/















































































































































































































































































































































































































































































































































































Author: Верба В.С. Татарский Б.Г.
Tags: электротехника радиолокация
ISBN: 978-5-93108-084-0
Year: 2014




Text
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОСМИЧЕСКОГО МО
ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Под редакцией д.т.н., проф. В.С. Вербы, д.т.н., проф. Б.Г.Татарского
UJ
CQ
РАДИОТЕХНИКА
ФЕДЕРАЛЬНЫЙ НАУЧНО-ПРОИЗВОДСТВЕННЫЙ ЦЕНТР
ОАО «КОНЦЕРН «ВЕГА»
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ
АВИАЦИОННО-КОСМИЧЕСКОГО
МОНИТОРИНГА ЗЕМНОЙ
ПОВЕРХНОСТИ И ВОЗДУШНОГО
ПРОСТРАНСТВА
НАУЧНАЯ СЕРИЯ
Труды научных школ
ОАО «Концерн радиостроения «Вега»
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ
АВИАЦИОННО-КОСМИЧЕСКОГО
МОНИТОРИНГА ЗЕМНОЙ
ПОВЕРХНОСТИ И ВОЗДУШНОГО
ПРОСТРАНСТВА
Под редакцией
д.т.н., профессора В.С. Вербы,
д.т.н., профессора Б.Г. Татарского
Москва
Радиотехника
2014
УДК 621.396.96
ББК 32.95
Р15
Научная серия
«Труды научных школ ОАО «Концерн радиостроения «Вега»
Под общей редакцией д.т.н., профессора В.С. Вербы
Редакционная коллегия:
Гл. редактор - д.т.н., профессор В. С. Верба
Члены редколлегии:
д.т.н., проф. М.М. Бутаев, д.т.н., проф. К.А. Злотников, д.т.н., проф. В.И. Меркулов,
д.т.н., проф. А.П. Курочкин, д.т.н. Л.Б. Неронский, с.н.с., к.т.н. В.А. Плющев,
д.т.н., проф. В.В. Родионов, д.в.н., проф. А.Т. Силкин, д.т.н., проф. А.А. Сахнин,
д.т.н., проф. Б.Г. Татарский, д.т.н. В.Н. Шахгеданов
Рецензенты:
академик РАН И.Б. Федорову
член-корреспондент РАН В.А. Черепенищ
д.т.н., профессор В.А. Сарычев
Авторы:
В.С. Верба, Б.Г. Татарский, А.Р. Ильчук, Т.А. Лепехина, Е.В. Майстренко,
В.И. Меркулов, В.А. Михеев, Л.Б. Перонский, В.А. Плющев, А.С. Пешко,
С.Н. Пущинский, П.А. Садовский, С.Н. Степаненко, И.А. Сидоров, А.Т. Силкин,
А.А. Трофимов, А.А. Филатов, М.И. Чернышев, И.А. Юрчик, Д.А. Ясенцев
Р 15 Радиолокационные системы авиационно-космического мониторинга
земной поверхности и воздушного пространства / Под ред. В. С. Вербы,
Б.Г. Татарского. Монография. М.: Радиотехника, 2014. - 576 с.: ил.
(Научная серия «Труды научных школ ОАО «Концерн радиостроения
«Вега»). - Авт. указаны на обороте тит. л.
ISBN 978-5-93108-084-0
Рассмотрены особенности построения систем радиолокационного монито-
ринга воздушного пространства и земной поверхности, учитывающие основные
тенденции развития данных систем и направленные на повышение их информа-
тивности.
Для сотрудников научных и разрабатывающих организаций, профессорско-
преподавательского состава, научных сотрудников, аспирантов и студентов
ВУЗов, областью научных интересов которых является радиолокация.
УДК 621.396.96
ББК 32.95
ISBN 978-5-93108-084-0
© Авторы, 2014
© ЗАО Издательство «Радиотехника», 2014
Вступительное слово Президента РАН академика В.Е. Фортова........... 7
Вступительное слово заместителя Министра обороны РФ,
ответственного секретаря
Военно-промышленной комиссии Российской Федерации
Ю.И. Борисова ...................................................... 9
От редактора .......................................................... 11
Отзыв о книге академика РАН И.Б. Фёдорова ............................. 13
Предисловие............................................................ 15
Глава 1. Радиолокационные системы
с пространственно-временной обработкой сигналов ...................... 17
Введение......................................................... 18
1.1. Бортовая РЛС дозора с пространственно-временной
обработкой сигналов.......................................... 18
1.2. РЛС кругового обзора с АФАР для бортового комплекса
беспилотного летательного аппарата........................... 27
1.3. РЛС управления воздушным движением
на основе антенных систем с АФАР ............................ 41
1.4. Бортовая РЛС многофункционального авиационного комплекса
разведки, оповещения и управления с цифровой ФАР ............ 54
1.5. Бортовая РЛС на основе ФАР
с электронно-механическим сканированием...................... 65
1.6. Применение экспертной информации при решении задач обзора
пространства РЛС на основе ФАР
с электронно-механическим сканированием..................... 75
1.7. Имитационная модель для исследования эффективности обзора
пространства РЛС на основе ФАР
с электронно-механическим сканированием......................89
Литература...................................................... 100
Глава 2. Радиолокационные системы высокого разрешения................. 103
Введение........................................................ 104
2.1. Компьютерные технологии при создании
перспективных радиолокационных систем высокого разрешения . 104
2.2. Направления развития многочастотных авиационных
радиолокационных комплексов дистанционного зондирования
высокого разрешения........................................ 114
2.3. Модифицированный алгоритм обнаружения сигнала,
отраженного от наземной движущейся цели для РСА с ФАР........ 137
3
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
2.4. Формирование эталонных радиолокационных портретов
надводных кораблей с использованием ограниченного набора
экспериментальных данных...................................... 145
2.5. Обработка больших массивов цифровых радиоголограмм
космических РСА высокого разрешения........................... 153
2.6. Разработка и особенности использования активного транспондера
для наземных и летных испытаний, калибровки и валидации
космических РСА .............................................. 162
Литература.................................................... 172
Глава 3. Радиолокационные системы с синтезированной апертурой,
формируемой при вращении фазового центра
реальной антенны .................................................... 175
Введение........................................................ 176
3.1. Анализ особенностей формирования и обработки
траекторного сигнала в РЛС с синтезированием апертуры антенны
при вращении фазового центра реальной антенны ................ 177
3.2. Особенности синтезирования апертуры антенны
при вращении фазового центра реальной антенны
в режиме обзора «под собой»................................... 185
3.3. Характеристика направленности искусственной апертуры антенны
и ее зависимость от траектории перемещения фазового центра
реальной антенны.............................................. 193
3.4. Синтезирование апертуры при учете поступательного
и вращательного движений фазового центра реальной антенны...... 201
3.5. Эффективная синтезированная апертура антенны
при комбинированной траектории движения
фазового центра реальной антенны.............................. 214
3.6. Интерферометрический режим бортовой РЛС
с синтезированием апертуры при вращении фазового центра
реальной антенны.............................................. 223
Литература ................................................... 231
Глава 4. Выбор зондирующих сигналов
для радиолокационных систем различного назначения .................... 233
Введение...................................................... 234
4.1. Функция неопределенности сигналов
с нелинейной частотной модуляцией............................. 235
4.2. Функция неопределенности сигналов
с комбинированной частотной модуляцией ....................... 244
4.3. Выбор системы ортогональных сигналов
для распределенной РЛС........................................ 255
4.4. Применение сверхкоротких импульсов в РЛС,
входящих в авиационные комплексы дозора ...................... 269
Литература ................................................... 275
4
ОГЛАВЛЕНИЕ
Глава 5. Обработка и обнаружение радиолокационных сигналов
в бортовых радиолокационных системах
при длительном когерентном накоплении ............................... 277
Введение........................................................ 278
5.1. Особенности радиолокационного наблюдения
воздушно-космических объектов
при длительном когерентном накоплении отраженных сигналов ............ 279
5.2. Многоканальная по времени запаздывания, доплеровской частоте,
крутизне изменения частоты система обработки
и обнаружения отраженных сигналов..................................... 291
5.3. Адаптивная система обработки и обнаружения
отраженных сигналов на основе способа автофокусировки................. 304
5.4. Система обработки и обнаружения отраженных сигналов
с использованием дискриминаторов ..................................... 324
5.5. Система обработки и обнаружения отраженных сигналов
на основе анализа доплеровского смещения частоты ................ 337
Литература ..................................................... 349
Глава 6. Принципы построения систем обработки сигналов
в радиолокационных системах.......................................... 351
Введение....................................................... 352
6.1. Использование методов интерполяции
при разработке тестовых данных
для проверки системы обработки радиолокационных сигналов........ 352
6.2. Системы обработки сигналов на кристалле
в радиолокационных комплексах ........................................ 358
6.3. Новые технологии в системе обработки сигналов в бортовой РЛС
авиационного комплекса дозора и наведения ............................ 367
6.4. Цифровые технологии и архитектура РЛС..................... 385
6.5. Цифровая обработка радиолокационных сигналов обзорной РЛС.. 396
6.6. Интеграция данных в многофункциональных
радиолокационных комплексах .......................................... 401
Литература .................................................... 419
Глава 7. Автоматическое сопровождение воздушных целей ................ 423
Введение....................................................... 424
7.1. Синтез следящих радиолокационных угломеров
для систем одноразового применения.................................... 425
7.2. Радиолокационно-оптические системы сопровождения целей..... 437
7.2.1. Выбор и обоснование моделей состояния и наблюдения для синтеза
комплексных оптимальных радиолокационно-оптических измерителей.......437
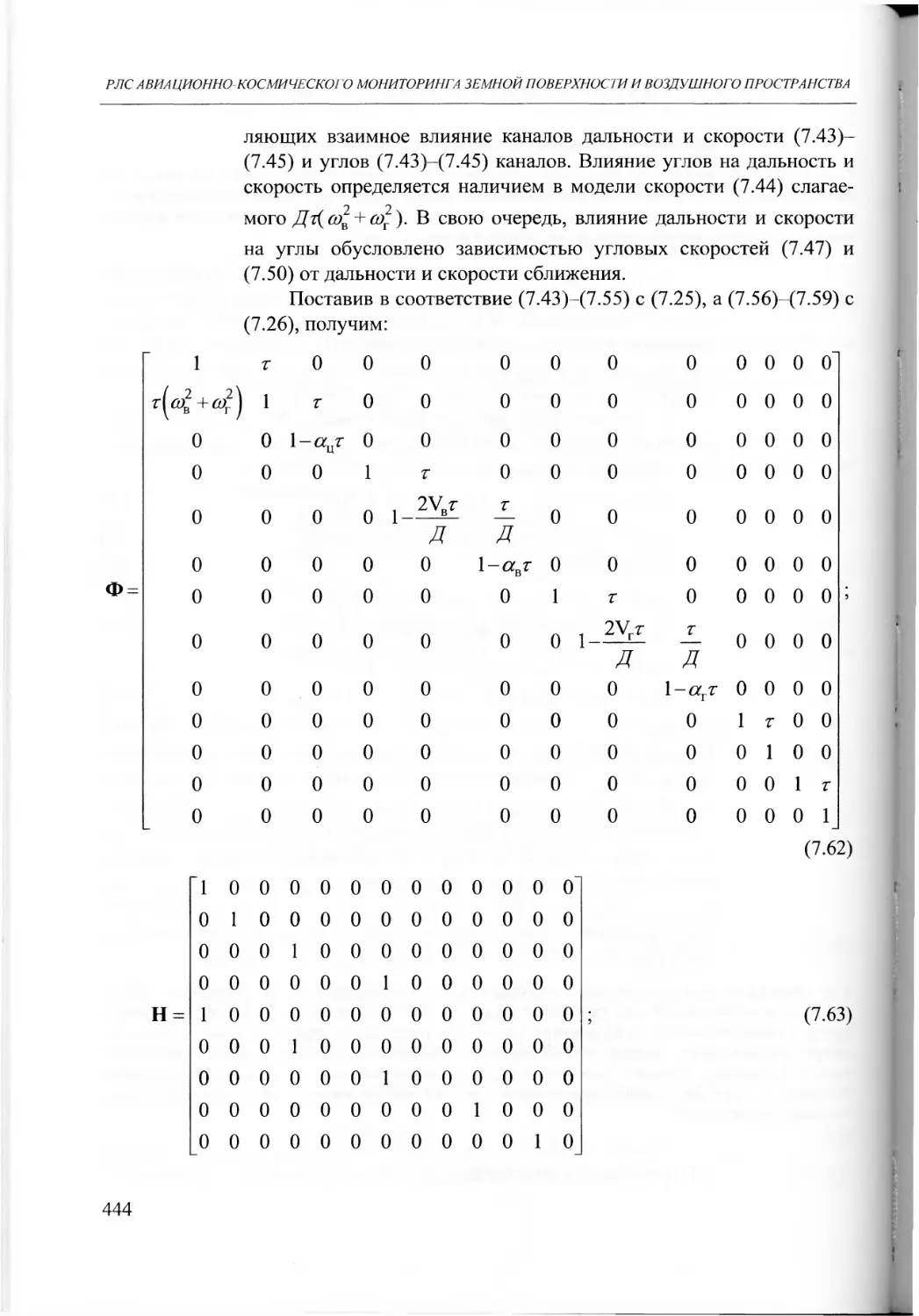
7.2.2. Радиолокационно-оптический дальномер с текущей коррекцией
прогноза состояния неодновременно приходящими измерениями ...........446
7.2.3. Исследование эффективности функционирования
радиолокационно-оптического дальномера с текущей коррекцией прогноза.452
7.3. Многодиапазонные системы сопровождения объектов........... 455
5
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
7.4. Автоматическое сопровождение целей в режиме обзора ....... 467
7.4.1. Алгоритмы автоматического сопровождения целей
в режиме обзора с адаптивной коррекцией прогноза
и бесстробовой идентификацией радиолокационных измерений ...467
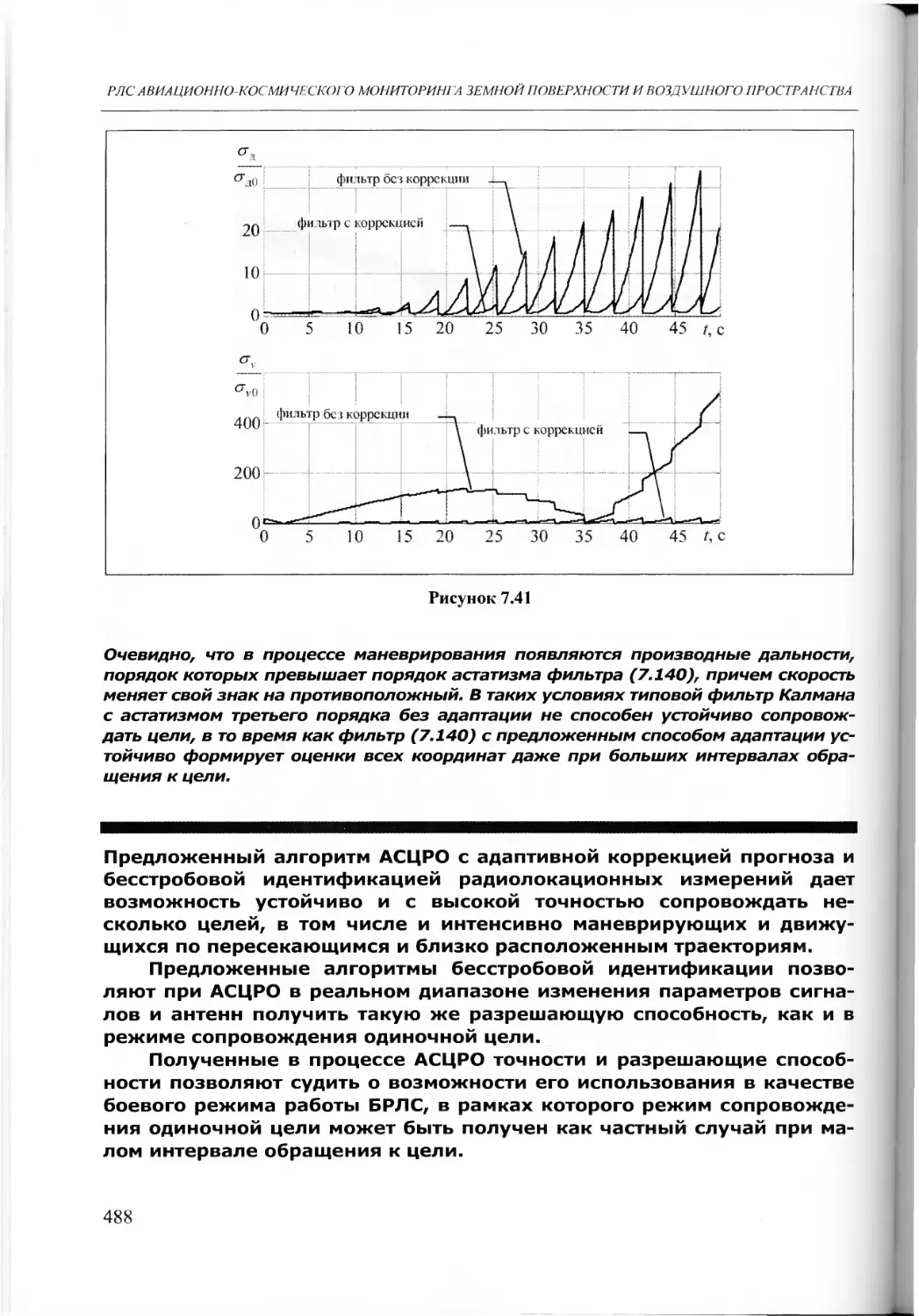
7.4.2. Эффективность алгоритмов автоматического сопровождения целей
в режиме обзора с адаптивной коррекцией прогноза
и бесстробовой идентификацией радиолокационных измерений .475
7.5. Радиолокационный метод измерения нерадиальных проекций
вектора скорости цели ...................................... 489
7.6. Определение степени уязвимости
автоматизированной информационной системы
в отношении конкретных методов реализации
угроз безопасности информации ............................ 501
Литература..................................................... 510
Глава 8. Пассивные радиолокационные системы ......................... 513
Введение....................................................... 514
8.1. Поляриметрическая система
из двух СВЧ-радиометров типа «Ранет-21» .................. 515
8.2. Радиометр СВЧ-диапазона с трёхопорной модуляцией.......... 522
8.3. Повышение информативности СВЧ-радиометрических систем
методом пассивного синтеза апертуры антенны ................ 527
8.4. Блок обработки информации для радиометрических систем
с синтезированием апертуры антенны.......................... 536
Литература..................................................... 540
Заключение .......................................................... 542
Список сокращений ............................................. 543
Сведения об авторах ................................................ 546
Научная школа «Радиолокационные системы
авиационно-космического мониторинга земной поверхности
и воздушного пространства» ...................................... 551
Научная школа «Пассивные радиолокационные системы» ................ 562
Приложение: оглавление книг научной серии
«Труды научных школ ОАО «Концерн радиостроения «Вега».................569
6
Знаменательным событием для научной общественности, интересы
которых лежат в области радиоэлектронных систем, является вы-
ход в свет серии монографий «Труды научных школ ОАО «Кон-
церн радиостроения «Вега», которые обобщают научные достиже-
ния головного предприятия Концерна (ЦКБ-17, НИИ-17, МНИИП)
за последние 10-15 лет в таких научных областях как радиолока-
ционные системы авиационно-космического мониторинга земной
поверхности и воздушного пространства, теория и техника антен-
но-фидерных и оптоэлектронных устройств, пассивные радиолока-
ционные системы, авиационные системы радиоуправления.
Выход монографий подтверждает, что зерна науки, посеянные
в НИИ-17 выдающимся ученым членом-корреспондентом Акаде-
мии наук СССР А.А. Пистолькорсом и взращенные его учениками
и последователями - членом-корреспондентом АН СССР Л.Д. Бах-
рахом, действительным членом РАН А.Л. Микаэляном, членами-
корреспондентами РАН А.П. Реутовым, В.Б. Штейншлейгером, и
сегодня дают плоды.
Российская академия наук высоко ценит результаты деятель-
ности научных школ головного предприятия и достигнутые успехи
его ученых, конструкторов и инженеров, определивших принципи-
ально новые направления развития сложных радиотехнических
систем воздушного, космического и наземного базирования. Тесное
сотрудничество ученых Концерна и институтов РАН позволяет ус-
пешно развивать данные направления и определять тренды их бу-
дущего развития.
Важным этапом в развитии науки на предприятии явилось
создание на его основе интегрированной структуры ОАО «Концерн
«Вега». Создание Концерна позволило объединить усилия ученых,
конструкторов и инженеров предприятия на приоритетных направ-
лениях развития науки и техники, научно-технологического ком-
плекса РФ в целом и ее ОПК.
Достигнутые успехи в разработке авиационных комплексов
дозора и наведения, радиотехнических комплексов мониторинга
земной поверхности космического и авиационного базирования,
комплексов для беспилотных летательных аппаратов получили вы-
сокую оценку Правительства РФ. Концерну присвоен высокий ста-
7
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
тус Федерального научно-производственного центра, что несо-
мненно служит положительным импульсом к дальнейшему разви-
тию науки и технологии на предприятии.
В этой связи, подготовленные к 70-летию головного предпри-
ятия Концерна монографии: «Радиолокационные системы авиаци-
онно-космического мониторинга земной поверхности и воздушно-
го пространства» (под редакцией д.т.н. проф. В.С. Вербы и д.т.н.
проф. Б.Г. Татарского), «Антенно-фидерные и оптоэлектронные
устройства» (под редакцией д.т.н. проф. В.С. Вербы и д.т.н. проф.
А.П. Курочкина) и «Авиационные системы радиоуправления» (под
ред. проф. В.С. Вербы и д.т.н. проф. В.И. Меркулова), являются до-
казательством жизнеспособности и работоспособности его науч-
ных школ.
Надеюсь, что монографии будут интересны не только сотруд-
никам предприятия, но и ученым научно-исследовательских орга-
низаций, инженерам-разработчикам, разрабатывающих предпри-
ятий, профессорско-преподавательскому составу, научным сотруд-
никам и аспирантам ВУЗов страны, чьи научные интересы лежат в
области радиотехники.
Пользуясь случаем, поздравляю руководителей научных школ,
научных сотрудников и аспирантов с юбилеем.
Желаю Вам, уважаемые коллеги, и дальше развивать и кре-
пить российскую науку на благо процветания нашего Отечества.
Президент
Российской академии наук,
академик
В.Е. Фортов
8
Серия монографий «Труды научных школ ОАО «Концерн радио-
строения «Вега», подготовленная к 70-летию головного предприятия
(ЦКБ-17, НИИ-17, МНИИП), является значимым событием не только
для коллектива предприятия, но и для всей радиоэлектронной отрасли.
Созданное в суровые годы Великой Отечественной войны,
ЦКБ-17 активно включилось в работу по оснащению самолетов
авиации ВВС Советского Союза современными радиолокационны-
ми устройствами. Так, уже в 1947 г. первые разработанные пред-
приятием радиолокационные станции поступили для оснащения
самолетов-бомбардировщиков ТУ-4 авиации ВВС СССР.
В последующие годы широкая гамма разработанных предпри-
ятием радиолокационных систем была принята на вооружение са-
молетов различных родов авиации ВВС страны. Разработанное на
предприятии семейство доплеровских измерителей путевой скоро-
сти и угла сноса позволило оснастить ими практически весь парк
самолетов и вертолетов авиации советского государства. Проведе-
ны разработки радиолокационных систем для космических носите-
лей. В то же время, одной из наиболее важных разработок пред-
приятия является авиационный радиолокационный комплекс дозо-
ра и наведения А-50, который по основным тактико-техническим
характеристикам не уступает известному комплексу АВАКС.
Успешную поступь МНИИП по разработке сложной совре-
менной радиолокационной техники остановил спад промышленно-
сти 1990-х годов, связанный с развалом СССР.
Новый импульс развития предприятие получило в 2004 г., ко-
гда на базе МНИИП было создано ОАО «Концерн радиостроения
«Вега». Сохраненный научный потенциал предприятия позволил
успешно провести модернизацию комплекса А-50, придав ему но-
вые функциональные возможности, и приступить к разработке
авиационного комплекса дальнего радиолокационного обнаруже-
ния, наведения и управления нового поколения. Параллельно ус-
пешно была решена задача по созданию оптико-радиотехнического
комплекса мониторинга для самолетного носителя в рамках про-
граммы «Открытое небо», разработан радиотехнический комплекс
для беспилотных летательных аппаратов, завершена программа по
9
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
разработке радиолокационной системы высокого разрешения для
носителя космического типа.
Проведенная работа по разработке, созданию и внедрению со-
временных комплексов и систем сложной радиолокационной тех-
ники в интересах укрепления обороноспособности государства и
развития народного хозяйства РФ была высоко оценена правитель-
ством Российской Федерации. Концерну «Вега» был присвоен ста-
тус Федерального научно-производственного центра. Сегодня, не-
сомненно, ОАО «Концерн радиостроения «Вега» является одним из
лидеров радиоэлектронной отрасли в области создания сложных
технических систем.
Достигнутые успехи в разработке сложной техники невоз-
можны были бы без поддержания и развития научных школ Кон-
церна. В настоящее время на головном предприятии действуют на-
учные школы - «Радиолокационные системы авиационно-косми-
ческого мониторинга земной поверхности и воздушного простран-
ства», «Прикладная электродинамика. Теория и техника антенно-
фидерных и оптоэлектронных устройств», «Пассивные радиолока-
ционные системы», «Авиационные системы радиоуправления»,
члены которых активно участвуют во всех проектах, реализуемых в
отрасли. В этом отношении Концерн «Вега» является безусловно
лидером в отрасли и служит хорошим примером для других интег-
рированных структур и предприятий.
Предлагаемые читателю монографии являются результатом
научно-теоретических разработок активных участников данных на-
учных школ. В монографиях отражены основные научные взгляды
ученых предприятия, соответствующие основным тенденциям раз-
вития радиолокационной техники.
Надеюсь, что монографии будут интересны широкому кругу
ученых, научных сотрудников и специалистов, чьи научные инте-
ресы лежат в области радиолокационных систем.
Пользуясь случаем, поздравляю дружный коллектив головного
предприятия ОАО «Концерн «Вега» с 70-летним юбилеем. Желаю
коллективу предприятия дальнейших успехов в деле обеспечения
безопасности нашей страны, здоровья его сотрудникам и членам
их семей.
Заместитель
Министра обороны РФ по вооружению,
Ответственный секретарь
Военно-промышленной комиссии
Российской Федерации
Ю.И. Борисов
10
Посвящается ученым, конструкторам, инженерам и рабочим
ОАО «Концерн радиостроения «Вега» всех поколений
(ЦКБ-17, НИИ-17, ФГУП «МНИИП», ОАО «Концернрадиостроения «Вега»)
К 70-летию одного из ведущих предприятий оборонно-промышлен-
ного комплекса Российской Федерации - головного предприятия
(ЦКБ-17, НИИ-17, МНИИП) Федерального научно-производствен-
ного центра открытого акционерного общества «Концерн радио-
строения «Вега», сотрудниками предприятия подготовлена серия
монографий «Труды научных школ ОАО «Концерн радиостроения
«Вега», являющаяся обобщением научных достижений и разрабо-
ток Концерна за последние годы.
• «Радиолокационные системы авиационно-космического монито-
ринга земной поверхности и воздушного пространства» (под ре-
дакцией д.т.н, проф. В.С. Вербы и д.т.н, проф. Б.Г. Татарского).
• «Антенно-фидерные и оптоэлектронные устройства» (под редак-
цией д.т.н., проф. В.С. Вербы и д.т.н., проф. А.П. Курочкина).
• «Авиационные системы радиоуправления» (под редакцией
д.т.н., проф. В.С. Вербы и д.т.н., проф. В.И. Меркулова).
Основу научных школ Концерна - «Радиолокационные систе-
мы авиационно-космического мониторинга земной поверхности и
воздушного пространства», «Прикладная электродинамика. Теория
и техника антенно-фидерных и оптоэлектронных устройств»,
«Пассивные радиолокационные системы», «Авиационные системы
радиоуправления» - заложили выдающиеся советские и российские
ученые - члены-корреспонденты АН СССР А.А. Пистолькорс,
В.П. Тихомиров, действительный член РАН А.Л. Микаэлян, члены-
корреспонденты РАН Л.Д. Бахрах, А.П. Реутов, В.Б. Штейшлей-
гер, доктора технических наук И.А. Бруханский, С.Т. Егоров,
П.О. Салганик.
При подготовке монографий не преследовалась цель сосредо-
точиться на детальном рассмотрении одного из направлений разви-
тия научных школ. Рассмотрение ведется по широкому спектру во-
просов, имеющих важное значение при разработке современных ра-
диотехнических систем.
11
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Несомненным достоинством представляемых в монографиях
материалов является их тесная взаимосвязь с практическими при-
ложениями, нашедшими воплощение в конкретных образцах ра-
диолокационной техники, получивших жизнь благодаря усилиям
творческих коллективов единомышленников головного предпри-
ятия Концерна радиостроения «Вега» и их активных соратников.
Надеемся, что серия «Труды научных школ ОАО «Концерн ра-
диостроения «Вега» будет полезна широкому кругу ученых, науч-
ным сотрудникам, инженерам-разработчикам, а также преподава-
телям, аспирантам и студентам профильных ВУЗов.
Редактор научной серии «Труды научных школ
ОАО «Концерн радиостроения «Вега»
Генеральный директор - генеральный конструктор
ОАО «Концерн радиостроения «Вега»
Заслуженный деятель науки РФ,
доктор технических наук, профессор
В. С. Верба
12
В рецензируемой коллективной монографии рассматриваются важ-
ные вопросы современной радиолокации, касающиеся повышения
информационных возможностей современных радиолокационных
систем (РЛС), технологии их разработки и испытаний.
Несомненным достоинством монографии является сочетание в
ней теоретических вопросов с реальной практикой разработки ра-
диолокационных систем и ее элементов, опираясь на современную
технологическую и элементную базу.
Учитывая, что авторами монографии являются ученые и раз-
работчики конкретных радиолокационных систем, содержание мо-
нографии сопровождается большим количеством рисунков, пред-
ставляющих радиолокационные изображения реальных объектов,
полученные в ходе испытаний и опытной эксплуатации разрабо-
танной техники, а также отдельные конструктивные элементы соз-
данных РЛС и комплексов.
Содержание глав является равновесным. Тем не менее, хоте-
лось бы выделить главы 1, 3-5 и 8, в которых представлен ориги-
нальный материал по новым технологиям построения РЛС.
В частности, в главе 1 рассматриваются вопросы разработки
перспективных РЛС, в качестве антенных систем которых исполь-
зуются активные фазированные антенные решетки, а также новые
подходы к организации обзора зоны ответственности на основе ме-
тодов и технологий систем искусственного интеллекта.
В главе 3 представлен оригинальный материал, связанный с
новым подходом к реализации РЛС с синтезированием апертуры
антенны, который строится на учете особенностей построения но-
сителей вертолетного типа и использовании естественного враща-
тельного движения его лопастной структуры для обеспечения дви-
жения фазового центра реальной антенны. Представленный мате-
риал сопровождается достаточно большим объемом рисунков, на
которых представлены результаты оценки эффективности разрабо-
танных решений.
В главе 4 представлен новый материал, связанный с выбором
зондирующих сигналов РЛС. Рассмотрение ведется с подробным
анализом сечений функций неопределенности данных сигналов,
что позволяет определить достоинства и недостатки предлагаемых
13
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
сигналов. Кроме того, приводится детальный анализ возможности
использования сверхкороткоимпульсных сигналов при реализации
РЛС обзорного типа.
Материал, представленный в главе 5, позволяет получить
представление по особенностям разработки систем обработки ра-
диолокационных сигналов для РЛС, реализующих режим длитель-
ного когерентного накопления сигналов. Изложение строится, от-
талкиваясь от детального анализа параметров отраженных сигналов
для данных условий, и сопровождается большим количеством по-
ясняющего материала в виде рисунков, диаграмм и схем.
В главе 8 представлен интересный материал по особенностям
построения пассивных радиолокационных систем. Неподдельный
интерес вызывает материал, связанный с повышением информаци-
онных возможностей СВЧ-радиометрических систем за счет мето-
да пассивного синтеза апертуры.
В целом в материалах монографии содержатся научные
результаты, которые будут полезны широкому кругу читателей,
связанных с вопросами разработки радиолокационных систем .
Академик РАН
И.Б. Федоров
14
Радиолокационные системы (РЛС) мониторинга воздушно-косми-
ческого пространства и земной поверхности достаточно интенсив-
но развивались последние 15-20 лет. Причиной этого явились ус-
пехи в технологиях разработки и проектирования цифровой эле-
ментной базы, методах и способах обработки сигналов, принципах
построения систем формирования и обработки радиолокационных
сигналов, совершенствование технологий построения активных фа-
зированных антенных решеток. Это позволило реализовывать в со-
временных РЛС сложные алгоритмы формирования и обработки
радиолокационных сигналов и создавать системы и комплексы, об-
ладающие широкими информационными возможностями.
Расширение информационных возможностей РЛС позволяет
создавать высокоэффективные, всепогодные и независящие от вре-
мени суток средства мониторинга, обеспечивающие решение задач,
связанных, в том числе, с распознаванием классов и типов целей,
формированием радиолокационных изображений с высокой дета-
лизацией, обнаружением замаскированных объектов противника и
обладающих малой отражающей способностью. В то же время,
учитывая, что в современных РЛС, как правило, используются
одинаковые методы обработки сигналов как при работе по воздуш-
ным объектам, так и при работе по наземным целям и формирова-
нии РЛИ земной поверхности, то имеется возможность, построения
многофункциональных радиолокационных систем и комплексов.
В предлагаемой монографии находят отражение многие из пе-
речисленных выше направлений развития современных РЛС мони-
торинга. Однако, понятно, что в данной монографии не ставится
задача детального рассмотрения основных вопросов развития со-
временной радиолокации. В ней, в первую очередь, обобщается ма-
териал, связанный с научными достижениями и разработками кон-
кретного коллектива ученых и разработчиков современных РЛС и
комплексов.
Материал, представленный в монографии, построен на ре-
зультатах, опубликованных в открытых научных изданиях, сотруд-
ников головного предприятия ОАО «Концерн «Вега», а также ак-
тивных участников его научной школы «Радиолокационные систе-
мы авиационно-космического мониторинга земной поверхности и
15
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
воздушного пространства» и в данном изложении представляется
впервые.
Структурно материал монографии оформлен в виде восьми
глав, в которых рассматриваются:
• вопросы разработки РЛС, учитывающие при обработке радио-
локационного сигнала как временную, так и пространственную
его структуру (глава 7);
• вопросы, связанные с формированием высокодетального изо-
бражения земной поверхности РЛС (глава 2), причем отдельно
рассматривается данная возможность при вращении фазового
центра антенны (глава 3), а также различные варианты обеспе-
чения высокой детальности по шкале дальности (глава 4);
• обеспечение высокой эффективности РЛС за счет использова-
ния длительной когерентной обработки сигналов (глава 5);
• вопросы разработки систем обработки радиолокационных сиг-
налов с использованием современных цифровых технологий
(глава 6);
• автоматическое сопровождение наблюдаемых воздушных объ-
ектов (глава 7);
• вопросы, связанные с обеспечением задач мониторинга при ра-
боте радиолокационных систем в пассивном режиме (глава 8).
Нумерация формул, рисунков и таблиц выполняется в преде-
лах одной главы. Ссылка на используемую литературу ведется в
пределах главы. Список используемых источников приводится в
конце каждой главы и формируется в алфавитном порядке.
Коллектив авторов выражает благодарность ученым и разра-
ботчикам, материалы научных статей которых были использованы
в данной монографии.
Надеемся, что данная монография будет интересна ученым,
разработчикам, профессорско-преподавательскому составу и
научным сотрудникам ВУЗов, профессиональные интересы кото-
рых связаны с областью радиолокации.
16
цщ
Ч®'
,-W , * И?
’ - «Si
r , ж
i&i s&i г.ч|к
:3k,«у $уу«‘>у’: ’ f«\-* щаад’
................’•*«
аботкой сигналов
loi
дение
. Бортовая РЛС дозора с пространственно-временной
обработкой сигналов ..............................
. РЛС кругового обзора с АФАР для бортового компле
BE ) летательного аппарата ....... с
ния воздушным движением
тенныу систем с АФДР .............
многофункционального
а комплекса разведки, оповещу
? с цифровой ФАР ............
_на основе ФАР
Еронно-механическим сканированием
нение экспертной информации
шении задач обзора пространства РЛ
эве ФАР
•ронно-механическим сканированием
> , ч. ^ионная модель для исследования
эффективности обзора
пространства РЛС на основе ФАР
с электронно-механическим сканированием
/jy/rriuyjjgУ. ,,.^Я1Ц№^ИЙЙг • - *’
* •• • • * • '• t .......
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Введение
Известно [1, 2], что при оптимальной обработке радиолокационных
сигналов необходимо учитывать не только временную его структу-
ру, но и учитывать пространственные характеристики сигнала, отра-
женного от цели. Однако, в виду неразвитости технологии разработ-
ки фазированных антенных решеток и соответствующей элементной
базы для ее реализации, традиционно радиолокационные системы
(РЛС) строились на базе антенн с механическим сканированием и,
таким образом, оптимизация обработки радиолокационных сигналов
проводилась только во временной области. В настоящее время си-
туация изменилась. В виду развития технологий разработки фазиро-
ванных антенных решеток и элементной базы, позволяющей на
практике реализовывать активные фазированные антенные решетки,
появилась реальная возможность вести оптимизацию разработки
РЛС не только во временной области , но и в пространственной.
В данной главе рассматриваются особенности разработки
РЛС, которые в процессе обработки радиолокационного сигнала
учитывают как временную, так и пространственную его структуры.
1.1 Бортовая РЛС дозора < с пространственно-временной обработкой сигналов ’
Основной задачей, стоящей перед пространственно-временной об-
работкой сигналов в авиационной РЛС дозора, является обеспече-
ние обнаружения наблюдаемых объектов (целей) в условиях воз-
действия мешающих отражений от подстилающей поверхности и
сигналов источников активных помех. При расположении РЛС на
движущемся скоростном носителе (самолете) сигналы мешаюших
отражений от подстилающей поверхности могут приобретать весьма
сложный и изменяющийся характер в двумерной области «азимут -
доплеровская частота». Это обусловлено наличием боковых лепе-
стков диаграммы направленности антенны РЛС, из-за которых про-
исходит облучение и прием отражений от подстилающей поверхно-
18
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
сти практически во всех направлениях. Так как носитель авиацион-
ной РЛС перемещается с достаточно высокой скоростью, отражен-
ные от поверхности сигналы, поступающие на приемный вход РЛС с
разных направлений, приобретают различные доплеровские сдвиги
частоты, определяемые углом между вектором скорости носителя и
направлением на отражающий участок.
Таким образом, совокупный отраженный сигнал от подстилающей поверхности в
точке приема РЛС оказывается сложной суммой сигналов, распределенных в
двумерной области «азимут - доплеровская частота». Это вызывает необходи-
мость применения системы обработки, согласованной с сигналом в указанной
двумерной области.
В связи с тем, что частота является лишь одним из парамет-
ров, описывающих характер изменения радиолокационного сигна-
ла во времени (наряду с временем запаздывания отраженного сиг-
нала, изменением огибающей пачки во времени, наличием модуля-
ции и др.), а азимут - одной из пространственных характеристик,
то для реализации системы обработки сигналов импульсно-
доплеровской РЛС целесообразно ее рассматривать как систему
пространственно-временной обработки. При таком подходе зада-
чей пространственно-временной обработки является адаптация ее
характеристик к входному сигналу одновременно в двух измерени-
ях: во времени и в пространстве.
Примером не адаптивной обработки может служить разделен-
ная в пространстве и во времени обработка сигнала в «обычной»
импульсно-доплеровской РЛС, когда функции пространственного
фильтра выполняет единая приемная антенна, после которой сиг-
нал подвергается временной обработке. При этом двумерный вход-
ной сигнал РЛС, с помощью антенны перед временной обработкой
преобразуется к одномерному виду, являющемуся функцией только
одной переменной - времени. При недостаточно низком уровне бо-
ковых лепестков антенны, в направлении которых сигналы отраже-
ний совпадают по доплеровской частоте с сигналом движущейся
цели, чувствительность РЛС может быть заметно снижена. В то же
время для сигнала цели, доплеровская частота которого отличается
от частоты сигналов, принимаемых по каким-либо конкретным бо-
ковым лепесткам, их наличие практически не сказывается, а влия-
ние оказывают другие боковые лепестки. Чтобы снизить влияние
отражений по боковым лепесткам передающей диаграммы, необ-
ходимо при создании согласованных фильтров для различных сиг-
налов от целей учитывать неодинаковость требований к их про-
странственным характеристикам.
Требование к пространственной характеристике каждого со-
гласованного фильтра заключается в дополнительном подавлении
19
РЛС АВИАЦИОННО-КОС МИЧЕСКОГО МОНИТОРИНГА ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПРОСТ РАИС 1 В А
сигналов, принимаемых с определенных направлений, в то время
как с других направлений такое подавление не требуется.
Применение пространственно-временной обработки создает предпосылки для
улучшения характеристик обнаружения авиационной дозорной РЛС при наблю-
дении движущихся целей на фоне отражений от подстилающей поверхности, в
том числе при недостаточно низких боковых лепестках диаграммы направленно-
сти антенны. Актуальность такого подхода к задаче очевидна особенно в случаях
размещения антенн на самолетах-носителях, где задача снижения боковых ле-
пестков принципиально осложнена ограниченными габаритными размерами ан-
тенных устройств, необходимостью применения «радиопрозрачных» аэродина-
мических обтекателей и влиянием конструкций самолета.
Вторым, не менее важным и актуальным, аспектом примене-
ния пространственно-временной обработки в авиационных РЛС до-
зора является возможность создания в двумерной характеристике
пространственно-временного фильтра направленных минимумов
(нулей), ориентированных на источники активных помех. Как и в
случае мешающих отражений от подстилающей поверхности, при-
менение пространственно-временной обработки создает предпо-
сылки улучшения характеристик обнаружения целей при воздейст-
вии постановщиков активных помех по боковым лепесткам диа-
граммы направленноеги.
В последнее время в литературе появилось достаточно много
работ, посвяшенных пространственно-временной обработке сигна-
лов в импульсно-доплеровских РЛС (например, [45, 46]). Основной
темой этих работ явилось формулирование обших принципов пред-
ставления сигналов в двумерной области и синтеза согласованных
двумерных фильтров. В материалах данного параграфа основное
внимание обращается на конкретизацию двумерной модели сигна-
ла с привязкой к реальным характеристикам направленности ан-
тенн авиационных дозорных РЛС, а также на рассмотрение спосо-
бов реализации согласованных двумерных фильтров при реальных
возможностях цифровой обработки сигналов. При этом, в первую
очередь, обращено внимание на выявление возможностей про-
странственно-временной обработки для улучшения характеристик
обнаружения движущихся целей на фоне помех от подстилающей
поверхности и активных помех. В этой связи некоторые представ-
ленные материалы используют упрошенные модели, допускающие, в
ряде случаев, те или иные отклонения о г строгого рассмотрения,
требующего весьма большого объема магематического моделирова-
ния с вводом конкретных параметров и выходящего за рамки данной
работы. Тем не менее, приводимые материалы в данном параграфе в
пелом позволяют сделать выводы, по крайней мере, по следующим
двум важным позициям:
20
ГЛАВА I. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
оценка эффективности применения пространственно-времен-
ной обработки с точки зрения улучшения характеристик обна-
ружения движущихся целей по сравнению с РЛС, применяю-
щей «обычную» обработку сигналов на фоне отражений от
подстилающей поверхности и активных помех;
формулирование требований к устройствам пространственно-
временной обработки сигналов, позволяющих приступить к
разработке их структуры и алгоритмов.
Модель сигналов самолетной РЛС дозора
Для синтеза согласованной с сигналом обработки, а также для
оценки эффективности ее применения необходимо создание моде-
ли радиолокационного сигнала. При этом будем полагать, что РЛС
построена по импульсно-доплеровскому типу. На вход импульсно-
доплеровской РЛС в каждый момент времени поступает сигнал от-
ражений от подстилающей поверхности, являющийся суммой эле-
ментарных сигналов, собранных с площади «импульсного кольца»,
ограниченного наклонной дальностью в пределах ст/2, где с - ско-
рость света, т - длительность зондирующего импульса. Если приме-
няется сжатие импульсов, то протяженность импульсного кольца по
дальности соответствует длительности сжатого импульса.
Обработка сигналов в импульсных РЛС обычно осуществляется дискретно, по
выборкам (квантам) дальности, период следования которых должен обеспечи-
вать сохранение разрешающей способности.
Распределение мощности сигнала от подстилающей поверхности
в одном кванте дальности в двумерном пространстве «азимут - часто-
та» напрямую зависит от формы и положения диаграммы направлен-
ности антенны по отношению к вектору скорости носителя РЛС.
На рис. 1.1 показан пример двумерного распределения плотно-
сти мощности сигналов самолетной обзорной РЛС в координатах
«азимут - доплеровская частота» [46]. По одной из осей отложен си-
нус азимутального угла 8т(азимут), отсчитываемого от нормали к
вектору скорости носителя РЛС. По другой оси отложена относи-
тельная доплеровская частота, являющаяся отношением истинной
доплеровской частоты к частоте повторения импульсов. Значения
относительной доплеровской частоты взяты в пределах однозначно-
го окна между гармониками частоты повторения (-0,5.. .+0,5).
Подобные модели сигналов будут существовать для каждого кванта дальности,
таким образом, совокупная модель полного сигнала РЛС будет ансамблем анало-
гичных моделей для всех обрабатываемых квантов дальности.
21
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Двумерная модель сигналов на рис. 1.1 соответствуют идеаль-
но когерентному зондирующему сигналу, бесконечно простираю-
щемуся во времени. Реальный сигнал, как правило, представляет
собой ограниченную во времени пачку. Кроме того, сигнал любого
реального передатчика подвержен мультипликативным амплитуд-
но-фазовым шумам. Эти факторы, в совокупности с процессом
смены отражающих участков на подстилающей поверхности из-за
перемещения РЛС, приводят к размыванию сигналов вдоль оси
частот (рис. 1.2, где показано рельефное изображение модели сум-
марного сигнала цели и отражений от подстилающей поверхности).
Цель
Обзорная РЛС
Рисунок 1.1
Рисунок 1.2
22
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Для уменьшения влияния отражений от подстилающей поверхности, вызванных
наличием боковых лепестков передающей ДНА, при приеме необходимо приме-
нять пространственный фильтр, роль которого в «обычной» РЛС выполняет
приемная антенна до временной обработки сигнала.
При использовании на самолете одной и той же апертуры для
формирования передающей и приемной диаграмм направленности
достижимые уровни боковых лепестков также будут одинаковыми
(во многих РЛС на прием и на передачу используется один и тот же
вход/выход единой антенны, переключаемый между приемником и
передатчиком с помощью дуплексного устройства).
Таким образом, если в качестве пространственного фильтра
применяется приемная антенна, то уровень плотности мощности
отражений от земли, принимаемый на боковых лепестках, по от-
ношению к главному максимуму, будет пропорционален квадрату
относительного уровня боковых лепестков по мощности (рис. 1.3).
Рисунок 1.3
Чтобы оценить эффективность применения приемной антенны
в качестве просгранственного фильтра, рассмотрим пример самолет-
ной РЛС дальнего радиолокационного обнаружения дециметрового
диапазона волн с однозначностью по дальности. Как показывают
расчеты, в такой РЛС при работе над сильно отражающими подсти-
лающими поверхностями, плотность мощности отражений от Земли,
принимаемых в импульсном объеме по главному максимуму ДНА на
рабочих дальностях, может достигать уровней, превышающих плот-
ность мощности внутренних шумов на 60...70 дБ. Чтобы исключить
влияние отражений, принимаемых по боковым лепесткам ДНА. не-
обходимо, чтобы плотность мощности этих сигналов была, по край-
ней мере, на порядок ниже плотности мощности внутренних шумов,
т.е. на 70...80 дБ ниже, чем в главном максимуме ДНА. Это означа-
23
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ет, что, если в качестве пространственного фильтра используется
единая приемопередающая ДНА, относительный уровень ее боковых
лепестков не должен превышать -35.. .40 дБ.
Приведенные требования к уровням боковых лепестков ДНА во многих случаях
оказываются невыполнимыми. Главным препятствием в достижении требуемых
малых значений уровней лепестков являются ограничения размеров апертуры
антенн на самолетах, а также влияние близко расположенных элементов конст-
рукций самолетов. Заметное влияние на боковые лепестки ДНА оказывает необ-
ходимость применения на самолетах «радиопрозрачных» аэродинамических об-
текателей антенн.
Сегодня существует ряд самолетов ДРЛО (самолеты Е2-С
«Hawkeye» - США, AEW-8C «Wedgetail» - Австралия, AEW-2
«Erieye-С» - Швеция и др.), оснащенных РЛС дециметрового диа-
пазона волн, обеспечивающих однозначность измерения дальности.
Все они используют антенны с дискретными элементами, шрани-
ченные по горизонтали 6...7-ю метрами. По материалам в откры-
той печати, освещающим их использование в различных странах,
можно прийти к выводу о том, что область их эффективной работы
ограничивает ся морской подстилающей поверхностью.
При работе над сушей из-за недостаточно низкого уровня боковых лепестков
ДНА характеристики РЛС этих самолетов оказываются значительно хуже.
В сечении, взятом для одного из значений частоты двумерной
модели сигнала, отражения от земли, обязанные наличию боковых
лепестков ДНА, приобретают характер отдельных узких максиму-
мов. На рис. 1.3 показано сечение вдоль оси азимута (на централь-
ной частоте сигнала цели) двумерной модели суммарного сигнала.
Важным свойством максимумов, обязанных отражениям на
боковых лепестках в каждом частотном сечении является то, что
они не совпадают по направлению с главным максимумом, по ко-
торому ожидается полезный сигнал движущейся цели. Следова-
тельно, если бы удалось каким-либо способом локально уменьшить
величину максимумов отражений именно на этих направлениях,
задача дополнительного снижения влияния отражений о г Земли в
данном частотном сечении была бы решена. Для этого в рассмат-
риваемом частотном сечении должен быть создан подавляющий
пространственный фильтр с амплитудной характеристикой, обрат-
ной максимумам отражений от Земли (пунктир на рис. 1.3). Важно
отметить, что обработка сигнала даже для одного из значений
доплеровской частоты, кроме процедур, оперирующих во времени,
одновременно должна включать в себя и процедуры, оперирующие
в пространстве, т.е. являться пространственно-временной обра-
боткой.
24
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Для различных доплеровских частот должны создаваться раз-
личные подавляющие пространственные характеристики фильтров.
Требования к характеристике
оптимального пространственно-частотного фильтра
В связи с тем, что пространственные характеристики двумерного
фильтра должны быть получены на базе все той же, единственно
имеющейся на самолете, антенны, получение глубоких минимумов
во многие десятки децибел представляется чрезвычайно проблем-
ным. В то же время, получение пространственных минимумов глу-
биной 15...20 дБ представляется вполне реальным.
В этом плане очевидно, что отнюдь не отпадает задача минимизации боковых
лепестков исходной приемопередающей ДНА. Дополнительные подавляющие
пространственные фильтры должны только играть роль «дожатия» отражений
на отдельных боковых лепестках до приемлемого уровня.
Данное рассмотрение было бы неполным, если не вспомнить еще
одно важное требование к характеристике пространственно-времен-
ного фильтра - подавление сигналов источников широкополосных ак-
тивных помех. Характеристика двумерного фильтра, обеспечивающе-
го подавление активной помехи, должна быть пространственным ми-
нимумом, простирающимся на азимуте источника помехи в пределах
всех относительных частот. На рис. 1.4 представлено рельефное изо-
бражение результирующей амплитудной характеристики субопти-
мального пространственно-частотного фильтра.
Минимум для
подавления
помех от Земли
Максимум
для сигнала цели
Минимум для
подавления АП
Активная
помеха
Сигнал
це. 1и
Отражения
or Земли
Рисунок 1.4
Особую задачу представляет формирование глубокого мини-
мума в области отражений по главному максимуму ДНА. Здесь, по-
видимому, следует исходить из предпосылки нереальности создания
25
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
пространственного минимума необходимой глубины (70...80 дБ). Б
этой связи единственно приемлемым способом является формиро-
вание одномерного частотного минимума. Глубокое частотное
подавление может быть достигнуто с помощью режекторного (вы-
резающего) фильтра.
В общем, характеристика субоптимального двумерного
фильтра на фоне отражений от земли должна удовлетворять не-
скольким требованиям, каждое из которых может обеспечиваться
отдельными звеньями на том или ином этапе обработки.
Способы построения
пространственно-временной обработки
С помощью цифровых методов обычно реализуются дискретные
устройства обработки. Обработку двумерного сигнала целесооб-
разно производить с помошью семейства дискретных фильтров
(«гребенки» фильтров), отражающих те или иные сечения харак-
теристики оптимального фильтра в плоскости «азимут - частота».
При дискретизации по частоте период расстановки таких дискретных фильтров
(частотных каналов) выбирается из соображений сохранения разрешающей
способности РЛС по радиальной скорости. Каждый дискретный фильтр в этом
случае представляет собой один частотный канал, т.е. является дискретным про-
странственно-частотным фильтром.
Характеристика каждого такого фильтра вдоль оси азимута от-
ражает требуемую диаграмму направленности по азимуту для того
или иного канала доплеровской частоты. Если антенное устройство
представляет собой антенную решетку, в которой имеется возмож-
ность независимой обработки ансамбля выходных сигналов ее эле-
ментов, то создание набора различных ДНА для различных доплеров-
ских каналов становится реальным. При этом важным является то, что
частотные каналы обработки при выборе достаточной протяженности
пачки могут быть выношены с необходимой развязкой между собой
с помощью аподизации обрабатываемой пачки по специальному зако-
ну (законы «Дольф-Чебышева», «Натолла» и др.).
Основной задачей данного параграфа явилось рассмотрение возмож-
ностей применения пространственно-временной обработки в авиаци-
онной дозорной РЛС для улучшения характеристик обнаружения дви-
жущихся целей на фоне мощных мешающих отражений от подсти-
лающей поверхности и от источников активных помех. С помощью
пространственно-временной обработки сигналов появляются допол-
нительные возможности уменьшения влияния отражений от Земли и
сигналов источников активных помех по боковым лепесткам диаграм-
26
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ С ИСТЕ МЫ С ПРОСТРАНСТВЕННО ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
мы направленности антенны при их недостаточно низком уровне.
Можно ожидать дополнительное подавление тех и других помех, обу-
словленных наличием боковых лепестков диаграммы направленности
антенны не менее, чем на 25...30 дБ.
Рассмотрение способов построения пространственно-временной
обработки сигналов показывает, что необходимая двумерная характе-
ристика может быть получена с помощью набора дискретных времен-
ных (частотных) фильтров, каждый их которых обладает собственной
пространственной характеристикой. Для получения независимых про-
странственных характеристик различных частотных фильтров, каж-
дый из них должен независимо формироваться из полного числа эле-
ментов антенной решетки. Таким образом, наличие антенной решетки
с возможностью независимых операций с сигналами ее элементов яв-
ляется необходимым условием для создания устройства пространст-
венно-временной обработки
В связи с недостаточной пространственной развязкой (уровнем
боковых лепестков диаграммы направленности), необходимая вели-
чина развязки между дискретными фильтрами должна обеспечивать-
ся в частотной области. При выборе достаточной протяженности пач-
ки, необходимая развязка между частотными каналами может быть
достигнута с помощью аподизации обрабатываемой пачки по специ-
альному закону (законы «Дольф-Чебышева», «Натолла» и др.).
Особенно ощутимым эффект от применения пространственно-
временной обработки должен оказаться в дозорной РЛС дециметрово-
го диапазона волн, в которой из-за ограниченных размеров антенного
устройства и влияния конструкций самолета-носителя снижение уров-
ня боковых лепестков ДНА принципиально ограничено величинами,
как правило, не обеспечивающими подавление помех от «тяжелой»
подстилающей поверхности и от источников активных помех.
РЛС кругового обзора с АФАР
I для бортового комплекса
беспилотного летательного аппарата
При расположении РЛС кругового обзора (РЛС КО) на борту носи-
теля необходимо учитывать особенности конструкции последнего.
Желательно, чтобы угловое сканирование окружающего простран-
ства антенной радиолокатора происходило в секторе 360° без зате-
нения. Для удовлетворения данных требований наиболее подходя-
27
РЛС АВИАЦИ()ННО-КиСМПЧЕСКО1 О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПРОСТРАНС 1ВА
щей будет конструкция планера БЛА в виде, представленном на
рис. 1.5. В этом случае, как видно из рис. 1.5, антенна РЛС вместе с
обтекателем располагается на специальном хвостовом оперении.
Учитывая многофункциональность РЛС, ее антенную систему жела-
тельно реализовывать на базе АФАР, которая может быть выполнена
в виде кольца или многогранника. Как вариант, возможно исполне-
ние антенной системы в виде полуактивной ФАР (ПАФАР), когда в
приемопередающих модулях (ППМ) распределенной системы отсут-
ствуют СВЧ элементы, обеспечивающие излучение мощности зон-
дирующего сигнала, а имеется общий сосредоточенный передатчик,
выполняющий данные функции. На рис. 1.6 схематично представле-
но исполнение АФАР в форме кольца и в виде равностороннего тре-
угольника, вписанного в окружность с радиусом, соответствующим
радиусу кольца. Горизонтальные размеры активизированной части
кольцевой АФАР не уступают размерам сторон треугольника при
любом положении луча по азимуту. Достоинством кольцевой АФАР
по сравнению с трехгранной решеткой является то, что на всех ази-
мутальных направлениях обеспечивается минимальная ширина луча
и максимальная эффективная площадь антенны.
Полнота
треугольной
АФАР
Рисунок 1.6
В трехгранной же АФАР неизбежно имеют место падение эф-
фективной площади и расширение главного луча диаграммы на-
правленности антенны (ДНА) при больших отклонениях по азимуту.
В частности, при отклонении главного луча на 60° эффективная
площадь антенны уменьшается вдвое, а луч вдвое расширяется.
28
ГЛАВА /. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНС1ВЕННО ВРЕМЕННОЙ ОБРАБОТКОЙ С И1 НАЛОВ
Диаграммы направленности кольцевой АФАР
Предположим, что АФАР состоит из N однотипных приемоизлу-
чающих элементов, расположенных с равным шагом по кольцу
(рис. 1.7) и к каждому ее элементу подключен ППМ, обеспечи-
вающий работу антенны как в режиме передачи, так и в режиме
приема радиолокационных сигналов. Одновременно в решетке ис-
пользуется (активизируется) ровно столько ППМ, сколько требуется
для обеспечения заданного уровня мощности зондирующего сигнала
на передачу и обеспечения направленных свойств (на рис. 1.7 данная
часть полотна антенны выделена штрих-пунктиром).
Формирование передающей диаграммы направленности на за-
данном азимуте осуществляется с помощью выставки требуемого фа-
зового распределения между излучающими элементами, которое
обеспечивает компенсацию кривизны излучающего полотна. Главный
максимум передающей диаграммы направленности в азимутальной
плоскости будет расположен по нормали к центральному столбцу за-
действованной части АФАР (рис. 1.7). Здесь же показано положение
фазового фронта волны, принимаемой с углового направления в.
В вертикальной плоскости диаграмма направленности форми-
руется приемопередаюшими элементами-столбцами АФАР. С по-
мощью фазовращателей, находящихся в составе передающих кана-
лов ППМ, возможно создание узкой суммарной диаграммы столбца
АФАР на передачу и её электронное качание. Для снижения уровня
вертикальных боковых лепестков передающей ДНА можно реали-
зовать спадающее амплитудное распределение с помощью атте-
нюаторов каналов ППМ.
Нормаль к центральному элементу
?а действ* кванн* >й части АФАР
(главный максимум ДНА)
ФроЙТЧ4ОТШ>1
Рисунок 1.7
29
РЛС АВИ. ЩИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВО ЗДУШНОГО ПРОСТРАНСТВ 1
Сигналы с выходов приемных каналов ППМ подвергаются аналого-цифровому
преобразованию в две квадратуры. С помощью мультиплексора цифровые вы-
ходы ППМ поступают в приёмный процессор АФАР, где создаётся необходимое
число приемных лучей.
Для уменьшения дальних азимутальных боковых лепестков ДН
элементы активной решетки обладают направленностью в горизон-
тальной плоскости, близкой к cos2 по модулю поля (рис. 1.8).
На рис. 1.9-1.12 приведены расчетные ДНА для активизиро-
ванной части АФАР, реализованной в виде кольца с диаметром, рав-
ным 4,0 м, для дециметрового диапазона длин волн и шагом между
элементами решетки, равным половине длины волны. На рисунках
приведены ДНА в азимутальной плоскости в диапазоне углов ±90°
(рис. 1.9), ±15° (рис. 1.10), ±1,5° (рис. 1.11) и в вертикальной плоско-
сти в диапазоне углов ±12° (рис. 1.12). Как видно из приведенных
рисунков, обеспечивается достаточно узкая ДНА главного луча (по
уровню минус 3 дБ), что позволяет реализовать высокую разрешаю-
щую способность обзорной РЛС по угловым координатам.
Азимутальный упп, град
Рисунок 1.9
30
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИ1 НАЛОВ
Рисунок 1.10
Азимута [ьный угол, град
Рисунок 1Л1
Рисунок 1.12
31
РИС АВИЛЦИОННО-КОСКШЧЕСКбГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ ИВОЗДХ ШНОГО ПРО( ТРАНСТВА
Энергетический потенциал РЛС и режимы ее работы
Активизированная часть кольцевой АФАР в нашем случае включа-
ет примерно 4 900 приемопередающих элементов. Если предполо-
жить, что мощность излучения одного ППМ равна 10 Вт, то сум-
марная импульсная мощность может составить 49 кВт. Если счи-
тать суммарные потери в ППМ, не превышающие 1,5 дБ (1,4 раза
по мощности), то суммарную импульсную мощность можно при-
нять равной 35 кВт.
Геометрическую площадь активизированной части решетки
для данных условий можно считать равной 1,4 м“. За счет спадаю-
щего распределения поля в раскрыве активизированной части
АФАР коэффициент использования её геометрической площади
будет меньше единицы (примем его равным ~ 0,7). Тогда эффек-
тивную площадь антенны 5-,ф можно считать равной 1 м2. В резуль-
тате коэффициент усиления антенны на передачу <711рд (в направле-
нии главного максимум ДНА), определяется соотношением [3]
бпрд=—А ол
где 2 - длина волны, будет примерно равен 104 (40 дБ).
Опираясь на основное уравнение радиолокации [1], запишем
соотношение, определяющее величину импульсной мощности Рп
отраженного сигнала от точечной цели, находящейся на направле-
нии главного максимума ДНА:
( _ 1 изч ^прд^эф^ц
и “ . . .9-/1 ’
(4 л-)2/?
где егц - эффективная площадь отражения (ЭПО) цели; R - расстоя-
ние до цели.
В то же время, спектральная плотность мощности внутренних
шумов Аш, пересчитанная к входу АФАР, определяется как
*ш=^кТ, (1.3)
где Nq -- шум-фактор приёмного тракта; к - постоянная Больцмана;
Т - термодинамическая температура входных цепей (произведение
кТ для температуры Г - 300 К равно 4 10 21 Вт/Гц).
Полагая, что обработка принятого сигнала ведется оптималь-
ным образом, определим отношение Q„ пиковои мощности выход-
ного радиоимпульса к средней мощности шумов на выходе согла-
сованного фильтра в виде
и
^7”
32
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
где
и ии
- энергия принятого АФАР радиоимпульса вследствие отражения
зондирующего сигнала от точечной цели, ти - длительность радио-
импульса.
Для получения заданной вероятности правильного обнаруже-
ния отраженного сигнала от цели на фоне внутренних шумов отно-
шение QH должно достигать значений, превышающих некоторую
пороговую величину ^лор. Тогда условие обнаружения, выраженное
через энергию Эи отраженного радиоимпульса, будет иметь вид
и
Поскольку энергия радиоимпульса равна произведению его
мощности на длительность, с учетом (1.6) выражение для импульс-
ной мощности может быть представлено в виде
D . (?пор^г
и
и
Используя (1.7) и учитывая (1.2), можно записать неравенство,
из которого можно определить необходимую мощность излучения
для обеспечения задачи обнаружения воздушной точечной цели с
требуемым качеством:
^ИЗЛ^ГфД^эф^Ц Йюр^О^^ QX
(4я)2Л4
и
Из (1.8) следует, что
> епор^0АГ(4я)27?
* ИЗЛ — ~ ~
и'^РД°эФСЦ
Для определения дальности обнаружения цели с заданной ве-
личиной ЭПО и требуемым качеством необходимо трансформиро-
вать формулу (1.9) с учетом потерь /;1на, обусловленных случайным
возможным изменением положения цели относительно направле-
ния главного максимума ДНА, который обычно оценивается на
уровне 2 дБ (1.6 раза по мощности)
и
ИЗЛ * И^пр I
33
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Обнаружение воздушных целей
При решении задач обнаружения воздушных целей желательно ис-
пользовать высокую частоту повторения зондирую] цих радиоим-
пульсов, при которой обеспечивается большое число когерентных
накоплений отраженных сигналов, а также однозначность измере-
ния доплеровского смещения частоты отраженных сигналов от
движущихся целей и получение необходимой ширины частотных
окон, свободных от периодического спектра отражений от подсти-
лающей поверхности [2, 4].
Как отмечалось ранее, значение QBOp, входящее в (1.10), будет
определяться в соответствии с требуемым качеством обнаружения
и, в свою очередь, определять число эффективно накапливаемых
радиоимпульсов.
Например, при спектральной обработке пачки, состоящей из
256-ти импульсов, на основе быстрого преобразования Фурье с ам-
плитудным взвешиванием число эффективно накапливаемых им-
пульсов приближенно равно 200. Для выдерживания вероятности
ложных тревог на уровне, не превышающем 10 6...10 , величина
Q110p составит около 0,1 (или около -10 дБ). С учетом данного заме-
чания максимальная дальность обнаружения, рассчитанная в соот-
ветствии с выражением (1.10) при длительности зондирующих ра-
диоимпульсов 1 мкс и различных величинах ЭПО воздушных це-
лей, приведена в табл. 1.1 (строка 1).
Таблица 1.1
№ п.п. Параметр ЭПО, м2
0,1 1,0 10,0
1 Максимальная дальность обнаружения, км 98 175 311
2 Максимальная дальность обнаружения с учетом потерь, км 77 138 245
Представленные в строке 1 значения максимальной дальности
не учитывают потери, вызванные поглощением электромагнитных
волн в атмосфере, и, кроме того, характеризуют обнаружение только
в одном кадре работы РЛС на фиксированной частоте повторения.
Энергетические потери только за счет поглощения в атмосфере на
приведенных дальностях могут достигать нескольких децибел. Для
восстановления однозначной дальности до цели на каждом азиму-
тальном направлении, определяемом положением главного луча
ДНА, необходима работа с несколькими кадрами, отличающимися
частотами повторения импульсов (на протяжении каждого кадра ра-
боты РЛС частота повторения должна быть неизменной).
34
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Совместная вероятность обнаружения цели в трёх кадрах ра-
боты подряд будет заметно ниже, чем вероятность обнаружения в
одном кадре, что также можно оценить как эквивалентные потери
радиолокационного потенциала, примерно равные 2 дБ. Если при-
нять совместные энергетические потери по указанным причинам
равными 4 дБ, то максимальная дальность обнаружения с учетом
потерь будет соответствовать значениям, приведенным в строке 2
табл. 1.1.
В начале каждого кадра, после смены частоты повторения, не-
избежно возникает переходной процесс установления отражений от
подстилающей поверхности, во время которого спектральная обра-
ботка сигнала оказывается невозможной. Эю время (при полёта но-
сителя РЛС на высоте 16 км), составит примерно 3 мс. Поэтому пол-
ная длительность кадра при обработке с помощью БПФ N импульсов
должна составить Ткадр > АТП + 3-10 Jc, где Ладр- длительность кадра
работы РЛС на одной частоте повторения, Тп - период повторения
импульсов; А- число импульсов, обрабатываемых БПФ.
Если исходить из возможного значения скважности излучения
около 10... 12, го при длительности импульса около 1 мкс, длитель-
ность периода повторения должна составить 10... 12 мкс. При
А = 256 длительность когерентно обрабатываемой части кадра со-
ставит 2,5...3,Оме. Прибавив к этой части кадра время переходного
процесса, получим, что полная длительность кадра должна быть по-
рядка 6 мс. При этом половина мощности излучения расходуется как
бы «впустую», что вызвано стремлением обеспечить высокопроиз-
водительный режим обзора с восстановлением однозначной дально-
сти «на проходе».
Для повышения КПД излучения необходимо удлинение кадра и его когерентно
обрабатываемой части, однако возможности восстановления однозначной даль-
ности при этом ухудшаются.
Если периоды повторения в соседних кадрах будут отличаться
на 1 мкс, ю интервал однозначности дальности после её восстанов-
ления по двум кадрам составит около 15 км, что явно недостаточно
в диапазоне дальности действия РЛС. Поэтому необходимо приме-
нение не менее трёх кадров с периодами повторения, различающи-
мися не менее, чем на мкс.
Время радиолокационного сеанса в одном азимутальном поло-
жении ДНА должно составить три полных кадра или около 18 мс.
При электронном сканировании с шагом около 0,5° для про-
смотра круговой азимутальной зоны потребуется 720 положений
луча, что составит около 13 с. Учитывая возможности электронно-
го «прицеливания» луча по приоритетным целям, этого темпа ос-
35
РЛС АВИ,\ЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ LUHOI0 ПРОСТРАНСТВА
зора круговой зоны должно быть достаточно. С применением по-
вторных радиолокационных сеансов по приоритетным целям, вре-
мя просмотра круговой зоны будет нарастать в соответствии с их
числом и временем, необходимым для «обслуживания» каждой це-
ли. Время радиолокационного сеанса в «прицельном» режиме, для
повышения вероятности обнаружения цели с применением более
трёх частот повторения, ориентировочно составит около 30 мс.
Обнаружение надводных целей
Для беспилотного аппарата создание информационного поля над-
водной обстановки может оказаться весьма важным в особенности
для удалённых акваторий, не охватываемых радиолокационными
полями береговых и корабельных РЛС. В силу весьма узкого азиму-
тального луча и повышенной разрешающей способности по дально-
сти данный режим работы РЛС может оказаться весьма полезным и
для обзора поверхности суши при получении оперативной радиоло-
кационной карты, а также при обнаружении наземных целей с доста-
точно большой величиной ЭПО.
Частоту повторения импульсов в этом режиме целесообразно
выбирать достаточно низкой с тем, чтобы обеспечить однозначность
измерений по дальности в круговой зоне обзора (~ 300 Гц). Длитель-
ность излучаемых радиоимпульсов, предельно возможная для полу-
чения длительности сжатого сигнала, не более 0,1 мкс. Полагая ре-
ально выполнимым значение коэффициента сжатия импульсов, рав-
ное 128. получим, что длительность излучаемых импульсов должна
составить около 13 мкс.
В качестве сложного сигнала наиболее приемлемо использование зондирующей
последовательности радиоимпульсов с внутриимпульсной линейной частотной
модуляцией (ЛЧМ). Ширина девиации частоты ЛЧМ в этом случае должна быть
около 10 МГц.
На вход АФАР, в каждом азимутальном положении луча, бу-
дут одновременно поступать отражения как от сосредоточенных
целей (при их наличии в пределах ДНА), так и от распространён-
ной по дальности и азимуту подстилающей поверхности (моря). В
этой связи для накопления сигналов сосредоточенных целей на фо-
не отражений от морской поверхности желательно проводить де-
корреляцию последних за счёт смены несущей частоты зондирую-
щего сшнала от импульса к импульсу. Разнос несущих частот из-
лучаемых импульсов должен быть достаточным, чтобы спектры
радиоимпульсов не перекрывались в пределах всей зондирующей
пачки. В этом случае сигнал подстилающей поверхности становит-
ся подобен некоррелированному шуму.
36
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Накопление сигнала от сосредоточенной цели, не являющейся,
в общем, точечной, на фоне некоррелированного шума возможно
только некогерентным способом. При числе импульсов, не превы-
шающем 10...20, потери на некогерентное накопление ещё не столь
велики и данный способ будет достаточно эффективен.
В качестве подтверждения данного вывода на рис. 1.13 приве-
дены графики, характеризующие изменение отношения сигнал/шум
на входе системы обработки, при котором достигается требуемая ве-
роятность правильного обнаружения в условиях когерентного (пунк-
тирная линия) и некогерентного (сплошная линия) накопления при
вероятности ложной тревоги 10 7.
Отношение мощностей сигнал-шум. дБ
Рисунок 1.13
Если исходить из той же длительности радиолокационного се-
анса, что и при круговом обзоре в режиме обнаружения воздушных
целей, то число импульсов в пачке будет 6. Энергетические потери
некогерентного накопления составят всего 1 дБ, а выигрыш - около
7 дБ. В данном режиме также возможны повторные радиолокаци-
онные сеансы (в выбранных секторах «прицеливания»), при кото-
рых может быть увеличено число накапливаемых импульсов. На-
пример, при увеличении числа импульсов в пачке до 20-ти энерге-
тический выигрыш составит 9... 10 дБ.
Максимальная дальность действия при решении задач обна-
ружения надводных целей приведена в табл. 1.2. При оценке дан-
ной величины было использовано соотношение (1.10) в предполо-
жении, что Спор = 7 (5 дБ).
37
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Таблица 1.2
№ п.п. Параметр ЭПО, м2
100,0 1820,0 3640,0
1 Максимальная дальность обнаружения цели на фоне внутренних шумов, км 400 — —
2 Максимальная дальность обнаружения цели на фоне отражений от морской поверхности, км 245 200 400
В строке 1 представлено значение дальности, определяющее
достаточный энергетический потенциал, когда обнаружение цели в
виде некрупного катера ведется на фоне только внутренних шумов
приемного канала при ти =10 мкс.
При оценке максимальной дальности обнаружения цели на
фоне отражений от морской поверхности (строка 2) последнюю не-
обходимо рассматривалась как поверхностно распределенную
цель. Величина сгц такой цели определяется через удельную величи-
ну ЭПО [1], примем ее равной 10 2, и одновременно отражающую
площадь поверхности, которая зависит от ширины диаграммы на-
правленности антенны в азимутальной плоскости, углового положе-
ния главного лепестка ДНА в угломестной плоскости, длительности
сжатого сигнала на выходе системы обработки и дальности до мор-
ской поверхности.
В нашем случае на дальности 200 км сгц = 260 м". Отталкиваясь
от данной величины и учитывая эффект декорреляции, получаем
значения минимальных значений ЭПО целей, обнаруживаемых со-
ответственно на дальности 200 и 300 км (строка 2).
Особенностью режима обнаружения надводных целей являет-
ся наличие фоновых отражений от морской поверхности, которые
будут присутствовать в любом секторе обзора в пределах 360°,
снижая эффективность обнаружения сосредоточенных целей.
Это обязывает при обработке радиолокационных сигналов ис-
пользовать отмеченную процедуру накопления полезных сигналов
(отраженных сигналов от сосредоточенной цели) на фоне декорре-
лированных помех от морской поверхности.
Панорамное отображение земной поверхности
с получением радиолокационной карты
Достаточно высокий радиолокационный потенциал при работе РЛС в
режиме обнаружения надводных целей позволяет осуществить об-
зорный режим земной поверхности в пределах радиогоризонта (в ра-
38
ГЛАВА I. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИТ НАЛОВ
диусе около 400 км). При использовании на наземном пункте, напри-
мер индикаторов кругового обзора (ИКО), возможно отображение на
них панорамного изображения земной (морской) поверхности.
При данном формате отображения на экране ИКО весьма чётко
прописываются границы море - суша и наблюдается отражение от
надводных кораблей на фоне морской поверхности, а также доста-
точно хорошо просматривается отражение рельефа, что позволяет
распознавать занятые сушей территории, а также обнаруживать неко-
торые характерные сосредоточенные объекты на суше. Это обстоя-
тельство позволяет характеризовать панорамное отображение как ра-
диолокационную карту.
Панорамное отображение может использоваться на начальном
этапе после вывода БЛА в заданный район дежурства для опера-
тивной оценки обстановки и определения наличия группировок
надводных объектов. Более подробная информация должна полу-
чаться в режимах «прицеливания» с реализацией полной разре-
шающей способности РЛС.
Измерение азимута и угла места
Ширина диаграммы направленности антенны в горизонтальной
плоскости составляет примерно 0,5°, поэтому для измерения азиму-
та цели в режиме «на проходе» целесообразно использовать мет од
максимума. Шаг перемещения луча при дискретном сканировании
по азимуту равен его ширине на уровне около -2 дБ.
Ошибка отсчета азимута при данном методе измерения соста-
вит не более трети от величины шага сканирования, т.е. около 0,2°
или 10... 12 угл. мин. Ошибка измерения тангенциальной состав-
ляющей положения цели относительно оси АФАР (СКО) при этом
составит около 0,7 км на дальности до цели 200 км. Учитывая не-
избежные навигационные ошибки, можно считать, что эта точность
вполне достаточна. Важным достоинством указанного метода явля-
ется то, что измерение азимутального угла осуществляется «на
проходе» в процессе обзорного сканирования луча по азимуту.
В то же время ширина ДНА в вертикальной плоскости весьма
велика и составляет примерно 7,0°. При отсутствии достаточно бы-
строго сканирования луча по вертикали желательно применять мо-
ноимпульсный метод измерения угла места с использованием двух
разнесенных приемных лучей [Г|. Измерение угла места цели отно-
сительно центра передающего луча (начала отсчета) в этом случае
обеспечивается за счет сравнения амплитуд сигналов, принимае-
мых одновременно по двум приемным лучам (нижнему и верхне-
му). в соответствии с выражением
39
Р 7С АВИАЦИОННО- КОСМИЧЕСКОГО л 1ОНИ ТОРИИГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОС ТРАНСГВА
где А], А2 - амплитуда сигналов в верхнем и нижнем каналах соот-
ветственно, с последующим определением отклонения от равно-
сигнальною направления Д0 с помощью умножения величины А на
коэффициент , который зависит от ширины приемных лучей
в вертикальной плоскости, их формы, величины разноса, а также от
градиента радиопрозрачного обтекателя, искажающего форму лу-
чей в зависимости от величины их отклонения в от нормали:
Д0 = Д-^(6>), (1.12)
где 0 — величина, соответствующая положению равносигнального
направления (РСН) относительно нормали к АФАР. При использо-
вании данного метода сохраняется практически линейная зависи-
мость А от углового отклонения от РСН в пределах ±0 j/2, где в А
ширина диаграммы направленности антенны в вертикальной
плоскости. Однако из-за наличия боковых лепестков как у приём-
ных, так и передающей ДНА, на уровнях амплитудного соотноше-
ния, превышающих по модулю 0,5, возможны появления неодно-
значности. В этой связи измерение отклонения от РСН следует ог-
раничить значениями (Д] - Д2)/(А + А)> не превышающими 0.5.
Точность измерения углового отклонения (СКО) в соответствии
с (1.11), (1.12) в области достоверных измерений составит примерно
0,1 от ширины ДНА, т.е. примерно 0,7° или около 40 угл. мин.
Рассмотрение возможностей построения дозорной РЛС кругового обзо-
ра на беспилотном летательном аппарате показывает, что имеются тех-
нические предпосылки для положительного решения данной задачи.
Сдерживающим фактором при реализации данного проекта могут
быть только экономические вопросы, связанные со стоимостью приё-
мопередающих модулей, число которых в кольцевой АФАР достаточно
велико.
Развитие микроэлектроники и налаживание серийных технологий
по производству ППМ в отечественной промышленности позволяют
надеяться на существенное снижение стоимости элементной базы для
разработки АФАР, следовательно, и обзорного комплекса на БЛА.
40
ГЛАВА /. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
РЛС управления воздушным движением
на основе антенных систем с АФАР
В настоящее время в системе организации управления воздушным
движением используются следующие типы наземных радиолокаци-
онных систем:
• обзорные аэродромные (ОЛР-А);
• трассовые (ОРЛ-Т), посадочные (ПРЛС);
• обзор летного поля (РЛ ОЛП).
Из них различают две основные группы РЛС: первичные и
вторичные. Первые, как правило, обеспечивают диспетчерский со-
став информацией о дальности и азимуте воздушных объектов (це-
лей), а также о местоположении зон опасных метеообразований.
Вторые позволяют получить информацию о координатах воздуш-
ного судна и дополнительную информацию (бортовой номер, оста-
ток топлива, сигналы об аварийных ситуациях) [28, 29].
Анализ состояния существующего парка указанных РЛС сис-
темы УВД показывает что в России и других странах, прежде всего
в странах СНГ, предприятиями Аэронавигации эксплуатируется
большое количество старых радиолокаторов, особенно Л-диапазона
(длина волны 23 см). На сегодняшний день они устарели как физи-
чески, так и морально. Существует проблема обеспечения их за-
пасными частями ввиду прекращения производства многих входя-
щих в их состав комплектующих изделий.
Основные принципы построения и функционирования
существующих обзорных первичных РЛС
• Использование вакуумных СВЧ устройств для формирования
мощных СВЧ импульсных сигналов (единицы мегаватт) с це-
лью обеспечения заданной дальности действия.
• Использование вращающихся зеркальных антенн с вращаю-
щимися сочленениями в волноводно-коаксиальном тракте.
• Построение приемного тракта с обработкой принимаемого сиг-
нала, как в аналоговой, так и цифровой форм;
• Использование сигналов с низкой частотой повторения и, как
правило, применение устройств селекции движущихся воздуш-
ных объектов, в виде схем череспериодной компенсации.
41
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Указанные принципы построения и практической реализации
рассматриваемых РЛС носят исторически сложившийся характер.
В то же время, анализ принципов построения существующих и
перспективных РЛС различного назначения, например бортовых
систем обнаружения, наведения и целеуказания, показывает, что
при их реализации характерным является:
• использование активных фазированных антенных решеток, в
том числе и с реализацией цифровых приемных антенных ре-
шеток;
• использование сигналов с высокой и средней частотами повто-
рения импульсов с последующей доплеровской спектральной
селекцией отраженных сигналов и длительным когерентным
накоплением;
• реализация алгоритмов обработки отраженного сигнала как на
этапе первичной, так и на этапе вторичной обработки инфор-
мации в специализированном цифровом вычислителе.
Указанные принципы реализации РЛС обеспечивают высокую
эффективность функционирования при наблюдении воздушных
объектов, в частности, бортовых РЛС [24].
Для повышения эффективности УВД все большее применение
находят принципы навигации, основанные на применении техноло-
гии АЗН (ADS-B - Automatic Dependent Surveillance Broadcast). Эта
технология является методом наблюдения, при котором ВС авто-
матически, по линии передачи данных, передают в центр УВД ин-
формацию о местоположении и параметрах полета, полученную от
бортовых пилотажно-навигационных систем.
В качестве основного инструмента определения навигацион-
ных параметров воздушного судна (скорость, высота, курс, коор-
динаты ВС) используется спутниковая система глобального пози-
ционирования GPS (ГЛОНАСС).
В центрах системы УВД передаваемые с борта ВС данные об-
рабатываются и отображаются на рабочем месте диспетчера так же,
как и радиолокационная информация. Перекрывающиеся поля двух
систем наблюдения (радиолокационной и АЗН) дают диспетчеру
единое поле наблюдения, которое будет распространено на нижнее
воздушное пространство и области с различными дефектами ра-
диолокационного поля.
Функции приема и передачи данных на борту ВС реализуются
в специальном ответчике. Анализ принципов построения АЗН по-
казывает, что с течением времени они способны, в значительной
степени, вытеснить вторичные РЛС.
42
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Анализ состояния аэродромной сети в РФ показывает, что имеется достаточно
большая потребность в ПРЛС, при этом к ПРЛС предъявляются повышенные тре-
бования по мобильности, что, в свою очередь, влечет за собой повышенные тре-
бования к массогабаритным характеристикам РЛС.
Представленные выводы, перспективы развития радиолокаци-
онных систем [2, 38] свидетельствуют о том, что необходимы раз-
работка и создание РЛС УВД нового поколения. В первую очередь,
это касается обзорных первичных РЛС.
Основным направлением реализации рассматриваемых РЛС
можно считать направление, при котором обеспечивается снижение
аппарат уроемкосги за счет повышения программоемкости [38]. При
таком подходе аппаратные функции ограничиваются только реше-
нием задач генерирования и излучения сигналов, а все остальные
функции обеспечивает вычислительная техника.
Исходя из сказанного, можно предположить, что перспектив-
ная РЛС представляет сочетание двух основных элементов - ан-
тенной системы в виде АФАР и системы цифровой обработки
(СЦО). Один из возможных вариантов схемного построения пер-
спективной РЛС представлен на рис. 1.14 [2].
Система цифровой обработки включает многоканальный циф-
ровой приемник, цифровое устройство формирования сигналов,
унифицированный процессор, адаптер интерфейса. Для передачи
данных целесообразно использование интерфейса RapidlO (быст-
рый ввод/вывод).
Указанные специализированные цифровые устройства и вы-
числительные модули процессоров, объединенные линиями связи,
представляют собой, по сути, специализированную вычислитель-
ную систему, которая реализует заданные функциональные алго-
43
РЛС' АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНО! О ПРОСТРАНСТВА
ритмы и обмен информацией между специализированными устрой-
ствами, стандартными модулями, а также внешними источниками и
потребителями информации.
Создание специализированной вычислительной системы (СВС) потребует разра-
ботки функциональных алгоритмов, а затем программного комплекса и разра-
ботки или выбора подходящих готовых модулей, отвечающих требованиям по
реализации соответствующих алгоритмов, включая передачу данных, интегра-
цию аппаратуры и программного комплекса и последующую отработку СВС в со-
ставе РЛС.
Требования к СЦО по решению основных задач
с учетом функционального назначения
первичных РЛС систем УВД
• Обнаружение воздушных объектов.
• Измерение фазовых координат (дальности, угловых координат в
горизонтальной и вертикальной плоскостях, скорости) воздуш-
ных объектов.
• Траекторное сопровождение воздушных объектов.
В настоящее время пристальное внимание уделяется исследо-
ваниям по практической реализации РЛС с цифровыми антенными
решетками [12].
При использовании ЦАР в каждом приемопередающем модуле,
как правило, в приемной части модуля, размещается аналого-
цифровой преобразователь и, соответственно, на выходе каждого
приемного канала формируется сигнал в цифровом виде. В даль-
нейшем сигналы с каждого канала поступают на диаграммо-
образующую схему. где производится их суммирование по заданно-
му алгоритму. В результате «формируется» требуемый набор про-
странственных лучей диаграммы направленности антенны. Как
правило, это суммарный (по всем каналам) луч ДНА, разностные лу-
чи ДНА в горизонтальной и вертикальной плоскостях.
В этом случае схема, представленная на рис. 1.14, трансфор-
мируется в схему, показанную на рис. 1.15.
Это приведет к тому, что будут существенно снижены требо-
вания к процессору обработки сигналов или даже отпадет необхо-
димость его использования.
В ЦАР может быть реализована первичная обработка принимаемых радиолока-
ционных сигналов (сжатие сигналов, согласованная фильтрация и т.д.).
Основные достоинства и недостатки ЦАР известны [12]. От-
меним лишь, что главной проблемой при их реализации является
высокая стоимость, особенно для антенн с большим (сотни и тыся-
чи) числом каналов.
44
ГЛАВА I. РАДИОЛОГА ЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРА БОТКОЙ СИ1 НАЛОВ
Указанные обстоятельства свидетельствуют о том, что задача
разработки перспективной РЛС системы УВД сводится фактически
к разработке следующих основных элементов - АФАР, алгоритми-
ческому и программному обеспечению и обоснованию требований
к специализированному вычислителю.
Исходя из этого, рассмотрим возможные варианты реализации
АФАР при проектировании перспективной обзорной РЛС для сис-
темы УВД.
Характеристики, которыми должна обладать
обзорная трассовая РЛС (приложение 3) [11]
Максимальная дальность действия.................. не менее 350 км
Угол обзора в горизонтальной плоскости.................... 360°
Период обновления информации........................ не более 10 с
Разрешающая способность по азимуту ................. не хуже 1,3°
Длина волны ........................................ 10 или 23 см
45
Р 1СЛВИ ЩИОННО-КОСМПЧЕС КОГО МОНИТОР И HI i ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗД~* ШНОГО ПРОСТРАНСТВА
Характеристики, которыми должна обладать
обзорная аэродромная РЛС (приложение 4) |11]
Максимальная дальность действия................ не менее 160 км
Угол обзора в горизонтальной плоскости.................. 360п
Период обновления информации....................... нс более 6 с
Длина волны ....................................... 10 или 23 см
Указанные нормативы установлены для вероятности правиль-
ного обнаружения не менее 0,8 при вероятности ложной тревоги,
равном 10 6, по воздушному судну (ВС) с эффективной площадью
отражения (ЭПО), равной 15 м".
При разработке АФАР целесообразно использовать следующий подход: реализо-
вать антенную систему, состоящую из нескольких независимых (с точки зрения
управления амплитудно-фазовым распределением, соответственно положением
ДНА) граней, например, как это показано на рис. 1.16.
При таком подходе антенное полотно обеспечивает всенаправ-
ленное излучение и прием сигналов за счет переключения отдельных
полотен и электрического сканирования луча диаграммы направлен-
ности в каждом полотне. Отдельные антенные полотна располагаются
на гранях правильного шестиугольника, каждая грань которого фор-
мирует узкий луч, который посредством электрического сканирования
обеспечивает секторный обзор пространства в зоне ± 30° по азимуту,
т.е. зона обзора по азимуту в пределах одной грани составляет 60°.
При условии, что разрешающая способность по азимуту со-
ставляет 2°, период обновления информации равен 6 с, угловые по-
зиции не пересекаются, время нахождения луча ДНА на одной уг-
ловой позиции составит 200 мс. В этом случае время когерентного
46
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
накопления может быть увеличено, как минимум, до 40...50 мс, что
позволит обеспечить требуемую дальность действия РЛС.
Выполним ориентировочный расчет структуры одной грани
(одного полотна АФАР) исходя из условия обеспечения требуемого
энергетического потенциала РЛС.
В общем случае, уравнение дальности для РЛС может быть
записано в виде
7^4 _ ^Л^н^прл^прм67!!^ Z Л , ~х
(4^)36ZnA07V0e
где Ри - излучаемая импульсная мощность, Вт; Ти - длительность на-
копления отраженного сигнала, с; Д - максимальная дальность до
объекта, м; Q - скважность излучаемого сигнала; - пороговое от-
ношение сигнал/шум; ац - обобщенный коэффициент потерь, 2 - ра-
бочая длина волны, м; G - коэффициент усиления антенны на пе-
редачу, раз; С2фМ - коэффициент усиления антенны на прием, раз;
сгц - эффективная площадь рассеяния цели, м“; А70 = кТш - спектраль-
ная плотность мощности шума; к - 1,38-lCTz3 - постоянная Больцма-
на, Дж/К; Tlu - эффективная шумовая температура системы.
Эффективная шумовая температура системы может быть рас-
считана в соответствии с выражением 7Ш = ГО(АШ -1), где То - тер-
модинамическая температура окружающей среды, К (обычно
То = 290 К), кш - коэффициент шума (при использовании АФАР
можно считать, что « (3,5...5) дБ).
Уравнение (1.13) позволяет определить основные энергетиче-
ские требования к антенной системе. Так, например, если использу-
ется зеркальная антенна, щелевая антенная решетка или пассивная
ФАР, тогда из данного уравнения определяются значения коэффици-
ентов усиления антенны на передачу и прием. При этом учитывают-
ся различного рода потери через коэффициент су, а также эффектив-
ная шумовая температура системы.
Параметры, которые необходимо определить
при использовании АФАР (1,13)
• Энергетический потенциал АФАР на передачу II 1рц = Pv ..,6 , так
как передатчик является неотъемлемой частью антенны и раздель-
ные измерения коэффициента усиления раскрыва антенны и излу-
чаемой АФАР мощности невозможны.
47
РЛС АВИАЦИОННО-КОС МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
• Энергетический потенциал АФАР на прием (параметр качества)
27* =<^прм/Ли > так как приемник (в приемопередающем модуле)
является неотъемлемой частью антенны и раздельные измерения
коэффициента усиления раскрыва антенны и эффективной шумо-
вой температуры невозможны.
При формировании требований к АФАР целесообразно и не-
обходимо пользоваться понятиями энергетических потенциалов.
Из (1.13) можно получить, что
77 /7 = (^л) капКрОД (1 14)
/2прд7'прм -2 * v 7
27н<ТцЛ
Энергетический потенциал АФАР на передачу 77прп при рав-
номерном амплитудном распределении (в излучении по нормали к
полотну АФАР) можно записать в виде
(1-15)
где РИ1 - импульсная мощность сигнала на выходе одного излуча-
теля; Gi - коэффициент усиления одного излучателя АФАР; N
число излучателей (ППМ) АФАР; g - коэффициент, учитывающий
форму полотна АФАР.
Если полотно имеет прямоугольную форму раскрыва, то
g = 1, а если круглую, то g « 0,86 .
Энергетический потенциал АФАР на прием можно записать в
виде
(116)
прм гр ’
Ли
где q - коэффициент использования поверхности полотна АФАР на
прием.
При прямоугольном раскрыве полотна с уровнем боковых ле-
пестков -23 дБ q = 0,81, при круглой форме с уровнем боковых ле-
пестков -24 дБ также q - 0,81.
При отклонении диаграммы направленности от нулевого угла необходимо учи-
тывать потери параметра качества за счет сканирования диаграммы и его
уменьшение за счет диаграммы направленности излучателя.
Из (1.15), (1.16) следует, что
и рд прм
ш
где 7„, = 290°(&,u - 1) и при кш = 3,5 дБ, 7],, = 357°.
48
ГЛАВА I. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Из (1.17) следует, что N определяется выражением
(118)
В табл. 1.3 представлены, для примера, результаты расчетов не-
обходимого количества излучателей, исходя из обеспечения требуемо-
го энергетического потенциала РЛС. Результаты расчетов выполнены
при следующих исходных данных: к = 1,3810~23 Дж/К, оу = 10 дБ,
/?о = 20 дБ (—100 раз) - пороговое отношение сигналчпум, обеспе-
чивающее вероятность правильного обнаружения 0,8 при вероят-
ности ложной тревоги 10 6, кш = 3 дБ, Д = 160 км, g = 1, q = 0,81
(прямоугольный раскрыв антенны), Gi = 3 дБ.
Таблица 1.3
Длина волны РЛС, см Время когерентного накопления, мс Импульсная мощность на выходе канала 1, Вт Скважность зондирующего сигнала Эффективная поверхность отражения цели, 2 М Число излучателей АФАР, шт.
23 20 50 5 15 210
10 20 50 5 15 365
23 20 200 5 15 132
23 30 200 5 15 115
23 20 200 10 15 166
В то же время, как известно [6], N - определяется также исходя
из ширины диаграммы направленное! и решетки в соответствующей
плоскости, сектора сканирования, возможности размещения излучате-
лей и ППМ с заданным шагом в выделенном пространстве.
Так, для плотно заполненного полотна с равномерным ампли-
тудным распределением, для расчета N можно использовать сле-
дующие соотношения. Шаг между излучателями (каналами) равен
dx-dy- 0,65А . Тогда для прямоугольного раскрыва по требуемой
ширине диа1раммы направленности можно определить размер ан-
тенны вдоль осей X (по азимуту) и Y (по углу места) используя со-
ответственно выражения
20“ Б = 50,8—град , (1.19)
Nydx
49
Р. 1С АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗД1 ШНО1 О ПРОС ТРАНСТВА
2071Б=5О,8-Д- град. (1.20)
NYdy
Обшее число каналов для прямоугольного раскрыва полотна
равно N = N \Ny. Для круглого раскрыва
2^азТь =58,5А град, (1.21)
г. z-
где R - радиус раскрыва, а общее число каналов Л «----.
dxdy
В табл. 1.4 (для длины волны 23 см) и табл. 1.5 (для длины
волны 10 см) представлены результаты расчетов необходимого
числа излучателей и геометрические размеры полотна антенны в
соответствующей плоскости, исходя из требуемого значения ши-
рины диаграммы направленности антенны. Считаем, что полотно
имеет прямоугольную форму.
Таблица 1.4
zc-ЗдБ » град 2/9ум град к АЛ, м А,, м
1,3 22,5 60 ~4 8,97 0,56 240
2,0 10 39 «8 5,83 1,12 312
Таблица 1.5
2^б , град 2^ , г рад М- АЛ, м Д, м N
1,3 22.5 60 ~4 3,9 0,26 240
2,0 10 39 «8 2,5 0,52 312
Анализ результатов, представленных в табл. 1.3-1.5, показывает, что при раз-
работке РЛС с АФАР имеется возможность «поиграть» параметрами зонди-
рующего сигнала (длительность когерентного накопления, скважность), сни-
зить (повысить) требования к выходной импульсной мощности сигнала на вы-
ходе передающего модуля АФАР. Целесообразность и возможность использо-
вания того или иного (10 см или 23 см) диапазона волн, конструктивное
исполнение АФАР и т.д.
50
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Другим возможным подходом, аналогичным рассмотренному
в п.1.2, к реализации АФАР для перспективной РЛС УВД является
использование неподвижной кольцевой АФАР, состоящей из N од-
нотипных приемоизлучающих элементов, расположенных с рав-
ным шагом по кольцу (рис. 1.17).
К каждому элементу кольцевой ФАР подключен активный
приемопередающий модуль, содержащий дуплексное устройство,
позволяющее разделить сш налы приема и излучения.
Подача СВЧ-мощности для раскачки выходных усилителей
ППМ осуществляется с помощью распределительного устройства
передачи. Перед выходным усилителем передающим канал каждо-
го ППМ содержит управляемый фазовращатель.
Распределительное устройство передачи обеспечивает одина-
ковую раскачивающую мощность, подводимую ко входам ППМ.
Необходимое фазовое распределение между излучающими элемен-
тами АФАР устанавливается с помощью фазовращателей, находя-
щихся в передающих каналах ППМ.
Формирование передающей диаграммы направленности на заданном азимуте
осуществляется с помощью включения передающих усилителей ППМ соответ-
ствующей части ФАР и задание требуемого фазового распределения между из-
лучающими элементами, компенсирующего кривизну излучающего раскрыва.
Главный максимум передающей диаграммы направленности будет расположен
по нормали к центральному элементу задействованной части АФАР. При этом
только за счет переключения ППМ обеспечивается дискретное сканирование
передающего луча по азимуту.
Таким образом, приемоизлучающие элементы АФАР пред-
ставляют собой конструкцию в виде «столбца», состоящего из А
излучателей-«этажей», в совокупности формирующих диаграмму
направленности в вертикальной плоскости.
51
РЛС' АВИАЦИОННО-КОСМИЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В рассматриваемых РЛС представляется перспективным ис-
пользование сигналов с ВЧП и СЧП. За счет указанных типов сиг-
налов, в сочетании с реализацией длительного (от носительно РЛС с
НЧП) когерентного накопления, возможно использование им-
пульсных сигналов с достаточно низкой импульсной мощностью
(единицы киловатт), что отвечает требованиям экологичности
(низкая спектральная плотность мощности), и в то же время обес-
печивает требуемую дальность действия РЛС.
Применение узкополосной доплеровской селекции позволяет измерить ради-
альную составляющую скорости наблюдаемого объекта, повысить разрешаю-
щую способность РЛС за счет высокой разрешающей способности по доплеров-
ской частоте (скорости объекта), обеспечить обнаружение движущихся объек-
тов, в большинстве случаев, на фоне внутренних шумов приемного устройства.
Другим основным элементом перспективной РЛС УВД явля-
ется СВС. Естественно, что структура СВС и предъявляемые к ней
требования зависят от решаемых по предназначению задач. Но в то
же время немалое значение имеет и выбранный вариант реализации
АФАР.
Варианты построения СВС
при конструктивном варианте АФАР (рис. 1.16)
• Использование одного мощного вычислителя, в котором ре-
шаются задачи сигнальной и вторичной обработки сигналов.
• Использование специализированных вычислителей (процессо-
ров первичной обработки сигнала, по числу граней), решаю-
щих задачи обнаружения и однозначного измерения координат
и параметров движения обнаруженных объектов, и одного об-
щего процессора обработки данных, в котором решается зада-
ча автоматического траекторного сопровождения целей и оп-
ределяется управление функционированием всего комплекса.
• Использование совокупности независимых (по числу граней)
вычислителей, каждый из которых обеспечивает решение за-
дач первичной и вторичной обработки сигналов в пределах од-
ной грани.
Второй вариант построения СВС является наиболее целесооб-
разным. так как позволит существенно снизить требования к обоб-
щенному процессору обработки данных (относительно первого ва-
рианта), как по производительности (быстродействию), так и по
скорости обмена данными как с потребителями, так и между моду-
лями обработки сигналов в процессоре.
Третий вариант построения СВС является малооправданным с
точки зрения снижения конструктивных характеристик (размеров)
радиолокационного комплекса.
52
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО ВРЕМЕННОЙ ОБРАБОТКОЙ С HI НА. 1ОВ
При использовании конструктивного варианта АФАР в виде
ЦАР особенностью построения СВС является то, что на вход СВС
поступает поток цифровых отсчетов. При этом, в зависимости от
реализации диаграммообразующей схемы (числа формируемых
диаграмм направленности), величина потока может составлять до
десятков гигабайт в секунду. Исходя их этого, необходимо обра-
тить особое внимание на оценку возможностей СВС по приему и
обработке поступающих цифровых отсчетов.
Обозначенные направления развития РЛС УВД соответствуют
требованиям ИКАО и ФАП [40] по радиотехническому обеспечению
полетов, по темпу обновления информации о воздушных объектах,
дальности действия, разрешающей способности по угловым коорди-
натам, а соответствующий выбор сигналов обеспечит и выполнение
требований разрешающей способности по дальности и скорости.
В общем случае, с учетом анализа состояния разработок по АФАР в РФ,
можно предположить, что:
в ближайшей перспективе (2-3 года) может быть налажено произ-
водство ППМ (приемопередающих модулей различных диапазонов
волн) в промышленных масштабах, что существенно сократит затраты
на разработку АФАР;
использование РЛС системы УВД с АФАР позволит существенно по-
высить надежность РЛС (отсутствие вращающихся элементов в РЛС,
выход из строя до 30 % ППМ несущественно снижают характеристики
РЛС);
использование РЛС системы УВД с АФАР и системой обработки сиг-
налов, реализованной в СВС, позволит снизить габаритные размеры
РЛС, ликвидировать специальные устройства размещения («кунги»),
предназначенные для размещения элементов приемопередающего
тракта;
единый (в методическом отношении) подход к разработке и созда-
нию линейки РЛС системы УВД (трассовые и аэродромные обзорные
РЛС, посадочные РЛС, РЛС обзора летного поля), созданный научно-
технический задел позволит снизить затраты на разработку и серийное
производство указанных РЛС, что сделает их привлекательными (в це-
новом отношении) для потенциального заказчика.
53
Р 7С АВИАЦИОИНО-KOCXh 1ЧЕСКО10 МОНИТОРИН11 ЗЕМНОЙ ПОВЕРХНОСТИ ! f ВОЗДХ ШНОГО ПРОСТРАНС. ТВА
Бортовая РЛС многофункционального
авиационного комплекса разведки,
оповещения и управления
с цифровой ФАР
Многофункциональные авиационные комплексы разведки, опове-
щения и управления являются дальнейшим развитием авиационных
комплексов радиолокационного дозора и наведения. Как ожидается,
данные комплексы будут обладать повышенной эффективностью
функционирования за счет расширения состава их военных и граж-
данских функций и повышения количественных и качественных ха-
рактеристик информационного поля на борту самолета-носи геля как
за счет наращивания тактико-технических характеристик основного
информационного датчика - обзорной РЛС, так и за счет оснащения
дополнительными датчиками информации (радиотехнической раз-
ведки, ИК-датчиками, аппаратурой РСА с получением радиолокаци-
онных изображений на борту самолета и др.) [34].
Если исходить из задач бортовых РЛС, применяемых в сущест-
вующих АК РЛДН, например задач, решаемых комплексами А-50
(Россия) и AWACS (США), главной из которых является обеспече-
ние радиолокационного информационного поля, в том числе поля
госопознавания, в круговом зоне, по воздушным и надводным це-
лям, то применение имеющихся тяжелых носителей с вращающим-
ся надфюзеляжным обтекателем антенны РЛС с фазовым (электри-
ческим) управлением луча в вертикальной плоскости достаточно и
близко к оптимальному [9, 19].
При вращающемся обтекателе обеспечивается круговая зона обзора, наилуч-
шим образом используются отведенные размеры для раскрыва антенны, на-
стройка антенного полотна производится в условиях антенного полигона с по-
лучением сверхнизкого уровня боковых лепестков диаграммы направленности
антенны. При этом для сохранения характеристик антенны на всем сроке экс-
плуатации не требуются специальные и сложные виды технического обслужи-
вания.
Антенны обзорных РЛС как в AWACS’e, так и в А-50, явля-
ются по антенной классификации «гибридными ФАР» с механиче-
ским вращением вокруг одной оси и электрическим отклонением
луча вокруг другой. Метод отклонения луча по вертикали - фазо-
вый при неподвижном относительно обтекателя полотне антенны.
54
ГЛАВА I. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО ВРЕМЕННОЙ ОБРАБОТКОЙ СИТ НАЛОВ
Необходимые направления повышения характеристик
обзорной РЛС для задач МАК РОУ
Расширение угломестной зоны обзора.
Повышение точности измерения угловых координат целей.
Повышение радиолокационного потенциала.
Повышение разрешающей способности по радиальной скорости
целей.
Снижение минимального значения радиальной скорости обна-
руживаемых целей.
• Повышение качества радиолокационной информации после
первичной обработки (снижение числа пропусков целей, сниже-
ние числа ложных целей, в том числе «альтимезровых» отметок,
вызванных отражениями на вертикальных лепестках ДНА и др.
• Ввод высокопотенциального режима всеракурсного обнаруже-
ния воздушных целей, находящихся в зоне прямой видимости
на дальности, превышающей расстояние до радиогоризонта
(выше радиогоризонта).
• Добавление второго радиолокационного канала в дециметровом
диапазоне волн для повышения вероятности обнаружения и со-
провождения малозамез ных целей и «обычных» целей в услови-
ях умышленных помех, чзо необходимо для работы самолета
МАК РОУ в системе разведывательно-ударного комплекса [34],
предназначенного для обнаружения и уничтожения наиболее
важных одиночных и групповых объектов противника в глубине
расположения его войск независимо от метеорологических ус-
ловий и времени суток.
Кроме того, в фюзеляже самолета-носителя МАК РОУ необ-
ходимо высвобождение значительных площадей, занятых сегодня
аппаратурой обработки сигнала и мощным передающим устройст-
вом РЛС, для размещения рабочих мест новых членов тактического
экипажа.
Наилучшим образом поставленные задачи могут быть решены с помощью ак-
тивной фазированной антенной решетки, размещаемой во вращающемся обте-
кателе и построенной с использованием современных достижений в области
СВЧ и цифровых технологий.
Достижения последних лет в области малошумящих усилите-
лей СВЧ-мощности со скрещенными полями (СВЧ-усилительных
приборов типа «М») [46], а также в области монокристаллических
быстродействующих АЦП и ЦАП позволяют создавать АФАР в
сантиметровом диапазоне волн, базирующиеся на «интеллектуаль-
ных» приемо-передающих антенных модулях с высоким КПД
(терминология «интеллектуальные» употребляется в зарубежной
55
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНО1 О IIРОС 'ТРАНСТВА
литературе и в последнее время получила широкое распростране-
ние и в российской научно-технической литературе). Технология
«интеллектуальной антенны» позволяет строить цифровую АФАР
без применения аналоговых фазовращателей и без сложных и гро-
моздких диаграммообразующих устройств [35, 36].
Принцип построения приемо-передающей части «интеллекту-
ального» модуля АФАР поясняется на рис. 1.18.
Рисунок 1.18
Замена аналоговой диаграммообразующей схемы с управлением аналоговыми
фазовращателями на высокоточный цифровой диаграммообразующий процес-
сор позволяет подключить малошумящие усилители и усилители мощности не-
посредственно к дуплексам излучающих элементов решетки с минимальными
потерями энергии сигнала. Управление распределением поля в раскрыве ан-
тенной решетки осуществляется цифровыми процессорами, формирующими
диаграмму направленности на передачу и на прием в цифровом виде.
Отметим, что диаграммообразующий процессор передачи по-
зволяет полностью сформировать зондирующий сигнал, т.е. одно-
временно с формированием передающей ДНА выполняет функции
возбудителя передатчика. В частности, при движущемся носителе
импульсно-доплеровской РЛС одной из функций возбудителя яв-
ляется выработка компенсирующею сдвига частоты сигнала -
«компенсация скорости носителя».
Из аналоговых устройств сосредоточенного приемопередат-
чика практически остается только когерентный СВЧ-гетеродин.
56
ГЛАВА /. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИ1 НАЛОВ
Цифровая АФАР обладает возможностью оперировать в реальном времени ам
плитудно-фазовым распределением в раскрыве приемной и передающей ФАР.
На рис. 1.19 показана предлагаемая структурная схема встраи-
вания элементов гибридной АФАР (ГАФАР) в антенное устройство
во вращающемся обтекателе.
Щелевыг волноводы («этажи») антенного полотна
(используются волноводы, имеющиеся в существугощем антенном блоке)
Диаграммообразующий iipoi icccop
СВЧ гетеродины
Рисунок 1.19
Блоки управления и электропитания ГАФАР (в том числе
анодный модулятор для усилителей СВЧ-мощности) должны раз-
мещаться в объеме вращающегося обтекателя.
Причины, по которым вариант размещения
мощного анодного модулятора в фюзеляже
крайне нежелателен
• Возникновение необходимости передачи мощных высоковольт-
ных импульсов с короткими фронтами через вращающееся кон-
тактное устройство и достаточно протяженную кабельную ли-
нию, что само по себе является сложной технической задачей.
• Большой уровень излучаемых электромагнитных полей, что от-
рицательно скажется на внутрифюзеляжной обстановке в части
электромагнитной совместимости различных компонентов ра-
диотехнического и павцгацйонтюго комплексов самолета.
В качестве выходных СВЧ-усилителей приемо-передающих
модулей (ППМ) ГАФАР предполагается использовать электрова-
куумные приборы (ЭВП) со скрещенными полями (в которых элек-
трическое и магнитное поле расположены под прямым vtbom), час-
57
РЛ( 1ВИАЦИОННО-КОСМИЧЕСКО10 МОНИТОРИНГ 1 ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПРОСТРАНСТВА
то называемые ЭВИ типа «М». К СВЧ-приборам типа «М?> отно-
сятся амплитроны, дематроны, биматроны («ЛБВ-М»), магнетроны
и ряд других приборов.
Важным достижением разработчиков ЭВП типа «М» за по-
следние годы явились исследования по снижению шума и побоч-
ных явлений, наблюдаемых в приборах этого типа и являвшихся до
последнего времени серьезным препятствием к их применению в
высококогерентных РЛС. На сегодня можно считать реальным
снижение интегрального шума до уровня минус 80...90 дБ, что яв-
ляется приемлемым для РЛС рассматриваемого типа [46].
В результате предварительных проработок представляется це-
лесообразным создание «интеллектуального» ППМ по принципу,
представленному на рис. 1.18.
В ППМ сосредоточено выполнение всех необходимых функ-
ций для формирования ДНА ГАФАР с помощью диаграммообра-
зующих процессоров:
• выработка зондирующего сигнала по цифровому «портрету» с
помощью когерентного СВЧ-гетеродина передачи и быстродей-
ствующего ЦАП;
• усиление зондирующего сигнала;
• дуплексная развязка передача/прием и усиление принимаемых
сигналов с малым шум-фактором;
• преобразование принимаемых сигналов к промежуточной частоте
с помощью когерентного СВЧ-гетеродина приема и преобразова-
ние в цифровую форму с помощью быстродействующего АЦП;
• обмен цифровой информацией с диаграммообразующими про-
цессорами;
• выработка сигналов встроенных датчиков для контроля работо-
способности.
Функции диаграммообразующих процессоров
• Выработка цифровых «портретов» зондирующих сигналов с не-
обходимым фазовым сдвигом для различных ППМ:
для формирования ДНА на передачу и обмен с ЦАП, находя-
щимися в ППМ,
для снижения плотности обменной цифровой информации
между центральным процессором и ППМ целесообразным представ-
ляется вариант рассредоточенного передающего процессора, когда в
каждом ППМ размешается гндивидульный процессор, вырабаты-
вающий свой цифровой сигнал в реальном времени, непосредствен-
но воздействующий на ЦАП
• Прием оцифрованных сигналов из ППМ и формирование необ-
ходимого числа приемных ДНА. По причинам, указанным для
58
ГЛАВ. 1 /. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТР1НСТВЕИНО-ВРЕ МШНОЙ ОБРАДО!КОЙ СИ1Н АЛОВ
передающего процессора, в каждом ППМ целесообразно раз-
мещение индивидуального приемного процессора, осуществ-
ляющего преваризельную обработку принимаемых сигналов с
преобразованием их к двум квадратурным составляющим, со-
гласованной с длительностью импульса фильтрации и прорежи-
ванием временных выборок.
Обмен радиолокационной информацией с устройством обработ-
ки сигналов РЛС.
Включение тестового режима ГАФАР и контроль работоспо-
собности с точностью до ППМ.
Основные режимы работы РЛС
Режим квазинепрерывного излучения - для обнаружения и со-
провождения движущихся воздушных целей.
Режим излучения с низкой частотой повторения длинных ЛЧМ-
импульсов высокой энергии (вышегоризонгный (ВГ) режим)
для всеракурсного обнаружения и сопровождения воздушных
целей, находящихся выше линии радиогоризонта и на расстоя-
ниях, превышающих дальность радиогоризонта.
Режим излучения с низкой частотой повторения импульсов с
расширенной полосой линейной частотной модуляции (режим
морских целей) - для обнаружения и сопровождения надводных
кораблей с улучшенным разрешением по дальности.
Режим квазинепрерывного излучения
Крутовой обзор в заданной угломестной зоне осуществляемся по-
строчно. При этом ГАФАР формирует в угломестной плоскости
один луч на передачу (сплошная линия) и два луча на прием (пунк-
тирная линия), как показано на рис. 1.20. Каждая угломестная
строка для каждого азимутального положения ДНА стабилизиро-
вана относительно горизонтальной плоскости с учетом крена и тан-
гажа самолета-носителя.
Рисунок 1.20
*
59
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Электрическое управление в угломестной плоскости осущест-
вляется дискретно-фазовым методом одновременно по передаю-
щим и приемным лучам ГАФАР Шаг дискретного угломестного
сканирования составляет небольшую долю от ширины луча. Пере-
ключение угла места (в том числе для стабилизации зоны обзора
при эволюциях самолета-носителя) происходит в моменты смены
частоты повторения КНИ, т.е. во время излучения и приема коге-
рентной пачки на одной частоте повторения положение лучей ГА-
ФАР остается неизменным.
Обработка принимаемых эхо-сигналов осуществляется циф-
ровым способом в двух идентичных каналах «пеленгационной па-
ры». После когерентной обработки, выполняющей селекцию сиг-
налов движущихся целей на фоне мощных помех от подстилающей
поверхности и когерентное накопление, осуществляется сложение
и вычитание амплитуд сигналов в каждом элементе разрешения
скорость - неоднозначная дальность.
По суммарному сигналу вырабатываются адаптирующиеся
пороги и осуществляется обнаружение сигнала цели.
По разностному сигналу в элементе разрешения, где обнару-
жен сигнал, производится расчет угломестного отклонения линии
визирования обнаруженной цели от равносигнального направления
по формуле
где Д6* - отклонение от равносигнального направления (РСН); At и
А2 - амплитуда сигнала с верхнего и с нижнего лучей пеленгацион-
ной пары; к масштабный коэффициент.
Формула является дискриминационной характеристикой двух
сдвинутых по углу амплитудных характеристик направленности
[31] относительно некоторого нулевого направления, называемого
«равносигнальным направлением». В радиолокации для нее часто
применяют термин пеленгационная характеристика.
Точность измерения угла с использованием пеленгационной ха-
рактеристики вблизи ее нуля приближается к потециально достижи-
мым значениям, при этом ошибка измерения угла отклонения по пе-
ленгационной характеристике возрастает по мере удаления от ее нуля.
Электрическое управление угломестным положением луча по-
зволяет в процессе циклического обзора осуществить подрежим
прицеливания по сопровождаемым целям, когда в азимутальном
стробе производится быстрая установка равносигнального направле-
ния пеленгационной пары ДНА в положение, измеренное в преды-
60
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИ/ НАЛОВ
дущих сеансах зондирования. При этом, с учетом сглаживания меж-
ду замерами, будет происходить «подтягивание» равносигнального
направления к истинному положению цели. Важным фактором при
этом является то, что ошибка измерения по формуле принимает ми-
нимальное значение (вблизи нуля пеленгационной характеристики).
Ожидаемая точность (среднеквадратическая ошибка) измерения от-
носительного угла места цели при названном методе - около 0,1 от
ширины ДНА в одном радиолокационном контакте.
Азимут цели определяется по средневзвешенному значению в
азимутальной пачке. При ожидаемом усовершенствовании цифро-
вой обработки сигнала в РЛС с ГАФАР СКО отсчета относитель-
ного азимута цели ожидается в пределах 0,3...0,4 от азимутального
дискрета между квазинепрерывными пачками (циклы когерентной
обработки).
Для когерентной обработки сигнала применяются современные логические ин-
тегральные схемы с высокой производительностью и разрядностью, позво-
ляющие существенно повысить тактико-технические характеристики РЛС.
Число зондирований в квазинепрерывной пачке на одной частоте
повторения около 200. Способ спектрального анализа - быстрое пре-
образование Фурье (БПФ) на 128 точек со специапьным амплитудным
взвешиванием окна БПФ, позволяющим получить диапазон частотной
селекции до 98 дБ.
После когерентной обработки производится первичное обна-
ружение отметок целей и их первичная обработка в высокопроиз-
водительной универсальной бортовой ЭВМ, позволяющая с высо-
кой достоверностью восстанавливать однозначную дальность до
целей, отсеивать «альтиметровые» помехи, порождаемые на верти-
кальных боковых лепестках ДНА и практически полностью использо-
вать потенциальные возможности РЛС для получения необходимых
точностных характеристик.
Режим излучения с низкой частотой повторения
длинных импульсов с высокой энергией
Круговой обзор осуществляется одной угломестной строкой, ста-
билизированной относительно горизонтальной плоскости.
Приемные лучи ГАФАР переключаются вверх примерно на по-
ловину их ширины с тем, чтобы нижний приемный луч совпадал с пе-
редающим лучом. Цифровая обработка отраженных сигналов произ-
водится только по нижнему лучу.
В процессе обработки осуществляется сжатие ЛЧМ-импульсов,
некогерентное накопление амплизуд азимутальной пачки импульсов,
автоматическая выработка порога, обнаружение превысивших порог
61
Л 7С АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГ 1 ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
сигналов целей и подготовка информации для отображения и сопро-
вождения цепей. Ввиду возможности наличия отдельных «загори-
зонтных» помех от подстилающей поверхности, захват отметок на со-
провождение производится вручную в ограниченном азимутально-
дальностном с гробе.
Режим излучения с низкой частотой
повторения импульсов
с широкополосной линейной частотной модуляцией
Круговой обзор, как и в режиме ВГ, осуществляется одной угломе-
стной строкой, стабилизированной относительно горизонтальной
плоскости. Нижний приемный и передающий лучи, совпадающие по
максимуму, с помощью фазового распределения в раскрыве ГАФАР,
расфокусируются таким образом, чтобы получить наименьшую
«мертвую» воронку над подстилающей (морской) поверхностью.
Формируется зондирующий ЛЧМ-импульс, который излуча-
ется в пространство, и осуществляется сжатие ЛЧМ-импульсов при
приеме.
Принятый сигнал после сжатия подвергается детектированию
в специальном УПЧ-амплитудном детекторе с логарифмической
характеристикой в широком динамическом диапазоне, преобразо-
ванию в цифровой код и цифровой обработке.
При цифровой обработке вырабатывается «плавающий» порог
над фоном отражений от моря и производится обнаружение превы-
сивших порог отметок.
Обнаруженные отметки поступают в два параллельно рабо-
тающих канала:
• канал подготовки информации для панорамного отображения;
• канал для подробного отображения (в выбранных азимутально-
дальностных стробах) и автоматического (или полуавтомати-
ческого) сопровождения.
При подготовке информации для панорамного отображения
осуществляется объединение отметок в интервалах задержки, согла-
сованных с разрешающей способностью на экране монитора. Одно-
временно с информацией отраженных сигналов на экране отобража-
ются введенные оператором азимугально-дальностные стробы.
По пультовым командам в отведенных областях экрана отображается инфор-
мация из стробов, обладающая полной разрешающей способностью. По этой
информации возможно автоматическое сопровождение (при ручном захвате
отметок) или полуавтоматическое сопровождение, когда оператор «подправ-
ляет» положение маркера относительно положения отметки, а передвижение
маркера осуществляется автоматически по экстраполированным данным.
62
ГЛАВА 1 РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Радиолокационный канал L-диапазона длин волн
Ранее отмечалось, целесообразность использования второго канала
обзорной РЛС в Z-диапазоне длин волн для повышения вероятности
обнаружения и сопровождения скоростных и малозаметных целей
(рис. 1.21) и «обычных» целей в условиях преднамеренных помех.
Для решения задач разведки по наземным целям на борту носителя МАК РОУ,
кроме традиционного радиолокатора с синтезированием апертуры антенны в
сантиметровом диапазоне волн, целесообразно иметь второй канал РСА - в де-
циметровом диапазоне, позволяющий обнаруживать объекты сквозь листву,
«спрятанные» за деревьями и кустами, а также ряд объектов, накрытых мас-
кировочными покрывалами, достаточно эффективно поглощающими радио-
волны сантиметрового диапазона и недостаточно толстыми, чтобы поглощать
радиоволны дециметрового диапазона (рис. 1.22).
Рисунок 1.21
Рисунок 1.22
63
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На радиолокационный канал //-диапазона могут также быть воз-
ложены функции по всеракурсному обнаружению воздушных целей
на дальностях, превышающих расстояние до радиогоризонта, а также
по обнаружению надводных кораблей на фоне отражений от морской
поверхности, значительно меньших, чем в сантиметровом диапазоне.
Для РЛС в /-диапазоне должна быть создана гибридная АФАР.
Одним из вариантов может быть ГАФАР /-диапазона, комплексиро-
ванная с антенными устройствами госопознавания и системы переда-
чи команд (на противоположной стороне вращающегося обтекателя).
Проведенный анализ принципов построения антенной системы для но-
вого поколения самолетов дозора позволяет считать, что наиболее пер-
спективным и целесообразным, в части затрат на разработку и преем-
ственность, направлением усовершенствования бортовой обзорной РЛС
является применение «интеллектуальной» цифровой АФАР, разме-
щаемой во вращающемся радиопрозрачном обтекателе тяжелого само-
лета дозора.
Достаточно обоснованным представляется внедрение в сущест-
вующую антенную систему «гибридной» АФАР, построенной с помо-
щью сравнительно небольшого числа приемо-передающих модулей.
Наиболее подходящими для задач приемо-передающих модулей гиб-
ридной АФАР являются новые электровакуумные приборы типа «М»,
обеспечивающие необходимо низкий уровень шумов и побочных яв-
лений.
Важным аспектом построения гибридной АФАР для перспективных
самолетов дозора является придание ей качества «интеллектуальной
антенны», когда сложные и громоздкие аналоговые диаграммообра-
зующие устройства заменяются высокоточными цифровыми устройст-
вами, базирующимися на современных цифровых технологиях.
Кроме выигрыша массо-габаритных показателей, необходимого
для размещения в обтекателе требуемого числа приемо-передающих
модулей и их источника питания, «интеллектуальная антенна» позво-
лит с помощью перепрограммирования достаточно легко вносить лю-
бые изменения в диаграмму направленности, в том числе - оперативно,
непосредственно в полете.
Наращивание тактико-технических характеристик РЛС, получаемое
с применением интеллектуальной цифровой АФАР, позволит на ее ос-
нове перейти к построению авиационного комплекса дозора нового по-
коления (МАК РОУ).
64
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Для решения задач поиска, обнаружения, сопровождения и распо-
знавания воздушных целей радиолокационная станция поставляет
информацию путем зондирования некоторой зоны пространства [1,
24]. При этом ограниченные возможности антенной системы РЛС
по формированию многолучевой диаграммы направленности обу-
словили необходимость последовательного во времени просмотра
контролируемой зоны.
Это ограничение не снимается и для наиболее совершенных
РЛС с фазированными антенными решетками, установленными на
механический привод для вращения полотна антенны. Антенны та-
кого типа сочетают достоинства механического и электронного
сканирования: практически безинерционное электронное сканиро-
вание и возможность компенсации эффекта расширения главного
луча ДН при его отклонении от нормали к полотну решетки за счет
механического вращения полотна антенны.
Формализация задачи обзора пространства
Процедура обзора пространства многофункциональной РЛС (тра-
ектория сканирования) определяет функциональную зависимость
пространственных и спектральных характеристик излучаемого РЛС
сигнала от времени:
_т/ \ х-'' (h + 0,5Af
u(z)=2z-rect Az.
i \ i s
(1-18)
- отсчет траектории сканирования (элемент зондирова-
ния); Ж, - дискрет зоны пространства одновременно просматривае-
мый РЛС (определяется характеристиками ДН антенны), зондирова-
ние которого в течение интервала времени [6, 6+Дб) осуществляется
сигналом с заданными спектральными характеристиками (Ж);
t е + Д/,-),
t + Д^),
65
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
где i - номер такта зондирования пространства; Л/ - длительность
z-го такта зондирования пространства (излучение, прием, обработка
и накопление сигнала с заданной угловой позиции).
В общем случае задача поиска оптимальной траектории обзо-
ра пространства формализуется следующим образом:
U*(/)= opt'1 Л'(и(/)), (1.19)
где С/д - множество допустимых траекторий обзора пространства
(траектории управления положением главного луча ДН антенны и
спектральными характеристиками сигнала РЛС); К(.) - показатель
качества, характеризующий эффективность решения частных задач
РЛС при заданной траектории управления U(t).
Множество С/д формируется в результате усечения всевозмож-
ных вариантов траекторий путем введения некоторых требований.
Дополнительные требования к U(t)
• Нахождение Ж/ в пределах зоны обзора, определяемой режи-
мом работы радиолокатора.
• Возможность установки (отклонения) луча ДН антенны в уг-
ловую позицию Ж/ в момент времени tj.
• Согласование динамики изменения Ж, с логикой изменения
спектральных характеристик сигнала РЛС. Так, для импульс-
но-доплеровской РЛС [1] эта логика учитывает алгоритмы
смены частоты повторения импульсов с целью снятия различ-
ного рода неоднозначностей измерений.
Реализация любой траектории сканирования пространства характеризуется не-
которыми показателями эффективности решения частных задач РЛС. В процес-
се развития тактической ситуации ценность информации, поставляемой РЛС из
различных областей пространства, изменяется. На ранних этапах функциони-
рования РЛС приоритетной является задача обнаружения. Далее более важной
может стать задача сопровождения целей, т.е. предпочтительнее будет траек-
тория управления, обеспечивающая получение более точной информации из
зоны пространства, где наблюдаются обнаруженные ранее цели. Следователь-
но, в процессе функционирования РЛС изменяется понятие оптимальности
анализируемых траекторий управления.
Свести разнообразные показатели качества решения частных
задач РЛС к скалярной величине, как правило, не представляется
возможным, т.е. глобальный показатель А?(.) является вектором,
элементы которого К, характеризуют качество решения соответст-
вующих частных задач mj(i = 1, ... , М).
Таким образом, необходимо решить задачу (1.19) при усло-
вии, что изменяются во времени как глобальный векторный пока-
затель К(.) число и состав его элементов, так и понятие опти-
мальности траектории управления U(t).
66
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Выбор метода организации обзора пространства РЛС
Среди существующих подходов к формированию траекторий обзора
пространства, называемых процедурами радиолокационного поиска,
наиболее предпочтительным считается применение управляемого об-
зора, когда управление поиском основано на использовании априор-
ной информации о числе целей и их распределении в пространстве.
В общем случае оптимизация поиска сводится к выбору траек-
тории управления, обеспечивающей экстремум среднего риска, ко-
торый должен учитывать энергетические затраты на принятие реше-
ния, а также стоимость ошибки принятия решения [6].
Сложность формирования зависимости среднего риска от
времени, наличие параметрической неопределенности относитель-
но плотности распределения амплитуда реализации вектора сиг-
нальной обстановки определяют необходимость решения задачи
формирования оптимальной траектории обзора пространства на
основе методов стохастического программирования.
Множество неизвестных и случайных факторов (класс цели,
ракурс наблюдения, дальность и т.п.) приводит к неоднозначности
строгого решения задачи в рассматриваемой постановке.
Это предполагает поиск упрощенных, частных вариантов, в ко-
торых решение задачи стохастического программирования сводят к
одноэтапным, двухэтапным и многошаговым процедурам с исполь-
зованием детерминированных эквивалентов. Кроме того, одним из
путей упрощения задачи поиска является переход от критерия сред-
него риска к очевидным и достаточно простым критериям:
• максимум вероятности обнаружения каждой новой цели за за-
данное время после ее появления [4];
• минимум среднего времени обнаружения появляющейся цели [5];
• максимум математического ожидания числа обнаруженных це-
лей за заданное время [18].
Одним из вариантов получения более общих результатов яв-
ляется использование информационной меры [7, 8, 15, 18, 25. 33],
характеризующей качество поиска в целом: от процедуры просмот-
ра ячеек до алгоритмов обработки сигналов и правил принятия ре-
шений. При выборе информационной меры используется матема-
тический аппарат теории оптимального управления [23]. Тогда при
последовательном обзоре оптимальное управление сводится к на-
блюдению той угловой позиции, где по результатам предыдущего
наблюдения ожидается максимальное убывание неопределенности.
Существующие подходы к получению траектории сканирования позволяют опти-
мальным образом организовать обзор пространства лишь при решении отдельных
частных задач, когда ищется экстремум скалярного показателя качества.
67
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Однако при рассмотрении более сложной ситуации, когда
РЛС одновременно решает несколько неравнозначных задач, таких
как обнаружение новых целей, сопровождение обнаруженных ра-
нее, ранжированных по степени важности и т.п., где качество ре-
шения каждой из задач оценивается своим показателем, представ-
ленные подходы не работают, так как критерии оказываются несо-
поставимы и критериальное пространство часто нельзя считать
метрическим. При этом имеют место как теоретические, так и чис-
то практические трудности в обосновании корректности путей
свертывания критериев.
Наиболее достоверные результаты по формированию траекто-
рии обзора пространства, оптимизируемой по векторному крите-
рию, может дать использование предпосылок и математического
аппарата теории выбора и принятия решений [3].
Для сравнения альтернатив, характеризуемых векторными по-
казателями, применяются бинарные отношения предпочтения, уста-
навливающие правила «равновесия» или «компромисса» между ре-
шаемыми РЛС задачами. В основе бинарного отношения лежит на-
бор аксиом - интуитивно понятных правил сравнения, определяе-
мых экспертом. Функция выбора Ср есть реализация алгоритма
попарного сравнения альтернатив и определения наилучших из них.
Таким образом, Ср служит математическим выражением
принципов выбора. Ее назначение состоит в выделении множества
лучших элементов X* исходного множества X (предъявления), на
основе свойств точек этого множества, совокупности некоторых
числовых или лингвистических характеристик и выбранного адек-
ватно задаче критерия оптимальности:
Х* = Ср(Х\
где X* cz X.
Для задачи обзора пространства множество X определяется
совокупностью пространственных ячеек, которые могут быть про-
смотрены в текущий момент времени при известном положении
полотна и характеристиках ДНА, а также допустимыми спектраль-
ными характеристиками излучаемого сигнала.
Структура системы формирования процедуры обзора
пространства
Алгоритм решения задачи (1.18) на основе (1.19)
Этап 1. Сформировать бинарное отношение предпочтения
Р для сравнения элементов зондирования по степени важности.
Исходными данными являются набор параметров {77,} - скаляр-
ных характеристик элементов зондирования, основанные на нем
68
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
правила предпочтения и логика применения этих правил (аксио-
мы) для сравнения альтернатив.
Этап 2. Задать множество выбора - совокупность элементов
зондирования, доступных на рассчитываемый момент времени с
определением числовых и логических характеристик, необходимых
для применения правил предпочтения в бинарном отношении Р.
Этап 3. Построить функцию выбора Ср в виде алгоритма попар-
ного сравнения всех альтернатив и применить ее к множеству выбора.
Многократное применение описанных операций к изменяю-
щемуся во времени множеству альтернатив, обеспечивающее по-
лучение последовательности пространственных ячеек и спектраль-
ных характеристик излучаемого в их направлении зондирующего
сигнала (1), представляет собой алгоритм формирования процеду-
ры обзора пространства.
На рис. 1.22 представлена структура системы формирования
процедуры обзора пространства на основе предложенной многоша-
говой процедуры.
Целевые установки от системы
верхнего уровня
Модул» формирования
множества предъявлений
Целевая обстановка: T(tj) — { Тz( tj) }' Модуль анализа ситуации
Опенка качест ва
решения текущих задач
му,РГС:
£
пеализация
алгоритма попарного
сравнения
альтернатив
Формирование
функции выбора Ср
РЛС
Оценка целевой
□остановки:
Процедура обзора пространства
Оценка и прогноз развития
целевой обстановки
Модул» тактическсо
планирования
Формирование
АЦч1)=1р ('/ i)
- определение
совокупности допустимых
пространственных ячеек;
- определение
совокупное и допустимых
спектральных
характеристик
зондирующего сигнала;
- вычисление готических
и числовых хаоактерчстик
элементов множества
предьявлений.
Прогноз развит ия
целевой обе ганс вки
Планирование работы РПС
- формирование перечня
текущих задач
A/(r/+1)={w.-(7z+i)};
- коррекция их приоритетов:
- олоеделе ние режима
функционирования РЛС
Модуль формирова» |ия текущих отсчетов траектории обзора пространства
Выбор наиболее вая;ных
• предпочтите пьных)
элементов зондирована
применение функции
выбора к множеству
альтернатив
Формирование бинарно! о отношения
предпочтечия Р
- коррекция гр авил сра знения альтернатив в
соответствии с М(Гр. ]
- коррекция совокупности знач ямых
параметров ) Щг i)k
- реализация процедуры сравнения
альтернатиб
Рисунок 1.22
Функциональные модули, входящие в состав системы
• Модуль анализа ситуации, в котором формируется оценка ка-
чества функционирования РЛС (К (tj)), а также оценивается
69
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
целевая обстановка {?}*(//)} - совокупность оценок тра-
екторий движения наблюдаемых целей.
• Модуль тактического планирования, определяющий прогноз
развития целевой обстановки Т (/z4i) и обеспечивающий в со-
ответствии с задачами системы верхнего уровня (например,
авиационного комплекса) ранжирование текущих задач РЛС
{пу} по степени важности.
• Модуль формирования множества предъявлений A(/z+i), обес-
печивающий в соответствии с режимом функционирования
РЛС определение пространственной зоны обзора и ограниче-
ний на спектральные характеристики излучаемых сигналов, а
также разбиение ее на элементы зондирования {хД/,+1)}-
• Модуль формирования текущих отсчетов зоны ответственно-
сти, в котором происходит формирование бинарного отноше-
ния предпочтения, соответствующей ему функции выбора и ее
применение к X(/z+1).
Пример формирования процедуры обзора
пространства РЛС с вращающейся ФАР
В качестве примера реализации разработанного алгоритма рас-
смотрим решение задачи организации обзора пространства для им-
пульсно-доплеровской РЛС кругового обзора с вращающейся ФАР.
Предположим, что РЛС работает в одном режиме и решает две ча-
стные задачи (М=2): обнаружение и сопровождение воздушных
целей.
Основные ограничения
рассматриваемого режима работы РЛС
Один такт зондирования для данного режима - 0,1 с.
Зона обзора РЛС представляет собой одну строку в азимуталь-
ной плоскости длиной 360°.
• ДН антенны имеет один главный луч, ширина которого счита-
ется постоянной, а вся зона обзора разбивается на фиксирован-
ные по азимуту элементы размером 0,5°.
• Электронное отклонение луча ДН не превышает ± 45°.
• Полотно антенны механически вращается с постоянной часто-
той 0,1 Гц.
В случае обнаружения цели для измерения координат (снятие не-
однозначности измерения скорости и дальности) производится по-
вторное зондирование данного элемента пространства сигналом с
другой частотой повторения.
70
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
В качестве модели целевой обстановки Г(/), необходимой для
оценки качества выполнения обзора на основе имитационного мо-
делирования, рассматривалась упрощенная модель, описывающая
только факт наличия цели в заданной ячейке пространства. Общее
число целей в зоне наблюдения фиксировано.
Предполагалось, что цель может случайно появляться и слу-
чайно исчезать, причем время ее жизни подчиняется показательному
закону, плотность распределения вероятности которого имеет вид
t<Q,
t>Q,
где Л-1 - среднее время жизни цели.
Для оценки качества решения РЛС своих функциональных за-
дач использовались следующие показатели качества:
К[ - отношение числа обнаруженных целей к общему числу
целей в зоне наблюдения;
Л?2 - отношение числа сопровождаемых целей к общему числу
целей в зоне наблюдения (цель сопровождается, если в течение пе-
риода обзора не менее двух раз было произведено измерение ее ко-
ординат).
Для обеспечения возможности непосредственного влияния на
данные показатели при формировании правил сравнения альтерна-
тив предложено использовать параметры риска R\ и физический
смысл которых демонстрируется на рис. 1.23. Параметр R} отсчи-
тывается от нижней границы зоны электронного сканирования и
задает размер зоны риска пропустить (не обслужить) цель. Пара-
метр Т?2 отсчитывается от верхней границы повторного обнаруже-
ния цели и характеризует вероятность того, что цель не будет взята
на сопровождение из-за отсутствия повторного измерения коорди-
нат цели.
f______________________________Зона обзора РЛС
Зона электронного
Максимальней интервал
для завязки трассы
Рисунок 1.23
71
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На основе данных параметров риска и исходя из представления о степени важ-
ности различных пространственных ячеек, определяемой складывающейся це-
левой обстановкой, был разработан ряд правил (аксиом), обеспечивающих
возможность выстраивания пространственных ячеек по степени важности
(срочности) их обслуживания. Каждое правило реализует возможность срав-
нения между собой двух пространственных ячеек с различными числовыми и
логическими характеристиками.
Пример одного из правил. Если обе про-
странственные ячейки находятся в зоне риска каждая из ячеек
уже обслуживалась, но требует повторного просмотра на текущем
периоде обзора, число просмотров данных ячеек на текущем периоде
обзора совпадает, то более важной считается пространственная
ячейка, первая покидающая зону электронного сканирования. Сово-
купность правил сравнения пространственных ячеек, охватывающих
полную группу их состояний, позволяет однозначно упорядочить их
по степени важности в любой момент времени, т.е. выбрать наиболее
важную из них (х ), определяющую текущий отсчет траектории об-
зора пространства. Выбор оптимального набора правил сравнения
представляет собой отдельную задачу, решаемую экспертами.
Таким образом, на основе структуры, представленной на
рис. 1.22 разработанных правил сравнения пространственных ячеек
и параметров Л] и Л2, реализуется алгоритм просмотра зоны ответ-
ственности РЛС, обеспечивающий решение задачи (1.18).
Для оценки качества функционирования формируемых алго-
ритмов сканирования была разработана и реализована в вычисли-
тельной среде имитационная модель пространственного обзора, по-
зволяющая контролировать процесс формирования процедуры об-
зора пространства (см. рис. 1.22), а также получать итоговые
показатели качества функционирования РЛС К\ и К2.
Фрагмент формирования траектории обзора пространства
в результате работы имитационной модели (рис. 1.24)
Число целей в зоне наблюдения РЛС .......................... 100
Среднее время жизни цели ................................. 600 с
Вероятность правильного обнаружения..........................0,9
вероятность ложной тревоги................................. 10-6
R} ........................................................0,5 с
R2............................................................0,1 с
Результаты оценки эффективности функционирования РЛС
(К\, К2) с использованием траектории управления, формируемой на
основе (3), полученные на основе данной модели при различных па-
раметрах загруженности целевой обстановки и параметрах настрой-
ки алгоритмов сканирования (7?i, R2), представлены на рис. 1.25.
Предложенный алгоритм просмотра зоны ответственности обеспе-
чивает эффективную работу РЛС на основе ФАР с электронно-
механическим сканированием.
72
ГЛАВА I. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕ ННО-ВРЕМЕННОЙ ОБРАЕОТКОЙ СИГНАЛОВ
Целевая обстановка
Наличие ueiiu ь мне- обзора
Astir.flf (угп. дискпег]
Процедура обз зра пространства
Граница зона риска R1
Р Зон 1 рискь 1
Р Вда границ»
Азиг туг (ч-л дискрет}
Р Hw* гра w
Отметки
целей
Границы зоны
электронного
сканирования
Оценка целевой
обстановки
Направление
вращения
антенны
Зона электронного
сканирования
Отсчеты траектории
обзора
пространства
ширина
отображаемого
фрагмента
траектории
обзора
пространства
Центральное
значение и
Возврат к обнаруженной
цели для взятия ее —
на сопровождение
Jpeiv
1000- Й
Номера пространственных
ячеек
^ Развитие тантнме^ай
Рисунок 1.24
Эффективность пространственного обзора
—7^,(7? = 0,1, Т?2=()Д)
= 0,1,7? =0,1)
-*-7^(7? = 0,2,7? =0,1)
-в- K:(R = 0.2, Т?2=0,1)
-—K}(R = 0,5, R =0,1)
— ^(7? = О,5,7? =0,1)
Количество целей в зоне наблюдения РЛС
Рисунок 1.25
Полученные зависимости позволяют сделать следующие выводы
1. Разработанный алгоритм при круговом обзоре обеспечивает
обслуживание до 80% из всех возможных угловых позиций
(обнаружение и измерение координат целей на данной угловой
позиции).
2. При загруженности целевой обстановки до 30% пространства
обеспечивается возможность повторного обслуживания за
73
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
один период обзора до 15% целей, разнесенных по углу, что
обеспечит повышение эффективности завязки трасс и сопро-
вождения маневрирующих целей.
3. Использование параметров риска Л]? Т?2 позволяет управлять
характеристиками качества сканирования в части повторно-
го обслуживания целей за один период обзора, особенно в
области загрузки целевой обстановки от 15 до 30%.
Предложенный подход позволяет достаточно просто адаптировать алгоритм
просмотра зоны ответственности РЛС к различным условиям помехово-целевой
обстановки и решаемым комплексом задачам. Это достигается в результате
разработки (переключения, выбора) правил сравнения пространственных яче-
ек по степени важности и изменения числовых параметров зон риска.
Например, можно учесть следующие особенности функцио-
нирования комплекса:
• наличие нескольких лучей ДНА для обзора пространства, дей-
ствующих в непересекающихся секторах пространства, добав-
лением новых правил сравнения, учитывающих возможность
обмена информацией между антенными подрешетками, рабо-
тающими в разных секторах с различной эффективностью:
• эффект расширения луча ДНА при отклонении его от нормали
к плоскости раскрыва - введением нового числового параметра
7?з (по аналогии с R\ и Л2), определяющего зону предпочти-
тельного сканирования с допустимым уровнем расширения
луча, и разработкой новых правил сравнения с учетом призна-
ка нахождения пространственной ячейки в данной зоне.
На основе анализа существующих алгоритмов радиолокационного по-
иска обоснована необходимость использования для формирования оп-
тимальной траектории обзора пространства многофункциональной РЛС
методов теории выбора и принятия решений.
Разработана и реализована в виде имитационной модели система
формирования процедуры обзора пространства.
Полученные на ее основе оптимальные траектории обзора про-
странства, учитывающие возможности электронного управления лучом,
обеспечивают по сравнению с РЛС с механическим сканированием бо-
лее высокую эффективность решения задач обнаружения и сопровож-
дения воздушных целей при достаточно хорошей управляемости про-
цесса формирования траекторий.
Предложенный подход обеспечивает простоту адаптации системы
формирования процедуры обзора пространства к изменениям техниче-
ских характеристик и условий функционирования РЛС, а также целе-
вых установок со стороны систем верхнего уровня.
74
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Организация обзора пространства радиолокационной станцией с фа-
зированной антенной решеткой в составе авиационного комплекса ра-
диолокационного комплекса дозора и наведения связана с решением
ряда проблем, обусловленных неполнотой информации об условиях
функционирования РЛС, а также необходимостью поиска компромис-
са между локальными целями многофункционального комплекса (об-
наружение, сопровождение, распознавание, наведение и др.).
Предложенный в [21] метод организации обзора пространства,
основанный на математическом аппарате теории выбора и приня-
тия решений, а также разработанная в соответствии с ним структу-
ра системы формирования процедуры обзора пространства [21] по-
зволяют формализовать и получить решение задачи пространст-
венного сканирования. Его эффективность во многом определяется
используемой функцией выбора Ср(.), а точнее лежащим в ее осно-
ве бинарным отношением предпочтения р для попарного сравнения
альтернативных угловых ячеек в зоне обзора.
Получить приемлемый алгоритм сравнения альтернатив, реа-
лизующий р, в широком диапазоне условий функционирования АК
РЛДН невозможно из-за высокой сложности, неопределенности со-
стояния комплекса относительно складывающейся воздушно-
целевой обстановки и разнообразия решаемых задач. Возможным
решением данной проблемы является выделение управляющего
уровня, обеспечивающего адаптацию системы формирования про-
цедуры обзора пространства путем периодической коррекции ис-
пользуемого в ней бинарного отношения предпочтения на основе
опыта специалистов-экспертов и предыстории функционирования
комплекса, сохраненной в процессе эксплуатации или имитацион-
ного моделирования его работы [22].
В этой связи представляет интерес рассмотрение возможности
разработки экспертной системы, обеспечивающей использование
опыта экспертов при формировании процедуры обзора пространст-
ва РЛС АК РЛДН. Для ее достижения последовательно решался
ряд задач, а именно:
• разработка требований к ЭС;
• разработка структуры ЭС;
75
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
• структурирование базы знаний ЭС;
• реализация прототипа ЭС в виде программного модуля.
Требования к экспертной системе
Исходя из целевого назначения, разрабатываемая экспертная сис-
тема относится к системам управления, что накладывает ряд стан-
дартных требований [20] на эффективность формируемых управ-
ляющих сигналов (команд), чувствительность ЭС к изменениям
внешней обстановки и устойчивость управляемой ею системы об-
зора пространства. В упрощенном варианте она может использо-
ваться и как система поддержки принятия решений при замыкании
контура управления на человека-оператора.
Учитывая некоторую «инерционность» в проявлении эффекта
от управляющих воздействий (несколько периодов обзора), обу-
словленную особенностями обзора РЛС на основе ФАР с электрон-
но-механическим сканированием [21], коррекция бинарного отно-
шения предпочтения должна производиться не непрерывно, а с не-
которой периодичностью в течение нескольких периодов обзора.
Следовательно, с точки зрения связи с реальным временем разра-
батываемую ЭС можно отнести к классу квазидинамических ЭС [17].
В процессе обработки знаний разрабатываемой ЭС требуется
организация тесного взаимодействия с программными компонен-
тами в составе программного обеспечения системы формирования
процедуры обзора пространства (например, в части экстраполяции
развития тактической ситуации), а также имитационными моделя-
ми для ее настройки [22] (рис. 1.26). Таким образом, с точки зрения
степени интеграции с другими программами ЭС должна классифи-
цироваться как гибридная [17].
Как правило, экспертные системы разрабатываются путем по-
лучения специфических знаний от эксперта-человека, формализуе-
мых инженером по знаниям, и ввода их в базу знаний системы
(рис. 1.26). Под базой знаний в системах управления понимается
подсистема, хранящая знания, необходимые для управления объек-
том, где «знания» представляют собой тройки образ ситуации - об-
раз действия - образ результата, отражающие закономерности во
взаимодействиях объекта управления с окружающей средой.
Данный подход к формированию знаний в виде набора правил,
соответствующий продукционной модели представления знании [17],
является наиболее естественным для рассматриваемой предметной
области, задаваемой достаточно трудно формализуемыми парамегра-
ми состояния АК РЛДН относительно воздушно-целевой обстановки
и рекомендациями эксперта по управлению обзором.
76
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Исходный набор правил может оказаться неполным или про-
тиворечивым, следовательно, база знаний ЭС должна обладать
средствами проверки хранящейся в ней информации. Кроме того,
для выполнения идентификации состояния комплекса в заданной
воздушно-целевой обстановке целесообразно использовать пред-
ставление знаний в виде абстрактных образов, описываемых фрей-
мами [17] (например, фреймами-ситуациями), позволяющими реа-
лизовать иерархическую структуру базы знаний.
Неполнота исходной базы знаний требует ее дополнения пу-
тем проведения процедуры «обучения» ЭС как по результатам ре-
ального функционирования системы (применение АК РЛДН), так и
на основе ее виртуального функционирования с использования
систем имитационного моделирования. Следовательно, разрабаты-
ваемая ЭС должна быть адаптивной системой и иметь в своем со-
ставе средства для коррекции базы знаний.
Необходимость привлечения экспертов и инженера по знаниям в процессе раз-
работки и настройки ЭС, а также оператора РЛС и оператора сопровождения в
процессе эксплуатации ЭС (например, при ее работе в режиме формирования
рекомендаций по управлению) требует включения в состав ЭС средств взаимо-
действия с пользователем, удовлетворяющих естественным требованиям эрго-
номичности [20].
Предварительные оценки предметной области показали, что
объем базы знаний, разрабатываемой ЭС, не будет превышать не-
скольких десятков тысяч правил, что позволяет не предъявлять
слишком высокие требования к технологии и реализации ЭС (вы-
бору инструментальных средств).
77
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Структура экспертной системы
Анализ представленных требований к ЭС позволяет предложить
вариант ее структуры, представленный на рис. 1.27.
Формализованные
исходные знания экспертов
Рисунок 1.27
Элементы, входящие в состав экспертной системы
• База знаний (БЗ). Содержит набор наилучших, с точки зрения
экспертов, правил параметры управления для заданных со-
стояний комплекса относительно складывающееся воздушно-
целевой обстановки (тактической ситуации) и решаемых задач.
• Модуль обработки знаний. Обеспечивает заполнение БЗ ис-
ходными знаниями экспертов, формализованными инженером
по знаниям. В процессе заполнения осуществляется проверка
корректности формирования новых знаний. Модуль реализует
процедуру изменения или формирования новых правил в базе
знаний ЭС на основе результатов функционирования А К
РЛДН или по итогам имитационного моделирования процесса
обзора пространства.
• Модуль интерпретации входных данных. Осуществляет преоб-
разование оценки текущей ситуации, поставляемой системой
формирования процедуры обзора пространства, в формат пра-
вил управления, содержащихся в БЗ ЭС.
• Модуль идентификации ситуации. Реализует процедуру поис-
ка образа текущей ситуации среди имеющихся данных в базе
знаний.
• Модуль формирования вывода. Реализует модель вывода ре-
шений, метод поиска решения в базе знаний при заданной
идентифицированной сигуации.
78
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
• Модуль представления рекомендаций и управляющих команд.
Формирует непосредственный выход ЭС в виде управляющих
сигналов (или рекомендаций оператору) для использования в
системе формирования процедуры обзора пространства.
Структурирование базы знаний экспертной системы
Структурирование знаний сокращает их дублирование, следова-
тельно, повышает надежность и достоверность информации. В об-
щем случае необходимыми стадиями процесса структурирования
знаний являются [17]:
• определение входных и выходных данных;
• составление словаря терминов; выявление объектов, понятий и
их атрибутов; выявление связей между понятиями;
• выделение метапонятий и детализация понятий; построение
пирамиды знаний; определение отношений;
• определение стратегии принятия решений (построение меха-
низма вывода);
• непосредственно структурирование поля знаний.
Ниже приводится краткое описание основных из них приме-
нительно к формированию базы знаний разрабатываемой ЭС.
Назначением разрабатываемой экспертной системы является
выдача рекомендаций (управляющих сигналов) для процедуры об-
зора пространства в зависимости от складывающейся ситуации.
Следовательно, входными данными является некоторый набор па-
раметров, идентифицирующих текущее состояние АК РЛДН отно-
сительно складывающейся воздушно-целевой обстановки, а в каче-
стве выходных данных должен выступать набор управлений, опре-
деляющих функционирование системы обзора пространства.
Факторы, существенные с точки зрения их влияния
на процедуру обзора пространства РЛС с ФАР
• Текущий этап выполнения задачи обзора пространства (пер-
вичное накопление информации, основной режим обзора,
внутреннее тестирование и т.п.).
• Вид траектории носителя и текущий ее участок.
• Упорядоченный в соответствии с приоритетами набор решае-
мых задач (обнаружение, сопровождение, наведение, распо-
знавание, картографирование и др.).
• Наличие дополнительных каналов получения информации (це-
леуказания от наземных комплексов АСУ, других авиацион-
ных комплексов и т.п.).
79
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
• Время нахождения в текущем состоянии, определяемое пара-
метрами обзора пространства.
• Группировка целей по секторам (число секторов).
• Характеристики каждого сектора (угловые параметры сектора,
число наблюдаемых в нем целей, число целей в секторе с учетом
информации, получаемой по дополнительным каналам).
• Характеристики наблюдаемых целей (координатные характе-
ристики, тип, важность, опасность, госпринадлежность и т.п.).
Набор выходных данных определяется путем выделения клю-
чевых параметров системы формирования процедуры обзора про-
странства, изменение которых возможно по командам извне (ко-
манды оператора, автоматической системой управления), а именно:
• режим механического вращения полотна ФАР (угловая скорость
вращения);
• количество, степень важности и угловые размеры приоритетных
секторов;
• алгоритм сравнения альтернатив, определяемый используемым
бинарным отношением предпочтения [21];
• значения параметров риска пропуска цели, срыва сопровожде-
ния [21] и т.п.
Применение аппарата нечеткой логики
Привлечение экспертов подразумевает высокую степень субъек-
тивности получаемой информации, определяющей выбор, вид и
параметры идентификации ситуации и принимаемого решения.
При этом входные и выходные переменные экспертной системы
должны адекватно отражать реальную действительность. В таких
условиях целесообразным решением данной проблемы является
использование аппарата нечетких множеств и нечеткой логики
[10], позволяющей формализовать субъективные понятия эксперта-
человека в достаточно понятную и пригодную для математических
преобразований форму.
Для описания экспертной системы, разрабатываемой на осно-
ве нечеткой логики, используются понятия нечеткой и лингвисти-
ческой переменных, а также нечеткого образа [10, 16].
Нечеткая переменная характеризуется тройкой {Ly, Ху, А'/},
где Ly - наименование нечеткой переменной, а Ху - подмножество
универсального множества X', на котором определена четкая пере-
менная xz; значение х, является компонентой входного вектора
х = (х1/, ...,х^о) универсального множества входных переменных
80
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
X, Alj - нечеткое множество на Xj, задаваемое функцией принад-
лежности
Функция принадлежности принимает значения из интервала
[О, 1]. Она количественно оценивает степень принадлежности эле-
мента нечеткому множеству. Конкретный вид функции принад-
лежности определяется в результате коллективного творчества
группы специалистов в рассматриваемой области - экспертов.
Лингвистическая переменная Z' представлена набором Z' =
{L\, •> где ~ значения нечетких переменных
(всего их М1), а V] - уровень детализации z-й лингвистической пе-
ременной, равный числу нечетких множеств, на которые разбива-
ется диапазон значений xz.
Нечеткий образ (О) характеризуется набором О = {Z1, ...,
ZN° , Е}, где Z1, ..., ZN° - значения лингвистических переменных
системы, количество которых определяется константой No, Е - зна-
чение оценки данного образа, определяющей степень близости на-
блюдаемого состояния к центру нечеткого образа.
Механизм вывода решений
Существуют различные алгоритмы формирования вывода [17]
Mamdani, Tsukamoto, Sugeno и др., область применения каждого из
них определяется формой задания исходных параметров, логикой
оценки образа и т.д. Для решаемой задачи было принято использо-
вать широко применяемый алгоритм Mamdani.
Процедура формирования вывода решения
Этап 1. Введение нечеткости (фазификация). Для работы с
лингвистическими переменными каждый терм следует соотнести с
соответствующим нечётким множеством, которое, в свою очередь,
представляется через универсальное множество и функцию при-
надлежности элементов этого универсального множества рассмат-
риваемому нечеткому множеству;
Этап 2. Логический вывод и композиция. В разрабатываемой
экспертной системе использованы механизмы вывода, основанные
на прецедентах [42]. Эти механизмы вывода применяются в про-
блемных ситуациях, сложность которых не позволяет провести их
конструктивную формализацию, но по которым имеется опыт
(прецеденты) их успешного разрешения.
Одна из трудностей этого подхода состоит в правильном под-
боре координат (Z1,...^^) ситуационного выбора, описывающего
81
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
эту проблемную ситуацию как по их числу 7V0, так и по форме
представления каждой координаты. Полнота описания ситуацион-
ного вектора и связь конкретного вектора с конкретным прецеден-
том устанавливается при длительной работе с экспертами - дейст-
вительными носителями этого знания.
Необходимо составить матрицу знаний по прецедентам. Пусть
к-с состояние проблемной ситуации описывается вектором с коор-
динатами (£^Л,...,£^,...,£^), где Llmk - значение z-й лингвисти-
ческой переменной для к-й ситуации, т е {1,...,Л/'| . Накопленное
множество прецедентов {Рк для к = 1, ..., К} - значений лингвис-
тической переменной, описывающей выходной параметр управле-
ния, с соответствующими входными данными {Z1, ..., ZV° }, раз-
мещается в матрице соответствия, представленной в табл. 1.6
Таблица 1.6
№ п/п Значения лингвистических переменных Исход
Z1 Z' • • ZM>
1 4., ... 4,1 • • • т No Ьт,\ Pi
• • • ... ... ... . • • • • • •..
к 4л ... 4л г No Ьт,к рк
• • • • « « ... ... а . • • • • ....
К • • • ^т,К • - • г No LmK Рк
Каждая строка вида
(ДиЛ’***’1,...,/С , а ш в
i-й строке принимают значения от 1 до М1, есть конкретный си-
туационный вектор. Введенная матрица определяет систему ло-
гических высказываний вида «ЕСЛИ ... И ..., ТО ...». Например,
строка матрицы к шифрует высказывание «ЕСЛИ Z1 - И ... И
Z’No г No п
= L ТО управлением является Рк.
Таким образом, матрица знаний представляет собой реализа-
цию нечеткого отношения А [17]:
R:O —> Р ,
где О - множество нечетких образов ситуаций; Р - лингвистиче-
ская переменная выбора.
82
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Частным случаем реализации алгоритма формирования выво-
да по Mamdani [17] может служить выражение
Ae(x) “ max
к—1
No
M*
min(//(4),min max ХЛ(х,)
z=l j=\ L
(1.20)
где /Uj,k(xi) - функция принадлежности четкой переменной х/? j-ro
значения z-й лингвистической переменной; //(•) - функция принад-
лежности вывода; //Xх) _ комбинированный вывод нечеткого мно-
жества исхода.
Этап 3. Дефазификация. Приведение к четкости производится
различными методами. Ниже в качестве примера представлены фор-
мулы методов дефазификации соответственно по «центроиду», по
центру максимумов, по медиане:
k=l
.* = к=\
+
р
* Г
max
*
min
где Pmm, /’щах - граничные значения изменения выходного параметра.
Таким образом, на выходе выражений (1.21), (1.22) или (1.23)
получается конкретное числовое значение Р , определяющее реко-
мендуемое в соответствии с имеющимися знаниями управление.
Реализация ЭС
С учетом использования аппарата нечетких множеств и представ-
ленного механизма вывода решений назначение элементов экс-
пертной системы (рис. 1.27) приобретает следующий смысл.
• Модуль интерпретации входных данных
В него поступает вектор со значениями оценки тактической
обстановки, где производится сопоставление оценок парамет-
ров текущей ситуации нечетким множествам соответствующих
нечетких переменных (фазификация) - определяется принад-
83
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
лежность к нечеткому множеству. Далее вычисляются для ка-
ждой нечеткой переменной значения характеристической
функции принадлежности для определения степени истинно-
сти каждой предпосылки каждого правила.
• Модуль идентификации ситуации
В нем осуществляется формирование образа текущей ситуации
в соответствии с заданным уровнем детализации Vi каждой
входной лингвистической переменной и вычисление его оценки
на основании выражения (1.20), которое приводит к одному не-
четкому подмножеству, которое будет назначено каждой пере-
менной для каждого правила.
В табл. 1.7 представлен первичный набор лингвистических пе-
ременных со значениями нечетких переменных который в дальней-
шем должен быть доработан в результате привлечения экспертов.
Таблица 1.7
Лингвистическая переменная Нечеткие переменные (значения лингвистических переменных)
Ширина сектора Узкий, широкий, средний
Распределение целей в секторе Равномерное, сосредоточенное, не определено
Точность (полнота) информации о цели Грубая, точная, средняя
Величина (зона) риска Очень низкая, низкая, средняя, высокая, очень высокая
Приоритетность решаемых задач Значительно важнее обнаружение, чем сопровождение; значительно важнее сопровождение, чем обнаружение; важнее обнаружение, чем сопровождение; важнее сопровождение, чем обнаружение; задачи равнозначны
Наличие информации по дополнительным каналам Наличие точных (грубых) ЦУ о целях, наличие точ- ных (грубых) ЦУ о наводимых истребителях
Число целей в секторе Отсутствует цель, одиночная цель, несколько целей в группе, много целей в группе
Тип цели Вертолет, истребитель, ударный истребитель, нс ус- тановлено
Принадлежность цели Не определён, свой, чужой
Маневренность цели Маневренная, не маневренная, не установлено
84
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
• Модуль формирования вывода
В нем формируются нечеткие управляющие воздействия с за-
данным периодом. Основой для проведения операции нечетко-
го логического вывода является матрица знаний (табл. 1.6),
обеспечивающая реализацию механизма вывода по претенден-
там. Тамже осуществляется приведение к четкости (дефазифи-
кация) для преобразования нечеткого набора выводов в четкое
число.
• Модуль обработки знаний
В нем проводится коррекция таблицы знаний (состава и количе-
ства параметров), значений показателей эффективности наблю-
даемых правил и т.д. по результатам анализа функционирования
ЭС, а также на основе имитационного моделирования решения
задачи обзора пространства.
• Модуль представления рекомендаций и управляющих команд
В нем с помощью графического интерфейса обеспечивается
визуализация и возможность выбора оператором рекомендуе-
мых решений по управлению, а также производится формиро-
вание команд управления в режиме автоматической коррекции
системы формирования процедуры обзора пространства.
Пример работы прототипа ЭС. В соответствии с разрабо-
танной структурой (рис. 1.27) и представленным описанием в среде
Matlab 2008 [13] был реализован исследовательский прототип ЭС,
обеспечивающий получение предварительных результатов - ос-
новных рекомендаций по управлению системой формирования
процедуры обзора пространства.
Рассматривается тактическая обстановка, задаваемая шириной
сектора и количеством целей в нём. Решается задача определения
величины зоны риска пропуска цели R1 (являющейся необходи-
мым параметром для настройки бинарного отношения предпочте-
ния). Смысл Я1 пояснён на рис. 1.28.
___________________________________Зона обзора РЛС___________________________________
Зона электронного
Н—7------*
Зона риска R,
Рисунок 1.28
85
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНС1В А
Он характеризует угловой размер зоны обзора, при нахожде-
нии в которой пространственная ячейка получает повышенный
приоритет из-за возможности пропуска её на текущем периоде об-
зора [21].
Для решения данной задачи в прототипе ЭС использовались
следующие исходные данные матрицы знаний ЭС.
Лингвистические переменные (согласно табл. 1.7):
Число целей в секторе.................Z\ = (Z?b Z?4,Z?5)
Распределение целей в секторе...............Z2 = (L2b L22,
Ширина сектора..............................Z3 = (£3Ь £32, L33)
Величина зоны риска (7?1)................Р = (Р], Р2, Р3, Р4, Р5)
Для каждой лингвистической переменной Zj, Z2, Z3, Р форми-
руются унифицированные кусочно-линейные функции принадлеж-
ности (я - трапециевидная; b - треугольная; с - гауссовская;
рис. 1.29), заданные в соответствующем универсальном множестве;
различные виды дефазификации (по центру масс, по центру макси-
мумов, по медиане).
Рисунок 1.29
Входные данные, используемые при расчетах
Распределение целей в секторе...............рассредоточенное
Ширина сектора ......................................... 40°
Число целей в секторе .................................0.. ЛОО
Тип функции принадлежности .................. трапециевидная
Параметр функции принадлежности
лингвистической переменной
«число целей в секторе»...........ширина верхнего основания 12;
угол наклона боковой стороны 70°
Число термов
лингвистических переменных Z\ .............................5
Вид фазификации...................................по центроиду
86
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Результаты исследований, проведенных на основе реализо-
ванного исследовательского прототипа ЭС, в части, касающейся
формирования рекомендаций по определению зоны риска пропуска
цели, представлены на рис. 1.30-1.33.
Рисунок 1.30
°0 20 40 60 80 100 120 Мд
Рисунок 1.32
87
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рис. 1.30 демонстрирует, как изменяется зависимость исхода
R\ от числа целей в зоне обзора при различных типах функции
принадлежности; рис. 1.31 - при изменении параметров трапецие-
видной функции принадлежности; рис. 1.32 отражает зависимость
вывода ЭС от детализации знаний о количестве целей в зоне обзо-
ра, а на рис. 1.33 демонстрируется чувствительность формируемого
параметра R\ к выбору метода дефазификации (а - по медиане; b -
по центроиду; с - по центру максимумов).
Рисунок 1.33
На основании полученных результатов можно сделать вывод,
что при формировании вывода (определение предпочтительного
значения /?}) целесообразно использовать трапециевидную функ-
цию принадлежности с размером верхнего основания 18, с макси-
мальной детализацией знаний о количестве целей в секторе, и при-
менять метод дефазикации по «центру максимумов». Выбор таких
параметров обеспечивает наиболее монотонную зависимость /?| от
числа целей в секторе.
Анализ полученных результатов показал, что в общем случае
зависимость величины риска пропуска обнаружения от числа целей
в секторе обзора имеется тенденция к росту, с их увеличением раз-
мер зоны риска возрастает, что соответствует физическому смыслу
Ri - минимизировать вероятность пропуска цели. Однако конкрет-
ные числовые значения существенно зависят от вида и параметров
функции принадлежности (рис. 1.30, 1.31), от детализации лин-
гвистических переменных (рис. 1.32), т.е. по сути определяется ис-
ходной информацией полученной от экспертов.
Разработанная структура ЭС, представленный механизм вывода, а так-
же полученные на основе реализованного прототипа числовые резуль-
88
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
тэты, позволяют утверждать о возможности использования ЭС для
управления системой формирования процедуры обзора пространства.
Экспертная система обеспечивает выбор наиболее подходящих:
складывающейся тактической ситуации бинарного отношения предпоч-
тения, определение его параметров (например, зон риска пропуска об-
наружения, срыва сопровождения и т.п.), параметров приоритетных
секторов, режима механического вращения полотна антенны как в ре-
жиме формирования рекомендации оператору РЛС, так и в режиме ав-
томатического управления. Особую важность При этом приобретает во-
прос корректной формализации знаний, полученных от экспертов.
Имитационное моделирование является одним из эффективных
средств оценки эффективности функционирования радиолокацион-
ных систем. Использование имитационной модели в ряде случаев
является единственно возможным способом получения предвари-
тельных оценок качества функционирования разрабатываемого
объекта (устройства, алгоритма).
В п. 1.6 рассмотрен алгоритм формирования процедуры обзора
пространства, который формирует траекторию сканирования глав-
ным лучом антенны РЛС и в результате обеспечивается формирова-
ние радиолокационным комплексом дозора и наведения представле-
ния о внешней обстановке. Необходимость оценки эффективности
функционирования РЛС под управлением заданных алгоритмов об-
зора пространства требует построения модели, обеспечивающей по-
лучение основных показателей, численно характеризующих качество
формирования РЛС представления о целевой обстановке. В этой свя-
зи рассмотрим вопросы построения такой модели.
Требования к имитационной модели
функционирования РЛС
Основным требованием к разрабатываемой модели, с точки зрения
ее целевого назначения, является возможность получения необхо-
димых показателей качества, характеризующих эффективность вы-
полнения комплексом задач, связанных с обзором пространства.
89
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Группы, на которые можно условно разделить показатели
Группа 1. Характеризует полноту отображения обстановки в зоне
обзора РЛС.
Группа 2. Характеризует достоверность отображения обстановки в
зоне обзора РЛС.
Группа 3. Определяет динамические характеристики алгоритмов
обзора, обнаружения и сопровождения (обновления) траекторий.
При натурных испытаниях и имитационном моделировании
полнота отображения обстановки в зоне обзора РЛС характери-
зуется средней длительностью времени обнаружения истинной
траектории и средней длительностью непрерывного сопровожде-
ния траектории цели, определяемыми как
у n\
'Т'Ъ 1 JVOOH. тр
J^cp _ 2обн.тр _ 1
обн. ip
1 ’ обн. тр 1 ’ обн. тр
у
-Е
сопр. тр
7 v coup, тр
у
J'CP
Хсопр.тр £ £ 2-
^’сопр. тр 1 ’сопр. тр z=l
где Г0|н тр - суммарное время, затраченное на обнаружение траек-
торий всех участвующих в испытаниях целей; ^бн тр - суммарное
число всех обнаруженных траекторий целей; ^обн <0>, /зав - момен-
ты времени первого обнаружения и завязки (постановки на сопро-
вождение) i -й траектории соответственно; ГСдПр - суммарное
время сопровождения траекторий всех участвующих в испытаниях
целей; тр - суммарное число всех отрезков сопровождения
траекторий целей; /;сбр _ момент времени сброса i -й траектории с
сопровождения.
Кроме того, к частным показателям полноты отображения
воздушной целевой обстановки также относятся коэффициент пра-
вильного определения числа объектов и средний коэффициент про-
водки:
Е
П.°б Е >
1 ’об
А-Х
(1-26)
ПР лгЕ
сбр .зав
ч
У —
/ j .обн(&) _ .обн (0)
/=1 \ Ч Ч
(1-27)
5
90
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
где - максимальное суммарное число одновременно сущест-
вующих трасс; Nq6 - суммарное число объектов воздушной целе-
вой обстановки; Z°6h - момент времени последнего обнаружения
i -й траектории.
В системе цифровой обработки радиолокационных данных
достоверность отображения обстановки в зоне обзора РЛС ха-
рактеризуется числом ложных траекторий, обнаруживаемых и пе-
редаваемых на сопровождение в каждом периоде обзора РЛС или в
единицу времени, а на практике используют коэффициенты:
гтЛь
1 сопр.л.тр
сопр.л.тр 1 сопр.и.тр
(1-28)
сопр.л.тр
Г ’
сопр.тр
(1.29)
где К[л тр - коэффициент ложных траекторий по времени; -
коэффициент ложных траекторий по числу; 7^ - суммарное
время сопровождения ложных траекторий; ^Пр.и.тр ~ суммарное
время сопровождения истинных траекторий; Af?onp л тр - суммарное
число сопровождаемых ложных траекторий; Af?onp тр - общее сум-
марное число сопровождаемых траекторий.
Среди динамических характеристик основное значение име-
ют точностные характеристики получаемых оценок параметров
траектории - среднеквадратические отклонения ошибок определе-
ния всех фазовых координат (дальности, скорости сближения, ази-
мута, угла места и т.д.):
I
.заб V Р k=l
Ч
(1.30)
где и pik(t) - истинное значение и оценка фазовой коорди-
наты р для i -й траектории в к -й временной реализации для мо-
мента времени Z; N - число усредняемых реализаций (;Vp >1).
91
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В (1.30) для обобщенной оценки точности сопровождения
СКО ошибок оценивания фазовых координат усредняются по вре-
мени и по трассам.
Основным требованием по назначению к имитационной модели функциониро-
вания РЛС является оценка показателей эффективности (1.24) - (1.30) при
различных алгоритмах пространственного сканирования для заданной воздуш-
ной целевой обстановки.
Анализ параметров, входящих в состав (1.24) - (1.30), а также
представленная в [26] структура системы формирования процеду-
ры обзора пространства, позволяют разработать некоторые требо-
вания.
Основные требования по составу
имитационной модели функционирования РЛС
• Модель целевой обстановки должна обеспечить формирование
адекватных входных данных для функционирования РЛС.
• Модель РЛС должна обеспечить имитацию преобразования в
радиолокаторе информации о реальном положении воздушной
цели в его оценку в конце каждого такта накопления и обра-
ботки сигнала и принятия решения о наличии цели; здесь про-
изводится непосредственно имитация формирования процеду-
ры обзора пространства, а также использование ее для управ-
ления антенной РЛС.
• В модели оценки целевой обстановки на основании истории об-
зора пространства РЛС должна производиться имитация функ-
ционирования алгоритмов сопровождения воздушных целей.
• Отдельный блок на основании информации, поступающей из
модели целевой обстановки и модели ее оценки, должен обес-
печить формирование интегральных характеристик качества,
(1.24)-(1.30).
Основные функциональные и пользовательские требования
к модели, определяемые решаемыми на ее основе задачами
и подходами к их решению
• Модульность структуры модели с четко определенным и в то
же время расширяемым протоколом взаимодействия между
отдельными модулями для обеспечения эффективного разви-
тия модели, т.е. построение в соответствии с концепцией от-
крытых систем [39].
• Открытая архитектура.
• Обеспечение существования совокупности взаимосвязанных мо-
делей различной степени детальности, а также простого механиз-
92
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
ма выбора модели, адекватной решаемой задаче, т.е. модель
функционирования РЛС должны быть реконфигурируемой.
Наличие в составе модели средств для включения человека-
оператора и эксперта в ее состав, а также средства для автома-
тизированного сбора, анализа и представления информации о
результатах моделирования.
Требования, предъявляемые к модели
с точки зрения выбора технологической базы
для построения имитационной модели
функционирования РЛС,
а также анализа современного состояния
технологий создания программных комплексов
Реализация функциональных модулей модели должна осуще-
ствляться на основе языков программирования C++ и С, позво-
ляющих с минимальными доработками применять программ-
ные модули в составе бортового программного обеспечения.
Применение стандартных шаблонов проектирования [43] для
улучшения модульности модели и «прозрачности» алгоритмов
ее функционирования.
Использование реляционной базы данных [32] для организа-
ции хранения исходных данных и итоговых результатов моде-
лирования.
Использование языка UML [41] при разработке документации
модели.
Структура имитационной модели
Исходя из требований, предъявляемых к имитационной модели,
на основе принципов построения открытых систем в качестве
структуры имитационной модели функционирования РЛС, в
первую очередь ориентированной на исследование алгоритмов
обзора пространства, предложено использовать структуру, пред-
ставленную на рис. 1.24. Модель функционирования РЛС разде-
лена на следующие основные части:
• модель тактической ситуации;
• модуль пространственных преобразований;
• модель РЛС;
• модель оценки целевой обстановки;
• блок формирования показателей эффективности;
• графический интерфейс пользователя.
93
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Модель функционирования РЛС
Модель тактической ситуации
Модель природных условий Модель движения носителя АК РЛДН
Модель целевой обстановки
Модель перемещения воздушной цели Модель ЭПО воздушной цели
Исходное состояние целевой обстановки Модель развития целевой обстановки
Модуль пространственных
преобразований
Модель РЛС
Модель
обнаружения
сигналов в
приемном
тракте РЛС
Модель
измерения
координат
воздушной
цели
Модель
перемещения
антенны РЛС
Модель
управляемого
обзора
Модель оценки целевой обстановки
(сопровождения воздушных целей)
t
Блок формирования показателей
эффективности
Графический интерфейс пользователя
Рисунок 1.24
Рисунок 1.25
94
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
Модуль пространственных преобразований
Он обеспечивает выполнение всех пересчетов пространственных
координат (точек и векторов), выполняемых как при имитации
движения летательных аппаратов, так и при имитации функциони-
рования РЛС. В процессе моделирования по мере необходимости
формируется иерархия систем координат [45] (рис. 1.25), в которой
каждая система координат «знает» свое текущее положение отно-
сительно родительской системе координат.
Система координат, не имеющая родителя, представляет со-
бой базовую систему OXqYqZq, связанную с Землей (абсолютная не-
подвижная система отсчета). При необходимости выполнения про-
странственных пересчетов в модуле пространственных преобразо-
ваний осуществляется поиск пути пересчета и реализуются
непосредственно процедуры пространственных преобразований
точек (центров масс ЛА, антенны) и векторов (скоростей ЛА) в
нужную систему координат.
Модель тактической ситуации
Эта модель обеспечивает формирование всех входных информацион-
ных потоков, имитирующих воздействие внешнего мира на функцио-
нирование РЛС. Это и модель природных условий (турбулентность
атмосферы, подстилающая поверхность и т.п.), и пространственные
перемещения самолета-носителя, и развитие целевой обстановки.
Модель движения носителя РЛС обеспечивает формирование
типовых траекторий самолета при несении боевого дежурства, та-
ких как взлет с ускорением и набором высоты, прямолинейное рав-
номерное движение на постоянной высоте, полет в зоне барражи-
рования «по коробочке» или в виде «восьмерки», снижение с тор-
можением и посадка.
Структура модели целевой обстановки
• Блок, определяющий исходное состояние целевой обстановки
(группировка, тип, начальное положение и ориентация векторов
скоростей воздушных объектов, а также решаемые ими задачи).
• Модель перемещения управляемого объекта, реализующая ти-
повые траектории движения.
• Модель развития целевой обстановки, определяющей траекто-
рии движения ЛА в соответствии с задачами, решаемыми раз-
личными группами ЛА.
• Модель ЭПО воздушной цели, представляющая собой закон
изменения ЭПО самолета (вертолета) в зависимости от его уг-
ловой ориентации относительно линии визирования.
95
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В модели РЛС производится имитация основных процессов,
существенных для решения задачи обзора пространства: формиро-
вание процедуры обзора (управление обзором) и, в соответствии с
ней, ориентация главного луча антенны с учетом механического
вращения полотна антенны; обнаружение, измерение и оценка ко-
ординат (параметров движения) воздушных целей.
Модель управляемого обзора имитирует работу основных эле-
ментов системы формирования процедуры обзора пространства
[26], определяющей последовательность наиболее предпочтитель-
ных (в соответствии с заложенными принципами оптимальности)
для просмотра угловых позиций.
Модели обнаружения сигналов в приемном тракте РЛС, из-
мерения и оценки координат воздушных целей на основе выполне-
ния энергетических расчетов распространения радиосигналов обес-
печивают формирование потока входной информации для алгорит-
мов сопровождения, т.е. признаков наличия целей на просматри-
ваемых угловых позициях, измеренных значений их координат и
параметров движения относительно самолета-носителя.
В модели оценки целевой обстановки на основе анализа и на-
копления информации, поступающей из модели РЛС, производится
формирование трасс, прогнозирование их развития, и отождествле-
ние их с данными о повторно обнаруженных целях, т.е. имитирует-
ся работа алгоритмов сопровождения воздушных целей, условно
разделяемых на процедуры завязки траектории, экстраполяции тра-
екторий в промежутках между измерениями, идентификации ре-
зультатов первичных измерений, коррекции (фильтрации) траекто-
рий, ранжирования целей и сброса траекторий с сопровождения,
обнаружения маневра цели и адаптации к нему и др.
Особенности, обусловленные возможностям РЛС
на основе ФАР с электронно-механическим сканированием,
учтенные при реализации алгоритмов сопровождения
в модели оценки целевой обстановки
• Переменный темп поступления первичных измерений, обу-
словленный перемещением целей, маневрированием носителя
РЛС, наличием приоритетных секторов.
• Изменение состава и точностных характеристик первичных
измерений на различных этапах сопровождения.
• Возможность обнаружения и формирования первичных изме-
рений от нескольких целей или групп целей на одной угловой
позиции.
96
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
• Наличие временных задержек в получении результатов первич-
ных измерений, связанных с используемыми вычисли!елями.
• Воздействие различного рода помех.
В блоке формирования показателей эффективности на осно-
ве сравнительного анализа реальной целевой обстановки, получае-
мой из модели тактической ситуации, и ее оценки, формируемой в
результате работы модели РЛС и алгоритмов сопровождения воз-
душных целей, производится вычисление показателей (1.24) -
(1.30), характеризующих эффективность решения РЛС задач, свя-
занных с обзором пространства.
Графический интерфейс пользователя (графическая оболочка
имитационной модели) должна обеспечить органичное включение
пользователя в процесс разработки и исследования алгоритмов об-
зора пространства на основе построенной имитационной модели.
Для решения этой задачи в составе графической оболочки
реализован ряд графических форм (окон), обеспечивающих воз-
можности управления процессом моделирования со стороны поль-
зователя и отображения результатов моделирования.
Окна, которые можно выделить
среди основных реализованных графических форм
имитационной модели (рис. 1.26)
• Окно управления модели — для выбора варианта загрузки ис-
ходных данных (целевой обстановки, алгоритма формирования
процедуры обзора пространства и др.), контроля развития мо-
делирования во времени, вывода сообщений пользователю.
• Окно управления режимами работы РЛС - для изменения па-
раметров функционирования РЛС сантиметрового и децимет-
рового диапазонов (задания приоритетных секторов, характе-
ристик излучаемых сигналов, частоты механического враще-
ния полотна антенны и т.д.).
• Окно отображения целевой обстановки - для представления
общего развития целевой обстановки относительно носителя
РЛС (траектории движения самолета-носителя и воздушных
целей), а также ее оценки, сформированной в результате рабо-
ты алгоритмов сопровождения воздушных целей (рассчиты-
ваемые трассы).
• Окно отображения результатов моделирования - для демон-
страции процедуры обзора пространства, а также рассчитан-
ных показа! елей качества (1.24) - (1.29), характеризующих
полноту и достоверность решения задачи обзора пространства.
97
РЛС АВИАЦИОННО-КОС МИЧЕСКОТ0 МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 1.26
Формирование показателей точности функционирования алго-
ритмов сопровождения воздушных целей осуществлялось по окон-
чании имитационного моделирования в результате считывания из
базы данных MySQL [9] накопленной в процессе имитации инфор-
мации об истинных и оценочных фазовых координатах воздушных
целей в соответствие с (1/30). Для представления динамики измене-
ния фазовых координат (и их оценок) использовались стандартные
средства визуализации программной среды MatLab [27].
Результаты имитационного моделирования
Реализация в виде программного модуля структуры имитационной
модели функционирования РЛС (рис. 1.24) в соответствии с разра-
ботанными технологическими требованиями обеспечила возмож-
ность проведения исследований с целью получения оценок эффек-
тивности решения задачи обзора пространства РЛС АК РЛДН, обо-
рудованной ФАР с электронно-механическим сканированием, при
различных алгоритмах сканирования
На основе разработанной модели были получены оценки эффективности
функционирования РЛС при различных вариантах целевой обстановки (в ко-
личестве воздушных целей от 10 до 200, равномерном распределении целей по
98
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
азимуту и группировании их в отдельных угловых секторах), а также при вари-
антах управления главным лучом антенны: установки по нормали к полотну
(сканирование только за счет механического вращения антенны) и реализации
процедуры электронного сканирования.
Таблица 1.9
Показатель эффективности Механическое сканирование Электронно- механическое сканирование
Средний коэффициент проводки, с Более 0,9 при Грнс>300 Более 0,9 при Т^нс > 300 с
Среднее время непрерывного сопровождения, с Более 600 Более 600
Среднее время завязки трассы, с 10...15 8...12
Коэффициент ложных трасс Менее 0,01 Менее 0,01
Точность определения плоскостных координат, км 0,3... 0,5 0,3...0,5
Точность определения высоты, км 0,8...1,2 0,8...1,2
Точность определения скорости, км/ч 20...25 20...25
ax = 66 м
oY - 78 м
x
X 1 L- V
X t
a? - 252 м
gYX~ М^С
п 1 X г г>
и и " -и 1 .--II? L ц.. Чотг*
о* 7 м/с
nr г“П. П ... г '-1 Г '
1 Г\.Н J-
Рисунок 1.27
99
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Полученные в результате имитационного моделирования ха-
рактеристики, представленные в табл. 1.9, хорошо согласуются с
ожидаемыми результатами.
На рис. 1.27 показан пример фазовых траекторий, пересчитан-
ных в абсолютную СК, полученных в результате работы алгорит-
мов сопровождения отдельной воздушной цели.
Реализованная в соответствии с разработанными требованиями имита-
ционная модель функционирования РЛС может использоваться в каче-
стве основы для решения задач пространственного обзора, а именно:
оптимизация процедуры пространственного сканирования; выбор тра-
ектории движения самолета-носителя; настройка алгоритмов сопрово-
ждения воздушных целей; выбор режима функционирования РЛС и т.д.
1. Герасимов А.А., Дудник П.И., Ильчук А.Р., Кондратенков Г.С., Татарский Б.Г. Авиа-
ционные радиолокационные комплексы и системы: учебник для слушателей и кур-
сантов ВУЗов ВВС / Под ред. П.И. Дудника. М.: Изд. ВВИА им. проф. Н.Е. Жуковско-
го. 2006.
2. Антипов В.Н., Меркулов В.И., Самарин О.Ф., Чернов В.С. Основные направления
развития авиационных бортовых РЛС // Успехи современной радиоэлектроники.
2009. № 10.
3. Айзерман М.А., Алескеров Ф.Т. Выбор вариантов. Основы теории. М.: Наука. 1990.
4. Бакут П. А., Большаков И. А., Герасимов В. М. и др. Вопросы статистической теории
радиолокации. Т. 1. М.: Сов. радио. 1963.
5. Бакут П. А., Иванчук Н. А., Жулина Ю. В. Обнаружение движущихся объектов. М.: Сов.
радио. 1980.
6. Васильев О. В., Меркулов В. И., Карев В. В. Управляемый радиолокационный поиск
воздушных целей // Зарубежная радиоэлектроника. Успехи современной радио-
электроники. 2002. №1.
7. Васильев О. В., Карев В. В. Управляемый радиолокационный поиск воздушных це-
лей, оптимизированный по информационному критерию // Радиотехника. 2000. №3.
С. 84-88.
8. Василевич Л. Ф., Ежов С. А. Управление обзором локационных средств в режиме
поиска и обнаружения целей // Радиоэлектроника. 1993. № 9.
9. Веллинг Л., Томсон Л. MySQL. Учебное пособие. Краткое изложение основ работы с
MySQL. М.: Вильямс. 2005
10. Верба В.С. Тенденции развития авиационных и космических средств информацион-
ной разведки и дозора // Наукоемкие технологии. 2004. № 8-9.
10. Гаврилова Т.А., Хорошевский В.Ф. Базы знаний интеллектуальных систем. СПб.:
Питер. 2000.
11. Гостюхин В.Л., Трусов В.Н., Климачев К.Г. и др. Активные фазированные решетки.
М.: Радио и связь. 1993.
12. Григорьев Л.Н. Цифровое формирование диаграммы направленности в фазирован-
ных антенных решетках. М.: Радиотехника. 2010.
100
ГЛАВА 1. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКОЙ СИГНАЛОВ
13. Дьяконов В.П. MATLAB R2007-2008-2009 для радиоинженеров. М.: ООО «Издатель-
ство ДМК - Пресс». 2010.
14. Заде Л.А. Понятие лингвистической переменной и его применение к принятию при-
ближенных решений. М.:Мир. 1976.
15. Конторов Д. С., Голубев-Новожилов Ю. С. Введение в радиолокационную системо-
технику. М.: Сов. радио. 1971.
16. Кофман А. Введение в теорию нечетких множеств. М.: Радио и связь. 1982.
17. Круглов В.В., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные сети. М.:
Физматлит. 2001.
18. Кузьмин С. 3. Основы проектирования систем цифровой обработки радиолокацион-
ной информации. М.: Радио и связь. 1986.
19. Курочкин А.П. Развитие антенно-фидерной и оптоэлектронной техники в ОАО
«Концерн радиостроения «Вега» // Наукоемкие технологии. 2004, № 8-9.
20. Магазанник В.Д., Львов В.М. Человеко-компьютерное взаимодействие: Учеб, посо-
бие для вузов. Тверь: Триада. 2005.
21. Мажура Н.Н., Пешко А.С., Юрчик И.А. Организация обзора пространства РЛС на ос-
нове ФАР с электронно-механическим сканированием // Радиотехника. 2009. № 8.
22. Мажура Н.Н., Пешко А.С., Шуклин А.И., Юрчик И.А. Имитационная модель для ис-
следования эффективности обзора пространства РЛС на основе ФАР с электронно-
механическим сканированием // Радиотехника. 2010. № 7.
23. Меркулов В. И., Лепин В. Н. Авиационные системы радиоуправления. Ч. 1. Методы
синтеза и анализа систем радиоуправления. М.: Радио и связь. 1997.
24. Многофункциональные радиолокационные системы / Под ред. Б.Г.Татарского. М.:
Дрофа. 2007.
25. Морозов И. А., Сныткин Ю. В. Управление радиолокационными наблюдениями по
информационному критерию // Радиоэлектроника. 1993. № 9.
26. Пешко А.С., Мажура Н.Н., Юрчик И.А. Организация обзора пространства РЛС на ос-
нове ФАР с электронно-механическим сканированием. М.: Радиотехника. 2009. № 8.
27. Потемкин В.Г. Вычисления в среде Matlab. М.: Диалог МИФИ. 2004.
28. Радиолокационное оборудование автоматизированных систем управления воздуш-
ным движением / Под ред. А.А. Кузнецова. М.: Транспорт. 1995.
29. Радиоэлектронные системы: Основы построения и теория. Справочник / Под ред.
Я.Д. Ширмана. М.: Радиотехника. 2007.
30. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информа-
ционная основа боевых действий МФ самолетов. Системы и алгоритмы первичной об-
работки радиолокационных сигналов / Под ред. А.И. Канащенкова и В.И. Меркулова.
М.: Радиотехника. 2006.
31. Радиоэлектронные системы. Основы построения и теория. Справочник / Под ред. Я.
Д. Ширмана. М.: ЗАО «Маквис», 1998.
32. Райордан Р.М. Основы реляционных баз данных. М.: Русская редакция. 2001.
33. Розанов Б. А., Форштер А. А. Оптимальное управление обзором при старении при-
обретаемой информации // Радиотехника и электроника. 1973. Т. 18. № 6.
34. Саблин В.Н. Разведывательно-ударные комплексы и радиолокационные системы
наблюдения земной поверхности.
35. Спока В.К., Васин В.И. Цифровая интеллектуальная ФАР - перспективная технология
для радиолокационных и радиоинформационных комплексов XXI века // Вестник МАИ.
2000. Т. 7. № 1.
36. Спока В.К. Перспективы и направления развития глобальных и низко- и среднеор-
битальных спутниковых систем мультимедийной персональной связи XXI века
(Связь России в XXI веке). Международная академия связи. 1999.
37. Современное состояние и перспективы развития беспилотных авиационных систем
XXI века. Аналитический обзор по материалам зарубежных информационных ис-
точников / Под общ. ред. акад. РАН Е.А.Федосова. Составитель О.С.Титков. М.: На-
учно-информационный центр ГосНИИАС. 2012.
101
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
38. Таныгин А.А. Перспективы развития радиолокации // Вестник концерна ПВО «Ал-
маз-Антей». 2011. №1(5).
39. Технология открытых систем / под ред. А.Я. Олейникова. М.: Янус-К. 2004.
40. ФАП «Радиотехническое обеспечение полетов и авиационная радиосвязь. Сертифи-
кационные требования» (приказ директора ФСВТ России №248 от 11 августа 2000
года), приложение 4.
41. Фаулер М., Скотт К. UML в кратком изложении. М.: Мир. 1997.
42. Федунов Б.Е., Прохоров М.Д. Вывод по прецеденту в базах знаний бортовых интел-
лектуальных систем // Искусственный интеллект и принятие решений. 2010. № 3.
43. Шаллоуей А., Тротт Д.Р. Шаблоны проектирования. Новый подход к объектно-
ориентированному анализу и проектированию. М. Вильямс, 2002.
44. Ширман Я.Д., Голиков В.Н., Бусыгин И.Н. Теоретические основы радиолокации /
Под ред. Я.Д. Ширмана. М.: Сов. радио. 1970.
45. Ярлыков М.С., Болдин В.А., Богачев А.С. Авиационные радионавигационные уст-
ройства и системы. М.: ВВИА им. Н.Е. Жуковского. 1980.
46. Karzhavin LA., Neyman B.Z., Gundobin G.S., Vislov V.I., Lashenko A.В., Levande A.B.
A study of noise and collateral phenomena observed in central cathode magnetron de-
vices, Applied Surface Science, 215(2003), 291-300.
47. Melvin И/. L. Space-Time Detection Theory. Georgia Tech Research Institute. 7220
Richardson Road, Smyrna, GA 30080, USA.
48. Ward J., Kogon S. M. Space-Time Adaptive Processing (STAP) for AMTI and GMTI
Radar// MIT Lincoln Laboratory, 26 April 2004.
102
Радиолокационные
системы
высокого разрешения
Я . л л ни) Л Г! Ш к Я Я Я кН Г. * к к к Я '.к' к к Я kJ Я Г Я 'к Я к Я Я Я к Я к к К'. кН к Я к к Я к Я к Я к к < к Я к к 'к' к *?к к Л к Я к ЯЛ к
2. 1< Компьютерные технологии при создание
радиолокационных систем высокого разрешения ................
2.2. Направления развития многочастотных авиационных
радиолокационных комплексов
дистанционного зондуоов^ния
высокого разрйюе! < Л1
2.3. Модифицированный алгоритм обнаружения сигнала,
отраженного от наземной движущейся цели
для РСА с ФАР ..........................................
2.4, Формирование эталонных радиолокационных портретов
надводнь1Х’^рр^л^й с использованием
ограниченнй^'й^бсрэ Экспериментальных данных
2.5. Обработка больших массивов
цифровых радиоголограмм космических РСА
высокого разрешения ..............................
2.6 Разработка и особенности использования
______^.Дграиопйнд^ дляЛзамЙь1Х
и летных испытаний, калибровки и валидации
космических РСА...................................
Литература ..............................................................
I
104 i
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В материалах данной главы главное внимание сосредоточено на
радиолокационных системах, которые предназначены для форми-
рования высокодетального радиолокационного изображения зем-
ной поверхности. Известно [1, 9, 21], данная задача будет решаться
в том случае, если линейные размеры элемента разложения РЛИ
(элемента разрешения) будут соизмеримы с линейными размерами
мелкодетальных наземных объектов наблюдения.
В связи с тем, что вопросы, связанные с обеспечением высокого
разрешения РЛС по шкале дальности, будут рассмотрены в гл. 4, то
основное внимание обращено на РЛС с режимом синтезирования
апертур, которые реализуют высокое линейное разрешение по ази-
муту.
I ' ' •
Компьютерные технологии при создании
перспективах радиолокационмых систем
высокого разрешения К.....
* . -
U
• 1
При проектировании перспективных радиолокационных систем высокого раз-
решения, к которым, в первую очередь, относятся РЛС с синтезированием
апертуры антенны (РСА), широко используют современные компьютерные
технологии [19].
Это стандартные пакеты для выпуска схем, конструкторской и
текстовой документации, специализированные пакеты для про-
граммирования цифровых и цифроаналоговых микросхем. Кроме
того, прикладные пакеты для проведения специальных расчетов. К
ним, например, относится и разработанная программа для расчета
режима «скансар», учитывающая реальные формы ДНА и уровни
неоднозначности сигналов. В качестве примера на рис. 2.1 пред-
ставлено изображение формы ДНА при использовании данного
режима с границами однозначности сигнала по дальности. Досто-
инством разработанной программы является обеспечение в ней со-
пряжения по вводу/выводу с пакетом MATLAB, что открывает ши-
рокие возможности для анализа данных и моделирования методов
коррекции искажений.
104
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Рисунок 2.1
В частности, на рис. 2.2,6/ приведена измеренная зависимость от-
клонения ФЧХ-сигнала от идеальной. Форма сжатого импульса пока-
зана на рис. 9,6 (кривая 7). Было установлено, что при максимальной
полосе сигнала 200 МГц суммарный набег фазы на крайних частотах
значительно превышал допустимый для сжатия ЛЧМ до требуемых
5 нс. Указанное явление, в основном, было обусловлено фазовыми на-
бегами в цепях формирования зондирующего сигнала.
По результатам моделирования была вычислена корректи-
рующая фазовая поправка, которую необходимо вводить в алго-
ритм наземного синтеза РЛИ (либо предыскажения ЛЧМ-сигнала
при его формировании в ФЧС). Форма сжатого сигнала с коррекци-
ей фазовых искажений приведена на рис. 9,6 (кривая 2).
Рисунок 2.2
Моделирование преобразований сигналов в РСА
При математическом моделировании, как правило, входной про-
цесс задают в виде набора имитированных точечных целей с до-
105
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
бавлением некоррелированного (реже - коррелированного) слу-
чайного процесса.
Уникальные возможности возникают при использовании в качестве входных
данных для моделирования комплексных радиолокационных изображений
объектов и подстилающей поверхности, полученных в результате съемки с по-
мощью реальной аппаратуры космических или самолетных РСА. В этом случае
результаты моделирования максимально приближаются к ожидаемым в ре-
альных условиях.
Предложенный подход к моделированию процессов обработ-
ки сигналов в РСА [35] основан на обращении последовательности
операторов, с помощью которой моделируют исследуемый РСА.
Моделирование комплексного радиолокационного изображения
рассматривается как результат последовательного применения об-
ратной двумерной свертки (деконволюции) для получения тестовой
цифровой радиоголограммы и прямой двумерной свертки для син-
теза КРЛИ:
5(x,r) = Synt{Hol(x,r)} = Synt|Synt-1 {Set (х, r)}j
или в спектральной области
(&\- ? (Or ) — ^Synt (^?х ’ )^Но1 (^?х ’ Ох ’ ’
где S&(x,r) и S(x,r) - исходное эталонное и получаемое КРЛИ;
Но1(х,г) - ЦРГ, формируемая по эталонному КРЛИ; Synt - проце-
дура синтеза КРЛИ; Synt 1 обратная процедура формирования
ЦРГ, FSet -спектр эталона, А?ноЬ FSynt - частотные характеристики
фильтров формирования ЦРГ и синтеза КРЛИ.
На рис. 2.3 представлена схема моделирования преобразований
сигналов в РСА с использованием реальной фоноцелевой обстанов-
ки, представленной комплексными РЛИ. Пунктиром указан возмож-
ный вариант сокращения вычислений без формирования ЦРГ.
При анализе конкретных алгоритмов формирования КРЛИ прямая и обратная
операции реализуются соответствующей композицией операторов БПФ, ОБПФ,
умножения на двумерные опорные функции.
106
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Разработанная методика включает в себя ряд операций подго-
товки данных, в том числе коррекцию двумерного спектра КРЛИ
для исключения неоднозначности, ретушь амплитудного РЛИ с об-
нулением неотражающих элементов подстилающей поверхности
(дороги, спокойная водная поверхность) и др. Для моделирования
РСА с разрешением лучшим, чем исходный материал, его масшта-
бируют, т.е. рассматривают как радиолокационный снимок умень-
шенной модели местности.
Для моделирования алгоритмов селекции движущихся целей КРЛИ разделяют
на несколько слоев, содержащих в первом слое местность и «лысые» места от
целей, а во втором (или других) - движущиеся цели. Формирование ЦРГ ведет-
ся по разным алгоритмам для местности и слоев с целями, затем парциальные
ЦРГ суммируются и к ним добавляются шумы.
Для сокращения вычислений вместо формирования полной
ЦРГ суммируют азимутальные или двумерные спектры сигналов,
добавляют шумы в спектральной области и моделируют синтез
РЛИ, начиная с вычисленных спектров. Для моделирования интер-
феррометрической обработки исходное КРЛИ используют как пер-
вичное, формируя к нему пару по пересчетным формулам в зави-
симости от задаваемого рельефа модели местности.
Применение предложенной методики моделирования позво-
ляет учесть влияние интерференции между отражателями на под-
стилающей поверхности, что трудно выполнить при традиционном
способе имитации входной обстановки.
Достоверность результатов моделирования во многом зависит
от соответствия исходного материала задачам моделирования. В
ряде случаев моделирование является инструментом для решения
общих задач, связанных с совершенствованием аппаратуры СРЛН,
например получения радиолокационных изображений местности и
радиолокационных портретов целей для обучения операторов-
дешифровщиков методам распознавания целей, разработки алго-
ритмов автоматического распознавания и алгоритмов сжатия ин-
формации. Применение моделирования в этих задачах относится к
случаю, когда имеется исходная обстановка с более высоким раз-
решением (например, от самолетных РСА). чем расчетное разре-
шение проектируемого РСА (космического).
В последнее время в задачах интерпретации радиолокационной информации
обозначилось новое направление повышения информативности видовых
средств наблюдения - верификационное моделирование [27], с помощью ко-
торого можно на основе моделирующего эксперимента объяснить механизм
формирования наблюдаемого явления.
107
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРА1К ТВ А
Пример такого моделирования - выявление сжатия ледовых
полей по радиолокационным изображениям РСА ERS-1, ERS-2,
полученным с интервалом 1 сут. [17, 35].
В частности, была проведена съемка острова Октябрьской ре-
волюции и окружающей ледовой обстановки в море Лаптевых с
получением интерферрограммы (рис. 2.4,я,г). По ее материковой
части был построен рельеф ледника (рис. 2.4,6). Интерференцион-
ная картина по ледовым полям (рис. 2.4,г и ж - фрагменты нижней
части рис. 2.4,а) не поддавалась объяснению. По одному комплекс-
ному РЛИ и в предположении о сжатии ледовых полей было смо-
делировано вторичное КРЛИ и получены фрагменты интсрферро-
грамм (1-4 на рис. 2.4,3), совмещенные с реальными ингерферро-
граммами на рис. 2.4,е.
Измеренные значения сжатия ледовых полей по азимуту (на
135° от меридиана) составило 0,01 ...0,24% на участке J, а на участ-
ках 2, 3 и 4, соответственно, 1,9, 2,6 и 2,2%.
Рисунок 2.4
108
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Формирование банков радиолокационной
фоноцелевой обстановки
В общем случае, когда имеется возможность использовать инфор-
мацию разных радиолокационных датчиков с разными характери-
стиками, численные методы тематической обработки оперируют с
несколькими параметрами.
Параметры наблюдаемой поверхности или объектов
• Удельная эффективная поверхность рассеяния (ЭПР) в пиксе-
лях радиолокационного изображения, измеренная в разных
диапазонах волн на согласованных (ГГ, ВВ) и ортогональных
(ГВ, ВГ) поляризациях или, если это предусмотрено, на согла-
сованных и противоположных круговых поляризациях.
• ЭПР или удельная ЭПР при усреднении РЛИ по площади объ-
екта или однородного участка местности.
• Гистограммы распределения удельной ЭПР по однородным
участкам местности, автокорреляционные функции и парамет-
ры текстурного анализа.
• Корреляционные зависимости между данным зондирования в
разных диапазонах волн.
• Разность фаз между поляризациями ГГ, ГВ, ВВ, ВГ, что обеспе-
чивает вычисление полной матрицы Стокса или ее компонентов
(для типизации лесных покровов обычно ограничиваются вы-
числением разности фаз в каналах ВВ и ВГ или ГГ и ГВ).
• Пространственное распределение фаз отраженных сигналов
для интерферрометрической обработки снимков, включающей
построение цифровых карт рельефа, получение трехмерных
изображений объектов, выявление изменений (когерентные
методы change detection), связанных с изменением оперативной
обстановки или сдвигом наблюдаемой поверхности (подвижка
земной коры, ледовая разведка, оценка изменений геометрии
продуктопроводов, опор ЛЭП и т.д.).
Для эффективного решения комплекса этих задач необходимо
формирование банков фоноцелевой обстановки, с их непрерывным
пополнением материалами текущих радиолокационных съемок и
сопутствующими материалами. Типы банков могу! специализиро-
ваться по своему назначению (картография, геология, экология,
океанология, научные и прикладные задачи и др.). Фрагменты бан-
ков данных могут использоваться для целей отработки методик,
моделирования и обучения методам тематической обработки.
В общем виде банки фоноцелевой обстановки должны включать
как обработанные комплексные радиолокационные изображения
109
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
(КРЛИ), представленные в виде амплитудных изображений (РЛИ) и
фазовых изображений (ФРЛИ), а также исходных материалов в виде
ЦРГ и сопроводительной информации. Примеры образцов РЛИ из
банка фоноцелевой обстановки на базе информации, полученной с
помощью РСА «Меч-КУ», представлены на рис. 2.5-2.7 [19].
Рисунок 2.5
Рисунок 2.6
ПО
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
В частности, на рис. 2.5 представлено РЛИ Гибралтарского
пролива с окружающей гористой местностью и долинами [19]. Вы-
делены фрагменты с сельскохозяйственными угодьями с автомати-
ческой агротехнологией, гавань со множеством судов, морская по-
верхность с яркостной модуляцией ряби под влиянием ветра и за-
грязнений, кильватерный след и смещенная относительно него
отметка от движущего судна. На рис. 2.6 представлены РЛИ бухты
с кораблями, а на рис. 2.7 - яркостные и рельефные радиолокацион-
ные портреты кораблей и судов.
Рисунок 2.7
Как видно из рис 2.7 приведенные яркостные и рельефные ра-
диолокационные портреты кораблей и судов представлены с оцен-
ками их ЭПР:
1 - (Т= 3500 м2; 2 - ст= 6060 м2; 3 - <у= 3900 м2;
4 - ст = 6500 м2; 5 - ст= 7360 м2; 6 - ст= 16920 м2;
7 - ст= 16050 м2; 8 - ст= 41600 м2; 9 - ст= 3600 м2,
которые могут быть использованы при выполнении предваритель-
ных энергетических расчетов.
Калибровка РСА
К современным РСА предъявляются требования как к измеритель-
ному инструменту, который, фиксируя отраженное электромагнит-
ное излучение, позволяет измерить электродинамические или гео-
метрические характеристики элементов подстилающей поверхно-
сти или объектов на ней. Данные измерения и результаты их
обработки с получением оценок требуемых параметров являются
111
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИ ТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
содержанием первичных или окончательных информационных
продуктов. Достижение высокой точности радиометрической ин-
формации (порядка 1 дБ) обеспечивается методами внутренней и
внешней калибровки на этапах предполетной подготовки комплек-
са (включая отработку стендового образца) и в течение эксплуата-
ции радиолокационных комплексов на орбите.
Контролируемость точностных характеристик выходной информации должна
поддерживаться организационно-техническими мероприятиями - «службой
калибровки», которая должна непрерывно сопровождать и фиксировать со-
стояние аппаратуры, ее параметры и их временную стабильность. При необхо-
димости в алгоритмы синтеза РЛИ должны вводится корректирующие функции,
как это было рассмотрено ранее. В аппаратуре и в программе эксплуатации
РСА должно предусматриваться периодическое (или экстренное) включение
контрольных и юстировочных режимов для измерения ее параметров и учета
данных измерений в алгоритмах синтеза РЛИ.
Пример получения данных о формах ДНА по азимуту и углу
места при работе РСА «Меч-КУ» с малыми углами падения и РЛИ
уголковой миры представлены на рис. 2.8 [19]. В частности, на рис.
2.8,а.б приведены изображения формы ДНА соответственно в
плоскостях азимута и угла места, а на рис. 2.8,в - РЛИ уголковой
миры. На рис. 2.9 показано выявление дефекта слипания младшего
разряда АЦП, обнаруженное на некоторых протяженных маршру-
тах съемки РСА «Меч-КУ», где рис. 2.9,6/ соответствует нормаль-
ной работе, а рис. 2.9,6 - выявленному эффекту. Дефект появлялся
примерно через 20 с после начала съемки.
Рисунок 2.8
Рисунок 2.9
112
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Рассматривая цепочку преобразования информации при синтезе
РЛИ целесообразно выделить этап предварительной обработки ин-
формации, на котором сигналы с выходов АЦП бортового аппарату-
ры РСА, пройдя накопление и передачу на Землю, преобразуются в
компьютерный формат - две квадратурные составляющие 16-ти раз-
рядов, включая знак (inti6), для последующего синтеза РЛИ.
На этапе предварительной обработки распаковывают данные из
формата АЦП, корректируют случайную фазу зондирующего сигна-
ла и направление закона ЛЧМ, вводимые для уменьшения помех от
неоднозначности сигналов, выравнивают коэффициент усиления
приемника. Такая операция должна учитывать положение аттенюа-
тора в данной строке и фактическое значение затухания, измеренно-
го при калибровке используемого приемного канала (основной, ре-
зервный, поляриметрический, включая неидентичность амплитуд-
ных и фазовых характеристик квадратурных составляющих).
На предварительном этапе можно вводить или формировать
для последующего использования функцию коррекции фазовой
ошибки сквозного тракта, включая блок формирования частот и
сигналов, промежуточные и выходной каскады передатчика, при-
емник, разбросы каналов АЦП. В общем случае корректирующие
функции должны учитывать временные изменения фазы на пере-
ходном температурном процессе (рис. 2.2). В принципе на этом
этапе возможна радиометрическая коррекция искажений сигналов,
вызванных формой угломесгной ДНА и другие коррекции по дан-
ным внешней калибровки РСА или проведения юстировочных и
калибровочных режимов.
Моделирование, основанное на реальных радиолокационных данных,
полученных в ходе летных испытаний и в процессе реальных полетов,
позволяет существенно повысить адекватность результатов модели-
рования реальным процессам и существенно сократить процесс от-
ладки разрабатываемых радиолокационных комплексов, а также
предложить комплекс мероприятий, направленных на повышение
достоверности получаемых радиолокационных данных и своевремен-
ное выявление возможных сбоев в радиолокационной аппаратуре.
113
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИН1А ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Направления развитая
многочастотных ав» ационных
2 2 радиолокационных комплексов
дистанционного зондирования
высокого разрешения
Радиолокаторы с синтезированной апертурой являются одним из
важнейших средств дистанционного зондирования в силу прису-
щих им всепогодности, независимости от времени суток и высокой
разрешающей способности. В этой связи современные авиацион-
ные радиолокационные комплексы дистанционного зондирования
высокого разрешения строятся на базе РСА.
Длина волн зондирующих колебаний в РСА
Известно [9, 20, 21], что информативность РЛИ формируемого РСА
в существенной степени зависит от используемой длины волны зон-
дирующих колебаний. Коэффициент обратного рассеяния подсти-
лающей поверхности на определенной длине волны зависит как от
геометрического состояния поверхности (степени ее шероховато-
сти), так и от вариаций ее электрических параметров в некотором
поверхностном слое (несколько скин-слоев).
При картографировании подстилающей поверхности на определенной длине
волны, мы получаем информацию о некотором поверхностном отражающем
слое, глубина которого варьируется в зависимости от шероховатости поверхно-
сти, ее электрофизических параметров и поляризации излучения.
При изменении длины волны происходит изменение степени
шероховатости поверхности, так как эффективно проявляют себя от-
ражающие элементы с размерами, сопоставимыми с длиной волны.
Увеличение длины волны, как правило, приводит к «выглажи-
ванию» отражающей поверхности, за исключением тех случаев, ко-
гда размеры отражающих элементов сравнимы с длиной волны и
возникают резонансные явления.
При увеличении длины волны также, как правило, возрастает
глубина скин-слоя, хотя в ряде случаев и не прямо пропорцио-
нально ее изменению из-за частотной зависимости электрофизи-
ческих параметров подстилающей поверхности.
В частности, на рис. 2.10 и 2.11 представлены РЛИ поверх-
ности земли, полученные при зондировании ее зондирующими
сигналами с длиной волны 4 см (Х-НН ), 68 см (P-VV) и 254 см
(VHF-HH) [20].
114
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
На 2.10 представлены РЛИ лесного массива Московской об-
ласти, на которых выделены: 1 - торфяные разработки; низкий
редкий кустарник; 2 - бывшие торфяные разработки, поросшие
густым молодым березовым лесом; 3 - березовый лес среднего
возраста; 4 - заболоченный участок, чахлый и погибший березовый
лес; 5 - старый сосновый лес, песок, трава, редкий подлесок. Здесь
же приведены фотоснимки отдельных участков зондируемых об-
ластей. При этом РЛИ, полученные при использовании колебаний с
длиной волны 4 см и 254 см, соответствуют горизонтальной поля-
ризации волн, а с длиной волны 68 см - вертикальной поляризации.
Рисунок 2.10
115
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 2.11 представлены РЛИ в окрестности излучины р. Оки в
Московской области. На изображениях отмечены: 1 - река Ока; 2 -
сельскохозяйственные угодья; 3 - здание фермы; 4 - ограждения из
колючей проволоки; 5 - поливальные установки типа «фрегат»; 6 -
малые поливальные установки (трубы диаметром 10 см высотой 1.5
м); 7 - поселок; 8 - ЛЭП; 9 - техника на полях. Представленные РЛИ
соответствуют вертикальной поляризации зондирующих колебаний.
Рисунок 2.11
При использовании РСА с существенно различающейся длиной волны можно
получать информацию о свойствах подстилающей поверхности с различных по
глубине отражающих слоев.
116
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Сопоставление между собой многочастотной информации об
отражающих свойствах различных по глубине слоев позволяет су-
дить об изменениях электрофизических параметров подстилающей
поверхности по глубине.
В ряде случаев (песчаные почвы пустыни) глубина проникно-
вения радиоволн метрового диапазона довольно значительна (до
30...50 м), что позволяет при одновременном использовании деци-
метрового и сантиметрового диапазонов иметь несколько глубин-
ных срезов подстилающей поверхности. В качестве примеров на
рис. 2.12-2.14 приведены РЛИ, полученные при совместном зонди-
ровании различных участков земной поверхности в диапазоне 4 см
(X) и в диапазоне 254 см (VHF) [20]..
Так, на рис. 2.12 представлены РЛИ пустыни Кара-Кум и гео-
логическая карта распределения подземных вод, составленная на
основе радиолокационной съемки: 1 - сухое русло р. Узбой; 2
барханы высотой 6... 15 м; 3 - подземные водные линзы. На рис.
2.13 - РЛИ района Архангельской области и геологические карты
кимберлитовых трубок, составленные на их основе: 1 - известная
кимберлитовая трубка; 2 - неизвестные до радиолокационной
съемки кимберлитовые трубки, а на рис. 2.14 - РЛИ акватории
Чешской губы Баренцева моря с участком побережья: 1 - зоны с
меньшей соленостью; 2 - структуры волнения: 3 - завихрения у
мыса Сувойный; 4 - устье реки Пеши, которые получены при вер-
тикальной поляризации зондирующих колебаний.
Рисунок 2.12
117
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 2.13
Рисунок 2.14
118
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Аналогичное проникновение радиоволн через растительность
позволяет проводить идентификацию типов растительности над
увлажненной почвой и обнаруживать скрытые густым раститель-
ным покровом заболоченные участки.
Информативность РЛИ изображений изменяется не только с из-
менением длины волны зондирующих колебаний. Влияние также ока-
зывает и поляризация данных колебаний. Например, на рис. 2.15 при-
ведены РЛИ акватории Норвежского моря, которые получены при од-
новременном зондировании данной области радиолокационными
сигналами на двух поляризациях. Слева на вертикальной поляризации
идентифицируется продуктивная зона, справа на горизонтальной по-
ляризации (в круге) видны идущие по поверхности косяки скумбрии.
Рисунок 2.15
Рисунок 2.16
119
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Наряду с РЛИ наблюдаемых объектов в картинной плоскости с помощью РСА
можно получать трехмерные изображения объектов.
В частности, на рис. 2.16 приведено РЛИ ледовой обстановки
и расположения судов в районе Двинской губы в диапазоне 23 см,
полученное при использовании зондирующих колебаний с гори-
зонтальной поляризацией.
Здесь же показаны трехмерные изображения интенсивностей
отраженных сигналов от отдельно стоящих судов.
В радиолокационных комплексах дистанционного зондирования желательно
использование наиболее широкого частотного диапазона с возможно большим
набором длин волн (резонансные явления в слоистых структурах).
При использовании авиационных носителей для РСА возникают
естественные ограничения на диапазон используемых радиоволн.
Со стороны коротковолновой части диапазон ограничен усло-
виями всепогодности, независимости от времени суток, т.е. это
длина волн 2...5 см. В качестве примера на рис. 2.17 приведено
РЛИ железнодорожной станции в Иркутской области, полученное в
диапазоне 4 см при использовании радиоволн с горизонтальной по-
ляризацией [20].
Рисунок 2.17
120
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Со стороны длинноволновой части диапазон ограничен усло-
виями размещения направленных многополяризационных антен-
ных систем на борту носителя и составляет длину волн 1,5...3 м.
Информация о подстилающей поверхности существенно ме-
няется при изменении длины волны в 3...5 раз (в случае отсутствия
резонансных явлений). Поэтому в радиодиапазоне оптимальными
диапазонами для многочастотного поляриметрического комплекса
дистанционного зондирования следует считать диапазоны 2...5 см;
20. ..30 см; 50. ..80 см и 150. ..350 см.
Разработанный и усовершенствованный в течение 1989-2000
гг. сотрудниками предприятия многочастотный поляриметриче-
ский авиационный радиолокационный комплекс дистанционного
зондирования с синтезированной апертурой и цифровой адаптив-
ной обработкой информации «ИМАРК» использует именно эти
диапазоны длин волн [6].
Возможности использования многочастотных поляриметриче-
ских авиационных комплексов РСА в геологии, картографии, океа-
нологии, сельском и лесном хозяйстве, экологии, контроле эко-
номической зоны, ледовой разведке и т.д., наглядно демонстриру-
ются результатами радиолокационной съемки, приведенными на
рис. 2.10-2.17.
Направления развития авиационных РСА
Основные тенденции развития радиолокаторов
с синтезированной апертурой антенны [59]
• Повышение разрешающей способности.
• Использование интерферометрии для селекции движущихся
объектов и для получения рельефа местности.
• Использование многочастотности и многополяризационности
для обнаружения и опознавания скрытых объектов.
Следуя этим тенденциям, во вновь разрабатываемых авиаци-
онных комплексах РСА закладываются соответствующие техниче-
ские решения.
Режим сверхвысокого разрешения
Разрешающая способность по наклонной дальности. Для реали-
зации режима сверхвысокого разрешения (8у « 0,3...0,5 м) по коор-
динате наклонной дальности у необходимо излучение зондирую-
щего импульса с шириной спектра AF = dldy = 500 МГц. Наиболее
приемлемым является вариант с формированием и излучением ра-
121
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
диоимпульса с линейной частотной модуляцией, девиация частоты
в котором достигает 500 МГц.
В разработанном экспериментальном образце осуществлено активное цифроа-
налоговое формирование ЛЧМ-импульса на нулевой несущей частоте с после-
дующим переносом на более высокие частоты вплоть до частоты излучения.
Формирование ЛЧМимпульса, частоты повторения импульсов, несущих и гете-
родинных частот производится таким образом, чтобы обеспечивался когерент-
ный прием радиолокационного сигнала с возможностью его последующего ко-
герентного накопления при азимутальной обработке.
Выходные широкополосные усилительные каскады передатчика
реализованы на транзисторах с импульсной мощностью не более
5...10Вт.
Для реализации режима сверхвысокого разрешения приемо-
передающие антенны, фидерные тракты и приемный тракт спроек-
тированы таким образом, чтобы обеспечить сквозную полосу про-
пускания не менее 500 МГц.
На рис. 2.18 приведены результаты стендовой отработки канала
дальности. Расстояние между метками на изображении a (d= 6,03 м) и
изображении б (d = 5.,73 м), соответствующими соседним разрешае-
мым отражателям бу = 0,3 м, т.е. реализовано разрешение dv ~ 0,3 м.
Рисунок 2.18
122
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Разрешающая способность по азимуту должна обеспечиваться
синтезированием апертуры антенны. Для получения разрешающей
способности 4с = 0,3 м длина синтезированной апертуры должна быть
не менее Ах = 2/?/24с. Соответственно, ширина диаграммы направлен-
ности в азимутальной плоскости должна быть не менее
^мин = А/28х = 0,05 рад.
Такая диаграмма направленности обеспечивается антенным
полотном с горизонтальным размером < 0,6 м.
Режим измерения рельефа местности
Принцип фазометрического измерения рельефа местности состоит
в специальной, фазометрической, совместной обработке радиоло-
кационных сигналов, принятых одновременно двумя разнесенными
в пространстве антеннами. Антенны должны быть разнесены в
плоскости, перпендикулярной линии пути. Схема облучения и
приема радиолокационных сигналов поясняется рис. 2.19.
Подстилающая поверхность облучается одной из антенн, на-
пример нижней А2. Отраженные сигналы принимаются одновре-
менно двумя антеннами А\ и А2. Разность хода между сигналами,
отраженными от одной и той же точки подстилающей поверхности
и принятыми двумя антеннами, составляет
Ar = sin a — b——,
R
где b - разнос между фазовыми центрами двух антенн. Предпола-
гается, что антенны разнесены строго в вертикальной плоскости;
а - угол визирования; Н - высота самолета относительно визируе-
мой точки; R - наклонная дальность до визируемой точки.
123
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Проведем оценку возможности достижения точности измере-
ния рельефа местности в 4 м на дальности до 50 км и в 10 м на
дальности до 100 км. При этом не будем учитывать кривизну Зем-
ли, поскольку при этих дальностях ее влияние на точностные ха-
рактеристики не существенно.
Высоту Н можно представить как сумму Нр + Л, где Но - высо-
та полета самолета относительно какой-либо горизонтальной по-
верхности, например уровня моря; h - высота визируемой точки
относительно уровня моря.
С учетом такого представления высоты разность хода пред-
ставляется в виде
Разность фаз между сигналами, принятыми двумя антеннами,
составляет
\(р = 2л
b Hp + h
2 R
Вычислив разность фаз, можно рассчитать высоту
h+H0=^я-.
0 2л- b
Точность определения высоты определяется точностью вы-
числения разности фаз Д^>, а также знанием точных значений вели-
чин b, R, Но.
Точность определения абсолютной высоты рельефа или отдельных объектов
местности определяется точностью определения высоты полета самолета. Эта
точность может быть достигнута только относительной калибровкой высоты во
время выполнения полета по реперным точкам с известной абсолютной высо-
той. Между реперными точками должен производиться контроль изменения
высоты с помощью инерциальной навигационной системы. Если реперные точ-
ки расположены достаточно близко друг от друга, то требования к навигацион-
ной системе упрощаются.
Оценим однозначность и точность измерения высоты h для
следующих значений основных параметров:
2 = 0,031 м;6 = 0,4 м;
^Омакс — Ю КМ, 77омин ““ 1 КМ,
^макс 50, 100 км, 7?мин 4 км.
Однозначность определения высоты h0 определяется из усло-
вия \(р = 2л. Отсюда h0 = 310 м для минимальной наклонной даль-
ности. Очевидно, что такие перепады практически невозможны для
124
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
точечных наземных объектов и поэтому проблемы неоднозначно-
сти для выбранных параметров не существует.
Из выражения, определяющего высоту h+Ho, находя частные
производные по соответствующим параметрам, получаем следую-
щие оценки точности измерения высоты в зависимости от погреш-
ности измерения наклонной дальности ЛЯ и расстояния между фа-
зовыми центрами \Ь. Для оценки точности определения высоты
можно положить h+ Но ~ Но, Тогда
Д/г(Я) = ,
Д/г(Ь) - -\b
Точность определения наклонной дальности при соответствующей калибровке
равна разрешающей способности по наклонной дальности.
Поскольку отношение высоты полета к наклонной дальности
меньше единицы, точность измерения высоты выше, чем разрешаю-
щая способность по дальности.
При b = 0,4 м и Hq = 10 км для измерения высоты рельефа с
точностью 5 м необходимо знание параметра Л£ с точностью
0,2 мм. Такая точность может быть достигнута только стендовой
калибровкой или относительной калибровкой в полете по специ-
ально подготовленному полигону с реперными объектами. При от-
носительном измерении рельефа такая точность определения рас-
стояния между фазовыми центрами антенн не нужна.
Важным фактором, влияющим на точность измерения высоты,
является отношение сигнал/шум. Формулу определения высоты за-
пишем в виде
h + HQ+Sh = + R-
0 2л- b
ИЛИ
где Sep - шумовое изменение разности фаз; 8h - неточность измере-
ния высоты, вызванная шумами.
Поскольку точность измерения фазы определяется отношением
шум/сигнал (по напряжению), шумовая составляющая разности фаз
будет соответственно в д/2 раза больше. Таким образом, при тре-
125
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
буемой точности определения высоты на дальности 50 км, равной
4 м, соотношение сигнал/шум должно составить не менее 47 дБ. Для
дальности 100 км и точности определения высоты 10 м это соотно-
шение должно быть равно 45 дБ.
Если задаться средней мощностью передатчика 1 кВт, то, как
показывают расчеты, требуемая точность определения высоты дос-
тижима для точечных объектов с ЭПР 10 м2.
При расчете высоты h следует учитывать еще два фактора,
влияющих на этот расчет:
1) постоянная разность фаз Д^о в каналах антенн и приемников;
2) отклонение (у/) оси фазовых центров двух антенн от верти-
кали по углу места.
Постоянная разность фаз Дде> вызывает абсолютную погреш-
ность, нарастающую пропорционально дальности:
которая может быть скомпенсирована методами калибровки по ре-
перным объектам.
С учетом отклонения у/ выражение для разности фаз между
каналами приема имеет вид
\<pv =2^-jsin((z-^).
Отклонение по углу места у/ приводит к ошибке измерения
высоты Sh~y/Rcc)sa . Таким образом, постоянное отклонение по
углу места также вызывает погрешность определения высоты в за-
висимости от дальности. Для получения точности определения вы-
соты на дальности 100 км, равной 10 м, необходима компенсация у/
с точностью до 20 угл. с.
Для отработки алгоритма фазометрического формирования
рельефа был разработан экспериментальный образец аппаратуры и
проведена радиолокационная съемка различных участков поверх-
ности в районе Кольского полуострова.
На рис. 2.20 приведено изображение рельефа участка местно-
сти, полученное фазометрическим методом. Измеренный перепад
высот на границе суша/водная поверхность составляет 20...80 м,
что хорошо коррелируется с данными топографической карты,
фрагмент которой приведен на рис. 2.21 [20].
126
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Рисунок 2.20
Подводя итог приведенных расчетов и обсуждений по режиму
ИРМ, можно сделать следующие основные выводы:
• для реализации режима требуется разработка антенной системы,
состоящей из двух разнесенных по вертикали идентичных ан-
тенн;
• потенциал радиолокатора в данном режиме должен быть суще-
ственно выше, чем для режима обнаружения;
• в состав антенной системы должны быть введены элементы
инерциальных навигационных систем для контроля углового
положения антенн;
127
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
для уменьшения ошибок определения высоты требуется раз-
работка и осуществление методов внутренней и внешней ка-
либровок.
Рисунок 2.21
Режим измерения малых радиальных скоростей
Принцип фазометрического измерения малых радиальных скоро-
стей состоит в специальной, фазомегрической, совместной обра-
ботке радиолокационных сигналов, принятых одновременно двумя
разнесенными в пространстве антеннами. Антенны должны быть
разнесены в пространстве вдоль линии пути.
128
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Подстилающая поверхность облучается одной из антенн, на-
пример передней А у. Отраженные сигналы принимаются одновре-
менно двумя антеннами А[ и А2. Временная задержка между изо-
бражениями от одной и той же точки подстилающей поверхности,
полученными двумя антеннами, разнесенными в пространстве
вдоль линии пути на расстояние Z, составляет
где L - разнос между фазовыми центрами двух антенн, предполага-
ется, что антенны разнесены строго вдоль линии пути; Ес - ско-
рость самолета относительно визируемой точки.
В случае движения визируемой точки с радиальной скоростью
Vr точка на втором изображении сместится на расстояние Дг = V,At,
2тт
что будет соответствовать сдвигу по фазе \(р = 2 Аг——.
Таким образом, радиальная скорость точки F, определяется по
ее относительному фазовому сдвигу Д$9 на изображениях следую-
щим образом:
г АфЛ
C~^L
Из этого выражения следует, что диапазон однозначного измере-
ния радиальной скорости ДКГ, соответствующий Аср = 2л, будет
с 2L
Точность измерения радиальной скорости точки 3Vr соответ-
ственно равна
Если положить соотношение сигнал/шум в каждом измери-
тельном канале равным 20 дБ, что является типичным требованием
для обнаружения точечных объектов, то эффективное значение фа-
зового шума для этих точечных объектов составит д(р = 0,1 рад
и шумовая составляющая разности фаз будет в V2 выше, т.е.
равна 0,14 рад.
При Vc = 720 км/ч; L ~ 60 см и 2 3 см будем иметь диапазон
однозначного измерения радиальной скорости ДЕГ = 18 км/ч и точ-
ность измерения радиальной скорости точки 3Vr = 0,4 км/ч.
129
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Диапазон однозначных измерений в этом случае может быть достаточно просто
расширен с помощью традиционного одноканального метода измерения ради-
альной скорости по доплеровскому смещению спектра.
Точность измерения радиальной скорости точки также зави-
сит от траекторных нестабильностей носителя в процессе съемки.
Наиболее существенными являются вариации по курсу, так
как они вызывают относительное перемещение разнесенных вдоль
линии пути антенн в радиальном направлении.
В случае рыскания носителя по курсу с угловой скоростью сок
относительная радиальная скорость фазовых центров двух антенн
разнесенных на расстояние L
Vг ОТН
Эта радиальная скорость должна быть меньше точности изме-
рения Vr отн < 8КГ, откуда получаем ограничение на угловую ско-
рость сок:
8срХ
и в случае выше оговоренных параметров имеем < 107с, что
вполне реально.
Угловые отклонения Ду/ по курсу (снос) или тангажу приводят
к уменьшению расстояния L между фазовыми центрами двух ан-
тенн на величину Д£=£(1 - cos Ду/) « L Рмд'И, что вызовет увели-
чение измеряемой радиальной скорости на величину ДГг^, равную
Ду?Л Ду/2
Эта радиальная скорость должна быть меньше точности изме-
рения ДКГ^ < 8ИГ, откуда получаем ограничение на угловые откло-
нения:
28(р
Ьхр
и в случае выше оговоренных параметров имеем Ду/ <12°.
Отклонения по крену вызывают только изменения величины принимаемого
сигнала (и, следовательно, отношения сигнал/шум) за счет формы диаграммы
направленности антенны в вертикальной плоскости, однако в реальности ши-
рина луча в вертикальной плоскости велика по сравнению с вариациями носи-
теля по крену и поэтому влияние их не существенно.
В случае улучшения точности измерения радиальной скорости
следует проводить измерения текущих значений углового положе-
ния носителя и его угловой скорости рыскания.
130
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Использование многочастотных РСА
для глубинного послойного зондирования
Имеется практический опыт использования радиолокаторов для глу-
бинного зондирования с борта самолета или вертолета, основанный на
временном разделении сигналов. При этом с борта носителя в надир
излучаются короткие (наносекундные) радиоимпульсы и принимается
сигнал от подстилающей поверхности и ее различных слоев, имею-
щих вариации электрофизических параметров.
Временной селекцией принятого сигнала получают информацию о глубинной
структуре подстилающей среды.
Особенностью этого метода является то, что он дает возмож-
ность получить с хорошим разрешением только вертикальный
профиль подстилающей среды. Полученная информация носит
трассовый характер. Разрешающая способность по направлениям,
ортогональным к направлению распространения, определяется
геометрическими размерами антенны, которые ограничены геомет-
рией летательных аппаратов. Поскольку при глубинном зондиро-
вании с помощью коротких радиоимпульсов эффективно использу-
ется только длинноволновая часть их спектра, то и угловые разме-
ры диаграммы направленности антенны, соответственно,
определяются этой длинноволновой частью их спектра.
Использование многочастотных длинноволновых РСА для
глубинного зондирования существенно отличается от вышеизло-
женного метода.
В РСА осуществляется боковой обзор подстилающей поверх-
ности, и зондирование ведется под углом 0, отличным от нормали.
Отраженный сигнал определяется как геометрическими, так и
электрофизическими свойствами эффективного отражающего слоя,
который для различных длин волн имеет различный вид.
Исследование возможности глубинного послойного зондиро-
вания с помощью многочастотных длинноволновых РСА представ-
ляется целесообразным начать со следующей модели.
Подстилающая поверхность является полупространством с за-
висимостью сг(Л) эффективной площади обратного рассеяния
(ЭПР) от глубины h для длины волны .
Коэффициент затухания в подстилающей поверхности зависит
от глубины и для длины волны 2/ имеет значение at(h).
В этом случае выражение для эффективной площади обратно-
го рассеяния имеет вид
131
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
оо
<т0/ (#)= p’i (Л)Ф; (л> &)dh ’
о
Л h
где Ф; (h, 0) = Az exp
cos#
-2 J (x)dx
о
- функция, учитывающая за-
тухание в среде и определяющая толщину слоя, в котором форми-
руется эффективная ЭПР.
Из соображений нормировки имеем
(ф,(/г,6»>#г = 1.
О
(2.2)
Поскольку точность измерения <т0, ограничена разрядностью
цифрового кода выходной информации к, для случая плавных вариа-
ций при h>ht естественно определить толщину слоя ht, в ко-
тором формируется эффективная ЭПР из следующего выражения:
[ф.(/г,6»)б//г = 1-Д, где А>-^ = 2
О
(2.3)
Поскольку нахождение функции сг(Л) из уравнения (2.1) даже
при известных функциях Ф?(Л) является некорректной задачей,
можно оценить интегральные послойные значения этой функции.
С учетом выражения (2.3) для случая четырех длин волн вы-
ражение (2.1) примет вид
сг01 = (А)Ф] (h)dh + ;
О h{
h\ h2 оо
сг02 = ^a2(h№2(h)dh+ ja2(h)<I>2(h)dh + ^a2(h^2(h)dh;
0 h\ h2
h\ h2
сг03 - p3 (Л)Ф3 (h)dh + Jcr3 (Л)Ф3 (h)dh + (2.4)
о h\
h3 oo
+ рт3(Л)Ф3(Л)б/Л+ ^cr3(h)<P3(h)dh;
/?2
132
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
h2
Л3
°04
= ^а4(Ь)Ф4(к)с1к+ ^&4(к)Ф4(к)е1к+ ^сг4(к)Ф4(Ь)с/Ь
0 hj h2
+ сг4(Л)Ф4(Л)б//2 4- ^<r4(ff№4(h)dh.
Л3 h4
В случае отсутствия частотной зависимости функции cr(h) и с
учетом возможности отбросить члены, лежащие под точностью из-
мерений, выражение (2.4) примет вид
ст01 = pl {h)dh;
о
К h2
сг02 = ^сг 2(h)dh + 2(Ь)Ф 2 (h)dh;
о
hi h2 h3
сг03 = |сг3(Л)Ф3(Л)б/Л+ Гсг3(Л)Фз(Л)б/Л+ сг3(Л)Ф3(Л)б/Л;
0 hi Й2
^cr4(h^4(h)dh+ ^a4(h)Ф4(h)dh +
о
h3 h4
+ сг4(Ь)Ф4(h)dh + сг4(к)Ф4{h)dh.
Л2 h3
Используя теорему о среднем, выражение (2.5) можно преоб-
разовать к следующему виду:
h\
tfbi ^Ю! |ф](/г)^;
о
(2.6)
133
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
который позволяет при известных функциях Ф (й) провести оценку
послойных средних значений сг(й).
Возможности метода демонстрируются рис. 2.22-2.25 [20]. В
частности на рис. 2.22 представлено окно, демонстрирующее пара-
метры первого варианта исходной модели и в нижней части - ре-
зультаты восстановления параметров слоев.
--Steps
Типпбчйы
| Песок 7,
Зависимое** ЗПР ст глуби#
Полни м
3iпонгнциальнаа
Г мперболическая
Ready
Влажность. %
Полином
OK I Cancel
Результаты расчета 5 —
4 см Н’- 0.1292 м S .flmal » 100029
2^ см Н2« 29509 м S1gma2« 978638
68 см нз 158712 м ЕчлпаЗ » 845436
254 см Н4- 353314 м ЗфьаЛ » 4.93495
0
Рисунок 2.22
Первый вариант исходной модели
ип почвы..........................песок влажностью 2%
Зависимость ЭПР от глубины...........линейная, убывающая
На рис. 2.23 представлено окно, демонстрирующее графики
исходной зависимости ЭПР от глубины (линейная, убывающая) и
результаты восстановления параметров слоев (ступенчатая линия)
для первого варианта исходной модели.
На рис. 2.24 представлено окно, демонстрирующее в верхней
части параметры второго варианта исходной зависимост и ЭПР от
глубины (линейная, возрастающая) и в нижней части - результаты
восстановления параметров слоев.
Второй вариант исходной модели
Гип почвы........................... песок влажностью 20%
Зависимость ЭПР от глубины.........линейная, возрастающая
134
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
пи
Рисунок 2.23
4.
Гипгк-чеы
3.8
36
3.4
зг
з.
28
Н1» 1£!£С_*8
120ГЭД
м
2.6
.5204492
4?л
2 4
м
2?
г
35
1.5
05
4 5
4.
5.
Reddy
|цслом*м" тииая
: ип«р6даччаскэя
Н2= |0«®Б
НА. ;122&U
.*54 см Н4 • р"5£"
Signal «
$1д(йл7 ж
f я ' |2 32994
девдл ч 0?&43
2- 25 3
Height m
Sigma
По инн
J'jF ггг-Лйы
C&icei
Регуал-зт* r и
4 см
БЙлм
Рисунок 2.24
На рис. 2.25 представлено окно, демонстрирующее графики
исходной зависимости ЭПР от глубины (линейная, возрастающая) и
результаты восстановления параметров слоев (ступенчатая линия) для
второго варианта исходной модели
Результаты моделирования хорошо согласуются с практически-
ми результатами (см. рис. 2.12 и 2.13).
135
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Не Mndow Hefc Input - tf. Xi
Рисунок 2.25
Следует отметить, что выражение (2.6) также удобно для ор-
ганизации итерационной процедуры уточнение послойных средних
значений сг(Л).
В случае наличия известной частотной зависимости функции
задача оценки послойных средних значений сг(Л) может
решаться аналогично, добавлением соответствующих коэффициен-
тов в выражение (2.6).
Результаты практической работы многочастотного многополяризаци-
онного авиационного радиолокационного комплекса «ИМАРК» демон-
стрируют возможность широкого использования таких многочастот-
ных поляриметрических авиационных комплексов РСА в геологии,
картографии, океанологии, сельском и лесном хозяйстве, экологии,
контроле экономической зоны, ледовой разведке и т.д.
Целесообразным вариантом выбора диапазонов рабочих длин
волн для многочастотных РСА является их различие по величине в
3...5 раз.
Основные направления развития авиационных РСА
Получение сверхвысокого разрешения.
Измерение рельефа местности.
Селекция объектов, движущихся с малой скоростью.
Создание многочастотных поляриметрических комплексов РСА.
136
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Модифицированный алгоритм
обнаружения сигнала, отраженного
от наземной движущееся цели,
для РСА с ФАР
Одной из задач, которая должна решаться РСА, является обнару-
жение наземных движущихся объектов (целей). Данные цели на
РЛИ, формируемом РСА, особенно важны при решении задач,
стоящих перед носителями ударного типа. Поскольку данные объ-
екты, как правило, являются малоразмерными, и должны наблю-
даться вне зависимости от оптической видимости, то для их обна-
ружения и селекции принципиально использование РСА. Наличие
движения цели снижает качество ее обнаружения с помощью РСА.
Ухудшение характеристик обнаружения обусловлено, в основном,
фоновой составляющей местности [21]. В тоже время, широкое ис-
пользование в бортовых РЛС антенных систем на базе (ФАР) по-
зволяет при решении задачи обнаружения и селекции наземных
движущихся целей использовать преимущества многоканальной
пространственной обработки. В этой связи рассмотрим вариант ал-
горитма обнаружения наземных движущихся целей как простран-
ственно-многоканального измерителя углового положения цели
данного типа для РСА с ФАР.
Сигналы цели и подстилающей поверхности складываются
аддитивно, вследствие чего действие флуктуирующего фона можно
рассматривать как аддитивную некоррелированную с сигналом от
цели помеху, а задачу обнаружения малоразмерных целей на фоне
подстилающей поверхности свести к задаче обнаружения флуктуи-
рующего сигнала цели на фоне аддитивного шума.
Траекторный сигнал РСА в т-м элементе ФАР [26]:
L
(0 = ^lG(Pl) еХР {-74 (0} еХР{-М> (А )} + «т (?) ’ <2-7)
7=1
Фт (Pi) = ~к (т - 9 A,sin А
Если в I -м разрешаемом элементе поверхности присутствует
цель, то модуль комплексного коэффициента переотражения ё1
распределен по закону Райса, в случае отсутствия цели - по релеев-
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
скому закону. Случайная фаза в обоих случаях имеет равномерное
распределение.
Как правило, оптимальная процедура обнаружения в радиоло-
кации сводится к формированию отношения правдоподобия [25],
что позволяет алгоритм обнаружения цели представить в виде
( Ffu/7 = 11 >
Z{U^) = F[M/Z = O]<Z?0’ (2‘8)
где /= 1 означает, что сигнал от цели присутствует в принимаемой
реализации (2.7); / = 0 - сигнал от цели в (2.7) отсутствует; F[.] -
функционал правдоподобия.
Принимая во внимание, что функционал правдоподобия ком-
плексного пространственно-временного белого шума имеет вид [8]
отношение правдоподобия для РСА с ФАР запишем в виде
где Re() - вычисление реальной части; * - комплексное сопряжение.
Второе слагаемое в показателе экспоненты числителя опреде-
ляет отношение (сигнал + фон местности)/шум, а в знаменателе
фон местности/шум. От наблюдения они не зависят, поэтому их
можно включить в пороговое значение. Учитывая, что
Тс/2
J ехр
~Тс/2
]2ки(с(/3' -/3^t dt = G
при i^l,
отношение правдоподобия (2.8) можно записать через условное отно-
шение правдоподобия и представить алгоритм обнаружения в виде
138
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
’ |^цф I ’ Рф | ’ ^цф ’ ^ф |
(2.10)
W4G(A)
где UZi (z) - сигнал на выходе при условии, что максимум ДНА на
прием формируется в направлении Д .
Вводя обозначения
(/)G($)exp[j$(/)]^
алгоритм (2.10) можно представить в виде
^цф^СО^ + ^ф)
о___________
l-^cos^+^J
vo
Для устранения влияния на процедуру обнаружения сопутст-
вующих случайных параметров е
ад
h.
цф^фЛфЛ проведем процедуру
усреднения (2.11) по данным переменным [25].
Первоначально проведем операцию усреднения числителя вы-
ражения. Для чего запишем:
139
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
где 70(-) ~ функция Бесселя нулевого порядка от мнимого аргу-
мента; ^ф=Л7^цф|; М- операция вычисления математического
ожидания.
Учитывая известные табличные интегралы [4]
и принимая во внимание 70 (х) = *70 ( jx), так как In (х) = j nJn ( jx),
получаем выражение для числителя в виде
С} ехр{[С2 -С3]1Г2},
глр с - • С - г _ £цф
Яцф+ЗПф 2^2(/)цф+2Г>ф) N*
Усредняя аналогично знаменатель выражения (2.11) с исполь-
зованием табличных интегралов (2.16) -(2.17) , получаем
ехр(с4Ж2)
где С4 =----у.
22V2
Принимая во внимание, что С\ не зависит от наблюдения, вне-
сем его в пороговое значение. Тогда алгоритм (2.11) примет вид
(2.14)
Учитывая монотонность отношения в (2.14), выполним опера-
цию логарифмирования данного выражения [331 и внесем констан-
ты Сг, Сз и С4 в пороговое значение 1п(Л'). Тогда
Z
дв
2
h.
do
(2.15)
140
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Доплеровское смещение частоты принимаемого сигнала являет-
ся случайной величиной, зависящей от возможной величины и уг-
лового положения цели Дц/, поэтому левая часть (2.15) есть условное
отношение правдоподобия при фиксированных и Дц/.
Аппроксимируя радиальную скорость цели и ее угловое положе-
ние независимыми случайными величинами + ... + L>,y
ГЦ ГЦ 11 ИЛ ГЦ1ШЛ
с вероятностью р ( ь>гц/) = р ( ц.ц = ,
/ = 1,/
и р(Ац/) = ~ l = соответственно, априорную плот-
ность вероятности и Дц/ можно представить в виде
Ррг (Чц ) ' А ’ ^(Чц Чш )’
I
Ррг (л)=X м( д - Л/) ’
а отношение правдоподобия получить путем усреднением условно-
го отношения правдоподобия:
Полученный алгоритм является многоканальным, содержа-
щим z-каналов по скорости и 7-каналов по углу. В каждом канале
формируется условное отношение правдоподобия. Число каналов
определяется выбранным диапазоном изменения скорости цели и
угловой разрешающей способности РСА. Каждый канал оканчива-
ется пороговым устройством. Такая система позволяет одновре-
менно обнаруживать отраженные сигналы от целей и приближенно
оценивать параметры данных целей по номерам каналов.
Реализация такого типа обнаружителя, имеет существенные технические труд-
ности. Одна из проблем заключается в необходимости формирования веерной
ДНА с максимумами в направлениях на геометрические центры разрешаемых
элементов поверхности.
141
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Проведем упрощение алгоритма обнаружения. Для этого
представим сигнал на выходе ФАР, входящий в (2.15), в виде
случаях практического применения
(2.17)
РСА Де
Тогда экспоненциальный множитель можно разложить в ряд
Маклорена относительно fl - До = О и ограничиться при этом ли-
нейным членом:
т т
~^']к(тп-l)d3fliexp ik^m-l)d3sinfli .
т
(2-18)
Первая сумма определяет суммарную диаграмму направлен-
ности с максимумом в направлении угла До, а вторая - разностную
ДНА в направлении Д. При этом алгоритм обнаружения (2.15)
можно записать как
Тс/2
j ^so(0G(A)exp[-M(z)Pz_
-7-J2
Гс/2
J 17A0(/)G(y9,)exp[j^(z)]^
-Гс/2
(2.19)
где С7Х0 (О и - сигналы суммарного и разностного каналов,
ориентированных максимумами на центр формируемого кадра.
Доплеровское смещение частоты можно аппроксимировать
дискретной случайной величиной
с веро-
ятностями р(/дг) = р(/д =/д,)> 1 = 1,7. Априорная плотность ве-
роятностью для доплеровского смещения частоты может быть
представлена в виде суммы
i
142
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Отношение правдоподобия, определяющее алгоритм обнару-
жения в данном случае, после усреднения будет иметь вид
(2.20)
Схема обнаружителя, соответствующая выражениям (2.19) и
(2.20), дана на рис. 2.26, который представляет собой обнаружи-
тель, построенный по схеме суммарно-разностной обработки.
Рисунок 2. 26
Рисунок 2.27
143
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Поскольку Р « 1, то при разложении ехр в (2.18) в ряд, вто-
рым слагаемым можно пренебречь и тогда получим алгоритм обна-
ружения
Tc/l >
й(0] = Х f ^zo(0G(A)exp[.M(z)Pz <h-
i -Tc/2
(2.21)
Алгоритм (2.21) представляет правило функционирования
пространственно-одноканального обнаружителя, схема которого
приведена на рис. 2.27 . Процесс обнаружения заключается в том,
что сигнал на квадратичном выходе каждого z-ro доплеровского
фильтра сравнивается с порогом.
Анализ показал, что пространственно-многоканальный обна-
ружитель, разработанный на основе модифицированного алгоритма
обнаружения, позволяет осуществлять обнаружение высококонтра-
стных медленно движущихся наземных целей на фоне подстилаю-
щей поверхности и имеет высокие потенциальные характеристики
за счет раздельной пространственной обработки сигнала цели и
сигнала, отраженного от местности и неподвижных объектов на
ней, с дальнейшей частотной фильтрацией. Однако следует учиты-
вать, что эффективность обнаружения зависит не только от отно-
шения сигнал/фон, но и от скорости движения цели.
Рассмотренные алгоритмы позволяют построить систему обработки РСА
в виде совместного обнаружителя и оценивателя местоположения на-
земных движущихся целей.
Отличительной особенностью алгоритмов является то, что в про-
цессе функционирования одновременно происходит оценка подсти-
лающей поверхности, делая такую систему обработки подстраиваемой
(адаптивной) под особенности наблюдаемой местности.
144
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Формировани
радиолокацией
‘.«'х . ’ Г • ,',и 1 ' jri-J*"'!. wMUk
С ИСПОЛЬЗОВ!
эксперимент!
___________3
цжных
: портретов
ограниченного набора
деаннйх.
Ранее отмечалось, что использование РЛ с синтезированием апер-
туры позволяет получать высокоинформативные РЛИ наблюдае-
мой поверхности и объектов на ней.
Применение широкозахватных РСА космического базирования с соответствую-
щими алгоритмами устранения неоднозначностей сигнала позволяет одновре-
менно реализовать широкую зону захвата (сотни километров) и высокое про-
странственное разрешение (единицы метров), позволяющее получить деталь-
ную информацию для распознавания класса (типа) надводных кораблей в
широком диапазоне водоизмещений.
При решении данной задачи необходимо учитывать влияние
морского волнения, которое приводит к качке и рысканью надвод-
ных кораблей и, как следствие, к искажению радиолокационных
портретов данных объектов, не возникающих при низком разреше-
нии РСА (более 200 м). Физика движения надводного корабля на
взволнованной морской поверхности рассмотрена в [24].
Искажения радиолокационного портрета надводных кораблей,
возникающие при радиолокационном мониторинге морской по-
верхности с помощью радиолокатора с синтезированной аперту-
рой, рассмотрены в [1, 16].
Процедуры, необходимые для реализации
системы распознавания объекта
(отнесение исследуемого объекта
к одному из взаимоисключающих классов) [28]
• Формирование алфавита классов по распознаваемым объектам.
• Разработка словаря признаков.
• Синтез алгоритма распознавания, позволяющий относить кон-
трольную выборку наблюдений к одному из взаимоисклю-
чающих классов или групп классов - при недостаточном объе-
ме имеющейся информации, априорной и полученной во время
сеанса съемки.
• Процесс обучения системы.
Обучение является неотъемлемой составной частью процесса
распознавания и имеет своей целью формирование эталонных опи-
145
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
саний классов, форма которых определяется способом их исполь-
зования в решающих правилах [28]. Использование различных ти-
пов решающих правил при проведении процедуры радиолокацион-
ного распознавания достаточно полно показаны в [30].
Специфика задачи распознавания надводных кораблей обусловлена тем, что
реестр плавсредств может превышать тысячи единиц, а условия наблюдения
изменчивы по разрешающей способности РСА, ракурсам и углам падения, база
данных системы распознавания надводных кораблей должна постоянно обнов-
ляться и дополняться. Функционирование системы распознавания должно со-
держать все перечисленные выше компоненты (с разделением на бортовую
аппаратуру и архивы данных).
Для анализа системы распознавания используют широко из-
вестные методы математического моделирования. Определяющим
фактором является наличие базы данных с цифровыми портретами
надводных кораблей известного класса. Например, использование
экспериментальных данных по надводной обстановке и морской по-
верхности в контролируемых условиях волнения, полученных в ходе
эксплуатации РСА 5-диапазона волн «Меч-КУ» КА «Алмаз-1» [3, 5].
Данные представляются в виде комплексных РЛИ (КРЛИ), т.е. РЛИ,
содержащих амплитудную и фазовую составляющие [1].
При дальнейшем уточнении необходимо основываться на ис-
пользовании статистической теории распознавания образов с уче-
том изменчивости радиолокационных портретов надводных кораб-
лей в процессе их радиолокационного наблюдения [1, 16]. Такой
подход позволяет создать модели РЛИ надводных кораблей с уче-
том характеристик РСА (разрешающая способность) и искажений
РЛИ надводных кораблей вызванного морским волнением.
Основополагающим моментом при создании таких моделей является наличие
специально разработанной методики [2, 18], позволяющей проводить модели-
рование РЛИ НК, находящихся на взволнованной морской поверхности, с уче-
том искажений, вызванных условиями наблюдения (морское волнение, ракурс,
разрешающая способность).
В этой связи рассмотрим формирование базы РЛИ надводных
кораблей с учетом изменчивости их РЛИ при съемке широко-
захватными РСА космического базирования.
Для комплексного решения задачи распознавания надводных кораблей на
взволнованной морской поверхности принципиальное значение приобретает
наличие широкого ряда исходных данных, а именно: радиолокационных изо-
бражений, полученных при вариации различных условий наблюдения. По-
скольку получение экспериментальных данных в виде реальных радиолокаци-
онных изображений одного и того же типа надводных кораблей для многооб-
разных условий наблюдения по многим причинам представляется
затруднительным, целесообразно использовать альтернативный способ - ком-
пьютерное моделирование РЛИ НК.
146
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Оно проводится с использованием ограниченного набора экс-
периментальных данных (РЛИ надводных кораблей на стоянках) и
дополнительной априорной информации (класс надводных кораб-
лей, параметры съемки и т.д.). Такое компьютерное моделирование
позволяет получить РЛИ надводных кораблей различных классов
для РСА с разной разрешающей способностью, а также учесть
влияние факторов искажающих РЛИ надводных кораблей таких,
как морское волнение [1,2, 18].
Наиболее адекватным способом получения РЛИ надводных кораблей является
моделирование с использованием экспериментальных данных как архивных,
так и получаемых от радиолокационных датчиков космического и авиационно-
го базирования. Эти данные должны быть представлены в виде комплексных
РЛ изображений в разных диапазонах волн с набором разных ракурсов и углов
падения, которые набираются по имеющимся радиоголограммам, полученным
в предыдущие годы.
Для примера на рис. 2.28 представлены РЛИ ВМБ Норфолк
(рис. 2.28,6?) и РЛИ ВМБ г. Севастополь (рис. 2.28,6), полученные
по архивным радиоголограммам РСА «Меч-КУ» КА «Алмаз-1» [3,
19] при пространственном разрешении порядка 9 м (5-диапазон).
Рисунок 2.28
Сопоставление формируемых РЛИ надводных кораблей их классам можно про-
водить с использованием соответствующей сопутствующей оптической съемки,
а в случае с надводными кораблями других стран и с использованием сопутст-
вующей информации оптических спутников.
В частности, на рис. 2.29 приведено РЛИ ВМБ Норфолк
ВМС США, полученное РСА «Меч-КУ» КА «Алмаз-1» (виток
2365, 26.08.1991) (рис. 2.29,а) и оптический снимок того же участка
местности (источник Googlmap) (рис. 2.29,6).
147
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Используя полученные РЛИ надводных кораблей на стоянках
в составе общего изображения, можно выполнить формирование
набора интересующих РЛИ надводных кораблей и сопоставление
радиолокационных изображений надводных кораблей их классам.
Для формирования РЛИ надводных кораблей с учетом разрешаю-
щей способности РСА, а также с учетом влияния факторов, иска-
жающих РЛИ надводных кораблей, таких как качка и рысканье
надводных кораблей на морском волнении, применяется проиедура
скелетизации [1,2, 18]. Она использует особенность отражения ра-
диоволн сантиметрового и дециметрового диапазонов от объектов
сложной формы - локальный характер отражения радиоволн.
Рисунок 2.29
Локальность отражения проявляется в том, что при любом ракурсе наблюде-
ния объекта всегда будут присутствовать сигналы от нескольких сильно отра-
жающих конструкций или устройств на фоне слабо отражающей части. В слу-
чае с НК, локальными участками отражения волн служат окрестности точек
зеркального отражения, ребра и угловые конструкции, образованные верти-
кальными стенками надстроек и палубой корабля [31, 32].
Сильно отражающие элементы рассматриваются как локаль-
ные источники отраженного поля (доминантные отражатели). Та-
кие локальные источники отражения в зависимости от разрешаю-
щей способности РСА могут давать раздельные, близкие к им-
пульсному отклику РСА, отметки или результат их интерференции
148
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
в элементе разрешения РСА. В результате моделирования по каж-
дому комплексному радиолокационному изображению (КРЛИ)
надводных кораблей, формируются комплексные точечные модели
надводных кораблей (КТМ НК), представляющие собой массивы
координат центров рассеивания отраженного сигнала для каждого
надводного корабля [1,2, 18].
На рис. 2.30 приведены яркостный (рис. 2.30,я) и рельефный
(рис. 2.30,6) радиолокационные портреты морского судна (предпо-
ложительно, порожний сухогруз). Кроме нескольких доминантных
отражателей на корме имеем близкую к точечным отражателям
разреженную структуру по кромке палубы.
Рисунок 2.30
Анализируя исходное КРЛИ НК по отклонению отметок по на-
клонной дальности от продольной оси, можно определить геомет-
рию распределения ЭПР точечных отражателей с учетом высоты (3D
КТМ) надводного корабля.
Для ее уточнения можно использовать чертежи или оптические
снимки надводного корабля как, например, показано на рис. 2.31 и
2.32, а также интерферометрическую обработку РЛИ, снятых па раз-
ных витках космического носителя РСА. В частности, на рис. 2.31
приведено изображение ТАВРК «Адмирал Кузнецов», полученное
после совмещения локальных источников отражения, выявленных
после обработки РЛИ, с его оптическим изображением.
Пример получения эталонных РЛИ НК для РСА с различной
разрешающей способностью приведен на рис. 2.32, где представле-
ны эталонные РЛИ НК с разрешающей способностью по азимуту 5,
15 и 35 м, которые получены по исходным РЛИ НК при линейном
разрешении по азимуту 1,5 м (С-диапазон).
149
РЛС АВИАЦИОИИО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 2.31
Рисунок 2.32
Трехмерная КТМ надводных кораблей используется при моделировании их ра-
диолокационных изображений с учетом искажений, вызванных качкой (рис.
2.33). Они также применяются в качестве обучающей выборки при отработке
алгоритма распознавания надводных кораблей, находящихся на взволнован-
ной морской поверхности.
Для получения модели РЛИ надводных кораблей, соответст-
вующей параметрам конкретной РСА, выполняют свертку КТМ с
опорной функцией /?хг, соответствующей импульсной реакции РСА.
150
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Радиолокационная модель надводных кораблей на взволнованной
морской поверхности представляет собой совокупность локальных
источников, изменяющих свое положение в пространстве согласно
законам качки и рысканья. Случайные изменения ориентации над-
водных кораблей (качка, рысканье) за время накопления отражен-
ных сигналов приводят к возникновению фазовых флуктуаций на
синтезированной апертуре, что, в свою очередь, приводит к иска-
жению радиолокационных изображений надводных кораблей. Со-
гласно принципам формирования синтезированной апертуры, мак-
симальные искажения радиолокационных портретов надводных
кораблей будут наблюдаться при наибольших путях перемещения
их отражателей в плоскости, перпендикулярной плоскости движе-
ния космического аппарата, что соответствует максимальному углу
наклонения судна в процессе морского волнения. Параметры для
моделирования выбираются с учетом задач, решаемых РЛС.
На рис. 2.33 показана изменчивость РЛИ надводных кораблей
для БПК проекта 1134-6 (а-ё) и МПК проекта 1124-6 (ж-и) при
изменении разрешения РСА -5м (ряд 7), 15 м (ряд 2) и 35 м (ряд
5), ракурса наблюдения 283° (а-ё), 315° (г-е) и 270е (ж-и) при от-
сутствии качки (а, г, ж) и наличии боковой качки 10° на сторону (6
и 6) и 15° на сторону (# и е), а также при совместном воздействии
килевой качки и рысканья ±7°(з, и).
BSD НИМ
BBBBDH
DDDBBBQDn
ММ МММ UB о
а) б) в) г) д) е) ж) з) и)
Рисунок 2.33
151
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНО! О ПРОСТРАНСТВА
При ракурсах, близких к бортовым, боковая качка приводит не
к изменению линейного размера РЛИ надводных кораблей, а к пере-
мещению отметок от доминантных отражателей. Более заметны ис-
кажения РЛИ, вызванные боковой качкой при ракурсах надводных
кораблей, близких к 45, 135, 225 или 315°. Килевая качка и рысканье
при бортовых ракурсах приводят к деформации отметки от продоль-
ного размера надводного корабля - ее сжатию (до 30% от истинного
размера) или растяжению (в 1,7 раза). Ухудшение разрешения РСА
до 35 м приводит к резкой потере информации о характере РЛИ над-
водного корабля. При наблюдении надводного корабля в нос - корма
(на рисунке не приведена) искажения РЛИ значительно меньше -
бортовая качка практически не проявляется, а килевая и рысканье
приводят к повороту образа надводного корабля до ±5°.
Использование радиолокационной съемки надводных кораблей, нахо-
дящихся на рейде или на стоянках в ВМБ, полученной РСА высокого
разрешения, позволяет получить РЛИ надводного корабля, пригодные
для использования их при формировании банка эталонных изображе-
ния надводного корабля.
Для формирования банка эталонных изображений надводного ко-
рабля целесообразно «препарировать» материалы конкретных радио-
локационных съемок надводной обстановки и представить их в виде на-
бора точечных отражателей с использованием процедуры скелетизации.
Преимущество такого подхода состоит в возможности моделирова-
ния ожидаемых РЛИ надводного корабля для конкретных условий на-
блюдения и параметров РСА.
Для формирования банка эталонов, используемых в составе дейст-
вующей радиолокационной аппаратуры контроля надводной обстанов-
ки космического базирования, необходимо расширение исходных дан-
ных с целью набора статистики и уточнения изменчивости образа над-
водного корабля от ракурса.
Режим получения комплексных РЛИ надводного корабля по ло-
кальным районам земной поверхности (стоянки надводного корабля,
маршруты перехода и др.) с возможно большей детальностью (5...10 м)
должен быть предусмотрен при проектировании перспективных РСА.
Это же касается и возможности наращивания и модификации банка
классификационных признаков в процессе эксплуатации системы.
Для целей моделирования возможно также использование радио-
локационных снимков высокого разрешения (~6 м), полученных, на-
пример, с помощью TerraSAR-X [7, 23, 29]. При этом следует заказывать
КРЛИ маршрутного (или прожекторного) режимов. Поскольку АРЛИ,
полученные путем некогерентного накопления исходных АРЛИ про-
жекторного режима с разрешением порядка 1,5 м, для применения
152
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
рассмотренной ранее методики формирования радиолокационных
портретов надводного корабля с произвольной разрешающей способ-
ностью непригодны.
Объёмы информации, поступающей от средств дистанционного
зондирования Земли, растут стремительно. Для цифровой обработ-
ки поступающей радиолокационной информации необходимо при-
влечение больших вычислительных мощностей. Наращивание их
экстенсивным путем - построение многопроцессорных или кла-
стерных систем - накладывает дополнительные требования на
межпроцессорные и межкомпьютерные каналы связи, а также про-
граммное обеспечение. Это, в свою очередь, существенно увеличи-
вает стоимость таких систем.
Остро встает вопрос о более эффективном использовании доступ-
ных вычислительных ресурсов. Эту цель можно достичь посредст-
вом изменения алгоритмов вычислений с учетом используемой вы-
числительной архитектуры. В настоящее время увеличение вычис-
лительной мощности достигается в основном за счет увеличения
степени параллельности или с помощью центрального процессора
или с помощью процессора видеокарты. Видеокарта обеспечивает
большее количество параллельно работающих элементарных вы-
числителей и большую скорость работы динамической памяти, од-
нако при этом проигрывает центральному процессору за счет про-
стоты самих вычислителей, меньшей тактовой частоты и отсутст-
вия механизма кэширования оперативной памяти. А центральный
процессор обеспечивает параллельность за счет многоядерности и
использования SIMD-инструкций.
В этой связи рассмотрим пример оптимизации вычислений
применительно к центральному процессору общего назначения про-
изводства Intel архитектуры Sandy Bridge [14].
Большинство операций, возникающих при обработке цифро-
вых радиоголограмм (ЦРГ), может быть представлено в виде по-
следовательных вычислений по строкам или столбцам голограммы
153
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
во временной или частотной области [21]. При этом выполнение
последовательной обработки данных может быть оптимизировано
только за счет оптимизации элементарного вычисления (при усло-
вии, если оно занимает больше времени, чем обращение к динами-
ческому ОЗУ) или объединения нескольких операций в одну. Вы-
полнение последовательной обработки массива по строкам во вре-
менной области обеспечивает максимальное использование про-
пускной способности памяти и механизма кэширования. Для реа-
лизации последовательной обработки радиоголограммы по столб-
цам и/или обработки в частотной области, требуется выполнение
операций транспонирования матрицы и преобразования Фурье, оп-
тимизация которых рассматривается в данной работе.
При транспонировании матрицы возникает необходимость обращения к дан-
ным не только последовательно (по строке), но и с определенным шагом (по
столбцу), что приводит к значительным потерям времени, вызванным латент-
ностью динамического ОЗУ. При этом одним из основных показателей с точки
зрения оптимизации является максимальный размер элемента, сохраняющего
целостность при выполнении транспонирования. Тогда для алгоритма, выпол-
няющего транспонирование в одной области памяти (in-place), размер блока
памяти, к которому будет происходить обращение, равен размеру связного
элемента, а транспонирование в двух областях памяти можно оптимизировать
путем использования кэша до блоков памяти размера, равного среднему гео-
метрическому между размером кэша и размером связного элемента.
В свою очередь, алгоритм быстрого преобразования Фурье
требует множества проходов по всему массиву данных [14] в усло-
виях достаточно больших длин исходного массива- превышающих
размер кэш-памяти, что приводит к множеству дополнительных
обращений к динамическому ОЗУ. Попытки увеличить размер эле-
ментарного преобразования для снижения количества проходов
обусловливают необходимость обращаться к большому количеству
отдельных участков памяти, что, в свою очередь, вызывает про-
блемы, обусловленные ограниченной ассоциативностью кэш-
памяти разных уровней (включая кэш память TLB).
Вследствие этого перестают работать механизмы предвыбор-
ки данных для процессора и нарушается последовательность обра-
щения к памяти. Возникают дополнительные потери в связи с ла-
тентностью памяти. В результате возникает потребность в оптими-
зации алгоритмов транспонирования и БПФ с учетом особенностей
архитектуры современных компьютеров.
Для решения поставленной задачи воспользуемся стандартным
компьютером, оснащенным процессором IntelCR Соте1м i5-2500
(микро-архитектура Sandy Bridge, рис. 234). Данный процессор име-
ет 4 ядра, работающих на частоте 3,3 ГГц (при отключенной техно-
154
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
логии Turbo Boost), кэш-память 3-го уровня объемом 6 МБ в 12-ти
банках, общую для всех ядер, кэш-память 2-го уровня 256 кБ на ка-
ждое ядро и кэш-память 1-го уровня 32 кБ на каждое ядро [14].
/1 SMf<*
I
ДУХ rF Ш 4 fevx FF AC j
нгр.ваам i________________-
Sfjhedtiifcr
а I '
I ;
t2 Dau c^he mtcj
Load
. Ute »
£lore Addres* Store Addr<s4‘
Memory Control
4* ftyhr» «
32k U Data Cache
w
Рисунок 2.34
Каждое ядро процессора имеет 6 «портов» конвейеров выпол-
нения инструкций, позволяющих каждый такт ставить в очередь по
одной SIMD-инструкции умножения, сложения и перестановки, а
каждые 2 такта - по две инструкции, требующие загрузку данных
из кэша 1-го уровня и по одной, сохраняющей данные. Благодаря
достаточно гибкому механизму внеочередного исполнения инст-
рукций, достаточно обеспечивать доставку данных в кэш 1-го
уровня и соблюдать баланс инструкций для разных портов для дос-
тижения оптимальной скорости их выполнения.
Компьютер содержит четыре модуля памяти DDR3-1333, ра-
ботающих в двухканальном режиме. При этом предельная пропу-
скная способность памяти, без учета латентности и избыточности
кодирования, составляет 19,87 ГБА в одну сторону (на чтение или
запись). Архитектура процессоров х86 обеспечивает «страничный»
доступ к ОЗУ, размер страницы памяти в используемой системе со-
ставляет 4 кБ. Все механизмы предвыборки данных из ОЗУ рабо-
тают в пределах одной страницы памяти.
При этом использовались операционная система Microsoft
Windows 7^64, среда разработки Microsoft Visual Studio 2005 для
отладки и тестов скорости, а также компилятор Flat Assembler
v. 1.69.35 для разработки DLL-библиотеки с основными функциями.
155
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Алгоритм БПФ
Для эффективного использования быстродействия вычислителей
ядра и снижения нагрузки на шину оперативной памяти был разра-
ботан соответствующий алгоритм (рис. 2.35) для выполнения бы-
строго преобразования Фурье. В его основе лежат два принципа:
предопределенное использование кэш-памяти и одновременная об-
работка нескольких строк.
сору 512 кВ to LLC
(. start )
2k-point FFT
copy 16 кВ to
1-st level cache
256-point FFT
copy 16 кВ to LLC
copy 512 кВ
(2*64*64*641 to LLC
in-cache
bit reverse shuffle
with multipy
prefetch 2^ кВ
( foi j~l..2l‘~<>
copy 4 кВ to
1 -st level cache
64 point FFI
____________ fc . .M_И—> , ,
copy 512 кВ to DR AM
copy 4 кВ to LLC
copy 512 kF. to DRAM
Рисунок 2.35
Предопределенное использование кэш-памяти
Основная цель данного принципа - обеспечить расположение всех
данных, необходимых для выполнения 4-, 8-, 16-, 32-, 64-, 128- или
256-точечного преобразования Фурье в области кэша данных 1-го
уровня. При этом до 16 кБ кэш-памяти отводится непосредственно
под данные, а в оставшейся части располагаются коэффициенты
156
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Фурье, базовые и комплексно умноженные на поворотный коэф-
фициент текущей группы.
Для последней итерации, при которой данные изначально ле-
жат в памяти последовательно, перемещение данных в кэш-память
осуществляется специальными командами процессора PREFETCH.
Для первых итераций перемещение в кэш-память и обратно осуще-
ствляется копированием между основной областью данных и выде-
ленной областью памяти соответствующего размера при помощи
специальных команд процессора, препятствующих помещению в
кэш-память основной области данных [14].
Такое копирование необходимо потому, что процессор не может разместить в
кэше все копируемые данные основной области памяти из-за ассоциативности
кэша. В результате копирования множества несвязных областей памяти в одну
связную проблема ассоциативности решается.
При размере ячейки, отводимой на один элемент строки, рав-
ный 64 байт, кэш-память l-ro уровня позволяет расположить
28 элементов, оставив место для коэффициентов Фурье, а кэш-
память 3-го уровня (1,5 МБ на ядро) - 214 элементов. Однако опыт-
ным путем было установлено, что при использовании для разме-
щения данных более 1-го банка кэша на ядро производительность
снижается, поэтому использование 1 Мб кэша сохранено только
для строк длины 214, тогда как для всех остальных в области кэша
3-го уровня располагается только 2 элементов.
В целях снижения расходов на латентность динамического
ОЗУ на первом этапе кэш 3-го уровня сначала заполняется блоками
данных по 2 кБ (256 блоков), содержащих по 32 последовательных
элемента строки, после чего для каждого из 32 элементов осущест-
вляется копирование по одному элементу каждого блока из области
кэша 3-го уровня в область кэша l-ro уровня. Таким образом, уда-
ется обеспечить выполнение всех итераций БПФ (не считая двоич-
но-инверсной перестановки) для массивов длины 2k (15 < к < 21) с
двумя фактическими обращениями к динамическому ОЗУ. При
этом обмен данными между ОЗУ и кэш-памятью осуществляется
блоками не менее 2 кБ. Для массивов с 22 < к < 29 потребуется три
фактических обращения при сохранении основных принципов ал-
горитма, однако реализация программы для таких длин не рассмат-
ривалась.
Алгоритм выполнения двоично-инверсной перестановки раз-
работан также на основе этого принципа. Он обеспечивает пере-
становку, используя 0,5 МБ кэш-памяти, с одним фактическим об-
ращением к ОЗУ, оперируя блоками по 4 кБ. Более подробно дан-
ный алгоритм описан ниже.
157
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Одновременная обработка нескольких строк
При обработке радиоголограмм используются двумерные массивы
данных. Это позволяет ускорять общий процесс обработки не толь-
ко путем снижения временных затрат на одну операцию, но и обес-
печением одновременного выполнения одной и той же операции
для нескольких строк. В целях разгрузки конвейера, выполняющего
перестановки элементов, а также для увеличения размера мини-
мального неделимого элемента при вычислениях, была выбрана
схема представления данных в памяти, приведенная на рис. 2.36.
Рисунок 2.36
При использовании этой схемы данные в памяти сгруппиро-
ваны по 64 байт (8 комплексных элементов одинарной точности
или 4 комплексных элемента двойной точности). Каждая группа
представляет собой элементы разных строк, находяшиеся на одной
позиции в строке. Первые 32 байт содержат действительную часть,
вторые - мнимую. Для лучшей скорости выполнения начало мас-
сива должно быть выравнено по границе страницы памяти (адрес
должен быть кратен 4096). Такая организация данных позволяет
обеспечить одновременное выполнение БПФ для 8-ми строк оди-
нарной точности или 4-х строк двойной точности. Все SIMD-
инструкции AVX оперируют с 32-байтными операндами, которые
содержат действительную или мнимую часть. А целый элемент со-
ответствует размеру строки кэша, т.е. минимальному обьему дан-
ных, который участвует в обмене между кэшами разных уровней.
Дополнительно обработка нескольких строк сразу позволяет
сэкономить на расчетеусчитывании коэффициентов Фурье, так как
они совпадают для всех строк. Коды программ для двойной и оди-
нарной точности отличаются только непосредственно наименова-
нием ассемблерных SIMD команд, а все операнды сохраняются,
время выполнения остаётся неизменным, изменяется только коли-
чество одновременно обрабатываемых строк.
158
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Такое представление данных увеличивает размер максимального элемента, со-
храняющего связность при транспонировании, до 256 байт при использовании
двойной точности (подматрица 4x4) и до 512 байт при использовании одинар-
ной точности (подматрица 8x8), что благоприятно влияет на возможность оп-
тимизации операции транспонирования.
В разработанном программном обеспечении минимальная
операция, выполняющая 4-точечное преобразование Фурье, содер-
жит 60 инструкций, в том числе:
• 12 инструкций умножения (portO) для выполнения комплекс-
ного умножения;
• 22 инструкции сложения/вычитания (portl), в числе которых
16 для выполнения комплексного сложения/вычитания и 6 для
выполнения комплексного умножения;
• 10 инструкций перестановок (port2) для копирования коэффи-
циентов Фурье (в их числе 4 инструкции с чтением операнда);
• 12 инструкций с чтением операнда (port3, port4, по 2 такта), в
том числе 8 для чтения исходных данных и 4 для чтения и ко-
пирования коэффициентов Фурье;
• 8 инструкций записи (port5, по 2 такта) для сохранения ре-
зультата.
В ходе испытаний было выяснено, что в условиях заведомо достоверного пред-
сказания переходов и предварительно декодированных инструкций выполне-
ние данной операции занимает у ядра процессора чуть менее 25 тактов кон-
вейеров, а в более реальных условиях (выполнение 256-точечного преобразо-
вания путем двух циклов, вызывающих сброс конвейера) одна такая операция
занимает чуть менее 27 тактов при условии нахождения всех исходных данных
в кэше 1-го уровня. Это говорит об удачной сбалансированности команд в дан-
ном вычислении - абсолютный минимум определяется количеством команд
сложения - 22 такта [34]. При этом значительно уменьшить количество сложе-
ний путем увеличения размера минимального преобразования не удастся.
Для использования всех ядер процессора используется допол-
нительное увеличение количества одновременно обрабатываемых
строк. Таким образом, обеспечивается обработка 16 строк двойной
точности или 32 строк одинарной точности одновременно. Синхро-
низация потоков не производилась. Поскольку алгоритм условно
разделен на периоды копирования данных и периоды вычисления,
использование нескольких ядер позволяет одним ядрам заниматься
вычислением в то время, когда другие заняты копированием данных.
Двоично-инверсная перестановка
Максимальный элемент, сохраняющий целостность при данной
операции, составляет 64 байт - один элемент нескольких строк.
Для обеспечения связного обращения к памяти блоками по 4 кБ в
159
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
процессе двоично-инверсной перестановки основной цикл реализу-
ется по центральным битам номера элемента. Копирование произ-
водится только в том случае, если исходное значение центральных
битов лексикографически больше или равно инверсному значению
(при равенстве копирование однонаправленное, иначе двунаправ-
ленное). На каждой итерации основного цикла копируются ячейки
со всеми возможными значениями 6-ти младших и 6-ти старших
битов номера элемента. С учетом необходимости двунаправленно-
го копирования, это 64x64x2 элементов по 64 байт, или 512 кБ, что
вполне вмещается в область кэш-памяти 3-го уровня. При этом
обеспечивается обмен между двумя группами по 64 блока памяти
размером 4 кБ каждый.
В данной реализации процедуры двунаправленного копирова-
ния 6 бит адреса инвертируются при операции чтения из ОЗУ в
кэш, а оставшиеся 6 бит - при операции записи.
Цель этой реализации состоит в том, чтобы обеспечить последовательное обраще-
ние к памяти в пределах одной страницы и не перенагружать внутренний цикл
расчетами адреса (все расчеты адреса проводятся только в среднем цикле).
Порядок пересортировки битов адреса представлен на рис. 2.37.
При этом процедура копирования в другом направлении выполня-
ется абсолютно идентично, т.е. меняются адреса источника и при-
емника, а также старший (18-й) бит адреса области кэш-памяти.
Дополнительно в эту же функцию вставлена операция умножения
результата на константу, используемая при обратном БПФ.
Float
Source
String
number
Read Cycle
0
1
2
3
4
5
6
7
Position
Memoiy Page
Main
Cycle
Lvi 3 Cache
О 1 2 3 4 5 I
Memory Page
Element
0 1
Destination
Multiply
Рисунок 2.37
160
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Анализ результатов
Из описанных результатов следует, что при работе на 4-ядерном
процессоре в 4 потока удатось достичь одновременную обработку
16 строк двойной точности или 32 строки одинарной точности со
скоростью более 2,2 ГБ/с. Следует отметить, что по результатам
собственного теста библиотеки FFTW на той же архитектуре была
показана скорость 1,6 ГБ/с для чисел с двойной точностью и
1,3 ГБ/с для чисел с одинарной точностью. На рис. 2.38 приведена
зависимость скорости вычисления БПФ для строк длиной 221 эле-
ментов от числа вычислительных потоков.
Полученная скорость, с учетом трех обращений к ОЗУ на чте-
ние и запись, составляет 68% от теоретического максимума пропу-
скной способности памяти и 78% от реально достигаемого значе-
ния при тестах на последовательное копирование. Оставшиеся по-
тери можно отнести на счет излишней латентности ОЗУ,
вызываемой необходимостью переключения на другие области па-
мяти и считывания из ОЗУ дескрипторов страниц (оценочно по-
рядка 10%), а также неудачным наложением потоков друг на друга,
когда 3 и более ядер одновременно находятся в стадии вычислений
или копирования между кэш-памятью различных уровней.
Достигнутое преимущество проявляется особенно ярко только при больших
значениях длины строки, при этом являющихся степенью 2. Это обусловлено
тем, что в данном алгоритме требуются 3 обращения к оперативной памяти для
длины от 215 до 221, в то время как количество обращений к ОЗУ, необходимых
для библиотеки FFTW, постепенно сокращается, вплоть до одного при длине
строки 217.
Возможность обработки строки с большей длиной при одном
обращении к памяти достигается благодаря тому, что FFTW опери-
рует с одной строкой, а не с группой, что позволяет целиком по-
местить в кэш-память строку большей длины. Теоретически пред-
ложенный алгоритм допускает возможность адаптации под обра-
161
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ботку одиночных строк, но такой способ расположения данных за-
труднит транспонирование, поэтому в данной работе не рассматри-
вался. Другим недостатком по сравнению с библиотекой FFTW яв-
ляется отсутствие реализации элементарных преобразований для
длин строки, кратных 3 или 5. Это может вызвать необходимость
выделения дополнительной памяти и ее использование в вычисле-
ниях при выполнении процедуры свертки.
В представленных материалах проведена оптимизация наиболее ресур-
созатратной операции - вычисления БПФ.
Установлено, что основным ограничивающим фактором при вы-
числении БПФ при использовании центрального процессора общего на-
значения является пропускная способность оперативной памяти.
Количество обращений к ОЗУ было минимизировано без значи-
тельных потерь на латентность памяти и скорость выполнения непо-
средственных вычислений.
В процессе исследования архитектуры определены ее достоинства
и узкие места, что позволяет предварительно оценивать скорость вы-
полнения тех или иных вычислений с приемлемой точностью до реали-
зации на компьютере.
Разработка и особенности использования
активного транспондера
для наземных и летных испытаний.
калибровки и валидации
космических РСА
Системный подход к разработке сложных радиотехнических ком-
плексов обусловил необходимость создания аппаратно-програм-
мных средств и универсальных методик, которые были бы приме-
нимы на всех этапах жизненного цикла РСА (при лабораторных
испытаниях макета, наземной отработке радиолокатора, летных
испытаниях и валидации), а также требует проверки и сравнения
результатов, получаемых на различных эгапах испытаний, на соот-
ветствие единому системному критерию [15].
В качестве такого аппаратно-программного средства предла-
гается активный транспондер, который представляет собой уст-
ройство для преобразования зондирующих сигналов РСА в имити-
рованные отражения данных сигналов от наземных обьектов и уча-
162
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
стков земной поверхности с заданными характеристиками обрат-
ного рассеяния, составляющих фоно-целевую обстановку требуе-
мой конфигурации, с учетом закона движения носителя (космичес-
кого или летательного аппарата) и параметров режима съемки.
Функцией активного транспондера как испытательного и калибровочного сред-
ства является формирование требуемых входных воздействий, подаваемых на
РСА, для измерения его сквозных характеристик. Входным воздействием в
данном случае является закон преобразования зондирующего сигнала в отра-
женный сигнал.
Характеристики РСА связаны с качеством радиолокационного
изображения, которое строится в соответствии со снимаемым объ-
ектом как полем коэффициента обратного рассеяния. К сквозным
характеристикам относятся, в первую очередь, пространственная
разрешающая способность, радиометрические характеристики
(разрешение, чувствительность, динамический диапазон) [21]. Для
проверки тех или иных характеристик РСА тестовый объект дол-
жен обладать теми свойствами, по которым проводится сравнение
полученного РЛИ с видом объекта съемки. Аппаратно-програм-
мные средства активного транспондера могут быть использованы
для имитации тестовых обьектов с необходимыми характеристика-
ми в случаях, когда трудно найти такие объекты в природе, по-
строить искусственно, а также провести калибровку имеющихся
природных радиомишеней с необходимой точностью [10].
Имеется ряд задач, связанных с летными испытаниями и внешней калибровкой
РСА, решение которых с помощью традиционных пассивных отражателей или
естественных целей затруднено или невозможно, однако достигается средст-
вами активного транспондера.
Задачи, связанные с летными испытаниями
Создание отражателя с большой ЭПР и равномерной диаграм-
мой рассеяния в широком диапазоне углов при небольших
собственных размерах, что необходимо, например для отра-
ботки бистатических РСА.
Селекция и формирование сигналов с требуемой поляризаци-
ей, в том числе с поляризацией возвращенной волны, отли-
чающейся от падающей.
• Регулировка имитируемой ЭПР.
• Имитация сложных целей.
Таким образом, активный транспондер является важным ин-
струментом для решения задач наземной отрабо тки и летных испы-
таний, а также калибровки и валидации.
163
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Варианты аппаратно-программной реализации
активного транспондера
Предполагается поэтапная (с усложнением схемотехнической
структуры и расширением функциональных возможностей)
аппаратная реализация активного транспондера.
Вариант 1. Активный транспондер с цифровой линией за-
держки, имеющий широконаправленную антенну, стабильный ка-
либрованный коэффициент усиления, достаточный для имитации-
точечной цели с большой ЭПР (70 дБ-м2 и более). Такой вариант
используется для измерения пространственного разрешения и ра-
диометрической калибровки РСА по точечной цели, а также поля-
риметрических характеристик. Одна из основных проблем аппарат-
ной реализации активного транспондера - необходимость точной
калибровки антенного и СВЧ-тракта для поддержания стабильного и
калиброванного (до 0,1 дБ) значения имитируемой ЭПР.
Вариант 2. Активный транспондер с цифровым сигнальным
процессором (ЦСП), позволяющий имитировать предварительно
сформированную модель произвольной фоно-целевой обстановки
без режима реального времени. Активный транспондер выполняет
запись зондирующего сигнала от РСА во время сеанса тестовой
съемки, преобразование записанного зондирующего сигнала в ими-
тированный отраженный сигнал в соответствии с заранее постро-
енной моделью фоно-целевой обстановки, режима съемки и закона
движения носителя, и воспроизведение имитируемого отраженного
сигнала с синхронизацией зондирующего сигнала во время сле-
дующего сеанса тестовой съемки с такими же параметрами.
Это позволяет выполнить подготовку данных имитируемого
отраженного сигнала для сложных режимов съемки, связанную с
большими объемами вычислений, при наличии ограниченных вы-
числительных средств, однако требует применения специальных
схемотехнических решений для обеспечения уточненной синхро-
низации от зондирующего сигнала и коррекции начальной фазы.
Разброс задержек запуска воспроизведения имитированного отраженного им-
пульса относительно приема зондирующего для всех импульсов в сеансе дол-
жен соответствовать флуктуации их начальной фазы на несущей частоте не
более 1 °, что на 2...3 порядка меньше периода дискретизации АЦП/ЦАП.
Возможность имитации произвольной ФЦО позволяет форми-
ровать испытательные воздействия для измерения радиометриче-
ских характеристик, соответствующих съемке поверхностно-
распределенных целей, а также для проверки функции вторичной
обработки РЛИ бортовыми средствами. Дополнительной возмож-
ностью такого активного транспондера является его применение
164
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
уже на этапе наземной отработки РСА (как комплекса в полном со-
ставе, так и его фрагмента или макета).
Вариант 3. Активный транспондер с цифровым сигнальным
процессором (ЦСП), позволяющий имитировать предварительно
сформированную модель произвольной ФЦО в режиме реального
времени.
Функции активного транспондера
в данной конфигурации
Запись ЗС от РСА во время сеанса тестовой съемки.
Преобразование каждого импульса записанного зондирующего
сигнала в импульс имитированного ОС в соответствии с зара-
нее построенной моделью ФЦО, режима съемки и закона дви-
жения носителя.
Воспроизведение имитируемого отраженного сигнала с про-
граммируемой задержкой относительно исходного зондирую-
щего сигнала.
Все три варианта функций активного транспондера имеют идентичную структуру
[11, 12], основными элементами которой являются устройство имитации и регист-
рации сигналов и компьютерная система формирования исходных данных.
Имитация отраженных сигналов
Алгоритм аппаратно-программной имитации
отраженных сигналов
Этап 1. Моделирование фоно-целевой обстановки как супер-
позиции двумерного поля ЭПР (УЭПР) в координатах наклонная
дальность - азимут и набора точечных целей с заданными ЭПР в
пространстве.
Этап 2. Коррекция модели фоно-целевой обстановки с уче-
том диаграммы направленности антенны для выбранного режима.
Этап 3. Расчет закона изменения параметров отраженного
сигнала для каждого элемента моделируемой фоно-целевой обста-
новки при движении носителя с учетом режима съемки.
Этап 4. Синтез закона преобразования зондирующего сигнала
в отраженный для каждого импульса в сеансе в виде импульсной
характеристики цифрового фильтра.
Этап 5. Запись реального зондирующего сигнала РСА.
Этап 6. Поимпульсное преобразование зондирующего сигна-
ла в имитированный отраженный.
Этап 7. Поимпульсное воспроизведение имитированного от-
раженного сигнала на несущей или промежуточной частоте с нор-
мированной задержкой относительно зондирующего сигнала и по-
дачу на вход приемной системы РСА.
165
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Структура алгоритма имитации отраженных сигналов [12]
приведена на рис. 2.39.
При моделировании фоно-целевой обстановки снимаемый
участок местности описывается двумерным полем комплексного
коэффициента обратного рассеяния:
где сг0 - удельная эффективная площадь рассеяния (УЭПР) эле-
мента снимаемой поверхности; ф - сдвиг начальной фазы отра-
женного сигнала; х - азимут; г - наклонная дальность.
Например, статистически однородный фон для измерения ра-
диометрической разрешающей способности моделируется при усло-
виях: ст0 - постоянная в пределах участка; ф задается генератором
случайных чисел с равномерным распределением на [0, 2л). Размеры
имитируемого участка по азимуту (.х) и наклонной дальности (г) в
элементах разрешения соответствуют размерам матрицы s(x, г).
Число строк матрицы должно совпадать с числом зондирующих им-
пульсов в сеансе и соответствует числу элементов разрешения бу-
дущего РЛИ по азимуту. Шаг точек модели по наклонной дальности
Аг задается в соответствии с частотой дискретизации записываемо-
го зондирующего сигнала Г\ и определяется по формуле
Ar = c/(2Ffl).
Каждый импульс остаточного сигнала является суперпозици-
ей отражений импульса зондирующего сигнала от элементов уча-
стка. Преобразование зондирующего сигнала язс(х, г) в имити-
руемый остаточный сигнал выполняется в виде свертки
166
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
с применением предварительно рассчитанной импульсной характе-
ристики Лих (х, г) , которая зависит от закона движения носителя и
комплексного коэффициента рассеяния снимаемого объекта
s(x, г). Полученная матрица данных комплексной огибающей
имитированного остаточного сигнала загружается в память гене-
ратора сигналов произвольной формы, осуществляющий воспроиз-
ведение имитированного остаточного сигнала в виде модулирован-
ного сигнала на несущей или промежуточной частоте или в форме
пары модулирующих видеосигналов.
Аппаратная реализация стенда
Стенд полунатурного моделирования с устройства имитации и
регистрации сигналов на базе модульных приборов Agilent [6] был
усовершенствован (рис. 2.40) и использован для отработки методик
измерения сквозных характеристик на технологическом комплекте
бортового радиолокационного комплекса (БРЛК) космического РСА
«Кондор-Э» [22]. Схемы организации обмена радиолокационными и
синхронизирующими сигналами между с устройства имитации и
регистрации сигналов и БРЛК приведены на рис. 2.41 и 2.42.
Рисунок 2.40
167
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Формирование массива данных имитированного отраженного
сигнала выполняется путем обработки записи зондирующего сиг-
нала, полученной в предыдущем сеансе в этом же режиме
(рис. 2.41). Массив в форме матрицы загружается в генератор сиг-
налов произвольной формы и построчно воспроизводится с внеш-
ней синхронизацией по стробирующему импульсу, управляющему
запуском зондирующего сигнала РСА (рис. 2.42).
С использованием стенда проведены сеансы тестовой съемки имитированных то-
чечных, групповых и поверхностно-распределенных целей. Качество полученных
изображений соответствует расчетным сквозным характеристикам РСА.
168
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИС ТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
Результаты эксперимента
Для отработки методики полунатурной имитации отраженных сиг-
налов использовались математические модели двух тестовых объек-
тов. Мира для определения пространственного разрешения (рис. 2.43)
содержит 9 точечных целей с одинаковыми ЭПР, образующих квадрат
([21], гл. 7), ориентированный под произвольным углом к трассе
спутника (во избежание наложения боковых лепестков РЛИ разных
точечных целей). Точечная цель 0, превышающая остальные по ЭПР
на 5 дБ, расположена с одной из сторон квадрата для определения
ориентации миры в координатах РЛИ.
100 ПО 120 130 140 150 160 170 180 190 200
Рисунок 2.43
Фрагмент РЛИ, содержащий изображение 10-точечной миры,
для режима высокого разрешения приведен на рис. 2.44.
100 200 300 400 500 600 700 800 900 1000
Рисунок 2.44
169
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 2.45 показано сечение РЛИ наиболее яркой точечной
цели (вынесенной за пределы квадрата) по дальности (функция от-
клика на ОТЦ по дальности в режиме высокого разрешения).
Модель миры для определения радиометрических характери-
стик (рис. 2.46,6?) содержит 16 прямоугольных участков с условны-
ми размерами 100x6000 дискретов (азимутхдальность), упорядо-
ченных по возрастанию УЭПР в направлении азимутальной оси.
Первый по счету участок, а также фон имеют нулевой (в абсолют-
ных единицах) коэффициент рассеяния; шаг возрастания УЭПР ос-
тальных участков, начиная со второго, в данном эксперименте вы-
бран равным 3 дБ. На рис. 2.46,6 приведен график сечения профиля
УЭПР миры в логарифмическом масштабе.
Рисунок 2.46
170
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
500
1000
1500
2000
2500
3000
3500
4000
1000 2000 3000 4000 5000 6000
Рисунок 2.47
Проверка проводилась для режима съемки с использованием
зондирующего ЛЧМ сигнала с базой 2000 при длигельности сеанса
2048 импульсов. На рис. 2.47 показано амплитудное РЛИ, синтези-
рованное по полученной радиоголограмме (а), и его усредненное се-
чение плоскостью азимут-уровень (б) - профиль усредненной ра-
диояркости, дБ.
Применение активного транспондера позволяет использовать единую
систему методик для наземных, летных и валидационных испытаний
РСА, а также применить единые критерии оценки показателей качества.
Предложенные методики дают возможность имитации входных
воздействий, соответствующих отражениям от точечных, групповых и
поверхностно-распределенных целей в соответствии с проверяемыми
режимами съемки.
Для проверки РСА, задача которых состоит в обнаружении и распо-
знавании типовых сложных целей на фоне неоднородных подстилаю-
щих поверхностей и передаче на землю результатов вторичной обра-
ботки РЛИ, возможно полунатурное моделирование заданной фоно-
целевой обстановки.
Аппаратно-программная имитация пространственно-распреде-
ленных целей с использованием активного транспондера позволяет из-
мерять радиометрические характеристики, в том числе радиометриче-
ское разрешение, на этапе летных и валидационных испытаний, а так-
же осуществлять периодическую радиометрическую калибровку РСА.
Активный транспондер может применяться для калибровки, контро-
ля работоспособности и диагностики состояния РСА при эксплуатации.
Для создания макетного образца активного транспондера могут быть
использованы покупные модульные приборы. Создание полнофункцио-
нального варианта активного транспондера требует специализированной
разработки его составных частей.
171
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Литература
1. Верба В.С., Неронский Л.Б., Осипов И.Г., Турук В.Э. Радиолокационные системы
землеобзора космического базирования / Под. ред. В.С. Вербы. М.: Радиотехника.
2010.
2. Верба В.С., Неронский Л.Б., Осипов И.Г., Пущинский С.Н., Турук В.Э. Способ распо-
знавания надводных кораблей на взволнованной морской поверхности / Патент на
изобретение № 2012113532. Дата регистрации приоритета 07.04.2010.
3. Витер В., Петровский В., Кучейко А. Космические аппараты радиолокационного наблю-
дения, созданные в «НПО машиностроения» // Новости космонавтики. 2001. № 3.
4. Град штейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и произведений. М.:
Наука. 1971.
5. Диккинс А.В., Иванов А.Ю., Карлин Л.Н., Неронский Л.Б. и др. Атлас аннотирован-
ных радиолокаионных изображений морской поверхности, полученных космиче-
ским аппаратом «Алмаз-1». М.: ГЕОС. 1999.
6. Дзенкевич А.В., Востров Э.А., Кошеваров Г.А. и др «ИМАРК» - многочастотный мно-
гополяризационный авиационный комплекс РСА" // III Междунар. конф, по авиаци-
онному дистанционному зондированию (июль 1997). Дания. С. 197-202.
7. 7.Интеллектуализация сложных систем // Информационно-измерительные и управ-
ляющие системы. 2009. Т. 7. № 3. С. 1-92.
8. Карпов О.А., Толстов Е.Ф., Филатов А.А. Идентификация движущихся целей в РСА и
пути ее решения методами статистического синтеза. Цифровая обработка сигналов.
Научно-методические материалы. М.: ВВИА им. Н.Е. Жуковского. 2003.
9. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дис-
танционного зондирования земли / Под ред. Г.С. Кондратенкова. М.: Радиотехника.
2008.
10. Лепехина Т.А., Николаев В.И. Аппаратно-программная имитация и обработка циф-
ровых радиоголограмм при наземных испытаниях космических радиолокаторов с
синтезированной апертурой // Материалы V Всерос. научно-техн. конф. «Проблемы
разработки перспективных микро- и наноэлектронных систем» (МЭС-2012). М.: ИППМ
РАН. 2012. С. 569-574.
11. Лепехина Т.А, Николаев В.И. Активная контрольная станция для задач валидации и
калибровки космического РСА // XXI Междунар. крымская конф. «СВЧ-техника и
телекоммукационные технологии» (КрыМиКо'2011). Материалы конф. Севастополь:
Вебер. 2011. С. 1063-1064.
12. Лепехина Т.А, Николаев В.И. Алгоритм цифровой имитации траекторных сигналов для
испытаний радиолокаторов с синтезированной апертурой высокого разрешения // XV
Междунар. конф. «Цифровая обработка сигналов и ее применение - DSPA-2013». М.:
РНТОРЭС им. А.С. Попова. 2013. С. 418-422.
13. Лепехина Т.А, Николаев В.И. Аппаратно-программное обеспечение стенда полуна-
турного моделирования для наземных испытаний космических радиолокаторов с
синтезированной апертурой // Информационно-измерительные и управляющие сис-
темы. 2013. № 1. С. 53-60.
14. Лепехина Т.А, Николаев В.И., Семенов М.А., Толстов Е.Ф. Проблемы обработки
больших массивов цифровых радиоголлограмм космических РСА высокого разре-
шения// Радиотехника. 2013. № 1. С. 37-41.
15. Лепехина Т.А, Николаев В.И. Разработка и особенности использования активного
транспондера для наземных и летных испытаний, калибровки и валидации косми-
172
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ВЫСОКОГО РАЗРЕШЕНИЯ
ческих РСА Ц Информационно-измерительные и управляющие системы. 2014. № 3.
Т. 12. С. 54-61.
16. Неронский Л.Б., Михайлов В.Ф., Брагин И.В. Микроволновая аппаратура дистанци-
онного зондирования Земли и атмосферы. Радиолокаторы с синтезированной апер-
турой антенны: Учебное пособие / СПбГУАП. СПб. 1999. Ч. 2. 220 с.
17. Неронский Л.Б., Пушков Д.В., Елизаветин И.В. Применение моделирования преоб-
разований сигналов в РСА для интерпретации данных ДЗЗ // 2-я Всеросс. конф.
СПб. Июнь 2004.
18. Неронский Л.Б., Верба В.С., Осипов И.Г., Лиханский С.Г., Пущинский С.Н., Турук
В.Э. Формирование точечных моделей объектов по комплексным РСА изображениям
// Сб. трудов НТК «Современные проблемы дистанционного зондирования Земли из
космоса». М.: ИКИ РАН. 2010. Вып. VII.
19. Неронский Л.Б. Перспективы совершенствования космических средств радиолока-
ционного наблюдения земной поверхности // Наукоемкие технологии. 2004. № 8-9.
С. 66-87.
20. Плющев В.А. Результаты разработки и направления развития многочастотных авиа-
ционных комплексов РСА// Наукоемкие технологии. 2004. № 8-9. С. 88-109.
21. Школьный Л.А., Толстов Е.Ф., Детков А.Н. и др. Радиолокационные системы воз-
душной разведки, дешифрирование радиолокационных изображений / Под ред.
Л.А. Школьного. М.: изд. ВВИА им. Н.Е. Жуковского. 2008. 531 с.
22. Рожнов А.В. Некоторые проблемные вопросы системной интеграции направлений
научной деятельности в задачах нейрокомпьютинга // Нейрокомпьютеры: разра-
ботка, применение. 2014. № 1. С. 3-9.
23. Собр. трудов академика А.Н. Крылова XI «Качка корабля». М.: Изд-во АН СССР. 1951.
24. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических сис-
тем: Учеб, пособие для вузов. М.: Радио и связь. 1991.
25. Толстов Е.Ф., Филатов А.А. Модель пространственно-временного сигнала, создавае-
мого движущейся точечной целью в РСА. НММ по цифровой обработке сигналов.
М.: ВВИА им. Н.Е. Жуковского. 1995.
26. Ушакова Н.Н. Коррекция цифровых космических изображений на основе верифи-
цирующего моделирования. Канд. дисс. Белгородский государственный технологи-
ческий университет им. В.Г. Шухова. 2004.
27. Фомин Я.А., Тарловский Г.Р. Статистическая теория распознавания образов. М.: Ра-
дио и связь. 1986.
28. Хохлачёв Е.Н., Рожнов А.В., Алешкевич А.А., Орлов Г.Ю., Залетдинов А.В. Комплекс
моделей систем физической защиты на основе многоуровневого описания сложных
систем // Нейрокомпьютеры: разработка, применение. 2009. № 12. С. 62-69.
29. Ширман Я.Д., Горшков С.А., Лещенко С.П., Братченко Г.Д., Орленко В.М. Методы
радиолокационного распознавания и их моделирование // Зарубежная радиоэлек-
троника. 1996. № 11.
30. Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М.: Радио и связь.
1986.
31. Штагер Е.А. Вероятностные характеристики поля, отраженного от тел сложной
формы // В кн. «Современные проблемы распространения и рассеяния волн». М.:
ИРЭ АН СССР. 1979
32. Ярлыков М.С., Миронов М.А. Марковская теория оценивания случайных процессов.
М.: Радио и связь. 1993.
173
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
33. 3Instruction tables. Lists of instruction latencies, throughputs and microoperation
breakdowns for Intel, AMD and VIA CPUs. Agner Fog. Copenhagen University College of
Engineering. Copyright © 1996 - 2011.
34. Neronskiy L.B., Verba V.S., Lihansky S.G., PushkovD.V., Elizavetin I.V. Phenomenologi-
cal Approach to SAR Signal Processing Simulation. EUSAR2004.
35. Proseedings «EUSAR 2004» 5th European Conference on Synthetic Aperture Radar. May
25-27 2004. Germany.
174
Глава 3
Радиолокационные системы
с синтезированной
апертурой, формируемой
при вращении
фазового центра
реальной антенны
ЕВ^ ДеНИе >ЧЛЧ<<Ч.ЧЧ >•>.!. 1 1 t .<<>>. >1 . и ( I г ч > I Ч >* '* Ч '>* I 176
3.1. Анализ особенностей формирования и обработки
траекторного сигнала в РЛС
с синтезированием апертуры антенны
при вращении фазового центра реальной антенны . 177
3.2. Особенности синтезирования апертуры антенны
при вращении фазового центра реальной антенны
в режиме обзора «под собой» , ................ 185
3.3. Характеристика направленности
искусственной апертуры антенны и ее зависимость
от траектории перемещения фазового центра
реальное антенны.............................. 193
3.4. Синтезирование апер’уры антенны при учете
поступательного и вращательного Движений
фазового центра реальной антенны .............. 201
3.5. Эффективная синтезированная апертура антенны
при комбинированной траектории движения
фазового центра реальной антенны ............. 214
3.6. Интерферометрический режим бортовой РЛС
с синтезированием апертуры при вращении
фазового центра реальной антенны ............. 223
Литература ..,.............................. 231
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Введение g|
Известно [4, 5, 7, 8], что синтезирование апертуры антенны позво-
ляет обеспечить высокое разрешение радиолокационной системы
по путевой дальности (по азимуту).
Причем процесс формирования искусственной апертуры воз-
можен как прямым, так и образным способом. В первом случае дан-
ная апертура создается за счет когерентной обработки принимаемого
сигнала в процессе поступательного перемещения носителя РЛС от-
носительно цели, а во втором - за счет аналогичной обработки, но
при вращении самой цели. Однако возможно образование искусст-
венной апертуры вследствие как вращательного движения фазового
центра реальной антенны [10, 16], так и при комбинации вращатель-
ного и поступательного движения фазового центра [13].
В данной главе рассмотрены особенности формирования и об-
работки траекторного сигнала в РЛС с синтезированием апертуры
антенны как при вращении фазового цента реальной антенны, так и
при комбинации поступательного и вращательного его движений.
Показано, что вращательное движение фазового центра реаль-
ной антенны позволяет получать радиолокационное изображение
подстилающей поверхности в требуемом угловом направлении с
одинаковой разрешающей способностью по азимуту. При комби-
нации движения фазового центра реальной антенны существует
дополнительное приращение синтезированной апертуры по срав-
нению с процессом ее формирования только при поступательном
движении, которое зависит от времени когерентной обработки тра-
екторного сигнала.
Обращается внимание на преимущества, которые имеют место
при использовании как вращательного, так и комбинированного
движения ФЦА, а также на негативные факторы, присущие процес-
су синтезирования в этих условиях.
Кроме того, рассматривается возможность формирования
трехмерных изображений наблюдаемых объектов при синтезиро-
вании апертуры антенны при вращении фазового центра реальной
антенны.
176
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
3.1 Анализ особенностей формирования м абработки траекторногосигнала в РЛС с синтезированием апертуры антенны при вращении фазового центра реальной антенны
Предположим, что фазовый центр реальной антенны перемещается
по круговой траектории радиусом г с постоянной угловой скоро-
стью Q. Центр вращения совпадает с началом системы координат
OXY (рис. 3.1). Объект наблюдения представляет собой точечную
цель и находится от точки О на удалении в плоскости вращения.
Радиус вращения антенны много меньше что позволяет не учи-
тывать амплитудную модуляцию траекторного сигнала, обуслов-
ленную изменением дальности до точечной цели. Предположим,
что облучающая РЛС работает в непрерывном режиме излучения
на частоте fo, а диаграмма направленности реальной антенны - сла-
бонаправленная.
Информационной частью траекторного сигнала (сигнала, от-
раженного от точечной цели и воспринимаемого антенной) являет-
ся комплексная огибающая, которую в общем виде можно предста-
вить как
5(/) = t/G(0exp
£>(/) - <р0
(3.1)
где U - случайная амплитуда сигнала; G(Z) - функция, описываю-
щая модуляцию сигнала диаграммы направленности реальной ан-
тенны; Л - длина волны зондирующего колебания; D(t) - расстоя-
ние между фазовым центром антенны и точечной целью в момент
времени t; (р$ - случайная начальная фаза траекторного сигнала.
177
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При дальнейшем изложении будем считать, что фазовые иска-
жения сигнала, обусловленные средой распространения радиоволны,
нестабильностью приемопередающего тракта и отклонениями фазо-
вого центра антенны от движения по окружности отсутствуют.
В общем случае закон изменения расстояния между фазового
центра антенны и объектом зондирования можно представить в виде
Z)(O = V(x - x(r))2 + Су - у (О)2, (3.2)
где x(t) и y(t) - текущие координаты фазового центра антенны;
х, у - координаты объекта зондирования.
При вращательном движении фазового центра антенны изме-
нения текущих координат x(t) и y(t) связаны с угловой скоростью
его вращения Q:
х(/) = —г cos(2^Qz) , y(t) = rsin(2^QZ) ,
поэтому изменение дальности до точечной цели описывает зависи-
мостью
D(t) = yj(x + r cos(2лО/))2 + (y-r sin(2я£1Г))2 . (3.3)
Из (3.3) видно, что функция, описывающая изменение дально-
сти до цели, является периодической, с периодом, равным времени
оборота фазового центра антенны вокруг оси вращения: Т = I/Q.
Изменение величины D(r)/r в процессе синтезирования апертуры
при вращении фазового центра антенны показано на рис. 3.2. При
построении зависимости D(t) были использованы относительные
величины D(t)!r^ x(f)/r, y(t)!r и t!T.
Рисунок 3.2
178
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Рассмотрим процесс синтезирования апертуры антенны при
ограничении времени когерентного накопления траекторного сиг-
нала в пределах одного оборота фазового центра реальной антенны,
т.е. ТС=Т.
В соответствии с выражениями (3.1) и (3.3) комплексную ам-
плитуду траекторного сигнала при вращении фазового центра ан-
тенны можно записать в виде
S(f)=Uexp -i y](x + r cos(2^QZ))2 + (у - г sin(2^QZ))2 . (3.4)
V Л )
При написании (3.4) случайная фаза фо полагалась равной нулю.
Основным физическим эффектом, на котором строится процесс синтезирования,
является эффект Доплера. Доплеровское смещение частоты траекторного сигна-
ла, отраженного от точечной цели, однозначно определяется радиальной состав-
ляющей полного вектора скорости движения фазового центра антенны относи-
тельно объекта наблюдения.
При синтезировании апертуры в плоскости чертежа доплеров-
ский сдвиг частоты описывается выражением
2Гп 2V
fun =---~ =----COS/,
дп 2 2
(3-5)
где VR - радиальная скорость движения фазового центра антенны;
/ - угол между линией визирования «фазового центра антенны
цель» и вектором V (рис. 3.3).
При вращении фазового центра угол у изменяется от - утах до
Утах (рис. 3.3), причем величина утах, учитывая, что г«£>о, может
быть определена из соотношения
Y max
(3.6)
179
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В свою очередь, радиальная составляющая полного вектора
скорости фазового центра антенны может быть определена как
т_ , ч dD(t) _
VR(/) =--— , поэтому, с учетом (3.3), можно записать
dt
W) =
-2л£2г(у cos(2tzT1/ ) + xsin(2;zfl/))
Z)(/)
(3.7)
Из (3.7) видно, что изменение радиальной скорости также
имеет периодический характер, следовательно, периодический ха-
рактер будет носить и изменение доплеровского смещения частоты
сигнала, отраженного от точечный центр. Характер изменения ра-
диальной составляющей полного вектора скорости в процессе син-
тезирования апертуры при вращении фазового центра антенны по-
казан на рис. 3.4.
Разность значений доплеровских смещений частот, соответст-
вующих значениям углов у = -утах и У = /тах > определяет девиа-
цию частоты траекторного сигнала. Учитывая, что дальность до
точечной цели много больше радиуса вращения и опираясь на (3.6),
угол визирования цели можно считать малым, поэтому девиацию
частоты принимаемого траекторного сигнала при вращении фазо-
вого центра антенны можно определить из выражения
= (8лОг)/Л . (3.8)
Как видно из (3.8), девиация частоты является линейной
функцией радиуса и частоты вращения фазового центра антенны.
Из выражения (3.8) и рис. 3.4 видно, что (в отличие от процесса синтезирования
апертуры антенны при прямолинейной траектории движения фазового центра
антенны, когда имеет место линейная зависимость частоты траекторного сигнала
от времени) при вращении фазового центра антенны возникает нелинейная (то-
нальная) модуляция частоты траекторного сигнала от времени.
Рисунок 3.4
180
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Процедура формирования опорной функции для оптимальной
обработки траекторного сигнала в процессе синтезирования при
вращении ФЦ антенны будет существенно отличаться от аналогич-
ной при его прямолинейном движении.
Известно [4, 15], что при оптимальной обработке траекторного
сигнала в процессе синтезирования апертуры необходимо согласо-
вать параметры опорной функции с параметрами данного сигнала, а
именно: опорная функция должна совпадать с обрабатываемым тра-
екторным сигналом с точностью до постоянного множителя, но
иметь противоположную фазу. Если не учитывать воздействие внут-
ренних шумов и фона на сигнал, отраженный от точечной цели, то
U вых в процессе синтезирования апертуры антенны будет представ-
лять функцию неопределенности траекторного сигнала [7]:
^вых(^^) =
Т , __________ ____________________ X
= JtxoexpLy (Vxo2+яо2 - Jwo - ^)2+mo - ^)2) U (з .9)
0
где dx,dy- координаты соседней точки пространства.
Однако с учетом сделанных предположений можно упростить
выражение (9): так как целью исследования является рассмотрение
потенциальных возможностей по разрешению в азимутальной
плоскости, то можно полагать, что dy = 0. Предположим, что фор-
мируемая синтезированная апертура обеспечивает линейное раз-
решение по азимуту меньшее, чем изменение расстояния от фазо-
вого центра антенны до объекта зондирования при вращении фазо-
вого центра антенны, тогда dx « \]х(0)2 + у(0)2 .
При таких малых изменениях расстояния в слабонаправлен-
ной реальной антенне изменением амплитуды траекторного сигна-
ла можно пренебречь и не учитывать сомножитель G(t) при анализе
функции неопределенности. Поэтому перейдем к нормированной
ФН траекторного сигнала:
т
ц,ых(^) = ]ехр
о
-у/(dx - г cos(2tzQ/))2 + (y-r sin(2лГ1/))2)) dt. (3.10)
Одновременно с [7ВЫХ функция неопределенности (3.10) тра-
екторного сигнала, полученного при вращении фазового центра ан-
тенны, рассмотрим (7ВЫХ при поступательном перемещении функ-
j—(д/(гсо8(2лО/))2 + (у - rsin(2^fi/))2 -
181
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ция неопределенности вдоль траектории носителя РЛС (рис. 3.5).
Путь синтезирования в обоих случаях одинаков и равен Lc = 2г.
Получаемые сечения функция неопределенности вдоль координаты
х для данных ситуаций приведены на рис. 3.6.
Сравнительный анализ 17вых оптимальной системы обработки
при синтезировании апертуры при прямолинейном и вращательном
движении ФЦ реальной антенны показывает, что:
автокорреляционная функция траекторного сигнала при вра-
щательном движении фазового центра имеет более высокий уровень
первых боковых лепестков (примерно 40% от максимума), в то вре-
мя как при прямолинейном движении антенны - 21%.
ширина основного пика автокорреляционной функции траек-
торного сигнала в случае линейного движения фазового центра ан-
тенны больше примерно в 1,37 раза, чем для траекторного сигнала
при вращении фазового центра антенны.
При одинаковых остальных условиях ширина синтезированной диаграммы на-
правленности при круговом вращении фазового центра реальной антенны
меньше, чем при линейной траектории.
Рисунок 3.6
182
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
При поступательном перемещении фазового центра комплекс-
ная огибающая отклика оптимальной системы описывается выра-
жением (3.11) и представляет собой функцию sin(x)/х :
А)/2
IC(*) = 4- [ exp(i24A/))rf/) = slnWA) (3.11)
A A**
При вращательном движении фазового центра реальной ан-
тенны огибающая описывается выражением (3.12) и представляет
собой функцию Бесселя 1-го рода нулевого порядка:
Jc(dfc) = — f exp(i2A:6/xsin(^))(7/? = J^lkf^dx). (3.12)
А -Л'2
Характер изменения данных функций приведен на рис. 3.7.
Разрешающая способность радиолокационной системы с синтези-
рованием апертуры (РСА) определяется по выходному отклику оп-
тимальной системы обработки траекторного сигнала, рассматри-
ваемому на уровне 0,7, который определяется основным лепестком
(первыми лепестками рассматриваемых функций). Ширина же пер-
вых лепестков у функций sin(x)/x и Jq(x) разная. Величина данного
различия может быть определена из отношения
ЛА. = ,
где 7 , aJ’7 - протяженность первых лепестков функций sin(x)/x
и Jq(x) соответственно на уровне 0,7.
Опираясь на рис. 3.7 и выражения для функций sin(x)/x и Jq(x),
получаем
Дх =л/2,3. (3.13)
В результате получаем, что ширина отклика оптимальной сис-
темы обработки при вращательном движении фазового центра ан-
тенны реальной антенны и малых угловых размеров синтезирван-
ной апертуры определяется выражением
(3.14)
Л л 4г
Анализ выражения (3.14) показывает, что, как и при поступа-
тельном перемещении фазового центра реальной антенны, потенци-
альная линейная разрешающая способность РСА по азимуту при вра-
щении фазового центра антенны, зависит только от углового размера
синтезируемой апертуры /3$ и дальности до объекта локации. Однако
183
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
при одинаковом угловом размере Д и дальности Dq до точечного объ-
екта при вращении фазового центра антенны обеспечивается мень-
2 3
шее значение величины дх, равное -2—<5хл, где Зхд - линейное раз-
я
решение при поступательном движении фазового центра.
Рисунок 3.7
Повышение разрешающей способности при одинаковых остальных условиях
приведет к увеличению дальности действия РСА в режиме обнаружения и
улучшению качества формируемого радиолокационного изображения. Однако
наличие мощных первых боковых лепестков у функции неопределенности тра-
екторного сигнала негативно скажется на процессе разрешения близкораспо-
ложенных целей.
Необходимо заметить, что для РСА, использующей прямоли-
нейное движение фазового центра антенны, наблюдалась зависи-
мость линейной разрешающей способности по азимуту от угла ус-
тановки главного луча диаграммы напраленности реальной антен-
ны [1]. Наилучшее разрешение обеспечивалось при угле, равном
90°. При уменьшении угла визирования разрешающая способность
ухудшалась пропорционально синусу данного угла при фиксиро-
ванном угловом размере апертуры [4]. Такой характер зависимости
разрешающей способности от угла наблюдения не позволял осуще-
ствлять получение высокодетальных изображений местности в пе-
реднем секторе, меньшем ±15°, относительно продольной оси лета-
тельного аппарата.
При вращательном движении фазового центра антенны угловой размер синте-
зируемой апертуры не зависит от угла визирования, что позволяет получать
радиолокационные изображения с одинаковой детальностью в любом угловом
направлении.
184
ГЛАВА 3 РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
При вращении фазового центра антенны возникает тональная частот-
ная модуляция траекторного сигнала, приводящая к расширению его
спектра по сравнению со случаем прямолинейного движения фазово-
го центра, и, как следствие, к сужению выходного отклика системы
обработки на одиночную цель.
Одновременно возрастает уровень боковых лепестков, что за-
трудняет процесс разрешения близкорасположенных целей.
Важным достоинством синтезирования при вращении фазового
центра реальной антенны является возможность получения высокоде-
тального радиолокационного изображения в любом желаемом секто-
ре наблюдения относительно оси вращения.
Особенности синтезирования
апертуры антенны
3.2 при вращении фазового центра
реальной антенны
в режиме обзора «- под собой»
Возможности по пространственной селекции радиолокационной сис-
темы с синтезированной апертурой (РСА), как и обычной РЛС, оп-
ределяются разрешающем способностью по дальности 8г и линейной
разрешающей способностью по угловой координате (азимуту) 81.
Оценивание разрешающей способности обычно производят, опираясь
на критерий Рэлея, несмотря на то, что сигналы и шумы РСА носят
случайный характер.
На практике использование вероятностных характеристик для
оценки разрешения крайне неудобно, поскольку на разрешение
влияет большое число параметров объектов наблюдения, сигналов и
шумов, статистические сведения о которых обычно отсутствуют [5].
Возможности по разрешению в РСА определяются параметра-
ми траекторного сигнала, а разрешение, в соответствии с критерием
Рэлея, определяется по функции рассогласования траекторного сиг-
нала точечной цели и опорного сигнала на выходе согласованной
системы обработки
Л Д/) = pr (х) * s*T (х, Д/)б/х, (3.15)
X
где ST (х) - пространственно-временной сигнал РСА. рассматривае-
мый как функция вектора х = {х, у, z, t}; X - область, в которой за-
185
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
дан и анализируется (обрабатывается) сигнал ST (х) ; {х. у, z, t} - век-
тор аргументов пространственно-временного сигнала РСА; Ду - сме-
щение опорного сигнала по координате у относительно параметра
сигнала у0; s*r (х, А/) - комплексно-сопряженный опорный сигнал.
При оценке потенциальной разрешающей способности, как
правило, не учитывают влияние фона и внутренних шумов прием-
ника. С учетом данных замечаний выходной отклик на сигнал, от-
раженный от точечной цели в процессе синтезирования апертуры
антенны, по аналогии с (3.9), представляет собой функцию неопре-
деленности траекторного сигнала:
J(dx,dy,dz) = Jc?(z)
о
+ г(02
(7хо2+яо2
(3.16)
где dx, dy, dz - координаты соседней точки пространства; G(f)
функция, описывающая амплитудную модуляцию траекторного
сигнала диаграммой направленности реальной антенны: Т - дли-
тельность интервала когерентного накопления сигнала.
Как отмечалось ранее, разрешающая способность определяет-
ся длительностью выходного отклика опт имальной системы обра-
ботки по оцениваемой координате (протяженностью сечения тела
неопределенности траекторного сигнала РСА) на выбранном уров-
не. Причем основным фактором, влияющим на разрешающую спо-
собность РСА, является размер базы траекторного сигнала (искус-
ственной апертуры). Известно [8], что линейный размер элемента
разрешения РСА по путевой дальности пропорционален угловому
размеру синтезированной апертуры и зависит от дальности до на-
блюдаемой поверхности:
где Л - длина волны РСА; D - наклонная дальность до элемента
разрешения; X- - угловой размер синтезированной апертуры.
Оценим возможности разрешения РСА при вращении фазового
центра антенны в режиме наблюдения «под собой». Как и ранее (см.
п. 3.1), будем считать, что ФЦА движется по окружности радиусом г,
но плоскость вращения находится относительно поверхности земли на
высоте //(рис. 3.8). Причем точечная цель удалена удалена ог плоско-
сти врашепия на расстояние Do и располагается на прямой ОО\ про-
186
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ....
ходящей через центр вращения фазового центра (точка О') и его про-
екцию на горизонтальную поверхность земли. Предположим, что ко-
герентное накопление сигнала, отраженного от точечной цели осуще-
ствляется за один оборот ФЦА вокруг оси его вращения.
Для простоты будем полагать, что ФЦА движется строго по
окружности с постоянной угловой скоростью Q плоскости O'XY
(рис. 3.8,6?), которая параллельна неподвижной системе координат
OXY. Объект наблюдения находится в начале неподвижной систе-
мы координат OXYZ, ось OZ которой проходит центр вращения
ФЦА (точкаО') (рис. 3.8, б). Радиус вращения г считается много
меньшим высоты Н подвеса ФЦА (рис. 3.8, в), что позволяет не
учитывать амплитудную модуляцию траекторного сигнала, обу-
словленную изменением дальности до точечной цели. Будем, как и
ранее, полагать, что облучающая РЛС работает в непрерывном ре-
жиме излучения на частоте Уо, а диаграмма направленности реаль-
ной антенны - слабонаправленная.
Рисунок 3.8
187
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Оценим потенциальную разрешающую способность РСА для
данных условий, опираясь на функцию неопределенности траек-
торного сигнала, формируемого при вращении ФЦА.
Основным носителем информации в траекторном сигнале
(см. п. 3.1) является его комплексная огибающая, которую можно
представить в виде (3.1). Учитывая вышеизложенные условия на-
блюдения точечной цели в режиме «под собой», а также характери-
стики реальной антенны РСА, комплексную огибающую (3.1) мож-
но представить как
S(z) = t/expf-z^7r2 + Я2
(3-17)
С целью упрощения анализа начальную фазу траекторного
сигнала будем считать равной нулю.
Особенности при синтезировании апертуры антенны
в режиме «под собой»
• Расстояние между ФЦА и точечной целью в процессе синтези-
рования остается неизменным.
• Огибающая S{t) является функцией высоты расположения фа-
зовой цели реальной антенны относительно исследуемой по-
верхности.
С учетом (3.16) и (3.17) выражение, аналитическое для функ-
ции неопределенности траекторного сигнала при вращении ФЦА,
можно записать в виде
J(dx} -
т ,
- lexp j—(V(rcos(2^0)2 +(rsin(27zfl/))2 + Н2 - (3.18)
J \. Л
о
-д/(б&-гсо5(2лО/))2 + (<7v-rsin(2^Q/))2 + Н2\ dt.
Тело неопределенности и диаграмма неопределенности, соот-
ветствующие (3.18), приведены на рис. 3.9 и 3.10.
Из анализа (3.18) следует, что в режиме обзора сгрого «под
собой» синтезируемая апертура имеет одинаковый угловой размер
как по путевой дальности (азимуту), так и по радиальной дально-
сти. Поскольку РСА обычно используется для получения радиоло-
кационного излучения земной поверхности, то, в первую очередь,
найдем потенциальную разрешающую способность РСА по ради-
альной и путевой дальностям, полагая dz = 0.
188
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Л
Рисунок 3.9
Рисунок 3.10
Для этого рассмотрим вертикальные сечения тела неопреде-
ленности вдоль осей путевой и радиальной дальности dx и dy, ко-
торые приведены на рис. 3.11.
Из сравнения сечений видно, что длительность выходных от-
кликов по ортогональным осям (путевая и радиальная дальность),
взятых на одинаковых уровнях, одинакова. Следовательно, одина-
ковыми оказываются разрешающие способности по азимуту и
дальности, которые могут быть оценены как
6 Аз = 8R =
2,3/17?
189
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 3.11
Особенности сечений TH траекторного сигнала
• Уровень боковых лепестков составляет примерно 40% от мак-
симального значения, что приведет к ухудшению контрастно-
сти получаемого радиолокационного изображения.
• Ширина сечения меньше, чем при прямолинейной траектории
движения ФЦА при одинаковых угловых размерах синтези-
руемой апертуры [10].
Рассмотрим влияние на вид тела неопределенности траектор-
ного сигнала изменения положения точечной цели. Будем считать,
что точечная цель смещается вдоль оси Y. Смещение цели приведет
к изменению угла ее визирования и к увеличению дальности до
нее. Поскольку сечения функции неопределенности траекторного
сигнала строятся в угловых координатах, то изменение дальности
не будет влиять на ширину сечения. На рис. 3.12 изображены соот-
ветственно результаты трансформации диаграмм неопределенности
траекторного сигнала (рис. 3.12, а) и сечений тела неопределенно-
сти по радиальной (рис. 3.12, б) и тангенциальной (рис. 3.12, г?)
дальностям при смещении цели но оси Y на величину, равную по-
ловине высоты подвеса.
Из проведенных рисунков следует, что происходит изменение
тела неопределенности по оси X (расширение области высокой кор-
реляции и боковых лепестков). По координате Yтрансформация из-
менения тела не происходит, что говорит о постоянстве разрешения
по азимуту. Это объясняется постоянным угловым размером синте-
зированной апертуры при любом положении цели относительно
центра вращения фазового центра антенны.
190
ГЛАВА 3 РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ. ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Азимут
Дальность
Рисунок 3.12
Из-за осесимметричной формы синтезируемого апертурного
раскрыва при постоянной величине смещения направление смеще-
ния не играет роли. При этом происходит разворот системы коорди-
нат «радиальная дальность - путевая дальность», но разрешение ос-
тается неизменным.
На рис. 3.13 приведены диаграммы неопределенности
(рис. 3.13, а) и дано сечение тела неопределенности траекторного
сигнала по радиальной дальности (рис. 3.13. б) при смещении цели
вдоль оси У, равном высоте подвеса.
Из рисунков видно, что при увеличении угла визирования це-
ли происходит дальнейшее ухудшение разрешения по радиальной
дальности.
191
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 3.13
Рисунок 3.14
Из анализа проведенных результатов следует, что разрешаю-
щая способность РЛС по радиальной дальности может быть опре-
делена из выражения
8R = ——= 2,3 , (3.19)
4лт cos2 (j/) 4лг cos3 (j/)
где у/ - угол визирования цели; 2- длина волны РЛС; г - радиус
вращения ФЦА
192
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ. ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Изменения показателя разрешающей способности по радиаль-
ной дальности в зависимости от угла визирования цели приведены
на рис. 3.14. При этом высота подвеса ФЦА полагалась неизмен-
ной, а отношения длины волны к радиусу вращения фазового цен-
тра реальной антенны рассматривались равными 0.02; 0,01; 0,005
соответственно.
Из графиков, приведенных на рис. 3.14, следует, что разрешаю-
щая способность при увеличении угла визирования падает, однако при
углах визирования менее 40° данное падение происходит медленно.
Переход от одномерных синтезированных апертур к двумерным по-
зволяет обеспечивать высокое разрешение не только по азимуту, но и
по радиальной дальности без применения специальных видов зонди-
рующих сигналов.
При удалении точечной цели от начала координат происходит
ухудшение разрешающей способности по радиальной дальности, что
обусловлено уменьшением углового размера синтезированной апер-
туры в соответствующей плоскости.
Смещение объекта зондирования по азимутальной координате
при этом не приведет к ухудшению потенциальной разрешающей спо-
собности по тангенциальной дальности, при условии, что ширина диа-
грамма направленности реальной антенны одинакова в вертикальной
и горизонтальной плоскостях.
Процесс синтезирования апертуры, имеющий место при когерент-
ном накоплении траекторного сигнала в процессе перемещения
фазового центра реальной антенны по определенной траектории,
можно рассматривать с позиций теории антенн [5]. В частности,
при импульсном режиме излучения и прямолинейном движении
носителя РЛС за счет когерентной обработки траекторного сигнала
формируется искусственная антенная решетка, протяженность
которой зависит от скорости перемещения фазового центра
193
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
реальной антенны и длительности интервала когерентного накоп-
ления траекторного сигнала.
Форма синтезированной антенной решетки определяется траек-
торией перемещения фазового центра реальной антенны в простран-
стве. Как известно [5], за счет синтезирования апертуры можно обес-
печить высокое разрешение по всем пространственным координатам.
Однако для этого необходимо обеспечить перемещение фазового
центра реальной антенны в двух взаимосвязанных плоскостях и
когерентную обработку получаемого траекторного сигнала.
В процессе синтезирования траектория фазового центра реальной антенны
может отличаться от линейной, что приводит к нелинейному закону изменения
доплеровского смещения частоты траекторного сигнала [10].
С точки зрения спектральной теории сигналов нелинейность
частотной модуляции приводит к расширению спектра сигнала, а
это, в свою очередь, повышает разрешающую способность РЛС по
дальности. Если отталкиваться от принципа пространственно-
временной эквивалентности [6], то появление нелинейной час-
тотной модуляции траекторного сигнала при перемещении фазо-
вого центра реальной антенны по траектории, отличной от прямо-
линейной, должно приводить к повышению направленных свойств
синтезированной апертуры, от которых зависит разрешающая
способность РСА по азимуту.
В этой связи проведем анализ взаимозависимости харак-
теристик направленности синтезированных антенн при различных
траекториях перемещения фазового центра реальной антенны,
опираясь на теорию линейных фазированных антенных решеток
[14]. Основное внимание при этом будем обращать на антенные
решетки двух типов - линейную и кольцевую.
Как известно [14], основной характеристикой направленности
любой антенной системы является зависимость амплитуды поля
излучения от направления в пространстве. Графическое представ-
ление характеристики направленности обычно называют диаграм-
мой направленности антенной системы.
Для линейной эквидистантной антенной решетки харак-
теристика направленности может быть представлена в виде [14]
У/2
-У/2
^sin(^) dy
(3.20)
5
где 1(у) - амплитудное распределение поля в раскрыве антенны
вдоль оси у; А - длина волны; Y - максимальная протяженность
апертуры антенны по оси у; А- нормирующий множитель.
194
ГЛАВА 3 РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
При равномерном распределении поля в раскрыве антенной
решетки (/(у) = const), в соответствии с (3.20), ее диаграмма
направленности будет описываться функцией sin(x)/x. Графичес-
кая иллюстрация данной диаграммы для линейной АР при соот-
ношении размера апертуры к длине волны, равном 10:1, приведена
на рис. 3.15.
Рисунок 3.15
Для синтезированных антенных решеток характеристика
направленности может быть описана аналогично (3.20), но за счет
двойного прохождения радиоволной расстояния носитель - цель в
показателе экспоненты необходимо учесть коэффициент 2:
У/2
Атт
-i—
jysin(^) dy.
-Nil
При формировании искусственной апертуры антенны за счет вращения ФЦА
синтезированная антенная решетка имеет вид дуги окружности с радиусом, со-
ответствующим радиусу вращения ФЦА.
Непосредс гвенный расчет характеристик направленности
кольцевых ФАР - довольно сложная задача, однако провести
опенку характеристики направленности таких АР можно, опираясь
на упрощенный расчет, который проводится при следующих до-
пущениях [14].
• В пределах излучающего участка кольцевая антенная решетка с
дискретными излучателями заменяется такой же с непрерывным
распределением тока /(у), равным реальному амплитудному
распределению в точках размещения излучателей, и с достаточно
гладким распределением тока между этими точками.
195
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Парциальная диаграмма направленности излучателя и ампли-
тудное распределение на излучающем участке аппроксими-
руются элементарными функциями.
В соответствии со сделанными допущениями диаграмма
направленности кольцевой антенной решетки в плоскости дуги
окружности можно представить в виде
Р
FK(<p) = A j/(«)Fa(<p)x
-Р
хехр -i—7?(cos(^)-cos(^-cr)) da,
(3.21)
где Fa (ф) - диаграмма направленности в азимутальной плоскости
отдельного излучателя с координатой а.
Для вычисления диаграмма направленности в соответствии с
(3.21) часто используется метод эквивалентного линейного излу-
чателя. Суть метода заключается в том, что диаграмма направлен-
ности кольцевой антенны рассчитывают как ДН синфазной линей-
ной антенны, у которой амплитудное распределение соответствует
проекции амплитудного распределения по кольцу (в пределах
излучающего участка) на линейную антенну длиной /экв (рис. 3.16),
расположенную перпендикулярно направлению формируемого луча.
Рисунок 3.16
196
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
При переходе к эквивалентной линейной антенне амплитудное
распределение имеет вид
4kbW=7| arcsinfe
На рис. 3.17 приведена графическая иллюстрация амплитудного
распределения в раскрыве эквивалентной линейной антенной решет-
ки. Из рисунка видно, что распределение поля в раскрыве антенной
решетки неравномерно. В центральной части амплитуда распределе-
ния примерно постоянна. По мере продвижения к периферии она
начинает нарастать и резко увеличивается к краям апертуры.
2 2
С учетом распределения (3.22) диаграмма направленности
кольцевой антенной решетки в азимутальной плоскости имеет вид
У1
F{cp) = A рэкв(у)ехр
J’sin(p) dy,
(3.23)
где = 7?sin(/?); J3 - половина углового размера излучающего
участка кольцевой решетки.
На рис. 3.18 приведена диаграмма направленности кольцевой
антенной решетки, построенной в соответствии с (3.23), для
излучающего участка, равного половине дуги окружности
(сплошная линия), и диаграмма направленности линейного
раскрыва аналогичной протяженности (пунктирная линия).
197
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 3.18
Сравнивая диаграммы направленности антенных решеток,
приведенных на рис. 3.18, можно сделать следующие выводы.
Изменение амплитудного распределения в раскрыве апертуры антенны вследст-
вие изменения формы решетки трансформирует ее диаграмму направленности.
В частности, как видно из рис. 3.17 и 3.18, при амплитудном
распределении, возрастающем к краям апертуры, происходит
сужение главного лепестка диаграммы направленности и увеличение
уровня боковых лепестков.
Аналогичная ситуация возникает и при рассмотрении
синтезированных антенн, формируемых при различных траекториях
перемещения ФЦА. Так, в [10] показано, что при формировании
синтезированной апертуры за счет вращения ФЦА происходит
сужение ее главного лепестка при возрастании уровня боковых
лепестков по сравнению с синтезированной апертурой при линейном
перемещении ФЦА.
В то же время, в [5] утверждается, что изменение траектории
перемещения фазового центра реальной антенны не влияет на
направленные свойства синтезированной апертуры. Это утверждение
верно только в том случае, когда путь ФЦА в процессе когерентного
накопления траекторного сигнала мало отличается от прямолинейного
[7]. Это относится, в частности, к случаю маневрирования носителя
РСА с радиусом виража, соизмеримым с дальностью до цели.
Если радиус окружности, описываемой фазовым центром реальной антенны за
интервал накопления сигнала, много меньше дальности до цели, наблюдается
эффект трансформации выходного отклика системы оптимальной обработки
(диаграммы направленности синтезированной апертуры) в соответствии с опи-
санными ранее эффектами [10].
198
ГЛАВА 3 РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Этот факт объяснялся расширением спектра пространственных
частот траекторного сигнала, что в соответствии с принципом
пространственно-временной эквивалентности приводит к
трансформации выходного отклика системы оптимальной обработки
. w sin(x)
траекторного сигнала по сравнению с формой------.
Изменение траектории перемещения ФЦА по сравнению с прямолинейной, при
синтезировании апертуры приводит к изменению амплитудно-фазового распреде-
ления в синтезированной антенной решетке, что, в свою очередь, сказывается на
изменении формы синтезированной диаграммы направленности, являющейся от-
кликом оптимальной системы обработки траекторного сигнала на входное воздей-
ствие в виде сигнала, отраженного от одиночной точечной цели [1].
На рис. 3.19 и 3.20 представлены результаты моделирования
выходного отклика РСА от траектории движения ФЦ реальной
антенны при различных соотношениях между радиусом вращения
ФЦА и дальностью до точечной цели. Угловой размер апертуры
у = Xc/D , где Хс - линейный размер синтезированной апертуры и D
- дальность до цели, полагался равным 0,01.
При этом считалось, что система обработки траекторного
сигнала настроена на прием линейно-частотно-модулированного
сигнала (опорная функция системы обработки рассчитывалась для
прямолинейного поступательного движения ФЦ реальной
антенны). В то же время на ее вход подавался сигнал, частота
которого изменялась по гармоническому закону, т.е. когда ФЦА
перемещается по круговой траектории. На рис. 3.19 и 3.20
приведены отклики системы обработки траекторного сигнала РСА
при радиусах вращения ФЦА, составляющих 0,9£> и O,1D
соответственно.
Как и следовало ожидать, несоответствие параметров
опорного сигнала с параметрами сигнала, действующего на входе
системы обработки, приводит к искажению выходного сигнала.
Причем, как видно из приведенных на рис. 3.19 и 3.20
графиков, при радиусе вращения ФЦА, соизмеримом с дальностью,
_ _ sin(x)
отклик системы обработки мало отличается от ------------
. При
радиусе вращения фазового центра реальной антенны много
меньших дальности до точечной пели отклик существенно
расширяется и уменьшается по уровню (0,14 против 0,45).
При радиусе перемещения ФЦА, много меньшем дальности до ТЦ, для получения
качественного и адекватного РЛИ нельзя пренебрегать возникающей нелинейной
модуляцией траекторного сигнала, и следует вводить поправки в опорную функ-
цию системы обработки траекторного сигнала.
199
РЛС АВИА ЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 3.19
Рисунок 3.20
Данные поправки должны компенсировать изменения
амплитудно-фазового распределения в синтезируемом раскрыве
антенны, происходящие из-за отклонения траектории движения
ФЦА от прямолинейной.
Из проведенного анализа следует, что изменение траектории переме-
щения ФЦ реальной антенны в процессе синтезирования апертуры ан-
тенны относительно прямолинейной приводит к изменению амплитуд-
200
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
но-фазового распределения поля в раскрыве искусственной антенной
решетки, которое сказывается на изменении ее диаграммы направ-
ленности.
Характер этого изменению зависит от соотношения между даль-
ностью до наблюдаемого объекта (подстилающей поверхности) и ра-
диуса кривизны траектории.
Когда радиус кривизны траектории перемещения фазового центра
реальной антенны много меньше дальности до цели, происходит из-
менение амплитудно-фазового распределения в синтезированной
апертуре, приводящее к уменьшению ширины диаграммы направлен-
ности синтезированной антенны, при одновременном возрастании
уровня ее боковых лепестков.
Синтезирование апертуры антенны
при учете поступательного
и вращательного движений
фазового центра реальной антенны
V К . л . - к ... • «Г Ж?. . "Jim .. .к
В предыдущих параграфах данной главы рассмотрены осо-
бенности, связанные с формированием и обработкой траекторного
сигнала в РЛС с режимом синтезирования апертуры при вращении
ФЦА. Исследуем особенности, присущие режиму синтезирования
апертуры антенны при перемещении ФЦА по комбинированной
траектории, когда виртуальная апертура формируется с учетом как
поступательного движения ФЦ, так и его движения относительно
оси вращения.
Предположим, что объект зондирования является наземной
точечной неподвижной целью, располагаемой в переднебоковом
секторе относительно линии пути носителя РЛС. Поступательное
движение ФЦА происходит по линейной траектории под
фиксированным углом относительно линии пути (оси OY), а
вращательное - за счет вращательного движения ФЦА в картинной
(горизонтальной) плоскости вокруг центра масс носителя (рис. 3.21).
Как видно из рисунка, комбинированная траектория переме-
щения ФЦА представляет собой растянутую спираль. Степень
растяжения зависит от соотношения скоростей поступательного и
вращательного движений. Зондирование неподвижной наземной
точечной цели осуществляется непрерывным сигналом. Диаграмма
направленности антенны предполагается слабонаправленной.
201
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок S.21
Как известно [5, 7], основой для описания траекторного сигнала
является характер изменения дальности до объекта наблюдения. При
комбинированной траектории перемещения ФЦА изменение даль-
ности до ТЦ происходит в соответствии с выражением
Ps(О = ^(*фц(0-*ц)2 +(уфц(0->ц)2 +402 , (3.24)
где хц,рц= const - координаты объекта зондирования (точечной
неподвижной цели); z(t) - h - const - высота носителя РСА отно-
сительно поверхности земли.
202
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА
Изменение координат ФЦ вследствие его прямолинейного
движения происходит по правилу
*пр(0 = VA = vnp
COS(iZ)/,
УпР(0 = *7= Vnp sin(a)t
(3.25)
гДе Vnp
- скорость прямолинейного движения носителя РСЛ.
Вращательное движение фазового центра относительно оси
вращения приводит к изменению координат в соответствии с
соотношениями
хвр О) = ~r cos(2З'вр (0 = r sin(27£lt),
(3.26)
где Q = VBp
- скорость вращательного движения фазового центра
относительно его оси вращения; г - радиус вращения. Обе
величины полагаются постоянными.
Комбинированное движение ФЦА приводит к изменению его
координат в соответствии с соотношениями
хфц(0 хо + хпр (0 + хвр (0? .Уфц(0 3;о + JAip (0 + .Увр (0- (3.27)
При написании (3.27) полагалось, что координаты начала
траектории фазового центра х0, у0 равны нулю. Выражения
(3.25)-(3.27) представляют собой траекторные уравнения в пара-
метрическом виде и описывают изменение хфц , ^фц, входящих в
формулу дальности (3.24).
Опираясь на выражения (3.24)-(3.27) и считая, как и ранее,
сигнал, излучаемый РЛС, монохроматическим, изменение фазы
траекторного сигнала на интервале синтезирования при комбини-
рованной траектории перемещения ФЦА можно представить в виде
%рм(0 = ^А:(0 =
А
(3.28)
Поскольку частота является производной от фазы, ю
выражению (3.28) можно поставить в соответствие выражение,
определяющее изменение частоты траекторного сигнала на
интервалах синтезирования в виде
^прм (0 _ 4я 5£>еЦ) _ 4лг
^сбл (0 ’
(3.29)
где Ксбл(/) - скорость сближения ФЦА и точечной цели при
движении носителя.
203
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 3.22 и 3.23 приведены графики, показывающие
характер изменения Dz(z), ^9прм(/) и /прм(0 в процессе
синтезирования апертуры при комбинированной траектории
перемещения ФЦА.
Рисунок 3.22
Рисунок 3.23
204
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ. ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
ОСЯМ
относительные
ординат на данных рисунках отложены
(рис. 3.22),
величины
,н(0 =
z ч ^прм СО
^прм.н(0 =
^прм (®)
прм.н V )
(рис. 3.23, в,
вр
прм.н (О ПРИ Тс=пТвр остается
г), а по осям абсцисс - относительное время 10 =---, где
^вр
период вращения ФЦА относительно оси вращения.
Из приведенных на рисунках зависимостей видно, что
рассмотренные параметры изменяются по периодическому закону с
периодом, равным периоду вращения ФЦА. Причем среднее
значение и %рмн(0 ПРИ малых временах синтезирования
(Тс = пТвр) изменяется линейно. При больших временах интервала
наблюдения (Гс »Твр) средние значения величин DSh (г) и
^прмн(О изменяются по квадратичному закону. Среднее значение
частоты траекторного сигнала /г
постоянным, но с ростом времени наблюдения (Тс »Гвр)
изменяется по линейному закону.
Выражения (3.24) - (3.27) позволяют описать информацион-
ную часть траекторного сигнала по аналогии с (3.1), как
(4тг
Л (3.29)
где S(t) - комплексная огибающая траекторного сигнала; U - ам-
плитуда сигнала; G(t) - функция, описывающая модуляцию сигнала
ДН реальной антенны (в дальнейшем будем полагать G(Z) = 1); Л
длина волны зондирующего колебания; D7(t) - расстояние между
фазовым центром антенны и точечной целью в момент времени t; (р^
- случайная начальная фаза траекторного сигнала.
При написании (3.29) полагалось, что фазовые искажения сигна-
ла, обусловленные средой распространения радиоволны, нестабильно-
стью приемопередающего тракта и отклонениями фазового центра ан-
тенны от движения по траектории, отсутствуют. Амплитудная моду-
ляция траекторного сигнала, возникающая вследствие изменения
дальности до точечной цели, не учитывается, поскольку полагается,
что г . Из выражений (3.28), (3.29) и рис. 3.23, б видно, что
205
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
траекторный сигнал является частотно-модулированнным, причем
частота меняется по гармоническому закону.
Предположим, что наблюдение траекторного сигнала ведется
на фоне только внутренних шумов приемника РЛС. В этой связи
уравнение наблюдения можно представить в виде
y(Z,6z) = S(r) + W),
(3.30)
где S(f) - комплексная огибающая траекторного сигнала (3.29);
N(f) - шумы наблюдения.
Как отмечалось ранее, оптимальный алгоритм обработки тра-
екторного сигнала сводится к перемножению принимаемого и
опорного сигнала, который с точностью до постоянного множителя
повторяет полезный:
S*(t,ao) = S(t,dx,dy) =
— Uq 2
12 2
^(хфцЦ)-хц-Дх) +(уфц(/)-Уц-^) +z(t)2
(3.31)
и затем накоплению (интегрированию) результатов произведений в
течение времени наблюдения (времени синтезирования):
С7ВЫх = \y(t,a}S*(t,ao)dt.
(3.32)
При оценке потенциальных возможностей РСА при перемеще-
нии ФЦА по комбинированной траектории предположим, что шумы
наблюдения отсутствуют. В результате алгоритм (3.32) можно пере-
писать в виде
тс
UBax(dx,dy)= \s(f)S(t,dx,dy)dt
(3.33)
о
где dx, dy - координаты соседней точки пространства.
Выходной отклик (3.33) системы обработки, как и ранее, можно
трактовать как функцию неопределенности траекторного сигнала,
формируемого при перемещении ФЦА по комбинированной траекто-
рии. Моделирование данного отклика с учетом (3.31) и (3.33) для двух
различных дальностей позволило получить вид траекторного сигнала
(рис. 3.24).
Только при малой дальности до цели РСА обладает разрешающей способностью
как по азимутальной, так и по угломестной координатам (рис. 3.24,а). При боль-
шом удалении разрешение по дальностной координате (в плоскости угла места)
может быть обеспечено только при использовании сложных сигналов.
206
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФА ЗОВОГО ЦЕНТРА ...
В дальнейшем будем вести рассмотрение в условиях, когда
точечная цель является неподвижной и находится на большом уда-
лении от РСА, полагая, что разрешение по дальности обеспечива-
ется выбором требуемой ширины спектра зондирующего сигнала.
Как указывалось ранее, возможности РСА по линейному разре-
шению в азимутальной плоскости оцениваются по длительности вы-
ходного отклика (3.33). Для оценки данного параметра рассмотрим
сечения тела неопределенности (рис. 3.24,6) при различных соотно-
шениях скорости поступательного и вращательного движения ФЦА,
азимутальных направлениях прямолинейного движения, длительности
когерентного накопления, и проведем сравнительный анализ возмож-
ностей РСА по разрешению при прямолинейном, вращательном и
комбинированном вариантах движения ФЦА.
Рисунок 3.24
При проведении анализа будем опираться на известные резуль-
таты. Так, потенциальная разрешающая способность при прямоли-
нейном движении носителя РСА и переднебоковом обзоре [13, 16]
^аз=----—----->
2FHrcsin^
(3.34)
где А - длина волны; D — дальность до точечной цели (наблюдае-
мой поверхности); Кн - скорость полета носителя (путевая ско-
рость); Тс - время синтезирования; <рА - угол установки реальной
антенны РЛС относительно линии пути.
Линейная разрешающая способность по азимуту при враще-
нии ФЦА равна [5]
^аз=—(3-35)
л 4г
где г - радиус вращающей структуры (радиус вращения ФЦА).
Кроме того, в [9] показано, что огибающая выходного от клика
оптимальной системы обработки при поступательном движении опи-
207
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
сывается функцией sinx/x (рис. 5 - пунктирная линия), а при враща-
тельном движении - функцией Бесселя первого рода нулевого поряд-
ка (рис. 5 - сплошная линия). В результате при чисто вращательном
движении (по сравнению с поступательным движением ФЦА) разре-
шающая способность выше, но одновременно выше и уровень БЛ
(порядка 40% от уровня ГЛ).
Рисунок 3.25
При комбинированном движении ФЦА и неизменном положении точечной цели
изменение угла направления прямолинейного движения эквивалентно изменению
синтезируемой апертуры антенны, видимой с точки цели.
Следовательно, при комбинированном способе движения
ФЦА изменение углового направления прямолинейного движения
в сторону увеличения приводит к улучшению линейного разреше-
ния по азимуту. Данный факт подтверждается результатами
моделирования, которые приведены на рис. 3.26. Изображение на
рис. 3.26, а соответствует движению носителя РСА под углом
a =0,52 рад, на рис. 3.26, б - 1,04 рад, на рис. 3.26, в - 1,57 рад
(носитель летит непосредственно на цель).
Отличительной особенностью комбинированного движения,
как видно из рис. 3.26, в, является то, что при нахождении цели
строго на линии пути носителя БРЛС линейное разрешение по
азимуту остается высоким и определяется параметрами вращаю-
щейся структуры.
Из выражения (3.34) видно, что при комбинированном
движении ФЦА на размеры формируемой апертуры влияет
скорость движения носителя. На рис. 3.27 представлены выходные
отклики оптимальной обработки траекторного сигнала в
зависимости от изменения скорости прямолинейного движения
208
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
носителя РСА при неизменной скорости вращения ФЦА.
Отношение скоростей вращательного и поступательного движений
вр
пр
вр
= 2лтГ2) варьировалась от 4,31 до 3,03
(рис 321,6 иллюстрирует выходной отклик, соответствующий
отношению скоростей 3,56).
Рисунок 3.26
Скорость прямолинейного движения влияет на приращение линейного разре-
шения по азимуту за счет поступательной компоненты движения ФЦА. Увели-
чение скорости движения носителя РСА приводит к улучшению разрешения
РСА при комбинированном движении ФЦА, а также к постепенному снижению
уровня бокового лепестка выходного сигнала, что повышает контрастность
формируемого РЛИ.
В то же время, из анализа выражений (3.34) и (3.35) видно, что
при комбинированном движении ФЦА скорость вращения ФЦА
относительно оси его вращения не оказывает явное влияния на
форму фазового центра траекторного сигнала. Однако изменение
скорости вращения непосредственно влияет на число оборотов в
течение периода синтезирования, а также на степень растяжения
спиралевидной траектории ФЦА. Выходные отклики системы
оптимальной обработки траекторного сигнала в зависимости от
изменения скорости вращательного движения фазового центра
реальной антенны при неизменной скорости прямолинейного
движения представлены на рис. 3.27. Отношение скоростей
вращательного и поступательного движения варьировалась от 1,82
до 3,03 (рис 3.27,6 иллюстрирует выходной отклик, соответствую-
щий отношению скоростей 2,43).
Изменение скорости вращательного движения ФЦА при сохранении неизменной
скорости прямолинейного перемещения оказывает влияние как на изменение
уровня бокового лепестка, так и на их положение относительно главного лепестка.
Так, увеличение скорости вращательного движения приводит к снижению уровня
главного лепестка и одновременно к удалению их относительно ГЛ.
209
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 3.27
Оценим влияние характера движения фазового центра антен-
ны на потенциальные возможности РСА по разрешению.
При этом будем полагать, что угловое направление поступа-
тельного движения, отношение скоростей вращения ФЦА и пере-
мещения носителя, а также отношение радиуса вращающей струк-
туры и начального значения дальности до точечной цели сохраня-
ются неизменными. Сравнение вариантов движений и влияние на
показатели разрешения РСА проведем путем моделирования сис-
темы обработки в данных условиях.
При моделировании перечисленные выше величины будем
полагать соответственно равными 0,785 рад, 3,03 и 3,625-10-4.
Сравнительный анализ различных вариантов движений ФЦА при-
веден на рис. 3.28 - 3.30. Так, на рис. 3.28 изображены выходные
отклики оптимальной системы обработки для двух видов траекто-
рий перемещения ФЦА - комбинированного (сплошная линия) и
поступательного (пунктирная линия).
Рисунок 3.28
Основным варьируемым параметром поступательного движения
являлось отношение времени накопления траекторного сигнала к пе-
210
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
которое изменялось от 0,5 (рис. 3.28,я) до 5
Т
риоду вращения г)т - —-
Tip
(рис. 3.28,в). Результаты, приведенные на рис. 3.28, б, соответствуют
отношению 7Т , равному 2,5.
Из сравнения результатов, приведенных на рис. 3.28,я-в, следу-
ет, что при малом времени синтезирования, когда длина синтезиро-
ванной апертуры меньше или соизмерима с размером апертуры, по-
лучаемой только при вращении, наблюдается выигрыш в линейном
азимутальном разрешении при комбинированном способе переме-
щения ФЦА. По мере роста времени синтезирования вклад в эквива-
лентное увеличение синтезированной апертуры вращательной ком-
поненты уменьшается.
Результаты сравнительного анализа вращательного и комби-
нированного движения ФЦА представлены на рис. 3.29, где сплошная
линия соответствует комбинированному перемещению ФЦА, а
пунктирная - вращательному. Результаты, приведенные на рис. 3.29,
соответствуют отношению времени накопления траекторного сигнала
к периоду вращения ФЦА т/т , равному 0,5; 2,5 и 5.
Рисунок 3.29
Сравнение воздействия вращательного и комбинированного движения ФЦА на ре-
зультаты обработки траекторного сигнала показывает, что при комбинированном
движении за счет влияния поступательной компоненты движения снижается уро-
вень БЛ выходного отклика по сравнению с чисто вращательным движением. Бо-
ковые лепестки высокого уровня по мере роста времени синтезирования смеща-
ются в сторону от ГЛ выходного отклика. Когда время синтезирования при комби-
нированном движении становится значительно больше времени синтезирования,
необходимого для формирования апертуры при вращательном движении, линей-
ное разрешение по азимуту при комбинированном варианте траектории становит-
ся выше, чем при только вращательном движении.
211
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В связи с возможностью вращения ФЦА относительно центра
масс носителя, движущегося поступательно как по часовой стрелке,
так и в обратном направлении, на рис. 3.30 представлены результаты
анализа данных вариантов движения на возможности РСА по
разрешению. В частности, на рис 3.30,а приведена графическая
иллюстрация отмеченных двух вариантов комбинированного
движения (по осям графика отложены линейные приращения
координат хфц, j/фц, нормированные к соответствующим
проекциям дальности хФЦн =—уфцн “—“Л а на Рис- 3.30,б-г
Dx Dy
представлены выходные отклики системы отработки для данных
вариантов движения.
Рисунок 330
212
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Время накопления траекторного сигнала при моделировании
варьировалось в пределах, аналогичных предыдущему этапу
анализа, однако приведенные графики выходных откликов
соответствуют отношению т/т, равному 1, 2,5 и 3,5.
Из представленных результатов следует, что при малом
времени синтезирования в один и тот же момент времени и одной
траектории в одном случае (при вращении ФЦА против часовой
стрелки) наблюдается уменьшение синтезируемой апертуры, а в
другом случае (при вращении по часовой стрелке) — ее увеличение.
В то же время, по мере роста времени синтезирования данный
эффект при комбинированном движении ФЦА практически не влияет
на качество процесса синтезирования, и суммарная разрешающая
способность по азимуту становится одинаковой (рис. З.ЗО,б-г).
Траекторный сигнал, формируемый в процессе синтезирования апер-
туры антенны при комбинированной траектории движения ФЦА, явля-
ется сложно-частотно модулированным. Параметры нелинейной мо-
дуляции траекторного сигнала зависят как от характеристик вращаю-
щейся структуры ФЦА (от угловой скорости перемещения фазового
центра и радиуса вращения), так и скорости поступательного его дви-
жения.
При комбинированном перемещении фазового центра реальной
антенны наблюдается приращение синтезированной апертуры, кото-
рое обеспечивает повышение линейного разрешения РСА по азимуту,
однако данное преимущество наблюдается при малом времени коге-
рентного накопления траекторного сигнала (TH < 5 ТВР).
За счет вращательной компоненты движения ФЦА относительно
центра масс носителя РСА при комбинированной траектории его пере-
мещения возможно решение проблемы получения РЛИ строго впереди
носителя, детальность формируемого изображения в этом случае оп-
ределяется параметрами вращающей структуры.
Поступательная компонента комбинированного движения ФЦА
позволяет снизить уровень боковых лепестков выходного отклика
системы обработки по сравнению со случаем чисто вращательного
движения, следовательно, повысить контрастность формируемого
РЛИ.
213
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
' Эффективная синтезированная
апертура антенны
3.5 ! при комбинированной траектории
движения фазового центра
реальной антенны
Искусственная апертура, формируемая в процессе когерентной об-
работки траекторного сигнала в процессе перемещения ФЦА, опре-
деляет возможности РСА по разрешению в азимутальной плоскости.
При поступательном перемещении ФЦА при прочих равных
условиях параметры синтезированной апертуры зависят от протя-
женности интервала, в течение которого ведется когерентная об-
работка траекторного сигнала [2, 4, 5]. При вращательном движе-
нии ФЦА параметры искусственной апертуры определяются пара-
метрами вращающей структуры [10-12]. При учете как поступа-
тельного, так и вращательного движения ФЦА на параметры синте-
зированной апертуры влияет как протяженность интервала коге-
рентной обработки, так и параметры вращающей структуры [13].
Вместе с тем, вклад в процесс формирования искусственной
апертуры антенны отдельных составляющих комбинированного
движения ФЦА различен. В этой связи рассмотрим влияние
составляющих комбинированной зраектории движения ФЦА
(рис. 3.31) на процесс синтезирования апертуры антенны. При этом
объект зондирования является наземной точечной неподвижной
целью, располагаемой в передне-боковом секторе относительно
линии пути носителя РЛС.
Рисунок 3.31
214
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Как видно из рис. 3.31, траектория комбинированного пере-
мещения имеет характерные участки, которые повторяются с пе-
риодичностью вращения фазового центра реальной антенны отно-
сительно центра масс носителя. В течение одного периода вра-
щения траектория (рис. 3.31,6) включает в себя как дугообразную
часть, по которой перемещается фазовый центр поступательно
вперед, так и петлевую часть, по которой он движется в
направлении, обратном движению носителя (рис. 3.31,6). Анализ
времени движения фазового центра по данным участкам
траектории показал, что на петлевую часть траектории расходуется
время в три раза большее, чем на дуговую.
Из результатов, приведенных в [13], следует, что при
движении ФЦА по комбинированной траектории путь синтезиро-
вания можно представить в виде Lc = Lc + ЛА, где Lc - путь синте-
зирования, соответствующий движению ФЦА по прямолинейной
траектории; ДА - приращение Ас за счет вращательной компо-
ненты движения ФЦА.
Причем приращение ДА обеспечивается, когда ФЦ движется
по дугообразной части траектории. После достижения опреде-
ленной точки на петлевой части траектории величина АА = 0,
несмотря на постоянное приращение длины кривой линии за счет
вращательного движения фазового центра. Данную точку на
траектории можно найти, если воспользоваться уравнением
нормали, проведенной к касательной в данной точке траектории:
y(i) - у(М=- Х'1)) (3.36)
у (О
Для ее нахождения необходимо найти совместное решение
уравнений нормали и траектории в заданной точке:
Уфц('1) = Я*1)-
(3.37)
Учитывая, что аналитическое представление нормали является
уравнением прямой в плоскости ун (t) = x(t) + b, получаем следую-
щую систему уравнений:
Vnp cos(a) + 2flQrsin(2TzQ/)+ Vnp sin(a) + 2^Qrcos(2^Q/) = 0;
sin(cr) + 2яОг cos(2tzQ/) 0,
(3.38)
где Q - угловая скорость вращения ФЦА; г - радиус вращения ФЦ;
а - угловое положение цели относительно линии пути носителя.
215
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Решение системы (3.38) имеет вид
В результате получаем две характерные точки O2[x(t2\ у (^2)]
и О3[х(/3); y(z3)] на траектории, которые определяют ее дугообраз-
ную часть, влияющую на величину Lc, и через которые может
быть проведена секущая, отделяющая петлевую часть траектории.
Для наглядности на рис. 3.32 в укрупненном масштабе
сплошной линией выделена часть траектории фазового центра,
соответствующая периоду вращения.
Перемещение по дугообразной части, расположенной выше
этой прямой, приводит к постоянному приращению синтезируемо-
го раскрыва.
Если на траектории отметить две точки О2 и О3,
соответствующие началу и концу дугообразной ее части и лежащие
на продолжении нормали к касательной в точке изменения знака
производной, то можно выделить некоторую эквивалентную
апертуру £*кв, формируемую при поступательном перемещении
фазового центра в процессе синтезирования при движении его по
комбинированной траектории.
216
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Петлевая часть траектории, заключенная между точками
Хб)] и O2[x(t2); Х*2)]> не оказывает положительное
воздействие на приращение пути синтезирования за счет
поступательного движения. Тем не менее, на интервале
упомянутой части траектории процесс синтезирования реализуется,
но только за счет вращательной компоненты перемещения ФЦА.
Параметры, необходимые для оценки эффективности
процесса синтезирования при учете
как различных частей траектории ФЦА, так и всей ее части
• Длина траектории 5(ТН) синтезирования.
• Формируемая апертура Lc (Тн )
• Уровень боковых лепестков £/6j[(Th) выходного сигнала
оптимальной системы обработки.
• Потенциальное линейное разрешение в азимутальной
ПЛОСКОСТИ «^.комб^н)
Данные параметры, как известно, являются функциями времени
синтезирования (времени накопления ТИ траекторного сигнала).
Для сравнительного анализа различных вариантов движения
введем относительные перечисленные выше качественные
показатели в виде:
(3-40)
£(гс)=^-2,(^ (3-41)
= (3.42)
^аз.комб.1 v*cz
где первый определяет относительную синтезированную апертуру,
второй - относительный уровень боковых лепестков выходного
сигнала оптимальной системы обработки, третий - относительное
линейное азимутальное разрешение.
При рассмотрении показателей (3.40) - (3.42) фигурируют два
вида движения ФЦА. Учитывая, что анализируются три вида траек-
торий движения (прямолинейная, круговая и комбинированная),
наиболее целесообразно рассматривать данные показатели при
сравнении комбинированной траектории с прямолинейной и
вращательной.
217
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Характер изменения параметров (3.40) - (3.42) в зависимости
от относительного времени когерентной обработки в процессе син-
тезирования апертуры при движении ФЦА по комбинированной
траектории относительно аналогичных процессов при прямолиней-
ной и вращательной траекториях приведен в табл. 3.1. Подстроч-
ный идентификатор при каждом качественном параметре, пред-
ставленном в табл. 3.1, состоит из двух индексов: первый опреде-
ляет сравниваемый показатель в соответствии с (3.40) - (3.42),
второй - вид траектории перемещения фазового центра: 1 - прямо-
линейное, 2 - вращательное. В качестве относительного времени, в
табл. 3.1 используется величина т] , равная отношению времени на-
копления к периоду вращения.
Таблица 3.1
т 77 = —— Т вр Параметр
Качественный параметр Качественный параметр <2 Качественный параметр £
К А.к< >мб ” L с.пр е А.комб <?12~ L ^с.вр е ^бл.комб бл.пр е _ ^бл.комб <?22“ и бл.вр к _ ^аз.комб ^31 О Г ^аз.пр су е _ ^аз.комб Ь32 “ А/ ^*аз.вр
1,0 2,015 2,232 1,619 0,85 0,496 0,865
2,5 1 3,109 1,19 0,625 1 0,621
5,0 1 5,836 1 0,525 1 0,33
Чем меньше относительное время г], тем выше показатель (3.40) и больше про-
является преимущество комбинированного движения перед прямолинейным, ко-
торое обусловлено значительным вкладом величины AL в величину Л* . За счег
этого при данных условиях и лучше показатель (3.42).
Приращение АЛ за счет вращательного движения уменьшается
по мере увеличения времени накопления. После времени
накопления, примерно равного Лн = 2,57^р , вклад АЛ в Л* можно не
учитывать. Такая же тенденция изменения и параметра 4з •
Иначе ведет себя показатель (3.41). При малом времени
накопления уровень боковых лепестков высок - выше, чем при
чисто прямолинейном движении. При накоплении сигнала в течение
пяти периодов вращения и более уровень боковых лепестков
снижается и устанавливается соответствующим уровню, имеющему]
место при поступательном перемещении фазового центра.
218
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
В связи с тем, что при комбинированной траектории движения
ФЦА, как это отмечалось ранее, все ее участки вносят вклад в
приращение синтезируемой апертуры, обусловленной поступатель-
ным движением, оценим вклад вращательного движения. Участками
комбинированной траектории, которые обеспечивают приращение
апертуры, являются дугообразные ее части.
Рассматривая данные участки комбинированной траектории, можно говорить об
эффективной синтезированной апертуре, представляющей собой совокупность ду-
гообразных ее частей.
При этом возможно образование эффективной апертуры,
опираясь на два подхода.
Подход L В состав эффективной траектории включаются
только те участки дугообразной траектории, которые отсекаются
прямой, проходящей через точки пересечения дугообразных частей
комбинированной траектории, соответствующих разным периодам
вращения (прямая АВ на рис. 3.32). Как показывает анализ
элементов комбинированной траектории ФЦА, образуемой за
временной интервал, равный одному периоду вращения 7^р,
данные дугообразные участки синтезированной апертуры
образуются за четверть периода вращения (рис. 3.33,а).
Поход 2. В состав эффективной траектории включаются все
дугообразные участки комбинированной траектории, которые
обеспечивают приращение величины £с. В этом случае время, в
течение которого формируется дугообразная часть траектории,
составляет 0,6Твр (рис. 3.34,я).
Вне зависимости от того, какой подход будет использован для
формирования эффективной апертуры при комбинированном
движении ФЦА, эффект приращения синтезированной апертуры
будет наблюдаться только при малом времени синтезирования
апертуры: 7^<2,57^р. При большом времени синтезирования
основным движением ФЦА, за счет которого обеспечивается
синтезированная апертура, будет его поступательное движение,
обусловленное перемещением носителя, что следует из результатов
анализа введенных выше коэффициентов эффективности
синтезирования. В табл. 3.2 даны коэффициенты эффективности
синтезирования для первого варианта формирования апертуры. В
табл. 3.3 даны коэффициенты эффективности синтезирования для
второго варианта формирования апертуры.
219
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
dB. рад-10'3
Гс = Гвр
б)
d6, рад 10'3
de, рад-10
в)
Рисунок 3.33
Таблица 3.2
т т вр Параметр
Качественный параметр Качественный параметр 6 Качественный параметр 6 j
Е _ ^С.КОмб L пр Е _ ^•'с.КОмб L ^с.вр Е _ ^бл.КОмб и ^бл пр Е _ ^бл.КОмб ^22" и и блвр е ^аз.комб *31 “ Х7 ^ач.пр е _ ^азжомб ^^аз.вр
1,0 0,985 1,108 1,476 0,775 1,015 1,743
3,0 1 3,844 1 0,525 1 0,502
5,0 1 5,612 1 0,525 1 0,343
220
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Рисунок 3.34
Таблица 3.3
т 7 = — Т вр Параметр
Качественный параметр £ Качественный параметр 6 Качественный параметр
Е _ ^С.КОмб L ^с.пр Е _ ^С.КОМб ^12~ L ^с.вр Е ^бл.КОМб ^бл.пр Е _ ^бл.КОмб ^22- ц бл.вр *31 “ X/ ^аз.пр су е _ ^аз.комб ьзг ~ & аз.вр
1,0 1,97 2,215 1,571 0,825 0,508 0,871
3,0 1 3,844 1,238 0,65 1 0,502
5,0 1 4,864 1 0,396 1 0,396
221
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Из результатов таблиц видно, что в зависимости от варианта
подхода образования эффективной апертуры по-разному изменяется
относительный уровень боковых лепестков (показатель ) и ли"
нейное разрешение по азимуту (показатель £3). При втором вариан-
те подхода образования эффективной апертуры и малом времени
когерентного накопления показатель £3 выше, чем при первом.
Данные выводы подтверждаются результатами моделирова-
ния (рис. 3.33, 3.34). На рисунках представлены выходные отклики
системы обработки траекторного сигнала при комбинированной
траектории движения ФЦА с учетом первого и второго вариантов
формирования эффективной апертуры соответственно при различ-
ных интервалах когерентной обработки траекторного сигнала.
Необходимо заметить, что представленные в табл. 3.32 и 3.33, а
также на рис. 3.33 и 3.34 результаты соответствуют анализу примени-
тельно к вкладу вращательного движения ФЦА в поступательное его
движение при комбинированной траектории перемещения ФЦ. Все
достоинства, связанные с чисто вращательным движением ФЦА (а
именно: возможность синтезирования строго впереди носителя РСА;
формирование искусственной апертуры в режиме «под собой»; синтез
апертуры антенны при отсутствии поступательного движения
носителя РСА) остаются и при комбинированном перемещении ФЦА.
Кроме того, открывается возможность синтеза апертуры и,
следовательно, формирования РЛИ наблюдаемой поверхности не
только в передне-боковом и боковом секторе, но и в задней полусфере
носителя. В тоже время, ввиду изменения круговой траектории ФЦА
за один период вращения при комбинированной траектории его
движения возникают некоторые особенности, которые следует
учитывать при реализации системы обработки траекторного сигнала.
При комбинированной траектории движения ФЦА имеет место прира-
щение синтезируемого раскрыва за счет вращательной компоненты по
сравнению с чисто поступательным движением, которое обусловлено
фазового центра перемещением на дугообразном участке траектории.
Совокупность дугообразных участков комбинированной траекто-
рии образует эффективную синтезированную апертуру.
Направление вращательного движения ФЦА относительно на-
правления поступательного движения носителя при комбинированной
траектории движения фазового центра реальной антенны имеет зна-
чение при малых временах когерентного накопления траекторного
сигнала и может приводить как к увеличению синтезируемого рас-
крыва, так и его уменьшению.
222
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
\ Интерферометрический режим
бортовой РЛС
3.6 с синтезированием апертуры
при вращении фазового
центра реальной антенны
_____ г > л
При рассмотрении вопросов формирования РЛИ в режиме синтези-
рования апертуры за счет вращения фазового центра реальной
антенны предполагалось, что отображение его осуществляется в
картинной плоскости. В то же время, при формировании
изображений различных объектов используются 3D технологии,
которые дают трехмерное представление наблюдаемого объекта.
При поступательном движении ФЦА использование интерферометрического ре-
жима формирования высокодетального РЛИ земной поверхности позволяет полу-
чать трехмерные изображения наблюдаемого кадра земной поверхности.
Рассмотрим режим интерферометрии применительно к
процессу формирования РЛИ при синтезировании за счет вращения
фазового центра реальной антенны.
Предположим, что на высоте Н над подстилающей поверхно-
стью располагаются два фазовых центра реальной антенной систе-
мы. Они разнесены в пространстве на высоту Афц и вращаются в
плоскостях, параллельных поверхности земли (рис. 3.35). Высота
подвеса фазовых центров реальной антенны Н » Лфц . В результате
расстояние d между фазовыми центрами (база) в процессе наблю-
дения земной поверхности изменяется от минимального значения
б7мин = Лфц до t7MaKC, которое при заданном разносе плоскостей
вращения зависит от радиуса вращения фазового центра. Радиусы
вращения фазовых центров т\ и г2 будем считать одинаковыми. В
итоге в процессе вращения база интерферометра du изменяет как
свою длину, так и угловое положение относительно вертикали - угол
(pd. На рис. 3.35: du - база интерферометра, Афц - разнос высот
расположения ФЦ1 и ФЦ2; a - угол между ФЦ1 и ФЦ2 в плоскости
горизонта, (р - угол прихода сигнала, отраженного от цели; (pd -
угол наклона базы интерферометра; (рн - угол визирования.
Иными словами, база интерферометра является функцией двух
параметров- б7и = /(йфц, г) (рис. 3.36):
223
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
<№ =
(3.43)
где
ХФЦ1 (0 “ -УфЦ2 (О — Хвр (О?
УфЦ1 О) “ ХФЦ2 (О = -Увр (О-
- координаты фазовых центров.
При этом минимальное и максимальное значения базы
где г - радиус вращения ФЦА.
224
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Объектом зондирования является точечная цель, расположенная
на подстилающей поверхности и находящаяся на расстоянии D от
источника зондирующего сигнала в плоскости горизонта. Высота цели
относительно плоской подстилающей поверхности - /?ц .
Угол визирования
(рк (/) = arcsin(z(0/r>H (/)) (3.44)
за период вращения остается практически неизменным ввиду того,
что наклонная дальность до цели, определяемая выражением (3.45),
значительно превышает высоту Н полета носителя:
(О = -^фц(О)2 +(л -З'фцЮ)2 +(^фц(0)2 , (3-45)
где хц, у - координаты объекта зондирования на подстилающей
поверхности (гц = 0); хФЦ , уфц, 2ФЦ - текущие координаты
фазового центра антенны. Координата гФЦ характеризует малое
значение самого угла, а изменение дальности ввиду вращения
фазового центра несущественно.
Нетрудно заметить, что угол между фазовыми центрами в
горизонтальной плоскости <2фц при их совместном встречном
вращении со временем изменяется. Учитывая, что угловая скорость
вращения одинакова, период изменения угла Та составляет в 2 раза
меньшее значение по сравнению с периодом Гвр вращения. С пе-
риодом Та изменяются угол наклона базы интерферометра cpd и
угол (р прихода сигнала, отраженного от цели. Однако характер их
изменения более сложный:
<Pd (О = агс8ш(АФЦ / dH (/)),
(3.46)
(p(t) = 0,5 л- - % (Z) - <pd (t),
где dM(t) - текущее значение базы интерферометра.
Информация о высоте наблюдаемой цели заложена в фазовых
различиях принимаемых сигналов в точках ФЦ1 и ФЦ2:
Yx(t, a)-SnpMA(t, ax) + n(t), (SAT)
Y2(t, a) = SnpM2(t, a2) + n(t), (3.48)
где SupMi(t, 6ZZ) - полезный сигнал; - параметр принимаемого
сигнала 5прм/, в который заложена информация о фазе сигнала;
225
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
n(t) - шумовое воздействие, представляющее собой аддитивный
белый гауссовский шум (БГШ).
Необходимо, опираясь на принимаемые сигналы (3.47), (3.48),
соотношения (3.45) и (3.46) и геометрию зондирования наземной
цели (рис. 3.35), определить высоту наблюдаемого объекта.
Для выделения информации о высоте наблюдаемого объекта
воспользуемся известной методикой оценки информационных
параметров радиолокационного сигнала [2], построенной на методе
максимума функции правдоподобия (логарифма функции
правдоподобия). В соответствии с данной методикой необходимо
сформировать функцию правдоподобия, определить ее логарифм и
найти максимум данной функции. Аргумент функции, при котором
достигается ее максимум, и будет оценкой информационного
параметра. В данном случае логарифм функции правдоподобия
(корреляционный интеграл) имеет вид
Z(a)= ^Y(t,a)Son(t)dt.
(3-49)
Следовательно, максимум Z(a) можно найти из выражения
[У(t,a)Son (f)dt = 0.
да
да J
о
(3.50)
Решение уравнения (3.50) и является оценкой информацион-
ного параметра.
Структуру системы обработки, соответствующую (3.50), мож-
но реализовать как во временной форме, так и в частотной.
Опираясь на второй (частотный) вариант, структуру системы
обработки можно представить в виде, приведенном на рис. 3.37.
Выходным параметром системы обработки является разность фаз
сигналов, принятых в точках ФЦ1 и ФЦ2. Выделение данной ин-
формации на схеме рис. 3.37 осуществляется с помощью элементов
ИФ (идентификатор фазы) и ФД (фазовый детектор).
Перемножение принимаемого колебания на опорную
функцию в каждом канале обработки позволяет устранить фазовый
набег, обусловленный вращением фазового центра:
Прм1 (0 — *^прм1 (0 * *$оп1 (0 —
<(2^/o/+^J[(/7(z)-ft)+O>5Acec]2+Z)2)
Л ’ J
= те
(3.51)
226
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
ФД
Рисунок 3.37
После спектральной обработки
ТС
sPx(D= р'прм1(/Н2^л.
О
в идентификаторе фазы происходит выделение фазы сигнала:
(/) = arg(Sp, (/)) (/ = 1,2). (3.52)
Информация о позволяет найти разность фаз
A = arg(SA (/) - arg(Sp2 (/)), (3.53)
которая связана с высотой /?ц объекта детерминированной
зависимостью
Лц - Н - DH (3.54)
I 4л-Лфц J
где Aj/(/0) - разность фаз принятых сигналов на центральной
частоте спектра.
Выражение (3.54) при известных Л, Н, DH и Лфц позволяет
по оценке Aj/(/0) определить высоту наблюдаемого объекта.
Как известно [3,5], потенциальная точность определения
угловой координаты зависит от ширины ДН антенны ©0 и
отношения q сигнал/шум (С/Ш) на входе приемного устройства:
227
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
О
В свою очередь, при заданном значении угловой координаты
высота рельефа связана с дальностью до объекта:
(3.56)
сгА(/) = —-
cos(pH(/))
При этом угол прихода сигнала (p(t), отраженного от цели,
связан с фазой сигнала интерферометра :
(3-57)
4лу7и(/)
Соотношение (3.57) получено на основе предположения о ма-
лости значений углов ср, что позволяет считать sin(^?)» (р. Следо-
вательно,
В результате выражение для точности оценивания высоты
объекта будет иметь вид
_ (t\ = 'WQQp П 5QS
^T^(Z) I— , (3.5У)
47rda(t)y]q cos(>H(/))
где dn (t) - текущее значение базы интерферометра; ©0 - ширина
диагрммы направленности антенны в угломестной плоскости при
работе на прием и передачу; q - отношение сигнал/шум.
Характер поведения точности измерения высоты во времени
приведен на рис. 3.38 (по оси ординат отложена нормированная
° 7 \ °л(0 \
величина crh(t) = ——).
Рисунок 3.38
228
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Как видно из выражения (3.59) и приведенного графика,
точность измерения высоты объекта изменяется с течением
времени по периодическому закону. Период этого изменения
определяется периодом вращения фазового центра. Это связано с
тем, что в процессе вращения текущее значение базы
интерферометра d^(t) изменяется в пределах от <7МИН до б7макс.
Из выражения (3.59) видно, что точность измерения высоты
объекта пропорциональна базе dn : чем больше <7И, тем выше точ-
ность ее измерения. В то же время, величина базы, как отмечалось
ранее, изменяется от своего минимального до максимального зна-
чения. В моменты времени, соответствующие 0,375Гвр и 0,875Твр,
точность измерения имеет наихудшее значение. Это объясняется
тем, что фазовые центры в данный момент располагаются один под
другим и база имеет минимальное значение <7МИН = Лфц.
Максимальная точность соответствует положению фазовых
центров, разнесенных по высоте и углу в плоскости горизонта
(рис. 3.36). Этого положения ФЦ1 и ФЦ2 достигают в середине
временного интервала
0,375Гвр; 0,875Гвр , т.е. в точке 0,625Гвр ,
что при учете периодичности представленной зависимости приво-
дит к значению (0,125 + 0,5т?)Твр, где п - число оборотов враще-
ния фазовых центров антенн. Коэффициент 0,5 объясняется тем,
что фазовые центры антенн вращаются с одинаковой скоростью, но
в противоположном направлении. В итоге отношение
максимальной величины точности к минимальной —
о
^"/?МИН
определяется отношением
JMaKC +
MdKL __ V ____
^мин ^ФЦ ^ФЦ
В случае синхронного вращения фазовых центров антенной
системы в одном направлении периодичность зависимости
точности измерения высоты (рис. 3.38) от времени пропадает.
Точность с учетом текущего значения наклонной дальности DH до
цели определяется минимальным значением базы б/мин = Лфц .
229
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Для оценки эффективности работы представленного алгоритма
измерения высоты объекта наблюдения было проведено моделиро-
вание представленной на рис. 3.37 системы обработки сигналов. Ре-
зультаты моделирования алгоритма представлены на рис. 3.39 (а
при отсутствии отражений от фона местности; б — трехмерное изо-
бражение данного объекта).
Рисунок 3.39
230
ГЛАВА 3. РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЕМОЙ ПРИ ВРАЩЕНИИ ФАЗОВОГО ЦЕНТРА ...
Как показали результаты моделирования, при отношении сиг-
нал/шум не менее 10... 15 дБ по мощности относительная точность
измерения высоты объекта составляет не более 10... 12% от ее ис-
тинного значения.
Показана возможность получения трехмерного РЛИ объекта зондиро-
вания на основе интерферометрического подхода при вращении фазо-
вых центров антенной системы радио-видения.
При соосном вращении фазовых центров реальной антенной сис-
темы возможно формирование трехмерного РЛИ наземных объектов
при функционировании бортового радиолокатора в режиме синтезиро-
вания апертуры антенны.
Точность измерения высоты наземного объекта при заданном от-
ношении сигнал/шум q на входе приемного устройства и известной
дальности зависит от базового расстояния интерферометра dv г рабочей
длины волны 2 радиолокатора и высоты расположения фазовых цен-
тров его антенной системы.
Литература
1. Антипов В.Н., Горяйнов В.Т., Кулин А.Н. и др. Радиолокационные станции с цифро-
вым синтезированием апертуры антенны / под ред. В.Т. Горяйнова. М.: Радио и
связь. 1988.
2. Бакулев П.А. Радиолокационные системы. М.: Радиотехника. 2007
3. Денисов В.П., Дубинин Д.В. Фазовые радиопеленгаторы. М.: Томский государст-
венный университет систем управления и радиоэлектроники. 2002.
4. Дудник П.И., Ильчук А.Р., Татарский Б.Г. Многофункциональные радиолокацион-
ные системы. Учеб, пособие для вузов / под ред. Б.Г. Татарского. М.: Дрофа. 2007.
5. Кондратенков Г. С., Фролов А.Ю. Радиовидение. М.: Радиотехника. 2004.
6. Коростелев А.А. Пространственно-временная теория радиосистем. М.: Радио и
связь. 1987.
7. Реутов А.П., Михайлов Б.А., Кондратенков Г.С., Бойко Б.В. Радиолокационные
станции бокового обзора. М.: Сов. радио. 1970.
8. РЛС обзора земной поверхности / под ред. Г.С. Кондратенкова. М.: Радио и связь.
1983.
9. Татарский Б.Г., Ясенцев Д.А. Исследование особенностей функции неопределенно-
сти сигнала с нелинейной частотой модуляцией. Информационно-измерительные и
управляющие системы. 2007. № 11. С. 8-13.
10. Татарский Б.Г, Ясенцев Д.А. Анализ особенностей формирования и обработки тра-
екторного сигнала в РЛС с синтезированием апертуры антенны при вращении ее
фазового центра // Информационно-измерительные и управляющие системы. 2008.
№ 9. Т. 6. С. 3-8.
11. Татарский Б.Г., Ясенцев Д.А. Особенности синтезирования апертуры при вращении
фазового центра антенны в режиме обзора «под собой» // Информационно-
измерительные и управляющие системы. 2009. № 1. Т. 7. С. 20-25.
231
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
12. Татарский Б.Г., Жуков М.Н., Ясенцев Д.А. Разрешающая способность РЛС с синте-
зированием апертуры при различных способах перемещения фазового центра ан-
тенны // Информационно-измерительные и управляющие системы. 2009. Т. 7. № 8.
С. 22-28.
13. Татарский Б.Г., Майстренко Е.В. Синтезирование апертуры антенны при учете по-
ступательного и вращательного движения фазового центра антенны // Антенны.
2010. № 9 (160). С. 15-23.
14. Устройства СВЧ и антенны. Проектирование фазированных антенных решеток /
под ред. Д.И. Воскресенского. Изд. 3-е. М.: Радиотехника. 2003.
15. Фалькович С.Е. Прием радиолокационных сигналов на фоне флуктуационных по-
мех. М.: Сов. радио. 1961.
16. The Circular Synthetic Radar // IEEE Transactions on aerospace and electronic system.
1973. № 7.
232
Глава 4
Выбор
зондирующих сигналов
для радиолокационных
систем
различного назначения
Введение ................................
4 1. Функция неопределенности сигналов
с нелинейной частотной модуляцией .......
4.2. Функция неопределенности сигналов
Й комбинированной частотной модуляцией .
4.3. Выбор системы ортогональных сигналов
для распределенной РЛС .------------------
4.4. Применение сверхкоротких имгульсов
в радиолокационных системах
’ авиационных комплексов дозора ............
Лигатура ....._______________;..........
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Эффективность решения задач, стоящих перед РЛС, как известно
[8, 11-13, 16, 17, 23], существенно зависит от вида используемых в
ней зондирующих сигналов. Поэтому выбор данных сигналов дол-
жен осуществляться с учетом удовлетворения вполне конкретных
требований по ее дальности действия и качеству обнаружения, раз-
решающей способности, а также точности оценивания координат и
параметров движения целей.
Дальность обнаружения целей увеличивается при использова-
нии зондирующих сигналов с большой энергией [1, И, 24], повы-
сить которую можно как за счет увеличения мощности передатчика
РЛС, так и длительности зондирующего сигнала. Пиковая мощ-
ность РЛС ограничивается сверху возможностями генератора ра-
диочастоты и электрической прочностью фидерных линий, соеди-
няющих этот генератор с антенной. При использовании ФАР пико-
вая мощность ограничена пиковой мощностью модулей ФАР [8].
Следовательно, остается единственная возможность повышать
энергию зондирующего сигнала путем увеличения его длительно-
сти. Однако простые сигналы большой длительности не обладают
хорошим разрешением по дальности. Переход же к сложным сиг-
налам с большой базой может разрешить эти противоречия. Чаще
всего для решения данной задачи используют сложные сигналы, у
которых по определенному закону изменяются фаза, частота или
частота и фаза одновременно.
При использовании данных видов модуляции можно получать
сложные сигналы с раздельным управлением длительностью и ши-
риной спектра, что приводит к возможности раздельного управле-
ния разрешающей способностью РЛС по времени и частоте, следо-
вательно, создавать радиолокаторы с заданными наперед высокими
тактическими характеристиками.
В то же время, инженерами-разработчиками активно рассмат-
ривается возможность использования в РЛС и других типов широ-
кополосных зондирующих сигналов, которые относятся к семейст-
ву сверхкороткоимпульсных [6, 14, 15]. Сравнение возможностей
данных сигналов и обычных радиоимпульсных показывает, что
первые при реализации в РЛС дают последним ряд преимуществ,
связанных, в первую очередь, с решением задач распознавания на-
блюдаемых объектов.
234
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
В материалах главы рассматриваются вопросы, связанные с
возможностями РЛС по разрешению при использовании сигналов с
нелинейной частотной модуляцией, ансамблями ортогональных
сигналов, а также проводится анализ возможностей при использо-
вания зондирующих сигналов в виде коротких видеоимпульсов в
РЛС дозорного типа.
В настоящее время достаточно хорошо изучены алгоритмы и уст-
ройства оптимальной обработки сигналов с угловой модуляцией, у
которых частота меняется линейно (ЛЧМ-сигналы) или фаза кото-
рых изменяется в соответствии с выбранным двоичным кодом
(ФКМ-сигналы) [3, 9-11, 13].
Однако практика показывает, что при использовании РЛС в
ряде приложений приходится сталкиваться с нелинейной частотной
модуляцией, при которой закон модуляции может быть описан раз-
личными функциями, в том числе гармоническими. Спектральный
анализ сигналов с нелинейной частотной модуляцией, а также их
автокорреляционных функций достаточно подробно представлен в
[9, 10]. В то же время, остается открытым вопрос, связанный с ана-
лизом свойств функций неопределенностей таких сигналов. В дан-
ной главе проводится анализ разрешающей способности РЛС при
использовании сигналов с тональной частотной модуляцией.
Основную роль при определении потенциальных возможно-
стей применяемых зондирующих сигналов по разрешению и точ-
ности играет функция неопределенности радиолокационного сиг-
нала [11, 13, 16, 21]. Как известно, она может интерпретироваться
как нормированный сигнал корреляционного приемника, настроен-
ного на некоторый опорный сигнал с комплексной амплитудой
*
S(t), когда на его вход поступает сигнал без помех, у которого па-
хе
раметры комплексной амплитуды S(f) расстроены относительно
опорных по времени и частоте соответственно на т и F:
235
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
оо * *
° 1г
T(r,F) = — S(t)S(t - T)exp(j2xFt)dt =
2Е J
зфс *
T j5(/)W-F)eXp(j2^/r)#.
(4.1)
С другой стороны, функция неопределенности может интерпре-
тироваться как нормированный выходной сигнал согласованного
фильтра, настроенного на сигнал S(f) с комплексной огибающей его
*
спектра S(f), на вход которого поступает сигнал без помех, задер-
жанный по времени на величину т, комплексная огибающая которого
имеет смещение F относительно ожидаемой настройки согласованно-
го фильтра.
Рассмотрим сигнал с нелинейной частотной модуляцией, изме-
нение которой a>(t) во времени подчинено косинусоидальному за-
кону
a>(t) = 2 л dF cos(2Ml/), t g [0, Tc ],
(4.2)
где dF - девиация частоты; Q - частота модулирующей функции;
Тс - длительность сигнала.
В этом случае аналитическое выражение для спектра ком-
ft
плексной огибающей сигнала S(t) с тональной частотной модуля-
цией (4.2) может быть представлено в виде [9, 19]:
OZ X гг гг. т z ч . ({CO-nF£)Tc
S(a) = U0Tc У J„(w)smc ------------
П--СО 4
(4-3)
что позволяет записать выражение для модуля функции неопреде-
ленности данного сигнала с выбранным законом модуляции как [19]
T(t,F) = — fcos(F7c/-2WFrsin(/))J/ = JFT (IndFr) , (4.4)
Л J C
0
где Tc - длительность сигнала; dF - девиация частоты; JFT -
С
функция Бесселя 1-го рода FTc-порядка.
Учитывая характер изменения функций Бесселя, можно ут-
верждать, что тело неопределенности (TH) сигнала с тональной
модуляцией будет иметь многомодовый характер. При варьирова-
нии длительности сигнала Тс и параметров частотной модуляции
(Q, dF) будет меняться как уровень, так и положение боковых ле-
пестков TH на координатной плоскости OtF.
236
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
Введение в сигнал нелинейной частотной модуляции приводит к расширению его
спектра примерно в два раза по сравнению с ЛЧМ-сигналом, поэтому можно
ожидать повышение разрешающей способности РЛС по дальности при использо-
вании сигналов с тональной частотной модуляции.
Представляет интерес рассмотрение различных ситуаций, свя-
занных с соотношением между периодом модулирующей функции и
длительностью сигнала. Учитывая сложность аналитического анализа
возможных соотношений при варьировании периода модуляции Тм и
девиации частоты dF, было проведено численное моделирование вы-
ходного отклика фильтра, согласованного с сигналом, частота которо-
го изменяется по гармоническому закону. Результаты данного моде-
лирования приведены на рис. 4.1—4.13. На рис. 4.1—4.4 даны результа-
ты моделирования для случая, когда ТМ = 2ТС. Характер изменения
комплексной огибающей сигнала и ее частоты для данного случая по-
казан на рис. 4.1 и 4.2 соответственно.
Вид комплексной огибающей сигнала при выбранном соот-
ношении периода модуляции и длительности сигнала и девиации
частоты 10тг показан на рис. 4.1.
ЭД
237
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Известно [11], что оценить совместную разрешающую спо-
собность РЛС при использовании конкретного типа сигнала воз-
можно по диаграммам направленности, представляющим собой го-
ризонтальное сечение TH на определенном уровне. Виды сечений
TH сигнала с тональной модуляцией частоты при Тм = 2ТС на уров-
нях 0,5 и 0,7 приведены на рис. 4.3.
Рисунок 4.3
Из анализа диаграмм направленности видно, что область высо-
кой корреляции (главный пик TH) повернута относительно коорди-
натных осей г = /д - /до и F - - f, где соответственно теку-
щие время запаздывания и доплеровское смещение частоты ;
/до и УдП() - значения данных параметров, на которые настроен опти-
мальный фильтр. Ширина данной области достаточно узкая, что гово-
рит о возможности достижения высокого разрешения по времени
(дальности).
В то же время, для полноты картины необходимо провести сече-
ния TH вдоль оси т (в материалах параграфа не анализируются сече-
ния TH сигнала с угловой модуляцией вдоль оси F, так как вариации
ширины спектра не влияют на разрешающую способность РЛС по
частоте (скорости)).
Поскольку сечение TH вдоль оси т совпадает по форме с корре-
ляционной функцией сигнала, то на рис. 4.4 приведена корреляцион-
ная функция сигнала с тональной частотной модуляцией для огово-
238
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
ренных выше параметров сигнала. Из рисунка видно, что автокорре-
ляционная функция сигнала имеет высокий уровень первых боковых
лепестков (примерно 40% от максимума). Для сравнения на рис. 4.5
и 4.6 показаны диаграммы неопределенности по уровням 0,5 и 0,7 и
автокорреляционная функция сигнала с линейной частотной моду-
ляцией при аналогичных параметрах закона модуляции [19].
Рисунок 4.5
239
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Как видно из рис. 4.4 и 4.6, ширина основного пика корреляци-
онной функции у ЛЧМ-сигнала при определенном значении девиации
частоты больше, чем у сигнала с тональной модуляцией. Учитывая,
что ширина данного пика обратно пропорциональна эффективной
ширине спектра сигнала [11, 17], можно утверждать, что при одинако-
вой величине девиации частоты спектр сигнала с тональной модуля-
цией является более широким по сравнению с ЛЧМ-сигналом.
При оптимальной обработке сигнал с НЛЧМ сжимается в большее число раз, чем
сигнал с ЛЧМ, и, следовательно, обеспечивается выигрыш в разрешающей спо-
собности РЛС по дальности, который составляет примерно 2О°/о.
Рисунок 4.6
Рисунок 4.7
Из анализа вышеприведенных диаграмм и вертикального сече-
ния TH следует, что тело неопределенности сигнала с тональной час-
тотной модуляцией имеет моноголепестковую структуру в виде об-
ласти высокой корреляции и боковых лепестков высокого уровня, что
240
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
затрудняет процесс разрешения близкорасположенных целей. Диа-
грамма неопределенности сигнала с тональной частотной модуляцией
при Тм = 2ТС по своему виду сходна с ДН сигнала с линейной частот-
ной модуляцией. Однако основной лепесток TH сигнала с НЛЧМ раз-
ворачивается в противоположную сторону.
Рассмотрим ситуацию, когда период модулирующей функции
равен длительности сигнала, т.е. Гм= Тс (рис. 4.7), а девиация частоты
остается неизменной. Результаты анализа выходного отклика согласо-
ванного фильтра для данного случая приведены на рис. 4.8 и 4.9.
241
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Как видно из рис. 4.7, характер изменения частоты модулиру-
ющей функции за время, соответствующее длительности сигнала Тс,
изменяется в различных полупериодах модуляции (в первом полу-
периоде частота повышается, во втором понижается). Данный ха-
рактер изменения частоты отражается на поведении комплексной
огибающей выходного сигнала фильтра, следовательно, и на функ-
ции неопределенности сигнала с НЛЧМ.
Горизонтальное сечение TH сигнала для данной ситуации на
уровнях 0,5 и 0,7 изображено на рис. 4.8.
Из приведенных ДН можно сделать предварительные выводы.
Основной пик функции неопределенности не повернут относи-
тельно осей системы координат, что наблюдалось при Гм = 0,5 Тс.
Уровень боковых лепестков остался довольно высоким, причем
данные лепестки отстоят от оси т и располагаются вдоль прямых
, , dF
у = , где кум =----индекс частотной модуляции.
За счет изменения знака производной частоты по времени за пе-
риод модуляции основной пик ФН приобретает эллипсовидную фор-
му, главная ось которого располагается вдоль оси т.
Автокорреляционная функция сигнала приведена на рис. 4.9,
из которого видно, что основной пик АКФ сузился, однако уровень
боковых лепестков не изменился. Видно также, что при Гм = Тс ши-
рина спектра сигнала возросла в два раза по сравнению с предыду-
щим случаем.
Предположим теперь, что период модулирующей функции
меньше длительности сигнала (Гм < Т^). Будем считать, что период
модулирующей функции в три раза меньше длительности сигнала,
а длительность сигнала и девиация частоты остаются неизменны-
ми. Диаграммы неопределенности сигнала с тональной частотной
модуляцией для выбранных условий на уровнях 0,5 и 0,7, а также
его АКФ приведены соответственно на рис. 4.10 и 4.11.
Анализ данных диаграмм и вертикального сечения TH сигнала
вдоль оси т показал, что уровень боковых лепестков остается неиз-
менным, однако ширина лепестков стала меньше и изменилось их
положение на плоскости OrF относительно координатных осей. Ео-
первых, за счет роста крутизны прямой у - +kyMt БЛ прижимают-
ся к оси F и, во-вторых, увеличивается относительное расстояние
между областью низкой корреляции и осью т. Кроме того, проле
ходит сужение основного пика ФН по оси т. При постоянной вели)
чине девиации частоты ширина основного пика уменьшилась пр
порционально увеличению девиации частоты, т.е. в три раза.
242
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
-0,5
0,5 —
Г^0,5 1
—0,5
0Л—
-0,005 0 0,05 т
Рисунок 4.10
-0,05 -0,04 -0,06 -0,03 -0,01 0 0,01 0,02 0,03 0,04 0,05
т,с
Рисунок 4.11
До сих пор анализ ДН сигналов с тональной модуляцией про-
водился при неизменной величине девиации частоты. Рассмотрим
влияние вариации данного параметра на вид ДН и разрешающую
способность РЛС по времени. Будем считать, что период модуляции
равен длительности сигнала и осуществим увеличение девиации час-
тоты в три раза. Результаты данных вариаций также оценим по виду
ДН и вертикальному сечению TH по оси т (рис. 4.12 и 4.13).
243
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
О
°, 5* 0,5
_ А с 0 5-
<0,7-
К
0,5— 0S
о,£ OS
-0,005
О
0,005
Рисунок 4.12
Рисунок 4.13
Как видно из сравнения рис. 4.8, 4.9 и рис. 4.12, 4.13 увеличе-
ние девиации частоты приводит к сужению области высокой кор-
реляции и БЛ функции неопределенности сигнала с тональной ЧМ
вследствие увеличения базы сигнала. Ширина центральной области
ДН уменьшается пропорционально увеличению девиации частоты^
что улучшает разрешающую способность сигнала.
Однако уровень боковых лепестков не изменяется. Макси-
мальный уровень данных лепестков составляет 40% от максимума.
Изменяется также положение БЛ относительно оси т.
244
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Форма и параметры функции неопределенности сигналов с тональной
частотной модуляцией зависят от соотношения между частотой моду-
лирующей функции и длительностью сигнала, а также от величины
девиации частоты, причем:
тело неопределенности сигнала имеет ярко выраженную область
высокой корреляции и боковые лепестки, плавно спадающие от центра к
периферии, уровень которых может достигать 40% от максимума;
форма и положение области высокой корреляции относительно
координатных осей т и F зависит от соотношения между длительно-
стью сигнала Тс и периодом модуляции Тм;
увеличение частоты модулирующей функции приводит к сужению
как области высокой корреляции, так и боковых лепестков, и, кроме
того, к сдвигу первых боковых лепестков относительно области высо-
кой корреляции в сторону увеличения величины г, однако уровень
данных лепестков не изменяется;
увеличение девиации частотной модуляции приводит к сужению
основного пика функции неопределенности и боковых лепестков, а
также к изменению положения последних, которые прижимаются к
оси F.
В некоторых практических приложениях возникает необходимость
использования сигналов, у которых частота изменяется одновремен-
но как по линейному, так и нелинейному законам. Несмотря на то,
что в научно-технической литературе, например в [3, 9, 10], прово-
дится рассмотрение сигналов с различными видами частотной моду-
ляции, в том числе и при комбинации линейной и нелинейной моду-
ляций, анализ возможностей таких сигналов проводится с точки зре-
ния изучения их общих свойств без детального рассмотрения
функций неопределенности (ФН) данных сигналов. Как известно
[11-13], знание свойств ФН и особенностей ее тела при использова-
нии различных типов сигналов важно для радиолокации.
В материалах данного параграфа проводится детальное рас-
смотрение влияния параметров сигнала с комбинированной час-
тотной модуляцией (КЧМ-сигнал) на характер изменения времен-
245
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ного и частотного его представления, а также функции неопреде-
ленности.
Рассмотрим временную форму описания КЧМ-сигнала через
его комплексное представление в виде
at2 Ду . ч
— ч-----sin(Qz)
о
С с
5
где UQ - амплитуда сигнала; Тс - длительность сигнала с КЧМ; /0 -
средняя частота спектра сигнала; a = bJ\jTc - коэффициент линей
ной частотной модуляции (ЛЧМ); AFM - девиация ЛЧМ; Ду - де
виация нелинейной частотной модуляции (НЧМ); Q = 2л/нм
=-----частота нелинейной модуляции (НМ); Тнм - период НМ.
База данного сигнала определяется как В = TcAFmZ =
= Tc(AFM+Av) = TcAFM(i + nf).
Из (4.5) следует, что частота КЧМ-сигнала изменяется в соот-
ветствии с выражением
/(/) = fQ + at + 0,5 Д у cos(Qz),
(4-6)
Комплексная огибающая S(t) сигнала с КЧМ имеет вид
S(t) - Uo exp
—sin(QZ) IL
£л у \
(4-7)
Как видно из (4.5) - (4.7), вид КЧМ-сигнала, характер его мо-
дуляции зависят как от абсолютных значений линейной и гармони-
ческой девиаций частоты AFM и Ду, так и от их отношения:
ту = Ду/AFM , а также от соотношения между временными пара-
метрами сигнала Тнм и Тс. Для оценки данного влияния введем от-
носительную длительность .
На рис. 4.14 показано изменение частоты и фазы сигнала в
пределах длительности Тс при различном отношении г/у девиаций
246
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
частот (2 - r]f = 0,1; 2 - rjf = 0,5; 3 - rjf = 0,9 ) и фиксированной вели-
чине Гнм (Тнм = Тс), а на рис. 4.15 - изменение частоты и фазы сиг-
нала при вариации периода Гнм НМ (2 - = 0,33,2 - = 0,5 ; 3 -
= 1) в пределах длительности Тс ( < 1) и фиксированном от-
ношении r/f {r/f =0,5).
Рисунок 4.14
Рисунок 4.15
Характер изменения комплексной огибающей S(t) КЧМ-
сигнала при вариации отношений ту и приведен на рис. 4.16.
В частности, рис. 4.16,67 соответствует изменению огибающей при
вариации т/у (2 -rjf =0,1; 2 - rjf =0,5; 3 - =0,9 ), а на рис. 4.16,6-
ее изменению при вариации (2 - = 0,33 ; 2 - = 0,5,3 - = 1).
247
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 4.16
Влияние изменений отношений т/у и ст на амплитудный и
фазовый спектры комплексной огибающей КЧМ-сигнала показано
на рис. 4.17 и 4.18. На рис. 4.17 отображается изменение амплитуд-
ного (рис. 4.17,«) и фазового (рис. 4.17,5) спектров при варьирова-
нии отношения девиаций частот ?;y=Av/AFM, когда величины
AFM = const, -0,33. На рис. 4.18 отображается изменение ампли-
тудного (рис. 4.18,6?) и фазового (рис. 4.18,5) спектров при варьиро-
вании относительной длительности ^т=ТП1А/ТСУ когда параметры
Тс = const, т/у = 0,5.
При варьировании характерного параметра модуляции 7/ и
относительной длительности изменяется динамика изменения
временных и частотных характеристик КЧМ-сигнала.
В частности, нарушается осциллирующий характер комплексной
огибающей КЧМ-сигнала при увеличении параметра ту (увеличение
вклада гармонической составляющей Ду девиации частоты).
248
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Рисунок 4.17
249
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
^ = 1 &=1
д)б)
Рисунок 4.18
250
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Аналогичные изменения происходят при уменьшении парамет-
ра . Чем больше отношение (относительная длительность) при
фиксированной величине 7у, тем сильнее сходство комплексной
огибающей сигнала с огибающей ЛЧМ-сигнала, аналогично, при ма-
лой величине отношения ту и фиксированном отношении .
Из рис. 4.17 следует, что варьирование отношения т/у де-
виаций частот приводит к изменению амплитудного и фазового
спектров комплексной огибающей КЧМ-сигнала. С увеличением
гу при фиксированных длительности Тс и линейной девиации
AFM сигнала амплитудный спектр расширяется, что обусловлено
большим вкладом в структуру спектра тональной ЧМ.
Расширение спектра пропорционально увеличению гу , ши-
рина спектра определяется суммарной девиацией частоты
А^мО-1-7?/)- При гу =1 основная часть спектра сосредо-
точена в области ±2AFmI или ±4AFm . Одновременно с увеличе-
нием девиации А у гармонической ЧМ изменяется схожесть фа-
зового спектра с аналогичным спектром ЛЧМ-сигнала в виду по-
явления осцилляций в центральной его области.
Увеличение коэффициента при сохранении неизменными
параметров AFM, A v и Тс, как следует из рис. 4.18, также приво-
дит к изменению как амплитудного, так и фазового спектров КЧМ-
сигнала. Чем больше период Гнм тональной модуляции, тем выше
сходство амплитудного спектра с аналогичным спектром ЛЧМ-
сигнала. С уменьшением относительной длительности ампли-
тудный и фазовый спектры расширяются, становятся более изре-
занными, что обусловлено возрастанием роли нелинейной модуля-
ции в формировании структуры КЧМ-сигнала.
Проведем сравнение функций неопределенности КЧМ-
сигнала и сигналов с линейной и гармонической частотными моду-
ляциями. Известно [11, 17], и о чем говорилось ранее, потенциаль-
ные возможности РЛС при использовании того или иного типа
зондирующего сигнала определяются, опираясь на анализ сечений
тела ФН вдоль осей г, F и диаграммы неопределенности (сечения
тела ФН плоскостями, параллельными координатной на заданном
уровне от максимального значения). Здесь параметры т = f - /д0 и
F = ~ ’ где (д ’ (до _ текущее время запаздывания сигнала и
опорное значение данного времени, на которое настраивается оп-
251
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
тимальный приемник РЛС соответственно; - текущее и
опорное доплеровское смещение частоты.
Запишем выражение, описывающее тело ФН КЧМ-сигнала, ис-
пользуя временную форму представления ФН в соответствии с (4.1):
^(r,F)
где Е =
00 .
Js(0S\/-r)exp{j2;rFr}6fr ,
(4.8)
2
dt - энергия КЧМ-сигнала; S (•) - комплексно-
• о
сопряженная функция к 5(0; Т(г^) - ФН КЧМ-сигнала. Символ
о в левой части (4.8) над идентификатором ФН означает
нормированное ее значение. В данном случае нормировка осущест-
влялась к энергии КЧМ-сигнала.
Построение тела ФН в соответствии с (4.8) выполнялось пу-
тем моделирования на ПЭВМ. Результаты данного моделирования
в виде сечений тела ФН представлены на рис. 4.19. и 4.20.
На рис. 4.19,67 представлено сечение тела ФН вдоль оси г:
о
^F)
на рис. 4.19,6 - вдоль оси
при
F=0 ’
4у=О,33, а на рис. 4.20 - диаграмма неопределенности
(рис. 4.20,6?) и тело неопределенности (рис. 4.20,6) КЧМ-сигнала.
Для сравнения на рис. 4.21 и 4.22 приведены диаграммы неоп-
ределенности и тела ФН сигналов с ЛЧМ [И] и НЧМ (гармониче-
ской ЧМ) при -0,33 [19] соответственно.
Рисунок 4.19
252
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РА ЗЛИЧНОГО НАЗНА ЧЕНИЯ
Рисунок 4.20
Рисунок 4.21
Рисунок 4.22
253
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Из представленных сечений и рис. 4.19, 4.20 видны следую-
щие особенности тела ФН КЧМ-сигнала.
1. Имеется ярко выраженная область высокой корреляции,
расположенная в центре координатной плоскости OtF , которая,
как и у ЛЧМ-сигнала, развернута относительно координатных осей
г и F. Причем протяженность зоны высокой корреляции вдоль
оси поворота у = t (AFmZ = AFM + A v), являющейся ее
осью симметрии, существенно меньше по сравнению с ЛЧМ-
сигналом. Угол поворота при фиксированной длительности Тс сиг-
нала главным образом определяется значением линейной девиации
AF, частоты КЧМ-сигнала.
2. Имеются области низкой корреляции (боковые лепестки
(БЛ)), максимальный уровень которых выше аналогичного уровня
БЛ ЛЧМ-сигнала, но меньше, чем у аналогичных лепестков сигна-
ла с НЧМ. Причем уровень БЛ спадает не плавно к периферии, как
у ЛЧМ-сигнала, а колеблется относительно некоторого среднего
уровня.
3. Положение боковых лепестков относительно главного, и их
уровень зависит от параметров гармонической модуляции КЧМ-
сигнала. Прослеживается явная периодичность расположения БЛ
по оси г, определяемая периодом НМ. Вдоль частотной оси БЛ
располагаются относительно равномерно.
За счет выбора параметров модуляции КЧМ-сигнала, при прочих рав-
ных условиях, можно обеспечить высокое разрешение радиолокаци-
онной системы по времени запаздывания (дальности).
Варьируя параметрами НМ, можно существенно снизить уровень
БЛ TH КЧМ-сигнала по сравнению с НЧМ-сигналом и обеспечить их
уровень ниже уровня БЛ TH ЛЧМ-сигнала и, как следствие, снизить
степень взаимного влияния откликов близко расположенных целей
через БЛ в виду увеличения расстояния между областями высокой и
низкой корреляций.
254
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
<1
- -
Выбор системы ортогональных сигналов
для распределенной РЛС
? *
Одним из перспективных направлений развития систем активной
радиолокации, позволяющим придать этим системам новые свойства,
является переход к многопозиционным (содержащим несколько
разнесенных передающих и приемных позиций) РЛС [26]. Наряду с
традиционным подходом к построению данных систем в последнее
время рассматривают возможность построения распределенных РЛС,
опираясь на технологию MIMO (Multiple Input - Multiple Output -
множество входов - множество выходов) [18,27,28].
Использование данной технологии позволяет, оставаясь в рамках активных ме-
тодов радиолокации, обеспечить высокие тактические показатели РЛС, напри-
мер помехозащищенность, разрешающую способность, точность. Одной из отли-
чительных особенностей таких РЛС является использование совокупности орто-
гональных зондирующих сигналов. Наиболее полно высокие тактические
требования к распределенной РЛС удовлетворяются при широкополосных и
сверхширокополосных сигналах.
Как известно [3, 11, 13, 15], указанные типы сложных
сигналов позволяют существенно повысить скрытность функцио-
нирования радиолокационных систем, улучшить разрешающую
способность по дальности, обеспечить решение задачи распоз-
навания обнаруженных целей, измерить полный вектор скорости
цели по доплеровской частоте и т.д.
В этой связи актуальная задача при разработке распределенных РЛС, исполь-
зующих MIMO-технологии (MIMO РЛС), - выбор конкретных типов сложных зон-
дирующих сигналов. В настоящее время проведено большое количество иссле-
дований по синтезу и обработке систем сложных сигналов применительно к тех-
нике связи, например в [2]. Аналогичные исследования проводятся и
применительно к системам радиолокации [11, 15, 20]. Если при выборе сигналов
в системах связи основное внимание обращено на корреляционные свойства для
системы сигналов, то при решении задач радиолокации важна оценка свойств
функции неопределенности (ФН), которая учитывает не только корреляцию сиг-
налов по времени, но и по частоте.
При выборе системы сигналов для построения распределен-
ной РЛС важно не только обеспечить высокие показатели разреше-
ния, которые, как отмечалось, можно оценить анализируя ФН ис-
пользуемых сигналов, но и оценить степень влияния сигналов сис-
темы друг на друга.
255
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рассмотрим возможность выбора системы сигналов доя
распределенной РЛС, построенной на базе технологии MIMO,
удовлетворяющих как высоким показателям разрешения, так и
требуемой степени взаимного влияния друг на друга.
Критерии оценки системы сигналов
Пусть имеется система сигналов, которая состоит из совокупности
L = [Si(<t),S2(<t),...,SL(t)}. Для каждого сигнала , опираясь
на (4.1), можно определить функцию неопределенности в виде
*
Ч\(г,ь>) = Js (f)Si(r-r)exp{j2zrL>/}d/, (4.9)
*
• •
где Si(t) - комплексная огибающая z-го сигнала,
комплексно-сопряженная функция к Si(t) .
Функции (4.9) на координатной плоскости соответствует
пространственная фигура
ч'Дт,^)2
которая определяет тело
неопределенности, соответствующее сигналу St (t) .
Тело неопределенности имеет область высокой корреляции,
достигает максимума в точке r = 0, ь> = 0 и имеет побочные
максимумы (боковые лепестки), соответствующие области низкой
корреляции.
Определим максимальный уровень боковых лепестков (БЛ),
соответствующий функции 4<(г,ц):
7?о. = max {Т,- (г,и)>,-(г, и) = 0 . (4.10)
drdL>
Тогда для системы сигналов L можно ввести среднее значение
уровня максимумов боковых лепестков тел неопределенности в
виде
В то же время, для системы L наряду с функциями (г,ь>)
существует К = {L — 1)— функций взаимной неопределенности:
*
ik = р (/)£*(/-г)exp{j -2fl-L>r}dr,
/, к = 1,£, к .
(4.12)
256
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
Для тел взаимной неопределенности можно определить
максимальный уровень боковых лепестков, аналогично (4.10) в виде
= max
(4.13)
и соответственно ввести среднее значение максимумов БЛ тел
взаимной неопределенности
<414>
i=l
Если значения уровней максимумов БЛ расположить по
элементам квадратной матрицы Rw размером ZxZ, причем на
главной диагонали расположить максимумы БЛ тел
неопределенности, а в остальных ячейках - максимумы БЛ тел
взаимной неопределенности, то получим диаграмму уровней
максимумов БЛ для системы сигналов L. Данная матрица
Rw позволяет выбрать сигнал с комплексной огибающей Si(t) с L,
исходя из уровня максимумов боковых лепестков функций
и Тik(r,v), а также определить средние значения
максимумов БЛ тел ФН и взаимной неопределенности в
соответствии с (4.11) и (4.14).
Ниже, опираясь на матрицу , будем осуществлять выбор
такой системы сигналов L, для которой значения элементов Rw
минимальны, или, другими словами, будем проводить выбор сис-
темы сигналов на основе анализа тел неопределенности (4.9) и
взаимной неопределенности (4.12) с поиском систем таких сигна-
лов, у которых минимален средний уровень максимумов боковых
лепестков тел неопределенности и взаимной неопределенности.
Учитывая, что класс сигналов S(f) достаточно обширен, ос-
новное внимание сосредоточим на системах фазоманипулиро-
ванных и частотно-кодированных сигналов.
Фазоманипулированные сигналы
Данные классы сигналов широко используются в практике
радиолокации, связи и радионавигации. Они представляют собой
последовательность импульсов с меняющейся от элемента к
элементу фазой. Фаза может принимать любые значения, но на
практике чаще используют сигналы, у которых фаза z-ro элемента
принимает только два значения Ойл. Представить комплексную
огибающую ФМ-сигнала можно в виде
257
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
S(f) = ^rect
ехр{у$} = УЭД rect
Z - 1ТЭ
(4.15)
где rect[«] =
Z - 1ТЭ
2 2
>; тэ - длительность элементарной
О, t<£
посылки ФМ-сигнала;
Из (4.15) следует, что комплексную огибающую любого
фазоманипулированного сигнала (ФМ-сигнала) можно представить
в виде последовательностей прямоугольных импульсов с
отрицательной или положительной амплитудой, чередование
которых следует в соответствии с кодирующей
последовательностью {х,}, i = 1,N, где N- общее число элементов
кодирующей последовательности, a Xi принимает два значения: 0 и
1. При этом изменение фазы ф1 элементарной посылки ФМ-сигнала
происходит в соответствии с правилом ф1 -х^.
Свойства функции, следовательно, и тел неопределенности
определяются данными кодовыми последовательностями
(4.17)
При выборе системы сигналов, как отмечалось ранее, важно знать не только
корреляционные свойства выбранного ансамбля, но и степень взаимного влия-
ния сигналов друг на друга, которая определяется из их взаимокорреляцион-
ных свойств.
В дальнейшем ограничимся рассмотрением системы ФМ-
сигналов, построенных с использованием последовательностей
Голда и производных от функций Уолша.
Производные системы сигналов от функций Уолша
Данные сигналы получаются при поэлементном умножении сиг-
налов исходной последовательности на элементы производящего
сигнала, обладающего лучшими свойствами по уровню БЛ по
сравнению с исходными. В качестве исходной рассмотрим систему
функций Уолша, которые можно сформировать по рекурсивному
алгоритму с помощью матриц Адамара:
Н, =
, =[1],
(4.18)
258
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
где i - порядок матрицы; , Нг_х - матрицы Адамара соответ-
ственно z-ro и (z — 1) порядков.
В качестве примера покажем построение матриц Адамара 3-го
порядка (z = 3):
В результате процедуры (4.18) каждая строка матрицы Hz
будет функцией Уолша. В качестве производящего сигнала
возьмем ^-последовательность, корреляционные свойства которой
приближаются к идеальным, и дополним ее еще одним символом -
1, исходя из требований балансное™ (числа 1 и -1 должны быть
одинаковы, поскольку известно [2], что в ^-последовательностях
число 1 на одну больше -1) и совпадений размеров сигналов для
функций Уолша N = 2к . Для ^/-последовательности N = 2к -1, к -
число элементов исходного (начального) кода, однозначно
связанного со степенью неприводимого многочлена, используемого
для формирования ^-последовательности.
Ниже приводятся данные для производной системы функций
Уолша (порядок матрицы Адамара к = 6), ^-последовательности с
неприводимым многочленом шестой степени х6 +Х1 +1 (табл. 4.1)
Информация о неприводимых многочленах для Л/-последователь-
ностей может быть найдена, например в [2].
Таблица 4.1
Значения функций Уолша В L N т
Производная система 64 64 64 0,3 0,4
Исходная система функций Уолша 64 64 64 0,72 0,54
Представлена информация о базе сигналов (столбец 5),
объеме системы сигналов (столбец А), числе элементов в системе
сигналов (столбец А), средних значениях уровней максимумов тел
неопределенности (столбец R ), и средних значениях уровней
максимумов тел взаимной неопределенности (столбец )
системы сигналов.
259
рлс авиационно-кос мического мониторинга зе\ :ной ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 4.23 и 4.24 приводится графическая иллюстрация
матрицы Rm для производной системы функций Уолша и ис-
ходной системы функций Уолша, соответствующих (см. табл. 4.1).
10 20 30 40 50 60
Номер элемента в системе
Рисунок 4.23
10 20 30 40 50 60
Номер элемента в системе
Рисунок 4.24
Как отмечалось ранее, матрица Р \п является квадратной, и на
ее главной диагонали располагаются значения максимумов
боковых лепестков тел неопределенности, рассчитанных в
соответствии с (4.10).
260
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Среднее значение данных лепестков определено в
соответствии с (4.11) и приведено в пятом столбце таблицы (/? ).
Значения уровней боковых лепестков тел взаимной неопределен-
ности, рассчитанные в соответствии с (4.13), расположены на рис.
4.23 вне диагонали. Среднее же значение данных лепестков,
вычисленное в соответствии с (4.14), приведено в столбце Rb^
(см. табл. 4.1).
Так как Ч^Дг,^) = Ч/А?у-(т,ь>), то объем вычислений для
поиска максимумов тел взаимной неопределенности можно
сократить вдвое, что и отражено на рис. 4.23 и 4.24, где значения
максимумов БЛ приведены только для области, расположенной на
главной диагонали и выше. Симметричные значения соответствуют
на данных рисунках черной треугольной области, расположенной
ниже главной диагонали. В левом нижнем углу диаграммы
находится белый пиксель, значение которого равно 1. Он служит
для нормировки шкал всех диаграмм.
Для оценки величины значений уровня БЛ справа от
диаграммы приведена шкала, которая имеет меняющийся черно-
белый окрас. Черный цвет соответствует низкому уровню БЛ, а
светлый - высокому, что и отражено на диаграммах (рис. 4.23 и
4.24). Как видно, светло-серые тона преобладают на диаграмме,
соответствующей системе сигналов, построенных на базе функций
Уолша. Для производной системы сигналов (рис. 4.23), в целом,
уровень БЛ меньше, однако имеются локальные области с высоким
максимальным уровнем данных лепестков (светлые области).
Для производной системы Уолша с порождающим сигналом в
виде А/-последовательности (рис. 4.23) значения лежат в области
0,3...0,4, хотя для отдельных элементов матрицы Rw уровень
достигает 0,9 (почти белый цвет).
Для исходной системы Уолша (рис. 4.24) значения уровней БЛ
начинаются от 0,5.
Из сравнения результатов, приведенных на рис. 4.23 и 4.24,
следует, что для производной системы сигналов значения
максимумов БЛ функций Ч\(т,ь>) и Ч^Дт,^) в целом меньше,
чем для первоначальной системы Уолша.
Производная система сигналов от функций Уолша предпочтительнее системы
функций Уолша, в виду меньшего уровня максимумов. Для систем сигналов, по-
строенных на базе других М-последовательностей с неприводимыми многочле-
нами шестой степени, результаты примерно такие же.
261
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Системы сигналов,
построенные на основе последовательностей Голда
Возьмем две ^/-последовательности и будем одну из них циклически
сдвигать относительно другой с последующим умножением (сумми-
рованием по модулю 2). При длине исходных Л/-последова-
тельностей N = 2к -1 получится L = 2к -1 сигналов. Для
некоторых пар ^/-последовательностей периодическая взаимокорре-
ляционная функция принимает только три значения:
Правило выбора пар последовательностей, удовлетворяющих
условию (4.19), было разработано Голдом [2] и получило название
метода Голда. Для ^/-последовательностей шестой степени
существует одна пара, обладающая подходящими свойствами. Это
^/-последовательности, образованные следующими неприводи-
мыми многочленами х6 + х1 +1 и х6 + х5 + х2 + х1 +1. Данные
^/-последовательности были использованы для формирования
последовательностей Голда.
Для сформированной последовательности в соответствии с
(4.10), (4.11), (4.13) и (4.14) определены максимальные средние
значения максимумов БЛ тел неопределенности и взаимной
неопределенности (см. табл.4.2).
Таблица 4.2
Значение функций Уолша В L N йа
Система последовательностей Голда 63 63 63 0,3 0,32
Соответствующая диаграмма распределения уровней БЛ
приведена на рис. 4.25. Видно, что все значения уровней БЛ
примерно одинаковы, а средние значения уровней максимумов БЛ
для ФН и ФВН примерно равны.
262
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
Рисунок 4.25
Многофазные последовательности
В отличие от ФМ-сигналов, построенных на бинарных кодирую-
щих последовательностях и рассмотренных ранее, в многофазных
сигналах фаза может принимать значения из диапазона [0, яг]. Для
z-ro элемента в A-кодовой последовательности системы много-
фазных сигналов значения фазы элементарных сигналов опре-
деляются по правилу
(4.20)
где г и р - взаимно простые числа; ак (i) - кодирующая последова-
тельность.
При числе элементов N » 1
взаимокорреляционной функции [2]
можно оценить максимум БЛ
<5 = ln.V--ln
3
(4.2 В
Примером такой системы сигналов может служить система,
элементы последовательностей которой определяются как [2]
ак (z) = ki1 + cxi + cG (modTV),
(4.23)
где z = 0,..., TV -1, к = 1,...,TV -1, c0, cj - целые числа.
263
РЛС АВИАЦИОННО- КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Число сигналов в такой системе L = N- 1. В качестве примера
рассмотрим систему сигналов с числом элементов N = 61 и
коэффициентами с0 = Ci= О и оценим, как и в предыдущем случае,
уровни 7? и 7?/; . Результат данной оценки приведен в табл. 4.3.
Таблица 4.3
Значения функции Уолша В L N К,,
Система МФК 61 60 61 0,96 0,37
Диаграмма уровней БЛ дана на рис. 4.26. Из представленных
результатов видно, что:
• максимальный уровень БЛ ФН (главная диагональ на рис. 4.26) и
уровень максимумов БЛ функции взаимной неопределенности
достаточно высок;
• существует чередование областей низкой корреляции.
10 20 30 40 50 60 0
Номер элемента в системе
Рисунок 4.26
Для наглядности на рис. 4.27 приведено TH системы много-
фазных кодированных сигналов (МФК-сигналов). Видно, что данная
особенность структуры TH при реализации данных сигналов приводит
к существенной неоднозначности измерений дальности и скороеги
объектов радиолокационного наблюдения.
Данное обстоятельство, а также высокое значение максимумов боковых лепест-
ков тел неопределенности сигналов, не позволит использовать данные системы
сигналов в радиолокационных измерениях.
264
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИ1 НАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
1
0,9
Рисунок 4.27
Системы частотно-кодированных сигналов
В системах сигналов, использующих фазокодовую манипуляцию, в
том числе и многофазную от импульса к импульсу, в соответствии
с кодирующей последовательностью изменяется только фаза
элементарной посылки, в то время как частота несущего колебания
не изменяется. Для повышения разрешающей способности РЛС по
дальности возможно также использовать сигналы со
скачкообразным изменением частоты, которые называются
частотно-кодированными сигналами. Данные сигналы можно
представить в виде
W-1
ЭД) = Д - ir3 ) exp {]2л-/0/}, (4.24)
/=0
где Ut(t) - ехр{]2лД/^} ; fo - частота несущего колебания; Д/-- шаг
изменения частоты, определяемый из соотношения
т
ЦД-- (4.25)
Порядок изменения номера частот М = {m0, mXy...pnN_x^
является кодом, который и определяет свойства тел
неопределенности. Рассмотрим разновидность данных сигналов, у
которых А/ изменяется в соответствии с кодом Костаса. Как
известно [2, 11], под последовательностью Костаса понимают
последовательность, дающую не более одного совпадения для всех
сдвигов кроме нулевого, при котором происходит наложение
265
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
диаграммы сигнала на саму себя. Число совпадений равно N (число
элементов сигнала).
База сигналов Костаса определяется как
В = TCAFC = Nt3N \f = N2Bx ,
где Bx =тэ; £xfc - база элементарного сигнала.
Данные системы сигналов потенциально позволяют уменьшать
величину боковых лепестков тела неопределенности в 1/N раз.
Представим первоначально фазоманипулированный или
МФК-сигнал на плоскости частота - время (OFT) в виде, при-
веденном на рис. 4.28,0.
Рисунок 4.28
У такого сигнала несущая частота в пределах его длитель-
ности, определяемой кодирующей последовательностью, не изме-
няется. Аналогичное изображение для ЧКС приведено на
рис. 4.28,6. Как видно из данного рисунка, у частотно-кодиро-
ванных сигналов, наоборот, частота изменяется от импульса к
импульсу. В общем случае, номер частот может повторяться в
кодовой последовательности, но коды Костаса вводят ограничение:
частота не должна повторяться за период сигнала, т.е. макси-
мальное число сигналов будет NL
По частотно-временным диаграммам можно построить
приблизительный вид тела неопределенности ЧКС. Для этого
необходимо представленную диаграмму на рис. 4.28,6 сдвигать
относительно самой себя и далее производить подсчет совпадений
элементов. Полученная при этом диаграмма совпадений, описы-
вающая зависимость числа совпадений от сдвига по горизонтали и
вертикали, и даст примерный вид тела неопределенности для ЧКС
по закону Костаса.
266
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Последовательности Костаса полностью известны до N = 28. Однако до сих пор
нет алгоритма, который позволял бы строить все функции Костаса заданного по-
рядка. Есть только алгоритмы, строящие часть кодов Костаса заданного порядка.
Примером такого алгоритма служит алгоритм Голомба, суть
которого состоит во взятии примитивных элементов а и р в поле
GF(q) и определении массива Д у = 1, если а1 + р3 = 1.
Полученный массив и будет массивом Костаса.
В качестве примера приведем систему кодов Костаса, полу-
ченную с помощью алгоритма Голомба. В табл. 4.4 приведена
матрица кодирующих последовательностей, построенная с помощью
данного алгоритма. Каждая строка в матрице - это последователь-
ность Костаса, вся матрица является представлением системы
кодирующих сигналов Костаса.
Таблица 4.4
Номер сигнала Номер элемента
2 3 4 5 6
1 2 5 4 6 3
2 1 2 6 4 3 5
3 2 4 3 1 5 6
4 2 4 5 1 6 3
5 3 6 1 5 4 2
6 3 6 4 5 2 1
7 4 1 3 2 5 6
8 4 1 6 2 3 5
9 5 3 2 6 1 4
10 5 3 4 6 2 1
11 6 5 1 3 4 2
12 6 5 2 3 1 4
Ниже, как и для предыдущих систем сигналов, приведены
данные по частотно-кодированным (ЧК) сигналам (табл. 4.5),
построенным в соответствии с кодами Костаса для системы ЧК-
сигналов из 12 и 16 элементов.
267
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Таблица 4.5
Значения функции Уолша В L N R ит °т
Система сигналов Костаса (длина 6) 36 12 6 0,56 0,44
Система сигналов Костаса (длина 14) 196 16 14 0,45 0,24
Матрицы Rw , отображающие измеренные уровни Б Л тел ФН
и тел взаимной неопределенности для данных систем сигналов,
приведены соответственно на рис. 4.29 и 4.30.
2 4 6 8 10 12
Номер элемента системы
Рисунок 4.29
Рисунок 4.30
268
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
С ростом числа элементов ЧКС уровень максимумов и среднее значение макси-
мумов боковых лепестков тел неопределенности и взаимной неопределенности
уменьшается, что потенциально позволяет обеспечить высокие показатели по-
мехозащищенности наряду с заданными характеристиками разрешения.
Сравнительный анализ рассмотренных систем сигналов по результа-
там, представленным в табл. 4.1-4.5 и на диаграммах 4.23-4.30, по-
зволяет утверждать, что исходя из критерия минимума максимального
уровня БЛ тела ФН предпочтение следует отдавать ФКМ-сигналам, по-
строенным с использованием последовательностей Голда.
Если исходить из критерия минимума максимального уровня БЛ
тела взаимной неопределенности, то предпочтение следует отдать
ЧКС, построенным с использованием последовательностей Костаса.
При практической реализации, кроме отмеченных фактов, необ-
ходимо учитывать такие, как, например, сложность реализации систе-
мы, необходимость синхронизации разнесенных точек приема и т.п.,
поэтому окончательный выбор в пользу той или иной системы сигна-
лов определяется предназначением радиолокационной системы и
требованиями по ее реализации.
Поиск зондирующих сигналов для перспективных распределен-
ных систем должен быть сосредоточен на выделенных группах систем
сигналов.
Важные современные требования к информационному полю авиа-
ционных комплексов дозора, кроме определения координат обнару-
живаемых целей - это распознавание ряда их характеристик, таких
как тип цели, их число в плотных группах и ряд других, которые
могут быть решены при использовании широкополосных
зондирующих сигналов. Однако при выборе данных сигналов
необходимо учитывать конкретные условия, в которых должны
работать РЛС данных комплексов: диапазон используемых длин
волн, режим излучения, отражения от поверхности земли и т.п.
269
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
РЛС комплексов данного типа, например «Хокай», «АВАКС» [4, 5], являясь «ра-
диоимпульсными», достаточно успешно решают общую задачу создания инфор-
мационного поля. В тоже время, в недостаточной мере обеспечивают такие каче-
ства информационного поля, как распознавание типа обнаруживаемых целей,
их число и расположение в группах, обнаружение и распознавание «специаль-
ных» объектов (малозаметных объектов, выполненных по технологии «Стеле»,
имитирующих радиолокационных ловушек и др.).
Для целого ряда потребителей радиолокационной информации,
наличие перечисленных выше характеристик позволило бы сущест-
венно повысить эффективность РЛС, а в ряде случаев - явилось бы
определяющим при решении важных тактических задач.
Значительный интерес представляет рассмотрение возможности
создания на борту авиационных комплексов дозора РЛС, основанных
на новых принципах работы, превосходящих по ряду характеристик
«традиционные» РЛС.
Проведенные оценки необходимой суммарной энергии зондиру-
ющих импульсов, коэффициента направленного действия антенны и
ее эффективной площади при приеме, а также способов электронного
сканирования луча для авиационных видеоимиулъсных РЛС дозора,
показывают, что на сегодня единственно приемлемым вариантом тех-
нической реализации является построение активной видеоимнульсной
сканирующей антенной решетки (ВИС АР), использующей достаточно
большое число активных приемоизлучающих элементов.
В связи с тем, что работа РЛС с ВИСАР в любом варианте при-
менения должна быть обеспечена в пределах всего заданного инфор-
мационного поля главными требованиями к РЛС данного типа в
составе авиационных системах дозора являются требования обеспе-
чения радиолокационного потенциала и необходимой разрешающей
способности, обеспечивающей при решении задачи обнаружения
сигналов, отраженных от целей, выделять их на фоне отражений от
подстилающей поверхности.
Известно [11, 22, 24], что радиолокационные отражения от
различных частей реальной воздушной цели далеко не равноценны,
и что при любом ракурсе зондирования, среди множества отражаю-
щих точек (блестящих точек цели) существует всего несколько
превалирующих отражающих частей, практически целиком
определяющих результирующую амплитуду отраженного сигнала
(обычно это - кромки крыльев и хвостового оперения, элементы
конструкции, образующие подобие «уголковых» отражателей,
сопла двигателей и некоторые другие).
Как показывают эксперименты, число энергетически весомых
отражателей, даже у достаточно крупных и сложных воздушных
объектов обычно не превышает десяти. При этом следует учи-
270
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
тывать, что распределение амплитуд сигналов от этих отражателей
также неравномерно. Другими словами, среди отраженных сигна-
лов в каждом конкретном случае обычно присутствует, по крайней
мере, один сигнал, амплитуда которого отличается от результи-
рующей амплитуды «обычной» радиоимпульсной РЛС не более,
чем на единицы децибел.
При работе РЛС с ВИ САР сигналы, отраженные от различных частей цели, раз-
решаются по времени запаздывания, среди которых будет находиться сигнал с
максимальной амплитудой, и именно по нему будет осуществляться первичное
радидлокационное обнаружение.
Если принять одинаковыми значения коэффициентов направ-
ленного действия передающих антенн, эффективных площадей
приемных антенн, энергии зондирующих импульсов и шум-
фактора приемников обеих РЛС, то, при согласованном приеме,
отношение сигнал/шум, формируемое по каждому сигналу от того
или иного точечного отражателя, будет также одинаковым. В этих
условиях, для получения одинакового радиолокационного потен-
циала при одиночном зондировании для видеоимпульсной РЛС по-
требуется примерно такая же энергия зондирующего импульса как
и для радиоимпульсной РЛС.
Для получения необходимых характеристик направленности ВИСАР, не усту-
пающих характеристикам антенн радиоимпульсных РЛС-аналогов, а также для
получения достаточной (не хуже, чем в радиоимпульсном аналоге) разрешаю-
щей способности по радиальной скорости целей, длительность и форма видео-
импульса должны обеспечивать энергетическую компактность спектра данного
сигнала при значении его центральной частоты вблизи значения несущей часто-
ты радиоимпульсного аналога.
Исходя из данных замечаний, на сегодня удовлетворяющим
предъявленным требованиям представляется двухполярный
импульс, близкий по форме и длительности к одному периоду
синусоиды несущей частоты радиоимпульсного аналога (рис. 4.31).
Рисунок 4.31
271
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При указанных параметрах видеоимпульса, при одинаковых
размерах антенны, будут обеспечиваться близкие значения
коэффициентов направленного действия антенн и угловой ширины
главных максимумов диаграмм направленности.
Для ВИСАР - аналога РЛС, входящей в авиационный комплекс «Хокай», дли-
тельность полного импульса должна составить около 2,5 нс, а для аналога РЛС
комплекса «АВАКС» - около 0,3 нс.
Если в радиоимпульсных РЛС когерентное накопление озна-
чает сложение импульсов, совпадающих по времени запаздывания
огибающей, с определенными (доплеровскими) фазовыми сдви-
гами колебаний внутриимпульсного заполнения, то в видеоим-
пульсной РЛС для когерентного накопления необходимо напрямую
сложить отраженные импульсы, совпадающие по времени запаз-
дывания.
В силу изменения времени запаздывания отраженных
сигналов движущихся целей между моментами зондированиями,
когерентное накопление видеоимпульсов должно осуществляться в
согласованных скоростных каналах, компенсирующих изменение
запаздывание между периодами зондирования для той или иной
радиальной скорости цели (аналогичных скоростным каналам
радиоимпульсной РЛС, настраиваемым на определенный
частотный сдвиг внутриимпульсного заполнения).
Разрешающая способность по скорости, при накоплении
достаточно большого числа зондирований, может быть весьма
высокой, а число скоростных каналов, в диапазоне возможных
радиальных скоростей целей, может достигать нескольких сотен.
Число скоростных каналов когерентной обработки сигнала
видеоимпульсной РЛС примерно соответствует числу каналов
радиоимпульсной РЛС, работающей с той же частотой повторения
импульсов.
По-видимому, для сохранения одинаковой средней
излучаемой мощности, должна быть одинаковой и частота
повторения импульсов.
В то же время, в результате многократного увеличения числа
элементов разрешения по времени запаздывания (числа дальност-
ных каналов) объем согласованной обработки должен многократно
превышать объем обработки радиоимпульсной РЛС.
Оценим параметры ВИСАР, позволяющие выполнить пос-
тавленные выше задачи. Например, в пределах отведенных размеров
антенны радиолокационного комплекса «Хокай» [4, 5] можно
разместить 20...30 приемопередающих элемента ВИСАР с шагом в
полдлины волны. Энергия зондирующего импульса РЛС данного
272
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНАЧЕНИЯ
комплекса, при длительности 12,5 мкс и импульсной мощности
1,0 МВт составляет 106 •12,5 10-6= 12,5 Дж. Следовательно, для
получения той же энергии в импульсе ВИСАР длительностью 2,5 нс
необходима импульсная мощность около 5 ГВт.
Импульсная мощность одного модуля ВИСАР при этом должна
составлять 0,2.. .0,3 ГВт, что можно считать технически выполнимым.
В пределах отведенного антенного раскрыва (7x1,5 м) радиолокационного ком-
плекса «АВАКС» [4,5] можно разместить около 1ООО... 1500 активных приемопе-
редающих элементов ВИСАР.
Энергия зондирующего импульса РЛС комплекса «АВАКС» в
режиме работы с ВЧПИ при импульсной мощности 1,5 МВт и
длительности 1,0 мкс составляет 1,5 • 106 • 10 6 = 1,5 Дж. Значит,
для получения той же энергии в импульсе ВИСАР длительностью
0,3 нс необходима импульсная мощность около 5 ГВт. Импульсная
мощность одного модуля ВИСАР при этом должна быть около
5 МВт, что вполне реализуемо.
Сравнение РЛС с ВИСАР с радиоимпульсными РЛС дециметрового и сантиметро-
вого диапазона волн показывает, что их радиолокационные потенциалы могут
быть выполнены весьма близкими при близкой мощности излучения.
Отношение мощности помехи, отраженной от подстилающей
поверхности, к средней мощности шумов на выходе согласован-
ного приемника будет пропорционально геометрическим размерам
одновременно отражающей площади.
При малых углах падения радиоволн, характерных для РЛС с
большой дальностью действия и расположенной на поднятой
платформе, геометрические размеры одновременно отражающей
площади пропорциональна длительности импульса.
Для РЛС с ВИСАР и НЧПИ при длительности импульса 2 нс,
можно ожидать ослабления относительного уровня помех от под-
стилающей поверхности примерно на 20 дБ по сравнению с уров-
нем помех в дециметровой РЛС с импульсом длительностью после
сжатия 0,2 мкс, а для РЛС с ВЧПИ при длительности импульса 0,3
нс - ослабления примерно на 35 дБ по сравнению с уровнем помех
в сантиметровой РЛС с импульсом длительностью 1,0 мкс.
Расчеты и экспериментальные данные показывают, что в
дециметровой радиоимпульсной РЛС, используемой в составе
комплекса «Хокай» при длительности ЛЧМ-импульса после сжатия
до величины около 0,2 мкс, отношение помеха/шум на рабочих
дальностях достигает значений:
над морской поверхностью при волнении до 6 баллов .до 20 дБ
над сушей (пересеченной местностью, покрытой лесом) . до 40...50 дБ
273
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Это означает, что над морской поверхностью РЛС с ВИСАР в
большинстве случаев сможет работать без применения устройства
СДЦ, а при работе над сушей потребуется подавление помех в
устройстве СДЦ до 20.. .30 дБ.
В радиоимпульсной РЛС сантиметрового диапазона с
неоднозначностью по дальности, используемой в составе РЛК
«АВАКС», отношение помеха/шум над сушей может достигать
60...70 дБ. Таким образом, в РЛС с ВИСАР требования к
помехоподавляющей способности СДЦ не превышают 50 дБ.
При этом ряд технических характеристик основных
компонентов РЛС должен удовлетворять определенным
требованиям, напрямую связанным с величиной необходимого
подавления L в устройстве СДЦ. Для РЛС с НЧПИ эти требования
составляют:
относительный уровень боковых лепестков ДНА
в горизонтальной плоскости на передачу/прием:
ближних....................................... не более -L дБ
дальних.......................................не более -{L + 20) дБ
интегральный уровень мощности
амплитудно-фазовых шумов передатчика
в частотном окне между гармониками частоты повторения,
с отбрасыванием полосы ± 50 Гц у краев окна,
относительно мощности сигнала
на гармонике частоты повторения...............не более -(£+10) дБ
Таким образом, для ВИСАР, использующей двухнаносе-
кундные импульсы, сформулированные выше требования будут
характеризоваться следующими цифрами:
относительный уровень боковых лепестков ДНА
в горизонтальной плоскости на передачу/приём:
ближних........
(в одну сторону)
дальних .......
(в одну сторону)
не более -30 дБ
не более -15 дБ
не более -50 дБ
не более -25 дБ
интегральный уровень мощности
амплитудно-фазовых шумов передатчика
в частотном окне между гармониками частоты повторения,
с отбрасыванием полосы ± 50 Гц у краев окна,
относительно мощности сигнала
на гармонике частоты повторения..................не более -40 дБ
Сформулированные требования к подавлению мешающих
отражений для РЛС с ВИСАР и НЧПИ вполне могут быть
обеспечены с помощью простейшего устройства СДЦ в виде
однократного череспериодного вычитания отраженных сигналов.
274
ГЛАВА 4. ВЫБОР ЗОНДИРУЮЩИХ СИГНАЛОВ ДЛЯ РЛС РАЗЛИЧНОГО НАЗНА ЧЕНИЯ
Важным свойством РЛС с ВИСАР и НЧПИ является то, что, в отличие от радиоим-
пульсных РЛС с НЧПИ, процедура СДЦ не порождает полос «слепых» скоростей
в диапазоне от VR,min до гигантских значений [6], при которых межпериодный
сдвиг по времени запаздывания становится кратным периоду повторения им-
пульсов (например, для Тп = 3'10~3 с это значение равно 5-1010 м/с).
В РЛС с ВЧПИ в процессе радиолокационного контакта с
целью происходит накопление достаточно большого числа им-
пульсов принимаемой пачки отраженных сигналов. В связи с тем,
что время запаздывания отраженного сигнала движущейся цели
изменяется между периодами повторения импульсов, накопление
пачки должно осуществляться в скоростных каналах, согласованных
с той или иной радиальной скоростью цели с помощью соот-
ветствующего межпериодного сдвига по времени запаздывания.
Для оптимизации совокупности накопителей для разных
скоростей шаг по времени запаздывания между соседними
скоростными каналами за время накопления пачки должен быть
близок к длительности зондирующего импульса. В свою очередь,
шаг между каналами характеризует разрешающую способность по
радиальной скорости. Например, при ги = 0,3 10"9, Т = 5-10~3 с,
А К = 6 м/с, или около 22 км/ч.
Применение сверхкоротких импульсов в радиолокационных системах
авиационных комплексов дозора можно считать достаточно перспек-
тивным. При этом могут быть получены характеристики, превосходя-
щие имеющиеся характеристики «традиционных» радиоимпульсных
РЛС.
^Ййтера^ра
1. Бакулев П.А. Радиолокационные системы. М.: Радиотехника. 2004.
2. Варакин Л. Е. Системы связи с шумоподобными сигналами. М.: Радио и связь. 1985
3. Варакин Л.Е. Теория сложных сигналов. М.: Советское радио. 1970.
4. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Со-
стояние и тенденции развития. М.: Радиотехника. 2008.
5. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Прин-
ципы построения, проблемы разработки и особенности функционирования. М.: Ра-
диотехника. 2014.
6. Верба В.С.,Дод В.Н., Трофимов Ф.Ф., Чернышев М.И. Применение сверхкоротких
импульсов в радиолокационных системах авиационных комплексов дозора // Труды
Российского НТОРЭС им. А.С. Попова. Сер. Сверхширокополосные сигналы и сверх-
короткие импульсы в радиолокации, связи и акустике. 2005. Вып. 1. С. 143-147.
7. Гостюхин В.Л., Трусов В.Н., Гостюхин А.В. Активные фазированные антенные ре-
шетки / Под ред. В.Л. Гостюхина. Изд. 3-е, перераб. и доп. М.: Радиотехника. 2011.
275
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
8. Гришин Ю. И., Ипатов В. П., Казаринов Ю. М. и др. Радиотехнические системы.
Учеб, пособие для вузов / Под ред. Ю. М. Казаринова. М.: Радиотехника. 2007.
9. Денисенко А. Н., Стеценко О. А. Теоретическая радиотехника: Справ, пособие. Ч. 1.
Детерминированные сигналы (методы анализа). М.: Издательство стандартов. 1993.
10. Денисенко А. Н. Теоретическая радиотехника. Сигналы с фазовой и частотной
модуляцией. М.: Стандарты. 1994.
11. Дудник П. И., Герасимов А. А., Ильчук А. Р., Кондратенков Г. С., Татарский Б. Г.
Авиационные радиолокационные комплексы и системы: Учеб, для слушателей и
курсантов вузов ВВС / Под ред. П.И. Дудника. М.: ВВИА им. проф. Н. Е. Жуковско-
го. 2006.
12. Дудник П.И., Ильчук А.Р., Татарский Б.Г. Многофункциональные радиолокационные
системы: учеб, пособие для вузов / Под ред. Б.Г. Татарского. М.: Дрофа. 2007.
13. Лезин Ю.С. Введение в теорию и технику радиотехнических систем: учеб, пособие для
вузов.
М.: Радио и связь. 1986.
14. Кардо-Сысоев А.Ф., Зозулин С.В., Флеров А.П., Французов А.Д. Активная фазирован-
ная решетка для излучения субнаносекундных импульсов // Проблемы транспорта.
2000. № 3. С. 179-194.
15. Кошелев В.И. Мощные импульсы сверхширокополосного излучения для
радиолокации // Конспекты лекций Всеросс. науч. конф. «Сверхширокополосные
сигналы в радиолокации, связи и акустике». Муром. 2003. С. 5.
16. Манжос В.Н., Ширман Я.Д. Теория и техника обработки радиолокационной
информации на фоне помех. М.: Радио и связь. 1981.
17. РЛС - информационная основа боевых действий многофункциональных самолетов.
Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред.
А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника. 2006.
18. Татарский Б.Г., Жуков М.Н. Технологии MIMO в радиолокации // Информационно-
измерительные и управляющие системы. 2011. Т. 9. № 1.
19. Татарский Б.Г., Ясенцев Д.А. Исследование особенностей функции
неопределенности сигнала с нелинейной частотной модуляцией // Информационно-
измерительные и управляющие системы. 2007. № 11.
20. Татарский Б.Г., Ильчук П.А. Выбор системы ортогональных сигналов для
распределенной РЛС // Информационно-измерительные и управляющие системы.
2011. Т. 9. № 8.
21. Тузов Г.И. и др. Помехозащищенность радиосистем со сложными сигналами. М.:
Радио и связь. 1985.
22. Фалькович С.Е. Прием радиолокационных сигналов на фоне флуктуационных
помех. М.: Советское радио. 1961
23. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М.: Радио и связь.
1983.
24. Ширман Я.Д., Лосев Ю.И., Миневрин Н.Н. и др. Радиоэлектронные системы: основы
построения и теория: Справочник / Под ред. Я.Д. Ширмана. М.: ЗАО «МАКВИС».
1998.
25. Шишов Ю.А. Ворошилов В.А. Многоканальная радиолокация с временным разделением
каналов. М.: Радио и связь. 1987.
26. Черняк В.С. Многопозиционные РЛС. М.: Радио и связь. 1993.
27. Черняк В.С. О новых и старых целях радиолокации: MIMO РЛС // Успехи современ-
ной радиоэлектроники. 2011. № 2.
28. MIMO Radar Signal Processing / Edited by Jian Li and Petre Stoica. Copiright ©|2009,
John Wiley & Sons. Inc.
276
Глава 5
системах
битном накоплении
324
Обработка и обнаружение
радиолокационных
сигналбв в бортовых
при длительном
коге
игналов ........ „г,,
а я по времени запазды;
смещения частоты «д
................................«««<«..
Введение ...................ж ... * .... i *» . ад!
5.1, Особенней радиолокационного наблюде
воздушно-космических объектов
при длительном когерентном накоплении
отражен
5.2. Многока
доплеровской частоте, крутизне изменения частоты
система обработки и обнаружения сигналов ........ .
5.3. АдагтеивййЖлвтена обработки и рбн^^Шн'из
отраженных с гнало г
Ча основе способ* автофокусировки ..............
откйи обнаружения сигналов Ш
дискриминаторов’ л. С..........
5.5. Система обработки и обнаружения
отраженных сигналов на основе анализа
^ЖдрпД
Дитерату
РЛС АВИАЦИОННО КОС \1И ВЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕ РХНОСГИ И ВОЗДУШНОЕ О ПРОСТРАНС1В А
Одним из эффективных направлений повышения информационных
возможностей, под которыми понимается способное! ь извлекать из
радиосигналов больший объем информации, бортовых радиолока-
ционных систем (БРЛС) является увеличение времени когерентной
обработки отраженных от целей сигналов.
Эффективность БРЛС, в которой используется принцип дли-
тельной когерентной обработки сигналов, характеризуется увели-
чением дальности обнаружения воздушно-космических целей, в
том числе разработанных по технологии «Стеле», возможностью
решения задач по распознаванию классов и зипов целей по спек-
тральным доплеровским портретам, обеспечением раздельного об-
наружения целей, выполняющих полет в сомкнутых боевых поряд-
ках (повышением разрешающей способности по скорости), опреде-
лением поведенческой активности целей, повышением помехоза-
щищенности и достоверности опознавания целей, увеличением
дальности постановки целей на автосопровождение, реализацией
высокоточных алгоритмов траекторного сопровождения целей, по-
вышением точности измерения фазовых координат целей.
В то же время, главенствующей тенденцией развития воздуш-
но-космических летательных аппаратов, особенно боевых, является
стремление повысить их маневренные и/или скоростные свойства,
что обусловливает изменения в кинематике их движения и, как
следствие, в параметрах отраженного сигнала.
Указанные обстоятельства приводят к тому, что актуальной
проблемой при практической реализации в БРЛС режимов длитель-
ного когерентного накопления является разработка систем обработ-
ки и обнаружения отраженных сигналов, обеспечивающих радиоло-
кационное наблюдение динамичных воздушно-космических целей,
под которыми в дальнейшем будем понимать объекты, обладающие
высокими маневренными (диапазон допустимых перегрузок состав-
ляет (1... 10)g и/или скоростными свойствами (число М> 4).
В материалах главы рассматриваются основные подходы и
способы к построению указанных систем обработки и обнаруже-
ния, представлены результаты исследования их характеристик, да-
ны рекомендации по практической реализации.
278
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОЕ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Особенности
радиолокационного наблюдения
5.1 воздушно-космических объектов
при длительном когерентном накоплении
отраженных сигналов
Анализ существующих бортовых радиолокационных систем показы-
вает, что обработка сигналов в них построена, главным образом, на
основе использования корреляционно-фильтрового способа обработки
с реализацией когерентного накопления отраженных сигналов [5, 6,
13]. Используемый способ обработки соответствует структуре «время
задержки (дальность) - доплеровская частота (скорость)» и позволяет
обеспечить большую дальность и высокую эффективность (характе-
ристики обнаружения, разрешение целей, точность измерения дально-
сти и скорости) радиолокационного наблюдения объектов (целей) при
условии, что они совершают равномерный и прямолинейный полет
без выполнения резких эволюций.
В то же время, прослеживается стремление к созданию высоко-
скоростных и сверхманевренных воздушно-космических летатель-
ных аппаратов [3, 10], что отражается в изменении кинематики их
движения и приводит к изменению параметров отраженного сигнала
при радиолокационном наблюдении указанных целей.
Рассмотрим, каким образом проявляются указанные изменения
в параметрах отраженного сигнала на примере наблюдения высоко-
скоростной цели.
Допустим, что положение цели относительно фазового центра
антенны (ФЦА) БРЛС характеризуется радиус-вектором Д(/) =
- [•*(/) Z(/)]T в переносной земной системе координат
(ПЗСК) OXYZ (рис. 5.1).
При этом начало ПЗСК (точка О) соответ с гвует проекции фазо-
вого центра антенны (ФЦА) А на горизонтальную плоскость в на-
чальный момент времени. Ось ОХ направлена вдоль вектора V4
скорости ФЦА, ось OY - вертикально вверх, а ось OZ дополняет сис-
тему координат (СК) до правой тройки.
Сферические координаты пели Ц в ПЗСК AXYZ с началом А в
ФЦА - дальность Д - Д , азимут а и угол места (3 - связаны с де-
картовыми координатами (x,y,z) соотношениями:
х = Дсо$/3со$а ; у - Дбш Д; z = Дсъъ/Зъта .
279
РЛС АВИ ЩИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ИIНОГ О ПРОСТРАНСТВА
Для оценки и количественного анализа параметров относи-
тельного движения ФЦА - цель использовалась модель, согласно
которой носитель БРЛС прямолинейно движется вдоль оси АХ с
постоянной скоростью VA = [у 0 0]т а перемещение цели
(рис. 5.2) аппроксимируется плоской параметрической кривой
-cos 2л
%'(/)
5
z'(Z) = O. (5.1)
Рисунок 5.1
280
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.2
Последнее характерно, например, для высокоскоростных це-
лей, когда полет выполняется на высоте 30...80 км по траектории
синусоидальной формы.
Здесь и - минимальная и максимальная высота полета
цели; D - пространственный период траектории; X' и Z' - абсцис-
са и аппликата цели в частной СК CXXZ', представленной на рис.
5.3. Начало С указанной СК соответствует проекции положения
цели в начальный момент времени на горизонтальную плоскость
OXZ, ось СХ' направлена вдоль горизонтальной проекции вектора
V скорости цели, а ось CZ' дополняет СК до правой тройки.
281
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Пересчет декартовых координат (x,y,z) ПЗСК и декартовых ко-
ординат (х ,y,z') может быть осуществлен с помощью выражений
x = -x'cosy + z'siny + cx -vt,
z = -х'sin/-z'cos у +
(5.2)
где cx и ш - соответствующие координаты цели в начальный мо-
мент времени; у — угол поворота плоскости траектории цели отно-
сительно оси ОХ ПЗСК.
Для движения цели в частной СК CXYZ' с постоянным моду-
лем вектора скорости
с учетом (5.1) получается дифференциальное уравнение
dx(t) -
х'(0) = О
(53)
Численными методами может быть получено решение урав-
нения (5.3) в виде последовательности значений
— х (^_j),
абсциссы x'(Z)2i/(t) положения цели в частной СК CXXZr для за-
данных К моментов времени Zo, .... tK_x.
Полученные значения х'к = xf(tk), к = 0; К -1 могут быть ис-
пользованы для определения других параметров движения цели.
Действительно, используя (5.1), можно вычислить значения ради-
ус-вектора
скорости
282
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ Н А КОПЛЕНИИ
dx'(t)
dt
dyV)
dt
dz'(t)
и ускорения
a'k = a'(tlA =
dV'(t)
d2K\t)
d2x'(f)
dt1
d2y(t)
dt1
d2z'(t)
dt2
цели в частной CK CXrYZr.
283
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
С помощью (5.2) могут быть найдены величины, определяю-
щие относительное движение ФЦА БРЛС и цели в ПЗСК AXYZ.
Так, для радиус-вектора Д(0, скорости V(7) = и ускорения
dt
d\Xt)
&(t) ------ справедливы выражения:
dt
Д(/) = М(у)г'(/) + С-У/,
У(0 = М(у)У'(Ц-Ул,
a(Z) = М(у)а'Ц) V/.
(5.4)
(5-5)
(5.6)
Здесь
М(/) =
-cosy
О
-sin у
О sin у
1 О
О -cosy
- матрица поворачивающих косинусов преобразования (5.2);
радиус-вектор, определяющий положение цели в ПЗСК AXYZ в
начальный момент времени.
Некоторые результаты расчетов с использованием уравнений
(5.3>—(5.6) представлены на рис. 5.4-5.7. На рис. 5.4 показаны декарто-
вы координаты цели в ПЗСК AXYZ, на рис. 5.5 - сферические коорди-
наты цели в ПЗСК AX4Z. на рис. 5.6 - проекции скорости цели в ПЗСК
AXYZ, на рис. 5.7 - проекции ускорения пели в ПЗСК AXYZ.
Рисунок 5.4
*
284
ГЛАВА 5. ОБРАБОТКА РАС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕН1 НОМ НАКОПЛЕНИИ
Рисунок 5.5
Рисунок 5.6
Рисунок 5.7
285
Р. ТС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При моделировании задавалось, что начальные сферические ко-
ординаты цели в ПЗСК Д(Д) = О, сг(7о) = -1Ос; /?(70) = arcsin
Движение цели сопровождается достаточно быстрым изменением координат це
ли и их производных, достигающих относительно больших значений.
При условии, что фазовые искажения, обусловленные траек-
торными флуктуациями и неоднородностями среды распростране-
ния и нестабильностями приемопередающего тракта отсутствуют,
сигнал s(Z) можно представить в виде
s(t) = UG(t)exp
ДУ)-<р0
5
(5-7)
где U, (fa - случайные амплитуда и фаза сигнала; Л - длина волны
РЛС; G(t) - нормированная функция, характеризующая модуляцию
сигнала ДН реальной антенной (на передачу и прием), которая, в
свою очередь, определяется текущими угловыми положениями це-
ли и ДН; Д(0 - текущее расстояние от ФЦА до цели.
В дальнейшем считаем, что фазовые искажения, обусловленные траекторными
флуктуациями и неоднородностями среды распространения и нестабильностями
приемопередающего тракта отсутствуют.
Для удобства анализа, трансформируем рис. 5.1 в вид, представ-
ленный на рис. 5.8, где показана геометрия взаимного движения носи-
теля РЛС и цели с координатами ЛА (*ла,.ула,2ла) , цели (хц,уц,2ц) .
Рисунок 5.8
286
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ Н СКОПЛЕНИИ
Анализ особенностей кинематики движения цели показывает,
что текущее расстояние «цель - ФЦА» целесообразно аппроксими-
ровать выражением
Д(0 = Дц + Гсбл/ + ^-Г,
(5.8)
где Исбл - скорость сближения носителя РЛС и цели; ясбл - уско-
рение сближения носителя РЛС и цели; Д{[ - дальность РЛС -
цель (рис. 5.8):
(5.9)
где XJia,XJi,Yia,Yll,Zna,Zll - координаты носителя РЛС и цели со-
ответственно.
Выражение для И.6л и <зсбл определяется последовательным
дифференцированием выражения (5.9):
(5.10)
ГДе ’ ^Jia ’ ^ла’^ла’^ла ’ ’^ц СОСТаВЛЯЮЩИе
векторов скорости и ускорения носителя РЛС и цели соответственно.
Рассмотрим случай (рис. 5.9), когда носитель РЛС движется по
прямолинейной траектории с параметрами в момент времени t = 0:
= 0,
= ^ла=0,
= а = 0
(5-12)
и цель движется в произвольном направлении с постоянной скоро-
стью относительно РЛС:
287
РЛС АВИАЦИОННО- КОСМИЧЕС 'КОГ О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТР. 1НСТВА
Л = Д.cos Acosftp А • Д,sin Acos/h> }ц=Asin/ip
\ = уД z^v7, уц = уД (5.13)
Vх-ах V7 = а7 VY -а'
ГЦ С/Ц ’ Ц Ц ’ Ц ыц ’
где /?ц - угол между вектором скорости носителя и проекцией ли-
нии визирования на плоскость X0Z; ун - угол между линией визи-
рования и проекцией линии визирования на плоскость X0Z.
Рисунок 5.9
С учётом (5.12) и (5.13) выражения (5.10) и (5.11) имеют вид
Кбл = -(АЛа - Ax)cos A C0S/u + Az sin A cos/u +
+Ar sin/U’
cos /?ц cos уц + (7ц sin /ц.
Тогда с учётом (5.8) изменение расстояния РЛС - цель описы-
вается выражением
288
ГЛАВА 5 ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
ДД)=ДЦ+ (-(^ - )cosЛ cos/u + sinЛcosr« + f7uy sin/ц)+
ц
2
ла ' ц
cos Д cos /ц + 7Ц sin Д cos /ц + sin /,
ц
Соответственно, фаза сигнала изменяется по закону
(5.15)
где в дальнейшем принято, что <£>0 = —Дц - постоянная начальная
фаза;
/д(') =
1 dcp(t)
2л dt
(5.16)
- доплеровская частота сигнала (производная фазы).
Представленные зависимости показывают, что даже при пря-
молинейном движении объектов, но с высокой скоростью имеет
место квадратичный набег фазы, что приводит к линейно-частот-
ной модуляции частоты отраженного сигнала.
Если используется корреляционно-фильтровая система обработки типа даль-
ность - скорость это приводит к существенным потерям в отношении сигнал/шум
на выходе системы обработки.
Для примера, на рис. 5.10 представлены графики зависимости
модуля выходного сигнала корреляционно-фильтровой системы об-
работки (дальность - скорость) от величины квадратичного набега
фазы, нормированные к амплитуде неискаженного сигнала, полу-
ченные путем цифрового моделирования при времени когерентною
накопления 100 мс.
По оси абсцисс показана полоса частот, занимаемая сигналом.
На графике приведены: амплитуда неискаженного сигнала (соответ-
ствует равномерному и прямолинейному двр<жению цели), амплиту-
да сигнала, отраженного от цели, движущегося с радиальным уско-
рением 0,1g, 0,3g, 1g, 2g, 4g соответственно.
Из рис. 5.10 видно, что амплитуда на выходе системы обработки
существенно зависит от величины квадратичного набе1 а фазы.
289
Р. 7С АВИАЦИОННО-КОС МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 5.10
При радиальном ускорении 1g амплитуда сигнала падает на
11 дБ, а сигнал занимает полосу частот 70 Гц при ширине допле-
ровского фильтра 10 Гц.
На рис. 5.11 приведены графики потерь в отношении сиг-
нал/шум на выходе корреляционно-фильтровой (дальность - ско-
рость) системы обработки отраженных сигналов при наблюдении
гиперзвуковых летательных аппаратов.
Рисунок 5.11
БРЛС расположена в точке с координатами (0,0). По оси Y от-
ложено боковое отклонение цели относительно носителя РЛС (в
метрах). По оси X показано расстояние между РЛС и целью (в мет-
рах). Кривые с численными показателями отображают количест-
290
ГЛАВА 5. ОБРАБОТКА РЛС-СИ! НАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
венные потери (в дБ). Представлены потери в отношении сиг-
нал/шум при наблюдении ГЗЛА, движущегося со скоростью ЮМ,
скорость носителя равна 160 м/с, длительность пачки принимаемо-
го сигнала равна 100 мс.
Анализ результатов показывает, что при наблюдении гипер-
звуковых целей, даже при больших расстояниях (до 500 км) имеют
место существенные (50...60 дБ и более) потери в отношении сиг-
нал/шум.
Для реализации режимов длительного когерентного накопления не-
обходимо произвести разработку систем обработки сигналов, в кото-
рых учитываются указанные выше изменения параметров отраженно-
го сигнала за время радиолокационного наблюдения.
5.2
.< ь '
uw'»
•1 С* J kvl 5
"Ж ;
J
SgS Г"
ения
альная
ш запаздыва
ской частоте,
Изменения чг
бработки и о<
Ь1х сигналов
Результаты исследований, представленные в п. 5.1, показывают,
что отраженный сигнал представляет собой ЛЧМ-сигнал, девиация
частоты (крутизна изменения частоты - КИЧ) которого при задан-
ном времени когерентного накопления и длине волны зависит не
только от радиального ускорения объекта наблюдения и носителя
РЛС, но и от тангенциальных составляющих их скорости, а также
от расстояния между носителем РЛС и объектом наблюдения.
Данное обстоятельство позволяет утверждать, что появляющаяся в отражен-
ном сигнале девиация частоты носит случайный характер и, в общем случае,
может рассматриваться как информационным, так и неинформационным пара-
метром [11].
Исходя из этого, целесообразно выполнить синтез устройств
обработки и обнаружения сигналов со случайным значением девиа-
ции частоты, так как в известной литературе, например [11-13, 16],
рассматриваются задачи обработки и обнаружения квазидетермини-
рованных сигналов со случайными значениями только начальной
фазы, амплитуды, доплеровской частоты, времени задержки, или же
различными комбинациями указанных параметров сигнала.
291
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Первоначально выполним синтез обнаружителя сигнала при
условии, что девиация частоты является неизвестным неинформа-
ционным параметром, и кроме случайного характера изменения де-
виации частоты имеет место случайный характер изменения на-
чальной фазы, которая также рассматривается как неинформацион-
ный параметр.
Как и прежде [11-13, 16], считаем, что на входе устройства
обработки наблюдается реализация
y(f) = &s(t,ju)+n(t), 0 < 1<Т,
(5.17)
где /л - обобщенный случайный неинформативный параметр с из-
вестной априорной плотностью вероятности pan(ju); n(t) - белый га-
уссовский шум с нулевым математическим ожиданием и корреляци-
онной функцией в виде ^-функции; <9 - параметр, равный 1 или О,
значение которого необходимо оценить в процессе решения задачи
обнаружения (<9 = 1 - сигнал есть; <9=0 сигнал отсутствует).
Применительно к поставленной задаче обнаружения сигналь-
ная функция выражения (5.17) запишется в виде
5(/,//) = Л(/)соз(2я/0/ + ^(/) + ^0) , (5.18)
где A(t) - функция амплитудной модуляции сигнала; fQ - несущая
b ’
частота сигнала; - начальная фаза; ^(7) = —Г - функция фазо-
вой модуляции; b - крутизна изменения частоты, определяемая
как отношение девиации частоты AF к времени когерентного нако-
пления сигнала Гкн, ф$ - начальная фаза, или
(5.19)
По условию задачи , так как в модели (5.18) неиз-
вестными являются b и значение случайной начальной фазы ф(}.
В соответствии с [11], выражение (5.19) может быть записано
в виде
5(/,6,^0) = 51
(/,A)cOs(^) + 52
(z,Z>)sin(^0),
(5.20)
где 5]
/ Л
(/,/>) = Л(/)сО8 2тг/0/4—t1
\
ратурные составляющие сигнала.
Очевидно, что ф^ может быть описана априорной плотностью
вероятностью, подчиняющейся равномерному закону:
292
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
р(фо)=
(5.21)
Девиация частоты отраженного сигнала является случайной величиной, а апри-
орная информация о ее распределении отсутствует.
В тоже время, исходя из физических особенностей процесса
формирования отраженного сигнала при радиолокационном на-
блюдении объектов в пределах заданного времени когерентного
накопления, естественно предположить, что значение КИЧ с рав-
ной вероятностью может принимать любое значение в пределах
некоторого диапазона возможных значений, определяемого, на-
пример, аэродинамическими свойствами объектов.
При таком предположении априорная плотность вероятности
КИЧ описывается выражением
I 1 ’ ^min — — ^max ’
''max 'main
(5.22)
где Z>max, />min - максимальное и минимальное значения КИЧ соот-
ветственно.
Считая, что начальная фаза и КИЧ статистически независимы,
совместная плотность вероятности указанных параметров формиру-
ется путем умножения соответствующих плотностей вероятности:
1
к mnin
р(М) =
2я(Ъ
Как известно [11-13, 16], решение задачи обнаружения осу-
ществляется путем формирования отношения правдоподобия
f/?(j76« = l,X2)/? (yy)d//
А = J----------------------, (5.24)
р(у/<9 = 0)
где p(yl&=\, D — плотность вероятности наблюдаемой реализации
при условии, что сигнал есть и случайные параметры р зафиксиро-
ваны, плотность вероятности шума неизвестных параметров не со-
держит (т.е. не зависит от параметра //), и сравнения его с порогом.
В зависимости от результата сравнения принимается решение
о наличии пели (.9 = 1) или отсутствии (& = 0) в зоне наблюдения.
С учетом вышеуказанного, выражение для отношения правдо-
подобия А, получаемое путем усреднения условного отношения
правдоподобия A(y/^0,Z?) по всем возможным значениям фазы и
КИЧ [11, 13], запишется в виде
293
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС 7И И ВОЗДУШНОГО ПРОСТРАНСТВА
^тах 2/Г
Л= J \^(ylф(j,b)p(фG,b)dbdф(j =
^min
^тах 2 Л"
= j ]*ЛЦ>/^,6)рЦ^p^dbdt^. (5.25)
^min О
Условное отношение правдоподобия Л\у/ф^.Ь) совпадает с
отношением правдоподобия для полностью известного сигнала.
Тогда
2
A(_y/$„6) = exp<
(5.26)
Корреляционный интеграл
гОО/ФсД) = J $СФц,Ь\ y(t)dt
—СО
удобно представить в виде
\
z(y(t)/<^,b) = z^cos^ + z2(6)sin^ =z0(6)cos($) -0(h)),
ОС ОС
где ^(й)= , z2(Z>) = - его квадратурные
V7 7
zf (Л)+z; (Z?), cos 0(b) =
ДЬ)
zo(/)) ’
sin0(Z>) =
z2W
zo(^)
Так как 7KII » —, то энергия сигнала от значения фазы не за-
/о
висит [11,13]. Появляющаяся в отраженном сигнале случайная де-
виация также нс влияет на энергию сигнала. Поэтому мо?кно запи-
сать, что
7 т ь
ls2(0o,b,t)df - f/C (7)cos2(£?0/ + — t2 + - E,
J J
о 0
A(^/^0,fe) = exp
z0(/?)cos(^-^))--^- >
Ao J
(5-27)
(5.28)
При указанных условиях безусловное отношение правдоподо-
бия запишется в виде
294
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ KOI ЕРЕН1 НОМ НАКОПЛЕНИИ
z0 («) cos (-/9(A))-
- р(Фо)Р^ь^Ьс1Фо
о ,
zo(Z>)cos(^-0(j))
^max J
----------------------exp
2тг(д1пах — ^min)
min
Е
P^\))p(b)d^ =
- весовая функция; /0(<) - моди-
фицированная функция Бесселя первого рода нулевого порядка.
Учитывая, что функция /0(ф) монотонная, получаем опти-
мальный алгоритм обнаружения
b z X 19=1
ипах (О Л >
А f /0 —z0(6) db—h.
J I Ng J <
^min «9=0
(5.29)
Схема обнаружителя, построенная в соответствии с выраже-
нием (5.29) представлена на рис. 5.12.
Синтезированный обнаружитель представляет собой корреляционную схему с
двумя квадратурными каналами, в каждом из которых выполняется операция
формирования корреляционного интеграла для ЛЧМ-сигнала. После формирова-
ния модульного значения суммы корреляционных интегралов, полученных в
каждом канале для принятой реализации с учетом фиксированного значения де-
виации частоты, последовательно выполняются операции вычисления модифи-
295
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
цированной функции Бесселя первого рода нулевого порядка, весового взвеши-
вания и интегрирования полученного значения в пределах возможного диапазо-
на значений девиации частоты (усреднения по всем возможным значениям де-
виации частоты).
На рис. 5.13 представлены характеристики обнаружения сиг-
нала со случайными начальной фазой и девиацией частоты, полу-
ченные путём цифрового имитационного моделирования для сле-
дующих условии:
время накопления ........................................... 100 мс
число реализаций...............................................300
диапазон значений КИЧ в опорном сигнале
(соответствует диапазону изменения ускорений) ...........-10g... 10g
дискрет изменения параметра опорного сигнала.................0,06g
вероятность ложной тревоги Рлт .......................... 10 1 и 10 3
Рисунок 5.13
При выборе порога использовался критерий Неймана-
Пирсона.
Анализ представленных характеристик обнаружения показы-
вает, что они расположены правее соответствующих характеристик
для детерминированного сигнала и для сигнала только со случайной
начальной фазой, т.е. условия обнаружения сигналов со случайным
значением крутизны изменения частоты значительно ухудшаются.
В среднем, для обнаружения маневрирующей цели с вероят-
ностью правильного обнаружения Рпо = 0,5 необходимо отношение
сигнал/шум на выходе оптимального устройства обработки поряд-
ка 15... 17 дБ при Рлт = 10 3.
На практике обычно неизвестны не только начальная фаза и
девиация частоты, но и амплитуда сигнала. В этом случае в выра-
296
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
жении (5.19) необходимо использовать модель сигнала со случай-
ными начальной фазой, девиацией и амплитудой:
< Ы2 Л
= aA(t)cos бУ0/ч----\-ф$ , (5.30)
где а - безразмерный параметр, определяющий амплитуду сигнала
и распределенный по закону Рэлея:
р(а) = -у ехр
а
Г“2
Тогда совместная плотность вероятности запишется в виде
p(<h,b,a) = exp
Znkbcr
Используя аналогичную методику, выражение для отношения
правдоподобия Л, получаемое путем усреднения условного отно-
шения правдоподобия / а,(/)$,Ь) по всем возможным значениям
фазы, крутизны изменения частоты, амплитуды запишется в виде
, ^тах 00 / { . г-! Л / л. \
а
2
АЛ<т2 J J
^min О
Вводя обозначение
а ехр -а
2<т2
— az(b) da .
о )
о
и’ — —— н-------
2<т2 Уо
получим, что
^тах
2wAbcr2 J
“^nm
----yZ2(Z?) \db.
wA’q
При этом
о
sin 0(b) = ,
z(b) z(b)
z(j’(/) / Фй,b,а) = az(b)cos(^) - 0(b)).
Z
Z
о
5
о
297
Р 1С АВИАЦ1ЮННО-КО1 МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТР АНСТВА
Схема обнаружителя, реализующая алгоритм (5.33), представ-
лена на рис. 5.14.
Рис' нок 5.14
«
Схема оптимального устройства обработки рассматриваемого сигнала содержит
два квадратурных канала, в каждом из которых выполняется операция форми-
рования корреляционного интеграла для ЛЧМ-сигнала.
После формирования квадрата модульного значения суммы
корреляционных интегралов производятся последовательно опера-
ции экспоненцирования, весового взвешивания и интегрирования
полученного значения в пределах возможного диапазона значении
КИЧ (усреднение по всем возможным значениям КИЧУ
На рис. 5.15 представлены характеристики обнаружения сиг-
нала со случайными начальное фазой, КИЧ, амплитудой, получен-
ные путём цифрового имитационного моделирования для следую-
щих условии:
время накопления .......................................... 100 мс
число реализаций..............................................300
диапазон изменения значении ускорения
в опорном сигнале ......................................- 10g... 10g
дискрет изменения параметра опорного сигнала................0,06g
Рлг..................................................... 10 1 и 10 4
Сравнительный анализ характеристик обнаружения, представ-
ленных на рис. 5.13 и 5.15, показывает, что появление случайной
амплитуды приводит к заметному ухудшению условий обнаруже-
ния. В тоже время флуктуации амплитуды на входе системы обра-
ботки приводят к улучшению характеристик обнаружения при ма-
лых отношениях сигнал/шум.
298
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕН'1 НОМ НАКОПЛЕНИИ
Рисунок 5.15
Результаты проведенных исследований позволяют сделать основной вывод: не-
знание девиации частоты в отраженном сигнале приводит к возрастанию поро-
гового значения отношения си гнал/шум, а соответственно к уменьшению даль-
ности обнаружения маневрирующих или гиперзвуковых объектов.
В перспективных РЛС обзора воздушною пространства для
обеспечения бессрывного сопровождения (траекторного или не-
прерывного) объектов, актуальной задачей является оценка уско-
рения наблюдаемого объекта. Указанное обстоятельство подчерки-
вает необходимость обнаружения отраженных сигналов со случай-
ным значением девиации частоты с позиции совместного
обнаружения - оценивания, когда КИЧ является информационным
параметром.
С учетом того, что в реальных ситуациях неизвестными, как
правило, также являются время задержки отраженного сигнала и
доплеровское смещение частоты, задачу обнаружения целесооб-
разно сформулировать следующим образом.
Необходимо синтезировать обнаружитель отраженного сигнала при условии, что
неизвестны: начальная фаза фо, амплитуда - а, время задержки т, доплеровское
смещение частоты крутизна изменения доплеровского смещения частоты Ь.
Указанные параметры принимаемого сигнала изменяются случайным образом,
но при этом известны априорные плотности вероятности их распределения.
В соответствии с 111] синтез оптимального обнаружителя рас-
сматриваемого сигнала сводится к нахождению отношения правдо-
подобия А путем усреднения условного отношения правдоподобия
А(^/ . При этом можно допустить, что время задерж-
ки т, доплеровское смещение частоты крутизна изменения доп-
299
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
леровского смещения частоты b аппроксимируются независимыми
дискретными случайными величинами, принимающими конечное
число значений г19...,г7, ЬЪ...,ЬК с вероятностями
Pti = = = ;
Pjj 1
Pbk =P{b = bk},k = \,...,K.
При указанных условиях отношение правдоподобия принима-
ет вид
и ж
л = X PnPjjPbk^y1 (5-34)
/J.A-
где А^у/г,-,/^,/^.) - условное отношение правдоподобия, которое
рассчитывается путем усреднения условного отношения
А (у I ) по амплитуде а и начальной фазе ф$. При ус-
ловии, что плотности вероятности начальной фазы и амплитуды
распределены по законам, описываемым выражениями (5.21) и
(5.31) соответственно, то
где z(r;,/v^) = Jz|2(r/,/v-,^)+z2(r/»Zy.^) - огибающая корреля-
ционного интеграла, квадратурные составляющие которого равны
%2 ( ’ fjjj ’ ^к )
y(t}A(t - г,)sin (2тг/0 + - тг) +
Схема синтезированного оптимального обнаружителя пред-
ставлена на рис. 5.16.
300
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РТС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.16
301
Р ТС АВИАЦИОННО-КОСМИЧЕСКО! О МОН НЮРИН! А ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПРОСТРЛНС ТВ. 1
Анализ схемы 5.16 и выражения (5.35) показывает, что синте-
зированный обнаружитель является многоканальным, содержащим
I каналов по времени запаздывания (дальности), J каналов по час-
тоте (скорости) и К каналов по крутизне изменения частоты. В ка-
ждом канале формируется огибающая z(rrf^bk} корреляционно-
го интеграла для фиксированных значений времени запаздывания
ri, смещения частоты f и крутизны изменения частоты Ьк, кото-
рая, согласно (5.35), подвергается экспоненциальному преобразо-
ванию, после чего выходные сигналы каналов суммируются с ве-
сами в блоке весовой обработки (БВО) в соответствии с (5.34).
Значение весового коэффициента определяется в общем слу-
чае по формуле
Кук Рп Pcoj Phk •
(5.36)
Результат суммирования подается на пороговое устройство
(ПУ).
Характеристики обнаружения сигналов, рассчитанные для об-
наружителя, построенного в соответстви с выражениями (5.34)
(5.36), представлены на рис. 5.17.
Рисунок 5.17
*
При проведении расчетов было принято, что Л = 0,03 м; чис-
ло каналов дальности равно 2, время когерентного накопления со-
ставляет 100 мс, что соответствует ширине доплеровского филыра
10 Гц, число каналов по ускорению (крутизне изменения частоты)
равно 1500, что соответствует расстановке каналов по крутизне из-
302
ГЛАВА 5. ОБРАБОГК 4 РЛС-СИГ НАЛОВ В БОРТОВЫХ Р ГС ПРИ ДЛИТЕЛЬНОМ КОП РЕНТНО1 t Н 4КОП ГЕНИИ
менения частоты сигнала, равной 6,7 1/с2 (ускорение 0,1 м/с2 или
перегрузка 0,01g).
Диапазон доплеровской фильтрации составляет 10 кГц. Таким
образом, общее число каналов обработки равно 3000000. Отноше-
ние сигнал/шум q рассчитывалось в фильтре после накопления.
Анализ характеристик обнаружения, рассчитанных для ука-
занных условий, показывает, например, что для обеспечения веро-
ятности Рпо = 0,5 при Рлт = 10 3 требуется обеспечить отношение
сигнал/шум порядка 13... 15 дБ.
Максимальная вероятность правильного обнаружения сигнала со слу-
чайной КИЧ достигается при точном совпадении КИЧ в опорном канале
со значением КИЧ в отраженном сигнале.
Увеличение времени накопления приводит к существенному росту
канальности системы обработки по КИЧ, что предъявляет достаточно
жесткие требования к производительности вычислительной системы.
Обнаружение цели производится независимо в различных кана-
лах по КИЧ, что дает возможность несколько повысить общую вероят-
ность правильного обнаружения объекта. Например, вероятность об-
наружения цели в канале согласованном по КИЧ с параметрами при-
нимаемого сигнала, при отношении сигнал шум, равном 15 дБ,
составляет Рпоо = 0,55, рассогласованном на 2,5 м/с2 - РПО2,5 = 0,4,
рассогласованном на 5 м/с2 - РПО5 = 0,05, тогда общая вероятность об-
наружения равна
Р,ю = 1 - (1 - Рпо0)(1 -Рао2>5)(1 - = 1 -(1 -0.55)(1 -0,4)(1 -0,05) = 0,744.
Общая вероятность правильного обнаружения РПО=0,744, превы-
шает вероятность в канале, согласованном по радиальному ускорению
РПоо=0,55, что является несомненным достоинством многоканальной
системы обработки и позволяет предъявить требования к количеству
каналов по КИЧ для различных значений времени накопления, за-
давшись некоторым условием. Например, появление девиации часто-
ты не должно приводить к снижению вероятности правильного обна-
ружения сигнала от динамичной цели более, чем на 20 %.
303
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
. .аптивная система
обработки и обнаруже
отраженных сигналов
на основе способа автофокусировки
Корреляционные методы обработки сигналов связаны с формиро-
ванием опорных сигналов. Исходя из этого целесообразно при реа-
лизации режима длительного когерентного накопления рассмот-
реть способ обработки на основе метода автофокусировки.
Суть метода автофокусировки заключается в том, что информация о величине
квадратичного набега фазы принимаемого сигнала извлекается непосредствен-
но из самого принимаемого сигнала и в последующем используется для форми-
рования опорного сигнала. Таким образом, говорят, что осуществляется фокуси-
ровка (настройка) системы обработки под параметры принимаемого сигнала.
Рассмотрим возможность применения методов автофокуси-
ровки для обработки сигналов, отраженных от динамичных целей
при реализации длительного когерентного накопления.
Математические соотношения для имитационной модели
формирования и обработки сигнала
с использованием методов автофокусировки
Математическая модель сигнала отраженного от динамичной
цели:
Я*) = 4,(0+ «„(*),
ЗД = 4 ехр]Лд0 + Vpnt(k} + ^t(k)t(k))I,
L л z J
(5.37)
(5.38)
где Su(k) и fin(k) - комплексный сигнал отраженный от цели и
---------------------------------------- • ]
шум в дискретные моменты времени к - О, К ; К — int < >; Гкн -
I A J
время когерентного накопления сигнала; Д - временной дискрет;
г (А) = АД - текущее время; Ас - амплитуда сигнала, отраженного от
цели; Л - длина волны РЛС; Д$, Ирц и ярц - дальность, радиальная
скорость и ускорение цели соответственно.
• Математическая модель устройства выделения опорного сиг-
нала, реализующая алгоритм
/С-1 ( п \
El атс I
>(£)exP]-j—, (5 39)
л=о I л J
304
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Son(m) = W(m)yc{m), (5.40)
Л/-1
ЗД^опС^хр
т~0
где j>c (m) - результат применения прямого ДПФ к входному сигна-
лу у (к); т - номер доплеровского фильтра in — - АЧХ
фильтра для выделения спектра сигнала цели; 50П(А) - опорный
сигнал (результат применения обратного ДПФ к сигналу Son (т).
• Математическая модель устройства обработки сигнала, реали-
зующего алгоритм
S(m) =
к-\ ( ?
X С <Л) У (к) exp - J тк
А=0 &
(5.42)
Допущения, при которых проводилось исследование
алгоритма автофокусировки
с помощью имитационной модели
• Полет носителя РЛС происходит по прямолинейной траекто-
рии с постоянной скоростью.
• Динамика перемещения целей обусловлена изменением только
радиального ускорения цели.
• Обработка сигнала выполняется только для одного канала
дальности и сигнал, отраженной от цели, всегда совпадает по
времени со стробом дальности.
• Прием сигнала, отраженного от цели, осуществляется на фоне
белых гауссовских шумов с известными статистическими ха-
рактеристиками.
Амплитуда сигнала, отраженного от цели, постоянна на интер-
вале времени когерентного накопления.
Обработка сигнала производится на нулевой промежуточной
частоте.
В качестве исходных данных было принято что: Л = 0,03 м,
частота повторения импульсов FH = 120 кГц и определяет времен-
ной дискрет Л = 1/FH ; Гкн = 100 мс.
На рис. 5.18,67 показана временная реализация входного сигнала
(5.38) на интервале времени 0,1 с, отраженного от цели движущейся
относительно БРЛС со скоростью 600 м/с и ускорением 100 м/с2.
Спектр такого сигнала имеет вид, представленный на рис. 5.18,6. Из
рисунка видно, что основная энергия сигнала в частотной области
305
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
сконцентрирована в узкой полосе 600 Гц. Форма спектра близка к
прямоугольной, что и предопределяет выбор АЧХ фильтра W(J).
Полосу пропускания фильтра W(f) необходимо выбирать из усло-
вия согласованности с полосой спектра сигнала цели, что в диапа-
зоне радиальных ускорений цели 10.. 100 м/с2 составляет величину
60...660 Гц.
/'Гц хЮ4
Рисунок 5.18
о
На рис. 5.19,а показан сигнал на выходе фильтра с АЧХ W(/), а
на рис. 5.19,6 показан этот же сигнал, но после применения обрат-
ного ДПФ.
Данный сигнал используется в дальнейшем в качестве опорного при обработке
сигнала цели по алгоритму (5.42).
Результат автофокусировки представлен на рис. 5.20,6. В то
же время, на рис. 5.20,6/ изображен несфокусированный от данной
цели сигнал.
Из сравнения рисунков можно сделать следующие выводы.
1. Алгоритм автофокусировки эффективен при обработке сиг-
налов от динамичной воздушно-космической цели при реализации
длительного когерентного накопления.
2. Фокусировка приводит к возрастанию разрешающей способ-
ности по частоте (скорости) до потенциально возможной (10Гц).
3. Амплитуда сигнала возрастает почти на порядок.
306
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНаЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.19
Рисунок 5.20
Дальнейшие исследования алгоритма автофокусировки проводились для случая
многоцелевой ситуации, т.е. когда в зоне радиолокационного наблюдения
имеются несколько целей.
307
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При моделировании это соответствует условию нахождения в
зоне частотного анализа нескольких целей. Амплитуда сигналов
при этом принималась одинаковой для всех целей А = 1 В, а пара-
метры движения целей равны:
для цели 1 .............................. Крц = 200 м/с; б/рц =50 м/с2
для цели 2 ............................. Ирц = 400 м/с, ярц =100 м/с"
для цели 3 ............................. Knu = 600 м/с, ат. = 150 м/с2
Результат традиционной обработки сигнала от таких целей по-
казан на рис. 5.21,67. В случае, если для реализации алгоритма авто-
фокусировки выбрать сигнал от цели 3, то получим результат, пред-
ставленный на рис. 5.21,6. Очевидно, что фокусировка по цели 3
приводит к еще большей расфокусировке сигналов целей 1 и 2.
Рисунок 5.21
Данную проблему можно решить путем увеличения числа каналов системы об-
работки по числу целей, находящихся в зоне радиолокационного наблюдения.
На рис. 5.22,а представлена ситуация, когда наблюдаются це-
ли, движущиеся с разной скоростью, но с одинаковым ускорением.
На практике моделируемая ситуация может иметь место при ра-
диолокационном наблюдении целей с турбореактивными двигате-
лями (ТРД), когда в спектре сигнала наряду с планерной состав-
ляющей находятся отражения от турбин двигателя самолета. В рас-
сматриваемом случае фокусировка по сигналу от цели 3 одинаково
эффективна как для цели 1, так и для цели 2 (рис. 5.22,6).
308
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.22
Рисунок 5.23
Представленные результаты получены при отсутствии шумов в обрабатываемом
сигнале, что, в общем случае, не соответствует реальным условиям работы РЛС.
Поэтому необходимо рассмотреть работу алгоритма автофокусировки в многоце-
левой ситуации в зависимости от соотношения сигнал/шум.
309
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Результаты традиционной обработки сигналов от данных це-
лей, при различных соотношениях сигнал/шум, представлены на
рис. 5.23,67 - 5.26,6/.
Рисунок 5.24
10000
8000
6000
4000
2000
о
£(/)
6000
4000
2000
о
Рисунок 5.25
310
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Предполагается, что цель с номером 1 движется с постоянной
скоростью, поэтому выходной сигнал от нее максимальный. Соот-
ветственно, отношение сигнал шум задавалось по цели 1 и соответ-
ствовало: на рис. 5.23 - 30 дБ, на рис. 5.24 - 25 дБ, на рис. 5.25
20 дБ, на рис. 5.26-15 дБ.
Автофокусировка выполнялась по сигналу, отраженному от
цели с номером 3, а результаты обработки при различных соотно-
шениях сигнал/шум представлены на рис. 5.23,6- 5.26,6.
Рисунок 5.26
Результаты моделирования
• Ввиду того, что источником информации о параметрах движе-
ния целей (например, их скорости, ускорении и т.д.) является
сам принимаемый сигнал, то становится возможным использо-
вание его для создания опорного сигнала в устройствах обра-
ботки корреляционного типа.
• При нахождении в зоне частотного (спектрального) анализа
нескольких целей, движущихся с различным радиальным ус-
корением, автофокусировка только по одной из них приводит к
снижению эффективности обнаружения других целей. Реше-
ние указанной проблемы приводит к росту числа каналов сис-
темы обработки, соответствующему количеству целей в зоне
радиолокационного наблюдения.
311
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При условии, что наблюдаемые цели имеют различное допле-
ровское смещение частоты, но движутся с одинаковым ради-
альным ускорением (такая ситуация возможна при наблюде-
нии планерной и турбинных составляющих в зоне спектраль-
ного анализа), автофокусировка одинакова эффективна для
всех целей, независимо от того, сигнал какой из них использу-
ется в качестве опорного.
Использование автофокусировки эффективно при достаточно
большом (порядка > 15... 17 дБ) отношении сигнал' шум на вы-
ходе системы обработки.
Основные проблемы при реализации способа автофокусировки
для наблюдения динамичных целей
• Выбор отраженного сигнала (особенно среди множества на-
блюдаемых) для его использования в качестве опорного.
• Извлечение информации о величине квадратичного набега фа-
зы, содержащейся в данном сигнале, с последующим форми-
рованием сигнала управления для формирования соответст-
вующего опорного сигнала.
Применение автофокусировки возможно как при функционировании БРЛС в ре-
жиме траекторного сопровождения до обнаружения целей, так и при однократ-
ном просмотре заданной точки пространства.
Рассмотрим возможности реализации способа автофокусировки
при функционировании БРЛС в режиме траекторного сопровождения.
Способы реализации тракторного сопровождения
Способ 1. На каждом такте (цикле) обзора осуществляется из-
мерение параметров сигнала, отраженного от динамичной цели, а в
процессе траекторного сопровождения реализуется процедура
«сглаживания» измеренных параметров с помощью специального
фильтра сопровождения. По истечении некоторого количества
циклов обзора осуществляется «подстройка» системы обработки
под параметры принимаемого сигнала и реализация алгоритма со-
гласованной фильтрации для принятой реализации
Число циклов обзора, по истечении которых выполняется авто-
фокусировка, может быть выбрано, например, исходя из результатов
сравнения текущей величины дисперсии ошибки оцениваемых пара-
метров с некоторым заданным пороговым уровнем дисперсии.
Способ 2. На каждом такте (цикле) обзора ос^тцествляется изме-
рение параметров сигнала, отраженного от динамичной цели. По ре-
зультатам измерения производится «подстройка» системы обработки
под параметры принимаемого сигнала с последующей реализацией
алгоритма согласованной фильтрации для принятой реализации, По-
312
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
еле этого производится оценка вероятности обнаружения цели (по
факту превышения вновь полученным откликом на выходе доплеров-
ского фильтра порога обнаружения, соответствующего обнаружению
нединамичной цели) и, в зависимости от полученных результатов,
принимается решение о продолжении процедуры траекторного сопро-
вождения - обнаружения цели с использованием автофокусировки
или об окончательном обнаружении динамичной цели.
Синтез системы обработки сигналов на основе метода автофокусировки целесо-
образно выполнить на основе статистической теории оптимального управления с
использованием локального функционала качества, а также положения, что
синтез обнаружителя сигналов от динамичных целей с использованием способа
автофокусировки можно рассматривать как синтез системы с частично заданной
структурой, где в качестве заданных элементов можно рассматривать устройство
первичной обработки сигнала и устройство обнаружения.
В последнем случае, такая структура может быть представле-
на в виде, приведенном на рис. 5.27. Данная схема реализована с
учетом алгоритма измерения частотных параметров сигнала [6].
Приемник (ПРМ), состоящий из умножителя сигналов (факти-
чески данную роль выполняет смеситель), АЦП. устройства
выполнения операции БПФ.
Измеритель частотных параметров сигнала (ИЧПС), состоя-
щий из формирователей амплитудно-частотного (ФАЧС) и фа-
313
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
зо-частотного (ФФЧС) спектров сигнала, определителя девиа-
ции частоты (ОДЧ), определителя знака девиации частоты
(ОЗД) принимаемого сигнала.
• Схема слежения (СС).
• Управляемый гетеродин.
• Пороговое устройство.
С выхода антенны отраженный сигнал поступает в ПРМ, пре-
образуется в цифровой вид с помощью АЦП и в виде квадратурных
составляющих подается в ИЧПС, где осуществляется операция
ДПФ (БПФ) для формирования АЧС.
Как показано в [6], АЧС позволяет измерить величину девиа-
ции частоты сигнала, вызванную динамичностью перемещения це-
ли, а с помощью ФЧС рассчитывается направление изменения
(знак девиации) несущей частоты. Измеренные параметры посту-
пают на устройство слежения (СС). Информация об измеренных на
выходе СС параметрах используется для формирования сигнала
управления УГ.
Приемное устройство, ИЧПС, ПУ представляют собой задан-
ные элементы системы обнаружения.
Задача синтеза обнаружителя сигналов при траекторном сопровождении до обна-
ружения с использованием способа автофокусировки может быть сформулирова-
на следующим образом: по результатам наблюдении z(t) выбором вектора управ-
лений и необходимо наилучшим (оптимальным) образом на выходе системы
управления (системы слежения) сформировать управляемую траекторию xy(t).
При этом в качестве элементов вектора z(/), при использовании
способа автофокусировки необходимо и достаточно использовать
значение доплеровской частоты /д и величину девиации частоты AF
принимаемого сигнала, а качестве вектора ху(/) - параметры УГ.
Критерием оценки синтеза рассматриваемой системы управления яв-
ляется получение характеристик обнаружения, асимптотически при-
ближающихся (соответствующих) условию наблюдения недина-
мичной цели (а бл = 0 ) при минимуме затрат на изменение пара-
метров УГ.
Оптимизация по алгоритмам СТОУ даёт возможность получить системы управле-
ния совместно наилучшие как по точности, так и по экономичности с учётом ре-
альных ограничений быстродействия исполнительных органов, сигналов управле-
ния и расходуемой ими энергии.
Анализ схемы, представленной на рис. 5.27, показывает, что рас-
сматриваемый синтез системы обнаружения сигналов динамичных
целей с использованием СТОУ заключается в синтезе системы слеже-
314
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ Б БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
ния за параметрами принимаемого сигнала и формировании сигнала
управления, обеспечивающего минимум функционала качества вида
(5-43)
где Му - знак условного математического ожидания; ху и хт - век-
торы требуемых и управляемых фазовых координат соответствен-
но; К и Q - матрицы штрафов на управление и точность слежения
соответственно; и - вектор управления.
Уравнения состояния для параметров (доплеровской частоты
и девиации доплеровской частоты) отслеживаемого процесса мож-
но представить в виде соответствующей системы уравнений:
/дот (^) — /дот D + ’ /цот (®) — /дотО ’ (5-44)
AF01(^) = -aAF0T(Zr-l) + ^(^-l), AFOT(0) = ЛГот0. (5.45)
Модель заданной части системы слежения (управителя) долж-
на учитывать возможность устойчивого управления исполнитель-
ными устройствами, определяемую условием управляемости
£ДХВу =п,
где и - число фазовых координат вектора ху(/), и обеспечения ре-
жима памяти при кратковременных пропаданиях радиосигналов.
Для рассматриваемой системы обнаружения исполнительным
устройством является УГ, формирующий ЛЧМ-радиосигпал на
промежуточной (поднесущей) частоте.
С учётом указанных замечаний отслеженные (управляемые)
параметры (а именно: доплеровское смещение и девиация частоты)
запишутся в виде
/ду(Ц = /дуЛ -1) + AFy (А - 1)т , /Ду (0) = /Ду0 , (5.46)
AFy (А) = AFy (А -1) + b, (А - 1)иу (к -1) + £yv (к -1),
AFy(0) = AFy0.
(5.47)
В (5.44)-(5.47) b} (£-1) - коэффициент эффективносги сигна-
ла управления uv(£-l); (£-1) и J;n,(7r-1) - центрированные
гауссовские шумы с известными односторонними спектральными
плотностями Dv и Z)yv.
Для оценивания (5.44)-(5.47) необходимо, как минимум, обес-
печить наблюдение /дот(£) и /д (Л).
315
Р. 7С АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Информацию о /Дот(£) можно получить от ИЧПС, а информа-
ция о /ду(^) выдается с управителя. Тогда, с учётом сказанного,
уравнения наблюдения запишутся в виде алгебраических уравнений
гд1(£) = кд|ЛЛ0Т(£) +Ui W > (5-48)
M*) = WfloT(|+U(*)> (5.49)
z (к) = к J^ (k)+^ (к), (5.50)
где гд](&) и гд2(£) - измерения, получаемые в ИЧПС; гду(/с) -
измерения, получаемые на выходе датчика заданной части системы
слежения; к (к) - коэффициент передачи измерителя; !LVH(A') и
$ди(£) _ центрированные гауссовские шумы измерений с односто-
ронними спектральными плотностями £)дуи, £>ли.
В общем случае в состав оптимальной радиоэлектронной сис-
темы, синтезированной на основе алгоритмов СТОУ, входят опти-
мальные фильтр и регулятор, поэтому выполним синтез указанных
устройств.
Так как исходные модели (5.44), (5.45), (5.48)-(5.50) - линей-
ные, а шумы - гауссовские, то при квадратичных функционалах
качества задачи синтеза оптимальных фильтра и ре1улятора могут
решаться независимо.
Синтез регулятора
Регулятор должен решать две задачи:
• вырабатывать сигнал управления;
• формировать сигнал комбинированной обратной связи в опти-
мальный фильтр.
Для решения этих задач необходимо для заданной части сис-
темы слежения (5.44), (5.45), предназначенной для отслеживания
процесса (5.46), (5.47) при наличии наблюдений (5.48)-(5.50),
сформировать сигнал управления uv, оптимальный по минимуму
функционала
где #ц, <712= #21 и q22 - коэффициенты штрафов за точность слеже-
ния по доплеровской частоте и девиации частоты; ки - коэффици-
ент штрафа за сигнал управления.
316
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
-it
т
5
Учитывая (5.44)-(5.47), запишем несколько выражений:
вектор отслеживаемых хот и вектора управляемых ху координат
Хот(^)~ Удот(^)
матрица сигналов управления и матрица коэффициентов
штрафов за сигнал управления
и(£) = !/„(&), К(£) = ки(к);
матрица эффективности управления
О
ЬД)\;
матрица коэффициентов штрафов за точность слежения
#11 #12
Ву(*) =
QW =
динамические матрицы состояния отслеживаемых и управляе-
мых фазовых координат
Ф(Л, к - 1)от
, Ф(М-1)У =
О
О
Тогда алгоритм функционирования оптимального регулятора
запишется в виде
«/(£) =
= К v (к)№а (Л) + К* (k)&bF(k),
где
А/д(*) = /дот(*)-/ду(*)> AAF(^) = AFoT(A:)-AFy(A-) (5.54)
- ошибки слежения по доплеровской частоте и девиации частоты;
V
- коэффициенты усиления ошибок слежения.
Регулятор представляет собой систему с отрицательной об-
ратной связью по всем управляемым координатам, т.е. /ду (А) и
О)-
317
Р, 7С АВИАЦИОННО- КОСМИЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНО( ТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Для функционирования регулятора необходимы оптимальные
оценки /Дот(Л), /ду(^) и А^от(Л), AFy(£).
Сигнал управления зависит как от ошибок сопровождения по
Л Л
доплеровской частоте /дот(£) , f Ду(£) , так и ошибок по опреде-
Л А
лению девиации частоты AF0T(A), AFy(£).
Вес ошибок в сигнале управления определяется соотношени-
ем штрафов за точность слежения и экономичность -^1 и .
«и
Синтез оптимального фильтра системы слежения
Синтез оптимального фильтра системы слежения выполняется на
основе моделей (5.44)-(5.50), определяющих обобщенный вектор
состояния
х(А)= /Дот(£)
;T(Zr) /Ду(£) AFy(£)T
(5.56)
и век гор измерений
z(*) = гД](А) гд2(Л) гду(£)
Как следует из (5.44)-(5.50), используемые модели являются
линейными, шумы наблюдений и состояния носят гауссовский ха-
рактер. В этом случае для синтеза фильтра можно использовать ал-
горитм оптимальной линейной фильтрации, для реализации кото-
рого необходимо решать систему уравнений размерностью
Nj =N + 0,5JV(2V + l) = 4 + 0,5x2x5 = 9,
(5.57)
где N= 4 - размерность обобщенного вектора состояния (5.56).
Как следует из (5.56), в его состав входят управляемые коор-
динаты /д (£) и AFy(A), для которых необходимо сформировать
А
независимые оценки /ду(£) и AFy(£) на основе измерений (5.50).
С учетом отмеченных особенностей исходный вектор состоя-
ния (5.56) можно разбить на два подвектора:
А/*^т )
, Ху(^ /ду(^)
AFy(A)
для каждого из которых, может быть синтезирован свой отдельный
фильтр.
ГЛАВА 5. ОБРАБОТКА РЛС СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КО/ ЕРЕНГНОМ НАКОПЛЕНИИ
В связи с этим синтез оптимального фильтра системы слеже-
ния можно выполнить путем синтеза двух фильтров:
• фильтр управителя по моделям
Уду(^) Уду(^ 0^ •> Уду(О) УдуО ’
(5.58)
AFy (^) = AFy (£ -1) + Ьу (к - 1>у (к -1) + £yv(k -1), AFy (0) - AFy0.
2ду(^) ^дуУду (^)“г ^дуи ’
(5.59)
фильтр отслеживаемых координат, базирующегося на моделях
Удот(^) Удог(^ 0 + 1)F Удот(О) УДотО ’
(5.60)
AF0T(к) = -aAF0T(k -1) + £ (Л -1), AF0T(0) = AFot0 ;
^k) = K^(kyf^(k)+^k), z42(^) = ^2(A)AF01(A)+^h2(Z:).(5.61)
Выражения (5.60) и (5.61) получены из (5.44), (5.48), (5.49) с
Л
учётом сформированной оценки /ду(^) •
Тогда, используя (5.60) и (5.61), можно записать, что
> z(£) = Z(^)ot >
(5.62)
Фот(^Л-1)
1
0
к
В(*)у= j
, Н(*) = [^(£) 0],
и, с учетом (5.62), получаем, что
/дот(*) = /до# -1) + (к - ])к + *0Т1Дгд1(А) + £О12Д7д2(£) .
/от (°) =/ото;
AFОт(£) — JFot(£ 1) +А0т1Дгд1(£)4-&012Дгд2(Л:),
AFoi (0) - AFot0 .
(5.63)
где
Агд1(^)^7д1(^)-^/Дот(А-1) , ^(k^z^k)-k.a^(k-\) ; (5.64)
kmi (J - L2 ) переменные коэффициенты усиления невязки.
Используя (5.58), (5.59), можно записать, что
= [ /yW
"I г
AFV(A.) _Ф,(/с,А-1) =
319
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
z(k) = zAy(k), Щк) = \Кд(к) 0J.
Тогда
fy Л) = Дк -1) + А/у (к - 1)к + £у1 АиДу (к),
/у(0) = гДу(0)МДу; (5.65)
A Fy (к) = A F(k -1) + by (к - 1)Му (к -1) + ку2 Д7Ду (к),
AFy(0)=AFy0,
где ку\ и кУ2 ~ коэффициенты усиления невязки;
^zoy(k)=zRy(k)-kayfy(k). (5.66)
Таким образом, для обнаружения динамичных целей необхо-
л
димо иметь оценки отслеживаемых частоты Доплера /от(£) и де-
Л
виации частоты A FOt(A) .
Учет ошибок сопровождения по скорости позволит сделать более устойчивым
процесс сопровождения динамичных целей до принятия решения об обнаружении
при траекторном сопровождении.
Схема, представленная на рис. 5.28, представляет собой мно-
гомерную, нестационарную, многоконтурную схему. Многомер-
ность обусловлена наличием нескольких входных Zj-, z^F и не-
скольких выходных сигналов. Нестационарност ь обусловлена на-
личием в фильтрах переменных коэффициентов усиления невязок
£ФН , ^Ф21 ’ ^Ф12’ ^Ф22 в фильтре отслеживаемых координат и
£ф11, ^Ф21 в фильтре управителя, которые изменяются от своих
наибольших значений в момент начала работы до наименьших в
установившемся режиме.
Такое изменение коэффициентов даёт возможность быстро от-
работать начальные ошибки за счёт широкой полосы пропускания
фильтров. В то же время, существенно узкая полоса в установив-
шемся режиме позволяет обеспечить хорошее сглаживание случай-
ных возмушений. В рассматриваемой системе можно выделить не-
сколько контуров. Многоконтурный тип следящей системы позволя-
ет разрешить противоречия между требованиями одновременного
обеспечения высокой точное™, быстродействия и устойчивости.
320
Г J ABA 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.28
321
РЛС АВИ ЩИОННО-КОС ЧИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУIИНОГО ПРОСТРАНСТВА
Особенности, обеспечиваемые фильтром
отслеживаемого процесса,
вследствие его высокой точности и быстродействия
К потребителям поступают непосредственно оценки f т (к) и
л
А Есут(к), а не их запаздывающие аналоги, как это имеет место
в одноконтурных системах.
Л Л
• Оценки /от(£) и AFotW формируются по более точным мо-
делям, в которых учитываются манёвры, что особенно важно
при траекторном сопровождении динамичных целей.
Исследования синтезированной системы обнаружения дина-
мичных целей при реализации режима обзора воздушного про-
странства и траекторного (до обнаружения) сопровождения целей
выполнены путем математического моделирования.
В процессе моделирования на каждом такте (цикле) обзора
осуществлялось измерение параметров сигнала, отраженного от ди-
намичной цели, а в процессе траекторного сопровождения реализу-
ется процедура их «сглаживания» с помощью специального фильтра
сопровождения (фильтр отслеживаемых координат). На каждом так-
те сопровождения (совпадающим с периодом обзора пространства)
л
фиксировались оценки отслеживаемых координат /от(£) и
л
AFot(/<), и проводилось сравнение дисперсий оценок, полученных
на каждом такте сопровождения, с пороговым значением, опреде-
ляемым минимально возможным значением их дисперсий.
При достижении текущими результатами измерений диспер-
сий оценок их порогового значения выдавалась команда на форми-
рование сигнала управления для УГ с последующей реализацией
процедуры автофокусировки, т.е. устранения квадратичною набега
фазы, возникающего вследствие динамичного перемещения цели.
Таким образом, по истечении некоторого числа циклов обзора
осуществляется «подстройка» системы обработки под параметры
принимаемого сигнала и реализация алгоритма согласованной
фильтрации для принятой реализации. В том случае, если после
выполнения операции автофокусировки принимаемый сигнал пре-
вышает «верхний» порог обнаружения, то принимается решение об
обнаружении цели.
На рис. 5.29 представлены характеристики обнаружения ди-
намичной цели (кривая 2) при реализации синтезированного обна-
322
ГЛАВА 5. ОБРАБОТКА РЛС СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
ружителя на основе способа автофокусировки при времени коге-
рентного накопления 100 мс.
сь дБ
Рисунок 5.29
При использовании способа автофокусировки характеристика
обнаружения динамичной цели будет всегда соответствовать кривой
2, независимо от того, как динамично перемещается цель. В идеаль-
ном случае кривые 1 и 2 должны совпадать. Однако характеристики
обнаружения, представленные на рис. 5.29. не совпадают, что обу-
словлено особенностями алгоритмов измерения частотных парамет-
ров принимаемого сигнала, описанного в [6J. Указанные алгоритмы
измерения частотных параметров сигнала обладают минимальной
чувствительностью к измерению девиации частоты, так как мини-
мальная величина девиации, которая может быть измерена, соответ-
ствует условию, что «расширение» спектра отраженного сигнала со-
ставляет два узкополосных доплеровских фильтра.
При реализации алгоритмов автофокусировки указанные условия соот-
ветствуют потерям в отношении сигнал/шум. Для рассматриваемой
длительности когерентного накопления потери составляют порядка од-
ного децибела.
Анализ характеристик обнаружения, представленных на рис. 5.29,
показывает практическую работоспособность синтезированного обна-
ружителя на основе способа автофокусировки.
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС1ИИ ВОЗД\ ШНОГО ПРОСТРАНСТВА
Система обработки и обнаружения
отраженных сигналов
с использованием дискриминаторов
Анализ возможностей реализации многоканальной по дальности,
скорости и ускорению системы первичной обработки сигналов
(п. 5.2), отраженных от динамичных целей, показывает, что общее
число каналов при времени когерентного накопления сигналов
80... 100 мс может достигать нескольких десятков и даже сотен ты-
сяч. Данное обстоятельство существенно повышает требования,
предъявляемые к вычислительным устройствам РЛС и затрудняет
практическую реализацию систем.
Одним из методов решения указанной проблемы является построение систем об-
работки и обнаружения сигналов с использованием дискриминаторов, что позво-
ляет существенно уменьшить число каналов обработки принимаемых сигналов по
ускорению в каждом канале дальности.
Как известно из теории оптимального приема радиосигналов
[13, 16], в общем случае обработка принимаемых сигналов разби-
вается на два этапа.
Этап 1. Обнаружение сигналов на фоне шумов и помех.
Этап 2. Получение оценок координат и параметров целей
х,(/), формирующих вектор фазовых координат х(/).
При работе обнаружителя автоматически, как правило, осуще-
ствляется грубое измерение координат вектора х(7) (или парамет-
ров сигнала Д(/}), которое выполняется в момент превышения по-
рога обнаружения путем фиксации параметров опорного сигнала,
значения координат х, в котором известны (задаются при настройке
обнаружителя).
Например, в многоканальном обнаружителе сигнала динамич-
ной цели по номеру доплеровского филыра, сигнал в котором пре-
высил порог, можно судить о скорости сближения с целью, а по но-
меру канала устранения линейной частотной модуляции - о величи-
не радиального ускорения сближения с целью [5, 7].
В тоже время, для повышения точности оценок параметров
радиолокационного сигнала часто используют радиолокационные
дискриминаторы [1, 2], которые формируют сигналы пропорцио-
нальные рассогласованию между текущими значениями парамет-
324
ГЛАВА 5. ОБРАБОТКА РЛС-СИ ГН ШОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
ров обрабатываемых сигналов и опорными значениями этих пара-
метров, полученными в системе обработки.
Очевидно, что параметры многоканальной системы обработки
могут рассматриваться как опорные значения, а сигналы, отражен-
ные от динамичных целей и приобретающие, вследствие этого, до-
полнительную частотную модуляцию, могут рассматриваться как
сигналы с текущими значениями параметров, отличающимися от
параметров настройки многоканальной системы обработки.
Наличие в составе системы обработки дискриминатора по крутизне изменения
частоты позволит выявить рассогласование, которое возникает между крутизной
изменения частоты принимаемого сигнала и значением крутизны изменения час-
тоты опорного сигнала, которое может быть использовано для подстройки опор-
ных параметров системы обработки.
Как известно [10], при синтезе оптимального дискриминатора
одной из основных задач является получение и исследование его
дискриминационной характеристики (ДХ). Так как при наблюдении
динамичной цели имеет место доплеровский сдвиг частоты / сиг-
нала и, кроме того, возникает дополнительная частотная модуляция,
которую можно охарактеризовать индексом линейной частотной мо-
дуляции /я, то для оценки возможностей обнаружения сигналов от
динамичных целей на фоне белых гауссовских шумов необходимо
получить выражения для ДХ по частоте Д и индексу линейной час-
тотной модуляции (ИЧМ) [д . ДХ такого дискриминатора иллюстри-
руют его потенциальные возможности и могут выступать в качестве
«эталона» при сравнении с другими дискриминаторами.
В РЛС с ВЧПИ и СЧПИ, выбором соответствующей частоты
повторения зондирующего сигнала обеспечивается однозначная
передача спектра доплеровских частот сигнала, что позволяет сде-
лать переход к непрерывному аналогу сигнала, приходящего в ка-
нал дальности и представить огибающую пачки импульсов дли-
тельностью Т в виде
^(0 = в(/W, х) +/7(г),
(5.67)
где Ац - случайная комплексная амплитуда сигнала отраженного
от цели; UB(f) - функция, характеризующая форму огибаюшей;
n(f) - гауссовские шумы с известной спектральной плотностью No;
s(t,x) = i(/,A) = exp{j^(7)} - сигнальная функция, А = [/д,//]г
вектор оцениваемых параметров сигнала.
325
Р 1С АВИАЦИОННО-КОСМИЧЕСКОГО МОНИ I ОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Выходные сигналы дискриминатора можно описать в виде
выражений
Д^(Л0)1 и к =____d (dW(\^C
< dA ) И dAm I dA }
где Z - выходной chi нал пропорциональный рассогласованиям по
параметрам сигнала; К - характеризует крутизну ДХ. Детермини-
рованная составляющая выходного сигнала дискриминатора опи-
сывает ДХ Рд, которая определяется как среднее значение выход-
ного напряжения дискриминатора по совокупности реализаций на-
блюдения ПРИ фиксированных значениях параметров сигнала
(Л = [./д,Д ) И их оценок Ло = [/эо,//0]т). Тогда
FA=M{Z} = Ml
(5.68)
Для неэнергетических параметров Л и наблюдения (5.67) с
учетом
2
^(Ло) = ^т-1п(С(Ло))>
2(Л0)
1
Nn
2 <?
Т2(Л0) = Д
О
получим, 41 о
/’д(А,А0) = 2^х
xRe 2сг„2
1.1
772 Т 2
J <7в(ф](Л)5о(Л0)Л J СУВ(/)5(Л)
-Т 2
-тп
dA
(5.69)
5
где ^(Aq) - опорный сигнал; - дисперсия амплитуды сигнала
2 Ti2
Цели; = п кт zkt--; £ = 2сГа£0 ’ £0 = [ ^(Ф(А0)^о(А0)^ •
2л;(л/7 + е) j
Если воспользоваться разложением фаз отраженного и опорно-
го
сигналов в степенной ряд ^(/) = 2я fTyt +
И Й)(/) =
2
326
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ЦТИТЕЛЬНОМ КОГЕРЕНТНОМ Н АКОП ГЕНИИ
соответственно, то ДХ по частоте и ИЧМ может
быть представлена в виде выражений
Д/'
exp
Т/2 t
U^(t)J2TTtexp /2тг r/t
-TH
T 2
f С'в(/)ул72 exp
-Г/2
(5.70)
(5.71)
(5.72)
(5.73)
где k-> = 4A1cr2 ; »7 = /д-/д0; v = p-pio.
Практическая реализация оптимальных дискриминаторов часто оказывается дос-
таточно сложна, поэтому используют квазиоптимальные дискриминаторы допле-
ровской частоты и ее производной.
Так, для дискриминатора с использованием каналов, расстро-
енных по частоте и крутизне изменения частоты, выходные сигна-
лы дискриминатора будут определяться выражениями
где Д - величина расстройки; z/0 - корреляционный ингетрал вида
Кц характеризуют крушзну ДХ по час-
тоте и производной доплеровской частоты соответственно.
327
R 7C ЛВИАЦИОННО-КОС 'МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В тоже время для дискриминатора с дифференцированием
опорного сигнала выходные напряжения по частоте и ее производ-
ной определяются выражениями
Zf - Re(wt)Im(w0) - Re(w0)Im^) ,
= Re(w2) bn(j/0) - Re(w0 ) Im(w2),
а сигналы, пропорциональные крутизне ДХ, записываются в виде
2 *
К - W] -47rRe(w0w2),
к/л = ±1 -Re(w0Wj),
Т 2
Щ = f /7В1(0^>*(ЛЭ,?)Л
-772
Т/2
U2= J <7В2(/)^(О/(ЛЭ,/)Л
-Т/2
т/2
-Т 2
где UBi(t), Uвз(t) весовые функции вида
t7B1(/) = 2^(£); UB2{t) = я/(*)2 ; UB3(t) = .
Исследования характеристик указанных типов квазиоптималь-
ных дискриминаторов, выполненные с использованием методов циф-
рового имитационного моделирования, показаны на рис. 5.37-5.43.
На рис. 5.30-5.33 представлены результаты исследований дис-
криминатора с дифференцированием опорного сигнала, на рис. 5.34,
5.35 - результаты исследований дискриминатора с использованием
каналов, расстроенных по частоте и крутизне изменения частоты. На
рис. 5.30 даны ДХ при нулевых расстройках по частоте (верхний ри-
сунок) и крутизне изменения часто гы (нижний рисунок) для Гкн =
= 0,05 с. На рис. 5.31 показана ДХ при точной настройке по крутизне
изменения частоты v = // - //0 = 0 и рассогласованию по частоте
г/ = f - /0 = ±20 Гц, ГЮ1 = 0,05 с. На рис. 5.32 и 5.33 представлены за-
висимости СКО оценки скорости сближения (рис. 5.32) и ускорения
(рис. 5.33), от отношения сигнал/шум, при различных временах коге-
рентного накопления сигнала. Графики получены при расстройках по
частоте и КИЧ в пределах линейной части ДХ.
328
ГЛАВА 5. ОБРАБОТКА РЛС-СИ1 НАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.31
На рис. 5.34, 5.35 представлены ДХ дискриминатора с разне-
сенными каналами, полученные при различных величинах разноса
каналов по КИЧ для времени накопления 0,05 с. С увеличением
ДА наблюдается рост крутизны ДХ и увеличение размера ее ли-
нейной части. При некотором разносе А (Л;/~300 1/с2) крутизна
ДХ достигает своего максимального значения. Дальнейшее увели-
чение разноса нецелесообразно, так как приводит к искажению ДХ.
329
РТС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 5.32
Рисунок 5.33
Полученные результаты показывают, что точность оценки частоты и ее производ-
ной в области небольших расстроек по f и д для дискриминатора с дифференциро-
ванием опорного сигнала несколько выше, чем для дискриминаторов с использо-
ванием разнесенных каналов.
Однако на практике работа дискриминатора в области малых
расстроек возможна только при большом отношении сигнал/шум.
При реализации алгоритмов измерения параметров движения цели целесооб-
разно использовать дискриминатор с каналами, разнесенными по частоте и
крутизне изменения частоты.
330
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.34
Рисунок 5.35
В этом случае путем соответствующего выбора разноса кана-
лов Az и А может быть достигнут больший размер линейной
J г* ° г
части ДХ и, соответственно, более высокая точность оценки вели-
чины рассогласования как по частоте, так и по КИЧ в области
больших расстроек. Это подтверждает вид ДХ дискриминатора с
разнесенными каналами на рис. 5.34 и 5.35.
При разработке обнаружителя динамичных целей целесообразно использовать
дискриминатор с разнесенными каналами.
331
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Тогда, с учетом схемного построения многоканального обна-
ружителя динамичных целей [7], структура обнаружителя сигналов
от динамичных целей на основе дискриминатора с разнесенными
каналами может быть реализована в виде, показанном на рис. 5.36.
Рисунок 5.36
Сигнал с выхода селектора дальности (СД) подается на входы К
(по числу доплеровских частотных каналов) «дискриминацион-
ных» каналов, каждый из которых содержит три перемножителя, на
вторые входы которых подаются опорные сигна лы. Выходной сиг-
нал каждого перемножителя подвергается спектральной обработке
с помощью алгоритма быстрого преобразования Фурье (БПФ).
Кроме того, выходной сигнал «центрального» перемножителя по-
ступает на обнаружитель (ПУ) для принятия решения о наличии
332
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
или отсутствии цели в зоне наблюдения. При превышении порога
принимается решение об обнаружении нединамичнои цели.
Одновременно спектральные отсчеты, соответствующие од-
ноименным фильтрам трех каналов обработки по КИЧ, подаются
на разностную схему, включающую три вычитающих устройства
(ВУ1, ВУ2, ВУЗ), на выходе которой получаем напряжение, про-
порциональное крутизне изменения доплеровской частоты сигнала
(ускорению цели). Если порог не превышен, то на последующем
такте, в соответствии с результатами обработки сигнала на преды-
дущем такте, алгоритм обработки или не изменяется (при принятии
решения об обнаружении нединамичной цели) или производится
коррекция опорных сигналов на величину, пропорциональную кру-
тизне изменения доплеровской частоты. При этом опорный сигнал,
подаваемый на вход «центрального» канала, представляет собой
ЛЧМ-сигнал с параметрами, соответствующими измеренному зна-
чению крутизны изменения доплеровской частоты. Для опорных
сигналов, подаваемых на два других канала, КИЧ изменяется син-
хронно на величину А//, пропорциональную измеренному значе-
нию крутизны. Таким образом, обеспечивается согласованная об-
работка сигнала от динамичной цели по «центральному» каналу. В
последующем повторно выполняется процедура обнаружения при-
нимаемого сигнала, но при гипотезе, что в принимаемой реализа-
ции содержится полезный сигнал от динамичной цели.
На рис. 5.37 представлена нормированная амплитуда сигна-
лов, формируемых на выходах сумматоров при первоначальном
наблюдении цели, движущейся с ускорением 2g. Величина рас-
стройки каналов по ускорению составляет ± 3g.
На рис. 5.38 представлена нормированная амплитуда сигна-
лов, формируемых на выходах сумматоров после подстройки кана-
лов, выполненной по результатам однократного измерения пара-
метров (КИЧ) частотно-модулированного принимаемого сигнала
при наблюдении цели, движущейся с ускорением 2g.
Результаты представленных исследований показывают, что имеет место адап-
тация системы обработки сигналов под параметры отраженного от цели сигна-
ла, что выражается в максимизации напряжения на выходе «центрального»
канала, обеспечивающего согласованную обработку принимаемого сигнала.
Общее число «дискриминационных» каналов может быть оп-
ределено как
(5-74)
333
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
где ДЕф - диапазон доплеровской фильтрации принимаемого сиг-
нала; Д/ф - полоса пропускания узкополосного доплеровского
фильтра в системе обработки сигналов.
На рис. 5.39 представлены характеристики обнаружения сиг-
налов от цели движущейся с радиальным ускорением 5 м/с", при
различной расстройке каналов по КИЧ: 2 - при расстройке 1g (Дц =
= 10 м/с2, а = 5 м/с2); 3 - при расстройке 3g (Дд = 30 м/с2); 4 - при
расстройке 9g (Л// = 90 м/с2). Цифрой 1 обозначена характеристика
обнаружения нединамичной цели. Время когерентного накопления
составляет 100 мс (Дн - 0 м/с2).
Рисунок 5.37
Рисунок 5.38
334
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.39
При расчете характеристик обнаружения на каждом такте на-
блюдения (обращения к запомненной реализации) принятой реали-
зации сигнала осуществлялась процедура обнаружения по «цен-
тральному» каналу обработки. Ложная тревога по центральному
каналу устанавливалась равной 10~3.
Анализ полученных характеристик обнаружения сигналов от-
раженных от динамичных целей показывает следующее.
1. Ухудшение характеристик обнаружения динамичной цели
(кривые 2-4) по сравнению с характеристикой нединамичной цели
(кривая 7) обусловлено ошибками определения параметров прини-
маемого сигнала (крутизны изменения частоты), что, в свою оче-
редь, приводит в формированию опорного сигнала, нс в полной ме-
ре адекватному параметрам принимаемого сигнала.
2. Характеристики обнаружения в существенной степени за-
висят от растройки каналов по КИЧ, поэтому при построении сис-
тем обнаружения динамичных целей на основе дискриминаторов
необходимо учитывать диапазон возможных ускорений целей или
же реализовывать систему обнаружения, адаптивную к динамич-
ным свойствам целей, например по данным целеуказания от внеш-
них информационных источников.
В реальных тактических ситуациях в зоне радиолокационного
наблюдения может находиться несколько целей. На рис. 5.40 пред-
ставлены нормированные амплитуды сигналов, формируемых на
выходах сумматоров при первоначальном наблюдении двух целей,
движущихся с ускорением 10 и 20 м/с‘ соответственно. Разница доп-
335
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
леровских частот сигналов, отраженных от целей, составляет 60 Гц.
Величина расстройки каналов по ускорению составляет ± 30 м/с2.
На рис. 5.41 представлена нормированная амплитуда сигналов,
формируемых на выходах сумматоров после подстройки каналов при
радиолокационном наблюдении двух указанных выше целей.
Рисунок 5.40
^Цпах
Рисунок 5.41
Анализ рис. 5.40 и 5.41 показывает, что имеет место адаптация
системы обработки сигналов под параметры отраженных от целей
сигнала, что выражается в максимизации напряжений на выходе
«центральных» элементов в каждом канале по доплеровской часто-
те. Указанное обстоятельство свидетельствует о повышении раз-
решающей способности БРЛС по скорости при наблюдении дина-
мичных целей.
336
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Для обнаружения динамичных воздушных целей может быть исполь-
зована схема адаптивного обнаружителя с использованием свойств
дискриминаторов.
Максимальное число каналов обнаружителя равно N = 3NnNyr где
/7Д - число каналов по дальности; /Vv - число каналов по скорости, рав-
ное числу импульсов в пачке принимаемого сигнала.
Вероятность правильного обнаружения динамичных целей явля-
ется функцией расстройки каналов обнаружения по КИЧ.
Эффективное время адаптации к динамичности цели для решения
задачи обнаружения зависит от отношения сигнал/шум.
Адаптивный обнаружитель сигнала от динамичной цели может
быть использован как при реализации алгоритмов тракторного сопро-
вождения, так и при реализации алгоритма радиолокационного на-
блюдения целей в заданную точку пространства.
СжЛ||| обработки и обнаружения
5е атрвЙрных сигналов
на Og||pe анализа
дояМЦ^еского смещения частоты
Анализ характера изменения параметров сигнала, отраженного от
динамичных целей, показывает, что в качестве варианта математи-
ческого аппарата обнаружения таких целей на этапе первичной об-
работки сигнала могут быть использованы методы обнаружения
разладки случайного процесса.
Основой для такого утверждения является то, что обнаружитель сигнала в коге-
рентной РЛС с ВЧПИ (СЧПИ) можно рассматривать как динамическую систему, в
которой при появлении на входе отраженного от динамичного объекта сигнала
имеют место изменения выходного напряжения, проявляющиеся в уменьшении
его амплитуды, появлении многопиковости, «размазывании» его несколькими
доплеровскими фильтрами и т.д.
Это позволяет утверждать, что при наличии системы обработки,
настроенной на прием и обработку сигнала от нединамичного объекта,
при поступлении сигнала от динамичного объекта имеет место раз-
ладка процесса обработки. Задача при этом заключается в обнаруже-
нии резких изменений (имеющих место при наблюдении динамичных
объектов) в динамической системе, какой и является обнаружитель.
337
РДС АВИ..ЦИОННО-КОС'МИЧЕСКО1 О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПР( )СТР 1НСТВ 4
В [8] представлены результаты синтеза и исследования обна-
ружителя сигналов от динамичного объекта на основе теории раз-
ладки, которые показывают, что существует принципиальная воз-
можность реализации устройств обнаружения динамичных объек-
тов с использованием указанного способа. Метод обнаружения
изменений в указанном обнаружителе основан на формировании
остатков при использовании структуры включающей свой состав
фильтр и алгоритм принятия решения. Используемый в такой сис-
теме фильтр синтезируется на основе предположения об отсутст-
вии возможных изменений в системе. На каждом такте фильтрации
выполняется измерение параметров принимаемого сигнала, на ос-
новании которых формируется опорный сигнал, который вычита-
ется из входного наблюдения, образуя остаточный сигнал. Откло-
нение в разностном сигнале будет указывать на разладку, а факт
его наличия положен в основу алгоритма принятия решения.
Исследования показали, что синтез фильтра целесообразно выполнить с исполь-
зованием алгоритмов линейной или нелинейной фильтрации [9], однако для его
работоспособности необходимо знание доплеровского смещения частоты отра-
женного сигнала, что затрудняет его практическое применение в РЛС, функциони-
рующей в режиме обзора пространства, при котором априорно доплеровская час-
тота отраженного сигнала, как правило, неизвестна.
Вместе с тем, анализ особенностей функционирования фильтра,
синтезированного в [8] показывает, что одним из вариантов реализа-
ции обнаружителей динамичных целей на этапе первичной обработ-
ки сигнала является возможность их синтеза на основе анализа оце-
нок доплеровского смещения частоты принимаемого сигнала.
В устройстве обнаружения на основе теории разладки, пред-
ставленном в [8], используется расширенный фильтр Калмана. син-
тезированный при условии, что вектор оцениваемых параметров
включает амплитуды квадратурных составляющих Ас и 4., а так-
же доплеровское смещение частоты принимаемого сигнала /‘ :
(5.75)
Уравнения состояния для указанных параметров описываются вы-
ражениями:
(5.76)
4 (0) = 4о
4(0) = Ао, ,4с(о) = Асо-
338
Г1АВА 5. ОБРАБОТКА РЛС-СИГ НАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЧЕНПИ
Анализ (5.75), (5.76) показывает, что фильтр синтезируется
для условия наблюдения нединамичного объекта и при этом ис-
ключаются «резкие» тангенциальные перемещения объекта или но-
сителя РЛС.
В то же время, очевидно, что для обнаружения динамичных
объектов целесообразно использовать фильтр, синтезированный
для модели, в которой уравнение состояния доплеровской частоты
сигнала описывается выражением
ДС Дс ^фд ’ ./дс (®) ./дсО ’
(5.77)
т.е. доплеровское смещение частоты представляется в виде узкопо-
лосного процесса с заданными характеристиками (дисперсией и
постоянно! 1 времени (полосой пропускания)); а - величина, обрат-
ная постоянной времени динамичности (маневра, ускорения) Щ7];
/?ф1 - формирующит белый шум с известными характеристиками.
Дисперсия и полоса процесса изменения частоты в (5.77) мо-
гут выбираться из наихудших условий, например исходя из макси-
мально возможных значений величины ускорения цели и длитель-
ности маневра [17].
Для решения задачи синтеза обнаружителя на основе оценок
доплеровского смещения частоты рассмотрим, каким законом опи-
сывается плотность вероятности указанных оценок на выходе
предложенного (5.77) фильтра Калмана при наличии и отсутствии
полезного сигнала.
На рис. 5.42 представлена гисто! рамма распределения оценок
доплеровской частоты на выходе фильтра, полученная при усло-
вии, чго полезный сигнал на входе фильтра отсутствует. Частота
настройки (начальное значение доплеровского смещения частоты)
фильтра составляет 2,5 кГц. На основе полученных результатов
выполнена оценка параметров распределения (математического
ожидания и дисперсии) и построена функция /(л), описываемая вы-
ражением (показана на рис. 5.42 утолщенной линией)
(5.78)
На выходе фильтра, настроенного на соответствующее значение доплеровского
смещения частоты, формируются отсчеты оценок частоты, плотность вероятности
которых описывается гауссовской плотностью вероятности с математическим
ожиданием, соответствующим начальной частоте настройки фильтра.
339
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 5.42
Это означает, чго плотность вероятности оценки доплеров-
А
ской частоты / на выходе одного z-ro фильтра при отсутствии по-
лезного сигнала запишется в виде
w(/,/S = 0) =
7=Гехр<
\27Т(У
(5-79)
где /н/ - доплеровская частота настройки z-ro фильтра.
На рис. 5.43 представлены гистограммы распределения оценок
на выходе одного фильтра, полученные при условии, чго на входе
фильтра присутствует полезный сигнал с истинной доплеровской
частотой, равном 2,475 кГц. Время когерентного накопления равно
7КИ =100 мс.
Аналогично, как и для случая отсутствия сигнала, на основе
полученных результатов выполнена оценка параметров распреде-
ления (математического ожидания и дисперсии) на основе которых
построена функция /(х) (показана на рис. 5.43 утолщенной линией).
Число попаданий оценок (при построении гистограммы) в по-
лосу пропускания доплеровского фильтра определяется априорной
дисперсией оценки частоты, а также отношением сигнал шум в
фильтре. При моделировании указанное значение дисперсии выби-
ралось равным тройному перекрытию фильтров при величине сиг-
нал/шум 17... 20 дБ.
340
ГЛАВА 5. ОБРАБОТКА РЛС-СИ1 ЛАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ Н 4 КОПЛЕНИИ
Рисунок 5.43
При бесконечном времени наблюдения оценки на выходах всех
фильтров асимптотически сойдутся к истинному' значению доплеров-
ского смещения частоты сигнала. Однако на конечном инт ервале на-
блюдения количество фильтров (для которых будет выполнено ука-
занное условие) определяется числом, для которых априорная диспер-
сия согласована с рассогласованием по начальному условию.
Очевидно, что в случае наличия сигнала, отраженного от цели,
оценка частоты также будет распределена по нормальному закону,
но с математическим ожиданием соответствующему истинной доп-
леровской частоте сигнала цели.
Если значение истинной доплеровской частоты сигнала цели не соответствует час-
тоте настройки фильтра (первоначальной частоте целеуказания), а также если не
выполнено согласование с априорной дисперсией оценки частоты, то за время на-
копления сигнала оценка доплеровской частоты практически не приблизится
асимптотически к истинной оценке доплеровской частоты сигнала цели.
Таким образом, плотность вероятности оценки доплеровской
л
частоты f на выходе одного z-ro фильтра при наличии полезного
сигнала запишется в виде
(5.80)
где f - истинная доплеровская частота сигнала цели.
341
Р 7С АВИАЦИОННО-КОС \1H4FC К Of О Л ЮНИТОРИН1 I ЗЕМНОЙ ПОВЕРХНОС 'ТИ И ВОЗ. И IИНОГО ПРОСТР А НС JB.A
Представленные результаты совпадают с результатами [15],
где показано, что плотность вероятности оценки, формируемой на
выходе фильтра Кал мана, описывается гауссовским законом.
Отметим, что частоту /1С в (5.80) можно задать в виде
Ле = /и + 47 >
(5-81)
где А/- — отклонение истинного значения доплеровской частоты от
частоты настройки фильтра /ш-.
Тогда (5.80) запишется в виде
(5.82)
Представленные исследования оценок доплеровской частоты позволяют вы-
полнить синтез обнаружителя сигналов как динамичных, так и нединамичных
целей по критерию максимума отношения правдоподобия с использованием
оценок параметров сигналов, формируемых на выходах фильтров оценивания
параметров сигналов.
Так как априорно значение доплеровского смещения частоты
неизвестно, то для повышения эффективности функционирования
фильтра (получение оценок доплеровскою смещения частоты,
близких к истинному значению в течение времени., меньшем или
равном времени наблюдения) можно использовать набор рассмот-
ренных выше фильтров Калмана (см. (5.75), (5.77)), для каждого из
которых задается конкретное (свое) начальное значение доплеров-
ского смещения частоты ((5.77) - Дс0). Общее число фильтровых
каналов при этом определяется диапазоном доплеровской фильтра-
ции (Агф) и может быть рассчитано по формуле
(5.83)
где АД - полоса пропускания узкополосного доплеровского
фильтра в системе обработки сигналов, используемой в когерент-
но-импульсной РЛС, обратно пропорциональная времени коге-
рентного накопления (наблюдения) Тки .
Для решения задачи определения присутствия'отсутствия по-
лезного сигнала во входном колебании запишем отношение прав-
доподобия, формируемое на выходе одного канала обработки:
342
ГЛАВА 5. ОБРАБО1КА РЛС-СИГН АЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Ч/;/5*0)
Ч/',/5 = о)
(5.84)
Вследствие того, что на выходах каналов результаты измере-
ний формируются независимо друг относительно друга, то отно-
шение правдоподобия для всего диапазона анализируемых допле-
ровских частот (каналов обработки) запишется в виде | 14]
л(<Р/2,-,Л
’•••’.У ?/)
(5.85)
<4 ^(/,./5 = 0)
С учетом (5.81)-(5.84) выражение (5.85) преобразуется к виду
9 ?•••?.
= ехр<
2<т2
2ст2
и после дальнейших преобразований в показателе экспоненты за-
пишется как
Для решения задачи обнаружения отношение правдоподобия
(5.87) сравнивается с порогом
5^0
Л Л ЛА
5=0
(5.88)
при превышении, которого принимается решение о том, что полезный
сигнал в принимаемом колебании присутствует (л 0), в противном
случае принимается решение о том, что сигнала отсутствует (5 = 0).
Анализ выражения (5.88) показывает, что увеличение oiноше-
ния правдоподобия будет обеспечиваться при выполнении условии
343
РЛС АВИАЦИОННО-КОС МИ11ЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗЛУШНО10 ПРОСТРАНСТВА
Л А
( f»\ - f,) = ( /Li - Лг) > т-е- f i = Лг, ДЛЯ как можно большего КОЛИ-
\ «у г! 1 «у /х hi "У /_i,v' «у / у
чества каналов. В идеальном случае, это условие должно выпол-
няться для всех каналов и тогда, как видно из (5.87), отношение
правдоподобия будет принимать максимальное значение.
Чем больше фильтров за заданный интервал наблюдения «отработают» на-
чальное рассогласование, возникающее вследствие разности априорной часто-
ты настройки фильтра и доплеровского смещения частоты приходящего сигна-
ла, тем выше вероятность обнаружения цели.
На рис. 5.44 представлена схема обнаружителя сигналов на
основе расширенных фильтров Калмана, построенная с соответст-
вии с выражением (5.87).
Рисунок 5.44
Следует отметить, что величина порогового значения, следо-
вательно, и характеристики обнаружения, будут определяться чис-
лом фильтровых каналов, на выходах которых значения оценок до-
плеровского смещения частоты будут совпадать с истинным значе-
нием доплеровской частоты сигнала цели (в пределах заданного
диапазона ошибок оценки частоты).
Решение об обнаружении принимается на основе группировки оценок допле-
ровского смещения частоты по диапазонам настроек фильтров. Исследование
свойств оценок, формируемых на выходе фильтров, показывает, что они груп-
пируются около истинной доплеровской частоты принимаемого сигнала.
На рис. 5.45 представлены гистограммы распределения оценок
на различных тактах фильтрации (такт фильтрации соответствует
периоду повторения импульсов) при наблюдении нединамичного
объекта. В процессе моделирования имитировался отраженный от
объекта сигнал, доплеровское смещение частоты которого соответ-
ствует частоте настройки 25 фильтра. Время наблюдения составля-
ет 100 мс, отношение сигнал/шум равно 20 дБ.
344
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕ Н1 НОМ НАКОПЛЕНИИ
Рисунок 5.45
По оси абсцисс показано общее число фильтровых каналов с
их последовательной нумерацией: 1 — распределение оценок в мо-
мент времени, соответствующий максимальному времени накопле-
ния равному 100 мс; 2 - распределение оценок в момент времени,
соответствующий такту фильтрации 50 мс; 3 — распределение оце-
нок в момент времени, соответствующий такту фильтрации 25 мс;
4 - распределение оценок в момент времени, соответствующий такту
фильтрации 22,2 мс; 5 - распределение оценок в момент времени, со-
ответствующий такту фильтрации 12,5 мс; 6 — распределение оценок в
момент времени, соответствующий такту фильтрации 6,25 мс.
По оси ординат показано число каналов, на выходах которых
выдаются оценки доплеровского смещения частоты, соответст-
вующие доплеровской частоте принимаемого сит нала.
Анализ результатов, представленных на рис. 5.45, показывает,
что наибольшее число фильтровых каналов выдает оценку допле-
ровского смещения частоты, соответствующую 25-му каналу, уже
на такте фильтрации, равном 50 мс. Это позволяет утверждать, что
уже по истечении 50 мс наблюдения можно принять решение об
обнаружении цели.
Кроме того, анализ результатов, представленных на рис. 5.45,
показывает, что решение об обнаружении может быть принято и в
другой момент времени, отличный от максимального времени на-
345
РЛС А БИ4ЦИОННО-КОСМИЧЕСКС )ГО МОНИТОРИНГ 4 ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНО1 О ПРОСТР 4НС7ВА
копления. Очевидно, что при максимальном времени накопления
число фильтровых каналов, обеспечивающих формирование оцен-
ки доплеровской частоты, соответствующей 25-му каналу будет
меньше, чем при времени накопления, равном 50 мс.
Указанное обстоятельство объясняется физическими свойствами фильтра Кал-
мана, заключающимися в том, что в процессе фильтрации поиск сигнала и от-
работка ошибок по доплеровской частоте происходят до тех пор, пока коэффи-
циенты усиления невязок имеют достаточный вес. После чего при наличии
слабого сигнала, под действием шума или ускорения объекта, возможен срыв
процесса оценивания, что приводит к «размытию» максимума. Поэтому в про-
цессе обнаружения сравнение с порогом проводится на каждом такте фильт-
рации с фиксацией времени обнаружения.
На рис. 5 46 представлены аналогичные гистограммы распре-
деления оценок на различных тактах фильтрации, но при наблюде-
нии динамичною объекта.
Имитируемый сигнал также имеет значение доплеровской
частоты, соответствующее настройке 25 фильтра, время накопле-
ния составляет ЬОО мс, отношение сигнал .шум составляет 20 дБ,
объект двигается с радиальным ускорением 0,5.щ
Рисунок 5.46
Анализ результатов, представленных на рис. 5.46, показывает,
что максимальное число оценок группируется в 25-м канале, причем
наибольшее число фильтровых каналов выдает оценку доплеровскою
3 6
ГЛАВА 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
смещения частоты сигнала, соответствующую 25-му каналу, на такте
фильтрации, равном 50 мс. Это позво.11яст утверждать о возможноеги
принятия решения об обнаружении, но уже динамичного объекта, за
время, меньшее, чем интервал когерентного накопления.
Таким образом, независимо от того, наблюдается ли динамич-
ный или нединамичный объект, возможно (и целесообразно) при-
нятие решение об обнаружении за время, меньшее времени макси-
мального накопления сигнала.
Важной задачей при практической реализации синтезированной системы обнару-
жения является выбор порога обнаружения. В процессе синтеза фильтра указы-
валось, что для обеспечения функционирования фильтра необходимо задать на-
чальные условия (априорное значение) по доплеровской частоте и априорную
дисперсию оценки доплеровского смещения частоты Яфо. Данная величина опре-
деляет диапазон поиска оценки частоты, а также определяет число фильтров спо-
собных дать оценку доплеровского смещения частоты в одном диапазоне.
На рис. 5.47 представлены характеристики обнаружения при
наблюдении динамичной и нединамичной цели: 1 - характеристика
обнаружения нединамичной цели; 2 - динамичная (движущееся с
радиальным ускорением 1,5g).
Вероятность ложной тревоги составляет 2-10 3. Величина от-
ношения сигнал/шум, показанная на рисунке 5.47, обозначает то
значение, которое бы было при накоплении сигнала 100 мс. Это
сделано для удобства сравнения различных графических зависимо-
стей. Фактически же задается отношение сигнал/шум в одном им-
пульсе (#i):
где q - результирующее отношение сигнал/шум по окончании вре-
мени радиолокационного наблюдения (в данном случае это время
составляет 100 мс); N - число импульсов в пачке.
На рис. 5.48 представлены характеристики среднего времени
принятия решения от отношения сигнал/шум при различной дина-
мичности: 1 - зависимость среднего времени принятия решения
при отсутствии ускорения; 2 - при ускорении 1g; 3 - при ускорении
6g; 4 - при ускорении 10g.
На рис. 5.49 представлены характеристики обнаружения цели
при различной динамичности цели при нефиксированном времени
принятия решения: 1 - при ускорении 0g; 2 - при ускорении 1g; 3
при ускорении 6g; 4 - при ускорении 10g.
347
РЛС АВИАЦИОННО-КОСМИЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 5.47
Рисунок 5.48
348
ГЛАВ 4 5. ОБРАБОТКА РЛС-СИГНАЛОВ В БОРТОВЫХ РЛС ПРИ ДЛИТЕЛЬНОМ КОГЕРЕНТНОМ НАКОПЛЕНИИ
Рисунок 5.49
Синтезированный обнаружитель на основе оценок доплеровского сме-
щения частоты сигналов может быть использован в когерентно-
импульсных РЛС для обнаружения как динамичных, так и нединамич-
ных воздушных объектов.
Общее число каналов обработки сигналов с использованием син-
тезированного обнаружителя определяется произведением числа ка-
налов дальности и доплеровского смещения частоты (скорости).
Синтезированный обнаружитель обеспечивает принятие решения
об обнаружении объекта за время в среднем меньшее, чем это необ-
ходимо при использовании обнаружителей по критерию Неймана-
Пирсона.
По сравнению с устройствами обнаружения сигналов в сущест-
вующих когерентно-импульсных РЛС синтезированный обнаружитель
обеспечивает более высокие показатели качества обнаружения дина-
мичных воздушно-космических объектов.
1. Авиационные системы радиоуправления. Т. 1. Принципы построения систем радио-
управления. Основы синтеза и анализа / Под ред. А.И. Канащенкова и В.И. Мерку-
лова. М.: Радиотехника. 2003.
349
РЛС АВИАЦИОННО КОС\1ИЧЕСКОГО МОНИ1 ОРИНГА ЗЕМНОЙ ПОВЕРХНОС '1И И ВОЗД\ЩНОГО ПРОСТРАНСТВА
2. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самона-
ведения / Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника. 2003.
3. Белкин В.Н., Муравлев С.П. Гиперзвуковые технологии в проектах оружия и лета-
тельных аппаратов // Авиационные системы - научно-техническая информация.
ГОСНИИАС. 2013. № 7.
4. Дудник П.И., Герасимов А.А., Ильчук А.Р., Кондратенков Г.С., Татарский Б.Г. Авиа-
ционные радиолокационные устройства и системы / Под ред. П.И. Дудника. М.:
ВВИА им. проф. Н.Е. Жуковского. 2006.
5. Дудник П.И., Ильчук А.Р., Татарский Б.Г. Многофункциональные радиолокационные
системы. М.: Дрофа. 2007.
6. Ильчук А.Р., Захаров М.С., Шуклин А.И. Способ измерения частотных характери-
стик эхосигнала, отражённого от маневрирующей воздушной цели // Радиотехника.
2007. № 8.
7. Ильчук А.Р., Меркулов В.И., Юрчик И.А. Особенности обнаружения сигналов в бор-
товых РЛС при наблюдении интенсивно-маневрирующих целей // Радиотехника.
2004. № 10.
8. Ильчук А.Р., Киселев В.В., Ладыгин В.А. Структура обнаружителя сигналов от ма-
неврирующих целей на основе метод разладки случайных процессов // Материалы
Междунар. научно-технич. конф. «Многопроцессорные вычислительные и управ-
ляющие системы». Россия. Дивноморское. 2007.
9. Кондратюк Е. Исследования, проводимые в США в области создания гиперзвуковых
летательных аппаратов // Зарубежное военное обозрение. 2013. № 2.
10. Меркулов В.И, Бирюков П.П., Горгонов Г.И. Радиоэлектронные датчики информаци-
онно-вычислительных систем. Учеб, пособие. М.: ВВИА им. проф. Н.Е. Жуковского.
1998.
11. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. М.: Радио и
связь. 1992.
12. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических сигналов. М.: Со-
ветское радио. 1978.
13. Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь. 1983.
14. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических уст-
ройств и систем. М.: Радио и связь. 1991.
15. Харисов В.Н., Аникин А.Л. Синтез алгоритмов оптимального управления выбором
источников излучения // Статистический синтез радиосистем. № 2. Радиотехника.
1997. №7. С. 3-13.
16. Шахтарин Б.И. Обнаружение сигналов. М.:МГТУ им. Н.Э. Баумана. 2005.
17. Singer R. Estimating optimal tracking filter performance for manned maneuvering tar-
gets // IEEE Trans. 1979. July. ATC-6. № 4.
350
Глава 6
алов
401
419
Принципы
построения систем
обработки сигнале
в радиолокационных
системах
6.4. Цифровые
6.5, Цифровая
gp обзорной РЛС
6.6. Интеграция данных в многофункциональных
радиолокационных комплексах
Литература
Введен и е ^^Уг^^^*»****-*** «г».*>»«»-»...«*. •«.*«>•«•»» • 352.
6.1. Использование методов интерполяции
при разработке Тестовых данных
для проверки системы обработки
радиолокационных сигналов......
6.2. Системьгпбработки сигналов на f
в радиолокационных комплексах.....................JL
6.3. Новые технологии в системе обработки сигналов
в бортовой РЛС
авиационного комплекса дозора и наве,
хнологии и архитектура PJ
работка радиолокационны
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС1И И ВОЗДУШНОГО ПРОСТР. ШСТВА
При построении РЛС существенное значение играет то, какие
принципы обработки сигналов закладываются в основу ее функ-
ционирования.
Современные борговые РЛС, как правило, строятся по коге-
рентному принципу, что позволяет извлекать максимум информа-
ции из отраженной волны от наблюдаемых объектов и реализовы-
вать систему обработки радиолокационных сигналов данной РЛС
как при работе в режиме воздух - воздух, так и в режиме воздух -
поверхность, опираясь на спектральные методы обработки.
В тоже время, даже при использовании данных методов суще-
ствует возможность по-разному выполнить реализацию системы
обработки радиолокационных сигналов, учитывая существующий
прогресс в информационных технологиях, методах цифровой обра-
ботки сигналов и данных, а также в цифровой элементной базе.
Кроме того, при вхождении РЛС в бортовой радиолокационный
комплекс возможны различные варианты реализации систем обработ-
ки данных, поступающих от разнородных информационных датчиков.
В материалах данной главы рассматриваются все перечислен-
ные вопросы.
Использование методов интерполяции
при разработке тестовых данных
для проверки системы обработки
радиолокационных сигналов
При создании современных бортовых РЛС, входящих в состав
авиационных комплексов дальнего радиолокационного обнаруже-
ния и управления, большое внимание уделяется использованию
существующих банков записей реальных радиолокационных сиг-
налов, полученных в ходе летных испытаний предшествующих ра-
диолокационных систем и комплексов. БРЛС дозорного комплекса
представляет собой импульсно-доплеровскую РЛС с квазинепре-
рывным излучением малой скважности и предназначена для созда-
352
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРА БОТКИ СИГНАЛОВ В РЛС
ния единого информационного поля воздушных движущихся це-
лей, включая и маловысотные. В зону облучения РЛС попадают
значительные области земной поверхности, вследствие чего наряду
с потоком реальных целей формируется интенсивный поток лож-
ных, в том числе и целеподобных отметок, который, если не при-
нять соответствующие меры, может парализовать работу системы
построения и сопровождения трасс целей.
Основной задачей системы обработки сигналов, входящей в состав РЛС, явля-
ется реализация целого ряда алгоритмов селекции и обнаружения движущихся
целей на фоне мощных отражений от подстилающей поверхности.
В системе обработки производятся:
• спектральный анализ сигналов в каждом элементе дальности;
• пороговая обработка выходной матрицы БПФ,
• адаптивная пространственная селекция областей пассивных
помех с использованием методов морфологической обработки
изображений;
• межкадровая и межканальная обработка данных.
Обычно отладка алгоритмов обработки сигналов, закладывае-
мых в систему обработки сигналов, производи! ся с помощью ком-
пьютерного моделирования и завершается на этапе натурных,
весьма дорогостоящих летных испытании. Однако возможен и дру-
гой, более эффективный и экономичный способ отладки и испыта-
ний радиолокационного комплекса - с использованием в качестве
входных данных записей реальных радиолокационных сигналов.
Такие записи, содержащие различные сценарии мишенной обста-
новки, накапливаются в банке данных в значительном объеме при
проведении летных испытаний предшествующих обзорных РЛС,
работающих в том же диапазоне длин волн и имеющих близкие по
размерам антенные устройства.
Препятствием на пути прямого использования записей сигна-
лов являются различия в форматах сигнальных кадров. Для приве-
дения форматов исходных записей к нужному виду предлагается
использовать интерполяцию исходных комплексных отсчетов сиг-
нала как по дальности, так и по частоте. При сравнительном анали-
зе методов линейной, тригонометрической и сплайн интерполяции
по дальности, последний показал наиболее т очные результаты.
При этом данный метод взят как базовый при дальнейшем
рассмотрении. Для интерполяции по частоте воспользуемся мето-
дом дополнения кадра нулевыми строками дальности до выбран-
ной размерности БПФ. в данном случае до 256-ти.
353
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Особое внимание при использовании интерполяционных методов восстановле-
ния сигнальных отсчетов необходимо обратить на точность интерполяции, по-
скольку даже незначительные, на первый взгляд, искажения, вносимые в сигна-
лы пассивной помехи, могут привести к столь существенному росту шумовых
«крыльев» их частотного спектра, что обнаружение малоразмерных целей ста-
нет невозможным. При этом шумы интерполяции в кадре могут быть определены
как разность между эталонным кадром и кадром, полученным из него же путем
децимации с последующим восстановлением путем интерполяции.
Для наглядности приведены двумерные изображения входных
сигналов эталонного (рис. 6.1,6?) и интерполированного (рис. 6.1,6)
кадров, а также матрица шумов интерполяции (рис. 6.1,в). Относи-
тельный уровень шумов интерполяции, усредненный по всему ан-
самблю выборок в кадре, значителен и составляет-(18...20) дБ.
10 20 30 40 50 60 70 80 90
в)
Рисунок 6.1
В этой связи важным и интересным представляется результат
анализа спектральных характеристик шумов интерполяции (рис. 6.2).
Энергетический спектр шумов практически полностью сконцентри-
рован в узкой полосе в районе нулевых частот, где сосредоточен
также спектр коррелированной пассивной помехи (свидетельствует
о мультипликативном характере шумов интерполяции).
354
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Поскольку указанная область спектра при обработке сигналов всегда исключа-
ется - из-за невозможности обнаружения целей в этой зоне, то шумы интерпо-
ляции практически не оказывают влияние на характеристики обнаружения це-
лей. Последнее подтверждается прямым измерением отношения сигнал/шум для
одной из целей, взятой в исходном и в интерполированном кадре - оно одинако-
во в обоих случаях и составляет 28 дБ.
Рисунок 6.2
Сравнивая изображения фрагментов выходных матриц БПФ
(рис. 6.3,a - фрагмент исходного кадра; рис. 6.3,6 - фрагмент ин-
терполированного кадра), можно отметить более высокое качество
изображений в интерполированных кадрах по сравнению с исход-
ными записями, которое является следствием повышения разре-
шающей способности по дальности и частоте на изображении в ре-
зультате проведенной интерполяции. Разрешение по дальности
связано с увеличением частоты представления сигнала, которое
фактически происходит при создании интерполированных отметок,
а разрешение по частоте - с увеличением размерности БПФ.
При недостаточно высокой по сравнению с шириной спектра сигнала частотой
тактирования заметно проявляется эффект наложения спектров (рис. 6.4,а).
Высокочастотные компоненты спектра сигнала, ответственные за потенциально
достижимое разрешение по дальности, выходят за пределы половинной частоты
дискретизации и утрачивают при этом свою эффективность. По мере увеличения
частоты дискретизации действие эффекта наложения спектров ослабляется
(рис. 6.4,6) и его влияние на параметр разрешения становится пренебрежимо
малым.
355
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 6.3
Рисунок 6.4
Рисунок 6.5
356
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБР 1БОТКИ СИГНАЛОВ В РЛС
Для подтверждения выводов визуального наблюдения были
произведены количественные измерения зависимости разрешаю-
щей способности по дальности и доплеровской частоте в зависимо-
сти от частоты выборки сигналов (рис. 6.5).
При этом в кадр исходной записи сигналов искусственно вво-
дились две точечные цели, интервал между которыми по дальности
и частоте мог изменяться в необходимых пределах.
Критерием разрешения являлось наличие провала между двумя
группами отметок.
Результаты измерений (рис. 6.6) показывают, что при увели-
чении тактовой частоты в 1,8 раза по сравнению с принятой в ра-
диолокаторе-прототипе (Ft = 1), разрешающая способность возрас-
тает примерно в 1,5 раза. Дальнейшее повышение тактовой часто-
ты, как видно из графика, нецелесообразно.
Рисунок. 6.6
Для существующих дозорных РЛС имеется возможность повышения разрешаю-
щей способности по радиолокационному изображению путем введения в про-
граммы обработки сигналов процедур интерполяции. При этом внесение каких-
либо изменений в конструкции цифровых приемников и АЦП не требуется.
Улучшение разрешения по частоте, вследствие перехода на
повышенную размерность БПФ со 128 на 256, не столь значительно
и составляет примерно 8%. В тоже время увеличение размерности
БПФ позволяет получить более четкие очертания областей пассив-
ных помех для облегчения процедуры их адаптивной локализации
с последующей режекцией.
357
Р. К'АВИ4ЦИОННО- КОС МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНО1 О ПРОС ТРАНСТВА
Использование методов интерполяции при формировании тестовых
входных данных из записей реальных радиолокационных сигналов
может быть использовано при отладке алгоритмов обработки сигна-
лов и проведения испытаний РЛС.
Использование записей реальных сигналов позволяет произвести
отладку и испытания создаваемых радиолокационных комплексов по
целому ряду параметров и характеристик без организации дорого-
стоящих летных испытаний. Также может быть оценена эффектив-
ность работы алгоритмов выделения и блокирования пассивных по-
мех от подстилающей поверхности, принимаемых по основному и бо-
ковым лепесткам ДНА.
Кроме того, может быть обеспечено повышение разрешающей спо-
собности существующих дозорных РЛС по радиолокационным изобра-
жениям путем введения в программы обработки сигналов процедур ин-
терполяции.
6.2
Системы обработки
на кристалле
в радаолокационных к
Одним из направлений, определяющих научно-технический про-
гресс в разработке современных радиоэлектронных систем, в том
числе и радиолокационных, является эффективное использование
высокоинтегрированной микроэлектронной элементной базы, ис-
пользование современных средств и методов автоматизированного
проектирования разрабатываемой радиоэлектронной аппаратуры.
Появившийся в последние годы принципиально новый класс
сверхбольших интегральных схем (СБИС) - система на кристалле
(СнЮ, в которых степень интеграции достигает нескольких десят-
ков миллионов вентилей на кристалле, стирает грань между элек-
тронными компонентами и радиоэлектронной аппаратурой.
Применение СнК открывает перед разработчиками радиоэлек-
тронной аппаратуры принципиально новые возможности разработ-
ки и конструирования как отдельных узлов, так и изделий в целом.
Система на кристалле фактически является аппаратно-програм-
мной реализацией какой-либо функционально законченной части
РЭА, проектируется и производится на основе интеграции в одном
кристалле сложных функциональных цифровых и цифро-
358
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
аналоговых блоков, таких, например, как процессоры различного
вида, цифровые синтезаторы частот и сигналов, цифро-аналоговые
и аналого-цифровые преобразователи, устройства памяти, схемы
фазовой автоподстройки частоты, интерфейсы и др.
В настоящее время за рубежом создана и продолжает разви-
ваться инфраструктура создания СнК, в которую входят дизайн-
центры проектирования СБИС, фирмы по разработке широкой но-
менклатуры СФ-блоков и предприятия-изготовители СБИС (крем-
ниевые фабрики).
В проектировании СнК должны участвовать предприятия трех
направлений: системного (разработчики РЭА), функционального (раз-
работчики СФ и РЭА) и консгруктивно-технологического (изготови-
тели СБИС). Предприятия каждого из этих направлений обладают
специалистами и технологией решения задач своего уровня и решают
стоящие задачи во взаимодействии с предприятиями-партнерами
смежных направлений, учитывая особенности и ограничения, возни-
кающие на всех этапах разработки СнК. Такая организация взаимо-
действия получила практическое подтверждение в ряде проектов.
Процесс разработки СнК может идти несколькими путями.
1. Разработчики РЭА могут выступать в качестве заказчиков
для дизайн-центров проектирования СнК. В этом случае они ставят
задачи на разработку конкретных СнК, каждая из которых или их
совокупность позволяет решать задачу или несколько задач в инте-
ресах разработчика РЭА.
2. Разработчики СФ-блоков сами могут выступать в роли кон-
структоров РЭА.
3. Разработчики РЭА и разработчики СФ-блоков могут рабо-
тать совместно.
Очевидно, что третий путь является более предпочтительным,
так как позволяет оперативно решать возникающие проблемы на
основе опыта и знаний специалистов разных направлений.
В процессе проектирования СнК объединяются системы авто-
матизированного проектирования собственно систем, аппаратуры и
элементной базы. Это позволяет создать аппарат многоуровнего
моделирования, синтеза и верификации, исключить или значитель-
но уменьшить число повторных запусков (итераций) изготовления,
особенно для СнК, содержащих цифроаналоговые и радиочастот-
ные СФ-блоки, сократить время и снизить стоимость разработки.
В настоящее время наибольшие успехи в нашей стране достигнуты в разработке
цифровых СнК и отдельных СнК для систем связи и цифрового телевидения.
Разработка цифро-аналоговых СнК для радиолокационной техники, работающей
в Р-, L-, S- и Х-диапазонах, практически только начинается. Концерн радиострое-
ния «Вега» является одной из фирм, разрабатывающих РЭА.
359
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Учитывая тематику работ концерна, рассмотрим возможность
применения СнК в устройствах синтеза, приема и обработки сигналов
с учетом основных требований, предъявляемых к сигналам и этим
устройствам, например со стороны авиационного комплекса радиоло-
кационного дозора и наведения.
Главной задачей АК РЛДН является обеспечение с помощью бортовой РЛС ра-
диолокационного информационного поля в круговой зоне с целью обнаружения
воздушных, надводных и наземных движущихся объектов, в том числе со сни-
женной эффективной поверхностью отражения, и оперативной обработки ра-
диолокационной информации для получения радиолокационных изображений
на борту самолета.
В связи с большим диапазоном дальности действия обзорной
РЛС, по сравнению с высотой полета носителя, т.е. достаточно ма-
лым углом скольжения к подстилающей поверхности, приему по-
лезных сигналов, отраженных от целей, всегда сопутствует прием
большого количества маскирующих отраженных сигналов или по-
мех от подстилающей поверхности, воспринимаемых основным и
боковыми лепестками диаграммы направленности антенны. Сум-
марный уровень этих помех может превышать пороговую мощ-
ность полезного сигнала на 80...90 дБ.
Так как единственным признаком, позволяющим в рассматри-
ваемом случае отличить отраженный сигнал от движущейся цели
от отраженных сигналов неподвижных предметов, является доп-
плеровское смешение частоты, то необходимым условием надеж-
ного обнаружения полезного сигнала может быть только частотное
разделение сигнала движущейся цели от сигналов помехи с ее по-
давлением на 90... 100 дБ.
Указанная величина подавления должна выполняться при ве-
личине отстройки от главного спектрального максимума помехи,
соответствующей минимальной радиальной составляющей скоро-
сти цели относительно неподвижной земли.
Спектральная плотность мощности шумов в главном спек-
тральном максимуме помехи, в случае работы импульсно-
допплеровской РЛС с высокой частотой повторения над достаточ-
но «тяжелой» подстилающей поверхностью, может превышать
СПМ шумов приемопередатчика на 90 дБ.
Из-за наличия достаточно больших (ближних) боковых лепест-
ков диаграммы направленности антенны, а также из-за амплитудно-
фазовых шумов приемо-передающего устройства, спектральная
плотность мощности помехи нарастает по мере приближения по час-
тоте к главному спектральному максимуму помехи. Спад СПМ по-
мехи на 80...90 дБ. необходимый для обнаружения порогового сиг-
360
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
нала движущейся цели, наступает лишь при достижении некоторой
отстройки от главного максимума, что обусловливает принципиаль-
ное наличие минимально допустимой радиальной составляющей
скорости обнаруживаемой цели F/emm (относительно неподвижной
земли), ниже которой цель обнаруживаться не будет. Величина
зависит как от закона спадания боковых лепестков ДНА, так и от
спектра амплитудно-фазовых шумов приемопередатчика.
Принципиально важные требования
для решения задачи обнаружения цели
• Снижение относительного уровня боковых лепестков ДНА при
заданных угловых оз клонениях от главного максимума - на вели-
чину, не выше -(45...50) дБ (с учетом двойного ослабления отра-
жений на боковых лепестках ДНА - на передачу и на прием).
• Снижение относительного уровня СПМ шумов приемо-
передатчика до уровня -(100... 110) дЬ/Гц в области доплеров-
ских отстроек (примерно 1 кГц) от несущей частоты для S-
диапазона.
Улучшение характеристик обзорной РЛС должно осуществ-
ляться как за счет применения новых технологий при разработке
приемо-передающих трактов, так и за счет внедрения многоканаль-
ной сквозной цифровой обработки радиолокационных сигналов с
преобразованием аналогового сигнала промежуточной частоты в
цифровой код, применения цифрового фазового детектора, устра-
няющего неточности разложения сигнала на две квадратурные со-
ставляющие и повышающего линейный динамический диапазон, а
также обеспечивающий одновременную оптимизацию как режимов
работы РЛС, так и алгоритмов обработки сигналов. При этом повы-
шаются требования к разрядной сетке и производительности приме-
няемых цифровых вычислительных устройств. Так, например, вход-
ные аналого-цифровые преобразователи уже сегодня должны иметь
14-разрядные выходные коды и работать с темпом до 100... 150 МГц,
а спецвычислитель должен обеспечить обработку потока данных в
одном канале со скорост ью до 300 Мбайт/с.
Проведенные на предприятии работы по моделированию сис-
тем обработки и результаты проверки эффективности эксперимен-
тальных образцов в реальных условиях позволяют утверждать, что
применение современных технологий для сквозной (когерентной и
некогерентной) цифровой обработки радиолокационных сш налов
может значительно улучшить характеристики РЛС.
Кроме того, необходимо применение передающего устройства,
обладающего существенно меньшими амплитудно-фазовыми шумами
361
РЛС АВИАЦРЮЕШО-КОСМИЧЕСКОЪ МОНИТОРИМ А ЗЕМНОЙ ГЮВЕРХНОС, ТИ И ВОЗДУШНО! О ПРОСТРАНС ТВА
во всей цепочке формирования зондирующего сигнала и повышенной
импульсной мощностью излучения. Также необходимо использование
цифровых методов формирования и сжатия зондирующих сигналов с
внутриимпульсной модуляцией и базой не менее 10\
Анализ технических требований, предъявляемых к сигналам, используемым в
разрабатываемых и перспективных РЛС различного назначения и базирования,
обеспечивающих высокую разрешающую способность (дециметры), показывает
необходимость использования сложных сверхширокополосных до 500...1000 МГц
сигналов со сверхбольшой базой 103...106, низким уровнем -80 дБ суммарных
шумов в полосе сигнала и минимальным уровнем суммарных фазовых искаже-
ний, например, не превышающих единиц градусов при линейной частотной мо-
дуляции, включая искажения, вносимые приемо-передающим и антенно-
фидерным трактами, в том числе и АФАР при их использовании.
Практически все, за исключением уровня выходной мощно-
сти, параметры сигналов определяются выбранным способом их
синтеза, имеющейся элементной базой, схемотехническими и кон-
структивно-технологическими решениями, принятыми при разра-
ботке формирователей сигналов и несущих частот для передающе-
го устройства, тетеродинных частот для приемного устройства,
частот синхронизации для устройств обработки принятых сигналов
и устройств управления РЛС.
Эффективным способом формирования СШС с различными законами модуляции и
возможностью оперативного управления ими является использование быстродей-
ствующих цифровых вычислительных синтезаторов или DDS в зарубежной терми-
нологии, которые могут быть реализованы в СнК, состоящей из собственно ЦВС на
основе многоразрядных накапливающих сумматоров и функциональных преобра-
зователей кодов фазы в цифровые отсчеты амплитуды синтезируемого сигнала,
работающих с тактовой частотой ~1 ГГц, двух квадратурных 10-разрядных цифро-
аналоговых преобразователей, узлов управления и других устройств.
При этом предельно достижимые характеристики СШС и ско-
рость управления их параметрами во многом определяются приня-
тыми схемотехническими решениями для ЦВС и формирователя, а
также процедурами управления и эффективностью программного
обеспечения для подготовки данных интегрированных в СнК узлов
управления.
Возможности ЦВС в виде системы на кристалле
• Реализовать практически любой закон модуляции сложных
сигналов с заданной точностью.
• Обеспечить оперативное изменение их параметров (девиации
частоты, начальной фазы, знака скорости модуляции, длитель-
ности импульсов и т.д.).
• Компенсировать или существенно уменьшить искажения, вно-
симые приемо-передающим и антенно-фицерным трактами.
362
ГЛАВ I 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Значительно, не менее, чем в 5... 10 раз, снизить массу и габа-
ритные размеры формирователей при одновременном повы-
шении их надежности.
Устройства, необходимые для переноса
сформированных в ЦВС сигналов
в нужный диапазон частот (Р, L, S иХ)
• Управляемые по частоте малошумящие кварцевые генераторы
и генераторы непрерывных СВЧ-колебаний.
• Сверхмалошумящие генераторы СВЧ-колебаний на основе
дисковых диэлектрических резонаторов из лейкосапфира,
обеспечивающих на отстройках кГц от несущей S-диа-
пазона уровень фазовых шумов не более -120 дБ/Гц.
• Устройства, обеспечивающие получение сеток непрерывных ма-
лошумящих -ЭД...НО дБ/Гц при отстройках от несущей 1 кГц и
быстропереключаемых (< 1 мс) частот (схемы фазовой автопод-
стройки частоты или PLL в зарубежной терминологии на основе
ВЧ- и СВЧ-делителей частоты, цифровых частотно-фазовых де-
текторов и устройств рандомизации «паразитных» спектраль-
ных составляющих).
• Квадратурные модуляторы на основе малошумящих ВЧ- и
СВЧ-фазосдвигающих устройств, перемножителей квадратур-
ных сигналов и усилителей с подавлением боковых полос и
несущих частот не менее 35...40 дБ. Схемы ФАПЧ и КМ также
могут быть выполнены в виде СнК.
В настоящее время в связи с отсутствием отечественных мик-
росхем ЦВС, ФАПЧ и КМ приходится использовать зарубежную
элементную базу фирм Analog Devices, Sirenza, Hittite и др.
Радиоприемные устройства современных радиолокационных
комплексов должны обеспечивать возможность многоканального и
многорежимного приема сложных широкополосных сигналов с
минимальными вносимыми фазовыми и амплитудными искаже-
ниями. Характеристики приемных устройств, в первую очередь,
определяются трактом промежуточной частоты.
Основные параметры, необходимые для разработки
универсальной программируемой СнК
широкополосного тракта промежуточной частоты
для решения поставленных задач
• Верхняя граничная частота полосы пропускания по уоовню
-3 дБ не менее 1500 МГц.
363
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС1И И ВОЗДУШНОГО ПРОСТРАНСТВА
Неравномерность амплитудно-частотной характеристики в по-
лосе частот 500 МГц не более ± 0,5 дБ.
Нелинейность фазо-частотной характеристики в полосе частот
500 МГц не более ± 5°.
• Динамический диапазон входных сигналов относительно
уровня собственных шумов тракта в полосе частот 500 МГц не
менее 70 дБ.
Анализ современных зарубежных полупроводниковых микро-
схем показывает возможность создания основных функциональных
устройств тракта промежуточной частоты радиоприемных уст-
ройств с требуемыми характеристиками. Это малошумящие широ-
кополосные усилители, ступенчатые аттенюаторы, регулируемые
усилители, усилители-ограничители, коммутаторы аналоговых
сигналов, квадратурные демодуляторы фирм Agilent Technologies,
Analog Devices, Hittite, МАСОМ, Maxim, Motorola, S1RENZA
MICRODEVICES и др. Имеются сведения о полупроводниковых
СнК широкополосных трактов промежуточной частоты для связ-
ных устройств.
Возможности системы на кристалле
• Микроминиатюризация приемных каналов ПЧ в РЛС. Ожи-
даемое снижение массы тракта П Ч не менее 10 раз.
• Улучшение разрешающей способности РЛС по дальности за
счет увеличения полосы пропускания тракта ПЧ до 500 МГц и
более.
Повышение показателя надежности трактов ПЧ.
Сокращение сроков, трудоемкости и стоимости разработки
трактов ПЧ РЛС.
Существенное сокращение номенклатуры, числа и стоимости
покупных комплектующих электрорадиоизделий путем ис-
ключения при этом необходимости использования зарубежной
элементной базы.
Основные функциональные устройства
Предварительный усилитель промежуточной частоты с им-
пульсным стробированием (супрессией) сигнала.
Ступенчатый аттенюатор.
Регулируемый усилитель.
Усилитель-ограничитель.
Коммутаторы аналоговых сигналов, квадратурный демодулятор.
Видеоусилители для синфазного и ква цратурного видеосигналов.
Система контроля работоспособности приемного тракта.
364
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Тракт должен иметь коммутируемые входы и выходы для
подключения внешних полосовых фильтров промежуточной часто-
ты и фильтров нижних частот в видеоусилителях.
Современный уровень цифровой техники позволяет практически полностью оп-
тимизировать характеристики устройств обработки сигналов и одновременно
кардинально уменьшить массу и габаритные размеры аппаратуры, изъять из РЛС
громоздкую аппаратуру аналоговой обработки сигналов.
Факторами, ограничивающими применение цифровой обра-
ботки сигналов в РЛС, являются высокие требования к быстродей-
ствию, динамическому диапазону (разрядности) и точностным ха-
рактеристикам аналого-цифровых преобразователей.
Исходя из результатов приведенного выше анализа характери-
стик радиолокационных сигналов, рассмотрим два варианта по-
строения ЦОС.
Вариант 1. Традиционная схема - с выхода усилителя про-
межуточной частоты сигнал поступает на аналоговый квадратур-
ный детектор и далее квадратурные составляющие сигнала - на два
АЦП, работающих на частоте не менее 1...2 МГц, и с разрядно-
стью, не менее 16... 18. Разработка таких АЦП с учетом высоких
требований к линейности характеристик представляет собой слож-
ную техническую и технологическую проблему и на сегодняшний
день практически не реализована. Недостатком такой схемы явля-
ется наличие аналогового фазового детектора, требования к кото-
рому (по точности обеспечения квадратурное™ каналов при высо-
ком уровне их разделения, по обеспечению линейного динамиче-
ского диапазона и малому коэффициенту шума) являются само-
стоятельной сложной технической проблемой.
Вариант 2. Структурная схема присуща радиоприемникам с
цифровой обработкой сигнала, начиная с промежуточной частоты.
В этом случае АЦП должны иметь 12... 14 разрядов и работать с
частотой квантования не менее 60 МГц. Преимуществом этого ва-
рианта является применение цифрового квадратурного фазового
детектора, а также наличие на мировом рынке ряда АЦП разных
фирм с характеристиками, близкими к требуемым, в том числе и в
виде СФ-блоков. Этот вариант может быть выбран в качестве ос-
новного, причем при реализации ЦОС на СнК к последней должны
быть предъявлены требования как наличия встроенного 10-, 12-
разрядного АЦП, так и отдельного входа для 14-, 16 разрядного
АЦП для перспективных разработок.
Схема канала когерентной обработки по второму варианту
представляет собой последовательную цепь преобразований, вклю-
чающих АЦП. ЦФД, интеграторы-дециматоры, цифровой режек-
торный фильтр, спектранализаторы и пороговые обнаружители.
365
Р 1С АВИ ЩИОННО КОС МНИ ЕД КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНО^ЛИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Для преобразования дискретизированного входного сигнала
промежуточной частоты, выборки которого следуют с частотой F1IICKT,
в сигнал, эквивалентный видеосигналу, выборки которого следуют с
частотой ^альн, на двух квадратурах, применяется ЦФД. работающий
примерно с такими же алгоритмами как и FREQUENCY
TRANSLATOR цифрового приемного процессора AD6620.
Для подавления комбинационных составляющих в спектре,
полученных в результате преобразования входного сигнала и пре-
образования в частоту дискретизации выходных выборок, должна
быть предусмотрена возможность программирования параметров
фильтров-накопителей.
Поскольку требования к производительности ЦФД и фильт-
ров-накопителей предельно высоки и работают они в конвейерном
режиме, то целесообразна их аппаратная реализация, причем в виде
( Ф-блока.
Для ослабления влияния мощных помех должен быть реали-
зован цифровой режекгорный фильтр с бесконечной импульсной
характеристикой 4-го порядка, построенный на основе каскадного
соединения двух БИХ филыров 2-го порядка, или эквивалентный
фильтр с конечной импульсной характеристикой 35...40 порядка,
причем коэффициенты фильтров должны быть программируемыми
в виде нескольких наборов в зависимости от вида подстилающей
поверхности.
Реализация ЦРФ в СнК должна быть аппаратной по тем же
соображениям, что и реализация ЦФД.
Дискретное преобразование Фурье реализуется на основе стан-
дартной процедуры 4-точечного быстрого преобразования Фурье с
числом каскадов от 3-х до 5...6-ти для обеспечения различных вари-
антов РЛС. БПФ может быть реализовано как программно с помо-
щью встроенного в СнК сигнального проиессора, так и аппаратно,
причем учитывая, что оно используется практически во всех режи-
мах работы РЛС, а на сигнальный процессор накладываются алго-
ритмически достаточно сложные алгоритмы обнаружителя, пред-
почтительным является аппаратный вариант. Модуль может вычис-
ляться по приближенной формуле с точностью 1% также аппаратно.
Пороговый обнаружитель является устройством, наиболее
чувствительным к характеристикам поступающей на вход аппара-
туры ЦОС смеси помехи, шума и сигнала. Алгоритмы его работы
для обеспечения оптимального обнаружения для разных режимов
работы РЛС могут кардинально отличаться и включать в себя как
параметрические, так и непараметрические принципы обнаруже-
ния, поэтому он должен быть реализован программно на встроен-
ном в СнК сигнальном процессоре.
366
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
На встроенный процессор может быть возложен целый ряд задач первичной об-
работки, таких как снятие неоднозначности, определение высоты цели, блоки-
ровка отдельных элементов радиолокационного информационного поля в зави-
симости от помеховой обстановки и других, поэтому требования к встроенному в
СнК процессору достаточно высоки и должны определяться на стадии сквозного
моделирования (и макетирования) работы аппаратуры ЦОС.
С целью реализации устройств синтеза, приема и обработки
сигналов в виде комплекта СнК разработаны тематические карточ-
ки на ряд ОКР, выполнение которых позволит обеспечить синтез,
прием и обработку сигналов в Р-, L-, S-, X-диапазонах с требуемы-
ми параметрами и преодолеть зависимость ведущихся и перспек-
тивных разработок РЛС от импортной элементной базы подобного
типа, используемой в настоящее время.
Использование достижений в области разработок «систем на кристал-
ле» для синтеза, приема и обработки сигналов в виде функционально-
полного комплекта может заметно изменить облик обзорной РЛС для
авиационных комплексов дальней радиолокации.
Процесс разработки новых радиоэлектронных систем, в том числе
и радиолокационных, неразрывно связан с вопросами их модерни-
зации, поскольку данные системы являются сложными техниче-
скими системами как с точки зрения их разработки, так и техноло-
гии изготовления.
С экономической точки зрения, не всегда оправдано создание абсолютно новой
РЭС без прохождения предварительного этапа (этапов) ее модернизации. Процесс
модернизации РЭС неразрывно связан с текущим уровнем развития технологий
разработки радиоэлектронной аппаратуры и ее элементной базы.
Учитывая, что в последние годы появились как новые техно-
логии разработки сложных технических систем, в том числе и ра-
диоэлектронных, так и более совершенная и производительная
цифровая элементная база, актуальной является задача применения
367
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
данных достижений для модернизации и разработки сложных ра-
диолокационных комплексов таких, например, как авиационные
комплексы радиолокационного дозора и наведения А-50 (Россия) и
AWACS (США) [11, 12].
Остановимся на вопросах совершенствования авиационных
радиолокационных комплексов данного типа.
Основные задачи процесса совершенствования
данных комплексов [13]
• Обеспечение радиолокационного информационного поля в кру-
говой зоне, в том числе поля опознавания государственной
принадлежности, по воздушным и надводным целям с возмож-
ностью оповещения наземных и корабельных АСУ.
• Обеспечение попя систем активного запроса — ответа и пе-
редачи команд (САЗО - СПК) для управления истребительной
и ударной авиацией.
Для выполнения указанных задач достаточным и оптималь-
ным является применение имеющихся тяжелых авиационных носи-
телей с вращающимся надфюзеляжным обтекателем антенны
РЛС, обеспечивающим круговой обзор. Обзор в вертикальной
плоское™ обеспечивается с помощью фазового (электронного)
управления луча при неподвижном полотне антенны.
При вращающемся обтекателе обеспечивается круговая зона
обзора, наилучшим образом используются отведенные размеры для
апертуры антенны, настройка антенного полотна производится в
условиях антенного полигона с получением сверхнизкого уровня
боковых лепестков ДНА. Для сохранения характеристик антенны
на всем сроке эксплуатации не требуются специальные и сложные
виды технического обслуживания.
Использование пассивного антенного полотна позволяет, без особых техниче-
ских проблем, применить любой (оптимальный) диапазон волн, а гарантирован-
ный сверхнизкий уровень боковых лепестков ДНА - применить импульсно-
доплеровский принцип работы, при котором обеспечивается достаточная шири-
на частотного окна (окна прозрачности) без полос «слепых скоростей» для доп-
леровской фильтрации сигналов движущихся целей на фоне мощных маски-
рующих отражений от подстилающей поверхности.
Подтверждением оптимальности такого построения комплек-
сов типа AWACS при решении задач дальнего радиолокационного
дозора и наведения является то, что при модернизации комплекса
и смене носителя с устаревающих самолетов типа «Боинг - 707» на
новые самолеты типа «Боинг-747» радиоэлектронное оборудование
новых комплексов остается прежним, в том числе - антенна во
вращающемся обтекателе.
368
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Направления усовершенствований, перманентно проводимых
на комплексах AWACS, касаются, в основном, наращивания воз-
можностей информационно-вычислительного комплекса, ввода до-
полнительных датчиков информации - радиотехнической разведки,
ИК-пеленгатора и т.п., добавления новых членов экипажа, и, как
обычно, устранения имеющихся недостатков.
Функциональное развитие существующих авиационных ком-
плексов радиолокационного дозора и наведения, в конечном счете,
преследует цель создания многофункционального авиационного
комплекса, обладающего достаточно высокой автономностью и
универсальностью для решения задач, выдвигаемых различными
родами войск, а также для оперативного наблюдения и управ пения
гражданской авиацией в приполярных районах и в чрезвычайных
ситуациях.
Кроме наращивания функций управления и оповещения, раз-
нородность задач и высокая автономность МАК выдвигают требо-
вания существенного наращивания характеристик информационно-
го поля, главными в которых являются характеристики обзорной
бортовой РЛС (БРЛС).
Наиболее важные и новые функции МАК
в части информационного поля
• Возможность обнаружения и сопровождения наземных (над-
водных) объектов, в том числе с применением режима работы
с синтезированной апертурой антенны, с оперативной обра-
боткой информации и получением радиолокационных изобра-
жении на борту самолета МАК.
• Возможность создания объединенного информационно! о поля
на боргу головного МАК при групповых действиях более од-
ного МАК. а также при использования информации полей,
создаваемых другими системами, передаваемой на борт го-
ловного МАК. В частности, на борту МАК целесообразно ис-
пользовать радиолокационную информацию наземных АСУ, а
также взаимодействующих истребителей, получаемую ими в
режиме патрулирования.
Кроме того, в пределах информационного поля, создаваемого
по воздушным объектам, должна быть обеспечена возможность об-
наружения и сопровождения самолетов со сниженной ЭПР (с при-
менением технологий «Стеле»), обнаружения и сопровождения
вертолетов, а также всеракурсного обнаружения воздушных объек-
тов на дальности, превышающей расстояние до радиогоризонта
(над линией радиогоризонта).
369
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ Н1НО1 О ПРОСТРАНСТВА
Во всех режимах работы активных каналов РЛС должна осу-
ществляться совмещенная работа пассивных каналов пеленгации
постановщиков активных помех (ПАП).
Направления усовершенствования,
базирующиеся на современных достижениях
в области элементной базы
и технологий
Снижение шум-фактора приемного тракта за счет применения
электростатических СВЧ-устройств (СВЧУ), обладающих по-
вышенной электрической прочностью, и изъятия устройств
защиты, порождающих дополнительные потери СВЧ-энергии.
Существенное снижение энергетических потерь в системе об-
работки радиолокационного сигнала за счет применения прин-
ципиально новой системы цифровой обработки.
Повышение разрешающей способности по доплеровской час-
тоте сигнала за счет увеличения времени когерентного накоп-
ления в новом системе обработки.
Увеличение инструментального интервала восстановления од-
нозначной дальности до цели на двух частотах повторения в
квазинепрерывном режиме за счет изменения закона чередова-
ния и увеличения периода следования импульсов.
Усовершенствование алгоритма идентификации отметок на
соседних кадрах работы РЛС и, как следствие, снижение числа
комбинаторных отметок на ложных однозначных дальностях
при наличии в луче ДНА нескольких целей.
Разработка и ввод новых алгоритмов обнаружения и распозна-
вания отраженного сигнала от цели типа «вертолет».
Ввод алгоритма автоматического распознавания и отсеивания
сигнала помехи от подстилающей поверхности в «альтиметро-
вой» зоне.
Усовершенствование алгоритма распознавания и селекции
сигнала импульсной помехи.
Усовершенствование процедуры обнаружения и пеленгации
источников активных помех за счет использования новой сис-
темы цифровой обработки.
Разработка и ввод в состав аппаратуры нового автоматизиро-
ванного рабочего места оператора РЛС.
Доработка составных частей передатчика с целью снижения
амплитудно-фазовых шумов, повышения надежности высоко-
вольтных узлов и упрощения эксплуатации.
370
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ С ИСТЕЦ ОБРАБОТКИ СИ/ НАЛОВ В РЛС
• Существенное снижение массы, числа конструктивных единиц
и энергопотребления аппаратуры РЛС за счет изъятия приме-
нявшихся ранее шкафов аппаратуры аналоговой обработки, а
также прежней цифровой обработки на устаревшей элемент-
ной базе.
Как показали проводившиеся испытания и многолетняя экс-
плуатация РЛС на самолете Л-50, заложенные при разработке ос-
новные параметры радиолокационного тракта остаются достаточно
оптимальными и на сегодняшний день (длина волны, ДН антенны с
предельно малыми боковыми лепестками, мощность излучения и
т.п.) и весьма близки к параметрам радиолокационного тракта РЛС
комплекса АВАКС.
В тоже время сегодняшний уровень цифровой техники разре-
шает практически полностью оптимизировать характеристики об-
работки сигналов и одновременно кардинально уменьшить массу и
габариты аппаратуры, позволяющие изъять из РЛС громоздкие
шкафы обработки.
Алгоритм оптимизации 1131
Этап 1. Ввод в приемный тракт цифрового приемного про-
цессора, осуществляющего преобразование аналогового сигнала в
цифровую форму непосредственно на промежуточной частоте с
помощью выборок, следующих с тактовой частотой, намного пре-
вышающей номинал промежуточной частоты.
Этап 2. Цифровое преобразование сигнала приемного про-
цессора в две квадратурные составляющие и согласованную с по-
лосой сигнала фильтрацию. Важно отметить, что при согласован-
ной фильтрации сигнала в полосе частот, значительно меньшей
частоты выборок, происходит наращивание разрядной сетки по
сравнению с разрядной сеткой входного АЦП. Динамический диа-
пазон сигналов на выходе фильтра достигает 16-ти двоичных раз-
рядов. После согласованной фильтрации осуществляется деци ма-
ния выборок квадратурных составляющих, согласованная с разре-
шающей способностью по времени запаздывания.
Этап 3. Увеличение времени когерентного накопления сигна-
ла с помощью осуществления быстрого преобразования Фурье на
128 выборок, при динамическом диапазоне входного сигнала 16-ги
двоичных разрядов, что позволяет снизить энергетические потери
примерно на 2 дБ. Внутри пачки, подвергающейся БПФ, осуществ-
ляется амплитудное взвешивание (аподизация) по специальному
закону, что позволяет повысить частотную селективность (подав-
ляющую способность) внутри частотного окна до 90... 95 дБ.
371
РЛС А ВИАЦИОННО-КОСМИЧЕСКО10 МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Этап 4. Снижение номинала частоты повторения в режиме
КНИ в полтора раза, что, в конечном итоге, позволяет увеличить
интервал однозначного отсчета дальности до 530 км.
Этап 5. Переход с 3-кадровой последовательности чередова-
ния частот повторения на 2-кадровую, что приводит к повышению
вероятности восстановления однозначных дальностей до целей «на
проходе» во всем диапазоне дальностей действия РЛС.
Этап 6. Повышенная селективность и укорочение шага гре-
бенки частотных каналов БПФ-128 позволяют снизить минималь-
ную радиальную скорость пели до 160 км/ч.
Этап 7. Изъятие звена аналоговой обработки на кварцевых
фильтрах позволит избежать неравномерность шумов по элементам
дальности, т.е. убрать имеющийся запас первичного порога обна-
ружения примерно в 2,0 дБ.
Этап 8. Повышенная частотная селективность позволяет, при
работе над большинством типов подстилающей поверхности, не при-
менять звено предварительной режектирующей фильтрации и снизить
потери сигнала на минимальных радиальных скоростях цели.
Этап 9. Повышенная производительность специального вы-
числителя обработки радиолокационных сигналов позволяет, при
усложнении его алгоритмов, совместить в нем, кроме когерентной
обработки сигналов кадра, функции анализа широкополосных сиг-
налов, обеспечивающие распознавание и классификацию широко-
полосных сигналов трех типов: лопасть винта вертолета; импульс-
ная помеха; шумовая помеха.
Распознавание названных типов широкополосных сигналов
необходимо для адресации их на дальнейшую (первичную) обра-
ботку, происходящую по разным алгоритмам.
Основные направления оптимизации
параметров первичной обработки
• Анализ потоков первичных отметок и порогов, поступающих
по каналам скорости от специального вычислителя обработки.
Выработка двухмерной усредненной информации о потоках
отметок в координатах «скорость - дальность неоднозначная».
• Разработка алгоритма определения каналов скорости с повышен-
ным потоком случайных ложных отметок и выработка вторично-
го порога для нормализации вероятности ложных тревог.
• Разработка алгоритма определения каналов скорости и неодно-
значной дальности с организованными (протяженными по ази-
муту) ложными отметками, идентификация «альтимезровых»
отметок, селектирование альтиметровых отметок.
372
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
• Обработка групп отметок целей, поступающих в смежных ка-
налах скорости и неоднозначной дальности и выделение цен-
трального элемента разрешения в кадре.
• Предварительное измерение отклонения луча по углу места.
• Группирование отметок соседних кадров по признаку скорости
и углу места, определение однозначной дальности, уточнение
азимута и угла места по двум кадрам.
• Предусматривается обратный канал от вторичной обработки
радиолокационной информации, по которому передаются про-
лонгированные в сетке единого времени координаты сопрово-
ждаемых целей. В рамках первичной обработки, по пультовым
командам оператора, происходит пересчет в координаты с не-
однозначной дальностью и выставляются стробы приоритета,
внутри которых производится восстановление однозначной
дальности и уточнение угловых координат даже в случае нали-
чия отметок только на одной частоте повторения.
В соответствии с рассмотренными подходами и опираясь на
использование новейших технологий, была проведена разработка
системы обработки для РЛС радиолокационного комплекса дозора
и наведения.
Аппаратура цифровой обработки выполнена в виде однотип-
ных по конструкции модулей на печатных платах. Модули являют-
ся типовыми элементами замены и размещаются в шкафу системы
цифровой обработки (рис. 6.7-6.9). В частности, на рис. 6.7 приве-
ден внешний вид шкафа цифровой обработки, а рис. 6.8 - его вид
со снятой крышкой (видны модули на печатных платах).
Рисунок 6.7
373
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 6.8
Рисунок 6.9
Для обработки радиолокационных сигналов приемной пары
парциальных каналов РЛС служит единый модуль - «Специальный
Вычислитель Когерентной Обработки» (модуль СВ-КО) [24]. Мо-
дуль СВ-KO предназначен для обработки сигналов пеленгационной
пары приемных лучей и включает в себя два идентичных канала
обработки, заканчивающихся пороговыми устройствами, а также
общую часть, обеспечивающую формирование, хранение и обмен
формуляров с устройством последующей обработки (модулем пер-
374
ГЛаВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСЛЕ \1 ОБРАБОТКИ СИ1 НАЛОВ В РЛС
вичной обработки ОИ). Унифицированная конструкция модуля по-
казана на рис. 6.9, где представлена плата модуля СВ-КО с уста-
новленной СБИС ОРЛИ, речь о которой будет идти ниже.
Функции модуля СВ-КО
• Оцифровывание поступающего из приемника аналогового сиг-
нала на промежуточной частоте 5 МГц, частота дискретизации
60 МГц.
• Фазовое детектирование полученного цифрового сигнала с по-
лучением действительной (cos) и мнимой (sin) составляющих
сигнала.
• Проведение процедуры фильтрации и децимации каждой состав-
ляющей сигнала, после чего сигнал следует с частотой 1 МГц.
• Проведение коррекции спектра входной последовательности
путем умножения cos и sin составляющих сигнала на коэффи-
циенты cos(^A) и sin(^/Vr ПРИ этом происходит компенсация
скорости самолета-носителя; расчет коэффициентов cos((pN) и
sin(^M производится в отдельном модуле (модуле КС).
• Фильтрация сигнала перед алгоритмической обработкой (для
снижения влияния подстилающей поверхности) с помощью циф-
рового рекурсивного фильтра (полоса режекции от 1 до 1,5 кГц).
• Осуществление спектрального анализа отфильтрованной по-
следовательности.
• Формирование порога обнаружения с помощью некогерентно-
го накопления «шума» и обнаружение полезного сигнала.
• Компоновка обнаруженных целей в виде формуляров для их
передачи в БЦВМ первичной обработки ^в модуль ОИ).
• Подготовка массива контрольных точек для вывода их на
пульт оператора РЛС (через модуль УС).
• Подготовка данных (для модуля ЗИ) для дальнейшей записи их
на внешний жесткий магнитный носитель.
• Обработка контрольной информации, сравнение ее с эталоном
и выдача результата сравнения в составе заголовка формуляра
в БЦВМ первичной обработки (модуль ОЮ.
Схема модуля СВ-КО приведена на рис. 6.10, где приняты
следующие обозначения: АЦП - аналогово-цифровой преобразова-
тель; ГКИ - генератор контрольной информации; ФД - фазовый
детектор: Ден - дециматор; КС корректор спектра: ЦРФ - цифро-
вой режекторныи фильтр; ОЗУ 1, ОЗУ2 - оперативные запоминаю-
щие устройства для транспонирования матрицы сигналов; ДПФ
спектроанализатор (дискретное преобразование Фурье); УО - узко-
375
РИС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИ ГОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
полосный обнаружитель; ШО - широкополосный обнаружитель;
ПК - пеленгационный канал; ОЗУЗ - оперативное запоминающее
устройство формуляров обнаруженных отметок.
в модуль УС
ЗАП1
ЗАП2
КОНТР11 - KOHTP4T
КОНТР12 - КОНТР4.2
Рисунок 6.10
376
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИС ТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
По команде оператора РЛС вместо выхода АЦП на вход уст-
ройства в режиме самоконтроля шкафа РА-45А подключается ге-
нератор контрольной информации (ГКИ). Существуют три режима
работы ГКИ: «Цель», «Шум», «Цель + шум». По результатам про-
хождения теста судят об исправности канала обработки.
Как отмечалось ранее в 6.1, использование СБИС типа «Сис-
тема на кристалле» открывает новые возможности при реализации
цифровой системы обработки.
Новые решения по разработке и применению СБИС
«Обработки Радиолокационной Информации» (ОРЛИ) [24, 49]
по технологии «Система на кристалле»
в системе цифровой обработки
РЛС комплекса дозора и наведения
• Создать канал цифровой конвейерной обработки, обрабаты-
вающий радиолокационные сигналы, поступающие в аналого-
вой форме на промежуточной частоте, в большом динамиче-
ском диапазоне с «идеальным» разложением в ортогональные
(квадратурные) составляющие.
• Применить высокую опорную тактовую частоту, так как воз-
можность ее изменения позволяет в широких пределах согла-
совывать параметры приемного процессора с конкретными ха-
рактеристиками обрабатываемых сигналов: номиналом про-
межуточной частоты, полосой частот, требуемым периодом
выдачи выборок квадратур сигнала в реальном времени;
• Реализовать в канале цифровую когерентную обработку радио-
локационных сигналов, т.е. осуществить комплексную обработ-
ку квадратур сигналов, поступающих в реальном времени.
• Реализовать в канале некогерентную обработку радиолокаци-
онных сигналов, осуществляя обработку модулей сигналов,
поступающих после комплексной когерентной обработки.
• Использовать возможность высокой потоковой производи-
тельности СБИС, что позволит решать широкий круг задач
первичной некогерентной обработки: некогерентное накопле-
ние радиолокационных сигналов, выработка адаптирующихся
порогов и пороговое обнаружение, группирование обнаружен-
ных отметок по признакам «амплитуда - дальность - частота»,
отсев отметок (например, по признакам «дальность - часто-
та»), выработка требуемого формата и обмен с последующими
устройствами обработки и отображения и др.
Данные шаги позволили значительно улучшить тактико-
технические характеристики РЛС А К РЛДН и создать задел на пер-
спективу.
377
РЛС АВИ.ЩИОННО-КОСК 1ИЧЕС КОГО МОНИТОРИНГ 1 ЗЕМНОЙ ПОВЕРХНО( 'ТИ И ВОЗДУШНОГО ПРОСТРА НСТВА
Общая масса, энергопотребление и тепловыделение разрабо-
танной аппаратуры цифровой обработки уменьшились на порядки.
Разработанная СБИС ОРЛИ типа «Система на кристалле» заменяет 5 корпусов
FPGA. Применение «Системы на кристалле» позволило уместить аппаратуру
обработки одного канала РЛС на одной стандартной плате, а весь комплект - на
8-ми платах.
Остановимся на СБИС ОРЛИ [24]. Логическая структура разра-
ботанной СБИС ОРЛИ состоит из двух идентичных каналов.
Основные блоки, входящие в логическую структуру
разработанной СБИС ОРЛИ
• Цифровые фазовые детекторы.
• Дециматоры-интеграторы.
• Цифровые режекторные фильтры.
• Блоки дискретного преобразования Фурье (в формате БПФ).
• Блоки порогового обнаружения полезных сигналов.
• Блок формирования формуляров для передачи в БЦВС пер-
вичной обработки.
Для реализации данной структуры был разработан и выпущен
в САПР CAENCE комплект конструкторской документации на
СБИС ОРЛИ ИЛТА.431249.017. По этой документации была изго-
товлена партия СБИС ОРЛИ в количестве 15 штук.
Параметры кристалла СБИС ОРЛИ
• Степень интеграции 900000 вентилей.
• Размер кристалла 5,9x5,9 мм.
• Технология изготовления КМОП 0,25 мкм.
• Тип корпуса QFP 208.
На рис. 6.11 приведена фотография топологии кристалла
СБИС ОРЛИ.
Как отмечалось ранее, на рис. 6.9 приведена фотография мо-
дуля СВ КО, выполненного с применением СБИС ОРЛИ, взаимо-
заменяемого с модулем СВ-КО, выполненным на корпусах FPGA.
СБИС ОРЛИ занимает на модуле лишь небольшой участок в его
центральной части. Этот модуль имеет лучшие показатели по обна-
ружению сигналов в шумах радиотракта и от подстилающей по-
верхности, а также по энергетике выделенных сигналов, по надеж-
ности и потреблению.
Схема СБИС ОРЛИ представлена на рис. 6.12.
378
ГЛАВА 6 ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИ1 НАЛОВ В РЛС
Рисунок 6.11
Рисунок 6.12
379
РЛС АВИАЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Остановимся на описании алгоритма работы СБИС ОРЛИ [ ].
Информация на микросхему поступает от двух 14-разрядных АЦП
(пеленгационная пара) с частотой 60 МГц по полуканалам 1 и 2 со-
ответственно. Код - дополнительный. Обработка в полуканалах
полностью идентичная. Для синхронизации работы микросхемы
внутри модуля, шкафа и станции на нее поступают сигналы управ-
ления, двухразрядный код частоты повторения [kFn (1,0)], а также
меандры с частотой 1 МГц и 60 МГц, посредством которых выра-
батываются наборы фаз различной частоты, необходимые для пра-
вильной и устойчивой работы составляющих узлов микросхемы.
Для изменения параметров работы отдельных функциональ-
ных узлов микросхемы, таких как, например, вид АЧХ ЦРФ, коэф-
фициент адаптивного порога, задание ручного порога и т.д., извне в
микросхему подается управление.
Для коррекции спектра сигналов, в зависимости от эволюций
и скорости носителя, на микросхему подаются квадратурные со-
ставляющие сигнала коррекции (cos z, sin z).
4-разряд ные шины выхода микросхемы
• Передача результатов обработки в виде формуляров в БЦВМ
первичной обработки.
• Вывод контрольных точек обработки на дисплей пульта опе-
ратора.
• Запись информации после децимации на жесткий диск БЦВМ.
Алгоритм работы каждого канала пеленгационной пары, как
уже отмечалось выше, строго идентичен и состоит из следующих
операций над массивом сигналов.
Аналоговый сигнал с промежуточной частотой 5 МГц плюс до-
плеровское смещение частоты оцифровывается в АЦП с частотой
60 МГц и попадает на фазовый детектор (ФД), с выхода которого sin и
cos составляющая сигнала поступает на свои дециматоры (Ден). Де-
циматор осуществляет преобразование сигнала с частотой 60 МГЦ в
сигнал с частотой 1 МГц за три итерации Продецимированный сигнал,
в свою очередь, поступает на режекторный фильтр (ЦРФ).
ЦРФ представляет собой рекурсивный режекторный фильтр
четвертого порядка, построенный на основе каскадного соединения
двух фильтров второго порядка. Имеется возможность менять по
команде от пульта оператора коэффициенты фильтрации, которые
хранятся во внутреннем ПЗУ микросхемы. Есть также возможность
по команде исключить ЦРФ из обработки - сделать ЦРФ трансля-
тором с коэффициентом трансляции, равным 1. Информация с вы-
ходов фильтров записывается в ОЗУ1 (внешнее ОЗУ для микро-
380
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
схемы), где происходит транспонирование матрицы сигналов. Эта
матрица поступает на спектроанализатор.
Дискретное преобразование Фурье состоит из аподизации,
собственно преобразования и вычисления модуля сигнала по его
действительной и мнимой составляющим. Аподизация заключается
в умножении выборки сигнала во временной области на различные
виды весовой функции (окна). Коэффициенты данных окон нахо-
дятся во внутреннем ПЗУ микросхемы и извлекаются оттуда по
команде оператора. Спектр вычисляется по процедуре быстрого
преобразования Фурье по смешанному основанию. Поворачиваю-
щие коэффициенты представляют собой 28-разрядные коды, хра-
нящиеся во внутреннем ПЗУ микросхемы. Модуль вычисляется по
упрощенной формуле:
М = 2Re + Im, если Re >Im;
М = 21m + Re, если Im > Re,
где M - идентификатор модуля; Re - действительная составляю-
щая; 1m - мнимая составляющая.
Погрешность такого вычисления модуля составляет 3 %.
Полученный таким образом спектр записывается во внешнее
ОЗУ2, где происходит транспонирование матрицы сигнала и она
поступает на пороговый обнаружитель.
Пороговый обнаружитель состоит из узкополосных обнару-
жителей, где по своим алгоритмам вычисляется адаптивный порог,
производится умножение на коэффициент порога, задаваемый опе-
ратором, и сравнение каждой выборки сигнала с исполнительным
порогом.
Сигнал, прошедший обнаружение (превысивший порог), со
своими координатами (дальность и скорость) в узле формирования
формуляров организуется соответствующим образом для передачи
в БЦВМ первичной обработки.
По описанным принципам были разработаны отдельные
сложно функциональные блоки (СФ блоки) СБИС ОРЛИ.
Базируясь на полученных данных по СФ блокам, была произведена интеграция
принципиальных схем СФ блоков в принципиальную схему СБИС ОРЛИ. Одно-
временно с трансляцией электрической схемы проводились мероприятия по ве-
рификации получаемых результатов. Разработанная СБИС ОРЛИ была изготов-
лена на фирме Progate Group Corporation и протестирована на соответствие тре-
бованиям ТУ с положительными результатами. Модуль АЦП КО «Барс» проверен
на соответствие заданным функциям и показал удовлетворительные результаты.
Разработанные СБИС имеют полностью принадлежащую разра-
ботчику документацию и возможность гибкого ее использования для
разработки следующего поколения СБИС [24, 36, 49]. Таким образом,
обеспечивается независимость от импортных комплектующих.
381
РЛС АВИАЦИОННО-КОС МИЧЕС KOI О МОНИТОРИНГА ЗЕ А1НОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Возможность изготовления СБИС на зарубежных фабриках по выпущенной до-
кументации позволяет ориентировать проекты СБИС на технологические нормы
0,09 мкм и меньше уже сейчас, не дожидаясь освоения этих технологий на оте-
чественных фабриках, что дает колоссальный выигрыш по времени.
Автоматизированное рабочее место
оператора РЛС [13]
В процессе модернизации бортовой РЛС встраивание нового кана-
ла цифровой обработки потребовало создания нового современного
автоматизированного рабочего места (АРМ) оператора РЛС, кото-
рое представляет собой программно-аппаратный комплекс, со-
стоящий из дисплейного комплекта (ДК) и функционального про-
граммного обеспечения (ФПО) АРМ (см. рис. 6.13).
Рисунок 6.13
Программно-аппаратный комплекс обеспечивает прием и отображения радиоло-
кационной информации и служит для обеспечения оператора РЛС программны-
ми средствами управления и контроля процессами решения задач в канале циф-
ровой обработки радиолокационной информации.
Дисплейный комплект представляет собой бортовую ЭВМ с
жидкокристаллическим монитором и пультом управления, содер-
жащим клавиатуру и трекбол (шар управления маркером).
Функционирование АРМ осуществляется под управлением
комплекса программ, загруженных в накопитель ЭВМ.
Комплекс программ АРМ содержит комплекс программ ДК
(с операционной системой и со специальным программным обес-
печением) и ФПО АРМ.
Специальное программное обеспечение включает в себя процедуры работы с
графикой на индикаторе тактического обстановки (ИТО) и содержит специаль-
ные функции для рисования отдельных графических объектов и преобразования
систем координат.
382
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Компоненты ФПО АРМ
• ПО оператора РЛС.
• Программа обеспечения диагностирования:
- передача команд в канал цифровой обработки радиолокаци-
онной информации (КЦО);
- получение выходных данных КЦО;
- отображение результата исполнения команды и выходных
данных КЦО на ИТО;
- отображение служебной, функциональной, справочной ин-
формации, информации с контрольных точек КЦО;
- управление КЦО;
- управление режимами отображения с использованием вирту-
ального кнопочного пульта и главного меню окна тактиче-
ской информации ФПО АРМ.
Программа обеспечения диагностирования ФПО АРМ предна-
значена для проверки функционирования ПО оператора РЛС.
Вид отображаемой информации на экране монитора АРМ
оператора РЛС приведен на рис. 6.14.
Рисунок 6.14
383
РЛС АВИАЦИОННО-КОСМИ ЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Объекты, отображающиеся на ИТО
Отметки воздушных целей, полученные на текущем обзоре.
Трассы или отметки воздушных целей на нескольких послед-
них обзорах.
Пеленги постановщиков активных помех.
• Секторы снятого излучения.
• Положение азимута обработки в виде символа голубого цвета,
движущегося по окружности, максимально удаленной от центра.
• Азимутально-дальностная сетка.
• Метка самолета-носителя в виде короткой стрелки, исходящей
из центра азимутально-дальностной сетки.
• Километровая сетка.
• Градуированные линейки по осям X, Y с шагом градуировки,
зависящим от масштаба, по оси X - на нижней границе ИТО,
по оси Г-на правой границе ИТО.
Полоса состояния находится в нижней части окна ИТО и со-
держит информацию о параметрах носителя, текущих параметрах
работы изделия и краткие сообщения оператору (о техническом со-
стоянии РЛС, о конфликтных ситуациях в обработке и т.д.).
В окнах справочной информации ОТИ отображается инфор-
мация об определенных целях или пеленгах ПАП, выбранных опе-
ратором.
Виртуальный кнопочный пульт
Виртуальный кнопочный пульт представляет собой изображение
матрицы кнопок 4x4 и используется для индикации текущего со-
стояния (значения) кнопок дополнительной клавиатуры пульта
управления.
На кнопках виртуального пульта изображены сокращенные
условные названия команд или их групп.
Для ввода команды необходимо с помощью трекбола подвес-
ти маркер к соответствующей кнопке В КП и нажать кнопку трек-
бола. Вид ВКП (названия кнопок) зависит от решаемой задачи.
Использование достижений в области разработок «систем на кристал-
ле» для синтеза, приема и обработки сигналов в виде функционально-
полного комплекта может заметно изменить облик обзорной РЛС для
авиационных комплексов дальней радиолокации.
Перечисленные усовершенствования и новые разработки для
бортовой РЛС определяют основные направления использования по-
тенциальных возможностей аппаратуры для повышения ТТХ авиаци-
онных комплексов дозора и наведения.
384
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
В 6.3 отмечалось, что процесс разработки новых и модернизация
существующих РЛС неразрывно связаны с развитием технологий
проектирования данных систем и их элементной базой. В этой свя-
зи рассмотрим насколько данные факторы влияют на изменение
архитектуры бортовых РЛС (БРЛС) [46, 47].
На ранних стадиях своего развития радиолокационные стан-
ции строились под выполнение какой-либо одной из задач радио-
локационного приема (например, измерение дальности до цели ли-
бо ее обнаружения), поэтому в ту пору они назывались радиолока-
ционными устройствами и для выполнения своих функций не
требовали привлечения сложных вычислительных устройств.
По мере расширения круга решаемых задач, появились полно-
весные РЛС, включающие в себя совокупность радиолокационных
устройств. Возложение на РЛС задач, связанных с выполнением
прицеливания по обнаруженной цели, привело к необходимости
встраивания в радиолокатор некоторого вычислительного устрой-
ства. В зависимости от конкретного образца РЛС такое устройство
было либо распределенным (элементы его включались в состав от-
дельных блоков РЛС), либо сосредоточенным, когда функции ВУ
реализовывались в специальных блоках или их совокупности, об-
разуя вычислительным тракт.
Реализация вычислительных процедур в данных ВУ осуществ-
лялась на элементах аналоговой техники. Позже все вычислительные
операции были возложены на аналоговую вычислительную машину,
которая, однако, не всегда рассматривалась как составной элемент
РЛС. Переход к когерентным принципам построения РЛС позволил
еще более расширить возможности радиолокатора. Появилась воз-
можность выделять подвижные цели на фоне неподвижных отража-
телей и измерять скорость их движения. К этому времени развитие
цифровых технологий позволило создавать малогабаритные цифро-
вые устройства и объединять их в цифровые вычислительные маши-
ны, обладающие относительно малым весом, что имело принципи-
альное значение для БРЛС лета тельных аппаратов.
385
PJC АВИ ЩИОННО-КОСМИЧЕСКО1 О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Первоначально вычислительные и логические функции, выполняемые данными
цифровыми машинами, сводились к простым математическим операциям. По-
следующий прогресс в цифровой технике позволил разработать первые вычис-
лительные устройства, выполняющие спектральный анализ радиолокационных
сигналов, что сделало возможным проводить спектральную обработку отражен-
ных сигналов на основе алгоритмов дискретного преобразования Фурье и вклю-
чить данное устройство в состав РЛС. Появившаяся возможность измерять ради-
альную скорость движения цели позволила реализовать в РЛС принцип одно-
временного сопровождения нескольких целей.
Вследствие этого в состав РЛС вошло цифровое вычислитель-
ное устройство, на которое были возложены задачи фильтрации и
сглаживания результатов первичных измерений (данных, получен-
ных на этапе обнаружения целей). В итоге появился некоторый
прототип структуры современного радиолокатора (рис. 6.15), кото-
рый предполагает включение цифровой вычислительной системы в
состав блоков БРЛС [46]. Однако из-за недостаточности развития
цифровой технологии, на цифровую вычислительную систему
нельзя было полностью возложить процесс спектрального анализа
принятого радиолокационного сигнала.
МНИ
Рисунок 6.15
С развитием микропроцессорных технологий появилась воз-
можность в полновесном представлении вычислительной системы
БРЛС в виде макроконвейера, включающего два компонента: про-
386
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
цессор сигналов и процессор данных. С этого момента данные
два цифровых компонента - являются традиционными элементами
системы обработки БРЛС.
Влияние архитектуры системы обработки информации
на архитектуру современных и перспективных БРЛС
В связи с развитием БРЛС и становлением их как сложных техниче-
ских систем, объединяющих в себе функции РЛС классов воздух -
воздух и воздух - поверхность [2, 19], потребовали переосмысления
таких понятий как структура и структурная организация данных сис-
тем, называемые также архитектурой [35, 57], и методологических
принципов системного исследования и проектирования.
Термин архитектура был использован первоначально в вычис-
лительной технике, чтобы охарактеризовать свойства вычисли-
тельных машин или систем с точки зрения программиста, т.е. их
общую структуру и функциональное поведение [27, 30, 52]. При-
менительно к БРЛС термин архитектура может быть определен как
принятое при проектировании распределение функций, реализуе-
мых системой, по некоторым уровням многоуровневой, много-
функциональной системы и точное определение границ между
этими уровнями.
Успехи в развитии цифровых технологий, достигнутые в 1980
1990-е гг., позволили разработать компактную малогабаритную вы-
числительную систему с открытой архитектурой. Достигнутый при ее
создании уровень цифровых технологий, несомненно, сказался на ар-
хитектуре самих цифровых систем, используемых в системе обработ-
ки радиолокационных сигналов, и БРЛС. В результате были созданы
РЛС с цифровой системой обработки, которые получили наименова-
ние «РЛС 4-го поколения».
Обобщенная структура такой БРЛС приведена на рис. 6.16,
где обозначено: АС - антенная система; АП - антенный переклю-
чатель; ВЧ ПРМ - высокочастотный приемник; АЦП - аналогово-
цифровой преобразователь; УПФ - устройство предварительной
фильтрации; ПС - процессор сигналов; ПД - процессор данных;
МПИ - цифровая магистраль передачи информации. Пунктиром на
рис. 6.16 обведена цифровая система обработки сигналов и данных.
Понятие архитектура открытых систем (открытая архитекту-
ра) предполагает возможность расширения системы, внесения в нее
новых компонент, которые в дальнейшем могут использоваться так
же, как и встроенные. Открытость характеризует глобальный про-
цесс стандартизации аппаратных и программных средств, направ-
ленный на достижение совместимости и переносимости продуктов
387
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
большого числа независимых поставщиков. Основой, обеспечи-
вающей реализацию открытых систем, служит совокупность от-
крытых общедоступных стандартов, при помощи которых унифи-
цируется взаимодействие модулей аппаратуры и всех компонентов
Понятие интегрированная архитектура предполагает совместное использование
общих физических и временных ресурсов системы при исполнении функций сис-
темы. Из данного определения следует, что современные БРЛС имеют интегри-
рованную архитектуру.
Специфическим свойством архитектуры БРЛС, как и любой
СТС, является возможность выделения в ней набора уровней абст-
ракции и их исследования с целью поиска подходящего проектного
решения. Таким образом, архитектура БРЛС, определяя принципы
построения и образуя остов системы, позволяет организовать по-
следовательно-параллельное проектирование данной системы с
учетом всех ее этапов жизненного цикла.
Выбор той или иной архитектуры РЛС зависит от числа и
сложности функций, реализуемых системой; технологий, доступ-
ных проектировщику; длительности времени жизни системы; за-
кладываемой при разработке возможности модернизации; допус-
тимой стоимости жизненного цикла или его отдельных фаз и ряда
других факторов.
Само представление и число уровней архитектуры конкретной
системы определяется решаемой задачей анализа или проектирова-
ния. Так, для описания функционирования РЛС, как это видно из
рис. 6.16, обычно достаточно выделения уровней антенной систе-
388
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБР\Б()1КИ С ИТ НАЛОВ В РЛС
мы, приемного и передающего каналов, подсистемы синхрониза-
ции, системы обработки и системы отображения информации.
При проектировании интерфейса человек - система интерес
представляет один уровень и распределение функций между РЛС и
человеком (летчиком или оператором).
Обратим внимание на архитектуру цифровой системы обра-
ботки информации и рассмотрим ее влияние на архитектуру БРЛС
и радиоэлектронный комплекс летательного аппарата в целом.
Архитектура ЦСОИ РЛС претерпела в процессе эволюции не-
сколько критических изменений, связанных с потребностями реа-
лизации новых функций, с одной стороны, и возможностями новых
технологий по реализации таких функций, с другой.
Так, потребность выполнения сложных вычислений и логиче-
ской обработки данных и успехи в области создания специализиро-
ванных цифровых вычислительных машин, как это уже отмеча-
лось, привели к включению в состав СОИ РЛС бортовой ЦВМ
(БЦВМ), выполняющей вторичную обработку информации (обра-
ботку данных). Использование ЦВМ в составе РЛС и шины пере-
дачи данных, обеспечивающих управление блоками РЛС, послу-
жило отправной точкой в развитии архизек гуры открытых систем
применительно к БРЛС. Пример данной архизсктуры РЛС и отра-
жает структура на рис. 6.16.
Новый шаг в развитии архитектуры бортовых РЛС связан с переходом к созда-
нию радиоэлектронного комплекса самолета на основе использования техноло-
гии пассивных фазированных антенных решеток.
Потребносзь в реализации цифрового формирования и управ-
ления диаграммой направленности антенны, пространственно-
временной обработки и гибкой (программируемой) первичной об-
работки радиолокационных сигналов на основе быстрого преобра-
зования Фурье, а также достижения в области разработки больших
интегральных схем, реализующих аналого-цифровые преобразова-
тели и микропроцессоры, привели к появлению в составе ЦСОИ
данных БРЛС программируемого процессора сигналов, специали-
зированного на обработку последовательностей оцифрованных
значений квадратур радиолокационного сигнала. В результате в со-
ставе сисземы обработки БРЛС был реализован макроконвейер [4],
содержащий ППС и БЦВМ (рис. 6.17).
Очередной технологический прорыв в области разработки сверхбольших инте-
гральных схем позволил реализовать практически любые функциональные
устройства в составе микропроцессоров, используя десятки миллионов транзи-
сторов, размещаемых на кристалле, и сделал, по существу, бессмысленным
разделение микропроцессоров на универсальные и специализированные, ори-
ентированные на обработку сигналов.
389
390
Рисунок 6.17
РЛС АВИАЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Такие микропроцессоры позволили создавать однородные мно-
гопроцессорные вычислительные системы, используя унифицирован-
ные процессорные элементы (возможно в разных конструктивных ис-
полнениях).
Рост производительности многопроцессорных ВС ограничен
пропускной способностью шины, соединяющей функциональные мо-
дули, что диктует переход от шинных структур к коммуникационным
структурам на базе пространственных комму га горов. Таким образом,
в архитектуре ЦСОИ перспективных БРЛС макроконвейер, содержа-
щий ППС и БЦВМ, следует ожидать замененным на суперЭВМ.
Весьма крупные успехи в области передачи данных по медным
проводам (LVDS-линии) позволяли передавать информацию со ско-
ростью более гигабит в секунду на расстояния до 10 м и дали воз-
можность строить распределенные ВС, которые легко масштабиру-
ются (это свойство открытых систем), и элементы которых могут
быть размещены в различных точках конструкции объекта.
Одним из перспективных интерфейсов передачи данных явля-
ется Rapid Ю (быстрый вход - выход), который может быть реализо-
ван в параллельном и последовательном вариантах исполнения с ис-
пользованием стандартных LVDS-линий.
Архитектура Rapid IO специально разрабатывалась, чтобы
удовлетворять важнейшим требованиям, которые предъявляются к
системам реального времени, а именно: малые задержки; детерми-
низм; надежность; масштабируемость; малые размеры; масса и по-
требление. Это одна из немногих на сегодняшний день стандартных
архитектур коммуникационной среды с аппаратным обнаружением и
исправлением ошибок в каждом звене канала передачи данных. По-
явление таких каналов передачи данных изменяет не только архи-
тектуру ВС, но и в целом архитектуру РЛС, в которой ранее исполь-
зовались шинные структуры в качестве системообразующих.
Принципиально новый шаг в развитии архитектуры БРЛС связан с переходом к
созданию интегрированного радиоэлектронного комплекса многофункцио-
нального самолета нового поколения, представляющего многофункциональ-
ную радиочастотную систему, которая функционально объединяет в себе ра-
диолокационную и радиотехнические системы различного назначения и бази-
руется на использовании технологии активных фазированных антенных
решеток (АФАР) и сложных алгоритмов цифровой обработки информации.
Это уже открытая интегрированная архитектура. Пример такой
архитектуры приведен на рис. 6.18, где представлена структура
БРЛС с унифицированной системой управления и обработки инфор-
мации.
391
Рисунок 6.18
40
Рисунок 6.19
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рост требований к разрешению по дальности, с одной стороны, и
достижения в области создания АЦП, с другой, позволили сделать
следующий шаг в эволюции архитектуры ЦСОИ и РЛС. Появление
АЦП, выполняющих оцифровку сигналов с частотой более 1 ГГц, по-
зволили оцифровывать сигналы на второй и даже первой промежу-
точных частотах с дальнейшей обрабогкой в цифровом виде, сущест-
венно улучшив характеристики приемного канала, в том числе по мас-
се, габаритам и потреблению. Можно сказать с позиций системы
обработки, что в состав вычислительной системы вошло цифровое
специализированное устройство, выполняющее предварительную об-
работку радиолокационных сигналов и формирующее пакеты для пе-
редачи данных в коммуникационной сети.
Решение задачи повышения разрешения и помехозащищенности
РЛС требует использования широкого набора сложных сигналов и
возможности перестройки излучаемых зондирующих сигналов от им-
пульса к импульсу. Применение цифровых вычислительных синтеза-
торов для формирования сигналов с последующим переносом их на
высокую частоту обеспечивает решение указанной задачи.
В качестве примера на рис. 6.19 приведена архитектура БРЛС,
в состав которой входит ЦСОИ, содержащая цифровой многока-
нальный приемник, цифровое устройство формирования опорных и
зондирующих сигналов, ВС и коммуникационную систему.
Технология АФАР позволяет формировать архитектуру РЛС.
в которой антенная система разделена на подрешетки, а канааь-
ность приемника определяется их количеством.
Последующая микроминиатюризация на базе нанотехнологий приведет к тому,
что оцифровка и локальное управление будут производиться в приемо-передаю-
щем модуле, а РЛС с АФАР превратятся в информационно-вычислительную сис-
тему, содержащую аналоговые рецепторы и излучатели, специализированную
вычислительную систему и объединяющую их коммуникационную сеть.
Идеальный вариант, когда с антенны снимается цифровой
сигнал, а его обработка выполняется в ЦСО. Данный вариант архи-
тектуры БРЛС приведен на рис. 6.20.
Отличительной особенностью данной архитектуры является на-
личие многоканальной антенной системы, реализация которой воз-
можна как на базе АФАР, так и с использованием конформных антен-
ных систем. При реализации данной архитектуры РЛС уходит в небы-
тие сложившееся представление о радиолокаторе как о системе в вице
четко обозначенных элементов: передатчик, приемник, антенна и сис-
тема обработки. Вычислительная среда в данной структуре обеспечи-
вает различные варианты системы цифровой обработки сигналов и
данных при реализации БРЛС как в виде сосредоточенной простран-
394
ГЛАВА 6 ПРИНЦИПЫ ПОСТРОЕНИЯ СИС1Е М ОБРАБОТКИ СИ1 НАЛОВ В РЛС
ственно-многоканалыгой системы, так и в виде пространственно-
распределенной многоканальной системы (конформной системы).
Рисунок 6.20
Сложившаяся к концу XX столетия архитектура БРЛС практически не
претерпела каких-либо существенных изменений вплоть до развития
технологий активных ФАР. Переход к АФАР позволил получить БРЛС в
виде не только многоканальной системы по времени, но и пространст-
ву. Достижения в цифровых технологиях последних лет существенно
расширяют информационные возможности перспективных радиолока-
торов, позволяя за счет формирования ансамбля зондирующих сигна-
лов, обладающих требуемыми свойствами, обеспечивать гибкость сис-
темы обработки радиолокационных сигналов и данных, осуществляя
ее настройку на заданные условия радиолокационного наблюдения за
счет использования программируемого цифрового формирователя
сигналов, широкополосного цифрового многоканального приемника и
универсального процессора.
Узким местом СЦО БРЛС предыдущих поколений являлись линии
связи как внутри системы, так и обеспечивающие обмен с внешними
устройствами. Устранение данного недостатка достигается за счет ис-
пользования высокоскоростных современных однонаправленных ли-
ний связи типа «точка - точка» (например, с протоколом Rapid IO).
395
РИС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Еще одним преимуществом ЦСОИ, построенной на данных принципах,
является возможность ее реконфигурации.
Тенденции развития архитектуры БРЛС, обусловленные развити-
ем цифровых технологий, ведут к тому, что ее эволюция идет в сторо-
ну снижения удельного веса высокочастотной части приемо-
передающего тракта РЯС. По мере появления высокоскоростных АЦП
СВЧ приемник все более приближается к антенной системе РЯС, пре-
вращая БРЛС в цифровую систему, изменяя сложившееся представле-
ние о ней как о системе в виде четко обозначенных элементов: пере-
датчик, приемник, антенна и система обработки сигналов.
Цифровые технологи дают возможность решать задачу разработ-
ки РЛС, опираясь на другие подходы, максимально используя пре-
имущество цифрового представления сигналов.
6.5
Цифровая обработка
радйолокационных Ш
обзорной РЛС
Использование цифровых технологий в РЛС позволяют значитель-
но улучшить их характеристики и существенно влияют на архитек-
турное построение данных систем. В тоже время, существуют ог-
раничения. которые не позволяют в полной мере использовать пре-
имущества цифровых технологий. В этой связи рассмотрим, какие
узкие места существуют при использовании цифровых технологий
на примере канала цифровой обработки радиолокационного сигна-
ла применительно к обзорной РЛС [14].
Современный уровень цифровой техники позволяет практически полностью оп-
тимизировать характеристики обработки радиолокационных сигналов, в том
числе распространить цифровую обработку на ряд алгоритмов, ранее реализо-
вавшихся на аналоговой аппаратуре.
Факторами, ограничивающими применение цифровое обра-
ботки сигналов в РЛС, являются высокие требования к быстродей-
ствию, динамическому диапазону (разрядности) и точностным ха-
рактеристикам аналого-цифровых преобразователей.
Исходя из результатов анализа характеристик радиолокацион-
ных сигналов в станциях дозора [15] предлагается вариант по-
строения ЦОС, который достаточно эффективно может быть реали-
зован на СБИС типа СнК [49].
396
ГЛАВА 6 ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБР. ШАТКИ СИГНАЛОВ В РЛС
Представим схему канала цифровой обработки радиолокаци-
онной информации в виде, изображенном на рис. 6.22: АЦП - ана-
лого-цифровой преобразователь; АС - аподизация в стробе; ЦФД
цифровой фазовый детектор; ДИ - децимация и интегрирование;
ЦРФ - цифровой режекторный фильтр: ДПФ 128т - дискретный
преобразователь Фурье (128 точек); ВМ - вычислитель модуля;
НО - некогерентная обработка.
Рассмотрим кратко основные функции, выполняемые элемен-
тами приведенной схемы.
Входным элементом канала является аналого-цифровой пре-
образователь. Главной целью преобразования сигнала в цифровую
форму непосредственно на промежуточной частоте является воз-
можность последующего выполнения цифрового разложения сш-
нала на две квадратурные составляющие. При этом обеспечивается
полная идентичность квадратурных каналов по коэффициенту пе-
редачи и точность соблюдения фазового сдвига л/2 между квадра-
турами, практически недостижимые при аналоговом исполнении на
двух фазовых детекторах. Ключевыми вопросами при аналого-
цифровом преобразовании являются допустимые ограничения раз-
рядной сетки, величина эквивалентных входных шумов устройства
выборки-хранения (УВХ) и значение частоты дискретизации.
Разрядная сетка АЦП должна обеспечивагь требование ли-
нейности преобразования в динамическим диапазоне входных сиг-
налов, достигающим 90 дБ над средним значением внутренних
шумов приемного тракта. Кроме того, иена младшего разряда и
397
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИIОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
собственные шумы АЦП должны обеспечивать снижение суммар-
ного значения вносимых шумов (дискретизации и УВХ), после со-
гласованной фильтрации с выхода фазового детектора, до уровня,
не превышающего -10 дБ относительно шумов приемного тракта.
Величина ослабления вносимых АЦП шумов после усредняю-
щих цифровых фильтров в квадратурах сигнала зависит от соотноше-
ния частоты дискретизации и эквивалентной полосы частот фильтра
по закону квадратного корня. При использовании линейного накопи-
теля выборок в качестве усредняющего фильтра ослабление вносимых
АЦП шумов будет равно квадратному корню из числа эффективно на-
капливаемых выборок. При использовании накопителя с взвешивани-
ем амплитуд выборок в пределах накапливаемой пачки (аподизации)
по закону, близкому к sin2, число эффективно накапливаемых выборок
составит примерно половину от их полного числа.
Процедура накопления приводит к росту разрядной сетки и более подробному
представлению квадратур сигнала, что эквивалентно случаю преобразования
после некоего «идеального аналогового фазового детектора» с помощью АЦП с
увеличенным числом разрядов (в сторону младших разрядов с уменьшением их
цены). Эквивалентное, с точки зрения подробности описания входного сигнала,
нарастание диапазона линейного преобразования также равно квадратному
корню из числа эффективно накапливаемых выборок.
Аподизация в стробе
Входные сигналы представляют собой периодическую последова-
тельность коротких импульсов с заполнением на промежуточной
частоте, приходящих на обработку с произвольной задержкой во
времени. В этой связи обработка должна происходить независимо
по квантам времени, согласованным с длительностью импульса.
Для снижения энергетических потерь сигнала при произвольном
положении входного импульса относительно кванта обработки
формируются две последовательности квантов, сдвинутых на поло-
вину их ширины.
Разбиение на короткие временные кванты эквивалентно нелинейной процедуре
умножения входного сигнала на прямоугольную огибающую (стробирование),
что порождает ряд новых частотных составляющих в спектре сигнала. Если час-
тота заполнения импульса не кратна частоте их повторения, то, при не очень вы-
сокой промежуточной частоте относительно длительности импульса, помимо ис-
тинной частоты сигнала, в окне между гармониками частоты повторения появит-
ся «зеркальная» составляющая.
Определенный интерес представляет и выбор частоты работы
АЦП. Для работы квадратурного фазового детектора частота кван-
тования должна быть кратна 4//пР, где / = 1, 2 ,..., н. Для i > 1 может
398
<»
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБР 4БОТКИ СИГНАЛОВ В РЛС
возникнуть проблема нечетных гармоник, зато увеличивается эф-
фект накопления сигнала.
Цифровой фазовый детектор
Для подавления каждой sin- и cos-составляющих в спектре, полу-
ченных в результате преобразования входного сигнала, и получе-
ния частоты выходных выборок, соответствующих одному элемен-
ту дальности, используются:
• разбиение последовательности выборок на пачки по 2т выборок;
• аподизация выборок в пачке по закону
FF(&) = sin2 кр/(2т) ,
где W(k) - функция аподизации; к - номер выборки в пачке,
к = 0, ..., 2т;
• входные выборки с частотой дискретизации (разрядность
14р, включая знак).
Выходом фазового детектора являются sin- и cos-
составляющие сигнала.
Амплитуда усредненной выборки после децимации:
2т /
SIN - BI (к) /(2m) - амплитуда продецимированной выборки
z=o /
каждой квадратуры;
2т /
/(2m) - амплитуда продецимированной выбор-
к=О
ки каждой квадратуры.
Цифровой режекторный фильтр
Для ослабления влияния мощных помех от подстилающей поверх-
ности должен быть реализован режекторный фильтр, коэффициен-
ты которого выбираются в зависимости от характера подстилаю-
щей поверхности.
Рекурсивный цифровой режекторный фильтр 4-го порядка по-
строен на основе каскадного соединения двух фильтров 2-го по-
рядка, выполненных в соответствии с соотношением
Y[i] = ВОх Х[/] + #1 х X[i -1] + В2х X[i - 2] -
- Л1хУ[/-1]- Л2хУ[/-2],
или эквивалентного ему КИХ-фильтра примерно 30-го порядка.
399
РЛС АВИАЦИОННО-КОСМИЧЕ( КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Начальные условия на работу фильтра не накладываются, так
как исключение переходного процесса фильтра из дальнейшей об-
работки обеспечивается временным стробированием работы вы-
числителя БПФ. Каждая квадратурная составляющая фильтруется
независимо, но с идентичными коэффициентами.
После процедуры фильтрации информация поступает в фор-
мате реального времени (последовательная упаковка):
Oj[Oz....(D-l)z] .... (7V-l)j[Oz ... (£>-!)/],
где j - номер зондирования; i - номер канала дальности.
Для дальнейшей обработки информацию нужно преобразо-
вать в следующий вид:
Oz[oy ... (7V-1);] ... (D-l)z[0j ... (7V-l)j
Дискретное преобразование Фурье
Преобразование Фурье осуществляется два раза на каждой дально-
сти с некоторым сдвигом относительно начала пачки импульсов,
чтобы в дальнейшем в обнаружителе выполнить критерий два из
двух. Производится вычисление 128-точечного ДПФ. Для улучше-
ния качества спектрального анализа перед вычислением ДПФ не-
обходимо иметь возможность наложения на временные выборки
весовых функций:
A[z] = Fc[z] х Fa[z],
где Fc[z] - выборки сигнала; Fa[z] - выборки функции аподизации;
i - номер выборки от 0 до 127.
Функция аподизации может быть изменена в зависимости как
от параметров сигнала, так и режима работы РЛС.
Вычисление модуля
Вычисление модуля ведется по приближенной формуле:
М = Re + Im/2, если Re > Im,
М = Im + Re/2, если Im > Re.
Обнаружитель
Обнаружитель включает вычислитель порога П(/) и схему сравне-
ния с ним. Порог вычисляется для каждого частотного канала на
основе z выборок данного канала. Пороги соседних частотных ка-
налов не коррелированы.
400
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Исполнительный порог вычисляется по формуле
П(/) =
где f — номер текущей составляющей БПФ [0...(N-1)], N = 128; / -
номер текущей дальности [O...(D-3)]; D - число обрабатываемых
дальностей; Кп - значение порога.
Факт превышения амплитуда сигнала A(f,i) исполнительного по-
рога n(f) происходит при выполнении условия
Л(/,г)>П(/).
(6.1)
Управление параметрами обработки проводится, как правило,
в азимутальных сзробах по результатам предыдущего обзора.
Приведенный алгоритм реализован в виде экспериментально-
го образца и прошел проверку на макете РЛС.
Рассмотрены основные факторы, ограничивающие применение циф-
ровой обработки сигналов в РЛС, а также показаны особенности по-
строения и функционирования отдельных элементов канала цифровой
обработки сигналов при работе РЛС в режиме обзора при выделении
цели на фоне мешающих отражений от подстилающей поверхности.
Интеграция данных
6.6 I в многофункциональных
радиолокационных комплексах
Расширение информационных возможностей является одной из ус-
тойчивых тенденций развития информационно-управляющих систем
(БПУС) бортовых комплексов летательных аппаратов (ЛА). При
этом под расширением информационных возможностей БИУС по-
нимается способность устройств обработки сигналов и данных сис-
темы извлекать больший объем информации из обрабатываемых
электромагнитных полей и эффективно использовать данные внеш-
401
РЛС АВИАЦИОННО-КОС МИ11ЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО П РОСТРАНС ГВ А
них источников информации, улучшая при этом показатели досто-
верности, точности, разрешающей способности, помехозащищенно-
сти, а также увеличивая зону действия БИУС [11] по сравнению с
предыдущими аналогичными системами.
Расширение информационных возможностей БИУС непосредственно приводит к
повышению ситуационной осведомленности летчика (экипажа) ЛА или операто-
ра беспилотного ЛА.
Реализация управления информационными возможностями
БИУС является многоплановой задачей, содержащей целый ком-
плекс взаимосвязанных проблем. В процессе решения этого ком-
плекса проблем при ограниченных вычислительных и энергетиче-
ских ресурсах возникает проблема управления информационными
возможностями БИУС. К числу важных способов расширения ин-
формационных возможностей относится интеграция (комплексиро-
вание) данных, поступающих от бортовых датчиков различной фи-
зической природы или одной физической природы, но функциони-
рующих в разных частотных диапазонах [9, 11, 51, 58]. Поэтому
основной акцент делается именно на данный способ повышения
информационных возможностей БИУС.
Объектом интеграции могут быть данные, характ еризующие
состояние отдельного объекта, а также и изображения, например,
объекта или участка земной (водной) поверхности. К данным, ха-
рактеризующим отдельные объекты, относятся координаты и па-
раметры движения объекта (траекторные данные) или прямоуголь-
ные и сферические (полярные) координаты для неподвижных объ-
ектов, тип, класс объекта, эффективная поверхность отражения и
другие его признаки.
Способы интеграции зависят от степени однородности данных.
Однородные данные представляют собой результат измерений
одних и тех же физических величин, например дальности до объекта,
полученных различными информационными датчиками. Интеграция
однородных данных обеспечивает повышение точности определения
фазовых координат, помехоустойчивости, достоверности сведений
об объекте, снижение вероятности потери объекта и повышение воз-
можности по его сопровождению. Разнородными данными считают-
ся результаты численных измерений различных физических вели-
чин, в том числе и функционально связанных, и результаты оцени-
вания качественных признаков объекта (тип, класс, размер и др.).
Интеграция разнородных данных позволяет повысить информатив-
ность сведений об объекте, что облегчает решение задач их клас-
сификации и идентификации.
402
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИ( ТЕМ ОБРАБОТКИ СИ/ НАЛОВ В РЛС
В простейшем случае интеграция сводится к выбору наиболее
информативного измерительного датчика [11]. Однако преимуще-
ственно интеграция данных представляет собой процесс совмест-
ной обработки результатов измерений однородных или разнород-
ных физических величин, характеризующих состояние объекта или
изображений участка земной (водной) поверхности, полученных
совокупностью датчиков.
Как известно [3, 7, 9, 11, 16, 51, 58], на современных и перспек-
тивных ЛА устанавливаются разнообразные датчики информации:
бортовые РЛС (БРЛС); станции радиотехнической разведки (РТР);
системы вторичной радиолокации (СВРЛ); системы государственно-
го опознавания (СТО); оптико-электронные и инфракрасные систе-
мы; инерциальные и спутниковые системы навигации.
Наличие на ЛА большого числа информационных датчиков
позволяет организовать единую информационно-управляющую
сеть. Главной целью создания подобной сети является формирова-
ние единого информационного поля в заданной области окружаю-
щего пространства.
Наличие на борту ЛА нескольких информационных датчиков
позволяет совместно использовать различные их комбинации, на-
пример БРЛС и станции РТР, БРЛС и СВРЛ, БРЛС и СТО, станции
РТР и СВРЛ (СТО), БРЛС и оптико-электронные и/или инфракрас-
ные системы. При интеграции датчиков важная роль уделяется
технологии объединения поступающих от них потоков информа-
ции. В зависимости от уровня интеграции различают первичную и
вторичную комплексную обработку информации.
Интеграция датчиков на уровне первичной обработки информации имеет це-
лью не только улучшить характеристики точности радиотехнических датчиков
в режиме слежения, но и повысить качество функционирования в аномальных
режимах их работы (при срывах слежения, ложных захватах из-за действия
помех и т.п.) [58].
Практическая реализация комплексной первичной обработки
информации связана с определенными трудностями. Поэтому чаще
используется комплексная вторичная обработка информации, под
которой понимается совместная обработка выходных данных изме-
рительных датчиков. В настоящее время при вторичной обработке
информации широкое применение получают оптимальные и субоп-
тимальные алгоритмы оценивания в терминах пространства со-
стояний, базирующиеся на дифференциальных и разностных урав-
нениях, полученных на основе оптимальной линейной фильтрации.
Способы и алгоритмы интеграции данных существенно зависят от
того, насколько одновременно они поступают от датчиков на ком-
плексную обработку.
403
Р. ТС АВИ4ЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Анализ известных вариантов объединения датчиков показыва-
ет, что могут применяться различные способы и алгоритмы инте-
грации данных. Ниже приводятся краткие сведения о наиболее из-
вестных из них, рассмотрение которых позволяет получить общее
представление о современных путях решения разнообразных задач
объединения информационных потоков от различных датчиков и
трудностях, возникающих при интеграции измерительных данных
в БИУС авиационных комплексов.
Здесь не проанализированы вопросы, связанные с идентифи-
кацией данных, приходящих от различных информационных дат-
чиков, поскольку это является предметом отдельного исследова-
ния. Некоторые особенности проблемы идентификации данных при
реализации различных вариантов интеграции датчиков и возмож-
ные пути ее решения рассмотрены в [40, 55, 56].
Интеграция разнородных данных от БРЛС
и станции РТР
Возможны различные варианты интеграции данных от БРЛС и
станции РТР. В качестве примера рассмотрим способ интеграции
разнородных данных, реализованный в авиационном комплексе
дальнего радиолокационного обнаружения и управления (АК
ДРЛО и У) «АВАКС», в состав которого входит самолет Е-3.
Самолет Е-3, созданный в середине 1970-х гг., предназначался
для дальнего радиолокационного обнаружения и сопровождения
воздушных целей и наведения самолетов тактической авиации на
воздушные цели противника [3,7,11,16]. Основу его оборудования
составляет многорежимная бортовая РЛС AN/APY-2. Обзор про-
странства осуществляется с помощью антенны, вращающейся в го-
ризонтальной плоскости с постоянной скоростью, равной 6 об./мин.
С момента ввода самолетов Е-ЗА в эксплуатацию прошло не-
сколько этапов модернизации комплекса. В частности, модерниза-
ция по проекту Block 30/35 была направлена на создание на борту
самолета системы комплексной воздушной разведки и управления,
действующей как в активном радиолокационном режиме, так и
пассивном режиме радиотехнической разведки [3, 7, 11, 16]. Для
этого самолет Е-ЗА проекта Block 30/35 дополнительно оснащен
станцией радиотехнической разведки AN/AYR-1.
Гпавной задачей станции РТР является беззапросное распознавание обнаружен-
ных воздушных целей по их бортовым источникам излучения, в число которых
входят самолетные РЛС управления оружием и пилотирования с огибанием
рельефа местности, бортовые приемопередатчики навигационной системы
TAKAN и т.д.
404
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОГНИЯ СИСТЕМ ОБРАБОТКИ С И1 НАЛОВ В РЛС
Перехват радиоизлучений таких источников и анализ в реальном
масштабе времени их основных параметров (несущая частота, дли-
тельность и период повторения импульсов) позволяют определить
конкретный тип каждого источника и привязать его к определенному
носителю. Например, обнаружение сигналов самолетной РЛС
ANAPG-66 будет свидетельствовать об обнаружении истребителя
F-16. Кроме того, определяется режим работы РЛС управления ору-
жием самолета противника: находится ли она в состоянии поиска или
уже выполнила захват и сопровождает цель, вырабатывая данные для
стрельбы, что представляет собой важную информацию, когда само-
лет Е-3 управляет действиями своей авиации в воздушном бою.
Станция обеспечивает круговой всенаправленный и остронаправленный прием с
моноимпульсной пеленгацией источников излучения с ошибкой 3° (среднеквад-
ратическое отклонение), ее производительность составляет 100 распознаваний
источников излучения за 10 с. Емкость каталога опорных параметров станции
рассчитана на распознавание до 500 типов РЛС и их носителей.
Процесс распознавания принимаемых сигналов пеленгуемых
станции в AN/AYR-1 происходит следующим способом [3]. Син-
хронно и соосно (по лучам в горизонтальной плоскости) произво-
дится механический круговой радиолокационный поиск бортовой
РЛС AN/APY-2 и пассивный электронный пеленгационный - стан-
цией РТР AN/AYR-1. При этом одновременно с получением отмет-
ки импульсов, отраженных от обнаруженного летательного аппара-
та, посредством радиоперехвата выявляется, какие на нем в момент
радиолокационного обнаружения функционируют радиоэлектрон-
ные средства.
Если обнаруживается групповая цель, в составе которой БРЛС
AN/APY-2 не способна осуществлять распознавание индивидуаль-
ных целей, то станция РТР может выявить в ней число и типы тех
индивидуальных целей, радиоэлектронные системы которых в мо-
мент радиолокационного контакта излучают различные по частоте
и по параметрам модуляции сигналы.
В результате реализации данного способа интеграции повышается степень осве-
домленности об обнаруженных объектах. Более сложный вариант интеграции
данных от БРЛС и станции РТР получается в ситуации, когда обзор датчиками
информации по пространственным координатам в отличие от рассмотренного
осуществляется не синхронно. При этом существенно усложняется процедура
отождествления совокупности радиоэлектронных средств, обнаруженных стан-
цией РТР, с радиоконтрастными объектами-носителями РЛС, обнаруживаемыми
БРЛС. Способ интеграции данных от БРЛС и станции РТР для данного случая опи-
сан в [56].
405
РЛС АВИАЦИОННО-КОСМИ ЧЕС КОГО МОНИТОРИНГА ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОЕ О ПР ОС ТРАНС ТВ А
Совмещение радиолокационного
и топографического (оптического) изображений
земной поверхности
Одним из направлений интеграции в комплексах земного монито-
ринга авиационного базирования является совмещение цифровых
карт местности (ЦКМ) с радиолокационным изображением (РЛИ),
формируемым БРЛС при функционировании ее в режимах высоко-
го и сверхвысокого разрешения. При совмещении радиолокацион-
ного изображения местности с электронной картой местности и
матрицей высот значительно облегчается определение соответст-
вия между ориентирами на РЛИ и объектами на карте.
Совмещение цифровых карт местности с РЛИ может быть
реализовано тремя способами: навигационный, полуавтоматиче-
ский; автоматический [23]. Самый простой в реализации - навига-
ционный способ, который применяется при начальном функциони-
ровании остальных способов. При его использовании происходит
«наложение» РЛИ на ЦКМ в одинаковых координатах и масштабе
по параметрам навигационной системы. В случае недостаточной
точности навигационных систем самолета данный способ дает низ-
кую точность совмещения изображений.
Более высокая точность получается при использовании полуав-
томатического способа. В этом случае оператор вручную назначает
ориентиры, и относительно них производятся уточнения параметров
при совмещении. Возможны как простое линейное смещение РЛИ
относительно карты, так и его повторное преобразование, устра-
няющее нелинейные искажения между изображениями.
При автоматическом способе уточнения совмещения участие
оператора не требуется. При функционировании алгоритма поиск
сопрягаемых точек на изображениях выполняется программно. Ос-
новные трудности создания автоматических алгоритмов связаны,
прежде всего, с различиями в физических принципах получения
топографических (оптических) и радиолокационных изображений.
При совмещении изображений приходится учитывать яркост-
ные и геометрические отличия между изображениями.
Наиболее характерные отличия двумерных изображений
1. Отличие в масштабе. Масштаб сформированного РЛИ за-
висит от линейной разрешающей способности радиолокатора и вы-
соты полета самолета. Масштаб ЦКМ выбирается в зависимости от
желаемой детатизации объектов Обычно детализация ЦКМ и оп-
тических изображений (ОИ1 превышает возможности БРЛС с син-
тезированной апертурой (РСА).
406
ГЛАВА 6 ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИ1 НАЛОВ В РЛС
2. Отличие в угле поворота. Отклонения даже на малый угол
РЛИ от ЦКМ и ОИ вызывают большие сложности в совмещении,
так как объекты на изображениях при автоматическом совмещении
будут восприниматься как отличающиеся по форме.
3. Отличие в размере и линейном пространственном сдвиге
заключается в том, что участок местности, представленный на
РЛИ, как правило, гораздо меньше размера ЦКМ, на которой его
надо найти, и располагается в неизвестной области ЦКМ.
4. Отличие в перспективе. Радиолокационное изображение
формируется за счет проектирования трехмерного пространства на
плоскость в зависимости от высоты полета ЛА. В общем случае
линии, которые на ЦКМ являются параллельными, в результате ис-
кажений перспективы на РЛИ могут такими не являться. Однако
при большом угле съемки перспективные искажения можно свести
к неравномерному искажению масштаба.
Большие трудности при автоматическом совмещении РЛИ и ЦКМ возникают из-за
того, что большинство радиоконтрастных объектов, которые подходят в качестве
эталонов, отображаются на ЦКМ и РЛИ по-разному. К этому добавляется зависи-
мость радиолокационного изображения большинства объектов от времени года,
а также то обстоятельство, что изображения объектов особенно малоразмерных
имеют случайный характер, в частности, из-за влияния спекл-шума.
Непосредственно автоматически совместить ЦКМ и РЛИ, ис-
пользуя корреляционный подход, можно только по эталонам пер-
вого типа, к которым относятся изображения водных поверхностей
и береговых линий: изгибы рек, места слияния рек; взаимное поло-
жение водных поверхностей; озера и береговые линии оригиналь-
ной формы; острова [21].
Основные этапы
при автоматическом совмещении ЦКМ и РЛИ [23]
Этап 1. Формирование эталонов из карты (фотопланов), их
предварительная обработка.
Этап 2. Устранение геометрических искажений РЛИ, возни-
кающих при его преобразовании к виду, используемому при со-
вмещении изображений.
Этап 3. Обработка РЛИ с целью выделения объектов местности.
Этап 4. Поиск эталонных изображений на РЛИ (привязка).
Этап 5. Совмещение РЛИ с картой.
При совмещении оптических снимков непосредственное вы-
деление эталонных объектов необходимо выполнять оператору. В
остальном операции автоматического совмещения идентичны [21].
В результате интеграции радиолокационного и оптических датчи-
ков увеличивается четкость изображений, улучшаются условия для
идентификации и распознавания целей.
407
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Интеграции однородных одновременно поступающих
данных
Рассмотрим способы и алгоритмы комплексной обработки одно-
родных данных при одновременном и неодновременном их посту-
плении от информационных датчиков. На современных летатель-
ных аппаратах возможна установка радиолокационного комплекса,
состоящего из двух бортовых РЛС, работающих в различных диа-
пазонах частот. Это позволяет повысить помехозащищенность ра-
диолокационного комплекса, его надежность и эффективность рас-
познавания целей.
Однако при создании подобного комплекса возникает про-
блема рациональной организации управления информационными
потоками, формируемыми бортовыми РЛС в различных режимах
функционирования, в частности, в режиме сопровождения движу-
щихся воздушных целей.
Одной из важнейших задач этого режима является оценивание координат
движущихся целей с использованием принципов комплексной обработки ре-
зультатов первичных измерений угловых координат, относительной дальности
до цели и скорости сближения с ней. При решении данной задачи необходимо
учитывать условия, при выполнении которых целесообразно объединение од-
ноименных первичных измерений или косвенных измерений, формируемых
двумя бортовыми РЛС.
Найдем эти условия применительно к флуктуационным ошиб-
кам измерения для случая измерения некоторой обобщенной коор-
динаты x(t) цели, изменение которой может быть описано квазиде-
терминированной функцией времени t или произвольным случай-
ным процессом [50]. Под обобщенной координатой будем
понимать любой информативный параметр (угол, дальность, ско-
рость сближения) или некоторую функцию от информативных па-
раметров (координата цели по любой из осей прямоугольной сис-
темы координат).
Пусть измерения Z] (/) и z2 (/) координаты х (/) цели, осу-
ществляемые бортовыми РЛС1 и РЛС2, сопровождаются аддитив-
ными погрешностями £j(/) и £2(/) с математическими ожиданиями,
равными нулю, и дисперсиями D\ (/) и ft(z) соответственно:
Z1 (/) = х(0 + £ (/) И Z, (Т = x(z) + (/) .
Для сокращения записей обозначение времени / в формулах
далее опускается. Предполагается, что измерения в БРЛС1 и
БРЛС2 выполняются в одни и те же моменты времени.
408
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
На рис. 6.23 показана схема, иллюстрирующая процедуру объе-
динения результатов измерений (информационных потоков) z\ и zi.
поступающих с выходов измерительных устройств БРЛС1 и БРЛС2.
Выходные сигналы комплектируемых измерителей 1 и 2 по-
ступают соответственно на усилители с коэффициентами передачи
1/ Dx и 1/£>2 ’ образно пропорциональными дисперсиям D[ и по-
грешностей измерения и £2 > а затем суммируются. Суммарный
сигнал ze подвергается в делителе преобразованию. Результирую-
щий (объединенный) сигнал zp используется в дальнейшем в алго-
ритмах оценивания координат и параметров движения цели.
Определим требуемый коэффициент деления суммарного сиг-
нала zc в делителе. Предварительно найдем значение суммарного
сигнала
Введем обозначение
(6.2)
(6.3)
Для последующего оценивания координат и параметров дви-
жения цели сигнал на выходе делителя должен содержать слагае-
мое х без весового коэффициента кл. Для этого разделим левую и
правую части (6.2) на кл. Тогда
409
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Из (6.4) следует, что с выхода делителя на вход фильтра, в ко-
тором выполняется оценивание фазовых координат цели, подается
истинное значение координаты х, искаженное результирующей по-
грешностью
(6.5)
представляющей собой весовую сумму аддитивных ошибок изме-
рителей 1 и 2.
Определим дисперсию результирующей ошибки при условии,
что среднеквадратические погрешности (СКО) <зх и сг2 измерите-
лей бортовых РЛС отличаются в п раз: сг2 = по\9 где п > 1. Как из-
вестно [26], для случайного процесса (6.5) дисперсия
2
Подставив в (6.6) D2=n Dx, получим
Для СКО результирующей погрешности соответственно имеем
(6-7)
Как следует из (6.7), при объединении двух информационных
потоков результирующая погрешность не превышает погрешность
измерения
р
координаты х БРЛС1. Действительно, при п
= 0,707(7! , при п = 2 а
- 0,89^ , при п = 3
7Го
р
4
= 0,94(7! , при п = 4 = —т=а\ =0,97(7! . Предель-
ное (наихудшее) значение СКО результирующей погрешности при
значении и, стремящемся к бесконечности, составляет стр - ет..
При любом соотношении среднеквадратических ошибок измерителей бортовых
РЛС значение результирующей ошибки ст не превышает среднеквадратиче-
г
скую погрешность наиболее точного из двух измерителей.
410
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
Поскольку по условию наиболее точным является измеритель
1, то в результате объединения двух информационных потоков не-
зависимо от соотношения ошибок измерителей имеет место
ар < crj , при этом максимальный выигрыш в точности составляет
30 %.
По этой же методике можно рассчитать значения результи-
рующих погрешность при других коэффициентах весового взвеши-
вания данных, поступающих от измерителей. Так, если вместо ко-
эффициентов передачи l/Dj и 1/D2 взять соответственно коэффи-
циенты 1/сг1 и 1/(7 2, то при объединении двух информационных
потоков результирующая погрешность координаты х может быть
как больше, так и меньше погрешности измерителя 1: при и = 1
стр - = , при п = 2 <7^=0,948^ , при п = 3
(Ур - 1,06(7! , при И = 4 СГр = 1,13(7! .
Предельное (наихудшее) значение СКО результирующей по-
грешности составляет (jp — = 1,41 (7|. Отсюда следует, что ис-
пользование подобного варианта весового взвешивания ошибок
измерителей является нерациональным.
Аналогичная методика может быть использована при оценке
эффективности объединения и других измерителей, например уг-
ломеров бортовой РЛС и станции РТР, измерителей однородных
параметров БРЛС и СВРЛ (СТО).
Данная методика может быть обобщена и на случай большего
числа измерителей, чем это приведено выше. Интеграция однород-
ных данных может выполняться и без использования рассмотрен-
ной процедуры их совместной весовой обработки, предшествую-
щей дальнейшей фильтрации, необходимой для построения траек-
торий наблюдаемых объектов. В этом случае первичные измерения
могут непосредственно подаваться на вход многомерного фильтра,
осуществляющего оптимальную либо квазиоптимальную их обра-
ботку. Один из возможных вариантов обработки приведен в [31].
Интеграции однородных данных
при их неодновременном поступлении
Одной из самых устойчивых тенденций повышения эффективности сложных
информационно-управляющих систем является комплексирование датчиков.
Необходимо отметить, что достаточно часто спецификой та-
кого комплексирования является неодновременность прихода из-
411
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО мониторинга земной поверхности и воздушного простр нчства
мерений в систему совместной обработки, что затрудняет, а иногда
и делает невозможным использование классических алгоритмов
оценивания [32].
Наиболее простые способы устранения
этого недостатка
Способ 1. Прогноз измерений, приходящих от различных датчи-
ков на одни и те же периодически повторяющиеся моменты времени,
в которые и выполняется коррекция прогноза всеми измерениями 133].
Способ 2. Текущая коррекция прогноза по каждому разновре-
менно приходящему измерению [32].
Особенности способа 1 [33]
Необходимость численного дифференцирования экстраполи-
руемых измерений, что обусловливает ухудшение их точности
и соответственно точность коррекции.
• Ухудшение точности коррекции с увеличением времени экст-
раполяции измерений.
• Потеря части измерений, если частота их поступления от раз-
личных дат чиков отличается более, чем в два раза.
• Усиление нестационарное™ процесса фильтрации при перемен-
ных интервалах прогноза измерений, обусловленное зависимо-
стью коэффициентов усиления невязки от времени их экстрапо-
ляции.
• Сложность отождествления разнородных измерений при авто-
матическом сопровождении целей в режиме обзора [40].
Известны различные варианты реализации первого способа
учета разновременности измерений. В [33] предлагается способ ин-
теграции данных радиолокационного и оптико-электронного изме-
рителей. Разработанный в [33] способ интеграции разновременно
приходящих данных не учитывает численные показатели достовер-
ности принадлежности измерений от различных датчиков к одному
и тому же объекту. В [28] приведен алгоритм оптимальной ком-
плексной обработки однородных данных на пункте сбора и обра-
ботки информации от N различных источников с учетом показате-
лей достоверности их идентификации.
Предполагается, что от всех источников поступают измерен-
ные значения фазовых координат воздушного объекта, в качестве
которых могут рассматриваться: азимут ЛА, угол места, дальность
до ЛА, курс или скорость полета ЛА. На пункте сбора и обработки
проводится экстраполяция измерений на заданный момент времени
t и осуществляется процедура идентификации измерений с расче-
412
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
том соответствующих численных показателей их принадлежности
к сопровождаемому объекту.
Оценка интересующей фазовой координаты при наличии, на-
пример, двух источников определяется соотношением
х(7) = хэ(7) +
Дид I (?) Сх (?) - хэ (?)) Д'2 + Дид2 (?) С2 (?) - хэ (П)Р? (/)
Дэ(?) + ДИд|(?)Д’2(?) + ^ид2 (?)Д2(?)
где D3(/) - дисперсия оценки хэ(7) прогноза фазовой координаты
х(7); £>ид1(7) и/)ид2(/) - показатели достоверности правильного
отождествления хэ(7) с экстраполированными измерениями zx(t) и
z2(7) первого и второго источников; Р](/)иГ2(/) - дисперсии
ошибок измерения первого и второго источников. В качестве пока-
зателя достоверности может использоваться вероятность отождест-
вления.
Анализ этого выражения свидетельствует о том, что при вы-
числении оценки фазовой координаты экстраполированные изме-
рения независимых источников учитываются через невязку с ре-
зультатами прогноза хэ(/) на момент времени t оценки фазовой
координаты с предыдущего шага оценивания с весами, прямо про-
порциональными квадрату показателю отождествления и обратно
пропорциональными дисперсиям ошибок измерений.
Если показатели правильного отождествления экстраполиро-
ванного значения фазовой координаты с измерениями источников
равны единице, то оценки, получаемые с помощью разработанного
способа совместной обработки от N источников, совпадают с оцен-
ками, получаемыми известным способ среднего взвешивания.
Предлагаемый способ комплексной обработки координатно-трассовой информа-
ции о летательных аппаратах, поступающей от разнородных и разнотипных ис-
точников, позволяет осторожно относиться к измерениям, достоверность при-
надлежности которых к одному и тому же ЛА невысока, и, тем самым, избежать
завязки ложных трасс [28].
Более универсальным способом учета разновременности из-
мерений является использование текущей коррекции прогноза по
результатам каждых приходящих измерений независимо от време-
ни их прихода.
В основу реализации этого способа может быть положено ис-
пользование алгоритмов анатого-дискретной фильтрации [32], в
рамках которой прогноз выполняется с матым интервалом дискре-
413
R ТС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНОГО ПРОСТРАНСТВ 4
тизации, приближаясь по своей точности к аналоговой процедуре, а
его коррекция выполняется по мере поступления каждого из неод-
новременно поступающего измерения. В математическом плане за-
дача такого оценивания формулируется следующим образом.
Для процесса
х(£) = Ф& к -1 )х(А -1) + (к -1)
при наличии измерений
z(A) = Qz(A)[H(A)x(A) + ^(A)]
необходимо сформировать оценки по правилу
х(А) = хэ(А ) + Кф (A) Az(A); х(0) = М{х0};
(6-8)
(6.9)
(6.10)
хэ(А) = Ф(А,А-1)х(А-1); (6.11)
Az(A) = z(A)-Qz(A)H(A)x,(A); (6.12)
Кф(А) = О(А)Нг(А)О;1(А); (6.13)
D(A) =
Е-Кф(А)Н(А) D,(A),D(0) = Do
1W
К.
при к = pTj /т,
при к*pTjjT,
(6.М)
D3 (к) = Ф(к, к -1 )D(£ -1 )ФТ (£, к -1) + Dx (к -1), (6.15)
где х и х - и-мерный вектор состояния и его оценка; Ф - пере-
ходная матрица; z -m-мерный (m < ri) вектор измерений; Н - мат-
рица связи измерений и состояния;
о 0 ... Q:mn
(6.16)
диагональная матрица признаков прихода у-х измерений
(7 = 1, m ), в которой элементы Qz j j = 1 при наличииу-х измерений
и Q^jj =0 при их отсутствии; £х и £и - центрированные векторы
гауссовских возмущений состояния и измерений с известными
матрицами дисперсий Dx и DH ; х3 - вектор прогноза состояния;
Кф - матрица коэффициентов усиления невязок Az; D и D -
414
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
матрицы ошибок фильтрации и прогноза; Л/{х0| - математиче-
ское ожидание возможных начальных состояний вектора х;
т « Tj - интервал дискретизации прогноза состояния (6.11); Т- -
интервал прихода j-x из-мерений, р = 1,2, 3,...
Обобщенная схема алгоритма фильтрации (6.9)-(6.15) приведена
на рис. 6.24.
Рисунок 6.24
Анализ алгоритма (6.9)-(6.15) и схемы позволяет сделать сле-
дующие заключения.
Экстраполяция состояния (6.11) и вычисление матрицы (6.15)
выполняются с малым шагом т « Т,, в то время как измерения и
матрица априорных дисперсий (6.14) поступают с шагом Т. , опре-
деляющим моменты коррекции (рис. 6.25).
Рисунок 6.25
Такой подход позволяет обеспечить:
1) непрерывное поступление оценок (прогноза) к потребите-
лям, что особенно важно для бортовых систем воздушного базиро-
вания;
415
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
2) формирование коэффициентов усиления (6.13)-(6.15) невя-
зок независимо от моментов прихода измерений.
Изменение структуры фильтра при разновременном приходе
измерении, определяющее число невязок, используемых для теку-
щей коррекции общего прогноза (6.11), выполняется автоматиче-
ски по значениям признаков прихода измерений QZjj (6.16).
Несомненным достоинством рассматриваемого алгоритма является то, что он со-
храняет работоспособность при любом сочетании времен прихода различных
измерений без их пропусков, реализуя более высокую точность оценивания по
сравнению с методом прогноза измерений.
Еше одним преимуществом алгоритма (6.9)-(6.15) является его
способность работать при автоматическом сопровождении нескольких
целей в режиме обзора [32]. Алгоритм (6.9) -(6.16) не накладывает
принципиальные ограничения на возможность его реализации.
На основе изложенного подхода в [34] выполнен синтез опти-
мальных алгоритмов комплексной обработки информации в много-
датчиковой обзорной системе, состоящей из радиолокационного и
оптического измерителей.
Кроме рассмотренного разработаны и другие алгоритмы, реа-
лизующие текущую коррекцию прогноза по каждому разновремен-
но приходящему измерению.
Известен способ фильтрации многомерных разнородных тра-
екторных измерений от разнотипных информационных средств,
основанный на использовании дискретного фильтра Калмана в ре-
альном режиме времени [37].
В измерительном комплексе, состоящем из пространственно
разнесенных разнотипных информационных средств, измерения
(например, наклонная дальность до ЛА, угол места, азимут ЛА) со-
провождаются коррелированными ошибками и могут иметь раз-
личные временные интервалы Д/ следования. Особенностью пред-
лагаемых алгоритмов фильтрации является введение для времен-
ных интервалов Д/ процедуры формирования адекватной модели
движения наблюдаемого ЛА путем расчета матричных коэффици-
ентов а(Д0 и в(Д/) для рекуррентного уравнения вида
0(A) = а(Дг)0(А -1) + Ь(Д/>! (А),
где 0(A) - случайный вектор оцениваемых параметров движения
ЛА, компонентами козорого являются прямоугольные координаты
ЛА и скорости их изменения в А-й момент времени; а(Д/) и Ь(Д/)
матричные коэффициенты, характеризующие соответственно де-
416
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
терминированную и стохастическую составляющие модели движе-
ния; - многомерный гауссовский вектор с независимыми
компонентами; А/ - интервал времени предсказания оцениваемых
параметров на моменты времени поступления последующих изме-
рений, определяемый разностью между моментами времени прихо-
да соседних измерений. Структура матричных коэффициентов оп-
ределяется выбранной моделью движения ЛА и временным интер-
валом А^ поступления траекторных измерений.
Искомые матрицы а (А/) и Ь(А^) определяются через решение
двух матричных дифференциальных уравнений, эффективные ал-
горитмы решения которых приведены в [10]. Результаты экспери-
ментальных исследований свидетельствуют о том, что разработан-
ный способ фильтрации многомерных разнородных траекторных
измерений от разнотипных датчиков позволяет в значительной сте-
пени повысить точность и надежность оценки параметров движе-
ния сопровождаемых ЛА, а также надежность функционирования
всего траекторного измерительного комплекса [37].
К числу важных способов расширения информационных возможно-
стей бортовых информационно-управляющих систем ЛА относится ин-
теграция датчиков различной физической природы или одной физи-
ческой природы, но функционирующих в разных частотных диапазо-
нах. Объектом интеграции могут быть данные, характеризующие
состояние отдельного объекта, и изображения участка земной (вод-
ной) поверхности, полученные от нескольких датчиков.
Способы интеграции зависят от степени однородности данных.
Интеграция однородных данных обеспечивает повышение точно-
сти определения фазовых координат, помехоустойчивости, достовер-
ности сведений об объекте, снижение вероятности потери объекта и
повышение устойчивости его сопровождения.
Интеграция разнородных данных позволяет повысить информа-
тивность сведений об объекте. При реализации процедуры интеграции
данных в многодатчиковых БИУС могут применяться эвристические,
квазиоптимальные и оптимальные алгоритмы обработки информации.
Возможны различные варианты интеграции данных от БРЛС и
станции РТР. Рассмотренный в качестве примера способ интеграции
разнородных данных, реализованный в АК РЛДН «AWACS», предпола-
гает объединение траекторных данные о целях, поступающих от БРЛС,
и данных об угловых координатах и типах ЛА, определяемых станцией
РТР по сигналам их бортовых радиоэлектронных средств. В результате
реализации данного способа интеграции повышается степень осве-
домленности об обнаруженных объектах.
417
Р1С АВИАцИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Одним из направлений интеграции в комплексах земного монито-
ринга авиационного базирования является совмещение цифровых
карт местности с радиолокационным изображением, формируемым
БРЛС при функционировании ее в режимах высокого и сверхвысокого
разрешения. Совмещение цифровых карт местности с РЛИ может быть
реализовано тремя способами: навигационным, полуавтоматическим и
автоматическим. Основные способами создания автоматических алго-
ритмов связаны с различиями в физических принципах получения то-
пографических (оптических) и радиолокационных изображений. Не-
посредственно автоматически совместить ЦКМ и РЛИ с использовани-
ем корреляционного подхода можно только по эталонам с однозначно
идентифицируемыми признаками, к которым относят изображения
водных поверхностей и береговых линий: изгибы рек, места слияния
рек; взаимное положение водных поверхностей; озера и береговые
линии оригинальной формы; острова.
Интеграция однородных данных может выполняться как с ис-
пользованием, так и без использования процедуры их совместной ве-
совой обработки, предшествующей операции построения траекторий
наблюдаемых объектов. В последнем случае первичные измерения
непосредственно подаются на вход многомерного фильтра, осуществ-
ляющего оптимальную или квазиоптимальную их обработку. При ин-
теграции однородных одновременно поступающих данных необходи-
мо учитывать условия, при выполнении которых эффективно объеди-
нение одноименных первичных измерений, формируемых датчиками,
или косвенных измерений. При весовом взвешивании данных от двух
измерителей с коэффициентами передачи, обратно пропорциональ-
ными дисперсиям погрешностей измерения обобщенной координаты,
максимальный выигрыш в точности составляет 30 % по отношению к
среднеквадратической погрешности наиболее точного измерителя.
Достаточно часто спецификой интеграции данных является неод-
новременность прихода измерений в систему совместной обработки,
что затрудняет, а иногда и делает невозможным использование клас-
сических алгоритмов оценивания. Наиболее простые способы устра-
нения этого недостатка: прогноз измерений, приходящих от различ-
ных датчиков на одни и те же периодически повторяющиеся моменты
времени, в которые и выполняется коррекция прогноза всеми измере-
ниями, и текущая коррекция прогноза по каждому разновременно
приходящему измерению.
Более универсальным способом учета разновременности измере-
ний является использование текущей коррекции прогноза по резуль-
татам каждых приходящих измерений независимо от времени их при-
хода.
В основе этого способа лежит использование алгоритмов аналого-
дискретной фильтрации, в рамках которой прогноз выполняется с ма-
лым интервалом дискретизации, приближаясь по своей точности к
-118
ГЛАВ 4 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБР 1БОТЕИ СИГНАЛОВ В РЛС ?
аналоговой процедуре, а его коррекция выполняется по мере поступ-
ления каждого неодновременно поступающего измерения.
Достоинство данного алгоритма - сохранение им работоспособно-
сти при любом сочетании времени прихода различных измерений без
их пропусков, реализуя более высокую точность оценивания по срав-
нению с методом прогноза измерений.
Литература
1. Амдаль Дж., Блоу Дж., Брукс Ф. Архитектура системы IBM 360 // Кибернетический
сборник. Новая серия. Вып. 1. М.: Мир. 1965.
2. Антонов. Г. Бортовое радиоэлектронное оборудование истребителя F-35 // Зару-
бежное военное обозрение. 2004. № 8.
3. Афинов В. Модернизация системы АВАКС // Зарубежное военное обозрение. 1995.
№ 6.
4. Базлев Д., Почуев С. Радар для самолета пятого поколения // Информационно-
аналитический журнал Корпорации «Фазотрон-НИИР». 2006. № 1-2.
5. 5.Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. М.: Бином. Ла-
боратория знаний. 2003.
6. Белый Ю. И., Каюмжий В. Н., Артамонов П. И. Принципы построения унифициро-
ванных бортовых радиоэлектронных комплексов интегрального типа // Радиосис-
темы. Вып. 91. Радиоэлектронные комплексы. 2005. № 5.
7. Бобков А. Авиационные средства дальнего радиолокационного обнаружения и
управления иностранных государств // Зарубежное военное обозрение. 2006. № 5.
№ 10.
8. Бортовые радиолокационные станции военной авиации зарубежных стран /
9. Аналитический обзор по материалам открытой печати / Под ред. С.В. Ягольникова
и В.С. Вербы. МО РФ. 2ЦНИИ. 2005.
10. Бортовые системы управления боевыми режимами современных и перспективных
самолетов // Кн. 1. Аналитический обзор по материалам зарубежных информаци-
онных источников / Под общей ред. акад. РАН Е.А. Федосова. М.: НИЦ ГосНИАС.
2009.
11. Буренок В.М., Найденов В.Г., Поляков В.И. Математические методы и модели в
теории информационно-измерительных систем. М.: Машиностроение. 2011.
12. Верба В.С. Авиационные комплексы радиолокационного обнаружения и управле-
ния. Состояние и тенденции развития. М.: Радиотехника. 2008.
13. Верба В.С. Авиационные комплексы радиолокационного обнаружения и управле-
ния. Принципы построения, проблемы разработки и особенности функционирова-
ния. М.: Радиотехника. 2014.
14. Верба В. С., Силкин А.Т., Трофимов А.А., Чернышев М.И. Пути совершенствования
бортовой РЛС авиационного комплекса дозора и наведения - новые технологии
Динамика радиоэлектроники-2. М.: Техносфера. 2008. С. 117-132.
15. Верба В.С., Сергеев В.В., Чернышев М.И. Канал цифровой обработки сигнала обзорной
РЛС Ц Материалы XXXII Междунар. конф. «Информационные технологии в науке, те-
лекоммуникации и бизнесе» (Украина, Ялта -Гурзуф). 20-30 мая 2005. С. 339-341.
419
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС ТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
16. Верба В.С., Гандурин В. А., Трофимов А.А. Бортовая РЛС для перспективного много-
функционального авиационного комплекса разведки, оповещения и управления (МАК
РОУ) с цифровой АФАР //Наукоемкие технологии. 2004. № 8, 9. Т. 5. С. 110-116.
17. Виноградов М. Перспективные комплексы воздушной радиолокационной разведки
ведущих зарубежных стран // Зарубежное военное обозрение. 2008. № 2.
18. Володин В.В., Ерохин И.Е., Бояров А.А. Состояние и перспективы разработки РЛС
для самолетов 5-го поколения / Под ред. Е.А. Федосова. М.: НИЦ ГосНИИАС. 2002.
19. Доманин К.И., Устинов В.И. Комплексная имитация цифровых данных радиолока-
ционного и навигационного оборудования для АРМ РЛС // Тезисы докладов V на-
учно-технич. конф. «Проблемы развития боеприпасов, средств поражения и систем
управления». Пенза. 2006
20. Дудник П. И., Ильчук А. Р., Татарский Б. Г. Многофункциональные радиолокацион-
ные системы / под ред. Б. Г. Татарского. М.: Дрофа. 2007.
21. Интегрированная авионика самолета JSF Ц Научно-техническая информация. Се-
рия: Авиационные системы. 2004. № 1. М.: НИЦ ГосНИИАС.
22. Кирдяшкин В.В., Сосулин Ю.Г. Автоматическое совмещение радиолокационного
изображения с оптическим изображением и цифровой картой местности // Успехи
современной радиоэлектроники. 2010. № 10.
23. Колпаков К. М., Павлов А. М. Состояние и тенденции развития бортовых вычисли-
тельных систем перспективных летательных аппаратов. Ч. 1 и 2. Аналитический
обзор по материалам зарубежной информации / Под ред. Е.А. Федосова. М.: НИЦ
ГосНИИАС. 2008.
24. Кондратенков Г.С., Быков В.Н., Викентьев А.Ю. Методика автоматического совме-
щения радиолокационных изображений с цифровыми картами и оптическими
снимками местности // Радиотехника. 2007. № 8.
25. Корнеев И.Л., Сергеев В.В., Серов Е.М., Силкин А.Т СБИС «ОРЛИ» - обработка сигна-
ла обзорной РЛС //Материалы XXXII международной конференции «Информационные
технологии в науке, телекоммуникациии»(Украина, Ялта - Гурзуф). 20-30 мая 2005.
26. Корнеев Ю.А., Гладков В.В. Перспективные методы имитации радиолокационных
сцен и сигналов. Ч. 1, 2 // С6. докл. XI Междунар. научно-технич. конф. «Радиоло-
кация. Радионавигация. Связь». Воронеж. 2005.
27. Корн Г., Корн Т. Справочник по математике. Для научных работников и инженеров.
Перевод с американского издания / Под ред. И.Г. Арамовича. М.: Наука. 1974.
28. Кузьмин С. 3. Цифровая радиолокация. Введение в радиолокацию. Киев: Изда-
тельство КВ1Ц. 2000.
29. Кудряшов Г.Г., Остапенко О.Н. Метод оптимальной комплексной обработки инфор-
мации от различных источников // Радиотехника. 2012. № 11.
30. Кутахов В. П. Архитектура радиоавионики летательных аппаратов пятого
31. поколения / Авионика 2002-2004: С6. статей / Под ред. А. И. Канащенкова. М.:
Радиотехника. 2005.
32. Майерс Г. Архитектура современных ЭВМ: В 2-х кн. Кн. 1; Пер. с англ. М.: Мир.
1985.
33. Меркулов В.И, Васильев О.В., Забелин И.В., Хамматов Р.Р. Алгоритм функциониро-
вания радиолокационно-оптического угломера в обзорноследящем режиме // Ра-
диотехника. 2007. № 8.
34. Меркулов В.И. Алгоритм линейного оценивания с текущей коррекцией прогноза по
неодновременно приходящим измерениям // Информационно-измерительные и
управляющие системы. 2009. Т. 7. № 8.
35. Меркулов В.И, Забелин И.В., Ефимов В.А., Захаров М.С. Алгоритм фильтрации в
420
ГЛАВА 6. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБРАБОТКИ СИГНАЛОВ В РЛС
комплексной радиолокационно-оптической системе с прогнозом разновременно
приходящих измерений // Наукоемкие технологии. 2008. Т. 9. № 12.
36. Меркулов В.И, Забелин И.В. Радиолокационно-оптический угломер с текущей кор-
рекцией прогноза состояния неодновременно приходящими измерениями // Радио-
техника. 2007. № 8.
37. Мотоока Т, Томита С., Танака С. Компьютеры на СБИС. В 2-х кн. Кн. 1: Пер. с
японского. М.: Мир. 1988.
38. Мышляков Р.Г., Андреев Ю.С., Силкин А.Т. Особенности проектирования СБИС ти-
па «СнК», малой применимости» // Радиотехника. 2007. № 8.
39. Найденов В.Г., Поляков В.И. Метод фильтрации многомерных разнородных траек-
торных измерений от разнотипных измерительных средств для формирования дан-
ных целеуказаний средствам траекторного измерительного комплекса // Успехи
современной радиоэлектроники. 2011. № 3.
40. Новые технические решения при разработке бортового радиоэлектронного обору-
дования самолетов 5-го поколения // Научно-техническая информация. Серия:
Авиационные системы. 2006. № 6. М.: НИЦ ГосНИИАС.
41. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера. 2009.
42. Перов А.И. Комплексная дискретная обработка координатных данных нескольких
объектов, поступающих от пространственно-разнесенных РЛС с идентификацией
измерений // Радиотехника. 1998. № 10.
43. Планы использования конформных антенных решеток на борту РЛС // Экспресс-
информация. Сер. Авиационные системы. 2006. № 48. М.: НИЦ ГосНИИАС.
44. Полна Г., Сеге Г. Задачи и теоремы из анализа. Ч. 2. М.: Наука. 1978.
45. Применение перспективных радиолокационных методов при разработке бортовых
РЛС Ц Научно-техническая информация. Сер. Авиационные системы. 2002. № 4-5.
М.: НИЦ ГосНИИАС.
46. Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - инфор-
мационная основа боевых действий многофункциональных самолетов. Системы и
алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И. Ка-
нащенкова, В.И. Меркулова. М.: Радиотехника. 2006.
47. Разработка конформных антенн для летательных аппаратов скрытного полета // Экс-
пресс-информация. Сер. Авиационные системы. 2007. № 43. М.: НИЦ ГосНИИАС.
48. Самарин О.Ф., Соловьев А.А., Шарова Т.В. Радиолокационные системы многофунк-
циональных самолетов. Т. 3. Вычислительные системы РЛС многофункциональных
самолетов / Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника. 2006.
49. Самарин О.Ф., Татарский Б.Г. Чернов В.С. Развитие цифровых технологий и архи-
тектура радиолокационных систем // Информационно-измерительные и управляю-
щие системы. 2010. Т. 8. №1.
50. Самарский А.А., Гулин А.В. Численные методы. М.: Наука. 1989
51. Силкин А.Т., Чернышев М.И., Янушевский Г.Д., Тарасов В.Л., Сергеев В.В. Пер-
спективы применения систем на кристалле в радиолокационных комплексах //
Наукоемкие технологии. 2004. Т. 5. № 8, 9. С. 60-65.
52. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб, посо-
бие для вузов. М.: Радио и связь. 1992.
53. Сочетание датчиков: улучшение ситуационной осведомленности // Ежемесячный
информационный бюллетень «Иностранная печать об экономическом, научно-
техническом и военном потенциале государств-участников СНГ и технических
средствах его выявления». Серия: «Техническое оснащение спецслужб зарубеж-
ных государств». М.: ВИНИТИ РАН. 2013. № 1.
421
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
54. Толковый словарь по вычислительным системам / Под ред. В. Иллингуорта и др.:
Пер с англ. А. К. Белоцкого и др. -М.: Машиностроение. 1990.
55. Турецкий А.Х. Теория интерполирования в задачах. Минск: Вышейшая школа.
1968.
56. Ханова А.А. Интерполяция функций. Методическое пособие. Астраханский госу-
дарственный технический университет. 2001.
57. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь. 1993.
58. Школьный Л.А, Ясько С.И. Отождествление РЭС на основе данных от разнородных
датчиков информации // Радиотехника. 1999. № 9.
59. Ярлыков М. С., Богачев А. С. Авиационные радиоэлектронные комплексы. М.: ВА-
ТУ. 2000.
60. Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные ком-
плексы навигации, прицеливания и управления вооружением. Т.1. Теоретические
основы / под ред. М.С. Ярлыкова. М.: Радиотехника. 2012.
422
аж
Автоматическое
воз
489
автом
в отношении конкретных методов реализации
угроз безопасности информации ............. ......
Лптераггурз .................................................
Введение ..
7.1, Синтаз
ДЛЯ СИС
сопровождения объектов .................
7.4. Автоматическое сопровождение целей
в режиме обзора ........................ ,.
7.5. Радиолокационный метод измерения
проекций вектора скорости ’Цели
’Топени уязвимости
энной информационной системы
радиолокационных углоМеррв
Йового применения • -Si-»»- •
Фнно-огпические системы
сопровождения целей .......... ............
сопровождение
ых целей
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Автоматическое сопровождение воздушных целей является одним
из основных режимов функционирования РЛС, в рамках которого
формируются оценки координат относительного движения цели и
самолета-носителя, используемые для управления и формирования
команд целеуказания средствам поражения.
Постулаты, на которых базировались
классические алгоритмы автоматического сопровождения
(1950-1960-х гг.)
Боевые действия ведутся в рамках дуэльных ситуаций (один на
один).
Цель и наводимый объект движутся прямолинейно с постоян-
ной скоростью.
Наводимый объект является безынерционной материальной
точкой.
Взаимные связи абсолютных и относительных координат сис-
темы «цель - наводимый объект» определяются в рамках стро-
го линейных представлений.
Однодиапазонная РЛС является единственным источникам
информации о целях.
К настоящему времени эти постулаты не соблюдаются:
появились сверхманевренные и гиперзвуковые цели с очень
сложными (нелинейными) перемещениями в пространстве;
боевые действия стали групповыми, что потребовало создания
режима многоцелевого сопровождения;
• современная РЛС, как правило, является составной частью интег-
рированного радиоэлектронного комплекса, в составе которого
присутствуют другие источники информации: оптико-
электронная система и система радиотехнической разведки.
Ниже представлены алгоритмы автоматического сопровожде-
ния воздушных целей, в которых учтены эти изменившиеся реалии.
На примере следящего угломера предложен подход к учету
инерционности следящей системы в процессе сопровождения
сверхманевренных и гиперзвуковых целей.
424
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Рассмотрены алгоритмы сопровождения целей на основе совме-
стного использования радиолокационных и оптиколокационных из-
мерителей, а также при использовании многодиапазонных РЛС.
Приведены алгоритмы высокодостоверного и высокоточного
сопровождения целей в режиме обзора, позволяющие использовать
его в качестве основного режима для наведения средств поражения.
Приведенные алгоритмы могут служить не только как источ-
ник информации о современном состоянии режимов автоматиче-
ского сопровождения, но и в качестве методического материала для
синтеза и анализа других разновидностей систем сопровождения.
Кроме того, в материалах главы приведены алгоритмы изме-
рения нерадиальных проекций вектора скорости цели, которые мо-
гут быть использованы при реализации процедуры автоматическо-
го сопровождения цели, а также рассмотрены вопросы степени за-
щищенности информации, циркулируемой в автоматизированных
информационных системах.
Синтвзеледящих
радиолокационных угломеров
дЛЯфиотем одноразового применения
Расширение номенклатуры сверхманевренных (СМЛА) и гнперзву-
ковых (ГЗЛА) летательных аппаратов, принимаемых на вооруже-
ние технически развитыми странами, приводит к усложнению про-
цедур их перехвата, особенно на конечном этапе наведения. Это,
прежде всего, обусловлено сложным непредсказуемым характером
их движения в пространстве, которое приводит к срыву сопровож-
дения в существующих следящих системах.
Существующие следящие системы с астатизмом второго (ред-
ко третьего) порядка, не обеспечивают устойчивое сопровождение
таких целей из-за появления в законах изменения сопровождаемых
координат (дальности, углов) производных третьего и более высо-
ких порядков. Использование типовых алгоритмов автоматическо-
го сопровождения целей приводит к существенному несоответст-
вию динамических свойств интенсивно маневрирующих целей
П1МЦ) и бортовых систем сопровождения. Кроме того, в типовых
одноконтурных системах требования точности противоречат тре-
бованиям устойчивости [8].
425
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Для устранения этого недостатка необходимо использовать
многоконтурные системы, в которых требования точности и устой-
чивости обеспечиваются различными контурами, реализуя высокие
показатели системы в целом, принимая при этом меры по учету в
следящих системах несоответствия их динамических свойств ди-
намическим свойствам ИМЦ.
Необходимо подчеркнуть, что из всех следящих систем, пре-
жде всего, необходимо улучшить устойчивость и точность сопро-
вождения следящих угломеров, вносящих основной вклад в ошиб-
ки наведения [8].
Особенно важной является потребность одновременного
улучшения точности и устойчивости данных каналов для радиоло-
кационных систем объектов одноразового применения, к которым
относят ракеты «воздух-воздух» и беспилотные летательные аппа-
раты в режиме «камикадзе». К системам такого типа, предназна-
ченным для перехвата конкретной одиночной цели, предъявляются
два требования: низкая стоимость изготовления и высокая точность
наведения на конечном участке. Существующие следящие системы
на базе антенн с электромеханическим приводом, будучи достаточ-
но дешевыми, не обеспечивают требуемую точность сопровожде-
ния из-за наличия инерционного привода.
В свою очередь, безынерционные антенны на базе ФАР (АФАР),
будучи дорогостоящими, не обеспечивают высокую точность наведе-
ния на конечном участке наведения из-за дискретного характера со-
провождения, который приводит к усилению угловых шумов [7].
Весьма актуальной является разработка угломеров на базе антенн с механиче-
ским инерционным приводом, в которых учитывается несоответствие динамиче-
ских свойств цели и инерционного привода.
Для решения этой задачи воспользуемся аппаратом статисти-
ческой теории оптимального управления, который позволяет для
типовой модели системы носитель- цель:
Хт(О = ГХт(О + ^г(?),
(7.1)
при описании динамических свойств следящей системы моделью
Ху (0 = Fyxy (/) + Byu(0 + (/),
получить алгоритм управления [2]:
и =-К-1Ву ГРу(/)ху+ р(/)Т
РУ(О = -L-FJPv(?)- Р (/)Fy + Р (/)В К *ВуР(/), PV(ZK) = Q;
(7-2)
(7-3)
0(O = -LxT+ Py(/)ByK-’B;-FyT p(0, pyaK) = -QxT(/),
< I— —J
426
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
оптимальный по минимуму функционала качества:
Q|_Xt('k)-xA)J +
z ,
+ fl[xT(7) - ху (,)]Т Ь[хт(7) - ху (/)] + uT(Z)Ku(Z) df >.
о v
Здесь хт и ху - я-мерные векторы состояния цели и следящей сис-
темы; FT и Fy - динамические магрицы внутренних связей соот-
ветствующих векторов состояния; и - r-мерный (г<и) вектор
сигналов управления; В - матрица эффективности управления; ^у
и - векторы шумов состояния; Q - матрица штрафов за ошибки
в момент времени / окончания управления; L - матрица штрафов
за ошибки в текущий момент времени t; К - матрица штрафов за ве-
личину сигнала управления; Р матрица весовых коэффициентов те-
кущего состояния ху; р оценка вектора, учитывающего внешние
воздействия хт; хт и ху - оптимальные оценки векторов хт и ху.
Воспользовавшись теоремой статистической эквивалентности
[7], будем считат ь, что £T(Z) = 0 и ^у(/) = 0 . Предположим, что ис-
пользуются высокоточные алгоритмы оптимальной фильтрации,
при которых хт = хт и ху = ху. Для упрощения записи также опус-
тим зависимость матриц и векторов от времени
Тогда несоответствие динамических свойств следящей систе-
мы и цели можно выразить вектором ошибок
Дх = хт-ху., (7.4)
изменение которого во времени можно найти посредством решения
векторного уравнения
Дх = хт-ху, (7.5)
Учитывая в (7.5) выражения (7.1) и (7.2), получаем
Ax = FyAx-ByU + ^FT -F,)xT. (7.6)
Решение этого неоднородного уравнения состоит из общего
решения однородной части, определяемого первым слагаемым
427
<
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
FyAx, и частного решения неоднородного уравнения, определяе-
мого вторым и третьим слагаемыми -Byii + (FT - Fy )хт .
Выбором сигнала управления можно скомпенсировать несо-
ответствие динамических свойств следящей системы и цели. Если
динамические свойства (7.2) следящей системы соответствуют тре-
буемым значениям (F = F, ), то ошибка будет убывать вплоть до
нуля, со скоростью, определяемой ее динамическими свойствами
(Fy). В такой ситуации убывание можно ускорить за счет сигнала
управления. В случае несоответствия динамических характеристик
(F Ф FT ), в решении (7.6) появляется вынужденная составляющая,
и коррекция не всегда будет давать в пределе нулевую ошибку.
Найдем управляющий сигнал минимизирующий ошибку со-
провождения (7.6) с учетом общих соотношений (7.3), полагая, что
Дх = у:
y = Fyy-Byu + ^„, у(О) = Дхо,
где = (Fr - F jxT . Тогда сигнал управления:
и = -н4вту[руу + р],
Р' (Z) = - L - F;py - PyFy + РуВуК-1ВуРу,
р= Рувук 'ву-Fy p + Py(FT-Fy)xT.
(7.7)
В отличие от сигнала управления (7.3), в (7.7) присутствует сла-
гаемое Py(FT -Fy)xT, учитывающее различие динамических свойств
следящей системы и цели при конкретном законе изменения хт.
Используя (7.7), перейдем к задаче синтеза управления инер-
ционным приводом следящего угломера, при условии, что сигналы
управления в ортогональных плоскостях не зависят друг от друга,
что дает возможность ограничится одной плоскостью, например
горизонтальной. В качестве модели состояния системы сопровож-
дения воспользуемся типовым уравнением привода антенны [8]:
Фа=о>а, %(О)-^о;
1 ь
i — — ^7 ^а + ^7 ^а + £а ’ (®) — ^аО ’
(7.8)
428
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
а в качестве модели относительного движения цели используем ки-
нематические уравнения [1]:
^ц(°) = РцО:
Ф\\ ^Ц’
%(0)=<у,(0;
(7-9)
где (р.а и й).а - угол поворота антенны относительно продольной
оси носителя и угловая скорость ее перемещения; Т - постоянная
времени привода угломера; b - коэффициент его усиления; <ри и
69Ц - пеленг цели и угловая скорость линии визирования; у/ - курс
носителя; Д и Д - дальность до цели и ее производная; уц и /п
поперечные ускорения цели и носителя, £а и - шумы состоя-
ния привода и цели.
Взаимное геометрическое расположение цели и носителя РЛС
показано на рис. 7.1, где точками Ооу и Оц показано расположение
объекта управления (ОУ) и цели. Тогда, исходя из (7.4), (7.8) и (7.9).
можно определить ошибки сопровождения по углу и скорости:
(710)
ДбУ = ^ц-^а.
Рисунок 7.1
Используя модели (7.1) и (7.2), исходя из (7.8) (7.10), запи-
шем в явном виде векторы состояния и динамические матрицы свя-
зей системы:
429
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
(7.П)
В свою очередь, несоответствие динамических свойств РЛС и
цели определяется матрицей:
(7.12)
Из (7.12) следует, что для соответствия динамических свойств
цели и следящей системы необходимо выполнение условия
Т - Д / \2Д]. Однако при Т - const обеспечить это условие не-
возможно, поскольку Д и Д меняются в процессе сопровожде-
ния. В связи с этим, целесообразно для решения этой задачи ис-
пользовать расчет сигнала управления по правилу (7.7), при усло-
вии, что матрицы Ру, Q, L и вектор р введены в общем виде:
Р\2
?
(7.13)
Используя (7.10) - (7.13) в формулах (7.7), получаем:
«а =^(А2Д^+/’22Д® + А),
кТ
(7.14)
430
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Можно заметить, что система уравнений (7.15), не решаемая в
общем случае в аналитическом виде, должна решаться в обратном
времени. Следовательно, сигнал управления (7.14) не может быть
получен в режиме реального времени.
Однако может быть найдено стационарное решение системы
(7.15) при условии ри =0, рп = 0, р22 - 0, которое имеет место
при t <<tK.
Поскольку момент окончания управления неизвестен, то будет
достаточно выбрать конечное время работы системы заведомо больше
максимально возможного времени работы следящей системы:
^рлс<<:^к- (7-16)
В таком случае можно считать, что требуемое условие будет
выполняться на всем участке работы следящей системы
Графики зависимостей р[2 и р22, используемых в (7.14), для
некоторых соотношений коэффициентов штрафов оказаны на
рис. 7.2. При этом различные номера кривых соответствуют парам
соотношений:/ - wj; 2 - 3 - 4 - (т2,и2),
где =lu / k, ni = 122 / к ; i = 1,2 ; т2 - 100т}; пх - 5п2 .
Установившийся характер этих зависимостей на большей час-
ти временного диапазона показывает справедливость сделанных
допущений (7.16).
431
РЧС АВИАЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Анализ переходных процессов, имеющих место при вычисле-
нии р~>2, при различных соотношениях коэффициентов штра-
фов свидетельствуют о том, что время регулирования не превыша-
ет 2 с (рис. 7.2). Принимая во внимание условие (7.16), можно ут-
верждать, что в течение всего времени работы /рлс значения
/?12, р22 будут постоянными. Это дает возможность при вычисле-
нии (7.14) использовать их установившееся значение. Тогда
(7.17)
где были учтены выводы теоремы статистической эквивалентности
о замене координат состояния их оценками [7].
Исследование эффективности разработанного алгоритма про-
водилось по результатам сопровождения цели, маневрирующей по
сложному закону
t2 t3 t4
<РЦ = <P:i(0) + ®ц(0)/ + <У4(0)— + со (0)— + (У (0)—,
2 о 24
2 3
t Г
cou = cou (0) + соц (0) t+ <УЦ (0)— + соц (0)—,
(7.18)
(0) + Ч (°)' + (°) V + (°) T + (°) 47 ’
2 о 24
2 3
t t
<4i = (0) + (0) t+ <УЦ (0)— + (Уц(0)—,
I 2 о
(7.19)
угломером с инерционным приводом (7.8) с сигналом управления
(7.17). Спецификой (7.18) является его явное несоответствие моде-
ли (7.9), положенной в основу синтеза и возможность за счет мани-
пуляций 69Ы(О), 6УЦ(О), <йц(0) и йц(0) реализовать законы измене-
ния и 69Ц практически любой сложности.
В качестве показателей эффективности использовались отно-
сительные текущие ошибки сопровождения
^(р ^а &)%
в в ' Дб90 Дб90
и время регулирования
.t>f <pa(t)
^рег • ^рег ’
^ц(0)-^а(0) ’ ’
432
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
где в - ширина диаграммы направленности антенны; Дб9() - на-
чальная ошибка захвата по угловой скорости.
Параметры моделей и входных воздействий варьировались в реальном поле
условий применения. Считалось, что антенна сопровождает цель, если ошибка
сопровождения не превышает половину ширины диаграммы направленности
антенны.
Исследования проводились в несколько этапов.
Этап 1. Исследовалась способность (7.17) отрабатывать ошибки
захвата разных знаков. Для этого проводилось моделирование работы
алгоритма в одинаковых условиях, при разных знаках начальных
ошибок сопровождения по углу и по угловой скорости. Пример гра-
фиков полученных зависимостей ошибок сопровождения приведены
на рис. 7.3, где разным номерам соответствуют различные значения
ошибок захвата: / - Д^(0) > 0, Дб9(0) < 0; 2 - Д^(0) > 0, Дй>(0) < 0 ;
3-Д^(0)>0, Д^(0)>0;4-Д^(0)<0, Д^(0)>0.
Система устойчиво отрабатывает первоначальные ошибки захвата любых знаков
при любом их сочетании, причем время регулирования не превышает 3 с.
Этап 2. Исследовался характер зависимости ошибок сопро-
вождения от времени для различных параметров привода антенны
b и Т (7.8). Для этого проводилось моделирование работы алгорит-
ма (7.17) при условии, что цель движется по траектории, соответст-
вующей гипотезе движения с постоянной первой производной уг-
ловой скорости. Пример зависимостей ошибок сопровождения от
433
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
времени представлен на рис. 7.4, где постоянная времени Т = 3 с,
линия 3 соответствует значению 6 = 16,2 - 6 = 32,3 - 6 = 64.
При увеличении постоянной времени угломера снижается скорость убывания
ошибки сопровождения, причем при больших значениях постоянной времени мо-
гут возникать затухающие колебания. Однако эти эффекты могут быть в опреде-
ленной степени скомпенсированы увеличением коэффициента передачи привода.
Этап 3. Изучалось влияние состава управляющего сигнала на
точность, устойчивость и быстродействие угломера. В связи с этим
рассматривались следующие варианты алгоритмов формирования
сигнала управления:
bPn I \ , ЬР12 I \ , 1
г/. = =-^- -<р. +=^-ку„-а>я +—а>.. +
а kT V u а; кТ v ц 7 b u
(7.20)
U
(7.21)
Ц’
(7.22)
434
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Ьр\2 ( \ , Ьр22 / \
ма =---— ( Я, “ <Ра + ~£-^( О).. - О) ,
U ~Фа)-
d X * Т d /
(7.23)
(7.24)
Анализ результатов моделирования при движении цели по закону
69Ц — const Ф 0 показал, что ошибки сопровождения при использовании алго-
ритмов (7.20) - (7.22) стремятся к нулю. При этом алгоритмы (7.23) и (7.24)
реализуют постоянную ошибку сопровождения по углу.
Усложнение закона входного воздействия показало, что при
движении цели по закону сЬц = const Ф 0 , ошибки сопровождения
при использовании алгоритмов (7.23) и (7.24) возрастают вплоть до
срыва сопровождения. Алгоритм (7.22) реализует постоянную
ошибку сопровождения по углу, в то время как при использовании
(7.20) и (7.21) ошибки стремятся к нулю. Ошибка сопровождения
по угловой скорости для всех трех алгоритмов (7.20) - (7.22) мала.
Результаты моделирования работы этих алгоритмов в процес-
се изменения угла и угловой скорости, при движении цели по зако-
ну йц - const Ф 0, показаны на рис. 7.5, где различными номерами
обозначены ошибки для различных алгоритмов: I - соответствует
алгоритму (7.20); 2 - (7.21); 3 - (J.22\ 4 - (7.23); 5 - (7.24).
435
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При данных условиях ошибки сопровождения при использова-
нии алгоритмов (7.22)-(7.24) накапливаются очень быстро. Для ал-
горитмов (7.20) и (7.21) скорость накопления ошибок минимальна.
Этап 4. Проверена возможность сопровождения целей борто-
вой пеленг которых изменяется по синусоидальному закону, харак-
терному для гиперзвуковых летательных аппаратов. Результаты мо-
делирования приведены на рис. 7.6, где различными номерами обо-
значены ошибки сопровождения различных алгоритмов: 1 соответ-
ствует алгоритму (7.20); 2 - (7.21); 3 - (7.22); 4 - 5 - (7.24).
Рисунок 7.6
В реальных условиях большие ошибки сопровождения, которые
можно наблюдать на рис. 7.6, при использовании алгоритмов (7.22)-
(7.24) приведут к его срыву. Различие в точности сопровождения при
использовании групп алгоритмов (7.22)-(7.24) и (7.20) и (7.21) быстро
возрастает с увеличением постоянной времени угломера Т.
Предложенный алгоритм управления инерционными следящими сис-
темами позволяет эффективно сопровождать интенсивно маневри-
рующие цели, движущиеся по сложным законам, обеспечивая устой-
чивость и высокую точность сопровождения.
Для реализации полученного закона сопровождения в угломере
требуется оценивать пеленг цели, угол поворота антенны, угловую
436
ГЛАВА 7. АВТОМА1ИЧЕСКОЕ СОПРОВОЖДЕНИЕВОЗДУ ШНЫХЦЕЛЕЙ
скорость линии визирования, ее первую и вторую производные, что
позволяет скомпенсировать его инерционность.
Предложенный алгоритм управления инерционным приводом угло-
мера не накладывает принципиальных ограничений на возможность его
реализации.
7.2.1. Выбор и обоснование моделей
состояния и наблюдения
для синтеза комплексных оптимальных
радиолокационно-оптических измерителей
Принятие на вооружение ВВС самолетов, обладающих сверхма-
невренными свойствами [2], приводит к существенному возраста-
нию требований к устойчивости, точности и быстродействию ра-
диоэлектронных следящих систем, функционирующих в режиме
сопровождения как одной, так и нескольких целей.
Особенно высокие требования по этим показателям предъяв-
ляются к дальномерным и угломерным следящим устройствам, в
значительной степени влияющим на точность и устойчивость фор-
мирования сигналов управления летательным аппаратом [2, 8] и
команд целеуказания ракетам. В [9] проведен анализ необходимо-
сти и возможных путей интеграции бортовых радиолокационных и
оптических систем с целью качественного повышения показателей
эффективности бортовых следящих систем в составе авиационных
радиоэлектронных комплексов.
Необходимо отметить, что существующие одноконтурные
дальномеры и угломеры не удовлетворяют предъявляемым к ним
требованиям по быстродействию, точности и устойчивости сопро-
вождения интенсивно маневрирующих воздушных целей.
Использование интенсивных маневров приводит к появлению в отслеживаемых
координатах производных, порядок которых превышает порядок астатизма су-
ществующих следящих систем, что неизбежно вызывает увеличение динамиче-
ских ошибок, которое в итоге приводит к срыву сопровождения цели [8]. Наибо-
лее сильно эти недостатки проявляются в сложной помеховой обстановке.
437
РЛС АВИ. [ЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Одним из вариантов решения данной проблемы является пе-
реход к многоконтурным измерителям с использованием комплек-
сирования первичных датчиков и улучшения степени развязки чув-
ствительных элементов от угловых колебаний носителя.
Комплексирование первичных датчиков информации позволяет получить целый
ряд преимуществ по сравнению с системами, в которых комплексирование не
используется. К этим преимуществам, прежде всего, относятся повышение точ-
ности и устойчивости функционирования, улучшение помехозащищенности и
степени адаптации информационных систем к условиям применения, которая, в
частности, обеспечивается возможностью реализации на базе одной структуры
большого количества различных режимов их работы.
Одним из первых этапов разработки оптимальных многокон-
турных систем является определение их потенциальных возможно-
стей. Эта задача может быть решена в процессе исследования алго-
ритмов функционирования, полученных для условий полной апри-
орной определенности без учета каких-либо ограничений. Такие
алгоритмы, не соответствуя многим практическим задачам, вместе
с тем позволяют по результатам полученных потенциальных пока-
зателей определить целесообразность дальнейших разработок.
Решение задачи синтеза комплексного радиолокационно-
оптического измерителя в условиях полной априорной определенно-
сти может быть получено на основе математического аппарата ли-
нейной фильтрации Калмана. Этот аппарат позволяет для процесса
х(£) = Ф(кк - 1)х(/с -1) + (к -1) ,
при наличии измерений
z(fc) = H(fc)x(£)+ £„(*)
(7.25)
(7.26)
сформировать оптимальные по минимуму среднеквадратических
ошибок оценки по правилу [2]:
ЭД = х3(к) + Кф(к)[z(Ar) - Нхэ(£)], х0(0) = х0; (7.27)
х,(/с) = Ф(ЛЛ-1)х(А;-1);
Кф (к) = D3 (£)Н"' (A;)[H(Ar)D3 (£)Н* (к) + D„ (к)]~ ’; (7.29)
D(k) = [Е(А) - Кф (*)H(fc)]D3(к), D(0) = Do ; (7.30)
ОЭ(А) = Ф(А,А -1)О(/с-1)Фга(АЛ-1) + Ох(А--1). (7.31)
438
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
В соотношениях (7.25) - (7.31): х - ^-мерный вектор состоя-
ния в к -й и {к -1) -й моменты времени; Ф - переходная матрица; z
т-мерный (т < п) вектор измерений; Н - матрица связи векторов
х и z; £х, - центрированные векторы гауссовских возмущений
состояния и измерений с известными матрицами дисперсий Dv и
D„; х - вектор оптимальных оценок процесса х; х, - вектор экстра-
полированных оценок; Кф - матричный коэффициент усиления не-
вязки измерений (z - HxJ; D3 - матрица дисперсий ошибок экстра-
поляции; D - матрица ошибок фильтрации; Е - единичная матрица.
Для реализации выбранного метода синтеза комплексного из-
мерителя необходимо иметь модели отслеживаемого (7.25) и на-
блюдаемого (7.26) процессов.
Проведем обоснование состава и вида координат состояния
векторов х и z. В общем случае, все модели должны отражать су-
щественные связи оцениваемых процессов, что необходимо для
формирования достаточно точного прогноза в (7.28). Однако число
фазовых координат модели состояния должно быть по возможно-
сти небольшим, так как в противном случае вследствие «проклятия
размерности» [2] резко возрастает объем вычислений при форми-
ровании матрицы D(k) (6) и D3(k) (7.31). Кроме того, модели долж-
ны предусматривать возможность измерения фазовых координат, а
также удовлетворять критерию наблюдаемости.
Выбор и обоснование исходных моделей состояния и наблюдения, обеспечи-
вающих синтез алгоритмов функционирования радиолокационно-оптического
измерителя, является весьма ответственным этапом синтеза.
Выбор исходных моделей состояния выполняется на оснозе
анализа задач, решаемых измерителем. В составе бортовой РЛС
(БРЛС) и оптиколокационной системы (ОЛС) комплексный изме-
ритель должен осуществлять информационное обеспечение всех
методов наведения, используемых многофункциональных самоле-
тов в режимах перехвата воздушных целей, уничтожения наземных
объектов и выполнения маловысотного полета в процессе преодо-
ления объектовой ПВО, а также формировать команды целеуказа-
ния средствам поражения.
Анализ существующих и перспективных методов наведения и
состава команд целеуказаний [8], позволяет сделать вывод, что для
информационного обеспечения комплексный радиолокационно-
оптический измеритель должен, в общем случае, формировать
оценки дальностей, скоростей сближения, бортовых пеленгов и уг-
ловых скоростей линии визирования в плоскостях управления и
поперечных ускорений цели.
439
РЛС АВИАЦИОННО-КОСМИЧЕС KOI О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Допущения, при которых осуществляется
выбор требуемых моделей
В состав информационно-вычислительной системы самолета
входят импульсно-доплеровская РЛС с фазированной антенной
решеткой, оптико-локационная станция и система автономных дат-
чиков.
• Все информационные системы работают в режиме сопрово-
ждения одной цели.
• Задачи обнаружения целей и устранения неоднозначности
дальности и скорости решены одним из известных способов.
• Процедуры нормировки сигналов и уплотнения каналов ре-
шены в РЛС в процессе формирования выходных сигналов пе-
ленгаторов.
• РЛС формирует первичные однозначные измерения дальности,
скорости сближения и бортовых пеленгов в горизонтальной и
вертикальной плоскостях.
• ОЛС формирует первичные измерения дальности и бортовых
пеленгов в горизонтальной и вертикальной плоскостях.
• В системе автономных датчиков формируются измерения уг-
лов тангажа, курса и трех составляющих ускорений.
Геометрические соотношения между фазовыми координатами
для вертикальной плоскости показаны на рис. 7.7. На этом рисунке
в связанной системе координат XqOcYq точками Ос и Оц показаны
текущее положение самолета и цели; ОСХС - продольная ось само-
лета; - борговой пеленг цели; £ - тангаж самолета; а - угол
атаки; Vc - вектор собственной скорости; Гц - вектор скорости це-
ли; Д - дальность до цели; jUB - вектор бокового ускорения цели;
jCB - вектор бокового ускорения самолета.
С учетом сделанных допущений, модель состояния, учиты-
вающую связь абсолютных и относи тельных координат цели и са-
молета, можно представить в виде системы уравнений:
Д=Г Д(О) = До; (7.32)
Йр=47ц + 47с+(<Ур2в + 4Ур2г)д, К(О) = Го; (7.33)
47ц —44ц47ц + ^ц, 47ц (О) — 47ц0, (7.34)
= ^b(°Wbo; <7-35)
'“К 1
«в = —ч +—Оцв - Усв)> ч (°) = Чо; (7-36^
440
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
6^(0) 6*rQ,
(7.37)
(7.38)
(7.39)
(7.40)
где Д, V, KB=Ksini9, Vv - Kcos^cosT - дальность до цели, ско-
рость сближения с ней и составляющие скорости сближения в вер-
тикальной и горизонтальной плоскостях; ац и ас - проекции ускоре-
ний цели и самолета на линию визирования, где для ускорения цели
ац использована известная модель Зингера [9]; £в, и сов, сог - углы
визирования и угловые скорости в вертикальной и горизонтальной
плоскостях; 7цВ, jm и jCB,JCr - поперечное ускорение цели и самолета в
вертикальной и горизонтальной плоскостях; £,ц, ^цв, ^цг - гауссовское
возмущение с известной спектральной плотностью.
Рисунок 7.7
Комплексный следящий измеритель должен решать задачи не только форми-
рования оценок дальности, скорости сближения, углов, угловых скоростей и
ускорений, но обеспечивать стабилизацию луча ФАР и ПЛЭ при угловых коле-
баниях ЛА.
441
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
При этом для повышения точности стабилизации целесооб-
разно подавать в канал управления лучом антенны сигналы как по-
зиционной, так и скоростнойкоррекции. В связи с этим модели эво-
люций тангажа и курса (рис. 7.7) должны как минимум строиться
по гипотезе движений с постоянной зашумленной скоростью:
& = й)9, & (0)= & о; а>э = ^09 > “>9 (0)= “>9 и; (7-41)
»/ = ^,КОМЙ>Л=^,®г(о)=^о, (7.42)
где у/— курс (угол рыскания); со& и со^ - угловые скорости тангажа
и курса, и £ - центрированные гауссовские шумы с извест-
ными спектральными плотностями.
С учетом вышесказанного после перехода к дискретному
представлению система уравнений обобщенной модели состояния
принимает вид
Д(кДД(к-1)+ тУ(к-1), Д(О)=До; (7.43)
V(k)= У(к-1)+ таДк-1)+ таДк-1)+ тД(к-1)(а>1 {к-1) + (У2 (к-1)),
И(О)=Го;
сЦк)=( 1 -ац т)аи(к-1 )+^Дк-1), czu(O)=czuO;
£-„(Л)=£’в(^-1)+ таДк-\), fB(0)=fB0;
(7.44)
(7-45)
(7.46)
... . 2Кв(&)г
соДк) = 1----5--- а>(к-1) +
k Д(А-1)/
ьттгт;(7цВ(^-1)-лв(!-1)),
Ди-1)
^В(О) ^В0’
Уцв(^) (1 ^И^)/цв(^ 1)+ьЦВ(^ 1),Уцв(0) JubO.
ЕД^Дк-УД гаДк - 1). £’r(0)=£rt);
(Уг(£) = !-
2Кг(£-1)г
ж-l)
а\.(к-1) +
+ П(к Л Лг(^ 1)),
А И V
бУг (0)
(7.47)
(7.48)
(7.49)
(7.50)
Jur(^) (1 агг))цГ(Л 1)+^ 1),/цг(0) JurO?
(7.51)
19(^) = 19(Л-1)+т^(Л-1), .9(0)= Яи;
(7.52)
(* ) = Ю9 (к - 0 + ^со9 (к - 0 > Ю9 (°)= ^9 о;
(7.53)
^\i(.k') (к 1 )”^~^<ov (^ 1X ft\|.(0)
(7.55)
442
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Выбор и обоснование моделей наблюдения
Первичные измерители (формирователи наблюдаемого процесса) должны га-
рантировать формирование оптимальных оценок всех фазовых координат век-
тора состояния и выбираются исходя из возможности их практической реали-
зации с учетом выполнения условия наблюдаемости [2].
В соответствии с этим условием в каждой группе функционально
связанных координат состояния, как минимум, должны наблюдаться
нулевые производные. В импульсно-доплеровской БРЛС возможно
измерение дальности, скорости сближения и углов пеленга, в ОЛС из-
мерение дальности и углов визирования. Кроме того, не представляет
трудностей измерение собственных ускорений ac,/св и/сг.
С учетом специфики функционирования БРЛС, ОЛС и нави-
гационных датчиков, модель измерений может быть представлена в
виде системы уравнений:
ДДк)=Д(к)+^Ду, Ири(£)= Г(А)+ £ри(£);
£рви(^)“£в(^)+ ^£рви(^-) , £рги(^)— ^г(^)+ ^грги(^) ,
Дои(*)=да+4доИда;
^ови(^) ^в(^)^~^£ОВи(^), ^Ьги(^)-^г(^)^ ^еоги(^),
& и(к)= & (к)+^и(к); Vh(^)=vW+^h(^);
^си(^)~^с(^)н^^аси(^'), Усви(^)Дсв(^) ‘эсви(^),
j сги (^)—j сг W4" ^сги(^) ,
(7.56)
(7.57)
(7.58)
(7.59)
(7.60)
(7.61)
где Дри и Кри - отсчеты дальности и скорости сближения, форми-
руемые в БРЛС; £рви и £рги - цифровые отсчеты углов визирования;
Дои, £Ьви И £Оги - цифровые отсчеты дальности до цели и углов визи-
рования, определяемые в ОЛС; i9„. и аСи, Ави, Усги - отмасштаби-
рованные к соответствующим координатам цифровые отсчеты тан-
гажа, курса и акселерометров, формирующих напряжения, пропор-
циональные продольному и поперечному ускорениям; £дри, £VII, £ЕВИ,
гти,
>8ОВИ,
^гоги, ^Эи, 4уи, ^аси, <зсви, ^сги ЦвНТрирОВаННЫв ДИС-
кретные белые шумы измерений с известными дисперсиями £>дри,
D
D
ури.
грви,
срги,
дои.
гови,
ЕОГИ,
аси,
сви,
сги
Как показали предварительно проведенные исследования, оценивание собст-
венных ускорений (7.61) самолета (ас, jCB, jcr) в отдельных фильтрах не приво-
дит к существенному повышению точности, поскольку современные акселеро-
метры производят, наряду с измерением, оценку соответствующих ускорений.
Соответственно, данные оценки будут использоваться в виде управляющих
сигналов, а (7.5б)-(7.б0) используются как наблюдения при формировании
невязок измерений.
Анализ моделей (7.43)-(7.55) свидетельствует о наличии
внутренних детерминированных связей состояния, предопреде-
443
РЛС АВИАЦИОННО КОСМИЧЕСКО10 МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ляющих взаимное влияние каналов дальности и скорости (7.43)-
(7.45) и углов (7.43)-(7.45) каналов. Влияние углов на дальность и
скорость определяется наличием в модели скорости (7.44) слагае-
мого Дт{ со^ + ). В свою очередь, влияние дальности и скорости
на углы обусловлено зависимостью угловых скоростей (7.47) и
(7.50) от дальности и скорости сближения.
Поставив в соответствие (7.43)-(7.55) с (7.25), а (7.56)-(7.59) с
(7.26), получим:
1 г 0 0
1 г 0
I о J /
0 0 1-«цг 0
0 0 0 1
0 000
О ООО
0 000
0 000
0 000
0 000
0 000
0 000
0 000
0 00 О 00000
0 00 О 00000
0 00 О 00000
т 00 О 00000
2V т т
1—~Е~ — 0 0 0 0000
О 1-авт О О 0 0 0 0 0
о 0 1 г о о о о о ;
2Vr т
0 0 0 1—-Л- -Г 0 0 0 0
0 0 0 0 1-агт 0 0 0 0
0 00 0 0 1 г о о
О 00 0 00100
О 00 0 0001т
О 00 0 0000 1
(7.62)
1 0 0 0 0 0 0 0
0 10 0 0
Н= 1 0 0 0 0
0 0 0 10
0 0 0 0 0
0 0 0 0 0
ООО
ООО
О 1 о
ООО
ООО
О 1 о
ООО
ООО
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 10 0 0
0 0 0 1 0
(7.63)
0 0 0 1 0
0 0 0 0 0
0 0 0 0 0
444
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
00000 0 00 0 000 0
00000 0 00 0 000 0
О 0 £>ац О О 0 00 о о о о о
00000 0 00 0 000 0
00000 0 00 0 000 0
о о
о о
о о
о о
о о
о о
ООО
Dx= О
О О Z), „„ о о
J Цв
0 0 0 0 0
0 0 0 0 0
(7.64)
о
о
о
о
о
о
о
о
00 0 00 О О 0 Dj цг о о о о
00000 0 00 0 000 0
00000 0 00 0 0 DaS о о
00000 0 00 0 000 0
00000 0 00 О ООО Dav
£> 00 000 000
дри
О О ООО 000
О 0 DFnm ООО 000
с* UnH
ООО £> , 0 0 0 0 0
opl И
О О О 0 £> О 0 00
ДОИ
0 0 0 0 0 ООО
ООО 000 DFnm О О
00 О О О О 0 Dq„ О
ООО 000 О О Г) „
L/ И
(7.65)
Проверка моделей состояния и измерений с использованием (7.62),
(7.63) на выполнение условия наблюдаемости [2] показала, что при
использовании измерений (7.56)-(7.59) можно получить оценки всех
требуемых фазовых координат.
Полученные модели, достаточно полно учитывающие внутренние
связи оцениваемых процессов и специфику их измерений, будут исполь-
зованы в качестве базовых в процессе синтеза и анализа радиолокаци-
онно-оптических систем различного назначения.
445
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
7 .2.2. Радиолокационно-оптический дальномер
с текущей коррекцией прогноза состояния
неодновременно приходящими измерениями
Одним из наиболее рациональных способов комплексирования ин-
формации в бортовых информационно-управляющих системах воз-
душного базирования является совместная обработка сигналов, по-
ступающих от РЛС и оптиколокационной системы. Необходимо
отметить, что одним из неудобств такого комплексирования явля-
ется неодновременность поступления первичных измерений от
РЛС и ОЛС, обусловленная различными временными интервалами
обращения к лоцируемому объекту.
Эта особенность делает весьма затруднительным использова-
ние классических алгоритмов фильтрации [7], основанных на кор-
рекции прогноза состояния одновременно всеми измерениями [10].
Наиболее простые способы устранения этого недостатка
• Способ, основанный на прогнозе измерений на фиксирован-
ные, периодически повторяющиеся моменты времени, в кото-
рые и выполняется коррекция прогноза состояния.
• Способ, основанный на текущей коррекции прогноза состоя-
ния каждым поступившим измерением [6].
Ниже на основе общей модели состояния (7.43)-(7.55) и изме-
рений (7.56)—(7.61) рассмотрены алгоритмы оценивания дальности,
скорости сближения и радиального ускорения с текущей коррекци-
ей прогноза состояния по измерениям, поступающим от РЛС и
ОЛС в различные моменты времени.
Условия, при которых выполняется рассмотрение этой задачи
на основе предложенной методики [6]
• Измерители (РЛС и ОЛС) базируются на подвижном носителе.
• Импульсно-доплеровская РЛС измеряет дальность до подвиж-
ной цели и скорость сближения с ней:
Дрлс (к) = Д(к)+
‘эДРЛС ю
Ррлс ^УРЛС (О
(7.66)
с периодом обращения к цели ГРЛС, а лазерный дальномер, входя-
щий в состав ОЛС, измеряет дальность
Доле (Л) ~ Д(^)+ £долс (^)
с периодом обращения к цели Голс Ф Т}
(7.67)
рдс
446
I
ГЛАВА 7. АВТОМА ТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Для прогноза в комплексном фильтре используется гипотеза
равноускоренного движения
Ж) = Д(^-1) + Г(А:-1)г + 0,5-аа-1)-г2,
Г(£) = Г(£-1) + а(/с-1)г,
a(fc-l) = a(£-l) + £(i-l),
Д(0) = До,
Г(О) = Ко, (7.68)
<7(О) = ао.
В соотношениях (7.66) - (7.68): Д, V, а - соответственно
дальность до цели, скорость сближения с ней и радиальное ускоре-
ние; т - интервал дискретизации, используемый для прогноза со-
стояния по модели (3), удовлетворяющий условию
?РЛС’ Г<<^ОЭС’
(7.69)
Дрлс , ^рлс и Доле _ результаты однозначных измерении дально-
сти и скорости в РЛС и измерений дальности в ОЭС; £дрдс> ^урлс
и £долс ~ центрированные гауссовские шумы измерений в РЛС и
ОЛС с известными дисперсиями £>дрдо ^урлс и ^долс» ча “
центрированный гауссовский шум возмущения состояния с извест-
ной дисперсией D,x.
При этом в рамках условия (7.69) допускаются любые соот-
ношения между Голс и Трлс ’ в том числе и периодически обеспе-
чивающие одновременное поступление измерений (7.66) и (7.67).
В математическом плане задача фильтрации формулируется
следующим образом.
По модели состояния (7.68) при наличии измерений (7.66).
(7.67) с матрицей их признаков
О
О
О
Q33
(7.70)
необходимо сформировать оценки дальности Д, скорости сближе-
ния V и радиального ускорения а на основе алгоритма (7.27)
(7.29) при условии, что признаки Qn =1 и Q22 =1 при поступле-
нии измерений от РЛС и Qu = 0, Q22 “0 при их отсутствии. В
свою очередь, (?зз ~ 1 и (2зз = ® соответственно при поступлении
измерений от ОЛС и их отсутствии.
447
РЛС АВИАЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Поставив (7.66)-(7.70) в соответствие общим векторно-
матричным представлением (7.25)-(7.31), получим:
0
0
0
0
0
0
0
0
О
Рдолс
(7.71)
Аз
Аз
Аз
Ai
Ai
Аг к]3
Аг Аз ’
Аг Аз
где матрицы D и D3 введены в общем виде:
А1 = Ai/Адрлс ’ Аг ~ Аг/Арлс > Аз “ Аз/Ацолс >
Ai = Ai/Адрлс ’ Аг = Аг/Арлс ’ Аз ~ Аз/Аолс >(7.72)
А1 ~ Ai/Адрлс ’ Аг ~ Аг/Арлс ’ Аз ~ Аз/Адолс ’
a Dzy (/ = 2, 3;у = 2, 3) вычисляются в процессе решения уравнений
(7.30), (7.31).
Тогда:
А Лрлс
Аг ‘ Алс ’
Аз * Доле
(7.73)
АгДрлс(^) бц’Дэ(^)
Az(Zr) =
Аг 'Але (k)-Q22-V3(k)
взз'Доэс(к) Q22^3(k)
^(к)
^з(к)
(7-74)
448
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Д(к) = Дэ(к)+К, ,(A)Az, (к)+K12(A)Az2(fe)+K13(A)Az3(A),
Д(О) = М{До},
V(k) = Уэ (к) 4 К2, (к)Az, (к)+К22 (A) Az2 (к) + К23 (k)bz3 (к\
(7-75)
K(O) = M{Vo},
а(к) - аэ (к) + К3, (А ) Az, (к) + К32 (k)&z2 (А) + К33 (k)te3 (А),
а(О) = Л/{ао},
ДЭ(А) = Д(А-1) + И(А-1)-г + 0,5-а(А-1)-г2,
Кэ(А) = Г(А-1) + а(А-1)-г,
(7-76)
^э(^) = “ О,
где М{Д0} , Л/{И0} и М|б70} - математическое ожидание на-
чальных условий (3).
Схема, иллюстрирующая функционирование алгоритма
(7.73)-(7.76), приведена на рис. 7.8.
Полученная схема отличается от типовой [7] только наличием
признаков измерении Qd . Следует, однако, отметить, что в зависи-
мости от времени прихода измерений алгоритмы оценивания даль-
ности, скорости и ускорения, соответственно и структура фильтра,
могут значительно изменяться.
Так, например, при одновременном поступлении измерений от
РЛС (Дрлс, ^рлс) и от ОЛС (Доле)’ К0ГДа Qn~ 1> и
2зз = 1 ’ результаты экстраполяции (7.76) одновременно корректиру-
ются тремя невязками Azl, Az2 и Az3 (7.74). а алгоритм оценивания
соответствует классической процедуре калмановской фильтрации [7].
Если измерения от РЛС и ОЛС приходят в различное время,
то на момент прихода измерении от РЛС признаки измерений при-
нимают значения Qx} = 1, Q12 - 1, 2зз = 0 и матрица Qz принима-
ет вид
449
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
1 О
z(A) - О 1
О Дрлс(^)
О ^лс(^)
ДрЛС<Л)
О О
О ,7Оэс(^
О
Дрлс(^) Дэ(^)
(7.77)
Az(A)= КРЛС(А:)-ГЭ(А)
а матрица коэффициентов усиления по-прежнему определяется со-
отношением (7.72). С учетом (7.72) и (7.77), ангоригм фильтрации
бу де! определяться рекуррентными уравнениями:
450
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Д(к) = Дэ (к) + К{, (к)Az, (к) + Кх 2 (fc)Az2 (к), Д(0) = М (До };
V(k) = V3(k) + Ku(k)^{k) + K22(k)te2(k), V(0) = M{Vo}-, (1.18)
а(к) = аэ(к) + + K32(k)kz2(k) , 5(0) = ТИ{<70} ,
которые отличаются от (7.75) отсутствием коррекции прогноза
(7.76) по измерениям Д(УЭС (7.67). Схема такого фильтра следует
из общей схемы, приведенной на рис. 7.8, при условии, что Qu = 1,
022 ” 1 ’ а 033 “ 0 •
На момент прихода измерений только от ОЭС: (Эц-0,
022 ~ 0, 0зз = 1, а
ООО
Qz = 0 0 0
0 0 I
(7.79)
а оценки формируются по правилу
Д{к) = Дэ{к) + К}Дк^Дк},
Д(О) = ЛЦДо};
Лк) = Гэ(/с) + К2Дк)^Дк), Г(0) = М{Ц};
а(к) = аэ(к) + A?33(Zr)Az3(A) , 5(0) = Л/{я0} ,
(7.80)
в котором экстраполяция состояния выполняется в соответствии с
гипотезой равноускоренного движения (7.76).
Схема алгоритма (7.76), (7.80) может быть получена как част-
ный случай схемы, приведенной на рис. 7.8, при условии, что
0ц = 0 , 022 — 0, а 2зз = 1 •
451
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНО! О ПРОСТРАНСТВА
Достоинства рассмотренного способа оценивания с текущей
коррекцией прогноза состояния
• Способность функционировать при любом сочетании времени
прихода измерений.
• Если измерения от РЛС и ОЭС приходят одновременно, то
оценки формируются по алгоритму (7.75), (7.76); при отсутст-
вии сигналов от ОЭС и наличии сигналов от РЛС - по алго-
ритму (7.76) - (7.78). а при поступлении измерений только от
ОЭС - по алгоритму (7.76), (7.78).
Эта особенность обеспечивает устойчивое формирование оценок и при пропа-
дании сигналов от одного из измерителей.
Инвариантность процедуры вычисления коэффициентов усиления не-
вязок ко времени прихода измерений.
Возможность их использования при автоматическом сопровождении
целей в режиме обзора [8, 12] при наличии соответствующих процедур
идентификации измерений, приходящих от различных целей.
7.2.3. Исследование эффективности
функционирования
радиолокационно-оптического дальномера
с текущей коррекцией прогноза
Рассмотрим результаты исследования эффективности алгоритмов
сопровождения воздушных целей радиолокационно-оптическим
дальномером с текущей коррекцией прогноза по неодновременно
приходящим измерениям, определяемых соотношениями (7.75),
(7.76), (7.78} и (7.80). Исследования проводились на этапах экстра-
поляции и фильтрации при неодновременном приходе измерений
бортовой радиолокационной станции и оптиколокационной систе-
мы. Эффективность алгоритмов определялась:
• по показателям потенциальной и реальной точности оценива-
ния координат состояния;
• по быстродействию функционирования разработанных алго-
ритмов.
В качестве оценки потенциальной точности использовались
среднеквадратические ошибки сгПд, crnvonA, определяемые уравне-
ниями Риккати (7.30), (7.31), при использовании в них векторно-
матричного представления (7.71).
452
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Для оценки реальной точности использовались среднеквадра-
тические ошибки <уд, <Уу оценивания дальности Д до цели искорости
сближения V с ней, рассчитываемые по классической формуле
(x,-(fr)-X,(£))2
2V-1
(7-81)
где xz- и xi - реальное значение и оценка i - фазовой координаты
(z =Д, V, а) на к-м шаге; J - число реализаций; N- число отсчетов.
Под быстродействием функционирования разработанных ал-
горитмов понималось время отработки начальных ошибок оцени-
вания (захвата).
Исследования проводились в несколько этапов путем имита-
ционного моделирования траекторий целей (7.68), результатов из-
мерений (7.66), (7.67) и алгоритмов аналого-дискретного оценива-
ния (7.75), (7.76), (7.78) и (7.78) при следующих условиях:
• объектом сопровождения является маневрирующая цель;
• такт счета равен т= 0,005 с;
• период обращения к цели БРЛС составляет 7рлс=О,О5 с;
• период обращения к цели ОЛС составляет 7бэс=0,01 с;
• диапазон изменения дальностей 0 < Д < 50 км;
• используются измерители с ошибками сгд РЛс, Пу рлс и ад олс;
• имеют место начальные ошибки захвата цели по дальности ДД0
и по скорости ДКо.
Этап 7. Исследовалась потенциальная точность формирова-
ния оценок дальности, скорости и ускорения сближения.
На рис. 7.9 для этого варианта настройки фильтра приведены
зависимости относительных СКО потенциальных ошибок оценива-
ния дальности сгпд/сгпдо, скорости сближения сгцу/crnvo и относи-
тельного ускорения Опа/сИтао-
СКО фильтрации всех исследуемых параметров сходятся от своих первона-
чальных ошибок к значительно меньшим в установившемся режиме. Сходи-
мость дисперсий позволяет сделать предположение о том, что синтезирован-
ный комплексный радиолокационно-оптический измеритель будет устойчиво
формировать оценки фильтруемых координат.
Этап 2. Исследовалась реальная точность оценивания фазо-
вых координат с текущей коррекцией прогноза по неодновременно
приходящим измерениям, рассчитываемая по правилу (7.81).
На рис. 7.10 показана реализация изменения дальности до це-
ли, скорости сближения с ней, относительного ускорения (сплош-
ная линия) и их оценки (пунктирная линия).
453
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
а)
б)
в)
Рисунок 7.9
Рисунок 7.10
454
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
о)
Рисунок 7.11
455
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 7.11 показана зависимость относительных СКО реаль-
ных ошибок оценивания дальности Од'Одо, скорости сближения
сгу/сгуо и относительного ускорения <тА/сгАо.
Синтезированный фильтр устойчиво формирует оценки всех координат, а СКО
реальных ошибок оценивания сходятся от своих максимальных значений к ми-
нимальным.
Этап 3. Исследовалась эффективность функционирования ал-
горитма фильтрации при отработке начальных ошибок захвата.
При этом полагалось, что начальные ошибки не согласованы меж-
ду собой и составляют: по дальности ДДо = ±50 м, по скорости -
ДРо= ±10 м/с и по ускорению - Дяо = ±5 м/с2.
На рис. 7.12 представлены зависимости ошибок оценивания
по дальности ДД, по скорости ДР и по ускорению Дя при условии,
что все возмущения отсутствуют.
Ошибки захвата уверенно устраняются во всем возможном диапазоне их зна-
чений при любом сочетании по знаку. Динамические ошибки в установившемся
режиме при этом практически равны нулю. При несогласованных начальных
условиях время регулирования не превышает 15 с.
Этап 4. Проведено сравнение по точности предложенного алго-
ритма фильтрации с двумя алгоритмами фильтрации при одновремен-
ном приходе измерений для разного времени обращения к цели.
Рисунок 7.13
456
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
На рис. 7.13 показана зависимость относительных СКО реаль-
ных ошибок оценивания дальности (Уд/стдо, скорости сближения
oy/ovo и относительного ускорения сга/&ао для предложенного алго-
ритма (№ /) и для вариантов фильтрации при одновременном при-
ходе измерений с периодом Т\ = 0,01 с (№ 2) и = 0,05 с (№ 3).
Точность разработанного алгоритма несколько ниже, чем точность при одновре-
менном приходе измерений с периодом Ti = 0,01 с, что объясняется более частой
коррекцией прогноза измерения от РЛС и ОЛС, но выше, чем точность фильтра с
периодом обращения Т2 = 0,05 с, обусловленная использованием коррекции про-
гноза измерения от ОЛС между редкими приходами измерений от РЛС.
Предложенный алгоритм функционирования радиолокационно-
оптического дальномера с текущей коррекцией прогноза по неодно-
временно приходящим измерениям позволяет устойчиво и с высокой
точностью сопровождать воздушные цели при любом сочетании вре-
мени прихода измерений от РЛС и ОЭС.
Преимуществом рассмотренных алгоритмов является возможность
их использования при автоматическом сопровождении целей в режиме
обзора [8, 12] при наличии соответствующих процедур идентификации
измерений, приходящих от различных целей.
Одним из основных режимов работы существующих и перспектив-
ных РЛС кругового обзора является автоматическое сопровожде-
ние целей при сохранении обзора. В случае, когда круговой обзор
достигается при помощи механического сканирования, длительный
интервал между приходом измерений приводит к существенно воз-
растанию погрешностей или даже срыву сопровождения.
Одним из способов уменьшения интервала прихода измерений для РЛС с механи-
ческим сканированием является использование двух антенных полотен, обращен-
ных в противоположные стороны [11]. В этом случае целесообразно использовать
антенны разных диапазонов, что существенно повышает помехозащищенность
РЛС и, потенциально, точность системы в целом.
457
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТ И И ВОЗДУШНОГО ПРОСТРАНСТВА
Такой подход требует усложнения алгоритмов обработки, по-
скольку необходимо использовать отождествление сигналов, полу-
чаемых от цели в разных диапазонах, и алгоритмы их комплекси-
рования. Следует, отметить, что существующие алгоритмы ком-
плексирования [12], основанные на оптимальном оценивании,
рассчитаны на обработку одновременно поступающих измерении.
Кроме того, типовые алгоритмы фильтрации обеспечивают
формирование оптимальных оценок только на моменты прихода
измерений, интервал между которыми при круговом обзоре дости-
гает десятков секунд, что приводит к достаточно редкой передаче
результатов оценивания потребителям. В то же время для решения
задач управления и формирования команд целеуказаний эта ин-
формация должна поступать непрерывно.
Необходимо иметь новые алгоритмы оценки фазовых координат относительно-
го и абсолютного движения всех целей, обеспечивающих непрерывную выдачу
информации потребителям при достаточно редком (дискретном) и неодновре-
менном поступлении двухдиапазонных сигналов, отраженных от каждой цели.
В такой ситуации текущие оценки требуемых фазовых координат в промежут-
ках между поступлениями отраженных сигналов формируются на основе тех
или иных процедур экстраполяции (прогноза) с малым интервалом дискрети-
зации, а накапливающиеся ошибки корректируются дискретно поступающими
измерениями.
Для решения этой задачи целесообразно использовать алго-
ритмы аналого-дискретной фильтрации (АДФ) [7, 13]. Следует
подчеркнуть, что применение классических алгоритмов АДФ | И],
показатели точности и устойчивости которых существенно зависят
от соответствия условий функционирования моделям, положенным
в основу их синтеза, не всегда обеспечивает требуемую точност ь и
устойчивость при многоцелевом сопровождении. Высокая степень
неопределенности пространственных перемещений воздушных
объектов приводит к снижению точности или к срыву сопровожде-
ния из-за расхождения процессов фильтрации.
Рациональным выходом из этой ситуации является использование алгоритмов
адаптивной аналого-дискретной фильтрации, в которых, в зависимости от си-
туации, автоматически изменяются параметры или структура фильтров. При
этом наиболее часто используется адаптивная коррекция прогноза или коррек-
ция коэффициента усиления невязки.
В общем случае, алгоритмы адаптивной аналого-дискретной
фильтрации 13 позволяют для процессов
х(Л) = фЦЛ-1)х(А -!) + £,.(£-1),
(7.82)
при наличии наблюдений
458
ГЛАВА 7. АВТОМА ТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
z(£) = Qz[H(A)x(A)+ £„(*)],
[Е при к - пТ / г, п = 1,2,3,...,
QzU) = s
[О при £ =£ яГ/т,
сформировать оценки
х(А) = хэ(А) + Кфа(/с)Дг(А), х(А)-х0;
Az(£) = z(k- l)-QzH(£)x3(£);
хэ (£) - Ф(к,к - 1)х(& -1) + иГ1;
[fn(Az(Zr)) при/с=??7/т,
<
О при кФпТ / г,
О, если коррекция прогноза
не используется,
(7.83)
(7.84)
(7.85)
(7.86)
K(1)a(^) = Q,(A-)D(^)Hr(^)Du,(A-);
(7.87)
[f (Az(£)) при к -пТ / г,
[Е при кФ пТ! т,
Е, если коррекция коэффициентов
усиления не используется,
J[e-k^)H(*)] 1Ш-1),
1Дл) — S
|р(£Л-1)
D(O)=Do приА=л77г,
приЛтьнТ/ г,
(7.88)
D(A,A —1) = Ф(А,А—1)D(A —1)ф(А,А-1) + Da.(A —1), (7.89)
где Ф(А,А-1) - переходная (фундаментальная) матрица; Н(А)
матрица измерений; и - возмущения состояния и измерений
соответственно; Qz - матрица признаков прихода измерений на
к -м шаге; ип - аддитивная добавка, используемая при коррекции
прогноза, величина которого определяется по результатам анализа
невязки fn(Az(Zr)); D(Zr) и D(/c,/< l) - матрицы апостериорных и
априорных ошибок фильтрации; Qr - матрица весовых множите-
лей, используемый при автоматической коррекции коэффициента
усиления невязки по результатам fv(Az(Zr)) ее анализа.
459
РЛС АВИАЦИОННО-КОСМИЧЕ(. KOI О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Актуальной является задача синтеза алгоритмов комплексной (совместной)
фильтрации измерений, неодновременно приходящих от двухдиапазонной (с
антеннами Р- и S-диапазонов) импульсно-доплеровской РЛС с большими ин-
тервалами, и формирования общего текущего прогноза для дальномерного ка-
нала с использованием адаптивной аналого-дискретной фильтрации.
Допущения, сделанные при синтезе алгоритма оценивания
• Измерения дальности до цели и скорости сближения с нею от
разных диапазонов приходят поочередно и равноточны, т.е.
отпичаются по точности не более трех раз.
• Синтез алгоритмов фильтрации производится отдельно для ка-
нала измерений дальности и канала измерений скорости сбли-
жения, что позволяет увеличить помехоустойчивость.
• РЛС работает в режиме многоцелевого сопровождения с адап-
тивной фиты рацией на базе одр -фильтра с коррекцией коэф-
фициентов усиления невязок.
Отождествление измерений осуществляется по известным пра-
вилам [12].
Самолет-носитель РЛС и цель находятся в одной плоскости.
Дискретные уравнения, описывающие изменение дальности
от самолета-носителя до цели и скорости ее изменения, выглядят
следующим образом:
• для канала измерений дальности
Д(к) = Д(А-1) + Д(к-\)т,
Д(к) = Д(к-\) + Дт,
которым соответствуют измерения
ди(А-) = Ж)+^Ди;
для канала измерения скорости сближения
Г(£) = Г(£-1) + я(£-1)т,
а(к) = а(к -1) + £ат.
(7.90)
(7.91)
(7.92)
(7.93)
Сопоставив (7.90). (7.91) с (7.82) - (7.87) и с учетом использо-
вания одр -фильтра, получим исходные векторно-матричные пред-
ставления для адаптивной аналого-дискретной фильтрации для ка-
нала дальности:
Ф(М-1) =
1
о
т
460
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Н(£) = [1
0], $и(*ЫдИ
(7.94)
Az (Л) = М = Д, (к -1) - Qz Ди (к),
ип(Л:) = О.
(7.95)
Проведенные исследования показали, что алгоритмы калма-
новской фильтрации устойчиво формируют оптимальные оценки
только при условии, что интервал прихода измерений не превыша-
ет 3 с. Используя упрощенный вариант адаптивной оцр -фильт-
рации, получаем:
Д(к) = ДДк) + аДк)ДД(к\
Д(к')~ Д(к-1) + —Х-—ДЦ(к ')
ДДк) = Д(к-1) + Д(к-Г)т
' КД\к}-Р^
ЬД2(М
5
•>
аД0
(7.96)
(7.97)
(7.98)
(7.99)
(7.100)
Аналогично, для канала измерений скорости сближения полу-
чаем:
Н(£) =
0], $и(к) = <^,
Ф(£Л-1)
Дг(к) = ДГн=ГДк-1)-вХи(к),
ип(к) = О,
(7.101)
(7.102)
Гц(£) = Кцэ(£) + М*Жц(*)>
а^к) = а^к-\) + &^-ДУДк\
т
УДк}ДДк-\} + аДк-\уг,
АИц2(£)-ДГи
av(к)=<
рдк) = Wro
Cfj/Q
?
ДГЦ(£) > АГк0
(7.103)
(7.104)
(7.105)
(7.106)
(7.107)
461
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНСХ ПИ И ВОЗДУШНОГО ПРОСТР. 1НСГВА
Отличие полученных алгоритмов адаптивной аналого-дискретной фильтрации от
классической а^/3 -фильтрации состоит в том, что экстраполяция (7.98), (7.105)
выполняется с малым интервалом т, а коррекция оценок (7.96), (7.103) - с
большим интервалом Т » т.
При этом изменение значений коэффициентов усиления невязки, несмотря на не-
которое снижение точности по сравнению с теоретической, обеспечивает адапта-
цию фильтров к изменяющимся условиям функционирования и формирование
сходящихся оценок.
Для полученной системы путем имитационного моделирова-
ния была проведена оценка эффективности, в качестве показателя
которой было взято математическое ожидание погрешности оцени-
вания координат в текущий момент времени.
Поскольку предварительная оценка эффективности при моде-
лировании с использованием заложенных в фильтрах моделей со-
стояния и измерений (7.90), (7.91) и (7.92), (7.93) показала доста-
точную точность полученных алгоритмов, было проведено допол-
нительное моделирование на основе следующих моделей движения
самолета-носителя
хс (£) = хс (к -1) + Vc (к -1) sin у/с (к - 1)г,
УС(Ю = У<Зк -1) + ГУ ~ l)eos^c(Z: - 1)г,
J/(7c) = rc(A-I) + aca-l)7,
ac(k'} = ac(k:-1) + £г,
и цели
ХД) = x3k -1) + - l)sint/Mk - 1)г,
УП(М = у^к -1) + Иц(к - l)cos^ua - Dr,
Иц^) = Иц(Л-0 + «ц(А-Пг,
^33 (3 1)4 <^ЦГ,
(7.108)
(7.109)
где хс, ус, х, v — координаты самолета-носителя и цели в не-
подвижной декартовой системе координат соответственно; Vc, ,
а., аи, 5/с и 5/ц - их скорость, продольное ускорение и курс; «5С,
— возмущение движения.
Этим моделям соответствуют следующие измерения:
Ди (О = \V'u - хс )2 + (Уц - Ус )2 + £ди (7Л 1 °)
Ии (к) - cos(£ - </ц) - Ис cos(£ - ) + £Ги. (7.111)
462
ГЛАВА 7 АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
На рис. 7.14-7.20 приведены результаты одного из наборов
численных экспериментов, соответствующего следующим началь-
ным условиям: скорость носителя РЛС - 200 м/с, цели - 300 м7с,
расстояние между носителем и целью в начальный момент времени
-100 км. Исследовался наихудший вариант с движением цели по
криволинейной траектории при разноточных измерениях, средне-
квадратичное отклонение погрешностей которых для диапазона 2
было в три раза больше СКО для диапазона 1: сг2 / сг{ = 3 .
463
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 7.14 приведена относительная траектория цели с борта
носителя в плоскости XOY, а на рис. 7.15 и 7.16 - дальность до це-
ли и скорость сближения с ней.
На рис. 7.17 приведены графики погрешности оценивания
дальности для дальномерного канала, а на рис. 7.18 - графики по-
грешности оценивания скорости сближения для канала измерений
скорости при помощи классической а,р-фильтрации [13] отдельно
для каналов диапазона 1 (штриховая линия) и 2 (штрих-пунктирная
линия) при условии, что измерения по каждому каналу приходят
одновременно.
Рисунок 7.17
464
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Рисунок 7.18
Рисунок 7.19
465
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На рис. 7.19 представлены графики погрешности оценивания
дальности для разных вариантов алгоритмов оценивания: предлагае-
мого (сплошная линия) при помощи оценок (7.96) - (7.98) и при по-
мощи классической а,[3-фильтрации отдельно для каналов диапазона 1
(штриховая линия) и 2 (штрих-пунктирная линия), при этом для клас-
сической а,[3-фильтрации измерения приходя г с интервалом Т между
разными диапазонами.
На рис. 7.20 представлены результаты моделирования оценива-
ния скорости сближения по формуле (7.103) - (7.105).
Предлагаемый алгоритм позволяет существенно (в несколько раз) по-
высить точность слежения за маневрирующей целью по сравнению с
использованием независимой фильтрации с периодом 2Т.
За счет более частой коррекции, СКО алгоритма комплексной обра-
ботки, характеризующее «однородность» оценивания, несколько мень-
ше (5...10 %), чем СКО оценивания любого канала в отдельности, даже
при неравноточных измерениях.
466
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
7.4.1. Алгоритмы автоматического
сопровождения целей в режиме обзора
с адаптивной коррекцией прогноза
и бесстробовой идентификацией
радиолокационных измерений
Автоматическое сопровождение целей в режиме обзора является
одним из основных режимов работы современных РЛС. Под АСЦ-
РО понимается процесс непрерывного формирования оценок отно-
сительных и абсолютных фазовых координат целей при достаточно
редком (дискретном) поступлении от них отраженных сигналов
[8]. Решение этой задачи осуществляется в несколько этапов,
включающих формирование первичных измерений, завязку траек-
торий, экстраполяцию координат состояния (траекторий) в проме-
жутках между поступлениями отраженных сигналов, идентифика-
цию полученных измерений на их принадлежность к той или иной
из сопровождаемых траекторий, коррекцию (фильтрацию) опреде-
ленной траектории, по результатам идентифицированных измере-
ний, ранжирование целей по степени их важности (опасности) и
сброс сопровождаемых траектории.
Следует отметить, что каждый этап может выполняться раз-
личными способами [1, 8, 12], обеспечивающими различную эф-
фективность режима в целом. Наибольшее распространение полу-
чили алгоритмы с экстраполяцией по гипотезе движения с посто-
янной скоростью, идентификацией в стробах отождествления и
а,/3-фильтрацией [], 2, 4, 6].
Расширение номенклатуры сверхманевренных самолетов [2], интенсивное
развитие групповых действий с использованием большого количества самоле-
тов в сложных быстроизменяющихся условиях применения потребовало раз-
работки более совершенных разновидностей АСЦРО, основанных на использо-
вании более сложных моделей движения, бесстробовых методов идентифика-
ции более сложных алгоритмов адаптивной фильтрации.
Некоторые варианты таких алгоритмов АСЦРО приведены в
[8, 12].
Рассмотрим еще один вариант алгоритмов АСЦРО, в котором
органично сочетаются высокая точность оценивания координат при
467
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
сопровождении маневрирующих целей и высокая разрешающая
способность, дающая возможность достоверно сопровождать близ-
ко расположенные цели при весьма незначительной потребной
производительности бортовой вычислительной системы.
Для решения этой задачи целесообразно использовать алго-
ритм адаптивной аналого-дискретной фильтрации [ 10] с коррекци-
ей прогноза, который позволяет для процесса
х(Л) = Ф(Л, k-l)x(k-V) + $x(k)
по идентифицированным измерениям
z(£) = 0(£)[W)x(£) + 4(/c)],
где
1, к= —, z = 0,1,2,3,...
т
0, кД—, z-0,1,2,3,...,
I Т
сформировать оценки по правилу:
х(А) = х,(£) + Кф(/с)Аг(7с); х(0) = хо;
хэ(А) = Ф(/с, к - 1)х(& -1) + и(к);
Az(A:)-az(^-HWx3W];
Кф(А-) = О(Л)Нт(/с)Ви'(/с);
[Е-КФ(А-)ВД]О(£, £-l),D(O) = Do, к = —,
0(A) = Т
D(A, к-}), к*—.
D(A, &-1) = Ф(£, /с-1П)(/с-1)Фт(Л. A-1) + DV(A-1).
(7-П2)
(7.113)
(7.114)
(7.115)
(7.116)
(7.117)
(7.118)
(7.119)
(7.120)
Здесь х, хэ, х - //-мерные векторы состояния, экстраполяции и
оценок; Ф - переходная матрица состояния; z - ^-мерный
(/77 < п ) вектор измерений; Н - матрица связи z и х; Dv и Dn
ковариационные матрицы шумов состояния £х и измерений ;
т - интервал экстраполяции; Т »т - период обращений к цели;
Q - признак наличия измерений; Кф - матрица коэффициентов
усиления невязки Az; D(£) и D(A,A-1) - апостериорная и апри-
орная ковариационные матрицы ошибок оценивания; Е - единич-
ная матрица;
468
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
и(к) = R(£) {[Е - Н(^)КФ (Л)] [z(A:) - Н(Аг)хэ (Л)]}; (7.121)
R(£) = [Нт (*)Qp (к)Н(к) + Кр (£)Г1 Нт (k)Qp (к) (7.122)
адаптивная поправка прогноза, оптимальная по минимуму функ-
ционала качества [2]
Ip = m{[z(£) - H(/c)i(£)]TQp[z(£) - Н(Л)х(Л)]+uT(A)Kr(£)u(£)}; (7.123)
QP и К э - матрицы штрафов соответственно за точность прибли-
жения х к z и за величину управляющих поправок и .
Решение о принадлежности полученного измерения (7.113)
той или иной из экстраполируемых траекторий (7.116) принимается
по минимуму функционала
п
I
= min
{J}
(7.124)
формируемого по результатам полученных измерений на основе
вычисления и для всех j-x экстраполируемых траекторий. Оче-
видно, что при соответствии полученных измерений экстраполи-
руемой траектории они незначительно отличаются от Н(А)хэ(Л) в
(7.121) и и(Л) будет минимальным. Если измерения приходят от
другой цели, то невязка в (7.121) увеличивается, что приводит к
увеличению uif и, соответственно, к увеличению функционала
(7.124). Та траектория, для которой функционал (7.124) будет наи-
меньшим, считается идентифицированной.
Использование бесстробового метода идентификации, основанного на исполь-
зовании экстремального (7.124), а не порогового критерия, позволит сущест-
венно снизить недостатки стробовой идентификации [2].
Далее будут синтезированы совместно функционирующие ал-
горитмы экстраполяции, идентификации радиолокационных изме-
рений и коррекции результатов экстраполяции по идентифициро-
ванным измерениям в предположении, что завязка траектории уже
выполнена одним из известных способов. Этапы ранжирования це-
лей и сброса траекторий не рассматриваются.
В существующих бортовых РЛС алгоритмы mhoi оцелевого
сопровождения базируются на использовании простейших моделей
движения с постоянными скоростями [1]. Причинами использова-
ния таких грубых моделей являются ограниченные возможности
бортовых вычислителей и большие интервалы времени между по-
ступлениями отраженных сигналов от антенн с механическим
469
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
управлением, превышающие время жизни сложных гипотез движе-
ния воздушных объектов.
К настоящему времени существенно возросли возможности БВС по производи-
тельности, а использование фазированных антенных решеток с электронным
управлением лучом позволяет существенно сократить интервалы времени ме-
жду обращениями к одной цели.
С учетом этого вполне правомерным является использование
для прогноза моделей 3-го порядка:
ДX) = Д(к -1) + V(k - 1)г + 0,57дг2, Д (0) = До; (7.125)
Г(Л) = Г(£-1) + уд(£-1)т, К(О) = Го;' (7.126)
7д (k) = Ja (k -1) + £/д (к -1), 7д (0) = 7до; (7.127)
£г(к) = £r(k-\) + a>r(k-V)T + Q,5jrT2, £’г(О) = £,о; (7.128)
й?г(А-) = 69г(Л-1) + Уг(^-1)г, 6Y(O) = <yo; (7.129)
.7rW = ./r(^-l) + <r> 7г(О) = 7го; (7-130)
£B(k) = £B(k-i)+a)B(k-l')T+Q,5jR(k-l)T2, £в(0) = £т; (7.131)
й>Дк) = соДк -1) + jB(k - 1)т, <ув(О) = <уво; (7.132)
h(k) = jB(k-\) + £jB, Ув(О) = Уво, (7.133)
в которых Д и И - дальность до цели и скорость сближения с ней;
пг, пв и , шв - углы визирования и угловая скорость линий
визирования в горизонтальной и вертикальной плоскостях; у’д, jx
и - продольное и поперечные ускорения в горизонтальной и
вертикальной плоскостях; А - номер интервала дискретизации т;
‘э/д, 4уг и ‘э/в “ центрированные гауссовские шумы состояния с
известными дисперсиями D-v и DlB.
Модели состояния (7.125) - (7.133) обеспечивают оценивание всех фазовых
координат, используемых в современных методах наведения и командах целе-
указания ракетам [8].
Для формирования опенок всех координат состояния (7.125)
(7.133) в соответствии с критерием наблюдаемости [7] необходимо,
как минимум, измерять дальность и углы визирования пг и £в . При
использовании импульсно-доплеровского режима работы РЛС доста-
точно просто измеряется скорость сближения (доплеровская частота).
Тогда модель наблюдений определяется соотношениями:
ддк) = Д(Х)+^Дк),
(7.134)
470
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Vn(k) = V(k) + ^Vn(k}, (7.135)
£Гн{к) = £г(к) + £Ги(Л), (7.136)
*вД) = ^) + Ш (7-137)
где Ди , Ии и £Ги, £Ви - измеренные дальность, скорости и углов ви-
зирования цели; £Ди, , £Ги и £Ви - центрированные гауссовские
шумы измерений с известными дисперсиями £>дп , Dl lA и 7)Ги , 7?Ви .
На рис. 7.21 показано взаимное расположение цели и носителя
РЛС в горизонтальной плоскости. Здесь Уц - вектор скорости цели;
0оу Хоу - продольная ось носителя РЛС; Дб* - текущая ошибка изме-
рений; у/ - курс носителя; РСН - равносигнальное направление.
Рисунок 7.21
Модели состояния (7.125) - (7.133) и измерителей (7.134)
(7.137) для дальномерного и угломерного каналов могут быть
представлены в векторно-матричной форме (7.112) и (7.113).
(7.138)
471
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
^гв 1 77 0,572’ 0
Х^гв - 6УГВ ф = ’ лТВ 0 1 7 5 0 ,
_ */гв _ 0 0 1 _^гв_
О
ге\ В - I ^ГВи I’ Н£ГВ -
О 0], ^И£гв ~
(7.139)
О
ЬГВи
Используя (7.138) в (7.115) - (7.120), получаем алгоритм
фильтрации в дальномерном канале РЛС:
Д (к) = Дэ (к) + АГФ1, (к)Щ(к) + Хф12 (к) A V(k\
V(k) = V3(k) + КФ2Х (к)ДД(к) + Кф22(к)АУ(к),
Ja(k) = ja (к) + ХФЗ, (к)ДД(к) + Хф32 (к) А У (к),
Д(0) = Д3,
И(О) = И3, (7.140)
7д(0) = 0;
Дэ (к) = Д(к -1) + V(k -1)7 + 0,5/д (к - 1)т2 + Дд (к),
V, (к) = V(k -1) + /д (к -1)7 + uv (к),
(7.141)
Удэ (к) = Уд (к -1) + и ,д (Ду
lAW) = ДДк)- ДДк), k = iT
| АПЛ) = Ии(£)-Иэ(£), и’
ДД = О, АИ = О, кФ—.
п
(7.142)
Здесь
«д {к) = [П! (Аг)(1 - ХФ1, (кУ) - гХ2(Д)Кф2Х (куЩДД) +
+[г,2 (£)(1 - Хф22 (кУ) - гх, (*)ХФ12 (A:)] A V(k\
(к) = [г21 (А)(1 - ХФ1 j (к)) - г22 (к)Кф2Х (^)Ж(Л) +
4[г22(А)(1 - ХФ22(А)) - г21 (*)Хф12(Л)]АИ(^),
«,д (к) = [г3, (Д)(1 - КФ1 j (к)) - ri2 (ЖФ21 (^)ЖОД +
фз2 (*)(1 - ^Ф22 (^)) - Г31(А)Кф12(А)]АИ(А),
вычисляемые по правилу (7.121), (7.122) адаптивные поправки к
прогнозу (7.141), оптимальные по минимуму функционала (7.123)
472
I
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
?Р12 ЛД(к)
(7р22 _ЛУ(к)
^р!3
^р23
^рЗЗ
Ыд(^)
Wp(£)
М/Д^)
(7.144)
(7.145)
В соотношениях (7.140) и (7.141): Д3 и V3 - начальные значения
дальности и скорости, формируемые на этапе завязки; Кф:.
(z = l, 2, 3; у — 1, 2) — коэффициенты усиления невязок (7.142),
вычисляемые в процессе решения уравнений (7.115) - (7.120), a rif
- коэффициенты, учитывающие вес невязок (7.142) при вычисле-
нии поправок , uv и UjR по закону (7.121).
Анализ алгоритмов фильтрации (7.140)-(7.143) позволяет
прийти к следующим заключениям.
1. Полученный алгоритм отличается от классического алго-
ритма калмановской фильтрации наличием аддитивных адаптив-
ных поправок (7.143) прогноза, а также тем, что сам прогноз (7.141)
осуществляется с малым шагом т <^Т , приближаясь по своей точ-
ности к аналоговым процедурам предсказания, в то время как не-
вязки (7.142), коэффициенты их усиления (7.118) и поправки
(7.143) вычисляются с существенно большей дискретностью по ме-
ре получения измерений (7.134), (7.135);
2. Поправки прогноза (7.121), (7.122) и (7.143) зависят от па-
раметров первичных измерителей (II), синтезированных фильтров
(Кфу) и от условий применения, определяющих конкретные зна-
чения Ди, Ки и ЛД, ЛК.
473
I
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Это позволяет получить систему фильтрации, адаптивную к выбранным пер-
вичным измерителям, синтезированному фильтру и закону изменения отсле-
живаемой траектории.
В начальные моменты времени, когда коэффициенты Кф-
фильтра велики и он динамично реагирует на первоначальные
ошибки завязки траекторий ДД^(О), ДЕ(0) и Д/д(0), поправки
Ид, uv и и-д незначительны. В то же время в установившемся
режиме работы фильтра, когда Кф- малы и он плохо реагирует на
изменение входных сигналов (эффект старения измерений [7]), ко-
эффициенты rtj передачи невязок возрастают, и прогноз (7.141)
значительно существеннее корректируется поправками (7.143).
3. Если реальные условия функционирования фильтра соот-
ветствуют гипотезе движения, использованной при его синтезе, то
невязки малы (Д^ ~0, № ~0) и прогноз (7.141) практически не
корректируется. Если реальные траектории целей соответствуют
более сложным гипотезам движения, то возрастают невязки (7.142),
корректирующие поправки Пд , uv и и^д (7.143), изменяются экс-
траполированные значения фазовых координат (7.141), и, соответ-
ственно, оценки (7.140).
Использование (7.139) в алгоритмах (7.115)—(7.120) позволяет
получить аналогичные алгоритмы адаптивной аналого-дискретной
фильтрации для угломерных каналов, формирующих оценки sY,
й)г, 7Г и £в, , ув , и для которых справедливы все выводы, сде-
ланные для фильтра дальномерного канала.
В соответствии с (7.124), решение об идентификации полу-
ченных измерений (7.134) - (7.137) принимается по минимуму
функционала
I = шш^д^д 4- uvqv 4- МддС[дд 4- u^Yq£Y 4- u^l)Yq(oY 4-
V I И
+7г#г + w^B^B +гУг/?В%В + wjB#/B
в процессе его поочередного вычисления для всех j экстраполируе-
мых траекторий. Та траектория, для которой функционал (7.146)
будет наименьшим, и считается наиболее достоверно соответст-
вующей данному измерению.
Весовые коэффициенты (?д, qv, q^, qjB, определяемые
важностью той или иной поправки для всего режима в целом, мо-
гут выбираться по различным правилам. Наиболее простым из них
474
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
является правило равнозначности, в соответствии с которым вклад
всех слагаемых в функционал (7.146) полагается одинаковым [5].
Достоинствами предложенной процедуры бесстробовой идентифика-
ции по правилу (7.146) являются отсутствие ограничений на разре-
шающую способность, накладываемых размерами стробов [1], учет
предыстории движения в (7.143), (7.146), что позволяет снизить ве-
роятность перепутывания близко расположенных и пересекающихся
траекторий, снижение вероятности сопровождения ложных целей, по-
скольку здесь вероятность ложных тревог определяется размерами
элементов разрешения, а не существенно большими размерами стро-
бов отождествления, возможность адаптации фильтров сопровожде-
ния за счет адаптивной коррекции прогноза.
Рассмотренные алгоритмы не накладывают принципиальные огра-
ничения на возможность их реализации.
7.4.2. Эффективность алгоритмов
автоматического сопровождения целей
в режиме обзора
с адаптивной коррекцией прогноза
и бесстробовой идентификацией
радиолокационных измерений
В данном параграфе представлены результаты исследования эффек-
тивности алгоритмов автоматического сопровождения целей в ре-
жиме обзора с бесстробовой идентификацией и адаптивной коррек-
цией прогноза, определяемых в [7] соотношениями (29)-(35). Иссле-
дования проводились на примере функционирования дальномерного
канала РЛС на этапах экстраполяции, идентификации измерении и
фильтрации. Эффективность алгоритмов определялась по показате-
лям точности оценивания фазовых координат, используемых для
управления самолетом-носителем и выдачи команд целеуказаний
управляемым средствам поражения (УСП); по разрешающей спо-
собности по этим координатам и достоверности правильной иденти-
фикации радиолокационных измерений при сопровождении далеко и
близко расположенных неманеврирующих и маневрирующих целей,
в том числе и на пересекающихся трассах.
В качестве оценки точности использовались среднеквадратиче-
ские ошибки ад, аг оценивания дальности Д до цели искорости сбли-
жения Vс ней, рассчитываемые по классической формуле (7.81).
Под разрешающей способностью понималась минимальная
разность в координатах, при которой с вероятностью не хуже за-
данной принимается решение о наличии двух целей.
475
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Исследования проводились в четыре этапа путем имитацион-
ного моделирования траектории целей (7.125)—(7.127), результатов
измерений (7.134), (7.135), алгоритмов аналого-дискретного оцени-
вания и бесстробовой идентификации (7.140)-(7.143), (7.146) [1].
Этап 7. Исследовалась точность формирования оценок даль-
ности и скорости сближения при следующих условиях:
• объектом сопровождения является слабоманеврирующая цель;
• периоды обращения к целям изменяются в интервале от
Т1 =0,4 с до Т2 = 3,2 с;
• диапазон изменения дальностей 0 < Д < 100 км;
• время накопления изменяется от 10 до 20 мс;
• используются измерители с ошибками оДИ, оУИ;
• имеют место начальные ошибки завязки траектории по даль-
ности ДД0 и по скорости AV0.
На рис. 7.22 показана реализация изменения дальности до це-
ли и скорости сближения с ней.
Д х 104, м
0 5 10 15 20 25 30 35 40 45 t, С
Рисунок 7.22
Г. ПАВА 7. АВ1 ОМА ГИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗД\111НЫХ ЦЕЛЕЙ
На рис. 7.23 и 7.24 для этого варианта приведены зависимости
относительных СКО ошибок оценивания дальности сгц/сгдтахи
скорости сближения o|/<rvmax для времени обращения к цели Т\ и
72>771 соответственно.
Рисунок 7.23
Рисунок 7.24
477
РЛС АВИАЦИОННО-КОСМИЧЕ( КО1 О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ ВОЗДУШНОГО ПРОСТРАНСТВА
Пилообразный характер объясняется тем, что в промежутках между
поступлениями измерении растут ошибки экстраполяции, а в моменты
прихода измерений происходит коррекция оценок фазовых координат по
измерениям, которая сопровождается уменьшением ошибок. Минималь-
ные значения СКО ошибок оценивания фазовых координат сгх опреде-
ляются значениями СКО шумов состояния процесса (7.125) - (7.127) и из-
мерении (7.134). (7,135), а максимальные значения сгх t зависят еще и от
интервала времени обращения к цели, поскольку эти величины определяют
ошибки экстраполяции (7.141).
Этап 2. Исследовались чувствительность функционала бес-
стробовой идентификации (7.146) к приходу измерений от другой
цели, а также разрешающая способность и достоверность иденти-
фикации радиолокационных измерений. Приход измерений от дру-
гой цели имитировался приращением измеренных значений даль-
ности и скорости в момент времени t = 30 с на величины ДД=
= 1000 м и ЛИ = 100 м/с. На рис. 7.25 показана реализации дально-
сти и скорости и результатов их измерений.
На рис. 7.26 и 7.27 показаны изменения функционала 1
(7.146) ПРИ наличии приращений по дальности (рис. 7.26) и скоро-
сти (рис. 7.27), который в момент времени t = 30 с имеет макси-
мальное значение, свидетельствуя о высокой чувствительности
функционала к приходу измерений от другой цели.
Рисунок 7.25
478
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Рисунок 7.26
На рис. 7.28 и 7.29 приведены графики зависимостей вероят-
ности правильного принятия решения о приходе измерений от дру-
гой цели РПрд и РПРУ от приращения ошибки измерений по
дальности Ад (рис. 7.28) и скорости сближения Аг (рис. 7.29) при
значениях времени обращения к цели 7] (сплошная линия), Г2 > 7]
(пунктирная линия).
479
РЛС АВИАЦИОННО КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНО( ПИ И ВОЗДУШНОГО ПРОСТРАНСТВ 4
Рисунок 7.28
XV, м/с
Рисунок 7.29
480
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Разнос целей по дальности при этом изменялся в пределах
10 < Ад < 1 000 м, а по скорости сближения 1 < Ак <100 м/с. Из
рис. 7.28 видно, что при длительности зондирующего импульса
/и= 1 мкс, при которой потенциальное разрешение по дальности
определяется величиной 150 м, бесстробовый способ идентифика-
ции позволяет практически достоверно различать цели даже при
достаточно редком обращении к ним.
По результатам исследований второго этапа можно сделать
следующие заключения.
1. При приходе измерений от других, даже близко располо-
женных целей, функционал (7.146) изменяется на несколько поряд-
ков, что позволяет достаточно просто регистрировать эти измене-
ния. В связи с этим использование минимума функционала в каче-
стве решающего правила является эффективным средством
идентификации измерении
2. С ростом требовании к достоверности принятия решения о
приходе измерений от другой цели чувствительность алгоритма
идентификации ухудшается.
3. Чувствительность алгоритма идентификации несколько
улучшается при уменьшении времени обращения к цели и сущест-
венно улучшается при увеличении точности первичных измерений.
Предложенный способ бесстробовой идентификации на основе адаптивной
коррекции прогноза обеспечивает в реальном диапазоне потенциальных раз-
решающих способностей практически стопроцентную достоверность идентифи-
кации в очень широком диапазоне изменений периодов обращения к цели.
Этап 3. Исследовалась эффективность функционирования алго-
ритма АСЦРО при сопровождении двух целей, движущихся по пере-
секающимся траекториям. При моделировании исследовались различ-
ные варианты пересечения траекторий как по одной, так и по всем из-
меряемым координатам. На рис. 7.30 и 7.31 представлено взаимное
расположение самолета-носителя БРЛС и двух целей, движущихся по
пересекающимся траекториям, а также показаны законы изменения
дальности и скорости сближения соответствующих ситуаций, когда
имеют место пересечение по дальности и его отсутствие по скорости.
На рис. 7.32 приведена зависимость функционалов I и I
(7.146) при сопровождении этих целей. Индексы И (/ = 1,2) соот-
ветствуют ситуации, когда функционалы вычисляются при усло-
вии, что приходят измерения от /-х (своих) целей, а
//(/,/ = 1,2;/^;) функционалы, вычисляемые при приходе из-
мерений от «чужих» целей.
481
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Z, м
Рисунок 7.30
а}
ТА
Рисунок 7.31
482
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
-10
10
Рисунок 7.32
Из рисунков видно, что функционалы реагируют на приход
каждого измерения. Заметим, однако, что скачки функционалов
в одни и те же моменты времени на несколько порядков превыша-
ют скачки функционалов //7, в том числе и в моменты пресечения
траекторий.
Предложенный алгоритм АСЦРО позволяет выполнять высокоточное достоверное
сопровождение целей, движущихся даже по пересекающимся траекториям.
Этап 4. Исследовалось функционирование алгоритма АСЦРО
при сопровождении интенсивно маневрирующих целей. На
рис. 7.33 изометрии показан случай сопровождения маневрирую-
щей сложным образом цели, а на рис. 7.34-7.37 приведены законы
изменения дальности и скорости сближения, их оценок в фильтрах
с адаптивной коррекцией и без нее при периодах обращения к цели
Т\ = 0,4 с до Г2 = 3,2 с. Рис. 7.38-7.41 иллюстрируют законы изме-
нения во времени корректирующих поправок по дальности ид и
скорости и [И относительные СКО ошибок оценивания дальности
сгд I (У2 0 и скорости av/ сгг0 в типовом фильтре и с коррекцией при
периодах обращения к цели 1\ и соответственно.
483
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
10000
Рисунок 7.33
Рисунок 7.34
484
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Рисунок 7.35
Рисунок 7.36
485
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 7.37
Рисунок 7.38
486
ГЛАВА 7 АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
ид, м/с
1 Я 1 СаЖаааа^аа ааача ai aa^J аа ai аа .аааа-аа.— а-а.а ааа—аа_в. .а-а-а- >J-a — .Е —а - а -а -I - - — — — — . а —-—.--———---—L.- — — - !.. аа.-ааI—»— >чАМ-а _« _> >аа< ч <-а—
О 5 10 15 20 25 30 35 40 45 г, с
Рисунок 7.40
487
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 7.41
Очевидно, что в процессе маневрирования появляются производные дальности,
порядок которых превышает порядок астатизма фильтра (7.140), причем скорость
меняет свой знак на противоположный. В таких условиях типовой фильтр Калмана
с астатизмом третьего порядка без адаптации не способен устойчиво сопровож-
дать цели, в то время как фильтр (7.140) с предложенным способом адаптации ус-
тойчиво формирует оценки всех координат даже при больших интервалах обра-
щения к цели.
Предложенный алгоритм АСЦРО с адаптивной коррекцией прогноза и
бесстробовой идентификацией радиолокационных измерений дает
возможность устойчиво и с высокой точностью сопровождать не-
сколько целей, в том числе и интенсивно маневрирующих и движу-
щихся по пересекающимся и близко расположенным траекториям.
Предложенные алгоритмы бесстробовой идентификации позво-
ляют при АСЦРО в реальном диапазоне изменения параметров сигна-
лов и антенн получить такую же разрешающую способность, как и в
режиме сопровождения одиночной цели.
Полученные в процессе АСЦРО точности и разрешающие способ-
ности позволяют судить о возможности его использования в качестве
боевого режима работы БРЛС, в рамках которого режим сопровожде-
ния одиночной цели может быть получен как частный случай при ма-
лом интервале обращения к цели.
488
ГЛАВА 7.АВТОМАГИЧЕС КОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЬ И
Предлагаемые режимы являются экономичными в вычислитель-
ном отношении и может быть рекомендован для реализации в пер-
спективных БРЛС.
Скорость цели является одним из параметров, который позволяет
определять изменение ее пространственного положения. Широко
применяемый в радиолокации метод измерения скорости, основан-
ный на измерении доплеровского смещения частоты принимаемого
радиолокационного сигнала, позволяет определять только радиаль-
ную составляющую вектора скорости цели (скорость сближения).
Измерение только одной из трех проекций вектора скорости не дает возможность
однозначно определять ни величину скорости цели, ни направление ее движения.
В частности, на рис. 7.42 представлены значительно разли-
чающиеся векторы скорости Уь Уэ, ... , У5 , имеющие одинаковую
радиальную проекцию Урад.
Неоднозначность определения вектора скорости цели делает
невозможным однозначное прогнозирование положения цели.
Кроме того, в ряде случаев важны именно нерадиальные проекции
скорости цели. Например, если цель движется приблизительно по-
489
Г 1С Ш1ЩИОННО КОС 'МНЧЕСКО1 О МОНИТОРИНГА ЗЕ МНОЙ ПОВЕРХНОСТИ И ВОЗД\ [ИНОГО НЕОСТРА! К ТВ А
перек линии визирования, измерение радиальной проекции скоро-
сти может вообще не иметь смысла.
Нерадиальные проекции скорости и полный вектор скорости
цели в настоящее время определяются другими, недоплеровскими
способами. Эти способы основаны на измерении координат цели в
некоторые соседние моменты времени, определении вектора пере-
мещения цели за время между этими моментами и делении вектора
перемещения на величину интервала между моментами. Результа-
тами такого измерения являются не мгновенные значения скорости
или ее проекции, а их усредненные значения за некоторый преды-
дущий интервал времени. Таким образом, результаты измерений
запаздывают, а в случае маневрирующей цели могут значительно
отличаться от мгновенных значений скорости. На рис. 7.43 показа-
но различие между вектором мгновенной скорости цели V и его ус-
редненным значением Vcp. Временное запаздывание можно умень-
шить за счет уменьшения интервала усреднения, однако при этом
возрастает погрешность измерения.
Текущее положение
цели
Начало интервала
усреднения
Траектория
цели
Рисунок 7.43
При попытке определить скорость цели путем дифференцирования результатов
измерений координат цели погрешность измерения скорости становится неприем-
лемо высокой вследствие того, что при дифференцировании подчеркиваются вы-
сокочастотные компоненты спектра ошибок измерения.
В этой связи актуальной является задача разработки метода
измерения значений произвольных, в том числе нерадиальных,
проекций скорости цели с минимальным запаздыванием, сравни-
мым с запаздыванием при доплеровском измерении радиальной
проекции скорости (это запаздывание определяется временем из-
мерения частотного сдвига). Измерение трех независимых проек-
ций вектора скорости (или одной радиальной и двух нерадиальных,
или трех нерадиальных) позволит однозначно определять полный
вектор скорости.
490
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Чисто теоретически для измерения поперечной проекции ско-
рости можно было бы использовать так называемый поперечный
эффект Доплера. Он обусловлен тем, что в системах отсчета, дви-
жущихся с разной скоростью, время течет по-разному. Однако в от-
личие от обычного, продольного эффекза Доплера, при котором час-
тотный сдвиг пропорционален величине Vl v (V - скорость сближе-
ния; v - скорость волны, равная в случае электромагнитной волны
скорости света с), поперечный эффект Доплера является эффектом
второго порядка относительно величины И/с. Он может быть замечен
и приниматься во внимание только при релятивистских скоростях.
Однако из этого не следует, что о поперечной проекции ско-
рости цели нельзя судить по частоте принимаемого радиолокаци-
онного сигнала.
Во-первых, можно показать, что в случае многопозиционной
локации, то есть когда зондирующий сигнал излучается из одной
точки, а отраженный целью сигнал принимается в другой точке,
частота принимаемого сигнала зависит от проекции скорости, ко-
торая не является радиальной. Правда, в этом случае также измеря-
ется только одна проекция.
Во-вторых, утверждение о том, что мгновенные значения па-
раметров принятого сигнала не несут информации о поперечной
проекции скорости цели, справедливо только в случае обычной ли-
нейной локации.
Для определения нерадиальных проекций вектора скорости цели целесообразно
применять нелинейную локацию. Однако не следует считать, что цель обязательно
должна обладать нелинейностью. На самом деле достаточно, чтобы нелинейные
преобразования сигнала происходили или при отражении зондирующего сигнала
от цели, или в радиолокаторе. Предпочтительнее, естественно, последнее.
Теоретические предпосылки метода
Для поиска путей построения измерителя нерадиальных про-
екций скорости цели с применением нелинейных преобразований
следует определить, какие параметры преобразованных сигналов
могут зависеть от нерадиальных проекций скорости. Наиболее же-
лательной является возможность определять мгновенное значение
нерадиальной проекции скорости цели по частоте преобразованно-
го сигнала (или по частотам преобразованных сигналов). Поэтому,
в первую очередь, следует изучить влияние движения цели на
мгновенные значения комбинационных частот в случае примене-
ния нескольких зондирующих сигналов.
Пусть имеются N источников монохроматических волн (пере-
дающих антенн), которые расположены в точках А[, Аз, ..., AV-
491
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТ РАИС 7 БА
Частоту соответствующих монохроматических волн (зондирующих
сигналов) обозначим как аг, • •••> &N•
Предположим, что каждая монохроматическая волна отража-
ется (рассеивается) целью, расположенной в точке Ц. Отраженный
сигнал, соответствующей частоты, избирательно воспринимается
антеннами N приемников, которые расположены в точках
Апрь АПр2, ..., .
Все принятые приемниками сигналы доставляются в некото-
рый пункт обработки, где производится нелинейное преобразова-
ние сигналов. Сигнал, полученный в результате нелинейного пре-
образования, поступает на фильтр, настроенный на одну из комби-
национных частот Q, являющуюся линейной комбинацией частот
зондирующих сигналов:
0=77^9) + П2СО2 +... + Wv6y/v , (7.147)
где /71,^2, ••• , пи - целые числа, некоторые из них могут быть от-
рицательными.
Если цель неподвижна, каждый z-й приемник принимает от-
раженный сигнал, частота которого равна частоте бУ, z-ro передат-
чика, и частота сигнала на выходе фильтра равна номинальному
значению комбинационной частоты, определяемому (7.147).
Если цель движется, то в силу эффекта Доплера каждый z-й
приемник принимает сигнал, частота которого а)сигн , несколько от-
личается от частоты cOj z-ro передатчика. Соответственно, частота
сигнала на выходе фильтра Окомб
^комб ~ ^сигп,1 ^2 ^сигн2 "*"••• + ^сигн,И
отличается от частоты Q, определяемой (7.147).
Предположим, что при этом комбинационная частота остается
в пределах полосы пропускания фильтра, и фильтр продолжает вы-
делять колебания выбранной комбинационной частоты.
Покажем, что при некоторых условиях величина частотного
сдвига, обусловленного движением цели, пропорциональна нера-
диальной проекции скорости цели. I
Фаза уд (Z,r) сигнала, принимаемого z-м приемником, зависит
не только от времени t, но и от координат цели:
<Р, G>r)=w;1 ~ki гпрд,/- к, 'пр,; +<Poj > (7.148)
где к} - волновое число для z-ro зондирующего сигнала; гпрдд- - рас-
стояние от z-й передающей антенны до цели; гпрд - расстояние от
цели до z-й приемной антенны; <poti — начальная фаза z-ro зонди-
рующего сигнала; г - вектор координат цели.
492
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Таким образом, нелинейному преобразованию подвергаются
несколько синусоидальных колебаний с текущей фазой cpt (/,г). Из-
вестно [10], что результат такого преобразования можно разложить в
кратный ряд Фурье. Каждый член ряда является синусоидой, теку-
щая фаза Ф (/,г) которой с точностью до постоянного фазового сдви-
га То равна линейной комбинации фаз исходных колебаний, с целы-
ми (не обязательно положительными) коэффициентами:
Ф(/,г)=зд(/,г) +щ^2(^,г) + ... + А7Л/(Д/у (г,г) +Т0 . (7.149)
Подставив (7.148) в (7.149) и сгруппировав слагаемые, полу-
чим:
Ф(/,г)= (пха\ +п2а>2 +...+nNa)N)t -
— (гпрДд+ГПр,| ) + ^2^2 4трд,2 ^~4ip,2 )+ ••• (7.150)
- + ^Л'(ГпрдЛ+ГпрЛ )] + '71^O,1+'W2+---+/72V^O,/V +^0-
Введем обозначения:
^(r) — (гпрДд + ГПрД )+^2^2(^прд,2 ^пр,2 )+••• 151)
• •• + (гПрД,М +^Пр.дг)?
^00 = ^0,1+^2 ^о,2+---+^%л+Ч/о- (7.152)
Преобразовав (4) с учетом (1), (5) и (6), получим:
Ф(Лг)=Ог-Т(г)+Т00. (7.153)
Выражение (7.153) по форме совпадает с выражением для фа-
зы монохроматической волны, частота которой равна Q, а форма
фазовых поверхностей определяется уравнениями T(r) = const. Не-
зависимо от конкретного вида функции Т(г), функция Ф(/,г) обла-
дает некоторыми волновыми свойствами. В частности, поверхно-
сти равных фаз колебаний комбинационной частоты нигде не пере-
секаются, а с течением времени перемещаются так, что замещают
одна другую. Волноподобное поведение функции вида (7.153) по-
служило основанием введения для обозначения такой функции
термина квазиволна [4, 26, 27].
Поверхности равных фаз квазиволны почти во всех случаях не являются ни пло-
скими, ни цилиндрическими, ни сферическими. Однако в окрестности любой точ-
ки, кроме точек расположения источников зондирующих сигналов, зависимость
фазы квазиволны от времени и от координат близка к зависимости от тех же ве-
личин фазы некоторой виртуальной плоской волны частоты П,
Волновые параметры этой виртуальной плоской волны (вол-
новой вектор, длина волны, направление распространения, ско-
рость распространения) удобно использовать для описания локаль-
493
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУ ШНО10 ПРОСТРАНСТВА
ного (в окрестности выбранной точки) поведения квазиволны. По-
этому эти параметры были названы локальными волновыми пара-
метрами квазиволны.
В [26] показано, что локальный волновой вектор квази волны
К равен градиенту функции Ч'(г):
К(г)- grad Т(г).
(7.154)
Все остальные локальные волновые параметры квазиволны
можно выразить через локальный волновой вектор К(г). Локальное
направпение распространения квазиволны совпадает, естественно, с
направлением вектора К(г), а локальная длина волны А(г) и локаль-
ная скорость распространения И(г) определяются по формулам:
(7.155)
(7.156)
Продифференцируем по времени обе части выражения (7.153)
в предположении, что цель движется:
<7Ф(/,г) z , dv
---= q _ grad T (г)—. (7.157)
dt dt
Учитывая (7.154) и введя обозначения:
б/Ф(^,г)
dt
КОМО
(час-
тота сигнала на выходе фильтра); — = V ( вектор скорости цели),
dt
получаем:
QKOv6=Q-K(r)Vu=Q-K(r) К°(г)Уц =
= О + |к(г)|(-К°(г)Уц],
(7.158)
где К (г) — орт волнового вектора К(г).
Скалярное произведение —К°У равно величине проекции
вектора V на направление, противоположное вектору К(г).
Таким образом, в случае неподвижной цели частота сигнала
на выходе фильтра равна выбранной комбинационной частоте Q , а
в случае подвижной цели отличается от Q на величину, пропор-
циональную проекции вектора скорости на направление вектора
К(г). Полученная зависимость аналогична зависимости частоты
отраженного монохроматического сигнала от радиальной проекции
скорости цели.
494
I
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Покажем, что направление волнового вектора К(г) может
быть нерадиальным.
Подставим (7.151) в (7.154):
^(г)—^а<1[(/7|&|(АПрд ] “Ь^пр,1) + ^2^2(^прд,2 ”*~^пр,2 )+• ’ прд,Л' +^np.Az )] —
=n1A-|[grad(/;pll)+gradO;lpl)]+ «2£2[grad(z;lpJl2)+ grad(rnp2 )]+...
- +«w^/v[g1'ad(rnpi„v)+grad(<ip.,v )]•
Учтем, что градиент модуля вектора как функции координат
конца этого вектора равен орту вектора. Тогда
К (г) — П\к\ (гпрдд + ГПр |) + ^2^2(Гпрд,2 + Гпрд) + •••
О 0 (/.159)
... + Ищкщ (гпрд Д/ +^Прду)?
где г^рд z - орт вектора гпрд z, начало которого находится в точке
расположения z-й передающей антенны, а конец - в точке располо-
жения цели, z-1,2; ...,7V; гд • - орт вектора гпр/, начало которого
находится в точке расположения z-й приемной антенны, а конец - в
точке расположения цели, /=1,2; ..., N.
Каждая круглая скобка в правой части (7.159) является суммой
единичных векторов и равна вектору, направленному по биссектрисе
угла, образованного соответствующими ортами. На рис. 7.44 пред-
ставлена векторная диаграмма для случая двух зондирующих час-
тот и, соответственно, для двух пар передатчик - приемник. Из ри-
сунка видно, что если в этом случае использовать преобразование
сигналов в сигнал комбинационной частоты при отрицательном
значении и2> то направление вектора К(г) окажется почти перпен-
дикулярным по отношению к любой из линий, соединяющих цель с
антеннами. При этом частотный сдвиг сигнала на выходе фильтра
будет пропорционален соответствующей существенно нерадиаль-
ной проекции.
Рисунок 7.44
495
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Как видно из (7.159), направление локального волнового век-
тора может изменяться в широких пределах. В основном это на-
правление зависит от числа зондирующих сигналов, от выбранных
коэффициентов п\ ,w2, ••• , , от положения антенн и от частот
зондирующих сигналов. С чисто теоретической точки зрения сте-
пеней свободы много. Однако из практических соображений следу-
ет минимизировать количество зондирующих сигналов, количество
приемников, передатчиков и антенн. Кроме того, при выборе ко-
эффициентов п\ ,п2, ... , wjv (т.е. при выборе комбинационной часто-
ты) следует учитывать как энергетическую эффективность преоб-
разования сигналов в ту или иную комбинационную частоту, так и
возможность исключения или минимизации влияния сигналов ос-
тальных комбинационных частот на работу системы.
Условия, необходимые для измерения нерадиальной проекции
вектора скорости цели
• Цель следует облучать не одной, а двумя или более монохро-
матическими волнами.
• Из принятых колебаний следует сформировать сигнал комби-
национной частоты.
• Применяемые антенны (все или хотя бы некоторые из них)
должны быть разнесены в пространстве.
Предпочтительнее использовать две, а не несколько волн. И
дело нс только в том, что увеличение количества волн связано с
увеличением количества передатчиков и антенн, т.е. с существен-
ным усложнением системы. Следует учитывать и то, что амплиту-
ды колебаний комбинационных частот обычно тем меньше, чем
больше сумма абсолютных значений коэффициентов гц ,п2, ••• , w.v •
По той же причине желательно использовать суммарную и раз-
ностную частоты. Однако из этих двух частот следует выбрать разно-
стную. Направление локального волнового вектора квазиволны разно-
стной частоты близко к поперечному, тогда как локальный волновой
вектор квазиволны суммарной частоты направлен почти вдоль на-
правления облучения. Кроме того, разностную частоту легче выделить
из все! о спектра комбинационных частот. В частности, если использо-
вать для преобразования сигналов возведение с>ммы сигналов в квад-
рат с применением идеального квадратичного элемента, то в спектре
комбинационных частот присутствуют, кроме постоянной состав-
ляющей и разностной частоты, только значительно превосходящие
последнюю суммарная частота и удвоенные частоты входных сигна-
лов. При этом выделение разностной частоты (частоты биений) может
происходить без применения специальных фильтров, с помощью
обычного амплитудного детектора.
496
ГЛАВА 7 АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Техническая реализация метода
Даже при использовании только двух частот зондирующих сигна-
лов с анализом только разностной частоты возможны различные
варианты построения радиолокационной системы, способной изме-
рять нерадиальные проекции скорости цели. Эти варианты разли-
чаются количеством приемных и передающих антенн и их распо-
ложением.
Наиболее предпочтительным является вариант, когда радиолокационная система
содержит две передающие антенны, расположенные в разных точках Ai и А^, и
одну приемную, расположенную в точке Апр. Разновидностью этого варианта яв-
ляется случай, когда приемная антенна совмещена с одной из передающих, то
есть когда имеется одна передающая антенна и одна приемопередающая.
Полоса пропускания приемника позволяет принимать оба от-
раженных от цели сигнала.
На рис. 7.45 представлена векторная диаграмма, поясняющая
использование предлагаемого варианта построения радиолокаци-
онной системы. Обозначения на рисунке следующие: Л] - пере-
дающая антенна, излучающая зондирующий сигнал частоты со\\ Аг
- передающая антенна, излучающая зондирующий сигнал частоты
с&2\ А11р - приемная антенна; Ц - цель; , г2 - векторы, начало ко-
торых находится в точках расположения антенн Ai и Аг, а концы -
в точке расположения цели; гпр - вектор, начало которого находит-
ся в точке расположения приемной антенны Апр , а конец - в точке
расположения цели; г^, г2 ,г^р - орты векторов , r2 ,гпр ; Z?i, b2-
расстояние от первой и от второй передающих антенн до линии на-
блюдения (приемная антенна Аир - цель Ц).
Мгновенные значения фаз *Р\(1) и ^(t) отраженных целью и
принятых сигналов зависят от расстояний г\ и г2 (от соответст-
вующих передающих антенн до цели), а также от расстояния гпр (от
цели до приемной антенны):
{/,(/) = <У|/-L 'j+r 1 + ^01;
с 4 7
/ х \
^2 (О = а)Т---Ч г2 + 'пр ) + ^02 >
С 4 7
где у/^ и у/02 - начальные фазы сигналов частот со\ и ох
497
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
498
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Продифференцируем эти выражения полным образом по вре-
мени, учитывая, что при движении цели величины п, и гпр зави-
сят от времени:
Учтем, что
grad(r2) = r£;
dt
d^2 _ ^np
dt dt
grad(rnp) i*np,
V - скорость цели (при непод-
вижных Ai ,А2, Апр).
Тогда
/ \ Ur / о о
^сигн! ^сигн2 — ^2/ Vu 1^9] 1*1 ^2^2
С х
Введем обозначения:
А^сигн
^сигн! ^сигн2 ’
D = <9,Г,° _ ^r2° + - О)2 ) гп°р.
Сгруппировав слагаемые, получим
с(ал - <9-, - Ай? ) = V D = V D' D
\ 1 X- СИ1 Г1 / Ц, Ц
где D0 - орт вектора D.
Скалярное произведение V^D0 есть величина проекции зектора
V на направление вектора D Обозначив эту проекцию VD, получим
6>i А^сигн
D
(7.160)
Величины частот а>\ и а>2 или их разность могут быть извест-
ны заранее с достаточной точностью. Точность определения вели-
чины - coi) может быть повышена путем формирования сигнала
разностной частоты с последующим измерением этой частоты.
Величина ДбУсигн = &)сигн1 ~^Сигн2 может быть определена пу-
тем измерения частот принимаемых сит налов. Однако для повы-
шения точности определения величины ДбУСИ1Н целесообразно пре-
образовать принимаемые сигналы частот &)сигн1 и й>С111 н2 в сигнал
499
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
разностной частоты, с последующим измерением частоты преобра-
зованного сигнала.
При достаточно малых расстояниях Ь\ и Ьг целесообразно ис-
пользовать приближенные формулы для радиальной Ррад и попе-
речной /Ц10пер проекций вектораD:
2(®j-а>2),
Ь^со^ b2co2
(7.161)
попер
Из (7.161) следует, что строго поперечную проекцию скорости
измерять предлагаемым методом невозможно. Но в большинстве
случаев этого и не требуется.
Для однозначного определения вектора скорости достаточно определить его про-
екцию на направления трех любых неколлинеарных векторов.
Если тангенциальную проекцию скорости определять все-таки
необходимо (не для определения полного вектора скорости, а для
чего-то другого), то, зная полный вектор скорости, можно найги
его проекцию на любое направление, в том числе на направление,
перпендикулярное линии наблюдения.
Возможность радиолокационного измерения нерадиальных
проекций скорости цели была подтверждена экспериментально, с
применением специально созданной лабораторной установки.
Предлагаемый метод измерения обеспечивает определение мгновен-
ных значений произвольных, в том числе нерадиальных, проекций
вектора скорости, что позволяет своевременно обнаруживать манев-
ры цели и достаточно точно прогнозировать ее положение в после-
дующие моменты времени.
Применение метода возможно не только в традиционных радио-
локаторах различного назначения, но и в полицейских измерителях
скорости автомобилей. В частности, появляется возможность измерять
скорость автомобиля при расположении измерителя в стороне от кон-
тролируемой трассы, над трассой (на аэростате, на вертолете, на вы-
соком здании или сооружении) или в стороне от трассы и выше ее.
Детальная проработка метода позволяет создать новые классы
РЛС - 5-координатные (с измерением трех пространственных коорди-
нат цели и двух проекций ее скорости) и 6-координатные (с измере-
нием пространственных координат и полного вектора скорости).
Обнаруженный эффект изменения частоты комбинационных ко-
лебаний при движении цели может быть основой для построения сис-
500
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
тем селекции движущихся целей. Такие системы, в отличие от извест-
ных систем селекции движущихся целей, позволят проводить селек-
цию подвижных целей не только по радиальной компоненте скорости,
но и по проекции скорости на заданное направление (например, по
скорости приближения к границе), по направлению движения, по мо-
дулю скорости, а также по сочетаниям направления и величины ско-
рости, т.е. по полному вектору скорости.
дов
Определение степени уф9
автоматизированной
информационной системы
реализации угроз безопас
информации
При конкретной реализации РЛС важным является вопрос на-
сколько защищена информация, циркулируемая по ее информаци-
онным каналам. Поскольку от того, подвержена или нет искаже-
нию данная информация, зависит надежность работы алгоритмиче-
ского обеспечения современного радиолокатора, а, следовательно,
и обеспечение заявленных функциональных возможностей и так-
тических показателей РЛС в целом.
Выявление угроз, знание методов реализации угроз безопас-
ности информации позволяет обеспечить надежное функциониро-
вание РЛС. В этой связи рассматривается один из способов опреде-
ления степени уязвимости радиолокатора как автоматизированной
информационной системы в отношении конкретных методов реа-
лизации угроз безопасности информации.
Исходя из общих позиций обеспечения безопасности инфор-
мации, первоначально необходимо определить какая информация
подлежит защите и какие ее свойства следует обеспечить, а затем
сформировать перечень методов реализации угроз безопасности
информации, которые позволяют противоборствующей стороне
(нарушителю безопасности информации) достичь конкретной цели,
и определить степень уязвимости АИС в отношении данных мето-
дов (далее - задача определения степени уязвимости АИС) [19].
Для нарушения заданных характеристик безопасности информации, обрабаты-
ваемой в АИС нарушитель должен использовать соответствующие методы реали-
зация угроз безопасности информации через существующие уязвимости АИС [12].
501
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Таким образом, для определения степени уязвимости АИС не-
обходимо:
• составить следующие перечни:
- цели угроз безопасности информации;
- типы нарушителей безопасности информации;
- методы реализации угроз безопасности информации;
- уязвимости АИС;
• определить взаимосвязи данных перечней;
• определить степень уязвимости АИС в отношении конкретных
методов реализации угроз безопасности информации.
Сложность решения данной задачи обусловлена трудоемкой
подготовительной работой и необходимостью учета большого чис-
ла различных параметров, связанных с самой защищаемой инфор-
мацией, порядком ее обработки и типом АИС, т.е. носит комплекс-
ный характер.
Способы решений поставленной задачи
• Субъективные (качественные оценки).
• Вероятностные (количественные оценки).
Субъективные способы основаны на суждениях отдельных спе-
циалистов в области информационной безопасности и часто исполь-
зуют качественные шкалы оценок или лингвистические переменные,
требующие дополнительного построения соответствующих функций
принадлежности (так как в самих способах они не приводятся) и, со-
ответственно, не могут претендовать на объективную оценку. Для ис-
пользования второй группы методов необходимо иметь вероятност-
ные значения ряда величин, которые на практике получить затрудни-
тельно, и как следствие невозможно получить не только объективную
оценку, но и просто адекватный результат. В связи с этим возникает
потребность совершенствования существующих способов.
В основе построения способа определения степени уязвимости АИС, рассматри-
ваемого в данном параграфе, лежит анализ логической цепочки: цель угрозы
безопасности информации => нарушитель безопасности информации => метод реа-
лизации угрозы безопасности информации => уязвимость АИС».
Отталкиваясь от описанной схемы, перейдем к рассмотрению
отдельных «звеньев» данной логической цепочки и формированию
соответствующих перечней.
1. Цель угрозы безопасности информации - нарушение задан-
ных характеристик (свойств) защищаемой информации: конфиден-
циальность, целостность, доступность, аутентичность, подотчет-
ность, неотказуемость и/или достоверность [7, 8]. Перечень кон-
кретных целей угроз безопасности информации в отношении
502
ГЛАВА 7. АВ 1 ОМА ТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
информации, обрабатываемой в конкретной АИС, формируется на
основе заданных владельцем характеристик (свойств) защищаемой
информации. Следует отметить, что если владельцу АИС не требу-
ется обеспечение данных свойств информации, то и потребность в
обеспечении ее безопасности отсутствует.
2. Нарушитель безопасности информации - тип физического
лица или группы лиц, случайно или преднамеренно осуществляю-
щих действия, следствием которых является нарушение безопасно-
сти информации при ее обработке (например, внешний или внут-
ренний нарушитель; нарушитель, обладающий доступом к АИС
или не обладающим таким доступом, и т.д.) [20]. Для составления
конкретного перечня типов нарушителей безопасности информа-
ции (формирования модели нарушителя), т.е. тех лиц (групп лиц),
которые могут стремиться достичь определенные ранее цели за
счет реализации угроз безопасности информации или по неосто-
рожности, могут использоваться существующие на сегодняшний
день рекомендации в данной области [3, 21, 22].
3. Метод реализации угрозы безопасности информации - после-
довательность действий, направленная на нарушение заданных харак-
теристик (свойств) защищаемой информации или с целью создания
условий для этого (например, перехват информации, передаваемой по
линии связи; внедрение в запрос специального кода (Injection) и т.д.).
Для составления перечня всех возможных (гипотетических) методов
реализации угроз безопасности информации, т.е. методов, которые
обозначенные типы нарушителей гипотетически могут использовать
для достижения поставленных целей, целесообразно использовать
существующие рекомендации в данной области [3,9].
4. Уязвимость АИС - это присущий АИС недостаток, исполь-
зование которого приводит к нарушению безопасности информа-
ции в АИС, т.е. к реализации угрозы информационной безопасно-
сти (например, отсутствуют ограничения на повторное использова-
ние пароля; не используется блокировка учетных записей;
отсутствуют резервные каналы связи и т.д.) Для составления пе-
речня уязвимостей конкретной АИС могут использоваться сущест-
вующие рекомендации в данной области [3, 9] и результаты (отче-
ты), формируемые средствами анализа защищенности.
Взаимосвязи между перечнями
• Взаимосвязь типов нарушителей безопасности информации с це-
лями и методами реализации угрозы безопасности информации.
• Взаимосвязь методов реализации угрозы безопасности инфор-
мации и уязвимостей АИС с целями угроз безопасности ин-
формации.
503
t
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В существующей нормативной базе есть ряд вариаций по ин-
терпретации предложенной выше логической цепочки и ее отдель-
ных «звеньев» (на них даны ссылки для составления соответст-
вующих перечней), но отсутствуют способы определения их взаи-
мосвязей.
Перейдем к рассмотрению взаимосвязи типов нарушителей
безопасности информации с целями и методами реализации угроз
безопасности информации (рис. 7.46).
Для каждой ячейки сформированного куба устанавливается зна-
чение степени использования конкретным типом нарушителя соответ-
ствующего метода для достижения определенной цели угрозы безо-
пасности информации (величина где и £е[1;Л7]):
• = 1, если j-й тип нарушителя может использовать к-й метод
для достижения i-й цели.
W4k = 0, если j-й тип нарушителя не может использовать к-й
метод для достижения i-й цели.
Рисунок 7.46
«/
Таким образом, на данном этапе осуществляется сокращение
числа гипотетических методов реализации угроз безопасности ин-
формации (Л/ -число гипотетических методов, М* - число уточ-
ненных методов {М* < М))9 исходя из набора целей угроз безопас-
ности информации и типов нарушителей.
504
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Теперь перейдем к рассмотрению взаимосвязи методов реализа-
ции угроз безопасности информации (М* < М)) и уязвимостей АИС с
целями угроз безопасности информации (рис. 7.47). В данной взаимо-
связи, рассматриваются только те методы, для которых Wyk = 1.
Рисунок 7.47
Для каждой ячейки сформированного куба устанавливается
значение лингвистической переменной - степени уязвимости АИС
в отношении конкретного метода реализаиии угрозы безопасности
информации для достижения определенной цели. Значение лин-
гвистической переменной зависит от применяемых мер и средств
защиты информации в составе АИС.
С использованием результатов, полученных средствами ана-
лиза защищенности (сканеры безопасности), интервьюирования
персонала АИС, изучения существующих мер и средств защиты
информации, для каждой ячейки куба устанавливаются следующие
варианты значения степени уязвимости АИС:
Вариант 1. Очень низкая степень - А-й метод не может быть
реализован через j-ю уязвимость для достижения /-й цели (к-й метод
не может эксплуатировать j-ю уязвимость ни при каких условиях).
Вариант 2. Низкая степень - А-й метод может быть реализо-
ван через j-ю уязвимость для достижения z-й цели, но для эксплуа-
тации у-й уязвимости нужны особые условия, при этом принятые
505
РЛС АВИАЦИОННО-КОСМИЧЕСКО! 'О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС ГИ И ВОЗДУШНОГО ПРОСТРАНСТВ 4
защитные меры существенно затрудняют реализацию &-го метода
(отсутствуют объективные возможности для реализации метода).
Вариант 3. Средняя степень - к-й метод может быть реализо-
ван через у-ю уязвимость для достижения z-й цели, но принятые
защитные меры существенно затрудняют его реализацию.
Вариант 4. Высокая степень - к-й метод может быть реализо-
ван через у-ю уязвимость для достижения z-й цели и принятые за-
щитные меры недостаточны.
Вариант 5. Очень высокая степнь - к-й метод может быть
реализован через у-ю уязвимость для достижения z-й цели и защит-
ные меры не приняты.
Для установления значение лингвистической переменной в отношении уязвимо-
стей технического характера с использованием результатов, полученных средст-
вами анализа защищенности (сканерами безопасности), необходимо использовать
мировой опыт по оценке уязвимостей, отраженный в Общей системе оценки уяз-
вимостей (Common Vulnerability Scoring System (CVSS)).
Взаимосвязь уровней, установленных в CVSS, со степенью
уязвимости АИС в отношении уязвимостей технического характера
приведены в табл. 7. 1.
Таблица 7.1
№ Уровень, установленный в CVSS Степень уязвимости АИС
1 —. Очень низкая
2 Низкая Низкая
3 Средняя Средняя
4 Высокая Высокая
5 Критическая Очень высокая
Таблица 7.2
№ Степень уязвимости АИС Описание
1 Очень низкая —
2 Низкая Защитные меры планируются, выполняются, проверяются и обновляются
3 Средняя Защитные меры планируются и выполняются
4 Высокая Защитные выполняются полностью или частично
5 Очень высокая Защитные меры не выполняются
506
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Установление значения лингвистической переменной в отно-
шении уязвимостей организационного характера с использованием
результатов, интервьюирования персонала АИС, изучения сущест-
вующих мер и средств защиты информации, необходимо произво-
дить в соответствии с принципом Планирование (Plan) =^> Осуще-
ствление (Do) => Проверка (Check) => Действие (Act) (табл. 7.2).
Каждому значению лингвистической переменной (степени
уязвимости АИС) соответствует определенное нечеткое мно?кество
значений со своей функцией принадлежности, где
jg[1,£]h/cg[1;.W*].
В случае использования нормированной, линейной шкалы для
Vijk функции принадлежности для каждого значения лингвистиче-
ской переменной (степени уязвимости АИС) будут иметь вид,
представленный на рис. 7.48.
Таким образом, используя операцию объединения нечетких
множеств общая функция принадлежности степени уязвимости
АИС будет иметь, приведенный на рис. 7.49.
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Рисунок 7.49
При этом для использования на практике предлагается сту-
пенчатая функция принадлежности (рис. 7.50), так как она не по-
зволит некорректно трактовать числовые значения V/f^ соответст-
вующие значениям лингвистической переменной.
Рисунок 7.50
При использовании ступенчатой функции принадлежности ве-
личина Кд в зависимости от значения лингвистической переменной
(степени уязвимости АИС) может принимать следующие макси-
мальные значения, которые и предлагается использовать на практике.
Очень низкая .............................................. 0,00
Низкая .................................................... 0,25
508
ГЛАВА 7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ВОЗДУШНЫХ ЦЕЛЕЙ
Средняя...................................................0,50
Высокая.................................................. 0,75
Очень высокая............................................ 1,00
После этого для каждого £-го метода реализации угрозы безо-
пасности информации сформировано J-е число наборов уязвимо-
стей (каждый набор для достижения z-й цели), их необходимо оце-
нить обобщенным показателем -
Данный показатель не может быть рассчитан как среднее арифметическое значе-
ние величин Vjjk или как среднее арифметическое значение с какими-либо весо-
выми коэффициентами, так как процесс обеспечения безопасности информации -
это «цепь» и ее прочность определяется прочностью самого слабого ее звена.
Таким образом,
* *
Vuk ~ max^ ,
где j е [1;£] при i = const и k = const.
На основе значений строится последовательность мето-
дов реализации угроз безопасности информации по убыванию.
Последовательность действий предлагаемого способа
определения степени уязвимости АИС
1. Формирование перечня целей реализации угроз безопас-
ности информации на основе характеристик (свойств) защищаемой
информации, обрабатываемой в АИС.
2. Формирование перечня типов нарушителей безопасности
информации, с учетом существующих в нормативно-методической
базе рекомендаций по классификации нарушителей.
3. Формирование гипотетического перечня методов реализа-
ции угроз безопасности информации, исходя из типов нарушителей.
4. Формирование перечня уязвимостей АИС, исходя из типа
АИС.
5. Установление взаимосвязи типов нарушителей безопас-
ности информации с целями и методами реализации угрозы безо-
пасности информации.
6. Определение величины Wljk.
7. Определение числа методов реализации угрозы безопас-
ности информации (Л/*) для которых = 1.
8. Установление взаимосвязи для определенных в п. 7 мето-
дов реализации угрозы безопасности информации и уязвимостей
АИС с целями угроз безопасности информации.
9. Определение степени уязвимости АИС и величины Vyk с
использованием функции принадлежности.
10. Определение величины Г %*.
11. Упорядочивание методов по величине
509
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Предложенный способ определения степени уязвимости АИС, основывающийся на
анализе целей нарушения безопасности информации, типов нарушителей безо-
пасности информации и уязвимостей АИС, носит комплексных характер и допол-
няет недостающую информацию о состоянии защищенности информации, обраба-
тываемой в АИС.
Величина И, * может быть использована для определения сте-
пени защищенности информации, обрабатываемой в АИС, а также
при оценке рисков информационной безопасности и формировании
облика систем защиты информации АИС.
Рассмотренный способ определения степени уязвимости, в отличие от
аналогов, является инвариантным к типам АИС и к используемым под-
ходам к классификации типов нарушителей безопасности информа-
ции, уязвимостей АИС и методов реализации угроз безопасности ин-
формации. Это позволяет, не меняя самого методического инструмен-
тария, вводить новые виды источников угроз и/или уязвимостей АИС,
а также методов их реализации, которые станут известны в результате
развития знаний в области защиты информации.
Литература
1. Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные
радиолокационные комплексы истребителей. М.: Воениздат. 1994.
2. Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-
технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под
ред. Е.А. Федосова. М.: Дрофа. 2001. 815 с.
3. Базовая модель угроз безопасности персональных данных при их обработке в
информационных системах персональных данных. Утверждена ФСТЭК России 2008-
02-15. С. 24-32.
4. Бахрах Л.Д., Поваренкин Н.В., Степаненко С.Н. Использование квэзиволн для
фазирования антенных решеток с произвольным расположением модулей //
Электромагнитные волны и электронные системы. 1997. Т. 2. № 6.
5. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения.
Состояние и тенденции развития. М.: Радиотехника. 2008. 432 с.
6. Верба В.С., Ефремов А.С., Криштопов А.В., Михайлов М.В., Силкин А.Т., Степанен-
ко С.Н. Радиолокационный метод измерения полного вектора скорости цели //
Радиотехника. 2007. № 10 (Радиоэлектронные системы управления. №1). С. 55-60.
7. ГОСТ Р50922-2006. Защита информации. Основные термины и определения. Введен
2008-02-01. М.: Изд-во стандартов. 2008. 3 с.
8. ГОСТ РИСО/МЭК 13335-1-2006. Информационная технология. Методы и средства
обеспечения безопасности. Ч. 1. Концепция и модели менеджмента безопасности
информационных и телекоммуникационных технологий. Введен 2007-06-01. М.:
Изд-во стандартов. 2007. 1-8 с.
510
ГЛАВА 7. АВ ТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ В 03ДУ ШИЫХ ЦЕЛЕЙ
9. ГОСТ РИСО/МЭК ТО 13335-3-2007. Информационная технология. Методы и средства
обеспечения безопасности. Ч. 3. Методы менеджмента безопасности информа-
ционных технологий. Введен 2007-09-01. 39 с.
10. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров.
М.:Наука. 1984.
11. Крутько П.Д., Максимов А.И., Скворцов Л.М. Алгоритмы и программы проектиро-
вания автоматических систем / Под ред. П.Д. Крутько. М.: Радио и связь. 1988.
12. Кузнецов А.В., Иржавский А.А., Захарченко А.Н. Методика оценки степени защи-
щенности информации в автоматизированных информационных системах //
Наукоемкие технологии. 2011. № 8. Т. 12. С. 43-47.
13. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. Киев: КВИЦ. 2000.
14. Меркулов В.И. Алгоритм линейного оценивания с текущей коррекцией прогноза по
неодновременного приходящим измерениям // Информационно-измерительные и
управляющие системы. 2009. № 8.
15. Меркулов В.И., Дрогалин В.В., Богачев А.С. и др. Авиационные системы радио-
управления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза
и анализа / Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника. 2003.
192 с.
16. Меркулов В.И., Дрогалин В.В., Богачев А.С. и др. Авиационные системы радио-
управления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Кана-
щенкова и В.И. Меркулова. М.: Радиотехника. 2003. 390 с.
17. Меркулов В.И., Забелин И.В. Анализ необходимости и возможности интеграции
бортовых радиолокационных и оптических систем // Радиотехника. 2008. № 10.
18. Меркулов В.И., Канащенков А.И., Перов А.И. и др. Оценивание дальности и скорости
в радиолокационных системах. Ч. 1 / Под ред. А.И. Канащенкова и В.И. Меркулова.
М.: Радиотехника. 2006.
19. Михеев В.А., Кузнецов А.В.. Репин М.М. Способ определения степени уязвимости
автоматизированной информационной системы в отношении конкретных методов
реализации угроз безопасности информации //Вопросы защиты информации. 2013.
№ 1. С. 20-25.
20. Методика определения актуальных угроз безопасности персональных данных при
их обработке в информационных системах персональных данных. Утверждена
ФСТЭК России 2008-02-14.- 5 с.
21. Методические рекомендации по обеспечению с помощью криптосредств
безопасности персональных данных при их обработке в информационных системах
персональных данных с использованием средств автоматизации. Утверждены
руководством 8 Центра ФСБ России № 149/54-144 2008-02-21.
22. Руководящий документ. Концепция защиты средств вычислительной техники и
автоматизированных систем от несанкционированного доступа к информации.-
Утвержден решением председателя Гостехкомиссии России 1992-03-30. 3 с.
23. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических
устройств и систем. М.: Радио и связь. 2004. 608 с.
24. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопро-
вождение целей: Пер. с англ. М.: Радио и связь. 1993.
25. Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные комп-
лексы навигации, прицеливания и управления вооружением летательных аппа-
ратов. Т. 1. Теоретические основы / Под ред. М.С. Ярлыкова. М.: Радиотехника.
2012. 504 с.
511
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
26. Stepanenko S.f Bakhrakh L.f Neudakin A., Horoshulin V. Excitation of combination fre-
quency waves when monochromatic waves are superimposed on an irregular non-linear
medium // Proc. URSI Int. Symp. on EM Theory. 1995. St. Petersburg. Russia. P. 534.
27. Stepanenko S., Horoshulin V.f Fleck A.f Savinkow I. Nonlinear diffraction in inhomoge-
neous or limited nonlinear medium Abstracts 11 XXVth General Assembly of the Interna-
tional Union of Radio Science. Lille. France. 1996. P. 91.
512
Введение ..................................... 514
8.1. Поляриметрическая система
из двух СВЧ-радиометров типа «Ранет-21» ...............515
8.2. Радиометр СВЧ-диапазона
с трёхопорной модуляцией...............................522
8.3. Повышение информативности
СВЧ-радио«е*грчч( ских систем
методом пЛреимого синтеза апертуры антенны ........527
8.4. Блок обработки информации
для радиометрических систем
с синтезированием апертуры антенны ......... .....536
Литерагура .......................................... 540
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В предыдущих главах рассматривались вопросы, связанные с РЛС
мониторинга окружающего пространства и земной поверхности,
которые для получения информации используют активные методы
радиолокации.
В данных системах информация извлекается из радиолокаци-
онных сигналов, которые формируются путем отражения энергии
зондирующих сигналов от объектов наблюдения и поверхности
земли. В то же время существует класс РЛС, которые извлекают
информацию об окружающей обстановке, анализируя собственное
излучение целей. Данные РЛС, как известно 11], относятся к классу
пассивных радиолокаторов.
В данной главе рассматриваются особенности функциониро-
вания и построения пассивных РЛС, которые решают задачи мони-
торинга земной поверхности, анализируя тепловое излучение земли
и объектов на цей, соответствующее радиодиапазону. Такой тип
РЛС широко известен под названием СВЧ-радиометров [2, 7]. Со-
держание главы построено на материалах разработок СВЧ-
радиометров, проводимых в ОАО «Концерн «Вега», и затрагивает
как принципы их построения, так и методы повышения информа-
тивности данных радиометрических систем, в том числе основан-
ных на принципах синтезирования апертуры антенны.
Использование данных подходов обеспечивает улучшение
пространственно!о разрешения радиометрической системы и по-
вышение информативности формируемого изображения.
Кроме того, приводятся примеры известных в мире радиомет-
рических систем с синтезированной апертурой.
Оцениваются преимущества применения современных ин-
формационных технологий и цифровых методов обработки радио-
тепловых сигналов.
Анализируется возможность применения таких систем в раз-
личных областях народного хозяйства.
Оценивается возможность разработки систем с синтезирован-
ной апертурой антенны Л-диапазона на современной цифровой
элементной базе.
514
ГЛАВА 8. ПАССИВНЫЕ РЛС
8.1
Поляриметрическая система
из двух СВЧ-радиометров
типа «Ранет-21»
В связи с глобальным изменением климата и увеличением количест-
ва техногенных катастроф, в частности, аварий защитных гидроло-
гических сооружений, существенно возросла потребность в посто-
янном мониторинге данных объектов и своевременном выявлении
тех опасных участков на них, которые могут явиться причиной по-
тенциальных аварий. Все это в полной мере относится и к другим
искусственным объектам, таким, например, как земляные дамбы,
железнодорожные насыпи и т.п.
Игнорирование проведения мониторинговых мероприятий мо-
жет привести к катастрофическим последствиям. В частности, на
рис. 8.1 приведено изображение района вблизи дамбы после ее про-
рыва, которое позволяет оценить последствия халатного отношения
к мониторингу состояния гидрологического объекта.
Рисунок 8.1
Существующий традиционный способ мониторинга гидротех-
нических сооружений, при котором делается отбор проб грунта с
различной глубины с последующим высушиванием для определе-
515
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС ТИ И ВОЗДУШНО! О ПРОСТРАНСТВА
ния профиля влажности почвогрунтов, чрезвычайно трудоёмкий и
дорогостоящий. Более экономичным является мониторинг почво-
грунтов при использовании СВЧ-радиотеплолокаторов (СВЧ-
радиометров). Данный способ мониторинга является перспектив-
ным способом определения влажности почвогрунтов и строится,
как правило, на использовании СВЧ-радиометрических датчиков
различных диапазонов длин волн.
Как известно [2, 7], СВЧ-радиометрия или пассивное дистанци-
онное зондирование основано на измерении собственною электро-
магнитного излучения объектов природной среды в диапазоне от
миллиметровых до дециметровых длин волн. СВЧ-излучение поч-
вогрунтов определяется, главным образом, объемным содержанием
свободной влаги. Влагосодержание почвы зависит как от естествен-
ных факторов, таких как дождь и снеготаяние, так и искусственных
(полив и ирригационное увлажнение). На влагосодержание почвы
влияют также глубина залегания грунтовых вод, плотность и темпе-
ратура почвы, соленость почвенного раствора, параметры расти-
тельного покрова, прежде всего биомасса растительности.
Мерой интенсивности излучения в СВЧ диапазоне является яр-
костная температура Ть, Радиотепловое излучение почвы состоит из
двух компонент (собственное тепловое излучение и реликтовое из-
лучение небесной сферы, отраженного от поверхности почвы. Ин-
тенсивность собственного теплового излучения почвы равна произ-
ведению коэффициента излучения почвы аг и физической темпера-
туры Тс почвы.
Интенсивность отраженного от поверхности почвы реликтово-
го излучения небесной сферы равна произведению реликтовой тем-
пературы небесной сферы Тн на коэффициент отражения от поверх-
ности почвы, который численно равен (1-аг). В этой связи интен-
сивность радиотеплового излучения определяется как
Г =се-Т. + 0-®)Ти. (8.1)
В свою очередь, коэффициент излучения является функцией
диэлектрической проницаемости среды.
На рис. 8.2 представлено распределение излучательной спо-
собности различных объектов (металл, вода, увлажненная и сухая
почвы), выраженной через величины коэффициентов ж, яркостной
температуры а также диэлектрической проницаемости г.
Из представленных на диаграммах (рис. 8.2) данных следует,
что максимальную яркост ную температуру имеет с>хая почва. Чем
больше влажность, тем меньше ее яркостная температура.
516
ГЛАВА 8. ПАССИВНЫЕ РЛС
Ж ?л(К)
1 — 300
-200
0,5-
-100
Очень сухая почва
।------------।
Очень влажная почва
20
80
Метая л
।----------(
Рисунок 8.2
*
В основу определения влажности почвогрунтов с помощью
СВЧ-радиометрического зондирования положен следующий прин-
цип. Диэлектрическая проницаемость воды (г = 81) существенно
больше диэлектрической проницаемости сухой почвы (в = 2...12).
Диэлектрическая проницаемость влажной почвы зависит от её влаж-
ности, а излучательная способность почвы зависит от её диэлектри-
ческой проницаемости. Следовательно, измеряя излучательную спо-
собность почвы, можно пересчитать её во влажность почвы [2, 8].
СВЧ-радиометр является прибором, измеряющим радиоярко-
стную температуру объектов. Он может размещаться как на назем-
ных, так и на авиационных или космических носителях. Для полу-
чения высокого разрешения требуется применение антенн с боль-
шими пространственными размерами. При размещении радио-
метров на наземных мобильных платформах не всегда удается
исследовать заданные области, особенно в местах с труднопрохо-
димым рельефом. Поэтому предпочтительным является использо-
вание авиационных носителей. Применение традиционных авиаци-
онных носителей в виде пилотируемых аппаратов возможно, но
дорого, поскольку при их использовании подразумеваются расходы
на горючее, поддержание исправности самолета, оплату работы
пилотов, диспетчеров аэродромных служб и т.д.
Существенно дешевле использовать в качестве носителя беспилотный летатель-
ный аппарат. Для применения радиометра на беспилотном летательном аппарате
необходимо разработать такой радиометр, который обладал бы массогабарит-
ными показателями, дающими возможность разместить его на носителе данного
типа. Радиометр, удовлетворяющий данным массогабаритмным требованиям,
был разработан сотрудниками ОАО «Концерн «Вега» и получил название «Ра-
нет-21» [14].
517
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Масса радиотеплолокатора составила 7 кг. Внешний вид ли-
цевой части радиометра «Ранет-21» приведен на рис. 8.3. Данный
радиотеплолокатор является радиометром с двухопорной модуля-
цией и включает в свой состав антенную систему, усилитель НЧ,
аккумулятор, контроллер ММС,
ММС карту, GPS антенну и GPS приемник. Общий вид конст-
руктивного исполнения прибора приведен на рис. 8.4, а схема ра-
диометра представлена на рис. 8.5.
Аккумулятор
Усилитель НЧ
ММС Карта
Сумматор
Фильтр ВЧ
Усилитель ВЧ
GPS Антенна Контроллер ММС GPS Приёмник
Рисунок 8.4
Рисунок 8.5
518
ГЛАВА 8. ПАССИВНЫЕ РЛС
СВЧ-радиометр выполнен как приемник прямого усиления.
Сигнал с антенны подается на сумматор и далее поступает на
фильтр ВЧ. Затем происходит усиление и детектирование сигнала.
Для привязки к местности используется GPS-навигатор, информа-
ция с которого записывается на Multy Media Card (ММС-карту)
вместе с радиометрическими данными (рис. 8.5).
Для решения задач мониторинга водоопасных ситуаций в ряде случаев требует-
ся иметь радиометрическую информацию, полученную одновременно на двух
поляризациях - вертикальной и горизонтальной. Кроме того, для дальнейшей
обработки, документирования и интерпретации полученной информации необ-
ходимо радиометрическую съемку дополнить информацией синхронной видео-
съемки. Такая специализированная СВЧ-радиометрическая система была созда-
на в кооперации специалистов компании «Мирамап» (Нидерланды), ИРЭ РАН и
ОАО «Концерн «Вега».
Основу для данной радиометрической системы составили два
радиометра типа «Ранет-21», которые были дополнены специализи-
рованным видеорегистратором. Вся система была размещена на
подвижном наземном носителе - квадроцикле. Компоновку аппа-
ратуры на носителе выполнили специалисты компании «Мирамап»,
аппаратная часть комплекса обеспечивалась силами специалистов
ОАО «Концерн «Вега», а программное обеспечение разработано
специалистами ИРЭ РАН. Внешний вид радиометрического ком-
плекса приведен на рис. 8.6.
Рисунок 8.6
Радиометрическая информация, сопровождаемая навигацион-
ными данными, регистрируется на флеш-картах памяти типа ММС
отдельно для горизонтального и вертикального каналов. Видеоин-
формация, также сопровождаемая навигационными данными, реги-
519
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
стрируется на флеш-карте памяти типа микро SD. После окончания
сеанса записи данных, накопленная информация переносится в
персональный компьютер, где совместно обрабатывается для полу-
чения тематических карт.
В процессе первичной обработки вычисляются радиояркост-
ные температуры радиометрических сигналов, принятых по кана-
лам горизонтальной и вертикальной поляризаций, а также индекс
поляризации, равный отношению разности температур двух поля-
ризаций к их сумме:
На рис. 8.7 представлено окно главной формы программы об-
работки информации.
Vwcd
Fjkfet wm ptciwe.
'jhow
r ftdidw Tiece
С йЬЛог.
S.itoc**-
P? Hdizorial |з
V Vetiical [з
Restore
Info
Defa 02 06 11
T-me 13:2958
020611_133000.jpg
Temp V 283 78
Temp H 317.46
Index -0 06
Longitude 6 12 42 63
I nntude 52 10 59 65
Рисунок 8.7
520
ГЛАВА 8. ПАССИВНЫЕ РЛС
В верхнем правом углу окна отображаются графики зависимо-
сти радиояркостных температур от времени для каналов горизон-
тальной и вертикальной поляризаций. Ниже представлено в виде
графика изменение значения индекса поляризации. Слева в поле
«info» дана текстовая информация значений температур и навига-
ционных данных, соответствующих текущему положению курсора,
отображаемому в виде вертикальной линии на графиках. В нижнем
левом углу формы отображается окно с видеоизображением вы-
бранного курсором участка поверхности, а в правом углу формы
окно с траекторией движения носителя, где черным кружочком от-
мечено место, соответствующее текущему положению курсора.
После предварительной обработки данные сохраняются в
формате, удобном для дальнейшей обработки стандартными гео-
информационными программами с построением многослойных те-
матических карт, в частности, карт влагосодержания почвогрунтов,
которые, используются для обнаружения мест подземных протечек
в земляных дамбах.
Рисунок 8.8
На рис. 8.8 представлено изображение рабочего момента
съемки радиометрических данных с помощью поляриметрическая
системы из двух СВЧ-рациометров типа «Ранет-21», расположен-
ных на квадрацикле.
Исследование дамб в Нидерландах с помощью данного комплекса,
проведенное фирмой «Мирамап», показало высокую надежность и
эффективность применения описанной поляриметрической системы
из двух СВЧ-радиометров для решения задач мониторинга водоопас-
ных ситуаций.
521
к
РЛС АВИАЦИОННО-КОС \ 1ИЧЕСКО1О МОИИ1 ОРИНГА ЗЕМНОЙ ПОВЕРХИОС ТИИ ВОЗДЪ L1JHOI О ПРОСТ РАИС ТВА
Рассмотренный в 8.1 СВЧ-радиометрический приемник с двухопор-
ной модуляцией и непрерывной внутренней калибровкой [15] в тече-
ние многих лет использовался совместно со специалистами ИРЭ
им. В.А. Котельникова РАН для решения многих задач дистанционно-
го зондирования, в частности, для измерения влажности почвогрунтов
и обнаружения мест подземных протечек земляных дамб [2, 9].
Радиометрические системы данного типа нашли применение в
дистанционном зондировании наземных объектов с борта лета-
тельного аппарата или с наземной подвижной или неподвижной
платформы [10].
Необходимо заметить, что точность измерения радиояркост-
ной температуры в радиометрическом приёмнике зависит от ряда
факторов, таких как флуктуация температуры окружающей среды;
собственные шумы приёмника; наличие внешних и внутренних
помех; точность калибровки.
При дистанционном зондировании водных и переувлажнён-
ных объектов СВЧ-радиометром с двухопорной модуляцией, когда
радиояркостная температура объектов существенно (в несколько
раз) меньше температуры окружающей среды, в несколько раз
ухудшается точность измерений по сравнению со случаем измере-
ния радиояркостной температуры менее увлажнённых объектов.
В этой связи рассмотрим возможность повышения точности
измерения радиояркостной температуры при дистанционном зон-
дировании водных и переувлажнённых объектов на основе исполь-
зования радиометрического приёмника нового типа - СВЧ-ра-
диометра с трёхопорной модуляцией.
Первоначально рассмотрим схему СВЧ-радиометра предыду-
щего поколеггия с двухопорной модуляцией и непрерывной калиб-
ровкой (рис. 8.5), и сосредоточим свое внимание только на струк-
туре радиометрического приемника и основных этапах обработки
радиометрических данных. В результате получтгм более детальную
схему СВЧ-радиометра (рис. 8.9).
522
ГЛАВА В. ПАССИВНЫЕ РЛС
Рисунок 8.9
Из схемы следует, что СВЧ-радиометр предыдущего поколе-
ния включает в себя следующие элементы: переключатель (П), ко-
торый обеспечивает поочередное подключение к усилителю высо-
кой частоты (УВЧ) выходов антенны (А), каналов холодного (ХЭ)
и горячего (ГЭ) эталонов. Очередность задастся сигналом управле-
ния от модулятора (М). Термодатчики холодного (ТДХ) и горячего
(7ДГ) эталонов передают соответствующие значения температур в
блок множительно-делительной операции (МДО).
После УВЧ сигнал поступает на квадратичный детектор (КД), а
затем в блок синхронной фильтрации и синхронного детектирования
(СФ и СД), в котором формируются значения t/a- Ux и Ua- и за-
тем также передаются в МДО. В блоке выполнения МДО, по сигна-
лам с выходов синхронного детектора (СД) и термодатчиков . ДХ и
ТДГ осуществляется вычисление антенной температуры.
Коэффициентом пропорциональности служит коэффициент
усиления радиомет рического тракта.
После МДО сигнал поступает на аналого-цифровой преобра-
зователь (АЦП) и через контроллер записи (CCF) значение оценок
антенной температуры поступает на карту памяти типа Compact
Flash (CF).
Спецификой радиометра данного типа является то, что в качестве холодной эта-
лонной согласованной нагрузки используется 50-омный резистор, температур-
ный режим которого определяется температурой окружающей среды, а в каче-
стве горячей эталонной согласованной нагрузки - такой же резистор, но подог-
ретый на несколько десятков градусов.
523
РЛС АВИАЦИОННО-КОСМИЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
На выходе блока вычисления МДО возникает сигнал, пропор-
циональный значению антенной температуры:
С учётом того, что температура горячего внутреннего эталона
всегда выше температуры холодного внутреннего эталона и учиты-
вая, что измеренные температуры термодатчиками существенно
точнее, чем измерения, сделанные при помоши радиометра, абсо-
лютная погрешность измерения антенной температуры может быть
описана формулой
Используя формулу (8.3), можно выразить напряжения через
соответствующую им радиояркостную температуру. Тогда форму-
ла (8.4) примет вид
где Ку- величина, обратная вольт-градусной характеристике тер-
модатчиков.
Из выражения (8.5) видно, что абсолютная погрешность изме-
рений остается постоянной, когда антенная температура находится
в интервале между температурами внутренних эталонов, и линейно
возрастает по мере удаления антенной температуры от эталонов за
пределами этого интервала. На рис. 8.10 представлен график зави-
симости А7а от Та.
Рисунок 8.10
524
ГЛАВА 8. ПАССИВНЫЕ РЛС
Из представленной зависимости видно существенное увеличение погрешности
измерений, если измеряемая температура превосходит диапазон температур
внутренних эталонных согласованных нагрузок.
Для снижения погрешности измерений в диапазоне низких
температур (50...100 К) необходимо увеличивать интервал калиб-
ровки за счёт уменьшения радиояркостной температуры холодного
эталона. Этого можно добиться используя жидкостное охлаждение
холодной эталонной согласованной нагрузки жидким азотом, жид-
ким гелием или используя твердотельные источники низкотемпе-
ратурного шума [17].
Использование твердотельных источников низкотемпературного шума предпоч-
тительнее, так как не требуется дорогостоящая, энергозатратная, крупногаба-
ритная криогенная техника. Однако применение твердотельных источников хо-
лодного шума затруднено из-за их нестабильности и непредсказуемости радио-
яркостной температуры.
Для устранения отмеченных недостатков был разработан мо-
дуляционный радиометр с трёхопорной модуляцией, структурная
схема которого приведена на рис. 8.11. В этом радиометре исполь-
зуется источник с «холодным» шумом (ИХШ) в виде полупровод-
никового усилителя, подключаемого ко входу радиометрического
приёмника своими входными клеммами. По сравнению со схемой
на рис. 8.9, схема радиометра с трёхопорной модуляцией (рис. 8.11)
включает дополнительные элементы: нагревательный элемент
(НЭ); вентиль (В); термодатчик «холодного» шума (ТДХШ); мало-
шумящей усилитель (МШУ); фильтр СВЧ (ФСВЧ); филыр проме-
жуточной частоты (ФПЧ); видеоусилитель (ВУ).
ТДГ
ь
к регистратору
ГЗ НЭ
ИХШ
sin
от гетеродина
о г синхронизатора
от регистратора
pei нстратор
cos
от гетеродина
гдхш
к регистратору
Рисунок 8.11
525
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В этом случае диапазон температур, в котором абсолютная
погрешность ДТа сохраняет своё постоянное значение, расширяет-
ся, что позволяет повысить точность измерений по сравнению со
схемой радиометрического приемника с двухопорной модуляцией.
В качестве подтверждения сделанного вывода, на рис. 8.12 приве-
дена зависимость ДТа от Та при использовании эталона в виде «хо-
лодного» шума.
Применение схемы радиометрического приемника с трёхопорной модуляцией и
использование в ней источника холодного шума, позволяют повысить точность
измерения радиояркостной температуры и одновременно обеспечить компенса-
цию влияния окружающей среды.
Кроме того, применение в приемнике цифровой обработки квад-
ратурных сигналов позволяет существенно уменьшить габаритные
размеры, массу и энергопотребление радиометрической системы.
Рисунок 8.12
Рисунок 8.13
526
ГЛАВ 1 8. ПАССИВНЫЕ Р. Я
Радиометрический приёмник с трёхопорной модуляцией был
разработан в 2011 г. и изготовлен в количестве 6 экспериментальных
образцов в 2012 г. под шифром «РАСА» по заказу Минпромторга РФ
в рамках Федеральной программы развития электронной компонент-
ной базы. Внешний вид радиометрического приёмника с трёхопорной
модуляцией «РАСА» с антенной и системой регистрации представлен
на рис. 8.13. Масса данного радиомезрического приемника составила
всего 2,5 кг. Данное обстоятельство позволяет СВЧ- радиометр «РА-
СА» с успехом использовать на мобильных, в том числе авиационных
(пилотируемых и беспилотных) и космических, плат формах.
Радиометрический приёмник с трёхопорной модуляцией позволяет
решать задачи СВЧ-радиометрического дистанционного зондирования
земной и водной поверхностей с высокоточным определением их ра-
диояркостной температуры.
Повышение информативности
СВЧ-радиометрических систем
методом пассивного синтеза
апертуры антенны
.../ .ж...:._ _1 _________ _
Развитие информационных технологий и цифровых методов обра-
ботки информации заставляет по-новому взглянуть на известные
технологии и системы, в частности, на радиометрические системы,
а также на методы приёма и измерения параметров тепловых по-
лей. Применение информационных технологий в радиометрии су-
лит несомненные выгоды, так как «только та наука достигает со-
вершенства, которой удаётся связать себя с математикой ...».
В этой связи является целесообразным проведение анализа по
оценке преимуществ, которые могут быть получены от применения
современных информационных технологий и методов цифровой об-
работки сигналов в радиотеплолокаторах. Учитывая, что одним из
основных параметров радиометрических систем дистанционного
зондирования, является информативность, основное внимание обра-
тим на повышение данного параметра СВЧ-радиометрических сис-
тем за счет использования методов пассивного синтеза апертуры.
527
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТР. 1НСТВА
Как известно [4], в соответствии с теоремой В.А. Котельнико-
ва любые аналоговые сигналы с ограниченным спектром могут
быть представлены набором дискретных отсчётов их амплитуд, ес-
ли эти отсчёты делаются с частотой, превосходящей частоту Найк-
виста. Значения амплитуд дискретных отсчётов могут быть пред-
ставлены с заданной точностью числами, показывающими сколько
минимально разрешаемых квантов амплитуды сигнала необходимо
просуммировать для достижения требуемого амплитудного значе-
ния сигнала.
Таким образом, аналоговый сигнал представляется потоком
чисел, как правило, двоичных. Под информативностью сигнала бу-
дем понимать количество двоичных цифр, представляющих сигнал,
поступающих в единицу времени. Если вспомнить, что единицей
информации является одноразрядное двоичное число - ноль или
единица, названное битом, то информативность, в данном случае,
определяется количеством бит в секунду.
Информативность СВЧ-радиометрической системы является
универсальным параметром, по значению которого можно судить о
потребительских свойствах радиометров, особенно в системах дис-
танционного зондирования. Традиционно используются различные
параметры оценки радиометрических систем, например секундная
чувствительность, пространственная разрешающая способность,
точность измерения радиояркостных температур, точность калиб-
ровки и другие. Однако информативность является единственным и
универсальным параметром, являющимся функцией всех перечис-
ленных величин.
Для повышения информативности наиболее выгодно повышать пространствен-
ное разрешение антенной системы, так как при увеличении разрешающей спо-
собности по каждой из координат в два раза информативность обзора простран-
ства возрастёт в четыре раза. Наиболее перспективный путь решения проблемы
повышения пространственной разрешающей способности СВЧ-радиометри-
ческих систем - разработка СВЧ-радиометрической системы с синтезированной
апертурой антенны.
Физические принципы построения СВЧ -радиометрических сис-
тем с синтезированной апертурой были разработаны в конце XX в.
Однако физическая реализация принципов пассивного синтеза
апсргуры не представлялась в тот момент возможной из-за отсут-
ствия элементной базы, способной эти принципы реализовать. На
сегодняшний день такая элементная база есть. Прежде всего, эго
цифровые микросхемы аналого-цифровых преобразователей, быст-
рые микросхемы программируемой логики и сигнальные микро-
процессоры.
528
ГЛАВА 8. ПАССИВНЫЕ РЛС
В качестве примеров таких систем могут служить СВЧ-радио-
метры L-диапазона «СТАР-Лайт» производства США и «МИРАС»,
запущенный Европейским космическим агентством 2 ноября 2009 г.
Внешний вид данных систем представлен на рис. 8.14. На
рис 8.14,6/ представлен 21-см радиотеплолокатор «СТАР-Лайт», а
на рис. 8.14,6 - система «МИРАС».
Рисунок 8.14
А ппаратно-программные мероприятия
для реализации принципов пассивного синтеза апертуры
• Разработка специального малошумящего широкополосного
приемника СВЧ-сигнала, способного выдавать на выход сиг-
нал, содержащего как амплитудную, так и фазовую информа-
цию от принимаемой электромагнитной волны.
• Разработка регистратора, способного работать на борту лета-
тельного аппарата и запоминать информацию с выхода квадра-
турных каналов приемника с темпом не менее 40 Мбайт с за
время не менее 40 мин.
• Создание антенной системы, состоящей из нескольких элемен-
тарных приемных антенн, разнесенных в пространстве.
• Разработка программного обеспечения для синтезирования
апертуры и построения карт яркостных температур.
В настоящее время уже создан определенный задел. Так, при
разработке изделия МРК-411 был создан приемник под диапазон
23 см, который может быть использован в качестве приемника
СВЧ-радиометра при небольшой его перестройке на длину волны
21 см. Помимо этого, при разработке РСА по теме «Нониус» был
создан регистратор информации, который после минимальной до-
работки будет удовлетворять требованиям, отмеченным выше.
529
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Кроме того, отдельные элементы антенной системы также после
минимальной доработки могут быть заимствованы из МРК-411.
СВЧ-радиометрическая система с синтезированной апертурой
строится из отдельных элементарных радиометров с общим гетеро-
дином и системой синхронизации. Обычно элементарные радиомет-
ры располагаются вдоль трех лучей, выходящих из одной точки под
углом 120° друг относительно друга (схема У, см. рис. 8.14,6/ и б).
Такая схема оптимальна по количеству элементарных радио-
метров для синтезирования двумерной апертуры. Однако для раз-
мещения на самолете такая схема менее удобна, чем схема «X»
(крест Миллса), когда элементарные радиометры располагаются
вдоль четырех лучей (рис. 8.15), выходящих из одной точки под
углом 90° друг относительно друга. Схема элементарного радио-
метра представлена на рис. 8.16. В состав радиометра входят сле-
дующие элементы: А - антенна; М - модулятор; С - смеситель; Ф
фильтр; МШУ - малошумящий усилитель; КДФ - квадратурно-
фазовый детектор; АЦП - аналого-цифровой преобразователь;
CCF - контроллер; GF- карты; ГЭ и ХЭ - «горячая» и «холодная»
эталонные нагрузки; ТДХ и ТДГ - термодатчики «горячей» и «хо-
лодной» эталонных нагрузок; БУ - общий блок управления а также
общий гетеродин.
Рисунок 8.15
530
ГЛАВА 8. ПАССИВНЫЕ РЛС
Рисунок 8.16
Такой радиометрический приёмник - унифицированный элек-
тронный модуль, был разработан в ходе выполнения ОКР «РАСА»
по заказу Минпромторга РФ. На рис. 8.17 представлены изображе-
ния данного электронного модуля, где приведены его внешний вид
(рис. 8.17,6?) и внутреннее исполнение (рис. 8.17,6).
Рисунок 8.17
Как отмечалось ранее, задача СВЧ-радиометрии при дистан-
ционном зондировании - построение карт распределения яркостной
температуры подстилающей поверхности Гя(х,^). Пространствен-
531
Р1С АВИ -ЩЧОННО- КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНО*. ТИ И ВОЗДУ ИЕНОЮ ПРОСТРАНСТВА
ное разрешение - важнейший параметр радиометрической системы.
Оно определяется главным образом диаграммой направленности
антенной системы. Здесь ключевое значение имеет ширина главного
лепестка, определяющая собственно пространственное разрешение,
и уровень боковых лепестков, влияющий на динамический диапазон
и точность измерения радиояркостных температур.
Известно [3], что антенная система выступает как линейный
фильтр пространственных частот, воздействующий на функцию
радиояркостных температур, объекта исследования:
Т Auy) = fx(u,v)A(u,v), (8-6)
где Л(щг) — пространственная частотная характеристика антенной
системы, являющаяся обратным преобразованием Фурье от диаграм-
мы направленности антенны по мощности, и определяемая как
А = constE • Е ; Е- функция распределения поля в раскрыве антенны.
В тоже время известно [3], что пространственный спектр
источника и распределение яркости связаны между собой двумер-
ным преобразованием Фурье:
Д (W, v) = |(Л,ууЕ2*Л"+п Mxdy,
R
В этой связи, антенна выступает в роли фильтра пространст-
венных частот сигнала, на выходе которого получается спектр
изображения Tj(z/,v):
Уравнение антенного сглаживания в спектральной форме
может быть записано как
Г,(ичм) = 7}/(^м)-А(п^ = Р0Г(и,у)ЕЕ , (8.9)
где Л(//,г) - ДНА антенны по мощности.
Следовательно. ДНА антенной системы может быть рас-
считана как обратное преобразование Фурье от её пространствен-
но-частотной характерно гики (ПЧХ). Такой подход гораздо
удобнее и эффективнее, чем вычисление ДНА прямым методом.
Требования предельно высоких разрешений приводят к
сложным многоэлементным конструкциям (рис. 8.18). содержащим
532
ГЛ 4ВА 8. ПАССИВНЫЕ Р IC
до нескольких десятков отдельных элементарных антенн. Исходя
из определения ПЧХ как функции амплитудно-фазового распре-
деления поля в раскрыве антенны, каждая пара элементов создаёт
один «остров» на спектральной плоскости uv. Чем больше таких
«островов», тем меньше областей пространственного спектра, к
которым антенна нечувствительна.
В соответствии с критерием
J A(co)dco
_ -00_______
б»гр Л(О)<Х»гр
(8.10)
идеальной будет считаться такая антенная система, которая нс
будет иметь «дыр» в области uv, соответствующей максимальным
расстояниям между элементами. В этом случае ПЧХ антенны будет
эквивалентна сплошному зеркалу тех же размеров.
Рисунок 8.18
*
Учитывая конечность размеров антенн и воспользовавшись
теоремой отсчётов, г/т-плоскоегь разбивается на прямоугольную
систему ячеек (Д//, Дг|, каждая из которых представима отдельной
точкой.
Спектральная чувствительность антенной системы
A(u,v) = A/t ;d(u - АД.’/ )Р’( v- /Ду),
к — —К ,...,0,...,Х,
l = -L, ...,0,..., L.
(8.11)
^тах ХД//,
у
max
= £Д у,
533
РЛС ШИАЦИОННО-КОСМИЧЕС КОГО МОНИТОРИНГА ЗЬ МНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
где Ак 7 - спектральная чувствительность антенной системы в точке
(и = к Au, v = /Ду).
По определению, ДНА антенны по мощности
А(х, у) = F 'а = [р(и, V)e-j2rr{‘'x+v) 'dudv . (8.12)
Подставляя в (8.12) величину Л(д,у), определяемую из
уравнения (8.11), получим ДНА в виде А(х,у), которая в случае
отсутствия «дыр» на wv-плоскости, будет определяться как
^(х, у) =
in [(2А? + DttvAz/] sin[(2L + 1)/гхДу]
(2К + ОтглДг/
(2£ + 1)яхДу
(8.13)
В случае неидеальной антенны, при наличии незаполненных
ячеек (£./), в которых Ак1 = 0, получим, исходя из принципа
суперпозиции, интерференционные лепестки. Каждая «дырка» в
г/у-плоскости вычитает из идеальной ДНА многолепестковую
диаграмму. Например, пусть nuv - число «дыр» на ду-плоскости, т.е.
число незаполненных ячеек размерами Д//хДу; М - диаметр
синтезированной области на wy-плоскости; р=^- - процент дыр
М,.
на синтезированной области.
Мажорирующие оценки уровня лепестков
для большого числа случайно расположенных
по плоскости «дыр»
• Максимально возможный боковой лепесток (т.е. случай, когда
в этой точке все вычитаемые диаграммы складываются в фазе):
(8-14)
Среднеквадратичный уровень лепестков на больших
расстояниях от главного лепестка равен
(8.15)
Существует и другой, эмпирический критерий «качества»
ПЧХ антенной решётки: отсутствие в ПЧХ продолжительных
нулей (т.е. больше, чем 1*1). В этом случае предполагается, что
главный лепесток «анти-ДНА» не будет усиливать первый боковой
лепесток. Исходя из данного критерия, наиболее выгодными будут
конфигурации типа «крест Миллса», а также Г- и Y-образные
534
ГЛАВА 8. ПАССИВНЫЕ РЛС
системы, которые обеспечивают допустимую ПЧХ антенны при
наименьшем числе элементарных приёмников.
На рис. 8.19 представлена практическая реализация системы с
пассивным синтезом апертуры из 11-м каналов в виде «креста
Миллса». Соответствующие данной конфигурации ПЧХ и ДНА
радиометрической системы с синтезированной апертурой с базой 9
представлены на рис. 8.20. Рис. 8.20,а соответствует ПЧХ, а
рис. 8.20,6-ДНА.
Рисунок 8.19
Рисунок 8.20
535
РЛС' ЛИАЦИОННО КОС 'МИЧЕС КОГО МОНИ1 ОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Для дополнительного удешевления конструкции заполнение
решётки элементарными приёмниками может быть сделано не
сплошным (MIRAS, STAR-Light), а разреженным [6].
Радиометрические системы с синтезированием апертуры могут приме-
няться для решения народно-хозяйственных и специальных военных
задач, где традиционно используются в системах дистанционного зон-
дирования, но при этом они будут способны обнаруживать более мел-
кие объекты.
Блок обработки информации
8Я4 для Радиометрических систем
с синтезированием апер\ ры антенны
Радиометрические системы, рассмотренные в 8.1-8.3 могут приме-
няться как при решении военных, так и гражданских задач, а также
использоваться на борту носителей различного типа. А именно: в сис-
темах дистанционного зондирования земли с наземных носителей,
авиационных (как пилотируемых, так и беспилотных и космических
платформ); в медицинских системах для термографирования тела че-
ловека или животных; в системах обеспечения безопасности, для об-
наружения различных объектов, скрытых под одеждой человека [7].
В настоящее время наиболее динамично развивается направ-
ление, связанное с дистанционным зондированием земли, так как
информация, получаемая СВЧ-радиометрами, может быть успешно
использована для решения задач оперативной диагностики, оценки
масштабов и уменьшения последствий стрессовых природных про-
цессов. Подтверждением этого, например, служит геоинформаци-
онная система I ИМС-Регион в Болгарии [12], В настоящее время
данное направление стало особенно актуальным в ряде стран Евро-
пы и в России в связи с глобальным изменением климата и ростом
числа природных катастроф.
Однако низкая разрешающая способность космических систем
с размером разрешаемого элемента, порядка 50x50 км [18], не по-
зволяет в полной мере воспользоваться преимуществами СВЧ-
радиометрического зондирования. Авиационные радиометрические
536
ГЛАВА 8. П1ССИВНЫЕ РЛС
системы позволяют получать более высокие разрешающие способ-
ности, в L-диапазоне, порядка 50x50 м при полёте на высоте около
100 м, что также не всегда является достаточным. В этой связи ак-
туальной является задача повышения разрешающей способности
СВЧ-радиометрических систем дистанционного зондирования,
особенно в L-диапазоне.
Простое увеличение апертуры антенны, с целью получения бо-
лее узкой диаграммы направленности, и, как следствия, более высо-
кой разрешающей способности, не всегда применимо, так как антен-
ны больших размеров трудно размещать на борту авиационного но-
сителя. Альтернативным решением, популярным сегодня у европей-
ских и американских исследователей, стало использование систем с
пассивным, интерферометрическим синтезом апертуры (см. 8.3).
В этом случае одновременно используется несколько радио-
метрических приёмников, антенны которых имеют сравнительно
небольшие размеры (порядка длинны волны), располагаются в оп-
ределённом порядке и разнесены на различные расстояния.
Ширина главного луча диаграммы направленности отдельного
приёмника может быть достаточно большой - 50...70°, но ширина
синтезированного луча в интерферометрической системе может
быть в десятки раз меньше, так как определяется базой системы
(расстояние между наиболее удалёнными антеннами), числом эле-
ментарных приёмников и длинной волны [6].
Для использования в качестве элементарного приёмника соб-
ственного теплового излучения подстилающей поверхности требу-
ется применение особого радиометрического приёмника, способно-
го принимать и запоминать информацию не только об амплитуде
радиотепловой волны, но также и о её фазе. Такими функциями об-
ладает приемный модуль «РАСА» (см. 8.3).
Для реализации радиометрической системы с интерферомет-
рическим пассивным синтезом апертуры необходим специализиро-
ванный вычислитель, обеспечивающий обработку в реальном мас-
штабе времени поступающей от приёмников информации и таким
образом реализующий процесс синтеза пассивной искусственной
апертуры, который условно назовем блоко м синтезирования.
Разработка блока обработки информации для радиометриче-
ской системы с синтезированием апертуры возможна на различной
цифровой элементной базе. Рассмотрим возможность его цеализа-
ции на микросхемах программируемой логики (программируемые
логические интегральные схемы). Для этого, прежде всего, необхо-
димо оценить информационный поток, который должен обрабаты-
вать блок синтезирования.
537
РЛС АВИ4ЦИОННО-КОСМИЧЕ СКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Предположим, что от одного приёмника поступает поток ком-
плексных чисел. Такое предположение правомочно, поскольку
комплексное число одновременно несёт информацию об амплитуде
и о фазе волны. Это амплитуда и фаза комплексного числа. Для пе-
редали одного потока комплексных чисел используются два потока
действительных чисел, представляющих действительную и мни-
мую компоненты комплексного числа. Действительные числа, мо-
гут быть представлены, например, восьмиразрядными двоичными
числами. Этого вполне достаточно для рассматриваемой системы.
В результате на выходе элементарного приёмника существуют
два потока однобайтных чисел, которые формируются двухканаль-
ным аналого-цифровым преобразователем. Темп дискретизации
определяется шириной спектральной полосы выходных квадратур-
ных сигналов и должен быть равен или превосходить частоту
Найквиста.
Обычно для радиометров, работающих в L-диапазоне, цен-
тральная частота и ширина полосы выбирается с учётом выделен-
ного для радиоастрономов частотного «окна», в котором запрещена
работа любых радиопередатчиков. В рассматриваемом случае это
окно лежит в пределах частот 1400... 1427 МГц [3]. Для радиомет-
рического приёмника «РАСА» ширина полосы приёмника выбрана
равной 12 МГц в пределах выделенной радиоастрономам полосы
частот. С учётом изложенного, суммарный информационный поток
на выходе приёмника составит 12 х 4 = 48 МБайт/с.
При одновременном использовании 12-ти приёмников общий
информационный поток составит 12 х 48 = 576 МБайт/с. Следует
отметить, что такой информационный поток будет только в случае
применения радиометра компенсационного типа. Для радиометра с
двухопорной модуляцией и непрерывной внутренней калибровкой
при меандровои модуляции поток информации будет в двое мень-
ше - 288 Мбайт/с, так как сигнал от антенны принимается только
половину периода модуляции, а в другую половину принимаются
сигналы от внутренних источников калибровки.
Из данного анализа следует, что на сегодня ни один из известных микропроцес-
соров не сможет справиться с таким потоком информации в реальном масштабе
времени. Поэтому, необходимо разработать специализированный вычислитель,
состоящий из нескольких аналогичных вычислительных структур, по числу фор-
мируемых синтезированных лучей, способных одновременно принимать и обра-
батывать информационные потоки сразу от всех приёмников.
Возможный вариант схемы для реализации такой вычисли-
тельной структуры представлен на рис. 8.21.
538
ГЛАВА 8. ПАССИВНЫЕ РЛС
Рисунок 8.21
Блок обработки работает по следующем}’ алгоритму. Блок состо-
ит из N одинаковых вычислительных модулей, работающих одновре-
менно, для формирования N независимых синтезированных лучей. На
вход модуля формирования луча поступают потоки данных от всех
приёмников, прошедшие через блок казибровки БК, где данные под-
вергаются линейному преобразованию, в результате которого все дан-
ные становятся сопоставимыми по единой радиометрической шкале, с
заданной крутизной и начапьной точкой. Алгоритм вычисления ка-
либровочных коэффициентов не рассматривается.
539
Р 1С АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Модуль формирования синтезированного луча представляет
набор из М перемножителей, где М - число элементарных приём-
ников, и сумматор, для параллельного суммирования всех М чисел
с выходов перемножителей и последовательного суммирования
квадратов полученных чисел, для определения радиометрического
выигрыша и формирования сигнала синтезированного луча про-
порционального мощности волны, пришедшей с соответствующего
направления. На входы перемножителей подаются константы - по-
ворачивающие множители, комплексные числа с единичной ам-
плитудой и заданной фазой. Набор поворачивающих множителей
для всех М потоков данных от приёмников определяет положение
синтезированного луча в пространстве.
Существенно прореженный поток данных поступает на вход
формирователя выходного потока данных, и с его выхода - на ре-
гистратор информации.
Описанная вычислительная структура может быть реализова-
на на одной единственной П.ПИС фирмы ALTERA, и это главный
вывод, который можно сделать из проведённого анализа.
Литература
1. Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Ильчук А.Р., Герасимов А.А. Авиа-
ционные радиолокационные комплексы и системы; учебник для слушателей и кур-
сантов ВУЗов ВВС / Под ред. П.И. Дудника. М.: Изд-во ВВИА им. проф. Н.Е. Жуков-
ского. 2006.
2. Башаринов А.Е., Шутко А.М. Измерение влажности земных покровов методами
СВЧ-радиометрии // Метрология и гидрология. 1971. № 9. С. 17.
3. Есепкина Н.А., Корольков Д.В., Парийский Ю.Н. Радиотелескопы и радиометры. М.:
Наука. 1973. 416с.
4. Котельников В.А. О пропускной способности эфира и проволоки в электросвязи.
Всесоюзный энергетический комитет. // Материалы к I Всесоюзному съезду по во-
просам технической реконструкции дела связи и развития слаботочной промыш-
ленности. 1933.
5. Патент RU 2328751 С2 Россия, МПК G01R29/08 (2006.01). Многочастотный радио-
термограф. / Бирюков Е.Д., Верба В.С., Гудков А.Г., Леушин В.Ю., Плющев В.А.,
Сидоров И.А. (Россия). 20006129203/09; Заявл. 14.08.2006; Опубл. 10.07.2008.
Бюллетень №19.
6. Томпсон Р., Морган Дж., Свенсон Дж. Интерферометрия и синтез в радиоастроно-
мии: Пер. с англ. М. Мир. 1989. 568 с.
7. Траектория полёта / Под ред. В.С. Вербы. М.: Оружие и технологии. 2005
8. Шутко А.М. СВЧ-радиометрия водной поверхности и почвогрунтов. М. Наука. 1986.
190 с.
9. Шутко А., Новичихин Е., Сидоров И., Плющев В. и др. Мониторинг водоопасных си-
туаций в Украинском Причерноморье: проблемы, организация, эффективность.
Одесса. 1998.
10. Шутко А.М., Новичихин Е.П., Сидоров И.А., Белоусов О.Б., Смольянинов С.И., Ха-
арбринк Р. Сканирующая радиометрическая система для сбора и обработки ин-
540
I ЛАВ4 8. ПАССИВНЫЕ Р. 1С
формации о состоянии гидрологических сооружений // 56-я Научно-технич. конф.,
посвященная 60-летию МИРЭА. М.: МИРЭА. 2007.
11. Шутко А.М., Новичихин Е.П., Сидоров И.А., Белоусов О.Б., Горбачев Д.А., Арчер Ф.
Радиометрическая система для сбора и обработки информации о влажности поч-
вогрунтов с борта беспилотного летательного аппарата // 56-я Научно-технич.
конф., посвященная 60-летию МИРЭА. М.: МИРЭА. 2007.
12. Шутко А.М., Новичихин Е.П., Сидоров И.А., Плющев В.А. и др. Оперативная диагно-
стика, оценка масштабов и уменьшение последствий стрессовых природных процес-
сов. София: Академическое издательство им. проф. Мариана Дринова. 2012.
13. Шутко А.М., Новичихин Е.П., Плющев В.А., Сидоров И.А., Рещиков А.Д., Солдатен-
ко А.П. СВЧ-радиометр с трехопорной модуляцией // Радиотехника. 2013. №1. С.
120-122.
14. Шутко А.М., Новичихин Е.П., Маречек С.В., Плющев В.А., Сидоров И.А., Бирюков В.Д.,
Рещиков А.Д., Хаарбринк Р. Поляметрическая система из двух СВЧ-радиометров типа
«Ранет-21» // Радиотехника. 2013. № 1. С. 123-126.
15. А.с. №1734468.
16. Dicke R.H. The Measurement of Thermal Radiation at Microwave Frequencies // Rev.
Sci. Instrum. 1946. P. 268-275.
17. Frater R.M., Williams D.R. An active «cold» noise source // IEEE transactions on mi-
crowave theory and techniques. 1981. V. 29. Is.4.
18. Shutko A.M., Krapivin V.F., Sidorov I.A. Practical microwave radiometric risk assess-
ment. Sofia: Professor Marin Drinov Academic Publishing House. 2010. 88 p.
541
Данная монография является обобщением результатов, полученных
учеными и активными участниками научной школы «Радиолокаци-
онные системы авиационно-космического мониторинга земной по-
верхности и воздушного пространства». В то же время материалы,
представленные в монографии., позволяют оценить направления
развития современных систем радиолокационного мониторинга,
следуя которым можно обеспечить существенное повышение эф-
фективности радиолокационных систем при наблюдении воздуш-
но-космических объектов и земной поверхности.
Заслуживает внимание, что в данной книге впервые обобщены
результаты исследований, связанные с получением высокодеталь-
ного радиолокационного изображения наземных объектов и земной
поверхности при синтезе апертуры за счет вращения фазового цен-
тра реальной антенны, а также показаны особенности данного син-
теза при учете совместного движения фазового центра по враща-
тельной и поступательной траекториям движения.
В полной мере это относится и к материалу монографии, в ко-
тором рассматриваются особенности радиолокационного наблюде-
ния при длительном когерентном накоплении, а также изложены
проблемы построения системы обработки и обнаружения отражен-
ных сигналов в данных условиях, в том числе многоканальных и
адаптивных систем.
В этом плане также интересен материал, посвященный разра-
ботке систем пассивного радиолокационного мониторинга, обеспе-
чивающих получение высокодетапьного изображения земной по-
верхности.
В материалах монографии не ставилась цель подробно рас-
смотреть все тенденции развития радиолокационных систем, а ос-
новное внимание было обращено на вопросы, которые могут пред-
ставлять интерес для ученых, занимающихся проблемами радиоло-
кационного мониторинга.
542
АДФ - аналогово-дискретная фильтрация
АЗН - автономная навигационная система
зависимого наблюдения
АИС - автоматизированная
информационная система
АКФ - автокорреляционная функция
АР - антенная решетка
АРЛИ - амплитудное радиолокационное
изображение
АРМ - автоматизированное рабочее место
АК РЛДН - авиационный комплекс
радиолокационного дозора и наведения
АС - антенная система
АСЦРО - автоматическое сопровождение
целей в режиме обзора
АСУ - автоматическая система управления
АТ - активный транспондер
АФАР - активная фазированная антенная
решетка
АЧХ - амплитудная частотная
характеристика
АЦП - аналого-цифровой преобразователь
БИХ - бесконечная импульсная
характеристика
БИС - большая интегральная схема
БЗ - база знаний
БЗ ЭС - база знаний экспертной системы
БЛА - беспилотный летательный аппарат
БЛ - боковой лепесток
БПФ - быстрое преобразование Фурье
БРЛК - бортовой радиолокационный ком-
плекс
БРЛС - бортовая радиолокационная
система
БЦВМ - бортовая цифровая
вычислительная машина
ВВС - военно-воздушные силы
ВВ - вертикально-вертикальная
поляризация
ВГ - вертикально-горизонтальная
поляризация
ВГ - режим работы РЛС выше горизонта
ВИ - видеоимпульс
ВИСАР - видеоимпульсная сканирующая
антенная решетка
ВКП - виртуальный кнопочный
переключатель
ВМБ - военно-морская база
ВС - воздушное судно
ВУ - вычитающее устройство,
вычислительное устройство
ВУ - видеоусилитель
ВЧ - высокая частота
ВЧП - высокая частота повторения
ВЧПИ - высокая частота повторения
импульсов
ГАФАР - гибридная активная
фазированная антенная решетка
ГЗЛА - гиперзвуковой летательный
аппарат
ГКИ - генератор контрольной
информации
ГВ - горизонтально-вертикальная
поляризация
ГГ - горизонтально-горизонтальная
поляризация
ГЛ - главный лепесток
ГСПФ - генератор сигнала произвольной
формы
ГУН - управляемый генератор
непрерывных колебаний
ГЭ - горячий эталон
ДИ - децимация и интегрирование
ДК - дисплейный комплект
ДМ - демодулятор
ДН - диаграмма неопределенности,
диаграмма направленности
ДНА - диаграмма направленности
антенны
ДОС - диаграммообразующая схема
ДПФ - дискретное преобразование Фурье
ДХ - дискриминационная характеристика
ЗИ - зондирующий импульс
ЗС - зондирующий сигнал
ИКО - индикатор кругового обзора
ИМЦ - интенсивно маневрирующая цель
ИРМ - измерение рельева местности
ИТО - индикатор тактической обстановки
ИЧПС - измеритель частотных параметров
сигнала
ИРЭ РАН - институт радиотехники
и электроники им. В.А. Котельникова
Российской академии наук
ИФ - идентификатор фазы
543
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
ИКАО - международная организация
гражданской авиации
ИЧМ - индекс линейной частотной
модуляции
ИХШ - источник с холодным шумом
КГУН - кварцевый управляемый генератор
непрерывных колебаний
КД - квадратичный детектор
КИЧ - крутизна изменения частоты
КИХ - конечная импульсная
характеристика
КНИ - квазинепрерывное излучение
КО - когерентная обработка
КПД - коэффициент полезного действия
КРЛИ - комплексное радиолокационное
изображение
КРЛОИ - комплексный радиолокационно-
оптический измеритель
КС - корректор спектра
КТМ - комплексная точечная модель
КФД - квадратурно-фазовый детектор
КЧМ - комбинированная частотная
модуляция
КЦО - канал цифровой обработки
ЛА - летательный аппарат
ЛВ - линия визирования
ЛБВ - лампа бегущей волны
лпд - линия передачи данных
ЛЧМ - линейная частотная модуляция
ЛЭП - линия передачи электрической
энергии
МАК - многофункциональный
авиационный комплекс
МАК РОУ - многофункциональный
авиационный комплекс разведки,
опознавания и управления
МДО - множительно-делительная
операция
МПИ - магистраль передачи информации
МФК - многофазное кодирование
МШУ - малошумящий усилитель
НДЦ - наземная движущая цель
НК - надводный корабль
НЛЧМ - нелинейная частотная модуляция
НЧМ - нелинейная частотная модуляция
НЧП - низкая частота повторения
НЧПИ - низкая частота повторения им-
пульсов
НЭ - нагревательный элемент
одч - определитель девиации частоты
озд - определитель знака девиации
часто!ы
ОЗУ - оперативное запоминающее
устройство
ОЛС - оптико-локационная система
ОРЛИ - обработка радиолокационной
информации
ОС - отраженный сигнал
ОРЛ-А - обзорный радиолокатор
аэродромный
ОРЛ-Т - обзорный радиолокатор
трассовый
ПАП - постановщик активных помех
ПА ФАР - полуактивная фазированная
антенная решетка
ПД - процессор данных
ПЗСК - переносная земная система
координат
ПЗУ - постоянное запоминающее
устройство
ПК - пеленгационный канал
ПЛИС - программируемая логическая ин-
тегральная микросхема
ПО - программное обеспечение
ППМ - приемо-передающий модуль
ППС - программируемый процессор
сигналов
ПРМ - приемник
ПРЛС - посадочная радиолокационная
станция
ПС - процессор сигналов
ПУ - пороговое устройство
ПЧ - промежуточная частота
ПЧХ - пространственно-частотная
характеристика
РЛ - радиолокатор (радиолокационный)
РЛ ОЛП - радиолокатор обзора
летного поля
РЛИ - радиолокационное изображение
РЛИ НК - радиолокационное изображение
надводного корабля
РЛК - радиолокационный комплекс
РЛС - радиолокационная станция
(система)
РЛС ДРЛО - радиолокационная система
дальнего радиолокационного обнаружения
РЛС КО - радиолокационная система
кругового обзора
РЛС УВД - радиолокационная система
управления воздушным движением
РСА - радиолокационная сисгема
с синтезированием апертуры антенны
РСН - равносигнальное направление
РТР - радиотехническая разведка
РЭА - радиоэлектронная аппаратура
РЭК - радиоэлектронный комплекс
РЭС - радиоэлектронная сисгема
РЭСС - радиоэлектронная следящая
система
САЗО - система активного запроса-ответа
544
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
СБИС - сверхбольшая интегральная схема
СВ КО - спецвычислитель когерентной
обработки
СВС - специальная вычислительная
система
СВРЛ - система вторичной радиолокации
СВЧ - сверхвысокая частот, сверхвысоко-
частотный
СВЧУ - сверхвысокочастотное устройство
СГО - система государственного
опознавания
СД - селектор дальности
СД - синхронный детектор
сдц - селекция движущихся целей
СК - система координат
СКО - среднеквадратическое отклонение,
среднеквадратическая ошибка
СМЛА - сверхманевренный летательный
аппарат
СнК - система на кристалле
СОЦ - сопровождение одиночной цели
СПК - система передачи команд
СПМ - спектральная плотность мощности
СС - схема слежения
СТОУ - стохастическая теория оптималь-
ного управления
СЧП - средняя частота повторения
СЧПИ - средняя частота повторения
импульсов
СФ - согласованный фильтр
СФИД - система формирования
исходных данных
СЦО - система цифровой обработки
СШС - сверхширокополосный сигнал
ТАВК - тактический авиационный ракет-
ный крейсер
тдг - термодатчик горячего эталона
тдх - термодатчик холодного эталона
ТДХШ - термодатчик холодного шума
TH - тело неопределенности
ТРД - турбореактивный двигатель
ТЦ - точечная цель
ТТХ - тактико-технические характеристики
УВД - управление воздушным движением
УГ - управляемый гетеродин
УИРС - устройство имитации и регистра-
ции сигналов
УО - узкополосный обнаружитель
УПФ - устройство предварительной
фильтрации
УПЧ - усилитель промежуточной частоты
УСП - управляемое средство поражения
УЭПР - упорядоченные по возрастанию
значения эффективной поверхности
рассеяния
ФАПЧ - фазовая автоподстройка частоты
ФАЧС - формирователь
амплитудно-частотного спектра
ФАР - фазированная антенная решетка
ФД - фазовый детектор
ФКМ - фазовая кодовая модуляция
ФН - функция неопределенности
ФПО - функциональное программное
обеспечение
ФПЧ - фильтр промежуточных частот
ФСВЧ - фильтр сверхвысоких частот
ФРЛИ - фазовое радиолокационное
изображение
ФФЧС - формирователь
фазово-частотного спектра
ФЧО - фазо-частоный спектр
ФЧХ - фазо-частотная характеристика
ФЦ - фазовый центр
ФЦА - фазовый центр антенны
ФЦО - фазо-целевая обстановка
ЦАП - цифро-аналоговый
преобразователь
ЦАР - цифровая антенная решетка
ЦВС - цифровая вычислительная система
ЦКМ - цифровая карта местности
ЦСОИ - цифровая система обработки ин-
формации
ЦОС - цифровая обработка сигналов
ЦРГ - цифровая радиоголограмма
ЦРФ - цифровой режекторный фильтр
ЦСП - цифровой сигнальный процессор
ЦУ - целеуказание
ЦФД - цифровой фазовый детектор
ЧКС - частотно-кодированный сигнал
ЧМ - частотная модуляция
ШО - широкополосный обнаружитель
ЭВП - электровакуумный прибор
ЭПР - эффективная поверхность
рассеяния
ЭПО - эффективная площадь отражения
ЭС - экспертная система
545
Верба Владимир Степанович - генеральный директор —
генеральный конструктор ОАО «Концерн радиостроения «Вега»,
заслуженный деятель науки РФ, доктор технических наук, профессор,
заведующий базовыми кафедрами МФТИ, МГТУ им. Н. Э. Баумана,
МИРЭА.
Область научных интересов-, системный анализ, радиотехнические
системы и комплексы специального назначения.
Татарский Борис Григорьевич - директор, Научно-образователь-
ный центр, ОАО «Концерн «Вега», докт. техн, наук, профессор,
кафедра «Радиолокация и радионавигация», МАИ.
Область научных интересов: оптимальная обработка сигналов, прин-
ципы построения радиолокационных систем, обработка радиолокаци-
онных сигналов в радиолокаторах с синтезированием апертуры, об-
работка радиолокационных сигналов в условиях неопределенности.
Ильчук Анатолий Ростиславович - докт. техн, наук, профессор,
зам. директора по перспективному развитию ОАО «Радиоэлектронные
технологии».
Область научных интересов: оптимальная обработка сигналов, принципы
построения радиолокационных систем, обработка радиолокационных сиг-
налов при длительных временах когерентного накопления, принципы по-
строения и обработка сигналов в системах с активным ответом.
Лепехина Татьяна Александровна - канд. техн, наук, начальник
отдела, ОАО «Концерн «Вега».
Область научных интересов: обработка сигналов и изображений в радио-
локационных системах с синтезированием апертуры, моделирование и ис-
пытание радиолокационных систем с синтезированием апертуры.
546
СВЕДЕНИЯ ОБ АВТОРАХ
Майстренко Евгений Владимирович - канд. техн, наук, начальник
отдела, Научно-образовательный центр, ОАО «Концерн «Вега».
Область научных интересов: принципы построения радиолокацион-
ных систем, обработка радиолокационных сигналов в радиолокаторах
с синтезированием апертуры.
Меркулов Владимир Иванович - зам. генерального конструктора
ОАО «Концерн «Вега», докт. техн, наук, профессор.
Область научных интересов: вторичная обработка радиолокационных
сигналов при многоцелевом сопровождении.
Михеев Вячеслав Алексеевич - ген. директор, ОАО «НИЦЭВТ»,
канд. техн. наук.
Область научных интересов: защита информации в автоматизирован-
ных информационных системах.
Неронский Леон Богуславович - вед. науч, сотрудник, ОАО «Концерн
«Вега», докт. техн, наук, профессор, МГТУ МИРЭА.
Область научных интересов: теория и проектирование космических
радиолокаторов с синтезированной апертурой антенны, дистанционное
зондирование Земли, обработка сигналов и изображений.
547
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Плющев Виктор Алексеевич - зам. ген. конструктора, ОАО «Кон-
церн «Вега», канд. техн, наук, ст. науч, сотудник.
Область научных интересов: многочастотные радиолокационные системы
с синтезированной апертурой, пассивные радиолокационные системы.
Пешко Александр Святославович - начальник лаборатории, ОАО
«Концерн «Вега», канд. техн. наук.
Область научных интересов: обработка радиолокационных сигналов
при обзоре зоны ответственности и сопровождении целей, использо-
вание методов искусственного интеллекта при радиолокационном об-
зоре.
Пущинский Сергей Николаевич - ст. науч, сотрудник, ОАО «Кон-
церн «Вега», канд. техн. наук.
Область научных интересов: обработка радиолокационных изображе-
ний, распознавание объектов по радиолокационным изображениям.
Садовский Петр Алексеевич - ст. науч, сотрудник, ОАО «Концерн
«Вега», канд. техн. наук.
Область научных интересов: вторичная обработка радиолокационных
сигналов при многоцелевом сопровождении.
548
СВЕДЕНИЯ ОБ АВТОРАХ
Степаненко Сергей Николаевич - начальник отдела, ОАО «Концерн
«Вега», канд. техн, наук, ст. науч, сотрудник.
Область научных интересов: радиолокация, антенная техника.
Сидоров Игорь Александрович - начальник отдела ОАО «Концерн
«Вега», канд. техн, наук, доцент.
Область научных интересов: многочастотные радиолокационные сис-
темы с синтезированной апертурой, пассивные радиолокационные сис-
темы.
*4
Силкин Александр Тихонович - директор по науке, ОАО «Концерн «Ве-
га», докт. воен, наук, профессор, зав. базовой кафедрой МГТУ МИРЭА.
Область научных интересов: системный анализ, радиотехнические сис-
темы и устройства.
Трофимов Арий Александрович - вед. науч, сотрудник, ОАО «Кон-
церн «Вега», канд. техн. наук.
Область научных интересов: разработка радиолокационных систем.
Филатов Александр Александрович - начальник отдела, Научно-
образовательный центр, ОАО «Концерн «Вега», канд. техн. наук.
Область научных интересов: цифровая обработка сигналов в радиоло-
кационных системах с синтезированием апертуры.
549
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Чернышев Михаил Исакович - вед. науч, сотрудник, ОАО «Концерн
«Вега».
Область научных интересов: разработка радиолокационных систем.
Юрчик Игорь Аркадьевич - начальник отдела ОАО «Концерн
«Вега», канд. техн, наук, ст. науч, сотрудник
Область научных интересов: обработка радиолокационных сигналов
при обзоре пространства и сопровождении целей, радиолокационные
системы с синтезированием апертуры антенны, управление состоянием
систем и объектов, использование методов искусственного интеллекта
при радиолокационном обзоре.
Ясенцев Дмитрий Александрович - доцент, кафедра радиолокации
и радионавигации, МАИ, канд. техн. наук.
Область научных интересов: оптимальная обработка сигналов, принци-
пы построения радиолокационных систем, обработка радиолокационных
сигналов в радиолокаторах с синтезированием апертуры.
550
Научная школа «РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА»
Формирование научной школы «Радиолокационные системы авиаци-
онно-космического мониторинга земной поверхности и воздушного
пространства» началось с момента создания ЦКБ-17 (1944 г.), которое
в последующем носило название НИИ-17 (1946 г.), Московский науч-
но-исследовательский институт приборостроения (МНИИЛ) (1967 г.),
Концерн радиостроения «Вега» (2004 г.). На первом этапе своего ста-
новления научные интересы творческого коллектива школы были свя-
заны с вопросами разработки бортовых радиолокационных систем
(РЛС) и устройств для нужд Военно-воздушных сил страны. На этом
этапе были разработаны, созданы и приняты на вооружение: радиоло-
кационный комплекс (РЛК) прицельного оборудования «Рубидии»
(ТУ-4), радиолокационная прицельная станция «Торий-А» (МиГ-15),
радиолокационный прицел «Аргон» (Ту-16), радиолокационные стан-
ции перехвата и прицеливания «Коршун» (Миг-17), «Изумруд» (МиГ-
17П). С момента возникновения научной идеи по разработке той или
иной РЛС до момента появления конкретного ее образца принимало
участие большое число талантливых ученых, инженеров и техниче-
ских работников НИИ, но несомненными лидерами творческого кол-
лектива являлись Я.Б. Шапировский, А И, Корчмар, Г.М. Кунявский,
Д.С. Михайлевич, Е.И Гальперин, А.Б. Слспушкин, В.В Тихомиров.
В процессе создания данных систем были развиты теоретические
вопросы радиолокации, отработаны основные принципы построения
бортовых РЛС и особенности обработки сигналов при решении задач
обнаружения воздушных целей и измерения их координат, а также
решены вопросы сопряжения бортовых РЛС и средств поражения на-
блюдаемых целей. Сочетание опытно-конструкторских и научно-
исследовательских работ в деятельности коллектива позволяло акцен-
тировать внимание как на теоретических вопросах радиолокации, так и
на решении отдельных прикладных задач, что способствовало нахож-
дению путей и средств повышения тактико-технических характери-
стик разрабатываемых радиолокационных станций. Результаты дея-
тельности по разработке бортовых РЛС научного коллектива НИИ и
его членов были признаны научным сообществом страны. За большой
вклад в развитие радиолокации В.В.Тихомиров был избран членом-
корреспондентом Академии наук СССР.
В начале 60-х годов появились первые зарубежные публикации
по радиолокаторам с синтезированной апертурой антенны (РСА) и ме-
551
РЛС АВИЗЦИОННО-КОСМНЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗЛУ ШНО1 О ПРОСТР 1НСТВА
тодам оптической обработки сигналов. По этой тематике проводились
работы и в Советском Союзе. Именно научные разработки по данному
направлению связаны со вторым этапом становления школы монито-
рин1 а. Особо в этой свя ш следует отметить научно-исследовательскую
работу «Азимут» (научный руководитель А.П. Реутов), выполненную
в 1961 г. в ВВИА им. проф. Н.Е. Жуковского при участии ПИИ-17. В
этой работе впервые в нашей стране были реализованы принципы РСА
с получением изображение высокого разрешения (-15 м)в дециметро-
вом диапазоне длин (70-см) волн. Однако для выполнения опытно-
конструкторских работ но созданию РСА различного назначения не-
обходимо было провести многочисленные теоретические и экспери-
мен зальные исследования в различных участках сайт метрового диа-
пазона радиоволн с получением радиолокационных изображении ме-
стности и исследования наблюдаемости объектов. Одной из -фких
фундаментальных работ была НИР «Клинок» (научный руководитель
11.0. Салганлк). К выполнению НИР «Клинок» были широко привле-
чены специалисты ВВИА им. проф. Н Е. Жуковского, Ленинградской
Ака хеми и им. А.Ф. Можайского, Горьковскою государственного уни-
верситета. В хо зе выполнения данной работы были проработаны во-
просы теории РСА с оценкой влияния аппаратурных и i раек торных
нестабильностей, исследованы пути построения основных блоков бор-
товой аппаратуры: антенн, приёмоперсдающего тракта, индикаторных
устройств, фоторсгистрирутоших устройств, устройств оптической об-
работки информации и синтеза радиолокационного изображения. На-
учная работа включала в себя серьёзные экспериментальные исследо-
вания. За короткий срок были разработаны и испытаны самолётные
макеты РСА в трёх диапазонах длин волн (2-см, 3-см и 10-см) на само-
летах Ил-18 и Ли-2 и проведен большой объём лётных исследовании,
позволивших получить детальные изображения земной поверхности и
обосновать параметры РСА в перспект ивных ОКР. В 1964 г. впервые в
стране был реализован бортовой синтез изображения с применением
устройства аналоговой (фильтрово-i) обработки сигналов. В 3-см диа-
пазоне волн было получено радиолокационное изображение с разре-
шением 15 м.
Проведенные теоретические и экспериментальные исследования
позволили создать солидный задел для последующих разработок РЛС
мониторинга земной поверхности различной степени разрешения и ба-
зирования таких, как: самолётные РЛС Б-001 (Як-28Б), РЛС Б-002 (Су),
бортовые комплексы разведки БКР 1 в составе РЛС бокового обзора с
синтезированной апертурой «Штык», «Штык-2» (Су-24МР) и БКР-2 в
составе РЛС бокового обзора с синтезированной апертурой «Шомпол»
(Ту-22М), а также провести в последствии коренную модернизацию
комплекса БКР-1 и наземного комплекса «Посредник-1.
Одновременно с опытно-конструкторскими разработками по РЛС
обзора земной поверхности коллективом школы велись научно-
исследовательские работы по совершенствованию аппаратуры данного
552
НАУЧНАЯ ШКОЛА «РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОСМИЧЕСКОГО ...»
направления, научными руководителями которых в разное время были
Г.А. Зонненштраль, В.Б Штейншлейгер, Р.А. Разумов, О.Н. Яковлев,
В.В. Вепринцев, Л.Н Тяпкин, А В Дзенкевич и другие. Кроме того,
был разработан эскизный проект бортового комплекса для военного
фотокартографического самолета, выполнены НИР по обоснованию
технического облика бортового комплекса наблюдения для самолета
картографической аэросъемки. В разработке материалов проекта, по-
мимо сотрудников института, принимали участие специалисты и дру-
гих организаций: 29 ЦНИИ МО РФ, НИЦ-24 ЦНИИ МО РФ, ФГУП
«ПО «УОМЗ» (Московский и Казанский филиалы), ЗАО «МНИТИ»,
ФНПЦ ОАО «Красногорский завод им.С. А.Зверева», ОАО «Авиаци-
онный Комплекс им.С.В. Ильюшина», ОАО «ОКБ Сухого», ФГУП
«НИИ7П», НПО «Мобильные информационные системы», ФГУП
«ЦНИИГАиК», АНО ПО «КСИ», ОАО «КБ «Луч», ОАО «НПП «Рубин»,
ОАО «НИИ «Кулон» , Госценгра «Природа», ТПК «Лникое».
Развитием научных исследований и опытно-конструкторских ра-
бот по принципам построения и разработки систем зондирования зем-
ной поверхности стало участие сотрудников института в международ-
ной программе мониторинга «Открытое небо». Опы гно-конструктор-
ская работа «Авиационная система наблюдения «Открытое небо» была
начата в 1992 г. в рамках международного договора «Открытое небо».
Головным исполнителем работы был определен МНИИП, а главным
конструктором Л.Н. Гяпкин. Позже главным конструктором работ по
данному направлению был назначен В.Н Шахгеданов. В результате
выполнения работ по программе «Открытое небо» была разработана
аппаратура наблюдения для самолетов-носителей и аннотационная ап-
паратура, которые успешно прошли испытания и используются е ходе
проведения наблюдательных полетов.
Помимо работ по программе «Открытое небо» коллективом шко-
лы мониторинга велись научные разработки по созданию многочас-
тотного (от 4-см до 2,5-м длин волн) радиолокационного комплекса
зондирования земли «ИМАРК» (главный конструктор А В. Дзенкевич)
для нужд народного хозяйства страны. Комплекс «ИМАРК» является
единственным комплексом в России, обеспечивающим решение важ-
нейших народно-хозяйственных задач такого рода. Данный комплекс
не имеет аналогов и среди зарубежных многочастотных комплексов
дистанционного зондирования, в том числе по такому ключевому па-
раметру, как глубина проникновения в исследуемую среду в сочетании
с высокой разрешающей способностью. На всех этапах отладки и про-
верки работоспособности комплекса проводились полёты на самолёте-
лаборатории Ту-134А, а с 19Q7 г. - на самолёте Ан-26БРЛ «Арктика».
В интерпретации получаемой комплексом информации принимали
также активное участие специалисты ИРЭ РАН.
В 2000 г. за работу но данному проекту Государственную пре-
мию получили 9.А. Востров, А.В. Дзенкевич, Г.А. Кошеваров,
553
РЛС АВИАЦИОННО-КОСМИЧЕСКО! О МОНИТОРИНГА 3F МНОЙ ПОВЕРХНО^ МИ И ВОЗДУШНОГО ПРОС ТРАНС ТВ 1
В.Ю. Манаков, Л.Я. Мельников, В.А. Плющев, И.О. Порохов и со-
трудник ИРЭ РАН Б.Г. Кутуза.
В настоящее время продолжаются работы по модернизации мно-
гочастотного поляриметрического радиолокационного комплекса
«ИМАРК», в том числе для решения задач, выполняемых в рамках
международных соглашений.
Очередным этапом формирования школы мониторинга является
развитие работ по созданию РЛС дистанционного зондирования земли
высокого разрешения для космических носителей. Отправной точкой
разработки данных систем послужило Постановление Правительства
СССР 1960 г. о разработке систем морской космической разведки и
целеуказания (МКРЦ). Накопленный к началу 60-х годов в институте
опыт по созданию самолетных РЛС бокового обзора (БО) позволил
приступить к разработке бортового радиоэлектронного комплекса
космического базирования «Чайка» (главный конструктор И.А. Бру-
ханский). В отличие от ранее проводимых работ по самолетным сис-
темам радиолокационного мониторинга многое при разработке ком-
плекса «Чайка», основой которого являлся радиолокатор БО «Риф»,
пришлось решать практически заново, что было обусловлено, в пер-
вую очередь, тем, что носителем комплекса являлся космический ап-
парат. Важнейшим этаном работы, определившим в дальнейшем ус-
пешную эксплуатацию комплекса в космосе и развитие последующих
работ по космическим РЛС, стали лётные испытания аналога РБО
«Риф^> (главный конструктор П.О. Салганик) на самолёте Ил-18. В ре-
зультате проведённых теоретических и экспериментальных исследова-
ний были найдены оптимальные решения для построения РЛС БО
космического базирования. Первая информация с искусственного
спутника Земли с системой радиолокационного мониторинга была
принята с космического аппарата «Космос-402», запущенного 1 апреля
1971 г., а сама система принята на вооружение в 1975 г. Успешная
эксплуатация БРК «Чайка» продолжалась вплоть до 1988 г. в составе
бортового оборудования космических аппаратов «Космос-402».
«Космос-516», «Космос-1076», «Космос-1700» и др.
Параллельно с разработкой РЛС БО для космических аппаратов
научный и инженерно-технический коллектив школы занимался раз-
работкой РЛС высокого разрешения для данных носителей, функцио-
нирующих в режиме синтезирования апертуры. Базой для данной раз-
работки послужили результаты, полученные в упомянутой ранее НИР
«Клинок».
Результаты теоретических и экспериментальных исследований по
этому направлению обеспечили необходимый научно-технический за-
дел для проведения ОКР по космическим РСА. Первой крупной разра-
боткой была заданная в 1966 г. ОКР по системе радиолокационного
наблюдения «Меч-А» (главный конструктор П.О. Салганик) для пило-
тируемой орбитальной станции «Алмаз-А».
554
НАУЧНАЯ ШКОЛА «РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОСМИЧЕСКО1 О ...»
В ходе создания РСА «Меч» были найдены и реализованы новые
технические решения по комплексу в целом и по входящим в него уст-
ройствам, проведены летные испытания. Технологический комплект
бортовой аппаратуры был размещён на летающей лаборатории - само-
лёте Ил-18, с помощью которого обеспечивалось проведение испыта-
ний по наблюдению типовых объектов техники и земной поверхности.
Данные работы проводились совместно с ИРЭ АН СССР.
Радиолокационный комплекс наблюдения «Меч-К» был выведен
на орбиту в июле 1987 г. на космическом носителе «Космос-1870» . Ус-
пешная эксплуатация РСА «Меч-К» в составе КА «Космос-1870» в те-
чение двух лет (с июля 1987 г. по июль 1989 г.) позволила получить
большой объём радиолокационных снимков с высокой разрешающей
способностью (15...20 м). Результаты полученных данных космического
мониторинга земной поверхности показали высокую информативность
РСА при решении задач всепогодного зондирования и экологического
мониторинга поверхности Земли и Мирового океана с выявлением
ущерба от экологических катастроф и ci ихийных бедствий.
Опыт эксплуатации РСА «Меч-К» позволил провести ее после-
дующую модернизацию. В модернизированном РСА «Меч-КУ» (глав-
ный конструктор И.Г. Осипов) для КА «Алмаз-1» были расширены
технические возможности по проведению сьёмки: повышена разре-
шающая способность до 10 - 15 м, введены цифровая передача ин-
формации на пункт приёма и цифровой синтез радиоголограммы, рас-
ширены зоны захвата с 20 до 40 - 45 км и полоса обзора со 160 до
350 км, повышена оперативность радиолокационной съёмки с 8 до 3
суток. За время эксплуатации РСА «Меч-КУ» на станции «Алмаз-1» с
марта 1991 г. по октябрь 1992 г. были проведены съёмки во всех рай-
онах Земного шара - от Антарктиды, где велась проводка во льдах те-
плохода «Сомов», до пролива Югорский, от вулканов Камчатки до
районов выхода кимберлитовых трубок в тропических джунглях Гайя-
ны. Выполненные научные программы дистанционного зондирования
Земли с использованием РСА «Меч-КУ» позволили получить ценную
информацию для отечественных и зарубежных заказчиков. Отмечено,
что детальность и качество получаемой РЛИ превосходит качество
информации близкой по параметрам зарубежной аппаратуры РСА
FRS-1.
Параллельно коллективом научной школы были выполнены: эс-
кизный проект трехчастотного (3, 10 и 70 см) многорежимного ЬРК
ЭКОР-1В для КА «Алмаз-1 В». Научно-исследовательские работы
«Арктика» и «Корвет-А» по созданию РСА Х-диапазона волн для ле-
довой разведки с применением антенной решётки с частотным скани-
рованием по углу места; НИР «Карта» с проработкой путей построе-
ния высокоорбитальных РСА, эскизные проекты широкозахватных
РСА ЭКОР-Ф и ЭКОР-ФЛ с бортовой обработкой сигналов (главный
конструктор Е И. Вяткина). Кроме того, шла разработка высокоэффек-
тивных космических радиолокационных комплексов на основе РСА
555
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
«Стриж» для мониторинга земной поверхности, обеспечения судовож-
дения, контроля оперативной обстановки в зонах конфликтов на базе
малых космических аппаратов типа «Кондор-Э». Руководители работ
по созданию РСА «Стриж» - И.Г. Осипов и В.Э. Турук.
Важным научным направлением, которое стало образующим для
школы мониторинга, является разработка радиолокационных ком-
плексов дозора. Процесс разработки данных комплексов отличается от
других систем обнаружения и опознавания целей тем, что:
• комплексы могут создаваться на базе различных типов летатель-
ных аппаратов: самолётов, вертолётов, аэростатов и др.;
• в зависимости от типа летательного аппарата и, соответственно,
высоты его подъёма дальность радиогоризонта и зона обзора су-
щественно меняются, что требует адекватного изменения энерге-
тического потенциала комплекса;
• существует большое разнообразие типов наземных и воздушных
объектов, которые могут находиться в зоне радиолокационной от-
ветственности;
• принципиально необходимо обнаруживать разнотипные воздуш-
ные объекты, летящие на малой высоте на фоне различных типов
подстилающей поверхности (земля, вода, лес, льды и пр.);
• должна быть предусмотрена возможность одновременной работы
по воздушным и наземным целям;
• должна быть обеспечена возможность измерения координат и од-
новременного сопровождения большого числа наблюдаемых целей.
Основу данного научного направления положила научно-
экспериментальная работа «Озеро» (научный руководитель А.Т. Ме-
тельский), которая выполнялась в течение 1957-1958 гг. Было создано
два лётных макета аппаратуры РЛС для испытаний на самолёте и вер-
толёте. Первый вариант с уменьшенной антенной прошёл лётные ис-
пытания на самолёте Ту-4, вертолётный был установлен на вышке.
Экспериментальные исследования позволили проверить работоспо-
собность сформированных технических решений и подтвердить воз-
можность селекции движущихся целей (СДЦ) на фоне отражений от
пассивных отражателей при использовании алгоритмов с внешней ко-
герентность, которые позже были реализованы при разработке радио-
технического комплекса (РТК) «Лиана». Комплекс «Лиана» (главный
конструктор - В.Г1. Иванов, заместители главного конструктора -
А.Т. Метельский, О.В. Резепов и В.В. Кузнецов) на носителе Ту-126
был первым отечественным самолётным комплексом дальнего радио-
локационного обнаружения (ДРЛО), который был разработан коллек-
тивом школы. Самолёт Ту-126 с РТК «Лиана» был принят на вооруже-
ние авиации Войск ПВО и в течение 25 лет выполнял задачи противо-
воздушной обороны на северо-западе страны.
В 1963 г. был разработан эскизный проект ОКР «Вега» (главный
конструктор Ю.М. Крестьянов), в котором основным требованием яв-
лялось обеспечение наведения истребителей с борта самолёта Ту-126.
556
НАУЧНАЯ ШКОЛА «РАДИОЛОК ЩИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОСМИЧЕСКОГО ...»
Повышались и другие ТТТ к разрабатываемому комплексу по сравне-
нию с РТК «Лиана». В эскизном проекте был проработан целый ряд
системных научных задач в части методов и алгоритмов наведения,
построения систем радиосвязи и управления. Позже эти проработки
использовались при создании комплекса самолёта А-50. В процессе
работ был создан лётный макет РЛС дециметрового диапазона волн,
установленный на самолёте Ту-126. Полёты продемонстрировали воз-
можность обнаружения воздушных целей на фоне земли, однако в це-
лом система подавления помех оказалась слабо проработанной. После
защиты эскизного проекта по теме «Вега» по инициативе командова-
ния Войск ПВО работы прекратились. Основная причина - недоста-
точная способность РЛС комплекса обнаруживать низколетящие пели
на фоне значительных отражений от Земли (суша, лес, льды).
В 1960-е гг. в арсенале вооруженных сил развитых стран появи-
лась «новая» тактика преодоления радиолокационных зон ПВО самолё-
тами, летящими на малой высоте над любыми видами поверхности зем-
ли. При этом отражённый от цели радиолокационный сигнал был на-
столько мал по сравнению с отражениями от земной поверхности, что
выделение полезного сигнала представляла собой сложнейшую научно-
техническую проблему. Первой НИР, посвящённой методам обнаруже-
ния воздушных целей на фоне отражении от подстилающей поверхно-
сти, была тема «Рама» (научный руководитель В.Б. Шгейншлсйгер), на-
чатая в 1952 г. В течение двух лег была создана экспериментальная РЛС
сантиметрового диапазона с магнетронным передатчиком, антенной,
размером 1,1 м на 0,6 м, и режимом СДЦ на основе внешней когерент-
ности. Испытание РЛС было на самолёте Ли-2 и показало возможность
обнаружения цели, летящей ниже самолёта-носителя на удалении 20 км.
В дальнейшем метод СДЦ с внешней когерентностью разрабатывался
применительно к РЛС перехвата в НИР «Штора» под гем же руково-
дством. Результаты НИР были внедрены в ОКР в КБ-339 после передачи
туда тематики перехвата.
Однако дальнейшие разработки по развитию комплексов дозора
были невозможны без решения проблем подавления помех от «тяжё-
лых» в радиолокационном смысле покровов земной поверхности (степь,
лес, бурное море, горы и пр.), которые могли быть решены при исполь-
зовании когерентных методов обработки отраженных сигналов.
Началом работ по разработке когерентных методов СДЦ на фоне
помех от различных видов земной поверхности явилась НИР «Улей-С4»
(научный руководитель - В.Ф. Погрешаев), которая выполнялась в тече-
ние 1965-1966 гг. В НИР, помимо теоретических исследований, был соз-
дан экспериментально-измерительный радиолокационный комплекс,
функционирующий на трёх длинах волн (10, 35, 70 см) и размешенный на
самолёте Ан-12. Лётные исследования по отражающим свойствам земных
покровов были проведены в различных районах - от пустыни Кара-Кум
до льдов Карского моря. Ранее при проведении работ по теме «Вега» в
ходе летных исследований с борта самолёта Ту-126.
557
РЛС АВИ ЩИОННО-КОСМИЧЕС КОГО МОНИТОРИНГА ЗЕМНОЙ IlOBEPXHOi TH И ВОЗДУ МНОГО ПРОСТРАНСТВА
Базовой научно-исследовательской работой, определившей даль-
нейшее развитие комплексов дозора, явилась «Пчела-67» (научный ру-
ководитель - А.Т. Метельский, заместители - В.Ф. Погрешаев и О.В.
Резепов), которая выполнялась в течение 1967-1972 гг. В части разра-
ботки РЛС работы велись по двум направлениям. В рамках первого
направления исследований (научный руководитель А.Т. Метельский)
был создан экспериментальный образец когерентной РЛС дециметро-
вого диапазона волн. Образец РЛС был установлен на позиции радио-
локационной роты Войск ПВО на горе Тарки-Тау в Дагестане, где и
проводились отработка и испытания РЛС. Проведенные в мае-декабре
1972 г. испытания показали высокое качество обнаружения низколстящих
малоразмерных целей (самолёты МиГ-17 и Ан-2, вертолет Ми-8) на фоне
мешаюших отражений от различных поверхностей.
Вторым направлением (научный руководитель - В.Ф. Погрешаев)
было создание экспериментального образца когерентной радиолока-
ционной станин и сантиметрового диапазона волн с квазинспрерывным
излучением импульсных сигналов. Экспериментальный образец такой
РЛС, работающей в сантиметровом диапазоне волн, был установлен на
специально оборудованном вертолёте Ми-10. В мае 1972 г. впервые в
стране было осуществлено обнаружение низколетящего самолёта-цели
на дальности 200 км с борта вертолёта Ми-10. Оба варианта построе-
ния РЛС, исследуемые в НИР «Пчела-67», нашли применение в опыт-
но-конструкторских работах по созданию комплексов дозора, приня-
тых в дальнейшем на вооружение и получивших наименование РТК
«Перископ» и РТК «Шмель».
Основой для создания радиотехнического комплекса (Р1 К) «Пе-
рископ-В» (главный конструктор А.Т. Метельский) явилась РЛС де-
циметрового диапазона волн, исследования которой проводились в
НИР «Пчела-67». «Перпскоп-В» - первый в стране нагорный радиоло-
кационный пост, способный обнаруживать малоразмерные низколетя-
щие цели на фоне отражений от земли на дальности до 200 км. Вскоре
после принятия на вооружение комплекс был модернизирован совме-
стно с Нижегородским КБ «Горизонт» завода «Электромаш» (шифр
«Псрископ-ВМ»), В новом варианте комплекса антенна устанавлива-
лась на артиллерийской передвижной платформе и использовалась в
зависимости от метеоусловий с радиопрозрачным обтекателем или без
него. «Перископ-В» и «Перископ-ВМ» базировались на южных, север-
ных и восточных границах страны. За разработку данного РЛК
Государственной премии СССР были удостены: Ю М. Крест ьянов,
А.Т. Метельский, Л.Б Пурик, А.Е. Панов, Н.С. Смоляр.
Основой для Р1К следующего поколения «Шмель» (главный
конструктор - В.П. Иванов, заместители главного конструктора
В Ф. Станишнев-Коновалов, О.В. Резепов, В.Ф. Погрешаев, В.М. Во-
ронцов, С.Н. Минаев, А В Васильев (с 1996 г.)), предназначенного для
дальнего радиолокационного обнаружения воздушных целей, в том
числе низколетящих над любыми видами земной поверхности, послу-
558
НА УЧИ АН ШКОЛА « РАДИОЛОЙ А ЦИОНИЫЕ С ИСТЕК 1Ы А ВИАЦИОИИО-КОСК1ИЧЕСКО10 ...»
жила квазинепрерывная радиолокационная станция сантиметрового
диапазона, разработка которой проводилась в рамках создания коге-
рентных РЛС. В разработке данного комплекса, помимо представите-
лей научной школы, принимала участие большая группа научных и
инженерно-технических сотрудников НИИ и КБ СССР. Главным кон-
структором РЛС комплекса являлся В.Ф. Погрешаев, его заместителя-
ми были А.А. Трофимов, И.В. Честной (с 1984 г. - В.А. Гандурин).
Главным конструктором бортовой вычислительной системы (БВС) яв-
лялся О.В. Резепов, заместителями были Л.И. Петров, В.И. Карпеев,
И.К. Алейников (МНИИПА). РТК Комплекс «Шмель» был установлен
на самолете А-50 и обеспечивал наведение истребителей на воздуш-
ные цели, вывод фронтовой и морской авиации на заданные наземные
или надводные цели.
Одновременно с разработкой комплекса дозора и наведения в ин-
ституте продолжались научно-исследовательские работы по дальней-
шему развитию средств дозора: НИР «Астероид», «Жало», «Аврора»,
«Просвет», «Полёт» и др.
В 1984 г. результаты НИР и опыт создания комплексов «Лиана» и
«Шмель» позволили приступить к разработке самолёта до юра третье-
го поколения - А-50М с РТК «Шмель-2». Главный конструктор РТК
В.Ф. Станишнсв-Коновалов.
В 1989 г. Государственной премии СССР за цикл работ по иссле-
дованию и научному развитию направления радиолокации, решающе-
му проблему обнаружения целей над Землей, были удостоены:
Ю.Н. Карев, Л.Я. Мельников, М.Т. Новосартов, В.Ф. Погрешаев,
И.П. Половков, О.В. Резепов, В.Ф. Стаиишнев-Коновалов, А.А. Тро-
фимов, Н.В. Честной.
Для обучения лётного состава тактических операторов в 1983 г.
началась разработка стенда-тренажёра комплекса «Шмель» (длавный
конструктор, Л.Б. Перонский, с 1986 г. Г.О. Лопаткин). Эскизный про-
ект, защищённый в 1983 г., предусматривал построение аппаратуры в
виде двух независимых, но сопрягаемых аппаратно-программных ком-
плексов: управляющего вычислительного комплекса тренажёра I ВКТ)
и комплекса из БВС РТК «Шмель» и рабочих мест тактических опера-
торов. Каждый комплекс moi работать и тестироваться автономно с
помощью имитаторов. Это обеспечило живучесть системы, а впослед-
ствии использование комплекса рабочих мест как стенда сопровожде-
ния и для регламентных и послеремонтных проверок лётных блоков
аппаратуры «Шмель». Работы по тренажеру успешно завершились его
предъявлением в 1990 г.
В 1990 г. Указом Президиума Верховного Совета СССР 97 ра-
ботников института награждены орденами и медалями за заслуги в
создании, проведении испытании и освоении серийною производства
самолёта А-50 с комплексом «Шмель». В 1996 г. премии Правительст-
ва РФ в области науки и техники за создание и совершенствование в
процессе практического использования самолёта А-50 с комплексом
559
РЛС АВИАЦИОННО-КОС МИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
«Шмель» удостоены главный конструктор В.П. Иванов, а также ра-
ботники А.В. Васильев, В.И. Карпеев, А.В. Кокин (ВВС), С.Н. Минаев,
Л Н. Петров, Е.А. Подольный.
Как показал опыт проводившихся испытаний и многолетней экс-
плуатации РЛС па самолете А-50, заложенные при разработке основ-
ные принципы и параметры радиолокационного тракта остаются оп-
тимальными и на сегодня (длина волны, ДН антенны с предельно ма-
лыми боковыми лепестками, мощность излучения и т.п.) и весьма
близки к параметрам радиолокационного тракта РЛС комплекса
АВАКС.
Значительные отступления при реализации РЛС от оптимальных
параметров были обусловлены, главным образом, существующим
уровнем технологии, который отражался на аппаратуре и алгоритмах
обработки радиолокационных сигналов.
Сегодняшний уровень развития цифровой техники позволил
практически полностью оптимизировать характеристики системы об-
работки сигналов и одновременно кардинально уменьшить массу и га-
бариты аппаратуры, и, как следствие этого, изъять из РЛС громоздкие
шкафы обработки.
В ноябре 2009 г. завершена ОКР по глубокой модернизации РТК
самолёта радиолокационного дозора и наведения А-50 (главный кон-
структор А.В. Васильев). Утверждён акт о завершении Государствен-
ных испытаний. Начато серийное изготовление новых комплексов.
В процессе модернизации борговой РЛС Р.'К основной акцент
делался на широком использовании цифровых методов обработки
принимаемых радиолокационных сигналов, повышении функциональ-
ных возможностей РЛС и производительности спецвычислигеля. Реа-
лизация предложенных мер модернизации позволила существенного
уменьшить объем аппаратуры обработки и выполнить ее в виде одно-
типных по конструкции модулей на печатных платах, размещаемых в
шкафу цифровой обработки.
Одновременно с работами по РТК для самолёта А-50 в институте
началась разработка РТК «Квант» (главный конструктор А.Т. Метель-
ский) для самолёта дозора более «легкого» класса Ан-71, создаваемого
ОКБ имени Антонова (г. Киев) на базе военно-транспортного Ан-72.
Прорабатывался вариант создания самолёта Ан-71 с палубным базиро-
ванием. В этом варианте велись также работы по самолёту Як-44. Од-
нако после распада СССР рабозы по Ан-71 были законсервированы, а
затем прекращены.
Перспектива дальнейшего развития АК РЛДН - в наращивании
его тактико-технических характеристик и расширении функциональ-
ных возможностей, С учётом концепции по созданию межвидового
авиационного комплекса наблюдения, оповещения и управления сего-
дня коллективом научной школы мониторинга развернуты работы по
созданию перспективного радиотехнического комплекса дозора и на-
ведения, Научным руководителем работ по данному проекту является
560
НАУЧНАЯ ШКОЛА «РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АВИАЦИОННО-КОС МИЧЕСКО1 О ...»
док.техн.наук, профессор В.С. Верба. При разработке данного ком-
плекса широко используются результаты научных исследований, по-
лученных в ходе НИР «Дозор», «Всплеск» и «Аллигатор», ОКР «Барс»
(научный руководитель всех работ В.С. Верба).
Как видно из анализа этапов развития научной школы «Радиоло-
кационные системы авиационно-космического мониторинга земной
поверхности и воздушного пространства» ее формирование, становле-
ние и развитие протекало в течение многих лет при непосредственном
участии большого коллектива талантливых ученых, инженеров-
конструкторов, инженеров-технологов и технических сотрудников
предприятия, в том числе, и сторонних организаций. Сегодня это
творческий коллектив единомышленников, способных решать слож-
ные научно-технические проблемы.
561
Научная школа
«Пассивные
РАДИОЛОКАЦИОННЫЕ
мы»
Успехи, достигнутые коллективом Московского научно-исследо-
вательскою института приборостроения (ЦКБ-17. НИИ-17, МНИИП) в
период с 1944 по 1960 гг.. а именно, разработка радиолокационных
систем для решения задач дозора, наведения, а также для обзора зем-
ной поверхности, позволили создать чувствительные приемные уст-
ройства и СВЧ-элементы, необходимые для построения сверхчувстви-
тельных радиолокационных систем, способных принимать и измерять
характеристики собственною радиотеплового излучения различных
объектов и сред в СВЧ-диапазоне. По измеренным полевым характе-
ристикам специалисты могут дистанционно, т.е. без непосредственно-
го контакта с объектом исследования, получать о нем информацию.
Кроме того, начало космической эры и бурное развитие космонавтики,
которое происходило приблизительно в тот же период времени, а так-
же стремление человечества к познанию окружающего космического
пространства, планет солнечной системы и объектов дальнего космоса,
ставило задачи по созданию пассивных систем для авиационного и
космического мониторинга. Как результат, в МНИИП создаётся одно
из важных самостоятельных направлений - «Пассивные радиолокаци-
онные системы». С 1957 г. научным руководителем нового направле-
ния и главным конструктором СВЧ-радиометрических систем стано-
вится талантливый учёный, выпускник Военно-воздушной инженер-
ной академии им. проф. Н.Е. Жуковского 1945 г. - Сергей Тихонович
Ег оров (1920 - 1999 гг.).
В 1960 г. под руководством С.Т. Егорова начата научно-
исследовательская работа «Энергия». Работа проводилась с целью ис-
следования пассивных методов дистанционного зондирования в инте-
ресах исследования поверхности планет солнечной системы и Земли.
В 1963 г. проведена научно-исследовательская работа «Зерно». Полу-
ченные в ходе выполнения НИР результаты позволили в 1964 г. соз-
дать 4-канальный трассовый комплекс радиометров «Наука». С помо-
щью этой аппаратуры, размещённой на борту ИСЗ «Космос-243»,
23 сентября 1°о8 г. и «Космос-384», 10 декабря 19^0 г. впервые в мире
проведено исследование поверхности Земли из космоса. В 1967 г. на-
чата разработка радиометрических поляриметров трёхсантиметрового
диапазона. Были изготовлены несколько комплектов радиометров для
размещения на борту космических аппаратов серии «Марс». Космиче-
ские аппараты «Марс-2» и «Марс-3» (1971 г.) и «Марс-5» (19'74 г.)
достигли орбиты Марса и провели успешные исследования поверхно-
сти планеты методами тепловой пассивной локации.
562
НАУЧНАЯ ШКОЛА «ПАССИВНЫЕ РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ»
В 1968 г. начата научно-исследовательская работа «Стриж-Е»,
посвящённая исследованию возможностей картографирования земной
поверхности с помощью тепловой пассивной РЛС, размещенной на
самолёте Ил-14.
Продолжение работ по разработке космических средств пассив-
ного дистанционного зондирования привело в 1973 г. к созданию ска-
нирующего комплекса пассивной РЛС космического базирования. С
помощью СВЧ-радиометров «Метеор», размещённых на борту ИСЗ
«Метеор-25» и «Метеор-28», в 1976 и 1977 гг. были получены радио-
тепловые изображения состояния атмосферы и ледовой обстановки в
полярных районах страны.
В 1976 г. был разработан пассивный трассовый комплекс «Ра-
дон», состоящий из трехканального одночастотного поляриметра «Ра-
диан» и трёхчастотного поляриметра «Раздан». Комплекс «Радон» ус-
танавливался на ИСЗ Космос-1076 (1979) и Космос-1151 (1980), а «Ра-
диан» - на ИСЗ Космос-1500 (1983) и Космос-1602 (1984). Трёх-
частотный спектрометр «Раздан» был размещён на ИСЗ Космос-1766
(1986) и Космос-1869 (1987).
В 1981 г. начата ОКР «Радиус» по созданию 4-диапазонйой само-
лётной радиометрической станции, предназначенной для об юра и кар-
тографирования земной поверхности с целью дистанционного измере-
ния влажности грунтов и солёности водоёмов, исследования снежных
и ледовых покровов, обнаружения нефтяных плёнок на водной по-
верхности, а также для мониторинга пожароопасных ситуаций в лес-
ных зонах. Экспериментальные работы проводились в семидесятые
I оды в Средней А зим и Краснодарском крае.
За создание аппаратуры «Радиус» С. Г. Егорову в составе автор-
ского коллектива от ИРЭ АН СССР присуждена Государственная пре-
мия СССР.
С 1987 г. проводились испытания комплекса «Радиус» в различ-
ных климатических зонах СССР от Средней Азии до Северного полю-
са. В ходе испытаний были подтверждены заданные по техническому
заданию характеристики и высокая надёжность аппаратуры. На тот
момент комплекс «Радиус» был самым перспективным радиометриче-
ским комплексом, так как был разработан с использованием самой со-
временной элементной базы. В частности, в состав спецвычислителя
«Радиуса» впервые были включены цифровые микропроцессоры
580ВМ80 и цифровая система регистрации выходной информации на
основе цифрового магнитофона МЛП14-3. С этого момента начался но-
вый качественный скачек при разработке радиометрической аппаратуры,
обусловленный всё более широким применением в составе аппаратуры
цифровых устройств и цифровых методов обработки сигнала и информа-
ции. Всего было произведено пять экспериментальных образцов аппара-
туры «Радиус».
563
Р ТС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗЛУ ШНОГО ПРОСТРАНСТВА
На рубеже 1986 1988 гг. произошли серьёзные кадровые измене-
ния. Многие сотрудники «старой» радиометрической школы С.Т. Его-
рова, такие как В.Н. Галактионов, Е.А. Зайцев, Г.Г. Лидере, Л.Н. Ма-
лофеев, Ю.К. Шестопалов, В.М. Баккал. Г.Е. Влнцлав, А.А. Власов
ушли в другие организации, уволились по состоянию здоровья или
ушли на заслуженный отдых.
Произошла смена главного конструктора. Вместо С.Т. Егорова
радиометрическое направление возглавил его ученик Виктор Алексее-
вич Плющев, ранее защитивший кандидатскую диссертацию под ру-
ководством С.Т. Егорова и работавший его заместителем. В составе
радиометрической школы остались Е.Д. Бирюков, специализирую-
щийся на разработке СВЧ-трактов, С.П. Ходячих - разработчик систем
управления и синхронизации. В их коллектив влились молодые спе-
циалисты, выпускники кафедры радиооптики Московского физико-
техническою института, защитившие дипломы под руководством
С.Т. Еюрова и В.А. Илюшева, в разные годы в хронологическом по-
рядке это В.Ф. Морозов, А.М. Малинин, А.В. Еванов, П.А. ( идоров,
И В Меренков.
Начало работы обновлённой радиометрической школы совпало с
началом «лихих» 1990-х гг., koi да было фактически прекращено госу-
даре! венное финансирование новых разработок. В »тот период разра-
ботчики сами искали и находили заказчиков на радиометрические раз-
работки. О космических и авиационных системах на время пришлось
забыть и «спуститься» на землю. Время требовало создания дешёвых
приложении для удовлетворения сегодняшних, земных потребностей
людей.
Так, был разработан портативный наземный многоканальный ра-
диометрический измеритель влажности почвы «РИВ». В 1999 г. в пус-
тынных районах Туркмении проведены успешные испытания прибора.
В 1989 г. начались работы по созданию радиометра «ИТХ», при-
бора для измерения распределения температуры в буртах с хлопком
сырцом па предмет своевременного обнаружения очагов «самовозго-
рания». Проведены испытания в Узбекистане в 1990-1Q92 гг. Эго пер-
вый портативный! радиометр, где для обработки низкочастотного сш-
нала применялся микроконтроллер 1816ВЕ51, благодаря чему удалось
существенно снизить габариты, массу и энергопотребление прибора.
Прекращение финансирования работ по пассивному дистанцион-
ному зондированию тгривело к необходимости поиска новых направ-
лений для применения наработанных ранее научных результатов и
технологий.
Так. был разработан медицинский многоканальный СВЧ-радио-
мстрический скагерометр под руководством В А. Плющева. В 1995 г.
была начата разработка медицинскою радиотермографа «Раскат»,
12-канальною радиометра-скатерометра, предназначенного для ран-
ней диагностики онкологических заболеваний.
564
НАУЧНАЯ ШКОЛА «ПАССИВНЫЕ РА/ ШОЛОКАЦИОННЫЕ СМС ЛЕМЫ»
Совместно со специалистами ИРЭ РАН А.Г. Сельским и А.В. Яно-
вичем, ранее работавшими в МНИИП, были проведены клинические
испытания в различных медицинских учреждениях, которые показали
высокую эффективность использования пассивных методов локации для
медицинских целей. В работах по созданию аппаратуры «Раскат» при-
няли участие А.М. Малинин, Е.Д. Бирюков, С.П. Ходячих, А.В. Иванов,
И.А. Сидоров, А.В. Винтницкпй.
При отсутствии заказов на средства пассивного дистанционного
зондирования внутри страны разработчики были вынуждены искать
заказы за рубежом. И такие заказы нашлись в США. Правда американ-
ская фирма, заинтересованная в использовании аппаратуры «Радиус»
на своих самолётах, не имела бортов, аналогичных отечественному
АН-2, для которого и был разработан комплекс «Радиус». Потребова-
лась серьезная модернизация аппаратуры, чтобы уменьшить её массу с
350 до 90 кг. Такая модернизация была проведена, и благодаря широ-
кому внедрению цифровой техники задача была решена. Правда при-
шлось отказаться от системы i иросгабилизацин антенной системы, но
за счёт использования навигационных данных от спутниковой и инер-
циальной навигационных систем удалось проводить коррекцию ра-
диометрических данных при привязке их к цифровым картам местно-
сти. В 1998 г. впервые модернизированный сканирующий радиометр
«Радиус-М» был испытан совместно с американской компанией «Гео-
информатика» на территории США. В результате лётных эксперимен-
тов были получены радиотспловые карты и карты влагосодержанпя
почвогрунтов в районе слияния рек Миссиссиппп и Огайо. Впервые
получаемые радиометрические данные регистрировались синхронно с
данными спутниковой навигационной системы, что позволило более
точно осуществить привязку карт влагосодержанпя к географическим
координатам.
В конце 90-х начале 2000-х гг. началось оживление работ по дис-
танционному зондированию и в России, благодаря началу сотрудниче-
ства МНИИП с Мурманским институтом ПИНРО. Гак, в 1999 г. нача-
лась ОКР «Скумбрия», в результате которой были разработаны и уста-
новлены на борт самолёта АН-26БРЛ двухдиапазонный радиолокатор
и СВЧ-радиометр с целью обнаружения на морской акватории продук-
тивных зон и передачи их координат рыболовным судам. Внедрение
новых технологий рыбной разведки позволило значительно увеличить
уловы скумбрии и других видов промысловых рыб.
В эго время ушёл из жизни основатель научной школы пассивной
радиолокации доктор технических наук, профессор, лауреат Государ-
ственной премии СССР, заслуженный деятель науки и техники РФ,
Почетный радист - Сергей Тихонович Егоров (1920 1999 г.)
В 2000 г. аппаратура «Радиус-М» была установлена на борту
американского самолёта Твин-оттер и проведены испытания над тер-
риторией штата Калифорния. Получены карты влагосодержанпя поч-
565
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
вогрунтов с различных высот и на больных площадях. К сожалению,
при возвращении из Калифорнии машина, перевозившая аппаратуру
«Радиус», перевернулась на заснеженной дороге в штате Колорадо. В
результате аварии аппаратура получипа серьёзные повреждения, и ра-
бота со сканирующим радиометром была прекращена. В этом же году
под руководством В.А. Плющева успешно защитил кандидатскую дис-
сертацию И.А. Сидоров, по радиометрической тематике. В диссерта-
ции И.А. Сидоров обосновал перспективы дальнейшего внедрения
цифровых методов обработки сигнала и информационных технологий
для совершенствования радиометрических систем.
В 2003 г. вновь начаты эксперименты совместно с Алабамским уни-
верситетом сельского хозяйства и механики (AAMU) и ИРЭ РАН по из-
мерению влажности почвогрунтов трассовыми спектрометрическими ра-
диометрами с использованием в качестве носителя автомобильных плат-
форм и беспилотных летательных аппаратов. Впервые была поставлена
задача разработки нового поколения портативных СВЧ-радиометров для
беспилотных летагсльных аппаратов.
В 2004 г. продолжены эксперименты совместно с Алабамским
университетом сельского хозяйства и механики и ИРЭ РАН по изме-
рению влажности почвогрунтов трассовыми спектрометрическими ра-
диометрами с использованием в качестве носителя автомобильных
платформ. Создана СВЧ-радпометрическая система из четырёх радио-
метров на базе машины для гольфа.
В 2004 г. проведена очередная модернизация аппаратуры «Ради-
ус». Реализована цифровая обработка сигнала, которая позволила
улучшить мног не технические параметры радиометра. В этом же году
сотрудничавший в США со специалистами радиометрической школы
концерна «Вега» Роланд Хаарбринк возвращается из Америки на ро-
дину в Нидерланды и создаёт там фирму «Мирамап» (Microwave radi-
ometry mapping, СВЧ-радиомстричсское картографирование), специ-
ально для внедрения СВЧ-радиометрических методов дистанционного
зондирования в Нидерландах, для решения жизненно важных проблем
водного баланса. Уже на следующий год «Мирамап» получает звание
«наиболее успешное инновационное предприятие 2005 года» и стано-
вится обладателем, гранта бизнес-инкуба гора Европейского космиче-
ского агентства (ESA). С самого начала фирма «Мирамап» планирова-
ла для решения стоящих перед ней задач использовать радиометриче-
скую аппаратуру производства концерна «Вега», и с этого момента
началась новая страница сотрудничества.
Начаты совместные работы с Нидерландской фирмой «Мирамап»
по обследованию состояния дамб в Нидерландах. Модернизированный
комплекс «Радиус» был размещён на борту самолёта. Проведены лёт-
ные испытания на территории Нидерландов.
Одновременно в 2005 г. впервые в мире был успешно проведён
лётный эксперимент совместно с Алабамским университетом сельско-
566
НА УЧНАЯ ШКОЛА «ПАССИВНЫЕ РАДИОЛОЙ. ЩИОННЫЕ СИС ’ТЕМЫ»
го хозяйства и механики и ИРЭ РАН по СВЧ-радиометрическому зон-
дированию с борта беспилотного летательного аппарата. СВЧ-
радиометр 5-сантиметривого диапазона был размещён на борту амери-
канского беспилотного вертолёта и в автоматическом режиме выпол-
нил полёт над заданной территорией. После возвращения вертолёта и
обработки данных были получены карты влагосодержания подсти-
лающей поверхности.
В 2007 г. после длительного перерыва возобновились лётные ра-
боты по дистанционному зондированию на территории Российской
федерации. С помощью модернизированного комплекса «Радиус-М»
проведена радиометрическая съёмка железнодорожной линии Орёл-
Елец с борза самолёта АН-2. Были успешно обнаружены места эрозии
железнодорожных призм, однако начавшиеся в 2008 г. работы в инте-
ресах РАО РЖД из-за разразившегося финансового кризиса, были пре-
рваны.
Но были продолжены лётные эксперименты в Нидерландах.
Впервые с самолёта фирмы «Мирамап» обследованы дамбы в Болга-
рии.
В 2008 г. завершена ОКР «Ранет» (главный конструктор
И.А.Сидоров). Разработаны портативные, автономные, однодианазон-
ныс СВЧ-радиометры серии «Ранет» («Ранег-21» и «Ранег-05»). Это
портативные приборы массой 8,5 и 5,5 кг cooibctctbchho, с цифровой
обработкой продетектированного сигнала. Радиометры впервые по-
строены по принципу «всё в одном», когда антенна, приёмник, регист-
ратор, спутниковый навигатор и аккумуляторная батарея совмещены в
едином конструктиве?.
В 2009 г. завершена ОКР «Ранет-MH ГЦ» (главный конструктор
И.А. Сидоров). Расширена линейка радиометров «Ранет». Разработаны
радиометры «Ранет-008» 8-миллиметрового диапазона и «Ранет-135»
13,5-ми плиметрового диапазона.
В 2010 г. осущсс!влена поставка радиометров серии «Ранет» по
контрактам в Болгарию и Нидерланды. Проведены натурные испыта-
ния. В 2011 г. в Нидерланды для фирмы «Мирамап» поставлен ешё
один комплект аппаратуры «Ранет-21». На базе квадроцикла собрана
поляриметрическая система, позволяющая увеличить производитель-
ность зондирования земляных дамб.
В 2012 г. впервые выигран открытый конкурс Минпромторга на
право проведения ОКР «РАСА» (главный конструктор И.А. Сидоров).
В ходе выполнения ОКР разработаны и изготовлены шесть комплектов
унифицированных электронных модулей для СВЧ-радиометрических
систем с пассивным синтезированием апертуры антенны L-диапазона.
Создаётся базовая технология, которая позволит значительно повы-
сить разрешающую способность и информативность СВЧ-
радиометрических систем.
567
Р. 7С АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОС ТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
В работах по ОКР «РАСА» наряду с представителями «старой»
школы радиометристов А.М. Малининым и С.П. Ходячих впервые
приняли участие молодые и талантливые аспиранты Р.М. Гвоздь, вы-
пускник МИРЭА, А.Д. Рещиков, выпускник МАИ, А.П. Солдатенко,
выпускник МИРЭА. В разработку приёмника «РАСА» существенный
вклат внесли В.Л. Тарасов, Н.В. Спницин, молодая и талантливая вы-
пускница МАИ Е.А. Овчинникова.
На сегодняшний день, в ОАО «Концерн «Вега» успешно работа-
ют молодые учёные, аспиранты, представляющие уже четвёртое поко-
ление учёных и специалистов радиометрической школы С.Т. Егорова -
В.А. Плющева, которые в своих диссертационных работах продолжа-
ют традиции и ведуа исследования новых направлений и применений
СВЧ радиометров.
568
; ПРИЛОЖЕНИЕ: оглавление научной серии книг «Труды научных школ ОАО^Концерн радиостроения «Вега»
КНИГА 2
Антенно-фидерные и оптоэлектронные
устройства
Под ред. В.С.Вербы и А.П. Курочкина
Отзыв о книге академика РАН Ю.В. Гуляева
Глава 1. Волноводно-щелевые антенные решётки
Глава 2. Активные фазированные антенные решетки
Глава 3. Активные сверхширокополосные видеоимпульсные
сканирующие антенные решетки
Глава 4. Специальные сверхвысокочастотные
и сверхширокополосные излучатели
Глава 5. Методы проектирования микрополосковых
и щелевых антенн
Глава 6. Методы миниатюризации и уменьшения
добротности антенн
Глава 7. Расчет характеристик антенного обтекателя
в приближении физической оптики
569
РЛС АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
КНИГА 3
Авиационные системы радиоуправления
Под ред. В.С. Вербы и В.И. Меркулова
Отзыв о книге академика РАН Е.А.Федосова
Глава 1. Разработка перспективных систем радиоуправления
Глава 2. Методы и алгоритмы синтеза оптимального управления
Глава 3. Методы наведения и алгоритмы траекторного управления
Глава 4. Методы и алгоритмы управления
в многопозиционных радиоэлектронных системах наведения
Глава 5. Управление беспилотными летательными аппаратами
Глава 6. Информационное обеспечение систем радиоуправления
Глава 7. Информационное обеспечение
пассивных систем радиоуправления
570
Для заметок
Научное издание
НАУЧНАЯ СЕРИЯ
Труды научных школ ОАО «Концерн радиостроения «Вега»
Под общей редакцией д.т.н., профессора В.С. Вербы
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ
АВИАЦИОННО-КОСМИЧЕСКОГО МОНИТОРИНГА
ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОГО ПРОСТРАНСТВА
Монография
под редакцией
д.т.н., профессора В.С. Вербы,
д.т.н., профессора Б.Г. Татарского
Авторы
(см. с. 546—550)
Дизайн обложки предоставлен ОАО «Концерн «Вега»
Изд. К° 37. Сдано в набор 01.09.2014.
Подписано в печать 01.10.2014. Формат 70x100 1/16.
Бумага офсетная. Гарнитура Таймс.
Печать офсетная
Уч.-изд. л. 46,8. Тираж 500 экз. Зак. №
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д. 20/6
Тел. факс: (495)621 -48-37; 625-78-72, 625-92-41
e-mail: info@radiotec.ru
www.radiotec.ru
Отпечатано в типографии ООО «Галлея-Принт»
10 ЛЕТ ОАО «КОНЦЕРН «ВЕГА»
28 апреля 2004 г. Указом Президента РФ в целях
обеспечения приоритетного развития ключевых
технологий радиостроения, радиолокационных средств,
систем разведки, систем управления наземного,
авиационного и космического базирования в интересах
обороны и экономики страны создана вертикально
интегрированная акционерная структура. За прошедшие
10 лет сформирована уникальная по своему
составу и специализации научно-производственная
корпорация - ОАО «Концерн «бега», основная задача
которой состоит в создании широкого спектра
современных радиоэлектронных изделий и систем
военного и гражданского назначения. В состав ОАО
«Концерн «Бега» входит 20 научно-исследовательских,
конструкторских и производственных предприятий,
активно участвующих в инновационном развитии
и технологической модернизации отечественной
радиоэлектронной промышленности, создающих
образцы наукоемкой и высокотехнологичной продукции
военного и гражданского назначения.
70 ЛЕТ ГОЛОВНОМУ ПРЕДПРИЯТИЮ
1 октября 1944 г. постановлением Г ссударственного
комитета обороны СССР было создано Центральное
конструкторское бюро №17 (ЦКБ-17) Наркомата
авиационной промышленности, определенное
головным предприятием отрасли по созданию
авиационных радиолокационных систем.
»>Х«< ЦКБ-17 4 НИИ-17 МНИИП 4 ОАО «КОНЦЕРН «ВЕГА» »>Х«<