэтому матрицы расстояний будут симметричными. Сим-
Рис. 5.7. Схема трехзвенного
маршрута № 1
152
метричная и несимметричная матрицы
рассчитываются одинаково. Матрица
расстояний по маршруту № 1 приведена
в табл. 5.29.
По диагонали в кружках записаны
пункты маршрута. На пересечении
строки и столбца указаны расстояния
между соответствующими пунктами.
Итоговая строка матрицы называется
строкой сумм. В ней указана сумма
расстояний по каждому столбцу.
Первоначально следует наметить
маршрут объезда трех пунктов, кото-
рым соответствуют в строке сумм
наибольшие значения: это пункты 1, 3, 2
(см. табл. 5.29). Три этих пункта образуют первоначальный кольцевой
маршрут» который можно записать в следующей форме 1 - 3 - 2 - 1.
Схема начального маршрута приведена на рис. 5.7.
В этот маршрут включается следующий пункт, которому в строке
сумм соответствует следующее по максимальности значение сумм
расстояний. Таких пунктов два: 0 и 8. Берется любой из них, например
пункт 0.
Чтобы определить, между какими пунктами начального маршрута
следует его вставить, следует проанализировать все звенья маршрута
и выбрать то из них, где приращение пробега при включении данного
пункта будет наименьшим.
В общем случае прирост длины маршрута при включении пункта К
в звено i - .< определяется
&i-j =k~k *lk-j ~k-j>
где — расстояние от первого пункта звена до включаемого, км; — расстояние от
включаемого пункта до второго пункта звена, км; - длина звена 1-7, км.
Для звена 1 - 3 маршрута № 1
А I-з s h-o + *0-3 - *1-3 = Ю + 5 -11 = 4 км;
для звена 3-2
А3-2 = *3-0 + *0-2 ~ *3-2 = 5 + 7 - 8 = 4 км;
для звена 2- 1
А 2-1= *2—0 + *0—1 ~ *2-1= 7 + ю - 7 = 10 км.
Минимальное приращение расстояния, равное 4 км, на двух
звеньях: 3 - 2 и 1 - 3. Это значит, что пункт 0 можно включать в
Таблица 5.29
... ® 10 5 7 4 2 5
10 О 5 7 б 9 И
5 5 (?) 2 3. 4 б
7 7 2 0 5 б 8
4 6 3 5 5 0 б 9
2 9 4 б б (13) 3_
5 11 б 8 9 3
33 48 25 35 33 30 42
153
Рис. 5.8. Схема чегырехзвенного марш-
рута И° 1
любое из этих звеньев. Пусть это
будет звено 1-3, тогда маршрут
будет иметь такую последователь-
ность объезда пунктов: 1 - 0 - 3-2
- 1. Но поскольку движение автомо-
биля начинается с пункта 0 и им же
заканчивается, то фактическая
последовательность объезда пунктов
выразится в следующем виде: 0-3-
2-1-0. Этот четырехзвенный
маршрут показан на рис. 5.8.
Затем по табл. 5.29 выбирается
пункт, соответствующий следую-
щему по убыванию значению вели-
чины расстояния в строке сумм. Им
будет пункт 8 (сумма 33).
Проанализируем звенья предыдущего маршрута (см. рис. 5.8) на
включение данного пункта. Увеличение длины маршрута составит:
для звена 0-3
д0-3 ” *0-8 + *8—3 ~ *6-3 “ 4 + 9 - 5 = 8 км;
для звена 3-2
д3—2 = *3—8 + *8—2 “ *3-2 = 9 + 5 —8»6км;
для звена 2- 1
Д2-1 = *2-8 + *8—1— *2—1 “5 + 6 — 7 = 4 км;
для звена 1-0
Д1-0 = Zi_g + Zg-0- *1-0“6 + 4-10-0 км.
Следовательно, длина маршрута не увеличится совсем, если пункт
8 вставить в звено 1-0. Тогда последовательность объезда пунктов
будет следующей: 0-3-2-1-8-0.
Затем включаются пункты 10 и 9. Повторив указанные действия
для этих пунктов, получим рациональный порядок объезда всех пунк-
тов маршрута №1:0 — 10 — 3—9—2 — 1-8—0. Длина маршрута № 1
составит 30 км.
Выбранная рациональная последовательность объезда пунктов
маршрута проверяется по грузовместимости кузова, не произойдет ли
перегрузка автомобиля. Такая проверка маршрута № 1 показала, что
выбранная последовательность объезда не может быть выдержана, так
как перегрузка автомобиля произойдет в пункте 10. В этот пункт
154
Рис. 5.9. Схема маршрута № 1 длиной Рис. 5.10. Схема маршрута № 1 длиной
32 км 31 км
автомобиль отправится сразу же, загрузив на складе (пункт 0) 28 ед.
груза, в пункте 10 3 ед. груза должно быть выгружено, а 10 ед. погру-
жено, значит, в кузове автомобиля окажется 35 ед. груза, что недопус-
тимо, поскольку вместимость автомобиля 30 ед.
Необходимо подобрать другую последовательность объезда пунк-
тов маршрута № 1. При этом произойдет отклонение от рациональной
последовательности и длина маршрута увеличится. Это может быть
последовательность 0-8-9-1-9-2-9-3- 10-0 длиной 32 км
(рис. 5.9) или последовательность 0-3 - 10-9-2—9 - 1-8-0
длиной 31 км (рис. 5.10).
Матрица расстояний по маршруту № 2 приведена в табл. 5.30.
В первоначальный маршрут войдут пункты 4, б и 0. Последователь-
ность объезда пунктов следующая:0 - 4 - 6 - 0 (рис. 5.11). Следующим
в маршрут включаем пункт 7 (сумма 26). Проанализируем звенья
Таблица 5.30
б 3 5 5 8
6 0 4 > 5 8 9
3 4 GD 2 4 5
5 5 2 0 б 6
5 8 4 б 0 3
8 9 5 6 3 0
27 32 18 24 26 31
155
о
та№2
о
Рис. 5.11. Схема трехзвенного маршру- рИСв 5е12. Схема четырехзвенного
маршрута № 2
начального маршрута на возможность включения данного пункта.
Приращение длины маршрута будет следующим:
для звена 0-4
А 0-4~ *0-7 + *7—4 — *0—4 =5+8-6=7км;
для звена 4-6
Дд-б = /4—7 + /7-6 ~ *4-6 = 8 + 3 — 9 = 2 км;
для звена 6-0
д6-о ~ *6—7 + *7-0 ~ *6-0 = з + 5 - 8 = 0 Км.
Включаем пункт 7 в звено 6-0, при этом пробег по маршруту не
возрастет. Последовательность объезда пунктов маршрута выразится в
следующем виде: 0-4-6-7-0 (рис. 5.12).
По табл. 5.30 следующей по убыванию значения величины расстоя-
ния в строке сумм будет величина, равная 24, соответствующая
пункту 5. Пункт 5 включаем в предыдущий маршрут.
Прирост длины маршрута составит при включении пункта 5 в
звено 0-4
Д 0-4 s *0-5 + *5-4 ”*С—4 = 5+ 5-6 = 4 Км;
в звено 4-6
д4 - 6 = *4-5 + *5-6 “ *4-6 = 5 + 6 — 9 = 2 км;
в звено 6-7
А6-7 = /б-5 + *5-7“ *6-7 = 6 + 6- 3 = 9км;
в звено 7-0
Д7-0 = *7-5 + *5-0 ”*7—0 = 5 + 5 — 5 = 6 км.
Разрываем звено 4 - 6 и включаем в него пункт 5, при этом пробег
по маршруту увеличивается на минимальную величину, равную 2 км.
Последовательность объезда пунктов маршрута 0-4-5-6-7-0
дана на рис. 5.13.
Остается включить в маршрут пункт 11. При этом прирост длины
маршрута будет следующей величины:
в звено 0-4
Д 0-4 = *0-11+ *11-4 - *0-4 = 3+4 -6 = 1 км;
в звено 4-5
Д4—5 = *4—И + *ц—5“ *4—5 = 4 +2 —5 = 1 км;
в звено 5-6
Д5-6 = *5-11 +*11-6“/5-6 = 2 + 5-6 = 1км;
в звено 6-7
Д 6-7 = *6-11 + *11—7“ *6-7 =5+4-3=6км;
в звено 7-0
Д 7—0 = *7—11 + *11—0 — *7—0 = 4 + 3 — 5 = 2 км.
та№2
Рис. 5.14. Схема шестизвенного марш-
рута № 2
Минимальное приращение
расстояния, равное 1 км, иа трех
звеньях: 0 - 4; 4 - 5; 5 - 6. Значит,
пункт 11 можно включить в любое Из
этих звеньев. Пусть это будет звено
5-6, тогда рациональный порядок
объезда всех пунктов маршрута № 2:
0-4-5-11-6-7-0. Длина
маршрута 26 км (рис. 5.14).
Проверка выбранной рациональ-
ной последовательности объезда
пунктов маршрута № 2 по вмести-
мости кузова автомобиля показала,
не будет. Схема маршрута № 2
что превышения грузовместимости
приведена на рис. 5.15.
Таким образом, установлено, что организовать доставку и сбор
груза в пункты Б, В, Г, Д, Е, Ж, 3, И, К, Л, М со склада А в количестве
51 ед. рационально по двум развозочно-сборным маршрутам:
по маршруту №10-3 - 10-9-2-9 - 1-8-0 протяженностью
31 км, общим объемом ввоза 28 ед. и вывоза 25 ед.;
по маршруту №20-4-5 - 11-6-7-0 длиной 26 км общим
объемом ввоза 23 ед. и вывоза 26 ед. груза.
5.4. Метод „ветвей и границ”
Метод „ ветвей и границ” был предложен Дж. Литлом, К. Мурти,
Д. Суини и К. Кэролом [10] и получил широкое распространение для
решения задачи коммивояжера. Этот метод с успехом используется и
для решения разнообразных задач дискретной оптимизации.
Задача „странствующего коммивояжера” заключается в том, что
имеется п городов. Коммивояжер выезжает из одного из них и объез-
жает все города с условием побывать в каждом из них только один
раз. Расстояние между городами неодинаково, поэтому каждая после-
довательность городов (этап) дает разное суммарное расстояние
пробега. Из всех этапов необходимо найти такой, у которого эта сумма
была бы минимальна.
Метод „ветвей и границ” является одним из методов точного
решения задачи развозки. Общая идея метода довольно проста. Вна-
чале для всего множества допустимых решений задачи определяется
нижняя граница значения функционала. Эта граница представляет
собой число, меньше которого значение целевой функции заведомо
быть не может.
Решение задачи заключается в постепенном развивании множе-
ства допустимых решений (задача развозки) на все меньшие и мень-
шие подмножества, для каждого из которых определяется нижняя
граница функционала и выбирается подмножество с наименьшим
158
Таблица 5.31
А Б В Г Д Е Ж 3 И
А 0 6 8 12 20 16 18 20 10
Б 6 0 2 6 14 10 12 18 8
В 10 4 0 10 18 14 16 16 6
Г 12 6 8 0 8 4 6 14 14
Д 14 8 4 8 0 4 8 6 10
Е 16 10 8 4 4 0 2 10 14
Ж 22 16 12 16 8 12 0 8 18
3 20 14 10 14 6 10 8 0 12
И 10 10 6 16 16 20 18 10 0
значением нижней границы, затем вновь разбивают множество на
подмножества, выбирая одно с наименьшей границей, и т.д. В конце
концов должно быть получено подмножество, содержащее одно'
единственное решение, нижняя граница которого совпадает со значе-
нием целевой функции для этого решения. Если значение целевой
функции строго меньше нижних границ остальных подмножеств, то
это и есть единственное оптимальное•
решение.
Рассмотрим алгоритм метода
„ветвей и границ” на конкретном
примере.
Пусть имеется замкнутая транс-
портная сеть, включающая девять
пунктов А, Б, В, Г, Д, Е, Ж, 3, И,
матрица кратчайших расстояний
между которыми представлена в
табл. 5.31. Задача развозки заключа-
ется в том, чтобы доставить груз в
каждый пункт с минимальным
общим пробегом по маршруту, при
этом можно каждый пункт посетить
только один раз.
Предположим, что в матрице
кратчайших расстояний (табл. 5.31)
диагональные элементы - это беско-
нечно большое число 00, что означает
запрет на перевозки в том же самом
пункте. Исходная матрица для
Рис. 5.16. Дерево решений
159
Таблица 5.32'
А БВГДЕЖЗ И
А со 6 8 12 20 4 \16 18 20 10
Б 6 со 2 6 14 10 12 18 8
В 10 4 со 10 18 14 16 16 6
Г 12 6 8 со 8 4 6 14 14
Д 14 8 4 8 со 4 8 6 10
Б 16 10 8 4 4 со 2 10 14
Ж 22 16 12 16 & 12 со 8 18
3 20 14 10 14 6 10 8 оо 12
И 10 10 6 16 16 20 18 10 со
решения задачи коммивояжера методом „ветвей и границ” приведена
в табл. 5.32.
Решение задачи может быть изображено графическим способом в
виде дерева поиска решений (рис. 5.16). Ветви дерева соответствуют
множеству возможных решений. Каждое множество изображается
кружком, в середине которого проставлен признак, объединяющий
решения данного множества.
1. Расчет по алгоритму метода „ветвей и границ” начинают с
приведения исходной матрицы по минимальному расстоянию. Для
этого из каждого элемента строки вычитают наименьший элемент
данной строки (табл. 5.33). Затем из полученных элементов каждого
столбца новой матрицы вычитают наименьший элемент этого столбца
(табл. 5.34).
Приведенная матрица показана в табл. 5.34. Справа и внизу мат-
рицы проставлены константы приведения - минимальные элементы,
которые вычитались вначале из строк, а затем из столбцов матрицы.
Сумма констант и есть нижняя граница протяженности для всех
маршрутов, изображенная на рис. 5.16 кружком „все решения”, а
рядом проставлено значение нижней границы этого множества, кото-
рое в данном случае равно 50.
2. В каждой строке и в каждом столбце имеется хотя бы один ноль
в приведенной матрице. Нулевые расстояния в клетках матрицы
указывают на наличие минимальных по протяженности маршрутов,
поэтому при построении циклических маршрутов в первую очередь
рассматривают элементы с нулевыми протяженностями.
Для этого определяют оценки всех нулевых элементов приведен-
ной матрицы как сумму наименьших величин протяженности соот-
ветствующей строки и столбца матрицы. Например, для нулевого
160
Таблица 5.33
АБ В Г ДЕЖ З И
СО 0 2 б 14 10 12 14 4
4 со 0 4 12 8 10 16 б
б 0 со б 14 10 12 12 2
8 2 4 . со 4 0 2 2 10
10 ,4 0 4 со 0 4 2 б
14 8 б 2 2 со 0 8 12
14 8 4 8 0 4 к00 0 10
14 8 4 8 0 4 2 со б
4 4 0 10 10 14 12 4 со
Таблица 5.34
АБВГДЕЖЗИ
2 2 4 14 10 12 14 2
0
0 0 0 0 2 12 8 10 16 4
2 0 0 4 14 10 12/ 12 2 0
4 2 4 4 0 2 2 2 8
6 4 0 0 2 0 0 4 2 4
10 8 б 2 0 2 2 0 8 10
10 8 4 б 0 0 4 2 0 8
10 8 4 б ( 2 ) 4 2 4
L. 0 4 0 0 8 10 14 12 4
4 0 0 2 0 0 002 50
161
элемента АБ (см. табл. 5.34) оценка составит 2 + 0. Оценка указывает
на потери от невключения данного элемента в маршрут. Ее проставля-
ют в правом верхнем углу нулевого элемента.
Очевидно, чтобы избежать больших потерь, следует в первую
очередь включить в маршрут нулевой элемент с наибольшей оценкой.
В рассматриваемом примере максимальная оценкаравная 2 соответст-
вует нескольким элементам. В этом случае выбирается любая из пар,
например, пара АБ.
3. Для ветвления множества его необходимо разделить на два
вида: маршруты первого подмножества будут включать пару АБ, а
маршруты второго подмножества ее не включают. Соответственно в
кружки, отражающие эти подмножества, вносится запись: в первый
АБ, во второй - АБ.
Нижняя граница для маршрутов второго подмножества равна
сумме значений нижней границы разделяемого множества „все мар-
шруты” и величины оценки пары АБ, т.е. 50 + 2. После этого изначаль-
ного множества делают ответвление к множеству АБ с расстоянием
50 км (см. рис. 5.16) и множества АБ, проставляя возле него расстояние
52 км. Строку А и столбец Б исключают из рассмотрения и удаляют из
матрицы.
162
Выбор в дальнейшем пары БА после пары АБ привел бы к наруше-
нию условия о заезде в каждый пункт только по одному разу. Поэтому
выбор пары БА блокируют, проставляя в соответствующую клетку
матрицы знак бесконечности (<*>), а прежнее значение элемента в
клетке, равное 2, уничтожают.
4. Преобразованная и приведенная новая матрица показана в табл.
5.31. Максимальная оценка матрицы соответствует элементу в строке
В и столбце И, т.е. принадлежит множеству ВИ.
Далее вновь образуем два подмножества маршрутов: включающее
пару ВИ и подмножество,не включающее ее. Нижняя граница первого
подмножества 50 + 0; второго ВИ 50 + 4 (см. рис. 5.16).
5. Исключаем из дальнейшего рассмотрения строку В и столбец Я,
блокируем элемент подмножества ИВ (табл. 5.36),* чтобы не нарушить
условие задачи о невозможности преждевременного зацикливания
маршрута,необходимо блокировать элементы БА и ИВ.
6. В табл. 5.36 приведена матрица,соответствующая новому этапу
решения.
Описанными выше приемами в табл. 5.36 выбираем пару ИА.
Нижняя граница подмножества ИА остается равной 50, а подмножества
ИА 50 + 8. Исключив строку Я, столбец А и выполнив приведение
матрицы, перейдем к новому этапу решения (табл. 5.37).
163
Таблица 5.38
В табл. 5.37 выбираем пару ВГ9 которой соответствует максималь-
ная оценка, равная 6. В процессе вычисления констант приведения
появляется константа, равная 2. Следовательно, подмножество БГ
увеличится на 2 и его протяженность составит 50 + 2, а протяженность
подмножества БГ равна 50 + 6.
Действуя аналогичным образом, по табл. 5.38 ^выбираем следую-
щую пару ДБ с пределами нижних границ ДВ 52; ДВ - 56. Затем (табл.
5.39) пару ГЕ с нижними границами соответственно ГЕ - 52; ГЕ *- 58.
Таким же образом по табл. 5.40 определяем пару пунктов с минималь-
ными расстояниями, это пункты Е и Ж, подмножествам которых
соответствуют нижние границы ЕЖ - 52; ЕЖ - 62.
Таблица 5.40 Таблица 5.41
Д Ж 3
164
Таблица 5.42
После очередного приведения матриц получаем матрицу 2x2
(табл. 5.41) и по нулевым элементам в клетках однозначно определяем’
две недостающие пары пунктов маршрута ЖЗ я ЗД.
Увязка последовательности объезда пунктов маршрута произво-
дится по одноименным обозначениям относительно въезда и выезда. В
результате преобразований получим циклический маршрут АБ - БГ-
ГБ - ЕЖ—ЖЗ - ЗД - ДВ - ВИ - ИА, включающий все девять пунк-
тов доставки груза с общим расстоянием перевозки 52 км.
Поскольку протяженность полученного маршрута меньше нижней
границы протяженностью любого из не разделенных вершин дерева
решений (см. рис. 5.16), следовательно это решение является оптималь-
ным (но возможно не единственным) решением задачи.
Если по условию задачи необходимо найти все альтернативные
оптимальные решения, то следует рассмотреть ветви дерева решения,
начало которых не превышает значения полученного оптимального
решения.
Такая ветвь одна и начинается она с подмножества АВ (см. рис.
5.16). Данное подмножество включает маршруты, которые не содержат
пару АВ. Следовательно в исходной матрице задачи (см. табл. 5.32): на
пересечении строки А и столбца В необходимо поставить знак блоки-
165
ровки-°°. В результате чего получим исходную матрицу (табл. 5.42)
для продолжения решения задачи.
Используя уже известный алгоритм, а именно: приведение мат-
рицы по кратчайшему расстоянию; определение оценок; выбор пары
для ветвления; вычеркивание соответствующих строк и столбцов,
блокировка; и опять приведение новой матрицы, - продолжим
решение задачи маршрутизации.
В табл. 5.42. указано несколько оценок одинакового значения,
равного 2 для нулевых клеток: АБ, ВИ, ГЕ, ЕГ, ЕЖ, ЖЗ и ЗД. В этом
случае выбираем из этих пар любую, например, пару АБ. Разветвление
осуществляем на два подмножества: первое, включающее маршруты с
парой АБ, и второе - не включающее АБ. Это подмножество обозначим
АБ. Нижние границы подмножеств соответственно равны 52 и 54, т.е.
значение границы первого подмножества равно оптимальной протя-
женности кольцевого маршрута, а второго - выше этого значения.
Следовательно, решение задачи должно быть продолжено.
Следующая стадия решения задачи соответствует матрице (табл.
5.43), в которой самая перспективная клетка ВИ имеет оценку, равную
6. Произведем разветвление на подмножества ВИ и ВИ с нижними
границами соответственно 52 и: 58.
Наследующей стадии решения (табл. 5.44)' однозначно получена
наибольшая рценка,равная 8. определившая выбор пары ИА с разветв-
лением на ИА и ИА нижними границами соответственно 52 и 60.
166
Таблица 5.44
Продолжая расчеты по тому же алгоритму на следующих этапах
решения задачи по ветви, определим последовательно пары ВИ с
дополнительной блокировкой элемента БА; ИА с дополнительной
блокировкой ИВ; БВ, ГЕ, ЕЖ без дополнительных блокировок (табл.
5.45,5.46,5.47). <
После разветвления подмножества ЕЖ получим два: ЕЖ и ЕЖ,
нижние границы которых соответственно равные 54 и 56 оказались
167
Таблица 5.46
Таблица 5.47
выше длины оптимального маршрута. Это значит, что среди решений
подмножества АВ оптимальных нет и решение по ветви закончено.
Следовательно^задача развозки в данном случае имеет единственное
оптимальное решение,соответствующее найденному ранее кольцевому
маршруту длиной 52 км.
Перейдем к формализации алгоритма метода „ветвей и границ”
при решении задачи маршрутизации (развозки), полагая при этом, что
многие операции ясны и понятны из рассмотренного примера.
Запишем рабочую матрицу в общем виде (табл. 5.48).
ВОЗМОЖНО /у Iji-
Таблица 5.48
1 2 3 j ... m Константы приведения по строкам hj
1 оо z12 z13 Z1J hm Л1
2 21 ОО 23 1У hm h2
3 31 32 со Z3j h3
... ... ... ... ... ... ...
i li li2 zi3 zu km hi
... ... ... ... ... ... ...
п П1 п2 "3 ni oo
Константы приведения по столбцам hj hl h2 h3 hi hm
168
Обозначим:
L - матрица кратчайших расстояний между пунктами; L' - та же
матрица, измененная в ходе вычислений; 1ц - элемент матрицы,
обозначающий кратчайшее расстояние от i-го до j-ro пункта (i, j = 1, 2,
..., п, 1ц = оо (оо _ знак блокировки движения).
Циклический маршрут /
R = {’i> '2> »з> •••> *п> ч)>
где i - пункты маршрута.
Целевая функция
п
2=S L + min при п + 1 = 1.
2=1
Этапы решения:
1. Приведение матрицы и определение нижней границы расстояний
со (х) для множества ’’все маршруты” ~х или вершины дерева решений
п т
hf+S hi,
М j=l J
где hj — константы приведения соответственно по строкам и столбцам;
hf=min Iq, i=l, 2,п;
Jy ~ kj "" fy» Ь J ~ •••» n>
J
где - элемент новой матрицы после приведения по строкам;
hj=min j = 1,2,т;
// /
*у = hj~hp
И - *
где - элемент новой матрицы после приведения исходной матрицы по столбцам.
На рис. 5.16 значение ы (х) проставляют у начальной вершины „все
решения”.
2. Определение оценки для клеток с = 0 в новой матрице [!'•
/ //
2iy = min/ffc +minty;
к s
здесь
k£j;st i; к, s= 1,2,n,
/ //
где — наименьшее значение элемента в строке i; ty — наименьшее значение элемента в
столбце /.
169
3. Определение пары (ks) с максимальной оценкой, т.е.
Ofc » max Qj.-; i, j »1,2,.... n.
ij
От начальной вершины „все решения” проводят ответвление
вершин Лии к.sc нижними границами:
п т
ы (ks)» ы (х) + S hi + S h>;
_ М Я '
w (ks)“to (x)+Qks>
где ks — маршруты подмножества^включаюшего пункты к и s; ks — маршруты подмноже-
ства>невключающего пункты к as.
4. Исключение из матрицы строки к и столбца s, приравнивание к
бесконечности (°0) элемента, находящегося на пересечении строки s и
столбца к, т.е. накладывание запрета на его включение в маршрут или
блокирование.
5. После блокировки операция приведения повторяется, но уже в
новой матрице - L' с вычеркнутой строкой к и 5-м столбцом и забло-
кированными необходимыми элементами 1^
Для ветвления выбирают следующую вершину ближайшего ветв-
ления, имеющую наименьшую нижнюю границу, и так до получения
матрицы размером 2x2. В этой матрице пары, включенные в маршрут,
определяют однозначно и в результате формируют оптимальный
маршрут.
После этого, с целью определения альтернативных маршрутов
оптимальному, просчитывают ветви дерева решений, элементы кото-
рого имеют значения нижних границ не выше оптимального. Алгоритм
расчета ветвей дерева решений тот же.
Достоинство метода „ветвей и границ” заключается в том, что он
является самым эффективным из методов точного решения задачи,
позволяет, не доводя вычислительный процесс до конца, т.е. опреде-
ление альтернативных маршрутов оптимальному, получить довольно
хорошее приближенное решение, а также то, что этот метод настолько
прост, что не требует специально&подготовки для понимания.
Глава 6
МЕТОДЫ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
6.1. Основные понятия и постановка задач динамического
программирования
Динамическое программирование представляет собой математи-
ческий метод оптимизации, позволяющий осуществлять оптимальное
планирование многошаговых (многоэтапных) управляемых процессов
и процессов, зависящих от времени. Экономический процесс называет-
ся управляемым, если можно влиять на ход его развития. Управле-
нием называется совокупность решений, принимаемых на каждом
этапе с целью влияния на ход процесса.
Задачи, решаемые методом динамического программирования,
формулируются следующим образом: имеется управляемый процесс,
задано его начальное и конечное состояния, требуется определить
значения факторов его состояния, обеспечивающих получение опти-
мума функции процесса в целом. К наиболее типичным задачам
динамического программирования относятся: распределение ресурсов
и капитальных вложений между возможными направлениями их
использования (по объему и времени); задача о замене оборудования;
составление календарных планов текущего и капитального ремонта
сложного оборудования; определение кратчайших расстояний на
заданной транспортной сети и др.
Задачи динамического программирования имеют отличительные
свойства. Отметим основные из них.
1. Процесс принятия решений распадается на несколько этапов, на
каждом из которых принимается решение с таким условием, чтобы
обеспечивалась оптимальность всего процесса в целом.
2. Независимость оптимального плана от предыстории. Оптималь-
ный план зависит от состояния изучаемого процесса в исходный
момент времени, а не от того, как было достигнуто исходное состоя-
ние.
3. Значение функции цели Процесса должно складываться из
элементарных значений функции, рассчитываемой для каждого этапа.
Это требование динамического программирования1 относительно
критерия оптимальности называется аддитивностью.
В задачах динамического программирования управление по
этапам должно выбираться с учетом всех его последствий в будущем.
На каждом этапе определяется такое управление, которое обеспечи-
вает оптимальное продолжение процесса относительно достигнутого в
данный момент состояния. Этот принцип называется принципом опти-
мальности, он сформулирован Р. Веллманом - американским матема-
тиком, основоположником метода динамического программирования.
Другими словами, при планировании многоэтапного процесса следует
171
исходить из интересов процесса в целом, т.е. при принятии решения на
этапе необходимо иметь в виду конечную цель.
Именно на основе общего принципа оптимальности можно уверен-
но отбрасывать некоторые решения на последующих этапах, даже не
зная тех решений, которые были приняты на предыдущих. В против-
ном случае приходилось бы перебирать все возможные варианты
(комбинации) последовательностей, что значительно затруднило бы
решение задач динамического программирования.
Из принципа оптимальности есть исключение. На последнем этапе
можно действовать без оценки будущего этапа, поскольку его нет. На
последнем этапе управление следует выбирать так, чтобы оно дало
наибольший эффект и было на этом этапе наилучшим. Поэтому процесс
динамического планирования проводится в обратном во времени
направлении, т.е. сначала планируется последний этап. При этом
необходимо сделать разные предположения о том, чем закончился
предпоследний этап, и для каждого из этих направлений выбрать
управление на последнем этапе. Естественно, это будет условно
оптимальное управление, поскольку оно основано на предположении,
что предыдущий этап окончился так-то. На I этапе не надо делать
никаких гипотез о состоянии системы, так как начальное состояние
задано условиями задачи. Поэтому с учетом найденных условно
оптимальных управлений на последующих этапах мы можем найти
безусловно оптимальное управление на I этапе, которое и является
оптимальным управлением для всего процесса. Следовательно, задача
динамического программирования решается в два этапа: на I этапе,
который выполняется от конца процесса к началу, находят условные
оптимальные решения; на II этапе, который выполняется от начала
процесса к концу, находят безусловно оптимальное решение.
Процесс решения задачи динамического программирования
включает следующие операции.
1. Исследуемый экономический процесс разбивается на составные
элементы - этапы. Некоторые операции расчленяются на этапы естест-
венно: например, при планировании производства на предприятии
естественным этапом является год. Для других операций разделение
на этапы приходится вводить искусственно.
2. Для каждого этапа вводятся функциональные характеристики
(параметры или переменные) процесса и их числовые значения. Затем
выделяются управляющие факторы, с помощью которых можно влиять
на развитие процесса.
3. На каждом этапе решения задачи динамического программиро-
вания имеется зависимость между рассматриваемыми переменными и
функцией цели. Зависимость выражается с помощью уравнений,
неравенств и не обязательно должна быть линейной. Методом динами-
ческого программирования для каждого этапа устанавливают такой
уровень управления, который обеспечивает оптимальность функции
цели процесса в целом.
172
Рассмотрим достоинства и недостатки метода динамического
программирования.
Достоинство динамического программирования заключается
прежде всего в том, что задача разбивается на этапы и решение осуще-
ствляется для каждого из них. Тем самым сложная многовариантная
задача оптимизации сводится к совокупности более простых частных
задач, что значительно упрощает процедуру расчетов. Динамическое
программирование приспособлено к решению значительного числа
практических задач экономики и позволяет проводить анализ струк-
туры полученного решения по этапам. Этот метод позволил также
значительно расширить круг решаемых вариационных задач за счет
включения нелинейных и плохо формализуемых задач.
К недостаткам метода динамического программирования следует ♦
отнести отсутствие общего алгоритма решения, пригодного для всех
задач. Метод дает лишь общее направление решения конкретной
задачи, и поэтому в каждом случае необходимо находить наиболее
подходящий метод оптимизации. Значительна также трудоемкость
решения задач оптимизации большой размерности, что требует приме-
нения совершенной вычислительной техники. Вместе с тем в сравне-
нии с обычными комбинаторными методами, когда ведется перебор
возможных вариантов решений, динамический метод значительно
эффективнее.
Так, чтобы получить обычным методом перебора вариантов опти-
мальное решение, необходимо проанализировать кп возможных
комбинаций (к - количество решений, которое принимается на каж-
дом этапе; п - количество этапов). При динамическом методе рассмат-
ривается к п возможных решений, поскольку на каждом этапе выбира-
ется наилучшее решение, а все неблагоприятные комбинации из
рассмотрения исключаются. Если предположить к = 3, п = 10, то комби-
наторный подход требует для анализа к" - З10 = 59 000 комбинаций.
Метод поэтапного расчета, применяемый в динамическом программи-
ровании, потребует анализа к п = 3*10 = 30 комбинаций. Эффективность
метода динамического программирования становится все более
существенной с ростом п.
Идею и принципы метода динамического программирования
рассмотрим на примере задачи выбора кратчайшего маршрута на
транспортной сети.
На рис. 6.1 показаны транспортная сеть и возможные пути, соеди-
няющие исходный пункт 1 с конечным пунктом 12, указаны также
расстояния между пунктами в километрах. Условно пункты сети
можно отнести к шести этапам. Задача заключается в том, чтобы
выбрать маршрут от пункта 1 до пункта 12 наименьшей протяженности.
Согласно алгоритму метода динамического программирования
анализ вариантов начинается с конца процесса. Вначале определим
минимальные расстояния от пунктов 10 и 11 до конечного пункта 12 (V
этап). Минимальные расстояния определим с помощью расчетных
таблиц. Так, из табл. 6.1 следует, что на V этапе никаких комбинаций
173
Рис. 6.1. Схема транспортной cent
нет, из пунктов 10 и П в пункт 12 имеется только по одному пути,
соответственно 12 и 10 км. На IV этапе выбрать самый короткий путь
из пунктов 8 и 9 через пункты V этапа в конечный пункт 12.
Возможные варианты представлены в табл. 6.2. Для перемещения
из пункта 8 в пункт 10 необходимо пройти 9 км, а из пункта 10 в пункт
12 (см. табл. 6.1) - 12 км, общая длина пути составит 21 км. Если этот
путь будет проходить через пункт И, то его длина составит 16 км. Из
двух возможных комбинаций выбираем ту, которая соответствует
минимальному расстоянию - 16 км, т.е. путь должен пройти через
пункт 11. Аналогично находим расстояние перемещения из пункта 9IV
этапа через пункты V этапа в конечный пункт 12. Рациональным при
этом оказался путь через пункт 11 длиной 14 км. Это значение простав-
ляем в столбце min L/y-w, а клетки таблицы с нерациональными рас-
стояниями зачеркиваем. Таким же образом рассматриваем варианты
перемещения из пунктов III этапа в пункт 12 через пункты IV этапа
(табл., 6.3), а из пунктов И этапа через пункты III этапа в конечный
пункт 12 (табл. 6.4). И наконец расстояния перемещения из начального
пункта 1 через пункты 2,3 и 4 Л этапа представлены в табл. 6.5.
Таким образом, следуя от конца маршрута, мы вначале опреде-
лили, через какой пункт рационально двигаться, чтобы оказаться в
пунктах IV этапа, затем III этапа и так до пункта 1. Следовательно,
получено условное оптимальное решение задачи. После этого, следуя
от начала маршрута к концу, используя данные табл. 6.1 - 6.5, в
которых условные оптимальные решения остались незачеркнутыми,
находим действительно оптимальное решение. Из табл. 6.5 видно, что
необходимо двигаться из пункта 1 в пункт 3. Из табл. 6.4 следует, что
из пункта 3 надо перемещаться в пункт 5; из пункта 5 - в пункт 8 (см.
табл. 6.3); из пункта 8 - в пункт 11 (см. табл. 6.2) и, наконец, из табл.
6.1 видно, что из пункта 11 необходимо следовать в конечный пункт
12. Следовательно, оптимальным является маршрут 1 - 3- 5- 8- 11-
12. На рис. 6.1 оптимальный маршрут выделен жирным шрифтом.
Длина маршрута будет минимальной и составит 3 + 5 + 7 + 6 + 10 =
= 31 км.
Большинство задач динамического программирования решают с
помощью функциональных уравнений. Для задачи определения
174
Таблица 6.1
кратчайшего маршрута на транс-
портной сети (см. рис. 6.1) функ-
циональное уравнение в общем
виде будет следующим
где Ijj — расстояние между пунктами i и j;
fj - минимальное расстояние передвижения
от пункта / к конечному пункту 12 по
допустимым маршрутам при использовании
оптимальной стратегии.
Решение задачи динамичес-
кого программирования по опре-
делению рационального маршрута
методом функциональных урав-
нений приведено ниже:
/12 е °;
Из пунктов V этапа В пункт VI этапа min Ly—vi
10 12 12
11 10 10
Таблиц 6.2
Из пунк- тов IV этапа Через пункты V этапа min LIV-VI
10 11.
8 ''V+'is^ 6+10 16
9. 7+12^ 4 + 10 14__
/П e min 011—12 +/12)s min(10 + 0) = 10;
/Ю е min (/10-12 +/Г2) =min(ll + 0) = 11;
/9«min\ .4 + 10 Is 14;
>9—10*710) 1 (7 + 11
/8 = min\ 18-11 +Л1)_ (-mm ,6 + 10 1=16;
18-10 +/10) (9 + 1Г
/7 = min f 17-8+/8), . г j ( min i 8 + 16> «16;
(17-9+/9) ( 2 + Ц
/6 = min f’6-9+/9) .( \ / «nun ] •6 + 14j = 20;
U6-8+/8) (5 + 16)
/5 = min(/5-8 +/g) = min (7 +16)« 23;
/4 = min' H4-7+/7) . । | /«nun] -12+16} n | (s27;
U4-6+/6) 1 ! 7 + 20)
13-1+fi 15 + 16
/3 = rtiin H3-6+/«=s min' ! 10 + 20? «28;
Ьз-5+Л) ( 5 + 23)
r h-e+fs-i . 1 :11+20i ,1
/2 = min 1 u^=mlni /« 31;
1 ’2-5+/sJ 1 [ 9 + 23)
11—4+/4 6 + 27
/1 »min ’ Hi-3+/3i“mto! k3 + 28? =31.
U1-2+/2) । [ 4 + 3)
Таблица 6.3
| Из пунк- тов Ш этапа Через пункты IV этапа min
8 9
5 7 + 16 •шл 23
6 5+1< 6 + 14 20
7 "*8+16^ 2 + 14 16
Таблица 6.4
Из пунк- тов и этапа Через пункты Ш этапа nin
5 6 7
2 9 + 23 11 + 20 — 21
3 5 + 23 10+20 15 + 16 28
4 — 7 + 20 12+16 27
Таблица 6.5
Из пунк- тов J этапа Через пункты II этапа min LI-VI
2 3 4
1 4 + 31 3 + 28 6 + 27 31
175
По комбинациям пунктов маршрута, обеспечивающих минималь-
ные расстояния, определим оптимальный маршрут 1-3-5-8- 11 -
12 длиной 31 км. Сравнив полученное решение с предыдущим
табличным решением, можно убедиться в том, что результаты совпа-
дают, значит, вычисления выполнены правильно.
6.2. Распределение ресурсов методом динамического
программирования
Метод динамического программирования позволяет находить
оптимальное решение задачи многоэтапного распределения однород-
ных средств (капитальных вложений, машин, сырья и т.д.) между
объектами.
Рассмотрим упрощенную задачу распределения капитальных
вложений между объектами, когда не учитывается фактор времени и
процесс освоения средств. Речь идет об однократном распределении
средств.
Необходимо с наибольшей эффективностью распределить сумму
капитальных вложений К между п объектами. Неизвестные величины
Xj представляют собой сумму, выделяемую i-му объекту. По каждому
объекту известна зависимость дополнительного выпуска продукции
от суммы выделяемых капитальных вложений, т.е. заданы функции
Необходимо так распределить вложения, чтобы максимизировать
общую величину прироста продукции.
Математически задачу можно сформулировать следующим обра-
зом.
Найти значения неизвестных *i, *2> •••> хь *п> удовлетворяющих
условиям
И
S Xi = К; Xi 0 (xi - целые),
1=1
обращающие в максимум функцию
п
FnW= 2 /to),
i=l
где Xi - сумма возможных вложении по i-му объекту (отрасль, предприятие, цех, учас-
ток); К — капитальные вложения, подлежащие распределению; /to) “ фондоотдача по
i-му объекту (прибыль, прирост продукции И Т.Д.).
Идея алгоритма состоит в том, что объекты вложений вовлекаются
в рассмотрение последовательно по одному на каждом этапе, и всякий
раз решается задача распределения средств между первыми i объек-
тами (i = 1, 2, ..., п). Последняя из задач и будет являться решением
поставленной. Отметим, что в данном случае процесс решения осуще-
ствляется в прямом направлении от первого этапа к последнему.
Предположим, что функция непрерывна в области определе-
ния от 0 до К, а это значит, что всегда существует максимальное значе-
176
ние функции, соответствующее оптимальному распределению х, (х =
= 1,2....fc) средств между первыми i объектами. Обозначим ее через
Fi(x). Следовательно, известен столбец чисел F;(l), F((2),...»Fj(K), а для
каждого числа определен соответствующий план распределения
ресурсов.
Если на первые i объектов распределено х средств, то на (» + 1)-й
объект распределяют (к - х) средств. При этом необходимо, чтобы
общая отдача от них на (/+ 1)-м объектах была бы максимальной, т.е.
£|+1(К) = max[f,(х) + fM(K - x)J
при 0 < х < К.
Таким образом, в многоэтапных процессах с последовательным приня-
тием решений переход системы от этапа к этапу описывается функцио-
нальными уравнениями. Функциональное уравнение вида
называется типичным или основным.
Решение задачи по оптимальному распределению ресурсов между
(1 + 1) объектами состоит из (п - 1) однотипных этапов. Этапы решения
задачи следующие: /
fi(K)=/i(x);
F2(K) = max{/i(x) + f2(K- x)};
F3(K) = max^F2(x) + fi(K-x^ " •
Fn-l(K) = max 2W + Zn—1(^*“ *)}»
Fn(K) = max {Fn_j(x) + fn(.K-x)J.
На каждом этапе используют вычисленный на предыдущем этапе
столбец F;(x) и столбец Fi+1(x). Начинают решение задачи с того, что
назначают на первый объект все имеющиеся средства, т.е. получают
^(х) = Л(х) (* = 0, 1, 2, ..., к). Весь цикл распределения состоит из к
одинаковых этапов, в каждом из которых фиксируют х (х = 0, 1, 2......
к) и определяют одно число столбца Fj+i(x), а именно F^k). При фик-
сированном значении аргумента в подцикле (этапе) выполняют сле-
дующие операции:
образуют суммы
FiW +4+1(К-х) (х= 0,1, 2,.... к),
из них выбирают максимальную
WO = max{F,(x) + fM(k - х)}
(х =0,1,2,к).
177
Таблица 6.6
Таблица 6.7
Капиталь- ные вложе- ния (x) Фондоотдача по авто- управлениям Капита- льные вложе- ниях Fife) План распределения капитальных вложений по управлениям
первому /1(х) второму f^x) третьему /3М
пер- вто- третье-
вому рому му
0 0 0 0 0 0 0 0 0
1 0,5 0,4 0,6 1 0,5 0,5 0 0
2 0,7 0,7 1,1 2 0,7 2 0 0
3 0,9 1,0 1,3 3 0,9 3 0 0
4 ... У.._ —У 1—12— 4 М 4 0 0
Основные положения описанного динамического метода рассмот-
рим на конкретном числовом примере.
Приведем пример. Необходимо оптимальным образом распреде-
лить 4 ед. (млн. р.) капитальных вложений (К = 4) между тремя авто-
транспортными управлениями (п = 3), чтобы обеспечить при этом
максимальный прирост выпуска продукции (объем перевозок). Пока-
затели фондоотдачи по каждому управлению представлены в табл. 6.6.
На I этапе капитальные вложения направляют в первое автотранс-
портное управление, образовав столбец чисел Fj(j) (хш 0, 1, 2, 3, 4),
соответствующих фондоотдаче в этом управлении (табл. 6.7).
На И этапе определяют столбец чисел и соответствующие им
планы распределения средств между первым и вторым управлениями:
l»maxfo,5 1 «0,5;
CF1(O)+/2(1)J 10 + 0,4 J
71(2) 1 Со,7
F 2(2) - max' F i(0) +/г(2) "max' 0 + 0,7 «0,9;
J1(1)+/2(1)J (p,5+0,4,
71(3) "I f 0,9 1
.'Fl(O)+/2(3) Io+ 1,0 I
F2(3) - max] F1(1) +/2(2) (= max ] 0,5+0,7 f-1,2;
fl(2)+/2(O J (J.7+0,4 J
Fl(4) 1 fl.3 1 1
Fl(0)+/2(4) 0+1,5
^2(4) = maxS Fi(l) +/2(3) >“ max1 0,5+0,7 1,5.
И1(2)+/2(2) 0,7+0,7
(F1(3)+/2(1)J J,9+0,4
178
Таблица 6.8
Капитальные вложения х Fj(x) /2(*) План распределения капитальных вложений по автоуправлениям
первому второму третьему
1 0,5 0,4 0,5 1 0 0
2 0,7 0,7 0,9 1 1 0
3 0,9 1,0 1,2 1 2 0
4 1,3 0 4 0
Анализируя функциональные уравнения, получаем следующее:
при- распределении одной единицы капитальных вложений ее лучше
распределить в первое автотранспортное управление, поскольку при
этом получается максимальная отдача, равная 0,5 ед. При распреде-
лении двух единиц средств 1 ед. следует выделить первому и 1 ед.
второму автоуправлению. При этом будет обеспечена наибольшая
отдача средств, а именно 0,9 ед. Три единицы средств следует распре-
делить так: первому автотранспортному управлению 1 ед., второму -
2 ед. И, наконец, четыре единицы средств рационально направить во
второе транспортное управление, так как они обеспечат наибольшую
фондоотдачу - 1,5 ед.
Результаты расчетов П этапа решения задачи приведены в
табл. 6.8.
На Ш этапе в расчет принимается третье автотранспортное управ-
ление. Следовательно, и капитальные вложения распределяем между
тремя объектами с учетом оптимальных стратегий, выбранных на
первых двух этапах.
Функциональные уравнения заключительного этапа выглядят так:
f f2(1) ] Г 0,5-J
F3(l) = max |F2(0) + ^(IJ- max {fl + 0,6/ = 0,6;
F3(2) “max
F2(2) a (* °,9 .
F2(0) +/3(2)1 l°+ 1,1 (
/2(»+/з(1)) (p.5 + 0,6.
1,1.
^Если наибольших сумм несколько, то выбирают любую из них (см.
'^(3) Л '1,2 "
F2(0)+/3(3)/ 0+1,3
F3(3)“max< ^2(!) +/з(2) vmax 0.5+ 1,1 «
^2(2)+/з(1) J к0,9 + 0,6
1,6;
179
1» 'F2W Г 1,5 '
F3(4) = шах Г2«»+/з(4) К2(1) +/3(3) = шах 0 + 1,7 0,5 +1,3 • =2.
^2(2)+/з<2) 0,9+ 1,1
/2(3)+/3(1), 1,2 + 0,6 J
На обратном цикле определяем, в какие управления следует
вкладывать средства и сколько должно их быть, чтобы общая отдача
от них была максимальной. Например, при распределении четырех
единиц капитальных вложений две из них рационально выделить
третьему управлению. Это следует из III этапа решения задачи. Две
оставшиеся единицы целесообразно распределить между первым и
вторым управлениями. Чтобы узнать, как их распределить оптималь-
ным образом, надо вернуться ко II этапу решения и рассмотреть
соответствующую стратегию F2(2). Из нее следует, что каждому из двух
управлений следует выделить по одной единице капитальных вложе-
ний. При этом достигается максимальная фондоотдача от всех четырех
единиц вложений, которая составляет 2 ед.
Результаты расчетов III заключительного этапа решения показаны
в табл. 6.9.
Решим более сложную задачу распределения ресурсов, в которой
учитывается фактор времени и степень освоения ресурсов. Сформули-
руем задачу и метод ее решения сначала в общем виде.
Пусть имеется некоторое количество капитальных вложений /С,
которое необходимо вложить в т объектов в течение п этапов. В
результате вложений в i-й объект (i = 1, 2,п) на j-м этапе О' = 1, 2,
и) ресурсов Xij образуется ежегодный доход, определяемый функцией
дохода fijtxi). Вложенные средства частично уменьшаются (амортизи-
руются, тоатятся). Другая часть ресурсов остается неизрасходованной
и определяется функцией остатка а(Хц).
Задача заключается в том, чтобы определить значения вложе-
ния ресурсов на каждом этапе в каждый объект, которые обеспечи-
вают максимальный доход F на всех объектах и этапах. Это одна из
Таблица 6.9
Капитальные вложения X Г2(х) /зМ w План распределения капитальных вложений по управлениям
первому второму третьему
1 0,5 0,6 0,6 0 0 1
2 0,9 1,1 1,1 0 0 2
3 1,2 1,3 1,6 0 1 2
4 1,5 1,7 2,0 1 1 2
180
Рис. 6.2. Схема решения задачи методом динамического программирования
типичных задач динамического программирования. Схематично
последовательность решения задачи методом динамического програм-
мирования показана на рис. 6.2.
Из рис. 6.2 следует, что начальный ресурс Ki на I этапе распреде-
ляется между т объектами. В первый объект вкладывают хц; в i-й
объект - хп", в m-й объект - xmi. Общий доход на I этапе равен сумме
m
доходов на каждом объекте Fi = 2 /ii(xii). Суммарный остаток к
*=1 т
концу I этапа и началу II этапа составит Z ад(хд) = Kj и является
м
ресурсом для II этапа.
На II этапе распределяют ресурсы К.2 и т.д. Тогда общий доход на т
объектах за п этапов равен
т п
ГИп(Я)= S X /у<х1У).
1=1 >1
Математически задача может быть записана следующей моделью:
m п
^1тп(К)в 2 S max;
i=l >1
т
S xij=Kj;
i=l
т
aij(xij)= Л)‘+1 пРи
>1
Ху 1, 2,m;j= 1, 2,n).
181
Согласно принципу оптимальности на каждом этапе необходимо
так распределить ресурсы, чтобы, начиная с этого этапа и до конца
процесса, доход был максимальным. Доход F^n на этапах, начиная от
J-ro и кончая n-м, запишем
f?7n " max {Fj+f(j+iy.n},
где/(/+1)^п - доход, полученный на последующих этапах.
Система функциональных уравнений для различных этапов будет
следующей:
flrn ” max +^2т-пИ
F2-~n “ max 1^2 +/34-п);
^(n—1)т-п “ max l^n—l +Mi
Fn“fn-
При распределении ресурсов необходимо думать не только о
максимальном доходе на данном этапе, но и о влиянии этого распреде-
ления на последующие этапы. И только на последнем этапе распреде-
лять ресурс следует так, чтобы получить максимальный доход именно
на этом этапе, поскольку остаток ресурса после n-го этапа нас уже не
интересует. В соответствии с этим принципом задачу решают начиная с
последнего этапа. Затем следует переходить к решению предпослед-
него этапа, определяя условно оптимальное распределение, и так до
первого этапа, где, зная, с чего начинается процесс, необходимо опре-
делить действительно оптимальное решение. Затем, идя от начала
процесса распределения к концу, находится оптимальное распределе-
ние ресурса уже для всего процесса.
Перейдем к конкретной задаче распределения ресурсов динами-
ческим методом. Пусть имеется 10 ед. (млн. р.) капитальных вложе-
ний, т.е. начальный ресурс IQ = 10, которые необходимо распределить
между двумя объектами (т = 2) на протяжении трех лет (п = 3) таким
образом, чтобы суммарный доход на всех этапах и всех объектах был
максимальным. Функции дохода и остатка для всех этапов одинаковы
и определяются следующими аналитическими зависимостями.
Функции дохода:
для объекта 1 fa = 0,8ху;
для объекта 2 fa = 0,5ху •
Функции остатка:
для объекта 101 = 0,Зху;
для объекта 2 a-i = 0,6ху,
где? - номер этапа; ху и ху - искомые значения ресурсов.
182
Решение задачи оптимального распределения ресурсов начинаем с
последнего, HI этапа, предполагая, что к началу этапа имеются ресур-
сы К3, истинная величина которых неизвестна.
В соответствии с принципом оптимальности, какие бы решения ни
были приняты на первых двух этапах и какое бы количество ресур-
сов К3 не было получено вследствие этого к началу Ш этапа, мы долж-
ны это количество ресурсов использовать наилучшим образом и полу-
чить за один последний год наибольший доход. Математически это
условие может быть записано следующим образом:
* з */1(*)13+-ЭД*)23 * юах;
* 13 + *23 “ к3 нри «13 > 0; *23 °-
После подстановки /1(х)1з и /з(х)23 из условий задачи получим:
F3 « 0,8х1з + М*23** тах>
* 1з+*23шКз;
* 13 * 0; *23 * °-
Решить задачу на данном этапе довольно просто. В целевую функ-
цию хи входит с коэффициентом 0,8, большим, чем коэффициент 0,5
при Х23- Следовательно, чтобы максимизировать функцию F3, необхо-
димо принять:
*13 "кз;
*23
Тогда шахГз® 0,8X3.
Такое решение означает, что распределяемые ресурсы К3 следует
вложить в объект 1. Полученное решение является условным, поско-
льку истинное значение ресурсов К3 пока неизвестно.
Ресурсы К3 являются остатком ресурсов в конце второго этапа
Х3 “ «1(х)12 + «2(х)22-
Бели подставить значения функций остатка из условия задачи, то
получим
ХЗ “ 0,3x12 + 0,6x22-
Найдем значение дохода max F3 через ресурсы II этапа К2, подставив в
полученное решение значение К3,
max f3 - 0,8X3 - 0,8(0,3*12 + °,б*22)
или окончательно
max F3 “ 0,24x12 + М&22-
183
Далее перейдем к максимизации дохода на двух этапах (II и III):
Г2-*3 ~ F2 + max F3 * тах
прих12+ х22 =^2>
х12 0; х22 0.
Подставив значения тахГз и функций дохода из условий задачи^
получим
F24-3 ~ 0Лх12 + 0,5x22 + 0,24x12 + 0,48x22 “* max
ИЛИ
Г2«гЗ = 1,04x12 + 0,98x22 ** max
при условиях
х12 + х22 = ^2>*
х12 > °; х22 0.
Коэффициент при х\2 в целевой функции больше коэффициента
при х22« Следовательно max F24-3 будет при xu = Х22 = 0, т.е. ресурсы
К2 необходимо направить на объект 1. При этом шах ?2±3 = 1,04К2*
Выразим ресурсы К2 через ресурсы I этапа. Поскольку ресурсы К2
являются остатком ресурсов I этапа, то
К2= ^(^ll)4* ®2(*21),
ИЛИ
#2 = 0,Зхц + 0,6x21.
Запишем полученное на II этапе решение max F2^3 = через
ресурсы на I этапе KJ. Подставив значение К2> получим:
max £2^.3 - l,04(0,3xi 1 + 0,6x21) = 0,312xi 1 + 0,624x21.
Функция суммарного дохода на трех этапах:
Г1-тЗ = Л (Х11) + /2(^21) + max F2-r3‘
Эту функцию необходимо максимизировать:
Г14-3 ж Л(*11)+ £(*21)+ тах г2-тЗ тах
при
хц + х21 = К1;
х >0; *21 *0.
184
Таблица 6.10
Объект Этап
I 11 Ш
1 хц-0 *12=*2 *13 “к3
2 *21=к1 Х22 = 0 *23“°
После подстановки функций дохода и значения шах Гз-а-з получим:
^1^3 = 0,8хц + 0,5^21 + 0,312xi 1 + 0,624x21,
ИЛИ
^1^з = 1,112хц + 1,124x21 “* max
при
хц + х21=Л'1;
*п >0;*21>0-
Максимального значения функция достигает при хц = 0;
*21 = а именно max F^3 = 1,124^.
Это значит, что ресурсы Kj следует направить на объект 2.
Полученное решение (табл. 6.10) соответствует условно оптималь-
ному распределению ресурсов, поскольку, как уже отмечалось, неиз-
вестно истинное значение ресурсов Кг и К3.
На П этапе решения, следуя от начала процесса к концу, устанав-
ливаем действительно оптимальные распределения ресурсов и опреде-
ляем доход.
На I этапе все ресурсы направлены на объект 2. Величина началь-
ного ресурса задана и составляет Ki = 10 ед. Получаемый доход опреде-
ляет функция
£1-9,8x11+0,5x21.
После подстановки в нее значений, приведенных в табл. 6.10,
получим
£1 - 0,8 • О + 0,5К1 - 0,5 • 10 - 5 ед.
При этом к началу II этапа (года) остаток капитальных вложений
составит
+0,8x21ш 0,3 • 0 + 0,6 • 10 - 6 ед.
185
На П этапе капитальные вложения направляют на объект 1 “
= они обеспечат доход
Ft • 0,8x12+0,5X22 ш 0,8^2 + 0,5 *0 • 0,8 *6 4,8 ед.
Остаток ресурсов составит
#3 e 0,3xi2 + 0,5x22 в 0,3 • б + 0,6 • 0 ® 1,8 ед.
На III этапе 1,8 ед. ресурсов направляют на объект 1 (х^ = (см.
табл. 6.10)). Такое распределение ресурсов обеспечит доход
F3=0,8х1з + 0,5x23 “ 0,8Кз + 0,5 • 0 0,8 • 1,8 1,44 ед.
Остаток неиспользованных ресурсов составит
К4ж 0,Зх1з + 0,6x23" 0,ЗКз + 0,6 • 0“ 03 • 1,8“ 0,54 ед.
Максимальный суммарный доход
max Г 1+з • пих Fi + max F2 + «пах F3 " 5 + 4,8 +1,44 11,24 ед.
Поскольку решение I этапа является решением всей задачи, то
значение общего дохода должно быть равно значению дохода на I
этапе. Проверим, max F1+3 = l,124Kj, = 10, следовательно, max F1+3 •
= 11,24 ед. Задача решена верно.
6.3. Задача о замене оборудования
Одной из проблем, с которой постоянно приходится сталкиваться
при организации работы автомобильного транспорта, является замена
старых автомобилей новыми. Известно, что тысячи автомобилей
продолжают эксплуатироваться и после истечения амортизационного
срока их работы, что приводит к значительному росту затрат на их
содержание и ремонт. Для научного обоснования сроков замены
машин необходимо решить задачу динамического программирования
об экономически оправданной их замене.
Задача заключается в следующем. Для планового периода надо
найти оптимальную политику замены машины, другими словами, для
каждого годе* в плановом периоде надо решить - сохранить имеющую-
ся в данный момент машину или купить новую с тем, чтобы суммарная
прибыль (доход) за плановый период была максимальной.
Основными функциональными характеристиками параметров
машины являются [9]:
t — возраст .машины (t “ 0,1,2,п); t “ в - соответствует использованию новой
машины; t-1—использованию машины возраста 1 год и т. д.;
186
r(t) — аымюса продукции (для автомобиля — выручка за транспортные услуги),
производимой за год на машине возраста
u(t) — эксплуатационные затраты за год на машину возрастав
s(t) остаточная стоимость машины возраста
р — цена новой машины;
tg ~ начальный возраст машины;
N — продолжительность планового периода (количество лет в плановом периоде).
В рассматриваемом примере о замене машины ее возраст отсчиты-
вается в прямом направлении, а этапы, на которые разбит процесс, - в
обратном. Таким образом, возраст t 0 соответствует началу использо-
вания новой машины; t = 1 означает последний год планового периода
(до конца планового периода остался 1 год); п я 2 означает, что до
конца планового периода осталось 2 года и т. д.; п = N - последние N
лет планового периода, т. е. весь плановый период. Отметим, что
плановый период естественным образом расчленяется на этапы длиной
в 1 год, в каждом из которых необходимо решить, сохранить или
заменить машину.
Функция дохода fn(t) определяет суммарный доход за последние п
лет, создаваемый машиной, возраст которой на начало периода из п
лет составил t лет.
С помощью функций fx(t), f2(t), ..., faff) проанализируем задачу
динамического программирования и выберем оптимальную стратегию
замены. Очевидно, если мы сумеем вычислить fa(t) при t = и найти
политику замен, обеспечивающую максимальный доход за плановый
период, т. е. найдем max f^(to), то это и будет решением задачи.
Согласно алгоритму динамического программирования задачу
надо решать с конца - справа налево (в соответствии с ростом пара-
метра п и снижением параметра (), так как на последнем этапе процес-
са планирования мы можем действовать без учета предыдущих этапов
и считать, что оптимальная политика на последнем этапе должна
обеспечить максимальный доход за последний год.
Функциональное уравнение, отражающее возможные решения,
будет следующим:
. м fr(t) - u(t) (сохранение машины);
- шах [ _ р+,(0) - «(о) (замена машины).
Уравнение отражает две возможные стратегии:
сохранение машины и получение за последний год максимального
дохода
r(t)-u(t):
покупка новой машины, что обеспечит за-последний год доход
s(t)-p + r(0)-u(0).
187
Очевидно, что решение о замене имеющейся машины возраста t на
новую следует принимать лишь в случае, когда доход от новой маши-
ны больше, чем от старой, т. е.
s(t) —Р + КО) — 1X0) > r(t) — u(t).
Если же
sft) — р + КО) — u(0) < r(t) — u(t),
то имеющуюся машину следует сохранить. Знак неравенства < (мень-
ше или равно) указывает на то, что если доходы от новой и старой
машины равны, то лучше сохранить старую машину, так как мы к ней
привыкли и хорошо ее знаем.
Чтобы записать основное функциональное уравнение для решения
задачи, рассмотрим два смежных этапа - предпоследний и последний,
т. е. п + 1 и п.
В случае сохранения машины мы получим от нее в первый год
(последний этап) доход r(t) - u(t), причем к концу этого года машина
’’постареет” на 1 год и будет иметь возраст t + 1, обеспечив на пред-
последнем этапе доход f„(t + 1), а общий доход за последние n + 1 лет
будет равен
В случае замены машины в ’’первом году” (на последнем этапе
решения) затраты на покупку новой машины составят s(t)-p (знак
означает расход средств), а доход за год будет равен г(0) - и(0), к
концу этого года возраст машины составит 1 год; поэтому оптимальная
политика замены в последние п лет обеспечит доход /п(1), а общий
доход за последние (n + 1) лет будет равен
з(0 — Р + КО) — и(0)+/п(1).
Основное функциональное уравнение
/п+lft) = max fr® ~ * М* +!) (сохранение машины);
(sft) — р + r(0) ~ и(0) + /п(1) (замена машины).
При переходе от одного этапа к другому возраст машины увеличи-
вается от t до t + 1, а число этапов уменьшается от N до N - 1. Соотно-
шения, записанные основным функциональным уравнением, устанав-
ливающие связь между /п+1 и f„, называют рекуррентными соотноше-
ниями Веллмана. Слово ’’рекуррентное” происходит от латинского
слова ’’recurso”, что означает ’’бегу назад, возвращаюсь” и имеет здесь
естественный смысл - возврат к предыдущему.
Рассмотрим условный числовой пример, в котором р = 15, s(t) = 0,
188
Таблица 6.11
Возраст маши- ны t Стои- мость продук- ции r(t) Эксплуа- тацион- ные за- траты u(t) Доход f(t)-r(t)-u(t)
0 30 18 12
1 30 19 И
2 28 20 8
3 28 21 7
4 27 21 б
5 27 22 5
Возраст маши- ны t Стои- мость продук- ции r(t) Эксплуа- тацион- ные за- траты u(t) Доход f(t)-r(t)-u(t)
б 26 22 4
7 26 23 3
8 25 24 1
9 25 25 0
10 24 25 0
т. е. машина полностью себя окупила: r(t), u(t), а также функция f(t)
дохода указаны в табл. 6.11.
При расчетах используем функциональные уравненйя (рекур-
рентные соотношения) и заполняем табл. 6.12 по строкам следующим
образом: вначале первую строку, затем вторую и т. д. Очевидно, что
первая строка табл. 6.12 совпадает с последней строкой табл. 6.11 и
соответствует политике сохранения машины, поскольку
fit)’r(t)-u(t)>0.
Таблица 6.12
fn(t) 0 1 2 3 4 5 6 7 8 9 10
N N-l • • • • • • 3 2 1
fl(t) 12 11 8 7 6 5 4 3 1 0 0
fit) 23 19 15 13 11 llv
fit) 31 26 '21 19v
fit) 38 33 27 26 26v
fit) 45 38 34 33v
fit) 50 47 40 39 38 38v
fit) 59 51 47 4?V
fit) 63 58 55 54 53 52 51 sov
fit) 70 66 62 60 58 58v - •
hit) 78 - 73 68 66v
189
Перейдем к заполнению второй строки, занесем в нее значения £ ft)
(/1(1)»г(0) - «(О) +/1(1)8 30 * 18 +11« 23 (сохранениемашины);
твуИ1)*и(1)+/1(2)
/XI)8 max 2
[/1(1)
<11+3
819 (сохранение машины);
11
]/»)
WD
я 15 (сохранение машины);
в 13 (сохранение машины);
«И (сохранение машины);
|K5)-u(5)+/i(6)
/Х5)»тах2 4 4
1/1(1)
11 (замена машины).
) 5 + 4
»тах S
111
Вычисления продолжаются до тех пор, пока не будет выполнено
условие /1(1) > /,ft). В этот момент машину необходимо заменить,
поскольку прибыль в результате замены будет больше, чем в случае
использования старой машины. Отметим в табл. 6.12 этот момент
знаком V и дальнейшие вычисления прекратим.
Заполним третью строку табл. 6.12, для чего определим значения
функции
/з(0)-тах< 'г(0)-и(0)+Я1) [/2(1) -max 1 Г 12 + 19 119 « 31 (сохранение машины);
/э(1)-тах^ (г(1)-«(1)+/2(2) [/2(1) «max i f 11 + 15 I 19 8 26 (сохранение машины);
/з(2)-тах< Г К2)-и(2)+/ХЗ) (/2(1) -max J ( 8 + 13 I 19 8 21 (сохранение машины);
/з(3)-тах Гг(3)-и(3)+/2(4) 1/2(1) -max 4 f 7 + 11 I 19 819 (замена машины).
190
Для /j(3) выполняется условие /2(1) > /з69> что соответствует
решению о замене машины.
В практических расчетах вычисления проводят непосредственно в
табл. 6.12, контролируя условие /1+п(1) > /24П(У. Вычислим, например,
по таблице значения дляД(У:
/<(в) “Я(0) +/з(1)“ 12 + 26 - 38 > /3(1) - 26 (сохранение машины);
А(1) “/1(1) +/з(2) “ И + 21 “ 33 > /з(1) (сохранение машины);
/4(2) “/1(2) +/з0) “ 8 +19 - 27 > /3(1) (сохранение машины);
/4(3) “/1(3) +/з0) “7 + 19-26 -/з(1) (сохранение машины);
/40) ”/10) +/з(3) “ 6 +19 - 25 < //I) (замена машины).
Отметим в табл. 6.12 момент замены машины и перейдем к расчету
значений f$(t) и т. д. По условию задачи длина этапа соответствует
году, поэтому решение заканчивается на десятиэтапном процессе.
Рассмотрим экономическую интерпретацию полученного решения.
По результатам расчетов, приведенных в табл. 6.12, и линии, разгра-
ничивающей области, соответствующие политике сохранения машины
(слева) и замены машины (справа), определим оптимальный цикл
замены. В десятиэтапном процессе при сложившихся соотношениях
годового выпуска продукции и затрат на эксплуатацию машины ее
замену необходимо производить через каждые 3 года. В этом случае
будет обеспечен максимальный доход.
По таблицам, соответствующим табл. 6.12, определяют оптималь-
ную политику замены машины или оборудования для каждого кон-
кретного случая. Пусть, например, в начале планового периода
имеется машина возраста 2 года. Найдем оптимальную политику ее
использования и замены за весь период.
Максимальный доход за 10 лет при условии, что в начале периода
имеется машина возраста 2 года, указан в табл. 6.12 в клетке /ю(2) и
составляет 68 ед. Чтобы обеспечить этот максимальный доход, необхо-
димо выбрать оптимальную политику замен. Значение функции
дохода Ао(2) расположено слева от разграничительной линии, т. е. в
зоне, определяющей стратегию сохранения машины. Следовательно,
машину возраста 2 года на десятом году экономически выгодно
сохранить.
Проработав 1 год, машина состарится на 1 год, следовательно, за 9
лет до конца планового периода будем иметь машину возраста 3 года.
Значит, в табл. 6.12 надо найти значение функции /д(3). Доход состав-
ляет в этом случае 60 ед. и расположен левее линии разграничения,
т. е. в зоне сохранения машины. Это значит, что за 9 лет до конца
планового периода машину следует сохранить.
191
Проработав 1 год, машина состарится, и на VIII этапе ей соответст-.
вует функция /8(4). Значение этой функции находится слева от раз*
граничительной линии, и это указывает на то, что в данном году
машину целесообразно сохранить. Заменить машину следует на
седьмом году, о чем свидетельствует функция /7(5), которая располо-
жена справа от разграничительной линии в зоне замен.
Заменив машину и проработав на ней 1 год, надо на VI этапе
искать значение функции /8(1); оно составляет 47 ед. Имея машину
возраста 2 года, надо действовать оптимально в оставшиеся 5 лет.
Продолжая рассуждать таким же образом, как и прежде, по
табл. 6.12 найдем последовательно, что /$(2) и Д(3) соответствуют
политике сохранения машины, /з(4) - политике ее замены. И вновь
/2(1), /1(2) - годы эксплуатации машины, т. е. в этот период ее следует
сохранить.
Рассмотренный процесс представляет собой политику условных
решений, поскольку он рассматривался от конца к началу периода
планирования. На самом же деле планирование всегда протекает от
начала периода к концу. Прямому процессу соответствуют реальные
решения, которые определяют с помощью табл. 6.12, начиная с функ-
ции /1(2) и переходя последовательно к значениям функции, соответст-
вующим сроку службы машины на каждом последующем этапе. Для
машины начального возраста 2 года оптимальная политика замен в
реальных решениях показана на схеме:
/1(2) Д //1) Д /3(4) Д /4(3) Д /5(2) Д
сохр. сохр. замен., сохр. сохр.
-*«> л» ~ М» М» JI
Такая политика замены машины, т. е. через каждые 3 года, обеспе-
чит получение максимального дохода 68 ед. Значения функции дохода
указаны над стрелками.
Используя этот способ, можно определить оптимальную политику,
замены любого другого начального состояния машины (например, для
новой /18(0)). Если же необходимо решить задачу о замене машины в
плановом периоде меньше 10 лет, например 5 лет, то для этого опять
можно воспользоваться табл. 6.12. При начальном возрасте машины
2 года, /5(2) “ 34, а оптимальная политика ее замены совпадает с полу-
ченной траекторией:
/1(2) Д //1) Д /3(4) Д /4(3) Д /5(2) Д.
сохр. сохр. замен. сохр. сохр.
Таким образом, метод динамического программирования дает
возможность проводить глубокий анализ и обширную интерпретацию
задач о замене машин и оборудования.
192
Глава 7
КОРРЕЛЯЦИОННО-РЕГРЕССИОННЫЕ МЕТОДЫ
АНАЛИЗА и планирования
7.1. Производственные функции
Экономические явления и процессы на автомобильном транспорте
есть результат действия многочисленных и разнообразных факторов:
существенных и несущественных, главных и второстепенных, случай-
ных и неслучайных и т. п. Для объективного изучения результатов
хозяйственной деятельности автотранспортных предприятий необхо-
димо знать, как влияют те или иные факторы на результат производ-
ства. Решают такие задачи путем построения и исследования произ-
водственных функций. Правильное определение производственных
функций позволяет принять оптимальное решение по использованию
различных производственных факторов в организации работы автомо-
бильного транспорта.
Производственная- функция представляет собой экономико-мате-
матическое выражение зависимости результатов производственной
деятельности от обусловивших эти результаты показателей - факто-
ров. Факторы, включаемые в производственные функции, неоднород-
ны по структуре и часто проявляются неоднозначно. Поэтому боль-
шинство производственных функций относится к классу статистиче-
ских моделей, исследуемых методами корреляции и регрессии.
Математическая модель производственной функции обычно
описывается уравнением
У м.,
где Xj.xj,..., хп — показатели-факторы (затраты труда и средств, технико-экономические
показатели работы АТП, характеристики уровня организации труда и т. п.).
Самым простым видом производственной функции является
прямолинейная зависимость между двумя переменными
у=с + Ьх
Такая зависимость имеет место при равномерном изменении значения
функции в связи с изменением изучаемого фактора-аргумента.
В экономике в качестве производственных функций широко
применяют также одно- и многофакторные зависимости, описываемые
Уравнениями гиперболы, параболы, степенными и показательными
уравнениями.
Часто применяемыми производственными функциями являются
Функции издержек, производства, капитальных затрат и др. Функции
производства отражают зависимость между выпуском продукции и
193
затратами ресурсов. Функции издержек - зависимость издержек
производства какой-либо продукции от объема выпуска этой продук-
ции (например, себестоимость автомобильных перевозок от их объема)
или от уровня специализации предприятия, объема и структуры
производственных фондов, производительности труда. Известную
аналогию с функциями издержек имеют производственные функции
капитальных затрат. С помощью производственных функций иссле-
дуют и другие экономические показатели производства, например
производительность труда, фондоотдачу, рентабельность производства
и др.
Рассмотрим процесс исследования производственных функций на
примере функции выпуска. Выпуск продукции в зависимости 6т
факторов производства достаточно хорошо описывает степенная
функция вида
которая преобразуется в линейно-логарифмическую функцию
log у - log в0 + 01 log *1 + а2 log *2,..., а„ log х„.
Переход к линейно-логарифмической функции намного упрощает
расчеты по определению параметров °о> а1.an* п₽и этом требуется
лишь немного больше вычислений, чем при расчете простейшего
линейного уравнения. Вместе с тем линейно-логарифмическая функ-
ция, как криволинейная, позволяет лучше отразить характер связи
между изучаемыми признаками, чем уравнение прямолинейной
зависимости.
Одними из первых функцию такого вида в 1928 г. использовали
ученые-экономисты К. Кобб и П. Дуглас при анализе экономики
Соединенных Штатов. Они пытались установить влияние соотношения
затрат на рабочую силу, с одной стороны, и влияние капитала, с дру-
гой, на рост национального дохода. В этих исследованиях была приме-
нена функция следующего вида (такие производственные функции
часто называют функциями типа Кобба-Дугласа):
y-aXV2,
где у — национальный доход; ад> ар а2 — параметры уравнения; М — фонд заработной
платы; К—имеющиеся в наличии основные фонды (т. е. ’капитал”).
Функция типа Кобба-Дугласа имеет важное аналитическое значе-
ние не только в изучении развития национальной экономики, но и в
изучении деятельности предприятий, что представляет большой
интерес.
Условимся, что результат производства, обозначенный у, будет
представлять продукцию предприятия; М - фонд заработной платы
194
или число рабочих, а К - основные фонды предприятия. Логарифмиро-
ванное уравнение
log y’logeo + OilOgM + OjlogK'
служит для вычисления параметров q, q, в2 методом наименьших
квадратов. При этом предполагаем, что q + a2 = 1.
Исследуем заданную производственную функцию. Прежде всего
определим показатель производительности труда как отношение
объема выпускаемой продукции к численности рабочих
у/М“ао№1-1№2.
Полученное выражение характеризует среднюю производитель-
ность труда, т. е. показывает среднее количество продукции, приходя-
щееся на одного работника или на единицу отработанного времени.
Поскольку параметр q находится в интервале от нуля до единицы,
т. е. О < q < 1, то показатель степени (q - 1) при М в правой части
уравнения является отрицательной величиной, а это значит, что с
увеличением затрат труда (величины М) средняя производительность
труда снижается.
Предельная производительность труда - есть частная производная
выпуска продукции по затратам труда
dy/dM-a^M^K02
и показывает, сколько дополнительных единиц продукции приносит
дополнительная единица затраченного труда. С увеличением затрат
труда М при неизменных фондах К предельная производительность
труда снижается. С увеличением объема фондов при неизменных
трудовых ресурсах, т. е. с ростом фондовооруженности труда, произ-
водительность труда возрастает.
По основным фондам интерпретируем аналогичным образом.
Средний выпуск продукции, приходящийся на единицу основных
фондов, т. е. средняя фондоотдача определяется так:
Из полученного выражения следует, что средняя фондоотдача
уменьшается с ростом объема основных фондов и увеличивается с
ростом ресурсов труда.
Показатель предельной фондоотдачи определяется как частная
производная по объему фондов
dy/dK-e^2^1K®2“1.
Относительный прирост объема производства на единицу относи-
тельного увеличения ресурсов определяется следующим образом.
195
Предельную производительность труда и предельную фондоотдачу
необходимо разделить на объем продукции и умножить на величину
ресурсов (трудовых затрат и основных фондов). Тогда относительная
предельная производительность труда определяется:
dM М 1к 2 = = er У atMaiKa2
Относительная предельная фондоотдача:
dy К
dK у
,ЛН*1К,г
“ в2.
Параметры at и а2 представляют собой в сущности эластичность
выпуска продукции соответственно по затратам труда и основных
фондов. Параметр aj показывает, насколько увеличивается выпуск
продукции при росте затрат труда на 1 %, а параметр в2 - насколько,
увеличится выпуск продукции при увеличении затрат фондов на 1 %.
Как видим, относительная предельная производительность труда и
относительная предельная фондоотдача от объемов ресурсов не зави-
сят, и при любом их сочетании увеличение трудовых затрат на 1 % приво-,
дит к росту объема производства на ai %, а увеличение затрат фондов'
на 1 % приводит к увеличению выпуска продукции на о2 %. Следова-
тельно, эластичность выпуска по затратам труда и фондам есть вели-
чина постоянная, равная соответственно aj и а2. Этот вывод относится
только к рассматриваемой производственной функции.
Производственные функции позволяют исследовать также вопро-
сы замещения й взаимодействия ресурсов. Замещение ресурсов
означает, что единицу одногр ресурса можно было бы заменить некото-
рым количеством другого ресурса так, что объем продукции при этом
не изменится. В экономических исследованиях важно знать предель-
ную норму замещения. Для производственных функций типа Кобба-
Дугласа она равна
__dK _
dM ~~ а2М *
Предельная норма замещения зависит не только от параметров и
о2, но и от соотношения объемов ресурсов. Чем выше, например,
фондовооруженность труда, тем выше норма замещения затрат живого
труда производственными фондами. Для того чтобы учесть соотноше-
ние объемов ресурсов, вычисляют показатель эластичности замещения
ресурсов. В данном конкретном случае эластичность замещения
определяется как отношение относительных приращений К/М (фондо-
вооруженности труда) и предельной нормы замещения. Обозначив
dK/dM = h, получим выражение для эластичности замещения ресурсов:
d(K/M) ft
dft к/м
196
Таблица 7.1
Название функции Уравнение У=/(х) Средняя производи- тельность Предельная производи- тельность <-£> Коэффициент эластичности т. dy X dx у
Линейная Парабола Гипербола у - а + Ьх у - а + Ьх + сх2 b у-а+— X —+ь X а — + Ь + сх X а, Ъ b Ь + 2сх Ъх
а + Ьх (Ъ + 2сх)х
а + Ъх + сх? b
X + X2 х2 ах + Ь
Степенная ув&Р ах6"1 еЬж*”1 b
Показательная y-atF ab* х ab* In Ъ xln b
Экспоненциальная у - ае^х аеь* X abebx Ьх
Эластичность.замещения ресурсов в рассматриваемой производ-
ственной функции постоянна и равна* единице. Это значит, что измене-
ние фондовооруженности труда (К/М) на 1 % соответствует изменению
предельной нормы замещения тоже на 1 %.
Исследуя производственные функции, можно получить и другие
их характеристики. Например, эффект от одновременного пропорцио-
нального увеличения объема как ресурса труда, так и производствен-
ных фондов, или определить потребность в одном из ресурсов при за-
данных объеме производства и величине другого ресурса и т. п.
При выборе вида производственной функции следует исходит из
существа исследуемого явления, характера факторов-аргументов,
учитывать закономерности изменения средних и предельных ресур-
сов, норм замещения и коэффициентов эластичности. В табл. 7.1
представлены часто применяемые производственные функции, отра-
жающие однофакторные зависимости и основные их характеристики.
7.2. Парная корреляция
Все явления в природе и обществе взаимосвязаны и обусловлены
действием многих причин и факторов. При изучении причинно-след-
ственных связей в области организации автомобильного транспорта
многие из них описывают функциональные или корреляционные <
зависимости.
197
Функциональная зависимость ~ это такая связь между величина-
ми, когда значение зависимой величины-функции полностью опреде-
ляется значениями влияющих величин-аргументов. Здесь наблюда-
ется полное соответствие между зависимой и независимой величина-
ми. Например, путь, пройденный автомобилем, всегда зависит от
скорости, с которой он будет двигаться, и времени движения. Это
условие будет соблюдаться независимо от того, какие перевозки
выполняются, какой груз перевозится и какими автомобилями.
Корреляционная зависимость отражает связь между величинами,
когда определенным значениям влияющих величин соответствует
много значений зависимой величины. В корреляционной зависимости
нет полного соответствия между причиной и следствием, а наблюдает-
ся лишь известное соотношение - корреляция (в переводе с латин-
ского означает соответствие, взаимосвязь). Корреляционная связь
проявляется лишь в общей совокупности наблюдений и может быть
выявлена статистическим путем. Так, корреляционная связь имеет
место между производительностью труда и фондовооруженностью
рабочих, производительностью и текучестью рабочих. Это значит, что
один и тот же прирост производительности труда не обязательно
сопровождается одинаковым увеличением его фондовооруженности
или одним и тем же снижением текучести и т. д.
Основным содержанием метода корреляционного анализа являет-
ся изучение причинно-следственных связей, построение математиче-
ских моделей зависимости одних величин от других, количественная
характеристика связи и определение ре значимости.
Корреляционные методы обнаруживают и характеризуют фактиче-
ское проявление связи на основе изучения опыта работы и особеннос-
тей производства, количественного измерения связи, что имеет
большое практическое значение в области планирования и организа-
ции автотранспортного производства.
Необходимым условием применения корреляционных методов
является предварительный качественно-теоретический анализ суще-
ства изучаемого процесса или явления. Именно теоретический анализ
указывает на вытекающие из существа явлений возможности причин-
но-следственной связи между ними. Корреляционный анализ должен
дать ответ на вопрос: проявляется ли в действительности и как прояв-
ляется, воспроизводится возможная связь в данных конкретных
условиях?
Корреляционный анализ включает следующие основные этапы:
установление наличия корреляционной связи между изучаемыми
явлениями, вскрытие внутренней сущности явлений и порождяющи*
их причин;
определение формы связи и исчисление ее количественной харак-
теристики, то есть построение корреляционной модели в виде уравне-
ния связи и нахождение его: параметров;
измерение степени тесноты корреляционной связи и исчисление ее
количественных показателей и оценок.
198
Корреляционная связь между двумя признаками изучается с
помощью методов парной корреляции. Простейшим уравнением,
описывающим зависимость между двумя переменными, является
линейное уравнение
y-e+tob
Построение линейной корреляционной однофакторной модели
рассмотрим на конкретном примере. Допустим, что мы располагаем
данными о выработке транспортной продукции в расчете на одного
рабочего в приведенных тонно-километрах (производительность
труда) и показателями о текучести рабочей силы (коэффициент теку-
чести) по 34 грузовым автотранспортным предприятиям (табл. 7.2).
Таблица 7.2
№ п/п Коэффициент текучести, xi Производительность труда, тыс. при- веденных т-км, Расчетные показатели
УХ X2 У3
1 21,8 143,3 3123,9 475,2 20534,9
2 23,3 110,9 2583,9 542,9 12298,8
3 26,0 123,0 3198,0 676,0 15129,0
4 27,0 117,0 3159,0 729,0 13689,0
5 29,3 129,4 3791,4 858,5 - 16744,4
6 38,0 115,4 4385,2 1444,0 13317,2
7 z 38,0 112,9 4290,2 1444,0 12746,4
8 38,0 108,4 4119,2 1444,0 11750,6
9 38,0 129,4 4917,2 1444,0 16744,0
10 38,5 145,3 5594,1 1482,3 21112,1
11 40,0 141,1 56443 1600,0 19909,2
12 42,0 128,5 5397,0 1764,0 16512,3
ИТ. До ... • • • ... ... ...
34 79,0 1675,2 х=49,3 98,5 Еу-3876,5 У-114,0 7781,5 486837,7 6241,0 2х2 = 90414,( 9702,3 V- 447927,4
Примечание. Игза громоздкости вея таблица не приводится;показан только ее
Фрагмент.
199
Рис. 7.1. График корреляционной связи между' производительностью труда и
коэффициентом текучести рабочей силы
Данные в табл. 7.2 расположены в порядке возрастания признака-
фактора, т. е. коэффициента текучести рабочих. Даже из приведенного
фрагмента таблицы видно, что с ростом показателя текучести кадрдв
наблюдается тенденция к снижению производительности труда. Такой
вывод вытекает исходя из, сути изучаемой связи, поскольку известно,
что увеличение текучести рабочих отрицательно сказывается на их
производительности. Следовательно, предварительно можно предпо-
ложить наличие корреляционной связи между изучаемыми показате-
лями.
Корреляционным анализом необходимо установить, имеется ли
такая связь на самом деле, а также ее вид и количественные характе-
ристики. Для этого нанесем все 34 точки из таблицы на график
(рис. 7.1). Абсциссой точки является коэффициент текучести (обозна-
чим его через х), ординатой - значение показателя производительно-
сти труда (обозначим ее через у). Такой график называется полем
корреляции.
Для выяснения характера предполагаемой связи в каждом интер-
вале по коэффициенту текучести вычислены средневзвешенные
значения показателей производительности труда, которые соединены
на графике ломаной линией. Эта линия называется эмпирической
линией регрессии. По характеру ее расположения определяют вид
корреляционной связи. На графике (см. рис. 7.1) эмпирическая линия
регрессии имеет незначительную кривизну и расположена на поле
корреляции так, что можно предположить линейную форму связи
между производительностью труда автотранспортных рабочих и их
текучестью, которая описывается уравнением прямой вида Ух - а + Ьх.
200
Описать корреляционную линейную зависимость математически -
значит определить численные значения параметров а и Ь, при которых
прямая будет наилучшим образом соответствовать имеющимся факти-
ческим данным. А это зйачит, что она должна проходить в максима ль-,
ной близости к ломаной линии, представляющей эмпирические дан-
ные. Такая линия называется теоретической линией регрессии и
характеризует зависимость между ух и х при средних значениях,
кроме х факторов, т. е. при средних прочих условиях.
Задача нахождения уравнения теоретической линии регрессии
может решаться различными методами. Один из них - метод наимень-
ших квадратов. При этом методе за критерий оценки принята мини-
мальная сумма квадратов отклонений фактических значений у (точек
ломаной линии) от вычисленных по уравнению прямой. Отклонения
берут в квадрате, так как в первой степени они могут быть либо
положительными, либо отрицательными, а их сумма равна нулю для
многих прямых. Минимуму же квадратов отклонений соответствует
единственная прямая.
Таким образом, необходимо определить такие значения коэффи-
циентов а и Ь, при которых сумма квадратов отклонений наблюдае-
w n I-
мых значений у от расчетных будет минимальной, т. е. s = s (у,- -
- У*)2 "*min* _ W
Подставив выражение ух = а + Ьх,, получим
п
min,
где Xj, уi — известные величины (исходные данные); а и b — искомые параметры уравне-
ния линии регрессии; i — порядковый номер исходного показателя; п - общее количество
исходных показателей (число наблюдении).
В точке минимума функции ее первая производная равна нулю,
поэтому дифференцируем s в отношении а и Ь, а соответствующие
частные производные приравняем нулю:
ds/da = —22 (у-а - Ьх) = 0;
ds/db'» —(у — a — Ъх)х = 0.
Опуская обозначения частных производных, сократив на -2,
почленно,просуммировав и перенеся в правую часть члены с коэффи-
циентами а и Ь, получим систему нормальных уравнений для вычисле-
ния параметров а и Ь:
2у » па + Ь 2х;
2ху seSx + bSx2.
201
Решив систему нормальных уравнений, найдем выражения для
вычисления а и In
nZxy — ZxZy
nSxa-(Zx)3
__Z^Zy-ZxZxy
nZx*-(Zx)3
Следовательно, для расчета коэффициентов уравнения регрессии
необходимо иметь значения n; Sy; Еху; Ex2.Эти значения приведены в
расчетной части табл. 7.2.
Подставив необходимые значения в расчетные выражения* полу-
чим;
34 -186837,7 —1675,2 - 3«76»5 -141431,6
34 * 90414,6 — (1675,2) ' 267801,9 ’5 '
90414,6 • 3876,5 -1675,2 ♦ 186837,7
34 - 90414,6 —(1675,2)2
= 140,04.
Расчет параметров уравнения регрессии изложенным выше спосо-
бом становится все более затруднительным с ростом числа наблюде-
ний. Изложим более эффективный способ вычислений, основанный на
использовании синтезированной корреляционной таблицы, которая
имеет форму табл. 7.3. В ней сохраняются те же интервалы для пере-
менных, что и на поле корреляции (см. рис. 7.1). Вычисления рекомен-
дуется проводить в условных единицах, что особенно эффективно при
’’ручном” счете.
Чтобы перейти к условным переменным, для каждой из них
находят средний интервал. При нечетном числе интервалов средний
интервал определяется однозначно; если число интервалов четное,
как в нашем случае, то один из интервалов условно принимается за
средний. Пусть для переменной х за средний принят интервал 3, тогда
условные значения переменных определяют так;
, х-(х— 45)710,
где 45 - середина среднего интервала; 10 - принятый размер интервала.
В общем случае формулы для расчета условных значений х* и у
% w ~ у я (у "* ,
где с* су - соответственно средние значения х и у в средних интервалах; х, у - значения
соответствующих переменных в расчетных интервалах; i* iy-интервал по переменным х
ну.
202
^Ииервалых,- 20-30 3(М0 40-50
Интер- валы Ук *L 25 35 45
Ук -2 -1 0
У> к т тх9 т тх* т mxf
90—100 95 —2 т
ту9
100-110 105* -Г т 1 -1 3 0
ту9 -1 -3
110-120 115 0 т 2 -4 2 -2 i 0
ту9 0 0 0
120-130 125 1 т 2 —4 1 -1 2 0
’ ту* 2 1 2
130-140 135 2 т
ту9
Таблица 7.3
50—60 60—70 70—80 Допустимые столбцы
55 55 75 ~WX «
Г 2 3
т тх* т тх' т тх'
1 1 -2 2 4 2 6 5 -10 11 28
3 3 2 4 2 6 И -11 12 И
-3 —2 -2
1 1 1 2 8 0 -3 0
0 0
1 1 1 2 7 7 -2 7
1 . 1
— — — —
Окончание табл. 7.3
204
^^^Интервалы х{ 20-30 30-40 40-50 50-60 60-70 70-80 Допустимые столбцы
Интер- валы Ук xi 25 35 45 55 65 75 E_ II K. Ci
-2 -1 0 1 2 3
Ук У к m mx m mx m mx m mx m mx' m mx
140—150 145 3 m my' 1 -2 3 1 —1 3 1 0 3 3 9 -3 27
Дополни- тельные строки 6 h =S m 1 fc»l Ki 5 5 8 6 6 4 n = 34 Ey’=—5 Ex- = 15 E(y')2 = 65
6 2 ткА k=l ' 5 3 2 -4 -5 -6
hi xi -10 -5 0 -6 12 12
20 5 0 6 24 36 E(x’)2 = 91
(™КУ) < x' -10 -3 0 —4 -10 -18 S x'y' = = —45
Для переменной за средний принят интервал 40-50. В среднем
интервале значение переменной равно нулю, слева находятся интер-
валы со значениями 1 и 2 со знаком минус, справа - условные пере-
менные 1,2 и 3 со знаком плюс.
По переменной у третий интервал принят за средний, для него
у я 0; вверх расположены условные значения переменной 1, 2 со
знаком минус, вниз - значения 1, 2, 3 со знаком плюс. Дальнейшие
расчеты ведут в условных переменных. При этом основные клетки
таблицы содержат такие показатели (см. табл. 7.3):
т —число наблюдений (точек), попавших в данный интервал на поле корреляции;
тх' —произведение условной переменной х' на значение т в данном интервале;
ту' —произведение условной переменной у' на соответствующее значение т в клетке
таблицы.
Остальные расчеты понятны из формул дополнительных строк и
столбцов табл. 7.3. Принятая форма корреляционной таблицы дает
возможность контролировать правильность расчетов, сравнивая
значения одних и тех же показателей, но полученных разными спосо-
бами вычислений.
Значения параметров уравнения регрессии при прямолинейной
корреляционной зависимости определяют решением системы нормаль-
ных уравнений в условных показателях;
Sy'= na'+ b’Sx';
2у'х'= а' + Ъ' £хг, ,
где а’, Ь’ — искомые параметры теоретической линии регрессии в условном выражении;
п - число показателей в совокупности (число наблюдений).
Показатели, необходимые для расчетов, имеются в корреляцион-
ной таблице:
— 5 = 34а' + 15b’;
—45 = 15а'+ 91b*.
Решив систему уравнений, получим Ь' - -0,528, а “ 0,0763. Следова-
тельно, в условных единицах теоретическая линия регрессии описы-
вается уравнением
Ух = 0,0763 - 0,528х*.
Чтобы перейти к действительным единицам измерения, необхо-
димо вычислить следующие соотношения;
для параметра b
ь-ь’-К,
*х
205
где iy — интервал таблицы по производительности, равный 10; ix - интервал по коэффи-
циенту текучести, равный 10, тогда
10
6—0,528—- = -0,528;
10
для параметра а
a=Cy + i^t’ + Ьсх,
где су сх — соответственно средние значения производительности и коэффициента теку-
чести в интервале, которому соответствуют нулевые значения условных переменных,
т. е. Сут 115; сх™ 45;
тогда
в-115 + 10.0,763 + 0,528.45 -140,04.
Как видим, получены те же значения параметров а и Ь, что и при
их расчете непосредственно в натуральных показателях. При этом
методика расчетов сохраняется, а сами расчеты значительно упроща-
ются. Добавим также, что показатели корреляционной таблицы ис-
пользуются и в дальнейших расчетах для определения тесноты корре-
ляционной связи и других характеристик корреляционных исследо-
ваний.
Запишем эмпирическое уравнение, отражающее корреляционную
связь между производительностью труда рабочих и их текучестью по
исследуемой группе автотранспортных предприятий;
£.= 140,04-0,528х,
где У*— показатель производительности труда, тыс. приведенных т-кьц х — коэффициент
текучести рабочих, %.
Параметр а отражает максимальную производительность по всей
совокупности, т. е. она достигает 140,04 тыс. приведенных т-км в год.
Коэффициент регрессии Ь = -0,528 означает, что увеличение текучести
на 1 % приводит к снижению выработки одного рабочего на 0,528 тыс.
приведенных т-км в год, что составляет примерно 0,5 % от средней
выработки.
Приведем системы нормальных уравнений для расчета параметров
в случае гиперболической и параболической корреляционной зави-
симости. _
При гиперболической зависимости вида ух = а + Ь/х параметры а и
Ъ определяют путем решения системы нормальных уравнений:
Syena + bS—~ :
х
Еу— ааЕ~ +bS—Ц .
XXX2
206
Если корреляционная связь между_ показателями описывается
уравнением параболы второго порядка у - а + Ьх + сх3, то коэффи-
циенты а, b и с определяют из следующей системы нормальных урав-
нений:
Sy = па + ЬЕх + cSx2;
Хух = аЕх + бЕх2 + сЕх3;
S ja2 = a Sx2 + b Zx3 + c Zx4.
Следующим этапом корреляционного анализа является определе-
ние степени существенности связи между параметрами.
7.3. Измерение тесноты корреляционной связи
Однофакторный корреляционно-регрессионный анализ исследует
связь, предполагая, что на зависимую переменную воздействует
только один изучаемый фактор, а другие остаются неизменными.
Поэтому, чтобы использовать полученную зависимость для изучения
свойств и закономерностей экономического явления, необходимо
знать тесноту связи между признаками и установить силу воздействия
изучаемого фактора на зависимую переменную величину.
При парной линейной корреляционной зависимости теснота связи
характеризуется специальным показателем - коэффициентом корре-
ляции, который показывает, насколько значим исследуемый фактор в
сравнении с другими неучтенными факторами. О тесноте корреляцион-
ной связи и влиянии других факторов можно судить по характеру
корреляционного по ля (см. рис. 7.1).
Точки корреляционного поля выражают фактические показатели
производительности труда рабочих автотранспортных предприятий, а
теоретическая линия регрессии - расчетные ее значения. Отклонение
точек поля от линии регрессии объясняется влиянием побочных
факторов. Если бы такого влияния не было, то точки находились бы на
линии регрессии. Вместе с тем как эмпирические, так и теоретические <
значения отклоняются от средней арифметической. Отсюда очевидно,
что чем больше разброс эмпирических значений (точек), тем больше
влияние побочных факторов.,
Напомним, что координаты средней арифметической точки на
графике определяют из уравнений
у ® Zy/п; хв Sx4t.
Для рассматриваемого примера у * 144; х = 49,3 (эти значения приведе-
ны в табл. 7.3).
207
Общая колеблемость значений производительности труда, вызван-
ная действующими на нее факторами, включая и исследуемый (теку-
честь рабочей силы), характеризуется общей дисперсией о£, которая
представляет собой средний квадрат отклонений фактических значе-
ний признака у от их средней арифметической.
<$-Жу-йН
Колеблемость фактических значений около теоретической линии
регрессии, вызванная влиянием других факторов, кроме коэффи-
циента текучести, характеризуется дисперсией а£д или средним квад-
ратом отклонений фактических значений результативного признака от
теоретических, рассчитанных по уравнению регрессии
«у/х=2(У-Л)2/я.
Отклонения расчетных значений производительности труда,
вызванные непосредственно изменением показателя текучести рабо-
чих, характеризуются дисперсией о*д точек теоретической линии
регрессии вокруг средней арифметической:
°у/х“2(Ух-Йа/п.
Общая дисперсия соответствует сумме частных дисперсий
°у " ау/х + « у/*-
Следовательно, чем теснее корреляционная связь между резуль-
тативным признаком у и исследуемым фактором х, тем больше дис-
персия 0у/х будет стремиться к значению общей дисперсии, а частная
дисперсия о’д будет стремиться к нулю.
Следовательно, отношение Оуд/Оу показывает, какая часть общей
вариации результативного признака у обусловлена влиянием фактора-
аргумента х. Количественно теснота связи для однофакторной прямо-
линейной и криволинейной корреляционной зависимости определяет-
ся корреляционным отношением, которое показывает, в какой мере
соблюдается строгая функциональная зависимость между переменны-
ми хи у.
Корреляционное отношение рассчитывают
’’“^ey/j/oy=eyZ»/oy
где б у/х - среднее квадратичное отклонение теоретических значении у, вычисленных по
уравнению регрессии» от средней арифметической; оу - среднее квадратичное отклонение
фактических значений у от средней арифметической.
При прямолинейной связи между показателями корреляционное
208
отношение соответствует коэффициенту корреляции, для расчета
которого используют формулу
ГУ/х‘ v П Sx2 - (Zxf'V n S? - (Sy)2”
При парной линейной корреляционной зависимости коэффициент
корреляции имеет или положительный, или отрицательный знак. При
прямо пропорциональной зависимости гу/х он положителен, при
обратно пропорциональной - отрицателен. При этом следует отметить,
что коэффициент регрессии в уравнении связи и коэффициент корре-
ляции имеют одинаковые знаки. Числовое значение коэффициента
корреляции меняется в пределах от -1 до +1. Если гу/х = 0, то это
указывает на то, что никакой связи между признаками нет; если гу/х =
= 1 (с любым знаком), то между признаками существует функциональ-
ная связь. Обычно считают тесноту связи удовлетворительной при
гу/х > Теснота связи зависит от коэффициента корреляции следую-
щим образом:
Коэффициент Теснота
корреляции связи
0,1—0,3 слабая
0,3—0,5 умеренная
0,5—0,7 заметная
0,7-0,9 высокая
0,9-0,99 весьма высокая
Что касается корреляционного отношения, рассчитанного при
криволинейной корреляционной зависимости, то оно меняется от 0 до
1. При отсутствии связи оно равно нулю, при полной функциональной
зависимости - единице. В отличие от коэффициента корреляции
корреляционному отношению не придают знака, поскольку кривая
зависимости имеет разный наклон. Кроме характеристики тесноты
связи, корреляционное отношение может быть использовано при
обосновании формы связи путем сравнения его значения со значением
коэффициента корреляции. Если корреляционное отношение для
исследуемой совокупности окажется значительно больше коэффи-
циента корреляции, вычисленного для этой же совокупности, то это
будет свидетельствовать о том, что кривая точнее отражает зависи-
мость между признаками по сравнению с прямолинейной зависи-
мостью.
Рассчитаем коэффициент корреляции для зависимости выработки
одного рабочего от показателя текучести кадров по данным 34 авто-
транспортных предприятий (см. табл. 7.2):
г 34 * 18б837>7 - 1б75>2 ‘ 3876,5 _
Гу/х S -/34-90414,6 — (1675,2)2734-447927,4 - (3876,5)* ~ ‘
209
Его числовое значение и отрицательный знак указывают на то, что
между исследуемыми признаками наблюдается заметная (см. табл. 7.4)
обратная связь.
Как видим, расчет коэффициента корреляции в действительных
показателях, даже при малом числе наблюдений, требует большой
вычислительной работы. При большом количестве наблюдений объем
расчетов значительно возрастает, и в этом случае коэффициент корре-
ляции целесообразно определять в условных единицах. При этом
методика расчетов остается прежней, но оперировать приходится
простыми значениями чисел. Та же расчетная формула в условных
показателях примет вид
n Sx'y' — Sx’ Sy* *
Гу/х~ V n Sx'2 - ( Sx)2 V n Sy'2 - ( Sy')2 *
Необходимые для расчетов показатели содержатся в синтезированной
корреляционной таблице (см. табл. 7.3). Выполним необходимый
расчет:
34(—45) —15(—S) „„
V" -/34 • 91 —152 V 34 • 65 — (—5)2 ° “°’61’
Квадрат коэффициента корреляции называют коэффициентом
детерминации. Он, так же как и квадрат теоретического корреляцион-
ного отношения, показывает, какая часть вариации результативного
признака вызвана влиянием фактора, включенного в анализ. В рас-
сматриваемом примере коэффициент детерминации составит т*/х -
= (-0,61)2 = 0,372, или 37,2 %. Следовательно, на рассматриваемых
автотранспортных предприятиях 37,2 % вариации выработки на одного
рабочего обусловлено изменением уровня текучести кадров.
Методика измерения тесноты связи показателей при множествен-
ной и частной корреляции изложена в п. 7.4.
7.4. Основные сведения о множественной и частной
корреляции
В моделях множественной корреляции зависимая переменная
рассматривается как функция не одной, а нескольких независимых
переменных:
y=f(x\^^xr).
При множественной корреляции выбор уравнения связи намного
сложнее, чем при парной корреляции, поскольку действие разнооб-
разных факторов имеет различный характер и, как правило, отсутст-
вует возможность графического контроля. Поэтому еще большее
210
значение приобретает качественный анализ связи каждого из факто*
ров с зависимой переменной.
В корреляционном анализе часто применяется двухфакторное
уравнение множественной регрессии, геометрически отражающее
плоскость
yxz sa + bx + cz9
где а> Ь, с— неизвестные параметры уравнения.
Параметры двухфакторного уравнения множественной корреля-
ции определяют из условия наименьших квадратов, которое требует,
чтобы минимизировалось выражение
п
4 (у<-УхЛ
где п — количество наблюдений; i — порядковый номер наблюдений; yz- — фактические
значения результативного признака; у^ — расчетные значения результативного признака,
вычисленные по уравнению регрессии.
Затем необходимо последовательно приравнять нулю частные
производные уравнения наименьших квадратов по коэффициентам а,
Ь, с. После преобразования будет получена система трех нормальных
уравнений для определения коэффициентов множественной регрессии
а, Ь, с. Эта система уравнений имеет следующий вид:
2у = па + b Zx + с Ez;
Syx -aZx + b + с Еху,;
Zyz = a£y + b Zxy + с Еу2.
В общем случае линейное уравнение множественной корреляции
для п факторов записывается так:
Используя принцип наименьших квадратов, получим систему нор-
мальных уравнений для расчета коэффициентов регрессии q, а2,ап»
Sy«noo+ ei^l+fl2^2+*” + ап Чн
Syxi=flQSxi+fljSx2+ • • •+
2ух2я в 0 2*2+ а 1 2+ а2 ^2+ • • • + Ъх*п 5
Xjan = e0Sxn + ajZxjxn+a2Sx^n + ... + enX^.
211
Коэффициенты регрессии имеют определенный смысл, играющий
важное значение в экономико-математическом анализе. Например,
коэффициент ц, в системе нормальных уравнений отвечает на вопрос,
на сколько единиц в среднем меняется.^ если фактор х\ изменить на
единицу при условии, что другие факторы ............сохранят
постоянные значения.
Теснота корреляционной связи между зависимой переменной ух и
независимыми переменными хр . . ., х„ измеряется с помощью
коэффициента множественной корреляции:
/
RyxltX2f..., х„ 1 Цу-у? ’
где 26/—>х1,х2,..чхп)2'” Дисперсия фактических значений признака у at теоретических
ее значений, рассчитанных по уравнению множественной регрессии; 2 (у — у)2 — общая
дисперсия фактических значений признака у от их средней арифметической.
По абсолютному значению коэффициент множественной корреля-
ции изменяется от 0 до 1. Определенного знака он не имеет, так как
показатели-факторы могут по-разному влиять на зависимую пере-
менную, т. е. с одними факторами корреляция может быть положи-
тельной, с другими - отрицательной или знакопеременной.
Коэффициент множественной корреляции зависит от отношения
между рассеянием значений, определенных на основе уравнения
множественной регрессии, и рассеянием фактических значений зави-
симой переменной. Величина его будет тем больше, а корреляционная
связь тем более интенсивной, чем меньше фактические значения
отклоняются от теоретической линии множественной регрессии.
Коэффициент множественной корреляции достигнет значения, равного
единице, если все,наблюдаемые значения признака будут полностью
совпадать с рассчитанными на основе уравнения множественной
регрессии. Это значит, что вариация зависимой переменной полностью
объясняется изменениями независимых переменных, включенных в
расчет корреляции.
В экономических исследованиях приходится часто определять
степень влияния отдельного фактора на зависимую переменную при
условии, что остальные независимые факторы не меняются. Такие
задачи решаются методами частной корреляции. Для определения
уравнения частной регрессии по какому-либо фактору необходимо в
найденное уравнение множественной регрессии подставить средние
или другие фиксированные значения факторов,кроме анализируемого.
Такие уравнения частной регрессии будут различаться между собой
лишь свободным членом. Коэффициент регрессии при исследуемом
факторе всегда остается тем же, что и в уравнении множественной
регрессии и называется частным коэффициентом регрессии. Интенсив-
ность влияния каждого фактора на зависимую переменную измеряется
коэффициентом частной корреляции.
212
Коэффициент частной корреляции рассчитывают на основе коэф-
фициентов парной корреляцйи. Например, коэффициент частной
корреляции первого порядка при изучении влияния фактора на
зависимую переменную у, при исключении влияния фактора х2 опре-
деляется из выражения
ryl~ry2r12____
Ryl> 2
где Гу! — коэффициент парной корреляции между зависимой переменной и фактором х^;
гу2 ~ коэффициент парной корреляции между у и х2; г12 — коэффициент корреляционной
зависимости между факторами и х2.
В общем случае, когда в корреляционную модель включено п
независимых переменных хр х2,..хп, воздействующих на изменение
величины зависимой переменной у, коэффициент частной корреляции
любого ранга определяют так:
гу1,2, .(п-1) ~ гуп2,3.. .(п-1)г1 п, 2,3.. .(п-1)
ЯУ1,2, з... п - 2 3.. ,(П_1)К1-г21п,2Д./.(п_7'
Параметры уравнения множественной регрессии, а также коэф-
фициенты частной корреляции целесообразно рассчитывать на ЭВМ по
стандартным программам.
Глава 8
МЕТОДЫ ОПТИМИЗАЦИИ АВТОТРАНСПОРТНЫХ
МОЩНОСТЕЙ И ИХ РАЗМЕЩЕНИЯ*
8.1. Постановка и экономико-математическая модель
задачи развития и размещения транспортных мощностей
Размещение транспортных мощностей в широком его понимании
заключается в территориальном распределении производительных сил
в соответствии с общественным разделением труда. Fro цель - создать
оптимальную пространственную структуру производства, обеспечи-
вающую рациональное использование материальных ресурсов, сбере-
жение общественного труда, комплексное развитие территории и
производственно-экономических связей, улучшение территориальных
пропорций.
Оптимизационные модели развития и размещения производитель-
ных сил относятся к задачам перспективного планирования. На
* В написании главы принимала участие Л. Ф. Сухова.
213
автомобильном транспорте оптимальным считается такой план созда-
ния новых и расширения или модернизации действующих транспорт-
ных мощностей, выбора способа и вида перевозок, при котором спрос
на транспортные услуги удовлетворялся бы полностью с наибольшей
эффективностью.
Решение задачи развития и размещения грузового автотранспорта
позволяет получить ответы на такие вопросы, как:
размещение, размеры и специализация транспортных мощностей;
темпы развития отрасли и отдельных ее подразделений;
соотношение между реконструкцией действующих предприятий и
новым строительством;
потребность отрасли в капитальных вложениях и других важней-
ших ресурсах, а также их распределение между объектами;
прикрепление транспортных мощностей к поставщикам грузов, а
поставщиков к потребителям;
транспортные связи с указанием направления и объема перевозок,
а также провести сравнительную оценку эффективности учтенных
ресурсов, транспортных мощностей применительно к рассматриваемо-
му критерию и в рамках используемой экстремальной модели.
Модели оптимального развития и размещения производства и
транспорта включают обширный круг задач (рис. 8.1). В общем случае
эти задачи должны ставиться как динамические. Динамическая
постановка задач позволяет оптимизировать развитие и размещение
отрасли с учетом процессов ее развития во времени. Технико-экономи-
ческие показатели и ограничения такой задачи должны быть заданы
для всех моментов времени рассматриваемого периода и отражать
связи между последовательными состояниями одного и того же
объекта.
Информационные, а иногда и вычислительные трудности, связан-
ные с динамической постановкой задач размещения, в некоторых
случаях приводят к необходимости упрощенной постановки практи-
ческих задач как статических. При этом система размещения рассмат-
ривается на какой-то фиксированный момент времени (год) и считает-
ся постоянной во времени. Задачу размещения удобнее решать как
задачу линейного программирования, однако это слишком упрощает
модель и не отражает некоторых основных положений теории разме-
щения.
В линейных моделях по существу не учитывается фактор, вызы-
вающий концентрацию автотранспортного производства, - это нели-
нейная зависимость затрат на единицу производства от его масштабов
и специализации. В реальной действительности зависимость затрат от
масштабов производства описывается гиперболической или степенной
функцией. Задача размещения в этом случае должна иметь нелиней-
ную целевую функцию, расчет которой связан с большими трудностя-
ми из-за необходимости анализа работы действующих предприятий и
обработки значительного числа статистических данных методами
корреляционно-регрессионного анализа.
214
Рис. 8.1. Классификация задач развития и размещения производства и транспорта
Применение сложных методов оптимизации, таких, как динамиче-
ское или нелинейное программирование, тоже затруднено, поэтому
прибегают к кусочно-линейной аппроксимации соответствующих
нелинейных зависимостей и последовательному решению целого ряда
линейных моделей. Такой прием используется, в частности, при
решении задачи размещения методом последовательного перерасчета
издержек, который будет изложен несколько позже.
Кратко охарактеризуем некоторые виды задач размещения. Так,
однопродуктовые задачи размещения на автомобильном транспорте
отражают развитие и размещение автотранспортных предприятий,
выполняющих перевозки однородного или взаимозаменяемых грузов.
Многопродуктовые задачи предназначены для выбора оптимальных
мощностей, специализации и размещения транспортных предприятий,
осуществляющих перевозки двух и более видов грузов.
Задачи развития и размещения транспорта могут быть одноэтап-
ными и многоэтапными. В одноэтапных задачах учитывается процесс
доставки либо только сырья, необходимого для производства продук-
ции, либо доставки только продукции к местам ее потребления. Если,
например, оптимизировать транспортный процесс по доставке сырья и
готовой продукции одновременно, то такая задача размещения отно-
сится к типу многоэтапных.
Имеются и другие признаки классификации задач размещения (см.
рис. 8.1). Каждая конкретная задача обычно характеризуется несколь-
кими признаками.
215
В проблеме размещения грузового автомобильного транспорта
одним из важных является вопрос о показателе производственной
транспортной мощности предприятий. От того, насколько правильно
будет обоснован этот показатель, зависит результат решения задачи,
ведь оптимизация размещения на транспорте по сути и сводится к
выбору транспортной мощности предприятий и рациональному их
распределению по территории в соответствии с общественным разделе-
нием труда, уровнем развития производительных сил в регионе и
другими условиями и особенностями района размещения.
В общем понимании мощность - это размер работы, выполняемой
в единицу времени. Поэтому показатель грузовой автотранспортной
мощности должен учитывать все виды работ, выполняемых предприя-
тием. Продукция транспортной работы выражается количест-
вом выполненных тонно-километров и перевезенных тонн груза.
Совместно учесть оба эти вида работ можно с помощью их сопоставле-
ния, а также через переводные коэффициенты и определение показа-
теля транспортной работы в приведенных тонно-километрах. Таким
же методом можно учитывать и остальные виды транспортных работ
(перевозку пассажиров, работу транспорта по часам, транспортно-
экспедиционные услуги и др.).
Другим важным вопросом при разработке экономико-математи-
ческой модели задачи размещения является оценка вариантов разме-
щения по их эффективности. Показатель, определяющий эффектив-
ность размещения и позволяющий выбрать оптимальный план разви-
тия и размещения транспорта с точки зрения этого показателя, назы-
вается критерием оптимальности. От того, насколько обоснованно
выбран этот показатель, зависит эффективность решения всей задачи
размещения.
Основное требование, предъявляемое к критерию оптимальности
в частных практических задачах размещения, заключается в том, что
он должен соответствовать народнохозяйственному оптимуму. Но,
как известно, глобальный критерий окончательно еще не установлен,
поэтому в качестве частных критериев используют различные показа-
тели, которые обеспечивают разработку не оптимального, а лишь
допустимого плана размещения.
Показателем эффективности развития и размещения автотран-
спортного производства служат минимальные суммарные затраты
общественного труда на выполнение транспортных работ. Суммарные
затраты включают затраты, связанные с эксплуатацией подвижного
состава автомобильного транспорта, а также капитальные вложения на
размещение, т. е. приведенные затраты, которые определяют так:
Р =с + ЕнК1
где с— эксплуатационные затраты, связанные с процессом перевозок, р.; Гн— норматив-
ный коэффициент эффективности капитальных вложении; К— капитальные вложения в
размещение, тыс. руб.
216
В результате изменения транспортной мощности происходит
разнородное изменение удельных затрат. С увеличением автотран-
спортной мощности эксплуатационные затраты и капитальные вложе-
ния в расчете на 1 приведенный т-км транспортной работы снижаются,
но увеличиваются затраты на прирост порожних пробегов автомоби-
лей Цу за счет расширения зоны обслуживания. Последний фактор и
ограничивает бесконечный рост мощности ДТП. Следовательно,
затраты на прирост порожних пробегов автомобилей в критерии
оптимальности размещения нужно отразить как самостоятельно-обо-
собленные. Тогда функция цели примет вид
В соответствии с принятым критерием эффективности размещения
и показателем транспортной мощности составлена экономико-матема-
тическая модель задачи развития и размещения автомобильного
транспорта. В модели использованы следующие обозначения:
т — количество возможных пунктов размещения автотранспортных подразделений;
i — индекс пункта размещения, i = 1,2,..rrrt
п — количество обслуживаемых пунктов-грузоотправителей;
j - индекс пункта-грузоотправителя, j =1,2,..., тг,
z — общая сумма приведенных затрат на эксплуатацию, капитальные вложения и
прирост порожних пробегов автомобилей, р.;
Ьу — годовой объем транспортной работы /то грузоотправителя, приведенные т-км;
— расчетная мощность *то автотранспортного подразделения, приведенные т-км в
год;
— принятая мощность i-го автотранспортного подразделения, приведенные т-км в
год;
Cj — эксплуатационные затраты на выполнение единицы транспортной работы в t-м
автотранспортном подразделении, рприведенный т-км;
— удельные капитальные вложения в t-м автотранспортном подразделении, р./1
приведенный т-км;
dy — затраты на прирост порожних пробегов автомобилей за счет нулевых при подаче
автомобиля из *-го автотранспортного подразделения в /-й пункт грузоотправи-
теля, а также из последнего места разгрузки обратно, р./1 приведенный т-км;
xij — годовая потребность в перевозках /-го пункта-грузоотправителя, которая удов-
летворяется Ы автотранспортным подразделением, приведенные т-км.
Экономико-математическая модель задачи размещения будет
следующей.
Необходимо минимизировать суммарные приведенные затраты на
эксплуатацию, капитальные вложения и прирост порожних пробегов
автомобилей:
£‘=1 5=i
217
При следующих условиях:
1. Общий объем транспортной работы, выполняемый каждым
автотранспортным подразделением, должен соответствовать его
расчетной мощности
п
2. Потребность грузоотправителей в перевозках должна быть
полностью удовлетворена
т
hxv=bi'
3. Принятая суммарная мощность всех включенных в задачу
автотранспортных подразделений должна превышать общий спрос на
транспортную работу, что отражает условие полного удовлетворения
спроса
т п
2* Q; > S Ъ: •
М ‘ >1 }
4. Суммарный спрос на транспортную работу реальных потреби-
телей должен соответствовать общей расчетной мощности автотран-
спортных подразделений
п т
S Ь.-= S W/.
>1 J М 1
5. Условие неотрицательности переменных
Таким образом, сформулирована модель так называемой открытой
задачи размещения, в которой суммарная транспортная мощность
пунктов размещения превышает общий спрос грузоотправителей на
перевозки с целью его полного удовлетворения. Прежде чем присту-
пить к решению задачи, необходимо свести ее к закрытому виду, что
достигается введением в модель в данном случае ’’фиктивного”
потребителя.
Объем спроса этого потребителя на транспортную работу
соответствует разности между суммарной мощностью транспортных
подразделений и суммарным спросом потребителей:
тп п
Ф 1=1 /»1
218
После формулировки и конструирования экономико-математиче-
ской модели задачи развития и размещения необходимо выбрать
метод ее решения и приступить к подготовке исходных данных для
конкретного района размещения автотранспорта.
8.2. Метод последовательного перерасчета издержек
Исходными данными для решения экономико-математической
модели задачи размещения грузовых автотранспортных мощностей
служат:
перечень пунктов грузообразования и их потребность в перевоз-
ках, схема географического расположения в районе размещения и
схема транспортной сети района;
возможные варианты развития действующих транспортных мощ-
ностей с анализом их технико-эксплуатационных показателей по
различным перспективным вариантам эксплуатации и реконструкции.
Это данные о размерах транспортных мощностей, соответствующих
эксплуатационных затратах и капитальных вложениях, затратах на
нулевые пробеги автомобилей для различных вариантов возможного
развития мощностей;
возможные пункты размещения новых транспортных мощностей с
возможными их предельными размерами в каждом пункте и соответ-
ствующие технико-эксплуатационные и экономические показатели.
Для того чтобы планировать размещение транспорта, необходимо
знать перспективный спрос на перевозки. Для этого существуют
определенные методы расчета показателя как в территориальном
разрезе, так и по этапам планирования. Это могут быть методы экс-
траполяционного прогнозирования, данные плановых и статистиче-
ских органов о перспективах развития исследуемого района размеще-
ния и др. Однако следует обметить, что показатель перспективного
спроса на перевозки остается все же весьма условным и поэтому
требует периодического пересмотра и корректировки.
Одной из сложных задач при подготовке исходной информации
для решения вопросов размещения транспортных мощностей являют-
ся технико-экономические изыскания по установлению возможных
пунктов размещения мощностей. Теоретически пунктов возможного
размещения бесконечно много, однако число мест размещения, в
которых имеются необходимые предпосылки, всегда ограничено. Это,
как правило, центры административных районов и другие населенные
пункты, в которых имеются источники необходимых ресурсов (трудо-
вых, энергетических и т. д.) и коммуникации по их доставке.
Особое внимание следует обратить на экологические и социальные
факторы и условия при размещении транспортных производств. Для
этого следует проводить необходимые изыскания и экспертизы.
В качестве исходных нужно также иметь данные о составляющих
целевой функции (критерии оптимальности), т. е. данные об эксплуа-
219
тационных и капитальных затратах, а также затратах на прирост
порожних пробегов автомобилей. Эти показатели должны быть рассчи-
таны на единицу транспортной работы, т. е. 1 приведенный т-км.
Себестоимость перевозок для различных вариантов развития тран-
спортных мощностей определяют на основе отчетных и статистических
данных при помощи методов корреляционно-регрессионного анализа и
прогнозирования технического прогресса в области грузового авто-
транспорта. Капитальные вложения определяют по сметной стоимости
строительства и стоимости подвижного состава.
Изложим более подробно методику расчета затрат на прирост
порожних пробегов.
Затраты на прирост порожних пробегов автомобилей зависят от
территориального расположения грузоотправителей, грузополучате-
лей и мест размещения автотранспортных мощностей. Прирост проис-
ходит из-за изменения величины нулевых пробегов. При обслужива-
нии перевозками j-ro пункта-грузоотправителя автотранспортным
подразделением, расположенным в пункте i, затраты на нулевой
пробег за все время работы составят
п
х
/=1
т
1=1 U pij м
где /q.. — нулевой пробег автомобиля при подаче его от (то автотранспортного подразделе*
ния Kj-му грузоотправителю и обратно, км; — автомобиле-дни работы /то грузоот-
правителя при его обслуживании i-м автотранспортным подразделением; скм — стоимость
1 км пробега автомобиля, р.
Если в пункте-грузоотправителе выполнено р^ив т.км транспорт-
ной работы, то затраты на прирост порожних пробегов автомобилей в
расчете на 1 приведенный т-км составят
Ч'А%Скм
^прив т-км
(8.1]
Чтобы определить затраты на 1 км нулевого пробега, необходимо
полученное выражение разделить на величину нулевых пробегов.
Удельные затраты на прирост порожних пробегов автомобиле?
рассчитывают по каждому сочетанию пункта размещения и пункт?
отправления груза в зависимости от расстояния между ними. Эт1
затраты учитывают в критерии эффективности размещения.
В соответствии с экономико-математической моделью задачу
размещения составляется исходная матрица для решения (табл. 8.1). Е
первом столбце матрицы указаны пункты возможного размещения
автотранспортных подразделений, в последнем столбце - их расчет
ная мощность, полученная при решении задачи. В предпоследнее
столбце проставлены значения принятой мощности, соответствующие
максимально возможной мощности подразделения в данном пункте
220
Таблица 8.1
Пункт возмож- ного раз- мещения АТП Грузоотправитель Транспортная мощность, млн. приведенных т«км BI2S
Bl В2 • • . ВП ВФ
приня- тая расчет- ная
-^1 сущ ci+dn *11 c12+d12 *12 ... ci+din *1п м *1п+1 Wj = п
42 02+^2+ ^21 *21 <?2+^2+^22 *22 ... *2п 0 *2, п+1 42 «2» П =.Х*? J-1 *
... ••• ••• ... ... ... ... ...
Ат 1 *ml хт2 ... хтп 0 *ш, п+1 4т ”т = п
Спрос на перевоз- ки, приве денные т«км в гол Ь1 Ь2 ... Ьп т 1=1 п — S bi >1 J V Т м з ~v т Z w.- = i=l 1 n = S bj
Пункты-грузоотправители указаны по горизонтали матрицы, а их
спрос на перевозки - в последней строке. В матрице один столбец
отводится для фиктивного потребителя, спрос которого на транспорт-
ную работу принимается равным разности между принятой мощностью
автотранспортных подразделений и общей потребностью грузоотпра-
вителей в транспортной работе.
В правом верхнем углу клеток матрицы проставляют показатели
суммарных затрат на единицу транспортной работы pi}-. Напомним, что
суммарные затраты включают эксплуатационные затраты с;, капиталь-
ные вложения Kj, а также затраты на прирост порожних пробегов авто-
мобилей djj. В клетках матрицы, соответствующих действующим АТП,
которые не требуют капитальных вложений на реконструкцию и
развитие, в суммарных затратах учитываются только затраты на
эксплуатацию и прирост порожних пробегов, т. е. с(- + d^. В клетках
столбца ’’фиктивный потребитель”, соответствующих действующим
221
транспортным мощностям, проставляют букву М, которая означает
бесконечно большое число. В остальных клетках проставляют нули.
Это необходимо для того, чтобы предупредить планирование фиктив-
ной транспортной работы действующим предприятиям и поставить в
равные условия остальные подразделения.
Поскольку размещаемые мощности и расстояния отличаются друг
от друга, в исходной матрице будут разными и показатели критерия
оптимальности. Появляется возможность выбрать такие мощности и
места их размещения, при которых общая сумма затрат на транспорт-
ную работу будет минимальной.
Задачу размещения целесообразно решать методом последователь-
ного перерасчета издержек, который позволяет учесть нелинейность
изменения удельных приведенных затрат от транспортной мощности и
свести общее решение к решению ряда более простых транспортных
задач.
Метод последовательного перерасчета издержек рассмотрим на
условном числовом примере. Пусть известен район, в котором необхо-
димо разместить транспортные мощности с таким расчетом, чтобы
полностью удовлетворить спрос на перевозки с наибольшей их эффек-
тивностью. С этой целью в районе размещения проведены технико-
экономические изыскания, в результате которых выявлено пять
возможных пунктов размещения транспортных мощностей - Ар А% А$,
А* и А$ и максимально возможная величина транспортной мощности в
каждом из пунктов. Эти значения мощностей занесены в предпослед-
ний столбец матрицы задачи (табл. 8.2) ’’принятая мощность”. На
основе изучения и обработки отчетно-статистических данных, а также
прогноза развития перевозок установлены плановые объемы тран-
спортной работы в пунктах-грузоотправителях. Их значения помеще-
ны в последнюю строку матрицы.
Для каждой клетки матрицы рассчитаны соответствующие показа-
тели критерия оптимальности. Для этого методом корреляционного
анализа по исследуемой совокупности автотранспортных предприятий
установлена зависимость эксплуатационных затрат на единицу тран-
спортной работы от размера транспортной мощности, которая описыва-
ется гиперболой вида
q = 2,93 + 6,5/х,
где х — транспортная мощность, млн. приведенных т-км в год.
Таким же методом установлена зависимость капитальных вложе-
ний на 1 приведенный т-км транспортной работы от мощности:
К,=3,04 + 16,3/х.
Эти два элемента критерия оптимальности зависят только от
транспортной мощности и сохраняют свое значение для всех клеток
строки, соответствующей данной мощности.
222
Таблица 8.2
Пункт ВОЗМОЖ- НОГО размеще- ния АТП По- тенциа- лы строк Грузоотправитель Транспортная мощ- ность, млн. приведен- ных T-Км В Год
*1 В2 *3 В4 В5 в6 Вф
п ©тени (иалстс >лбца приня- тая расчет- ная
10 8 9 11 11 10 0
А1 0 11 14 9 3 12 16 10 0 2 5 3
А2 0 9 8 4 10 14 12 11 0 6 10 4
А3 -2 8 12 7 7 9 7 11 .8 1 0 15 - 15
^4 сущ 8 5 10 0 11 14 9 3 12 м 8 8
А5 -1 16 12 14 10 2 18 15 0 2 2
Спрос на перевозки, млн. приведенных Т-КМ 5 4 10 9 3 1" 8 40 32
Затраты на прирост порожних пробегов автомобилей dy зависят
как от объема выполняемой транспортной работы, так и от расстояния
между пунктами размещения и грузоотправления, поэтому их необхо-
димо рассчитать для каждой клетки матрицы по формуле (8.1).
Исходная матрица задачи размещения имеет форму табл. 8.2,
разница состоит лишь в том, что в ней не заполнен последний столбец
и не разнесены загрузки в клетки матрицы. Эти действия выполняют в
ходе решения задачи. Решают исходную матрицу как открытую тран-
спортную задачу любым из известных методов, например методом
потенциалов. Расчетная мощность в каждом из пунктов размещения
соответствует сумме транспортных работ (по строке), которую должно
выполнить соответствующее АТП в пунктах-грузоотправителях (без
223
фиктивного) согласно полученному плану перевозок. Значение расчет-
ной мощности заносят в последний столбец матрицы и сравнивают с
принятым значением мощности. Если окажется, что значения совпа-
дают или расчетная мощность равна нулю, то такой план считают
оптимальным и решение задачи закончено. Если же такого соответст-
вия нет, решение задачи следует продолжить. Для этого составляют
новую матрицу, в которой пересчитывают показатели критерия опти-
мальности согласно расчетной мощности (отсюда название метода).
Затем решают пересчитанную матрицу и подсчитывают суммарные '
затраты на перевозки. Составление и решение новых матриц продол-
жают до тех пор, пока не встретится сумма затрат, ранее уже получен-
ная. Такое размещение соответствует оптимальному. Размеры мощнос-
тей считаются рациональными, а места их расположения наиболее
эффективными.
Первый план размещения транспортных мощностей, полученный в
результате решения исходной матрицы методом потенциалов, пред-
ставлен в табл. 8.2. Согласно этому плану общие издержки на осущест-
вление транспортной работы составят 2666 тыс. р.:
г-9.3 + 8.4 + 7.7 + 9.7 + 8.1 + 8.5 + 9.3 + 10.2 = 2666тыс.р.
Сравнивая расчетную мощность с принятой, видим, что по пунк-
там А] и они не совпадают. Это значит, что решение задачи размеще-
ния не закончено, и его следует продолжить. Для этого составляется
новая матрица, в клетках первой и второй строки которой показатели
критерия оптимальности пересчитаны соответственно на мощность,
равную 3 и 4 млн. приведенных т-км в год. Поскольку от величины
мощности зависят удельные эксплуатационные затраты и капитальные
вложения, их пересчитывают по тем же корреляционным зависимо-
стям, что и на первом этапе решения. Составляющая критерия опти-
мальности по затратам на прирост порожних пробегов автомобилей d{j
не пересчитывается, так как не зависит от размера транспортной мощ-
ности.
Пересчитанную матрицу решают так же, как транспортную задачу,
полученное решение представлено в табл. 8.3.
Анализируя табл. 8.3, видим, что расчетные мощности остались
прежними, следовательно, пересчитывать затраты нет смысла, так как
они будут теми же. Изменилась общая сумма затрат за счет увеличе-
ния пересчитанных значений критерия в сравнении с исходными
значениями, что объясняется снижением расчетной мощности по
отношению к принятой. Общие издержки по второму плану размеще-
ния транспортных мощностей составят:
z=2-13 +143+4-11 + 8.7 + 7.9 + 5-8 + 3-9 + 2-10 - 2890 тыс. р.
Поскольку получены те же расчетные мощности, что и в первом
плане размещения, продолжать дальнейшее решение задачи нецеле-
224
Таблица 8.3
Пункт ВОЗМОЖНОГО размеще- ния АТП Потен- пиал строки Грузоотправитель Транспортная мощность, млн. приведенных т*км в год
А А А А А А А
Потенциал столбца ПриНЯ- тая расчет- ная
10 И 13 15 11 13 0
А1 0 14 17 13 2 15 19 13 1 0 5 3
А1 0 12 11 4 14 17 15 14 0 6 10 4
Аз “6 8 12 7 8 9 7 И 8 0 15 15
^4 сущ -2 8 5 10 11 0 14 9 3 12 м
As —5 16 12 14 10 2 18 15 0 2 2
Спрос на перевозки, млн. приведенных т*км 5 4 10 9 3 1 8 40 32
сообразно, так как оно будет повторяться. Данное распределение
транспортных мощностей принимается за оптимальное.
Полученный план размещения транспортных мощностей является
реальным, поскольку в нем потребности пунктов-грузоотправителей в
транспортной работе удовлетворены полностью. При этом не нарушает-
ся баланс между расчетной суммарной мощностью и общей потреб-
ностью в транспортной работе. Рациональным является размещение в
пункте Aj мощности в 3 млн. приведенных т-км в год в пункте Д2 ”
4 млн. приведенных т-км; в пункте А3 - 15 млн. приведенных т-км; в
пункте -^4 сущ следует оставить ту же действующую транспортную
225
I
I
Таблица 8.4
Пункт размещения автотран- спортной мощности Обслужи- ваемый грузоотпра- витель Объем тран- спортной работы, млн. приведенных Т-км
Рз 2
U 1
Л2 В2 4
Д. рз 8
Л3 1*4 7
Пункт * размещения автотран- спортной ’мощности Обслужи- ваемый грузоотпра- витель . Объем тран- спортной работы, млн. приведенных Т-км
•^4сущ А Vs 5 3
А5 в< 2
Итого 32
мощность, т. e. 8 млн. приведенных т-км, и в пункте А5 рационально
разместить мощность, равную 2 млн. приведенных т-км в год.
Получен также план рационального прикрепления грузоотправи-
телей к местам размещения транспортных мощностей, расшифровка
которого приведена в табл. 8.4.
8.3. Способы решения частных задач размещения
В отличие от общей задачи размещения в частных задачах рассмат-
ривают отдельные элементы системы размещения. Если в общей задаче
размещения вопросы количества, мощности, мест расположения
автотранспортных подразделений решают комплексно, то в частных
задачах рассматривают ‘один-два из этих вопросов при условии, что
другие составные элементы размещения заданы и не требуют экономи-
ческого обоснования.
К категории частных задач размещения, например, относят:
задачу выбора места размещения автотранспортного подразделе-
ния заданной мощности;
определение оптимального размера и количества автотранспорт-
ных подразделений, когда известны общая потребность в подвижном
составе и места его возможной дислокации;
установление рациональной зоны деятельности единичной тран-
спортной мощности при известном ее местоположении;
решение альтернативных вопросов об экономичности создания
новых транспортных мощностей или реконструкции действующих;
рациональное распределение подвижного состава по автотран-
спортным подразделениям и др.
Частные задачи размещения обычно решают с помощью специаль-
ных упрощенных методов и приемов. Рассмотрим некоторые примеры
решения частных задач размещения.
226
Определение размера и потребного количества автотранспортных
подразделений. Эти задачи необходимы при создании транспортных
организаций, когда известны общая потребность в автомобилях и
структура парка подвижного состава.
Показателем критерия оптимальности служит общая сумма затрат,
включающая капитальные вложения на строительство и создание
материально-технической базы автомобильного транспорта и затраты
на эксплуатацию транспортных средств.
Принцип минимизации общих затрат основан на том, что в тран-
спортном предприятии с увеличением числа автомобилей капиталь-
ные вложения на единицу подвижного состава снижаются, а эксплуа-
тационные расходы увеличиваются (рис. 8.2).
Расчет капитальных вложений определился на основе действую-
щих нормативов, а удельные эксплуатационные затраты - по эмпири-
ческим данным с тем, чтобы учесть конкретные условия эксплуатации
автомобилей и уровень организации производства. В. случае отсутст-
вия фактических данных по эксплуатационным затратам (например,
при создании новых подразделений) используют нормативные значе-
ния этих затрат, скорректированные для конкретных условий работы
транспорта в районе размещения или эмпирические показатели для
таких же подразделений,
работающих в аналогичных
условиях.
Установив конкретные
виды зависимостей капиталь-
ных вложений и эксплуата-
ционных затрат на единицу
подвижного состава и сложив
их, находим функцию общих
затрат (см. рис. 8.2). Функция
является криволинейной,
поэтому минимального значе-
ния она достигает в точке
перегиба, где первая произ-
водная функция равна нулю.
Продифференцировав функ-
цию общих затрат и приравняв
первую производную по
количеству автомобилей к
нулю, находим оптимальное
количество автомобилей в
подразделении, при котором
достигаются минимальные
затраты на капитальные
вложения и эксплуатацию
автомобилей.
Разделив общую потреб-
Рис. 8JL График зависимостей капитальных
вложений и эксплуатационных затрат от
количества автомобилей на предприятии
227
ность в подвижном составу на оптимальный размер подразделения,
определяем необходимое их количество.
Рассмотрим конкретный пример. Пусть для выполнения заплани-
рованного объема транспортной работы необходимо 600 автомобилей.
Необходимо решить вопрос, сколько и какой величины надо органи-
зовать автотранспортных подразделений, чтобы затраты по их строи-
тельству и эксплуатации подвижного состава были бы минимальными.
Зависимость эксплуатационных затрат в расчете на один автомо-
биль имеет вид
Э = 7,8 + 0,0275АсГГ
Зависимость удельных капитальных вложений на один автомо-
биль от количества автомобилей в подразделении
К=5,4+4ММСП.
Сложив эти зависимости, получим функцию общих затрат:
«= 13Д + 0,02754ел + 404/4№.
Взяв первую производную этой функции и приравняв ее нулю,
имеем
(fa/dAen- 0,0275 - «А/Ат‘ 0.
Определим оптимальное количество автомобилей, которое долж-
но быть в транспортном подразделении:
А °™ = -/404/0,0275 = 120 ед. '
При общей потребности в 600 автомобилей необходимо иметь пять
автотранспортных подразделений оптимального размера (600:120).
Общие минимальные затраты на создание подразделений и на
эксплуатацию подвижного состава в этих подразделениях составят:
zmin ” (13,2-0,0275-120 + 404/120)600 = 11922 тыс. р.
Создать транспортные подразделения, равные по мощности, в
конкретных условиях района размещения практически невозможно,
поскольку оказывают влияние различные факторы размещения.
Поэтому необходимо знать, насколько допустимо отклонение от
оптимального количества подвижного состава в подразделении и к
каким экономическим последствиям это приведет.
Исследуя функцию общих издержек (см. рис. 8.2) в зависимости от
количества автомобилей в подразделении, можно заметить, что в
области минимума она меняется медленно, но с удалением от этой
228
точки, особенно в сторону малых ее значений, функция растет быст-
рее, резче. Это ее свойство может быть использовано для обоснования
принятия решения относительно корректировки величины подразде-
ления.
Отклонения фактического количества автомобилей в подразделе-
нии от оптимального можно выразить с помощью коэффициента а:
А сп. факт= ЯЛ- опт*
Тогда при фактическом размере подразделения суммарные из-
держки
ga+i
гфакг” а гопт*
Таким образом, фактические издержки будут отличаться от
оптимальных на величину fc:
lt = (ga + l)/g.
Коэффициент к определяет относительное увеличение издержек за
счет отклонения действительного количества автомобилей в подраз-
делении от оптимального. С помощью этого коэффициента можно
установить предельные отклонения в количестве автомобилей в
подразделении и соответствующее им возрастание общих затрат.
Если известно увеличение расчетных издержек, вызванное реаль-
ными условиями размещения, то можно поступить и наоборот, т. е.
определить возможные отклонения в количестве автомобилей. В этом
случае используют соотношение
g-fc± Vka-1.
Например, допустим, что фактические издержки автотранспорта
увеличились на 5 % относительного оптимального их значения, т. е.
к = 1,05. Следовательно,
g »1,05 ± V 1,1025-1* 0,73 < g < 1,37.
Это значит, что если оптимальное количество автомобилей в
подразделении составляет 120 ед., то его можно уменьшить на 27 % или
увеличить на 37 %, что приведет к одинаковому изменению общих
издержек, а именно они увеличатся на 5 %. Таким образом, при увели-,
чении издержек на 5 % количество автомобилей в подразделении
может колебаться от 88 до 164 ед.
Оптимизация транспортной мощности по плотности грузообраэо-
вания. Одной из частных задач размещения является определение
рациональной производственной мощности и радиуса зоны обслужива-
229
ния действующего автотранспортного предприятия по заданной
плотности грузообразования. Плотность грузообразования измеряется
количеством транспортной работы, приходящейся на единицу площа-
ди обслуживаемой территории.
К таким задачам можно отнести определение мощности и зоны
обслуживания станций технического обслуживания и ремонта легко-
вых автомобилей, организаций по транспортно-экспедиционному
обслуживанию населения, размещение ремонтных предприятий,
определение мощности и. зоны обслуживания автотранспортных
предприятий, занятых перевозкой сельскохозяйственных грузов и др.
Очевидно, что при более высокой плотности грузообразования
необходимо создавать транспортные предприятия большей мощности с
меньшим радиусом обслуживаемой территории. И наоборот, при
низкой плотности грузообразования часто бывает экономически
оправданным создание предприятий малой мощности, поскольку в
этих условиях резко возрастают затраты на нулевые пробеги автомо-
билей, что может свести на нет выгоды от укрупнения транспортных
мощностей. В каждом конкретном случае размер транспортной мощ-
ности и радиус обслуживаемой территории должны устанавливаться
на основе аналитических расчетов.
При размещении грузовых автотранспортных предприятий с
заданным местоположением возникает необходимость определить
транспортную мощность и радиус обслуживаемой территории, при
которых сумма приведенных затрат на эксплуатацию и нулевые
пробеги автомобилей была бы минимальной. При этом целевая функ-
ция будет иметь следующий вид:
где s(p) — приведенные затраты на эксплуатацию автомобилей, pjl приведенный т-км;
s(Lq) - затраты на нулевые пробеги автомобилей, kJkm.
Для автомобильного транспорта общего пользования установлено,
что зависимость удельных приведенных затрат от мощности авто-
транспортного предприятия описывается степенной функцией
/ > -ь
где а, Ь - параметры уравнения; р — мощность автотранспортного предприятия, млн. при-
веденных т-км.
Зависимость удельных затрат на нулевые пробеги автомобилей от
размера транспортной мощности устанавливалась исходя из следую-
щих предположений: форма обслуживаемой территории - круг,
плотность грузообразования распределена по территории равномерно.
Расчетная формула при этих условиях имеет вид
~ 388,94^^8 Яв^"
1М0000.ОрЧ/^
230
где - расходы на 1 км нулевого пробега, 14 в — коэффициент кривизны маршрута
(принят 1,6); QT *- производительность автомобиля за год, млн. приведенных т*км; л —
число "Пи”, равное 3,14; fc — удельная плотность грузообразования, млн. приваленных
Т'Км/км3.
Общая сумма удельных затрат, которую необходимо минимизи-
ровать,
-Ь 388.9*»^»%^
«общ’®1 + 10W000.0г<лкуд- ’
Определив первую производную этой функции и приравняв ее
нулю, получим формулы для. расчета оптимальной мощности авто-
транспортного предприятия по заданной плотности грузообразования:
1_____
Ь + 0,5
и оптимального радиуса обслуживаемой территории
Я4Ц w»;; a+l
или __________,
R .у_£ж’.
ОПТ V як
НКуд
Определение оптимальной автотранспортной мощности и радиуса
обслуживания рассмотрим на примере. Допустим, зависимость удель-
ных приведенных затрат от мощности описывается зависимостью вида
—0,163
3(У-8^75р
Известны: к =11 191 приведенных т-км/км3; = 20 к./км; Q. =
= 100 000 приведенных т-км. Коэффициент кривизны маршрутов в
районе размещения 6 = 1,2; а8 = 0,7. Подставив данные в расчетную
формулу мощности, получим
5142,1-8,375*0,163 V3,14-0,11191
Ропт"| 20.0,7-1,2
_1___
0,663
- 21,2 млн. приведенных т*км.
Радиус обслуживаемой территории
“ J 3,14.0,011191""" ‘ 24,5
Таким образом, оптимальная мощность автотранспортного пред-
приятия при заданных условиях размещения 21,2 млн. приведенных
231
Таблица 8.5
АТП Мощность АТП, тыс. при- веденных Т-км Потре- битель Спрос, тыс. приве- денных т-км Затраты на 1 приведенный т-км, к.
В1 В2 83 84 В5
Л1 7070 81 1630 А1 7 12 9 21 16
А2 11100 *2 815 А2 20 18 10 14 8
Аз 6500 83 1225 А3 24 26 16 19 20
А4 6400 84 20350 А4 17 30 22 23 15
в5 650
т-км в год при рациональном радиусе обслуживаемой территории
24,5 км.
Выбор места размещения автотранспортного предприятия задан-
ной мощности. Допустим, требуется построить новое транспортное
предприятие, поскольку два существующих не справляются с расту-
щими объемами перевозок. Новое предприятие необходимо размес-
тить в одном из двух предполагаемых мест. Задача состоит в том,
чтобы построить новое предприятие заданной мощности в таком месте,
где расходы на его строительство, а также затраты на содержание и
эксплуатацию подвижного состава будут минимальными.
Несмотря на то что при решении задачи учитываются общие
затраты, на размещение предприятия оказывает влияние только часть
их, а именно затраты на подачу автомобилей к месту первой погрузки
и возвращению их в гараж с места последней разгрузки. Это объясня-
ется тем, что дополнительно вводимая мощность задана однозначно и
поэтому затраты на строительство, содержание и эксплуатацию под-
вижного состава являются функцией мощности и в любом пункте'
размещения будут одни и те же. Разными будут затраты, связанные с
подачей и возвратом автомобилей, поскольку соответствующие
расстояния неодинаковы.
Необходимая для решения задачи информация, касающаяся
имеющихся издержек и планируемых мощностей, содержится в
табл. 8.5.
В исходных данных задачи мощность автотранспортных предприя-
тий и спрос потребителей на транспортные услуги выражены в приве-
денных тонно-километрах, что учитывает особенности работы тран-
спорта и его продукции. Мощность вновь вводимого предприятия
составляет 6500 тыс. приведенных т«км в год. Издержки на единицу
транспортной продукции (работы) по действующим предприятиям (Aj
и А2) включают эксплуатационные расходы, а по вновь вводимым (A3
232
и А4) ~ эксплуатационные расходы и капитальные вложения на их
строительство с учетом нормативного срока окупаемости.
Задача заключается в том, чтобы определить, в каком из двух
возможных мест - А$ или А4 - более экономично строить новое пред-
приятие мощностью 6500 тыс. приведенных т*км в год. Решим задачу
последовательно, и проанализируем возможность размещения пред-
приятия вначале в пункте А3, а затем в пункте Д4.
На I этапе решения исходные данные из табл. 8.5, касающиеся
деятельности предприятия А3, полностью включаются в транспортную
матрицу. Как это показано в табл. 8.6, наличные и планируемые
мощности, а также спрос потребителей заносятся соответственно в
крайний правый столбец и нижнюю строку, они являются ограничи-
тельными условиями задачи. Каждая клетка матрицы соответствует
возможному варианту обслуживания потребителей транспортными
услугами. По каждому из вариантов предусмотрены свои издержки,
которые проставлены в верхнем правом углу клетки. Остальная часть
клетки предназначена для записи возможных объемов транспортных
работ.
Задача решена модифицированным распределительным методом,
проверка на оптимальность осуществлена с помощью метода потен-
циалов. Оптимальное распределение для варианта А$ приведено в
табл. 8.6.
Таблица 8.6
АТП Потен- циал строки Потребитель Транспортная мощность, тыс. приведенных Т-КМ
Bl Bi Въ В4 В5
Потенциал столбца
7 12 9 21 15
А1 0 7 1630 12 815 9 1225 21 3400 16 7070
Ai -7 20 18 10 14 10450 8 650 11100
-2 24 26 16 19 6500 20 6500
Спрос, тыс. приве- денных т*км 1630 815 1225 20350 650 24670
233
Из оптимального плана распределения мощностей следует, что
существующее предприятие А± должно обслуживать потребителей By
fy, В3, By предприятие А2 - потребителей В^ и В$; вновь вводимое
транспортное предприятие обслуживает потребителя В4. Минимальные
издержки при таком распределении транспортных мощностей составят
7.1630 +12-815 + 94225 + 21.3400 +14*10450 +19.6500 + 8-650 - 3786,15 тыс. р.
Такие же расчеты проведены и по варианту строительства нового
транспортного предприятия в пункте Л4. Оптимальное распределение
мощностей по этому варианту представлено в табл. 8.7.
Общие издержки в связи с размещением нового предприятия в
пункте А* составят 4046,15 тыс. р. Следовательно, более экономичным
является размещение нового автотранспортного предприятия в пунк-
те А^ что обеспечит экономию средств по сравнению со вторым вари-
антом в 260 тыс. р. в год (4046,15 - 3786,15 и 260 тыс. р.).
Данная задача может быть решена и другим способом, когда
рассматриваются одновременно оба варианта строительства. Условие
задачи приведено в табл. 8.8. Чтобы сбалансировать общий спрос и
общую мощность, в задаче введен фиктивный потребитель, спрос на
который равен разности между суммарной мощностью АТП и общим
спросом, т. е. 31170 - 24670 = 6500 тыс. приведенных т-км. Транспорт-
Таблица 8.7
АТП Потен- циал строки Потребитель Транспортная мощность, тыс. приведенных т-км
*2 *3 В4. *5
Потенциал столбца
7 12 9 21 15
А1 0 7 1630 12 815 9 1225 21 3400 16 7070
а2 -7 20 18 10 14 10450 8 650 11100
Л4 —2 17 30 22 23 6500 18 6500
Спрос, тыс. приве- денных т-км 1630 815 1225 20350 650 24670
234
Таблица 8.8
АТП Потен- циал строки Потребитель Транспортная мощность» тыс. приведенных т-км
Bl В2 Вз В< В$ Вф
Потенциал столбца
7 12 9 21 15 2
А1 0 7 1630 12 815 9 1225 21 3400 16 М 7070
Л2 -7 20 18 10 14 10450 8 650 М 11100
А3 -2 24 26 16 19 6500 20 0 6500
Л4 —2 17 30 22 23 16 0 6500 6500
Спрос» тыс. приве- денных Т*КМ 1630 815 1225 20350 650 6500 31170
ное предприятие, которое будет удовлетворять потребности фиктивно-
го потребителя согласно полученному решению, из плана размещения
исключается.
Из полученного решения по второму способу следует тот же
результат, а именно строительство нового предприятия более выгодно
в пункте А3. Минимальные затраты при этом составят 3786,15 тыс. р.
Рациональное размещение подвижного состава по автотранспорт-
ным предприятиям. При определении наилучшего размещения тран-
спортных средств по предприятиям необходимо учитывать места
возможного строительства АТП, уже действующие предприятия и
количество подвижного состава, которое можно разместить; потреб-
ность клиентов в подвижном составе по количеству единиц, провоз-
ной способности и маркам, а также другие условия размещения АТП.
Эти условия являются ограничениями задачи оптимального размеще-
ния подвижного состава по автотранспортным предприятиям.
Задача оптимизации решается методами линейного программиро-
вания и заключается в следующем.
1. Определяется величина и структура грузооборота отдельных
предприятий и организаций. Если в городе или районе таких пред-
приятий много, то для упрощения расчетов их объединяют по терри-
ториальному признаку в несколько микрорайонов. Каждый из них
рассматривают как одну точку погрузки и разгрузки, грузооборот
235
Таблица 8.9
Пункт раз- Клиент 7
маценияпод- Bi В2 1 1 в3
вижного состава Расстояние, км
А1 3 2 4 1
42 2 3 5 4
А3 3 4 5 2
।
которой равен сумме грузооборотов предприятий, вошедших в данный
микрорайон.
2. В соответствии с величиной и структурой грузооборота опредб*
ляют тип и количество потребного подвижного состава.
3. Определяют расстояния от клиентов или микрорайонов до мест
возможного расположения транспортных средств.
4. Строят математическую модель и исходную матрицу задачу
размещения, при этом учитывают все исходные данные и поставлен:
ные ограничения. ’Л
5. С помощью метода потенциалов или любого другого метода
линейного программирования решают матрицу на минимум нулевого,
пробега до выявления его оптимального значения.
6. Проводят экономический анализ полученного решения.
Приведем условный пример. Чтобы осуществить перевозки грузор
клиентам Blt В^В&В^, необходимо следующее количество однотипно-;
го подвижного состава: Вг- 100 ед.; В2 “ 70; В3 - 120; - 50 ед.
Парк, необходимый для обслуживания клиентов, можно размес-
тить в пунктах Ai, A%, А3: в А] можно разместить только 100 ед. под-
вижного состава; в Д2 “ 50 и в А3 - 250 ед.
Расстояния между клиентами и возможными пунктами размещу
ния подвижного состава даны в табл. 8.9.
В общем виде математическую модель задачи можно записать так:
где — количество единиц подвижного состава, которое будет направлено из пункта i
для перевозки грузов клиента Л в; — количество единиц подвижного состава, которое
может быть размещено в пункте i; bj — количество единиц подвижного состава, необходи-
мое для перевозки грузов клиента; сц — расстояние между клиентом j и пунктом разме-
щения I.
Условия задачи записывают в транспортную матрицу (табл. 8.10).
Потребность в подвижном составе по каждому клиенту заносят в
нижнюю строку, ограничения по мощности в каждом пункте - в
предпоследний столбец таблицы. В связи с тем, что в данном случае
емкость мест хранения превышает величину потребного парка, в
матрицу добавляют фиктивный столбец (’’фиктивный клиент” Вф). В
этом столбце вместо реальных расстояний указывают очень большое
число М. Потребность ’’фиктивного клиента” в подвижном составе
равна разности между общим числом единиц возможного размещения
парка подвижного состава и фактической потребностью в нем.
Каждая клетка матрицы соответствует возможному варианту
обслуживания клиентов транспортными услугами. В правом верхнем
углу клетки показаны расстояния между пунктами размещения и
клиентами, сюда же заносят и планируемое количество подвижного
состава.
Задача решена методом потенциалов. В табл. 8.10 показано опти-
мальное решение, из которого следует, что возможности пунктов Aj и
А2 по размещению подвижного состава использованы полностью
соответственно размещениям 100 и 50 ед., в пункте А3 можно размес-
Таблица 8.10
Пункт размещения подвижного состава Поте»- циал строки Клиент Итого можно раз- местить единиц под- вижного состава Оптимальное размещение подвижного состава
В2 В3 В4 Вф
Потенциал столбца
2 2 4 1 М-1
А1 0 3 2 70 4 1 30 м 100 100
А2 0 2 50 3 5 4 м 50 50
Л3 1 3 50 4 5 120 2 20 м 60 250 190
Итого единиц 100 70 120 50 60 400 340
237
Таблица 8.Ц
АТП Микрорайон (клиент)
В1 *2 | 1 £з 1 1
Расстояние, км
А1 3 4 1 5
А2 1 2 3 4
А3 4 3 6 1
тить 250 ед., а необходимо разместить 190 ед. подвижного состава. В
клетках таблицы указано количество подвижного состава, необходи-
мое для обслуживания соответствующих клиентов.
Для рациональной организации технического обслуживания и
ремонта, сокращения затрат на капитальное строительство целесооб-
разно специализировать автотранспортные предприятия по эксплуата-
ции подвижного состава одной марки. Методика определения опти-
мального варианта размещения парка при этом усложняется.
Рассмотрим еще один пример. Чтобы перевозить грузы в микро-
район Bi города, требуется 20 ед. подвижного состава I типа; 30 ед. П
типа и 40 ед. Ш типа; в В2 - 40 ед. I типа, 100 ед. II типа; в пункт В3 -
60 ед. П типа и 80 ед. III типа; в пункт В4 - 100 ед. I типа, 50 ед. II типа и
50 ед. III типа.
Парк подвижного состава можно разместить в трех.автотранспорт-
ных предприятиях (Ар А2, А3) в следующих количествах: в Ai -
100 ед. I типа, 100 ед. II типа, 50 ед. Ш типа; в А2 - 100 ед. I типа, 200 ед.
II типа, 20 ед. Ш типа; в А3 - 100 ед. III типа.
Кроме того,известно, что микрорайон не может обслуживаться
подвижным составом II типа, если он будет размещен в АТП Ар
Расстояния от АТП до микрорайонов указаны в табл. 8.11.
Задачу можно решить с помощью отдельных матриц по каждому
типу подвижного состава или путем совмещения этих матриц в спе-
циальную форму (табл. 8.12). Запись условий в таком виде позволяет в
одной таблице решать одновременно все Матрицы (в нашем примере
их три - по количеству типов подвижного состава). Чтобы учесть
дополнительное условие невозможности обслуживания клиента
подвижным составом типа II из автотранспортного предприятия Ар
элемент (расстояние), находящийся в клетке А^П) - ^(П), принимают
за бесконечно большую величину М.
В клетках увеличенной матрицы, которые не образованы пересе-
чением строк и столбцов, соответствующих одному и тому же типу
подвижного состава, расстояние не указывают и сами клетки при
расчетах во внимание не принимают.
238
Таблица 8.12
АТП Тип подвиж- ного состава По- тен- Микрорайон (клиент) Можно размес- тить, ед. Оптимальное количество, ед.
*1 В2 В3 В4 | 1
циалы Тип подвижного состава
I II ш I П II III I 11 III I II Ш
3 1 -1 f 3 2 1 1 5 4 —4 м М М
А1 I 0 3 0 4 5 60 м 40 100 60
А1 II 0 3 М 1 60 5 м 40 100 60
III 0 3 1 50 5 М 50 50
I -1 1 20 2 40 4 40 М 100 100
А2 II 0 1 30 2 100 3 4 50 м 20 200 180
Ш 2 1 20 3 4 М 20 20
А3 III 5 4 20 6 30 1 50 м 100 100
Итого единиц 20 30 40 40 100 60 80 100 50 50 40 60 — 670 570
f&l
Задача решена методом потенциалов. В табл. 8.12 приведено
оптимальное решение, из которого следует, что в автотранспортном
предприятии Aj следует разместить по 60 ед. подвижного состава I и П
типов и 50 ед. III типа; в А2 “ 1типа 100 ед., П типа ~ 180 ед. и III типа-
20 ед.; в предприятии -43 следует разместить 100 ед. подвижного
состава III типа.
Таблица 8,13
АТП Тип ПОД- виж- ного соста- ва Микрорайон (клиент) Итого единиц ПОДВИЖ- НОГО состава Рациональ- ный одно- типный парк в АТП
В1 В2 | | в3 В4
Тип подвижного состава
I П ш I П п ш I П ш
*1 I 3 4 5
П 3 4 1 60 5 60
Ш 3 1 80 5 80 170
I 1 20 2 40 4 60
П 1 30 2 100 3 4 130 240
Ш 1 40 3 4 40
Аз I 4 3 1 100 100 160
И 4 3 6 1 50 50
ш 4 6 1 50 50
Итого единиц 20 30 40 40 100 60 80 100 50 50 570 570
240
Если из условий предыдущего примера исключить ограничения,
кроме тех, которые относятся к количеству единиц подвижного
состава для каждого микрорайона, т. е. в каждом автотранспортном
предприятии можно разместить весь парк любого типа, построить и
решить увеличенную матрицу на минимум суммарного пробега под-
вижного состава от транспортных предприятий до микрорайонов, то
легко определить специализацию предприятия. По полученному
оптимальному решению (табл. 8.13) определяют, какой из типов
подвижного состава преобладает в общем парке АТП. В этом пред-
приятии и рационально сосредоточить весь парк подвижного состава
этого типа.
В данном примере в результате предварительного решения уста-
новлено, что в автотранспортном предприятии больше подвижного
состава Ш типа (80 ед.), причем даже больше, чем в А2 и 43. Следова-
тельно, парк автомобилей Ш типа (170 ед.) целесообразно сосредото-
чить в этом предприятии. В автотранспортном предприятии Л2 преоб-
ладают автомобили II типа, в предприятии А3 - автомобили I типа,
следовательно, эти АТП и должны специализироваться по эксплуата-*
ции этих типов подвижного состава.
8.4. Экономическая интерпретация задачи размещения
Экономическая интерпретация задачи размещения осуществляет-
ся на основе экономико-математического анализа, суть которого
заключается в проверке обоснованности сформулированной модели и
полученного на ее основе оптимального плана размещения. Необходи-
мость такого анализа обусловлена некоторыми обстоятельствами.
Отметим основные из них.
Анализ необходим для обнаружения и устранения ошибок, кото-
рые могли быть допущены при формировании модели, ее решении и
реализации, а также для проверки степени соответствия решения
реальным условиям и факторам размещения, поскольку при модели-
ровании эти условия, как правило, упрощаются; для определения
направлений изменения и меры устойчивости оптимального плана
размещения при изменении спроса на транспортную работу, а также
при изменении транспортных мощностей, организации новых техноло-
гий перевозок грузов и возникновении других требований.
В ходе анализа определяют целесообразность расширения и изме-
нения условий и возможностей, отображенных в модели задачи с’
целью дальнейшего улучшения качества системы размещения и
определения перспектив* ее развития; устанавливается возможность
использования модели, как инструмента для научного управления
системой размещения. Если условия ее функционирования по каким-
либо причинам изменились или ставится задача их изменить, тогда
необходимо знать, в каких пределах параметров система не выйдет из
оптимального режима или какие меры принять, чтобы вернуть систему
в оптимальный режим.
241
Следует подчеркнуть, что экономико-математическии анализ
представляет гораздо большую ценность, чем получение непосредст-
венно оптимального решения. Анализ модели и решения позволяет
ответить на вопросы, связанные с повышением рентабельности произ-
водства, увеличением выпуска продукции и др.
В экономико-математическом анализе используют положения
теории двойственности задач линейного программирования, суть
которой заключается в том, что задачи линейного программирования
имеют двойственную природу, когда по условиям исходной задачи
может быть сформулирована задача, двойственная к ней, причем
параметры обеих задач тесно взаимосвязаны.
Основная теорема двойственности гласит:
если одна из задач двойственной пары имеет оптимальное реше-
ние, то другая задача также имеет решение, причем максимальное
значение целевой функции прямой и двойственной задачи численно
равны.
Рассмотрим эти свойства на примере задачи размещения, сформу-
лированной в п. 8.3, в которой необходимо выбрать рациональное
место размещения транспортного предприятия в одном из двух пунк-
тов возможного строительства.
Математическая модель исходной задачи размещения на множе-
стве решений системы ограничений такова:
* 11 ♦ *12* *13+ *14* *15* *1ф“ Ж*
* 21+*22+ *23**24* *25* *2ф“ 1и00;
* 31+ *32* *33**34* *35* *3ф “ «500;
* 41+*42+ *43* *44* *45* *4ф“ б500!
*11 + *21 + *31 + *41“1вЗО>
*12+ *22+*32+ *42“
*13**23**33**43“ ^225;
*14+ *24 * *34+*44 " 20350;
*15* *25* *35* *45“ «50;
Xq>* i-1,2,3,4; /“1,2,3,4,5.
Необходимо найти минимальное значение функции:
Г W - 7хц+12X12+9х13+21X14 + 15хи+Мх^+20x2i + 18x32 + 10X23 * 1<х24 *
+ 8х25+Мх2ф+24хз1 + 2вХз2+Кх3,+ 19хз4+20Хз5+0Хзф+17х41 + 30Х42+ 22Х4з+
+2ЗХ44+15x45+0х4ф.
242
Таблица 8.14
Пере- менные *11 *12 *13 *14 *15 *1ф • • • *45 *4ф Коэффи- циент^
“1 1 1 1 1 1 1 0 0 7070
“2 0 0 0 0 0 0 0 0 11100
“3 0 0 0 0 0 0. 0 0 6500
“4 0 0 0 0 0 0 0 0 6500
1 0 0 0 0 0 0 0 1630
»2 0 1 0 0 0 0 0 0 815
»3 0 0 1 0 0 0 0 0 1225
»4 0 0 0 1 0 0 0 0 20350
»5 0 0 0 0 1 0 1 0 650
»6 0 0 0 0 0 1 0 1 6500
7 12 9 21 15 м • • • 15 0
Сформулируем математическую модель двойственной задачи, для
чего введем четыре переменные (и^, tig, и*) по числу мест размеще-
ния автотранспортных предприятий и шесть,переменных (и, л, %, хь
v5, V110 числу потребителей.
Специальная таблица (табл. 8.14) значительно облегчит составле-
ние математической модели двойственной задачи. В первой строке
таблицы записаны переменные исходной задачи; в первом столбце -
переменные двойственной задачи. В последней строке стоят коэффи-
циенты целевой функции исходной задачи, а в последнем столбце -
коэффициенты целевой функции двойственной задачи. В прямоуголь-
нике, который получился в результате ограничения указанными
строками и столбцами, записывают коэффициенты при переменных
исходной задачи - это матрица исходной задачи.
Чтобы получить, например, первое ограничение двойственной
задачи, надо найти сумму произведений чисел, стоящих в столбце под
хи> на соответствующие переменные первого столбца, а для получения
второго ограничения - сумму произведений чисел, стоящих под х12»
на соответствующие переменные первого столбца и т. д. Переменной
х^ (предпоследний столбец таблицы) соответствует последнее ограни-
чение двойственной задачи. Числовое ограничение соответствует
коэффициентам целевой функции прямой задачи, помещенным в
последней строке таблицы.
Выражение для целевой функции получается как сумма произве-
дений переменных первого столбца на соответствующие числовые
значения последнего столбца.
243
С помощью таблицы составляют двойственную задачу, которая
будет формулироваться так:
найти решение системы ограничений
ui+»i“7; ui+»4«21;
ul+,2“^% uj+v5“15;
ui+v3=9; uj+Vj-M;
... иг. д.;
максимизировать целевую функцию
L(x) “ 7070uj+11100u2+ 6500u3+ 6500u4+ 1630v x + 815v2+ 1225v3+
+ 20350*4+ 650vs+ 6500Vj.
Заметим, что ограничения исходной задачи имеют вид равенств,
поэтому переменные двойственной задачи могут принимать отрица-
тельные значения, а также то, что в практических расчетах перемен-
ные двойственной задачи определяются непосредственно в матрице
и используются для проверки решения на оптимальность и экономи-
ческой интерпретации содержания задачи.
Экономическая интерпретация задачи размещения грузового
автомобильного транспорта заключается в следующем.
По условиям математической модели задачи размещения состав-
ляется первоначальная матрица (табл. 8.15).
Строки табл. 8.15 соответствуют местам размещения транспортных
мощностей, а последняя строка - общему спросу потребителей на
транспортные услуги. В столбцах записана потребность в транспортной
работе, в последнем - возможная транспортная мощность в пункте
размещения.
Поскольку поставлена задача выбора из двух возможных мест (43
и Л4) наиболее экономичного для размещения автотранспортного
предприятия мощностью 6500 тыс. приведенных т*км, то в матрицу
включаются оба варианта строительства, и для того, чтобы сбаланси-
ровать спрос и общую мощность, необходим ’’фиктивный потреби-
тель”, спрос которого в транспортной работе равен мощности автотран-
спортного предприятия в 6500 тыс. приведенных т-км. Это чисто услов-
ный прием, поэтому запланированные ’’фиктивному потребителю”
перевозки являются нереальными, экономические затраты на них не
нужны.
Каждая клетка матрицы интерпретируется как транспортная
коммуникация между соответствующим автотранспортным предприя-
тием и потребителем, а число, проставленное в верхнем правом углу
клетки матрицы, отражает затраты на единицу транспортной работы
244
Таблица 8.15
АТП Потен- пиал строки Потребитель Транспортная мощность, тыс. приведенных т-кмвгод
В1 *2 Вз В4 в5 Вф
Потенциал столбца
^1сущ 7 12 9 21 16 м 7070
^2 сущ 20 18 10 14 8 м 111004
Аз 24 26 16 19 20 0 6500
*4 17 30 22 23 18 0 6500
Спрос, тыс. приве- денных Т*км в ГОД 1630 815 1225 .20350 650 6500 31170
(к./1 приведенный т-км), которую выполняет предприятие для данного
потребителя, и характеризует доступность транспортных услуг для
потребителя. В клетках ’’фиктивного потребителя” для существующих
автотранспортных предприятий и А^ проставлена буква М, озна-
чающая бесконечно большое число, и это следует рассматривать как
запрет на планирование фиктивных перевозок для действующих
транспортных предприятий.
Для пунктов возможного строительства эти затраты приняты
одинаковыми, равными нулю, с тем, чтобы поставить в равные усло-
вия по этому показателю оба варианта.
Например, если рассмотреть клетки и то первая означает
коммуникацию между автотранспортным предприятием, расположен-
ным в пункте Ар и потребителем В^, вторая - коммуникацию между
пунктами Ai п 1%. Соответственно стоимость единицы транспортной
работы в 7 к. и 12 к. указывает на то, что доступность транспортного
предприятия для потребителя Bj выше (затраты ниже), чем для потре-
бителя^.
Что касается затрат на единицу транспортной продукции, то
следует иметь в виду, что на действующих предприятиях эти затраты
определяются себестоимостью перевозок, а на вновь вводимых пред-
245
приятиях, кроме себестоимости, учитываются также капитальные
вложения, пересчитанные с учетом нормативного срока окупаемости;
т. е. дополнительных затрат на строительство и создание материально»
технической базы вновь строящегося предприятия. Следовательно,
удельные затраты, как правило, выше при новом строительстве.
Характерно, что удельные затраты зависят от величины транспортной
мощности, что позволяет выбрать наиболее эффективный размер
мощности и рационально ее разместить.
В целом экономическое содержание исходной матрицы (табл. 8.15)
в том, что она характеризует такое состояние размещения, когда
транспортный процесс еще не начат, транспортные мощности не ис-
пользуются и, естественно, затрат на перевозки нет, поэтому целевая
функция L(x) = 0.
Далее каким-либо способом распределяются транспортные мощ-
ности для обслуживания потребителей и составляется допустимый
план их размещения. Допустимым считается план, в котором все
мощности распределены, а спрос потребителей полностью удовлетво-
рен. Это соответствует тому, что транспортный процесс начат, появ-
ляются расходы на перевозки, целевая функция увеличивается и
становится больше нуля. Полученное распределение транспортных
мощностей проверяется на оптимальность с помощью метода потен-
циалов, и, если оно не оптимально, осуществляется переход к новому
распределению. И так поступают до тех пор, пока не будет получен
оптимальный план размещения, а целевая функция при этом достиг-
нет минимума.
В табл. 8.16 представлен первый допустимый план размещения,
полученный способом северо-западного угла.
Экономическое содержание первого плана размещения транспорт-
ных-мощностей (см. табл. 8.16) следующее. Автотранспортное пред-
приятие, расположенное в пункте Aj, должно обслуживать потребите-
лей JEL Др выполняя соответственно следующие объемы пере-
возок: 1630, 815, 1225, 3400 тыс. приведенных т-км в год. Автотран-
спортное предприятие в пункте А^ должно обслуживать грузоотправи-
теля В4 и выполнить объем транспортных работ 11 100 тыс. приведен-
ных т-км. За транспортным предприятием пункта А3 закреплены
потребители В4 и В5 с объемами работ 5850 и 650 тыс. приведенных
т-км.
Для возможного пункта строительства А* выполнение объема
транспортных работ в 6500 тыс. приведенных т-км запланировано
’’фиктивному потребителю”. Это указывает на то, что транспортная
работа предприятию в пункте Л4 не планируется.
Общая транспортная мощность в каждом пункте размещения
определяется суммированием по строке соответствующих объемов
транспортных работ.
Итак, имеется первоначальный план размещения, транспортный
процесс начат. Необходимые затраты на выполнение этого плана
246
Таблица 8.16
перевозок составят: L(x) = 1630*7 + 815*12 + 1225*9 + 3400*21 + 11100*14 +
+ 5850*19 + 650*20 + 6500*0 = 3831,65 тыс. р.
На следующем этапе решения первоначальный план проверяется
на оптимальность с помощью потенциалов. Для этого предусмотрены
дополнительные столбец и строка в таблице.
Исходя из правила потенциалов
“1+»/“₽#»
где «р —ямавяиры ъхпввютияо столбца и строки; р^ - удельные затраты ла едини-
цу транспортной работы в заполненной клетке матрицы, расположенной на пересечении Нк
строки и/то столбца.
Потенциал первой строки uj обычно принимают равным нулю,
после чего легко определить значения остальных потенциалов.
Улучшить полученное распределение транспортных мощностей
можно только за счет перераспределения загрузок в незанятые клетки
из занятых. Для этого с помощью метода оценок (их иногда называют
объективно обусловленными, двойственными и т. п.) определяют
эффективность неиспользованных коммуникаций:
247
При этом возможны три варианта.
I вариант - оценка равна нулю. Это значит, что использование
данной коммуникации не изменит эффективности плана размещения,
т. е. полученный за счет использования данной коммуникации план
размещения является альтернативным по эффективности к расчетно-
му. Другими словами, в этом случае возможно несколько вариантов
размещения с одинаковой эффективностью.
II вариант - оценка клетки матрицы положительная. Это указы-
вает на то, что данная коммуникация относительно других является
неэффективной, ее использование ведет к росту затрат на перевозки.
III вариант - оценка клетки отрицательная. Это указывает прежде
всего на то, что полученный план размещения не является оптималь-
ным и данная коммуникация более эффективна, чем используемые.
Если ее загрузить, то тот же объем перевозок можно выполнить с
меньшими затратами. В этом случае решение задачи размещения счи-
тается незаконченным, поскольку возможно новое, более эффектив-
ное решение путем перераспределения транспортных мощностей в
клетку с отрицательной оценкой. Если имеется несколько клеток с
отрицательными оценками, то в первую очередь загружают более
эффективную, т. е. ту клетку, в которой отрицательная оценка по
абсолютной величине наибольшая.
Оценки характеризуют изменение целевой функции на величину
самой оценки в расчете на единицу транспортной работы. При поло-
жительной оценке целевая функция увеличивается, а при отрицатель-
ной - снижается, при нулевой - остается без изменения. Следует
отметить, что оценки заполненных клеток всегда равны нулю, по-
скольку эффективность перевозок между соответствующими пункта-
ми уже использована, перевозки включены в план и нет смысла их
проверять, они служат базой для сравнения других вариантов.
При проверке исходного плана на оптимальность (см. табл. 8.16)
оказалось три потенциально эффективных коммуникации: это А^ с
оценкой ”-6”; Л2В5 с оценкой ”-7” и А^В5 с оценкой ”-5”. Следова-
тельно, наиболее эффективной является транспортная связь
которую и следует использовать в первую очередь для улучшения
плана размещения.
Чтобы перераспределить транспортную мощность и не нарушить
равновесия между общей мощностью и спросом, следует построить
замкнутый контур к клетке А2В5, который проходил бы через клетки
А2В4, А3В4, А3В5. У вершин контура поочередно проставляются знаки
”+” и начиная с клетки А2Й5,в которой ставят знак ”+”. Перемеще-
нию подлежит наименьшая по абсолютной величине загрузка у вер-
шин контура с отрицательным знаком. В нашем примере это 650. Эта
величина прибавляется к загрузкам у вершин контура со знаком ”+” и
вычитается из загрузок у вершин контура со знаком ”.
Переместив загрузку в 650 тыс. приведенных т-км в клетку А2В5,
получим новый более эффективный план распределения транспортных
248
Таблица 8.17
мощностей, который обеспечивает выполнение плана перевозок с
меныпими затратами (табл. 8.17). Зная экономический смысл оценок,
можно определить, что затраты на перевозки снизятся на 45,5 тыс. р.
(650-7 = 45,5).
Проверка полученного плана на оптимальность (см. табл. 8.17)
методом потенциалов показала, что этот вариант размещения тран-
спортных мощностей является оптимальным, поскольку не оказалось
ни одной незагруженной клетки с отрицательной оценкой. При этом
общие издержки на выполнение всего объема транспортных работ,
равного 31 170 тыс. приведенных т-км, будут минимальными и соста-
вят:
Цх)~ 1630-7 815-12 +1225-9 + 3400-21 -I-10450.14 + 650-8 + 650049 - 3786,15 тыс. р.
Как видим, издержки снизились по сравнению с предыдущим
распределением, как и предсказывалось раньше, на 45,5 тыс. р.
Чтобы проверить правильность решения задачи, можно восполь-
зоваться свойствами двойственной задачи к ней и пересчитать целе-
вую функцию с помощью потенциалов. Абсолютные значения функций
должны совпасть; в противном случае в решении допущена ошибка.
Целевая функция двойственной задачи составит:
Ifx) - 7070.0 + Ш00.(-7) + 6500.(-2) +1630.7+ 81542 +1225-9 + 20350-21 + 65045 +
+ 6500.2 ° 3786,15 тыс. р.
249
Значения целевой функции прямой и двойственной задач по
абсолютной величине совпали, задача решена верно.
Рассмотрим экономическое содержание оптимального решения.
Прежде всего оно указывает на то, что строительство нового АТП в
пункте А4 экономически нецелесообразно, поскольку соответствую-
щая транспортная мощность полностью отнесена к ’’фиктивному
потребителю”. Для остальных пунктов размещения транспортные
мощности указаны в последнем столбце матрицы (см. табл. 8.17). Здесь
же отражена оптимальная схема перевозок, из которой следует, какое
автотранспортное предприятие, каких потребителей должно обслужи-
вать, в соответствии с чем и запланированы транспортные мощности.
Экономико-математический анализ предусматривает также
исследование оптимального плана размещения при необходимости
введения дополнительных условий или требований, определения
направлений дальнейшего совершенствования развития системы
размещения и предсказания последствий таких изменений.
Например, пусть по каким-либо причинам запланированное
строительство автотранспортного предприятия в пункте А2 невозмож-
но и его необходимо перенести в пункт А* с сохранением той же тран-
спортной связи по обслуживанию потребителя В4. Исследуем, к каким
экономическим последствиям приведет такое отступление от опти-
мального плана размещения. Чтобы выполнить заданные условия,
очевидно, необходимо переместить транспортную мощность в
6500 тыс. приведенных т-км в клетку А4В4, не нарушив при этом соот-
ношения между мощностью и спросом. Необходимо построить замкну-
тый контур к загружаемой клетке А4В4 (см. табл. 8.16).
Поскольку затраты на единицу транспортной мощности в клетке
А4В4 на 4 к. больше, чем в клетке А3В4 оптимального плана (23-19), тб
указанное перемещение, мощности приведет к увеличению издержек
на 260 тыс. р.
Приведем еще один пример. Допустим, спрос потребителя В5 на
транспортную работу увеличился на 1000 тыс. приведенных т-км.
Какую транспортную мощность следует реконструировать и до какого
размера, чтобы рост затрат был наименьшим? Очевидно, надо исполь-
зовать транспортную связь A2BS (см. табл. 8.17) с минимальными из-
держками на единицу транспортной мощности (8 к.). Следовательно,
необходимо рассмотреть вариант реконструкции существующего
автотранспортного предприятия в пункте А2 с тем,- чтобы увеличить
его мощность на 1000 тыс. приведенных т-км. При этом затраты будут
минимальными и их рост составит 1000-8 = 80 тыс. р.
Из приведенных примеров видно, что в процессе принятия реше-
ния о размещении существует множество различных вариантов.
Однако, зная последствия возможных изменений, можно экономиче-
ски обосновать тот или иной из них.
Анализ устойчивости плана размещения проводится, главным
образом, с помощью коэффициентов целевой функции и возможен в
250
двух направлениях: анализ коэффициентов целевой функции при
свободных переменных и анализ коэффициентов при базисных пере-
менных.
Устойчивость оптимального плана определяется интервалами
изменения коэффициентов целевой функции, при которых не происхо-
дит изменения полученного оптимального решения.
Анализ на устойчивость плана при изменении коэффициентов
целевой функции при свободных переменных, т. е. переменных,
которые не вошли в оптимальный план размещения, проводится с
помощью оценок, используемых для проверки промежуточных реше-
ний на оптимальность. В оптимальном плане размещения оценки для
небазисных переменных должны быть положительными:
откуда
maxA^=pfy-(uf + »y),
где max Ду- — максимально допустимое изменение коэффициента целевой функции при
(Ай переменной, не приводящее к изменению плана размещения (или убыток, который
будет получен при включении в план данной переменной г единичной транспортной
мощностью); up Vj — соответственно потенциалы Hi строки и /то столбца оптимальной
матрицы; р^ — коэффициент целевой функции при переменных, не вошедших в базис.
Исследование не включенных в план размещения коммуникаций
направлено на оценку их эффективности. Повышение эффективности
коммуникаций связано с усовершенствованием технологического
процесса перевозок, изменением дорожных условий и др.
При выборе места размещения предприятия в одном из возможных
пунктов строительства многие коммуникации не включаются в опти-
мальный план размещения. Однако, небезынтересно знать, при каких
условиях они могут быть выгодны с точки зрения поставленного в
задаче критерия оптимальности. Для рассматриваемой задачи в табл.
8.18 приведены данные, показывающие, на сколько должны быть
снижены затраты на выполнение транспортных работ, чтобы включе-
ние данных коммуникаций в план размещения стало возможным.
Правильность расчетов можно проверить методом подстановки
предельных значений целевой функции в матрицу с'оптимальным
распределением и проверить план размещения с помощью потенциа-
лов, а также возможно включить в план небазисные переменные с
новыми значениями коэффициентов. Оказалось, что в рассматривае-
мом примере полученное распределение транспортных мощностей не
может быть улучшено за счет заполнения незагруженных (незанятых)
клеток, так как все оценки равны нулю, что является дополнитель-
ным контролем правильности выполненных расчетов.
Таким образом, в пределах указанных значений (см. табл. 8.18)
изменение коэффициентов целевой функции при небазисных перемен-
ных плана размещения останется без изменения и обеспечит мини-
мальное значение целевой функции.
251
Таблица 8.18
Коммуни- кация Перемен- ная pij Ру - max Ау max Д:у» р. max Д^ % к ру
а1в5 *15 -16 15 1 6,25
*21 20 0 20 100,0
А^2 *22 18 5 13 72,2
А^з *23 10 2 8 80,0
A3P1 *31 24 5 19 79,2
А3Р2 *32 26 10 16 61,5
А3В3 *33 16 7 9 56,3
А 3В5 *35 20 13 7 35,0
А01 *41 17 5 12 70,6 ’ *
А^2 *42 30 10 20 66,7
А4В3 *43 22 7 15 68,2
А4В4 *44 23 19 4 17,4
Aft *45 18 13 5 27,8
Анализ коэффициентов целевой функции представляет собой
ценную информацию для экономических исследований. Так, относи-
тельно небольшое изменение затрат (см. табл. 8.18) на выполнение
транспортной работы требуется для того, чтобы стало возможным
размещение, в порядке снижения их эффективности, следующих
коммуникаций: А1В5, А4В4, А4В5. Включение в план таких переменных,
как %21> *23> *31> х22> Х41 и других приведет к резкому увеличению
затрат на перевозки, а ликвидация убыточности соответствующих
коммуникаций связана с большими трудностями и ростом затрат.
Максимальное увеличение коэффициентов целевой функции при
i-й базисной переменной (коммуникаций, задействованных планом)
определяется следующим образом. Зная, что минимальное значение -
есть ноль, т. е. Рц - (ut + vj = 0, находим либо потенциал строки, либо -
столбца. Например, если потенциал столбца, тогда у = р^ - uf. Так как
потенциалы строк в оптимальной матрице нам известны, определим
минимальные значения потенциалов столбцов для незагруженных
клеток и проставим их в матрицу. Затем находим максимально допус-
тимые значения затрат для базисных переменных (как сумму потен-
циалов строки и столбца).
Например, для коммуникации вычислим максимальные
затраты, не приводящие к изменению оптимального плана. Для этого
выберем потенциалы строк незагруженных клеток первого столбца
оптимальной матрицы, которые соответственно равны -7, -2, -2, а
соответствующие им затраты р21 = 20; р31 = 24; р41 = 17. Следовательно,
v2l = 20 - (-7) = 27; v31 = 24 - (-2) = 26; v41 = 17 - (-2) = 19. Выбираем
252
Таблица 8.19
Коммуникация Базисная переменная Затраты на 1 приведенный т»км, к.
исходные максимальные
А1В1 *11 7 19
AjB2 *12 12 25
А]В3 *13 9 17
A1B4 *14 21 25
А^4 *24 14 18
A^S *25 8 9
А3В4 *34 19 23
наименьшее значение потенциала столбца, т. е. 19. Следовательно,
предельно допустимое значение составит: max Ди = ^ + щ = 19 + 0 = 19.
В табл. 8.19 приведены данные, определяющие границы роста
затрат на перевозки по используемым коммуникациям, при которых
оптимальный план размещения остается неизменным.
По некоторым используемым коммуникациям даже незначитель-
ное изменение затрат на перевозки приводит к необходимости пере-
смотра плана размещения.
Наименьшее изменение затрат по коммуникациям - 1 к. на 1 при-
веденный т*км (9-8) в клетке (коммуникации) А2В5, наибольшее - 13
(25-12) по коммуникации Таким образом, чтобы сохранить
стабильность оптимального плана размещения, необходимо в первую
очередь сократить затраты по коммуникации A2Bj. Однако существует
предел сокращения затрат по данной коммуникации, поскольку после,
некоторого момента стабильность плана будет зависеть от затрат по
другим коммуникациям. Так, пределом сокращения затрат по комму-
никации Л2В5 является 4 к. на 1 приведенный т-км, так как после
этого устойчивость плана будет зависеть от других коммуникаций, а
именно А2В4 (18 - 14 = 4); А1В4 (25 - 21 = 4); А3В4 (23 - 19 = 4). В свою
очередь, предел сокращения затрат по этим коммуникациям б к. на 1
приведенный т*км, поскольку в дальнейшем на стабильность плана
размещения будет влиять изменение затрат по коммуникации A^fy (17
(17-9 = 6)ит. д.
Проверка расчетов методом замены базисных переменных на их
предельные значения в оптимальном плане размещения показала, что
расчеты выполнены верно, поскольку структура плана при этом не
изменяется (табл. 8.20).
Значение целевой функции, рассчитанное по предельным значе-
ниям, переменных, 5006,2 тыс. р. Значит, целевая функция может
изменяться от 3786,15 до 5006,2 тыс. р. При этом план размещения
транспортных мощностей останется прежним.
253
Таблица 8.20
Экономико-математический анализ модели задачи размещения и
ее решения позволяет определить направления дальнейшего совер-
шенствования системы размещения, предвидеть последствия возмож-
ных ее изменений. Так, например, максимальное увеличение базисных
переменных определяется значением минимальной оценки в незагру-
женных клетках, план размещения при этом не меняется.
В нашем примере минимальная оценка незанятой клетки ”+1”
(клетка А]В5). Это значит, что если затраты по всем базисным комму-
никациям возрастут на 1 к., то план размещения мощностей останется
прежним, если же изменения будут больше, то план необходимо
пересмотреть.
Из приведенных расчетов видно (см. табл. 8.20), что минимальное
увеличение затрат, при которых оптимальный план остается неизмен-
ным, составляет +1 для коммуникации А2В5, т. е. повышение устойчи-
вости плана зависит именно от уровня затрат по данной коммуника-
ции. Следовательно, чтобы повысить эффективность системы размеще-
ния автотранспортных мощностей,в первую очередь следует обратить
внимание именно на коммуникацию снижая затраты на перевоз-
ки или предпринимая другие меры.
Таким образом, экономико-математический анализ является
ценным инструментом для эффективной организации и управления
размещением автотранспортных мощностей, определения направле-
ний дальнейшего совершенствования системы размещения.
254
Глава 9
СЕТЕВЫЕ МЕТОДЫ ПЛАНИРОВАНИЯ И УПРАВЛЕНИЯ (СПУ)
9.1. Назначение системы СПУ. Элементы сетевых моделей
Сетевое планирование и управление (СПУ) - прогрессивная форма
научного анализа и контроля в управлении различными отраслями
народного хозяйства - получило широкое распространение в экономи-
ческих исследованиях.
СПУ представляет собой систему планирования и управления,
которая является комплексом современных расчетных методов
планирования, организационных мероприятий и средств контроля за
выполнением плана. Она позволяет повысить по сравнению с тради-
ционными методами эффективность управления за счет рациональной
организации производственных процессов, а также выявления и
мобилизации скрытых ресурсов времени и материальных средств.
Данная система используется на автомобильном транспорте при
планировании сложных и трудоемких работ с большим числом испол-
нителей, например, при планировании и анализе работы автотран-
спортных и авторемонтных предприятий, в области перспективного и
оперативного планирования автомобильных перевозок, для анализа
транспортных сетей. Использование систем СПУ целесообразно также
при составлении мбнтажно-транспортных графиков, устанавливающих
взаимосвязь строительства и автомобильного транспорта в соответст-
вии с принятым комплексным планом выполнения работ.
Работы по сетевому планированию ведутся в два этапа:
расчет и построение сетевого плана;
его анализ для выявления резервов времени и материальных
ресурсов (выполняется последовательно с целью улучшения? плана и
доведения его до оптимального).
Задачи, решаемые в системе СПУ, можно условно разделить на два
класса:
задачи минимизации времени выполнения комплекса работ при
ограниченных или неограниченных ресурсах;
задачи определения минимальной стоимости или минимума
ресурсов для осуществления данного комплекса работ.
Сетевое планирование как метод математического моделирования
основан на использовании сетевых моделей, которые могут быть
моделями различных процессов: производственных, научно-исследо-
вательских, транспортных и т. д.
Сетевая модель представляет собой математический аппарат для
изучения и управления сложными комплексами взаимосвязанных
работ, направленных на достижение относительно небольшого числа
четко определенных целей. Сетевая модель может быть изображена
либо графически, либо в виде таблиц.
255
Графическое изображение модели - сетевой график - дает воз-
можность, сохранив существующую на практике взаимосвязь состав-
ных частей исследуемого процесса, отобразить его во времени с необ-
ходимой степенью детализации. Однако в системе СПУ сетевой график
служит лишь инструментом управления и сетевые методы планирова-
ния не ограничиваются его использованием.
В состав системы СПУ входят: технология применения специаль-
ной сетевой модели для описания управляемого процесса; способы
использования сетевых графиков как наглядное отображение данной
модели; методы расчета сетевой модели и комплекс специальных
процедур, позволяющих рационально организовывать, планировать,
оценивать и контролировать выполнение комплекса работ или дан-
ного производственного процесса. Так, например, в строительстве
сетевая модель, построенная По критерию ’’время”, представляет
собой технологию производства строительно-монтажных работ.
Следовательно, процесс построения сетевой модели комплекса
операций можно представить в виде следующих этапов:
изучение исходных данных и расчленение комплекса операций на
отдельные работы;
построение исходного сетевого графика;
определение показателей работы исходного сетевого графика и их
оценка; *
расчет сетевой модели;
приведение параметров сетевой модели в соответствие с заданны-
ми ограничениями (оптимизация моделируемого процесса);
расчет показателей плана;
утверждение полученных показателей вышестоящими организа-
циями и доведение их до ответственных исполнителей работ.
Для изучения основ сетевого планирования следует рассмотреть
подробно этапы построения сетевого графика, расчеты сетевой модели
и ее оптимизацию.
Задача построения сетевого графика может быть сведена к следую-
щему: необходимо реализовать некоторый производственный (или
транспортный) процесс (комплекс работ), связанный с выполнением
конечного числа п операций и достижением в результате этого опреде-
ленной поставленной цели, например определения минимально
возможной продолжительности реализации данного процесса (ком-
плекса), т. е. нахождения наиболее раннего из всех возможных сроков
его завершения.
Сетевые графики могут быть ориентированы не только на крите-
рий времени, но и на другие параметры, например, минимизацию
ресурсов или конечной стоимости работ по выполнению заданного
плана.
Существуют одноцелевые и многоцелевые сетевые графики.
Многоцелевые графики основанУ на тех же методах построения и
расчета, что и одноцелевые, с той лишь разницей, что наиболее ранние
сроки завершения событий должны вычисляться для каждой из
256 '
поставленных целей. Наиболее поздний из этих сроков определяет
время решения задачи, т. е. время достижения конечной цели.
Сетевой график позволяет графическим способом (в виде сети)
установить технологические взаимосвязи всех звеньев основного
комплекса и определить возможную последовательность выполнения
работ, которая приведет к получению оптимального конечного резуль- ’
тата организации процесса.
Для построения и расчетов сетевого графика необходимо: руково-
дителям комплекса работ установить желаемый срок завершения
работ; составить в соответствии с принятой технологией перечень
действий и операций, необходимый для достижения целей; принять
желаемую или требуемую последовательность выполнения операций,
т. е. точно определить, какие операции должны быть закончены, чтобы
могла начаться любая другая операция, входящая в комплекс; при
этом для задания такой последовательности необходимо определить
лишь те операции, которые непосредственно предшествуют каждой
рассматриваемой операции.
Сетевой график может быть выполнен с различной степенью
детализации процесса. Это зависит от характера системы СПУ и ее
целевого назначения. Для разных уровней управления степень детали-
зации или укрупнения сетевых графиков может быть различной.
На практике при исследовании крупных производственных про-
цессов или выполнении больших комплексов работ составляются
локальные сетевые графики на участки или операции; затем происхо-
дит ”сшивка” этих локальных графиков и составление общего сетево-
го графика для процесса в целом.
В сетевом планировании выделяются два основных элемента
сетевых графиков: это событие и работа.
В любом комплексе работ или производственном процессе могут
быть выделены важнейшие моменты, определяющие этапы выполне-
ния комплекса или процесса. Например, моменты начала или оконча-
ния каких-либо технологических операций (процедур), организацион-
но-технических мероприятий, составления документации, поставок
материалов; моменты начала или окончания элементов перевозочного
процесса, погрузки-разгрузки и т. д.
Такие моменты в сетевом планировании называются событиями.
Следовательно, событие представляет собой начало или окончание
какого-либо действия (операции). х
Само действие (операция), которое необходимо выполнить для
достижения поставленных целей, называется работой. В сетевом
планировании работа понимается не как определенный результат, а
как процесс, предшествующий свершению какого-либо события.
Таким образом, сетевой график представляет собой последова-
тельность работ и событий, отражающую их технологическую взаимо-
связь.
На любом одноцелевом сетевом графике выделяются два особых
события: начальное и конечное.
257
Начальное событие соответствует началу работ (нулевой момент
времени), а конечное - их завершению (достижению поставленной
цели). Остальные события называются промежуточными.
Характерной особенностью событий является то, что они происхо-
дят как бы ’’автоматически”, если выполнены все предшествующие им
работы, т. е. для совершения события не требуется затрат никаких
ресурсов (временных, материальных и пр.).
В отличие от события работа, как процесс, не может произойти без
затрат каких-либо ресурсов: времени, материалов, энергии, рабочей
силы и т. д.
При построении и расчетах сетевых графиков по критерию ’’вре-
мя” каждая работа, входящая в состав графика, должна характери-
зоваться своей продолжительностью. Продолжительность работ изме-
ряется в единицах времени, устанавливаемых для данного графика
(часы, дни, месяцы и т. п.).
Оценка продолжительности работ, входящих в сетевой график,
должна выполняться либо ответственными исполнителями работ, либо
экспертами, имеющими большой практический опыт. Она проводится
на основе сведений о наличии ресурсов и ритмичности их использо-
вания. Способ оценки параметров работ имеет важное значение в
системах СПУ. Кроме временных оценок работы, в сетевом графике
могут иметь место оценки по необходимому количеству исполните-
лей, трудоемкости, стоимости и другим параметрам.
Таким образом, построение сетевого графика может начинаться с
выделения событий или с составления полного перечня работ, которые
необходимо выполнить, и определения их продолжительности.
Непрерывная последовательность взаимосвязанных работ и
событий от начального до конечного события, которая имеет наиболь-
шую продолжительность-во времени, называется критическим путем.
Критический путь является одним из важнейших понятий в сетевом
планировании. Он имеет большую практическую ценность, так как
позволяет проводить оптимизацию сетевых графиков. Продолжитель-
ность критического пути характеризует и продолжительность всего
комплекса работ, поскольку увеличение продолжительности (или
сдвиг срока окончания) любой операции, принадлежащей этому пути,
приводит к такому же увеличению продолжительности комплекса или
процесса.
Критический путь на сетевом графике не обязательно является
единственным. Те работы и события, через которые проходит критиче-
ский путь, называются критическими. Как показывает практика,
количество критических событий и работ не превышает обычно 10-
15 % элементов сетевого графика. Однако именно эти работы, состав-
ляющие критический путь, определяют сроки выполнения комплекса
работ в целом. Сокращение или увеличение сроков выполнения
критических работ соответственно сокращает или увеличивает общую
продолжительность производственного (транспортного, научно-иссле-
довательского и др.) процесса.
258
Другие работы, находящиеся на менее продолжительных по
времени путях, не влияют на своевременное достижение цели и имеют
некоторый резерв времени по сравнению с критическими работами.
Это позволяет перераспределить ресурсы, с тем чтобы сократить
критический путь и тем самым уменьшить общую* продолжительность
комплекса работ, т. е. определить наиболее ранний из возможны!
срок завершения какого-либо процесса.
Определение продолжительности критического пути, а также
других показателей - ранних и поздних сроков начала и окончания
работ, ресурсов (запасов) времени, вероятностей наступления событий
и т. д. - проводится при расчете сетевой модели.
9 J. Принципы построения сетевых графиков
Рассмотрим методы построения сетевых графиков, основные
параметры сетевых моделей и их расчет на примере одноцелевого
сетевого графика (рис. 9.1), который упрощенно представляет собой
процесс составления сменно-суточного плана перевозок грузов авто-
мобильным транспортом.
Составление плана перевозок грузов расчленено на пятнадцать
событий, каждому из которых, кроме начального, предшествует одно
или несколько действии (работ). Задана также продолжительность
каждой работы.
Перечень работ, характеризующий сетевой график, а также про-
должительность работ, представлен в табл. 9.1 (продолжительности
выполнения работ выбраны условно).
Основные правила построения сетевых графиков сводятся к
следующему.
На сетевом графике событие принято обозначать кружком, внутри
которого указан номер события. Выделены начальное, конечное и про-
межуточное события. Каждое промежуточное имеет последующее и
предшествующее события, которые соединены ориентированной стрел-
кой, причем стрелка всегда должна быть направлена от предшествую-
щего события к последующему. Эта стрелка и представляет собой на
сетевом графике работу. Любые два события могут быть соединены не
более чем одной стрелкой.
Рис. 9.1. Сетевой график составления сменно-суточного задания
259
Таблица 9.Г
Работа Содержание работы Продолжитель- ность работы, ч
1-2 Получение заявок на перевозку грузов от клиентуры 7
1-3 Фиктивная работа (зависимость) 0
2-3 Определение корреспондирующихся точек и расстояний 3
между ними
2-4 Определение объемов перевозок 4
3-6 Фиктивная работа (зависимость) 0 -
4-5 Выбор подвижного состава для осуществления перевозок 2
5-6 Фиктивная работа (зависимость) 0
6-7 Разработка рациональных маршрутов перевозок 1,5 4
7-8 Расчет потребного парка подвижного состава 2
8-9 Составление маршрутных ведомостей 4 «
9-10 Выписка путевых листов 3
10-11 Доставка грузов потребителям 8
10-13 Контроль за работой подвижного состава на линии 8
11-12 Прием товарно-транспортных документов 1,5
12-14 Обработка товарно-транспортных документов 2
13-14 Фиктивная работа (зависимость) 0
14-15 Составление диспетчерского отчета 2
Как уже говорилось, событие является промежуточным или
окончательным результатом одной или нескольких работ, которые
необходимо выполнить, чтобы можно было начать одну или несколько
следующих работ. Событие выполняется после окончания всех входя-
щих в него работ, причем момент свершения события является одно-
временно и моментом окончания последней из них.
Начальное событие не имеет никаких предшествующих работ и на
графике хар'актеризуется тем, что в него не входит ни одна стрелка
(см. рис. 9.1, событие 2).
Конечное событие не имеет никаких, последующих работ, так как
оно само является конечным результатом. На графике из него не*1
выходит ни одна стрелка (событие 25).
События сетевого графика нумеруются так, чтобы для каждой
работы номер начального события был меньше, чем номер конечного.
Каждая работа кодируется двумя цифрами. Первая цифра означает
начало работы и соответствует номеру предшествующего события;
вторая означает окончание работы и соответствует номеру последую-
щего события. Например, работа ’’Выписка путевых листов”, выпол-
няемая между событями 9 и 10, имеет код (9-10) (см. табл. 9.1).
На сетевых графиках продолжительность работы указана над
стрелкой, соединяющей два события. Следует иметь в виду, что длина
и направление стрелок не связаны с действительной продолжитель-
260
костью работ. На рис. 9.1 видно, что часть работ графика выполняется
последовательно, например работы 6-7, 7-6, 8-9 и т.. д. Это означает, что
начало каждой последующей работы зависит от окончания предшест-
вующей. Другие работы, например 10-11, 10-13, могут начинаться в
один и тот же момент времени с наступлением события 10, поскольку
этим двум работам предшествует одна и та же работа 9-10. Такие
работы не зависят во времени одна от другой и могут выполняться
параллельно. Комплекс работ завершится, как только окончится
работа 14-15 и совершится событие 15. Составление сменно-суточного
плана перевозок грузов на этом считается законченным.
Работы, на выполнение которых необходимо затратить только
время и никакие другие ресурсы, называются ожиданиями. Они так же
как и остальные, отмечаются на сетевом графике сплошной стрелкой.
Ожидания в ходе выполнения работ могут быть связаны с .технологи-
ческими перерывами.
Однако между какими-либо двумя событиями может быть только
логическая взаимосвязь, и в этом случае работа может быть как бы
’’выполнена” без затрат каких-либо ресурсов, в том‘числе и времени.
Тогда считается, что между этими событиями установлена зависи-
мость, которая на графике обозначается пунктирной линией между
событиями 1 и 3; 3 и 6‘, 5 и 6; 13 и 14, а такие работы, как 1-3, 3-6, 5-6,
13-14, называются фиктивными. Продолжительность фиктивных работ
равна нулю. Значение фиктивных работ будет рассмотрено далее при
расчетах параметров сетевого графика.
Таким образом, при построении сетевых графиков в кружках
указывают номера событий; стрелки представляют собой работы;
цифры над стрелками называются временными оценками, они показы-
вают ориентировочную продолжительность работ. Кроме того, на
графике должен быть выделен критический путь, как максимальный
по продолжительности путь между начальным и конечным событиями.
Минимизации критического пути при анализе сетевых графиков
уделяется главное внимание.
Необходимо также при разработке и составлении сетевых графи-
ков учитывать следующие важные их особенности:
1. Ни одно событие не может произойти до тех пор, пока не будут
закончены все входящие в него работы.
2. Ни одна работа, выходящая из данного события, не может
начаться до тех пор, пока данйое событие не произойдет.
3. Ни одна последующая работа не может быть начата раньше, чем
будут закончены все предшествующие ей работы.
Исходя из рассмотренных выше положений, можно установить, что
в системах СПУ при построении исходного сетевого графика исполь-
зуется следующая терминология: элементы сетевого графика - собы-
тия и работы.
Событие - важнейший момент в технологическом процессе или в
комплексе выполняемых работ, представляющий собой начало или
окончание какого-либо действия, работы.
261
Начальное событие - событие, не имеющее предшествующих
работ; соответствует нулевому моменту времени.
Конечное событие - событие, не имеющее последующих работ;
соответствует моменту достижения поставленной цели.
Предшествующее событие — событие, которым данная работа
начинается.
Последующее событие — событие, которым Та же самая работа
заканчивается.
Критическое событие - событие, через которое на графике прохо*
дит критический путь.
Работа- производственный (или какой-либо другой) процесс,
предшествующий совершению какого-нибудь события и требующий
для своего выполнения затрат временных, материальных или трудо-
вых ресурсов.
Зависимость ~ "фиктивная работа”, для выполнения которой
затрат каких-либо ресурсов не требуется; отражает логическую взаи-
мосвязь между двумя событиями.
Критическая работа - работа, лежащая на критическом пути.
Путь - непрерывная последовательность работ и событий.
Длина пути - сумма продолжительности находящихся на данном
пути работ.
Для того чтобы рассчитать необходимое время на выполнение
комплекса работ или, как в рассматриваемом примере, на составле-
ние сменно-суточного плана перевозок грузов, и определить значения
критического пути и других параметров сетевой модели, надо в
первую очередь определить время начала и окончания каждой работы,
время наступления каждого события, входящего в сетевой график, а
также установить возможности изменения этих параметров, иначе
говоря, возможность проведения оптимизации сетевой модели.
9 J. Расчет параметров сетевой модели
Расчет сетевой модели сводится к определению следующих дан-
ных: ожидаемых сроков выполнения комплекса работ в соответствии
с сетевым графиком; состава работ критической зоны (критического и
подкритического путей), т. е. определению тех работ, у которых
резервы времени минимальны; сроков их начала и окончания; ранних
и поздних сроков начала и окончания остальных работ сетевого
графика с определением имеющихся резервов времени.
Для определения ожидаемых сроков выполнения комплекса работ
("ожидаемого времени") в сетевом планировании используются три
временных оценки:
оптимистическая - время, необходимое для выполнения процесса
при благоприятных условиях;
пессимистическая - время, необходимое для выполнения про-
цесса при крайне неблагоприятных условиях;
26z
Таблица 9.2
№ п/п Путь Продолжительность пути Примечания
1 1-2-4-5-6-7-8- 7+4+2+0+15+2+4+3+ Критический
— 9 — 10 — 11 — 12 — 14 — 15 + 8 + 15+2+2-37 путь
2 1—2—4—5—6—7—8— 7+4+2+0+15+2+4+3+
—9 — 10 — 13 — 14 — 15 + 8 + 0 + 2 = 33,5
3 1—2—3—6—7—8—9— 7+3+0+15+2+4+3+8+
— 10 — 11 — 12 — 14 — 15 + 15+2 + 2=34
4 1—2—3—6—7—8—9— 7+3+0+15+2+4+3+8+
— 10 — 13 — 14 — 15 + 0 + 2=30,5
5 1—3 — 6—7—8 — 9 — 10 — 0 + 0 + 15+2 + 4+3 + 8 + 15 +
— 11 — 12 — 14 — 15 + 2+2-24
6 1-3-6-7-8-9-10- 0+0+15+2+4+3+8+0+ Путь наименьшей
-13-14-15 + 2-20,5 длины
наиболее вероятная - время, необходимое для выполнения
процесса в реально сложившихся в данный момент обстоятельствах.
Временные оценки складываются из статистически ожидаемых
продолжительностей работ, входящих в состав данного комплекса.
Как уже говорилось, оценки продолжительности работ являются
очень важными показателями в системе СПУ, поэтому необходимо,
чтобы их давали либо ответственные исполнители, дибо опытные
эксперты.
Первой следует давать оценку наиболее вероятного времени,
затем можно оценить оптимистическое время и последней дается
оценка пессимистического времени. Эти три оценки продолжитель-
ности работ определяют различные сроки наступления событий и
являются исходными параметрами при анализе и расчете сетевой
модели.
Вычислить продолжительность критического пути можно исходя
из того, что длина пути на сетевом графике представляет собой сумму
продолжительности пути и находящихся на данном пути работ, а
критический путь по определению является максимальным из воз-
можных путей графика между начальным и конечным событиями. Для
этого используются расчеты, представленные в табл. 9.2.
Из табл. 9.2 видно, что критическим является путь 1 продолжи-
тельностью 37 ч. Этот путь выделен на рис. 9.1 более яркой сплошной
стрелкой. Остальные пути графика меньше критического по продол-
жительности, следовательно, они имеют резерв времени. Пути 2 и 3
имеют продолжительность, близкую по значению к критической, т. е.
они находятся в критической зоне. Такие пути называются подкрити-
ческими. Резервы времени у них минимальны.
263
Событие j
Продолжительность Продолжительность
______lij______JjlUV. Ъ*
*\Ч/Л*/* J---------------
\/ N \/
Событие к
Рис. 9J. Основные элементы сетевого графика
При расчете сетевых моделей ожидаемое расчетное время обоз*
начают (где i - номер предшествующего события для данной
работы; / - номер последующего события для данной работы).
При расчете ожидаемого времени могут быть использованы как
методы детерминированного расчета, так и методы теории вероят-
ностей.
Величина t^- представляет собой продолжительность работы и на
сетевом графике проставляется над стрелкой (рис. 9.2).
Каждое событие в сетевой модели характеризуется тремя расчет-
ными показателями, определяющими срок его наступления.
1. Наиболее ранний срок наступления каждого события в сети
TJj), где j = 1,2,...» п - одно из событий данной сети (на рис. 9.1 я 1,
2.....15).
Время Tp(j) является минимально необходимым временем между,
наступлением начального и данного событий. Гр(1) = 0, т. е. для началь-
ного события сетевого графика наиболее ранний срок наступления
равен нулю, что следует из определения начального события.
Для любого другого события этот показатель определяется:
т^1) = max +
где —продолжительность работы (i —j).
Следовательно, минимальное время, необходимое для того, чтобы
могло наступить событие j (наиболее ранний срок наступления Д
определяется как время выполнения комплекса работ по пути наи-
большей длины из всех путей, соединяющих начальное и данное
события.
Для конечного события сетевого графика наиболее ранний срок
наступления равен продолжительности критического пути. Наиболее’
ранний срок наступления конечного события называется критическим
временем сетевого графика.
2. Наиболее поздний срок наступления события в сети Тп(1).
Этот показатель определяет наиболее допустимое время наступ-
ления события, не требующее увеличения времени на выполнение
всего комплекса работ.
Для критического события сетевого графика Tp(i) « Tn(i); для
начального Тп(1) = 0.
264
Для других событий сетевого графика Tn(i) определяется:
где T^j) — наиболее поздний срок наступления последующего события j. ty - продолжи-
тельность работы (f-j).
Этот показатель рассчитывается от конца сетевого графика к
началу, т. е. в направлении, обратном определению наиболее раннего
срока наступления событий. Для конечного события к делается пред-
положение, что наиболее ранний срок его наступления равен наиболее
позднему сроку, т. е, Тр(к) - Та(к),
Если это равенство не выполняется, значит, продолжительность
комплекса работ оказалась больше допустимой, установленной для
данного графика. Тогда продолжительности работ комплекса, в
первую очередь критических, должны корректироваться. Для крити-
ческого пути также верно равенство Тр(У = TB(j).
3. Допустимый срок наступления события Ta(j):
$0
Данное неравенство показывает, что допустимый срок наступле-
ния события должен находиться в диапазоне изменений от наиболее
раннего срока наступления до наиболее позднего допустимого срока
наступления события. Для критических событий $ (к) = ? (к) = S (к).
Результаты расчетов сроков наступления событий для сетевого
графика приведены в табл. 9.3.
Для событий, лежащих на критическом пути Тр(к) = Тв(к).
Как известно, каждое событие на сети является одновременно
моментом окончания предшествующей, входящей в него работы, и
начала последующей работы, выходящей из данного события. Следо-
вательно, каждое событие содержит две временные оценки (рис. 9.3):
Рис. 9.3. Сетевой график составления сменно-суточного задания и его расчетные параметры
265
Таблица 9.3
№ со- бытия Событие Срок наступления события
наиболее ранний наиболее поздний
1 Начато поступление заявок на перевозку грузов 0 0
2 от клиентуры Начато определение объемов перевозок и коррес- 7 7
3 пондирующйхся точек с расстояниями между ними Закончено определение расстояний между коррес- 10 13*
4 пондирующимися точками Закончено определение объемов перевозок и на- 11 11
5 чат выбор подвижного состава Выбор подвижного состава закончен 13 13
б Начата разработка рациональных маршрутов 13 13
7 Начат расчет потребного парка подвижного состава 14,5 45
8 Начато составление маршрутных ведомостей 16,5 16,5
9 Начата выписка путевых листов 20,5 20,5
10 Начаты доставка грузов потребителям и контроль 23,5 23,5
11 за работой подвижного состава на линии Доставка грузов потребителям окончена 31,5 31,5
12 Окончен прием товарно-транспортных накладных 33 33
13 и начата их обработка Закончен контроль за работой подвижного состава 31,5 35*
14 Начато составление диспетчерского отчета 35 35
15 Составление диспетчерского отчета закончено 37 37
* События, не лежащие на критическом пути.
раннее начало последующей работы; позднее окончание предшествую*
щей работы.
В рамках сетевого графика каждая работа характеризуется сле-
дующими временными параметрами:
1. Раннее начало работы t ^определяется как продолжительность
пути от начального события до предшествующего события данной
работы. Раннее начало любой последующей работы (/ - fc) равно сумме
значений раннего начала и продолжительности работы (i - Д пред*
шествующей данной работе (см. рис. 9.3):
Раннее начало работ, выходящих из первого события, равно нулю.
Например, для работы 4-5
#24* *24^1-2* *1-2* » + 7 + 4-11.
266
Если данной работе предшествуют две и более работы, то ее раннее
начало равно максимальному значению сумм раннего начала и про-
должительности предшествующих ей работ:
t£-maxp??+ty]. (9.2)
Раннее начало работы (i - к) равно наиболее раннему сроку на-
ступления предшествующего события/, т. е.
например, = Гр(4) = 11 ч.
2. Раннее окончание работы t Р° равно сумме раннего начала работы
и ее продолжительности:
‘йР°“Т+^:
например, для работы 4-5
^et₽«+^’11+2“134-
Раннее окончание работы меньше или равно значению наиболее
раннего срока наступления последующего события / работы i -j.
3. Позднее начало работы представляет собой самый поздний
срок начала работы, который не вызывает задержки выполнения всего
комплекса работ.* Позднее начало работы рассчитывается в обратном
порядке, от конца сетевого графика к началу, и определяется, как
разность между продолжительностью критического пути и наибольшей
длиной пути от конечного события графика до предшествующего
события данной работы. Например, для работы 9-10
f 9М0 ° fKp “ (*14-15 + *12-14 * *11-12 + *10-11 * *9-1^“ 3? ~ (2 + 2 +1,5 + 8 + 3) = 20,5 «.
На графике (см. рис. 9.1) между событиями 13 и 14 введена зависи-
мость, т. е. существует фиктивная работа 13-14. Это значит, что после
окончания работы 10-13 и совершения события 13 может быть начата
работа 14-15. Другими словами, сменно-суточное планирование пере-
возок после окончания контроля за работой подвижного состава на
линии позволяет приступить к началу составления диспетчерского
отчета. Аналогично объясняется значение работ 1-3,5-6,3-6.
Из графика видно, что для определения позднего начала работы
существует второй путь от конечного события 15 до события 9 -
путь 9-10-13-14-15. Его продолжительность равна 2 + 0 + 8 + 3 = 13,
что меньше длины первоначально рассмотренного пути 9-10-11-12-
14-15. Согласно формуле (9.3) выбирается наибольшее из этих значе-
ний, следовательно, f^_10 = 20,5 ч.
267
4. Позднее окончание работы t равно времени окончания рабо-
ты, если она была начата в поздний срок, и поэтому определяется, как
сумма позднего начала работы и ее продолжительности:
*4* Т* (М)
например, для работы 9-10
^20,5 + 3 = 23,54.
Если известно позднее окончание последующей работы, то для данной
работы зто значение определяется так:
Например, для работы (8-9)
fB9-ir *э-иГ и-5 - 3 " 2°>5 *
Позднее окончание работы ^сетевого графика всегда равно наиболее
позднему сроку наступления последующего события T^j), например .
1X10) = 23,5 ч.
Если у данной работы две и более последующих работы, то ее
позднее окончание определяется минимальной разностью между;
поздним окончанием и продолжительностью последующих работ:
*ij9= min [ ). (9.6)
Изменение рассмотренных параметров дает возможность увеличи-
вать или сокращать продолжительность выполнения каждой работы
сетевого графика. Очевидно, что для работ, находящихся на критиче-
ском пути, никаких вариантов изменения продолжительности быть не
может, поскольку сроки наступления предшествующего и последую®
щего событий одинаковы, т. е.
TJO-TJO и трй)-тпе>.
Для критических работ совпадают временные параметры, а,
значит, запасы времени у этих работ равны нулю. х
В зависимости от возможных изменений временных характерис-
тик для других работ сетевого графика, не лежащих на критической
пути, могут быть определены запасы времени:
1. Полный (общий) запас времени Rij представляет собой время, на*
которое можно перенести начало работы i -j, или, наоборот, увеличит^
ее продолжительность без изменения общего срока выполнений
комплекса работ:
например, для работы 13-14
268
2. Свободный (независимый) запас времени рассчитывается для
одной или нескольких работ графика
(9.8)
например, для работы 1-3
Rt.3- т№ ~ ЭД) ~ *1-з“10 ~0 -0 “10 *
3. Частный запас (резерв) времени представляет собой время, на
которое можно перенести начало работы или увеличить ее продолжи*
тельность без изменения раннего начала последующих работ (одной
или нескольких):
rv=fA +ty)*
например, для работы 3-6
rM=^7-<t₽M+^-13-(10 + °) = 34-
Таким образом, для основных параметров - временных характе-
ристик - при расчетах сетевых моделей используют следующие услов-
ные обозначения:
Параметр Условное
обозначение
Ожидаемое расчетное время или продол- ty
жительность
Наиболее ранний срок наступления со- ТрЙ)
бытия
Наиболее поздний срок наступления со-
бытия
Допустимый срок наступления события эд;
Раннее начало работы \ -j С
Позднее начало работы i
Позднее окончание работы i С
Раннее окончание работы i -j $
Полный (общий) запас времени
Свободный запас времени
Частный запас времени fy-.
Ручным способом могут быть обработаны массивы исходных
данных для сетевого графика, содержащего 200-300 элементов.
Критический путь и резервы времени рассчитывают или непосредст-
венно на сетевом графике, или в виде таблиц.
В результате расчетов определяют продолжительности критиче-
ского пути, резервы времени и сроки выполнения работ в соответст-
вии с приведенными ранее формулами.
269
Расчет параметров модели на сетевом графике. Параметры модели
при этом методе расчета определяются непосредственно на сетевом
графике. Нумерация событий в возрастающем порядке на графике не
обязательна, но для любых изменений, вносимых в сетевой график и
требующих перерасчета параметров, необходимо составлять новый
график.
По этому методу каждое событие графика делится на четыре
сектора (см. рис. 9.3). Как уже рассматривалось, каждое событие
сетевого графика содержит раннее окончание последующей, выходя-
щей из него работы. Это значение записывается в правом секторе
события. Событие также содержит оценку позднего окончания пред-
шествующей, т. е. входящей в него работы. Это значение указывается
в левом секторе. В верхнем секторе записывается номер данного
события JV, а в нижнем - номер предшествующего события N, через
которое к данному идет максимальный путь от начального события.
Расчет начинается с определения по формулам (9.1) и (9.2) раннего
начала работ сетевого графика. Начиная с события 1, для которого
раннее начало работ, выходящих из него, равно нулю, определяются
значения ?РН для последующих работ и записываются в правые секто-
ра событий*. Для конечного, завершающего события сети раннее начало
(полученное значение) переносится в левый сектор, имеющий значе-
ние позднего окончания работ. Затем по формулам (9.5) и (9.6) опреде-
ляются значения поздних окончаний работ и проставляются в левые
сектора событий. Значения раннего окончания и позднего начала,
проставленные в конечном событии, представляют собой длину
критического пути данного графика. Критический путь можно устано-
вить, переходя от конечного события 15 по тем номерам событий,
которые записаны в нижних секторах.
Если событие лежит на критическом пути, в нем раннее начало
последующих работ равно позднему окончанию предшествующих
работ = tjj°. Работы, соединяющие критические события, лежат на
критическом пути. Затем по формулам (9.7), (9.8), (9.9) определяют ре-
зервы времени, которые имеет данный график. Полученные результа-
ты расчетов сводят в табл. 9.4.
Пример, расчета параметров графика вручную рассмотренным
методом дан для участка сети, изображенной на рис. 9.1 от события 10
до события 15, и приводится на рис. 9.3.
Расчет сетевых моделей в табличной форме. При этом методе
расчета должны соблюдаться все правила построения сетевых графи-
ков, в том числе и нумерация событий. В результате расчетов форми-
руется таблица (см. табл. 9.4), по которой затем выполняется анализ, и
определяется возможность корректировки временных характеристик
модели с целью ее оптимизации.
В графе 1 таблицы указывают число работ, предшествующих
данной работе; в графе 2 - коды работ, входящих в состав сетевого
графика, в возрастающем порядке; в графе 3 - продолжительность
работ; в графах 4—10 — значения временных характеристик, рассчи-
Таблица 9.4
Число работ, пред- шествующих данной Код работы i‘l Продол- жительность работы, ч Начало работы Окончание работы Запас времени
ран- нее позд- нее ран- нее позд- нее пол- ный сво- бод- ный част- ный
% % % % :s» а: 53» ift; ги
1 2 3 4 S 6 7 8 9 10
0 1-2 7 0 0 7 7 0 0 0
0 1-3 0 0 13 0 13 13 10 10
1 2-3 3 7 10 10 13 3 0 0
1 2-4 4 7 7 11 11 0 0 0
2 3-6 0 10 13 10 13 3 0 3
1 4-5 2 11 11 13 13 0 0 0
1 5-6 0 13 13 13 13 0 0 0
2 6-7 1,5 13 13 14,5 14,5 0 0 0
1 7-8 2 14,5 14,5 16,5 16,5 0 0 0
1 8-9. 4 16,5 16,5 20,5 20,5 0 0 0
1 9-10 3 20,5 20,5 23,5 23,5 0 0 0
1 10-11 8 23,5 23,5 31,5 31,5 0 0 0
1 10-13 8 23,5 ’ 27 31,5 35 3,5 0 0
1 11-12 М 31,5 31,5 33 33 0 . 0 0
1 12-14 2 33 33 35 35 0 0 0
1 13-14 0 31,5 35 31,5 35 3,5 0 3,5
2 14-15 2 35 35 37 37 0 0 0
тайных для данного графика по формулам, приведенным ранее. Из
полученных значений определяется величина критического пути, а
также критические события и работы данного графика.
Расчеты, приведенные в табл. 9.4, выполнены для сетевого графи-
ка ’’Составление сменно-суточного плана перевозок грузов автомо-
бильным транспортом”, представленного на рис. 9.1. Из табл. 9.4
следует, что значение критического пути определяется по максималь-
ной величине из ранних окончаний работ и равно 37 ч. Позднее
окончание работы 14-15, завершающееся событием 15, равно макси-
мальному значению из ранних окончаний работ и также определяется
продолжительностью критического пути.
Работы, у которых их раннее начало и окончание соответственно
равны позднему началу и окончанию, лежат на критическом пути и
не имеют запасов времени. Для данного графика к ним относятся
работы 1-2,2-4,4-5,5-6, 6-7, 7-8,8-9,9-10,10-11,11-12,12-14,14-15.
271
9.4. Оптимизация сетевых моделей
После того как построен исходный сетевой график и рассчитаны
основные параметры сетевой модели, необходимо дать оценку полу,
ченным результатам, т. е. сравнить значение продолжительности
критического пути с тем желательным сроком завершения работ,
который был установлен руководством разрабатываемого комплекса.
Если установленный срок оказался меньше расчетного срока выполне-
ния комплекса работ (процесса), т. е. меньше полученной продолжи-
тельности критического пути, то необходимо перейти к следующему
этапу сетевого планирования - анализу сетевого графика на основе
полученных расчетов и его оптимизации по времени.
Оптимизация сетевого графика по времени заключается в сокра*
щении критического пути по времени и проводится в следующем
порядке: ,
проверяется правильность временных оценок работ критической
зоны сетевого графика, т. е. таких работ, которые или уже находятся
на критическом пути, или имеют минимальные резервы времени;
необходимо стремиться к тому, чтобы продолжительность работ
критической зоны была минимальной в допустимых пределах; '
изучается возможность замены последовательного выполнения,
работ параллельными там, где это допускается технологией, с целью
сокращения общей продолжительности работ;
проводится перераспределение ресурсов между работами сетевого
графика, т. е. резервы времени, которыми располагают работы вне
критической зоны, передаются работам критическим или близким Ж
ним; *.
анализируется возможность максимального сокращения крити-
ческих работ;
сокращаются сроки выполнения комплекса работ за счет привлек
чения дополнительных ресурсов, а также изменения технологических^
условий производства комплекса работ.
* После выполнения этих мероприятий вновь необходимо провести,
расчет сетевой модели с целью определения длины критического пути
и соответствующих значений временных параметров.
Построение и расчеты различных вариантов одного и того же
сетевого графика необходимы еще и потому, что работы, критические
для одного варианта процесса, могут быть некритическими для друго-
го варианта, и, наоборот, некритические работы могут стать критиче-
скими в зависимости от способа составления графика. При получений
нового варианта сетевого графика определяется новое значение
критического пути, которое должно уже в большей степени соответст-
вовать установленному сроку выполнения работ. Затем изыскиваются
новые возможности сокращения сроков, и так до тех пор, пока все
варианты улучшения сетевого графика не будут опробованы. г
В реальных условиях сетевые модели могут содержать тысячи
операций (работ), поэтому выполнить анализ сетевых графиков И;
272
расчеты различных вариантов их построения традиционными метода-
ми невозможно. Для решения подобных задач эффективно использу-
ются экономико-математические методы, позволяющие проводить
расчеты как вручную, так и с использованием ЭВМ.
При построении соответствующих математических моделей пере-
менными являются сроки начала и окончания операций (работ).
Необходимо оптимизировать целевую экстремальную функцию по
заданному критерию. Оптимизация сетевого графика, как уже отмеча-
лось, проводится на основе изменения критического пути.
Сетевой график (см. рис. 9.1) представляет собой сеть, аналогич-
ную транспортной сети, в которой заданы события (вершины), работы
(звенья), определены некоторые неотрицательные величины (fy),
характеризующие продолжительность выполнения работы. Решением
задачи является нахождение оптимального значения критического
пути, т. е. определение на сети расстояния между двумя вершинами
(начальным и конечным событиями), или пути, проходя по которому
п
- суммарная продолжительность работ сетевого графика - до-
стигает максимума.
Нетрудно видеть, что данная задача в такой постановке структур-
но эквивалентна задаче определения кратчайших расстояний между
пунктами транспортной сети, методы которой изложены в гл. 5, п. 5.1.
Заменив расстояние между двумя вершинами на продолжитель-
ность выполнения работ в сетевом графике, можно получить задачу,
аналогичную рассмотренной ранее, с той лишь разницей, что в данном
случае целевая функция - определение продолжительности критиче-
ского пути - максимизируется, а не минимизируется.
Те же экономико-математические методы, которые используются
для определения кратчайших расстояний, могут быть использованы и
для оптимизации сетевых моделей. Эту аналогию можно проследить
на простом примере.
Чтобы определить наиболее ранний срок наступления какого-либо
события на сети т Jj) (где j > 2), необходимо просчитать суммарные
затраты времени по всем путям, ведущим к данному событию, и
выбрать из них максимальный. Затем, установив срок наступления
для какого-либо определенного события, можно строить дальнейшие
пути и находить их продолжительности, используя данное событие в
качестве начального. Наиболее поздние сроки наступления событий
рассчитывают аналогично, но в обратном порядке, поэтому из несколь-
ких возможных значений времени выбирают минимальное.
В наиболее сложных постановках задач сетевого планирования в
качестве переменных величин рассматривают продолжительность
операций (работ), на которые наложены определенные ограничения. В
таких задачах минимизируются либо продолжительность комплекса
работ в целом при заданных затратах на его реализацию, либо затраты
при фиксированной продолжительности работ.
273
В сетевом планировании используются три экономико-математи-
ческих метода исследования операций.
1. Сетевые модели, построенные на основе сетевых графиков,
представляют собой объект математической теории графов - направ-
ленные графы. Сетевые графики позволили найти новые области
применения этого математического метода исследований. С точки
зрения теории графов, сетевые графики рассматриваются как детерми-
нированные, т. е. имеющие фиксированное значение продолжитель-
ности каждой работы. Однако на практике продолжительность работ
сетевого графика получает различные оценки: наиболее вероятную,
оптимистическую и пессимистическую. z
2. Определение и анализ временных оценок продолжительности
работ позволяют представить сетевой график в виде вероятностной
модели и использовать для расчетов параметров сетевого графике
теорию вероятностей и математической статистики. z
В случае вероятностного анализа параметров (временных харак-
теристик значений критического пути) получается очень большое
количество реализаций данного сетевого графика. Расчеты в таком
случае проводятся с использованием современных ЭВМ.
3. При оптимизации сетевых моделей используются принципы
теории оптимальных задач линейного и нелинейного программирова-
ния.
Сетевые модели при проведении оптимизации обычно сводятся
путем преобразований к частным случаям моделей линейного про-
граммирования и решаются с применением экономико-математиче-
ских методов и ЭВМ методами линейного программирования. Уже
было рассмотрено, как можно представить сетевую модель в виде
подобной задачи. Оптимизация сетевых планов методами линейного
программирования может проводиться по критериям ’’время”, ’’стои-
мость” или ’’ресурсы”. Алгоритм решения задачи представляет собой
алгоритм определения наибольшего значения продолжительности
критического пути. •
Однако в общей постановке задачи нахождения оптимальных
планов на основе сетевых моделей не могут быть решены методами
линейного программирования, поскольку их решение связанос
определением экстремальных значений целевой функции многих
переменных, на которые наложена совокупность ограничений, при
условии, что сама функция и некоторые ограничения нелинейны. В
таком случае в сетевом планировании для решения данных задач
используются методы нелинейного целочисленного программирова-
ния, в частности динамическое программирование (общий метод).
Расчеты таких моделей достаточно сложны и трудоемки, поэтому на
практике применяются упрощенные постановки подобных задач, а в
результате решения достигается частичная, а не полная оптимизация..
Преимущества и недостатки сетевого метода планирования.
Важным преимуществом сетевого планирования по сравнению с
другими методами является то, что составление и использование
274
сетевых моделей позволяют осуществлять на практике принцип
выборочного управления, т. е. сосредоточить внимание только на тех
моментах работы, которые являются решающими с точки зрения
сроков. Такими моментами, очевидно, будут критические и подкрити-
ческие работы, находящиеся в критической зоне, т. е. имеющие нуле-
вые или минимальные резервы времени.
Принцип выборочного управления в таком случае осуществляет-
ся, как правило, посредством перевода ресурсов с некритических
работ на критические с целью оптимизации критического пути и
сокращения сроков выполнения комплекса работ. Это делается либо
на этапе планирования, либо уже при контроле за выполнением
процесса при отставании выполнения работ от намеченного графика.
Кроме использования принципа выборочного управления, сетевые
модели имеют и другие преимущества:
анализ сетевых моделей позволяет составить план мероприятий по
выполнению какого-либо комплекса или процесса, причем в план
включаются работы, имеющие решающее значение для данного процес-
са. В то же время из сети исключаются работы, степень важности
которых незначительна; сетевые графики дают четкое представление
об общем объеме работ комплекса; облегчают распределение средств и
рабочей силы, что создает условия для наилучшего использования
ресурсов; позволяют не только составлять оперативные и текущие
планы, но и прогнозировать сложные процессы и большие комплексы
работ, что способствует выявлению резервов и повышению эффектив-
ности производства; обеспечивают наглядность технологической
последовательности работ; изменения практических условий работы
не вызывает изменений самой графической модели; меняются только
значения продолжительности работ, составляющих сетевой график.
Это преимущество сетевых графиков особенно ощутимо по сравнению
с использованием в практике планирования календарных линейных
графиков.
Рассмотренные методы построения систем СПУ на основе сетевых
графиков (моделей сетевого планирования) в настоящее время полу-
чают все большее распространение в различных отраслях народного
хозяйства, в том числе и на автомобильном транспорте.
Использование систем СПУ с применением средств современной
вычислительной техники повышает эффективность процессов плани-
рования, организации и управления и является прогрессивным на-
правлением в развитии народного хозяйства нашей страны.
Недостатком СПУ является то, что после снятия каждой информа-
ции до какого-либо события следует делать перерасчет графика,
начиная с данного события. Вследствие этого увеличивается и услож-
няется объем вычислительной работы.
Глава 10
ПРИМЕНЕНИЕ ТЕОРИИ МАССОВОГО ОБСЛУЖИВАНИЯ
В ОРГАНИЗАЦИИ АВТОМОБИЛЬНЫХ ПЕРЕВОЗОК
10.1. Общая характеристика и математический аппарат
систем массового обслуживания
В связи с непрерывным развитием производства значительно
усложняются производственные связи и взаимозависимости, воз-
растает объем экономических расчетов, повышаются требования к их
точности. Все это требует применения математических методов, уско-
ряющих расчеты, повышающих их точность и облегчающих труд
работников, занятых решением экономических задач.
Все более широкое распространение в настоящее время получают
идет и методы теории массового обслуживания, которые находят
применение и на автомобильном транспорте, при исследовании техно-
логических процессов, в расчетах по организации и планированию,
при выявлении производственных резервов. Используя теорию массо-
вого обслуживания, можно решить, например, задачи определения
числа линий или постов технического обслуживания и ремонта авто-
мобилей, расчета количества постов погрузки (или разгрузки), опре-
деления рационального числа оборотных агрегатов и т. д.
В отличие от математического программирования, где главную
роль играет определение минимума или максимума целевой функции
при . наличии ряда ограничений, основной задачей теории массового
обслуживания является формализация процесса. Теория выражается в
виде формул, объясняет и подсказывает ситуацию массового обслужи-
вания, обеспечивая лучшее понимание и принятие соответствующих
решений. Разумеется, на основании характеристик, полученных с
помощью теории, можно определить оптимум целевой функции, но это
делается уже приемами, непосредственно не относящимися к теории
массового обслуживания.
Термин ’’обслуживание” означает удовлетворение каких-либо
потребностей, а ’’массовое” показывает, что речь идет не о конкретном
объекте, а о совокупности объектов, имеющих общие потребности в
обслуживании. Особенностью теории массового обслуживания являет-
ся то, что она рассматривает любой процесс массового обслуживания
как вероятностный.
В этой главе почти не рассматривается математическая сторона
теории массового обслуживания, поскольку перед нами стоит цель
помочь студентам и инженерно-техническим работникам применить
развитые в теории модели и методы для практических расчетов по
организации и планированию работы автомобильного транспорта.
Теория массового обслуживания, являясь одним из разделов
теории вероятностей, в последние годы получила развитие и выдели-
лась в самостоятельный раздел математики. Основоположником ее
276
Обслуживаемая система
Обслуживающая система
Совокупность
источников
требований
Входящий
поток
требований
Накопитель Механизм ^nnm!^
требований обслуживания
Требования,
поступающие
8 случайные
моменты
времени
Очередь Г
ожидающих
требований - *
Дисциплина
очереди .
определяет
порядок об-
служивания
требований
j, Обслуженные
| требования
^Обсуживающий
аппарат
Рис. Ю.1. Общая модель системы массового обслуживания
является датский ученый А. К. Эрланг, .опубликовавший в 1909 г.
первую книгу, посвященную вопросам применения теории при проек-
тировании и эксплуатации телефонных станций. Большой вклад в
развитие теории массового обслуживания внесли ученые А. Я. Хин-
чин, Б. В. Гнеденко, Н. П. Бусленко, А. Н. Колмогоров, Б. А. Севастья-
нов, К. Пальм, Ф. Поллачек, Д. Кендалл, Д. Кокс, Т. Саати и др.
Стимулом к развитию теории массового обслуживания послужили
попытки предсказать случайно изменяющиеся потребности по резуль-
татам наблюдений. Теория массового обслуживания занимается
изучением таких процессов, в которых возникают очереди на обслу-
живание. Причиной возникновения очередей являются случайно
изменяющиеся потребности в обслуживании и (или) колебания време-
ни, затрачиваемого на удовлетворение заявки на обслуживание.
Общая модель системы массового обслуживания представлена на
рис. 10.1.
Модель состоит из обслуживаемой и .обслуживающей систем.
Обслуживаемая система включает совокупность источников требова-
ний и входящего потока требований.
Требование - это запрос на выполнение какой-либо работы (на
производство услуги).
Источник требования - объект (человек, механизм и т. д.), кото-
рый может послать в обслуживающую систему одновременно только
одно требование.
Возможный носитель требования, например, автомобиль или
агрегат, который может выйти из строя, рабочий, которому могут
понадобиться запасные части, житель города или группа жителей - это
источники требований, а заявки на ремонт, запасную часть, свободное
такси - носитель требований, соответствующий указанным выше
источникам. Требование и его носитель часто отождествляются.
277
Требования, поступающие от всех источников в обслуживающую
систему, образуют поток, называемый входящим потоком требований.
Обслуживающая система состоит из накопителя и механизма
обслуживания. Требования поступают в накопитель, где ожидают
начала обслуживания, если есть очередь, или сразу в механизм обслу-
живания.
Обслуживанием считается удовлетворение поступившего запроса
на выполнение услуги. Механизм обслуживания состоит из несколь-
ких обслуживающих аппаратов.
Обслуживающий аппарат - это часть механизма обслуживания,
которая способна удовлетворить одновременно только одно требова-
ние (ремонтный рабочий, бригада, кран, экскаватор, пост мойки и др.).
Если обслуживание состоит из нескольких последовательных опера-
ций, каждая из которых выполняется отдельно обслуживающим
аппаратом, то такое объединение аппаратов называют каналом обслу-
живания, а саму систему - многофазовой. После окончания обслужи-
вания требования покидают систему, образуя выходящий поток
требований.
В качестве примера системы массового обслуживания рассмотрим
организацию погрузки на крупном предприятии - грузоотправителе. В
такой системе входящий поток требований образуют автомобили,
прибывающие на предприятие в какие-то случайные моменты време-
ни. Обслуживанием является погрузка грузов в автомобили и выпол-
нение некоторых сопутствующих ей операций, например проверка
автомобилей при въезде на территорию предприятия, взвешивание,
оформление документов и т. д. Обслуживание в этом случае является
многофазовым. Требуется проанализировать работу данной системы.
Проводя соответствующие наблюдения, можно установить закон
распределения входящего потока требований, закон распределения
времени обслуживания на каждой фазе, время ожидания автомобиля
в очереди, время простоя обслуживающих аппаратов и другие харак-
теристики. Затем можно оценить, во сколько обходятся потери от
ожидания в очереди автомобилей плюс потери от простоя аппаратов и
обслуживающего персонала. Если полученная сумма окажется доста-
точно большой, то следует изменить организацию погрузочных работ,
например увелииить число постов погрузки или взвешивания, заме-/
нить подвижной состав, изменить порядок погрузки, увеличить
сменность работы и т. д.
Как в таком случае выбрать наиболее эффективный вариант
погрузки? Исходить из средней загруженности системы нельзя, по-
скольку одним из условий нормальной работы системы является
выполнение неравенства (на каждой фазе)
X/SV = p <1,
где X — средняя интенсивность входящего потока требований в единицу времени; v —
интенсивность обслуживания одним аппаратом требований в единицу времени; а - число
обслуживающих аппаратов; р — коэффициент использования обслуживающей системы.
278
Если коэффициент использования будет больше единицы, то
обслуживающая система не справится с обслуживанием и очередь
будет неограниченно расти.
В любой разомкнутой системе с ожиданием коэффициент исполь-
зования должен быть меньше единицы. Следовательно, механизм
обслуживания часть времени будет незанятым. Однако это не исклю-
чает образования очереди в некоторые моменты времени. Наличие
очереди объясняется случайностью моментов поступления требова-
ний в систему и колебаниями длительности их обслуживания. По-
скольку моменты поступления требований случайны, работа системы
протекает нерегулярно: в потоке требований образуются сгущения и
разрежения. Сгущения могут привести к образованию очереди (либо к
отказу обслуживания), разрежения - к непроизводительным простоям
отдельных аппаратов или механизма обслуживания в целом. На эти
случайности, связанные с нерегулярностью входящего потока, накла-
дываются еще случайности, связанные с изменением времени обслу-
живания различных требований. Следовательно, при оценке качества
функционирования обслуживающей системы всегда нужно учитывать
вероятностный характер потока требований и времени обслуживания
различных требований.
Теория массового обслуживания позволяет определить характер
функционирования системы массового обслуживания по характерис-
тикам ее частей (совокупность требований ’’входящий поток”, ’’нако-
питель”, ’’механизм обслуживания”, ’’выходящий поток”).
Для оценки работы обслуживающей системы можно применить
также ’’Метод проб и ошибок”. Например, оборудуется еще один пост
погрузки, а затем в течение некоторого времени проводится наблюде-
ние за работой модифицированной системы и определяются новые
характеристики ее функционирования. Однако этот метод плох тем,
что сначала приходится затрачивать время и средства, а затем уже
определять, насколько эффективны были эти затраты. С другой сторо-
ны, если возможностей модификации несколько, то какую из них
следует выбрать для эксперимента, чтобы получить наилучший ре-
зультат? Ответ на этот вопрос можно получить с помощью теории
массового обслуживания.
Разумеется, для применения теории массового обслуживания
также нужно изучать и анализировать фактические данные. Но при
этом приходится рассматривать не систему в целом, а каждую состав-
ную ее часть, что намного проще. Такой анализ можно выполнить до
того, как обслуживающая система модифицирована. В этом и заклю-
чается практическая цель применения теории: возможность предска-
зать поведение системы до того, как такая система создана, т. е. еще на
стадии ее проектирования.
Теперь можно сформулировать предмет теории массового обслу-
живания и цели, которые она преследует.
Предметом теории массового обслуживания является количест-
венная сторона процессов, связанных с массовым обслуживанием.
279
Таблица 10.1
Элемент системы массово* го обслуживания Признак классификации Значение, принимаемое классифицируемым признаком
Входящий по- ток требовании Количество источников требований Количество требований, одновременно поступаю- щих в обслуживающую си- стему Описание входящего по- тока Поведение требований при входе в обслуживаю- щую систему и наличии очереди в накопителе Ограниченное, неограниченное Одно, группа Вид закона распределения Требование теряется (отказ в обслужи- вании); остается в накопителе или уходит в зависимости от длины очереди или вре- мени ожидания; присоединяется к бли- жайшей очереди; имеет неполную инфор- мацию о состоянии очереди; соглашение между требованиями
Накопитель Емкость накопителя Органиченная, неограниченная
требовании Виды очередей Вид дисциплины очере- ди (порядок обслужива- ния) Поведение требования в очереди Общие, специализированные В порядке поступления; поступивший первым обслуживается последним; слу- чайный выбор на обслуживание; приори- тет с прерыванием обслуживания Ожидание обслуживания; уход из оче- реди
Механизм обс- Количество обслужива- Один, несколько, неограниченное ко-
луживания ющих аппаратов Описание времени обс- луживания личество Вид закона распределения для каждо- го обслуживающего аппарата
Вид обслуживающего аппарата Размещение обслуживаю- щего аппарата в механизме обслуживания Однородные, неоднородные (специали- зированные) Объединение для обслуживания по- требностей клиента; параллельно друг другу; последовательно (многофазовое обслуживание); специальное (переменное число аппаратов на каждой фазе обслу- живания)
выходящий Описание выходящего Вид закона распределения выходящего
поток требова- потока потока
ний Образование цикла Система массового обслуживания с ко- нечным числом источников
280
Целью теории является разработка математических методов для
отыскания основных характеристик процессов массового обслужива-
ния для оценки качества функционирования обслуживающей сис-
темы.
Классификация систем массового обслуживания приведена в
табл. 10.1.
В зависимости от количества источников требований системы
массового обслуживания делятся на две группы: замкнутые с ограни-
ченным числом источников, например система экскаватор - самосва-
лы при вывозе грунта, и разомкнутые с неограниченным, вернее очень
большим, числом источников, например система станция технического
обслуживания - владельцы индивидуальных автомобилей. Большое
значение для решения задач массового обслуживания имеют законы
распределения входящего потока требований и времени обслужива-
ния. С этой точки зрения системы подразделяются на пуассоновские,
или марковские (требования поступают в обслуживающую систему в
соответствии с законом Пуассона, а время обслуживания подчиняется
показательному закону), и непуассоновские (при другом виде закона
распределения входящего потока и (или) времени обслуживания).
В соответствии с поведением требований системы можно подраз-
делить на три группы:
системы с отказами, в которых требование, заставшее обслужи-
вающие аппараты занятыми, получает отказ в обслуживании и теряет-
ся (например, в системе автоматическая телефонная станция - клиен-
ты - отказ, если в момент поступления вызова занята нужная линия
связи);
система с ожиданиями: требование ждет начала обслуживания,
например автомобиль ожидает погрузки;
смешанные системы, когда часть требований покидает накопитель
или вообще не присоединяется к очереди в зависимости от ее длины и
времени ожидания; например, часть автомобилей может уехать с
автозаправочной станции, если очередь на заправку велика.
Следующим основным признаком классификации систем является
дисциплина обслуживания (см. табл. 10.1), причем предоставление
приоритета отдельным требованиям (классу требований) позволяет
улучшить качество функционирования данной системы массового
обслуживания и т. д.
10Д Входящий поток требований. Время обслуживания
Цель деятельности любой обслуживающей системы - удовлетво-
рение заявок (требований) на обслуживание. Поэтому поток требова-
ний является одним из основных понятий теории массового обслужи-
вания.
Изучение потока требований является первой задачей, которая
неизбежно возникает как при теоретической разработке проблем
281
массового обслуживания, так и при практическом применении ее
методов к решению конкретных задач. Ведь для того, чтобы предпри-
нять какие-либо конкретные шаги по организации обслуживающей
системы с целью улучшения качества ее функционирования, необхо-
димо сначала тщательно изучить поток требований, поступающих в эту
систему.
Процесс поступления заявок на обслуживание - процесс случай-
ный. Для его полного определения необходимо установить вид функ-
ции
• •» *п’ • •> “ ^1>
x(t^ ° kj,..., x(tf^ “ kn
для любых
причем
< *2 < • • • < и kj < к2 ^.. кц,
где f — продолжительность промежутка времени; к — количество поступающих в систему
требований за время £₽{...}—вероятность того, что за время tj поступит к} требований,
за t2— к2требований и т. д.
Например, вероятность того, что в течение суток в систему каж-
дый час будет поступать только одно требование, равна
М1,2,...,24;1,2,...,24)-р(х(1)-1; х(2)"%..4х(24)-24}.
Задача определения функции F (ti, tn; fci> къ. -., kn)в общем
случае является весьма трудной.
В данной книге рассматриваются лишь потоки, обладающие свой-
ствами стационарности и ординарности.
Стационарными являются потоки, для которых вероятность
поступления определенного числа требований в течение заданного
промежутка времени не зависит от начала отсчета времени, но зависит
от его продолжительности. Свойством стационарности обладает,
например, поток требований на текущий ремонт по дням календар-
ного периода, образованный автомобилями крупного автотранспорт-
ного предприятия.
Для многих конкретных систем обслуживания характер потока
требований таков, что в любой момент времени может поступить
только одно требование. Потоки, обладающие этим свойством, назы-
ваются ординарными. Для ординарных потоков появление двух
требований и более за малый промежуток времени t есть бесконечно
малая величина более высокого порядка, чем t
282
Поток требовании называется потоком без последствия, если
число требований, поступивших в систему после произвольного
момента времени t, не зависит от того, какое число требований посту-
пило в систему до момента t Например, прибытие автомобилей в
крупный пункт погрузки происходит независимо от того, когда и
сколько автомобилей прибыло до этого момента.
Поток требований, одновременно обладающий свойствами стацио-
нарности, ординарности и отсутствия последствий, называется прос-
тейшим.
Для потока такого типа число требований в промежутке
времени t распределено по закону Пуассона с параметром кг.
Р(к, kt)°
где Кк, Хд — вероятность поступления за время t точно к требований; х ~ параметр
потока, равный математическому ожиданию числа требований, поступивших в систему зэ
единицу времени.
Приведем основные характеристики закона Пуассона:
математическое ожидание
М[Х]-Х«
дисперсия
jlfcJ-M2;
среднее квадратическое отклонение
о’вхе
мода
коэффициент вариации
v=xt/xt-i.
В теории массового обслуживания наиболее распространен сле-
дующий способ задания входящего потока. Пусть Ц, Ц..tn - момен-
ты поступления последовательных требований потока. Величина г0 =
= 0 - начальный момент потока. Обозначим через (i= 1,2,
..., п) промежуток времени между (i - 1)-м и f-м требованиями. Поток
требований будет задан, если известно время между смежными требо-
ваниями.
283
Для простейшего потока времени между смежными требованиями
распределено по показательному (экспоненциальному) закону:
f(9)-p(t < 0) -1 —е~9, е > 0;
де)-^-*-0;
М[0] = 1Д; Д[О] = 0§ = 1/Л2; у=1; мо-0.
Некоторым обобщением простейшего потока является поток с
ограниченным последействием, или рекуррентный поток. Стационар-
ный и ординарный потоки называются потоками с ограниченными
последействиями, если промежутки между последовательными
моментами поступления требований являются независимыми случай-
ными величинами, каждая из которых имеет один и тот же закон
распределения F(0). В частности, если промежутки времени могут
иметь постоянную величину, то такой поток называется регулярным,
или детерминированным. Если К(0) имеет вид F(0) = 1 - е ‘Х0, то поток
будет простейшим.
Из других законов распределения теории массового обслуживания
наибольшее распространение имеют закон Эрланга, для которого
коэффициент вариации меньше единицы, гиперэкспоненциальный и,
хорошо известный, нормальный закон.
Методику выбора закона распределения для аппроксимации
данных, полученных в результате наблюдения, рассмотрим на кон-
кретном примере.
Например, возьмем наблюдаемые данные об интервалах между
моментами поступления автомобилей-самосвалов на базу минерально-
строительных материалов за какой-то день, с: 408; 142; 170; 61; 2; 51; 7;
225; 38; 221; 74; 15; 226; 2; 6; 321; 36; 83; 2; 26; 25; 41; 123; 71; 100; 196; 87;
24; 201; 44; 116; 29; 79; 38; 3; 16; 38; 198; 107; 142; 18; 7; 147; 13; 58; 206; 3;
26; 18; 22; 67; 83; 235; 3; 276; 218; 91; 156; 53; 14; 76; 111; 26; 69; 143; 29; 193;
159; 25; 17; 133; 6; 156; 96; 49; 51; 104; 107; 6; 124; 149; 5; 3; 65; 31; 51; 66; 71;
154; 67; 92; 85; 114; 26; 15; 36; 104; 83; 75; 74; 12; 127; 57; 40; 93; 27; 1; 97;
141; 183; 178; 113; 102; 34; 222; 1; 227; 65; 390; 47; 121; 2; 69; 10; 457; 8; 102.
Аппроксимация исходного материала одним из законов распреде-
ления проводится в несколько этапов.
1. Сгруппировать полученные данные. Длина интервала группи-
ровки определяется по формуле Стерджесса или на основе последо-
вательного подбора до тех пор, пока гистограмма, построенная по
данным группировки, не будет иметь больших ’’провалов”. Вообще же
группировка всегда является в определенной степени субъективной.
По формуле Стерджесса
втах ~ ^min
1 +3,321g N ’
457-1 456 <56
l+3,321gl27 = 1 + 3,32.2,1038 = 8 = 57,1 ft60c’
284
Рис. 10.Х Распределение интервалов между автомобилями-самосвалами
число интервалов равно 8, длина интервала - 60 с. Количество заме-
ров, попадающее в тот или иной интервал группировки, определяется
непосредственным подсчетом; если какой-то замер попадает на грани-
цу двух интервалов, он распределяется поровну (по 0,5) между этими
интервалами. Сгруппированные данные приведены в табл. 10.2.
2. Построить эмпирическое распределение (рис. 10.2) и сравнить его
внешний вид с известными теоретическими законами распределения.
Сравнение показывает; что эмпирическое распределение напоминает
экспоненциальный или гиперэкспоненциальный закон.
3. Определить среднюю арифметическую, дисперсию и стандарт-
ное отклонение по фактическим данным. Вспомогательные расчеты
даны в табл. 10.2. Используется упрощенная методика, изложенная в
[1, с. 123,140]:
S-.e'~£— N{
- t 1 Д0 + Ь;
u
N
)2^
--------S-------- (A6)2 - (0 - Ь)2
N
где Of — середина f-го интервала группировки; Ьг — общее число замеров; N/ — число
замеров в i-м интервале (частота).
285
Интер- валы группи- ровки, мин Середина интервалов, 0, мин Количе- ство за- меров (частот^) 1 ^Ni 1
0-1 0,5 56 -1 -56 56
1—2 1,5 37 0 0 0
2-3 2,5 16 1 16 16
3-4 3,5 13 2 26 52
4-5 4,5 1 3 3 9
5-6 5,5 1 4 4 16
6-7 6,5 2 5 10 50
7-8 7,5 1 6 6 36
S 32,0 127 — 9 235
Примгчание. Методика расчета не излагается. При объединении последних четырех группа
Для непрерывных распределений Д0 равно длине интервала
группировки, а Ъ - постоянное число, равное середине интервала,
который делит замеры на две примерно равные части ("медианный”
интервал); в данном случае b «1,5 и Д0 = 1.
Средняя арифметическая
9
e 1 ♦ 1,5 ° 0,071 +1,5 -1,571 МИН.
127
Дисперсия
°9“~^ I2-(1,571-16,5) *-1,845 мин*; О-1,36 мин.
Полученные значения являются оценками математического
ожидания и дисперсии для теоретического закона распределения.
Поскольку математическое ожидание и стандартное отклонение почти
равны, следует для аппроксимации выбрать экспоненциальный закон
распределения.
4. Выровнять эмпирическое распределение по экспоненциальной
кривой.
Экспоненциальный закон имеет четыре способа оценки параметра
X.; в качестве оценки принимается величина, обратная средней ариф-
метической, рассчитанной по фактическим данным; графический
способ; метод средних; метод наименьших квадратов.
286
Таблида 10.2
Расчет по методу наименьших квадратов (Х = 0,5989) Расчет с использованием величины, обратной средней арифметической (X « 0,636)
1g Щ 0,-lgAQ (0i)2 w (Ц-лЦ3 18^ (ty-M3
1,7482 0,8741 0,25 1,7212 52,62 0,22 1,7692 58,78 0,13
1,5682 2,3523 2,25 1,4611 28,92 2,26 1,4930 31,12 1,11
1,2041 3,0102 6,25 1,2010 15,89 0,0 1,2168 16,47 0,01
1,1139 3,8987 12,25 0,9409 8,73 2,07 0,9406 8,72 2,10
0,0 0,0 20,25 0,6808 4,80 0,6644 4,62
О.,О 0,0 30,25 0,4207 2,63 01,01 0,3882 2,44 0,63
0,3010 1,9565 42,25 0,1606 1,45 0,1120 1,29
0,0 0,0 56,25 1,9005 0,80 1,8358 0,68
5,9354 12,0918 170,0 — 115,84 5,56 — 124,12 3,98
lg Nri = 0,8927; = 7,81.
Метод средних и метод наименьших квадратов более точные (но
более сложные). Однако опыт показывает, что эти методы не дают
никаких преимуществ по сравнению с другими.
Графический способ является субъективным, так как аппрокси-
мирующую прямую в полулогарифмической сетке координат прихо-
дится проводить ”на глаз”.
Наиболее рационально для оценки параметра экспоненциального
распределения использование величины, обратной средней арифмети-
ческой.
Для условий данного примера
X «1/0 = 1/1,571 “ 0,636 требований/мин.
Экспоненциальный закон приближенно можно записать
N/VsXe~X9 Де.
После логарифмирования получим
lgWj-lgW+lgX-X0flge + lgA0,
Подставим фактические данные
lg Nj = lg 127 + 1g 0,636 - 0,636.0,43430,- + 1g 1;
1g Nji - 2,1038 +1,8035 - 0,27620,- + 0,0000 -1,9073 - 0,27620,-,
где Nj—теоретическая частота i-го интервала.
287
Результаты расчетов см. в табл. 10.2. В той же таблице и на
рис. 10.3 даны теоретические частоты экспоненциального распределе-
ния, полученные потенцированием.
Близость эмпирического и теоретического распределений можно
проверить по одному из применяемых в математической статистике
критериев согласия. Наиболее удобным является критерий Романов-
ского, так как для его применения не требуется специальных таблиц.
Согласно этому критерию расхождение между эмпирическим и теоре-
тическим распределением носит случайный характер, если
где т — число степеней свободы, равное числу групп в эмпирическом распределении без
числа связей, наложеньях на частоты при теоретическом распределении. Для экспонен-
циального закона и закона Эрланга число таких связей равно 2, а для гиперэкспоненциаль-
ного и нормального законов — 3.
В математической статистике для определения х2 рекомендуется
объединять малочисленные группы, поэтому четыре последние группы
объединены в одну, для которой 0f = 6, = 5, A0f = 4;
lg Nri = lg 127 + lg 0,636 + lg 4 - 0,636.0,4343.6;
lg Nri = 2,1038+1,8035 + 0,6021 - 1,6572 = 0,8522;
N„ = 7,12.
Результаты расчетов см. в табл. 10,2, х2 = 3,98, т = 5 - 2 = 3.
Тогда
(3,98 - 3)/7б = 0,98/2,45 = 0,4 < 3,
поэтому применение экспоненциального закона распределения для
аппроксимации интервалов прибытия самосвалов является правомер-
ным. Плотность вероятности определяется
<-0,6366
/(0) = О,636е
Рассмотрим пример организации работ автомобилей-самосвалов и
погрузочных средств. Для аппроксимации времени обслуживания
автомобилей используем выражение 1,0944с"1 881, которое не является
экспоненциальным законом распределения, хотя дальнейшие расчеты
ведутся по формулам, для применения которых обязательно экспо-
ненциальное распределение времени обслуживания. Исходные Данный
задачи приведены в сгруппированном виде табл. 10.3.
Эмпирическое распределение показано на рис. 10.3. Сравнение
эмпирического распределения с теоретическими законами показы-
288
80
вает, что оно напоминает закон Эрланга. Определим среднюю арифме-
тическую, дисперсию, стандартное отклонение и порядок закона
Эрланга:
ё “ 0.14 + 0.63 - -0,042 + 0,63 - 0,59 ч;
364
о2 Т7Г 0.142 - 0,042 = 0,1323 - 0,0016 = 0,1307 ч2;
364
о-Vo,1307 = 0,361ч;
к = (0,59)2/(0,361)2 = 2,67;
и
№1/6 = 1/0,59 = 1,7.
Следовательно, аппроксимировать фактические данные можно
законом Эрланга 2-го или 3-го порядка:
/fc(6) = vkP(k-l; vfcO).
Плотность вероятности в середине i-ro интервала
/fc(e)=vkP(k-i; vko);
теоретическая частота
Wrf=/fc(0i)A0f.
289
Середи- на интер- вала Длина интер- вала ДО/, Число замеров 8;-0,63 е.-МЗ (9, - 0,63)3 „ Закон Эрланга 2-го
0,14 0,14 ' 0,14 * vk = 0 Ki;3,4e^«9t
0,07 0,14 S —4 -20 80 0,238 0,1859 0,631
0,21 0,14 60 -3 -120 540 0,714 0,3493 0,187
0,35 0,14 79 -2 -158 316 1,190 0,3494 1,188
0,49 0,14 50 -1 -50 50 1,666 0,3032 1,030
0,63 0,14 65 0 0 0 2,142 0,2535 0,862
0,77 0,14 40 1 40 40 2,618 0,1958 0,666
0,91 0,14 19 2 38 76 3,094 0,1422 0,483
1,05 0,14 22 3 66 198 3,570 0,1060 0,360
1,19 0,14 8 4 32 128 4,046 0,0715 0,243
1,40 0,28 7 55 38,5 212 4,760 0,0433 0,147
1,75 0,42 6 8 48 384 5,950 0,0158 0,054
2,31 0,70 3 12 36 432 7,854 0,0032 0,011
S — 364 — —109,5 2456 — — дев
Для определения Р(к - 1; v к0{) использована таблица закона Пуас-
сона, для промежуточных значений vk8f применялась линейная
интерполяция.
Последовательность расчетов показана на примере аппроксимации
законом Эрланга 2-го порядка для первого интервала группировки
табл. 10.3.
1. Определить: vfcO,; v = 1,7; к = 2; при 0.- = 0,07 vfc0. = 1,7-2-0,07 =
= 0,238 и т. д.
X Установить по таблице закона Пуассона:
К*: —1; 3,40f);
№0,238)-1,1637+-----------------0,038 - 0,1859,
где 0,1637 - XI; 0.2) и 0,2222 - XI; 0,3).
3. Рассчитать плотность вероятности в середине каждой группы:
/2(of)-vkXi;vM^
/2(0»0Т)- 3,4-0,1859 -0,631.
290
Таблица 10,3
порядка (V-1,7; к=2) Закон Эрланга Зто порядка (v«l,7;fc»3)
де^ Wrf (Ni-NJ* 5,10f ЯШе? деда (Nj-Nj2
N* "ti
0,088 32 22,78 0,357 0,0449 0,229 0,032 12 4,08
0,166 60 0,0 1,071 0,1901 0,970 0,136 50 2,00
0,166 61 5,31 1,785 0,2521 1,285 0,180 66 2,56
0,144 52 0,08 2,499 0,2474 1,260 0,176 64 3,06
0,121 44 10,02 3,213 0,2075 1,060 0,148 54 1,50
0,093 34 1,06 3,927 0,1522 0,776 0,109 40 0,0
0,068 25 1,44 4,641 0,1066 0,543 0,076 28 2,89
0,050 18 0,89 5,355 0,0702 0,358 0,050 18 0,80
0,034 12 1,33 6,069 0,0431 0,220 0,031 11 0,82
0,041 15 4,26 7,140 , 0,0207 0,106 0,030 11 1,45
0,023 8 0,50 8,925 0,0054 0,026 0,011 4 1,00
0,008 3 0,00 11,781 0,0006 0,003 0,002 1 4,00
«* . 364 47,67 — — — — 359 24,25
4. Вычислить вероятность для каждого интервала группировки по
выражению A8f /2(8{), где A8f - величина интервала для i-й группы.
Для первой группы 0,14*0,631 = 0,0883.
5. Определить теоретические частоты:
Ят,»(Е^)[Д0//2(М»
I , г-
где T.Nj "N — общее число замеров; Nrj » 364-0,0883 я 32; S « 364, однако эта величина
может не совпадать с общим фактическим числом замеров, например при аппроксимации
законом Эрланга 3-го порядка ЕЛГТ /« 359. Расхождения получаются из-за округлений при
расчетах до целых значений к приближенного определения вероятностей по выраже-
нию
Додор.
6. Определить
для первой группы:
' (5—32)а/32»729/32»22,78;
, (Ni-W г ,
? ------х:*’"47-67-
291
'1,
Результаты расчетов см. в табл. 10.3. Там же приведена аппрокси-
мация с использованием закона Эрланга 3-го порядка. Полученные
значения теоретических частот для закона Эрланга 3-го порядку’
находятся ближе к практическим значениям, чем теоретические
расчеты закона 2-го порядка; величина х2, рассчитанная для закона
Эрланга 3-го порядка, почти в два раза меньше, чем для аналогичного
закона 2-го порядка. Следовательно, для аппроксимации времени
погрузки нужно выбрать закон Эрланга 3-го порядка.
Попытки уменьшить величину X2 и улучшить приближение за счет
изменения параметра v дали следующие результаты:
v = l,7; Х2 = 24,25;
v = 1,65 (снижение на 3 %) х2 = 29,23;
V = 1,72 (увеличение на 1 %) х2 = 24,98;
v = 1,75 (увеличение на 3 %) х2 = 26,93.
Эти, данные показывают, что изменение параметра не приводит к
лучшему приближению.
Проверка по критерию Романовского
(24,25 -10)/20 = 14,25/4,48 = 3,18 > 3
дает отрицательный результат, однако если учесть, что треть величины
X2 (8,08) попадает на две крайние малочисленные группы, то можно
считать приемлемой аппроксимацию времени погрузки законом
Эрланга 3-го порядка:
Близость теоретического распределения к фактическим данным
подтверждается и рис. 10.3.
ЮЛ Примеры решения задач массового обслуживания
на автомобильном транспорте
В замкнутых системах массового обслуживания одним из показателей качества
функционирования замкнутых систем являются коэффициент простоя обслуживаемого
требования A JC и коэффициент простоя обслуживающего аппарата Л Д Примером такой
системы является организация работы погрузочного пункта, когда вывозом груза зани-
мается определенное число закрепленных за объектом автомобилей и они работают на
маятниковых маршрутах с односторонней загрузкой.
Приведем примеры определения характеристик систем массового обслуживания.
Пример 1. В объединении транспортно-экспедиционного обслуживания, населения
имеется центр приема заказов по телефону на некоторые виды услуг, объединенный со
справочным бюро. В частности, бюро заказов принимает заявки на грузовые такси. Наи-
большая загрузка работы бюро приходится на период выезда жителей города на дачи и
возвращения их обратно.
292
Требования, которыми в данном случае являются телефонные звонки жителей,
поступают в бюро в случайные моменты времени; поток требований можно считать прос-
тейшим. Временем обслуживания является время разговора диспетчера с клиентом.
Распределение времени обслуживания близко к экспоненциальному, так как большинство
звонков связано с вопросами и уточнениями и меньше — с приемом заказов. Каждый
диспетчер бюро принимает заказы и отвечает на вопросы. Если в момент очередного
звонка все диспетчеры (телефонные аппараты) заняты, клиент получает отказ в обслужи-
вании. Следовательно, процесс приема заказов и выдачи справок можно рассматривать
как пуассоновскую систему массового обслуживания с отказами.
Допустим, что интенсивность входящего потока требований в период *пик* состав-
ляет 2 звонка в минуту (Л.я 2); среднее время обслуживания одного требования равно
2 мин (1/v » 2). Определить, сколько требуется установить телефонных аппаратов в бюро
заказов, чтобы вероятность отказа в обслуживании не превышала 0,1.
Вероятность отказа определяется
s 1 х
где Ро «1/2 — (-А)”.
п-0 n v
Для данного примера Л = 2; у = 1/2.
При наличии одного обслуживающего аппарата (5 = 1) ,
5 1 11
р0 = 17 \ “3 4" ° 1/-3“ 4°+“7Г 41 = 1/1 + 4 = 0,2;
пв0 п/ U! 1! ’ ’
0,2
/’,-1’1—^-4*-ОД
Таким образом, вероятность отказа для системы с одним обслуживающим аппаратом
составит 0,8, что значительно превышает допустимую по условиям данного примера
величину. Следовательно, нужно увеличить число обслуживающих аппаратов. Результаты
расчетов приведены ниже.
Число телефон- ных аппаратов ро Р
1 0,200 0,800
2 0,769 0,615
3 0,0422 0,451
4 0,0291 0,311
5 0,0233 0,199
6 0,0206 0,117
7 0,0193 0,063
Расчеты показывают, что необходимо установить 7 телефонных аппаратов, при этом
вероятность отказа в обслуживании составит 0,063. Среднее число занятых аппаратов равно
1 1
z,—ТГЗ»— 4" • °«ОЙ ^3>75-
П=1 (п — 1)!
293
Следовательно, число свободных обслуживающих аппаратов составляет 7 — 3,75 •
-3,25.
Для расчета можно использовать и другую формулу:
2
Am-M1-Ps)/v; Ам—— (1-0,063) «3,75.
1/Z
Примеров автотранспортном предприятии, имеющем подвижной состав одной
марки, применяется агрегатный метод ремонта, осуществляемый путем замены неисправ-
него агрегата на годный, взятый со склада. При отсутствии на складе агрегатов автомобиль
ожидает ремонта. Если же в наличии имеется хотя бы один годный агрегат, то он немед-
ленно устанавливается на данный автомобиль. Требуется определить оптимальное количе-
ство оборотных двигателей.
Поскольку процесс выхода двигателя из строя является случайным и время ремонта
также случайная величина, задачу необходимо решать с помощью теории массового
обслуживания.
Входящий поток требований образуют автомобили с неисправными двигателями.
Обслуживающим аппаратом является оборотный двигатель. Дисциплина замены двигате-
лей — в порядке поступления заявок. Временем обслуживания следует считать время
восстановления неисправного двигателя, т. е. период с момента снятия двигателя с авто-
мобиля до момента поступления отремонтированного двигателя на склад оборотных
агрегатов.
Так как количество источников требований хотя и ограничено, но велико (несколько
сотен автомобилей), а доля автомобилей с неисправными двигателями мала, то
интенсивность входящего потока требований зависит от количества ранее поступивших в
систему требований. Следовательно, процесс замены двигателей можно рассматривать как
разомкнутую систему массового обслуживания с ожиданием.
Критерий оптимальности выбирается из следующих соображений. Время, затрачи-
ваемое на замену двигателя, снижается с ростом числа оборотных двигателей, что вызывает
соответственно увеличение автомобиле-дней работы. Такого же эффекта можно добиться
за счет роста списочного количества автомобилей. Следовательно, увеличение числа
оборотных двигателей на единицу (с п до п +1) эффективно до тех пор, пока выполняется
неравенство
> цена 1 двигателя / цена 1 автомобиля
или, учитывая, что в
> цена * Двигателя / цена 1 автомобиля,
где А^ — среднее количество автомобилей, ожидающих установки неисправных двига-
телей, если число оборотных двигателей равно п.
Для простейшего входящего потока интенсивностью X « 3 автомобиля в сутки,
экспоненциального распределения времени обслуживания со средним 1/v « сут и при
цене двигателя, равной 0,125 цены автомобиля, решение приведено ниже.
Поскольку для разомкнутых систем массового обслуживания с ожиданием должно
выполняться неравенство
p«»A./3V<l или
294
Таблица 10.4
Показатель
Вероятность того, что оборотные двигатели
находятся на складе в исправном состоя-
нии Ро
Вероятность того, что в ремонте находится
з оборотных двигателей Ps
Среднее количество автомобилей, ожидаю-
щих установки двигателей А н
Сокращение числа простаивающих автомо-
билей при увеличении числа оборотных
двигателей на единицу
________1______1______1_____1
4924 2437 2017 1879 1839 1819
2^2 0,922 0,378 0,16
938 1398 0344 0Д18
38,2
0,071
6,089
то количество оборотных двигателей не может быть меньше 8 (3:1/2,5 » 73). Для обслу-
живающих 8 аппаратов среднее количество требований в накопителе определяется
Р$
^н8= 1 73
8—— (1—-^)2
2,5 8 7
при этом
?8в$г~ 7,5%“248Р0
и
----!«_
п-0 П.» ?1(ЫД5-3)
Следовательно,
Ан8»(240.24®/4924»12,1,
т. е» при числе оборотных двигателей, равном 8, более 12 автомобилей будут простаивать в
ожидании отремонтированных двигателей. Результаты расчетов при другом количестве
оборотных двигателей представлены в табл. 10.4.
Результаты расчетов показывают, что данное автотранспортное предприятие должно
иметь 12 оборотных двигателей. Приобретение 13-го двигателя сокращает число простаи-
вающих автомобилей на 0,089 < 0,125 и, следовательно, неэффективно.
Пример 3. На автозаправочной станции для заправки бензином марки А-76 имеется
одна бензоколонка. Определить характеристики работы системы, если автомобили по-
ступают по закону Пуассона с интенсивностью X » 11 автомобилей/^ время заправки
подчиняется экспоненциальному закону со средним 1/v = 0,1 ч. Одновременно в очереди
могут находиться не более 4 автомобилей. Как изменятся показатели функционирования
смешанной системы массового обслуживания, если поставить еще одну бензоколонку?
295
При наличии одной бензоколонки (s «1, X » И, v «10, I = 4) показатели функциони-
рования смешанной системы массового обслуживания определяются:
Ро — вероятность того, что бензоколонка свободна:
1 и 1 11 11
1!^ ~ 10 >
- 1/1 +-Ц- (-0,611) -1/7,721 = 0,1295;
—0,1
Р$ — вероятность того, что в системе имеется 5 требований (автомобилей):
i .p/’o-Wo-oj*24;
Р^ — вероятность отказа в обслуживании:
. Р5 э~~ 1,1s *0,1295 = 0,209;
Ан—среднее число ожидающих заправки автомобилей:
Ан=”^1)г[1Д “54,15+м,1в] “1А
Ас — среднее число свободных обслуживающих аппаратов (бензоколонок);
АС=РО=0,1295.
Таким образом, при наличии одной бензоколонки более 20 % автомобилей не могут
заправиться топливом, в среднем ожидают заправки два автомобиля. Время работы
бензоколонки составляет 87 %. При наличии двух бензоколонок ($ = 2, X »11, v »10,1 = 4):
Ро-1/1 +1,1 + — 1 1,12(1 - 0,55)= = 1/3,378 = 0,296;
Р2=““ 1,1*.0,296 - 0,’79;
2 2
— 1>14296 = 0,0164;
0 179
Лв—^^/0,55 - 5-0,55= + 4-0,55=) -1,19;
Лс = (2+ 1,1) 0,296 = 0,918.
Установка второй бензоколонки снижает вероятность отказа в обслуживании с 0,209
до 0,016. В 1,6 раза уменьшается количество автомобилей, ожидающих заправки; одна из
бензоколонок около 92 % времени будет свободна.
Пример Сколько автомобилей следует закрепить за одним погрузочным механиз-
мом, чтобы себестоимость простоя автомобилей и погрузочного механизма была мини-
296
Таблица 10.5
С ^0(Ас) | -Ан <Ан+'2Ас
1 0,800 0,000 1,600
2 0,615 0,077 1,307
3 0,455 0,238 1,148
4 0,311 0,554 1,176
5 0,199 0,995 1,393
мальной? Закон распределения времени погрузки — экспоненциальный, среднее время
погрузки 1Л = 0,25 ч. Поступление каждого автомобиля под погрузку подчинено закону
Пуассона, среднее время с момента окончания погрузки до следующего возвращения под
погрузку 1Д в 1 ч. Себестоимость одного часа простоя погрузочного механизма в два раза
выше» чем автомобиля.
Сколько потребуется автомобилей при тех же условиях, если их обслуживанием
одновременно будут заниматься два погрузочных механизма?
В данном случае имеем замкнутую систему массового обслуживания, критерий
эффективности которой можно выразить:
Ан + 2АС-* min.
При этом себестоимость 1 ч простоя автомобиля принята за единицу.
Для системы с одним обслуживающим аппаратом:
С rf
Р0s VI + 0,25С+S — ' ' 0,25”;
п«2 (С-п)!
0,25” Р0 ; 4
Лс«?0.
Результаты расчетов при разном количестве источников требований С представлены в
табл. 10.5.
Из таблицы видно, что себестоимость простоя погрузочного механизма и автомобилей
будет минимальной, если закрепить три автомобиля за одним погрузчиком.
Для системы с двумя обслуживающими аппаратами расчеты удобнее проводить в
порядке, показанном в табл. 10.6 для С = б.
Определим отношения Р^Р^:
рп _ а
Рд " П1(С—п)
0,25я, где п = 1,2;
гп с
— .. ’ 1 0,25я, гдеп “3,4,..., С.
р0
297
J
Таблица Ю.б
п ^п/?0 (п-2)Рп (2-п)Рп
1 2 3 4 5
0 1,0000 0,2420 * 0,485
1 1,5000 0,3631 — 0,363
2 0,9375 0,2269 0 0
3 0,4688 0,1135 0,111
4 0,1758 0,1425 0,085 «а»
5 0,0440 0,0107 0,032 —
6 0,0055 0,0013 0,005 —
Е 4,1316 1,0000 0,233 0,848
б
Затем, суммируя отношения Рп/Р0 и учитывая, что £ Рп » L получим
п«0
б Рп б
2-^-l/P0S Рп-1/Р0-4,Шб,
n®0 Pq n=0
откуда Ра=0,2420. Умножая значения, указанные в графе 2 на Pq, получаем вероятности?,;
того, что в системе находится точно п требований» Среднее количество требований в
накопителе
б
Аи= Х(п-2)Рп.
rr=u
Результаты расчетов показаны в графе 4, а в графе 5 — число свободных обслуживаю-
щих аппаратов, рассчитанных по формуле
б
Лс e S (2 - п)Рп •
п=0
Таким образом, при шести закрепленных автомобилях среднее число ожидающих
погрузки автомобилей равно 0,233, а среднее число простаивающих механизмов — 0,848»
Себестоимость простоя автомобилей и погрузочных механизмов равна 0,233 + 2-0,848 «
= 1,929 к. Тот же показатель при другом числе закрепленных автомобилей равен:
при С=7 0,411 + 2*0,684 = 1,779 к;
С» 8 0,670 + 2-0,534 «1,736 к;
С«9 1,016 + 2*0,402 «1,820 к.
Минимальной себестоимость простоя будет, если закрепить за двумя погрузочными
механизмами 8 автомобилей» При этом коэффициент простоя равен:
для автомобиля
AjC~ 0,670/8 «0,084;
для погрузочного механизма
Ан&« 0,534/2 «0,267.
298
Пример 5. С крупного предприятия-грузоотправителя перевозятся грузы к различ-
ным грузополучателям. Погрузка организована на двух постах. Как показали проведен-
ные исследования, поток автомобилей, поступающих под Погрузку, является простейшим
с интенсивностью X е 6 автомобилей/ч; время погрузки одного автомобиля подчинено
показательному закону распределения со средним значением 1/v « 0,2 ч. Следовательно,
процесс погрузки можно рассматривать как разомкнутую пуассоновскую систему массо*
вето обслуживания с ожиданием я двумя обслуживающими аппаратами.
На предприятии проводится реконструкция, после которой выпуск продукции
возрастет в 1,5 раза; соответственно возрастет и интенсивность входящего потока до 6*1,5 в
» 9 автомобилей/ч. Имеется возможность оборудовать еще один поет погрузки или прове-
сти мероприятия по регулированию входящего потока, что позволит снизить коэффициент
вариации до • 1/уЗ. Определить рациональный вариант модификации системы»
Таблица 10.7
Число
обслужи-
вающих
аппаратов
Коэффициент использования системы р « АЛу
8.1 I ОД I 0»з [ 0,4 | 0,5 | 0,8 I 0.7 I 0.8 I 0,9 I 0,95 I 0,98
Отношение среднего времени ожидания в накопителе к среднему времени
обслуживания
Входящий поток — пуассоновский
Время обслуживания—экспоненциальное
2 0,0101 0,0417 0,0989 0,1905 0,3333 0,5625 0,9608 1,778 4,263 9,256 24Д
3 0,0014 0,0103 0,0325 0,0784 0,1579 0,2956 0,5470 1,074 2,724 5,045 16,0
4 0,0002 0,0030 0,0132 0,0378 0,0870 0,1794 0Д572 0,745 1,969 4,457 П.9
5 0,0000 0,0010 0,0057 0,0103 0,0521 0,1181 0,2519 0,554 1,525 3,610 9Д
6 0,0000 0,0003 0,0026 0,0111 0,0370 0,0819 0,1866 0,431 1,234 3,024 8,0
Входящий поток — регулярный
Время обслуживания —экспоненциальное
2 I 0,00 I 0,00 I 0,00 I 0,02 I 0,06 I 0,15 I 0,33 I 0,71 I 1,93 I 4,38 I 11,8
3 j 0,00 | 0,00 j 0,00 I 0,01 j 0,02 j 0,07 | 0,17 | 0,41 | 1,21 { 2,88 | 7,8
Входящий поток — пуассоновский
Время обслуживания — постоянное
2 0061 0,0242 0,0554 0,1333 0,1768 0,2930 0,4936 0,903 2,147 4,644 12.1
3 0,0000 0,0070 0,0230 0,0530 0,1020 0,1810 0,3180 0,606 1,427 3,100 8.4
4 0,0000 0,0000 0,0100 0,0290 0,0650 0,1300 0,2480 0,49 1,240 2,740 7.2
5 0,0000 0,0000 0,0000 0,0160 0,0420 0,0930 0,1920 0,408 1,067 2,380 М
6 0,0000 0,0000 0,0000 0,0090 0,0280 0,0680 0,1510 0,337 0,910 2,110 5Д
299
Таблица 10.8
Показатель Вариант
I II Ш
Отношение среднего времени ожидания по- грузки к среднему времени погрузки vWH 4,263 0,293 2,71
Среднее время о^йдания погрузки WH, ч 0,853 0,059 0,542
Среднее количество ожидающих погрузки ав- томобилей, Лн = v WH 7,677 0,531 4,878
Среднее число свободных постов погрузки, Ас=з —X/v 0,2 1,2 0,2
Рассмотрим три варианта:
1. з = 2; пуассоновская система, X = 9, v = 5, р = 0,9;
15 = 3; пуассоновская система, X = 9, v = 5, р = 0,6;
3.5 « 2; входящий поток Эрланга 3-го порядка, время обслуживания экспоненциаль-
ное, X « 9, v = 5, р = 0,9.
По табл. 10.7, где указано среднее время ожидания в накопителе для разомкнутых
систем массового обслуживания с ожиданием и несколькими обслуживающими аппара- .
тами, определяется отношение времени ожидания в накопителе к среднему времени
обслуживания для каждого из вариантов, остальные показатели функционирования
системы массового обслуживания рассчитываются. Результаты расчетов представлены в
табл. 10.8.
Таблица 10.9
Показатель Вариант
I П Ш
Себестоимость одного автомоби- 7,2 7,2 7,2
ледая простоя, р. Себестоимость дня простоя поста 22,3 22,3 22,3
погрузки, р. Стоимость одного автомобиля, р. 2700 2700 2700
Стоимость поста потру тки, р. — 15000 —
Затраты на регулирование входя- — 6,0
щего потока автомобилей, р./сут Текущие затраты, р./сут 55,3 + 4,5 = 59,8 3,8 + 26,8 = 30,6 35,1 + 4,5 + 6,0 =
Приведенные капитальные вло- 7,5 0,5+ 5,5 = 6,0 = 45,6 4,8
жения (коэффициент эффектив- ности 0,12,330 ди. работы за год), рУсут Приведенные затраты, pJcyr 67,3 36,6 50,4
< 300
В качестве критерия оптимальности в данной задаче следует выбрать минимум
приведенных затрат на перевозку и погрузку» Поскольку объем перевозок во всех вариан»
тах одинаков, затраты, непосредственно связанные^ с погрузкой и перевозкой, будут
одинаковы и их можно не рассматривать. Требуется учесть лишь те затраты, которые
„ связаны с простоем автомобилей, постов погрузки и регулированием входящего потока, а
также приведенные капитальные вложения в автомобили, ожидающие погрузки, и на
оборудование поста погрузки во II варианте. Результаты расчетов приведены в табл. 10.9.
Расчеты показали, что наиболее эффективным является оборудование третьего поста
погрузки.
Следует отметить, что мероприятия по регулированию входящего потока обеспечи-
вают экономию приведенных затрат по сравнению с первоначальным вариантом
16,9 р./сут, или 25,1 %.
СПИСОК ЛИТЕРАТУРЫ
1. Алдохин И» П. Теория массового обслуживания в промышлен-
ности. Ми Экономика, 1970.175 с
2. Геронимус Б. Л., Царфин Л. В. Экономико-математические
методы в планировании на автомобильном транспорте. Ми Транспорт, 1988.
192 с
3. Вовша П. С», Левитин Е. С», Панов С. А. Проблемы
концентрации грузового автомобильного транспорта* Ми Транспорт, 1987.
165 с
4. Кожин А. П. Математические методы в планировании и управле-
нии грузовыми автомобильными перевозками. Ми Высшая школа, 1979.
304с
5. Панов С. А., Поляк А. М», Поносов Ю. К. Развитие парка
в автотранспортных объединениях. Ми Транспорт, 1986.200 с
6. Панов С. А. Совершенствование перевозок на автомобильном
транспорте. Ми Наука, 1973.152 с
7. Рихтер К. Ю. Транспортная эконометрия. Ми Транспорт, 1982.
317 с
'8 . Сухова Л. Ф. Модели и методы оптимизации размещения грузо-
вого автомобильного транспорта. Ми Транспорт, 1991.127 с
9. Ходош М. С. Грузовые автомобильные перевозки. Ми Транспорт,
1986.208 с
10. Экономико-математические методы и модели планирования и
управления. Кн. IV / Под ред. В. Г. Шорина. Ми Знание, 1973.240 с ’
И. Литл Дж., Мурти К», Суини Д., Кэрел К. Алгоритм для
решения задачи о коммивояжере // Экономика и мет. методы. 1965. Т. L
Выл. 1. С. 94—107.
ОГЛАВЛЕНИЕ
Предисловие............................................................ *
Глава 1. Характеристика я математические основы методов оптимизации. *
1.1. Сущность и значение методов оптимизации......................... 4
IX Основы матричного исчисления........................................ 8
1.3. Общая задача линейного программирования. Двойственность задач.... 22
Глава 2. Графоаналитический метод.................................. 28
2Д. Геометрическая интерпретация задач оптимизации............... 28
2Х Решение задач на максимум и минимум целевой функции................ 35
23. Применение графоаналитического метода на автомобильном транспорте.. 42
Глава 3. Симплексный метод............................................ 47
ЗД. Симплексный метод в общем виде.................................. 47
3.2. Определение допустимого базисного решения.«...................... 59
3.3. Экономическое содержание симплексного метода..................... 62
3.4. Симплексный метод с искусственным базисом.................. 72
Глава 4. Транспортная задача и методы ее решения...................... 80
4.1. Распределительный метод и его модификации........................ 80
4.2. Способы составления первого допустимого плана перевозок.......... 93
4.3. Решение транспортных задач, имеющих некоторые дополнительные условия.. 102
4.4. Методы с разрешающими элементами.............................. 107
Глава 5. Методы маршрутизации перевозок грузов...................... 124
5.1. Методы определения кратчайших расстояний между пунктами транспортной
сети 124
5Х Методы составления рациональных маршрутов при перевозках массовых
Грузов............................................................ 133
5.3. Составление рациональных развоэочно-сборных маршрутов........... 149
5.4. Метод’ветвей и границ*.......................................... 158
Глава б. Методы динамического программирования....................... 171
6.1. Основные понятия и постановка задач динамического программирования.... 171
6.2. Распределение ресурсов методом динамического щюграммирования....... 176
6Л. Задача о замене оборудования.................................... 186
Глава 7. Корреляционно-регрессионные методы анализа и планирования.. 193
7.1. Производственные функции....................................... 193
7Х Парная корреляция.............................................. 197
7.3. Измерение тесноты корреляционной связи.......................... 207
7.4. Основные сведения о множественной и частной корреляции........... 210
303
Глава 8. Методы оптимизации автотранспортных мощностей и их размеще-
ния .................................................................. 213
8.1. Постановка и экономико-математическая модель задачи развития и размеще-
ния транспортных мощностей............................................. аз
8.2. Метод последовательного перерасчета издержек.......................
8 J. Способы решения частных задач размещения........................
8.4. Экономическая интерпретация задачи размещения......................
Глава 9. Сетевые методы планирования и управления (СПУ)............... 255
9.1. Назначение системы СПУ. Элементы сетевых моделей................. 255
9.2. Принципы построения сетевых графиков............................ 259
9.3. Расчет параметров сетевой модели................................. 262
9.4. Оптимизация сетевых моделей.......................................272
Глава 10. Применение теории массового обслуживания в организации
автомобильных перевозок............................................... 276
10.1. Общая характеристика и математический аппарат систем массового обслужива-
ния *........................................................... ; 276
10.2. Входящий поток требований. Время обслуживания................... 281
10.3. Примеры решения задач массового обслуживания на автомобильном тран-
спорте................................................................ 292
Список литературы..........................................................
Учебник
КОЖИН Алексей Павлович
МЕЗЕНЦЕВ Виталий Никитович
МАТЕМАТИЧЕСКИЕ МЕТОДЫ В ПЛАНИРОВАНИИ
И УПРАВЛЕНИИ ГРУЗОВЫМИ АВТОМОБИЛЬНЫМИ
ПЕРЕВОЗКАМИ
Технический редактор Л. Г. Дягилева
Корректор-вычитчик Т. А. Мельникова
Корректор В. А. Луценко
ИБ№0010
Лицензия № 010163 от 04.01.92.
Подписано в печать 03.11.94. Формат 60x88 1/16. Бум. тип. № 2. Офсетная печать.
Гарнитура Пресс Роман. Усл. печ. л. 18,62. Усл. кр.-отт. 18,86. Уч.-изд. л. 18,95.
Тираж 1000 экз. ЗаказЯЯС 160. Изд. № 1-1-1/1 № 6440 .
Текст набран на наборно-печатающих автоматах
Ортна -Знак Почета” издательство „ТРАНСПОРТ", 103064, Москва, Басманный туп., б£_
Московская типография №9 Комитета Российской Федерации по печати
109033, Москва, Волочаевская ул., 40