/

























































































































































































































































































































Author: Кондратенков Г.С.
Tags: электротехника радиолокация радиотехника радиоэлектроника авиационное оборудование
ISBN: 978-5-93108-105-2
Year: 2015
Similar




Text
, ' ‘*>2 ’•* . ** *' ’ » *»Л
, * h f '»* • , * t ' У f
Научная серия «Бортовке аэронавигационные системы» ' «
4 '»* * ’ •’Л‘^ .• -< . / < ’* Г г * Ч’* * г ’
^» >* • 1 • , • *4. ' “ F • . Ч.
Z ‘ V t ‘ 1 ”
• < * X .5^/1 А \* • •-? л<
' ч * / •
АВИАЦИОННЫЕ
СИСТЕМЫ
РАДИОВИДЕНИЯ
I
.1
• I
а
РАДИОТЕХНИКА
• » I
, !
ондратенкова
Под.редакциеи Г.С
АВИАЦИОННЫЕ
СИСТЕМЫ
РАДИОВИДЕНИЯ
Под редакцией
Г.С. Кондратенкова
Москва
Радиотехника
2015
УДК 621.396.96
ББК 32.95
А 20
Научная серия
«Бортовые аэронавигационные системы»
Редактор серии
д.т.н., проф. М.Н. Каневский
Редакционная коллегия:
д.т.н., проф. М.Н. Каневский (гл. редактор), д.т.н., проф. А.Л. Аникин, д.т.н., проф.
Н.А. Баранов, д.т.н., проф. А.С. Белоцерковский, д.т.н., проф. О.В. Васильев, д.т.н.,
проф. А.В. Гайденков, д.т.н., проф. Г.С. Кондратенков, д.т.н., проф. А.А. Лавров
Рецензенты:
докт. техн, наук, профессор Е. Ф. Толстов,
докт. техн, наук, профессор Л.Б. Неронский
Издание осуществлено при финансовой поддержке
ОАО «Бортовые радионавигационные системы»
Авторы:
Владимир Никитович Антипов, Андрей Юрьевич Викентьев,
Евгений Евгеньевич Колтышев, Геннадий Степанович Кондратенков,
Алексей Алексеевич Лавров, Алексей Юрьевич Фролов,
Владимир Тадеушевич Янковский
А20 Авиационные системы радиовидения. Монография / Под ред. Г.С. Конд-
ратенкова. - М.: «Радиотехника», 2015. - 648 с.: ил. (Научная серия «Бор-
товые аэронавигационные системы»). Авторы указаны на обороте ти-
тульного листа.
ISBN 978-5-93108-105-2
Дано систематическое изложение основ теории авиационных систем радиовиде-
ния (амплитудные, фазовые, скоростные и поляризационные портреты, многопо-
зиционные системы, обратное синтезирование). Приведены примеры реализации
и эффективности различных методов радиовидения. Книга написана с использо-
ванием только открытых опубликованных трудов научной школы «Радиовиде-
ние» ВВИА им. проф. Н.Е. Жуковского.
Для научных работников и инженеров, а также преподавателей, аспирантов и
студентов высших учебных заведений радиотехнического профиля.
УДК 621.396.96
ББК 32.95
© Авторы, 2015
1 ОАО «Бортовые аэронавигационные системы», 2015
ISBN 978-5-93108-105-2 с ЗАО «Издательство «Радиотехника», 2015
Изд. № 48. Сдано в набор 15.08.2014
Подписано в печать 25.05.2015. Формат 60x90 1/16
Бумага офсетная. Гарнитура Таймс
Печать офсетная
Печ. л. 40,5. Тираж 500 экз. Зак. №
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д. 20/6
Тсл./факс: (495)621-48-37; 625-78-72, 625-92-41
E-mail: info@radiotec.ru; www.radiotec.ru
Отпечатано в типографии ООО «Галлея-Принт»
Оглавление
Перечень сокращений...................................10
Введение. От радиолокации к радиовидению..............13
ГЛАВА 1
Радиолокационное обнаружение
и измерение координат целей...........................21
1.1. Структура радиолокационного канала................21
1.2. Методы обнаружения и измерения координат цели....29
ГЛАВА 2
Радиолокационные характеристики
наземных и морских целей..............................41
2.1. Общие закономерности рассеяния
электромагнитных волн объектами ......................41
2.2. Функция отражения целей..........................49
2.3. Радиолокационные характеристики отражения целей
в различных диапазонах волн............................58
ГЛАВА 3
Оптимальное радиолокационное наблюдение...............69
3.1. Пространственно-временная модель
радиолокационного наблюдения..........................69
3.2. Модель пространственно-временного сигнала........73
3.3. Оптимальная обработка радиолокационного сигнала..76
3.4. Обнаружение радиолокационных сигналов............88
3.5. Обнаружение цели................................100
3.6. Разрешение радиолокационных сигналов............106
3.7. Разрешение целей по дальности, скорости
и угловым координатам................................119
3.8. Измерение координат целей.......................124
3.9. Измерение параметров движения целей.............131
4
Оглавление
ГЛАВА 4
Синтезирование апертуры антенны......................141
4.1. Принцип синтезирования апертуры антенны.........141
4.2. Основные свойства
синтезированной апертуры антенны.....................146
4.3. Закономерности пространственной селекции........152
4.4. Пространственная селекция прямолинейной
синтезированной апертуры антенны.....................163
4.5. Траекторное управление носителем
при синтезировании апертуры антенны..................171
4.6. Передний обзор с моноимпульсной антенной........176
4.7. Функция неопределенности траекторного сигнала
радиолокационной системы с синтезированием апертуры
антенны планового обзора..............................179
4.8. Интерферометрический режим измерения
высоты объектов.......................................182
ГЛАВА 5
Радиолокационная система
с синтезированием апертуры антенны...................187
5.1. Структура модели радиолокационной системы
с синтезированием апертуры антенны...................187
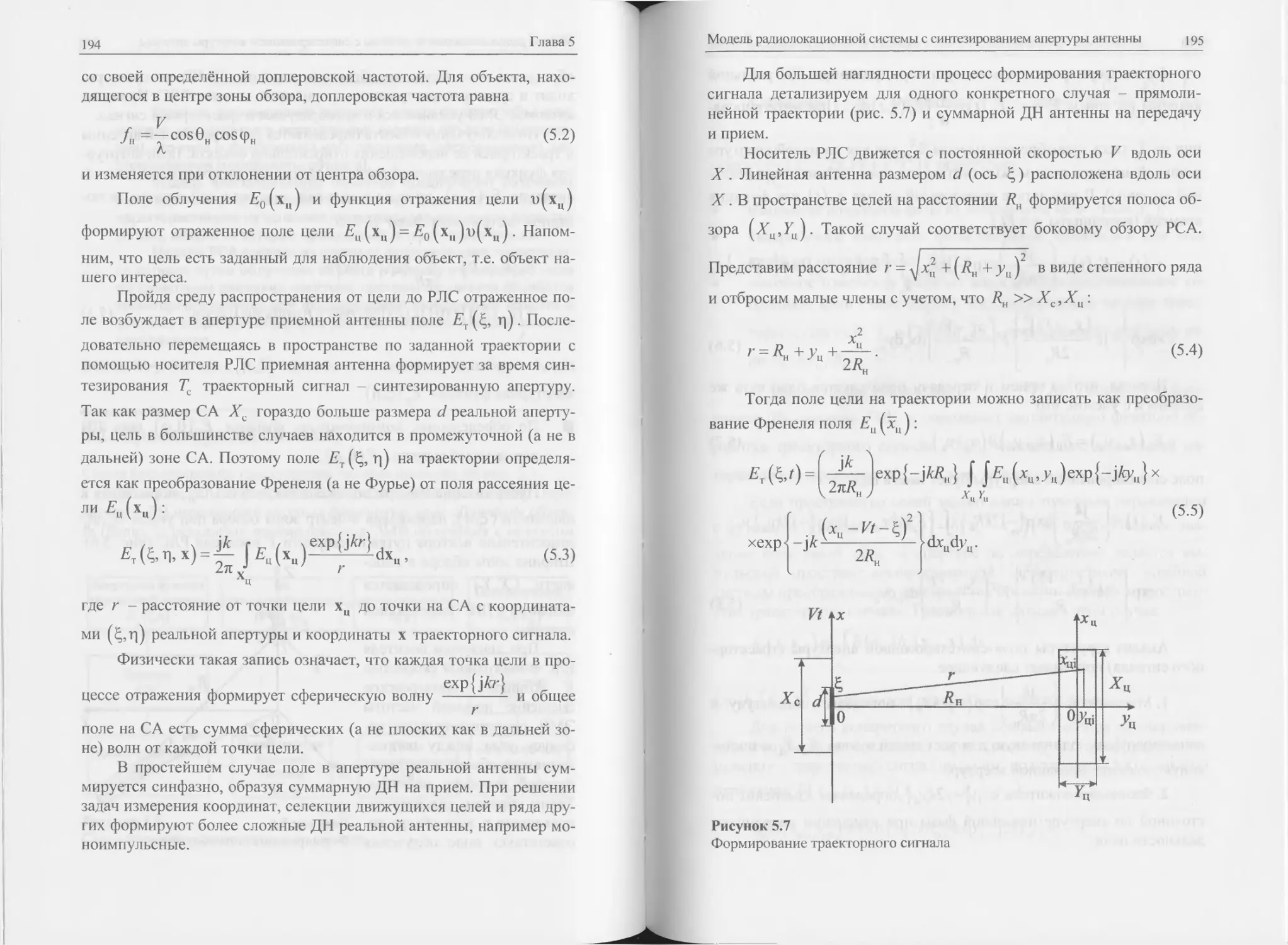
5.2. Траекторный сигнал..............................192
5.3. Классификатор целей.............................205
5.4. Детальность радиолокационного изображения
при несогласованной обработке траекторного сигнала...213
5.5. Корреляция сигналов радиолокационной системы
с синтезированием апертуры антенны
при изменении несущей частоты........................218
ГЛАВА 6
Принципы построения
радиолокационной системы землеобзора
с синтезированием апертуры антенны...................221
6.1. Структурная схема радиолокационной системы
землеобзора..........................................221
6.2. Приемопередающий тракт..........................225
6.3. Антенная система................................237
Оглавление
5
ГЛАВА 7
Обработка траекторного сигнала
радиолокационной системы
с синтезированием апертуры антенны....................249
7.1. Алгоритм согласованной обработки
траекторного сигнала...................................249
7.2. Оптическая система обработки
траекторного сигнала...................................273
7.3. Цифровая система обработки
траекторного сигнала...................................289
7.4. Влияние искажений траекторного сигнала
на характеристики радиолокационной системы
с синтезированием апертуры антенны.................305
7.5. Компенсация траекторных нестабильностей
с помощью инерциальной навигационной системы.......313
7.6. Автофокусировка изображения
в радиолокационной системе
с синтезированием апертуры антенны................318
ГЛАВА 8
Характеристики радиолокационной системы землеобзора
с синтезированием апертуры антенны....................335
8.1. Пространственное разрешение.......................335
8.2. Радиометрическое разрешение
и динамический диапазон...........................339
8.3. Дальность обнаружения целей......................342
8.4. Характеристики зоны обзора.......................354
ГЛАВА 9
Обнаружение, захват и сопровождение цели..............357
9.1. Точность измерения координат цели................357
9.2. Измерение вектора путевой скорости
носителя радиолокационной системы
с синтезированием апертуры антенны................362
9.3. Измерение путевой скорости и угла сноса
носителя радиолокационной системы
с синтезированием апертуры антенны
в передней зоне обзора.............................375
9.4. Автосопровождение цели............................388
6
Оглавление
ГЛАВА 10
Селекция движущихся целей............................405
10.1. Методы селекции наземных движущихся целей......405
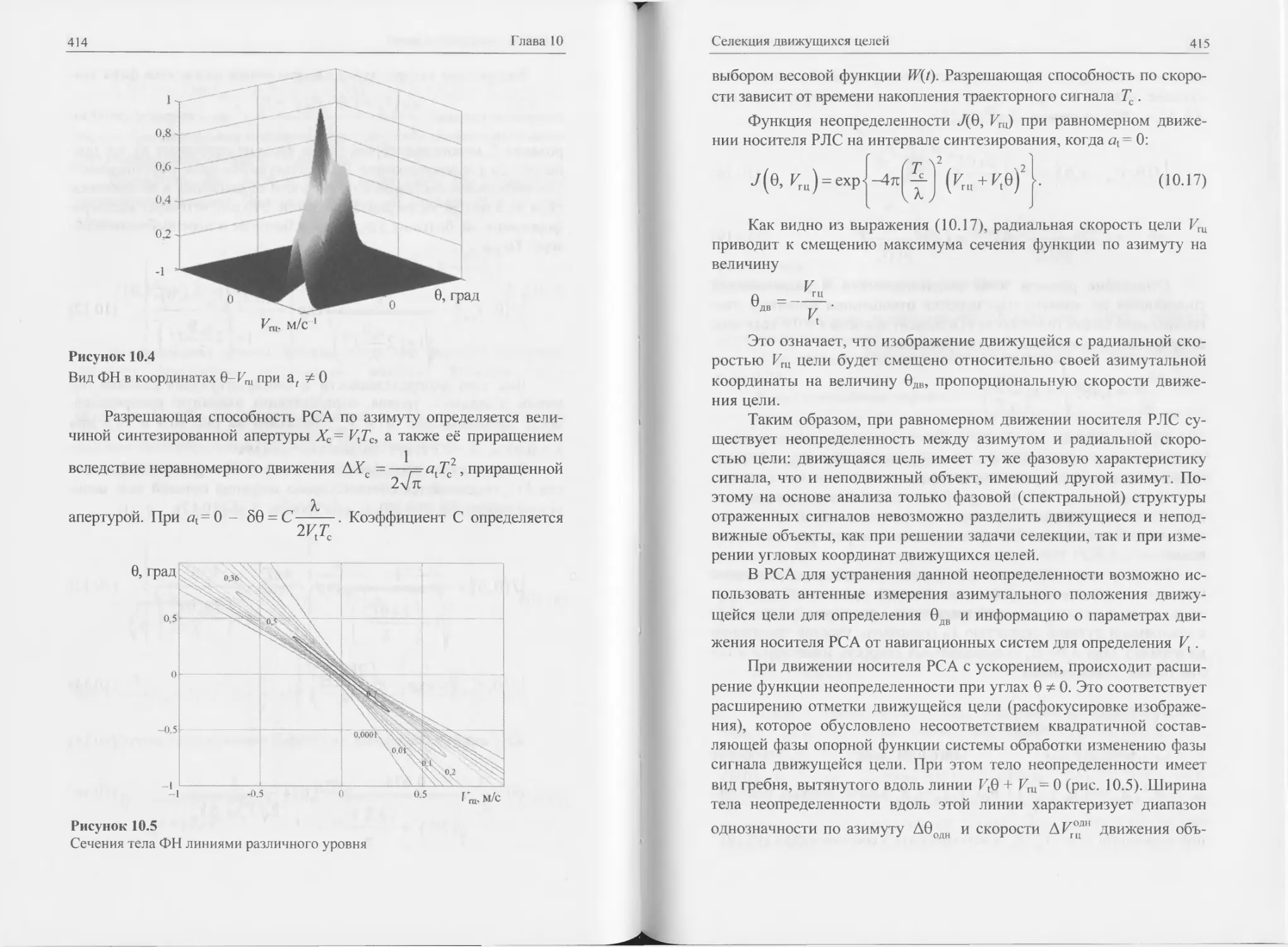
10.2. Характеристики сигналов движущихся целей.......408
10.3. Алгоритмы селекции движущихся целей............434
ГЛАВА 11
Распознавание целей..................................487
11.1. Решение задач распознавания целей..............487
11.2. Распознавательные признаки объектов............489
ГЛАВА 12
Помехозащищенность радиолокационной системы
землеобзора с синтезированием апертуры антенны ......496
12.1. Помехозащищенность радиолокационной системы
землеобзора в условиях радиоэлектронной борьбы........496
12.2. Скрытность работы радиолокационной системы
землеобзора..........................................498
12.3. Помехоустойчивость работы
радиолокационной системы землеобзора.................508
ГЛАВА 13
Радиолокационная система
с обратным синтезированием апертуры антенны..........515
13.1. Разрешающая способность
радиолокационной системы........................515
13.2. Наблюдение морской цели........................520
13.3. Наблюдение групповой цели......................526
ГЛАВА 14
Радиолокационное наблюдение
морской поверхности..................................529
14.1. Модель пространственно-временного сигнала,
отраженного от морской поверхности...................529
14.1.1. Модель движения морской поверхности.....532
14.1.2. Модель отражения радиолокационного сигнала
от морской поверхности..........................536
14.1.3. Пространственно-временной траекторный сигнал
в раскрыве антенны радиолокационной системы
с синтезированием апертуры.......................541
14.1.4. Спектр пространственно-временных частот сигнала.543
Оглавление
7
] 4.2. Режим формирования амплитудного портрета
морской поверхности......................................546
14.2.1 . Изображение одиночной морской волны........548
14.2.2 . Разрешающая способность
радиолокационной системы
с синтезированием апертуры антенны
при формировании амплитудного портрета
морской поверхности..........................555
14.3. Режим формирования скоростного портрета
морской поверхности......................................558
14.3.1. Модель сигнала для дискретной функции
отражения морской поверхности.......................558
14.3.2. Алгоритм формирования
скоростного портрета
методом моноимпульсного измерения угла .............560
14.4. Точность формирования скоростного портрета........563
14.4.1. Потенциальная точность измерения скорости
в элементе разрешения...............................563
14.4.2. Предельная точность формирования
скоростного портрета при отсутствии
внутреннего шума приемника..........................564
14.4.3. Влияние шумов приемника на точность
формирования скоростного портрета...................566
ГЛАВА 15
Многопозиционные радиолокационные системы
с синтезированием апертуры антенны......................569
15.1. Основные свойства многопозиционных
радиолокационных систем...................................569
15.1.1. Характеристики целей в многопозиционных
радиолокационных системах...........................571
15.1.2. Зоны действия многопозиционных
радиолокационных систем.............................573
15.2. Пространственно-временная функция
неопределенности бистатической
радиолокационной системы.................................575
15.3. Потенциальная точность измерения азимута
и составляющих скоростей движения цели
в бистатической радиолокационной системе.................585
15.4. Алгоритмы когерентной обработки
траекторного сигнала
при разнесенных приемнике и передатчике..................586
8
Оглавление
ГЛАВА 16
Радиолокационные системы самонаведения
с синтезированием апертуры антенны....................593
16.1. Особенности наведения управляемых средств
в режиме синтезирования апертуры антенны..............593
16.2. Траектория движения носителя
радиолокационной системы
с постоянным линейным разрешением.....................596
16.3. Траектория движения носителя
радиолокационной системы
с постоянным угловым разрешением......................602
16.4. Точностные характеристики
радиолокационных систем наведения.....................604
ГЛАВА 17
Корреляционная обработка
радиолокационных изображений..........................607
17.1. Алгоритмы совмещения радиолокационного,
картографического и оптического изображений...........60”
17.2. Алгоритмы автоматического совмещения
радиолокационного изображения
с цифровой картой местности...........................609
17.2.1. Формирование эталонов....................610
17.2.2. Устранение геометрических искажений
радиолокационных изображений.....................613
17.2.3. Обработка полученных радиолокационных
изображений......................................614
17.2.4. Поиск местоположения эталонного изображения
на радиолокационном изображении..................616
17.2.5. Точность совмещения радиолокационных изображений
с цифровой картой местности......................618
17.3. Индикация радиолокационной
и картографической информации.........................621
17.4. Коррекция навигационных ошибок
по радиолокационному изображению......................623
ГЛАВА 18
Авиационные радиолокационные системы
с синтезированием апертуры антенны....................627
18.1. Радиолокационные системы
комплексов воздушной разведки.........................627
Оглавление
9
18.2. Радиолокационные системы
малогабаритных и беспилотных
летательных аппаратов....................................632
18.3. Многофункциональные
радиолокационные системы
истребителей.................................... 635
18.3.1. Структура радиолокационной системы..........635
18.3.2. Режимы работы радиолокационной системы
по обеспечению мониторинга поверхности Земли.......637
18.3.3. Режимы работы радиолокационной системы
по навигационному обеспечению полета
и определению функционального состояния
наземных целей.....................................641
Литература...............................................645
Перечень сокращений
GPS
АД
АП
АПВ
АЦП
АЧХ
АФАР
БД
БЛА
БПФ
БС
БЦВМ
БЦО
ВПП
ВР
ГА
ГЛОНАСС
дд
дисс
ДН
дол
ДПФ
ЗУ
ИБЛ
ПК
ИНС
иен
ИУП
кпд
спутниковая навигационная система (global position
system)
амплитудный детектор
амплитудный портрет
апостериорная плотность вероятности
аналого-цифровой преобразователь
амплитудно-частотная характеристика
- активная фазированная антенная решетка
- база данных
беспилотный летательный аппарат
быстрое преобразование Фурье
- быстрая свертка
бортовая цифровая вычислительная машина
блок цифровой обработки
- взлетно-посадочная полоса
- высокое разрешение
гармонический анализ
глобальная навигационная спутниковая система
- динамический диапазон
доплеровский измеритель скорости и угла сноса
диаграмма направленности
- доплеровское обужение луча
- дискретное преобразование Фурье
запоминающее устройство
интегральный уровень боковых лепестков
инфракрасный
инерциальная навигационная система
- измеритель скорости носителя РЛС
информационно-упраляющее поле
коэффициент направленного действия
Перечень сокращений 1 1
ЛА лц лчм лэп м МБЛ мич МП МПРСА МФ нзск HP НРТР НС нск НУРС ОБПФ ог ОУ - летательный аппарат ложные цели - линейная частотная модуляция - линия электропередач - модулятор максимальный уровень боковых лепестков мгновенное изменение частоты - морская поверхность - многопозиционные РСА - многофункциональный - нормальная земная система координат - низкое разрешение - непосредственная радиотехническая разведка - навигационная система наземная система координат - неуправляемые реактивные снаряды обратное быстрое преобразование Фурье опорный генератор - органы управления - плотность потока мощности сигнала
ИБО пвчх ПМР по ппз ппп ПРД ПРМ ПС РЛИ РЛС РСА - переднебоковой обзор пространственно-временная частотная характеристика поляризационная матрица рассеяния программное обеспечение полное поляризационное зондирование полный поляризационный прием - передатчик - приемник прямая свертка радиолокационное изображение радиолокационная система радиолокатор с синтезированной (искусственной) апертурой ант енны
РСН РТР РЭБ РЭП РЭС СА САП - равносигнальное направление радиотехническая разведка - радиоэлектронная борьба радиоэлектронное подавление радиоэлектронное средство синтезированная апертура станция активных помех
12
Авиационные системы радиовидения
сдц
сдч
ско
см
СМИ
сндц
СП
СР
стэлс
сч
твд
TH
то
ттх
УБЛ
УМ
УПЧ
ФАР
ФД
ФКМ
ФН
ФО
ФЦА
ЦКМ
ЦП
ЩАР
цсо
ЭВМ
ЭЛТ
эмв
ЭПР
— селекция движущихся целей
- средняя доплеровская частота
среднеквадратическое отклонение
- смеситель
система микронавигации
- селекция наземных движущихся целей
— скоростной портрет
- среднее разрешение
технология снижения заметности
- синтезатор частот
- театр военных действий
траекторные нестабильности
- телескопический обзор
тактико-технические характеристики
- уровень боковых лепестков
— усилитель мощности
— усилитель промежуточной частоты
фазированная антенная решетка
- фазовый детектор
фазово-кодовая манипуляция
функция неопределенности
- функция отражения
— фазовый центр антенны
- цифровая карта местности
цифровой процессор
— щелевая антенная решетка
цифровая система обработки
электронно-вычислительная машина
- электронно-лучевая трубка
- электромагнитная волна
эффективная площадь рассеяния
Введение
От радиолокации к радиовидению
Радиовидение (детальное радиолокационное наблюдение
объектов), как область науки и техники, является частью радио-
локации.
Б Радиолокационное наблюдение - обнаружение, определение ме-
стоположения, распознавание и определение функционального
состояния заданных объектов наблюдения (целей) путем обна-
ружения и измерения параметров радиоволн, приходящих от
объектов.
Основным отличием систем радиовидения от традиционных
радиолокационных систем является сверхвысокое разрешение не
только по дальности, но и по угловым координатам. Это позволяет
получать с помощью систем радиовидения радиолокационные изо-
бражения наблюдаемых объектов, сравнимые по детальности с оп-
тическими изображениями.
Радиовидение - наблюдение объектов в радиодиапазоне волн с
детальностью оптических систем.
В отличие от оптических систем, системы радиовидения дают
возможность получать детальные изображения объектов в любое
время года на любом ТВД, независимо от метеоусловий, естествен-
ной освещенности, наличия дыма и пыли, на значительном удалении
и одновременно в широко!! зоне наблюдения, а также объектов, не-
видимых в оптическом диапазоне волн (в условиях оптической мас-
кировки, под пологом леса, в приземном слое, под слоем снега и
льда).
Система радиовидения, наряду с детальной координатной ин-
формацией о классе и типе целей, их функциональном состоянии
14
Авиационные системы радиовидения
(дальность, скорость, угловые координаты, местоположение, число и
размеры элементов целей, динамика изменения их координат), по-
зволяет также получать и детальную некоординатную информацию
(электрофизические характеристики материала и структура цели,
динамика их изменений), оценивая интенсивность, пространственно-
временную когерентность и поляризационные характеристики при-
нимаемых электромагнитных волн.
Возможность работы систем радиовидения (получение де-
тальных изображений) в самых различных диапазонах от милли-
метровых до метровых длин волн позволяет значительно повысить
эффективность решения задач радиолокационного наблюдения,
особенно обнаружение скрытых объектов, малоразмерных объек-
тов на фоне и объектов, выполненных по технологии СТЭЛС, а
также распознавание класса, типа и функционального состояния
целей.
Дополнительные возможности по повышению эффективности
радиолокационного наблюдения, прежде всего, обеспечения всена-
правленность наблюдения и помехозащищенности, дает применение
многопозиционных, в том числе бистатических систем, когда пере-
дающие и приемные элементы разнесены в пространстве и движутся
в общем случае по различным траекториям.
Такие уникальные возможности систем радиовидения предо-
пределили их широкое применение при решении хозяйственных и
военных задач.
Мониторинг земной и водной поверхности
• Состояние нефтепроводов, газопроводов, плотин, дамб, ЛЭП,
транспортных коммуникаций.
• Состояние почв, озер, болот, лесов, лесных вырубок.
• Оценка гидрологии (наводнений, подпочвенных подтоплений,
засухи).
• Определение биомассы, роста сельхозкультур
• Оценка активности вулканов и сейсмической активности.
• Обнаружение очагов степных и лесных пожаров.
• Оценка состояния моря (степень волнения, штормы, цунами,
загрязнение поверхности, ледовая обстановка, динамика льдов
и течений, рыбные промыслы).
• Определение районов катастроф и аварий (падение ЛА, круше-
ние поездов, терпящие бедствия корабли, аварии автотранспор-
та, прорыв плотин и дамб, утечка горючих, химических, биоло-
Введение
15
гических и радиоактивных веществ, обнаружение групп людей,
одиночных машин и плавсредств).
Детальная всепогодная разведка
• Обнаружение наземных целей, в том числе малоразмерных,
сосредоточенных и распределенных, на любой подстилаю-
щей поверхности, скрытых растительностью и заглубленных,
с искусственно сниженной заметностью, неподвижных и
движущихся (танки, тактические ракеты, зенитно-ракетные
комплексы, самолеты и вертолеты на стоянках, автотранс-
порт).
• Обнаружение скоплений войск, военных лагерей, фортифика-
ционных сооружений, переправ, новых дорог и троп, минных
полей, плотин, дамб, нефтепроводов, ВПП, ангаров, складов.
• Обнаружение морских надводных целей, в том числе малораз-
мерных при любой степени волнения поверхности моря и во
льдах.
• Обнаружение на водной поверхности следов кораблей.
• Определение функционального состояния целей, а также по
признаку свой/чужой.
• Оценка состояния аэродромов, железнодорожных узлов, мор-
ских портов.
• Детальное наблюдение поля боя, определение линии боевого
соприкосновения, оценка результатов боевой деятельности.
• Высокоточное целеуказание разведанных объектов.
Высокоточное наведение самолета и оружия
• Наведение высокоточного оружия, в том числе на малоразмер-
ные цели.
• Прицеливание при бомбометании, пуск НУРСов, сброс грузов.
• Автономная высокоточная навигация, в том числе при слепой
посадке на необорудованный аэродром (площадку).
• Маловысотный полет.
• Возможно также радиовидение воздушных целей, определение
детальной метеообстановки, оценка рельефа местности и ое-
шение других задач.
История развития систем радиовидения началась в 1950-х гг.
практически одновременно в СССР (Военно-воздучгная инженер-
ная академия им. профессора Н.Е. Жуковского) и США (Мичи-
ганский университет) сначала применительно к задачам воздуш-
16
Авиационные системы радиовидения
ной и космической разведки. Такие системы получили название
радиолокаторов с синтезированной (искусственной) апертурой
антенны (РСА). Первые открытые монографии, обобщающие
опыт научных исследований и разработки РСА, опубликованы в
1970 г. [4].
Основной задачей для обеспечения радиовидения является по-
лучение высокой (сверхвысокой) разрешающей способности РЛС по
дальности и углу (азимуту). Проблема получения высокого разреше-
ния по дальности к тому моменту была решена путем использования
широкополосных зондирующих сигналов. А для обеспечения высо-
кого разрешения по углу необходимы были антенны очень больших
размеров (сотни метров), размещение которых на летательных аппа-
ратах невозможно.
Идея метода (получение высокого разрешения по углу при ма-
лых размерах антенны) была основана на формировании большой
апертуры антенны на борту летательного аппарата (носителя РЛС)
искусственным способом. Для этого апертура синтезировалась, т.е.
формировалась, последовательно во времени при полете самолета
по определенной, точно известной (обычно прямолинейной) траек-
тории путем запоминания отраженного от объекта электромагнит-
ного поля (амплитуды и фазы траекторного сигнала). Отсюда на-
звание метода - синтезирование апертуры антенны. Иногда такую
антенну называли также искусственной или фантомной антенной,
подчеркивая ее отличие от реальной антенны малого размера, ис-
пользуемой в бортовой РЛС.
Когерентное (синфазное) суммирование сигналов, принятых и
запомненных за время пролета заданного участка траектории (тра-
екторного сигнала), эквивалентно синфазному суммированию сиг-
налов, принимаемых реальной линейной фазированной антенной
решеткой такого же большого размера. Поэтому угловая разре-
шающая способность и, следовательно, детальность радиолокаци-
онного изображения объекта по азимуту повышаются приблизи-
тельно во столько раз, во сколько синтезированная апертура больше
реальной апертуры антенны РЛС. В настоящее время это улучше-
ние может быть в тысячу и более раз, что обеспечивает высокую
детальность (1 м и лучше) радиолокационных изображений (радио-
видение).
Создание РЛС с синтезированной апертурой потребовало ре-
шения целого ряда научно-технических проблем, среди которых вы-
деляются своей сложностью две.
Введение
17
Обеспечение высокой когерентности траекторного сигнала тре-
бовало точного знания закона изменения амплитуды и фазы сигнала.
Необходимое время когерентности составляло десятки секунд при
ширине полосы частот модуляции 100 МГц и более одновременно в
большом числе (тысячи) каналов.
В практическом плане наибольшие сомнения вызывала воз-
можность выдерживания заданной прямолинейной траектории носи-
теля РЛС в процессе синтезирования апертуры с точностью по боко-
вому отклонению порядка миллиметра на интервале в сотни метров
чтобы обеспечить синфазное (когерентное) сложение сигналов. Это
казалось фантастикой. Однако летные эксперименты показали, что
самолет, благодаря своей значительной массе, при полете без ма-
невра в невозмущенной атмосфере перемещается строго по прямо-
линейной траектории на значительное расстояние (до 100 м). При
использовании специальных методов измерения и компенсации
влияния отклонений траектории от заданной, методов микронавига-
ции и автофокусировки, возможно синтезирование апертуры разме-
ром сотни и более метров при маневрировании и полете в турбу-
лентной атмосфере.
Большие успехи были также достигнуты в создании когерент-
ного приемо-передающего тракта бортовых РЛС, что в результате
обеспечило получение когерентного траекторного сигнала РСА.
Более сложной оказалась проблема обработки траекторного
сигнала. Аналоговые электронные устройства не могли решить эту
задачу и все надежды возлагались на цифровую обработку. Однако,
хотя прошло более 40 лет с момента начала работ в этом направле-
нии, и сегодня требования к объему памяти и быстродействию вы-
числительных систем достигают предельных значений возможно-
стей бортовых ЭВМ.
Поэтому на первом этапе развития РСА для решения столь
сложной задачи обработки траекторного сигнала пришлось разраба-
тывать принципиально новые системы с использованием когерент-
ных оптических устройств [6]. Иногда их называют голографиче-
скими системами.
Впервые идеи использования когерентных оптических систем с
акустооптическим преобразователем радиолокационных сигналов в
световые волны были предложены для спектрального анализа ра-
диолокационных сигналов [2] и впоследствии применены в борто-
вых системах непосредственной радиотехнической разведки.
18
Авиационные системы радиовидения
огда же разрабатывались когерентные оптические системы
для PC А [3]. В таких системах на борту носителя PC А траекторный
сигнал записывается на фотопленку с сохранением его фазовой
структуры. Обработка траекторного сигнала и получение радиоло-
кационного изображения объекта осуществляется в наземных опти-
ческих устройствах путем освещения проявленной фотопленки с за-
писью траекторного сигнала (радиоголограммы) лазерным светом,
формирования изображения объекта с помощью специальной опти-
ки и записи этого изображения на вторичную фотопленку.
Естественно, что при этом происходит большая задержка ин-
формации, обусловленная временем доставки и обработки фото-
пленки, достигающая нескольких часов. Однако и в настоящее вре-
мя, благодаря уникальным свойствам (высокое качество изображе-
ний, широкая полоса обзора, регистрация изображения), оптические
системы используются в тех случаях, когда задержка информации не
играет решающей роли.
В настоящее время радиовидение переживает этап бурного раз-
вития: значительно повышаются тактико-технические характеристи-
ки, резко расширяются области применения РСА. Практически все
новые системы используют цифровые методы обработки сигналов,
что позволяет работать в реальном масштабе времени. Значительно
(на порядок и более) возросла разрешающая способность РСА. I ак,
авиационные системы разведки имеют разрешение до 30 см.
Все РСА. имеют режимы селекции движущихся целей. Введе-
ние второго, разнесенного по высоте, приемного канала (интерфе-
рометрические РСА) позволило получать трехмерные (рельеф) изо-
бражения земной поверхности.
Остро стоящая задача распознавания целей привела к разработ-
ке поляриметрических РСА с полным поляризационным зондирова-
нием и приемом.
Большинство существующих авиационных РСА работают в
сантиметровом диапазоне волн. Вследствие высокого поглощения
радиоволн этого диапазона листвой деревьев, травой, почвой та-
кие РСА не могут обнаруживать цели, скрытые растительностью
или грунтом. Появились системы, работающие в дециметровом
(70 см) и метровом (2,5 м) диапазонах волн. Такие РСА могут на-
блюдать цели под полотом леса, в районах затоплений, скрытые
растительностью, и многие другие замаскированные объекты.
Активно разрабатываются многопозиционные РСА.
Введение
19
Учитывая огромное количество опубликованных и ежегодно
публикуемых материалов исследований по радиовидению, не всегда
доступных читателю, книга носит системный и самодостаточный
характер, т.е. для ее чтения и понимания не требуется привлечение
других источников.
В начале книги дается решение основных задач радиовидения
на основе классической теории статистической радиолокации. При
этом используются известные методы синтеза и анализа оптималь-
ных алгоритмов.
Представлены также без ссылок широко используемые справоч-
ные данные по радиолокационным характеристикам различных объек-
тов наблюдения с уточнением и дополнением по результатам собствен-
ных исследований применительно к задачам радиовидения.
Непосредственно основы теории радиовидения изложены в со-
ответствии с опубликованными в открытой печати трудами авто-
ров книги.
Вопросы приоритетности исследований теории и принципов
построения систем радиовидения не рассматриваются, так как
большинство работ и их результаты в начальном периоде исследо-
ваний у нас в стране и за рубежом были закрытыми.
Также не рассматриваются вопросы практической реализации
методов радиовидения при модернизации и создании перспективных
авиационных радиолокационных комплексов.
Приведенные в последней главе таблицы ТТХ авиационных
систем радиовидения взяты из открытых опубликованных статей и
рекламных проспектов.
В литературе указаны некоторые опубликованные в открытой
печати труды авторов книги и их коллег по научной школе (моно-
графии, учебники, статьи).
При желании читатель может обратиться к указанной литерату-
ре для уточнения результатов исследований по отдельным вопросам,
указанным в названии трудов.
Информационное обеспечение решения большинства авиаци-
онных научных, хозяйственных и боевых задач основано на исполь-
зовании радиовидения - бортовых радиолокационных систем с син-
тезированной апертурой антенны.
Такие системы позволяют наблюдать Землю и объекты в слож-
ных метеусловиях, днем и ночью, на больших дальностях с деталь-
ностью оптических систем.
20
Авиационные системы радиовидения
Монография создана на основе более полувекового
опыта разработки теории и принципов построения сис-
тем радиовидения научной школы Военно-воздушной ин-
женерной академии им. проф. Н.Е. Жуковского и предна-
значена для студентов, инженеров и научных работников,
занимающихся проблемами радиовидения.
ГЛАВА 1
Радиолокационное обнаружение
и измерение координат целей
1.1. Структура радиолокационного канала
РЛС впервые появились как средство обнаружения и определения
координат самолетов в системах противовоздушной обороны перед
Второй Мировой войной. С тех пор радиолокация развивается ги-
гантскими темпами и в настоящее время используется практически
во всех комплексах вооружения и при решении многих хозяйствен-
ных задач. Главный качественны;! скачок в радиолокации произо-
шел когда от обнаружения и измерения координат перешли к распо-
знаванию объектов.
Для этого в РЛС ведется оценка и дается детальный анализ
многих параметров электромагнитной волны (ЭМВ), отраженной от
объекта. Зная (изучая заранее) взаимосвязь параметров ЭМВ с ха-
рактеристиками объектов, решаются все задачи радиолокационно-
го наблюдения: обнаружение, измерение координат, распознавание
объектов и определение их функционального состояния (характер
движения в целом и отдельных частей, работа двигателя, стрельба,
пуск ракет и др.). На рис. 1.1 представлена структура радиолокаци-
онного наблюдения.
Рисунок 1.1
Структура радиолокационного наблюдения
22
I лава 1
Радиолокация - это обнаружение заданных объектов, определе-
ние их координат и других характеристик путем обнаружения и
измерения параметров радиоволн, приходящих от объектов.
Радиолокация, как наука, основана на использовании ряда фи-
зических законов, связанных с распространением и рассеянием элек-
тромагнитных волн.
Важнейшим для радиолокации свойством электромагнитных
волн является их рассеяние при падении на объекты. Это позволяет,
принимая рассеянные объектом волны и измеряя их параметры, су-
дить о наличии и свойствах объекта. В общем случае объект рассеи-
вает волны во все стороны, в том числе и в сторону, обратную на-
правлению прихода падающей волны. Таким образом, облучая объ-
ект, можно принимать отраженную волну в том же месте, откуда
распространяется волна облучения. При многопозиционной радио-
локации рассеянные волны принимаются также с других, отличных
от облучения, направлений.
Закон о прямолинейности распространения электромагнитных
волн в однородной среде используется для определения угловых ко-
ординат объекта путем измерения направления прихода волны, как
вектора Пойнтинга, перпендикулярного фазовому фронту волны.
Постоянство скорости распространения электромагнитных
волн позволяет определять дальность до объекта путем измере-
ния задержки волны при распространении ее от объекта до ра-
диолокатора.
Важным свойством электромагнитных волн является их малое
затухание при распространении в атмосфере и космосе, что позво-
ляет получать большую дальность обнаружения объектов практиче-
ски в любых метеоусловиях. Только при переходе к миллиметровым
волнам затухание в атмосфере значительно ограничивает дальность
распространения электромагнитных волн, особенно в дожде.
Электромагнитные волны, рассеянные движущимся объектом,
имеют другую длину волны по сравнению с волной облучения {доп-
леровское смещение частоты}. Этот эффект позволяет выделять
движущиеся объекты и определять их скорость путем измерения ве-
личины смещения частоты.
Кроме перечисленных основных законов используются мно-
гочисленные закономерности рассеяния электромагнитных волн
объектами в зависимости от геометрических размеров, формы, элек-
трических свойств материала объекта, а также от длины волны, угла
Методы радиолокационного обнаружения и измерения координат целей
23
падения, поляризации и напряженности электромагнитного поля об-
лучения. Характеристики распространения радиоволн в различных
средах также зависят от типа среды (атмосфера, ионосфера, космос,
снег, почва и т.п.) и ее неоднородности (турбулентность, облачность,
концентрация электронов и т.п.), что учитывается при анализе рас-
сеянного объектом поля.
Параметры ЭМВ,
используемые в процессе радиолокационного наблюдения
• Напряженность поля ЭМВ Е, В/м.
Вектор Пойнтинга |Е' = П , Вт/м2.
• Скорость распространения с = 3 • ИХ м/с.
• Несущая частота колебаний /0 (Гц) или длина волны
• Начальная фаза колебаний <р0, град.
• Поляризация.
• Параметры модуляции напряженности и фазы волны.
Радиодиапазон ЭМВ, используемых в радиолокации, обычно
исчисляется от десятков метров до миллиметров.
В табл. 1.1 показаны диапазоны волн авиационных РЛС и не-
сущие частоты, соответствующие центру диапазона.
Таблица 1.1
Диапазоны волн авиационных РЛС
Обо- значе- ния США К с S L Р VHF
Д/о, ГГЦ 12...40 8...12 4...8 2...4 1...2 300... 1000 30...300
/о, ГГц 38 10 6 3,4 1,3 430 120
2о 8 мм 3 см 5 см 9 см 23 см 70 см 2,5 м
Пример, с учетом того, что Хо =с/, диапазон X имеет
длину волны от 3,75 см до 2,5 см. Наиболее часто в авиационных
РЛС используется длина волны Хо= 3,2 см.
24
Глава 1
Часто к радиолокации относят также два других направления
науки и техники, связанные с излучением и приемом радиоволн,
приходящих от объектов.
Направление 1 — радиометрия, или теплорадиолокация, ис-
пользует для изучения объектов их собственное излучение как на-
гретого тела в радиодиапазоне частот, которое принимается и анали-
зируется широкополосным приемником. Иногда этот метод называ-
ют пассивной радиолокацией.
Направление 2 — радиолокация с активным ответом. Харак-
терным примером этого направления является система государст-
венного опознавания, в которой объект оснащен активным ответчи-
ком, излучающим электромагнитную волну в ответ на запросную
(облучающую) волну радиолокатора.
Структура радиолокационного канала (рис. 1.2) включает в
себя собственно РЛС, носитель РЛС, среду распространения ра-
диоволн, группу объектов, систему навигации и систему индика-
ции и управления каналом. Все эти элементы структуры участвуют
в процессе обнаружения и определения характеристик заданных
объектов.
1. Группа объектов состоит из заданных объектов (целей),
вспомогательных объектов (ориентиров), сопутствующих объ-
Рисунок 1.2
Структура радиолокационного канала
Методы радиолокационного обнаружения и измерения координат целей
25
ектов (фона), объектов излучающих или переизлучающих по-
меховые сигналы (источников помех).
Цели - заданные объекты, т.е. объекты интереса, могут иметь
различную физическую природу: воздушные цели (самолеты,
ракеты, облака, дождь, турбулентность атмосферы и т.п.), на-
земные цели (скопление войск и отдельные виды техники,
взлетные полосы аэродромов и сельскохозяйственные угодья,
инженерные сооружения и дороги и т.п.), морские цели (кораб-
ли, ледовые поля, морская поверхность).
Ориентиры - вспомогательные объекты, которые помогают
решать основную задачу обнаружения и определения характе-
ристик целей. Так, например, ориентир (объект с известными
координатами) используется для высокоточного определения
координат целей, расположенных вблизи этого объекта.
Фон - сопутствующие объекты, которые обычно препятствуют
обнаружению целей. Так, если малоразмерная цель наблюдает-
ся на фоне подстилающей (земной) поверхности, то фон маски-
рует цель.
Сигнал от фона намного превышает сигнал от цели, что требует
особой системы обработки сигналов для подавления сигнала фона и
выделения сигнала цели.
Активные и пассивные источники помех - объекты, которые
излучают или переизлучают сигналы, мешающие обнаружению
сигналов цели.
Помехи обычно используются в процессе радиоэлектронной
борьбы, однако они могут быть и непреднамеренными (естествен-
ными), например в виде излучения других радиопередающих уст-
ройств. Пассивные помехи создаются специальными отражателями
(облака диполей, аэрозолей и других образований), отражения от ко-
торых маскируют сигналы целей.
2. Среда распространения радиоволн - пространство между
РЛС и объектом.
Обычно считается, что электромагнитная волна от объекта до
РЛС распространяется прямолинейно и с постоянной скоростью.
Наличие неоднородности среды (коэффициента преломления)
вносит ошибки в процесс измерения характеристик цели, а потери
26
Глава 1
энергии вследствие поглощения в среде приводят к уменьшению
дальности обнаружения целей. Поэтому при решении радиолокаци-
онных задач требуется учитывать харакгеристики среды распро-
странения.
В зависимости от решаемой радиолокатором задачи, различ-
ные объекты и даже среда распространения могут изменять свое
назначение. Так, турбулентность атмосферы, являясь обычно ха-
рактеристикой среды распространения, в другой задаче может
быть объектом нашего интереса, т.е. целью, например в метеоро-
логической РЛС. Земная поверхность в случае обнаружения мало-
размерной цели, например танка, является фоном, а при картогра-
фировании — целью. Также часто, особенно в многофункциональ-
ной РЛС, меняют свое назначение ориентиры и цели.
3. Радиолокационная система (РЛС) — включает в себя собст-
венно аппаратуру РЛС («железо») и программное обеспечение
(ПО) работы РЛС. Выделение ПО в отдельный элемент обу-
словлено как важнейшей ролью ПО в решении всех радиолока-
ционных задач, так и ее специфическим видом, как продукта
сугубо интеллектуальной деятельности, стоимость которого
намного превышает стоимость аппаратуры РЛС.
Интеллект РЛС материализован в виде алгоритмов и программ
процессоров и вычислительных машин, т.е. в программном обеспе-
чении. Конечно, этот интеллект может быть реализован только при
наличии соответствующей аппаратурной части РЛС, которая, в свою
очередь, также требует больших интеллектуальных вложений (тех-
нология создания и эксплуатации).
Основные блоки аппаратуры РЛС
• Антенные и приемо-передающие модули. Антенно-фидерные
устройства модулей обеспечивают направленное излучение и
прием радиоволн с учетом их поляризации. Передающие моду-
ли обеспечивают усиление, амплитудную и фазовую модуля-
цию радиочастотных колебаний. Приемные модули обеспечи-
вают малошумящее усиление и преобразование частоты при
нимаемых радиочастотных колебаний.
• Синтезатор сигналов генерирует колебания заданной радио-
частоты и частот модуляции и преобразования для приемо-
передающих модулей.
Методы радиолокационного обнаружения и измерения координат целей
27
• Процессор обработки сигналов выполняет с помощью аналого-
вых и цифровых устройств заданный алгоритм обработки при-
нимаемых радиочастотных колебаний после преобразования в
приемнике.
• БЦВМ управления и обработки данных обеспечивает согласо-
вание работы и режимов всех устройств РЛС и носителя РЛС в
соответствии с решаемой задачей, а также обработку данных с
выхода сигнального процессора.
Кроме перечисленных составных частей РЛС, в нее также вхо-
дят устройства технической диагностики, источники питания, сеть
распределения сигналов и коммутационные устройства (на рисунке
не показаны).
Система навигации снабжает необходимой информацией сис-
темы обработки сигналов и управления.
Система индикаиии и управления обеспечивает связь между
оператором и РЛС с использованием устройств отображения
информации и интеллектуальных систем управления, реали-
зуемых с помощью БЦВМ.
Носитель РЛС выполняет не только транспортные функции, но
и обеспечивает заданное пространственное положение РЛС
(траекторию) исходя из задачи формирования требуемого про-
странственно-временного сигнала.
Функционирование радиолокационного канала начинается с за-
дания оператором тактической задачи, исходя из которой система
управления через БЦВМ управления формирует структуру канала и
его режимы работы. Коммутационные устройства обеспечивают ре-
конфигурацию (изменение структуры) РЛС путем переключения
приемопередающих модулей и вычислительных модулей процессо-
ров и способов объединения сигналов и данных с помощью сети
распределения (шины), соединяющей все модули. Кроме того, сис-
тема управления изменяет состав модулей программного обеспече-
ния процессоров и БЦВМ для выполнения заданных алгоритмов
управления, обработки сигналов и индикации.
Сложные задачи реконфигурации аппаратуры РЛС и про-
граммного обеспечения требуют большой интеллектуальной под-
держки оператора РЛС соответствующим программным обеспече-
нием БЦВМ системы управления, высвобождая мышление операто-
ра (летчика) для решения тактических задач.
28
Глава 1
В соответствии с заданным режимом работы синтезатор сигна-
лов вырабатывает высокочастотные колебания несущей частоты
зондирующего сигнала, а также частоты преобразования и модуля-
ции сигналов. Наличие высокостабильного генератора опорной час-
тоты обеспечивает взаимную когерентность всех сигналов, выраба-
тываемых синтезатором.
Каждый передающий модуль осуществляет модуляцию и уси-
ление сигналов синтезатора. В соответствии с программой процес-
сора управления фазовращатели каждого передающего модуля осу-
ществляют взаимное фазирование излучаемых электромагнитных
волн так, чтобы сформировалась требуемая диаграмма направленно-
сти на передачу.
Излученная электромагнитная волна, пройдя среду распростра-
нения от РЛС до объекта, формирует поле облучения объекта. В за-
висимости от свойств объекта и параметров поля облучения, харак-
теризуемых функцией отражения объекта, формируется рассеянная
объектом ЭМВ, распространяющаяся в сторону РЛС.
Отраженная от объекта электромагнитная волна, пройдя среду
распространения от объекта до РЛС, возбуждает поле на апертуре
приемных антенных модулей. В соответствии с программой процес-
сора управления фазовращатели каждого приемного модуля осуще-
ствляют фазирование принимаемых электромагнитных колебаний
так, чтобы сформировать требуемую диаграмму направленности на
прием.
Приемные модули усиливают и преобразуют по частоте и мо-
дуляции принимаемые сигналы. Формирование приемной диаграм-
мы направленности возможно как аналоговым сумматором сигналов
после фазовращателей, так и в процессе обработки с использованием
цифровых фазовращателей. Для этого аналоговые сигналы с помо-
щью АЦП преобразуются в цифровые.
Процессор обработки сигналов и БЦВМ выполняют заданные
алгоритмы оценки параметров сигналов, обнаружения, определения
координат, распознавания цели, обеспечения помехозащищенности
и другие алгоритмы. Полученные данные используются оператором
и подаются в другие системы (разведка, оружие, оборона и т.п.).
Дополнительные каналы (обычно другой физической природы)
обеспечивают необходимой информацией процессоры обработки и
БЦВМ управления. Это, прежде всего, система навигации, которая
совместно с носителем обеспечивает требуемую траекторию пере-
мещения антенных модулей РЛС исходя из необходимости решения
заданной тактической задачи.
Методы радиолокационного обнаружения и измерения координат целей
29
Радиолокация - обнаружение заданных объектов, определе-
ние их координат и других характеристик путем обнаружения и
измерения параметров радиоволн, приходящих от объектов.
Радиолокационное наблюдение - обнаружение, определение
местоположения, распознавание и определение функционального
состояния объектов наблюдения - целей.
Основные законы, на которых основана радиолокация
• Рассеяние ЭМВ при облучении цели.
• Прямолинейное распространение радиоволн.
• Постоянство скорости распространения радиоволн.
• Доплеровское смещение частоты ЭМВ при отражении от дви-
жущейся цели.
Структура радиолокационного канала
• РЛС.
• Носитель РЛС.
• Среда распространения радиоволн.
• Группа объектов.
• Система навигации.
• Система индикации и управления каналом.
1.2. Методы обнаружения
и измерения координат цели
Задачами радиолокационного наблюдения на первом этапе являются
обнаружение и измерение координат цели. Более сложная задача
классификации требует анализа многих других характеристик цели
используя различные методы оценки параметров ЭМВ.
Задача обнаружения цели в радиолокации сводится к задаче
обнаружения отраженной от цели и приходящей к РЛС электромаг-
нитной волны. Чтобы надежно обнаружить (наблюдать) цель, необ-
ходимо накопить определенный уровень энергии отраженной ЭМВ,
так как процесс наблюдения сопровождается различного рода поме-
хами.
Надежность (вероятность) обнаружения ЭМВ при наличии по-
мех определяется отношением энергии сигнала (ЭМВ) Ес к энергии
помехи Еп, равной спектральной плотности помехи Nn в полосе
30
Глава 1
спектра частот сигнала. Чем больше это отношение, тем выше на-
дежность обнаружения.
Энергия сигнала равна произведению средней мощности Р
на время наблюдения Тс: Ес = РСТС, Втс.
Энергия помехи, учитывая что 1/Гс, ест ь полоса частот сигнала
ДА , в которой действует помеха, Еп = РПГС =Pn/Afc = Уп(Вт-с)
определяется спектральной плотностью мощности помехи.
Уровень накопленной в процессе наблюдения энергии ЭМВ за-
висит от размера анализируемой волны в пространстве и времени.
Чем больше площадь антенны, тем больше площадь принимаемой
ЭМВ, тем больше мощность сигнала на выходе антенны. Чем боль-
ше время наблюдения, тем больше энергия сигнала, тем выше на-
дежность обнаружения сигнала и цели.
Задача измерения дальности цели в радиолокации сводится к
задаче измерения задержки ЭМВ тц при ее распространении от
РЛС до цели и обратно. При этом дальность цели есть расстояние
Рц от РЛС до цели в момент облучения цели ЭМВ.
Считается, что скорость распространения радиоволны - вели-
чина постоянная. В случае однопозиционной РЛС, ЭМВ за время тц
проходит двойной путь 2Рц = сти и 7?ц - (ст ) 2 .
Измерение задержки тц в РЛС возможно различными методами,
так как все параметры ЭМВ зависят от времени задержки. Обычно
используются три метода: импульсный, частотный и фазовый.
Импульсный метод измерения задержки предполагает, что в
РЛС используется сигнал в виде высокочастотного импульса,
периодически повторяющегося с частотой Fn .
Длительность импульса ти гораздо меньше периода повторе-
ния импульсов Гп =1/Fn . На рис. 1.3 иллюстративно показан им-
пульсный метод измерения задержки. В момент времени tx антенна
РЛС излучает импульс ЭМВ мощностью в направлении на цель.
В /2 ЭМВ облучает цель и формирует отраженный импульс Р, рас-
пространяющийся в обратном направлении. В /3 импульс ЭМВ
Методы радиолокационного обнаружения и измерения координат целей
31
Рисунок 1.3
Импульсный метод измерения дальности
1
достигает антенны РЛС. Процессор фиксирует время tx и и вычис-
ляет задержку тц -13 - tx.
Процесс измерения задержки повторяется с периодом ГГ1 . Если
задержка тц превышает период повторения Т}., то возникает ошиб-
ка измерения (неоднозначность). На рис. 1.4 иллюстративно показан
процесс формирования ошибки измерения.
Если тц1 <ТП, то отраженный импульс приходит в своем пер-
вом периоде повторения и неоднозначность измерения отсутствует.
Если тц2 > Гп, то отраженный импульс приходит в следующем (вто-
ром) периоде повторения и измеренное значение задержки относи-
тельно второго излучения импульса равно тц2 = тц2 — Ти . Соответст-
венно, дальность цели будет измерена с ошибкой Т?ц2 =(стц2)/2, а
истинная 7?цЭ =(стц2)/2. Зона однозначного (правильного) измере-
ния дальности при периодическом сигнале АТ? = (с7п)/2 .
Рисунок 1.4
Погрешность измерения дальности при импульсном методе измерения
32
Глава 1
Задержка импульса тц = 10 мкс соответствует дальности
1,5 км, а тц = 100 мкс Т?ц = 15 км. При просмотре полосы дально-
сти шириной АТ? = 30 км на расстоянии (60...90) км начальная за-
держка тн = 400 мкс и конечная тк = 600 мкс.
При частоте повторения импульсов Fri=l кГц период по-
вторения Гп = 1/Fn = 1 мс и максимальная однозначная полоса
дальности АТ? = = 150 км.
Частотный метод измерения задержки предполагает исполь-
зование в РЛС сигналов с частотной (обычно линейной) моду-
ляцией
/(') = /n+vr,
где v = — - индекс частотной модуляции (рис. 1.5,а),
dt
Период модуляции частоты Тм выбирается гораздо больше
максимальной задержки сигнала.
Изменение частоты отраженного сигнала на рис. 1.5,6 пред-
ставлено пунктиром. Разница частот излучаемого и принимаемого
сигналов А/. определяется временем задержки сигнала цели тц :
Рисунок 1.5
Частотный метод измерения задержки сигнала
Методы радиолокационного обнаружения и измерения координат целей
33
А(')=/о+у('-*ц)
44=/(0“A(z) = VTu’
г = <
и
V
Разницу частот измеряют с помощью спектроанализатора. Из-
меренное значение AfT позволяет вычислить дальность цели:
7?ц=(Стц)/2 = (сА/т)/(2у).
Недостатком частотного метода является наличие проникаю-
щего (излучаемого) сигнала в момент приема отраженного сигнала,
что ограничивает чувствительность приемного устройства. Для
уменьшения проникающего сигнала обычно приходится использо-
вать две раздельных антенны (на передачу и прием).
Л Фазовый метод измерения задержки использует зависимость
изменения фазы отраженной ЭМВ относительно излучаемой от
величины задержки.
Сигналы можно представить в следующем виде:
излученный сигнал
- принимаемый сигнал
^прм = t/Lcos [(00 (/ - тц ) + фц ] ,
где (00 = - несущая частота; <р0 - начальная фаза излучения;
срц - начальная фаза отражения; Uv и £7Ц - амплитуда излученного
и принимаемого сигналов.
Если начальные фазы сигналов равны (<р0 =ФЦ), то разность
фаз определяется задержкой тц :
А<р = со0тц - 2тс/0тц - 2л-тц,
Д<р.
2тгс
34
Глава 1
Измеренное значение Дер определяет дальность цели:
R—А<р.
ц 2 4л
Для измерения разности фаз Д<р используется фазовый детек-
тор, в котором перемножаются излученный и принимаемый сигна-
лы. Сигнал на выходе фазовою детектора пропорционален cosAcp,
т.е. сигнал фазового детектора изменяется при изменении дальности
периодически с периодом Д<р = 2л . Это приводит к неоднозначно-
сти измерения дальности с периодом Д/?ц = — • 2л = Х/2.
4л
Случайное изменение фазы срп при отражении ЭМВ от цели и
малый диапазон однозначности измерения дальности X/ 2 являются
основными недостатками фазового метода.
Фазовый метод отличается высокой чувст вигельностью к из-
менению задержки и дальности. Так, при длине волны X = 3 см из-
менение дальности всего на 1 мм приводит к изменению разности
фаз
Дф = (4лДЯ )Д = 24°.
Высокая чувствительность фазового метода к изменению
дальности (расстояния) используется при измерении угловых ко-
ординат и скорости цели.
Измерение радиальной скорости движения цели сводится к из-
мерению изменения дальности цели.
Непрерывно измеряя дальность 7?ц тем или иным методом (им-
пульсным, частотным или фазовым) и дифференцируя функцию
7?ц (/) , получаем скорость движения цели относительно РЛС - ради-
альную скорость =
d/
Наибольшую точность измерения изменения дальности обеспе-
чивает фазовый метод. При движении цели с постоянной радиаль-
ной скоростью Vr дальность цели равна /? (/) = 7?0 ± Vrt, где Rt -
дальность в момент начала облучения цели (начальная дальность),
знак ± зависит от направления движения цели: к РЛС или от РЛС.
Методы радиолокационного обнаружения и измерения координат целей 35
Задержка сигнала в этом случае
г
5
и
а фаза сигнала
Фц=^О
о -г
^~Фо’
4л/0
где (р0 =----
4л
— Rq - начальная фаза.
Таким образом, в результате движения цели относительно РЛС
(или РЛС относительно цели) несущая частота принимаемого сигна-
ла вследствие доплеровского эффекта изменяется на величину
г
Эффект Доплера является основой методов селекции целей по
скорости и измерения их скорости.
Знак смещения частоты определяется направлением движения
цели. При сближении с РЛС частота увеличивается (знак +), а при
удалении уменьшается (знак -). Сравнивая частоту принимаемого
сигнала /0 + f с частотой излученного /0, можно определить доп-
леровское смещение частоты и радиальную скорость цели:
2
—-°cos2ti/?
Uo cos2nfQt
C/0sin27r//
-sin 271^7
Рисунок 1.6
Функциональная схема фазового детектора
36
Глава 1
Сравнение фазы излучаемого и принимаемого сигналов произ-
водят с помощью фазового детектора, а измерение частоты f - с
помощью спектро-анализагора.
Для обеспечения измерения не только частоты, но и ее знака
используется двухканальный ФД (рис. 1.6).
При импульсном зондирующем сигнале изменение фазы отра-
женного сигнала вследствие доплеровского смещения частоты за
время длительности импульса ти обычно мало и им пренебрегают.
При скорости Vr = 30 м/с (110 км/ч), Х = 3 см и ти = 1 мкс
сдвиг фазы за время длительности импульса менее 1°:
Дф = (4дК)Д = 0,7°.
Поэтому учитывается только изменение фазы за период повто-
рения Тп импульсов. Если вследствие изменения дальности
4 л V
Д7?ц = Кг7^ изменение фазы от импульса к импульсу Дсрп -—
меньше 2л , то частота огибающей импульсного сигнала на выходе
фазового детектора (частота биений излученного и отраженного
сигналов /б = 2Кг/л) численно равна доплеровской частоте /б = f
с периодом Тб =1/ f (рис. 1.7).
Однозначное измерение доплеровской частоты и, соответст-
венно, радиальной скорости цели определяется условием, когда из-
менение фазы сигнала ФД 008(27^ за период повторения Гп дос-
тигает 2 л:
^Т^/макс^п ИЛИ У^акс
Рисунок 1.7
Импульсный периодический сигнал на выходе фазового детектора
Методы радиолокационного обнаружения и измерения координат целей 37
Это соответствует измеряемой однозначно максимально ради-
альной скорости
г макс
Это условие соответствует теореме Котельникова, в соответ-
ствии с которой на период максимальной частоты сигнала необхо-
димы два отсчета. В нашем случае на период максимальной доп-
леровской частоты Тмин = 1//макс приходятся два отсчета периода
повторения Тп (sin- и cos-сигналы ФД).
Пренебрегая влиянием доплеровского смещения частоты
при облучении цели импульсным сигналом мы фактически пере-
шли к измерению скорости фазовым методом измерения измене-
ния дальности. Однако, так как в пределах однозначности изме-
рений частота биений и доплеровская частота численно равны
друг другу, здесь и далее будем использовать термин доплеров-
ская частота.
Измерение угловых координат цели путем пространственной
обработки отраженной от цели ЭМВ сводится к нахождению на-
правления вектора Пойнтинга П, который расположен по нормали к
фронту волны (поверхности равных фаз ЭМВ).
В однородной среде ЭМВ распространяется прямолинейно и в
случае точечного источника волны (точечной цели) фазовый фронт
является, сферическим. На расстоянии цели, большем дальней зоны
R > = (2d2}/к, где d - размер анализируемого (принимаемого)
участка фазового фронта ЭМВ, кривизной фронта можно пренебречь
и считать, что фронт волны плоский.
У авиационных РЛС дальняя зона находится вблизи антенны
и практически всегда можно считать фронт волны плоским. Так,
при размере антенны d - 1 м и к = 2 см RVi = 100 м .
Для измерения положения фазового фронта волны необходимо
не менее двух разнесенных в пространстве антенных элементов.
На рис. 1.8 представлена схема измерения направления прихода
ЭМВ при приеме в двух точках (интерферометр), разнесенных на
расстояние базы d.
38
Глава 1
Рисунок 1.8
Схема измерения направления на цель с помощью интерферомефа
Фазовый фронт ЭМВ плоский, направление его прихода к ин-
терферометру определяется вектором П. Угол 0ц фазового фронта
относительно базы интерферометра определяет направление на цель.
При 0ц = 0 направление на цель по нормали к базе.
Антенные элементы 1 и 2 преобразуют ЭМВ в электрические
сигналы. Информация об угле 0ц заключена в задержке фазового
фронта Аг второго элемента относительно первого: \r — d sin0u.
Тогда задержка сигнала 2 относительно сигнала 1 составляет
Дг dsinO
т = — =------— . Измеряя относительную задержку сигналов т ,
с с
можно определить угол цели 0ц .
Возможны различные методы измерения задержки. Наиболее
чувствительным методом является фазовый, когда задержка опреде-
ляется по величине запаздывания фазы второго сигнала относитель-
но первого:
_ 2nd . _
Дф = 2л/0т =---sin0u,
тогда угол цели
ц
= arcsin
Измерить разность фаз Дф можно с помощью фазового детек-
тора {фазовый метод) или непосредственно суммируя сигналы пер-
вого и второго элементов {амплитудный метод):
Методы радиолокационного обнаружения и измерения координат целей
39
U( =J7cos(<n0Z + (p0),
U 2 = Ucos (<В0/ + Фо + Дф) ,
= 2Lfcos
—sinO
I X
COS COqZ + Фо
где U — амплитуда сигнала; ф0 — начальная фаза сигнала.
Амплитуда суммарного сигнала
°£(eu) = 20cos
имеет максимум при 0ц = 0. Функция Uz (0Ц) является диаграммой
направленности антенны (ДН) в данном случае интерферометра.
Максимумы диаграммы направленности периодически повторяются
д nd а
для различных углов 6Ц , когда величина —sin0u становится крат-
ной 2л: , что приводит к неоднозначности измерения угла 0ц интер-
ферометром sin0u = 2Х/<7. На рис. 1.9 показаны основной и два бо-
ковых пика сигнала интерферометра.
Для устранения неоднозначности измерения угла цели исполь-
зуют многобазовый интерферометр, когда ЭМВ одновременно при-
Рисунок 1.9
Сигнал интерферометра (я); ДН антенной решетки (б)
40
Глава 1
нимают несколько антенных элементов, расположенных вдоль базы
интерферометра на различных расстояниях. В этом случае максиму-
мы для разных баз формируются на различных углах 0ц , кроме
истинного угла 0ц = 0, где все максимумы совпадают.
Так как антенна РЛС предназначена не только для измерения
угла цели, но и для накопления энергии ЭМВ (обнаружения цели),
то число приемных элементов на раскрыве d берется максимально
возможным (7Умакс =2б//Х). При этом обеспечивается подавление
боковых максимумов. Изменение 1Д (0) при одинаковой амплитуде
сигналов антенных элементов имеет вид sin0/0 (рис. 1.9,6).
Таким образом, ширина ДН антенны определяется относи-
тельным размером антенны d/X.
Характерная величина относительного размера антенн d/X
Для авиационных РЛС истребителя.......................20...30
Для фронтового бомбардировщика........................50... 150
Для радиолокационного дозора и наведения..............80... 100
Для РЛС ледовой разведки
с длинной вдоль фюзеляжной антенны..................200...300
Дальность цели определяется измерением задержки ЭМВ
при распространении до цели и обратно. Задержка измеряется
импульсным, частотным или фазовым методом.
Радиальная скорость цели определяется измерением допле-
ровского смещения частоты ЭМВ при облучении цели.
Угловые координаты цели определяются измерением поло-
жения волнового фронта отражённой ЭМВ относительно плоско-
сти апертуры приёмной антенны.
ГЛАВА 2
Радиолокационные характеристики
наземных и морских целей
2.1. Общие закономерности рассеяния
электромагнитных волн объектами
Источником информации об объектах является отраженная
(рассеянная) ЭМВ, приходящая к приемной антенне РЛС. Эффек-
тивность решения задач радиолокационного наблюдения (обнару-
жения, классификации) во многом определяется знанием законов
рассеяния ЭМВ объектами наблюдения.
Гермин «отражение» обычно используют как частный случай
рассеяния ЭМВ в сторону источника облучения.
Рассеяние ЭМВ возникает тогда, когда есть неоднородности
среды распространения в виде того или иного объекта (танк, ко-
рабль, элементы земной поверхности и т.п.). Два главных свойства
объекта определяют его характеристики отражения (параметры от-
раженной волны):
• комплексная диэлектрическая и магнитная проницаемость ма-
териала объекта;
• размеры неоднородностей поверхности и внутренней структу-
ры объекта.
При этом рассеянная ЭМВ определяется также параметрами
волны облучения и условиями облучения и приема отраженной вол-
ны: длина волны; поляризация; ширина спектра частот модуляции
42
Глава 2
волны; ракурс облучения объекта; направление распространения и
приёма рассеянной ЭМВ.
Точные решения задач дифракции ЭМВ на телах сложной фор-
мы и материала, к которым относятся реальные объекты радиолока-
ционного наблюдения, в настоящее время существуют только для
небольшого числа объектов в строго определенных условиях. По-
этому решение обратной задачи определения характеристик объек-
тов по измеренным значениям параметров отраженной ЭМВ пред-
ставляется не только сложной, но и часто неоднозначной задачей.
Это объясняется большим числом случайных неконтролируемых ус-
ловий наблюдения и отдельных характеристик объектов (влажность,
старение материала, частичное изменение формы объекта и т.п.).
В тоже время существуют общие закономерности формирования
отраженного от объекта поля, знание которых позволяет решать зада-
чи радиолокационного наблюдения с заданной степенью вероятности.
Рассеянное поле возникает вследствие отличия свойств среды
распространения ЭМВ от свойств объекта.
Отдельные элементы объекта также имеют различные отра-
жающие свойства в случае отличия параметров их структуры и ма-
териала от соседних элементов объекта. Неоднородность свойств
материала внутри объекта также может влиять на функцию отраже-
ния вследствие частичного проникновения электромагнитной волны
облучения вглубь материала. При этом комплексная диэлектриче-
ская и магнитная проницаемость материала объекта определяют
длину волны и ее поглощение в материале.
Так, например, при падении плоской волны на плоскую по-
верхность раздела двух сред с коэффициентами преломления и
Рисунок 2.1
Отражение от плоской
поверхности
п2, где п = Тф ; S и р - соответственно
диэлектрическая и магнитная проницае-
мость, коэффициент отражения мощности
При одинаковых коэффициентах пре-
ломления сред = п2 слева и справа
(рис. 2.1) коэффициент отражения =
т.е. ЭМВ не отражается от границы двух
Радиолокационные характеристики наземных и морских целей
43
сред. При пх »п2 происходит почти полное отражение волны
(^1).
Рассеивающие свойства объекта определяются соотношением
длины волны облучения и размеров неоднородностей.
Так, если размер неоднородности меньше длины волны, то рас-
сеиваемое им поле невелико и определяется, в основном, объемом
неоднородности, как, например, при отражении волны от облаков,
дождя и других неоднородностей
атмосферы. При размере неодно-
родности порядка длины волны
наблюдается резонансное взаи-
модействие и большое рассеива-
ние волны. Например, головки
заклепок на крыле и щель люка
самолета вызывают большое от-
раженное поле в сантиметровом
диапазоне волны. Если размер
неоднородностей намного боль-
ше длины волны, то отражение
имеет сложный характер взаимо-
действия различного типа волн.
Рисунок 2.2
Отражение электромагнитной
волны от шара
На рис. 2.2 в качестве примера показано изменение мощности
отраженной волны Р р в относительных единицах в зависимости
от соотношения радиуса шара г и длины волны Л . При г/Х < 0,2
мощность отражения невелика и растёт пропорционально увели-
чению объема шара. При гД = 0,2... 1,0 наблюдается резонансное
отражение, а при г » Л коэффициент отражения не изменяется.
Неоднородности объектов. По свойствам, влияющим на рас-
сеяние волны, их можно разделить на два больших класса: ше-
роховатые неоднородности (случайные поля) и гладкие неод-
нородности. Шероховатые поверхности формируют диффузное
(во все стороны) отражение, а гладкие - зеркальное.
Случайные поля состоят из неоднородностей, дисперсия и ра-
диус корреляции которых изменяются в широких пределах в
зависимости от типа объекта.
44
Глава 2
Такие поля имеют нестационарный характер, однако при доста-
точной детальности описания (наблюдения) их можно представить
кусочно-стационарными полями. В этом случае отдельные наблю-
даемые участки объекта с размерами, намного превышающими ра-
диус корреляции неоднородностей (дороги, участки степи, водная
поверхность и т.п.), представляются стационарными полями с по-
стоянной дисперсией и нормальным законом распределения пара-
метров неоднородности.
Напомним, что объектами радиовидения являются отдельные
элементы техники, сооружений, аэродромов, дорог, воздушные це-
ли, элементы земной и водной поверхности. Для участков ровной
земной поверхности (степь, пашня, верхушки деревьев леса, взлет-
но-посадочная полоса, ледовые поля и т.п.) среднее квадратическое
отклонение и радиус корреляции неоднородностей изменяется от
единиц до десятков и сотен сантиметров. При этом радиус корреля-
ции гА шероховатостей обычно превышает в несколько раз СКО по-
верхности по высоте ah:
лес.................................................гк/= 1,5...2
луг, степь летом...........................................5... 6
серый лёд..................................................10...20
пустыня.....................................................3...4
Пересеченная местность, наряду с неоднородностями поверх-
ности, имеет также неоднородности рельефа, СКО и радиус
корреляции которого исчисляется десятками метров. Рельеф
изменяет угол падения волны на шероховатую поверхность.
Вследствие этого изменяется средняя мощность обратного рас-
сеяния.
Рисунок 2.3
График зависимости мощности отраже-
ния от угла скольжения
На рис. 2.3 иллюстра-
тивно показано изменение
средней мощности отраже-
ния ровной земной поверх-
ности от угла скольжения
<рн (угол между направлени-
ем облучения и земной по-
верхностью в вертикальной
плоскости). При малых уг-
лах фн мощность отражения
уменьшается пропорцио-
нально sin фн .
Радиолокационные характеристики наземных и морских целей
45
Существует аналогичная зависимость мощности отраженного
поля от угла скольжения на поверхность и других объектов (стены
сооружений, ВПП, водная поверхность и т.п.)- Границы стационар-
ных участков поверхности могут быть и плавными (поле - кустар-
ник - лес) и резкими (реки, дороги в лесу, пашня).
Гладкие неоднородности образуются поверхностями с малыми
шероховатостями, когда СКО неоднородностей меньше длины
волны облучения.
Такие неоднородности имеют поверхности большинства руко-
творных объектов военной техники и сооружений, представляющих
собой сочетание различных геометрических фигур с достаточно
гладкой поверхностью (плоскости, сферы, цилиндры, уголки). Это,
например, самолеты, танки, РЛС, автомашины, корабли.
Неоднородности с малыми шероховатостями формируют, в ос-
новном, зеркальные отражения так, что суммарное рассеяние от
группы гладких неоднородностей преобладает в одном или несколь-
ких направлениях. В результате мощность отражения в этих направ-
лениях значительно больше, чем при диффузном рассеянии. Наи-
большая мощность обратного отражения (в сторону облучения)
формируется неоднородностями в виде уголковых отражателей, а
также плоскостями, ориентированными перпендикулярно направле-
нию облучения.
Неоднородности такого рода создают зеркальную область от-
ражения - зеркальную точку, т.е. вся область отражения имеет один
фазовый центр, из которого излучается отраженная всей областью
волна. При этом расстояние между оз дельными зеркальными точка-
ми на поверхности объекта превышает геометрические размеры не-
однородностей, порождающих эти точки. Кроме того, положение
зеркальных точек и мощность отраженной волны остаются стабиль-
ными при значительных изменениях углов облучения, наблюдения и
длины волны.
На рис. 2.4 показано положение зеркальных точек для совре-
менного истребителя с переднего ракурса облучения в сантимет-
ровом диапазоне волн. 1 очка 1 соответствует носу фюзеляжа, точ-
ка 2 - воздухозаборникам, точка 3 - излому кромки крыла. Рас-
стояние между зеркальными точками значительно превышает
размеры областей отражения, формирующих эти точки. Мощность
отражения от других областей фюзеляжа и крыла обычно на не-
сколько порядков меньше мощности отражения от зеркальных то-
46
Глава 2
Рисунок 2.4
Положение зеркальных
точек отражения самолёта-истребителя
с переднего ракурса облучения
чек. Эти малые отражения
образуются отражающими
точками на поверхностях
различной кривизны, на кра-
ях и ребрах. Вносят вклад
также краевые и поверхност-
ные («ползущие») волны. Ес-
тественно, что такое радио-
локационное изображение
самолета мало похоже на фо-
тографическое даже при
большой разрешающей спо-
собности.
Другим примером глад-
ких неоднородностей может служить обшивка самолета F-117A,
выполненного по технологии СТЭЛС. Такая обшивка состоит из
отдельных плоских пластинок, расположенных так, что при облу-
чении самолета с переднего ракурса пластинки отражают волну в
боковом направлении в соответствии с законом оптики «угол па-
дения равен углу отражения». В обратном направлении отражение
минимально, что и обеспечивает снижение заметности. В этом
случае такой объект может рассматриваться как случайное поле,
формирующее диффузное отражение при облучении и наблюде-
нии с переднего ракурса.
Аналогично сформированы неоднородности обшивки само-
лета В-2. Все кромки прямые и ориентированы под острым углом к
главным направлениям облучения РЛС в передней и задней зонах.
Объемные конструкции ограничены криволинейными поверхно-
стями с непрерывно изменяющимся радиусом кривизны. Все по-
верхности сделаны наклонными для любого направления облуче-
ния. Линии сопряжения поверхностей направлены под острыми
углами к главным направлениям облучения. Вся поверхность об-
шивки гладкая, отсутствуют выступающие головки винтов, закле-
пок и защелки люков. Все кромки (передние и задние крыла, воз-
духозаборников и выходных сопел двигателей, люков и панелей
обшивок, органов управления, плоских антенн и т.п.) параллельны
друг другу. Дополнительно используются поглощаюшие материа-
лы, максимально снижающие отражения от возможных зеркаль-
ных точек и кромок. В такой конструкции для всех направлений
облучения, кроме перпендикулярного к кромкам, достигается ми-
нимальное образное отражение (диффузное отражение) характер-
ное для случайных полей.
Радиолокационные характеристики наземных и морских целей
47
Реальные поверхности объектов естественного и искусственно-
го происхождения имеют как шероховатые, так и гладкие неод-
нородности, и создают одновременно и диффузное и зеркальное
отражения. Соотношение между ними определяется размерами
неоднородностей, длиной волны и направлением облучения.
Особое влияние оказывают поляризационные характеристики
волны облучения и приемной антенны. Наибольшее рассеяние
происходит в том случае, когда вектор электрической напряжен-
ности поля совпадает с преобладающим размером неоднородно-
сти. Так, отражение от проводов линий электропередач макси-
мально при горизонтальной поляризации волны и минимально
при вертикальной.
Специфический характер носит формирование отраженной
волны в случае наличия переотражения облучающей и отражающей
волн между отдельными элементами объекта.
Наряду с пространственными характеристиками отражения
объектов существуют временные характеристики, обусловлен-
ные изменением параметров отражения во времени. Если объ-
екты не изменяют свои отражающие свойства за время обра-
ботки отраженной волны, или их изменение априорно известно,
то они имеют когерентную во времени характеристику отраже-
ния (неподвижная или движущаяся по известному закону тех-
ника, лес при отсутствии ветра, вращающиеся лопасти вертоле-
та и т.п.).
При случайном движении объекта и его отдельных частей, при
случайном изменении за время синтезирования его ракурса проис-
ходит случайное изменение фазы и амплитуды отраженного поля,
т.е. нарушается когерентность во времени. У реальных объектов все-
гда существуют когерентная и некогерентная составляющие отра-
женного поля. Соотношение мощностей когерентной и некогерент-
ной составляющих зависит от типа объекта и условий наблюдения.
Изменение поля отражения по пространству объекта в большин-
стве случаев носит случайный характер. Это обусловлено тем,
что отражающие свойства объекта случайным образом зависят
от большого числа факторов (размеров неоднородностей, мате-
риалов объекта, угла падения волны облучения и т.п.). В ре-
зультате рассеянное поле по пространству объекта имеет слу-
чайные амплитуду и фазу.
48
Глава 2
Радиолокационное изображение объекта вследствие этого
представляет собой шумовую «зернистую» картинку - спекч-шум. В
отличие от фотографического, оно состоит из отдельных случайных
по амплитуде и фазе точек (элементов разрешения) с дисперсией,
пропорциональной мощности отражения элемента объекта.
Например, изображение взлетной полосы в сантиметровом
диапазоне волн, несмотря на ровный характер поверхности ВПП,
имеет случайное пространственное однородное распределение ин-
тенсивности, т.е. зернистый, шумовой вид.
Для получения «гладкого» полутонового изображения необхо-
димо усреднение нескольких независимых реализаций шумовых
изображений РЛИ, например полученных при различных длинах
волн, поляризации, углах облучения и т.п. В оптическом диапазоне
такое усреднение происходит при фотографировании объекта в сол-
нечном свете, который является некогерентным, состоящим из мно-
жества спектральных составляющих со случайными амплитудами,
фазами и поляризацией.
У некоторых объектов, имеющих регулярную структуру, на-
пример трубопроводов, поле отражения в длинноволновом
диапазоне по пространству объекта коррелированно. Такой
объект называется пространственно-когерентным.
Рассеивание электромагнитной волны объектом возникает
вследствие отличия свойств среды распространения от свойств
объекта.
Отражающие свойства объекта определяются его геометри-
ческими и электрическими характеристиками (формой, размера-
ми, комплексной диэлектрической и магнитной проницаемостью)
и зависят от параметров облучающей волны (от длины волны,
поляризации, направления облучения и приема).
Пространственные характеристики отраженного объектом
поля определяются в основном соотношением длины волны об-
лучения и размеров неоднородностей свойств объекта. Шерохо-
ватые неоднородности формируют диффузное (во все стороны)
отражение, а гладкие - зеркальное.
Реальные поверхности объектов естественного и искусст-
венного происхождения создают одновременно и диффузное и
зеркальное отражения. У большинства объектов техники преоб-
ладает отражение в виде отдельных зеркальных точек.
Распределение отраженного поля по поверхности объектов
имеет случайный характер (случайную амплитуду и фазу) и, как
Радиолокационные характеристики наземных и морских целей
49
следствие, изображение объектов представляет собой шумовую
картинку (спекл-шум).
Временные характеристики поля отражения объекта имеют
когерентную и некогерентную составляющие.
2.2. Функция отражения целей
Зная общие закономерности рассеяния (отражения) ЭМВ объектом
(целью), необходимо для решения задач радиолокационного наблю-
дения определить характеристики отражения конкретных целей и
сформировать радиолокационные портреты (амплитудные, фазовые,
доплеровские (скоростные), поляризационные, многочастотные).
Для формирования радиолокационного портрета используется отра-
женное от цели поле в раскрыве приемной антенны РСА, т.е. поле в
дальней зоне как результат дифракции падающей на цель ЭМВ.
Точное решение задачи дифракции ЭМВ на телах сложной гео-
метрической формы и комплексного коэффициента преломления
практически невозможно.
Допущения, принимаемые при решении задач радиовидения
• Линейность системы в целом.
• Однородность среды распространения.
• Отсутствие траекторных нестабильностей и шумов.
• Узкополосное облучающее поле.
• Возможность разделения облучающей и отраженной ЭМВ.
• Отраженное поле представляется в виде распределения напря-
женности ЭМВ на плоскости (земной, водной поверхности), ко-
торая в процессе излучения формирует поле в раскрыве антен-
ны.
В РСА землеобзора размер элемента разрешения цели практи-
чески всегда больше длины волны. Отраженная волна элемента раз-
решения формируется за счет рассеяния на отдельных отражателях и
представляет собой векторную (с учетом фаз) сумму отраженных
волн от всех точек в элементе разрешения.
Дифракционное поле непосредственно у цели (в ближнеи зоне)
имеет сложную, изменяющуюся от расстояния структуру. В тоже
время для решения задач радиовидения используется поле излуче-
ния цели в дальней зоне, формируемое в результате дифракции поля
50
Глава 2
облучения на цели. Поэтому напряженность поля излучения цели Ец
определяют по напряженности поля излучения цели в дальней зоне
£, которое меньше в л/4я7?ц, чем Еи.
В качестве характеристики отражающих свойств локальных
(точечных) отражателей объекта (цели) используют комплексный ко-
эффициент рассеяния - комплексное число, равное отношению на-
пряженности рассеянного точечным отражателем поля Е у приемной
антенны в дальней зоне к напряженности поля облучения отражате-
ля Eq у цели при заданных поляризации на передачу и прием, длине
волны и угле облучения:
(2.1)
Энергетическая характеристика отражения цели определяет
мощность сигнала пели на входе приёмника, от которой зави-
сит эффективность решения всех задач радиолокационного на-
блюдения и, прежде всего, задачи обнаружения цели.
Формирование отражённого сигнала цели в процессе радиоло-
кационного наблюдения показано на рис. 2.5.
Мощность сигнала переотражения цели Р определяется плот-
ностью потока мощности отражённой от цели ЭМВ у приёмной ан-
тенны РЛС (модулем вектора Пойтинга
Ппрм
2
, Вт/м ) и площадью
антенны SQ, м2:
а '
В свою очередь, отражённая ЭМВ с плотностью мощности
Ппрм образуется в результате облучения цели. Передатчик ПРД и
Рисунок 2-5
Схема облучения цели и приёма отражённой ЭМВ
Радиолокационные характеристики наземных и морских целей
51
антенна (ПП - переключатель приём - передача) формируют ЭМВ,
которая распространяется па расстояние до цели и обеспечивает
плотность потока мощности облучения цели ЛОбл . Отражённая
ЭМВ распространяется от цели во все стороны и у приёмной антен-
ны имеет плотность потока мощности П
прм •
Для определения плотности потока мощности отраженной ЭМВ
в зависимости от характеристик цели вводят понятие эффективной
площади рассеяния (отражения) цели (ЭПР) суц, м2. Считается, что
цель как источник отраженной волны имеет мощность отражения
а плотность мощности отражённой волны у антенны
прм
4л7?ц2 4яЯ2
(2.2)
При определении ЭПР цели полагают, что заданы длина волны,
поляризация, направление облучения и приема.
ЭПР цели - площадь плоской пластины, расположенной вместо
цели по нормали к направлению облучения, которая при изо-
тропном переизлучении создает в месте приема такую же плот-
ность потока мощности отраженной ЭМВ, как и реальная цель.
Для каждой цели определяют (обычно экспериментальным пу-
тем) значение ее ЭПР, позволяющее рассчитывать мощность отра-
женного сигнала. Численно ЭПР цели может значительно отличать-
ся от геометрической площади цели.
Таким образом, зная значение суц конкретной цели, можно опре-
делить мощность принимаемого сигнала пели, пропорциональную суц :
4^
(23)
При этом
о„ = lim 4л7?2
(2.4)
Глава 2
где условие 7?ц —> оо означает прием и облучение плоской волной.
Заметим, что здесь Ео - напряжённость ЭМВ облучения непосред-
ственно у цели; Е - напряжённость ЭМВ у приёмной антенны, т.е.
после прохождения ЭМВ расстояния от цели до РЛС. Поэтому в
формуле (2.4) имеется коэффициент , хотя конечно ЭПР цели не
зависит от расстояния до цели.
Учитывая, ню мощность отраженного поля в раскрыве антенны
определяется эффективной площадью рассеяния (ЭПР) точечного
отражателя
2
<7 = lim 4ti7?2 — [м2], (2.5)
ц ц Ео
комплексный коэффициент рассеяния связан с ЭПР отражателя:
9 = л/°?ехрЬ’фц} м,
(2.6)
где фц - изменение фазы волны при отражении, а ЭПР точечного
отражателя
В случае гладких неоднородностей цель состоит из N отдельно
расположенных точек и отражение представляется суммой коэффи-
циентов отражений точечных элементов цели:
N
п-1
(2.7)
где =^'Of?exp{j(pn} - коэффициент отражения п точечного отра-
жателя; х = {х, у, zj - координаты цели.
Расстояние между точками значительно превышает длину вол-
ны, а их положение в элементе разрешения и мощность отраженной
волны относительно устойчивы при изменении длины волны, поля-
ризации и угла.
Если максимальное расстояние между отражателями цели го-
раздо меньше размера элемента разрешения РЛС, то такая цель
называется точечной (рис. 2.6,я). Она имеет один эквивалент-
ный фазовый центр отражения, определяемый векторной сум-
мой ЭМВ всех отражателей.
Радиолокационные характеристики наземных и морских целей
53
Рисунок 2.6
Положение трех отражателей в элементе разрешения (пунктир):
а - у точечной; б - у многоточечной; в - у сосредоточенной целей
Если точечные отражатели цели расположены в различных час-
тях элемента разрешения (и в центре и на краю), то такая цель
называется многоточечной (рис. 2.6,6).
Здесь также отраженная волна есть результат векторного сум-
мирования ЭМВ всех отражателей как и у точечной цели.
Однако вследствие большого расстояния между отдельными
отражателями амплитуда и фаза отраженной ЭМВ, а также положе-
ние эквивалентного фазового центра значительно изменяется при
изменении длины волны, поляризации и направления облучения и
приема.
При высоком разрешении функция отражения рукотворной це-
ли может состоять из нескольких элементов разрешения, связанных
в пространстве между собой общей конструкцией цели. Такая цель
называется сосредоточенной (рис. 2.6,в), состоящей из нескольких
(множества) точечных и многоточечных элементов.
Реальная рукотворная цель, например танк, может быть точеч-
ной при размере элемента разрешения по дальности Зг и азимуту
31 значительно больше, чем размер танка (Зг х ЗС = 100 м х 100 м),
многоточечной при размере элемента разрешения, близком размеру
танка (6г х 6^-10 м х 10 м), или сосредоточенной, если 8г х =
= 0,3 мх0,3 м .
Амплитуда vо и фаза ф каждой точки функции отражения
являются случайными величинами. Распределение плотности вероят-
ности случайной фазы равномерное (О...2л). Распределение ампли-
туды зависит от типа цели и условии наблюдения. Так как реальная
54
Глава 2
рукотворная цель, даже точечная, содержит несколько преобладаю-
щих по мощности отражателей, то плотность распределения вероят-
ности ЭПР цели обычно имеет вид % -квадрат с четырьмя степенями
свободы:
4о
ехр<
2о
(2.8)
Случайное значение ЭПР цели есть результат векторного ело-
жения амплитуд N отражателей о =
Х7^ехр(^„)
, а среднее
значение с>ц - сумма средних значений оЛ .
Эффективная площадь отражения пространственно-распреде-
ленных целей (фона) определяется значением удельной ЭПР и раз-
мером элемента разрешения.
У линейно-распределенных целей (лесопосадки вдоль дорог,
заграждения из колючей проволоки, траншеи и т.п.) значение ЭПР
элемента разрешения цели Оф определяется удельной линейной
ЭПР G, (м2/м):
°ол5Р ’
где 5р - линейное разрешение вдоль цели.
Мощность отражения от неоднородностей типа «случайное
поле» характеризуется удельной эффективной плошадью рас-
сеяния су0, т.е. ЭПР на единицу площади объекта [м /м2].
Среднее значение мощности отражения в элементе разрешения
с>ф для пространственно-однородного поля (среднее значение ЭПР
фона) определяется разрешаемой площадкой РЛС, т.е. линейным
разрешением по дальности 8r/cos<pH и азимуту :
cos <рн
(2.9)
Мощность отражения от неоднородности типа «случайный
объем», например облака дипольных отражателей, характеризуется
удельным объемом рассеяния о0 (м2/м3), т.е. величиной ЭПР (м2)
на единицу объема (м3) облака. Средняя величина ЭПР объемного
Радиолокационные характеристики наземных и морских целей
55
элемента разрешения Оф =о08Г, где 8 К - объем элемента разре-
шения, м3.
Функция отражения случайного поля представляется в виде
распределения на плоскости земной (водной) поверхности элемен-
тарных отражателей - фацетов. Размеры фацетов гораздо больше
длины волны, но меньше размеров неоднородностей случайного по-
ля о0(х). В этом случае функцию отражения для случайного поля
неоднородностей можно представить в виде неоднородного (кусоч-
но-однородного) комплексного некоррелированного шума:
3(x) = A/o(x)exp{j(p(x)}, (2.10)
где о(х) - удельная площадь рассеяния (отражения) случайного
поля.
В этом случае пространственная корреляционная функция от-
ражения случайного поля может быть представлена в виде
где o0(xj) изменяется в соответствии с характеристикой отражения
(ЭПР) конкретного случайного поля (объекта).
Размер объекта с постоянной с>0 определяет участок стационар-
ности функции отражения. Такими участками могут быть ВПП, доро-
ги, водная поверхность, участки степи, леса, сельскохозяйственных
угодий и т.п. Изменение су0 по пространству (радиус корреляции)
обычно значительно превышает длину волны даже при небольших
размерах объектов случайного поля (отдельные деревья, кусты, об-
рывы рек, резкие неоднородности рельефа).
В ряде случаев объект может занимать всего один элемент раз-
решения (точка на изображении), например отдельное дерево. В от-
личие от зеркальной точки, положение фазового центра которой от-
носительно стабильно, у элемента разрешения случайного поля фа-
зовый центр изменяет свое положение при изменении длины волны,
поляризации, направления облучения и приема. Также изменяется и
напряженность отраженного поля. Если размер объема типа слу-
чайного поля намного меньше элемента разрешения РСА, то его
функция отражения будет подобна функции отражения зеркальной
точки.
В случае неоднородностей объекта типа «случайное поле», ко-
гда число отражателей в элементе разрешения велико, они располо-
56
Глава 2
жены во всей площади элемента и отсутствуют преобладающие по
мощности отражатели, амплитуда функции отражения разрешаемого
элемента фона л/су имеет релеевское распределение плотности ве-
роятности, а ЭПР фона и - экспоненциальное:
Распределение случайной фазы отражения равномерное
(О...2л).
Повышение эффективности решения задач радиолокационного
наблюдения, особенно распознавания и оценки функционального
состояния цели, достигается путем использования поляризационных
характеристик функции отражения.
Для заданных условий наблюдения (длина волны, поляризация
и ракурс облучения) поляризационная матрица рассеяния стабиль-
ной цели (ПМР) запишется в виде
где Kq (X,ro,Oo,q>o) - вектор поля облучения в сферической системе
координат (го,Оо,сро); о - ЭПР цели на определенной поляризации:
вертикальной В или горизонтальной Г.
Внутридиагональные члены матрицы 512 и 521 определяют
вклад в рассеянный сигнал той части, которая не согласована с по-
ляризацией облучающей волны (кроссполяризационная компонен-
та). При однопозиционном излучении и приеме кроссполяризацион-
ные члены равны (512 = %) > а характеристика рассеяния объекта
определяется тремя комплексными числами , s22 и 512 (амплиту-
дами и разностью фаз между ними). Сумма мощностей отраженного
сигнала на разных поляризациях определяет полную ЭПР цели:
~ 1 + 2cTi2 4 с>22.
Источники кроссполяризационных компонентов матрицы
Различия геометрических характеристик отражателей по раз-
личным направлениям.
Многократное рассеяние ЭМВ на элементах объекта и подсти-
лающей поверхности.
5(0 =
5(0 х) =
Радиолокационные характеристики наземных и морских целей 57
• Анизотропность материала объекта.
• Структура шероховатостей поверхности (СКО высот).
При изменении во времени условий наблюдения цели (ракурса
облучения, перемещения, вибрации, положение отдельных частей и
т.п.) матрица рассеяния становится функцией времени:
5п(0 ^12(0
^21(0 S 21(f)
В случае пространственно-распределенных объектов ПМР ста-
новится матрицей функций пространственных координат х разре-
шаемых элементов объектов:
sH(Z,x) s12(Z,x)
s2i(',x) s22(t,x) ’
Обычно ПМР рукотворных целей может быть представлена со-
вокупностью ПМР отражателей простых типов: сфер, уголковых от-
ражателей, пластин, спирален и т.п.
Полуволновый вибратор имеет ЭПР при направлении вектора
электромагнитного поля вдоль вибратора:
о = 0,86 X2.
Матрица рассеяния сферы имеет равные диагональные элементы:
что означает равенство ЭПР для обеих поляризаций и отсутствие
кроссполяризационного рассеяния. При этом ЭПР сферы радиусом г:
Также отражает трехгранный уголковый отражатель с длиной
грани а'.
су = 12тт €/4/А? ,
и прямоугольная пластина размером а х Ъ при нормальном облучении
4па2Ь2
Двухгранный отражатель из пластин размером а и b имеет ЭПР
58
Глава 2
Пространственные и временные характеристики отражения в
значительной степени зависят от длины волны РЛС. Поэтому далее
рассмотрим особенности функции отражения различных объектов
для трех характерных диапазонов: сантиметрового, дециметрово-
го (60...90 см), и метрового (единицы метров).
2.3. Радиолокационные характеристики
отражения целей
в различных диапазонах волн
Применение многодиапазонных РЛС позволяет значительно повы-
сить эффективность радиолокационного наблюдения, особенно в
случае естественной и искусственной маскировки объектов.
Детальность изображения объектов определяется линейным
разрешением по дальности и угловым координатам. В зависимости
от тактической задачи разрешение РЛС землеобзора составляет от
десятков сантиметров до десятков метров. В сантиметровом диапа-
зоне волн радиолокационное изображение хотя и подобно фотогра-
фическому, но имеет ряд особенностей, обусловленных свойствами
функции отражения.
Функция отражения неоднородностей земной поверхности
имеет радиус корреляции порядка длины волны, и в разрешаемый
элемент на местности попадает множество отражателей со случай-
ной амплитудой и фазой. В результате изображение земной поверх-
ности носит шумовой характер (спекл-шум). Дисперсия интенсив-
ности изображения определяется удельной ЭПР местности.
Ориентировочные значения удельных ЭПР поверхности Земли
приведены в табл. 2.1 для горизонтальной (ГГ) и вертикальной (ВВ)
поляризации и различных углов падения (скольжения). Значение
удельной ЭПР для конкретной местности может значительно (до
5 дБ) отличаться от приведенного в таблице, что объясняется зави-
симостью отражения от целого ряда трудно учитываемых факторов
(конкретная структура поверхности, влажность, внутренние неодно-
родности и т.п.).
В табл. 2.2 приведены ориентировочный значения удельных
ЭПР линейных распределенных целей (разрешение 5... 10 м, усред-
нение по всем ракурсам, сантиметровый диапазон).
Радиолокационные характеристики наземных и морских целей
59
Таблица 2.1
Удельные ЭПР поверхности Земли
Объекты Угол падения (скольжения), град ’ ДЕ (2t = 3,0 см) Со 9 ДЕ (к = 70 см)
гг ВВ ГГ, ВВ
Море, волнение 2 балла 10 -40 -32 -50
20 -38 -28 4^"
50 -35 -30 42
Море, волнение 6 баллов 10 -35 -30 -35
20 -30 -25 -32
50 -27 -22 -30
ВПП 10 -40 -30 -60
20 -32 -24 -58
50 -20 -18 -55
Степь, зима, снег 10 -23 -23 -60
20 -17 -17 -55
50 -14 -14 -50
Степь, лето, трава 3 -35 -35 -60
10 -16 -15 -55
20 -15 -15 -53
50 -12 -12 -50
Пустыня, камни, песок 10 -18 -20 —4-5
20 -15 -17 -4b
50 -12 -14 -35
Лес 10 -14 -14 -35
20 -14 -15 -30
50 -12 -12 -25
У объемных целей, например облака дипольных отражателей,
величина ЭПР элемента разрешения определяется удельной объем-
ной ЭПР ооо (м2/м ’) и объемом элемента разрешения цели 6 Г :
Если в одном кубическом метре объема облака находится N ди-
полей (обычно менее 2-3), то удельная ЭПР облака диполей:
сг00 =0,17Х2ЛГ.
60
Глава 2
Таблица 2.2
ЭПР линейных распределенных целей
Класс, тип цели Оол? м2/м
Железнодорожный мост 1,8
Автомобильный мост 1,3
Электрифицированная дорога 1,1
Ограждение из колючей проволоки 0,6
Окоп, ров, обваловка 0,5
Шоссе двухрядное 0,3
Если объем облака УД меньше объема элемента разрешения, то
°Фд=°оЛ=О,17Х2М;.
Удельная ЭПР дождевых облаков при дожде 10 мм/ч и X = 3 см
равна Goo = -70 дБ/м.
Средняя отражательная способность местности зависит также
от рельефа (наклона наблюдаемой площади относительно направле-
ния облучения). С увеличением угла наклона удельная ЭПР растет.
Этим объясняется большее отражение от неоднородностей рельефа
местности и кромки леса со стороны облучения.
Вследствие различия коэффициентов отражения в радио и оп-
тическом диапазонах волн контраст (отличие мощности отражения)
различных участков местности (лес, кустарник, степь, сельскохозяй-
ственные угодья) в РЛС не всегда соответствует контрасту на фото-
снимке.
Наклонный характер облучения вызывает появление на изо-
бражении теней, что обусловлено сильным поглощением электро-
магнитных волн сантиметрового диапазона листвой деревьев и поч-
вой. Ориентировочные значения коэффициента затухания у элек-
тромагнитных волн в различных материалах (при распространении
в одном направлении) представлены в табл. 2.3.
Временные характеристики функции отражения различных
участков местности определяются колебаниями отражателей (листва
деревьев, кустарник, трава) под действием ветра. Чем больше ско-
рость ветра, тем больше разброс скоростей отдельных отражателей.
Радиолокационные характеристики наземных и морских целей
тем шире полоса спектра частот функции отражения. Зависимость
ширины спектра частот отраженного сигнала Л/ от скорости ветра
W для X = 3 см представлена на рис. 2.7,1а. При этом спектральная
плотность имеет вид
*(/)=
1
1 + (//Д/)2 ’
Таблица 2.3
Ориентировочные значения коэффициента затухания электромаг-
нитных волн в различных материалах
Длина волны Тип местности
Глина, морской лёд, У, дБ/м Песок, бетон, у, дБ/м Снег, пресный лед, у, дБ/м Вода пресная, у, дБ/м Дере- вья, У, ДБ/м Крона деревь- ев, у, дБ/м
Х = 3 см 100 20 1 1000 1,2 0,5
Х= 70 см 10 3 0,1 7 0,12 0,05
К - 3 м 8 1 0,05 2 0,03 0,01
Для скорости ветра (5...7) м/с функция отражения от леса име-
ет полосу частот порядка 9 Гц. В зависимости от скорости ветра из-
меняется соотношение когерентной Рк и некогерентной (случайной)
РЛ составляющих мощности отраженного сигнала леса (рис. 2.7,6).
Рисунок 2.7
Графики зависимости ширины спектра (я) и отношения когерентной
и некогерентной составляющей мощности (б) отражённого сигнала леса
от скорости ветра
62
Глава 2
Особо сложный характер имеют отражения от взволнованной
морской поверхности (регулярные волны, корабельные волны и др.).
Анализ функции отражения морской поверхности дан в гл. 14.
Рукотворные объекты с размерами, меньшими элемента разре-
шения, имеют изображение в виде отдельных точек. Средние ориен-
тировочные значения ЭПР таких объектов в сантиметровом диапа-
зоне волн представлены в табл. 2.4.
Таблица 2.4
ЭПР и размеры целей
Обьект 2 О, м Размер, м*м
Человек 0,5 0,5x0,5
Крылатая ракета на земле 1,0 3x0,8
Танк, БМП, САУ 4...20 8x4
Автомобиль 10...20 7x3
Истребитель на стоянке 3...15 12x17
Бомбардировщик на стоянке 20...150 50x40
Пусковая установка ракет 20...50 10x7
РСЗО 15...20 7x4
Подводная лодка на поверхности моря 10...200 300x30
Патрульный катер 300 52x8
Фрегат 3-1 о3 140x14
Эсминец 3,5’103 170x17
Крейсер 17-103 180x20
Десантный корабль ЗОЮ3 260x30
Авианосец 45-103 330x40
Постройки городского типа 100-103 50x20
В случае разрешения отдельных точек объекта задается ЭПР
каждой точки. Фронтовой истребитель (усредненные значения для
различных самолетов) имеет:
ЭПР....................................................0,04 м2
Воздухозаборник.........................................2,5 м2
Задняя кромка крыла....................................0,08 м2
Задняя кромка стабилизатора............................0,06 м2
Для снижения ЭПР (маскировки) объектов используются ра-
диопоглощающие покрытия, типовое поглощение которых составля-
ет 15...25 дБ в полосе частот 20 % сантиметрового диапазона.
Радиолокационные характеристики наземных и морских целей 63
Временные характеристики функции отражения объекта с глад-
кими неоднородностями определяются случайными движениями его
отдельных частей (зеркальных точек) и объекта в целом, а также слу-
чайным изменением за время наблюдения ракурса облучения.
Например, время когерентности (интервал корреляции)
функции отражения в сантиметровом диапазоне движущегося тан-
ка тк = 0,2...0.3 с .
В качестве иллюстрации на рис. 2.8 представлены особенности
функции отражения (амплитуды) различных объектов в сантиметро-
вом диапазоне. Пересеченная местность имеет функцию отражения
типа нормального случайного процесса с изменяющейся дисперсией.
У водной поверхности дисперсия резко уменьшается. Обрывистый
берег реки имеет значительно большую дисперсию со стороны об-
лучения. Дерево в степи дает всплеск дисперсии и тень. Функция
отражения степи в области тени резко уменьшается. Объект с глад-
кими неоднородностями имеет функцию отражения в виде несколь-
ких зеркальных точек. При этом по контуру объекта экранируется
отражение от подстилающей поверхности (тень объекта на фоне
степи). Кромка леса со стороны облучения дает всплеск отражения, а
с противоположной стороны - тень, размер которой определяется
высотой деревьев и углом облучения.
Рисунок 2.8
Функция отражения пересечённой местности
64
Глава 2
В дециметровом диапазоне (X = 60...90 см) по сравнению с
сантиметровым начинаются резкие изменения свойств функции от-
ражения, так как геометрические размеры неоднородностей по-
верхности и внутренней структуры большинства объектов стано-
вятся меньше или соизмеримыми с длиной волны. Рассеяние от
мелкоструктурных поверхностей (ВПП, степь) имеет зеркальный
характер, и удельная ЭПР резко падает (см. табл. 2.1). Изображение
таких поверхностей малоконтрастное и низкой интенсивности.
Практически нет контраста изображений ВПП - степь - водная по-
верхность.
На этом фоне наблюдаются отдельные стабильные точки, обу-
словленные отражениями от более крупных неоднородностей, на-
пример неровностей рельефа степи (ямы, канавы, бугры и т.п.). Для
степи число таких точек составляет 25...45 на 1 км2, при этом ЭПР
точек больше ЭПР фона (ст»(Уф) примерно на 10... 15 дБ. Так как
шероховатость таких неровностей рельефа мала по сравнению с
длиной волны, ю они имеют функцию отражения типа зеркальной
точки со стабильным фазовым центром.
Аналогично приближаются по свойствам к зеркальным точкам
и функции отражения отдельных элементов (столбы, отдельные де-
ревья, домики, линии электропередач и т.п.). Наличие таких зер-
кальных точек в функции отражения стационарного случайного поля
изменяет распределение плотности вероятности ЭПР. Отражения о г
мелкоструктурных поверхностей (фон) имеют (как и в сантиметро-
вом диапазоне) экспоненциальное распределение. Отражения от от-
дельных элементов поверхности имеют распределение подобно то-
чечным и многоточечным объектам.
У элементов, размер которых соизмерим с длиной волны, ЭПР
значительно возрастает в результате резонансного характера пере-
отражения.
Например, кукурузное поле, высота растений и расстояния
между рядами на котором порядка длины волны, имеет удельную
ЭПР на 1...2 порядка больше, чем в сантиметровом и метровом
диапазонах.
Наблюдаются участки местности с обратным контрастом по
сравнению с сантиметровым диапазоном. Так, мелкий кустарник
на сухой почве дает меньшее отражение, а болотные кочки с ред-
Радиолокационные характеристики наземных и морских целей
65
кими деревьями - большее отражение по сравнению с окружающим
лесом, тогда как в сантиметровом диапазоне этот контраст был об-
ратным.
Излучение этого диапазона проникает сквозь листву, отражаясь
от крупных сучьев и стволов. Поглощение электромагнитных волн в
деревьях в 10 раз меньше, чем в сантиметровом диапазоне. Изобра-
жение лесного массива приобретает более детальный характер, так
как наблюдаются объекты (малые поляны, лесные дороги, объекты
техники и т.п.), ранее затененные листвой. Наблюдаются водные по-
верхности (болота, озера, разливы рек), скрытые листвой (трава,
кустарник).
Объекты техники в дециметровом диапазоне в большинстве
случаев увеличивают ЭПР (табл. 2.5), что обусловлено увеличени-
ем зеркальной и резонансной части отражения. Значительно отли-
чается функция отражения объектов при различной поляризации
ЭМВ. Уменьшается эффект искусственного снижения заметности
объектов.
Таблица 2.5
ЭПР точечных объектов при изменении диапазона волн
Человек Дерево Авто БМП Лодка Велоси- пед
о, м2 Х = 3 см ГГ, ВВ 0,5 Крона 1,0...2,0 10 5 0,02 2,0
о, м2 X = 70 см ГГ - 1,0 ВВ - 1,5 Сучья 0,5...1,0 20 15 гг 0,05 2,0
о, м2 \ = 300 см ВВ - 1,0...2,5 ГГ - 1,0 Ствол 0,1...5,0 30 20 ГГ 0,1 2,0
Временные характеристики функции отражения более ста-
бильны, чем в сантиметровом диапазоне. Так, интервал когерент-
ности сигнала движущегося автомобиля гк = 1 ...2 с .
Радиолокационное изображение объектов в дециметровом диа-
пазоне характеризуется в целом как стабильное, состоящее из от-
дельных точечных структур на малоконтрастном фоне.
В метровом диапазоне (X = 2,5...3,5 м ) радиолокационное
изображение объектов характеризуется дальнейшим усилением от-
ражения от более крупных неоднородностей и практически полным
66
Глава 2
подавлением фона, т.е. отражений от мелкоструктурных неоднород-
ностей (степь, пашня, кустарник, дороги, ВПП). Значительно увели-
чивается ЭПР и контраст металлических сооружений (мачты, башни,
дома). Резко выделяются крупные неоднородности местности и ис-
кусственные сооружения (обрывы рек, кварталы домов). Значитель-
но уменьшается поглощение ЭМВ во всех средах (табл. 2.3). В лесу
видна структура полян, отдельных групп деревьев, объекты в лесу.
Возможно обнаружение объектов, находящихся под земной поверх-
ностью (в сухой почве).
Объекты военной техники (танки, самолеты, РЛС и т.п.) стано-
вятся соизмеримыми с длиной волны, что изменяет характер рассея-
ния электромагнитной волны, Решающую роль начинают играть ре-
зонансные явления, а также ползущие и бегущие волны. Это вызы-
вает увеличение обратного рассеяния.
Общий вид радиолокационного изображения в метровом диа-
пазоне волн можно характеризовать как отдельно расположенные
зеркальные точечные отражатели, соответствующие элементам
крупных неоднородностей земной поверхности и сооружений, а
также объектам техники.
В заключение анализа характеристик функции отражения объ-
ектов отметим, что принятие той или иной модели зависит от кон-
кретных условий работы РСА (длины волны, поляризации, углов на-
блюдения и облучения, разрешающей способности и т.п.) и от ре-
шаемой задачи (обнаружения, измерения координат, селекции
движущихся целей и т.п.).
При наблюдении стационарных случайных поверхностей
(участки ровной земной поверхности, ВПП и т.д.) элемент разре-
шения имеет ЭПР сгф с экспоненциальным распределением плот-
ности вероятности независимо от разрешающей способности.
В случае нестационарной случайной поверхности (большие
участки земной поверхности типа пересеченной местности) значи-
тельно изменяется сгп и ЭПР сгф.
Наземные и морские цели отличаются сложной конфигурацией.
Наличие плоскостей и углов приводит к сложному характеру стати-
стики амплитуд отраженных сигналов.
Одна зеркальная точка в элементе разрешения имеет стабиль-
ную ЭПР, которая неизвестна (случайна для наблюдателя). Плот-
ность распределения ЭПР зеркальных точек зависит от типа наблю-
Радиолокационные характеристики наземных и морских целей
67
даемых объектов (корабль, ЗРК, кварталы домов и т.п.). Обычно это
распределение для одного класса целей имеет экспоненциальный
характер. В случае, когда в элементе разрешения размещается не-
сколько зеркальных точек, распределение плотности вероятности
ЭПР такого элемента разрешения обычно описывается функцией
Хи-квадрат с четырьмя степенями свободы.
Распределение фаз функции отражения случайных поверхно-
стей не зависит от разрешающей способности и равновероятно от О
до 2л.
Функция отражения каждой точки объекта есть случайная
комплексная величина - комплексный коэффициент рассеяния
(отражения). В результате радиолокационное изображение носит
шумовой характер (спекл-шум).
Случайная функция отражения шероховатых неоднородно-
стей имеет пространственно-нестационарный характер. Дисперсия
коэффициента отражения отдельных точек изменяется в соответ-
ствии с удельной отражающей поверхностью объекта.
Случайная функция отражения представляется комплексным
некоррелированным шумом с нормальным законом распределе-
ния (релеевский для амплитуд и равномерный О...2л для фаз).
Функция отражения гладких неоднородностей представляет-
ся несколькими отдельными зеркальными точками. Каждая зер-
кальная точка конкретного объекта имеет относительно стабиль-
ное положение фазового центра и эффективную площадь рас-
сеяния. Распределение амплитуды отдельных зеркальных точек
зависит от типа объекта (обычно релеевское), а распределение
фаз - равномерное от 0 до 2л.
Статистические характеристики функции отражения разре-
шаемого элемента объекта определяются соотношением разме-
ров элемента и объекта.
При размере объекта гораздо меньшем элемента разрешения
(точечный объект), статистические характеристики отражения со-
ответствуют зеркальной точке.
Когда объект занимает один элемент разрешения и содержит
несколько зеркальных точек, ЭПР отражения объекта имеет рас-
пределение плотности вероятности Хи-квадрат с четырьмя степе-
нями свободы.
Если в элементе разрешения находится участок стацио-
нарной случайной поверхности, ЭПР отражения от такого эле-
мента имеет экспоненциальное распределение плотности ве-
роятности.
68
Глава 2
Распределение фаз отражения элемента разрешения равно-
вероятно от 0 до 2л.
Функция отражения во времени имеет когерентную и случай-
ную составляющие, соотношение между которыми зависит от СКО
скоростей элементарных отражателей.
С увеличением длины волны излучения РЛС:
уменьшается отражение от мелкоструктурных неоднородно-
стей земной поверхности и рукотворных объектов;
увеличивается время когерентности отраженной ЭМВ;
уменьшается поглощение в среде распространения (расти-
тельности и почве);
теряется эффективность технология искусственного сниже-
ния заметности;
радиолокационное изображение резко отличается от фото-
графического.
ГЛАВА 3
Оптимальное
радиолокационное наблюдение
3.1. Пространственно-временная модель
радиолокационного наблюдения
Задачей радиолокационного наблюдения является получение инфор-
мации о заданной группе объектов (целей):
• обнаружить цели;
• определить их местоположение (координаты);
• распознать цели;
• определить их функциональное состояние (перемещение, дви-
жение отдельных элементов, изменение отражающих свойств).
При этом необходимо обеспечить раздельное наблюдение (раз-
решение) каждой цели в зоне обзора, независимо от наличия других
целей и объектов (фона).
Комплекс таких сложных взаимосвязанных задач радиолока-
ционного наблюдения требует тщательного выбора и обоснования
методов и алгоритмов их решения системой обработки. При этом
возможно использование различных критериев для обоснования
принятия решения по выбору оптимальных (наилучших1 методов и
алгоритмов в заданных условиях радиолокационного наблюдения.
Обычно в качестве таких критериев (целевых функций) исполь-
зуют показатели качества РЛС - её тактико-технические характери-
стики. В этом случае оптимальная система обработки обеспечивает в
заданных условиях наблюдения наилучшие ТТХ: разрешение целей;
максимальная дальность обнаружения целей; наивысшая точность
70
Глава 3
измерения координат; наибольшая надёжность распознавания целей
и другие характеристики. Возможны также критерии минимизации
вычислительных затрат, энергопотребления и массы системы обра-
ботки.
Такой сложный, удовлетворяющий многим критериям (много-
критериальный), выбор решений при оптимизации системы обра-
ботки требует для его реализации разработки и использования сис-
темных моделей радиолокационного наблюдения. При этом рас-
сматриваются два вида моделей: структурные и функциональные.
Каждая модель отражает существенные для решения задач анализа и
синтеза алгоритмов радиолокационного наблюдения свойства РЛС.
Структурная модель радиолокационного наблюдения описыва-
ет РЛС как сложную систему, состоящую из совокупности элемен-
тов (подсистем). Все элементы связанны между собой и взаимодей-
ствуют с объектами и средой распространения ЭМВ. Применительно
к задаче оптимизации системы обработки на рис. 3.1 представлена
модель радиолокационного наблюдения. Каждый элемент структуры
представляет собой материальную часть («железо») РЛС.
Подсистема передатчик-антенна обеспечивает облучение
ЭМВ всех объектов в заданной зоне обзора.
На приёмную антенну приходят ЭМВ, отражённые от объектов,
а также ЭМВ от источников помех (естественных и преднамерен-
ных). Апертура приёмной антенны содержит множество разнесён-
ных в пространстве излучателей (многоканальная апертура).
Рисунок 3.1
Структурная модель радиолокационного наблюдения
Оптимальное радиолокационное наблюдение
Возбуждаемые ЭМВ в излучателях высокочастотные колебания
на выходе каждого канала апертуры поступают на вход соответст-
вующего канала многоканального приёмника, который усиливает и
селектирует (выделяет) по частоте колебания электрического тока
(напряжения), обусловленные отражениями ЭМВ от заданных объ-
ектов (целей).
На выходе приёмников электрические колебания обычно преоб-
разуют в цифровую форму и подают на вход процессоров системы
обработки, которая и решает задачи радиолокационного наблюдения.
Функциональная модель радиолокационного наблюдения описы-
вает связь между параметрами элементов структурной модели и их
изменение в процессе наблюдения. Существуют функциональные
модели аналитические (математические) и имитационные (имитация
функционирования РЛС в процессе решения задач радиолокацион-
ного наблюдения с помощью аналоговых и цифровых процессоров).
Далее рассматриваются математические модели. позволяющие ре-
шать задачи синтеза и анализа оптимальных алгоритмов радиолока-
ционного наблюдения в общем виде.
На рис. 3.2 представлена функциональная схема модели РЛС в
процессе решения задач радиолокационного наблюдения цели (по-
лучения информации).
Получение информации это изменение объёма и структуры
знаний о наблюдаемых целях у потребителя, например разведыва-
тельной системы. В РЛС в качестве переносчика информации от це-
ли к потребителю используются ЭМВ. Изменение параметров облу-
чающей ЭМВ в процессе отражения от цели является сигналом. Об-
работка сигналов позволяет оценить параметры ЭМВ цели, т.е.
получить данные. В результате обработки данных формируется ин-
формация о цели (обнаружение, координаты и класс цели). Класси-
фикация цели включает задачи распознавания цели и определения её
функционального состояния.
Рисунок 3.2
Функциональная модель радиолокационного наблюдения
72
Глава 3
Вследствие сложности анализа и синтеза оптимальном одно-
временно по многим критериям системы обработки обоснование и
анализ функциональной модели радиолокационного наблюдения
разбивается на ряд последовательных этапов.
Этап 1. Выбираются методы решения задач радиолокационно-
го наблюдения и обосновываются характеристики зондирующего
сигнала (облучающей ЭМВ) при решении различных тактических
задач. Для этого анализируются: функция отражения целей и других
объектов (фона); характеристики среды распространения ЭМВ и
сигналы источников помех; возможности реализации требуемых зон
обзора, разрешения, обнаружения и измерения координат целей. В
результате анализа выбираются диапазон ЭМВ, поляризация, вид и
параметры модуляиии, ДН антенны и для заданных целей формиру-
ется пространственно-временной сигнал.
Этап 2. Синтезируется оптимальная система обработки сфор-
мированного пространственно-временного сигнала при известных
(заданных) помехах для получения данных (параметров сигнала).
Этап 3. Выбираются и обосновываются (синтезируются) мето-
ды и алгоритмы обработки данных для решения задач обнаруже-
ния, разрешения, измерения координат и классификации целей.
Обработку сигналов (этап 2) часто называют первичной, а обра-
ботку данных (этап 3) - вторичной.
Большое число параметров функциональной модели РЛС и
критериев оптимальности системы обработки, в целом, приводит к
необходимости итерационных процедур решения задач па различ-
ных этапах. Так, по результатам этапа 2 (получение данных) кор-
ректируются результаты этапа 1 (характеристики пространствен-
но-временного сигнала), а по результатам этапа 3 (классификации
целей) корректируются характеристики моделей этанов 1, 2.
В наиболее общем виде разработаны процедуры синтеза оп-
тимальных систем обработки радиолокационных сигналов, чт о по-
зволяет использовать полученные на втором этапе оптимальные
алгоритмы обнаружения, измерения параметров, селекции и раз-
решения сигналов как основу решения задач этапов 1, 2.
Рассмотрим далее оптимальную обработку пространственно-
временного сигнала (первичная обработка) и алгоритмы обработки
данных для решения задач обнаружения, разрешения и измерения
координат неподвижных целей. Наблюдение движущихся целей, а
Оптимальное радиолокационное наблюдение
73
также задачи распознавания и оценки функционального состояния
всех целей рассматриваются в других главах.
3.2. Модель
пространственно-временного сигнала
Формирование пространственно-временного сигнала обеспечивается
облучением объектов ЭМВ с помощью подсистемы «передатчик-
антенна» РЛС. В результате отражения от объектов изменяются па-
раметры облучающей ЭМВ. В общем случае изменения всех пара-
метров несут информацию о характеристиках функции отражения
каждой цели и других объектов.
Параметры электромагнитного поля облучения
в виде плоской гармонической волны
• Амплитуда напряжённости поля Ео.
• Несущая частота колебаний со0 = .
• Начальная фаза колебаний (р0.
• Вид поляризации (линейная, круговая и др.).
• Направление вращения поляризации.
• Азимутальный угол распространения волны.
• Угол места распространения волны.
• Направление распространения волны (к цели, от цели).
В РЛС обычно используются квазигармонические ЭМВ (сумма
гармонических волн), полоса частот которых А/ гораздо меньше не-
сущей частоты /0. В плоскости (x, v) зоны обзора цели одна состав-
ляющая поляризации облучающей ЭМВ может быть записана в виде
E0(x,j;/) = &o(0cos
Що/ + фм(х,у/)ч (р0(х.у) .
где EsQ(t} - амплитудная модуляция напряжённости поля; со0=2л/0
несущая частота; <рм(х, у, - фазовая модуляция; ф0(х, v) - на-
чальная фаза.
В результате взаимодействия облучающей волны с функцией
отражения цели Э(х, у, /), определённой для заданной поляризации
74
Глава 3
и углов облучения, возникает отражённая волна, которая распро-
страняется к РЛС и формирует на приёмной апертуре антенны с ко-
ординатами (%,?]) отражённую ЭМВ цели - пространственно-
временной сигнал.
Сигнал точечной цели можно записать в виде
=«БЦ5'Ц(^,Т|)Х
xcos[2n(/0 +/„)/ + <рц (£, V) + Фм V) + фн ] >
(3.2)
где Ец5ц - амплитуда напряжённости отражённого поля точечной
цели; / - доплеровское смещение несущей частоты, возникающее
вследствие наличия радиальной скорости относительного переме-
щения РЛС и цели; (рц г|, - распределение начальной фазы
сигнала на апертуре антенны, определяемое угловым положением
цели; (рм т|, - фаза модулирующей функции; фн - начальная
фаза.
В общем случае, особенно при длительной когерентной обра-
ботке сигналов по траектории полета носителя РЛС, пространствен-
ная (по апертуре антенны) и временная обработка взаимосвязаны,
что будет учтено в последующих главах, посвященных непосредст-
венно режимам радиовидения.
Для дальнейшего рассмотрения полагаем, что:
1) угловое положение цели за время обработки сигнала можно
считать постоянным: (рц т|, = (р т|) ;
2) изменением амплитуды и задержки модулирующей функции
сигнала по апертуре антенны можно пренебречь, т.е. т|, = s(/)
И Фм(^ 0 = (Рм(0’
3) влияние изменения задержки сигнала т, обусловленное
изменением расстояния между РЛС и целью, на изменение задерж-
ки модулирующей функции за время наблюдения сигнала Т неве-
лико, так что можно считать л = .V (/ т,. |, фкд (7) = (ркд (t - т, ),
\ / \ Ц/'ТМ\/тм\ Ц / 7
где тц = const.
В этом случае пространственно-временной сигнал точечной це-
ли может быть представлен в виде произведения пространственного
и временного сигналов. Математическая модель комплексной ам-
Оптимальное радиолокационное наблюдение
плитуды отражённого сигнала такого узкополосно! о процесса может
быть записана в виде
Е(^, и, ') = £uexp{-j<pu(£, п)}^ц^-тц)ехр{-)27г/А/}х
хехр|—j<pM (/— тц)|ехр{—jcp„} (3.3)
Рассматриваемая математическая модель пространственно-
временного сигнала соответствует ситуации, когда все параметры
сигнала за время наблюдения считаются постоянными. В этом слу-
чае задача обработки сигнала сводится к оценки его параметров.
Параметры временного сигнала
• Мощность сигнала , пропорциональная ЭПР цели.
• Начальная задержка сигнала т , пропорциональная дальности
цели 7?ц.
Частота сигнала /ц, пропорциональная радиальной скорости
цели относительно РЛС.
Начальная фаза сигнала фн, обусловленная рядом неконтро-
лируемых изменений характеристик функции отражения цели,
среды распространения ЭМВ, положения фазового центра ан-
тенны и других параметров, приводит к её случайности.
й® Параметрами пространственного сигнала являются законы
изменения фазы напряжённости поля по апертуре антенны
(рц (Е,) и фц (т]) , определяемые соответственно азимутом и уг-
лом места цели.
При принятых допущениях пространственно-временной сигнал
Е(^ т|, можно представить в виде произведения пространствен-
ного и временного сигналов (3.3).
Такая форма записи приводит к возможности раздельной про-
странственной и временной обработки. Обычно в результате про-
странственной обработки сигнала формируется приёмная диаграмма
направленности антенны, а затем ведётся временная обработка сиг-
налов на выходе антенны. Возможен также обратный порядок: сна-
чала ведётся временная обработка в каждом канале апертуры антен-
ны. а затем формирование диаграммы направленности путём межка-
нальной обработки сигналов апертуры антенны.
76
Глава 3
3.3. Оптимальная обработка
радиолокационного сигнала
Задача синтеза алгоритмов оптимальной обработки пространствен-
но-временного сигнала состоит в нахождении такого алгоритма, ко-
торый обеспечивает оценку параметров наблюдаемого сигнала наи-
лучшим по заданному критерию способом.
Для большей наглядности и конкретности в дальнейшем рас-
сматриваем нахождение оптимального алгоритма для обработки
временного сигнала где а - вектор параметров, определяю-
щий характеристики целей. Оптимальный алгоритм обработки про-
странственного сигнала находится аналогичным способом.
Рассмотрим метод определения алгоритма обработки сигнала
когда имеется однозначная функциональная зависимость параметров
сигнала и характеристик цели при отсутствии помех. В этом случае
задача радиолокационного наблюдения сводится к решению обрат-
ной задачи, когда оценка параметров сигнала цели d определяется
функциональным преобразованием сигнала цели s(/,a).
Так, например, при решении задачи оценки дальности цели
Лц по оценке задержки сигнала тц
Л СТ
(3.4)
а оценка задержки т„ определяется функциональным преобразо-
ванием сигнала
iu = 'D{5(/’Tu)}’ (3.5)
где D - оператор преобразования.
Точность измерения дальности в этом случае может быть
сколь угодно высокой. Она не зависит от свойств сигнала ,
а определяется только точностью выполнения функциональных
преобразований (3.4) и (3.5).
На практике такой метод решения задач радиолокационного
наблюдения ограничен наличием во входном сигнале различного ро-
да помех. Это, прежде всего, шумы входного устройства приемника
Оптимальное радиолокационное наблюдение
77
(внутренние шумы). Одновременно могут присутствовать внешние
помехи: сигналы, отраженные от соседних с целью объектов (фона)
излучения радиолокационных, телевизионных, навигационных,
связных и других передатчиков, специально создаваемые противни-
ком активные, и пассивные помехи. Кроме того, мощность отражен-
ного сигнала определяется ЭПР цели, которая, в свою очередь, явля-
ется случайной величиной. Вследствие этого распределение напря-
женности поля по апертуре приемной антенны (пространственно-
временной сигнал) Е(^ т|, /, является случайным сигналом.
В таких условиях наблюдения, когда сами сигналы и аддитив-
ные (суммируемые с сигналом) помехи являются случайными про-
цессами, оценка параметров сигналов и, соответственно, характери-
стик целей, также носит случайный (вероятностный) характер. Так,
например, при решении задачи обнаружения цели нельзя точно ре-
шить есть ли цель или она отсутствует. Можно только судить о ве-
роятности нахождения сигнала цели в принимаемом сигнале.
Нахождение оптимальных алгоритмов обработки случайных
сигналов в присутствии помех возможно используя методы стати-
стической теории радиотехнических систем. Ценность статистиче-
ских методов состоит в том, что они показывают предельные воз-
можности эффективности решения задач в данных условиях наблю-
дения и заданных критериях, т.е. лучших оценок характеристик
целей получить нельзя. Используя статистические методы, можно
определять наилучшие условия наблюдения (вид зондирующего
сигнала, траекторию носителя РЛС, поле облучения цели, направле-
ние наблюдения) в зависимости от решаемой задачи.
В соответствии с теорией статистических решений алгоритм
оптимальной обработки входного сигнала сводится к формирова-
нию апостериорной (послеопытной) вероятности (плотности веро-
ятностей) принимаемого решения т.е. условной вероятности того
или иного значения параметра сигнала цели при условии наблюде-
ния данного входного сигнала (суммы сигнала цели и шума). Апо-
стериорная вероятность несет исчерпывающую информацию об
оцениваемых параметрах.
В качестве критерия оптимальности принятия решения в ста-
тистической теории применительно к радиолокационным задачам
оценки параметров сигналов используется величина потерь^ обу-
словленных неправильным решением. При оценке параметра сигиа-
А
ла а вследствие наличия помех появляется ошибка оценки: ос ос.
78
Глава 3
Среднее значение потерь определяется как суммарная цена всех
ошибок с учетом их стоимости и вероятности их появления.
При оценке параметров сигнала обычно в качестве критерия
оптимальности используется минимум средних потерь (средний
риск). При этом предполагают квадратичное возрастание стоимости
потерь с ростом величины ошибки оценки параметра. В этом случае
оценка параметра выполняется по положению максимума апостери-
орной плотности вероятности параметра сигнала. В большинстве
случаев такой алгоритм обеспечивает несмещённость оценки и ми-
нимальную дисперсию ошибки оценки параметра.
На рис. 3.3 в качестве примера иллюстративно показана мето-
дика принятия решения при обработке радиолокационных сигналов
трех точечных целей.
Считаем, что все параметры сигналов (кроме одного, задержка
тц) известны. Неизвестно наличие или отсутствие сигналов целей в
принимаемом сигнале
з
= ) + »(')>
т~-\
(3.6)
я(/,тЦт) - сигнал т-м цели; - помеховый сигнал.
Пусть сформированные по результатам наблюдения входного
сигнала U (z) апостериорные плотности вероятности (АПВ)
Рисунок 3.3
Апостериорная плотность вероятности параметра тц грех сш налов
Оптимальное радиолокационное наблюдение
79
Рт(тцт/^(^)) каждого сигнала имеют ширину 6т меньше, чем
разность задержек соседних сигналов:
^ц2 - >5т И
tj3—т]Э >6т. При таких условиях обеспечивается раздельная об-
работка (разрешение) каждого сигнала наблюдаемых целей. Выбро-
сы АПВ в промежутках обусловлены помеховым сигналом.
При превышении максимума АПВ заданного порогового уров-
ня (порога) принимается решение об обнаружении первого и второго
сигналов. Превышение порога шумовым выбросом в точке тш соот-
ветствует ложному обнаружению (ложной тревоге). Отсутствие пре-
вышения порога третьим сигналом соответствует пропуску этого
сигнала.
Положение соответствующего максимума АПВ принимается в
качестве опенки задержки обнаруженных сигналов тщ и тЦ2 .
Рассмотрим методику формирования апостериорной плотно-
сти вероятности оцениваемого параметра а сигнала цели.
В соответствии с теоремой Байеса апостериорная плотность ве-
роятности параметра а в случае приема сигнала U равна
p(a/t7) =
1
p(u)
p(a)p(U/a) = Kvp(a)p(U/a)
(3.7)
5
где Kv = \/р(ЪТ} - нормирующий коэффициент, не зависящий от
параметра а.
Для упрощения записи здесь и далее зависимость от времени
[/(/) опущена.
Априорная (доопытная) плотность вероятности р(а) пара-
метра а известна заранее на основании знания:
1) группы объектов наблюдения;
2) условий наблюдения (удаление зоны обзора, ширины зоны
обзора, траектории носителя РЛС);
3) результатов предшествующих наблюдении (при многократ-
ном наблюдении);
4) информации от других систем наблюдения (оптических, пас-
сивных и агентурных).
Условная плотность вероятности определяет вероят-
ность значений входного сигнала U при заданном параметре сигна-
ла а. Зная статистические характеристики сигнала цели и по-
80
Глава 3
мехи заранее вычисляют характеристики сигнала U и функ-
цию р(и/а), т.е. определяют вероятностную (стагистическую)
взаимосвязь входного сигнала U и параметра цели а .
Расчет таких распределений выполняется по известным прави-
лам нахождения законов распределения вероятностей функций слу-
чайных аргументов.
Двумерная функция p(U/а) как зависимость плотности веро-
ятности параметра а от входного сигнала называется функцией
правдоподобия. При заданном входном сигнале f/BX она пока-
зывает, насколько одно из возможных значении параметра а
«более правдоподобно», чем другое. Обозначим функцию
правдоподобия £(а) = р((7вх/а).
На рис. 3.4 иллюстративно показаны рассчитанные распределе-
ния вероятностей входного сигнала U для различных значений па-
раметров а = (otj ...а6 ). В данном примере максимум функции прав-
доподобия при принятом сигнале С/вх (рис. 3.5) соответствует пара-
метру ос4, т.е. оценка параметра а - ос4.
При принятом входном сигнале С/вх апостериорная плотность
вероятности равна произведению априорной плотности вероятности
р(а) на функцию правдоподобия £(а):
/7(аЛ/вх) = ^иР(а)£(а)- (3‘8)
Рисунок 3.4 Рисунок 3.5
Графики формирования функции Графики функции правдоподобия
правдоподобия
Оптимальное радиолокационное наблюдение
Если априорное распределение р(а) в пределах ширины
функции правдоподобия изменяется незначительно (рис. 3.6), нахо-
ждение максимума апостериорной плотности вероятности соответ-
ствует определению максимального значения функции правдопо-
добия.
Таким образом, алгоритм оптимальной обработки временных
радиолокационных сигналов при решении задач радиолокационного
наблюдения целей требует выполнения следующих операций.
Этап 1. Определяются заранее (считаются известными) харак-
теристики пространственно-временного сигнала:
• вид зондирующих сигналов;
• условия наблюдения (объекты, среда распространения ЭМВ и
помеховая обстановка);
• статистические характеристики отраженных сигналов целей:
• статистические характеристики помеховых сигналов;
• априорная плотность вероятности оцениваемых параметров
сигналов цели.
Этап 2. Наблюдается (определяется) сигнал, на входе системы
обработки.
Этап 3. Формируется функция правдоподобия оцениваемых
параметров при данном входном сигнале.
Этап 4. Формируется апостериорная плотность вероятности
оцениваемых параметров сигнала цели путем умножения априорной
плотности вероятности на функцию правдоподобия.
Этап 5. Оцениваются параметры сигналов по положению мак-
симума апостериорной плотности вероятности.
Рассмотрим методику формирования функции правдоподобия
на одном простом (идеализированном) примере оценки параметра
сигнала цели.
р f а
Апостериорная
плотность
вероятности
Z(a) - функция правдоподобия
/?(а) - априорная
плотность вероятности
Рисунок 3.6
Апостериорная плотность вероятности
82
Глава 3
Сигналы и условия наблюдения
• Присутствует только один сигнал цели и все параметры сигнала
s(/,a) на интервале наблюдения Т постоянны и полностью
известны за исключением одного оцениваемого параметра це-
ли ац.
• Присутствует только один источник помех - внутренний шум
приемника n(t) — белый гауссовский шум с нулевым матема-
тическим ожиданием и одностороннее спектральной плотно-
стью 7V0.
• Входной сигнал представляет собой сумму сигнала и шума:
С/вх (/) = + на интервале наблюдения Т.
Плотность распределения вероятности входного сигнала - га-
уссово со смещением на величину сигнала . Это распределе-
ние (как функция а при наблюдаемом L\x(z)) является функцией
правдоподобия
£(а) = /?([/вх (/)/«(/,а)) =
(3.9)
где К - постоянный коэффициент.
Максимум функции правдоподобия достигается при минималь-
|- / х / хп2
-12
нои величине
отсутствии шума выражение в скобках равно нулю при а = ац, т.е.
оценка параметра по максимуму правдоподобия соответствует
6с = ац.
Интеграл в показателе экспоненты равен (раскрывая скобки):
Первый член не зависит от параметра а, т.е. не влияет на по-
ложение максимума и может быть опущен. Второй член учитывает-
ся при оценке энергетического параметра, например мощности сиг-
Оптимальное радиолокационное наблюдение
83
нала, пропорциональной ЭПР цели. Так как он не зависит от входно-
го сигнала С/вх, то вычисляется заранее.
Если мощность сигнала s2 (/,а) не зависит от параметра а (не-
энергетический параметр) функция правдоподобия определяется
только третьим членом. Максимум экспоненты и соответственно
функции правдоподобия достигается при максимуме этого члена,
т.е. при определении максимума функции правдоподобия экспонен-
ту можно заменить её показателем. Опуская несущественные посто-
янные, коэффициенты функции правдоподобия в этом случае можно
записать в виде
Максимум сигнальной части Lc (а) (без учета шума)
2 гг
£с(а) = — 5(/,ац j5(/,a)d/ достигает при а = ац и равен
^0 о
(/,a]r)dZ - энергия сигнала.
Дисперсия шумовой части (без учета сигнала)
£ш(а) =—In(t)s(/,a)d/ равна MlL2( =—, где М -операция
о
статистического усреднения.
На выходе системы оптимальной обработки отношение макси-
мальной мощности сигнальной часзи к дисперсии шумовой части
(отношение сигнал/'шум) равно
Таким образом, отношение сигнап'шум на выходе оптималь-
ной системы обработки определяется отношением энергии сигна-
ла, накопленной за время наблюдения 7, к спектральной плотно-
сти шума.
84
Глава 3
Формирователь
опорного сигнала
Рисунок 3.7
Схема коррелятора
Рисунок 3.8
Схема согласованного фильтра
В соответствии с алгорит-
мом формирования функции
правдоподобия (3.11) оптималь-
ная система обработки входного
радиолокационного сигнала
должна определять корреляци-
онную функцию входного сиг-
нала С^вх (^) и опорного сигнала
s(t,a) по параметру а. При
а = а,1 корреляционная функция
близка к своему максимуму, при
этом накапливается вся энергия
сигнала и обеспечивается макси-
мальное отношение сигнал/шум
д0=2Е/Nq . На рис. 3.7 пред-
ставлена структурная схема коррелятора.
Операция (3.11) может быть выполнена и в частотной области
(согласованная фильтрация, рис. 3.8).
При прохождении входного сигнала через фильтр, частотная
характеристика которого //(со) согласована (комплексно сопря-
женная) со спектром опорного сигнала: //(со) = 5* (со) , в момент
времени t-T формируется значение /(а). Спектр сигнала цели
00
есть преобразование Фурье-сигнала s(/): 5Ц (со) - Js(z,au)e~jwMz.
—оо
Если частотная характеристика фильтра согласована со спектром
сигнала цели
00
Н(со) = 5*(со)= j/(z,au)e JW/dZ,
—00
(3.13)
то при отсутствии шума выходной сигнал L в момент времени
t = T будет максимальным по сравнению с другими фильтрами, со-
гласованными с другим параметром а. Действительно, сигнальная
часть на выходе фильтра с частотной характеристикой
Н (со) = *S** (со)
Оптимальное радиолокационное наблюдение
85
ос
j (co)5*(co)ejc°Mco =
—оо
(3.14)
равна энергии сигнала при t = Т, как и при корреляционной обра-
ботке.
Таким образом, система оптимальной обработки радиолока-
ционного сигнала в случае помехи типа белого гауссового шума мо-
жет быть реализована в виде коррелятора входного и опорного сиг-
налов или в виде фильтра, частотная характеристика которого со-
гласована (является комплексно-сопряженной) со спектром сигнала
цели. И в том и другом случае на выходе системы обработки проис-
ходит накопление всей энергии сигнала за время наблюдения (обра-
ботки) и отношение сигнал/шум определяется отношением энергии
сигнала к спектральной плотности шума.
Пусть обрабатывается сигнал в виде высокочастотного им-
пульса на несущей частоте со(] длительностью Ти, амплитудой а} ,
частотой /ц = 0 , задержкой тц - 0 и начальной фазой ри:
5uO) = auCOS((D0Z + (Pu)
[O..TJ.
, t 6
Аддитивный шум - белый гауссов со спектральной
плотностью Уо.
Сигнальная часть функции правдоподобия имеет максималь-
ную величину, когда опорный сигнал коррелятора s() (z) = 5, (/):
с макс
7
2 11
— pu(01(dd/=
''о О
Т
2 и
--- J67ucos(c00/ + (PL ) 67uCOs(n)0/4 (pL )d( =
Nо о
2бГ г 1 г -я сгТ
—[— 1+ cos(2col/ + 2(pII)z d/ - 11 и.
V J 2L v ц 7 J V
/vo о 7Vo
Учитывая, что энергия высокочастотного импульса
Ец = a^I\j2, максимум сигнальной части фvнкции правдоподобия:
86
Глава 3
с макс
N0 '
Дисперсия шумовой части функции правдоподобия
М{Л.\ = М<—
I 111J Гм
] 2Е„
I п\t) tzucos(соо/ + (pLJd/ > =-
О ^0
и отношение мощности сигнальной части к дисперсии шумовой
части
£2
с макс
А/(л2ш} М, '
При решении задач радиолокационного наблюдения цели часть
параметров сигнала не используется. Так, например, начальная фаза
фн сигнала зависит от большого числа неконтролируемых условий
формирования функции отражения и сигнала цели. В результате связь
начальной фазы сигнала с характеристиками цели носит случайный
характер. Также обычно не интересуются конкретным значением ам-
плитуды сигнала при обнаружении цели, определяя только сам факт
наличия сигнала. В этом случае амплитуда и начальная фаза сигнала
являются неинформативными параметрами и не подлежат оценке, так
как не несут информацию о характеристиках цели в отличие от ин-
формационных параметров «задержки» и «частоты» сигнала.
Задача оптимальной обработки сигналов при наличии неин-
формативных параметров сводится к статистическому усреднению
функции правдоподобия по априорно известному распределению
плотности вероятности неинформационных параметров :
В этом случае результат оптимальной обработки не будет зави-
сеть от конкретных значений амплитуды и начальной фазы сигнала
цели в принимаемом сигнале.
Распределение плотности вероятности начальной фазы сигнала
при радиолокационном наблюдении цели равномерно в пределах
О...2л. Известно, что в результате статистического усреднения
функции правдоподобия по начальной фазе алгоритм оценки ин-
формационных параметров £ (а) сводится к формированию функ-
ции Бесселя нулевого порядка /о от модуля функции правдоподобия:
Оптимальное радиолокационное наблюдение
87
/0 (|ьо|). Функцию /0
при большом значении £0 (большом отно-
шении сигнал/шум) можно аппроксимировать линейной функцией.
Тогда
2
(3.15)
т т
где 2C0S — j*z/(z)5’cos (/)d/, Zsin — (^)d/, ^Cos(05 ^sin (0
о 0
квадратурные (сдвинутые по фазе относительно друг друга на 90°)
составляющие опорного сигнала цели.
Так как оценка параметра а производится по положению мак-
симума функции £(а), здесь, как и ранее, опущены несуществен-
ные в этом случае постоянные множители.
При усреднении функции правдоподобия по случайной ампли-
туде сигнала, распределенной по релеевскому закону, алгоритм
оценки информационных параметров £(а) не изменяется.
Таким образом, алгоритм обработки без оценки начальной фа-
зы и амплитуды сигнала сводится к взятию модуля корреляционного
интеграла. В случае фильтровой обработки на выходе согласованно-
го фильтра включается амплитудный детектор.
Естественно, что характеристики эффективности оценки ин-
формационных параметров при усреднении по неинформационным
параметрам будут другими (хуже), чем при известных неинформа-
ционных параметрах.
Отраженное от цели электромагнитное поле на апертуре при-
емной антенны (пространственно-временной сигнал) является слу-
чайным и сопровождается помехами. В результате оценка парамет-
ров сигнала также носит случайный (вероятностный) характер.
Оптимальная обработка радиолокационного сигнала сводит-
ся к формированию апостериорной (послеопытной) плотности
вероятности оцениваемых параметров.
Оптимальная оценка параметра сигнала находится по мак-
симуму апостериорной плотности вероятности. При этом обеспе-
чивается минимум средних потерь, обусловленных ошибками
оценки параметров сигнала, что обычно соответствует минимуму
дисперсии ошибки.
88
Глава 3
Апостериорная плотность вероятности равна произведению
априорной (доопытной) плотности вероятности параметров сиг-
нала на функцию правдоподобия.
Функция правдоподобия определяет вероятность того или
иного значения параметра сигнала при заданном входном сигнале
(сигнал плюс шум).
При помехах типа белого гауссова шума оптимальной обра-
боткой сигнала (формирование функции правдоподобия) являет-
ся согласованная обработка.
Функция правдоподобия формируется путём вычисления
корреляции входного и опорного сигнала, согласованного с сигна-
лом цели.
Возможно также формирование функции правдоподобия пу-
тем согласованной фильтрации входного сигнала. Частотная ха-
рактеристика согласованного фильтра является комплексно-
сопряженной со спектром сигнала цели.
Отношение сигнал/шум на выходе согласованной обработки
равно отношению удвоенной энергии сигнала к спектральной
плотности шума.
3.4. Обнаружение радиолокационных сигналов
Задачу обнаружения сигналов при радиолокационном наблюдении
целесообразно решать в первую очередь, так как последующие опе-
рации обработки обнаруженных сигналов (измерение параметров,
оценка характеристик целей) требуют больших вычислительных за-
трат. Однако для обнаружения сигналов требуется знать их парамет-
ры, так как нельзя обнаружить «то, не зная чего». Кроме того, прак-
тически в каждом элементе зоны обзора РЛС, особенно при землеоб-
зоре, могут находиться другие объекты, представляющие интерес
для наблюдателя (цели). Поэтому для обеспечения раздельного на-
блюдения объектов, необходимо обеспечить разрешение их сигна-
лов. В то же время для разрешения сигналов требуется знание их па-
раметры.
Таким образом, задачи обнаружения, измерения параметров и
разрешения сигналов оказываются тесно взаимосвязанными. Поэто-
му критерий минимума среднего риска при синтезе оптимальной
системы обработки сигналов должен учитывать ошибки решения
всех этих задач, что приводит к практически нереализуемым алго-
ритмам, особенно при наблюдении большого числа сигналов с близ-
Оптимальное радиолокационное наблюдение
89
кими значениями параметров. Так, при картографировании практи-
чески невозможно оценить и компенсировать влияние всех соседних
сигналов со случайными параметрами для обеспечения оптимальной
оценки параметров сигнала заданной цели.
Поэтому задача обработки разбивается на ряд последователь-
ных независимых этапов с оптимизацией каждого этапа раздельно
по своим критериям.
Этап 1, Обеспечивается разрешение по параметрам каждого
сигнала в заданной зоне обзора. Разрешение оптимизируется путем
выбора (обоснования) структуры и параметров сигнала без учета их
статистической природы и наличия помех.
Этап 2. Решается задача оптимального обнаружения сигналов
в каждом элементе разрешения зоны обзора, например в матрице ка -
налов по задержке и частоте сигналов.
Этап 3. Производится грубая оценка параметров обнаружен-
ных сигналов по номеру элемента разрешения.
Этап 4, Решается задача оптимальной оценки параметров об-
наруженных сигналов в своем элементе разрешения.
Далее будем считать, что вся зона параметров сигналов разби-
та на отдельные элементы разрешения и в элементе разрешения
может присутствовать только один сигнал цели. В каждом эле-
менте есть сигнал помехи (шум). Входной сигнал системы обработ-
ки является суммой сигнала цели и шума: .
Характеристики обнаружения определяются характеристиками
сигнала цели и шума. Шум полагаем гауссовым с постоянной спек-
тральной плотностью Ао-
Типовые варианты характеристик амплитуд
и фаз сигналов цели
• Полностью известный сигнал, неизвестно только его наличие
или отсутствие во входном сигнале.
• Когерентный сигнал (известен закон изменения его фазы). Не-
известна амплитуда и начальная фаза сигнала. Амплитуда и на-
чальная фаза сигнала постоянные и случайные.
• Некогерентная пачка сигналов. Каждый сигцдл пачки когерент-
ный со случайной амплитудой и начальной фазой. Начальные
фазы сигналов некоррелированны. Амплитуда сигналов пачки
может быть постоянной («дружные» флуктуации) и некоррели-
рованными (быстрые флуктуации).
Для сравнения характеристик обнаружения все сигналы имеют
одинаковую среднюю мощность, пропорциональную ЭПР цели.
90
Глава 3
Плотность распределения мощности сигнала цели — экспоненциаль-
ная (релеевское распределение амплитуд), а начальной фазы - рав-
номерная (0; 2л).
Вначале рассмотрим потенциальные характеристики обнару-
жения, когда сигнал цели s(t} полностью известен. Информацион-
ный параметр а сигнала принимает только два значения:
a = 1, когда сигнал цели присутствует во входном сигнале £/(/), и
a = 0, когда сигнала цели нет.
В соответствии с критерием обеспечения минимума среднего
риска при принятии решения об обнаружении сигнала формируют
апостериорную вероятность наличия сигнала цели Р(а = 1 и) и
отсутствия сигнала цели Р(а-0/^/) в принятом сигнале u(t) и
сравнивают их между собой. Для этого берут отношение вероятно-
стей и сравнивают его с порогом.
При отсутствии априорных сведений о наличии сигнала цели
формируют отношение правдоподобия (коэффициент правдоподо-
бия - число) и также сравнивают с порогом'.
Р(и!а = 1)
-Н-----
Р(и/а.= 0)
(3.16)
где Р(^//а = 1) - плотность вероятности реализации входного сиг-
нала при гипотезе о наличия сигнала цели; Р(и/а = 0) - плот-
ность вероятности той же реализации входного сигнала u[t) при
гипот езе об отсутствии сигнала цели.
В случае, когда известны все параметры сигнала информацион-
ные и неинформационные, кроме параметра обнаружения a ,
о
о
(3.17)
(3.18)
о о
где" Ки - нормирующим множитель; Т - длительность сигнала.
Отношение правдоподобия (3.16) при (3.17) и (3.18) сравнива-
ется с порогом h:
Оптимальное радиолокационное наблюдение
91
(3.19)
т
где Е = р (/) d/ - энергия сигнала,
о
Отношение энергии сигнала к снек тральной плотности шумов
E/Nq является известной величиной и может быть включено в по-
роговый уровень.
Логарифм отношения правдоподобия сравнивается с порогом:
> 1п/г +
(3.20)
Таким образом, при обнаружении сигнала используется тажс
операция вычисления корреляции входного сигнала с сигналом цели,
как и при оценке других параметров сигнала. Отличие состоит в
операции сравнения Lq с порогом, который зависит от отношения
сигнал/шум.
В случае, когда неинформационные параметры сигнала началь-
ная фаза и амплитуда неизвестны, алгоритмы обнаружения сводят-
ся к взятию модуля от корреляционного интеграла, как и при оценке
других параметров сигнала:
(3.21)
т т
где Zcos = p(05cos(0d/’ zsin = fM(O5s,n(Od?’ 5cos(0 И 5sin(0 -
о 0
квадратурные (сдвинутые по фазе относительно друг друга на 90°)
составляющие оперного сигнала цели.
При согласованной фильтрации для вычисления модуля на вы-
ходе фильтра включается амплитудный детектор (АД).
В зависимости от статистических характеристик неизвестных
неинформационяых параметров выходной сигнап Z коррелятора или
сигнал согласованного фильтра после амплитудного детектора перед
сравнением с порогом подвергается соответствующему функцио-
нальному преобразованию. Так как все эти преобразования известны
и носят монотонным характер, их учитывают в величине устанавли-
ваемого порога.
92
Глава 3
Рисунок 3.9
Схемы коррелятора (а) и согласованного фильтра (б) обнаружения сигнала
Схемы коррелятора и согласованного фильтра обнаружения
сигнала представлены на рис. 3.9.
Эффективность решения задач
обнаружения сигналов целей
Вероятности, характеризующие вид ошибок
при принятии решения об обнаружении сигнала
Рт - вероятность ложной тревоги (ложного обнаружения), ко-
гда принимается решение о наличии сигнала цели в принимаемом
сигнале, в то время, как он отсутствует.
jFJip - вероятность пропуска сигнала цели, когда принимается
решение об отсутствии сигнала, в то время, как в принимаемом сиг-
нале он есть.
При этом сумма вероятностей полного события равна единице:
где Рпн - вероятность правипьного необнаружения; РПО - вероят-
ность правильного обнаружения.
Оптимальное радиолокационное наблюдение
При выборе величины порога при обнаружении радиолокаци-
онного сигнала обычно используют критерий Неймана-Пирсона,
при котором задаётся (фиксируется) величина (не более) вероятно-
сти ошибки ложного обнаружения {ложной тревоги) Р1Т. Формиро-
вание отношения правдоподобия при этом обеспечивает максималь-
ную вероятность правильного обнаружения Рпо .
Задание в качестве критерия малой величины Р1Г, обычно не
более 10 2—10 6. и соответствующего уровня порога, обусловлено
тем, что при решении большинства тактических задач стоимость
ошибки ложного обнаружения гораздо больше стоимости пропуска
сигнала цели. Это объясняется тем, что обнаружение сигнала цели
требует последующего решения целого комплекса задач (определе-
ние местоположения, классификация, оценка сил и средств против-
ника, целеуказание оружию и т.п.).
Рассмотрим характеристики и Р,г оптимального обнару-
жителя в случае, когда все параметры сигнала известны.
Нормированный по 7V0 выходной сигнал £0 (безразмерное
число) оптимального обнаружителя в случае наличия/отсутствия
сигнала соответственно равны:
2 Тг
£0ш =T^J«(05on(0d/-
^0 о
В случае гауссова шума сигналы £Ос
и £Ош также имеют
гауссовскую плотность вероятности (рис. 3.10).
Рисунок 3.10
Графики плотности
вероятности при наличии
и отсутствии сигнала
94
Глава 3
Шумовая и сигнальная составляющие имеют одинаковую дис-
персию о2 -2E/Nq . но математическое ожидание сигнальной со-
ставляющей смещена на величину 2Е/Лг0 .
Вероятность ложной тревоги Р1Г равна площади шумовой со-
ставляющей при £Ош > Л :
(3.24)
Ош
- интеграл вероятности.
Вероятность правильного обнаружения
сигнальной составляющей при £Ос > h :
равна площади
' h \1Е
Рпо = /--7—-J— * (3*25)
При статистическом усреднении отношения правдоподобия по
неинформативным неизвестным параметрам начальной фазе и ам-
плитуде сигнала распределения плотностей вероятности шумовой и
сигнальной составляющей будут релеевскими и соответственно ха-
рактеристики обнаружения будут ухудшаться.
Важно отметить, что характеристики обнаружения не зависят
от формы сигнала и определяются только его энергией, если на вхо-
де присутствует только один сигнал.
Для оценки эффективности того или иного обнаружителя
сигнала используют заранее рассчитанные зависимости между Р т ,
PnQ от отношения сигнал/шум. Чаще всего используют рабочие
характеристики или характеристики обнаружения как функции
правильного обнаружения от отношения сигнал/шум при фиксиро-
ванной величине ложной тревоги. На рис. 3.11 представлены ха-
рактеристики обнаружения полностью известного сигнала и сигна-
ла со случайной начальной фазой и амплитудой. Случайность ам-
плитуды и начальной фазы сигнала значительно снижают
вероятность обнаружения, особенно при малых вероятностях лож-
ной тревоги.
Оптимальное радиолокационное наблюдение
95
Рисунок 3.11
Характеристики обнаружения полностью известного сигнала (сплошные)
и сигнала со случайными амплитудой и начальной фазой (пунктирные)
Для Р ' = 10 4 и Рпо = 0,6 при полностью известном сигнале
q = 12 дБ , а при неизвестной амплитуде и фазе q( = 16 дБ , т.е. на
4 дБ больше. При РЛ1 = 10’s эта разница возрастает до 5,5 дБ.
Алгоритм обработки и характеристики обнаружения зависят от
вида и параметров сигналов РЛС: случайной начальной фазы, слу-
чайной амплитуды с различными законами распределения вероятно-
стей, пачки импульсов с известными и случайными изменениями
фазы от импульса к импульсу и различными законами распределе-
ния амплитуд импульсов в пачке.
В РЛС обычно используются сигналы в виде когерентных и не-
когерентных пачек импульсов.
Когерентность пачки означает, что кроме случайной началь-
ной фазы первого импульса закон изменения начальных фаз
всех остальных импульсов пачки известен.
Некогерентностъ пачки означает, что не только начальная фаза
первого импульса пачки, но и все последующие импульсы
имеют случайную фазу.
Структура оптимального обнаружителя когерентной пачки
импульсов представлена на рис. 3.12. Далее полагаем, что амплитуда
96
Глава 3
Рисунок 3.12
Схема обнаружителя когерентной пачки импульсов
импульсов в пределах пачки постоянная, но случайная. Закон рас-
пределения вероятностей амплитуды - релеевский.
Импульсные сигналы с выхода УПЧ поступают на согласован-
ную систему обработки каждого одиночного импульса в виде двух
квадратурных каналов коррелятора. Так как при обнаружении пред-
полагается, что все информационные параметры сигнала (задержка и
частота) известны, то опорные сигналы коррелятора scos (/) и ssin
учитывают изменения фазы от импульса к импульсу и подаются
точно в момент времени, соответствующий приходу отраженного
сигнала s(^). На выходе интегратора за время длительности им-
пульса ти формируются квадратурные сигналы каждого импульса
пачки Zwcos и Z sin (постоянные видеоимпульсы), где п - номер им-
пульса в пачке из N импульсов. Последующие сумматоры этих сиг-
налов в каждом квадратурном канале обеспечивают накопление
энергии N импульсов пачки. Возведение в квадрат и суммирование
сигналов квадратур устраняет влияние случайной начальной фазы
первого импульса пачки.
Извлечение корня и сравнение амплитуды выходного сигнала
оптимальной системы обработки с порогом обеспечивают обнару-
жение сигнала в виде когерентной пачки импульсов. В соответствии
с критерием Неймана-Пирсона порог выбирается из условия форми-
рования заданной (не более) вероятности ложной тревоги Р т. Веро-
ятность правильного обнаружения определяется отношением сиг-
нал/шум, равным lE/N^ , где Е -средняя (по вероятности) энергия
пачки из N импульсов со средней энергией каждого импульса Ех.
Оптимальное радиолокационное наблюдение
97
Характеристики обнаружения такие же как и для одиночного
сигнала (рис. 3.11) с учетом того, что теперь энергия сигнала равна
энергии пачки импульсов, которая в Npa3 больше энергии одиночно-
го импульса: qQ = 2Е}Х 'NQ .
При обнаружении некогерентной пачки импульсов, когда на-
чальная фаза каждого импульса случайная, квадратурные сигналы
Zncos и Zwsin становятся также случайными, т.е. накопление энер-
гии импульсов пачки не происходит.
Следовательно, суммирование выходных сигналов системы об-
работки одиночных импульсов производят по амплитуде без учета
фазовых соотношений.
На рис. 3.13 представлена структура обнаружителя некоге-
рентной пачки импульсов.
На первом этапе формируется амплитуда выходного сигнала со-
гласованной системы обработки каждого одиночного импульса Zn .
На рисунке этот этап представлен в виде коррелятора. Возмож-
но также выполнение обработ ки одиночного импульса с помощью
согласованного фильтра и амплитудного детектора. Выходной сиг-
нал детектора Zn формируется и стробируется в момент окончания
каждого импульса.
Дальнейшая обработка некогерентной пачки происходит путем
суммирования сигналов детектора Zn , формируя сигнал пачки ZA ,
который сравнивается с порогом.
В результате суммирования сигналов после детектирования из-
меняются законы распределения вероятностей выходных сигналов и
Рисунок 3.13
Схема обнаружителя некогерентной пачки импульсов
98
Глава 3
шумов и их параметры. Характеристики обнаружения некогерент-
ной пачки импульсов отличаются от характеристик обнаружения
пачки когерентных сигналов.
На рис. 3.14 представлен пример характеристик обнаружения
некогерентной пачки импульсов как зависимость вероятности пра-
вильного обнаружения от отношения сигнал/шум одного импуль-
са. Закон распределения вероятностей амплитуд импульсов - реле-
евский, начальная фаза - случайная. Амплитуда импульсов в пачке
постоянна и изменяется случайным образом от пачки к пачке
(«дружные» флуктуации). Энергия одиночного импульса Ех - ста-
тистически средняя величина. Вероятность ложной тревоги задана
(Р г = 10 6 ). Задается число импульсов в пачке N= 1, 2, 4, 10, 50.
На рис. 3.15 представлены характеристики обнаружения неко-
герентной пачки быстрофлуктуирующих сигналов, когда каждый
импульс в пачки является случайным.
Из анализа этих характеристик обнаружения (рис. 3.11, 3.14,
3.15) следует, что некогерентное накопление импульсов пачек менее
эффективно, чем когерентное. Так, при накоплении 10-ти импульсов
(рис. 3.14) уменьшение требуемого отношения сигнал/шум для
обеспечения той же вероятности правильного обнаружения
РП0 = 0,5, как и при одном импульсе, составляет 7 дБ вместо 10 дБ
Рисунок 3.14
Характеристики обнаружения
некогерентной пачки
«дружно» флуктуирующих сигналов
Рисунок 3.15
Характеристики обнаружения
некогерентной пачки
быстрофлуктуирующих сигналов
Оптимальное радиолокационное наблюдение
99
при когерентном накоплении. С увеличением числа импульсов пач-
ки эта разница возрастает. Иногда эту разницу трактуют как потери
в отношении сигнал/шум при некогерентном накоплении. В данном
примере потери равны 3 дБ.
В случае некогерентного накопления быстрофлуктуирующих
сигналов (рис. 3.15) вероятность обнаружения гораздо выше, чем в
случае «дружно» флуктуирующих сигналов. Так, при накоплении че-
тырёх «дружно» флуктуирующих сигналов при q0 = 2Е} /7V0 = 12 дБ,
Рпо = 0,56, а при быстрофлуктуирующих Р - 0,78.
Отношение = 2Е} /No соответствует отношению сигнал шум
в линейной части обнаружителя на выходе согласованного фильтра до
детектора или другого нелинейного преобразования. Учитывая, что
энергия сигнала Е = РСТ, а мощность шума Рш = = Уо у, от-
ношение сигнал/шум равно отношению мощности сигнала к мощности
шума перед детектированием: q0 = 2РС /Рт = Рмакс /Рш , где Рс - сред-
няя мощность сигнала на выходе линейной части системы обработки;
Р^^ ~ максимальное значение этой же мощности,
смаке
Часто характеристики обнаружения сигналов РЛС вычисляют и
строят графики как функции отношения д = Рс/Рш = О,5до, так как
параметры сигнала Рс и Рш определяются тактико-техническими ха-
рактеристиками РЛС. К тому же технически удобнее и точнее выпол-
нять операцию сравнения выходного сигнала с порогом по средней
Рисунок 3.16
Выходног сигнал фильтра, согласованного с прямоугольным импульсом
на промежуточной частоте
100
Глава 3
мощности, чем по максимальной. На рис. 3.16 проиллюстрирован
пример выходного сигнала фильтра, согласованного с импульсом на
промежуточной частоте. Показаны уровни Рс и Рмакс. Величина Рс
есть результат усреднения мощности по всей длительности сигнала.
3.5. Обнаружение цели
Обнаружение цели определяется обнаружением сигнала, отражен-
ного от цели. Эффективность обнаружения сигнала при отсутствии
соседних целей и фона местности зависит от отношения энергии
сигнала Ес к спектральной плотности шума 7V0: qQ = 2ЕС / 7V0 или
отношения средней мощности отраженного сигнала Рс к мощности
шума Рш'- 2/ / Рш на выходе оптимального обнаружителя (до
детектора).
Очевидно, что чем больше расстояние от РЛС до цели, тем
меньше мощность отраженного и принимаемого сигнала, тем мень-
ше вероятность правильного обнаружения сигнала при прочих рав-
ных условиях радиолокационного наблюдения. Таким образом, ха-
рактеристики обнаружения цели зависят от дальности до цели.
Максимальная дальность обнаружения цели (дапъность обна-
ружения) есть максимальное расстояние между РЛС и целью, при
котором обеспечивается обнаружение цели с заданными вероятно-
стями правильного обнаружения и ложной тревоги (ложного обна-
ружения).
Рассмотрим зависимость энергии принимаемого сигнала от па-
раметров РЛС, цели и условий наблюдения. Плотность потока мощ-
ности излучаемой электромагнитной волны /7И при изотропном
(одинаковом во все стороны) излучении передающей антенны РЛС
обратно пропорциональна площади поверхности шара на расстоянии
расположения цели /?ц:
где Ри - мощность излучения РЛС.
Передающая антенна РЛС имеет диаграмму направленности с
коэффициентом усиления G в направлении на цель. В результате
Оптимальное радиолокационное наблюдение
101
плотность потока мощности облучения цели 77и увеличивается в
G раз:
Мощность ЭМВ, отраженной целью, определяется ЭПР цели <зц :
— ПЦОЦ •
Считая что ЭМВ от цели распространяется изотропно, в случае
однопозиционной РЛС плотность потока мощности на расстоянии
/?ц у приемной антенны РЛС равна
П —
пр " 4л/?ц “ (4тг)27?ц ’
Мощность принимаемого сигнала Рпр на согласованной на-
грузке на выходе антенны пропорциональна эффективной площади
апертуры приемной антенны Sa:
Полученная зависимость показывает, что мощность сигнала
цели уменьшается пропорционально четвертой степени расстояния
до цели, в то время как от мощности излучения РЛС она зависит
только в первой степени.
Мощность принимаемого сигнала пропорциональна ЭПР цели,
т.е. чем больше сгц , тем больше дальность ее обнаружения.
Эффективная площадь апертуры принимаемой антенны Sa оп-
ределяет ее коэффициент усиления
При использовании одной и той же антенны на передачу и на
прием мощность принимаемого сигнала на выходе апертуры:
102
Глава 3
Анализ полученных зависимостей показывает, что эффектив-
ным способом повышения мощности принимаемого сигнала являет-
ся увеличение площади антенны (пропорционально квадрату площа-
ди). Однако возможности размещения на летательном аппарате и
поддержания точности распределения электромагнитного поля по
апертуре ограничивают максимальные размеры антенны, обычно не
более (100.. .200) длин волн.
Излучаемая Ри и, следовательно, принимаемая мощность Рпр
сигнала может значительно изменяться за время обработки сигнала Тс
Так, например, при импульсной работе РЛС излучает сигнал
за время длительности импульса ти с промежутками времени ме-
жду импульсами (период повторения) Ти. В этом случае средняя
мощность излучения
т
1г Р т
Рсп=— =
Vp rrf J И v гт~т J
7 с о 1 П
а энергия излучаемого сигнала
т
Г Р Т
Е = \Р (t}dt = P Т = =Рт N
0 7 п
где NK - число излученных импульсов в когерентно.! пачке за
время Тс.
Соответственно, энергия принятого сигнала за время когерент-
ной обработки равна
Таким образом, энергия принимаемого сигнала определяется
средней мощностью излучения Рс?, а не импульсной. Окончательно,
энергия сигнала Ес на выходе оптимальной системы обработки (до
детектора) определяется максимальной величиной принимаемой Епр
и суммарными потерями энергии в различных частях тракта РЛС
и среде распространения ЭМВ: Ес = ЕЩ)/ап .
Отношение сигнал/шум определяется энергией сигнала и спект-
ральной плотностью шума. Это отношение также равно отношению
Оптимальное радиолокационное наблюдение
103
мощности сигнала к мощности шума на выходе линейной части уст-
ройства обработки сигнала (до детектора):
No No ЛШ Рш’
где Л/с = 1/7^ - полоса частот спектра сигнала; Рс =—— ----- -
(4л)3 <ап
средняя мощность принимаемого сигнала.
Для достижения заданных характеристик обнаружения цели /JI0
и РЛ1 необходимо обеспечить требуемое отношение сигнал/шум,
равное
Напомним, что характеристики обнаружения в справочниках
обычно даются в виде зависимостей Рпп и Р от q = Рг / Р„ = Er / 7Vn ,
1Ю J11 *- V t LLL U / 7
а не от q[} = lE/N^ = 2РС/РШ , т.е. параметр сигнал/шум отличается
на коэффициент 2.
Величина q обеспечивается при выполнении условия
gc _ Л =
No Рш (4л)3 AUX"
где /?0 - дальность обнаружения цели.
Отсюда дальность обнаружения цели равна
(3.26)
В случае, когда помехой для обнаружения сигнала цели является
только внутренний шум приемника, спектральная плотность шума
^=кТРш,
где кТ - постоянная величина, равная 4*10 1 Вг/Гц; Еш - фактор
шума приемника (2... 10) дБ, зависящий от типа приемника.
В когерентно-импульсной РЛС излучается и принимается коге-
рентная пачка из NK импульсов
104
Глава 3
n =т /т = ft
1Nк с/2п 1 ii с ’
где Fn - частота повторения импульсов.
Энергия сигнала когерентной пачки импульсов равна сумме
NK энергий отдельных импульсов Еи = Рити. Дальность обнаруже-
ния цели когерентно-импульсной РЛС
Суммарные потери энергии сигнала ап определяются потеря-
ми в высокочастотном тракте РЛС а6Ч, потерями при обработке
сигнала аобр, потерями ЭМВ при прохождении облачности (дождя)
а1Ж и растительности араст. Общие потери достигают величины
(10...20) дБ.
При наличии кроме внутреннего шума приемника дополнитель-
ной активной помехи со спектральной плотностью 7Vn общая мощ-
ность шума возрастает:
что приводит к уменьшению дальности обнаружения цели.
При обнаружении цели, находящейся на сильно отражающем
фоне (земная или взволнованная водная поверхность), дополнитель-
ной к шуму помехой является сигнал фона, отраженный от подсти-
лающей поверхности. Мощность фона определяется ЭПР фона в
элементе разрешения площадью 8S. При однородном фоне
РсрС2Х2оф
/, \3 п4 ’
(4л)
где ЭПР фона сгф = o08S = с>05г5^; 5г, 8£ - соответственно разме-
ры элемента разрешения по дальности и азимуту (при малом угле
скольжения).
Отношение сигнал'фон
Оптимальное радиолокационное наблюдение
105
Дальность обнаружения в этом случае определяется двумя ус-
ловиями, когда Рс/Рш > и Рс/Рф > дтр .
При картографировании местности в качестве цели выступает
элемент разрешения местности сГф = сг05гб€. Дальность карто! ра-
фирования при наличии только внутреннего шума
'PKTHNkG\2o05r8£
(4л)3 kTF^q^
(3.28)
Величина потерь ап и <?тр будет отличаться от аналогичных
величии при обнаружении точечной цели.
При решении задач оптимального обнаружения сигнала цели
считается, что все его информационные параметры известны, а
неинформационные (начальная фаза и амплитуда) статистически
усредняются.
Оптимальный обнаружитель сигнала цели формирует отно-
шение функций правдоподобия при наличии во входном сигнале
сигнала цели и при его отсутствии. Отношение правдоподобия (ко-
эффициент правдоподобия) сравнивается с порогом и при превы-
шении порога принимается решение о наличии сигнала цели.
Уровень порога в соответствии с критерием Неймана-
Пирсона определяет заданную вероятность ложной тревоги (лож-
ного обнаружения сигнала цели).
Эффективность обнаружения определяется отношением
энергии сигнала к спектральной плотности шумов (отношением
мощности сигнала к мощности шума на выходе обнаружителя до
детектора).
Характеристики обнаружения сигнала, как зависимость веро-
ятности правильного обнаружения от отношения сигнал/шум при
заданной вероятности ложной тревоги, вычисляются заранее
(справочные данные) для различных статистических характери-
стик сигналов и шумов. Обычно различают два типа сигналов: ко-
герентные и некогерентные пачки импульсов с различными ста-
тистическими характеристиками амплитуд импульсов.
Структура обнаружителя и характеристики обнаружения ко-
герентной пачки импульсов такие же, как и одиночного сигнала.
Оптимальная обработка пачки сводится к когерентному (синфаз-
ному) суммированию выходных сигналов фильтра, согласованно-
го с одиночным импульсом. Эффективность обнаружения опре-
деляется энергией всей пачки импульсов.
106
Глава 3
Обнаружение некогерентной пачки импульсов сводится к не-
когерентному (амплитудному) суммированию пачки выходных
сигналов амплитудного детектора фильтра, согласованного с
одиночным импульсом. Характеристики обнаружения зависят от
статистических свойств амплитуды и числа импульсов пачки. Эф-
фективность обнаружения некогерентной пачки импульсов ниже,
чем когерентной пачки.
Эффективность обнаружения «дружно» флуктуирующей
пачки импульсов ниже, чем быстрофлуктуирующей.
Дальность обнаружения цели пропорциональна корню чет-
вертой степени из средней мощности излучения, времени накоп-
ления сигнала, квадрата коэффициента усиления антенны и длины
волны, ЭПР цели и обратно пропорциональна корню четвертой
степени от спектральной плотности аддитивных шумов и коэффи-
циента потерь энергии сигнала в радиолокационном тракте.
3.6. Разрешение радиолокационных сигналов
Разрешающая способность РЛС - это возможность раздель-
ного наблюдения целей т.е. обнаружения, определения местопо-
ложения, распознавания и определения функционального со-
стояния заданной цели независимо от присутствия других це-
лей и объектов в зоне наблюдения.
Разрешение является важнейшей характеристикой РЛС земле-
обзора так как она определяет детальность наблюдаемого изобра-
жения (радиовидение). Чем выше разрешение, тем меньше размер
элемента разрешения, тем больше элементов разрешения в изобра-
жении цели.
При землеобзоре разрешение определяет также эффективность
обнаружения малоразмерных целей на фоне отражений от подсти-
лающей поверхности.
Чтобы разрешить цели необходимо разрешить сигналы, отра-
жённые от эзих целей, т.е. задача разрешения целей сводится к зада-
че разрешения сигналов.
Сигналом в радиолокации является изменение параметров ЭМВ
в процессе отражения от цели. Отраженная ЭМВ, поступающая на
вход РЛС, имеет большое число информационных и неинформаци-
онных параметров.
В качестве информационных параметров далее рассматриваем
напряженность поля, частоту колебаний, задержку относительно из-
Оптимальное радиолокационное наблюдение
107
лучаемой волны и направление прихода волны. Считаем также, что
возможна раздельная (независимая) обработки ЭМВ по пространст-
ву (апертуре антенны) и времени. Таким образом, для разрешения
целей необходимо разрешать сигналы целей хотя бы по одному из
параметров ЭМВ: направление прихода, частота или задержка.
В общем случае разрешающая способность РЛС по каждому
параметру сигнала зависит от целого ряда факторов, к которым от-
носятся: характеристики сигналов и алгоритмы их обработки, сте-
пень различия информационных и неинформационных параметров
сигналов, характеристики различного рода помех (шумы, фон, ак-
тивные помехи).
Наличие одновременно многих таких факторов с неизвестными
(обычно некоррелированными) характеристиками приводит к слож-
ной многовариантной задаче синтеза оптимальной системы разре-
шения сигналов даже по одному параметру.
В тоже время в радиолокации важнейшей задачей является об-
наружение сигналов: не обнаружив сигнал цели нельзя решать дру-
гие задачи. При радиовидении необходимо обеспечивать обнаруже-
ние сигналов с малой ЭПР и обычно на достаточно больших дально-
стях. В этом случае для получения необходимого для обнаружения
отношения сигнал/шум требуется накопление энергии при обработке
сигнала. Когерентная (согласованная) обработка сигнала является
основной операцией при решении задач радиолокационного наблю-
дения, так как она обеспечивает максимальное отношение сиг-
нал/шум. Поэтому обычно все другие задачи наблюдения решаются
после выполнения согласованной обработки сигналов.
Исходя из этих соображений задача разрешения сигналов ре-
шается на выходе согласованной системы обработки.
На рис. 3.17 в качестве примера показаны выходные сигналы
согласованной системы обработки по задержке т четырех сигналов
точечных целей. Отношение сигнал/шум большое, поэтому шумы на
рисунке не показаны (они малы). Первый и второй сигналы с за-
держкой т, и т2 не перекрываются друг другом и считаются разре-
шёнными. Третий и четвертый сигналы т3, т4 перекрываются и во-
прос о их разрешении остается открытым (на рисунке суммарный
сигнал не показан).
Для определения меры разрешающей способности обычно ис-
пользуют один из двух критериев.
Критерий Релея в качестве меры разрешающей способности
(разрешения) использует величину разницы параметров двух сигна-
108
Глава 3
Рисунок 3.17
Сигналы на выходе согласованной системы обработки
лов одинаковой амплитуды, отметка которых на изображении име-
ет провал между максимумами значений (двугорбая кривая). Шумы
при этом не учитываются. Критерий был разработан применительно
к визуальному наблюдению звезд с помощью телескопа. Так как
свет от звезд является некогерентным, то сложение света в изобра-
жении происходит по интенсивности, т.е. суммарная интенсивность
изображения двух звезд является суммой интенсивностей изображе-
ний каждой звезды.
На рис. 3.18 показана интенсивность I изображения двух звезд
по отдельности (штрихованная линия) и вместе. График суммарной
интенсивности имеет провал, который является признаком наличия
двух целей, т.е. их разрешения. Величину провала обычно задают 2 дБ.
Разница углов 66 = 02 - 0j, в этом случае есть мера разрешающей
способности (разрешение по углу 6).
Рисунок 3.18
Интенсивность изображения двух звезд
Оптимальное радиолокационное наблюдение
109
Применительно радиолокационному разрешению критерий Ре-
лея имеет целый ряд недостатков, однако вследствие наглядности
довольно часто используется при оценке разрешения РЛС.
Принципиальным недостатком критерия Релея является то, что
суммарный сигнал на выходе согласованной системы обработки за-
висит не только от разницы информационных параметров двух сиг-
налов, но и от случайной (неконтролируемой) разницы начальных
фаз сигналов. Это объясняется тем, что вследствие когерентности
сигналов они суммируются в согласованном фильтре векторно (с
учетом разницы начальных фаз).
На рис. 3.19 представлена структура согласованной обработки
при наличии двух сигналов, отличающихся начальной фазой и за-
держкой.
Сигнальная часть (без учета шума) первого сигнала £с1 на вы-
ходе согласованного фильтра (до детектора огибающей) равна
+оо
|5(7 - т1 (7 - x)dz.
—00
Аналогично при наличии на входе только второго сигнала
Модуль суммарного сигнала равен £с1 (т) + Lc2 (т) .
Здесь (fj и ф2 - случайные начальные фазы соответственно
первого и второго сигналов. Бесконечные пределы интегрирования
поставлены с учетом того, что вне пределов длительности Г сигна-
лы равны нулю.
На рис. 3.20,67 даны графики отдельно Ltl (т) и £с2 (т) с пере-
сечением на уровне 0,5 от
с макс
. При разнице начальных фаз
<Р1 -ф =0 амплитуда суммарного сигнала показана на рис. 3.20,6,
Рисунок 3.19
Схема согласованной обработки двух сигналов
no
Глава 3
Рисунок 3.20
Сигналы двух целей на выходе согласованной системы обработки
Рисунок 3.21
Ширина изображения точечной цели
на уровне -3 дБ
а при ф] - ф2 = я (в противофазе) на рис. 3.20,в. Важно что величина
провала в суммарном сигнале от двух целей определяется разностью
фаз и, следовательно, носит случайный характер. Поэтому использо-
вание критерия Релея при оценке разрешающей способности РЛС
требует проведения значительного числа экспериментов (получения
изображений двух целей) с последующим усреднением результатов
по случайной величине провала.
Второй критерий определения разрешения обладает достаточ-
ной простотой и высокой метрологической точностью. При этом
критерии используется толь-
ко один сигнал точечной це-
ли. Ширина выходного сиг-
нала согласованного фильтра
на уровне -3 дБ при большом
отношении сигнал/помеха
является мерой разрешения
сигналов (рис. 3.21).
Такая оценка разреше-
ния не зависит от начальной
фазы и амплитуды сигнала.
Она не учитывает также
влияние шумов и соседних сигналов.
Информационными параметрами временного сигнала яв-
ляются задержка и частота: . Отклик согласованного
по задержке и частоте фильтра без учета шумов:
LcM =
">
где s(t) - комплексная огибающая сигнала на входе системы обра-
ботки.
Оптимальное радиолокационное наблюдение
111
Видно, что ширина этого отклика на уровне -3 дБ (разрешаю-
щая способность) определяется только видом сигнала 5 (7), т.е. его
автокорреляционной функцией по параметрам т и f .
Аналогично определяется разрешение по угловой координате
как ширина отклика на выходе согласованной пространственной (по
апертуре антенны) системы обработки.
Разрешение целей определяется разрешением сигналов целей на
выходе согласованной системы обработки без учёта шумов и
фона.
Рассмотрим выход согласованной с сигналом ^(7) системы
обработки в случае, когда на входе присутствуют два сигнала:
где U(t} = sx (7) + л2 (7) + и(7) - сумма двух сигналов ^(z) и s2(t}
и шума и (7) .
Пренебрегая влиянием шума, выходной сигнал запишем в виде
- энергия первого сигнала.
Влияние присутствия второго сигнала на результат обработки
первого сигнала исключается (происходит разрешение сигналов),
если второй член выражения (3.29) равен нулю. Этот член определя-
ет взаимную корреляцию первого и второго сигналов.
В общем случае первый и второй сигналы отличаются ампли-
тудой, задержкой т , частотой f и начальной фазой ф. В дальней-
шем полагаем, что амплитуда и начальные фазы сигналов постоян-
ные и одинаковые:
Глава 3
112
Тогда нормированный по величине 2/7V0
онного интеграла в (3.29) равен
р(/)$*(/-т)ехp(j2n//)dZ ,
модуль корреляци-
(3.30)
Дя2 (Т’/) “
где т = т2 - г,, f = f\~f2-
Это выражение определяет изменение выходного сигнала со-
гласованной системы обработки при расстройке входного сигнала
точечной цели по задержке и частоте. При этом полагается, что шум,
сигналы фона и других целей отсутствуют.
Следовательно, разрешение сигналов определяется их рассогла-
сованием по задержке и частоте. Для оценки степени рассогласования
используется величина модуля автокорреляционного интеграла.
Ширина корреляционной функции по задержке и частоте на
уровне -3 дБ определяет разрешение сигналов по этим пара-
метрам.
Нормированный по энергии сигнала корреляционный интеграл
(3.30) назван функцией рассогласования или функцией неопределён-
ности. В дальнейшем будем использовать второе определение,
ставшее классическим.
Разрешающая способность РЛС определяется свойствами сигна-
ла, отражённого от цели - его функцией неопределённости.
Рассмотрим основные свойства функции неопределённости.
Функция неопределённости комплексной огибающей сигнала:
00
7(т’/) =
(/-т)ехp(j2n//)d/ ,
(3.31)
где т и f - рассогласование параметров сигнала соответственно по
задержке и частоте. Бесконечные пределы взяты с учётом конечной
длительности Тс сигналов, вне пределов которой сигнал равен нулю.
Зная спектр сигнала (преобразование Фурье)
+О0
—00
Оптимальное радиолокационное наблюдение
113
находим, что функция неопределённости, определяемая через спектр
сигнала, равна
1. Максимальное значение функции неопределенности равно
энергии сигнала и при нормировке сигнала Гs(t)s* = 1 равно
единице:
J(T = 0,/ = 0) = l.
2. Объем функции над плоскостью (т,/) равен квад-
рату энергии сигнала и не зависит от вида сигнала:
ОС X
J p2(T,/)dTd/- = J2(0,0) = l.
—ОС —00
3. Этот объем имеет название тело неопределенности.
4. Изменение вида сигнала приводит только к изменению
формы функции J2 (т,/) , оставляя объем тела неопределенности и
максимальное значение при т = 0 , f - 0 постоянными.
5. Спектр квадрата модуля сигнала определяет вид сечения
функции неопределенности по оси частот:
J (°./) = f H?)|2 ехр( j27r/z)dz
(3.33)
6. Преобразование Фурье от квадрата модуля спектра сигнала
определяет вид функции неопределенности по задержке:
Дт,О)= J|S(O|2exp(j27t/T)d/
(3-34)
7. Функция неопределенности симметрична относительно на-
чала координат (т = 0 , / = 0), т.е. = J( - т, - /) .
8. Кроме основного пика, ширина которого на уровне -3 дБ опре-
деляет разрешение соседних сигналов, функция неопределенности име-
114
Глава 3
ет боковые лепестки. Если задержка и частота других сигналов совпа-
дают с задержкой и частотой боковых лепестков ФН, то на выходе со-
гласованной системы обработки эти сигналы могут иметь значитель-
ную амплитуду сравнимую с амплитудой наблюдаемого сигнала, и раз-
решение не будет обеспечено.
Рассмотрим некоторые типовые сигналы и их функции неопре-
деленности. На рис. 3.22 представлена функция неопределенности
прямоугольного радиоимпульса длительностью ти (рис. 3.22,я).
Сечение ФН по оси т (рис. 3.22,6) представляет собой тре-
угольник с основанием 2ти. Ширина сечения на уровне -3 дБ от
максимума определяет разрешение по задержке 5т .
Сечение ФН по оси частот f (рис. 3.22,в) представляет собой
функцию вида sin
, где 8f - разрешение по частоте. Первый
боковой лепесток имеет максимум, равный -13 дБ.
Сечение ФН плоскостью, параллельной (т,/), на уровне -3 дБ,
представлено на рис. 3.22,г и названо диаграммой неопределен-
ности.
Рисунок 3.22
Функция неопределенности прямоугольного радиоимпульса
Оптимальное радиолокационное наблюдение
115
Ширина ФН по частоте определяется длительностью импульса:
8/’ = 1/ти, а по задержке шириной спектра импульса :
8т = 1/Л/и . У немодулированного импульса Д/и = 1/ти и произведе-
ние 8/ 8т = 1, т.е. площадь диаграммы неопределенности одиночного
импульса является постоянной величиной.
Диаграмма неопределенности при уменьшении длительности
импульса в два раза показана на рис. 3.22,3. Разрешение по дально-
сти увеличилось в два раза, но одновременно разрешение по частоте
ухудшилось в два раза, так что площадь диаграммы неопределенно-
сти осталась прежней.
У импульса с линейной частотной модуляцией ширина спектра
Д/‘. определяется изменением несущей частоты за время длительно-
сти импульса и может быть сделана гораздо больше, чем 1/ти . Раз-
решение по задержке 8т — 1/ Д/с в этом случае будет гораздо выше
чем ти . В то же время разрешение по оси частот, определяемое дли-
тельностью импульса, остается неизменным: 8^ = 1/ти .
На рис. 3.23 представлена диаграмма неопределенности ЛЧМ
импульса и немодулированного импульса (пунктиром). Хотя разре-
шение по задержке у ЛЧМ-импульса гораздо выше, площадь диа-
граммы неопределенности осталась прежней, как и у немодулиро-
ванного импульса. Поэтому сигналы, имеющие задержку и частоту в
пределах диаграммы неопределенности, разрешены не будут.
Сколь угодно узкий пик ФН и, соответственно, сколь угодно
высокое разрешение одновременно по задержке и частоте можно
получить используя специальные, например фазоманипулированные
сигналы. Большая длительность сигнала Тс обеспечивает высокое
разрешение по частоте, а широкая полоса спектра сигнала Д/с - вы-
сокое разрешение по задержке. ФН такого сигнала имеет вид кноп-
ки: узкий пик в центре, а вся остальная большая часть объема неоп-
ределенности распределена тонким слоем по всей плоскости (т,/),
размером 2ГС х2Д/с (рис. 3.24).
Интегральный уровень боковых лепестков (ИБЛ) - объем тела
неопределенности в боковых лепестках ФН, отнесенный к объ-
ему основного пика.
У «кнопочной» ФН ИБЛ значительно больше единицы. Поэтому,
несмотря на низкий уровень боковых лепестков ФН, при наличии
116
Глава 3
Рисунок 3.24
ФН «кнопочного» типа
Рисунок 3.23
Диаграмма неопределенности
ЛЧМ-импульса
Рисунок 3.25
Диаграмма неопределенности
пачки koi ерентных
немодулированных импульсов
большого числа сигналов в зоне
Тс х Д/с уровень мешающих сигна-
лов на выходе согласованного
фильтра также будет большим.
На рис. 3.25 представлена диа-
грамма неопределенности пачки
длительностью Тс когерентных не-
модулированных импульсов с пе-
риодом повторения ТП . ФН имеет
боковые пики повторяющиеся с пе-
риодом Ти по задержке и 1/Гп по
частоте. Сигналы, имеющие за-
держку и частоту, соответствующие
боковым пикам ФН, не будут раз-
решаться. Зато в «Чйстой» зоне без
боковых лепестков до первых боко-
вых пиков будет обеспечиваться вы-
сокое разрешение одновременно и
Оптимальное радиолокационное наблюдение
по дальности (5т = ти) и по частоте (bf = Х/ТС}. Сечения основного
лепестка ФН по задержке и по частоте показаны на рис. 3.26.
По задержке сечение такое же как и 3.22,6, а по частоте становится
более узким и определяется длительностью пачки bf — \!ТС, а не дли-
тельностью импульса.
Напомним, 410 функция неопределённости есть результат согла-
сованной (когерентной) обработки сигнала. Поэтому при некогерент-
нои пачке импульсов разрешение по частоте определяется длительно-
стью импульса, независимо от длительности пачки.
Рассмотрим функцию неопределённости пространственного
сигнала по апертуре антенны. Информационными параметрами
сигнала являются углы азимута и места прихода ЭМВ. В большин-
стве случаев можно считать, что пространственные сигналы по каж-
дому параметру являются независимыми друг от друга. Поэтому оп-
ределим ФН для одного сигнала, определяемого только углом ази-
мута прихода ЭМВ.
ФН по азимуту определяет возможность раздельного наблюде-
ния целей, находящихся на различных угловых направлениях по
азимуту. Пусть пространственный сигнал Е (ха ) имеет по прямоли-
нейной апертуре антенны (ось х) постоянную амплитуду (напря-
жённость поля £,) и фазу ср(ха): 2Г(ха) = EoexpQ(p(xa)) . Плоский
фронт волны падает на апертуру под углом 0. размер апертуры ра-
вен d (рис. 3.27).
В этом случае фаза пространственного сигнала ср( х ) определя-
ется запаздыванием фронта волны по апертуре на расстоянии г (ха ):
Рисунок 3.26
Сечения основного пика ФН пачки когерентных импульсов
по задержке (я) и частоте (б)
118
Глава 3
Рисунок 3.27
Формирование диаграммы направленности антенны
Пусть опорный сигнал системы согласованной обработки на-
строен на приём сигнала, приходящего под углом 6 = 0 (амплитуда
опорного сигнала равна Ео, а фаза - нулю). Тогда ФН пространст-
венного сигнала равна
+d/'l
J E02exp{j(p(xa)}dxa
-б//2
2
С учётом нормировки по EQ d функция неопределённости
sin0
(3.35)
В теории антенн это выражение определяет нормированную
диаграмму направленности линейной антенны с равномерным ам-
плитудным распределением по раскрыву. Для малых углов 0, харак-
терных для РЛС, функция неопределённости по углу 0 (диаграмма
направленности антенны)
Оптимальное радиолокационное наблюдение
119
Сечение ФН на уровне -3 дБ определяет разрешение по углу 0:
(3.37)
где 0О - ширина диаграммы направленности антенны.
Точное значение разрешения определяется многими другими
факторами: распределением амплитуды опорного сигнала по апер-
туре, отклонением формы апертуры от заданной (линейной), вза-
имным электромагнитным влиянием соседних элементов аперту-
ры. Поэтому приведенные формулы дают приближённую оценку
разрешения, определяя основные качественные зависимости.
3.7. Разрешение целей по дальности,
скорости и угловым координатам
Разрешение целей обеспечивается разрешением сигналов на выходе
согласованной системы обработки.
При землеобзоре эффективность решения задачи разрешения
целей определяется не только шириной выходного сигнала на уров-
не -3 дБ при согласованной обработке, но и максимальным и инте-
гральным уровнем боковых лепестков.
Так, наличие мощных отражателей в боковых лепестках ФН
приводит к формированию отметок ложных целей на выходе согла-
сованной системы обработки. Суммарный уровень отражений от
фона, определяемый интегральным уровнем боковых лепестков,
приводит к уменьшению динамического диапазона РЛИ.
Поэтому для снижения уровня боковых лепестков согласован-
ная обработка сигналов дополняется весовой обработкой обычно пу-
тем амплит удной модуляции опорного сигнала. При этом наряду со
значительным снижением уровня боковых лепестков происходит
некоторое снижение разрешения и отношения сигнал/шум.
Например, при использовании весовой функции Хэмминга
уровень БЛ снижается до -42,8 дБ, разрешение ухудшается в 1,5
раза, а отношение сигнал-шум падает на 1,34 дБ. В дальнейшем это
учитывается при расчете ТТХ РСА.
120
Глава 3
Связь между разрешением целей и разрешением сигналов оп-
ределяется заложенными в принципы построения РЛС методами из-
мерения параметров целей.
Разрешение целей по дальности определяется разрешением по
времени задержки сигнала от момента излучения зондирующе-
го сигнала до момента приёма отражённого сигнала независимо
от метода измерения задержки.
В РЛС землеобзора в большинстве случаев используется им-
пульсный метод измерения, а время задержки измеряется по време-
ни прихода отражённого от цели импульса.
Дальность R при постоянной скорости распространения ра-
диоволн равна при однопозиционной РЛС: R — где т - изме-
ренное время задержки. Соответственно, разрешение по дальности
определяется разрешением сигнала по задержке: <5г = с8т/2; а раз-
решение по задержке - шириной ФН по оси т. При известной час-
тоте f = 0 ФН комплексного сигнала по задержке
—со
В частотной области ФН по задержке определяется спектром
сигнала и при отсутствии расстройки ( / = 0 ):
со оо
J(O,t)= f|5(Z)|2ej2^J'(3:39)
—оо - оо
где квадрат модуля спектра сигнала
—оо
(3-40)
определяет ширину ФН по оси задержки. Чем шире спектр, тем уже
ФН, тем выше разрешение сигнала по задержке (рис. 3.28). Ширину
квадрата модуля спектра сигнала \fc определяют по уровню -3 дБ
или по ширине эквивалентного прямоугольного спектра:
оо
Оптимальное радиолокационное наблюдение
121
Рисунок 3.28
Взаимосвязь ширины спектра сигнала и разрешения оо задержке
При введении весовой функции 5В(7) в опорный сигнал согласо-
ванной системы обработки выходной сигнал расширяется
or
, а разрешение падает.
Точная взаимосвязь ширины спектра сигнала и ширины от-
клика согласованного фильтра зависит от многих факторов: форма,
амплитуда сигнала и вид (его фазовая (частотная) модуляция, ха-
рактеристики весовой функции опорного сигнала и время обработ-
ки). В тоже время, основным фактором, влияющим на разрешаю-
щую способность по дальности, является ширина спектра сигнала.
Поэтому для оценки разрешения обычно используют простую за-
висимость:
5т = 1/Д/с,
(341)
а влияние других факторов учитывается коэффициентом ухудшения
разрешения кт для конкретного вида сигнала и характеристик сис-
темы обработки. Разрешение по дальности в этом случае равно
5г = £тс/2Д/с (Аг = 1,2... 1,5) . (3.42)
Энергия импульса Еи = при коротком импульсе обычно не
удовлетворяет требованиям к эффективности обнаружения малораз-
мерных целей Поэтому для повышения энергии сигнала используют
Глава 3
122
импульсы большой длительности с внутриимпульсной модуляцией.
В этом случае полоса частот сигнала Л/ определяется полосой час-
тот модуляции.
Произведение Вс = тнД/с названо базой сигнала.
При обработке согласованным фильтром импульс сжимается до
величины тся и убирается внутриимпульсная модуляция. При этом
коэффициент сжатия равен базе сигнала = тн/тсж = тиА/с -Вс.
Разрешение по дальности по-прежнему будет определятся полосой
частот спектра сигнала .
Разрешение целей по радиальной скорости Vr определяется
разрешением сигналов по доплеровской частоте f = 2КГ /X .
ФН по оси частот ( т = 0 ) представляет собой преобразование
Фурье (спектр) квадрата модуля огибающей сигнала s(z) :
(3-43)
Чем больше длительность когерентного сигнала Гс, тем уже
спектр его огибающей (ширина ФН по частоте) независимо от внут-
риимпульсной и амплитудной модуляции сигнала. При этом
f|5(z)|'dz
J|s(z)pz
Так же как и при задержке, разрешение по частоте, в основном,
определяется длительностью сигнала:
¥=i/т;
(3.44)
а влияние других факторов учитывается коэффициентом ухудшения
разрешения k1 : 8f = к?/Тс , где кг =1,2...1,5.
Разрешение по радиальной скорости цели в этом случае равно
srr=w/2 = ^x/(27;).
(3.45)
Оптимальное радиолокационное наблюдение
123
Разрешение целей по азимуту определяется разрешением сиг-
налов по углу падения фронта ЭМВ на апертуру антенны при
согласованной пространственной обработке сигналов.
При прямолинейной апертуре (ось ха ) и угле 9 между фазовым
фронтом волны и осью ха пространственный сигнал по апертуре, по-
лагая sin 6 = 0, можно представить в виде Е(ха) = Е(ха)
е х
Если напряжённость поля по апертуре постоянна
и
размер апертуры равен d , ФН по углу 9
sin—Д0
X
где 90П - угол опорного пространственного сигнала, Д9 = 9-9т
разность угла и опорного угла.
Ширина ФН и соответственно разрешение по азимутальному
углу 9
36 = к. ~, (3.47)
d
где kQ =1,2... 1,5 - коэффициент, учитывающий ухудшение разре-
шения, обусловленное прежде всего изменением по апертуре ампли-
туды опорного сигнала В(ха) (весовой функции):
Разрешающая способность РЛС землеобзора определяет:
• возможность раздельного наблюдения целей;
• детальность изображения целей;
• эффективность обнаружения целей на фоне отражений от
подстилающей поверхности.
Разрешение целей обеспечивается разрешением сигналов на
выходе согласованной системы обработки.
Разрешение по критерию Релея определяется как минималь-
ное различие параметров двух сигналов на выходе системы об-
124
Глава 3
работки, при которых суммарный сигнал по этому параметру име-
ет провал (двугорбая кривая).
Разрешение по другому критерию определяется как ширина
одиночного выходного сигнала на уровне -3 дБ при отсутствии
шумов.
Свойства сигнала определяются его автокорреляционной
функцией, называемой функцией неопределённости, которая соот-
ветствует сигналу точечной цели на выходе согласованной систе-
мы обработки при отсутствии помех и других целей.
Функция неопределённости, кроме основного центрального
пика, имеет боковые лепестки. ФН сигнала в виде когерентной
пачки импульсов имеет узкий основной пик и боковые пики, рас-
положенные по задержке через период повторения, и по частоте -
через частоту повторения импульсов.
Сигналы фона и других целей, принимаемые по боковым ле-
песткам ФН, являются помехой для разрешения целей.
Разрешающая способность сигнала по задержке обратно
пропорциональна полосе частот спектра сигнала и определяет
разрешение целей по дальности.
Разрешающая способность когерентного сигнала по частоте
обратно пропорциональна длительности сигнала и определяет
разрешение целей по радиальной скорости.
Разрешающая способность пространственного когерентного
сигнала по углу прихода ЭМВ обратно пропорциональна размеру
апертуры антенны и определяет разрешение целей по азимуту и
углу места.
3 .8. Измерение координат целей
После решения задач обнаружения и разрешения целей, то есть об-
наружения каждой цели раздельно, следующей задачей радиолока-
ционного наблюдения является определение местоположения цели.
Для определения местоположения цели необходимо последова-
тельно решить три задачи.
Задача L Измерить параметры пространственно-временного
сигнала цели (отраженной от цели ЭВМ), в которых заключена ин-
формация о координатах цели.
Задача 2. Пересчитать значения параметров сигнала в соответ-
ствующие координаты цели.
Задача 3. Привязать координаты цели к заданной системе ко-
ординат.
Оптимальное радиолокационное наблюдение 125
Информация о координатах цели заключена во всех параметрах
ЭВМ: напряженности, положении фазового фронта, времени запазды-
вания, доплеровской частоте и начальной фазе. Взаимосвязь парамет-
ров ЭВМ и координат цели определяется принципами построения
РЛС. Произведя оценку параметров отраженной от цели ЭВМ и зная
зависимость координат цели от этих параметров, можно пересчитать
значения параме“ров в координаты цели относительно РЛС.
При решении задач землеобзора обычно требуется определить
местоположение цели в земной системе координат. В этом случае
координаты цели относительно РЛС пересчитываются с использова-
нием навигационных данных в координаты земной системы.
Каждый этап решения задачи определения местоположения це-
ли сопровождается различного рода помехами.
Флуктуационные помехи обусловлены внутренним шумом при-
емника РЛС, отражениями от земной поверхности и искусст-
венно создаваемыми активными и пассивными помехами. Эти
помехи носят аддитивный характер, то есть они суммируются с
сигналом цели.
Кроме того, существуют мультипликативные помехи, приво-
дящие к случайному (неконтролируемому) изменению пара-
метров сигналов.
Реальные цели в большинстве случаев не являются точечными,
то есть имеющими один стабильный фазовый центр отражения, от-
носительно которого измеряется дальность и азимут цели. Исключе-
ния составляют специальные цели: уголковые отражатели, линзы
Люнеберга, шары и т.п. В результате случайного расположения от-
ражателей по поверхности (объему) цели положение эквивалентного
фазового центра отраженной ЭВМ изменяется случайным образом в
пределах геометрического размера цели по азимуту (угловой шум) и
по дальности (дальномерный шум). Это приводит к ошибкам изме-
рения азимута и дальности цели.
Случайные изменения параметров среды распространения ЭВМ,
например коэффициента преломления атмосферы, приводят к случай-
ным изменениям задержки и направления прихода отраженной волны
и, соответственно, к ошибкам измерения дальности и азимута цели. К
мультипликативным помехам относятся также неконтролируемые из-
менения траектории движения носителя РЛС (траекторные нестабиль-
ности) и флуктуации параметров приемо-передающего тракта.
Потенциальная точность измерения координат цели опреде-
ляется при наличии помехи в виде широкополосного гауссово-
126
Глава 3
го шума с постоянной спектральной плотностью мощности в
пределах полосы частот спектра сигнала цели (белый шум).
При этом полагается, что все другие помехи отсутствуют и цель
является одиночной точечной.
Этап L Для определения точности измерения координат целей
используется оценка параметров пространственно-временного сиг-
нала: тц,/ц, 6Ц и фнц.
Этап 2. Полученные оценки параметров сигнала используются
для расчета соответствующих координат цели и ошибок оценки ко-
ординат.
Оптимальная оценка параметра бсц пространственно-вре-
менного сигнала равна тому значению а, при котором
для заданного входного сигнала апостериорная плотность вероят-
ности имеет максимальное значение.
Апостериорная плотность вероятности равна произведению апри-
орной плотности вероятности и функции правдоподобия £(ос).
При достаточно равномерной априорной плотности вероятно-
А
сти в районе оценки параметра осц максимум апостериорной плот-
ности совпадает с максимумом функций правдоподобия. Для нахо-
ждения оценки параметра сигнала формируют функцию правдопо-
добия для принятого входного сигнала и находят ее
максимум. Для нахождения максимума берут первую производную
от функции правдоподобия в районе максимума и находят значение
ос, при котором производная равна нулю. Это значение ос принима-
ется за опенку параметров а = а , :
d£(oc)
doc
= 0.
а-а ц
(3.48)
Точность измерения параметра сигнала
Как и при решении задач обнаружения/разрешения оптималь-
ной, обработкой сигнала при оценке параметров является согласо-
ванная обработка, в результате которой формируется функция прав-
доподобия. Пространственную и временную обработку выполняем
раздельно.
Оптимальное радиолокационное наблюдение
127
Функция правдоподобия временного сигнала равна
где входной сигнал = s\t,d^ + n[t^ является суммой сигна-
ла цели s(t,a ) и белого шума . Функция правдоподобия со-
стоит из двух частей - сигнальной и шумовой:
= £с(а) + 1ш(а).
При отсутствии шума максимум Z,(cc) будет наблюдаться при
6с = осц . Наличие шума п(Г) приводит к случайному смещению Дос
максимума функции £(ос) относи-
тельно параметра сигнала цели ссц :
Да = ос-ос,,. При большом отно-
шении сигнал/шум функция правдо-
подобия имеет один глобальный
максимум в точке 6с, и форма
функции близка к функции неопре-
деленности сигнала (рис. 3.29).
Дисперсия случайного откло-
нения максимума функции прав-
доподобия относительно истинно-
Рисунок 3.29
Функция правдоподобия
параметра сигнал a
/ - \2
го значения осц параметра ос равна (ос —ос) определяет точность
измерения параметра сигнала.
При большом отношении сигнал/шум дисперсия ошибки изме-
рения параметра осц равна
2 77 1
Ca=(a“aJ = 2/Г7-------’ (349)
где Jo - нормированная к энергии сигнала функция неопределенно-
сти. Вторая производная ФН определяет ее ширину: чем уже ФН,
тем больше вторая производная и тем меньше дисперсия ошибки.
128
Глава 3
Точность измерения параметра сигнала определяется шириной
ФН сигнала по этому параметру и отношением сигнал/шум.
Потенциальная точность измерения дальности
Вторая производная нормированной ФН в точке т = тц равна нор-
мированному второму моменту энергетического спектра сигнала:
(2л)2 f/2|5(/)|'d/
(3.50)
fk(/)l2d/
который определяет среднеквадратическую ширину спектра сигнала
Соответственно, дисперсия ошибки измерения задержки сигнала
(3.51)
Среднеквадратическая ширина спектра сигнала может быть
больше ширины энергетического спектра Д/с. Так, например,
прямоугольный импульсный сигнал с ЛЧМ-модуляцией полосой
Д/м и длительностью ти (база В = тиД/м » 1) имеет среднеквад-
ратическую полосу Д/’к = (л Д/ч)/а/з и, соответственно, точность
измерения задержки
СТт 1,8A/J2£WO ’
В реальных условиях работы, особенно при землеобзоре, вы-
ходной сигнал согласованной системы обработки имеет значитель-
ный уровень максимальных и интегрального боковых лепестков.
При наличии отражений от соседних целей и фона местности, при-
нимаемых по боковым лепесткам, эффективность измерения коор-
динат целей резко снижается.
С учетом обработки сигналов с весовой функцией среднеквад-
ратическую ширину энергетического спектра сигнала можно в
большинстве случаев считать равной ширине энергетического спек-
тра Д/ск = 44 •
Оптимальное радиолокационное наблюдение
129
Учитывая, что разрешающая способность по задержке
8т =---,
Д/с
точность измерения задержки (СКО) выше, чем разрешение в
4^0 Раз-
т
Точность измерения дальности определяется точностью из-
мерения задержки'.
=----С-т=- (3.53)
2 2ДЛЛ„
и выше, чем разрешение по дальности в y]qQ раз:
_ с8т 8г
д/?о"
Потенциальная точность измерения
радиальной скорости
Дисперсия ошибки измерения доплеровской частоты сигнала
2 __ 1
f dE/NdT< ;
Учитывая, что разрешающая способность по частоте
Т '
с
точность измерения доплеровской частоты выше, чем разрешение
8f
(3.56)
Точность измерения радиальной скорости определяется точно-
стью измерения доплеровской частоты:
130
Глава 3
(3.57)
и выше, чем разрешение по радиальной скорости в JqG раз:
5Г
GV ~ /—
(3.58)
Потенциальная точность измерения угла азимута
Дисперсия ошибки измерения угла азимута цели определяется вто-
рой производной ФН пространственного (по апертуре антенны)
сигнала:
п (2ЕХ)у"(ец)-
Вторая производная ФН в точке 0 = 0Ц,
(3.59)
(3.60)
Учитывая, что отношение X/d равно ширине ДН антенны Оо,
СКО оценки угла азимута определяется шириной диаграммы
направленности антенны по азимуту:
9р _
>/(2Wo) yfo'
(3.61)
Так же как и при измерении дальности и радиальной скорости,
точность оценки угла выше разрешения по углу 80 = 0О в ^qQ раз.
Ошибка измерения азимута цели определяется, в основном, точ-
ностью измерения угла азимута, так как относительная ошибка изме-
рения дальности 7?ц намного меньше ошибки измерения угла азимута:
(3.62)
В общем случае точность измерения различных параметров
сигнала (координат цели) может быть взаимозависимой. Однако в
РЛС землеобзора обычно выбирают такие сигналы, при которых
эта зависимость отсутствует.
Оптимальное радиолокационное наблюдение
131
3.9. Измерение параметров движения целей
В процессе радиолокационного наблюдения происходит изменение
местоположения цели как в следствие движения носителя РЛС, так и
в результате движения цели относительно других целей и объектов.
В этом случае возникает задача слежения за изменениями местопо-
ложения цели путем опенки изменения параметров сигнала цели.
Этап 1. Путем формирования функции правдоподобия оцени-
ваются параметры сигнала, считая их постоянными в течение време-
ни Тс.
V
Этап 2. В течение времени наблюдения Гн » Тс ведется сле-
жение за изменением параметров сигнала на основе методов линей-
ной или нелинейной фильтрации, что обеспечивает сопровождение
цели.
На рис. 330 представлена функциональная схема формирования
оценки изменяющего во времени параметра 6сц (/) сигнала.
Рисунок 3.30
Функциональная схема формирования оценки параметра сигнала
Используя входной сигнал u(t} на т-м интервале времени Тст
путем согласованной обработки формируется функция правдоподо-
бия Lm (а).
Для определения положения максимума функции правдоподо-
л
бия CLm на каждом интервале Тст обработки сигнала используется
А
дискриминатор. Процедура оценки параметров ат дискриминато-
ром сводится к взятию первой производной функции Lm (ос) по па-
раметру ос и приравниванию результата к нулю:
doc
cm
(3.63)
132
Глава 3
На рис. 3.31 показаны функция правдоподобия £w(oc) и харак-
теристика дискриминатора С/Д(ос).
В линейной части характеристики дискриминатора сигнала
£7Д (а) = у (а - 6с m ), где у - крутизна дискриминационной характе-
ристики. В точке а - ат сигнал дискриминатора равен нулю.
Полученное дискриминатором значение параметра ат сравни-
вается с ожидаемым (экстраполированным) значением параметра
аэт и разница значений Дос = ат - oc,)w (сигнал ошибки) подается
на вход фильтра слежения. В качестве сигнала ошибки используется
сигнал дискриминатора Ц1Л = уос w
Фильтр слежения формирует экстраполированное значение па-
раметра осэ/?2 по результатам оценки параметра 6cw_j на предыдущем
этапе обработки сигнала с использованием априорных сведений о
характере изменения параметра осц (/).
Фильтр слежения обеспечивает также сглаживание результа-
тов оценки изменения 6сц (/), обеспечивая повышение точности
слежения.
Конкретная структура и характеристики фильтра слежения оп-
ределяются уравнением наблюдения параметра а и априорными
сведениями о характере изменения параметра а(/) .
Уравнения наблюдения параметра определяются функ-
циональной зависимостью (7д(/,ос(7)) входного сигнала фильтра от
параметра ос (7) и белого шума наблюдения
Рисунок 3.31
Функция правдоподобия и характеристика дискриминатора параметра ОС
Оптимальное радиолокационное наблюдение
133
>,(/)=г7д(/’а(0)+,7н(0-
(3.64)
Изменение параметра ос(/) обычно задается дифференциаль-
ным уравнением
doc
dt
(3.65)
где - известная детерминированная функция; па (/) - белый
шум. В качестве критерия качества фильтрации используют мини-
мум СКО ошибки оценивания параметра ос, (/). Если зависимости
(3.64) и (3.65) линейные, то фильтрация также линейная. При нели-
нейных зависимостях - фильтрация нелинейная.
Дискриминатор по задержке сигнала
Для определения положения максимума функции правдоподобия
необходимо вычислить производную по задержке т сигнала в рай-
оне т = тц и приравнять ее к нулю:
dZ(x) _ d
dr di
(3.66)
Ц
Вычисление производной обычно осуществляется разностным
методом. При этом берутся два значения функции правдоподобия
для смещенных задержек сигнала т + Дт/2 и т-Дт/2 в районе
т = тц и вычисляется их разность:
т«тц
При т = тц сигнал дискриминатора (7ДТ = 0 . Крутизна дискри-
минатора ут определяется как шириной функции правдоподобия,
так и разностью задержек Дт. Разность Дт обычно выбирают рав-
ной разрешающей способности по т : Дт = St ив этом случае кру-
тизна ут = 1/5т.
На рис. 3.32.67 показан алгоритм формирования дискриминатора
задержки сигнала с использованием полу стробов. В качестве значений
134
Глава 3
Рисунок 3.32
Алгоритм формирования дискриминатора задержки
функции правдоподобия в точках т + Ат/2 и т-Ат/2 здесь использу-
ются интегралы от £(т) в пределах полустробов шириной тпс, сме-
щенных относительно друг друга на величину Ат (рис. 3,6,в). Дли-
тельность полустробов тпс и смещения полустробов Ат обычно вы-
бирают одинаковыми и равными (0,5... 1,0)8т разрешения сигнала
8т по задержке (ширина функции правдоподобия на уровне -3 дБ).
Дискриминатор по частоте сигнала
Подобно дискриминатору по задержке сигнала в дискримина-
торе по частоте используется разностный метод вычисления произ-
водной. Для этого формируются два разнесенных относительно час-
тоты / на величину А/ частотных канала (фильтра). Разность сиг-
налов этих каналов является дискриминационной характеристикой
по частоте:
Оптимальное радиолокационное наблюдение
135
Рисунок 3.33
Алгоритм формирования дискриминационной характеристики
по частоте сигнала
(/) = А + Д/’/г) - 1(Л - А</2) = Yf (/ - Л),
(3.68)
где у f - крутизна частной характеристики дискриминатора. Вели-
чину разноса частот А/ обычно выбирают равной ширине полосы
частот фильтра.
На рис. 3.33 представлен алгоритм формирования дискримина-
ционной характеристики по частоте сигнала.
Моноимпульсный дискриминатор по углу
Для формирования дискриминационной характеристики по углу на
апертуре антенны создается распределение поля, соответствующее
приему сигналов по двум разнесенным по углу на величину А0 диа-
граммам направленности (рис. 3.34).
В районе пересечения примерно на уровне -3 дБ диаграммы
направленности можно представить линейной зависимостью от угла
0. В этом случае сигналы и} (7) и принимаемые соответст-
венно по первому и второму угловому каналу,
\ *“ / \ , СЮ
136
Глава 3
Рисунок 3.34
Моноимпульсная диаграмма направленности антенны
/ \ / \ Д0^ / \ ^( Д0 clG/м \
w2(/)=5(z)g е+— =s(t)G — +—(е-ец),
\ \ J Civ
(3.69)
где 5(7) - сигнал, отраженный от цели; G(0) - коэффициент уси-
ления антенны.
Для исключения зависимости крутизны дискриминационной
характеристики от амплитуды сигнала (нормировка) формиру-
• ются суммарный и разностный каналы:
(t) = 2s(t)G
г/х (t\ = их \ t\ -I- и.»
Отношение разностного к суммарному сигналу является харак-
теристикой углового дискриминатора:
^д(е) = —
dG
~dQ
е-ец
(3.70)
Оптимальное радиолокационное наблюдение
В районе пересечения ДН антенны, где dG/d0 = const, дискри-
минационная характеристика линейная:
^д(е)=Уе(е-ёц),
(3.71)
где уе =
dG/de
с(де/2)
«1,50о.
В моноимпульсной антенне возможно формирование двух ка-
налов, отличающихся не амплитудой, а фазой сигналов благодаря
разности положения двух фазовых центров антенны. В этом случае
дискриминационная характеристика по углу
(3.72)
где « da /2 - разнос фазовых центров антенны.
Фильтр слежения типа (а - Р)
Информация о координатах цели в РЛС формируется дискретно с
интервалом, равным времени обработки сигнала Тс. В течение вре-
мени обработки Тс считается, что координаты сигнала (задержка,
доплеровская частота и угол прихода волны на апертуру антенны) не
изменяются. Изменение координат цели и, соответственно, парамет-
ров сигнала происходит от одного интервала обработки Тс к друго-
му и интервал корреляции изменений параметров больше, чем ин-
тервал Тс.
Для получения непрерывных данных о движении цели (сглажи-
вание измеренных параметров сигнала) используются различные
фильтры слежения. Наиболее простой из них (ос - Р) -фильтр.
Такой фильтр широко используется для обеспечения слежения
за целью по дальности, радиальной скорости и угловой координате,
так как имеют целый ряд преимуществ по сравнению с фильтрами
другого типа.
Фильтры типа (ос —Р) являются фильтрами последовательного
оценивания координат и параметров движения цели, обеспечиваю-
щие хорошее сглаживание и отслеживание перемещения цели.
138
Глава 3
Фильтры отличаются простотой реализации, так как коэффициенты
усиления а и Р не зависят от наблюдаемого сигнала.
Точность оценки координат и динамические ошибки слежения
практически не отличаются от характеристики более сложных
фильтров при условии постоянства скорости цели между интервала-
ми обработки сигнала.
На рис. 3.35 дана функциональная схема (а -р) -фильтра сле-
жения за задержкой сигнала. На вход дискриминатора с выхода сис-
темы обработки на /?/-м интервале Тст поступает сигнал в виде
функции правдоподобия Lm (т), максимум которой соответствует
задержке т/л.
Управитель полу стробами задержки устанавливает положение
нуля дискриминационной характеристики в соответствии с экстра-
полированной задержкой тэ/??.
Экстраполированная (ожидаемая) задержка сигнала цели фор-
мируется фильтром по результатам оценки задержки т/и_1 и скоро-
сти Vm } на предыдущем интервале обработки сигнала. С выхода
дискриминатора сигнал, пропорциональный разности задержек
пришедшего и экстраполированного сигналов Лт/Н = - тэ/н, по-
ступает на вход следящего фильтра, который формирует текущую
оценку задержки сигнала цели в момент времени tm = тТс не-
прерывной функции тц (7) . Фильтр формирует также оценку скоро-
сти Vm и экстраполированное значение задержки на следующем ин-
тервале обработки сигнала.
Рисунок 3.35
Функциональная схема (а - р)-фильтра
Оптимальное радиолокационное наблюдение
Алгоритм
Этап 7. Формирование ожидаемого (экстраполированного)
значения задержки сигнала на т-м интервале:
т — т
эт т ]
где и Vm_} - оценки задержки и скорости, полученные на пре-
дыдущем (т —1) интервале.
Точность оценки изменения задержки от (т —1) интервала к
271
ш-му интервалу Дт = —~Vm-i определяется точностью оценки ско-
рости на (т -1) интервале Vm_{.
Этап 2. Определение ошибки экстраполяции задержки на т-м
интервале как разницы между оценкой в процессе обработки
входного сигнала и экстраполированного значения:
= т — т
т т эт *
Ошибка обусловлена влиянием шумов и изменением задержки
вследствие движения цели.
Этап 3. Уточнение оценки задержки сигнала цели на /я-м ин-
тервале путем компенсации ошибки экстраполяции с коэффициен-
том а:
Этап 4. Уточнение оценки скорости цели путем компенсации
ошибки с коэффициентом Р:
Полученные оценки и Vm используются также для форми-
рования экстраполированного значения задержки на следующем 1
интервале.
Выбор коэффициентов усиления а и Р определяет степень
сглаживания и точность оценки задержки сигнала.
140
Глава 3
Если а = Р = 0, то это означает, что оценка задержки равна экс-
траполированному значению тт = тзт для любого последующего
интервала и новые изменения не несут информацию. Если происхо-
дит изменение маневра цели, ошибки могут резко возрасти.
Наоборот, если а = Р = 1, то сглаживание отсутствует и оцен-
ка задержки сигнала на т-м интервале равна измененному значе-
нию тт - тэт + Ат„,.
Определение местоположения цели относительно РЛС осуще-
ствляется путем измерения параметров пространственно-
временного сигнала и пересчета полученных значений парамет-
ров в координаты цели.
Оптимальная оценка параметров сигнала производится по
положению максимума функции правдоподобия. Максимум нахо-
дится путем вычисления первой производной и приравнивая ее к
нулю.
Потенциальная точность измерения параметров сигнала оп-
ределяется шириной функции неопределенности (разрешающей
способностью) и отношением сигнал/шум. Точность измерения
выше разрешающей способности в квадратный корень из отно-
шения сигнала/шум.
Измерение параметров движения цели осуществляется пу-
тем слежения за изменением соответствующих параметров сигна-
ла цели на основе методов линейной и нелинейной фильтрации.
Следящая система состоит из дискриминатора параметров
сигнала и фильтра слежения. Дискриминатор формирует сигнал
ошибки, пропорциональный разнице между измеренным и ожи-
даемым (экстраполируемым) значениями параметра. Фильтр
обеспечивает сглаживание и оценивание изменяющихся парамет-
ров сигналов.
Наиболее простым фильтром слежения является (а - Р)-фи-
льтр.
ГЛАВА 4
Синтезирование апертуры антенны
4.1. Принцип синтезирования
апертуры антенны
Синтезирование апертуры антенны является одним из наиболее пер-
спективных направлений развития радиолокации, появившихся в
конце 1950-х гг. и сразу привлекшее к себе широкое внимание. Ос-
новным преимуществом этого направления является многократное
(в 1000 и более раз) увеличение угловой разрешающей способности
РЛС. При этом обеспечивается возможность радиовидения объектов
радиолокации и обнаружения малоразмерных объектов, повышение
точности целеуказания и помехозащищенности РЛС.
На стадии развития этого направления основные успехи были
достигнуты в значительном повышении эффективности воздушной
разведки. В дальнейшем методы синтезирования апертуры начали
использоваться в разведывательно-ударных комплексах, много-
функциональных РЛС самолетов для обнаружения малоразмерных и
групповых целей и наведения на них управляемого оружия, в РЛС
планового обзора, системах радиотехнической разведки и навигации.
В развитии теории и практики от радиолокации к радиовиде-
нию было два этапа.
Этап 1. Благодаря использованию широкополосных (100 МГц
и более) зондирующих сигналов удалось обеспечить высокое разре-
шение по задержке сигналов и, как следствие, высокое разрешение
по дальности (единицы метров и лучше).
Однако получение высокого разрешения по угловой координате
наталкивалось на непреодолимое вначале препятствие - необходи-
142
Глава 4
мость использования антенных систем большого размера. В бортовых
РЛС, где размер антенны не превышает единиц метров, разрешающая
способность по углу обычно равна нескольким градусам. Разрешение
по углу 50 = X/d, а линейное разрешение 5£ на дальности R:
8£ = R8Q = XR/d.
При размере антенны d= 1 м и длине волны к = 3 см на даль-
ности 100 км линейное разрешение 5^ = 3 км, и говорить о радио-
видении при таком разрешении невозможно. Для получения разре-
шения 8£ - 1,5 м необходимо увеличить размер антенны в 1 000 раз
(d - 2 км ).
Для пояснения принципа синтезирования апертуры (СА) внача-
ле рассмотрим формирование диаграммы направленности реальной
антенны, которая и определяет разрешающую способность по угло-
вой координате обычной РЛС.
Рисунок 4.1
Формирование диаграммы
направленности реальной
антенны
Пусть имеется линейная
апертура антенны размером d, на
которую падает плоская электро-
магнитная волна под углом 0
(рис. 4.1), т.е. антенна работает на
прием.
Апертура (раскрыв) - та часть
антенны, которая участвует в
излучении и (или) приеме
электромагнитной волны.
Фронт во ты - это поверх-
ность равных фаз.
В рассматриваемом случае
это плоскость. Фаза электромагнитной волны вдоль апертуры (ось
Ха) определяется запаздыванием фронта волны относительно центра
апертуры:
Ф (Ха ) = уМ*а ) = (6) ,
А, Л
где г (ха) - расстояние от фронта волны до точки ха на апертуре.
Диаграмма направленности формируется в результате синфазно-
го суммирования электромагнитной волны, падающей на апертуру:
Синтезирование апертуры антенны
143
d/2
£(б)= J <Eoexp{j(p(xa)}dra,
- d/2
где Eq - напряженность электромагнитной волны.
Нормированная диаграмма направленности в этом случае равна
Ме)=
Разрешающая способность по угловой координате - ширина
ДН £н (0) на уровне 0,7 или, что тоже, 0,5 по мощности:
0О =О,88Х/б7.
При работе одной антенны не только на прием, но и на переда-
чу, ДН определяется как
— sin(6)
EH(6) = sin2
nd
-12
sin (6) ,
а эквивалентная ширина ДН на передачу и прием
0О = 0,64 X/б/ . (4.2)
Таким образом, ширина диаграммы направленности антенны и
соответственно разрешение по угловой координате РЛС определя-
ются относительным размеров апертуры антенны d/X .
В более общем случае апертура антенны задает объем анали-
зируемого пространственно-временного сигнала, который пред-
ставляет собой зависимость напряженности, фазы и поляризации
электромагнитного поля от пространственных координат и време-
ни. Таким образом, апертура характеризуется геометрическими
размерами анализируемого объема электромагнитной волны, вре-
менем анализа, поляризационными и частотными параметрами.
В этом случае разрешающая способность по угловой коорди-
нате определяется изменением пространственно-временного сиг-
нала в апертуре антенны в зависимости от углового положения ис-
точника электромагнитной волны.
Идея метода получения высокого разрешения по угловым ко-
ординатам при малых размерах антенны РЛС основана на формиро-
144
Глава 4
вании большой апертуры на борту летательного аппарата искусст-
венным способом (рис. 4.2).
Для этого апертура синтезируется, т.е. формируется при полете
самолета по определенной, точно известной (обычно прямоли-
нейной) траектории. Иногда такую антенну называют также ис-
кусственной^ подчеркивая ее отличие от реальной антенны ма-
лого размера, используемой в бортовой РЛС.
РЛС с таким методом формирования апертуры антенны назы-
вают радиолокатором с синтезированной апертурой.
Антенна РЛС излучает и принимает отраженные от цели сигна-
лы на траектории полета (траекторный сигнал). Когерентное (син-
фазное) суммирование отсчетов траекторного сигнала на заданном
участке траектории эквивалентно синфазному суммированию сигна-
лов в реальной фазированной антенной решетке такого же большого
размера. Поэтому угловая разрешающая способность РЛС повыша-
ется приблизительно во столько раз, во сколько синтезированная
апертура больше реальной апертуры антенны РЛС.
Таким образом, основное отличие синтезированных (искусст-
венных) апертур от обычных (реальных) апертур антенны состоит в
том, что синтезированная апертура формируется последовательно во
времени. В каждый данный момент прием электромагнитной волны
ведется реальной апертурой, а синтезированная апертура является ре-
зультатом последовательного во времени приема электромагнитной
Синтезированная
апертура
по азимута
Рисунок 4.2
Принцип синтезирования апертуры
Синтезирование апертуры антенны
145
Рисунок 4.3
Формирование диаграммы
аправленности синтезированной
апертурой антенны
волны реальной апертурой при
различном ее положении отно-
сительно источника электро-
магнитной волны цели.
Рассмотрим процесс син-
тезирования на примере фор-
мирования прямолинейной
апертуры РСА (рис. 4.3). Ан-
тенна РЛС перемещается по
прямолинейной траек i ории
(ось А), последовательно за-
нимая положения 1, 2,..., N.
В каждом положении ан-
тенна работает на передачу и прием, т.е. излучает зондирующий и
принимает отраженный от точечной цели сигналы в виде плоской
электромагнитной волны. Фронт волны расположен под углом О
относительно траектории. Процессор обработки сигналов в структуре
РЛС имеет устройство памяти для запоминания амплитуды и фазы
электромагнитной волны, принимаемой в каждом положении антен-
ны, формируя траекторный сигнал - аналог распределения поля по
апертуре в обычной антенне. Устройство формирования апертуры
обеспечивает перемещение антенны РЛС по прямолинейной траекто-
рии и синхронизирует излучение и прием сигналов РЛС с ее положе-
нием на траектории. Процессор обработки сигналов суммирует за-
помненные сигналы с учетом их фазы (синфазно). Так как размер ан-
тенны равен d и перемещение антенны от одного положения к
соседнему равно d, то имеем как бы непрерывную апертуру размером
Хс - Nd. Ее диаграмма направленности на прием определяется так
же, как и диаграмма направленности реальной аперту ры.
Набег фазы волны между двумя положениями реальной антен-
ны на траектории
Ф</ = 2 = 2-~sin(e)
л л
в два раза больше, чем у обычной апертуры, что обусловлено
двойным проходом электромагнитной волной расстояния г при пе-
редаче и при приеме. В результате ширина диаграммы направлен-
ности у синтезированной апертуры РСА такого типа оказывается
меньше, чем у реальной апертуры такого же размера на передачу и
приём (4.2):
146
Глава 4
6 = 0,44—= 0,44—
с X Nd
(4-3)
Главный результат синтезирования апертуры в том, что
размер апертуры увеличился в N раз по сравнению с размером ре-
альной апертуры.
Разрешение по угловой координате антенны с синтезирован-
ной апертурой при приеме сигналов определяется относительным
размером XjX синтезированной апертуры, сформированной в
результате перемещения реальной антенны относительно цели.
4.2. Основные свойства
синтезированной апертуры антенны
Свойство 1. Метод синтезирования апертуры в РЛС (РСА) позволя-
ет получать апертуру большого размера, используя антенну малого
размера. Для современных методов увеличение апертуры Хс/Х, со-
ставляет 102... 104 для бортовых авиационных систем.
Типовые значения относительных размеров dl'k апертур
различных систем
Панорамные РЛС.....................................10... 15
РЛС бокового обзора..............................200.. .300
Глаз человека......................................51 О'
РСА..............................................1О3...1О5
Оптические системы...............................104... 10f
Благодаря большому размеру апертуры РСА возможно получе-
ние высокого линейного разрешения по угловой координате на
больших дальностях:
5/^ = ес/г = о,44-^-а .
При Xc/'k-\Q5 на дальности 100 км линейное разрешение
равно 0,44 м, что соответствует условиям радиовидения объектов.
При этом размер С А Хс - 3 км, что примерно в 10' раз превышает
размер реальной антенны. Оптические системы в большинстве
случаев по погодным условиям (облачность, дымка) или в отсутст-
Синтезирование апертуры антенны
147
вие естественного освещения не позволяют наблюдать объекты на
таком расстоянии.
Свойство 2. Синтезированная апертура формируется в резуль-
тате приема и обработки отраженных от цели сигналов, т.е. синтези-
рованная апертура определяет ДН только на прием. ДН на передачу
при синтезировании апертуры определяется ДН реальной антенны.
Поляризационные и частотные свойства СА также определяются ре-
альной антенной.
Свойство 3. При синтезировании апертуры одновременно мо-
жет работать (излучать, принимать) всего один антенный элемент
(реальная антенна). В этом случае электродинамические задачи не
возникают при формировании всей апертуры, так как нет взаимо-
действия элементов по электромагнитному полю. Задача синтезиро-
вания апертуры и формирования диаграммы направленности факти-
чески сводится к разработке алгоритмов и их выполнению процес-
сором обработки траекторного сигнала.
Как и для реальной антенны, ДН синтезированной апертуры
есть зависимость сигнала на выходе процессора от угловой коорди-
наты точечного источника излучения (цели). Изменяя траекторию и
алгоритм, можно формировать различные ДН (однолучевые, мно-
голучевые, моноимпульсные, адаптивные и т.п.).
Свойство 4. Вследствие большого относительного размера СА
Хс/К объекты наблюдения РСА в большинстве случаев находятся в
промежуточной зоне (зона Френеля) апертуры, а не в дальней зоне,
как у большинства реальных антенн. При приеме в дальней зоне
фронт волны на апертуре считается плоским. С увеличением размера
апертуры (или уменьшением расстояния до объекта) сферичностью
фронта волны уже пренебрегать нельзя. Обычно условие дальней
зоны записывается как
Лда > 2 J2 Д .
Для реальной антенны бортовой РЛС граница дальней зоны по-
рядка 100 м, а при синтезировании когда Хс »d она исчисляется
тысячами километров. Поэтому в РСА при обработке траекторного
сигнала необходимо учитывать сферичность фазового фронта
электромагнитной волны.
В простейших РСА, когда размер СА небольшой, учет кривиз-
ны фронта электромагнитной волны не производят. Такой ре-
жим называют доплеровским обужением луча (ДОЛ), и увели-
чение разрешения при этом невелико (10...30) раз.
148
Г лава 4
Учет сферичности фронта волны при обработке траекторного
сигнала называют фокусировкой, а апертуру, соответственно,
фокусированной апертурой.
На рис. 4.4 показана диаграмма направленности дефокусиро-
ванной на расстоянии R > 7?дз (а) и фокусированной (б) апертуры в
промежуточной зоне на расстоянии < 7?13. Обычная апертура
предполагает прием плоских электромагнитных волн, что соответст-
вует фокусировке на бесконечное расстояние R$ = оо. ДН такой
апертуры до границы дальней зоны 7?дз имеет постоянное сечение,
равное примерно размеру апертуры Хс. Затем сечение ДН линейно
Рисунок 4.4
Распределение поля в промежуточной и дальней зонах ДН
Синтезирование апертуры антенны
149
расширяется в соответствии с угловым размером 0С = А/(2АС) и за-
висимостью линейного разрешения по углу 8£ = 6СЛ . Фокусирован-
ная апертура подобна оптической линзе, которая фокусирует изо-
бражение в промежуточной зоне.
ДН такой апертуры имеет минимальное сечение 8( = на
расстоянии фокусирования /?ф, т.е. такое же, как и у обычной антен-
ны в дальней зоне. Процесс фокусирования переносит свойства на-
правленности апертуры из дальней зоны в промежуточную. Так как
сферичность фронта волны зависит от расстояния до объекта, необ-
ходим различный закон фокусирования для разных дальностей, т.е.
для обеспечения фокусировки С А нужен многоканальный по даль-
ности алгоритм обработки траекторного сигнала.
Благодаря фокусировке С А обеспечивает в промежуточной зоне
разрешение не только по углу, но и по дальности даже при смодули-
рованном сигнале. Однако обычно оно невелико, и разрешение по
дальности обеспечивается за счет модуляции зондирующего сигнала.
Свойство 5. Для обеспечения синфазного сложения сигналов в
процессе синтезирования апертуры необходимо, чтобы сигналы бы-
ли когерентными.
Когерентность сигнала - априорное знание структуры сигнала,
т.е. для синфазного сложения требуется точное знание фазы
траекторного сигнала.
Обычно в антеннах считается допустимой максимальная ошиб-
ка положения точек апертуры относительно заданного порядка Х./8,
что соответствует ошибке фазы л/4.
Основными источниками ошибок (некогерентность траектор-
ного сшнала) являются фазовые нестабильности приемо-пере-
дающих модулей, траекторные нестабильности носителя РСА и не-
стабильности среды распространения электромагнитной волны. Так,
допустимая ошибка в знании траектории перемещения антенны от-
носительно цели равна нескольким миллиметрам (в сантиметровом
диапазоне элекгромагнитнои волны). Это требмет специальных мер
компенсации этих ошибок с помощью систем микронавигации и ал-
горитмов автофокусировки.
Свойство 6
Энергетические характеристики СА (отношение сигнал
внутренний шум) определяются коэффициентом усиления ре-
альной антенны и временем синтезирования, т.е. временем ко-
герентного накопления сигналов.
150
Глава 4
И Помехозащищенность от внешних активных и пассивных по-
мех определяется как ДН реальной антенны, так и направлен-
ными свойствами СА, т.е. пространственной селекцией помех.
Действительно, в каждом положении антенны при синтезиро-
вании апертуры мощность принятого сигнала определяется мощно-
стью излучения и коэффициентом усиления антенны, а синфазное
сложение этих сигналов при синтезировании эквивалентно накоп-
лению энергии сигнала за время синтезирования при постоянной
спектральной мощности внутренних шумов. По отношению к ис-
точникам внешних помех, кроме того, возможна угловая селекция,
эффективность которой зависит от ДН реальной и синтезированной
апертур.
Свойство 7. Относительное перемещение антенны и объекта,
необходимое для формирования С А, можно выполнить различными
методами.
Формирование СА в результате движения антенны при непод-
вижном объекте называют прямым синтезированием, а форми-
рование СА при движении объекта и неподвижной антенне
обратным синтезированием. При этом возможно формирова-
ние СА в результате вращения объекта, что эквивалентно дви-
жению антенны вокруг объекта.
Использование в процессе синтезирования одновременно не
одной, а многих приёмных антенн позволяет синтезировать не толь-
ко линейные, но и плоские и объемные СА.
Свойство 8. Обработка траекторного сигнала для получения
сверхвысокой разрешающей способности по дальности и азимуту в
реальном масштабе времени (режим радиовидения) требует высо-
кого быстродействия (10 ... 10° операций/с) и большого объема па-
мяти (1(Л..1О8 байт) процессора, что представляет исключительно
сложную задачу для бортовых ЦРМ. В наземных условиях эту зада-
чу успешно решает оптический процессор, в котором используется
запись траекторного сигнала на фотопленку и аналоговая обработка
сигнала с помощью когерентной оптической системы.
Свойство 9. Синтезирование апертуры требует определенного
времени, что приводит к задержке информации в РСА. Минималь-
ное запаздывание информации определяется временем синтезирова-
ния, т.е. временем формирования СА, Обычно оно составляет деся-
тые доли - единицы секунд. Максимальная задержка определяется с
учетом времени выполнения алгоритма синтезирования соответст-
вующим процессором обработки траекторных сигналов. Наибольшую
Синтезирование апертуры антенны
151
задержку имеют наземные оптические процессоры. Она состоит из
времени полета самолета в зоне работы РСА, времени возвращения
на базу, времени доставки фотопленки с записью траекторных сиг-
налов в лабораторию, времени фотохимической обработки пленки,
оптической обработки и записи изображения на вторичную фото-
пленку и, наконец, фотохимической обработки вторичной пленки.
Это время может достигать нескольких часов.
Для получения режима радиовидения необходима сверхвы-
сокая разрешающая способность РЛС по дальности и азимуту (от
единиц метров до десятков сантиметров).
Разрешение по дальности обеспечивается использованием
широкополосных зондирующих сигналов (100 МГц и более).
Разрешение по азимуту обеспечивается синтезированной
апертурой антенны размером сотни метров и даже километров
при обычном (малом) размере антенны.
Синтезированная апертура формируется путем относитель-
ного перемещения антенны РЛС и цели. При неподвижной цели
синтезирование называется прямым, а при неподвижной антенне
и перемещении цели - обратным. Обратное синтезирование воз-
можно путём вращения цели.
Синтезированная апертура формирует ДН только на прием
путем обработки траекторного сигнала. Используя соответствую-
щие алгоритмы, процессор обработки может формировать раз-
личные ДН (суммарные, моноимпульсные, многолучевые и т.п.).
Алгоритм обработки траекторного сигнала должен учитывать
сферичность волн, отраженных от цели (осуществлять фокусиров-
ку). При небольших размерах СА можно не применять фокусировку.
Такой режим РСА называют доплеровским обужением луча (ДОЛ).
Обработка траекторного сигнала эквивалентна синфазному
суммированию, что требует обеспечения когерентности сигнала.
Нарушение когерентности обусловлено, прежде всего, траектор-
ной нестабильностью относительного перемещения антенны РЛС
и цели, а также нестабильностью приемо-передающего тракта и
среды распространения электромагнитной волны. Для компенса-
ции нестабильностей используются специальные системы мик-
ронавигации и алгоритмы автофокусировки при обработке траек-
торного сигнала.
Обработка траекторного сигнала в реальном масштабе вре-
мени требует высокого быстродействия (до 109 операций/с) и
большого объема памяти (до 108бит) бортового процессора.
Использование наземной оптической системы обработки
приводит к задержке информации до нескольких часов.
152
Глава 4
4.3. Закономерности
пространственной селекции
Пространственная селекция есть разделение объектов по их коор-
динатам. Она определяет детальность получаемого радиолокаци-
онного изображения (РЛИ). Чем выше пространственная селекция
и детальность РЛИ, тем больше малоразмерных объектов и элемен-
тов крупных объектов можно наблюдать (обнаруживать, опреде-
лять координаты и другие параметры) в зоне обзора РЛС.
Пространственная селекция РСА, так же как и обычной РЛС, ха-
рактеризуется разрешающей способностью по дальности Ьг и линей-
ной разрешающей способностью по угловой координате (азимуту) 8£ .
В свою очередь, разрешение определяется свойствами про-
странственно-временного траекторного сигнала РСА, т.е. син-
тезированной апертурой антенны и модуляцией зондирующего
сигнала.
Поскольку сигналы и шумы РСА имеют статистическую при-
роду, т.е. носят случайный характер, разрешающая способность
должна определяться вероятностными характеристиками. Однако на
практике использование вероятностных характеристик крайне не-
удобно, так как разрешение зависит от большого числа параметров
объектов, сигналов и шумов, статистические сведения о которых
обычно отсутствуют. В то же время, при всем различии алгоритмов
обработки сигналов, основным фактором, влияющим на разрешаю-
щую способность РСА, является размер базы (апертуры) сигнала.
С учетом того, что накопление энергии сигналов на фоне шу-
мов является важнейшим критерием при выборе алгоритма обработ-
ки, выходное изображение РСА формируется путем согласованной
обработки траекторного сигнала. В этом случае возможность раз-
решения параметров сигнала РСА, в которых закодированы даль-
ность и угловая координата объекта, определяется функцией рассо-
гласования траекторного сигнала точечного объекта и опорного сиг-
нала на выходе согласованной системы обработки:
j(Aoc)= ГзЦх) s*(x,Aa)dx, (4.4)
где (х) - пространственно-временной траекторный сигнал РСА
как функция вектора х = x,y,z,t; X - область, где задан и анализи-
Синтезирование апертуры антенны
153
руется (обрабатывается) сигнал; Да - смещение параметра а отно-
*
сительно параметра сигнала а0; sT - комплексно-сопряженный
опорный сигнал.
В частном случае, функция рассогласования для параметров
задержки сигнала т и частоты f называется функцией неопре-
деленности'.
ОС
J(Т’/) = f 5т (Фт* (Z - Т)ехР {jWZ} dZ •
—ос
Рисунок 4.5
Траектория движения
антенны при С А
В дальнейшем будем использовать это более привычное назва-
ние в расширенном смысле для всех параметров сигнала и объекта.
Анализ пространственных за-
кономерностей селекции проведем
на примере линейной синтезиро-
ванной апергуры (СА) (рис. 4.5),
при которой антенна перемещается
по заданной траектории в течение
времени синтезирования Гс от /.
д° Z2: Tc=t2-t}.
Сигнал, отраженный от то-
чечного объекта, находящегося в
начале координат 0, т.е. траектор-
ный сигнал, зависит от многих па-
раметров и, прежде всего, от моду-
ляции зондирующею сигнала, па-
раметров траектории движения РЛС, несущей частоты и ДН реаль-
ной антенны. Ширина спектра траекторного сигнала, обусловленная
модуляцией зондирующего сигнала, обычно исчисляется десятками
мегагерц. Частотная модуляция траекторного сигнала, обусловленная
движением антенны по траектории и соответственным изменением
доплеровской частоты, имеет спектр шириной единицы килогерц.
Наконец, амплитудная модуляция траекторного сигнала, обуслов-
ленная перемещением ДН антенны, обычно весьма узкополосная
(единицы герц). Такое соотношение спектров модуляции позволяет
анализировать их влияние на пространственную селекцию РСА по-
рознь.
Поэтому предположим, что ДН антенны - всенаправленная, из-
лучение передатчика РСА - монохроматическое на длине волны X ,
154
Глава 4
антенна перемещается со скоростью, намного меньшей скорости
распространения электромагнитной волны. Объект полагается не-
подвижным. В этом случае будем анализировать свойства СА по
пространственной селекции объекта путем рассмотрения функции
неопределенности j(p) в зависимости от вектора р изменения
пространственной координаты объекта.
Траекторный сигнал можно записать в виде
5Т (/) = Uo (?) exp {jtp (/)} = Uo (/)exp{j£2r0 (/)}, (4.5)
где (701 - амплитуда траекторного сигнала; ср(/) - фаза траектор-
ного сигнала: k = '2Ti/'k - волновое число; г0(/) - расстояние от на-
чала координат до траектории перемещения антенны в момент вре-
мени t.
Траектория в общем виде имеет произвольный характер. Будем
полагать, что другие причины изменения фазы сигнала за время син-
тезирования (кроме изменения расстояния) отсутствуют. В даль-
нейшем влияние изменения характеристик среды распространения
электромагнитной волны, параметров приемо-передающего тракта и
траекторных нестабильностей будем рассматривать отдельно.
Функция неопределенности такого траекторного сигнала
f2
J(p)= f5T(Osp(z)d/ =
'l
% ( г -л
= Jt70 (z)C7p (/)exp{j£2| r0 (t) - rp , (4.6)
где .vp - траекторный сигнал от точечного объекта с координатой р ;
гр (/1 - расстояние от этой точки до траектории в момент времени t.
При р = 0 функция неопределенности СА
/2 /2
J (°) = рг (ф? (0dZ = (|Ро (Z) = Ес
А А
Энергия сигнала Ес равна U$TC, если амплитуда сигнала
U() (/) постоянна за время синтезирования Тс -12 .
Синтезирование апертуры антенны
155
При отклонении координаты точки объекта от начала коорди-
нат фазовый член в (4.6), пропорциональный
го(0-гр0) ’
изме-
няется, что приводит к уменьшению ФН На этом к основана
возможность пространственной селекции, которая характеризуется
величиной разрешающей способности.
Будем определять разрешающую способность по координате
(Х,У) как ширину модуля ФН на уровне 0,7, либо квадрата модуля
на уровне 0,5 (-3 дБ).
Рассмотрение ФН (4.6) показывает, что СА в общем случае
обеспечивает пространственную селекцию по всем координатам
(x,y,z), однако степень селекции различна, что определяется ско-
ростью изменения фазового члена
Дф = 2/Цг0 - г I при изменении
вектора р . Проанализируем зави-
симость разрешающей способности
СА по различным координатам от
параметров траекторного сигнала.
Рассмотрим траекторию в
плоскости (Х,У) (рис. 4.6), которая
является проекцией траектории об-
щего вида на эту плоскость. Анало-
гично можно рассмотреть любую
другую плоскость. Для упрощения
записи систему координат выберем
так, чтобы траектория была распо-
ложена симметрично относительно
оси Y. В этом случае ось X соответ-
Рисунок 4.6
Формирование СА на плоскости
ствует азимуту к , а ось Y- дальности г.
Предположим, что нас интересует СА, обеспечивающая высо-
кое разрешение по сравнению с расстоянием от РСА до объекта, т.е.
р « г0. При таких малых изменениях расстояния амплитуду траек-
торного сигнала можно считать неизменной, т.е. 1\(7) = (/) .
Произведем в (4.6) замену переменной t на угол 0, учитывая,
что r0(z) и / = /(0):
₽р/2
Др) = J t/0(p)L;(p)/’(p)exp{jn[r0(p)-rp(p)]}dp,
-₽о/2
156
Глава 4
где ^'(Р) - производная функции /(Р), обратной функции Р(^); Ро
угловой размер СА, т.е. угловой сектор, внутри которого размещена
С А, а центр сектора совпадает с объектом наблюдения.
Амплитудная функция угла Р под интегралом изменяется зна-
чительно медленнее по сравнению с фазовой функцией, определяе-
мой изменением расстояния (г0 — гр ) с учетом множителя к — 2л/Х .
Изменение расстояния всего на Х/2 приводит к изменению фазы на
2л и соответственно к резкому уменьшению ФН. Поэтому разре-
шающая способность определяется, в основном, фазовым множите-
лем ФН, а амплитудный множитель влияет только на форму ФН и
уровень боковых лепестков. В дальнейшем будем анализировать
нормированную ФН траекторного сигнала, полагая амплитудный
множитель постоянным:
1 ₽о/г2 г г
J(p) = }T I exP{Wro(P)-rp(P)
Ро _р0/2
Так как размер элемента разрешения намного меньше расстоя-
ния до объекта (р « ), то можно считать, что
2Л[г0 (р) - гр (р) | = 2&psin (а + р).
Это следует непосредственно из геометрических соотношений
рис. 4.6. С учетом этого допущения ФН траекторного сигнала при
синтезировании апертуры
1 Pf,r2 I 4л 1
J(p.a)= — । expjj—psin(a + p), dp.
Po-p„/2 l Л -1
(4-7)
Анализ (4.7) показывает, что ФН определяется только угловым
размером СА Ро и длиной волны к и напрямую не зависит от
дальности до объекта, вида траектории, скорости перемеще-
ния антенны и времени синтезирования.
На рис. 4.7 представлены различные виды траектории при син-
тезировании аперзуры, имеющие одинаковые угловые размеры и,
следовательно, обеспечивающие одинаковую разрешающую спо-
собность. При этом не важно, за какое время перемещалась антенна
по траектории в процессе синтезирования апертуры.
Синтезирование апертуры антенны
157
Рисунок 4.7
Различные типы СА с одинаковым угловым размером
Предельные возможности СА проиллюстрируем на примере
круговой траектории (рис. 4.8).
Рисунок 4.8
Круговая (я) и полукруговая (б) СА
Полностью круговая траектория вокруг объекта соответствует
угловому размеру С А А/.. Тогда ФН
тс
J(p,oc)
2л J
-л
а+л
J exp{j2^psin(p)}dp = Z0(2^p)
а-л
где /0 — функция Бесселя 0-го порядка. Ширина ФН для всех а , т.е.
по всем пространственным координатам на плоскости
(л-.г)
Sp = l,IS/t = 0,18X.
Таким образом, пространственная разрешающая способность
круговой (вокруг объекта) СА равна 0,18Х по всем координатам (и
по углу, и по дальности).
158
Глава 4
При полукруговой СА (рис. 4.8,6) Ро = п. Тогда ФН по оси X
(азимуту, а = 0 )
J(x) = — j exp|j2Axcos(p)}dp - IQ (2Ах)
Я-л/2
имеет тот же вид, что и при круговой СА. Следовательно, разреше-
ние по оси X
8х = 0,18Х.
ФН по оси Y (дальность) соответствует а = п / 2:
1 л/2
= - J exp|j2£ycos(p)}dp =
-ti/2
= — jcos(2A^sin(p))dp-j— Jsin(j2A^sin(p))dp =
71 0 71 0
=/o(2M_jQo(2M’
где t - функция Ломмеля-Вебера.
Ширина ‘/(т) на уровне 0,7 (разрешение по оси У)
8У = 2,6= 0,4Х, т.е. разрешение по дальности ухудшается по
сравнению с круговой траекторией примерно в 2 раза.
Таким образом, потенциальные характеристики пространствен-
ной селекции при больших угловых размерах СА обеспечивают раз-
решение порядка длины волны одновременно по азимуту и дально-
сти. Возможность разрешения по дальности при немодулированном
сигнале объясняется фокусирующими свойствами СА в промежу-
точной зоне дальностей подобно фокусирующим свойствам объек-
тива фотоаппарата, где резкое (детальное) изображение достигается
для объектов, расположенных в плоскости фокусирования.
В большинстве случаев работы РСА угловой размер СА не пре-
вышает несколько градусов (Ро с 1). Представим фазовый множи-
тель
sin(a+p) = sina - 0,5P'sina + pcosa,
что справедливо для малых углов р. Тогда ФН по азимуту (коорди-
нате р = ), при ос = 0:
Синтезирование апертуры антенны
159
. +₽и/2
/(4 = — J exp{j2Wp}jp =
Ро -Рп/2
sin(P0A^)
и разрешение
5€ = Л/(2ро).
Разрешение по дальности (координате
шириной ФН при а = тс/2:
j +Р0/2
J(r) = — J exp|-jArp2|dp,
РО -₽()/2
р = 5г) определяется
а модуль этой ФН
.'М I- ' I' ).
где С и S — интегралы Френеля; U = .
Разрешение по дальности
5г = 4Х/р02.
(4.9)
Сравнение разрешения по азимуту и дальности (4.8) и (4.9) по-
казывает, что при Ро « 1 разрешение по дальности значительно ху-
же, чем по углу.
Так, при угловом размере апертуры
Ро =10 2 рад и длине волны Х, = 3 см разре-
шение по дальности 8г = 4л/р2 = 1200 м , а по
азимуту S/7 = Л/2,ро - 1,5 м.
На рис. 4.9 показан типичный вид сечения
ФН в координатах ( г ).
При работе РСА в дециметровом и метро-
вом диапазонах волн получение высокого раз-
решения требует использования больших угло-
вых размеров СА. Разрешающая способность со-
ответственно по азимуту и дальности в этом
случае равна:
Рисунок 4.9
Сечение ФН
в координатах
дальность- азимут
160
Глава 4
----------• ,
4sin(pn/2)’ 4sin2(p0/4)
(4.Ю)
Очевидно, что одна и та же СА имеет различный угловой раз-
мер в зависимости от направления наблюдения, т.е. от положения
объекта относительно апертуры. Однако независимо от направле-
ния наблюдения закономерности пространственной селекции не
изменяются, т.е. разрешающая способность по дальности 8г и
азимуту определяется соответствующим данному направлению
угловым размером 301, Р02, 0ОЗ на рис. 4.10. При этом ось г совпа-
дает с направлением на объект (направлением наблюдения), а ось I
перпендикулярна оси г .
Для определения пространственной разрешающей способно-
сти в любом направлении относительно СА необходимо по-
вернуть систему координат по дальности г и углу f. так,
чтобы направление наблюдения совпало с осью дальности, и
определить значение углового размера СА Ро для этого на-
правления.
Общие закономерности пространственной селекции не изме-
няются, если рассматривать любые другие плоскости, например не
(У,У), a (Z,Y). В этом случае необходимо определить проекцию
Рисунок 4.10
Система координат дальность-азимут при различных углах наблюдения
Синтезирование апертуры антенны
161
траектории СА на эту плоскость и ее угловой размер относительно
направления наблюдения. Рассмотрение всех проекций СА позволя-
ет определить объем разрешаемого пространства объектов. Так, на-
пример, на рис. 4.11 показана круговая апертура в плоскости
(XpZj), параллельной плоскости (X,Z) и находящейся на рас-
стоянии Yo. В этом случае угловой размер апертуры Ро будет оди-
наковый для любых проекций в плоскостях, совпадающих с осью Y .
Поэтому разрешающая способность в плоскости (A,Z) будет оди-
наковой во всех направлениях, а разрешение по оси Y соответствует
разрешению по дальности. Объемный элемент разрешения будет
иметь вид эллипсоида, большая ось которого направлена вдоль оси
Y (дальности).
До сих пор рассматривались закономерности пространственной
селекции объектов применительно к РСА когда в процессе синтези-
рования апертуры перемещается одновременно приемная и пере-
дающая (единая) антенна. Если перемещается только приемная ан-
тенна, например передатчик находится на стационарной орбите и
подсвечивает объект, а приемная антенна находится на летательном
аппарате, то разрешающая способность уменьшается в два раза при
том же угловом размере апертуры. Это объясняется тем, что фазо-
вый набег на апертуре обусловлен в этом случае только однократ-
ным прохождением волны при приеме.
Аналогичные закономерности будут при неподвижной прием-
ной антенне и перемещении передающей антенны. Возможность
синтезирования апертуры в этом случае можно объяснить тем, что
Zi
к
Рисунок 4.11
Тело ФН при круговой апертуре в плоскости ,Yl)
162
Глава 4
движущийся источник в каждом направлении излучает электромаг-
нитные волны различной длины (доплеровское смещение частоты) и
как бы подкрашивает отдельные элементы объекта различной крас-
кой. Приемная антенна воспринимает этот эффект путем спектраль-
ного анализа отраженного от объекта сигнала.
Если приемо-передающая антенна РСА неподвижна, а переме-
щается объект, то угловой размер С А определяется траекторией пе-
ремещения объекта. При этом закономерности пространственной се-
лекции сохраняются. Аналогичным образом СА может быть сфор-
мирована путём поворота объекта при неподвижной антенне.
Разрешающая способность по углу и дальности при этом
8£ = л/2ф0 ; 5г = 4Л/<Ро , (4.11)
где (р0 - угол поворота объекта за время синтезирования соответст-
вует угловому размеру СА, т.е. (р0 = Ро.
Следует отметить, что, поскольку в этом случае угловой размер
СА Ро не зависит от дальности, данный метод обеспечивает радио-
видение на любых дальностях, которые ограничены только возмож-
ностью приема отраженного сигнала.
Синтезированная апертура может осуществлять простран-
ственную селекцию объектов по всем трем координатам при
немодулированном зондирующем сигнале и ненаправленной
антенне.
Пространственная разрешающая способность СА не зависит
от вида траектории в пространстве и времени, а определяется
только угловым размером синтезированной апертуры относи-
тельно объекта и длиной волны радиосигналов. Угловой размер
СА в плоскости равен ширине сектора, в котором размещается
проекция апертуры на эту плоскость.
Наилучшее разрешение достигается при таком направлении
наблюдения и в такой плоскости, при которых угловой размер
апертуры относительно объекта максимален.
Проекция синтезированной апертуры в плоскости обеспе-
чивает наилучшее линейное разрешение по азимуту (перпендику-
лярно направлению наблюдения), а наихудшее - по дальности
(вдоль направления наблюдения). При этом разрешение по азимуту
пропорционально угловому размеру апертуры р0, а разрешение по
дальности пропорционально квадрату углового размера апертуры:
5/ = Х/2р0 Vi 8г = 4А./Ро .
Синтезирование апертуры антенны 153
Предельно высокое и одинаковое разрешение по азимуту и
дальности достигается при угловом размере СА, равном 2л, т.е.
когда носитель РСА осуществляет круговой облет района наблю-
дения или объект поворачивается относительно неподвижной
РЛС на 360°.
Синтезирование апертуры возможно как путем перемещения
приемной и (или) передающей антенн при неподвижном объекте
или перемещением или вращением объекта при неподвижных ан-
теннах. При перемещении одновременно приемной и передающей
антенн разрешение увеличивается в два раза.
4.4. Пространственная селекция прямолинейной
синтезированной апертуры антенны
Наиболее важным для практики случаем является прямолинейное
движение антенны или объекта с постоянной за время синтезирова-
ния скоростью (рис. 4.12). В этом случае закон изменения расстоя-
ния между РЛС и целью с координатами (, 0] ) описывается вы-
ражением
(4.12)
где Ян - дальность наблюдения цели; 0Н - угол наблюдения цели;
V - путевая скорость носителя РЛС.
Рисунок 4.12
Синтезирование апертуры антенны при равномерном прямолинейном полёте
164
Глава 4
Расстояние между РЛС и точкой, смещённой относительно це-
ли на угол 9 , изменяется по закону
/х /х r2sin2(eH +0) ,
ге (/) « RH - V cos (ен + 0) t +--р---->-t2. (4.13)
Нормированная функция неопределённости (4.6) принимает вид
| At =
-cos(0H+0))~
(4-14)
где Тс - время синтезирования.
Квадратичным членом в выражении (4.14) можно пренебречь
при условии, что набег фазы, обусловленный им за время синтезиро-
вания меньше, чем тс/4. Данное условие выполняется при
0 < arcsin
8(ГГС):
(4-15)
что соответствует большинству практических задач.
С учётом того, что влияние квадратичного члена в выражении
(4.14) мало, нормированная функция неопределённости траекторно-
го сигнала при равномерном прямолинейном полёте описывается
выражением
j(0) = sinc(AL¥c cos0H -cos(0H +0)^«
sine кХс
и
о2
0sin0H +—cos6H
н 2
(4-16)
где Хс = VTC - длина синтезированной апертуры; sine = sinx/x .
Синтезирование апертуры антенны
165
Ширина функции неопределённости (4.16) на уровне 0,7 опре-
деляет разрешающую способность по азимуту прямолинейной син-
тезированной апертуры
(4.17)
Из выражения (4.17) могут быть получены выражения для раз-
решающей способности по азимуту для частных случаев:
передний обзор (0Н = 0 )
боковой обзор (9Н = 90 )
(4.18)
(4.19)
передне-боковой обзор (0, >5°...10е)
2 X sin 0Н
С п
2VT sin ен
Гя
(4.20)
Основные свойства прямолинейной синтезированной антенны
Свойство 1. ФИ при прямолинейном полете имеет пики неод-
нозначности и симметрична относительно вектора путевой скорости.
На рис. 4.13 показаны примеры функции неопределённости для уг-
лов 0Н1 = 0 , 0н2 = 3 , 0н2 = -5 .Из представленных рисунков сле-
дует, что при равномерном прямолинейном полете на основе анали-
за только фазовой (спектральной структуры) невозможно опреде-
лить слева или справа относительно вектора путевой скорости
расположен наблюдаемый объект.
Для устранения этой неопределенности в РСА традиционно ис-
пользуется реальная антенна, которая обеспечивает подавление пика
неоднозначности (мешающего сигнала). Для переднего обзора, когда
угловое положение отражателя относительно вектора путевой ско-
рости меньше ширины реальной ДНА, подавление становится неэф-
фективным.
166
Глава 4
Рисунок 4.13
ФН прямолинейной РСА
Для решения задачи формирования детального радиолокацион-
ного изображения местности в переднем секторе обзора необходимо
подавить пики неоднозначности ФН траекторного сигнала РСА и
тем самым обеспечить однозначное определение углового положе-
ния отражателя на РЛИ.
Решение этой проблемы возможно несколькими методами:
• с помощью оптимальной пространственно-временной обработ-
ки траекторного сигнала;
• с помощью специального траекторного управления носителем
РСА.
Свойство 2. Прямолинейная апертура является осью симмет-
рии для всех плоскостей, включающих эту прямую. ФН в каждой из
этих плоскостей будет одинаковой.
Свойство 3. Разрешение по азимуту уменьшается с уменьше-
нием угла наблюдения 0Н (при переходе от бокового к переднебоко-
вому обзору). Для сохранения постоянства разрешающей способно-
сти необходимо увеличивать интервал синтезирования обратно про-
порционально синусу угла наблюдения:
V _ ^сБО
с ~ Q ’
smtr
ri
где ХсЪО - требуемый интервал синтезирования для обеспечения
разрешения при боковом обзоре (0Н = тг/2).
Синтезирование апертуры антенны
167
Так, при угле наблюдения 0Н = 30 требуемый интервал синте-
зирования по сравнению с боковым обзором увеличивается в 2 раза,
а при угле 0н = 6 - в 10 раз.
Свойство 4, Требуемый интервал синтезирования также увели-
чивается пропорционально увеличению дальности наблюдения .
Свойство 5. Требуемый интервал синтезирования может быть
достигнут выбором соответствующего времени синтезирования при
заданной скорости или за счёт увеличения скорости при заданном
времени синтезирования.
Свойство 6. Разрешающая способность по азимуту в направлении
вектора путевой скорости определяется корнем квадратным из интер-
вала синтезирования (4.18). Для улучшения разрешения по азимуту в
2 раза необходимо увеличивать интервал синтезирования в 4 раза.
Свойство 7. Разрешение по азимуту соответствует ширине
отклика на точечную цель согласованной системы обработки тра-
екторного сигнала. При условии наблюдения в дальней зоне, когда
2Х2
/?н > /?дз =-—sin2 0н , траекторный сигнал имеет постоянную час-
тоту (доплеровское смещение частоты), пропорциональную углу
азимута. Согласованная обработка в этом случае соответствует спек-
тральному анализу траекторного сигнала. Поэтому синтезирование
апертуры в дальней зоне является доплеровским обужением луча.
Исходя из условия обработки в дальней зоне максимальный возмож-
Ч,
ный размер интервала синтезирования Лгсмжс
2sin26
, а разре-
шающая способность по азимуту в режиме ДОЛ не может быть
лучше
Согласованную обработку траекторного сигнала при Хс > Хсмакс
иногда называют фокусированной синтезированной апертурой.
Свойство 8. Разрешение по дальности за счёт фокусирующих
свойств синтезированной апертуры антенны при равномерном прямо-
линейном полёте может быть оценено с помощью выражения (4.9):
168
Глава 4
4Х 4Х/?2
___ _ ________н____
м ” V гт2 sin2 ен ’
(4.22)
где Ро » Хс sin 0Н /7?н - угловой размер СА при равномерном пря-
молинейном полёте.
При малых размерах СА разрешение по дальности намного ни-
же разрешения по азимуту. Поэтому для обеспечения высокого раз-
решения по дальности используют модуляцию зондирующего сиг-
нала. При использовании узкополосного зондирующего сигнала, у
которого ширина полосы частот модуляции А/с намного меньше не-
сущей частоты fQ (А/с « /0 ), влиянием модуляции несущей часто-
ты на разрешение СА по азимуту и влиянием СА на разрешение по
дальности можно пренебречь. В этом случае разрешение соответст-
венно по азимуту и дальности равно:
8^ = ---- = —-—
2₽0 2/0Р0’
(4-23)
(4.24)
Для обеспечения одинакового разрешения по азимуту и даль-
ности необходимо, чтобы Ро = Afc //0 .
Рисунок 4.14
ФН импульсного
периодического сигнапа
В РСА обычно используют
импульсный периодический зон-
дирующий сигнал. ФН такого
сигнала имеет центральную зону,
свободную от боковых лепест-
ков, что упрощает решение мно-
гих задач, связанных с наблюде-
нием объектов на фоне земной
поверхности. Интервал синтези-
рования определяегся длительно-
стью обрабатываемой пачки NK
когерентных импульсов с перио-
дом повторения Тп: Тс = NKTn .
ФН импульсного периоди-
ческого сигнала имеет периоди-
ческую структуру (рис. 4.14).
Синтезирование апертуры антенны 169
Неоднозначность по дальности соответствует неоднозначности
определения задержки т на величину Тп :
(4.25)
Неоднозначность по частоте ФН сигнала РСА на величину
Fn=\fTn эквивалентна неоднозначности по углу. Доплеровская
г 2Г
частота траекторного сигнала f -----cos0H, а разница доплеров-
X
2V
ских частот fx- f2— t±f = —A0sin 0H.
X
Полагая А/ = Fn, получаем неоднозначность сигнала РСА:
по азимутальному углу
де =-----------; (4.26)
2P7nsineH
по ази муту
Д? = дея =------н.
2TTnsineH
(4-27)
Вследствие периодического характера ФН возможно появления
ложных отметок, неоднозначное измерение координат объекта, сни-
жение динамического диапазона изображения и характеристик об-
наружения объектов на фоне местности вследствие приема дополни-
тельных сигналов фона от участков местности, расположенных в об-
ласти боковых пиков ФН. Для устранения этих нежелательных
явлений обычно используют направленные свойства реальной ан-
тенны.
Подавление областей неоднозначности, обусловленных им-
пульсным периодическим сигналом, показано на рис. 4.15, на кото-
ром изображены сечения областей ФН синтезированной апертуры и
ДН реальной антенны плоскостью У). Пересечение этих облас-
тей в районе RH, 0Н определяет разрешающую площадку 5Д, 5^ в
плоскости (X, У).
Область 1 определяется ФН С А по угловой координате при
немодулированном сигнале, которая имеет малый размер по углу
и большой 5г по дальности.
170
Глава 4
Рисунок 4.15
ФН СА с учётом диаграммы направленности антенны
Область 2 определяется ФН СА сигнала модуляции. Ее малый
размер 8Д = 8г/со8(рн определяет разрешение в плоскости (X, У)
по дальности, а большой размер определяет разрешение по углу за
счет ДН реальной антенны.
Область 3 определяется сечением ДН реальной антенны шири-
ной по азимуту 0О и углу места Фо.
Области 4 и 5 определяются боковыми пиками ФН при перио-
дическом зондирующем сигнале соответственно по азимуту и даль-
ности. ДН антенны выбирается таким образом, чтобы боковые пики
ФН находились вне зоны 3 и не влияли на качество радиолокацион-
ного изображения.
В боковом и переднебоковом секторе обзора при полёте по
прямолинейной траектории с постоянной скоростью разрешение
по азимуту определяется интервалом синтезирования Хс, даль-
ностью наблюдения /?н и углом наблюдения 0н:
ч,
2Х sin 0Н
с н
Синтезирование апертуры антенны
171
При переходе к переднему обзору (6Н —> 0) разрешение по
азимуту падает и при 0Н = О
Н . I
V с
При несфокусированной обработке траекторного сигнала (ре-
жим ДОЛ) максимальное разрешение по азимуту равно интервалу
синтезирования (6/ = Хс).
Для обеспечения высокого разрешения по дальности обыч-
но в РСА используется импульсный периодический зондирующий
сигнал.
Центральный пик ФН такого сигнала определяет разрешаю-
щую способность по дальности 6г =-----, пропорциональную
2А/С
полосе частот спектра зондирующего сигнала и по азимуту
6£ =-----------, пропорциональную числу NK импульсов в
2wkt;, sine„
пачке траекторного сигнала.
ФН импульсного периодического сигнала имеет боковые пи-
ки неоднозначности по задержке, расположенные через период
повторения импульсов Тп и по частоте - через частоту повторе-
ния Fn = \/Тп , что соответствует неоднозначности по дальности
СТП А/?
—- и по азимуту А£ =-----------
2 2ITnsineH
Для подавления областей неоднозначности ФН используется
ДН реальной антенны. Пики неоднозначности и по азимуту подав-
ляются ДН антенны по азимуту, а пики неоднозначности по даль-
ности - ДН антенны по углу места.
4.5. Траекторное управление носителем
при синтезировании апертуры антенны
Траекторное управление носителем позволяет повысить качество
решения целого ряда задач, например, снять ограничения по радио-
видению в переднем секторе обзора.
Рассмотрим возможность применения траекторного управления
носителем для обеспечения радиовидения в переднем секторе обзора.
172
Глава 4
Возможные варианты такого управления
• Изменение модуля скорости полета носителя.
• Изменение направления вектора путевой скорости относитель-
но наблюдаемого объекта при постоянном модуле скорости.
• Маневр типа «змейка».
С точки зрения управления движением носителя РСА первые
два способа обладают недостатками: в первом случае необходимо
торможение - ускорение, а во втором изменение общего направле-
ния движения носителя РСА относительно наблюдаемого объекта.
Обеспечить постоянство модуля скорости и общего направле-
ния движения носителя РСА позволяет траектория полёта носителя
типа «змейка». Траектория полета типа «змейка» может формиро-
ваться путем изменения боковой перегрузки носителя по гармониче-
скому закону:
/бок (0 /зм 5
где /зм - максимальная боковая перегрузка; (03M - цикли-
ческая частота «змейки»; Тзм - период «змейки».
Изменение боковой перегрузки по гармоническому закону при-
водит к изменению курса полёта носителя:
v(0 = Vo + Av(0’
где Vo - начальный курс; = ^зм sin(o>3M/ I - изменение кур-
ЗМ
са относительно \|/0.
Максимальное изменение курса при выполнении манёвра типа
«змейка»:
max
/ Т
J зм зм
2 л V
При скорости полёта авиационных носителем V -100...200 м/с,
малом значении периода змейки (Тзм < 4с) и максимальной боковой
перегрузке /зм< 50 м/с2 максимальное изменение курса составляет
единицы градусов.
В этом случае закон изменения расстояния между РЛС и целью
с координатами (7?Н,0Н) может аппроксимироваться выражением
(рис. 4.16):
Синтезирование апертуры антенны
173
Рисунок 4.16
Синтезирование апертуры антенны при манёвре «змейка»
г0(/) = /?н -Pcos(0H)/ +
r2sin2 (ен ) .2
-Z3Msin(0H)cos((O3M/)
Z3Mcos2(e„)
cos2
(4.28)
где 7?н - дальность наблюдения цели; 0Н - угол наблюдения цели;
V - путевая скорость носителя РЛС, Z3M = j3M /co2M - максимальное
боковое отклонение носителя от линии пути за счёт манёвра.
Первые три слагаемых в (4.28) есть изменение расстояния меж-
ду РЛС и целью за счёт движения носителя вдоль линии пути анало-
гично изменению расстояния при равномерном прямолинейном по-
лёте (4.12), а последние два за счёт поперечного отклонения от ли-
нии пути.
Расстояние между РЛС и точкой, смещённой относительно це-
ли на угол 9, изменяется по закону
= -^c°s(9H +0)z +
Z- / п гл \ ЗМ \ Н ц / 2 / . \
3Msm( 0 +0)cos((o,mZ)h---------------cos (со,м/).
ЗМ \ Н / \ ЗМ / О D \ '
Нормированная функция неопределённости (4.6) при выполне-
нии манёвра типа «змейка» принимает вид
174
Глава 4
TJ2
Лм(0) = ^ f exp(-j27r[v(O)z-|i(0)z2 +
2с -TJ2
+k(0)cos(co3Mz)-%(0)cos2(co3MZ) dZ,
(4.29)
где
„-COS
COS Uu
П
K2
g(₽";A₽) = M
AJx.
(sir 20H -sin2(0H +0))~
н
2
5
2 i 2 I 02
k(G) = -^(sin0H -sin(0H +0))-~zJ 0COS0H -—sin0H
3M \
%(РЦ> AP) = 1-^(cos20h-cos2(0h+0))«
X Яц®зм
Z2 / \
«——(0sin20H -0 'cos20H).
ХЯ/ H H'
Функция неопределенности траекторного сигнала при маневре
типа «змейка» для случая переднего обзора (0Н < 5 ) и времени синте-
зирования, равным периоду змейки (Тс = ГЗМ), определяется линей-
ным v(0) и гармоническим к(0) членами. В эгом случае ФН траек-
торного сигнала при манёвре типа «змейка» описывается выражением
Т z2
Лм(е) = ^- f exp{-j2n[v(0)z + K(0)cosoj3Mz]}dZ.
Т,м/2
(4-30)
Первое слагаемое фазы функции неопределённости определяет
разрешающую способность по азимуту при равномерном прямоли-
нейном полёте, а второе разрешающую способность за счёт выпол-
нения манёвра типа «змейка».
Синтезирование апертуры антенны
175
Разрешающая способность по азимуту при прямолинейном
равномерном полете описывается выражением (4.17). При отсутст-
вии линейного члена решение интеграла (4.30) является функцией
Бесселя нулевого порядка и разрешение, определяемое только ма-
нёвром:
(4-31)
На рис. 4.17 показана функция неопределенности, рассчитан-
ная по формуле (4.29) при выполнении манёвра типа змейка для
углов ен1=о°, ен2=з°, ен2 = -5с.
3 о 3 е +е 0
VH • V-
Рисунок 4.17
Функция неопределенности РСА при выполнении манёвра змейка
Управление траекторией движения РСА (полет змейкой)
обеспечивает высокое разрешение и устраняет неоднозначность
наблюдения по азимуту в передней зоне обзора.
176
Глава 4
4.6. Передний обзор с моноимпульсноч антенной
Возможно наблюдение в передней зоне обзора (рис. 4.18) при пря-
молинейном полете носителя, когда для устранения неоднозначно-
сти по азимуту (лево/право) используется моноимпульсная антенна.
Доплеровская частота сигнала цели, находящейся под углом
± Оц относительно вектора путевой скорости в одном разрешаемом
элементе по дальности, определяется выражением
/(о„) = — c°s9
В общем случае угловое положение цели в процессе синтезиро-
вания изменяется:
Однако в тех случаях, когда перемещение носителя за время
синтезирования много меньше дальности до цели (Vt« 7?н), влияни-
ем изменения углового положения цели можно пренебречь
(0ц = const 1. В дальнейшем будем рассматривать этот случай.
Частота сигналов отражателей, находящихся в направлении
вектора путевой скорости (0ц = 0°), будет максимально возможной в
спектре отраженных сигналов:
/макс = Ж = 0) = 2Г?Х .
Функция неопределенности траекторного сигнала в режиме пе-
реднего обзора определяется выражением
Рисунок 4.18
Наблюдение целей при переднем обзоре
Синтезирование апертуры антенны
177
Г/2
j(ou)= J 5т(О,ф1(ец,г)д/ =
7^/2
?i/2
= J exp{j27r/MaKC?}exp{-j27r/(eu)z} d/ =
-TJ2
TJ2
= [ exp|j2nAf d/,
-K /2
где разность между максимальной частотой 4акс и частотой f (0ц) на
выходе системы обработки определяется выражением
А/(0и ) = /макс ~ / (0ц) =-( I - cos 0ц) =-—sm —.
\ Ц у МаКС *^ \ ^ / У'
Для малых углов 0ц, характерных для режимов переднего обзо-
pa, sin0u ~0 ; и
<4 0„.
Следовательно, угловое положение цели по азимуту 0ц и ее до-
плеровская частота связаны соотношением
0 =+J— л/ •
ц y V J
Так как сигналы целей, расположенных симметрично (слева и
справа) относительно вектора путевой скорости, имеют одинаковою
доплеровскую частоту, они попадают в один и тот же доплеровский
фильтр.
Разделение таких сигналов возможно при испо льзовании моно-
импульсной (суммарно-разностной) антенны. Сигналы целей, при-
нимаемые с углов ±0Ц на частоте со(0к) = (0ц) будут описываться
выражениями:
4 (+ец)=4ejW+6“)+,₽0'); 4 (-ец) = Aej(“Hub),
где Ль фоь А2, Ф02 - амплитуда и начальная фаза сигналов отражён-
ных от целей с углов +0ц и 0ц соответственно.
В суммарном канале моноимпульсной антенны на частоте соц
будет приниматься сумма сигналов:
178
Глава 4
щ (®ц)=Д (+ец) g2 (+ец)+2 (-ец) сД-ец), (4.32)
где Gs(O) - диаграмма направленности антенны суммарного канала.
В разностном канале моноимпульсной антенны на частоте соц
сигнал имеет вид
(<*«)=4 (+9Ц) (+ец)+4 (-ец)сд(-ец),
(4.33)
где Сд(0) - диаграмма направленности антенны разностного канала.
Таким образом, выражения (4.32) и (4.33) являются системой
уравнений с двумя неизвестным: Д(+6Ц) и Л2(-0Ц). Решение
этой системы на основе наблюдений и £7д(соц) позволят
вычислить оценки амплитуд сигналов, приходящих слева и справа
относительно вектора путевой скорости А} (+0ц) и А2 (-0Ц) -
(4.34)
При вычислении выражений необходимо учитывать зависи-
мость сои = (4л/Х)Гсс8(бц). В случае, когда равносигналыюе на-
правление антенны направлено вдоль вектора путевой скорости
можно считать, что G^(-0U) = G^(+0U) и GA(-0U) = GA(0U). Выражения
для нахождения амплитуд в левом и правом каналах примут вид:
(4.35)
Использование моноимпульсной антенны при прямолиней-
ном полете позволяет устранить неоднозначность наблюдения в
передней зоне обзора по азимуту.
Синтезирование апертуры антенны
179
4.7. Функция неопределенности
траекторного сигнала
радиолокационной системы
с синтезированием апертуры антенны
планового обзора
В РЛС планового обзора формируется двухмерная синтезированная
апертура. Непрерывный немодулированный зондирующий сигнал
облучает одновременно всю заданную зону обзора, находящуюся
под ЛА. Отраженный сигнал принимается линейной приемной ан-
тенной решеткой размером У , расположенной поперек линии пути.
Амплитуда и фаза отраженного сигнала в каждом элементе решетки
запоминаются в течение времени Z.. т.е. при перемещении по уча-
стку траектории движения размером Хс = VTC формируется двух-
мерная синтезированная апертура размером XcYa (рис. А19).
На выходе системы обработки получается двухмерный сигнал,
амплитуда и фаза которого соответствуют амплитуде и фазе коэф-
фициента отражения соответствующего участка зоны обзора, т.е.
изображению местности и объектов в зоне обзора.
Суммарное расстояние гп (/) от передатчика до цели г\ (/) и от
цели до приёмного элемента антенной решётки г2 (/) изменяется по
закону
Аналогичным образом изменяется суммарное расстояние меж-
ду РЛС и опорной точкой смещённой относительно цели на
(Ах, Ay, Az):
гр (О = V(xh + А* + ^)2 + (Л + Ду)2 + ( z,. + Az)2 +
+J(xH + Дх + Vt)2 ,+ (ун + Ду + у)2 1 (zH + Дг)2.
180
Глава 4
Рисунок 4.19
Система координат двухмерной СА
Нормированная ФН (4.6) для двухмерного сигнала, определяет
разрешение по всем трём пространственным координатам (х, у\ z) :
/(Ar„, Аун, AzH)
TJ2 Y./2
(4-37)
j f jy(/,y)exp|j/cAr(Ax, Ay, Az, t, y^dtdy
где _ весовая функция системы обработки, которую будем
считать независимой от малых смещений параметров (Ах, Ду, Az).
Разность расстояний Аг при смещении координат объекта
Ar(Ax, Ду, Az, /, у) = г0 (/) - гр (/) =
Синтезирование апертуры антенны
181
-д/(хн+Ах + х)2 + (ун + Ду)2 + (zH + Az)2 -
(438)
~7(хн + Ах + х)2 + (^н + у + Ay)2 + (zH + Az)2 .
Здесь и далее сделана замена Vt - х .
Для упрощения (4.37) рассмотрим случай, когда расстояние от
РЛС до объекта значительно больше размеров апертуры и разре-
шающей способности станции (7?н » Хс, 7?н » Уа, 7?н » 5р ).
Кроме того, заменим координаты (Дх, Ду, Z\z) координатами
(г, /, г/), т.е. представим функцию неопределённости в координатах
дальность - азимут - угол места.
Для упрощения расчётов ДН антенны и весовую функцию об-
работки зададим в виде
При введении такой функции допустимо без больших ошибок
брать интеграл (4.37) в бесконечных пределах. Разлагая выражения
(4.38) в ряд и пренебрегая членами второго и большего порядка,
можно представить нормированную ФН РЛС планового обзора в
виде
J ОО 00
j(r, /, и} =------- J Jexp{a^x + b^x2 +соу + J(1y|dxdy. (4.39)
-со -ос
Для случая, когда цель находится в передней зоне обзора (ун = 0)
. 2тг wHsin(cpH)( гн wHctg(cpH)\
I I- ' 5
° X R„ I RH R„ ,
Н \ П Г1 /
Разрешающая способность РЛ С планового обзора по каждой из
трёх пространственных координат определяется выражениями:
5Z = 0,88Mf/rasin((pH),
182
Глава 4
5r = 0,45AJ//A'csin3((pH),
(4.40)
___________7ХЯ2____________
2^c2sin3((pH)+ra2sin3 (<pH)
Иллюстративно вид функции неопределённости в координатах
дальность - угол места, построенной по (4.39), изображен на рис.
4.20. Разрешение по дальности обусловлено фокусирующими свой-
ствами апертуры , а по углу места - диаграммой направленно-
сти синтезированной апертуры Хс.
Рисунок 4.20
Функция неопределенности при плановом обзоре
Двухмерная апертура антенны с синтезированием по линии пу-
ти носителя РСА обеспечивает наблюдение непосредственно под ЛА.
4.8. Интерферометрический режим измерения
высоты объектов
Данные для формирования РЛИ в обычном режиме РСА получают в
виде распределения ЭПР объекта в координатах задержка - допле-
ровская частота. Затем, полагая, что земная поверхность плоская,
пересчитывают координаты соответственно в дальность - азимут.
Синтезирование апертуры антенны
183
Рельеф местности искажает масштаб РЛИ в районе значитель-
ных изменений высоты поверхности. При малых изменениях высоты
(микрорельеф) эти искажения невелики, что не позволяет опреде-
лить их характеристики по искажениям масштаба.
В то же время информация о рельефе местности, в том числе о
малых изменениях высоты поверхности является важной как для со-
ставления цифровых карт местности, так и для вскрытия ряда объек-
тов (карьеров, отдельных сооружений и т.д.).
Для получения информации об изменении высоты поверхности
объектов (местности) в РСА используют интерферометриче-
ский режим (рис. п. 6), при котором измеряется угол места ка-
ждого разрешаемого по дальности и азимуту элемента с помо-
щью специальной антенной системы - интерферометра.
При использовании бортовой антенны точность измерения угла
места ср определяется шириной ДН антенны в утломестной плоскости
при работе на приём и передачу Фо и отношением сигнал/шум qQ :
пф=Фо/а&- (4-41)
Высота рельефа определяется углом ср, измеряемым антенной
(рис. 4.21):
Д = ф7?н/сов<рн .
(4-42)
Точность измерения высоты рельефа в этом случае равна
(4.43)
_ С(рЛн _ <МН
I
C0S(pH V^C0S(Ph
Система координат при измерении рельефа местности
184
Глава 4
Так, при ширине ДН антенны Фо = 1 , q0 - 100 , Лн = 1 км ,
срн = 10г потенциальная точность измерения высоты <Jh = 10 м .
Чем больше размер антенны, тем выше точность измерения уг-
ла места и соответственно высоты рельефа. Учитывая трудности
создания и размещения большой антенны на ЛА, используют две
относительно небольшие антенны, разнесенные на расстояние, го-
раздо большее размера каждой антенны (интерферометр).
Интерферометр формирует в угломестной плоскости многолу-
чевую ДН (рис. 4.22), при этом ширина каждого луча определяется
размером интерферометра с/и , а число лучей - шириной ДН отдель-
ной антенны.
Сигналы, принимаемые соответственно первой и второй антен-
нами, равны:
щ = A sin со/, и2 = A sin (со/ + ip).
Суммарный сигнал детектора на выходе приемника
= 2А cos (vp/2) •
Фаза сигнала интерферометра \р зависит от угла прихода ср:
2 nd
\р -----—sinср. (4.44)
X
Измеряя фазу ср , можно определить угол ср. Для малых углов
ср, когда sin ср = ср , угол в центральном луче
Рисунок 4.22
Диаграмма направленности интерферометра
Синтезирование апертуры антенны
185
(4.45)
<р =----
2лб/
и
Точность измерения высоты интерферометром определяется точ-
ностью измерения фазы = 1/. СКО измерения высоты равна
2лс/и cos<pH7^
(4.46)
Точность измерений интерферометром (зависимость фазы от
угла) может быть увеличена в два раза, если излучать сигнал пооче-
редно из верхней и нижней антенн.
Нули суммарного сигнала будут повторяться при фазах, равных
= л {2т + 1), что соответствует углам
(4.47)
где т - любое целое число.
В простейшем интерферометрическом режиме РСА на изобра-
жении местности в координатах дальность - азимут выводят линии
равных углов ср. Расстояние между линиями характеризует измене-
ние угла места и соответственно высоты рельефа местности.
точность измерения высоты рельефа h интерферометрической
РСА определяется точностью измерения всех параметров Н, Лн,
(рн (р и угла наклона базы интерферометра <ри (рис. 4.23).
Рисунок 4.23
Измерение высоты рельефа с помощью интерферометрической РСА
186
Глава 4
В большинстве разведывательных задач нас интересует изме-
нение высоты от одного разрешаемого элемента к другому в
пределах относительно небольшого кадра РЛИ. Иногда такой
режим называют дифференциальным.
В этом случае СКО изменения высоты определяется точно-
стью измерения изменения фазы интерферометрического сигнала.
При отклонении базы интерферометра на угол <ри
_____________И,_____________
2nJHcos(<p11 - <рн )cos(<pH
(4.48)
При Х = 3см, /?н - 6 км , q{} =100, <7и=3м, cos((pH) « 1,0 ,
(рн = (ри потенциальная точность измерения высоты Gh = 1 м .
Пути повышения точности измерения высоты
Увеличение базы интерферометра б/и.
Увеличение отношения сигнал-шум в канале измерения фазы
интерферометрического сигнала (несколько обзоров при неко-
герентном накоплении сигнала РСА).
Использование пространственно-временного фильтра слежения
за изменением фазы сигнала.
Измерение высоты рельефа местности возможно путем ис-
пользования ДНА в вертикальной плоскости. Точность измерения
высоты рельефа повышается при антенне типа интерферометра.
ГЛАВА 5
Радиолокационная система
с синтезированием апертуры антенны
5.1. Структура модели
радиолокационной системы
с синтезированием апертуры антенны
Рассмотренная в гл. 3 модель радиолокационного наблюдения далее
конкретизируется для радиолокатора с синтезированной апертурой.
Структура модели РСА состоит из физических элементов (объекты,
ЭМВ, системы и т.п.), процессов, происходящих в них, и математи-
ческих моделей элементов и процессов. Основной задачей разработ-
ки математических моделей элементов и процессов является синтез
оптимального классификатора наблюдаемых объектов (целей).
Объекты включают в себя все возможные их классы при задан-
ной решаемой тактической задаче. В зависимости от задачи изменя-
ются возможные объекты радиовидения, их количество и характери-
стики. Объекты характеризуются физическими свойствами, т.е. клас-
сом объекта (танки, сооружения, конкретная местность, аэродромы,
корабли и т.п.), их функциональным состоянием (вид деятельности,
движение, изменение параметров и т.п.) и местоположением, т.е. рас-
положением в заданном районе, квадрате, точке с известными коор-
динатами. Каждый объект в конкретном функциональном состоянии и
данном местоположении представляет один из возможных классов
объектов, т.е. объект i из всех классов (i = 0,1,2,..., I).
Исходя из такой логики классификации каждый объект в РСА
характеризуется своей функцией отражения. Задача РСА в этом
188
Глава 5
Рисунок 5.1
Схема классификации объекта
случае состоит в формировании функции отражения, в которой за-
ключена информация об объекте, оценки её характеристик и клас-
сификации объекта, т.е. отнесение его к одному из I объектов за-
данной классификации.
Пространство функций отражения 9- однозначно соответству-
ет пространству объектов, т.е. объект i имеет функцию отражения
3,, которая отличается от функции отражения объекта j: 3, Ф Зу
(рис. 5.1).
Почти все задачи радиолокационного наблюдения (обнаруже-
ние, измерение координат, разрешение, распознавание и др.) можно
рассматривать и оптимизировать их с единых позиций классифика-
ции целей. В этом случае каждой цели, её функциональному состоя-
нию и местоположению приписывается своя функция отражения
класс цели. Классификация цели сводится к решению о принадлеж-
ности отражённой от цели электромагнитной волны к той или иной
функции отражения и, соответственно, к той или иной цели.
Функция отражения &,(хц) - комплексная функция, соответ-
ствующая матрице рассеяния объекта в заданном поляризаци-
онном базисе при всех остальных заданных характеристиках
поля облучения.
Облучающая ЭМВ в результате рассеяния на объекте форми-
рует ЭМВ отражения, в которой заключена информация о функции
отражения объекта (рис. 5.2). В дальнейшем будем полагать, что
ЭМВ облучения, поляризация облучающей и отражённой волн, уг-
лы облучения объекта и приема отраженной волны известны.
Рисунок 5.2
Схема формирования траекторного сигнала
Модель радиолокационной системы с синтезированием апертуры антенны
189
Функцию отражения часто называют также локальной функцией
рассеяния как зависимость изменения во времени амплитуды и
фазы рассеянной волны отдельными элементами объекта с ко-
ординатами хц ={%ц,уц,2ц|.
Отраженная от объекта ЭМВ распространяется к антенне РЛС в
среде распространения, которую можно считать линейной системой.
Поле ЭМВ вблизи приёмной антенны РЛС в этом случае можно
описать как результат прохождения отраженной волны через линей-
ную систему с импульсной переходной характеристикой /?(х). Ан-
тенна РЛС находится на движущемся носителе, следовательно, есть
случайные отклонения от заданной траектории (траекторные неста-
бильности) и, кроме того, существуют неоднородности параметров
среды распространения. Поэтому характеристика /г(х) имеет как
регулярную (х), так и случайную hc (х) составляющие:
/г(х) = /гр(х)/гсл(х).
Принятая антенной ЭМВ на траектории носителя РЛС форми-
рует траекторный сигнал, который включает в себя также различно-
го рода помеховые сигналы от посторонних источников помех и
внутренние шумы:
C/Tj(x) = yri(x)4-w(x),
где - траекторный сигнал/-го объекта; т?(х) - внутренние шумы
и помехи.
Обычно внутренние шумы считаются белыми (некоррелиро-
ванными), а помехи (фон, активные помехи) - коррелирован-
ными в пространстве и времени.
Сформированный траекторный сигнал служит основным ис-
точником информации для решения задачи классификации объектов,
т.е. обнаружения, распознавания и определения местоположения. В
дальнейшем на основе синтеза оптимального классификатора задача
распределяется на два этапа.
Этап 1. Первичная обработка — получение радиолокационного
изображения (оценка функции отражения 6Z).
Этап 2. Вторичная обработка — решение задачи классифика-
ции объекта по его изображению (рис. 5.3).
Такое деление обусловлено несколькими причинами. Траектор-
ный сигнал несет в себе большое число неинформативных параметров
190
Глава 5
Рисунок 5.3
Схема классификации объекта по его РЛИ
(мощность передатчика, параметры нестабильностей, скорость носи-
теля и т.п.), и первичная обработка устраняет эти избыточные неин-
формативные параметры. Кроме того, первичная обработка использу-
ет всю возможную априорную информацию, общую для всех объек-
тов (длина волны, поляризация, дальность обзора, высота полета,
мощность фона и помех и т.п.). В результате первичная обработка,
устраняя несущественную информацию, сохраняет достаточную ста-
тистику для решения всех необходимых задач классификации.
Разделение классификации на цва этапа позволяет на этапе 2
использовать априорную информацию о конкретном классе объекта
и уникальные возможности оператора-дешифровщика, который мо-
жет использовать сложную логически-интуитивную априорную ин-
формацию при анализе изображения объекта. Современные эксперт-
ные (интеллектуальные) системы не могут заменить в полной мере
опытного оператора, который будет принимать окончательное ре-
шение, возлат ая на ЭВМ-классификатор вспомогательные задачи.
Первичная обработка траекторного сигнала сводится к его
пропусканию через линейную систему с импульсной переходной ха-
рактеристикой Л*(х), что обеспечивает на выходе получение пре-
образованной функции отражения i объекта искаженной
шумами, т.е. радиоизображение объекта.
Вторичная обработка обеспечивает корреляционную обработ-
ку радиоизображения 3-, (хц) с известными опорными (эталонными)
функциями отражения 3*(хц). Максимум корреляции соответству-
ет совпадению классов объектов изображения и опорной функции
j = i, что соответствует решению, что объект принадлежит к классу
/, так как каждый класс есть изолированная от других точка в про-
странстве решений.
Полная структура модели РСА землеобзора показана на рис. 5.4.
Модель радиолокационной системы с синтезированием апертуры антенны
191
Рисунок 5.4
Схема модели РСА
192
Глава 5
Задачей радиовидения является классификация объектов,
которая заключается в определении: наличия объекта (обнаруже-
ние), его типа и функционального состояния (распознавание), ме-
стоположения (координаты объекта).
Модель классификатора объектов предполагает разбиение
всех возможных в решаемой тактической задаче объектов с их
характеристиками на конечное число непересекаюшихся областей
(точек), каждой из которых присваивается свой номер класса.
Модель РСА состоит из системы формирования траекторно-
го сигнала путем облучения объекта и приема отраженного поля
по траектории движения носителя, системы первичной обработки
траекторного сигнала для формирования изображения объекта и
системы вторичной обработки для классификации объектов по их
изображению.
5.2. Траекторный сигнал
Схема формирования траекторного сигнала показана на рис. 5.5.
Носитель РЛС перемещает РЛС по заданной траектории. Пере-
датчик и ДН передающей антенны формируют поле облучения объек-
та (цели). В результате взаимодействия ЭМВ облучения с объектом
Рисунок 5.5
Схема формирования траекторного сигнала
Модель радиолокационной системы с синтезированием апертуры антенны 193
образуется поле излучения объекта (отражённая ЭМВ), которое про-
ходит в среде распространения к приёмной антенне РЛС. Принятая
антенной ЭМВ усиливается и преобразуется в траекторный сигнал.
Поле облучения объекта определяется ДН передающей антенны
и траекторией ее перемещения относительно объекта. Если апертур-
ная функция передающей антенны задана как распределение поля по
апертуре Еа (£>,т|), то поле в дальней зоне реальной антенны в по-
лярной системе координат 7?, О,ср :
Д (0,фЛ) = ^exp{-j&/?} X
X JX (£„г|) exp Iук sin0 coscp + г| sin0 sincp)[ d^dp,
A
(5-1)
где A - площадь антенны на плоскости (^,л)’ для К0Т0Р°й задана
апертурная функция Еа(^,т|).
По определению, нормированная функция Ео(0,ф) есть ДН
передающей антенны F(0,(p).
Пусть антенна РЛС расположена так. что ось 7?н, нормальная к
плоскости (%,л), направлена в центр зоны обзора под углом 0и,фн
относительно вектора путевой скорости V носителя РЛС (рис. 5.6).
Ширина зоны обзора в плос-
кости (X, У) определяется
шириной ДН передающей
антенны.
При движении носителя
РЛС с постоянной скоростью
V возникает доплеровское
смещение несущей частоты
ЭМВ, пропорциональное ко-
синусу угла между направ-
лением на объект и вектором
путевой скорости носителя.
Таким образом, каждому на-
правлению в зоне обзора со-
ответствует поле облучения
Рисунок 5.6
Формирование поля облучения
194
Глава 5
со своей определённой доплеровской частотой. Для объекта, нахо-
дящегося в центре зоны обзора, доплеровская частота равна
; = —COS0H COS(pH
(5-2)
и изменяется при отклонении от центра обзора.
Поле облучения Е0(хц) и функция отражения цели о(хц)
формируют отраженное поле цели Ец^Хц^Ео^Хц^о^Хц). Напом-
ним, что цель есть заданный для наблюдения объект, т.е. объект на-
шего интереса.
Пройдя среду распространения от цели до РЛС отраженное по-
ле возбуждает в апертуре приемной антенны поле Ет т|). После-
довательно перемещаясь в пространстве по заданной траектории с
помощью носителя РЛС приемная антенна формирует за время син-
тезирования Гс траекторный сигнал - синтезированную апертуру.
Так как размер СА Хс гораздо больше размера d реальной аперту-
ры, цель в большинстве случаев находится в промежуточной (а не в
дальней) зоне С А. Поэтому поле Ет г|) на траектории определя-
ется как преобразование Френеля (а не Фурье) от поля рассеяния це-
ли £ц(Хц):
(5.3)
где г - расстояние от точки цели хц до точки на СА с координата-
ми реальной апертуры и координаты х траекторного сигнала.
Физически такая запись означает, что каждая точка цели в про-
exp ]kt j
цессе отражения формирует сферическую волну -------- и общее
поле на СА есть сумма сферических (а не плоских как в дальней зо-
не) волн от каждой точки цели.
В простейшем случае поле в апертуре реальной антенны сум-
мируется синфазно, образуя суммарную ДН на прием. При решении
задач измерения координат, селекции движущихся целей и ряда дру-
гих формируют более сложные ДН реальной антенны, например мо-
ноимпульсные.
Модель радиолокационной системы с синтезированием апертуры антенны [ 95
Для большей наглядности процесс формирования траекторного
сигнала детализируем для одного конкретного случая - прямоли-
нейной траектории (рис. 5.7) и суммарной ДН антенны на передачу
и прием.
Носитель РЛС движется с постоянной скоростью V вдоль оси
X. Линейная антенна размером d (ось ) расположена вдоль оси
X. В пространстве целей на расстоянии /?н формируется полоса об-
зора (Х[?УЦ). Такой случай соответствует боковому обзору РСА.
Представим расстояние г = yjx? +(/?н + уц)2 в виде степенного ряда
и отбросим малые члены с учетом, что RH » ХС,ХЦ:
(5.4)
Тогда поле цели на траектории можно записать как преобразо-
вание Френеля поля Ец (хц):
Рисунок 5.7
Формирование траекторного сигнала
196
Глава 5
антенны на прием F, т.е. Ет(/) = —
Будем формировать суммарную нормированную ДН реальной
р?т dS,. При интегрирова-
d
нии по здесь пренебрегаем членом , так как на малой апертуре
реальной антенны поле можно считать плоским (дальняя зона реаль-
ной антенны). В результате траекторный сигнал лт (/) как функция
времени (координаты х - Vt)
(9 = ^(0 =
exp{-jAflu} J _[Ец(хц,.уц)ехр{ЛАуц
хехр< -jk
(5.6)
Полагая, что на прием и передачу используется одна и та же
антенна и с учетом, что
ец (w«)=£о (w«)9(wj >
поле синтезированной апертуры будет иметь вид
exp{-j2^7?H} j |£аЗ(хц,уц)ехр{-]2Ауц}
хехр< -jk
(5.8)
Анализ структуры поля синтезированной апертуры (траектор-
ного сигнала) показывает следующее.
1. Множитель
exp{-j2£7?H}
определяет амплитуду и
начальную фазу, одинаковую для всех целей в зоне А"ц,Уц и посто-
янную по синтезированной апертуре.
2. Фазовый множитель ехр{-/2Ауц} определяет изменение по-
стоянной по апертуре начальной фазы при изменении координаты
дальности цели.
Модель радиолокационной системы с синтезированием апертуры антенны
197
3. Фазовый
множитель
- 2хцГ/ + Г2/2)
> определяет:
2
изменение начальной фазы от координаты цели (член хц);
• квадратичное изменение фазы сигналов, одинаковое для всех
целей по апертуре (член );
• линейное изменение фазы по апертуре, пропорциональное ко-
ординате цели (член 2хцИ/), т.е. доплеровской частоте траек-
торного сигнала /ц =(2V/ХЛн)х, , пропорциональной углу це-
ли ец — хц/т?н.
4. Амплитудный множитель F" (хц -Vt/R^ 9 который форми-
руется ДН антенны F(Q) и определяет амплитудную функцию об-
работки траекторного сигнала F'(t), максимально возможный ин-
тервал синтезирования А"смакс и зону обзора по углу F2(xu).
Если пространство целей задано одним точечным отражателем
с функцией отражения 3(х1й)-5(хц -xui), то нормированное зна-
чение поля такой цели на апертуре по определению является им-
пульсной пространственно-временной характеристикой линейной
системы преобразования пространства объектов (целей) в простран-
ство траекторного сигнала. Траекторный сигнал в этом случае
\(x>xui) = f a(xu)4(x«i’x)dxu>
где h (xui,xj - импульсная переходная характеристика.
Для нашего конкретного случая бокового обзора нормирован-
ную импульсную переходную характеристику системы функция от-
ражения - траекторный сигнал получим, подставляя в (5.8) функцию
отражения S(xui ,j’uj) = §(хц - хЦ1 ,уц - vui)
hP (Л *ц> > Уш ) = ехР {“ } ехР {- J2 } х
198
Глава 5
В большинстве случаев для гладкой траектории импульсная пе-
реходная характеристика системы «функция отражения - траектор-
ный сигнал» может быть представлена в виде
(5.10)
где Игц - радиальная составляющая скорости носителя огносительно
цели; ягц - радиальная составляющая ускорения носителя относи-
тельно цели; 0Ц1 = а,xi/7?H -угол цели; <р0 - начальная фаза, опреде-
ляемая расстоянием от цели до носителя при t — 0.
Траекторный сигнал РСА есть результат прохождения функ-
ции отражения цели через линейную систему с импульсной пе-
реходной характеристикой, определяемой траекторией носи-
теля РСА, ДН антенны и характеристиками среды распро-
странения.
Случайные изменения фазы траекторного сигнала
В реальных условиях работы РСА среда распространения вносит
случайные, в основном фазовые, изменения в электромагнитную
волну, нарушающие когерентность траекторного сигнала. Эти изме-
нения могут быть учтены в виде случайной составляющей импульс-
ной переходной характеристики:
где /?с (x)-exp|j\|/(x)|; \|/(х) - случайные изменения фазы траек-
торного сигнала.
Ионосфера как среда распространения электромагнитных волн
при работе РСА влияет на фазовые флуктуации траекторного сигна-
ла в основном на частотах менее 3 ГГц (дециметровый и метровый
диапазоны).
Набег фазы в ионосфере оценивается величиной
\|/0 = (А/2/о) 10 4, где А- число электронов в столбе ионосферы се-
Модель радиолокационной системы с синтезированием апертуры антенны
199
чением 1 м2, равное 1016... 1019 в зависимости от состояния ионосфе-
ры (время года, суток, солнечная активность и т.п.); /0 - часто-
та, Гц.
Случайный набег фазы электромагнитной волны в ионосфере
определяется случайным изменением числа электронов вдоль раз-
личного пути распространения вследствие перемещения РЛС. Про-
странственная неоднородность ионосферы имеет радиус корреляции
менее 150 м и СКО числа электронов менее 1%, что определяет мак-
симальное СКО случайной фазы, равное (А//0 ) • 1О-6.
На фазовые изменения траекторного сигнала также оказывает
влияние изменение параметров тропосферы. Изменением показателя
преломления тропосферы во времени можно пренебречь, поскольку
время корреляции флуктуаций составляет 20... 100 с, что меньше
времени синтезирования. Пространственные изменения показателя
преломления обусловлены турбулентностью атмосферы с размерами
областей вихрей до сотен метров. Разность коэффициентов прелом-
ления n(x^-ri(x2} внутри вихрей является стационарным случай-
ным процессом, который характеризуется структурной функцией
(дисперсией)
D М = с2х2/3
спл ’
где с2 - структурная постоянная, определяемая состоянием атмо-
сферы.
В радиодиапазоне частот значения ее лежат в пределах
10”14... 10’16 и существенно убывают с высотой, так что основной
вклад во флуктуации показателя преломления вносит нижнш! слой
тропосферы толщиной 3...5 км.
Если плоская электромагнитная волна проходит область турбу-
лентности на расстояние R и обратно, структурная функция фазы
дД*)=М
>
т.е. дисперсия разности фаз на СА
(ось х), будет равна:
Д, (х) = 5,82 £2Ясп2х5/3 .
(5.12)
Разность фаз — \|/(х2) является нормальной случайной
величиной, а ее СКО растет примерно линейно к концу синтезиро-
200
Глава 5
ванного раскрыва, когда (jq - х2 - Хс ). При этом, чем короче длина
волны РСА, тем больше влияние турбулентности.
В дециметровом и метровом диапазонах волн поглощение в ли-
стве деревьев мало и электромагнитная волна распространяется
сквозь лесной массив, что позволяет наблюдать объекты под поло-
гом леса. Случайно расположенные стволы деревьев и сучья вносят
случайный набег фазы волны. Корреляционная функция случайной
фазы от угла синтезирования Р
7?(p)=D,,exp
[ ₽2О <
(5.13)
I ш
где D — дисперсия фазы, равная 0,026 рад" (зимой) и 0,057 рад2
(летом); (Pj =4,9-10 2 рад (зимой) и 5,1-10 2 рад (летом);
<р2 =2,6-10 2 рад (зимой) и 2,8-10 2 рад (летом) для смешанного
леса и X = 70 см.
Наибольшие фазовые ошибки вносят в траекторный сигнал от-
клонения движения носителя РЛС от заданной траектории. Траектор-
ные нестабильности приводят к изменению фазы сигнала вследствие
случайного изменения текущего расстояния г(/) от объекта до фазо-
вого центра антенны РЛС. Эти отклонения обусловлены турбулентно-
стью среды, в которой движется носитель РЛС, системой управления
носителя, изгибными колебаниями и вибрациями конструкции носи-
теля и самой РЛС. Основное влияние на изменение текущего расстоя-
ния оказывают боковые отклонения и рыскание носителя.
Корреляционная функция случайных боковых отклонений для
самолетов различного типа
Яг (т) = Д.ехр<
cos
(5.14)
2тк ’
где y]Dr = 1...10 м - СКО отклонений; тк = 2... 12 с; т0 = 5... 10 с .
Для угловых колебаний (рыскания) корреляционная функция
имеет тот же вид, а ее параметры составляют: JD0=1...2;
тк = 1 ...5 с ; т0 - 5... 10 с . Обычно в случайную составляющую
можно включить также фазовые нестабильности аппаратуры (антен-
на, приемо-передатчик). Таким образом, случайная составляющая
импульсной переходной характеристики траекторного сигнала
Модель радиолокационной системы с синтезированием апертуры антенны
201
/гсл = exp|-jv|/(/)| имеет случайную фазу как результат всех неста-
бильностей формирования траекторного сигнала.
Случайное изменение фазы траекторного сигнала разрушает
его когерентность и ухудшает все характеристики РСА. Для компен-
сации случайной фазы траекторного сигнала используют специаль-
ные устройства (микронавигация) и алгоритмы (автофокусировка).
Принципы их работы будут рассмотрены в последующих главах.
Статистические характеристики
траекторного сигнала
Рассмотрим статистические характеристики траекторного сигна-
ла, определяемые случайным характером функции отражения.
Траекторный сигнал цели в пределах элемента разрешения по
дальности, опуская несущественные в данном случае постоянные
множители, можно представить в виде
(х) = 1>2(хц)э(хц)ехр
(5.15)
где г(х,хц j - текущее расстояние между РЛС (ось А) и координатой
цели хп на полоске дальности; г 1x1 - постоянное во времени
поле облучения и приема по азимуту.
Предположим, что квадратичный и более высокие члены раз-
ложения в ряд функции г(х,хц) скомпенсированы. Тогда траектор-
ный сигнал
(5.16)
является преобразованием Фурье распределения поля отражения це-
ли F2(xu)3(x ) в пределах полоски дальности.
Корреляционная функция такого сигнала
—оо -со
202
Глава 5
Рассмотрим типовую функцию отражения цели в виде неодно-
родного, некоррелированного, комплексного шума с корреляцион-
ной функцией
Кц (ХцРХц2) “ ®(хц1 (хц2 ) ~ G0r ( Х111 )^( Хц1 Хц2Ь
(5.18)
где суОг (хц1 ) - удельная ЭПР цели в элементе разрешения по даль-
ности (полоске дальности).
Для такой функции отражения цели корреляционная функция
траекторного сигнала (5.17)
(5.19)
является преобразованием Фурье распределения мощности отра-
женного сигнала г I хц ) сгОг I хц I полоски дальности.
С учетом того, что корреляционная функция траекторного сиг-
нала (5,19) зависит от разности координат:
/Сг(Х1,х2
-х2) = Ат(Дх),
траекторный сигнал является стационарным случайным процессом,
несмотря на то что функция отражения нестационарна.
Определим интервал корреляции траекторного сигнала. Для
упрощения выкладок представим диаграмму направленности антен-
ны (на передачу и прием) в виде
F2 (0) - ехр
= ехр< -2,78
где 0О - ширина ДН антенны на уровне 0,5.
В этом случае корреляционная функция (5.19) имеет виц
Для однородного случайного поля отражения (степь, сплошной
лес, ВПП и т.п.) суОг = const и корреляционная функция траек-
торного сигнала
о
Модель радиолокационной системы с синтезированием апертуры антенны
203
ЛГт(Дх) = ехр< -7,1
Интервал корреляции на уровне 0.7
8КТ = 0,5 ре0= 0,54/,
(5.20)
(5.21)
где d — размер апертуры антенны.
Время корреляции при движении носителя с постоянной скоро-
стью V равно
Ь, =0,5d/V.
(5.22)
В случае сосредоточенной цели размером много меньше разме-
ра по азимуту полоски дальности б/ц « , удельную ЭПР цели
можно представить в виде
°0г(Хц) = еХР] 2’78
где - размер цели на уровне 0,5 значения ЭПР.
В этом случае интервал корреляции траекторного сигнала оп-
ределяется размером цели:
8ет=Х7?н/2<.
(5.23)
Если интервал разрешения РСА равен размеру цели 8хц = с!ц,
то 8КТ = Х7?н/28хц . Учитывая, что разрешение 8хц = Х7?Н/(2ХС) по-
лучим. что в этом случае интервал корреляции траекторного сигнала
равен интервалу синтезирования
(5.24)
Если размер цели много меньше интервала разрешения РСА
(б7ц « 8хг ), т.е. цель точечная, интервал корреляции траекторного
сигнала 8,., » Хс.
К1 V
При изменении положения диаграммы направленности антенны
распределение мощности отраженного сигнала вдоль полоски даль-
ности изменяется в процессе формирования траекторного сигнала за
время синтезирования, что приводит к его нестационарности.
204
Глава 5
Изменение мощности отраженного сигнала в результате смеще-
ния ДН антенны в общем случае приводит к изменению дисперсии
траекторного сигнала, однако интервал корреляции не изменяется.
Траекторный сигнал в модели РСА (сигнал цели, принимае-
мый на траектории носителя) формируется в результате прохож-
дения функции отражения цели через линейную систему с им-
пульсной пространственно-временной переходной характеристи-
кой, определяемой траекторией носителя РСА, ДН антенны и
характеристиками среды распространения электромагнитной
волны. Пространством является плоскость приемной апертуры
реальной антенны, а временем - изменение поля на апертуре при
движении носителя по траектории.
Амплитуда переходной характеристики определяется фор-
мой и направлением ДН в пространстве целей.
Фаза переходной характеристики в большинстве случаев
может быть представлена линейным и квадратичным членами
изменения во времени. Линейный член определяется радиальной
составляющей скорости перемещения фазового центра антенны
относительно цели, а квадратичный - радиальной составляющей
ускорения.
В реальных условиях работы импульсная переходная харак-
теристика имеет случайный фазовый множитель, обусловленный
случайным изменением фазовой характеристики приемо-пере-
дающего тракта, среды распространения электромагнитной вол-
ны, а также случайными отклонениями траектории носителя от
заданной (траекторными нестабильностями).
Статистические характеристики траекторного сигнала, опре-
деляемые случайным характером функции отражения объектов,
зависят от соотношения размера объекта и интервала разрешения
РСА.
Траекторный сигнал цели с функцией отражения типа слу-
чайного поля имеет интервал корреляции, равный половине раз-
мера реальной антенны.
С уменьшением размера цели интервал корреляции траек-
торного сигнала увеличивается. При размере цели, равном эле-
менту разрешения РСА, интервал корреляции траекторного сигна-
ла равен интервалу синтезирования. При размере цели, много
меньшем элемента разрешения (точечная цель), траекторный сиг-
нал становится детерминированным и представляет собой им-
пульсную переходную характеристику.
Модель радиолокационной системы с синтезированием апертуры антенны
205
5.3. Классификатор целей
Синтез оптимального классификатора целей основывается на стати-
стической теории многоальтернативного обнаружения, т.е. строится
многоканальная система (рис. 5.8), каждый канал которой настроен
на оптимальное обнаружение траекторного сигнала, соответствую-
щего одной из всего класса
функций отражения целей.
Далее рассмотрим част-
ный, но для радиовидения
типовой, случай классифика-
ции целей по их РЛИ функ-
ции отражения. Каждой i
функции отражения из задан-
ного множества : 1' соответ-
ствует цель с известным рас-
пределением по пространству
(хц,уц,иц) локальных харак-
теристик рассеяния - ампли-
туды и фазы отраженной
Рисунок 5.8
Схема классификатора цели
волны, т.е. портрет цели. Другие отличия целей (скоростные, поляри-
зационные) будут рассматриваться отдельно.
Далее рассматриваем линейную СА (ось X) и координаты цели
по азимуту хц.
Каждой функции отражения цели ft, однозначно соответ-
ствует траекторный сигнал
ц
где (x,xLIj - регулярная составляющая импульсной переходной
характеристики системы формирования траекторного сигнала.
Кроме регулярной составляющей есть случайная составляющая
импульсной переходной характеристики
/г(х)= Лр (х)/гсл W = hr (v)exp{jv(x)} •
Разность случайных фаз на концах интервала синтезирования
206
Г лава 5
Xz v(^c) = v(^)-v(^ + ^c)
может быть больше 2л, разрушая когерентность траекторного сиг-
нала. Поэтому разобьем весь интервал наблюдения Хо на М коге-
рентных участков синтезирования Хс (рис. 5.9). В этом случае коге-
рентные траекторные сигналы на различных интервалах синтезиро-
вания взаимно некогерентны, т.е. интервал когерентности
траекторных сигналов равен Хс. Такое представление функции ко-
герентности траекторного сигнала в виде ступенчатой функции на-
много упрощает задачу синтеза классификатора, не снижая общ-
ность результатов.
Траекторный сигнал на входе классификатора
м
«г (й = E[eXP{j'l'm (*)}ST (*т )+фт )] ’
7Я = 1
(5.26)
где ) - сумма внутреннего шума и фона.
Фон будем считать кусочно стационарным, так что можно счи-
тать белым шумом со спектральной плотностью NQ. Далее
не учитываем также зависимость сигнала фона от координат
апертуры реальной антенны, считая, что используется суммарная
ДН антенны.
Полагаем также, что благодаря высокому разрешению РСА все
объекты наблюдаются раздельно (разрешаются) и следовательно
синтез классификатора можно проводить для случая наличия траек-
торного сигнала только одного объекта и шума.
Задача синтеза оптимального классификатора сводится к оп-
ределению апостериорной вероятности наличия, траекторного
сигнала цели с заданной функцией отражения.
т-\ т=2 т—3 .... т-М
Рисунок 5.9
Интервалы когерентности траекторного сигнала
Модель радиолокационной системы с синтезированием апертуры антенны 207
Известно, что для сигнала (х) из М некоррелированных
частей с аддитивным белым шумом апостериорная плотность веро-
ятности
хехр<
WrmW-eXPC/VmW*)
(5-27)
где - постоянный коэффициент; Р{ - априорная вероятность на-
личия z-й цели; sT1 (х) траекторный сигнал z-й цели.
Апостериорная вероятность имеет максимальное значение то-
гда, когда в принимаемом сигнале ил. (х) присутствует траекторный
сигнал z-й цели.
Усредняем Рап (z,\|/m) по случайной начальной фазе \|/т на
каждом из М интервалов синтезирования. Тогда
м
т-\
— модуль корреляционного инте-
грала на интервале (корреляционный момент входного траек-
торного сигнала и траекторного сигнала z-й цели в качестве опорно-
го сигнала); Jim - отношение сигнал/шум; к2 - постоянный коэф-
фициент.
Учитывая, что монотонная функция от 7^n(z) не изменяет по-
ложение максимума Р (/), используем логарифмическую функцию
от РГ1 и при г1т»1, т.е. когда отношение сигнал/шум гораздо
больше единицы, 1п(л;т ) = rim. Апостериорная вероятность в этом
случае равна
(5.29)
208
Глава 5
м
гДе г. =XAim
т~-\
М
сумма М корреляционных моментов; dx — Jim =
т=\
— Mdxm - отношение сигнал/шум для всего траекторного сигнала.
И Оптимальный классификатор выполняет операцию корреляции
входного траекторного сигнала с опорным траекторным сиг-
налом каждой цели в отдельном канале на каждом интервале
синтезирования и затем суммирует модули корреляционных
моментов всех интервалов синтезирования.
Алгоритм выполнения этих операций в каждом канале для z-й
цели можно представить в виде
м
т=\
(5.30)
Рассмотрим случай классификации пространственно-
некогерентной цели, когда амплитуды и фазы каждой точки функ-
ции отражения случайны и известны только средние значения ам-
плитуд. Модель такой цели соответствует большинству объектов ра-
диовидения.
Полагаем, что функция отражения z-й цели состоит из суммы
отдельных точечных отражателей с координатами xt и каждая из L
точек в изображении разрешается:
(5.31)
где амплитуда
каждой точки распределена по закону Рэлея, а
фаза (р, - равномерно от 0 до 2л. Размер отражателя меньше раз-
мера элемента разрешения РСА, что позволяет считать его точеч-
ным.
Апостериорная вероятность (5.29), усредненная по случайным
амплитудам и фазам траекторных сигналов точечных отражателей,
при условии разрешения каждой точки
1 L м г.
ГТГГГл 4.пехр ££ л ,<m 1 ’
1 11 IW^m + 1) U1 Ш=1 ^i/m + 1_
т £
(5.32)
где
Модель радиолокационной системы с синтезированием апертуры антенны
209
(5.33)
- модуль корреляционного момента входного траекторного сигнала
и опорного траекторного сигнала i цели для { точки sTi/0 (х) ; б71/т
отношение сигнал/шум для / точки в т интервале синтезирования.
Амплитуда опорного сигнала пропорциональна среднему зна-
чению случайной амплитуды Z точечного отражателя.
Сигнальную часть корреляционного момента £ точки гг,р(без
шумов) можно представить в виде
i/0 >
где
модуль изображения (без шумов) £ точки в т вн-
тервале синтезирования; Эг0
- амплитуда опорной (эталонной)
функции отражения точки i цели, равное среднему значению слу-
чайной амплитуды функции отражения.
В соответствии с (5.32) изображение I точки в т интервале
синтезирования суммируется по амплитуде в М интервалах синтези-
рования и определяет корреляционный момент полученного изо-
бражения с опорной функцией отражения этой точки:
(5.34)
На рис. 5.10 иллюстративно показаны преобразования сигнала
одного точечного отражателя с координатой х. при формировании
корреляционного момента.
Корреляционный момент z-и цели (сигнальная часть) формиру-
ется в результате суммирования корреляционных моментов всех L
точек цели:
(5.35)
210
Глава 5
Рисунок 5.10
Преобразование сигнала при формировании корреляционного момента:
а - случайная амплитуда функции отражения точки I в т интервале синте-
зирования; б - траекторный сигнал точечного отражателя; в - изображение
точечного отражателя в т интервале синтезирования; г - изображение то-
чечного отражателя в результате амплитудного суммирования Мизображе-
ний; д - эталонная функция отражения
Модель радиолокационной системы с синтезированием апертуры антенны
211
Оптимальный классификатор целей со случайной функцией
отражения формирует на каждом интервале синтезирования
комплексное изображение каждой разрешаемой точки наблю-
даемых объектов и суммирует модули изображений каждой
точки отдельно на всех интервалах синтезирования. Накоп-
ленное некогерентное изображение объектов коррелируется с
модулем эталонной функции отражения i-й цели.
Структура классификатора дана на рис. 5.11. Анализ алгоритма
оптимальной классификации показывает, что обработка траекторно-
го сигнала может быть представлена двумя последовательными эта-
пами.
Этап 1. Состоит в формировании изображения объектов, рас-
положенных в зоне обзора РСА, отдельно для каждого объекта.
Этап 2. Предусматривает корреляцию каждого полученного
изображения объекта с эталонным изображением, представляющим
собой функцию отражения классифицируемой цели. Кроме функции
отражения объектов в изображении будут присутствовать шумы, ко-
торые, однако не изменяют алгоритм классификации.
Напомним, что в данном примере производилась классифика-
ция неподвижных целей по их радиолокационному изображению.
Рассмотрим статистические характеристики комплексного
изображения объекта (цели) по азимуту в одном разрешаемом эле-
менте дальности. Изображение является результатом согласованной
обработки траекторного сигнала для каждой точки объекта и без
учета аддитивного шума имеет вид
(5.36)
Рисунок 5.11
Схема классификатора
212
Глава 5
где W (х) - весовая функция обработки, определяющая размер син-
тезированной апертуры; хц - координата выходного изображения.
Корреляционная функция сигнальной части изображения
(5-37)
*
где 5Г
(х1)5т(х2) - корреляционная функция траекторного
сигнала
Полагая для упрощения выкладок весовую функцию
корреляционная функция изображения имеет вид
с
Ц2
хехр
4л2 Ас2
Ц1
(Л-!) ~ удельная ЭПР цели в элементе дальности.
Интервал корреляции (на уровне 0,7) при данной
функции W(х) равен
где о0г
весовой
ку
н
с
Учитывая, что при выбранной весовой функции W (х)
отмезки точечной цели суОг (хц1) =
(разрешающая способность) равна
с
ц ц1
ширина
) па уровне 0,7
(5.40)
интервал корреляции изображения стационарного случайного поля
определяется разрешающей способностью РСА:
Модель радиолокационной системы с синтезированием апертуры антенны
213
5кц=1,45хц.
(5.41)
Мощность сигнала изображения (5.38) пропорциональна
удельной ЭПР цели суОг в элементе разрешения по дальности.
При радиовидении неподвижные цели классифицируются по их
изображению - распределению функции отражения объекта по коор-
динатам дальности и азимута. Полагается, что каждый объект в зоне
обзора разрешается, траекторный сигнал когерентный на каждом ин-
тервале синтезирования и некогерентный от интервала к интервалу,
шум и фон - белый. Задача синтеза оптимального классификатора в
этих условиях сводится к нахождению апостериорной вероятности
наличия траекторного сигнала классифицируемой цели.
В случае пространственно-некогерентной цели, когда ампли-
туда и фаза каждой разрешаемой точки функции отражения цели
случайны и независимы между точками, оптимальный классифи-
катор формирует на каждом интервале синтезирования комплекс-
ное изображение каждой разрешаемой точки всех объектов в зоне
обзора. Модули изображения каждой точки отдельно суммируют-
ся на всех интервалах синтезирования. Некогерентно накопленное
изображение объектов коррелируется с модулем эталонной
функции отражения классифицируемой цели.
Дисперсия сигнала изображения пространственно-неко-
герентной цели пропорциональна распределению ЭПР по изобра-
жению цели, а интервал корреляции равен интервалу разрешения.
5.4. Детальность радиолокационного
изображения при несогласованной обработке
траекторного сигнала
Алгоритм классификации объектов сводится к обнаружению объек-
тов с известной функцией отражения в предположении, что в зоне
анализа благодаря высокой разрешающей способности РСА нахо-
дится только один объект. Разрешающая способность РСА опреде-
ляет не только возможность раздельного наблюдения целей, но и де-
тальность изображения каждой цели.
214
Глава 5
Чем выше детальность РЛИ, тем больше число элементов раз-
решения в изображении целей, тем больше отличия РЛИ классифи-
цируемой цели от РЛИ других объектов, тем выше эффективность
решения задачи классификации цели.
Разрешение целей в РСА достигается путём согласованной об-
работки траекторного сигнала. При этом возможность повышения
разрешающей способности всегда ограничена располагаемым вре-
менем наблюдения цели (синтезирования апертуры) и техническими
характеристиками аппаратуры РСА.
Далее решается задача повышения детальности формируемого
РЛИ цели по азимуту при заданном (ограниченном) интервале син-
тезирования апертуры РСА.
Оптимизация алгоритма решения этой задачи может быть вы-
полнена на основе критерия минимума среднеквадратической ошиб-
ки воспроизведения на выходе РСА функции отражения объекта, что
соответствует повышению детальности формируемого РЛИ.
Пусть функция отражения цели &(*ц) представляет собой ку-
сочно-однородное случайное поле отражения по азимуту в разре-
шаемом элементе по дальности. Внутри области однородности - это
нормальный случайный комплексный процесс. Задача сводится к
формированию на выходе РСА изображения заданного участка ста-
ционарного поля &(*ц) с минимальной среднеквадратической
ошибкой.
Наблюдаемый сигнал - сумма траекторного сигнала и шума:
Z7T (х) = 5Т (х) + 7?(х) .
Траекторный сигнал есть результат линейного преобразования
функции отражения в РСА:
00
5г(х)= |з(хц)/г(х-хц)ахц, (5.42)
—ос
где /?(х) - импульсная переходная характеристика траекторного
сигнала.
Шум т?(х) является нормальным случайным процессом, не-
коррелированным с траекторным сигналом. Это может быть внут-
ренний шум РСА, а также помеховый сигнал.
Так как Э'(-Хц) и /?(х) - нормальные однородные комплексные
процессы без постоянной составляющей, траекторный сигнал также
Модель радиолокационной сисл емы с синтезированием апертуры антенны ? 15
является нормальным стационарным случайным процессом. Для
нормальных процессов оптимальная система обработки - линейная.
Задача в этом случае сводится к нахождению оптимальной импульс-
ной переходной характеристики фильтра Винера без учета «физиче-
ской реализуемости», так как после запоминания траекторного сиг-
нала его обработка ведется в машинном, а не реальном времени.
В этом случае пределы интегрирования можно брать от -оо до оо .
Оптимальная переходная характеристика hG(x) системы обра-
ботки должна удовлетворять интегральному уравнению Випера-
Хопфа:
A?3u(Ax) = f Ло (х)Ки (Ах-х)dx, (5.43)
где К^и - взаимная корреляционная функция входного сигнала и и
функции отражения цели 3; Ки - корреляционная функция входно-
го сигнала.
Так как процессы 5т(х) и и(х) некоррелированные, то
ки (Д*)=к* (Д*)+кп (Д*) , где Ks - корреляционная функция тра-
екторного сигнала; Кп - корреляционная функция шума.
В свою очередь, корреляционная функция траекторного сигна-
ла определяется импульсной переходной характеристикой траектор-
ного сигнала и корреляционной функцией Х?9(Дх) функции отраже-
ния цели
а оо
Xj - х2 +
Ax)dx1dx2 .
Так как процессы 5т(х) и и(х) некоррелированы, то
00
Для стационарных процессов К$и (Ах) = К$и (- Ах) интеграль-
ное уравнение (9.43) можно записать в операторной форме:
/г* (-Ах) ® Ки (Ах) = /?0 (Ах) ® Ks (/Ах) + (Ах) ® Кп (Ах) ,
где знак ® - операция свертки.
216
Глава 5
При решении полученного уравнения методом преобразования
Фурье операции свертки превращаются в произведения спектров:
где Я (со ) - частотная характеристика системы формирования тра-
екторного сигнала; Яэ(сох) - спектральная плотность функции от-
ражения; Я0(сог) - частотная характеристика оптимального фильт-
ра; Wn (со ) - спектральная плотность шума в траекторном сигнале.
Здесь подразумевается, что амплитуда спектральной плотности
функции отражения W& пересчитана в соответствии с уравнением
радиолокации в область траекторного сигнала так, чтобы можно бы-
ло вести сравнение со спектральной плотностью шумов Wn в траек-
торном сигнале.
Из полученного уравнения находим частотную характеристику
системы фильтрации траекторного сигнала для формирования изо-
бражения функции отражения цели с минимальной среднеквадрати-
ческой ошибкой:
(5-44)
Ошибка воспроизведения функции отражения
(5.45)
Рассмотрим частные случаи фильтрации.
Если спектральные плотности функции отражения и шума
постоянны r пределах частотной характеристики системы форми-
рования траекторного сигнала Я(сох), т.е. JVn = const и
- const, и, кроме того, шумы велики (Wn ), то оптималь-
ный фильтр является согласованным со спектром траекторного
сигнала точечной цели: Яо (со ) = Я* (cov).
Модель радиолокационной системы с синтезированием апертуры антенны
217
С уменьшением спектральной плотности шума оптимальная
характеристика фильтра приближается к обратной характеристике
системы формирования траекторного сигнала:
и ( \ 1 1
Но (<о г) ®------_------------------------® —-—г .
II \ Л / f Ст \ Л / \ Л J \ Л J
В этом случае частотная характеристика РСА, равная
Н. (cor) Н (сог) = ——- Н (сог),
V \ л / \ Л J ТТ I \ \ Л J
становится равномерной, т.е. можно получить сколь угодно высо-
кую точность воспроизведения функции отражения. Это справед-
ливо, если спектральная плотность шумов много меньше спек-
тральной плотности траекторного сигнала:
W„ (со,-) « ЯДсоЭ н* (т )
11 j \j У Л/ j Л' j
во всем рабочем диапазоне часгот, что на практике, конечно, нико-
гда не выполняется. Последнее объясняется тем, что в пределах
полосы частот системы формирования траекторного сигнала
Н (сох) обеспечивается большое отношение сигнал/шум, а за пре-
делами полосы отношение сигнал'шум быстро спадает.
Использование оптимального фильтра с характеристикой
Н,, (coY), имеющей более широкую полосу по сравнению с Я (со,),
эквивалентно повышению разрешающей способности РСА по срав-
нению с использованием согласованного фильтра. При этом, естест-
венно, уменьшается отношение сигнал/шум на выходе фильтра.
Оптимальную частотную характеристику системы обработки
(5.44) можно представить в виде двух последовательно соединен-
ных систем. Первая система осуществляет согласованную фильт-
рацию траекторного сигнала и имеет частотную характеристику
Я (сох). Полученное комплексное изображение функции отраже-
ния корректируется фильтром с амплитудной (взвешивающей)
частотной характеристикой : (второй сомножитель (5.44)
Я(юх)|2+ГИп(сох) Ж9(фх)
Частотная характеристика корректора определяется, в основ-
ном, отношением сигнал/шум. Существо коррекции состоит в
уменьшении сглаживающего воздействия согласованного фильтра
путем подчеркивания высоких частот сигнала изображения. Чем
больше отношение сигнал шум. гем больший возможен подъем
высоких частот корректирующим фильтров, тем выше разрешаю-
218
Глава 5
щая способность РСА и выше точность воспроизведения функции
отражения.
Для обеспечения более высокой точности отображения функ-
ции отражения по сравнению с согласованной обработкой необхо-
димо значительно (в 10 и более раз) увеличивать входное отноше-
ние сигнал/шум.
Оптимальная частотная характеристика обработки траектор-
ного сигнала при формировании РЛИ однородных случайных по-
лей с увеличением отношения сигнал/шум приближается к обрат-
ной характеристике.
Расширение полосы пространственных частот эквивалентно
пропорциональному увеличению разрешающей способности, что
возможно только при значительном увеличении входного отно-
шения сигнал/шум.
Г—— . ......
5.5. Корреляция сигналов
радиолокационной системы
с синтезированием апертуры антенны
при изменении несущей частоты
Рассмотрим статис тические характеристики траекторного сигна-
ла и РЛИтри изменении несущей частоты зондирующего сигнала.
Траекторный сигнал с учетом, что X = с/ f, где с - скорость
распространения радиоволн,/- несущая частота, можно записать в
виде
+ог +00
(*) = f f)Э(хц ’ У и ) х
.4т/
хехп 1——
IX
(5.46)
где s(yir) - амплитуда сигнала по дальности.
Корреляционная функция траекторного сигнала при изменении
несущей частоты:
Модель радиолокационной системы с синтезированием апертуры антенны
219
(*> / , fl) = ST (*> fК fl) =
+оО
= J f {{^2иц1)^2иц2>(Л1)5б’ц2)Х
—00
^ц1,Л1)Э'(Хц2,Л2)ХеХР
.4?СС
( 4л ।
xexpl j—(У1уц| -/2Л2) 1^ц1^ц2Фц14Уц2- (5-47)
Подставляя в данное выражение корреляционную функцию от-
ражения объекта
O(jvu1 , уц1 )»• (хц2, уц2) = о0 (хц1, ун )5(хц1 - Л,,2, уц1 - уц2),
получаем
+х
хехр j^C/j - ЛЧ ехр| J—(А -/2)Л )<bcudyu. (5.48)
I ) V с J
Полагая, что о0(хц1,уц) в пределах элемента разрешения по
дальности постоянная величина, полученное выражение можно
представить в виде произведения двух интегралов: по хц и уц. Для
решения в замкнутом виде диаграмму направленности F(xu) и сиг-
нал по дальности 5(у ) представим в виде гауссовых кривых:
Здесь 8уц -с/(2А/ ) - разрешение по дальности при ширине спек-
тра сигнала, равной Afc.
220
Глава 5
В этом случае корреляционная функция траекторного сигнала
при изменении несущей частоты на величину - fx - f2 равна
Ла/)2
2,78(А/С)2
(5-49)
Первый член определяет раскорреляцию траекторного сигнала
при изменении несущей частоты, которая максимальна на краях
апертуры х = Хс/2, где
(5.50)
Второй член определяет раскорреляцию траекторного сигнала,
обусловленную изменением фазы функции отражения в элементе
разрешения по дальности:
5KS(A/)*A/C. (5.51)
Сравнение (5.50) и (5.51) показывает, что основное влияние на
раскорреляцию траекторного сигнала и, соответственно, РЛИ, ока-
зывает случайное изменение фазы отраженного сигнала разрешае-
мого элемента по дальности при изменении несущей частоты на ве-
личину, большую, чем ширина спектра зондирующего сигнала:
А/>А/С.
Изменение несущей частоты РСА приводит к случайным из-
менениям траекторного сигнала объекта.
При изменении несущей частоты на величину, большую ши-
рины спектра зондирующего сигнала, происходит раскорреляция
траекторного сигнала на одном и том же интервале синтезирова-
ния.
РЛИ объекта, полученная на одном и том же интервале син-
тезирования, но на различных несущих частотах, будут некорре-
лированными, если разнос частот больше, чем ширина спектра
зондирующего сигнала.
Сформированные на одном интервале синтезирования на
различных несущих частотах некоррелированные РЛИ одного и
того же объекта можно некогерентно складывать для уменьшения
спекл-шумов.
ГЛАВА 6
Принципы построения
радиолокационной системы землеобзора
с синтезированием апертуры антенны
6.1. Структурная схема
радиолокационной системы землеобзора
Структурная схема, отражающая основные элементы РСА при ре-
шении задач землеобзора, изображена на рис. 6.1. Выбор режимов
работы всех устройств РСА осуществляет БЦВМуи/гавленшг и конт-
роля (1) в соответствии с решаемой тактической задачей.
Высокостабильный опорный генератор высокочастотных коле-
баний (2) с помощью синтезатора частот (3) формирует все необ-
ходимые колебания как радиочастот (несущих, промежуточных,
частот модуляции), так и частот синхронизации, обеспечивая тем
самым когерентность приемопередающего тракта РСА. Модулятор
(4) формирует заданный вид зондирующего сигнала (амплитудную и
фазочастотную модуляцию) на несущей частоте. Усилитель мощно-
сти (5) обеспечивает требуемую мощность излучения зондирующе-
го сигнала, сохраняя его когерентность.
Через антенный переключатель (6) усиленные колебания по-
ступают в антенну (7), которая излучает электромагнитную волну в
пределах заданной диаграммы направленности.
Поляризация излучаемой и принимаемой волн определяется
конструкцией антенны (поляризатора'}. При полном поляризацион-
ном зондировании и приеме антенна формирует в общем случае че-
тыре независимых канала на прием волн с поляризацией ГГ, ВВ, ГВ
и ВГ, что позволяет формировать поляризационную матрицу рассея-
ния (ПМР) цели:
222
Глава 6
Рисунок 6.1
Структурная схема РСА
Принципы построения радиолокационной системы землеобзора...
223
s =
Snexp(j(pn) Sl2exp( j(pt2)
S2lexp(j<p21) S22exp( j<p22)
Элементы ПМР представляют собой комплексные безразмер-
ные числа и являются полной характеристикой отражательных
свойств функции отражения стабильной цели, так как ПМР опреде-
ляет амплитуду и фазу отраженной волны для каждой поляризации
при заданных параметрах облучающей волны. Комплексный харак-
тер элементов ПМР указывает на учет фазовых набегов, обуслов-
ленных рассеянием ортогонально поляризованных компонент зон-
дирующего сигнала.
Для однопозиционной РЛС S12 - S2l. В этом случае ПМР явля-
ется симметричной и имеет 6 информативных параметров.
Полное поляризационное зондирование пространства включает:
• облучение объекта последовательно или одновременно двумя
видами ортогональных поляризаций (горизонтальная и верти-
кальная или левое и правое вращение);
• полны) 1 поляризационный прием - одновременный прием двух
ортогональных поляризаций.
ПМР можно рассматривать как многомерный сигнал, который при
оптимальной обработке существенно расширяет возможности РСА.
Для оперативного измерения ПМР при полном поляризационном
зондировании наиболее часто используют метод с временным разде-
лением ортогональных по поляризации составляющих. В этом случае
задающий генератор вырабатывает гармоническое напряжение, кото-
рое поступает на вход формирователя сигналов, ортогональных по
временной структуре. Сформированные сигналы (/) и s2 (/) для
схемы с временным разделением удовлетворяют условию
52 /|-^(г + Г). Сигналы Sj (/) и s2(/) поступают поочередно на
передатчик. Усиленные в усилителях мощности сигналы через антен-
ные переключатели поступают на соответствующие антенны ортого-
нальных поляризаций последовательно и излучаются в направлении
на цель. Принимаемые сигналы первой антенной (/), Sj 1^1 (/ + Т)
и второй антенной 5'2251 (/ + Т)9 S2is{(t) позволяют сформировать
матрицу сигналов цели при полном поляризационном зондировании.
Далее в структуре РСА рассматривается один из каналов.
Система стабилизации и управления антенной (8) обеспечива-
ет стабилизацию и перемещение ДН антенны в соответствии с тре-
224
Глава 6
буемым режимом обзора земной поверхности. Например, при теле-
скопическом обзоре ДН антенны обеспечивает непрерывный под-
свет заданного участка земной поверхности путем слежения за ним
при изменении траектории движения носителя РСА.
Электромагнитные волны, отраженные от всех объектов в зоне
обзора РСА, приходят к антенне и формируют два сигнала, соответ-
ствующие каналам суммарной и разностной ДН антенны. В зависи-
мости от решаемой тактической задачи возможно использование
различного числа антенных каналов. Так, в режиме селекции и изме-
рения координат (азимута) движущейся цели используют три и бо-
лее каналов. Приемники (9) суммарного и разностного каналов обес-
печивают усиление и преобразование сигналов на промежуточную
частоту с последующим формированием с помощью фазового детек-
тора (10) двух квадратурных (sin и cos) сигналов в каждом канале.
На структурной схеме изображена цифровая система обработки
сигналов (АЦП (11) буферный регистр (12), процессоры) на борту но-
сителя, когда согласованная фильтрация сигналов по дальности (за-
держке) и азимуту (частоте траекторного сигнала) осуществляегся циф-
ровым процессором. При использовании наземной системы обработки
(оптической или цифровой) траекторные сигналы с выхода буферного
регистра записываются специальным регистратором или транслируют-
ся на наземный пункт обработки через систему передачи данных.
Процессор обработки цифровых сигналов, поступающих с бу-
ферного регистра, осуществляет согласованную фильтрацию по
дальности (сжатие импульсов (13)) и по азимуту (синтезирование
апертуры (14)), формируя детальное изображение объектов и целей в
зоне обзора РСА. Для повышения качества РЛИ производится их не-
когерентное накопление (15).
Процессор обработки данных, используя полученные РЛИ и алго-
ритмы селекции движущихся целей (20), определяет необходимые для
решения заданной тактической задачи характеристики целей. Класси-
фикация целей осуществляется либо автоматически, либо оператором.
Управление цифровой системой обработки сигналов и данных
осуществляется БЦВМ управления и контроля.
На индикаторе телевизионного типа (16) формируется РЛИ на-
блюдаемого участка земной поверхности и другая информация (ко-
ординаты целей, отметки движущихся целей, результаты классифи-
кации целей и т.п.). Кроме того, РЛИ регистрируется для последую-
щего анализа на земле.
Наличие случайных искажений траекторного сигнала, прежде
всего вследствие траекторных нестабильностей, требует их компен-
сации, особенно при полете в турбулентной атмосфере и высоких
Принципы построения радиолокационной системы землеобзора...
225
требованиях к разрешающей способности РСА. Для этого использу-
ются две системы.
Инерциальная система микронавигации (17) обеспечивает из-
мерение отклонения движения фазового центра антенны от за-
данной траектории.
Измеренные значения траекторных нестабильностей и соответст-
венно фазовых флуктуаций используются для их компенсации с помо-
щью управляемого коммутатора фазы на промежуточной частоте (18).
Система автофокусировки (19) определяет фазовые искажения
траекторного сигнала непосредственно по отраженному сигна-
лу от объектов и земной поверхности.
Результаты измерений используются при формировании ха-
рактеристики согласованного фильтра синтезирования апертуры.
В дальнейшем рассматриваются основные требования к парамет-
рам сигналов и устройств РСА.
6.2. Приемопередающий тракт
РСА относится к классу когерентных РЛС.
Когерентность - широкое понятие, определяющее степень
взаимосвязи различных явлений. Применительно к радиолока-
ции под когерентностью понимают степень взаимосвязи пара-
метров пространственно-временных сигналов.
В когерентных радиолокационных системах в отличие от неко-
герентных используется информация об изменении не только пара-
метров амплитуды, но и фазы отраженного от цели сигнала. Фаза
является наиболее чувствительным параметром сигнала. Так. на-
пример, изменение расстояния до цели всего на один сантиметр
приводит к изменению фазы сигнала на 180° (в сантиметровом диа-
пазоне волн), в то время как амплитуда сигнала и задержка огибаю-
щей сигнала остаются практически неизмененными. Поэтому, бла-
годаря такой высокой чувствительности, использование фазовой
информации в РСА позволяет значительно повысить эффективность
решения всех тактических задач.
226
Г лава 6
Когерентность РЛС — априорное знание законов изменения фа-
зы сигналов.
Когерентный приемопередающий тракт РСА включает в себя
устройства формирования зондирующего сигнала, усиления и
преобразования на промежуточную частоту принимаемого сиг-
нала, фазовые детекторы и АЦП.
Выбор зондирующего сигнала РСА землеобзора определяется
многими факторами. Получение высокой разрешающей способности
по дальности требует применения широкополосного зондирующего
сигнала.
Для получения радиолокационного изображения малоотра-
жающей местности и малоразмерных объектов (ВПП, водная по-
верхность, танки и т.п.) при большой дальности обзора необходима
значительная средняя мощность излучаемого сигнала, малые потери
приемопередающего тракта и малые шумы приемника.
Обеспечение высокого динамического диапазона изображения
требует малого уровня мощности боковых лепестков ФН зонди-
рующего сигнала. Наконец, для обеспечения синтезирования апер-
туры и получения высокого разрешения по азимуту необходима вы-
сокая степень когерентности зондирующего сигнала и всего прие-
мопередающего тракта.
Так как основным источником информации при синтезирова-
нии апертуры является фаза сигнала, отраженного от цели, то
под когерентностью приемопередающего тракта РСА обычно
понимают априорное знание закона изменения фазы зонди-
рующего сигнала относительно опорного сигнала гетеродина
при стабильности фазовых характеристик приемного тракта.
Когерентность тракта РСА обеспечивается путем формиро-
вания всех радиочастотных колебаний и синхроимпульсов от
единого высокостабильного опорного генератора с помощью
синтезатора частот.
В качестве опорного генератора обычно используют прецизи-
онные кварцевые генераторы диапазона 30...60 МГц с последующим
умножением (делением) частоты варакторными умножителями. Для
обеспечения высокой стабильности частот и малых фазовых шумов
генерируемых колебаний принимаются тщательные меры по стаби-
лизации питающих напряжений, температурной компенсации, изо-
ляции от механических воздействий и т.п.
Принципы построения радиолокационной системы землеобзора...
227
Усилительные приборы типа клистронов и ЛБВ обеспечивают
необходимую мощность излучения зондирующего сигнала, сформи-
рованного синтезатором частот и модулятором. Для этих приборов,
так же как и для опорного генератора, принимаются меры по стаби-
лизации питающих напряжений, так как их нестабильность порядка
1 % приводит к фазовым нестабильностям выходного сигнала с СКО
5... 10°. Можно считать, что тщательно сконструированный коге-
рентный передающий тракт имеет малые фазовые шумы и незначи-
тельный уход частоты за время синтезирования.
Схема формирования и преобразования сигнала в приемо-
передающем тракте когерентной РСА показана на рис. 6.2.
Опорный генератор ОГ и синтезатор частот СЧ формируют сигна-
лы несущей частоты /0, промежуточной /пр , их разности /0 - /пр, а
также частоты модуляции зондирующего сигнала /м . С помощью мо-
дулятора М формируется требуемый зондирующий сигнал на несущей
частоте /0, который усиливается усилителем мощности УМ и, пройдя
через антенный переключатель АП, излучается антенной.
Принимаемый траекторный сигнал, частота которого отличает-
ся от излученной на доплеровскую частоту /, преобразуется смеси-
телем СМ на промежуточную частоту. В качестве сигнала гетероди-
на синтезатор частот выдает колебания частоты /0 - /. После уси-
ления на промежуточной частоте (УПЧ) отраженный сигнал
преобразуется в два видеосигнала (квадратурные составляющие) с
помощью фазового детектора ФД. Для работы ФД синтезатор частот
Рисунок 6.2
Схема когерентного приёмопередающего тракта
228
Глава 6
также формирует опорные сигналы на частоте / , сдвинутые по
фазе относительно друг друга на л/2 . Дальнейшая обработка траек-
торного сигнала (по задержке и по траектории) производится после
ФД и АЦП с помощью цифрового процессора сигналов.
Обеспечение когерентности тракта РСА при такой схеме фор-
мирования зондирующего сигнала предъявляет высокие требования
к опорному генератору. Так, если излучаемый сигнал имеет фазу
Физл = ®0Z + ф(') >
где ф(7) - паразитная фазовая модуляция опорного генератора, то
задержанный на т0 принимаемый сигнал имеет фазу
Фпр=“о('-То) + ф(/-'Со)-
Фазовые флуктуации траекторного сигнала на выходе ФД равны
Дф(/,т0) = ф(<)-ф(/-т0).
Случайный процесс фазовых нестабильностей опорного гене-
ратора ср(/), обусловленный незначительным уходом частоты гене-
ратора за время синтезирования (единицы секунд), можно считать
нормальным случайным процессом с корреляционной функцией
7?,Дт). Тогда разность фаз такого процесса имеет дисперсию
Чем ниже частота фазовых флуктуаций опорного генератора, тем
больше значение 7?ф(т0) и, следовательно, меньше вклад низкочас-
тотных флуктуаций в СКО флуктуаций фазы Аф приемопередающе-
го тракта. Однако опорные генераторы обычно имеют спектральную
плотность фазовых шумов колебаний, возрастающую с уменьшением
частоты, что требует учета всех спектральных составляющих фазовых
шумов опорного генератора. У современных опорных генераторов
интервал корреляции фазовых нестабильностей Аф(/) обычно много
меньше времени синтезирования Тс (быстрые нестабильности), а
СКО нестабильностей фазы Аф составляет 3... 10°.
Наиболее сильно фазовые искажения влияют на интегральный
уровень боковых лепестков функции неопределенности, от которого
в значительной степени зависит динамический диапазон РЛИ и воз-
Принципы построения радиолокационной системы землеобзора...
229
можность обнаружения малоразмерных целей на фоне земной по-
верхности. При малых СКО флуктуаций фазы стД(р интегральный
уровень боковых лепестков Ринт [дБ] = 201g о [рад].
Так как нарушение когерентности приемопередающего тракта
является лишь одной из причин фазовых флуктуаций траекторного
сигнала, то допустимая величина <уДр приемопередатчика обычно не
должна превышать нескольких градусов.
Модуляция зондирующего сигнала определяет основные харак-
теристики РСА по разрешению, обнаружению и точности изме-
рения координат объектов.
Выбор сигналов по большинству подобных критериев сводится
к анализу функции неопределенности зондирующего сигнала. На-
пример, ширина главного пика ФН определяет разрешение и точ-
ность измерения координат; интегральный уровень боковых лепест-
ков ФН - динамический диапазон изображения; расстояние между
основным и боковым пиками ФН - неоднозначность измерения ко-
ординат и т.п.
Зондирующие сигналы можно разделить на два больших класса:
непрерывные модулированные сигналы и импульсные периодические
сигналы. Для этих классов ширина основного пика ФН определяется
полосой частот модуляции Afc и длительностью когерентной обра-
ботки сигнала Тс. Чем шире спектр, тем выше разрешающая способ-
ность по времени задержки сигнала (дальности), а чем больше дли-
тельность - тем выше разрешение по частоте (азимуту).
По двум причинам в РСА обычно используются импульсные
периодические сигналы.
Причина 1. Возможность получения малого интегрального
(суммарного) уровня мощности боковых лепестков в зоне тмаксА/ от-
ражений от земной поверхности (рис. 6.3), где тмакс - максимальная
задержка (дальность обзора), а А/* - ширина спектра доплеровских
частот сигнала. Так, пачка импульсов без внутриимпульсной модуля-
ции имеет ФН в виде периодических пиков на всей площади 4А£Т,.
В отличие от непрерывного сигнала, у которого вся площадь ФН
4Л^ТС заполнена боковыми лепестками, у пачки импульсов площадь
между пиками свободна от боковых лепестков ФН. Пачка простых им-
230
Глава 6
Рисунок 6.3
Функция неопределенности
импульсного периодического сигнала
пульсных сигналов имеет
максимальную среди всех
возможных сигналов сво-
бодную от пиков площадь,
равную 2Тп = 4.
1 п
Выбирая период по-
вторения Тп, можно распо-
ложить область отраженно-
го сигнала в этой
свободной зоне. В этом
случае отношение сиг-
нал/фон в изображении бу-
дет определяться инте-
гральным уровнем боковых
лепестков лишь в неболь-
шой области вблизи основ-
ного пика ФН. Кроме того,
уровень этих боковых лепестков может быть значительно понижен
выбором соответствующей весовой функции при обработке сигнала.
Причина 2. Применение импульсного периодического сиг-
нала - это возможность использования одной антенны на передачу
и прием.
К сожалению, использовать простой импульсный сигнал без
внутриимпульсной модуляции в режиме радиовидения обычно не
удается вследствие низкой средней мощности такого сигнала.
Поэтому для увеличения средней мощности используют длин-
ные (ти = 1...100 мкс) сигналы с внутриимпульсной модуляцией с
последующим сжатием в 100 раз и более. При этом возрастает слож-
ность системы обработки и требуется выбор специальных видов мо-
дуляции, обеспечивающих малый уровень боковых лепестков в об-
ласти отражений тмаксД/*. Максимальная длительность излучаемого
сигнала обычно ограничивается максимально допустимой мертвой
зоной, обусловленной запиранием приемника на время излучения.
Максимальный уровень бокового лепестка (УБЛ) функции не-
определенности сигнала определяет возможность появления
ложных отметок целей в РЛИ, а интегральный уровень боковых
лепестков (ИБЛ) ограничивает динамический диапазон РЛИ.
Принципы построения радиолокационной системы землеобзора...
231
Снижение уровней боковых лепестков ФН РСА как максималь-
ного, так и интегрального, достигается выбором закона модуляции
зондирующего сигнала и алгоритма обработки. Обычно в качестве
алгоритма используется согласованная фильтрация и дополнитель-
ная весовая обработка. Общее правило снижения боковых лепестков
заключается в сглаживании переходных процессов модуляции зон-
дирующего сигнала, как при формировании, так и при его обработке.
Это приводит к уменьшению внеполосных излучений и мощности
боковых лепестков функции неопределенности с учетом обработки.
Например, при простом (без внутриимпульсной модуляции) зонди-
рующем сигнале форма импульса (его частотная характеристика) и
частотная характеристика системы обработки выбираются, исходя
из заданного уровня боковых лепестков выходного сигнала.
Так, если результирующая амплитудная спектральная харак-
теристика (произведение спектра сигнала на частотную характери-
стику системы обработки) — прямоугольная, то максимальный уро-
вень боковых лепестков выходного сигнала точечной цели по за-
держке равен -13 дБ, что явно велико. Если результирующая
частотная характеристика имеет сглаженный вид, например
W (/) = 0,08 + 0,92 cos2 (л// А/)
(функция Хэмминга), то максимальный лепесток снижается до
-42,8 дБ. При этом происходит некоторое расширение ФН (ухудше-
ние разрешающей способности по дальности) примерно в 1,5 раза,
что необходимо учитывать при задании ширины спектра импульса.
Аналогичные зависимости наблюдаются и при формировании
ФН по частоте (азимуту). В этом случае пачка импульсов (траек-
торный сигнал) также взвешивается сглаживающей функцией,
форма которой определяет уровень боковых лепестков по частоте.
Применительно к сигналам с внутриимпульсной модуляцией эти
закономерности означают, что для получения более низкого уровня
боковых лепестков необходимо непрерывное (п лавное, без скачков)
изменение параметров (фазы, частоты, амплитуды) импульса.
Из таких сигналов наиболее часто в РСА используются перио-
дические импульсные сигналы с внутриимпульсной линейной час-
тотной модуляцией. ФН таких сигналов, так же как и у простых им-
пульсных сигналов (рис. 6.3), имеет вид отдельных пиков, разнесен-
ных на Гг по задержке и на 1/Тп по частоте со свободной зоной
7 ' - 4. В области центрального пика уровень боковых лепестков
определяется весовой функцией обработки сигнала W(t).
232
Глава 6
Сечение центрального пика ФН по оси задержки т
00
Л(т)= J^(^)s(/)s*(/-t)c1/=
—00
где ц - индекс частотной модуляции.
Если = 1, то
Полоса спектра такого сигнала составляет = цти/( 2л , , а
разрешение - от = 0,9/Л/с.
На рис. 6.4 показано сечение по задержке ФН такого сигнала (1),
а (2) - ФН для случая весовой функции Хэмминга. Максимальный
уровень боковых лепестков понижается с -13,2 дБ до -42,8 дБ, а
интегральный с -10,3 дБ до -37 дБ при весовой обработке как ка-
ждого отдельного импульса, так и всей пачки по закону Хэмминга
(оценочные значения). Разрешение по задержке составляет
§T = 1,33/Afc , потери энергии сигнала вследствие несогласованной
обработки 1,34 дБ.
Такая весовая функция наиболее часто используется при обра-
ботке сигналов как по задержке, так и по частоте. Выбирая индекс
частотной модуляции ц так, чтобы
яс/цти =X/?H/(2JTcsineH),
можно получить одинаковое разрешение по дальности и азимуту.
Рисунок 6.4
Сечение функции неопределенности зондирующего сигнала по задержке
Принципы построения радиолокационной системы землеобзора...
233
Зондирующие сигналы с дискретным изменением параметров
модуляции (манипуляцией), как правило, имеют значительно худ-
шие значения уровня боковых лепестков, и их использование требу-
ет тщательного учета условий применения РСА, т.е. характеристик
функции отражения в зоне обзора "максД4.
Так, разновидностью сигналов с частотной модуляцией являет-
ся импульсный сигнал с частотной манипуляцией. Каждый импульс
последовательности с периодом следования Ти имеет постоянную,
но различную несущую частоту. Несущая частота изменяется скач-
ком от импульса к импульсу так, чтобы за время пачки сигнала Тп
из Аи импульсов, равное = ГИАИ, перебор всех частот составил
полную, требуемую для получения заданного разрешения по даль-
ности 8г, полосу
Л/с = 1/8т = c/lbr.
В этом случае вместо импульса с линейной частотной модуля-
цией используется пачка импульсов с перестройкой от импульса к
импульсу так, чтобы общая полоса спектра частот пачки была равна
полосе спектра импульса с линейной частотной модуляцией.
Если манипуляция частоты равна ширине спектра смоду-
лированного импульса: A^^l/т , то число импульсов Аи при
длительности пачки сигнала 7^ = ТИЛГИ определяет общую полосу
сигнала Afc - AHAfM (рис. 6.5). Такой сигнал иногда называют син-
тезированным по частоте сигналом по аналогии с синтезированием
апертуры. Здесь Аи = Afc/Л/м определяет коэффициент сжатия Л?сж
импульса ти (базу сигнала).
Рисунок 6.5
Спектр синтезированного по частоте сигнала
234
Глава 6
На рис. 6.6 изображено сечение ФН (одна четверть центральной
области) для пачки простых импульсов (1) и одной пачки частотно-
манипулированных по линейному закону (2). Размер сечения ФН по
оси частот для пачки простых и ЧМ импульсов одинаков и обратно
пропорционален длительности пачки
1/7;=1/(мл)=л,ж,
а по оси задержки пропорционален 1 / Afc, т.е. введение частотной
манипуляции сжимает ФН в соответствии с расширением спектра
Д/с = ^иА/м •
Хотя разрешение по дальности (ось т ) увеличилось, по оси эл-
липса сечения ФН оно осталось приблизительно таким же, как по
оси т для неманипулированных импульсов, и определяется дли-
тельностью импульса. Таким образом, ФН пачки частотно-
манипулированных импульсов аналогична ФН одиночного сигнала с
Рисунок 6.6
Функция неопределенности
синтезированного по частоте
сигнала с межпериодным
расширением спектра
линейной частотной модуляцией
из Wn.
Сечение ФН пачки из Nn
повторяющихся с периодом Тп
одинаковых пачек длительностью
Тп частотно-манипулированных
импульсов («пачки пачек»), пока-
зано на рис. 6.6 (3) штриховкой,
где Fn = Ги /ДГИ = 1/ Тп частота
повторения пачек, a Nn - число
пачек в сигнале длительностью
Т = N Т .
с п п
Разрешение по частоте такого
сигнала определяется длительно-
стью сигнала
Т = N Т =N N Т
С П П ¥ГГ¥Г1^И’
а разрешение по задержке - поло-
сой частот сигнала одной пачки.
Боковые пики ФН по частоте оп-
ределяются частотой повторения
пачек Fn, а по задержке - дли-
Принципы построения радиолокационной системы землеобзора...
235
тельностью пачки Гг1 = ГИ7УИ. Так как передатчик излучает импульсы
с частотой повторения FH то вся полоса однозначности по дальности
cl\j2 разделена «слепыми» зонами запирания приемника на участ-
ки ДТ? < сТи/2.
Преимущества сигнала
• Относительно большая длительность и узкая полоса частот
одновременно излучаемого и принимаемого немодулирован-
ного импульса, что резко снижает требования к одновремен-
ной широкополосности приемопередающего тракта, антенно-
фидерных устройств и АЦП при общей широкой полосе пачки
сигналов.
• Дополнительные степени свободы в выборе частоты повторения
импульсов, изменения частоты манипуляции и порядка манипу-
ляции частоты от импульса к импульсу. Так, используя высокую
частоту повторения, тем не менее можно принимать сигналы
только от одного заданного участка дальности, поскольку сигна-
лы с задержкой на Ги и более имеют другую несущую частоту и
не принимаются приемником.
• Повышенная помехозащищенность, так как случайное измене-
ние несущей частоты затрудняет разведку сигналов и организа-
цию помех.
К недостаткам такого сигнала следует отнести большую слож-
ность системы, алгоритмов преобразования и обработки сигнала.
Для получения высокого разрешения по дальности (10...20 см)
при ограниченной полосе пропускания УПЧ и антенны применяют
сигналы с частотной манипуляцией и ЛЧМ внутри каждого импуль-
са с девиацией равной разности частот манипуляции. При этом фор-
мируется сигнал с полосой до 1,5 ГГц.
Фазовая манипуляция
Другим примером дискретной модуляции являются сигналы с фазо-
вой манипуляцией, когда фаза внутри импульса изменяется скачком
(0 - л) в соответствии с выбранным кодом, например кодом Барке-
ра. Такие сигналы удобно генерировать и обрабатывать. Разрешение
по задержке определяется длительностью элемента кода, а число
элементов в импульсе определяет коэффициент сжатия. Основным
236
Глава 6
недостатком таких сигналов является значительный интегральный
уровень боковых лепестков, особенно при большом коэффициенте
сжатия, что приводит к снижению контраста изображения земной
поверхности. Так, составной код Баркера (последовательность не-
скольких 13-разрядных кодов) даже при весовой обработке функци-
ей Хэмминга имеет ИБЛ порядка -6 дБ.
Такой же ИБЛ имеет сигнал типа усеченной М последователь-
ности.
Хорошие характеристики УБЛ и ИБЛ имеет сигнал с череспе-
риодным дополнительным кодом, но зона однозначности по частоте
при таком сигнале уменьшается в два раза (±Fn/2) .
Периодическая линейная частотная модуляция
Непрерывные зондирующие сигналы также нашли применение в
РСА. Из всех возможных непрерывных сигналов обычно использу-
ют сигналы с периодической линейной частотной модуляцией. Пе-
риод модуляции, как и в случае использования импульсных сигна-
лов, определяется максимальной дальностью обзора и шириной
спектра доплеровских частот. Изменение несущей частоты за период
модуляции определяет ширину спектра зондирующего сигнала и со-
ответственно разрешение по дальности.
Процедура сжатия сигнала по дальности в каждом периоде мо-
дуляции заключается в умножении принимаемого сигнала на опор-
ный, в качестве которого используется зондирующий сигнал, и пре-
образовании Фурье. В результате формируется линейка отсчётов
сигнала по дальности с высоким разрешением в пределах заданной
зоны обзора по дальности. Дальнейшая обработка пачки, получен-
ной в соседних периодах модуляции, аналогична синтезированию
апертуры при периодическом импульсном зондирующем сигнале.
При большом периоде модуляции (большой дальности) необходимо
учитывать доплеровское смещение частоты в процессе сжатия сиг-
нала по дальности. Основным недостатком использования непре-
рывных зондирующих сигналов в РСА является необходимость ис-
пользования двух отдельных антенн на передачу и прием с высокой
степенью изоляции от проникновения излучаемого сигнала в прием-
ный тракт. При недостаточной изоляции фазовые шумы передатчика
значительно снижают чувствительность приёмника. Поэтому РСА с
непрерывным ЛЧМ-сигналом обычно имеют небольшую дальность
действия.
Принципы построения радиолокационной системы землеобзора...
237
В когерентном приёмо-передающем тракте РСА все колеба-
ния формируются от одного опорного генератора. Нарушение ко-
герентности РСА обусловлено в основном фазовыми флуктуа-
циями опорного генератора, СКО которых не должно превышать
3...1O0.
Модуляция зондирующего сигнала определяет характери-
стики РСА по обнаружению, разрешению и точности измерения.
В РСА обзора земной поверхности с высоким разрешением
обычно используют периодические импульсные сигналы с внут-
риимпульсной линейной частотной модуляцией, ФН которых об-
ладает свободной от боковых пиков зоной FuTn = 4. Уменьшение
уровня ближайших к центральному пику боковых лепестков дос-
тигается амплитудной весовой обработкой при сжатии импульсов.
Использование дискретных методов внутриимпульсной мо-
дуляции, например фазовой манипуляции, обеспечивает простоту
формирования и обработки сигналов цифровыми методами. Од-
нако такие сигналы имеют значительно больший интегральный
уровень боковых лепестков по сравнению с ЛЧМ-сигналами, что
снижает качество изображения, особенно динамический диапазон.
6.3. Антенная система
Параметры антенной системы определяют многие характеристики
РСА: поляризационные, энсргегические, зону обзора, неоднознач-
ность дальность-азимут, селекцию движущихся целей, точность из-
мерения угловых координат.
В большинстве случаев с увеличением размера антенны
улучшаются все характеристики РСА. Даже ограничение разре-
шающей способности по азимуту при полосовом обзоре, равное
б7/2, может быть преодолено за счет использования телескопиче-
ского обзора или многолучевой диаграммы направленности ан-
тенны по азимуту. Поэтому обычно используют антенну макси-
мально большого размера, исходя из возможностей ее размеще-
ния на борту ЛА.
Так, для ударных самолетов ее размер обычно не превышает
1,0... 1,5 м, у истребителей - менее 1,0 м. В разведывательно-
238
1 лава 6
ударном комплексе Джистарс используется антенна типа ФАР
размером 7 м, подвешиваемая под фюзеляжем. В РСА самолета
В-2 используются две вдолькрыльевые ФАР, каждая размером 2 м.
Энергетический потенциал РСА определяется коэффициентом
усиления антенны
где к - коэффициент использования раскрыва (апертуры) ан-
тенны, равный 0,5...0,7 для зеркальных и 0,6...0,8 для волно-
водно-щелевых антенн; А - геометрическая площадь раскрыва
антенны; X - длина волны РСА.
Антенны бортовых РЛС обычно имеют усиление порядка
30...35 дБ. Потери в антенно-фидерной системе определяются поте-
рями в волноводном тракте от передатчика до антенны (1,5...2 дБ), в
обтекателе при прохождении волны туда и обратно (1,2... 1,6 дБ) и в
волноводном тракте от антенны до приемника (1,3... 1,6 дБ). Шума-
ми антенной системы по сравнению с шумом входных устройств
(усилителей, преобразователей) обычно пренебрегают.
Важные параметры ДН антенны для обеспечения
заданных характеристик радиолокационного изображения
• Ширина основного лепестка ДН на уровне -3 дБ по азимуту 0О
и углу места Фо.
• Уровень максимального бокового лепестка Р иакс.
• Интегральный уровень боковых лепестков Ринг, как отношение
мощности всех боковых лепестков к мощности основного лепе-
стка ДН.
Мощность основного лепест ка обычно определяется в пределах
его ширины, равной 30о. Тогда интегральный уровень мощности
боковых лепестков антенны
х 1,500 оо 1,50о
JpH(0)d0- f pH(e)de pH(e)d0- f ^(o)d0
D _ -x -1,50O ~ -°o -1 500
J ИН. ’ l,50o ~ ’
J p„(ejde Jp„(e)de
-l,50o -n°
Принципы построения радиолокационной системы землеобзора...
239
где Рп (0) - нормированная ДН антенны по мощности.
Иногда основной лепесток определяют по положению первых
нулей Рн (0), что близко к величине 30о.
Эти параметры антенны, в свою очередь, определяются разме-
ром антенны и весовой функцией распределения напряженности по-
ля на раскрыве антенны W (х) .
В табл. 6.1 представлены параметры антенны на передачу или
прием для случая использования весовой функции вида
W (х) = 14- <tcos(tix),
х < 1 для различных значений коэффициен-
та а . При равномерном распределении (а = 0) ширина ДН антенны
0О =0,88—, а усиление G = G0. Для других распределений 0О и
<4
Go отличаются коэффициентами 0а - и Ga-a2&G. Значение
а = 0,852 соответствует весовой функции Хэмминга
W(x) = 0,08 + 0,92 cos(rar/2) = 0,54(1+0,852 cos(nx)).
Антенна устанавливается на гироплатформе, что обеспечивает
управление и стабилизацию положения ДН в пространстве при кре-
не, тангаже и рыскании ЛА. Такие же задачи антенна типа ФАР вы-
полняет электронным способом.
Таблица 6.1
Параметры антенны на передачу и прием
для различных весовых функций
а Оо ^бл макс, ДБ Дэл инт, ДБ «1
0 0,88 )Jd -13,3 -10,3 1,00 1,00
0,58 1,14X4/ -28,5 • -22,2 1,26 0,86
0,852 1,33 Х4/ -42,8 -37,0 1,50 0,74
1 1,5 Vd -31,7 -33,0 1,65 0,67
Положение зоны обзора по азимуту относительно вектора путе-
вой скорости носителя 0Н определяется направлением оси ДН ан-
тенны и может изменяться в пределах 0Н = ±90°.
Ширина ДН по азимуту 0О определяет зону одновременного
обзора по азимуту на дальности 7?н: ДА = 0О7?Н.
240
Глава 6
1. При телескопическом обзоре ДН антенны непрерывно следит за
заданной зоной обзора (ДЛ, ДУ?) путем изменения угла 0Н (рис. 6.7,а):
6Н (/) = ен()+—Sin0H()’
где 0нО - начальный угол наблюдения при t = 0. Время слежения
определяется требуемым временем синтезирования и числом обзо-
ров (некогерентных накоплений).
Если по тактическим требованиям к РСА ширина зоны одно-
временного обзора Д£ недостаточна, то используют многолучевую
на прием и широкую на передачу ДН по азимуту. При N форми-
Рисунок 6.7
Зоны телескопического (а), полосового (б) и секторного (в) обзоров
Принципы построения радиолокационной системы землеобзора...
241
руемых одновременно лучах ширина зоны обзора А£ = . Со-
ответственно в N раз возрастают требования к системе обработки
по быстродействию и объему памяти, а также сложность системы
формирования ДН антенны. Поэтому расширение зоны обзора чаще
достигается путем дополнительного секторного либо полосового
(переднебокового) обзора за счез увеличения времени обзора задан-
ной зоны.
2. При переднебоковом (полосовом) обзоре угол наблюдения
постоянен (0Н = const) и скорость обзора равна скорости полета но-
сителя РСА (рис. 6.7,5). Требуемая полоса зоны обзора по азимуту
обеспечивается выбором времени обзора:
= ^Об3 •
3. При секторном обзоре скорость обзора определяется угловой
скоростью сканирования ДН по азимуту Qa (рис. 6.7,в). Требуемая
полоса обзора
AZ, = 60бЛн = •
Сканирование может быть непрерывным или дискретным с ша-
гом по времени, равным Тс или TCNH , где 7VH - число некогерентно
накапливаемых изображений одного и того же участка зоны обзора.
Возможно объединение режимов переднебокового или сек-
торного обзора с телескопическим, что позволяет обеспечить по-
стоянство амплитуды траекторного сигнала за время синтезиро-
вания. В этом случае ДН антенны на интервале синтезирования
отслеживает зону обзора АЛ = 0О7?Н. При переходе к следующему
интервалу синтезирования ДН переходит на соседнюю зону обзора,
возможно с перекрытием для некогерентного накопления изобра-
жений в соответствии с заданным видом обзора (секторным или пе-
реднебоковым).
Положение и ширина зоны обзора по дальности определяются
ДН антенны в вертикальной (угломестной) плоскости. Дальность об-
зора РСА определяет угол положения ДН фн, отсчитываемый от го-
ризонтальной плоскости (рис. 6.8):
Д = ЯН cos ср
(без учета кривизны Земли), а полоса обзора
АД = .
г^нмакс
COS(pH
242
Глава 6
Рисунок 6.8
Зона обзора по дальности
Минимальная дальность обзора Дмин ограничивается ухудше-
нием разрешения по горизонтальной дальности
5Д = 5r/coscpH .
Максимальная ширина зоны обзора по дальности
ДДн =Ф0ДДн/81ПФн
определяется шириной ДН в угломестной плоскости Фо. Расшире-
ние зоны одновременного обзора ДДН возможно за счет использо-
вания ДН специальной формы, например типа
G(cp) = cosec2 (ср) cos1/2 (ср),
которая обеспечивает постоянство мощности отраженного сигнала
фона при изменении дальности 7?н в пределах зоны обзора. В режи-
ме радиовидения (высокого разрешения) требуемая ширина зоны об-
зора ДДН « 7?н обычно обеспечивается иглообразным лучом.
Важнейшей функцией антенны является подавление пиков не-
однозначности функции неопределённости сигналов РСА. Неодно-
значность по азимуту обусловлена периодической структурой сиг-
нала и устраняется выбором ширины Оо и формы ДН по азимуту.
Нижняя граница оценки требуемой ширины ДН определяется усло-
вием теоремы отсчетов при заданной частоте повторения
Ti=4/o=—%sin0H,
К
(6.1)
Принципы noci роения радиолокационной системы землеобзора...
243
т.е. частота повторения равна ширине спектра траекторного сигнала
на уровне -3 дБ. При заданной скорости V и длине волны X ширина
ДН должна быть не более
А -
0 2KsinG '
н
При боковом обзоре (0Н = я/2), если B0=X/d , частота повто-
рения Fn -2V lk-2V / d или VTn = d/2, т.е. за период повторения
носитель РСА перемещается на расстояние d/2.
При использовании антенны с механическим сканированием по
азимуту ширина ДН не зависит от угла наблюдения 0Н . В этом слу-
чае требования к размеру антенны с уменьшением угла наблюдения
(переднебоковой обзор) также уменьшаются:
2V
d = -- sin 0Н. (6.2)
В случае антенны типа передней ФАР ширина ДН антенны ме-
няется от угла наблюдения и эти требования определяются форму-
лой
(6.3)
При боковой ФАР требуемый размер антенны не зависит от уг-
ла наблюдения.
Условие Fn = Л/о справедливо при использовании двухканаль-
ной системы обработки (sin и cos сигналы), т.е. на период макси-
мальной доплеровской частоты прйходит|я два отсчёта, что соответ-
ствует теореме отсчётов. В одноканальных системах обработки, на-
пример оптической, требование к частоте повторения увеличивается
в два раза.
При заданной скорости полета и угле наблюдения 0Н угол не-
однозначности А0! (положение первого пика ФН по частоте) опре-
деляется выбором частоты повторения Fn зондирующего сигнала
де1 =XFn/(2rsin0H).
При этом чем выше частота повторения, тем больше подавле-
ние пиков неоднозначности по азимуту.
244
Глава 6
Верхняя граница частоты повторения ограничена условием по-
давления пиков неоднозначности по дальности. Максимально до-
пустимая частота повторения определяется максимальной дальне-
стью обзора RH макс:
(6.4)
н макс
Объединяя требования к частоте повторения для обеспечения
подавления пиков неоднозначности одновременно по азимуту и
дальности, получаем требование к минимальному горизонтальному
размеру антенны:
(6.5)
При использовании оптической системы обработки частота по-
вторения и соответственно размер антенны должен быть в два раза
больше, чем при цифровой.
Одновременное выполнение требований по уровню подавления
сигналов неоднозначности по азимуту и дальности противоречиво,
так как увеличение частоты повторения повышает эффективность
подавления сигналов неоднозначности по азимуту и уменьшает по-
давление по дальности. Компромисс находится путем варьирования
скоростью носителя, углом наблюдения, дальностью, формой ДН
антенны и размером антенны.
При обеспечении уровня подавления пиков неоднозначности по
дальности максимальная полоса обзора по дальности = R
А НН MdKC
определяется размером антенны по азимуту (6.5):
Обеспечение требуемой полосы обзора по дальности путем вы-
бора соотвезствующего горизонтального размера антенны приводит
к ограничению максимально возможного размера синтезированной
апертуры при полосовом обзоре
с макс
= Мн / sin ен = Х7?н /( J sin ен)
который определяет минимально возможный размер элемента раз-
решения по азимуту
Принципы построения радиолокационной системы землеобзора...
245
Ы = ^RH/(2Xt
с макс
sinO. \ = d 2.
n /
Кроме того, ширина ДН антенны 0Ь ограничивает максималь-
ную ширину зоны одновременного обзора и телескопического обзо-
ра, равную 0О7?И . Преодолеть эти ограничения возможно с помощью
многолучевой по азимуту ДН антенны. В этом случае размер антен-
ны d и, следовательно ширина каждой парциальной ДН антенны вы-
бираются из условия (6.5) в соответствии с требуемой максимальной
дальностью обзора.
Общая ширина ДН определяется суммой парциальных ДН и
выбирается в соответствии с требуемой максимальной разрешающей
способностью по азимуту и шириной одновременной зоны обзора по
азимуту.
Когда ширина зоны обзора по дальности намного меньше мак-
симальной дальности наблюдения А7?н « /?иМакс и угол наблюдения
срн в вертикальной плоскости достаточно большой (что характерно
при обзоре в ближней зоне), для устранения неоднозначности по
дальности целесообразно использовать узкую ДН в вертикальной
плоскости Фо < <рн (см. рис. 6.8). В этом случае Фп выбирается так,
чтобы обеспечить заданную полосу обзора по дальности АДЙ на
удалении 7?ri (без учета кривизны Земли):
(6.7)
Частота повторения теперь выбирается из условия обеспечения
однозначности по дальности в полосе обзора А/?н, а не на макси-
мальной дальности /?нмакс (6.4):
— = Д7?н = ДДН cos<pH.
тг-т н г Ш I п
2Fn
(6.8)
При этом требуемый размер антенны в вертикальной плоскости
dy увеличивается и равен
ДДн8т<Рн AVS<Ph
а в горизонтальной плоскости (6.5) уменьшается:
(6.9)
246
Глава 6
4ИД7? . _ 4КДД
-------—sin 0„ =--------cos(p„ sm <pu.
H I п • п
(6.10)
Таким образом, минимальная площадь антенны, необходимая
для подавления боковых пиков ФН, не зависит от полосы обзора:
4Г7?Н sin 6Н
иб/ф _ , (6.11)
/оШ
где /0 - несущая частота зондирующего сигнала.
Полоса обзора определяется соотношениями размеров антенны d
(6.10) и (6.9). При выполнении условия (6.11) для размера d
4V coscpH sin срн ’
(6.12)
т.е. для расширения полосы обзора необходимо увеличивать гори-
зонтальный размер антенны.
При максимальном разрешении 8^ = d/2 и равенстве разреше-
ний - 5Д число разрешаемых элементов в полосе обзора не зави-
сит от размера антенны:
I. _________________
( 2rcoscpH sin'pk
(6.13)
Расширение полосы обзора АД путем увеличения размера ан-
тенны d (6.12) ограничено возможностью создания и размещения
большой антенны на носителе РСА. Кроме того, при полосовом об-
зоре (боковой, переднебоковое обзор) предельное разрешение ио
азимуту ограничено горизонтальным размером антенны ~ d/2).
При телескопическом обзоре увеличение размера антенны d
уменьшает ширину зоны обзора по азимуту, равную XR^/d^ .
Расширить почосу обзора по дальности без увеличения гори
зонтального размера антенны можно двумя способами.
Способ 1. При использовании многолучевых по углу места ДН
антенны широкая полоса АД^ составляется из полос меньшей ши-
рины АДН и для каждой более узкой полосы антенна формирует
свою ДН в вертикальной плоскости. Теперь требования к горизон-
тальному d и вертикальному d размеру антенны определяются
Принципы построения радиолокационной системы землеобзора... 247
шириной частичной, более узкой, полосы обзора ДДН . Чем шире
требуемая полоса обзора ЛДУ, тем большее число лучей по углу
места на одной и той же апертуре антенны требуется сформировать.
Разделение соседних полос обзора АД] (подавление пиков неодно-
значности по дальности) достигается, как и прежде, выбором часто-
ты повторения Fn (6.8), а также ширины ДН в вертикальной плоско-
сти (6.7).
Способ 2. Увеличить зону обзора по дальности без увеличения
горизонтального размера антенны можно также путем сканирования
ДН по углу места. Однако при этом пропорционально увеличению
ДДН уменьшается располагаемое время синтезирования на каждое
положение ДН по углу места и соответственно разрешающая спо-
собность по азимуту.
Антенная система определяет многие характеристики РСА:
поляризационные, энергетические, зону обзора, подавление бо-
ковых пиков неоднозначности дальность-азимут, селекцию дви-
жущихся целей, точность измерения угловых координат и помехо-
защищенность.
Коэффициент усиления антенны определяется площадью
антенны, а максимальный и интегральный уровни боковых лепест-
ков - распределением поля по площади антенны.
Боковые пики функции неопределенности азимут-дальность
подавляются ДН антенны соответственно по азимуту и углу места.
Одновременное подавление пиков ФН по азимуту и дально-
сти обеспечивается при горизонтальном размере антенны
WR
, . н макс .
а >--------sin 9 .
г!
с
При оптической обработке требования к размеру антенны
возрастают в два раза.
Положение и форма ДН по углу места определяют положе-
ние и размер зоны обзора по дальности. Расширение зоны обзора
по дальности возможно либо с помощью многолучевой ДН по уг-
лу места, либо сканированием ДН. При сканировании уменьшают-
ся время облучения цели и соответственно максимально возмож-
ное разрешение по азимуту.
Положение и форма ДН антенны по азимуту определяют по-
ложение и размер зоны обзора по азимуту.
При телескопическом обзоре ДН антенны следит за заданной
зоной обзора по азимуту, и ширина зоны определяется шириной ДН.
248
Глава 6
При переднебоковом обзоре угловое положение ДН антенны
относительно вектора пулевой скорости носителя РСА выдержи-
вается постоянным, при этом ширина зоны обзора по азимуту оп-
ределяется скоростью носителя и временем обзора.
При секторном обзоре ДН антенны сканирует (непрерывно
или дискретно) в заданном угловом секторе, и ширина зоны обзо-
ра определяется шириной сектора сканирования.
ГЛАВА 7
Обработка траекторного сигнала
радиолокационной системы
с синтезированием апертуры антенны
7.1. Алгоритм согласованной обработки
траекторного сигнала
Система обработки сигналов РСА обеспечивает получение необхо-
димом информации для решения различных тактических задач: об-
наружение, определение местоположения, распознавание и опреде-
ление функционального состояния целей.
В большинстве случаев решение этих тактических задач вы-
полняется в два этапа.
Этап 1. Процессор обработки сигналов (сигнальный процес-
сор) РСА формирует РЛИ заданного вида (амплитудные, фазовые,
скоростные, поляризационные портреты целей).
Этап 2. Процессор данных (ЭВМ), используя полученные
РЛИ, определяет необходимые характеристики целей для решения
заданной тактической задачи. На основании априорных данных о
целях и изображений, полученных другими датчиками, строится
изображение целей в нужном масштабе с выделением особенностей
окружающей местности и объектов Далее производится обнаруже-
ние целей с поддержанием заданного уровня ложных тревог, осуще-
ствляется привязка изображения к земной системе координат с оп-
ределением местоположения целей и рельефа местности. Завершает-
ся обработка РЛИ определением типа целей и их функционального
состояния (движение, боевая работа).
250
Глава 7
Функционирование системы обработки обеспечивается набо-
ром алгоритмов решения задач (алгоритмическое обеспечение) и ап-
паратными средствами (аналоговыми или цифровыми процессорами
и ЭВМ). В данной главе определяются алгоритмы обработки траек-
торного сигнала РСА землеобзора и их реализация аналоговой опти-
ческой системой обработки или цифровым процессором.
Источником информации в РСА является электромагнитное
поле, отраженное от целей и принимаемое на траектории перемеще-
ния антенны (траекторный сигнал). В зависимости от того, какие па-
раметры поля используются в системе обработки сигналов, разли-
чают несколько этапов обработки сигнальным процессором.
Этап 1. Поляризационная обработка. При полном поляриза-
ционном зондировании, когда одновременно излучаются электро-
магнитные волны с горизонтальной (Г) и вертикальной (В) поляри-
зацией, приемная антенна (поляриметр) формирует четыре канала
различной поляризации сигналов (ГГ, ВВ, ГВ, ВГ). Сигнал каждого
канала содержит информацию о функции отражения цели при соот-
ветствующей поляризации падающей и отраженной волны. После-
дующая обработка сигналов четырех каналов обычно проводится
после формирования РЛИ целей в каждом канале раздельно путем
анализа взаимосвязей РЛИ разных каналов. В однопозиционной РСА
РЛИ с различной поляризационной обработкой имеют одинаковые
кроссполяризационные свойства функции отражения объектов при
землеобзоре. Поэтому достаточно трёх каналов обработки сигналов.
Поляризационная обработка повышает вероятность обнаружения и
особенно распознавания целей.
Этап 2. Пространственная обработка. При использовании
антенной системы РСА типа ФАР с раздельным приемом сигналов в
каждом элементе апертуры реальной антенны возможно формирова-
ние многоканальной синтезированной апертуры. Совместная обра-
ботка сигналов, формируемых в отдельных каналах (элементах
ФАР), названа пространственной обработкой (по пространству
апертуры реальной антенны). В простейшем случае все сигналы
элементов ФАР суммируются когерентно, образуя однолучевую
(суммарную) ДН антенны. Часто формируют одновременно суммар-
ную и разностную ДН (моноимпульсная антенна). Возможно фор-
мирование ФАР с несколькими, разнесенными по апертуре, фазовы-
ми центрами (каналами).
В интерферометрических РСА антенная система состоит из
двух, разнесенных по пространству, антенн, формируя два простран-
ственных канала (две синтезированных апертуры).
Обработка траекторного сигнала радиолокационной системы... 251
Пространственная обработка обычно осуществляется в два ша-
га. На первом шаге формируют необходимые ДН и фазовые центры
непосредственно на полотне антенны с помощью мостов, циркуля-
торов, фазовращателей и т.п. На втором - сигналы полученных ан-
тенных каналов усиливаются, преобразуются и обрабатываются на
промежуточной частоте в цифровом виде. Алгоритмы обработки оп-
ределяются решаемой тактической задачей (СДЦ, измерение коор-
динат, компенсация помеховых сигналов и др.). В сложных разведы-
вательно-ударных РСА формируется до 15-ти отдельных простран-
ственных каналов, позволяющих решить целый комплекс задач. В
антеннах типа ФАР возможно формирование ДН цифровым спосо-
бом после преобразования сигналов в каждом канале ФАР с помо-
щью АЦП.
Этап 3. Внутрипериодная обработка. В РСА обычно исполь-
зуются когерентно-импульсные периодические сигналы. В каждом
периоде повторения импульсов отраженный сигнал несет информа-
цию о цели. Задержка огибающей сигнала определяется дальностью
до цели. Изменение фазы сигнала цели относительно опорного коле-
бания определяется изменением расстояния до цели относительно
фазового центра антенны и является источником информации для
синтезирования апертуры. Внутрипериодная обработка сигналов
обеспечивает получение этой информации обычно путем согласо-
ванной обработки сигналов. При использовании сигналов с внутри-
импульсной модуляцией внутрипериодная обработка обеспечивает
также сжатие сигнала по дальности. Иногда внутрипериодную обра-
ботку сигналов называют обработкой в «быстром» времени, в отли-
чие от «медленного» времени обработки вдоль траектории носителя
РСА (синтезирования апертуры).
Этап 4. Межпериодная (траекторная) обработка. Основное
назначение траекторной обработки - синтезирование апертуры (сжа-
тие сигналов по азимуту). Поскольку сжатие сигналов по дальности
было выполнено в процессе внутрипериодной обработки, результа-
том последующей траекторной обработки является получение де-
тального изображения функции отражения целей (радиовидение).
В ряде случаев для формирования РЛИ с высоким разрешени-
ем, особенно в длинноволновом диапазоне волн, внутрипериодная и
межпериодная обработка не могут быть разделены на две независи-
мые. В этом случае пространственная (по апертуре реальной антен-
ны) и временная (внутрипериодная и межпериодная) обработки яв-
ляются единым процессом и требуют выполнения единого про-
странственно-временного алгоритма.
252
Глава 7
Траекторный сигнал представляет собой последовательность
отраженных от объектов сигналов, полученных в N периодах
повторения зондирующего сигнала на траектории перемещения
фазового центра антенны.
Каждая точечная цель переизлучает сферичную волну в на-
правлении антенны РСА. На рис. 7.1 приведен случаи с двумя то-
чечными целями, имеющими координаты дальность, азимут, высота
(Дц|, 0ц|, На]) и ( Дц2, 0и2, Яц2 ) в пределах ширины ДН антенны 0О.
Фаза траекторных сигналов целей определяется расстоянием от цели
до фазового центра антенны, соответственно г и г2 в N точках на
траектории.
Для обеспечения заданного разрешения по дальности в РСА
обычно используют импульсные зондирующие сигналы. В большин-
стве случаев одиночный импульс, отраженный от z-ro точечного объ-
екта, представляет копию зондирующего импульса, задержанную на
время Tj, которое определяется текущим расстоянием до объекта i\,
т.е. влиянием изменения задержки за время длительности импульса на
его комплексную огибающую можно пренебречь. При этом алгоритм
согласованной обработки можно разделить на два независимых шага:
внутрипериодная обработка каждого импульса и межпериодная обра-
ботка пачки импульсов, т.е. траекторная обработка. Согласованная
обработка является линейной операцией. Порядок следования этих
этапов может быть произвольным. В некоторых случаях, например
при использовании ЛЧМ-импульсов и оптической системы обработ-
ки, оба шага могут выполняться одновременно.
Рисунок 7.1
Формирование траекторного сигнала
Обработка траекторного сигнала радиолокационной системы...
253
В дальнейшем будем рассматривать обработку траекторного
сигналапредставляющего собой выходное сигнал внутрипериоднои
системы обработки. Целью этой обработки является получение ра-
диолокационного изображения с заданным разрешением по азимуту.
Для определения алгоритма согласованной обработки сигналов
при получении РЛИ рассмотрим закономерности формирования
траекторного сигнала от одиночного точечного объекта.
Полагаем, что частота повторения зондирующего сигнала дос-
таточна для представления траекторного сигнала в виде непрерыв-
ной функции в пределах интервала синтезирования. В этом случае
траекторный сигнал , при условии что фазовые искажения,
обусловленные траекторными флуктуациями, неоднородностями
среды распространения и нестабильностями приемопередаюхцего
зракта отсутствуют, можно представить в виде
где £/, ср0 - случайные амплитуда и фаза сш нала; X - длина волны
РСА; нормированная функция, характеризующая модуляцию
сигнала ДН реальной антенной (на передачу и прием), которая, в
свою очередь, определяется текущими угловыми положениями
объекта и ДН; гн - текущее расстояние от ФЦА до объекта.
В общем случае траектория не является плоской. Для упроще-
ния записи траекторного сигнала и алгоритма его обработки будем
рассматривать проекцию синтезированной апертуры в плоскости (JV, Y),
содержащей прямую наклонной дальности 7?н до объекта и синтези-
рованную апертуру (рис. 7.2). В этом случае синтезированная апер-
тура есть проекция траектории на плоскость (А, У).
В большинстве случаев траектория носителя РЛС на участке
синтезирования может быть представлена прямой линией или ок-
ружностью с известным радиусом разворота 7?р. При этом малые
отклонения от заданной траектории того или иного типа будем рас-
сматривать как траекторные нестабильности.
При прямолинейной траектории и постоянной скорости носи-
теля V текущее расстояние, отсчитываемое от точечного объекта до
координаты ФЦА на оси X:
254
Глава 7
Рисунок 7.2
Формирование траекторного сигнала в плоскости X, У при манёвре носителя
где Хн, Ун, = Vt - соответственно координаты объекта и теку-
щие координаты ФЦА в плоскости ОЛТ.
Пусть в момент времени t - О РЛС находится в начале системы
координат, при этом объект находится под углом 0Н к оси X в цен-
тре ДН реальной антенны, а текущее время t изменяется от - Гс /2
до Тс - временной интервал синтезирования.
Для определения закономерностей отраженного сигнала пред-
ставим (7.2) в виде ряда
(z) = 7?H-rzcoseH +
V2t2 sin2 ен
2^
• • 5
н
наклонная дальность до объекта в начальный
момент времени.
В тех случаях, когда в интервале -Tj2<t <+5 /2 изменение
фазы сигнала, обусловленное кубичным и более высокими членами
разложения, меньше допустимого, для определения фазовой харак-
теристики траекторного сигнала достаточно использовать квадра-
тичную аппроксимацию гн (/). Если считать допустимым значением
фазового набега, вызванного кубичным членом на краю апертуры
(при t = Тс/2\ величину, равную л/4, то квадратичная аппрокси-
мация оправдана для получения РЛИ с разрешением по азимуту:
Обработка траекторного сигнала радиолокационной системы...
255
57>^X2.RHctg0H/2.
Для Х = 3 см, 7?н=100км и 0Н=ЗО квадратичная аппрок-
симация гн (/) применима, если 5^ > 2,7 м.
При невыполнении этого неравенства необходимо учитывать
более высокие члены разложения. Однако величина дополнительных
фазовых членов обычно соизмерима с величиной нестабильностей
фазы траекторного сигнала и обычно автоматически учитывается ал-
горитмами автофокусировки. В дальнейшем будем считать, что ус-
ловие использования квадратичной аппроксимации текущего рас-
стояния между ФЦА и объектом выполняется, т.е.
гн (/) ^ - К/ cos 0„ + — = RH-Vrt + ^~-, (7.3)
где Vr = V cos0H ; ar = \V2 sin ' 0H 7?H - соответственно радиальная
скорость и ускорение движения ФЦА относительно объекта при
t = 0, а фаза траекторного сигнала изменяется по закону:
/ х 4л 2л V t . 2 п
(p"v)=TF?coseH"Y_^—sin е«+ ф<> ’
н
(7-4)
4л/?н
где ф0 = —-—
постоянная начальная фаза.
Доплеровская частота траекторного сигнала (производная фазы)
1 Jq>(H 2Г п 2T2sin20 2И 2аг
-----= —cos 0И----------------t = —— 1
2л dt X X/L X X
п
Из (7.5) видно, что средняя доплеровская частота сигнала (до-
плеровская частота в момент времени Z = 0) определяется радиаль-
ной скоростью движения ФЦА по отношению к объекту
Vr = V cos0H , которая, в свою очередь, зависит от его азимутального
положения (угла 0Н). Она максимальна при наблюдении по линии
пути (0Н = 0) и равна нулю при боковом обзоре (0Н - л/2).
Второй член в (7.5) определяет линейную частотную модуля-
цию (ЛЧМ) траекторного сигнала. Индекс частотной модуляции из-
256
Глава 7
меняется обратно пропорционально наклонной дальности до отра-
жателя и максимален при боковом обзоре.
Ширина спектра дотсровских частот траекторного сигнала в
пределах ширины ДН антенны 0О -к/d равна
A/д» — "т
COS 0
О
н л
н
е0 sin 0Н
sin0H.
н
Таким образом, ширина спектра доплеровских частот траектор-
ного сигнала определяется скоростью полёта носителя И, размером
антенны d и углом наблюдения 0Н и не зависит от длины волны.
При движении носителя РСА с постоянней скоростью по ок-
ружности с радиусом разворота 7?р, соизмеримым с дальностью до
объекта текущее расстояние
, ч r2/2sin20
1/1 - D I Н
н
Rp sin0
Доплеровская частота в этом случае
2Hcos0H 2r2sin20H
ri Н
X X/?
н
----s— t.
Rp sin0H J
В качестве иллюстрации на рис. 7.3,а показано изменение доп-
леровской частоты сигналов пяти объектов, расположенных на од-
ной дальности, но имеющих разное азимутальное положение от
0j до 05. Для разрешения сигналов объектов по азимуту необходи-
мо разрешить их по доплеровской частоте при предварительном
устранении ЛЧМ-сигналов. В этом случае частота сигналов останет-
ся постоянной, и будет определяться азимутальным положением
объектов (рис. 7.3,6).
При импульсном зондирующем сигнале, период повторения ко-
торого выбран исходя из необходимости устранения неоднозначно-
стей по азимуту и дальности, каждый импульс является дискретным
отсчетом (выборкой) траекторного сигнала (7.1). При этом измене-
ние дальности до объекта гн (7) в течение времени синтезирования
приводит не только к изменению фазы траекторного сигнала, но и к
изменению задержки огибающей импульсов.
Обработка траекторного сигнала радиолокационной системы...
257
Рисунок 7.3
Изменение частоты траекторного сигнала без компенсации (я)
и с компенсацией (б) линейной частотной модуляции
Когда максимальное изменение дальности до объекта на интер-
вале синтезирования, обусловленное квадратичным членом разло-
жения (7.3), меньше, чем половина разрешения по дальности 5г , т.е.
F2(rc/2)2sin2eH_V7?H ^8г (77)
2R„ 325/2 2 ’
то можно считать, что задержка огибающей изменяется линейно в
пределах синтезированной апертуры:
/Л 2(Лн-Tifcosej 2F7coseH
М0 =-----------------= т0-----------, (/•»)
с с
где т0 = 27?н /с — задержка сигнала в момент времени t = 0.
258
Глава 7
При несоблюдении условия (7.7) в законе изменения задержки
огибающей сигнала необходимо учитывать и квадратичные члены
выражения (7.3).
Используя рассмотренные выше закономерности изменения фа-
зы и задержки огибающей, траекторный сигнал точечного объекта
при импульсном режиме работы РСА можно записать в виде
(пТп) = U G(пТп) st [/ - пТп - тн (пТи) х
4л
хехр<j
sin2eH +ф0
(7.9)
где п - номер зондирующего импульса; Тп - период повторения
импульсов; sT [...] - функция, описывающая отраженный сигнал на
выходе внутрипериодной системы обработки.
Таким образом, траекторный сигнал точечного объекта пред-
ставляет собой пачку импульсов, следующих с периодом Тп . Ам-
плитуда импульсов в пачке плавно изменяется в соответствии с из-
менением значения ДН <7(лгГп) и зависит от закона управления ДН
(вида обзора). При среднем разрешении можно считать, что задерж-
ка отраженных импульсов тн меняется от периода к периоду по ли-
нейному закону, а фаза - по линейному и квадратичному, что соот-
ветствует ЛЧМ траекторного сигнала.
Исходя из проведенного анализа следует, что для согласован-
ной траекторной обработки сигнала система должна обеспечивать
когерентное накопление сигнала с ЛЧМ и регулировку параметров
системы так, чтобы учесть:
• изменение амплитуды сигнала, определяемое ДП антенны G и
видом обзора земной поверхности;
• изменение задержки огибающей сигнала тн, а также зависи-
мость этой задержки от азимута объекта;
2V
• изменение средней частоты сигнала объекта —cos0H при из-
К
менении его азимута:
• изменение индекса ЛЧМ в зависимости от азимута, дальности
объекта.
Обработка траекторного сигнала радиолокационной системы...
259
Алгоритм согласованной обработки
Траекторный сигнал на входе межпериодной системы обра-
ботки для одного элемента разрешения по дальности представляет
собой аддитивную смесь полезного сигнала и шума :
Полезный сигнал является суперпозицией сигналов эле-
ментарных отражателей, расположенных в пределах ДН антенны и
данного элемента разрешения по дальности (рис. 7.4):
*(')=& (О- <7Л°)
/=1
Здесь 5\(/) - сигнал точечного отражателя, находящегося на даль-
ности 7?н + т- (наклонная дальность наблюдения) и азимуте 0Н + 0j,
где 0Н - угол наблюдения (азимут центра зоны обзора относительно
оси X), который определяется направлением оси ДН в момент вре-
мени t = 0; 0, - угловая координата отражателя относительно на-
правления на центр зоны обзора, АТ? и AL - соответственно разме-
ры зоны обзора по дальности и азимуту.
При квадратичной аппроксимации текущей дальности объекта
до ФЦА (7.3)
Рисунок 7.4
Ограничение зоны обзора по азимуту и дальности
260
Глава 7
. 4 л
2,2
(7.И)
Аддитивная помеха /?(/) представляет собой гауссовский белый
шум с нулевым математическим ожиданием, спектральной плотно-
стью Nq и корреляционной функцией )и(^2)} =
Синтезирование апертуры антенны (получение сигнала 7(0,),
характеризующего РЛИ элемента разрешения), сводится к реализа-
ции алгоритма согласованной обработки траекторного сигнала:
'(0.)=
Гс/2
j u\t}hx (zjd/1 ,
-Т/2
(7.12)
где hx (z) - опорная функция системы обработки для i цели.
В качестве опорной функции используется функция, комплекс-
но сопряженная с сигналом от одиночной точечной цели:
(7.13)
где - действительная весовая функция синтезированной апер-
туры, от вида которой зависит, прежде всего, уровень боковых лепе-
стков выходного сигнала. По сравнению с (7.1) закон изменения фа-
зы имеет противоположный знак.
При квадратичной аппроксимации текущей дальности опорная
функция
/2i(z) = pr(z)x
F7cos(0H +0j)-
(7.14)
Сравнение (7.11) и (7.14) показывает, что целью умножения
сигнала на опорную функцию является демодуляция ЛЧМ-сигнала
(устранение квадратичного набега фазы) и сдвиг спектра сигнала на
нулевую частоту (устранение линейного набега фазы) для отражате-
Обработка траекторного сигнала радиолокационной системы...
261
ля, расположенного в элементе разрешения по дальности, соответст-
вующей дальности гх, и азимуту 0i. Далее следует накопление тако-
го сигнала в течение времени Тс (операция интегрирования в (7.12)
и взятие модуля).
Следует отметить, что траекторный сигнал РСА является им-
пульсным, поэтому значение опорной функции (7.14) определяется в
дискретные моменты времени t - пТп , где п - номер зондирующего
импульса, а интегратор представляет собой суммагор импульсов,
принимаемых в течение времени синтезирования.
Когерентное накопление сигнала в течение времени Тс обеспе-
чивает разрешение по частоте = i/Tc . Угловое разрешение по
азимуту из условия 8/ = (2Г/Х) cos(0i)-cos(0H+80) равно
2FT sin 0„ 2Хс sin 0Н
V г! VH
а линейное разрешение по азимуту
Ы = 50/?
п
ХА ХА
н ___ н
2FTsin0H 2XX sin 0И
V Н V н
(7.15)
где Хс - VTC - размер синтезированной апертуры по оси X. Следо-
вательно, время синтезирования определяется требуемой разре-
шающей способностью:
XR
т _______н___
с -2msineH ‘
н
(7.16)
Полоса доплеровских частот сигнала, обрабатываемых в одном
канале, равна
5
(7.17)
т.е. увеличивается с увеличением путевой скорости, и угла наблюде-
ния и с повышением разрешения. Следует отметить, что произведе-
ние полосы обрабатываемых частот на время синтезирования не за-
висит от путевой скорости и угла наблюдения: TcXf^ = XAH/28^2 .
Фокусировка - компенсация ЛЧМ-сигнала перед его накопле-
нием.
262
Глава 7
И Если в системе обработки РСА не учитывается ЛЧМ-сигналов
(в фазе опорной функции (7.16) отсутствует квадратичная со-
ставляющая), то такая РСА называется нсфоку сированной, а со-
ответствующий режим РЛС называют доплеровским обужени-
ем луча (ДОЛ).
При этом, в соответствии с (7.14) и (7.16), обработка сводится к
спектральному анализу сигнала, принятому в течение времени Тс, и
вычислению модуля сигнала в каждом фильтре. Изменение частоты
сигнала за время синтезирования не должно превышать разрешения
РСА по частоте, т.е. Д^обр <&f = ^/Тс . Отсюда, с учетом (7.18) и
(7.19), получим предельное время синтезирования в режиме ДОЛ:
Подставив найденное значение Тс в (7.17), получим, что вели-
чина разрешения в этом случае равна
(7.19)
Для получения РЛИ всех объектов, расположенных в пределах
зоны обзора, определяемой реальной диаграммой направленности, в
соответствии с алгоритмом (7.12) система обработки должна учиты-
вать различие параметров сигналов (задержки огибающей и скоро-
сти ее изменения, средней доплеровской частоты, крутизны ЛЧМ и
ширины спектра в зависимости от координат объектов). Система об-
работки при этом становится многоканальной.
Количество каналов в системе обработки зависит от способа
формирования РЛИ при обзоре пространства. Получение РЛИ при
кадровом и построчном алгоритмах для случая бокового обзора
( 0Н = 90 ) показано на рис. 7.5.
При кадровом алгоритме формирования РЛИ число лучей,
формируемых в результате обработки сигнала на каждом интервале
синтезирования, должно обеспечивать получение РЛИ без пропус-
ков во всей зоне обзора ДА . Число необходимых лучей определяет-
ся выражением
NA=kabL/W
Обработка 1раекторного сигнала радиолокационной системы...
263
Рисунок 7.5
Формирование РЛИ: а - по кадрам, б - построчное
где &£ - линейное разрешение РСА по азимуту; ка = 1...2 - коэф-
фициент перекрытия элементов разрешения по азимуту. Максималь-
ная величина — 0n7L .
макс и н
При 0П = 2 и RH = 100 км получим ДД,акс - 3000 м . Для пе-
рекрытия зоны обзора размером AZ, = ДАмакс без пропусков при
кг -1, 8J = 3 м - требуется А = 1000 азимутальных каналов.
При наличии в системе обработки только одного канала обзор
заданной зоны XL осуществляется за счет последовательного пере-
мещения интервала синтезирования с формированием одного луча
при каждом положении интервала синтезирования. При этом направ-
ление синтезированного луча совпадает с направлением ДН — 0Н (т.е.
©i = 0), ДН неподвижна относительно вектора путевой скорости ЛА
(0Н = const), а максимальный шаг смещения апертуры АХ не пре-
вышает размер элемента разрешения по оси X. При ka -1 XX = .
Такой алгоритм получения РЛИ называют построчным.
К Для упрощения системы обработки целесообразно для всех
сигналов в полосе обзора использовать единый алгоритм обра-
ботки.
264
Глава 7
В большинстве случаев это возможно только при ограничении
полосы обзора, как по дальности, так и по азимуту. При этом всю
заданную зону обзора можно разбить на ряд полос, в каждой из ко-
торых использовать постоянный алгоритм обработки сигналов.
Фаза и задержка огибающей сигнала объекта, расположенного
в центре полосы обзора с координатами 0Н и /?н, соответственно
равны:
н ’
/ х 2nV2t2 . 2л
ср(Z) =— P7cos0H----------sft 0r;
V 7 X н 7J?
н
/ х 2Р7 Л
Т?) = Тн-----COS0H,
где тн = 2R*Jc - начальная задержка огибающей.
Для объектов в зоне обзора с координатами дальности и азиму-
та, отличающимися от и 0Н, закон изменения фазы и задержки
огибающей траекторного сигнала будет другим. Будем считать, что
при изменении дальности и азимута объекта в пределах полосы об-
зора допустимо рассогласование траекторных сигналов на краю син-
тезированной апертуры относительно опорного сигнала по фазе на
величину Аф = л/4 и задержке Ат = 8т/2 . В этом случае возможная
ширина зоны обзора по дальности \R и азимуту А£ при использо-
вании одинакового опорного сигнала и закона управления стробами
дальности для всех траекторных сигналов
28£5г
(7.20)
(7.21)
Благодаря уменьшению зоны одновременной обработки сигна-
ла по азимуту и дальности опорную функцию (7.16) для всех сигна-
лов можно представить в виде
r0/sin0H
(7.22)
где Л(/,0П) - опорная функция, которая осуществляет компенсацию
одинаковой средней доплеровской частоты всех сигналов и одина-
ковую фокусировку изображения всех объектов, расположенных в
зоне обзора:
Обработка траекторного сигнала радиолокационной системы...
265
й(г,Он) = 0ф)ехр<Н
P7cos0„
н
Подставив (7.23) в (7.12), получим алгоритм обработки тра-
екторных сигналов в зоне обзора'.
т)=
7;/2
J w(/)A(z,eH)exp{-j2n/(ei)^d/,
-г /2
(7.24)
где /(0,) =
2Ksin0
---------bj - смещение доплеровской частоты сигнала
объекта с координатой 6 относительно доплеровской частоты сиг-
нала объекта, находящегося в центре зоны обзора с координатой 0И.
Из этого выражения видно, что сигнал РЛИ представляет собой мо-
дуль преобразования Фурье произведения принятого траекторного
сигнала и опорной функции, которая рассчитывается для центра зо-
ны обзора размером не более Д/?х ДА .
Таким образом, при ограниченной зоне обзора система обра-
ботки может быть многоканальной только по дальности и азиму-
ту. В каждом канале такой системы, отличающемся временем за-
держки и частотой, осуществляется компенсация ЛЧМ-сигналов с
одинаковой крутизной изменения частоты (фокусировка).
Каналы по дальности формируются стробированием по вре-
мени задержки. Разнос соседних каналов определяется разрешаю-
щей способностью по дальности 8г, при этом начальная задержка
строба в каждом канале изменяется за время обработки по линейно-
му закону.
Каналы по азимуту формируются путем спектрального анализа
сигнала в пределах полосы частот, определяемой азимутальным
размером зоны обзора ДА :
2V
COS 0„
н
2V
2V
sin0H.
Г1
н
н
т-е. 0ОАН < AZ,, то Д/о6р
Если ширина ДН меньше, чем возможный размер зоны обзора.
2V . 2V .
— 0osin0H =—sin0H, где d - размер
A d
антенны. Разнос соседних каналов по частоте определяется време-
266
Глава 7
нем синтезирования (8f = \/Тс\ которое, в свою очередь, зависит от
заданного разрешения РСА по азимуту (7.18).
В зависимости от решаемой тактической задачи, требуемой ве-
личины зоны обзора и времени обзора в РСА используют:
• полосовой обзор местности (боковой или переднебоковой
обзор);
• обзор сектора (секторный обзор),
• обзор участка местности в пределах ширины ДН антенны (те-
лескопический обзор).
Другие возможные виды обзора являются частными случаями
одного из трех указанных (например, боковой обзор) или их комби-
нацией.
1. При почосовом (переднебоковом или боковом) обзоре РЛИ
местности формируется построчно по мере пролета картографируе-
мой местности или в виде отдельных кадров, которые стыкуются
между собой.
При построчном картографировании система обработки на ка-
ждом интервале синтезирования обеспечивает формирование только
одной строки изображения в направлении максимума реальной ДН.
Для этого в каждом канале дальности принимаемый сигнал умножа-
ется на опорную функцию (7.23) и далее накапливается в течение
времени Тс, т.е. формируется только один синтезированный луч. За-
тем происходит смещение по траектории на величину АХ = 8^/kd и
обработка повторяется. РЛИ вдоль линии пути формируется путём
многократного повторения описанной выше обработки.
При большой полосе обзора по дальности приходится учиты-
вать зависимость опорной функции от дальности. Для этого весь
диапазон от R1ИН до 7?макс разбивают на несколько поддиапазонов
шириной АТ? и для каждого из них формируют опорную функцию
вида (7.23).
При формировании изображения в виде кадров для траекторно-
го сигнала, записанного в течение времени Тс, в системе обработки
с помощью опорной функции (7.25) компенсируется постоянная
средняя частота и ЛЧМ в направлении максимума диаграммы на-
правленности и далее производится спектральный анализ в пределах
полосы частот сигнала А^обр, соответствующей ширине кадра ДА
(7.25). Затем выполняется смещение по траектории полёта на вели-
чину АХ = AL и обработка повторяется.
Обработка траекторного сигнала радиолокационной системы...
267
2. При секторном обзоре антенна непрерывно или дискретно
сканирует по азимуту в секторе 0обз в течение времени Гибз. Пол-
ный кадр РЛИ разделяется на парциальные кадры, изображение ка-
ждого из которых формируется при обработке сигналов на соседних
интервалах синтезирования. Затем парциальные кадры объединяют-
ся в полный кадр РЛИ. Угловой размер парциального кадра обычно
равен ширине диаграммы направленности антенны 0 и полный
кадр содержит 0обз/0о парциальных кадров. Если парциальные
кадры формируются с перекрытием, то количество парциальных
кадров соответственно увеличивается.
Для обеспечения постоянного разрешения во всем секторе
обзора необходимо с уменьшением угла 0„ увеличивать время син-
тезирования и, следовательно, снижать скорость сканирования ДН
Это обусловлено тем, что участок поверхности, соответствующий
отдельному парциальному кадру РЛИ, должен непрерывно облу-
чаться в течение времени синтезирования. Максимальное время об-
лучения цели определяется временем прохода по цели диаграммы
направленности антенны шириной 0О со скоростью сканирования
0 XR
Qa: Тс =——. При заданном разрешении 8( — н—- требуемая
Q. 2r71sin0u
a v Н
скорость сканирования
25/FOosinOH
£2Я -------------. (/.2о)
С уменьшением угла 0Н увеличивается время синтезирования и
при постоянной частоте повторения Fn соответственно увеличива-
ется энергия сигнала вследствие увеличения числа накапливаемых
импульсов Nc - FnTc.
Для обеспечения постоянства характеристик РЛИ целей во всём
секторе обзора целесообразно поддерживать постоянство энергии
сигналов, т.е. постоянство Лгс. Для этого необходимо изменять им-
пульсную мощность излучения или частоту повторения с изменени-
ем угла наблюдения:
2И
Fn=—sineH. (7.27)
268
Глава 7
АГ хт?н еоя
В этом случае 7VC -----=------= const, что позволяет сущест-
венно упростить обработку сигнала при сканировании.
3. Телескопический обзор применяется при необходимости по-
лучения высокого разрешения и многократного наблюдения одного
и того же участка местности. При этом участок местности, представ-
ляющий интерес, должен полностью помещаться внутри диаграммы
направленности и его РЛИ получается путем кадровой обработки
сигнала на одном интервале синтезирования.
РЛИ формируется в окрестности выбранной точки (центра кад-
ра), координаты которой задаются дальностью 7?н и азимутом 0ч
относительно центра интервала синтезирования. Диаграмма направ-
ленности отслеживает центр кадра в течение одного или нескольких
интервалов синтезирования. При этом закон управления диаграммой
направленности по азимуту
(7.28)
где 0нО, /?н() начальные угол наблюдения и наклонная дальность
до центра кадра на интервале синтезирования.
При телескопическом обзоре отсутствует амплитудная модуля-
ция сигнала, обусловленная изменением положения ДН относитель-
но центра кадра. Опорная функция (7.23) изменяется от одного ин-
тервала синтезирования к другому по мере изменения угла наблюде-
ния и дальности центра кадра.
Для получения кадра РЛИ на каждом интервале синтезирова-
ния после умножения сигнала на опорную функцию (7.23) выполня-
ется спектральный анализ в пределах области частот (7.25). При та-
кой обработке, вследствие применения одной и той же опорной
функции для всей зоны обзора, размер кадра определяется выраже-
нием (7.19) и обычно меньше максимального, определяемого шири-
ной ДН. Для получения кадра РЛИ с высоким разрешением и мак-
симальным размером Д£макс = АН0О для каждого элемента разреше-
ния в кадре РЛИ необходимо применять оптимальную опорную
функцию (7.13), что ведет к усложнению системы обработки.
Разрешающая способность при телескопическом обзоре может
быть очень высокой, так как максимальное время Тс ограничено
только вычислительными возможностями системы обработки и фа-
зовыми искажениями траекторного сигнала.
Обработка траекторного сигнала радиолокационной системы...
269
Среди комбинированных режимов обзора возможно применение
секторно-телескопического обзора, когда в течение одного интервала
синтезирования применяют телескопический обзор, затем поворачи-
вают диаграмму направленности и вновь применяют телескопический
обзор и т.д., что обеспечивает более широкую зону обзора ЛА > Q0R,.
Алгоритм обработки сигналов РСА землеобзора наряду с син-
тезированием предусматривает некогерентное накопление сигна-
лов РЛИ.
Некогерентное накопление
РЛИ в РСА при однократном обзоре представляет собой простран-
ственный шум (спекл-шум), дисперсия которого изменяется в соот-
ветствии с отражающими свойствами объектов (ЭПР), а интервал
корреляции примерно равен разрешающей способности.
Спекл-шум возникает из-за того, что случайные по характери-
стикам и расположению элементарные отражатели в элементе
разрешения РСА, образуют случайное поле переизлучения.
Следствием этого является случайная величина ЭПР элементов
разрешения объектов.
Пятнистость изображения может заметно снизить вероятность
обнаружения объектов и другие характеристики РСА. Влияние
спекл-шума ослабляется путем дополнительного некогерентною на-
копления (сложения амплитуд) нескольких независимых РЛИ одних
и тех же объектов.
Методы, используемые для формирования
некоррелированных между собой изображений
• Параллельная работа РЛС на нескольких разнесенных несущих
частотах.
• Работа с излучением и приемом сигналов различной поляризации.
• Разбиение всей полосы частот зондирующего сигнала на ряд
примыкающих к друг другу полос, ширина которых определя-
ется требуемым разрешением по дальности.
• Аналогичное разбиение всего траекторного сигнала длительно-
стью Ао на примыкающие к друг другу участки, размер Тс ко-
торых определяется требуемым разрешением по азимуту.
Преимущество последнего метода в том, что траекторный сиг-
нал обычно имеет информационную избыточность, т.е. Ао > Тс и для
270
Глава 7
некогерентного накопления необходимы лишь дополнительные уст-
ройства в системе обработки сигналов. Величина TG представляет
собой общее время облучения (наблюдения) объекта. При перецне-
боковом обзоре оно определяется шириной ДН реальной антенны и
скоростью полета ЛА. При секторном обзоре зависит, кроме того, от
угловой скорости вращения антенны по азимуту, а при телескопиче-
ском - теоретически не ограничено.
Время корреляции спекл-шума в элементе разрешения на выхо-
де системы обработки обычно равно времени синтезирования Тс,
поэтому максимально возможное число некогерентных выборок
изображения на всем интервале наблюдения объекта равно
Наиболее просто осуществить некогерентное накопление при
телескопическое обзоре. В этом случае необходимо сложить кадры
РЛИ, полученные на последовательных интервалах синтезирования.
Число лучей, формируемых на каждом интервале синтезирования
при телескопическом обзоре и одном отсчете РЛИ на элемент раз-
решения по азимуту ( = 1), определяется отношением ширины зо-
ны обзора и разрешения по азимуту:
Если зона обзора определяется шириной диаграммы направ-
ленности, то
N„ = . (7.29)
л Ы
При некогерентном накоплении РЛИ в переднебоковом обзоре,
максимальный размер синтезированной апергуры
^О=е(Лн/8‘П0„>
а размер апертуры при синтезировании
Xc=^H/(25^sineH).
В этом случае максимальное число некогерентных изображе-
ний одного и того же объекта, которое может быть сформировано
при ПВО и использовании всего траекзорного сигнала:
- ° — _
н макс 7
Л р d
V d.
(7.30)
Обработка траекторного сигнала радиолокационной системы...
271
При построчном формировании РЛИ одним синтезированным
лучом каждый объект наблюдается за время обзора только один раз,
когда синтезированная диаграмма направленности совпадает с на-
правлением на объект, т.е. некогерентное накопление сигналов изо-
бражения отсутствует. Чтобы обеспечить некогерентное накопление
7Ун некоррелированных изображений в пределах Хо, требуется при
каждом положении апертуры формировать 7VH синтезированных лу-
чей, разнесенных по азимуту на размер синтезированной апертуры
Хс. Разнос необходим для обеспечения некоррелированности изо-
бражений. Сигналы изображения в каждом луче запоминаются на
соответствующее время, пропорциональное Тс , и складываются
(рис. 7.6,а). В результате сложения образуется один синтезирован-
ный луч, в котором выполнено #н некогерентных накоплений.
При формировании РЛИ по кадрам изображения кадров сме-
щены на размер синтезированной апертуры, поэтому для получения
РЛИ без пропусков необходимо
=^с/5х = Х7?н/й5^2
азимутальных лучей. Однако каждый объект в этом случае наблюда-
ется только один раз, поэтому для некогерентного накопления необ-
ходимо, чтобы кадры РЛИ перекрывались, т.е. в кадре необходимо
формировать
NX N 7Л
N = 7Vн±_н_ (7.31)
8х 28£2
лучей (рис. 7.6,5). Так, при подстановке в (7.31) значения NH = NH макс
из (7.30) получим такое же число лучей, как и при телескопическом об-
зоре. Это объясняется тем, что для максимального некогерентного на-
копления при переднебоковом обзоре количество азимутальных кана-
лов в кадре должно обеспечивать перекрытие всей зоны облучения, оп-
ределяемой шириной диаграммы направленности реальной антенны.
При секторном обзоре и кадровом формировании изображения
возможное число некогерентных накоплений определяется временем
облучения объекта и временем синтезирования
n„=t0/tc,
а время облучения зависит от скорости сканирования диаграммы на-
правленности
272
Глава 7
Рисунок 7.6
Некогерентное накопление при построчном (//) и кадровом (б) способе
формирования РЛИ
Обработка сигналов РСА выполняется сигнальным процес-
сором и процессором данных. Сигнальный процессор формирует
радиолокационное изображение заданного вида. Процессор дан-
ных выполняет обнаружение целей, определяет их тип, функцио-
нальное состояние и местоположение.
Обработка траекторного сигнала радиолокационной системы...
273
Сигнальный процессор выполняет поляризационную, про-
странственную, внутрипериодную и межпериодную (траекторную)
обработку. В РСА землеобзора реализуется алгоритм согласован-
ной обработки сигнала.
Сигнальный процессор формирует радиолокационное
изображение путем обработки траекторного сигнала с учетом:
изменения амплитуды сигнала, определяемого ДН антенны и
видом обзора; изменения задержки сигнала, а также зависимо-
сти этой задержки от азимута объекта; изменения средней час-
тоты сигнала объекта при изменении его азимута; изменения
индекса ЛЧМ в зависимости от азимута и дальности объекта;
изменения ширины спектра доплеровской частоты при измене-
нии азимута объекта.
При сверхвысоком разрешении (десятки сантиметров) алго-
ритм обработки в каждом канале, соответствующем одному эле-
менту разрешения РЛИ по дальности и азимуту, имеет различные
характеристики, что требует больших вычислительных затрат при
их реализации. При среднем разрешении по азимуту (единицы
метров) справедлива квадратичная аппроксимация изменения
фазы траекторного сигнала, и число требуемых каналов системы
обработки может быть значительно уменьшено за счет использо-
вания одинаковых алгоритмов для всех сигналов в зоне обзора.
Для сглаживания спекл-шумов РЛИ используют некогерент-
ное накопление изображений объектов, полученных на различных
интервалах синтезирования. Максимально возможное число неко-
герентных накоплений определяется отношением всего времени
облучения цели к времени синтезирования.
7.2. Оптическая система обработки
траекторного сигнала
На первых этапах развития РСА предлагались различные мето-
ды обработки сигналов, как аналоговые, так и цифровые. Однако все
они в конце 1950-х гг. не обладали необходимыми характеристика-
ми, как по объему памяти, так и по быстродействию.
Реализация алгоритмов РСА потребовала разработки принци-
пиально новых методов обработки радиолокационных сигналов - с
помощью когерентных оптических систем. Наиболее эффективным
устройством запоминания сигналов оказалась фотографическая
пленка, обладающая большой емкостью хранения информации.
274
Глава 7
Кроме того, оптические устройства легко реализуют многоканаль-
ную по дальности систему обработки данных. Объясняется это дву-
мерностью оптических систем. Одна координатная ось может быть
использована для записи и обработки азимутальных данных, а дру-
гая - для записи этих данных в различных разрешаемых элементах
по дальности.
В РСА с оптической системой обработки (рис. 7.7) радиолока-
ционные сигналы с выхода приемника поступают в преобразователь,
который превращает их в световые сигналы на входной плоскости
оптического процессора. Это преобразование осуществляется про-
странственным модулятором (фотоплёнкой с записью сигналов) пу-
тем освещения его когерентной световой волной лазерного источни-
ка излучения с помощью расширителя пучка (линз Oj и О2 ).
В качестве источника когерентного света используют лазеры
видимого оптического диапазона (длина волны 0,4...0,7 мкм). Опти-
ческий процессор представляет собой набор различных оптических
элементов (линз, диафрагм и т.п.), расположенных определенным
образом в пространстве. Необходимый алгоритм обработки обеспе-
чивается в результате прохождения света пространственно модули-
рованного траекторным сигналом РСА через оптические элементы
от входной до выходной плоскости. На выходной плоскости оптиче-
ской системы формируется РЛИ объектов, которое поступает на ин-
дикатор.
Расширитель Пространст- Оптическая
пучка венный модулятор система
Индикатор
Рисунок 7.7
Схема оптической системы обработки сигналов РСА
Обработка траекторного сигнала радиолокационной системы...
275
Благодаря высокой разрешающей способности оптическая сис-
тема способна одновременно и практически мгновенно (за время рас-
пространения света от модулятора до выходной плоскости) обрабаты-
вать большой объем информации при высоком качестве РЛИ. Однако
вследствие того, что в качестве преобразователя сигналов использу-
ются фоторегистраторы с фотохимической обработкой пленки, опти-
ческим системам обработки сигналов РСА присуще большое время
задержки информации. Кроме того, в них затруднена быстрая смена
алгоритма обработки (при маневре носителя, изменении режима обзо-
ра, одновременной селекции многих движущихся целей). Трудно так-
же осуществлять оперативную калибровку системы обработки.
Оптическая система включает в себя как оптические, так и
электромеханические, фотохимические и электронные узлы, т.е.
имеет «гибридный» характер, что усложняет ее проектирование, на-
стройку и обслуживание. Наконец, размещение на борту носителя
РЛС и эксплуатация когерентной оптической системы, имеющей
большие размеры и чувствительность к вибрациям, также представ-
ляет значительные трудности.
Вследствие этого, в настоящее время когерентные оптические
системы обработки сигналов РСА используются только в наземных
условиях и при таких режимах работы РСА, когда не требуется по-
лучение РЛИ в реальном масштабе времени (картографирование,
мониторинг и др.).
Схема оптической системы обработки сигналов РСА землеоб-
зора представлена на рис. 7.8. В оптической системе обработки в ка-
честве запоминающего устройства используется запись траекторных
сигналов с экрана электронно-лучевой трубки на фотопленку. Объек-
тив фотокамеры проектирует экран трубки на фотопленку, которая
непрерывно протягивается со скоростью, пропорциональной скоро-
сти полета носителя РСА. В результате вдоль фотопленки записы-
ваются траекторные сигналы в каждом разрешаемом по дальности
элементе. После возвращения самолета на аэродром кассета с плен-
кой доставляется в лабораторию наземной системы обработки.
В ряде случаев для ускорения доставки информации сигналы с
выхода приемника РЛС передаются по радиоканалу, так что запись
на фотопленку и обработка производится в наземных условиях.
В лаборатории после фотохимической обработки (проявления)
первичная пленка (голограмма) поступает в оптический процессор.
Участок пленки с записью траекторного сигнала на интервале синте-
зирования освещается параллельным пучком света лазера. Пройдя
через оптическую систему процессора (набор линз и диафрагм), све-
276
Глава 7
товой поток фокусируется на вторичной пленке в виде радиолокаци-
онного изображения участка местности, траекторные сигналы кото-
рого записаны на освещаемом лазером участке пленки. Первичная и
вторичная пленки протягиваются синхронно, так что на вторичной
пленке записывается радиолокационное изображение полосы обзора
местности вдоль траектории носителя РЛС. Система отображения
(диапроектор, фотопланшет и т.п.) позволяет наблюдать и дешифри-
ровать полученное изображение.
Устройство оптической записи сигналов в РСА имеет элек-
тронно-лучевую трубку (ЭЛТ) и фотокамеру (рис. 7.9). На экране
ЭЛТ формируется однострочная развертка дальности с яркостной
модуляцией, соответствующей напряжению сигналов на выходе ФД.
Линия развертки дальности проектируется на фотопленку и записы-
вается в виде линии с переменным почернением (плотностью).
НАЗЕМНАЯ СИСТЕМА ОБРАБОТКИ
фотохимическая
обработка пленки
Кассета
Первичная пленка
(голограмма)
Вторичная пленка
(РЛИ)
Лазер
система
Фотохимическая
обработка пленки
Рисунок 7.8
Схема бортовой и наземной частей оптической системы записи
и обработки сигналов РСА землеобзора
Обработка траекторного сигнала радиолокационной системы...
277
Рисунок 7.9
Схема оптической системы записи траекторного сигнала (голограммы)
Запись развертки дальности выполняется в поперечном направ-
лении на фотопленке. В процессе записи фотопленка смещается (про-
тягивается) со скоростью, пропорциональной скорости полета носите-
ля РЛС. В результате линии развертки последовательно одна рядом с
другой заполняют фотопленку, образуя двухмерную запись. Ось уп
поперек пленки соответствует наклонной дальности до объекта 7?н, а
ось хп вдоль пленки - пу гевой дальности х:
V » с
х = \Хп =—Хп>^= ПуУ„ = уУп ’
'пл р
где п и пу - масштабные коэффициенты записи; Ипл - скорость
протяжки пленки: с - скорость распространения радиоволн; Кр -
скорость развертки на индикаторе.
После фотохимической обработки прозрачность пленки (коэф-
фициент пропускания) изменяется пропорционально амплитуде за-
писанного сигнала. При наличии многих объектов в зоне обзора
РСА в результате суммирования сигналов на первичной пленке об-
разуется запись в виде сложного интерференционного узора.
Чтобы в процессе записи не ухудшить разрешение по дально-
сти, число разрешаемых элементов вдоль развертки на экране ЭЛТ
должно быз ь равно
278
Глава 7
КР = kpNR = кр М/5г ,
где к? - коэффициент запаса по разрешению ЭЛТ и плёнки.
Запись сигналов с выхода фазового детектора ведется только в
одном канале (cos или sin). При боковом обзоре траекторный сиг-
нал цели имеет в центре записи нулевую доплеровскую частоту
(рис. 7.10,6/). При освещении такой голограммы изображение цели
фокусируется на оптической оси. Там же проходит прямой луч лазе-
ра, обусловленный наличием постоянной составляющей прозрачно-
сти плёнки.
Для разделения прямого луча лазера и изображения целей запись
сигнала по оси хп производи гея на небольшой поднесущей частоте
FCM так, чтобы в записи сигнала отсутствовали нулевые частоты
(рис. 7.10,6). Чем больше FCM, тем больше смещается изображение
цели относительно оптической оси. Повышение поднесущей часто-
ты увеличивает требования к частоте повторения сигналов РСА,
разрешению ЭЛТ и пленки, а также к стабильности и скорости про-
тяжки пленки. Поэтому обычно выбирают минимально необходи-
мую величину поднесущей частоты. Максимальная частота биений
амплитуды видеоимпульсов на выходе ФД не превышает половину
частоты повторения импульсов Fn/2 . Поэтому поднесущую частоту
обычно выбирают равной половине максимальной частоты биений
сигнала так, чтобы спектр траекторного сигнала находился в середине
зоны однозначного соответствия доплеровской частоты траекторного
сигнала и частоты биений сигнала на выходе ФД, т.е. FCM = Fn/4.
Одноканальная запись на поднесущей частоте требует повыше-
ния частоты дискретизации сигнала по азимуту (частоты повторения
Fn) не менее, чем в 2 раза по сравнению с двухканальной системой
записи сигнала, в которой траекторный сигнал разделяется на две
квадратурные составляющие, записываемые раздельно.
Масштабный коэффициент записи их поддерживают посто-
янным, для чего скорость протяжки пленки изменяют пропорцио-
нально скорости полета носителя РСА. При этом минимально воз-
можная скорость протяжки (от которой зависит расход пленки) оп-
ределяется из условия прописывания максимальных частот биений
сигнала /чакс = Fn/2:
Обработка траекторного сигнала радиолокационной системы...
279
Рисунок 7.10
Траекторный сигнал: а - без поднесущей частоты; б - с поднесущей часто-
той; в - изменение прозрачности плёнки при записи траекторного сигнала
одиночной точечной цели; г - вид записи траекторного сигнала одиночной
точечной цели на фотоплёнке
где 5Х - разрешение системы регистрации вдоль оси хп (в периодах
на 1 мм), которое определяется разрешением ЭЛТ, оптической сис-
темы (объектив - пленка) и стабильностью механической системы
протяжки пленки.
280
Глава 7
Яркость свечения экрана ЭЛТ и прозрачность пленки являются
величинами, принимающими только положительные значения. По-
этому для записи двухполярного траекторного сигнала в сигнал на
выходе фазового детектора вводится постоянное смещение, опреде-
ляющее средний уровень свечения развертки экрана и соответствен-
но среднюю прозрачность плёнки По. Уровень смещения должен
превышать максимально возможную амплитуду записываемого сиг-
нала (рис. 7.10,в). Для обеспечения линейности тракта записи сигна-
ла необходимо, чтобы амплитудное пропускание фотопленки ПЕ с
записанным сигналом, т.е. изменение амплитуды (напряженности)
света при прохождении через фотопленку, соответствовало ампли-
туде видеосигнала на выходе ФД г/ФД (7):
ФД
9
где Кп - постоянный коэффициент пропорциональности. Так как про-
зрачность пленки П определяется отношением интенсивности (мощ-
ности) света, освещающего /0 и прошедшего пленку /п: = /п ,
то она должна быть пропорциональна квадрату амплитуды сигнала
Суммарная амплитудная характеристика тракта складывается
из характеристик элементов системы записи: ФД, видеоусилителя,
экрана ЭЛТ и фотопленки. Зависимость яркости свечения экрана
ЭЛТ и почернения фотопленки от напряжения сигнала на выходе
ФД нелинейна. Для устранения нелинейных искажений применяет-
ся предварительное «искажение» сигнала перед записью. Для этого
специальный нелинейный видеоусилитель обеспечивает на выходе
сигнал
Такой видеоусилитель называют гамма-корректором и подбо-
ром коэффициента ук обеспечивают линейность всего тракта
записи.
Для этого необходимо выполнить условие У] = УэУконтр = 2 , где
уэ = 1...3 - коэффициент, учитывающий нелинейность зависимости
яркости свечения экрана ЭЛ Г от напряжения на модуляторе (ампли-
Обработка траекторного сигнала радиолокационной системы...
281
туды сигнала); уконтр =0,5...5 - коэффициент контрастности фото-
пленки. определяемый свойствами пленки и режимом проявления.
Оптическая система преобразует изображения траекторных
сигналов на первичной пленке (голограмме) в РЛИ объектов.
Для этого первичная пленка освещается параллельным пучком
когерентного света. В результате прохождения света через пленку и
оптическую систему па выходной плоскости (вторичной фотоплен-
ке) формируется РЛИ участка местности, расположенного в преде-
лах ширины луча реальной антенны.
При протяжке первичной пленки выходное изображение также
перемещается вдоль оси путевой дальности. Для получения радио-
локационной карты большого участка местности и обеспечения не-
когерентного накопления сигналов изображения вторичная пленка в
выходной плоскости оптической системы движется со скоростью,
равной скорости перемещения изображения.
Обработка сигналов в оптическом устройстве сводится к фоку-
сированию записанного вдоль пленки сигнала (ось ап ) и передаче без
искажений изображения поперек пленки (ось уг ) (рис. 7.10,г).
Фокусирование сигнала, записанного вдоль оси х , происходит
в процессе распространения света в свободном пространстве
(рис. 7.11). Волны, проходящие через первичную пленку в светлых
участках записи сигнала точечной цели, далее распространяются во
все стороны. В некоторой точке 7 на расстоянии фокусирования R.
Рисунок 7.11
Фокусирование изображения одиночной точечной цели
282
Глава 7
разность хода волны (Д1,Д2,Д3, ...) от светлых участков пленки
оказывается кратной длине волны света, поэтому в этой точке волны
от светлых участков складываются синфазно. Темные участки пер-
вичной фотопленки значительно ослабляют волны, приходящие в
точку 1 в противофазе. Поэтому в точке 1 образуется яркое пятно —
изображение точечной цели. Расфокусированное изображение (пят-
но 2) появляется в результате прямого прохождения луча лазера.
Структура и характеристики оптической системы
обработки траекторного сигнала
Задача обработки светового сигнала, аналога траекторного сигнала,
сводится к сжатию ЛЧМ-сигнала (фокусированию) по оси хп раз-
дельно в каждом канале оси уп. Будем считать, что обработка сиг-
нала по задержке (дальности) проведена до записи сигнала и по оси
уп сигнал должен воспроизводиться с наименьшими искажениями.
При высококачественной оптике эта задача не вызывает трудностей
и сводится к проецированию с помощью объектива изображения
входной (первичной) пленки по оси уп на выходную (вторичную)
пленку по оси ув с заданным масштабом (обычно 1:1).
Алгоритм сжатия ЛЧМ-сигнала по оси хп может быть выпол-
нен простейшей оптической системой, состоящей из первичной и
вторичной пленок, разнесенных на расстояние 7?1(. Диафрагма ши-
риной Dn определяет размер синтезированной апертуры на первич-
ной пленке хп (рис. 7.12).
Распределение света на вторичной фотоплёнке при формировании РЛИ
Обработка траекторного сигнала радиолокационной системы...
283
При распространении когерентной световой волны в свободном
пространстве на расстояние распределение света Ев(хв) на вто-
ричной пленке связано линейным интегральным преобразованием с
распределением света Eit (хп) на первичной пленке (без учета здесь
и в дальнейшем несущественных множителей):
где кс = 2л/Х,с ; Хс - длина волны света.
Квадратичный характер фазовой переходной характеристики
свободного пространства имеет простое физическое объяснение. То-
чечный источник света на входной первичной пленке 5(xL) испус-
кает сферическую волну, которая падает на выходную (вторичную)
пленку. Сферический фронт волны обусловил квадратичное запаз-
дывание фронта относительно выходной плоскости.
Рассмотрим прохождение записанного на первичной пленке
траекторного сигнала через такую оптическую систему. Распределе-
ние света при освещении первичной пленки параллельным лучом
света лазера пропорционально траекторному сигналу:
где 50 - постоянный опорный сигнал; пх - масштаб записи по оси хп ;
хн - координата цели но азимуту (на оси Л); (27iFn)/(4P^IJT) - Фпн -
поднесущая частота записанного сигнала; Рг п - скорость протяжки
пленки.
Запись сигнала точечной цели (7.33) с координатой хн = 0 (бо-
ковой обзор) можно представить в виде трех членов:
284
Глава 7
Подставляя (7.34) в (7.33), получаем, что первый и второй чле-
ны дают расфокусированные изображения и s2 (рис. 7.12). Ось
Ев соответствует амплитуде выходного изображения. Третий член
дает сфокусированное изображение точечной цели:
Фокусирование происходит при расстоянии 7?ф между первич-
ной и вторичной пленками, когда квадратичный член равен нулю:
(735)
U Л.
Координата хв вторичной пленки соответствует азимутальной
координате изображения цели. Начало координат (хн = 0) смещено
в точку
ЮпЛЛф _ ЛЛЛ
2я 4Кпл
Расстояние 7?ф, на котором фокусируется изображение объекта,
определяется наклонной дальностью до объекта Rb и масштабом за-
писи сигнала пх, т.е. расстояние фокусирования изменяется пропор-
ционально изменению расстояния до объекта 7?н. Поэтому радиоло-
кационное изображение местности по путевой дальности формиру-
ется на плоскости, наклоненной к оптической оси системы.
Изображение по оси наклонной дальности формируется проециро-
ванием первичной пленки на наклоненную вторичную пленку с по-
мощью специальной оптической системы с цилиндрической линзой
(рис. 7.13).
Недостатком такой простой системы обработки является боль-
шое расстояние фокусирования и, следовательно, большое измене-
ние этого расстояния в пределах полосы обзора РСА (большой угол
наклона вторичной пленки).
Обработка траекторного сигнала радиолокационной системы...
285
Первичная пленка
Рисунок 7.13
Формирование изображения двух точечных целей на вторичной плёнке
по оси наклонной дальности
Так, при =5,5-103, =5-10 "м, 2i = 3cm, 7? = 36км рас-
стояние фокусирования будет равно 35 м.
Для устранения этого недостатка применяется оптическое уст-
ройство, в котором между первичной и вторичной пленками поме-
щается телескопическая система, состоящая из двух линз и Ь2 с
разными фокусными расстояниями (рис. 7.14). Расстояние между
линзами равно сумме их фокусных расстояний fx + f2. Такая систе-
ма (телескоп) образует в плоскости Р уменьшенное изображение
первичной пленки, что эквивалентно увеличению масштабного ко-
эффициента записи сигналов пх. Коэффициент уменьшения мас-
штаба изображения телескопической системой равен отношению
фокусных расстояний линз.
Рисунок 7.14
Телескопическая оптическая система
286
Глава 7
В свободном пространстве между плоскостью Р и вторичной
пленкой происходит фокусирование изображения на плоскость вто-
ричной пленки. При этом новое расстояние фокусирования опреде-
ляется по формуле
ф
(7.36)
и может составлять всего несколько сантиметров, а угол наклона
выходной плоскости - несколько градусов.
Схема оптической системы показана на рис. 7.15. Линзы Lx и
Ь2 образуют телескопическую систему, формирующую вблизи фо-
кальной плоскости линзы L2 изображение записи сигналов вдоль
плёнки. Для обеспечения фокусирования изображения во всей поло-
се обзора по дальности вторичную пленку располагают под неболь-
шим углом к оптической оси (единицы градусов). Подбором угла
наклона и перемещением вторичной пленки вдоль оптической оси
системы производится согласование расстояния фокусирования для
объектов, расположенных в ближней и дальней частях полосы обзо-
ра РСА.
Для передачи без изменения изображения сигналов по даль-
ности с первичной на вторичную пленку установлена вторая теле-
Рисунок 7.15
Схема оптической системы обработки
Обработка траекторного сигнала радиолокационной системы...
287
скопическая система с одинаковыми фокусными расстояниями
линз L3 и £4. При этом изображение с первичной пленки проеци-
руется в масштабе 1:1 на вторичную пленку. Так как вторичная
пленка наклонена относительно оси , то для передачи изображе-
ния без искажения первичная пленка также наклонена, но в другую
сторону.
Все линзы оптической системы- цилиндрического типа, т.е.
£j и L2 действуют только по оси хп, а линзы L3 и L4 - только по
оси vn.
Участок первичной пленки, освещаемый лучом лазера, ограни-
чен диафрагмой. Размер окна диафрагмы Dn по оси хп определяет-
ся требуемым размером синтезированной апертуры Хс с учетом
масштаба пленки вдоль оси хп : Dn = Xjnx . По оси уп диафрагма
обеспечивает освещение всей ширины записи на пленке. Масштаб
выходного изображения по оси хв : Мх = пх fjfz . Масштаб выход-
ного изображения по оси j^B равен масштабу записи на первичной
пленке: Му = иу .
Рассмотренная оптическая система осуществляет кадровый
алгоритм обработки траекторного сигнала РСА при ПВО с одно-
временным формированием ( Ао /5х - 2Хс sin 0н ) синтезиро-
ванных лучей, перекрывающих зону обзора, равную ширине ДН
реальной антенны - кадр РЛИ. При этом максимальное число не-
коррелированных кадров РЛИ за интервал наблюдения
XQ =Oo7?H/sinOb равно Х0/Хс и, следовательно, такое число кад-
ров РЛИ может некогерентно накапливаться для сглаживания
спекл-шума изображения.
Отметим, что для устранения фазовых шумов, обусловленных
случайным изменением толщины фотоэмульсии на пленке и колеба-
ниями толщины подложки фотопленки, первичную пленку с запи-
сью сигналов РСА в фильмовом канале оптической системы погру-
жают в жидкость иммерсионный фильмовый канал). При этом вы-
бирают такую жидкость, коэффициент преломления которой равен
коэффициенту преломления фотопленки (четыреххлористый угле-
род, водный раствор спирта и т.п.).
288
Глава 7
При использовании оптической системы обработки траек-
торный сигнал записывается на борту носителя РСА с экрана
электронно-лучевой трубки с однострочной разверткой на фото-
пленку: поперек пленки - развертка по дальности, а вдоль непре-
рывно протягиваемой пленки - траекторный сигнал.
В наземных условиях проявленная фотопленка (голограмма)
поступает в когерентную оптическую систему. Световой сигнал
формируется в виде распределения амплитуд света на входной
плоскости оптической системы путем освещения проявленной
фотопленки лучом лазера. В результате прохождения света через
оптическую систему на выходной плоскости (вторичной пленке)
формируется радиолокационное изображение.
Оптическая система обеспечивает одновременную многока-
нальную по дальности обработку траекторного сигнала, форми-
руя кадр РЛИ во всей зоне обзора по дальности и азимуту, опре-
деляемой ДН антенны.
Для устранения засветки изображения РЛИ расфокусирован-
ным лучом лазера траекторный сигнал на плёнке записывается на
небольшой поднесущей частоте.
Фокусировка траекторного сигнала, записанного вдоль
пленки, осуществляется при распространении светового поля в
свободном пространстве между первично!* и вторичной плен-
ками. Расстояние, на котором происходит фокусировка, опре-
деляется дальностью до цели и масштабным коэффициентом
записи сигнала на первичной пленке. Для уменьшения расстоя-
ния фокусирования между первичной и вторичной пленками
устанавливается цилиндрическая телескопическая оптика, ко-
торая формирует уменьшенное изображение первичной пленки,
что эквивалентно увеличению масштабного коэффициента за-
писи траекторного сигнала вдоль пленки. Для обеспечения фо-
кусировки на всех дальностях зоны обзора вторичная пленка
наклонена на небольшой угол относительно поперечной оси
оптической системы.
РЛИ по дальности, записанное поперек пленки, передается
на вторичную фотопленку без искажений с помощью второй ци-
линдрической телескопической оптики обычно в масштабе 1:1.
Обработка траекторного сигнала радиолокационной системы...
289
7.3. Цифровая система обработки
траекторного сигнала
Конкретная структура цифровой системы обработки (ЦСО) зависит
от множества факторов. Наибольшее влияние на неё оказывают: це-
левое назначение РСА и, как следствие, сложность и число алгорит-
мов, которые должны быть реализованы; технологический уровень
разработчика; ограничения на стоимость системы и другие факторы.
При всём многообразии структуры ЦСО можно выделить сле-
дующие основные элементы: аналого-цифровой преобразователь
(АЦП), запоминающее устройство (ЗУ) и цифровой процессор (ЦП).
Обеспечивают работу ЦСО: управляющая машина (УМ), навигаци-
онная система (НС), информационно-управляющее поле (ИУП), ко-
торое включает систему индикации (И) и органы управления ОУ, а
также система регистрации и хранения данных (Р) (рис. 7.16).
В РСА с цифровой системой обработки траекторный сигнал в
каждом периоде зондирования подвергается с помощью АЦП дис-
кретизации по дальности (задержке) и квантованию по амплитуде.
Дискретизация сигнала может осуществляться после аналого-
вого фазового детектора (ФД) или непосредственно после усилителя
промежуточной частоты. В первом случае дискретизация траектор-
ного сигнала осуществляется на нулевой частоте с помощью пары
АЦП - по одному АЦП для действительной (cos) и мнимой (sin) со-
ставляющей сигнала. Во втором случае фазовый детектор реализует-
ся в цифровом виде и дискретизация сигнала осуществляется на
поднесущей частоте. Преимуществом формирования действитель-
ной и мнимой составляющей траекторного сигнала в цифровой фор-
ме являются высокие стабильность, линейность и идентичность ка-
налов, а также отсутствие нарушения квадратуры. Однако для реа-
Рисунок 7.16
Цифровая система обработки траекторного сигнала
290
Глава 7
лизации ФД в цифровой форме необходима более высокая скорость
работы АЦП.
Управляет работой АЦП управляющая машина, которая, в со-
ответствии с выбранным режимом работы РСА, определяет время
начала дискретизации (начало приёма) сигнала, а также частоту дис-
кретизации.
Сигнал в цифровой форме сохраняется на время синтезирова-
ния и последующей обработки в быстродействующем запоминаю-
щем устройстве.
Непосредственная обработка сигнала осуществляется цифро-
вым процессором. В общем случае под процессором понимается
множество программируемых процессоров, работающих параллель-
но или последовательно и решающих общую задачу - обработка
сигнала. Достоинством программируемых процессоров является то.
что алгоритмы их работы могут быть оперативно изменены непо-
средственно в полёте, например, при смене режима работы. Работа
программируемых процессоров может дополняться устройствами с
фиксированной логикой работы, такими как программируемые ло-
гические интегральные схемы (ПЛИС). Эти устройства обладают
существенно большей производительностью, однако операгивное
изменение их алгоритмов работы часто затруднено или совсем не-
возможно.
Управление режимами и алгоритмами работы процессора, а
также передачу информации, необходимой для расчёта опорных
функций, осуществляет управляющая машина.
Задачи, решаемые управляющей машиной
• Получение от навигационной системы информации о коорди-
натах, параметрах движения и пространственной ориентации
летательного аппарата.
• Получение от органов управления информации о включении и
тактических параметрах режима работы РСА.
• Формирование служебной информации о параметрах и услови-
ях работы РСА в выбранном режиме.
• Управление антенной в соответствии с выбранным режимом
работы.
• Управление задержкой и размером зоны приема сигнала.
В некоторых случаях ЦСО дополняется системой регистрации
и хранения данных. Как правило, это делается в разведывательных,
научно-исследовательских РСА, а также при проведении испыта-
тельных полётов.
Обработка траекторного сигнала радиолокационной системы...
291
Причины задержки обработки сигналов в РСА
Первая причина задержки. Ссвязана с необходимостью фор-
мирования требуемого размера синтезированной апертуры, который
определяет разрешающую способность по азимуту. Минимальная
задержка получения изображения равна времени синтезирования Тс.
Время задержки уменьшается с ростом скорости носителя РСА.
Если для уменьшения спекл-шумов используется несколько не-
когерентно складываемых изображений Хн, получаемых на интер-
валах синтезирования по траектории РСА, то время задержки увели-
чивается в N„ раз и составляет TN„ .
Н А С н
Вторая причина задержки. Определяется необходимостью
формировать изображение определенного (заданного) участка зоны
обзора по путевой дальности АХ. При боковом обзоре и постоянной
скорости носителя РЛС задержка равна Т = &X/V. Если участок
ДХ равен или меньше ширины ДН антенны на заданной дальности,
можно использовать многоканальную обработку по азимуту, и время
задержки будет определяться временем синтезирования.
Третья причина задержки. Получение изображения является
конечное время выполнения операций в системе обработки, которое
в сильной степени зависит от вида системы обработки.
Анализ РЛИ (обнаружение и распознавание цели) обычно за-
нимает значительное время, поэтому сформированный кадр изобра-
жения на экране индикатора «замораживают» на время принятия
решения оператором.
Главными характеристиками ЦСО являются разрядность и бы-
стродействие АЦП и процессора, а также объем памяти ЗУ. При
этом требования к ЦСО зависят не только от параметров РСА, но и
от способа выполнения алгоритма обработки процессором.
Число разрядов (длина слова) цифрового сигнала после АЦП
определяется требуемым динамическим диапазоном сигналов.
Динамический диапазон /АцП разрядного цифрового сигнала
число уровней квантования сигнала: Хкв = 2 АЩ1 .
В логарифмическом масштабе динамический диапазон равен
ДД = 201ё#кв«6£АЦП,
292
Глава 7
т.е. добавление одного разряда расширяет динамический диапазон
цифрового сигнала на 6 дБ. Обычно АЦП с 8... 16 разрядами счита-
ется оптимальным с точки зрения обеспечения заданного динамиче-
ского диапазона при минимальных шумах квантования.
Требование к АЦП по быстродействию (частоте дискретиза-
ции Fx -|) определяется шириной спектра зондирующего сигнала,
т.е. разрешающей способностью РСА по дальности 8г :
^АЦП
= £Rc/28r,
где kR - число отсчетов сигнала на элемент разрешения по дально-
сти, обычно kR = 1...2.Так, kR =1 и 8г = 3м соответствует частота
дискретизации ЯАЦП = 50 МГц .
Объём ЗУ определяется необходимостью запоминания траек-
торного сигнала на интервале синтезирования. Запись цифрового
сигнала в ЗУ в каждом периоде повторения ведётся строкой по даль-
ности. Считывание траекторного сигнала из ЗУ для обработки в
процессоре производится по азимуту (поперёк строки дальности).
При этом длина строки цифровой памяти по азимуту (число отсче-
тов сигнала 7VC) определяется интервалом синтезирования
N =Т /Т =Т F
с с/ п с п
и, следовательно, требуемой разрешающей способностью РСА по
азимуту. С учетом памяти по всем каналам дальности объем ЗУ
Л/ = 2Л^АцП,
где TVR = Д7?/8г - число каналов дальности (при ArR = 1), а коэффи-
циент 2 учитывает наличие двух каналов (синфазного и квадратур-
ного). Подставляя значение Nc и TVR , получаем
М = ---—ЛЛцп =—2^71/АЛП • (7.37)
V sin ен5^ 5г 1 5г Ц
Так, для получения разрешения б? -бк = 3м на дальности
RH = 100 км в полосе обзора по дальности АТ? = Зкм при угле на-
блюдения 0н=30, Z, = 3 см, V = 250м/с, Гп=1кГц и
^апл = 8 бит = 1 байт требуемый объем памяти составляет 8 Мбайг.
Обработка траекторного сигнала радиолокационной системы...
293
Быстродействие системы памяти определяется её циклом об-
ращения - минимальным отрезком времени между двумя об-
ращениями к памяти (для считывания или записи).
Быстродействие ЦСО (производительность) определяется ско-
ростью выполнения программ или объёмом вычислительных ра-
бот, которую способна выполнить система обработки за задан-
ный промежуток времени.
В общем случае необходимо учитывать не только число эле-
ментарных операций (сложение, вычитание, умножение), которые
процессоры цифровой обработки сигнала выполняют очень эффек-
тивно, но и число операций вычисления тригонометрических
функций, деления, вычисления квадратного корня и т.д., которые
выполняются гораздо медленнее и приводят к существенному росту
суммарных вычислительных затрат. Как правило, для оценки тре-
буемого быстродействия вычислительных затрат используют оценку
количества комплексных операций умножения требуемых для реа-
лизации алгоритма обработки сигнала.
Также следует учитывать, что эффективное быстродействие
вычислительной системы снижается в процессе распараллеливания
алгоритма обработки. Это объясняется тем, что при распараллелива-
нии возникают накладные вычислительные расходы, связанные с
обменом промежуточными данными, необходимостью повторных
вычислений в блоках пересекающихся данных и т.д. Зависимость
времени работы алгоритма от количества параллельно работающих
вычислителей часто имеет нелинейный характер. Более того, в ряде
случаев возможна ситуация, когда возрастание количества парал-
лельно работающих вычислителей выше некоторого предела приво-
дит не к снижению времени работы алгоритма, а наоборот к его уве-
личению.
Формирование РЛИ в цифровом процессоре заключается в реа-
лизации алгоритма синтезирования апертуры:
Т(/2
I (z)d/,
-Тс/2
(7.38)
где h - опорная функция системы обработки для z-й цели.
Выбор того или иного способа обработки (алгоритма) опреде-
ляется задачами, которые возлагаются на РСА, а также возможно-
стями элементной базы, которая может быть использована при его
реализации цифровой системой обработки.
294
Глава 7
Типовые способы обработки сигналов в РСА
Способ прямой свертки (ПС). Заключается в непосредствен-
ном вычислении выражения (7.38) для каждого элемента разреше-
ния цели. При равномерном прямолинейном движении ЛА выражение
(7.38) переходи! в уравнение типа свертки (отсюда и название спосо-
ба). Например, при ПБО алгоритм формирования одного синтезиро-
ванного луча в направлении наблюдения 0н можно записать в виде
Тс/2
j w(/ + Tc)/?(z,0H)d/ ,
-TJ2
(7.39)
где хв и тс =хв/К - соответственно пространственный и времен-
ной сдвиг текущего интервала синтезирования относительно начала
системы координат. Величина хв в этом случае является координа-
той РЛИ по азимуту.
Способ прямой свертки может быть использован при любом
виде обзора и обеспечивает высокое качество РЛИ. однако требует
значительных вычислительных затрат на формирование РЛИ каждо-
го элемента разрешения отдельно. Поэтому он применяется в основ-
ном при ПБО с построчным формированием РЛИ.
Структура алгоритма для формирования одного синтезирован-
ного луча при ПБО показана на рис. 7.17. Сигнал с выхода АЦП за-
писывается в ЗУ строками по дальности, а считывается строками по
азимуту. После считывания вычисляется в дискретном виде выраже-
ние (7.38), при этом опорная функция (7.23) определяется фиксиро-
ванными значениями 0„ и /С.
н н
Рисунок 7.17
Схема алгоритма обработки траекторного сигнала способом прямой свёртки
Обработка траекторного сигнала радиолокационной системы...
295
Запись сигнала в память ЗУ осуществляется по столбцам, а счи-
тывание по строкам. В каждом зондирующем импульсе АЦП фор-
мирует новый столбец данных (рис. 7.17). При поступлении нового
столбца данных все имеющиеся отсчёты сдвигаются, вытесняя тем
самым первый столбец, а новый столбец записывается на место по-
следнего.
Оценку требуемых вычислительных затрат для реализации ал-
горитма прямой свёртки проведём в предположении, что время на-
копления сигнала Тс, определяется выражением (7.18), а частота по-
вторения зондирующих импульсов Fn выбирается минимально воз-
можной исходя из ширины спектра отражений от подстилающей
поверхности (7.6). В этом случае количество накапливаемых им-
пульсов в одной полоске дальности составляет
^с=^Л=И.,)/(<18/).
Для получения одного отсчёта РЛИ необходимо в соответствии
с (7.38) выполнить Nc комплексных операций умножения (операции
суммирования и вычисления модуля не учитываются).
Полный кадр РЛИ состоит из TVR = AR/<5r отсчётов по дально-
сти и N t /8€ отсчётов по азимуту. Максимальный размер кад-
ра по азимуту определяется шириной ДНА AZV1JKC = 0О7?Н /d-
При =1 число отсчётов по азимуту 7V1 = (Х7?и )/(<78€).
Таким образом, для получения полного кадра РЛИ методом
прямой свёртки необходимо выполнить:
Л1К. = NRN N = —I | (7.40)
пс R л с 8r ^<78Zj
комплексных операций умножения. Эти операции должны быть вы-
полнены за время синтезирования Тс. Соответственно, требуемое
быстродействие
У Д7? 2X7?£sin0
11L _ Н п
~т7
V-
(7-41)
Когда АТ? = 3 км, 8г - 8/ = 1 м . 7?н = 100 км, d = 1 м, X = 3 см ,
V - 250 м/с и 0Н=9ОП, требуемое быстродействие составляет
3,6-10° оп./с.
296
Глава 7
Способ быстрой свертки (БС). Представляет собой реализа-
цию способа прямой свертки в частотной области. Способ основан
на том, что свертке двух функций и во временной облас-
ти соответствует преобразование Фурье от произведения спектров
этих функций:
Ф{/(т)}=Ф-;1/(/)}Фр?(/)},
где Ф{ } - символ преобразования Фурье. При обработке сигнала
способом быстрой свертки вычисляются прямые преобразования
Фурье входного сигнала и\С и опорной функции в пределах
интервала синтезирования. Полученные спектры перемножаются,
после чего результирующий спектр подвергается обратному преоб-
разованию Фурье. Модуль обратного преобразования Фурье являет-
ся сигналом, определяющим РЛИ (рис. 7.18,67).
Все перечисленные преобразования представляют собой дис-
кретные преобразования Фурье (ДПФ), которые обычно реализуют-
ся на основе алгоритмов быстрого преобразования Фурье (БПФ) и
обратного БПФ (ОБПФ). Поэтому свертку в частотной области на-
зывают высокоскоростной или быстрой. При использовании алго-
ритмов БПФ (ОБПФ) с основанием 2 требуемое количество ком-
плексных операций умножения составляет 0,57Vlog27V, где N
длина входной выборки. Для реализации алгоритма быстрой свёртки
а)
б)
Рисунок 7.18
Схема алгоритма обработки траекторного сигнала способом
быстрой свёртки (с?) и гармонического анализа (б)
Обработка траекторного сигнала радиолокационной системы...
297
необходимо выполнить одно БПФ (траекторного сигнала) и одно
ОБПФ (результата перемножения спектров траекторного сигнала
и опорной функции). Также необходимо выполнить N комплекс-
ных умножений для перемножения спектров сигнала и опорной
функции.
Следует отметить, что эффективность быстрой свертки доста-
точно высока лишь в том случае, если преобразование (7.38) сводит-
ся к преобразованию типа свертки, Поэтому этот способ целесооб-
разно использовать при ПБО и равномерном прямолинейном движе-
нии носителя.
Другой особенностью вычисления свёртки сигналов является
то, что число выходных отсчётов NoVIV связано с числом входных
7 вых
отсчётов NBX и длиной опорной функции Nc соотношением
^вых ~ ^вх _ +1 . Для получения на выходе алгоритма быстрой
свёртки числа отсчётов, равного числу лучей
^b.x=^=M)/(d80
необходимое число входных отсчётов траекторного сигнала:
^Вх=^+^=2(мн)/(а8ф1.
Таким образом, для получения полного кадра РЛИ методом бы-
строй свёртки необходимо выполнить
N = N N (logXx +1) = — ^4[l°g2• (7-42)
бс R bxV 62 вх ) & dg^ 62 d8€ J J
комплексных операций умножения. Эти операции должны быть вы-
полнены за время синтезирования Т. Соответственно, требуемое
быстродействие
ббс ~
(7.43)
Для рассматриваемого примера требуемое быстродействие
составляет 3,2-10' оп./с, т.е. снизилось примерно в 100 раз по
сравнению с прямой свёрткой.
Способ гармонического анализа (Г4). Представляет собой реа-
лизацию соотношения (7.38) с помощью многофильтровой системы.
298
Глава 7
Этот способ основан на том, что азимут любого отражателя одно-
значно связан со средней доплеровской частотой отраженного от не-
го сигнала. При ГА опорная функция рассчитывается для центра зо-
ны обзора:
Она осуществляет компенсацию средней доплеровской частоты
зоны обзора и фокусировку изображения (компенсацию ЛЧМ). В ре-
зультате траекторный сигнал каждой точки зоны обзора имеет по-
стоянную доплеровскую часто гу. Сигнал РЛИ в каждом канале
дальности формируется путем преобразования Фурье о г произведе-
ния принятого сигнала и опорной функции
В ЗУ записывается NRNC отсчетов сигнала, относящихся к од-
ному интервалу синтезирования (рис. 7.18,6). Как и при других спо-
собах обработки, сигнал в ЗУ записывается столбцами, а считывает-
ся строками. Считанный сигнал умножается на опорную функцию, и
результат перемножения поступает в процессор, выполняющий
БПФ, на выходе которого формируется Nc отсчетов сигнала РЛИ в
одном канале дальности. В результате обработки сигналов всех ка-
налов дальности формируется кадр РЛИ с TVR строками. Далее хра-
нимые в ЗУ отсчеты траекторного сшнала полностью обновляются.
В результате обработки сигнала на другом интервале синтезирова-
ния образуется новый парциальный кадр.
Каждый отсчет сигнала азимутальной строки изображения в
парциальном кадре соответствует определенной доплеровской час-
тоте траекторного сигнала. Расстояние между фильтрами БПФ по
частоте определяется интервалом синтезирования 8f -\/TQ, поэтому
расстояние между отсчетами РЛИ по азимутальной координате 0,
равно разрешающей способности РСА.
Обработка траекторного сигнала радиолокационной системы... 299
Иногда при обработке сигналов способом ГА требуется полу-
чить больше одного отсчета сигнала РЛИ на элемент разрешения по
азимуту, т.е. обеспечить кг > 1. Для этого достаточно дополнить
число отсчетов сигнала на входе процессора БПФ нулевыми отсче-
тами 7V0 -{к^ — 1)7VC. Добавление нулевых отсчетов повышает тре-
бования к быстродействию процессора. Следует отметить, что в лю-
бом случае число отсчетов сигнала на входе процессора БПФ долж-
но соответствовать числу 2", поэтому добавление нулевых отсчетов
применяют также для выполнения этого условия.
Требуемое число комплексных умножений при способе гармо-
нического анализа для получения всего кадра РЛИ при кг -1
А/? к Ур А
^а = ВД(0,51оё2^ + 1) = -~ log2—* + 1 . (7.44)
or \2do( j\ do( у
Эти операции должны быть выполнены за время синтезирова-
ния Т . Соответственно, требуемое быстродействие составляет
N а AT? TsinO
1 ci _ п
(7.45)
Для рассматриваемого примера требуемое быстродействие со-
ставляет 7,5-1 О'* оп./с, т.е. снизилось примерно в 4 раза по сравнению
с быстрой свёрткой и в 400 раз по сравнению с прямой свёрткой.
Снижение требований к быстродействию цифровой системы
обработки при использовании алгоритмов ГА и БС по сравнению с
ПС может быть оценено с помощью выражений:
Сбс _^бс _2(1оё2Чж+1)
2пс Nnc кСУК
= 0>5(log2^ +1) (7 _
Спс Мгс ^СЖ
где Лсж = 7?n0o/S£ = 0О/80С - коэффициент сжатия реальной ДН по
азимуту.
Зависимость отношений Q§jQnc и бга/бпс от коэффициента
сжатия по азимуту приведена на рис. 7.19.
300
Глава 7
Рисунок 7.19
Уменьшение требуемого быстродействия процессора при обработке
траекторного сигнала способами ГА и БС по сравнению с ПС
Учет миграции сигналов целей по дальности
Покадровые способы формирования радиолокационного изображе-
ния, такие как быстрая свёртка и гармонический анализ, обладают
высокой вычислительной эффективностью, если все цели (в преде-
лах кадра), имеющие одинаковую наклонную дальность, находятся в
пределах одной строки системы памяти по дальности. Это условие,
как правило, выполняется в РСА с достаточно низким пространст-
венным разрешением. В РСА с высоким разрешением изменение
расстояния от ФЦА до цели такое, что сигналы цели за время синте-
зирования могут переходить из одной строки дальности в другую,
т.е. происходит миграция сигналов цели по дальности (задержке).
Для упрощения системы обработки целесообразно для сигналов
всех объектов, независимо от их азимута, использовать при об-
работке единый закон изменения задержки огибающей.
Для устранения линейной задержки огибающей сигнала точеч-
ной цели используется изменение момента стробирования при запи-
си сигнала в соответствии с выражением (7.10). После компенсации
линейной задержки огибающей расстояние до цели изменяется по
квадратичному закону. Миграция цели по дальности отсутствует,
если максимальное изменение дальности до объекта, обусловленное
квадратичным членом разложения (7.3), меньше чем половина эле-
мента разрешения по дальности:
r2(rc/2)2sin2eH = Х2ЛН < 8г
27? 328Г2 “ 2 ’
г!
Обработка траекторного сигнала радиолокационной системы,..
301
Максимальная разрешающая способность системы обработки в
которой не учитывается эффект миграции цели по квадратичному
закону не превышает (при условии 8£ = 8г ):
При = 3 см , /?н=100км максимальная разрешающая спо-
собность по азимуту, при котором миграция цели по каналам
дальности отсутствует, составляет 2,4 м.
Использование единого квадратичного закона изменения мо-
мента стробирования для всех целей в пределах зоны обзора не ре-
шает проблемы миграции целей по дальности при высоком разреше-
нии. На рис. 7.20,6? изображены кривые изменения дальности от грех
точечных целей, имеющих одну и туже наклонную дальность
(7?н1 = Т?н2=Т?н3), но различные азимутальные координаты. Устра-
нение миграции цели по дальности одной цели не приводит к пере-
мещению в тот же канал дальности отсчётов двух других целей, так
как они имеют другой закон миграции (рис. 7.20,6).
Существует большое количество алгоритмов компенсации ми-
грации целей по дальности, позволяющих эффективно использовать
покадровые алгоритмы формирования РЛИ. Один из возможных
способов компенсации миграции цели по дальности основывается на
том, что в частотной области все цели с одинаковой наклонной
дальностью имеют одинаковый закон изменения дальности от часто-
ты. Это позволяет переместить в один канал дальности сигналы от-
ражателей с различной азимутальной координатой. После переме-
Рисунок 7.20
Миграция целей с различным азимутальным углом по дальности
результат компенсации миграции цели 2 (6)
302
Глава 7
щения сигналов в один канал дальности возможно сжатие сигнала
по азимуту в частотной области или возврат во временную область.
Для примера рассмотрим алгоритм компенсации миграции
цели по дальности в случае бокового обзора ( 0Н - 90 ). В соответ-
ствии с выражением (7.5) между частотой и временем существует
линейная связь:
/(/)=4г';'(/)=4^Л (7‘47)
II
Подставив (7.51) в выражение для аппроксимации расстояния
между ФЦА и объектом (7.17) при 0Н = 90° , получим зависимость
изменения текущей дальности от частоты:
<7-48)
О V
Миграция цели по дальности, которую необходимо компен-
сировать определяется вторым слагаемым в выражении (7.48):
М/) = ^т/2- (7-49)
В соответствии со свойством Фурье-преобразования смещение
сигнала во времени не изменяет модуль спектральной плотности, а
приводит лишь к линейному сдвигу фазы. Выполнив Фурье-преобра-
зование траекторного сигнала получим единый закон миграции сиг-
налов целей по дальности всех точек поверхности с различным ази-
мутом, имеющих одинаковую наклонную дальность. Поэтому, пере-
мещая отсчёты сигнала в соответствии с выражением (7.49), можно
скомпенсировать эффект миграции целей по дальности для всех це-
лей в одном элементе зоне обзора по дальности.
С помощью обратного Фурье-преобразования можно осущест-
вить обратный переход к временной области траекторного сигнала, а
затем использовать любой способ обработки сигнала с целью полу-
чения РЛИ. Наибольшая вычислительная эффективность алгоритма
достигается при использовании обработки сигнала способом быст-
рой свёртки. В этом случае сразу после компенсации миграции це-
лей по дальности спектр траекторного сигнала перемножается со
спектром сигнала опорной функции. Структура алгоритма формиро-
вания РЛИ способом быстрой свёртки совместно с компенсацией
миграции целей по дальности приведена на рис. 7.21.
В ограниченной зоне обзора по дальности АТ? (рис. 7.22,1а)
можно использовать единый закон компенсации для всех целей в зо-
Обработка траекторного сигнала радиолокационной системы...
303
Рисунок 7.21
Структура алгоритма формирования РЛИ способом быстрой свёртки
совместно с компенсацией миграции целей по дальности
не обзора (рис. 7.22.6), полагая, что ошибки компенсации на краях
зоны не превышают элемента разрешения по дальности. В соответ-
ствии с (7.53), максимальная погрешность на краю кадра будет на-
блюдаться при f — ±Fnl2\
hr
2 ’
Отсюда максимальный размер кадра, к которому применим
единый закон компенсации:
а=
V (F/2)
(7.50)
При X = 3 см . V = 200 м/с , Fn = 1 кГц и Ъг -1 м макси-
мальный размер кадра, к которому применим единый закон ком-
пенсации, А7?1; = 1400 м .
Рисунок 7.22
Спектр сигнала: а - до компенсации миграции целей по дальности;
б - после компенсации
304
Глава 7
Диапазон однозначного измерения частоты траекторного сиг-
нала определяется частотой повторения зондирующего сигнала:
-Fn/2< f <+Fn/2. В соответствии с выражением (7.49), макси-
мальное значение миграции цели по дальности, которое может быть
скомпенсировано данным алгоритмом составляет
При Х = 3см, V = 200 м/с, ^п=1кГц и Ян=100км мак-
симальное значение миграции цели по дальности, которое может
быть скомпенсировано данным алгоритмом Дгмакс = 70 м. При
большей миграции проявляется неоднозначность по частоте и кор-
рекция производится не полностью.
При решении большинства тактических задач с использова-
нием РСА требуется минимизация задержки информации, обу-
словленной необходимым временем выполнения операций сис-
темой обработки сигналов.
Минимизация времени задержки возможна при использова-
нии цифровой системы обработки. При этом также достигается
гибкость в управлении алгоритмами обработки при изменении
решаемых задач.
Главными характеристиками ЦСО являются разрядность,
быстродействие АЦП и процессора, а также объем памяти.
Структура ЦСО состоит из ФД, АЦП, и цифрового процес-
сора (ЦП).
Используются три вида алгоритмов цифровой обработки:
• прямая свертка траекторного сигнала с опорной функцией;
• быстрая свертка, когда операция свёртки ведется в частот-
ной области с применением БПФ, что обеспечивает выиг-
рыш в требуемом быстродействии ЦП;
• гармонический анализ, когда траекторные сигналы приводят
к форме, позволяющей использовать БПФ одновременно
для всех сигналов в элементе дальности.
Алгоритм ГА требует наименьшего быстродействия ЦП, но ог-
раничивает зону одновременного обзора (обработки) по азимуту.
В РСА с высоким разрешением происходит миграция сигнала
цели по дальности (задержке). Один из способов компенсации ми-
грации цели по дальности основывается на том, что в частотной об-
ласти траекторные сигналы целей с одинаковой наклонной дально-
стью имеют одинаковый закон изменения дальности от частоты.
Обработка траекторного сигнала радиолокационной системы...
305
7.4. Влияние искажений траекторного сигнала
на характеристики
радиолокационной системы
с синтезированием апертуры антенны
В реальных условиях работы РСА всегда имеют место искажения тра-
екторного сигнала, обусловленные различными дестабилизирующими
факторами. К ним, в первую очередь, относятся нестабильности ха-
рактеристик среды распространения радиоволн и аппаратуры РСА,
а также траекторные нестабильности овижения ЛА.
Аппаратурные источники искажения траекторного сигнала -
нестабильности приемопередающего тракта, прежде всего,
опорного генератора, синтезатора частот и фазового детектора,
ограничение динамического диапазона приемника и системы
обработки, а также ошибки аппроксимации алгоритмов обра-
ботки сигналов.
Нестабильности характеристик среды распространения обу-
словлены, прежде всего, тропосферными неоднородностями.
Траекторные нестабильности являются результатом случайных
движений ЛА при полёте в турбулентной атмосфере, а также в
результате ошибок работы системы управления ЛА.
Искажения траекторного сигнала, которые могут быть как ам-
плитудными, так и фазовыми, вызывают искажения получаемого
РЛИ. Искажения РЛИ обычно оцениваются по изменению парамет-
ров сигнала изображения точечного объекта.
Траекторный сигнал точечного объекта при флуктуациях его
амплитуды и фазовых искажениях \|/(/) при прямолинейной
траектории и телескопическом обзоре можно записать в виде
5(/) = z/(/)G(0,)exp^j(2n(/,J + jy(z)}, (7.52)
где ^(Oj) — коэффициент усиления антенны в направлении объекта;
fn = 2Kcos0H/X - средняя доплеровская частота сигнала, завися-
щая от угла наблюдения 0Н; - 2V sin(0H )0,/X - смещение допле-
ровской частоты сигнала, определяемое координатой объекта 0 по
306
Глава 7
r2sin2(0 +0J
азимуту относительно центра зоны обзора бн ; =--------------
скорость изменения частоты сигнала.
Выходной сигнал согласованной системы обработки (без учёта
шумов) как функция параметров ее настройки
2Hsin0„)0 _ K2sin2(0H +0)
X И ЯД
н
при равномерной весовой функции (W(/) = 1) имеет вид
Д/,м)=
d/
«У 2
G(0j) j Lr(/)exp[j27t[(/-y;)/ + (p-p])?j + j\|/(z)}d/
-Гс/2
При отсутствии искажений
, }=ЦЛ (Шдп[я(/-л)тс
Ш Hf-fiK
(7.53)
(7.54)
выходной сигнал системы обработки имеет вид функции sin(x)/x и
при / = 0 и G(0) = Gq :
IhGJ' sink/T
/(/) = _L_oc----
[л/Гс]
Основными параметрами неискаженного выходного сигнала
являются: максимальная амплитуда U^GCTC; положение максимума
f = fx, которое определяется азимутом объекта; ширина главного
лепестка 8f -\/Тс^ которая определяет разрешение по азимуту; уро-
вень первого бокового лепестка по отношению к главному лепестку,
который для функции sin(x)/x составляет-13,2 дБ.
Амплитудные искажения траекторного сигнала обусловлены, в
основном, ошибками стабилизации ДН антенны и изменением
ЭПР цели за время синтезирования.
Обработка траекторного сигнала радиолокационной системы...
307
Они носят медленный характер, и их влияние эквивалентно из-
менению весовой функции системы обработки. Обычно ам-
плитудные флуктуации траекторного сигнала за время синтезирова-
ния невелики и их влияние вызывает изменения амплитуды РЛИ
(полосатость кадра).
Следствием фазовых искажений траекторного сигнала в систе-
ме обработки являются:
• смещение максимума, что приводит к ошибкам измерения ко-
ординат объектов и искажению РЛИ местности;
• уменьшение максимума выходного сигнала, что равносильно
снижению энергетического потенциала РЛС;
• расширение главного лепестка, что ухудшает разрешающую
способность;
• увеличение уровня боковых лепестков, что снижает контраст
РЛИ.
Перечисленные искажения изображения выражаются функцио-
нальной зависимостью основных параметров выходного сигнала
РСА от характеристик искажений траекторного сигнала. Следует
отметить, что большие фазовые искажения могут привести к полно-
му разрушению РЛИ.
Искажающая функция v|/(0 может быть регулярной и случай-
ной, медленно или быстро изменяющейся в течение времени синте-
зирования, возможны также периодические изменения как
следствие механических вибраций или электрических наводок.
При медленных флуктуациях фазы, когда время синтезирова-
ния значительно меньше времени корреляции фазовых флуктуаций
т , искажающую функцию можно аппроксимировать степен-
ным полиномом с постоянными, но случайными коэффициентами:
\|/(/) = c1/ + c2Z2 +c3Z3 I ....
При = имеют место линейные искажения фазы сигна-
ла. В этом случае сигнал изображения точечного объекта (7.53), в
системе обработки согласованной по квадратичному параметру при-
нимаемого сигнала ( ц = ц,), равен
Z(/) = t/oG(0i)
308
Глава 7
U0G(ei)rcSm[7t(/ + c1/2n-^)7;
~n(f + cj2n-f:)Tc'
Форма выходного сигнала при линейном фазовом искажении
траекторного сигнала идентична форме неискаженного выходного
сигнала (7.58), но максимум сигнала наблюдается в канале, настро-
енном на частоту fx+c /(2л) .
Поскольку азимут объекта £ определяется частотой сигнала
линейные искажения фазы сигнала (сдвиг частоты kf\=cx/(2л))
приводят к сдвигу отметки объекта по азимуту на величину
2Ksin0H 4 л V sin 0„
н н
(7.56)
Относительная (по отношению к интервалу разрешения 8£) ве-
личина смещения РЛИ
Д1=—=4/;?;=—• (7-57)
or 2л
Таким образом, относительное смещение объекта по азимуту
пропорционально коэффициенту линейного искажения фазы и дли-
тельности формирования синтезированной апертуры. Допустимая
величина коэффициента линейных фазовых искажений в соответст-
вии с (7.56)
4nF(sineH)A£J0n
(7.58)
где 10П - допустимая величина смещения РЛИ.
Если Д£ . <5€, т.е. рассогласование системы обработки по
частоте, вызванное некомпенсированным линейным набегом фазы
сигнала, не должно превышать разрешения РСА по частоте, то
с1/(2л) = Д/; <1/Гс =8f. Следует отметить, что при некогерентном
накоплении различное смещение отдельных изображений приводит
к расфокусировке получаемого РЛИ.
В случае квадратичного искажения фазы сигнала, \|/(/) = с2/2,
выходной сигнал канала обработки, настроенного на неискаженный
сигнал, принимаемый с направления (0( - 0 ),
Обработка траекторного сигнала радиолокационной системы...
309
(7.59)
После преобразования сигнал может быть выражен через инте-
гралы Френеля в следующем виде:
с(Ц) + с(С/2)] +][5(Ц) + л((7)2
COS
s(t/)=
Анализ выражения (7.60) показывает, что квадратичные иска-
жения вызываю г уменьшение максимума сигнала изображения то-
чечного объекта, расширение главного лепестка и увеличение уров-
ня боковых лепестков. Степень этих искажений зависит от фазового
набега на концах синтезированной апертуры относительно ее сере-
дины Д\|/ = с2Гс2 /4 . Зависимость сигнала изображения от величины
Д\|/, нормированные к амплитуде неискаженного сигнала, приведе-
ны на рис. 7.23. По оси абсцисс здесь приведена относительная ко-
Рисунок 7.23
Графики зависимости модуля сигнала изображения
от квадратичного изменения фазы Ду
310
Глава 7
ордината РЛИ -£/5/ = f /bf. Влияние квадратичных фазовых иска-
жений на параметры выходного сигнала в зависимости от величины
Д<|/ показано на рис. 7.24. На этих графиках коэффициент Рмакс по-
казывает снижение мощности выходного сигнала; М - увеличение
ширины главного лепестка (относительно неискаженного сигнала на
уровне -3 дБ); 7^ок = ^бок/7^акс - отношение мощности первого бо-
кового лепестка /}бок к мощности главного лепестка /^акс.
При допустимом снижении амплитуды сигнала изображения
на 0,5 дБ соответствующий ему фазовый набег Д\|/ = л/4, а допус-
тимый коэффициент квадратичных фазовых искажений
л
(7.61)
Кубические фазовые искажения вызывают смещение, умень-
шение мощности сигнала изображения, расширение его главно-
го лепестка и ассиметричные изменения боковых лепестков.
Если считать допустимыми искажения выходного сигнала при
Д\|/’ = л/2, то коэффициент с3 должен удовлетворять соотношению
2л
с3 < —. (7.62)
7 с
При периодических фазовых искажениях набег =
= с^ sin (2л/у +<р), где и - соответственно амплитуда
и частота изменений фазы сигнала.
Рисунок 7.24
График зависимости влияния квадратичной фазовой ошибки
на параметры выходного сигнала
Обработка траекторного сигнала радиолокационной системы...
311
Сигнал на выходе системы обработки, согласованной с неиска-
женным сигналом для 0, = 0 , при синусоидальных фазовых искаже-
ниях (<р = 0):
Тс/2
I(f) = uoGo f exP;j(2^ + cv sin 271/^1 d/.
-Tc/2
Используя разложение экспоненциальной
expljCy sin^27i/v/B в степенной ряд, получаем
(7-63)
функции
1 sin л/Гс
4 J яДс
;(/)=адт
(7.64)
где первое слагаемое - неискаженный сигнал изображения (его
максимум уменьшается пропорционально множителю (1-с^/4),
который характеризует снижение энергетического потенциала
РСА); другие слагаемые определяют искажение формы сигнала.
Характер искажения зависит от частоты колебаний фазы .
Медленные гармонические изменения фазы \ Tc=8f)
влияют так же как и линейные и квадратичные.
При быстрых гармонических колебаниях фазы (/ » \/Тс = &f)
основной лепесток сигнала по форме практически не искажается, но
с обеих сторон от него на одинаковом удалении появляются допол-
нительные боковые лепестки на частоте ±/ . Отношение мощности
первого дополнительного БЛ к мощности основного
макс
312
Глава 7
Если <л/8, что соответствует Д\|/ = 2су|1 = л/4, то уровень
дополнительных боковых лепестков не превышает уровень боковых
лепестков неискаженного изображения (-13,2 дБ). Следует отметить,
что при выполнении этого условия уменьшение амплитуды основно-
го лепестка также будет несущественным.
Относительное изменение сигнала изображения РСА при слу-
чайных флуктуациях фазы зависит от среднеквадратической
разности фазовых флуктуаций на концах апертуры стЛ, кото-
рую можно представить через коэффициент корреляции г(Гс )
разности фаз:
од = ф^(\-г(тУ) , (7.66)
где Оу - СКО флуктуаций фазы в любой точке апертуры.
Таким образом, величина изменений параметров выходного
сигнала зависит от характера фазовых искажений, однако при малых
искажениях для всех видов функции достаточно выполнить
условие
\|/(0 < Лу доп-
v 7 макс Л
Это условие означает, что на интервале
синтезирования Тс максимальные фазовые искажения
не
макс
должны превышать допустимую фазовую погрешность Avjj 10П. При
этом линейный набег искажения фазы не учитывается, так как он
определяется допустимым смещением частоты сигнала (условие
(6.29)), т.е. при регулярных фазовых искажениях
макс
рассчи-
тывается по квадратичному и более высоким членам разложения
функции .
Допустимый уровень быстрых фазовых флуктуаций обычно
определяется допустимым уровнем суммарной (интегральной) мощ-
ности боковых лепестков. Для малых значений Оу интегральная
мощность боковых лепестков в децибелах равна
^,нт =201ogov.
(7.67)
Обычно допустимая величина о у = 6... 15° .
Быстрые амплитудные флуктуации влияют так же как и фазо-
вые флуктуации при малых значениях изменения амплитуды и
Обработка траекторного сигнала радиолокационной системы...
313
фазы. Так, 5%-ные амплитудные флуктуации эквивалентны
флуктуациям фазы 3°.
В условиях реальной работы РСА основной причиной фазовых
искажений сигнала является нестабильность движения ЛА. Поэтому
основной задачей при получении высокого разрешения является
снижение ошибок определения параметров траектории движения
фазового центра антенны для обеспечения точной компенсации фа-
зовых ошибок.
7.5. Компенсация траекторных нестабильностей
с помощью инерциальной
навигационной системы
Опорная (заданная) траектория движения (маневр) носителя РСА
выдерживается с помощью штатной навигационной системы, кото-
рая вырабатывает сигналы управления для автопилота носителя.
Заданное положение зоны обзора РСА относительно опорной тра-
ектории (азимут 0Н, угол места <рн, и удаление зоны обзора
дальность 7?н), (рис. 7.25) выдерживается путем управления ДН ре-
альной антенны относительно строительной оси носителя РЛС по
курсу, крену и тангажу и задержкой сигнала тн = 27?н /св каждой
точке траектории.
Ошибки системы управления и случайные колебания носителя
РСА при полёте в турбулентной атмосфере вызывают отклоне-
ния движения ФЦА РСА от опорной траектории - траектор-
ная нестабильность.
Случайные движения ФЦА определяются также упругими ко-
лебаниями и вибрациями конструкции носителя РСА.
Для работы РСА необходимо знание траектории носителя для
вычисления закона изменения расстояния от ФЦА до наблюдаемого
объекта и расчета опорной функции с точностью до малых долей дли-
ны волны РЛС в пределах интервала синтезирования. Система ком-
пенсации искажений траекторного сигнала вызванных 1 Н выполняет:
• измерение траекторных нестабильностей:
• коррекцию фазы опорного или отраженного сигнала;
314
Глава 7
Рисунок 7.25
Система координат движения фазового центра антенны РСА
• коррекцию изменения задержки отраженного сигнала;
• перемещение ДН реальной антенны для поддержания заданно-
го положения зоны обзора на местности;
• привязку получаемого изображения к системе координат инди-
катора.
Фаза и задержка отраженного сигнала определяются текущим
расстоянием от фазового центра антенны до объекта. Задача
компенсации TH решается путём измерения случайных отклонений
траектории ФЦА с помощью специальной инерциальной системы
микронавигации. Совместно со штатной навигационной системой в
этом случае она является датчиком параметров траектории движения
носителя РСА, определяющих алгоритм обработки траекторного
сигнала (рис. 7.26). Изменения задержки сигнала на интервале син-
тезирования учитываются соответствующим сдвигом отсчетов АЦП,
а изменения фазы - сдвигом фазы опорной функции с помощью фа-
зовращателя.
Фаза опорной функции <р1 при согласованной обработке
сигнала z-й цели определяется законом изменения текущего расстоя-
ния между ФЦА и целью на интервале синтезирования:
Обработка траекторного сигнала радиолокационной системы...
315
Рисунок 7.26
Схема системы компенсации траекторных нестабильностей
где x(z), j’(z),//(z) = Z(z) - текущие координаты ФЦА в земной
системе координат О0XYZ (рис. 7.25); х[9у1 - координаты цели в
той же системе координат.
Для формирования опорной функции обычно применяется
квадратичная аппроксимация текущего расстояния:
(7.68)
где - начальная дальность цели; Кп, аг- - соответственно ради-
альная скорость и ускорение ФЦА относительно объекта при Z = 0,
которые определяются формулами:
= (к cos 0: + Zvsin0-)coscp1 — FC sin ф:,
У Л 1 у 1 / *1 2-. *11
г=0
(av cos 0; + a sin 0, ) cos ср. +
У Л. 1 j 1/ * 1
+аг sin ip.
316
Глава 7
Кх, KY, Kz, ах, а, - проекции скорости и ускорения движения
ФЦА на оси нормальной земной системы координат O0ATZ (НЗСК)
в момент времени t — 0; V — Кх + Ку + Kz - модуль полной скоро-
сти ФЦА в тот же момент времени; 0{, ф{ - соответственно азимут в
горизонтальной плоскости и угол наклона в вертикальной плоскости
z-й точки земной поверхности при t = 0.
Для центральной точки кадра изображения (0, = 0н, Ф( =фн,
= R,) опорная функция равна
где Кг, а{ - радиальные скорость и ускорение движения ФЦА по от-
ношению к центру зоны обзора:
Vt =(Kxcos6H +rYsin0H)cos(pH -rzsin<pH,
/ ч V2 - V1
aT=-(a cos 0Н + aY sin 0H ) cos <pH + az sin <pH +-—. (7.69)
Квадратичная аппроксимация текущего расстояния оп-
равдана также с практической точки зрения, так как позволяет
уменьшить число измеряемых параметров движения ФЦА и частоту
их определения до одного раза на интервале синтезирования. Более
высокие члены разложения в ряд текущего расстояния гД/) рас-
сматриваются совместно с траекторными нестабильностями и ком-
пенсируются системой микронавигации iCMH).
Ошибки системы микронавигации
Ошибки измерения составляющих скорости и ускорения носителя
по осям ИСК приводят к ошибкам при вычислении тангенциальной
скорости, радиальной скорости и ускорения движения ФЦА. Обычно
ошибки оценки тангенциальной скорости незначительны и их влия-
нием можно пренебречь.
Ошибки оценки на интервале синтезирования радиальной ско-
рости ЛЦ и радиального ускорения движения ФЦА Atzr приводят к
Обработка траекторного сигнала радиолокационной системы...
317
тому, что формируемая опорная функция оказывается рассогласо-
ванной с отраженным сигналом. В этом случае фазовые искажения
траекторного сигнала имеют вид
у(/)
(7.70)
Ошибка оценки радиальной скорости приводит к линейному
набегу фазы траекторного сигнала, что вызывает сдвиг изображения,
а ошибка оценки радиального ускорения приводит к квадратичному
набегу фазы, что вызывает расфокусировка РЛИ.
Ошибка измерения радиальной скорости зависит от ошибок
измерения составляющих скорости Кх, KY, Kz, которые, в свою оче-
редь, зависят от ошибок измерения соответствующих ускорений с
помощью акселерометров, ибо скорость в СМИ определяется путем
интегрирования выходных сигналов акселерометров. Ошибка изме-
рения радиального ускорения (7.69) определяется как непосредст-
венно ошибками самих акселерометров, так и ошибками измерения
скорости.
Для оценки влияния случайных ошибок измерения ДГГ и Atzr
на характеристики РЛИ используют зависимости (7.58) и (7.61) с
4л 2л
учетом того, что сх -—А Ег и с2 - —Дяг -
Z
При допустимом сдвиге изображения на половину элемента
разрешения для Тс =1...1,5 с из (7.58) следует, что допустимое СКО
ошибки измерения радиальной скорости составляет 3 • 10 ~ м с.
Если потребовать чтобы вследствие неточного измерения ради-
ального ускорения ФЦА разрешающая способность РСА вследствие
расфокусировки не ухудшалась более чем на 10%, то из (7.65) следу-
ет, что для интервалов синтезирования Тс = 1...1,5с необходимо из-
мерять радиальное ускорение с СКО менее, чем 10 м/с .
Задача определения составляющих вектора скорости и ускоре-
ния движения ЛА в ИСК, а также направления на центр зоны обзора
решается в СМН с помощью акселерометров и гироскопов. При этом
важной характеристикой является полоса пропускания соответст-
вующих измерителей. Случайные изменения параметров движения
ФЦА в результате ГН являются узкополосными процессами, у кото-
рых средняя частота спектров лежит в пределах 0,2...2 Гц, а ширина
спектров колеблется от 0,1 до 0,3 Гц.
318
Глава 7
Система компенсации ТН (рис. 7.26) состоит из двух ИНС - штат-
ной навигационной ИНС с коррекцией от радиотехнических датчиков
(ГЛОНАС, ДИСС или РЛС в режиме измерения скорости и угла сноса)
и широкополосной СМН с системой акселерометров и датчиков угло-
вых скоростей, устанавливаемых непосредственно на антенне РСА.
Штатные навигационные системы предназначены для решения
задач навигации. Полосу пропускания этих систем выбирают гораз-
до более узкой, чем полоса траекторных нестабильностей, так чтобы
измерять лишь низкочастотные отклонения ЛА от заданной траекто-
рии полета и таким образом повысить точность навигации. Для ком-
пенсации ТН необходимы измерители, которые должны быть широ-
кополосными и иметь малые ошибки на интервале синтезирования.
Типовые значения ошибок (СКО) систем микронавигации
ИНС, лазерный гироскоп, GPS
Курс....................................................0,02°
Крен, тангаж............................................0,01°
Скорость по строительной оси..........................0,03 м/с
Дальность..........................................16 м (GPS)
Интегрирование выходных сигналов акселерометров ИНС при
определении составляющих вектора скорости ЛА приводит к возраста-
нию погрешности измерения радиальной скорости и радиального уско-
рения с течением времени. Поэтому в системах компенсации ТН при-
меняют следящий измеритель средней доплеровской частоты траектор-
ных сигналов в пределах ДН реальной антенны. Такой доплеровский
измеритель позволяет определять медленные по сравнению с временем
синтезирования изменения радиальной скорости носителя РЛС относи-
тельно центра зоны одновременного обзора. При этом погрешность из-
мерения Vr с течением времени не возрастает.
7.6. Автофокусировка изображения
в радиолокационной системе
с синтезированием апертуры антенны
Создание высокоточной СМН является сложной технической про-
блемой и часто требования к датчикам СМН не выполняются. В
этом случае для измерения фазовых искажений траекторного сигна-
ла дополнительно используется алгоритмический метод. Он осно-
Обработка траекторного сигнала радиолокационной системы...
319
ван на том, что сам траекторный сигнал или радиолокационное изо-
бражение являются носителями информации о фазовых нестабиль-
ностях, которые могут быть измерены с помощью специальных ал-
горитмов обработки сигнала. При таком методе имеется возмож-
ность компенсации фазовых флуктуаций, обусловленных не только
ТН, а также нестабильностями аппаратуры РСА и среды распро-
странения радиоволн. Устраняются также фазовые ошибки опорного
сигнала, обусловленные квадратичной аппроксимацией текущего
расстояния между ФЦА и целью.
Обычно процесс извлечения информации о фазовых искажени-
ях из траекторного сигнала или самого РЛИ и компенсации этих ис-
кажений используется для повышения детальности (резкости) полу-
чаемого изображения. Поэтому он часто называется автофокусиров-
кой подобно фокусировке изображения в оптических системах.
Целью автофокусировки является обеспечение компенсации
фазовых искажений при ограниченной точности микронавигацион-
ной системы.
Главной задачей процесса автофокусировки применительно к
системам РСА является оценка фазовой ошибки траекторного сиг-
нала и компенсация фазовой ошибки.
Источником информации о фазовых искажениях выступает сам
траекторный сигнал. Некоторые алгоритмы автофокусировки тре-
буют явного знания набора коэффициентов разложения в ряд функ-
ции фазовой ошибки. В других алгоритмах коэффициенты присутст-
вуют неявно, в виде некоторой случайной функции. Простые методы
автофокусировки определяют только квадратичный коэффициент
фазовой ошибки, в то время как более сложные методы позволяют
оценить ошибки практически любого порядка.
Для компенсации искажений траекторного сигнала используют
полученную оценку фазовой ошибки. При этом проводится расчёт
опорной функции, компенсирующей траекторные нестабильности.
Фаза этой опорной функции равна оцененной на предыдущем шаге
фазовой ошибке, взятой с обратным знаком.
Группы методов автофокусировки изображения
Группа 1. Используются мощные сигналы одиночных точечных
отражателей (ориентиров). При большом отношении сигнал/шум и
сигнал/фон траекторный сигнал ориентира имеет те же фазовые ис-
кажения, что и траекторный сигнал цели, расположенной в районе
ориентира. Эти искажения измеряются тем или иным способом и
затем компенсируются в траекторном сигнале цели. Достоинством
320
Глава 7
этих методов является возможность компенсации всех видов иска-
жений, в том числе быстроизменяющихся в полосе частот до
10...20 Гц. Недостаток метода - необходимость наличия ориентиров
в районе цели.
Группа 2. Использует траекторный сигнал от всех объектов и
фона местности в диаграмме направленности антенны. Главным
достоинством этих методов является то, что отсутствие точечных
отражателей не вызывает срыв работы алгоритмов автофокусиров-
ки, а их наличие только повышает эффективность процесса авто-
фокусировки.
При пространственно-инвариантной автофокусировке алго-
ритмы осуществляют оценку фазовой ошибки и выполняют её ком-
пенсацию для всех целей, присутствующих в зоне обзора, независи-
мо от их координат, т.е. выполняется. Однако в некоторых случаях
доминирующими являются фазовые ошибки, зависящие от коорди-
нат объекта.
При пространственно-зависимой автофокусировке всё радиоло-
кационное изображение делится на участки, в пределах каждого из
которых можно считать фазовую ошибку пространственно-инва-
риантной. Затем из отдельно сфокусированных участков формируется
полное радиолокационное изображение.
Автофокусировка изображения
на основе оценки средней доплеровской частоты
Метод автофокусировки радиолокационного изображения на основе
оценки средней доплеровской частоты fc^ (СДЧ) использует тра-
екторный сигнал от всех объектов и фона местности в диаграмме
направленности антенны,
Линейные изменение фазы
Рисунок 7.27
Измерение средней
доплеровской частоты
= приводит к смещению
выходного сигнала изображения,
которое оценивается по сдвигу
частоты максимума спектра траек-
торного сигнала на величину
Д/сдч = <п/(2л). На рис. 7.27 по-
казан спектр траекторного сигнала
при боковом обзоре при смещении
средней частоты Д/^дЧ .
Обработка траекюрного сигнала радиолокационной системы...
321
Для измерения изменения СДЧ вся синтезированная апертура
разбивается на несколько подапертур. Для оценки коэффициента с2
квадратичной фазовой погрешности \|/ (z) = c2t2 апертура длитель-
ностью Тс разбивается на две неперекрывающиеся подапертуры
длительностью 7^/2.
Траекторный сигнал (без учёта шумов) после фокусиров-
ки можно представить в виде произведения неискаженного ошибкой
траекторного сигнала 50(z) и экспоненциальной функции фазовой
ошибки - V|/(z)
s(/)-sn(/)e'w), -Tj2<t<Tj2. (7.71)
При наличии только квадратичной фазовой погрешности траек-
торный сигнал в каждой подапертуре длительностью 7 /2 описыва-
ется выражениями:
-Гс/4</<Тс/4, (7.72)
Лг (/) = .?(/+ Гс/4) = 50 (0е 2 16 ,
-Tj4<t<Tj4. (7.73)
Коэффициент линейного изменения фазы ±с27с/2 в выражени-
ях (7.72) и (7.73) определяет среднюю доплеровскую частоту сигна-
ла в первой и второй апертурах, а фаза с t линейное изменение
частоты c2t/n (рис. 7.28).
Средняя частота сигнала /сдч = ±(с27^)/(4я) вызывает сме-
щение изображения изображений, формируемых соответственно
первой и второй подапертурам, а линейное изменение частоты c2t/я, -
расфокусировку изображений. Для оценки коэффициента с2 обычно
используют измерение относительного смещения изображений по
частоте Л/сдч =(с2^с)/(4л).
322
Глава 7
Рисунок 7.28
Алгоритм автофокусировки на основе измерения средней доплеровской
частоты: а - квадратичная фазовая погрешность по всей апертуре;
б - квадратичная фазовая погрешность на половине апертуре (подапертура 1);
в - квадратичная фазовая по1решность на половине апертуре (подапертура 2);
г - средняя доплеровская частота (подапертура 1); д - средняя доплеровская
частота (подапертура 2)
Схема фазоразностного алгоритма оценки коэффициента с2
представлена на рис. 7.29. Комплексносопряжённый сигнал 5,1 (z)
умножается на сигнал Л'2 (0 :
Обработка траекторного сигнала радиолокационной системы...
323
5д (0=s2 (04 (0=4 (05о (0х
(7.74)
и выполняется Фурье-преобразование (БПФ):
-Тс/4 -TJ4
(1.15)
Максимум спектра (со) расположен на средней частоте
^макс - С2^с • Оценка й)макс определяет оценку коэффициента квадра-
тичной фазовой погрешности
• — Самаке
2 — т
1 с
(7-76)
Вычисление средней доплеровской частоты за определенный
интервал наблюдения (траектории) приводит к сужению полосы час-
тот измеряемых нестабильностей. Поэтому такой метод позволяет
компенсировать только медленные нестабильности. Кроме того,
большие ошибки в измерение СДЧ вносят изменения ЭПР отра-
жающей поверхности по азимуту. Для уменьшения этих ошибок ус-
редняются значения СДЧ и, соответственно, коэффициента с2, из-
меренные в нескольких каналах дальности.
Рисунок 7.29
Схема фазоразностного алгоритма автофокусировки
324
Глава 7
Рассмотренный алгоритм можно расширить для оценки фазо-
вых погрешностей более высокого порядка путем деления апертуры
длительностью Тс более, чем на две подапертуры. В общем случае
использование N подапертур достаточно для оценки коэффициентов
разложения функции фазовой ошибки TV-го порядка.
Достоинство рассмотренного способа оценки фазовых неста-
бильностей состоит в отсутствии ограничений на вид отражающей
поверхности: появление сигнала от точечного объекта улучшает
оценку параметров, а его отсутствие не вызывает срыв режима авто-
фокусировки. Кроме того, такой способ автофокусировки прост в
реализации и нетребователен к производительности вычислительной
системы.
Недостатком такого алгоритма автофокусировки является то,
что с увеличением количества неперекрывающихся подапертур
уменьшается их длительность. Уменьшение длительности подапер-
тур вызывает ухудшение разрешения и отношения сигнал/шум вы-
ходного сигнала. Эти эффекты снижают точность оценки сдвига
частоты между под апертурам и. На практике алгоритм автофокуси-
ровки на основе оценки средней доплеровской частоты можно
применять для оценки фазовой погрешности максимум пятого по-
рядка.
При больших фазовых погрешностях выходной сигнал имеет
значительную протяжённость по частоте. Это приводит к тому, что
относительный сдвиг частоты вычисляется с большой ошибкой. Для
повышения точности алгоритм автофокусировки применяют после-
довательно несколько раз. Как правило, трёх-четырёх итераций дос-
таточно, чтобы осуществить точную фокусировку радиолокационно-
го изображения.
Автофокусировка изображения
по сигналам точечных отражателей
При высоком разрешении в зоне обзора почти всегда находятся не-
сколько ориентиров (точечных отражателей). Алгоритм автофокуси-
ровки по сигналам от точечных отражателей обеспечивает высокую
точность компенсации фазовых нестабильностей, поэтому данный
метод получил наибольшее распространение. Схема РСА с фокуси-
ровкой изображения по сигналу точечного объекта представлена на
рис. 7.30. Если сигнал ориентира намного превышает суммарный
сигнал от других объектов и местности в пределах одного элемента
Обработка траекторного сигнала радиолокационной системы...
325
Рисунок 7.30
Алгоритм автофокусировки по сигналу мощного точечного отражателя
разрешения по дальности и ширины ДН реальной антенны, то он
может быть выделен из общего сигнала путем стробирования по
дальности. В этом случае селектор опорного сигнала представляет
собой селектор сигнала от полоски дальности, в которой находится
опорный ориентир.
Такая система автофокусировки является инвариантной к фа-
зовым искажениям сигнала, поскольку опорная функция в согласо-
ванном алгоритме получения изображения представляет собой ком-
плексно-сопряженный сигнал от одиночного точечного объекта. Од-
нако фазовые флуктуации сигналов от различных объектов могут
отличаться, что обусловлено разностью запаздывания сигналов.
Максимальная величина этой разности определяется шириной зоны
обзора по дальности: Дтмакс = сД7?/2.
Конкретное значение времени корреляции линейных и угловых
колебаний ЛА зависит от типа ЛА и турбулентности атмосферы и
составляет величину оз долей секунды до нескольких секунд, что
значительно больше Дтмакс. Время корреляции тропосферных не-
стабильностей фазы сигнала также превышает Дтмакс. Фазовые
флуктуации приемопередающего тракта имеют различную природу
и обычно подразделяются на медленные, время корреляции которых
ТПРМ-ПРД » Дтмакс 11 быстрые, ДЛЯ которых ТпРМ-ПРД «Атмакс-
Однако быстрые флуктуации имеют малую дисперсию и могут не
учитываться.
Таким образом, в течение периода повторения РСА фазовые
флуктуации сигналов различных объектов в зоне обзора обладают
сильной корреляционной связью, что позволяет использовать сигнал
отдельного точечного объекта для компенсации фазовых искажений
сигналов других объектов, расположенных в зоне одновременного
обзора РСА. При этом устраняется влияние не только ТН, но и тро-
326
Глава 7
посферных нестабильностей и нестабильностей приемопередающего
тракта.
Однако когда ЭПР опорного объекта сравнима с ЭПР фона ме-
стности в пределах того же элемента разрешения по дальности и
ширины ДН реальной антенны, качество фокусировки будет низким
вследствие помех от фона местности. Поэтому требуется принимать
специальные меры при формировании опорного сигнала
Траекторный сигнал w(/) одного канала дальности РСА при
наличии N точечных объектов представляет собой сумму сигналов
фона местности в пределах полоски дальности и ширины ДН ре-
альной антенны •Уф(^) и объектов 5, |/), искаженных мультиплика-
тивной помехой \|/(z), принимаемую на фоне внутренних белых
шумов и(/) :
Сигналы фона и z-го точечного объекта:
ОС
.4л
5
—ОС
(7.77)
(7.78)
(7.79)
где й(0) — комплексная функция отражения полоски дальности по
азимутальной координате 0, отсчитываемой от положения центра
ДН в момент времени / = 0; (7(0,/) - значение ДН реальной антен-
ны в направлении 0 для момента времени /; г (0,/) - расстояние от
элементарного отражателя с азимутальной координатой 0 до ФЦА в
момент времени / при полете ЛА по расчетной траектории; Д и 0t
соответственно комплексная амплитуда сигнала z-го объекта и его
азимутальное положение относительно центра зоны обзора.
В качестве модели функции отражения фона и(0) используется
пространственный неоднородный некоррелированный шум с нулевым
средним значением: М [и(0)} = 0 и корреляционной функцией
Обработка траекторного сигнала радиолокационной системы...
327
.м{й(01)и*(е2)|=сОг(е1)5(е1-е2),
(7.80)
где о0г (0) - удельная ЭПР фона, разрешаемой по дальности пло-
щадки. Для статистически однородной поверхности суОг = const.
Изменение дальности до отражателя в зоне обзора можно ап-
проксимировать квадратичной зависимостью:
/2
r(0j) = (Kt0-Kr)/ + ^-, (7.81)
где Kt, Иг, аг - соответственно радиальная и тангенциальная скоро-
сти и радиальное ускорение движения ФЦА по отношению к центру
зоны обзора. Значения Vr и аг вычисляются по данным навигаци-
онной системы и используются при расчёте опорной функции:
где - действительная весовая функция; Vx и аг - оценки Vr и аг.
После перемножения с опорной функцией сигналы фона и то-
чечных объектов примут вид:
(7.82)
(7.83)
Фазовые нестабильности \|/(/" определяются фазовым набе-
гом, вызванным отклонениями носителя от расчетной траектории, а
также фазовыми нестабильностями среды распространения радио-
волн и приемопередающего тракта РСА у н :
(7.84)
Фазовые нестабильности у, (t) являются неизвестной случай-
ной функцией.
Сигналы точечных объектов (отражателей) 5Д/) = ехр jy(z)}
содержат информацию о фазовых искажениях траекторного сиг-
328
Глава 7
нала и используются для автофокусировки изображения. В качест-
ве точечных отражателей могут выступать малоразмерные объек-
ты, уголковые отражатели и т.п. Селектор по дальности выделяет
сигналы точечных отражателей и измеряет их фазу у(^) =
= arctg(lm(w, (z))/Re(z/, (/))}
опорной функции /?(/) = ехрjig. Непосредственное измерение
фазовых нестабильностей предпочтительнее оценки коэффициентов
линейного и квадратичного фазовых набегов, так как позволяет уст-
ранить фазовые набеги более высоких порядков.
для формирования фокусирующей
Качество фокусировки в такой системе определяется СКО
ошибки измерения фазы у(/) сигнала выделенного опорного
объекта. При большом отношении фон/шум ошибка зависит от от-
ношения мощности сигнала объекта Ро- к мощности сигнала фона
, принимаемого от земной поверхности, расположенной в пре-
делах ДН реальной антенны и строба дальности:
су2 = D^/P^ • Допустимое значение определяется вели-
чиной допустимых искажений РЛИ. Так, при с\/доп=л/12
<7фдоп =1/ст^оп “15- Величина <7ф зависит от ЭПР объекта ,
удельной ЭПР фона о0 и площади полоски дальности:
_ ^об _ °об
ф “ Я ’ По Wr ’
(7.85)
где R" - дальность наблюдения; 60 - ширина ДН реальной антен-
ны; 5г - разрешение по дальности. Таким образом,
с>об > суо/?нОо5г при cf0 = -22 дБ (степь летом), /?н = 50 км ,
0О = 1,8 и 8г = 3 м необходимая ЭПР объекта аоб > 500 м2.
Реальные точечные объекты обычно имеют значительно мень-
шую ЭПР. Поэтому для автофокусировки необходима дополнитель-
ная селекция сигнала объекта на фоне помехи по частоте (азимуту).
Выделение из помех сигнала точечного объекта
5, (7)exp|j\|/(7)j осуществляется путем фильтрации в частотной об-
ласти. Схема фильтрации представлена на рис. 7.31. После умноже-
Обработка траекторного сигнала радиолокационной системы...
329
Рисунок 7.31
Алгоритм фильтрации сигнала точечного
ния траекторного сигнала w(7) на вычисленную по навигационным
данным опорную функцию z-го объекта h} (/) и БПФ обеспечивается
получение спектра траекторного сигнала (искаженного РЛИ объекта
и фона). Фильтр с амплитудно-частотной характеристикой (АЧХ),
согласованной со спектром сигнала (/)ехр j j\|f (/)}, выделяет ис-
кажённое изображение опорного объекта. Для получения оценки фа-
зы сигнала выполняется обратное БПФ (ОБПФ). Фаза ф(7) исполь-
зуется для формирования фокусирующей опорной функции, устра-
няющей траекторные нестабильности:
^oKyC(9=exp{-v(o; -
Re^z/j
(7.86)
Определим АЧХ фильтра для выделения сигнала изображения
опорного объекта. При использовании гауссовской весовой функции
и опорной функции, рассчитанной по данным ИНС, модуль
спектра сигнала ic (t) можно аппроксимировать следующей зависи-
мостью:
Ш) = Дехр<
l,38(/n-/ni)2
л/2
(7.87)
где /п - частота, соответствующая я-му фильтру БПФ; А- - макси-
мум амплитуды спектра сигнала /-го объекта; - номер фильтра, в
330
Глава 7
котором наблюдается максимум сигнал z-го объекта; Л/J - ширина
спектра траекторного сигнала /-го объекта.
Значения 4 и А/ можно оценить по спектру сигнала /\(/п)
на выходе БПФ (рис. 7.32). В случае стационарного фона в окрест-
ности объекта, оптимальная АЧХ фильтра для выделения изображе-
ния опорного объекта определяется выражением
(7.88)
где 7ф ср — средняя мощность фона; А?(и) - аппроксимация модуля
спектра сигнала объекта (7.87):
А?(и) = ехр
л2
j
(7.89)
bfjbf - отношение ширины спектра сигнала к ширине элемента
разрешения по частоте, которое выражает степень расфокусировки
изображения точечного объекта.
Средняя мощность фона ср в элементе разрешения определяет-
ся по изображению фона (/п ) в окрестности изображения объекта:
Рисунок 7.32
АЧХ фильтра и спектры траекторных сигналов точечного отражателя и фона
Обработка траекторного сигнала радиолокационной системы...
331
где N(j) « Л^фмакс - число фильтров в пределах ширины спектра сиг-
нала опорного объекта; Л^)макс = (2И Оо)/(Х8/) - максимальное чис-
ло фильтров в пределах ширины спектра сигнала от фона местности.
Степень расфокусировки изображения точечного объекта равна
Л/ _ 1,38(л? — л?, )2
^Ъ|п(1Ш)1М
(7.91)
Для расчетов берутся фильтры справа и слева от пх, для кото-
рых F(/r/)| Д > 0,5 . Результаты расчетов по всем фильтрам усред-
няются.
Требования к ЭПР опорного объекта в случае выделения сиг-
нала путём фильтрации в частотной области уменьшаются в
^Фмакс/^лчх Раъ гДе ^ачх “ шиРина АЧХ. Так, если ширина
АЧХ составляет 5 элементов изображения (5 фильтров БПФ), то
при Афмаке =500 требования к ЭПР объекта уменьшаются в i00
раз, следовательно, при том же значении с>() необходимо
Ооб > 5 м2.
Если в зоне обзора присутствует несколько точечных объектов
расчет опорной функции осуществляется путем усреднения фазы,
измеренной для всех объектов. Для устранения влияния различных
начальных фаз сигнала каждого объекта измеряется приращение фа-
зы за период повторения:
А\|/ (к ) = \|/ (А) - \|/ (к-1) = arctg
,(7.92)
332
Глава 7
где (Л) - сигнал z-го объекта на выходе ОБПФ в момент времени
tk ; N - число объектов, по которым осуществляется автофокусн-
ровка.
В этом случае опорная функция для фокусировки определяется
путем суммирования соответствующих приращений:
^фокус (*) = exp{-jV(£)},
к
где -\|/(А:-1) +А\|/(Л) = У^А\|/(А:) , причем = 0 .
।
На рис. 7.33 представлен пример использования алгоритма ав-
тофокусировки на массиве траекторного сигнала с уголковым отра-
жателем. Потенциальное разрешение по азимуту составляет 1 м. По-
сле предварительной фокусировки по данным от навигационной сис-
темы разрешение составило 4 м (штриховая линия). После
автофокусировки (сплошная линия) достигнуто разрешение близкое к
оптимальному -1,1м. Нескомпенсированная фазовая ошибка, рас-
считанная в соответствии с данным алгоритмом, представлена на
рис. 7.34. Видно, что фазовая ошибка имеет ярко выраженный квад-
ратичный характер, однако присутствуют и ошибки другого поряд-
ка. На рис. 7.35 показано увеличение амплитуды сигнала изображе-
ния отражателя после нескольких последовательных фокусировок
(итераций). Из рисунка видно, что основной эффект фокусировки
РЛИ достигается на первом шаге.
О 100 200 300 400 500 600
Рисунок 7.33
РЛИ точечной цели до автофокусировки и после
Обработка траекторного сигнала радиолокационной системы...
333
Некомпенсированная фазовая ошибка
Рисунок 7.35
График зависимости качества автофокусировки от числа итераций
Алгоритм автофокусировки по сигналам точечных отражате-
лей обладает высокой точностью компенсации фазовых ошибок
высокого порядка в широком классе наблюдаемых целей. Однако
данный алгоритм предъявляет достаточно жёсткие требования к
«точечное™» целей. Это говорит о необходимости применения до-
полнительных алгоритмов отбора объектов подходящих для про-
цедуры автофокусировки, что, в свою очередь, приводит к увеличе-
нию вычислительной сложности алгоритма.
В реальных условиях работы РСА параметры траекторного
сигнала изменяются случайным образом вследствие нестабильно-
стей приемопередающего тракта, среды распространения радио-
волн и траекторных нестабильностей.
334
Глава 7
Случайные линейные изменения фазы приводят к смеще-
нию изображения. Квадратичные изменения фазы вызывают
расфокусировку изображения. Быстрые периодические измене-
ния фазы приводят к появлению ложных отметок, а быстрые
случайные изменения вызывают рост интегрального уровня бо-
ковых лепестков.
Наибольшее влияние на параметры траекторного сигнала
оказывают траекторные нестабильности, обусловленные откло-
нением движения фазового центра антенны РСА от опорной (за-
данной) траектории.
Устранение влияния случайных изменений фазы обеспечи-
вается системой компенсации нестабильностей траекторного сиг-
нала, которая измеряет фазовые нестабильности и корректирует
фазу опорного сигнала.
На первом этапе измерение и компенсация случайных от-
клонений ФЦА осуществляется специализированной системой
микронавигации, которая обычно состоит из инерциальных дат-
чиков ускорений, лазерного гироскопа и приемника ГЛОНАС.
На втором этапе оставшиеся нескомпенсированными фазо-
вые ошибки, измеряются непосредственно по принимаемому тра-
екторному сигналу целей и компенсируются (режим автофокуси-
ровки).
Существуют два метода автофокусировки: по сигналам оди-
ночных точечных отражателей и по сигналам от всех объектов и
фона местности в пределах диаграммы направленности антенны.
Достоинством методов автофокусировки по сигналам точеч-
ных отражателей является возможность компенсации всех видов
искажений, в том числе быстроизменяющихся в полосе частот до
10...20 Гц. Недостаток метода - необходимость наличия ориенти-
ров в районе цели.
Достоинством алгоритмов автофокусировки по сигналам от
всех объектов и фона местности является то, что отсутствие то-
чечных отражателей не приводит к срыву работы алгоритмов ав-
тофокусировки, а их наличие повышает эффективность процесса
автофокусировки.
ГЛАВА 8
Характеристики
радиолокационной системы землеобзора
с синтезированием апертуры антенны
8.1. Пространственное разрешение
Рассмотрим характеристики РСА землеобзора в режиме формирова-
ния амплитудного портрета цели - радиолокационного изображения
цели, в котором интенсивность каждой точки изображения пропор-
циональна ЭПР соответствующего элемента разрешения цели.
Основной характеристикой РЛИ цели, определяющей её де-
тальность, является пространственное разрешение {обычно в плос-
кости поверхности Земли). Кроме того, разрешающая способность в
значительной степени определяет эффективность решения задач об-
наружения малоразмерных целей на фоне, распознавания групповых
и сосредоточенных целей, а также определения их координат и со-
провождения.
Количественной мерой разрешающей способности является
ширина изображения точечной цели на уровне -3 дБ, что соответст-
вует уровню 0,5 по интенсивности изображения. При оценке разре-
шающей способности для устранения влияния искажения формы
изображения вследствие ограничения сигнала, ЭПР цели выбирается
таким образом, чтобы сигнал изображения находился в линейной
части амплитудной характеристики выходного устройства (процес-
сора, индикатора).
В качестве точечной цели обычно используют уголковые отра-
жатели, расположенные на однородном слабоотражающем фоне для
исключения влияния фона и соседних объектов.
336
Глава 8
Группа отдельно расположенных отражателей, имеющих ЭПР с
различием 5 дБ друг от друга, позволяет использовать их изображе-
ние для оценки линейности тракта. При таких условиях (отсутствие
шумов и линейность тракта) выходной сигнал согласованной систе-
мы обработки при реальной работе БРЛС отличается от функции не-
определенности наличием в опорном сигнале функции весовой об-
работки для снижения уровня боковых лепестков, а также наличием
искажений, обусловленных разного рода нестабильностями входно-
го сигнала и ограничениями цифровой системы обработки.
На рис. 8.1 показан для примера характерный вид нормирован-
ной амплитуды выходного сигнала согласованной системы обработ-
ки £с по задержке с учетом нестабильностей входного сигнала и ве-
совой обработки.
Для оценки качества РЛИ используются три основных пара-
метра выходного сигнала (РЛИ точечной цели).
Ширина отклика на уровне -3 дБ характеризует разрешающую
способность РЛС 8т, определяющую ширину РЛИ отдельных бле-
стящих точек и интервал пространственной корреляции однородной
функции отражения пели.
Ширина отклика, равная 38т, характеризует площадь основного
лепестка РЛИ точечной цели.
Рисунок 8.1
Выходной сигнал согласованной системы обработки
Характеристики радиолокационной системы землеобзора...
337
Максимальный уровень бокового лепестка отклика (МБЛ) ха-
рактеризует интенсивность ложных отметок в РЛИ.
Интегральный уровень боковых лепестков равен отношению
площади всех боковых лепестков (заштрихована) к площади основ-
ного лепестка:
Интегральный уровень боковых лепестков характеризует сум-
марную мощность лепестков от всех, в основном мощных, бле-
стящих точек функции отражения цели.
В результате при большом уровне ИБЛ маскируются РЛИ эле-
ментов цели с малым значением ЭПР и снижается динамический
диапазон РЛИ. Дополнительный вклад в ИБЛ вносят нестабильности
(прежде всего, фазовые) приемо-передатчика и цифровой системы
обработки. Обычно сложно обеспечить ИБЛ лучше 15...20 дБ.
При цифровой системе обработки выходной сигнал формирует-
ся дискретной последовательностью отсчетов (пикселов) обычно с
интервалом 0,55т (рис. 8.1). Для восстановления промежуточных от-
счетов РЛИ используют интерполяцию известным методом преобра-
зования Фурье. Для получения отсчетов во всей области боковых
лепестков РЛИ точечной цели достаточно 32 пкс. Осуществляя пря-
мое преобразование Фурье, получают 32 комплексных отсчета. До-
полняя их комплексными нулями до 256 отсчетов и выполняя обрат-
ное преобразование Фурье с вычислением модуля, получаем в 8 раз
больше отсчетов в РЛИ точечной цели. Дальнейшая интерполяция
РЛИ между отсчетами линейная. По полученной непрерывной
функции изменения амплитуды РЛИ ведется оценка разрешения,
максимального и интегрального уровней боковых лепестков.
Е Разрешающая способность по горизонтальной дальности 5Д
(рис. 8.2) определяется разрешением по наклонной дальности 5г и
углом наблюдения в вертикальной плотности (угол места фн):
5Д=^=-= (8J)
cos<p„ 2A/Ccos<p„ 2^cos<ph
338
Глава 8
где Лсж = тиЛ/с - коэффициент сжатия импульса с внутриимпульс-
ной модуляцией; кг = 1,3 -2,0 - коэффициент ухудшения разре-
шающей способности по дальности, определяемый видом весовой
функции обработки и нестабильностями сигнала и аппаратуры РЛС.
Линейная разрешающая способность по азимуту определяется
угловым размером синтезированной апертурой [3() (рис. 8.3).
При прямолинейной СА разрешение по азимуту
= к№н_ = kfkR« ' (8.2)
2PTsineH 2XcsineH
ин СИ
Использование весовой функции при формировании РЛИ и на-
личии искажений сигнала, обусловленных, прежде всего траектор-
ными нестабильностями, приводит к ухудшению разрешения в
к =1,3... 2,0 раза.
Рисунок 8.2
Разрешение по горизонтальной дальности
Рисунок 8.3
Система координат при определении разрешения по азимуту
Характеристики радиолокационной системы землеобзора...
339
Конкретные требования к характеристикам РЛИ по разреше-
нию, уровню максимального бокового лепестка и интегральному
уровню боковых лепестков определяются решаемой тактической за-
дачей (ансамблем наблюдаемых целей и априорными характеристи-
ками класса целей), а также требованиями к вероятности правильно-
го распознавания и алгоритмом принятия решений. Типовыми ха-
рактеристиками РСА землеобзора являются 8г = = (0,3 -3,0) м,
МБЛ = (25 - 35) дБ, ИБЛ = (15 - 20) дБ.
8.2. Радиометрическое разрешение
и динамический диапазон
Радиометрическое разрешение есть минимальная величина
различения ЭПР двух целей. Оно определяет возможность раз-
деления целей по величине их ЭПР.
Так как сама ЭПР, спекл-шум и аддитивные шумы изображения
цели имеют случайную природу, то интенсивность каждой т очки РЛИ
цели также является случайной величиной. Поэтому для различения
целей с различной ЭПР необходимо, чтобы среднее значение интен-
сивности изображения цели превышало ее случайную составляющую.
В качестве меры радиометрического разрешения используют
отношение среднеквадратического отклонения интенсивности к
среднему значению интенсивности изображения т:
(8.3)
Чем меньше у, тем выше радиометрическое разрешение, тем
меньшую разницу между двумя значениями ЭПР целей можно оце-
нивать.
Для повышения радиометрического разрешения необходимо
повышать отношение сигна.'г помеха и сглаживать спекл-шум. Для
этого используют некогерентное (по интенсивности) сложение не-
коррелированных изображений целей. При накоплении N РЛИ ра-
диометрическое разрешение растет пропорционально :
СКО
.— . Типовыми характеристиками радиометрического
разрешения являются 2...3 дБ, а для распределенных целей 1 дБ.
340
Глава 8
Динамический диапазон РСА землеобзора определяется отно-
шением максимальной ЭПР наблюдаемых целей к минимальной.
Входной динамический диапазон (ДД) ЭПР наблюдаемых целей
Оцмакс/<5цмин может достигать 60...70 дБ. В дециметровом (метровом)
диапазоне ДД достигает 80 дБ.
Выходной динамический диапазон РСА обычно не превышает
40...45 дБ, что обусловлено целым рядом технических причин:
• нестабильность характеристик приемо-передающего тракта;
• ошибки управления ДН антенны;
• ограничения ДД системы обработки сигнала;
• траекторные нестабильности;
• нестабильность среды распространения ЭВМ;
• неоднозначность задержка — частота функции неопределенно-
сти сигнала;
• пассивные и активные помехи (дождь, земная поверхность,
преднамеренные помехи).
Суммарный уровень быстрых фазовых флуктуаций, обуслов-
ленных этими причинами, определяет интегральный уровень боко-
вых лепестков. При оф«1 интегральный уровень боковых лепестков
Ринт ~ 20 log О<р.
Эти причины вызывают также повышение максимального
уровня боковых лепестков выходных сигналов, а также уровня адди-
тивного фона (помехи) изображения. В результате минимальное
значение ЭПР наблюдаемых целей определяется уровнем боковых
лепестков и помех, что приводит к снижению ДД РЛИ.
В табл. 8.1 показаны типовые величины интегрального уровня
боковых лепестков, обусловленных различными источниками флук-
туаций.
Таблица 8.1
Характерные величины РИ||1 для различных источников флуктуаций
Источник флуктуаций Ринт по ази- муту, дБ Ринт по даль- ности, дБ
Траекторные нестабильности -25. ..-30 —
Среда распространения -25...-30 —
Приемопередатчик -25...-35 -30...-35
Фазовый детектор -30...-35 —
АЦП (6 разрядов) -30 —
Цифровая система обработки (32 разряда) -40 -40
Неопределенность азимут - дальность -30... -40 -40...-50
Характеристики радиолокационной системы землеобзора...
341
ДД при наблюдении двух рядом расположенных точечных це-
лей определяется максимальным уровнем первого бокового лепестка
и обычно не превышает 35...40 дБ. Максимальный контраст РЛИ
распределенных целей определяется интегральным уровнем боко-
вых лепестков и уровнем шума (помехи).
При наблюдении цели с отрицательным контрастом, например
дороги в лесу, ДД при малом уровне шума равен интегральному
уровню боковых лепестков, который обычно составляет-15.. .-18 дБ.
Основное ограничение ДД РЛИ определяется индикатором.
При телевизионной индикации ДД = 15...30 дБ, а при записи на фо-
топленку ДД = 25...3О дБ. Поэтому на индикатор выносят лишь
часть ДД возможных целей в зависимости от тактической задачи.
При наблюдении целей с малой ЭПР (фон местности, мало-
размерные цели) индикатор ограничивает амплитуды сигналов це-
лей с большой ЭПР. При наблюдении кораблей, городских построек
и других целей с большой ЭПР на линейный участок амплитудной
характеристики индикатора выносятся только сигналы большой
амплитуды.
Наибольший вклад в ограничение динамического диапазона
изображения одиночных (изолированных) отражателей вносят шу-
мы, обусловленные отражениями от дождя и организованными по-
мехами. Недостаточный динамический диапазон может привести к
появлению ложных отметок на изображении. Основными причина-
ми этого является низкий уровень подавления пиков неоднозначно-
сти по азимуту и дальности, а также значительный уровень боковых
лепестков выходного сигнала при наблюдении мощных отражателей
на слабоотражающем фоне.
Примером этого может быть появление ложных отметок бе-
реговой черты на фоне изображения морской поверхности или се-
рия отметок боковых лепестков по азимуту и дальности (кресг)
вблизи изображения точечной цели с большой ЭПР.
Нестабильность амплитудных характеристик РСА в процессе
формирования РЛИ зоны обзора приводит к появлению на изобра-
жении полос в виде изменения средней интенсивности изображения.
Причиной этого являются ошибки управления ДН антенны, неточ-
ность компенсации спада коэффициента усиления на краях ДН ан-
342
Глава 8
тенны, ошибки состыковки соседних кадров РЛИ и т.п. Обычно до-
пускается нестабильность интенсивности изображения зоны обзора
(«полосатость») менее 1 дБ.
8.3. Дальность обнаружения целей
Дальность действия РСА землеобзора определяется максимальным
расстоянием между РЛС и целью, при котором обеспечивается за-
данная эффективность решения задач наблюдения. Так как первой
задачей наблюдения является обнаружение цели, то в качестве ха-
рактеристики РСА используется дальность обнаружения цели с из-
вестной ЭПР и заданными вероятностями правильного обнаружения
и ложной тревоги, а так же условиями функционирования (дождь,
фон, помехи и т.п.). В качестве целей задают типовые объекты, ха-
рактерные для задач, решаемых рассматриваемым авиационным
комплексом РСА землеобзора (табл. 8.2).
Таблица 8.2
Характеристики ЭПР в диапазоне волн 3 см
и размеры наземных и морских целей
Цель Оц, М2 Размеры цели, MXM
Человек 0,5 0,5x0,5
Крылатая ракета на земле 1,0 3x0,8
Танк, БМП, САУ 4...20 8x4
Автомобиль 10...20 7x3
Истребитель на стоянке 3...15 12x17
Бомбардировщик на стоянке 20...150 50x40
Пусковая установка ракет 20...50 10x7
Подводная лодка на поверхности моря 10...200 300x30
Патрульный катер 300 52x8
Фрегат 31 о3 140x14
Эсминец 3,5-103 170x17
Крейсер 17-Ю3 180x20
Десантный корабль 30-103 260x30
Авианосец 45-103 330x40
Характеристики радиолокационной системы землеобзора...
343
В таблице представлены также усредненные по многим типам
размеры целей. При высоком разрешении РСА в элемент разреше-
ния может попасть только часть цели. В этом случае в качестве ЭПР
цели используют ЭПР разрешаемого элемента цели сэц . Особенно-
стью определения дальности обнаружения цели РСА по сравнению с
обычной РЛС, является зависимость числа когерентно накапливаемых
импульсов от разрешающей способности по азимуту:
26^ V sin0
н
(8-4)
Поддерживая постоянным разрешение по азимуту и дально-
сти Ъг независимо от дальности наблюдения и учитывая, что
РитиРп - Рср - дальность обнаружения сигнала цели на фоне внут-
реннего шума (3.27), имеем
(8.5)
Эта зависимость соответствует обнаружению точечной цели на
слабоотражающем фоне. В этом случае отражением от подстилаю-
щей поверхности (фоном) пренебрегают. Необходимое отношение
сигнал /шум дтр определяется требуемой вероятностью правильного
обнаружения при заданной ложной тревоге, которые, в свою оче-
редь, определяются решаемой тактической задачей и статистиче-
скими характеристиками сигнала цели и шумов.
Вероятность правильного обнаружения Рцо определяется це-
ной потерь в решении задач комплексом, обусловленных необ-
наружением цели.
Например, пропуск цели при обзоре на заданной дальности
потребует дополнительного времени для поиска цели и, следова-
тельно, уменьшает располагаемое время для решения последую-
щих задач (распознавания, сопровождения и т.д.). При высоком
разрешении пропуск в обнаружении элемента цели приводит к ис-
кажению изображения цели. Обычно при решении разведыватель-
но-ударных задач задают РГ10 = 0,8...0,9 (вероятность пропуска цели
0,1...0,2).
344
Г лава 8
Вероятность ложной тревоги Рлт (ложного обнаружения) оп-
ределяется ценой потерь, обусловленных принятием решения
на последующие этапы наблюдения цели при ее отсутствии.
Обычно вероятность ложной тревоги задают на один элемент
разрешения наблюдаемой зоны обзора Рпт = 10-4... 10-6.
Наземные и морские цели отличаются сложной конфигурацией.
Наличие отдельных плоскостей, уголков, элементов с резонансным
характером отражений приводит к тому, что в элемент разрешения
попадает небольшое число мощных отражателей.
В этом случае плотность вероятности ЭПР малоразмерной
цели или разрешаемого элемента большой цели обычно харак-
теризуется логнормальным законом или законом распределения
хи-квадрат с 4-мя степенями свободы'.
Плотность вероятности мощности помехового сигнала (шума)
в элементе разрешения обычно характеризуется экспоненци-
альным законом
Характеристики обнаружения для этих законов распределения
мощности сигнала и помехи представлены на рис. 8.4, где изображе-
на зависимость вероятности правильного обнаружения Рпо от отно -
шения сигнал/шум ^-Рс/Рш на выходе согласованного фильтра
при вероятности ложной тревоги Рт = 10 6 в одном элементе раз-
решения и различном числе 7VH обзоров (накапливаемых независи-
мых изображений цели и помехи).
Типовой задачей в этих условиях является обнаружение ЛА на
аэродроме, когда влиянием фона можно пренебречь. Обычно требу-
ется обеспечить 7^10 = 0,8, 7?1Т = 10 4, что соответствует др=9дБ
при Ан = 4.
При обнаружении точечной цели на сильноотражающем фоне
влиянием внутренних шумов обычно пренебрегают. В этом случае
Характеристики радиолокационной системы землеобзора...
345
Рисунок 8.4
Характеристики обнаружения целей на слабоотражающем фоне
характеристики обнаружения определяются отношением сигнал/фон
для одного элемента разрешения. Мощность сигнала фона в элемен-
те разрешения зависит от удельной ЭПР фона и разрешения РСА:
(Тф = сг05£5г/cos срн , а мощность сигнала цели - от ЭПР цели сгн.
При заданной величине сг0 улучшить характеристики обнаружения
можно, только повышая разрешение по азимуту и дальности
(уменьшая разрешаемую площадку 8^8r/coscpH ):
^QuCOS(pH
^1р c>08£8r
(8.6)
Дальность обнаружения малоразмерной цели на си льноотра-
жающем фоне определяется двумя условиями.
Условие 1. Обеспечение на этой дальности такого разрешения,
при котором
Условие 2.
Оц coscpH
Обеспечение такого отношения сигнал/шум
Рс/ Р »qTp, при котором влиянием шумов по сравнению с фоном
можно пренебречь.
Типовой задачей является обнаружение группы танков на
фоне степи, Рпо=0,9, Р7Т = 10 6 на кадре РЛИ размером 103х103
346
Глава 8
элементов разрешения наблюдается одна ложная отметка. Из 10-ти
танков в среднем обнаруживается 9 танков. Требуемое отношение
сигнал/фон 10 дБ при Ан= 4.
При обнаружении малоразмерной цели на фоне су0 значитель-
ный вклад в величину мощности фона элемента разрешения цели
может вносить сильноотражающий фон в окрестностях цели (а0 ).
Примером такой ситуации может служить обнаружение цели
на поляне в лесу. Влияние соседнего сильноотражающего фона
(леса) в этом случае учитывается через интегральный уровень бо-
ковых лепестков выходного сигнала (2^1НТ):
= = aHCQS(PH _ (8>7)
^С5(| 3“ ^инт^Оокр)
Особый случай представляет обнаружение объектов, замаски-
рованных специальными радиопоглощающими покрытиями (техно-
логия СТЭЛС).
Типовые покрытия имеют в сантиметровом диапазоне по-
глощение 15...25 дБ в полосе частот, составляющей до 20 % цен-
тральной частоты. При маскировке таким покрытием объекта с
ЭПР оц = 10 м2 и поглощением 20 дБ действующая величина ЭПР
равна 0,1 м2. При расположении объекта на фоне с удельной ЭПР
о(|=-20дБ и разрешении РСА (3x3 м2) отношение сигнал/фон
будет равно 1, т.е. объект не будет обнаружен.
При переходе в дециметровый диапазон (А = 70 см) значи-
тельно уменьшается поглощающая способность покрытия, что по-
зволяет обнаруживать объекты с ЭПР (1...10) м2.
При картографировании наиболее сложной задачей является
обнаружение элементов земной (водной) поверхности на фоне раз-
личного рода шумов, прежде всего, внутреннего шума РСА, отра-
жений от метеообразований (дождя), а также пассивных и актив-
ных помех.
В этом случае используется такая характеристика как даль-
ность картографирования, т.е. максимальная дальность, на ко-
торой обеспечивается обнаружение элементов пространствен-
Характеристики радиолокационной системы землеобзора...
347
но-распределенной цели с заданными вероятностями правиль-
ного обнаружение и ложной тревоги.
Обычно задается тип цели с минимальной удельной ЭПР
(ВПП, водная поверхность и т.п.) и условия картографирования
(тип обзора, метеоусловия, помеховая обстановка) (табл. 8.3).
Таблица 8.3
Характеристики удельной ЭПР земной и водной поверхностей
Объекты Угол паде- ния X = 0,8 см X = 3,0 см X = 70 см
гг ВВ ГГ ВВ ГГ ВВ
МОРЕ, волнение 2 балла 10 -40 -38 —L 10 -32 -50 -50
20 -38 -35 -38 -28 —45 45
50 -35 -35 -35 -30 42 42
МОРЕ, волнение 6 баллов 10 -30 -28 -35 -30 -35 -35
20 -25 -23 -30 -25 -32 -32
50 -22 -20 -27 -22 -30 -30
ВПП 10 -26 -24 -40 -30 60 -60
20 -20 - 15 -32 -24 -58 -58
50 -14 -10 -20 -1 18 -55 -55
Степь, зима, снег 10 -15 -15 -23 -23 -60 60
20 -10 -10 -1 17 -1 17 -55 -55
50 -5 -5 -14 -14 -50 -50
Степь, лето, трава 3 -35 -35 -35 -35 ^0 -60
10 -15 -15 -16 -15 -55 -55
20 -12 -1 12 -] 5 -15 -53 -53
50 -10 -10 -12 -12 -50 -50
Пустыня, камни, песок 10 -16 -20 -18 -20 45 45
20 -15 -1 17 -1 5 -1 7 -40 -40
50 -12 -14 -12 -14 -35 -35
Лес 10 -16 -16 -14 -14 -35 -35
20 -14 -14 -14 -15 -30 -30
50 -12 -] 12 -12 -12 -25 -25
Дальность обнаружения разрешаемого элемента поверхности
Земли на фоне внутренних шумов (дальность картографирования)
получим, подставляя в (8.5) значение <эи = а0м11Н8/5г/coscpH :
348
Глава 8
РСрС2Х3сОмин8г
2(4n)3^TpZ:7’FmazK sin0H cos<pH
(8.8)
На рис. 8.5 представлены характеристики обнаружения при
картографировании местности. Типовой задачей является карто-
графирование (ВПП, степь, море, лес) с Р,г =10 1, Рпо =0,5. Веро-
ятность PIT = 10 1 означает, что на участке 10х 10 элементов раз-
решения зоны обзора будет 10 ложных выбросов (отметок шума).
Р — 0,5 означает пропуск половины сигналов местности с задан-
ной ЭПР Оф =о05/8г . Такие характеристики Рпо и Р1Т задают для
РЛИ с минимальной удельной ЭПР картографируемой местности
(обычно ВПП или водная поверхность).
Иногда в качестве критерия дальности картографирования ис-
пользуют понятие чувствительности - минимальной удельной
ЭПР о0мин, при которой отношение сигнал/шум равно 0 дБ при
всех других заданных характеристиках РСА.
Особо определяются характеристики обнаружения пространст-
венно-распределенной цели с отрицательным контрастом (просека в
лесу, ВПП, речка с пологими берегами и т.п.), т.е. когда окружаю-
щий фон имеет удельную ЭПР иОф больше, чем удельная ЭПР цели
Рисунок 8.5
Характеристики обнаружения при картографировании местности
Характеристики радиолокационной системы землеобзора...
349
о0ц . В этом случае задача обнаружения сводится к различению двух
сигналов, отличающихся средней мощностью. Наиболее сложной
является задача обнаружения протяженной цели с меньшей, чем у
окружающего фона удельной ЭПР, когда цель занимает всего не-
сколько элементов разрешения по одной из координат («провал»).
Уровень мощности сигнала в этих элементах определяется как мощ-
ностью сигнала цели, так и интегральным уровнем боковых лепестков
Рннт ФН сигналов окружающего фона, а так же мощностью помех
Рп (шумами приемника, АЦП, процессора и внешними помехами):
^оиоц8№г
cos<pH
ф ИНТ
(8-9)
где Ко - коэффициент, учитывающий характеристики РЛС.
В соседних с целью разрешаемых элементах фона уровень
мощности сигнала в основном определяется отражениями от фона:
C0S(Pn
(8.10)
Полагая, что мощность помех Ри много меньше мощности сигна-
лов цели и фона, принимаемого по боковым лепесткам, получаем от-
ношение Р$/Рц (контраст изображения):
Плотность вероятности
мощности сигналов фона и
цели распределяется по экс-
поненциальному закону (для
одного обзора). На рис. 8.6
даны характеристики обнару-
жения элементов цели с отри-
цательным контрастом в зави-
симости от контраста изобра-
жения. Поскольку число эле-
ментов разрешения цели и фо-
на велико, вероятность ложной
тревоги (вероятность приня-
Рисунок 8.6
Характеристики обнаружения цели
с отрицательным контрастом
Глава 8
350
тия цели за фон в одном элементе разрешения) можно задавать дос-
таточно большой (РЛ1 = 10 LlO 2). Для обеспечения вероятности
правильного обнаружения Рпо =0,8 при однократном обзоре требу-
ется контраст цели Рф/Рц=12дБ, а при 4-кратном обзоре
Рф/Ри=5дБ.
В качестве примера рассмотрим обнаружение дороги
(°оц = ~ 30 дБ) на просеке в лесу (о0ф = - 15 дБ ). Если интеграль-
ный уровень боковых лепестков Ринт=-15дБ, то контраст
Р$/Ри =12дБ, что обеспечивает обнаружение дороги в лесу при
однократном обзоре.
Дальность обнаружения цели с отрицательным контрастом оп-
ределяется условием, при котором можно пренебречь влиянием шу-
мов на величину контраста изображения.
При обнаружении объектов, находящихся под слоем снега,
необходимо учитывать потери энергии сигнала в среде распро-
странения.
Потери в дожде адж определяются интенсивностью дождя
(мм/час) и расстоянием, проходимым ЭМВ в полосе дождя (ту-
да и обратно). Обычно высота (верхняя кромка) дождя //лж не
превышает 3 км (рис. 8.7):
где Я - высота полёта самолёта; Ru - расстояние до цели.
Цель
Рисунок 8.7
Путь прохождения ЭВМ в дожде
Характеристики радиолокационной системы землеобзора...
351
Потери в дожде:
^ДЖ “ 2^дЖУ ДЖ ’
(Э(мм/ч)
где коэффициент потерь у.ж=0,3—---------- (дБ/км) определяется
V (см)
интенсивностью дождя Q. Коэффициент потерь у 1Ж при среднем
дожде 4 мм/ч в сантиметровом диапазоне составляет 0,12 дБ км, а в
миллиметровом диапазоне в 10 раз больше. В дециметровом диапа-
зоне влиянием дождя можно пренебречь. При расчётах потерь в до-
жде можно с достаточной точностью брать расстояние до цели R t,
равное ожидаемой величине дальности обнаружения цели.
Потери в растительности а определяются для двух случа-
ев обнаружения целей: под пологом сплошного леса и за лесо-
посадками вдоль дорог. Основное поглощение происходит в
кронах деревьев.
В первом случае (рис. 8.8), путь в кронах деревьев равен
Лкр = hK?R , где /? - высота крон деревьев (3...7 м). Коэффици-
ент поглощения в кронах деревьев а = 2R рукр. В сантиметровом
диапазоне укр = 1,2 дБ 7м . В дециметровом диапазоне (X = 70 см ) ко-
эффициент поглощения в 10 раз меньше (у, э = 0,12 дБ * м).
Во втором случае (лесопосадки вдоль дорог) поглощение опре-
деляется размером одной-двух крон деревьев.
Рисунок 8.8
Путь прохождения ЭМВ в кронах деревьев
352
Глава 8
При картографировании растительность (трава, кусты, деревья)
маскируют водные поверхности (разливы рек, бывшие торфоразра-
ботки, болота). Поглощение (потери) в такой растительности оцени-
ваются также, как и в листве деревьев.
Суммарные потери ап учитывают также потери при обработке
сигналов. Потери при обработке обусловлены несогласованностью
характеристик системы обработки сигналов вследствие ошибок оп-
ределения параметров движения носителя и характеристик РСА, а
также ошибок формирования опорной функции процессором, несов-
падением частоты сигнала с частотой настройки одного из гребенки
фильтров обработки, падением амплитуды сигнала на краях ДН ан-
тенны и весовой функции обработки, флуктуациями траекторного
сигнала. При обнаружении точечной цели эти потери достигают
5...8 дБ, а суммарные потери соответственно 10...20 дБ.
В конкретных условиях функционирования РСА всегда суще-
ствуют неконтролируемые изменения характеристик цели (ЭПР це-
ли и фона), среды распространения (осадки, поглощение в расти-
тельности) и потерь в тракте РЛС. Эти изменения могут достигать
5...7 дБ.
В РСА землеобзора в зависимости от типа решаемой такти-
ческой задачи используются различные характеристики обнару-
жения целей. Различают четыре типовые задачи:
1) картографирование;
2) обнаружение сосредоточенной цели на слабоотражающем
фоне;
3) обнаружение сосредоточенной цели на сильноотражаю-
щем фоне;
4) обнаружение цели с отрицательным контрастом, когда
ЭПР цели меньше ЭПР фона.
В режиме картографирования дальность землеобзора опре-
деляется возможностью обнаружения на фоне внутренних шумов
сигналов, отраженных от разрешаемого элемента заданной про-
странственно-распределенной цели с минимальной удельной ЭПР
(обычно водной поверхности).
Плотность вероятности распределения ЭПР разрешаемого
элемента пространственно-распределенной цели подчиняется
экспоненциальному закону. Цель содержит множество элемен-
тов разрешения, что позволяет допустить вероятность ложной
тревоги 10"1 и соответственно требуемое отношение сигнал/шум
дтр=ЗдБ при однократном обзоре; кроме того, уменьшаются на
3...5 дБ потери в системе обработки.
Характеристики радиолокационной системы землеобзора...
353
Обнаружение отдельной сосредоточенной цели на слабо-
отражающем фоне определяется отношением мощности сигнала
цели к мощности внутреннего шума на выходе приемника и харак-
теризуется дальностью, на которой обеспечивается обнаружение
цели с заданной вероятностью правильного обнаружения и ложно-
го обнаружения.
Мощность сигнала цели увеличивается пропорционально
числу накапливаемых импульсов при синтезировании апертуры и
уменьшается вследствие потерь в высокочастотном тракте, среде
распространения и системе обработки сигналов. При заданном
постоянном разрешении по азимуту мощность сигнала уменьша-
ется пропорционально дальности в третьей степени.
Вероятность правильного обнаружения определяется стати-
стическими свойствами сигналов цели и помех. Плотность веро-
ятности распределения ЭПР сосредоточенной рукотворной цели
обычно характеризуется логнормальным законом или законом
«хи-квадрат» с четырьмя степенями свободы. При некогерентном
накоплении статистические характеристики сигнала и шума изме-
няются, и для обеспечения той же самой вероятности обнаруже-
ния требуется меньшее отношение сигнал/шум qTp. При Рпо=0,8 и
Рлт = 106 и 4-кратном обзоре qTp = 9 дБ, а при однократном обзоре
qTp= 15 дБ.
Характеристики обнаружения сосредоточенной цели на
сильноотражающем фоне определяются отношением сигнал/фон,
при этом внутренним шумом пренебрегают. Мощность фона про-
порциональна удельной ЭПР и площади разрешаемой площадки
на местности. Поэтому повысить вероятность обнаружения цели
на фоне можно только увеличивая разрешающую способность
РСА. Дальность обнаружения в этом случае определяется усло-
вием, когда отношение сигнал/шум становится больше требуемого
отношения сигнал/фон и шумом можно пренебречь. Требуемое
отношение сигнал/фон при Рпо = 0,8 и Рлт = 10“6 равно 15 дБ при од-
нократном и 9 дБ при 4-кратном обзоре.
Характеристики обнаружения целей с отрицательным кон-
трастом («провалом» в изображении местности) определяются
отношением мощности окружающего фона к мощности цели в
элементах разрешения (контрастом). Контраст уменьшается
вследствие попадания в элемент разрешения цели отражений от
окружающего фона по боковым лепесткам. Для обнаружения про-
тяженной цели требуется контраст Рф/Рц = 12 дБ при однократном
обзоре и 5 дБ при 4-кратном обзоре. Внутренними шумами можно
пренебречь.
При высокой разрешающей способности, когда площадь
элемента разрешения меньше площади цели, обнаружение каждо-
го разрешаемого элемента рукотворной цели обеспечивается на
любом фоне.
354
Глава 8
8.4. Характеристики зоны обзора
Зона обзора определяется как область земной (водной) поверхности,
где требуется решение тактических задач с заданными характери-
стиками.
Параметры зоны обзора
• Дальность обзора, т.е. удаление зоны обзора от РСА.
• Полоса одновременного обзора по дальности.
• Углы наблюдения, т.е. положение зоны обзора относительно
вектора путевой скорости носителя РСА.
• Полоса обзора по азимуту.
• Время обзора.
• Разрешающая способность по азимуту.
Дальность обзора разведывательно-ударных авиационных ком-
плексов обычно составляет 80... 160 км. Полоса обзора по дальности
исчисляется в элементах разрешения и составляет Nr = (0,5... 1,0) • 103,
что определяется возможностями индикации и оперативного анализа
радиолокационного изображения оператором. Аналогично определяет-
ся полоса обзора по азимуту N(, = Nr = (0,5... 1,0) • 103 элементов раз-
решения. Для разведывательных систем полоса обзора по дальности
обычно на порядок больше: Nr = (3...5)-1048г, а полоса обзора по
азимуту (путевой дальности) определяется возможностью системы
регистрации траекторных сигналов или изображений и может со-
ставлять сотни километров.
Угол наблюдения для разведывательных систем задается близ-
ким к боковому, а для ударных - любым, иногда за исключением пе-
реднего (заднего) сектора ±(5...1О ) вследствие ухудшения разре-
шающей способности по азимуту в этих секторах.
При переднебоковом (полосовом) обзоре время обзора заданной
полосы по азимуту \L определяется скоростью полета носите-
ля: 7"обз = t±L/V = N Ы)У. При этом максимальное разрешение
по азимуту равно т/а/2. При формировании NH некогерентных
изображений максимальное разрешение ухудшается в Ан раз.
При телескопическом обзоре полоса обзора по азимуту
&L = 0О/?Н, а разрешение по азимуту ограничено только воз-
Характеристики радиолокационной системы землеобзора...
355
можностями системы обработки. Число разрешаемых элемен-
тов в зоне обзора и разрешение по азимуту связаны соотноше-
нием N
V V п
Если задано требуемое разрешение
5/ =—Z/x’—
VT sin ен
L Н
(с учетом весовой обработки и других ухудшающих факторов опу-
щен коэффициент 2), то время обзора зоны
уп
To63=N„Tc=N — (8.12)
Eo/sinO н
где АГН=3...4 - число некогерентно накапливаемых изображений,
получаемых на различных интервалах синтезирования.
При этом число элементов разрешения в зоне обзора
^-^7L=^SllieH- (8J3>
от
а
Если задано число элементов разрешения N , то разрешение по
азимуту должно быть
.„Мн
и соответственно время обзора
(8-14)
V sin 0Н
Если время переднебокового обзора заданной полосы по азиму-
ту велико или мала полоса при телескопическом обзоре, то применя-
ется секторный обзор. Предположим, что время облучения цели при
секторном обзоре определяется только угловой скоростью сканиро-
вания ДН антенны, пренебрегая влиянием скорости полета носителя.
При постоянной скорости сканирования
%
^=77-, (8.15)
где Qa - угловая скорость сканирования ДН по азимуту.
Также будем считать, что требуемый сектор сканирования при
заданной зоне обзора ДА
обз D ^а^обз *
356
Глава 8
Принятые допущения справедливы при условии, что »V ,
О )бз » 60 и внутри зоны обзора разрешение изменяется незначитель-
но. Учитывая, что время облучения определяет интервал синтезирова-
ния Тс и соответственно разрешающую способность: Гобл = NHTC,
KWin0H
а время обзора - число элементов разрешения в зоне обзора:
(8.17)
получаем, что
V sin0H
Г1
(8.18)
С учетом принятых допущений время секторного обзора при
заданном числе разрешаемых элементов N, в зоне обзора не зависит
от разрешающей способности. Это объясняется тем, что с увеличе-
нием разрешения уменьшается требуемая зона обзора и соответст-
венно требуемая скорость сканирования. В результате увеличивается
время облучения цели и повышается разрешение.
Время обзора, определяемое (8.18), не включает время обработ-
ки сигналов и время анализа изображения, поскотьку предполагает-
ся, что система обработки работает в реальном масштабе времени, а
анализ изображения проводит оператор.
Возможно использование гибридных видов обзора, например
объединение телескопического и переднебокового, что при заданном
разрешении позволяет расширить зону обзора &L > Оо/?н при увели-
чении времени обзора.
Характеристиками зоны обзора РСА являются: дальность
обзора, углы наблюдения, полосы обзора по дальности и азимуту
и время обзора.
Полоса обзора определяется числом разрешаемых элемен-
тов по дальности и азимуту и в зависимости от тактической зада-
чи изменяется от 500 до 5000 элементов.
Время обзора заданной полосы определяется видом обзора
(телескопический, секторный и переднебоковой) и числом разре-
шаемых элементов в полосе обзора.
ГЛАВА 9
Обнаружение, захват
и сопровождение цели
9.1. Измерение координат цели
Основными координатами целей, из-
меряемыми в РСА, являются дальность
Лц, угол 0Ц относительно вектора
скорости V носителя, угол 0] -ьа от-
носительно строительной оси носите-
ля, а также координаты цели в задан-
ной прямоугольной системе координат
(рис. 9.1).
Параметры
радиолокационного сигнала
цели, которые определяют
её координаты
Рисунок 9.1
Система координат
«наклонная дальность -
вектор путевой скорости»
Задержка огибающей тц.
Доплеровская частота f.
Угловое положение фазового фрон-
та отраженной волны.
Потенциальная точность измерения этих параметров (гл. 3) оп-
ределяется свойствами сигнала и помех.
Источники помех
Внутренний шум приемника.
358
Глава 9
Шумы квантования системы обработки, отражения от метеооб-
разований и земной поверхности.
Искусственные пассивные и активные помехи.
Точность измерения дальности цели
Для неподвижной точечной цели наклонная дальность = стц/2, а
СКО ошибки измерений задержки при аддитивной помехе типа бе-
лого шума
°г = ’
где q{] - отношение сигнал/помеха; 5т - разрешающая способность,
определяемая как ширина отметки цели на выходе системы обработки
на уровне 3 дБ. Таким образом, СКО погрешности измерения дальности
oR = |от = 57?/^ •
& Кроме ошибок измерения дальности, обусловленных наличием
помех, существуют погрешности измерений, не зависящие от
мощности сигнала и помех.
Это ошибки, обусловленные случайными изменениями скоро-
сти распространения электромагнитных волн в атмосфере и откло-
нением траектории волны от прямолинейной вследствие рефракции.
Обе эти причины являются результатом изменения коэффициента
преломления атмосферы, прежде всего, по высоте, вследствие изме-
нения влажности, температуры, давления и других условий. Для са-
молетных РСА эта ошибка обусловлена, прежде всего, рефракцией и
носит систематический характер, т.е. остается постоянной за время
работы РСА в заданном районе. Она может достигать 10...20 м. Ес-
ли имеется возможность измерить характеристики атмосферы, то эта
ошибка может быть скомпенсирована, что важно, например, при
картографировании местности.
Измерение дальности до объекта предполагает наличие опреде-
ленной точки на объекте, относительно которой вычисляется даль-
ность. При радиолокационных измерениях это означает, что у цели
имеется один фазовый центр функции отражения (как у уголкового
отражателя), относительно которого измеряется задержка сигнала и
вычисляется дальность. Реальная цель (в элементе разрешения РСА)
имеет несколько отражателей, и положение эквивалентного фазово-
Обнаружение, захват и сопровождение цели
359
го центра цели является случайным в пределах геометрического
размера цели, а в некоторых случаях даже выходит за ее пределы. В
результате возникает ошибка измерения дальности до геометриче-
ского центра цели, СКО ошибки которой примерно равно половине
размера цели по дальности. Используя различные методы сглажива-
ния РЛИ (уменьшение спекл-шума), можно снизить эту ошибку.
Кроме того, источниками ошибок измерения дальности могут
быть нестабильности задержки сигнала в приемопередающем трак-
те, фильтре сжатия по дальности и дискриминаторе задержки, а так-
же нестабильности генератора отсчета задержки и квантователя по
задержке. Обычно суммарная ошибка измерения дальности, вызы-
ваемая этими причинами, не превышает 2...3 м.
Точность измерения угла цели
Угол цели относительно вектора скорости 0г определяется допле-
ровской частотой сигнала цели и скоростью носителя V:
0Ц =arccos(X/u/2r).
Потенциальная точность измерения доплеровской частоты оп-
ределяется характеристиками сигнала и помех. В случае нормальных
аддитивных помех СКО погрешность измерения частоты
где Тс - длительность сигнала пачки радиоимпульсов (время синте-
зирования).
При точно известной V СКО погрешность измерения угла цели
04 относительно вектора скорости равна
dfu f 2rsinOu
При боковом обзоре (6Н = 90°) и неподвижной цели
________50
Азимутальная погрешность, не зависящая от мощности сигнала
и помех, определяется конечным размером цели (половина геомет-
360
Глава 9
рического размера по азимуту при отсутствии сглаживания спекл-
шумов) и рефракцией при распространении электромагнитных волн в
атмосфере. Угловая азимутальная погрешность вследствие рефракции
для самолетных РСА обычно мала (меньше 10 5 рад). Кроме того, ис-
точниками погрешностей являются фазовые нестабильности приемо-
передающего тракта, частотного дискриминатора, фильтра сжатия.
Обычно эти частотные нестабильности не превышают 1.. .2 Гц.
На практике основным источникам угловых погрешностей
является погрешность ov навигационной системы при измерении
скорости носителя:
Так, при использовании стандартных доплеровских измерителей
скорости и угла сноса (ДИСС) СКО погрешность измерения скорости
<JV составляет 0,1 % от измеряемой величины, что приводит к погреш-
ности измерения азимута цели (для углов 0н , близких к я/2 ) с СКО,
Более точное измерение путевой скорости возможно по резуль-
татам оценки максимальной доплеровской частоты спектра траек-
торного сигнала. В большинстве тактических задач измерение угла
азимута цели производится относительно строительной оси носителя
РСА. В этом случае основную погрешность в измерение азимута це-
ли вносит неточность определения угла сноса а (рис. 9.1). Практиче-
ски можно считать, что погрешность измерения азимута цели относи-
тельно строительной оси носителя РСА равна погрешности измерения
угла сноса и для типовых ДИСС составляет па = 25...30 мин (СКО),
что в 50... 100 раз превышает разрешающую способность РСА. По-
этому в большинстве случаев угловые координаты цели (азимут) оп-
ределяются с помощью реальной (а не синтезированной) ДН антен-
ны. Потенциальная точность определения угла определяется разме-
ром апертуры антенны L:
Обнаружение, захваз и сопровождение цели
361
Для антенн с непрерывным раскрывом справедливо <те —
1де _ ширина ДНА. Точность определения местопо-
ложения цели в земной системе координат зависит, прежде всего, от
ошибок навигационной системы, используемой носителем
(ГЛОНАСС, ИНС и т.п.). Благодаря высокой разрешающей способ-
ности РСА (радиовидению) возможна высокоточная привязка цели к
ориентирам с известными координатами. В этом случае точность
измерения координат цели определяется погрешностью измерения
разности координат цели и ориентиров. При малых расстояниях ме-
жду целью и ориентиром погрешность измерения координат цели и
координат ориентира оказывается коррелированной, так что по-
грешность измерения разности координат оказывается близка к по-
тенциальной.
При картографировании точность определения координат цели
на изображении карты местности в земной системе координат опре-
деляется точностью навигационной привязки центра кадра изобра-
жения, точностью измерения положения центра изображения цели и
расстояния на изображении между центром кадра и центром цели.
6S Точность навигационной привязки кадра изображения определя-
ется навигационной ошибкой измерения координат носителя РСА.
Точность определения положения центра изображения цели
(ориентира) определяется разрешающей способностью (шири-
ной пятна изображения точечной цели) и отношением сиг-
нал/помеха в элементе разрешения.
Точность определения расстояния между центром кадра и
центром изображения цели определяемся в основном масштаб-
ными искажениями изображения.
Они являются следствием погрешностей определения путевой
скорости, а также результатом игнорирования кривизны земной по-
верхности и несоответствия наклонной и горизонтальной дальностей
вследствие неровностей рельефа местности. При значительной не-
ровности рельефа, когда наклонные дальности до целей 1 и 2 оказы-
ваются равными (R} = Т?2), погрешность определения горизонталь-
ной дальности (рис. 9.2)
АД«(Яц2Я)/Ян,
где Н а - возвышение цели (рельефа) над горизонтал ьной поверх-
ностью; Н - высота полета носителя РСА.
362
I лава 9
Рисунок 9.2
Погрешность определения горизонтальной дальности
Точность измерения координат цели определяется точностью
измерения параметров отраженного сигнала, которая в свою оче-
редь зависит от размера базы сигнала (длительность, полоса частот,
пространственный размер апертуры) и отношения сигнал/помеха.
Точность измерения дальности определяется шириной спек-
тра сигнала РСА и отношением сигнал/помеха.
Точность измерения угла цели относительно вектора скоро-
сти носителя РСА определяется временем синтезирования и точ-
ностью измерения скорости носителя и существенно зависит от
ракурса наблюдения.
Точность измерения угла цели относительно строительной оси
носителя РСА определяется погрешностью измерения угла сноса.
Точность определения местоположения цели в земной сис-
теме координат зависит, прежде всего, от погрешности навигаци-
онной системы. Наименьшая погрешность достигается при ис-
пользовании ориентиров с известными координатами, располо-
женных вблизи цели.
9.2. Измерение вектора путевой скорости
носителя радиолокационной системы
с синтезированием апертуры антенны
Высокоточное измерение параметров собственного движения носи-
теля необходимо для успешного решения ряда задач, к числу кото-
рых относятся задачи обнаружения, захвата и сопровождения воз-
душных и наземных целей, карто! рафирования местности, коррек-
ции текущих координат, следования рельефу местности и т.д.
Обнаружение, захват и сопровождение цели
363
Особенно высокие требования к точности измерения вектора путе-
вой скорости ЛА предъявляются при обеспечении функционирова-
ния РЛС в режимах с синтезированием апертуры (среднеквадратиче-
ское значение отклонения погрешности измерения путевой скорости
не должно превышать значения 0,01...0,5 м/с) и при обеспечении за-
дач прицеливания. Указанные требования по точности могут быть
достигнуты путем создания бортовых комплексных измерителей
земной скорости полета на основе РСА, работающем в режиме изме-
рения скорости носителя при ее объединении с нерадиотехнически-
ми измерителями.
Наиболее жёсткими требованиями к точности измерения со-
ставляющих вектора скорости ЛА обладает режим секторного обзо-
ра. При секторном обзоре антенна непрерывного или дискретно ска-
нирует по азимуту в секторе 0обз в течение времени Гобз. Полный
кадр РЛИ формируется из парциальных кадров, изображение каждо-
го из которых формируется при обработке сигналов на соседних ин-
тервалах синтезирования. Ошибки в измерении скорости движения
носителя приводят к смещению по азимутальной координате друг
относительно друга РЛИ парциальных кадров, невозможности их
объединения в полный кадр, а также к расфокусировке РЛИ
(рис. 9.3,а\
Рассмотрим алгоритм оценки составляющих скорости носите-
ля в бортовой РСА, работающей в режиме секторного обзора.
Рисунок 9.3
РЛИ при ошибках измерения скорости движения носителя [а)
и после их коррекции (б)
364
Глава 9
Обработка траекторного сигнала в каждом канале дально-
сти для каждого парциального кадра имеет вид
Тс/2
(9.1)
где к — номер парциального кадра; W(/) - весовая функция системы
обработки; h(t 1 - опорная функция.
Пусть самолет движется прямолинейно и равномерно со скоро-
стью V (рис. 9.4). ДН антенны направлена под углом азимута р0 и
углом места у0 относительно строительной оси носителя.
После преобразования частоты, сигнал на выходе УПЧ прием-
ника, принимаемый от /л-й полоски дальности, расположенной на
дальности Лт, представляет собой сумму сигналов, отраженных от
точек земной поверхности, наблюдаемую на фоне внутренних шу-
мов приемного тракта n(t):
00
—ос
(9.2)
где G(p, у, z) - ДНА антенны в направлении точки, расположенной
на земной поверхности по углом азимута Р и углом места у в мо-
Рисунок 9.4
Взаимное расположение носителя и ДН антенны
Обнаружение, захват и сопровождение цели
365
мент времени /; (р, у, /) - траекторный сигнал, отражённый от
этой же точки, в момент времени t.
Траекторный сигнал, отражённый от точки:
sT (Р, Y, 0 = £ (Р, у) <?(Р, У, 0ехр(-jW(P, У)0, (9.3)
где е(Р, у) - комплексная амплитуда сигнала отражателя, распо-
ложенного в точке (Р, у) ; /(р, у) - доплеровская частота сигнала,
отражённого от этой же точки. В общем случае углы (Р.у) - ме-
няются в процессе синтезирования, что приводит к фазовой моду-
ляции траекторного сигнала, однако, если время синтезирования
ГГ I XR.
/с < — ------------— (режим ДОЛ), то изменением углов за
sin^p0 cos у0
время когерентного накопления можно пренебречь. Это допущение
не влияет на общность рассуждений, но позволяет значительно уп-
ростить запись и анализ всех выражений.
В качестве модели функции отражения поверхности использу-
ем пространственный комплексный неоднородный некоррелирован-
ный шум:
Ё(Р, у) = 4t> (Р, у)ехр( j ф(р, у)),
где Д (Р, у) - случайная амплитуда сигнала фона, отраженного от
элементарной площадки в элементе разрешения по дальности;
(р( Р, у) - случайная начальная фаза функции отражения.
Для статистически однородной поверхности, когда плотность
потока мощности сигнала, отражённого от земли,
РФо( р. У) = /До = const:
м{ё(Р1, У| )ё* (р2, у2)} = /ф05(Р1 - Р2)s(у 1 - У2) >
где Рф0 - среднее значение мощности фона, пропорциональное
удельной ЭПР фона.
Математическое ожидание пространственного неоднородного
некоррелированного шума:
)} = м{ё*(е|))=о,
и корреляционная функция:
366
Глава 9
м{£(е1)8*(е2)} = рф0(е1)§(е,-е2).
Доплеровская частота сигнала, отражённого от точки (р, у) :
5
+ KEsin(p + y)cos(y)J,
(9.4)
где X - длина волны РЛС; , Кн - проекции вектора скорости
V на соответствующие оси; - курс ЛА (угол межу осью ON и
строительной осью носителя).
Опорная функция h(t) обеспечивает компенсацию доплеров-
ской частоты траекторного сигнала, обусловленную сближением но-
сителя с центром парциального кадра, имеющего координаты
(Р,,у0). Расчёт опорной функции осуществляется по данным, по-
ступающим от навигационной системы:
h(t) = ехр {j2n/0/},
2 г
/o(Po,Yo) = 7LKnhcos(Po +v)cos(Y0) + rHHsin(y0) +
Л
+ *EHSin(Po +V)cOs(y0) ,
(9.5)
где KNh, ИЕн, ИНн - проекции вектора скорости V на соответст-
вующие оси, измеренные навигационной системой.
Спектральная плотность мощности траекторного сигнала после
компенсации доплеровской частоты, обусловленной сближением
носителя с центром парциального кадра по форме повторяет форму
ДНА, а его средняя доплеровская частота равна разности частот
/о(РоЛо) и /(Ро>Уо):
Л/ = /о(Ро,Уо)-/(РоЛо) =
2 г
= 7LArNcos(Po+v)cos(Y0) + AHHsin(Y0) +
Л
+AKEsin(p0 + v)cos(y0)],
(9.6)
где AKn = KNH -KN; АГЕ = ИЕн -ГЕ; АГН = КНн -Кн - погрешность
измерения составляющих вектора скорости V навигационной системой.
Обнаружение, захват и сопровождение цели
367
Ширина спектральной плотности отражений от земной поверх-
ности определяется шириной ДНА - 0О:
(9.7)
где cos0 = cosPo cosyo-
Анализ выражения (9.6) показывает, что при отсутствии ошибок
измерения составляющих вектора скорости AKN = ЛИЕ = ЛКН = О
средняя доплеровская частота сигнала &f - 0. При наличии ошибок
средняя доплеровская частота становится отличной от нуля и меняет-
ся от угла наблюдения. Таким образом, измерив среднюю доплеров-
скую частоту в каждом парциальном кадре можно оценить погреш-
ность измерения составляющих вектора скорости V.
Измерение средней доплеровской частоты сигнала формирует-
ся на основе измерения максимума спектра или вычисления его
энергетического центра — доплеровского центроида. Формирование
измерений средней доплеровской частоты на основе доплеровского
центроида позволяет ослабить влияние мощных точечных отражате-
лей на точность измерения. Точность измерения средней доплеров-
ской частоты определяется характером подстилающей поверхности
местности и шириной спектральной плотности AF. На рис. 9.5 в ка-
честве примера приведены полученные в результате лётного экспе-
римента усредненные по 500-м каналам дальности спектры сигна-
лов, отраженных от подстилающей поверхности. Пунктирном лини-
ей показан усреднённый спектр сигнала при наличии ошибки в
измерении скорости носителя, а непрерывной при отсутствии ошиб-
ки. Усреднение по большому количеству каналов дальности позво-
ляет достаточно точно определить смещение спектра отражений, вы-
званное наличием ошибок в измерении составляющих вектора ско-
рости носителя.
Алгоритм оценки погрешности измерения составляющих век-
тора скорости X = [ ДИу АИя Д//?]1 можно получить на основе калма-
новской фильтрации. Уравнение наблюдения в каждом k-м парци-
альном кадре имеет вид
zk=A/k(X) + Zzk,^l..X (9.8)
где Л? - число угловых позиций.
368
Глава 9
Рисунок 9.5
Усредненные спектры сигналов, отраженных от подстилающей поверхности
при отсутствии (сплошная) и наличии (пунктирная) ошибок НС
Выражение для Л/^ (X) описывается формулой (9.6); - шум
наблюдения с дисперсией
AF2
Т^ = ^ = 0,1...0,5-ЛГк2, (9.9)
q
где q - отношение сигнал/шум.
Ширина спектра отражений AFk описывается выражением (9.7).
Так как ошибки инерциальной навигационной системы носите-
ля являются медленно меняющимися процессами, то в пределах
времени формирования РЛИ всего сектора обзора (единицы секунд)
можно считать погрешность измерения составляющих вектора ско-
рости V постоянной. Уравнение состояния в этом случае имеет вид
Xk=Xk_i; Хо= 0. (9 10)
Алгоритм калмановской фильтрации вектора X с учётом выра-
жений (9.8) и (9.10) имеет вид:
л л R ( л > Xk=Xk 1 + ^^ zk-HkX, . , Nk I k k k lJ Rk=Rk_i-Rk_X(HkRk_,H[ + ^ (9.11 ) HkRk4,
Обнаружение, захват и сопровождение цели
369
(9.12)
cos(yk + pok)cosYok
sin(k|/k+Pok)cosYok ’
sinYok
(9-13)
где 7?дг = 7?дг = 7?дг - априорные дисперсии оцениваемых пара-
Е Н
метров.
Проверка работоспособности алгоритма осуществлялась на ос-
нове анализа лётно-экспериментальных данных полученных РСА в
режиме секторного обзора. С этой целью были обработаны радиого-
лограммы трёх следующих друг за другом кадров РЛИ. Сканирова-
ние осуществлялось в пределах сектора углов 10°...50° относительно
строительной оси ЛА.
На рис. 9.6 приведены графики результатов изменения трёх со-
ставляющих вектора скорости, с использованием алгоритма (9.11)-
(9.12). Полный кадр РЛИ формируется из 60-ти парциальных кадров.
Результаты измерения средней доплеровской частоты (центроида), в
трёх кадрах РЛИ приведены на рис. 9.7. По данным измерений сред-
ней доплеровской частоты с помощью алгоритма, описанного выра-
жениями (9.11)-(9.13), получены оценки погрешности измерения со-
ставляющих вектора скорости X, которые составили: AFN=0,3 м/с,
ДГн = 1 м/с, АРе~0,4м^с. На рис. 9.8 приведены результаты реше-
ния уравнения Риккати (9.12). Из трафика следует, что наибольшая
точность достигается при оценивании погрешностей ДРы и ДРе, а
наихудшая при оценке погрешности вертикальной составляющей
скорост и А Гн- Это обусловлено малой чувствительностью измерите-
ля к погрешности А Гц при малых значениях угла у .
Использование оценок ДР\, ДГН, ДРе Для коррекции навигаци-
онной системы и расчёта опорной функции (9.5) позволяет сущест-
венно повысить качество формируемого изображения. На рис. 9.3,6
приведен тот же кадр РЛИ, что и показан на рис. 9.3,6/. но построен-
ный по уточнённым навигационным данным. Ошибки оценивания
погрешности ИНС не превышают 0,3...0,5 м/с.
370
Глава 9
в)
Рисунок 9.6
Результаты измерения трех составляющих вектора скорости
Рисунок 9.7
Результаты измерения средней доплеровской частоты по трем кадрам РЛИ
Обнаружение, захват и сопровождение цели
371
Рисунок 9.8
Результаты решения уравнения Риккати
Точности оценивания APn ДИн А Не определяются количеством
используемых парциальных кадров (при условии постоянства оши-
бок APn АРн А Ре) и совокупностью значений углов установки лучей
Рои и Той • В ряде практических случаев, не связанных непосредст-
венно с получением РЛИ, эти углы могут выбираться некоторым
наилучшим способом. Рассмотрим возможные подходы к оптимиза-
ции пространственного положения лучей.
Оптимизация алгоритма оценивания вектора X = [APn А Ре А Ин]1
основана на методе максимизации функционала правдоподобия на-
блюдения (9.8):
(9.14)
х-х
(9.15)
(9.16)
N - диагональная матрица дисперсий шумов наблюдений.
Составляющие матрицы дисперсии шумов наблюдения N опре-
деляются отношением сигнал/внутренний шум приемника q, шири-
ной диаграммы направленности 0о, угловым положением луча ДНА
Рои. Уои и алгоритмом измерения средней доплеровской частоты. Ве-
личина М (9.9) определяется точностью выбранного способа изме-
рения средней доплеровской частоты и типом отражающей поверх-
ности. Ча практике Ak » , где Arls = 0.001... 1.
372
Глава 9
Элементы матрицы Hr рассчитываются в соответствии с выра-
жением (9.13) для каждого £-го парциального кадра. Решение (9.14)
имеет вид
(9.17)
Ковариационная матрица погрешности оценивания значений X
D(Piyr2(ATN-1A)’1, (9.18)
где р = [ро1,рО2,...,р(1К], Т = [Уо1Ло25-Лок] “ векторы угловых
позиций антенны по азимуту и углу места.
Анализ ковариационной матрицы погрешности (9.18) показы-
вает, что точность оценивания значений X зависит от числа угловых
позиций и их угловых положений. При ограниченном числе угловых
позиций существует необходимость оптимизации их взаимного рас-
положения.
Точность оценки погрешности измерения составляющих векто-
ра путевой скорости неразрывно связана с понятием эллипсоида рас-
сеяния.
Эллипсоид рассеяния - это поверхность (в и-мерном простран-
стве) равных значений плотностей вероятности ошибок.
Для нормального закона распределения погрешностей объём
эллипсоида рассеяния пропорционален корню квадратному из опре-
делителя ковариационной матрицы ошибок (коэффициент пропор-
циональности зависит от заданного значения плотности вероятности
ошибок на границе эллипсоида). Чем точнее оценки, тем меньше
объём эллипсоида рассеяния.
В качестве критерия оптимальности угловых положений цен-
тров кадра синтезирования целесообразно принять величину
определителя ковариационной матрицы погрешности .
Другим критерием при выборе оптимального расположения уг-
ловых позиций является минимум эксцентриситета эллипсоида рас-
сеяния.
tt Минимум эксцентриситета эллипсоида рассеяния характери-
зуется максимальным равенством его больших полуосей, т.е.
максимальным равенством дисперсии погрешности оценивания
составляющих вектора X.
Обнаружение, захват и сопровождение пели
373
В качестве критерия оптимального расположения угловых по-
зиций может выступать критерий минимума следа ковариационной
матрицы. Использование данного критерия обеспечивает выбор та-
кого углового положения лучей, при котором дисперсия оценки лю-
бой составляющей скорости не хуже суммы дисперсий всех состав-
ляющих.
Для простоты анализа оптимизации выбора угловых позиций
рассмотрим случат! оценки ошибок измерения горизонтальных со-
ставляющих вектора путевой скорости (считается, что вертикальная
составляющая известна и равна нулю). В этом случае вектор оцени-
ваемых параметров имеет вид Х=[ДИд/ ДГе]т и минимальное тре-
буемое количество угловых позиций соответственно равно двум.
Также для простоты считаем, что положения центров кадров синте-
зирования по углу места равны нулю (у01 = 0г, у02 = 0 ).
Для двухмерного случая корень квадратный из детерминанта
ковариационной матрицы ошибок D(pyj имеет смысл площади эл-
липса ошибок. На рис. 9.9 показана зависимость площади эллипса
ошибок от взаимного положения угловых позиций (Р0], Ро?) для
случая, когда элементы матрицы дисперсии шумов наблюдения N не
зависят от угла (N^= const). На рисуйке тёмным цветом показаны
области с минимальной площадью эллипса ошибок, а светлыми со-
ответственно с максимальной площадью. Максимальная точность
оценивания составляющих вектора X (минимальная площадь эллип-
са ошибок) соответствует ситуации, когда угловые позиции ортого-
нальны, т.е. разность между углами Р01 и Р02 равна 90°. Минималь-
ная точность оценки соответствует ситуации, когда разница между
угловыми позициями стремится к нулю.
Для критериев минимума эксцентриситета эллипсоида рассея-
ния и следа ковариационной матрицы в случае независящих от угла
элементов матрицы дисперсии шумов наблюдения N результаты
идентичны критерию минимума определителя ковариационно]! мат-
рицы погрешности.
В соответствии с выражением (9.9) диагональные элементы
матрицы дисперсии шумов наблюдения N определяются шириной
спектра отражении от поверхности земли, которая в свою очередь
зависит от типа антенной системы. При использовании антенны с
механическим сканированием по азимуту ширина диаграммы на-
правленности антенны не зависит от угла наблюдения, в этом слу-
чае ширина спектра отражений от поверхности земли определяется
374
Глава 9
выражением (9.7). В случае использования ФАР ширина диаграм-
мы направленности антенны зависит от угла наблюдения
e0(e)=e0/cos(e).
Когда элементы матрицы дисперсии шумов наблюдения N за-
висят от угла РОк результаты для всех трёх критериев различны. Для
примера на рис. 9.10 показана зависимость эксцентриситета эллипса
ошибок от взаимного положения угловых позиций (Ро1, Р92) Для
случая использования антенны с механическим сканированием. Оп-
тимальная оценка в этом случае соответствует углам Pminl =-45 ,
Pm.n2 =45 (и соответственно Р1П1П| =45°, pmin2 =-45°). Несмотря
на то, что дисперсии оценки ошибок по осям ON и ОЕ равны, сум-
марная дисперсия оценки ошибок не минимальная.
Кроме выбора критерия оптимизации при практической реали-
зации на выбор положения угловых позиций сильное влияние ока-
зывает сектор сканирования антенны по азимуту и углу места. Для
РЛС с механическим сканированием антенны:
характерное значение сектора сканирования по азимуту...±60°
максимальное отклонение антенны по углу места..........-60°
минимальный угол места
(ограничивается требованием облучения земной поверхности) -4°
ширина диаграммы направленности антенны..................3°
Рисунок 9.10
Зависимость эксцентриситета
эллипса ошибок от взаимного
положения угловых позиций
Рисунок 9.9
Зависимость площади эллипса
ошибок от взаимного положения
угловых позиций
Обнаружение, захват и сопровождение цели
375
При использовании критерия минимума суммарной дисперсии
ошибок (минимум следа матрицы), оптимальным положением лучей
в пространстве является: Ршп1=-6Э5 Pmin2-:9 .
Приведенная методика позволяет оптимизировать пространст-
венное положение лучей ДНА РЛС и их число при учете факторов
влияющих на точность оценки вектора X К числу таких факторов
можно отнести зависимость мощности отраженного сигнала от
дальности, изменение удельной площади рассеяния от угла места и
поляризации, а также учитывать точность выбранного метода изме-
рения средней доплеровской частоты. Учёт этих и других факторов
выполняется путём изменения элементов матрицы дисперсий шумов
наблюдения N.
Качество РЛИ РСА существенно зависит от точности опреде-
ления составляющих скоростей носителя. Эти составляющие мо-
гут быть определены на основе учета взаимосвязи частоты отра-
женного сигнала от направления его прихода.
Измерение составляющих скоростей носителя может быть
реализовано как в процессе формирования РСА изображения при
сканировании ДНА, так и в специальном режиме.
В последнем случае за счет оптимизации пространственно-
го положения лучей ДНА достигается наибольшая точность (де-
сятки см/с).
9.3. Измерение путевой скорости и угла сноса
носителя радиолокационной системы
с синтезированием апертуры антенны
в передней зоне обзора
Траекторный сигнал, отражённый от фона местности в произволь-
ном приёмном канале в одном элементе разрешения по дальности
представляет собой аддитивную смесь сигналов, отражённых от зем-
ной поверхности в пределах диаграммы направленности антенны:
(9.19)
376
Глава 9
где 8 (6) — комплексная амплитуда сигнала, отражённого от эле-
мента земной поверхности, находящегося под углом 0 относитель-
но вектора путевой скорости; С?(0) - ДНА антенны в направлении
на этот элемент; г(0, - расстояние от элемента до фазового цен-
тра антенны в момент времени /; а - угол между вектором путевой
скорости и проекцией строительной оси ЛА на горизонтальную
плоскость.
Ось ДНА совпадает с осью носителя РСА; опорная точка кадра
синтезирования лежит в направлении РСН антенны (рис. 9.11).
При переднем обзоре влияние квадратичного изменения фазы
траекторного сигнала несущественно и
г(6/) ~^cosO.
При использовании обработки траекторного сигнала методом
гармонического анализа без использования опорной функции, уст-
раняющей линейный набег фазы, сигнал на выходе доплеровского
фильтра описывается выражением
т
jp(O + й(/)]еcfr =
О
ОО
= {ё(е)с?(е+а)^(/ф,/(е))ае+гш(/ф),
00
(9.20)
Рисунок 9.11
Измерение путевой скорости и угла сноса носителя РСА
Обнаружение, захват и сопровождение цели
377
'с [ / ПТ/ \ J
где F(4,/(e))= p(/)e’j2,l/*'dr = 7;sinc^7i7; /ф-—cos0 В- -
о I V Л 7J
( ч sin(x)
функция, описывающая АЧХ фильтра (sinc(x) =-----^-^). В (9.20) не
учтена зависимость доплеровской частоты от угла места и верти-
кальной составляющей скорости полета носителя РСА (что харак-
терно, например, для маловысотного полета).
Дисперсия отсчетов РЛИ (сигналов на выходе доплеровских
фильтров) суммарного канала РСА в предположении независимости
сигналов, отраженных от различных элементов подстилающей по-
верхности (e(6i )в* (62)) = 7ф8(01 -62), имеет вид
de+<4 .(9.21)
Типовой вид зависимости мощности отражений (первого сла-
гаемого (9.21)) от частоты настройки доплеровского фильтра пред-
ставлен на рис. 9.12.
Рисунок 9.12
Графики зависимости мощности отражений
от частоты настройки доплеровского фильтра
378
Глава 9
Зависимости для различных углов сноса а приведены при ис-
пользовании аппроксимации ДНА в виде
о
О
; G(e)=dbin 71
7Ш
В данном числовом примере ширина ДНА 0о = 5 ; время накоп-
ления Тс = 0,1 с; Л = 0,03 м; скорость полета У= 200 м/с; частота по-
вторения зондирующих импульсов Fn = 2600 Гц.
Максимальная частота спектра отражений от подстилающей
поверхности определяется значением 2Р7Х = 13333 Гц и соответст-
вует срезу спектра в зоне спектральною анализа приемника РСА
[-Fn 2, Fn/2] на частоте 333 Гц независимо от угла сноса. С увеличе-
нием угла отклонения луча ДНА от направления вектора скорости
контраст среза спектра понижается и определяется уровнем боковых
лепестков ДНА. Измерение частоты среза спектра и учет неодно-
значности определения частоты позволяет определить путевую ско-
рость полета носителя с точностью, определяемо!: длительностью
когерентного накопления ДИ= Х/(2ТС).
Рассмотрим модель выборки спектральных отсчетов траектор-
ного сигнала фона в РСА переднего обзора в одном канале дально-
сти в виде выборки дискретного нормального белого шума
(рис. 9.13) размером К, дисперсия которого скачкообразно меняется
с отсчета, соответствующего максимальной доплеровской частоте:
Г 2
1
2
LLi ’
max ’
2
ш ’
max J к ’
2 2
где оф и ош
шуму приемника.
Плотность вероятности действительной и мнимой составляю-
щих произвольного £-го спектрального отсчета определяется про-
изведением нормальных законов распределения отсчетов ею квад-
ратур:
дисперсии, соогветсгвующие фону и внузреннему
2
%ск
-—ГехР]
2л<7?
К
.2
sk
э —Г (9,23)
X
В предположении независимости сигналов на выходе фильтров
совместная плотность вероятности выборки спектральных отсчетов
и, следовательно, функционал правдоподобия определяется соотно-
шением
Обнаружение, захват и сопровождение цели
379
Рисунок 9.13
Выборка спектральных отсчетов траекторного сигнала фона
в канале дальности РСА переднего обзора
(9.24)
а его логарифм
(9.25)
где z( fk) - независимые дискретные отсчеты комплексного белого
шума с дисперсией, определяемой (9.22).
Максимум функционала (9.25)
соответствует оценке
п ~ п
. Для реализации алгоритма (9.25) необходимы апри-
п
орные данные о значениях и о|Г Оценки данных величин мож-
но определить на основе решения системы уравнений:
(9.26)
2 2
где = ош
380
Глава 9
Решение имеет вид:
(9.27)
Подстановка (9.27) в (9.25) определяет результирующий алго-
ритм определения скорости носителя:
(9.28)
На рис. 9.14 показана реализации функционала правдоподобия
(9.28), построенная при следующих условиях: К= 128; с>| = 100;
2
— 1 ’ ^тах —
На рис. 9.15 представлена зависимость среднеквадратического
отклонения оценки максимальной доплеровской частоты от отношения
2/2
дисперсии сигналов q - пЕ/с>ш , полученная путем моделирования.
Увеличение отношения дисперсий приводит к уменьшению
СКО оценки максимальной доплеровской частоты. При отношении
дисперсии сигналов q > 10 дБ, ошибка оценки не превышает одного
отсчета.
Рисунок 9.14
Реализация функционала правдоподобия
Обнаружение, захват и сопровождение цели
381
Рисунок 9.15
График зависимости СКО оценки максимальной доплеровской частоты
от отношения дисперсии сигналов
Влияние числа отсчетов zy =z, + zUI и zItI на точность оценки
у1 J U I ц 1
максимальной доплеровской частоты показано на рис. 9.16, где
представлена зависимость среднеквадратического отклонения оцен-
ки максимальной доплеровской частоты от отношения п/К для раз-
личных отношений . Рис. 9.16 показывает, что точность
оценки максимальной доплеровской частоты практически не зависит
от числа отсчетов сигнала. Увеличение ошибок оценивания па краях
зоны анализа связано с уменьшением выборки для формирования
оценок (9.27).
Спектр реального траекторного сигйала РСА переднего обзора
показан на рис. 9.17. Спектр имеет три характерные области частот.
Левая и правая области частот соответствует внутреннему шуму и
отражениям от подстилающей поверхности, приходящих по дальним
Рисунок 9.16
Влияние числа отсчетов на точность оценки максимальной
доплеровской частоты
382
Глава 9
боковым лепесткам ДНА, а средняя - фону местности. Правая гра-
ница фона соответствует максимальной доплеровской частоте, а ле-
вая граница определяется шириной ДНА и величиной угла отклоне-
ния ДНА от направления вектора скорости (рис. 9.12 и 9.17).
Для определения максимальной доплеровской частоты нужно
оценить правую границу частот фона.
На рис. 9.18 представлена функция правдоподобия, построен-
ная по выборке траекторного сигнала РСА, соответствующего
рис. 9.17.
Функция правдоподобия имеет два характерных максимума,
причем максимальная доплеровская частота оценивается по правому
максимуму функции. Формирование левого максимума функции
правдоподобия вызвано наличием изменения дисперсии обуслов-
ленное формой ДНА, что не учитывает модель (9.22).
Рисунок 9.17
Спектр реального траекторного сигнала РСА переднего обзора
Рисунок 9.18
Функция правдоподобия, построенная по выборке траекторного сигнала
РСА, соответствующего рис. 9.17
Обнаружение, захват и сопровождение цели
383
На рис. 9.19 представлена зависимость среднеквадратического
отклонения оценки максимальной доплеровской частоты в спектре
отраженных сигналов РСА переднего обзора о г отношения фон/шум
на частотеИсходные условия: V= 200 м/с, X = 0,03 м, Тс = 0,1 с,
0о= 3°, число реализаций 10 000.
Увеличение отношения фон/шум приводит к уменьшению СКО
оценки максимальной доплеровской частоты, однако точность оцен-
ки по выборке спектра траекторного сигнала РСА существенно ху-
же, чем оценка, полученная для модели спектральной выборки
(9.22). Это вызвано отличием реального спектра траекторного сиг-
нала (рис. 9.17) от математической модели (9.22).
Анализ спектра траекторного сигнала показывает, что отноше-
ние ширины спектра сигнала AFC к полосе спектрального анализа Fn
мало (AFC/Fn = 0,01 ...0,1), что оказывает существенное влияние на
точность оценки. Например, при тех же условиях и Fn = 1000 Гц -
AFC/Fn—0,013. Для повышения точности оценки максимальной доп-
леровской частоты необходимо уменьшить количество шумовых от-
счетов на частотах ниже спектра фона местности. Это может быть
сделано на основе априорной информации о параметрах полета, а
также при больших отношениях сигнал/шум - пороговым методом.
Использование выборки спектра сигнала с одним перепадом уровня
мощности флуктуаций позволяет устранить появление второго (ле-
вого) максимума функции правдоподобия.
Для повышения точности оценки максимальной доплеровской
частоты данным алгоритмом необходимо максимально приблизить
выборку спектра отраженного сигнала РСА переднего обзора к мо-
дели сигнала, показанной на рис. 9.13.
Рисунок 9.19
СКО оценки максимальной доплеровской частоты
384
Глава 9
Способы выполнения этого условия
• Уменьшение числа шумовых отсчетов в спектре отраженного
сигнала.
• Использование весовых функции с низким уровнем боковых
лепестков (например, Натолл - 90 дБ, Хемминг - 42 дБ);
Определение разницы частот отметки цели и среза спектра тра-
екторного сигнала РСА (максимальной доплеровской частотой)
А/ - /max ~ /ц позволяет оценить угловое положение неподвижной
цели относительно направления вектора скорости:
о fi ХГг г
0Ц = arccosl 1 - 2-L/max - /ц
(9.29)
Определение максимальной доплеровской частоты с точностью
до ширины доплеровского фильтра позволяет измерять угловое по-
ложение неподвижной цели относительно вектора скорости с точно-
стью сопоставимой с шириной синтезированной диаграммы направ-
ленности РСА 50.
При определении углового положения цели относительно
строительной оси носителя РСА необходимо использовать угловые
измерения непосредственно цели или измерять угловое положение
вектора скорости носителя РСА - угол сноса. Задачу определения
модуля вектора скорости (максимальной доплеровской частоты тра-
екторного сигнала) и его направления относительно строительной
оси носителя РСА (угла сноса а) целесообразно решать совместно.
Для этого необходимы антенные измерения углового положения от-
ражателей, доплеровские частоты которых соответствуют перепаду
МОЩНОСТИ В СПеКТре -/пах-
Оценка вектора скорости (К,а) может быть получена на основе
максимума функционала правдоподобия спектра траекторного сиг-
нала РСА по двум параметрам И и а при использовании моноим-
пульснои антенны.
Выборка спектральных отсчетов суммарного и разностного ка-
налов РСА в канале дальности, соответствующая фильтру с частотой
настройкиУф, определяется выражением, аналогичным (9.20):
Обнаружение, захват и сопровождение цели
385
т
1 с
(/Ф) = J|Xe (г) + йд£ (г)] е12п/ф‘ dl =
О
да г А
г ~л'с а-----COS0
= |ё(б)СДЛ(0 + а)7;е х > d0 + zA>Ilu(/ф).
- X
Функционал правдоподобия спектральных отсчетов траектор-
ного сигнала РСА суммарного и разностного каналов для произ-
вольного доплеровского (А-ого) фильтра определяется выражением:
где R - корреляционная матрица отсчётов РЛИ суммарного и разно-
стного каналов в к-м доплеровском фильтре:
составляющие которой определяются аналогично (9.21)
^(/ф)=^(/ф)=
X
^(/Ф)=п!(/Ф)=
да
Р jG (0 + a)sinc2
d0 + о
2 .
Еш ’
386
Глава 9
00
Лхд (/ф) = р f (0 + «)СЛ (0 + а)х
xsinc2
В предположении независимости спектральных отсчетов, лога-
рифм функционала правдоподобия для всей совокупности К отсче-
тов РЛИ одного канала дальности приобретает вид
L(z/a,K) =
-2К In { 27Г ((Д, )/?£ (/фй) - (/фА)) •.
(9.33)
Координаты максимума двумерной функции определяют вели-
чину вектора скорости носителя РСА.
На рис. 9.20 и рис. 9.21 приведены графики зависимости сред-
неквадратической погрешности измерения скорости и угла сноса от
отношения фон/шум q. Расчет произведен при следующих парамет-
рах: Тс= 1 с; длина волны Х = 0,03 м; скорость полета носителя
У= 200 м/с; угол сноса a = 1°; ширина ДНА 0О= 6°.
Рисунок 9.20
График зависимости среднеквадратической погрешности измерения
скорости от отношения фон/шум
Обнаружение, захват и сопровождение цели
387
Рисунок 9.21
График зависимости среднеквадратической погрешности измерения
угла сноса от отношения фон/шум
С увеличением отношения фон/шум точность оценки возраста-
ет, и при отношении более 20 дБ погрешность измерения скорости
составляет менее 2,5 см/с, а измерение угла сноса - 20'. Использова-
ние одновременно нескольких N каналов дальности позволит увели-
чить точность оценки модуля вектора путевой скорости и угла сноса.
При этом результирующий алгоритм вычисления функционала
правдоподобия
£(z/a,r) = ^^n(z/aT),
П-1
где £n(z/a,H) определяется выражением (9.33).
Путевая скорость носителя РСА может быть определена по
величине максимальной доплеровской частоты спектра отражен-
ного сигнала в канале дальности в передней зоне обзора. Измере-
ние угла сноса возможно путем учета корреляционных связей в
спектрах нескольких (минимум двух) пространственных каналах.
Использование нескольких каналов дальности повышает точ-
ность измерения скорости и угла сноса.
388
Г лава 9
9.4. Автосопровождение цели
Режим сопровождения наземной цели начинается после обнаруже-
ния и захвата цели. Автоматическое сопровождение цели в РСА
обеспечивается с помощью следящих измерителей дальности, ско-
рости и угловых координат цели.
В зависимости от решаемой задачи формируется набор изме-
ряемых координат цели. В большинстве случаев требуется измере-
ние дальности до цели R, скорости сближения с нею Ксбп = -R, углы
пеленга цели в вертикальной (фд) и горизонтальной (фг) плоско-
стях, проекции (Од и соЛ угловой скорости линии визирования в тех
же плоскостях.
Возможно измерение второй производной от дальности (уско-
рения сближения) и составляющих углового ускорения.
Обобщенная схема многоканального следящего измерителя
РСА показана на рис. 9.22. В состав многоканального измерителя
входят многомерный дискриминатор (МД), фильтр (Ф), экстраполя-
тор (Э) и исполнительное устройство (ИУ). Вектор измеряемых па-
раметров цели X(t) содержится в параметрах отраженного сигнала
(электромагнитного поля, образованного при отражении от цели ра-
диосигналов).
Исполнительное устройство РСА совместно с ЭВМ управления
РСА и органами управления предназначено для управления антен-
ной с механическим или электронным сканированием, формирова-
ния и перемещение прицельной метки, выбора центра кадра синтези-
Рисунок 9.22
Схема следящего устройства РСА
Обнаружение, захват и сопровождение цели
389
рования и режимов работы РСА, с также параметров зондирующих
сигналов.
Фильтр, входящий в состав следящего измерителя, предназначен
для фильтрации данных поступающих с дискриминатора.
Такая фильтрация необходима потому, что на выходе дискри-
минатора содержится значительная флуктуационная составляющая
наблюдаемых параметров, вызванная внутренним шумом приемного
устройства, флуктуациями амплитуды отраженного сигнала, естест-
венными и организованными помехами и другими дестабилизирую-
щими факторами.
Экстраполятор предназначен для формирования координат це-
ли на следующий такт измерений и выдачу данных для электронного
перекрестия. На его вход наряду с фильтруемыми параметрами по-
ступают параметры, характеризующие собственное движение носи-
теля РСА - XC(Z). Как правило, фильтр и экстраполятор выполнены в
ЭВМ управления работой РСА.
Многоканальный дискриминатор представляет собой устройст-
во, выполненное как аппаратными, так и программными средствами.
В простейшем варианте дискриминатор формирует сигнал,
равный разности между координатами перекрестия (экстраполиро-
ванными координатами) и координатами ближайшего максимально-
го по амплитуде сигнала или сигналом, уровень которого превысил
заданный порог. При этом цель может быть как точечной, так и про-
тяженной, и занимать несколько элементов разрешения по задержке
и частоте.
На рис. 9.23 схематично приведено изображение РСА трех це-
лей в координатах дальность-азимут (доплеровская частота): для
первой цели ошибки экстраполяции равны нулю, для второй
ошибки равны ДА и А/д, для третьей - ошибки экстраполяции выхо-
дят за границы строба отождествления (пунктирный квадрат) и цель
считается потерянной или имеет место «сброс» сопровождения.
В режиме низкого разрешения координата f\ заменяется угло-
вой координатой, которая характеризует положение луча антенны
относительно продольной оси самолета или земной системы коор-
динат.
Для измерения углового положения цели 6Ц используют центр
тяжести амплитуд обнаруженных сигналов:
N N
390
Глава 9
Рисунок 9.23
Схема расположения цели, строба сопровождения и прицельной метки
на индикаторе РСА
где 0, - положения максимума антенны в момент окончания /-той
пачки импульсов (интервала синтезирования); - амплитуда сиг-
нала в этот же момент времени.
При сопровождении одно!' цели, строб отождествления, как
правило, равен размеру изображения в режиме «МИКРОПЛАН», а
электронное перекрестие совпадает с центром кадра. В некоторых
системах аналогичным образом формируют оценку дальности:
N N
i-1 i=l
где R- - дальность до /-го строба; Д - амплитуда сигнала в этом
стробе; N- число стробов в режиме «МИКРОПЛАН».
Возможны дискриминаторы, которые формируют координаты
цели путем вычисления функционала правдоподобия в пределах за-
данного диапазона их изменения (например, дальности в пределах
части или всего периода повторения) с шагом в десятые или даже
сотые доли элемента разрешения. Поиск максимума функционала
правдоподобия обеспечивается последовательным сравниванием
двух соседних отсчетов. Для построения отношения правдоподобия
по дальности используют всею лишь несколько стробов.
Например, выражение для формирования функционала правдо-
подобия по комплексным амплитудам выходных сигналов К стробов
дальности (Zsl, Zcb Zs2, Zc2,... ZsK, ZcK) имет вид
P(Z/t) = P(Zc/t)P(Zs/t),
Обнаружение, захват и сопровождение цели
391
где
т т
zs = Jj’(')S(/)sin(2K/0/)ck.
о о
Аналогично выражается P(Zs/t) при замене cos<pn на sincp(1.
Усреднение по случайной амплитуде, распределенной по Релею
с параметром <уа, и равномерно распределенной начальной фазе по-
зволяет получить функционал правдоподобия в виде
В этом выражении
о
корреляционная функция огибающей отдельного импульсного
сигнала. Вид для трех неперекрываюшихся стробов дальности
приведен на рис. 9.24. На рис. 9.25 приведена реализация, построен-
ная по приведенной формуле.
Для построения функционала правдоподобия возможно исполь-
зование модульных значений выходных сигналов К стробов дальне-
ста ( Ак = JFk + )• При этом:
Глава 9
392
Рисунок 9.24
Корреляционные функции прямоугольного импульса
k к=\ J
где in _ модифицированная функция Бесселя нулевого порядка.
Обнаружение, захват и сопровождение пели
393
Аналогично можно построить такой дискриминатор по частоте
на основе выходных сигналов доплеровских фильтров. Поиск мак-
симума функционала правдоподобия
Ю
обеспечи-
вается нахождением нуля производном функционала по оценивае-
мому параметру:
d
dX
£(Х) = 0 при
Раскладывая L'(X) в окрестности Хэ (экстраполированной коор-
динаты цели) в степенной ряд и ограничиваясь линейным членом
разложения (£’(Х)-£'(ХЭ) + £"(ХЭ )ДХ+...), получаем выраже-
ние для формирования невязки Дх:
(9.34)
Выражение (9.34) описывает алгоритм дискриминатора, т.е.
формирования оценки координаты на интервале синтезирования Тс.
Реализация алгоритма (9.34) основана на представлении произ-
водных £'(ХЭ) и £"(ХЭ) в разностном виде:
Обычно величину ДХ выбирают исходя из условия
при равенстве экстраполированной координаты Хэ истинной экстра-
полированной координаты Хи (рис. 9.26). Здесь операция (•) означа-
ет усреднение по ансамблю реализаций, так как сигнал S(t, X), отра-
женный от цели, принимается аддитивно с внутренним шумом при-
емника. Выполнение указанного равенства определяет ДХ как
размер элемента разрешения по координате, а алгоритм (9.34) реали-
зуют в виде
394
Глава 9
Рисунок 9.26
Характерный вид функционала правдоподобия в окрестности истинного
значения оцениваемого параметра
(9.35)
Выражение (935) соответствует алгоритмам сигнала Лх от ам-
плитуды принимаемого сигнала.
Для протяженной цели по координатам дальность - доплеров-
ская частота алгоритм дискриминатора (9.35) заключается в форми-
ровании 4-х квадрантов вокруг координаты метки прицеливания
(рис. 9.27) с последующей суммарно-разностной обработки этих
квадрантов (аналог моноимпульсной антенны в двух плоскостях).
Рисунок 9.27
Формирование дискриминатора протяженной цели
Обнаружение, захват и сопровождение цели
395
При этом алгоритм работы дискриминатора описывают выра-
жениями вида:
Л/+Л/ц/2 М+Л/и/2
т-М-Мл!2 т-М-М^И
5
где J(rm, fi) - действительное число, соответствующее модулю от-
счета РЛИ в z, т-м элементе разрешения по частоте и дальности (/
и М экстраполированные значения): /ц5г и Мц5;ф - размер цели
по дальности и доплеровской частоте или размер строба сопровож-
дения.
Следует отметить, что доплеровская частота соответствует
двум угловым кооодинатам неподвижной цели по азимуту (0Ц) и
углу места (ф ) относительно вектора скорости носителя V\
COS0U СО8фп .
Для движущейся цели однозначная связь между угловыми ко-
ординатами цели и её доплеровской частотой вообще отсутствует.
Поэтому значение доплеровской частоты (как и дальности) служит
целеуказанием для угловых (суммарный и два разностных - по
азимуту и углу места) каналов. Путем соответствующей нормиров-
ки на выходах угловых каналов формируются угловые координаты
цели относительно строительной оси самолета (земной или иной
системы координат). На рис. 9.28 представлена структурная схема
пеленгатора (дискриминатора по угловым координатам) по углу
места.
Сигналы, принимаемые суммарной (Z) и разностной по углу
места (Дум) или азимуту (Ддз) диаграммами направленности пре-
образуются в приемниках в цифровой сигнал. В процессоре обра-
ботки сигналов, по данным целеуказания, сигналы выбранной це-
396
Глава 9
Рисунок 9.28
Схема дискриминатора по угловым координатам
ли стробируются по дальности (СД) и селектируются по допле-
ровской частоте (ДФ), а затем поступают на схему нормировки,
на выходе которой формируется дискриминационная характери-
стика ZyM(^). При этом размер строба по дальности и ширина до-
плеровского фильтра могут превышать разрешающую способ-
ность РСА по этим координатам. Схема нормировки необходима
для исключения зависимости угловых измерений от амплитуды
отраженного сигнала.
На выходах многомерного дискриминатора формируются
сигналы невязки, соответствующие разности между истинными
X(Jk) и экстраполированными Х,(^) координатами цели ДХ =
= Х(^) -Хэ(^) в аддитивной смеси с шумовыми выборками в
момент времени tk= кТ\
^мд~^[Х(/к) X3(Zk)] +n(zk),
где G(-) - в общем случае матричная нелинейная функция разности
между истинными и экстраполированными координатами цели;
п(^) - вектор независимых шумовых выборок с матричной диспер-
сией <7Х.
При анализе следящих систем нелинейную функцию G() счи-
тают линейной с крутизной в нулевой точке по рассогласованию
H = rfG/rfAX|w_0:
Обнаружение, захват и сопровождение цели
397
Z(/k) = H[X(/k) -ХД)]+п(^,
(9.36)
что справедливо при малых рассогласованиях и когда отношение
сигнал/помеха достаточно велико. Кроме того, при синтезе и анализе
следящих систем в дискриминаторе, описываемым (9.36), пренебре-
гают взаимным влиянием ошибок одной координаты на другую. В
результате матричный дискриминатор (9.36) преобразуется в век-
торный:
где
(9.37)
- дискриминатор по дальности (задержки) с крутизной и ошиб-
ками A7r(/r);
(9.38)
- дискриминатор по доплеровской частоте с крутизной Н? и ошиб-
ками A?f(/k);
АЗ
A3
(9.39)
дискриминатор по азимуту с крутизной и ошибками л?лз(^к);
(9.40)
- дискриминатор по азимуту с крутизной Яум и ошибками яум(4)-
Фильтры сопровождения реализую] совместно с экстраполято-
ром на основе дискре!ных алгоритмов фильтров Калмана, игр-
фильгров или упрощенных а-фильтров.
Дискретный алгоритм фильтрации Калмана
Модель параметров сигнала
Х(К1) = F(£ + 1, £)Х(£) к пх(£).
(9.41)
398
Глава 9
Модель наблюдении
Z(Zr) = Н(Л)Х(А) + п(А) (9.42)
Начальные условия
М(Х(О)) = Хо; М[Х2(0)] = Do; (9.43)
Априорные данные
М(пх(А)) = М(п(А)) = 0, М[пх(Л)пх(1)] = Wx8(/c -1);
М[п(А)п(1)] = ЛГ05(А:— 1);
М[пх(А) п(1)] = М[п(£) Х(О)] = М[пх(*) Х(О)] = О.
Алгоритм фильтрации
Х(Л +1) = F(£ +1, £)X(£) + K(A:)[z(A:)-H(A)X3(£) , (9.44)
где Хэ (к) = F(£ +1, к)Х(к) - экстраполированное значение X на
такт.
Коэффициент у си тения
K(A:) = D(Z:)HT(A;)No1. (9.45)
Априорная дисперсия
D(fc + 1/к) = F(£ + 1, к)Х)(к + 1 /Л)ЕТ(А + 1, к) + Nx'.
Уравнение д чя апостериорной дисперсии
D(A) = [I - К(А) Н (£)] D(£ + 1 /к\ (9.46)
Дискретный алгоритм а-р-фильтрации
По своей структуре а - Р -фильтры совпадают с дискретными
фильтрами Калмана при полиномиальной модели изменения фильт-
руемых параметров. Отличия состоят лишь в том, что в а — Р-
фильтрах коэффициенты усиления невязок а и р постоянны или
Обнаружение, захват и сопровождение цели
399
эпизодически меняются по априорным сведениям, а соответствую-
щие коэффициенты фильтров Калмана зависят во времени и эта за-
висимость описывается уравнением Риккати. Например, в случае
фильтрации дальности и скорости сближения Х(к) = R(k), Рсбл(^)Г
при наблюдении только дальности до цели ZR >к ) = к) + (А),
алгоритмы а - Р -фильтрации имеют вид:
R(k) = R3 Ц) + а[ ZR (к) - R3 (Л)],
(9-47)
Лъл (к) - ГС£Л (к -1) + |[ZR (Л) - R3 (к) ,
R3(k) = R(k-l) + VV}iJi(k-l)T, (9.48)
что совпадает с алюритмами дискретной фильтрации Калмана, ко-
гда матрица F(A + 1, к) =
, а матрица К(А) превращается в век-
гор К(А) = |а, р/7]т с постоянными коэффициентами.
Для анализа а-Р-фильтров используют
аппарат Z-
преобразований:
в соответствии с
к=\
которым на входе присутствует одномерный сигнал Х(к\ содержа-
щий дегерминированную составляющую в виде полинома:
X(k) = Xo + VxkT + ^
(кТ)~ + ... и случайную -
в виде независи-
мых выборок белого шума с дисперсией оХ- Цифровой следящий
фильтр описывается Z-преобразованием решетчатой функции, кото-
рая соответствует уравнениям (9.47) и (9.48).
Для этих уравнений Z-преобразование имеет вид:
При выводе формул (9.49) и (9.50) использовано тождество
400
Глава 9
Z(/(* -1)) = z~'Z(f(k)) .
Передаточные функции а-Р-фильтров по дальности и скоро-
сти соответственно равны:
Установившаяся динамическая погрешность измерения дально-
сти и скорости для этих передаточных функций пропорциональна
ускорения входного воздействия и имеет вид:
где а - ускорение движения цели.
Дисперсия флуктуационной погрешности измерения дальности
(Д<ар) и скорости сближения (£>уар) пропорциональна дисперсии
шумов дальности на выходе дискриминатора :
_2a2-3ap + 2p •>
Ra₽“ a(4-2a-p) °R
Из-за наличия возмущающих воздействий коэффициенты аир
выбирают исходя из значений дисперсии возмущений (траекторных
нестабильностей по дальности) и дисперсии выходного шу-
ма дискриминатора по дальности, обусловленного флуктуациями
сигнала и внутренним шумом приемника РЛС. Как правило, данные
коэффициенты выбирают a < 1 и Р < 1 и тем меньше, чем выше уро-
вень возмущений.
Оптимизация а и Р коэффициентов может быть произведена
по различным критериям. Одним из наиболее распространенных яв-
ляется критерий минимизации суммы величины дисперсии суммар-
ной (динамической (9.53), обусловленной инерционностью системы
Обнаружение, захват и сопровождение цели
401
фильтрации, и флуктуационной (9.54)) ошибки измерения оцени-
ваемого параметра.
(9.55)
Дисперсия случайного возмущения, равномерно распределен-
а2
ного в диапазоне ±ятах, определяется как DR = .
Коэффициенты аир определяются решением системы нели-
нейных уравнений:
da
где
нормированная
суммарная ошибка фильтрации; £ap = - безразмерный
коэффициент называемый индексом слежения, или относительная
интенсивность маневра (отношение динамической ошибки слежения
(ошибки экстраполяции) к ошибке измерения).
Или
(9 56)
(9.56) является системой алгебраических уравнений 5-й степени, не
имеющей аналитического решения в радикалах. Результаты числен-
ного её решения представлены на рис. 9.29 в виде зависимостей оп-
тимальных значений ао и Ро коэффициентов фильтра от логарифма
квадрата индекса слежения. Логарифмическая шкала по оси абсцисс
выбрана для удобства представления зависимостей.
402
Глава 9
Рисунок 9.29
Оптимальные а0-Ро-коэффициенты
Дискретный алгоритм а -фильтрации
В некоторых следящих системах, когда динамические характеристи-
ки цели не велики (цель не маневрирует), применяют алгоритмы а -
фильтрации, которые отличаются от рассмотренных а - Р -фильтров
тем, что Р = 0. Алгоритм работы фильтра описывается разностным
уравнением вида:
£(fc) = £(£-l) + a[zR(fc)-.K(A:-l)],
R3(k) = R(k-l).
(9.57)
Для таких фильтров передаточная функция упрощается:
(9.58)
При этом в установившемся режиме фильтр имеет постоянную
динамическую ошибку, пропорциональную скорости изменения
входного воздействия Их:
(9.59)
а флуктуационная ошибка описывается формулой
Обнаружение, захват и сопровождение цели
403
(9.60)
Коэффициент а, обеспечивающий минимум суммарной ошибки
фильтрации,
определяется решением нелинейного уравнения:
/1 \2
z х 11 — а) 2 ос
где Da(a) = - у2—Ьач----------нормированная суммарная ошиб-
a 2-a
ка фильтрации.
|r2zx
В этом случае индексом слежения определяется Ln = —-— .
Или
(9.61)
Решение (9.61) определяет оптимальный коэффициент ар и
представлено на рис. 9.30.
Рисунок 9.30
Оптимальный коэффициент а0
404
Глава 9
Автосопровождением цели в РСА считается непрерывное
определение её координат и их производных в выбранной систе-
ме координат в на основе дискретно во времени поступающих
оценок задержки (дальности), доплеровской частоты (скорости
сближения) отраженного сигнала, а также углового положения его
фазового фронта относительно нормали к антенне.
Временной дискрет (такт фильтрации) определяется дли-
тельностью времени синтезирования Т < Тс.
Для сглаживания флуктуаций оценок используются различ-
ные алгоритмы фильтрации, учитывающие статистические харак-
теристики поступающих оценок и динамику изменения опреде-
ляемых координат.
ГЛАВА 10
( елекция движущихся целей
10.1. Методы селекции
наземных движущихся целей
Селекция движущихся целей в РСА - обнаружение сигналов
движущихся сосредоточенных целей путем подавления сигна-
лов всех других неподвижных целей и фона местности.
В настоящее время понятие режима СДЦ значительно расши-
рено. СДЦ следует рассматривать как опцию различных режимов
работы РСА при формировании радиолокационного изображения
объектов и поверхности Земли.
Взаимосвязанные задачи, решаемые на различных уровнях
Обнаружение только движущихся с радиальной скоростью объ-
ектов при подавлении сигналов всех других объектов и фона
местности.
• Обнаружение только движущихся объектов с измерением их
координат (дальность - азимут) и радиальных скоростей.
• Обнаружение только движущихся объектов с измерением их
координат и векторов скорости (радиальной и тангенциальной).
• Обнаружение одновременно движущихся и неподвижных объек-
тов с измерением их координат и векторов скорости с индикацией
на фоне радиолокационного изображения земной поверхности.
Для обеспечения решения задачи обнаружения движущихся
объектов используются специальные алгоритмы и устройства их
реализации.
406
Глава 10
Алгоритмы селекции основаны на различиях пространственно-
временных характеристик сигналов, отражённых от движущих-
ся и неподвижных объектов.
Оптимальные алгоритмы СДЦ требуют реализации многока-
нальной пространственно-временной обработки сигналов РСА.
Пространственная обработка — обработка принимаемого
электромагнитного поля по раскрыву антенны.
Временная обработка - обработка сигналов, принимаемых от-
дельными элементами раскрыва антенны во время перемеще-
ния носителя РЛС по траектории.
Синтез и реализация оптимальных алгоритмов представляет
весьма сложную задачу, и в большинстве случаев используют раз-
личные квазиоптималъные способы обработки сигналов. Обычно
пространственная обработка обеспечивает подавление мешающих
отражений от неподвижных объектов и фона путем формирования
провалов («нулей») ДН антенны в направлении на помеху. Времен-
ная обработка обеспечивает доплеровскую фильтрацию сигналов для
разделения спектров сигналов движущихся целей и мешающих отра-
жений, а также выделения сигналов на фоне шумов. При этом исполь-
зуются простые антенные системы: моноимпульсные, двухканаль-
ные интерферометры и даже одноканальные антенные системы.
В качестве примера на рис. 10.1 показано сечение распределе-
ния мощности отраженного сигнала фона (неподвижных объектов)
при боковом обзоре в пределах ширины ДН Оо и движущейся цели в
плоскости азимут - доплеровская частота (0-/). Азимутальный
угол 0 отсчитывается от центра зоны обзора и при боковом обзоре
частоты фона определяется азимутальным углом: f = 2И/Х, 0 .
При совпадении доплеровских частот движущейся цели и по-
мехи (сигналы находятся в одном доплеровском фильтре /ц =7^)
их угловые положения (азимуты) отличаются (0ц Ф Оф!, что позво-
ляет селектировать сигналы цели путем пространственной обработ-
ки. Если помеха и цель совпадают по азимуту (6и = 0ф2), то они се-
лектируются путем доплеровской фильтрации (fx ).
Оптимальная система обработки, подавляя фон и выделяя сиг-
нал движущейся цели, обеспечивает максимальное отношение сиг-
нал/фон при минимальной радиальной скорости цели.
Селекция движущихся целей
407
Рисунок 10.1
Распределение мощности отражений от подо илающей поверхности
и движущейся цели в координатах в - f при боковом обзоре
Так как в одном элементе дальности может быть несколько
движущихся целей, оптимальная система должна быть многока-
нальной не только по доплеровской частоте, но и по азимуту.
Основное назначение систем СДЦ - разделение сигналов дви-
жущихся целей и мешающих отражений, т.е. сигналов всех остальных
объектов (неподвижных объектов, земной и водной поверхности).
При этом задача обнаружения/распознавания решается путем по-
строения системы обнаружения сигналов движущихся целей на фоне
коррелированных помех, образуемых сигналами неподвижных объек-
тов, земной и водной поверхности, а также различного рода шумов.
Оптимальную структуру такого обнаружения/распознавания
можно представить в виде последовательно соединенных устройств:
фильтра подавления сигналов мешающих отражении («выбеливаю-
щего» фильтра), фильтра, согласованного с сигналами движущихся
целей, и порогового устройства (рис. 10.2). В результате действия
первого фильтра происходит подавление сигналов неподвижных це-
лей (фона). На выходе фильтра суммарные остатки сигналов ме-
шающих отражений и шумов имеют равномерную спектральную
плотность в пределах полосы частот chi налов движущихся целей
(белый шум), т.е. происходит «выбеливание» помехового сигнала.
Последующей оптимальной обработкой является согласованная
фильтрация сигналов движущихся целей, прошедших «выбеливаю-
щий» фильтр. На выходе согласованного фильтра выставленный
408
Глава 10
Рисунок 10.2
Схема реализации алгоритмов СДЦ
уровень порога определяет вероятностные характеристики системы
СДЦ при обнаружении движущихся целей. В ряде случаев система
СДЦ выполняет одновременно (одним устройством) как подавление
сигналов неподвижных объектов (фона), так и согласованную
фильтрацию сигналов движущихся целей.
При последующем пояснении и анализе алгоритмов функциони-
рования РСА в режимах СДЦ будем полагать, что движущаяся цель яв-
ляется точечным объектом и влиянием близко расположенных целей
можно пренебречь (соседние цели отсутствуют); подстилающая по-
верхность изотропна; преднамеренные помехи отсутствуют.
10.2. Характеристики сигналов
движущихся целей
Функция неопределенности траекторного сигнала
движущейся цели
При небольших значениях радиальной скорости цели и разрешения
по дальности влиянием изменения закона задержки огибающей
можно пренебречь. Наиболее чувствительной к движению цели яв-
ляется фазовая характеристика траекторного сигнала. Поэтому рас-
смотрим сначала функцию неопределенности при учете только фа-
зовой характеристики траекторного сигнала. Так как при согласо-
ванной обработке (формировании ФН) для уменьшения боковых
лепестков выходного сигнала используется весовая функция, в даль-
нейшем ФН будем определять как
2
(10-1)
Селекция движущихся целей
409
где Тс - время синтезирования; W(t) - амплитудная весовая функ-
ция системы обработки; r0(t) - изменение расстояния РЛС - центр
кадра синтезирования; гц(/) - РЛС - движущаяся цель, которое ап-
проксимируется выражением
Гц (0 = Яц + +
^сб /2
(Ю-2)
где #сб, Реб ~ ускорение и скорость сближения носителя РЛС и цели;
Яц - дальность РЛС - цель:
яц = v'U-^ц)2 +0’-л)2>
(Ю.З)
где х, у, хц, уц - координаты носителя РЛС и цели соответственно.
Реб и асб определяются последовательным дифференцировани-
ем выражения (10.3):
(Ю.4)
(10.5)
где Их, Vy, ах9 ау , V* , , а*, ау - составляющие векторов ско-
рости и ускорения носителя РЛС и цели соответственно.
Рассмотрим случай, когда:
1) носитель РЛС движется по прямолинейной траектории со
скоростью V и ускорением я;
2) цель движется в произвольном направлении относительно
РЛС с постоянной скоростью Рц (рис. 10.3);
3) 6Ц =0ОТ +0 - угол между вектором скорости носителя и на-
правлением на цель). 0 г - угол между вектором скорости носителя
и направлением на центр (опорную точку) кадра синтезирования: 0
утловое положение цели относительно опорной точки).
410
Глава 10
Рисунок 10.3
Геометрия движения носителя РСА и цели
С учетом этого:
Гсб = -(г - гцх )coseu + Ky sin 0Ц;
((г- К? )sin0„ + ru>COS0U)
Яб = -a cos 0ц + —-------—---------------
ц
(10.6)
гц (0 = Яц - (г - Кцх)/ cos 0ц + К, 7sin 0ц -
u 2 27?ц
t2- (Кsin0 - К Y
= R -Wcos0„ +K,,t-acos0„ — + ----------------—
Ц Ц га Ц 2
где Кгц =ruxcos0u+ Kuysin0u; KtL( = Гцх sin 0T| - Кцу cos0u - радиаль-
ная (совпадающая с направлением РЛС - цель) и тангенциальная со-
ставляющие скорости движения цели.
Селекция движущихся целей
411
Аналогично определяется закон изменения расстояния РЛС -
центр кадра синтезирования r0(Z). при этом будем считать, что даль-
ность до опорной точки равна дальности до цели 7?о = Ац = R, а уско-
рение и скорость сближения носителя РЛС и центра кадра синтези-
рования соответственно равны:
= -Г cos0OT; асб = -acos0OT
(10.7)
Таким образом,
/ ч „ .. _ GCOS0 2
ro(Z) = /?-,/c0seoT?---2---Z +
(10.8)
где Иг, - радиальная (совпадающая с направлением РЛС - центр
кадра синтезирования) и тангенциальная составляющая скорости
носителя; av - радиальная составляющая ускорения летательного
аппарата.
Изменение расстояния РЛС - цель описывается выражением
Ги (0 - Г0 (0 = ~V(C0S бц - COS0OT +
С учетом того, что 0Ц = 0ОГ •+ 0; Vr - Vcos0OT ; F't = Vsin0OT:
Гц (?) - r0 (?) - Vr (1 - cos 0) t + Vtt sin 0 + Vrut +
+ ar —
cos0) + atsin0
/ \2
cosO + Vr sinO-Hm j
2R
При боковом и переднебоковом обзоре, когда радиальная со-
ставляющая перемещения носителя РСА для всех точек в пределах
небольшого отклонения 0 одинакова (в пределах углового размера
кадра синтезирования):
412
Глава 10
2
гц (z) - r0 (/) = +vtet+^-t2 + [(vt + у,q - к )2 - p;2)—
U \ / ' x / Щ L 2 у x I * Щ / L J 2
5
где - тангенциальная составляющая ускорения летательного аппа-
рата относительно опорной точки кадра.
Рассмотрим ФН, когда опорную точку кадра синтезирования
считаем неподвижной. При этом влияние ДН антенны РСА не учи-
тываем:
т
1с
2
у(е,ггцЛц)= Jfk(z)
т
'с
dZ .(10.9)
2
Для снижения уровня боковых лепестков функции неопреде-
ленности используем гауссовскую весовую функцию вида
t2
-п—
W(t} = e с (Тс - ширина функции на уровне -3 дБ) и заменим
пределы интегрирования [-Гс/2, Тс/2] на бесконечные:
dr =
1+(2ц7;2)
(10.10)
Модуль нормированной функции неопределенности:
(10.11)
Селекция движущихся целей
413
Рассмотрим случай, когда квадратичным слагаемым фазы тра-
4n(rt + rre-KtI1)2-rt2
екторного сигнала —---------------------1 на интервале синтези-
X 27?
рования Тс можно пренебречь (набег фазы не превышает я), т.е. пре-
небрегаем расфокусировкой РЛИ движущейся цели обусловленной
тангенциальной составляющей скорости ее движения и положением
цели не в центре кадра синтезирования. Это соответствует картогра-
фированию на больших удалениях в боковом и переднебоковом об-
зоре. Тогда
Вид тела неопределенности и соответствующих сечений ли-
ниями различного уровня, определяющих взаимную неопределен-
ность по параметрам 6 и Кгц, показаны на рис. 10.4 и 10.5 при
X = 0,03 м; Тс 0,3 с; at= -50 м/с2; Vt = -50 м/с.
Разрешающая способность по азимуту 50 и радиальной скоро-
сти 5КЩ определяется соответственно шириной сечений тела неоп-
ределенности J(0, 0) и J(0, Кгц) на уровне -3 дБ (10.12):
414
Глава 10
Ищ. м/с 1
Рисунок 10.4
Вид ФН в координатах 0-Ггц при а, Ф 0
Разрешающая способность РСА по азимуту определяется вели-
чиной синтезированной апертуры Хс= VtTc, а также её приращением
л у 1 т2
вследствие неравномерного движения Да с =—, приращенной
2х/тг
апертурой. При at=0 - 80 = С----------. Коэффициент С определяется
2Kt7^c
Рисунок 10.5
Сечения тела ФН линиями различного уровня
Селекция движущихся целей
415
выбором весовой функции Разрешающая способность по скоро-
сти зависит от времени накопления траекторного сигнала Гс.
Функция неопределенности J(0, Кд) при равномерном движе-
нии носителя РЛС на интервале синтезирования, когда а{ = 0:
Как видно из выражения (10.17), радиальная скорость цели
приводит к смещению максимума сечения функции по азимуту на
величину
Это означает, что изображение движущемся с радиальной ско-
ростью Кц пели будет смещено относительно своей азимутальной
координаты на величину 0дв, пропорциональную скорости движе-
ния цели.
Таким образом, при равномерном движении носителя РЛС су-
ществует неопределенность между азимутом и радиальной скоро-
стью цели: движущаяся цель имеет ту же фазовую характеристику
сигнала, что и неподвижный объект, имеющий другой азимут. По-
этому на основе анализа только фазовой (спектральной) структуры
отраженных сигналов невозможно разделить движущиеся и непод-
вижные объекты, как при решении задачи селекции, так и при изме-
рении угловых координат движущихся целей.
В РСА для устранения данной неопределенности возможно ис-
пользовать антенные измерения азимутального положения движу-
щейся цели для определения 0дв и информацию о параметрах дви-
жения носителя РСА от навигационных систем для определения Vt.
При движении носителя РСА с ускорением, происходит расши-
рение функции неопределенности при углах 0^0. Это соответствует
расширению отметки движущейся цели (расфокусировке изображе-
ния), которое обусловлено несоответствием квадратичной состав-
ляющей фазы опорной функции системы обработки изменению фазы
сигнала движущейся цели. При этом тело неопределенности имеет
вид гребня, вытянутого вдоль линии rt0 + Рщ= 0 (рис. 10.5). Ширина
тела неопределенности вдоль этой линии характеризует диапазон
однозначности по азимуту А0ОДН и скорости АКГ°ДН движения объ-
416
Глава 10
екта, который определяется соответственно проекцией на соответст-
вующие оси 0 и Ггц ширины сечения тела неопределенности
ДО, -nt0) на уровне -3 дБ (10.13):
(10.18)
(10.19)
Отношение размера зоны неоднозначности к разрешающей
способности по азимуту определяется отношением величины тан-
генциальной скорости носителя Vt в момент времени t = 0 к величине
ее приращения за интервал синтезирования atTc:
При Vt = 100 м/с, at = 1 м/с2 и Гс = 1 с эта величина составляет
« 528, при этом для X = 0,03 м зона неоднозначности А0ОДН~ 3° соиз-
мерима с шириной ДН реальной антенны.
Из выражения (10.19) следует, что величина зоны однозначно-
сти по азимуту определяется величиной тангенциальной составляю-
щей ускорения носителя РСА относительно центра кадра синтезиро-
вания.
Наличие тангенциального ускорения может быть обусловлено
не только изменением скорости носителя при прямолинейном поле-
те, но и при полете по круговой траектории с радиусом Rp (рис. 10.6)
с постоянной путевой скоростью Кп (например, участок траектории
на вираже). При R » Rp тангенциальная скорость изменяется в со-
ответствии с выражением
Соответствующее
2
ной величиной at - -Vu 7?р
тангенциальное ускорение
при VnTc«Rp можно считать постоян-
и использовать в соотношениях (10.19).
Селекция движущихся целей
417
Рисунок 10.6
Полет носителя РСА по круговой траектории
Таким образом, устранение неоднозначности азимут - скорость
цели также возможно:
1) при прямолинейном полете путем изменения скорости носи-
теля РСА;
2) при выполнении виража.
Размер зоны неоднозначности по азимуту определяется разно-
стью размеров синтезированной апертуры при маневрировании и без
маневра при одинаковом времени синтезирования, т.е. размером
приращения апертуры вследствие неравномерной тангенциальной
скорости движения носителя РЛС.
В РСА обычно для устранения неопределенности азимут - ра-
диальная скорость используются антенные измерения. При этом для
прямолинейного равномерного полета носителя РСА с учетом диа-
граммы направленности антенны на прием при телескопическом об-
зоре без учета влияния тангенциальной скорости цели и расфокуси-
ровки РЛИ на краях кадра ФН имеет вид
j(e,Kru)=W)exp
(10.20)
Первый сомножитель (10.20) определяет азимутальное разре-
шение реальной диаграммой направленности антенны РЛС
е2
G(0) - е ° (0о - ширина ДНА на уровне - 3 дБ), экспоненциаль-
ный - обусловленное синтезированной апертурой. Таким образом,
результирующее разрешение по азимуту 50^ при принятой аппрок-
симации ДНА:
418
Глава 10
S6v = 0,674
Zu У
(10.21)
Азимутальное разрешение, обусловленное синтезированием
X
апертуры 80 = 0,674-----, значительно превышает разрешение, оп-
2Kt7^
ределяемое шириной ДНА 0О. Разрешение по радиальной скорости
цели определяется временем синтезирования (10.15). Зона неопреде-
ленности (неоднозначности) азимут - скорость цели определяется
ДНА РЛС - А0ОДН = 00.
На рис. 10.7 показан вид тела неопределенности траекторного
сигнала цели в координатах азимут 0 - радиальная скорость Кгц,
соответствующий (10.20) при 0о-4°; Х = 0,03 м: 7^ =0,05 с; Vt =
= -30 м/с.
Для анализа влияния радиальной составляющей скорости
движения цели на ее радиолокационное изображение рассмотрим
функцию неопределенности в координатах азимут 0 - доплеров-
ская частота /= 2(Kt0 + Кш)/Х. Максимумы функции, соответст-
вующие неподвижным объектам, располагаются на линии
f=2Vfi/X (рис. 10.8). Положение тел функций, соответствующих
движущимся объектам со скоростью Игц, имеют смещение по доп-
леровской частоте на величину 2КГЦ/Х относительно линии непод-
вижных объектов.
Рисунок 10.7
Тело ФН (п) и его сечение (б) с учетом ДНА
Селекция движущихся целей
419
Рисунок 10.8
Спектральные пространственно-временные различия отражений
движущихся и неподвижных объектов
Если цель неподвижна и находится в центре ДНА, соответст-
вующая ей отметка 1 формируется спектральным отсчетом нулевой
частоты. Если цель движется со скоростью Егц. то ее отметка 2 сме-
щается на величину/цВ= 2Еги/Х.
На частоте, соответствующей частоте 2ЕШ/Х, формируется так-
же отметка 3 от неподвижного объекта, угол азимута которого опре-
деляется из равенства /= 2ЕГЦ/Х = 2 Et0/X (0 = 0ДВ= Егц/К). Амплитуда
отметки 3 неподвижного объекта определяется также коэффициен-
том усиления ДНА РЛС в направлении 0ДВ. Если доплеровская час-
тота движущейся цели, наблюдаемой под углом азимута 0 = 0°, пре-
вышает значение /= ± Et0(A, сигнал, отраженный от неподвижного
объекта и имеющего такую же частоту, подавляется антенной РЛС.
так как приходит с азимутального направления, соответствующего
боковым лепестка ДНА ( 0 > 0q/2).
Указанные явления лежат в основе селекции движущихся целей
по радиальной скорости.
Рассмотрим влияние тангенциальной составляющей скорости
движения цели на её радиолокационное изображение в РСА. Нали-
чие тангенциальной составляющей скорости эквивалентно измене-
нию скорости полета самолета (см. (10.6), (10.7)). Это приводит к
расфокусировке изображения движущейся цели, вызванное увели-
чением радиальной составляющей ускорения сближения носителя
420
Глава 10
РЛС с целью относительно центра зоны обзора
При равномерном полете носителя
а = 0 и боковом обзоре (Кг= 0) функция неопределенности траектор-
ного сигнала определяется выражением
т; '2
-Гс/2
При гауссовской весовой функции ФН имеет вид
Разрешение по азимуту определяется соотношением:
80 - 0,674
t с
Вид тела неопределенности в координатах f = — Pt0 - Дяг по-
казан на рис. 10.9 при Тс = 0,1 с и X = 0,03 м. Форма сечении тела не-
определенности по f и 0 совпадают в силу указанной линейной свя-
зи, отличаясь масштабом. Аналогично, также совпадают формы се-
J7 JZ
чения тела по параметрам Дяг и Ktu, Дб/Г ~-, так как V{»
R
Как следует из (10.23) и рис. 10.9, когда система обработки на-
строена на сигналы неподвижных целей, тангенциальная состав-
ляющая скорости движения цели приводит к расширению функции
неопределенности и уменьшению амплитуды ее пика, т.е. к расфо-
Селекция движ) щихся целей
421
Рисунок 10.9
Тело ФН (а) и его сечение (б) в координатах/- Д<яг
кусировке по азимутальной координате и уменьшению интенсивно-
сти радиолокационного изображения.
На рис. 10.10 представлены графики ухудшения разрешения по
50(К 0)
азимуту А, = —;----7
р 56(rt=0)
и уменьшения амплитуды отметки цели
в зависимости от Дяг.
Разрешающая способность по тангенциальной скорости описы-
вается выражением
Рисунок 10.10
Графики зависимости ухудшения разрешения по азимуту
и уменьшения амплитуды отметки цели в зависимости от Дяг
422
Глава 10
что намного хуже разрешения по радиальной скорости 5ЕГЦ .
Для обеспечения требуемой разрешающей способности по
дальности в РСА используется импульсный периодический зонди-
рующий сигнал. При этом функция неопределенности траекторного
сигнала описывается выражением
(10.24)
где s(f) - функция, описывающая огибающую радиоимпульса дли-
тельностью ти.
Функция неопределенности имеет периодическую структуру с
периодом Тп по времени задержки и FH- 1/Тп по частоте. Неодно-
значность по времени Д/3 = Тп задержки соответствует неоднознач-
ности по дальности а неоднозначность по частоте
Af= \/TV1 - неоднозначности по радиальной скорости сближения но-
сителя РЛС и движущейся цели, обусловленной ее угловым положе-
нием 0 и её радиальной скоростью = — (Игц + Et0).
Если изменение дальности до цели, обусловленное взаимным
движением, невелико, то изменением функции s(t) за время синтези-
рования можно пренебречь. Огибающую радиоимпульса s(t) аппрок-
симируем функцией
е Ти . При этом функция неопределенности
описывается выражением
Селекция движущихся целей
423
где v и ц определяются выражениями (10.10).
При ц —> 0 (в условиях наблюдения цели при равномерном по-
лете на большой дальности) функция имеет вид
При учете влияния ДНА вид тела неопределенности (10.26) и его
сечение показан на рис. 10.11 в плоскости 0 - Гга при Ап=200Гц:
ти= 1,3 мс; Nf= 7; Vt = 40 м/с; 00= 4°.
Импульсный сигнал приводит к размножению зоны неопреде-
ленности азимут-радиальная скорость цели. Периодичность неопре-
деленности по оси Гщ определяется частотой повторения импульсов
nXFj2 (и = 0,1,2,...).
При обеспечении высокого разрешения по дальности (использо-
ванием широкополосных зондирующих сигналов РЛС) движущаяся
цель за время синтезирования перемещается из элемента разрешения
по дальности в соседний. В этом случае если система обработки
сигналов РСА настроена на формирование изображения неподвиж-
ного объекта, то отметка на радиолокационном изображении, соот-
ветствующая движущейся цели, размывается (расширяется) по
дальности относительно истинного положения объекта и ослабля-
ется. Размывание отметок по наклонной дальности определяется
424
Радиальным
™-’а- р™ХЮ0Ми»™
Пм«»м.™ за время
не о
^.шсм цели за время синтезирования аперту-
Г'1-’1 ~ ? гц^ с-
Рассмотрим функцию неопределенности траекторного сигнала
движущейся иептя _ время задержки отраженного сиг-
скорость цели Игц. Для простоты анализа пред-
. синтезирования частота отраженного сигнала
^гц + Kt0) = const
, а система обработки согла-
^viure с отраженным сигналом. Изменение частоты
(квадратичная составляющая фазы траекторного сигнала 2ЯР72 -> 0^
мало. При этом гц(Г) - го(О (Кц+ и
сована по
N т,
п
О
t ~~ тТ —
п :л
ds.
С Учетом гауссоВсКой апн
(10.27)
Селекция движущихся целей
425
(10.28)
где с - скорость распространения радиоволны.
Периодичность структуры функции неопределенности по коор-
динате t3 может быть представлена сечением тела функции
В дальнейшем полагаем, что путем выбора частоты повторения
сигналов обеспечивается однозначное соответствие частоты биений
на выходе фазового детектора и доплеровской частоты сигнала дви-
жущейся цели. При этом в полосе обзора по дальности определяе-
мой шириной ДН в угломестной плоскости и частотой повторения
сигналов, также обеспечивается однозначность по дальности. По-
этому рассмотрим функцию неопределенности в области централь-
ного пика, при этом в выражении (10.27) п = т и двойная сумма за-
меняется на одну, а (10.28) приобретает вид
426
Глава 10
Вид центрального пика функции и его сечения линиями равных
уровней показан на рис. 10.12 в координатах нормированный к ве-
личине элемента разрешения сдвиг по дальности /3/ти - число эле-
ментов разрешения, пройденных целью за период повторения
2V Т
ГЦ п
и
Как следует из рис. 10.12, тело неопределенности имеет форму
гребня, наклон которого на плоскости (/3/ти) -
определяет-
ся скоростью движения цели. Ширина гребня при увеличении ради-
альной скорости движения цели расширяется в соответствии со зна-
ком скорости (направлением) движения цели, что соответствует
смещению и размыванию по каналам дальности отметки на РЛИ, со-
ответствующей движущейся цели.
При увеличении числа накапливаемых импульсов (интервал
синтезирования Гс) ширина тела неопределенности уменьшается,
гребень приобретает ножевидную форму. Положение цели относи-
тельно центра кадра синтезирования определяет дополнительное из-
менение задержки отраженного от нее сигнала за время синтезиро-
вания, что при больших значениях Тс и тангенциальной составляю-
щей скорости Kt носителя РСА приводит к искажению РЛИ по
дальности.
Рисунок 10.12
Центральный пик ФН траекторного сигнала движущейся цели (а) и его се-
чение (б) в координатах t3 - И1Ц
Селекция движущихся целей
427
Таким образом, в РСА существующая априорная неопределен-
ность по скорости движения цели вызывает искажения в виде сдвига
и размывания сё радиолокационного изображения, как по дальности,
так и по азимутальной координате.
Статистические характеристики сигналов
движущихся целей
Для получения выражений, описывающих электромагнитное поле, от-
раженное от наземной цели и поверхности Земли, воспользуемся гео-
метрическими соотношениями, приведенными на рис. 10.13. Самолет-
носитель РСА выполняет полет с путевой скоростью Г. Наземная цель
находится в точке Ц на дальности 7?ц и движется со скоростью Кц.
Антенная система РЛС имеет апертуру, размер которой в гори-
зонтальной плоскости равен L.
Отражатели находятся в дальней зоне приемной антенны, т.е.
фазовый фронт волны в пределах апертуры антенны можно считать
Рисунок 10.13
Геометрия взаимного движения носителя РСА, цели
и неподвижных отражателей
428
Глава 10
плоским. Кроме того, считаем, что дальность до z-го отражателя и
цели много больше размеров антенной системы и синтезированной
апертуры, а флуктуации отраженного сигнала во времени и на апер-
туре реальной антенны пренебрежимо малы за время Тс. Также бу-
дем считать, что фазовые изменения сигнала, обусловленные раз-
личного рода нестабильностями РСА, скомпенсированы.
Принимаемое антенной системой РСА электромагнитное поле
y(t, х) от произвольного элемента разрешения по дальности, пред-
ставляет собой сумму сигналов отражённых от цели 5ц(х,/) под-
стилающей поверхности 5П (х, /) и внутренних шумов приёмной
системы РЛС n(t, х):
J>(/,x) = 5Ц (х,/) + 5П (х,/) + й(/,х) .
(10.30)
Пространственно-временной сигнал, отраженный от подсти-
лающей поверхности в элементе разрешения по дальности, пред-
ставляет собой совокупность большого числа сигналов независимых
отражателей:
st(t,x)= fe(e)s(/)G(e)
е
' 2V л
---cos(0OT-^0)?+sin(0).r
u Jde
(10.31)
где ё(0) — удельная отражающая способность поверхности; Оо —
ширина ДНА; (7(0) = ехр (-л(О/Оо)2} — диаграмма направленности ан-
тенны на передачу; S(t) — огибающая отраженного сигнала в элемен-
те разрешения по дальности (примем 5(/) = 1).
Корреляционная функция сигнала (10.31)
в предположении независимости сигналов отдельных отражателей
()ё* (02)) - по8(02 “01) описывается выражением
(10.32)
где сто - удельная ЭПР подстилающей поверхности; 0 = [-л, я];
т = /2“й; р=Х2-Х1.
Селекция движущихся целей
429
Таким образом, корреляционная функция сигнала, отраженного
от земной поверхности в раскрыве антенны, стационарна по времени
и по пространству.
Пространственно-временная спектральная плотность отраже-
ний от подстилающей поверхности определяется преобразованием
Фурье от корреляционной функции поля (10.32):
ОС оо j2n --—---—т+-—р
Ш<р)= HhG2(e)e Z Jx
-00-000
xe-j2#t-j2rappdedpdT =
= р0с2(е)51^-фЪ[^со8(еот+е)-/ме.
При малых значениях ширины ДНА допустимо
sin 0/X « 0/Х, при этом выражение (10.33) имеет вид
\ (Лф) ~ °о
(10.33)
считать
о Л 2
-2л — (р
^cos(eOI +м>)
(10.34)
5
где фХ = 0; ф - пространственная частота (скорость изменения фазы
сигнала по координате х).
Вид спектральной плотности сигнала отражений от подсти-
лающей поверхности показан на рис. 10.14, при положении луча
ДНА относительно вектора скорости носителя 0от=9О° и 20°. Спек-
тральная плотность представляет собой «гребень», вытянутый вдоль
линии, связывающей доплеровский сдвиг частоты отраженно! о сиг-
нала /и угловое положение неподвижного точечного объекта 0 = фХ:
(10.35)
Огибающая гребня определяется функцией ДНА (7(0). Это
следствие того, что электромагнитное поле, отраженное от подсти-
лающей поверхности, представляет собой сумму плоских монохро-
матических волн, отраженных от точечных отражателей и находя-
щихся в зоне облучения передающей антенны. Доплеровская частота
колебаний поля и направление нормали к плоскости фронта волны
связаны между собой зависимостью (10.35).
430
Глава 10
Рисунок 10.14
Спектральная плотность сигнала отражений
от подстилающей поверхности
С учетом компенсации доплеровского сдвига частоты
f = 2Kcos0or/X , соответствующего отражениям, приходящим по
равносигнальному направлению ДНА, спектральная плотность оп-
ределяется выражением
где Vr= Kcos0OT и Kt= Hsin0OT - радиальная и тангенциальная состав-
ляющая скорости носителя РСА (рис. 10.13).
При углах наблюдения сопоставимых по величине с шириной
ДНА 0о спектральная плотность распределена вдоль параболиче-
ской кривой (рис. 10.15,6?), связывающей доплеровскую частоту от-
раженного сигнала и угловое положение неподвижного точечного
объекта, вида
г, о2 2rte
х Г-
(10.37)
Селекция движущихся целей
431
При боковом и переднебоковом обзоре, при углах наблюдения,
V
превышающих ширину ДНА, 0ОТ = arctan — » 0С квадратичной за-
висимостью доплеровского приращения частоты отраженного сиг-
нала неподвижного объекта от его углового положения можно пре-
небречь. Спектральная плотность мощности отражений от подсти-
лающей поверхности
-44 ( 2V >
5п(/,е)~о0е 8 /+-М)
V Л 7
(10.38)
в пределах ширины луча ДНА вытянута вдоль прямой линии
(рис. 10.15.6), связывающей доплеровскую частоту отраженного
сигнала и угловое положение неподвижного точечного объекта.
-0 или 0 =
(10.39)
Сигнал, отраженный движущейся целью, описывается выраже-
нием
(z,x) = у4б(0ц)ехр< j
(кгс/ - иге2? - 2Kteu/+ецх) (ю.4О)
где А - Ае)Ц>0 - комплексная случайная амплитуда отраженного сиг-
нала цели; А - распределена по Релею с параметром сга; <р0 - случайная
начальная фаза, равномерно распределенная в интервале [-я, я].
Корреляционная функция поля и спектральная плотность сиг-
нала движущейся цели определяются выражениями:
MT’P) = aaG2 (0u)X
xexp|j4(2|Zr11 -Гец -2К,ец)т +
(Л Л J
\ (/.ф) ~ (е„)5(/-:Л)8[ ф-У;
2V И02 2Г0
г _ ГЦ__r rvu _
(10.41)
(10.42)
432
Глава 10
Х = 0,03 м; 0=5°; V =200 м/с
’ ’ 0 ’г
Рисунок 10.15
Спектральная плотность при переднем (а) и переднебоковом обзоре (б)
Суперпозиция сигнала движущейся цели и отражений от изо-
тропной подстилающей поверхности показана на рис. 10.16 для
следующих условий: Л = 0,03 м; Оо=5°; Иг=60 м/с; Ct=-200 м/с
(0ОГ =-73,3°); 0ц=3°; ^ = -17,5 м/с. Данные различия спектральных
плотностей (38) и (42) лежат в основе пространственно-временной
фильтрации сигналов на фоне коррелированных помех.
Таким образом, наличие пространственно-временных различий
характеристик сигналов, отраженных от движущейся наземной цели
Рисунок 10.16
Спектральная плотность суперпозиции отражений
от подстилающей поверхности и движущейся цели
Селекция движущихся целей 433
и подстилающей поверхности, лежит в основе функционирования
систем обнаружения, селекции и измерения параметров сигналов,
отраженных от движущихся наземных целей на фоне отражений от
подстилающей поверхности.
Радиальная составляющая скорости цели вызывает смеще-
ние доплеровской частоты и, соответственно, сдвиг отметки цели
по азимуту на изображении, а также размывание отметки цели по
наклонной дальности (миграция цели по каналам дальности, обу-
словленная ее радиальным перемещением на расстояние, пре-
вышающее элемент разрешения по дальности за время синтези-
рования Тс).
Тангенциальная составляющая скорости движения цели вы-
зывает размывание ее отметки по азимуту (расфокусировку), ко-
торое обусловлено несоответствием квадратичной составляющей
фазы опорной функции системы обработки изменению фазы сиг-
нала движущейся цели.
При равномерном движении носителя РЛС существует неоп-
ределенность между азимутом и радиальной скоростью цели. При
этом изображение движущейся цели (с радиальной скоростью Угц)
смещено относительно своей азимутальной координаты на вели-
чину 0ДВ = vru/vt, пропорциональную скорости движения цели, так
как сигнал, отраженный движущейся целью, имеет ту же фазовую
характеристику сигнала, что и неподвижным объектом, имеющим
другой азимут.
При решении задачи селекции движущихся целей устранение
неоднозначности азимут - радиальная скорость цели возможно
при следующих условиях:
1) создание тангенциального ускорения носителя РСА отно-
сительно центра кадра;
2) применение пространственно-временной обработки отра-
женных сигналов с использованием направленных свойств ан-
тенн РЛС.
Радиолокационный сигнал, отраженный от местности в пре-
делах элемента разрешения по дальности, представляет собой
пространственно-временную коррелированную помеху. Её спек-
тральная плотность имеет вид линейной массы, расположенной
по оси, связывающей доплеровскую частоту отраженного сигнала
и азимут неподвижного объекта.
Пространственно-временные различия сигналов, отражен-
ных от движущейся наземной цели и подстилающей поверхности,
позволяют селектировать полезный сигнал движущейся наземной
цели на фоне мешающих отражений.
434
Глава 10
10.3. Алгоритмы селекции движущихся целей
Селекция движущихся целей
доплеровской фильтрации сигналов
В РСА для решения задачи селекции используются доплеровские
различия сигналов, отраженных от движущихся целей и фона мест-
ности (неподвижных объектов).
Рассмотрим случай, когда ЛА движется прямолинейно и равно-
мерно вдоль оси ОХ со скоростью И (рис. 10.17). ДНА направлена под
углом 0ОТ относительно вектора путевой скорости, ведется телескопи-
ческий обзор. Цель осуществляет движение в радиальном направле-
нии относительно носителя РСА со скоростью Гщ. Сигнал на выходе
УПЧ приемника, принимаемый от полоски (разрешаемого элемента)
дальности, расположенной на дальности R, представляет собой сумму
сигналов отраженных от движущейся цели и поверхности Земли, в
пределах ширины ДНА, наблюдаемую на фоне внутренних шумов:
^(0=^ц(/)+^п(/)+й(0=
V(0c(eu)e
i2Ar Гг/+Гп/+Г.0,,Н
J I 11Д I ц
[гец)2<2
2R
Опорная точка
кадра синтезирования
Щель
Рисунок 10.17
Синтезирование при прямолинейном и равномерном движении ЛА
Селекция движущихся целей
435
e(0)S(r)C(0)
j2* ГГН
хе
(10.43)
где Лц = Лц exp{j(p0} ; Лц и ф0 - случайная амплитуда и фаза сигнала
отраженного от цели; £(/) - функция, описывающая огибающую ра-
диосигнала; к = 2л/Х - волновое число; Лр - промежуточная частота;
е(0) - комплексная удельная функция амплитуды отражения по-
лоски дальности Земли; Гг= Fcos0Oi, Kt = Hsin0or - радиальная и
тангенциальная составляющая скорости движения носителя РЛС от-
носительно направления на опорную точку кадра синтезирования,
угловое положение которой совпадает с равносигнальным направле-
нием ДН антенны; - комплексный белый шум спектральной
плотностью Nq/2.
Система обработки реализует алгоритм гармонического анали-
за сигнала (рис. 10.18). Сигнал с выхода УПЧ подается на вход блока
фазовых детекторов (ФД), где преобразуется в два ортогональных
сигнала (квадратуры). На второй вход блока ФД подается сигнал ко-
герентного гетеродина:
(10.44)
Рисунок 10.18
Структура системы обработки РСА
436
Глава 10
используемый для компенсации квадратичного фазового набега
kV^R и линейного набега фазы 2kVrt, вызванного радиальной
составляющей скорости сближения носителя с центром зоны об-
зора.
Для формирования сигнала гетеродина используется информа-
ция о скорости движения носителя и угловом положении ДН антен-
ны РЛС. Сигналы с выхода блока фазовых детекторов поступают на
блок АЦП, где стробируются по каналам дальности, преобразуются
в цифровой код и подаются в блок цифровой обработки (БЦО). Он
выполняет спектральный анализ сигнала в каждом канале дальности
с использованием алгоритмов БПФ.
Сигналы на выходе ФД в одном канале дальности:
y(t) = ^С(0Ц) ехр {- j 2к{ кгц+rteu )0 +
00
+ f Ё(6)С(6)ехр {- j2AKte/}de + ЭД.
—00
(10.45)
Сигнал неподвижного объекта имеет доплеровскую частоту:
(10.46)
Радиальное движение объекта относительно РСА определяет
дополнительное доплеровское смещение частоты, зависящее от ве-
личины и знака (направления) радиальной составляющей скорости:
(10.47)
На рис. 10.19,67 показано расположение точечных объектов от-
носительно РСН ДН антенны. При 0uJ = 0Ц2 = 0 объект 1 - неподви-
жен, а объект 2 - движется. Имеется также неподвижные объект 3 с
большой ЭПР, сигнал которого принимается по боковому лепестку
ДН. Штриховой линией показан уровень о0 удельной ЭПР фона. На
рис. 10.19,6 показано положение сигналов движущихся и неподвиж-
ных объектов на РЛИ по частоте f . Неподвижный объект 1 имеет
сигнал на нулевой частоте. Доплеровская частота сигналов 2 и 3
Селекция движущихся целей
437
Рисунок 10.19
Расположение точечных объектов по азимуту относительно РСН ДНА (я)
и частоте (б)
Сигнал движущегося объекта 2, принимаемый вместе с сигна-
лами неподвижных объектов 1, 3 и фона, будет отличаться по допле-
ровской частоте и может быть отселектирован.
Сигналы фона и неподвижных объектов, принимаемые по ос-
новному лепестку ДН, занимают полосу частот
А/п=-т±е0>
(10.48)
где 0о - ширина ДН антенны.
Алгоритм селекции движущихся объектов сводится к выделе-
нию сигналов с граничной частотой f > /гр , определяемой шириной
спектра Д/п:
Угр ’
(10.49)
где к - постоянный коэффициент (порог селекции).
Если сигнал обнаружен и частота f объекта больше
(сигнал объекта 2), то считается, что объект движется, а если
(сигнал объекта 1) - объект неподвижен.
438
Глава 10
Такая простейшая система СДЦ имеет ряд существенных не-
достатков. Так, сигналы неподвижных объектов с большой ЭПР, хо-
тя и принимаются по боковым лепесткам ДН антенны, тем не менее,
могут быть обнаружены (сигнал объекта 3). Так как их угловое по-
ложение 0Ц >0о/2 и соответственно доплеровская частота превы-
5
эти неподвижные объекты будут счи-
таться движущимися.
В свою очередь, движущиеся объекты в случае малых радиаль-
2Fr
ных скоростей, когда —— < /гр, будут считаться неподвижными.
При этом сигнал движущегося объекта попадает в частотную об-
ласть сигналов фона и его обнаружение зависит от отношения сиг-
нал/фон.
Еще одним существенным недостатком такой системы СДЦ яв-
ляется неопределенность «угловое положение - радиальная ско-
рость» движущегося объекта. Взаимное положение по азимуту объ-
ектов в РЛИ определяется доплеровской частотой их сигналов:
МЬ ±2Кп1к¥дц±^
2кД/дц X J 2Kt Vx ‘
(10.50)
Поэтому отметка движущегося объекта в изображении смещена
по азимуту относительно истинного положения:
А6ц—• (Ю.51)
ч
При Егц = 10 м7с и Vt= 200 м/с на дальности Л = 20 км смещение
отметки движущеейся цели по азимуту будет равно 1 км. Используя
измерения азимута цели с помощью антенны, можно восстановить
положение отметки цели, близкое к истинному. Потенциальная точ-
ность измерения угла азимута цели сУд ~^о/yj^7о и =^о
При 0о= 10 “ и отношении сигнал/шум 100 точность восстанов-
ления азимута движущейся цели будет с/= 20 м.
Корреляционная функция сигнала цели:
Кц (А ’ h ) ~ (5ц )Лц (^2 )) =
= РцС2(0ц)ехр{)2£(Ггц +КД )т|,
(10.52)
Селекция движущихся целей
439
где Рл = ( Лц • Л* I - средняя мощность сигнала цели; т = t2 - Л.
Корреляционная функция помехового сигнала и шума
s(i) = sn(t)+n(t) при модели отражения от Земли в виде пространст-
венного белого шума, т.е. (ё(е1)ё*(О2)) = До8(92-01), где Рл0 -
удельная мощность сигнала, отраженного полоской дальности
(рис. 10.17) подстилающей поверхности, приходящаяся на единицу
угла:
^(x)=ff(£(01)8*(e2)}G(eI)G(e2)
xexp|-j2&Kr (02Z2 -6^)} d02d0t +
(10.53)
где Pn = Любо - мощность отраженного сигнала от местности.
Спектральные плотности сигналов цели, помехи и шума нахо-
дятся как преобразования Фурье корреляционных функций (10.52) и
(10.53), и имеют вид:
5ц(Г)^РцС2(0ц)8(/дц);
ад = ^(Г) + -^ = ^-ехр{-7г(//Д/п)2}+^.
2 ? 72
(10.54)
(10.55)
Графики спектральных плотностей цели и помехи с учетом им-
пульсного характера сигнала приведены на рис. 10.20. Спектральная
плотность сигнала цели смещена относительно плотности помехи на
величину, пропорциональную доплеровской частоте цели /цц. Дви-
жение носителя приводит к расширению спектральной плотности
помехи пропорционально Vt.
Сигналы, спектральные составляющие которых находятся вне
диапазона частот фона, определяемого главным лепестком ДН,
можно идентифицировать как отраженные от движущихся целей:
1/дц! < A/nj
-rt(eu+eo)<Kru<rt(0o-eu).
440
Глава 10
Зона частот
неподвижных объектов
Рисунок 10.20
Спектральная плотность цели и помехи
при импульсном зондирующем сигнале
Fn Область частот
движущихся объектов
Возможность наблюдения движущейся цели на фоне отраже-
ний от подстилающей поверхности, определяется также соотноше-
нием мощностей сигналов, отраженных от движущейся цели и не-
подвижных отражателей. Спектральная плотность мощности прини-
маемых сигналов после доплеровской фильтрации:
• 2 2
Сх (/) = Щ (/) (/); sr (/) = яф (/) \ (/), (10.56)
л(/ /ф)
2 А /'2
где //ф(/)=е ф - коэффициент передачи системы узкопо-
лосной фильтрации траекторного сигнала (доплеровского фильтра);
Л/ф= 1/Гс - ширина узкополосного фильтра на уровне 0,7.
Мощность сигналов на выходе линейной части системы обра-
ботки определяется выражением:
00
С'х = р.Г (/)4Л рпвых=
-а
Jsr(/)df,
-С'
)ВЫХ _
ш
вьь
(10.57)
Селекция движущихся целей
441
где 7Ссж= 0о/80 = 2И(Гс0о'Х - коэффициент сжатия ДНА в РСА.
Таким образом, мощность помеховых отражений от подсти-
лающей поверхности на выходе системы обработки траекторного
сигнала уменьшается примерно в Ксж раз за счет высокой разре-
шающей способности по азимуту. Отношение мощности сигнала,
отраженного от движущейся цели, к мощности помехи на выходе
линейной части системы обработки =-------------------------- определя-
г ^СДП+Ш) рВЫХ рВЫХ К
'п ' Ли
ется соотношением
<7с/шс2(ец)
(10.59)
2^
где q . =----- — отношение мощности сигнала, отраженного от
^оД/ф
цели к мощности внутренних шумов приемника (сигнал/шум по
2Р 2Р
мощности); дпш =-------Г ~------------- - отношение мощ-
^а/ф71Кж
ности отражений от подстилающей поверхности, соответствующих
элементу разрешения РСА, к мощности внутренних шумов прием-
ника.
Как следует из выражения (10.59), выходное отношение сиг-
нал/помеха системы обработки определяется соотношением ширины
ДНА 0о и величины Kru/Kt. При 0() знаменат ель (10.59) стре-
442
Глава 10
мится к 1 и qc (п ш) ~ qc ш . Таким образом, когда доплеровская час-
тота сигнала цели превышает частоту, соответствующую отражени-
ям, приходящим с направлений, соответствующих боковым лепест-
кам ДНА, обнаружение сигнала цели наиболее эффективно. При
этом минимальная радиальная составляющая скорости наблюдаемой
цели определяется мощностью отражений от подстилающей поверх-
ности, тангенциальной скоростью носителя и шириной ДНА РСА.
Чем меньше тангенциальная скорость носителя, тем уже
спектр мощности помеховых отражений, тем при меньшей величи-
не радиальной скорости цели, отраженный от нее сигнал будет на-
блюдаться. Для снижения минимальной радиальной скорости се-
лектируемой цели необходимо также уменьшать ширину ДН ре-
альной антенны 0О«
Зависимость <7с/(п+ш)(Кц) с учетом импульсного характера сигна-
ла приведена на рис. 10.21 для следующих условий: qQ/m = 20 дБ;
<7п/ш= 25 дБ; 0Ц = 0°; X = 0,03 м; 0о = 3°; Тс = 0,1 с. Сплошными линия-
ми представлены зависимости при частоте повторения Fn = 2000 Гц,
и пунктирными при - 1500 Гц. Кривая 1 соответствует Ft = 150 м/с,
кривая 2-100 м/с.
Увеличение тангенциальной скорости носителя РСА относи-
тельно центра зоны обзора приводит к расширению спектральной
плотности помеховых отражений, и следовательно, к уменьшению
отношения сигнал/помеха #с/п(Кц) на выходе системы обработки.
Рисунок 10.21
Г рафики эффективности селекции движущихся целей
при различной частоте повторения Fn и скорости движения С носителя РСА
Селекция движущихся целей 443
Периодический характер спектральной плотности помеховых
отражений определяет наличие слепых скоростей цели Кгц = FnFп/2
(и = 0, 1,2, ...), когда спектр сигнала цели маскируется помеховыми
отражениями, соответствующих частотам Fn.
Системы СДЦ, основанные на доплеровской фильтрации,
обычно эффективно выделяют цели, движущиеся с радиальной ско-
ростью Кгц> 10 м/с.
При реализации в БЦО обработки траекторного сигнала мето-
дом гармонического анализа парциальный кадр изображения РСА
(строка дальности РЛИ) формируется в результате одного цикла
обработки на одном интервале синтезирования. При этом спек-
тральный анализ отраженных сигналов в области частот, соответ-
ствующей спектральным отражениям от подстилающей поверхно-
сти принимаемых основным лучом ДИА, определяет изображение
неподвижных объектов, а области частот, соответствующей боко-
вым лепесткам ДНА, - изображение движущихся целей.
Если БЦО осуществляет обработку траекторного сигнала спо-
собом прямой свертки (при боковом или переднебоковом обзоре),
то процесс получения РЛИ движущихся целей описывается соот-
ношением
Z
- т)/Г (/) d/
(10.60)
Опорная функция /?(/) учитывает, помимо квадратичного фазо-
вого набега, линейный набег, который соответствует возможному
приращению частоты Доплера. Последний обусловлен радиальным
движением цели, превышающим доплеровский сдвиг частоты сиг-
налов неподвижных отражателей
(10.61)
Опорная функция определяется выражением
(10.62)
где Rm - дальность, соответствующая ш-му каналу дальности.
444
Глава 10
Частота/^ выбирается из условия (10.61) таким образом, чтобы
направление луча синтезированной ДНА (направление на точку фо-
кусировки) соответствовало боковым лепесткам реальной ДНА РЛС
или первым нулям ДНА - = ±2 Ц0бл/^; ббл - направление первого
нуля ДНА (между главным и боковым лепестком ДНА, рис. 10.22).
При этом отражение от подстилающей поверхности ослабляются
боковыми лепестками ДНА, в то время как сигнал, отраженный от
движущейся цели, принимается главным лучом ДНА.
Синтезированная ДНА СДЦ, соответствующая доплеровскому
фильтру, настроенному на частоту /ц, вследствие поступательного
движения носителя РСА последовательно просмафивает полосу ме-
стности. По мере полета доплеровская частота отраженного от дви-
жущейся цели совпадет с частотой настройки доплеровского фильт-
ра СДЦ. При этом в фильфе накапливаются и сигналы от непод-
вижных объектов, которые приходят с направления фокусировки
синтезированной ДНА СДЦ - 0бЛ ослабленными до уровня боковых
лепестков ДНА. Сигнал движущейся цели проходит в фильф СДЦ
по основному лучу ДНА без ослабления.
Точка фокусировки
в режиме СДЦ
С интезированная
ДНА СДЦ
Рисунок 10.22
Соотношение между направлениями синтезированной ДН РСА
при формировании РЛИ неподвижных объектов
и синтезированной ДН РСА при СДЦ
Селекция движущихся целей
445
Как правило, одновременно формируется РЛИ подстилающей
поверхности (неподвижных объектов), для чего параллельно выпол-
няется обработка принимаемого сигнала с использованием опорной
функции
/2(z)=FK(z)exp< j2ji
При этом направление синтезированного луча соответствует
РСН антенны.
Индикация наличия движущейся цели может быть выполнена
цветовой (или мерцающей) подсветкой на индикаторе РЛИ отметки
цели. При этом отметка движущейся цели смещена относительно
своего истинного азимутального положения на величину ДО =
которая превышает ширину ДН реальной антенны Оо, поэтому для
привязки отметки цели к изображению неподвижных объектов угло-
вое положение цели измеряется антенной РСА.
Так как точность определения угла невысока, тс дополнительно
используется логическая обработка, заключаю)цаяся в идентифика-
ции на изображении неподвижных объектов дорог, магистралей и
т.п. и постановке близ лежащих отметок движущихся целей на их
возможное место.
Таким образом, алгоритм функционирования РСА в режиме
селекции движущихся целей с использованием доплеровской
фильтрации аналогичен алгоритму получения РСА изображения
неподвижных объектов (картографированию), когда осуществляется
обработка сигналов полосы частот, соответствующих отражениям,
приходящим по основному лучу ДНА. Отличие заключается в обра-
ботке сигналов, доплеровские частоты которых лежат вне пределов
спектра отражений неподвижных объектов Д/п = Ft6o ‘К соответст-
вующих боковым лепесткам ДНА, (в настройке опорной функции
системы обработки).
Методы селекции движущихся целей в РСА, реализующие вы-
деление полезного сигнала (частотную селекцию) в области частот,
соответствующих зоне свободной от помеховых отражений, позво-
ляют обнаруживать и селектировать цели, имеющие радиальную со-
ставляющую собственной скорости, обычно превышающую величи-
ну 10...20 м/с. Цели с меньшими значениями радиальных состав-
ляющих скорости движения, особенно слабоконтрастные, попадая в
зону пассивных помех маскируются ими. Поэтому малоскоростные
цели данным методом выделить практически невозможно.
446
Глава 10
Для выделения сигналов, отраженных от движущихся целей,
на фоне отражений, приходящих от неподвижных объектов и фо-
на местности, в РСА используются параметрические различия в
отраженных сигналах.
Различия в доплеровских сдвигах частоты используются в
простейших системах СДЦ, реализующих доплеровскую фильтра-
цию сигналов. Такие системы определяют наличие движения
объекта, измеряя смещение доплеровской частоты его сигнала
относительно сигналов неподвижных объектов (фона).
Если смещение превышает ширину спектра сигналов фона,
определяемого шириной ДН антенны, то сигнал движущихся объ-
ектов находится в области сигналов фона, принимаемых по боко-
вым лепесткам ДН антенны, и может быть выделен с помощью
порогового устройства.
Эффективность обнаружения движущейся цели на фоне от-
ражений от подстилающей поверхности, определяется соотноше-
нием мощностей сигналов, отраженных от движущейся цели, и
сигналов неподвижных отражателей, приходящих по боковым ле-
песткам ДНА.
При использовании СДЦ на основе частотной селекции важ-
ными требованиями к РСА с СДЦ являются: малая ширина ДНА,
низкий уровень боковых лепестков ДНА и относительно неболь-
шие скорости полета носителя.
Пространственно-временные методы селекции
движущихся целей
Повышение эффективности селекции движущихся наземных целей
(селекции малоскоростных целей) может быть достигнуто путем
пространственно-временной обработки принимаемых сигналов. Ис-
пользование совместной пространственной и временной обработки
определяется тем, что при совмещении движущейся и неподвижной
цели в пространстве, сигналы, отраженные от них, будут различать-
ся по доплеровской частоте и, наоборот, при равенстве доплеров-
ских частот отраженных сигналов, цели различаются пространст-
венным положением (направлением прихода отраженных от них
электромагнитных волн). Реализация такой обработки может быть
выполнена различными методами.
Селекция движущихся целей
447
Метод 1. СДЦ с использованием моноимпулъсной антенной
системы
Рассмотрим селекцию движущихся целей в моноимпулъсной
РСА с амплитудной суммарно-разностной системой пеленгации.
Антенная система РЛС формирует суммарную G (0) и разностную
ДН <7д(0). При этом для подавления сигнала неподвижного объек-
та, имеющего ту же частоту, что и сигнал движущейся цели, исполь-
зуют разностную ДНА, равносигнальное направление (РСН) которой
направлено на неподвижный объект.
Пусть опорная функция система обработки траекторного сиг-
нала в разностном канале согласована с сигналом неподвижного от-
ражателя с углом азимута 0 = 0. Квадратичный набег фазы траек-
торного сигнала и траекторные нестабильности скомпенсированы.
Рассмотрим частотную передаточную характеристику канала
системы обработки сигнала, как пространственно-временного
фильтра:
/Д/,ф) = бд(ф)
(10.63)
где бд (ф) = бд
- коэффициент передачи системы
пространственной фильтрации траекторного сигнала РСА (ДН раз-
ностного канала моноимпульсной антенной системы); ф = 0/Х -
я /2
пространственная частота; (/) = е Л/ф - коэффициент переда-
чи системы узкополосной доплеровской фильтрации траекторного
сигнала (в рассматриваемом случае^ = 0 Гц).
Тогда на выходе такого пространственно-временного фильтра
(линейной части разностного канала РСА) мощность сигналов, от-
раженных от подстилающей поверхности и движущейся цели опре-
деляются соответственно выражениями:
а х
= J puBb,x(/,e)d/do =
-ОО —00
X 03
= J J|tf(A6)|25u(/,0)d/de;
-CO -00
(10.64)
448
Глава 10
ОО 00
РПТ = f pr (/,0)d/de =
—оо —оо
00 00
= J J^(/,e)|2sn(/,o)d/do.
—oo —oo
(10.65)
На рис. 10.23 показаны пространственно-временная спектраль-
ная плотность помехового сигнала на входе системы обработки (без
учета спектральной плотности пространственно-временного внут-
реннего шума системы обработки) и спектральная плотность сигнала
5цЫХ (/, 0) на выходе системы обработки:
(10.66)
(10.67)
Как видно из рис. 10.23, форма и уровень 5®ых(/, 0) опреде-
ляются разностной ДН бд(0) и передаточной характеристикой
H$(f) доплеровского фильтра.
е
Рисунок 10.23
Фильтрация спектральной плотности помехового сигнала
прос1ранственно-временным фильтром системы обработки СДЦ
Селекция движущихся целей
449
Подставляя в (10.64), (10.65) соответственно выражения (10.66)
и (10.67), получаем:
(10.68)
(10.69)
- мощность отражении от подстилаю-
щей поверхности, соответствующая элементу разрешения РСА;
2
А?сж = — Kt7^0o - коэффициент сжатия ДН в РСА.
При этом мощность внутренних шумов системы обработки оп-
ределяется соотношением:
вых
«(/.efd/de^
AA't.
2 2?i£ ’
- спектральная плотность пространственно-временного шума
системы обработки.
Анализ выражений (10.68) и (10.69) показывает, что на выходе
системы обработки разностного канала выделяются сигналы тех
объектов, угловая координата и скорость которых связаны соотно-
шением JVt (так как Д = 2rt0u/X, + 2Р^/Х, = 0 ). При
этом мощность сигнала, отраженного движущейся целью, на выходе
пространственно-временного фильтра пропорциональна квадрату ее
радиальной скорости, а мощность помеховых отражений не зависит
от скорости цели.
Оценим степень подавления в разностном канале сигналов, от-
раженных от неподвижных объектов и местности. Мощность фоно-
вых отражений в суммарном канале моноимпульсной системы опре-
деляется выражением в полосе фильтрации 0 Гц):
450
Глава 10
00 00
G2(6)^(/)2-Sn(/)d/de =
(10.70)
Таким образом, при реализации режима синтезирования в раз-
ностном канале моноимпульсной антенны на выходе системы обра-
ботки происходит подавление сигнала, отраженного подстилающей
поверхностью, в
)ВЫХ
п Л
= 4л[1 + К;ж ]« К;ж
(10.71)
раз по мощности.
Отношение сигнал/(помеха + шум) на выходе системы обра-
б0ТКИ ?с/(п+ш)
характеризует эффективность селекции движущихся
целей и определяется выражением
(10.72)
- отношение мощности сигнала, отраженного
от цели к мощности внутренних шумов (сигнал/шум по мощности)
на выходе системы обработки;
— отно-
шение мощности фоновых отражений (от подстилающей поверхно-
сти) на выходе системы обработки, соответствующих элементу раз-
решения РСА, к мощности внутренних шумов системы обработки.
Анализ (10.72) показывает, что отношение сигнал/(поме-
ха г шум) #с/(п+ш) при скорости цели
Ггц < Ct0o пропорционально
квадрату ее скорости и не зависит от ширины ДН антенны. Такая за-
кономерность объясняется тем, что при увеличении скорости дви-
Селекция движущихся целей
451
жения цели квадратично увеличивается мощность сигнала цели на
выходе системы (10.68), а мощность помеховых сигналов остается
постоянной (10.69). При изменении ширины ДН антенны Оо и соот-
ветственно крутизны разностной ДН антенны пропорционально из-
меняется на выходе системы обработки и мощность сигнала цели и
2
мощность фона (так как Рп ~ Ксж
_ м0
сж
При
> К®- величина #с/(п+ш) уменьшается вследствие уменьше-
ния коэффициента усиления антенны в направлении движущейся
цели, так как её угловое положение относительно РСН превышает
ширину ДНА.
Зависимость ^(П+ш)(Ущ) повторяет форму ДНА разностного ка-
нала РСА и приведена на рис. 10.24 для следующих условий:
#с/ш = 25 дБ; <7*/ш= 15 дБ; X = 0,03 м; 00 = 3°; Тс = 0,1 с.
Как следует из приведенных зависимостей, алгоритм селекции
движущихся целей разностным каналом моноимпульсной РСА при
телескопическом обзоре обеспечивает выделение целей, движущих-
ся с радиальными скоростями Vm = 1...7 м с.
При переднебоковом и секторном обзорах за время синтезиро-
вания изменяется угловое положение элемента разрешения поверх-
ности, имеющего нулевую доплеровскую частоту. Смещение на-
правления подавления более, чем на элемент разрешения РСА, ведет
Рисунок 10.24
Эффективность селекции движущихся целей в разностном канале
моноимпульсной антенны
452
Глава 10
к резкому снижению эффективности подавления сигналов непод-
вижных объектов. Для обеспечения функционирования алгоритма
СДЦ с использованием разностной ДНА необходимо выполнение
условия
50>сп 71.
С1\ V
(10.73)
При боковом и переднебоковом обзоре оно имеет вид
или 50 • R > Хс, что соответствует режиму ДОЛ.
Для эффективной компенсации помехового сигнала необходи-
мо в процессе когерентного накопления управлять положением РСН
разностной ДНА (отслеживать угловое положение помехи), что
обеспечивается при телескопическом обзоре. Такие алгоритмы од-
новременной компенсации квадратичного фазового набега и управ-
ления нулем ДНА реализуются в РСА с пространственно-много-
канальной системой приема отраженных сигналов (например, в РЛС
с цифровыми антенными решетками).
Режим СДЦ с моноимпульсной антенной системой можно ис-
пользовать совместно с режимом картографирования местности.
С целью снижения вычислительных затрат обычно используется об-
работка сигнала методом гармонического анализа. В этом случае ал-
горитм обработки сигналов при селекции движущейся цели опреде-
ляется соотношением
т
'с
f[zjt) - Х:(4п)2Д/)]Л* d/
о
(10.74)
где гд(/) и zL(/) - траекторный сигнал в разностном и суммарном
каналах моноимпульсной антенны соответственно:
L/2
z^(t)= j s(t,x)Bl(x)e^oX Ах\
-L/2
//2
zL(/) = [ s(/,x)B*(x)e-J ^dx; (10.75)
-L/2
где /?(/) - опорная функция, компенсирующая центральную частоту
и квадратичную фазу траекторного сигнала; В^(х) и 5д(х) - ам-
плитудно-фазовое распределение поля в раскрыве антенны £, фор-
Селекция движущихся целей
453
мирующее разностную и суммарную ДНА; /ф=/ц0 и /рцо - опорное
(ожидаемое) значение временной и пространственной частот сигна-
ла цели (или частота настройки доплеровского фильтра и направле-
ние фазирования антенны 0цО, или угловое положение ДНА относи-
тельно нормали к плоскости раскрыва антенны (как правило,
Лцо= вц(А = 0); ЛГ(/^П)-.д(в») - весовой коэффициент (коэффи-
Gs(0n)
циент компенсации), определяемый угловым положением непод-
вижного объекта, отраженный сигнал от которого имеет частоту,
равную частоте сигнала, отраженного от движущейся цели
2 2
f _±TZ0 + —Г
./ цо у 1 X 'ц'
Учитывая, что амплитудно-фазовые распределения Вх(х) и
5е(х) связаны Фурье-преобразованием с соответствующими функ-
циями, описывающими ДН б\(/ф) и GXCQ, и что / = 0/Х , получим
выражение для пространственно-временной частотной характери-
стики системы обработки:
(10.76)
где Уф - частота настройки системы обработки (доплеровского фильт-
X ®ц0
ра); --- - пространственная частота настройки пространственного
фильтра (направление фазирования антенной системы РСА).
Сомножитель в квадратных скобках определяет результирую-
щую диаграмму направленности системы обработки, т.е. передаточ-
ную характеристику системы как пространственного фильтра (при
УфцО = 0ц(А = 0)‘
G(0) = GJ0)-
GA(X4/2rt)c
СЕ(Х/ф/2Г,) :
(10.77)
454
Глава 10
Воспользуемся аппроксимацией функции ДН вида
(ef
GA(e) = ^-G£(e); G£(0) = expUz242} = e W .
uo
Тогда
G(e)= e-^
2rt
Gz(0),
а ПВЧХ имеет вид
Д/,0) =
e-^L
©о
(10.78)
Из выражения (10.78) следует, что система обработки форми-
лы д ^4
рует ноль ДН в направлении неподвижного объекта 0П =------
2Ht
(G(0) = 0 при 0 = 0п), отраженный сигнал от которого принимается
доплеровским фильтром, настроенным на частоту Уф =Уц0.
На рис. 10.25 показан типичный вид модуля ПВЧХ, соответст-
вующей (10.78) при следующих значениях параметров: *к = 0,03 м;
Оо=3°; 77=0,02 0; Vt = 100 м/с; Уф = 80 Гц. Наклонная линия опреде-
ляет положение спектральной плотности помеховых отражений на
плоскости (У, 0). ПВЧХ формирует нулевой коэффициент передачи в
направлении
= 0,69°,
соответствующей частоте неподвиж-
ного объекта и совпадающего с центральной частотой настройки до-
плеровского фильтра.
Таким образом, алгоритм обработки траекторного сигнала в
такой системе СДЦ состоит из согласованной доплеровской фильт-
рации сигналов в суммарном и разностном каналах и пространст-
венной режекции помехи, путем формирования нуля диаграммы
направленности приемной антенны в точку подстилающей поверх-
ности, имеющую доплеровскую частоту, равную частоте сигнала
цели (рис. 10.25).
Селекция движущихся целей
455
Рисунок 10.25
ПВЧХ системы обработки моноимпульсной СДЦ
Мощность сигналов, отраженных от движущейся цели, с уче-
том (10.64) и (10.67) определяется выражением
(10.79)
и направлении ДН антенны 0цо = 0:
(10.80)
Мощность отражений от подстилающей поверхности в зависи-
мости от частоты настройки доплеровского фильтра, где наблюдает-
ся сигнал целиУф=У^о с учетом (10.65) и (10.66):
2лТс2/ф2
456
Глава 10
(10.81)
Коэффициент режекции /Сп(/ф) помехового сигнала в фильтре
синтезирования (настроенном на частоту f§) определяется отноше-
нием мощностей помехового сигнала в суммарном канале РЛС
РПВ£1Х (Д ) и на выходе алгоритма СДЦ (10.81).
В соответствии с (10.70),
(10.82)
(10.83)
При f= 0 выражение (10.83) совпадает с (10.71). С увеличением
частоты настройки фильтра эффективность подавления неподвиж-
ных объектов незначительно снижается, так как направления прихо-
да сигналов от неподвижных объектов соответствуют боковым лепе-
сткам ДНА моноимпульсной системы.
Мощность внутреннего шума на выходе системы обработки
(10.74) определяется суммой мощностей внутренних шумов каждого
G (0 )
из каналов приема с учетом весового коэффициента :
(0п )
(W2K.)
G^/2Vt)
(10.84)
Отношение мощности сигнала цели к мощности помех и внут-
реннего шума на выходе системы обработки 9с/(П+ш) (^i-ц) =
2К 2К„
при 0цО=Ои /ф=/ц=—!-ец+—i
л л
, имеет
вид
Селекция движущихся целей
457
где ^суш - отношение сигнал/шум по мощности на выходе системы
обработки; gn/IU - отношение мощности отражений от подстилаю-
щей поверхности на выходе системы обработки, соответствующих
элементу разрешения РСА, к мощности внутренних шумов системы
обработки.
Соответствующие (10.85) зависимости представлены на
рис. 10.26-10.28. Зависимости (рис.10.26) рассчитаны для следую-
щих условий: дсш=20дБ; дп/ш=40дБ; Х = 0,03 м; 0Ц=О°; 0о=3°;
Kt = 120 м/с. Время когерентного накопления Тс изменяется от 0,03
до 2 с.
Из (10.85) и рис. 10.26 следует, что с увеличением времени син-
тезирования Тс увеличивается отношение сигнал/помеха на выходе
линейной части системы обработки, что определяется увеличением
разрешения и, следовательно, степенью подавления отражений от
неподвижных объектов.
Рисунок 10.26
Графики эффективности селекции движущихся целей в моноимпульсном
селекторе РСА при различном времени синтезирования
458
Глава 10
Рисунок 10.27
Графики эффективности селекции движущихся целей в моноимпульсном
селекторе РСА при различной тангенциальной составляющей скорости Kt
полета носителя РСА
На рис. 10.27 и 10.28 представлены зависимости величины
^вых(Ки) при аналогичных рис. 10.26 расчетных параметрах и
Тс = 0,1 с при изменении Vt от 100 до 300 м/с (рис. 10.27) и при изме-
нении азимутального отклонения цели относительно РСН антенной
системы от 0° до 1,5° (рис. 10.28).
Алгоритм СДЦ (10.74) реализуется в виде:
Рисунок 10.28
Графики эффективности селекции движущихся целей в моноимпульсном
селекторе РСА при различном положении цели относительно РСН
Селекция движущихся целей
459
z~za(4)-k(4)zL(4)
*(/♦)=
са(е.) С»Н/2>Л.)
Ч(«.) е£(х/ф/2и,)'
(10.86)
где
zz(4)=jM0*Wj2#*'d'-
О
(10.87)
о
Схема РСА, реализующий рассмотренный алгоритм СДЦ, пред-
ставлена на рис. 10.29. БЦО системы обработки производит обработку
траекторного сигнала РСА способом гармонического анализа. На вы-
ходе БЦО Z-го и А-го каналов формируется соответствующие векторы
Zx и ZA комплексных отсчетов изображений, соответствующих ампли-
тудам сигнала на выходе доплеровских фильтров/^ (10.87).
Для вычисления коэффициентов компенсации Л?(/ф) необходимо
априорное знание коэффициентов усиления ДН каналов моноим-
пульсной антенны в направлении, соответствующем неподвижному
объекту 0П = X4/(2Kt).
На практике точные знания о форме ДНА отсутствуют. В этом
случае прибегают к адаптивному вычислению коэффициента ком-
пенсации на основе оценки отношения амплитуд сигналов фона в
Рисунок 10.29
Схема алгоритма СДЦ в РСА с моноимпульсной антенной системой
460
Глава 10
соответствующих доплеровских фильтрах и последующего усредне-
ния его по каналам дальности, например:
где п - номер канала дальности.
Число N элементов дальности, по которым производится усред-
нение, выбирается так, чтобы сигналы движущихся целей не оказыва-
ли влияние на точность вычисления коэффициента компенсации.
Исследования данного алгоритма СДЦ показывают его эффек-
тивность и возможность обнаружения целей, двигающихся с ради-
альными скоростями Игц > 2 м/с при обеспечении Ксук> 30 при отно-
шении мощности отражений от подстилающей поверхности, соот-
ветствующих элементу разрешения РСА, к мощности внутренних
шумов приемника qn/U1 < 30 дБ и отношении сигнал/шум по мощно-
сти ^с/ш 20 дБ.
Пространственно-временные методы СДЦ позволяют эффек-
тивно выделять сигналы движущихся целей, допчеровские частоты
которых соответствуют спектральной зоне отражений от непод-
вижных объектов, приходящих по главному лучу ДНА.
Данные методы СДЦ используют априорную взаимосвязь доп-
леровского сдвига частоты и направления прихода сигнала, отра-
женного от неподвижного объекта.
Сигнал движущейся цели, находящейся на том же азимуталь-
ном направлении, имеет дополнительный доплеровский набег, обу-
словленный ее радиальной скоростью относительно РСА.
Алгоритм СДЦ в РСА с моноимпулъсной антенной системой
реализуется согласованной доплеровской фильтрацией траектор-
ных сигналов в суммарном и разностном каналах и пространствен-
ной режекцией сигналов от неподвижных объектов, заключающейся
в формировании нуля диаграммы направленности приемной систе-
мы в направлении на точку подстилающей поверхности, имеющей
доплеровскую частоту равную частоте полезного сигнала.
Амплитуда сигнала движущейся цели на выходе моноимпулъс-
ного селектора прямо пропорциональна её радиальной скорости.
Эффективность подавления сигналов от неподвижных объектов в
моноимпулъсной РСА определяется квадратом коэффициента
сжатия ДНА К2Л .
' ' Vziv
Селекция движущихся целей
46]
Метод 2. СДЦ с остановленным фазовым центром
В РСА одними из эффективных систем выделения движущихся
целей являются системы, функционирующие с использованием ал-
горитмов СДЦ с остановленным фазовым центром.
Рассмотрим систему, состоящую из передатчика ПРД и двух
приемников ПРМ1 и ПРМ2 с одинаковыми антенными системами,
разнесенными на расстояние Ак (рис. 10.30). РЛС перемещается по
прямолинейной траектории с постоянной скоростью V. В момент
времени t излучаются передатчиком и принимаются приемниками 1
и 2 сигналы i (0 и огражённые от всех объектов, находящихся в
элементе разрешения по дальности в пределах ширины ДН антенны.
Фазы сигналов зЦ) и s2(f) определяются длиной волны РЛС и
соответственно суммой расстояний гПрд+гпрм1 и гПрд+гпрМ2 - от
передатчика до отражателя и от отражателя до приемников. В усло-
виях дальней зоны приема эти расстояния равны:
Г] (0 “ ГПРД + ГПРМ1 = R ~ ^COS(®ot — 0)^ +
Рисунок 10.30
Геометрические соошошения в РСА с остановленным фазовым центром
462
Глава 10
прд sin0 + R - Vcos(0OT - 0)z--sin0 =
-2R- 2 Vrt cos 6 - 2 V{t sin 0 + Апрд sin 0-- sin 0 ,
r2 = 2R - 2Vrt cos0 - 2Vj sin 0 + Апрд sin 0 + —-sin 0.
(10.89)
(10.90)
Для подавления сигналов от неподвижных объектов производят
весовое суммирование сигналов, принимаемых разнесенными в про-
странстве антенными каналами и в общем случае, разнесенными во
времени. Разнос во времени учтем, введя задержку сигнала At перво-
го приемного канала (ПРМ1) относительно второго (ПРМ2):
т\ (t - At) = 2R - 2ГГ cos 0 (/ - At) - 2Vtt sin 0 +
+ 2rtAt sin0 +Апрд sin0----sin0 .
(10.91)
При этом разность фаз сигналов первого и второго приемников
Аср - —(2ГГ cos 0At + 2KtAt sin 0 - Ax sin 0),
(10.92)
при обеспечении компенсации радиального фазового набега траек-
торного сигнала и малых углах 0 (или при боковом обзоре Vx = 0 м/с)
равна нулю при условии
ГД=Дх/2
(10.93)
независимо от положения неподвижного отражателя по азимуту в зо-
не обзора и положения передатчика относительно приемных антенн.
Таким образом, для подавления сигналов от неподвижных объ-
ектов в такой системе, необходимо:
1) скомпенсировать радиальное движение носителя РСА с цен-
тром зоны обзора (например, путем гетеродинирования);
2) сфазировать сигналы отражений от неподвижных объектов
(фона местности), используя задержку первого по ходу движения
А ‘
приемного канала на величину —— (для бокового обзора равную
2Kt
времени пролета половины расстояния между приемниками);
3) произвести суммирование сигналов на выходе приемников с ве-
сом А* =-1.
Селекция движущихся целей
463
Выполнение (10.93) называется условием совмещения фазовых
центров антенны.
Под фазовым центром понимается фазовый центр (ФЦ) систе-
мы передатчик-приемник, т.е. точка, равноудаленная от пере-
датчика и приемника.
В рассматриваемом случае - это совмещение фазовых центров
«ФЦ ПРД-ПРМ1» и «ФЦ ПРД-ПРМ2» (рис. 10.30).
Для бокового обзора (VY= 0 м/с) такой алгоритм СДЦ имеет вид
Z~ j ^(/-Д )-z2(/) h (/)е ck,
о
(10.94)
где zi(tf) и Z2(t) - траекторные сигналы в антенных каналах соответст-
венно;
опорная функция, компенсирующая
квадратичную фазу траекторного сигнала РСА.
В выражении (10.94) разность в квадратных скобках определяет
работу компенсатора, на выходе которого сигнал от неподвижного
объекта имеет вид
2л i \
j—^2/?-2^/sinO+A1IPj sinOj
A,
2 л A
j— 2 И At sin 6——sinG
P Ц 2
j—Arsine
-e x 2
A
2
.2л
= 2j/IG(e)eJx
2fl-2Ft t
sin б+Лцрд sinG
xsin
’Д-------
t t ~
sin 0 .
Сигнал движущейся цели на выходе компенсатора:
xsin
2л
1—
e
VA----
2Я-2ГгГ-2Г< t
-t
sinG^ ЛПрд smG^+2^
(10.96)
sinOp-^A't
t
464
Глава 10
При обеспечении равенства (10.93) выражение (10.95) обраща-
ется в 0, а (10.96) в выражение
^к(0 = 2].4цС(ец)х
2л( (
j— 2/?-2ГгГ-2Гг i
Л
хе
V
2 J
/
sin 0Ц +Дпрд s’n +2ИГЦ
(10.97)
Таким образом, на выходе компенсатора сигналы от неподвиж-
ных объектов подавляются, а уровень сигнала отраженного от дви-
жущейся цели определяется её радиальной скоростью, расстоянием
между приемными каналами и тангенциальной скоростью носителя
относительно центра кадра синтезирования.
Дальнейшая обработка сводится к когерентному накоплению
сигнала цели на фоне внутреннего шума приемника.
Схема РСА, реализующего рассмотренный алгоритм СДЦ, пред-
ставлена на рис. 10.31 и аналогична структуре алгоритма (10.86). БЦО
системы обработки производит обработку траекторного сигнала
РСА, например способом гармонического анализа. На выходе БЦО
1-го и 2-ю каналов формируется соответствующие векторы Zi и
комплексных отсчетов изображений, соответствующих амплитудам
сигнала на выходе доплеровских фильтровУф.
Задержка траекторного сигнала в одном из каналов приемника
осуществляется в частотной области на основе свойства преобразо-
вания Фурье, а алгоритм (10.94) реализуется в вице
или
Z-Z^J-e^Z.f/J
(10.98)
Коэффициенты компенсации К j = eJ“’7 At вычисляются из
условия (10.93) AZ=A по навигационным данным о величи-
не Vt. Ошибки навигационной системы определяют эффективность
подавления отражений от неподвижных объектов. На практике ис-
пользуют и адаптивные методы определения Л?(/^), подбирая вели-
чину А, из условия минимального уровня отражений ог подстилаю-
щей поверхности на выходе алгоритма, считая, что вклад в общий
уровень РЛИ сигналов от движущихся целей мал.
Селекция движущихся целей
465
Рисунок 10.31
Схема алгоритма СДЦ с остановленным фазовым центром
Рассмотренный алгоритм используется в РСА с антенной сис-
темой, имеющей разнесенные фазовые центры приемных каналов
(фазометрической антенной). При этом выполнение условия (10.93)
необязательно, хотя оно и обеспечивает максимальную эффектив-
ность СДЦ.
В общем виде алгоритм СДЦ с двуканальной фазометрической
антенной имеет вид
Z=j| s(t, х)-е s(?-At5x-Ax) х
о о
хе J2n/uo' J2”W .
(10.99)
Система, формирует два пространственных канала, сфазиро-
ванных на направление /^ц0 = 0иО/Х и смещенных в азимутальной
плоскости (в направлении оси ОХ) вдоль линии апертуры на вели-
чину Лх. Когерентное накопление сигналов на частоте /ф=/цо в кана-
лах, пространственно разнесенных на величину Дх, осуществляется с
относительной временной задержкой At. Весовой коэффициент
А Л
-j2n -а-Дх+ДД, -j2n
А A
К=е 4 “ ' =е 4-1 , обеспечивает синфазность сиг-
налов неподвижных объектов, что и обеспечивает их подавление при
вычитании.
Алгоритм (10.99) в системе обработки реализуется в виде:
466
Глава 10
—J2tt —-—At Д Гс
Z= jz,(t)e~32n^dt-e ' Jz2(/-A,Xj2’t/*zdZ;
о 0
(10.100)
L/2 Оцо
P -j2tt--x
zx(t} = J s(Z, x)e 1 dx;
-L/2
-L/2
Необходимо отметить, что при Д,= 0, алгоритм (10.100) соот-
ветствует алгоритму (10.74), с той лишь разницей, что в качестве ан-
тенной системы используется моноимпульсная фазометрическая
система. При Дг = 0, алгоритм (10.100) соответствует алгоритмам че-
респериодной компенсации.
Комплексная пространственно-временная частотная характери-
стика, соответствующая (10.100), описывается выражением
(10.101)
С учетом (10.64) и (10.67) мощность полезного сигнала на выходе
системы обработки определяется выражением, аналогичным (10.79):
(10.102)
При Л = /ф =
и направлении фазирования антен-
ны по нормали к раскрыву Оцо= 0:
вых
= 4 sin2
(10.103)
Селекция движущихся целей
467
Аналогично, мощность отражений от подстилающей поверх-
ности:
вых
(10.104)
При Оцо = 0
Коэффициент режекции помехового сигнала в фильтре синте-
зирования (настроенном на частоту /цо) определяется аналогично
(10.71), (10.83) и равен
(10.105)
Таким образом, степень режекции помехи в алгоритме (10.100)
определяется не только коэффициентом сжатия ДНА и размером
апертуры L приемного канала, но и величиной (2Р А, -Дх), равен-
ство нулю которой (10.93) определяет наивысшую степень подавле-
ния ситналов неподвижных объектов.
Мощность внутреннего шума на выходе системы обработки
(10.100) определяется суммой мощностей внутренних шумов каждо-
го из каналов приема с учетом весового коэффициента:
швы к
(10.106)
468
Глава 10
Отношение мощности сигнала цели к мощности помех и внут-
реннего шума на выходе системы обработки #с/(п+ш) в зависимости от
радиальной скорости цели при изменении временной задержки меж-
ду каналами приема А, показана на рис. 10.32 с учетом импульсного
зондирующего сигнала (неоднозначности по частоте). Расчеты про-
изведены для Лг=0,33; 0,5; 0,833; 1,25 мс; при частоте повторения
Fn = 1 кГц; Vt= 120 м/с; Ах = 0,3 м; времени когерентного накопле-
ния (синтезирования) Гс=0,1 с; ширине ДНА 00 = А,/Л = 3°; длине
волны - к = 0,03 м (L - ширина апертуры каждого из пространст-
венно разнесенных приемных каналов); 0ц=0цо-00; ^С/Ш=20дБ;
^П/1П = 40 дБ. Кривая, соответствующая Az = 1,25 мс, удовлетворяет
условию (10.93).
На рис. 10.32-10.34 представленные зависимости рассчитаны
с учетом влияния использования импульсного зондирующего сиг-
нала. При скорости, кратной 0,5XFn = 15 м/с, характеристики алго-
ритма селекции незначительно падают из-за влияния некомпенси-
рованных остатков помехового сигнала, ослабленных боковыми
лепестками ДНА.
На рис. 10.33, 10.34 представлены величины q в зависи-
мости от радиальной скорости цели при соблюдении условия
(10.93), при аналогичных расчетных параметрах рис. 10.32. На
рис. 10.33 показаны кривые при изменении Vt от 100 до 200 м/с при
Ах=0,Зм. На рис. 10.34 - при изменении Ах от 0,1 до 0,4 м при
Vt = 120 м/с.
Рисунок 10.32
Эффективность СДЦ в РСА с фазометрической антенной
при изменении временной задержки между каналами приема At
Селекция движущихся целей
469
Рисунок 10.33
Эффективность СДЦ в РСА с фазометрической антенной
при совмещении фазовых центров и различной тангенциальной
составляющей скорости носителя РСА И,
Особенностью функционирования алгоритмов с фазометриче-
ской антенной системой (10.98)—(10.100) является наличие слепых
скоростей. Сигналы целей, имеющие радиальные составляющие
скорости
(« = о,±1,±2, ...),
Л
ослабляются до нулевого уровня. Это определяется выражениями
(10.97) и (10.103), что физически соответствует формированию сис-
5 Ю 15 20 25 Гга, м/с
Рисунок 10.34
Эффективность СДЦ в РСА с фазометрической антенной при совмещении
фазовых центров и различном расстоянии Лт между приемными каналами
470
Глава 10
темой обработки результирующей многолепестковой ДНА, нули ко-
торой соответствуют направлениям режекции 0р:
6 =п-^--0п;п = 0,+1,±2,
А
у
(10.107)
где 0П - угловое положение области помеховых отражений, опреде-
ляемое частотой настройки доплеровского фильтра системы обра-
ботки еп = 4o/(2Ht).
Величина разноса фазовых центров каналов Ах определяет ка-
чество функционирования систем селекции с фазометрическими ан-
тенными системами (рис. 10.34). При увеличении размера Ах возрас-
тает количество слепых скоростей цели (рис. 10.32-10.34), однако
увеличивается эффективность выделения малоскоростных целей
(рис. 10.34) за счет меньшего уровня подавления полезного сигнала.
Высокая эффективность алгоритм СДЦ с фазометрическими
антенными системами обусловлена формированием пространствен-
но-временной АЧХ, которая обеспечивает подавление помеховых
отражений вдоль линии, соответствующей неподвижным объектам
(рис. 10.16). На рис. 10.35 представлен вид ПВЧХ системы (10.101)
при выполнении условия совмещения фазовых центров (10.93). Рас-
четы произведены для значений параметров, аналогичных рис. 10.25
и ДЛ = 0,3 м.
Рисунок 10.35
ПВЧХ системы обработки СДЦ с остановленным фазовым центром
Селекция движущихся целей
471
Линия минимального коэффициента передачи ПВЧХ системы
(10.101) совпадает с линией помех f = 2^0/Х, в отличие от ПВЧХ
алгоритма (10.74).
Уравнение линии режекции определяется соотношением
(10.108)
и совпадает с уравнением линии помех при выполнении условия со-
вмещения фазовых центров (10.93). Угол наклона линии определяет-
ся отношением Ax/(XAZ). При невыполнении условия совмещения ли-
ния режекции ПВЧХ не только меняет наклон в координатах (0,/),
но и смешается, что снижает качество подавления отражений от не-
подвижных объектов.
Подобные системы СДЦ, ПВЧХ которых формирую! линию
режекции совпадающую с линиеи помех, реализуются на основе ис-
пользования и амплитудных моноимпульсных ДНА.
Для устранения слепых скоростей в системах СДЦ с фазомет-
рической антенной системой применяют многобазовые методы об-
работки сигналов.
Следует отметить, что задача селекции движущейся цели и
подавления отражений от неподвижных объектов не решает задачу
определения истинного положения движущейся цели по азимуту.
Для измерения азимутального положения движущейся цели на фо-
не отражений от подстилающей поверхности необходимо исполь-
зовать системы с числом пространственных каналов более двух,
как минимум два из которых обеспечивают режекцию мешающих
сигналов.
Системы СДЦ с пространственно-временной обработкой сиг-
нала способны обнаруживать на фоне мощных отражений от Земли
движущиеся малоразмерные наземные цели с радиальными скоро-
стями единицы м/с.
Несмотря на большое разнообразие систем СДЦ с пространст-
венно-временной обработкой сигнала, все они так или иначе исполь-
зуют пространственно-многоканальную антенную систему и много-
канальную когерентную обработку сигналов (2 и более).
Выбор необходимого алгоритма СДЦ определяется решаемой
тактической задачей, возможностью размещения на ЛА многока-
нальных антенных систем и требованиями к быстродействию и объ-
ему памяти процессора обработки сигналов. При этом независимо от
способа обработки сигналов потенциальные характерист ики опреде-
472
Глава 10
ляются размером антенной системы, интервалом синтезирования и
отношением сигнал/фон.
Для повышения эффективности СДЦ необходимо увеличивать
размер антенны и число антенных каналов, а также разрешающую
способность по азимуту.
Алгоритмы СДЦ с остановленным фазовым центром имеют
более высокую эффективность подавления сигналов мешающих от-
ражении, обусловленную формированием ПВЧХ, которая обеспечи-
вает режекцию вдоль линии, связывающей направления прихода сиг-
налов от неподвижных объектов и их доплеровскую частоту, в пре-
делах всей полосы доплеровского фильтра, а моноимпульсный
селектор — в направлении, соответствующем центру доплеровского
фильтра.
Особенностью систем СДЦ с фазометрическими антенными
системами является наличие слепых скоростей, что обусловлено
формированием системой обработки результирующей многолепе-
стковой ДНА, нули которой соответствуют не только направле-
ниям на неподвижные объекты, но и направлениям, кратным от-
ношению длины волны X и расстоянию Ах между фазовыми цен-
yf
трами приемных каналов фазометрической РСА: 0п + л•
/7=1,2, ...
Селекция обнаруженных движущихся целей
по радиальной скорости
В РСА землеобзора при высокой разрешающей способности обеспе-
чивается эффективное обнаружение малоразмерных целей на фоне
отражений от земной поверхности независимо от того, движется
цель или нет. Цель, находящаяся в главном лепестке ДН антенны,
обнаруживается по превышению порога в доплеровском фильтре,
настроенном на частоту сигнала цели.
Таким образом, при высокой разрешающей способности РСА
или наблюдении целей на слабоотражающем фоне, когда задача об-
наружения решена, задача селекции движущихся целей сводится к
задаче измерения скорости обнаруженных целей.
Доплеровская частота Д отраженного сигнала определяется ра-
диальной скоростью Ггц, азимутом цели 0ц, а также скоростью носи-
теля РСА И:
Селекция движущихся целей
473
2V
—cos0L
(10.109)
Имея оценки азимута и доплеровской частоты сигнала, можно
определить радиальную скорость цели:
^=v-rcos§«-
(10.110)
Цель считается движущейся, если ее радиальная скорость пре-
вышает пороговое значение
V
ГЦ
> . Порог выбирается из условия
обеспечения заданного уровня ложного решения и зависит от оши-
бок измерения/ц, 0ц и V,
Для измерения угла 0L можно использовать моноимпульсную
антеннную систему. Синтезирование апертуры в суммарном канале
обеспечивает одновременное формирование РЛИ неподвижных и
движущихся целей, фона и измерение доплеровской частоты обна-
руженных сигналов целей. Разностный канал обеспечивает измере-
ние азимутальных углов целей. Оценки радиальных скоростей и уг-
лов позволяют селектировать движущиеся цели и определять их ис-
тинное положение по азимуту.
Оценка углового положения движущегося объекта с использо-
ванием ДНА производится относительно строительной оси носителя
РСА (рис. 10.36). В выражении (10.110) 0Ц соответствует азимуталь-
ному положению цели относительно вектора путевой скорости.
Точность измерения азимута цели относительно вектора путе-
вой скорости определяется ошибками измерения угла сноса и азиму-
та цели относительно строительной оси носителя РСА:
а при малых углах сноса а
; =rsin0OT.
Точность оценивания угла сноса определяется ошибками изме-
рения скорости оу полета носителя РСА: ~ • При комплек-
сировании инерциальной навигационной системы со спутниковым
приемоипдикатором (или с РЛС, функционирующей в режиме изме-
474
Глава 10
Рисунок 10.36
Геометрические соотношения при определении азимута движущейся цели
= В этом случае при
радиальной
рения скорости носителя) точность определения угла сноса состав-
ляет <та = 3. 10' (при = 0,1 ...0,5 м/с). При Оо=3° и отношении
мощности сигнала цели к мощности внутреннего шума на выходе
линейной части приемника РСА дс/ш = q0= 20 дБ точность антенных
измерений азимутального угла ае
Иг=200м/с точность измерения радиальной скорости цели
Oj = 1,2,... 1,6 м/с. Влиянием ошибок измерения/можно пренебречь.
Необходимо отметить, что если мощность сигналов, отражен-
ных от подстилающей поверхности, превышает уровень внутреннего
шума приемника РСА на выходе канала обработки, то точность из-
мерения параметров траекторного сигнала существенно зависит от
результирующего отношения мощности сигнала цели к суммарной
мощности внутреннего шума и отражений от фона местности. Вели-
чина последней в канале обработки сигнала определяется инте-
гральным уровнем боковых лепестков ФН траекторного сигнала
РСА. Проникновение сигналов отражений в элемент разрешения, в
котором наблюдается сигнал цели, по боковым лепесткам согласо-
ванного фильтра резко снижает точность измерений параметров
сигнала цели: задержки, доплеровской частоты и углового положе-
ния нормали к фазовому фронту, отраженной от цели волны.
Селекция движущихся целей
475
Потенциальные точности измерения азимута
и составляющих скорости движения цели в РСА
Потенциальную точность измерения азимута и составляющих ско-
рости движения цели в РСА можно определить на основе анализа
логарифма функционала правдоподобия, который формирует опти-
мальный приемник на своем выходе. Для случая приема полностью
известного сигнала на фоне нормального белого шума логарифм
функционала правдоподобия соответствует половине реальной части
ФН, определенной в комплексном виде.
Дисперсия оценки z-го параметра (/ = 1 - азимут, / = 2 - ради-
альная скорость, 1 = 3 - тангенциальная скорость) определяется вы-
ражением
(10.111)
где Ф - определитель информационной матрицы Фишера Ф; Ац
алгебраическое дополнение z-го элемента диагонали информацион-
ной матрицы Ф.
Элементы матрицы Ф определяются второй частной производ-
ной функции неопределенности в её максимуме:
при %! = 0 = 0; х2 = Кц = 0; х3 = Кц = 0, где - элементы ковариа-
ционной матрицы априорных ошибок измерения параметров.
ФН траекторного сигнала движущейся цели в РСА, осуществ-
ляющей равномерный прямолинейный полет и телескопический об-
— 71——
зор узконаправленной ДНА вида G(9) = e е° , определяется соот-
ношением
х W(/)е
или
476
Глава 10
а>
4еЛцЛц) = с1 2(е) Jexp<
—ОО
t2
(10.112)
Интегрирование (10.112) дает результат:
j(e^uZtu) = G2(e)|^
к
При этом информационная матрица Фишера имеет вид
Дисперсии ошибок измерения азимута (£>е), радиальной (£>г )
и тангенциальной ( Dv) составляющих скоростей составляет
1 , 4т?о ! 2го7о !______________1 ! ЗГсГг2
00 Зе2 1+ 1 X2 2тг/?2
?о^гп1
2_ 1 А2862
+ з№ \ 3T^D°V
(10.113)
Селекция движущихся целей
477
где De (О) = Dq , Dv^ (0) = Dy^ , Dv^ (О) = - априорная диспер-
сия ошибок измерения параметров 0, Сгц и ИГц соответственно.
В случае измерения азимута неподвижной цели
<М°) = М0) = 0’ из (10.113) следует, что
Для бокового обзора (Иг= 0):
(10.116)
4Wo
6о
Повышение точности измерений при увеличении отношения
сигнал/помеха q свойственно всем типам РЛС. Однако в РСА дис-
персия ошибки измерения азимута цели зависят, кроме того, от ско-
рости носителя, времени синтезирования и размера реальной антен-
ны (L - X/0О ).
478
Глава 10
При ширине синтезированного луча значительно меньше ши-
21
рины реальной ДНА 80 =--------« Оо точность измерения азимута
2nt7^
неподвижной цели определяется разрешающей способностью РСА
по азимуту 80 и отношением сигнал/помеха:
+ De,(0)
(10.117)
Второе слагаемое (10.106)—(10.107) определяется расфокуси-
ровкой цели, обусловленной ее отклонением по азимутальной коор-
динате относительно центра кадра синтезирования. Расфокусировка
проявляется при переднем, переднебоковом обзоре и отсутствует
при боковом (Кг= 0).
В случае измерения параметров движущейся цели, когда
о„ (0) = (0) = D, (0) —>00, потенциальная точность измерения
азимутальной координаты и составляющих скорости определяются
выражениями:
(10.118)
(10.119)
(10.120)
Для бокового обзора (Иг=0) выражения (10.118)—(10.120) при-
обретают известный вид:
Селекция движущихся целей
479
(10.121)
(10.122)
(10.123)
При наблюдении движущейся цели точность определения ее
азимутального положения определяется шириной реальной ДНА
РСА (10.107), что связано с неопределенностью азимут-радиальная
скорость - незнанием связи между доплеровской частотой прини-
маемого сигнала и азимутом цели (п. 10.2).
Точность измерения радиальной составляющей скорости дви-
жения цели в РСА (10.122) определяется неопределенностью её по-
ложения в ДНА относительно РСН - 0О, так как скорость сближения
с целью (10.99):
Кб=^ц + ^-
С увеличением путевой скорости или ширины ДН реальной ан-
тенны расширяется спектр доплеровских частот принимаемого сиг-
нала. ухудшается точность измерения частоты и, соответственно,
радиальной скорости движения цели.
Информацией о тангенциальном движении цели является из-
менение её азимутальной координаты за время накопления сигна-
ла Тс. Поэтому, чем выше разрешающая способность по азимуту и
чем больше интервал наблюдения, тем выше точность измерения
тангенциальной скорости. Дисперсия ошибки измерения танген-
циальной составляющей скорости в РСА (10.120) и (10.123) опре-
деляется шириной синтезированного и реального луча РЛС Оо
(при высоком разрешении РСА 56 « 0о - шириной синтезиро-
ванною луча РСА), а также интервалом синтезирования и дально-
стью до цели.
При высоком разрешении (Ксук » 1) точность определения тан-
генциальной скорости цели в основном зависит от разрешающей
способности РСА по азимуту 50.
Тангенциальная скорость цели приводит к расфокусировке ее
изображения по азимуту (доплеровской частоте). Поэтому расфо-
480
Глава 10
кусировка цели, обусловленная её положением относительно цен-
тра кадра синтезирования при переднебоковом обзоре (Гг^ 0), при-
водит к неопределенности при определении ее тангенциальной
скорости. Этим обусловлено снижение потенциальной точности
DV{ (10.120).
Селекция обнаруженных целей
по тангенциальной скорости
Существующие методы СДЦ, которые оценивают только радиаль-
ную составляющую скорости объекта, позволяют выделить не более
60 % движущихся наземных объектов военной техники. Введение
режима СДЦ по тангенциальной скорости позволяет селектировать
до 80...90 % таких объектов.
Согласованная обработка траекторных сигналов имеет низкую
чувствительность к тангенциальной скорости цели, что не позволяет
эффективно подавлять сигналы неподвижных целей и подстилаю-
щей поверхности для решения задачи СДЦ.
Однако при высокой разрешающей способности РСА движу-
щаяся с тангенциальной скоростью малоразмерная наземная цель
будет эффективно обнаруживаться в обычном режиме формирова-
ния РЛИ зоны обзора. В этом случае задача селекции движущейся
цели сводится к измерению тангенциальной скорости обнаруженной
цели.
Рассмотрим вариант бокового обзора (0н=90°; 0ц=0°). Точеч-
ная цель движется с постоянной тангенциальной скоростью:
Kut= const. 1 раекторный сигнал, отражённый от цели в элементе раз-
решения по дальности в суммарном канале
(10.124)
где , (р0 - амплитуда и начальная фаза, отраженного от цели сиг-
нала; г(/) - закон изменения расстояния РСА цель.
Закон изменения расстояния РСА- цель для случая бокового об-
зора можно представить в виде
(10.125)
Селекция движущихся целей
481
где R - расстояние от РЛС до центра кадра синтезирования в момент
времени t — 0.
Учитывая, что фаза сигнала
и полагая, что
= 1, траекторный сигнал:
(10.126)
Так как скорость наземных целей гораздо меньше скорости но-
J/2
сителя РЛС ( Ktu « Vt), то членом ——Г можно пренебречь.
27?
Комплексная амплитуда J на выходе системы обработки, со-
гласованной с сигналом неподвижной цели,
t >dt =
(10.127)
Амплитуда J выходного сигнала (радиолокационного изо-
бражения) от величины тангенциальной скорости цели зависит не-
значительно:
(10.128)
где Ц = 2Г,Г /OR).
Фаза сигнала (рц изменяется гораздо существеннее:
482
Глава 10
(10.129)
Однако однозначное определение тангенциальной скорости це-
ли по фазовой характеристике выходного сигнала невозможно, так
как фаза сигнала РЛИ <рц зависит не только от параметров движения
цели, но и случайной начальной фазы. Для решения задачи селекции
необходимо введение второго канала синтезирования. В роли такого
канала может выступать вторая, смещённая по траектории апертура,
или апертура другой длительности синтезирования.
Рассмотрим случай использования синтезированных апертур
различной длительности. Амплитуда и фаза сигнала при двух раз-
личных значениях длительности синтезирования Тс\ и Тсг имеют
вид:
Для малых значений х, при которых arctg х » х оценка танген-
циальной скорости находится с помощью выражения
(10.132)
где Аф = (рц1 - (рц2 - оценка разности фаз выходных сигналов, фор-
мируемых двумя каналами.
Работа алгоритма селекции движущихся целей заключается в
сравнении разности фаз сигналов, отражённых от цели, с порогом /?9.
При превышении порога /?9 принимается решение о том, что цель
движется.
Величина порога /?ф определяется траекторными нестабильно-
стями носителя РСА, мощностью внутренних шумов приемника и
фона местности, нестабильностью функции отражения объекта, а
также случайным изменением фазы сигнала при смене интервала
синтезирования («неточечностью» цели).
Анализ выражения (10.132) показывает, что для повышения
точности оценки тангенциальной скорости цели необходимо увели-
Селекция движущихся целей
483
чивать различия в интервалах синтезирования так, чтобы длитель-
ность накопления траекторного сигнала первой апертурой 771 была
минимальной, а второй ГС2 - максимальной. При этом следует учи-
тывать, что максимальное время синтезирования определяется тре-
буемой разрешающей способностью, а минимальное время синтези-
рования ограничивается необходимостью обнаружения цели с за-
данной вероятностью.
На рис. 10.37 приведены графики зависимости СКО оценки
тангенциальной скорости от соотношения длительностей первой и
второй апертур при следующих параметрах: наклонная дальность
R = 35 км, длина волны 7. = 0,03 м, скорость полёта носителя
Kt = 200 м/с, время синтезирования второй апертурой ТС2 = 1 с. В ка-
честве цели рассматривался движущейся объект (<зц = 4 м2), наблю-
даемый на фоне различных подстилающих поверхностей. Из графи-
ка следует, что минимальное значение СКО оценки тангенциальной
скорости цели обеспечивается при Гс1 = (0,5...0,8)ГС2.
Влияние «неточечности» цели на функционирование алгоритма
показано на рис. 10.38. В качестве сигнала, отражённого от неточеч-
ной цели, использовалась сумма двух сигналов, отражённых от двух
точечных отражателей, имеющих одинаковую тангенциальную ско-
рость, но разнесённых в пространстве на различное расстояние Ах в
пределах размера цели (б/ц). Из рисунка следует, что в случае, когда
цель точечная (с1ц « 0), ошибки оценивания тангенциальной скорости
цели минимальны, а при du « Ах - максимальны. Неточечность цели
более, чем в 3 раза снижает эффективность данного алгоритма.
Рисунок 10.37
Графики зависимости СКО оценки тангенциальной скорости цели
от соотношения длительное гей первой и второй апертур
484
Глава 10
Рисунок 10.38
Влияние «неточечности» цели на ошибки оценивания Vut
Алгоритм селекции движущихся целей
по их тангенциальной скорости (рис. 10.39)
Этап 1. Формировании двух кадров комплексных изображений
одного и того же участка местности (траекторный сигнал второго
кадра соответствует другому интервалу синтезирования) J2.
Этап 2. Обнаружение сигналов целей на фоне отражений от
подстилающей поверхности (пороговая обработка по амплитуде П).
Этап 3. Оценка разности фаз сигналов обнаруженных целей
Дф в двух каналах.
Этап 4. Пороговая обработка разности фаз: при превышении
порогового значения разности фаз /?ф принимается решение, что
цель движется.
Рисунок 10.39
Структура алгоритма СДЦ по тангенциальной скорости
Селекция движущихся целей
485
В РСА с высокой разрешающей способностью обеспечива-
ется обнаружение малоразмерных как движущихся, так и непод-
вижных наземных целей на фоне отражений от земной поверх-
ности.
Задача селекции движущихся целей в этом случае решается
путем измерения параметров отраженного сигнала.
При этом для обеспечения селекции движущихся целей по
радиальной скорости и преодоления неоднозначности «азимут-
доплеровская частота» используются доплеровская фильтрация
траекторного сигнала РСА и антенные измерения.
Для селекции цели по тангенциальной скорости используют
измерения параметров фазовой модуляции траекторного сигнала
РСА на основе фазовых измерений и спектрального анализа.
Потенциальная точность определения азимутальной коор-
динаты движущейся цели определяется шириной ДН реальной ан-
тенны, а точность измерения радиальной скорости цели - дли-
тельностью интервала синтезирования.
Реальная точность измерения азимута движущейся цели оп-
ределяется ошибками измерения вектора скорости носителя РСА.
Потенциальная точность определения тангенциальной
скорости движущейся цели зависит от разрешающей способно-
сти РСА по азимуту 80, а также интервала синтезирования и
дальности до цели.
Эффективность решения задачи СДЦ по радиальной скоро-
сти с использованием антенных измерений азимутальной коорди-
наты движущейся цели определяется не только точностью угло-
мера, но и ошибками определения положения вектора скорости
носителя РСА.
Данная задача решается навигационной системой носителя
РСА, либо использованием специальных режимов функциониро-
вания РСА, позволяющих автономно определить составляющие
скорости (режим ДИСС и др.).
Одним из методов измерения тангенциальной скорости
движения цели является использование двух комплексных
изображений объектов на различных по длительности интер-
валах синтезирования.
Измерение разности фаз сигналов изображений одних и
тех же объектов пропорциональна их тангенциальной скорости.
Однако «неточечность» цели и фазовые шумы (траектор-
ные нестабильности) снижают эффективность алгоритма в не-
сколько раз.
486
Глава 10
Измерение тангенциальной скорости цели на основе оце-
нивания параметров модуляции сигнала отраженного от цели
может использоваться совместно с пространственно-временны-
ми алгоритмами подавления мешающих отражений от непод-
вижных объектов.
ГЛАВА 11
Распознавание целей
11.1. Решение задач распознавания целей
Вопросы распознавания целей являются наиболее активной обла-
стью исследований теории радиовидения. Количество задач, направ-
лений исследований и объемы уже полученных результатов требуют
отдельного детального рассмотрения.
В данной главе рассмотрены только основные направления ре-
шения задач распознавания целей.
Задача распознавания целей сводится к селекции (выделению)
заданных для вскрытия объектов (целей) среди других обнаружен-
ных объектов естественного и искусственного происхождения. В за-
дачу распознавания входит также определение класса (типа) выде-
ленных объектов и их функционального состояния.
Особенно важной и ответственной задачей при принятии реше-
ния является распознавание специальных ложных целей (надувных
макетов, уголковых отражателей и т.п.), а также объектов по при-
надлежности «свой - чужой».
Распознавание целей является наиболее сложной задачей ра-
диолокационного наблюдения, требующей для своего решения
большой априорной информации.
Так, вероятность распознавания определяют:
• ансамбль распознаваемых целей;
• априорные сведения о классе и функциональном состоянии на-
блюдаемых целей;
• свойства выбранных распознавательных признаков;
488
Глава 11
• алгоритм принятия решения о классе цели и его функциональ-
ном состоянии.
В качестве ансамбля распознаваемых целей принимается набор
типовых наблюдаемых объектов при решении заданной тактической
задачи. При этом каждый раз при определении вероятности распо-
знавания целей предполагается наличие двух целей с наиболее близ-
кими характеристиками, т.е. наихудший случай. Кроме того, исполь-
зуются априорные сведения о наличии той или иной цели.
Обычно критерием выбора распознавательных признаков и ме-
тодов повышения их эффективности является «принцип разумной
достаточности», так как формирование новых и повышение характе-
ристик используемых признаков требует перераспределения (расхо-
дования) располагаемых ресурсов (вычислительных, энергетиче-
ских, временных) РСА, которые всегда ограничены критическими
технологиями и тактическими требованиями.
В качестве алгоритма распознавания обычно используется пра-
вило минимизации среднего риска.
Возможный набор распознавательных признаков при радиоло-
кационном наблюдении определяется характеристиками отражения
целей и точностью их оценки. Перспективные РСА обеспечивают
эффективную оценку практически всех параметров отражения объ-
ектов, если используются:
• большие антенные системы типа АФАР с оптимальной про-
сзранственной обработкой отраженной ЭМВ;
• широкополосные зондирующие сигналы;
• длительные интервалы синтезирования с траекторным управ-
лением;
• различные диапазоны радиоволн от К до UHF\
• полное поляризационное зондирование;
• разнесенное во времени и пространстве наблюдение.
В свою очередь, точность оценки характеристик отражения оп-
ределяется алгоритмами оценки и точностью калибровки аппарату-
ры и программного обеспечения РСА.
Характеристики отражения целей
для формирования распознавательных признаков
• Детальность (пространственное разрешение).
• Координаты разрешаемых элементов.
• Комплексная амплитуда и ЭПР сигналов элементов.
Распознавание целей
489
Поляризационные характеристики (амплитуда и фаза сигналов
элементов на различных поляризациях).
Динамика изменения координат элементов (СДЦ).
Динамика изменения комплексных амплитуд сигналов элементов.
Интерферометрия по углу места (рельеф).
Характеристики в различных диапазонах волн.
Статистические характеристики координат и амплитуд сигналов.
11.2. Распознавательные признаки объектов
Характерные размеры РЛИ объекта
К характерным размерам объекта относятся его длина, ширина,
высота, площадь и объем, определяемые числом элементов разреше-
ния в РЛИ объекта. Дополнительным признаком является форма
РЛИ объекта.
На рис. 11.1 дан график зависимости вероятности классифика-
ции цели Рк от числа элементов разрешения N3 на характерном
размере изображения.
Решение задачи селекции
ложных целей, имеющих такие же
характерные размеры, как и за-
данные цели, требует привлечения
дополнительных распознаватель-
ных признаков.
Амплитудный
портрет объекта
Амплитудный портрет — это
детальное изображение объ-
екта в виде распределения
амплитуды отраженного сиг-
нала по элементам разреше-
ния РЛИ.
Рисунок 11.1
График зависимости вероятности
классификации цели от числа эле-
ментов разрешения РЛИ цели
490
Глава 11
В качестве распознавательных признаков используются стати-
стические характеристики сигнала.
Значение ЭПР, полученное усреднением реализаций амплитуды
РЛИ за несколько обзоров, характеризует распределение отражающей
способности объекта по элементам разрешения.
Корреляционная функция характеризует взаимосвязь амплитуд
РЛИ как в разрешаемом элементе от обзора к обзору, так и между
элементами. Рассматриваются также законы распределения плотно-
сти вероятности амплитуд РЛИ.
Трудностью использования этих признаков является получение
банка данных для заданного класса (типов) объектов, что требует
больших экспериментальных работ. Рассматривается также возмож-
ность расчета на ЭВМ статистических характеристик РЛИ объектов.
Так как амплитудный портрет цели значительно изменяется
уже при повороте цели по азимуту всего на 1°, а также при измене-
нии угла места и в результате затенения отдельных элементов цели
требуется огромный объем данных об отражающих свойствах каж-
дой цели.
Для уменьшения объема данных возможно использование доста-
точно устойчивых (квазиинвариантных) к повороту и затенению цен-
тров отражения целей, их взаимного расположения и мощности отра-
женного сигнала.
Трехмерный портрет объекта
Обычно РЛИ объекта формируется в виде плоской картины в проек-
ции на земную поверхность. В то же время значительная информа-
ция о классе и типе объекта заключена в высоте объекта. Кроме есте-
ственного изменения высоты земной поверхности (рельефа местно-
сти) РСА позволяет получать изображение микрорельефа объекта, т.е.
изменение рельефа местности, связанное с наличием вскрываемого
объекта (капониры, карьеры, отдельные сооружения, техника и т.п.).
При малых углах визирования и расположении объектов на
плоской поверхности Земли они создают радиолокационные тени,
по которым судят о высоте объекта. Длина тени при малых углах
наблюдения = /г/<рн , где h - высота объекта; (рн — угол визиро-
вания (в рад). Так, при угле визирования 6° объект высотой h = 10 м
дает тень длиной 100 м.
Распознавание целей
491
При средних и больших углах визирования, а также при слож-
ном характере рельефа Земли в районе объекта метод радиолокаци-
онных теней не работает. Поэтому для измерения высоты объекта
используют угломерный способ с помощью реальной антенны РСА.
Чем больше размер антенны, тем выше точность измерения высоты.
Для упрощения конструкции антенны обычно используют две раз-
несенных в угломестной плоскости антенны (интерферометр). Раз-
ность фаз сигналов одного и того же разрешаемого по дальности и
азимуту элемента объекта, принимаемых антеннами интерферомет-
ра, пропорциональна высоте объекта. По этой информации строится
трехмерный портрет объекта. Основным направлением развития та-
ких интерферометрических РСА является повышение точности из-
мерения высоты. Для этого увеличивают разнос антенн и повышают
точность измерения разности фаз.
Большой разнос антенн возможен при последовательном фор-
мировании двух синтезированных апертур на разных высотах.
Для уменьшения влияния растительности, покрывающей объ-
екты, интерферометрическая РСА может работать в дециметровом
диапазоне.
Поляризационные портреты объекта
Развитие техники антенн-поляриметров дало возможность формиро-
вать полную поляризационную матрицу функции отражения объек-
та. При этом РЛИ объекта, полученные при различных поляризаци-
ях, несут информацию о конструкции и структуре материала объек-
та. Так, значительно отличаются РЛИ объектов естественного и
искусственного происхождения в зависимости от поляризации, а
также у специальных ложных целей. Основной проблемой при соз-
дании полнополяриметрической РСА является значительное услож-
нение аппаратной и программной (алгоритмической) частей. Факти-
чески работают параллельно три канала приема сигнала и обработки
данных. Также весьма сложной задачей является определение (в ос-
новном экспериментальное) поляризационной матрицы функции от-
ражения объектов для различных условий наблюдения.
Далее рассматриваются некоторые алгоритмы оценки поляри-
зационных характеристик РЛИ и их взаимосвязь с отражающими
свойствами объекта.
Средняя интенсивность сигнала s
2
пропорциональна ЭПР о
элемента разрешения РЛИ:
492
Глава 11
DD
*^ГВ
2
^вг = °
(11.1)
Почная интенсивность элемента РЛИ:
2
вв
2
ГВ
(П-2)
^Z
Макси.мум интенсивности:
*$гв
2 - диффузное отражение;
2
нечетное отражение (от трехгранного уголка, сфе-
5ГГ
ры, нормальной к облучению плоскости);
*$гг *^вв
корабля и т.п.).
Коэффициент депочяризации:
2
вв
2
четное отражение (от двухгранного уголка, борта
5ГГ
вв
^z
R = 0 - отражение от сферы;
R = 1 - отражение от двухгранного уголка;
R = 0,5 - отражение от диполя.
Когерентные отражатели:
(фгг - <рвв) = 0 (нечетное переотражение);
(фгг - <рвв) = +я (четное переотражение).
Когерентность сигналов:
^вь^гг
V гг вв
больше у открытой местности, чем у леса и кустарников.
Многочастотный портрет объекта
Функция отражения объекта изменяется значительным образом в за-
висимости от отношения размеров неоднородностей его структуры
(конструкции и материалов) и длины волны РСА. Закономерности
Распознавание целей
493
отражения электромагнитных волн (диффузное, зеркальное, резо-
нансное и др.) достаточно хорошо известны, что позволяет опреде-
лять изменение функции отражения конкретных объектов при смене
частоты излучения РСА. Рассматривая эти закономерности, обычно
отмечают три резко различающихся по характеру функции отраже-
ния диапазона частот: сантиметровый (X = 3 см ), длинный децимет-
ровый (- 70 см ) и метровый (X = 2,5 м).
Рассматриваются также сверхширокополосные системы в диа-
пазонах 215...900 МГц и 100...600 МГц, которые могут работать в
двух поддиапазонах - дециметровом и метровом - с полосой частот
100 МГц. Высокое разрешение по азимуту и дальности позволяет
получать детальные изображения объектов в различных диапазонах
волн.
Динамический портрет объекта
Движение объекта и его отдельных частей является одним из самых
важных распознавательных признаков, который лежит в основе не
только распознавания класса и типа, но и функционального состоя-
ния объекта.
Задача формирования динамического портрета отдельных со-
средоточенных объектов, наблюдаемых на фоне подстилающей по-
верхности, решается на различных уровнях.
В первом случае используется режим СДЦ. который позволяет
селектировать движущиеся объекты по их радиальной скорости.
Основное направление развития режима СДЦ - снижение мини-
мальной радиальной скорости цели, при которой принимается реше-
ние о движении объекта. В настоящее время считается возможным
обнаружение целей., движущихся со скоростью 1...2 м/с. При этом
для подавления сигнала неподвижного фона используют антенну с
лвумя разнесенными вдоль линии пути фазовыми центрами.
В режиме СДЦ осуществляется не только селекция, но и изме-
рение радиальной составляющей скорости и азимута объектов. Для
этого используется пространственно-временная обработка сигналов,
при которой необходима антенна с тремя и более фазовыми центра-
ми. Возможно также одновременное измерение тангенциальной и
радиальной составляющих скорости объекта при точност и измере-
ния порядка 2.. .3 м/с.
При распознавании движущегося (вращающегося) объекта воз-
можно получение детального РЛИ методами обратного (инверсного)
494
Глава 11
синтезирования. При этом даже небольшое изменение угла наблю-
дения объекта (угол поворота объекта относительно линии объект
РСА) или его отдельных элементов позволяет получить высокое
разрешение. Например, при изменении угла на Pf возможно разре-
шение в плоскости поворота, равное 5... 10 длинам волн, независимо
от дальности наблюдения.
Вторым основным направлением использования динамическо-
го портрета является определение функционального состояния объ-
екта. Боевая работа (стрельба, пуск ракет), а также маневрирова-
ние, движение отдельных частей объекта, работа двигателя вызы-
вают пространственно-временную модуляцию функции отражения
объекта и соответственно траекторного сигнала РСА. Обнаружение
и определение параметров этой модуляции позволяет распознавать
объект (класс, тип, ложная цель) и судить о его функциональном
состоянии.
В случае распределенного объекта (например, водной поверх-
ности) имеется возможность формирования динамического (частот-
ного, фазового) портрета поверхности. Так, скоростной портрет
морской поверхности (радиальная скорость движения морской по-
верхности в координатах «дальность - азимут») позволяет опреде-
лять степень регулярного волнения, турбулентности различного ро-
да, течения. Скоростной портрет позволяет обнаруживать и распо-
знавать морские объекты по их следам на морской поверхности,
определять степень волнения в интересах судовождения и участки
загрязнения (экология, следы катастроф).
Важным распознавательным признаком являются также кон-
фигурация и взаимное перемещение группы объектов, что зребует
точного измерения координат и вектора скорости всех объектов
в группе.
Возможна также оценка изменений в двух разнесенных по времени
формирования РЛИ:
• общая мощность отраженного сигнала в каждом элементе раз-
решения Р^/Р^ ;
• отдельная поляризационная составляющая мощности;
• когерентность отраженного сигнала.
Селекция ложных целей
Проблема селекции (выделения) среди обнаруженных объектов спе-
циально созданных ложных целей, схожих по ряду распознаватель-
Распознавание целей
495
ных признаков с заданными объектами, является одной из наиболее
сложных.
Методы создания ложных целей непрерывно совершенствуются.
На первом этапе в качестве ЛЦ использовались уголковые отражате-
ли с ЭПР, равной ЭПР объекта. С ростом разрешающей способности
потребовались более сложные по конфигурации ложных целей, ко-
торые стали повторять геометрический образ объекта (например, на-
дувные макеты), что определяло сходство РЛИ объекта и ложной
цели. Буксируемые (движущиеся) ЛЦ повторяют динамику движе-
ния объекта.
Основным направлением решения задачи селекции ЛЦ является
увеличение числа распознавательных признаков объекта, форми-
руемых РСА.
Основные распознавательные признаки объектов
при их наблюдении РСА
• Характерные размеры РЛИ объектов.
• Амплитудные портреты объектов.
• Поляризационные портреты объектов.
• Трехмерные портреты объектов.
• Многочастотные портреты объектов.
• Динамические портреты объектов.
ГЛАВА 12
Помехозащ ищенностпъ
радиолокационной системы землеобзора
с синтезированием апертуры антенны
12.1. Помехозащищенность
радиолокационной системы землеобзора
в условиях радиоэлектронной борьбы
Помехозащищенность является важнейшей характеристикой РСА,
определяющей возможность эффективного решения функциональ-
ных задач в условиях ведения радиоэлектронной борьбы (РЭБ).
Радиоэлектронная борьба определяется как комплекс меро-
приятий и действий конфликтующих сторон, направленных на обна-
ружение и радиоэлектронное подавление КРЭП) радиоэлектронных
средств (РЭС) противника и радиоэлектронную защиту своих РЭС
от преднамеренных и непреднамеренных помех, а также техниче-
ской разведки сигналов РЭС.
При этом помехозащищенность РЭС характеризует способ-
ность выполнения функциональных задач с заданной эффективно-
стью в условиях воздействия преднамеренных и непреднамеренных
помех, а также возможность противодействовать радиотехнической
разведке (РТР) своих сигналов.
Анализ помехозащищенности требует системного (целостного)
подхода с учетом всех структур, участвующих в РЭБ, взаимосвязей
целей, задач и критериев оценки их функционирования в динамике
взаимодействия и развития. Динамика взаимодействия (противобор-
ства) средств и способов РЭП и РТР составляет основу РЭБ. В этом
Помехозащищенность радиолокационной системы землеобзора...
497
смысле помехозащищенность, как часть РЭБ, является военно-
технической категорией и означает способность реализовывать це-
левую функцию при организованном противодействии противника.
Помехозащищенность РЭС достигается путем сочетания обо-
ронительных и наступательных действий (рис. 12.1).
Наступательные действия
• Уничтожение постановщиков помех, например ударной авиа-
цией путем наведения ракет на источник излучения.
• Радиоэлектронное подавление средств РТР и управления стан-
циями активных помех противника (контрРЭП).
Оборонительным действиям
• Защита РЭС от конкретных помех и технической разведки, ко-
торая обеспечивается совокупностью устройств и алгоритмов
РЭС, в том числе адаптацией к помехоцелевой обстановке, ре-
зервированием и комплексированием каналов.
• Повышение скрытности излучения, имитации и маскировки.
Оценка помехозащищенности РЭС требует знания сил и
средств РЭБ, возможностей и ТТХ систем противника, взаимной
Рисунок 12.1
Применение РСА в условиях РЭБ
498
Глава 12
информации о действиях РЭП и РТР (тактика применения). Поэто-
му характеристики помехозащищенности могут быть определены,
если заданы все возможные условия функционирования РЭС (поме-
хоцелевая обстановка) и их изменения в процессе РЭБ.
Помехозащищенность как часть РЭБ оценивается по многим
критериям: информационный, энергетический, оперативно-тактиче-
ский и военно-экономический. Учитывая сложный многофакторный
характер взаимодействия РЭС и систем РЭП в процессе РЭБ, рас-
смотрим только технические характеристики конфликтующих сис-
тем, которые определяют частные показатели защиты РЭС от кон-
кретных помех, входящих в общую оценку помехозащищенности.
Применительно к РСА землеобзора помехозащищенность оп-
ределяется скрытностью и помехоустойчивостью работы.
Скрытность характеризует степень защищенности излучаемых
сигналов РСА от обнаружения и измерения их параметров сис-
темой РТР противника.
Помехоустойчивость характеризует эффективность функцио-
нирования РСА в условиях воздействия заданных помех.
Таким образом, показатели помехозащищенности определяют-
ся в результате анализа антагонистического конфликта систем РТР,
РЭП и РСА в условиях РЭБ. Так, создание эффективных помех ра-
боте РСА землеобзора возможно только при наличии достаточно
полной информации о параметрах излучения РСА. Поэтому система
непосредственной РТР комплекса РЭБ противника должна осущест-
влять с требуемой эффективностью обнаружение и оценку парамет-
ров сигналов РСА в интересах РЭП.
В свою очередь, эффективность решения задач РТР зависит от
характеристик излучаемых сигналов РСА, а эффективность воздей-
ствия помех зависит не только от вида помех, но и от алгоритмов
обработки сигналов РСА.
12.2. Скрытность работы
радиолокационной системы землеобзора
Хотя скрытность и помехоустойчивость РСА взаимосвязаны, прежде
всего, со структурой и алгоритмами обработки сигналов, целесооб-
Помехозащищенность радиолокационной системы землеобзора...
499
разно рассматривать их характеристики отдельно. Это обусловлено
последовательностью действий конфликтующих сторон в ходе РЭБ.
На рис. 12.2 представлена функциональная схема информаци-
онного конфликта РСА и комплекса РЭП в виде станции активных
помех (САП). Информационное обеспечение САП выполняет стан-
ция непосредственной радиотехнической разведки (НРТР).
На приемные антенны НРТР приходит поток сигналов РСА и
других источников излучения, находящихся в зоне приема НРТР.
Обнаружение и определение параметров излучения (несущую часто-
ту, модуляцию, направление прихода) выполняет приемное устрой-
ство. На основе анализа полученных и хранящихся в базе данных
характеристик сигналов распознаются источники излучения и при-
нимается решение на подавление работы РСА.
На основе сведений о параметрах рациональных (оптимальных)
помех для обнаруженных сигналов РСА, хранящихся в базе данных
САП, формируется, усиливается (генерируется) и излучается поме-
ховый сигнал в направлении РСА.
Процессор РСА анализирует помехоцелевую обстановку и из-
меняет параметры зондирующего сигнала и алгоритм обработки
принимаемых сигналов и помех с целью оптимизации решения за-
данной тактической задачи, например картографирования.
Далее процесс противодействия РЭП и РСА повторяется. Важ-
но отметить, что в информационном конфликте с РЭП инициатива
принадлежит РСА. Реакция РЭП на появление сигналов РСА всегда
Рисунок 12.2
Схема информационного конфликта РСА и комплекса РЭП
500
Глава 12
запаздывает. Чем непредсказумее начало излучения и изменение па-
раметров сигналов РСА, тем больше запаздывание помехи и тем
больше эффективность работ ы РСА в условиях РЭБ.
Скрытность работы РСА определяется как свойствами излу-
чаемого сигнала, так и возможностями системы НРТР по обнаруже-
нию и измерению их параметров.
Основные характеристики HP ТР
• Рабочая чувствительность.
• Перекрытие по диапазону и одновременная (мгновенная) поло-
са частот приема.
• Точность измерения параметров сигналов.
• Запаздывание реакции
• Пропускная способность.
Рабочая чувствительность — это минимальная мощность сиг-
нала Р на входе приемника НРТР, при которой обеспечивает-
ся решение задач радиотехнической разведки с заданной эф-
фективностью.
Рабочая чувствительность НРТР изменяется в очень широких
пределах в зависимости от вида сигнала и типа приемного устройства.
Так, потенциальная чувствительность (с/ш = 1) определяется
спектральной плотностью внутренних шумов приемника, которая
обычно равна -130 дБ относительно 1 Вт при полосе Afn =10 МГц.
Кроме внутренних шумов на входе приемника РТР присутствуют
внешние шумы, обусловленные многочисленными источниками из-
лучения.
Здесь и далее все числовые примеры носят оценочный (иллюст-
ративный) характер. Для РСА землеобзора характерны широкие поло-
сы частот зондирующего сигнала (100...500 МГц), определяемые тре-
буемым разрешением по дальности (1,5...0,3) м. Поэтому даже по-
тенциальная чувствительность не превышает (-100...-110) дБ/Вт
при работе по сигналам РСА.
В настоящее время в качестве приемных устройств используют
детекторные (энергетические) и супергетеродинные приемники.
Супергетеродинные приемники обеспечивают чувствительность,
близкую к потенциальной. При этом для просмотра всего диапазона
частот (1...10 ГГц) используют быструю перестройку приемника
(1...4 ГГц/c) при одновременной полосе анализа 2... 10 МГц. После-
довательный просмотр диапазона частот приводит к пропуску сиг-
Помехозащищенность радиолокационной системы землеобзора...
501
налов и ошибкам измерения частоты. При быстрой перестройке не-
сущей частоты сигнала РСА (от импульса к импульсу) последова-
тельный анализ диапазона частот приводит к недопустимым ошибкам.
Поэтому перспективные системы НРТР строятся по многока-
нальной схеме с мгновенным измерением частоты (МИЯ), когда
весь диапазон частот разбивается на прилегающие друг к другу по-
лосы шириной 5...10 МГц. Анализ и запоминание несущей частоты
и модуляции сигнала осуществляются цифровым процессором с вы-
соким быстродействием (109... 101° опер./с).
Отношение сигнал/шум на выходе каждого канала определяет
эффективность решения задач обнаружения и оценки параметров
принимаемых сигналов. Обычно при обнаружении сигнала задаются
величины правильного обнаружения Рпо =0,5...0.7 и ложней трево-
ги РЛТ =10 6...10-) в каждом стробируемом элементе сигнала, чю
требует величины отношения сигнал/шум 13... 15 дБ.
С учетом всех шумов и потерь рабочая чувствительность, т.е.
минимально необходимая мощность разведываемого сигнала на
входе приемника НРТР, изменяется в широких пределах и зависит
как от типа приемного устройства, так и от параметров сигнала. Так,
при диапазоне частот 4 ГГц (8... 12 ГГц) многоканальный по частоте
приемник с полосой фильтров 10 МГц имеет рабочую чувствитель-
ность (-80...-90) дБ/Вт. При расширении полосы фильтра до 100 МГц,
что характерно для РСА, чувствительность снижается в 5... 10 раз.
Мощность сигнала РСА на входе приемника зависит от коэф-
фициента усиления антенны системы НРТР. Обеспечение одновре-
менного обнаружения и точного определения координат РСА требу-
ет применения многоканапьных (многолучевых) антенн и многока-
нальных по частоте приемников. Это приводит к высокой сложности
системы НРТР. При этом точность измерения угла обычно составля-
ет 1...2°, а несущей частоты 1...5МГц. Длительность импульса ти
измеряется путем стробирования принимаемого сигнала при дли-
тельности строба меныце ти. Для измерения частоты повторения
необходимо принимать не менее 3...4 периодов повторения. Боль-
шая многоканальность системы НРТР приводит к увеличению веро-
ятности ложной тревоги.
Поэтому задачи обнаружения и определения направление при-
хода сигнала часто выполняют в два эзапа.
Этап 7. С помощью всенаправленной антенны (несколько лу-
чей) производят обнаружение и измерение несущей частоты сигнала
с помощью многоканального по частоте приемника.
502
Глава 12
Этап 2. Определяется направление прихода и параметры обна-
руженного сигнала с помощью высоконаправленной (многолучевой)
антенны. На основе результатов измерений параметров сигнала и
использования базы данных распознается тип РЛС.
Кроме этих параметров НРТР определяет также поляризацию,
метод сканирования и уровень боковых лепестков ДН антенны, мощ-
ность излучения, дальность, высоту и скорость полета носителя РСА.
Важнейшей характеристикой системы НРТР и комплекса РЭБ в
целом является время реакции на появление сигнала РСА и его изме-
нение. Это время определяегся запаздыванием, обусловленным вы-
полнением алгоритмов обнаружения, измерения параметров сигналов
и распознавания типа РЛС, а также временем формирования помехи.
В перспективных НРТР предусмотрено максимальное сниже-
ние запаздывания реакции (менее 10 мс).
Существует также другая причина запаздывания реакции САП.
В момент излучения помехи рабочая чувствительность приемника
НРТР падает на 30...40 дБ. Поэтому для обеспечения контроля эф-
фективности помехи обычно используют временное разделение из-
лучения и приема САП. Это позволяет изменять параметры излуче-
ния БРЛС неконтролируемо для САП во время излучения помехи.
На вход приемника станции НРТР одновременно приходит
большое количество сигналов (до 106...10 имп./с), которые необхо-
димо обнаружить, определить параметры и распознать источник из-
лучения. Возможности решения этих задач характеризуются пропу-
скной способностью. Пропускная способность НРТР зависит от
многоканальности приемника и производительности процессора.
В табл. 12.1 показаны оценочные характеристики систем НРТР
авиационного, наземного и корабельного базирования.
Основные направления повышения скрытности работы РСА
• Снижение пространственной (Вт/м2) и спектральной (Вт/Гц)
плотности потока мощности РСА в районе нахождения станции
НРТР за счет:
длительного когерентного накопления сигнала при синтези-
ровании апертуры и некогерентного накопления выходных
сигналов;
- использования зондирующих сигналов большой длительно-
сти с внутриимпульсной модуляцией и согласованной обра-
ботки (сжатие по дальности) в приемном устройстве;
регулировки импульсной мощности в зависимости от даль-
ности до цели таким образом, чтобы отношение сигнал/шум
оставалось постоянным (не превышало требуемого);
Помехозащищенность радиолокационной системы землеобзора...
503
1 аблица 12.1
Оценочные характеристики систем НРТР
Тип НРТР Диапазон частоты, ГГц Полоса разрешения, МГц Тип приемника Коэффициент усиления антенны, дБ Рабочая чувствитель- ность. дБ/Вт Время реакции, мс Пропускная способность
Авиаци- онная 8...12 10 мич многолучевая 10 -75 10...100 менее 10
Наземная 8...12 5 мич многолучевая 15 -90 10...100 16
Корабель- ная 8...12 5 мич многолучевая 20 -100 10...100 100
использования частоты повторения импульсов исходя из од-
нозначности по дальности, что обеспечивает максимально
возможное количество накапливаемых импульсов при тре-
буемом времени синтезирования.
У современных РСА произведение коэффициента сжатия на
число когерентно накапливаемых импульсов при синтезировании
апертуры достигает 106. Пропорционально уменьшается импульс-
ная мощность РСА. требуемая для обнаружения цели и, соответст-
венно, уменьшается вероятность обнаружения сигналов РСА стан-
цией НРТР. Кроме того, использование в РСА широкополосных
сигналов до 100. ..500 МГц снижает рабочую чувствительность при-
емника НРТР по сравнению с приемом сигналов полосой 2... 10 МГц
в 10...250 раз.
• Обеспечение максимальной непредсказуемости для проливчика
характеристик РСА. Для уменьшения возможности когерентно-
го и некогерентного накопления сигналов приемником HP ГР
изменяется:
время начала излучения (прерывность работы);
- несущая частота различных диапазонов волн;
- поляризация излучаемой и принимаемой волн;
504
Глава 12
- вид внутриимпульсной модуляции и модуляции пачек им-
пульсов;
методы обзора зоны, в том числе с использованием многолу-
чевых антенн;
- пространственное положение приемной части РСА относи-
тельно передающей при двухпозиционной работе.
В силу неопределенности характеристик РСА для эффектив-
ного приема сигналов требуется использование многоканального
по многим параметрам приемного устройства НРТР, что приводит
к большой вероятности ложной тревоги и сложности систем
НРТР.
• Квазислучайное изменение характеристик зондирующего сиг-
нала:
- начальной фазы каждого импульса;
- несущей частоты различных когерентных пачек сигналов;
- внутриимпульсной модуляции;
- частоты повторения импульсов.
Эти изменения учитываются при обработке сигнала (компенси-
руются) РСА, а для противника они являются случайными, превра-
щая зондирующий сигнал в шумоподобный сигнал, что значительно
снижает возможности его обнаружения.
• Адаптивное изменение характеристик РСА в зависимости от
помехо-целевой обстановки:
работа в свободном от помех «частотном окне»;
выбор несущей частоты и времени излучения, близких к па-
раметрам РЭС противника.
• Минимизация уровня излучения в направлении на станцию
НРТР путем регулирования уровня боковых лепестков ДН ан-
тенны РСА.
Энергетические показатели скрытности работы РСА
Скрытность работы РСА — условия, при которых сигналы
РСА не могут быть обнаружены станцией НРТР.
Полагаем наихудший (для РСА) вариант, когда станция НРТР
расположена в районе цели и ее антенна направлена точно на РСА.
Приемник HP! Р построен по многоканальной схеме и обеспечивает
обнаружение сигналов РСА без пропусков за время, в течение кото-
рого сигналы РСА имеют постоянные параметры.
Помехозащищенность радиолокационной системы землеобзора...
505
При рабочей чувствительности Р? и коэффициенте усиления
антенны Gp станция НРТР имеет чувствительность по полю (мини-
мальная обнаруживаемая плотность потока мощности сигнала):
(12.1)
где Sa - эффективная площадь антенны станции HP ГР; X - длина
волны РСА.
Для обеспечения скрытности работы плотность потока мощно-
сти излучения РСА в районе станции НРТР должна быть меньше
чувствительности Пр :
(12.2)
где Ри - импульсная мощность излучения РСА.
С учетом (12.1) получаем, что мощность излучения РСА, при
которой сигнал не обнаруживается во всем диапазоне дальностей,
должна уменьшаться пропорционально квадрату расстояния между
РСА и станцией НРТР;
2(4я)Ч
GGpX2
(12.3)
В то же время, требуемая для обнаружения цели мощность из-
лучения определяется параметрами РСА и ЭПР цели и зависиг от
расстояния между РСА и целью в четвертой степени. Так, при прие-
ме одного импульса без внутриимпульсной модуляции отношение
сигнал/шум равно
^2^
' ^R'kTF^f^’
(12.4)
где оц - ЭПР цели; ЛГ-4-10‘21 Вт/Гц; - фактор шума прием-
ника РСА; bf - полоса частот приемника, определяемая требуемой
разрешающей способностью по дальности; ап - потери мощности
сигнала в тракте РСА.
506
Глава 12
Для увеличения дальности действия РСА используют зонди-
рующие сигналы достаточно большой длительности ти , а для сохра-
нения при этом требуемого разрешения по дальности (полосы частот
Л/*) применяют внутриимпульсную модуляцию с последующей со-
гласованной обработкой (сжатием импульсов) в приемнике. В соот-
ветствии с законом сохранения энергии Рити = Рсжтсж мощность сжа-
того импульса тоже увеличивается в ксук (коэффициент сжатия) раз:
(12.5)
В результате синтезирования апертуры происходит когерентное
накопление Nk = FUTC импульсов, где Fn - частота повторения им-
пульсов, Тс - время синтезирования. Кроме того, для уменьшения
спекл-шумов в РСА получают и некогерентно (по мощности) сум-
мируют Nu = 3...4 кадра изображения цели. Так как отношение сиг-
нал/шум в каждом кадре РЛИ достаточно большое, то некогерентное
суммирование эквивалентно когерентному, т.е. увеличивает выход-
ное отношение сигнал/шум в 7VH раз.
В результате отношение сигнал/шум увеличивается в
ксук NH Nk раз:
Я = ЯАжЛТЛн
(4Я)3/?4Л7УшЛ/ап ’
(12.6)
Предположим, что РСА имеет одинаковое разрешение по даль-
ности 8г и азимуту 8/ :
А
8/’ = 8£ , 8г =-, 8^ =-----(боковой обзор),
2Д/ 2 к?;
(12.7)
где V- скорость носителя РСА.
Частота повторения выбирается максимальной исходя из тре-
бования однозначности по дальности:
Fn = c/(2R}.
(12.8)
Подставляя в (12.6) значения Fn, Тс и Af из (12.7) и (12.8),
получаем требуемую мощность излучения Р1р для обеспечения за-
данного отношения сигнал/шум qip:
Помехозащищенность радиолокационной системы землеобзора...
507
п п4 2(4л)3kTF Га
Р =Rq ——---------щ
G?k3(T к N
ц сж н
На рис. 12.3 показаны графи-
ки изменения />„(12.3) и
₽ф(12.9) от расстояния между
РСА, целью и станцией НРТР.
Видно, что если дальность дейст-
вия РСА меньше 7?скр, то требуе-
мая для обнаружения цели мощ-
ность излучения меньше мощно-
сти, при которой сигнал РСА
обнаруживается станцией НРТР
(станция и цель находятся рядом).
Приравнивая = Рскр, по-
лучаем максимальную дальность
/?скр, меньше которой обеспечи-
вается скрытная работа РСА:
(12.9)
Рисунок 12.3
Графики зависимости мощности
излучения РСА и чувствительности
станции РТР от дальности
j '
2(4n)2^kTFwVan
(12.10)
Полагая рабочую чувствительность станции НРТР
Рр =--90 дБ/Вт и коэффициент усиления антенны С7р = 100,
G = 1000 длину волны Х = 3см, оц=10м , &сж=103, |/VH = 4,
kTFxu = 10 20, дтр = 10 , V - 200 м/с, потери au = 10 дБ , получаем
максимальную дальность скрытной работы РСА, равную 85 км.
Характеристики скрытности зависят от положения станции
HP ГР относительно РСА и цели. Если станция находится ближе к
РСА, чем цель, т.е. 7?р < /?, го дальность скрытной работы уменьша-
ется, а при удалении станции НРТР от РСА и цели скрытность по-
вышается:
508
Глава 12
4 7?2Л„(7Х3оцЛсж^н
М., = -----Ц еж н л t)
скр 2(4л)2^^ГЛшГап
При изменении положения станции НРТР относительно цели
по угловой координате сигналы РСА излучаются в направлении
станции боковыми лепестками ДН антенны РСА, что увеличивает
скрытность работы РСА.
Аналогично повышается скрытность, когда максимум ДН ан-
тенны НРТР не совпадает с направлением на РСА.
Напомним, что приведенные соотношения справедливы, если
мощность излучения РСА регулируется в зависимости от дальности
так, чтобы отношение сигнал/шум для обнаружения заданной цели
было постоянным (не более требуемого). Также принято, что разре-
шение по дальности и азимуту одинаково ( 8г = Ы ) и поддерживает-
ся максимальная частота повторения Fn = c/(2R) в зависимости от
дальности.
В режиме картографирования, когда наблюдение ведется в ши-
рокой зоне обзора по дальности, требуемая мощность излучения
РСА определяется расстоянием до дальней границы зоны обзора.
Обеспечение скрытности работы РСА при размещении станции
НРТР на ближней границе зоны обзора достигается путем уменьше-
ния плотности потока мощности излучения (12.2) уменьшением ко-
эффициента усиления антенны в угломестной плоскости.
12.3. Помехоустойчивость работы
радиолокационной системы землеобзора
Показатели помехоустойчивости РСА определяют возможности ре-
шения задачи наблюдения целей (обнаружение, определение коор-
динат, распознавание) при наличии различного вида помех.
Помехи могут быть преднамеренными, т.е. специально созда-
ваемыми комплексами РЭП, и непреднамеренными. К последним
относятся сигналы различного рода источников электромагнитного
излучения (промышленные, связные, навигационные, бытовые и
другие технические устройства), а также сигналы РСА, отраженные
от объектов, земной и водной поверхности, дождя и т.п.
Помехозащищенность радиолокационной системы землеобзора...
509
Помехоустойчивость РСА землеобзора - оценка эффективно-
сти работы в условиях воздействия преднамеренных помех, ко-
торые являются средством радиоэлектронного подавления РЛС
в условиях РЭБ.
Обычно различают три вида преднамеренных помехи: маски-
рующие, имитирующие и деструктивные.
Маскирующие помехи уменьшают различие мощностей сигнала
цели и шума (отношение сигнал/шум) путем введения дополни-
тельных шумов (помеховых сигналов).
Имитирующие помехи имеют параметры, близкие к параметрам
сигналов целей, и создают в РСА ложные отметки целей.
Деструктивные помехи представляют собой электромагнитное
излучение большой мощности, которое поступает на вход при-
емника РСА и выводит из строя полупроводниковые приборы,
прекращая функционирование РСА.
К особому классу помех относят активное воздействие на сре-
ду распространения радиоволн, которое увеличивает поглоще-
ние электромагнитных волн на трассе распространения (погло-
щающие завесы).
Такие помехи уменьшают энергию сигналов цели.
Аналогично действуют пассивные помехи, которые снижают
ЭПР цели либо разрушают фазовую структуру отраженного
сигнала цели.
Примером такой помехи могут служить различного рода по-
глощающие покрытия, наносимые на цель.
Помехи, наиболее опасные для РСА
• Прицельные по частоте и направлению активные маскирующие
помехи.
• Пассивные имитирующие помехи, создаваемые сигналами на-
дувных макетов целей, уголковых отражателей и облаками ди-
польных отражателей.
• Структуры, снижающие ЭПР целей (технология СТЕЛС, по-
глощающие покрытия).
Борьба с пассивными имитирующими помехами сводится к
решению задачи распознавания целей. При высоком разрешении
510
Глава 12
РСА распознавание ведется по размеру изображения цели, динамике
движения целей и т.п.
Снижение ЭПР цели обычно эффективно только в относитель-
но узком частотном диапазоне волн. Поэтому основными методами
борьбы с такой помехой является переход в другой (обычно длинно-
волновый) диапазон работы РСА.
Влияние шумовой помехи. Рассмотрим количественные пока-
затели помехоустойчивости РСА при воздействии заградительной
шумовой помехи. Помеховый сигнал представляет собой реализацию
случайного процесса. В пределах ширины полосы частот принимае-
мого сигнала РСА спектральная плотность помехи ЛГП равномерная.
В случае, когда полоса частот помехи шире или равна полосе частот
сигнала . действие помехи эквивалентно маскирующему
действию внутреннего шума приемника РСА.
Отношение сигнал/шум, которое определяет характеристики
обнаружения, измерения координат и распознавания целей, в случае
воздействия шумовой помехи равно:
где £с — энергия сигнала цели, накопленная в процессе обработки;
7V0 - kTFm - спектральная плотность вну гренних шумов; - спек-
тральная плотность помехи.
Таким образом, спектральная плотность аддитивной шумовой
помехи суммируется с спектральной плотностью внутренних шумов
и уменьшает отношение сигнал/шум. Соответственно снижается эф-
фективность решения всех задач РСА. Рассмотрим эффект влияния
шумовой помехи на примере снижения дальности обнаружения це-
ли. Энергия одного отраженного от цели импульса мощностью и
длительностью ти на входе приемника РСА
(72Х2оц
г-» _ гу Ц
а,~ и и (4 л)3/?4 ’
При использовании внутриимпульсной модуляции
т = к . т = к /Af, где Af - ширина полосы сигнала и соответст-
венно приемника РСА. В результате синтезирования апертуры в сис-
теме обработки происходит когерентное накопление пачки
Помехозащищенность радиолокационной системы землеобзора... 5 ц
Nk = FnTc импульсов, где Fn - частота повторения импульсов, а
Т - время синтезирования, а также некогерентное накопление Ан
изображений цели. Энергия сигнала цели в этом случае
F (1
Е =----” Ц > (12.12)
(4л)3/?4Д/ап
где ап - потери энергии сигнала в тракте РСА.
к я/
Будем считать, что разрешение по азимуту or =---- (боковой
2РТС
обзор) не зависит от дальности (интервал синтезирования Гс увели-
чивается пропорционально дальности 7?) и равно разрешению по
дальности 5г = с/2Д/. Частота повторения импульсов F выбрана
максимально возможной из условия обеспечения однозначности по
дальности: Д -cj2R .В этом случае
¥ 2Г
Подставляя это значение в (12.4), получаем, что
___ы
2(4л)3Я4Ка„ сж '
В случае отсутствия помехи отношение сигнал/шум
Ес _ PHGU3ou^^
No R*VkTFmv.D
и дальность обнаружения цели
РцСТоЛж^,,
2(4л)^трИГ7Е’шап ’
(12.13)
(12-14)
(12.15)
где требуемое отношение сигнал/шум qiV определяется статисти-
ческими характеристиками сигнала цели и шума при заданных ве-
роятностях правильного обнаружения Рпо и ложной тревоги Ргг.
512
Глава 12
При наличии помех их спектральная плотность на входе при-
емника обычно гораздо больше плотности внутренних шумов
(Nn » Nq ) и определяется выражением
. PnGnG)2
Af(4n)2R2 ’
(12.16)
где PnGn - произведение мощности помехи Рп на коэффициент
усиления антенны Gn САП - определяет энергетический потенциал
помехи, а PnGn/- спектральную плотность излучаемого сигнала
помехи в полосе частот сигнала Л/.
С уменьшением дальности до системы НРТР спектральная
плотность помехи на входе РСА возрастает пропорционально квад-
рату дальности.
В этом случае отношение сигнал/шум
Е^_ А/
ЛГП 8яК2К(1п PnGn ’
(12.17)
Таким образом, для поддержания требуемого (исходя из харак-
теристик обнаружения цели) отношения сигнал шум #тр необходи-
мо увеличивать мощность зондирующего сигнала Ри либо согла-
ситься с уменьшением дальности обнаружения цели. Мощность сиг-
нала при наличии помехи должна увеличиваться пропорционально
спектральной плотности излучаемого сигнала помехи:
, = 87г7?2Ка„ PnGn
ип А/
(12.18)
Формула (12.18) справедлива при условии .
Отношение требуемой импульсной мощности РСА в условиях
помех Рип к мощности Ри при отсутствии помех для обеспечения
одинаковой дальности обнаружения цели равно
Р N СУ Р G
L ИП _ _п_ — _VZ/V_____ 1 П^П fl 9 1Q\
Рл~ NС (4n)2R2kTFm ’
Спектральная плотность излучения PnGvJAf (удельный энер-
гетический потенциал) у наземных и корабельных САП может дос-
Помехозащищенность радиолокационной системы землеобзора...
513
тигать 10 1 Вт/Гц и более, что требует повышения мощности излу-
чения РСА в тысячу и более раз. Дальность обнаружения цели РСА
в условиях помех
Л.<^Лж^н Л/
2(4л)71рГап PnGn
(12.20)
При сохранении прежней мощности излучения дальность обна-
ружения цели в условиях помех по сравнению с дальностью об-
наружения без помех уменьшается в десятки и сотни раз.
Таким образом, если известны время работы РСА, несущая час-
тота зондирующего сигнала, ширина спектра и угловое положение
РСА относительно САП, мощная шумовая помеха подавляет работу
РСА как по основному, так и по первым боковым лепесткам ДН ан-
тенны.
Наряду с повышением скрытности работы, для обеспечения ра-
ботоспособности РСА в условиях воздействия мощных шумовых
помех используется пространственное подавление сигналов САП. В
этом случае в ДН антенны РСА формируется провал («ноль ДН») в
направлении САП. При провале -30 дБ соответственно мощность
помехи на входе РСА снижается в 1000 раз.
Эффективным способом повышения помехозащищенности
РСА является переход в двухпозиционный режим работы, когда ме-
жду передающей и приемной позициями имеется достаточно боль-
шое угловое расстояние.
Скрытность работы РСА характеризует степень защищенно-
сти излучаемых сигналов РСА от обнаружения и измерения их па-
раметров системой РТР противника.
Основными направлениями повышения скрытности работы
РСА являются:
• снижение импульсной мощности излучения, требуемой для
обнаружения цели;
• обеспечение максимальной непредсказуемости для против-
ника характеристик РСА;
• квазислучайное изменение характеристик зондирующего
сигнала;
• адаптивное изменение характеристик РСА в зависимости от
помехоцелевой обстановки;
514
Глава 12
• минимизация уровня излучения в направлении на станцию
НРТР путем регулирования уровня боковых лепестков ДН
антенны РСА.
Помехоустойчивость характеризует эффективность функ-
ционирования РСА в условиях воздействия заданных помех.
Выделяют три вида преднамеренных помехи: маскирующие,
имитирующие и деструктивные.
Наиболее опасными для РСА являются прицельные по час-
тоте и направлению активные маскирующие помехи, пассивные
имитирующие помехи, создаваемые сигналами надувных макетов
целей, уголковых отражателей, облаками дипольных отражате-
лей, и структуры, снижающие ЭПР целей (технология СТЕЛС, по-
глощающие покрытия).
ГЛАВА 13
Радиолокационная система
с обратным синтезированием
апертуры антенны
13.1. Разрешающая способность
радиолокационной системы
В соответствии с теорией пространственной селекции РСА для
обеспечения разрешения по угловой координате необходимо на-
блюдать цели при различных ракурсах, т.е. апертура антенны
РСА должна иметь определённый угловой размер относительно
цели. Так, синтезированная апертура в виде дуги радиусом R,
обеспечивает наблюдение цели последовательно во времени под
различными ракурсами в пределах углового размера Ро -VTci R
(рИС. 13.1,67).
В этом случае реальная апертура увеличивает угловой сектор
наблюдения (синтезирует апертуру) за счёт облёта цели с радиусом
разворота 7?н и постоянной линейной скоростью V. При малых угло-
вых размерах синтезированной апертуры Ро разрешение по угловой
координате ( при использовании единой антенны на передачу и
приём 8^-Х, «2р0).
Очевидно, что изменение ракурса наблюдения цели возможно не
только за счёт перемещения антенны РСА, но и за счёт перемешения
самой цели (рис. 13.1,6). При неподвижной РЛС угловой размер син-
тезированной апертуры в этом случае определяется скоростью пере-
516
Глава 13
Цель
Рисунок 13.1
Методы формирования синтезированной апертуры за счёт движения
приёмопередаюшей антенны РЛС (я), перемещения самой цели (б),
поворота цели (в)
мещения цели и временем синтезирования Тс : Ро = ИЦТС //?н .
При одинаковом угловом размере Ро = Vl{Tc/Ri{ = VTC /Rn обеспечи-
вается такое же разрешение как и при синтезировании апертуры за
счёт движения приёмо-передающей антенны РСА:
se=—=-^-. (13.1)
2₽о 2ГЦГС
Также очевидно, что изменение угла наблюдения цели возмож-
но при неподвижных РЛС и цели за счет поворота цели (рис. 13.1,в).
Угол поворота цели за время синтезирования определяется угловой
скоростью вращения цели : Ро = QUTC, что обеспечивает угловое
разрешение
51 = — = . (13.2)
2Ро 2ОЦГС
В отличие от других методов в случае синтезирования аперту-
ры за счёт вращения цели разрешающая способность не зависит от
дальности до цели при постоянном времени синтезирования. Так,
например, при угле поворота цели всего на 3° и длине волны 3 см
достигается разрешение Ь£ = 30 см на любой дальности, на которой
обеспечивается достаточное для обнаружения цели отношение сиг-
нал/шум.
Радиолокационная система с обратным синтезирование апертуры антенны s ] 7
Методы синтезирования, основанные на использовании пере-
мещения и (или) вращения цели, получили название обратное (ин-
версное) синтезирование. Характерными примерами использования
обратного синтезирования являются: получение радиолокационных
портретов морских целей (кораблей) за счёт использования их качки
и рыскания по курсу, оценка ЭПР элементов цели, разрешаемых за
счёт вращения цели на стенде и др.
Рассмотрим траекторный сигнал РСА при обратном синтезиро-
вании апертуры. Фаза и задержка траекторного сигнала, как основ-
ные источники информации о цели, определяются изменением рас-
стояния до элементов цели в процессе синтезирования апертуры. В
общем случае расстояние изменяется вследствие перемещения цели
относительно РЛС и вращения цели. При этом цель может одновре-
менно вращаться в различных плоскостях с различной угловой ско-
ростью.
Для частного случая получения изображения неподвижной
вращающейся цели в плоскости дальность г - азимут I, когда ось
вращения цели перпендикулярна направлению на РЛС (рис. 13.2),
текущее расстояние от РЛС до /-го элемента цели при
/?н » \М2 + можно представить в виде
Rx =Rn -^jSinQ^ + rjCOs^/,
(13.3)
где Пц - угловая скорость вращения цели.
Рисунок 13.2
Система координат цели в плоскости дальность г - азимут I,
когда ось вращения цели перпендикулярна направлению на РЛС
518
Глава 13
Соответственно фаза траекторного сигнала =
ровская частота
г 2 ЭД 2£ir4 2к .
/ =------ = —L£2 cos fl t----L£2 sin £2 t.
Ja' x dt x u ц x ц
?
а допле-
(13.4)
В случае малых угловых размеров синтезированной апертуры,
когда Ро = £\ТС «1, фаза траекторного сигнала без учёта началь-
ной фазы
(13.5)
а частота сигнала
(13.6)
Таким образом, вращение цели формирует траекторный сигнал
с линейной частотной модуляцией.
2£-
Доплеровская частота —LQU образуется в результате линей-
X
ной скорости движения /-го элемента в направлении РЛС при вра-
щении цели. Разрешение сигналов по этой доплеровской частоте
обеспечивает разрешение элементов цели по азимуту £.
Линейное изменение частоты сигнала /-го элемента цели опре-
деляется координатой дальности этого элемента л- относительно
центра вращения цели. Разрешение элементов цели по частотной
модуляции траекторных сигналов при малом размере синтезирова-
ния апертуры невелико. Поэтому разрешение по дальности обычно
обеспечивается модуляцией зондирующего сигнала. При этом в ал-
горитме обработки траекторного сигнала необходимо учитывать из-
менение, как частоты сигнала, так и его задержки
Ат.
(13-7)
Эти изменения можно не учитывать, если допустить, что изме-
нение частоты и задержки за время синтезирования меньше, чем
разрешение по частоте и задержке. В этом случае размер зоны обзо-
ра АТ? х А А и разрешение Ъг — Ъ£ будут связаны условием
Радиолокационная система с обратным синтезирование апертуры антенны
519
А7? = Л£<(25£)2Д.
(13.8)
При таких ограничениях алгоритм обработки траекторного
сигнала при обратном синтезировании за счет вращения цели сво-
дится к доплеровской фильтрации в каждом канале, разрешаемом по
дальности. Координата элемента цели по дальности определяется
задержкой сигнала г\ = стt /2, а координата азимута - доплеровской
частотой
f v. Масштаб изображения цели по азимуту опре-
деляется скоростью вращения цели Оц.
Основные особенности
для методов обратного синтезирования
применительно к РЛС землеобзора
• Цель движется как единый объект, т.е. отдельные элементы це-
ли перемещаются по взаимосвязанным траекториям.
• При наблюдении одиночных объектов, например кораблей,
размер зоны обзора определяется размером объекта.
• Разрешение по угловой координате определяется углом поворо-
та цели относительно направления на РЛС за время синтезирова-
ния, при этом угол поворота не превышает десяти градусов.
• Разрешение по дальности обеспечивается, как и при прямом
синтезировании, за счёт модуляции зондирующего сигнала.
• Параметры траекторного сигнала определяются параметрами
движения цели (вектором угловой скорости), который в боль-
шинстве случаев неизвестен наблюдателю. Это требует адап-
тивной к параметрам движения цели обработки траекторного
сигнала, и большого объёма априорных сведений о цели.
Полоса доплеровских частот траекторного сигнала и, следова-
тельно, требуемая частота повторения зондирующих импульсов оп-
ределяются размером цели (зоны обзора) по азимуту.
2Q
4/д=-тАД^- (13.9)
к
В общем случае результирующий вектор вращения цели Qp,
образованный одновременным перемещением цели в различных
плоскостях, не перпендикулярен направлению наблюдения. Тогда
вектор скорости вращения цели Оц, определяющий масштаб и по-
520
Глава 13
Рисунок 13.3
Система координат при вращении цели
ложение плоскости изобра-
жения цели (^, г) в про-
странстве, является проекци-
ей результирующего вектора
Qp на плоскость, нормаль-
ную к направлению наблю-
дения 7?н (рис. 13.3).
Плоскость изображения
(I, г) в этом случае нор-
мальна плоскости, в которой
расположены векторы вра-
щения Qp, Оц и вектор направления наблюдения 7?н. Масштаб
изображения цели по азимуту, как и ранее, определяется угловой
скоростью вращения цели
=Qp sin<p,
(13.10)
где ср - угол между векторами О и 7?п.
13.2. Наблюдение морской цели
В РЛС землеобзора метод обратного синтезирования используется
для получения изображений морских целей (кораблей). Он даёт воз-
можность получения высокого разрешения и в передней зоне обзора
РСА, так как необходимый угловой размер синтезированной аперту-
ры обеспечивается за счёт собственного движения (перемещения и
вращения) корабля. Кроме того, обратное синтезирование апертуры
обеспечивает высокое разрешение и в плоскости дальность - угол
места. Применительно к наблюдению кораблей это позволяет полу-
чить изображение вертикального контура надстроек кораблей, что
особенно важно при решении задачи распознавания морских целей.
Одновременно с перемещением по курсу при волнении моря
корабль испытывает также колебания корпуса вокруг центра масс.
Для задач обратного синтезирования обычно используют рыскание
по курсу, килевую и бортовую качку корабля. Рыскание по курсу
(рис. 13.4.6?) соответствуют вращению корабля относительно верти-
Радиолокационная система с обратным синтезирование апертуры антенны 521
кальной оси. Килевая качка (попеременный дифферент на нос и на
корму) соответствует вращению корабля относительно поперечной
горизонтальной оси (рис. 13.4,6). Попеременный крен (бортовая кач-
ка) на левый и правый борт соответствует вращению корабля отно-
сительно продольной горизонтальной оси (рис. 13.4,в). На рис. 13.4
все оси вращения перпендикулярны плоскости рисунка.
Вращение корабля носит периодический характер, т.е. угол от-
клонения корабля от равновесного (нормального) положения изме-
няется в соответствии с гармоническим законом
sin
MdKC
(13.11)
где Р - соответственно угол крена, рыскания или угол килевой кач-
ки; Рмакс - максимальное отклонение корабля по соответствующему
углу; Тк - период колебаний.
Угловая скорость вращения изменяется по i армони чес кому закону
dt
(13.12)
Максимальная скорость
(13.13)
достигается в момент прохождения равновесного (как при отсутст-
вии волнения моря) положения корабля.
Рисунок 13.4
Виды колебаний морских объектов при волнении моря:
а - рыскание по курсу; б - килевая качка; в - крен (бортовая качкая)
Глава 13
522
У большинства океанских кораблей период колебаний Тк
практически не зависит от степени волнения моря и определяется
конструкцией корабля. Амплитуда угловых колебаний Рмакс оп-
ределяется многими факторами: высотой волн, направлением бега
волн относительно курса корабля, скоростью движения и конст-
рукцией корабля. Большой корабль, как колебательная система,
эквивалентен узкополосному фильтру и параметры его колебаний
(амплитуду и период) можно считать постоянными за время син-
тезирования порядка долей секунд. С уменьшением водоизмеще-
ния корабля (менее 1000 т) амплитуда и период отклонения уже
зависят от характеристик волнения моря и носят случайный ха-
рактер. Считают, что угол Р является узкополосным нормальным
процессом. В табл. 13.1 даны оценочные значения характеристик
колебаний кораблей различного типа при волнении моря 5...6
баллов.
Таблица 13.1
Оценочные значения характеристик колебаний кораблей
различного типа при волнении моря 5-6 баллов
Тип корабля Вид колебаний Период колебаний Гк, с Амплитуда колебаний ршкс, °
Танкер средний Крен 10...13 18...28
Киль 5...8 3...5
Курс 8...10 1...2
Сухогруз Крен 13...19 15...28
Киль 6...10 3...6
Курс 8...12 1...2
Лайнер Крен 17...30 8...13
Киль 8...12 3...5
Курс 10...15 1...2
Крейсер Крен 10...14 15...20
Киль 5...8 1,5...2
Курс 12...15 1,5...2
Авианосец Крен 20...28 2...3
Киль 10...13 0,3... 0,5
Курс 30...35 0,5...0,8
Радиолокационная система с обратным синтезирование апертуры антенны
523
Если линия визирования ко-
рабля перпендикулярна оси угло-
вых колебаний (вращения), воз-
можно получение изображения ко-
рабля в различных плоскостях.
Килевая качка обеспечивает полу-
чение изображения вдоль корабля и
его надстроек, качка по крену
изображение в боковом направле-
нии корабля и надстроек, рыскание
по курсу - изображение корабля в
горизонтальной плоскости. Движе-
Рисунок 13.5
Формирование РЛИ
за счёт бортовой качки корабля
ние корабля с постоянными скоростью и курсом эквивалентно
движению РЛ[С при неподвижном корабле и обеспечивает изобра-
жение в горизонтальной плоскости. В реальной ситуации одновре-
менно существуют все виды колебаний корабля, что затрудняет оп-
ределение положения плоскости изображения относительно корабля.
В то же время, наблюдая «динамическое» изображение корабля, т.е.
изображение, изменяющееся в зависимости от фазы колебаний ко-
рабля РЛИ во время различных интервалов синтезирования, можно
эффективно распознавать его класс.
Рассмотрим характеристики сигнала при обратном синтезиро-
вании в случае бортовой (крен) и продольной (килевой) качки ко-
рабля. При бортовой качке изменение rh расстояния от надстройки
на высоте h j\q РЛС (рис. 13.5) определяется выражением
макс
(13.14)
где h - высота элемента надстройки, отсчитываемая от оси вращения
корабля.
Учитывая, что угловое отклонение Рмакс «1 (в рад.), измене-
ние расстояние до РЛС и, следовательно, фазы отражённого сигнала
можно представить в виде
sm
4тг/гр . 2 л
=------t^-sin -—t
(13.15)
(13.16)
524
Глава 13
Соответственно, доплеровская частота равна
f (/) = 4л/гРмС cos Г—/|. (13.17)
’ ХТК 1т J
Как видно из выражений (13.16) и (13.17), характеристики от-
ражённого сигнала зависят от момента наблюдения (синтезирова-
ния) t = /0 ± Гс/2 . Так, при /0 = 0 корабль наблюдается в момент пе-
рехода угла через нуль, когда угловая скорость отклонения
максимальна (см. 13.13):
2я
Q =—В
макс гр г'макс
^к
При малом времени синтезирования Гс «Тк доплеровская
частота сигнала при /0 = 0 изменяется незначительно и каждому
элементу надстройки по высоте соответствует своя доплеровская
частота
/ц
4л
Рмакс^7 ’
I ivlaKU
(13.18)
Учитывая, что изменение угла Р за время синтезирования
-О 7' =
О макс 2 с
макс с ’
(13.19)
разрешение по высоте надстройки корабля равно
I = ^Тк
20О 47Г₽макЛ ’
(13.20)
Алгоритм обработки сигналов сводится к доплеровской фильт-
рации в каждом элементе разрешения по наклонной дальности.
Полученные зависимости справедливы и при килевой качке ко-
рабля и радиолокационном наблюдении в передней зоне обзора РЛС
на встречных курсах самолёта-носителя РСА и корабля (рис. 13.6).
Разрешение по доплеровской частоте в этом случае соответствует
разрешению по высоте надстройки h, а разрешение по задержке зон-
дирующего импульса соответствует разрешению вдоль корабля.
При увеличении времени синтезирования начинают сказывать-
ся изменения доплеровской частоты и задержки сигнала, что необ-
ходимо учитывать в алгоритме обработки. Предельное разрешение
Радиолокационная система с обратным синтезирование апертуры антенны
525
Рисунок 13.6
Формирование РЛИ за счёт килевой качки корабля
без учёта изменений задержки и частоты ограничено величиной
(5/?)2 > ХЛмакс/2 (режим ДОЛ). Для других моментов наблюдения
п j Ф 0) при постоянном времени синтезирования разрешение будет
ухудшаться.
Напомним, что вектор угловой скорости лежит в плоскости,
нормальной к направлению наблюдения, а плоскость изображения
нормальна к вектору угловой скорости. Необходимые параметры
можно получить, измеряя характеристики сигнала в каждом до-
плеровском канале на выходе моноимпульсной антенны. Упрощен-
ная схема РСА при обратном синтезировании по морским целям
представлена на рис. 13.7. Антенная система формирует три про-
странственных канала приёма: суммарный и два разностных (в го-
ризонтальной и вертикальной плоскостях). После преобразования
на промежуточной частоте принимаемые сигналы с помощью фа-
зовых детекторов и АЦП превращаются в цифровые сигналы.
Рисунок 13.7
Упрощенная схема РСА при обратном С А по морским целям
526
Глава 13
Система слежения по частоте определяет среднюю доплеров-
скую частоту принимаемых сигналов и её изменение для компенсации
в процессе обработки сигналов (автофокусировка), а также измеряет
изменение задержки огибающей сигналов для её компенсации при
синтезировании апертуры. Система измерения вектора угловой скоро-
сти вращения (колебания) корабля обеспечивает определение мас-
штаба и ориентации в пространстве изображения корабля.
13.3. Наблюдение групповой цели
Перемещение цели, так же как и движение носителя РЛС, соз-
даёт эффект синтезирования апертуры, угловой размер которой оп-
ределяется взаимным угловым перемещением РЛС и цели. Покажем
это на примере разрешения элементов групповой цели (рис. 13.8),
состоящей из двух синхронно движущихся малоразмерных объектов
(точечных целей). Доплеровская частота траекторного сигнала при
взаимном перемещении РЛС с постоянной скоростью V и цели 1 так-
же с постоянной за время синтезирования скоростью Кц
ц = ~(У COS0,, +КЦ cosaj.
(13.21)
Для цели 2, смещённой по углу на величину ДО «1, доплеров-
ская частота изменяется так, что разность частот сигналов двух це-
Рисунок 13.8
Система координат при обратном СА
по групповой цели
лей, движущихся с одина-
ковой скоростью, состав-
ляет
АГ 2
Д/. х
ц А
х(К sin0H - sina . )Д0 =
= |(Kt-rut)Ae, (13.22)
А,
где и Кц t - соответст-
венно тангенциальные со-
ставляющие скорости РЛС
и целей.
Радиолокационная система с обратным синтезирование апертуры антенны
527
Разрешение сигналов двух целей по доплеровской частоте
8/ = 1 / Т определяет разрешение целей по углу ДО при Af = :
Соответственно, линейное разрешение по углу
определяется, как и ранее, угловым размером синтезированной апер-
туры Ро = QTC, где Q - угловая скорость вращения линии визиро-
вания РЛС - цель.
Алгоритм обработки траекторного сигнала при наблюдении
групповой цели определяется фазовой структурой сигнала, которая,
в свою очередь, зависит от взаимного перемещения (траекторий)
РЛС и целей. При прямолинейных траекториях и постоянных скоро-
стях движения относительное расстояние РЛС - цель (см. рис. 13.8):
r(0 = RH - COS0H + Уц cosaj/ +
| (Гsine,, -rusinau)2
2/?н
(13.25)
Фазовая функция траекторного сигнала (без учёта несущест-
венной начальной фазы)
(13.26)
Соответственно, доплеровская частота траекторного сигнала
А (') = | (К + (К - Кп )21 • (13.27)
н
Для цели, смещённой на угол АО , доплеровская частота траек-
торного сигнала
AeW=|(^ + ^r)-|(^-^t)Ae--^(Kt-^t)2/. (13.28)
Л Л
н
Первый член соответствует постоянной частоте траекторного
сигнала, которая определяется радиальной скоростью взаимного пе-
ремещения (Кг + Рцг) РЛС и цели. Такую частоту имеет сигнал цели,
528
Глава 13
находящейся в центре зоны обзора под углом 0Н на расстоянии Rn.
Второй член также соответствует постоянной частоте сигнала цели,
смещённой относительно центра зоны обзора на угол Д0. Послед-
ний член соответствует линейно изменяющейся частоте траекторно-
го сигнала. В приближении Д0 «1 он не зависит от углового сме-
щения цели Д0.
Алгоритм обработки такого траекторного сигнала аналогичен
обработке сигналов неподвижных целей при прямом синтезирова-
нии. В отличие от прямого синтезирования здесь учитываются отно-
сительные скорости перемещения РЛС и цели (Уг+РцГ) и
(Kt - Kut). Знаки суммирования скоростей определяются выбранной
системой координат. Так как Ицг и I в общем случае неизвестны,
требуется адаптивная к этим параметрам система обработки, напри-
мер с помощью автофокусировки.
Формирование синтезированной апертуры при перемещении
(вращении) цели и неподвижной РЛС называется обратным, или
инверсным, синтезированием.
При обратном синтезировании полагают, что цель движется
как единый объект и параметры отражённого сигнала определя-
ются характеристиками движения цели.
Фаза отражённого сигнала РСА при вращении цели с посто-
янной скоростью изменяется по гармоническому закону. Средняя
доплеровская частота сигнала разрешаемого элемента цели про-
порциональна его угловой координате, а индекс частотной моду-
ляции - координате дальности.
Разрешающая способность по углу определяется временем
синтезирования и угловой скоростью вращения цели в плоскости
наблюдения РЛС - цель, а получение высокого разрешения по
дальности обеспечивается модуляцией зондирующего сигнала.
При обратном синтезировании по морским целям использу-
ется вращение (колебания) корабля: бортовая и килевая качка и
рыскание по курсу. При обратном синтезировании возможно по-
лучение трёхмерного изображения корабля с высоким разреше-
нием по азимуту, углу места и дальности. Так как параметры коле-
баний корабля (векторы угловых скоростей) неизвестны, требует-
ся адаптивная обработка траекторного сигнала РСА.
Обратное синтезирование возможно также при использова-
нии линейного перемещения цели (без вращения). Разрешение по
азимуту в этом случае определяется временем синтезирования и
угловой скоростью вращения линии визирования РЛС - цель.
ГЛАВА 14
Радиолокационное наблюдение
морской поверхности
14.1. Модель пространственно-временного
сигнала, отраженного
от морской поверхности
Важным объектом наблюдения с использованием РСА является мор-
ская поверхность (МП). Интерес представляют как цели на МП, на-
пример корабль, так и состояние МП - параметры волнения, течения,
внутренние волны, цунами и аномалии, возникающие в результате
движения кораблей, загрязнений и т.д. В этой главе рассмотрены
свойства РСА при изображении волнения и аномалий на МП при ра-
боте в двух режимах - формировании амплитудного (АП) и скоро-
стного (СП) портретов.
Значительная часть информации о состоянии МП заключена в
пространственном распределении скорости ее движения. РСА в ре-
жиме формирования амплитудного портрета позволяет, в некоторых
случаях, наблюдать структуру морского волнения и аномалии МП, как
за счет амплитудной модуляции отраженного сигнала, так и за счет
доплеровской модуляции его частоты, вызванной движением поверх-
ности. Однако такое изображение лишь косвенно и не всегда адекват-
но характеризует движение МП. При решении многих практических
задач необходима возможно более точная картина пространственного
распределения скорости собственного движения поверхности. Для
формирования такого изображения скоростного распределения в РСА
используется режим формирования скоросзного портрета.
530
Глава 14
Скоростной портрет - изображение движущейся поверхности,
интенсивность каждой точки которого пропорциональна скоро-
сти движения соответствующего элемента поверхности.
Режим СП обладает присущей РСА высокой пространственной
разрешающей способностью и возможностью измерения скорости
движения поверхности с точностью до единиц сантиметров в секун-
ду. На рис. 14.1 для сравнения приведены сформированные РСА АП
и СП участка взволнованной МП со следом движущегося корабля. В
приведенном примере СП создает более информативное и адекват-
ное изображение волнения МП и следа.
В табл. 14.1 приведены требования к разрешающей способно-
сти и точности измерения скорости для решения различных задач
при обзоре МП.
Рассмотрим РСА, установленную на движущемся авиационном но-
сителе. Движение предполагается прямолинейным, равномерным, с
постоянной скоростью. Геометрия и основные параметры системы
наблюдения представлены на рис. 14.2.
Принятые обозначения
xi = {*1 j У1 -> z\} - земная сист ема координат;
x = {x,jr} - система координат, связанная с направлением
максимума ДН антенны;
ха - координата, связанная с раскрывом антенны;
О азимут 500 м
а)
Рисунок 14.1
Радиолокационное изображение МП:
а - амплитудный портрет; б - скоростной портрет
0 ашмгг 500 \1
Радиолокационное наблюдение морской поверхности
531
Таблица 14.1
Решаемые задачи Информаци- онные призна- ки Диапа- зон из- менения скоро- сти, м/с Требуе- мая точ- ность измере- ния ско- рости, см/с Требуемая разрешаю- щая спо- собность, м
Обнаружение турбулентных аномалий Случайная составляющая скорости 0...1 5...10 3...7
Обнаружение регулярных аномалий Регулярная составляющая скорости 0...3 5...20 5...20
Идентифи- кация волне- ния, баллы 1...2 Максимальная скорость (м/с) / длина волны (м) 0,8/100 5...10 5...15
3...4 1,5/300 10...15 10...30
5...6 2,5/500 15...20 30...50
Рисунок 14.2
Геометрия системы наблюдения
532
Глава 14
Хо
V.
н
Q
г
R
а
ба
е
ew
8у
d
а
- координаты центра зоны обзора в системе коор-
динат х;
скорость движения ЛА вдоль оси %!;
высота полета ЛА;
строка дальности, область на поверхности, опре-
деленная элементом разрешения по горизонталь-
ной дальности и следом ДН антенны;
- расстояние от фазового центра антенны до центра
строки дальности в момент t = 0;
угол падения электромагнитной волны в центр
зоны обзора;
угол выноса ДН (направление максимума ДН от-
носительно оси у1);
угловое положение цели относительно направле-
ния максимума ДН;
- направление бега морской волны относительно оси
, перпендикулярное направлению гребней волны;
разрешающая способность по горизонтальной
дальности;
- ширина следа ДН антенны;
- длина антенны.
14.1.1. Модель движения морской поверхности
Рассмотрим математические соотношения, описывающие движение
морских волн в рамках линейной теории волнения. В этом случае
МП задается суперпозицией бесконечно длинных вдоль гребня ци-
линдрических гравитационных волн, каждая из которых характери-
зуется направлением распространения (направлением бега) 0w,
длиной волны А и высотой от подножия до гребня 2я. Сечение
рельефа волны в направлении ее бега представлено на рис. 14.3.
При описании волны используют ее параметры - волновое чис-
ло кА=2л/Л и крутизну Рл = а/А . Рельеф волны имеет форму
трохоиды, при этом каждая точка на ее поверхности совершает ор-
битальное движение по кругу радиусом а с угловой скоростью
С0д = y/kAg , где g ускорение свободного падения. Смещение
центра вращения точки с течением времени не происходит.
Радиолокационное наблюдение морской поверхности
533
Рисунок 14.3
Параметры гравитационной волны: а - рельеф волны; б - траектория дви-
жения точки; в - пространственное распределение скорости
Модуль вектора мгновенной линейной скорости точки Ко оп-
ределяется выражением
КО=РЛЛ/2^А.
(М.1)
На рис. 14.3 приведено пространственное распределение мгно-
венных значений проекции у вектора линейной скорости точек вол-
ны на горизонтальное направление.
Пространственное распределение скорости имеет гармониче-
ский характер и изменяется во времени. На доплеровский сдвиг час-
тоты отраженного от МП сигнала влияет радиальная составляющая
скорости v, т.е. проекция на направление точка поверхности - ан-
тенна J1A. В принятой системе координат (см. рис. 14.2) двумерное в
пространстве и изменяющееся во времени распределение радиаль-
ной составляющей скорости в волне на МП имеет вид
(М.2)
534
Глава 14
где
ГЛ = Ко cos a^l + cos2(0w -0a)tg2a ,
£v (х> У^) = cos{k\xx + клуУ + ®az + Ул) >
ул = arctg [cos (6W - 6а) tga],
кАх = кЛ sin(ew - ea Млу = кА COS(0W - 0a ) •
Скорость движения МП v при существовании на поверхно-
сти системы из NK волн определяется линейной суперпозицией
скоростей
V = kvv;, (14.3)
где kv - {Zrvl,^v2,...A;vl,...ZrvNA}, VA — ~ “
размерные векторы волновых чисел и модулей скорости каждой из
волн.
На рис. 14.4 показана зависимость максимальной скорости вол-
ны от ее длины при различной крутизне 0Л , которая лежит в боль-
шинстве случаев в пределах 0...0,05. В ветровых волнах максималь-
ная скорость Pq редко превышает 1...5 м/с, так как длинные волны
имеют большую крутизну только при сильном штормовом ветре.
Исключением являются вышедшие на поверхность внутренние вол-
ны и волны цунами, большая скорость движения которых является
признаком для идентификации.
Короткие гравитационные волны (длиной менее 10...50 см), а
также капиллярные волны, формирующиеся под действием сил вет-
Рисунок 14.4
Скорость орбитального движения гравитационной волны
Радиолокационное наблюдение морской поверхности
535
ра и сил поверхностного натяжения воды, образуют на МП хаотиче-
скую мелкую структуру (рябь), которая не может быть описана в
рамках спектрального разложения по системам цилиндрических
волн. Скоростное распределение, образованное рябью, обычно пред-
ставляется скоростным шумом vs(x,jy), некоррелированным в про-
странстве. Среднеквадратичное отклонение (СКО) этого шума oV5
определяется, прежде всего, скоростью ветра и его значения для вет-
рового волнения лежат в пределах 0... 1 м/с.
И Гидродинамические аномалии МП образуются при движении
кораблей, при выходе на поверхность внутренних волн, в ре-
зультате выглаживаний под воздействием локальных порывов
ветра, в зонах загрязнения, при распространении цунами и т.д.
Аномалии отражают характер различных явлений в океане и в
атмосфере над ним, позволяют обнаруживать надводные корабли и
оценивать параметры их движения и размеры. Аномалии движения
МП образуют различные структуры гравитационных волн и зоны
повышенной интенсивности хаотического движения. Скорости дви-
жения МП в аномалиях имеют обычно тот же порядок, что и скоро-
сти в ветровом волнении, но могут и существенно превышать их,
создавая заметный скоростной контраст аномалий.
Например, движущийся корабль приводит к образованию волн,
получивших название корабельных.
Длина корабельной волны связана со скоростью его движения,
а высота зависит от водоизмещения и обводов корпуса. Как правило,
максимальная скорость движения МП в корабельной волне лежит в
пределах 0...3 м/с. Время существования корабельных волн состав-
ляет единицы и десятки минут.
За кораблем формируется спутный турбулентный след (СТС),
образованный за счет вращения винтов и срыва потока при об-
текании корпуса корабля.
Частицы жидкости совершают неупорядоченное круговое дви-
жение, в результате чего вектор скорости в любой точке непрерывно
изменяется по модулю и направлению, поэтому в моделях он пред-
ставляется учас!ками поверхности с пространственно изотропным и
некоррелированным случайным распределением скорости. Участки
имеют вид полос длиной от сотен метров до десятков километров и
шириной в десятки метров. СКО скорости в следе окс в начале следа
достигает более чем 1 м/с, постепенно спадая до нуля к его концу.
536
Глава 14
Время существования СТС, зависящее от состояния МП, больше,
чем у корабельных волн, и достигает десятков часов.
14.1.2. Модель отражения радиолокационного сигнала
от морской поверхности
Примем двухмасштабную модель отражения, представляющую МП
в виде совокупности отражающих участков, движущихся вместе с
поверхностью крупных гравитационных волн. Такая модель наибо-
лее точно описывает процессы в трехсантиметровом диапазоне волн
зондирующих сигналов.
Модель выделяет в спектре волнения четыре зоны:
• узкая спектральная зона в области волновых чисел £Лр (на вол-
нах этой длины происходит резонансное отражение сигнала);
• зона длинных волн, разрешаемых РСА;
• зона средних длин волн, не разрешаемых РСА;
• зона мелкоструктурной ряби.
Резонансное волновое число /сЛр зависит от волнового числа
зондирующего сигнала кг, при его оценке используют приближен-
ную зависимость £Лр « 0,2кх . Для РЛС трехсантиметрового диапа-
зона резонансные длины морских волн лежат в диапазоне 0,1 ...0,3 м.
Волны этой длины образуют на МП отражающие структуры, не из-
меняющие свои параметры в течение времени Тс <1...2 с. Отраже-
ние от резонансных волн приближенно описывается фацетной мо-
делью (рис. 14.5).
Рисунок 14.5
Двухмасштабная модель отражения, сечение рельефа МП плоскостью (х?у)
Радиолокационное наблюдение морской поверхности
537
Фацеты - это отражающие площадки, размер которых зависит
от к} и для трехсантиметрового диапазона составляет 0,3...3 м.
Каждый фацет рассматривается как точечный отражатель и ха-
рактеризуется комплексным коэффициентом отражения Pj и поло-
жением фазового центра Xj = {-T1,jr1}. Крупные волны определяют
ориентацию фацета, его движение и характер модуляции отраженно-
го сигнала. Коэффициент отражения фацета зависит от его ориента-
ции относительно направления облучения.
Движение МП влияет на отраженный сигнал несколькими ме-
ханизмами модуляции.
Наиболее значимые механизмы модуляции
• Собственное движение резонансной волны.
• Движение ряби с волновыми числами более кКу.
• Движение больших гравитационных волн.
• Движение средних волн.
Резонансная волновая структура распространяется как свобод-
ная гравитационно-капиллярная волна с фазовой скоростью V р. Это
движение эквивалентно синхронному на больших площадях МП
движению со скоростью Кфр всех фацетов.
Рябь формирует хаотическое пространственное распределение
скоростей с небольшим СКО, как правило, порядка 1...5 см/с. Это
движение приводит к расфокусировке РСА-изображения, тем боль-
шей, чем больше время накопления сигнала. Практика использова-
ния РСА показывает, что степень расфокусировки может быть при-
емлемой вплоть до времени синтезирования 1.. .3 с при к - 3 см.
Большие гравитационные волны, разрешаемые РСА, определя-
ют параметры вектора скорости фацетов. Скорость движения каждо-
го фацета определяется его положением в длинной волне и радиаль-
ная составляющая этой скорости медленно меняется с течением
времени. Смещение фацета за время синтезирования обычно значи-
тельно меньше размера элемента разрешения РСА, поэтому его
влиянием на расфокусировку изображения можно пренебрегать. Для
описания движения крупных гравитационных волн, как естествен-
ных так и аномальных, используем понятие регулярная составляю-
щая скорости *vp(x).
Средние волны, т.е. не разрешаемые РСА, но имеющие волно-
вые числа меньше резонансных, имеют широкий угловой спектр, что
538
Глава 14
создает на поверхности картину распределения скоростей близкую к
хаотической.
Общепринятым является представление этой волновой струк-
туры в виде случайного в пространстве некоррелированного
распределения скоростей vc(x) — случайной составляющей
скорости, складывающейся с движением крупной гравитаци-
онной волны.
Ее СКО ovc в большинстве случаев колеблется в пределах
0,05...0,5 м/с. Такая же модель применима и к отражениям от СТС, но
СКО в следах может быть значительно больше, достигая 0,1.. .3 м/с.
Суммарное движение МП определяется линейной суперпози-
цией регулярной и случайной составляющих скоростей:
v(x) = vp(x) + vc(x).
(14.4)
Для формирования модели отраженного от МП сигнала вос-
пользуемся понятием функция отражения (ФО) 3(х,/), кото-
рая определяется как отношение напряженностей падающей и
отраженной электромагнитных волн:
= £0TP(V)/£liaa(x7),
где £отр(х,/) является той частью отраженного поля в плоскости
МП, которая формирует поле в апертуре приемной антенны РСА.
Упрощающие допущения при задании ФО
• Модуль коэффициента отражения каждой точки поверхности яв-
ляется случайной величиной, некоррелированной в пространстве.
• Начальная фаза отраженного сигнала в каждой точке является
случайной величиной, равномерно распределенной в интервале
(-л, л) и некоррелированной в пространстве.
• Все параметры отражающих участков поверхности, в том числе
радиальная составляющая скорости собственного движения
каждой точки поверхности v(x), т.е. проекция вектора этой
скорости на направление отражатель - РЛС, в течение времени
накопления сигнала Тг не изменяются.
При этих условиях ФО имеет вид
&(x,Z) = p(x)exp{-j2&xv(x)/}.
(14.5)
Радиолокационное наблюдение морской поверхности
539
Она состоит из двух компонентов:
• не зависящий от времени комплексный коэффициент отраже-
ния р(х) ;
• функция, описывающая пространственное распределение доп-
леровского сдвига частоты отраженного сигнала, возникающе-
го за счет движения поверхности exp{-j2£xv(x)/}.
Пространственная корреляционная функция коэффициента от-
ражения, определенная как результат его статистического усредне-
ния по ансамблю реализаций,
р(х)р*(х + ^)>=р0(х)8(^),
(14.6)
где 8(...) - дельта-функция Дирака, отражающая некоррелирован-
ность соседних фацетов (оператор (...) здесь и в дальнейшем озна-
чает статистическое усреднение по реализациям).
Однако некоррелированность не исключает статистическую за-
висимость, выраженную через р0 (X), которая определяет распреде-
ление в пространстве модуляции сигнала по интенсивности.
Интегрирование р0(х) по области на поверхности, ограничен-
ной участком £2 , дает значение
Ря = fpo(x)dx >
которое по физическому смыслу является эффективной поверхно-
стью рассеяния (ЭПР) этого участка pQ = и имеет размерность
[м2]. Относительная к площади элемента разрешения величина
°улГ2 ~ / Рх имеет смысл удельной ЭПР элемента разрешения.
Величины oQ и о ^случайны. Среднее значение для стати-
стически однородной области поверхности площадью оп »
°уд —< ^удП >
определяет удельную ЭПР поверхности, являющуюся безразмерной
величиной.
Достоверность принятых моделей отражения когерентного ра-
диолокационного сигнала от МП при высоком пространственном
разрешении подтверждают проведенные экспериментальные иссле-
дования.
540
Глава 14
РЛС с длиной волны зондирующего сигнала А = 2,25 см была
установлена на корабле и облучала МП вперед по курсу, формируя
за счет направленных свойств диаграммы направленности пятно об-
лучения поверхности размером 2^3 м. Время накопления непрерыв-
ного когерентного сигнала составляло Тс = 1 с. Развертка создавае-
мого изображения по дальности R осуществлялась за счет движения
носителя РЛС при неподвижной относительно этого корабля диа-
граммы направленности.
Для каждого участка принимаемого сигнала длительностью Тс
рассчитывалась центральная частота спектра fQ и вычислялся ее
доплеровский сдвиг относительно частоты зондирующего сигна-
ла, вызванный движением МП. При использованных параметрах
системы наблюдения сдвиг частоты связан с радиальной состав-
ляющей скорости движения vr соответствующего отражающего
участка МП соотношением vr = 0,0125/^ .
На рис. 14.6,67 приведена одна из реализаций радиолокационно-
го скоростного (частотного) изображения морской поверхности .
Во время эксперимента морские волны имели длину 8...12 м, высо-
та волн от подножия до гребня составляла 0,5...0,7 м, отдельные
волны высотой до 1 м.
Рисунок 14.6
Радиолокационные изображения МП (экспериментальные данные):
а - частотный портрет; б — амплитудный портрет
Радиолокационное наблюдение морской поверхности
541
Максимальная скорость движения такой волны в соответствии
с соотношением (14.2) для параметров Л = 10 м, РЛ = 0,03 составля-
ет Ко = 0,74 м/с. Корабль двигался навстречу направлению бега волн
(поперек гребней).
Изображение отражает структуру волнения длиной порядка
Л = 10 м. Амплитуда частотных распределений лежит, в основном, в
диапазоне 50... 100 Гц, что соответствует амплитуде скоростных
распределений в диапазоне 0,62... 1,25 м/с и согласуется с теорети-
чески рассчитанной для волнения с наблюдаемыми параметрами.
Кроме того, на изображении наблюдается волна длиной около 100 м.
Для сравнения на этом же рисунке приведено радиолокацион-
ное изображение (АП), интенсивность которого Р пропорциональна
мощности принимаемого сигнала. Изображение получено для той же
реализации сигнала, что и представленное выше частотное. Эта кар-
тина не отражает структуры волнения и имеет несколько хаотически
расположенных выбросов.
В ходе экспериментов оценивалась ширина спектра отражен-
ных от МП сигналов и на ее основе рассчитывалось значение ovc
СКО случайной составляющей скорости движения в мелкоструктур-
ном волнении. В рассматриваемом примере <\с = 0,25 м/с, что соот-
ветствует принятым в модели параметрам. Как видно, хаотическое
движение такой интенсивности не разрушило радиолокационной
картины скоростного распределения в регулярном волнении. При
волнении 3 балла значение ovc не превышало 0,35 м/с. Однако из-
меренная интенсивность случайного движения существенно воз-
растала в СТС кораблей. Например, для идущего со скоростью
15... 17 узлов корабля ovc = 0,75 м/с, а для буксируемого со скоро-
стью 3...4 узла плавкрана ovc = 1 м/с. Измерения в следе выполня-
лись через 3 мин после его возникновения.
14.1.3. Пространственно-временной траекторный сигнал
в раскрыве антенны радиолокационной системы
с синтезированием апертуры
Представим отраженный сигнал в раскрыве антенны как функцию
времени и пространственных координат г/(ха,/) - пространствен-
но-временной сигнал. Под сигналом на этом этапе обработки пони-
542
Глава 14
мается напряженность электромагнитного поля. В рассматриваемых
режимах РСА пространственная обработка в вертикальной плоско-
сти (вдоль оси z{) соответствует формированию суммарной ДН при-
емной антенны, поэтому и в дальнейшем описывается как функция
одной пространственной координаты г/(ха, /).
РСА работает в режиме телескопического обзора, т.е. максимум
ее передающей диаграммы направленности в течение времени син-
тезирования следит за центром зоны обзора х0. В этом случае нор-
мированное к своему максимуму пространственное распределение
амплитуды напряженности облучающего поверхность поля Г0(х)
определяется не зависящей от времени ДН передающей антенны. В
РСА когерентный сигнал с волновым числом кх излучается в виде
импульсной последовательности с частотой повторения Fn и дли-
тельностью зондирующего импульса ти. Частота Fn выбирается
достаточной для однозначной передачи спектра доплеровских частот
отраженного сигнала, поэтому под сигналом и в дальнейшем пони-
мается комплексная огибающая траекторного сигнала.
При записи и полагаем, что центральная доплеровская частота,
соответствующая углу выноса диаграммы направленности 0а,
квадратичное изменение во времени фазы принимаемых сигналов и
влияние траекторных нестабильностей движения ЛА скомпенсиро-
ваны известными методами и угловому положению неподвижной
цели соответствует неизменный во времени доплеровский сдвиг
частоты принимаемого сигнала. Далее и рассматривается как сиг-
нал в одном разрешаемом канале горизонтальной дальности, т.е.
отраженный от зоны на поверхности, выделенной на рис. 14.2 как
область Qr.
Сигнал связан с ФОП линейным преобразованием
(ла,/) = и jjr0(x)»(x,/)exp{j<p0(xa,/;x)}dx,
(14.7)
где U - амплитуда поля в раскрыве антенны; ф0(...) - ядро преоб-
разования поля пространством распространения.
В пределах узкой полоски дальности зависимостью (р0 от у
можно пренебречь и представить ядро в виде
<Ро(ха, t; х) = kxR'1 (2Kct/ - ха)х,
(14.8)
Радиолокационное наблюдение морской поверхности
543
принимая для тангенциальной составляющей скорости полета ЛА
Kct = Ис cos 0а ее значение относительно точки Хо в момент t — 0.
Для формирования ДН и снижения уровня боковых лепестков доп-
леровских фильтров принимаемый пространственно-временной сиг-
нал умножается на некоторую взвешивающую функцию zv0(xa,/),
учитывающую ограничение по времени накопления и по раскрыву
антенны. С точностью до амплитуды г/0(ха,/) является сигналом от
неподвижной точечной цели, расположенной в центре зоны обзора.
В систему обработки поступает входной сигнал
«с(Ха>/) = И0(Ха,/>(Ха,/).
(14.9)
Подставляя в выражение (14.9) значение функций из (14.6, 14.7,
14.8), получаем выражение для входного сигнала в традиционном виде:
(Ха > 0 = Ull0 (*а > О ЯГо (х) р(х) X
хехр
14.1.4. Спектр пространственно-временных
частот сигнала
Определим спектр временных cot и пространственных сох частот
принимаемого сигнала:
5c(cox,cot) = F{wc(xa,r)} =
= Я^МННЧА +CO,/)}dXad/ , (14.10)
где F{...} - оператор преобразования Фурье.
В дальнейшем используем приведенные частоты, образован-
ные линейной заменой переменных:
хх = 7?сох / к. ,
A X А '
xt = /2Kct^,
(14.П)
xd(x) = 7?v(x)/Kct.
Приведенная частота имеет наглядный физический смысл: хх
координата отражающей точки на поверхности, создающей в прием-
544
Глава 14
ной антенне сигнал с пространственной частотой сох; xt - коорди-
ната неподвижной отражающей точки на поверхности, создающей
принимаемый сигнал с доплеровским сдвигом частоты cot; xd (х)
величина, на которую в РСА смещается изображение движущейся
цели, расположенной в точке с координатами х.
Для неподвижной точечной цели пространственная и времен-
ная частота совпадают: xt = хх , xd (х) = 0.
Применяя к (14.10) замену переменных (14.11), получаем вы-
ражение для спектра сигнала в приведенных пространственно-
временных частотах:
гг
Sc(xx,xt) = а JJwc(xa,Oexp{-j-^-(xxxa + 2^xtf)}dxadf,
к
где а - масштабный коэффициент преобразования координат.
Воспользуемся теоремой о спектре произведения функции и
представим спектр сигнала в приведенных частотах в виде двумер-
ной свертки
ScUxJt) = 5oU,^t)®®S8(xx,xt), (14.12)
где So -F{u0} - спектр сигнала неподвижной точечной цели, рас-
положенной в центре зоны обзора; S$ = F {и} - формирующий
спектр, вид которого определяется характеристиками движущейся
отражающей поверхности.
Спектр сигнала неподвижной точечной цели равен
So Гх ) = ЛГа (хх)Ф(х,),
где А - постоянный коэффициент, определяющий энергетические co-
ot ношения; Га(хх) - след приемной ДН на поверхности; Ф(хг) -
форма сжатого в результате синтезирования сигнала, т.е. отклик РСА на
неподвижную точечную цель, расположенную в начале координат.
На рис. 14.7 показаны спектры сигналов неподвижной и дви-
жущейся точечных целей. Ширина этих спектров вдоль оси приве-
денных временных частот xt равна 8Х - ширине отметки непод-
вижной точечной цели вдоль оси х, получаемой в РСА-
изображении за счет доплеровской фильтрации. Ширина спектра
вдоль оси приведенных пространственных частот хх определяется
величиной Хаь шириной следа приемной ДН на поверхности.
Радиолокационное наблюдение морской поверхности
545
Рисунок 14.7
Спектр приведенных пространственно-временных частот сигнала точечной
цели: а - неподвижная цель расположена в центре зоны обзора; б - движу-
щаяся цель расположена в точке / О
В частном случае, когда в пределах узкого элемента разреше-
ния по дальности передающая ДН практически не зависит от у, а
изменение ФО вдоль оси у пренебрежимо мало, формирующий
спектр, рассчитываемый как преобразование Фурье от сигнала гк
имеет вид двумерной 8 -функции от сложного аргумента:
) = Го(х\)р(хх)8[xd(xx) + хх -xj,
(14.13)
т.е. является 8-функцией, имеющей бесконечную величину на ли-
нии. образованной на плоскости хх,.vt функцией
и имеющей переменную в пространстве координат плотность
Из (14.13) следует, что амплитуда спектра зависит не только
от коэффициента отражения, но и от вида распределения скоростей
на МП.
Пример спектра сигнала и его следа (сечения плоскостью рав-
ных значений) на частотной плоскости для отражения от одиноч-
ной морской волны в одной полоске дальности показан на
546
Глава 14
рис. 14.8. Хотя при построении этого спектра в ФО исключалось
влияние пространственной модуляции амплитуды р(х) = const(х) ,
в спектре ясно выражена амплитудная модуляция, обусловленная
движением МП.
Рисунок 14.8
Спектр сигнала от одиночной морской волны
и его след на частотной плоскости
14.2. Режим формирования амплитудного
портрета морской поверхности
Для определения основных свойств РСА при обзоре МП в режиме
формирования АП воспользуемся схемой обработки сигналов, пред-
ставленной на рис. 14.9. Антенна формирует суммарную приемную
диаграмму направленности. В режиме телескопического обзора
нормированное к своему максимуму распределение коэффициента
усиления антенны на облучаемой поверхности Га не зависит от
времени, т.е. Га = Га (х). Во многих типах РСА суммарные прием-
ная и передающая диаграммы совпадают Га(х) = Г0(х) . Учиты-
вая, что в дальнейшем рассматриваются и другие виды ДН, для обо-
значения сигнала в такой РСА введем индекс суммирования .
Радиолокационное наблюдение морской поверхности
547
Азимут
Рисунок 14.9
Схема обработки сигналов РСА
Приемник выполняет преобразование электромагнитного поля
в электрический сигнал, усиление сигналов, компенсацию фазовых
набегов, согласованную обработку и стробирование сигнала по
дальности. На выходе приемника образуются М пар квадратурных
каналов дальности (задержки), сигналы которых поступают в систе-
му доплеровской фильтрации. В каждом канале дальности сигналы
разрешаются по частоте в N доплеровских фильтрах, имеющих по-
лосу пропускания шириной Аш =2п/Гс и центральную частоту на-
стройки соп. На рисунке каждая пара квадратурных каналов дально-
сти представлена одной линейкой доплеровских фильтров. После
фильтрации вычисляется модуль выходных сигналов и матрица дан-
ных из N> М элементов поступает в устройство формирования изо-
бражения для индикации.
Во всех каналах дальности алгоритмы обработки идентичны,
поэтому рассмотрим один m-й канал, опуская для простоты индекс
т при записи сигнала. Сигналы в паре квадратурных каналов представ-
ляются как один комплексный, до момента вычисления его модуля.
Для такой системы обработки сигнал на входе m-го канала
фильтрации, без учета шума приемных устройств, определяется ин-
тегрированием выражения (14.9) по ха в пределах реального рас-
крыва антенны:
548
Глава 14
(14.14)
d3
Спектр временных частот этого сигнала с точностью до посто-
янного множителя равен
5z(i)=pc(xx,xt)dxx, (14.15)
где Sc определяется выражением (14.12). На выходе фильтровой
системы РСА формируется модуль этого спектра
который поступает в систему индикации и является амплитудным
портретом.
При изображении неподвижной поверхности для каждого z-го от-
ражающего участка поверхности приведенная временная частота спек-
тра xti, определенная частотой настройки доплеровского фильтра
xtl = 7?со1 /(2KctA\), считается в изображении координатой по азиму-
ту х, а соответствующее этому xti значение Zzi пропорционально
коэффициенту отражения /-го участка. При цифровой обработке
сигналов на выходе фильтровой системы формируется матрица вы-
ходных сигналов фильтров ZLNM , которая с точностью до ширины
полосы пропускания и-го фильтра описывает выходной сигнал Zz .
Движение МП, модулируя интенсивность спектра сигнала, при-
водит к модуляции интенсивности изображения. Математическое
описание этого эффекта получим интегрируя (14.15) при условиях
(14.12, 14.13):
Sx(xt) = 4 Jr0(x)ra(x)p(x)O[xd(x) + x-xt]dx, (14.16)
где постоянный коэффициент А} определяется энергетическими па-
раметрами системы.
14.2.1. Изображение одиночной морской волны
Рассмотрим изображение в РСА одиночной морской волны, описы-
ваемой выражениями (14.2). Энергетический спектр сигнала 5Э,
отраженного от такой волны, как среднее по реализациям
е >ис-
Радиолокационное наблюдение морской поверхности
549
ходя из (14.13, 14.16), определяется формирующим энергетическим
спектром:
(14.17)
след которого на частотной плоскости xx,xt описывается уравне-
нием
(1г п
cos(kAxxK + vA) + хх - xt = 0.
'ct
След формирующего спектра показывает, какой доплеровский
сдвиг частоты отраженного сигнала cot = xt(2Vctkx /R) создает уча-
сток, имеющий на поверхности координату х = хх или, что то же
самое, какова в АП МП координата xt участка, имеющего на по-
верхности координату хх.
На рис. 14.10 показаны следы формирующего спектра для волн
одинаковой длины, но с разной амплитудой скоростных распределе-
ний. Для относительно малой амплитуды скоростного распределе-
ния КЛ1 каждой доплеровской частоте xtl соответствует единствен-
ное значение пространственной частоты, в данном случае хР Это
означает, что в доплеровский фильтр системы обработки пройде!
только сигнал, отраженный от участка поверхности с центром х15
т.е. существует однозначное соответствие «координата - доплеров-
ская частота».
Рисунок 14.10
Следы формирующего спектра для одиночной морской волны
550
Глава 14
При большой амплитуде VA2 существует несколько простран-
ственных частот х2,х3,х4, которым соответствует одна временная
частота xti. Это означает, что в доплеровский фильтр с частотой на-
стройки, соответствующей xti, пройдут сигналы, отраженные от не-
скольких участков поверхности, т.е. возникает неоднозначность
«координата - доплеровская частота». Неоднозначность скоростного
распределения исключает возможность однозначного пространст-
венного разрешения отражающих участков поверхности за счет доп-
леровской фильтрации.
Определим условия однозначности спектра. При произвольном
скоростном распределении она достигается отсутствием локальных
максимумов у функции xt =xd(xx) + xx , что обеспечивается выпол-
нением неравенства xd(xx)>-l. Применяя это условие к спектру
(14.17) раскроем значения входящих туда параметров волнения и
получим условие однозначности спектра сигнала для одиночной
морской волны'.
<1.(14.18)
Величину В в дальнейшем будем называть параметром одно-
значности. Физический смысл параметра однозначности становится
ясным, если представить условие (14.18) в виде
где Лх = A/sin(0w -0а) - длина морской волны вдоль элемента раз-
решения по дальности (вдоль оси х); xdmax --------------cosax
Kt
x^l + cos2 (0W -0a)tg2a - максимальный сдвиг изображения участ-
ка МП. Из условия (14.18) следует, что для каждого типа одиночной
морской волны, характеризуемой длиной Л, крутизной рЛ и на-
правлением бега 0W, можно выбрать такие параметры системы ра-
диолокационного наблюдения 7?, Kct, а, 0а, которые обеспечат по-
лучение однозначного спектра принимаемого сигнала.
Радиолокационное наблюдение морской поверхности
551
Совокупность параметров, обеспечивающих необходимые для
формирования качественного изображения спектры сигналов,
образует зоны однозначности.
Для примера на рис. 14.11 показан участок поверхности радиу-
сом 50 км. ЛА находится в центре зоны и движется вдоль оси х} со
скоростью Ис. Под зонами однозначности понимаются участки по-
верхности, на которых выполняется условие В < 1. Линиями равных
значений В показаны зоны однозначности спектра, где более тем-
ными оттенками показаны области с меньшими значениями В . Чер-
ный цвет соответствует значению В = 0. Белым цветом на рисунке
(зона 2) отмечены участки поверхности, где выполняется условие
В > 1. Черным прямоугольником (зона 1) показано одно из возможных
положений зоны, в которой осуществляется обзор. Зоны построены для
морского волнения с параметрами А = 200 м, Рл = 0,005, 0W = 30° и
для параметров системы наблюдения Vc = 200 м/с, Н = 1000 м.
Движение МП приводит к тому, что в некоторых областях час-
тотного диапазона группируются сигналы, отраженные от участков
поверхности, по размеру превышающие элемент разрешения 8Х.
Это явление, получившее название группировка, приводит к модуля-
ции интенсивности спектра за счет движения МП, дополнительно к
Ж
Хр км
4
Направление
бега волны
ю аГ’з) « ®
.Ур км
Рисунок 14.11
Расположение зон однозначности спектра
552
Глава 14
модуляции за счет вариаций р(х) и независимо от нее. Рассматри-
вать явление группировки удобно в пределах зон однозначности, так
как вне них спектр «рассыпается» и определение аналитических за-
висимостей практически невозможно.
Из выражения для формирующего спектра (14.17), с учетом
свойств многомерной (14.17) 8-функции, интенсивность энергети-
ческого спектра вдоль его гребня определяется выражением
о / \ ^1^хРо^о(хх)
^gV*x/ / ~ у ’
71 + m;jl + id(xx)]2
(14.19)
где гм = X, /8У - коэффициент сжатия, 8Y = Х7? / 2И71 cos0a - по-
С/lx d Л А ± J Л С U d
тенциальная разрешающая способность РСА.
Глубину модуляции интенсивности спектра за счет движения
МП оценим, исходя из максимальной £grnax и минимальной Sgmin
интенсивности спектра, величиной Л/ = 5сттяу/(5отяу-5опп;п), кото-
a J £llldA 4 jx LlldA £,111111 '
рая для скоростного распределения в одиночной волне определяется
значением В:
ХХа+£)2
7i44(i-я)2
(14.20)
Глубина модуляции возрастает при увеличении тсж . Этот вы-
вод справедлив только для случая, когда элемент 8Х значительно
меньше длины морской волны Л . Рассматривая изменения М в
пределах зоны однозначности, отметим, что глубина модуляции
стремится к 1, т.е. к отсутствию модуляции, в центре зоны одно-
значности, так как в этой области В = 0, и максимальна на ее крае,
стремясь к значению
М = 71 + 4шсж - 2^сж •
Движение волны, модулируя амплитуду спектра, приводит к
амплитудной модуляции РСА-изображения, формируя АП волнения
Форма волны в изображении и глубина модуляции зависят от ряда
факторов, которые изменяют один параметр - соотношение макси-
мального сдвига изображения и наблюдаемой вдоль строки дально-
сти длины волны xdmax/Ax . На рис. 14.12 приведены изображения
одиночной морской волны в РСА в одной строке дальности для участка
поверхности длиной 1000 м при Л = 160 м, для различных xdmax .
Радиолокационное наблюдение морской поверхности
553
Рисунок 14.12
Изображение одиночной волны в РСА в одной строке дальности:
а - исходная скорость (Лх = 160 м); б - исходный коэффициент отражения;
в - слабая группировка (xdmax= 13 м; В = 0.47); г - группировка
(*dmax= 27,6 м; В = 1); д - перегруппировка (xdrrax = 55,2 м; В = 2);
е - сильная перегруппировка (Xdmax = 110,5 м; В = 4)
Исходная радиальная составляющая регулярной скорости
уг (х) для всех изображений имеет одинаковую форму, но отличает-
ся по амплитуде, что выражается в изменении xdmax и в значении
параметра однозначности В. Интенсивность изображения Zx пред-
ставлена в относительных единицах. Из рисунка видно, что волне-
ние МП отображается на АП за счет движения до значений В ~2.
Глубина модуляции максимальна при В = 1.
Свойства АП морской волны для двух различных зон наблюде-
ния, т.е. различных значений параметра однозначности, иллюстри-
руются на рис. 14.13. Радиолокационное наблюдение МП ведется с
JIA, летящего на высоте Н -2000 м со скоростью Кс=200 м/с.
Одиночная морская волна бежит под углом 0W = 30° и имеет длину
А - 150 м и высоту от подножия до гребня 2а = 2 м, что соответст-
вует ее крутизне РЛ -0,0067.
554
Глава 14
Рисунок 14.13
АП морской волны, боковой обзор: а - R = 20 км, В = 1,16;
б - R = 70 км, В = 4,06
Движение МП состоит из суммы скоростей регулярного волне-
ния и случайной составляющей скорости, определенной в виде изо-
тропного пространственно некоррелированного процесса с нулевым
средним и СКО ovc = 0,1 м/с. Коэффициент отражения МП р(х) за-
дается комплексным изотропным пространственно некоррелирован-
ным гауссовским случайным процессом. Величина удельной ЭПР
МП <т принята равной -40 дБ и не зависит от положения области
наблюдения.
АП построены для РЛС, имеющей параметры:
длина антенны......................................da - 3 м
высота антенны.....................................d7 = 1 м
разрешающая способность по дальности...............6у = 3 м
потенциальная разрешающая способность
по азимуту при боковом обзоре......................6Х = 3 м
средняя мощность передатчика......................Рп = 10 Вт
спектральная плотность
внутреннего шума приемника................кТ0 =410 21 Вт/Гц
коэффициент шума приемника........................кш = 3 дБ
коэффициент потерь в приемном тракте..............ар = 4 дБ
Радиолокационные изображения МП построены методом чис-
ленного моделирования при строго боковом обзоре для двух дально-
стей до области наблюдения (R - 20 км и R = 70 км). Наблюдаемая
вдоль оси х (вдоль элемента разрешения по дальности) длина мор-
ской волны Av = 300 м.
л
Радиолокационное наблюдение морской поверхности
555
Для области 1 максимальная радиальная составляющая скоро-
сти в регулярном волнении КОр = 0,56 м/с определяет максимальный
сдвиг в изображении xdmax =55,6 м, что соответствует параметру
однозначности 5 = 1,16, близкому к полной группировке. Для полу-
чения заданного разрешения 8Х = 3 м время накопления сигнала
(время синтезирования апертуры) составляет Тс = 0,5 с. При задан-
ных параметрах РСА и МП отношение сигнал/внутренний шум по
мощности в доплеровском фильтре qQ = 30 dB. Полученное в облас-
ти 1 радиолокационное изображение МП вполне адекватно и кон-
трастно отражает структуру регулярного волнения.
Для области 2, расположенной на большей дальности, макси-
мальная радиальная составляющая скорости в регулярном волнении
изменяется незначительно (И()р = 0,55 м/с). Однако максимальный
сдвиг в изображении увеличивается до xdmax = 194 м, что соответст-
вует параметру однозначности В = 4,06, относящемуся к большой
перегруппировке. Для получения заданного разрешения 6Х=3 м
время накопления сигнала увеличивается до 7С = 1,75 с, отношение
сигнал/внутренний шум по мощности в доплеровском фильтре пада-
ет до значения д0 = 14 дБ. Полученное в условиях большой пере-
группировки в области 2 радиолокационное изображение МП не по-
зволяет наблюдать структуру регулярного волнения.
14.2.2. Разрешающая способность
радиолокационной системы с синтезированием
апертуры антенны при формировании
амплитудного портрета морской поверхности
Рассмотрим разрешающую способность РСА по азимуту, т.е. вдоль
координаты х. При оценке разрешающей способности РСА под раз-
решением 8Х понимают ширину на уровне -3 дБ от максимума от-
метки (сигнала), создаваемой в выходном изображении точечной це-
лью. В дальнейшем величина 8Х называется потенциальная разре-
шающая способность РСА. С другой стороны, через доплеровский
фильтр в системе обработки с полосой пропускания шириной Д(1)
проходит сигнал, отраженный от участка неподвижной поверхности
556
Глава 14
шириной 8р = Х7?/2Кс1Гс. Этот участок называется элемент разре-
шения. Этой же величине равна и 5Х - ширина отметки точечной
цели (ширина функции неопределенности), следовательно при изо-
бражении неподвижной поверхности 8р = 8Х (рис. 14.14). На рисун-
ке приведены следы формирующих спектров на частот ной плоско-
сти, определенной в приведенных частотах.
В соответствии с заменой переменных (14.11), приведенная про-
странственная частота равна координате соответствующего отра-
жающего участка поверхности хх = х, а приведенная временная час-
тота связана с доплеровской частотой постоянным масштабным ко-
эффициентом xt =cot7?/(2HtA\), следовательно 8Х = ^R/(2Vctkx).
Для неподвижной поверхности след является прямой линией и для
любой пары фильтров 8р1 = 8р2 = 8Х.
Рисунок 14.14
Разрешение участков МП при доплеровской фильтрации: а - неподвижная
поверхность; б регулярная волна; в - случайное значение 1; г - случайное
значение 2
Радиолокационное наблюдение морской поверхности
557
При наличии на поверхности регулярного скоростного рас-
пределения, без случайной составляющей, в фильтры проходят
сигналы от участков разной величины, 8р1 Ф 8рЭ, которые могут
быть больше или меньше 8^. Говорить в этих условиях о величине
8р как о постоянном факторе для всех участков изображения не
имеет смысла.
Случайное движение МП расширяет участок, сигнал от которо-
го проходит в фильтр: этот участок тем больше, чем выше интен-
сивность скоростного шума. Однако далеко не все отражающие эле-
менты, находящиеся в пределах 8рс, проходят через этот фильтр,
сдвигаясь в соседние, иногда далеко отстоящие.
Следовательно, для АП МП целесообразно говорить о разре-
шающей способности 8р как о размере того участка поверхности,
сигнал от которого проходит в данный доплеровский фильтр. Для
учета случайной составляющей движения МП необходимо рассмат-
ривать среднее по реализациям значение величины элемента разре-
шения 8рс -< 8р >, также различное для разных участков МП.
На рис. 14.15 показан пример участка поверхности Q. ограни-
ченного полоской дальности шириной А и областью, в которой до-
плеровский сдвиг частоты отраженного сигнала совпадает с полосой
пропускания я-го фильтра Д(оп :
Q = inf {cod (х) е А(1)П}.
Наличие случайной составляющей скорости гс(х) придает уча-
стку Q случайную форму. Переходя к приведенным частотам, усло-
вие принадлежности к Q имеет вид
Рисунок 14.15
Разрешаемый участок морской поверхности
558
Глава 14
41 + 4Р Офп)]+xdc W < 8х /2>
(14.21)
где ХфП - приведенная центральная частота настройки фильтра.
Среднее по реализациям случайного процесса xdc(x) определя-
ет разрешающую способность (размер участка Q вдоль оси х), обу-
словленную регулярным волнением МП:
1+4р(хфп)
(14.22)
Для одиночной гравитационной волны, наблюдаемой в зоне
однозначности, изменение размера разрешаемого элемента вдоль
полоски дальности определяется выражением
рс 1 +T?cos(&Axx)
14.3. Режим формирования скоростного портрета
морской поверхности
14.3.1. Модель сигнала для дискретной функции
отражения морской поверхности
Для рассмотрения СП целесообразно использовать дискретную мо-
дель ФО МП, так как дискретизация принимаемого сигнала обуслов-
лена дискретным характером системы доплеровской фильтрации. На
основе проведенного в предыдущих разделах анализа свойств МП и
отраженных от нее сигналов сформулируем основные параметры
этой модели, схематично представленной на рис. 14.16.
Зона обзора состоит из М каналов дальности, которым соот-
ветствует М независимых строк дальности. Каждая из строк даль-
ности состоит из N участков разрешения Qn, где N - число доп-
леровских фильтров в одном канале дальности. Форма участка Qn и
его положение определяются пространственным распределением
скорости движения МП v(x). Каждому участку Qn соответствует
один точечный отражатель, положение которого на строке дально-
Радиолокационное наблюдение морской поверхности
559
Рисунок 14.16
Дискретная модель ФО МП
сти хп , комплексный коэффициента отражения рп и радиальная со-
ставляющая скорости собственного движения xt =R(v/Vct +0) оп-
ределяются интегральными, взвешенными с пространственным рас-
пределением коэффициента отражения р(х), характеристиками это-
го участка:
Pn = J p(x)dx,
Qn
хп = Re{—- [ xp(x)dx}, (14.23)
Рп Q
vn=Re{— fv(x)p(x)dx}.
Pn Q
В дальнейшем удобнее пользоваться не линейным, а угловым
положением отражателя 0n = xn / R .
Состояние МП в строке дальности описывается совокупностью
TV-размерных векторов параметров р, х, v, или эквивалентной сово-
купностью p,0,v.
Задача формирования СП состоит в получении оценок парамет-
ров х (или 0 ), и v, которые являются информационными, при со-
путствующих параметрах р.
560
Глава 14
Описанная дискретная модель ФО является эквичастотной, так
как отражатели расположены равномерно на оси создаваемых
ими доплеровских сдвигов частоты отраженного сигнала. В от-
личие от нее, модель неподвижной отражающей поверхности
является эквидистантной, так как в ней отражатели располо-
жены равномерно вдоль пространственной координаты х. Мо-
дель отражения вдоль оси у (горизонтальной дальности) явля-
ется эквидистантной.
Отраженные от точечных целей сигналы создают на входе РСА
пространственно-временной сигнал, определенный во времени /ив
раскрыве антенны ха.
Введем определения составляющих сигнала:
со = 2A\(v + Cct0) - доплеровская частота принимаемого сигнала;
v
xt = /?(--1-0) - приведенная временная частота принимаемо-
го!
го сигнала;
е - вектор комплексных огибающих сигнала, элементы которо-
го равны en = en(xa,Z) = exp{-j^0nxa — jcon/} ;
Го - вектор значений следа на МП передающей ДН;
Pgo ~ Горг - вектор комплексных нормированных коэффици-
ентов отражения;
zy() ~ (Ла ’ 0 ~ огибающая сигнала от неподвижного точечно-
го отражателя, расположенного в начале координат х - 0 .
При таком описании составляющих выражение для входного
сигнала РСА, отраженного от поверхности, представленной точеч-
ными отражателями, имеет вид
и ~ woPcoe •
(14.24)
14.3.2. Алгоритм формирования скоростного портрета
методом моноимпульсного измерения угла
При формировании СП оценке подлежат угловое положение отража-
телей 0 и доплеровские сдвиги частоты отраженных от них сигналов
со , что позволяет рассчитать оценку скоростей движения отражателей
й
л
(14.25)
Радиолокационное наблюдение морской поверхности 561
Рассмотрим один из возможных методов формирования СП с
использованием моноимпульсного углового измерителя. Для полу-
чения оценки угла при приеме сигнала создаются две диаграммы на-
правленности Gj (0), G2 (0), максимумы которых ориентированы в
направлениях 0а + 0д и 0а - 0д. Для этих ДН формируются прием-
ные каналы Si?S2
S] = , S2 = jw0^2e02dz, (14.26)
где е01, е02 - векторы опорных сигналов, элементы которого равны
enl =ехр{-jA\Onl*a - j®nO > en2=eXP{-j^en2Xa-j®n^; ^2 “
принимаемые по диаграммам реализации сигнала в смеси с шумом.
На их основе формируются суммарный и разностный каналы
sL=s1+s2,sA=s1-s2,
из которых при работе на линейном участке пеленгационной характе-
ристики с коэффициентом крутизны kQ рассчитывается оценка невязки
1 sA
0д=-^- (14.27)
Кд
Требуемая для СП оценка угла получается как
НА,
а за оценку частоты принимается частота настройки фильтров, при-
емных каналов (14.26):
6 = cot.
Оценка скорости v рассчитывается из (14.25).
Возможный вариант реализации рассмотренного алгоритма для
одного из идентичных каналов дальности представлен на рис. 14.17.
Сигналы суммарной и разностной диаграмм направленности посту-
пают в соответствующие приемники, выполняющие стробирование
каналов дальности, компенсацию регулярных фазовых набегов и
траекторных нестабильностей ЛА, фазовое детектирование с форми-
рованием синусного и косинусного каналов, а также аподизацию
принимаемых сигналов с целью снижения уровня боковых лепест-
ков фильтров.
Выходные сигналы приемников посзупают в идентичные каналы
фильтрации. Для каждой пары п-х фильтров рассчитываются оценки
562
Глава 14
Рисунок 14.17
Структура системы обработки сигналов в режиме формирования СП в РСА
с моноимпульсным угломером
угла прихода сигнала 0п (или координаты хп ) и скорости движения
соответствующего элемента поверхности vn. Совокупность оценок
х, v образует СП в строке дальности и поступает на индикацию.
В этой схеме пространственная разрешающая способность по
оси х определяется доплеровской фильтрацией принимаемых сигна-
лов. а точность измерения координат и скорости движения отражаю-
щих участков - точностью моноимпульсного измерительного метода.
Изображения одного и того же участка МП в режимах АП и СП
приведены на рис. 14.18. Изображения построены для дальности
А = 30 км при разрешающей способности по дальности 8у = 3 м, по
азимуту 8Х = 3 м, максимальная скорость в волне v = 0,5 м^с. Оче-
видно, чю в приведенном примере СП более адекватно, чем РСА-
изображение, отражает структуру волнения и детали пространствен-
ного распределения скоростей движения МП.
Сравнит ельный анализ АП и СП показывает, что формирование
СП возможно в широком диапазоне углов обзора, особенно на отно-
сительно небольших дальностях. СП с наиболее контрастным изо-
бражением волнения формируются при излучении зондирующего
Радиолокационное наблюдение морской поверхности
563
Рисунок 14.18
Радиолокационные изображения в 3D проекции:
а - амплитудный портрет; б - скоростной портрет
сигнала вдоль направления бега волн, где построение АП волнения
затруднено. Для большинства условий наблюдения СП более ин-
формативен при изображении волнения на МП, чем АП.
-----------------
14.4. Точность формирования
скоростного портрета
Алгоритм формирования СП использует представление поверхности
полем точечных отражателей: истинное непрерывное распределение
скорости на МП v(x) заменяется дискретными значениями v,x. Такой
подход позволяет считать ошибкой измерения скорости в одном эле-
менте разрешения Avn разницу между значением скорости точечного
отражателя vn и полученным значением оценки этой скорости vn
= v — v
vn n n
14.4.1. Потенциальная точность измерения скорости
в элементе разрешения
Ошибка измерения скорости в п-м частотном канале практически не
зависит от ошибки измерения частоты и определяется СКО ошибки
измерения угла о0п:
Gvn — '
564
Глава 14
Тогда дисперсия ошибки оценки скорости равна
(14.28)
где 0о - ширина диаграммы направленности антенны;
qn=2Pc/(Рп+Рш) - отношение мощности сигнал/помеха в фильтре,
определяемое мощностью внутреннего шума Рш и мощностью поме-
ховых отражений, принимаемых по боковым лепесткам фильтра Рп .
Для обеспечения точности измерения скорости в одном фильт-
ре в единицы и десятки сантиметров в секунду требуется отношение
сигнал/помеха, составляющее десятки дБ. Достижение таких значе-
ний qn требует, среди других условий, обеспечения высокого энер-
гетического потенциала, прежде всего за счет увеличения времени
накопления сигнала, повышения средней излучаемой мощности и
снижения уровня шума приемников.
14.4.2. Предельная точность формирования
скоростного портрета при отсутствии
внутреннего шума приемника
Определим точность измерения СП в предположении настолько боль-
шого отношения сигнал/внутренний шум, что шумами приемника
можно пренебречь. Тогда помехи образованы отражениями от МП,
принимаемыми по боковым лепесткам доплеровских фильтров.
Эту точность будем называть предельной, так как она не может
быть улучшена за счет повышения энергетического потенциа-
ла РЛС.
Требует определения и само понятие точность измерения СП,
так как оно отличается от понятия точность измерения скорости в
одном фильтровом канале.
Под точностью измерения СП будем понимать среднее по все-
му изображению МП значение ошибки измерения регулярной
составляющей скорости.
Пусть скоростное распределение на МП имеет вид суммы регу-
лярной и случайной составляющих
v(x) = vp(x) 4-Vc(x),
Радиолокационное наблюдение морской поверхности
565
а сформированный СП равен v(x). Тогда точность измерения СП
оценивается величиной СКО Av(x) :
Д* (х) > , где Д v (х) = v(x) - vp (х) .
Интенсивность полезного сигнала в конкретном доплеровском
фильтре случайна, она определяется случайным коэффициентом от-
ражения разрешенного этим фильтром участка МП. Если полезный
сигнал настолько мал, что помеховые отражения сравнимы с ним,
или даже превышают его, при оценке угла прихода сигнала в этом
фильтре возникают аномально большие ошибки измерения. Наличие
большого количества таких аномальных ошибок в СП значительно
ухудшает качество изображения.
Распространенным способом борьбы с аномальными ошибками
является пороговая селекция сигналов до применения алгорит-
мов оценивания.
Фактически, сначала решается задача обнаружения полезного
сигнала в каждом доплеровском фильтре, а затем для каждого обна-
руженного сигнала производится оценка его параметров. На выходе
фильтров суммарного приемного канала устанавливается порог вы-
сотой /?, все фильтры, сигнал в которых не превышает порог, исклю-
чаются из дальнейшего процесса формирования СП. Уровень порога
h целесообразно устанавливать в зависимости от среднего уровня
сигналов на выходе фильтров
/z = /?p(|S£|),
где Лр - коэффициент пороговой селекции.
На рис. 14.19 представлена полученная методом математиче-
ского моделирования зависимость ошибки формирования СП от
уровня порога при отсутствии внутреннего шума приемника. Ис-
пользованы параметры моделирования: размер участка поверхности
500x250 м, число каналов фильтрации, равное числу точек в изо-
бражении N*M= 166x50. Из рисунка видно, что СКО меньше,
чем СКО случайной составляющей скорости ovc. Это является след-
ствием того, что фильтр временных частот играет роль фильтра про-
странственных частот и подавляет мощность некоррелированного в
пространстве скоростного шума vc (х).
Для приведенных на графике условий ошибка монотонно
уменьшается с увеличением уровня порога. Однако значительное
566
Глава 14
Рисунок 14.19
Ошибки формирования СП при наличии случайной составляющей скорости
без внутреннего шума для vpmax = 0,2 м/с, R = 10 км, da = 3 м: а - скоростной
портрет (avc = 0,17 м/с); б - скоростной портрет (ovc = 0,45 м/с)
увеличение порога, до значений Лр > 1, приводит к быстрому росту
ошибки, вплоть до полного разрушения изображения.
Несмотря на относительно большой уровень ошибки (он срав-
ним с амплитудой скорости в регулярной составляющей), визуально
качество СП позволяет наблюдать структуру регулярного волнения.
14.4.3. Влияние шумов приемника
на точность формирования скоростного портрета
Оценка влияния внутренних шумов аппаратуры на точность измере-
ний СП и в целом на качество формируемого изображения является
одним из центральных моментов при определении технических воз-
можное! ей реализации режима формирования скоростного портрета
и гри определении облика системы наблюдения.
Действительно, точность угловых измерений за счет направ-
ленных свойств ДН невысока по сравнению с пространственной раз-
решающей способностью РСА и может быть сравнима с ней только
Радиолокационное наблюдение морской поверхности
567
при отношении сигнал/внутренний шум по мощности qQ, состав-
ляющем десятки дБ. Однако качество СП определяется средней по
всему портрету ошибкой, которая уменьшается при увеличении ко-
личества элементов изображения. Вследствие этого условия получе-
ния качественного СП обеспечиваются при относительно небольших
значениях д0.
На рис. 14.20 приведена зависимость ошибки измерения скоро-
сти регулярной составляющей движения МП от отношения сиг-
нал/внутренний шум. При увеличении q0 ошибка асимптотически
стремится к значению, определяемому уровнем помех, образован-
ных отражениями от МП, т.е. к предельной ошибке. Стабилизация
ov наступает после qQ «30...50.
Важно оценить визуально как погрешность влияет на качест-
во СП. Приведенные изображения показывают, что даже при
ошибке измерения скорости, близкой к амплитуде регулярной со-
ставляющей скорости, СП адекватно передает картину регулярно-
го волнения.
Рисунок 14.20
Погрешность измерения СП при vpmax = 0,425 м/с, R = 10 км, da = 3 м, ha = 0.8:
а скоростной портрет (д0 = 5; ov = 0,31) (ovc = 0,17 м/с); б - скоростной
портрет (#0 - 50; = 0,22) (ovc = 0,45 м/с)
568
Глава 14
Скоростной портрет с качеством, достаточным для наблюдения
картины регулярного волнения на МП, может быть сформирован
при относительно небольших значениях отношения сигнал/внут-
ренний шум, в некоторых случаях, имеющих значения >5. Ана-
лиз зависимости погрешности измерения регулярной составляющей
скорости движения от соотношения мощности сигнала и мощности
помех и визуальный анализ качества формируемых изображений,
показывают, что существующие РСА наблюдения МП способны
формировать СП, достоверно отражающий структуру волнения.
При обзоре морской поверхности РСА создает изображение
ее волнения и аномалий за счет измененеия коэффициента отра-
жения и доплеровской модуляции отраженного сигнала, вызван-
ной движением МП. При наблюдении МП возможно применение
двух режимов - амплитудного портрета и скоростного портрета.
Для получения качественных изображений МП необходимо вы-
полнять обзор в «зонах однозначности», положение которых за-
висит от характера волнения и параметров полета носителя.
Режим СП позволяет получать данные о пространственном
распределении скорости движения поверхности на больших аква-
ториях с детальностью, измеряемой единицами метров, и точно-
стью измерения скорости до единиц сантиметров в секунду. В
большинстве случаев СП превосходит возможности АП при на-
блюдении и оценке параметров течений, внутренних волн, цуна-
ми, ветрового волнения и аномалий МП, вызванных человеческой
деятельностью.
Несмотря на относительно невысокую точность измерения
угла, точность формирования скоростного портрета достигает еди-
ниц сантиметров в секунду, а визуальное восприятие СП обеспе-
чивает решения широкого круга практических задач.
Введение режима формирования скоростного портрета в
РСА требует выполнения точных угловых измерений, например за
счет использования большой моноимпульсной антенны.
ГЛАВА 15
Многопозиционные
радиолокационные системы
с синтезированием апертуры антенны
15.1. Основные свойства многопозиционных
радиолокационных систем
Высокое угловое и линейное разрешение по азимуту можно получить
путем синтезирования апертуры антенны при движении как пере-
дающей, так и приемной позиции. При этом число радиолокационных
позиций и их взаимное перемещение относительно цели выбираются
исходя из необходимости решения заданной тактической задачи.
Так, например, в разведывательных или многофункциональных
РСА обычно используется однопозиционная система (совмещенная
приемопередающая антенна) при прямолинейной траектории носителя
РСА и переднебоковом или телескопическом обзоре. Это обеспечивает
требуемую (высокую) разрешающую способность по азимуту во всей
зоне обзора, кроме переднего сектора, где разрешение резко падает.
Однако передний сектор (±10° относительно вектора путевой скоро-
сти) имеет важное значение при решении многих тактических задач:
разведка, наведение оружия, десантирование, посадка и т.д.
Для получения высокого разрешения в переднем секторе об-
зора возможно использовать многопозиционные РСА. При этом
управление позициями (траекториями движения передающих и
(или) приемных пунктов) оптимизируется исходя из получения
требуемой разрешающей способности в заданном секторе обзора.
570
Глава 15
При многопозиционном режиме РСА (МПРСА) возможно ис-
пользование одновременно многих систем, работающих только в
режиме приема, при одной передающей позиции, которая облучает
заданную зону обзора (рис. 15.1). Отсутствие излучения в таких при-
емных позициях РСА повышает скрытность работы и боевую устой-
чивость. При этом значительно снижается масса и энергопотребле-
ние приемных позиций. Однако одновременно повышаются требо-
вания к мощности излучения передающей позиции, так как она
находится на значительном удалении (обычно вне зоны ПВО про-
тивника). Большая высота полета передающей позиции обеспечива-
ет уменьшение радиолокационных теней.
Носителями передающих позиций могут быть как авиацион-
ные, так и космические аппараты, а приемные позиции могут быть
даже неподвижными (наземные и морские станции, аэростаты и
т.п.). В качестве передающих (подсвечивающих) позиций могут ис-
пользоваться также телевизионные, связные, радионавигационные, в
том числе спутниковые, и другие типы радиоэлектронных систем.
Основной проблемой при работе многопозиционной РСА яв.11я-
ется обеспечение синхронизации приемных позиций с передающей
по несущей частоте, частоте повторения импульсов и положению
зоны обзора.
Простейшим вариантом (или составной частью) многопозици-
онной РСА, обеспечивающим высокое угловое разрешение в
передней зоне обзора, является бистатическая (двухпозицион-
ная) РСА, в которой передающая и приемная позиции разнесе-
ны и двигаются по различным траекториям.
Передающая / Приёмные
Рисунок 15.1
Многопозиционные на приём РСА
।
।
Многспозиционные радиолокапционные системы...
571
В состав МПРСА кроме приемников, передатчиков или прие-
мопередатчиков, расположенных в различных точках пространства,
и пункта совместной обработки информации, который может быть
совмещен с одной из позиций, также входят линии связи для переда-
чи информации от отдельных позиций на пункт обработки, синхро-
низации и управления позициями. Одним из вариантов построения
МПРСА является объединение в единую систему однопозицион-
ных РСА, расположенных как на земле, так и на борту ЛА. Такие
МПРСА обладают большей гибкостью, поскольку в зависимости
от складывающейся ситуации позиции могут переходить в режим
работы передающей или приемной, а также обычной однопозици-
онной РЛС.
15.1.1. Характеристики целей
в многопозиционных радиолокационных системах
В двухпозиционных РСА характеристики целей (в частности ЭПР)
зависят от различия направлений от цели на передающую и прием-
ную позиции - угла двухпозиционности Р (рис. 15.2).
Для элементарных целей и малой, по сравнению с размерами це-
ли, длины волны к связь между двухпозиционной (при р Ф 0) и одно-
позиционной (при р = 0) ЭПР одной и той же цели устанавливается
теоремой эквивалентности'. ЭПР цели в двухпозиционной РЛС с уг-
лом /3 < 180° равна однопозициониой ЭПР той же цели, измеренной
вдоль биссектрисы угла /3 на частоте, уменьшенной в cosfJPl} раз.
Рисунок 15.2
Геометрия бистатической системы
572
Глава 15
Аналогичная зависимость справедлива и для целей, представляю-
щих собой совокупность блестящих точек. При этом максимальная об-
ласть значений 0 определяется шириной собственных ДН блестящих
точек, которая, в свою очередь, зависит от характера и размеров точек.
Эксперименты показали, что по отношению к усредненным, а также
максимальным и минимальным значениям ЭПР на определенных
интервалах ракурсов для такой сложной цели как самолет «теорема
эквивалентности» выполнятся при углах 0 до 60...90°.
В общем случае при облучении тел простой формы плоской
волной наблюдается медленный рост ЭПР для 0 < 0 < 50°. При даль-
нейшем увеличении 0 рост ускоряется. При 0 = 90... 110° ЭПР воз-
растает примерно на порядок по сравнению с однопозиционной ЭПР
(0 = 0°). У сферы ЭПР постоянна вплоть до 0 = 150... 160°. Когда 0
достигает 180° (рассеяние вперед) для любых целей имеет место
резкое увеличение ЭПР до значения
С(р= 180°) = 4л52/Х2, (15.1)
где 5 - площадь плоской фигуры, ограниченной кривой раздела ос-
вещенной и теневой частей цели.
Отсюда следует, что при рассеянии вперед и S» X2 двухпо-
зиционная ЭПР цели намного больше однопозиционной.
По результатам экспериментов для таких сложных целей, как
самолет, в двухпозиционной РЛС по сравнению с однопозиционны-
ми (за исключением случая рассеяния вперед) может наблюдаться
уменьшение ЭПР на 6...8 дБ. Это объясняется уменьшением вклада
в ЭПР участков зеркального отражения, имеющих сравнительно уз-
кие собственные диаграммы направленности (элементы двигателей,
крыльев, антенн). Одновременно уменьшается угловой шум цели и
ширина спектра флуктуаций ЭПР. Это согласуется с увеличением
«эквивалентной» длины волны в l/cos(0/2) раз. Для некоторых целей
двухпозиционная ЭПР значительно больше однопозиционной. Это, в
частности, относится к целям со сниженной радиолокационной за-
метностью, которые рассеивают падающую на них энергию пре-
имущественно в сторону от строительной оси цели.
Помимо ЭПР цели относительно каждой приемной позиции в
МПРЛС необходимо знать и характеристики статистической связи
флуктуаций этих ЭПР. Если угол между направлениями от цели на
разнесенные приемные позиции превышает среднюю ширину диа-
граммы рассеяния (вторичного излучения) цели, то статистическая
связь флуктуаций ЭПР отсутствует.
Многопозиционные радиолокапционные системы...
573
15.1.2. Зоны действия многопозиционных
радиолокационных систем
Зона действия МПРСА зависит не только от характеристик пере-
дающих и приемных позиций, но и от геометрии системы, т.е. числа
и пространственного расположения позиций.
Если в двухпозиционной РЛС (рис. 15.2) диаграмма направлен-
ности антенн передающей и приемной позиций, разнесенных на базу
£, направлены на цель, то плотность потока мощности, создаваемая
передатчиком у цели,
Прд ^излСпрд ! (4л7? прд)э
где Ризл - мощность излучения; бпрд - коэффициент направленного
действия передающей антенны; Лпрц - расстояние от передающей
позиции до цели.
Плотность потока мощности, создаваемая сигналом цели у при-
емника,
Пц= Ризлбпрлп(Р) 7 ((4л)2А2прдА2прМ),
где о(Р) - ЭПР цели, которая зависит от двухпозиционного угла Р;
7?прм - дальность от цели до приемной позиции. Мощность сигнала
на входе приемника РПрм = Пц511рм, где 5прм - площадь приемной ан-
тенны.
Энергия излучаемого сигнала £изл = PcpZH, где Рср - средняя
мощность передатчика; ZH - время наблюдения. Тогда отношение
энергии принимаемого сигнала Е к спектральной плотности шумов
Nqравно
_ Р _ ^ср^н^прд^ПрМ^(Р)
(15.2)
где Nq = кТЕи, =4-10 21РШ - спектральная плотность шума при
Т = 300 С: Fin - коэффициент шума приемника; ап - коэффициент
потерь энергии сигнала.
Полученное выражение позволяет определить зону действия
РЛС, как область пространства, в которой при фиксированной ЭПР
цели о выполняется условие qc> q^, где q^ - требуемое отношение
сигнал/шум, при котором цель обнаруживается с заданной вероятно-
стью правильного обнаружения при фиксированной вероятности
ложной тревоги или измеряются ее координаты с заданной точно-
стью. Граница зоны действия определяется выражением
574
Глава 15
2^HGnpAp,XP)
(4n)2^Tpan7V0
= const.
(15.3)
Таким образом, граница зоны действия в пространстве пред-
ставляет собой линию, для которой постоянно произведение дально-
стей от цели до передающей и приемной позиций. Заметим, что в
однопозиционной РЛС 7?Прд = 7?пРм = следовательно, для однопози-
ционной РЛС граница зоны действия в пространстве представляет
собой сферу радиусом R.
Граница зоны действия двухпозиционной РЛС в плоскости,
проходящей через линию базы, описывается овалами Кассини. Если
ввести постоянный безразмерный коэффициент С = 25j7?npj/?npM / L ,
то овалы Кассини представляются в декартовой или полярной сис-
теме координат выражениями
(хн2+>’н2+I)2-4х„2= С4; (p2+l)2-4p2cos2(e) = С4, (15.4)
где хн = 2x/L; = 2y/L; р2 = хн2 + унг; 0 = arctg(vH/x„).
Форма овалов Кассини зависит от параметра С. На рис. 15.3 по-
казаны овалы Кассини при трех значениях С. Чем больше значение
С, тем ближе овалы Кассини к окружности, определяющей на этой
Рисунок 15.3
Зона действия бистатической системы
Многопозиционные радиолокапционные системы...
575
же плоскости границу зоны действия однопозиционной РЛС, распо-
ложенной в центре базы. По мере уменьшения С зона действия вы-
тягивается, а при С < 1 разбивается на две отдельные зоны вокруг
передающей и приемной позиций.
Для получения сплошной зоны действия, что возможно при
С > 1, базу L между позициями выбирают обычно меньшей, чем ра-
бочая дальность РЛС: L < ^прстах^пРмтах • При этом гарантируется
С > 2, следовательно, сплошная зона обзора.
15.2. Пространственно-временная функция
неопределенности бистатической
радиолокационной системы
Пространственно-временная функция неопределенности описывает
комплексную огибающую сигнала на выходе согласованной систе-
мы обработки без шума и является функцией задержки, доплеров-
ской частоты, направления прихода электромагнитной волны и их
производных.
Рассмотрим пространственно-временную функцию неопреде-
ленности РСА по угловой координате (азимуту), радиальной и тан-
генциальной составляющим скорости цели при импульсном зонди-
рующем сигнале.
Выражение для сигнала, отраженного от точечной цели, в эле-
менте антенны с координатой х < d / 2 , где d - размер антенны
РЛС, и в момент времени t <ТС! 2 имеет вид
хехр
5ц(/,х) = Д/7
.2л/ ^(0^1 -2л . _ z ч .
+ JT z----;7+VsmMO+J<Po
Ц с ) 2d Л
(15.5)
где Ао и фо - случайные амплитуда и начальная фаза, постоянные на
интервале синтезирования Тс; ехр(-лг2 2d1) и ехр(-лГ 2ГС2)
множители, учитывающие распределение поля на реальной антенне
576
Глава 15
и весовую обработку (аподизацию) при синтезировании апертуры;
г г/ \ тт z 7с(/ 77 7L )
u(t) = Up ехр(---------) - огибающая и-го импульса пачки ; ти -
2т
и
длительность импульса; R(f) и Or(z) - текущие значения наклонной
дальности по линии: передатчик-цель-приемник и угла визирования
цели (азимут) с приемника; ~(NC - 1)ТИ < t < NcTn ; Nc = Тс/Ти\ Nc -
число импульсов на интервале синтезирования.
Расстояние R(t) равно сумме расстояний от передатчика до цели
Rj(t) и от цели до приемника 7?r(Z):
R(t) = RT(f) + T?R(0.
В общем случае система обработки, включающая приемную
антенну и временной фильтр, согласована с электромагнитным по-
лем 50П (/, х), для определения которого необходимо вычислять ди-
намику треугольника двухпозиционной системы, который состоит из
точек Т (передатчик), R (приемник) и поверхность земли К (/ = 0).
Причем точки Т и R движутся со скоростью Гт и Pr (рис. 15.4). То-
гда, в зависимости от азимута объекта (/), его радиальной (Кгц) и тан-
генциальной (Кш) скорости, нормированная амплитуда выходного
сигнала будет представлять собой пространственно-временную
функцию неопределенности:
d> 2 Гс/2
j j su(/,rt,Kr/,x)son(f,x)(kdx, (15.6)
-d:2-Tc!2
где I - смещение цели относительно точки К по изо дал и.
В дальнейшем будем рассматривать непрерывный эквивалент
импульсного сигнала, считая, что система обработки согласована с
огибающей импульса и имеет место однозначная дальность. В этом
случае задержкой сигнала в огибающей импульса можно пренеб-
речь.
При прямолинейном равномерном движении приемника и пе-
редатчика расстояния J?T, и J?TR, а также угол визирования цели со
стороны приемника Or в квадратичном приближении изменяются по
законам:
Krrcos(eT0+—)-
^то
(15.7)
Многопозиционные радиолокапционные системы...
577
Гипербола постоянной частоты
(изодопа)
Рисунок 15.4
Геометрические соотношения бистатической РСА
^r(M) — ^ro ^r^Os(6R0 +
^RO
(15.8)
^COs6BR0+ S^n ®BR0+
2a0
TZ л • 2 л
+Pr i cos 0BT0 + —— —j sin 0BT0 j
^RO
6т(О“®то+р + pT sin6ro?
^RO ^RO
(15.9)
(15.10)
578
Глава 15
где Лто, 7?ro, 0 го, 6ro, = ^tr (0) - значения соответствующих пара-
метров при t = 0; Otro и Orto - yi ол визирования передатчика со сто-
роны приемника и, наоборот, приемника со стороны передатчика
при t = 0 (рис. 15.4).
Учитывая далее обычно выполняемые для РСА условия: размер
синтезированной антенны много меньше дальности до передатчика
(ГТГС << /?то), скорость наземной цели меньше скоростей движения
приемника и передатчика: (Кц = + — ^т) и -- ^r , а бис-
татический угол р мал, после интегрирования выражения (15.6) с ус-
ловиями (15.5) и (15.7)—(15.10) находим выражение для функции не-
определенности:
J(e,riu,^) = ^V2exp
2nJ2 q2
X2
(Мд-^г®«е)2
Л
где 0 = 7/ T?R0 - угловая координата (азимут) цели относительно
нормали к приемной антенне;
(15.12)
(15.11)
Л
- приращение доплеровской частоты, которая определяется разно-
стью скоростей сближения по линиям: передатчик - цель (/ 0)
приемник и передатчик - точка К(1 = 0) - приемник;
Многопозиционные радиолокапционные системы...
579
(15.13)
- приращение крутизны частотной модуляции отраженного сигнала
текущей точки / по отношению к I = 0; шц = Vtu /T?R0 - угловая ско-
рость линии визирования приемник-цель;
. п 2nd' 2
А=—- +—z—w -jTip -
2 2 Х2 Ц
комплексный коэффициент.
Тогда модуль нормированной (относительно максимального
значения: Jmax = 2XTcd ) функции неопределенности принимает вид
®ue + 4я/д1-1
2тг<7 _ 2 Z \2
—-2-®ц6) + (ЯЦ)
А
4яг/2
А.2
(15.14)
Первый экспоненциальный сомножитель в (15.14) представляет
собой ФН, определяемую реальной антенной, а последующие
функцию неопределенности, обусловленную синтезированием апер-
туры. На рис. 15.5 показаны виды сечений ФН по азимуту для биста-
тической РСА с совмещенными позициями или однопозиционной
РСА (7?TR=0, P’Rt= Frt, CRr = КТг) при различных значениях состав-
ляющих скорости движения цели Vtlx и ИП1.
При отсутствии синтезирования апертуры (РЛС неподвижна)
ФН по азимуту определяется реальной приемной апертурой (кри-
вая ФН1).
При синтезировании апертуры в функции неопределенности
существует неоднозначность азимут - радиальная скорость цели. В
580
Глава 15
Рисунок 15.5
Сечение функций неопределённости однопозиционной РСА
случае неподвижной цели (Кш = = 0,1 = 0), положение максимумов
реальной (ФН1) и синтезированной (ФН2) апертур совпадают. При
радиальном движении цели (Иш= 0) и / = 0, ФН2 для неподвижной це-
ли (Рщ= 0) и ФН5 для цели, движущейся с радиальной скоростью Игц,
Г,
различаются лишь сдвигом по оси / на величину /см =—L'^co- На-
^Rt
личие тангенциальной скорости приводит к уменьшению максимума
и расширению ФН вследствие расфокусировки системы обработки
(ФН4, рис. 15.5).
При наблюдении неподвижной цели и смещенной по азимуту
на величину I - -1СМ , происходит уменьшение максимума ФН по за-
кону реальной антенны. Следовательно, источником информации в
РС А, раскрывающим неоднозначность азимут - радиальная ско-
рость, является реальная антенна.
Для бистатических РСА характерны те же закономерности, что
и для однопозиционных РСА, в части влияния тангенциальной и ра-
диальной составляющих скоростей движения цели: эффект смеще-
ния при наличии радиальной составляющей и расширение ФН при
наличии тангенциальной составляющей. Однако для бистатических
РСА имеются особенности, характерные для различных дальностей
7?r и 7?т и пространственного положения векторов Hr и Гу. На
рис. 15.6 изображены сечения ФН, для наиболее характерных поло-
жений приемника и передатчика.
Рисунок 15.6
Сечение функций неопределённости бистатической РСА
При совмещении векторов Гг и Er ФН2 имеет тот же вид, что и
для однопозиционых РСА. Если вектор Fr на той же дальности раз-
вернуть относительно вектора Рт на некоторый угол а, то функция
неопределенности расширяется пропорционально (1 + |sina|) и в слу-
чае, когда вектор FR, перпендикулярен вектору Гт, ФН расширяется
в 2 раза (ФНЗ) и разрешение по азимуту обеспечивается за счет дви-
жения передатчика.
При движении приемника прямо на цель и большом значении
базы (7?tr ~ T?R) ФН имеет два максимума (ФН4), причем амплитуда
второго максимума уменьшается по закону реальной антенны. По-
ложение этих максимумов можно определить, приравняв нулю зави-
симость (15.12):
(15.13)
или при
R2 V
rR -0, 7?T(1>/?r0, /2 =-2-^-^
''ТО 'Кг
(15.14)
582
Глава 15
Наличие двух максимумов объясняется тем, что при малых / за-
висимость доплеровской частоты отраженного сигнала (4) вследст-
вие движения передатчика пропорциональна / (рис. 15.4, /дт), а
вследствие движения приемника на точку К изменяется по квад-
ратичному закону (рис. 15.7).
Поэтому результирующая доплеровская частота /^=Удт+/цК
равна нулю для двух точек: 1\ = 0 и /2. Отраженные сигналы от этих
двух точек не отличаются друг от друга и обрабатываются одинако-
во во времени. Наличие пространственного разноса между точками
/1 и /2 приводит к тому, что максимум второй точки /2 уменьшается
по закону приемной антенны. Поэтому подавление второго максима
ФН может быть достигнуто за счет уменьшения ширины ФН реаль-
ной антенны на прием или с использованием специальной формы
(провал в направлении /2) ФН реальной апертуры.
При малых бистатических углах Р < 90° (рис. 15.1) эффект
поворота сетки разрешения мал (не более 40 %). Площадь эле-
мента разрешения определяется произведением разрешающей
способности РЛС по дальности на разрешающую способность по
азимуту:
85=8гх8/. (15.15)
В соответствии с общими закономерностями синтезирования
апертуры разрешающая способность по угловой координате опреде-
Рисунок 15.7
Графики зависимости доплеровских частот отраженного сигнала от рас-
стояния до точки наблюдения
Многопозиционные радиолокапционные системы...
583
ляется угловым размером синтезированной апертуры 8/ = X / Ро. При
прямолинейном равномерном движении элементов бистатической
системы угловой размер синтезированной апертуры определяется
суммой угловых скоростей линий визирования цель-приемник (coR )
и передатчик-цель (шт): 30 = (фг + со, )ГС.
В свою очередь, угловая скорость определяется отношением
тангециальных скоростей цели, приемника, передатчика и расстоя-
нии между ними:
®т = (rTt + Ktu ) / RT0 ; coR = (FRt + ) / R
При произвольном начальном положении приемника и пере-
датчика анализ разрешающей способности бистатических систем по
азимуту очень громоздкий. Поэтому рассмотрение ограничим част-
ными, но очень важными случаями.
При совмещении векторов скорости приемника и передатчи-
ка (7?т = Rr, Pt = Vr), разрешающая способность по азимуту опре-
деляется теми же закономерностями, что и для однопозиционных
РСА:
5ZAsXRR/2KRrcsin0R().
(15.16)
Важным преимуществом бистатической РСА (по сравнению с
однопозиционной) следует считать возможность получения высоко-
го разрешения по азимуту при неподвижном приемнике или при
движении его прямо на цель. В частности, при ARo = Ят0, разрешение
по азимуту обеспечивается за счет движения передатчика:
ТОхс
(15.17)
На рис. 15.8 представлена зависимость разрешающей способ-
ности при изменении угла визирования точки К со стороны прием-
ника 0R0 для различных дальностей 7?Rq, из которых следует, что
при уменьшении угла визирования разрешающая способность пада-
ет практически линейно.
При малой дальности до точки К (ARo < АТо) и FRl = 0 (движение
приемника прямо на цель) разрешающая способность бистатической
РСА обеспечивается в основном за счет движения приемника (син-
тезирование в передней зоне обзора):
8L
К
^RO Чо^с •
(15.18)
584
Глава 15
Рисунок 15.8
Графики зависимости разрешающей способности бистатической РСА
от угла визирования цели
Для анализа других закономерностей разрешающей способно-
сти бистатической РСА рассмотрим следующую тактическую си-
туацию. В начальный момент времени векторы скоростей передат-
чика и приемника совмещены, а точка К находится под углом Ото,
затем приемник РСА начинает разгоняться с продольной перегруз-
кой УПр и разворачивается на точку К с боковой перегрузкой Убок, а
передатчик продолжает прямолинейный полет.
На начальном участке полета приемника разрешающая способ-
ность бистатической РСА будет, с одной стороны, падать вследствие
разворота приемника и уменьшения угла визирования цели, а с дру-
гой стороны, возрастать вследствие уменьшения дальности до цели
T?Ro и увеличения угла визирования точки К со стороны передатчика
Ото- Можно подобрать такую траекторию движения приемника и пе-
редатчика, чтобы сохранить разрешающую способность по азимуту.
Например, если за некоторое время приемник пролетит половину
расстояния до точки К или в два раза увеличится угол визирования
точки К со стороны передатчика.
Наличие радиальной и тангенциальной составляющих ускоре-
ния приемника также оказывает влияние на разрешающую способ-
ность РСА. Если разгон приемника осуществляется с перегрузкой не
более 2g, разворот - с боковой перегрузкой до 5g, а время синтези-
рования сравнительно мало (Тс<0,1 с), разрешающая способность
РСА ухудшается не более, чем в 1,5...2 раза.
Многопозиционные радиолокапционные системы...
585
Рисунок 15.9
Графики зависимости разрешающей способности бистагической РСА
от дальности до цели
В качестве примера на рис. 15.9 показана зависимость разре-
шающей способности РСА на всем интервале полета приемника с
дальности 30 км при разгоне его с продольным ускорением
Jnp = 2g, развороте с = 5g и J§ = 2g, скорость передатчика
Гт = 200 м/с, начальный угол равен 30 , а время синтезирования
TQ = 0,1 с (разрешающая способность в момент разлета (5/а = 30 м).
Из рисунка следует, что при полете с ускорением на началь-
ном участке дальности разрешающая способность ухудшается
примерно в 2 раза (J§ = 5g) и в 1,5 раза (J§ = 2g), а далее при
уменьшении дальности практически линейно возрастает.
15.3. Потенциальная точность измерения азимута
и составляющих скоростей движения цели
в бистатической радиолокационной системе
Потенциальную точность измерения азимута и составляющих ско-
рости движения цели в бистатической РСА можно определить на
основе анализа ФН по методике, основанной на разложении функ-
ции неопределенности в ряд и ограничении вторым членом.
586
Глава 15
В соответствии с этой методикой, которая изложена в гл. 10,
дисперсия оценки азимута, радиальной и тангенциальной скоростей
определяются размерами реальной и синтезированной антенн и вре-
менем синтезирования.
При разнесении приемника и передатчика ошибки измерения
азимута и составляющих скорости движения определяются теми же
закономерностями, что и для однопозиционных РСА, а количест-
венно определяются путем замены в формулах (15.25), (15.26),
(15.27) ширины синтезированного луча 0с на аналогичные величины
для бистатических систем: 6/Б / ^r0 или 8/п / ^r0 в зависимости от
дальности приемника до цели соответственно. Поэтому точность
измерения азимута движущейся цели определяется шириной прием-
ной ДН антенны, радиальной скорости - шириной ДН приемной ан-
тенны и скоростью носителя, а тангенциальной скорости - разре-
шающей способностью РСА по азимуту (б/А, 8/б или 8Д<) и интерва-
лом синтезирования.
Для неподвижных целей погрешность измерения азимута цели
относительно вектора скорости носителя определяется только раз-
решающей способностью по азимуту б/Б или 8/к. Из (15.25) и (15.24),
в частности, следует, чт о при картографировании неподвижных це-
лей погрешность измерения азимута при малой дальности между
приемником и целью определяется только скоростью Pr и временем
синтезирования Тс.
15.4. Алгоритмы когерентной обработки
траекторного сигнала при разнесенном
приемнике и передатчике
Благодаря совместной обработки информации о каждой цели, полу-
чаемой в разнесенных точках пространства (или в одной точке, но
при облучении цели с различных позиций) достигаются основные
преимущества МПРСА:
• возможность создания зоны действия требуемой конфигурации
в зависимости от ожидаемой радиолокационной обстановки;
• более полное использование энергии в системе;
• повышение разрешающей способности в перецней зоне обзора;
• большая точность измерения местоположения целей в про-
странстве;
Мпогопозиционныс радиолокапционные системы...
587
• возможность измерения полного вектора скорости целей;
• повышение помехозащищенности по отношению к активным и
пассивным помехами;
• увеличение надежи ости выполнения задачи.
Однако эти преимущества достигаются ценой увеличения слож-
ности системы. Возникает необходимость организации линий переда-
чи информации, синхронизации работы позиций, их фазирования и
навигационной привязки. Кроме того, возрастает объем информации
и сложность ее обработки. Однако реализация бистатического прин-
ципа синтезированной апертуры при разнесении передающей и при-
емной частей РСА по разным носителям связано с решением новых
проблем, отсутствующих в однопозиционных РСА - это обеспечение
синхронизации взаимодействия активной и пассивной сторон.
В однопозиционных РСА все составные части располагаются
вместе, синхронизируются от одного опорного генератора и управ-
ляются одной бортовой ЭВМ по единой циклограмме. Для нормаль-
ного функционирования бистатической РСА также требуются обес-
печить функционирование обеих разнесенных составных частей как
единого устройства, т.е. обеспечить три вида синхронизации: про-
странственную, фазовую и временную.
Требования к синхронизации
• Передающая и приемная диаграммы направленности антенн дол-
жны быть направлены на цель (пространственная синхронизация).
• На приемной позиции должны быть точно известны моменты
времени излучения зондирующих сигналов на всем интервале
накопления принимаемых отраженных сш налов (временная
синхронизация).
• Относительный уход частоты (фазы) колебаний задающих ге-
теродинов приемной и передающей позиций не должен превы-
шать допустимого значения (фазовая синхронизация).
Отметим, что все эти требования равнозначны с точки зрения
их необходимости, но существенно различаются по степени воз-
можности их технической реализации. В настоящее время техниче-
ски наиболее сложными задачами для реализации при авиационном
базировании элементов бистатической РСА являются фазовая и вре-
менная синхронизации.
Пространственная синхронизация - отслеживание ДНА при-
емной позиции положения центральной точки зоны обзора пе-
редающей позиции.
588
Глава 15
На авиационном носителе, работающем в пассивном режиме,
должны быть данные о положении зоны обзора, времени ее подсвета
и характеристиках зондирующего сигнала (литера, вид зондирующе-
го сигнала, период повторения). Эти вопросы обычно решаются с
помощью организационных мероприятий применения бистатиче-
ской РСА. Для точной настройки положения ДНА приемной пози-
ции, после выхода ЛА в зону видимости района цели, могут быть
использованы алгоритмы автоматического поиска.
Требования к фазовой синхронизации
• Требования к когерентности начальной фазы зондирующих им-
пульсов на интервалах времени сопоставимых с длительностью
интервала синтезирования (кратковременная стабильность).
• Требования к долговременной стабильности частоты на интер-
валах существенно превышающих длительность интервала син-
тезирования.
• Требования к кратковременной стабильности
~ С(рОП
где су2 - дисперсия фазы, обусловленная некогерентностью генера-
тора в бистатическом режиме; сСоп - дисперсия фазы, обусловлен-
ная некогерентностью генератора на одной из позиций, т.е. требова-
ния к стабильности фазы в бистатических РСА 41 раз выше.
• При представлении требований к долговременной стабильности
обычно предъявляют требования к относительному уходу час-
тоты в единицу времени:
8Г = <ркв//от;;
где <ркв - допустимый квадратичный набег фазы.
При (ркв=л/4, /о=1ОГГц, Гс=2с получим, что 8f должна
быть не хуже » 5 • 10-11 .
Характеристики ЗГ большинства современных авиационных
РЛС удовлетворяют требованиям по кратковременной нест абильно-
сти. С обеспечением долговременной стабильности дело обстоит
сложнее.
Многопозиционные радиолокапционные системы...
589
Следует подчеркнуть, что приведенные требования сформули-
рованы без учета возможности использования адаптивных алгорит-
мов автофокусировки при формировании РЛИ. Использование адап-
тации позволяет снизить требования по долговременной стабильно-
сти частоты.
Временная синхронизация
В однопозиционных РСА используют единый генератор стабильной
частоты, на основе которого формируются все временные интерва-
лы, поэтому изменения всех временных соотношений происходят
одновременно и для передающей и для приемной частей РЛС. В
бистатической РСА в связи с наличием двух независимых генерато-
ров (для активной и для пассивной частей) временные диаграммы
начинают расходиться. Это приведет к неучтенному сдвигу строба
приемника относительно исходного значения, т. е. строб приемника
будет перемещаться в процессе накопления сигнала. Так, для типо-
вых значений долговременной относительной нестабильности гене-
раторов серийных РЛС (например, КГ4) сдвиг может достигать еди-
ниц и даже десятков километров за несколько секунд, что приведет к
нарушению работоспособности РСА в бистатическом режиме.
Требования к долговременной относительной нестабильности
генераторов зависят от требований к допустимому сдвигу полосок
дальности радиоголограммы на интервале синтезирования. Если
принять допустимый сдвиг строба приемника по полоскам дально-
сти равным половине элемента разрешения, то Af = 8//(2сГс). Так,
для разрешения по дальности и азимуту не хуже 10 м при интервале
синтезирования около 1,5 с долговременная нестабильность А/
должна быть не хуже 10 8.
Если эго условие не выполняется, то требуется периодически
корректировать период повторения импульсов передатчика. Частота
проведения коррекции зависит от времени взаимной корреляции от-
носительных нестабильностей опорных генераторов и должна рас-
считываться для каждого случая отдельно.
Одной из основных проблем при синтезировании апертуры яв-
ляется обеспечение когерентности при обработке принимаемых сиг-
налов в течение времени синтезирования (когерентного накопления)
Тс. В моностатических РСА когерентность обеспечивается примене-
нием полностью когерентного приемо-передающего устройства и
введением компенсации траекторных нестабильностей носителя
590
Глава 15
РСА. В тех случаях, когда приемник и передатчик РСА разнесены в
пространстве, сложности обеспечения когерентности возрастают. В
двухпозиционных РСА когерентность можно обеспечить следую-
щими методами:
• использование высокостабильного автономного задающего ге-
нератора передатчика и опорного гетеродина приемника;
• фазирование опорного гетеродина приемника зондирующими
сигналами передатчика;
• использование режима внешней когерентности.
При использовании автономных генератора передатчика и
опорного гетеродина приемника формирование радиолокационного
изображения местности и целей обеспечивается алгоритмами синте-
зирования апертуры, как и для однопозиционного случая. Степень
когерентности определяется, прежде всего, кратковременной ста-
бильностью генераторов (за время синтезирования апертуры или пе-
риода следования импульсов в зависимости от принципов создания
когерентности). Поскольку кратковременные отклонения частоты
задаюцих генераторов приемника и передатчика могут считаться не-
зависимыми, то, по сравнению с аналогичными устройствами одно-
позиционной РСА, их стабильность должна быть в 2 раза выше.
Помимо кратковременной стабильности частоты важное значе-
ние в разнесенных системах имеет проблема обеспечения длитель-
ной высокой стабильности. Дело в том, что медленное отклонение
частоты сигнала приводит к смещению спектра сигнала на такую же
величину без его расширения. Такая трансформация отраженного
сигнала практически не влияет на характеристики обнаружения и
измерения координат цели, однако приводит к необходимости поис-
ка сигнала по частоте или реализации многоканальной системы об-
работки.
Характеристики некоторых типов генераторов в зависимости
от используемых стандартов частоты приведены в табл. 15.1. В
настоящее время твердотельные генераторы обеспечивают на ра-
бочей частоте около 10 ГГц собственную стабильность в пределах
10 9...10 п. Более высокую стабильность (до 10 13) можно достичь с
помощью атомных стандартов частоты.
Бистатические РЛС с фазированием опорного гетеродина при-
емника зондирущими импульсами передатчика имеют на борту са-
молета дополнительный приемный канал (рис. 15.10), в котором
осуществляется селекция сигнала передатчика по частоте, периоду
следования и длительности импульсов. Отселектированным, таким
образом, сигналом обеспечивается фазировка опорного гетеродина
Многопозиционные радиолокапционные системы...
591
Таблица 15.1
Характеристики задающих генераторов
Тип стандарта частоты Длительная стабильность частоты Время прогрева, ч Потреб- ляемая мощность, Вт Масса, кг
Цезиевый 3-10 11 0,3 48 23
Рубидиевый 10’11 в месяц 1...4 49 15,5
Рубидиевый 310 ив месяц 2 13 1,4
Кварцевый 2 Т0 в час 0,25 10 0,5
по зондирущему сигналу передатчика. Кроме того, по датчикам по-
лета, а иногда и с помощью линии передачи телеметрической ин-
формации компенсируют движение приемника и передатчика РСА.
Формирование изображения местности, селекция сигналов це-
ли и формирование команд управления обеспечивается в процессоре
РСА. Построенные по изложенному принципу называют полуактив-
ными РСА. К недостаткам этого метода следует отнести необходи-
мость компенсации собственного движения приемника и особенно
передатчика. При отсутствии телеметрической информации с пере-
датчика измерение параметров его движения обеспечивается в при-
емнике зондирующего сигнала.
В системах с внешней когерентностью компенсация собствен-
ного движения осуществляется автоматически. Для этой цели опор-
ный гетеродин (рис. 15.11) фазируется сигналом, отраженным от на-
земного объекта с большой ЭПР (ориентир).
Рисунок 15.10
Схема формирования опорного сигнала в полуактивной РСА
592
I лава 15
Рисунок 15.11
Схема формирования опорного сигнала с использованием ориентира
Выделение этого сигнала среди других отражений от земной
поверхности обеспечивается с помощью следящего селектора по
частоте и задержке. Поскольку в параметрах отраженного от ориен-
тира сигнала содержатся все составляющие движения передатчика и
приемника (детерминированные и случайные), то на выходе смеси-
теля они практически полностью компенсируются для всех объек-
тов, находящихся в зоне облучения.
Основной проблемой при работе многопозиционной РСА яв-
ляется обеспечение синхронизации приемных позиций с пере-
дающей по несущей частоте, частоте повторения импульсов и по-
ложению зоны обзора.
ЭПР цели в двухпозиционной РЛС с углом р<180° практиче-
ски равна однопозиционной ЭПР. Когда р достигает 180° (рассея-
ние вперед) для любых целей имеет место резкое увеличение
ЭПР. Для некоторых целей двухпозиционная ЭПР значительно
больше однопозиционной. Это, в частности, относится к целям со
сниженной радиолокационной заметностью.
Дальность и зона действия многопозиционной РСА зависят не
только от характеристик передающих и приемных позиций, но и от
геометрии системы, т.е. числа и пространственного расположения
позиций. Для получения сплошной зоны действия, базу L между по-
зициями выбирают меньшей, чем рабочая дальность РЛС:
L ^ПРД max ^ПРМ max ’
Важным преимуществом бистатической РСА (по сравнению с
однопозиционной) вляется возможность получения высокого
разрешения по азимуту при неподвижном приемнике или при
движении его прямо на цель. При этом разрешающая способность
ухудшается всего лишь в 2 раза.
ГЛАВА 16
Радиолокационные системы самонаведения
с синтезированием апертуры антенны
16.1. Особенности наведения
управляемых средств в режиме
синтезирования апертуры антенны
Проблема использования РСА для решения задач наведения заклю-
чается в том, что детальное изображение местности и целей на
большой дальности формируется не по курсу носителя, а в передне-
боковом секторе. При этом непрерывное наблюдение цели как спо-
соб повышения точности и устойчивости измерений, предполагает
полёг носителя РСА по определенной траектории, обеспечиваюшей
формирование РЛИ с требуемым качеством.
Рассмотренный далее анализ траекторий полёта носителя РСА
определяет не только динамические параметры движения (необхо-
димые перегрузки), но и тактические (радиус разворота, от клонение
от прямолинейной траектории и т.п.).
В зависимости от решаемой тактической задачи бывает необ-
ходимо обеспечить постоянство углового разрешения или постоян-
ство линейного разрешения.
Обеспечение постоянства углового разрешения приводит к то-
му, что по мере сближения носителя с целью детатыюсть РЛИ не-
прерывно возрастает. Наведение с постоянным угловым разрешени-
ем наилучшим образом подходит для выполнения наведения на
крупноразмерные цели, например ВПП, промышленные сооруже-
ния, корабли. На большом удапении низкая детальность РЛИ и
594
Глава 16
большая зона обзора позволяет выполнить выделение района поиска
цели внутри зоны обзора. По мере подлёта к ней происходит увели-
чение детальности изображения, что позволяют выполнить обнару-
жение цели. Дальнейшее улучшение детальности РЛИ позволяет
выполнить выбор точки наведения (прицеливания) внутри цели.
При наведении с постоянным линейным разрешением размер
зоны обзора и детальность радиолокационного изображения не ме-
няется на всей траектории полёта носителя. Наведение с постоянным
линейным разрешением наилучшим образом подходит для наведе-
ния на наземные малоразмерные цели с известными координатами.
Обеспечение постоянного линейного разрешения приводит к тому,
что на всей траектории наведения сохраняется постоянным отноше-
ние сигнал цели/фон. Обеспечение постоянства отношения сиг-
нал/фон, в свою очередь, обеспечивает постоянство точности изме-
рения и сопровождения цели.
В зависимости от условий полета и дальности до цели, для
обеспечения требуемого линейного или углового разрешения необ-
ходимо обеспечить определенные условия наблюдения цели - тре-
буемую траекторию наведения.
Разрешающая способность по дальности не зависит от условий
наблюдения цели и дальности до неё и определяется шириной полосы
зондирующего сигнала Д/с. Поэтому при определении траекторий по-
лета, обеспечивающих постоянство углового и линейного разрешения,
будем анализировать только разрешающую способность по азимуту.
Разрешающая способность РСА по азимуту при равномерном
прямолинейном полете
50 =
VTC sinен + J(VTC sinен )2 + XVTC cose
(16.1)
что позволяет определить угол 0Н =0Т между вектором скорости
полета носителя и целью, при котором обеспечивается требуемое
разрешение по азимуту 50 = 5/т> R:
0T = 2arctan<
<47?;
п 5/ ту
1 V J
(16.2)
2 1 А.7?
Радиолокационные системы самонаведения...
595
а также расстояние до цели Rn при заданном разрешении 8/т, когда
угол между вектором скорости и направлением на цель 0Н = 0:
7?п = 0,758/,
(16.3)
На дальности, меньшей Rn, разрешающая способность РСА по
азимуту выше требуемой, даже при нулевом угле наблюдения цели.
Это позволяет перейти на дальность, меньшую Rn, к прямому методу
наведения:
еТр=°-
(16.4)
На рис. 16.1 показана зависимость дальности до цели 7?п, от
длины интервала синтезирования VTC при к- 0,03 м. Из приведен-
ных графиков следует, что переход к прямому методу наведения с
высоким разрешением (единицы метров) возможен на дальности до
цели сотни метров. С более низким разрешением (десятки метров)
переход к прямому методу возможен на дальности единицы кило-
метров до цели.
Рисунок 16.1
] рафики зависимости предельной дальности перехода
к прямому методу наведения
596
Глава 16
16.2. Траектория движения носителя
радиолокационной системы
с постоянным линейным разрешением
Уравнения траектории объекта наведения (носителя РСА) с посто-
янной скоростью V в горизонтальной плоскости в полярной системе
координат, центр которой совмещен с точкой цели (рис. 16.2), опре-
деляются выражениями производной дальности до цели и ее угла
визирования:
7? =-Г cos 0т, 7?(0) = 7?0,
(16.5)
Ф = сот
К sin 0Т
R
, <р(0) = (ро-
(16.6)
Дифференцирование (16.6) определяет уравнение для угловой
скорости линии визирования:
6 i'cos^ + Vsinе cose, Hsinj^
т т R R2 tV ’ R()
Выражение для производной угла 6Т и начального значения
0Т(О) определяется из условий обеспечения постоянного требуемого
разрешения 8/т - равенство нулю производной выражения 507? = 5/:
5Z = 507? + 7?50 = 0 .
На основании (16.1) выражение для 0г имеет вид
Рисунок 16.2
Геометрические соотношения при самонаведении
Радиолокационные системы самонаведения...
597
(16.8)
С течением времени дальность до цели R уменьшается и в мо-
мент времени t = /п, когда 7?(/п) = 7?п, требуемый угол визирования
цели становится равным нулю, что является условием перехода на
прямое наведение:
R = -V cos 6Т, Л(/п) = Яп, (16.9)
ф = сот, ф(/п) = фп, (16.10)
<ЬТ = 0, сот(/п) = 0, (16.11)
Рт = 0, рт(/п) = 0. (16.12)
Решение уравнений (16.9) (16.12) имеет простой вид:
R(t) = Rx-Vt, ф(/) = фп, сот(/) = 0, рт(0 = 0,
(16.13)
и описывает в пространстве прямую линию.
В отличие от (16.9)—(16.12) решение системы дифференциаль-
ных уравнений (16.5) (16.7) имеет сложный вид и в общем виде ана-
литического решения не имеет и может быть найдено численными
методами решения систем дифференциальных уравнений.
Получение аналитических уравнений, описывающих простран-
ственную траекторию носителя с постоянным линейным разрешени-
ем, возможно при использовании известного упрощенного выраже-
ния, определяющего требуемый угол 0Т между вектором скорости
полета носителя и направлением на цель:
272 /.R XR
01 =--------------«------------.
л 2PT sin6ll 2VT. sin0H
L- ri L rl
(16.14)
598
Глава 16
Формула (16.14) справедлива при выполнении (см.(16.1)) условия
(утс sin е)2 » — XVTC cosO.
71
(16.15)
Превышение правой части в 10 раз определяет допустимое зна-
чения угла 6д и соответствующие им дальности до цели 7?д:
(16.16)
(16.17)
При типовых условиях полета носителя РСА и X = 0,03 м зна-
чение углов Од лежат в пределах не менее 5...7°, а значение дально-
сти - единицы километров (рис. 16.3 и 16.4).
Таким образом, условие постоянства линейного разрешения 8/
на траектории полета определяется выражениями:
о/ =--------= const,
2F71sin0
Рисунок 16.3
График зависимости предельного
угла визирования при переходе
на метод прямого наведения
от интервала синтезирования
Рисунок 16.4
Графики зависимости предельной
дальности до пели при переходе
на метод прямого наведения
от интервала синтезирования
Радиолокационные системы самонаведения...
599
XR • ХА cos 0
2KTcsin0 2H71sin20
V С
(16.18)
При этом требуемый угол наблюдения цели относительно век-
тора скорости на траекюрии:
0Т = arcsin
XR 1
21Т8Г I
V 1 J
(16.19)
Таким образом, траекторию движения носителя РСА на даль-
ности R> Ra описывает система дифференциальных уравнений:
R = -V cos6, Я(0) = Ro,
V sin 0 _ X
R ~ 2T.8L
V- I
, <p(0) = <p0,
= 0, ®т(0) =
2TC8/T ’
• Ksin0T _ X
R~~ 2T8L ’
V 1
0(0) = 0 0 = arcsin < —— >.
k / 2УГЫ
v V 1 J
(16.20)
(16.21)
(16.22)
(16.23)
Для сохранения постоянства линейного разрешения на всей
траектории наведения необходимо зафиксировать постоянную угло-
вую скорость линии визирования при начальном угле визирования
цели: 0(0) = arcsin
<2*7-8/. .
Решение (16.20)—(16.23) имеет вид:
Х ,-П rsin01O
* — ^тО
2Тс8/т
(16.24)
(16.25)
600
Глава 16
<р(0 = Фо
V sin 9т0 t
(16.26)
Уравнения (16.24)-( 16.26) параметрически определяют окруж-
ность в полярной системе координат {R, <р} (рис. 16.5) с радиусом
/?о
р =------—, дуга которой проходит через цель, а движение объекта
2 sin 0т0
характеризуется постоянной перегрузкой:
Г2 _ 2r2sineT0
gp gR<>
(16.27)
Следует заметить, что при движении ЛА с боковой перегруз-
кой и и при формировании радиолокационного изображения
(РЛИ) методом гармонического анализа тангенциальная состав-
ляющая ускорения объекта относительно центра кадра синтезиро-
вания приводит к расфокусировке изображения РЛИ на краях сек-
тора. Кроме того, на конечной дальности при малых углах визиро-
вания цели возникает эффект «парной цели», когда в пределах
Рисунок 16.5
Траектория движения с постоянным линейным разрешением по азимуту
Радиолокационные системы самонаведения...
601
ширины диаграммы направленности реальной антенны возникают
две точки с одинаковой доплеровской частотой. Поэтому предель-
ный угол визирования цели следует ограничить шириной луча ан-
тенны РСА, или использовать специальные алгоритмы, обеспечи-
вающие однозначное измерение углового положения цели относи-
тельно вектора скорости.
Исходя из анализа требуемой траектории наведения при посто-
янном линейном разрешении 57, она может быть разбита на три эта-
па (рис. 16.6).
Этап 1. Дальнее наведение (R > /?д), которое характеризуется
траекторией полета носителя по дуге окружности с радиусом р и по-
стоянной перегрузкой п.
Этап 2 (промежуточный) - ближнее наведение. Характеризу-
ется плавным увеличением радиуса кривизны траектории р и окон-
чательным переходом ее в точке 7?п к прямолинейной (р = оо).
Этап 3. Прямое наведение (R < 7?п). Характеризуется прямоли-
нейной траекторией полета носителя.
При обеспечении фиксированного линейного разрешения в
общем случае на дальностях больших Rn, требуемая траектория
Рисунок 16.6
Результирующая траектория самонаведения
602
Глава 16
полета носителя описывается системой нелинейных дифференци-
альных уравнений. На дальности, меньшей Лп, требуемая траекто-
рия представляет собой прямую, проходящую через цель. Линей-
ное разрешение по азимуту по мере подлета к цели становится
выше, чем требуемое.
16.3. Траектория движения носителя
радиолокационной системы
с постоянным угловым разрешением
При сохранении постоянства углового разрешения 80т, в соответст-
вии с (16.1), необходимо зафиксировать 0(/),
80г= const, 0Т =0.
(16.28)
При выполнении (16.28) требуемый угол наблюдения цели от-
носительно вектора скорости зависит от требуемой угловой разре-
шающей способности 80т и описывается выражением
0Т = 2 arctan <
(16.29)
При большом угле 0т его зависимость от требуемой угловой
разрешающей способности 80т описывается выражением
0т = arcsin <
2Г7180
(16.30)
Уравнение траектории, обеспечивающей условие (16.30), опре-
деляется системой дифференциальных уравнений:
3, R(0) = R0, (16.31)
И sin 0т = (16.32)
Радиолокационные системы самонаведения...
603
И sine cos0
сот =--------2------, СОТ(0) = (Drfj,
(16.33)
ет-о,ет(О) = етО. (16.34)
Решение (16.31)—(16.34) имеет вид:
Л(/) = /гО-ГсО8(0тоО’
(16.35)
ф(') = Фо - tgeTO •1п !-
ъ J
(16.36)
Для сохранения постоянства углового разрешения на всей тра-
ектории наведения необходимо зафиксировать угол визирования це-
ли 0то и обеспечить изменение угла линии визирования в соответст-
вии с (16.36).
Уравнения (16.35) и (16.36) параметрически определяют лога-
рифмическую спираль в полярной системе координат с цент-
ром, соответствующим положению цели:
тО
(16.37)
Кривая, соответствующая (16.44), проходит через центр полярной
системы координат (рис. 16.7, фо= 0) и имеет переменный радиус
R(i - K/cosO^
sin 0,()
(16.38)
Рисунок 16.7
Траектория движения с постоянным угловым разрешением по азимуту
604
Глава 16
Движение по траектории, обеспечивающей постоянство угло-
вого разрешения, характеризуется интенсивно нарастающей боковой
перегрузкой по мере приближения объекта к цели. Поэтому целесо-
образно при достижении предельной перегрузки перейти на режим
программного разворота на цель или на режим постоянного (улуч-
шающегося) линейного разрешения.
Таким образом, для обеспечения режима синтезирования апер-
туры с постоянным угловым разрешением необходимо два условия.
Условие L Начальный угол визирования должен быть отлич-
ным от нуля и обеспечивать требуемое разрешение.
Условие 2. Движение объекта должно быть с постоянной или с
нарастающей по мере приближения к цели, угловой скоростью ли-
нии визирования.
16.4. Точностные характеристики
радиолокационных систем наведения
Для оценки величины промаха предположим, что на к-м участке
траектории полета перегрузка объекта наведения (п) постоянна и от-
личается от требуемой (ит). При этом (рис. 16.8) участок истинной
траектории наведения также представляет собой дугу окружности,
но с другим центром (точка А) и радиусом р (рис. 16.8), а требуемая
сот и текущая со угловые скорости линий визирования не равны меж-
ду собой (сот со). На рис. 16.8 углы между линиями визирования це-
ли и ракеты из центров требуемой и истинной окружностей обозна-
чены через уг и у.
Из рассмотрения треугольника АВС и на основании теоремы
косинусов, величина промаха h определяется формулой
/г + ^---'-(рт-р)(1-с°8Ут),
2р р
и при малых значениях h « р:
-cosyT) = 2p2
(16.39)
Радиолокационные системы самонаведения...
605
Учитывая, что расстояние до цели 7?k= 2pTsin(Yq/2) (рис. 16.8),
а радиусы истинной и требуемой окружностей связаны зависимо-
стями вида
1 _ со 1 _ сот
р~ 2Й' р7~2Г ’
выражение для текущего промаха имеет вид
(16.40)
При наведении объекта по логарифмической кривой или по ду-
ге окружности величина промаха пропорциональна разности угло-
вых скоростей: требуемой сот и текущей со. Выражение (16.40) не
противоречит известному соотношению. В частности, при прямоли-
нейном полете (сот = 0) величина текущего промаха пропорциональна
угловой скорости линии визирования.
Рисунок 16.8
Геометрические соотношения для оценки промаха
606
Глава 16
В зависимости от решаемой тактической задачи при самона-
ведении РСА необходимо обеспечить либо постоянство углового
разрешения, либо постоянство линейного разрешения.
Для сохранения постоянства линейного разрешения на всей
траектории наведения необходимо движение РСА по окружности,
дуга которой проходит через цель, а движение объекта характери-
зуется постоянной перегрузкой.
Траектория, обеспечивающая постоянство углового разре-
шения имеет вид логарифмической спирали и характеризуется
интенсивно нарастающей боковой перегрузкой по мере прибли-
жения объекта к цели.
При наведении объекта по логарифмической кривой или по
дуге окружности величина текущего промаха пропорциональна
разности угловых скоростей: требуемой шт и текущей ш.
ГЛАВА 17
Корреляционная обработка
радиолокационных изображений
17.1. Алгоритмы совмещения
радиолокационного, картографического
и оптического изображений
РСА обеспечивает высокую разрешающую способность (радиовиде-
ние) и, соответственно, получение детальных РЛИ наблюдаемой по-
верхности Земли и объектов независимо от метеоусловий и времени
суток. Число пикселей РЛИ типовых объектов наблюдения в зави-
симости от разрешения приведено в табл. 17.1.
Высокая детальность РЛИ (и как следствие большое число пик-
селей типовых объектов) позволяет использовать корреляционные
методы решения задач путем корреляции:
• РЛИ и ЦКМ;
• РЛИ и оптического изображения;
• текущего и эталонного РЛИ;
• РЛИ, полученных в разное время.
Возможно решение следующих задач корреляционными мето-
дами.
• Оценка навигационных параметров полета носителя РСА.
• Коррекция ИНС (дискретно-непрерывная, с использованием
фильтра Калмана).
• Распознавание сосредоточенных и распределенных целей.
• Наведение носителя РСА на заданный объект.
608
Глава 17
Таблица 17.1
Число пикселей типовых объектов
в эталоне (размером 100x100) на РЛИ
Разрешение, м 1 3 10
Река, (ширина 50 м) 50x100 17x100 5x100
ВПП (50x2000 м) 50x100 17x100 5x100
Стоянка аэродрома (150x600 м) 100x100 50x100 15x60
Фрегат (14x140м) 14x100 5x47 2x14
Подводная лодка (30x300 м) 30x100 10x100 3x30
Дорога (ширина 6 м) 6x100 2x100 1X100
Шоссе (ширина 25 м) 25x100 8x100 3x100
Совмещение цифровых карт местности с РЛИ может приме-
няться для решения навигационных и прицельных задач, для повы-
шения информативности в комплексах земного мониторинга авиа-
ционного базирования. При использовании цифровых карт местности
с РЛИ индикатор, ранее показывающий только радиолокационное
изображение местности, теперь совмещает его с цифровой картой
объектового состава местности или рельефа земной поверхности.
Это позволяет экипажу при необходимости выполнять полёт по
маршруту без использования наземных навигационных средств и ви-
зуального просмотра пролетаемой местности. При совмещении РЛИ
и ЦКМ значительно облегчается определение соответствия между
ориентирами на РЛИ и объектами на карте. Отображение данных
выполняется в режиме реального времени.
Совмещение цифровых карт местности с РЛИ может быть реа-
лизовано тремя способами: навигационным, полуавтоматическим и
автоматическим.
Самым простым в реализации является навигационный способ.
Его реализация является начальной и при функционировании ос-
тальных способов. При его использовании происходит «наложение»
РЛИ на ЦКМ в единой проекции (одинаковых системах координат и
Корреляционная обработка радиолокационных изображений
609
масштабе) по параметрам навигационной системы. В случае низкой
точности навигационных систем самолета недостатком данного ме-
тода является низкая точность совмещения изображений.
Более высокая точность получается при использовании полу-
автоматического способа реализации. При этом способе оператор
на совмещенном по навигационным параметрам РЛИ и ЦКМ
вручную назначает ориентиры, и относительно них производятся
уточнение параметров при совмещении. Возможно как простое
линейное смещение РЛИ относительно карты, так и его повторное
преобразование, устраняющее нелинейные искажения между изо-
бражениями.
При автоматическом способе уточнения совмещения участие
оператора не требуется. При функционировании такого алгоритма
поиск сопрягаемых точек на изображениях выполняется про-
граммно.
К основным трудностям при создании автоматических алго-
ритмов необходимо отнести прежде всего различия в физических
принципах получения оптических (топографических) и радиолока-
ционных изображений. Кроме того, РЛИ большинства объектов су-
щественно зависят от времени года (листва, снег), состояния покры-
тия (влажность). Также изображения объектов (особенно малораз-
мерных) имеют случайный характер, в частности велико влияние
спекл-шума. Поэтому необходимо при практической реализации ал-
горитма автоматического совмещения РЛИ и ЦКМ иметь возмож-
ность выделить ориентиры с устойчивыми характеристиками отра-
жения, либо производить учет их состояния. Трудность практиче-
ского совмещения ЦКМ с РЛИ обуславливается прежде всего
нестабильностью поля радиолокационного контраста и сложностью
построения эталона поля.
17.2. Алгоритмы автоматического совмещения
радиолокационного изображения
с цифровой картой местности
Логика автоматического способа совмещения приведена на рис. 17.1.
На основе параметров навигационной системы формируется необхо-
димый эталон ЦКМ и РЛИ данного участка (объекта).
610
Глава 17
г
Рисунок 17.1
Функциональная схема автоматического совмещения РЛИ и ЦКМ
Основные этапы при автоматическом совмещении
РЛИиЦКМ
• Формирование радиолокационных эталонов из ЦКМ и их пред-
варительная обработка.
• Преобразование РЛИ с учетом геометрии получаемого радио-
локационного изображения навигационным способом.
• Обработка РЛИ с целью выделения объектов местности.
• Осуществление поиска эталонных изображений на РЛИ.
• Совмещение РЛИ с картой на индикаторе или формирование
поправок для коррекции навигационных координат. Кроме то-
го, по результатам поиска эталонов возможно формирование
данных для повторного устранения искажений РЛИ относи-
тельно ЦКМ (показано пунктирной линией).
Если результаты поиска эталонов используются только для
коррекции параметров навигационной системы (без индикации), то
схема представляет собой систему автономной коррекции навигаци-
онных параметров.
Рассмотрим подробнее каждый этап.
17.2.1. Формирование эталонов
Этот этап осуществляется при подготовке к полету оператором или
автоматически на основе знаний предполагаемого участка полета и
характерных отражательных свойств объектов, которые можно раз-
Корреляционная обработка радиолокационных изображений
611
делить на две группы. Первая - точечные, имеющие большую РЛ
контрастность, в частности - ЛЭП, вышки, сооружения и т.д. Эф-
фективным является выделение не одного точечного ориентира, а
характерное расположение некоторого числа ярких объектов, т.н. со-
звездия.
Достоинствами алгоритма при использовании точечных объек-
тов можно считать высокую точность коррекции, фактически рав-
ную разрешению РЛИ, относительную простоту реализации. Однако
недостаточная детализированность цифровых карт и высокая слу-
чайность отражения точечных излучателей не позволяет в большин-
стве случаев достоверно определить заранее яркие точечные объек-
ты на РЛИ по ЦКМ.
Ко второй группе можно отнести протяженные, имеющие ха-
рактерные формы, объекты. К ним, прежде всего, можно отнести
гидрографию (реки, озера, береговая черта), дорожную сеть, насе-
ленные пункты. Эти объекты позволяют на основе знания их отра-
жающих свойств по карте получить адекватную модель радиолока-
ционных изображений для последующего поиска. Изображение
приводится к бинарному виду, так как невозможно определить за-
ранее значение мощности отражения и можно вести речь только о
его характере.
В случае, если предполагается одновременное использование
в качестве эталонов нескольких объектов с различной отражатель-
ной способностью, возможно формирование многоуровневых эта-
лонов, где каждый уровень соответствует своему типу объектов.
На рис. 17.2 показано выделение бинарного изображения реки по
ЦКМ. Также по виду автокорреляционной функции или вручную
необходимо назначить положение эталонов на сформированном из
ЦКМ изображении (пример положения эталонов показан на
рис. 17.4,6/).
Помимо использования объектов ЦКМ при формировании эта-
лонов возможен учет рельефа местности и формирование зон радио-
теней. Учет этого фактора особенно актуален при формировании
РЛИ в местности со значительными перепадами высот и при полете
носителя на малых высотах, однако при реализации необходимо
учитывать, что формирование эталонных изображений радиотеней в
отличии от изображений объектов осуществляется под конкретные
ракурсы и высоты полета.
612
Глава 17
а)
Рисунок 17.2
Участок местности ЦКМ (а); выделение объекта гидрографии из ЦКМ (б)
Корреляционная обработка радиолокационных изображений
613
17.2.2. Устранение геометрических искажений
радиолокационных изображений
Формирование ЦКМ и РЛИ осуществляется в различных плоскостях
в пространстве, в результате чего изображения объектов подверга-
ются значительным геометрическим искажениям. К ним, прежде
всего, относятся: поворот, разномасштабность (растяжение/сжатие),
перспективные искажения. Для совмещения необходимо изображе-
ния привести к одному виду. В общем случае взаимная деформация
описывается проективными преобразованиями, которые связаны с
отображением трехмерной визуальной информации на двумерную
плоскость. Приведение текущих снимков к эталонному, или наобо-
рот, в таком случае можно осуществить лишь нелинейной функцией
преобразования. Поэтому необходимо привлекать полиномиальную
аппроксимирующую функцию преобразования. Параметры преобра-
зований (коэффициенты полиномов функций) вычисляются по парам
взаимно соответствующих точек на изображениях на основе миними-
зации среднеквадратической погрешности аппроксимации фактически
наблюдаемых координат их полиномиальной оценкой. Взаимное по-
ложение точек на ЦКМ и РЛИ вычисляется на основе навигационных
параметров самолета, а также параметров зоны обзора РЛС.
На основе вычисленных или расставленных к реперов (их число
должно быть не менее 6) формируются векторы координат реперных
точек преобразуемого изображения:
/ т
Хрли ~(ХРЛИ1 ХРЛИ2 ••• 1;РЛИк ) ’
/ \Т
Х?ЛИ=(.УрЛИ1 -РрЛИ2 ••• -УрЛИк ) >
и специальная матрица реперных точек опорного (картографическо-
го) изображения R:
1 1 1 *01 1 *о2 Л1 Уо2 2 *4 *02 *О1Л1 *о2Уо2 Уо2
R = 1 1 *оЗ УоЗ *озЛз 2 УоЗ •
• • • • • • • • • •
И • 1 *ок • >’ок • 2 *ок • *окЛк • 2 >okJ
Параметры
А = (б/0 ах ...
преобразований
т
а5) , B = (Z>0 Ьх
(коэффициенты полиномов)
... Ь5) вычисляются как:
614
Глава 17
«) б)
Рисунок 17.3
Исходное РЛИ (я); преобразованное в плоскость ЦКМ РЛИ (б)
A = (RTR)-'RTXPJIH,
B = (RrR)-,RrYPJIII.
Далее перебором выполняется расчет соответствующей точки
преобразуемого изображения для каждого экранного пикселя по
формулам:
2 2
I = aG + а}г + а2с + а3г + аАгс + а5с ,
j = bQ + bxr + b2c + Z?3r" + b4rc + b5c2,
где г, с - координаты формируемого изображения; z, i - соответст-
вующие им координаты исходного изображения. Если значения i,j
выпадают за пределы исходного преобразуемого изображения, то
присваивается значение по умолчанию (например, 0 - черное или
255 - белое).
Значения i,j не получатся целыми, поэтому их надо привести к
целым по алгоритму интерполяции.
Пример преобразования РЛИ (рис. 17.3,4?) в плоскость цифро-
вой карты (рис. 17.2,4?) показан на рис. 17.3,6.
17.2.3. Обработка полученных
радиолокационных изображений
Непосредственно осуществлять поиск бинарных эталонных участков
на получаемых РЛИ неэффективно по причине большого количества
объектов на местности и наличия значительной шумовой состав-
ляющей. Поэтому этапу поиска предшествует операция выделения
Корреляционная обработка радиолокационных изображений
615
на РЛИ искомых объектов. Основными методами, позволяющими
выполнять эту операцию, являются сегментация и оконтуривание
изображений. Оба способа насчитывают большое количество алго-
ритмов, различающихся как по сложности реализации, так и по эф-
фективности выделения объектов. Кроме того, для снижения зави-
симости результатов обработки изображений от искажающих слу-
чайных шумовых составляющих предварительно осуществляется
фильтрация изображений (масочная, медианная, частотная и т.д.).
Под сегментацией изображения понимается процесс его раз-
биения на составные части по сходству свойств их точек. Сущест-
вует несколько основных методов сегментации (дисперсионный,
наращивания областей и др.), однако на практике наиболее просто
применимы модификации пороговых методов. Основной пробле-
мой при проведении такой обработки является адаптивное к харак-
теристикам изображения определение порога, сравнение с которым
яркости исходного изображения позволяет определить значение
выходного изображения в каждой его точке. С целью улучшения
сегментации возможно дополнительное применение операций ма-
тематической морфологии для бинарных изображений, позволяю-
щих на основе анализа структуры изображения выделять заданные
объекты или изменять их форму для повышения эффективности
выполнения последующих операций корреляционного поиска.
Пример оконтуривания эталонов ЦКМ и РЛИ после сегментации
показан на рис. 17.4.
Рисунок 17.4
Положение эталонов на контурной ЦКМ (а); результаты поиска эталонов
на оконтуренном РЛИ (б)
616
Глава 17
17.2.4. Поиск местоположения эталонного изображения
на радиолокационном изображении
Алгоритмы установления сходства в своих основополагающих вари-
антах в той или иной степени связаны с получением характеристик
стохастической взаимосвязи сравниваемых фрагментов изображе-
ний. Все они основываются на идеях корреляционной и спектраль-
ной теории сигналов. При корреляционном методе осуществляется
поиск максимума коэффициента корреляции обработанного бинар-
ного РЛИ с эталоном:
0(х,у)й(х.^)
1 ’
где Цо и U - центрированные значения яркостей эталона и бинар-
ного РЛИ. Операция центрирования необходима для устранения за-
висимостей значения коэффициента корреляции от энергетики (яр-
кости) участков.
Для обеспечения заданных значений достоверности привязки
необходимо превышение отношения уровня основного максимума к
остальным пороговой величины. Обычно в качестве критериев эф-
фективности процедур идентификации сходства принимается точ-
ность совмещения фрагментов и вероятность ложной привязки, ко-
гда экстремум функционала сходства значимо смещен относительно
истинного положения.
На рис. 17.4,6 показан результат поиска эталонных фрагментов
из ЦКМ (рис. 17.4,6?) на оконтуренном радиолокационном изображе-
нии. По результатам измерений относительных смещений вносятся
поправки совмещения изображений.
Вычисление взаимосвязи эталона и изображения можно осуще-
ствлять на основе спектрального анализа сигналов. Фактически та-
кой метод также осуществляет формирование корреляционного ин-
теграла, только в частотной области. В этом случае при помощи ал-
горитмов БПФ значительно снижаются потребные вычислительные
затраты для орт анизации вычислений.
Корреляционная обработка радиолокационных изображений
617
Рисунок 17.5
Совмещенное изображение РЛИ и ЦКМ
Совмещение РЛИ с картой
После определения смещения РЛИ относительно ЦКМ по эта-
лонам задача сводится к совместной индикации с учетом вычислен-
ных поправок. Пример индикации результата совмещения показан
на рис. 17.5.
Рисунок 17.6
Назначение эталона на бинарном изображении, сформированном
из оптического снимка (t;); результат поиска эталона на бинарном РЛИ (б)
618
Глава 17
При совмещении РЛИ и оптических снимков непосредственное
выделение эталонных объектов обычно выполняет оператор. В ос-
тальном операции автоматического совмещения идентичны. На
рис. 17.6,6 показан результат поиска эталона, сформированного из
оптического снимка (рис. 17.6,(7), на РЛИ, а на рис. 17.9 фрагмент их
взаимного совмещения.
17.2.5. Точность совмещения
радиолокационных изображений
с цифровой картой местности
Рассмотрим характеристики начальной точности совмещения РЛИ
и ЦКМ.
Основные факторы, вызывающие погрешности совмещения
Дискретность величины задержки приема отраженного сигнала
при формировании РЛИ из-за дискретности значения тактовой
частоты опорного генератора. При тактовой частоте 56 МГц
смещение РЛИ равно
с[м/с] 3-108 с л
т =-----в------=-------6 ~ 53 м .
56-106[Гц]-2 56-Ю6
Эта величина не вносит значимое смещение при отображении РЛИ.
Погрешность определения высоты самолета Я вызывает по-
грешность совмещения, равную
Я
\[Б2-Н2 ’
где D - дальность до формируемого кадра РЛИ
Влияние этой величины значительно при формировании РЛИ на
малых дальностях при большой высоте носителя РЛС. На рис. 17.7
показано значение СКО совмещения РЛИ при наложении на ЦКМ,
вызванное погрешностью высотомера, где принято оя =0,01 Н .
• Достоверность и детализированность используемых цифровых
карт.
При разрешении РЛИ 10 м для выполнения совмещения необ-
ходима карга масштаба не хуже 1 : 25 000. При улучшении разреше-
ния требуются более точные планы местности (5 м - 1 : 10 000).
• Погрешность определения границ кадра РЛИ.
Корреляционная обработка радиолокационных изображений
619
Рисунок 17.7
Графики зависимости ошибки совмещения РЛИ и ЦКМ в зависимости
от высоты на дальностях 14, 20 и 40 км
Прежде всего определяется погрешностью углового датчика
антенны ор и может составлять значение нескольких минут. Макси-
мальная ошибка совмещения за счет погрешности растет линейно с
увеличением дальности. Пример зависимости СКО совмещения из-
за погрешности углового датчика приведена на рис. 17.8.
• Погрешность определения курса носителя РЛС.
Зависимость линейной погрешности при совмещении анало-
гично погрешности определения границ кадра РЛИ и равна произве-
дению дальности на погрешность определения курса. СКО опреде-
ления курса самолета определяется параметрами навигационной
системы самолета и увеличивается при возрастании времени авто-
номного полета.
D, км
Рисунок 17.8
Графики зависимости ошибки совмещения РЛИ и ЦКМ от дальности
при ошибке определения углового положения антенны 0,1°
620
Глава 17
• Ошибка определения координат в наземной системе координат.
Наличие ошибки определения координат (ах) приводит к ли-
нейному смещению РЛИ относительно ЦКМ на эту величину j
Суммарное значение погрешности начального совмещения
ЦКМ и РЛИ, возникающей из-за погрешностей измерения навигаци-
онных параметров равно
В зависимости от условии получения РЛИ возможно домини-
рование различных составляющих в данном выражении. Характер-
ным режимом при совмещении РЛИ с ЦКМ является обзор земной
поверхности на значительных дальностях, при которых высотомер-
ная погрешность минимизируется. Кроме того, точность определе-
ния местоположения самолета при использовании современных на-
вигационных спутниковых систем составляет единицы десятков
метров. Поэтому основной вклад в погрешность определения место-
положения РЛИ на ЦКМ вносит, прежде всего, погрешность опреде-
ления азимутального направления при формировании кадра РЛИ.
Так из-за ошибки определения курса в 1° на дальности 50 км
ошибка совмещения составит 8 72 м, что может составить значительные
трудности при определении соответствия объектов на карте и на РЛИ.
Реализация методики корреляционной привязки позволяет
осуществить автоматическое совмещение РЛИ с цифровыми карта-
ми и оптическими снимками местности и обеспечить точность вза-
имной привязки потенциально до элемента разрешения РЛИ.
Рисунок 17.9
Совмещенное изображение оптического снимка и РЛИ
Корреляционная обработка радиолокационных изображений
621
Точность зависит от множества факторов: качества формируе-
мого РЛИ, параметров процедур его обработки, достоверности ЦКМ
и наличия информативных объектов на ней, неустранимых геомет-
рических искажений между РЛИ и ЦКМ. В ряде практических работ
были получены точности порядка трех элементов разрешения.
17.3. Индикация радиолокационной
и картографической информации
Совместное отображение радиолокационной информации и ЦКМ
возможно реализовать тремя способами:
Способ 7. Совмещение РЛИ и ЦКМ на одном индикаторе с
установлением уровня прозрачности слоёв (рис. 17.10). При боль-
шой прозрачности РЛИ ЦКМ оказывает значительное мешающее
действие для восприятия, а при
малой прозрачности затрудняет-
ся анализ ЦКМ. Данный режим
целесообразен прежде всего при
обзоре участков местности, ко-
гда детального анализа объек-
тов не требуется. В этом случае
отображаются весь объектовый
состав цифровой карты и суще-
ствует возможность анализа все-
го РЛИ.
Способ 2, Наложение век-
торных слоев карты на растровый
слои РЛИ (рис. 17.11). Выбором
отображаемых слоёв и объектов
из классификатора карты сущест-
вует возможность поэтапного
уменьшения количества объектов,
оставив только интересующие
(например, отбросив мешающие
надписи (рис. 17.11,6) перейти к
анализу дорожной сети и гидро-
графии).
Рисунок 17.10
Коэффициент прозрачности
РЛИ о = 0,8
622
Глава 17
Рисунок 17.11
Наложение ЦКМ на РЛИ с максимальной нагрузкой карты (а);
наложение ЦКМ на РЛИ со сниженной нагрузкой карты (б)
Способ 3. Совместная индикация РЛИ и ЦКМ (рис. 17.12) по-
зволяет анализировать каждое из изображений отдельно, избавляя
оператора от мешающих воздействий изображений друг на друга.
Для однозначной идентификации положения объектов на РЛИ и
ЦКМ необходимо введение синхронного курсора, который отобра-
жается при перемещении на экране с РЛИ в те же координаты мест-
ности на экране с ЦКМ.
Рисунок 17.12
Совместная индикация РЛИ и ЦКМ
Корреляционная обработка радиолокационных изображений
623
Рисунок 17.13
Режим целеуказания
По организации управляющего взаимодействия между РЛС и
бортовой системой картографической информации возможно введе-
ние двух режимов.
Режим 1. Режим совмещения, при котором формируются
управляющие сигналы для формирования на экране картографиче-
ской информации с параметрами (рабочая зона, масштаб, ориента-
ция), определяемыми на основе характеристик получаемых РЛИ.
Режим 2. Режим целеуказания для БРЛС (рис. 17.13), при ко-
тором формируются управляющие сигналы для вычисления центра и
параметров формирования РЛИ на основе выбранного оператором
участка местности по индицируемой картографической информации.
---------------------------
17.4. Коррекция навигационных ошибок
по радиолокационному изображению
При длительном автономном полете самолета без использования
внешнего навигационного сегмента (пропадание информации от
спутниковой навигационной системы) осуществляется накопление
ошибки определения местоположения самолета, которая может со-
624
Глава 17
ставить значение сотни метров и более. В этом случае возможна
коррекция этой ошибки путем определения соответствия местопо-
ложения объектов на РЛИ и ЦКМ. Обратим внимание, что ИНС по-
зволяет получать следующие навигационные параметры: местопо-
ложение, скорость и ускорение носителя, его положение в воздухе
(ориентация) и угловые скорости.
Выполнение привязки РЛИ и ЦКМ позволяет определить ме-
стоположение, ориентацию и скорость носителя. Период выполне-
ния коррекции ИНС зависит от величины накапливаемой ошибки и
условий получения РЛИ (время формирования кадра и наличия ин-
формативных объектов на местности) и может составлять величину
от долей до 10 мин при использовании режима радиовидения.
Для реализации системы коррекции ошибок навигации по РЛИ
необходимо наличие информативных рад иол окационно-контраст-
ных участков вдоль маршрута движения (зон коррекции).
Особенности поля радиолокационного контраста
• Потенциально высокая информативность (в том числе и на рав-
нинных участках местности, где рельеф не информативен).
• Возможностью построения кадрового измерителя поля с малым
временем наблюдения.
• Возможность получения информации независимо от метеоус-
ловий, времени года и суток и на значительных по сравнению с
другими системами наблюдения дальностях.
Система радиовидения позволяет формировать детальные, вы-
сокоинформативные РЛИ и обеспечивать корреляцию эталонов с
высокой точностью и частотой привязки по траектории полета но-
сителя РСА. Эю позволяет выполнять частую процедуру коррек-
ции ИНС.
При малых интервалах между последовательными корреляция-
ми (минуты) позиционная и скоростная ошибки ИНС возрастают не-
значительно, что обеспечивает высокоточное определение коорди-
нат ЛА и объектов с помощью ИНС в промежутках между выполне-
нием коррекции.
Коррекция навигационных параметров выполняется по резуль-
татам привязки РЛИ и ЦКМ. При этом невязки по координатам вы-
числяются как разница между положением эталона и положением
максимума КФ. На ее основе определяются ошибки счисления коор-
динат носителя (Ах, Ду) и ошибка определения углового положения
оси обзора (Аф), повлекших смещение получаемого РЛИ относи-
Корреляционная обработка радиолокационных изображений
625
Рисунок 17.14
Коррекция координат по радиолокационным изображениям местности
тельно эталона. При использовании N точек соответствия эталонов
(*oi, №) и получаемого РЛИ (хрли „ урли j):
Дф = arctg
оср^ рлиср
о ср рлиср
5
о ср' рлиср J о ср J рлиср J
= *оср - Хрлиср cos( Дф) - урлиср sin (Дф) ,
+. Ярлиср Sin ( А(р) “ >'р-1иср C0S ( Дф) >
1 Л 1 Д 1 Л
Где %0Ср — f j^oi ’ Кер “’ дт / ^3 oi ? Хрлиср — дт / Кплю ’
i=\ /=1 /=1
j N ] N । N
.Урлиср — 4^рл и i ’ — ^oi-Vpnni ’ N oi^ртиi ’
। V । N
C ~ ^oi^p ini > D — J oi Л рл и i •
Достоинством данного метода является всепогодность, исполь-
зование в любое время суток, возможность формирования эталонов из
различной исходной информации, возможность применения метода
на участках местности с минимальным перепадом значении высот.
Реализация коррекции навигационных ошибок по данным ра-
диовидения требует этапа подготовки эталонов, осуществляемой пе-
626
Глава 17
ред полетом или оперативно. Трудность построения эталона поля
обусловлена, в основном, сильной зависимостью интенсивности
принятого сигнала от условий визирования и характеристик РСА.
Совмещение РЛИ, полученных в режиме радиовидения, и ЦКМ
позволяет выполнить:
• координатную привязку (целеуказание) обнаруженных объ-
ектов на РЛИ;
• дешифрирование РЛИ местности за счет совместного ис-
пользования информации об объектовом составе ЦКМ;
• определение погрешностей совмещения и уточнение привяз-
ки РЛИ и объектов на нем к картографической основе.
Реализация корреляционных методов привязки РЛИ, полу-
ченных в режиме радиовидения, и ЦКМ позволяет выполнять ав-
тономную и автоматическую коррекцию ИНС. Потенциальная точ-
ность привязки составляет единицы элементов разрешения РЛИ,
т.е. единицы-десятки метров.
ГЛАВА 18
Авиационные радиолокационные системы
с синтезированием апертуры антенны
18.1. Радиолокационные системы комплексов
воздушной разведки
В силу специфических особенностей распространения, отражения и
излучения ЭМВ различного диапазона РСА различаются, как по
объему и качеству получаемой информации, так и по ограничениям
их применения по высоте и скорости летательного аппарата, метео-
условиям и т.д. Важнейшим свойством РСА является возможность
обеспечения радиовидения (высокой детальности изображения объ-
ектов наблюдения) не только в миллиметровом и сантиметровом
диапазонах волн, но и в длинноволновом (вплоть до единиц метров)
диапазоне волн, что позволяет получать принципиально новую ин-
формацию об объектах наблюдения. В дециметровом и метровых
диапазонах волн появляется возможность обнаруживать объекты,
замаскированные растительностью или находящиеся в лесу, а также
объекты, выполненные по технологии снижения заметности.
В данной главе представлены ТТХ РСА различного тактическо-
го назначения взятые из открытых опубликованных статей и рек-
ламных проспектов.
В табл. 18.1 представлены ТТХ РСА воздушной разведки. На
рис. 18.1 дано изображение местности, полученное с помощью
РЛС «Ронсар» (разрешение 3 м). На рис. 18.1 показаны: 1 - железно-
дорожная станция; 2 - шоссейная дорога со скоплением автомоби-
лей перед светофором; 3 - радиолокационный полигон с эталонными
отражателями; линии электропередачи; 5, 6 - земснаряд и трубопровод
Рисунок 18.1
Изображение местности в РСА комплекса воздушной разведки
Таблица 18.1
Характеристики РСА воздушной разведки
ИМАРК РОНСАР AN/APY-3 КОМПАКТ ПИКА МАЛЫШ AN/APS- 137 AN/APS-143 ASARS-2
Носитель ТУ-134А Ту-154М Е-8А Ан-30 S-3 S-70, Р-3 LJ-2S
Страна Россия Россия США Россия Россия Россия США США США
Длина волны, см 4.23.68.254 3 3 4.23.68.254 3 3 3 3 3
Дальность действия, км 5...15 150 - суша. 300 - море 10...15 72
Разрешение, м 3... 12 3 3 0,3... 1,5 0,3...7 0,3... 1,5 3,9, 30 1...18 1...18
Полоса обзора, км 24 3...15 25 - суша, 100 - море 2...5
Режимы работы ПО. ТО ПО, то ПО, ТО ПО ПО, ТО по, то, СДЦ по. то, СДЦ по, то, СДЦ по, то. СДЦ
Обработка сигнала В воз- духе В воз- духе В воз- духе На земле, в воздухе На земле, в воздухе На земле, в воздухе В воз- духе В воз- духе В воз- духе
м
00
630
Глава 18
на озере; 7 - плавсредство на озере; 8 - железнодорожный мост над
автомобильной дорогой; 9 - движущиеся автомобили (смещены от-
носительно шоссе).
В современных РСА обеспечивается цифровая обработка ра-
диолокационных сигналов как на борту ЛА в реальном масштабе
времени, так и передача их на наземный пункт по широкополосной
радиолинии. При этом реализуется отображение радиолокационной
информации на бортовом и наземном мониторе. Практически все
РСА используют сложные импульсные сигналы (с внутриимпульс-
ной ЛЧМ, с изменением частоты от импульса к импульсу, ФКМ -
сигналы и т.п.). Некоторые типы РСА (например, AN/APS-137(v))
имеют режим инверсного синтезирования (ISAR) с разрешением
0,9... 1,8 м.
Наземное устройство обработки радиолокационной информа-
ции, построенное на базе ПЭВМ и специальных плат адаптеров,
обеспечивает формирование радиолокационных изображений из за-
писанных на борту ЛА голограмм. Для регистрации голограмм и
изображений используют адаптеры и стандартные накопители ин-
формации, реализованные на ФЛЭШ-памяти или винчестерах с объ-
емом не менее 4 Тбайт и скоростью непрерывной записи в стандарте
АТА до 262 Мбайт/с.
Режимы отображения радиолокационных изображений
• Размер отображаемых строк до 32 пкс.
• Отображение координатной сетки в пикселах метрах с воз-
можностью масштабирования.
• Представление радиолокационных изображений в черно-белом
или цветном виде с возможностью изменения цветовых оттенков.
• Масштабирование изображений от 1:32 до 4:1.
• Маркирование отдельным цветом приближающихся и удаляю-
щихся объектов, а также движущихся объектов с высокой ско-
ростью перемещения.
• Отображение движущихся объектов без отображения фона.
Создание технологии детального картографирования и дешиф-
рирования изображений земной поверхности позволяет использо-
вать разведывательные комплексы при решении следующих науч-
ных задач.
1. Проведение гидрологических и гляциологических наблюде-
ний, оценка влажности почв, снежного покрова, состояние айсбер-
гов, ледников, вечной мерзлоты.
2. Картография морских льдов и оценка эволюции льдин.
Авиационные радиолокационные системы...
63|
3. Проведение картографии, топографических и литологиче-
ских измерений.
4. Оценка динамики земной коры.
5. Оценка активности вулканов и последствий вулканической
деятельности, включая течения лавы и грязевых потоков.
Возможно также обнаруживать нефтяные пятна на фоне воды с
толщиной пленки от нескольких микрон и контролировать их пере-
мещение и динамику распространения. Кроме указанных задач раз-
ведывательные комплексы используют в следующих хозяйственных
целях:
• точное картографирование местности;
• классификация и оценка состояния почв;
• определение наличия наземных и подземных биомасс;
• обнаружение дорог в горных и лесных районах и заповедниках;
• обнаружение легальных и нелегальных лесных вырубок;
• определение зон засоления при обмелении водоемов и эксплуа-
тации мелиоративных сооружений;
• оценка экологического состояния открытых разработок полез-
ных ископаемых;
• обнаружение репродуктивности морских и океанических зон;
• оценка злоупотреблений в применении пестицидов и удобрений;
• определение бальности волнения моря и направления гребней
волн для оперативной оценки судоходных трасс морских и
океанических акваторий.
В интересах правоохранительной деятельности бортовые раз-
ведывательные системы способны обнаруживать браконьеров, нар-
котрафики и несанкционированные посевы наркотиков.
Большие перспективы многодиапазонного комплекса заложены
для предотвращения и ликвидации чрезвычайных ситуаций:
• обнаружение экипажей терпящих бедствия;
• поиск мелких объектов в районах катастроф: катеров, шлюпок,
обломков самолетов и других объектов:
• обнаружение аварий на нефте-, газо- и водопроводах и канали-
зационных сетях;
• оценка последствий паводков, прибрежных штормов, цунами,
сезонных дождей и таяния снегов;
определение границ ареалов, пораженных пожарами, засухами
и наводнениями;
оценка загрязнения акваторий нефтепродуктами;
632
Глава 18
• оценка морского волнения, силы и направления ветра при вы-
полнении аварийно-спасательных работ на море.
Широко применяют РСА в военных целях и антитеррористиче-
ской деятельности. Бортовые разведывательные системы обнаружи-
вают, измеряют координаты и обеспечивают оперативную доставку
информацию командованию. С целью предотвращения террористи-
ческих акций РСА способны обнаруживать воздушных террористов
и малоразмерные наземные объекты: склады оружия, военные лаге-
ря, новые тропы и дороги, несанкционированное передвижение тех-
ники и т.п.
18.2. Радиолокационные системы
малогабаритных и беспилотных
летательных аппаратов
Большинство беспилотных летательных аппаратов (БЛА) решают
разведывательные задачи. В качестве датчиков, обеспечивающих
получение информации, в них используются оптико-электронные,
инфракрасные (ИК) датчики и РЛС с синтезированием апертуры ан-
тенны (табл. 18.2).
РСА малогабаритных и беспилотных самолетов представляют
собой малогабаритное приемо-передающее устройство с двумя ан-
теннами, сигнальный процессор реального масштаба времени и за-
писывающее устройство. Большинство типов этих РСА работают в
X и Ка и используют непрерывные сигналы с ЛЧМ.
РСА малогабаритных разведывательных БЛА позволяют наблю-
дать объекты, находящиеся на удалении до 25 км с разрешением доли
метра (РЛС Lynx) и имеют три режима работы: ПО - полосовой об-
зор, ТО - телескопический обзор; СДЦ - селекция движущихся целей.
Сформированное изображение передается на наземные станции
На ударные БЛА также устанавливаются малогабаритные РЛС
с синтезированной апертурой и режимом СДЦ. Примером является
ударный БЛА малого радиуса действия «Taifun/KDN».
В состав разведывательно-ударной системы БЛА «Taifun»,
предназначенного для поиска, идентификации и самонаведения на
выбранные цели: танки, артиллерийские системы, командные пунк-
ты и склады материально-технического обеспечения в тылу против-
ника, входит РСА «МТ1».
Авиационные радиолокационные системы...
633
Таблица 18.2
Характеристики малогабаритных РСА
Характеристики Разрешение 0,3... 1 м 0,3 м, 1 м 0,3... 1 м 0,3 м, 1 м 0,3...3 m, ОД...З м 0,1 ...0,3 м до 0,3 м ‘Г) о 0,5 м 0,1 ...0,3 м 0,1 ...0,3 м -4 d
Полоса (зона) 0,4... 0,8км 2,4x2,4 км 0,4 . 1,2 км 1,2 х 1,2 км 0,93 km 10 km 1 200 м 1 i i i 300. 600,900
Дальность 10.. 25 км 18...28 км 12 км, 3-14 км 54...87 km 39...54 km 10...23 KM i 1 KM 4 km i i 15 km
Режимы по, то, СДЦ по. то, СДЦ no, TO, СДЦ TO no no по, сдц no, TO, сдц no сдц
Масса / Потр. мощность / Габариты 75 кг 1,1 кВт 30 кг 530 Вт 52 кг 550 Вт 12,5 кг 30 кг -/(14x20 cm) 14 кг 66 кг /1,1 кВт 36 кг / 700 Вт 15 кг /150 Вт 10 кг /100 Вт
Диа- пазоп Ku(J) Ku Ku Ku Ku (J) Ka Ka i Ka
Носитель RQ-1A «Predator» RQ-7A «Shadow-200» RQ-8A «Fire Scout» «Predator», «IGNAT», «Prowler II», RQ-8A «Fire Scout» RQ-l «Predator» «IGNAT» CL-289 i «Taifun/KDN» RQ-5A (BQM-155A) «Hunter», «Searcher» Ми-8
Название / фирма (страна) TESAR «Northrop Grumman» TUAVR «Northrop Grumman» Lynx «Energys’s Sandia National Laboratories» MiniSAR «Energys» SWORD « Thales/EADSDonuer SAR бокового обзора TNO-FEL (11идерланды) SAR/MTI «STN Atlas» EL/M2055 IAI Elta «Шмель» УПКБ «Деталь»
№ CN —t* CO oo
634
Глава 18
Рисунок 18.2
Изображение местности вблизи реки в РСА
Изображения, полученные с помощью РСА «Шмель» пред-
ставлены на рис. 18.2-18.3. На этих рисунках виден ландшафт зем-
ной поверхности (городские постройки, дороги, река, лесные мас-
сивы, озеро) и объекты на ней. В частности, на изображениях вид-
ны суда, движущиеся по реке и кильватерный след за ними
(рис. 18.2, точка 1), взлётно-посадочная полоса (рис. 18.3, точка 2) и
самолёты на стоянке (рис. 18.3, точка 3), городские постройки
(рис. 18.3, точка 4) и т.п.
Рисунок 18.3
Изображение городских построек и аэродрома в РСА
Авиационные радиолокационные системы...
635
18.3. Многофункциональные
радиолокационные системы истребителей
18.3.1. Структура радиолокационной системы
Введение режимов синтезирования апертуры в МФ РЛС истребите-
лей значительно расширило функциональные возможности самоле-
тов и повысило эффективность их боевого применения по наземным
целям (табл. 18.3).
Структурные схемы этих РЛС идентичные и имеют структуру,
состоящую из антенны (двухзеркальная, щелевая, ФАР на приводе
или активная ФАР), приемопередатчика и вычислительного устрой-
ства (рис. 18.4).
Антенна и приемопередатчик осуществляют формирование и
излучение мощных зондирующих импульсов, когерентный прием и
преобразование сигналов и данных в цифровую форму. В вычисли-
тельном устройстве процессор сигналов обеспечивает требуемый ал-
горитм обработки, а процессор данных выделяет информацию об
окружающей обстановке, отображает ее на индикаторе, решает бое-
вые алгоритмы и формирует сигналы управления самолетом. Кроме
того, вычислительное устройство (ЦВМ управления) совместно с
пультом управления определяет режимы работы РЛС, обеспечивая
заданные параметры излучаемого сигнала, требуемые каналы обра-
ботки: суммарный S, разностный по азимуту Ааз, разностный по углу
места Аум и компенсационный (Комп.), а также полосу приемников,
частоту выборок и разрядность АЦП.
Процессор обработки сигналов представляет собой быстродей-
ствующую ЭВМ и в зависимости от режима работы РЛС осуществ-
ляет временную и доплеровскую фильтрацию принимаемых сигна
лов, обеспечивает алгоритмы помехозащиты, производит обнаруже-
ние сигналов, измеряет координаты целей и т.п.
процессор обработки данных представляет собой универсаль-
ную ЭВМ, с помощью которой решаются задачи: сопровождения
целей; определения численного состава группы; измерение собст-
венной скорости носителя; обход и облет препятствии; боевые алго-
ритмы наведения самолета и оружия и т.п.
Индикатор современной МФ РЛС входит в состав системы еди-
ной индикации самолета и имеет цифровую память для формирования
636
Глава 18
AN/AP G-81 F-35 АФАР 250 09 300 15 Технические характеристики
AN/AP G-77 F-22 АФАР 250 09 300 сП
99-DdV /NV F-16 ЩАР 250 09 300 сп •п СЧ
AN/ APG-70 F-15 ЩАР 250 09 300 сП 15 1—4
Ирбис-Э СУ-35 ФАР 500 150 400 т—< 15
Барс -АО ФАР 300 80 400 10 15 П
Жук-А МиГ- 35 АФАР 300 09 300 г—< 15 240
Жук МиГ- 29С ЩАР 250 60 300 10 tn сч 8,5 220
Копьё МиГ- 21-93 t ЩАР 150 40 350 >п СЧ 1 1—< к. о\ 115
Н-019Б Топаз МиГ- 29БМ к й д Л 5 о. 250 60 400 20 1 1—’ 380
юо-н СУ- 27МК о со Л. > д' 300 80 400 20 1 1—<
Наименование Истребитель Антенна о = 3000 о •П II О Низк. Высок. Скор, км/ч /’ср, кВт н & Масса, кг
ДобН> КМ Разр. м
Авиационные радиолокационные системы...
637
Рисунок 18.4
Схема МФ РЛС
текущего изображения и экран большой яркости телевизионного или
жидкокристаллического типа. Отображение информации на экране
индикатора определяется режимами работы МФ РЛС и боевыми ре-
жимами истребителя.
18.3.2. Режимы работы радиолокационной системы
по обеспечению мониторинга поверхности Земли
Информационное обеспечение выполнения ударных задач самоле-
том требует в любое время года, на любом театре военных действий,
круглосуточно, независимо от погодных условий, наличия дыма,
пыли, маскировочных мероприятий противника, в условиях радио-
электронного противодействия, на больших удалениях от целей и
одновременно в широкой зоне обзора, решения задач обнаружения
объектов удара, определения их функционального состояния, целе-
указания и применения оружия.
В зависимости от этапов решения ударных задач мониторинг
земной поверхности ведётся либо в широкой зоне, для контроля
большой площади и выбора района боевых действий, либо в узкой
638
Глава 18
зоне, для более детального изучения района боевых действий и вы-
бора объекта удара. При решении задачи прицеливании и нанесении
удара контролируется, как правило, небольшой участок местности.
Таким образом, характер тактических задач определяет необходи-
мость реализации в РСА режимов картографирования с низким,
средним, высоким разрешением.
Режим низкого разрешения (HP) (режич картографирования
РЛ) характеризуется линейным разрешением по угловой коор-
динате порядка сотен метров, определяемым шириной главного
луча диаграммы направленности РЛС 0О, а по дальности - де-
сятки и сотни мечров.
Режим HP используется в целях быстрого просмотра большого
участка местности (±(60...70°, и даже ±120°) по азимуту в диапазоне
дальностей от 10 до радиогоризонта - 350...600 км) для поиска
крупных радиолокационно-контрастных объектов, а также выдачи
сигналов целеуказания в систему вооружения. Кроме того, этот ре-
жим используется для предварительного целеуказания режимам
среднего (СР) и высокого (ВР) разрешения. В данном режиме осу-
ществляется некогерентная обработка траекторного сигнала. Карта
местности в данном режиме индицируется в виде сектора в поляр-
ной системе координат, связанной с земной поверхностью или с са-
молетом (рис. 18.5). На экран индикатора РЛС выводят координаты
наземной цели (иногда даже не радиоконтрастной), введенной перед
полетом, в виде программной цели.
При выполнении задач прицеливания радиолокационное изо-
бражение (РЛИ) может быть «заморожено» на определенный про-
межуток времени, а выделенная его часть увеличена (режим «Мик-
роплан»-рис. 18.6).
Режим среднего разрешения обеспечивает формирование РЛИ
местности в режиме РСА при переднее-боковом обзоре в сек-
торе от ±10° слева и справа относительно вектора скорости по-
лёта, а зона обзора по дальности составляет несколько десятков
километров.
Формирование РЛИ в секторе углов меньших ±10° нецелесооб-
разно из-за резкого падения разрешающей способности по азимуту
или большого времени синтезирования. В режиме СР обработка от-
ражённого сигнала ведётся методом ДОЛ. Разрешающая способность
по азимуту составляет несколько угловых минут и 20.. .50 м по даль-
Авиационные радиолокационные системы...
639
Рисунок 18.5
Индикатор МФ РЛС в режиме «НР»
(мелкий масштаб): 1 - метка
сопровождаемой цели; 2 - прицельный
маркер; 3 - программная цель
Рисунок 18.6
Индикатор МФ РЛС
в режиме «МИКРОПЛАН»
ности. Карта местности в режиме СР представлена на рис. 18.7, при
этом РЛИ также может быть «заморожено». Для борьбы со спекл-
шумом используется 3...5-кратное некогерентное накопление вы-
ходного изображения.
Рисунок 18.7
Индикатор МФ РЛС
в режиме «СР»
Рисунок 18.8
Индикатор МФ РЛС
в режиме «ВР»
640
Глава 18
I i Картографирование с высоким разрешением характеризуется
коэффициентом сжатия ДНА реальной антенны 100...500 раз
при длительном (3...5 с) накоплении траекторного сигнала.
Радиолокационное изображение строится в декартовой системе
координат (рис. 18.8). Обеспечиваемое разрешение единицы метров
на дальностях до 50 км.
Зона обзора по азимуту в режимах СР и ВР превышает ширину
ДНА. Для формирования РЛИ весь сектор обзора разделяется на
парциальные кадры, изображение каждого из которых формируется
при обработке сигналов на соседних интервалах синтезирования. За-
тем парциальные кадры объединяются в полный кадр РЛИ. Радио-
локационное изображение в режимах СР и ВР может обновляться по
мере обработки принимаемого сигнала или по мере пролета носите-
лем картографируемого участка поверхности. Как правило, режим
ВР является режимом «микроплан» для режима СР.
При необходимости многократного наблюдения одного и того
же участка местности с высокой частотой обновления радиолокаци-
онной информации применяется телескопический обзор. Примене-
ние режима телескопического обзора наиболее целесообразно после
обнаружения целей в режимах ВР и СР для решения задач распозна-
вания, прицеливания и сопровождения наземных целей. При этом
участок местности, представляющий интерес, полностью помещает-
ся внутри реальной ДНА и его РЛИ получается при кадровой обра-
ботке сигнала за один интервал синтезирования. Для снижения
влияния спекл-шумов, также как и в режимах ВР и СР, применяется
некогерентное объединение информации, полученной в соседних
интервалах синтезирования. Обеспечиваемое разрешение, такое же,
как и в режиме ВР, однако существенно возрастает темп обновления
информации о целях (0,5...3 с).
Сравнение радиолокационного изображения в режиме ВР и фо-
тографии местности показано на рис. 18.9.
Режим обнаружения морских целей (режим «Море»)
При обзоре морской поверхности на бортовую РЛС, помимо задач,
выполняемых в режиме обзора земной поверхности, возлагается ре-
шение ряда дополнительных задач.
1. Обнаружение надводных морских объектов как движущихся,
так и неподвижных на дальностях прямой видимости. В качестве та-
ких объектов могут выступать как крупные морские объекты (авиа-
Авиационные радиолокационные системы...
641
Рисунок 18.9
Радиолокационная карта и фотография местности в районе г. Жуковский:
1 - взлетно-посадочная полоса; 2 - река
носцы, крейсеры, танкеры), так и малоразмерные (катеры, рубки и
перископы погруженных подводных лодок).
2. Обнаружение неоднородностей морской поверхности, вызван-
ных различными физическими причинами (нефтяные пятна, косяки
рыб, следовые аномалии, движущиеся морские объекты).
3. Измерение параметров морского волнения.
Алгоритм работы РЛС при обнаружении морских целей ана-
логичен режимам HP и СР. Однако требует излучения со сменой
поляризации сигнала и изменением несущей частоты. Изменение
поляризации сигнала приводит к уменьшению отражений от мор-
ской поверхности, а смена несущей частоты декоррелирует мешаю-
щие отражения от взволнованной поверхности.
18.3.3. Режимы работы радиолокационной системы
по навигационному обеспечению полета
и определению функционального состояния
наземных целей
При реализации рассмозренных режимов картографирования при-
меняется ряд мер, направленных на обеспечение помощи экипажу в
восприятии РЛИ.
1. Вводится режим «микроплан» для укрупнённого изображе-
ния небольшого участка местности и «обужаются» отметки целей.
642
Глава 18
2. Используется регулировка яркости отображения информа-
ции, а также регулятор фона и цели, когда можно выделить только
яркие цели, подавив фон местности, и наоборот, когда можно уси-
лить фон местности.
3. Совмещают РЛИ с цифровой картой местности, что обеспе-
чивает информационную поддержку экипажу при функционирова-
нии РЛС в зоне радиотеней, коррекцию местоположения и курсовую
коррекцию носителя, автоматизацию процесса поиска и идентифи-
кации назначенных целей (мосты, переправы, населённые пункты,
транспортные развязки, коммуникационные сооружения, фортифи-
кационные сооружения, промышленные объекты, портовые соору-
жения и т.д.).
4. Для повышения эффективности обнаружения и распознава-
ния целей, в качестве отличительного признака используется факт
их движения.
Режим измерения скорости носителя осуществляется путём
одно или двухстрочного сканирования антенной по азимуту в преде-
лах заданного сектора, синтезирования апертуры в течение несколь-
ких десятков миллисекунд, измерения средней доплеровской частоты
сигнала на основе вычисления энергетического центра спектральной
плотности отражённого сигнала - доплеровского центроида. В ре-
зультате сканирования формируется массив из нескольких сотен зна-
чений средней доплеровской частоты, на основе которого формирует-
ся система линейных уравнений и измеряются три составляющих век-
тора путевой скорости самолёта. Точность измерения составляющих
вектора путевой скорости самолёта соизмерима с точностью спутни-
ковой навигационной системы и составляет 0,1.. .0,4 м/с.
Для измерения высоты цели или рельефа местности в районе
цели в РСА предусмотрен режим измерения дальности до наземных
объектов, находящихся в заданном направлении. Режим измерения
дальности до наземных объектов осуществляется путем обработки
сигналов, принятых по суммарному и разностному по углу места ка-
налам моноимпульсной антенны. В результате формируется пелен-
гационная характеристика по углу места (дальности) и определяется
канал дальности соответствующий равносигнальному направлению.
Ошибки измерения дальности составляют 20...300м на дальности
3...50 км. Данный режим может применяться также для обеспечения
маловысотного полёта.
Режим селекции наземных движущихся целей (СНДЦ) осу-
ществляется при сканировании антенны в пределах заданного секто-
Авиационные радиолокационные системы...
643
Рисунок 18.10
Индикатор МФ РЛС в режиме
«СДЦ», кружками отмечены
движущиеся цели
ра углов относительно вектора
путевой скорости. Отметки
движущихся целей могут быть
наложены па изображение кар-
ты местности или совмещены с
РЛИ рассмотренных режимов
картографирования (рис. 18.10).
Для решения задач СНДЦ ис-
пользуют одноканальные РСА,
когда в большом секторе (г90 )
обнаруживаются достаточно
скоростные цели (скорость бо-
лее 15 км/ч;. Для обнаружения
малоскоростных целей исполь-
зуют совместную обработку
сигналов суммарного и разно-
стного по азимуту каналов мо-
ноимпульсной антенны. Прак-
тически режим обнаружения
движущихся целей обеспечивает индикацию целей, радиальная со-
ставляющая скорости которых не менее 5 км/ч.
Всепогодное высокоточное нанесение удара по наземным (мор-
ским), в том числе малоразмерным целям с помощью систем радио-
видения потребовало разработки специальных алгоритмов. Это свя-
зано с тем, что детальное радиолокационное наблюдение объектов с
одного борта самолета в секторе ±10° относительно вектора путевой
скорости требует значительного времени синтезирования. После
принятия решения на атаку выбранной цели оператор борговой РЛС
совмещает на многофункциональном индикаторе прицельную метку
с отметкой цели и РСА переходит в режим автоматического сопро-
вождения цели.
При нанесении удара по наземным (морским) целям режим ав-
томатического сопровождения предназначен для уточнения азиму-
та и дальности до выбранной цели, а также их производных, необхо-
димых для управления самолётом. С этой целью уменьшают ско-
рость сканирования антенны в 3...5 раз и первичное измерение
азимута осуществляется по центру тяжести пачки отражённых сиг-
налов. Первичное измерение дальности обеспечивается по номеру
ближайшего к прицельной метке строба дальности в котором на-
блюдается максимальная амплитуда. Далее первичные значения
644
Глава 18
азимута и дальности фильтруются и формируются их производные.
После ввода координат цели в систему управления самолётом начи-
нается заключительный этап вывод самолёта с помощью навигаци-
онной системы в точку бомбометания или пуска ракет - режим про-
граммно-корректируемого сопровождения.
На конечном участке автоматически включается телевизионная
головка самонаведения (ГСН) управляемого оружия в направлении
на цель. Для доприцеливапия достаточно выполнить маневр по уст-
ранению ошибок первичного радиолокационного измерения коор-
динат и ошибок счисления пути.
Анализ режимов функционирования бортовых РЛС в режиме
синтезирования апертуры показывает возрастающую роль РСА,
которая превращается в один из основных элементов комплекса
управления самолетом и оружием.
Литература
1. Кондратенков ГС., Михайлов Б.А Сравнение методов повышения разрешаю-
щей способности РЛС И Труды ВВИА им. Н.Е. Жуковского. 1961. № 883.
2. А. с. № 21080 (СССР). 1959. Ультразвуковой спектроанализатор радиоло-
кационных сигналов с использованием явления дифракции света на ульт-
развуковых волнах в прозрачной среде, возбуждаемых радиолокационны-
ми сигналами.
3. А. с. № 23361 (СССР). 1961. Оптический способ обработки сигналов РСА.
4. Реутов А.П., Михайлов Б.А., Кондратенков Г.С., Бойко Б.В. Радиолокаци-
онные станции бокового обзора. М.: Сов. радио. 1970.
5. Воскресенский Д.И., Кондратенков Г.С., Филиппов В.С. и др. Проектиро-
вание фазированных антенных решеток / Под ред. Д.И. Воскресенского.
Изд. 3-е. М.: Радиотехника. 2003.
6. Кондратенков ГС. Обработка информации когерентными оптическими
системами. М.: Сов. радио. 1972.
7. Антипов В.Н, Толстов Е.Ф., Титов М.П. и др. Радиолокационные станции
с цифровым синтезированием апертуры антенны / Под ред. В.Т. Горяйно-
ва. М.: Радио и связь. 1988.
8. Кондратенков ГС., Потехин В.А., Реутов А.П., Феоктистов Ю.А. Радио-
локационные станции обзора Земли Под ред. Г.С. Кондратенкова. М.: Ра-
дио и связь. 1983.
9. Курилов Н.Н., Саблин В.Н., Федосеев В.С и др. Радиолокационные стан-
ции воздушной разведки . Под ред. Г.С. Кондратенкова. М.: Воениздат.
1983.
10. Герасимов А.А., Колтышев Е.Е., Кондратенков Г.С., Умнов ИН., Червя-
ков И.Н., Юрчик И.А. и др. Радиовидение / Под ред. Г.С. Кондратенкова.
М.: ВВИА. 1097.
11. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные сис-
темы дистанционного зондирования Земли / Под ред. Г.С. Кондратенкова.
М.: Радиотехника. 2005.
12. Лавров А.А Радиолокационный скоростной портрет. Основы теории. М.:
Радиотехника. 2013.
13. Бч\дов А.А., Минкин ДЮ., Колтышев Е.Е. Радиолокационные методы на-
вигации по картам местности. СПб.: Владос. 2011.
14. Кондратенков Г.С., Фролов А.Ю. Теоретические основы построения ра-
диолокационных систем дистанционного зондирования Земли. М.: ВВИА
им. Жуковского, 2009.
646
Литература
15. Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункцио-
нальные радиоэлектронные комплексы истребителя / Под ред. Г.С. Конд-
ратенкова. М.: Воениздат. 1994.
16. Анцев Г.В., Кондратенков Г.С., Сарычев В. А., Татарский Б.Г Использование
межпериодной частотной манипуляции в системах наведения высокоточного
оружия / Сб. науч. тр. «55 лет на службе Отечеству». Радар ММС. 2005.
17. Кондратенков Г.С., Колтышев Е.Е., Фролов А.Ю., Янковский В.Т. Фазо-
вый портрет объектов в РЛС с синтезированной апертурой // Радиотехни-
ка. 2000. № 8.
18. Кондратенков Г.С., Фролов А.Ю. Комплексный алгоритм автофокусиров-
ки и селекции движущихся целей в радиолокаторах с синтезированной
апертурой // Радиотехника. 2004. № 10.
19. Кондратенков ЕС, Лавров А.А. Радиолокационный скоростной портрет //
Радиотехника. 1994. № 4-5.
20. Кутахов П.В., Лавров А.А., Червяков И.Н. Радиолокационный скоростной
портрет на базе двухантенной РСА / Радиотехника. 1995. №11.
21. Колтышев Е.Е., Янковский В.Т. Синтез оптимального алгоритма селекции
сигналов движущихся объектов на фоне мешающих отражений в радиоло-
каторах с синтезированной апертурой // Радиотехника. 1996. № 10.
22. Антипов В.Н, Колтышев Е.Е., Илъчук А.Р., Янковский В.Т. Селектор дви-
жущихся целей в РЛС с моноимнульсной антенной системой И Радиотех-
ника. 1997. № 8.
23. Колтышев Е.Е. Селекция целей в многоканальных РСА // Радиотехника.
2006. № 6.
24. Кондратенков Г.С., Хотлянник В.А., Иванисов Б.А. Синтезирование апер-
туры через растительность // Радиотехника. 1997. № 8.
25. Кондратенков Г.С., Хотлянник В.А. Статистические характеристики сиг-
налов РСА // Радиотехника. 2000. № 3.
26. Поздышев В.Ю. Поляризационное обнаружение - распознавание в радио-
видении // Радиотехника. 2003. № 6.
27. Жуков М.Н., Лавров А.А. Повышение точности измерения параметров цели
с использованием информации о маневре носителя РЛС И Радиотехника.
1995. № 11.
28. Кондратенков Г.С., Фролов А.Ю. Радиовидение в передней зоне обзора
бортовой радиолокационной станции с синтезированной апертурой антен-
ны // Радиотехника. 2004. № 1.
29. Каргашин Ю.Д., Фролов А.Ю. Оптимальный алгоритм однозначной оценки
азимута цели в бортовых радиолокационных станциях с синтезированной
апертурой в режиме переднего обзора // Радиотехника . 2005. № 6.
30. Антипов В.Н.Г Илъчук А.Р., Фролов А.Ю. Радиолокационная система с син-
тезированной апертурой в комплексе управления самолетом и его оружи-
ем // Радиотехника. 2005. №> 6.
31. Колтышев Е.Е., Круглов А.А., Чернов В.С., Янковский В.Т. Устойчивость и
точность авиационных систем самонаведения с синтезированной аперту-
рой // Радиотехника. 2006. № 7.
32. Антипов В.И., Колтышев Е.Е., Сухомлинов Д.В. Оптимизация траектории
наведения объекта в радиолокационных системах с синтезированием апер-
туры // Радиотехника. 2009. № 6.
Литература
647
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
Фролов А.Ю. Информационное обеспечение посадки летательного аппара-
та с использованием бортовой радиолокационной станции с синтезирован-
ной апертурой // Радиотехника. 2007. №11.
Кулътурмиди К.П., Янковский В.Т. Алгоритм измерения дальности и ско-
рости в импульсно-доплеровской РЛС на средних частотах повторения И
Радиотехника. 2009. № 6.
Колтышев Е.Е., Кожаев А.А., Фролов А.Ю., Янковский В. Т. Алгоритм доп-
леровского измерения скорости в РЛС с синтезированной апертурой II Ра-
диотехника. 2005. № 6.
Янковский В.Т., Чернов С.А., Кузнецов А.И. Корреляционно-экстремальный
алгоритм измерения координат протяженного радиолокационного объекта
в бортовой РЛС ЛА с синтезированием апертуры антенны И Информаци-
онно-измерительные и управляющие системы. 2004. № 5.
Беспалов В.В., Фролов А Ю., Чезганов Н Ф. Синтез оптимального алгорит-
ма оценки вектора путевой скорости носителя в радиолокационных систе-
мах с синтезированной апертурой И Радиотехника. 2009. № 6.
Кондратенков Г.С., Быков В.Н., Викентьев А.Ю. Методика автоматиче-
ского совмещения радиолокационных изображений с цифровыми картами
и оптическими снимками местности И Радиотехника. 2007. № 8.
Каргашин Ю.Д., Янковский В.Т., Круглов А.А. Алгоритм радиолокационно-
го сопровождения многоточечной цели И Радиотехника. 2005. № 6.
Кондратенков Г.С. Приемное устройство голографического радиолокато-
ра И Труды ВВИА им. Н.Е. Жуковского. 1968. № 1215.
Антипов В.Н. Разрешающая способность полуактивных РЛС с синтезиро-
ванной апертурой // Радиотехника. 1987. № 5.
Колтышев Е.Е., Баранников В.А., Чернов В.С. Устойчивость и точность
авиационных полуактивных систем наведения с синтезированной аперту-
рой И Радиотехника.2005. № 6.
Исаев С.А., Кондратенков Г.С. Цифро-натурные и летно-модельные мето-
ды испытаний КБО И Радиотехника. 1996. № 9.
Лавров А.А., Хотлянник В.А. Особенности обнаружения пространственно-
временного сигнала при линейном расположении источника помех И Ра-
диотехника. 1990. № 5.
Кондратенков ГС, Лавров А. А. Радиолокационный скоростной портрет//
Радиотехника. 1994. № 4.
Лавров А.А., Фриде Б.Я. Характеристики радиолокационного метода изме-
рения поверхностного распределения скоростей // Радиотехника и элек-
троника. Т. ХХХУ111. 1988. № 10.
Лавров А.А. Детальность РЛИ поверхности при доплеровской фильтрации
//Радиотехника. 1988. № 12.
Лавров А.А. Аппроксимация сигнала, отраженного от движущейся поверх-
ности // Радиотехника. 1991. № 1.
Ермоленко А.Ю., Лавров А. А., Проценко И.В. Энергетический пространствен-
но-временной спектр сигнала, отраженного от движущейся поверхности. М.:
Научно-метод. материалы ВВИА им. проф. Н.Е. Жуковского. 1989.
Лавров А.А., Проценко И.В., Червяков И.Н. Алгоритм обнаружения радио-
локационных малоконтрастных распределенных объектов И Радиотехника.
1994. №7.
648
Литература
51. Лавров А.А., Толстов Е.Ф. Радиолокационный мониторинг земной поверх-
ности и океана // Радиотехника. 1997. № 1.
52. Антипов В.Н., Колтышев Е.Е., Таганцев В.А., Фролов А.Ю., Янковский В.Т.
Электромагнитная совместимость когерентно-импульсных РЛС // Радио-
техника. 2012 № 10.
53. Антипов В.Н, Ильчук А.Р., Колтышев Е.Е., Янковский В.Т. Алгоритмы се-
лекции сигналов движущихся объектов в когерентно-импульсных РЛС //
Радиотехника. 1998. № 4.
54. Антипов В.Н., Колтышев Е.Е., Mvxuh В.В., Печенников А.В., Фролов А.Ю.,
Янковский В.Т. Радиолокационная система беспилотного летательного ап-
парата '/ Радиотехника. 2006. № 7.
55. Антпипов В И., Гуляйкин О.П., Ефимов В.А. Обнаружение узкополосного
сигнала на фоне пространственно коррелированной помехи // Радиотехни-
ка. 1990. №2.
56. Богтач С.И. Пространственно временная обработка сигналов бортовой
РЛС при обнаружении движущихся объектов и маневрировании носителя
РЛС // Радиотехника. 1999. № 2.
57. Антипов В.Н., Ефимов В.А., Умнов И.Н. Селектор малоскоростных целей
на фоне подстилающей поверхности I / Радиотехника. 1994. № 4-5.
58. Антипов В.Н, Сусликов Д.Ю. Картографирование и обнаружение наземных
движущихся целей h Радиотехника. 2005. № 6.
59. Колтышев Е.Е., Макаров П.А., Мухин В.В., Сусликов Д.Ю., Фролов А.Ю.,
Янковский В.Т. Алгоритмы селекции сигналов движущихся объектов в
РЛС с многоканальной антенной системой И Радиотехника. 2012. № 10.
60. Коипышев Е.Е. Макаров П.А., Мухин В.В., Сусликов Д.Ю., Фроюв А.Ю., Ян-
ковский В.Т. Повышение эффективности селекции сигналов движущихся на-
земных целей в моноимпульсных РСА. Радиолокационные системы специаль-
ного и гражданского назначения 2013 -2015 / Под ред. Ю.И. Белого. ОАО
«НИИ приборостроения им. В.В. Тихомирова». М.: Радиотехника. 2013.
61. Хотлинник В.А. Пространственно-временная селекция подвижных протяжен-
ных объектов на фоне мешающих отражений И Радиотехника. 1995. №11.
62. Меркулов В И., Антипов В.Н., Бирюков П.А. Авиационные системы радиоав-
томатики. / Под ред. В И. Меркулова. М.: ВВИА им И Е. Жуковского. 2003.
63. Лавский С.В., Чернов В.С. и др. Комплексы авиационного РЭО. М.: ВВИА
им. Н.Е. Жуковского. 1988.
64. Курил кин В.В., Меркулов В.И., Сагпин В.Н., Шуклин А.И. Алгоритм про-
порционального самонаведения ракет «воздух - поверхность» с синтезиро-
ванием апертуры антенны // Радиотехника. 2000. № 7.
Дано систематическое гзпоженив основ теории авиационных
систем радиовидения (амплитудные, фазовые^ скоростные и
поляризационные портреты, многопозиционные системы,
обратное синтезирование). Приведены примеры реализации и
эффективности различных методов радиовидения. Книга
написана с использованием только открытых опубликованных
трудов научной школы «Радиовидение» БВИЛ им. проф. Н.Е.
Жуковского.
Для научных работников и инженеров, а также преподавателей,
аспирантов и студентов высших учебных заведений